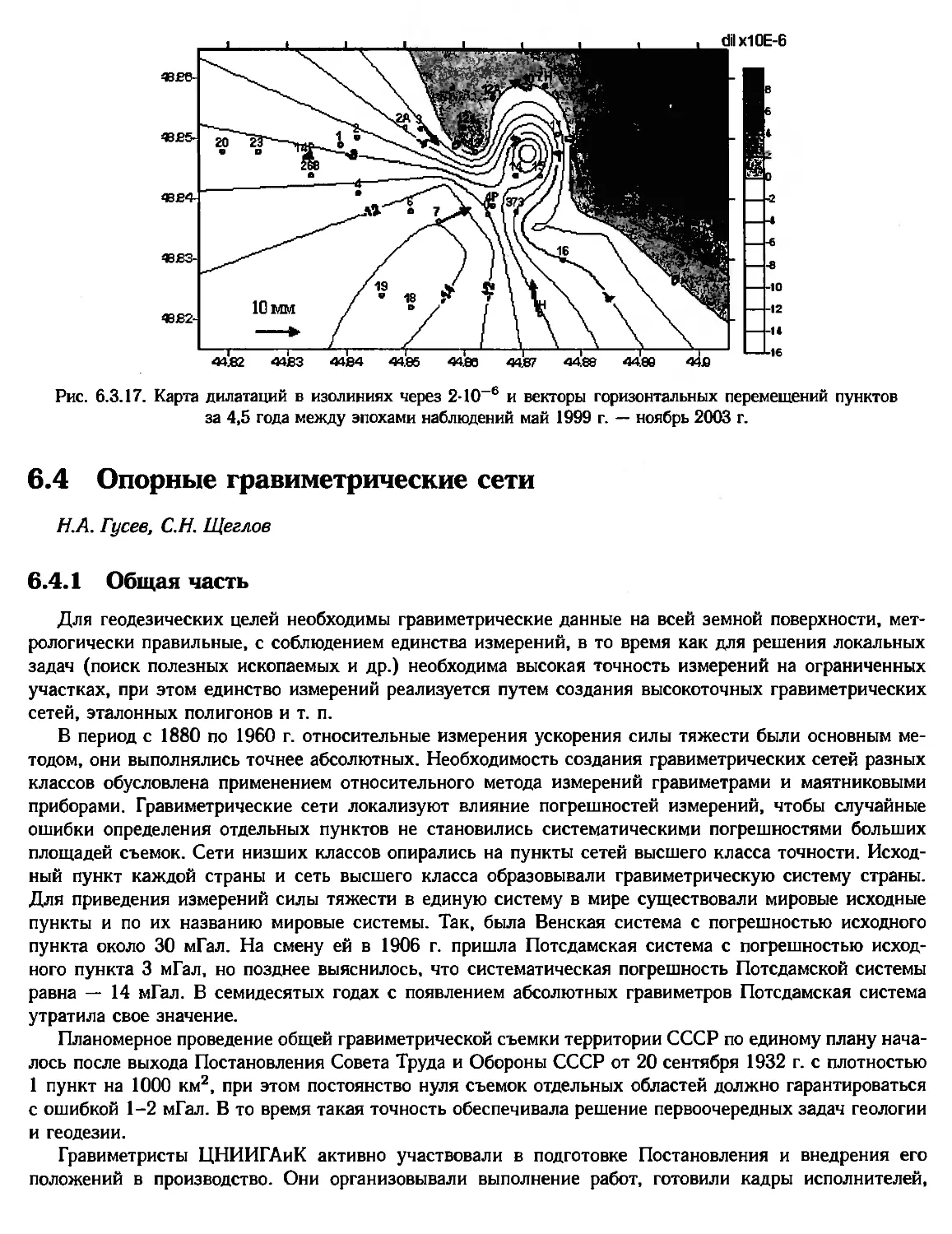
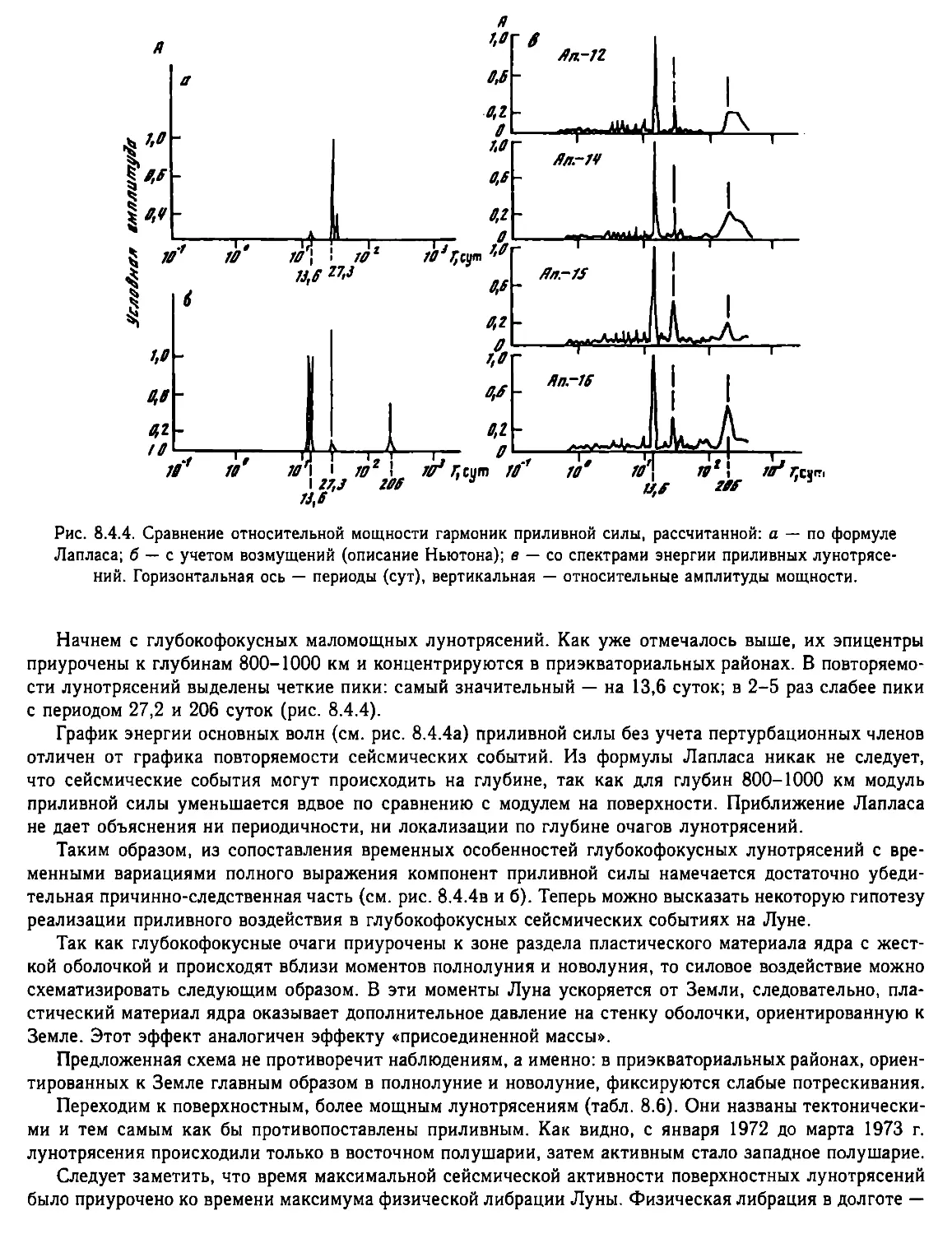
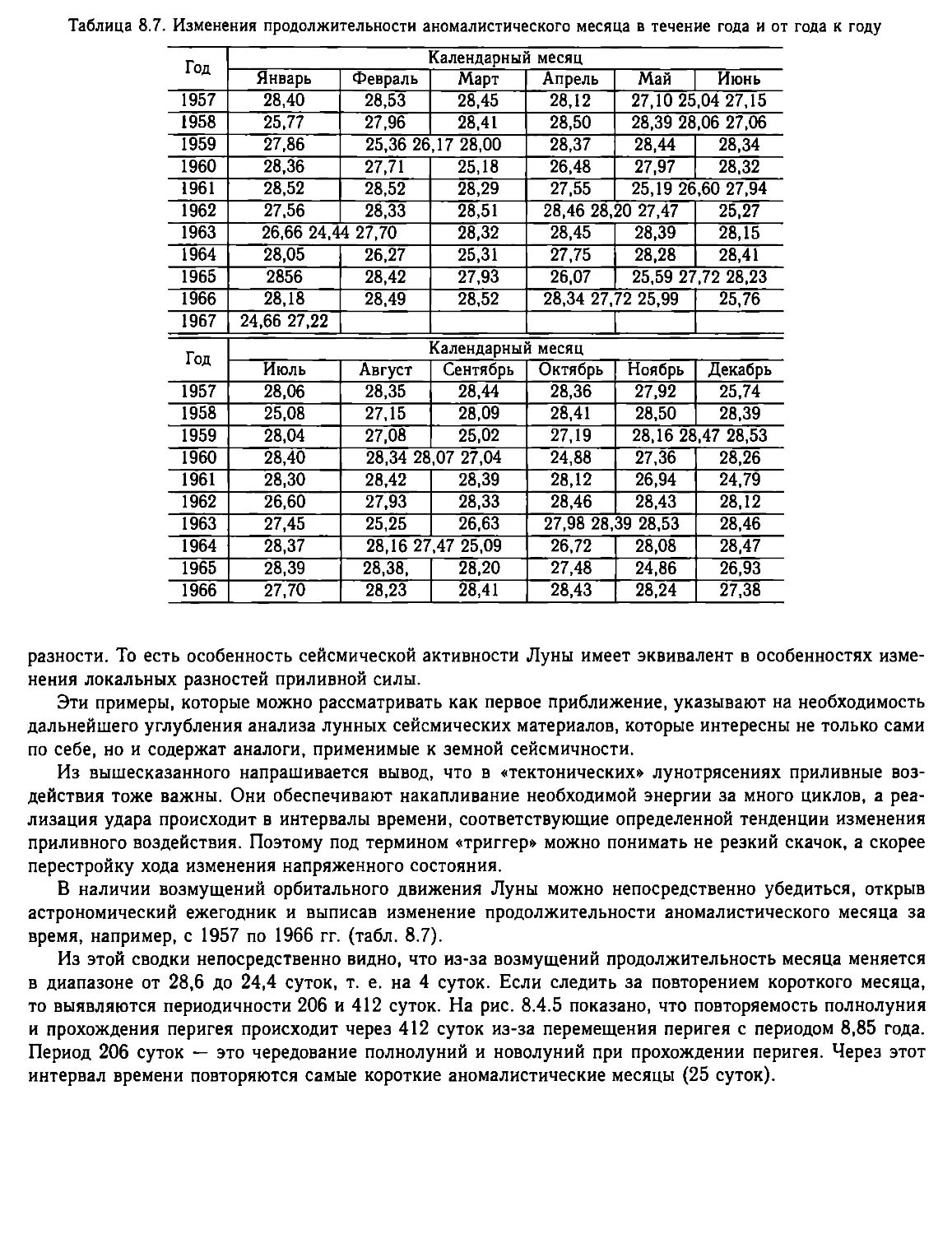
/





































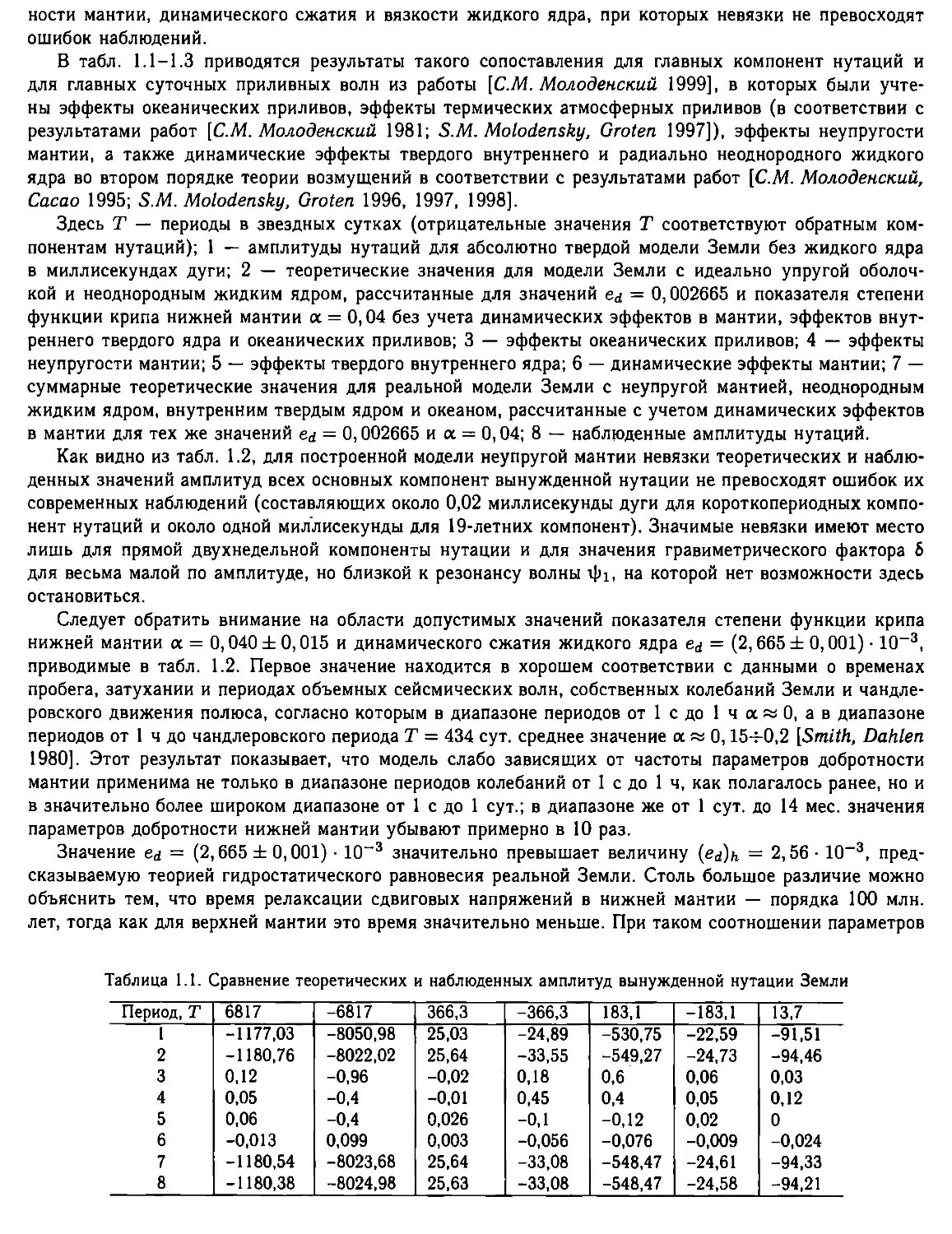
























































































































































































































































































































































Теги: науки о земле геодезия гравиметрия




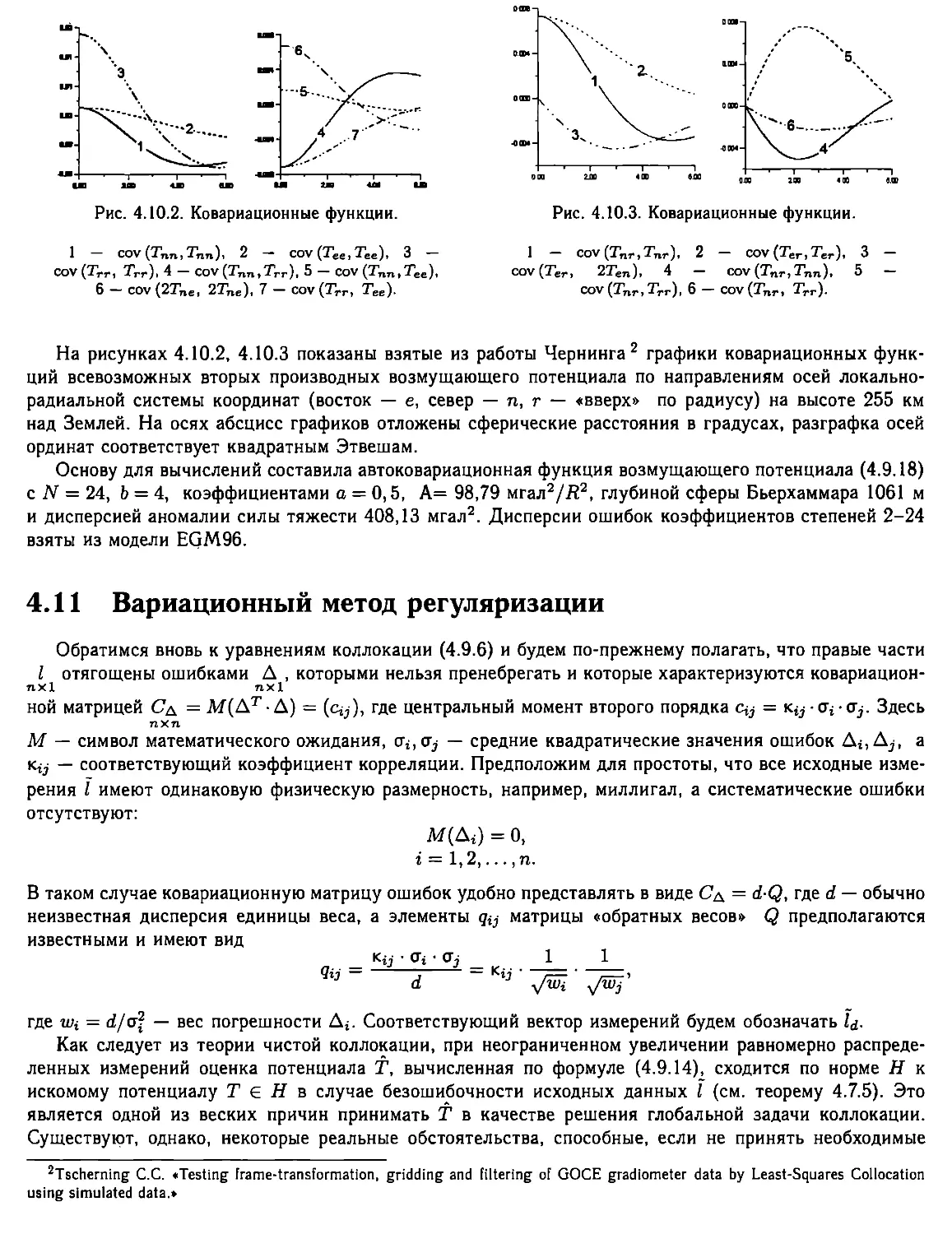
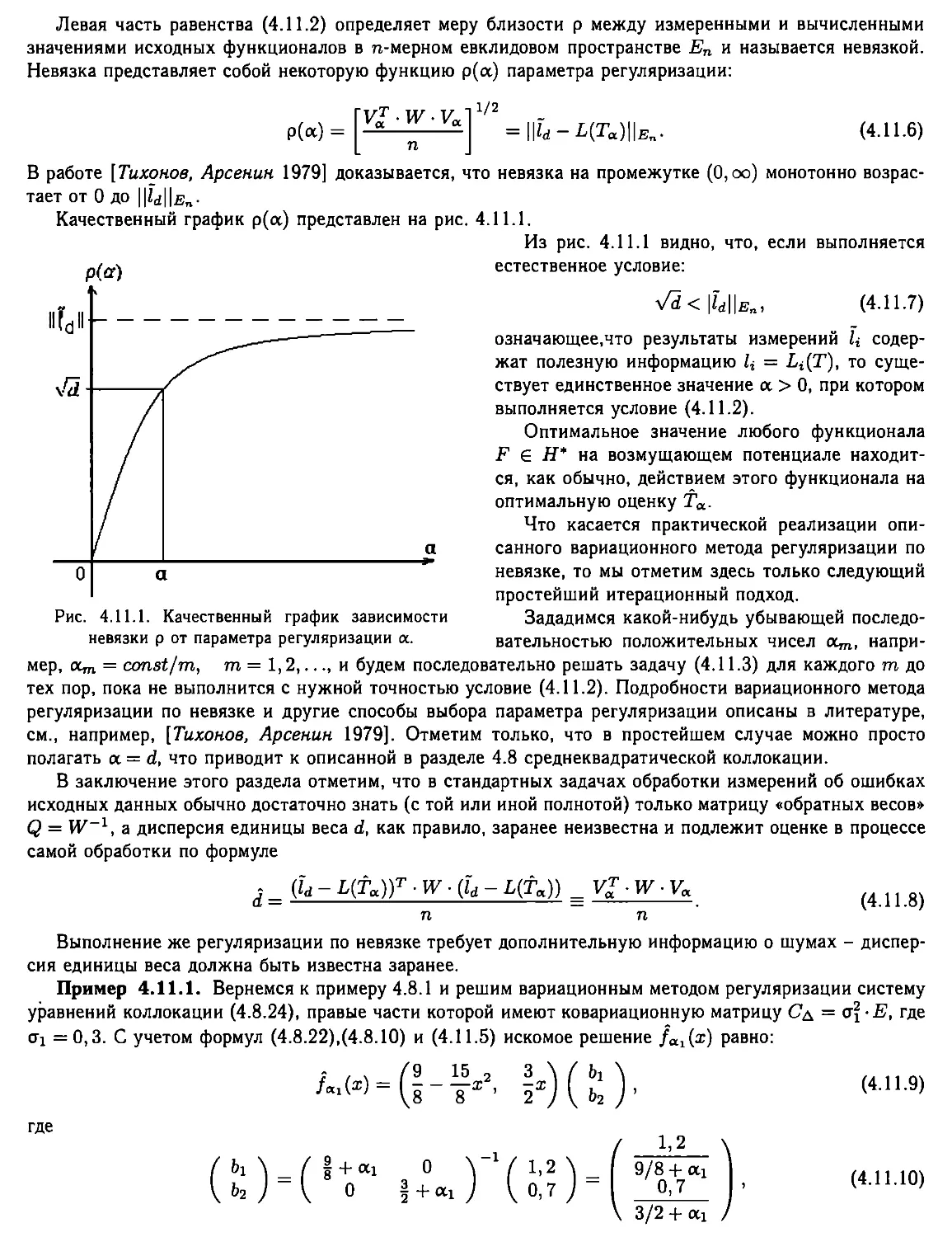
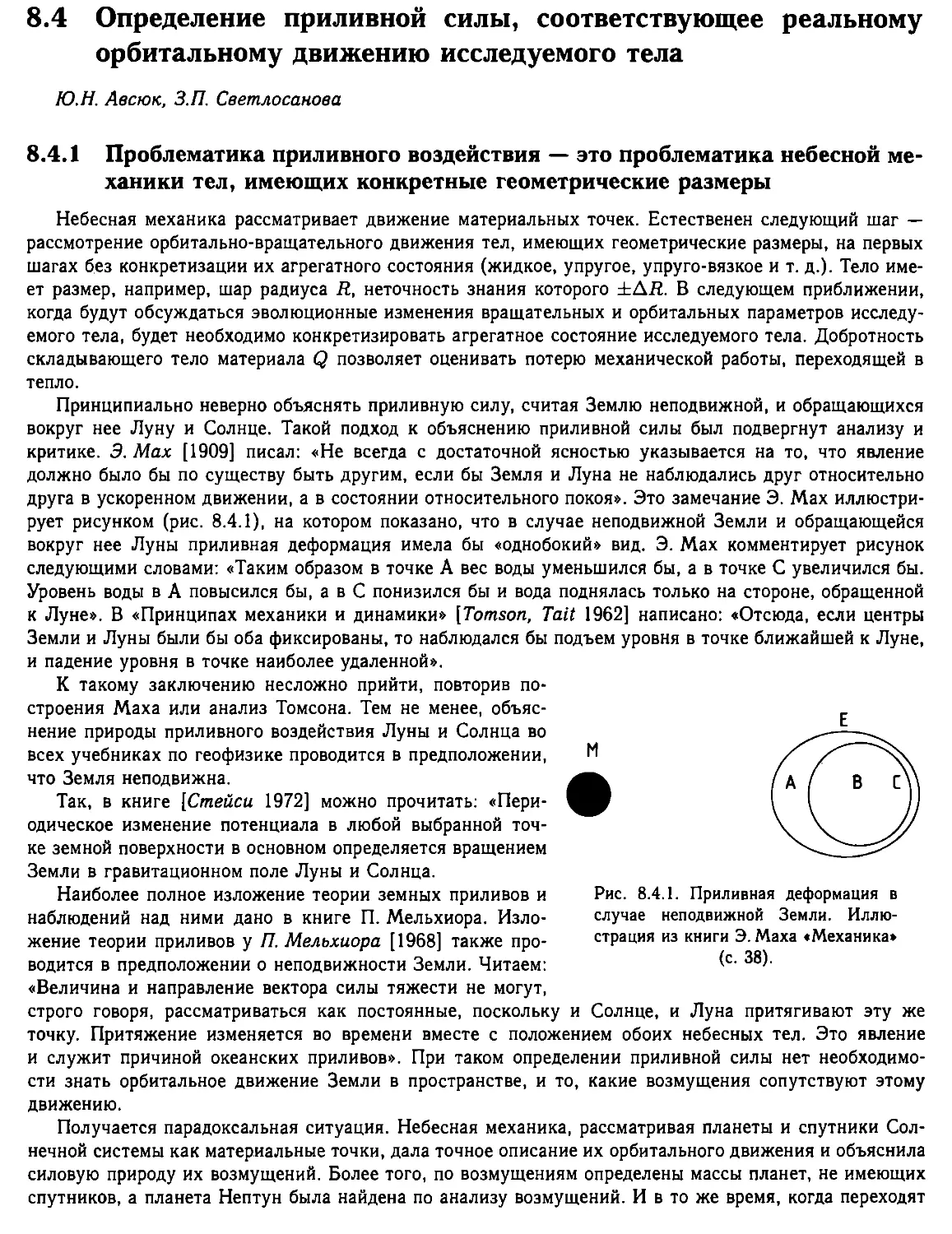
Текст
ГРАЬИМЕТРИ^ и ГЕОДЕЗИЯ
'л
rutracker.org
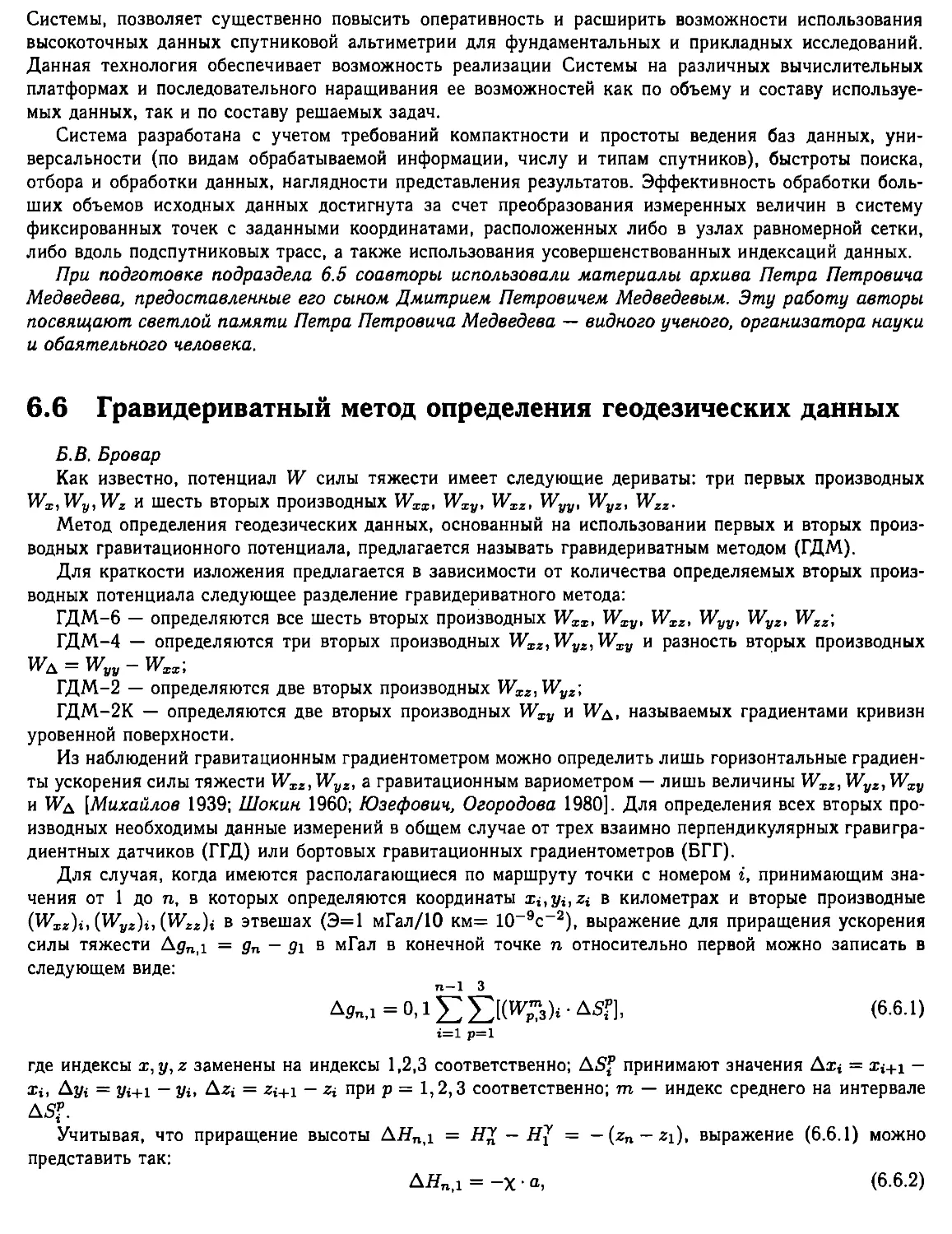
ГРАВИМЕТРИЯ
И
ГЕОДЕЗИЯ
Список сокращений
АГН — астрономо-гравиметрическое нивелирова-
ние
АГП КГС — астрономо-геодезические пункты кос-
мической геодезической сети
АГС — астрономо-геодезическая сеть
АГЭ — Аэрогравиметрическая экспедиция Геофи-
зического института АН СССР
ACT — аномалия силы тяжести, или аномалия
ускорения силы тяжести
БГГ — бортовые гравитационные градиентометры
ВАУ — высокоточные астрономические фотоуста-
новки
ВГС — высокоточная геодезическая сеть
ВГУ — Высшее геодезическое управление
ВКГ — высота квазигеоида
ВТУ ГШ МО РФ — Военно-топографическое
управление Генерального Штаба Вооруженных
Сил Российской Федерации
ГАИШ — Государственный астрономический ин-
ститут им. П.К. Штернберга
ГБЧ — «Гипотеза Больших Чисел»
ГВО — главная высотная основа
ГГП — государственный гравиметрический пункт
ГГС — государственная геодезическая сеть
ГГС-1 — государственная гравиметрическая сеть
1 класса
ГДП — геодинамические полигоны
ГЕОИК — геодезический измерительный комплекс
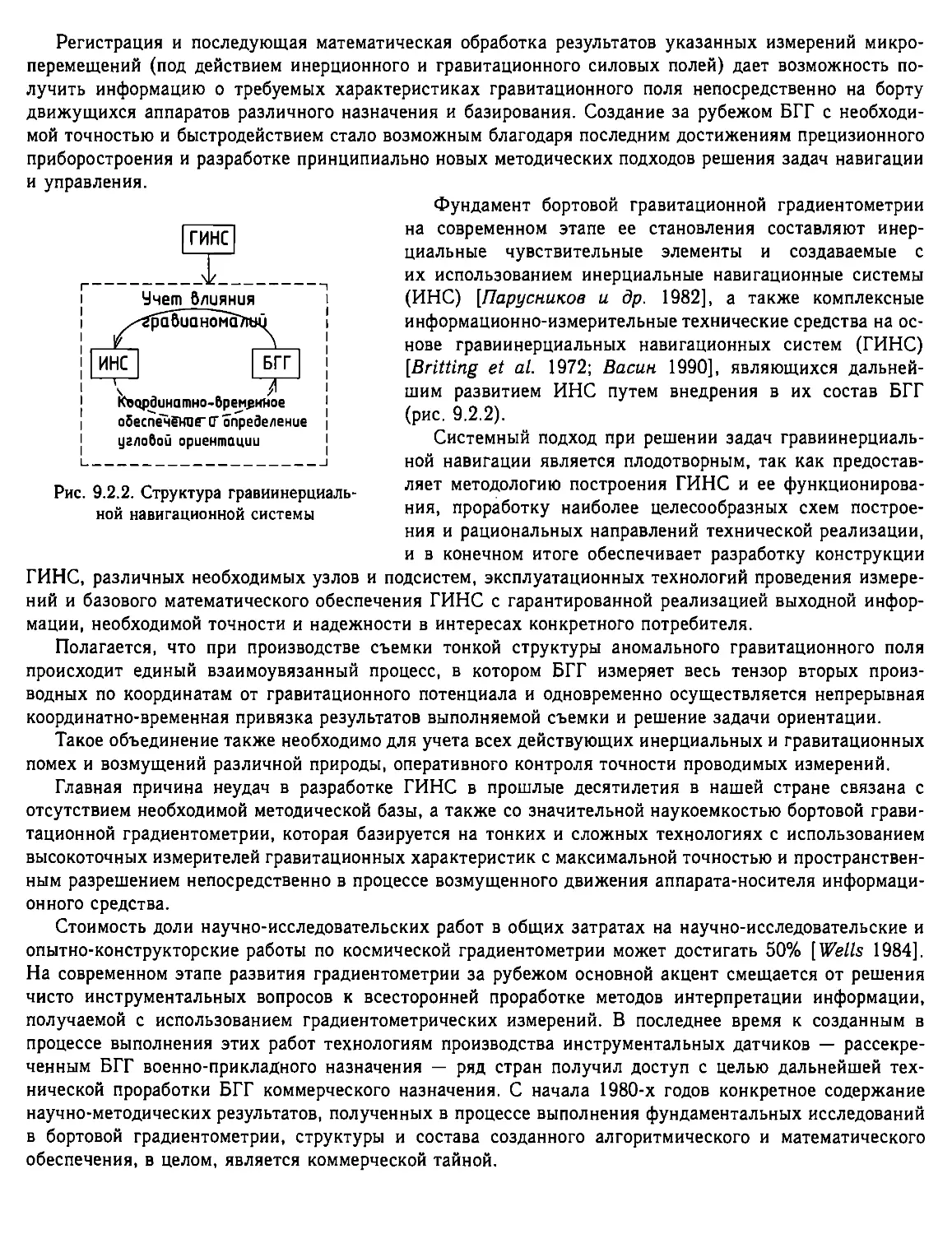
ГИНС — гравитационные инерциальные навигаци-
онные системы
ГЛОНАСС — глобальная навигационная спутни-
ковая система
ГНСС — глобальная навигационная спутниковая
система
ГПЗ — гравитационное поле Земли
ГСВЧ — государственная служба времени и ча-
стоты
ГУГК — Главное управление геодезии и картогра-
фии
ГУГСК — Главное управление государственной
съемки и картографии
ГУЗ — Государственный университет по земле-
устройству
ГУНИО — Главное управление навигации и океа-
нографии Минобороны
ГФГС — государственная фундаментальная грави-
метрическая сеть
ДГС — доплеровская геодезическая сеть
ИСЗ — искусственный спутник Земли
КА — космический аппарат
КВНО — координатно-временное и навигационное
обеспечение
КВО — координатно-временное обеспечение
КВТ — Корпус военных топографов
КГС — космическая геодезическая сеть
КК — контрольно-корректирующая станция
КЭД — квантовая электродинамика
МБВ — Международное бюро времени
МГТС — Международный геодезический и геофи-
зический союз
Мингео — Министерство геологии
МО — Министерство обороны (Минобороны)
МСДП — Международная служба движения по-
люса
МСШ — Международная служба широты
ОТО — общая теория относительности
ПВЗ — параметры вращения Земли
ПЗ-85 — система геодезических параметров Зем-
ли 1985 года («Параметры Земли 1985 года»)
ПЗ-90 — система геодезических параметров Зем-
ли 1990 года («Параметры Земли 1990 года»)
РВСН — ракетные войска стратегического назна-
чения
РСДБ — радиоинтерферометрия со сверхдлинной
базой
СВДЗК — современные вертикальные движения
земной коры
СГС-1 — спутниковая геодезическая сеть 1 класса
СДГС — спутниковые дифференциальные геоде-
зические станции
СДКМ — система дифференциальной коррекции
и мониторинга
СК — система координат
СК-42 — система координат 1942 года
СК-95 — система координат 1995 года
СКО — средняя квадратическая ошибка
СКП — средняя квадратическая погрешность
СКС — сферическая координатная система
СТО — специальная теория относительности
СУОЛ — составляющие уклонений отвесных ли-
ний
ТВО — теории Великого объединения
ТМОГИ — теория математической обработки гео-
дезических измерений
УОЛ — уклонения отвесных линий
УСТ — ускорение силы тяжести
ФАГС — фундаментальная астрономо-
геодезическая сеть
ФГУП — федеральное государственное унитарное
предприятие
ФФК — фундаментальные физические константы
ФЭУ — фотоэлектронный умножитель
ЦНИИГАиК — ФГУП «Центральный ордена
«Знак Почета» научно-исследовательский ин-
ститут геодезии, аэросъёмки и картографии
им. Ф. Н. Красовского»
ЭОМЗ — ФГУП «Экспериментальный оптико-
механический завод»
СЕО — Celestial Earth Origin (Земное условное
начало
СЮ — Celestial Intermediate Origin (Международ-
ное условное начало)
EOP — Earth Orientation Parameters (параметры
ориентации Земли)
GPS — Global Positional System (глобальная си-
стема определения положения)
ICAO — International Civil Aviation Organization
(Международная организация гражданской авиа-
ции)
ICRS — International Celestial Reference System
(международная небесная система отсчета)
IERS — International Earth Rotation and Reference
System Service (Международная служба вращения
Земли и систем отсчета)
IMO — International Maritime Organization (Меж-
дународная морская организация)
ITRF — International Terresrial Reference Frame
(международная общеземная отсчетная основа)
ITRS — International Terresrial Reference System
(международная земная система отсчета)
KMS — глобальная модель среднего уровня мор-
ской поверхности и гравитационного поля Земли
NASA — National Aeronautics and Space
Administration (Национальное управление по аэро-
навтике и исследованию космического простран-
ства)
NIMA — National Imagery and Mapping Agency
(Национальное управление no съемкам и карто-
графированию)
RTK — Real Time Kinematic (кинематика в реаль-
ном режиме времени)
ТЕО — Terrestrial Earth Origin (сухопутная земная
основа, или сухопутная земная исходная основа)
TIO — Terrestrial Intermediate Origin (сухопутная
промежуточная земная исходная основа)
WGS-84 — World Geodetic System (мировая гео-
дезическая система 1984 года)
Введение
Книга, в которой рассматриваются отношения гравиметрии и геодезии, посвящена 90-летию со дня
рождения Всеволода Владимировича Бровара — крупного российского ученого в области геодезической
гравиметрии и геодезии, и 100-летию со дня рождения Михаила Сергеевича Молоденского — рос-
сийского геодезиста и геофизика, основоположника современной теории фигуры Земли, освободивший
геодезию от гипотез о внутреннем строении Земли и превративший ее в точную науку.
Цель работы состоит в показе взаимного влияния гравиметрии и геодезии, эволюции во времени
их задач, подведении основных итогов теоретических, экспериментальных и производственных работ
в области физической геодезии на рубеже второго и третьего тысячелетия, перехода от частного к
системному решению их задач, а также в определении перспектив развития гравиметрии в интересах
геодезии.
В книге рассмотрены вопросы:
— исторического обзора зарождения, становления и развития геодезии и гравиметрии;
— связи земной системы с небесной системой координат;
— теории гравитации и ее модификаций, фундаментальных физических констант, методов и проблем
определения гравитационной постоянной;
— приливных и неприливных временных вариаций ускорения силы тяжести;
— теории М.С. Молоденского и ее дальнейшего развития;
— разработки вариационного метода физической геодезии и коллокации;
— устройств наиболее значимых гравиметрических приборов, баллистических и статических грави-
метров, а также градиентометров;
— установления единой общеземной системы координат, нормальных высот и ускорения силы тя-
жести;
— спутниковой альтиметрии и спутниковой градиентометрии;
— гравиметрической изученности Земли и некоторых планет;
— использования геодезических данных при решении прикладных задач геодезии, геодинамики и
гравиметрии;
— моделирования аномального гравитационного поля Земли, в том числе методики определения
составляющих уклонений отвесных линий и высот квазигеоида по гравиметрическим данным;
— кинематики и динамики оболочек Земли;
— концепции, объясняющей циклический ход эволюции системы Земля-Луна;
— определения вариаций ускорения силы тяжести в сейсмоактивных и вулканических районах;
— корреляции изменений земного гравитационного поля и вертикальных движений земной коры;
— спектрального анализа вариаций силы тяжести, вращения Земли;
— системного подхода при решении задач гравиметрии и геодезии в ближайшей перспективе;
— современных задач бортовой гравитационной градиентометрии;
— определения вектора ускорения силы притяжения, ориентации и координат движущегося объекта
каскадным методом;
— модернизации гравиметра ГАГ-3 и освоения новых областей применения новых физических при-
боров.
В книге обобщены достижения гравиметрии и геодезии на длительном этапе. В приложении про-
слежена эволюция содержания задач геодезии и гравиметрии, даны портреты около двухсот ученых
(теоретиков, экспериментаторов и организаторов) и описания в хронологическом порядке их вклада в
теорию, аппаратуру и производство измерений.
Показана необходимость перехода к системному подходу решения задач геодезии и гравиметрии, к
пересмотру стратегии развития геодезии и гравиметрии как наук, так и топографо-геодезического и гра-
виметрического производства; рассмотрены перспективы совместного развития геодезии и гравиметрии
и их новые области применения.
1. Эволюция содержания задач
геодезии и гравиметрии
1.1 Методологические аспекты изучения поля земной силы
тяжести
В.В. Бровар, М.И. Юркина
1. Методологию принято рассматривать как часть логики, изучающую правильные пути (методы)
систематического изучения выбранного предмета. Она включает в себя методы описания (изложения)
предмета, методы обучения предмету, но главное ее содержание составляют методы исследования пред-
мета. Методы исследования чрезвычайно разнообразны. Они изменяются в зависимости от предмета и
целей исследования, но вместе с тем к одному и тому же предмету и цели можно применять различные
методы исследования. По форме методы исследования можно разделить на дедуктивные (от общего
к частному) и индуктивные (от частного к общему), на анализ и синтез. О других общих методах
удобнее сказать по мере изложения.
Математика использует в основном метод дедукции, по крайней мере при доказательствах. Так
развивалась геометрия с античного времени. Гносеологическое обоснование этого подхода в 1781 г. дал
И. Кант (1724-1804). Он утверждает возможность суждений, не зависимых от опыта, — априорных
синтетических суждений. Именно на таких суждениях (постулатах) основана геометрия и математика
вообще. В естественных науках, как, например, в физике, астрономии, химии, геологии, биологии,
берущих наблюдения и специально поставленные опыты за исходное, приходится использовать бо-
лее трудный путь исследования — индукцию. От опытно установленных зависимостей переходят к
формулировке правила. Затем рассматривают различные следствия установленного правила, и если
следствия подтверждаются новыми опытами, то правило получает возможность называться законом,
законом природы. Знание законов радикально облегчает дальнейшие исследования, так как позволяет
идти обратным путем — от закона к явлению, от общего к частному. Это уже — дедуктивный метод
исследования.
Развитие науки при дедуктивном методе иногда сравнивают с плаванием по течению, а при ин-
дуктивном — с плаванием против течения. Но дедуктивные исследования в естественных науках в
конце концов сталкиваются с новыми фактами, противоречащими исходным законам. Это означает,
что установленные правила или законы, на которых строились дедуктивные исследования, нуждаются
в уточнениях или даже в изменениях. Очень редко приходится менять законы, а вместе с ними и
основные понятия, представления. Так, в свое время приходилось отказываться, например, от эпицик-
лов в астрономии, или в физике — от теплорода, магнитных и электрических жидкостей и т. п. По
терминологии Т.Куна [1977], в такие периоды одна парадигма сменяет другую.
В 1902 г. В.И. Вернадский ввел более широкое понятие о научном мировоззрении, отметив, что
оно не является синонимом истины, а постепенно эволюционирует, будучи неразрывно связанным с
господствующими философскими, религиозными, художественными и прочими представлениями, опре-
деляющими общий интеллектуальный климат и уровень духовного развития человеческого сознания
той или иной эпохи. «Сухой остаток», переходящий из одного научного мировоззрения в другое, пред-
ставляют собой лишь научно достоверные факты и эмпирические обобщения. Подробнее в работах
[Вернадский 1981; Яншин и др. 2000].
Далее рассматривается в общих чертах развитие в геодезии методов изучения поля земной силы
тяжести и их синтез.
2. Аристотель (384-322 гг. до н. э.) в сочинении «О небе» описывает ряд явлений, доказывающих
шарообразность Земли и известных еще пифагорейцам. Там же он упоминает выполненные измерения
земного радиуса, указывая, что длина окружности земного шара составляет 400000 стадиев, но длина
эллинистической стадии неопределенна [Фирсов 1972].
Для современного читателя более интересны рассуждения Аристотеля о форме Земли. За первич-
ное он берет силу тяжести и считает ее направленной к центру Вселенной. Образование Земли из
частиц, падающих к центру, делает ее шарообразной. Если на какое-то время центр масс Земли и
центр Вселенной не совпадут, то под действием центральной силы совпадение в конце концов все-таки
произойдет. Аристотель считает Землю неподвижной и потому — шарообразной. Если бы Земля имела
другую форму, то, — замечает Аристотель, — должна была бы существовать еще какая-то сила, кроме
центральной. Стремление к центру Вселенной, описанное Аристотелем, до сих пор довлеет над умами
при применении закона Ньютона и определении вращения Земли. Аль-Хазини (XII в. н. э.) (сведения
о нем можно найти у Романской [1991]) — ученик Омара Хайяма — полагал вес тел возрастающим с
расстоянием от центра Мира — центра Земли. Ньютон упомянул такую силу в «Началах», указав, что
эта сила при любом распределении плотности тела проходит через его центр масс. Для ньютоновой
силы такой теоремы в «Началах», естественно, нет. Однако и теперь при расчетах движения небесных
тел не считаются с возможным смещением действующих сил с центров масс.
В рассуждениях Аристотеля ценна неразрывная связь силы тяжести и формы Земли. Это очень
важно и не всегда всем понятно. Именно в результате пренебрежения этой связью появились парадоксы
с антиподами: поле тяжести считали однородным, а Землю — шаром. Только в новое время А.К. Клеро
(1713-1765) придал этой связи общую афористичную форму: «... вопрос о фигуре Земли основан на
законе действия силы тяжести» [Клеро 1947, с. 10].
Первое дошедшее до нас измерение земного радиуса выполнено Эратосфеном (ок. 276-194 до н. э.).
Ему удалось в момент солнцестояния измерить непосредственно разность Дер широт двух пунктов, а
также расстояние Д5 между ними. Выбранные пункты (Александрия и теперешний Асуан) находятся
в пойме Нила вблизи уровня моря и имеют небольшую разность долгот (~3°), поэтому измеренную
длину Д5 дуги можно было рассматривать как меридиональное сечение Земли, а измеренную разность
широт Дф — равной углу между отвесными линиями. Отношение Д(р:Д5 определяет тогда среднюю
кривизну отрезка Д5. Эратосфен посчитал ее равной кривизне всей Земли. Точность радиуса Земли,
по оценке С. У. Кэри [1988, с. 32 русского издания], получилась высокой, ~2%, хотя расстояние Д5
было измерено очень грубо: по средней суточной скорости каравана.
Использованный Эратосфеном комплекс измерений не только оказался пригодным для определения
земного радиуса, но и обосновывал принцип универсального астрономо-геодезического метода изучения
уровенной поверхности потенциала силы тяжести — геоида. В зависимости от целей исследования в
разные эпохи длины дуг между астропунктами то старались увеличивать (градусные измерения), то,
наоборот, делать короткими (астрономическое нивелирование), но метод сохранялся, а с некоторыми
уточнениями понятий и дополнениями использовался и в астрономо-геодезических сетях XX века.
Новое значение в геодезии приобретает чисто геометрический спутниковый метод сейчас благодаря
синтезу с механическим методом изучения внешнего гравитационного поля Земли.
В эпоху великих географических открытий Гемма Фризий (1508-1555) для уточнения топографиче-
ской съемки применил прямые засечки с концов измеренного базиса Брюссель-Антверпен. Он же для
измерения длинных дуг предложил метод триангуляции. Идею Фризия о ряде триангуляции вскоре
осуществил его ученик знаменитый Г. Меркатор (1512-1594), см. у Вернадского [1981, с. 183]. Более
обстоятельно триангуляцию использовал Б. Снеллиус (1580-1626) для определения земного радиуса.
С использованием триангуляции стали измерять дуги, отнесенные к геоиду.
3. Открытия Н. Коперника (1473-1543), И. Кеплера (1571-1630), Г. Галилея (1564-1642) основаны
на тщательном анализе опытов и астрономических наблюдений. Философ Ф. Бэкон (1561-1626) и
Галилей с разных позиций, но оба призывали изучать природу, привлекая математику. В эти годы
оформился новый метод изучения явлений — индукция. Появилась крылатая фраза: «знание — сила».
Теоретические предпосылки всестороннего изучения гравитационного поля, а вместе с ним и поля
силы тяжести на земной поверхности заложены были в 1687 г. И. Ньютоном (1643-1727) в книге «Ма-
тематические начала натуральной философии». Ньютон создал единый комплекс понятий и законов
механики в результате гармонического соединения «правил» Н. Коперника, И. Кеплера, Г. Галилея и
собственных идей. Формальный перенос начала системы координат с Земли на Солнце аргументирован
Коперником эстетическими соображениями и простотой орбит. Но значение этого шага для развития
естествознания было чрезвычайно важным: найдена была инерциальная система координат. Динами-
ческие принципы Галилея относились именно к ней, и в своих наземных опытах Галилей оговаривал
необходимость введения поправок за вращение Земли в результаты опыта. В установлении своих «пра-
вил» Кеплер также опирался на наблюдения (индукция), но давал им бесколичественные, схоластиче-
ские объяснения: планета «склонна к покою», а движение ее происходит под влиянием «действующей
души» Солнца, а действие Солнца направлено по касательной к орбитальному движению... Такого
рода объяснения раздражали Галилея. Великие современники не находили общего языка. Ньютон в
коперниковой системе координат непротиворечиво соединил «правила» Кеплера и Галилея со своим
«правилом» о силе притяжения. Методология Ньютона и сейчас безупречна.
Согласно принципу инерции Галилея в инерциальной системе координат скорость должна изменять-
ся под действием внешней силы, и изменение силы измеряется изменением скорости. Ньютон вычислял
скорость по законам Кеплера, а силу — по своему закону. В результате движение получилось эллипти-
ческим, в соответствии с законами Кеплера. Это, конечно, индукция. Затем, согласно закону Ньютона,
дедуктивным путем была вычислена орбита Кеплера. При этом оказалось, что третий закон Кеплера
получил небольшое уточнение, приведшее к лучшей сходимости вычисленной орбиты с наблюдениями.
Дальнейшее расширение задачи (дедукция) привело к выводу, что движение под действием ньютонова
притяжения может происходить не только по эллиптическим орбитам, но еще по параболическим и
гиперболическим. Тем самым движения комет также получили объяснения. Далее рассмотрено было
движение спутников планет, и непонятные отклонения их орбит получили объяснения в возмущающем
влиянии Солнца. Наконец, оценено было полярное сжатие Земли, доказано, что движение Луны и па-
дение тел у земной поверхности происходят под действием одной и той же силы. Объяснение получили
и земные приливы.
Разнообразные многолетние исследования подтвердили законы Кеплера. Только наблюдаемое веко-
вое движение перигелия Меркурия не удалось полностью объяснить теоретически Леверье и Ньюкому.
Этот факт напоминает, что дедуктивный процесс познания не обходится без индукции, то есть в права
должны вступать новые понятия, новые гипотезы и их экспериментальные проверки. Но это, как мы
теперь знаем, произойдет не скоро. Современники же с сомнением встретили ньютоново притяжение по
другой причине. Возник вопрос: почему тела притягиваются друг к другу? Причина «дальнодействия»
безуспешно обсуждалась в прошлом (Ж.Л. Лесаж, У. Томсон, подробнее см. [Розенбергер 1890, Виз-
гин 1981]) и обсуждается в наши дни. Свой вклад в понимание гравитации внес А.Д. Сахаров в статье
[1967], научных трудах [1995] и в «Воспоминаниях» [1996, т. 1, с. 570, т. 2, сс. 252, 300]. Он разви-
вает теорию гравитации Эйнштейна. Этот вопрос обдумывал, конечно, и сам Ньютон. Механического
решения он не нашел, да и не мог найти, оставаясь в пределах своей системы понятий, но предложил
несколько уточнить методологию изучения. Именно, первую задачу исследования он видит в установ-
лении законов природы, а давать им объяснения — вторая задача исследования: «Причину же этих
свойств силы тяготения я до сих пор не мог вывести из явлений, гипотез же я не измышляю... »
(«... в действительности имело место расхождение между словами Ньютона и его реальной практи-
кой» — заметил В.С. Черняк в книге «Принципы историографии... », с. 259-260). И далее: «Довольно
того, что тяготение на самом деле существует и действует согласно изложенным нами законам, и
вполне достаточно для объяснения всех движений небесных тел и моря» [Ньютон 1989, с. 662].
Соединение Ньютоном закона притяжения с законами механики и новыми методами в математике
привело к созданию новой парадигмы: системе жестко увязанных между собой исходных понятий (ев-
клидова геометрия, пространство, время, масса, сила, скорость, ускорение, количество движения...) и
соответствующих им методов изучения, охватывающих все более и более обширные области физики.
Г.В. Лейбниц (1646-1716), использовав результаты X. Гюйгенса (1629-1695), открыл закон сохране-
ния «живых сил» — дал первую формулировку закона сохранения энергии, Ю.Р. Майер (1814-1878),
Г.Л.Ф. Гельмгольц (1821-1894), Дж.П. Джоуль (1818-1889) уточняли формулировку этого закона, его
математическое и экспериментальное обоснования. Открылся невиданный простор для дедуктивного
метода.
Разнообразные работы объединены одним методом, сформулированным еще в 1637 г. Р. Декартом
(1596-1650): «.. .делить каждое из исследуемых .. .затруднений на столько частей, сколько это воз-
можно и нужно для лучшего их преодоления» [1950, с. 272]. Принцип прекрасно оправдал себя в
математике и физике. На его идейной основе разработан мощный метод дифференциальных уравне-
ний. В небесной механике он позволяет изучать движение отдельных тел Солнечной системы. В теории
фигуры Земли новая ньютонова парадигма проявилась в книге III «Начал» в расчете сжатия однородно-
го эллипсоида, уровенного для потенциала силы тяжести. В разделе «Найти и сравнить между собою
веса тел в разных областях Земли» Ньютон доказывает, что приращение веса от экватора к полюсам
приблизительно пропорционально квадрату синуса широты — первая формулировка формулы Клеро —
и приблизительно в том же отношении возрастают длины радиуса меридиана с широтою. Допустив,
что земная сила тяжести равна равнодействующей силы притяжения, всегда направленной, согласно
представлению Декарта, к центру Земли, и центробежной силы, Гюйгенс в работе 1690 г. определил
земное сжатие 1:578. Возник вопрос о возможности существования сфероидальных небесных тел. В
этих исследованиях велика роль понятия о потенциале силы, появившемся еще в средние века. Этим
понятием пользовались Гюйгенс, Ньютон, П.Л.М. де Мопертюи (1698-1759), Клеро, Л. Эйлер (1707-
1783). В книге 1736 г. Эйлер явно выразил потенциал силы притяжения точечной массы (подробнее
[Юркина 1977, 1987, 1988; Yurkina 1985]).
В размышлениях о трудных задачах исследователи едва ли отдают себе отчет, дедукцией или ин-
дукцией они занимаются. В.И. Вернадский в 1902 г. заметил в письме жене: «... я смотрю на значение
философии в развитии знания совсем иначе, чем большинство натуралистов, и придаю ей огромное,
плодотворное значение». И далее: «Развитие научной мысли никогда не идет дедукцией или индук-
цией — оно должно иметь свои корни в другой — более полной поэзии и фантазии — области: это
или область жизни, или область искусства, или область, не связанная с точной дедукцией или ин-
дукцией — рационалистическими процессами, — область философии. Философия всегда заключает
зародыши, иногда даже предвосхищает целые области будущего развития науки, и только благодаря
одновременной работе человеческого ума в этой области получается правильная критика неизбежно
схематических построений науки...»
4. Предполагалось сначала, что выведенные из градусных измерений кривизны дуг меридианов на
разных широтах характеризуют сечения одного и того же эллипсоида. Но в конце 30-х — начале 40-х
годов XVIII в. в работах «О фигуре Земли» и «О неравенстве силы тяжести в разных местах Земли»
Р.И.Бошкович (1711-1787) делает вывод, что фигура Земли, образованная замкнутой поверхностью
океанов, не может быть представлена единым сфероидом [Цверава 1986]. Взгляд Бошковича, энцикло-
педиста, члена многих академий, почетного члена Петербургской академии, не встретил поддержки, и
Ж.Б.Ж. Деламбр (1749-1822), следуя А.М. Лежандру (1752-1833), при обсуждении материалов фран-
цузских градусных измерений конца XVIII — начала XIX вв., выполненных для установления десятич-
ной системы мер, объяснял такие расхождения местными влияниями [Mechain, Delambre 1810, t. 3,
р. 92]. Иногда стремились их исключить, вводя топографические поправки. Методология обработки гра-
дусных измерений в течение долгих лет в лучшем случае использовала указанный подход. Этот взгляд
продержался в России до начала XX в. Ему следовал И.И. Стебницкий, обсуждал В.В. Витковский
(подробнее см. [Бровар, Юркина 1997]). Факты заставили отказаться от этой точки зрения: введение
поправок за местные влияния иногда не только не уменьшало, но увеличивало расхождения между
астрономическими и геодезическими данными. Отклик этого взгляда проявился недавно в книге [Аба-
лакин и др. 1996, с. 31], где уклонения отвеса объяснены локальными аномалиями силы тяжести.
После основополагающих противоречивых работ Ньютона и Гюйгенса более близкий к реальной
Земле этап исследования достигнут в книге Клеро 1743 г. Для этого автор дополнительно использо-
вал представление о жидком равновесном состоянии Земли. В первой части этого труда разработана,
можно сказать, аналитическая гидростатика. Во второй части рассмотрены фигуры равновесия жидких
планет (однородных и неоднородных). Доказано, что неоднородная планета может существовать в виде
семейства двухосных эллипсоидов малого сжатия, вращающихся с малой угловой скоростью, если спра-
ведливо некоторое интегро-дифференциальное уравнение, связывающее постоянные плотности слоев с
их сжатиями (уравнение Клеро). Дальнейшие преобразования уравнения, исследование его неодно-
значности и многие другие вопросы, связанные с изучением возможности существования фигур рав-
новесия, нашли непосредственное продолжение в работах математиков и механиков Ж.Л. Д’Аламбера
(1717-1783), П.С. Лапласа (1749-1827), Р. Радо (1835-1911), А. Пуанкаре (1854-1912), А.М. Ляпунова
(1857-1918). Сейчас более точная теория неоднородных жидких равновесных и неравновесных планет
развивается в работах геофизиков В.Н. Жаркова и В.П. Трубицына [1983], Б.П. Кондратьева [1989],
а теория Клеро-Радо непосредственно используется для описания начального состояния Земли при
изучении ее упругих колебаний [Молоденский 1989].
Для изучения поля силы тяжести на поверхности Земли Клеро установил в той же книге замеча-
тельную теорему: (а-Ь)а-1 + (ур — у^уё1 = 2,5а>2ар“1, где а и b — большая и малая полуоси земного
эллипсоида, уе, ур — сила тяжести на экваторе и полюсе, си — угловая скорость вращения. Теорема
определяет сжатие Земли в предположении, что квадратами каждого из трех членов можно пренебречь.
Для уровенного эллипсоида произвольного сжатия подобная зависимость опубликована П. Пицетти в
книге 1913 г.
Развитие теории потенциала и теории фигуры Земли в работах Эйлера, Ж.Л. Лагранжа (1736-1813),
Лапласа, А.М. Лежандра и их дедуктивные построения, приведшие к экспериментальному изучению
внешнего потенциала Земли без сведений о ее плотности и без предположения о ее жидком состоянии
[Laplace 1785], отражены в нашей статье 1997 г. В частности, ряды Лапласа до сих пор остаются одним
из основных математических аппаратов геодезии при решении глобальных задач. Точность решения
исследована Буршей и др. [1998]. Особенно полезными они оказались в спутниковых исследованиях:
низкие гармоники земного гравитационного поля, включая определяющий земное сжатие коэффициент
при полиноме Лежандра второй степени, наиболее надежно получены по спутниковым наблюдениям.
Изучением гравитационного поля занимались выдающиеся математики последние три столетия. В
XVIII-XX вв. разрабатывались способы решений дифференциальных уравнений, обыкновенных и в
частных производных (математическая физика), охвативших единым подходом и собственно механику,
механику сплошных сред, гидродинамику, акустику, а также теплоту и теорию поля, скалярного и
векторного, теорию упругости, теорию электромагнитного поля.
Расчеты притяжения двух- и трехосных эллипсоидов как моделей Земли выполнены Эйлером,
Лагранжем, Лапласом, Лежандром, К.Ф. Гауссом (1777-1885), С.Д. Пуассоном (1781-1840), М. Шалем
(1793-1880) и многими другими. В течение многих лет такой подход был основой методологии изу-
чения фигуры Земли и ее гравитационного поля. При этом были выяснены многие вопросы теории
потенциала: Пуассон распространил уравнение Лапласа для вторых производных потенциала на точку
внутри притягивающей массы, появились интегралы Гаусса, существенно облегчающие определение
притяжений однородных тел, что нашло применение при вычислении поправок за рельеф в гравимет-
рии. Даже много лет спустя после появления формулы Стокса (1849 г.) продолжали появляться работы
геодезической направленности о притяжении эллипсоидов. Например, в учебнике [Михайлова 1939]
притяжению однородного двухосного эллипсоида посвящена глава 4, хотя такой расчет не нужен ни для
изложения теории краевой задачи Стокса, ни для практических приемов геодезической гравиметрии.
Общий метод решения дифференциальных уравнений в частных производных в 1822 г. разработал
Фурье (1768-1830). Метод позволяет представить общее решение в виде частных функций, удовлетво-
ряющих исходному уравнению в частных производных в заданной области. Общее решение состоит в
определении только постоянных коэффициентов по краевым и начальным условиям. Частным случаем
рядов Фурье является разложение Лапласа.
Теория сферических функций второго рода, составляющих основу разложений в ряды по сферои-
дальным функциям, связанным с эллипсоидом вращения, разработана Г.Э. Гейне (1821-1881) — [Heine
1843, 1851, 1861]. В первой из этих работ решена первая внешняя и внутренняя краевая задача для
эллипсоидов методом Фурье, во второй — рассмотрено притяжение эллипсоидов, двухосного и трехос-
ного. В книге 1861 г. разработана теория упомянутых функций и введено их название (с. 41). Теперь
практически применяются сфероидальные координаты разного вида: введенные в работе [Niven 1880]
(в работах Молоденского и Мещерякова), Пицетти [1913] и в книге [Heiskanen, Moritz 1967], в
работах Морица. Подробнее этот вопрос рассмотрен в подразделе 1.4.
Одно из решений Гейне (первая внешняя краевая задача для сжатого эллипсоида) в XX в. находит
применение в теории фигуры Земли при определении нормального потенциала. Решение второй краевой
задачи, основанное на разложении Гейне, получил в 1991 г. Г.А. Мещеряков (1924-1992).
5. Данные о расхождении среднего уровня моря и эллипсоида постепенно накапливались, как и
сведения о непостоянстве силы тяжести на параллелях и неправильном ее изменении вдоль мериди-
анов. В письме Шумахеру в 1823 г. Гаусс ввел понятие геоида (термин ввел И.Б. Листинг [Listing
1873, с. 41]). В публикации 1828 г., обсуждая результаты ганноверского измерения разности широт
Геттингена и Альтоны, а также французских, английских и итальянских градусных измерений, Гаусс
[Gauss 1828] отвергает точку зрения Деламбра о локальных отклонениях отвеса и пишет: «То, что мы
называем поверхностью Земли в геометрическом смысле, есть не что иное, как та поверхность, которая
везде перпендикулярна направлению силы тяжести и часть которой образована поверхностью мирово-
го океана». И заключает: «Нет сомнения, что будущие века очень много добавят к математическим
знаниям о фигуре Земли».
Экспериментально установленный факт поставил перед геодезией наряду с определением земного
эллипсоида новую задачу — определить эту уровенную поверхность. Как следует из цитаты, Гаусс
предполагает силу тяжести отнесенной к точкам геоида. В работе 1828 г. он первым применил астро-
номическое нивелирование (название дано Ф. Р. Гельмертом (1843-1917) в книге 1884 г., с. VIII и 599)
для приращений ДА/ высот геоида над отчетным эллипсоидом по составляющим £,,т] угла между нор-
малями эллипсоида и геоида. Но, следуя предшественникам, многие свои исследования Гаусс посвятил
изучению эллипсоидальной поверхности и геодезическим операциям на ней: геодезическим линиям и
треугольникам со сторонами из геодезических линий, используя преимущественно только плановые
координаты. Теория поверхностей, развитая Гауссом, была стимулирована геодезическими задачами.
Геодезия представлялась Гауссу поверхностной. В зависимость декартовых координат с геодезически-
ми широтами В, долготами L и высотами Н, высоты были введены Ф.Р. Гельмертом в книге 1880 г.,
с. 189. Следуя Гауссу и стремясь приблизиться к реальной земной поверхности, рассматривали решение
геодезических задач на поверхностях более сложного вида, чем эллипсоид вращения [Беспалов 1980].
Практического применения эти исследования не нашли.
Гаусс ввел в астрономию и геодезию разработанный им метод наименьших квадратов — приводя-
щий к определению вероятностных результатов метод обработки избыточных наблюдений, искаженных
случайными влияниями. Этот метод касается измерений всех видов и широко используется. Большое
практическое значение сохраняет вклад Гаусса в решение краевых задач [Гаусс 1952], а также вклад
Грина [Green 1871].
Метод определения ДА/, £,,т] одновременно с определением полуосей отсчетного эллипсоида опи-
сал Ф.В. Бессель (1784-1846). Методика Бесселя предполагала наблюдения по рядам триангуляции
астрономических широт и долгот, благодаря чему стало возможно определение кривизны любых дуг,
а не только меридиональных. Гаусс и Бессель заложили основы обработки измерений в астрономо-
геодезических сетях с учетом особенностей реального гравитационного поля, но без измерений силы
тяжести. Эти приемы были развиты А.Ж.Ф. Ивон-Виллярсо (1813-1883) и'Ф.А. Слудским (1841-1897),
в частности геометрический метод изучения земной поверхности совместно с геометрическим и аст-
рономическим нивелированиями. Этим способом И.И. Померанцев [1897] построил карту геоида в
Ферганской долине. Пуанкаре [Poincard 1901] рассмотрел астрономо-геодезический метод построения
сетей большой протяженности, отметил возможность систематических быстро накапливающихся по-
грешностей, сопоставил применение методов развертывания и проектирования, описал роль уклонений
отвеса, полученных методом проектирования нормалями к эллипсоиду. Эта статья Пуанкаре завершила
теорию обработки астрономо-геодезических измерений без использования наблюдений силы тяжести.
Несмотря на огромное значение астрономо-геодезических работ в истории цивилизации и разно-
образное повсеместное их практическое использование, сам по себе астрономо-геодезический метод
изучения поля силы тяжести Земли ограничен. Кривизна уровенной поверхности, конечно, полезна,
но это только одна локальная характеристика одной уровенной поверхности Земли. Даже необходимо-
сти определения понятия силы тяжести в этом методе не возникает (достаточно знать, что спокойная
поверхность жидкости и отвес ортогональны). Геодезия имеет дело с измерениями силы тяжести на
земной поверхности, а используемая уровенная поверхность потенциала силы тяжести обычно прохо-
дит на сотни метров ниже. Так возникает задача о приведении модуля и направления измеряемой силы
тяжести на геоид. Поэтому введение геоида как объекта изучения геодезии позволило высшей геодезии
подойти только к временному приближенному решению своей задачи.
6. Дж. Г. Стокс (1819-1903) ввел в геодезию краевые задачи математической физики в двух публи-
кациях 1849 г. Он свел решение задачи об определении геоида по гравиметрическим данным на нем к
решению первой краевой задачи, до того как этой задачей занялся П. Г. Дирихле, и она получила его
имя.
Исходная идея Стокса сводится к разделению потенциала силы тяжести Земли на два слагаемых —
нормальный потенциал силы тяжести, представляющий в целом потенциал вращающейся Земли, и
малый остаток — возмущающий чисто гравитационный потенциал. Польза введения нормального по-
тенциала, близкого к реально существующему, в том, что формулы представления малого возмущаю-
щего потенциала могут быть значительно упрощены по сравнению с реальным потенциалом. У Стокса
нормальный потенциал включает потенциал центробежной силы. При использовании топографических
и топографо-изостатических редукций для повышения точности интерполяции аномалий силы тяже-
сти центробежный потенциал и потенциал притяжения земного эллипсоида следует рассматривать
порознь. На современном уровне точности возможно придется считаться со смещением центра земной
массы с оси вращения из-за влияния других небесных тел. Возмущающий потенциал вне масс должен
удовлетворять уравнению Лапласа. Стокс предположил, что масс вне геоида нет и сила тяжести на
нем измерена. При этих условиях им установлена связь на геоиде между смешанной аномалией си-
лы тяжести и возмущающим потенциалом. Эта связь играет роль краевого условия, которому должен
подчиняться искомый интеграл уравнения Лапласа (возмущающий потенциал) на поверхности геоида.
Разложение возмущающего потенциала по сферическим функциям Стокс подставил в краевое условие
и нашел известный медленно сходящийся ряд (ряд Стокса). Он определяет возмущающий потенциал
через разложение на сфере смешанных аномалий силы тяжести. При вычислениях Стокс заменил геоид
сферой и вывел более удобную для точного счета, чем ряд, интегральную формулу. В нашей стране
принципы теории Стокса, вывод его интегральной формулы и необходимые редукции силы тяжести
впервые были описаны в учебнике А.А. Михайлова (первое издание вышло в 1933 г., второе — в 1939).
Решение Стокса открыло путь к экспериментальному определению геоида по измерениям силы
тяжести, выполненным, конечно, на земной поверхности. Из-за отсутствия гравиметрической съемки
Земли результат Стокса долгие годы не находил применения, но перспективность этого пути отмеча-
лась, например, Гельмертом. Решение Стокса определяет возмущающий потенциал на эллипсоиде, а
вместе с ним и высоту геоида над эллипсоидом. До настоящего времени и ряд, и формула Стокса
употребляются на практике.
С современной точки зрения, теория Стокса приближенно представляет внешний возмущающий
потенциал Земли. Приближенность появляется в результате замены сферой реальной земной поверхно-
сти. Что касается определения геоида, то для этого требуется регуляризация геоида и редуцирование
на него измеряемой силы тяжести. Обе эти задачи Стокс решал приближенно. Для точного решения
необходимы сведения о распределении массы внутри Земли. Затем следовало восстановить реальное
распределение масс, чтобы перейти к геоиду реальной Земли. Вполне сознавая приближенность реше-
ния, Стокс отмечал, что у него речь идет только о внешнем гравитационном потенциале. Погрешность
решения его устраивала. Учет сжатия краевой поверхности рассмотрен Д.В. Загребиным в работах
1949-1976 гг. и М.С. Молоденским [1956] и др., но поиск практически более удобных решений про-
должается и сейчас.
Накопление гравиметрических данных сопровождалось ростом интереса к теории Стокса. Усилия
геодезистов были направлены на совершенствование астрономо-геодезического и гравиметрического
методов изучения не Земли, а именно геоида. Множество работ посвящено регуляризации Земли и
приведению силы тяжести на геоид. Обсуждалась также возможная точность вычисления по формуле
Стокса. Площадные гравиметрические съемки, специально выполняемые в геодезических, а также в
гравиразведочных целях, послужили в СССР основой обработки астрономо-геодезической сети мето-
дом проектирования на отсчетный эллипсоид, что позволило создать единообразную по точности сеть
на всей территории страны. Были разработаны методы вычисления уклонения отвеса и астрономо-
гравиметрического нивелирования: гравиметрическая съемка позволяет выделить местные влияния на
направления отвеса в астропунктах, остаточные уклонения отвеса изменяются медленно, их можно
проинтерполировать на промежуточные точки и затем восстановить в них местные влияния. Таким
образом, гравиметрическая съемка позволяет как бы сгустить астрономические пункты геодезической
сети — произошел синтез геометрического и физического методов геодезии.
Высоты точек земной поверхности над некоторым отсчетным эллипсоидом определены при исполь-
зовании теории Стокса как суммы ортометрических высот и высот геоида. Ортометрические высоты
определены приращениями потенциала силы тяжести от некоторого начала счета (как правило, у уров-
ня моря) до исследуемой точки геометрическим нивелированием и измерениями силы тяжести вдоль
пути нивелирования. Для перевода приращения потенциала в линейную меру необходимы средние дт
из величин силы тяжести вдоль ортометрической высоты от исследуемой точки на Земле до геоида.
Вычисления на моделях Земли, отражающих земные условия, выявили высокие требования к точно-
сти регуляризации Земли и редукции силы тяжести на регуляризованный геоид, а также к определению
среднего дт из величин силы тяжести внутри Земли. Например, для вывода ортометрической высоты
с ошибкой 1 мм при высоте в 1000 м среднее дт нужно получить с погрешностью в 1 мГал. Влияние
неоднородности земной коры на среднее дт может достичь нескольких десятков мГал, а соответствен-
ная погрешность ортометрической высоты будет выражена несколькими сантиметрами. Швейцарский
геодезист Нитхаммер в работе [Niethammer 1932] стремился к выводу ортометрических высот с наивыс-
шей точностью, но не принял во внимание аномалии вертикального градиента силы тяжести, которые
могут вызвать упомянутые ошибки. Разработанная Нитхаммером методика очень трудоемка: для учета
поправок за рельеф местности вдоль силовой линии репера необходима тщательная выборка высот с
топографических карт. В практических вычислениях производственного характера рекомендации Нит-
хаммера никогда использованы не были, как и другие подобные исследования. Объяснить это можно
тем, что неизбежные ошибки вычисления дт на силовой линии каждого репера влияют на ортометри-
ческую высоту только этого репера и не накапливаются по ходу нивелирования, а поэтому и почти не
влияют на точность нивелирной сети. Отсюда можно усмотреть, что геодезисты на практике не очень
стремились к определению высот над геоидом, что приходило в противоречие с теорией.
7. М.С. Молоденский (1909-1991) в работах 1945, 1948 и 1960 годов решил совместную задачу о
счете высот, определении внешнего земного гравитационного поля и фигуры земной поверхности по
гравиметрическим и геодезическим измерениям на этой поверхности, а теперь и совместно со спут-
никовыми данными. Сведения о внутреннем строении Земли, все еще полезные для интерполяции
измерений, принципиального значения не имеют. Решение Молоденского основано на краевой задаче с
косой производной (направление силы тяжести может составлять некоторый угол с направлением нор-
мали к земной поверхности, в стоксовом приближении эти направления совпадают) и краевым условием
на самой земной поверхности. Таким образом, решение краевых задач математической физики остается
основным методологическим приемом теории фигуры Земли. Теперь на формулы Стокса и Венинг-
Мейнеса установился взгляд как на приближенные выражения высот квазигеоида и уклонений отвеса
согласно теории Молоденского. М.С. Молоденский разработал также геометрический метод решения
задач на земной поверхности — передачи геодезических координат,— свободный, в отличие от прежних
подходов, от изучения кривизн поверхности и использования геодезических линий на ней. Эти резуль-
таты Молоденского естественно соединились с его теорией определения возмущающего потенциала —
был расширен синтез геометрического и физического методов геодезии.
С развитием и распространением техники GPS теория Молоденского приобретает значение в связи с
задачей вычисления высот квазигеоида с сантиметровой погрешностью, что позволило бы контролиро-
вать геометрическое нивелирование или даже совсем отказаться от этого вида работ. А высокоточное
определение уклонений отвеса, возможно, пополнит астрометрические наблюдения, приведя их к об-
щим для всех обсерваторий в некоторый момент времени неизвестным: смещению мгновенного полюса
с условного международного начала или постоянным нутации, что будет полезно для контроля ее тео-
рии. О теории Молоденского подробнее сказано в нашей статье 1996 г., в работе [Moritz 1980], а также
в главе 3 настоящей книги.
8. Знаменитый пятый постулат Евклида вызывал сомнения математиков в течение двух тысяч лет:
старались его доказать, используя первые четыре постулата. Авторитет Канта независимо подкреплял
априорные начала математики, представления о пространстве и времени, а вместе с тем подкреплял и
парадигму Ньютона. В 1823 г. Н.И. Лобачевский (1792-1856) доказал необходимость пятого постулата
Евклида, тем, что, заменив его на противоположный, построил новую непротиворечивую геометрию.
Геометрия Лобачевского и появившиеся следом другие неевклидовы геометрии могли зародить первые
сомнения в кантовском априорном понимании пространства и времени, а вместе с ними — в системе
Галилея-Ньютона. Возникал вопрос о соответствии реальности той или иной геометрии. Точка зре-
ния Канта на априорность пространства и времени становилась сомнительной. Геометрия теряла свою
априорную основу и гносеологически становилась вровень с механикой. Понимая все эти возникающие
общенаучные проблемы, Лобачевский предлагал решать их экспериментально, опираясь на исследова-
ния параллаксов звезд.
Доклад Лобачевского (1823 г.) встретил у коллег резкое сопротивление. Первая публикация «О на-
чалах геометрии» могла состояться в Казани только в 1829 г. Несколько лет спустя автор, став ректором
Казанского университета, все-таки добился публикации серии статей (1835-1838) в «Ученых записках
Казанского университета». Но отношение к его работам не изменилось. Наконец, в 1840 г. Лобачев-
ский опубликовал в Берлине брошюру «Геометрические исследования по теории параллельных линий».
Работу сразу оценил Гаусс и по его рекомендации в 1842 г. автор был избран членом-корреспондентом
Геттингенского научного общества. Однако общее понимание возможности существования разных гео-
метрий пришло еще лет через тридцать, после работ Б. Римана (1826-1866) и особенно Э. Бельтрами
(1835-1900).
В 1868 г. профессор Болонского университета Бельтрами опубликовал статью об опыте пояснения
неевклидовой геометрии, рассмотрев сферическую поверхность постоянной отрицательной кривизны и
соответствующую ей планиметрию — плоские прямолинейные фигуры. Результаты оказались анало-
гичны результатам Лобачевского (Бельтрами пользовался французским переводом изданной в Берлине
брошюры Лобачевского). В 1869 г. статья Бельтрами была издана по-французски.
Известный математик Ф. Клейн в книге «Неевклидова геометрия» [1928] дал ее анализ. В главе 7
«Соотношения между эллиптической, евклидовой и гиперболической геометриями» на с. 209 русского
издания Клейн сделал вывод о логической равноправности этих геометрий, но оценил неевклидовы
геометрии как логически непригодные к практическим приложениям. На с. 231 Клейн пишет «...ко
внешнему миру евклидова геометрия подходит с такой большей степенью точности, что мы на земной
поверхности и в области нашей Солнечной системы можем без всяких сомнений исходить из предполо-
жения о справедливости гипотезы Евклида, не впадая в противоречие с опытом... » Но это написано в
1928 г. С тех пор точности измерений возросли многократно и вопрос может представиться открытым.
Однако в вышедшей первым изданием в 1903 г. книге «Наука и гипотеза» А. Пуанкаре смотрел глуб-
же. В разделе «Геометрия и астрономия», отметив, что «.,. аксиомы геометрии... суть не более чем
замаскированные определения» (выделено Пуанкаре), автор приходит к выводу: «Никакая геометрия
не может быть более истинна, чем другая; та или иная геометрия может быть только более удоб-
ной. И вот, евклидова геометрия есть и всегда будет наиболее удобной ...» На с. 67 издания 1990 г.
читаем: «... евклидовой геометрии нечего... опасаться новых опытов», а на с. 72: «... опыт не может
решить выбор между Евклидом и Лобачевским» {Пуанкаре 1990]. Пуанкаре склоняется к признанию
априорности основ геометрии.
Эйнштейн (1879-1955) полагал, что только опыт может дать ответ, является ли практическая гео-
метрия евклидовой или нет [Эйнштейн 1966, с. 85]. Одновременно он писал в той же работе (с. 91):
«Из последних результатов теории относительности представляется вероятным, что наше трехмерное
пространство... является приблизительно сферическим, то есть законы расположения в нем твердых
тел определяются не евклидовой геометрией, а приближенно описываются сферической геометрией,
если только рассматривать области достаточно большой протяженности». Между тем, Лобачевский
понял невозможность определения кривизны пространства большой протяженности предложенным им
способом, обнаружив, что гипотетическая кривизна неуклонно уменьшается, поскольку зависит от
минимального звездного параллакса, доступного определению в данную историческую эпоху, в свою
очередь зависимого от точности угловых измерений. Искривление, зависящее от точности измерений,
то есть от наблюдателя, нельзя приписать свойству пространства-объекта наблюдений. Анализу иссле-
дований Лобачевского посвящены публикации Н.И. Идельсона [1949] и Л.И. Брылевской [1999].
В двух статьях, посвященных обсуждению гипотезы об искривленности пространства Вселенной,
С.А. Толчельникова-Мурри [1999а, б] утверждает, что евклидова геометрия является не только наи-
более удобным методом, но и единственно возможным при определении расстояний во Вселенной,
поскольку при решении параллактических звездных треугольников нет избыточных измерений для
определения кривизны пространства. В указанных статьях отмечено, что практическую проверку ма-
тематической теории нельзя осуществить без сопоставления идеального, математического понятия — в
данном случае прямой — с чем-либо материальным, природным, поддающемся измерению. Используя
луч света как аналог прямой, физики апеллируют к наблюдениям астрономов, якобы подтверждающих
искривление лучей. Однако астрономы используют не лучи света между источником и наблюдателем,
а направление от наблюдателя к видимому месту источника света. Очевидно, что направление не мо-
жет быть искривленным. С.А. Толчельникова-Мурри полагает, что физики должны были бы начать с
определения луча в рамках какой-либо модели света, что было бы первым шагом на пути к постановке
задачи о практической проверке гипотезы об искривлении лучей.
Искривление лучей света в поле притяжения небесных тел, как правило, связывают с теорией
Эйнштейна, но такое предположение высказывал Ньютон [Вавилов 1989, с. 86], упомянул Лаплас и,
следуя его указанию в первом томе трактата по небесной механике, оценил Зольднер [Soldner 1801]
как величину, имеющую в поле притяжения Солнца порядок 0", 001.
Также до появления теорий Минковского и Эйнштейна Вернадский записал в 1885 г. в дневнике:
«Бесспорно, что и время, и пространство отдельно в природе не встречаются, они неразделимы».
Известные опыты Х.К. Эрстеда, М. Фарадея и А.А. Майкельсона привели к новым фактам, не со-
гласующимся с ньютоновыми силами и в целом с парадигмой Ньютона. Еще более ощутимый удар
пришлось выдержать ньютоновой парадигме на рубеже столетий при появлении знаменитой формулы
Е = тс2, ее часто связывают с общей теорией относительности (ОТО) А. Эйнштейна, но эта формула
и представление о непостоянстве массы т при изменении энергии Е возникли до появления ОТО.
Историю формулы с двух противоположных позиций — с точки зрения как ОТО, так и отрицания
ОТО — описали Окунь [1989] и Сухоруковы [1993]: эта формула появилась в трудах Дж.Дж.Томсона
(1856-1940) и Ж.А. Пуанкаре (1854-1912), в частности в статье [Ройгсагё 1900]. Формула не вписы-
вается в механику Ньютона, но из этого не следует, что только ОТО должна заменить эту механику.
ОТО, хотя и получила широкое признание, все еще остается по существу гипотезой, поскольку не
имеет надежной ни индукционной, ни тем более дедуктивной опоры. Было принято считать, что толь-
ко теория Эйнштейна может объяснить движение перигелия Меркурия. И этот вывод способствовал
утверждению теории. Однако такое представление основано на недоразумении. При расчете влияния
Солнца на движение Меркурия не был принят во внимание указанный Эйлером эффект смещения
действующей силы притяжения с центра масс Солнца. Эффект Эйлера ведет к появлению в потенциале
притяжения Солнца и Меркурия гармоники первой степени, убывающей пропорционально расстоянию
от Солнца в третьей степени. Влияние же членов, принятых во внимание при таких расчетах, убывает
пропорционально этому расстоянию в пятой степени (подробнее [Юркина 1997]). П. Гербер [Gerber
1898] объяснил наблюдаемое движение перигелия Меркурия, допустив, что потенциал притяжения
распространяется со скоростью света. Конечная скорость распространения может объяснить и выво-
димое из радиоинтерферометрических данных по эволюции орбит двойных пульсаров представление о
гравитационных волнах [Постнов 1998]. Веселов [1998] связывает особенность движения Меркурия с
гипотезой об увеличении массы планет. Троицкий [1995] отрицает гипотезу о расширении Вселенной,
Стрельцов [1997] утверждает независимость распространения света от гравитационного поля, Окоро-
ков [1998] отмечает противоречия в подтверждениях некоторых выводов ОТО, Цицин [1994] полагает,
что необходимо вернуться к концепции неопределенно большого (бесконечного) возраста Вселенной.
В.Я. Бровар [1996], в посмертно опубликованной книге критикует эту теорию совсем с другой точки
зрения. Общепризнанное представление об одновременности состоит в том, что все сосуществующее
считается и одновременным. Так считали все — Ньютон, Кант и даже сам Эйнштейн. Однако Эйнштейн
первым установил, что две движущиеся инерциальные системы разновременны, хотя и сосуществуют.
Из этого факта следовало бы заключить, что сосуществование не имеет отношения к одновременности,
но Эйнштейн такого заключения не сделал, предпочитая парадокс: движущиеся инерциальные системы
«одновременны», но у них разное время. Без парадоксов следовало бы сказать следующее: движущиеся
инерциальные системы сосуществуют, но у них разное время.
Отличия общей теории относительности от механики Ньютона проявляются в движениях с боль-
шими скоростями и энергиями, но теперь при все возрастающей точности измерений релятивистские
поправки становятся заметными. В Международном астрономическом союзе и Международном геодези-
ческом и геофизическом союзе установился взгляд на общую теорию относительности как на теорию,
отражающую реальность, в наблюдения принято вводить релятивистские поправки. С.М. Копейкин
[Kopeikin 1991] рассмотрел релятивистские поправки силы тяжести и ее градиентов, а также реляти-
вистские определения геоида. Релятивистские эффекты в геодезии Г. Мориц описал в статье [1993] и в
книге [Moritz, Hofmann-Wellenhof 1993]. Опытную проверку общей теории относительности и других
теорий гравитации [Логунов 2006] необходимо продолжать.
9. В методологии научного познания все большее распространение находит системный подход, в
основе которого лежит выявление связей в рассматриваемом объекте; их изучение и установление их
взаимодействий, а в итоге — рассмотрение изучаемых объектов как взаимодействующих систем. Наи-
более ярко необходимость системного подхода проявляется в биологии. Исследуя эволюцию животных
и растений, необходимо иметь в виду их вес. В «Беседах... », работе 1638 г., Галилей писал (пуб-
ликация [1934, с. 52-53]): природа не могла бы создать лошадь величиной в двадцать лошадей, или
гиганта, в десять раз превышающего обычный человеческий рост, иначе как чудом, или изменив в
достаточной мере пропорцию членов, в особенности костей, весьма и весьма усилив их по сравнению
с пропорциями обычного скелета. Целесообразность размеров человека в связи с силой тяжести на
Земле обсуждал К.Э. Циолковский (1857-1935) в работе, начатой в 1882 г., датированной 1920 г. и
опубликованной в 1964 г. В этой работе, в частности, есть раздел: «Уклонение от внутреннего подобия
при изменении размеров».
При движении животного все его массы приходят в закономерное движение, все части взаимодей-
ствуют одна с другой и подчинены общей цели — движению. Другими словами — массы тела образуют
систему, сформировавшуюся в поле силы тяжести и позволяющую животному двигаться. Но живот-
ному приходится решать и множество других задач (осязать, слышать, обонять и ориентироваться в
пространстве, переваривать пищу и др.), и для каждой из них в организме находится специализиро-
ванная система взаимодействующих частей. Животное имеет множество взаимодействующих систем, и
в совокупности они образуют единую систему систем — организм.
Реально существующую систему центров масс четвероногого обнаружил в 1940 г. В. Я.Бровар.
Метод описан в его работе, опубликованной посмертно [Бровар 1960]. На замороженном трупе опре-
деляется центр тяжести, через него делается распил, перпендикулярный позвоночнику (в естественной
позе плоскость распила вертикальна). Центры тяжести частей определяются также. Процесс повто-
ряется, и найденная система частных центров масс представляет собой последовательно сменяющие
одна другую эквивалентные системы из возрастающего числа слагаемых. При разных типах движения
реально проявляется та или иная, в частности, при рыси или галопе. При семи распилах скелет оказал-
ся разделенным на шесть анатомически естественных частей: череп, шею, грудь, поясницу, крестец и
хвост. Распилы прошли через точки опоры передней конечности и задней. Только первый распил ока-
зался не связанным со скелетом. Использованная система объективна: анатомические границы частей
оказались связанными со строением животного. Несложные механические соображения показывают,
что расположение частных центров масс в суставах минимизирует работу, затрачиваемую четвероногим
при движении. Устойчивость животного достигается смещением центров масс вниз. Можно предполо-
жить и другие механические аргументы в пользу выявленной системы. Можно допустить, что в общих
случаях она оптимальна.
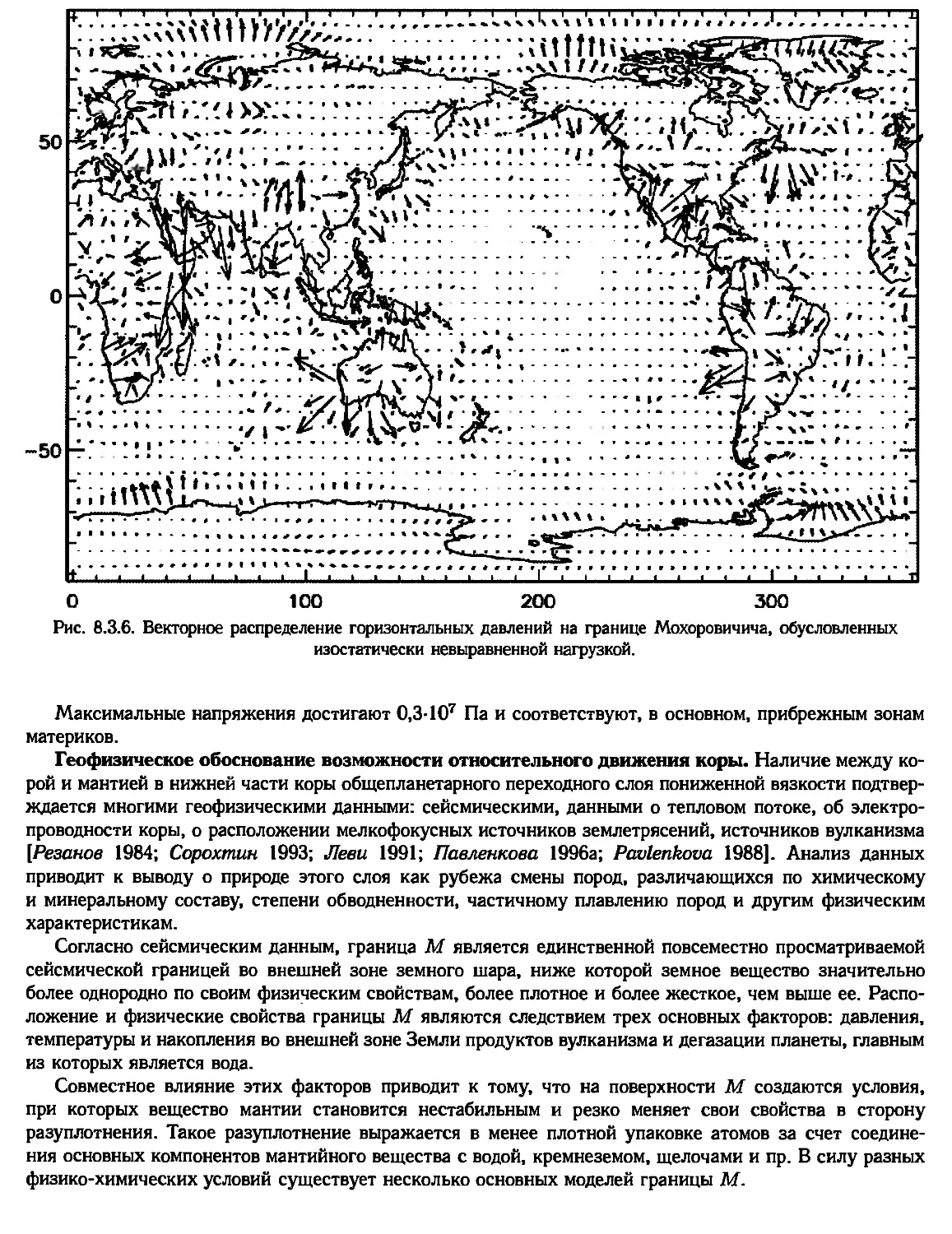
Земля естественно сформировалась, эволюционирует и деформируется внешними и внутренними
силами. Строение планеты должно допускать вынужденные и свободные колебания без чрезмерных
напряжений. У Земли могут быть аналоги суставов, сочленений, узлов. Используя стандартную сфери-
ческую модель распределения плотности в Земле, первый «разрез» нужно провести через ее центр, по
экватору, а затем искать центры масс полушария и его частей. Три разреза близко подошли к внешним
границам зон ядра, по Буллену, два центра оказались на границе внутреннего и внешнего ядра. Наи-
большая точность достигнута на внешней границе ядра, известной наиболее точно, и обнаружилось
согласие с выводом Дж. Роуза (G.R. Rouse) о существовании плоскостей, в 19 пересечениях которых —
по кругам Роуза — находятся зоны наибольшей сейсмической или вулканической активности — зоны
Беньофа. Если через сейсмически активную область провести плоскость, то диаметрально противопо-
ложная область сечения (круга Роуза) также будет сейсмически активна. Только 10% зон сейсмиче-
ской активности не попадает под эту закономерность. По кругам Роуза расположены горные хребты и
островные дуги. Расположение плоскостей «разрывов» Земли на очагах глубоких землетрясений или
горных хребтов показывает существование здесь наибольших деформаций в настоящем (сейсмическая
активность) и прошлом (основные дуги и горные хребты). По пересечениям плоскостей устанавливается
геометрическая форма поверхности земного ядра, которая коррелирует с фигурой геоида [Bisque, Rouse
1968; Роуз 1969]. В оглавлении рефератов популярного журнала «Science news» сказано: «Плоскости
через земной шар выдвигают теорию наук о Земле» (подробнее см. «Круги» Дж. Роуза [1969]).
Разработке роли вращательных движений в формировании Земли посвящен сборник статей
«Ротационные процессы в геологии и физике» 2007 г. Рассмотрев вихревые аспекты геодинамики,
В.В. Низовцев и В.А. Кривицкий в этом сборнике предлагают альтернативу тектонике плит. Излагая
историю вопроса о формировании Земли, Л.И. Иогансон отметила работы Е.В. Быханова (1877 г.),
М.В.Стоваса (1967 г.) и Б.Л. Личкова (1965 г.) и многих других о роли изменений во вращении Земли
на ее развитие и появление при этом критических параллелей и меридианов.
Разрабатывать теорию изучения систем начали сравнительно недавно, хотя философия (Лейбниц,
Гегель) давно указывала на необходимость такого подхода. Общий метод системных исследований по-
ка что не разработан. Ясно, что необходимо четко поставить цель исследования и найти объективный
метод выявления элементов той системы, которая соответствует поставленной цели. При этом целое
следует рассматривать как исходное данное. Элементы системы должны реально существовать, следу-
ет искать наименьшее число взаимодействующих элементов. Свойства целого определяются не столько
свойствами частей, сколько их отношениями, их организацией, их системностью. Если методология
Декарта имеет дело с «организованной простотой», в случайных процессах возникает — «неорганизо-
ванная сложность», то в системных исследованиях «организованная сложность».
Идейная основа системных исследований выражена Аристотелем в афоризме: «целое больше суммы
его частей». Этим утверждается, что в целом проявляются такие свойства, которых нет в частях. Идею
о системных исследованиях иногда приписывают Л. фон Берталанфи [1973; Bertalanffy 1969], датируя
ее 1937 г. Против такой точки зрения решительно высказался Блауберг [1973] в своем историческом
обзоре. Отметив, что стремление к целостности исследования можно проследить вплоть до античности,
Блауберг указывает на исследования кристаллографа Е.С. Федорова, врача и физиолога Н.А. Белова,
опубликованные в 1911 г., и логика и математика Гр. Грузинцева (1928 г.) как выполненные в соответ-
ствии с принципами системного подхода. В 1906 г. Е.С. Федоров опубликовал идеи об универсальных
научных принципах и свое учение, названное им перфекционизмом, об общих законах совершенство-
вания в природе. Работа была написана в 70-х годах XIX в. В 80-х годах Е.С. Федоров опубликовал
работу [1885], в которой развито геометрическое обоснование кристаллографии, эту работу он так-
же долго не мог опубликовать, поскольку П.Л. Чебышеву казался странным аспект исследования, а
кристаллографы не понимали, для чего оно нужно.
В нашей стране издавались ежегодники «Системные исследования». Один из них, изданный в
1997 г., посвящен методологическим проблемам.
В геодезии системный подход еще не нашел ясно выраженного применения. Примером системного
подхода в геофизике может служить исследование Э.Л. Шэна 1 (также [Шэн 1977а, б, 1980]). Исполь-
зовав теорию оптимальных процессов, Шэн описал изменение структуры сферически симметричной
планеты при ее эволюции с сохранением массы и моментов инерции до достижения устойчивого состо-
[Шэн — в работах на украинском языке фамилия автора пишется Шен
яния, которое возникает при минимуме гравитационной потенциальной энергии, отметил, в частности,
возникновение верхней мантии, пришел к выводу о существовании ядра.
Следующий шаг в использовании системного подхода к изучению строения планет сделал
Б.В. Васильев [1998], описав эффекты, связанные с электрической поляризацией, индуцированной
тяготением в электронно-ядерной плазме. Минимизировав полную энергию планеты при заданных
массе, радиусе, плотности на поверхности, Васильев пришел к выводу, что разделение массы на ядро
и мантию происходит при скачке давления.
Примером отсутствия системного подхода в геодезии и геодинамике может служить пренебрежение
изменением гравитационного поля при изучении вертикальных движений земной коры геометрическим
нивелированием, хотя на картах таких движений отдельные участки могут быть объяснены именно из-
менением поля и, следовательно, будут искажены выводы о движениях при их пересечении. Изменения
гравитационного поля могут быть вызваны, например, изменением влагонасыщенности грунта (подроб-
нее [Серкеров 1999; Серебрякова, Юркина 1998]). Если анализировать только результаты повторного
геометрического нивелирования, то будут получены изменения той величены, которую определяет этот
вид геодезических работ, — геопотенциала. Его изменение характеризуют изменения в течениях воды —
очень полезные сведения, но все-таки не вертикальные движения земной коры.
10. Теории Стокса и Молоденского основаны на краевых задачах математической физики. Однако
эти задачи разные и связанные с ними методы обработки измерений и решений настолько различаются,
что переход на практике от первой теории ко второй потребовал изменения концепции геодезии. Если
следовать Куну [1977], то можно считать, что названные теории соответствуют разным парадигмам —
разным моделям постановки проблем и их решениям, разным правилам и стандартам научной практики.
Все же многие факты развития теории фигуры, гравитационного поля Земли и астрономии не
согласуются со взглядами Куна на научные революции — смены профессиональных предписаний, раз-
рушение традиций. Суждение таких корифеев, как Ньютон и Вернадский, противоречат взглядам Куна.
Известные слова Ньютона в письме Гуку 1676 г.: «Если я видел дальше, то лишь потому, что стоял на
плечах гигантов» — указывают на преемственность в развитии, а не только на опровержение получен-
ных ранее результатов. Вернадский отмечал, что, как правило, последующие достижения включают в
себя предыдущие. Это непосредственно иллюстрируют теории Молоденского и Стокса, первая включает
вторую как нулевое приближение.
Если радикальные изменения в подходах к решению задач и происходят, то их роль меньше, чем
это следует из теории Куна. Действительно, если Коперник и совершил революцию в астрономии,
то последующее развитие: вклады Галилея, Ньютона, Эйлера, Лагранжа... были последовательным
эволюционным развитием, а разве их роль не велика? Популярности концепции Куна способствовала,
по-видимому, мода XX в. на революции и перевороты.
В своей книге Кун много внимания уделил трудностям перехода от одной парадигмы к другой,
отметил, в частности, стремление подавить инакомыслие (с. 44), обратил внимание на мнение Макса
Планка, высказанное в его научной автобиографии: истина прокладывает себе дорогу не убеждениями
оппонентов, но скорее потому, что оппоненты умирают и заменяются новым поколением (с. 199).
Как переворот в принятых методах решения задач теории фигуры Земли можно оценить введение
краевых задач и отказ от расчетов притяжения эллипсоидов. Приближается еще один переворот в
связи с широким развитием метода GPS: определение высоты над отсчетным эллипсоидом в каждом
гравиметрическом пункте ведет к переходу от смешанных к чистым аномалиям силы тяжести. Тогда
на суше и море краевые задачи будут сводиться к интегральным уравнениям одинакового типа.
1.2 Связь геодезии и гравиметрии с другими науками
Б.В. Бровар, М.И. Юркина
Геодезия (от греческих слов ул — Земля и баш» — я разделяю, что можно перевести как разгра-
ничивающая Землю) — одна из наук о Земле, возникшая в глубокой древности, решение задач которой
изначально носило количественный характер.
Термин гравиметрия (от латинского gravitas — тяжесть, греческого цЕтреси — измеряю) перво-
начально означал измерение удельного веса тел. С развитием других наук и техники, с изменением
представлений о Земле и Вселенной, с изменением потребностей человечества изменялось и содержа-
ние главных задач геодезии и гравиметрии. Есть версия о том, что в глубокой древности из науки
астрономии выделились в самостоятельные науки физика и математика. Приведем здесь их краткие
характеристики.
Астрономия (от греческого acrrpcrv — звезда и греческого 'vopoc — закон),— наука о строении
и развитии космических тел, образуемых ими систем и Вселенной в целом. Астрономия — древней-
шая наука, на ее развитие повлияли практические потребности человечества (предсказание сезонных
явлений, счет времени, определение местоположения на поверхности Земли и др.). Рождение совре-
менной астрономии было связано с отказом от геоцентрической системы мира (Птолемей) и заменой
ее гелиоцентрической системой (Н. Коперник), с началом телескопических исследований небесных тел
(Г. Галилей) и установлением закона всемирного тяготения (И. Кеплер, начало XVII в.; И. Ньютон).
Для астрономии XVIII-XIX вв. были периодом накопления данных о Солнечной системе, Галакти-
ке и физической природе звезд, Солнца, планет и др. космических тел. В XX в. стала развиваться
внегалактическая астрономия. Исследования Э.П. Хабблом спектров галактик (1929) привели к выво-
ду о разлете галактик, предсказанном в 1922 г. А.А. Фридманом. Давид Гильберт получил уравнения
тяготения в общей теории относительности (ОТО), разработанной А. Эйнштейном в 1915-1916 гг.
Ж.А. Пуанкаре независимо от А. Эйнштейна построил основы специальной теории относительности.
Научно-техническая революция XX в. оказала влияние на развитие астрономии в целом и астрофизи-
ки в особенности. Создание оптических и радиотелескопов с высоким разрешением, применение ракет и
ИСЗ для астрономических наблюдений за пределами земной атмосферы привели к открытию целого ря-
да новых космических тел: радиогалактик, квазаров, пульсаров, источников рентгеновского излучения
и др. Были разработаны основы теории эволюции звезд и космогонии Солнечной системы. Крупней-
шим достижением астрофизики XX в. стал переход с 1 января 1998 г. на Международную Небесную
Опорную Систему (ICRS), которая не связана с экватором и эклиптикой, а фиксируется относительно
системы принимаемых за неподвижные в пространстве направлений на 212 квазаров, распределенных
по всему небу со средней плотностью 1 квазар на 194,6 квадратных градуса.
Высокая точность слежения за положениями инструментов, с которыми наблюдаются и определя-
ются координаты квазаров, и одновременно за параметрами вращения Земли (ПВЗ), обеспечивающими
связь небесной (ICRS) и новой земной системой координат (ITRS), позволило бы успешно решать це-
лый ряд практических задач. Однако связь с земной системой координат осложнена несовершенством
теории вращения Земли.
На рис. 1.2.1 показана структура астрономии.
Теоретическая астрономия изучает движения реально существующих небесных тел и основыва-
ется на фундаментальных физических закономерностях и теориях, как части естествознания.
Астрометрия изучает взаимное расположение небесных тел в пространстве и его изменение во
времени по определенным из наблюдений сферическим координатам, а также вращение Земли, опреде-
ление астрономических постоянных, фигур небесных тел и расположение деталей на их поверхности.
Фундаментальная астрометрия изучает построение фундаментальной системы небесных коорди-
нат на основе установления экваториальных координат и собственных движений ярких «фундаменталь-
ных» звезд, а также пространственной инерционной системы координат. Эти системы применяются в
звездной астрономии, небесной механике и геодезии.
физика
математика
астрономия
Рис. 1.2.1. Структура астрономии
Практическая астрономия — учение о способах определения из астрономических наблюдений
времени, астрономических (географических) координат и азимутов направлений и об астрономических
инструментах; подразделяется на геодезическую, мореходную и авиационную.
Астрофизика — изучает все многообразие физических явлений во Вселенной. По объектам ис-
следований выделяют физику Солнца, планет, межзвездной среды и туманностей, звезд, космологию,
по методам — подразделяют на астрофотометрию (измерение блеска звезд и яркости протяженных
небесных объектов фотометрическими методами), астроспектроскопию (изучение спектров звезд для
определения их физических и химических свойств, в том числе скоростей их движения), астроспектро-
фотометрию (изучение распределения энергии в спектрах космических тел для определения температу-
ры, химического состава и плотности звездных атмосфер и газовых туманностей), астрополяриметрию
(изучение по поляризации излучения светил их физической природы, существующих на них магнитных
полей, состава и плотности межзвездной среды, атмосферы планет), астроколориметрию (количествен-
ное изучение цветов светил), радиоастрономию (изучение космических тел по их радиоизлучению при
помощи радиотелескопов), ренгеновскую астрономию (раздел внеатмосферной астрономии, исследую-
щий рентгеновское изучение космических объектов), гамма-астрономию (направление внеатмосферной
астрономии, изучающее космические тела по их гамма-излучению).
Астрофизика изучает характеристики света небесных светил, астрометрия — вопросы, связанные
с направлениями на светила, изменением этих направлений и взаимными угловыми расстояниями
светил.
Звездная астрономия исследует общие закономерности строения, состава, динамики и эволюции
звездных систем; включает звездную статистику, кинематику и динамику.
Космогония изучает происхождение и развитие космических тел и их систем.
Космология — физическое учение о Вселенной как целом, основанное на результатах исследования
наиболее общих свойств (однородности, изотропности и расширения) той части Вселенной, которая
доступна для астрономических наблюдений.
Физика (греч. фиоткц, от фи ок — природа) — наука о природе, изучающая простейшие и вместе
с тем наиболее общие свойства материального мира. На стыке физики и других естественных наук
возникли биофизика, астрофизика, геофизика, физическая химия и др. Подразделяется на физику эле-
ментарных частиц, атомных ядер, атомов, молекул, твердого тела, плазмы и т. д. К основным разделам
теоретической физики относятся: классическая механика (наука об изменении с течением времени
взаимного положения тел или их частей — за исключением микрочастиц — в пространстве и о вза-
имодействиях между ними; в её основе лежат законы Ньютона), оптика (раздел физики, в котором
исследуются процессы излучения света, его распространения в различных средах и взаимодействия
света с веществом), электродинамика (теория электромагнитных процессов в различных средах и в
вакууме; описывается уравнениями Максвелла), термодинамика (раздел физики, в котором изучают-
ся наиболее общие свойства макроскопических систем, находящихся в состоянии термодинамического
равновесия, и процессы перехода между этими состояниями), статистическая физика (статистическая
механика, раздел физики, изучающий свойства макроскопических тел как систем из очень большого
числа частиц — молекул, атомов, электронов), теория относительности (общая теория относительно-
сти, релятивистская теория тяготения, удовлетворяющая принципу относительности Эйнштейна, экви-
валентности — локальной неразличимости сил тяготения и сил инерции, возникающих при ускорении
системы отсчета), квантовая механика (волновая механика, теория, устанавливающая способ описания
и законы движения микрочастиц в заданных внешних полях), квантовая теория поля (релятивистская
квантовая теория систем с бесконечным числом степеней свободы).
Математика (греч. цатпецатьке, от цатцЕца — наука) — наука, в которой изучаются «простран-
ственные формы и количественные отношения действительного мира» (Ф. Энгельс). До начала XVII в.
математика — преимущественно наука о числах, скалярных величинах и сравнительно простых гео-
метрических фигурах; изучаемые ею величины (длины, площади, объемы и пр.) рассматриваются как
постоянные. К этому периоду относится возникновение арифметики, геометрии, позднее — алгебры
и тригонометрии и некоторых частных приемов математического анализа. Областью применения ма-
тематики являлись: счет, торговля, землемерные работы, астрономия, отчасти архитектура. В XVII и
XVIII вв. потребности бурно развивавшегося естествознания и техники (мореплавания, астрономии,
баллистики, гидравлики и т. д.) привели к введению в математику идей движения и изменения, преж-
де всего в форме переменных величин и функциональной зависимости между ними. Это повлекло за
собой создание аналитической геометрии, дифференциального исчисления. В XVIII в. возникают и раз-
виваются теория дифференциальных уравнений, дифференциальная геометрия и т. д. В XIX и XX вв.
математика поднимается на новые ступени абстракции. Обычные величины и числа оказываются лишь
частными случаями объектов, изучаемых в современной алгебре; геометрия переходит под влиянием
идей Н.И. Лобачевского к исследованию «пространств», весьма частным случаем которых является ев-
клидово пространство. Развиваются новые дисциплины: теория функций комплексного переменного,
теория групп, проективная геометрия, неевклидова геометрия, теория множеств, математическая логи-
ка, функциональный анализ и др. Практическое освоение результатов теоретического математического
исследования требует ответа на поставленную задачу в числовой форме. В связи с этим в XIX-XX вв.
численные методы математики вырастают в самостоятельную ее ветвь — вычислительную математику.
Стремление упростить и ускорить решение ряда трудоемких вычислительных задач привело к созда-
нию вычислительных машин. Потребности развития самой математики, «математизация» различных
областей науки, проникновение математических методов во многие сферы практической деятельности,
быстрый прогресс вычислительной техники привели к появлению целого ряда новых математических
дисциплин; таковы, например, теория игр, теория информации, теория графов, дискретная математика,
теория оптимального управления. В настоящее время многие разделы физики и математики востребо-
ваны геодезией и гравиметрией. Вычислительная техника и всё более совершенные формы математиче-
ского обеспечения делают труд исследователей более эффективным, при этом возрастает доступность
математических методов.
Из-за сложности такого объекта исследований, как планета Земля, ее изучением занимается целый
ряд наук о Земле, и в том числе геодезия и гравиметрия. На рис. 1.2.2 показана структура геодезии, а
на рис. 1.2.3 — структура гравиметрии. Запросы практики повышаются, постепенно более совершенные
методы и средства вытесняют традиционные.
Строение Земли характеризуется слоистой макроструктурой с центральной симметрией [Демениц-
кая 1967]. По мере накопления знаний о внутреннем строении и внешнем окружении Земли стала
выясняться ее тесная связь с окружающим космическим пространством: связь внешних (гравитацион-
Рис. 1.2.2. Структура геодезии
ное и магнитное поля, атмосфера, термобарисфера) и внутренних (слои земной коры, верхняя мантия,
астеносфера) оболочек нижней мантии и ядра (рис. 1.2.4).
Гравитационное поле является одной из наибольших по диаметру сфер влияния Земли. Грависфе-
ра — оболочка Земли, занимающая ту часть околоземного пространства, в которой гравитационное
влияние Земли преобладает над гравитационными полями космоса, вызываемыми массами Солнца,
Луны и других планет, а также гравитационным полем Галактики {Деменицкая 1967]. Эквипотенци-
альная поверхность грависферы имеет достаточно сложный вид, скорее всего, вид гигантского кардио-
ида. Грависфера определяет состояние внешних оболочек Земли, а также определяет условия падения
на Землю метеоритов и космической пыли.
Магнитное поле простирается с дневной стороны на расстояние до 8-14 радиусов Земли, а с ноч-
ной — до нескольких сот радиусов Земли, и при этом формирует газовую оболочку, окружающую
Землю, со всеми ее особенностями: от конструирования радиационных поясов до защиты от пря-
мого попадания на Землю первичных частиц космического излучения. Магнитосфера (или электро-
магнитосфера) — область околоземного пространства, где электромагнитное поле имеет отношение к
нашей планете. Установлена сложная, далеко не сферическая, внешняя форма магнитосферы, непрерыв-
но изменяющаяся по конфигурации и силе, в частности, наличие магнитного шлейфа, возникающего
под влиянием солнечного ветра (потока космического излучения).
Атмосфера (газовая оболочка) состоит из нескольких диффузионно разделенных слоев, начиная от
поверхности Земли: тропосфера, в которой сосредоточено ~79% всей массы атмосферы; стратосфера
~20%; ионосфера ~0,5% и верхняя атмосфера — пояс водорода, переходящий в межпланетную среду.
Газовая оболочка повторяет сплюснутую фигуру твердой Земли. Например, верхняя граница тропосфе-
ры лежит над экватором в среднем на высоте 16-18 км, в умеренных широтах на высоте 10-12 км, а
в полярных областях на высоте 7-10 км.
Между атмосферой и земной корой существует взаимодействие, которое приводит к взаимному об-
мену элементами, вследствие чего между оболочками создается подвижное равновесие. Наиболее этот
обмен осуществляется через водную оболочку земного шара — гидросферу. Гидросфера и криосфера
(лед) Земли являются существенной частью механизма, который заставляет воздух, воду и тепло цирку-
лировать по всей Земле, поскольку океаны содержат 97% мировых запасов воды (Д.И. Щербаков, 1963
г.). В соответствии с гипотезой А.П. Виноградова [1962], «образование океана и воздушной оболоч-
ки — гидросферы и атмосферы — обусловлено выносом, в процессе выплавления и дегазации наиболее
легко летучей фракции мантии на поверхность Земли. Только вещество мантии могло обеспечить этот
процесс». Оболочечное строение Земли, по Р.М.Деменицкой [1967], на рис. 1.2.4 дополнено еще одной
оболочкой — ноосферой — современной стадией, геологически переживаемой биосферой.
Подходя геохимически и биогеохимически к изучению геологических явлений, В.И. Вернадский
(1944 г.) рассматривал всю окружающую нас природу в одном и том же атомном аспекте.
Понятие «биосферы» введено в биологию Ламарком (1744-1829) в Париже в начале XIX в., а в
геологию — Э. Зюссом (1831-1914) в Вене в конце того же века. В XX столетии биосфера получает
совершенно новое понимание. Она выявляется как планетное явление космического характера {Вер-
надский 1981]: «Живое вещество по весу составляет ничтожную часть планеты. По-видимому, это
наблюдается в течение всего геологического времени, то есть геологически вечно. Оно сосредоточено в
тонкой, более или менее сплошной, пленке на поверхности суши в тропосфере — в лесах и в полях —
и проникает весь океан. В ходе геологического времени оно закономерно изменяется морфологически.
История живого вещества в ходе времени выражается в медленном изменении форм жизни, форм жи-
вых организмов, генетически между собой непрерывно связанных, от одного поколения к другому без
перерыва».
Как известно (Советский энциклопедический словарь, 1982 г.), наука — сфера человеческой дея-
тельности, функция которой состоит в выработке и теоретической систематизации объективных знаний
о действительности; одна из форм общественного сознания; включает как деятельность по получению
нового знания, так и её результат — сумму знаний, лежащих в основе научной картины мира; обо-
значение отдельных отраслей научного знания. Непосредственные цели — описание, объяснение и
предсказание процессов и явлений действительности, составляющих предмет её изучения, на осно-
Рис. 1.2.3. Структура гравиметрии
| астрометрия|
теория научного знания
объект n/IQHerT1Q зем/|Я
изучения, L - ~ j • - - J
оболочечное строение Земли LГРАВИСФЕРА 1 | МАГНИТОСФЕРА| теория геопотенциала геомагнетизм физика атмосферы физика моря => разведочная геофизика и её методы физика К гравиметрический твёрдой'’магнитнЬ|й Земли Асейсмический А электрический А ядерно-физический физика математика математическая физика астрономия астрофизика геофизика геохимия геология геоморфология геодезия гравиметрия геодинамика топография картография гидрография география
АТМОСФЕРА тропосфера стратосфера ионосфера верхняя атмосфера
ГИДРОСФЕРА КРИОСФЕРА
^НООСФЕРА i 1 1
ТВЁРДАЯ ЗЕМЛЯ земная кора верхняя мантия средняя мантия нижняя мантия внешнее ядро переходная зона в ядре внутреннее ядро
Рис. 1.2.4. Оболочечное строение Земли и науки, его изучающие
ве открываемых ею законов. Зародившись в древнем мире в связи с потребностями общественной
практики, начала складываться с XVI-XVII вв. и в ходе исторического развития превратилась в про-
изводительную силу и важнейший социальный институт, оказывающий значительное влияние на все
сферы общества. Объем научной деятельности с XVII в. удваивается примерно каждые 10-15 лет.
В развитии науки чередуются экстенсивные и революционные периоды — научные революции,
приводящие к изменению её структуры, принципов познания, категорий и методов, а также форм
её организации. Для науки характерно диалектическое сочетание процессов её дифференциации и
интеграции, развития фундаментальных и прикладных исследований. В условиях научно-технической
революции сложилась единая система «наука-техника-производство», в которой науке принадлежит
ведущая роль.
1.3 Изменения содержания задач геодезии и гравиметрии
Б.В. Бровар, М.И. Юркина
Основная цель приводимых в приложении материалов состоит в том, чтобы проследить пути на-
копления научных знаний во времени, отдавая должное ученым, деятельность которых сказалась на
развитии геодезии, гравиметрии, астрономии, геофизики и математики, и главное — проследить эво-
люцию представлений о Земле и её гравитационном поле, о Вселенной, а также содержания задач
геодезии и гравиметрии. В статье [Молоденский, Федынский 1947] отмечено, что термин «гравимет-
рия» вошел в научный обиход только в XX в. В этом же веке гравиметрия развилась в самостоятельную
отрасль прикладного знания. На ранних этапах формирования наук в полном понимании определений
предмета и задач как геодезии, так и гравиметрии не было, поэтому для наглядности эти определения
сформулированы.
В приложении кратко охарактеризован вклад теоретиков, экспериментаторов, преподавателей и ор-
ганизаторов науки в теорию, аппаратуру и производство измерений, при этом использована принятая в
настоящее время хронология. Сведения об ученых и их фотографии, приведенные в последовательно-
сти их дат рождения, получены от здравствующих ученых, по архивным документам, из Интернета, из
приведенных ниже источников. Изображения ученых призваны «очеловечить», персонифицировать и
приблизить научные и практические результаты к читателю, в особенности молодому. Здесь не стави-
лась цель охватить всех ученых, внесших свой вклад в геодезию, гравиметрию, астрономию, геофизику
и математику, так как'это самостоятельная задача. Поэтому перечень имен ученых далеко не полон и,
возможно, субъективен.
В какой-то мере восполнить этот пробел можно, если обратиться к статье [Молоденский, Федын-
ский 1947]; к вступительным статьям редактора Г.В. Багратуни к сочинениям К.Ф. Гаусса [1957, 1958]
и Ф.Р. Гельмерта [1962]; к книгам Г.П. Логиновой, В.Г. Селиханович [1963]; Н.И. Невской [1964]; к
работам А.В. Клименко [1980]; И.Г. Колчинского, А.А. Корсунъ, М.Г. Родригеса [1986]; В.В.Бровара,
М.И. Юркиной [1996]; к книге Вольфганга Торге [1999]; к двум томам под названием «Российская
прикладная геофизика XX века в биографиях», изданным в 1998 и 2004 гг.; к монографии Л.А. Кашина
[1999]; к книгам С.В. Сергеева, Е.И. Долгова [2001, 2005]; к статьям В.В.Бровара, М.И. Юркиной
[2004, 2005]; к монографиям Г.Н. Тетерина [2006, 2008]; к справочнику А.А.Дражнюка [2007]; к
книге П.А. Строева, В.Л. Пантелеева, З.Н. Левицкой, Т.С. Чесноковой [2007]; к книге В.С. Кусова
[2009], а также к списку литературы.
Большой вклад в развитие геодезии, астрономии и подготовку кадров внесли военные ученые аст-
рономы и геодезисты: Николай Яковлевич Цингер (1842-1918), Дмитрий Данилович Гедеонов (1854—
1908), Василий Васильевич Витковский (1856-1924), Иллиодор Иванович Померанцев (1847-1921),
Николай Андреевич Урмаев (1895-1959), Александр Васильевич Мазаев (1894-1976), Сергей Сергее-
вич Уралов, Петр Алексеевич Гайдаев, Иван Михайлович Герасимов (1900-1982), Николай Петрович
Макаров, Мухамбет Машимович Машимов и др. В решение прикладных задач геодезии и гравиметрии
внесли свой вклад и ученые военно-промышленного комплекса.
Для наглядного восприятия приложения на рис. 1.3.1 и 1.3.2 показаны хронологические схемы
появления наук и деятельности ученых на фоне некоторых исторических событий. К этим событиям
отнесены некоторые географические открытия и путешествия, войны и этапы технического прогресса.
Из-за недостатка места ряд имен ученых не приведен на рисунке или не повторен по колонкам «теория»,
«аппаратура» и «измерения и их обработка». По вертикали дана оцифровка времени в годах, при этом
знак минус означает время до нашей эры.
На схеме можно заметить взаимную циклическую обусловленность теории и практики. Так, великие
географические открытия способствовали повышению интереса к проблемам астрономии и в резуль-
тате появились работы Коперника, Кеплера, Галилея, Гюйгенса, Ньютона. Второй пример. Проведение
гравиметрической маятниковой съемки в СССР начиная с 1932 г. способствовало активизации теоре-
тических работ, и в результате был разработан метод астрономо-гравиметрического нивелирования, а
позднее теория определения фигуры Земли Молоденского [1945, 1948].
На фиг. I (цв. вклейка) показана эволюция представлений о Земле и гравитационном поле, а также
эволюция содержания задач геодезии и гравиметрии. По вертикали дано время, так же как на рис. 1.3.1.
Прямым шрифтом даны формулировки представлений о Земле и о гравитационном поле, курсивом и
наклонно — формулировки задач геодезии и гравиметрии.
На фиг. I не поместилась формулировка задачи гравиметрии, данная в книге [Торге 1999]: «Опре-
деление гравитационного поля Земли и других небесных тел как функции координат и времени по
измерениям силы тяжести и гравитационных градиентов на поверхности тела или вблизи нее».
Наша формулировка задачи гравиметрии иная: «Изучение гравитационного поля Земли и других
космических тел в принятой системе координат и времени для определения их поверхности и
внутреннего строения, а также для наук и технических средств, в которых используются данные
о гравитационном поле».
В нашей формулировке намеренно не уточняется состав измеряемых характеристик гравитацион-
ного поля, как это сделано Торге, так как характеристики гравитационного поля можно получать не
только непосредственными измерениями, но и опосредованными (спутниковая альтиметрия, спутнико-
вое нивелирование, измерения орбит ИСЗ и КА, наблюдения системы «спутник-спутник», измерения
бортовыми градиентометрами на подвижном основании, инерциальные навигационные системы и др.).
В то же время, формулировка Торге умалчивает об областях использования данных гравиметрии. По
нашему мнению, методы определения и состав определяемых данных не следует конкретизировать,
потому что это может привести к искусственному ограничению направлений исследований и даже к
«растаскиванию» или к застою гравиметрии.
3000 Первые астрономические записи 6 Египте, Вавилоне, Китае (БЕ «Астрономы» 1986). -2000
-2900 - 1900
2800 -1800
2700 2697 во н.э. - Древнейшие из сохранившихся сообщений о солнечном затмении (Китай) (БС «Астрономы» 1986). -1700
2600 - 1600
-2500 -1500
2400 - 1400
2300 2315-2287 во н.э. - Первые сведения о появлении комет (Китай) (БС «Астрономы» 1986). - 1300
2200 - 1200
2100 Мореплавание, созвездия, письменность Бегство [-1048 ] идумеян от Давида [-1048 —1034 до н.э.) - 1100
2000 География, геометрия, геодезия, межевание Сесак [1010-965 до н.э.) - 1000
1900 Ирригационные работы в Египте Мерид написал книгу по геометрии (-XX-XIX в до н.э.) [— 860 ] - 900
1800 - 800
1700 В Вавилоне используют египетский год, учреждают астрономическую эру Набонассара [-747] - 700
1600 Фалес возродил астрономию [611-545 до н.э) - 600
-1500 - 500
1400 - 400
1300 - 300
•1200 -200
•1100 Чу Конг (-1100 до н.э.) -100
Рис. 1.3.1. Хронологическая схема деятельности ученых на фоне некоторых исторических событий
Примечание: Слева дана принятая шкала лет до нашей эры, а справа показана приближенно шкала лет до нашей эры,
предложенная И. Ньютоном. В квадратных скобках приведены годы по И. Ньютону.
-1000
-900
-800
-700
-600
-500
-400
-300
-200
-100
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1400
1450
1500
1550
1600
1625
1650
1675
1700
1725
1750
1775
1800
1820
1840
1860
1880
1900
1910
1920
1930
1940
1950
1960
1970
1980
1990
2000
плавание вокруг Африки при фараоне Нехо II (610-594 до н.э.)
Пифагор (580-500 до н.э.)
Демокрит (460-370 до н.э.)
Платон Аристотель Ши Шен
Римский водопровод 312 до н.э. Аристарх Евкли3 Архиме3 Эратосфен
Г иппарх
Птолемей
Завершение строительства Великого канала,
соединившего южные и северные районы Китая
И-Синь
аль-Мамун
Строительство грандиозной плотины на реке Кур в
Фарсе и создание оросительных систем в Иране (970) ибн Юнус
ал-Хазини
Поло
Изобретение книгопечатания Гутенбергом
Никитин, Колумб, Да Гама, Кабот Улугбек
Магеллан Коперник Начало книгопечатания на Руси Галилей Начало строительства Ньютон русского флота (1696) Маклорен Первый геграфический атлас России Клеро Беринг 1728-41 Кук 1773-79 Крузенштерн-Беллинсгаузен-Лазарев Отечественная война 1812г. Лаплас Врангель Строительство первой в Гаусс России железной дороги - 1837 Грин Стокс _ . - Ляпунов Первая мировая воина фриЫ3ман Красовский Вторая мировая война Иоловенашй Первый запуск ИСЗ - 1957 Мигаль Создание РВСН - 1961 Еремеев В. БпоВлп Фризий Фернель Г. Меркатор Браге Кеплер Гевелий Снеллиус Норвуд Я. Бернулли Гюйгенс И Бернулли Рише Пикар Лейбниц д. Бернулли Эйлер Ломоносов Буге Лежандр Фарадей Кэтер Бес,:е/'ь Пуассон Етру3е. теннер Литке Слудский Менделеев Ньюком Бредихин Пуанкаре Этвёш Голицын Гельмерт Венинг-Мейнес Уп„л Кв?“й .. . . Хавол пцмероо Михаилов „ Т Изотов Сорокин Магницкий Париискии Агалецкий Федынский Ьуланже Тихонов Хейфец Сагитов Жонголович
Мировая грави- метрическая съёмка GPS Пеллинен Юркина Остач . цлииип оеселоо Ю.Нейман Гусев Баграмянц Сакума, Фаллер, Арнаутов ГУГК, АН, Мингео, Минобороны
| Некоторые исторические события |Теория| Аппаратура | Измерения и их обработка |
Рис. 1.3.2. Хронологическая схема деятельности ученых на фоне некоторых исторических событий
Примечание: Слева дана принятая шкала лет до нашей эры, а справа показана приближенно шкала лет до нашей эры,
предложенная И. Ньютоном. В квадратных скобках приведены годы по И. Ньютону.
t
Из фиг. I видно, что представления о Земле не всегда шли по пути к истине, был и возврат к
заблуждениям.
Для объяснения регресса научного знания процитируем «Избранные труды по истории науки» [Вер-
надский 1981, с. 72-74]: «...недостаточно, чтобы истина была высказана или чтобы явление было
доказано. Их понимание, проникновение ими человеческого разума зависит от других причин, одна
хрустальная ясность и стройность, строгость доказательств недостаточны. Условия внешней социаль-
ной среды, состояние техники, настроение и привычки мыслящих людей науки должны быть при этом
принимаемы во внимание. Опять перед нами стоит тот же вывод, опять мы сталкиваемся со сложно-
стью объекта исследования. Научное мировоззрение не есть абстрактное логическое построение. Оно
является сложным и своеобразным выражением общественной психологии».
И в XX, и в XXI вв. наблюдались случаи регресса в науке. Примеры тому — известные гонения на
философию, генетику и кибернетику в СССР. Однако случаи регресса в науке не всегда можно объ-
яснить несовершенством проводимой политики в государстве. После создания теории Молоденского с
позиций прежнего взгляда появлялись работы [Маловичко 1953; Машимов 1998; Martinec, Grafarend
1997], в которых пытались пропагандировать использование ортометрических высот и геоида. Ино-
гда на такого рода работы писались критические статьи [В.В.Бровар 1954; М.С.Молоденский 1959;
В.В. Бровар и др. 1963; Юркина 1998; В. V. Brovar et al. 2003]. Попытки исказить теорию Молоденского
продолжаются.
По мнению В.Н. Страхова [1995], труды российских геофизиков и математиков П.П. Лазарева,
Г.А. Гамбурцева, В.А. Фока, В.Р. Бурсиана, М.С. Молоденского, Ю.В. Ризниченко, О.Ю. Шмидта,
П.С. Новикова, Л.Н. Сретенского, А.Н. Тихонова, создавших традиции и определивших лидирующее
положение российской науки в мировой, не освоены в развитых странах западного мира (США,
Франция, Германия, Япония). В частности, им отмечена разработка строгой теории фигуры и
гравитационного поля Земли.
Хронология древней и средневековой истории, в настоящем (теперешнем) ее виде, создана в се-
рии фундаментальных трудов XVI-XVII вв., начинающейся трудами Иосифа Скалигера (1540-1609)
(losephus lustus Scaliger) и завершенной Дионисием Петавиусом (1583-1652) (D. Petavius). Следуя ска-
лигеровской схеме, в XVIII в. русскую историю и хронологию «переработал» Герард Фридрих Миллер
(1705-1783). Однако есть и другие версии исторической хронологии.
Критики скалигеровской хронологии, как правило, ее укорачивали в сторону ее омоложения. Среди
критиков скалигеровской хронологии были [Носовский, Фоменко 2002; Носовский и др. 2000];
— профессор Саламанкского университета де Арсилла (XVI в.) (de Arcilia), доказывавший, что
«древняя» история сочинена в средние века;
— И. Ньютон (1643-1727), написавший «Краткую хронику исторических событий, начиная с пер-
вых в Европе до покорения Персии Александром Македонским» и «Правильную хронологию древних
царств» (1725 г.), готовивший более подробную книгу по древней хронологии, утраченную после его
смерти;
— Вольтер (Voltaire) [настоящее имя и фамилия Мари Франсуа Аруэ (Arouet)] (1694-1778), от-
разивший взгляды И. Ньютона, отметил при этом, что И. Ньютон уменьшил возраст цивилизованного
мира на 500 лет [Voltaire 1771] и предложил устанавливать хронологию по движению точки весеннего
равноденствия;
— Н.А. Морозов (1854-1946), предложивший идеи нескольких новых естественнонаучных методов
анализа хронологии, фактически превратив хронологию в науку.
За критику работ Г.Ф. Миллера жестоко пострадал М.В. Ломоносов. После его смерти по указанию
графа Разумовского библиотека М.В. Ломоносова, содержавшая много летописей, была вывезена и в
дальнейшем бесследно исчезла.
В 2007 г. издательством «РИМИС» впервые на русском языке опубликована (считавшаяся утерян-
ной) книга Исаака Ньютона «Исправленная хронология древних царств» на 656 страницах, при этом
русский перевод сопровожден оригинальным английским текстом.
В этой книге (с. 156) читаем, что Гиппарх, сопоставляя собственные наблюдения с наблюдениями
своих предшественников Метона и Евктемона, первым из всех пришел к выводу, что точки равноден-
ствий смещаются назад по сравнению с неподвижными звездами; Гиппарх считал, что они отступают
на один градус примерно за сто лет. На самом же деле смещение происходит со скоростью один градус
в семьдесят два года. Откуда И. Ньютон делает вывод, что «греки сделали поход аргонавтов примерно
на триста лет более древним, нежели в действительности».
В трудах Носовского и Фоменко [2002] выдвинута гипотеза, согласно которой «Гиппарх и Пто-
лемей — реально существовавшие астрономы, однако время их жизни, по-видимому, нужно сдвинуть
вверх на 1000 или 1400 лет», то есть приблизить к нашему времени.
Можно спорить о деталях их гипотез, о датах, но общий подход И. Ньютона, Н.А. Морозова,
А.Т. Фоменко и др. к хронологии, основанный на методах естественных наук (на необходимости сбора
доказательств, фактов, объективно подтверждающих конкретные события, например, затмения Солнца
и Луны, данные археологии и др., на анализе исторических источников, в том числе методами ма-
тематики, статистики, и на результатах обширных компьютерных расчетов), историкам следовало бы
приветствовать и самим использовать указанные методы в своей работе.
Не приводя критику определений геодезии в «Законе о геодезии и картографии» от 26 декабря
1995 г. №209-ФЗ, в «Новом энциклопедическом словаре» 2004 г., в учебниках «Инженерная геоде-
зия» [Багратуни и др. 1984; Огородова 2006], «Высшая геодезия, часть III. Теоретическая геодезия»,
укажем, что не только в разные эпохи, но и в одно и то же время в термины «форма, размеры и фигу-
ра Земли» различными учеными вкладывался разный смысл. Сначала под формой понимались сфера,
затем эллипсоид, под размерами — радиус сферы, большая полуось и сжатие эллипсоида соответствен-
но, под фигурой Земли — геоид Гаусса-Листинга и собственно поверхность Земли. Был период, когда
под фигурой Земли различными учеными подразумевался разный смысл: одними — геоид, другими —
поверхность Земли. Поэтому во избежание недоразумений необходимо вещи называть своими именами.
В результате расширения области применения геодезии за счет других планет появились, в частно-
сти, термины планетодезия, лунная гравиметрия [Сагитов 1979] и др.
Нельзя не согласиться с критикой [Тетерин 2006] того, что даже в учебниках отсутствуют формули-
ровки определений наук, в лучшем случае перечисляются их задачи; не показывается соподчиненность
наук. Претендуя на системность подхода, Г.Н. Тетерин определяет геодезию как науку о геометризации
и координатизации объектов и явлений окружающего пространства. Понимая при этом под геомет-
ризацией представление объектов и явлений окружающего пространства совокупностью точек, линий
и поверхностей в графической, аналитической, цифровой, электронной или естественной (веществен-
ной) форме. По мнению авторов, односторонний (геометрический) взгляд Г.Н. Тетерина на предмет,
содержание и главную задачу геодезии нельзя признать системным (или метасистемным) потому, что
системный подход предполагает рассмотрение задачи геодезии как определения во времени поверхно-
сти и внешнего гравитационного поля Земли в принятой системе координат, не противопоставляя одну
часть целого другой и не абсолютизируя какую-либо одну из них.
Попытки преуменьшить физическую сторону и преувеличить геометрическую уже были. По этому
поводу интересна полемика в статьях [Жонголович 1968; В.В. Бровар 1970].
Философский подход к решению проблемы определения иерархии наук и их содержания дан в
работах В.Я. Бровара [1996, 2007].
Используя опыт формализации, имеющийся при составлении формул изобретений, дадим определе-
ние геодезии в следующей формулировке.
Геодезия — древняя естественная наука о Земле:
а) находящаяся на стыке астрономии, физики, математики, гравиметрии, картографии, геофизики,
геодинамики, космонавтики, баллистики, навигации и других областей знания;
б) отличающаяся от других наук о Земле тем, что её область изучения распространяется на опре-
деление во времени количественных геометрических характеристик поверхности Земли и количествен-
ных характеристик внешнего гравитационного поля Земли в принятой системе координат, с целью
предоставления результатов измерений многим отраслям человеческой деятельности, в том числе для
отображения их различных характеристик в графическом виде на планах и картах, в визуальном виде
на мониторах, в цифровом виде на различных носителях;
в) содержащая следующую упорядоченную структуру научных знаний и их практических реализа-
ций:
— высшую геодезию, в которой используются традиционные и вновь разрабатываемые методы
изучения поверхности и внешнего гравитационного поля Земли (астрономо-геодезический, физический
(гравиметрический), астрономо-гравиметрический, спутниковый геометрический, спутниковая альти-
метрия, спутниковый динамический (глобальные навигационные спутниковые системы), светолокация
Луны и КА, длиннобазисная радиоинтерферометрия);
разделяющуюся на
основные геодезические работы на суше, подразделяющиеся на триангуляцию, полиго-
нометрию, трилатерацию, радио- и электро-оптические дальномерные измерения, базисные
измерения, геодезическую астрономию, нивелирование, спутниковые определения координат,
уравнительные вычисления,
морскую геодезию,
космическую геодезию,
теоретическую геодезию, подразделяющуюся на сфероидическую геодезию, простран-
ственную геодезию, физическую геодезию.
— прикладную (инженерную) геодезию,
— топографию, разделяющуюся на
теодолитную съемку, мензульную съемку, тахеометрию, наземную фотограмметрическую съемку,
фотограмметрию, аэрокосмические съемки, гироскопию (гиротеодолиты, гиростабилизированные плат-
формы), инерциальные навигационные системы, мобильные топографо-геодезические комплексы, спут-
никовую аппаратуру, съемку с лазерным сканированием;
— геодезические методы решения геодинамических задач;
— геодезическое приборостроение и систему его метрологического обеспечения;
— вычислительную (математическую) обработку результатов геодезических измерений.
Представленная формулировка носит иллюстративный характер, поэтому из-за громоздкости неко-
торые подразделы не раскрыты.
1.4 Земная сферическая система координат, определение движе-
ний среднего полюса и земных пунктов
С.А. Толчельникова
Анализируются использованные условия для установления земной сферической координатной си-
стемы (СКС). Показано, что приведение координат опорных светил (звезд, квазаров) к системе одной
экваториальной обсерватории с постоянными координатами Л, ср создает необходимые и достаточные
условия для установления независимой земной СКС, в которой возможно решить задачу приведения
триангуляционных сетей к единому началу. Если постоянное значение присвоено также широте второй
обсерватории, то будет обеспечена возможность простого контроля определяемых движений среднего
полюса и земных пунктов относительно коры.
На первом этапе рассмотрены движения в проективном пространстве (на «небесной сфере»), что
позволяет исключить использование часто пересматриваемых численных моделей, описывающих орби-
тальное движение Земли и прецессию земной оси, при выводе искомых долгопериодических и вековых
движений и в результате максимально приблизить точность их определения к достигнутой в наблюде-
ниях.
1.4.1 Введение
Революционные изменения произошли в технических средствах астрономических и геодезических
наблюдений, но астрономия и геодезия при этом остались единой наукой, поэтому тема «ориенти-
рование осей земной системы координат» была предложена учеными ЦНИИГАиК для обсуждения
совместно с астрономами. Традиционно в решении этой задачи принимали участие и астрономы, и
геодезисты. Для доказательства достаточно назвать геодезические и астрономические форумы, обсуж-
давшие эту проблему, или таких отечественный ученых, как, например, А.А. Михайлов, Е.П. Федоров,
В.Э. Брандт, И.Д. Жонголович, А.А. Изотов.
Мы рассмотрим сферическую координатную систему (СКС), предназначаемую для определения дви-
жения среднего полюса Земли и земных пунктов, в первую очередь для изучения вековых и долгопе-
риодических составляющих в движении проекций указанных объектов (по так называемой «небесной»
сфере). При этом небесными реперами останутся звезды, а земными — отвесы в пунктах наблюдений.
В принципе можно изложить (но пока невозможно практически решить) задачу применительно также
к радионаблюдениям квазаров, тогда роль земных реперов взяли бы на себя не отвесные линии в точ-
ках наблюдений, а перпендикуляры к срединам хорд, соединяющих антенны радиоинтерферометров.
Очевидна также невозможность определения вековых и долгопериодических изменений координат по
коротким рядам наблюдений.
Как известно, наблюдаемые направления на проекции наиболее удаленных объектов (на звезды,
либо квазары) остаются постоянными для наблюдателей, движущихся равномерно и прямолинейно в
пределах расстояний, равных диаметру Земли и даже превосходящих его. Это полезное «свойство»
светил, находящихся на практически бесконечных расстояниях от наблюдателя, использовали как аст-
рономы, так и путешественники на море и на суше — изменение таких направлений позволяло оценить
вращение наблюдателя по изменениям часовых углов звезд. Мы также пользуемся этим свойством,
когда отождествляем любые мыслимые геоцентрические направления на далекие опорные тела с на-
блюдаемыми топоцентрическими направлениями после учета суточной аберрации и рефракции. Такое
отождествление невозможно для близких тел, поскольку направления на них зависят от положения
центра координатной триады.
Предлагаемое нами — это первый этап в построении декартовой СК, необходимой теоретикам для
совершенствования создаваемых ими моделей Земли на основе сравнения вычисленных и наблюдаемых
изменений координат.
Второй этап остается за рамками этой статьи. Он заключается в построении геоцентрических
триад — связанных с центром массы Земли и с центром отсчетного эллипсоида, — которые необходимы
соответственно для создания теоретической модели, описывающей вращение Земли и для изучения ее
формы.
По традиции, на первом этапе измеряются углы между проекциями на опорные светила и на изу-
чаемые объекты. Задача второго этапа заключатся в переходе от найденных движений проекций к
движениям тел в метрическом пространстве, для этого направления на изучаемые тела (частицы)
необходимо привести к единому центру: барицентру — в небесной механике, центру Галактики — в
звездной астрономии.
В нашем случае в топоцентрические направления, найденные на первом этапе, придется вносить
изменения в зависимости от того, где будет расположен центр земной триады. Переход к геоцентриче-
ской и геодезической триадам осуществлялся методами геодезии с помощью специальных наблюдений,
к концу XX в. как дополненных, так и замененных более точными. Как уже упоминалось, обсуждение
второго этапа выходит за рамки статьи.
Стремление к тому, чтобы обсуждаемая проблема была понятна не только специалистам, изучающим
вращение Земли, побуждает к краткому изложению истории вопроса и современного подхода.
1.4.2 Краткая история методов изучения движения полюса в XX веке
Как хорошо известно, на протяжении примерно 300 лет основополагающая опорная система ко-
ординат задавалась звездными каталогами, которые составлялись на основе наблюдений абсолютным
методом [Подобед 1968; Walter, Sovers 2000; Толчельникова-Мурри 1987].
Вплоть до середины XIX в. получаемые изменения широт обсерваторий не превосходили ошибок на-
блюдений, поэтому не удавалось обнаружить периодических изменений широт, предсказанных Эйлером
для твердотельной Земли еще в 1765 году.
Увеличение точности астрономических наблюдений позволило Петерсу и Кюстнеру на основе анали-
за изменений абсолютных значений широт заключить, что значительная часть уклонений мгновенных
широт от среднего значения может быть объяснена периодическими колебаниями широты обсервато-
рии. После этого, а также исследований Чандлера и проведенных наблюдений с зенит-телескопами,
превосходящими по точности меридианные и вертикальные инструменты, была поставлена задача про-
ведения систематических наблюдений за периодическими уклонениями широт от их средних значений,
изменения последних в то время не предвиделись.
Таким образом, кроме изучения движения земной оси в пространстве (регулярной прецессии и ну-
тационных колебаний) стали изучать периодические движения этой же оси (или «небесного» экватора)
относительно положений отвесов инструментов в разных регионах Земли. Последнее относительное
движение принято называть движением полюса, хотя оно является движением той же самой оси Зем-
ли, но по отношению к иным, а именно земным, реперам.
Задача систематического изучения колебаний широт в конце XIX в. обсуждалась астрономами
нескольких стран и привела к созданию Международной службы широты (МСШ), для чего был уста-
новлен земной экватор, предназначенный для изучения колебаний широт.
Несколько ранее, на Международной геодезической конференции (1883 г.) и Международной мери-
дианной конференции (1884 г.), было принято решение о приведении всех долгот на Земле в единую
систему посредством связи нулевой долготы с меридианным кругом Гринвичской обсерватории. Однако
с помощью одного инструмента с зафиксированной долготой нельзя «установить земной меридиан»,
т. е. однозначно связать этот «круг» с земной твердью; двух точек, расположенных не на одном диамет-
ре, было бы необходимо и достаточно для этой цели. Второй точкой мог быть полюс Мира, напомним о
сожалении, приведенном в [Михайлов 1970, с. 614], по поводу невозможности зафиксировать началь-
ное положение полюса с помощью астрономического инструмента, установленного на полюсе.
Задача МСШ заключалась в изучении изменений широт станций для изучения периодических ко-
лебаний движения полюса Земли на основе уточняемых значений каталожных склонений звезд. Для
этого с 1899 г. начались наблюдения на пяти международных станциях МСШ, которые были распо-
ложены примерно на одной широте 38°8' и, по возможности, равномерно по долготе. Широты пяти
станций МСШ, были определены с использованием лучших каталогов склонений звезд [Михайлов
1970, 1971а, б], и стали начальными значениями, с избыточностью зафиксировавшими эту земную
координату для начальной эпохи.
Геодезистов описанное выше установление земной СКС (нулевой долготы и экватора) устраивало до
тех пор, пока не обнаружились нерегулярные изменения средних широт станций и движение среднего
полюса, или экватора, Земли относительно его положения в начальную эпоху. После этого прошли
дискуссии, результатом которых стала привязка геодезических сетей не к среднему полюсу Орлова,
как было прежде, а к Международному условному началу (СЮ), т. е. к экватору, установленному
начальными значениями широт станций МСШ.
Затем МСШ была заменена Международной службой движения полюса (МСДП), а для изучения
движения полюса стали использоваться также наблюдения долгот, анализируемые Международным
бюро времени (МБВ). Число пунктов, участвовавших в службах и наблюдавших с зенит-телескопами,
астролябиями, пассажными инструментами и фотографическими зенитными трубами, достигло 88.
Когда оказалось, что изменениями координат среднего полюса невозможно объяснить всех изме-
нений средних широт и долгот, увеличилось число неизвестных, которые требовалось определить из
наблюдений: кроме колебаний — периодических изменений координат полюса х, у — подлежали опре-
делению также изменения средних координат полюса и станций слежения. За счет увеличения числа
станций надеялись добиться статистической достоверности результатов.
Обозначим скорости изменения средних координат полюса и станций соответственно через х, у и
у,у'. Величины у,у' можно назвать собственными движениями станций по долготе Л и широте <р по
аналогии с собственными движениями звезд ц — по а и ц' — по 8.
Из наблюдений на обсерватории с номером к получают левые части уравнений
ДЛк = [(i sin At - ycosAfc)tg<pfe +vfe]AT,
(1.4.1)
&<Pk — (i cos Лк + ysinAfc + Vfe)AT,
(1.4.2)
где AT — время между эпохами наблюдений.
Первое уравнение в (1.4.1) записано здесь с учетом того, что с 1960 года нуль-пункт отсчета долгот
был перенесен с Гринвича на экватор, что, как известно, упростило формулу для вычисления изменений
долгот [Михайлов 1968, с. 476].
При такой записи уравнений (1.4.1) очевидна аналогия между задачами, рассматриваемой нами и
в звездной астрономии начала прошлого века [Паренаго 1954], когда по наблюдаемым изменениям
каталожных координат необходимо было определить прецессионное движение (значения т и п) и
собственные движения звезд ц и ц' из уравнений
oqv-i — a/v = (m + n tg 6 sin a + |i)AT, 5n+i — = (ncos a + ц^ДТ.
В обоих случаях объединение уравнений всевозможных станций (обсерваторий) приводит к систе-
ме, в которой число неизвестных, подлежащих определению, оказывается на два больше, чем число
независимых уравнений. В статье [Федоров 1974] описаны разные ограничения на движения станций,
использованные международной службой в разные периоды.
В звездной астрономии ограничения на движения звезд Галактики были признаны неудовлетвори-
тельными после того, как обнаружились звездные потоки. Это замечание относится и к решениям
системы (1.4.1), поскольку пункты наблюдений находятся на разных тектонических плитах и конти-
нентах, что добавляет к индивидуальным еще и общие движения, присущие группам станций.
Необходимо заметить, что, будучи «перенесенным» на экватор, нуль-пункт оказался не закреплен-
ным конкретным астрономическим инструментом — репером. «Сохранность» системы отсчета теперь
обеспечивалась только тем, что сумму поправок средних долгот наиболее устойчивых обсерваторий
стали приравнивать нулю. Эта процедура затрудняла учет изменений долгот новых станций слежения,
вводимых в строй, и не могла обеспечить отсутствия так называемого «дрейфа нуль-пункта», о чем
писал Б. Гино [Guinot 1981].
1.4.3 Наследие XX века
Хотя наша тема — определение средних движений, следует упомянуть о кардинальных переме-
нах, происшедших в конце века, обеспечивших возможность уточнения высокочастотных движений:
колебаний полюса и изменений скорости вращения Земли вокруг оси. Наблюдения с РСДБ позволили
определять текущие координаты полюса не только значительно точнее (с ошибкой >0,001"), но и за
меньший промежуток времени, чем прежде, а неравномерность вращения Земли стали изучать в систе-
ме Эфемеридного, а затем Атомного времени. Физики получили возможность учитывать высокочастот-
ные изменения в своих экспериментах, были решены многие проблемы, связанные с ориентированием
в пространстве.
К числу нерешенных проблем, унаследованных XXI в., можно отнести, во-первых, упомянутую нами
приближенность методов, применяемых для отделения движения среднего полюса Земли от изменений
координат станций.
Вторая проблема сложнее и требует пояснения.
По мере увеличения точности определения одновременности наблюдений на разных континентах,
а также разности моментов наблюдений связь прямых восхождений с точкой Весны перестала играть
прежнюю роль в задаче определения вращения Земли, на что указал еще Ньюком. Он писал, что
отсчет прямых восхождений от точки Весны необходим только для связи с эклиптическими долготами
[Newcomb 1906, с. 321 и 324].
Поскольку нуль-пункт отсчета долгот был связан с направлением отвеса в конкретной точке Земли,
для повышения точности определения поправок часов и разностей долгот пунктов достаточно было
уточнения разностей прямых восхождений звезд. Целью многих наблюдений стало приведение разно-
стей а для звезд в единую систему, т. е. их уравнивание без привязки к менее точным наблюдениям
Солнца.
В отличие от этого при определениях изменений широт станций астрономы не могли воспользо-
ваться значениями разностей склонений, они опирались на каталожные значения склонений звезд,
отсчитываемые от небесного экватора, или полюса Мира, вращающегося относительно звезд. Непо-
средственно по наблюдениям одна координатная ось связывалась с земным нуль-пунктом, а другая —
с небесным полюсом.
В старину наблюдаемый небесный экватор называли равноденственным кругом. Отсчитываемые
от него склонения звезд, а следовательно и связанные с ними широты обсерваторий изменяются из-за
движения точки Весны, причиной которого является не только движение оси Земли в пространстве, но
и движение земной орбиты, так называемая прецессия от планет. Представление о сложности разделе-
ния наблюдаемого движения равноденственных точек в соответствии с причинами, их вызывающими,
можно получить из учебников сферической астрономии с изложением методики Ньюкома, основан-
ной на использовании двух численных моделей — вращения оси Земли и ее орбитального движения
[Newcomb 1906, с. 235-246].
Хотя прецессия от планет на два порядка меньше прецессионного движения оси, накопление ошибок
в её учете отразится на значениях координат среднего полюса, определяемых из широтных наблюдений.
Не случайно раздражение астрономов конца прошлого века вызывала та часть движения точки Вес-
ны, которая не находила теоретического объяснения [Губанов и др. 1983, с. 19]. Е.П. Федоров цитирует
высказывания X. Айхгорна и П. Ваймана, приветствующих «отказ от точки Весны как фундаменталь-
ной точки астрометрии» [Федоров 1960, с. 95-96]. Хотя причина их пожелания не представлена, ее
можно объяснить стремлением освободиться от точки со столь сложным движением при наблюдени-
ях за вращением Земли. К числу причин, вызывающих движение точки Весны, в XX в. добавили
еще неравномерность вращения Земли. Независимость новых координат опорных объектов ICRS от
поведения точки Весны и двух наблюдавшихся прежде кругов, определяющих ее движение, считается
достоинством новой главной системы.
Целью этого раздела было пояснение методического различия в принятом изучении колебаний по-
люса по изменениям долгот и широт. Напомним также об отступлениях практики XX в. от принятой
традиции составления фундаментальных каталогов на основе индивидуальных абсолютных каталогов.
Изменения в методике наблюдений и их обработки привели к тому, что фундаментальные каталоги
перестали воспроизводить абсолютную (независимую) систему положений [Tolchelnikova-Murri 1986;
Tolchelnikova-Murri et al. 1991; Толчельникова 1997]. Динамическими («теоретическими») поправка-
ми стали исправлять не только наблюдаемые положения равноденственных точек, но и экватора, что
позволило Ж. Ковалевскому назвать «гибридной» систему последнего каталога FK5 [Kovalevsky 1974].
1.4.4 Современный подход к изучению движения полюса
Звездная СКС подвержена «деформации» из-за собственных движений звезд и признается враща-
ющейся, т. к. координаты звезд изменяются при переходе от абсолютных каталогов одной эпохи к
каталогам последующих эпох. В новой опорной системе ICRS (для краткости мы будем ее называть
«квазарной») точечным радиоисточникам присвоили постоянные координаты, и новая Международная
служба (IERS) перешла на наблюдения радиоисточников вместо звезд. Квазарная система коорди-
нат после учета аберрационных смещений источников излучения становится «недеформируемой» для
земных наблюдателей в течение очень многих десятилетий, поэтому некоторые авторы характеризу-
ют ее как «фиксированную раз и навсегда» [Витязев 2001, с. 95]. Другие полагают, что в будущем
для «поддержания» внегалактической системы радиоисточники «будут скованы статистическими усло-
виями» [Walter, Sovers 2000, эпилог]. В этой монографии затронута гипотеза Большого взрыва для
обоснования «невращения системы ICRS относительно всей Вселенной» [Толчельникова 2002].
Вращение земного репера относительно звезд, приведенных в систему ICRS, зависит от вращения
оси Земли, неравномерности движения Земли вокруг своей оси, медленного вращения плоскости зем-
ной орбиты, вращения земной коры относительно земной оси, «собственных движений» реперов со
скоростями -у и у'.
Собственные движения звезд будут уверенно определены в квазарной системе, что приведет к точ-
ному учету движений проекций звезд относительно друг друга. Звездная сфера также станет «недефор-
мируемой», однако это не исключит относительного вращения звездной и внегалактической (квазарной)
сфер, и звездные астрономы продолжат изучение вращения Галактики. Для решения нашей задачи из
наблюдаемого относительного вращения приходится выводить не одно, а несколько вращений.
Новая служба определяет высокочастотные составляющие изменений координат полюса х, у и из-
менения скорости вращения Земли в системе Атомного времени благодаря высокой точности средств
регистрации наблюдений, а также удовлетворительной (в течение 10-15 лет) точности тех численных
моделей, которые приходится использовать для приведения координат светил на видимое место. О том,
что модели устаревают, свидетельствуют многократные на протяжении XX в. смены численных моде-
лей, описывающих движения планет, а также переопределения по разным наблюдениям коэффициентов
рядов, описывающих колебания земной оси в пространстве.
Как известно, необходимы наблюдения, чтобы уточнять коэффициенты рядов, используемых при
вычислении теоретических средних координат звезд [Федоров 1958]. Поскольку решение недоопреде-
ленной системы не единственное, оно приводит к перераспределению ошибок между параметрами тех
моделей, которые уточняются по данным непосредственных наблюдений.
Из перечисленных выше причин нетрудно сосчитать, сколько численных моделей приходится ис-
пользовать астрономам для вывода движения среднего полюса и значений -v и -v'.
Современная процедура учета теоретических, т. е. модельных поправок описана в статье [Лукашова,
Свешников 2004], откуда, в частности, видно, что желанное «избавление» от точки Весны не устра-
нило необходимости моделирования движения эклиптики для исключения влияния этого движения на
определяемое вращение Земли. При этом вековые изменения угла е между экватором и эклиптикой,
наблюдаемые в течение двух тысяч лет, приписаны вращению эклиптики (см., например, [Маррей 1986,
сс. 254-255, 102], хотя на этот счет высказаны и другие теоретические соображения, например в [Aoki
1969]. Очевидны трудности в уточнении прогнозов, когда по наблюдениям приходится одновременно
уточнять несколько численных моделей.
Поскольку построение перечисленных моделей (теорий) входит в компетенцию разных отраслей со-
временной астрономии, а также геодезии, геодинамики и геофизики, специалисты используют резуль-
таты смежных областей, а не совместное решение. Это не меняет сути дела, что нашло отражение в
стремлении перейти к величинам, непосредственно наблюдаемым (возникла «problem of observability»)
и в таких предложениях, как избавление от влияния теорий на координаты при помощи замены по-
следних дугами [Дравских и др. 1975; Губанов и др. 1983].
Наше предложение, изложенное в следующем разделе, противоречит мнению тех авторов, которые
полагают, что наблюдаемые экватор и эклиптика (либо один из этих кругов) более не потребуются
астрономам, т. к. определена одна невращающаяся триада, связываемая с барицентрической триадой
(система ICRS, называемая иногда инерциальной), с которой можно связать другие триады, заданные
«теоретически» с помощью численных моделей: динамической, описывающей движения тел Солнечной
системы [Duncombe et al. 1974-1975], и земной, описывающей вращение Земли как в пространстве,
так и относительно триады, связанной с неким «геоцентром» [Татевян и др. 2004].
В разделе «Принцип построения Международной земной системы координат» статьи [Татевян и др.
2004] описаны требования к «построению и сохранению фундаментальной земной системы координат
с точностью IO"10 (или 6 мм) на поверхности Земли» (с. 33), о ее реализациях ITRF-89, ITRF-97 и
еще более точных в будущем. Не упоминаются сферическая или декартова система координат, а «за-
крепленная на поверхности Земли сеть пунктов, фиксированных в земной коре, заметно смещающихся
относительно центра масс Земли». «Однако на практике из-за отсутствия достоверной модели этих
движений в качестве начала системы координат (т. е. триады, курсив мой, С. Т.) используется некое
среднее положение «геоцентра» на начало каждого года» (с. 35).
Если под «закрепленной сетью пунктов» подразумевается принятое навсегда постоянство их коор-
динат, то остается ли возможность изучения относительных перемещений пунктов v?
Исследователи уверенно справляются с краткосрочными прогнозами, с определением долгопериоди-
ческих и вековых движений дело обстоит значительно хуже, о чем свидетельствуют слишком частые
изменения (updating — букв, «осовременивание») соглашений относительно параметров ориентации
Земли (ЕОР), принимаемых международным сообществом (Fundamental Astronomy, 2004 г., с. 8-12,
с. 101-105).
Для улучшения прогнозов и моделей требуются сравнения разностей значений «о» и «с», приве-
денных в одну систему координат. Между тем, земные направления, наблюдаемые с РСДБ, принято
связывать с барицентрической триадой, тогда как искомые движения полюса и пунктов на этапе по-
строения земной модели необходимо связать с иной («земной») триадой. Поскольку из указанных
центров нельзя наблюдать, приходится вводить промежуточные (intermediate) полюса и начала «для
описания элементов движущихся опорных систем» (Fundamental Astronomy 2004 г., с. 187, а также
сс. 101-105, 161-165, 187-181, 191-195). Специально созданная при МАС Комиссия по терминологии
(Nomenclature in Fundamental Astronomy, см. Fundamental Astronomy 2004 г., с. 161-187) в 2004 г.
предложила переименовать эти начала СЕО и ТЕО (Celestial Earth Origin и Terrestrial Earth Origin) в
CIO и TIO, заменив слово Earth на intermediate.
Если учесть, что современные модели должны быть согласованы с релятивистской теорией, кото-
рая, в частности, требует изменения поправок в системе времени при переводе движений из одной
триады в другую («ход релятивистского времени зависит от системы координат»), то о неоправданной
усложненности новых решений можно не распространяться.
1.4.5 Предлагаемый метод установления земной сферической координатной си-
стемы
Считается, что для задания, или установления системы координат на небесной сфере необходимо и
достаточно зафиксировать значения трех координат для двух реперов, чтобы этим обозначить большой
круг и нуль-пункт на нем. Для установления СКС, в которой изучали вращение Земли в новое время,
использованы долготы и широты Годдарского центра космических полетов и долготы обсерватории На-
тал в Бразилии, т.е. фиксирован меридиан и нуль-пункт на нем [Федоров 1960, с. 100]. Е.П.Федоров
упоминает также другую СКС с таким же предназначением, когда фиксированы две широты — Годдар-
ского центра и станции Вентцель в ФРГ, а также долгота обсерватории Натал.
1. Мы зафиксируем, т. е. будем считать постоянными значения долготы и широты обсерватории А
вблизи экватора и широты обсерватории В, отличной по долготе от А примерно на 90°. Как всегда, в
первую эпоху установления СКС, следует обеспечить преемственность с наблюдениями предшествую-
щих эпох. Тогда во вторую эпоху появляется возможность определения изменений координат полюса в
новой системе, которая не только точнее прежней, но является ее продолжением.
В согласии с астрономической традицией, в первую эпоху определены абсолютные (независимые)
координаты светил, для чего необходимы наблюдения Солнца, в нашем случае, как минимум, на одной
обсерватории А. При этом будет определен также угол между меридианом обсерватории А и точкой
Весны. Очевидно, что долготу обсерватории А необходимо связать с долготой того места, которому
прежде была присвоена нулевая долгота.
2. Поясним метод приведения координат звезд, наблюдаемых на разных обсерваториях земного
шара, в систему одной обсерватории А. Решение этой задачи по наблюдениям методом равных высот
было дано в работе [Крейнин, Толчельникова-Мурри 1981]. Необходимо подчеркнуть, что при редукции
наблюдаемых координат звезд на средние места предлагалось учитывать изменения координат полюса
и скорости вращения Земли в системе атомного времени по данным РСДБ [Крейнин, Толчельникова-
Мурри 1981; Толчельникова-Мурри, Крейнин 1980; Крейнин, Мурри 1973].
Для пояснения мы упростим задачу, предположив, что средняя широта избранной обсерватории А
равна нулю (<р 1'), и ограничимся менее точными, но значительно более простыми наблюдениями в
меридиане места.
Начнем с прямых восхождений. Как известно, до определения поправки равноденствия ДА опреде-
ляются разности средних значений прямых восхождений звезд
ДоСг Д^/i — li,hi
где г и h — номера звезд. С.А. Толчельникова-Мурри и Е.И. Крейнин [1980] описали приведение прямых
восхождений звезд не к точке Весны, а к долготе одной из обсерваторий, которую выгоднее всего
расположить на земном экваторе. Показано, как из исходных уравнений наблюдений с пассажными
инструментами
До,- sin Zi sec + (До^ — ДЛк) = 1^к Р = cos Si,
где к — индекс обсерватории, можно на каждой обсерватории определить независимые от предыдущих
(абсолютные) значения Да^ — азимута пассажного инструмента для каждого отдельного наблюдения
группы звезд продолжительностью не более 2 часов, и, кроме того, абсолютные значения разностей
Да, - ДЛк = Ц,к. (1.4.3)
Из уравнений (1.4.3), полученных по наблюдениям на всех обсерваториях, при ДЛд = 0 опре-
деляются приведенные к долготе обсерватории А прямые восхождения всех звезд, наблюдаемых на
обсерваториях, задействованных в общей программе. Одновременно долготы обсерваторий приводят-
ся к единой системе, связанной с направлением отвеса в точке А. Эквивалентность предложенного
решения совместному уравниванию всех наблюдений на разных обсерваториях методом наименьших
квадратов доказана в статье [Толчельникова-Мурри, Крейнин 1980].
Более точные методы определения абсолютных склонений и широт обсерваторий рассмотрены в ря-
де статей, где предложен для этого метод равных высот, а также абсолютные наблюдения на экваторе
методом Крейнина-Мурри [Крейнин, Толчельникова-Мурри 1973; Михайлов 1973]. Метод определения
склонений звезд в системе обсерватории А и одновременного приведения широт обсерваторий в систе-
му, связанную с широтой А, описан в уже упомянутой нами статье [Крейнин, Толчельникова-Мурри
1981], где он рассмотрен как этап, предшествующий выводу абсолютных склонений звезд.
Из вышеизложенного следует, что одновременно с определениями абсолютных координат звезд
можно определить также их координаты, приведенные в систему одной обсерватории, но для решения
последней задачи нет необходимости в наблюдениях Солнца.
3. Рассмотрим теперь, что можно получить из приведения наблюдений на всех пунктах в систему
долготы и широты одной обсерватории.
Присвоение постоянных долготы и широты обсерватории А позволяет в дополнение к эклип-
тике и экватору спроектировать на небесную сферу третий большой круг. Чем больше времени
пройдет между эпохами наблюдений, тем заметнее станет отличие двух экваторов, причем не только
из-за движения среднего полюса, но и из-за движений точки Весны, включая прецессию оси.
На экваторе меридиан места проходит через зенит и два полюса, расположенные на линии горизон-
та. Если полюсы сместятся на Да: (один поднимется, другой опустится за горизонт), то все параллели
на обсерватории А наклонятся к горизонту. Соответственно сдвинется точка экватора относительно
зенита, поэтому склонения звезд 6, измеряемые в системе <рд = const, изменятся на Да:.
Средний экватор рассматриваемой обсерватории проходит через зенит, точки востока и запада. Если
полюс сместится в перпендикулярном направлении, т. е. на Ду, это не отразится на наклоне экватора,
но на Ду — сместятся точки экватора (отмеченные звездами) в направлении, ортогональном прежне-
му горизонту, соответственно изменится время восхода, захода и прохождения звезд через меридиан.
Следовательно, прямые восхождения звезд, отсчитываемые в системе Лд = const, изменятся на Ду.
После приведения всех наблюдаемых координат в систему обсерватории А, уже во вторую эпоху по
изменениям средних координат звезд можно будет определить значения и на всех пунктах. При этом
уравнения (1.4.1) для одной обсерватории, именно А, не будут содержать неизвестных у, у'.
ДЛк = Да: sin Ль - Ду cos Ль tg <pk + "Vfc ДТ
Д<Рк = Да: cos Лк + Ду sin Лк +УкАТ
Следовательно, при совместном решении уравнений для всех обсерваторий будет получена система
с числом неизвестных, равным числу уравнений, тогда значения Да: и Ду, так же как и у, и у', для
всех обсерваторий (разумеется, кроме А) определятся однозначно без каких-либо условий.
(1.4.4)
Полученные значения v и V являются смещениями станций относительно направления от-
веса в избранной точке обсерватории А. Для уравнивания геодезических сетей это направление
имеет большие преимущества по сравнению с полюсом Земли не только потому, что в океане
невозможно, а в Антарктиде трудно проводить наблюдения звезд (и ИСЗ), но и потому, что
долготу полюса невозможно зафиксировать — она является величиной неопределенной.
Благодаря вращению Земли, направления отвеса в точке А проектируются на разные звезды, отсюда
и вытекает возможность использования одного направления, достаточно удаленного от полюса Земли.
4. Изложенное в этом разделе, вероятно, вызовет возражения со стороны астрономов, привыкших к
распространенным в XX в. способам статистической (неоднозначной) зависимости между координатами
звезд и земных пунктов. Действительно, при отсутствии контроля выбор обсерватории А можно считать
неудачным, если она окажется подвижной в теле Земли. Однако контроль предусмотрен. Во-первых,
анализ значений -Vfc и у'к даст возможность определить относительные движения обсерваторий (найти
наиболее и наименее подвижную).
Во-вторых, не проводя каких-либо дополнительных наблюдений, можно привести координаты на-
блюдаемых звезд в систему иной обсерватории. Так (см. п. 1), для второй обсерватории В, которую
также выгодно выбрать на тропических широтах, при Лв = 90° между координатами полюса и звезд
получится иная зависимость, т. к. смещение полюса Да: повлияет на значения Дав, а смещение Ду на
значения Дбв- Появится возможность проконтролировать те результаты, которые были получены после
приведения координат в систему А. Экваториальные обсерватории выгодны и тем, что на наблюдаемые
значения разностей их долгот не влияет движение полюса [Михайлов 1970, с. 617]).
Очевидно, контролем может служить также определение движения среднего полюса и относитель-
ных смещений станций отдельно по изменениям склонений 6 и прямых восхождений звезд а. В первом
случае исключается влияние на результаты ошибок нутации в прямом восхождении, во втором —
нутации по склонению.
Принято считать возможным выводить среднее положение полюса на основе шестилетних наблю-
дений, но в принципе (если отвлечься от оценки точности результатов наблюдений координат звезд
за короткое время) допустимы и другие периоды наблюдений (не меньше года!), если есть необходи-
мость в уточнении колебаний земной оси в пространстве, т. е. каких-либо членов нутации, которую
учитывают при наблюдениях как звезд, так и квазаров. При регулярных наблюдениях будут компен-
сированы влияния ошибок тех периодических членов нутации, которые равны или пропорциональны
периоду наблюдений. Итак, избыточная система уравнений необходима для того, чтобы контролиро-
вать результаты главного однозначного (не статистического) решения и обеспечить преемственность
при непредвиденных обстоятельствах, разрушении обсерватории А и т. п.
Вопрос о том, являются ли причиной изменений земных координат точек движения блоков и мате-
риков или изменения направлений отвесов, решается методами геодезии и гравиметрии, на этом этапе
неизбежен переход к триадам.
1.4.6 Заключение
1. Предложенный метод позволяет перейти к топоцентрическим координатам земных пунктов с наи-
меньшей потерей в точности, достигнутой для звезд в небесной сетке (frame), поскольку направления
как на опорные, так и на изучаемые объекты отнесены к практически бесконечно удаленной сфере.
Чтобы однозначно решить задачу, достаточно ввести одно новое земное направление, с которым следу-
ет связать координаты опорных небесных объектов по наземным наблюдениям посредством глобального
их уравнивания (приведения в систему долготы и широты обсерватории А). Преимущество вводимого
направления перед полюсом Мира в том, что углы между ним и отвесными линиями пунктов наблю-
дений не зависят от прецессионного и нутационного движения оси Земли, поэтому оно выгодно для
изучения обсуждаемых нами движений. Предусмотрен также и контроль этого решения.
2. На протяжении тысячелетий время определялось по движению равноденственных точек относи-
тельно звезд [Коперник 1964, Толчельникова 2005], мы же рассматривали все движения в системе
Атомного времени, т. е. затронули лишь одну из проблем, связанных с изучением долгопериодических
и вековых движений по наблюдаемым явлениям.
Интерес к долгосрочным прогнозам проявляют климатологи и геологи, а в последнее время также
широкая общественность, заинтригованная книгой Роберта Ньютона о «преступлении» Птолемея и
«изысканиями» академика П.Т. Фоменко.
К сожалению, главной целью астрометрии и небесной механики стало координатно-временное обес-
печение разнообразных потребителей. Их обычно интересует задача точного ориентирования, т. е. опре-
деления изменений своего положения относительно подходящих реперов — маяков, но не выяснение
тех многих причин, из-за которых происходят изменения положений. В этом проявляется несоот-
ветствие интересов потребителей координат и исследователей природы, создающих численные модели
вращений тел и их обращений в соответствующих системах тел на основе теорий и наблюдений. Ча-
стый пересмотр современных моделей свидетельствует об их неудовлетворительности для долгосрочных
прогнозов.
3. Мы предложили земную СКС, имея в виду изучение долгопериодических и возможной вековой
составляющей в движении среднего полюса Земли и станций (обсерваторий) при использовании резуль-
татов наблюдений с РСДБ для учета колебаний мгновенного полюса и изменений скорости вращения
Земли, т. е. при редукции координат светил на средние места.
Потребители координат и времени могут довольствоваться государственными службами, не связан-
ными в общую сеть. Однако для решения фундаментальных задач астрометрии и геодезии необ-
ходима «общеземная», Международная СКС. Еще в XIX в. была осознана необходимость перейти от
изучения движений небесных светил на отдельных государственных обсерваториях к международно-
му сотрудничеству, в результате чего абсолютные каталоги, получаемые на отдельных обсерваториях,
были заменены сводными (фундаментальными) каталогами звезд. Благодаря этому, всеобщими, меж-
дународными, оказались две системы координат, или два наблюдаемых «небесных круга»: экватор и
эклиптика, связанные равноденственными точками. Достоинством введенного здесь третьего большого
круга, пересекающегося с двумя предыдущими на той же «небесной сфере», является возможность
его наблюдать, причем связанная с ним СКС не изменяется, позволяя мысленно перемещать
«наблюдателя» в любую точку в теле Земли.
В наш космический век сама Земля становится астрономическим инструментом. К реализации этой
идеи, в конечном счете, направлено и наше предложение, но тело Земли может выступать в роли
астрономического инструмента только в том случае, если относительные положения реперов — ин-
струментов, играющих роль индексов двух шкал, можно определить с высокой точностью. Авторы
современных статей заверяют, что необходимая точность уже достигнута и предсказывают ее дальней-
ший рост в ближайшем будущем.
1.5 О связи земной и небесной системы координат
М.И. Юркина
Для связи земной системы координат с небесной системой возможно использовать наблюдения
астрономических широт и долгот и другие наблюдения, например, новой техникой при определениях
ориентировки Земли в пространстве. Должно быть изучено движение полюса земного вращения и
фиксировано его положение в некоторый момент времени.
Принцип решения задачи был описан Л. Эйлером [Euler 1765а], в одной из его статей 1765 г. Эйлер
рассмотрел общий случай, допустив, что скорости собственного вращения планеты, ее нутационно-
прецессионого движения и движения полюса по поверхности могут иметь один порядок. Главные
центральные моменты инерции планеты Эйлер принял различными, что обусловливает возможность
появления вращательных моментов внешних сил и изменения ориентировки в пространстве под влия-
нием других небесных тел, ось собственного вращения планеты не совпадающей с ее мгновенной осью
вращения. Эйлер пришел к выводу, что задача о разделении нутационно-вращательного движения и
движения полюса вращения по поверхности планеты на основе наблюдений звезд недоопределена.
Рассмотрение задачи Эйлер продолжил в статье следующего 1766 г. [Euler 1766], дополнив условия
задачи заданием действующих сил и рассмотрев составленные им динамические уравнения движения.
Эйлер допустил близость оси вращения планеты к ее главной полярной оси инерции, равенство эква-
ториальных моментов инерции, равномерность движения возмущающего небесного тела по круговой
орбите около планеты. При этих упрощениях рассмотрено влияние Луны и Солнца на движение оси
Земли в пространстве. Эйлер отметил возможность свободной пространственной нутации оси Земли
при равномерном ее вращении около этой оси из-за неравенства полярного и экваториального моментов
инерции. Для однородной Земли при ее сжатии 1:200 Эйлер оценил период этой нутации в 23h53m,
отметив трудность ее практического определения.
В последующем, вплоть до наступления эры космических исследований, определение земного вра-
щения развивалось в направлении работы Эйлера 1766 г. при уточнении задачи механики об опре-
делении ориентировки Земли, учете деформируемости Земли в динамических уравнениях и данных о
внутреннем строении Земли. Обзор выполненных исследований дан в работе [Костина, Юркина 2002].
Большая разница в периодах основных волн вынужденной нутации и движения полюса приводила к
уверенному разделению переменных, пока точность оставалась в сравнительно невысоких пределах и
не имели значения другие волны в обоих движениях. В упомянутом обзоре описаны суждения Чанд-
лера, Ньюкома, Идельсона и Поттера, Федорова, Джеффриса, Морица и Мюллера по описываемой
теме. Джеффрис совместно с Висенте и М.С. Молоденский в работах 1953 и 1989 гг., собранных в
«Избранных трудах» [Молоденский 2001], развили теорию упругих деформаций Земли и их учета при
определении нутации. Это направление до сих пор активно развивается в работах С.М. Молоденского,
Вероники Деан и др. Совершенствование теории осуществляется приближением моделей Земли к ре-
альной Земле, учетом отличий деформаций от описываемых законом Гука и коэффициентами упругости
Ламе, влияний морских приливов и других эффектов. Как бы ни были сложны эти модели, они пред-
ставляют реальную Землю упрощенно. Поэтому некоторые авторы, упуская недоопределенность задачи
об определении ориентировки Земли в пространстве и движения полюса по наблюдениям звезд, выска-
зывали пожелания о проверке нутации наблюдениями. Но такая проверка невозможна.
Многочисленные уточнения механической задачи не коснулись эффекта, отмеченного Эйлером в его
известной книге в конце главы 16 о вращении небесных тел [Euler 1765b, § 763, § 816] и связанного со
смещением результирующих сил притяжения Земли Луной и Солнцем с центра масс Земли (подробнее
[Юркина 20046]). Силы притяжения Земли Луной и Солнцем могут быть смещены с центра масс Земли
из-за земного сжатия до 140 м и 30 см соответственно. Поэтому необходимо различать центр земной
массы и точки приложения внешних сил. Механики Ф.Миндинг и У.Р. Гамильтон связывали такие
точки с минимумом вызываемых Луной и Солнцем возмущающих вращательных моментов, поэтому
расстояние между центром земной массы и точками приложения сил притяжения Земли Луной и
Солнцем может достичь соответственно 300 м и 80 см.
Предварительная оценка показала [Юркина 20046], что в отдельные моменты времени учитываемый
и поправочные члены имеют одинаковый порядок величины, при обращении возмущающего небесного
тела вокруг Земли влияние поправочного члена может отчасти компенсироваться, компенсация не
может быть полной.
Радикально отличный путь решения рассматриваемой задачи предложен в работе [Зиман и др.
1970]. Авторы разработали способ определения вектора собственного вращения планеты в системе ее
координат по фотоснимкам ее поверхности и звезд с космических летательных аппаратов. Они допу-
стили перемещения оси вращения в теле планеты. Задачу можно решить по двум парам синхронных
снимков звезд и участка планеты в последовательные моменты времени. Можно найти изменение
ориентировки съемочной аппаратуры в пространстве, ее поворот относительно планеты. На снимках
планеты должно быть не менее пяти общих точек ее поверхности. Можно определить также пово-
рот планеты в фиксированной системе координат. Такой подход реализовал Е. Г. Беленький [1991],
определивший положение северного полюса Венеры по данным радиолокационного картографирования
поверхности Венеры автоматическими межпланетными станциями «Венера-15» и «Венера-16» с орбит
искусственных спутников Венеры 1983 и 1984 гг. Зарубежные установления полюсов планет основаны
на подобных подходах. Высокая точность современной аналитической пространственной фототриан-
гулянии, основанная на высоком качестве фотоматериалов и больших возможностях вычислительной
техники, позволяет надеяться на современный уровень точности при применении подхода Зимана и др.
к определению движения земного полюса. Решение этой задачи усовершенствовано М.С.Урмаевым
[Урмаев, Фролов 1999]. Полюс будет определен как центр вращения земной поверхности, но при ин-
терпретации следует иметь в виду, что ось вращения может быть смещена с центра земной массы из-за
смещения сил притяжения Луны и Солнца с этого центра.
Осуществление подхода Зимана и др. позволило бы исключить смещения полюса из разного рода
наблюдений, в которых такие влияния проявляются. Тогда можно было бы определить ориентировку
Земли в пространстве (углы прецессии, нутации и собственного вращения) без каких-либо сведений о
внутреннем строении Земли. Можно провести аналогию с теорией фигуры Земли: решение Молоден-
ского 1945-1960 гг. избавило геодезистов от геоида Гаусса-Листинга и необходимости использовать
сведения о внутреннем гравитационном поле. Применение подхода Зимана и др. позволяет получить
независимый критерий качества земных моделей, но предварительно должно быть изучено сложение
действующих сил и распределение ускорений. Затронутый вопрос касается также гравиметрических
измерений, поскольку связан с изменениями центробежной силы.
1.6 Системы координат и системы отсчета в геодезии и теории
фигуры Земли
М.В. Пик, М.И. Юркина
1.6.1 Введение
Выдающиеся геодезисты прошлого Гельмерт и Пицетти понимали, что точное определение фигу-
ры геоида и ортометрических высот невозможно без детальных сведений о распределении масс внутри
Земли [Helmert 1880-1884, с. 502; Pizzetti 1906-1925, Bd. 6, Teil 1, с. 206]. Стремление решать основ-
ную геодезическую задачу — определение гравитационного поля и фигуры Земли — через применение
теории Стокса и вычисление ортометрических высот оказалось в противоречии с ростом требований к
точности и накоплением измерительных данных. Появление теории Молоденского преодолело возник-
ший в геодезии кризис.
Теория Молоденского [19456, 1948; Молоденский и др. 1960] позволяет определить внешнее земное
гравитационное поле и фигуру земной поверхности по гравиметрическим и геодезическим измерениям
на этой поверхности. Эта теория дает совместное решение задач об определении поля и установле-
нии счета высот. Теория Молоденского включает в себя новый тип задач математической физики. В
ранее исследованных задачах фигура поверхности принята известной и по значениям потенциала или
его производным по какому-либо направлению или какой-либо комбинации этих величин, заданным
на поверхности, нужно определить поле. Теория Молоденского определяет поверхность по значениям
потенциала и силы тяжести на ней. Точнее, потенциал предполагается измеренным относительно неко-
торой точки, принятой за начало отсчета высот, как правило, вблизи уровня моря. Возможно несколько
начал отсчета.
Таким образом, для решения краевой задачи достаточно разностей потенциалов. Их полные величи-
ны возможно определить из сопоставления с результатами измерений в астрономо-геодезических сетях
или по спутниковым данным.
1.6.2 Теория Пицетти уровенного эллипсоида
Сравнительная простота теории Молоденского достигнута выделением линейного приближения. Это
можно сделать благодаря близости Земли к ее простой модели — сжатому эллипсоиду вращения —
сфероиду, уровенному для потенциала силы тяжести. Модель Земли создает отсчетное (нормальное)
гравитационное поле. Как отсчетную можно было бы использовать другие земные модели, например
фигуру неоднородной жидкости, вращающуюся как твердое тело в равновесии, или нормальный сфе-
роид Гельмерта, включающий гармонику четвертой степени реального земного поля. Но такие модели
Земли сложнее упомянутого эллипсоида вращения, часто называемого сфероидом, и не имеют преиму-
ществ перед ним. Решение геометрических задач геодезии отработано только для сфероида. Этот круг
задач составляет сфероидическую геодезию.
В теории фигуры Земли как решении задачи математической физики на основе выполняемых на
земной поверхности геодезических и гравиметрических наблюдений достаточна такая близость Зем-
ли и ее модели — отсчетного эллипсоида, чтобы нелинейными членами можно было пренебречь без
потери точности. Наибольшая возможная близость необходима при решении небесномеханической за-
дачи об определении ориентировки Земли в пространстве. В последнем случае положение эллипсоида
должно соответствовать положению реальной Земли: центр эллипсоида должен совпадать с центром
масс Земли, их оси вращения должны быть совмещены и угловые скорости вращения должны быть
одинаковыми, массы Земли и эллипсоида должны быть равны.
Математическая модель Земли в виде эллипсоида вращения полностью определена четырьмя па-
раметрами, устанавливаемыми по астрономическим и геодезическим данным. Согласно решению ге-
неральной ассамблеи Международного геодезического и геофизического союза (МГГС) в Люцерне
1967 года за основные параметры были приняты: а — большая полуось, GM — произведение грави-
тационной постоянной на массу Земли, Л — стоксов параметр — коэффициент при шаровой функции
Лежандра второй степени в разложении земного потенциала, си — угловая скорость вращения Земли.
Численные величины этих параметров периодически, между ассамблеями МГГС, получали поправ-
ки. Впоследствии членами Специальной комиссии МГГС по фундаментальным постоянным были вы-
двинуты два дополнительных условия [Baria 1995b, Бурша 1996]:
А. Фундаментальные постоянные должны быть естественными физическими величинами, то есть
они должны иметь физический смысл.
Б. Их определение должно быть единственным без предварительных условий.
Этим условиям в большей степени, чем стоксов параметр J2, удовлетворяет разность С — (А + В)/2
моментов инерции Земли, полярного и среднего из экваториальных. Для уровенного эллипсоида вра-
щения эта величина определена формулой Пицетти [1913]:
GMc2 Г 4 си2а2с3 // с2\ с с\-1
С(С-Л) = —^---^((s+^aretgj-S^ j, (1.6.1)
где эксцентриситет с = (а2 — Ь2)1/2, b — малая полуось эллипсоида.
Коэффициент
G[C-(A + B)/2]
2 GMa2 ( >
тесно связан с разностью моментов инерции. Большую полуось а ранее связывали с эллипсоидом, рав-
ным по объему с геоидом. Однако геоид как уровенная поверхность, по определению Гаусса и Листинга
совпадающая со средним уровнем океана, все в большей степени не соответствует современному стрем-
лению к точности и определенности получаемых решений, так как на материках проходит внутри их
массы, а отличия в уровнях морей и океанов затрудняет их связь с геоидом. Это последнее затруднение
преодолено в работах [BurSa et al. 2002]: по альтиметрическим данным они получили для среднего
геопотенциала на поверхности Мирового океана Wq = (62 636 856,0 ± 0,5) м2с-2.
В.В. Бровар [1995] предложил определять параметры земного эллипсоида из условия минимума
аномального поля Земли. Это условие Бровар выразил формулой
с dT
I — — T—dS = min,
J dn
s
где T = W — U, W — потенциал силы тяжести реальной Земли, U — то же отсчетного эллипсоида,
S — поверхность Земли. Приближенно можно представить
J(W-?7)2dS = min. (1.6.3)
s
Пренебрегая влиянием земного сжатия и углами наклонов земной поверхности, условие (1.6.3) в
стоксовом приближении можно привести к виду
Да = -Сср-(ИЪ-^о)^, (1.6.4)
где Да — поправка в большую полуось отсчетного эллипсоида, Сер — среднее из высот квазигеоида
по всей Земле, Wo — потенциал в начале счета высот, то есть эта величина может быть отличной от
среднего геопотенциала на поверхности мирового океана, Uq — потенциал нормальной силы тяжести у
на поверхности отсчетного эллипсоида.
Полагая основными параметрами GM, a, J2 и ц>, для определения вторичных без потери точности
можно использовать формулу Морица [Heiskanen, Moritz 1967]
„с2 4 ш2с^ / ( с2 \ с с\ 1
= (|ад
Пицетти [1894] первым предложил использовать эллипсоид вращения как отсчетную поверхность,
а поле такого эллипсоида — как отсчетное в геодезических задачах, связанных с земным гравитаци-
онным полем. Теории уровенного эллипсоида вращения посвящена книга [Пицетти 1913] и несколько
его более ранних статей. Пицетти решил первую краевую задачу (задачу Дирихле) для эллипсоида
вращения, выразив это решение замкнутой формулой. Первая краевая задача может иметь только одно
решение. Если получено несколько решений, они должны быть идентичными. Пользуясь иной, чем
Пицетти, системой координат, [Молоденский 19456] построил иное решение задачи Дирихле для эл-
липсоида вращения. Схожее решение получил также Ламберт [Lambert 1961]. Поскольку во многих
задачах геометрические данные неотделимы от физических, теория Пицетти играет выдающуюся роль
в истории геодезии.
Далее мы сравним решения Пицетти и Молоденского. Но сначала следует напомнить не отра-
женную в геодезической литературе теорию Ламе криволинейных координатных систем [Lam£ 1837,
1838], описавшего эллипсоидальную ортогональную систему общего вида с координатными поверх-
ностями второго порядка: софокусными трехосными эллипсоидом, однополостным и двухполостным
гиперболоидами. Ламе выразил условие ортогональности координатных линий и поверхностей, опреде-
ление линейного смещения по приращениям криволинейных координат (были введены коэффициенты,
получившие имя Ламе). В этих статьях эллипсоиды вращения кратко упомянуты. Им специально по-
священа статья Ламе [Ьатё 1839], в которой описана координатная система для эллипсоида вращения
общего вида:
x = cfficosv, у = cf /isinv, z = су//2 — 1 у 1 — Д2, (1.6.6)
варьируя определения функций f и Д, можно изменять систему координат и искать наиболее простое
решение поставленной задачи.
Например, приняв f = chw, /1 = sinu, можно получить
Xi = с sin u cos и ch w, Х2 = csinusin vchw, Х3 = ccosushw, (1.6.7)
где координата и дополняет приведенную широту t до 90°, v — долгота, координата w соответствует
счету высот. Эта система координат по всей вероятности впервые введена в статье [Niven 1880] о
распространении теплоты в эллипсоиде вращения.
Предыстория криволинейных эллипсоидальных координат связана со статьей Гаусса [Gauss 1825] о
конформном отображении некоторой заданной поверхности. Рассматривая эллипсоид вращения, Гаусс
приводит формулы, связывающие декартовы координаты точек на поверхности эллипсоида с его полу-
осями а, Ь, долготой v и приведенной широтой t:
xi = acostcosv, Х2 = acostsinv, T3 = bsint. (1.6.8)
На пространство вне эллипсоида эти формулы не распространяются.
Пицетти [1913] использовал систему
Xi = \/а2 + s cost cos и, Х2 — у/ а2 + s cost sin v, x$ = y/b2 + s sin t, (1-6.9)
что обобщает формулы Гаусса. Хирвонен [Hirvonen 1960] использовал систему
Xi = с cosec a cost cos v хг = с cosec а cos t sin и, хз = cctg asint, (1.6.10)
где sin a = e, cctga = b. Хотин [Hotine 1969] записал ее в виде
xi = ae cosec a cos t cos v, x? = ae cosec a cos t sin v, хз = ae ctg a sin t. (1.6.11)
Хейсканен и Мориц [Heiskanen, Moritz 1967] ввели координатную систему b, t, v:
Xi = y/b2 + c2 cost cos v, X2 = y/b2 + c2 cos t sin v, хз = bsint. (1.6.12)
Для потенциала V притяжения эллипсоида, уровенного относительно потенциала силы тяжести U,
Молоденский [19456] нашел:
GM a>2a2
V =-----arcctgshw+ ——[(3sh2w + 1) arcctgsh w — 3sh wl/Wcosu),
c 3m
(1.6.13)
где
4 c3/ 6 c2 5 c4 20c6\ ______
TV7? I - 777 + 777 - 7777 «0,00015,
15 b3 \ 7 b2 7 b4 33 b6 J
128 c6
/ b2 \ b b
m = 3-T + 1 arcctg-----3-
\ c2 / c c
1 15t3 / 6c2 1 c4 _ . , n
— «—-=-1 + -t=- + ——r + ,. I! °2 — полином Лежандра первого рода второй степени,
гл 4 с3 \ 7 о2 49 о4 11319оь/
Гиперболические функции получили распространение в аналитических исследованиях. Их, напри-
мер, использовал Гобсон [1931] в своем известном трактате по теории сферических и эллипсоидальных
функций. Однако в компьютерных вычислениях они связаны с трудностями. Поэтому представляют
интерес варианты решения рассматриваемой задачи, в которых нет этих функций. Например, приняв
f = (j2 + I)1/2, /1 = sinu, находим:
xi = c(j2 + I)1/2 sinucosu, X2 — c(j2 + I)1/2 sin u sin v, X3 = cjcosu,
что соответствует j = shw и ведет к более простому выражению потенциала. Именно
V =----arcctg j + -7-—[(3j2 + 1) arcctgj — 3j]P2(cosu). (1.6.14)
c 3m
Системе координат Пицетти соответствуют
У = -у/а2 + s, /i=cost. (1.6.15)
с
Пицетти [1913] и Молоденский [19456] решали первую краевую задачу для эллипсоида вращения
как частный случай; ранее, в общем виде, введя понятие о сферических функциях Лежандра второго
рода Qn, решил эту задачу Гейне [Heine 1843, 1861]. Как пишет Гейне в книге 1861 г., эти функции
появились впервые в работах Гаусса при выражении знаменателей цепных дробей, Якоби [Jacobi 1827]
заметил связь этих функций со сферическими функциями. В интерпретации Гобсона, если краевые
значения не зависят от долготы, решение Гейне имеет вид:
tz V' л <2n(?shw)
^ ~ / , ъ\ -fn(cosu),
n=0 *«n VcJ
(1.6.16)
коэффициенты Ап должны быть определены из условий, что на поверхности эллипсоида потенциал
притяжения равен
V = [7 - ^ц>2с2 sin2 uch2 wo, (1.6.17)
а на бесконечности этот потенциал регулярен, то есть lim pV = GM, где U — потенциал силы
р—>оо
тяжести.
Уравнение (1.6.17) можно преобразовать
V = U - |ш2а2 + ^o>2a2P2(cosu), (1.6.18)
О о
что позволяет разделить определение нулевой и второй гармоник. Поскольку на поверхности эллипсо-
, b
ида shw = -, имеем
с
А2 = a>2a2/3. (1.6.19)
Для определения коэффициента Ао нужно использовать условие на бесконечности lim arcctg shw =
р—*оо
-. Следовательно, Ao = ОМ. arcctg- и из уравнения (1.6.16) можно вернуться к (1.6.13), имея в виду
р с с
выражение сферической функции второго рода
Qn(x) = |рп(х) In _ И/п-Дх),
L X — 1
где
Wn-iCr) =
1 • 3 • 5... (2п — 1)
1-2-3...п
п (п — 1)
2 (2п — 1)
1 1 п (п — 1)
5 “ 3 2(2n —1)
I о
п(п — 1)(п — 2)(п — 3)'
2 • 4 • (2п - 1)(2п - 3).
и
Qo (г sh w) = —г arcctgsh w,
Q2 (г sh w) - (3 sh2
&
\ о
w + 1) arcctg sh w — -i sh w,
(1.6.20)
то есть в координатах Пицетти
TZ GM \/Ь2 + s w2a2
V -------arcctg----------1-----
с c 3m
Потенциал силы тяжести равен
Ль2 + 5,Л ¥ '/b2 + s t^b2 + s .
3—т------h 1 arcctg------------3-------- fMsint).
\ c2 ) c c
(1.6.21)
U = V + ^о>2с2 sin2 и ch2 w - V + ^о>2(а2 + з) cos2 t.
(1.6.22)
Координатный эллипсоид, проходящий через точку Р(а', У) над отсчетным эллипсоидом (а, Ь), не
является уровенной поверхностью потенциала нормальной силы тяжести. Касательная к отвесной ли-
нии нормального гравитационного поля в точке Р не совпадает с нормалью к поверхности координат-
ного эллипсоида в точке Р(а’,Ь'). Нормальная сила тяжести у(Р) будет, следовательно, определена как
dU dU
сумма векторов , - , -г-тг-:
hads htdt
dU(P)\2 (dU(P)\
hads ) \ htdt )
(1.6.23)
или в более удобной форме
,рч = dU(P) 1 (dU(P)\2 (дЩР)
hsds 2 \ htdt J \ hsds
(1.6.24)
Подробности можно найти в работах [Pick et al. 1973; Pick 1978, 1990; Пик, Юркина 2004].
Системы сфероидальных координат удобны в теории фигуры Земли не только тем, что в них полу-
чены точные замкнутые выражения потенциала притяжения эллипсоида для точек вне эллипсоида и
на его поверхности, но также сравнительной простотой представления величины, обратной расстоянию
между такими точками, и разложений по сфероидальным функциям. Принцип последних разработан
Ф.Э. Нойманом [Neumann 1848] на основе сферических функций второго рода через десять лет после
его же способа разложения по сферическим функциям на основе выборки значений функции в опре-
деленных точках сферы [Neumann 1838], что ведет к определению каждого коэффициента независимо
от других коэффициентов.
Некоторые полезные дополнения можно найти в работах (Thong, Grafarend 1989 г.; Ardalan,
Grafarend 2001 г.) и других публикациях Графаренда, но авторы не согласны с его историческими
комментариями.
1.6.3 Связь геодезической системы координат с используемыми в теории
Пицетти
В решениях задач без использования земного гравитационного поля находит применение система
эллипсоидальных координат B,L = v, Н, связанная с декартовыми координатами формулами:
/ / \ -1/2 уу\
ху = a I 11-------sin2 В ) -I---------I cos В cos L,
\ \ а2 у а I
Х2 = а
с2 \-1/2 уу\
1-----sin2 В ) -I------] cos В sin L,
а2 7 а /
(1.6.25)
Ь2 (( с2 . 2 ан\
хэ = — 1---sin В 4- -^г- sin В.
а \ \ а2 7 о2 /
Эту систему координат принято называть геодезической. Она удобна, поскольку в эту систему явно
входит высота Н над отсчетным геодезическим эллипсоидом с полуосями а и Ь и точно выражено
расстояние между двумя точками замкнутой формулой [Молоденский 1954].
На рис. 1.6.1 показаны системы координат u,v,w, B,L,H и поверхность U = const.
Частный вид зависимостей геодезических широт В, долгот L = *v и высот Н и декартовых координат
®i,хз при Н = 0, по всей вероятности, впервые опубликован Ф. А. Слудским [1865], уточнение при
Н 0 дано Гельмертом [Helmert 1880, s. 189].
Зависимость между координатами и = 90°—t, v, w (1.6.13) B,L = v,H (1.6.25) можно устанавливать
через декартовы координаты ху,Х2,хз. Из-за близости численных значений В и t, ссЬшрДш и Н, где
wp — величина координаты w на отсчетном эллипсоиде, рационально определять малые разности
е -1 — В, к - cchwpAw — Н.
Умножив первые из уравнений в системах (1.6.13) и (1.6.25) на cos и, вторые уравнения — на sin и,
и сложив результаты, для определения величин е и Дш можно получить два нелинейных уравнения:
1с2 3 с4 5 с6
А = [а + -—sin2 В + rsin4_B + ——sin6В + am + Hl cos В = cch(w + Дш) cos(B + е),
2 а 8(г 16 а& р
,b2 1 с2^2 . 2 Зс4Ь2 . 4 5 с6Ь2 . 6 Ь2 , . . . .
z = [---1- -—=- sin2 В + -—— sin4 В + ——=- sin6 В -|-----т + Н] sin В - csh(w_ + Дш) sm(B + е),
а 2 ad 8 а& 16 a' a v
Рис. 1.6.1. Схема координатных эллипсоидов и гиперболоидов системы u,v,w, координатных поверхностей
системы В, L = v, Н и уровенной поверхности нормального поля U. Геодезическая широта В — угол между
плоскостью экватора и нормалью Мп.
1 3 • 5 • 7 с8 . 8 1 • 3 • 5 • 7 9 . 10
где т — -д sin В + -— sm В + ..., и, разложив в ряды, наити
2 4 • 6 • 8 а° 2 • 4 • 6 • 8 • 10
А = c(chw0 + Awshwo + i(Aw)2ch wo)(cosB — EsinB—^e2cosB) =
M Z
= (a + Awb + ^(Aw)2)(cosB — Esin B— ^e2 cosB),
Z Z
1 2
z — (6 + Awa 4- -(Aw) b)(sinB + £,cosB—— sin B).
z z
Таким образом,
A = acosB — EasinB——acosB + AwbcosB - eAwbsinB—-e2Aw6cosB + -(Aw)2acosB,
z z z
£2 £2 1
z = bsinB + ebcosB——bsinB + AwasinB + eAwacosB——-AwasinB + ~(Aw)26sinB.
z z z
Умножив первое из полученных уравнений на -a sin В, второе — на bcosB и сложив, можно
выразить величину е:
_ — Аа sin В + zb cos В + (а2 — b2)p _ I
a2 sin2 В + b2 cos2 В II ’
где р = sin В cos В,
1 =
,2
а
1 „2 „3 .3
1с а — о
2 а2 а
sin2
Q «4 1.3
О С 0> ~ и
8 а4 а
sin4 В —
5 с8 а3 — Ь3
16 а6 * а
sin8 В —
л3 — ь3
-----т -(а- Ъ)Н
Р-
Имея в виду в последующем сохранить члены порядка а2, где а — земное сжатие, член, содержа-
щий величину т, можно опустить, поскольку его величина имеет порядок 6а2а5. Выразив все члены
числителя I и знаменателя II через земное сжатие а, можно найти:
I: а2 = [—а + 2а2-За2 sin2 В—~а]Р,
(II: а2)-1 = 1 + 2а - 2asin2 В + За2 — 7а2sin2 В + 4а2sin4 В,
можно вычислить в первом приближении
£ =
2 • 2 „ Я
-a-a sin В-а р.
а
Е2
Получив с принятой точностью е2, можно вычислить поправку ——р(а2 — Ь2) и убедиться, что она
не влияет на величину е. Умножив первое из преобразованных уравнений на ЬсовВ, второе — на
a sin В и сложив, можно выразить величину Aw
Ab cos В + га sin В — ab + £ab J,
Aw =-------------я--------------— = —.
a2 sin2 В + b2 cos2 В Л
Учет членов, содержащих а и не содержащих высоту Н, привел к результату Aw(a, a2) = 0, в
сумме эти члены тождественно равны нулю.
Можно представить
Ji = cos2 B[ab + — sin2 В + sin4 В + ~ sin6 В + аЪт + ВЬ]+
2а 8 ал 16 а5
1 (2 „ Q r4 'Sr6 Г2
+ sin2B[b2 + - —zb2 sin2 В + - —rb2 sin4 В -I—- —zb2 sin6 В + b2m + Ba] — ab + —ab.
2 a2 8 a4 16 a6 2
Результат можно получить как сумму семи слагаемых:
abcos2В + b2 sin2 В — ab = —a2a(l — a) sin2В
1 С2Ь .2 г, 2 п 1 ,2 4 г, 1 • 2 г,,, 2
-— sin2 В cos2В + --яЬ2 sin4 В = - — sm2 В(1 — asin В),
2 a 2 a2 2 а ’
sin4 В cos2В + ^^-b2sin6 В = ^^sln4B(l — asin2B)),
8 ad 8 a4 8 a3
5 c6b . _ 2 г, 5 c6 l2 . о _ 5 c6b . . 2
— —sin6 Bcos2B + ——b2sin8B = ——sin6B(l — asm2B),
16 a5 16 a6 16 a5
abm cos2 В + b2msin2B = abm(l — asin2B),
Hb cos2В + Ha sin2В = Hb + H(a — b) sin2B,
1 £2b .1 2 H 9\ * 2 Т-» 2 n
-— = (-a2 + — a2)sin2Bcos2B.
2 a v2 a
В результате следует:
aAw = В + Bacos2B + Ba2cos2B(l — 3cos2B).
Коэффициент Ламе, переводящий приращение криволинейной координаты w в линейное смещение,
равен c(ch2 w — cos2 t)z и а(1 — a cos2 В), т. е.
а(1 — а cos2 В) Aw » ДИ,
или, как принято в выводе, ДН = Н
aAw = Н(1 + acos2B).
Таким образом, главный член совпал в обоих подходах.
Углы между касательными к координатным линиям системы t, w и системы В, Н можно определить,
вычислив производные:
RdB Rdt 1 с4 . , „ „ Н с2 . „ „ „ „
„ = --777 » - -7 sin3 В cos В ——sinBcosB. (1.6.26)
Rdw dH 4 a4 R a2 k ’
Связь сферической системы координат с системой (1.6.25) рассмотрена в работе [В.В.Бровар,
Б.В.Бровар 1999], выполненной при финансовой поддержке РФФИ по проекту 97-05-65054.
1.6.4 Установление системы координат в теле Земли
Начало декартовых координат, как правило, совмещают с центром масс Земли, хотя бы смещенным
из-за топографо-изостатических редукций силы тяжести, уменьшающих ошибки ее интерполяции. Для
оценки влияния топографии на положение центра земной массы [Mader 1927] рассмотрел две модели
Земли. На эллипсоид Вихерта были наложены схематические континенты с высотами Н = 0,8 км и
Н = 0,4 км и плотностью с = 3,2 г • см-3 и созданы океаны с глубиной 4 км и плотностью воды
ега = 1,027 г • см-3. Центр масс получившегося тела имеет в первом из этих случаев относительно
центра эллипсоида и его осей радиус-вектор 672 м при северной широте 50° и восточной долготе
35°. Во втором случае получено соответственно 595 м при почти тех же широте и долготе. При
изостатической компенсации топографических масс, по Пратту, и глубинах поверхности компенсации в
80 и 120 км, радиус-вектор центра инерции оказался меньше 10 м при компенсации, по Эри, и толщинах
коры в 80 и 120 км радиус-вектор оказался в обоих случаях близким к 250 м. Ламберт в работе
1945 г. охарактеризовал положение центра инерции земных топографических масс радиусом-вектором
625 м при северной широте 44° и долготе 31°. Воспользовавшись разложением Прея высот суши и
глубин океанов по сферическим функциям, Юнг [Jung 1956] для радиуса-вектора получил 592 м, при
трех разных способах изостатической компенсации радиус-вектор оказался меньше 10 м. Современные
исследования влияния земного рельефа представлены в работе [Чуйкова и др. 1996]. Высоты земной
поверхности ими представлены разложением по сферическим функциям до 30-й степени. Оказалось,
что геометрический центр эквивалентного, однородного по плотности, рельефа смещен относительно
центра земной массы на 1,04 км в направлении точки с координатами В = 48°, L = 37°, что по порядку
величин согласуется с данными Мадера и Ламберта.
Ось Z направлена по среднему положению оси вращения Земли или ему параллельно (при смеще-
нии центра масс) к северным полюсам Земли или эллипсоида, ось X расположена в меридиональной
плоскости начала счета долгот, ось Y дополняет систему до правой.
1.7 Приливы, нутация и внутреннее строение Земли
С.М. Молоденский
Современные модели внутреннего строения Земли основаны в основном на данных о временах
пробега и затухании объемных и поверхностных сейсмических волн, а также о периодах и декрементах
затухания собственных колебаний Земли.
Благодаря внедрению РСДБ и криогенных гравиметров, точность астрометрических и приливных
гравиметрических наблюдений возросла более чем на три порядка. Это открыло принципиально новые
возможности исследования внутреннего строения Земли в низкочастотном диапазоне периодов поряд-
ка суток, года и сотен миллионов лет (что соответствует периодам приливов, вынужденной нутации,
чандлеровского движения полюса и времени, характеризующего вековое замедление скорости суточно-
го вращения Земли). При этом оказалось возможным не только уточнить те параметры, которые уже
исследовались ранее сейсмическими методами (такие, как функция крипа мантии, параметры механи-
ческой добротности мантии в диапазоне сверхнизких частот), но и исследовать не известные ранее
свойства Земли (сюда можно отнести данные об эллиптичности границы жидкого ядра с мантией и
твердого внутреннего ядра, о вязкости жидкого ядра, о величине электромагнитной связи жидкого ядра
с мантией и о возможных значениях электропроводности нижней мантии, о возможных распределениях
частоты Брунта-Вяйсяля в жидком ядре, о горизонтальных неоднородностях нижней мантии).
В 1863 г. Кельвин обратил внимание на способ определения средней жесткости земного шара. Ес-
ли предположить, что Земля — это расплавленное тело, покрытое тонкой корой, то тогда приливные
смещения земной поверхности должны почти точно совпадать с приливными смещениями эквипотенци-
альной поверхности, и океанских приливов не должно быть. К тому времени океанские приливы были
изучены довольно подробно, и сам факт их существования уже свидетельствовал о том, что толщина
жесткой оболочки Земли должна исчисляться не десятками, а сотнями или тысячами километров (при
толщине коры порядка десятков километров ей следовало бы приписать значения модуля сдвига, на
много порядков превосходящие любые разумные пределы).
Ввиду существенной роли инерции океанских вод амплитуды и фазы полусуточных и суточных
океанических приливов сильно отличаются от значений, предсказываемых теорией гидростатического
равновесия, поэтому для своих оценок Кельвин использовал длиннопериодные компоненты. Исследуя
двухнедельные приливы в Индийском океане, он обнаружил, что их амплитуда составляет около двух
третей от величины, предсказываемой статической теорией океанских приливов на поверхности твердой
планеты. Это отклонение он объяснил упругим прогибом поверхности Земли под действием приливных
сил на величину, равную примерно одной трети приливного смещения эквипотенциальной поверхности.
Используя эту гипотезу, Кельвин впервые оценил среднее значение модуля сдвига Земли, которое
оказалось близким к модулю сдвига стали (эта оценка была подтверждена позже, когда стали известны
скорости сейсмических волн).
Оценка Кельвина получила подтверждение также в работах С. Чандлера и С. Ньюкомба, изучав-
ших явление изменяемости широт [Манк, Макдональд 1963]. В 1891 г. Чандлер, анализируя данные
о колебаниях широты более чем за 200 лет, обнаружил, что спектр изменений широт содержит не
только годичную компоненту (связанную с цикличностью циркуляции атмосферы), но и 14-месячную
компоненту. Из известных уравнений Эйлера, описывающих свободное вращение твердого тела, сле-
дует, что для модели твердой Земли период свободного движения полюсов должен составлять лишь
305 сут. Наблюденный Чандлером период оказался на 120 сут. длиннее того, который должен быть
для модели целиком твердой Земли без жидкого ядра и без океанов. Простое качественное объяснение
этого различия было дано уже в 1892 г. Ньюкомбом, обратившим внимание на то, что в случае упругой
Земли с океаном дефект массы, образующийся в результате смещения оси вращения относительно оси
фигуры, должен частично компенсироваться как в результате упругого прогиба земной поверхности под
действием изменяющихся во времени центробежных сил, так и в результате перетекания океанских вод
(под действием тех же сил).
Поскольку потенциал центробежной силы описывается сферической функцией второго порядка того
же вида, что и приливный потенциал, эффект удлинения Чандлеровского периода полностью определя-
ется параметрами эффективной жесткости Земли к воздействию приливных сил (позднее эти величины
стали называть числами Лява). Количественный анализ эффектов деформируемости земного шара на
его вращение был дан Лиувиллем.
Если исходить из оценки Кельвина, то тогда удлинение чандлеровского периода должно составлять
около 130 сут. В соответствии с оценкой Ньюкомба, подвижность вод океанов должна привести к
дополнительному удлинению чандлеровского периода на величину около 30 сут. (эта величина опреде-
ляется главным образом отношением плотности морской воды к средней плотности Земли и отношением
площади поверхности океанов к общей площади земной поверхности). Из оценки Кельвина следовало,
что должен существовать некий механизм, сокращающий эйлеровский период на величину порядка
одного месяца (в дальнейшем стало ясно, что это — динамический эффект жидкого ядра, сводящийся
к тому, что жидкое ядро слабо связано с мантией, и поэтому оно не участвует в чандлеровском движе-
нии полюса; поскольку момент инерции жидкого ядра составляет около 10% от момента инерции всей
Земли, то и эффект его проскальзывания составляет около 10% эйлеровского периода, т. е. примерно
30 сут.).
В 1910 г. почти одновременно и независимо друг от друга задача о вращении твердого тела с
эллипсоидальной полостью, целиком заполненной однородной и несжимаемой жидкостью, была решена
Хафом, Слудским и Пуанкаре. Точное решение этой задачи позволило рассмотреть не только вопрос о
влиянии жидкого ядра Земли на ее свободное вращение, но и задачу о вынужденной нутации Земли под
действием моментов сил, действующих со стороны Солнца и Луны. Для модели деформируемой Земли
с однородным и несжимаемым эллиптическим жидким ядром и с океаном было получено следующее
простое выражение (см., например, [Джеффрис 1960; Манк, Макдональд 1963; Smith, Dahlen 1980]) :
°Ch =
С-А
(1.7.1)
где сек — чандлеровская частота; о> — угловая скорость суточного вращения Земли; А и С — главные
моменты инерции Земли; Ai — момент инерции жидкого ядра; к — число Лява для реальной модели
Земли с океаном; ks — вековое (или секулярное) число Лява, соответствующее модели целиком жидкой
Земли (но с теми же распределениями плотности и модулей объемного сжатия, что и для реальной
Земли).
Из формулы (1.7.1) следует ряд физически ясных результатов, о которых упоминалось выше:
1. При приближении к к значению ks период чандлеровского движения полюса стремится к беско-
нечности. Так как в случае целиком жидкой планеты ее фигура точно совпадает с фигурой равновес-
ного эллипсоида при произвольном начальном смещении оси вращения. В такой ситуации вращение
относительно любой оси устойчиво, и эйлеровской свободной нутации не возникает.
2. Для случая абсолютно жесткой планеты со сферическим идеально жидким ядром невязкая жид-
кость в сферической полости не может оказывать никакого воздействия на свободную нутацию обо-
лочки (так как момент сил, действующих со стороны жидкого ядра на оболочку, равен нулю), поэтому
формула (1.7.1) для чандлеровской частоты должна совпасть с формулой Эйлера для оболочки. Учиты-
вая, что в случае сферического ядра С — А = (С — Ci) — (А — АД мы видим, что это условие также
соблюдено.
3. Входящий в знаменатель (1.7.1) член — Ai определяет величину сокращения чандлеровского
периода на величину около 30 сут. за счет проскальзывания жидкого ядра относительно оболочки.
Для реальной модели вязко-упругой Земли с океаном отношение к/к$ равно примерно 0,38, а
отношение А\/А ~0,115. При этих значениях параметров определяемая формулой (1.7.1) чандлеровская
частота практически точно совпадает с результатами наблюдений.
В 1949 г. на новые геофизические приложения решения Пуанкаре обратил внимание Джеффрис.
Им было показано, что ни модель упругой Земли без жидкого ядра, ни модель Пуанкаре не позволяют
согласовать теоретические значения амплитуд вынужденной нутации с данными наблюдений. В работе
[Jeffreys, Vicente 1957] построена модель, значительно лучше предыдущих согласующаяся с данными
наблюдений. Показано, что эффекты упругости мантии оказывают существенное влияние не только
на период чандлеровского движения, но и на амплитуды вынужденной нутации. Переход от модели
абсолютно твердой Земли к модели с упругой мантией без жидкого ядра почти не меняет значений
невязок между теоретическими и наблюденными амплитудами основной и полугодичной компонент
нутаций. При переходе от модели абсолютно твердой Земли без жидкого ядра к модели с абсолютно
твердой мантией и жидким ядром (модели Пуанкаре) знак невязок для 19-летних компонент нутаций
изменяется на противоположный; абсолютные значения невязок возрастают в ~2 раза.
Задача о вращении Земли под действием лунно-солнечных моментов тесно связана с задачей об
упругих деформациях Земли под действием приливных сил, а результаты астрономических наблюдений
вариаций координат должны интерпретироваться совместно с результатами приливных наблюдений.
Точное решение задачи об упругих приливных деформациях сферической гравитирующей радиально
неоднородной Земли с жидким ядром в статическом приближении было независимо построено японским
геофизиком X. Такеучи [Takeuchi 1951] ив ГЕОФИ АН СССР — М.С. Молоденским [1953].
По существу, речь шла о постановке и решении граничной задачи нового типа (четвертого порядка,
в отличие от задачи второго порядка в теории упругости), свойства которой не были ранее исследованы.
В работе [М.С. Молоденский 1953] решение этой задачи сведено к интегрированию системы обыкно-
венных дифференциальных уравнений шестого порядка, а также к системе линейных интегральных
уравнений. Доказана единственность решений и получены численные решения задачи для моделей
Земли Буллена-Гутенберга, которые достаточно хорошо описывали зависимости скоростей продольных
и поперечных волн с глубиной.
В связи с быстрым развитием сейсмологии постановка задачи об уточнении моделей внутреннего
строения Земли по приливным и астрометрическим данным была сформулирована следующим обра-
зом: поскольку отношения модулей объемного сжатия и модулей сдвига к плотности на всех глубинах
известны достаточно точно, необходимо получить дополнительную информацию о возможных распре-
делениях плотности с глубиной. При определении этих распределений следовало, конечно, учитывать
и данные о полной величине массы и момента инерции Земли, а также ограничения, накладываемые
условием, что возрастание плотности с глубиной не может происходить медленней, чем по адиабатиче-
скому закону.
В работе [М.С. Молоденский 1961] получено решение динамической задачи о нутации и суточных
земных приливах гравитирующей Земли с гидростатическим распределением начальных напряжений,
упругой радиально неоднородной мантией и эллиптическим неоднородным сжимаемым жидким ядром.
Результаты этой работы находились в хорошем соответствии с результатами Джеффриса и Висенте
[Jeffreys, Vicente 1957], однако в области близсуточного резонанса имелись и заметные различия. О
весьма высоком качестве работы 1961 г. свидетельствует то, что в 1979 г. ее результаты были приняты
Международной ассоциацией астрономии в качестве базовой теоретической модели.
В середине 60-х годов в лаборатории внутреннего строения Земли под руководством чл.-корр. АН
СССР Н.Н. Парийского начаты интенсивные экспериментальные исследования земных приливов с це-
лью уточнения моделей внутреннего строения Земли. Уже к 1970-м годам в ИФЗ АН СССР были
накоплены уникальные многолетние серии непрерывных приливных наблюдений в Обнинске, Красной
Пахре и Талгаре [Парийский, Барсенков 1973] (Гриднев и др., 1973 г.), анализ которых позволил
определить значения гравиметрического приливного фактора с точностью около 0,2%, а значения чисел
Лява — с точностью около 1% (это соответствует точности определения амплитуд приливных волн око-
ло 0,2 мкГал). Поэтому возникла необходимость учитывать эффекты океанических приливов не только
в прибрежных, но и в континентальных областях. Эта большая и весьма важная работа была впер-
вые проделана Б.П. Перцевым [1976] путем расчета функций Грина, определяющих упругий прогиб и
изменение гравитационного потенциала на поверхности реальной Земли под воздействием нагрузки,
заданной на сферической трапеции достаточно малых размеров. Поправки для различных приливных
волн получали путем суммирования эффектов, создаваемых всеми элементарными площадками. Расче-
ты Б.П. Перцева показали, что даже для весьма удаленных от океана пунктов (таких, как Обнинск или
Талгар) поправки за океан имеют величину порядка нескольких микрогал, что значительно превышает
погрешности наблюдений.
В конце 1980-х — начале 1990-х годов широкое использование криогенных приливных гравиметров
позволило повысить точность приливных гравиметрических наблюдений почти на три порядка (оцени-
ваемые по внутренней сходимости ошибки определения приливных амплитуд уменьшились с величин
порядка одного микрогала до одного-двух наногал). Ошибки калибровки криогенных гравиметров про-
должали оставаться на уровне порядка 10“3, однако это не помешало найти определяемые отношениями
амплитуд параметры резонансной кривой в близсуточном диапазоне с относительной погрешностью не
хуже 10~4-10-5. Одновременно со столь резким повышением точности приливных наблюдений, бла-
годаря внедрению радиоинтерферометров со сверхдлинной базой, существенно возросла и точность
астрономических наблюдений. Если классические астрономические методы наблюдения в оптическом
диапазоне позволяли определить амплитуды вынужденной нутации Земли с точностью около 30-50
миллисекунд дуги, то VLBI-наблюдения позволили достичь точности около 20 микросекунд. Для адек-
ватной геофизической интерпретации столь точных данных пришлось решить ряд новых задач, главные
из которых следующие: 1) учет влияния горизонтальных неоднородностей мантии и коры на амплиту-
ды и фазы земных приливов; 2) учет влияния океанических и атмосферных термических приливов на
амплитуды и фазы вынужденной нутации; 3) учет динамических эффектов в мантии; 4) уточнение тео-
рии динамических эффектов ядра за счет более точного анализа эффектов радиальной неоднородности
жидкого ядра (включая эффекты свободной близсуточной нутации твердого внутреннего ядра).
В работах [Wahr 1981; Wahr, Sasao 1981] рассмотрено решение задачи о приливах и нутации
реальной Земли с океаном, основанное на разложениях поля приливных смещений в жидком ядре и
в оболочке в бесконечные ряды векторных тороидальных и сфероидальных сферических функций. В
результате подстановки этих разложений в уравнения движения получены бесконечные системы обык-
новенных дифференциальных уравнений, численное интегрирование которых осуществлялось путем
их обрывания (замены бесконечных систем конечными). Их результаты оказались в очень хорошем
согласии с результатами работы [А1.С. Молоденский 1961].
С точки зрения геофизической интерпретации новых данных, следовало прежде всего обратить вни-
мание на возможности изучения тех параметров, которые не могут быть определены другими методами.
Сюда относятся: горизонтальные неоднородности модулей упругости в мантии в диапазоне частот глав-
ных приливных волн; параметры механической добротности мантии в диапазоне периодов от одних
суток до 19 лет; вязкость жидкого ядра; величина электромагнитной связи между жидким ядром и
мантией; эллиптичность внешнего жидкого ядра и внутреннего твердого ядра.
Численные расчеты влияния крупномасштабных и локальных горизонтальных неоднородностей ман-
тии на амплитуды и фазы приливных изменений силы тяжести, наклонов и деформаций земной по-
верхности показали [С.М. Молоденский, Крамер 1980], что при относительной точности определения
приливного гравиметрического фактора 5 ~0,2% открывается возможность определения горизонталь-
ных неоднородностей модулей упругости верхней мантии величиной не менее 2,5% и нижней мантии —
не менее 0,6%. В работе [С.М. Молоденский 1984] для простейшей модели однородного упругого полу-
пространства получены простые аналитические соотношения, определяющие влияние локальных неод-
нородностей коры и верхней мантии на амплитуды и фазы приливных наклонов и деформаций. Некото-
рые практические примеры применения приливных наклономерных наблюдений к изучению локальных
неоднородностей земной коры содержатся в работе [Волков и др. 2002].
Изучение крупномасштабных горизонтальных неоднородностей нижней мантии по приливным гра-
виметрическим данным представляется весьма перспективной задачей в связи с резким повышением
точности криогенных гравиметров. Оцениваемая по внутренней сходимости точность определения гра-
виметрических факторов 5 составляет сейчас около 0,002-0,004%. Абсолютная точность определения
пространственного распределения факторов 5 пока не столь высока (~0,1%). Это несколько ограничи-
вает современные возможности изучения крупномасштабных горизонтальных неоднородностей мантии.
Сравнение результатов теории Вара [Wahr 1981] с результатами первых VLBI-наблюдений показа-
ло, что ошибки редуцирования бесконечных систем недопустимо велики. Для их исключения Матиус
и Шапиро [Mathews, Shapiro 1992] предложили отказаться от разложений Смита-Вара и использовать
вместо него приближенное решение Cacao [Sasao et al. 1980]. Для решения уравнений нутационного
движения Земли в пространстве использовалась гипотеза о том, что поле скоростей в жидком ядре удо-
влетворяет тому же условию пространственной однородности вихря, которое имеет место для решения
Пуанкаре:
rot V = const(a:, у, z), (1-7.2)
здесь V — вектор скорости, (x,y,z) — декартовы координаты.
В результате построено решение, лучше согласующееся с данными наблюдений. Однако ошибки,
обусловленные использованием никак не обоснованного предположения (1.7.2), не оценены.
В работах [С.М. Молоденский, Cacao 1995; S.M. Molodensky, Groten 1997, 1998] для решения гид-
родинамических уравнений в жидком ядре использован новый подход, основанный на разложениях ре-
шений по степеням малого параметра, равного отношению угловой частоты нутации к угловой скорости
суточного вращения Земли. Решения трехмерных гидродинамических уравнений были представлены в
виде суперпозиции решений двумерных обобщенных приливных уравнений Лапласа в тонких сфери-
ческих слоях. В отличие от обычных уравнений Лапласа, в которых нижняя граница предполагается
неподвижной, жидкость — однородной, несжимаемой и негравитирующей, в обобщенных уравнениях
ни одно из этих четырех ограничений не используется. В результате полного численного интегриро-
вания обобщенных приливных уравнений Лапласа с последующим сшиванием решений, полученных
в сферических слоях разных радиусов, получены решения в разных порядках теории возмущений по
степеням малого параметра. Сравнение решений разных порядков показало, что уже во втором порядке
теории возмущений ошибки теоретических расчетов амплитуд нутаций для всех компонент пренебре-
жимо малы по сравнению с точностью современных наблюдений.
В работе [5.А1. Molodensky, Groten 1999] результат численного интегрирования обобщенных при-
ливных уравнений Лапласа использован и для учета эффектов неоднородности, сжимаемости и само-
гравитации жидкого ядра на величину периода чандлеровского движения полюса.
Для решения обратной задачи определения механических свойств Земли, а также величины элек-
тромагнитной связи жидкого ядра с мантией по приливным и астрометрическим данным необходимо,
наряду с учетом динамических эффектов жидкого ядра и мантии, учесть также эффекты океанов и
атмосферы. Термические приливы в атмосфере на много порядков превосходят гравитационные прили-
вы; в океане же, наоборот, гравитационный прилив значительно больше термического. По этой причине
методы их учета существенно различаются: в динамических уравнениях Земля рассматривается как че-
тырехкомпонентная система, состоящая из твердого внутреннего ядра, внешнего жидкого ядра, мантии
и океана (момент инерции атмосферы пренебрежимо мал по сравнению с моментами перечисленных
четырех сферических слоев и поэтому в качестве пятой компоненты не учитывается). Амплитуда тер-
мических приливов значительно превосходит амплитуды гравитационных мантии, поэтому их анализ
можно проводить отдельно, без учета нутации Земли.
Динамические эффекты океанов на нутацию Земли почти одновременно и независимо были рассчи-
таны в работах [С.М Молоденский 1981; Wahr, Sasao 1981] и дали близкие результаты.
В работе [5.А1. Molodensky, Groten 1997] построена аналитическая модель термических прили-
вов, учитывающая суточные и сезонные вариации солнечного теплового потока, а также различия
теплоемкости суши и континентов. Решение строилось в виде суперпозиции решений неоднородных
обобщенных приливных уравнений с правой частью, определяемой известными разложениями средних
колебаний температуры по сферическим функциям. Показано, что наблюдаемые внефазные компоненты
нутаций для прямых годичных и полугодичных компонент могут быть объяснены влиянием термиче-
ских приливов. Но внефазная компонента обратной годичной нутации не может быть связана с воздей-
ствием термических приливов, и для ее интерпретации необходимо учитывать механизм диссипации
приливной энергии в ядре и мантии Земли.
После учета всех основных возмущающих факторов построена модель Земли с неупругой мантией,
вязким жидким ядром, с атмосферой и океаном, которая наилучшим образом согласуется с совре-
менными VLBI-данными о вращении Земли [С.А1. Молоденский 1999]. Так как наименее изученными
являются значения сжатия жидкого ядра и параметры неупругости мантии для близсуточных перио-
дов колебаний, эти параметры подобраны на основе условия минимизации различий теоретических и
наблюденных амплитуд вынужденной нутации. Показано, что оптимальные значения параметров доб-
ротности мантии в близсуточном диапазоне лежат между их значениями для периодов собственных
колебаний Земли (порядка 1 ч и менее) и для чандлеровского периода (около 14 мес.). Для этой
модели рассчитаны эффекты резонанса жидкого ядра в диапазоне близсуточных периодов. Сравнение
теоретических значений чисел Лява и гравиметрических факторов с их наблюденными значениями про-
изводилось для данных, полученных в 1974-1998 гг. в Брюсселе (с помощью криогенного приливного
гравиметра). Более детальное сопоставление моделей Земли, построенных по данным о приливах и
нутации Земли, проведено в работе [С.М. Молоденский 2006].
При сопоставлении глобальных (осредненных по всем пунктам наблюдений) значений амплитуд и
фаз вынужденной нутации и исправленных за океан гравиметрических факторов 6 с их теоретическими
значениями возникает обратная задача определения области допустимых значений параметров доброт-
ности мантии, динамического сжатия и вязкости жидкого ядра, при которых невязки не превосходят
ошибок наблюдений.
В табл. 1.1-1.3 приводятся результаты такого сопоставления для главных компонент нутаций и
для главных суточных приливных волн из работы [С.М. Молоденский 1999], в которых были учте-
ны эффекты океанических приливов, эффекты термических атмосферных приливов (в соответствии с
результатами работ [С.М. Молоденский 1981; S.M. Molodensky, Groten 1997]), эффекты неупругости
мантии, а также динамические эффекты твердого внутреннего и радиально неоднородного жидкого
ядра во втором порядке теории возмущений в соответствии с результатами работ [С.М. Молоденский,
Cacao 1995; S.M. Molodensky, Groten 1996, 1997, 1998].
Здесь T — периоды в звездных сутках (отрицательные значения Т соответствуют обратным ком-
понентам нутаций); 1 — амплитуды нутаций для абсолютно твердой модели Земли без жидкого ядра
в миллисекундах дуги; 2 — теоретические значения для модели Земли с идеально упругой оболоч-
кой и неоднородным жидким ядром, рассчитанные для значений ед = 0,002665 и показателя степени
функции крипа нижней мантии а = 0,04 без учета динамических эффектов в мантии, эффектов внут-
реннего твердого ядра и океанических приливов; 3 — эффекты океанических приливов; 4 — эффекты
неупругости мантии; 5 — эффекты твердого внутреннего ядра; 6 — динамические эффекты мантии; 7 —
суммарные теоретические значения для реальной модели Земли с неупругой мантией, неоднородным
жидким ядром, внутренним твердым ядром и океаном, рассчитанные с учетом динамических эффектов
в мантии для тех же значений — 0,002665 и а = 0,04; 8 — наблюденные амплитуды нутаций.
Как видно из табл. 1.2, для построенной модели неупругой мантии невязки теоретических и наблю-
денных значений амплитуд всех основных компонент вынужденной нутации не превосходят ошибок их
современных наблюдений (составляющих около 0,02 миллисекунды дуги для короткопериодных компо-
нент нутаций и около одной миллисекунды для 19-летних компонент). Значимые невязки имеют место
лишь для прямой двухнедельной компоненты нутации и для значения гравиметрического фактора 6
для весьма малой по амплитуде, но близкой к резонансу волны ф1, на которой нет возможности здесь
остановиться.
Следует обратить внимание на области допустимых значений показателя степени функции крипа
нижней мантии а = 0,040 ± 0,015 и динамического сжатия жидкого ядра = (2,665 ± 0,001) • 10“3,
приводимые в табл. 1.2. Первое значение находится в хорошем соответствии с данными о временах
пробега, затухании и периодах объемных сейсмических волн, собственных колебаний Земли и чандле-
ровского движения полюса, согласно которым в диапазоне периодов от 1 с до 1 ч а » 0, а в диапазоне
периодов от 1 ч до чандлеровского периода Т = 434 сут. среднее значение а « 0,154-0,2 [Smith, Dahlen
1980]. Этот результат показывает, что модель слабо зависящих от частоты параметров добротности
мантии применима не только в диапазоне периодов колебаний от 1 с до 1 ч, как полагалось ранее, но и
в значительно более широком диапазоне от 1 с до 1 сут.; в диапазоне же от 1 сут. до 14 мес. значения
параметров добротности нижней мантии убывают примерно в 10 раз.
Значение ед = (2,665 ± 0,001) • 10-3 значительно превышает величину (ed}h = 2,56- 10“3, пред-
сказываемую теорией гидростатического равновесия реальной Земли. Столь большое различие можно
объяснить тем, что время релаксации сдвиговых напряжений в нижней мантии — порядка 100 млн.
лет, тогда как для верхней мантии это время значительно меньше. При таком соотношении параметров
Таблица 1.1. Сравнение теоретических и наблюденных амплитуд вынужденной нутации Земли
Период, Т 6817 -6817 366,3 -366,3 183,1 -183,1 13,7
1 -1177,03 -8050,98 25,03 -24,89 -530,75 -22,59 -91,51
2 -1180,76 -8022,02 25,64 -33,55 -549,27 -24,73 -94,46
3 0,12 -0,96 -0,02 0,18 0,6 0,06 0,03
4 0,05 -0,4 -0,01 0,45 0,4 0,05 0,12
5 0,06 -0,4 0,026 -0,1 -0,12 0,02 0
6 -0,013 0,099 0,003 -0,056 -0,076 -0,009 -0,024
7 -1180,54 -8023,68 25,64 -33,08 -548,47 -24,61 -94,33
8 -1180,38 -8024,98 25,63 -33,08 -548,47 -24,58 -94,21
Таблица 1.2. Невязки (в миллисекундах дуги) между главными теоретическими и наблюденными амплиту-
дами нутаций для модели Земли PREM (построенной для периода колебаний 1 с), для которой значения
модуля сдвига в мантии для суточного периода колебаний экстраполированы с помощью степенной функции
крипа с различными показателями степени а
Период, Т 6817 366,3 183,1 13,7 -6817 -366,3 -183,1
Невязки 51 -0,24 0,02 -0,45 -0,01 2 0 -0,07
Невязки 5г -0,16 0,01 0 0,12 1.3 0 -0,03
Таблица 1.3. Значения гравиметрического фактора 5 = 1 + h - (3/2)fc для реальной модели Земли с неупру-
гой мантией, неоднородным жидким ядром, внутренним твердым ядром и с океаном, рассчитанные при
значениях еа=0,002665 и а=0,04 и исправленные за воздействие сил инерции из-за приливных деформа-
ций и сил инерции из-за нутации, действующих непосредственно на приливный гравиметр для суточных
волн. 1 — теоретические значения [С.М. Молоденский 1999]; 2 — исправленные за океан наблюденные
значения из работы [Melchior et al. 1995]
Волна кг Ф1 Pi Ф1 Ог
Период, Т оо -366,3 183,1 -183,1 13,7
1 1,13646 1,27847 1,15171 1,17401 1,15743
2 1,13760 ±0,00006 1,2305 ±0,0078 1,1521 ±0,0002 1,1736 ±0,0045 1,15720 ±0,00008
граница ядро-мантия «запоминает» ту фигуру равновесия, которая имела место 100 млн. лет назад
(когда Земля вращалась быстрее), тогда как сжатие всей Земли примерно соответствует фигуре рав-
новесия в современную эпоху. В работе [С.М. Молоденский 2000] на основе этой гипотезы построены
модели распределения вязкости в нижней мантии, которые оказались в хорошем согласии с моделями
В.П. Трубицына [2000], построенными по данным о крупномасштабной конвекции мантии.
Отклонение от (еа)н не может быть выявлено методами сейсмологии, так как их чувствительность
примерно в 30-50 раз меньше чувствительности рассматриваемого здесь метода.
Амплитуды и фазы вынужденной нутации и приливных вариаций ускорения силы тяжести весьма
чувствительны также к величине вязкости земного ядра. В работе [Molodensky, Groten 1998] сделан
вывод, что вязкость земного ядра не превышает 103 Пуаз. Этот верхний предел почти на три порядка
меньше тех значений вязкости, которые можно было бы выявить по современным сейсмическим данным
и по данным о затухании собственных колебаний Земли.
Верхний предел вязкости ~103 Пуаз не противоречит известной оценке Френкеля, согласно кото-
рой вязкость металлов при температурах и давлениях земного ядра порядка 0,1 Пуаза. Сопоставление
наблюденных и теоретических океанических приливов показывает, что наилучшее согласие достига-
ется при коэффициенте горизонтальной турбулентной вязкости океана, превосходящей молекулярную
вязкость воды примерно на 4-5 порядков [Melchior 1986]. Так как характерные значения числа Рей-
нольдса в океане того же порядка, что и в жидком ядре, величина отношения турбулентной вязкости
к молекулярной порядка 104 представляется достаточно правдоподобной.
Нельзя исключить, что электромагнитное трение между жидким ядром и оболочкой того же порядка
величины, что и вязкое турбулентное трение. Для сравнения эффектов вязкости ядра и электромагнит-
ной связи ядра с мантией в работах [С.М. Молоденский 2004а, б] рассчитаны среднеквадратические
отклонения теоретических и наблюденных амплитуд нутаций для весьма большого числа (~104) проб-
ных моделей Земли, различающихся величиной электромагнитной связи твердое ядро — жидкое ядро —
оболочка', турбулентной вязкости жидкого ядра и величиной безразмерного «коэффициента неупруго-
сти» нижней мантии Кт, определяющего отношение коэффициента эффективной жесткости нижней
мантии (к воздействию объемных сил приливного типа) для колебаний с периодом в одни сутки к
значению того же коэффициента для колебаний с периодом 200 с.
Для оценки эффектов электромагнитной связи на амплитуды нутаций удобно ввести так называемые
«комплексные значения эффективных сжатий» внешнего жидкого ядра e(liq) и твердого внутреннего
ядра e(soZ).
Наилучшее согласие теоретических и наблюденных амплитуд нутаций для пяти главных компонент
(ст = 1710-6") может быть достигнуто при следующих значениях параметров:
e(liq) = 0,002736 ± 0,000001; Кт = 1,0435 ± 0,0005; e(sol) = 0,0053 ± 0,0002. (1.7.3)
Поэтому появляется основание утверждать, что значение эффективного динамического сжатия твер-
дого внутреннего ядра e(soZ) = 0,0053 ± 0,0002 значительно (примерно в 2 раза) превосходит значение
динамического сжатия, предсказываемое теорией гидростатического равновесия вращающейся плане-
ты. Это может быть связано с эффектом электромагнитной связи жидкого ядра с твердым внутренним
ядром, приводящим к дополнительному моменту сил, действующему на внутреннее твердое ядро точно
таким же образом, как и момент, возникающий из-за эллиптичности твердого ядра. При значениях
электропроводности, характерных для металлов в области температур и давлений земного ядра, время
диффузии магнитного поля на много порядков превосходит период колебаний твердого ядра относи-
тельно жидкого, возбуждаемого нутацией, поэтому электромагнитная связь, как и инерциальная, не
приводят к диссипации приливной энергии и к сдвигу фаз момента электромагнитных сил относи-
тельно момента сил гидродинамического давления. И ситуация, когда е(зоГ) значительно превосходит
величину гидростатического сжатия внутреннего твердого ядра еь, еще не свидетельствует о том, что
реальное (геометрическое) сжатие твердого ядра существенно отличается от е^. Оценка параметра Кт
(1.7.3) несет важную информацию о неупругих свойствах нижней мантии в низкочастотном диапазоне
периодов колебаний от одного часа до одних суток.
Для геофизической интерпретации точных данных решены следующие новые задачи: 1) учет влия-
ния горизонтальных неоднородностей мантии и коры на амплитуды и фазы земных приливов; 2) учет
влияния океанических и атмосферных термических приливов на амплитуды и фазы вынужденной ну-
тации; 3) учет динамических эффектов в мантии; 4) уточнение теории динамических эффектов ядра
за счет более точного анализа эффектов радиальной неоднородности жидкого ядра (включая эффекты
свободной близсуточной нутации твердого внутреннего ядра).
Сопоставление результатов теоретических расчетов с данными наблюдений позволяет не только
уточнить те параметры, которые уже исследовались ранее методами сейсмологии, но и исследовать не
известные ранее свойства Земли.
2. Ньютоновская гравитация и
эффекты общей теории
относительности
2.1 Общая теория относительности
В.И. Денисов
Общая теория относительности (ОТО) является классической теорией пространства, времени и гра-
витации. Она была создана А. Эйнштейном в 1915 году. Гравитационные эксперименты, выполненные
к тому времени, показали, что в одном и том же гравитационном поле тела различной массы и хи-
мического состава в отсутствие сопротивления воздуха приобретают одинаковые ускорения. Так как
аналогичным свойством обладают ускорения тел в неинерциальных системах отсчета, то А. Эйнштейн
сделал вывод об эквивалентности гравитационных полей и полей сил инерции в достаточно малых об-
ластях пространства и времени. Это утверждение в научной литературе получило название принципа
эквивалентности.
Исходя из этого принципа, А. Эйнштейн пришел к выводу, что гравитационное воздействие на все
виды материи (вещество и физические поля) должно осуществляться через метрический тензор
вещественного четырехмерного псевдориманова пространства, обычно называемого пространством-
временем.
2.1.1 Уравнения Эйнштейна и их экспериментальный статус
Согласно идеологии ОТО, материя во всех ее формах искривляет пространство-время, а искривлен-
ное пространство-время, в свою очередь, воздействует на материю, вызывая ее движение.
Основными уравнениями в этой теории являются уравнения Эйнштейна:
где G — 6,6710-8см3г-1с-2 — гравитационная постоянная, с — скорость света, Ттп — тензор энергии-
импульса материи, компонентами которого являются плотность энергии, плотность импульса и трех-
мерный тензор натяжений.
Эти уравнения нелинейны и их решение представляет собой сложную математическую задачу. Тем
не менее, к настоящему времени получен целый ряд точных решений этих уравнений. Среди них
важное место занимает решение Шварцшильда, описывающее гравитационное поле вне сферически
симметрического источника массы М:
ds2 = Г1 — c2dt2 — -Т<^г.—_ т-2[«/02 + sin2 0d(p2],
Г 7 (Г - Тд)
(2.1.2)
где з — «расстояние» в четырехмерном пространстве-времени с координатами х° = &, х1 = х, х2 = у,
х3 = z; ds — интервал в этом пространстве; тд = 2GM/c? — гравитационный радиус тела (радиус
сферы Шварцшильда).
Параметр тд/т, входящий в выражение (2.1.2), обычно очень мал. В частности, для Земли тд =
0,9 см, в результате чего на ее поверхности, при т = 6,3- 103 км, этот параметр принимает значение
Тд/т & IO”9 .
Несколько больших значений параметр гэ/г достигает на поверхности Солнца. Учитывая, что для
Солнца гд « 3 км, г и 7 • 105 км, получим гд/т ~ 10-6. В природе существуют также и объекты, у
которых параметр тд/т близок к единице.
В случае слабых гравитационных полей, когда метрический тензор псевдориманова пространства-
времени очень мало отличается от метрического тензора псевдоевклидова пространства-времени, урав-
нения Эйнштейна (2.1.1) можно решать методом последовательных приближений. Полученные решения
позволили организовать экспериментальную проверку ОТО. Такие эксперименты проводились и прово-
дятся, как только возникает техническая возможность для их осуществления.
Одним из первых было проведено измерение гравитационного смещения частоты электромагнитных
волн. Согласно ОТО, если излучатель фотонов частоты а>д находится в некоторой точке А и имеет
четырехскорость и1А, а наблюдатель находится в точке В и имеет четырехскорость ив, то частота
принимаемого фотона шв будет отличаться от частоты шд на величину Дш, описываемую формулой:
_ Ы^аРд ,9 , ох
а>д gik{B)u*BpkB'
W gik — компоненты ковариантного метрического тензора, рк — четырехимпульс фотона.
Все проведенные к настоящему времени эксперименты были в состоянии проверить эту формулу
только с точностью, линейной по малому параметру гд/т. В этом приближении результаты экспери-
ментов подтвердили справедливость формулы (2.1.3). Однако различие между предсказаниями ОТО и
ньютоновской теории гравитации проявляется только в квадратичном по тд/т приближении. Поэтому
проведенные эксперименты по измерению гравитационного смещения частоты были не в состоянии
заметить различие между предсказаниями этих теорий.
Эксперименты по измерению гравитационного искривления электромагнитных лучей в этом отно-
шении дали более определенный результат.
Согласно ОТО, при прохождении электромагнитных волн любой частоты в слабом гравитационном
поле сферически симметричного тела (2.1.2) ее луч, в силу уравнения геодезических, отклоняется на
угол, асимптотически главная часть которого имеет вид:
_ 4GM
6tp ~ <?Ь ’
где Ь — прицельное расстояние луча.
Теория гравитации Ньютона также предсказывает отклонение электромагнитного луча в этом экс-
перименте, но вдвое меньше.
Угол бф очень мал и для лучей, касающихся края диска Солнца, составляет всего 6Ф — 1,75".
Измерения углов отклонения лучей света, излучаемых звездами, и радиоволн квазаров в гравита-
ционном поле Солнца подтвердили предсказание ОТО и опровергли предсказание теории гравитации
Ньютона. Другим эффектом, обнаруженным вскоре после создания ОТО, является эффект смещения
перигелиев планет, который можно представить как малое вращение эллиптической орбиты каждой
планеты в ее плоскости в направлении движения планеты.
В теории гравитации Ньютона в сферически симметричном гравитационном поле такой эффект
отсутствует. В ОТО решение уравнения геодезических (2.1.3) в гравитационном поле показывает, что
за один оборот планеты по орбите сама орбита повернется на угол:
с т 6nGM
6Ф =----------
с2а(1 — е2)
где а — большая полуось орбиты, е — ее эксцентриситет.
Наибольшее значение угол смещения 5Ф имеет для Меркурия: 5Ф = 43" за сто лет. Обработка име-
ющихся наблюдательных данных, проведенная в начале прошлого века, подтвердила это предсказание
ОТО.
Еще одним эффектом ОТО, проверенным экспериментально, является задержка электромагнитных
сигналов при их распространении в гравитационном поле. Как показывают расчеты, при движении
электромагнитного сигнала от излучателя, находящегося с одной стороны Солнца, к наблюдателю, на-
ходящемуся с другой стороны Солнца, его время распространения увеличивается примерно на 200 мкс
по сравнению с временем распространения между этими же точками в отсутствие гравитационного
поля. Для проверки этого эффекта были проведены эксперименты по радиолокации планет Солнечной
системы и по регулярному обмену радиосигналами между Землей и космическим аппаратом, находя-
щимся с другой стороны Солнца. Обработка полученных данных позволила сделать вывод о совпадении
результатов наблюдений с предсказаниями ОТО.
И наконец, постоянно проводилась проверка принципа эквивалентности, на основе которого
А. Эйнштейн сформулировал свою теорию. Наибольшая относительная точность проверки этого прин-
ципа 10-12 была достигнута в опытах В.Б. Брагинского и В.И. Панова с сотрудниками [Брагинский,
Панов 1971] и 10-13 при лазерной локации Луны.
Таким образом, в слабом гравитационном поле Солнечной системы результаты проведенных экспе-
риментов достаточно хорошо совпадают с предсказаниями ОТО.
2.1.2 Гравитационные волны
Одним из наиболее красивых предсказаний ОТО Эйнштейна являются гравитационные волны. Воз-
можность распространения возмущений метрического тензора в виде волн в этой теории следует как из
гиперболического типа уравнений Эйнштейна, записанных в их нелинейном виде, так и из линейных
уравнений, получаемых в первом порядке теории возмущений. Согласно уравнениям Эйнштейна, любой
материальный объект, у которого зависящая от времени часть тензора энергии-импульса не обладает
центральной или аксиальной симметрией, должен излучать гравитационные волны.
Однако все попытки зарегистрировать гравитационные волны или какие-либо их проявления до-
статочно долгое время оканчивались неудачей. Поэтому в научной литературе иногда высказывались
сомнения в реальности существования гравитационных волн.
Эта ситуация кардинально изменилась лишь в самое последнее время, после того как наблюдения за
двойной пульсарной системой PSR 1913+16, начатые еще в 1975 г., показали, что эта система теряет
энергию на излучение гравитационных волн в соответствии с предсказаниями ОТО. Этот важный
результат был отмечен присуждением Р. Халсу и Дж. Тэйлору Нобелевской премии по физике 1994 г.
Таким образом, в настоящее время сомнения в существовании гравитационных волн исчезли и на
первый план выходит вопрос об их регистрации в земных условиях. Однако из-за малости константы
гравитационного взаимодействия сделать это непросто.
Исторически первыми в качестве источников и детекторов гравитационных волн были рассмотрены
механические системы. Эти системы характеризуются достаточно малой частотой излучения и очень
большой длиной волны. На основе выполненных расчетов были проведены оценки интенсивности из-
лучения гравитационных волн двойными звездами и другими астрофизическими объектами, а также
разработаны и построены квадрупольно-массовые детекторы, которые в настоящее время используются
для поиска низкочастотных источников гравитационных волн во многих лабораториях мира.
Наряду с механическими системами в качестве излучателей и детекторов гравитационных волн
исследовались и электромагнитные системы, в которых происходит взаимодействие гравитационных и
электромагнитных волн. Эти процессы в настоящее время рассматриваются как основные, с помощью
которых предполагается изучать поведение гравитационных волн в лабораторных и астрофизических
условиях.
На основе выполненных теоретических исследований в США в настоящее время построены два
лазерно-интерферометрических детектора низкочастотных гравитационных волн, излучаемых различ-
ными астрофизическими источниками (проект LIGO). Эти интерферометры представляют собой интер-
ферометры типа Майкельсона с длиной плеча 4 км. В каждом плече этого интерферометра помещен
резонатор Фабри-Перо, обеспечивающий ~30 отражений электромагнитных волн до их выхода на
регистрирующее устройство. Согласно расчетам, такой интерферометр в состоянии зарегистрировать
гравитационные волны с безразмерной амплитудой ~ 10-21.
Аналогичные лазерно-интерферометрические детекторы гравитационных волн, но меньших разме-
ров, в настоящее время разрабатываются и в ряде других стран.
2.1.3 Описание эволюции звезд и проблема черных дыр
В области сильных гравитационных полей предсказания ОТО существенно отличаются от предска-
заний теории гравитации Ньютона. Одним из таких предсказаний являются черные дыры — астрофизи-
ческие объекты, сжатые гравитационными силами до размеров, меньших их гравитационного радиуса
тд (радиуса сферы Шварцшильда). Термин «черная дыра» ввел в 1969 г. американский ученый Джон
Уиллер для обозначения астрофизических объектов, которые, согласно ОТО, могут возникать как на
ранних стадиях развития Вселенной, так и в конце эволюции звезд, если их масса в два с небольшим
раза превышает массу Солнца.
Чтобы было понятно, о чем идет речь, давайте рассмотрим жизненный цикл звезды. Звезда, как
известно, образуется, когда большое количество газа под действием сил собственного гравитационного
поля начинает сжиматься. В процессе этого сжатия атомы газа, соударяясь друг с другом, разогре-
вают вещество звезды до такой температуры, что оказываются возможными реакции слияния легких
ядер и внутри звезды начинается термоядерная реакция. Так как на начальной стадии облако газа, в
основном, состоит из атомов водорода, то сначала идет реакция синтеза ядер гелия, аналогичная той,
которая происходит при взрыве водородной бомбы, но только из-за сжимающего действия сил грави-
тации продукты реакции не разлетаются в разные стороны. Тепло, выделяющееся при этой реакции,
вызывает нагрев звезды и ее свечение. В результате давление внутри звезды нарастает до тех пор, пока
оно не уравновесит силы гравитационного сжатия. После этого начинается стадия более или менее
устойчивого течения термоядерных реакций в звезде, когда сначала выгорает весь водород, происхо-
дит дальнейшее сжатие звезды, повышение ее температуры и начинается горение все более тяжелых
элементов. Из-за большого количества запасов термоядерной энергии эти процессы могут идти очень
долго, например, наше Солнце существует уже несколько миллиардов лет. Но в конце концов все за-
пасы энергии звезды исчерпаются и термоядерные реакции в ней настолько ослабнут, что окажутся
не в состоянии препятствовать гравитационному сжатию звезды. Дальнейшая судьба этой звезды во
многом зависит от ее массы к моменту этого сжатия.
Если ее масса не превышает некоторого предела, называемого пределом Чандрасекара, примерно
равного 1,2 массы Солнца, то звезда превращается в белый карлик — медленно остывающую звезду, в
которой силы гравитационного сжатия уравновешиваются силами давления электронов, находящихся в
составе звезды и представляющих так называемый вырожденный электронный газ. В настоящее время
известно немало белых карликов. Одним из первых был открыт белый карлик, вращающийся вокруг
Сириуса — самой яркой звезды на ночном небе.
Если же масса звезды превышает предел Чандрасекара, то, согласно ОТО, происходит гравита-
ционный коллапс — резкое сжатие звезды гравитационными силами. Этот коллапс развивается ка-
тастрофически — скорость движения поверхности звезды к центру оказывается близкой к скорости
свободного падения. При массе звезды, не превышающей примерно 2,2 масс Солнца, гравитационный
коллапс приведет к образованию нейтронной звезды, у которой силы гравитационного сжатия компен-
сируются силами давления, возникающими между протонами и нейтронами, из которых нейтронные
звезды состоят. Радиус типичной нейтронной звезды составляет около десяти километров, а плотность
вещества — сотни миллионов тонн на кубический сантиметр.
Если масса звезды превышает 2,2 массы Солнца, то, согласно уравнениям Эйнштейна, давление про-
тонов и нейтронов оказывается не в состоянии остановить гравитационное сжатие, и гравитационный
коллапс звезды продолжается безостановочно. Его результатом, согласно ОТО, является черная ды-
ра — астрофизический объект с таким сильным гравитационным полем, которое ничему не позволяет
вырваться наружу — ни частицам вещества, ни излучению.
Анализ уравнений ОТО показал, что в черной дыре вещество должно сконцентрироваться в одной
точке, а вокруг этой точки должна образоваться область пространства с особыми свойствами. Радиус
этой области, называемый радиусом Шварцшильда, прямо пропорционален массе черной дыры. Любой
сигнал, испущенный из-под сферы Шварцшильда, не в состоянии выйти наружу, и для наблюдателя,
находящегося вне этой области, она не видна и как бы потеряна. Поэтому границу этой области еще
называют горизонтом событий.
На основе дальнейших исследований была сформулирована знаменитая теорема ОТО: «У черной
дыры нет волос», согласно которой характеристиками, определяющими гравитационное поле вне черной
дыры, могут быть только ее масса, момент импульса (вращение) и заряд. Все остальные характеристики
первоначальной звезды и ее вещества (образно говоря: как бы ее волосы) в процессе образования
черной дыры пропадают.
Другое интересное свойство горизонта событий черной дыры состоит в том, что время свободного
падения любого пробного тела к границе этой области, измеренное по часам покоящегося наблюдателя,
оказывается бесконечным, в то время как этот же промежуток времени, измеренный по часам свободно
падающего наблюдателя, оказывается конечным. Поэтому наблюдатель, свободно падающий в черную
дыру и нашедший возможность вернуться назад до пересечения горизонта событий (например с помо-
щью ракетных двигателей), обнаружит, что вдали от черной дыры за время его короткого путешествия
прошло значительно больше времени, чем по его часам.
Разность показаний между его часами и часами, покоившимися вдали от черной дыры, зависит
от того, насколько близко путешественник приближался к горизонту событий и сколько времени он
находился в ее окрестности. Как показывают расчеты, эта разность может быть сколь угодно велика,
так что путешественник, затратив небольшое время по собственным часам и незначительно постарев
за время путешествия, вернувшись к месту старта, может не найти не только своих сверстников, но ни
самой Земли, ни Солнца — а только остывший белый карлик (бывший когда-то Солнцем) на их месте.
Поиск черных дыр очень затруднен. Фактически единственным необходимым критерием отнесения
астрофизического объекта к черным дырам в ОТО А. Эйнштейна является наличие массы, большей
2,2 масс Солнца, содержащейся в области небольшого размера — с радиусом около десяти километров.
Поэтому для поиска кандидатов в черные дыры в настоящее время имеется только одна возможность —
это наблюдение воздействия сильного гравитационного поля черной дыры на движение других звезд и
окружающего вещества. Астрономы наблюдали много систем, в которых две звезды обращаются одна
вокруг другой под действием гравитационного поля, и научились по результатам таких наблюдений
оценивать массы этих звезд.
Если одной из таких звезд будет черная дыра, а другой — обычная видимая звезда, то по наблю-
дениям за ее движением можно оценить, какую наименьшую массу может иметь ее невидимый ком-
паньон. Если эта масса окажется большей, чем 2,2 массы Солнца, то одно из необходимых условий,
предъявляемых теорией А. Эйнштейна к черным дырам, окажется выполненным. Другое необходимое
условие более существенно и оно требует, чтобы звезда — кандидат в черные дыры — имела малый
радиус — около десяти километров. Наблюдательным проявлением черной дыры при данных условиях
может быть интенсивное рентгеновское излучение, испускаемое окружающим веществом, движущимся
к черной дыре под действием ее сильного гравитационного поля. Поэтому из двойной системы, где
находится черная дыра, должно приходить на Землю рентгеновское излучение. Так как рентгеновское
излучение задерживается атмосферой Земли, то его наблюдение возможно только из космоса.
В настоящее время многие космические программы России, США и других стран заняты поиском
и изучением рентгеновских источников в нашей Галактике и ее ближайшем окружении. По мере про-
ведения таких исследований в научной литературе периодически появляются сообщения об открытии
все новых и новых двойных систем, удовлетворяющих указанным необходимым условиям. К настоя-
щему времени обнаружено уже несколько десятков таких двойных рентгеновских источников. Однако
полученные данные пока не позволяют однозначно говорить об открытии черных дыр в природе.
2.1.4 Космология общей теории относительности
Общая теория относительности (ОТО) позволяет получить ответы на вопросы о происхождении и
развитии Вселенной. Как известно, одну’из первых реалистичных моделей нестационарной Вселенной,
основанную на классической теории Эйнштейна, предложил российский ученый А.А. Фридман еще в
1922-1924 гг. и существенно дополнил Г. Гамов.
Согласно ОТО, возможны два типа моделей нестационарной Вселенной: открытая и закрытая. В
первой из них квадрат интервала имеет вид:
л
ds2 = c2dt2---5---~ — r2[d02 + sin2 0d<p2], (2.1.4)
a2 4-r2
где функция a = a(t) называется масштабным фактором.
Объем открытой Вселенной бесконечен и она не имеет границ. В случае закрытой модели Вселенной
квадрат интервала имеет иной вид:
ds2 = c2dt2---=---= — r2[dd2 + sin2 0d<p2]. (2.1.5)
a2 — r2
Закрытая Вселенная имеет конечный объем, но не имеет границ. Зависимость масштабного фак-
тора от времени можно получить, если использовать уравнения Эйнштейна (2.1.1) с неравным нулю
тензором энергии-импульса материи.
Обе космологические модели хорошо описывают экспериментально установленный закон Хаббла —
красное смещение в спектрах галактик, пропорциональное их расстоянию от Земли.
В обоих моделях история Вселенной начинается с сингулярного состояния — мировой точки, в ко-
торой кривизна пространства-времени, плотность вещества и его температура были бесконечно боль-
шими. Из этого состояния в результате Большого Взрыва Вселенная начинает расширяться. По мере
ее расширения вещество и излучение охлаждаются. Как показывают расчеты, через секунду после
Большого Взрыва температура во Вселенной понизилась примерно до десяти миллиардов градусов, что
в тысячу раз больше, чем температура в центре Солнца.
В это время Вселенная состояла из фотонов, электронов, нейтрино, их античастиц, а также из
некоторого количества нейтронов и протонов. При дальнейшем расширении и охлаждении Вселенной
примерно через три минуты после Большого Взрыва в результате различных взаимодействий в ней
образовалась смесь легких ядер водорода и гелия. После этого в течение примерно миллиона лет
Вселенная просто продолжала расширяться, охлаждалась и в ней не происходило ничего особенного.
Когда температура вещества во Вселенной понизилась до нескольких тысяч градусов, стало воз-
можным образование атомов водорода и гелия из их ядер и электронов. В момент образования атомов
вещество Вселенной стало прозрачным для фотонов и, согласно модели горячей Вселенной, эти фото-
ны (называемые реликтовым излучением) должны существовать и сейчас с эффективной температурой
около трех градусов Кельвина. Измерения, выполненные в 1965 г. А. Пензиасом и Р. Уилсоном, действи-
тельно показали наличие этого реликтового электромагнитного излучения, равномерно распределенного
по небесной сфере.
Открытая модель Вселенной (2.1.4) предсказывает неограниченное ее расширение, в результате чего
расстояния между ее различными точками будут неограниченно возрастать. В случае закрытой модели
Вселенной (2.1.5) ее расширение с течением времени должно измениться на сжатие и, согласно ОТО,
она должна опять вернуться в сингулярное состояние.
Возраст Вселенной в открытой и закрытой моделях хотя и различен, но по порядку величины близок
к 10 млрд. лет.
Существующая неопределенность в выборе между этими двумя моделями Вселенной связана с
неопределенностью в величине средней плотности вещества во Вселенной. В ОТО от величины сред-
ней плотности вещества £ зависит величина параметра замедления q расширяющейся Вселенной:
q = 4тгб£/(ЗЯ2с2), где Н — параметр Хаббла.
В теории Эйнштейна параметр замедления является одной из важнейших величин, характеризу-
ющих Вселенную в целом: при параметре замедления q < 1/2 модель Вселенной открытая, а при
q > 1/2 — закрытая. Из оценок массы вещества в галактиках следует, что г/с2 » 3 • 10~31 г/см3.
В этом случае параметр замедления, согласно теории Эйнштейна, должен быть равен q = 0,03
и Вселенная должна быть открытой. Однако измерения величины параметра замедления дали иной
результат, согласно которому q ~ 5. Таким образом, в ОТО получающаяся из наблюдений величина
параметра замедления вступает в противоречие с наблюдаемой плотностью вещества в галактиках,
которая значительно меньше, чем требуется для соответствия.
Для устранения этого несоответствия в настоящее время предпринимаются попытки как по уве-
личению величины е (поиск недостающего вещества в галактиках, гипотеза существования темной,
несветящейся, материи), так и по уменьшению значения q, получаемого из эксперимента (предположе-
ние о наличии сильной эволюции функции светимости от величины красного смещения). Обе модели
горячей Вселенной описывают однородное и изотропное распределение вещества в пространстве. Од-
нако во Вселенной могли существовать очень малые неоднородности, которые выступили как центры
гравитационного притяжения вещества. В результате вокруг этих областей образовались облака водо-
рода и гелия, представляющие собой зародыши галактик.
Состоящий из водорода и гелия газ галактик с течением времени распался на облака меньшего
размера, сжимающиеся под действием собственного гравитационного притяжения. При этом сжатии
атомы сталкивались друг с другом, температура газа и его плотность повышались и после достаточного
разогрева в облаке начиналась термоядерная реакция синтеза более, тяжелых ядер из ядер водорода и
гелия. Тем самым облако газа превращалось в звезду. С этого момента во Вселенной начали вспыхивать
водородно-гелиевые звезды. Но так как эти звезды имели очень большие размеры, то их гравитационное
сжатие вызывало настолько быстрое течение термоядерных реакций, что они выжигали свой водород
всего за сто миллионов лет, превратив его в гелий и более тяжелые элементы.
Так как интенсивные термоядерные реакции являются нестационарными, то время от времени внеш-
ние слои звезд под действием термоядерных взрывов отрывались от внутренних слоев и уносились в
окружающее пространство. Это вещество представляло собой сырье для образования звезд следующих
поколений. Наше Солнце, например, является звездой второго или третьего поколения, образовавшей-
ся под действием гравитационного притяжения из водорода, гелия и небольшого количества более
тяжелых элементов, выброшенных взрывом из более ранней звезды.
Небольшое количество различных тяжелых элементов, собравшись вместе, образовали планеты, ко-
торые, как и Земля, начали обращаться вокруг центральной звезды — в нашем случае вокруг Солнца.
Дальнейшая эволюция планет зависела от их размеров, химического состава, скорости собственно-
го вращения и расстояния от звезды. В нашей Солнечной системе наиболее благоприятные условия
для зарождения жизни сложились на Земле. В других звездных системах также возможно появление
благоприятных условий для зарождения жизни в аналогичной или иной формах.
2.2 Гравитационная постоянная
В.Н. Мельников
2.2.1 Фундаментальные физические константы
В любой фундаментальной физической теории мы встречаемся с константами, которые характери-
зуют стабильность различных типов процессов и видов материи. Эти константы важны, так как они
проявляются независимо в разных ситуациях и имеют одно и то же значение, по крайней мере в
пределах тех точностей измерения, которые достигнуты на сегодняшний день. Именно благодаря этой
роли они называются фундаментальными физическими константами (ФФК). Определить строго это
понятие и их набор не представляется возможным. И это потому, что данные константы, в основном
размерные, присутствуют во вполне определенных физических теориях. В процессе научного процесса
некоторые из этих теорий заменяются более общими со своими собственными константами. При этом
обычно возникают соотношения между старыми и новыми константами. Поэтому мы можем говорить
не об абсолютном наборе ФФК, а только о наборе, соответствующем современному уровню физической
науки.
В последние десятилетия основным направлением развития физики является тенденция к объедине-
нию четырех известных типов взаимодействий: гравитационных, электромагнитных, слабых и сильных.
Действительно, до создания теории электромагнитных и слабых взаимодействий С. Вайнбергом и
А. Саламом и разработки некоторых теорий Великого объединения — ТВО (электромагнитного, силь-
ного и слабого взаимодействий) в качестве набора ФФК рассматривались c,h,a.,GF,ge,mp, (или те),
G, Н, р, Л, к, I, где е — заряд электрона, h — постоянная Планка, тр тлте — массы протона и электрона;
a, Gp,ga и G — константы электромагнитного, слабого, сильного и гравитационного взаимодействий,
а Н, р, 0, Л — космологические параметры (постоянная Хаббла, средняя плотность материи во Вселен-
ной, космологическая постоянная и параметр в теории сильных взаимодействий), к и J — постоянная
Больцмана и механический эквивалент тепла. Последние играют роль переводных множителей между
температурой, с одной стороны, и энергией и механическими величинами — с другой.
После утверждения в 1983 г. нового определения метра, связанного с определенной длиной волны
света X (а не с платино-иридиевым стержнем, как это было ранее), эту роль частично играет также и
скорость света с (X = ct). Теперь ее можно тоже рассматривать и как переводной множитель между
единицами времени (частоты) и длины, так как она по определению является абсолютно точной.
Что касается природы ФФК, то можно отметить несколько подходов к ее объяснению. Одна из пер-
вых гипотез принадлежит Дж. А. Уилеру: в каждом новом цикле развития Вселенной ФФК возникают
заново вместе с новыми физическими законами, определяющими ее эволюцию в данном цикле. Тем
самым ФФК и физические законы связаны с рождением и эволюцией Вселенной.
Менее глобальный подход к природе размерных ФФК предполагает, что они необходимы, чтобы
сделать физические соотношения безразмерными или что они являются мерой асимптотических состо-
яний. Действительно, в релятивистских теориях скорость света обычно проявляется в виде отношения
v/c, где v — скорость объекта. В то же время, скорости всех тел не превышают скорости света с, так
что она играет роль предельной скорости. Такой же смысл имеют и ряд других ФФК: h — минималь-
ный квант действия в квантовой теории, е — минимально возможный наблюдаемый (заряд электрона)
и т. п.
Наконец, ФФК или их комбинации могут рассматриваться как естественные масштабы, характе-
ризующие основные единицы физических величин: времени, длины, массы. Такими масштабами могут
быть, например, планковские масштабы длины ~ 10-33 см, массы ~ 10-5 г и времени ~ 10-43 с,
которые определяются как комбинации в некоторых степенях только из с, h и G.
Другая интересная и широко обсуждаемая проблема, связанная с ФФК,— почему их значения
лежат в весьма узком интервале, необходимом для возникновения и существования жизни на земле
(для стабильности атомов, времени жизни звезд главной последовательности, к которой принадлежит
и Солнце, современной температуры Земли, существования океанов и т. п.). Существует несколько
возможных и пока до конца не убедительных объяснений. Во-первых, это чисто случайно, что мы
живем именно в таком мире и с такими ФФК, хотя вероятность этого факта ничтожна среди всех
возможных наборов констант. Во-вторых, жизнь может существовать, по-видимому, в других формах
и для других наборов ФФК, о которых мы не знаем. В-третьих, любые другие наборы ФФК могут
реализовываться в других вселенных, кроме нашей.
Наконец, но, может быть, не в последнюю очередь, существует некоторый космический процесс тон-
кой настройки ФФК, приводящий их к современным значениям в течение долгой эволюции, возможно,
через прохождение многих циклов развития Вселенной и т. п.
2.2.2 Проблема гравитационной постоянной G
Проблема точного измерения гравитационной постоянной и определения ее стабильности является
одной из центральных проблем, связанных с ФФК, а также частью быстро развивающихся направле-
ний: объединения фундаментальных физических взаимодействий (где центральную роль играет сейчас
гравитационное взаимодействие) и гравитационно-релятивистской метрологии, связанного с прецизи-
онными пространственно-временными измерениями. Оно возникло благодаря быстрому росту точности
измерений, распространению прецизионных измерений на большие расстояния (космос) и тенденции
современной физики к объединению взаимодействий. Можно указать три основные проблемы, связан-
ные с гравитационной постоянной G:
1. Абсолютные измерения значения G.
2. Возможные вариации G со временем (медленные, порядка скорости расширения Вселенной и
менее).
3. Возможные вариации G с расстоянием (или появление новых, неньютоновских дополнительных
взаимодействий).
Измерения абсолютного значения гравитационной постоянной G
Существует множество лабораторных измерений значения G на основе весов Кавендиша с погреш-
ностью 10~3 и только 4 (Франция, СССР, США, Россия)— на уровне 10-4. Но и эти четыре не
согласуются друг с другом в пределах погрешностей измерений. Официальное значение G, даваемое
международной комиссией по константам CODATA с 1986 г. G = (6,67259 ± 0,00085)-10-11 м3кг-1с-2,
основано на измерении, проведенном Лютером и Фаулером в США в 1982 г. За последние несколько
лет ситуация еще более ухудшилась. Более десятка измерений G, проведенных в разных странах, рас-
ходятся со значением CODATA настолько, что можно говорить только о том, что G определена на самом
деле с погрешностью 10"3, а не 10~4. Начиная с 1999 г. CODATA рекомендует значение G с погреш-
ностью 10-3. Это означает по существу, что либо пределы точностей измерения G в земных условиях
достигнуты (невозможно устранить или учесть влияние окружающих объектов, нестабильность мате-
риала нитей и др.), либо в процессе измерения проявляется какая-то новая физика. Первое означает,
что, может быть, следует перенести измерения G в более спокойный космос, а второе — необходи-
мо более тщательно изучать теории, обобщающие теорию гравитации Эйнштейна или объединенные
теории взаимодействий.
Точное знание G необходимо по многим причинам. Во-первых, потому что это фундаментальная
константа, во-вторых, для точного значения масс Земли, планет, их средней плотности и, в конечном
итоге, для уточнения их моделей; для перехода от механических к электромагнитным величинам и
обратно; для вычисления одних констант через другие, с помощью соотношений, даваемых объединен-
ными теориями; для поиска новых физических взаимодействий и геофизических эффектов и т. п.
Возможные временные вариации G
Эта проблема возникла в связи с попытками объяснения связи между явлениями микро- и мак-
ромира. П.А.М. Дирак был первым, кто ввел так называемую «Гипотезу Больших Чисел», согласно
которой очень большие числа не могут естественно возникать в физических теориях, а должны быть
связаны друг с другом и с возрастом Вселенной 1017 секунд, выраженным в характерном ядерном
времени 10-23 секунды (Т = 1040). Он предположил, что отношение силы гравитационного взаимодей-
ствия к сильному, Gmp/hc ~ 10“40, обратно пропорционально возрасту Вселенной: G ~ Г-1. Тогда,
поскольку возраст Вселенной все время меняется, то и комбинация констант тоже должна меняться.
Атомные константы казались Дираку незыблемыми, и он вслед за Милном (1935) выбрал вариант G
как Г-1. Поскольку возраст Вселенной оценивается сейчас как (2-1О)1О10 лет, то скорость изменения
G/G = 5 • 10~п в год.
После оригинальной гипотезы Дирака появилось множество гипотез и теорий, допускающих ва-
риации некоторых ФФК (G, a, Gp и др.), в частности предложенных Гамовым и Теллером. Ряд ори-
гинальных схем обобщенных теорий гравитации был предложен проф. К. П. Станюковичем, а также
его учениками. Конечно, предложения о возможных вариациях констант могут вести к важным астро-
физическим, космологическим, геофизическим и др. следствиям и соответствующим новым эффектам.
Такие эффекты рассчитывались и продолжают рассчитываться и сопоставляться с данными наблюдений
и экспериментов.
Что касается экспериментальных данных по ограничению скорости изменения гравитационной по-
стоянной со временем, то существуют следующие основные результаты:
1. Достаточно грубые данные по росту кораллов, более надежные данные по скорости замедления
периода пульсаров и т. п. на уровне 10-11-10~12 в год.
2. Единственные позитивные, но никем не подтвержденные данные Ван Фландерна (1981, США) из
анализа среднего движения Луны и данных о древних затмениях на уровне 10-11 в год.
3. Ограничения сверху на вариации G, полученные специалистами США на основе данных по
движению орбитальных и посадочных модулей спутников Марса «Маринер» на уровне 10-11-10-12 в
год (1992).
4. Наиболее надежные данные по лазерной локации Луны на уровне 10-12 в год.
Отсюда можно видеть, что вариации гравитационной постоянной допускаются на уровне 10-12
и менее в год и что существует необходимость в дальнейших теоретических и экспериментальных
разработках этой проблемы. Будущие миссии космических аппаратов к Марсу и Венере, а также
лазерная локация Луны несомненно решат эту проблему, так как чем больше интервалы времени
между измерениями и, конечно, чем точнее они, тем более строгие результаты будут получены.
Новые неныотоновские взаимодействия, или пространственные вариации G
Почти все обобщенные теории гравитации и объединенные теории взаимодействий предсказывают
не только возможные временные, но и пространственные вариации гравитационной постоянной, ко-
торые могут проявляться как дополнительное к закону Ньютона взаимодействие (оно проявляется в
видимом нарушении принципа эквивалентности) либо не зависящее от состава и проявляющееся как
нарушение закона обратных квадратов для всех тел, либо как появление новых частиц, передающих
новые взаимодействия.
Данные как экспериментальных лабораторных, так и астрономических наблюдений за движением
спутников и планет исключают с большой точностью существование новых массивных частиц — пере-
носчиков новых взаимодействий — почти во всех диапазонах нового взаимодействия, кроме диапазона
миллиметров и от метров до сотен метров. Обычно это возможное отклонение от закона Ньютона зада-
ется дополнительным вкладом типа потенциала Юкавы — экспоненциальным взаимодействием, быстро
спадающим с расстоянием и характеризуемым силой взаимодействия и определенным масштабом, свя-
занным с массой переносчика взаимодействия. Существует пока только один позитивный результат,
свидетельствующий о возможном существовании нарушения закона обратных квадратов, полученный
итальянской группой в диапазоне 20-500 м с силой взаимодействия 0,13-0,25. Он получен при ис-
пользовании гравиметров и станции накопления энергии, где в ночное время вода закачивается в
водохранилище и затем в дневное время используется для дополнительной выработки энергии за счет
поднятия уровня воды. Правда, и здесь необходима независимая проверка данного результата, воз-
можно с использованием других схем, а именно космических. Что касается теоретических схем, то,
с общерелятивистской точки зрения, если мы допускаем возможность временных вариаций констант,
естественно рассмотреть и возможность вариаций пространственных.
2.3 Определение гравитационной постоянной G
В.П. Измайлов, О.В. Карагиоз
2.3.1 Классические методы измерения G крутильными весами
Английский физик Г. Кавендиш в 1798 году осуществил первые опыты по определению средней
плотности Земли и постоянной тяготения с помощью крутильных весов [Cavendish 1798]. В дальней-
шем различные авторы многократно использовали крутильные весы при осуществлении аналогичных
опытов. Подобные эксперименты описаны в работах [Reich 1838; Baity 1842; Cornu, Bailie 1873; Boys
1889; Eotvos 1896; Braun 1897a, b; Heyl 1930; Heyl, Chrzanowski 1942; Брызжев 1970; Facy, Pontikis
1971; Сагитов и др. 1977; Luther, Towler 1982; Saulnier, Frisch 1989; Карагиоз, Измайлов 1996;
Fitzgerald, Armstrong 1999; Luo et al. 1999, 2009; Meyer et al. 1999; Schurr et al. 1999; Kleinevoss et
al. 1999; Quinn et al. 2001; Nolting et al. 1999; Armstrong, Fitzgerald 2003; Schlammiger et al. 2006].
Успех опытов с крутильными весами в значительной мере зависит от их чувствительности, пропор-
циональной квадрату периода колебаний. Рост чувствительности достигается увеличением габаритов
и уменьшением диаметра нити. Увеличение габаритов весов ограничено размерами корпуса, предна-
значенного для защиты весов от конвективных потоков воздуха [Успенский 1930]. Однако даже в
случае использования многослойных металлических экранов защита оказывается малоэффективной и
ограничивает стабильность весов на уровне единиц или даже десятков этвеш (1 Э=1 • 10-9/с2). Раз-
мещение весов в высоком вакууме ведет к радикальному повышению стабильности до уровня сотых
долей этвеша.
Увеличение чувствительности путем уменьшения диаметра нити ограничено ее прочностными ха-
рактеристиками. При малом запасе прочности существенно усложняется процесс изготовления весов,
возрастает угроза обрыва нити при транспортировке или случайных сотрясениях, значительно возрас-
тает вероятность разрыва нити при термомеханической обработке током высокой частоты, позволяю-
щим уменьшить декремент затухания и дрейф положения равновесия. Желательно иметь достаточно
большой запас прочности, с точки зрения сохранения малонапряженного состояния, материала нити
подвеса, исключающего вероятность отклонения упругих деформаций при закручивании от линейного
закона Гука.
В опытах П. Хейла и П. Хржановского [Heyl, Chrzanowski 1942] нить весов имела примерно двой-
ной запас прочности на разрыв и находилась в сильно напряженном состоянии. Наличие больших
притягивающих масс позволило частично ослабить влияние различных дестабилизирующих факторов,
связанных, например, с флуктуациями температуры, направленными потоками разреженного газа, воз-
действием микросейсм. В работе [Сагитов и др. 1977] аналогичный эффект был получен за счет
увеличения габаритов крутильных весов. Притягивающие массы изготавливались в виде стальных кру-
говых цилиндров. Отказ от наиболее простой и традиционной шаровой формы взаимодействующих
масс связан со стремлением упростить технологию их изготовления, увеличить величину притяги-
вающего момента, разнообразить материал и форму взаимодействующих тел. При этом существенно
возрастает громоздкость аналитических формул, используемых при определении G. Отсутствие демп-
фера качаний и высокого вакуума является слабой стороной работ [Сагитов и др. 1977; Heyl 1930;
Heyl, Chrzanowski 1942], но наличие указанных выше достоинств (большого периода колебаний, круп-
ных габаритов установки) обеспечило получение в данных экспериментах сравнительно небольшой
погрешности определения G.
В экспериментальных работах использовалось два метода определения гравитационной постоян-
ной — статический и динамический. В более ранних работах использовался только статический режим,
в котором измеряемой величиной является смещение положения равновесия весов. Ф. Райх [Reich 1838]
сделал первую попытку применить динамический метод, когда притяжение между взаимодействую-
щими массами измеряется по периодам крутильных колебаний. Попытка Райха оказалась не вполне
удачной. Спустя сто лет динамический метод становится основным. В опытах по определению гра-
витационной постоянной К. Браун [Braun 1897] наряду со статическим уже успешно использовал и
динамический метод, а венгерский физик Р. Этвеш [EdYoos 1896] впервые стал использовать только
динамический метод. В его приборе притягивающие массы были изготовлены из свинца в виде двух
параллелепипедов. В пространстве между ними устанавливалась крутильная система, период колеба-
ний которой при различных ориентациях коромысла составлял либо 641, либо 860 секунд. Измерения
проводились в воздухе.
В последние годы большинство авторов отдает предпочтение динамическому методу определения
гравитационной постоянной. Возрастание времени релаксации весов на несколько порядков за счет
устранения вязкого трения о воздух позволило проводить измерения периодов колебаний весов при
практически постоянной амплитуде, что способствовало развитию динамического метода. К некоторым
недостаткам последнего можно отнести лишь усложнение расчетов и необходимость учета различных
нелинейных эффектов, связанных, например, с агармоничностью колебаний крутильных весов.
2.3.2 Методы определения G с помощью вертикальных весов
В крутильных весах упругая сила нити подвеса рабочего тела используется в качестве некоторой
стабильной во времени силы сравнения при определении постоянной тяготения, регистрации пондеро-
моторного действия светового излучения [Брагинский и др. 1965; Cook et al. 1962; Stimler et al. 1964]
или измерении градиентов гравитационного поля. Эту функцию может выполнять и любая другая,
не менее стабильная сила. Такой силой сравнения может служить сила земного тяготения, лунно-
солнечными вариациями которой в большинстве практических случаев можно пренебречь. Эта сила
велика по своему абсолютному значению, вследствие чего основанные на ее использовании верти-
кальные весы с ножевой опорой вращения на много порядков уступают по своей чувствительности
крутильным весам. Тем не менее такие весы также использовались при определении G. Наличие мало-
чувствительного датчика устраняло ряд дестабилизирующих факторов, характерных для крутильных
весов, а недостаток чувствительности частично компенсировался использованием больших притягива-
ющих масс. Так, Ф. Йолли [Jolly 1878] в качестве притягивающего тела использовал свинцовый шар
массой 5775 кг, А. Кениг, Ф. Рихарц и О. Кригар-Менцель [Konig, Richarz 1884; Richarz, Krigar-Menzel
1899] — параллелепипед из свинца массой 100537 кг. Д. Пойнтинг [Poynting, Phyllips 1905] исполь-
зовал сравнительно небольшие шаровые притягивающие тела из сплава свинца с сурьмой, имевшие
массы 153,4 и 76,5 кг. В [Speake, Metherell 1984] дается описание высокоточных рычажных весов,
предназначенных для определения G с точностью на уровне 1 • 10-5. В весах использовались пробные
массы величиной 1 кг, подвешенные на концах плеч длиной 30 см. Притягивающие массы выполнены в
виде параллелепипедов с прямоугольным отверстием в центре. Такая геометрия обеспечивает необхо-
димую однородность поля в области нахождения малых масс. Гравитационную постоянную определяют
компенсационным методом с помощью цилиндрического конденсатора. Указывается, что для достиже-
ния планируемой точности необходимо измерять массы, их размеры, размер конденсатора и величину
компенсирующего напряжения с точностью порядка 1 • 10~6. В опытах [Брызжев 1970] предполагалось
использовать притягивающее тело из ртути массой около 10 т . Автор заменил ножевую опору на упру-
гий подвес оригинальной конструкции, однако дрейф параметров весов затруднил успешное проведение
экспериментов.
Геофизические опыты дают большой случайный разброс, при этом наблюдается систематически
завышенное значение [В.В. Бровар и др. 1995; В.В. Бровар, Калядин 1990], которое трудно объяс-
нить погрешностями измерений. В работе [В.В. Бровар и др. 1995] получено значение G = 6,693-
10"11 Нм2/кг2, которое отражает влияние ошибок при интерпретации плотности пород горы Зримо.
Измерения силы тяжести выполнялись на надводном судне [Гайнанов, Пантелеев 1991] и на бор-
ту подводного аппарата. Донные измерения проводились гравиметром Ла Косте-Ромберг. Комбинация
надводных и подводных гравиметрических данных позволила построить плотностную модель горы.
Теоретическая возможность существования пятого взаимодействия привела к появлению экспери-
ментальных работ по его обнаружению, в том числе проверке закона притяжения. Некоторые работы
в этой области состоят в измерении G при геофизических расстояниях. Такие опыты дают большой
случайный разброс G4.
Некоторые авторы пытались увеличить чувствительность весов с ножевой опорой, изготавливая их
в виде вертикального маятника, обладающего большим периодом колебаний. Такая идея была впервые
реализована И.Вильзингом [Wilsing 1889]. В отличие от метода Йолли-Пойнтинга, когда измерение
величины притяжения между взаимодействующими массами сводится к определению изменения веса
притягиваемых масс, в установке Вильзинга величина притяжения измерялась по изменению уклоне-
ния отвеса. В способе Вильзинга сила притяжения также сравнивается с силой тяжести, поэтому он
принципиально ничем не отличается от метода Йолли-Пойнтинга. Можно усмотреть лишь некоторые
конструктивные преимущества вертикального положения маятника в установке Вильзинга, позволяю-
щие свести к минимуму его деформации под действием собственного веса. Идею Вильзинга пытался
реализовать В. Ласка, который предложил аналогичный прибор. Автор описал идею и принцип устрой-
ства, но экспериментальных результатов не опубликовал [Laska 1889].
2.3.3 Оценка влияния промежуточной среды на гравитационное
взаимодействие
Влияние посторонних масс на гравитационное взаимодействие двух других масс может появить-
ся в силу неаддитивности гравитационного поля. Экспериментальные определения влияния проме-
жуточной среды на гравитационное взаимодействие масс были проведены Л.Аустином и Ч.Твингом
[Austing, Thwing 1897], которые экранировали массы в крутильных весах слоем масс различной плот-
ности, К. Майораной [Majorana 1930], проверявшим изменение веса экранируемой от Земли массы,
В.Б. Брагинским. Аналогичный метод использовался также в работах [Slichter et al. 1965; Weber
1966]. В экспериментах Майораны [Majorana 1930], по мнению автора, возможно, наблюдалось на-
личие предполагаемого эффекта, что соответствовало коэффициенту экранизации порядка 10-12 см2/г.
В остальных экспериментах данный эффект не был обнаружен.
2.3.4 Анализ временных и пространственных вариаций гравитационной
постоянной
В современной физике дискутируется вопрос о переменности постоянной тяготения во времени
[Barrow 1978, Eichendorf, Reinhardt 1977, Hoffmann 1963, Lapiedra, Palacios 1981, Massa 1993,
Morganstern 1972, Rothman, Matzner 1982, Yang et al. 1979] и пространстве. Согласно гипотезе
Дирака-Йордана, изменение постоянной тяготения в год должно составлять около 1О~10 ее величины.
Во всех тщательно выполненных экспериментах такой эффект зарегистрировать не удалось.
В последние годы наибольший интерес вызывало исследование зависимости гравитационной посто-
янной G от расстояния R между взаимодействующими массами [Ляховец 1986, 1987; Милюков 1985;
Митрофанов, Пономарева 1987; Панов, Фронтов 1979; Chan, Paik 1984, Hoskins et al. 1985; Long
1976; Romaides et al. 1994; Walesch et al. 1995].
В работе [Long 1976] была экспериментально получена зависимость G(R). Автор отказался от
использования традиционной сферической формы притягивающих масс, использовав в экспериментах
кольца. Последние создают однородные гравитационные поля, что избавляет от необходимости точного
определения R. На одном из плеч коромысла на двух тонких нитях длинной 87 см был подвешен ша-
ровой груз массой 50 г, изготовленный из тантала. Коромысло весов было подвешено на вольфрамовой
нити диаметром 50 мкм длиной 48,6 см. Ближнее кольцо массой 1225,271 г, изготовленное из чи-
стого тантала, имело следующие геометрические размеры: наружный радиус — 4,5536 см, внутренний
радиус — 2,7513 см, толщина — 1,7765 см. Максимум поля ближнего кольца расположен по оси на
расстоянии 2,6088 см от его середины. Дальнее кольцо массой 57 580,83 г, изготовленное из латуни ме-
тодом центробежного литья, имело, соответственно, радиусы 27,112 и 21,589 см при толщине 7,633 см.
Были проведены сравнительные измерения гравитационной постоянной при расстояниях 4,48 и 29,9 см
между центрами взаимодействующих масс. Автор обнаружил существенный рост G с увеличением R,
но абсолютных значений G не опубликовал.
Работы Д. Лонга [Long 1976, 1980, 1981а, б] способствовали появлению ряда следующих публи-
каций [В.В. Бровар и др. 1995; В.В. Бровар, Калядин 1990; Зайцев, Колосницын 1989; Карагиоэ и
др. 1981, 1987; Ляховец 1986; Милюков 1985; Осипов 1993; Митрофанов, Пономарева 1987; Панов,
Фронтов 1979; Chen et al. 1984; Hirakawa 1980; Mio et al. 1984; Stacey, Tuck 1981]. В эксперимен-
тальных работах на лабораторных расстояниях аналогичный результат получить не удалось.
2.3.5 Проверка гипотез, предсказывающих отклонение от закона обратных
квадратов
Установка для измерения гравитационной постоянной позволяет проверить ряд гипотез, предска-
зывающих какое-либо отклонение от закона обратных квадратов [Карагиоз и др. 1981]. Методика
измерений G обычно основана на гипотезе об отсутствии таких отклонений. Если зависимость G(R')
существует (см. работы [Long 1980, 1981, 1984]), то это должно привести к завышенной оценке G. В
[Карагиоз, Измайлов 1996], такого эффекта не оказалось, так что в первом приближении отклонение
от закона обратных квадратов не наблюдается. К аналогичному выводу пришли и другие исследователи
[Милюков 1985; Митрофанов, Пономарева 1987; Панов, Фронтов 1979; Hirakawa 1980; Hirakawa et
al. 1980]. Измерение гравитационного взаимодействия при малых расстояниях было осуществлено и в
работе [Mio et al. 1984], где также не было обнаружено какого-либо отклонения от закона обратных
квадратов.
В работе [Измайлов, Карагиоз 2006] описана методика по проверке влияния Земли на измерение
гравитационной постоянной крутильными весами. В результате исследований установлено, что верхняя
граница экранирования находится на уровне (2,0 ± 0,5) • 10~13 см2/г.
2.3.6 Анализ основных дестабилизирующих факторов
К числу основных дестабилизирующих факторов при измерениях с крутильными весами следует,
прежде всего, отнести воздействие микросейсм и потоков разреженного газа. Оба фактора ведут к
одинаковым последствиям: меняют положение равновесия, смещают период крутильных колебаний.
При достаточно высоком вакууме (10-6 Па) на первый план выходят микросейсмы, однако в процессе
длительной работы в связи с постепенным ухудшением вакуума ситуация может измениться, поэтому
приходится постоянно заботиться о сохранении достаточно высокого вакуума.
Автор работы [Kuroda 1995] полагает, что несовершенство упругих свойств нити подвеса вносит
систематическую погрешность в результаты измерений. С учетом его гипотезы авторы [Bagley, Luther
1997] в результаты вычислений ввели поправку на несовершенство упругих характеристик нити под-
веса. Они установили, что значение гравитационной постоянной при добротности 950 больше, чем при
добротности 490, на величину, близкую к предсказанной по теории Куроды. Авторы отметили улуч-
шение полученных ранее результатов измерений гравитационной постоянной G, абсолютное значение
которой возросло. С высоким качеством нити подвеса связывают надежды на получение малой погреш-
ности и другие авторы [Gundlach, Merkowitz 2000; Quinn et al. 2001]. В 2006 году комитет CODATA,
занимающийся анализом экспериментов по измерению фундаментальных констант, под натиском но-
вых противоречащих друг другу экспериментальных данных был вынужден в 12 раз ухудшить точ-
ность рекомендованного значения G по сравнению с 1998 годом. Причиной этих разногласий могли
стать неучтенные систематические погрешности при постановке опытов. Несостоятельность гипотезы
Куроды очевидна [Писаренко 1989]. Внутреннее трение в металлических нитях имеет гистерезисную
природу, характеризуется коэффициентом гистерезисных потерь и не зависит от частоты деформации.
Существенным дестабилизирующим фактором при измерении слабых гравитационных сил может
оказаться дополнительное магнитное взаимодействие. Многие специалисты его игнорируют, работают с
притягивающими стальными массами, не защищают крутильную систему магнитным экраном. Обнару-
жить дополнительное взаимодействие достаточно сложно, если оно мало. Однако при неблагоприятных
условиях оно может существенно возрасти, при этом измеренные значения G могут возрасти. Исклю-
чить полностью магнитное взаимодействие при отсутствии магнитного экрана практически невозможно
даже при использовании притягивающих масс из немагнитных материалов.
Наши эксперименты показали, что трудно сохранить в течение длительного времени взаимное поло-
жение взаимодействующих тел. Вариации температуры и ее градиентов ведут к изменению как вклада
неравновесных потоков в жесткость крутильной системы, так и положения притягивающих масс. Изме-
няются линейные размеры весов и плиты, на которой укреплены устройства для фиксации масс. Раз-
ность температур на верхней и нижней поверхности плиты вследствие ее конечной теплопроводности
приводит к деформации на изгиб. Данный эффект характерен для биметаллических пластин. При такой
деформации центр притягивающей массы существенно смещается, поскольку находится на некотором
расстояния от плиты. С течением длительного времени вследствие слабых ударов притягивающей массы
по посадочным отверстиям в момент фиксации деформируется контур отверстий, изменяется реальное
положение притягивающих масс. Долгопериодные вариации значений G обусловлены флуктуациями
положения притягивающих масс, поскольку в процессе измерений они не контролируются, а поэтому в
расчетах не учитываются.
2.4 Принцип эквивалентности и земные приливы
Н.И. Колосницын
2.4.1 Принцип эквивалентности и его роль в создании релятивистской теории
гравитации
Понятие принципа эквивалентности введено в научный оборот Эйнштейном. Оно восходит к уста-
новленному Галилеем факту, согласно которому все тела независимо от их массы и состава падают
в поле притяжения Земли с одинаковым ускорением. Действительно, по закону тяготения Ньютона
сила гравитационного притяжения между двумя телами, отстоящими друг от друга на расстояние г,
определяется формулой:
GM1M2 . (GM2\ ,Q .
F=——= Mr I —1 = Mrg, (2.4.1)
из которой следует, что сила, испытываемая телом 1 в поле тяготения тела 2, пропорциональна его
гравитационной массе — Mr. В то же время в соответствии со вторым законом Ньютона ускорение
тела определяется его инертной массой mi и в гравитационном поле равно:
1 „ Mr (GM2\ Mr
а = —F = — —о- = —9-
mi mi \ т* / mi
(2.4.2)
Отсюда из установленного Галилеем падения различных тел в однородном поле Земли (д = const) с
одинаковым ускорением (а = const) следует пропорциональность между гравитационной массой тела и
его инертной массой: M/m = const. Отношение масс для всех тел является универсальной постоянной,
а его значение зависит от выбора единиц. При обычном выборе одной и той же единицы для инертной
и гравитационной массы (грамм, килограмм) отношение М/т является безразмерным.
Равенство гравитационной массы и инертной (М/т = 1) Ньютон обосновывал экспериментами с
маятниками, проведенными им с точностью 1 • 103. В настоящее время точность проверки равенства
масс в лабораторных условиях достигла величины порядка 1 • 1012 [Брагинский, Панов 1971]. Это очень
высокая точность, но, тем не менее, эмпирически равенство масс доказать нельзя. Оно представляет
собой постулат и, строго говоря, отношение М/т = а нужно рассматривать как дополнительный
параметр теории. Если в законе тяготения (2.4.1) гравитационные массы заменить инертными, то
получим новую эквивалентную форму этого закона:
Gmim2
F = aia2------
r2
(2.4.3)
В задаче двух тел параметр а можно объединить с массой, что равносильно заданию a = 1. Однако
в задаче трех тел отличие параметра а от единицы влечет за собой появление качественно новых
эффектов, наблюдение которых позволяет численно оценить величину а.
Универсальность свободного падения тел в гравитационном поле, обнаруженную Галилеем, Фок
предложил называть обобщенным принципом Галилея [Фок 1961]. Дикке этот же факт назвал слабым
принципом эквивалентности [Дикке 1965]. Мизнер, Торн и Уиллер [Мизнер и др. 1977] использовали
термин — принцип универсальности свободного падения. К. Уилл [1985] объединил эти определения
в виде ньютоновского принципа эквивалентности. Несмотря на разнобой в терминологии, здесь,
прежде всего, имеется в виду равенство (эквивалентность) гравитационной и инертной масс, независи-
мо от величины массы и состава тела. Универсальность движения тел в гравитационном поле является
следствием этой эквивалентности масс.
С созданием Пуанкаре и Эйнштейном (в 1905-1906 гг.) специальной теории относительности (СТО)
стала очевидной необходимость в новой теории тяготения, поскольку в ньютоновской теории изначаль-
но заложено мгновенное дальнодействие, что не согласуется с СТО. Пуанкаре тогда же предложил
вариант неньютоновской гравитации, основанный на релятивистском обобщении силы тяготения [Пу-
анкаре 1979]. Этот подход потом развивали Г. Минковский, А. Зоммерфельд и Г.А. Лоренц.
В отличие от Пуанкаре Эйнштейн сначала пытался обобщить уравнение Пуассона и уравнения
движения материальной точки, так чтобы они были инвариантными относительно преобразований Ло-
ренца и, кроме того, совместимы с фактом равенства гравитационной и инертной масс. В этом же
направлении над созданием новой теории работали М. Абрагам, Г. Нордстрем и Г. Ми. Эйнштейну
не удалось получить лоренц-инвариантные уравнения, совместимые с равенством масс, и он утратил
интерес к созданию скалярного варианта релятивистской гравитации. (Позже лоренц-инвариантная ска-
лярная теория гравитации, удовлетворяющая также требованию равенства гравитационной и инертной
масс, была построена Нордстремом, но оказалась противоречащей эксперименту — в ней отсутствова-
ло искривление световых лучей и предсказывалось движение перигелия Меркурия с неверным знаком
[Паули 1947].)
Эйнштейн наметил иной подход к построению новой теории, опираясь на факт равенства инертной
и гравитационной масс, согласно которому система, находящаяся в однородном гравитационном поле,
в механическом отношении эквивалентна равномерно ускоренной системе отсчета без гравитацион-
ного поля (слабый принцип эквивалентности). Эйнштейн потребовал, чтобы не только механические,
но и все другие процессы в обеих системах протекали одинаково [Эйнштейн 1965]. Так появилось
(в 1911 г.) понятие принципа эквивалентности в его «сильной» (по современной терминологии) фор-
мулировке. На основе этого принципа Эйнштейн (в рамках однородной силы тяжести) предсказал
замедление хода часов в гравитационном поле («красное смещение») и отклонение световых лучей гра-
витационным полем Солнца на величину 0,83 угловой секунды (вдвое меньше, чем в окончательном
варианте теории) и поставил вопрос об астрономической проверке этих эффектов.
Зависимость распространения света и хода часов от гравитационного поля указывала на то, что
уже в однородном гравитационном поле преобразования Лоренца не выполняются. Переход к неод-
нородным полям ограничивал применение принципа эквивалентности бесконечно малыми областями
пространства-времени. В этих областях можно выделить свободно падающую («сопутствующую») си-
стему отсчета, в которой гравитация отсутствует, и поэтому в ней локально выполняются преобразова-
ния Лоренца, а пространство характеризуется метрикой Минковского:
ds2 = c2dt2 — dx2 — dy2 — dz2. (2.4.4)
Зависимость (локального) времени-хода часов от гравитационного потенциала подсказывала вид
метрики с переменной скоростью света:
ds2 = с2(х, у, z)dt2 — dx2 — dy2 — dz2, (2.4.5)
которая явно указывала, что пространство-время «искривлено». Далее в 1913 г. [Эйнштейн, Гроссман
1965] последовал переход к римановой геометрии с метрикой:
ds2 = gtkdxldxk. (2.4.6)
История развития Эйнштейном концепции принципа эквивалентности изложена, например, у
В.П. Визгина [2001]. Компоненты метрического тензора дне в этом подходе имеют тот же смысл, что и
скалярный потенциал в ньютоновской гравитации. С другой стороны, они определяют метрические со-
отношения четырехмерного мира. Это слияние метрики и гравитации является основным достижением
теории тяготения Эйнштейна. Уравнения, определяющие метрику gik, были найдены в конце 1915 г.
одновременно Гильбертом и Эйнштейном независимо, но, как выяснилось недавно [Визгин 2001],
при определенном влиянии друг на друга (в этот период они активно переписывались друг с другом,
обмениваясь сведениями о своей работе над теорией). С открытием этих уравнений завершается
создание релятивистской теории гравитации Эйнштейна — общей теории относительности (ОТО).
Движение материальной точки, как следует из уравнений Эйнштейна-Гильберта, происходит по
геодезическим риманова пространства-времени, что предполагает равенство гравитационной и инерт-
ной массы тела, независимо от ее величины. Тем самым в эйнштейновской гравитации, в отличие
от ньютоновской, равенство масс является следствием теории. Распространение тяготения в теории
Эйнштейна происходит с конечной скоростью — скоростью света, что устранило основной недостаток
теории Ньютона, в которой эта скорость является бесконечно большой.
Принцип эквивалентности в узком смысле как равенство гравитационной и инертной масс, как уже
указывалось выше, в ньютоновской гравитации выглядит случайным фактом. Понятно, что по мере
совершенствования технологий измерения он должен каждый раз уточняться. В эйнштейновской гра-
витации равенство масс является следствием теории и наряду с другими ее предсказаниями также
требует экспериментальной проверки. В настоящее время возник дополнительный интерес к провер-
ке принципа эквивалентности, связанный с программой объединения всех взаимодействий, включая
гравитационное. Известные варианты объединения ведут к нарушению принципа эквивалентности (на-
пример, [Damour et al. 2002]). В связи с этим проверка принципа эквивалентности (в узком смысле)
выходит за рамки теории тяготения и становится фундаментальной физической проблемой.
Значение и смысл сильного (собственно эйнштейновского) принципа эквивалентности стали пере-
сматриваться вскоре после создания ОТО. Было обращено внимание на сугубо локальный характер
принципа и отсутствие эквивалентности поля ускорений и гравитационного поля (сил инерции и сил
гравитации) в конечных областях пространства. С другой стороны, равенство гравитационной и инерт-
ной масс (слабый принцип эквивалентности) имеет общий, а не локальный характер [Фок 1961].
Эддингтон один из первых подверг анализу содержание (сильного) принципа эквивалентности. Он
заметил, что «принцип эквивалентности сыграл большую роль при построении общей теории относи-
тельности, но теперь.. .он стал менее необходим» [Эддингтон 1934]. Развивая аргументацию Эддинг-
тона, А.А. Логунов отметил, что влияние инерции можно устранить во всем пространстве, переходя к
инерциальной системе координат, а влияние гравитации можно устранить только в бесконечно малых
областях пространства, причем не для всех физических процессов, а только для тех, которые не зависят
от кривизны пространства-времени. В частности, принцип эквивалентности Эйнштейна несправедлив
для частиц с высшими спинами, поскольку в уравнения движения таких частиц тензор кривизны вхо-
дит явным образом. Принцип эквивалентности также несправедлив для протяженных частиц. В итоге
«принцип эквивалентности, понимаемый как возможность исключения гравитационного поля в беско-
нечно малой области, не является правильным, поскольку кривизну пространства, если она имеется,
исключить каким-либо выбором системы координат, даже с заданной точностью, невозможно» [Логу-
нов, Мествиришвили 1985]. Отметим, что кривизна пространства определяется вторыми производными
гравитационного потенциала и их можно измерить гравитационными вариометрами [Миронов 1980] и
гравитационными градиометрами [Мизнер и др. 1977]. С помощью этих приборов экспериментатор в
лифте может всегда определить, ускоряется ли он или покоится в гравитационном поле (вопреки утвер-
ждению Эйнштейна в его известном примере с лифтом). По мнению Синга, «принцип эквивалентности
выполнил обязанности повивальной бабки при рождении общей теории относительности... Я предла-
гаю похоронить повивальную бабку с соответствующими почестями... » [Синг 1963]. Отметим также
исторический факт, — уравнения релятивистской гравитации были выведены Гильбертом из вариаци-
онного принципа без использования принципа эквивалентности [Гильберт 1979].
Критика (сильного) принципа эквивалентности, приведенная выше, является обоснованной. Она
определяет пределы применимости этого принципа, который в этих пределах, однако, сохраняет опре-
деленное методологическое значение и даже находит применение в инженерной практике и практике
космических технологий. Четкое понимание содержания и смысла сильного принципа эквивалентности
позволяет, в частности, сформулировать требования к эксперименту по проверке равенства гравитаци-
онной и инертной масс тела (слабого принципа эквивалентности). Эвристическая ценность принципа
была продемонстрирована самим Эйнштейном в период создания релятивистской теории гравитации.
Последовательное развитие именно концепции принципа эквивалентности привело сначала к объедине-
нию римановой геометрии с гравитацией, а затем и к построению самой теории — получению уравне-
ний (Эйнштейна-Гильберта). Все остальные подходы к построению релятивистской теории гравитации
оказались тупиковыми.
2.4.2 Задача трех тел. Аномальный потенциал
Экспериментальная проверка слабого принципа эквивалентности должна осуществляться в рамках
ньютоновской теории, поскольку она, как отмечено выше, содержит в качестве параметра отношение
гравитационной и инертной масс. В теорию Эйнштейна этот параметр не входит. Специфические эф-
фекты, связанные с нарушением (слабого) принципа эквивалентности, появляются только в задаче трех
тел (см. выше).
Рис. 2.4.1. Относительное расстояние
между точками г и j.
Рассмотрим три тела, подчиняющихся закону Ньюто-
на, записанного в форме (2.4.3), которая учитывает воз-
можное нарушение принципа эквивалентности. Использу-
ем инерциальную систему координат, в которой вектор
Pi = (f,i,T|i! Ci) — положение материальной точки т^г =
0,1,2). Относительное расстояние между точками i и j (см.
рис. 2.4.1) есть:
r"ij — Pi Pi- (2.4.7)
По законам Ньютона:
а РО Г01 Г02
—= aoaiGmi-=- + ocQoc2Gm2-r,
dt2 rgj rg2
=-aoaiGmo^-+ aia2Gm2^U, (2.4.8)
dt2 Пи rf2
d?p2 „ П)2 „ Г12
—y- = -aoa2Gm0-3-------aia2Gmi—.
at r02 r12
Перейдем в систему координат, начало которой находится в центре тела то, а оси Ох, Оу, Oz
параллельны осям О£„От],ОС. Вычитаем первое уравнение из второго и третьего, а второе из третьего.
Получаем:
й2Пи . гуг , \ Пн ( Иг Л)г\ . п,
—7-5- +G(m0 + mi)aoai-x- = a2Gm2 ---------ao-s- , (2.4.9)
at r01 \ r12 г02/
+ G(m0 + m2)otQa2^~- = -oc-iGmi (oc2^- + , (2.4.10)
dt2 rg2 V *i2 rgi J
,^2 +G(nti +m2)aia2^- = aoGm0 - a2^^ • (2.4.11)
dt2 rf2 V >oi rg2/
Рассмотрим уравнение (2.4.10) и введем пертурбационную функцию
J?o2 = Gmi faia2 —---aoai^01 -Z02^ . (2.4.12)
\ Г12 Г01 /
Тогда уравнению (2.4.10) можно придать форму
d?fo2 . . тог BRq2
-sr + G(mo + m2)»<««2^ = ^-. (2.4.13)
Учитывая соотношение т22 = (го2 — rbi)2 = П)2 + Пи — 2гогПн cos Ф, вытекающее из определения п2,
первое слагаемое в (2.4.12) представим в виде разложения в ряд по полиномам Лежандра:
1 1 1 °°
— =----------------------Г = — У tnPn(cos Ф). (2.4.14)
Г*12 Г01(1 + t2 — 2t созф)5 П)1
Здесь t = (го2/го1)>Рп(созФ) — полином Лежандра. Второй член в правой части (2.4.12) есть
^02/01 = — t cos Ф = — tPi(cos^). (2.4.15)
Пи roi roi
Подставим (2.4.14) и (2.4.15) в пертурбационную функцию Rq2. Получаем
Rm = Gmi — + —tPi(cos Ф) + — У tnPn(cos Ф) -
7*01 7*01 Г01 H
n=2
————-iPj (COS Ф) .
Г01
(2.4.16)
Учитывая, что в уравнении движения пертурбационная функция Rq2 дифференцируется по пере-
менной тог, добавим к ней слагаемое -Gm1(aoai/roi), не зависящее от гбг. Далее к выражению в
скобках в правой части (2.4.16) добавим нулевой член в виде
ai ——— ( У tnPn (cos Ф) - У tnPn(cos Ф)
Го1 \п=2 п=2
В результате этих подстановок приходим к следующему выражению для пертурбационной функции:
Л02 = ociGmi
<Х2 - «О
Г12
+ —У *nPn (cos Ф) .
Го1 J
(2.4.17)
Первое слагаемое в пертурбационной функции (2.4.17) связано с нарушением (слабого) принципа
эквивалентности [Колосницын, Осипова 1981]:
^02n = Я£П(ГО2) = ai(«2 - ao)— = <Xi(a2 ~ «о)— У ГРп(созФ). (2.4.18)
П2 Го1
Полученный аномальный потенциал (аномальная пертурбационная функция) (2.4.18) описывает до-
полнительные (аномальные) движения тела 2 вокруг тела 0 при возмущающем действии тела 1. С по-
мощью хорошо разработанных в небесной механике методов потенциал (2.4.18) позволяет рассчитать
аномальные движения планет солнечной системы [Колосницын, Осипова 1981], аномальное движение
Луны — эффект Нордтведта [Nordtvedt 1973].
2.4.3 Аномальные приливы
Пертурбационная функция (2.4.18) позволяет также рассчитать дополнительные (аномальные) при-
ливы, возникающие при нарушении принципа эквивалентности [Колосницын, Осипова 1978]. Запишем
уравнение пробной частицы (2.4.2) относительно Земли (0) с учетом возмущающего действия Солн-
ца (2.4.1). Воспользуемся уравнением (2.4.10). Имеем:
^2Л)2 . г,, . \ Г02 9Rq2 ,П И 1
—rrr- + G(m0 + m2)aoa2-3- = , (2.4.19)
at2 Tq2 дто2
где
Дог = a-iGmi
«2 ~ «О
Г12
+ — У tnPn(cosZ)
Г01^2
оо оо
= ai(a2 - ощ)^1 У tnPn(cosZ) + aiGmj — У tnP„(cosZ) (2.4.20)
Го1 Го1^2
есть пертурбационная функция. Индексы 0, 1 и 2 относятся соответственно к Земле, пробному те-
лу и Солнцу; радиус-векторы направлены от центра Земли 0 к телу г; <pi = Gmi/roi — значение
гравитационного потенциала Солнца в центре Земли; Z — зенитное расстояние Солнца; гог/тщ — сол-
нечный (суточный) параллакс. В случае, когда принцип эквивалентности выполняется (аг = ао = 1),
первая сумма в (2.4.20) исчезает и пертурбационная функция переходит в известное выражение для
приливного потенциала (например [Мельхиор 1968]). Нарушение принципа эквивалентности приводит
к появлению аномального приливного потенциала (аномальной пертурбационной функции), в котором
ведущий член пропорционален первой степени солнечного параллакса:
W<S) = (а2 - аоЭф!—Pr(cosZ). (2.4.21)
Г01
Здесь и далее для радиуса Земли используется обозначение тог = а.
Отношение аномального приливного потенциала Wi к главной части обычного потенциала — W2
(пропорциональной второй степени параллакса) равно
Wi/W2 « (а2 - ao)/(a/roi). (2.4.22)
Здесь (а2 — ао) — разность отношений гравитационной и инертной масс для пробного тела и Земли
в целом. Возможное нарушение принципа эквивалентности для земных приливов может быть связано
с разным вкладом собственной гравитационной энергии Земли и пробного тела в гравитационную и
инертную массы. Собственная энергия Земли по порядку величины примерно равна Gm§/a. Ее отно-
шение к полной энергии Земли тос2 имеет порядок ~ GM^/at?. Собственной гравитационной энергией
пробного тела можно пренебречь, так что для ожидаемого нарушения принципа эквивалентности полу-
чаем оценку: ai — a2 ~r|GMo/ac2 = 0.69-10“9т]. Полагая численный коэффициент т| равным единице,
получаем: IVi/IV2 ~ 1.4- 10“5. В настоящее время наиболее точные измерения приливных изменений
гравитационных сил проводятся с помощью сверхпроводящих гравиметров. Их точность достигает ве-
личины порядка 1 • 10“15 (П. Мельхиор — частное сообщение), что вполне достаточно для измерения
аномальной составляющей прилива.
Лунный аномальный прилив (при г] = 1) в 180 раз меньше солнечного и поэтому в первом прибли-
жении его можно не рассматривать.
Рассмотрим основные характеристики аномальных (солнечных) приливов. Потенциал в эква-
ториальной системе координат записывается следующим образом:
= AaCi(sin <р sin 5 + cos <р cos 5 cost). (2.4.23)
Здесь <p — широта места; 5 — склонение Солнца; t — часовой угол; Да = ai — а2; Ci = <pia/roi.
Деление потенциала на две части соответствует существованию двух типов аномальных приливов.
Первый тип приливов определяется функцией sin <р sin 5. Ее узловая линия совпадает с экватором,
максимальное значение достигается на полюсах, аномальный прилив охватывает целиком северное
либо южное полушарие в зависимости от знака склонения 5. Основной прилив имеет период, равный
одному году.
Рис. 2.4.2. Первый и второй типы приливов.
определяются формулами:
Второй тип приливов определяется
функцией cos ф cos 5 cos t, которая име-
ет узловыми линиями два меридиана,
отстоящие на 90° по обе стороны от
меридиана Солнца. Приливы этого ти-
па имеют суточный период, максималь-
ная амплитуда наблюдается на эквато-
ре (рис. 2.4.2).
Найдем выражения для компоненты
аномальной приливной силы. В систе-
ме координат с осью О, направленной
по меридиану на юг, осью OY, направ-
ленной в зенит, компоненты прилив-
ной силы в расчете на единицу массы:
горизонтальная Fh и вертикальная F-v
sinZ;
(2.4.24)
Таблица 2.1. Вертикальные компоненты прилива
Обозначения Аргументное число по Дудсону Часовая скорость Амплитуда, 10-4 мкГл Широтная зависимость
Долгопериодические гармоники
056554 0°,041067 14320
Sa 056556 0°,041071 754 sin2 <р — 1/3
С О о со 056555 0°,0410685 1,6 sin <р
2Д<р = 35,6"
Суточные гармоники
Si 6 (Pi) 164554 14°,999998 1210
Si 6 (Ki) 164556 15°,000002 3474 sin2<p
164555 15°, 000000 4 COS (р
2Дср = 237,4"
Таблица 2.2. Горизонтальные компоненты прилива
Обозна- чения Аргументное число по Дудсону Часовая скорость Составляющая С-Ю Составляющая 3-В
Амплитуда, 10~4 мкГл Широтная зависимость Амплитуда, 10-4 мкГл Широтная зависимость
Sa S™ 056554 056556 056555 Долге 0°,041067 0°,041071 0°,0410685 периодические г 14320 754 1,6 2Д<р = 35,6" армоники sin2cp cos (р
Sie(Pi) Sit(Ki) S(an) 164554 164556 164555 14°,999998 15°,000002 15°,000000 2Д<р = 168" Суточные гармон 1210 3474 4 ики cos2(p sin ср 1210 3 474 4 2Д<р = sin <р 1 = 474"
dW . /(р2\ _
F-v = —— = Да I — ) cos Z.
да V02/
Переходя к составляющим по осям, получаем
Fx — (а2 — ao)go(cos5sin (р cost — cos ср sin 5),
Fv — -(аг - ао)<?о cos5sint,
Fz = (аг — ao)go(sin5sin(p + cos 5 cos <p cost).
Эти же формулы можно записать в векторной форме
F = (а2 - ао)0О,
(2.4.25)
(2.4.26)
(2.4.27)
в которых до есть ускорение свободного падения Земли на Солнце.
Направление аномальной приливной силы всегда совпадает с направлением из центра Земли на
Солнце, если а2 — ао > 0.
Из (2.4.26) следует существование трех основных гармоник аномального прилива: долгопериоди-
ческой компоненты с периодом, равным году (Т), и двух суточных компонент с периодами, различа-
ющимися на 8 минут. Амплитуды этих волн относятся соответственно, как (1/2,4) : (1/23) : 1. При
детальном анализе — учете эллиптичности земной орбиты, каждая из этих волн порождает спектр гар-
моник, разнесенных по частоте на величины Д/ = п/Т (п = ±1, ±2,...) с амплитудами, убывающими,
как степень эксцентриситета земной орбиты: elnL
Гармоника с наибольшей амплитудой имеет период, равный средним солнечным суткам. В обозна-
чениях Дудсона ее аргументное число есть 164 555. Гармоника с годовым периодом имеет аргументное
число 056555. Ее амплитуда в 2,4 раза меньше среднесолнечной гармоники. Основные характеристики
аномальных приливов в сравнении с близлежащими гармониками нормального прилива приведены в
табл. 2.1 (вертикальная составляющая) и табл. 2.2 (горизонтальная составляющая). В этих таблицах
приведены наиболее близкие по частоте гармоники обычного прилива, имеющие название эллипти-
ческих волн. Для разрешения аномальной гармоники методами частотного анализа требуется время
наблюдения 20000 лет. В силу этого разделить эллиптические волны и аномальный прилив в общем
случае невозможно. Однако, как видно из таблиц, эллиптические волны по-разному зависят от широты,
и, следовательно, действительное соотношение между ними зависит от условий наблюдения. Так, вер-
тикальная компонента эллиптической волны с годовым периодом обращается в нуль на широте 36,16°,
горизонтальная на экваторе.
Амплитуды соответствующего аномального прилива при этом близки или точно равны своим макси-
мальным значениям. Оптимальные условия для наблюдения аномальных суточных приливов осуществ-
ляются на экваторе (вертикальная компонента и горизонтальная составляющая 3-В) и на широте 45°
(горизонтальная составляющая С-Ю). Вблизи каждой из этих широт можно выделить зону, в преде-
лах которой нормальная компонента прилива не превышает аномальную компоненту. Размеры этих зон
приведены в таблицах, они меняются в пределах от 35" до 8'.
Как известно, нормальные приливы вызывают прецессию земной оси и девиацию угловой скорости
вращения Земли вокруг своей оси. Аналогичные эффекты для аномального прилива отсутствуют.
Геофизические следствия нарушения принципа эквивалентности (равенства гравитационной и инерт-
ной масс) проявляются в виде аномальных приливов. Современная аппаратура по измерению земных
приливов (стационарные криогенные гравиметры и др.) уже находится на том уровне чувствительности
и точности, когда аномальные приливы могут быть обнаружены. Ввиду фундаментального значения
принципа эквивалентности проверка его различных проявлений, в том числе в качестве аномальных
приливов, представляет несомненный интерес. Аналогичный эффект Нордтведта, возможные аномаль-
ные движения Луны в настоящее время тщательно исследуются методами лазерной локации [Dickey
et al. 1994].
* * *
В заключение раздела необходимо добавить , что теоретические и экс-
периментальные работы в области знаний, рассматривающих пространственно-временные свойства фи-
зических процессов, продолжаются. Помимо процитированных выше трудов читатель может обратиться
к работам [Логунов 2006; Шкловский 1991; Kopejkin 1988, 1991; Тяпкин 2004; Толчельникова и др.
1997; Клюшин 2005; Юркина 1997; Бриллюэн 1970; Ниэовцев 2000; Фоминский 2001; Калинин 2001;
Иноземцев и др. 2005; Вотяков 2006; Иванов 2007; Шпаков и др. 2006], к книге «Проблемы простран-
ства, времени, движения», том I // Сборник трудов IV Международной конференции, посвященной
400-летию Декарта и 350-летию Лейбница (23-29.09.1996 г., Санкт-Петербург). Т. 1. СПб.: РАН ОАО
СПб-Технология.
3. Теория Молоденского и ее
дальнейшее развитие
М. И. Юркина
3.1 Возмущающий потенциал. Нормальная высота. Высота
квазигеоида
Возмущающий потенциал Т можно определить как разность потенциала W — Q притяжения Земли
и потенциала V притяжения отсчетного эллипсоида
T = W-Q-V, (3.1.1)
не предполагая в общем случае совмещения осей вращения Земли и координатной системы, связанной
с потенциалом V; W обозначает потенциал силы тяжести, П — потенциал центробежной силы.
Один из основных результатов теории Молоденского — определение нормальной высоты — связан
с возможностью разделить высоту точки земной поверхности над отсчетным эллипсоидом на две ча-
сти: неправильную и несравненно более гладкую. Такое разделение осуществляет квазигеоид — вспо-
могательная поверхность, близкая к геоиду. Квазигеоид возможно определить, в отличие от геоида,
независимо от строения Земли, только по результатам собственно геодезических и гравиметрических
наблюдений на земной поверхности. Первая, неправильная, часть высот над эллипсоидом определена
разностью потенциалов в точке отсчета и исследуемой, или геометрическим нивелированием и измере-
ниями силы тяжести вдоль его пути. Вторую, гладкую, часть высот определяет решение краевой задачи
теории потенциала с наклонной производной, или астрономо-гравиметрическое (астрономическое) ни-
велирование.
Всегда можно знать столь близкие к истинным координаты uo,vo,wq, что величины
Ди = и — ио, Ди = V — ио, &w = w — wo (3.1.2)
будут малы, и их вторыми степенями и произведениями можно пренебречь или их учесть в поправках
за нелинейность. Из сопоставления астрономо-геодезических и гравиметрических данных можно опре-
делить координаты центра геодезического эллипсоида в геоцентрической системе. При этом влияния
поправок Ди, Ди, Дш можно принять во внимание. Координаты и, и, w точек земной поверхности в
геоцентрической системе можно считать известными при применении спутниковых GPS-технологий.
Как известно, можно представить
W = W0-fgdh, (3.1.3)
где РИо ~ значение потенциала W силы тяжести в начале О счета высот, д — сила тяжести, dh —
элементарное нивелирное превышение. Интеграл следует вычислять по контуру геометрического ниве-
лирования от начала счета до точки с координатами и, и, w, к которой отнесено значение W.
Потенциал центробежной силы равен
Q = у- (х2 + у2) = “у-с2 sin2 и ch2 w. (3.1.4)
Потенциал V можно разложить в ряды Тейлора
х dV А dV Л 152У. 1Э2У.а d2V л '
y(u,w) = V(u0,w0) + -г-Ди + Дш + --^-у (Ди)2 + ^-(Дш)2 + ДиДи; + ... (3.1.5)
du dw 2 ди2 2 dw2 dudw
Производные справа должны быть вычислены в точке uo,vo,wo. Сходимость ряда (3.1.5) не долж-
на вызывать сомнений. Поэтому между точками u,v,w и uo,vo,wq не может быть элементов массы,
создающей потенциал V, такая масса не может находиться вне земной поверхности.
Выполнение этих условий необходимо при определении возмущающего потенциала методами мате-
матической физики: решением уравнения Лапласа при некоторых условиях на земной поверхности и в
бесконечности.
Постоянное во времени влияние Луны и Солнца можно исключить аналитически, проследив соот-
ветственные члены в основных уравнениях теории Молоденского [Юркина 1984, 1985, 1997; Yurkina
et al. 1986].
Раскрыв производные от потенциала V по координатам и, w и воспользовавшись рядом Джеймса
Грегори
v 11 1 1 1
arcctg sh w — --------5--1----ё-------?--1----о----• • •, (3.1.6)
sh w 3 shd w 5 sh5 w 7 sh' w 9 sha w
нетрудно выделить главные члены и получить приближенно
dV ~ ш2а2 Ь3 sin2u / 6с2\ / 6 1 \
ди 2 с3 sh3 w \ 7 Ь2 ) \ 7 sh2 w) ’
dV GM w2a2b3 „ .
-7— ~-----;-----о—5-------Рг(сози),
dw c ch w cP sh w ch w
d2V ~ 22 b3cos2u / 6 1 \ / 6c2\
du2 c? sh3 w \ 7 sh2 w) \ 7b2/’
d2V GM shw w2a2b3 „ , .
—77 ~ ----- • —s-ЬЗ— =—P2(C0SU),
dw2 c ch2 w <? sh3 w
d2V 3 w2a2b3
„ ~ « - • —-------5— sin 2u.
dudw 2 c3 ch w sh w
Из формул (3.1.1), (3.1.3)-(3.1.5) и выражений производных от потенциалов V и П следует:
г GM
Т = IVo — J gdh-----arcctgsh wo-
cu2a2 r/„ , 2 ,\ , „ , i . O)2a2b3sm2uo
---3m” Lv* sh wo + 1) arcctgshwo — 3shw0] Pafcosuo) +
dV . 1 , 2b3cos2uo/A ,2 1 [GM shw0
- — Дш + -cu2a2-^—=—-(Ди)2 - -
dw 2 c3 sh3 w0 2
3 w2a2b3
2 c3 sh2 wo ch wo
— ^a>2c2 sin 2uo ch2
-----J--5-Ди—
2 c3 sh3wo
w2a2b3 . .1 . .2
-—-2— + 3——3—^2(cosu) (Дш)2-
c ch wo cP sh wo
sin 2uoAu)Aw) — ^cu2c2 sin2 uq ch2 wq —
At
, d£l dft ,
шоД и — -—Aw + —— (Дш — Д w)—
ow dw
— ^ш2с2 [cos 2uo ch2 wo (Д'и)2 + sin2 uq сЬ2шо(Д7ш)2 + зт2иозЬ2шо(Д/и)(Д,ш)] + ...
(3.1.7)
(3.1.8)
Поправки в координаты при производных центробежного потенциала отмечены штрихом из-за воз-
можного различия систем отсчета при определении этого потенциала и потенциала притяжения эллип-
соида. Координату wo Молоденский [19456] определил так, чтобы она точно соответствовала нормаль-
ной высоте, введенной им в работе 1945 г. под условием
- Jgdh — V(uo, wo) + П(ио, wq) - (V + H)8hw=b = arcctgshw0+
+ ——[(3sh2 wo + 1) arcctgsh wo - 3shwo]P2(cosuo) H--sin2 uq ch2 wq - Uq, (3.1.9)
отп 2
где
rr GM b w2a2
Uq =-----arcctg - 4----—,
с c 3
t. e. это потенциал силы тяжести на отсчетном эллипсоиде. Величину
C = (M*^obw (3-1.10)
Молоденский [19456] назвал высотой квазигеоида, или аномалией высоты, а высоту
яп = я-(лш)“=“°0Дш (3-1-11)
— нормальной высотой. В формуле (3.1.11): Н — высота над отсчетным эллипсоидом. Коэффициент Ла-
ме hw в зависимостях (3.1.10) и (3.1.11) должен быть вычислен по координатам uq,wq. Из выражений
(3.1.8) и (3.1.9) следует
C=1|t-(Wo-C/o)-
ш2а2 b3 sin 2uq . ш2а2 b3 cos 2un,. ,,
— ---Г—о-----Alt--------=•—ч—-(Ди)24-
2 с3 sh3 wq 2 с3 sh3 wq '
1
2
'GM shw0 w2a2b3
c ch2 Wq C3 sh3 WQ
W2C? . „ i 2 * / .
—-— sin 2ito ch wqA u - —— (Aw — A w) 4-
2 dw 2
4—-— sin2 uq ch 2wq( A'w)2 4----— sin 2u0 sh 2wq(A'u)(A'w) 4-... > ,
„ , J,* Vi 3 a>2a2b3sin2uo, „ ,
P2(cosu0) (Aw)2 4--—^-------——(Au)(Aw)4-
c3 sh wq ch wo
W2C2 2 /А/ \2
cos 2uq ch wq(A u)24-
(3.1.12)
i ду_\
hw dw)
11=110
hw dw)
(3.1.13)
1
9Q
где
11=uo
W=Wo
Величина Г близка к нормальной силе тяжести у. Разность (у — Г) определена выражением
i ra(v + Q)i2
(у4-Г)Л3 du
25 ai4Jf2
—-------sin2 2u « 0,9 • 10-6Я2 sin2 2u, hu = hw,
результат будет получен в миллигалах, если высота над отсчетным эллипсоидом выражена в километ-
b а
рах. На поверхности отсчетного эллипсоида sh wp = ch wp = -.
Имея в виду
ш27?
2Г
« 1 : 580, нетрудно рассчитать, что при при 7?Ди = ЯД'и = 100 м эти члены
меньше 0,2 MM-sin2uo, а члены с (Ан)2 = (Д'и)2 меньше 0,3-10 9 m-cos2uq, на 1 км высоты иссле-
дуемой точки. Но при топографо-изостатических редукциях силы тяжести Ан / Д'и. В этом случае
соответственные члены нужно рассматривать по отдельности, влияние их оказывается существенным и
может достичь 0,3 M-sin2uo. Естественно, такие влияния могут складываться. Влияние членов с (Ди)2
и (Д'и)2 по абсолютной величине не больше 0,002 mm-cos2uo. Эти члены можно опустить.
Влияние первого из членов с (Aw)2 при 7?Aw = 100 м близко к 1 мм. При современном уровне
точности этот член может иметь значение. Влияние второго члена с (Aw)2 не больше 0,01P2(cosu) мм
и пренебрегаемо. Влияние члена с (A'w)2 не больше 0,01 sin2 uq мм при 7?A'w = 100 мм и также пре-
небрегаемо. Влияние члена с (Au) (Aw) при 7?Au = 7?Aw = 100 м не больше 0,01 MM-sin2uo. Влияние
члена с (A'u)(A'w) не больше 0,005 MM-sin2uo. Если A'w = —Aw, т. е. эти влияния по абсолютной
величине складываются, влияние члена с производной 7— в (3.1.12) может достичь 0,7 м-sin2 ио.
dw
При расчете топографо-изостатических редукций силы тяжести необходимы поправки за смещение
центра земной массы.
Связь между возмущающим потенциалом Т и высотой квазигеоида можно представить
m ztzz гт А ц>2а2 63 sin 2uo А , lGMshwo ,2
T-(W0-U0)-——^—^-------Au + --—(Aw)2-
2 с3 sh wo 2 с ch wo
9Q A W2C2 2 AZ 9ПЛ/ 1 ZO 1 1
— —— Aw 4--— sin2«o ch2 wqA u + 7—A w > . (3.1.14)
dw 2 aw I
Для вывода координаты wo некоторой точки К земной поверхности согласно (3.1.9) можно получить
- J* gdh= J* dU,
(OK) (О'К')
где О' — некоторая точка поверхности отсчётного эллипсоида. Для вычисления интеграла по контуру в
правой части можно использовать систему B,L,H, результат будет хорошо сочетаться с определением
высоты Н с использованием GPS-технологий. Тогда К' — точка координатной линии Н, нормаль-
ный потенциал которой равен реальному потенциалу точки К. Точка О' на поверхности отсчетного
эллипсоида определена пересечением координатной линии Н точки К. Тогда
г ,, с fdU dw dU ди\
I gdh= ] dH =
J J \ dw дН du dH J
(OK) (O'K') v '
Рис. 3.1.1. Угол (—у, Я) между направлением, об-
ратным направлению нормальной силы тяжести,
и направлением счета по координатной линии Я.
Угол (w, —у) между направлением, обратным на-
правлению нормальной силы тяжести, и направле-
нием счета по координатной линии w.
где (—у, Я) обозначает угол между направлени-
ем, обратным направлению нормальной силы тя-
жести, и направлением счета по координатной ли-
нии Н. Этот угол можно выразить (рис. 3.1.1,
3.1.2):
1 ди _ 1 (ди ди ди dw\
( Т’ ' ~ у дВ ~ у\ди дВ + dw дВ) '
(3.1.16)
где = ЛШГ « ГЛ. На рис. 3.1.2 Hi = Н2 =
dw
Н3 = const, так как расстояние между отсчётным
эллипсоидом и каждой координатной поверхно-
стью геодезической системы должно быть посто-
янным.
Подробно производные в (3.1.16) оценены в
работе [Еремеев, Юркина 1972, § 9, 48-49]. В
частности, имеем формулу Гаусса [Gauss 1853],
где a — земное сжатие,
(-У,Я)«
Н /5си2Л
Я \2 у
— a ) sin 2В,
и зависимость
(w, -у) «
5 Я си2Л
2Л у
sin 2u.
(3.1.17)
Можно убедиться, что
1 — cos(w, — у) 4 • 10-5 ( — I sin2 2и (3.1.18)
\ Л /
и
/ TJ \ 2
1 — соз(Я, —у) ^1,4-10-5 ( — 1 sin2 2В.
(3.1.19)
По малости угла (w, —у)
ЯШ(Я') - ЯШ(О') = — f gdh. (3.1.20)
(OK)
Нетрудно убедиться, что длина координатной
линии w практически не отличается от высоты
при Н 10 км. Из оценок (3.1.16) и (3.1.17)
(см. рис. 3.1.2)
Рис. 3.1.2. Сечение координатных поверхностей
(w, Н)ю a— sin 2и
R
hwdw — dH и
1 2 (Н\2 . 2п
-от ( — I виг2ш2Я,
2 \ R J
(3.1.21)
(3.1.22)
и
интегрируя, можно вывести
W=Wq
hwdw —
W=Wp
И и |а2Я
6
— I sin2 2u < 5 • 10-5
Я /
ММ.
(3.1.23)
В геодезической системе координат В, L, Я можно найти
HN(K)
J gdh = | У сов(Я, —у)</Я.
(ОК) о
Согласно оценке (3.1.19) получаем [Еремеев 1951]
HN(K) = — f gdh,
Ут (OK)
(3.1.24)
(3.1.25)
где ут обозначает среднее интегральное значение нормальной силы тяжести по высоте от поверхности
отсчетного эллипсоида до высоты т. е.
1 HN(K)
S (3L26)
Разложив нормальную силу тяжести в ряд, можно вывести
= то + 1я„(К) + 1я4(К) + ±Я&(Ю (^)о + •. (3.1.27)
Соотношения (3.1.25) и (3.1.27) приводят к уравнению относительно нормальной высоты Hn
Як(Ю=[т. + |я„(К)(^) +...] 1 J Л (3.1.28)
L \ / О \/О \/0J (ПК\
которое можно решить последовательными приближениями. Нетрудно видеть, что последний член в
квадратных скобках может изменить нормальную высоту не больше, чем на 0,05 мм при Я=10 км.
Предпоследний член при Я=10 км может вызвать ошибку в 30 мм. Упомянутых последовательных
приближений не требуется, т. к. при последовательном вычислении нормальных высот от начала их
счета будет известна приближенная высота
НР(К) = HN(J)+ J* dh,
(JK)
(3.1.29)
близкая к нормальной высоте Hn(K) точки К. Теоретические и практические детали определения
нормальных высот и счёта высот в земном гравитационном поле можно найти в работах [Еремеев,
Звонова 1953, Еремеев, Юркина 1955, 1972; Юркина 20046].
Требованию, чтобы между точками [и, v, w) и (uo,t>o, wo) отсутствовали элементы массы, создающие
нормальное поле, удовлетворить нетрудно, достаточно массу, создающую потенциал V, распределить
внутри отсчетного эллипсоида на эллипсоиде, софокусном отсчетному, в виде простого слоя с плотно-
стью Фу.
3.2 Зависимость между возмущающим потенциалом и силой
тяжести. Краевое условие
Продифференцировав выражение (3.1.1) возмущающего потенциала по направлению касательной к
координатной линии w, можно найти
1 ВТ 1 dW 1 5Q 1 dV 1 dW ,nnts
т~ ' = т~ ' л----т- д------г- • д— = т— ----ЬГ(и, w), (3.2.1)
(jll) (JtV C/IV UW uW
где коэффициент Ламе hw = с\/ch1 2 w - sin2 u.
Легко видеть, что
1 dW
-т-------------------------------т— = gcos(w, —g) = gсоз0ш. (3.2.2)
itiD OW
dW
-г— отличается от силы тяжести даже при 0Ш = 1
_ dw
на 0,05 мГал, что до сих пор пренебрегаемо, но при желании может быть принято во внимание. Таким
образом, с помощью ряда Тейлора можно представить
Поскольку соз0ш « 1 - - 02 , производная --Д-
2 h-..
1 st /аг' -.-^-Г^с)-^- i /э2г\“”" ,д 12 -jU?) (д“> - ** / W=Wo U—Uq z QY \ U=UO 1 Au — I 77— | Aw— / \ UW J W=Wq \ / W=Wq 1 / \ U=Uo ✓ np X U=Uo -НМ <д“>2-(аХ) (M-(Aw)-.. (3.2.3) « / w=Wq \v’*ww/W=Wo
Для вывода краевого условия нужно член с разностью Aw умножить на коэффициент /гш(ио,шо),
поделить его на эту же величину и, подставив вместо образовавшегося произведения — высоты квази-
геоида — выражение этой высоты через возмущающий потенциал, найти
1 ЗТ Т (дТ\и~и° .
hw[u,w) ’ dw + (^Г)» Uw - 9 ~ ~ \d^)w=wo Ди
1
2
(A«)2 -
71=710
(Aw)2
W=Wq
Э2Г \
dudw J
71=710
W=Wq
(Au) • (Aw)+
(3.2.4)
(rhw)S
агу u° ( w2a2b3 sin2u0
1
iGAfshwo/* \2 ш2<? • r, ,2 а/ ®П/а а/ Л
-------=—(Aw)----— sin2u0 ch wo A u + =— (Aw — Aw) > + ...
2 c clr wo 2 dw J
Использовав производные от потенциалов Q и V, приведенные в разделе 3.1, можно представить
„ GM .2 ш2а2 „ , . cu2csh2w„. . . ,
Г = - 3^^F1{u,w}F2{wWcOSu}------2---
(3.2.5)
где
Fi — (ch2 w — sin2 и) ^2 = (sh2 w + cos2 u) 1^2 » 7
b
! lc2 2
Ft = 3 sh w ch2 w arcctg shw — 3sh2 w — 2.
Функция F2 — сравнительно малая разность больших величин. Воспользовавшись рядом Джеймса
Грегори, эту функцию можно представить в виде
2 1 А 3 1 _^_1________5 1
5 sh2 w \ 7 sh2 w 21 sh4 * w 33 sh6 w
Тогда можно получить
Г»
GM
c2shwchw
1 +
COS2 и
sh2 w
4 w2a2c2 Л 3 1 5 1
15 GMcm sh2 w \ 7 sh2 w 21 sh4 w
5 1 \ „ , ,
™-Тб— + • • • I P2(cosu)-
aa sn W /
u>2c3shwch2w
GM
sin2 u
(3.2.6)
и на поверхности эллипсоида
„ GM / c2 2 '
Г « —— 1 + 77 COS2 и
ab \ &
3 w2a2b
2 GM
lc2 16 c4 208 c6\
+ 7Ь2 441b4 + 11319b6 ) +
5 w2a2b 2 (л 9 (? 16 c4 624 c6\l
+ 2’GArCOS + 35 b2 “ 245 b4 + 18865b6/ J ’
(3.2.7)
что соответствует точности порядка 1-10 4 мГал. Использовав производные от функции Fi и F2, можно
. а к ь
вывести для поверхности эллипсоида, при chw = -,shw = -
С с
аг 1 GMc2 . „ Л 3 с2 . 2 \ 5 2, Л 2 с2 с2 . 2 \ /о п оч
тг— = ----— sin2u I 1 + sm и — -си bsin2u I 1 + ——7 + тsin и ). (3.2.8)
ди 2 а4 \ 2 а2 /2 \ 35 а2 а2 J
Последние члены каждого из этих слагаемых при Au = 100 м/R соответствуют изменению величины
Г не больше 0,001 мГал. Полное влияние члена -^-Ди близко к —0, lsin2u мГал. Имея в виду w2R =
ди
„ 1 дГ 2Г
Га, — • — = ——, находим
UW лЪ
_ дГ 1 1 дГ ш2а2 b3sin2u 5_ . „
и ~ ~V'h^'d^' ~Г~ ’ ? ~ 2Га8Ш2и
и при Ди = 100 м/R оцениваем влияние этих членов равным « 0,13 sin2it мГал. Это влияние носит
систематический характер и должно быть сохранено. Члены с (Ди)2, (Дм)2, (Ди)(Дш) пренебрегаемы.
Члены с Д'и и разность (Дм — Д'ги) могут иметь значение, их следует сохранять для более аккуратной
оценки в конкретных условиях.
Если — (Wo — Uq) = 100 м, соответственный член формулы (3.2) достигнет «30 мГал.
Погрешность, возникающая при вычислении коэффициента Ламе /гш по приближенным координатам
ito,wo, пренебрегаема.
Пользуясь производными от функции Fi и приписывая заведомо большие значения
— тг— « 500 мГал, Ди = Дги = 100 m/R,
Row
можно убедиться, что краевое условие можно записать в виде:
1 (т аг ат\ А 1 1 аг
hw\v'dw dw)~9 + “ u+r'hwdw*
х Wo-uo-
w2<? , an, , ,1
—-— sin 2u ch2 шДи + (Дш — Д'ш) = Дд, (3.2.9)
где Г, hw и все коэффициенты справа определены приближенными координатами uo,wo.
Из выражения (3.2.6) следует
аг _ 2GM / cos2u\ 3^2 Г 1 1 lcos2u 8 ш2а2с
dw с2 ch2 W \ sh2 w) 1 2gh2w 2sh2w 15GAfmsh2w
3 1 3 cos2 it 5 1 1 cos2 it 5 1 1 cos2 it
28 sh2 w 4 sh2 w 84 sh4 w 28 sh4 w 132 sh6 w 84 sh6 w
x P2(cosu) +
cu2c3 sh w ch2 w sin2 и f 2 cos2 it cos2 и \ 1
2GM \ sh2 w sh4 w J J
(3.2.10)
Последний член ряда четвертого члена в фигурных скобках имеет относительную величину порядка
1 • 1О-10. На поверхности отсчетного эллипсоида, сохраняя относительную точность порядка земного
сжатия, находим
аг 2GM
dw Ь2
, 1 С2 С2 2 1 „ 5 _ 2
“-2P+2Pcos “
где Р = ш2Ь3 : GM.
(3.2.11)
С такой же точностью выводим
f^ = -2(1-^“s2“+p)- <3-2|2>
Во многих случаях допустимо и целесообразно упростить краевое условие (3.2.9), поскольку
1 ат ат 1 ар iar Р ае ат , . iar . , ч ат
55“ в?’£755 + X' aJ =° а?+ реёяп(‘>’“')” а?’ (3'2|3)
где р — радиус-вектор, 0 — полярное расстояние в сферической системе координат. Приближенное
равенство (3.2.13) имеет погрешность в ~1 мГал даже в аномальных районах. Эта погрешность в
основном вызвана вторым членом последней части (3.2.13). Ошибка достигает наибольшей величины
вблизи широты 45° и убывает к экватору и полюсам.
Как следует из (3.2.12) и предыдущих оценок, относительная точность замены
J_1 ЭГ _ _2
hw Г dw р
имеет порядок земного сжатия, а в искажение краевого условия будет не больше 0,1 мГал.
Таким образом, в сферической системе координат имеем
2Т дТ
----1” "й—
р др
(3.2.14)
(3.2.15)
К функции Т в левой части краевого условия (3.2.9) нельзя добавить какую-либо гармоническую
функцию, которая обратила бы в нуль правую часть этого условия. Таким образом, решение задачи
Молоденского единственно. Упрощенное краевое условие (3.2.15) допускает добавление к возмущаю-
щему потенциалу Т любой сферической функции первой степени. Однако такую трактовку едва ли
можно оценить как корректную. Если вывод краевого условия с самого начала выполнять в сфери-
ческой системе координат, то величины правой части значительно превзошли бы обычно получаемые
аномалии силы тяжести. В частности, если параметры отсчетного поля позволили бы сохранить поря-
док аномалий силы тяжести вблизи широты 45°, то их отличия вблизи полюсов и экватора от обычно
dW
получаемых величин могли бы достичь «2500 мГал. Оценка (3.2.2) отличия производной от силы
др
тяжести у широты 45° привела бы к «6 мГал. Возмущающий потенциал Т нужно определить по из-
мерениям силы тяжести g на земной поверхности. Эту задачу можно решить хорошо разработанными
способами, поскольку возмущающий потенциал удовлетворяет уравнению Лапласа и краевому условию
(3.2.9), а также регулярен на бесконечности (при shw —» chw —» оо), т. е.
lim Т = 0.
sh w—»оо
ch w—»оо
Возникает задача, к настоящему времени хорошо разработанная в теории линейных уравнений с
частными производными второго порядка эллиптического типа — краевая задача с косой, или на-
клонной производной, см. например, [Михлин 1962]. Иногда эту задачу называют именем Пуанкаре
[Бицадзе 1982, Мазья 1988, Янушаускас 1985]).
Стремясь к большей общности выводов, в краевом условии сохранено неравенство Wo / Uq (в
работах Молоденского в аналогичных случаях принято Wo = С7о)- Впервые на необходимость такого
уточнения вывода формулы Стокса обратил внимание Минео [Mineo 1933] при анализе вывода этой
формулы, выполненного Пуанкаре с учетом земного сжатия. Вывод формулы Стокса при Wo / Uq
выполнил В.В. Бровар [1958], сохраняя это неравенство, он изложил теорию Молоденского в учебнике
[Бровар и др. 1961]. Демьянов и Майоров [2004] обосновали целесообразность подхода Молоденского
при предварительном объединении нивелирных сетей. Теперь это стало возможным благодаря космиче-
ским методам. Измеренную силу тяжести g в свободном члене краевого условия всегда будем считать
отнесенной к земной поверхности [Еремеев, Юркина 1969].
Это замечание сделано потому, что во многих публикациях ее относят к Земле, построенной в
первом приближении по нормальным высотам — теллуроиду. Однако, при этом возникают в принципе
те же трудности, что при регуляризации Земли, и затруднены последующие уточнения. Если же сила
тяжести отнесена к земной поверхности, то при последовательных приближениях ее построение можно
уточнять, имея в виду только ту структуру гравитационного поля, которая соответствует имеющейся
гравиметрической съемке. Молоденский [19456] именно так трактовал вывод краевого условия. Если
сила тяжести определена в пункте GPS-измерений, т. е. известна высота над отсчетным эллипсоидом с
центром, совмещении с центром земной массы, тогда
1 дТ 1 dW ч
-т- • д- = -т—• -д----Г(и,ш) = Д1£. (3.2.16)
hw dw hw dw
Для использования морских измерений силы тяжести необходимы их плановые координаты и вы-
соты над отсчетным эллипсоидом, т. е. данные GPS-измерений или в сочетании с альтиметрическими.
Возникает уравнение того же типа, что (3.2.16), при более простом вычислении Г(и,ш).
3.3 Интегральное уравнение для плотности простого слоя.
Его разрешимость
Решение задачи об определении земного гравитационного поля [Молоденский 1948] предложил
искать в виде
где Ф — плотность простого слоя на земной поверхности S, г обозначает расстояние между фиксиро-
ванной точкой и текущим элементом dS.
Стефен Грей заметил, что наэлектризованные тела, сплошные и полые, притягивают одинаково
[Gray 1733]. Так возникло представление о простом слое, заменяющем притяжение объемных масс.
Возможность такого подхода привлекла внимание Гаусса, он описал его в работе, впервые опублико-
ванной в 1840 г. (русский перевод 1952 г.), Гаусс отметил, что существует единственное распределение
массы тела по его поверхности, которое дает заданные значения потенциалов в точках поверхности.
Исследованиям этого вывода Гаусса было отдано много усилий, в частности работы Пуанкаре [Poincard
1887, 1890, 1899], эти работы высоко оценил Адамар (1954, 1956 гг.), работы Брело [Brelot 1954, 1970,
1972]. Единственность представления гармонической функции потенциалом простого слоя доказывает
Карцивадзе [1965]. Сведения о работах Гаусса и Пуанкаре можно найти у Сологуба (1975 г.).
Плотность простого слоя как вспомогательную функцию при решении задач теории приливов ис-
пользовал Берстран в 1921, 1923 гг. Краевые условия его задачи содержат нормальную и касательную
производные, в его работах появляются интегральные уравнения с интегралами, существующими в
смысле их главного значения по Коши, сингулярными интегралами. В.Н. Страхов в 1977-1978 гг.
[Страхов 1995] рассмотрел возможности использования простого слоя при геофизической интерпрета-
ции гравитационных и магнитных аномалий.
Ранее [Еремеев, Юркина 1972] в зависимость (3.3.1) был добавлен член, содержащий как множи-
тель разность Wo — Uq, что позволило исключить эту разность практически точно из интегрального
уравнения относительно плотности Ф при использовании смешанных аномалий силы тяжести.
Гельмерт [Helmert 1884, с. 260] распределял простой слой на регуляризированном геоиде для опре-
деления гравитационного поля вне такого геоида. В этом случае производную следует вычислять по
нормали к поверхности и возникают только абсолютно сходящиеся интегралы.
Будем считать функцию Ф равномерно непрерывной. Из формулы (3.3.1) следует внешнее предель-
ное значение производной от возмущающего потенциала Т по касательной к координатной линии w. В
фиксированной точке
1 дТ 1 д с Ф 1 с Ф дт
— • — = -2лФсоз© + — •— -dS = —2лФсозО- — -^-dS, (3.3.2)
hw dw hw dw J r hw J dw
где первый член правой части появляется из-за разрывности производной потенциала простого слоя на
земной поверхности. Здесь 0 обозначает угол между касательной к координатной линии w и внешней
нормалью к земной поверхности S. Следует иметь в виду главное значение интеграла правой части, от-
меченного звездочкой — его предельное значение при стремлении к нулю радиуса г' сферы, описанной
вокруг фиксированной точки и выделяющей из поверхности S часть so-
Такое главное значение интеграла будет существовать и будет непрерывной функцией плановых
координат точки земной поверхности S, если высоты этой поверхности над отсчетной будут иметь
непрерывные вторые производные по плановым координатам и поверхность S будет удовлетворять
условиям Ляпунова [Liapounoff 1898]. Из краевого условия (3.2.9) следует интегральное уравнение
для плотности Ф
1 1 дГ с Ф 1 д с Ф
2яФ cos 0 +-г—• — • д— —dS— — — -dS = Aff. (3.3.3)
hw Г dw J r hw dw J г
Воспользовавшись оценками при выводе (3.2.13) и (3.2.14), можно перейти к сферической системе
координат. Тогда
г2 = Ро + Р2 “ 2РРо cos Ф, (3.3.4)
где р — радиус-вектор в текущей точке, ро — в фиксированной, Ф — угол между направлениями
радиус-векторов р и ро при начале координат, можно найти производную по радиус-вектору ро, которая
через зависимость (3.2.13) должна войти в уравнение (3.2.9). А именно,
<Эро 2г3ро 2рог’
(3.3.5)
Вместо уравнения (3.3.3), имея в виду (3.2.13), (3.2.14) и (3.3.5), можно вывести
2лФ cos© — -Д- f -dS + f Р° р2 ФdS = &g, (3.3.6)
2ро J г 2р0 J г3
О о
Имея в виду уточнение Бровара [1965],
1 Р2~Ро _ (р - Ро)2 , Р-Ро ,о о 7Ч
2р0 г3 2рог3 + г3 ’ { ’
с относительной погрешностью порядка земного сжатия, что соответствует искажению свободного
члена на величину не больше 1 мГал, можно получить интегральное уравнение
_ 3 г Ф г Н — Hq _ If (Н — Но)2 . А
2л Ф cos© — — —dS— ----------5—-$dS — — ---------5---$dS - &g, (3.3.8)
2RJ r J r3 2RJ г3
s s s
отличающееся от интегрального уравнения, опубликованного Молоденским [1948], последним членом
слева. Этот член появился как результат уточнения Бровара. Несмотря на величину (Я - Но)2 под
знаком интеграла этот член пренебрегаем. Для доказательства нужно рассмотреть ближайшую окрест-
ность фиксированной точки, представив ее плоскостью, касательной к земной поверхности в этой точке,
а также плоскость в этой же точке, параллельную касательной к отсчетной сфере. В сферическом тре-
угольнике на единичной сфере, описанной около фиксированной точки, нужно рассмотреть большие
круги — пересечения упомянутых плоскостей с единичной сферой. Из текущей точки большого круга,
представляющего первую из плоскостей, нужно опустить перпендикуляр на другой круг. Нетрудно ви-
деть (Я - Но) г-1 = tgQsinA, где А — длина дуги этого круга, отсчитанная от точки пересечения
больших кругов. Получаем
j (Я - Я0)2 *dS = _1_лфго fcg2 е sec е
So
где го — радиус выделенной центральной зоны, что доказывает утверждение.
Жиро [Giraud 1936, 1939] (см. также [Миранда 1957, 87-93]) распространил альтернативу Фред-
гольма на задачу с косой производной при решении уравнения Лапласа, то есть на задачу Молоденско-
го. Из упомянутой альтернативы следует: или рассматриваемая однородная задача имеет лишь нулевое
решение, что справедливо для уравнения (3.2.9), и тогда при любой непрерывной правой части краевого
условия задача имеет одно и только одно решение, представленное формулой (3.3.1), где функция Ф —
решение уравнения (3.3.3) или (3.3.8) — если требования к точности допускают. Или же соответству-
ющая однородная задача имеет некоторое количество линейно независимых решений, тогда уравнение
(3.3.3) имеет столько же линейно независимых решений, и рассматриваемая задача разрешима в том
и только в том случае, когда выполнены все условия, число которых равно числу упомянутых линейно
независимых решений, которым должен удовлетворять свободный член интегрального уравнения. Если
эти условия выполнены, рассматриваемая задача имеет неограниченно много решений. Учет земного
сжатия уменьшает при выводе аномалий силы тяжести их значения с «2500 мГал вблизи полюса и
экватора до нескольких сот миллигалов на отдельных особо аномальных участках земной поверхности.
Однако соответственное относительное изменение коэффициентов краевых условий и интегральных
уравнений, как оценено выше, невелико. Указанная близость коэффициентов может быть причиной
плохой устойчивости численных решений. Хотя рассматриваемая задача является корректной с точ-
ки зрения математических требований (малым изменением краевых данных соответствуют некоторые
определенные изменения решения), однако практически соотношение таких изменений может оказаться
неблагоприятным. Как следует из оценки (3.2.8), смещение эллипсоида на 100 м изменяет аномалии
силы тяжести не больше 0,1 мГал. Поэтому те слагаемые возмущающего потенциала, которые
зависят от положения отсчетного эллипсоида в пространстве, можно определить по аномалиям
силы тяжести только с низкой точностью.
Следовательно, при решении задачи Молоденского нужно заранее точно фиксировать положение
отсчетного эллипсоида: поместив начало координат в центр инерции Земли и направив малую ось
отсчетного эллипсоида по оси вращения Земли или — при топографо-изостатических редукциях —
параллельно этой оси.
Изложенные соображения приводят к необходимости отразить в членах с поправкой Ди широты
то обстоятельство, что при выводе аномалий силы тяжести могут быть не известны широты измери-
тельных точек относительно эллипсоида, центр которого совпадает с центром инерции Земли. Теория
решений интегральных уравнений (например [Красносельский и др. 1966, Забрейко и др. 1968]) рас-
пространяется и на рассматриваемый случай. Уравнение (3.3.8) можно преобразовать, заменив
д2
Ф = —xcos6, cosQdS = р2 da).
Р2
„ н
Допуская дополнительно относительную погрешность порядка —, имеем
Л
(3.3.9)
си ш
М.С. Молоденский и др. [1960] предложили решать это уравнение разложением по степеням пара-
метра к. Земная поверхность S преобразована в поверхность S, в полярной системе координат сохра-
нены при этом неизменными угловые координаты, а радиусы-векторы заменены р = R + кН, где R —
радиус земной сферы, р — радиус-вектор текущей точки преобразованной поверхности S. При к = 1
поверхности S и S совпадают, при к = 0 преобразованная поверхность совпадает с земной сферой.
Уравнение (3.3.9) тогда можно записать
о - 2 л 37? fxdcv 2 Г (Н-Н0)к_
27txcos О—— J —---------R J ------zg——хаш = Дд, (3.3.10)
W W
где
оо
X = 52xnfcn, COS2 0 = (1 + fc2tg20)-1, f2 = г2 + k2(H - Но)2, (3.3.11)
о
и получить
2л(хо + Х1£ + Х2к2 + .. .)(1 - к2 tg2 0 + к4 tg4 0 - .. .)-
- f (хо +Х1к + Х2к2 + ...) —(1 - ^fc2K2 + + • • -)dw—
2 J Гл 2 о
си
г 4 1^1
- R2 Г(Хо + Xik + Х2к2 + .. .)Л;к(1 - -А:2к2 + — к4*4 + .. .')-^dw = кд,
J 2 о Гп
си и
(3.3.12)
Н-Но
где к =-----.
то
Приравнивая коэффициенты при кп, можно получить систему интегральных уравнений:
2лхп - f —dw = Gn,
Z J ГО
(3.3.13)
где
Go = Д<7, Gi = R I Xo--§—dw,
i ro
n2 c H-HOj SR с (H - Ho)2 л 2
G2 = R I Xi--3—-dw - -7- Xo-----3~^~du} + 2яХ° e>
ro 4 J rg
„ n2 г H-Ho, SR2 г (H-H0)3 3„f (H — H0)2 „
G3 = R2 I X2-3—~dw - — I xo-----5-^-dw - -R I xi----r^“dtu + 27rXi e-
J rx 2 J rx 4 J rx
CD u CU u CU u
Как показано выше, влияние интегралов с множителями R пренебрегаемо. Раскладывая по сфери-
ческим функциям, нетрудно вывести
г3
го
г3
го
г5
ГО
(3.3.14)
f ^dw = -L f Gn[S(cos Ф) - l]dw, (3.3,15)
J rn 4яЯ J
cu cu
/7 Q r
Xn = + jg^2 J Gn[S(cos®) - l]dw. (3.3.16)
CD
Согласно (3.3.1), имеем
T = f — dS = R2 f = R2 f — (xo + kxi + k\2 + ...) x (1 - ^fc2K2 + |&4к4 + -)dw =
Jr J r J rn 28
S CU CD
= Д2ГХ0^+М2ГХ!Ли+^дг
Го J Го
cu cu
r X2dw _ 1 r Xo(H - H0)2
J to 2 J Tq
CU cu u
(3.3.17)
Используя соотношение (3.3.15), получаем
To = А^Со[5(созФ)_1]ЙШ)
си
Ti = A J Gi[S(cos®) - l]dw,
си
T2 = ^f G2[S(cos Ф) - l]dw - JХо(Я гзЯ°)2^'
си си О
Тз = 5л Т Сз[>5(созФ) - l]dw х/Я г3Я°^ dw-
CU си О
(3.3.18)
Первое уравнение, соответствующее k = 0 (нулевому приближению), и, следовательно, tg© = 0 и
р = R, дает результат, который получили бы путем переноса аномалий силы тяжести по радиусу на
поверхность отсчетной сферы, игнорируя внешние массы и любые поправки в аномалии и потенциал.
Оно соответствует стоксову приближению с той лишь разницей, что соответствующее ему приближение
То в возмущающем потенциале должно быть отнесено не к поверхности сферы, а к поверхности Зем-
ли. О потенциале на сфере внутри земной поверхности без дополнительных предположений никаких
заключений делать нельзя.
Все следующие уравнения можно решить, пользуясь функцией Стокса. Влияние рельефа прояв-
ляется во втором приближении, наклоны в явном виде появляются, начиная с третьего приближения.
Подынтегральные выражения в правых частях уравнений (3.3.14) убывают как -=• или быстрее, эти ин-
го
тегралы определены ближайшими окрестностями исследуемых пунктов. Согласно зависимости (3.2.16),
GPS-измерения ведут к интегральному уравнению
2лФcos© + Д- f Д ^-dS = Aiff . (3.3.19)
hw J rz dw
Для моря имеем
1 д с Ф
2лФ — —I -dS = д-Г. (3.3.20)
/lw ow j Г
Из теории ньютонова потенциала следует единственность и безусловность решения этих уравнений.
Поскольку этот вывод справедлив и для уравнения (3.3.3), согласно исследованию Вишика и Ладыжен-
ской (1956 г.), решение системы уравнений (3.3.3) и (3.3.19), (3.3.20) также единственно и безусловно,
но описанное разложение может оказаться расходящимся.
Для устойчивости численного решения системы интегральных уравнений следует присоединить к
ним условие о совмещении центра масс Земли с началом координат:
j^sinucosvchwdS1 = 0, J" Ф sin и sin v ch wdS = 0, J Ф cosushwdS — 0. (3.3.21)
s s s
И условие о совмещении координатной оси z и главной центральной полярной оси инерции
J $izdS = 0 J $yzdS = 0. (3.3.22)
s s
Из уравнений (3.3.3) и (3.2.9) следует
о ж „ 1 1 дГ гФ,п 1 д гФ,п 1 1 <ЭГ/ТГ7
2тгФсоз0 + - • — -т- —dS — — -т— —dS — - — -^-(Woi - Uo) =
Г hw dw Jr hw dw J г Г hw dw
5 Г
— g — Г + - — a sin 2u(iOi cos u cos v + ум cos и sin v — zOi sinu). (3.3.23)
2 ft
Уравнения (3.3.19)—(3.3.22) образуют систему, которую возможно решить последовательными при-
ближениями, опустив сначала интегральные члены, а затем последовательно их уточняя. Плотность Ф
приближенно может быть представлена
N п
Фо = 5? У? (anmPnm (cos u) cos mn + b„mP„m(cosu) sinmv).
n=2 m=0
(3.3.24)
Таким образом, система интегральных уравнений будет заменена системой линейных алгебраиче-
ских уравнений относительно коэффициентов апт и Ьпт, а также в общем случае потенциалов Wm,
где номер i должен соответствовать использованному началу счета высот, и координат
При использовании данных, связанных с геодезическими эллипсоидами, через эти координаты должны
быть выражены поправки Ди и Ди; в зависимости (3.2.9). Возможно использовать избыточные данные.
Коэффициенты отразят влияние земного сжатия и основных форм земного рельефа.
Поскольку
* Г!Ц!^.Г!!!2£*в,
2р0 j г3 Jr3
из уравнения (3.3.6) следует
2лФсоз0 + f _L(Woi - t/o) = д<? + ,
Г Z/i Л it
где С — аномалия высоты. Она может быть получена из совместного использования GPS-измерений и
результатов геометрического нивелирования. Полученное уравнение ведет к наиболее простому опре-
делению земного гравитационного поля: совместное использование упомянутых данных и гравимет-
рических наблюдений ведет в стоксовом приближении к взаимно независимым уравнениям. Получив
таким образом плотность Ф, можно вычислить интегральные поправки Молоденского, отнести их к
свободным членам и повторять вычисления плотности Ф. Если аномалия силы тяжести вычислена по
полной высоте точки, выведенной по GPS-измерениям, полученное уравнение приобретает вид
Рис. 3.3.1. Сечение Земли через ее
центр массы: S — реальная земная по-
верхность, о- — отсчетная сфера.
2 лф cos е + J я°3 Ф^ Д1 g - .
s г
В обсуждениях способов решения краевой задачи Молоденского получил распространение взгляд на
возможность использования аналитического продолжения аномалий силы тяжести на отсчетную сферу.
Этот прием отражен в книге [Moritz 1980]. Согласно его изложению (в русском варианте сс. 56-57),
теорема Рунге и теорема Келдыша-Лаврентьева гарантируют возможность представления потенциала
притяжения реальной Земли на ее поверхности и вне этой поверхности равномерно сходящимся рядом
гармонических функций.
Как известно, функцию, достаточно гладкую на поверх-
ности сферы, можно представить равномерно сходящим-
ся рядом Лапласа. В частности, такой функцией может
быть потенциал притяжения на поверхности реальной Зем-
ли, рассматриваемый как функция плановых координат. По-
строение такого ряда может служить хорошим интерполя-
ционным приемом, этот ряд может служить базой для реше-
ния первой краевой задачи, то есть определения потенциала
притяжения вне земной поверхности, но не непосредствен-
ной трансформацией ряда (что было бы возможно при сфе-
рической земной поверхности), а при предварительном пе-
ресчете в плотность простого слоя на земной поверхности
с учетом земного рельефа через решение соответственного
интегрального уравнения. Описанный подход соответствует
теореме Рунге [Moritz 1980, с. 55], но ведет к более слож-
ному решению, чем это следует из формулировок на упо-
мянутых сс. 56 и 57 книги, хотя достигаемая цель вполне
соответствует этим формулировкам.
Пусть на рис. 3.3.1 представлены: S — земная поверхность, ст — отсчетная сфера. На с. 77 и сле-
дующих своей книги Мориц строит решение, используя аналитическое продолжение аномалий силы
тяжести с земной поверхности S на отсчетную сферу ст. Автор имеет в виду возможные сингулярности
между поверхностями S и ст, из-за которых задача аналитического продолжения может не иметь стро-
гого решения. Исчезнет ли эта трудность при дискретных наблюдениях? Аналитическое продолжение
аномалий силы тяжести с поверхности S на поверхность ст невозможно, если между этими поверхно-
стями находятся массы, гравитационное влияние которых нельзя объяснить массами, заключенными
внутри поверхности ст.
Текст раздела § 13 «Применение к задаче Бьерхаммара» в книге Морица предполагает возможность
аналитического продолжения внешнего потенциала вниз до уровня отсчетной сферы. Основание такой
возможности автор видит в сколь угодно точной аппроксимации продолженного реального потенциала
в свете теоремы Рунге. Но этой теореме была дана упрощенная трактовка.
Аронов в книге [1976] и серии статей 1963-1971 гг. (некоторые из них с разными соавторами)
для интерполяции аномалий силы тяжести и определения разных характеристик гравитационного поля
использовал аппроксимацию поля притяжением простого слоя на внутренних относительно краевой
поверхности плоскости или отдельных плоских участках, то есть аналитически продолжал поле вниз.
Как следствие некорректности такого подхода в решениях Аронова возникала осцилляция плотности
простого слоя на соседних участках, однако точности полученных решений вполне соответствовали
наблюдательной точности. Следовательно, притягивающие массы в основном допускали аналитическое
продолжение.
Обсуждая возможную расходимость разложения по сферическим функциям, Мориц упоминает пес-
чинку [Moritz 1980, с. 52]. Однако осцилляцию в сотни миллигал в результатах Аронова вызывали не
песчинки, а нечто большее. Если мы хотим гарантировать высокую точность результата, исследования
нужно продолжить, имея в виду критические замечания Страхова [1999].
Среди геодезистов, зарубежных и российских, распространено неверное суждение о теории Моло-
денского определения фигуры Земли и ее внешнего гравитационного поля по выполняемым на земной
поверхности и вне Земли измерениям. Основой таких суждений стала книга [Moritz 1980], в которой
принято, что в теории Молоденского использована свободная краевая поверхность и что результаты
можно получить на основе разложений по сферическим функциям. Предполагаемая Г. Морицем связь
теории Молоденского с краевой задачей со свободной границей следует из изложения с. 256 русско-
го перевода его книги. Но в теории Молоденского краевая поверхность фиксирована. Эти два вида
измерений обеспечивают два краевых условия, необходимых для точного решения краевой задачи с
неизвестной фиксированной границей — см. [Математическая энциклопедия 1977-1984, т. 1, стб. 79-
80].
Молоденским получено точное решение в двух вариантах, зависящее только от точности измерений:
два интегральных уравнения относительно возмущающего потенциала [19456] и относительно плот-
ности простого слоя [1948]. Каждое из этих уравнений дает полное решение задачи об определении
внешнего земного гравитационного поля по измерениям силы тяжести, для вывода свободных членов
этих уравнений должны быть использованы данные геометрического нивелирования. Интегральные
уравнения, полученные Молоденским, относятся к типу интегральных уравнений, содержащих инте-
гралы типа Коши — сингулярные интегралы. Французский математик Жорж Жиро в 30-х годах XX в.
распространил на такие интегральные уравнения альтернативу Фредгольма. Это обстоятельство имеет
большое принципиальное значение для обоснования разрешимости задачи Молоденского. Об этом был
сделан вывод им самим в статье [Молоденский 1948] — со ссылкой на статью В.Д. Купрадзе, в которой
изложены результаты Жиро [Giraud 1936, 3 serie t. 53, №1, 1-40].
Основное внимание Мориц уделил разложению Молоденского по степеням вспомогательного пара-
метра к. Практика вычислений на моделях показала быстрое — в двух приближениях — повышение
точности решения сравнительно со стоксовым, что удобно практически. Но это разложение составляет
некорректный прием, при его использовании нельзя ставить вопрос о сколь угодно точном решении.
По воспоминаниям М.Е. Хейфеца, при защите Молоденским докторской диссертации в МИИГАиК’е
работа была послана на математическую экспертизу и успешно ее прошла, трактовка Морицем теории
Молоденского не могла бы преодолеть такую проверку.
Вывод Л.П. Пеллинена о равноценности и тождественности поправок при последовательных прибли-
жениях решения интегрального уравнения Молоденского также связан с допущениями о возможности
некорректных методов решения упомянутого уравнения.
Библиографические данные упомянутых работ можно найти в русском переводе книги Морица.
Критика теории линейных некорректных задач, развиваемых на основе работ А.Н. Тихонова, изло-
жена В.Н. Страховым [1999, сс. 171-173].
3.4 Интегральное уравнение относительно возмущающего
потенциала
На основе формулы Грина
4лТ = ]‘(Т^-(<-4) -~)dS, (3.4.1)
J on \ г J г on
где п — внешняя нормаль к земной поверхности S, г — расстояние между фиксированной точкой и эле-
ментом dS этой поверхности, и краевого условия (3.2.9), М. С. Молоденский [19456; М.С. Молоденский
и др. 1960] получил интегральное уравнение относительно возмущающего потенциала Т (см. также
[Еремеев, Юркина 1972]). Преобразования выполнены в системе произвольных ортогональных криво-
линейных координат g, Qi и q2. Эти преобразования привели к замене дифференцирования по нормали
п дифференцированием по координатам, при этом принято, что высоты Н земной поверхности над
некоторой отсчетной заданы как функции плановых координат 91 и 92. Формула Грина приведена к
виду
Т = ff f(T-T0)^----^)sec2(9,n) - (Т - То)
4л JJ у dv г г dv)
-^2H + 2D[-,H
г \г
hih2dqi dq2,
(3.4.2)
где Т — возмущающий потенциал, справа в текущих точках земной поверхности S, слева — вне Земли в
некоторой фиксированной точке, То — его величина в пересечении радиуса-вектора этой точки и земной
поверхности, dv — hodq, ho, hi, h2 — коэффициенты Ламе, соответствующие координатам 9,91,92.
_ 1 д2 /h0h2 дН\ д2 /hQhi дН
2 hih2 dqi \ hi dqi J + dq2 \ h2 dq2
D тЛ h° д2~т dH h° д2г дН
\r’ / hj dqi dqi /12 ^92 dq2’
для некоторой функции F общего вида и для высоты Н имеем
d^F dJF dF dH d2H H
dqi dqi + dq dqi ’ dqi 91
(3.4.3)
(3.4.4)
и аналогично для производной по координате q2.
Из формулы (3.4.2) следует интегральное уравнение
1 г Т 1 с - /1 \ 1г df1)
Т + — -Ь2Н cosQdS + - TD -,Н cosQdS- — T^-secQdS =
2л J г л J \г J 2л J dv
s s х 7 s
= -^- f-^secOdS. <3-4-5)
2л J г dv
Имея в виду зависимость /11/12^91^92 = cosQdS, а также формулы (3.2.9) и (3.2.16), интеграл
в уравнении (3.4.5) справа можно разбить на части в зависимости от используемых аномалий силы
тяжести: Ду или Д1у. Тогда
sec QdS =
1 Т 1* /1 \ 1 * \
— f-A2HcosQdS + - [TD[-,H]cosQdS- — (т-g-
2л J г л J \г / 2л J ov
s s 4 ' s
1 с 1 1 с т дГ 1 г 1
=+— I - Ду sec QdS—— I — — sec QdS + — I -AigsecQdS. (3.4.6)
2л J г 2л J Гг dv 2л J r y
So So Si
Теория решений уравнений подобного типа отработана достаточно детально [Красносельский и
др. 1966; Забрейко и др. 1968]. В частности, обоснована сходимость последовательных приближений к
решению уравнения. Кроме неизвестной функции Т интегральное уравнение (3.4.6) содержит неизвест-
ные разности (Wo — Uo) — их столько, сколько использовано начал счета высот. Координаты центров
геодезических отсчетных эллипсоидов в геоцентрической системе войдут в аномалию силы тяжести с
малым множителем. Их можно определить в совместном решении, если по данным GPS и геометриче-
ского нивелирования выведены высоты Си квазигеоида. Тогда к уравнению (3.4.6) можно присоединить
следующее, см. (3.3.23):
р [Т — (Wb — C/q)] = Сц + a(io cos и cos v + yo cos и sin v — zq sin u), (3.4.7)
где потенциал Wb соответствует нормальной высоте, использованной при выводе высоты С квазигеоида
из GPS-измерений.
Поправки Ди, Ди, Дш в координаты за переход от геодезического эллипсоида к геоцентрическому
выражают формулы [Еремеев, Юркина 1972]
c(ch1 2 w — sin2 и)(шц — шг) = xq sin и cos v shw + y0 sin и sin v shw + zq cosuchw,'
c(ch2 w — sin2 u)(uu — ur) = io cos и cos v ch w + yo cosusinvchw — zosinushw, *
с(иц — vr) sin и ch w = —xq sin v 4- yo cos v.
(3.4.8)
где x0,y0,z0 — координаты центра геодезического эллипсоида в геоцентрической системе, полуоси
и сжатия геодезического и геоцентрического эллипсоидов приняты одинаковыми, их малые оси —
взаимно параллельными. Упрощая, можно получить приближенно
5
Fu (иц — иг) = 77 Га sin 2u(iq cos и cos v + y0 cos и sin v — zq sin u).
Lt
Область Sq будет подразделена на участки с разными началами WOj счета высот. Поправки Д'и, Д'ш
за смещение центра земной массы при использовании топографических редукций должны быть введены
заранее.
Таким образом, получаем
f cos QdS+ - ItD (~,h\ cosQdS —f T-^- (~}secQdS+
2л Jr и J \r J 2 л J ov \r J
s s 4 ' s x z
N
+ Л Г ^-^-secQdS-fyl.l.^(Woi-t/o)secQdS =
2nJ Trdv 2л J г Г dvK '
So So i=l
1 Г 1 1 r 1
= — -(y — T)secQdS + — -Д1узес6</5-|-
271 j r 271 J r
s0 '
5 _ fl
+ — Га I -
4л Jr
So
Si
N
sec 6 sin 2u(ioi cos и cos v + y0< cos и sin v — zq{ sin u)dS. (3.4.9)
В первом приближении можно принять
Т=Л f -(g-r>secQdS+ f -AiosecedS+
2 л J г 2л J г
So Si
5 pl
+ — Га -sec 9) sin2u(zoi cosucosv + yOi cos u sin v - zOi sinu)dS, (3.4.10)
4л J r
So i=l
и, подставив это значение возмущающего потенциала, вычисленное в достаточно плотной сети точек
по земной поверхности, в интегральные члены, добавить их к свободному члену и снова определить
возмущающий потенциал. Такую операцию следует повторять, пока последняя не приведет к уточ-
нению возмущающего потенциала. Этот процесс, по всей вероятности, можно ускорить, определив
первое приближение по формуле Стокса. Нелинейность уравнений (3.4.6) и (3.4.9) можно принять во
внимание, уточняя на каждом этапе поверхность интегрирования по формуле (3.1.14). В общем случае
возможность учета нелинейности обоснована в работах Канторовича [1949], а также Канторовича и
Акилова [1977] методом Ньютона.
При численных решениях уравнений подобного типа обычно определяют последовательными при-
ближениями средние величины искомой функции на отдельных участках области ее распределения. В
нашем случае может быть полезен другой также распространенный прием — представление искомой
функции в виде разложения, в нашем случае по эллипсоидальным функциям, и сведение задачи к
определению коэффициентов разложения
N п
Т - У2 [AnmPnm(cosu) cosmv + jBnmPnm(cosu)smmu]. (3.4.11)
71=2 7П=0
Нулевой порядок не включен, поскольку в число неизвестных входят потенциалы WOi, совмещение
начала координат с центром масс ведет к условию
Лю — Ац = Вц = 0.
Высоты также следует представить разложением по эллипсоидальным функциям, что практически
будет мало отличаться от разложения по сферическим функциям (вместо геоцентрической широты
нужно будет использовать приведенную широту). Принцип решения обоснован Михлиным, Радевой
[1974]. Определение коэффициентов Апт,Впт приведет вопрос об определении возмущающего потен-
циала вне Земли к решению первой краевой задачи. Для определения потенциала Т вне Земли можно
также использовать уравнение (3.4.5).
Определение потенциалов Wot позволит установить единую систему высот. Приведя все массивы
измерений в единую систему, можно будет поставить вопрос об определении общего земного эллип-
соида под условием минимума аномальных сил [Бровар 1995; Бурша и др. 1997] или под условием
(ТУ — L7)dS = 0, возникающим как следствие условия JsT2dS = min, что ведет к минимуму ано-
мального потенциала [Юркина 1999]. Определив нормальный потенциал на поверхности общего зем-
ного эллипсоида, можно установить, как предложено Демьяновым [Бурша и др. 1997, Демьянов 1999],
оптимальную единую систему высот, отсчитывая их от уровенной поверхности реального поля, на
которой потенциал силы тяжести равен нормальному потенциалу на общем земном эллипсоиде.
3.5 Вывод высот квазигеоида и уклонений отвеса по плотности
простого слоя на земной поверхности. О вычислении
производных от возмущающего потенциала
Согласно определению (3.3.1), высоту квазигеоида можно представить через плотность простого
слоя, используя формулу (3.1.14):
f -dS - (Wo - Uo) - .
Jr 2
ш2а2 b3
c3 sh3 wo
sin2uo . 1 GM
Au + ------
2 c
dO. . w2c2
Aw + ——
dw 2
sh Wo / л \ о
-T2—(Дш)2-
ch wo
sin2uo ch2 w0A'u +——A'w . (3.5.1)
dw
Для связи производных от потенциала W по плановым координатам u,v с уклонениями отвеса в
плоскостях меридиана и первого вертикала, то есть сначала с углом между направлениями вектора
—д и касательной к координатной линии и, а также направлениями координатной линии v, можно
использовать формулы [Молоденский 19456].
1 dW 1 dW 1 dW
cos(q, —g) = --• —, cos(gi, -g) = , cos(g2, -д') = —т~ • д—, (3.5.2)
g dv gh\ dqi gh,2 ag2
где 9,91,92. как в разделе 3.4, — произвольные ортогональные криволинейные координаты.
При определении уклонений отвеса появятся производные расстояния г по полярному расстоянию
и долготе фиксированной точки. Эти величины можно выразить, использовав формулы Молоденского
[1954] геодезических построений при помощи прямых линий (в книге 1960 г. формулы 1.2.10). Из этих
формул следует
5т _ . . dr _ . . .
— = — R cos A sin z, — = ft sin Asin z sin u,
du dv
где A — азимут направления на текущую точку интегрирования, z — её зенитное расстояние. По
теореме синусов из плоского треугольника с вершинами в начале координат (в центре масс Земли), в
исследуемой точке и текущей точке интегрирования следует
R + H . ,
sinz —-------sinxp.
г
При геологической интерпретации аномалий силы тяжести могут быть полезны вторые и следую-
щие производные по координатам от потенциала простого слоя на плоскости, внешней относительно
земной поверхности. При выводе таких производных в точках земной поверхности могут быть полезны
выражения для скачков соответственных производных, описанных во многих работах [Green 1828; Pad
1877; Neumann 1880; Muller 1951; Mack 1959].
Вертикальный градиент силы тяжести на основе формулы Грина выразил Остач [1969], через плот-
ность простого слоя — Юркина [1965] при плоской отсчетной поверхности. Поскольку ближайшая
окрестность фиксированной точки оказывает на вертикальный градиент силы тяжести преобладающее
влияние, это упрощение приводит к практически достаточно точным формулам. Оценка на моделях
Земли, выполненная Игнатовой [1965], показала низкую точность формул для вертикального гра-
диента, выведенных для плоской земной поверхности, при применении таких формул к участкам с
наклонами.
Решение Молоденского разложением по степеням параметра k можно использовать для выражения
последовательных приближений к уклонениям отвеса в плоскостях меридиана и первого вертикала.
3.6 Определение простого слоя по спутниковым данным о вторых
производных геопотенциала
Повышение точности гравиметрических выводов, необходимое для полноценного использования
GPS-измерений и данных о гравитационном поле, как правило, связывают с разложением геопотенци-
ала по сферическим функциям. Достигнутая такими разложениями точность охарактеризована Демья-
новым и др. [1996]. В этой работе описан принцип коррелатного уравнивания, позволившего получить
поправки к исходным аномалиям силы тяжести. В результате получены уравненные средние аномалии
силы тяжести по трапециям 1x10 для всей земной поверхности, что соответствует разложению геопо-
тенциала до 180-й степени. Точность более поздних моделей гравитационного поля удалось повысить,
в среднем до ±0,2м на океанах, до ±0,5 м для территории США, до ±0,2 м в Центральной Европе,
большее расхождение в США обусловлены по всей вероятности сдвигом начал отсчета высот [Бурила
и др. 1998]. Дальнейшее повышение точности едва ли возможно не столько из-за неполноты измери-
тельных данных, сколько из-за дефектов используемых методов: возникает противоречие используемых
сферической системы координат и теории Стокса с эллипсоидальностью Земли. Формально в припо-
лярных областях разложение может быть просуммировано, но не ясно, представят ли такие суммы
реальное земное гравитационное поле: разложения могут быть расходящимися. Определение членов
возрастающих степеней тогда приведет не к повышению точности, а к ее снижению. Антонов и Хол-
щевников [1980, 1985], Антонов и др. [1988] и Мещеряков [1991] полагают, что в общем случае
разложение геопотенциала вблизи земной поверхности следует считать расходящимся и для его пред-
ставления нужно разрабатывать другие методы. Антонов и Холщевников пришли к выводу, что ряд
геопотенциала начинает расходиться у земной поверхности при степенях больше 200-й.
Возрастающие с ростом числа неизвестных трудности их разделения также могут препятствовать
дальнейшему повышению точности. В таких условиях проявляются преимущества представления гра-
витационного поля простым слоем на земной поверхности. При использовании простого слоя и эллип-
соидальной системы координат земное сжатие учитывается автоматически.
Градиенты составляющих притяжения по координатным осям предполагалось измерять на спутниках
«Аристотель», запуск которых Европейское космическое агентство и НАСА планировали на конец
XX века. Орбиты спутников предполагались на высотах 160-250 км. Возникавшие при этом трудности
связаны с требованием к относительной точности измерений: 10-11-10-13 с-2 [Rummel, Colombo 1985].
Одновременно с акселерометрами спутник оснащается приемником GPS.
Для измерения всех составляющих тензора вторых производных потенциала земного притяжения
необходимо восемь трехосных акселерометров, расположенных по углам куба, но сопротивление ат-
мосферы в десять раз превосходит влияние притяжения, поэтому предполагалось использовать только
четыре акселерометра на углах пластины, перпендикулярной спутникову вектору скорости для опреде-
ления градиентов в радиальном направлении (от центра земной массы) и перпендикулярно движению
спутника, составляющие вдоль движения можно измерить с низкой точностью. Такие данные о плани-
руемых измерениях градиентов составляющих притяжения приведены в [Коор 1993] с указанием ис-
точника сведений. Планируемая точность измерений составляла 0,01 Э-Гц-1, сообщается о разработке
более точных сверхпроводящих градиентометров. Вопросы, связанные с бортовыми гравитационными
градиентометрами, рассмотрены также в подразделах 5.7, 6.8, 6.9 и 9.2.
Р.Л. Форвард [1975] оценил, что при движении спутника по полярной орбите на высоте 250 км
за каждые 80 витков он будет пролетать в пределах 250 км от любой точки земной поверхности, то
есть определит поле градиентов за 5 суток. Руммель и Коломбо [Rummel, Colombo 1985] полагали,
что организация спутниковых градиентометрических наблюдений будет иметь значение для геодезии,
сходное с появлением спутниковой альтиметрии. В указанной статье рассмотрено использование гради-
ентометрических данных для уточнения гравитационного поля и орбиты спутника. В работе [Vermeer
1990] рассмотрены систематические ошибки метода, в частности из-за неточности пространственного
положения спутника. Полезные сведения о планируемых измерениях приведены в работах [Rummel
1986; Arabelos, Tscherning 1990; Koop 1993]. Содержание книги [Koop 1993] изложено Юркиной в
работе 1994 г. В перечисленных публикациях использование градиентометрических данных связано с
уточнением разложения геопотенциала.
Из девяти элементов тензора независимы только пять, поскольку
d2W _ d2W d2W _ d2W d2W _ d2W
dxtdyt dytdxt’ dxtdzt dztdxt' dytdzt dztdyt
Через W здесь обозначен потенциал земного притяжения:
W = V + Т,
где V — потенциал притяжения отсчетного эллипсоида.
Еще одно условие следует из уравнения Лапласа
d2W d2W d2W п
дх2 + dy? + dz? ~
Использована декартова система координат, связанная со спутником, несущим акселерометры. Ось
Ъ направлена по радиальному направлению, ось xt — по направлению движения, ось yt дополняет
d2W d2W
, планировались измерения 2 и 2 .
dyt
В сферической системе координат, связанной с Землей,
систему до правой. Таким образом
х = pcos <р cosv,
у = pcos <р sin v,
z — psin ср,
где р — радиус-вектор с началом в центре земной массы, <р — широта, v — долгота, можно представить
Э2ТУ Э2ТУ d2W 1 d2W
dz? др2 ’ dy? р2 дд2 ’
где в правой части последнего выражения в знаменателе представлен квадрат дуги, перпендикулярной
к траектории спутника.
Для связи результатов измерений с плотностью простого слоя можно использовать производные от
потенциала Т по широте ф и по долготе v. А именно
ЭТ _ &Г Эф дТ dv
дд Эф дд + dv Э5’
Э2Т _ Э2Т /Эф\2 дТ d2cp d2T
Э52 Эф2 \ &&) Эф Э52 dv2
dv\2 dT d2v
ddj + dv"d&'
(3.6.1)
Для
вычисления производных
Эф dv d2<p d2v
эо’ эё’ эё2-’ эё2
можно воспользоваться изображенным на
рис. 3.6.1 сферическим треугольником PQTq, где Р — полюс, точка Q — исследуемая точка положения
спутника в момент измерения, дуга QTq — часть последующего движения по орбите. Дуга QT
перпендикулярна орбите спутника. Из сферического треугольника PQT имеем
cos(90° — ф) = cos5cos(90° — фо) + sin5sin(90° - фо) cos(90° - А).
Рис. 3.6.1. Сферический треугольник PQTo
Упростив и продифференцировав по •& два ра-
за, можно найти в пределе •& —» 0, ф —> фо:
с/ф . . d2cp 9 .
M=slnA' а^ = -‘«фо“8 л.
Из того же сферического треугольника имеем
по теореме синусов
sin v _ sin(90° — ф) _ cos ф
sin 5 sin(90° — A) cos А’
и после дифференцирования при v — 0,5 =
0, Ф —> Фо
dv cos фо d2v
-------г, = —2 sin фо tg А.
сг& cos А Э52
В сферической системе координат основные уравнения градиентометрии раскрыты, например, в
статье [Koop, Stelpstra 1989] и книге [Коор 1993]. В статье приведены вычислительные схемы для про-
изводных функций Лежандра, связи с декартовыми системами координат, локальной и общей земной.
Наиболее полноценное использование градиентометрические данные найдут в сочетании с наземными
гравиметрическими наблюдениями, а потому, как упомянуто, следует принять во внимание земное сжа-
тие, особенно при совместном использовании GPS-измерений и решения краевой задачи Молоденского
с сантиметровой точностью. Тогда будет полезной система эллипсоидальных координат, позволяющая
представлять отсчетное нормальное гравитационное поле замкнутыми формулами. Эта эллипсоидаль-
ная система координат связана с декартовыми формулами (3.2.12). Наибольшее влияние на градиент
д2Т £
притяжения будет оказывать участок земной поверхности, расположенный непосредственно под
спутником. Сторона такого участка должна быть примерно равна высоте спутника. Влияние соседних
участков будет быстро уменьшаться с увеличением расстояния до спутника. Поэтому можно восполь-
зоваться последовательными приближениями, относя влияние более удаленных участков к свободному
члену, используя величины плотности, определенные в предыдущем приближении. Подобный подход
хорошо зарекомендовал себя в схожем случае определения гравитационного поля Луны [Еремеев, Юр-
кина 1973].
При составлении уравнений целесообразно в возмущающем потенциале выделить часть, представ-
ленную разложением по сферическим функциям, тогда решение представит уточнение использованного
разложения, выраженное через простой слой земной поверхности.
Наблюдения спутник—спутник представляют упрощенный вариант описанного, поскольку опреде-
ляют разность производных от потенциала земного притяжения по направлению прямой, соединяющей
спутники.
3.7 Дополнительные замечания о связи координатной системы с
Землей
По ходу изложения была упомянута возможность при решении уравнений Молоденского получить
результаты в системе координат с началом в центре масс Земли, а также возможность совмещения
координатной оси Z с главной центральной полярной осью инерции (уравнения (3.3.21)-(3.3.22)). Если
в пунктах астрономо-геодезической сети определены высоты квазигеоида и уклонения отвеса по гра-
виметрическим данным, т. е. в системе координат с началом в центре земной массы, тогда уравнения
(3.3.23), (3.4.8) можно использовать для связи геодезической и геоцентрической систем координат. В
соответствии с точностью астрономо-геодезической сети, эти уравнения следует упростить, опустив
малые поправки порядка земного сжатия, придав уравнениям первоначальный вид Молоденского и др.
[1960]. При этом
Л(шц — шг) = Сц — Сг> cchw —> cshw —> R,
— Сг = sin и c°s v + уо sin и sin v + zq cos u,
R(E,u — E,r) = zo cos и cos v + yo cos и sin v - zq sin u,
Л(цц — nr) = xo sin v — yo cos v.
Наиболее просто можно установить связь координатной системы с Землей, назначив координаты
некоторой точке земной поверхности (например «исходному пункту» астрономо-геодезической сети).
Остающиеся три степени свободы, соответствующие трем компонентам вращения Земли как твердо-
го тела вокруг неподвижной точки, можно использовать, введя условие, чтобы малая ось эллипсоида
была параллельна оси вращения Земли и плоскости начальных геодезического и астрономического ме-
ридианов были параллельны. Тогда составляющие уклонения отвеса можно вычислять по их обычно
применяемым формулам и связь между астрономическим и геодезическим азимутами будет выраже-
на уравнением Лапласа в его традиционной форме [Молоденский 1954; Молоденский и др. 1960;
Yeremeyev, Yurkina 1969]. Если при решении интегральных уравнений относительно плотности про-
стого слоя для уменьшения ошибок интерполяции силы тяжести введены топографо-изостатические
редукции силы тяжести, то условия о совмещении центра инерции Земли и начала координат приобре-
тают вид
J Ф(а; - xt)dS = - J S(i - xtjd'T, J Ф(у - yt)dS = - J S(y - yt)dx, J Ф(г - = - J S(z - zt)dx,
S т S т S т
где S — плотность выделяемой массы, dx — элемент её объема т, xt,yt,zt — составляющие смещения
центра масс из-за топографических редукций. Условия параллельности оси z и оси вращения Земли
соответственно выражены так
J Ф(я - xt)(z - zt)dS = - J's (я - xt)(z - zt)dx, J Ф(у - yt)(z - zt)dS = - J S(y - j/t)(z - zt)dx.
S т S т
В теории фигуры Земли, как правило, рассматривают Землю как твердое тело, равномерно вращаю-
щееся вокруг неизменной оси вращения. Малые приливные поправки силы тяжести в положения отвеса
удаляют возмущающие массы Луны и Солнца на неограниченно большое расстояние от Земли. Если
приливные изменения названных величин зарегистрированы высокоточными гравиметрами и наклоно-
мерами, такие данные можно использовать для приведения силы тяжести, высокоточной нивелировки и
других измерений, связанных с положением отвеса, к одному моменту времени. Тогда положение Луны
и Солнца относительно Земли будет как бы жестко связано с ней, и можно считать исключенными
влияния некоторых других факторов, нарушающих условие о Земле как абсолютно твердом теле: на-
клонов отдельных блоков земной коры из-за изменения атмосферного давления, тепловых воздействий,
из-за влияния морских приливов и других причин.
Молоденский [1958] отметил необходимость изучать вековое движение полюса при строгой по-
становке задачи в комплексе с изучением деформаций Земли и сопровождать учетом смещений мест
наблюдений. Медленные изменения силы тяжести и движения полюса пытались связать Юркина и
Файтельсон [1975]. Однако не все деформации реальной Земли, изменения ее гравитационного поля
можно учесть в геодезических выводах достаточно точно. Задачи «кинематической геодезии» [Моло-
денский 1958], как правило, не имеют единственного решения, так как нельзя отделить движений
изучаемых точек от движения начала отсчета. В общем случае (при изменениях гравитационного поля
и смещениях измерительных пунктов) смещения центра масс Земли нельзя определить из измерений
[Юркина 1993; Yurkina 1993].
Принято считать, что центр земной массы, не измененной топографическими редукциями, лежит
на оси вращения Земли. Однако из-за смещения равнодействующих сил притяжения Земли и Луны,
Земли и Солнца с центра масс Земли, геометрическое место нулевых ускорений может оказаться также
смещенным с этого центра. Смещения равнодействующих притяжения Земли и Луны, Земли и Солнца
достигают соответственно 140 м и 30 см. Согласно замечаниям Эйлера [Euler 1765а, 1862], Миндинга
[Minding 1838], Гамильтона [Hamilton 1866], возмущающий вращательный момент следует рассчи-
тывать относительно точки, в которой результирующий вращательный момент минимален. Несколько
подробнее см. в статьях [Юркина, Бондарева 1989], а также [Юркина 1992, 1996д, 20046].
Стремясь к наиболее точному решению, необходимо отразить данные задачи наиболее полно в
невозмущенном движении и использовать уравнение движения в форме Гамильтона-Якоби, облегчаю-
щей учет возмущений. В этом случае уже в нулевом приближении движение по орбите и вращение
не разделены. Такое нулевое приближение и аналитическое решение уравнения Гамильтона-Якоби,
описывающего поступательно-вращательное движение небесного тела с неравными моментами инер-
ции в центральном поле притяжения, изложено в депоненте Юркиной [1980]. При этом кинетическая
энергия тела выражена точно, потенциал притяжения представлен нулевой гармоникой. Такое решение
можно использовать как оскулирующее при построении более точных решений этой задачи. Упомяну-
тое уравнение Гамильтона-Якоби обобщает результат Тиссерана [Tisserand 1891], применение теории
возмущения Якоби к этому уравнению описано в том же депоненте.
Другой путь решения описываемой задачи можно получить, представив разложение потенциала
притяжения Земли и возмущающего небесного тела (Луны или Солнца) по сферическим гармоникам,
полагая при этом несовпадающими центр массы Земли и точку приложения результирующей силы,
найти изменяющиеся во времени гармоники первой степени и порядка и использовать метод Вуларда
[1963] для определения соответствующих поправок в углы прецессии, нутации и собственного враще-
ния [Юркина 2004а].
Международная служба вращения Земли задержалась с необходимым уточнением теории.
Поскольку центробежная сила составляет малую долю силы земного притяжения, смещения рав-
нодействующих сил притяжения Земли и Луны, Земли и Солнца не могут влиять на точность грави-
тационного поля, используемого в геодезии, но в лабораторных измерениях силы тяжести описанный
эффект может проявиться. Центр земной массы может смещаться в теле Земли из-за сезонных измене-
ний в распределении атмосферной массы, грунтовых вод, уровня моря. Согласно оценкам [Sto/z 1976],
такие смещения могут достигать 5 мм. Броше и Зюндерман в 1977 г. рассмотрели влияние океанских
приливов на вращение Земли и пришли к выводу, что соответственные смещения геоцентра могут быть
около 2 см. Штольц и Ларден [Sfo/z, Larden 1979] отметили необходимость более аккуратных оценок,
чем выполненные ранее, поскольку положение геоцентра определяет отсчетную систему при изучении
динамики Земли. По оценке [BurSa et al. 1999с] сезонные изменения морской топографии могут сме-
щать центр земной массы на величины до 10 мм и изменять направление полярной оси инерции Земли
до 0,15", а знаменатель земного сжатия — до 0,0003. Эти оценки выполнены по альтиметрическим
данным TOPEX/POSEIDON 1993-1996 гг. Лазерное слежение за спутниками Lageos привело к подоб-
ным по величине суточным и полусуточным смещениям геоцентра из-за приливного влияния [Watkins,
Eanes 1993]. Заметные при современной точности движения геоцентра упомянуты в докладах [Eanes
1995; Ви, Хи 1996]. Обсуждая современные геодинамические задачи, З.М. Малкин [1997] отмечает
необходимость определения геоцентра на миллиметровом уровне точности.
4. Вариационный метод физической
геодезии и коллокация
Ю.М. Нейман, В.А. Бывшее
4.1 Постановка задачи
Известно, что в геодезии, неразрывно связанной с измерениями, важнейшую роль играет теория
математической обработки геодезических измерений (ТМОГИ). В основе ее стандартной трактовки ле-
жит метод наименьших квадратов, хорошо зарекомендовавший себя со времен Гаусса и Лежандра и
позволяющий уверенно решать разнообразный круг задач геодезии, астрономии и целого ряда других
дисциплин, имеющих дело с эмпирическими данными. При этом обычной является ситуация, когда
измеряемые величины и величины, подлежащие отысканию в результате математической обработки,
представляют собой, с математической точки зрения, скаляры или конечный набор скаляров (конеч-
номерные векторы) — длины линий, величины углов, превышения, координаты пунктов, их отметки и
т. п. Указанная математическая суть этих понятий позволяет описывать их исчерпывающим образом в
рамках стандартного курса конечномерных евклидовых пространств.
В данной работе основными объектами, которые надо оценивать в процессе обработки результатов
измерений, являются бесконечномерные векторы и непрерывные функции. Такая целенаправленность
продиктована насущными потребностями разделов геодезии, непосредственно связанных с решением ее
основной задачи — определением в единой системе координат поверхности Земли и ее внешнего грави-
тационного поля. Дело в том, что и искомая физическая поверхность Земли, и искомый потенциал силы
тяжести представляют собой, с математической точки зрения, некоторые функции (причем чрезвычай-
но сложной структуры) и не могут быть в принципе описаны величинами скалярными. Аналогичная
ситуация имеет место в целом ряде задач космической геодезии, фотограмметрии и других дисциплин.
В то же время, исходные измерения по-прежнему содержат то или иное дискретное множество чисел.
В связи с этим возникает необходимость в обобщении ТМОГИ на класс задач, связанных, вообще
говоря, с «восстановлением» функций по результатам дискретных измерений различных «проявлений»
этих функций — например, с определением геопотенциала по результатам измерений в отдельных
точках величин силы тяжести.
Систематическую теорию для решения подобных задач удается построить различными путями: ли-
бо опираясь на оптимальный линейный прогноз и фильтрации на основе ковариационной теории слу-
чайных функций (статистический подход), либо опираясь на основные положения функционального
анализа (функциональный подход). Однако в конечном счёте, оба пути приводят к одним и тем же
результатам и, тацим образом, обогащают друг друга интерпретациями с совершенно разных позиций.
Суть функционального подхода состоит в обобщении ТМОГИ на случай оценивания функций по ре-
зультатам измерений значений функционалов на этих функциях. Делается это так называемым методом
коллокации. Термин «коллокация» после работы известного отечественного математика Л.В. Канто-
ровича [Канторович 1934] широко используется в математике в связи с решением интегральных и
дифференциальных уравнений, когда приближённое решение определяется из условия удовлетворения
уравнению в некоторых заданных точках. Однако мы в дальнейшем, вслед за работами [Moritz 1970;
Жидков 1977], будем вкладывать в этот термин несколько иной смысл, более подходящий для гео-
дезических приложений и представляющий собой, с математической точки зрения, обобщение метода
наименьших квадратов на случай бесконечномерных гильбертовых пространств.
Основные теоретические результаты формулируются в виде лемм и теорем, хотя и не все дока-
зательства даются достаточно строго и полно. Это позволяет читателям акцентировать внимание на
основных положениях и опускать при первом чтении подробности доказательств.
4.2 Необходимые сведения о функционалах на гильбертовом
пространстве
Характерной чертой классических задач ТМОГИ является ограниченность числа измеряемых
(Xi, Хг> • • •, Хт) и определяемых (У1,Уг, • • • ,Yn) элементов. В самом деле, как бы ни велика была
любая геодезическая сеть, число п измеряемых и число т определяемых элементов в ней конечно. Это
означает, что для теории и практики уравнительных вычислений достаточно теории конечномерных
евклидовых пространств, поскольку объектами уравнительных вычислений являются конечномерные
векторы. Совсем другая ситуация в задачах физической геодезии. Там основными объектами изучения
являются функции — характеристики гравитационного поля Земли. Эти функции определены на
некотором множестве D (в каждом конкретном случае множество D различно: оно может быть
отрезком числовой оси, частью поверхности или пространства). Обозначим V(D) множество функций,
определенных на множестве D. Пусть среди элементов V(D) есть и функция /, которая нас интересу-
ет. Важно отметить, что f не входит ни в одно из конечномерных пространств Rk. Это обстоятельство
подчеркивает различие задач геодезии геометрической и физической и выявляет потребность в вектор-
ном пространстве бесконечного числа измерений. Мы будем полагать в дальнейшем, что множество
V(D) является гильбертовым пространством, например Лг(^)> представляющим собой пополнение
бесконечномерного евклидова пространства Сг(1)) всевозможных непрерывных функций со скалярным
произведением
(/,<?) = J/(A)-5(X)dr>A. (4.2.1)
D
Необходимые подробности о гильбертовых пространствах можно найти, например, в учебном посо-
бии [Треногий 2002].
Однако пространство слишком широкое. В Ьз^ТУ) входят, в частности, функции, терпящие
разрыв даже в каждой точке. Между тем, часто априорно известна некоторая информация о гладкости
интересующей нас функции. Например, известно, что сама функция и ее производные до порядка q
включительно непрерывны. Эту информацию полезно использовать при выборе гильбертова простран-
ства, которому может принадлежать исследуемая функция. Рассмотрим множество функций, непрерыв-
ных в замкнутой области D вместе со всеми производными до порядка q включительно, причем и сами
функции, и их производные до порядка q включительно интегрируемы в D с квадратом. Обозначим
это множество C9(D). Ясно, что C9(D) с V(Z>). Мало того, C9(D) с Аг(-О)- Превратим C9(D) в
евклидово пространство C2(D), определив в C9(D) операцию скалярного произведения по формуле:
V Г дк№ dkg(A)dDA
U,g)~2_^k \ дху'дхУ2дхУз' дху'дхУ2дхУз { ’
к=0 Т1+Т2+тз=кД> 12 3 12 3
Аналогично определяется скалярное произведение в случае, когда D — отрезок или часть поверхности.
В формуле (4.2.2) функции f,g е С2(О); (xi, хз, хз) — декартовы координаты переменной точки
А е D-, (У1,Уг,Уз) — неотрицательные целые числа. Символ £2 означает суммирование по
Yi+T2+Y3=k
всевозможным наборам (У1,У2,Уз)> таким, что yi +уг +уз = к',
dkf(A)
dxyidx%2dx%3
- частная производная
порядка к от функции f G C9(D), вычисленная в точке A(a?i, Х2, хз) е D ; {afc}£_0 — произвольные
ненулевые числа.
Так же, как и пространство Сг(1)), евклидово пространство C'J(D) бесконечномерно, но непол-
но. Если его пополнить, то получится гильбертово пространство W9(Z>), которое принято называть
соболевским.
Важно отметить, что W9(Z>) С 1/г(-О), поэтому нужную функцию в W2 (D) в определенном смысле
«отыскать» легче, чем в Ьз(1У).
Итак, гильбертовы пространства — это бесконечномерные полные евклидовы пространства. Вектора-
ми или элементами, заполняющими эти пространства, являются функции, определенные на некотором
множестве D. В дальнейшем гильбертово пространство, если нет необходимости конкретизировать, бу-
дем обозначать буквой Н. Для операции скалярного произведения в Н сохраним обозначение
Любой элемент f е Н может быть определен с помощью базисных функций {еДЛ)}?^ .
Для геодезических приложений наибольший интерес представляет понятие линейных функционалов
на Н. Поэтому мы приведем здесь соответствующие справочные сведения.
Определение 4.2.1. Правило L, согласно которому каждому элементу f е Н поставлено в соот-
ветствие одно и только одно число Lf, называется функционалом, определенным на Н.
Пусть, например, X = [—п, я] и С(—я, я) — множество непрерывных на [—я, я] функций. Функ-
ционалами, определенными на С(—я, я), в частности, являются:
— определенный интеграл L, где L(f) = f(x)dx ;
— правила а, и bi вычисления коэффициентов Фурье по тригонометрической системе:
ао(/) = -4- J f(x)dx,
v 271 -я
1 П
аЛ/) = -у= J f(x) cosixdx,
УП-п
1 п
ЬД/) = -X- J /(х)sinixdx,
—п
i = 1,2,....
Функционал называется линейным, если для любых Д и Д из Н и любых действительных чисел
оса и а.2 справедливо равенство:
Д(«1 • /1 + «2 • /г) = «1 • Д/1 + «2 • Д/г- (4.2.3)
Пример 4.2.1. Зафиксируем произвольный элемент Ф(А) е Н. Линейный функционал на Н можно
определить так:
Д/ = (/,Ф)я- (4.2.4)
Определение 4.2.2. Функционал L, определенный на Н, называется ограниченным, если при лю-
бом элементе / е Н имеет место неравенство:
|Д/| С II/II, где С = const > 0. (4.2.5)
Определение 4.2.3. Наименьшее из чисел С, удовлетворяющих неравенству (4.2.5), называется
нормой ограниченного функционала и обозначается ||L||. Таким образом,
|Д/1 ЦДЦ • 11/11, (4.2.6)
причем ||Д|| нельзя заменить меньшим числом.
Докажем ограниченность функционала (4.2.4). Согласно известному неравенству Буняковского—Коши,
К/, Ф)я| У(Ф,Ф)я-(/,/)я = ||ф|| • 11/11- (4.2.7)
Неравенство (4.2.7) справедливо при любом f е Н. Если / = Ф, то (4.2.7) обращается в равенство.
Значит, ||Д|| — ||Ф||.
Ниже нам понадобится свойство непрерывности линейных ограниченных функционалов.
Определение 4.2.4. Функционал L, определенный на Н, называется непрерывным, если из усло-
вия /п -+ / следует сходимость последовательности (Lfn'j^Li к числу Lf.
Теорема 4.2.1. Всякий линейный ограниченный на Н функционал L непрерывен.
Доказательство. Так как L — линейный функционал, то согласно (4.2.3) имеет место равенство:
|L/n - Lf\ = |L(/n - /)|.
Из последнего равенства и ограниченности L вытекает, согласно (4.2.6), неравенство:
О |L/n - Lf\ = |L(/n - /)| ||L|| • ||/n - /||. (4.2.8)
По условию теоремы ||/п - /|| —> 0 при п -+ оо, поэтому |L/n - Lf\ —> 0 при п —> оо. Теорема
доказана. Из нее, в частности, следует, что функционал (4.2.4) является непрерывным на Н.
Наша ближайшая цель — изучить множество линейных ограниченных функционалов, определенных
на Н. Будем обозначать это множество Н*.
Теорема 4.2.2. Н* — векторное пространство.
Доказательство. Пусть Li и Ьг — любые элементы из Н* и cq, аг — произвольные действительные
числа. Определим операцию равенства элементов в Н*. Будем говорить, что Li = L2, если при любом
f е Н имеет место равенство:
Iaf = L2f. (4.2.9)
Операции сложения элементов из Н* и умножения их на действительные числа определим так:
L = (aiLi + a2L2) & Н*, если при V/ е Н
Lf — (aiLi + аг^г)/ = ai-^i/ + аг^г/- (4.2.10)
Покажем, что операции сложения и умножения на число определены корректно, то есть что L =
(aiLi + аг^г) £ Н*. Имеем:
IWI = + агЛг/1 |aj • |Lif\ + |аг| • |Ьг/|
^(|а1|.||Л|| + |а2|- НМ) • 11/11-
Это означает линейность и ограниченность функционала L, то есть L G Н*. Нулем в пространстве
Н назовем такой функционал 0*, значение которого на любом элементе f € Н равно нулю: 0*/ = 0.
Проверку аксиом векторного пространства мы предоставляем читателю. Теорема доказана.
Следующая замечательная теорема, принадлежащая Ф. Риссу, полностью характеризует простран-
ство Н*.
Теорема 4.2.3. Пространство Н* является гильбертовым пространством, изометрично изоморф-
ным пространству Н. Это значит, что для всякого линейного ограниченного функционала L е Н*
существует единственный элемент Фд е Н такой, что при V/ е Н справедливо равенство:
Г/ = (/,Фд), (4.2.11)
причем
ЦЬ|| = ||Фд||. (4.2.12)
Мы не приводим здесь доказательство теоремы Рисса, но обращаем внимание на то, что эта теорема
играет важнейшую роль в дальнейших рассуждениях. Смысл ее состоит в том, что значение любо-
го линейного ограниченного функционала L на каждом элементе f € Н можно представить в виде
скалярного произведения этого элемента f и некоторого другого элемента Фд е Н, зависящего от L
и играющего роль определенного представителя L. Ниже будет указан элегантный способ вычисле-
ния элемента Фд, что приводит к универсальному способу вычисления значений любого линейного
функционала L.
Формула (4.2.12) также очень важна для геодезических приложений, поскольку определяет смысл
точностных расчетов.
Определение 4.2.5. Гильбертово пространство Н* называется сопряженным данному гильбертову
пространству Н. Элемент Фд е Н, однозначно определяющий линейный ограниченный функционал L е
Н*, называется элементом, сопряженным данному функционалу L, или представителем функционала
L.
В гильбертовом пространстве Н*, элементами которого являются линейные ограниченные функ-
ционалы, заданные на Н, определена операция скалярного произведения (Д1,Дг)* для каждой пары
Li,L2 G Н*. Действительно, в силу вытекающего из теоремы Ф. Рисса изометричного изоморфизма
между Н и Н*, скалярное произведение в Н* можно вычислить следующим образом:
(М.Ьг)* = (Фд1)Фд2)н. (4.2.13)
Здесь ФЬ1,Фь2 — элементы из Н, сопряженные функционалам G Н*.
В результате для пространства Н* справедливы все понятия гильбертовых пространств. В
частности, символом Span{Li, L2, , Ln} мы будем обозначать пространство, натянутое на линейно-
независимые функционалы (Li, L2,..., Ln) € Н*.
Заметим, что теорема 4.2.3 остается справедливой и для любых конечномерных евклидовых про-
странств в силу полноты последних.
Завершим этот раздел важным для приложений примером простейшего линейного функционала.
Определение 4.2.6. Пусть Н — гильбертово пространство функций, определенных в какой-нибудь
области D, а В е D — какая-нибудь точка области. Дельта-функционалом называется функционал 6В>
значение которого на любой функции f G Н равно значению этой функции в точке В:
f>Bf = f(B). (4.2.14)
Отметим, что, строго говоря, дельта-функционал определен не на всяком гильбертовом пространстве.
Например, функции, заполняющие L^D), могут быть не определены на множествах нулевой меры.
Однако это не имеет значения для геодезических приложений.
Пример 4.2.2. Пусть D = [—1,1]. Рассмотрим множество полиномов, определенных на D и имею-
щих степень не выше 1. Обозначим это множество Р^1]—1,1]. Превратим его в евклидово пространство
Р^1]— 1,1], определив операции равенства, сложения, умножения на числа, а также нулевой элемент и
операцию скалярного произведения по формуле (4.2.1). Таким образом, Рз^1]—1,1] заполняют функции
вида f(x) = <хх + (3.
Можно доказать, что:
1) размерность пространства dimP^1]—1,1] = 2;
2) ортонормированный базис в P^l— 1,1] образует полиномы еДгг) = л/2/2 и ег(а:) = х;
3) Ьх е Р^1]-!, 1], то есть дельта-функционал при любом х G [—1,1] ограничен, причем его норма
115x11 v^.
Некоторые виды геодезических функционалов обсуждаются в следующем разделе.
4.3 Примеры геодезических функционалов
Одной из труднейших задач ТМОГИ всегда считалась разработка алгоритмов, позволяющих сов-
местно обрабатывать разнородные измерения, полученные геодезией геометрической (углы и линии),
физической (аномалия силы тяжести), космической (например, результаты допплеровского слежения за
спутниками), а также геодезической астрономией (широты, долготы, азимуты). Для решения подобных
проблем желательно, прежде всего, попытаться взглянуть на всевозможные геодезические измерения с
неких единых и потому достаточно абстрактных позиций. Именно это и позволяет сделать обсуждае-
мый нами функциональный подход к обработке разнородной геодезической информации. В основе его
лежит взгляд на объекты всевозможных геодезических измерений как на функционалы, определенные
на специально выбранном гильбертовом пространстве. Непременным элементом этого пространства
должен быть потенциал силы тяжести (или возмущающий потенциал) Земли, поскольку результаты
измерений суть (отягощенные неизбежными ошибками) значения функционалов на реально существу-
ющем геопотенциале.
В самом деле, пусть Y — истинное значение какой-либо величины, являющейся объектом измере-
ний в геодезии геометрической, физической, космической или геодезической астрономии — неважно.
Это значение всегда зависит от координат одной или нескольких точек, расположенных на земной
поверхности или вне ее, и от потенциала W силы тяжести Земли. Таким образом,
y = F(X,W). (4.3.1)
Здесь X е Еп — вектор-столбец п параметров, состоящий, например, из координат точек, от кото-
рых зависит Y, или содержащий какие-либо неизвестные числа, скажем, смещение системы координат
или параметры ее ориентировки; Еп — n-мерное евклидово пространство; W е G, где G — некото-
рое заранее оговоренное гильбертово пространство; F — функционал, в общем случае нелинейный,
отображающий произведение1 пространств Еп х G в множество действительных чисел Ei, т. е.
F : Еп х G —+ Е1. (4.3.2)
Другими словами, F — это некоторое правило, согласно которому каждой паре элементов, один из
которых берется из Еп, а другой — из G, можно поставить в соответствие одно действительное число.
Рассмотрим некоторые примеры указанного подхода, описанные в работе [Мориц 1983]. Не будем
только пока конкретизировать то гильбертово пространство G, одним из элементов которого является
потенциал W. Дело в том, что главной частью W является известный нормальный потенциал U, а
неизвестен лишь возмущающий потенциал Т — W — U. Поэтому практический интерес — это мы
увидим в конце раздела — представляют те гильбертовы пространства Н, которые содержат Т.
Пример 4.3.1. Одним из основных объектов измерений физической геодезии является величина д
силы тяжести, представляющая, по определению, следующий оператор от потенциала:
9 = 9<W) = |р| = |grad W| = yjw^+W^ + W^ (4.3.3)
Здесь Wx,Wy,W2 — частные производные W по x,y,z соответственно. Измеряемое значение величины
силы тяжести в заданной точке Р есть значение соответствующего дельта-функционала 5р от д-.
Y = 5р(д) = 5р(д(1У)). (4.3.4)
Таким образом, Y зависит от трех координат точки Р и функции W, что согласуется с представле-
нием (4.3.1).
Пример 4.3.2. Одним из основных объектов измерений геодезической астрономии являются аст-
рономические широты ср и астрономические долготы Л, которые можно связать с потенциалом W
следующим образом:
-W W
Ф = <р (W) = arctg —. z =, Л = A(W) = arctg —(4.3.5)
Jwl+Wj Wx
Измеряемые значения астрономических широты и долготы в заданной точке Р есть значение соот-
ветствующего дельта-функционала 6р от <р и Л:
Y = 5р(<р) = 6p(<p(W)) или Y = 5р(<р) = 6р(ф(И0). (4.3.6)
Таким образом, Y зависит от трех координат точки Р и функции W, что согласуется с представле-
нием (4.3.1).
Пример 4.3.3. Одними из основных объектов измерений геометрической геодезии являются длины
линий з и величины горизонтальных углов (3. Пусть Po,Pi,P2 — три фиксированные точки земной
поверхности; Aii, Ayi, Azi — разности координат точек Ру и Fq; Аггг, Ауг, Адъ — то же для точек
Р2 и Ро. Тогда, как известно,
SQ1 = у/Aij 4- AyJ + Azf, (4.3.7)
'Пусть U и V — два пространства. Элементами произведения С/х V служат все упорядоченные пары (и, v), где и G U, v € V.
Например, двумерная плоскость Е2 = Ei х Ei, где Ei — ось всех действительных чисел, т. к. точка (х,у) 6 Е2, если
х £ Ei, у g Ei (поэтому произведение пространств называют также декартовым произведением).
а величина угла есть разность астрономических азимутов:
А-Ро-Рг = Р = Лог — Ooi-
Здесь
«02 = Sp0(02), Ooi = 6p0(oi),
где
- A lisinAH- AytcosA 1О
Ooi = arctg —-----;--------------:----—-----т-------, г = 1,2, (4.3.8)
— A Xi sin <p cos Л — Ay» sin ф sm Л + Azi cos ф
а ф = ф(РК) и Л = A(W) определяются формулами (4.3.5).
Таким образом,
s = F(X), где X = (xp0,yp0,zp0,xp1,yp1,zpl)T G Ее-, . , q.
0 = F(X,W), где Хе Ед. 1 ’
Расстояние я — единственный объект геодезических измерений, не связанный с гравитационным полем.
Однако зависимость s = F(X) естественно рассматривать как частный случай зависимости (4.3.1).
Пример 4.3.4. Одним из основных источников информации в космической геодезии являются до-
пплеровские наблюдения спутников, позволяющие определить величину скорости d! изменения даль-
ности d от фиксированной точки Ро на земной поверхности до спутника. Дальность выражается фор-
мулой, аналогичной (4.3.7), но только теперь точкой Pi служит спутник, положение которого обычно
характеризуется шестью элементами кеплеровой орбиты pi,P2,---iP6 и коэффициентами Фурье
разложения ньютоновского геопотенциала V по сферическим функциям. Эти коэффициенты представ-
ляют собой линейные функционалы на V типа:
Сппг = ^ппг JJ У(Р) • Snm(F)da; PG а. (4.3.10)
О’
Здесь а — единичная сфера; SnTn(P) — сферическая функция степени п и порядка тп\ апт — некоторая
константа, зависящая от п и т\ интеграл — поверхностный 1-го рода. Таким образом,
d' = F(X,V), (4.3.11)
где X = (хр0,ур0, zp0,pi,p2,... ,Рб)т> а V отличается от W только отсутствием слагаемого за счет
центробежной силы вращения Земли.
Приведенные примеры показывают, что научиться обрабатывать разнородные геодезические изме-
рения — это значит научиться обрабатывать функционалы. Поэтому дальнейшее изложение полностью
посвящено соответствующим постановкам задач и возможным методам их решения.
Исходными данными в традиционных методах уравнивания служат результаты измерений некото-
рых (в общем случае нелинейных) функций конечного числа искомых параметров. Задача состоит в
оптимальном определении этих параметров, составляющих конечномерный вектор, либо в оптималь-
ном вычислении значений каких-либо новых (не измеренных) функций этих параметров. Практически
приемлемые алгоритмы удается получить лишь после линеаризации зависимостей измеряемых и ис-
пользуемых величин.
Теперь результаты измерений мы будем рассматривать как измеренные значения некоторых нели-
нейных функционалов типа (4.3.1), и задача состоит в оптимальном определении параметров, включая
восстановление бесконечномерного вектора — непрерывной функции W, либо в оптимальном вычис-
лении каких-либо новых (не измеренных) функционалов на W. При этом практически приемлемые
алгоритмы опять-таки удается получить лишь для линейных функционалов.
Основная идея линеаризации геодезических функционалов состоит в следующем.
Пусть Хо ~ n-мерный вектор-столбец приближенных значений искомых параметров, a U — нор-
мальный геопотенциал, так что
X = Хо + АХ, W = U + Т,
(4.3.12)
где ДХ — n-мерный вектор-столбец поправок к Хо. а Г — возмущающий потенциал, являющийся эле-
ментом некоторого заранее оговоренного гильбертова пространства гармонических функций Н. Тогда
дифференциал dF функционала (4.3.1) в окрестности точки (Xo,t7) G Еп х Н имеет вид:
п / ЭР \
dF = ^ Н- kxi + LT. (4.3.13)
i=1 X^i/O
Здесь Xi и Дх$ — координаты векторов X и ДХ, г = 1,2,...,n; L — линейный ограниченный функ-
ционал, L 6 Н*; нижний индекс 0 у частных производных напоминает о том, что значения частных
производных вычислены в точке Xo,U. Далее приращение функционала (4.3.1)
ДУ = F(X, W) - F(X0,17) (4.3.14)
заменяем дифференциалом (4.3.13) и получаем нужную линеаризацию
n / 9F \
ДУ«У т— &Xi + l, (4.3.15)
где введено обозначение
I = LT. (4.3.16)
Измерение У дает в результате число у, позволяющее в соответствии с (4.3.14) вычислить
Ду = у - Г(Х0) U) (4.3.17)
и составить, таким образом, уравнение в соответствии с (4.3.15):
n /9F\
Ду = У kxi + LT. (4.3.18)
Неизвестными здесь являются п поправок Дх, и функция Т. Таких уравнений возникает столько,
сколько проведено измерений.
Отметим, что каким бы большим ни было количество измерений, оно всегда конечно. Неизвестное
же Т бесконечномерно. Поэтому добиться того, чтобы количество измерений превышало количество
неизвестных — как это всегда бывает в традиционных задачах ТМОГИ — в рассматриваемой ситуации
невозможно. Отсюда и невозможность ограничиться традиционным методом наименьших квадратов.
Необходимо обобщение его на случай бесконечномерных пространств.
Пример 4.3.5. Рассмотрим линеаризацию астрономических и гравиметрических функционалов из
примеров 3.1 и 3.2.
д, <р и Л представляют собой, согласно (4.3.3) и (4.3.5), элементарные функции координат вектора
graxiW. Линеаризуя их в окрестности приближенных значений WXo, WVo, W2o (WXo — значение Wx
в точке с приближенными координатами хо, Уо, zo), получим линейную зависимость дифференциалов
dg,d<p и dA от дифференциалов dWx, dWy, dWz. Далее в эту зависимость надо подставить найденные
отдельно дифференциалы dWx,dWy,dWz в окрестности приближенных координат хо.Уо.-^о точки Р и
приближенных производных UXo, Uyo, Uzo. Эти дифференциалы представляют собой суммы линейных
функций от Дх, Ду, Дг и линейных функционалов от Т. Действительно,
/ Wx \ / UXo \ / ТХо \ / Дх \ / Дх \
Wy « Uyo + ТУо 4-Гс/о Ду +ГТо Ду , (4.3.19)
\W2 J \UZ0 ) \TZ0 ) \bz ) \ Дг /
где Г[/о — квадратная 3x3 матрица Гессе, (г, у) — позицию в которой занимает значение в точке
xo,yo,zo второй частной производной d2U/dxidxj (обозначено х = xi, у = хг, z = хз). Последнее
слагаемое — произведение членов первого порядка малости Дх* и элементов гессеана Т, и потому
может быть отброшено. В результате
dWx \
dWv |
dW2 )
Тхо
Ту0
+ Г[/о
Да:
Ду
Дг
(4.3.20)
Практически удобно не подставлять (4.3.20) в выражения упоминавшихся дифференциалов функций
(4.3.3) и (4.3.5) — это довольно громоздко — а вспомнить известные соотношения:
д = gradW =
Wx
Wy
w2
—g cos <p cos Л
—g coscp sin A
—g sin <p
(4.3.21)
Y = gradJ7 =
Ux
Uy
U2
—у coscp* cos A*
—Yeos <p* sin A*
—Y sin <p*
(4.3.22)
где ср*, A* — нормальные широта и долгота, и линеаризовать д в окрестности у. В результате найдем,
что
Wx \ / Ux \ / у dtp \
Wv I = I Uy I +Q I yc0S(P*^ I > (4.3.23)
Wz ) \UZ ) \ dg J
где матрица
(sin <p* cos A*
sin <p* sin A*
— cos <p*
sin A*
— cos A*
0
— coscp* cos A*
— cos <p* sin A*
— sin <p*
(4.3.24)
Отсюда нужные дифференциалы легко находятся из соотношений
У dtp \ / / Wx \ / Ux \\
Ycos<p*dA I = Q-1 I I Wy I — I Uy II,
dg / \\W2 J \UZ J J
(4.3.25)
где gradW — grad U « d(gradW), согласно (4.3.20), a Q-1 = QT, так как матрица Q — ортогональ-
ная (ее векторы-столбцы ортонормированы, в чем легко убедиться непосредственно). Окончательно
получим:
(Ytfcp \
Ycos<p*dA I = <2т(Г[/о Д X + gradTb)- (4.3.26)
dg )
Скажем,
dtp = Pn Д х + pi2 Д У + Р1з Д z + LT, (4.3.27)
где
LT = — (уы^го + yzi^i/o + 931Тго)- (4.3.28)
Здесь pij и qij — элементы матриц у<2тГио и Q соответственно, и (4.3.27) имеет нужную структуру
(4.3.13).
Таким образом, измеренное значение у широты ср в точке, координаты которой известны прибли-
женно, дает уравнение (4.3.27) типа (4.3.18), левая часть в котором подсчитывается, в соответствии с
(4.3.17), по первой формуле (4.3.5) при W = U и X — (iq, yo, zq)t.
В последующих разделах мы рассмотрим основные вопросы аппроксимации линейных функционалов
и восстановления функции по заданным значениям линейных функционалов на этой функции. При этом
сначала будем, для простоты, полагать, что:
а) ошибки измерений величин Y пренебрегаемо малы, то есть у = Y;
б) приближенные значения Xq параметров X настолько точны, что поправки АХ пренебрегаемо
малы.
В указанных условиях уравнение (4.3.18), согласно (4.3.15)-(4.3.17), имеет вид:
LT = I, (4.3.29)
где число I = Ду и подсчитывается по формуле (4.3.17). Именно информация типа (4.3.29) представляет
новизну с точки зрения классической ТМОГИ.
В дальнейшем ограничения а) и б) будут сняты.
Доказать, что зенитное расстояние Z точки Pi, измеренное в точке Ро, можно следующим образом
представить в виде (4.3.1):
Z = arccos | (Aii cos <р cos X + Дуг cos <р sin X + Azi sin <p) J ,
\ /
где <p = <p(W) и X = X(W) определяются формулами (4.3.5), a soi — формулой (4.3.7).
4.4 Коллокация как обобщенная задача интерполяции
Начнем с постановки известных задач интерполяции функции, для простоты, одной переменной.
Некоторая функция /, аналитическое выражение которой неизвестно, определена на промежутке
[а, Ь], но задана только в отдельных точках (узлах интерполяции) xi,X2, • • • >гп этого промежутка.
Задача интерполяции №1 (локальная интерполяция). Располагая числами yt = f(xi), г =
1,2,... ,п и зная, что f принадлежит некоторому классу К функций (например, непрерывных на [а, Ь]),
требуется указать способ, с помощью которого можно было бы приписать значению / в заданной про-
межуточной между узлами точке х1 G (х1у... ,хп) некоторое «разумное» приближенное число, то есть
требуется проявить своего рода «искусство чтения между строк».
Задача интерполяции №2 (глобальная интерполяция). Требуется восстановить функцию /, то
есть найти такую аналитически заданную функцию /, которая приближала бы f на [а, Ь], а ее значения
в узлах интерполяции совпадали бы с заданными значениями функции /.
Полиномиальный подход к этим задачам заключается, как известно, в неявном или явном выборе
интерполяционного полинома f степени не выше п — 1, например, в форме Лагранжа или Ньютона и в
вычислении У(х') « f(x').
Более абстрактная формулировка задачи позволяет получить решение гораздо более широкого, чем
интерполяция, класса задач и, в конечном счете, приведет нас к методу обработки измерений, чрезвы-
чайно эффективному с точки зрения геодезических приложений.
Пусть изучаемая функция f принадлежит некоторому классу К функций, определенных в заданной
ограниченной замкнутой области D — одномерной, двумерной или трехмерной — неважно (размерность
области D обусловлена количеством независимых переменных у изучаемой функции /). Пусть далее на
К определены п + 1 линейных линейно-независимых функционалов Ьг, L2,. ,Ln, F, и нам известны
значения первых п из этих функционалов на /, то есть известны числа i = 1,2,... ,n.
Задача коллокации №1 (локальная коллокация).
Требуется указать способ, с помощью которого можно было бы приписать значению F(/) некоторое
«разумное» приближенное число.
Задача коллокации №2 (глобальная коллокация).
Требуется восстановить функцию /, то есть найти такую аналитически заданную функцию /, ко-
торая приближала бы f на D, а значения функционалов Ьг,Ь2,..., Ln на f совпадали бы с заданными
числами li, 1г,..., 1п, соответственно.
Описанные задачи будем называть задачами коллокации. Если участвующие в постановке за-
дач функционалы Li, L2, . , Ln, F суть дельта-функционалы, соответствующие фиксированным точкам
Р1у Р2,..., Рп, Р' е D, то задачи коллокации ничем не отличаются от задач интерполяции, в частности,
тех, с которых мы начали содержание этого раздела (при D = [а, Ь]). Таким образом, интерполяция
есть частный случай коллокации.
Пример 4.4.1. Пусть К — множество всех функций, непрерывных на отрезке [а, Ь]. Заданы точки
ix, 12,^3,14 этого отрезка и действительные числа Zi = f(xi), l2 = f'(x2), I3 = /"(^з)) U = f(x)dx,
где f e К.
Требуется:
задача №1 — вычислить F(/) = 6Х4(/) = /(14) ;
задача №2 — восстановить функцию f на [а, Ь].
Пример 4.4.2. Пусть D — некоторая область на земной поверхности, К — множество функций
трех переменных, гармонических вне Земли, регулярных на бесконечности и непрерывных на D. Заданы
точки Pi,Р2,Рз,Р4 е D и результаты измерений астрономических широты yi и долготы у2 в точке Pi,
астрономического азимута уз направления PiP2 и силы тяжести у4, у5 в точках Рг,Рз. См. примеры
3.1, 3.2, 3.3 и 3.5.
Поскольку координаты X точек Р1,Р2,Рз,Р4 заданы, а ошибки измерений предполагаются пре-
небрегаемыми, то указанные измерения дают 5 уравнений вида (4.3.16), то есть ЦТ = Ц, где i =
1,2, . ..,5, Ц = yi - Fi(X,U), Fi — функционалы примеров 3.1, 3.2 и 3.3, a Li — их линеаризация.
Требуется:
задача №1 — вычислить в точке Р4 высоту квазигеоида, представляющую собой следующий функ-
ционал на возмущающем потенциале Т: С(Р4) = 6р4(Т/у), где у — модуль нормальной силы тяжести;
задача №2 — восстановить возмущающий потенциал Т Земли.
При решении задач коллокации следует исходить из того, что класс К функций, которому при-
надлежит изучаемая функция /, представляет собой некоторое гильбертово пространство Н. Такая
ситуация, с одной стороны, полностью соответствует общим принципам ТМОГИ, а с другой стороны,
позволяет наиболее естественно получить сравнительно простое решение задачи коллокации.
Пример 4.4.3. Класс функций К представляет собой гильбертово пространство W2[-n,n] (см.
формулу (4.2.2) и ниже формулу (4.5.9)). Заданы точки ц = -л, х2 = -п/2, х3 =0, х4 = л/2, 15 =
л и действительные числа Ц = f(xi), i = 1,2,3,4,5, где f — некоторая функция из введенного
гильбертова пространства.
Требуется:
задача №1 — вычислить интеграл J = F(J") =
задача №2 — восстановить функцию f на [—л, л].
Рассмотрим в общем виде решение (локальной) задачи коллокации №1.
Поскольку вся количественная информация об изучаемой функции f содержится только в числах
/1,^2>-.-Jn. то искомое число F(f) есть, конечно, некоторая функция от li,l2, • ,1п- Мы будем ее
аппроксимировать линейной однородной функцией, т. е. будем полагать, что
F(f) « F(f) = aih + a2l2 + ... + anln, (4.4.1)
где коэффициенты ai,a2,... ,an линейной комбинации подлежат определению. Здесь F — линейный
функционал, аппроксимирующий F.
Перепишем (4.4.1) с помощью матричной символики:
F(/) « Г(/) = аЧ (4.4.1')
где а и I — n-мерные столбцы чисел щ,..., ап и 14,..., 1п, соответственно. Так как Ц = Li(f), то (4.4.1)
равносильно следующей записи
F(/) = aMf) + a2L2(J) + ... + anLn(J) = aTL(J), (4.4.1")
где L — n-мерный столбец исходных функционалов Li,..., Ln (векторный функционал, преобразующий
функции из Я в n-мерные векторы). Следовательно,
F = aTL.
(4.4.2)
При отыскании необходимых коэффициентов а полезно учесть, что множество всех линейных огра-
ниченных на Н функционалов образует гильбертово пространство Н* (сопряженное с Н). Заданные
функционалы
Li,...,Ln е Н*, будучи линейно-независимыми, образуют базис n-мерного подпространства =
Span{Li,... ,Ln}. При этом F G Н*, но в общем случае F Н[, так как F по условию линейно неза-
висим от Li,...,Ln. Поэтому естественно коэффициенты а в (4.4.2) подобрать таким образом, чтобы
F G Я* оказался элементом наилучшей аппроксимации F е Н* и, следовательно, расстояние между F
и F по метрике Н* было бы наименьшим среди всех других возможных.
Таким образом, по определению, F такой элемент из Н*, что
||F-F||‘= .inf ||F —F||*. (4.4.3)
Fe не-
подобные задачи имеют стандартное решение: коэффициенты а суть корни следующей системы
линейных алгебраических уравнений:
(Li, Li)*ai + (Li, L2}*a2 + ... + (Li,Ln)*an = (Li, F)*
(L2, Fi)*ai + (L2, L2^*a2 + ... + (L2, Ln)*an = (L2, F)*
(Ln, Li)*ai + (Ln, L2>)*a,2 + • • • + (Fn, Ln)*an = (Ln, F)*
или в матричном виде
Га = b. (4.4.4')
Здесь Г — матрица Грама, (i,j) позицию в которой занимает скалярное произведение в Н* функ-
ционалов (Li, Lj), i = 1,2, . ,.,n, j = 1,2, ...,n, b — столбец правых частей системы (4.4.4), то есть
b = (Li,F)*, i = l,2, ...,п.
Если все необходимые скалярные произведения в Н* мы вычислять умеем, то, очевидно,
а = Г~ГЬ, ат = ЬтТ'~1 (4.4.5)
и, в силу (4.4.2),
F = ЬгГ-1Д. (4.4.6)
Матрица Грама Г нормальна, то есть симметрична и положительно определена. Следовательно, обрат-
ная матрица Г-1 обязательно существует.
Таким образом, согласно (4.4.1"), число
F(/) = ЬТГ-1Г(/) = ЬТГ~Ч « F(/) (4.4.7)
решает поставленную задачу коллокации №1. При этом, если искомый функционал F совпадает с
одним из заданных функционалов Li, то решение (4.4.6) даст точно такой же функционал Li. Действи-
тельно, в указанных условиях правая часть системы (4.4.4') есть г-й столбец матрицы Г, и потому а в
(4.4.5) есть г-й столбец единичной матрицы размером п, п. Следовательно, формула (4.4.6) дает
F = Li. (4.4.8)
Именно это свойство коллокации оправдывает ее название и позволяет считать ее обобщением интер-
поляции.
Итак, если мы научимся достаточно просто вычислять нужные для составления системы (4.4.4)
скалярные произведения функционалов, то аппроксимация значения нужного функционала F сводится
к простейшим действиям с матрицами (4.4.7).
Наиболее эффективный способ вычисления скалярных произведений в сопряженном пространстве
основан на вспомогательной теории воспроизводящих ядер. Необходимые сведения из этой теории и ее
применение для вычисления скалярных произведений функционалов описаны в следующих разделах.
Рассмотрим теперь решение второй (глобальной) задачи коллокации. Оно сводится, очевидно, к
решению следующей системы п уравнений
Lf = I, (4.4.9)
где функция f должна быть выбрана из Н. Эта система уравнений имеет по форме тот же смысл,
что и система параметрических уравнений связи в ТМОГИ. Однако имеется и существенное отличие
(см. замечание 3.2). Дело в том, что в классической ТМОГИ в роли неизвестного выступает всегда
некоторый конечномерный вектор. Теперь же неизвестной является функция, представляющая собой
элемент бесконечномерного гильбертова пространства. Каким бы большим ни было число п, количество
уравнений в (4.4.9) всегда можно трактовать как меньшее, чем число неизвестных. Поэтому система
(4.4.9) всегда имеет решение, причем решений бесчисленное множество. Обозначим множество всех
решений системы (4.4.9) через L~l. Можно доказать, что на этом множестве существует единственная
функция наименьшей нормы. Такая функция называется нормальным решением системы (4.4.9) и
принимается в качестве решения f глобальной задачи коллокации. Оператор, переводящий исходные
данные I в нормальное решение f системы (4.4.9), называется главным псевдообратным оператором
и обозначается L+.
Таким образом,
f = L+l, (4.4.10)
так что, по определению,
/:||/||н= inf ||/||н. (4.4.11)
feL-i
Можно доказать, что нормальное решение отличается от искомой функции f меньше всего (по метрике
пространства Н) по сравнению с любым другим возможным решением системы (4.4.9) и в этом смыс-
ле является оптимальным. Из других возможных обоснований оптимальности нормального решения
приведем без доказательства следующую теорему из монографии [Жидков 1977].
Теорема 4.4.1. Выберем какое-нибудь положительное число С ||/||, и на каждом решении f G
L~l, удовлетворяющем условию ||/|| С, вычислим значение функционала F G Н*. Множество всех
полученных чисел образует отрезок на числовой оси. Длина этого отрезка зависит, разумеется, от F и
выбранной константы С, но серединой отрезка всегда служит значение F именно на f для VF е Н*\
Таким образом, нормальное решение (4.4.10) глобальной задачи коллокации является оптимальным
и с точки зрения решения локальной задачи коллокации: для всякого линейного ограниченного на
Н функционала F число F(j") является оптимальным значением для F(/) при данной информации.
Можно доказать, что
F(/) = F(f), (4.4.12)
где F определяется условием (4.4.3), a f определяется условием (4.4.11) (см. ниже формулу (4.6.18)).
Теперь наметим путь практического определения оператора L+ и, следовательно, вычисления нор-
мального решения /.
Прежде всего, заметим, что нет необходимости искать f во всем бесконечномерном пространстве
Н. Эта функция, как будет показано ниже, всегда принадлежит конечномерному подпространству этого
пространства.
Определение 4.4.1. Множество всех функций из Н, являющихся решением уравнения (4.4.9), но
без правой части,
L<p = 0, (4.4.13)
называется ядром векторного функционала L и обозначается Kerb.
Можно доказать, что использование векторного функционала L приводит к разбиению гильбертова
пространства Н на два взаимно ортогональных подпространства
Н = Kerb ® КегЧ, (4.4.14)
причем KerL — бесконечномерно, а КегхЛ — конечномерно и имеет размерность п.
Здесь Ker L — множество всех функций из Н, каждая из которых ортогональна любой функции
из Kerb. Это множество называется ортогональным дополнением ядра векторного функционала. Имен-
но ортогональному дополнению ядра векторного функционала L принадлежит нормальное решение f
системы (4.4.9), то есть
/еКеДЬ. (4.4.15)
Доказательство этих утверждений можно найти, например, в работах [Жидков 1977; Мориц 1983;
Нейман 1979; Треногий 1980].
Итак, бесполезно искать f во всем бесконечномерном множестве Н. Достаточно ограничиться изу-
чением лишь n-мерного подпространства Кет-1!,, так как исходная информация не позволяет найти ту
составляющую функции f, которая принадлежит ядру используемого векторного функционала L. Этот
факт определяет и практический путь отыскания /.
Действительно, предположим, что мы умеем определять базис ei, ег,..., еп для Ker1!,. Тогда можно
быть уверенным в существовании таких чисел ci,c2,... ,Сп, что
f = ciei + с2е2 + ... + Спеп. (4.4.16)
Так как по условию задачи
Lf = l, (4.4.17)
то нужные коэффициенты ci,c2,... ,Сп суть корни следующей системы линейных алгебраических урав-
нений:
T'i(ei)ci + £i(e2)c2 + ... + Li(en)cn = Zj,
^2(61)01 + Z/2(e2)c2 + ... + Дг(еп)сп = h, lg^
Дп(в1)С1 “I- Ln(e2)c2 + . .. + Дп(^п)Сп =
или в матричном виде
G с = I . (4.4.19)
П,П П,1 П,1
Здесь G = (д^), где Ру = ЛДеД i, j = 1,2,... ,n; cT = (щ, c2,..., Cn).
Можно доказать, что detG / 0 и потому решение системы (4.4.19) всегда существует и единственно:
Подставляя с в (4.4.16), получаем искомое решение глобальной задачи коллокации:
f = е G-1 I , (4.4.21)
1,П П,П П,1
где е — строка базисных функций ei,..., еп.
Выводы. В этом разделе мы рассмотрели локальную и глобальную задачи коллокации. Решени-
ем первой из них служит оптимальный в вариационном смысле (4.4.3) функционал (4.4.6), решением
второй — оптимальная в вариационном смысле (4.4.11) функция (4.4.21). Для практической реали-
зации полученных алгоритмов необходимо научиться вычислять скалярные произведения заданных
функционалов Li,... ,Ln, F и научиться находить базис ортогонального дополнения к ядру заданных
функционалов Li, L2,..., Ln. Существенную пользу при этом оказывает теория воспроизводящих ядер,
к рассмотрению которой мы и переходим.
4.5 Элементы теории воспроизводящего ядра
Существенным предположением при постановке задач коллокации в предыдущем разделе является
то, что изучаемая функция ДЛ) принадлежит некоторому гильбертову пространству Н. Здесь мы
кратко рассмотрим специальный тип гильбертовых пространств, нашедших плодотворное приложение
в геодезии. Это так называемые гильбертовы пространства с воспроизводящим ядром (далее в. я.). Их
свойства позволяют с приемлемой для практики простотой вычислять скалярное произведение в Н*
(см. формулу (4.4.4)) и базис в подпространстве Кет"1!, (см. (4.4.14) и (4.4.16)). Теория гильбертовых
пространств с в. я. базируется на теореме Рисса 2.3.
Определение 4.5.1. Пусть Н — гильбертово пространство функций, определенных на множестве
D. Функция К(А,В), где Л и В — произвольные точки D, называется воспроизводящим ядром гиль-
бертова пространства Н, если К (А, В) обладает двумя свойствами:
1) если В — любая фиксированная точка D, то К (А, В) как функция точки А принадлежит Н, то
есть
К(А,В)еН. (4.5.1)
2) значение любой функции f G Н в произвольной точке В е D равно
/(В) = (/(Л),Я(Л,В))^. (4.5.2)
Здесь верхний индекс А говорит о том, что операция скалярного произведения применяется к
элементам f и К(-,В) как к функциям точки А е D (см., например, правила (4.2.1) и (4.2.2)).
Видно, что функции, заполняющие В с в. я. Я(Л, В), ограничены в каждой точке В области своего
определения D. В частности, является конечным число Я(В, В) при VB е D.
Из формул (4.5.2), (4.2.11), (4.2.14) и определений 4.2.5, 4.2.6 следует, что:
1) в Я с в. я. К(А, В) определен функционал 6В при VB G D ;
2) если Ьв € Н*, то функция Я(Л, В) является сопряженным элементом функционалу 6В.
Между условием 8в € Н* и существованием в Я в. я. К(А, В) имеется взаимосвязь. Она выявля-
ется следующей теоремой.
Теорема 4.5.1. Для того, чтобы Я имело в. я. К(А, В), необходимо и достаточно, чтобы 6В G Я*
для VB G D .
Доказательство. Докажем необходимость. Пусть в Я существует в. я. Я(Л, В). Из формул (4.2.14)
и (4.5.2) следует равенство:
I W)l = If (В)| = |(/(Л), К(А, В))£|. (4.5.3)
С учетом (4.5.1) в правой части равенства (4.5.3) воспользуемся неравенством Буняковского—Коши:
I W)l = \f(В)| 11/11 • {(Я(Л, В), Я(Л, В))*}1/2. (4.5.4)
В правой части неравенства (4.5.4) воспользуемся (4.5.2):
(Я(Л, В), К (А, В))£ = К (В, В). (4.5.5)
Отсюда неравенство (4.5.4) примет вид:
IMf)l = If (В)| Ilf II • ЯХ/2(В, В). (4.5.6)
Но число Я1/2(В,В) конечно, поэтому функционал 6В ограничен (см. (4.2.5)), то есть 6В G Я*.
Необходимость доказана.
Докажем достаточность. Пусть 6В 6 Я*. По теореме 4.2.3 в Я существует элемент Фбв(Л) такой,
что
6B(f) = f(B) - (/(Л),Ф6в(Л))£. (4.5.7)
Функция Фбв(Л) зависит от точки В G D. Обозначим
Ф6в(Л) = Я(Л,В). (4.5.8)
Поскольку при VB G D функция К (А, В) = Фав(Л) G Я, и справедлива формула (4.5.7), то
Я(Л, В) — в. я. пространства Я (см. определение 5.1). Теорема 4.5.1 доказана.
Пример 4.5.1. Пусть D = [—тт, тт]. Точки D будем обозначать х, у,.... Рассмотрим гильбертово
пространство Н = л], см. формулу (4.2.2), со скалярным произведением
7t
(/,9) = J [a2/(z)p(z) + f'(x)g'(x)]dx, а 0. (4.5.9)
— 71
В работе [Жидков 1977] доказано,что в №£[—л, л] существует в. я., равное
{ch<х(л — у) • chа(л + х)
а sh 2ла, .
ch а(л + у)^ ch а(л — х)
ос • sh 2ла
при —л^х^у^л,
при —л^у^х^л,
(4.5.10)
где ch и sh — гиперболические косинус и синус.
Наша ближайшая цель — научиться вычислять в. я.
Теорема 4.5.2. Пусть {еДЛ)}?^ — ортонормированный базис пространства Н, в котором суще-
ствует в. я. К(А, В). Тогда для любых точек А, В е D
К(А,В) = ^а(А)^(В). (4.5.11)
г=1
Доказательство. Поскольку при любой точке В € D в. я. В) Е Н, то имеет место формула:
оо
К(А, В) = $><((7), К(С, В))£ • е<(А). (4.5.12)
г=1
При вычислении коэффициентов Фурье в формуле (4.5.12) воспользуемся воспроизводящим свой-
ством (4.5.2):
(ei(C'),^(C',B))g = ei(B). (4.5.13)
С учетом (4.5.13) и (4.5.12) получаем доказательство справедливости формулы (4.5.11). Теорема
4.5.2 доказана.
Теперь изучим некоторые свойства в. я., необходимые в приложениях.
Теорема 4.5.3. Если в Н существует в. я. К(А,В), то оно единственно.
Доказательство. Пусть в Н существует воспроизводящее ядро К(А, В), тогда, согласно теореме
4.5.1, 8g G Н*, причем К(А, В) — сопряженный элемент дельта-функционалу 6д. Но, согласно теореме
4.2.3, сопряженный элемент К(А, В) единственный. Теорема 4.5.3 доказана.
Теорема 4.5.4. Если в Н существует в. я. К(А, В), то операция равенства элементов из Н влечет
за собой поточечное равенство.
Доказательство. Пусть фиф — элементы из Н, причем ф = ф. Тогда, конечно, и ]]ф — ф|| = 0.
Зафиксируем произвольную точку В е D и вычислим для нее ф(В) — ф(В).
Поскольку все 6 — функционалы в пространстве с в.я. конечны, то и число /(В) = ф(В) -ф(В)
конечно. Воспользуемся неравенством (4.5.6):
|/(В)| = |ф(В) - ф(В)| ||ф - ф|| • (К(В, B))V2.
Но ||Ф — Ф|| = 0, поэтому и ф(В) - ф(В) = 0 для VB, то есть ф(В) = ф(В). Теорема 4.5.4 доказана.
Теорема 4.5.5. Пусть К(А, В) — в.я. гильбертова пространства Н и {Bi}"=1 — совокупность п
точек из D. Тогда при любом наборе действительных чисел (ai, аг,..., а,,), одновременно неравных
нулю, имеет место неравенство:
f^a^B^a, 0, (4.5.14)
г=1 ; = 1
то есть воспроизводящее ядро является функцией положительно определенной.
Доказательство. Согласно равенству (4.5.5) и аксиомам линейного пространства, имеем
££аиод,в,)а, = =
2=1 j=l 1=1 j=l
= (£ а,К(Д ВД £ сцК(А, В^ = II £ сцК(А, вон2 0.
ji=l 2=1 2=1
Теорема 4.5.5 доказана.
Теорема 4.5.6. Пусть гильбертово пространство Н, имеющее в. я. К(А, В), разложено в прямую
сумму (см. раздел 4.2) подпространств Hi и Bj1-:
Н = Hi® Н^, (4.5.15)
тогда
К(А,В) = Ki(A,B) + К^(А,В), (4.5.16)
где Ki(A,B) — в. я. подпространства Hi, и Ki<A,B) — в.я. подпространства Н^-. Доказательство
вытекает из теоремы 4.5.2.
Из разложения (4.5.15) следует, что V/ G Н однозначно представим в виде суммы:
f(B) = /1(B) + /iL(B), (4.5.17)
где fi G Hi, fi~ G Hi. Функция /i(B) может быть найдена по формуле:
/1(В) = (/(Л),В1(Л,В))^. (4.5.18)
В самом деле, так как Ki(A,В) G Hi при VB G D, то Ki(A,В) ± Н^ . В частно-
сти, (tf(A),Ki(A,B))* = 0. Поэтому (/(Л), ^(Л.В))^ = (Д(Д) + f^{A),Ki{A,B))^ =
(fi(4), В1(Л,В))^ = /1(В), что и требовалось доказать.
Следующая теорема позволит получить элемент Фд(В) G Н, сопряженный любому линейному
ограниченному функционалу L G Н* (см. теорему 4.2.3).
Теорема 4.5.7. Пусть в Н существует в. я. К (А, В) и L — произвольный элемент из Н*, тогда
Фд(Л) = ^вВ(Л,В). (4.5.19)
В правой части (4.5.19) L действует на К(А, В) как на функцию точки В G D. Для простоты будем
обозначать LBK(A, В) = K(A,L).
Доказательство. Пусть f — любой элемент Н и К (А, В) — в. я. В таком случае справедлива
формула (4.5.2). Подействуем на обе части формулы (4.5.2) функционалом L-.
Lf = (f(A), LBK(A, В))£ = (/(Л), К(А, £))н- (4.5.20)
Сравнивая (4.5.20) и (4.2.11), получаем доказательство теоремы 4.5.7.
Особо отметим выражение для квадрата нормы функционала. Для этого обозначим K(L, L) резуль-
тат действия на в. я. К (А, В) функционалом L сначала как на функцию В, а затем как на функцию
точки А, то есть:
K(L,L) = La-LbK(A,B). (4.5.21)
Тогда
||L||2 = ||Фд||2 = K(L,L). (4.5.22)
В самом деле,
||Фь||2 = (K(A,L),K(A,L))B = (LbK(A,B),LbK(A,B))b =
= LB • LB(K(A, В), К(А, В))£ = LB LBK(B, В) = K(L, L).
Пример 4.5.2. Пусть Н = Р2^1[-1,1] из примера 4.2.2. Рассмотрим функционал Lx = bxoD, где
D — оператор взятия производной. На любую функцию f(x) = ах + [3 е Н функционал L действует
так:
Lx(ax + ₽) = Ьх о D(ax + ₽) = Ьх((ах + ₽)') = Ма) = «•
Найдем ФдДа;). Но сначала покажем, что L — ограниченный функционал, то есть L е Н*. Имеем:
11/112 = J (as + frfdx = |а2 + 2₽2.
Поэтому
IWI = l*|^y|-11/11- (4-5.23)
/q"
Сравнивая (4.5.23) и (4.2.6), приходим к выводу, что ||LX|| л/j, то есть Lx е Н*. Теперь воспользу-
емся формулами (4.5.27) и (4.5.19):
«li(x)=K(x,Lx) = |x. (4.5.24)
Вычислим ||LX||. Согласно (4.5.22),
1 q q
НМ2 = 1|ФьЛ2 = J = -, (4.5.25)
-1 *
и потому
В следующей теореме получен удобный для практики метод вычисления скалярного произведения
в гильбертовом пространстве Н* (см. раздел 4.4).
Теорема 4.5.8. Пусть Li,L2 — произвольные элементы из Н*, тогда
(Li, Ь2)‘ = Ьх • L2K(A, В) = KfLi,Ь2), (4.5.26)
где K(Li,L2) — результаты действия на в. я. К(А, В} сначала функционалом Ь2 как на функцию
второго аргумента, а затем функционалом Lx как на функцию первого аргумента.
Доказательство. Согласно формуле (4.2.13) (Lx,L2)* = (ФдцФдг), где Ф^, Фь2 — элементы из Н,
сопряженные функционалам Li и Ь2. Воспользовавшись теоремой 4.5.7 и формулой (4.5.5), получим:
(Lx,L2y = (LiK(A, В), L2K(A, В))£ = Lx • L2(K(A, В),
К (А, В))£ = Lx • L2K(B, В) = Ь2),
что и требовалось доказать.
Пример 4.5.3. Пусть Н = 1,1]. Рассмотрим функционалы Lx = Ьх о D (см. пример 4.5.2)
и L2(J) = j2x f(x)dx. Читателю предлагаем доказать, что L2 е Н*. Вычислим, пользуясь формулой
(4.5.26), скалярное произведение (Lx,L2)*.
Имеем K{x,L2) = J^j K(x,y}dy = j2x(^ + yxy)dy = 1.
Теперь получим:
(Lx, L2)* = Li • L2K(x, y) = LxK(x, L2) = 6X(1') = K(Li, L2) = 0.
Вопросы конкретного выбора воспроизводящего ядра для геодезических целей обсуждаются ниже
в разделе 4.9.
Упражнение 5.1. Рассмотрим конечномерное гильбертово пространство Н = Р2^1[—1,1] из примера
4.2.2.
Доказать, что в.я. в Р2^1[—1,1] существует и равно:
1 ч
К(х,у) = - + ^ху. (4.5.27)
Упражнение 5.2. Пусть в Н существует в. я. В).
Доказать, что из условия fn —-—> f следует сходимость /П(В)-► f(B) для VB 6 D (поточеч-
п-->00 71--»ОО
ная сходимость). Обратите внимание, что в общем случае это не так.
Упражнение 5.3. Доказать, что К(В,В) > 0 и К (А, В) = К (В, А) при \М, В 6 D.
Упражнение 5.4. Пусть Hi = Р^*[—1,1] (см. пример 4.2.2 и упражнение 5.1). Рассмотрим Hi =
Span{ei(x) = х}.
Доказать, что Ki(x,y) = %ху.
Упражнение 5.5. Доказать, что в формуле (4.5.16) функции Ki(A,B) и Ki(A,B) ортогональны при
VB 6 В.
Упражнение 5.6. Пусть Н = Р/1[—1,1].
Доказать, что ЦбгЦ2 = j + ^х?.
Упражнение 5.7. Рассмотрим Н = Р2<1[—1,1] и ограниченные функционалы Li и Li из примера
4.5.3. Доказать, что Н* = Span{Bi, Вг}- Пользуясь результатами раздела 4.2, найти разложение
дельта-функционала Ьх по базису (Li,Li).
Ответ: Ьх = х - Li + yLi.
4.6 Решение задач коллокации с помощью воспроизводящего
ядра
Располагая основными понятиями теории гильбертовых пространств с воспроизводящим ядром, мы
в состоянии теперь довести до конца решения локальной и глобальной задач коллокации (см. выводы
в конце раздела 4.4).
Важнейшим результатом содержания предыдущего раздела является тот факт, что воспроизводящее
ядро К (А, В) гильбертова пространства Н позволяет легко находить сопряженную функцию fFeH
для любого линейного ограниченного функционала F е Н*.
Согласно (4.2.11),
fF:F(f) = (f,fF)yfeH. (4.6.1)
Поэтому, согласно (4.5.2),
fF(A) = (/F(B), К(В, А))в = (К (В, A), fF(B))B = FB(K(A, В)) = К(А, F). (4.6.2)
Здесь К (A, F) представляет собой искомую функцию /f(A); А — текущая точка. Таким образом,
для практического определения /f(A) достаточно подействовать соответствующим функционалом F на
ядро К (А, В) как на функцию точки В.
В связи с этим легко получить и скалярное произведение (Fi,Fz) двух функционалов Fi и F2 в
гильбертовом пространстве Н*.
Действительно, в силу (4.2.13),
(FbFzf = (/f1,/f2). (4.6.3)
Но в соответствии с (4.6.2),
fF1=K(A,F\), fF2 = K(A,F2)
и, следовательно,
(Fi,F2)‘ = (^(A.FJ.^A.Fa))^ = (K(F1,A),K(A,F2))a = K(F1,F2). (4.6.4)
Таким образом, для получения числа (F1(F2)* достаточно на К (А, В) подействовать сначала функ-
ционалом Fi, как на функцию точки А, а затем функционалом F2 как на функцию точки В.
Здесь и далее принята договоренность, что запись F(/) равносильна записи f(F). Это и определяет
смысл записи К (A, F) в (4.6.2) и JC(Fi,F2) в (4.6.4). В частности,
ВД,Г2) = Г1дГ2вК(А,В).
Пример 4.6.1. Пусть некоторая задача решается в гильбертовом пространстве W^n, л] со ска-
лярным произведением (4.5.9) (см. пример 4.4.3). Этому пространству соответствует воспроизводящее
ядро (4.5.10).
Предположим, что Fi(/) = /(-7), a F2(/) = /(0).
Тогда:
/3 \
ch f -ал 1 • сЬ(а(л + х))
а • зЬ(2ла)
fF1(x) = K(x,Fi) = {
л
7’
mJ сЬ(а(л — д))
а • sh(2na)
(FltF2)* = K(Fi,F2) = 4 ---.
а sh(2na)
Теперь нетрудно переписать полученное в разделе 4.4 решение (4.4.7) локальной задачи коллокации
в терминах воспроизводящих ядер. Достаточно заметить, что в формулах (4.4.4)-(4.4.7)
(£^)’ = К(£^)
(Li(F)‘ = K(Li,F).
(4.6.5)
Для решения глобальной задачи коллокации важную роль играет следующий факт.
Теорема 4.6.1. Одним из базисов (неортогональных) n-мерного подпространства Ker1!, С Н слу-
жит набор п линейно-независимых функций K(Li,B), K[L2,B)........K(Ln,B) текущей точки В,
представляющих собой сопряженные функции по отношению к исходным линейно-независимым функ-
ционалам Li, L2,... ,Ln соответственно.
Доказательство см., напр. в [Нейман 1979, с. 135]. Здесь мы отметим лишь, что линейная неза-
висимость сопряженных функций является непосредственным следствием линейной независимости ис-
ходных функционалов.
Теперь понятно, что строка е базисных функций в формулах (4.4.16)-(4.4.20) представляет собой
1,71
строку сопряженных функций
K(Li,B), K(L2, В),..., K(Ln, В),
и потому элементами матрицы G в (4.4.19) служат числа
9ц = Li(ej) = Ц K(Lj, В) = K(Lj, Li) = K(Li, Lj). (4.6.6)
А матрица Г в формулах (4.4.4)-(4.4.7), разрешающих (локальную) задачу коллокации №1, и матрица
G в формулах (4.4.16)—(4.4.20), разрешающих (глобальную) задачу коллокации №2, есть одна и та же
нормальная матрица:
Г = G = К (L,L). (4.6.7)
71,71 71,71 71,71
Смысл последнего компактного обозначения таков: поскольку
ад,в)\
= LK(A,B) = K(L,B), (4.6.8)
* I П,1 n,l
K(Ln,B)J
TO
G = L(KT(L,B)) = (K(L,B) , Kt(L,B))h = K(L,L). (4.6.9)
n,n nfl l,n nfl l,n nfn
В этих обозначениях столбец Ь из (4.4.4)-(4.4.7) записывается следующим образом:
b = L (FK(A, В)) = К (L, F). (4.6.10)
П,1 П,1 П,1
Здесь K(L, В) представляет собой n-мерный столбец сопряженных функций К (Li, В) текущей точки
В для исходных функционалов L, (г = 1,2,..., n); K(L, F) представляет собой n-мерный столбец чисел
K(Li,F)\ K(L, L} — симметричная n х п матрица, (г, ^-позицию в которой занимают числа К (Li, Lj).
Итак, если класс функций, участвующий в постановке задач коллокации, представляет собой гиль-
бертово пространство Н с известным воспроизводящим ядром К (А, В), то:
— решение (локальной) задачи коллокации №1 практически рекомендуется находить по формулам
(4.4.2), (4.4.4)-(4.4.7), опираясь на (4.6.7), (4.6.10), то есть
F = aTL, (4.6.11)
где столбец коэффициентов а — корень системы
К (L,L) а = K(L,F\, (4.6.12)
n,n n,l n,l
таким образом,
F — KT(L,F)- K~\L,L)L, (4.6.13)
l,n n,n n,l
F(f) = KT(L,F)- K-\L,L)- Ц (4.6.14)
l,n n,n nfl
— решение (4.4.11) глобальной задачи коллокации №2 практически рекомендуется находить по фор-
муле (4.4.16), опираясь на следствие из теоремы 4.6.1, то есть в виде линейной комбинации предста-
вителей исходных функционалов,
/(В) = KT(L, В) с /(•) = KT(L, •) с (4.6.15)
1,П П,1 1,П П,1
где столбец коэффициентов с — корень системы
K(L,L)c=l; (4.6.16)
П,П П,1 п,1
таким образом,
f(-) = KT(L,-)K-1(L,L)l (4.6.17)
1,п п,п nfl
Тем самым получено исчерпывающее решение обеих задач коллокации.
В заключение сделаем несколько полезных замечаний.
1. Согласно (4.6.17) и (4.6.14),
F(f) = KT(L,F)K-\L,L)l = F(f), (4.6.18)
что является доказательством ранее указанного равенства (4.4.12).
2. Окончательные решения (4.6.14), (4.6.17) представляют собой линейные комбинации исходных
чисел 11,1г,
Р(П=ат1 (4.6.19)
1,П П,1
/(•)=ат(-)Г (4.6.20)
1,П П,1
Здесь
а = К-1 (L, L) • К(L,F) — столбец чисел;
1\П'Птг-^гт г\Лтг/г ' к л. (4.6.21)
а(-) = К [L,L)-K(Lt-j — столбец функции, 4
п,п П,1
составляющих новый базис n-мерного подпространства Ker1!, С Н. При этом
Га(-) = а(Г) = а, (4.6.22)
если г — i (4.6.23)
Важно, что а( ) и а зависят только от используемого гильбертова пространства Н (конкретно, от его
воспроизводящего ядра) и вида используемых функционалов L и F и не зависят от изучаемой функции
f (соотношение (4.6.23) является следствием того свойства, которое объясняет термин «коллокация»
и указано после формулы (4.4.7)). Напомним, что аналогичная ситуация имеет место в классических
задачах интерполяции с помощью полинома Лагранжа (роль а,( ) играют «полиномы влияния» г-го
узла), численном интегрировании (а<(•) — те же полиномы влияния, a aj(F) — весовые коэффициенты)
и в других задачах вычислительной математики.
3. Согласно (4.6.17) и (4.4.9),
/ = KT(L, •) • К-1 (L, L) • f = П/, (4.6.24)
где — это легко проверить непосредственно —
П • П = П2 = П. (4.6.25)
Оператор
П = KT(L, •) • K~\L,L)- L = a (•) L (4.6.26)
l,n n,n n,l l,n n,l
естественно назвать проектором. Его областью определения служит исходное гильбертово пространство
Н, а множество значений, согласно (4.4.15), есть ортогональное дополнение к ядру Ker1/, исходного
векторного функционала L (см. формулу (4.4.14)). При этом Ker1!, С Н и на Ker1!, проектор П
является тождественным, то есть
V/ € КегхЛ С Н, П/ = /. (4.6.27)
Проектор П является основным оператором, разрешающим обе задачи коллокации, поскольку, согласно
(4.6.13), (4.6.19) и (4.6.21),
/ = П/, Г = ГП. (4.6.28)
4. Известно, что классические формулы полиномиальной интерполяции и численного интегриро-
вания, имеющие, как уже подчеркивалось в замечании 2, ту же структуру, что и формулы (4.6.19),
(4.6.20), являются точными на множестве полиномов, удовлетворяющих условиям интерполяции и име-
ющих степень, не превышающую определенное число, зависящее от количества исходных узлов. При
этом исходными данными служат значения дельта-функционалов. Соотношение (4.6.27) показывает,
что решения (4.6.19), (4.6.20) задач коллокации, обобщающих в указанном в разделе 4.4 смысле зада-
чи интерполяции, являются точными на множестве функций, зависящем от структуры используемого
гильбертова пространства Н и от вида исходных функционалов L. При этом независимо от вида функ-
ционала F
Ff = Ff для V/ е Кег*-£ С Н n\/FeH‘,
(4.6.29)
что непосредственно вытекает из (4.6.28) и (4.6.27).
Другими словами,
(4.6.30)
Ker(F — F) = Ker1!, для VF 6 Я*.
Пример 4.6.2. Применительно к задаче из примеров 4.4.3 и 4.6.1
имеем
K(L,F) = ——?x
5,5 азЬ(2ла)
ch 2л
сЬ(|ла)
ch (ла)
ch(^a)
1
сЬ(|ла) сЬ(ла)
ch( j ла) ch( 3 а) сЬ(^а)сЬ(ла)
f rrrsvS rtli/frrrsv\
K~\L,L)= * ' x
5,5 sh(^a)
сЬ(ла) ch(^a)
ch2(^a)
ch(^a)
^ch(^a)
-1
0
0
I 0
ch2 (ла)
сЬ(ла) ch(^a)
ch (ла)
ch(^a)
ch2(^a)
ch(na) ch(?ya)
ch(j7ta) ch(^a)
ch($j7ra)
1 \
ch(^a)
ch (ла)
сЬ(^ла)
ch (2 ла))
-1
2ch(^a)
-1
0
0
-1
2ch(^a)
-1
0
0
0
-1
2ch(^a)
-1
0
0
0
-1
а'
х
b — KT(L,F) = (а 2,а 2,а 2,а 2, а 2),
F(/) = KT(L, F) K~\L, L)l = 2th(Ja) + i2 +13 + l4 + I).
Чтобы получить численные результаты, положим f(x) = ех, но для расчетов будем использовать
только значения Ц этой функции в указанных в примере 4.4.3 узлах Х{ с шагом h = :
Zi = 0,0432139, 12 = 0,2078796, l3 = 1, /4 = 4,810477, 15 = 23,140690 (здесь Ц = eXi, xt =
-л+5(г-1), i = 1,2,3,4,5).
При a = 1 получаем I « F(f) = 23,097467.
Для сравнения укажем, что истинное значение искомого интеграла I = f™nexdx = 23,097476, а его
оценка с помощью квадратурной формулы Симпсона с теми же пятью узлами составляет 23,70. Таким
образом, метод коллокации оказался гораздо более точным.
Заметим, что описанным методом коллокации легко получить формулу численного интегрирования
и для произвольного шага h, а именно:
7 ths£
J
-7t “9“
( 4 + lz + • • • + ln-1 + У'j,
где n = 1 + Ц = f(xi), Xi — —л + h(i — 1), i = 1,2, ...,n. Полученное выражение напоминает
квадратурную составную формулу трапеций, но отличается от нее первым сомножителем.
4.7 Оценивание точности решений
Остановимся на точности решения задач коллокации, полагая пока для простоты, что ошибки
измерения функционалов пренебрегаемо малы.
Начнем с (локальной) задачи коллокации №1. Цель этой задачи, как отмечалось в разделе 4.4, со-
стояла в определении такой аппроксимации F для искомого функционала F, которая отвечает условию
оптимальности (4.4.3). Такая аппроксимация найдена в виде (4.6.13). Точность ее естественно харак-
теризуется «расстоянием» |]F — F||* между F и F по метрике того пространства, элементами которого
являются функционалы F и F, то есть по метрике гильбертова пространства Н*. Знание воспроизводя-
щего ядра для исходного гильбертова пространства Н позволяет сравнительно просто вычислить
указанное расстояние.
Теорема 4.7.1. Мера близости ||F — F||* приближенного функционала F относительно соответ-
ствующего истинного функционала F определяется формулой:
||F - F||*2 = K(F, F) - KT(L,F) K-^L'L) K(F,L). (4.7.1)
1)1 1,71 n,n n,l
Доказательство.
||F - F||*2 = (F — F,F — F)* = (F-F,F)‘,
так как (F — F) ± F по свойству элемента наилучшей аппроксимации. Поэтому
||F - F||*2 = (F, F)* - (F, F)‘ = K(F, F) - K(F, F), (4.7.2)
согласно правилу (4.6.5). Но, учитывая (4.6.13),
K(F, F) = FK(-, F) = KT(L, F) K~\L, L) LK(-, F),
откуда и получается формула (4.7.1).
Теорема доказана.
Подчеркнем, что мера точности (4.7.1) не зависит от конкретной функции f из Н, на которой ищется
значение функционала F, а зависит только от структуры используемого гильбертова пространства Н (а
именно, от его воспроизводящего ядра), структуры аппроксимирующего F и заданных функционалов
L.
Можно доказать, что величина ||F — F||*2 уменьшается с увеличением п в силу положительной
определенности квадратичной формы, вычитаемой в (4.7.1) (это является следствием положительной
определенности воспроизводящего ядра, см. (4.5.14)).
Найденный функционал F позволил нам приписать искомому числу F(f), то есть значению F на
теперь уже конкретной, но неизвестной функции f € Н, разумное приближение F(/) в соответствии с
формулой (4.6.14). В общем случае (F / Ц, i = 1,2,..., п), очевидно, F(/) / F(/) и число
&F,f = F(f) - F\f) = (F - F)(f) (4.7.3)
представляет собой истинную ошибку аппроксимации.
Следующая теорема позволяет вычислить предельную ошибку такой аппроксимации.
Теорема 4.7.2. Истинная ошибка (4.7.3) аппроксимации числа F(/) числом F(J), полученным по
правилу (4.6.14), удовлетворяет неравенству
|Afj| = |(F - F)(/)| ||F - F||* • (ll/ll2 - II/II2)1/2, (4.7.4)
где ||F — F||* определяется формулой (4.7.1), ||/|| — норма нормального решения f глобальной задачи
коллокации (№2) определяется формулой
П/П2 = lT-K~\L,L)- I (4.7.5)
l,n n,n n,l
a ll/ll — норма изучаемой функции f e H предполагается известной.
Иногда более полезной оказывается иная форма неравенства (4.7.4):
ITO) — F(/)| Н/Н • (||F||*2 - {/<(F,Li)}T{/<(LilLJ)}-1{/<(F,Li)})1/2 (4.7.6)
Доказательство.
|AFi/| = |(F-F)(/)| = |(F-F)(/-/)|,
поскольку, в силу (4.4.15) и (4.6.29),
F/= F/<=► (F — F)(/) = 0. (4.7.7)
Значение функционала F — F на функции f — f можно представить скалярным произведением f — f с
функцией K(F-F,B'), являющейся представителем функционала F — F (см. (4.5.20) и (4.6.1), (4.6.2)),
I&F,f I = KF - Л(/ - /)| = (F(F - F, В), f - f)H. (4.7.8)
Поэтому, согласно неравенству Коши—Буняковского и (4.2.12),
|Af,/| IIF-FII* • ||/-/||. (4.7.9)
На основании соотношений (4.4.14) и (4.4.15),
V/eH:/ = (/-/) + /=>(/-7)±/, (4.7.10)
и потому справедлива обобщенная теорема Пифагора:
||/1|2 = 1|/||2 + Н/-/1|2. (4-7.11)
Выразив отсюда норму ||/ - /|| и подставив ее в (4.7.9), получим неравенство (4.7.4).
Вычислим теперь с учетом (4.6.9) квадрат нормы нормального решения.
\\f\\2 = (f,f) = (KT(Le). K~l(L,L)- I KT(L,-)-K~\L,L)- I ) =
l,n n,n n,l l,n n,n n,l
= (lTK~\L,L).K(L,.), KT(L,-). K~\L,L). Z ) =
l,n n,n n,l l,n n,n n,l
= I TK~\L,L)- K(L,L)- K~\L,L)- I = Z T • F-1(L, L) • I.
l,n n,n ntn ntn nfl l,n n,n n,l
Неравенство (4.7.6) получается на основании следующих рассуждений
\Ff - Ff\ = \F(f - /)| = |F(/) - {F(F, Ц)}Т{К(Ц, =
= |(F-{K(F,L1)}^{F(Li,LJ)}-1{LJ})(/)|
Ц/H • ||F —{F(F,Li)№(Li,LJ)}-1{LJ}||‘.
Можно доказать, что теорема Пифагора (4.7.12) справедлива и в терминах функционалов, то есть
l|F||2 = ||F||2 + ||F — F||2, (4.7.12)
откуда и следует (4.7.6). Теорема доказана.
Следующая теорема позволяет интерпретировать критерий точности аппроксимации типа (4.7.1) в
терминах истинной ошибки типа (4.7.3).
Теорема 4.7.3. Квадрат нормы разности искомого функционала F и его оптимальной оценки F,
дающий меру точности оценки F в квадратичной метрике пространства Н*, совпадает по величине с
истинной ошибкой оптимальной аппроксимации значения функционала F на своем представителе /F,
то есть
||F - F||*2 = Af,/p = F(/f) - F(/f). (4.7.13)
Доказательство.
На основании (4.7.2) и (4.6.2) имеем:
||F - F||*2 = FF(- , F) - FF(- , F) = F(/f) - F(/f).
Теорема доказана.
Теорема 4.7.4. Множество Кег1!/, представляющее собой n-мерное подпространство исходного
гильбертова пространства Н, имеет воспроизводящее ядро Кп(А В) вида
Кц(А,В) = KT(L,A)- К-ЧЦЬ}- К (В, L). (4.7.14)
1,п п,п лД
Доказательство. В силу теоремы 4.6.1 всякая функция /(В) из Кег-1!, представляется линейной
комбинацией вида
/(B) = F1T„(L,B).Cn>1.
Поэтому для V/ е Кег1!,:
(KT(L, А) • К~\Ь, L) К(В, L), =
= (KT(L, А) • K~\L, L) К(В, L), KT(L, В) с)в =
= KT(L, А) • K~\L, L) K(L, L)-c = KT(L, A) c = f(A)
и, следовательно, функция (4.7.14) обладает воспроизводящими свойствами. Теорема доказана.
Понятно, что, если воспроизводящим ядром (4.7.14) подействовать на функцию f из Н, то получится
проекция П/ этой функции на КегхД, то есть
VftH: (Яп(А,В),/(В))в = ПДА) = /(А). (4.7.15)
Это непосредственно вытекает из соотношений (4.7.10).
Остаточное воспроизводящее ядро Ко (А, В) для Кег£ имеет вид
Ко(А,В) = К(А,В)-Кп(А,В). (4.7.16)
Действительно, в силу (4.4.14), применима теорема 4.5.6.
Сопряженное пространство Я*, в соответствии с выражением (4.4.14), также разбивается, подобно
(4.7.10), на два взаимно ортогональных подпространства
Я* = (Кег1!)* Ф (КегД)*. (4.7.17)
При этом
F е (Кег*-£)*, (F — F) 6 (Кег£)‘ (4.7.18)
и
F = F®(F — F), F ± (F — F), (4.7.19)
что уже использовалось при доказательстве теоремы 4.7.1. Поэтому имеет место теорема Пифагора:
1И1*2 = 11Л*2 + И-Л*2.
где
||F||*2 = K(F, F), ||F||*2 = Fn(F, F), ||F - F||*2 = K0(F,F). (4.7.20)
Последняя формула представляет собой то же самое, что и формула (4.7.1).
Пример 4.7.1. Применительно к задаче, рассмотренной в примерах 4.4.3 и 4.6.1, имеем
||F - F||*2 = 2а-2|л - 4а-1 th(^a)|, ||/||2 = bi ch(^a) + 62,
где
bi — + 21| + 212 + 212 +1|, b2 = —2(1112 + I2I3 + I3I4 + Ws)-
Для указанных в примере 4.6.1 численных значений имеем
||F - F||* = 1,02; (||/||2 - ||/||2)1/2 = 0,Oil; |(F - F)(/)| 0,011 « 10"2.
Таким образом, предельная ошибка 10-2 значительно превышает полученную в действительности ис-
тинную ошибку (F — F)(f) = 23,097476 - 23,097467 « 10-5.
Формулы (4.7.1), (4.7.4) и (4.7.5) являются рабочими формулами для оценивания точности решения
задач коллокации в наиболее реальной для практики ситуации, когда число п исходных линейно-
независимых функционалов конечно. При этом важно, что, как уже отмечалось выше, величина ||F —
F||*2 уменьшается с увеличением п. Однако с увеличением п ухудшается обусловленность подлежащих
решению систем уравнений (4.6.12) и (4.6.16). Поэтому необходимо обсудить положение дел при п —>
оо.
Предварительно введем одно новое понятие.
Определение 7.1. Пусть D — некоторая ограниченная область — одномерная, двумерная или трех-
мерная, ас — как угодно малое положительное число. Множество точек Ai,A2,...,An области D
называется Е-сетью в этой области, если в Е-окрестность любой точки A G D попадает хотя бы одна
точка Ait г = 1,2,...,п. При этом сами точки А1,Аг, ...,АП называются узлами Е-сети. Ясно, что п
зависит от е и тг —> оо при е —> 0.
Теорема 4.7.5. Пусть Н — сепарабельное гильбертово пространство с воспроизводящим ядром
К (А, В). Элементами Н служат функции /(А), определенные в ограниченной области D. Пусть, да-
лее, точки Ах, Аг,..., Ап образуют е—сеть в D для заданного положительного числа е; пусть, да-
лее, 6i(-), бг(-), •••, 6П(-) обозначают дельта-функционалы, соответствующие узлам Е-сети (6i(/) =
/(Ai), г = 1,2,...,n), a fn~ нормальное решение (4.6.17) соответствующей глобальной задачи
коллокации с Ц = /(А;), г = 1,2,..., п. Тогда, если п —> оо так, что е —> 0, то:
а) сопряженные функции Ki = K(Ai,B), К% = F(A2, В),..., Кп = К(Ап,В),... текущей точки
В, соответствующие указанным дельта-функционалам, образуют полную систему функций в Н ;
б) нормальное решение fn сходится по норме пространства Н к истинной функции /, на которой
заданы значения дельта-функционалов, то есть
= / (4.7.21)
п—*00
в том смысле, что
II/- Л|| ->0 при п->оо. (4.7.21')
Доказательство [Tscherning 1978]. Обозначим, как обычно, столбец всех исходных функционалов
через L. В условиях, когда п —> оо, этот столбец бесконечномерен. Пусть на некоторой функции / е Н
имеем
L/ = 0 <=> /(Af) = 0, г = 1,2,... ,п,... (4.7.22)
Поскольку п —> оо так, что е —> 0, то (4.7.22) может иметь место лишь при /(А) = 0 для VA G D.
Следовательно, в пределе Kerb = 0. Но
Li(/) = /(А) = (K(Ai,B),/(B))B = (Fi,/)
и потому указанное положение равносильно тому, что
(Кг,Г) = 0,,г = 1,2,...,п,...=> / = 0, (4.7.23)
а это и означает, что функции Ki, i = 1,2,..., п,... образуют в Н полную систему.
Утверждение а) доказано.
Для всякого конечного п функции Ki,K?,... ,Кп составляют неортогональный базис п-мерного
подпространства Кед1!, С Н (см. теорему 4.6.1). На его основе мы можем построить ортонормирован-
ный базис Vi, V2,..., Vn, где
i
= (4.7.24)
J=1
и коэффициенты уу можно считать известными, поскольку они определяются по известной из линей-
ной алгебры схеме Грама—Шмидта. Всякое увеличение п оставляет уже найденные функции Vi без
изменения. Если п —» оо так, что £ —» 0, то функции V2,..., Vn ... составляют ортонормирован-
ный базис всего пространства Н. Пусть f — это та подлежащая восстановлению функция, на которой
заданы значения I исходных функционалов L. Так как по условию f е Н, то
ОО оо
/ = 52^Ц, ^г)?<оо, (4.7.25)
г=1 г=1
где Vi — коэффициенты Фурье искомой функции f по ортонормированной системе {У,}”!- Нормальное
решение (4.6.15) глобальной задачи коллокации с фиксированным п представляет собой начальный
отрезок длиной п ряда (4.7.25), то есть
п п
fn = У }cjKj =
i=l i=l
(4.7.26)
При этом
i i г i i
Vi = (/, Ц) = (/, £ УцК3) = 2>«(/, K) = <4-7-27)
j=i j=i j=i j=i j=i
то есть первые n коэффициентов Фурье Vi искомой функции f могут быть непосредственно вычислены
по исходным данным задачи коллокации. Следовательно,
ОО
Kerb э (/ - /п) = ViVi (4.7.28)
г=п4-1
и потому
оо
II/ - /п||2 = 22 vi 0 ПРИ п °°’ (4.7.29)
г=п+1
оо
то есть ряд сходящийся, так как ^2 < оо, . Теорема полностью доказана.
i=i
В условиях доказанной теоремы истинная ошибка (4.7.3) решения локальной задачи коллокации
также стремится к нулю, поскольку стремится к нулю правая часть неравенства (4.7.4).
Интересно отметить, что, если искомый функционал F есть тоже дельта-функционал, то задачи кол-
локации в условиях теоремы 4.7.5 совпадают с задачами интерполяции (см. начало раздела 4.4). Однако
решение этих задач классическими полиномиальными методами указанными предельными свойствами
не обладают!
Утверждение б) теоремы 4.7.5 является, по существу, следствием утверждения а) этой теоремы.
Справедливо следующее более общее утверждение.
Теорема 4.7.6. Для сходимости fn —> f G Н по метрике Н необходимо и достаточно, чтобы
система функций {Л'г}~1, сопряженная к исходным линейно-независимым функционалам из
Н* (уже не обязательно дельта-функционалам!), была полна в Н.
Доказательство. Если полна в Н, то
(К, f) = 0 для Vi означает, что f = 0 (4.7.30)
и потому непременно существующий предел
Иш/П = / (4.7.31)
обязан совпадать с /, поскольку
(Ki,f-f) = O для Vi. (4.7.32)
Теорема доказана.
Вопросы конкретного выбора воспроизводящего ядра для геодезических целей обсуждаются ниже
в разделе 4.9.
4.8 Среднеквадратическая коллокация
Обратимся вновь к уравнениям коллокации (4.4.9). Будем теперь полагать, что правые части ZnXi
отягощены ошибками Anxi, которыми уже нельзя пренебрегать и которые характеризуются ковариаци-
онной матрицей Сд = М(ДТ-Д) = (су), где центральный момент второго порядка Су = Py-Of-Oj. Здесь
М — символ математического ожидания, 07,0^ - средние квадратические значения ошибок Д£, Д^, а
Ру — соответствующий коэффициент корреляции. Так что результаты измерений Ц имеет структуру
/; = ьд/) + д4 = г4 + дй (4.8.1)
где истинные значения Li е Н* при i = 1,2, ...,п. Чтобы отметить это, соответствующий вектор
измерений будем сверху помечать символом ~.
В указанной ситуации неразумно отыскивать оценку f решения f задачи коллокации среди эле-
ментов множества L~l, как это рекомендовано в разделе 4.6. В самом деле, искомая функция f 6 Н,
вследствие ошибок измерений Д4 значений Li(f), не будет удовлетворять, вообще говоря, уравнениям
(4.4.9). Значит, f L~l. В этом разделе описывается подход к решению задач коллокации, соединя-
ющий в себе идеи классического метода наименьших квадратов и метода коллокации, рассмотренного
в разделах 4.6 и 4.7. Этот подход, называемый среднеквадратической коллокацией, алгоритмически
мало отличается от метода, изложенного в разделах 4.4-4.7, но позволяет ослабить влияние ошибок
измерений, осуществляя своего рода фильтрацию.
Начнем с решения глобальной задачи коллокации №2. Очевидно, решение /d(-) по-прежнему имеет
смысл отыскивать в подпространстве KerxL С Н (см. (4.4.14)), поскольку в результатах измерений I
содержится информация лишь о проекции /х(-) искомой функции /(•) на KerxL. Проекция же /о G
KerL функции f «не чувствуется» данным набором функционалов L , поскольку, согласно (4.4.13),
nxl
L(/o) - 0. (4.8.2)
Будем полагать, что исследуемая функция f может быть отнесена к функциональному гильбертову
пространству Лев, я. К(А,В). Согласно теореме 4.6.1, базисом подпространства Ke^L С Н служит
набор п линейно-независимых функций
{K(Llt В), K(L2, В),..., K(Ln, В)} = К T(L, В).
1ХП
Решение fd глобальной задачи методом средней квадратической коллокации по определению ищется
под условием:
(П/11н + vTCb1v) —* min, f G KerxL. (4.8.3)
Здесь Сд — ковариационная матрица ошибок измерений, a v — вектор уклонений от результатов
измерений I, соответствующий произвольной функции f :
v = L(f) - I. (4.8.4)
Для решения вариационной задачи (4.8.3) нам понадобится следующее известное из линейной алгебры
правило для подсчета квадрата нормы элемента евклидова пространства в случае, когда элемент задан
своими коэффициентами разложения по базису:
если К (L,B) — базис подпространства Кегх£, и f(B) = cnKfLi, В) — произвольный элемент
из KerxL, то
||/||^ = aTGa, (4.8.5)
где G, в соответствии с (4.6.9), является матрицей Грама с элементами
G = (ffa) = (K(Li,Lj)) = K(L,L).
(4.8.6)
Если, в частности, базис ортогонален, то матрица Грама G оказывается диагональной (и даже еди-
ничной, если базисные элементы к тому же нормированы). Формула (4.8.5) позволяет легко вычислить
квадрат нормы элемента из пространства Кегх^. При этом вектор уклонений (4.8.4) может быть найден
по формуле:
v = Ga - I. (4.8.7)
Чтобы убедиться в этом, подставим в (4.8.4) на место f разложение /(•) = 4jK(Lj, •) функции
по базису подпространства Ke^L и воспользуемся обозначением (4.6.6). Получим
Vi = Li(^ajKiLj,-)) ~k = ^ ajLjK^Lj, •) - L = £ajK(LjtLi) - Ц. (4.8.8)
j=i j=i j=i
Матричная запись этого и есть равенство (4.8.7).
Второе слагаемое в левой части записи (4.8.3) для любой функции f из KerxL, представленной
разложением по базису, можно вычислить по формуле
vTC^v = (aTG - FjC^Ga - /). (4.8.9)
Теорема 4.8.1. Решение глобальной задачи методом среднеквадратической коллокации представ-
ляет собой линейную комбинацию представителей исходных функционалов,
/(•)= KT(L,-) b (4.8.10)
1X71 ПХ1
где b - столбец корней системы нормальных уравнений
(K(L,L) + Сд) b = I . (4.8.11)
nxn nxn ПХ1 nxl
Доказательство. С учетом (4.8.5) и (4.8.9), запишем функционал
$(ai, а2,..., ап) = ||/||^ + vTC^v
для случая /(•) = aiK(Li, •) G Ker^L. Получим:
Ф(д) = ат (G + GC^G)a - 2FC^Ga + (4.8.12)
Можно доказать, что Ф(д) имеет единственный минимум, который достигается при значениях парамет-
ров а, совпадающих с решением системы уравнений:
ЭФ(а1_, а2г ^Дп) = 0 (4 8д з)
deLj
Выполнив дифференцирование Ф(а), получим систему (4.8.13) в виде:
(ССд1^ + G)a = GC^'l. (4.8.14)
Умножив обе части (4.8.14) на невырожденную матрицу СдС?-1, окончательно получим:
(G + Cb)a = l. (4.8.15)
Поскольку квадратная матрица (G + Сд) невырождена, то решение системы (4.8.15) можно записать,
с учетом (4.8.6), в виде:
а = (K(L,L) + С&)-1 I. (4.8.16)
Поэтому искомая функция
/(•) = ^K(Ljt -)а, = KT(L, -)а G KerxL
j=i
имеет вид (4.8.10), что и требовалось доказать.
Заметим, что оценки среднеквадратической коллокации (4.8.10), в отличие от чистой коллокации
(4.6.17), не воспроизводят исходные измерения, то есть
Lt(/) - (< = V» / 0, i = l,2,...,n, (4.8.17)
так как бессмысленно копировать значимые погрешности (сравните с (4.4.8)).
Точность оценки (4.8.10) может быть вычислена по формуле
IIF - F(I*2 = K(F, F) - (K(Lit F)')T (K{Lif LJ + Сд )"т • (K(F, Lt)), (4.8.18)
которая при Сд — 0 совпадает с (4.7.1).
Если Сд = 0, то и решение глобальной задачи методом среднеквадратической коллокации совпадает
с нормальным решением f (4.6.17) методом «чистой» коллокации.
Пример 4,8.1. Рассмотрим множество полиномов Р^2[—1,1], степень которых не превышает 2
и область определения [—1,1]. Введем структуру евклидова пространства Р^2[—1,1] на множестве
Р^2[—1,1] по аналогии с евклидовым пространством 1,1] из примера 4.2.2 со скалярным произ-
ведением 4.2.1.
Просто доказывается, что:
1) размерность этого пространства dimP2^2[—1] = 3;
2) ортонормированный базис евклидова пространства Р2^2[— 1> 1] образуют полиномы:
(4.8.19)
3) в Р2^2[—1,1] существует в. я. К(х,у), равное
. 1 3 5 /3 2 1\ /3 2 1\
К^,у) = - + -ху + -^-х -5Д5!/ - j)-
(4.8.20)
Пусть об изучаемой функции /(х) = 1 + х + х2 G Р2^2[—1,1] известна информация в виде значения
/(х) в точке х = 0 и значения /'(х) в той же точке х = 0, то есть на изучаемой функции f заданы
значения функционалов Li = 6q и L2 = 6о • D, где D — оператор дифференцирования:
М(/) = /(0) = 1,
М/) = /'(о) = 1.
(4.8.21)
Требуется по системе уравнений (4.8.21), являющихся конкретной реализацией уравнений (4.4.9),
решить глобальную задачу коллокации, то есть отыскать нормальное решение f(x). Ошибки исходных
данных, для начала, полагаем отсутствующими.
Решение. Воспользуемся формулой (4.6.17). С учетом (4.8.20), имеем :
K(x,L^ = ~^x2-, K(x,L2) = lx-,
о о z
_ / K(Li,Li) K^Lt) \ | 0 \
' K(Li,L2) K(L2,L2) ) ~ I о 3 I -
\ ы /
(4.8.22)
Итак, функция f(x) = -|z2 + х + 1 является оценкой функции /(х) = х2 + х + 1. Оценка f(x)
удовлетворяет уравнениям (4.8.21) и обладает свойством
ll/ll = min ||/||
/ е L~l ’
(4.8.23)
Теперь снимем ограничение о безошибочности исходных данных. Пусть вместо точных правых
частей (4.8.21) в нашем распоряжении имеются результаты независимых измерений значений /(0) и
/'(0):
Ь1(/) = 7(0) = 1,2,
Ь2(/) = 7'(0) = 0,7.
(4.8.24)
со средней квадратической ошибкой о = 0,3 и ковариационной матрицей
0,09
0
0
0,09 )'
Тогда решение глобальной задачи среднеквадратической коллокации можно найти по формуле (4.8.10):
= (I" Т*2’ Н ( °’о82 0,63 ) ( 0J ) = -1’85а;2 + 0’66а: + 1>11-
(4.8.25)
Найденная оценка fd(x) (как, впрочем, и истинная функция /(х) = х2 + х + 1), конечно, уже не
удовлетворяет уравнениям (4.8.24):
bi(/d) = /(о) = i.ii,
b2(7d) = 7'(о) = о,бб.
(4.8.26)
Рассмотрение примера 4.8.1 закончено.
Перейдем к обсуждению локальной задачи среднеквадратической коллокации в условиях (4.8.1).
Пусть F — заданный функционал из Н*.
Требуется:
1) аппроксимировать F линейной комбинацией заданных функционалов Llt L2,.... Ln и
2) по результатам измерений Zi, Z2, • • • Jn значений Ьг(/)> • • •, Ln(7) приписать F(/) разум-
ное приближенное значение Fd(f)-
Очевидно, решение первой части задачи никак не связано с ошибками измерений Д,, и наилучшая
аппроксимация функционала F элементом F из Span{Li, L2,. . ., Ln} отыскивается по-прежнему по
формуле (4.8.14).
Оценка Fd(f) величины F(f), полученная методом среднеквадратической коллокации, представляет
собой значения функционала F на глобальном решении (4.8.10), то есть
Л(/) = Г(Л) = К T(L, F) b (4.8.27)
1ХП ПХ1
где b - столбец корней системы нормальных уравнений (4.9.15).
Пример 4.8.2. Если на множестве Р2^2[-1,1] задать скалярное произведение как
. ь 1
(/, Р) = т-- f /(®) • g(x)dx = - f /(1) • g(x)dx, (4.8.28)
о — CL J L J
a —1
то базисными функциями будут ортонормированные полиномы Лежандра
Q 1
1, у/Зх, у/5(-х2 - -).
Рассмотрим восстановление функции f(x) — —2х+1 из соответствующего гильбертова пространства
по заданным на ней двум дельта-функционалам Li = /(0) = 1 и L2 = /(1) = — 1.
Решение. Воспроизводящее ядро, согласно (4.5.11),
т, z . 9 15. 9 9. 45 9 9
У) = 4 + Зху ~ у (х + У ) + ~£х У •
Поэтому представители заданных функционалов имеют вид
К(0, х) = — -^-х2, /С(1,х) = ~^х2 + Зх — |
и /(х) = biК(х, 0)+b2F(l, х), где коэффициенты линейной комбинации находятся из решения системы
нормальных уравнений
WL„Li}}b = l, « (_$ ‘3/д)(£ )-(_!)•
15 1
Имеем bi = 5/12, Ьг = -1/24 и потому /(х) -- ——х2 - -х + 1.
8 8
Предельную ошибку выполненной аппроксимации можно оценить по правилу (4.7.4), заменяя иско-
мый функционал F оператором Fx:
(. т . . __1 . \ 1/2
*(*.*)-( £ ) ( -3/2 ”3/9 ) ( К 1’х) ))
Выполняя преобразования и учитывая, что ||/|| = д/7/3 (подсчитано по определению нормы), полу-
чим
/15Х1/2 /35\ 1?/2
|/(х) - /(х)| Н/Н • - |х(х - 1)1 = - |х(х - 1)1 « 2,1. |х(х - 1)|.
\ О / \ О /
На самом деле,
15 1 15
|/(х) - /(х)| = I - 2х + 1 - (—-х2 - -х + 1)1 = —|х(х - 1)1 « 1,9 • |х(х - 1)|.
О О о
Пример 4.8.3. Пусть по-прежнему Н = Р^2[—1,1], и Li,L2 — функционалы из примера 4.8.1.
Требуется по результатам измерений li — 1,2 и I2 = 0,7 значений функционалов Li(/) и Ьг(/) вы-
числить по формуле (4.8.27) оценку Fd(f) интеграла F(/) = j^i f(x)dx. Ковариационная матрица Сд
определена в примере 4.8.1.
Решение.
F(Li, F) = F • K(Lf,у) = J - ууЛ dy = 1,
JQ
^У = 0,
-1
™ = W) = (1O)(°’O82 o’a, )
(4.8.29)
Вычислим для сравнения оценку величины F(f) методом «чистой» коллокации по формуле (4.6.15):
/ 8
= (1 0) I 9
| » 0,89.
9
(4.8.30)
0
2
3
Точное значение функционала:
F(/) = f(l+x + x2)dx = 2^2,67. (4.8.31)
-i 3
Видно, что обе оценки не имеют ни одного верного знака. Причина этого обсуждается в примере
4.11.2.
Обобщение на случай наличия дополнительных параметров
В геодезических приложениях роль функции f(P), на которой рассматриваются функционалы, иг-
рает возмущающий потенциал Т(Р). Однако не всегда исходные функционалы связаны с потенциалом
непосредственно. В общем случае, согласно (4.3.1), уравнения связи включают некоторое количество
к < п дополнительных параметров X, подлежащих определению или уточнению. Такие дополнительные
неизвестные могут быть следствием желания оценить возникающие систематические ошибки, напри-
мер, за счет неполноты знаний о соотношении между используемой локальной и нужной глобальной
системами координат, и т.п. Поэтому уравнения (4.8.1) полезно обобщить следующим образом:
k = Li(f) + Ai + А • X =li + /\i+ А • X, (4.8.32)
i.fc fc.i i,fc fc,i
где A - известная матрица. Обобщается и условие (4.8.3), под которым следует теперь искать оценки
X, fd глобальной задачи среднеквадратической коллокации:
(11/Ц2Н + vTC^v) + XTWX min. (4.8.33)
Здесь W— известная матрица к х к априорных весов искомых параметров X. Решение может быть
найдено стандартными средствами отыскания экстремума и подробно описано, например, в работе
[Мориц 1983]:
X = (АТК~1А + W)-1ATK~1i, f(P') = (K(Li, P’fK-1!, (4.8.34)
где
К = K{Li,Lj) + C^ 1 = 1-АХ. (4.8.35)
Таким образом, оценка / искомой функции / представляет собой, как всегда, линейную комбинацию
представителей исходных функционалов,
/=FT(L,-)b, (4.8.36)
1,71 П,1
но только теперь Ь - столбец корней системы нормальных уравнений с подправленной правой частью I
из (4.8.35),
(K(L, L) + Сь)Ь = I . (4.8.37)
п.п П,п п>1 п,1
При этом оценка X параметров находится из решения системы вида
(АТК~1А +W)X = Ат b , (4.8.38)
fc,n п,п п,к ktk fc,l fc,n n,l
где b— корень системы (4.8.37) с той же матрицей коэффициентов, но с исходной правой частью I.
Оценивание точности выполняется по формулам
Н = K(Li,F)TK~\ (4.8.39)
1,п 1П п,п
COVX = (ATK~1 A +W)~\ (4.8.40)
к к fc,n n,n
||F - F||*2 = K(F, F) — H • K(F, Li) + H-A- COVX (H A)T. (4.8.41)
При отсутствии параметров COVX = 0 и формула (4.8.41) совпадает с (4.8.18).
Пример 4.8.4. Предположим, что в точках Pi, Р2 по результатам альтиметрии независимо полу-
чены значения аномалии высоты Zi, Z2 с одинаковой средней квадратической ошибкой 0,01 м2 и пусть
при этом K(Li,Li) — K{L2,L2) = 0,99 м2, F(Li,L2) = 0,60 м2. Требуется оценить значение анома-
лии высоты С в заданной точке Р', для которой F(Li,£(F')) = F(L2,£(F')) = 0,80 м2, полагая, что
исходные результаты измерений содержат систематическое смещение, которое желательно оценить и
удалить.
Решение. Уравнения коллокации имеют структуру (4.8.32) с п = 2, к = 1, Ат = (1 1), W = 0 и
поэтому пользуемся формулами (4.8.35)-(4.8.38). Имеем
h= — 1 ( 1 \ \
0,64 \ —0,6 1 7 ‘ \ Г2 /
1 / /1 — 0, бГ2 \
0?64 \ -0, б/i +12 ) ’
АтК~гА = 5/4, X = °’4^+м 4/5 =
U, 04 2
Поэтому
1 (ii- i2 А
2 Д 12 - h ) ’
ь — к~Ч = 1 1 о* б 1. ( к А _ ё ( А
0,64 у 0,6 1 J 2 \ Zjj — /1/ 4 \ Z2 — ^1 ) ’
4 5-
^ = -^^1-12 + 12-11)^0.
5 4
Заметим, что в исходных точках
- - - 5--35--1
<(Pi) = K(LX, Li)bi + K(Lr, L2)b2 = 0,99-(Zi - Z2) + z • 7(Z2 - h) « z(h - h),
4 5 4 Z
то есть смещение удалено.
Оценивание точности выполняется по формулам (4.8.39)-(4.8.41):
Ох = 4(5т2,
||F-F||* = 0,99-( 1 1
\ £t
0,99 А / 1 1
0,6 ) + \ 2 2
4
• - • 1 м 1m.
5
Упражнение 8.1. Убедитесь, что, если в качестве f выбрать нормальное решение f глобальной задачи
«чистой» коллокации (см.раздел 4.6), то формула (4.8.5) принимает вид (4.7.5).
Упражнение 8.2. Доказать, что в условиях примера 4.8.1
Li,L2GH’, где Н = Р2Д-1,1],
и, следовательно, формула (4.6.17), которой воспользовались в примере 4.8.1 для отыскания нормаль-
ного решения системы (4.8.21), действительно применима.
Упражнение 8.3. Доказать, что в примере 4.8.1 подпространство KerL С Н заполняют полиномы
/(х) = сх2 при всевозможных значениях с, то есть KerL = Span{e(a:) = х2}.
Упражнение 8.4. Доказать, что в условиях примера 4.8.1 подпространство Ker3-/, С Н имеет раз-
мерность 2 и его базис составляют, например, функции
ei (i) = i2 — е2(х) = х.
и
Упражнение 8.5. Доказать, что множество решений системы (4.8.21) L~l заполняют полиномы ви-
да /(□:) = ах2 + х + 1 при различных значениях а. Показать, что L~l — линейное многообразие
размерности 1, полученное сдвигом подпространства KerL на вектор е(т) = i + 1.
Упражнение 8.6. Пусть L~l = {az2 + х + 1} с Р2^2[—1,1].
Доказать, что функция f(x) = -|z2 + z+ 1 € L~l действительно обладает свойством (4.8.23), где
11/Ц2 = J (ах2 + х + l)2dr, feL~l.
-i
Упражнение 8.7. Доказать, что наилучшая аппроксимация функционала F линейной комбинацией
функционалов Li и L2 (см. пример 4.8.3) равна:
Г=|д!. (4.8.42)
4.9 О выборе воспроизводящего ядра
Мы рассмотрели вопросы решения задач коллокации в любом заданном гильбертовом пространстве
Н с воспроизводящим ядром. Остается проблема практического выбора гильбертова пространства и
соответствующего воспроизводящего ядра. Для геодезических целей гильбертово пространство необ-
ходимо выбрать таким образом, чтобы оно непременно содержало в себе возмущающий потенциал
Земли, поскольку, как показано в разделе 4.3, любые геодезические измерения представляют собой
линейные или линеаризованные функционалы на потенциале.
В дальнейшем будем пользоваться сферической аппроксимацией, то есть точки с геодезическими
координатами h, <р,Л, отнесенными к эллипсоиду, формально будем заменять точками со сферическими
координатами г, 0, Л, отнесенными к среднеземной сфере радиуса R. При этом 0 = л/2 — ср, г = R + h.
Возмущающий потенциал будем представлять рядом
CM N 1
Т(г,0,А) = ТГ(г,0,Л)-1/(г,0,Л) = —j; 22 clmSlm(r,e,V (4.9.1)
1=2 тп= — 1
/ д \
по шаровым функциям 5(т(т, 0,Л) = ( — ) У/т(0,Л), где г, 0, Л — сферические координаты; W и
\ г /
U — полный и нормальный потенциалы, соответственно; G — гравитационная постоянная; М — масса
Земли; Yim — сферические функции степени I и порядка т, определяемые как
.. /л п z Г COS 771А ТП О
аде,х) = р,м(«»в)| sinmA m>0 ;
Fj|m| — полностью нормированные присоединенные функции Лежандра; с/т — соответствующие гар-
монические коэффициенты, подлежащие определению или уточнению; N — максимальная степень
разложения. Количество коэффициентов Ncoef определяется формулой
Ncoef = (Nmax + I)2 - N^in. (4.9.2)
В (4.9.1) имеем Nmax = N, Nmin = 2.
Значение N определяет пространственное разрешение на земной поверхности в виде минимальной
длины волны Amm гравитационного поля
Amin « 40000 км/(Nmax + 0,5). (4.9.3)
Член (R/r)l+1 отражает затухание поля с высотой. Поэтому достижимое значение N при моделирова-
нии гравитационного поля по результатам спутниковых измерений существенно зависит не только от
точностных возможностей аппаратуры, но и от высоты полета. Так, например, в известном европейском
проекте CHAMP (система высокий спутник - низкий спутник) приемлемое значение N где-то между
50 и 70, а для другого европейского проекта - GRACE (система низкий спутник - низкий спутник) -
где-то между 100 и 150.
Указанные шаровые функции будем трактовать как ортогональный базис некоторого гильбертова
Н пространства функций, регулярных на бесконечности и гармонических во внешнем пространстве
D относительно некоторой сферы, целиком расположенной в теле Земли. Известно, что реальный
потенциал Т не принадлежит такому пространству, но, согласно известной теореме Рунге [Мориц
1983, с. 55], может быть аппроксимирован функциями из Н как угодно точно.
В разделе 4.5 показано, что при очень необременительных и практически всегда выполняющихся
условиях пространство Н имеет воспроизводящее ядро, то есть такую функцию К(Р, Р') двух точек
Р, Р' е D, что:
1) если зафиксировать одну из этих точек, то К(Р,РГ) — как функция другой точки — принадлежит
Н;
2) для всякой функции f из Н справедливо воспроизводящее соотношение f(P') = (/(Р), АГ(Р, Р')),
где (/, К) обозначает скалярное произведение гильбертова пространства Н.
ОО
3) К(Р,Р') = 52 ei(P) • ег(Р')> гДе е<(Р), г = 1,2,... - ортонормированный базис гильбертова
i=i
пространства Н.
Легко проверить, что в нашем случае всем перечисленным условиям удовлетворяет выражение вида
00 д.2 1 °° СТ2 / Р2\ 1+1 1
К[Р,Р') = ^7^±й Е 5Ur,e,A)5Zm(r,e,A) = J27-^— — У/т(0,А)Угт(0 ,А),
1=2 + .> тп=—1 1=2 + m=—l
где о2 - любые положительные числа, имеющие размерность квадрата потенциала (м/с)4. Пользуясь
теоремой сложения для сферических функций, удобно переписать это в виде
К(Р,Р') = 5^0? ( — \ Жсозф), (4.9.4)
1=2 ' '
где Р;(.) — полиномы Лежандра степени I, ф — сферическое расстояние между точками Р и Р', г и
г' — отстояния этих точек от начала координат, of — степенные дисперсии возмущающего потенциала
(средне-интегральные значения квадратов сферических функций степени I на сфере с радиусом R,
равным среднему радиусу Земли,)
2 I
"? = (“) «ад
' ' m=—l
Любой результат Ц измерений после удаления нормальной составляющей удобно трактовать как
значение Ц некоторого ограниченного линейного (или линеаризованного) функционала Li на возмуща-
ющем потенциале Т е Н плюс неизбежная случайная ошибка Д», то есть
/; = ^ + Д£ = ЬДТ) + Дй (4.9.6)
где i = 1,2, ...,п — номер измерения, ап — количество измерений. Например, результат измерения
аномалии силы тяжести Др в заданной точке представляется в сферической аппроксимации следующим
функционалом
дТ 2
Дд = -^------Т + Дг. (4.9.7)
or г
Искомые величины (в частности, гармонические коэффициенты) также являются ограниченными
линейными функционалами на Т & Н. Обозначим искомые величины Fj(T), j = 1,2,..., fc, где k —
количество искомых величин.
Знание воспроизводящего ядра гильбертова пространства Н позволяет легко получить воспроиз-
водящее ядро какого-нибудь другого гильбертова пространства, которому принадлежит какая-нибудь
другая трансформанта гравитационного поля. Для этого достаточно подействовать соответствующим
функционалом на воспроизводящее ядро дважды: один раз как на функцию первой точки, а второй раз
- как на функцию второй точки. Например, для аномалии силы тяжести (4.9.7) с учетом (4.9.4) имеем
(Я о\ /Я 9\ °° /Г?2\*+1
)(р) (-»? - ?) <р'> ) р‘(с“*> =
7 ' 7 i=2 ' 7
Г
г=2
R2\i+1
— ) Pi (cos ф),
ТТ )
то есть
“ а _ 1\2 / р2 \ ’+1
= Рг(созф). (4.9.8)
В принципе, можно работать с любым воспроизводящим ядром. По форме ничего не меняется: и
критерии оптимальности (4.4.4), и характеристики точности (4.7.1) представляют собой нормы избран-
ного пространства, и задача решается под естественным условием минимизации этих норм. Однако
разные гильбертовы пространства придают разный смысл норме и, следовательно, разный смысл мере
аппроксимации. Поэтому желательно так выбрать гильбертово пространство, чтобы упомянутые крите-
рии совпадали (или почти совпадали) с вероятностно-статистическим понятием среднеквадратических
ошибок. Оказывается, что это можно сделать (по крайней мере, приближенно) благодаря существующе-
му изоморфизму между функциями, определенными на D и заполняющими гильбертово пространство
Н св. я. К(Р,Р'), и реализациями случайного поля Цси, А), определенными при каждом элементарном
исходе си на этом же множестве D. Воспроизводящее ядро К(Р,Р') при этом играет роль автоковари-
ационной функции К(Р, Р1) данного поля.
В самом деле, предположим, что в качестве воспроизводящего ядра взята ковариационная функция
К(Р,Р') возмущающего потенциала. Тогда скалярное произведение в Н* двух функционалов Li и Д2
на искомом потенциале приобретает смысл ковариации cov(Zi,Z2) = M(ZiJ2) между значениями h и /2
этих функционалов на потенциале, то есть
(Li,L2)* = K(Li,L2) = cov(M2) = M(Zi J2). (4.9.9)
Здесь M — символ математического ожидания. Поэтому, в частности,
ИМ*2 = ад, Li) = M(Z?) = о2^), (4.9.10)
где ff2(Zi) — дисперсия величины Ц.
Следовательно, мера точности ||F — F||*2, определяемая по формуле (4.7.1), представляет собой
дисперсию ошибки F(/)-F(/), а величина ||F-F||* есть среднеквадратическое значение этой ошибки.
Выражения вида K(Lt,Fj) в (4.6.12) получают смысл взаимной ковариации между соответствующими
значениями, а (4.9.8) — автоковариационная функция аномалии силы тяжести.
В результате описанные методы решения задач коллокации совпадают с известными в ковариаци-
онной теории случайных функций методами оптимального линейного прогноза.
Так, любой функционал на возмущающем потенциале в случае «чистой» коллокации выглядит,
согласно (4.6.17), следующим образом:
f,(t) = (ад^))т • (ад.л,))-1 I. (4.9.Н)
Другими словами, надо решить систему п нормальных уравнений
(ад,^))-Ь=Г (4.9.12)
г. г. «Д «Д
и тогда оптимальная оценка любого функционала на возмущающем потенциале определяется следую-
щей простой формулой
п
Fj(T) = Y/bi-K(Li,Fj). (4.9.13)
г=1
В частности, оценка самого возмущающего потенциала в произвольной точке Р' имеет вид
Т(Р’) = ^Ьг-К(Ц,Р’). (4.9.14)
г=1
Соотношения (4.9.13), (4.9.14) остаются, согласно теореме 4.8.1, справедливыми и в случае сред-
неквадратической коллокации, надо только для определения значений b решать систему нормальных
уравнений
(K(L,L) + Сд) b = I . (4.9.15)
nxn nxn Tixl nxl
При этом (K(Li,Lj)) можно трактовать как автоковариационную матрицу вектора измерений I,
число K(Li,Fj) - как взаимную ковариацию cov(Li(T),Fj(T)) между г-м результатом измерений и
j-й искомой величиной, a K(Li,P') — как взаимную ковариацию между г-м результатом измерений и
значением потенциала в точке Р'.
Остаточное воспроизводящее ядро типа (4.7.16), то есть
KQ(P, Р') = К(Р, Р') - (K(L, Р))т (K(L, L))-1 • К(Р', L), (4.9.16)
представляет собой автоковариационную функцию потенциала, остаточного после того, как оценка
(4.9.14) отнесена к референц-потенциалу.
Вычислить ковариационную функцию по формуле (4.9.4) практически, конечно, невозможно, по-
скольку необходимые для этого степенные дисперсии известны лишь до конечной степени N, причем
приближенно. Остальные степенные дисперсии приходится моделировать так, чтобы полученный ряд
оказался сходящимся. В работе [Tscherning, Rapp 1974] предложены следующие варианты такой моде-
ли
D \2п+2
Кв \
~R J
(4.9.17)
Здесь А — некоторая константа в единицах (м/с)4; R — средний радиус Земли; Rb — радиус некоторой
сферы, целиком расположенной в теле Земли (его называют радиусом сферы Бьерхаммара); гц(п) =
(п — 1)(п - 1), г;2(п) = (п - 1)(п — 2)(п + Ь), г>з(п) = (п - 1)(п — l)(n + bi)(n + Ь2); Ь, bi, Ь2
— некоторые натуральные числа. Ковариационная функция глобального возмущающего потенциала,
соответствующая одной из наиболее удачных моделей, записывается в следующем виде:
N / R2 \ i+1 °°
К(ф,т,т') = a^di ( — j Р»(созф) + ^2
i=2 / i=N+l
_________A_________
(n — l)(n — 2)(n + b)
i+l
-Pi (cos Ф).
(4.9.18)
Здесь РДсозф) — полиномы Лежандра г-ой степени, ф — сферическое расстояние между двумя точ-
ками, cosi|> = sin ф sin ф' + cos ф cos ф' соз(Л - Л'), г и г' — отстояния этих точек от начала координат,
di — степенные дисперсии погрешностей низкочастотной части потенциала до N включительно, ст? —
модельные степенные дисперсии остальной части спектра потенциала. Число b обычно выбирается рав-
ным 4, но иногда, чтобы максимально приблизиться к низким степенным дисперсиям, достигает 24.
Натуральное число N должно быть названо пользователем, а константы А и Rb являются параметрами
ковариационной функции и подлежат определению по результатам корреляционного анализа эмпири-
ческих данных. Для ориентировки полезно иметь в виду, что отношение А/R2 должно приближенно
соответствовать дисперсии аномалии силы тяжести (см. (4.9.8) при Р = Р') на нулевой высоте. Если
степенные дисперсии di неизвестны, то перед первым слагаемым в (4.9.18) ставим положительный
множитель пропорциональности а, полагая, что спектр шумов пропорционален спектру реального по-
ля. При этом а трактуется как дополнительный параметр, подлежащий определению по результатам
корреляционного анализа эмпирических данных. Параметры определяются последовательными прибли-
жениями методом наименьших квадратов.
Практика корреляционного анализа эмпирических данных коротко описана в разделе 4.10.
Знаменатели для потенциала pi(n) = (п - 1)(п - 1); р2(п) - (п - l)(n - 2)(n + in); р3(п) =
(n — 1)(п — l)(n + in)(n + in/); г —1,2.
4.10 Корреляционный анализ гравитационного поля
Ковариационная функция возмущающего потенциала обычно трактуется как функция сферического
расстояния ф между двумя точками Р(т, 0, А) и Р'(т', 0', Д') и определяется как среднее произведе-
ние значений потенциала в двух точках, занимающих всевозможные положения на земной сфере, но
постоянно находящихся на расстоянии ф друг от друга. Таким образом, по определению,
2тт л/2 2тг
А"(Фр,р') = j j jT(P)-T(P')<iasm0 dQ dX (4.10.1)
0 —Tt/2 0
где a — азимут между точками P и P', 0 и Л — сферические координаты точки Р, а Р' имеет
фиксированное сферическое расстояние до Р, см. рис. 4.10.1.
Подставляя сюда выражение (4.9.1) можно показать, что ковариа-
ционная функция (4.10.1) всегда имеет вид ряда (4.9.4) по полиномам
Лежандра при г — г' — R, а коэффициентами этого ряда являются
степенные дисперсии (4.9.5).
Численная реализация интеграла (4.10.1) состоит в делении нуж-
ного промежутка [0; фепа] сферического расстояния на ячейки длиной
Дф, и для каждой точки ф< этого промежутка вычисляется эмпири-
ческая оценка
, тгц
т(р')]п’ (4.10.2)
mi___,
П=1
где Р и Р' - всевозможные точки с известными значениями Т, сфе-
рическое расстояние между которыми удовлетворяет условию
ф< - Дф/2 ф ф; + Дф/2. (4.10.3)
Здесь mi - количество доступных произведений, Дф - среднее расстояние между точками с исходными
данными и фа — Дф/2 = 0, если ф, < Дф/2.
Найденная эмпирическая ковариационная функция (4.10.2) аппроксимируется аналитическим выра-
жением вида (4.9.18) путем подбора соответствующих параметров N, a, b, A, Rb-
Однако на практике вместо значений возмущающего потенциала обычно приходится иметь дело со
значениями какой-нибудь его трансформанты. Поэтому вычисленную ковариационную функцию надо
аппроксимировать и затем преобразовать к нужной ковариационной функции возмущающего потенциа-
ла. При аппроксимации выражением типа (4.9.18) модельные степенные дисперсии потенциала (4.9.17)
заменяются соответствующими моделями степенных дисперсий использованной трансформанты с по-
мощью известных соотношений между ними. Например, из (4.9.8) видно, что
^(ДР, ДР) = (4.10.4)
гг
Рис. 4.10.1. Полярные ко-
Рис. 4.10.2. Ковариационные функции.
1 COV (Тпп > 7пп), 2 — COV (Тее, Тее), 3 —
COV (Trr, Тгг)| 4 COV (Тпп » Тгг), 5 COV (ТПП( Тее),
6 — COV (2Тпе, 2Тпе), 7 — COV (ТГГ) Тее).
OOB-t
Рис. 4.10.3. Ковариационные функции.
1 — COV (Тпг * Тпг), 2 COV (Тег,Тег), 3 —
COV (Тег, 2Теп), 4 — COV (Тпг} ТПп), 5 —
COV (Тпг, Тгг), 6 COV (Тпг» Тгг).
На рисунках 4.10.2, 4.10.3 показаны взятые из работы Чернинга 2 графики ковариационных функ-
ций всевозможных вторых производных возмущающего потенциала по направлениям осей локально-
радиальной системы координат (восток — е, север — п, г — «вверх» по радиусу) на высоте 255 км
над Землей. На осях абсцисс графиков отложены сферические расстояния в градусах, разграфка осей
ординат соответствует квадратным Этвешам.
Основу для вычислений составила автоковариационная функция возмущающего потенциала (4.9.18)
с N = 24, b = 4, коэффициентами а = 0,5, А= 98,79 мгал2//?2, глубиной сферы Бьерхаммара 1061 м
и дисперсией аномалии силы тяжести 408,13 мгал2. Дисперсии ошибок коэффициентов степеней 2-24
взяты из модели EGM96.
4.11 Вариационный метод регуляризации
Обратимся вновь к уравнениям коллокации (4.9.6) и будем по-прежнему полагать, что правые части
I отягощены ошибками Д , которыми нельзя пренебрегать и которые характеризуются ковариацион-
nxl ПХ1
ной матрицей Сд = М(ДТ-Д) = (с^), где центральный момент второго порядка c-tj = Kij-Ui-Uj. Здесь
пхп
М — символ математического ожидания, о\,ау — средние квадратические значения ошибок Дг, Д,-, а
Kij — соответствующий коэффициент корреляции. Предположим для простоты, что все исходные изме-
рения I имеют одинаковую физическую размерность, например, миллигал, а систематические ошибки
отсутствуют:
М(Дг) = о,
i = 1,2,..., п.
В таком случае ковариационную матрицу ошибок удобно представлять в виде Сд = d-Q, где d — обычно
неизвестная дисперсия единицы веса, а элементы qij матрицы «обратных весов» Q предполагаются
известными и имеют вид
где Wi = d/tr? — вес погрешности Д,. Соответствующий вектор измерений будем обозначать Id-
Как следует из теории чистой коллокации, при неограниченном увеличении равномерно распреде-
ленных измерений оценка потенциала Т, вычисленная по формуле (4.9.14), сходится по норме Н к
искомому потенциалу Т е Н в случае безошибочности исходных данных I (см. теорему 4.7.5). Это
является одной из веских причин принимать Т в качестве решения глобальной задачи коллокации.
Существуют, однако, некоторые реальные обстоятельства, способные, если не принять необходимые
2Tscherning С.С. «Testing frame-transformation, gridding and filtering of GOCE gradiometer data by Least-Squares Collocation
using simulated data.»
меры, поставить под сомнение свойство (4.7.21) оценки Т. Дело в том, что обусловленность матрицы
K(L,L) с ростом п непременно ухудшается. Это означает, что непренебрегаемые ошибки измерений Д
и неизбежные ошибки округления при счете могут значительно исказить корни уравнений (4.9.15), что,
в свою очередь, приведет к ошибкам в Т, возрастающим с увеличением п. Кроме того, влияние ошибок
измерений, выполненных на спутниковых высотах, сильно возрастает при опускании к поверхности
Земли.
Сказанное заставляет модифицировать среднеквадратическую коллокацию и стараться отыскивать
такую оценку возмущающего потенциала (будем обозначать ее Та), которая, во-первых, гарантировала
бы сходимость (4.7.21), и, во-вторых, позволяла согласовывать вычисленное решение Та с ошибками
исходных данных Д : чем меньше ошибки Д, тем ближе Та должна быть к оценке Т, полученной в
условиях полного отсутствия шумов. Такие оценки называются регуляризованными.
Согласно [Тихонов, Арсенин 1979], регуляризованным решением уравнений (4.9.6) называется такая
функция Та 6 Н, зависящая от ld, которая удовлетворяет условию:
\\Та-Т\\н^0, (4.11.1)
d—>0
где Т - решение глобальной задачи коллокации, полученное по безошибочным исходным данным Iq,
состоящим из п чисел.
Таким образом, если найти метод получения регуляризованного решения, то, в силу (4.11.1) и
(4.7.21), Та будет сходиться по норме Н при d —> 0 и п —> оо к истинному возмущающему потенциалу
Т, то есть
lim ||Тя-Т||н = 0.
а-->0
П--ЮО
Предположим, что нам известна дисперсия единицы веса d = о2 ошибок Д,. Тогда один из наиболее
известных методов регуляризации состоит в выборе в качестве решения глобальной задачи коллока-
ции такой функции Та 6 Ker^L, которая согласуется с с точностью исходных данных d следующим
образом:
(id-L(fa»T-W.(ld-L(ta)) = Vf-W-Va = (4 ( j 2)
п п
где W = Q-1 — матрица весов измерений, a Va - столбец уклонений Via = Ц — Ц(Та), г = 1,2,..., п.
Другими словами, отыскание нужной оценки Тл сводится к решению классической вариационной за-
дачи на условный минимум :
||Т|& = Ьт K(L,L) b —► min
(id-ь(ТаУ)т• w• (Id-цтд» = vf.w-Уд = d (4 tj 3)
п п
Решение имеет стандартную структуру (4.9.14):
п
TatP'^^KtL^P'j-bia, (4.11.4)
i=l
где big являются корнями системы п линейных уравнений
(K(L,L) + a- Q)- b - ld. (4.11.5)
П,П П,П n»l n,l
Здесь положительное безразмерное число а называется параметром регуляризации. Его следует по-
добрать так, чтобы соответствующий возмущающий потенциал (4.11.4) обеспечивал выполнение ра-
венства (4.11.2) хотя бы приближенно.
Левая часть равенства (4.11.2) определяет меру близости р между измеренными и вычисленными
значениями исходных функционалов в n-мерном евклидовом пространстве Еп и называется невязкой.
Невязка представляет собой некоторую функцию р(а) параметра регуляризации:
р(а) =
VT • W • К11/2
* „ а =\\ld~ L(Ta)||s„-
(4.11.6)
В работе [Тихонов, Арсенин 1979] доказывается, что невязка на промежутке (0,оо) монотонно возрас-
тает ОТ О ДО ||Zd||En.
Качественный график р(а) представлен на рис. 4.11.1.
Из рис. 4.11.1 видно, что, если выполняется
Рис. 4.11.1. Качественный график зависимости
естественное условие:
^<|Zd||Bn, (4.11.7)
означающее,что результаты измерений Ц содер-
жат полезную информацию Ц = ЛДТ), то суще-
ствует единственное значение а > 0, при котором
выполняется условие (4.11.2).
Оптимальное значение любого функционала
F G Н* на возмущающем потенциале находит-
ся, как обычно, действием этого функционала на
оптимальную оценку Та.
Что касается практической реализации опи-
санного вариационного метода регуляризации по
невязке, то мы отметим здесь только следующий
простейший итерационный подход.
Зададимся какой-нибудь убывающей последо-
невязки р от параметра регуляризации ос. вательностью положительных чисел а™, напри-
мер, otm = const/m, m = 1,2,..., и будем последовательно решать задачу (4.11.3) для каждого m до
тех пор, пока не выполнится с нужной точностью условие (4.11.2). Подробности вариационного метода
регуляризации по невязке и другие способы выбора параметра регуляризации описаны в литературе,
см., например, [Тихонов, Арсенин 1979]. Отметим только, что в простейшем случае можно просто
полагать а = d, что приводит к описанной в разделе 4.8 среднеквадратической коллокации.
В заключение этого раздела отметим, что в стандартных задачах обработки измерений об ошибках
исходных данных обычно достаточно знать (с той или иной полнотой) только матрицу «обратных весов»
Q = И^-1, а дисперсия единицы веса d, как правило, заранее неизвестна и подлежит оценке в процессе
самой обработки по формуле
(ld - L(Ta))T • W • (ld - L(Ta)) _vf-w-va
n n
(4.11.8)
Выполнение же регуляризации по невязке требует дополнительную информацию о шумах - диспер-
сия единицы веса должна быть известна заранее.
Пример 4.11.1. Вернемся к примеру 4.8.1 и решим вариационным методом регуляризации систему
уравнений коллокации (4.8.24), правые части которой имеют ковариационную матрицу Сд = (rf-E, где
(Ji =0,3. С учетом формул (4.8.22),(4.8.10) и (4.11.5) искомое решение /«Дя) равно:
где
| + ai
О
15 2
8 Х ’
(4.11.9)
0 1 ( 1)2
| + ai ) \ 0,7 )
/ \
9/8 + ai
0,7
\ 3/2+ ai /
(4.11.10)
bi \
J
=
а параметр ai определяется из условия (4.11.6), которое в данном случае выглядит следующим образом:
Р2(*1) - |[(1,2 - УЯ1(0))2 + (0,7 - /*'а1(0))2] =
1
2
9,6oti \2 / 1,4сц \2
9 + 8ai J у 3 + 2ai у
= 0,3.
(4.11.11)
Проще всего решить уравнение (4.11.11) графически.
В результате получается ai = 0,53. Следовательно, bi = 0,73, Ь2 = 0,34 и, согласно, (4.11.9),
/<Х1(я) = —2, Ия:2 + 0,511 + 0,82. (4.11.12)
Отличие от искомой функции f(x) = х2+х+1, конечно, значительное, ведь исходных функционалов
всего 2.
Пусть уравнения коллокации (4.8.21) имеют два набора правых частей = (1,02 0,97) и =
(1,002 0,997), где матрицы обратных весов по-прежнему единичные, а средние квадратические
ошибки единицы веса ст2 = 0,03, оз = 0,003. Читатель может в качестве упражнения убедиться
самостоятельно, что в таком случае а2 = 0,04, аз = 3,8 10-3 и
(Q \ — 1
f +0,04 0 \ / 1,02 \
0 |+0,04 ) (. 0.97 )'
то есть
= —1,64х2 + 0,94х + 0,98 (4.11.13)
; , . /9 15 , 3 \ / п + 3,8'10-3 0 \ 1 / 1,002 \
(.S’ S’*0 3+3,810-з ) ( 0,997 )'
то есть
Уа2(х) = -1,66х2 + 1,00х + 0,99 (4.11.14)
Среднеквадратическая коллокация соответствует фиксированному значению параметра а=1 и для тех
же исходных данных дает
fd2(x) = -1,70a:2 + 0,97х +1,02; Лэ(х) =-1,67х2 + 1,00х+1,00. (4.11.15)
Для полноты картины получим решение методом «чистой» коллокации для безошибочных исходных
данных I? = (1 1). Имеем
У(х) = —1,67х2 + х + 1. (4.11.16)
Если вычислить расстояния \\fai — /||н = (.[^(ЛиСе) ~ /(a:))2^)1/2 ng|| i = 1,2,3 между полу-
ченными решениями (4.11.12)—(4.11.15) и нормальным решением (4.11.16), можно сделать вывод о
том, что /оц(х) тем ближе к У(х) в смысле нормы Н, чем меньше а,. Это полностью соответствует
определению регуляризованного решения (4.11.1). г
Пример 4.11.2. Вычислим по данным примера 4.11.1 оценку Fai(J) значения функционала
с с 2
F(/) = J /(x)dx = J (х2 + х + l)dx = 2- » 2,67.
-1 -i
С учетом формул (4.4.12), (4.6.14) и (4.11.12) имеем:
1
Fai (/) = F(jai) = J (-2, Их2 + 0,51х + 0,82)dx « 0,23. (4.11.17)
-1
Сравнивая Fai(f) с F(f), приходим к выводу, что значение Fa(f) получилось очень ненадежно. Анало-
гичные ненадежные результаты получаются и при использовании оценок (4.11.13)-(4.11.16), включая
и оценку (4.11.16) с безошибочными данными. Причина этого заключается в систематическом отличии
/(я) от /(я) вследствие слишком малого количества исходных данных. Мы можем проанализировать
этот эффект, поскольку в данном модельном примере известна истинная функция f(x).
Обозначим fo(x) = f(x) — f(x) = 3, Их2 + 0,49x + 0,18. Согласно (4.6.30), fo(x) G Kerb. Из
упражнения 8.3 известно, что Kerb = Span{x2}. Значит, ортонормированный базис в Kerb составляет
вектор
ei(a:) = = v^2-
Вычислим по формуле (4.5.11) воспроизводящее ядро Къ(х,у) подпространства Kerb:
с;
К0(х,у) = е1(х) -ei(3/) = -х2у2. (4.11.18)
С учетом формул (4.5.17) и (4.5.18) найдем проекцию /о(^) функции /(®) = х2 + х + 1 на Kerb:
г* ч Я
/о(я) = (/(у),К0(з/,я))н = [(у2 + у + !) • rf^dy = «я2. (4.11.19)
*/ Z о
-1
Следовательно, систематическая ошибка в значении F(/) равна:
Г(/о) = -I f x2dx = (4.11.20)
। У
Теперь можно получить значения Fai(/) и F(J), исправленные за систематическую ошибку:
га(/) = Л(/) + Г(/о) = о, 23 + у « 2,01.
F(f) = Л/) + ЛЛ) = | + V = 4 (4.11.21)
У У о
Таким образом, подправленный результат чистой коллокации с безошибочными данными совпадает с
точным значением интеграла; отличие 2,01 от 2,67 объясняется случайными погрешностями значений
исходных функционалов.
Понятно, что на практике величина F(/o), конечно, неизвестна, поэтому оценки коллокации при
наличии шумов искажены не только за счет неизбежных случайных ошибок исходных данных, но
и систематической ошибкой вследствие неполноты исходных измерений. Влияние обоих источников
ошибок уменьшается с ростом числа п уравнений коллокации (4.4.9) с одновременным улучшением
равномерности охвата свойств изучаемой функции.
Формально достаточным условием отсутствия систематических смещений является пустота ядра
используемых исходных функционалов, то есть
/о = 0 ч=> f € Кегх L, (4.11.22)
где /о — проекция / на Kerb. В нашем примере /о(я) = ^х2 0, поэтому f(x) = (х2 +х +1) £ KerxL.
Базис подпространства, ортогонального ядру функционалов (4.8.24), составляют функции ei(rr) = х2 —
3/5 и ез(а:) = х. Поэтому, если бы изучаемая функция являлась какой-нибудь линейной комбинацией
этих базисных функций вида f(x) = а(х2 — 3/5) + Ьх, то смещение оценок отсутствовало бы. Подберем
а и b так, чтобы не менять результаты измерений /(0) = 1, /'(О) = 1. Получим f(x) = -5х2/3 + х + 1.
Видим, что в указанных условиях результат (4.11.16) смещения не имеет.
Используя (4.5.17) и (4.5.18) можно получить в условиях примеров 4.11.1, 4.11.2 проекцию
функции /(я) = х2+а:+1 G Р2^2[-1, Ч на Кет-1/, и убедиться в справедливости равенства f(x) = f-L(x).
В самом деле: /х(а:) = (/(?/), Ко~(у,х)% = -|х2 + х + 1,
где К^(у,х) = | + %ху + ^х2у2 - ^(х2+у2) — воспроизводящее ядро подпространства Ker1-!, =
Span |^^х2 —
Пример 4.11.3. Добавим к исходным данным примеров 4.11.1, 4.11.2 еще одно измерение и пусть
теперь уравнения коллокации таковы:
/(0) = 1, /'(0) = 1, Г(0) = 2.
Согласно (4.6.17),
15 , 3 45 2 15
-X , —X, -X-
8’2’4 4
то есть оценка чистой коллокации f(x) точно восстановила искомую функцию f(x). Почему ? Дело в
том, что в данном примере
Хг о (9 15 2 3 45 о 15) „
Kerb = Span j - - —х, -х, —х2- — = Н,
и потому
/ G КегхД /о = 0 <=> /(я) = f(x).
Отметим, что Ьэ G Н* и ||Д3||2 = 4^.
Пример 4.11.4. Рассмотрим гильбертово пространство Н = Р2^1[-1,1] со скалярным произве-
дением (4.2.1), заполненное всевозможными линейными функциями ах + р. Пусть в двух точках
Xi = О, Х2 = е известны значения некоторой функции f(x), то есть L\f = /(0) « = 1+Д1, Да/ =
/(е) « Гз = 1 + е + Аг, где Д1 и Дг — истинные ошибки исходных измерений.
Точность la характеризуется числом d:
Л2 ч- Д2
d=\\Lf-ld\\2Ei = -^-^. (4.11.23)
Требуется решить локальную задачу коллокации: вычислить значение производной изучаемой функции
в точке Xi, то есть оценить функционал F(f) = /'(0).
Найдем сначала оценку величины F(J) методом чистой коллокации по безошибочным исходным
данным Iq = (1 1 + е)т. Используя формулы (4.5.27) и (4.6.17) имеем:
13 1 13
К(х,у) = - + -х-у, K(x,Li) = ~, K(x,L2) = - + -x-e,
у L и £/
Q 1 /1 1 \
ВД=0, адд2) = -е, K(L,L) = -^ 1 + 3e2J- (4-11.24)
F(/) = (F(F, Дг), K(F, L2) K~\L, L)) • ( * ) = /(e) ~ -/(0)- = 1. (4.11.25)
Итак, /'(0) = F(/) = F(/) = 1.
Заметим, что формула (4.6.17), реализующая в гильбертовом пространстве Н = [-1,1] метод
чистой коллокации, совпадает с правилом обыкновенного численного дифференцирования.
Зададимся теперь конкретным значением е = 0,001 и пусть исходные функционалы отягощены
ошибками Д1 = —0,05; Дг = 0,05. Можно проверить, что dimKerxL = 2 при е / 0, то есть
функционалы L\ и L2 линейно независимы в Н*. Однако соответствующий определитель Грама при
заданном значении е очень мал:
Зе2
detr = detJC(L, L) = — = 0,75 IO-6.
Это может являться признаком того, что используемые функционалы практически линейно зависимы,
что эквивалентно сильному влиянию на решение задач коллокации ошибок исходных данных. И дей-
ствительно, решение той же задачи с использованием тех же формул чистой коллокации (4.11.24) и
(4.11.25) дает результат
Е(/) = (0; 1,5.10-3). (-0.5 0 5 + 1°'55.10_6)’,(1%9551)-10О, (4.11.26)
который ничего общего не имеет с искомым значением /'(0) = 1. Таково влияние на оценку F(f)
ошибок исходных данных!
Теперь воспользуемся вариационным методом регуляризации, полагая матрицу обратных весов Q =
В, а в качестве дисперсии единицы веса возьмем
d=a2 = Д? + А1 = 0,25-10-2.
Параметр регуляризации подберем по невязке как корень уравнения (4.11.3), где и = Vd, = 0,05.
Получим а = 7,51 • 10-5. При этом:
J? m-fn-i 1П-31 Л>, 5 + 7,51 • 10~5 0,5 V1
Га(/) (0,1,5-10 )-^ 0,5 0,5 + 1,5 • 10-6 + 7,51 • 10-5у
(п оц \
и> 7 = 1,000. (4.11.27)
1, U&1 у
Таким образом, хотя значение параметра регуляризации весьма мало, но эффект, привносимый
им в решение, очень значителен. Конечно, при другой комбинации значений е и ошибок Д1 и Дг
совпадение Fa(J) с /'(0) может быть и не столь впечатляющим. Тем не менее, при заданном уровне
ошибок d вариация оценки Еа(/) относительно /'(0) будет значительно меньшей, чем у оценки F(J).
4.12 О решении уравнений коллокации
Отметим, что (4.9.12) и (4.9.15) являются системами нормальных уравнений, поскольку их матри-
цы коэффициентов симметричны и положительно определены. Одним из наиболее подходящих методов
решения этих уравнений является хорошо известный метод квадратного корня Холесского. Суть дела
состоит в представлении матрицы коэффициентов системы нормальных уравнений, подлежащей ре-
шению, скажем, (4.9.15), в виде произведения двух взаимно транспонированных треугольных матриц:
(K(L,L)+C) = UUT, где U— нижнетреугольная матрица. Тогда вместо системы (4.9.15) можно решать
гораздо более простую систему вида UTb = у, где у предварительно получается из решения такой же
простой системы Uy = I. Чтобы уяснить удобство метода квадратного корня с точки зрения алгоритмов
коллокации, временно введем следующие упрощенные обозначения:
(K(Lif Li) + С) = К, K(F, F) = || F|| *2 = Ko, K(Lit F) = KP.
Тогда для «окаймленной» блочной матрицы нормальных уравнений
К
КТР
КР \
Ко )
(4.12.1)
сомножитель Холесского имеет вид
(4.12.2)
I
У = u~rl = U-1 L2
\ Ln
UT (U^-'Kp
О (Ко - К^К^Кр)1/2
Таким образом, мы получаем не только нужный квадратный корень UT из матрицы нормальных урав-
нений, но и одновременно среднеквадратическую ошибку (4.8.18) оцениваемого функционала F.
Отметим также, что числа у = U~xl являются значениями линейных комбинаций исходных функ-
ционалов L на потенциале, то есть
\
(Г). (4.12.3)
/
Представителями этих линейных комбинаций служат линейные комбинации представителей функцио-
налов Li,..., Ln, то есть столбец функций
t/-1(/f(LllF'),...,^(Ln,P'))T.
Поэтому матрица Грама, соответствующая функционалам правой части (4.12.3), есть единичная мат-
рица Е:
= U~1UUT(UT)-1 = Е. (4.12.4)
Следовательно, все функционалы, соответствующие «измерениям» у, ортонормированы и поэтому со-
множитель Холесского, соответствующий исходным измерениям не надо перевычислять за-
ново, если возникает необходимость учесть новые измерения ln+i>
Приведем общую схему решения системы п нормальных уравнений
Ах = 1 (4.12.5)
методом квадратного корня. Она состоит из двух этапов.
Прямой ход (вычисление элементов нижнетреугольной матрицы U такой, что UUT = А):
for i = 1 to п
for j = i + l to n (4.12.6)
Uij — /^»i
end for
end for.
Очередной элемент можно вычислять, когда получены аналогичные значения с меньшими ин-
дексами. Так что заполнение U можно выполнять либо по строкам, либо по столбцам. При этом нет
необходимости хранить и А и U. Поэтому получаемые числа можно записывать на место a,j.
Обратный ход (решение сначала нижнетреугольной системы Uy = I и затем верхнетреугольной
UTx = у):
for i = 1 to n
(4-12.7)
end for
for i — n to 1
= (y* - Efc=i+i UffcZfc) /ua (4.12.8)
end for
Рис. 4.12.1. Сомножитель Холесского для окайм-
ленной матрицы.
Рис. 4.12.2. Затемненная часть матрицы редуци-
рована.
Цикл (4.12.7) не обязательно выполнять отдельно. Достаточно в прямом ходе редуцировать матрицу
коэффициентов, окаймленную столбцом и строкой свободных членов:
А
1Т
(4.12.9)
где Л— какая-нибудь константа. После редуцирования этой матрицы алгоритмом (4.12.6) получается
матрица, структура которой показана на рис.4.12.1. При этом А = Л — u2+1)J- = Л — lTА~11, где
вычитаемое дает значение часто нужной квадратичной формы, см., например, формулу (4.7.5)
\\Т\\2 = 1Т • I = 1Т Ь,
(4.12.10)
определяющую норму оценки возмущающего потенциала (4.9.14).
Указанное окаймление матрицы нормальных уравнений можно сочетать с другим полезным окайм-
лением вида (4.12.1).
Процесс редуцирования заданной матрицы можно прерывать. Для продолжения прямого хода надо
лишь указать количество полностью уже редуцированных строк и номер последнего полностью уже
редуцированного столбца, см. рис. 4.12.2.
Сохраняя матрицу UT, можно потом расширять матрицу нормальных уравнений, окаймляя ее раз-
личным количеством столбцов и строк и привлекая, таким образом, все новые и новые измерения. Воз-
никающее дополнительное редуцирование опять трактуется как продолжение прерванного с указанием
количества полностью уже редуцированных строк и номером последнего полностью уже редуцирован-
ного столбца.
В силу симметрии, для реализации метода квадратного корня достаточно памяти п(п + 1)/2 вме-
сто обычных п2. Число операций с плавающей точкой равно п3/3 + О(п2), что составляет примерно
половину того, что выполняется в гауссовом исключении.
Пример 4.12.1. В условиях примера 4.8.2 окаймленная матрица нормальных уравнений (4.12.1)
имеет вид
9/4 -3/2 К(0,х) \
-3/2 9 АГ(1,а:) I .
К(0, х) К(1,х) К(х,х) /
Редуцирование методом квадратного корня дает верхнетреугольную матрицу
/ 3
2
О
( 5 2 3\
I —х Ч— I
\ 2 2J
v2
— (5а:2 + Зх)
15 4 30 3 15 2\1/2
т1 тх+ т1)
/15\1^2
Полученный автоматически последний элемент на диагонали равен I — I |х(х - 1)| и определяет
у о J
предельную погрешность решения глобальной задачи коллокации в примере 4.8.2.
В задачах с дополнительными параметрами, отмеченных в подразделе 4.8.3, окаймленную матрицу
нормальных уравнений удобно записывать следующим образом
К А I
Ат W 0
/00
(4.12.11)
Автором работы [Tscherning 1974] рекомендуется соответствующий сомножитель Холесского в таком
случае представлять в виде
/ UT U-1 A U~ll _ \
0 V (ут)~1ЛгК~11 I , (4.12.12)
\о о llTc-1i-trk-1A(vvT)-1ATK-'Li)1/2)
где V есть результат редуцирования матрицы (ATK’-1A Ч- IV). Указанная модификация позволяет в
процессе прямого хода избегать отрицательных значений при W = 0.
Оценка параметров X получается из уравнения
VX = (ут)-1АтК~11,
а оценивание точности выполняется путем редуцирования по Холесскому матрицы
К А КР \
Ат W 0 I .
К'£ 0 Ко )
Пример 4.12.2. В условиях примера 4.8.4 матрица (4.12.11) имеет вид
1 0,6 1 1Х \
0,6 1 1 12
1 10 0’
/'1 Г2 0 0 /
К Ат i \
А 0 0 =
I 0 0/
Соответствующий сомножитель Холесского (4.12.12) выглядит следующим образом
/ 1 0,6 1 h \
т = 0 0,8 0,5 (12-0,6/1)5/4
"00 \/5/2 (/1 + /2)>Л/4
\ 0 0 0 ((/А - /2)5/4)V2 у
Обратный ход (4.12.7) метода квадратного корня дает
1 0,6 1 \ / 61 \
0 0,8 0,5 I I &2 I
0 0 \/5/2 / \ х /
/1
(/2-0,611)5/4
(/1 + /2)v/5/4
2
откуда х = (Zi + 12)/2 со средней квадратической ошибкой (АГК’-1А)1/2 = м;
v5
b2 = jG2-/i), bi = ^h-i2y,
* 4 5-
^P') = 7-^2-ll + h-l2)=0.
0 4
Точность решения можно оценить путем редуцирования правой части вида
/(K(L1,^(P'))\
К(Ь2,ЦР'У)
О
\ Л-(О)) /
/ 1 0,6
О 0,8
О О
\ 0,8 0,8
1 0,8 \
0,5 0,8
v/5/2 О
О 0,99 /
/ 0,8 \
0,4
2,4/ч/5
\ ^0,99 у
Здесь вычисления выполняются только с последним столбцом, так как подматрица, занимающая первые
три строчки и первые три столбца, уже редуцирована. Справа показан результат этого вычисления.
Таким образом, точность оценки С(Р') характеризуется средней квадратической ошибкой -^/0,59 м.
4.13 Последовательная коллокация
Количество исходных измерений в некоторых задачах может достигать десятков и даже сотен тысяч.
Основные вычислительные трудности практической реализации метода коллокации при этом связаны
с необходимостью решать очень большую систему нормальных уравнений вида (4.9.12), (4.9.15) или
(4.11.5). В работах [Moritz 1973; Мориц 1983; Tscherning 1974] развита теория последовательного
использования исходных данных, разбитых на группы. При этом приходится решать столько систем
уравнений, сколько групп, но зато размеры этих систем сравнительно небольшие. Пусть, например, все
п измерений (4.9.6), которые для простоты будем считать безошибочными, разбиты на две группы
h
/2
(4.13.1)
где li содержит mi измерений, a I2 содержит m2 измерений. Тогда соответствующие матрица коэффици-
ентов нормальных уравнений (4.9.12) и строка взаимных ковариаций в (4.9.14) принимают следующий
блочный вид:
Кц
К21
К12 \
/^22 / ’
(4.13.2)
= М (4.13.3)
Здесь з обозначает - как и у автора работ [Moritz 1973; Мориц 1983] - полезный сигнал, то есть
значение любого определяемого функционала на возмущающем потенциале.
В указанных условиях формула (4.9.11) принимает следующий вид:
з = KhK^li + (Ка2 - KhK^Ki2){K22 - К21К^К12Г\1г - #21^1)- (4-13.4)
Для случая (4.9.14) введем обозначения:
51 = ^41, (4.13.5)
Ti(P) = К$1 bi,
(4.13.6)
— h — = l2 — K21 • bi,
(4.13.7)
= K22 - K2lK^K12 = {cov к = 1,.. n = 1,.. . . ,7712 . . ,7712 (4.13.8)
K™ = KP2- KPlK^K12 = {cov^.lg))}, . ,7712, (4.13.9)
b2 = K~21Wl{/\ (4.13.10)
f2(P) = K%» .bz.
(4.13.11)
Здесь cov обозначает «ковариация», а верхний индекс в круглых скобках (1) сигнализирует о том, что
речь идет об остаточных величинах после учета влияния первой группы измерений.
В результате оптимальная оценка возмущающего потенциала получается последовательно в виде
суммы двух слагаемых, каждое из которых представляет влияние каждой группы измерений:
T(P) = fi(P) + f2(P).
Обобщение для к групп выглядит следующим образом [Tscherning 1974]:
9=1
< Т^ = Тр- f K^b,
9=1
8Ы = 8-£к^-Ья
, 9=1
И?) = {cov(^),lX))} fc = 1’"-’Tni
- K% = {covj =
K3i} = {cov(s(s)>J = !.•••,nii
h =к-1(9"1)
' fi(P) = К%9~1} • bi
{*
T(P) = ET<(P),
»=1
к
8 = Ё Si.
«=1
(4.13.12)
(4.13.13)
(4.13.14)
(4.13.15)
(4.13.16)
(4.13.17)
Здесь верхний индекс в круглых скобках (j) или (д) сигнализирует о том, что речь идет об оста-
точных величинах после учета влияния первых соответственно j или д групп измерений. Индекс (0)
соответствует исходным непреобразованным величинам.
Воспользуемся результатами работы [Tscherning 1974] и остановимся подробнее на наиболее рас-
пространенной ситуации, когда первую группу измерений составляют гармонические коэффициенты
возмущающего потенциала (4.9.1) степеней 2,3, ...,АГ, а воспроизводящее ядро совпадает с автокова-
риационной функцией возмущающего потенциала и имеет структуру (4.9.4).
Элементами столбца Кpi в (4.13.6) служат ковариации между потенциалом в точке Р и гармониче-
скими коэффициентами. Поэтому для их вычисления надо подействовать на ковариационную функцию
. « 11 л GM
таким функционалом йтп(.), который на потенциале (4.9.1) дает ——cim, то есть
R
Ltm(T) = М ИГ Е Е ^^(0, А) | • Sim(9,X)dw = ^-с1т (4.13.18)
о, \ n=2fc=-n /
и, следовательно,
, оо 2 п
1,„(<от(р,р'))_ —Е аде.*)' (4.13.19)
ш n=2 fc=—п
, , а2 , ,
Snfc(0 ,Л )S(m(0,A)dcu = ,А ).
Итак, столбец Кр\ в (4.13.6) составляют числа
СМ а2 / R\ '+1
V cov (ТР,с1т) = -±-- - Гы(0,А). (4-13.20)
л 21 + 1 \ г )
Элементами матрицы Кц в (4.13.3) служат ковариации между самими гармоническими коэффициента-
ми из первой группы измерений, которые попарно некоррелированы и потому отличны от нуля только в
том случае, когда их оба индекса совпадают. Поэтому на ковариационную функцию надо подействовать
функционалом (4.13.18) дважды:
Ь1тЬ1т(соу(Р,Р'У) = f -^-Sim(0,A)Sim(0,A)dcu = (4.13.21)
J Zi ~г 1
ш
СТ2
= =
Z4 ~г 1
Другими словами, матрица Кц в (4.13.3) диагональна и элементами ее диагонали служат числа
cov(clm,cim) = -^~. (4.13.22)
\ xt / Zt + 1
Поэтому система (4.13.34) легко решается и потенциал (4.13.6) находится аналитически.
Аналогично находится ковариация гармонических коэффициентов с любым другим функционалом
Г/
-.2 / / р \ 1+1 \
F,Lifn(cov (Р, Р')) = • F, - Yim(0, А) . (4.13.23)
24 + 1 \\7/ /
Например,
a / \ / d\ ^+2
^(covtP.F)) - (1 +1) +‘ я) М 1Ъп(в,А), (4.13.24)
^„(covU’P')) = (' + 1)(']р2)«? Л). (4.13.25)
Отметим также возможность вычисления коэффициента корреляции р между потенциалом в точке Р
и каким-нибудь гармоническим коэффициентом:
(д-2 /р\1+1 \
2гЬ(?) ^(е.л)
ч 1,чт,--------------------. (4.13.26)
л*. / ОО \ Ч*
тЙ=г(Есг‘)
v2i + 1 \|=2 /
Отмеченная выше простота решения системы уравнений (4.13.34) имеет место и в том случае, ко-
гда исходные гармонические коэффициенты характеризуются некоррелированными погрешностями с
дисперсиями
dj
«ы = (4.13.27)
где di — заданные неотрицательные константы (степенные дисперсии погрешностей потенциала). Дей-
ствительно, согласно (4.9.15), (4.11.4) и (4.13.20), (4.13.21), имеем
/•fl/ № 2 / D\
; (4.13.28)
1=2 т=—1 х ' — * _l Л.
21 + 1 +Л1т
Если обозначить
=! ^Т/а2 = ттЬ (4.13.29)
1 + di/Gf 1 + щ
полагая — di/df, то ряд для потенциала принимает стандартную форму (4.9.1):
Ti(P) = 52Й'+1 £ с1т Ylm(№ = -£'£'£ (4.13.30)
1=2 Г т=-1 Л 1=2 m=—l
/ д\
Здесь, как обычно, Sim(r, 0,A) = ( — ) l/m(6,A). При этом остаточные измерения (4.13.7) удобно
\ г )
трактовать как функционалы на новом возмущающем потенциале W - Ui относительно нового нор-
мального потенциала Ur = U + Т\.
Элементы матрицы занимающие (г,^-позицию, определяются правилом (4.13.8). Например,
если 32г = Т(Р), 32j = Т(Р'), то
N /P2\i+1 00 / ff2\i+1
cov(s^),s^)) = — j Р((созф)+ 52 ст' ( —) Р»(совф). (4.13.31)
1=2 'ГГ ' l=N+l 'ГГ '
Здесь ц,1) обозначает степенную дисперсию уклонений вычисленных значений гармонических коэф-
фициентов, входящих в первую группу измерений, от их измеренных значений, vim = cim - cim =
+ Поэтому
а'15 = аг-^-. (4.13.32)
1 + Н/
Таким образом, речь идет только о рациональном учете погрешностей исходных гармонических коэф-
фициентов с1т. Если же погрешности di пренебрегаемы, то = 0, c/m = cim = ат, о,1) =0 и
ковариационная функция (4.13.31) описывает поле с удаленным низкочастотным трендом.
Предположим далее, что вторую группу измерений в рассматриваемой ситуации составляют т2
значений аномалии силы тяжести Др, сглаженных по трапециям 1° х 1°. Сглаженные значения на
поверхности Земли можно приближенно трактовать как точечные значения на определенной высоте
h' над Землей. Обозначим такую точку как Р^г^б^А') и будем полагать, для определенности, h' =
r'—R = 10 км, а погрешности всех исходных данных будем считать пренебрегаемыми. Тогда остаточные
аномалии, согласно (4.13.7), 1^ =12 — К21 Ьг, где элементы строки К21 имеют вид
(K2i)hn = ^coV(bg(r\W),clm) = -94т(~~- + (4.13.33)
п 21 + 1 Т \Т )
а столбец bi составляют числа
(Мы = (4.13.34)
а1
Поэтому с учетом (4.9.7) и (4.13.30) можно показать, что
(£)i+1 WX) = hi ~ - ^(P')) , (4.13.35)
J T \T / \ от T /
то есть остаточные аномалии силы тяжести отнесены к новому нормальному потенциалу Ui = U + Ti-
Остаточные аномалии силы тяжести 1^ используются далее для вычисления Т2 по формуле
(4.13.11). При этом для получения Ьг в (4.13.10) надо уже реально решать систему уравнений
К$Ь2 = 1{21}-
Если имеется третья группа измерений, то идеология остается прежней: соответствующие остаточ-
ные значения вычисляются по правилам (4.13.13), то есть 132> = 1з - • Ьг - • Ьг и относятся к
новому нормальному полю U2 = Ui + Т2.
5. Гравиметрическая аппаратура,
используемая для решения задач
геодезии
5.1 Введение
Б.В. Бровар, Н.А. Гусев, В.А. Тулин
Для целей геодезии, в общем случае, необходимо и достаточно определить внешний действительный
гравитационный потенциал притяжения для исследуемой точки с известными координатами на текущий
момент времени, так как дальнейший расчет дериват внешнего гравитационного поля — нормального
и возмущающего (аномального) потенциалов, их первых и вторых производных — не вызывает особых
трудностей. Однако на практике происходит обратная картина — измеряют или определяют дерива-
ты внешнего гравитационного поля: модуль и составляющие ускорения силы тяжести (УСТ), вторые
производные от возмущающего потенциала, составляющие уклонений отвесных линий, разности потен-
циалов и разности составляющих уклонений отвесных линий, смешанные или чистые аномалии УСТ,
высоты квазигеоида.
С помощью гравиметрических данных определена мировая геодезическая система, соединяющая
воедино геодезические системы, существующие в различных районах земного шара.
На единичную массу, жестко связанную с Землей, действуют сила притяжения, возникающая в
соответствии с законом Ньютона между точкой и массой Земли, центробежная сила, обусловленная
вращением Земли вокруг своей оси, и сила притяжения небесных тел. Так как при определении си-
лы тяжести масса притягиваемой точки принята равной единице, то сила тяжести численно равна
ускорению силы тяжести. Вместо термина «ускорение силы тяжести» гравиметристы часто используют
термин «сила тяжести».
Но измерением силы тяжести (в буквальном понимании этого термина) гравиметрия не занимает-
ся. В гравитационном поле сила измеряется произведением инертной массы на ускорение, сообщаемое
этой массе, и, следовательно, зависит от величины массы. Возникает вопрос: как найти величину мас-
сы и что делать с полученным значением силы, коль скоро при наблюдениях в одной и той же точке
для тел разных масс при одном и том же полученном ими ускорении требуются разные силы. Гораздо
продуктивнее измерять ускорение, как физической величины, универсальной для тела любой массы, а
также его составляющие и производные, создаваемые гравитационным полем Земли.
Термину «ускорение свободного падения», предложенному в свое время моряками и рекомендуемо-
му в монографии «Гравиметрия — XX век» 1997 г. В.А. Романюком, можно дать несколько толкований
смысла, а это недопустимо. Если «ускорение свободного падения» измеряется относительно инерци-
альной системы координат, то определяют ускорение силы притяжения (тяготения), если — отно-
сительно системы координат, жестко связанной с Землей, то определяют «ускорение силы тяжести»,
а если — относительно системы координат, жестко связанной с движущимся судном, то определяют
кажущееся ускорение силы тяжести, отягощенное влияниями ускорений инерции судна, и т.п.
Обсудим следующие два предложения Б.В. Бровара.
Предложение 1: термины «ускорение силы тяготения», «ускорение силы тяжести» заменить на
термины укороченные, но сохраняющие и не искажающие смысл их определений: «ускорение тяготе-
ния», «ускорение тяжести» соответственно.
Предложение 2: так как ускорение — среднего рода, а сила — женского рода, то термин «уско-
рение силы тяготения» заменить на термин «тяготение», «ускорение силы тяжести» на термин
«тяжетение», а термин «сила тяготения» заменить на термин «тягость», термин «сила тяжести»
заменить на термин «тяжесть». В предложении 2 термины имеют кардинально сокращенный вид и
сохраняют смысл их определений.
Так как термин «ускорение свободного падения» вносит смысловую неопределенность, термин «уско-
рение силы тяжести» имеет лишь лингвистический недостаток, к которому все давно уже привыкли, а
предложенные термины не обсуждены научной общественностью, то сохраним общепринятый термин
«ускорение силы тяжести» (УСТ), помня, что о терминологии не спорят, а договариваются.
В практике применяются несколько принципиально различных методов измерения УСТ.
В методе свободного падения тела в гравитационном поле измеряются длина пути падения свободно
падающего тела (СПТ) и время, затраченное на этот путь. Далее по известным формулам вычисляется
УСТ. Применяется для абсолютных определений.
В методе несвободного падения в данном случае понимаются колебания маятника, которые пред-
ставляют собой многократное падение центра масс маятника к положению равновесия. Здесь измеря-
ются средний период колебаний маятника и его приведенная длина (оборотный маятник — для абсо-
лютных определений) или средний период при допущении, что приведенная длина маятника неизменна
(обычный маятниковый прибор — для относительных определений). Абсолютное или относительное
значение УСТ также находится путем вычислений.
В статическом методе силе тяжести пробного тела противопоставляется упругая сила. Мерой изме-
нения силы тяжести служит изменение величины силы, измеряемой тем или иным способом. Приме-
няется для относительных определений.
В динамическом методе мерой изменения силы тяжести является изменение напряженного состоя-
ния тела, что влечет за собой изменение его механических характеристик. Применяется для относи-
тельных определений.
В ротационном методе УСТ сравнивается с инерциальным (центробежным) ускорением [Тулин
1969]. В простейшем случае — это центробежный регулятор Уатта. Пробное тело подвешивается на
нити, и эта конструкция вращается вокруг оси, не проходящей через нить. Мерой изменения УСТ
является либо угол отклонения нити от вертикального положения при неизменной скорости враще-
ния, либо скорость вращения при неизменном угле отклонения. Предназначается для относительных
определений [Черемисенов 1971а, б].
На фиг. II (цв. вклейка) показано повышение точности гравиметрических определений с течени-
ем времени, а на рис. 5.2.1 приведена схема классификации измерительной аппаратуры по методам
измерений, по материалам чувствительных элементов и по применению.
Первые определения абсолютного значения УСТ были выполнены маятниками в конце XVII века с
погрешностью более 30 мГал. При этом определение длины маятника с высокой точностью оказалось
трудной задачей. Техника определения периода также была невысока. Поэтому погрешность измерений
абсолютного значения УСТ также была относительно большой. Эксперименты определения абсолютно-
го значения УСТ маятниками продолжались до середины 60-х годов XX в.
Относительный метод измерений УСТ с маятниковыми приборами (при неизменной приведенной
длине) оказался очень эффективным и применялся в течение длительного времени. Зарубежные ма-
ятниковые приборы были вытеснены статическими гравиметрами в середине шестидесятых годов. В
нашей стране, имеющей большую протяженность, маятниковые измерения продолжались дольше. Вна-
чале погрешности измерений с российскими маятниками были больше, но потом, с применением кварца
для стержней и с повышением общей технологии разработки маятниковых приборов, погрешности из-
мерений значительно уменьшились и к 2000 г. достигли 0,01 мГал (СМК).
Статические гравиметры появились в производстве в 1930-х годах, погрешность измерений с ними
была более 1 мГал. В настоящее время их точность повысилась на два порядка.
С появлением возможности точного измерения длины и времени баллистический метод стал быстро
развиваться и к 2000 г. достиг погрешности около 3 мкГал и, по всей вероятности, погрешность
измерений с ним будет снижаться и далее.
Рис. 5.2.1. Схема классификации измерительной аппаратуры по методам измерений, по материалам чувствительных элементов и по применению
5.2 Абсолютные измерения маятниковым методом
Н.А. Гусев
Впервые определения УСТ были произведены Галилеем в конце XVI века на основании открытого
им закона падения тел, по которому путь, пройденный свободно падающим телом в первую секунду,
численно равен половине УСТ. Однако эти измерения были слишком грубыми. Началом измерения
значений УСТ считается 1672 г., когда французским астрономом Рише было установлено, что сила
тяжести в разных местах на Земле не одинакова. Полученная Гюйгенсом (1673 г.) зависимость между
периодом колебаний маятника S, его приведенной длиной £ и силой тяжести д положила начало опре-
делению УСТ маятниковым методом. Эта зависимость для бесконечно малых колебаний выражается
формулой: S = Tty/Tfg.
Период колебаний маятника в гравиметрии — это промежуток времени от момента прохождения
маятником через положение равновесия до момента следующего прохождения равновесия.
Братьями Бернулли была разработана теория физического маятника (1691-1726 гг.). Л. Эйлер (1736
г.) вывел зависимость периода колебаний маятника от амплитуды его качаний. Это дало возможность
выполнять маятниковые измерения, которые были единственным средством более 200 лет. Метод поз-
волял точно определять период колебаний вследствие изохронности колебаний маятника. Первыми
гравиметрическими приборами были одиночные маятники, период колебаний которых определяли срав-
нением с колебаниями маятника секундных часов, ход последних контролировали по астрономическим
наблюдениям. Наиболее точные измерения периода колебаний маятника получали по методу совпа-
дений. Влияние окружающего воздуха на маятники не учитывали. Гравиметрические маятники были
весьма несовершенны: на тонкой нити, зажатой вверху, подвешивали шар диаметром около 2,5 см из
тяжелого материала — свинца, меди, платины, золота. В середине XVIII века зажим нити был заме-
нен опорной призмой. На смену нитяным маятникам пришел «жесткий» маятник, который качался на
остром ребре призмы, опирающейся на площадку.
В начале XIX века был предложен оборотный маятник, позволивший наиболее точно измерять его
приведенную длину. Этот маятник имеет две опорные призмы, параллельные между собой и разне-
сенные на некоторое расстояние друг от друга. Если период качания на обеих призмах одинаков, то
расстояние между ними равно приведенной длине маятника. Первым изготовил оборотный маятник
английский физик Кэтер в 1818 г. С маятниками Кэтера производились измерения в 1826-1829 гг. с
ошибкой ±15 мГал. Маятник Кэтера был усовершенствован Репсольдом, который поместил маятник на
штатив и создал методику измерения длины маятника с помощью перевозимого эталона. После этого
погрешность измерений несколько снизилась. Длину маятника определяли непосредственно измерени-
ем, и только после того как был предложен метод относительных наблюдений (1881 г.), эта трудоемкая
операция, сдерживающая повышение точности измерений, отпала. Позднее отдельный маятник был
помещен в корпус, изолирующий его от внешних воздействий. При этом было также необходимо раз-
работать арретирное устройство и устройство задания маятникам амплитуд и их пуск.
В 1898-1904 гг. в Потсдаме Кюнен и Фуртвенглер измерили абсолютное значение УСТ, применив
пять различных по весу, форме и длине оборотных маятников. Четыре маятника имели приведенную
длину по 100 см, а один — 25 см. Маятники изготовлены из латунных трубок. Часть наблюдений
проведена с маятниками, на которых укреплены острые призмы, опирающиеся на плоские площадки,
а другая — с маятниками, на которых укреплены плоские площадки, опирающиеся на острые призмы.
Приборы устанавливались на двойном массивном постаменте, изолированном от грунта. Ряд наблю-
дений проводился при пониженном давлении (около 40 мм ртутного столба). Наблюдался одиночный
маятник. Полученное значение 981 274 ±3 мГал оказалось завышено на 14 мГал.
В 1900 г. на XIII конференции МАГ в Париже была принята Венская исходная система, ее по-
грешность оказалась равной 30 мГал. В 1909 г. на XVI международной геодезической конференции в
Лондоне в качестве исходного мирового значения УСТ были приняты результаты, полученные Кюне-
ном и Фуртвенглером в 1898-1904 гг., послужившие основой Потсдамской гравиметрической системы,
которая просуществовала по 1971 г.
В 1930-1936 гг. в Вашингтоне П. Хейль [Heyl 1936] измерил абсолютное значение УСТ оборотными
маятниками, сделанными из кварцевых трубок. Призмы крепились на подставке, а опорные пластины
на маятнике. Маятники качались в вакуумированной камере. Погрешность измерений 3,5 мГал.
В 1935-1938 гг. Дж.С. Кларк в Теддингтоне (Лондон) измерил абсолютное значение УСТ одним
оборотным маятником, сделанным из двутавровой балки. Опорные пластинки укреплены на маятнике,
призмы — на штативе. На вакуумированном штативе посменно использовались шесть призм с радиу-
сами кривизны лезвия от 1,5 до 17 микрон. Погрешность измерений ±1 мГал.
В 1953-1956 гг. в Ленинграде во ВНИИМ им. Д.И. Менделеева оборотными маятниками изме-
рено абсолютное значение УСТ. Измерения выполнены тремя оборотными маятниками со стержнями
из плавленого кварца и добавочными грузами из латуни. Для стержней были применены кварцевые
заготовки в виде брусков прямоугольного сечения 70x30 мм. Бруски имели длину: 414, 614 и 764 мм.
В торцах брусков сделаны пропилы шириной 20 мм и глубиной 27 мм для опорных подушек и призм. С
боков в средней части брусков сделаны продольные вырезы шириной 50 мм и глубиной 10 мм и таким
способом получены стержни, имеющие в средней части двутавровое сечение. Торцевые поверхности
стержней были обработаны по 14-му классу чистоты с отклонением от плоскостности не более 0,2
интерференционной полосы. Из прозрачного плавленого кварца были изготовлены прямоугольные пла-
стины размером 70x30x25 мм и обработаны по плоскостности с такими же минимальными допусками,
как и стержни. Пластины соединены со стержнями силами молекулярного сцепления. Внутри окон,
образовавшихся в стержнях маятников, были вставлены опорные подушки и соединены с пластинами-
перемычками с помощью молекулярных сил. Для смещения центра тяжести маятника к одному из
концов стержня прикреплены добавочные грузы в виде двух латунных полос толщиной 7 мм и шири-
ной 68 мм каждая. Латунные полосы были плотно прижаты к ребрам жесткости кварцевого стержня
и стянуты двумя болтами, проходящими через отверстия в кварце. За пределами кварцевого стержня
латунные полосы соединены между собой с помощью латунного бруска, который вместе с латунными
полосами образует добавочный груз маятника. Торцы собранного маятника имеют плоскопараллельные
зеркальные поверхности.
Штатив прибора ВНИИМ состоял из стальной плиты, установленной с помощью швеллерных балок
на двух бетонных столбах, соединенных внизу бетонной перемычкой. Вакуумная камера представля-
ет собой медный цилиндр с внутренним диаметром 21,2 см и толщиной стенок 3 мм. Наблюдался
одиночный маятник. Погрешность измерений 1,9 мГал.
В 1968-1970 гг. проведены абсолютные измерения УСТ в Центральном институте физики Земли АН
ГДР (Потсдам) двумя приборами с разными оборотными маятниками. В одном из приборов находились
два латунных секундных маятника. В другом приборе применяли комплект трех пар кварцевых маят-
ников одинаковой массы с приведенными длинами 37,5, 50 и 75 см, с плоскими пластинками, которые
опирались на стальные лезвия штатива. Маятники качались в противофазе. Погрешность измерений
0,3 мГал.
Расстояние между опорными лезвиями (или пластинами) для вышеприведенных оборотных маятни-
ков измеряли с помощью микроскопа, позднее применяли интерференционные методы.
С 1970-х годов для определения абсолютного УСТ стали применять баллистические гравиметры,
отличающиеся высокой точностью.
5.3 Относительные измерения маятниковым методом на непо-
движном и подвижном основании
Н.А. Гусев
5.3.1 Относительные измерения маятниковым методом на неподвижном осно-
вании
Общие вопросы конструкции маятниковых приборов. К маятниковому прибору относятся: ма-
ятники, механизм управления маятниками, опорные площадки, регистратор периодов колебаний маят-
ников и их амплитуд, датчик времени и различные вспомогательные устройства (уровни, термометры,
барометры и т. д.). Если указанные блоки соединены воедино, то применяется название маятниковый
прибор. Если же это отдельные блоки, то тогда это комплекты или комплексы маятникового прибора.
Блок, в котором размещены маятники и устройства управления ими называется собственно маятнико-
вым прибором. Когда такие приборы были просты по устройству (маятники, опорные площадки, ручки
управления), то в литературе их часто называли просто штативом. Полевые условия работы наклады-
вают на маятниковые приборы жесткие требования: они должны быть компактны и надежны в работе.
В нижеприведенных описаниях маятниковых приборов применены 2, 3 или 4 маятника. Призмы (ножи)
маятников опираются на площадки, отполированные в одной плоскости. Плата, в которую впрессовыва-
ются опорные площадки, должна быть прочной, чтобы противостоять температурным и механическим
деформациям. Призмы и площадки, называемые опорными устройствами, обычно изготавливались из
агата, стали, стеллита и других материалов. Маятники являются датчиками УСТ и от их качества, в
основном, зависит точность измерений.
Основные требования к маятникам заключаются в постоянстве их приведенной длины (изменение
приведенной длины на 0,01 микрона соответствует 10-8 с в периоде полусекундного маятника) и
неизменности формы лезвия призмы, радиус кривизны которых равен 2-30 микрон. Оптимальный угол
заточки лезвия призмы лежит в пределах 120-140°. Маятник должен быть мало чувствительным к
внешним влияниям. Опорные устройства должны быть твердые, но не хрупкие, должны иметь хорошее
сопротивление истиранию и обеспечивать минимальное трение. Оси качания маятников должны быть
параллельны и точно выведены в горизонт (отнивелированы).
В некоторых приборах применены минимальные маятники мало чувствительные к небольшим изме-
нениям приведенной длины.
Были попытки применить четвертьсекундные маятники. Габариты прибора при этом уменьшаются,
но они сильнее зависят от срабатывания лезвия ножа, имеют большее затухание и на них сильнее ска-
зывается изменение приведенной длины. Поэтому четвертьсекундные маятники почти не применялись
в маятниковых приборах. Стержни маятников изготавливались из латуни, инвара, кварца, вольфрама,
молибдена. Поверхность маятников от коррозии покрывается защитным слоем металла (хром, золото
и др.). При парных качаниях периоды маятников уравниваются. Арретирный механизм обеспечивает
одновременность посадки краев лезвия призмы на площадки. Имеется механизм задания маятникам
соответствующих амплитуд и одновременности пуска в противофазе.
Наиболее значительное влияние на результаты маятниковых измерений оказывает температура.
Ее измеряли с помощью ртутных термометров. По предложению А.И. Фролова температуру внутри
прибора стали измерять с помощью интегрального термометра сопротивлений (ИТС) [Фролов 1948].
Применяли различные способы термокомпенсации маятников, создавали соответствующие конструкции
маятников с использованием материалов с различными температурными коэффициентами линейного
расширения, применяли термостатирование маятниковых приборов. Следует заметить, что термоком-
пенсация маятников нарушается с появлением температурных градиентов внутри прибора. При полевых
измерениях использовали пассивные методы борьбы с температурными влияниями: на пункте наблю-
дений различными способами поддерживали постоянную температуру, закрывали приборы теплоизоли-
рующими чехлами и т. д. С целью ослабления влияния внешней температуры на результаты измерений
маятниковые приборы помещают в термостаты.
приращение силы тяжести или значение g по формуле: g = дисх
Корпус прибора изготавливался жестким для уменьшения сокачания и предусматривалась изоля-
ция маятников от внешних влияний; во многих приборах предусмотрена откачка воздуха и имеется
устройство для отсчета давления внутри прибора. Опорные площадки приводятся в горизонтальное
положение с помощью подвесных уровней. Датчиками времени являются хронометры, кварцевые часы,
частота генераторов.
Приборы с физическими маятниками применялись только как относительные т.е. с их помощью
измеряли только разности силы тяжести от известного значения на исходном пункте (д). В этом случае
измерялись периоды колебаний маятников на исходном (sq) и определяемом (з) пунктах и вычислялось
Sq2
S2'
Относительный метод измерений стал широко применяться после появления приборов Штернека.
При этом методе основным требованием является сохранение постоянной приведенной длины маятни-
ков. После приборов Штернека и Штюкрата был создан ряд новых приборов (около 30), конструкция
которых мало отличается от конструкции указанных типов [Геодезия 1949]. Некоторые из этих при-
боров не имели широкого распространения, поэтому здесь приводится краткое описание только двух
типов: Штернека и Штюкрата, послуживших прототипами последующих разработок.
С развитием науки и техники маятниковая аппаратура подвергалась различным усовершенствова-
ниям и модификациям. Были разработаны более совершенные маятниковые приборы, новые способы
регистрации периодов колебаний маятников, а также улучшена методика измерений. Все это приводило
к повышению точности определений, или давало возможность сократить время наблюдений на пункте.
Развивалась как теория маятникового метода, так и способы наблюдений, учитывалось влияние окру-
жающей среды (температура, давление, влажность и т. д.). Был создан ряд приборов за рубежом и в
нашей стране. В тридцатых годах XX столетия за рубежом (фирма Галф) были созданы приборы, позво-
ляющие перевозить маятники в самом штативе (приборе) и, таким образом, исключалась погрешность,
вносимая каждой новой повеской маятников.
Большое значение, давшее возможность вести наблюдения с маятниками на подвижном основании,
имело предложение Венинг-Мейнеса (1923 г.). Он предложил метод наблюдений, при котором почти
полностью исключается влияние горизонтальных ускорений.
Первое время периоды колебаний маятников определяли визуально с помощью счетчика (электро-
механического или оптического) и хронометра. В тридцатых годах XX столетия для измерения периода
колебаний маятников и их амплитуд была применена фотографическая регистрация. Она повысила точ-
ность измерений, исключила так называемую личную ошибку наблюдателя и уменьшила трудоемкость
визуальных наблюдений. Однако и этот метод тоже оставался трудоемким: обработка пленки (бума-
ги), измерения записи колебаний маятников на оптическом приборе и т. д. Кроме того, этот метод не
позволял оперативно контролировать процесс наблюдений.
Качественный скачок в развитии маятниковой аппаратуры произошел от внедрения фотоэлектрон-
ной регистрации периодов колебаний маятников и их амплитуд. Этот метод значительно уменьшил
трудоемкость измерений, облегчил камеральную обработку полевых материалов и дал возможность со-
здать аппаратуру для автоматической регистрации периода и амплитуды колебаний маятника с приме-
нением ЭВМ. Стало возможным с точностью 10-7 с получать единичные периоды колебаний маятника
и оперативно следить за работой маятниковой аппаратуры.
Наряду с маятниками и приборами создавались вспомогательные приборы: механические и опти-
ческие счетчики, хроноскоп-счетчики, синхронные счетчики, полевые кварцевые хронометры, механи-
ческие и электрические акселерометры, гироплатформы, фоторегистраторы горизонта, наклономеры,
радиоприемники и устройства для приема ритмических сигналов времени и др. Они способствовали
как повышению точности измерений, так и улучшению эксплуатационных характеристик приборов.
В тридцатых годах XX столетия появился новый класс гравиметрических приборов — статические
гравиметры. Их мобильность, малые габариты, высокая отсчетная точность измерений, высокая произ-
водительность при выполнении детальных съемок сразу завоевали признание гравиметристов. Казалось
бы, в тот момент более громоздкий маятниковый метод не будет больше применяться для измерения
УСТ. Однако гравиметры, наряду с лучшими эксплуатационными качествами, имеют два существенных
недостатка: непостоянство нуль-пункта и необходимость определения цены деления шкалы.
Маятники же перед гравиметрами имеют ряд преимуществ. Они отличаются высокой стабильно-
стью, практически не имеют смещения нуль-пункта, не требуют эталонирования, позволяют получать
их периоды из большого числа колебаний и позволяют использовать при этом цифровую фильтрацию,
обеспечивают независимость результатов от измеряемого интервала УСТ и от продолжительности рей-
са. Благодаря этим качествам маятниковая аппаратура стала применяться для создания высокоточных
опорных сетей и базисов для эталонирования гравиметров.
Получил развитие также метод совместного определения УСТ статическими гравиметрами и ма-
ятниковыми приборами как наиболее прогрессивный и рационально использующий лучшие качества
вышеуказанных приборов. Методика работ по съемке морей и океанов с использованием надводных
кораблей также предусматривает совместную работу маятниковых приборов и гравиметров. Этот же
метод рационален при гравиметрических определениях на дрейфующих льдах и авиадесантных рабо-
тах.
Погрешность измерений с маятниковыми приборами уменьшалась с 15 мГал в тридцатых годах
XIX столетия до 0,04 мГал в девяностых годах прошлого столетия («Агат»).
Точность маятниковых измерений зависит, главным образом, от стабильности маятников и их изо-
ляции от влияния внешней среды. Поэтому при описании аппаратуры маятникам уделено больше вни-
мания, чем другим узлам прибора. Маятниковый прибор «Агат» описан более подробно, чем остальные
приборы, так как на данный момент он наиболее точный и совершенный прибор и широко используется
при создании высокоточных сетей, базисов для эталонирования гравиметров и т. д.
5.3.2 Зарубежная маятниковая аппаратура
Прибор Штернека. Первым удачно сконструированным маятниковым прибором, применявшимся
при измерениях силы тяжести относительным методом, был прибор австрийского геодезиста Штернека
(1881 г.) с маятниками его имени. Маятники прибора полусекундные, длиной около 30 см, вес 1,5 кг.
Призма маятника (агат или сталь) закреплена в головке средней частью, которая плотно пригнана к
прямоугольному гнезду и закреплена пластиной четырьмя винтами. Стержень диаметром 8,5 см и чече-
вица бронзовые. Чечевица навинчена на стержень и пропаяна. Во избежание коррозии вся поверхность
маятника покрыта хромом или золотом. Угол ребра призмы составляет 80°. Прибор одномаятниковый,
штатив был стенной и столбовой.
Для измерения периода и амплитуды колебаний маятника использовался электромагнитный счет-
чик, устройство которого заключается в следующем. Свет от лампочки накаливания прерывается за-
слонкой, управляемой контактами хронометра. Образованные таким образом блики поступают на зер-
кало маятника и возвращаются в зрительную трубу, с помощью которой наблюдатель визуально фикси-
рует моменты перехода бликов через нить трубы. Ошибка измерений с прибором Штернека составляла
около 10-15 мГал. По оценке Н.Н. Парийского, по измерениям на Кавказе ошибка составляла 4 мГал.
Основные недостатки прибора: большой температурный коэффициент маятников, недостаточно плотное
закрепление призмы в головке маятника, приводящее к плохому поведению маятников и к большому
температурному последействию их.
Прибор Штюкрата. В 1890 г. берлинский механик Штюкрат создал свой маятниковый прибор,
в дальнейшем получивший его имя. Приборы такого типа с небольшими конструктивными отличиями
выпускали фирмы Бамберг, Аскания Верке, Фехнер, в СССР Аэрогеоприбор. Усовершенствованные
приборы такого типа применялись до 1970 г. (ГДР, ПНР).
Прибор представляет собой массивную отливку диаметром 35 см с центральной вертикальной ко-
лонкой, на которой укреплена опорная плита с агатовыми площадками, на которые опираются маятники
своими призмами. Внизу отливки расположены подъемные винты, рукоятки для арретирования маят-
ников и рычаги для задания маятникам амплитуд с последующим пуском. В середине вертикальной
колонны проходит стержень, управляемый рукояткой внизу прибора через диск и червячную передачу.
Вверху стержень при вращении рукоятки перемещает вертикально лагеры, на которые опираются ма-
ятники своими нерабочими частями. Тем самым происходит арретирование маятников. Внизу прибора
расположены пусковые рычаги маятников. Прибор герметично закрывается металлическим колпаком.
Некоторые приборы допускают откачку воздуха.
У маятников этих приборов чечевица и стержень такие же, как и у маятника Штернека. Головка
имеет форму стремени, в паз типа «ласточкин хвост» которой с помощью температурной посадки
запрессован агатовый нож своей средней частью. Материал стремени, стержня и чечевицы — латунь
или инвар. В комплект прибора включаются также счетчик, термометры, барометры, уровни и другое
оборудование. Первые приборы были 3-маятниковые. На рубеже XX столетия 3-маятниковые приборы
были заменены 4-маятниковыми, которые качались двумя парами в противофазе. Основные недостатки
прибора: бронзовые маятники имели большой температурный коэффициент (более 15 мГал на градус),
инварные маятники более чувствительны к магнитным полям, отсутствие термостата. Приборы этого
типа применялись более 20 лет.
Упругие маятники Леже. Прибор состоит из кварцевого стержня диаметром 4 мм, укрепленного
вертикально на тонкой (0,02 мм) плоской ножке из эльинвара. Длина стержня-маятника 6 см, полупе-
риод колебаний его около 3 с. На стержне укреплен грузик, перемещая который можно регулировать
период колебаний маятника. Наблюдения проводят с помощью микроскопа.
Кембриджский маятниковый прибор. Кроме описанных выше приборов наиболее известны сле-
дующие маятниковые приборы, применявшиеся, ориентировочно, до 1970-х годов: Кембриджский (Ан-
глия), Фирмы Галф (США), Географического института Японии (GSI), Итальянской геодезической ко-
миссии, Обсерватории Доминиона [Сливин 1973а, б], Польский маятниковый прибор, Маятниковый
прибор ГДР.
Результаты измерений с первыми пятью приборами были использованы для создания Европейско-
Африканского, Северо-Американского, Западно-Тихоокеанского гравиметрических эталонных полиго-
нов, а также для создания Международной гравиметрической стандартизованной сети (IGSN-71), ис-
пользуемой в настоящее время. Приборы Польский и ГДР применялись при создании полигона Таллин-
София в 1968 г.
Кембриджский маятниковый прибор постоянно находился в эксплуатации с 1930 г. за исключением
военных лет 1939-47 гг. Прибор двухмаятниковый, вакуумированный (до ~25 мм рт. ст.), не термо-
статирован. В приборе применены полусекундные маятники конструкции Ленокс-Конингема, чечевица,
стержень и головка которых изготовлены из одного куска инвара и представляют единое целое. Приз-
ма из твердой стали закреплена в теле головки коническими латунными втулками. В качестве зеркала
служит отполированная боковая поверхность призмы. Маятники позолочены. Начальная амплитуда
колебаний маятников составляет около 30'. Опорные площадки выполнены из агата.
Фотографическая регистрация периода колебаний маятников, примененная в этом приборе, повы-
сила точность измерений и устранила личные ошибки наблюдателей, возникающих при визуальных
наблюдениях. Для получения отметок времени применяют кварцевый генератор с частотой 100 кГц и
синхронный мотор. При наблюдении периода колебаний маятников производят четырехминутные запи-
си в начале и в конце серии качаний, которая длится 60 минут. Остаточное давление в приборе около
25 мм рт. ст. Оно определяется с помощью манометра с точностью до 0,5 мм рт. ст. В 1962 г. прибор
усовершенствован: заменены некоторые ферромагнитные части, введена фотоэлектронная регистрация
периода колебаний маятников, в комплект введено кольцо Гельмгольца, соленоид для размагничивания
маятников, кварцевый хронометр. Погрешность измерений составляет около 0,5 мГал. Основные недо-
статки прибора: влияние магнитных полей на инварные маятники (применение катушки Гельмгольца
с целью устранения этого влияния усложнило работу с прибором), перевозка маятников отдельно от
прибора.
Маятниковый прибор фирмы Галф (США). Прибор находится в эксплуатации с 1932 г., с ним
выполнено наибольшее число измерений при создании мировой сети IGSN-71. Прибор двухмаятнико-
вый, вакуумирован и термостатирован. В 1959 г. он значительно усовершенствован. В нем применены
минимальные маятники стержневого типа, изготовленные из плавленого кварца, сечение 54x19 мм,
длина 32,5 см (приведенная длина 20 см, вес 590 г, период колебаний 0,45 с). Опорная призма ма-
ятника, изготовленная из пирекса, прикреплена к стержню с помощью плотной посадки и приклеена
специальным цементом. Угол заточки лезвия призмы 120°. Маятники постоянно находятся в приборе,
а на время транспортировки блокируются специальным устройством. Опорные площадки выполнены
также из пирекса. Разность периодов одиночных маятников не превышает 2х10-6 с. Воздух внутри
прибора осушается фосфорным ангидридом и ионизируется радиоактивной солью для уменьшения элек-
тростатического влияния на маятники. Постоянство температуры обеспечивается с точностью 0,05°С.
Наблюдения выполняют при давлении 1-5 мм рт. ст. Постоянство пусковых амплитуд поддерживается
с точностью 0,3%, а разность фаз — равной 180±2°. Период колебаний маятников определяется за 58
минут, запись колебаний маятников производится на фотобумагу в течение 2,5 минут в начале и в
конце серии наблюдений фотоэлектронным методом с применением 14-канального шлейфного осцилло-
графа. Фотоумножитель заменен на фотодиод. Погрешность определений с прибором составляет около
0,3 мГал. Основные недостатки прибора: большое температурное последействие маятников, применение
опорных устройств маятников, изготовленных из пирекса.
Маятниковый прибор географического института Японии. Прибор разработан в 1952 г., трех-
маятниковый, вакуумирован и термостатирован, оптическая схема и метод регистрации периодов ко-
лебаний маятников приняты по Венинг-Мейнесу. Минимальные маятники стержневой формы, сечение
стержня 40x20 мм, длина 400 мм, изготовлены из плавленого кварца. В отверстие стержня с помо-
щью сварки закрепляется кварцевая пластина, одна сторона которой полируется. К этой стороне также
полированной гранью прижимается стальной нож и скрепляется с пластиной винтами. Вес маятника
1 кг, период колебаний ~0,51 с. При арретировании и дезарретировании маятников для уменьшения
срабатывания лезвия ножа, возникающего вследствие ударов об опорную агатовую площадку при дез-
арретировании и вследствие разворота на площадке при арретировании, применяются вспомогательные
стальные площадки, укрепленные на специальной вилке, которые касаются лезвий своими плоскостями
в моменты посадки маятников на агатовые площадки и подъема с них.
Прибор не имеет блокирующего устройства и при транспортировке маятники перевозятся отдельно
от прибора. Наблюдения выполняют при остаточном давлении 0,1 мм рт. ст. и при постоянной тем-
пературе, которая поддерживается с точностью до ±0,1 °C. Применена фотоэлектронная регистрация
периодов колебаний маятников с помощью искрового хронографа. Регистрируются два фиктивных и
один действительный (средний) маятник. Продолжительность наблюдения одной серии 10 минут.
В 1963 г. прибор был усовершенствован: внутрь прибора введена радиоактивная соль, введены 5
термисторов для определения температуры, для измерения давления введена трубка Пирани, изготовлен
новый термостат.
В 1973 г. прибор снова совершенствовался и был разработан новый регистратор периодов колеба-
ний маятников. Точность измерений с прибором оценивается средней квадратической ошибкой около
0,4 мГал. Основные недостатки прибора: недостаточно жесткое крепление призмы маятника, перевозка
маятников отдельно от прибора, громоздкость прибора (вес прибора без термостата 65 кг).
Итальянский маятниковый прибор. Трехмаятниковый прибор Итальянской геодезической ко-
миссии изготовлен в 1954 г. фирмой «Сальмоираги». Прибор вакуумирован, но не термостатирован.
Его особенностью является то, что для управления маятниками применяется гидравлический привод.
Применены минимальные стержневые маятники из молибдена. Диаметр стержня 20 мм, длина 400 мм,
вес 1,3 кг, период колебаний ~0,49 с. Стальная или агатовая призма крепится к стержню с помощью
специальной мастики. Имеется устройство для блокировки маятников на время перевозки. Наблюдения
периодов колебаний маятников выполняют при давлении около 15 мм рт. ст. Температура в приборе
отсчитывается с ошибкой 0,01°С. Периоды колебаний маятников определяются с помощью фотоэлек-
тронного устройства и шлейфного осциллографа (осциллограф Хэтэуэя). Регистрирующее устройство
устанавливается на расстоянии 175 см от маятникового прибора. Регистрируются два фиктивных и
один действительный маятники, начальная амплитуда колебаний 35 минут. Продолжительность серии
наблюдений около двух часов. Погрешность измерения одной приборосвязи составляет около 0,4 мГал.
Основные недостатки прибора: отсутствие термостата, сложная и громоздкая система регистрации пе-
риода колебаний маятников.
Маятниковый прибор обсерватории Доминиона. В 1956 г. Л.Г.О. Томсон сконструировал 2-
маятниковый вакуумированный и термостатированный прибор. В 1960-1967 гг. Г.В. Вальянт модер-
низировал прибор. В приборе применены бронзовые позолоченные маятники Т. Менденхалла, изго-
товленные в 1920 г. Чечевица их имеет обтекаемую форму для уменьшения влияния плотности воз-
духа, вес 1,2 кг, период колебаний 0,5 с. Периоды колебаний маятников уравнены между собой до
5х10-6 с. Отличительной особенностью этих маятников является то, что они несут на себе опорные
агатовые площадки, а агатовые призмы укреплены на плите прибора. Маятники качаются в противо-
фазе с амплитудами, равными 26'. Маятники перевозятся отдельно от прибора. Периоды колебаний
маятников определяют фотоэлектронным способом с помощью 30-канального регистратора. Периоды
колебаний маятников от подвески на разные ножи могут изменяться до нескольких единиц шестого
знака секунды. Температура в приборе поддерживается постоянной с погрешностью 0,01°С, датчиками
температуры служат термисторы. Температурный коэффициент маятников равен 45 единицам седьмого
знака секунды на один градус Цельсия. Давление внутри прибора поддерживается равным около 1 мм
рт. ст. Погрешность измерений с прибором после модернизации составляет 0,08-0,15 мГал. Основные
недостатки прибора: большой температурный коэффициент маятников и укрепление опорной площадки
на маятнике.
Польский маятниковый прибор. В шестидесятых годах в ПНР был усовершенствован маятнико-
вый прибор фирмы Аскания с целью повышения точности. Был изготовлен новый регистратор периодов
колебаний маятников с использованием фотодиода и интегральных элементов, применены кварцевые
часы, реконструированы и другие узлы прибора. Во время измерений давление внутри прибора было
около 1 мм рт. ст. Для измерения давления разработан электронный вакуумметр. Для транспорти-
ровки маятников изготовлен термостат. Погрешность измерений по данным авторов около 0,07 мГал.
Основные недостатки прибора: отсутствие термостата и перевозка маятников отдельно от прибора.
5.3.3 Отечественные маятниковые приборы
Первые измерения УСТ в нашей стране выполнили адмирал Ф.П. Литке и гидрограф М.Ф. Рейнеке
в 1827-1830 гг. с оборотными маятниками Кэтера, позднее такие измерения выполняли Паррот и др.
Оборотные маятники Репсольда были приобретены Россией в 1865 г. В период 1865-1896 гг. с их
помощью определено около 50 пунктов. С приборами типа Штернека в России начали выполнять из-
мерения с 1896 г. (Казанская астрономическая обсерватория) и до начала первой империалистической
войны определено около 300 пунктов. 3-маятниковый прибор Штюкрата применялся на Шпицбергене.
Приборами Штернека и Штюкрата в России до 1917 г. было определено около 400 пунктов. Работы по
измерению УСТ возобновились только в 1921 г. [Михайлов 1939]. В 1923 г. Гижицким и Савкевичем
составлен первый каталог всех наблюдений в России (472 пункта). До 1932 г. в нашей стране выпол-
нялись разрозненные измерения УСТ с импортной аппаратурой. После 1932 г. приборы Штернека уже
не применялись, а 3-маятниковые приборы типа Штюкрата были переделаны в 4-маятниковые. Были
приобретены несколько приборов фирмы Аскания-Верке (бывший Бамберг) и два прибора Потсдам-
ского геодезического института механика Фехнера. К 1933 г. в СССР имелось около 20 зарубежных
маятниковых приборов.
20.09.1932 г. вышло Постановление Совета Труда и Обороны СССР о производстве общей гра-
виметрической (маятниковой) съемки в СССР. Большой вклад в обоснование и организацию этого
Постановления внесли А.Д. Архангельский, И.М. Губкин, И.А. Казанский, Ф.Н. Красовский, А.А. Ми-
хайлов, Б.В. Нумеров. При реализации этого постановления кроме упомянутых внесли большой вклад
М.С. Молоденский, М.С. Зверев, Л.С. Казаков, Ю.Д. Буланже и др.
Постановление положило начало комплексу исследований в области гравиметрии, начались широ-
комасштабные измерения УСТ, что стимулировало разработку отечественной маятниковой аппаратуры.
После 1932 г. вся гравиметрическая аппаратура была передана в Московское аэрогеодезическое пред-
приятие (МАГП). Появились и теоретические работы [Молоденский 1934]. Общая гравиметрическая
(маятниковая) съемка территории СССР завершилась в 1956 г. и выполнена, в основном, с помощью
маятниковых приборов, определено 16 795 маятниковых пунктов. В 1933 г. составлен единый каталог
пунктов, в который вошло 2724 пункта, а в 1944 г. издан каталог ~10 тыс. пунктов, определенных
по 1937 г. Размах полевых работ в тридцатых годах в нашей стране вынуждал гравиметристов со-
здавать более удобные приборы для экспедиционных работ. Так появились тяжелые приборы завода
«Аэрогеоприбор», облегченный прибор Л.В. Сорокина [1953], упругие маятники [Рудаковский 1938],
различные вспомогательные приборы: счетчики, радиоприемники для приема радиосигналов и др,
В 1939 г. в ЦНИИГАиК [Раэдымаха 1941] проводились работы по созданию удобного экспедици-
онного маятникового прибора. Был изготовлен опытный образец, вакуумированный, с минимальными
полусекундными кварцевыми маятниками стержневого типа со стальными призмами. Их перевозка
предполагалась в самом приборе. Для управления маятниками использовалась нейзильберовая мембра-
на с рабочим ходом около 7 мм. Изготовленный опытный образец практически не применялся.
В течение 1949-52 гг. в ЦНИИГАиК проводились исследования по повышению точности измерений
с применением кварцево-металлических маятников, предложенных М.Е. Хейфецем. Период колебаний
этих маятников мало зависит от температуры и магнитных полей. Кварцево-металлические маятники
и новая методика измерений позволили повысить точность до 0,5 мГал, сравнимую с точностью из-
мерений с гравиметрами. Различные модификации этих маятников позднее были внедрены в разные
маятниковые приборы, широко применяемые на производстве. В середине 50-х гг., в связи с возросшими
требованиями к точности гравиметрических определений и знанию параметров гравитационного поля
Земли, в ЦНИИГАиК начался новый этап активизации гравиметрического приборостроения и научных
исследований в области изучения фигуры и гравитационного поля Земли. Так появились маятниковые
приборы: ВМП, ОВМ, «Агат», СМК. Эти приборы, кроме СМК, благодаря их высокому техническому
уровню получили широкое распространение в нашей стране.
Приборы Астрономического института. Начиная с 1927 г. в Ленинградском Астрономическом
институте (ЛАИ) под руководством С.Е. Александрова выполнен ряд разработок маятниковых прибо-
ров [Александров 1935]. Были разработаны: один прибор с латунными полусекундными маятниками
типа Штернека, второй — с минимальными маятниками стержневой формы. Был также изготовлен
облегченный прибор для наблюдений на северном полюсе (Е. Федоров) [Александров 1935]. Построено
несколько счетчиков.
Аэрогеоприбор. На заводе «Аэрогеоприбор» (Лизунов) под руководством ЦНИИГАиК (И.А. Ка-
занский, С.Г. Маковер, Л.С. Казаков) в 1933-35 гг. освоен выпуск отечественных маятниковых прибо-
ров, аналогичных приборам типа Бамберг и Фехнер, получивший название «Аэрогеоприбор». Прибор
4-маятниковый, с латунными маятниками типа Штюкрата. Верхняя часть маятника имеет форму стре-
мени, в которую на температурной посадке впрессована агатовая призма. Основная часть прибора пред-
ставляет собой металлическую отливку круглого основания и центральной колонны, к которой наглухо
привинчена крестообразная плита с запрессованными агатовыми площадками. Маятники арретируются
с помощью лагер, управляемых лекалом с червячной передачей и арретирной ручкой. Для задания ма-
ятникам пусковых амплитуд и их пуска служат пусковые рычажки, на осях которых насажены диски
с накаткой. Прибор не термостатирован. Температура отсчитывается по ртутному термометру. Прибор
закрывается тяжелым металлическим колпаком. Наблюдения выполняются визуально с помощью элек-
тромагнитного или оптического счетчика и хронометра, ход которого определяется по ритмическим
сигналам времени, передаваемым по радио.
Период колебаний маятника определяется по формуле: S = (7(2(7 ± I)-1, где (7 — промежуток вре-
мени между двумя последующими прохождениями блика через нить счетчика, знак сложения берется
при S < 0,5 с , а знак вычитания — при S > 0,5 с.
В наблюденные периоды вводятся следующие поправки: за амплитуду, температуру, плотность воз-
духа, сокачание и ход хронометра. Прибор, упакованный в ящик, весит около 90 кг. Погрешность
измерений в нормальных условиях с возвратом на исходный пункт, после определения одного полевого
пункта, ориентировочно 2-3 мГал. Основные недостатки прибора: большой температурный коэффици-
ент и температурный гистерезис маятников, перевозка маятников отдельно от прибора. Прибор широко
применялся при выполнении общей гравиметрической съемки СССР при наземных измерениях 1, 2 и 3
классов, а также при соответствующей доработке при морских измерениях силы тяжести. В 1935 г. за-
водом «Аэрогеоприбор» было выпущено 12 таких приборов. В 1946-1947 гг. Ю.Д. Буланже с приборами
подобного типа определил пункт Оби-Гарм с погрешностью 0,45 мГал.
Маятниковый прибор ГАИШ. В 1935 г. в ГАИШ Л.В. Сорокин создал облегченный вариант
маятникового прибора. Вес прибора в упаковочном ящике чуть больше 30 кг. Это в ~3 раза меньше
прибора «Аэрогеоприбор», что важно при выполнении полевых работ.
Прибор 4-маятниковый, не вакуумирован и не термостатирован, конструктивно отличается от Аэро-
геоприбора. Подъемные винты расположены вверху в основной плите, а штатив-футляр служит подстав-
кой. Плита имеет квадратную форму с вырезом в средине, через который подвешиваются маятники.
В эту плиту впрессованы опорные площадки маятников из агата. Изменен арретирный и пусковой
механизмы. Применены латунные маятники типа Штюкрата. Оптический мостик аналогичен мостику
прибора Штюкрат. Определение периодов колебаний маятников визуальное с оптическим счетчиком,
как и на приборе Аэрогеоприбор. Оптический счетчик отличается от электромагнитного в следующем.
Часть балансира хронометра посеребрена и является зеркалом. На это зеркало падает луч света от
лампочки. Далее свет в виде блика идет на зеркала маятников и возвращается в трубу, а далее все
как у электромагнитного счетчика. Оптический счетчик исключает ошибку работы контактного реле
электромеханического счетчика. Было изготовлено около 30 оптических счетчиков.
Прибор ГАИШ, как и Аэрогеоприбор, широко применялся при выполнении общей гравиметрической
съемки СССР, особенно в труднодоступных районах на пунктах 3 класса. При редких, не более 2-4
раз за сезон, наблюдениях на исходном пункте и при плохих климатических условиях наблюдений
погрешность определений была 3-5 мГал.
Методика наблюдений с приборами типа ГАИШ и Аэрогеоприбор. Визуально с помощью опти-
ческого счетчика определяются моменты времени прохождения бликами нити визирной трубы, счет
секунд и минут берется с хронометра. Амплитуда отсчитывается по шкале счетчика в начале и в кон-
це серии наблюдений. Одна серия длится около двух часов, затем маятники перепускаются. В 1950-х
годах прошлого столетия использовались также хроноскоп-счетчик и синхронный счетчик. Интервал
составляет 4-6 серий. В начале и в конце интервала определяется сокачание прибора и принимают-
ся ритмические сигналы времени для определения хода хронометра. В зависимости от сходимости
результатов измерений на пункте наблюдаются 2-3 интервала. По измеренным периодам колебаний
маятников определяется приращение УСТ.
Упругие маятники. В 1939-1947 гг. в ЦНИИГАиК (Г.И. Рудаковский) были разработаны упру-
гие маятники. Основная цель разработки — определение УСТ в труднодоступных районах. Маятник
прибора представляет собой кварцевый конический стержень длиной ПО мм. Нижний утолщенный
конец имеет диаметр 4 мм, верхний — 3,5 мм. Стержень более толстой частью скреплен с тонкой
(0,1 мм) эльинварной пружиной (ножкой), на которой он совершает периодические колебания. Пру-
жина, изготовленная из цельного куска эльинвара, скрепляется нижним цилиндрическим концом с
основанием, а верхним концом — с кварцевым стержнем цанговым зажимом. Для регулировки пери-
ода колебаний на стержень насажена втулка с наружной резьбой, на которую навинчивается гайка и
контргайка служащие грузиками, подбирая которые получают необходимый период колебаний маятни-
ка. Имеется арретирное устройство. Для установки маятника в вертикальное положение на рамке (на
которой смонтирован маятник) имеется риска, а конец стержня вытянут в тонкую нить. Температура
измеряется ртутным термометром. Рамка и маятник помещены в стеклянную колбу, закрытую метал-
лическим колпаком. Наблюдения колебаний маятника ведутся с помощью микроскопа, увеличением
30х. Амплитуда качаний маятника отсчитывается по гребенке.
Приборы применялись на полевых работах в сороковых годах. Погрешность измерений составила
4-5 мГал. Широкого развития прибор не получил. Повторить эту разработку на новом уровне точности
не удалось.
Маятниковый прибор ВМП. Высокоточный маятниковый прибор ВМП был создан в 1958-60 гг.
в гравиметрической лаборатории ЦНИИГАиК (М.Е. Хейфец, Ю.А. Сливин) [Хейфец 1962]. Прибор
двухмаятниковый, имеет форму прямоугольного параллелепипеда, в шести стенках которого вмонтиро-
ваны обмотки (нагреватели) печи термостата.
В приборе применены полусекундные кварцево-металлические маятники (рис. 5.3.1). Агатовая приз-
ма своим основанием, имеющим углы, равные 70°, запрессована в теле инварной головки. Угол лезвия
призмы равен 120°.
Стержень из плавленого кварца, имеющий на концах конические утолще-
Ония, скрепляется с головкой и чечевицей с помощью накидных инварных гаек,
которые прижимают полукольца к конической поверхности стержня.
Чечевица, изготовленная из латуни, имеет углубление, в которое запрес-
сована переходная инварная втулка. В последнюю опирается стержень своей
торцевой частью. Вес маятника 1,5 кг, длина рабочей части лезвия = 20 мм.
Маятники постоянно находятся в приборе, а на время перевозки блокируются
специальным устройством. Температурное последействие маятников не превыша-
ет 10-7 с, температурный коэффициент а = —3-10-7 с/°С, который изменяется в
зависимости от положения торцовой части стержня в чечевице. В приборе имеет-
ся центрирующее устройство, обеспечивающее однообразие посадки маятников
на опорные площадки.
Температура в приборе определяется с помощью интегрального термометра
4 сопротивлений (ИТС), а влажность — по пленочному гигрометру. Регистрация
периодов колебаний маятников осуществляется записью на фотопленку фик-
тивного и двух действительных маятников. На эту же пленку записывается
показание гигрометра. Затем была разработана и применена фотоэлектронная
приставка (рис. 5.3.2) с целью измерения периодов и амплитуд колебаний ма-
ятников электронным способом с помощью пересчетных устройств взамен фо-
тографической регистрации [Гусев 1973а, б]. Приставка также использовалась
Рис. 5.3.1. при лабораторных исследованиях маятников.
Кварцево- В комплект входит два прибора. Погрешность измерений с комплектом со-
металлический ставляет 0,20-0,25 мГал. В то время это была высокая точность. Основные недо-
маятник статки прибора: негерметичность, трудоемкость фотографической регистрации
периодов колебаний маятников и их амплитуд, недостаточно надежное крепление кварцевого стержня
к головке и чечевице. Этим прибором определен ряд пунктов, в том числе полигон Мурманск-Тбилиси.
Общий вид аппаратуры приведен на рис. 5.3.3.
Маятниковый прибор ОВМ. Опытный вакуумный маятниковый прибор ОВМ разработан в
1965 г. в ЦНИИГАиК [Сливин 1973а, б]. Двухмаятниковый термостатированный и вакуумированный
прибор имеет цилиндрическую форму. Общий вид комплекта аппаратуры приведен на рис. 5.3.4.
Опорные агатовые площадки маятников, вакуумный кран, оптические элементы, датчик импульсов
укреплены на массивной основной плите, которая опирается на подставку тремя подъемными винтами.
Электродвигатель и устройства арретирования и блокирования маятников крепятся на нижней плате.
В приборе применены различные типы кварцево-металлических маятников.
В маятнике с вольфрамовой чечевицей типа Штюкрата головка изготовлена из инвара, а чече-
вица из сплава ВНМ (вольфрам — 94%, никель — 2,8%, медь — 3,2%). Форма чечевицы аналогична
форме маятника ВМП, но значительно уменьшена в размере. Кварцевый стержень маятника крепится
к головке и чечевице, как и у маятника ВМП, но без переходной инварной втулки.
Рис. 5.3.2. Фотоэлектронная
приставка
Рис. 5.3.3. Общий вид прибора ВМП
Агатовая призма запрессована в пазу головки. Угол за-
точки лезвия призмы равен 120°. Период колебаний маят-
ников равен 0,49 с, вес 1,2 кг. Маятник менее чувствителен
к влиянию магнитных полей, почти в два раза уменьшен ба-
рометрический коэффициент, который стал равен 9х 10-8 с
на мм рт. ст. Этот тип маятников был усовершенствован:
запрессовка призмы заменена креплением ее в пазу голов-
ки с помощью двух самозаклинивающих клиньев, имеющих
угол 30 минут с усилием ~200 кг, а для некоторых маятни-
ков стремя изготовлено из титана (Прибор 6102)
Кварцево-бронзовые маятники типа Штернека по фор-
Рис. 5.3.4. Комплект маятникового
прибора ОВМ
ме близки к минимальным. Стремя, чечевица, полукольца и гайки маятников выполнены из бронзы,
стержень — из плавленого кварца, призма — из агата. Соединение головки и чечевицы со стерж-
нем такое же, как и у вышеописанных маятников ОВМ. Форма чечевицы изменена в соответствии
с блокировочным устройством прибора. Закрепление призмы в теле головки выполнено с помощью
температурной посадки. Вес маятника 740 г, температурный коэффициент равен 4 - 10-7 с/°С, баро-
метрический коэффициент равен 15 10“8 с/мм рт. ст. Общая длина маятника равна 297 мм, период
колебаний -~0,49 с. В данном типе маятников нет магнитных деталей. Модификацией такого типа бы-
ли маятники с периодом колебаний 0,75 с, чечевица которого сделана из сплава ВНМ, а стержень —
кварцевая трубка, к двум концам которой приварены конусные фланцы для соединения с головкой и
чечевицей с помощью полуколец и гаек. Чувствительность к силе тяжести такого маятника в 1,5 ра-
за выше по сравнению с полусекундным маятником, а влияние изменения радиуса кривизны лезвия
призмы в два раза меньше.
Маятники с пружинящим элементом позволяют производить обработку лезвия призмы после за-
прессовки его в тело головки, которая выполняется с помощью температурной посадки. Крепление
кварцевого стержня с головкой и чечевицей, изготовленных из латуни, осуществляется поджимом
фланцев стержня с помощью гайки, пружинящего элемента и конической шайбы к латунным полу-
кольцам, которые в свою очередь опираются в бортики соответственно головки и чечевицы.
Пружинящий элемент введен для предотвра-
щения пластической деформации соприкасаю-
щихся деталей, а также от действия температур-
ного гистерезиса. Были изготовлены также маят-
ники такого типа с периодом колебаний 0,75 с.
Общим недостатком вышеописанных маятников
является микродеформация призмы из-за разли-
чия температурных коэффициентов призмы и го-
ловки.
Были изготовлены и исследованы маятники с
опорой из твердого сплава и из рубина. Эти опо-
ры уступали агатовым. Маятники постоянно на-
ходятся в приборе. На время перевозки они бло-
кируются специальным устройством.
Прибор автоматизирован и управляется с
пульта. Арретирование, центрирование, блокиро-
вание маятников на время транспортировки, а
также задание маятникам амплитуд с последую-
щим пуском осуществляется реверсивным элек-
тродвигателем. Посадка маятников на опорные
площадки и подъем с них выполняются при на-
Рис. 5.3.5. Оптическая схема прибора ОВМ
клонном положении.
Рис. 5.3.6. Маятни-
ковый прибор ОВМ
с автоколлимацион-
ным уровнем
Периоды колебаний маятников регистрируются по методу Венинг-
Мейнеса. Применено оптическое умножение угла отклонения фиктивного
маятника. Оптическая схема прибора приведена на рис. 5.3.5.
Фотоэлектронная регистрация периодов колебаний маятников и их ам-
плитуд, примененная в этом приборе, повысила точность измерений и зна-
чительно уменьшила трудоемкость процессов обработки материалов наблю-
дений.
Периоды колебаний маятников определяются с точностью ~10~8 с из
10-15 серий по 4096 колебаний маятника в каждой серии. Начальная ам-
плитуда колебаний маятников 20-40 минут. Давление внутри приборов во
время наблюдений поддерживается равным 0,5-1,0 мм рт. ст.
Нивелируют прибор по автоколлимационному уровню, устанавливаемо-
му над специальной агатовой площадкой (рис. 5.3.6), которая выведена в
одну плоскость с опорными площадками. Вес одного прибора без упаков-
ки 32 кг. В комплект в разное время входило 3-5 маятниковых приборов,
пульты управления, фотоэлектронные регистраторы, автоколлимационный
уровень, вакуумный насос. Погрешность измерений комплектом, состоя-
щим из четырех приборов, составляет 0,06-0,08 мГал. Прибор находился в
эксплуатации в 1965-76 гг.
Основные недостатки прибора: большое потребление электроэнергии,
что создает значительные трудности во время транспортировки; невозмож-
ность работы в полевых условиях от аккумуляторов; относительно большая громоздкость комплекта.
Маятниковый прибор Института физики Земли АН СССР. Прибор разработан В.А. Романю-
ком в Институте Физики Земли РАН. В нем применено электромагнитное подталкивание маятников
(рис. 5.3.7) для поддержания постоянной амплитуды их колебаний, которое производится в момент
нахождения маятников в положении равновесия.
Рис. 5.3.7. Ма-
ятник прибора
ИФЗ АН СССР
Для уменьшения сокачания штатива опорные площадки, на которые опи-
раются маятники, укреплены на массивной плите, соединенной с бетонными
столбами. Стержень маятников этого прибора, выполненный из ситалла или
плавленого кварца, полированными торцевыми плоскостями соединен с агато-
вой призмой и латунной чечевицей с помощью цилиндрических пружин. Каждая
пружина имеет силу 10 кг, так что общая сила сжатия равна 40 кг. Сверху к
чечевице привернут винтами латунный стакан для температурной компенсации
маятников. Пластина в нижней части чечевицы служит для электромагнитно-
го подталкивания маятников. Были также исследованы маятники на упругом
подвесе.
Период колебаний маятников определяют фотоэлектронным способом. Ос-
новные недостатки прибора: отсутствие термостата, перевозка маятников отдель-
но от прибора, громоздкость. В настоящее время прибор не применяется.
Маятниковый комплекс Агат. В 1976 г. в ЦНИИГАиК (Н.А. Гусев,
Ю.А. Сливин) создан новый комплекс маятниковой аппаратуры, получивший
шифр «Агат», в котором учтены недостатки комплекта ОВМ [Гусев 1977]. Он
имеет лучшие эксплуатационные качества и дает возможность расширить сферу
применения маятниковой аппаратуры.
По сравнению с маятниковым прибором ОВМ комплекс Агат в два раза точ-
нее, значительно компактнее, чем ОВМ (высота прибора 50 см, диаметр 22 см),
в четыре раза легче его (вес прибора 8 кг); потребляет в десять раз меньше элек-
троэнергии и позволяет выполнять высокоточные измерения в полевых условиях
от аккумуляторов. Для ослабления влияния температуры маятниковый прибор
помещен в сосуд Дьюара. Кроме того, в Агате упрощен механизм центрирования
маятников применением специальных пальцев со сферической поверхностью; по-
Рис. 5.3.8. Маятниковый ком-
плекс Агат
Рис. 5.3.9. Маятниковый
прибор Агат (без кожуха)
Рис. 5.3.10. Маятники прибо-
ра Агат
вышена разрешающая способность полупроводникового регистратора применением генератора 1 МГц
вместо 100 кГц. Агат не имеет аналогов ни в нашей стране, ни за рубежом.
Техническая характеристика комплекса «Агат»: Ср. кв. погрешность измерений независимо от
длительности рейса и величины Ад (в комплексе 3 прибора) ........................±0,04 мГал
Ср. кв. погрешность регистрации периода колебаний маятника ......................±10~8 с
Начальная амплитуда колебаний маятников .....................................35±5 мин.
Постоянство посадки маятников на опорные площадки...............................0.5 мкм
Стабильность частоты кварцевого генератора ......................................10-8 с
Температурный коэффициент маятников ........................................8-10—8 с/°С
Барометрический коэффициент маятников ....................................0,38-10-9 с/Па
Коэффициент термостатирования маятникового прибора ...............................100.
Комплекс (рис. 5.3.8) состоит из следующих блоков: маятниковый прибор, пульт управления и
регистрации, блок питания, стандарт частоты. В состав комплекса входит также вспомогательное обо-
рудование: вакуумный насос, автоколлимационный уровень, осциллограф и др. С целью исключения
возможных систематических ошибок, присущих одному прибору, а также для повышения точности
измерений в комплекс включается три маятниковых прибора.
Агат представляет собой двухмаятниковый термостатированный и вакуумированный прибор, в ко-
тором колебания маятников регистрируются по методу Венинг-Мейнеса с использованием электронных
пересчетных устройств.
В маятниковом приборе Агат (рис. 5.3.9) применен тип кварцево-металлических маятников
(рис. 5.3.10), в которых опорная призма и головка маятников являются единой деталью. Такая кон-
струкция позволяет исключить запрессовку опорной призмы в тело головки, что вызывало появление
значительных напряжений лезвия призмы маятника и как следствие — дестабилизацию приведенной
длины маятника. Опорная призма, имеющая в середине сквозное отверстие, выполнена из агата. В
верхней части этой призмы проточен бортик, используемый для крепления ее с кварцевым стержнем
при помощи двух полуколец, накидной гайки и гофрированной калиброванной пружины.
Две плоскости опорной призмы, расположенные под углом 140°, образуют лезвие, две другие плос-
кости, параллельные друг другу, являются зеркалами маятника.
Нижний груз (чечевица) выполнен из тяжелого сплава ВНМ и имеет цилиндрическую форму. Квар-
цевый стержень поджимается к чечевице гайкой через пружину с силой около 25 кг. Пружина служит
для исключения необратимых деформаций, возникающих вследствие изменения температуры. После
сборки верхняя и нижняя части маятника соединяются кварцевой трубкой и свариваются. Изменяя
глубину крепления кварцевого стержня в теле чечевицы, можно компенсировать температурный ко-
эффициент маятника. Для уравнивания периодов колебаний маятников имеется специальный винт из
сплава ВНМ, укрепленный на гайке.
Для ослабления влияния электростатических полей поверхность маятника покрыта тонким слоем
алюминия.
Вес маятника 690 г, период колебаний ~0,5 с. Маятники колеблются в одной плоскости в противо-
положных фазах. Были изготовлены и исследованы маятники с опорой из алмаза и цельнокварцевые,
но они по точности уступали вышеописанным маятникам прибора Агат. Для обеспечения сохранности
лезвий маятниковых призм маятники опускаются и поднимаются с опорных площадок в отклоненном
положении на угол, в два раза больший начального угла качания. Перед арретированием маятники
автоматически останавливаются специальным устройством. Маятниковый прибор конструктивно мож-
но разделить на два основных блока: верхний и нижний, соединенных между собой тонкостенной
дюралюминиевой трубой.
Вакуумплотное соединение нижней платы с колпаком обеспечивается резиновой прокладкой, при
этом колпак удерживается только силой атмосферного давления. Опорная плита (верхний блок), в
которой запрессованы опорные площадки для маятников, изготовлена из титанового сплава и имеет
форму большой жесткости (в виде стакана). На основной плите укреплено блокирующее устройство,
оптические детали и арретирные вилки. К основанию прибора (нижний блок) жестко крепится из-
готовленная из стеклопластика латунная плата. На ней установлены манометрический датчик давле-
ния, вакуумный вентиль, электродвигатель, вакуумный ввод. В эту же плату впаяны два бронзовых
сильфона, служащие для передачи внутрь вакуумированного прибора вертикального поступательно-
го перемещения для управления маятниками. Снизу этой платы укреплен блок ФЭУ. Арретирование,
центрирование, блокирование маятников на время транспортировки, задание амплитуд маятникам и их
пуск в противоположных фазах осуществляется в заданной последовательности при помощи одного
малогабаритного электродвигателя ДИД-01-ТА, расположенного вне вакуумированной камеры. При
этом поступательное перемещение на 5 мм рамки, укрепленной на сильфоне, с помощью кулачково-
го механизма преобразуется во вращательное движение на полный оборот храповика, соединенного с
шестерней. Это позволяет выполнять указанные выше действия не нарушая вакуума.
Для измерения остаточного давления внутри прибора применена электронная схема с теплоэлектри-
ческим датчиком МТ-15. Для откачки воздуха служит форвакуумный насос ВН-0,1. На вакуумном
колпаке прибора установлены три контактных термометра: один является датчиком температуры, два
других служат датчиками звуковой сигнализации, которая срабатывает в случае отклонения температу-
ры от нормы. Температура внутри прибора измеряется двумя термометрами сопротивлений с точностью
0,02° С. Влияние температуры в приборе учитывается раздельно для головки, стержня и чечевицы
маятников, для которых получают соответствующие температурные коэффициенты. Арретирные вилки
выполняют одновременно функции арретирования и центрирования маятников, обеспечивая точную по-
садку их на опорные площадки. Для повышения точности регистрации периода и амплитуд колебаний
маятников используется объектив с большим фокусным расстоянием (309 мм), применено четырехкрат-
ное оптическое умножение угла отклонения маятника, что позволило получить более короткий импульс
с выхода фотоумножителя (ФЭУ-60).
В качестве стандарта частоты использованы термостатированные генераторы (4 шт.), частота
1024 кГц которых стабилизирована вибростойкими кварцевыми линзовыми резонаторами. Частота
рабочего кварцевого генератора, устанавливаемого в регистратор, регулярно сравнивается с часто-
той генераторов стандарта частоты. На время транспортировки маятниковый прибор помещается в
транспортировочный футляр с терморегулятором.
Полупроводниковый фотоэлектронный регистратор периодов колебаний маятников и их амплитуд
конструктивно объединен с пультом управления маятниками. При каждом прохождении маятниками
через положение равновесия на ФЭУ выделяются импульсы колоколообразной формы длительностью
1,5 мс. Эти импульсы подаются на формирующие каскады регистратора, где преобразуются в остроко-
нечные импульсы, которые запускают два пересчетных устройства: одно считает количество колебаний
кварцевого генератора, другое — маятника. Счет прекращается через наперед заданное число коле-
Рис. 5.3.11. Стационар-
ный маятниковый комплекс
СМК
баний маятника. Период колебаний получим, поделив соответствующие показатели этих пересчетных
устройств.
Для определения амплитуды колебаний маятника одно из указан-
ных пересчетных устройств измеряет промежуток времени между дву-
мя последовательными импульсами, возникающими при пересечении
лучом света крайних щелей на ФЭУ. По измеренным периодам коле-
баний фиктивного маятника на двух пунктах получают приращение
УСТ. На пульте управления размещены приборы, с помощью которых
поддерживается постоянная температура маятников, регулируется на-
кал осветительной лампочки, измеряются остаточное давление возду-
ха и температура. Нивелируют прибор по цилиндрическим уровням,
контролируемым автоколлимационным уровнем, который устанавлива-
ется над специальной агатовой площадкой, выведенной параллельно
плоскости опорных площадок маятников. Отклонение плоскости ниве-
лировочных площадок от плоскости опорных площадок учитывается
по координатной сетке автоколлимационного уровня.
Программа измерений включает в себя 5-6 серий наблюдений, со-
стоящих из 2048 колебаний маятника. В измеренные периоды колеба-
ний маятников вводятся поправки: за амплитуду, температуру, плот-
ность воздуха, ход частоты генератора, лунно-солнечные приливы.
На примере Агата видно как с развитием науки и техники про-
стейший маятник превратился в сложный и совершенный прибор спо-
собный выполнять точные измерения УСТ. Практика показала, что неизменность периодов колебаний
маятников в пределах ~10-8 с в течение ряда лет (более пяти) при интенсивной эксплуатации в
тяжелых полевых условиях говорит о том, что основной узел маятников — лезвие призмы если и
срабатывается, то незначительно, а не так, как это предполагалось ранее.
В 1978-1990 гг. на всей территории СССР подразделениями Федеральной службы геодезии и карто-
графии (бывшего ГУГК) создана высокоточная государственная гравиметрическая сеть (более тысячи
пунктов), являющаяся основой для всех гравиметрических определений в стране и служащая для
определения фигуры и гравитационного поля Земли и решения других народнохозяйственных задач.
Основным прибором при создании этой сети был маятниковый комплекс Агат. На заводе ЭОМЗ было
выпущено 23 комплекса Агат (69 маятниковых приборов). Использование Агата позволило реализовать
прогрессивную технологию создания сети и избежать импорта зарубежной аппаратуры.
Стационарный маятниковый комплекс СМК. Для выполнения непрерывных высокоточных на-
блюдений в 1994 г. в ЦНИИГАиК разработан стационарный маятниковый комплекс СМК (Н.А. Гусев,
В.П. Киселев). В приборах комплекса применены кварцево-металлические маятники, аналогичные маят-
никам Агата с периодом колебаний ~0,75 с (длина около 70 см). Конструкция прибора с учетом длины
маятников аналогична конструкции Агата (рис. 5.3.11). Период колебаний маятников и их амплитуд
определяются с помощью ЭВМ. Использованы более совершенные электронные схемы.
Кварцевый генератор заменен на рубидиевый стандарт частоты. В комплекс включено три маят-
никовых прибора. С учетом этих изменений, а также применения удлиненных маятников и лучшей
их изоляции от внешних влияний погрешность измерений комплексом составляет 0,01 мГал за 4 часа
наблюдений. Комплекс не предполагается использовать на полевых работах. С его помощью в течение
нескольких лет вели наблюдения на фундаментальном пункте «Москва».
В разработке и исследовании новой аппаратуры, технологии гравиметрических определений и вы-
полнении измерений УСТ, кроме названных в тексте руководителей разработки, принимал участие
большой коллектив гравиметристов: В.Я. Барздел, Э.М. Березин, Л.А. Геренбург, А.Г. Гойдышева,
Н.Н. Желудова (конструктор), Л.И. Климов, Н.Н. Королев, А.А. Ларина (конструктор), В.В. Лохов,
С.М. Лукашук, Б.М. Малахов, Т.С. Московская, П.А. Неберов, В.Н. Орехов, З.П. Таранова, В.П. Те-
рехов и др.
Таблица 5.1. Основные технические характеристики маятниковых приборов
Названия маятниковых приборов
Харак- теристики Штер- нек Штюк рат • Венинг- Мейнес Кем- бридж. Галф ГАИШ Япон. Итал. Канад. ИФЗ вмп ммп- п ОВМ АМП- 1 пдм АГАТ
Год внедр- ения 1881 1890 1925 1930 1932 1935 1952 1954 1955 1959 1960 1961 1965 1969 1987 1976
Год модерн- изации - - - - 1959 - 1957 1965 1963 - - 1967 - - -
Маятники
Число в приборе 1 4 3 2 2 4 3 3 2 6 2 3 2 2 2 2
Тип Штернек Штюкрат Штернек Штюкрат Штернек Штюкрат Штернек Штюкрат । Штюкрат 1 Штернек
Период, с 0,5 0,51 - 0,51 0,45 0,5 0,51 0,49 0,5 0,5- 0,7 0,5
Материал
головка латунь - инвар кварц латунь кварц молиб. бронза инвар инвар ла- тунь инвар латун । агат
чечев. латунь - инвар кварц латунь кварц молиб. бронза латунь сплав ВНМ сплав ВНМ сплав ВНМ сплав ВНМ
стерж. латунь - инвар кварц латунь кварц молиб. бронза кварц
призма агат - сталь пирекс агат сталь сталь, агат агат
опора агат - агат пирекс агат
перевозка, вне/в приборе вне - вне внутри вне внутри вне внутри
Метод набл. 1 дейст. 4 дейст. 2 фикт., 1 дейст. 6 средн. 2 дейст. 4 дейст. 2 фикт., 1 дейст. 2 фикт., 1 дейст. 1 фикт. 4 фикт., 2 дейст. 1 фикт., 2 дейст. 1 фикт. 1 фикт. 1 фикт. 1 фикт.
Термостат нет есть нет есть нет есть нет есть есть есть есть есть есть
Коэф, термо- стати р. - - - - - - - - - - - - 70 100
Таблица 5.1. (продолжение). Основные технические характеристики маятниковых приборов
Названия маятниковых приборов
Характер- истики Штер нек Штюк рат Венинг- Мейнес Кем- бридж. Галф ГАИШ Япон. Итал. Канад. ИФЗ ВМП ммп п ОВМ АМП 1 пдм АГАТ
Вакуум- ирование нет есть есть нет есть нет есть
Остат. давл., мм рт ст. - - - 25 1-5 - 0.1 0.1 1 • - - 0,5- 1.0 - - -
Датчик времени часы хроно метр хроно- метр кварц, хро- ном. - хроно- метр - кварц, хрон. кварц, часы кварц ге- нер. кварц, ге- нер.
Управление ручное автом ручн. п/авт. автомат.
Регистр, периодов визуал. фото- запись фото- граф. шлейф, осцил. визуал. искр, хрон. фото- шлейф, осцил. фото- хрон. фото- граф. фото- элект! фото- . граф. фотоэлектр.
Вес
маятн. при- бора., кг - 80 - - 32 65 - 250 56 - 32 - - 8
комплект, кг - - - - 55 - - - - • 1000 1000 600 - 200
Наличие кардана нет нет есть нет есть нет есть нет есть есть нет
Регистр. ускорений нет нет есть нет есть нет есть нет
Погреш- ность измерений, мГал 10- 15 3-7 2-3 5-10 0,5 0,3 3 0,4 0,3 0,08- 0,15 3-7 0,25 3,0 0,05- 0,08 1,12- 0,16 1,5 1,0 0,04
Годы примен- ения (эксплуа- тации) 1881- 1900 1895- 1970 1927— 1950 1926- 1961 1932- 1950 1935- 1956 1952- 1961 1957- 1965 1955- 1967 1959- 1965 1960- 1963 1961- 1970 1965- 1975 1969- 1987- 1975-
Рис. 5.3.12. Морской маятниковый прибор под-
водный ММП-П
Рис. 5.3.13. Автоматизированный 2-маятниковый
прибор подводный АМП-1
Рис. 5.3.14. Прибор ПДМ
Рис. 5.3.15. Маятниковый прибор надводный
МНП
Все разработанные в ЦНИИГАиК приборы выпускались сначала в мастерских института (НИЭМ),
затем на ЭОМЗ.
Морские маятниковые приборы. В 1923 г. голландский инженер Венинг-Мейнес разработал ме-
тод одновременного качания двух маятников в противофазе с образованием фиктивного маятника, что
позволило в основном исключить влияние горизонтальных ускорений первого порядка и проводить ра-
боты на подвижном основании. Первые наблюдения Венинг-Мейнесом были проведены на подводной
лодке с использованием четырехмаятникового прибора Штюкрата в 1923 г. Первые морские измерения
УСТ в нашей стране на подводной лодке были выполнены в 1930 г. Л.В. Сорокиным. Он также при-
менил прибор типа Штюкрата, приспособленный для определений на море, установленный в карданов
подвес. Затем такие же работы были выполнены в ЦНИИГАиК в 1947 г. Более интенсивные работы
были выполнены в ЦНИИГАиК в 1955-1967 гг. при участии сотрудников других ведомств. В пер-
вые годы выполнения морских гравиметрических работ подводные маятниковые измерения являлись
единственным источником надежной гравиметрической информации в мировом океане.
В 1954-55 гг. в ЦНИИГАиК на базе прибора типа Штюкрата (Аэрогеоприбор) были разработаны
морские маятниковые приборы с фотографической регистрацией периодов колебаний маятников.
В 1959 г. в ИФЗ АН СССР был разработан морской шестимаятниковый прибор (МШП) с кварцево-
металлическими маятниками ЦНИИГАиК. Запись периодов колебаний маятников велась на фотоплен-
ку. В дальнейшем в ЦНИИГАиК аппаратуру для измерений на море стали создавать на основе назем-
ных приборов, помещая их в карданов подвес и добавляя узлы и блоки для регистрации наклонов и
ускорений. Так, в 1961 г. на основе ВМП был создан морской трехмаятниковый прибор ММП-П с
фотографической регистрацией периодов колебаний маятников (рис. 5.3.12). Погрешность измерений с
ним была 2 мГал при возмущающих ускорениях до 4 Гал.
В 1967-1968 гг. на базе прибора ОВМ был создан автоматизированный морской двухмаятнико-
вый прибор АМП-1 с фотоэлектронной регистрацией периодов и амплитуд колебаний маятников
(рис. 5.3.13). В приборе отсутствуют датчики ускорения и наклонов. Точность измерений при этом
не снизилась, а надежность работы повысилась. Инструментальная погрешность измерений с АМП-1
около 1,5-Ю-5 м/с2 (мГал) при возмущающих ускорениях (3-5)-10-2 м/с2 (Гал). Прибор выпускался
серийно, выпущено около 100 приборов.
Дальнейшим развитием прибора АМП-1 в 1987 г. для работ с дрейфующих льдов, на дне водоемов
в скафандре и в толще воды в демпферно-поплавковом устройстве явился прибор ПДМ (рис. 5.3.14).
Погрешность измерений с ним составила 1 мГал при возмущающих ускорениях до 3 Гал.
В 1972 г. в ЦНИИГАиК под руководством Б.М. Малахова разработан надводный морской автома-
тизированный маятниковый прибор (рис. 5.3.15). Прибор установлен на гиростабилизированной плат-
форме. Он характерен тем, что лезвиям ножей его маятников придана такая форма, которая позволяла
компенсировать влияние горизонтальных возмущающих ускорений второго порядка (так называемую
поправку Броуна). Погрешность измерений с этим прибором составила 3-7 мГал при возмущающих
ускорениях до 80 Гал. Прибор широкого распространения не получил. Морская маятниковая аппарату-
ра применяется в основном для контроля смещения нуль-пункта и определения масштабных коэффи-
циентов морских гравиметров (как плавучий опорный пункт).
С этой же целью они применяются для работ с дрейфующих льдов, для проведения ледовой съемки.
В этих видах работ маятниковому методу пока еще нет равноценной замены.
Четыре типа маятниковых приборов: ММП-П, ОВМ, АМП-1, Агат удостоены золотой медали
ВДНХ. Исследования, выполненные в ЦНИИГАиК, свидетельствуют об имеющихся еще резервах точ-
ности маятникового метода измерений силы тяжести, а также расширения сферы их применения.
Важную роль в развитии маятникового метода в нашей стране сыграли: А.А. Михайлов, И.А. Ка-
занский, Л.В. Сорокин, М.С. Зверев, Н.Н. Парийский, Ю.Д. Буланже, М.Е. Хейфец, Ю.А. Сливин,
С.Е. Александров, Н.А. Гусев, Б.М. Малахов, Э.Н. Березин, В.П. Терехов, В.В. Лохов, Н.Н. Королев,
А.А. Ларина, В.П. Киселев и др.
В табл. 5.1 приведены основные характеристики наиболее применяемых маятниковых приборов.
5.4 Статические гравиметры для определений на неподвижном и
подвижном основаниях
5.4.1 Начальный (предвоенный) период разработки гравиметров
В.А. Тулин
Не останавливаясь на истории создания гравиметрической аппаратуры в XIX и начале XX вв. за
рубежом, перейдем к отечественным разработкам. Этой темой поначалу занимался, в основном, Цен-
тральный научно-исследовательский институт геодезии, аэрофотосъемки и картографии (ЦНИИГАиК)
Главного управления геодезии и картографии при СМ СССР. Приведем выдержки из краткой справки
предвоенного состояния инструментальной гравиметрии [М.С. Молоденский 1940]. «Отдельные работы
по созданию советских гравиметрических инструментов начали производиться в ЦНИИГАиК с 1933 г.,
а именно с конструирования типового маятникового прибора для серийного заводского выпуска. Эти
приборы выпускались затем заводом «Аэрогеоприбор», чем и ограничивались работы по гравиметри-
ческому инструментостроению в ЦНИИГАиК до 1937 г. (Приобретенные за рубежом несколько эк-
земпляров гравиметров Болидена, Исинга, Норгарда показали свою перспективность при детальных и
региональных съемках, но в силу своей дороговизны и малого количества не решали задач широкомас-
штабных работ.) В 1938 г. ЦНИИГАиК перешел к разрешению основных задач в этой области, которые
в основном можно свести к двум: 1) дать производству быстро и точно работающие гравиметры для
исполнения общей гравиметрической съемки; 2) разработать и создать тип гравиметрического прибо-
ра для определения опорных гравиметрических пунктов I и II классов. В основном работа велась по
конструированию и изготовлению: а) упругих маятников типа Леже, б) пружинных гравиметров и в)
кварцевых вакуумных маятников; последние для определения пунктов I и II классов, а первые два для
определения пунктов III класса.
При освоении изготовления упругого маятника руководитель темы инж. Г.И. Рудаковский рас-
полагал только опубликованными краткими описаниями, в связи с чем пришлось преодолеть много
трудностей для того, чтобы разработать технологию изготовления прибора. За 1938 и 1939 гг. упру-
гими маятниками измерена сила тяжести на 350 пунктах. Обработка и анализ материала показывают,
что упругие маятники дают точность, в среднем соответствующую точности обычных гравиметриче-
ских пунктов III класса. Средняя ошибка в определении гравиметрических пунктов характеризуется
величиной в 2-3 мГал.
Ориентировочная стоимость пункта в равнинных районах составляла примерно 200 руб., а в горных
— 500 руб., тогда как стоимость пункта в благоприятных условиях при работе обычными маятниками
составляет не менее 800 руб. Вообще говоря, маятник Леже не относится к классу статических грави-
метров и упомянут здесь в связи со сходством с последними портативностью и производительностью,
а также с заказанным назначением.
Пружинный гравиметр. Работа с ним была начата в 1938 г. инж. Молоденским, Лозинской и
Мамешиной. В конце июля 1938 г. был изготовлен первый вариант макета гравиметра. Лабораторные
испытания дали положительные результаты: точность составила 1,5 мГал. Полевые испытания макета
гравиметра показали, что принцип конструкции гравиметра себя оправдал. Не вдаваясь в подробности,
укажем, что точность измерения получилась близкой к обычным маятниковым пунктам III класса.
В 1941 г. с началом войны дальнейшие работы были приостановлены. Таков в общих чертах на-
чальный период разработки сухопутных гравиметров в СССР.
5.4.2 Кольцевой гравиметр
В.А. Тулин
Рис. 5.4.1. Принципиальные схемы гравиметров
ГКМ и ГКА
Малая производительность маятниковых при-
боров побудила гравиметристов искать альтерна-
тиву в виде статических гравиметров. За рубе-
жом эти исследования начались с конца 20-х го-
дов, и за десяток лет было создано несколько
удачных конструкций, обеспечивавших погреш-
ность наблюдений 1-2 мГал, то есть с точно-
стью лучших маятниковых измерений на то вре-
мя [Молоденский, Федынский 1947].
Первым советским гравиметром стал прибор
с металлической ленточной кольцевой пружиной
[Молоденский 1945а], получивший впоследствии
название ГКМ (гравиметр кольцевой Молоден-
ского). В 1938 г. Молоденским, Лозинской и Ма-
мешиной был изготовлен первый вариант макета
гравиметра:
Чувствительная система ГКМ показана на
рис. 5.4.1а. Ленточная пружина S из эльинвара
одним концом закреплена на станине в точке D,
а другим соединена с концом Е рычага СЕ.
Второй конец рычага подвешен на тонких нитях АС. Параметры системы выбраны так, что упру-
гий момент пружины уравновешивается (не полностью) весовым моментом рычага, а форма пружины
близка к кольцевой. Расчет параметров производится по методике, изложенной в вышеупомянутой ра-
Рис. 5.4.2. Внешний вид гравиметра ГКМ
Рис. 5.4.3. К теории работы гравиметра ГКА
боте. К точке Е рычага прикреплена также измерительная пружина F, которая может натягиваться
(или отпускаться) при помощи микрометрического винта М. Процесс наблюдений состоит в следую-
щем. Вращением винта М рычаг приводится в некое заранее выбранное («нуль отсчета») положение, и
берется отсчет по винту.
Такая же процедура проделывается на связываемом пункте. Разность отсчетов по винту пропорцио-
нальна приращению силы тяжести. Нулевое положение рычага фиксируется при помощи ультрамикро-
метра, представляющего собой емкостной датчик, образованный двумя неподвижными К и К’ и одной
подвижной (рычаг) обкладками конденсатора. Пластины К и К’ соединены между собой.
Емкость конденсатора минимальна при центральном относительно пластин К и К’ положении рыча-
га. Факт достижения нужного положения рычага фиксируется электронной схемой, в качестве основ-
ной составляющей которой автор использует генератор Пирса. В работе М.С. Молоденского приведена
упрощенная теория работы ГКМ. Более строгое исследование опубликовано в 1954 г. [Горошко 1954].
В нем учитываются влияние собственного веса пружины и ее начальная кривизна. Заметим, кстати,
что эта работа выполнена на 10 лет раньше, чем была опубликована. Во всяком случае, в публикации
1945 г. М.С. Молоденский ее уже упоминает. Гравиметр Молоденского под шифром ГКМ-НИИПГ-5
стал первым из серийных российских гравиметров [Лозинская, Смирнов 1948].
Проект разработан в НИИ прикладной геофизики в 1946 г., а выпуск осуществлен в 1947-48 гг. Уль-
трамикрометр гравиметра обеспечивает точность фиксации нулевого положения рычага до ±0,1 мГал
при погрешности наблюдений около ±0,4-0,5 мГал. Упругая система помещена в термостат. Гравиметр
снабжен барометрическим компенсатором, представляющим собой пустотелый герметически закрытый
сосуд, расположенный на рычаге со стороны, противоположной грузу относительно оси вращения. Если
объемные моменты сосуда и груза относительно оси вращения равны, то, согласно закону Архимеда,
равновесие не будет нарушаться при изменении плотности воздуха. Время наблюдений на пункте,
включая установку прибора и подготовку к переезду на следующий пункт, составляет 5-10 минут.
Внешний вид прибора показан на рис. 5.4.2. Его высота 47 см, диаметр 35 см, вес 25 кг. В дальней-
шем ГКМ был подвергнут существенному усовершенствованию [Лозинская 1950], и в конце 1949 г.
было изготовлено 4 опытных образца. Главное новшество — введение астазирующего звена.
Схема астазированной системы изображена на рис. 5.4.1b. Ось вращения О рычага выполнена в
виде вольфрамовой нити диаметром 0,06 мм, перпендикулярной плоскости чертежа; нить не закручена.
Кольцевая пружина изготовлена из эльинварной ленты шириной 12 мм и толщиной 0,10-0,12 мм. В
рабочем состоянии пружина принимает форму кольца радиусом 37 мм. Рычаг ОЕ изготовлен из плавле-
ного кварца, во избежание электризации покрытого слоем металла. Момент рычага индивидуален для
каждого прибора и составляет 60-100 г-см. Вблизи точки О приварен направленный вниз стержень
(с концом в точке А). Тонкая нить AD из эльинвара (ленточка сечением 0,025x0,5 мм) соединяет
точку А с плоской пружиной DN (эльинварная лента сечением 0,2x12 мм). В исходном положении
нить AD проходит через точку О, и никакого дополнительного момента к рычагу не прикладывается.
При любом повороте рычага нить смещается относительно точки О, и за счет момента, развиваемого
пружиной DN, рычаг получает дополнительное смещение. Нулевое положение рычага осуществляется
компенсационной пружиной К, а фиксация этого факта — с помощью автоколлиматора L. Как и в
приборе ГКМ, мерой изменения силы тяжести между двумя пунктами является разность отсчетов по
микрометрическому винту. В зависимости от силы натяжения пружины DN меняется величина аста-
зирования: в реальном образце установлено примерно 20-кратное. Это соответствует чувствительности
около 25"/мГал.
Отсчетная компенсационная пружина обеспечивает измерения Дд в диапазоне 100-150 мГал. Ука-
занный диапазон, как правило, достаточен для локальных съемок. Однако при работе в районах с
другим общим уровнем д гравиметр зашкаливает и наблюдения становятся невозможными. Поэтому в
конструкцию введена диапазонная компенсационная пружина. Отсчеты по ней не берутся; ее назначе-
ние состоит в выведении рычага в рабочий диапазон. Диапазонная пружина обеспечивает перестройку
общего диапазона гравиметра в пределах изменения д 2000-2500 мГал.
Гравиметр снабжен барометрическим компенсатором и двухступенчатым термостатом с ртутными
контактными термометрами в качестве датчиков температуры. Для гашения собственных колебаний
рычаг снабжен воздушным демпфером. Упругая система оборудована системой арретиров, применяемых
при транспортировке прибора. Арретируются рычаг и кольцевая пружина.
Ниже кратко излагается теория работы ГКА [Сорокин 1953], имевшей в качестве первоисточника
автора идеи [Лозинская 195L]. Принимаются следующие допущения: изгиб пружины является плоским;
поперечное сечение пружины одинаково по всей ее длине; жесткость сечения пружины при изгибе
остается неизменной; начальная кривизна считается одинаковой вдоль всей пружины; пружина имеет
форму окружности, центр которой совпадает с осью вращения рычага гравиметра. Поясняющий чертеж
приведен на рис. 5.4.3.
Пружина FE в точке F жестко соединена со станиной прибора, а в точке Е — с рычагом ОЕ. Точка
О — ось вращения рычага. Точка С — центр тяжести рычага, точка К — место крепления компенсаци-
онной пружины. С рычагом ОЕ жестко соединен рычажок ОА, к точке А которого крепится нить AD,
связывающая его с астазирующей пружиной DN. Линия OG, связанная с рамой прибора, — то нуле-
вое положение, к которому приводится рычаг при отсчете. Угол а — наклон линии OG относительно
горизонта. Малый угол <р = 0 — 0, где 0 — постоянный угол закручивания пружины, т. е. угол, при
котором производится отсчет. Упругая система находится в равновесии, когда упругий момент пружины
FE равен сумме весового момента рычага и моментов, развиваемых компенсационной и астазирующей
пружинами:
Мв = Мр + Ма + Мк,
„/0 П , . $ 1
где: Мв = В — - — ) (получено из теории сопротивления материалов), — =-------кривизна в данной
\L R J Lt р
точке, В — жесткость данного сечения пружины, 0 — <р + 0 — центральный угол между концами
пружины, L — длина пружины, — — первоначальная кривизна пружины в данной точке, Мр =
R
тдтр cos(<p - a), Мк = -frk, Ма = Q • <р -• -, тд — вес рычага, гр и гк — отрезки ОС (плечо силы
ab
тд) и ОК (плечо силы /) соответственно, f — сила натяжения компенсационной пружины, ср------ —
а + о
плечо силы Q (получено из решения треугольника AOD), Q —сила натяжения астазирующей пружины,
а и b — отрезки ОА и OD' соответственно.
Подставив указанные значения в уравнение равновесия, получим:
<р + 0
L
В
) - тдгр cos(<p - а) + frk - = 0.
rt j а ~г о
Продифференцировав это уравнение и проведя ряд упрощений в
предположении малости углов и , получим основное уравнение грави-
метра ГКА
dtp f 1
dg dB drv , 1
- — - -б- + —R - ada+-----
g В rp j _ £
dL
L
rkdf
mgrp'
Из этого выражения можно найти чувствительность гравиметра,
если положить в нем равными нулю приращения dB,drp,dL,da,df,
а также угол наклона гравиметра к горизонту а. Она оказывается
равной
dtp _ 0 / Р\-1 Q6 ab -1
dg д \ R/ тдтр а + Ь
Рис. 5.4.4. Внешний вид
гравиметра ГКА
При изготовлении упругой системы величину Q выбирают равной
тд, т. е. весу рычага. Это способствует разгрузке нити, из которой из-
готовлена ось вращения. Нужную чувствительность прибора устанав-
ливают путем подбора величины а. Погрешность измерения разности силы тяжести прибором близка
к ±0,3 мГал на пунктах, отстоящих друг от друга на 1-10 км.
Внешний вид гравиметра ГКА приведен на рис. 5.4.4. Наружный диаметр гравиметра 260 мм, высота
350 мм, вес 13 кг.
5.4.3 Неастазированные гравиметры
В.А Тулин
Устройство гравиметра с горизонтальной крутильной нитью. В 1940 г. датским исследова-
телем Норгардом был предложен гравиметр, послуживший прототипом для российских разработок.
Датчик представляет собой пружинные весы (рис. 5.4.5).
На жесткой рамке 1, выполненной из плавленого оптического кварца, натянута тонкая кварцевая
нить 2. К ее середине приварен рычаг 3, который по аналогии с маятниковым прибором принято
называть маятником.
Заметим, что название не отвечает его сути: колебания
маятника гравиметра относительно положения равновесия
никакого отношения к измеряемому д не имеют, а наоборот,
только мешают процессу наблюдений.
На маятнике укреплен платиновый груз 4, а на его кон-
це — зеркальце 5. Рядом с ним расположено другое (6),
приваренное с помощью штанги 7 к рамке 1. Первое назы-
вают подвижным, второе — неподвижным зеркалами. Весо-
вой момент маятника mgl закручивает нить на некий угол
<р, компенсируясь упругим моментом нити.
Для горизонтального положения маятника имеет место
равенство
тд01 = т<ро,
Рис. 5.4.5. Схема датчика гравиметра
Норгарда
(5.4.1)
где ттг — масса маятника, д^ — УСТ, соответствующее горизонтальному положению маятника, I —
расстояние от оси вращения (нити) маятника до его центра масс, т — постоянная кручения нити, <ро —
угол закручивания нити для горизонтального положения маятника.
Рис. 5.4.6. Схема работы датчика гра-
виметра с горизонтальной крутильной
нитью
В негоризонтальном положении равенство выглядит
несколько по-иному (рис. 5.4.6).
mgl cos ос = т<р, (5.4.2)
где mg cos ос — сила, действующая в направлении оси 2 чув-
ствительности датчика, д — УСТ для данного положения
маятника, ос — угол между горизонтом 1 и осью маятника,
<р = Фо + ос — угол закручивания нити, соответствующий
этому весовому моменту.
Очевидно, что мерой изменения весового момента (или
попросту д) может являться изменение угла ос. Он может
быть найден, если наклонить датчик вокруг оси нити так,
чтобы плоскости зеркал датчика стали параллельными (как
принято говорить, совместились). Угол между горизонталь-
ным и наклоненным положениями датчика и будет иско-
мым.
Однако в рассматриваемой конфигурации датчик прак-
тически непригоден для измерений, поскольку положение
горизонтальной плоскости с нужной точностью определить весьма сложно. Суть идеи Норгарда состоит
в том, что с использованием свойства четности функции косинуса измеряется угол между положениями
маятника выше и ниже горизонта (рис. 5.4.7). Рамка вначале наклоняется так, чтобы зеркала датчика
совместились при положении маятника ниже горизонта (угол +а), а затем при повороте в противопо-
ложном направлении — выше горизонта (угол —а). В результате находятся направления удвоенного
угла наклона 2а, а знание положения горизонта становится ненужным. Угол 2а принято называть
углом раствора.
Заметим, что в совмещенном положении зеркал угол закручивания нити <р неизменен для любого
д. Поэтому, немного видоизменив (5.4.2), с учетом (5.4.1) получим
т<р
до = geos ос — —.
ml
(5.4.3)
Рис. 5.4.7. Схема измерения угла наклона маятника
УСТ в собственной системе гравиметра,
учитывая (5.4.3),
9г = д - до = ffo(sec ос - 1), (5.4.4)
где д — УСТ пункта наблюдений; до — УСТ
для горизонтального положения маятника.
Разность УСТ в двух пунктах
&9 = (ffrh - (Pr)i = ffo(seca2 - secaj.
Погрешность измерения определяет-
ся погрешностями получения д0 и ос. Диф-
ференцируя (5.4.4) по дГ и ос, а затем его же
по дг и до, найдем (для малого а)
dgr = ocgodoc, dgo = до •
9т
Для угла а=4° (дг «2400 мГал) при допустимой dg г=0, 1 мГал достаточно, чтобы dgo=4O мГал, а
da=0,30". Если определить д0 с нужной точностью нетрудно, то допустимая погрешность нахождения
угла а находится на пороге, а может быть, и ниже точности его измерения.
Диапазон измерений прибором и его чувствительность связаны следующим образом. Дифференци-
руя (5.4.3) по д и а, получим с учетом малости угла а выражение для чувствительности:
da. _ 1
dg ocg'
т. е. чувствительность обратно пропорциональна углу раствора.
Ось вращения маятника (нить) должна быть горизонтальна, иначе происходит уменьшение весового
момента на величину mglfl - cosP), где р — угол отклонения нити от горизонта. В пересчете на УСТ
для Р=10', например, уменьшение дг составит 4,2 мГал.
Таковы коротко «геометрические» основы работы гравиметра с горизонтальной крутильной нитью.
Практическая реализация метода много сложнее. Чувствительные системы гравиметров подобного
типа изготавливают, как правило, из плавленого кварца, чем решается множество конструктивно-
технологических проблем. Уникальные свойства плавленого кварца позволяют сравнительно просто
решить вопрос с влиянием температуры, поскольку температурный коэффициент упругости кварца при
обычных температурах с ее ростом увеличивается. Если поместить датчик в жидкость, происходит
компенсация температурного влияния за счет того, что с ростом температуры плотность жидкости,
а следовательно и архимедова сила уменьшается, и маятник стремится опуститься. Увеличившаяся
жесткость, наоборот, стремится поднять маятник.
Натянутая кварцевая нить — система высокодобротная, поэтому любое воздействие (микросейсмы
например) вызывает длительные колебания вокруг оси (нити), и наблюдения становятся практически
невозможными. Жидкость хорошо (хотя и не полностью) демпфирует эти колебания.
Кроме того, жидкость, в силу своей практической несжимаемости, выполняет еще функции защиты
от изменения атмосферного давления. Как показал эксперимент с датчиками Норгарда [Буланже 1956а,
б], барический эффект составляет всего (+0,03±0,20) мГал/бар.
Жидкостная температурная компенсация. Теория температурной компенсации достаточно хо-
рошо разработана [Лукавченко 1954]. Приведем ее выводы.
Уравнение равновесия датчика записывается в виде:
т<р = gov(apm - Ьрс) или 9о =—-у-’т. (5.4.5)
Орс)
где v — объем маятника; а и Ъ — длина маятника от оси вращения до центра масс и до центра объема
соответственно; рт и рс - средняя плотность маятника и жидкости соответственно.
dpc dT . ,
Дифференцируя (5.4.5) по переменным д, рс, т и зная производные — и — (это табличные
значения), получим температурный коэффициент
dg0 = _ bpc \ dg _ д(Рт - Ьреу)
dt у артп Ьрс J dt арт &Рс
где t — температура; рт = dt/t — термоэластический коэффициент кварцевой нити; у = dpc/pc —
температурный коэффициент объемного расширения жидкости.
Полная температурная компенсация достигается лишь для одной температуры, а именно при усло-
вии
UZ-Ё = ЕРц (5.4.6)
Рт Ьрс ’
Из уравнения (5.4.6) следует важный вывод: чем больше плотность грузика, тем при меньшем
общем весе маятника достигается полная температурная компенсация. Это означает, в свою очередь,
уменьшение нагрузки на нить. Поэтому грузики делают из материала с большим удельным весом,
например золота или платины.
В качестве примера на рис. 5.4.8 при-
ведена экспериментальная кривая температур-
ной зависимости датчика гравиметра [Буланже
1952]. Точка соответствует полной температур-
ной компенсации. В диапазоне 8-32°С темпе-
ратурный коэффициент изменяется от —0,8 до
+0,6 мГал/°С, имея нулевое значение при 21°С.
При термоэластическом коэффициенте плавлено-
го «сухого» кварца около 125 мГал/°С темпера-
турное влияние уменьшилось более, чем на два
порядка. Однако оно довольно значительно для
получения погрешности порядка 0,1 мГал и ме-
нее: датчик требует термостатирования.
Рис. 5.4.8. Экспериментальная кривая температур- Термостатирование гравиметров. Изуче-
ной компенсации нию температурного режима гравиметров все-
гда уделялось большое внимание [Буланже 1952;
Абашидзе 1958]. Экспедиционные наблюдения обнаруживают погрешность связи, относимую за счет
температурных влияний, до ±0,30 мГал [Буланже, Попов 1955]. Судя по литературным данным, наи-
более детальные работы по термостабилизации гравиметров были предприняты Институтом физики
Земли АН СССР. Проверка показала, что термостаты СН-3 и ГАЭ, имеют коэффициент термостатиро-
вания Kt « 1/120. При этом температурные коэффициенты упругих систем в группе из 7 гравиметров
лежат в пределах от -1,75 до +3,47 мГал/°С [Тулин 1963а]. Простой расчет показывает, что при
желательной погрешности измерений ±0,05 мГал и перепаде температур 20° Kt должен быть около
1/1200.
В итоге разработок ИФЗ РАН [Тулин 1960, 1961, 1962в, г, д, 19636, 19656] стало возможным
изготовить полевой термостат с погрешностью поддержания температуры в первые тысячные доли
градуса при ее систематическом смещении 0,0015°С/сутки. Анализ трех принципиально различных
схем регулирования температуры: астатической (рис. 5.4.9а), с независимым датчиком (рис. 5.4.96)
и релейной (рис. 5.4.9в) указал, что наиболее перспективной является первая из них. Рис. 5.4.10
иллюстрирует качество работы этих схем.
Рис. 5.4.9. Основные принципиальные схемы термостатов
Рис. 5.4.10. Каче-
ство работы термо-
статов разного прин-
ципа действия
а
Проблема стабилизации температуры неотделима от ее контроля.
Непосредственное измерение температуры нити толщиной в несколько десятков микрон, тем более
с погрешностью в тысячные доли градуса, практически невозможно.
Вследствие этого была разработана методика косвенного измерения, позволившая с достаточной
степенью уверенности судить об интегральной температуре нити [Тулин 1962е]. Разработка базирова-
лась на допущениях элементарной теории тепловой инерции [Кондратьев 1957] и весьма продуктивном
приеме термоэлектрической аналогии [Нейман 1937]. Оказалось, что температура термостатируемого
тела равна интегральной температуре печи термостата при условии центральной симметрии в любом
сечении слоя между нагревателем и телом. Наиболее пригодной для лабораторных исследований при до-
пустимой погрешности измерений ±0,001 °C оказалась схема неуравновешенного моста [Тулин 1963г].
В полевых условиях на основе оригинальной разработки [Тулин 1962ж] применялись измерители на
переменном токе [Тулин 1962е; Тулин, Савченко 19646], обеспечивавшие погрешность измерений не
выше ±0,01°С при работе на самолете.
Измерение угла раствора упругой системы. Нахождение угла раствора состоит из двух опера-
ций: определение направлений лучей угла, а затем его измерение. Фиксация направлений осуществля-
ется либо визуально с помощью автоколлимационной системы, либо при помощи оптико-электрических
устройств.
Как показали исследования [Буланже 19566], погрешность измерений гравиметром ГАЭ из-за несо-
вершенства отсчетного устройства составляет (±0,20±0,30) мГал и зависит, в основном, от неточности
визирования направлений угла раствора. В Институте физики Земли РАН был разработан способ
преодоления этой трудности [Тулин 1961, 1962а, 6]. Экспериментально установлено, что порог чув-
ствительности составляет около 0,1". Проверка в лабораторных условиях при наблюдениях на одних
и тех же штрихах угломерного инструмента обнаружила погрешность наблюдений около ±0,03 мГал
при угле раствора, соответствующем диапазону 1000 мГал. Еще более чувствительным индикатором
положения маятника гравиметра оказался емкостной преобразователь квазистатических перемещений
[Гусев, Манукин 1980]. Он использован в макете гравиметра с ненулевым отсчетом ГАД [Кочетков и
др. 1983], в котором применен датчик, употребляемый в морском приборе. Преобразователь в принципе
позволяет добиться абсолютной погрешности отсчета до 0,001 мГал.
Угол раствора может быть измерен двумя способами. Первый из них — тангенциальный — основан
на измерении линейного перемещения выбранной точки корпуса гравиметра после его поворота (при
условии неизменности плеча поворота) с последующим переводом в угловую меру; второй — непосред-
ственного измерения угла инструментом типа теодолита. Первый способ иллюстрирован рис. 5.4.11 —
система, принятая в гравиметре Норгарда. Корпус гравиметра опирается на два шарика; линия, со-
единяющая их центры, является осью вращения О. Микрометрические винты 1 и 2, опираясь на
отшлифованные пластины 3 и 4, поворачивают корпус гравиметра так, чтобы блики совместились в
положениях маятника выше и ниже горизонта. Отсчеты mi и тпг, взятые при этом, являются мерой
угла поворота датчика. Угол раствора может быть найден из формулы
tg(B+v)= tgp+_tgY_ = fc±m
ts(₽+Y) l-tgptgv L ’
где k — половина расстояния между нулями микрометрических винтов; L — плечо поворота; т =
0,5(mi ± m2) - s; s — поправка за положение нулей микрометрических винтов.
Вариантом этого способа является устройство, используемое в гравиметре СН-3 (рис. 5.4.12). Здесь
используется только один измерительный микрометрический винт, второе положение фиксируется спе-
циальным концевым упором.
Тангенциальный способ отсчета предполагает обязательную тарировку каждого прибора. Гравиметр,
где измерение угла раствора производятся непосредственно в угловой мере при помощи угломерного
круга, установленного на оси вращения датчика, был разработан в ИФЗ АН СССР [Буланже, Попов
1955]. В гравиметре используется кварцевая система гравиметра СН-3. В 1952 г. был изготовлен
опытный экземпляр, получивший индекс ГАЭ-1 (гравиметр аэрогравиметрической экспедиции — АГЭ),
а в последующие годы его усовершенствованные модификации — ГАЭ-2 и ГАЭ-3.
Рис. 5.4.11. Схема измерения
угла в гравиметре Норгарда
Рис. 5.4.12. Внешний вид гра-
виметра СН-3
Рис. 5.4.13. Внешний вид гра-
виметра ГАК-ЗМ
5.4.4 Дегазированные гравиметры
В.А. Тулин
Наряду с гравиметрами с горизонтальной крутильной нитью и практически одновременно с ни-
ми стал разрабатываться другой класс гравиметров — астазированных. Их сравнительно небольшой
диапазон с лихвой компенсирован повышенной чувствительностью.
В 1935 г. была предложена идея применения астазированного сейсмометра Голицына в качестве
гравиметра [Нумерова 1935]. Тремя годами позже была опубликована теория маятника Голицына
[Шнирман 1938]. Практическое применение этого принципа было осуществлено во Всесоюзном НИИ
геофизики министерства геологии СССР (далее — ВНИИГеофизики) группой сотрудников под руковод-
ством К.Е. Веселова и П.И. Лукавченко. Начиная с 1953 г. [Лукавченко, Веселов 1953] в институте
создан длинный ряд приборов с последовательно улучшаемыми характеристиками. Там же разрабо-
таны и основы теории работы астазированных гравиметров [Веселов 1955]. Первым из гравиметров,
послужившим прототипом последующих приборов, был ГАК-ЗМ [Веселов, Лукавченко, Петров 1954;
Абельскиий 1958] (рис. 5.4.13). Кварцевые астазированные гравиметры, построенные по принципу вер-
тикального сейсмографа Голицына, имеют примерно одинаковые функциональные узлы и различаются
между собой конструкцией этих узлов. Главными частями каждого гравиметра являются: датчик (си-
нонимы: упругая система, кварцевая система), отсчетное и диапазонное устройства, приспособление
для температурной компенсации.
Устройство упругой системы типового гравиметра схематически показано на рис. 5.4.14.
Чувствительный элемент системы, диапазонное и измерительное устройства, а также приспособ-
ление для температурной компенсации смонтированы на основной монтажной рамке 7, крепящейся
к корпусу гравиметра через держатель 8. Чувствительный элемент системы — астазированный вер-
тикальный сейсмограф Голицына состоит из маятника 1, удерживаемого в равновесии упругой силой
главной пружины 3 и силой закручивания нитей подвеса 4.
Движение конца маятника ограничено в пределах нескольких десятых миллиметра вилкой 22. На
маятник надета платиновая цилиндрическая навеска 2, служащая для увеличения момента масс, а
также для уменьшения действия электрических зарядов и защиты от прилипания маятника к ограни-
чителям. Главная пружина верхним концом прикрепляется неподвижно к основному каркасу системы,
нижним концом — к отростку маятника. Она навита из нити диаметром в 80-100 мкм, имеет отри-
цательную начальную длину порядка 15 мм и изготавливается из обыкновенной пружины выворачи-
ванием ее. Измерительное устройство системы состоит из рамки 5, которая вращается на нитях 6. К
этой рамке прикреплены нити подвеса маятника 4. Рамка 5 имеет два стержня, к которым прикреп-
лены диапазонная 10 и измерительная 9 пружины. Верхние концы пружин 10 и 9 прикрепляются к
подвижным штокам измерительного и диапазонного устройств. Натяжение пружины 9 контролируется
микрометрическим винтом, приводимым во вращение редуктором (счетчиком) 17. Положение маятника
1 контролируется при помощи оптической системы, состоящей из осветителя с конденсором 21, двух
призм 18, объектива 19 и окуляра 20. Утонченный конец маятника пересекает световой луч и образует
в поле зрения окуляра тонкую тень на фоне рисок шкалы.
Вращением редуктора 17 добиваются, чтобы тень совместилась с выбранным местом шкалы. При-
способление для температурной компенсации состоит из металлической нити 11, прикрепленной верх-
ним концом к основному каркасу системы, а нижним концом — к рычагу 12, который может вращаться
на нитях 15. Второй конец рычага 12 соединяется тонкой кварцевой нитью 16 с подвижной рамкой
температурного компенсатора 13, вращающегося на нитях 14. Нити подвеса, закрепленные на рамках
13 и 5, и маятника 4 должны располагаться на одной прямой.
Принцип действия чувствительного элемента системы заключается в следующем. При изменении
силы тяжести (например при ее увеличении) маятник 1 будет отклоняться от первоначального поло-
жения равновесия до тех пор, пока силы, вызванные деформацией главной пружины 3 и нитей подвеса
маятника 4, не уравновесят изменение силы тяжести. Главная пружина 3 соединена с маятником таким
образом, что при изменении силы тяжести возникает дополнительный упругий момент сил главной
пружины, знак которого совпадает со знаком изменения силы тяжести. Этот дополнительный момент
возникает вследствие того, что при увеличении силы тяжести плечо упругой силы'уменьшается, и
наоборот, при уменьшении силы тяжести плечо упругой силы возрастает.
Основы теории астазированных гравиметров изложены по книге К.Е. Веселова [1961].
На рис. 5.4.15 показана каноническая схема астазированного гравиметра. Принятые обозначения:
I — расстояние от оси вращения до центра тяжести маятника; т — масса маятника, сосредоточенная в
центре тяжести; и — расстояние от точки прикрепления нижнего конца главной пружины до оси вра-
щения; /1 — линейная жесткость главной пружины; гг — расстояние от точки прикрепления нижнего
конца измерительной пружины до оси вращения; /г — линейная жесткость измерительной пружины;
гз — расстояние от точки прикрепления нижнего конца диапазонной пружины до оси вращения; /з —
линейная жесткость диапазонной пружины; Ti — крутильная жесткость нитей подвеса маятника; тг —
Рис. 5.4.15. Каноническая схема астазированного
гравиметра
Рис. 5.4.14. Устройство упругой системы типово-
го астазированного гравиметра
крутильная жесткость нитей подвеса компенсационной рамки; ocq— начальный угол закручивания ни-
тей подвеса маятника; а — приращение начального угла закручивания нитей подвеса маятника при
изменении Дд; [3 — угол отклонения маятника в исходном положении от горизонтального положения
(наклон всего прибора); сро — первоначальный угол закручивания нитей подвеса компенсационной
рамки; срх — приращение угла сро при изменении силы тяжести; ср' — угол поворота компенсацион-
ной рамки; сро — первоначальный угол поворота компенсационной рамки; п — расстояние от центра
тяжести компенсационной рамки до оси вращения; — масса компенсационной рамки.
Рассмотрим работу датчика. Предполагается, что пружины работают в режиме закона Гука, точки
прикрепления пружин являются идеальными шарнирами, пружины невесомы. Углы отсчитываются
против часовой стрелки.
В соответствии с принятыми обозначениями можно написать: mgl cos(a + cpi + 0) — момент силы
тяжести маятника упругой системы (под действием силы тяжести нити подвеса маятника закручи-
ваются на угол а и нити подвеса компенсационной рамки — на угол cpi); тгцг^дcos(<Pq + сро) —
момент силы тяжести компенсационной рамки упругой системы; тДао + a) — крутильный момент
нитей подвеса маятника; тг(сро + Ф1) — крутильный момент нитей подвеса компенсационной рамки;
/1А1В1 — упругий момент главной пружины; /гАг^о + ^2) — упругий момент компенсационной
пружины; /зАз(Во" + Вз) — упругий момент диапазонной пружины.
В последних трех строках буквами А с индексами обозначается плечо упругой силы соответству-
ющей пружины, буквами В — деформации этих пружин при изменении силы тяжести, буквами В" и
В'" — первоначальные деформации пружин.
Если маятник упругой системы находится в состоянии покоя, то момент силы тяжести должен рав-
няться сумме крутильного момента нитей подвеса маятника и момента главной пружины, т.е. должно
выполняться условие:
mg/cos(a + (pi + 0) = /М1В1 -11(00 + a). (5.4.7)
В это же время момент силы тяжести компенсационной рамки будет уравновешиваться упруги-
ми моментами диапазонной и измерительной пружин, упругим крутильным моментом нитей подвеса
компенсационной рамки, а также моментами силы тяжести маятника и упругим моментом главной
пружины. Последние два момента действуют на компенсационную рамку через нити подвеса маятника.
Запишем это условие:
m4gr4cos(cpo+cpi) = /1А1В1+/2^2(-Во+-в2)+/з^з(-Во/+-вз)-Т2(фо+ф1)-п1^со8(а+Р+ср1). (5.4.8)
Сделав несколько упрощающих допущений, получим
mgl cos(a+ 0) = /М1В1 - тДао + a). (5.4.9)
В прямоугольной системе координат уравнение (5.4.9) запишется
mglcos(a + 0) +Ti(ao + a) — /in (у cos a — x sin a) (1 — = 0, (5.4.10)
где S = y/x2 + y2 + r2 — 2(icos a + ysin a).
Дифференцируя уравнение (5.4.10), получим выражение для угловой чувствительности системы:
da _ _________mlcos(a + 0)______
dg Ti — mgl sin(a + 0) + P + Q’
D , , . , zo\ firlzotycosa + xsina}2
где P = /1Г1 (y sin a + x cos a) (J - — J, Q =----------------.
Опуская преобразования непринципиального характера, из (5.4.11) найдем:
^9 = -^-- (5-4.12)
Знак «—» означает, что наклон создает кажущееся уменьшение си-
лы тяжести. Кривая зависимости кажущегося изменения силы тяже-
сти от изменения наклона имеет вид параболы, симметричной относи-
тельно горизонтальной плоскости и обращенной выпуклостью вверх.
doc _ со cos Р
dg 1 + geo sin Р ’
(5.4.13)
где с — угловая чувствительность гравиметра; со — угловая чувстви-
тельность при ос = 0 и Р = 0.
de о
^ = -^9- (5-4.14)
В том случае, когда прибор наклоняется так, что центр тяжести
маятника поднимается, чувствительность увеличивается. Если центр
тяжести при наклоне понижается, то чувствительность уменьшается.
Это иллюстрирует рис. 5.4.16, на котором приведен график зави-
симости чувствительности гравиметра от угла наклона в плоскости
Рис. 5.4.16. К чувствитель-
ности астазироваииого гра-
виметра
маятника.
На рис. 5.4.17 приведен экспериментальный график зависимости изменения чувствительности от
величины наклона маятника. Отрицательные отсчеты на шкале соответствуют положительным значе-
ниям угла ос, т. е. наклону маятника вниз. Сплошная линия (1) соответствует положительной начальной
длине главной пружины, штрих-пунктирная (2) — нулевой длине и штриховая (3) — отрицательной.
Отчетливо видно, что наклон маятника, вызванный изменением силы тяжести или компенсирующей
силы, у системы с главной пружиной, имеющей нулевую начальную длину, практически не влияет на
чувствительность. Системы же, имеющие главные пружины с положительной и отрицательной началь-
ной длиной, изменяют чувствительность при изменении наклона маятника. Если упругая система имеет
пружину положительной длины, то чувствительность ее возрастает при увеличении силы тяжести и
понижается при ее убывании.
Компенсация изменений силы тяжести. В
упругих системах отечественных кварцевых аста-
зированных гравиметров изменение силы тяже-
сти компенсируется путем изменения величины
первоначального угла закручивания нитей подве-
са маятника, которое осуществляется поворотом
компенсационной рамки с помощью изменения
натяжения пружин. Последние растягиваются с
помощью специальных механизмов, установлен-
ных в корпусе системы. Для компенсации изме-
нения момента силы тяжести маятника при из-
менении Д</ нужно изменить длину диапазонной
или измерительной пружин путем их растяжения
микрометрическими устройствами. При этом ком-
пенсационная рамка повернется на угол ф' и мо-
мент ее силы тяжести изменяется за счет изменения
упругих сил главной пружины при этом не изменится.
Рис. 5.4.17. Чувствительность упругих систем при
разных знаках начальной длины
величины д, а также угла поворота. Момент
Из уравнения (5.4.8), опуская промежуточные преобразования, получим:
dg = Sbn = kiAn,
TQTTll
где S — шаг винта; Дп — число оборотов винта; то = Тг + /2Г22 + /з^з3; &1 =
обычно называемая ценой деления винта.
_ П0СТ0ЯНнаЯ1
топи
Геренблат 1965].
Рис. 5.4.18.
Внешний вид
гравиметра
ГАГ-2
Калибровка шкалы: [Баранова и др. 1988, 1991а, б, 1992, 1993; Буданов и др. 1966, 1967а, б;
Иеберов 1970; Рукавишников 1972а, б, в, г, 1981а, б, в, 1994].
Влияние внешних факторов: [Рукавишников 1981а, б, в, г; Немцов 1959; Абашидзе, Балавадзе
1966; Абашидзе, Капанадзе, Ниаури, Цагурия 1983; Абашидзе, Капанидзе, Ниаури 1986; Веселов,
Методические приемы: [Веселов, Горин 1989], а также работах Поддуб-
ного (1970 г.), Тыртинского (1970 г.), Горина (1981 г.), Тимофеева (1961 г.).
Уменьшение влияния температуры: [Веселов 1961]
Заметим, что упругая система не является измерительным звеном. Она
лишь определяет границы, в которых нужно производить измерения. Точно так
же в астазированных гравиметрах упругая система является некоторым нуль-
индикатором положения, при котором нужно брать отсчет. Сравнительно неболь-
шие напряжения в нитях датчика позволяли надеяться на его более устойчивую
работу. Поэтому опыт работы с гравиметром ГАЭ был перенесен на астазиро-
ванную систему.
В ИФЗ АН СССР В.А. Романюк предложил построить астазированный
гравиметр с угломерным измерительным устройством [Романюк 1970]. Эта
идея позволила создать широкодиапазонный астазированный гравиметр, не
требующий эталонирования. Прибор выпускался серийно под именами ГАГ-2
(рис. 5.4.18) и ГАГ-3 [Поддубный 1974]. Гравиметр нашел широкое применение
при создании опорных гравиметрических сетей.
В дальнейшем под руководством В.Б. Дубовского был разработан гравиметр
с цифровым отсчетом ГАГ-ЗМ, вобравший в себя последние достижения в об-
ласти современной физики и техники.
Экспериментально показано, что ГАГ-ЗМ в статических условиях обнаруживает отсчетную точ-
ность 0,1 мкГал при времени накопления сигнала 3 мин, т. е., как показывают расчеты, реализует
чувствительность упругой системы на уровне броуновских шумов. Заметим, кстати, что ГАГ-ЗМ от-
лично пишет приливные изменения силы тяжести. ГАГ-ЗМ по основным параметрам превосходит
отечественные аналоги.
На базе гравиметра ГАГ-ЗМ был сконструирован вертикальный градиентометр с базой 1,5 м. При
полевых экспериментах в условиях многочисленных строительных помех градиентометр обнаруживает
погрешность ±6 Э.
Столь существенное продвижение в качестве измерений позволяет ставить ряд новых фундамен-
тальных и прикладных задач. Фактически открывается новое направление некриогенной микрограви-
метрии, позволяющее выявлять аномалии УСТ во времени и пространстве порядка 10“1О<7 и проводить
измерения вертикального градиента порядка 1 Э.
Из зарубежных приборов наиболее известны следующие гравиметры: «Уорден» (рис. 5.4.19) и
LaCoste-Romberg (США), «Шарп», «Содин», «Синтрекс» CG-5 (Канада), Аскания GS-11 и GS-15
(Германия).
5.4.5 Криогенные гравиметры
В.А. Тулин
В этом варианте использования силового метода измерения УСТ используется свойство взаимо-
действия магнитных полей. Возможность взвешивания сверхпроводящего тела в магнитном поле была
экспериментально показана в 1945 г. В.К. Аркадьевым, однако только в начале 70-х годов появились
сообщения о создании нового класса статических гравиметров, использующих это явление [Truman
1971]. Поскольку сверхпроводимость возможна только при низких температурах, такие гравиметры
называют криогенными.
Идея привлекательна тем, что, согласно теории, предварительно введенный
в сверхпроводящую катушку ток будет циркулировать в ней без потерь сколь
угодно долго по причине нулевого сопротивления обмотки. Это означает неиз-
менность создаваемого катушкой магнитного поля и, следовательно, высокое
постоянство упругих свойств «магнитной пружины». Обозначались, таким обра-
зом, предпосылки к уменьшению смещения нуль-пункта гравиметра. Как оказа-
лось впоследствии, эти ожидания вполне оправдались. В литературе описание
принципа действия прибора этого класса достаточно полно и наиболее сжато
приведено у Трубицына и др. (1984 г.), которую мы, порой дословно, процити-
руем.
При помещении в магнитное поле катушки сверхпроводящего тела на его
поверхности индуцируются незатухающие токи, которые создают собственное
магнитное поле. Результатом взаимодействия этих двух полей является сила,
стремящаяся вытолкнуть тело из поля катушки. Величина этой силы обратно
пропорциональна квадрату расстояния, источник поля — сверхпроводящее тело. Рис. 5.4.19.
Имеется некоторое расстояние, при котором сила выталкивания равна силе гра- Гравиметр Уор-
витационного притяжения. Тело «парит» над катушкой. Схема чувствительного Ден
элемента гравиметра, описанного Goodkind, приведена на рис. 5.4.20.
Полая алюминиевая сфера 6 поддерживается магнитным полем, создаваемым двумя одинаковыми
сверхпроводящими короткозамкнутыми катушками 4. Диаметр сферы 25,4 мм, толшина стенок около
1 мм, вес около 5 г. Катушки диаметром 57 мм содержат по 400 витков ниобиевой проволоки диаметром
0,157 мм и расположены друг от друга на расстоянии, равном их радиусу. Верхняя катушка находится
несколько ниже плоскости симметрии сферы. Вокруг последней взаимно перпендикулярно расположены
три пары вогнутых электродов 2, образующих сферическую поверхность с зазором около 1 мм.
Под сферой соосно с поддерживающими катушками установлена кольцевая
петля детектора 5 изменений магнитного потока, используемого для контроля
постоянства магнитного поля катушек. Кольцо диаметром 15,7 мм изготовле-
но из ниобия и через сверхпроводящий трансформатор соединено со сквидом
(сверхпроводящим квантовым интерферометром). Размеры приведены с целью
дать общее представление о габаритах датчика. Катушки намотаны на массив-
ный медный блок 1 с высверленной в нем камерой для установки электродов и
сферы.
Все устройство вместе со сверхпроводящим экраном вокруг него размещено
в герметичной камере, заполненной газообразным гелием под давлением 133 Па
и охлаждаемой снаружи жидким гелием.
Применение подвеса с двумя катушками позволяет повысить его устойчи-
вость и подобрать необходимую жесткость. Ток в катушки подают от разных
источников с помощью тепловых сверхпроводящих ключей. Суммарную под-
держивающую силу регулируют путем одновременного изменения токов обеих
Рис. 5.4.20.
Схема чувстви-
тельного
элемента
криогенного
гравиметра
катушек при сохранении их соотношения, а ее градиент устанавливают путем
изменения соотношения токов. Индикация перемещений сферы осуществляется
с помощью емкостного моста (рис. 5.4.21).
В два плеча моста включены емкости между кольцевым электродом (или с
последовательно соединенными между собой электродами, симметрично распо-
ложенными вокруг сферы в горизонтальной плоскости) и верхним и нижним
электродами, а в два других плеча включены вторичные сбалансированные об-
мотки трансформатора L1 и L2, подключенного к источнику питания Е.
Электроды изолированы от корпуса кварцевыми изоляторами 3, с внешними схемами соединяются
коаксиальными выводами 7. Для повышения линейности устройства сфера удерживается в одном и
том же положении путем компенсации действующей на нее внешней силы электростатической силой.
развиваемой между электродами и сферой. Для этого на верхний и нижний электроды М и N пода-
ется питание от разноименных полюсов источника постоянного напряжения, средняя точка которого
расположена так, что электроды имеют потенциалы +Uq и —Uq. Сигнал разбаланса моста, вызванный
смещением сферы, усиливается, детектируется с помощью синхронного детектора, фильтруется и через
цепь обратной связи подается на вертикальные электроды, изменяя их потенциалы на величину Д[7
(соответственно Uq + At/ и — Uq 4- Д[7). Развиваемая при этом электростатическая сила, действую-
щая на сферу, возвращает ее в исходное положение. Напряжение на электродах является выходной
величиной, пропорциональной измеряемому приращению силы тяжести.
Таким образом, роль основной пружины гра-
виметра выполняют два высокостабильных взаи-
модействующих магнитных поля, а измеритель-
ной — электростатическое поле.
Разрешающая способность датчика по д оце-
нивается величиной ±0,05 мкГал. Другая разра-
ботка [Truman 1971] имеет еще более впечатляю-
щие возможности: ее теоретическая чувствитель-
ность составляет ±1,5-10“5 мкГал. Разрешающая
способность по перемещению сферы — составля-
ет ±2-10-5 мкм, или 0,2 А. Это — фантастически
высокое разрешение. Уместно напомнить, что ха-
рактерный размер атома близок к 1 А. Скорость
Рис. 5.4.21. Схема индикации перемещения сферы смещения нуль-пункта весьма невелика и состав-
в криогенном гравиметре ляет 0,1 мГал/год. Высказываются соображения
[Гусев 1979], что смещение может быть доведено
до 0,01 мГал/год.
Разработчики Менде (1973 г.) и Диденко (1980 г.) предложили использовать в качестве датчика
перемещений сверхпроводящий цилиндрический резонатор СВЧ-диапазона. При чувствительности око-
ло 0,3 А этот способ ввиду хорошей стабильности сверхпроводящего резонатора позволяет измерять
перемещения с высокой точностью за длительные отрезки времени. Что касается собственно чувстви-
тельного элемента гравиметра, то и здесь намечены и реализованы схемы, существенно отличающиеся
от описанной выше. Так, предложена схема с астазированной электромагнитной системой, устройство,
в котором масса удерживается силами не отталкивания, а притяжения (Г.А. Караваев и др. 1978,
1979 г.).
Изложенные выше свойства криогенных гравиметров по порогу чувствительности и смещению нуль-
пункта делают их уникальным инструментом для исследований в области медленных и малых по ам-
плитуде процессов, например неприливных изменений силы тяжести. Методика измерений обычной
аппаратурой с «механическими» датчиками не всегда обеспечивает здесь желаемую достоверность ре-
зультатов, поскольку эффекты, вызываемые современными движениями (в широком смысле этого сло-
ва), весьма малы. Необходимость в жидком гелии, специальных условиях для наблюдений делают его
маломобильным. Исключительно высокие возможности криогенного гравиметра практически сложно
реализовать в обычной экспедиционной практике, поэтому он является инструментом обсерваторского
применения, предназначается для тончайших физических экспериментов в области изменения гравита-
ционного поля Земли и медленных движений ее поверхности (в том числе «вековых»), происходящих
в небольшом диапазоне.
5.4.6 Морские неастазированные гравиметры
В.А. Тулин
К началу 50-х годов XX столетия стали разворачиваться работы по маятниковым морским наблю-
дениям с подводных лодок , в чем страна имела некоторый опыт еще с довоенного времени благодаря
работам Л.В. Сорокина [Сорокин 1934а, б; Строев 1969; Буланже, Сагитов 1988]. Однако было ясно,
что такой способ неперспективен ввиду его непроизводительности и крайней дороговизны. Принци-
пиальным прорывом в этом направлении стало предложение К.Е. Веселова (ВНИИГеофизика Мингео
СССР) об использовании в качестве морского инструмента гравиметра с закритически демпфирован-
ным датчиком типа Норгарда [Веселов 1956, 1958]. Это был первый в мире морской статический
гравиметр. Идея Веселова была сразу же воспринята ИФЗ АН СССР, и в нем стала развиваться эта
тематика. Теория работы гравиметра и принципов обработки результатов наблюдений с ним разрабаты-
валась и развивалась сотрудниками ВНИИГеофизики, Государственного астрономического института
им. Штернберга МГУ, ИФЗ. Наиболее значимые результаты были получены в работах [Веселов, Пан-
телеев 1958; Исматходжаев 1965а, б, 1969, 1979; Исматходжаев, Пантелеев 1971; Кузиванов 1958,
1959; Кузиванов и др. 1966, Кузиванов, Лифшиц 1978; Пантелеев, Исматходжаев 1965; Романюк
1961а, б, 1970]. В монографии [Пантелеев 1983] обобщены основные достижения в области теории
морской гравиметрии.
Морской гравиметр состоит из следующих функциональных узлов: Датчика, реагирующего на из-
менение УСТ. Датчик, в свою очередь, состоит из чувствительного элемента, изменение положения
или состояния которого является мерой УСТ, демпфера, устройств для защиты от изменений внешнего
давления и температуры. Одновременно с УСТ датчик реагирует и на паразитные, с точки зрения реше-
ния основной задачи, ускорения корабля. Стабилизатора положения датчика относительно вертикали,
имеющего целью совместить с ней ось чувствительности. Преобразователя сигнала датчика в вид,
пригодный для дальнейшей обработки (фотозапись, электрический ток, цифровой код и др.).
Первый из макетов неастазированных гравиметров, изготовленный во ВНИИГеофизике (шифр СЗ-
1), имел визуальный отсчет. Тем не менее, при первых же подводных испытаниях в 1955 г. он показал
точность на уровне маятникового прибора [Веселов, Лозинская 1975]. Некоторые результаты морских
испытаний СЗ изложены также у Строева и др. в 1967 г.
Впоследствии совместными работами ВНИИГеофизики и
ГАИШ были в макетном виде реализованы предложения, ка-
савшиеся усовершенствования первоначальной идеи. К ним
относятся оптико-механический гравиметр ОМГ [Пантелеев,
Смирнов 1968], автоматизированный гравиметр АНГ [Бобров
и др. 1967] и его дальнейшее развитие — морской автома-
тизированный гравиметр МАГ с обратной связью на маятник
[Гладун и др. 1975]. Параллельно во ВНИИГеофизике под ру-
ководством В.О. Баграмянца, началась разработка морского
астазированного гравиметра с обратной связью — ГМН (гра-
виметр морской набортный). Испытания обнаружили некото-
рые конструктивные недоработки гравиметра МАГ, поэтому
вопрос о серийном производстве был решен в пользу грави-
метра ГМН.
В дальнейшем во ВНИИГеофизике сосредоточили свое
внимание на создании узкодиапазонных астазированных мор-
ских гравиметров, предназначенных, в основном, для работ
на небольших акваториях в разведочных целях, тогда как
ИФЗ — на широкодиапазонных неастазированных гравимет-
рах для океанских наблюдений. ИФЗ, имея хороший задел
экспериментальных возможностей (в частности, кварцедув-
ную технологию), уже в 1959 г. сообщил о создании и первых
Рис. 5.4.22. Принципиальная схема
датчика гравиметра ГАЛ с двойной
упругой системой
натурных исследованиях макета морского гравиметра ГАЛ
[Попов, 1959а, б], которые показали, что идея Веселова в модификации ИФЗ вполне работоспособ-
на. Датчик гравиметра ГАЛ схематически показан на рис. 5.4.22. Он состоит из двух идентичных
упругих систем (УС), маятники которых ориентированы в противоположных направлениях.
Каждая из систем состоит из жесткой рамки, выполненной в виде скобы 1, к концам которой при-
варена нить 2. К середине нити крепится маятник 3 с металлическим грузом, находящийся в примерно
горизонтальном положении. Весовой момент маятника компенсируется упругой силой закрученной ни-
ти.
Маятники снабжены зеркалами 4. Зеркала УС развернуты относительно друг друга таким образом,
что падающий луч света 5, отражаясь от левого зеркала, попадает на правое 6 и далее поступает на
регистрирующее устройство. Лучи формируются автоколлимационной системой (на рисунке не пока-
занной в целях его упрощения). Регистрация идет на движущейся фотопленке. Техника изготовления
датчика и некоторые необходимые аксессуары описаны в монографии [Попов 1967]. Датчик помещается
в герметичную коробку, заполненную вязкой полиметилсилоксановой жидкостью. Последняя выполняет
несколько функций. Во-первых, она демпфирует колебания маятника, вызываемые воздействием возму-
щающих ускорений. Во-вторых, с ее помощью осуществляется температурная компенсация. В-третьих,
в силу практически несжимаемости она осуществляет защиту от изменения внешнего давления, исклю-
чая таким образом барометрический эффект. Расчет параметров датчика хорошо отработан [Антонов
1968а, Антонов и др. 1983], равно как вопросы температурной компенсации [Антонов 19686, 1970] и
демпфирования [Антонов 1969].
Теория наблюдений гравиметрами на подвижном основании весьма громоздка, и излагать ее в
данной статье вряд ли целесообразно. При необходимости ознакомления с ней можно воспользоваться
вышеуказанными источниками. Приведем только ее главные выводы. При этом будем ориентироваться
на гиростабилизированный гравиметр, поскольку общепринятым стало мнение о непригодности для
надводных наблюдений карданова подвеса. Изложение имеет подчеркнуто упрощенный характер, по-
скольку в данном случае задача состоит в разъяснении физического смысла воздействия возмущений
и примерной оценке их величин. Заметим, что в реальных условиях морских наблюдений возмуще-
ния представлены довольно широким спектром частот (хотя всегда имеется некая преобладающая).
Упрощение, в частности, касается характера возмущений, т. к. рассматриваются воздействия моногар-
монических ускорений и наклонов. Этот нестрогий подход удобен для оценки погрешности наблюдений
в первом приближении. Основные погрешности наблюдений вызываются чистыми наклонами подставки
гравиметра, совместным воздействием наклонов подставки и горизонтальных ускорений, орбитальными
движениями подставки, вертикальными ускорениями. Найдем рабочие формулы указанных эффектов.
При этом полагаем, что
сит » 1, (5.4.15)
где си — круговая частота возмущений, т— постоянная времени жидкостного демпфера.
Выражение (5.4.15) означает, что маятник при наличии знакопеременных возмущений практически
точно следует за подставкой, и наклоны маятника относительно горизонта можно отожествлять с
наклонами подставки.
Чистые наклоны. Физический смысл состоит в том, что при наклоне УС закручивающая сила
уменьшается в cos а раз, где а — угол наклона маятника датчика относительно горизонта. Нетрудно
а2
найти, что для постоянного наклона это преуменьшение составит Ьда = — д—. Если наклон знакопе-
ременен, эффект будет пропорционален среднему интегральному значению .
Для синусоидального, например, изменения
с «2
= -Ру
(5.4.16)
Аналогично для наклона системы в плоскости нити (угол р) Ьд$ = -д^-.
Горизонтальные ускорения и наклоны. Рис. 5.4.23 иллюстрирует физику возникновения этого
эффекта. При наклоне подставки на угол горизонтальное ускорение X раскладывается на составляющие
U и V, первая из которых создает дополнительный закручивающий эффект, а вторая компенсируется
реакцией опоры. Применение двойной системы не исключает этой погрешности, поскольку моменты,
создаваемые составляющими U, противоположны, и угол между маятниками стремится увеличиться. В
другой фазе возмущений, когда а и X изменили свой знак (нижняя часть рис. 5.4.23), составляющие U
создают моменты того же знака (для простоты рисунка составляющие V не показаны). Иными словами,
эффект имеет систематический характер. Величина эффекта может быть найдена из равенства
Ьдх,а = J X(t)<x(t)dt.
о
При X(t) — Xocoswt и a(t) = aocos(cui+\|>),
где г|> — угол сдвига между наклоном и ускоре-
нием,
Ьдх,а = -Ц^созгра. (5.4.17)
Аналогично в другой плоскости
е УОРО .
cosxpp.
Этому вопросу посвящен ряд публикаций, на-
пример [Антонов и др. 1973; Береза и др. 1984;
Кутепов и др. 1970; Молоденский, Каган 1974].
Орбитальные движения. Погрешность,
возникающая вследствие орбитальных движе-
ний подставки (кросс-каплинг-эффект), имеет
следующий физический смысл (рис. 5.4.24а).
Под действием вертикального ускорения Z
маятник гравиметра изменяет свое положение,
переходя из положения А в положение Б, от-
клоняясь на угол 0. Горизонтальное ускорение X
раскладывается на составляющие U и V, первая
из которых стремится дополнительно закрутить
нить (вторая компенсируется реакцией опоры).
На правой половине рис. 5.4.24а показана карти-
на для ускорений, изменивших свой знак (другой
полупериод возмущений). Составляющая U дей-
ствует в ту же сторону, т. е. независимо от фазы
Z и X орбитальные движения вызывают ошибку
одного знака.
Оценим величину кросс-каплинг-эффекта для
одиночной системы в предположении, что в ис-
ходном положении маятник горизонтален.
Ускорения, действующие на маятник,
Рис. 5.4.23. К эффекту одновременного воздей-
ствия знакопеременных ускорений и наклонов
Рис. 5.4.24. К эффекту орбитальных движений ос-
нования гравиметра
Z = Zo cos cut, У = Yo cos(cut + 5),
где 5 — сдвиг по фазе между вертикальным и горизонтальным ускорениями.
Найдем & = f(Z) и затем Ьдсс = [Х5]. Уравнение равновесия упругой системы
К<р = тда,
(5.4.18)
где <р — угол закручивания нити, д — ускорение свободного падения, К,т,а — конструктивные
постоянные, под воздействием вертикальных ускорений будет иметь вид
K(tp -I- Ф) = та(д + Z), (5.4.18а)
где Ф — приращение угла закручивания, вызванное воздействием Z.
Равенство (5.4.18а) записано в предположении, что упругая система не демпфирована, а угол Ф
достаточно мал, чтобы закручивающий момент считать независимым от его величины.
Из (5.4.18) и (5.4.18а) Ф = -<р.
9
Упрощенно дифференциальное уравнение движения закритически демпфированного маятника под
действием вертикальных ускорений имеет вид тО + & = Ф, где & — показанный на рис. 5.4.23а угол,
т — постоянная времени демпфера. Его решение получается в следующем виде:
q _ <pZo cos(cui - ф) <pZoe
~ 9 \/l + ш2т2 p(1 + cd2t2)’
(5.4.19)
где tg ф = шт.
Второе слагаемое (5.4.19) характеризует переходный процесс и быстро уменьшается со временем.
Поэтому (5.4.19) с учетом (5.4.15) примет вид
О - ’ cos(cut — ф).
Величина кросс-каплинг-эффекта находится из очевидного равенства
т
Ьдсс = f cos(mt — ф) • Xq cos(mt + 6)dt.
Т j #шт
После необходимых преобразований
<р ZqXq .г .
6рсс = — • ---“ СО8(ф + 6) • — COs(w£ + 6).
4л о т
При использовании двойной упругой системы (рис. 5.4.246) орбитальные движения действуют так,
что одна нить закручивается, а другая раскручивается, и угол между системами сохраняется постоян-
ным. Это действительно происходит, если постоянные времени и углы закручивания систем одинаковы.
В противном случае полная компенсация недостижима. Например, для самого неблагоприятного слу-
чая, когда сов(ф + 5) = 1, остаточный кросс-каплинг-эффект равен
брсс = 6<7сс1 ~ &9сс2 = л
4пд
X0ZQ <Р1 / Т2 <Р2
Т2 \Т1 ф1
Индексами 1 и 2 обозначены номера одиночных систем.
Исследованию кросс-каплинг-эффекта уделено немало теоретических и экспериментальных иссле-
дований, к числу которых можно отнести [Левицкая 1972; Антонов и др. 1979; Жучков и др. 1987].
Интересно отметить, что далеко не всегда экспериментальные данные соответствуют теоретическим
расчетам [Тулин, Кузиванов 1988].
Вертикальные ускорения. Погрешности за чисто вертикальные знакопеременные ускорения воз-
никают вследствие, по крайней мере, двух причин.
Во-первых, чувствительность гравиметра зависит от положения маятника относительно горизонта;
максимальная чувствительность соответствует горизонтальному положению. В негоризонтальном поло-
жении сила закручивания, действующая на маятник, всегда уменьшается на 0,5 • трДср2 (независимо
от знака отклонения от горизонта). Вертикальные ускорения приводят к знакопеременным колебаниям
маятника относительно исходного уровня, вследствие чего отсчет по гравиметру всегда преуменьшает-
ся.
Величина этого эффекта, хотя и незначительно, зависит и от исходного угла маятника относительно
горизонта.
Во-вторых, сигнал на входе гравиметра имеет вид g+Z, где Z — вертикальные ускорения, физически
неотличимые от д. Единственный способ разделения этих составляющих — частотная фильтрация,
поскольку их спектры различаются. Первая ступень фильтрации — жидкостный демпфер системы,
который существенно, но не полностью освобождает полезный сигнал от помехи.
Минимизации погрешностей за вертикальные ускорения (они имеют случайный характер) посвя-
щено множество исследований. Первые публикации по этому поводу относятся к 1958-60 гг. [Веселов,
Пантелеев 1958; Веселов 1960]. Впоследствии были опубликованы работы [Левицкая 1971; Береза и
др. 1982; Береза, Ривкин 1983; Ломоносов, Пантелеев 1988] и ряд других. Однако, результаты этих
исследований, как правило, не доведены до рабочих формул. Работа [Боярский, Каган 1968] лишена
этого недостатка. Воспользуемся ею для иллюстрации процесса фильтрации.
Вначале поясним физическую сущность воз-
никновения этой погрешности. На рис. 5.4.25
в качестве примера показана моногармониче-
ская кривая записи гравиметра при вертикаль-
ных ускорениях. На основании работ [Кузиванов
и др. 1966; Пантелеев и др. 1969] возмущающий
сигнал в первом приближении можем считать ко-
синусоидальным. Значками дГист и дГям на нем
обозначены истинный (при отсутствии возмуще-
ний) и измеренный в результате осреднения от-
счеты. Их разность Ьдг есть погрешность осред-
нения на интервале Tq при произвольных фазах
начала и конца осреднения epi и срг- Очевидно
равенство
брт = дг,
Ч>2
Рис. 5.4.25. Физика возникновения случайной по-
грешности за вертикальные ускорения
<Р2
Jcos wtdt,
где дг„ — амплитуда возмущений, ш = 2п/Т — круговая частота возмущений.
После его несложных преобразований получим
Ьдг = дг,— COS
птх.
ср\ . <р
<P1+2)Sm2'
(5.4.20)
где ср = срг — <Р1 — разность фаз начала и конца осреднения.
Физический смысл возникновения рассмат-
риваемой погрешности заключается в том, что
при наблюдениях невозможно обеспечить одина-
ковость фаз начала и конца интервала осредне-
ния, а потому всегда остается некий некомпен-
сированный остаток, который хотя и уменьшен
за счет осреднения на довольно продолжитель-
ном интервале, все же значителен по величине.
Выбирая наихудший из возможных случаев,
когда ср = л, и заменяя периодическую часть
(5.4.20) ее математическим ожиданием, а также
приняв во внимание, что коэффициент подавле-
ния помех системы с закритическим демпфирова-
нием
— = \/1 + ш2т2,
9г,
где т — постоянная времени демпфера упругой
системы, имеем
То =
Рис.
5.4.26. Весовые фильтры и их амплитудно-
частотные характеристики
ZT2
п3Ьдтх'
(5.4.21)
По формуле (5.4.21) можно вычислить продолжительность времени осреднения при заданных усло-
виях возмущений и допустимой погрешности сглаживания фильтров. Наблюдатели стремятся елико
возможно уменьшить интервал Т, чтобы избежать погрешности наблюдений за счет изменения поля
на интервале осреднения. Однако, как показывают расчеты и модельные исследования, осреднение
«в лоб», как это предусматривает (5.4.21), неперспективно. Положение существенно улучшится, если
уменьшить влияние начального и конечного отрезков интервала осреднения. Для этого можно прибег-
нуть к весовому среднему, придав начальному и конечному [р ± Z] малые веса, что и было предложено
в работе [Боярский и др. 1968]. Рассмотрены три варианта фильтров с весовыми функциями (ВФ) и
соответствующими им амплитудно-частотными характеристиками (АЧХ):
ВФ
АЧХ
= т
P2("v) = COSTtTv
Рз(~у) = I (1 + cos
A(cu) = ^sin^
А2(щ) = COS
Рис. 5.4.27. Фото Рис. 5.4.28. Фото
гравиметра МГ-СЗ- гравиметра ГАЛ-М
ВНИИГеофизика
На рис. 5.4.26 представлены «геометрические» изображения этих фильтров (в верхней части) и
их АХЧ. Первый из них характеризует процесс обычного осреднения, при котором веса соседних
отсчетов внутри интервала осреднения одинаковы. Второй соответствует косинусоидальному, третий —
колоколообразному изменению весов отсчетов внутри интервала.
Отчетливо видны преимущества
двух последних случаев: эффектив-
ность сглаживания увеличивается во
много раз. Реализация таких фильтров
при наличии ЭВМ не вызывает затруд-
нений. При заданном интервале осред-
нения вычисляется набор весов, вели-
чины которых соответствует выбран-
ному фильтру, и каждый из которых
присваивается очередному отсчету. Да-
лее обычным путем находится весовое
среднее.
Интервал осреднения, количество
весов и вид фильтра задаются поль-
зователем (при заранее предусмот-
ренном в программе наборе филь-
тров). Фотографии первых образцов
неастазированных гравиметров пред-
ставлены на рис. 5.4.27 — МГ-СЗ-
ВНИИГеофизика и рис. 5.4.28 — ГАЛ-
М конструкции ИФЗ.
Первые морские исследования этих приборов показали следующие точности. МГ-СЗ-ВНИИГео-
физика - в кардановом подвесе на надводном судне при малых возмущающих ускорениях или их
отсутствии ±(4-5) мГал. Погрешность надводных наблюдений гиростабилизированного ГАЛ на пунктах
с известной силой тяжести составляет [Попов 1967]:
— для односистемных приборов ±(5-=-8) мГал с отдельными выбросами до ±30 мГал при возмуща-
ющих ускорениях до ±40 гал;
— для двухсистемных приборов ±(5-5-6) мГал при возмущениях ±75 Гал.
Гравиметр ГАЛ-М был оснащен специальным гиростабилизатором разработки ЦНИИ «Электропри-
бор» и под шифром МГФ (морской гравиметр с фоторегистрацией) изготавливался серийно с 1975 по
1980 гг. (выпущено свыше 120 экземпляров). Заявленная точность прибора была 10 мГал при ускоре-
ниях до 75 Гал, но практически она составляла 3-5 мГал [Железняк 2003].
Автоматизация морских гравиметрических наблюдений. Как указывалось выше, обработка
сигнала морского гравиметра будет эффективной и малозатратной по времени, если сигнал представлен
в цифровом виде. Первые образцы имели аналоговую форму записи (на фотопленке или на ленте само-
писца), которую приходилось вначале цифровать вручную (с неизбежными при этом ошибками), а за-
тем уже использовать компьютерные возможности. Автоматическая оцифровка сигнала кардинальным
образом изменила бы процесс морских измерений. Остановимся на автоматизации неастазированных
приборов. В ИФЗ решение этой задачи шло в двух направлениях.
Первый способ — оцифровка сигнала с помощью кодовой маски [Антонов и др. 1966; Башилов
и др. 1964; Казьмин и др. 1966а, б]. Не останавливаясь на сути работы устройства, укажем на его
основные характеристики, взяв за основу габариты ГАЛ.
Разрешение в направлении движения отраженного от упругой системы блика составляет около
0,01 мм, что при чувствительности системы около 100 мГал/мм и размере шкалы сканирования 20 мм
соответствует статическому диапазону 2000 мГал.
Нужно учесть, что значительную часть шкалы нужно зарезервировать на колебания блика вслед-
ствие знакопеременных ускорений и на систематическое смещение блика по мере изменения УСТ.
Прибор в принципе оказывается узкодиапазонным и поэтому непригодным для измерения в океане при
больших изменениях д. Практического применения
Второй способ — оцифровка с помощью
оптико-механического аналого-цифрового преоб-
разователя [Тулин 1962а, 1965г]. Задача осред-
нения возмущенного сигнала решается путем на-
хождения его среднего интеграла.
На рис. 5.4.29 показана реальная запись сиг-
нала гравиметра (заимствована из источника
[Попов 1967]).
Ее среднее значение на интервале 1-2
1 Т
Лер = J L dt,
о
или приближенно
к к
г=1 1=1
не нашел.
Рис. 5.4.29. Образец записи возмущенного сигна-
ла гравиметра
Здесь At — шаг сканирования, достаточно малый по сравнению с наименьшим периодом возмущении
к — число просуммированных ординат. Приближенная формула хорошо сходится с точной.
Расчет показывает, что для половины косину-
соиды с амплитудой, равной половине отсчетной
шкалы гравиметра, и периодом 6 с при частоте
сканирования 10 Гц относительная разность меж-
ду точным и приближенным результатами вычис-
лений не превосходит 1-Ю-4.
На рис. 5.4.30 показана принципиальная схе-
ма аналого-цифрового оптико-механического пре-
образователя отсчета (ОМПО). Упругая система
в принципе аналогична системе ГАЛ. С маятни-
ком жестко связано подвижное зеркало ПЗ, а с
рамкой — неподвижное зеркало НЗ.
В отличие от упругой системы ГАЛ плоскости
зеркал близки к параллельному положению.
При изменении УСТ момент, создаваемый ма-
ятником, изменяется, что ведет к изменению по-
Рис. 5.4.30. Принципиальная схема оптико-
механического АЦП (ОМПО)
ложения подвижного зеркала относительно неподвижного.
При помощи автоколлимационной оптической системы, состоящей из осветителя Л, объектива Об,
перегородки П с узкой щелью, изображение последней фокусируется в плоскости, касающейся (по
линии расположения бликов) полого круглого вращающегося барабана, имеющего винтообразный срез
торца.
Устройство настроено так, что в измеряемом диапазоне оба блика поочередно пересекаются об-
резом барабана и посредством вспомогательного зеркала ВЗ отражаются на катод фотоэлектронного
умножителя ФЭУ.
Высокочастотный генератор Г через делитель частоты ДЧ приводит во вращение синхронный мотор
СМ, несущий барабан, и используется также для измерения расстояния между бликами.
Окончательное выражение преобразования [Тулин 1965а] имеет вид
lx = Nn’
где 1Х — расстояние между бликами, L — шаг винтовой линии, N — коэффициент деления ДЧ, п —
число импульсов генератора, зафиксированное пересчетной схемой ПС.
Принимая во внимание, что L и N — величины постоянные, получаем прямо пропорциональную
зависимость расстояния между бликами и числа импульсов, зафиксированных пересчетной схемой.
Описываемый гравиметр (шифр АМГ) имеет несколько отличную от ГАЛ упругую систему
(рис. 5.4.31).
Она содержит три зеркала: подвижные (4), неподвижное (5) и обычные две рамки (1), две пары
нитей (2) и два маятника (3). Все зеркала лежат примерно в одной плоскости. Неподвижное зерка-
ло обеспечивает отсчет по каждой из систем по отдельности, что важно при многих исследованиях
прибора.
Блики от зеркал в плоскости сканирования ОМПО лежат на одной вертикали, причем неподвижный
блик размещается между подвижными. Идея прибора была реализована в ОКБ ИФЗ АН СССР серией
из 18 приборов [Тулин, Осинская 1970]. Первые образцы гравиметров с автоматизированным отсче-
том были изготовлены в 1965 г. Их последовательные модификации успешно применялись в морских
работах с 1967 г.
При диапазоне измерений без перестройки 10-12 Гал гравиметр обеспечивает порог чувствительно-
сти около ±0,1 мГал. Последняя конфигурация гравиметра (1990 г.) позволяет получать информацию
Рис. 5.4.31. Принципиаль-
ная схема датчика гравимет-
ра АМГ с двойной упругой
системой
Рис. 5.4.32. Фото гравиметра
АМГ
Рис. 5.4.33. Фото гравиметра
«Чекан-АМ»
о гравитационном поле в режиме реального времени. Нужно отметить, что разработки ИФЗ в области
автоматизации морских гравиметрических наблюдений были пионерскими для СССР.
Одна из первых модификаций АМГ в комплекте со специализированным вычислительным устрой-
ством показана на рис. 5.4.32. Дальнейшее усовершенствование неастазированного гравиметра произ-
водилось в кооперации ряда организаций во главе с ЦНИИ «Электроприбор» при научном руководстве
и участии ИФЗ РАН.
Сведения, содержащиеся в этом абзаце, сообщены автору Л.К. Железняком, являющимся одним из
участников разработок. В результате многолетней работы было создано семейство гравиметрических
комплексов: «Чета-АГГ» (МГК), «Скалочник», «Чекан-М», «Чекан-АМ».
Этот последовательный ряд характеризовался совершенствованием элементной базы и улучшением
технических характеристик, уменьшением энергопотребления, адаптацией к более жестким условиям
эксплуатации. Все они использовали упругую систему разработки ИФЗ, изготовляемую в заводских
условиях и отличающуюся от применяемой в АМГ высокой идентичностью входящих в него одиночных
систем и малости их взаимных перекосов. Датчик снабжен охлаждающим термостатом, что способству-
ет уменьшению скорости смещения нуль-пункта, и устанавливается на гиростабилизатор, разработан-
ный под его весовые и габаритные характеристики. На Международный симпозиум «Наземная, морская
и аэрогравиметрия: измерения на неподвижных и подвижных основаниях» был представлен морской
гравиметр «Чекан-АМ», созданный в ЦНИИ «Электроприбор» [Краснов и др. 2007]. В отличие от
предшествующих аналогов, состоящих из гиростабилизатора с гравиметрическим датчиком и прибора
управления, представленная модификация выполнена в виде единого прибора, включающего в себя
систему управления гиростабилизатора, блок термостабилизации гравиметрического датчика и модуль
преобразования выходного сигнала гравиметрического датчика в код, передаваемый в компьютер по
последовательному интерфейсу RS-232. Гравиметрический датчик построен на основе разработанной
совместно с ИФЗ РАН двойной кварцевой упругой системы, находящейся в герметичном титановом кор-
пусе, который помещен в термостат, поддерживающий постоянство температуры с точностью «0,1 °C.
Корпус заполнен полиметилсилаксановой жидкостью. Динамический диапазон измерений составляет не
менее 10 Гал, при этом практически полностью исключено влияние вибраций и ударных воздействий,
создаваемых при выполнении сейсмических работ.
Съем показаний гравиметрического датчика осуществляется посредством оптико-электронного пре-
образователя автоколлимационного типа, фотоприемник которого построен на двух приборах с заря-
довой связью линейного типа. В малогабаритном гиростабилизаторе нового поколения с цифровым
управлением и цифровыми следящими системами использованы поплавковые гироскопы с газодина-
мическими подшипниками, обеспечивающими практически неограниченный ресурс работы, а также
миниатюрные прецизионные акселерометры со встроенной электроникой. Погрешность стабилизации
положения гравиметрического датчика в плоскости горизонта не более 14".
Диаметр корпуса гиростабилизатора 430 мм, высота 450 мм, масса гиростабилизатора с гравимет-
рическим датчиком 55 кг, энергопотребление 300 Вт, предельная погрешность измерений 1 мГал. Отли-
чительной особенностью гравиметра является его интеграция со спутниковой навигационной системой.
Гравиметрическая и навигационная информация отображается на экране монитора в графическом и
цифровом виде.
Перспективные разработки. В качестве примера перспективной разработки можно привести ма-
кет гравиметра с магнитной пружиной, датчик которого не содержит механических упругих элементов
[Тулин 2006] и никакого отношения к гравиметрам с крутильной нитью не имеет. Однако, посколь-
ку он не астазирован, автор посчитал уместным поместить упоминание о нем в этот раздел. Имея
стопроцентную отрицательную обратную связь на пробное тело, датчик свободен от большинства недо-
статков, присущих используемым сейчас гравиметрам. При этом он имеет на порядок меньшие габариты
и вес. Исследования показали, что при 5-минутном осреднении на промежутке 8 часов (это — обыч-
ная продолжительность съемочного галса) не обнаруживается систематического смещения при средних
квадратических колебаниях отсчета mi = ±0,04 мГал.
Смещение на двухнедельном промежутке линейно (это обычно интервал между опорными наблю-
дениями) и составляет 6pt=0,133 мГал/сут при mi=±0,06 мГал. На промежутке 1,5 месяца (это со-
ставляет 0,3-0,5 продолжительности рейса) смещение линейно и составляет 6pt=0,129 мГал/сут при
mi=±0,14 мГал. Такие данные при соответствующей доводке могут быть основой для создания океан-
ского гравиметра нового поколения.
Гиростабилизация гравиметров. Создание гиростабилизатора является самостоятельной и весь-
ма непростой задачей. На первых стадиях разработки морского гравиметра по необходимости приме-
нялись стабилизаторы, предназначенные для иных целей. Так, использовались приборы для аэрофо-
тосъемочных аппаратов, гироазимутгоризонтов, орудийных танковых стабилизаторов и даже корабель-
ных стабилизированных постов наводки, способных помимо аппаратуры нести еще трех наблюдателей.
Считалось необходимым оснащать гравиметры дополнительной техникой вроде фоторегистраторов го-
ризонта и другими устройствами. Разумеется, можно было разработать стабилизатор специально для
гравиметра, но такой подход в ту пору был нерационален, поскольку чуть ли не каждый год появлялись
новые образцы гравиметров, каждый из которых имел свои весовые и габаритные характеристики, и
строить под каждый их них индивидуальный силовой стабилизатор означало резко затормозить всю
работу в целом.
В.С. Кутепов обратил внимание на технически очень простое устройство — гиромаятниковый ста-
билизатор [Булгаков 1955; Ройтенберг 1966]. Он реализовал эту идею для стабилизации гравиметров
[Кутепов 1971]. Вообще говоря, гиромаятниковый стабилизатор — не лучший прибор для поддержание
вертикали. Горизонтальные ускорения заметно выводят его из нужного положения. Возникла идея о
взаимной компенсации совместного воздействия остаточных наклонов стабилизатора и горизонтальных
ускорений и «чистых» наклонов. Общий эффект от воздействия наклонов и горизонтальных ускорений
можно записать
а2 OL
= ~9~Г + ~о~ cos1^- (5.4.22)
Первый член слагаемого правой части всегда отрицателен, и, если добиться, чтобы второй член
был положителен, возможно добиться компенсации общего эффекта а)1- Для этого можно ва-
рьировать знаком созф путем демпфирования прецессионных движений гироскопов. Была разработана
теория подобного устройства [Киреев и др. 1978а, б], реализованная в металле. Впоследствии эта кон-
струкция широко применялась в ИФЗ АН СССР и практически исключительно в разработках Мингео.
Экспериментальному и теоретическому исследованиям она подвергалась и впоследствии. Среди многих
из них можно упомянуть работы [Андреев 1985; Костров и др. 1985].
Стенды для исследования гиростабилизированных гравиметров. Теоретически характер и ве-
личины ошибок за счет возмущающих ускорений были четко оценены, однако они относились к идеали-
зированным датчикам и гиростабилизаторам. Реальные устройства, конечно, были далеки от идеала, и
их реальные свойства нуждались в экспериментальном исследовании. В этом контексте большое внима-
ние уделялось стендам, имитирующим морские возмущения. Стенды ускорений и наклонов позволяют
оценить и правильность результатов теоретических изысканий, и исследовать поведение той или иной
конструкции гиростабилизированного гравиметра вплоть до изучения особенностей конкретного прибо-
ра. Отметим, кстати, что необходимость стендов была понята на первых же этапах разработки морского
гравиметра. К 1963 г. в ИФЗ АН СССР было создано первое из таких устройств [Суходольский 1963].
В дальнейшем лидером разработки стендовой аппаратуры стал Тульский политехнический инсти-
тут (ТПИ). В 1959-1961 гг. в ТПИ под руководством К.С. Тарханова был разработан, изготовлен
и исследован стенд вертикальных и горизонтальных ускорений большой грузоподъемности ИС-ВГУ
[Богородицкий и др. 1965]. Коллективом сотрудников ТПИ под руководством В.С. Кутепова были раз-
работаны стенды, нашедшие применение в ряде научно-производственных организаций Мингео СССР.
Наиболее совершенным устройством стала созданная в сотрудничестве с ИФЗ АН СССР четырехком-
понентная установка СИГМА-4 [Жучков и др. 1977], позволяющая детально изучить самую, пожалуй,
неприятную погрешность при морских наблюдениях — кросс-каплинг-эффект, возникающий при орби-
тальных движениях судна. Стенд, в частности, позволяет задавать любые фазы между горизонтальным
и вертикальным движениями испытательной площадки. Заметим, кстати, что в результате некоторых
экспериментов выяснилось существенное несоответствие величин вычисленного и наблюденного эф-
фекта (Тулин и др., 1988 г.). Обзор разработок ТПИ приведен в [Кутепов 1986].
Эталонирование. Как было сказано, реакцией датчика на изменение УСТ является изменение
угла закручивания нити. Изменение необходимо зарегистрировать (как правило, применяется танген-
циальный способ) и привести его в общепринятую систему измерений СИ. Эта операция рассматрива-
ется как основной метрологический вопрос гравиметрии. Ее принято называть эталонированием, или
определением цены деления. Создание техники и методики эталонирования шло вначале параллельно
во ВНИИГеофизики [Буданов и др. 1967; Буданов, Евдокимов 1969] и ИФЗ АН СССР [Буланже и др.
1967; Козьякова, Рукавишников 1976; Романюк 1963а, б, в; Романюк, Рукавишников 1966; Боярский
и др. 1988]. Впоследствии эта тематика применительно к неастазированным гравиметрам развивалась
только в ИФЗ.
Принципиально новый подход к эталонированию был предложен Л.К. Железняком. Эталонирование
по-прежнему производилось методом наклона, но он был усовершенствован. Во-первых, при изготовле-
нии датчика гравиметра были сведены к допустимому минимуму перекосы входящих в него одиночных
систем, во-вторых, разработана методика эталонирования при наклоне прибора в любой плоскости
[Железняк и др. 1982, 1983].
Относительная погрешность эталонирования методом наклона составляет несколько единиц четвер-
того знака.
Математическая обработка. Этот раздел морских измерений, по сути, определяет успех массо-
вых измерений. В процессе наблюдений накапливается материал, объем которого исчисляется сотнями
тысяч и миллионами отсчетов за один рейс. Понятно, что без привлечения ЭВМ задача обработки
полученного наблюдательного материала практически неразрешима. Созданием необходимых программ
занимались многие специалисты. Наиболее успешно эта задача была решена в ИФЗ РАН Э.А. Бояр-
ским с небольшой группой сотрудников. Работа прошла путь от первой программы 1966 г., написанной
в кодах для ЭВМ М-20, до пакетов прикладных программ (ППП), написанных первоначально на
Фортране-4 для ЕС-ЭВМ, а позднее на Фортране-90 для PC. В результате в ИФЗ РАН создан пакет
MAGELLAN [Боярский и др. 1985] для обработки и последующего анализа наблюдений, который в
1989 г. был официально рекомендован в качестве базового всем организациям СССР, проводившим
морские гравиметрические работы.
В пакет входят следующие программы (текст Э.А. Боярского):
— графические редакторы исходных наблюдений (OTSEDI, SEAMCOOR, GLUEDI);
— сглаживание координат, их проверка и отбраковка выбросов (SEAMCOOR);
— фильтрация поправки Этвеша с одновременным просмотром измеренных профилей силы тяжести
(ETLOPAR);
— фильтрация поправки Этвеша как бы фильтром гравиметра (ETFILTER);
— формирование и редактирование единого файла исходных данных (группа программ ARCHIV:
ARVED, AROTS, ARCOOR, ARGLUB, ARPOPR, AROBZ);
— вычисление и редактирование каталога гравиметрических пунктов (GRAVCAT, GRAVOBZ);
— корректировка каталога поправками в виде регулярных или произвольных функций времени
(GRAVASI, GRAVURF);
— графическое представление результатов (GRAVMAP, GRAVPRF);
— поиск пересечений и совпадений профилей, анализ расхождений в повторных измерениях
(CROSS);
— оценка систематических ошибок по схеме двухфакторного дисперсионного анализа (ASISTO);
— обработка материалов градуировки гравиметра по пунктам или наклоном, в том числе при про-
извольном положении гравиметра на плите (ETALON, PROIZVOL);
— расчет приливных поправок (MARI).
Помимо этого для последующего анализа гравиметрических измерений были ППП URFIN,
TRAVERS (оба для уравнивания площадных геофизических съемок, но различными методами) и
SADKO (аналитическое представление геофизического поля и контроль результатов площадных
съемок с помощью бикубических сплайнов). Заметим, что все эти пакеты применимы к любым гео-
физическим измерениям. Применение унифицированных ППП предполагает возможно более полную
унификацию наблюдений.
Экспедиционные исследования. Морские наблюдения неастазированными гравиметрами можно
условно разделить на два блока: глобальные и локальные. Глобальные наблюдения, требования к слу-
чайной погрешности которых были сравнительно невелики, имели целью получение данных для вычис-
ления параметров фигуры Земли. Они должны иметь небольшую систематическую ошибку. Локальные,
проводимые с разведочной целью, при минимальной случайной погрешности допускают большую си-
стематическую.
В 1967 г. вышло Постановление Правительства СССР о проведении Мировой гравиметрической
съемки, которым предусматривалось, в частности, проведение морских наблюдений во всех районах
Мирового океана. Ввиду большого диапазона измерений для этой цели лучше всего подходили неаста-
зированные приборы. Работы проводились разными ведомствами, материалы которых недоступны ши-
рокому кругу. Поэтому автор останавливается только на хорошо известных ему материалах, которые
достаточно полно характеризуют возможности гравиметров этого типа.
В 1967 г. распоряжением Президиума АН СССР, при ИФЗ была образована Постоянно действую-
щая морская гравиметрическая экспедиция на НИС АН СССР (научный руководитель экспедиции —
Ю.Д. Буланже, начальник — В.А. Тулин). Экспедиция специализировалась на работах в удаленных оке-
анских акваториях при большом (несколько Гал) изменении д. Наблюдения велись преимущественно
оригинальной аппаратурой, разработанной и изготовленной в ИФЗ АН СССР и ТПИ. За 1967-1991 гг.
ПДМГЭ были организованы 32 отряда. Наблюдения были проведены на 132 800 пунктах, с работами
пройдено более 310 тыс. км. Стоит отметить две из них: рейс 1968 г., когда впервые в практике со-
ветских наблюдений были проведены результативные измерения на непрерывном транстихоокеанском
профиле, и работы 1973 г., когда по приглашению Мингео СССР экспедицией была проведена пер-
вая в СССР площадная съемка надводными гравиметрами в разведочных целях на Баренцевом море.
Площадь отснятой акватории составила 44 000 км2 при погрешности ±1,0 мГал.
Погрешность морских наблюдений. Ключевой вопрос любых измерений — уровень их погреш-
ности. Для оценки уровня работ ИФЗ конца 60-х — начала 80-х годов на общем фоне мировых
гравиметрических исследований в открытом океане воспользуемся результатами анализа [ Watts et al.
1985], проделанного Ламонтской геологической обсерваторией (США). Их можно считать вполне объ-
ективными, поскольку к обработке привлечен весь массив имевшихся к 1982 г. данных без какого-либо
исключения. Он состоял из 2,4 млн пунктов, полученных в 753 экспедициях 15-ю организациями раз-
ных стран в 1960-1982 гг. В этом массиве ИФЗ представлен 14-ю экспедициями, проведенными с
1968 г., т. е. с начала его регулярных работ в океане.
Результаты анализа довольно громоздки, поэтому остановимся только на величинах систематиче-
ской погрешности, представляющей наибольший интерес для данного издания. Она вычислялась как
систематическая составляющая невязок исследуемого рейса с другими работами, то есть, по сути дела,
погрешности относительно общего уровня съемки, принятого за нулевой.
Для работ каждой организации мы находили среднюю величину систематических погрешностей
рейсов и ее среднее квадратическое колебание (см. табл.). В таблице приведены сведения, касающиеся
только наиболее авторитетных и многоплавающих организаций (всего в банке имеются данные 15
организаций), а именно:
LDGO — Геологическая обсерватория Ламонта-Дохерти (ныне LDEO),
WHOI — Вудсхоллский океанографический институт,
NOAA — Национальная администрация океанографии и атмосферы,
HIGP — Гавайский институт геофизики и планетологии.
Организация Количество экспедиций Количество сравнений Расхождения, мГал
среднее его ср. кв. колебания
LDGO 233 22 488 -0,4 ±6,8
WHOI 45 4427 + 1,9 ±5,9
NOAA 24 7223 -0,4 ±10,7
HIGP 46 7548 + 1,6 ±3,5
ИФЗ 14 3911 -1,2 ±2,3
В таблице средние систематические составляющие погрешностей наблюдений приведенных орга-
низаций различаются ненамного, но наилучшей устойчивостью обладают материалы ИФЗ (колебания
среднего уровня втрое ниже, чем, например, у Ламонтской обсерватории). Что касается случайной
погрешности, то работа на полигонах, выполненных в виде сетки взаимно пересекающихся галсов
(например съемка 1973 г.), дает величину около ±1,0 мГал.
Приборы изготовления ЦНИИ «Электроприбор» показывают более высокие точности. Исследования
комплекса МГК, проведенные в центральной части Тихого океана на полигоне 20x20 км, состоящем из
сетки 22 взаимно пересекающихся галсов [Железняк 1992], показали следующие результаты. Средние
квадратические невязки в точках пересечений составляют 0,47 мГал, а после изощренной камеральной
обработки с применением метода поперечного сглаживания [Афанасьева и др. 1990] они уменьши-
лись до 0,14 мГал. Наблюдения велись на борту судна водоизмещением 5500 тонн при вертикальных
ускорениях от 40-45 до 20-22 Гал. Навигационное обеспечение осуществлялось с помощью системы
NAVSTAR. Систематическая погрешность съемки не указывается, но она не слишком важна, если речь
идет о наблюдениях с разведочной целью. В дальнейшем с применением навигационной системы GPS
в дифференциальном режиме случайная погрешность, показанная этими же приборами, составила, по
авторской оценке, ±(0,2-0,06) мГал [Железняк 2001].
Можно констатировать, что неастазированные гравиметры отвечают требованиям, предъявляемым
как к глобальной, так и локальной (разведочной) съемкам.
5.4.7 Морские астазированные гравиметры
В.О. Баграмянц
Как было указано в разделе о неастазированных морских гравиметрах, первый отечественный ста-
тический морской гравиметр был создан в середине 50-х годов во ВНИИГеофизике (шифр СЗ — ВНИ-
ИГеофизика). Гравиметр подвергся циклу длительных морских исследований, в результате которых
обнаружился ряд недостатков прибора. К ним можно отнести следующие.
1. Низкая помехоустойчивость и помехозащищенность чувствительной системы, связанная с нали-
чием многих степеней свободы движения пробной массы и прогибом нитей подвеса.
2. Низкая отсчетная точность (не лучше 1-2 мГал), что обусловливалось низкой статической чув-
ствительностью упругой системы и недостатками визуальной или фотографической регистрации коле-
баний маятника (рычага) ЧЭ.
3. Трудности эталонирования методом наклона и нестабильность масштабного коэффициента.
4. Отсутствие автоматизации измерительного процесса.
В середине 1960-х годов во ВНИИГеофизике автором с сотрудниками были начаты теоретические и
экспериментальные исследования по созданию морского гравиметра, построенного по схеме вертикаль-
ного сейсмографа Голицына с главной пружиной нулевой начальной длины.
Преимуществом гравиметра этого типа является высокая угловая чувствительность при относи-
тельно небольших деформациях главной пружины, линейность отсчетной системы. При определенных
параметрах элементов упругой системы удается сделать ее близкой к идеальной — имеющей одну сте-
пень свободы. Применение к тому же компенсационного метода измерений позволяет повысить точность
определений масштабного коэффициента гравиметра и обеспечить его стабильность.
Применение жидкостной температурной компенсации и компенсационного измерительного устрой-
ства, связанного с маятником, является отличием рассматриваемой системы от близких к ней по кон-
струкции наземных кварцевых астазированных гравиметров типа ГАК и ГНУ-КВ. Теория астазиро-
ванных наземных кварцевых гравиметров детально разработана К.Е. Веселовым [1961]. При работе в
автоматическом режиме (с обратной связью) благодаря оригинальной схеме гидродинамического фор-
сирования, гравиметр приобрел свойства фильтра, обеспечивающего эффективное выделение сигнала
на фоне помехи.
Устройство и основные характеристики датчика астазированного гравиметра
На рис. 5.4.34 в качестве примера приведена схема чувствительной системы одной из модификаций
морского пружинного гравиметра (ГМКП).
Рис. 5.4.34. Схема чувствительной системы гравиметра
ГМКП
1 — рамка маятника; 2 — платиновая навеска; 3 — нить под-
веса; 4 — главная пружина; 5 — измерительная пружина; 6 —
зеркальце; 7 — демпфирующие пластины; 8 — устройство регу-
лирования демпфирования; 9 — шток демпферного устройства;
10 — отсчетное устройство; 11 — осветитель; 12, 13, 14 —
конденсор, щель, объектив; 15 — фоторезистор
Горизонтальный рычаг (маятник) 1 с ме-
таллической навеской 2 подвешен на го-
ризонтальных коротких незакрученных ни-
тях 3, образующих ось вращения маятника
в вертикальной плоскости. Весовой момент
маятника уравновешивается упругим момен-
том главной пружины 4 и дополнительной
компенсационно-измерительной пружины 5.
Закрепленное на маятнике зеркальце 6 вме-
сте с оптической схемой 11-14, фотоэлек-
трическим преобразователем 15 обеспечива-
ют регистрацию наклонов маятника в вер-
тикальной плоскости, обусловленных воз-
действием ускорений. Перемещение верхне-
го конца пружины 5 с помощью микромет-
рического устройства 10 позволяет регули-
ровать положение маятника. При этом ме-
рой регистрируемых ускорений могут слу-
жить как изменения электрического сигна-
ла фотоэлектрического преобразователя, так
и изменения упругого момента компенсаци-
онной пружины, прокалиброванные соответ-
ствующим образом.
Вся упругая система, целиком изготов-
ленная из плавленого кварца, погружена
в вязкую кремний-органическую жидкость,
которая обеспечивает термокомпенсацию и
демпфирование чувствительной системы, а
также защиту ее от изменений внешнего
давления.
Демпферное устройство выполнено в виде пластин 7 с регулируемым зазором между ними.
Уравнение равновесия системы при установке гравиметра на неподвижном основании имеет вид:
gml cos(a + ср) cos (3 = М (ср),
(5.4.23)
где gml — весовой момент маятника чувствительной системы (т — масса платиновой навески, I —
расстояние от оси вращения до центра масс); а и- р — наклоны корпуса гравиметра по осям, сов-
падающим с направлением маятника и нити подвеса; ср — угловое отклонение маятника относи-
тельно исходного (нулевого) положения; М(ср) — момент упругих сил определяется выражением
М((р) = /АВ — fkAkBk — т(ф0 + ф); / и fk — линейные жесткости главной и компенсационной
пружин; т — крутильная жесткость нити подвеса маятника; ф0 — начальный угол закручивания нити
подвеса; А, В и Ак,Вк — длина (ВВк) и плечо (ДДк) соответственно главной и компенсационной
пружин.
Угловая чувствительность гравиметра определяется выражением
„ , /^М(ср) \-1
К — —г~ = —ml cos tp —— ------mgl sin tp
dg \ d<p J
Значение угловой чувствительности в целом является нелинейной функцией, но в случае когда
начальная длина главной пружины Lq = 0, то, пренебрегая в первом приближении упругим моментом
компенсационной пружины, имеем [Веселов 1961]:
Ki = —ml cos <р[т — mgl sin <р + fr^ze sin <p + хв cos <p)] \
(5.4.24)
где Г1 — расстояние от оси вращения маятника до нижнего конца крепления главной пружины; zb и
хв — координаты крепления верхнего конца главной пружины.
Чувствительность в исходном, горизонтальном положении маятника, то есть при ср = 0, принимает
значение
К1(0) = -тпДт + /гцв)-1. (5.4.25)
При значениях хв
т
—* — д- чувствительная система становится астазированной, и могут быть полу-
чены достаточно большие значения Kq. В разработанных приборах с фотоэлектрической регистрацией
оказались оптимальными значения /<=0,02 рад/Гал.
Замечательной особенностью систем, построенных по схеме вертикального сейсмографа Голицына,
является отсутствие прямой пропорциональной связи между чувствительностью и деформацией В глав-
ной пружины. При этом значительное увеличение чувствительности достигается за счет небольшого
возрастания деформации, что обеспечивает малую величину смещения нуль-пункта. Кроме того, при
малых деформациях главной пружины достаточно малы и габариты упругого элемента.
Демпфирование упругой системы позволяет значительно ослабить влияние короткопериодной ком-
поненты вертикальных ускорений z(t).
Но если чувствительная система характеризуется нелинейной зависимостью между наклонами маят-
ника и ускорениями, то после осреднения (фильтрации) неизбежно появление систематических ошибок.
Величина этой систематической ошибки будет определяться формулой:
фсист — 0, 5К
’а2м(ф) j _ 2
£ф2 9 Фпер >
(5.4.26)
где фпер — амплитуда вынужденных колебаний маятника.
Для системы с нулевой начальной длиной главной пружины выражение (5.4.26) преобразуется к
виду:
Атеист =-0,5фпеР2т(ф0 +ф0)(тг) 1. (5.4.27)
Таким образом, при фо — Фо = 0 вертикальные ускорения не приводят к систематическим ошиб-
кам. К аналогичному результату можно прийти, используя весьма тонкие нити подвеса (—- —>о).
Однако требования жесткости системы к воздействию боковых ускорений не позволяет использовать
гравиметры с такими нитями.
При разработке гравиметров крутильная жесткость нитей подвеса выбирается достаточно большой,
но существует ограничение, связанное, с одной стороны, с тем, что с увеличением т возрастает вели-
чина деформации главной пружины (для обеспечения заданной величины Ко), во-вторых, возрастают
нелинейные эффекты, связанные с тем, что при юстировке гравиметров трудно обеспечить условие
фо = 0. В пределах 5-10° всегда может иметь место закрученность нитей подвеса.
Важной особенностью описываемых систем является устройство для регулировании демпфирования.
К нему предъявляются следующие требования:
1. Моменты диссипативных сил, действующих на маятник при воздействии возмущающих ускоре-
ний, не должны приводить к систематическим ошибкам.
2. Демпфирование должно быть регулируемым в широких пределах, обеспечивая изменение посто-
янной времени Т от нескольких десятков до нескольких тысяч.
3. Демпферное устройство должно не только гасить вынужденные колебания маятника, но и обес-
печивать повышение жесткости системы к воздействию ускорений и вибраций.
Конструкция демпферного устройства, изображенного на рис. 5.4.34, в значительной мере отве-
чает этим требованиям. С помощью микрометрического устройства регулируется расстояние между
«неподвижными» пластинами, симметрично относительно оси вращения закрепленными на маятнике,
Ag,< мГал
+2-
T,=1440 сек.
Рис. 5.4.35. Влияние вертикаль-
ной вибрации на показания
гравиметра ГМН-К. Амплитуда
вибрации — 50 Гал
и «подвижными» пластинами, связанными с его штоком. Для случая, когда зазоры между обеими па-
рами одинаковы (обеспечивается при юстировке прибора) и пластины строго параллельны, выражение
для постоянной времени имеет вид
Т\ ==Т0+ 2K1b(mla)~1,
где То — минимальное значение постоянной времени при раздвинутых пластинах; а — величина зазора
между пластинами; b — параметр, зависящий от вязкости и плотности демпфирующей жидкости и
размеров пластин.
Эта конструкция демпфера приводит к существенно нелинейным явлениям, но при <ро = 0, то
есть при работе гравиметра в автокомпесационном режиме, при равенстве зазоров между пластинами
систематические погрешности отсутствуют, когда гравиметр подвергается воздействию периодических
вертикальных ускорений.
Проведенные стендовые испытания это подтвердили: при амплитуде вертикальных ускорений
до 100 Гал, систематические ошибки в гравиметрах не превышают 0,5-1,0 мГал при значениях
Тг ^10004-1500 с.
В гравиметре также существенно задемпфированы вибрационные колебания нити подвеса маятни-
ка. На рис. 5.4.35 приведены результаты исследований влияния вертикальной вибрации амплитудой
2=50 мГал на показания гравиметра ГМН-К №5, в частотном диапазоне от 4 до 100 Гц при значении
71=1440 с. Систематические ошибки с ростом частоты вибрации до 40 Гц уменьшаются от 1 мГал до
— 1 мГал и далее остаются на этом уровне, а резонансные эффекты практически полностью отсутству-
ют.
Все основные юстировочные регулировки (выбор чувствительности Kit выставление маятника в
«горизонт», регулировка демпфирующих пластин) производятся кварцедувом без заливки кварцевой
системы жидкостью. При погружении кварцевой системы в жидкость необходимо изменить объемный
момент маятника на расчетную величину таким образом, чтобы геометрическое положение маятника
относительно корпуса прибора не изменилось. Если при этом температурная компенсация оказыва-
ется неполной (Kt <3 мГал/°С), производятся дополнительные юстировки. В процессе исследований
динамических температурных эффектов обнаружены значительные изменения показаний гравиметров,
зависящие от скорости изменения температуры внутри коробки кварцевой системы (в термостатиро-
ванном гравиметре с коэффициентом термостатирования ^100). Эти ошибки связаны в значительной
степени не с конвективными перемещениями жидкости, а с наличием температурного градиента в
пограничной области кварцевый маятник-жидкость. Эти температурные неоднородности вызывают по-
явление вращательных моментов, возможно, связанных с движением жидкости в тонком пограничном
слое.
Меры по уменьшению возможности появления температурных градиентов в пределах коробки квар-
цевой системы позволили улучшить температурные характеристики чувствительной системы.
Автоматизированный астазированный гравиметр (на примере ГМН-К)
Автоматизированные гравиметры, построенные по замкнутой схеме, привлекают тем, что в них
удается существенно ослабить систематические ошибки, обусловленные влиянием возмущающих уско-
рений. Обеспечивая теми или иными приемами уменьшение амплитуды колебаний маятника, сводятся
к минимуму ошибки, связанные с упругим последействием, и тем самым стабилизируется смещение
нуль-пункта гравиметра. Кроме того, применение автоматической компенсации силы тяжести позво-
ляет стабилизировать масштабный коэффициент прибора, свести к минимуму ошибки, связанные с
нелинейностью ЧС и преобразователя отклонений маятника в электрический сигнал, а также с неста-
бильностью последнего. Наконец, гравиметры этого типа, построенные как сглаживающие устройства,
могут обеспечивать выделение полезного сигнала на фоне помехи непосредственно в процессе выпол-
нения непрерывных измерений.
В гравиметре ГМН-К с достаточно высокой точностью осуществляется компенсация низкочастот-
ной компоненты (полезный сигнал Д<?(£) и эффект Этвеша Д</э), а ускорения, обусловленные качкой
корабля, эффективно подавляются демпферным устройством самой упругой системы. В гравиметрах
этого типа удалось воспользоваться освоенными промышленностью микрометрическими компенсаци-
онными устройствами для наземных гравиметров. При его конструировании использованы результаты
анализа работы гравиметра АНГ [Пантелеев 1968], а также у Гладуна и др. (1970 г.), Гладуна (1971 г.).
В простейшем случае фотоэлектрический сигнал с преобразователя положения маятника после
усиления подается на управляющую обмотку реверсивного двигателя, характеризующегося линейной
зависимостью скорости на валу а двигателя от подаваемого напряжения U. Обороты микровинта а
с помощью компенсационного устройства (микрометрического винта с компенсационной пружиной)
преобразуются в управляющее воздействие, обеспечивающее возвращение маятника в исходное поло-
жение.
Рассмотрим системы линейных уравнений, описывающих работу схемы:
1ф + Нф + М(ср) = mlGm - Mjc,
— = К2К3К4 ср,
at
(5.4.28)
где х = К3 • а — перемещение штока компенсационного устройства; Мк = К3 - х — компенсационный
момент, воздействующий на маятник; I — момент инерции маятника; Н — момент диссипативных сил;
Gm — входной сигнал, равный сумме УСТ и возмущающих ускорений, действующих вдоль оси чувстви-
тельности гравиметра; К2, К3, К4, К3, К3 — коэффициенты преобразований, зависящие от параметров,
входящих в систему элементов.
После преобразований имеем
о... .. . ,,
То ср + Т1<р + ср + Коср = К1—,
at
То2 а + Т1&. + дс + Коа= ^Дб,
А
(5.4.29)
(5.4.30)
где То — постоянная упругой системы (То = — ); То — период свободных колебаний в с; Т) —
\ 2л /
постоянная времени упругой системы в с; Kq = KiK2K3K4K3K3 — общий коэффициент усиления
разомкнутой системы в с-1 (добротность по скорости); К* = K3K3.
В такой системе при Дб = const маятник будет находиться в исходном положении, то есть ср = 0,
а = Дб/К*.
(5.4.31)
Иными словами, выходная координата без искажений воспроизводит входной сигнал.
В гравиметре ГМН-К явления автоколебаний устранены с помощью специально разработанного
В.О. Баграмянцем в 1972-1975 гг. устройства для гидродинамического форсирования положением ма-
ятника, состоящего из закрепленной на маятнике вертикальной пластины и системы из параллельно и
симметрично ей расположенных пластин, соединенных со штоком микровинта измерительного устрой-
ства.
При вертикальном перемещении х штока компенсационной пружины момент, воздействующий на
маятник, имеет вид:
Мк = К6х + К7*(х-1пф), (5.4.32)
где К7 — параметр, определяющий силовое воздействие пластин. Величина К7 определяется формулой
К7 = т]^
(5.4.33)
т) — коэффициент вязкости жидкости; Sn — площадь взаимодействующих поверхностей пластин; dn —
расстояние между пластинами; 1п — расстояние от центра пластин до оси вращения маятника.
Рис. 5.4.36. Принципиальная схема гравиметра
ГМН-К
1 — датчик (собственно гравиметр); 2 — маятник чув-
ствительной системы; 3 — главная пружина; 4 — навес-
ка; 5 — зеркало; 6 — компенсационная (измерительная)
пружина; 7 — форсирующие пластины; 8 — осветитель;
9 — измерительный микровиит; 10 — редуктор; 11 —
двигатель; 12 — потенциометр; 13 — оптическая систе-
ма; 14 — дифференциальный фоторезистор; 15 — мост
постоянного тока; 16 — фильтр ФНЧ; 17 — усилитель;
18 — реле; 19 — регистратор
Существенной особенностью гравиметра
ГМН-К является также применение релейного
регулятора для управления двигателем компен-
сационного устройства, что позволяет устранить
ошибки, связанные с люфтами микровинта и
редуктора. На рис. 5.4.36 представлена прин-
ципиальная схема гравиметра ГМН-К, а на
рис. 5.4.37 — структурная схема.
Использование существенно нелинейного эле-
мента в цепи управления (двухпозиционное элек-
тронное реле) приводит к необходимости рас-
сматривать динамические характеристики гра-
виметра в раздельных областях: длиннопериод-
ной, связанной с действием полезного сигнала
(си<0,1 с-1), и короткопериодной.
Передаточная функция гравиметра по полез-
ному сигналу имеет вид
Wr(?) = [1 + (+ ТФ) р + ^р1 2 + ^р31
\л* / л* л*
(5.4.34)
где Т\ — постоянная времени упругой системы в
с; Т$ = К7/Кв — постоянная времени форсиру-
ющего устройства в с; Тг — постоянная времени фильтра низких частот — апериодического звена
1-го порядка в с; К* — параметр, определяющий зависимость скорости отработки компенсационного
сигнала рассогласования в с-1; р — оператор Лапласа.
1 2 3 4 5 6
Рис. 5.4.37. Структурная схема гравиметра ГМН-К
1 — упругая система; 2 — преобразователь: угол наклона маятника — напряжение; 3 — ФНЧ; 4 — усилитель; 5 — релей-
ный преобразователь; 6 — двигатель; 7 — микрометренное устройство; 8, 9 — компенсационная пружина с форсирующим
устройством (9)
Величина К* зависит от амплитуды линеаризирующего сигнала az (мГал) на входе релейного пре-
образователя ,
к* ,
naz
(5.4.35)
где По — максимальное значение скорости отработки компенсационного устройства в мГал-с-1.
Анализ передаточной функции и работа самих гравиметров показывают, что благодаря применению
форсирующего устройства и высокой чувствительности релейного регулятора автоколебания в статиче-
ских условиях (при выключении фильтра ФНЧ, то есть Т2 = 0) являются достаточно высокочастотными
и не вносят погрешностей в измерения. Переходные процессы в статических условиях имеют апериоди-
ческий характер, если выполняется условие на ограничение коэффициента затухания Е, колебательного
звена (2-го порядка):
/ 1 \ / Г, \ -1/2
^°’5?7 + Т<иШ ^1. (5.4.36)
\А / \Л /
При значениях 7ф > 10 с условие (5.4.36) для гравиметров ГМН-К всегда выполняется. При наблю-
дениях на подвижном основании ФНЧ включается (то есть Тг / 0), автоколебания также отсутствуют,
поскольку линеаризующим сигналом становятся вынужденные колебания маятника под воздействием
вертикальных ускорений.
Для случая, когда z = z0 sin cut (си — круговая
частота вертикальной качки), имеем
а2 « (5.4.37)
2Q
К* «-----1\Т2. (5.4.38)
7TZq
Анализ работы гравиметра показывает, что
включение ФНЧ делает практически независи-
мыми динамические параметры гравиметра по
«полезному» сигналу от величины постоянной
времени Т\, что позволяет производить ее ре-
гулировку в широких пределах. Необходимость
стабилизации динамических характеристик гра-
виметра, то есть сделать К* независящим от
условий морской качки, привели к разработке
модернизированной системы управления, вклю-
чающей искусственную реализацию релейного
преобразователя с помощью сигнала генератора
гармонических колебаний ил, суммирующегося
на входе усилителя с сигналом рассогласования
(рис. 5.4.38).
Одновременно рекомендуется использовать ФНЧ в виде звена 2-го порядка, обеспечивающего по-
давление помехи, обусловленной колебаниями маятника до уровня первых десятых долей мГал. В таком
случае общий коэффициент КдИН линеаризованной системы (по сигналу рассогласования) будет:
Рис. 5.4.38. Структурная схема линеаризованного
гравиметра ГМН-КМ
1 — упругая система; 2 — ФНЧ; 3 — сумматор; 4 —
усилитель; 5 — релейный преобразователь; 6 — двига-
тель; 7 — компенсационное и форсирующее устройство;
8 — генератор синусоидальных колебаний с управляемой
амплитудой выходного сигнала
лнн~ пил
(5.4.39)
где К* — коэффициент, преобразующий электрический сигнал генератора в единицы силы тяжести в
Вольт/мГал.
Значение коэффициента Клин выбирается равным не менее 0,1-0,2 с-1. Это позволяет повысить
точность приведения маятника в исходное горизонтальное положение, а также, что более важно, уста-
навливать большие значения постоянной времени упругой системы Т\.
Ограничение, накладываемое на значение 1\, связано с требованием неколебательного переходного
процесса, то есть
/ 1 \2
< 0,5Клин I -гт— + Тф (5.4.40)
\-^лнн /
Увеличение Ti до значений порядка 3000-5000 с позволяет существенно уменьшить, а при умерен-
ном волнении свести к минимуму ошибки, обусловленные кросс-каплинг-эффектом.
Реализация теоретических и экспериментальных разработок
Она воплотилась в последовательном ряде конструкций гравиметров, основные сведения о кото-
рых приводятся в обобщенном виде ниже. Это гравиметры ГМКП, ГМН-К, ГМН-КМ «Флагман».
Последние две модификации выпускались серийно.
На рис. 5.4.39 приведен смонтированный на борту судна гравиметрической лаборатории комплект
гравиметров ГМН-К, на рис. 5.4.40 и 5.4.41 — конструктивные схемы датчика и гиростабилизатора
ГМН-К, на рис. 5.4.42 — гиростабилизированный гравиметр ГМН-КМ «Флагман».
Гравиметры ГМКП, созданные в 1966-1970 гг., стали первыми в нашей стране морскими сильно-
демпфированными кварцевыми пружинными астазированными гравиметрами.
Фотоэлектрический индикатор положения маятника с 2-звенным ФНЧ обеспечивает регистрацию
отфильтрованных показаний по маятнику гравиметра на самописце типа КСП в диапазоне изменений
Д <7 ± 100 мГал. Отсчеты по компенсационному устройству, используемому для периодического приве-
дения маятника в рабочую зону, снимаются визуально.
Гравиметры подверглись всесторонним морским испытаниям на малотоннажных и больших океан-
ских научных судах.
Измеренное значение приращения УСТ Д</Иэм определяется по формуле
Дризм = + Cs^-Si, (5.4.41)
где Cn — цена оборота компенсационного устройства, мГал/об; Cs — цена деления регистратора,
мГал/дел; ДМ — приращение оборотов компенсационного устройства; Д5^ — изменение положения
маятника по шкале самописца.
Передаточная функция гравиметра в рабочем режиме имеет вид
W(p) = • гт J. П2 • (5-4.42)
Tip + 1 (Т2р + 1)
Постоянная времени чувствительной системы 1\ устройством для регулировки демпфирования вы-
биралась обычно равной 600 с, а постоянная времени фильтра Т2 = 15 с.
В качестве гиростабилизатора использовались платформы Н-55 ЦНИИГАиК, на которые монтиро-
вался парный комплект гравиметров ГМКП для исключения кросс-каплинг-эффекта.
Выполненные исследования позволили прийти к следующим выводам:
— пружинные гравиметры вполне работоспособны в рейсах различной продолжительности, причем
средняя квадратическая погрешность (по сопоставлению с донными измерениями) в коротких рей-
сах (менее 8 часов) не превышает 1,0-1,2 мГал, а в длительных океанских рейсах (более 15 суток)
составляет 5-6 мГал;
— смещение нуль-пункта не более 0,3 мГал/сут при температуре термостатирования 40-45°С;
— гравиметры надежно эталонируются методом наклона и характеризуются стабильностью мас-
штабного коэффициента порядка .
— к основным недостаткам ГМКП относятся: необходимость ручной перестройки положения маят-
ника с неизбежной потерей части записи; значительные динамические погрешности при измерениях,
обусловленные большими значениями Т\, и другие.
ГКМП, по существу, сыграл роль пилотного гравиметра, который обнаружил достоинства и недо-
статки морского астазированного гравиметра. Дальнейшее усовершенствование шло в направлениях
Рис. 5.4.39. Смонтированный на борту судна гра-
виметрической лаборатории комплект гравимет-
ров ГМН-К
Рис. 5.4.40. Конструктивная схема датчика гра-
виметра ГМН-К
Рис. 5.4.41. Конструктивный вид гиростабилиза-
тора ГМН-К
Рис. 5.4.42. Гиростабилизированный гравиметр
ГМН-КМ «Флагман»
усугубления первых и минимизации вторых. Недостатки прибора были устранены в автоматизирован-
ном гравиметре ГМН-К, опытные образцы которого были выпущены заводом «Нефтекип» в 1972 г.
Его описание дано в [Пантелеев 1983].
Комплект аппаратуры состоял их 2 гиростабилизированных гравиметров (гравиметрических дат-
чиков, каждый в раздельном гиростабилизаторе), снабженных автономными блоками управления, и
единого многоканального самопишущего регистратора. Маятники чувствительных систем для исклю-
чения кросс-каплинг-эффекта ориентировались в противоположные стороны. Комплект оснащен также
третьим прибором, игравшим роль запасного при выходе из строя одного из основных. В качестве
гиростабилизаторов использовались 4-гироскопная гировертикаль, разработанная совместно ИФЗ АН
СССР и Тульским политехническим институтом.
В 1987-2000 гг. была выполнена опытно-конструкторская разработка компьютеризированого ком-
плекса ГМН-КМ «Флагман», представляющего собой модернизацию ГМН-К. Новая модель гравимет-
ра снабжена устройством гармонической линеаризации в цепи управления компенсационным устрой-
ством, системами аналоговой и цифровой регистрации и предварительной обработки данных с получе-
нием вычисленных значений Д^наб в реальном времени.
Включение в состав гравиметрического комплекса персонального компьютера обеспечивает также
контроль наблюдений, повышая тем самым надежность морских набортных измерений.
Лабораторные исследования и результаты полевых измерений
При разработке гравиметров для проведения их аттестации использованы специально сконструи-
рованные стенды «Орбита», с помощью которых решены следующие задачи: определение в динами-
ческом режиме постоянных времени чувствительных систем (ЧС); подбор гравиметров по величине
кросс-каплинг-эффекта; градуировка каналов регистрации маятника, обеспечивающего определение
вертикальных возмущающих ускорений и т. д. Такая аттестация производилась и в заводских услови-
ях при выпуске гравиметров ГМН-К и ГМН-КМ «Флагман». (Всего заводом «Нефтекип» выпущено
более 100 комплектов ГМН-К и несколько комплектов ГМН-КМ «Флагман».) Серийные гравиметры
ГМН-КМ характеризовались установившимися значениями скорости смещения нуль-пункта от 0,3 до
1,2 мГал/сут при температуре термостатирования 45°С, а при температуре 20°С смещение не превыша-
ет 0,2 мГал/сут. В рейсах продолжительностью до 100 суток единичные наблюдения в портах захода
имеют среднее квадратическое отклонение от аппроксимирующей прямой не более ±1-2 мГал.
В гравиметрах ГМН-КМ «Флагман» смещение нуль-пункта в несколько раз меньше, чем в ГМН-
К, благодаря, в первую очередь, применению более толстых кварцевых нитей для главной пружины.
Гравиметры ГМН-К и ГМН-КМ «Флагман» надежно эталонируются методом наклона на установках
УЭГП, причем значения масштабных коэффициентов определяются с относительной погрешностью не
более (2±4)10_4 и сохраняются постоянными от рейса к рейсу с погрешностью не более 5 • 10-4.
Точностные характеристики гравиметра в полевых условиях исследовались на акваториях, имевших
донные измерения. Навигационное обеспечение работ позволило определять местоположение судна с
погрешностью не более 50 м, а эффект Этвеша — с погрешностью не более 0,3-0,5 мГал. Результаты
выполненных исследований представлены в табл. 5.2.
Результаты испытаний 1973-1975 гг. явились основанием для постановки организациями разных
ведомств производственных съемок. Основными потребителями гравиметров ГМН-К являлись органи-
зации Мингео СССР, Мингазпрома СССР, ГУГК при СМ СССР и другие ведомства, которые исполь-
зовали их как для выполнения программы МГС, так и для решения геолого-геофизических поисковых
задач при съемках на нефтегазоперспективных структурах континентального шельфа СССР и ряда
зарубежных стран. Гравиметры ГМН-К экспортировались также в некоторые страны СЭВ (Румыния).
Объективным доказательством эффективности разработанных принципов построения аппаратуры
и методики измерения с ней, высоких метрологических и эксплуатационных характеристик гравимет-
ров ГМН-К и ГМН-КМ явились выполненные производственными организациями площадные съемки
масштаба 1:200000 с погрешностью измерений на уровне 0,3-0,5 мГал на акваториях Балтийского и
Баренцева морей.
Данные об объемах выполненных в 1978-1986 гг. съемок с аппаратурой ГМН-К в различных
регионах Мирового океана представлены в табл. 5.3.
Таблица 5.2. Точностные характеристики ГМН
Полигон, год Тип гравиметра Погрешность, мГал Амплитуда вертикаль- ных ускорений, Гал Продолжитель- ность рейса
случай. систем.
Баренцево море, 1973 ГМКП 3,5 -2,0 10-100 18 сут
ГМН-72 2,3 -0,7 10-100 26 сут
ГМН-72 0,6 — до 50 6 ч
Берингово море, 1975 ГМН-К 1.9 -0,8 до 120 28 сут
Балтийское море, 1975 ГМН-К 0,5 — до 100 6 ч
Балтийское море, 1976 ГМН-К 0,34-0,4 — 10-60 6 ч
ГМН-К 0,64-0,7 — 60-100 6 ч
Баренцево море, 1982 ГМН-КМ 0,9 0,5 10-200 20 сут
0,6 — 10-200 8 ч
Курильский полигон, 1984 ГМН-К 1.8 -0,5 10-200 7 сут
ГМН-КМ 1.5 -0,7 10-200 7 сут
«Флагман» 1,4 -0,2 10-200 7 сут
Существенный скачок в обес-
печении высоких точностей изме-
рений на уровне 0,1-0,2 мГал до-
стигнут в начале 90-х годов с
появлением высокоточных спутни-
ковых определений навигационных
данных с применением дифферен-
циальных систем GPS с погреш-
ностью определений координат на
уровне ±5 м.
Примером таких съемок яви-
лись комплексные геофизические
исследования, выполненные по
инициативе И.Ф. Глумова на
НИС «XVII съезд профсоюзов»
(Южморгеология) в 1993 г. на
нефтеперспективных площадях
Таблица 5.3. Съемки Мирового океана с помощью ГМН-К
Ведомство (организация) Класс (масштаб) съемки Объем выполнен- ных измерений
Миигео СССР (ПГО «Севморгеология», ПО «Южморгеология») площадные
I кл. 2,5 тыс. км2
II кл. 1936 тыс. км2
IV кл. 6400 тыс. км2
V кл. 1500 тыс. км2
маршрутные
V кл. 277 тыс. пог. км
Мингазпром СССР ГУГК СМ СССР площадные
1:200 000 72,9 тыс. км2
1:500 000 241 тыс. км2
II кл. 700 тыс. км2
III кл. 1600 тыс. км2
IV кл. 400 тыс. км2
Всего площадных 12852,4 тыс. км2
Баренцева моря. В качестве на-
бортной гравиметрической аппаратуры использован комплект ГМН-КМ «Флагман». Наблюдения
проведены по системе взаимопересекающихся галсов с расстоянием между ними ~1-2 км. Средняя
квадратическая ошибка измерений, оцененная по величине невязок в точках пересечения профилей
составила ±0,3 мГал.
После уравнивания по методике, разработанной во ВНИИГеофизике (И.А. Смирнова, А.К. Веселов),
погрешность съемки составила ±0,08-0,1 мГал. Площадные съемки такого класса позволяют решать
разведочные задачи на нефтегазоперспективных участках шельфа, выявлять зоны разуплотнения, трас-
сировать разломные структуры и т. д.
Необходимо отметить, что описанные гравиметры по мировым масштабам цен весьма недороги (на
порядок дешевле аналогов) и просты в эксплуатации.
5.5 Приливные вариации силы тяжести: приборы,
методы обработки данных, интерпретация
А.В. Копаеа
Одним из перспективных методов геодинамических исследований является регистрация периоди-
ческих деформаций Земли, вызванных гравитационным влиянием Луны и Солнца и представляемым
переменным в пространстве и времени лунно-солнечным потенциалом. Разложение потенциала содер-
жит многие сотни гармоник с периодами от 8 часов до 18 лет (основными являются полусуточные и
суточные волны), амплитуды и фазы которых в точке наблюдений на поверхности Земли оказывают-
ся промодулированными из-за наличия у нее упругости и вязкости. Соответствующие коэффициенты
усиления и углы задержки фазы, называемые земноприливными параметрами, определяемые из гармо-
нического анализа многомесячных записей приливных вариаций силы тяжести, приливных наклонов
или деформаций, различны для разных периодов, что позволяет исследовать амплитудно- и фазово-
частотные характеристики различных оболочек Земли, непосредственно связанные с их упруго-вязкими
свойствами. Особое значение имеют наблюдения приливных вариаций силы тяжести стационарными
высокоточными гравиметрами, поскольку они обеспечивают наибольшую относительную точность опре-
деления земноприливных параметров (называемых в этом случае 5-факторами и сдвигами фазы) — до
0,2%.
Согласно современным моделям земных приливов, значения 5-факторов определяются, в основном,
глобальными динамическими характеристиками системы «ядро+мантия». Общепринятая в последние
годы модель упругих приливов, построенная J. Wahr и V. Dehant (рис. 5.5.1), показывает слабую
широтную зависимость 5-факторов, связанную с эллипсоидальностью Земли и нулевые сдвиги фаз для
всех волн [Молоденский С.М., Крамер 1980, Wu Xuefang 1994].
Поскольку характерные времена релаксации
Рис. 5.5.1. Модель Wahr-Dehant аномалий 5-
фактора
для мантии составляют тысячи лет, ее отклик на
приливных частотах (~0,5 и ~1 суток) является
практически упругим.
Введение предполагаемой вязкости в эту мо-
дель увеличивает 5-факторы для основных волн
лишь на 0,1-0,2%. Сдвиги фаз должны со-
ставлять 0,02-0,03°. Именно обнаружение этих
тонких эффектов является фундаментальной це-
лью приливных гравиметрических наблюдений на
ближайшие десятилетия [Baker et al. 1996]. Со-
гласно теоретическим исследованиям, региональ-
ные аномалии 5-факторов, связанные с неодно-
родностями упруго-вязких свойств мантии, не
должны превышать нескольких десятых долей
процента [Baker et al. 1989]. Соответствующая
точность определения 5-факторов в 0,1% пока
еще трудно достижима как из-за проблем с калибровкой приливных гравиметров, так и из-за воз-
мущающего влияния океанических приливов. При этом лучшие станции с тщательным образом про-
калиброванными приборами расположены в Европе, где океаническое влияние на 5-факторы достигает
нескольких процентов и вычисляется с точностью не выше 0,2-0,3°. Тем не менее основополагающие
исследования Т. Бейкера [Melchior 1995] подтвердили справедливость модели Wahr-Dehant на уровне
точности 0,2% для пяти пунктов в Западной Европе.
Все вышеизложенное позволяет полагать, что обнаруженные ранее многими исследователями ано-
малии 5-факторов, достигающие 2-3% и более [Melchior 1984], обусловлены всего лишь неточностями
калибровки и вычисления океанических поправок, поскольку реальная результирующая точность боль-
шинства приливных гравиметрических наблюдений составляет в среднем, 0,5-1,0%, если учитывать
наряду с точностью наблюдений и гармонического анализа (как правило, 0,1-0,3%) еще и точности ка-
либровки и вычисления океанических возмущений, которые зачастую трудно даже оценить. Эффекты
влияния неоднородностей упруго-вязких свойств мантии пока находятся, скорее всего, за пределами
точности эксперимента.
В то же время статистический анализ данных о приливных вариациях силы тяжести на мировой
сети пунктов (более 300), выполненный в Международном центре земных приливов в Брюсселе проф.
Мельхиором, позволил ему сделать вывод о наличии корреляции между аномалиями 5-факторов, с од-
ной стороны, и тепловым потоком из мантии и тектоникой регионов [Dehant 1987], с другой. Разверну-
тое обсуждение этой фундаментальной гипотезы приобрело в последние годы весьма острый характер,
при этом доводы как сторонников, так и противников весьма убедительны, где, в частности, показано,
что вышеупомянутая корреляция имеет место в основном для пунктов, расположенных вблизи океа-
нов, где возможны значительные ошибки в окончательных значениях 5-факторов из-за неточностей в
вычислениях поправок за океанические приливы. Тем не менее, вопрос пока остается открытым.
Также внимания заслуживают результаты японских [Takeshi 1985] и китайских [Tang Boxiong et
al. 1985; Li Ruihao et al. 1985] исследователей гравитационных приливов, согласно которым на терри-
тории как Китая, так и Японии аномалии 5-факторов коррелируют с толщинами земной коры. Можно
предположить, особенно для Японии, неточности в модельных вычислениях океанических эффектов,
в которые входит помимо прямого притяжения перемещающихся водных масс еще так называемые
нагрузочные приливы из-за изменяющейся океанической нагрузки на земную кору. В последние годы
приливные гравиметрические наблюдения успешно используются для уточнения моделей океанических
приливов, причем в этом случае расстояние приливной гравиметрической станции от океана должно
быть, наоборот, минимальным. Получаемые результаты используются либо для уточнения локальных
котидальных карт, либо в комплексе с мареографическими наблюдениями и данными спутниковой
альтиметрии для уточнения глобальной модели Швидерского.
Наиболее интригующими являются сообщения о зарегистрированных изменениях 5-факторов во
времени, связываемые с процессами подготовки землетрясений. Однако метрологическое обеспечение
наблюдений такого рода, полученных, как правило, одним прибором, оставляет желать лучшего. Тем не
менее, эти исследования активно ведутся в Китае. Сезонные вариации 5-факторов наблюдались и крио-
генными гравиметрами в Западной Европе, однако в этом случае они связаны с сезонной модуляцией
амплитуд океанических приливов.
Таким образом, в приливной гравиметрии на сегодняшний день существует ряд серьезных нерешен-
ных вопросов, пролить свет на которые могут только новые самым серьезным образом поставленные
с метрологической точки зрения наблюдения в континентальных районах вдали от океанов. Особенно
актуальны в этой связи приливные гравиметрические наблюдения в России. Приливные вариации си-
лы тяжести, регистрируемые стационарными высокоточными гравиметрами, определяются, в основном,
динамическими характеристиками системы «ядро+мантия». Наблюдения позволяют уточнить вязкость
мантии, в частности, подтвердить степенной закон зависимости добротности мантии от частоты вынуж-
дающего силового воздействия, а также исследовать так называемый «близсуточный» резонанс земных
приливов, связанный со свободной нутацией жидкого ядра.
Наблюдения неприливных вариаций УСТ чрезвычайно актуальны для геодинамики, поскольку они
могут быть вызваны такими явлениями, как движение полюсов и вертикальные движения земной
коры, представляющими огромный интерес как для фундаментальной геофизики и астрономии, так и
для сейсмического прогноза.
Величины деформаций и наклонов земной коры определяются в основном строением и упругими
характеристиками коры и, в частности, наличием вблизи пунктов наблюдений глубинных разломов. Со-
ответствующие приливные амплитудные и фазовые параметры отличаются в таких пунктах от модель-
ных значений на 30-50% и более, причем величина аномалии сильно зависит от степени активности
разлома.
Одной из важнейших задач геодинамики является исследование приливных и неприливных вариа-
ций УСТ. Для этого гравиметрические наблюдения следует проводить на выбранных пунктах стацио-
нарно в течение продолжительного времени (выделение даже основных лунных волн О\ и М2 требует
продолжительности записи не менее 1 месяца).
Рис. 5.5.2. Криогенный гравиметр
Рис. 5.5.3. Гравиметр Дельта (ГАИШ) на основе
Содин
Точность таких наблюдений должна быть не менее 1 мкГал с учетом, что максимальная амплитуда
приливных вариаций УСТ составляет в средних широтах порядка 200 мкГал. Поэтому единственным
типом гравиметрических приборов, пригодным для стационарных наблюдений, являются статические
гравиметры, включая криогенные (рис. 5.5.2-5.5.3).
Точность лучших лазерных баллистических гравиметров также позволяет проводить стационарные
наблюдения земных приливов, но такие эксперименты являются слишком дорогостоящими из-за по-
вышенного износа механических частей приборов и проводились лишь дважды. Приборы, имеющие
чувствительность не хуже 0,1 мкГал, в состоянии регистрировать собственные колебания Земли, ко-
торые также несут ценнейшую информацию о строении и упруго-вязких характеристиках различных
оболочек планет в частотном диапазоне 1 мин-1 час. Наконец, использование лучших стационарных
сверхпроводящих гравиметров с чувствительностью порядка 0,001 мкГал (1 нГал) позволяет в послед-
ние годы наблюдать собственные колебания жидкого ядра Земли.
Отметим, что наряду со стационарными статическими гравиметрами, выпускавшимися ограничен-
ными сериями (серии Аскания GS-15, Geodynamics, La Coste-Romberg ЕТ, криогенные гравиметры),
широко использовались и в ряде случаев применяются до сих пор серийные приборы типа La Coste-
Romberg G и D, адаптированные для стационарной записи. Любой стационарный приливный гравиметр
должен быть оснащен термостатом, обеспечивающим температурный коэффициент прибора не хуже
1 мкГал/°С/час.
Понятие «приливный гравиметр» в настоящее время подразумевает «приливный гравиметрический
комплекс», поскольку он включает в себя: собственно приливный гравиметр; устройство бесперебой-
ного питания; микробарограф для регистрации вариаций атмосферного давления; микротермограф для
записи изменений температуры; персональный компьютер, обеспечивающий запись, предварительную
обработку и визуализацию информации. Уровень развития приливных гравиметрических исследований
в нашей стране пока далек от желаемого, в первую очередь из-за слабости инструментальной базы,
которая включает лишь старые гравиметры Askania GS-11 и GS-12.
Усилиями научных групп ИФЗ АН СССР, ИГГ СО АН СССР, Полтавской гравиметрической обсер-
ватории АН УССР, ИГ АН ЭССР и ИГ АН ГССР на протяжении 1960-1980-х гг. велись продолжи-
тельные наблюдения этими приборами на пунктах Таллин, Пулково, Обнинск, Красная Пахра, Полтава,
Киев, Ялта, Бахчисарай, Симферополь, Тбилиси, Ташкент, Фрунзе, Талгар, Новосибирск, Иркутск. Ра-
боты проводились, как правило, параллельно несколькими приборами в течение 1-2 лет на каждом
Latitude (degrees)
5.5.4. Результаты наблюдений приливными
гравиметрами из банка ICET
пункте как минимум. Проанализируем результаты этих наблюдений с точки зрения: 1) соответствия
модели Wahr-Dehant, и 2) проверки гипотезы проф. Мельхиора.
Будем использовать только результаты наблю-
дений (рис. 5.5.4), включенных в Международ-
ный банк приливных гравиметрических данных 120
ICET проф. Мельхиора, обработанных по еди-
ной методике (гармонический анализ проводился
методом Венедикова, океанические поправки вы- ив
числялись по котидальным картам Швидерского). §
Наблюденные значения 5-факторов для основных “
волн М2 и 01 (которые менее остальных под- ?
вержены влиянию возмущающих факторов) для I, 119
15 вышеперечисленных пунктов с поправками за £
океанические приливы, за эллипсоидальную нор-
маль и инерцию вместе с доверительными интер- i.u
валами (соответствующими только внутренним
ошибкам после гармонического анализа) нанесе-
ны на рис. 5.5.5-5.5.6.
Сплошной линией обозначена модельная за- р^с
висимость в соответствии с [Wu Xuefang 1994].
Можно указать следующие возможные причины
расхождений:
1) региональные аномалии 5-факторов, связанные с аномалиями упруго-вязких свойств мантии,
2) ошибки, обусловленные неточностью используемой модели Wahr-Dehant;
3) ошибки в вычислениях поправки за океанические приливы,
4) неучтенные систематические ошибки, общие для всех гравиметров Askania,
5) ошибки калибровки гравиметров Askania.
Скорее всего, можно сразу отбросить пп. 1 и 2, поскольку, если бы региональные аномалии упруго-
вязких свойств мантии влияли на значения 5-факторов, то картина для волн М2 и 01 была бы схожей,
поскольку отличие в их периодах ничтожна по сравнению с характерными временами релаксации в
Stations
Рис. 5.5.5. Наблюденные значения 6-факторов
для основных волн Ма и Oi с поправками за
океанические приливы, за эллипсоидальную нор-
маль и инерцию
Рис. 5.5.6. График изменения 6-фактора с долго-
той
мантии; аналогично, если бы модельная зависимость была неточной (завышенной или заниженной), то
имелось бы систематическое отклонение для обеих
Рис. 5.5.7. График зависимости теплового потока
и 6-фактора
волн (рис. 5.5.7).
На основании рис. 5.5.7, где по оси абсцисс
отложены значения потока тепла, а по оси орди-
нат — 5-факторы, можно сделать вывод об от-
сутствии корреляции аномалий 5-факторов с по-
током тепла, предсказанной проф. Мельхиором
[Melchior 1995; Мельхиор, Садовский 1986].
Далее, факторы пп. 3 и 4 являются в дан-
ном случае систематическими, а п. 5 — случай-
ным, если учесть большое количество приборо-
лет рядов наблюдений на каждом пункте. Таким
образом, наиболее вероятные причины расхож-
дений — пп. 3 и 4. Ограниченные сведения о
приливах в Северном Ледовитом океане, конечно,
являются серьезным фактором, ограничивающим
точность приливных гравиметрических исследо-
ваний в Евразии, как и ошибки доступных коти-
дальных карт для остальных океанов, однако на
уровне порядка 0,2-0,3%, а не 1%, особенно для
континентальных пунктов.
Как показали исследования, так называемая
брюссельская система для калибровки приливных гравиметров, основанная на значении 5-фактора для
волны 01 в Брюсселе, завышена приблизительно на 1%. Поскольку для ее установления использованы
результаты многолетних наблюдений несколькими десятками гравиметров Askania, можно предпола-
гать наличие систематических ошибок, присущих этим гравиметрам, завышающим амплитуды суточ-
ных волн на величину порядка 1%. Судя по всему, этот вывод для волны 01 подтверждается и для
российских пунктов (см. рис. 5.5.7). Однако любые нелинейные эффекты в сложных измерительных
системах будут автоматически приводить к удвоению частот гармонических колебаний, проходящих
через измерительную систему, и как следствие — к перекачке энергии в полусуточные волны, в том
числе и в М2. Таким образом, значительный разброс значений 5-факторов для волны М2 также может
быть связан с систематическими эффектами суточной периодичности, скорее всего метеорологической
или/и температурной природы.
Изложенное позволяет сделать следующие выводы:
— реальная относительная точность приливных гравиметров типа Askania составляет порядка 1%,
поскольку им присущи систематические ошибки такого порядка, которые не могут быть устранены ни
увеличением продолжительности наблюдений, ни числом однотипных приборов;
— на этом уровне точности — 1% — на территории России отсутствуют отклонения от модели
Wahr-Dehant, связанные с какими-либо региональными особенностями строения мантии и коры, в том
числе, корреляция с потоком тепла;
— продолжение приливных гравиметрических наблюдений, столь актуальных на территории России,
требует использования новых тщательно исследованных стационарных гравиметров.
Другими источниками весьма интенсивных по амплитуде неприливных вариаций УСТ являются
изменения атмосферного давления и, особенно, вариации уровня грунтовых вод. К более экзотическим
явлениям следует отнести изменения снежного покрова и уровня Мирового океана, однако вышепере-
численные геодинамические явления являются не единственными, могущими вызывать неприливные
вариации УСТ. Такие процессы, как неравномерность вращения Земли и нутации также приводят к
изменениям УСТ как ввиду чисто инерциального (центробежного) эффекта, так и из-за сопутствующей
глобальной деформации Земли, однако их ожидаемая амплитуда существенно меньше 1 мкГал при ха-
рактерных периодах в годы и десятилетия и потому они пока не наблюдаемы. То же справедливо и для
вариаций УСТ, связанных с мантийной конвекцией, имеющей характерные периоды сотни и тысячи
лет.
Отметим, наконец, что разделение вариаций УСТ на приливные и неприливные является в опреде-
ленном смысле условным.
Работа выполнена при финансовой поддержке гранта РФФИ № 8-05-64941 и гранта про-
граммы «Университеты России — фундаментальные исследования» № 5548. Автор искренне при-
знателен проф. П. Мельхиору (Королевская Обсерватория Бельгии) за предоставленные данные и
полезные дискуссии.
5.6 Абсолютные измерения методом свободного падения
И.А. Гусев
Материалы подраздела 5.6 составлены по Трудам ВНИИМ 1958 г., Трудам метрологических инсти-
тутов, вып. 227(287) 1977 г., [Труды ХГНИИМ 1972; Труды ВНИИМ 1988]; работам Романюка [1974;
Романюк и др. 1970]; Арнаутова и др. [1972]; а также [Гусев, Сливин 1973а, б; Гусев 1975], и др.
5.6.1 Введение
Принципиально уже в XVII в. были созданы теоретические предпосылки измерения абсолютного
УСТ методом свободного падения. Однако до XX в. не существовало технических средств для изме-
рения с приемлемой точностью пути и времени свободного падения тела. Вследствие этого до середи-
ны XX в. единственным средством измерения абсолютного значения УСТ были оборотные маятники
(первоначально нитяные маятники). Лишь в конце XIX и начале XX вв. были предприняты попытки
измерения абсолютного значения УСТ методом падения.
В 1940-1960 гг. абсолютные измерения УСТ методом свободного падения проводились на стаци-
онарных установках в основном в метрологических учреждениях, обладавших эталонами и наиболее
точными средствами измерения длины и времени. [Юзефович, Огородова 1980]. В этот период времени
не имелось точных средств для непосредственного измерения во время падения тела малых интервалов
времени и пути. Поэтому применялись косвенные методы измерения.
В соответствии с развитием техники измерений последовательно применялись следующие методы
измерения пути падающего тела:
— нанесение меток на падающее тело (жезл);
— нанесение меток на падающее тело и неподвижную шкалу (совмещенное падение);
— фотографирование падающей линейки;
— задание двух станций интерференционным методом с помощью кварцевого эталона длины (А. Са-
кума);
— измерение интервалов пути между станциями путем счета интерференционных полос (методы
2-4 станций).
Погрешность измерений составляла 1-10 мГал.
Следующим шагом, позволившим резко повысить точность измерений, был интерференционный
метод задания с помощью кварцевого эталона интервалов длины и измерения времени прохождения
падающим телом этих интервалов, путем счета стабилизированной частоты (А. Сакума).
В 60-е и последующие годы началось применение интерференционного метода измерений с лазером
как источником монохроматического излучения с известной длиной волны. Интенсивно начали раз-
рабатывать транспортабельные абсолютные гравиметры. Произошел переход от наблюдений методом
2-4 станций к методу многих станций. Относительная погрешность определения длины волны лазера
в 60-е годы составляла несколько единиц 10“8, а в 90-е годы была порядка 1О-9-1О-10 [Буланже,
Щеглов 1993].
Нестабильность стандартов частоты уже в 60-е годы была менее 10-1°. Так, например, нестабиль-
ность генератора 45-9 за 24 часа не более 10“8, а рубидиевого стандарта 5-Ю-11 за 10 суток.
В течение всего времени применения метода свободного падения влияние погрешностей собственно
эталонов или средств измерения длины и времени не было основным источником погрешности измере-
ний УСТ, а составляло лишь малую часть этой погрешности.
В 70-90-е годы в нескольких странах мира были разработаны и широко применяются для наблю-
дений на опорных гравиметрических пунктах абсолютные гравиметры. Эти гравиметры построены по
одной принципиальной схеме и практически содержат одни и те же функциональные узлы. Их отли-
чие друг от друга состоит в конструктивных отличиях, размерах, массе, расположении и компоновке
механических частей и узлов, принципиальных схем и конструкции электроизмерительных блоков.
Первоначально наблюдения выполнялись по методу 3 или 4 станций, а затем по методу многих стан-
ций. На пункте обычно выполняют от нескольких десятков до нескольких тысяч бросков (свободного
падения уголкового светоотражателя). По измерениям каждого броска вычисляют УСТ [Арнаутов и
др. 1972].
5.6.2 Дифференциальное уравнение движения (падения) материальной точки
Согласно второму закону Ньютона, основное дифференциальное уравнение падения материальной
точки можно записать в виде:
ml = F, (5.6.1)
где F — действующая на материальную точку сила (сумма сил) различного происхождения.
Во второй половине XX века появилось много работ по теории и результатам измерений абсолютного
значения УСТ методом свободного падения. В этих работах приводятся дифференциальные уравнения
падения свободной материальной точки, по сути аналогичные уравнению (5.6.1), но отличающиеся по
форме записи, обозначениям, детальностью определения силы F. Ниже приведены некоторые из этих
дифференциальных уравнений.
l = g + yl (Труды ВНИИМ, 1958);
I + kl — yl = до (Сборник статей, Новосибирск, 1972 г.);
I = до — kJ. - к21I 2 [Арнаутов и др. 1972];
ml — т{д0 - yl) - Ft - Fm- Fp - Fg (Сборник статей, Новосибирск, 1972 г.); (5.6.2)
I = <jo(l + yl + kil + А^2) [Романюк 1974];
I + klI-yl = —до (Труды метрологических институтов, вып. 227(287), 1977 г.);
I - yl - (fc!I + к212 + yl2 + до) = 0 [ Труды ВНИИМ 1988].
Приняты обозначения: у — вертикальный градиент УСТ, ki, к2 — коэффициенты сил сопротивления,
F — возмущающие силы.
В приведенных уравнениях использованы единые обозначения с сохранением авторской формы за-
писи.
Из решения дифференциальных уравнений получены уравнения падения материальной точки. Эти
уравнения отличаются друг от друга формой записи, обозначениями параметров, полнотой учета влия-
ния возмущений и другим. Решения можно разделить на две группы:
Точные решения дифференциального уравнения, содержащие гиперболические или степенные
функции [Арнаутов и др. 1972; Труды ХГНИИМ 1972].
Приближенные решения в виде рядов по степеням t [Арнаутов и др. 1972, Труды ВНИИМ 1988],
Труды ВНИИМ 1958 г., Сборник статей, Новосибирск 1972 г., Труды метрологических институтов,
вып. 227(287) 1977 г.
Приближенное решение дифференциального уравнения (5.6.2) получено в виде
I = vot + 1 +
4
(5.6.3)
о
где
/(fc) =
1 л , / , 2 1 9
vo + zSof + «2 Ho + -zgovot + -g0 t .
о / \ о о )
(5.6.4)
Эти соотношения будут исходными при исследовании схем наблюдений УСТ.
5.6.3 Принципиальные схемы наблюдений
Станцией назовем точку траектории падающего тела, для которой известны (измерены) время и
путь. В зависимости от технических средств измерений применялось различное число станций и их
расположение на траектории.
По расположению станций на траектории относительно ее вершины различают симметричные и
несимметричные методы измерений. В симметричном методе наблюдения выполняют на симметричных
относительно вершины участках траектории. В несимметричном методе наблюдения выполняют на
нисходящей части траектории.
По числу станций на траектории методы наблюдений разделяют на метод трех станций, четырех
станций, метод многих станций, симметричный метод двух станций и симметричный метод одной
станции [Романюк 1974; Юзефович, Огородова 1980], а также [Труды ВНИИМ 1988].
В начальный период развития метода свободного падения отсутствовали технические средства для
точного измерения пути непосредственно во время падения тела. Возможно было лишь нанесение
меток на падающее тело импульсами стабилизированной частоты. Расстояния измерялись лишь после
окончания падения тела. Повышение точности измерений УСТ достигалось методом многих станций.
С появлением счетчиков импульсов и интерференционных методов появилась возможность измере-
ния (или задания) интервалов пути и времени. Для измерения каждого интервала пути или времени
необходим был один счетчик. Это обусловило применение методов трех или четырех станций. Метод
многих станций вновь стал применяться с появлением счетчиков, позволяющих снимать показания без
остановки счета.
Метод трех станций
Падающее тело последовательно проходит три станции. Измеряются два интервала времени и два
расстояния между станциями. Возможны варианты измерения пути и времени:
а) между первой — второй и второй — третьей станциями;
б) между первой — второй и первой — третьей станциями.
Формулы метода трех станций, аналогичные формулам метода 4 станций, получим из формул
(5.6.9)-(5.6.11), положив в них = £з. т = 0 [Романюк 1974]:
!М[1+тЬ + /(>=).|=Г1Г2(Г1+Тг + 2т). <5.6.5)
Формулу (5.6.5) можно привести к виду
й1+тЛ'+ /(*).! = (5.6.6)
где
fe/ = T+{5-6-7)
о ^х)
f(k)3 = | (k^i + fc2^i2 + ki^ + k2goX • , (5.6.8)
+ d2 = X, Ti +T2 = T, di = XX, Ti = XtT; g'o — УСТ в вершине траектории; h' — расстояние от
вершины траектории; Н — расстояние от вершины траектории до первой станции [Романюк 1974].
Формула (5.6.6) без квадратной скобки в левой части приведена в работах Кука [Соо/г 1965а, Ь].
Формулы для определения д из наблюдений методом трех станций содержатся в работах [Арнаутов
и др. 1972; Труды ХГНИИМ 1972], а также (Сборник статей, Новосибирск, 1972 г.; Lacombat, Etude,
1970 г.).
5.6.10)
Метод четырех станций
Падающее тело последовательно проходит 4 станции. Измеряют интервалы времени Т\ = t2 — ti,
?2 = i4 - и расстояния di = I2 - h, </2 = h — 1з и задают интервал т = <з - t,2. Интервалы времени
измеряют путем счета импульсов стандартной частоты, а расстояния — путем счета интерференционных
полос (источник света — стабилизированный лазер). Необходимо 4 счетчика импульсов или 2 счетчика,
если в интервале времени между второй и третьей станциями происходит снятие показаний счетчиков.
Составив систему 4 уравнений вида (5.6.3) и решив ее, получим следующие формулы:
So = [1 + yh + /(fc)9] = (5-6'9)
+ 12 + 2T)
где h — расстояние точки траектории от начала отсчета расстояний 1\
, _ Т1[^42(14 + vp^) ~ *з2(*з + vpta)] — Гг[*22(^2 + upfra) ~ ti2Gi + ^0^1)]
67172(71 + Т2 + 2т)
Ti[/(fc)4t42 - ДА:)з*з2] ~ T2[/(fc)2t22 - /(fc)2ti2]
7i72(7i + 7г + 2т)
f(k)3 — относительное влияние сил сопротивления, пропорциональных первой и второй степени ско-
рости падения тела [Романюк 1974].
Формулы для вычисления УСТ из наблюдений методом 4 станций имеются во многих работах. Их
отличие от формул (5.6.9)-(5.6.11) состоит в применении иных обозначений, иной записи правой части,
учета или неучета ряда возмущений ([Арнаутов и др. 1972; Hammond, Faller 1967; Preston-Thomas
1959], а также см. Сборник статей, Новосибирск 1972 г.).
Метод многих станций
В этом методе наблюдений падающее тело последовательно проходит большое число станций. Для
каждой станции определяют время и путь. Затем составляют систему уравнений, например, в виде
(5.6.3) или ином. Число таких уравнений равно числу станций, принятых в обработку. Полученная
система уравнений содержит в качестве неизвестных 1о>^о,Ро,У и, возможно, другие параметры.
Система уравнений, их решения и оценка точности приведены в Трудах ВНИИМ, вып. 32(92)
1958 г. Число станций достигало 80-100. В НПО «Метрология» разработана программа определения
параметров движения в методе многих станций с использованием ЭВМ «Электроника-60» [Труды
ВНИИМ 1988]. Метод многих станций исследован в [Арнаутов и др. 1975а, б, в].
При этом методе счетчик числа интерференционных полос и счетчик стандартной частоты ведут
непрерывный счет. По единому сигналу автоматически производится снятие показаний обоих счетчиков
без их остановки. В одном броске падающего тела таких одномоментных снятий показаний происходит
от нескольких десятков до нескольких сотен [Труды ВНИИМ 1988].
Симметричный метод двух станций
Измеряют по одному интервалу времени и пути на каждой части траектории, симметричной отно-
сительно вершины.
Формула (5.6.9) преобразуется к виду
I , Hi + Н2
9о 1+Y------7----+ /(&)э
о
8d
Т2-ч2'
(5.6.12)
(5.6.13)
где: д'о — расстояния от вершины траектории соответственно первой и второй станций; d — расстояние
между первой и второй станциями, одинаковые на двух частях траектории; Т — время между первыми
станциями; т — время между вторыми станциями [Романюк 1974]
Если коэффициенты сил сопротивления по величине одинаковое на обеих частях траектории, то
их влияние компенсируется и /(fc)3 = 0 [Романюк 1974]. Это одно из существенных достоинств
симметричного метода наблюдений. Формулы симметричного метода двух станций приведены в работах
[Cook 1959; Preston-Thomas et al. 1960; Cook 1965a, b; Гусев 1975].
Симметричный метод одной станции
Измеряют по одному интервалу времени и пути между станциями, симметрично расположенными
относительно вершины траектории. Формулу (5.6.12), полагая т = 0, L = 2d, преобразуем к виду
[Романюк 1974]:
5о = 1+У^ + /(Л)э
Метод изложен в Трудах метрологических институтов, вып. 227(287), 1977 г.
Каждому из перечисленных методов измерений присущи индивидуальные источники погрешностей.
5.6.4 Баллистические гравиметры
Г.Г. де Метц в 1892-1893 гг. осуществил в Киевском университете метод несвободного падения,
а А.А. Иванов в 1903-1905 гг. по инициативе Д.И. Менделеева — в Главной палате мер и весов
в Петербурге. В этих экспериментах использовалась машина Атвуда. Погрешность каждого из этих
измерений превышала 100 мГал [Юзефович, Огородова 1980].
В последующие годы, вплоть до середины XX века, не имеется сведений о проведении измерения
УСТ методом свободного падения. В начале XX века зародилась электроника; это позволило выпол-
нять измерения (с определенной точностью) интервалов времени свободно падающего тела. В середине
XX века почти одновременно в нескольких странах началась разработка аппаратуры и измерение аб-
солютного значения УСТ методом свободного падения: В 40-60-х годах было создано несколько ста-
ционарных абсолютных гравиметров. Эти гравиметры основывались на наблюдении падения жезла или
линейки. Были выполнены наблюдения в СССР, Франции, Канаде, ФРГ и др. [Труды ХГНИИМ 1972],
Труды ВНИИМ, 1958 г.
С появлением лазеров началась разработка и изготовление транспортабельных абсолютных грави-
метров, которые к концу XX века стали широко применяться при построении мировой и национальных
гравиметрических сетей.
В качестве падающего тела применялись различные устройства. Форма и устройство падающего
тела определялись исходя из методов измерения пути—времени и состояния технических средств из-
мерения. Падающее тело, содержащее уголковый светоотражатель, начали применять в 60-х годах, а с
появлением стабилизированных лазеров — во всех абсолютных гравиметрах. Уголковые светоотража-
тели по конструкции разделяются на две группы: а) выполненные в виде призмы и б) выполненные в
виде системы трех взаимно перпендикулярных зеркал.
Падающее тело гравиметра ИФЗ АН СССР содержит два симметрично расположенных относи-
тельно горизонтальной плоскости уголковых светоотражателя. Тело состоит из трех стеклянных па-
раллелепипедов размером 2x2x4 см, соединенных оптическим контактом. Наружные поверхности тела
алюминированы. [Романюк и др. 1970]. Все описанные выше методы в основном сводятся к двум, отли-
чающимся заданием начального импульса пробному телу: так называемые «симметричный» и «несим-
метричный» методы.
При симметричном методе пробное тело подбрасывается вверх устройством, называемым обычно
«катапультой», с определенной силой на некоторую, заранее заданную высоту. Регистрация элемен-
тов движения в этом случае проводится при движении пробного тела как вверх, так и вниз. При
несимметричном методе пробное тело в исходном состоянии находится в верхней точке траектории
движения. Перед началом измерений пробное тело отпускается из фиксированного положения удер-
живающим механизмом и совершает свободное падение. Регистрация элементов движения при этом
методе производится только при движении пробного тела вниз.
Регистрация элементов движения пробного тела как при симметричном, так и при несимметричном
методах возможна путем измерения интервалов времени, за которое пробное тело проходит фиксиро-
ванные отрезки пути, или путем измерения отрезков пути, которые пробное тело проходит за наперед
заданные интервалы времени.
Несимметричный метод измерений
Установка Ш. Воле, Севр. Падающее тело выполнено в виде линейки с делениями, которая
свободно падала в вакууме и фотографировалась в моменты кратковременных вспышек света лампы,
управляемых периодическими электрическими импульсами с известной частотой следования. После
проявления фотопленки визуально снимались отсчеты шкалы. Эту схему предложил в 1946 г. Ш. Воле,
Севр (Франция) [Грушинский, Сажина 1959; Огородова и др. 1978].
Установка А. Тулина в Севре. В 1957-1959 гг. А. Тулин в международном бюро мер и ве-
сов в Севре (Париж) выполнил измерения УСТ, применив свободное падение градуированной шкалы
(платино-иридиевая метровая линейка весом 3,5 кг). Расстояние, пройденное пробным телом за из-
вестные промежутки времени, фиксировалось на кинопленку [Труды ХГНИИМ 1972]. Установка не
транспортабельна. Инструментальная погрешность 1,0 мГал.
Канадский прибор для абсолютных измерений ускорения силы тяжести. В 1957-1959 гг.
Престон-Томас в Оттаве выполнил абсолютные измерения УСТ [Preston-Thomas 1960, Труды ХГНИИМ
1972].
Эталоном времени в приборе является 100-килогерцевый генератор, обеспечивающий стабильность
2-10-10 с. Расстояния, пройденные пробным телом за известные интервалы времени, фиксируются на
фотопластинке.
Пробным телом в приборе служит двухметровая линейка из нержавеющей стали весом 7 кг. В теле
линейки установлены три полупрозрачные стеклянные шкалы длиною около 20 мм. Расстояние между
шкалами сверялось по международному метру в бюро мер и весов с точностью до 0,5 мкм. На шкалах
нанесены деления через 0,1 мм. При свободном падении линейки ее шкалы пересекают горизонтальный
индекс регистратора, представляющего собой неподвижную сетку нитей. Посредством вспышек света
длительностью 0,5 мкс через 0,1 с на фотопластинке фиксируется взаимное расположение шкал линей-
ки и регистратора. Свободное падение линейки длится около 0,7 с. Погрешность измерения времени
равна 210-8 с.
Термостатированная рабочая камера выполнена из металлической трубы длиною 5,2 м со степенью
вакуумирования около 7-Ю-5 мм рт. ст. Линейка с помощью специального устройства поднимается
вверх для очередного броска без нарушения вакуума в рабочей камере. Влияние вибраций и микро-
сейсм фиксируется посредством трех сейсмографов. Установка не транспортабельна. Инструментальная
погрешность определения УСТ равна 0,9 мГал.
Японские баллистические гравиметры. Принцип работы установки института мер и весов, Япо-
ния, Токио, 1971 г., основан на баллистическом несимметричном многоточечном методе одной станции
[Cook 1965а, b; Inouye et al. 1971]. Эталоном времени в установке является высокостабильный генера-
тор частоты, обеспечивающий точность измерения отрезков времени порядка 1-Ю-7 с.
Пробным телом в установке служат инварная и кварцевая линейки. На линейках длиной около
1 м нанесены деления через 1 см с точностью 0,1 мкм. Эталонирование шкал линеек выполняют
с помощью интерферометра. Движение тела происходит в цилиндрической камере диаметром 30 см
и высотой 3,5 м, вакуумированной до 1-Ю-5 мм рт. ст. Перед падением линейка подвешивается на
нейлоновой нити, которая затем расплавляется с помощью электрического нагревателя.
Принцип измерения УСТ сводится к определению времени, необходимого для прохождения наперед
заданных отрезков пути пробным телом. При падении линейки деления, нанесенные на ее поверхно-
сти, ослабляют световой поток, поступающий на фотоумножитель, импульсы с которого совместно с
временными отметками поступают на осциллограф и фотографируются с помощью фотокамеры. Мо-
мент прохождения каждого деления падающего тела через опорную метку определяется с точностью
±110-7 с. Влияние микросейсм и вибраций регистрируется при помощи сейсмографа. Обработку на-
блюдений проводят по способу наименьших квадратов, что также уменьшает влияние вибраций и
микросейсм. Точность определения УСТ ±1 мГал. Установка не транспортабельна.
В 1980-х годах в Японии продолжали совершенствовать баллистический метод измерения УСТ. В
национальной астрономической обсерватории Мидзусава (NAOM) установлен прибор, изготовленный
по типу прибора А. Сакумы. Дальнейшие разработки вели независимо две организации: NAOM и
Институт географической съемки Японии (GSI). Разработаны отдельные узлы баллистического гра-
виметра: устройство вакуумной камеры, пробное тело типа «кошачий глаз», конструкция отпускания
пробного тела, устройство виброзащиты и др. Применены также уже известные узлы: гелий-неоновый
лазер, интерферометр Майкельсона, рубидиевый стандарт частоты, лавинный фотодиод, для виброза-
щиты применен сейсмометр. Однако в целом приборы имели недостаточно высокую точность измерений.
Аппаратура А.И. Марциняка. В 1954-55 гг. А.И. Марциняк во ВНИИМ (Ленинград) выполнил
абсолютное измерение УСТ, что отмечено в Трудах ВНИИМ 1958 г. Падающее тело выполнено в виде
длинного стержня (жезла), жезл свободно падает в вакууме. Во время падения на светочувствительный
слой проектируется изображение реперного штриха, освещаемого кратковременными периодическими
вспышками газосветной лампы (строботрона), управляемой импульсами частотой 125 или 250 Гц от
кварцевого эталона частоты через равные известные промежутки времени. После проявления изображе-
ния на жезле выполняют измерения расстояний между изображениями реперного штриха; интервалы
времени определяют по частоте периодических импульсов газосветной лампы. Измерение расстояний
между штрихами жезла производилось в лаборатории эталонов длины на линейной измерительной
машине.
Жезл аппаратуры ВНИИМ состоит из латунного корпуса длиной 105 см, в который с двух про-
тивоположных сторон вставлены и закреплены эластичным веществом цилиндрические стержни из
плавленого кварца (горного хрусталя). На стержнях имеются точно отшлифованные грани, на которые
нанесена светочувствительная фотоэмульсия. Головка жезла имеет дужку для подвешивания на игле
сбрасывающего механизма. Цилиндрическая камера, в которой падает жезл, имеет размеры: высота —
2,5 м и диаметр — 70 мм. Камера вакуумирована до 0,2 мм рт. ст. Гравиметр не транспортабелен.
Погрешность измерения УСТ 2,0 мГал.
Установка физико-технического государственного института ФРГ. Принцип работы установ-
ки физико-технического государственного института ФРГ (Браунгшвейг, 1969 г.) основан на балли-
стическом несимметричном многоточечном методе одной станции [Труды ХГНИИМ 1972]. Эталоном
времени в приборе является генератор частоты, обеспечивающий точность 1-Ю-8 с. Пробным телом в
приборе служит жезл длиною 2 м, диаметром 75 мм и весом около 5 кг. Жезл покрыт эмульсионным
слоем. Для определения УСТ на всем протяжении пути свободного падения жезла измеряются пути за
известные интервалы времени. Интервалы времени задаются импульсами света длительностью 10-7 с.
и частотою 130 Гц, образуемыми посредством вращающегося диска синхронного мотора. На одном
жезле можно получить большое число отметок времени при свободном падении его под разными ази-
мутами. Камера прибора вакуумирована до давления 2-10“5 мм рт. ст. Инструментальная погрешность
прибора ±2 мГал. Установка не транспортабельна.
Установка национальной службы метрологии ГДР. Принцип работы установки национальной
службы метрологии (ГДР, Берлин, 1970 г.) основан на свободном падении тела методом трех станций
[Cook 1965а, Ь]. Эталоном времени в приборе является генератор частоты, обеспечивающий точность
1-Ю-8 с. Пробным телом в установке служит латунный цилиндр диаметром 15 мм и длиною 100 мм. В
центре тяжести пробное тело имеет щель шириною 1,5 мкм. Определение УСТ проводят по двум посто-
янным интервалам пути, определяемым посредством инварной линейки длиной 1035 мм. При свободном
падении пробное тело в вакуумированной до 1-5-10-5 мм рт. ст. стальной камере длиною 1400 мм и
диаметром 117 мм проходит три световых барьера (реперные точки). Импульсы с фотоумножителя,
получаемые при пересечении щелью пробного тела светового барьера, управляют двумя электронными
счетчиками частоты, рассчитанными на работу от 10 МГц эталонного генератора. Интервалы времени
Рис. 5.6.1. Схема лазерного гравиметра ГАБЛ
Рис. 5.6.2. Вид гравиметра ГАБЛ-Э
регистрируются с точностью до 1-10-7 с. Влияние вибраций и микросейсм на камеру регистрируются
сейсмографом. Инструментальная погрешность прибора — 0,5 мГал. Установка не транспортабельна.
Абсолютные лазерные баллистические гравиметры типа ГАБЛ. С начала 70-х годов в Инсти-
туте автоматики и электрометрии (ИАиЭ) СО РАН ведется разработка баллистических гравиметров
по несимметричному методу измерений типа ГАБЛ [Арнаутов и др. 1972, 1982а, б, 1994] (Сборник
статей, Новосибирск: ИАиЭ, 1972 г.). Для измерения пути, пройденного свободно падающим телом
(СПТ), используется счет интерференционных полос лазерного интерферометра. Мерой длины служит
длина волны лазера, стабилизированного по атомному реперу в спектре излучения, а мерой интервалов
времени являются сигналы прецизионного (например рубидиевого) стандарта частоты. Лазерный гра-
виметр можно представить в виде четырех отдельных блоков: 1) баллистического блока, в котором осу-
ществляется свободное падение пробного тела; 2) лазерного интерферометра, дающего информацию о
перемещении свободно падающего тела; 3) измерительно-вычислительной системы, с помощью которой
производится измерение интервалов времени свободного падения и обработка результатов измерений и
4) электронного блока, предназначенного для автоматического управления работой гравиметра.
Падающее тело в гравиметре содержит уголковый светоотражатель, выполненный в виде призмы,
помещенной в корпус. В верхней части корпуса укреплена ферритовая пластинка, служащая для удер-
жания тела в верхнем положении, а также три подпятника, изготовленные из твердого сплава ВКУ-1,
служащие для ориентировки падающего тела. Вакуумный ввод служит для передачи вращательного
движения от шагового электродвигателя, находящегося вне вакуумной камеры, подъемному тросовому
механизму, расположенному внутри этой камеры, с помощью эксцентрика.
На рис. 5.6.1 представлена функциональная схема лазерного гравиметра ГАБЛ. В вакуумированной
камере 1 (труба из нержавеющей немагнитной стали) находится СПТ 2, с которым жестко связан оп-
тический уголковый отражатель 3. СПТ содержит ферритовый элемент 4, который в стартовой позиции
притягивается удерживающим электромагнитом 5 к верхней части трубы. Постоянство исходного поло-
жения СПТ обеспечивается трех конических штырьков (игл) 6, которые в стартовом положении входят
в полусферические углубления (подпятники) 7, закрепленные на верхнем фланце вакуумной камеры.
Ферритовый сердечник 8 удерживающего электромагнита 5 может смещаться в горизонтальной плоско-
сти в двух взаимноперпендикулярных направлениях с помощью винтов 9. СПТ поднимается кареткой
10 через вакуумный ввод движения 11с помощью электромотора 12. Для улавливания СПТ в конце
его падения служит пружинная ловушка. Движением каретки, включением и выключением электро-
магнитов управляет электронная схема 22. Лучи лазера проходят через стеклянное окно 13 камеры 1.
Вакуумирование камеры осуществляется через патрубок 14 с помощью вакуумной системы, содержа-
щей механический форвакуумный насос, диффузионный высоковакуумный насос и систему вакуум-
ных затворов. Оптический уголковый отражатель 3 включен в измерительное плечо интерферометра.
Луч лазера 15 делится пластинкой 16 на два. Измерительный пучок направлен вертикально вверх к
отражателю 3. Опорный луч идет к референтному уголковому отражателю 17 и после отражения ре-
комбинирует с измерительным пучком, образуя интерференционное поле в плоскости фотоприемника
18.
Уголковый отражатель 17 закреплен в центре качаний низкочастотного сейсмометра (период соб-
ственных колебаний ~10 с), благодаря чему влияние случайной погрешности измерения, вызванной
микросейсмическими колебаниями фундамента, удается снизить более чем на порядок. Схема форми-
рователя интервалов времени задает интервалы, соответствующие времени прохождения падающим те-
лом расстояний, равных целому числу интерференционных полос. Длительность интервалов измеряется
специальной электронной схемой с разрешением в 100 пикосекунд. Меру времени задает рубидиевый
стандарт частоты 20. Результаты измерений вводятся непосредственно со счетного блока 19 через ин-
терфейсное устройство в память ЭВМ 21, которая в темпе с экспериментом производит вычисления д,
статистическую обработку результатов повторных измерений, представляет графическую информацию
о влиянии внешних воздействий и вносит необходимые поправки в полученный результат.
В каждую серию измерений вносится поправка, учитывающая влияние сопротивления остаточного
газа в баллистической камере, и поправка за прилив, приводящая измеренное значение д к уровню
невозмущенного геопотенциала, учитывается притяжение атмосферных масс и изменение широты, обу-
словленное движением полюса Земли. О других инструментальных поправках подробно изложено в
[Арнаутов и др. 1982а, б, 1994].
Было создано несколько моделей, каждая из них была более совершенной по сравнению с предыду-
щей, повышалась и точность измерений.
Первоначально использовался лазер, частота которого стабилизировалась по провалу Лэмба, затем
был введен контрольный гелий-неоновый лазер с йодной ячейкой поглощения. Вместо измерений двух
отрезков пути стал применяться метод многих станций; повышена точность измерений интервалов
времени до 0,2 наносекунды; введены и другие изменения.
Дальнейшим совершенствованием гравиметра ГАБЛ является разработка гравиметра ГАБЛ-М
(1985 г.).
Суммарная среднеквадратическая ошибка определения абсолютного значения д гравиметром ГАБЛ-
М составляет около 5 мкГал и определяется в основном инструментальными погрешностями. На
рис. 5.6.2 показан внешний вид одной из последних модификаций гравиметра — ГАБЛ-Э (1996 г.).
Составляющие инструментальной погрешности приведены в табл. 5.4. Там же даны оценки их влияния
на точность определения абсолютного значения УСТ, а технические характеристики следующие:
Средняя квадратическая погрешность измерения
абсолютного значения УСТ ...........................................не более ±410-8 м/с2
Число отсчетов за время свободного падения ..........................................500
Цикл одного измерения ...............................................................10 с
Габариты: оптико-механический блок .........................................1200x700x700
электронный блок ............................................................620x560x660
Общий вес установки ...............................................................180 кг
Потребляемая мощность.................................................2 кВт (220 В, 50 Гц)
Создателями приборов типа ГАБЛ были: Г.П. Арнаутов, Е.Н. Калиш, В.П. Коронкевич, А.И. Лох-
матое, М.Г. Смирнов, Ю.Ф. Стусь, В.Г. Тарасюк.
Параллельно с разработкой приборов типа ГАБЛ совместными усилиями ИАиЭ СО РАН и Цен-
трального научно-исследовательского института геодезии, аэросъемки и картографии были созданы
приборы типа ГБЛ (1989 г.) и его облегченный вариант — гравиметр ГБЛ-П (1995 г.).
Абсолютный гравиметр ВНИИМ. Метод, предложенный П.Н. Агалецким в 1947 г., основан
на совмещении свободного и несвободного падения тел. Свободно падающее тело находится внутри
Таблица 5.4. Составляющие инструментальной погрешности ГАБЛ-М
№ п/п Источники погрешности Величина погрешности, IO"8 м/с2
1 Сила сопротивления остаточного газа ±2
2 Электромагнитные силы ±1
3 Определение длины волны лазерного излучения ±1
4 Ошибка измерения интервалов пути ±2
5 Ошибка измерения интервалов времени ±0,5
6 Отклонение от вертикали измерительного луча ±1
7 Вращение уголкового отражателя ±0,5
Суммарная среднеквадратическая погрешность 3,4
несвободно падающей вакуумированной камеры. Задача сводится к регистрации пути и времени дви-
жения свободно падающего тела [Юзефович, Огородова 1980], (Труды ВНИИМ, 1958 г.). Измерения
абсолютного УСТ выполнены в Ленинграде в 1954-55 гг.
Свободно падающее тело состоит из латунной рамки длиной 15 см и вложенной в рамку полоски
стеклянной фотопластинки. Масса тела — 70 г. Несвободно падающая камера аппаратуры ВНИИМ
оснащена электромагнитными рекордерами для нанесения магнитных отметок на двух вертикально
установленных стальных проволоках; аппаратурой для нанесения фотографических отметок на шкале
свободно падающего тела и электромагнитным устройством для дистанционного освобождения свобод-
но падающего тела внутри камеры во время ее падения. Вдоль пути падения камеры были натянуты
два токоподводящих проводника и две стальные проволоки; падающая камера имела снаружи в верхней
своей части две контактные щетки, скользящие по токоподводящим проводникам, и два электромагнит-
ных рекордера, скользящих по стальным проволокам; наружный диаметр камеры 4,5 см, длина 80 см,
масса 4,875 кг. Весь путь, проходимый падающей камерой, был равен 14 м. Длина пути, на котором
регистрировалось совмещенное падение тел, составляла 10,2 м. Электрические импульсы длительно-
стью 3-5 мкс с частотой повторения 62,5 Гц управляли газосветной лампой и уже световые сигналы
регистрировались на фотопластинке СВП.
Для измерения длины отрезков между фотографическими отметками на фотопластинке и для изме-
рения длины отрезков между магнитными отметками на проволоке имелись соответствующие компа-
раторы. Установка не транспортабельна. Инструментальная погрешность составляла 1,6 мГал.
Установка национального бюро стандартов (США, Гейзесберг). В 1966-1967 гг. Дуглас
П. Тейт, наблюдал падение жезла (плавленый кварц, длина 1 м) внутри несвободно движущейся
вакуумной камеры [Труды ХГНИИМ 1972, Tate 1967]. Принцип работы установки основан на бал-
листическом методе совместного падения двух тел: свободного падения пробного тела относительно
несвободно падающей камеры. Эталоном времени в приборе является кварцевый генератор с частотой
1 МГц и стабильностью 10-7 с.
Пробное тело — труба из плавленого кварца диаметром 15 мм, длиною 107 см при толщине стенок
1 мм, размещается внутри, вакуумированной камеры диаметром 48 мм и длиною несколько больше
пробного тела.
Определение УСТ производят по двум заданным постоянным интервалам пути и измеряемым от-
резкам времени, необходимым для прохождения этих интервалов.
Для получения импульсов, управляющих счетчиком времени, на пробном теле нанесены три щели.
При падении пробного тела щели пересекают реперную точку, выполненную в виде щели, за кото-
рой находится длиннофокусный микроскоп и фотоумножитель. При прохождении щелями пробного
тела реперной щели фотоумножитель выдает электрические импульсы, которые и управляют счетчи-
ками времени с разрешающей способностью 10 МГц. Первый импульс открывает оба счетчика, второй
импульс закрывает первый счетчик, а третий — второй счетчик.
Расстояние между щелями измеряется эталонной линейкой с точностью порядка 0,2-10—6 м с помо-
щью микроскоп-микрометра с отсчетной точностью 0,1 мкм.
Камера термостатирована, температуру измеряют ртутными термометрами. Камера вакуумирована,
остаточное давление не менее 1 -10—3 мм рт. ст. Эффект влияния электрических зарядов исключается
путем серебрения трубы с такой плотностью, чтобы ее сопротивление было $10 Ом. Ошибки в изме-
рении длины и времени приводят к ошибке не более 0,21 мГал, но погрешность эталона длины может
приводить к ошибке 0,39 мГал. Одним из главных источников ошибок является влияние микросейсм и
вибраций. Суммарное действие ошибок приводит к инструментальной погрешности установки, равной
±0,45 мгал. Установка не транспортабельна.
Баллистические гравиметры Фаллера. Первоначально приборы, созданные под руководством
Д. Фаллера (США), были основаны на простом падении пробного тела (уголкового отражателя). В
1963 г. Фаллер и Хаммонд в Принстоне (США) применили интерференционный метод измерения рас-
стояний и лазер как источник света [Юзефович, Огородова 1980; Гусев, Славин 1973а, б; Faller 1963,
1967; Faller, Marson 1988].
Принцип работы установки основан на баллистическом несимметричном методе. Эталоном времени
в приборе является генератор частоты со стабильностью 1 10—9 с. Для измерения отрезков пути, прой-
денного свободно падающим телом, применен интерферометр Майкельсона, где в качестве пробного
тела применен уголковый отражатель (трипельпризма). Источником света служит гелий-неоновый ла-
зер, длина волны которого определяется по отношению к эталону длины. Рабочая камера, выполненная
из стеклянной трубы диаметром 18 см, вакуумирована до 510_7 мм рт. ст. Для устранения влияния
статического электричества внутренняя поверхность камеры покрыта специальным составом. Для уста-
новки луча лазера в вертикальное положение применяется ртутный горизонт. С целью компенсации
влияния вибраций и микросейм неподвижная призма интерферометра крепится на инерционной массе
длиннопериодного сейсмографа. Подъем подвижного тела осуществляется с помощью механической
тележки, а юстировка его перед отпусканием проводится посредством трех «пальцев» со сферическими
головками.
Определение УСТ производят по двум заданным ин-
тервалам времени и пройденному расстоянию при падении
уголкового отражателя с высоты около 1 м. Отрезки пути
падения тела измеряют подсчетом интерференционных по-
лос. Для снижения требований к отпускающему устройству
измерение начинается спустя некоторый промежуток време-
ни после начала падения тела. Задающее устройство через
промежуток времени выдает три последовательных импуль-
са, соответствующих наперед заданным моментам времени.
Результаты измерений исправляются поправками за
остаточное давление, влияние магнитного поля, за скорость
света и отклонение направления падения от вертикали. Ин-
струментальная точность прибора лежит в интервале от
0,041 до 0,087 мГал (получено по результатам наблюдений
на 8 пунктах в 1971 г.). Прибор транспортабельный, весит
комплект 900 кг, продолжительность измерений на пунк-
те, включая установку и разборку комплекта, составляет 5
суток.
В дальнейшем приборы Фаллера постоянно модернизи-
ровались и обновлялись. Так, был переход от простого па-
дения тела к свободному падению тела внутри несвободно
падающей камеры. Было разработано ряд моделей: 15, А-10,
JILA, FG5. Наиболее совершенна последняя модель.
Принцип действия гравиметра FG5 состоит в измерении
интервалов времени, за которые свободно падающее тело
(СПТ) проходит заданные интервалы пути. Результаты из-
Рис. 5.6.3. Сравнение гравиметров FG5
в Финляндии, 2004 г.
мерений получают из многих измерений интервалов пути и времени. Измерение пути, пройденного
СПТ, осуществляется лазерным интерферометром.
Мерой пути служит длина волны излучения стабилизированного лазера, мерой интервалов времени
являются сигналы рубидиевого стандарта частоты. Прибор работает автоматически. Измерительный
путь у FG5 равен 20 см. СПТ свободно падает вместе с небольшой по размерам камерой, которая
несвободно падает в большой вакуумированной камере. Такое падение происходит под управлением
специальной следящей системы. Это позволяет несколько снизить требования к вакуумированию непо-
движной баллистической камеры и уменьшает влияние сопротивления остаточного газа движению
СПТ. В FG5 применяется стабилизированный гелий-неоновый лазер с йодной ячейкой поглощения,
связанный с интерферометром оптико-волоконной связью. Для уменьшения влияния микросейсм и
вибраций на результаты измерений в референтном плече интерферометра применена суперпружина с
периодом колебаний подвешенной на ней СПТ около 60 с. Баллистический гравиметр FG5 выпуска-
ется малой серией фирмой Micro-g Solutions, Inc. США. Погрешность измерений с ним — 2-4 мкГал.
Общий вид прибора FG5 показан на рис. 5.6.3.
Китайский баллистический гравиметр. В 1982 г. в национальном институте метрологии Китая
разработан баллистический гравиметр, работающий по трехточечному несимметричному методу [Feng
Yong-yuan et al. 1982]. Пробное тело — угол куба — свободно падает в вакуумированной камере.
Путь измеряется с помощью интерферометра Майкельсона, источником света служит стабилизи-
рованный гелий-неоновый лазер. Эталоном времени служит рубидиевый стандарт частоты с относи-
тельной погрешностью 1-10—10. Имеется антивибрационное устройство. Принцип работы гравиметра
аналогичен известному прибору Хамонда, Фаллера [Hammond, Faller 1971].
При измерении УСТ производится 50 бросков в час. Вес прибора 700 кг, высота около 2 м. Погреш-
ность измерений одной серии составляет 70 мкГал, общая погрешность измерений на пункте около
20 мкГал.
Симметричный метод измерений
Установка международного бюро мер и весов. Принцип работы установки основан на балли-
стическом симметричном методе двух станций.
А. Сакума (Франция, Севр) интерференционным методом задавал две станции, расстояние между
которыми 40 см, с помощью кварцевого эталона длины, равного 80 см [Гусев 1975; Юзефович, Ого-
родова 1980]. Эталоном времени в установке служит генератор частоты, обеспечивающий точность
10-10с, с выходами частот от 1 до 100 МГц.
Падающее тело гравиметра А. Сакумы содержит два симметрично расположенных относительно
горизонтальной плоскости уголковых светоотражателя. Каждый уголковый светоотражатель образован
тремя зеркалами, укрепленными с помощью винтов на дюралюминиевом основании. Положение зеркал
юстируется с точностью 1". Оптический центр уголкового светоотражателя и центр тяжести падающего
тела совмещены с точностью 10 мкм. Вес тела 430 г, из них 240 г — вес зеркал.
Вся аппаратура для измерения УСТ смонтирована в специальном помещении на бетонном фун-
даменте весом около 50 тонн. Основание фундамента размещено на глубине более двух метров от
поверхности земли и покоится на подушке из песка.
Установка состоит из двух камер, изготовленных из сплава меди и железа, соединенных между
собой Т-образно. В вертикальной камере высотой 2,8 м, весом около 850 кг происходит подбрасывание
пробного тела катапультой, а в горизонтальной камере длиною 1,3 м, весом около 350 кг находят-
ся оптические элементы горизонтального плеча интерферометра. Остаточное давление в вертикальной
камере поддерживается на уровне 10-7 мм рт. ст., а в горизонтальной — 10-3. Камеры имеют теплоизо-
лирующий слой пенопласта толщиной около 30 см, что позволяет поддерживать без наличия термостата
(обогревателя) температуру внутри камер с ошибкой ±0,001°С, при этом температура помещения, где
находится аппаратура, поддерживается при помощи кондиционера на уровне +20,0±0,2°С.
Источником белого света является лампа-вспышка мощностью 35 мегаватт. Длительность вспышки
лампы около 8 мс, а световой поток — 109 люмен. Вспомогательным управляющим источником служит
ртутная лампа сверхвысокого давления, излучающая световые волны длиной 546 нм. Эталон длины,
установленный в горизонтальной камере, представляет собой трубку из плавленого кварца с притерты-
ми к торцам и посаженными на оптический контакт зеркалами. Точность определения длины эталонов
±5-10-9 м, а стабильность лучше, чем 1 нм.
Генератор частоты прибора контролируется сравнением с образцовой частотой 200 кГц с точностью
до 10-11. Запись результатов сравнения ведется на самописце.
Большое внимание уделено в приборе борьбе с влиянием микросейсм и вибраций. Устранение их
влияния ведется двумя путями: компенсацией индустриальных короткопериодных вибраций с помощью
пьезодатчиков и регистрацией микросейсм синхронно с измерением УСТ посредством сейсмоприемника
с последующим введением поправки в измеренный результат УСТ. Кроме того, измерения проводятся
только ночью.
Нивелирование эталонов, размещенных в горизонтальной камере пробного тела, перед броском и
проверку вертикальности нити, подбрасывающей пробное тело, производят автоколлимационным спо-
собом по ртутному горизонту. Точность нивелирования ±5".
Принцип измерения УСТ сводится к определению времени, необходимого для прохождения проб-
ным телом отрезков пути при движении вверх и вниз. Интервалы времени прохождения пробным телом
реперных станций приблизительно равны 0,2 и 0,6 с и определяются с точностью выше 10-9 с. Расстоя-
ние между реперными станциями определяется с точностью 10-9 м при помощи высокочувствительного
оптического интерферометра.
Для получения одного результата силы тяжести проводят от 5 до 50 измерений. В полученные
значения вводят поправки за ход эталона времени, за температуру эталона длины, за влияние вибраций
и микросейсм и за лунно-солнечное притяжение.
Инструментальная погрешность прибора составляет 3-5 мкГал.
Установка национальной лаборатории стандартов (Австралия). Принцип работы установки
национальной лаборатории стандартов (г. Сидней) основан на баллистическом симметричном методе
двух станций [Gibbings et al. 1971].
Эталоном времени в установке служит генератор частоты, обеспечивающий точность измерения
промежутков времени 10-8 с. Пробным телом служит уголковый отражатель (система из трех зеркал,
смонтированных на дюралюминиевом основании). Вес тела 1,16 кг. Пробное тело является отражателем
интерферометра Майкельсона и подбрасывается вверх посредством катапульты.
Принцип работы аналогичен принципиальной схеме установки А. Сакумы в Севре.
Положения плоскостей станций задаются эталоном длины, представляющим собой трубу из плав-
леного кварца диаметром 29 мм, длиной 41 см, которая вынимается из установки и контролируется с
помощью интерферометра по отношению к длине волны излучения криптона. Погрешность в опреде-
лении расстояния между станциями характеризуется величиной 10-7.
Интервалы времени между последовательным прохождением отражателя через станции измеряются
фотоэлектронным способом посредством импульсов, получаемых с фотодиодов. Импульсы и временные
отметки генератора поступают на осциллограф, на экране которого они могут быть сфотографирова-
ны. Ошибка измерения силы тяжести из-за погрешности в измерении промежутков времени равна
±0,07 мГал.
Источником света служит циркониевая дуга. Давление в рабочей камере не превышает 10-3 мм
рт. ст. Нивелирование выполняется с помощью ртутного горизонта.
Погрешность измерения УСТ из 190 определений оценивается ±0,2 мГал. По мнению авторов,
наибольшее влияние на результаты измерения оказывают вибрации и микросейсмы, несмотря на то,
что учет их ведется при помощи сейсмографа.
Баллистический гравиметр Института метрологии «Д. Колоннетти». Баллистический грави-
метр Института метрологии «Д. Колоннетти» (Италия) разработан на базе установки А. Сакумы. При-
менен симметричный метод измерений, использованы аналогичные пробное тело и катапульта. Но
измерение пути движения пробного тела ведется путем счета интерференционных полос лазера. Ка-
мера вакуумирована до 10-3 мм рт. ст. Эталоном времени является рубидиевый стандарт частоты со
стабильностью 10-1°. Для ослабления влияния микросейсм и вибраций применен сейсмометр с перио-
дом колебаний маятника 20 с. Прибор транспортабелен. Погрешность измерений с ним около 10 мкГал
[Юзефович, Огородова 1980].
Приборы ХГНИИМ. В Харьковском государственном научно-исследовательском институте мет-
рологии (ХГНИИМ) в семидесятых годах разработано несколько устройств абсолютных гравиметров,
основанных на несимметричном и симметричном методе. В симметричном методе (В.Н. Бренер и др.)
наблюдения с 1969 г. ведутся по методу трех станций [Труды ХГНИИМ 1972]. Тело подбрасывается
катапультой с применением соленоида. Пробным телом в приборах является уголковый отражатель —
трипельпризма, закрепленная в металлической оправе.
Стационарный интерференционный гравиметр ИФЗ АН СССР. Гравиметр включает:
— подбрасываемое тело, составленное из трех параллелепипедов, соединенных оптическим кон-
тактом и образующих два симметрично расположенных уголковых светоотражателя [Романюк и др.
1970];
— катапульту для подбрасывания, устройство для торможения и поимки свободно падающего тела;
— вакуумную трубу со штативом;
— лазерный интерферометр;
— длиннопериодный сейсмометр, на маятнике которого укреплен референтный уголковый светоот-
ражатель, его оптический центр совмещен с центром качания маятника;
— электронное устройство измерения пути и времени;
— пульт автоматики.
Интерферометр и сейсмометр установлены на массивном бетонном фундаменте, а вакуумная труба
с катапультой — на штативе, опирающемся на основание, механически развязанное относительного
бетонного фундамента.
Аппаратура Кембриджской исследовательской лаборатории ВВС. В аппаратуре Кембриджской
исследовательской лаборатории ВВС, (США) для абсолютного измерения УСТ в качестве подбрасыва-
емого объекта применена электрически заряженная стеклянная частица диаметром 100 мкм, покрытая
тонким слоем алюминия (The Military Engineer, vol. 62, №406, 1970). При измерениях указанная ча-
стица совершает подъем и падение по траектории с амплитудой около 15 см. Моменты прохождения
частицы относительно двух уровней регистрируются при помощи счетного устройства, управляемого
импульсами с фотоумножителя. Эти уровни зафиксированы на кварцевом стержне в виде меток, рас-
стояние между которыми измеряется с точностью 0,01-0,02 мкм с помощью интерферометра. Прибор
работает автоматически, все управление и вычисления выполняет электронно-счетное устройство. При
испытаниях прибора в течение одного часа выполняли около 10000 измерений при точности среднего
результата ±0,1 мГал.
Прибор национальной физической лаборатории, Теддингтон. Принцип работы прибора наци-
ональной физической лаборатории, Теддингтон (Англия), основан на баллистическом симметричном
методе двух станций [Cook 1965а, Ь]. Эталоном времени в приборе является 100-килогерцевый генера-
тор со стабильностью 1О-10 с. Пробным телом в приборе является стеклянный шар диаметром 2 см,
который используется как линза, фокусирующая луч света, выходящего из одной щели на другую, за
которой расположен фотоэлектронный умножитель.
Работа прибора сводится к определению времени, необходимого для прохождения пробным телом
отрезков пути при движении вверх и вниз между постоянными станциями, расположенными на рас-
стоянии в 1 м. В момент нахождения пробного тела между щелями станции на анодной нагрузке
фотоумножителя возникает электрический импульс, управляющий счетным устройством. Импульсы
от щелей верхней станции управляют одним счетчиком, а от нижней — другим. Управляющие им-
пульсы совместно с импульсами времени, интервал следования которых 1 мкс, фотографируются. В
дальнейшем при обработке материалов наблюдения интервал времени между станциями определяется
с точностью до 0,2 мкс.
Расстояние между щелями станций (ширина щели 5 мкм на алюминированной поверхности стекла)
измеряется при помощи интерферометра. Ошибка измерения расстояния ~210-7 м.
Камера вакуумирована, остаточное давление не более 7-Ю-3 мм рт. ст. При этом давлении влияние
электростатических зарядов пробного тела незначительно, поскольку оно (пробное тело) покрыто токо-
проводящим слоем (окись индия). Вибрации и микросейсмы регистрировались во время измерений УСТ
сейсмографом. Средняя квадратическая ошибка определения УСТ на пункте составляет ±0,13 мГал.
Прибор не транспортабелен.
5.6.5 Возмущающие явления, учет или исключение их влияния
На измеренную величину УСТ влияют разные по своей природе явления (факторы, источники,
погрешности измерений). Их влияние может быть учтено путем: введения соответствующих поправок;
уменьшения или исключения влияния возмущений техническими средствами; компенсацией путем
выбора методики наблюдений.
В измеренные значения вводятся следующие поправки: за лунно-солнечные вариации; за притяже-
ния атмосферы; за. вертикальный градиент силы тяжести; за сопротивление остаточного газа в ваку-
умной камере; за эффект Доплера; за изменение длины волны лазера; за изменение частоты эталонного
генератора; за движение полюса.
При расчете поправок за движение полюса необходимо уточнить влияние Луны и Солнца, а
именно уточнить не учитываемый IERS эффект смещения действующих сил с центра масс Земли,
то есть необходимо различать центр масс и точки приложения действующих сил.
Вычисление поправок за влияние электростатических и магнитных полей нецелесообразно (практи-
чески невозможно), так как более эффективно применение простых технических средств по исключе-
нию или уменьшению влияния полей так, что их остаточное влияние пренебрежимо мало. Это достига-
ется путем: установки электростатического экрана внутри вакуумной трубы гравиметра; изготовления
корпуса вакуумной камеры и других деталей из материалов с малым электрическим сопротивлением;
заземления прибора; металлизации деталей; исключения магнитных материалов и др. [Арнаутов и др.
1972], Сборник статей, Новосибирск: ИАиЭ, 1972 г.
Обычно влияние микросейсм и вибраций ослабляется:
— компенсацией случайных погрешностей единичных измерений большим числом измерений;
— наблюдениями в то время, когда фон помех относительно мал (например, в ночное время);
— установкой неподвижного светоотражателя в центре качаний маятника длиннопериодного сей-
смометра [Гусев 1975, Романюк 1974];
— применением стабилизированных платформ [Гусев 1975];
— наблюдениями методом многих станций существенно ослабляет влияние вибраций, во многом
компенсирует их влияние (Сборник статей, Новосибирск: ИАиЭ, 1972 г.).
В 50-60-е годы погрешности абсолютных гравиметров, основанных на методе свободного падения,
были порядка нескольких десятых долей мГал. В 1980-90-е годы погрешности лучших абсолютных
гравиметров составляли уже около 10 мкГал, а в 2000-2005 гг. эти погрешности составляли 2-4 мкГал.
Таким образом, погрешности измерений абсолютных гравиметров за последние 30-40 лет уменьши-
лись приблизительно на два порядка.
Абсолютные гравиметры со свободно падающим телом не имеют таких источников возмущений,
которые бы принципиально ограничивали точность их измерений. Среди источников погрешностей не
имеется таких, которые нельзя ослабить, учесть или компенсировать их влияние до малых величин, на-
пример менее 0,1 мкГал. Следовательно, технически вполне возможно дальнейшее повышение точности
измерений абсолютных гравиметров до величины порядка 1-0,1 мкГал.
Однако при практическом использовании высокой точности абсолютных измерений (при точности
порядка первых микрогал) возникает ряд проблем повышения точности учета явлений, влияющих
непосредственно на величину УСТ:
— приливных и неприливных вариаций;
— притяжения атмосферы:
— определения нелинейной части вертикального и горизонтальных градиентов силы тяжести;
— вертикальных движений земной коры;
— изменение уровня грунтовых вод;
— движения полюса.
Дальнейшие разработки баллистических гравиметров проводятся с целью уменьшения веса и габа-
ритов при сохранении достигнутой точности измерений. Судя по публикации в Интернете [Brown et
al. 2005] в США создан гравиметр, в 5 раз меньший по объему и весу, чем гравиметр FG-5, и в 2 раза
меньший по высоте.
5.7 О разработках бортовых измерителей вторых производных
гравитационного потенциала
А.И. Сорока
Проблемы гравитационных измерений с движущихся объектов были поставлены перед исследова-
телями в связи с бурным развитием различных летательных аппаратов (ЛА), подводных, надводных
и других транспортных средств и с потребностью в дальнейшем повышении точности, помехозащи-
щенности и эксплуатационной надежности автономных систем навигации, наведения, ориентации и
инспекции движущихся объектов различного назначения.
Широкое использование гравитационного поля для этих целей предусматривает изучение структу-
ры и особенностей гравитационного поля различных естественных и искусственных тел, разработку и
создание бортовых измерителей различных компонент гравитационного поля и создание гравиинерци-
альных систем автоматического управления движущимися объектами различного назначения.
Идея построения бортовых вращающихся вариометров была предложена в СССР членом-
корреспондентом АН СССР А.А. Красовским несколько раньше, чем в США в фирме Hughes
Aircraft Р.Л. Форвардом (1969 г.) и К.С. Беллом (1971 г.). В дальнейшем работы в этом направлении
в СССР и США практически развивались параллельно и независимо друг от друга.
В настоящее время на подвижном основании практически измеряют только первую вертикальную
производную гравитационного потенциала, или УСТ.
Основная трудность измерения УСТ на борту быстродвижущегося объекта, испытывающего различ-
ные по спектру и амплитуде вибрации и перегрузки, состоит в сложности выделения полезного гравита-
ционного сигнала на фоне больших по амплитуде и изменяющихся по фазе и во времени инерционных
помех. При этом, ввиду малой эффективности используемых в настоящее время методов частотного вы-
деления полезного сигнала, требуется применять прецизионные гцроплатформы и автономные датчики
инерционных возмущений и достаточно точные и детальные данные о пространственных координатах,
скорости и направления движения бортового носителя, для того чтобы с нужной точностью учесть
поправки на эффект Этвеша. Несмотря на довольно многочисленные и длительные разработки аэро-
гравиметров, выполненных в СССР и за рубежом [Лозинская, Яшаяев 1970; Szabo, Antpny 1967,
1971], достигнутый уровень точности бортовых измерений в 7-10 мГал во многих применениях оказы-
вается недостаточным. Кроме того, эти гравиметры в силу их конструктивных особенностей не могут
быть использованы для гравиметрических измерений на аэрокосмических ЛА, испытывающих в полете
состояние невесомости.
Отмеченные трудности по разделению гравитационных и инерционных ускорений при бортовых из-
мерениях первых производных гравитационного потенциала привели ряд исследователей к заключению
о целесообразности разработок бортовых измерителей вторых производных гравитационного потенциа-
ла [Балабушевич 1954; Федынский 1959; Веселов 1964; Moritz 1968; Крылов и др. 1973].
При этом в качестве основных помех бортовых гравиметрических градиентометров (БГГ) оказывают
влияние инерционные помехи от угловых скоростей и угловых ускорений подвижного основания, кото-
рые поддаются эффективному контролю и устранению использованием гиростабилизированных грави-
датчиков. В этом случае помимо значительного ослабления помехи от эффекта Этвеша, по сравнению с
аэрогравиметрами, и одновременно полного исключения влияния на градиентометры ускорения прямо-
линейного и поступательного движения бортового носителя появляются дополнительные возможности
обнаружить структурные отличия полезного гравитационного сигнала от инерционных помех, кото-
Рис. 5.7.1. Бортовые измерители вторых производных гравитационного потенциала
рые наиболее эффективно проявляются при бортовых измерениях полного набора всех девяти вторых
производных гравитационного потенциала или при измерении полного тензора гравитационного поля
[Moritz 1968; Крылов и др. 1973]. При осуществлении бортовых измерений разности кривизны грави-
тационного потенциала W& и Wxv на полезный сигнал не влияет величина полного модуля измеряемого
гравитационного поля, а изменяются лишь ее неоднородности, что в некоторых аэрокосмических при-
менениях представляет собой интерес [Antony 1971]. Это является дополнительным преимуществом
БГГ по сравнению с бортовыми гравиметрами.
Современные измерители вторых производных гравитационного потенциала по своему назначению
можно разделить на статические, измеряющие на неподвижном основании, и динамические, или борто-
вые, которые по принципу работы можно разделить на компенсационные и модуляционные (рис. 5.7.1).
В основу конструкции современных статических гравитационно-градиентных датчиков заложена
идея крутильных весов Ш. Кулона, впервые примененная Г. Кавендишем при измерении величины гра-
витационной постоянной и средней плотности Земли и послужившая основой для создания в 1888 г.
венгерским ученым Лораном Этвешем гравитационного вариометра [Этвеш 1910], конструкция ко-
торого без каких-либо принципиальных изменений сохранилась и широко используется в настоящее
время в приборах S-20, Z-40, Е-60, ГРБМ-2, БТБГ-63.
Существенным недостатком данного типа приборов, исключающим возможность их бортового при-
менения, при достигнутой сравнительно высокой точности измерений в 1-5 Э (Этвеш), следует при-
знать их малую производительность (для наблюдения в одной точке требуется от 2 ч до 30-40 мин
времени) и повышенную чувствительность к температуре, сейсмическим и гравитационным помехам,
что в настоящее время ограничивает область их практического применения. Они применяются только в
научных и детальных рудных и подземных геофизических изысканиях [Справочник геофизика 1968].
Наряду с гравидатчиками этвешевского типа с вертикальной осью вращения торсионного подвеса
чувствительного элемента в последнее время появилось ряд предложений о возможности бортового
использования крутильных весов с горизонтальной осью вращения [Чернышев 1967]. Однако до на-
стоящего времени не имеется сообщений о создании такого типа приборов ни в СССР, ни за рубежом.
Это объясняется тем, что уже при попытке создания статических компенсационных приборов такого
типа разработчики встретились со значительными техническими трудностями [Гран 1964], вызванными
необходимостью точного до 0,1-0,01 мкм совмещения центра масс крутильной системы приборов с осью
подвеса на торсионах во время наблюдений, практически одинаковой чувствительности таких приборов
ко всем вторым производным гравитационного потенциала, и трудностью термической, вибрационной и
гравитационной защиты прибора от помех.
В связи с осуществлением в СССР и в других странах наземных съемок вертикального гради-
ента силы тяжести с помощью разнесенных по высоте высокоточных гравиметров и доказательством
отдельных преимуществ измерения на подвижном основании гравитационного поля сдвоенными ак-
селерометрами или ньютометрами [Балабушевич 1954; Федынский 1959; Веселов 1964; Moritz 1968;
Крылов и др. 1973] появилось ряд предложений по разработке и созданию БГГ с использованием сдво-
енных акселерометров различных модификаций: струнных, кварцевых, поплавковых и других типов
[Antony 1971].
К настоящему времени практически никому не удалось построить удовлетворительный по точности
и работоспособный БГГ, основанный на идее сдвоенных акселерометров, хотя за прошедшие два де-
сятилетия по практической реализации данной идеи были затрачены значительные средства и усилия
многих исследователей в разных странах.
При создании таких градиентометров возникали практически невыполнимые требования к стабиль-
ности и идентичности основных конструктивных параметров сдвоенных акселерометров или гравимет-
ров. По этой же причине не привели к положительным результатам попытки использовать приборы,
основанные на использовании эффекта Мессбауэра [Красиков 1968а, б], гравичувствительных полу-
проводниковых преобразователей [Капусткин 1969], ультравысокочастотных стоячих волн [Красиков
1968а, б], разности плавучести тел в жидкости [Арнаутов 1969] и электростатических подвесов [Май-
сов 1964] для бортовых измерений градиентов гравитационного поля. При этом в течение всего време-
ни измерений возникали аналогичные трудности (как и в компенсационных приборах с механическими
измерительными системами) по обеспечению достаточно точных и стабильных во времени электриче-
ских, температурных или других параметров приборов. Это характерно для всего класса прецизионных
компенсационных измерителей, у которых медленно меняющиеся или квазистатические измеряемые
величины сравниваются (компенсируются) с упругими, электрическими или другими константами чув-
Только в связи с появлением в измерительной техни-
ке нового модуляционного класса гравиинерциальных дат-
чиков, в которых используются резонансные свойства ме-
ханических колебательных систем, стабильность основных
параметров которых требуется поддерживать лишь в тече-
ние одного оборота вращающейся измерительной системы,
появилась возможность построения высокочувствительных
БГГ.
Остановимся подробнее на современном состоянии работ
по созданию бортовых модуляционных датчиков гравитаци-
онного поля, проводимых за рубежом.
Предложенный в 1963 г. Вильямсом вращающийся при-
бор измерений силы гравитации [ Williamson 1963] был
предназначен для использования в инерциальной навига-
ции. Чувствительный элемент этого прибора, выполненный
в виде отбалансированной гантели 1, вращается с частотой
1 Гц (рис. 5.7.2). Сама гантель насаженна на жесткую ось
2, укрепленную в двухступенчатом подшипнике, состоящем
из относительно грубого магнитоэлектрического подвеса 3 с
радиальными биениями до 7-10 мкм и прецизионного под-
мкм.
Стабильность скорости вращения привода датчика контролируется фотоэлектрическим датчиком 4
частотным методом, а полезный сигнал гравидатчика измеряется с помощью индуктивного датчика
перемещений 6 в виде перемещения гантелеобразного чувствительного элемента относительно равно-
вращающегося корпуса.
Несмотря на отдельные положительные технические решения, предлагаемый прибор в целом ока-
зался малопригоден для работы на подвижном основании. Судя по приведенным уравнениям датчика,
автор ошибочно считает свой датчик измерителем ускорений силы тяжести, в то время, как известно
[Этвеш 1910], что отбалансированная вращающаяся гантель является датчиком вторых производных
гравитационного потенциала, и в данном случае — датчиком вертикального градиента силы тяжести.
Кроме того, отсчетное устройство гравидатчика, неподвижная часть которого связана с не вращаю-
ствительнои системы приборов.
Рис. 5.7.2. Конструкция бортового гра-
видатчика Вильямса
шипника скольжения 5 с биениями ло 0.5
щимся основанием прибора, будет регистрировать, кроме полезного сигнала, и бортовые вибрационные
ускорения и перегрузки носителя, и будет отмечать мгновенные изменения скорости вращения привода
гравидатчика в пределах одного оборота.
В 1964 г. американская фирма Hughes Aircraft сообщила о начале исследований по созданию вра-
щающихся (модуляционных) БГГ, проводимых под руководством доктора Форварда и финансируемых
ВВС США и НАСА, причем ежегодные затраты на эту тему составляли 150 тыс. долларов. В 1966 г.
Форвард получил патент [Forward 1964] на вращающиеся датчики градиентов гравитационного и элек-
трического полей.
Чувствительный элемент гравитационного датчика предполагалось выполнить в виде двух динами-
ческих отбалансированных масс, укрепленных на тонких и гибких пластинках, но достаточно широ-
ких, чтобы удержать пробные массы в поле силы тяжести Земли. Полученный сигнал модуляционного
датчика идет на двойной частоте вращения привода гравидатчика и считывается дифференциально
включенными титанатобариевыми пьезоэлементами, укрепленными на гибких пластинах вращающейся
гантели. Электрический сигнал от пьезоэлементов предварительно усиливается до уровня 30 дБ, затем
подается на контактно-щеточный токосъем и после повторного усиления узкополосным резонансным
усилителем до уровня 100 дБ подается на стационарную регистрирующую аппаратуру. Частота враще-
ния гравидатчика должна быть 100 Гц, собственная частота — 200 Гц, добротность Q=3000. Датчик
должен быть вакуумирован и экранирован от температурных, акустических и вибромагнитных помех.
Теоретические исследования работы датчика Форварда с учетом всех возмущающих сил [Antony
1971] и конструктивных погрешностей, а также эксперименты по обращенной картине работы грави-
датчика привели к созданию трех действующих лабораторных макетов вращающегося БГГ (рис. 5.7.3).
Чувствительный элемент первого действующего макета модуляционного БГГ, по сообщению НАСА
(см. рис. 5.7.3а), состоит из двух крестообразных гантелей, изготовленных из монолитной цилиндри-
ческой алюминиевой заготовки диаметром 127 мм, с собственной частотой 200 Гц и добротностью
<3=200, помещенных в вакуумную камеру с давлением 0,01-Ю-5 атм. Датчик в стационарных усло-
виях регистрировал минимальный гравитационный градиент 10 Э, однако, сообщалось, что уровень
шумов в гравидатчике превышал полезный сигнал в 15 раз, что объяснялось недостаточным уровнем
вакуума в рабочей камере датчика.
Во второй действующей модели модуляционного БГГ (см. рис. 5.7.36) чувствительный элемент был
выполнен в виде спаренной гантели диаметром 12 см и весом каждой пробной массы 20 г. Собственная
частота датчика была 88 Гц, добротность Q=120. Датчик регистрировал переменный гравитационный
градиент от пары вольфрамовых вращающихся масс весом 1,012 кг каждая, причем на расстоянии
4,8 см от оси вращения гравидатчика был получен максимальный полезный сигнал с пьезодатчиков
97 мВ. Минимальный сигнал с гравидатчика был получен на расстоянии 12 см от оси вращающейся
гантели, что соответствует пороговому значению гравитационного градиента в 6 Э. Генератор гравита-
Рис. 5.7.3. Лабораторные макеты вращающихся гравитационно-градиентных датчиков
а) первая модель гравидатчика 1966 г; б) вторая модель гравидатчика 1967 г; в) третья модель гравидатчика 1968 г.
ционного поля и сам гравидатчик были тщательно виброизолированы. Стабильность скорости вращения
генератора гравитационного поля контролировалась фотоэлектрическим датчиком.
Чувствительный элемент третьей действующей модели вращающегося гравитационного-градиентно-
го датчика [Antony 1971] (см. рис. 5.7.3в) состоит из 4 пластмассовых цилиндров, заполненных воль-
фрамовыми опилками, весом по 200 г каждый, укрепленных между двумя парами взаимоперпендику-
лярных плеч длинной 12,5 см. Собственная частота датчика была 30 Гц. Максимальный гравитацион-
ный градиент в 600Е был зарегистрирован от пары вращающихся грузов по 34 кг каждый на расстоянии
26 см от оси вращения гантелей. Минимальный гравитационный сигнал в 0,2 Э был зарегистрирован
датчиком от пары вращающихся масс весом по 1 кг на расстоянии 20 см от оси вращения гантелей при
тепловом пороге чувствительности гравидатчика 0,05 Э.
По состоянию на 1972 г. [Antony 1971] известно, что первые два лабораторных макета вращающе-
гося гравидатчика были выполнены в лаборатории Хьюз Эйеркрафт по заказу НАСА. Они оказались
чувствительными к полю УСТ из-за нелинейностей дифференциально включенных пьезоэлектриче-
ских преобразователей системы съема полезного сигнала гравидатчика. Приборы этой конструкции в
дальнейших работах этой лаборатории не получили развития.
Конструкция третьего лабораторного макета БГГ получила в работах Хьюз Эйеркрафт дальнейшее
развитие [Antony 1971].
Первый этап разработок БГГ в лаборатории Хьюз Эйеркрафт был закончен созданием трех дей-
ствующих лабораторных макетов вращающихся гравитационно-градиентных датчиков стационарного
типа.
Второй этап работы этой лаборатории по контрактам с ВВС США был направлен на разработку
вращающихся гравитационно-градиентных датчиков с удвоенным чувствительным элементом на воз-
душных и механических подшипниках ротора датчика. Первые эксперименты с макетом вращающегося
гравитационно-градиентного датчика с газовыми подшипниками ротора показали, что уровень шумов
в этой конструкции оказался равным 1000 Э. Эти шумы были вызваны следующими причинами:
— динамической несбалансированностью гантелей гравидатчика;
— нестабильностью скорости вращения ротора газового привода;
— вибрационными и сейсмическими шумами подставки прибора;
— недостаточной экранировкой от влияния света, тепла и статического электричества.
Следующий макет ротационного БГГ лаборатории Хьюз Эйеркрафт на твердых подшипниках и
со сдвоенной механической колебательной системой показал, что при испытаниях уровень шумов не
превысил 900 Э. В 1970 г. в лаборатории удалось создать действующий макет вращающегося БГГ на
твердых подшипниках ротора датчика с точностью в 1 Э за период интегрирования выходного сигнала
в 10 с.
Третий этап в работах лаборатории Хьюз Эйеркрафт по созданию вращающегося БГГ по кон-
трактам с ВВС США, продолжающийся по настоящее время, начиная с 1971 г. включает разработку
системы изоляции этого датчика от вибрационных, линейных и угловых перегрузок бортового носи-
теля, оценку бортовых шумов гравидатчика различного происхождения, и проведение исследований
работы гравидатчика на борту движущегося объекта.
По материалам публикаций можно судить, что в США к настоящему времени разрабатывается
несколько конструктивных вариантов модуляционных БГГ, предназначенных для различных аэрокос-
мических ЛА [Вилк 1971; Wilson 1971; Hansens 1973].
Рассмотренные типы датчиков, в том числе и вращающиеся спаренные акселерометры [Дизел 1964;
Чоботов 1968], предложенные для гравитационно-градиентной стабилизации и ориентации ИСЗ, весь-
ма чувствительны к угловым ускорениям скорости вращения приводов гравидатчиков в пределах одного
оборота.
При пороговой чувствительности модуляционных датчиков и гравитационном градиенте в 1 Э допу-
стимые угловые ускорения ротора привода не должны превышать 1 Э, что накладывает весьма жесткие
требования на точность и абсолютную идентичность параметров разнесенных акселерометров [Сорока
1973] и на стабильность физических параметров дифференциально включенных титанатобариевых пье-
зодатчиков приборов Форварда. Причем стабильность физических параметров пьезодатчиков должна
быть не ниже 10-8-10-9, чувствительность к изгибным гравитационным усилиям не ниже 10-6-
10~3 дины и, с учетом механической прочности на изгиб тонких коромысел с укрепленными на них
пьезодатчиками, требуется пороговая чувствительность отсчетного устройства к линейным микропере-
мещениям гантелей порядка 10“3-10_4 А. Таким образом, в гравидатчиках Форварда [Forword 1964]
носителем точности работы всего прибора в целом является стабильность и строгая идентичность фи-
зических параметров пьезодатчиков до уровня 10“9-10-1°, что представляется исключительно трудной
технологической задачей.
Наиболее рациональной конструктивной схемой зарубежного модуляционного БГГ следует признать
схему Белла [Bell 1968], которая по ряду технических признаков уступает конструкции отечественного
гравидатчика, предложенного в СССР несколько раньше, чем в США.
В СССР под руководством чл.-корр. АН СССР А.А. Красовского велись исследования по разработке
и созданию макетов бортовых модуляционных БГГ, предназначенных для различных типов ЛА [Сорока
1974].
Опытно-исследовательские работы по построению модуляционного БГГ были начаты с обоснования
тактико-технических требований к отдельным узлам, системам и ко всему прибору в целом [Соро-
ка 1969]. Последующие работы были направлены на разработку и экспериментальное макетирование
отдельных наиболее ответственных узлов модуляционного гравидатчика: на отработку оптического от-
счетного устройства гравидатчика, на разработку и изготовление стабилизированного по скорости вра-
щения привода гравидатчика с твердыми подшипниками ротора, разгруженными воздушной подвеской,
и на выбор и экспериментальные исследования рациональной конструкции механической колебательной
системы гравидатчика [Сорока 1973].
К 1969 г. в результате проведенных опытно-исследовательских работ был создан первый отечествен-
ный лабораторный макет вращающегося БГГ с твердыми подшипниками ротора привода.
Макет гравидатчика был испытан на работоспособность в ак-
тивном режиме работы, то есть когда датчик был установлен на
равномерно вращающуюся газовую центрифугу и остался рабо-
тоспособным при резонансной частоте вращения в 2,5 Гц. Далее
макет гравидатчика был испытан в режиме работы обращенной
картины, когда вокруг невращающегося датчика создавалось пе-
ременное гравитационное поле в диапазоне ±300 Э с частотой
2,5 Гц, что соответствовало резонансной частоте датчика 5 Гц. В
результате проведенных экспериментов оказалось, что невраща-
ющийся макет модуляционного гравидатчика с одним чувстви-
тельным элементом воспринимает промышленные вибрационные
помехи лаборатории, уровень которых превышает полезный сиг-
нал в 102-103 раз. Сам полезный сигнал ожидался в виде пери-
одических колебаний чувствительного элемента в пределах 0,1-
0,001 мкм.
Параметры данного макета гравидатчика
— габариты, мм:
механической колебательной системы без кожуха ФЭУ и привода
диаметр ................................................70;
длина ...............................................100;
световолоконного жгута системы съема полезного сигнала,
впрессованного в чувствительный элемент датчика ..........31-9-7;
— средний диаметр отдельных световодов, мкм ............4,2;
— толщина светопоглащающего междуволоконного заполнения, мкм
1.7;
Рис. 5.7.4. Макет калибровочной
установки для юстировки рота-
ционных гравитационных варио-
метров с использованием грави-
метра ГАГ-ЗМ. На заднем плане:
А.И. Сорока, В.И. Леонтьев,
В.Б. Дубовской.
— вес, г
латунного чувствительного элемента гантелей .....................................................53;
четырех дисков механического фильтра помех ..................................................143;
— коэффициент подавления помех при собственной частоте колебаний чувствительного элемента 5 Гц и меха-
нического фильтра 1 Гц.............................................................................6-10 ;
— используется два типа торсионов: платнново-серебряный (типа ПлСр-20 ГОСТ-9444-60), вольфрамовый;
диаметры торсионов, мкм .....................................................................30-40;
длина рабочих шеек, мм ......................................................................3.
Восприимчивость макета модуляционного гравидатчика с одним чувствительным элементом и тор-
сионами одного диаметра к инерциальным помехам объясняется тем, что в нем неподвижная часть
световолоконного измерительного устройства реагировала только на гравитационный сигнал, тогда как
вибрационные помехи гасились многозвенными фильтрами механических помех. В дальнейшем с уче-
том полученных результатов была разработана конструкция БГГ (вариометра) [Сорока 1972, 1973] с
удвоенным чувствительным элементом и дифференциальным оптическим съемом полезных сигналов, с
торсионами переменного диаметра и дисками механического фильтра помех.
Согласно выполненным расчетам, оптическое отсчетное устройство данного варианта гравидатчика
при собственной частоте его чувствительного элемента 3 Гц и механической добротности Q=20 при
индикации полезного гравитационного сигнала в 1 Э должно было регистрировать линейные переме-
щения в 0,001 мкм, причем уровень тепловых шумов гравидатчика должен был быть на три порядка
ниже точности измерения.
Таким образом, по рассмотренным материалам в области разработок модуляционных БГГ мож-
но прийти к выводу, что основная трудность их создания состоит в конструкторско-технологической
отработке наиболее ответственных узлов и деталей этих приборов. Поэтому этап лабораторного ма-
кетирования является непременным условием для перехода к стендовым и натуральным испытаниям
разработанных приборов. Что касается уровня самих разработок модуляционных БГГ, то следует при-
знать, что бортовые гравиметрические приборы данной конструкции являются наиболее отработанными
в настоящее время в конструкторско-технологическом отношении по сравнению со всеми другими из-
вестными конструкциями бортовых гравиградиентометров.
Состояние разработок отечественных бортовых гравиградиентометров научных школ академиков
РАН А.А. Красовского (ВВИА им. Н.Е. Жуковского), В.Г. Пешехонова (ЦНИИ Электроприбор),
О.А. Глико (ИФЗ РАН) и В.Ф. Уткина (ЦНИИ Машиностроения) показано в работах [Сорока 2000,
Вольфсон 2002, Дубовской, раздел 6.7 настоящей книги, Васин, Попков, раздел 9.2 настоящей книги].
К 2007 г. в России созданы промышленные экспериментальные образцы ротационных гравита-
ционных вариометров на спаренных гантелях и спаренных акселерометрах в Раменском приборном
конструкторском бюро (ОАО РПКБ) совместно с ВВИА им. Н.Е. Жуковского (Сорока), общей массой
вместе с блоками питания и электроники ~10 кг, чувствительностью измерений 0,5-1,0 Э, погрешно-
стью измерений 10-15 Э за время выделения полезного сигнала 20-40 с и быстродействием 0,2-0,5 с. В
ЦНИИ Электроприборе созданы промышленные образцы неротационного гантельного гравивариометра
Г.Б. Вольфсона наземного, скважинного и космического применения с разрешающей чувствительно-
стью измерений, равной 0,1-0,5 Э.
В течение 2007-2008 гг. в ОАО Раменском приборостроительном конструкторском бюро совместно
с сотрудниками ИФЗ РАН и ВВИА им. Н.Е. Жуковского проведены юстировочные и метрологические
исследования разрешающей способности экспериментальных образцов РГВ-5 и РГВ-6 с использованием
гравиметра ГАГ-ЗМ (рис. 5.7.4). Доказана работоспособность созданных гравивариометров с погрешно-
стью определения «6 Э их масштабных коэффициентов. Дальнейшее повышение точности калибровки
ротационных гравитационных вариометров связано с развитием соответствующей метрологической ба-
зы, включая и полигонную технологию [Сорока и др. 2007].
В ЦНИИ Электроприборе созданы промышленные образцы неротационного гантельного гравива-
риометра Г.Б. Вольфсона наземного, скважинного и космического применения с разрешающей чув-
ствительностью измерений, равной 0,1-0,5 Э.
К 2007 г. за рубежом известны разработки морских [Bell 1998] и авиационных полнотензорных
бортовых гравитационных градиентометров [Lane 2004] с достигнутой точностью измерений на низ-
колетящем самолете типа Sesna в 5-6 Э за время измерений 40-60 с и общей массой вместе с гиро-
стабилизатором в 200-400 кг. На начало 2007 г. известен ряд зарубежных и отечественных проектов
создания низкоорбитальных гравиградиентных полнотензорных измерительных комплексов с ожидае-
мой точностью измерений в 0,01-0,0001 Э за время измерений 1-10 с на высотах 180-250 км (проекты
EKA GRACE, GOSE, в России «Метрика» [Сорока 2003].
5.8 Метрологическое обеспечение гравиметрических работ
Н.А. Гусев, А.И. Спиридонов
Под метрологическим обеспечением гравиметрических работ понимается комплекс организацион-
ных, технических, нормативно-методических и правовых мероприятий, направленных на обеспечение
единства измерений при производстве гравиметрических работ.
Правовые основы метрологического обеспечения регулируются Федеральным Законом «Об обес-
печении единства измерений», принятым в 1993 г. и обновленным в 2008 г. В соответствии с этим
законом геодезические работы отнесены к сфере государственного регулирования обеспечения един-
ства измерений. Из этого факта вытекают следующие требования:
— создание метрологической службы должно быть обязательным; ее права и обязанности должны
быть изложены в положении о метрологической службе, утверждаемым руководством предприятия и
согласованным с вышестоящей (головной или базовой) организацией метрологической службы отрасли;
— средства измерений как вновь разрабатываемые, так и поставляемые по импорту, должны прохо-
дить испытания для целей утверждения типа;
— средства измерений должны проходить поверку при выпуске из производства, при импорте, после
ремонта, в процессе эксплуатации и хранения;
— методики выполнения измерений должны быть аттестованы.
Техническую основу обеспечения единства измерений составляют эталоны, обеспечивающие с за-
данной точностью хранение и воспроизведение значений единиц физических величин, предназначенные
для передачи размеров единиц рабочим средствам измерений. Утверждение, хранение и использование
эталонов возложено на государственную метрологическую службу страны.
Нормативную основу государственной системы обеспечения единства измерений (ГСИ), функцио-
нирующей в соответствии с положениями законодательной метрологии, составляют стандарты, руково-
дящие документы, правила по метрологии, методики.
Основные понятия в области метрологического обеспечения гравиметрических работ установлены в
руководящем техническом материале [РТМ 68-6-94 1995].
За единицу ускорения g в международной системе единиц СИ принята производная единица —
метр на секунду в квадрате (м-с-2). Эта единица образована на базе двух основных единиц: единицы
длины — метра и единицы времени — секунды [ГОСТ 8.417-2002 2003].
В гравиметрии применяется также внесистемная единица, получившая наименование Гал, данное
ей в честь Галилео Галилея, проведшего первые определения УСТ (1 Гал= 10-2 м-с-2). Если масса
притягиваемого тела равна 1 грамму, то сила тяжести в динах численно равна ее ускорению в Галах, и
10-3 Гал = миллигал (мГал) = 10-5 м-с-2;
10-6 Гал = микрогал (мкГал) = 10-8 м-с-2.
При измерении градиентов УСТ (вторых производных потенциала) часто применяется, также не
входящая в систему СИ, единица Этвеш:
1 Этвеш (Э) = 10-9 с-2 = 0,1 мГал/км.
Ускорение силы тяжести на Земле g равно 9,8... м-с-2 = 980,... Гал. Диапазон изменения силы
тяжести на Земле (от экватора до полюса) составляет «5 Гал.
Точность современных наземных измерений УСТ достигла 10-9 • д, поэтому уровень метрологиче-
ского обеспечения должен быть достаточно высоким.
До появления абсолютных гравиметров, выдающих значения в системе СИ, измерения в основ-
ном выполняли относительными приборами. Для их применения (определение цены деления их шкал,
контроль смещения нуль-пунктов) были введены исходные и опорные пункты. Существовали также
международные исходные пункты (Вена, Потсдам), национальные исходные пункты и гравиметриче-
ские сети разных классов точности. Для определения цены деления гравиметров создавались эталонные
полигоны. Международные и национальные сети и полигоны описаны в разделе 6.4.
Государственная фундаментальная гравиметрическая сеть, созданная в нашей стране к 1993 г. и
являющаяся метрологической основой всех гравиметрических определений в стране, устанавливает
гравиметрическую систему России и служит исходной основой для сетей низших классов и съемок, а
также для решения научных задач [Гусев, Остач 1993].
Сеть 1 класса равномерно распределяет гравиметрическую систему на всю территорию страны.
Фундаментальные пункты и пункты 1 класса надежно закреплены на местности.
Дальнейшее развитие высокоточных гравиметрических сетей, в том числе на пунктах ФАГС и ВГС,
выполняется, в основном, баллистическими гравиметрами как наиболее точными на данное время.
Длина волны лазера и частота опорного генератора этих приборов проверяется в институтах государ-
ственной метрологической службы. Относительная нестабильность как частоты опорного генератора,
так и длины волны лазера не превышает 1О-10.
Трудность метрологического контроля заключается в том, что в настоящее время не существует
государственного эталона УСТ, а применяется единственно возможный метод сравнения гравиметров
между собой. Поэтому с целью сохранения единства измерений баллистические гравиметры, участ-
вующие в высокоточных определениях УСТ, должны метрологически проверяться сравнением между
собой на выбранном каком-либо фундаментальном пункте. В Севре (Франция) такие сравнения регу-
лярно (через 3-4 г.) проводятся с 1981 г. Аналогичные сравнения должны проводиться в нашей стране
и за рубежом. Сравнение гравиметров дает возможность определить реальную точность измерений с
конкретным прибором, а также определить приборную ошибку и уточнить методику измерений.
Задача метрологического обеспечения полностью не решается сличением одного прибора на одном
пункте, поскольку сила тяжести изменяется со временем, а каждый прибор имеет свою системати-
ческую погрешность. Поэтому в настоящее время в качестве исходного эталона (эталонная мера)
принимается группа главных фундаментальных пунктов, закрепленных на местности специальными
постаментами с марками, к которым относятся измеренные результаты. Пункты выбираются вдали от
сейсмоактивных районов. Каждый главный фундаментальный пункт (около 5 в стране) состоит из не
менее трех фундаментальных пунктов, связанных между собой высокоточными относительными связя-
ми.
На пунктах устанавливается аппаратура для регистрации внешних факторов: давления, температу-
ры и влажности воздуха, уровня грунтовых вод, влагонасыщенности почвы и т. д. Необходимо также
измерять вертикальные и горизонтальные градиенты УСТ, вибрационные и микросейсмические влия-
ния, а также параметры магнитного, электрического и других полей. Также необходим точный учет
изменения гравитационного ускорения из-за приливных влияний, за движение полюса и за состояние
атмосферы. Блоки и приборы, входящие в состав комплекса аппаратуры (стандарт частоты, вакуумметр
и др.), должны проверяться в институтах Федерального агентства по техническому регулированию и
метрологии. Высоты пунктов следует определять одновременно с определением УСТ, в том числе и при
повторных определениях, в единой системе высот с абсолютной погрешностью не более 3 мм.
Для поверки и передачи единиц могут использоваться как одиночные, так и групповые эталоны. В
качестве группового эталона могут быть приняты несколько высокоточных баллистических гравимет-
ров, участвующих в вышеуказанных сравнениях в нашей стране и с лучшими зарубежными аналогами
за ее пределами. Чтобы избежать систематических погрешностей, присущих одному типу гравиметров,
желательно применять приборы, основанные на различных физических принципах измерений. Количе-
ство приборов и число групповых измерений устанавливается в зависимости от заданной точности.
На главных фундаментальных пунктах выполняются повторные (лучше непрерывные) измерения
УСТ с наивысшей точностью проверенными баллистическими гравиметрами.
Для установления системы передачи размера единицы УСТ от эталона рабочим средствам измере-
ний существуют государственные и локальные поверочные схемы. При этом число ступеней передачи
размера единицы должно быть как можно меньше. Указанная группа главных фундаментальных пунк-
тов и группа (аттестованных) баллистических гравиметров является высшим звеном поверочной схемы.
Далее распространение единицы УСТ осуществляется через фундаментальные пункты, пункты сетей
1, 2 и 3 классов, эталонные гравиметрические полигоны; при этом средствами измерений являются
баллистические гравиметры, маятниковые приборы, статические гравиметры высокой точности в соот-
Рнс. 5.8.1. Локальная поверочная схема для средств измерений ускорения силы тяжести
ветствии с принятой поверочной схемой. В системе Роскартографии действует локальная поверочная
схема (ЛПС) для средств измерения УСТ [РД 68-8.17-98 1999], приведенная на рис. 5.8.1.
ЛПС распространяется на средства измерений УСТ (и его изменений) в диапазоне от 979 до 983 Гал
(от 0 до 6000 мГал) со средней квадратической погрешностью от 0,05 до 3 мГал. В качестве исход-
ного эталона принята группа главных фундаментальных гравиметрических пунктов, закрепленных на
местности, на которых должно быть определено значение УСТ с погрешностью не более 5 мкГал. В
качестве эталона, заимствованного из других поверочных схем, применяют многогранные призмы 1-го
разряда и автоколлиматоры 1-го разряда, установленные в государственной поверочной схеме средств
измерения плоского угла по ГОСТ 8.016-75, которые воспроизводят значения угла с погрешностью не
более 0,1".
Поверка исходных эталонов осуществляется органами государственной метрологической службы
через межповерочный интервал в 3 года.
Поверка рабочих средств измерений УСТ (или его приращений) осуществляется метрологическими
службами, аккредитованными на право поверки рабочих СИ, через установленный межповерочный
интервал по нормативным документам вида «Методы и средства поверки».
Таким образом, к настоящему времени сложилась вполне конкретная система обеспечения единства
измерений, определяемая главными фундаментальными пунктами, которая совместно с высокоточными
средствами измерений (группой баллистических гравиметров) является реальной основой метрологиче-
ского обеспечения всех гравиметрических определений в стране (включая воспроизведение, хранение
и передачу значения УСТ) [Гусев, Остач 1993]. На любой момент времени на главных фундаменталь-
ных пунктах известно значение УСТ с наивысшей для современного уровня развития науки и техники
точностью (не грубее 3 мкГал).
Морские гравиметрические определения должны быть также метрологически обеспечены.
6. Изучение поверхности и
гравитационного поля Земли
6.1 Геодезические системы координат и параметры гравитацион-
ного поля Земли
Б.В. Бровар, Г. В. Демьянов
Главная задача геодезии — определение в принятой системе координат положения точек поверхно-
сти и внешнего гравитационного поля Земли — может ставиться различно: для всей Земли в целом
с возможностью перехода к другим небесным телам: Луне, планетам и их спутникам, или в более
частном виде - в пределах одного государства или совсем небольшого участка, ограниченного рамками
одной трапеции крупного масштаба. Во всех случаях независимо от метода решения логически первым
стоит выбор системы координат. При этом нужно подобрать такую простую ортогональную систему,
чтобы одна из ее поверхностей — отсчетная поверхность — была по возможности ортогональна вектору
силы тяжести на всей изучаемой территории. Указанное требование не принципиально, а вызвано прак-
тическим удобством: при геодезических измерениях приборы почти всегда ориентируются по вектору
силы тяжести, и вся теория разрабатывается в предположении малости углов между координатными и
отвесными линиями [Бровар 1983].
При глобальной задаче вводят поверхность общего земного эллипсоида, центр которого совпадает
с центром масс, а оси совпадают с главными центральными осями инерции Земли, и возникает вопрос
о расположении относительно его геодезических пунктов земной поверхности. При изучении крупно-
го региона (континента) пользуются референц-эллипсоидом, центр которого не удается совместить с
центром масс Земли, но выбирается исходный пункт сети, расположение меридиана и направление
отвесной линии.
При решении локальных задач в качестве отсчетной поверхности можно использовать сферу или
плоскость, закрепляя любую из них также в одном подходящем исходном пункте. Вопросы, связанные
с учетом неоднородностей гравитационного поля в инженерной геодезии, здесь не будем рассматривать,
а укажем только на книгу В.В. Бровара [1983].
6.1.1 Система координат 1942 года
Началом истории построения в нашей стране единой геодезической системы координат можно счи-
тать 1816 год [Макаренко и др. 2000]. С этого года начались работы под руководством академика
Петербургской Академии Наук, основателя и первого директора Пулковской обсерватории В.Я. Струве
и генерала от инфантерии, почетного члена Петербургской Академии Наук К.И. Теннера по проложе-
нию триангуляционного ряда по территории России от устья Дуная до Северного Ледовитого океана
через Финляндию с включением территорий Швеции и Норвегии. Этот ряд триангуляции, протяжен-
ностью 25°20', получил впоследствии название дуги Струве.
В 1898 году Корпусом Военных Топографов под руководством генерала К.В. Шарнгорста было на-
чато уравнивание разрозненных «губернских триангуляций», покрывавших страну от западных границ
до Урала, включая Кавказ. Завершена эта работа была только в 1926 году изданием силами Военно-
топографической службы каталога Шарнгорста. Референц-эллипсоидом служил эллипсоид Бесселя, а
исходными пунктами являлись астрономическая обсерватория в Дерпте и пункты триангуляции мери-
дианной дуги Струве.
Началом следующего этапа построения единой системы координат на всю территорию России яв-
ляется 1928 г., когда Главным геодезическим управлением СССР была утверждена единая схема и
программа развития государственной триангуляции страны, предложенная Ф.Н. Красовским.
В схеме Ф.Н. Красовского передача координат на большие расстояния осуществляется проложением
по возможности вдоль меридианов и параллелей звеньев (рядов) триангуляции 1 класса, образующих
при взаимном пересечении полигоны с периметром 800-1000 км. Звено триангуляции 1 класса длиной
обычно не более 200 км состоит из треугольников, близких к равносторонним, или из комбинации
треугольников, геодезических четырехугольников и центральных систем. Длины сторон в звеньях три-
ангуляции 1 класса составляют, как правило, не менее 20 км. На концах звеньев триангуляции 1 класса
измерялись базисные стороны непосредственно прибором Едерина (инварными проволоками) или свето-
дальномером. На обоих концах базисных сторон (в вершинах полигонов) определялись пункты Лапласа
(астрономические определения широт, долгот и азимутов). Звено полигонометрии 1 класса вытянуто
и состоит не более чем из 10 сторон длиною 20-25 км. На обоих концах крайних сторон звена (в
вершинах полигонов) определяются пункты Лапласа с целью исключения накопления ошибок от поли-
гона к полигону и решения редукционных задач высшей геодезии. Для решения редукционных задач
необходимо знать составляющие уклонения отвесных линий в плоскости меридиана Е, и в плоскости
первого вертикала т).
Государственная геодезическая сеть подразделялась на сети 1, 2, 3 и 4 классов, различающихся
между собой точностью измерений углов и расстояний, длиной сторон сети и порядком последователь-
ного развития [Инструкция о построении... 1966].
В 1930 году под общим руководством Ф. Н. Красовского вычислительное бюро Главного геодези-
ческого управления приступило к уравниванию 8 полигонов 1 класса для европейской части СССР.
Позднее к этим полигонам был присоединен Уральский полигон. Вычисления велись относительно эл-
липсоида Бесселя методом развертывания, за начальный пункт принимался пункт Саблино. Основная
особенность и главный недостаток метода развертывания состоит в том, что результаты измерений,
выполненные на земной поверхности и редуцированные к уровню моря при дальнейшей обработке,
считались выполненными на поверхности референц-эллипсоида без каких либо поправок за несов-
падение поверхности эллипсоида и уровенной поверхности нулевой высоты. Работы по уравниванию
триангуляции были завершены в 1932 г. и принятая система координат получила название системы
1932 года.
Реальная строгость выполнения перечисленных условий определяется точностью всех использован-
ных астрономо-геодезических данных и не зависит от конкретного выбора исходного пункта. Значения
исходных геодезических дат устанавливают систему отсчета координат, но не определяют внутреннюю
точность самой геодезической сети. Точность взаимного положения геодезических пунктов в сети не
зависит от местоположения исходного пункта, а также от значений исходных геодезических дат.
Подобное установление по существу референцных систем координат было единственно возможным
в то время при использовании традиционных астрономо-геодезических измерений.
При установлении системы координат 1942 года в уравнивание вошли 87 полигонов АГС, покры-
вавших большую часть европейской территории СССР и узкой полосой распространяющих координаты
до Дальнего Востока. Обработка выполнена на эллипсоиде Красовского с использованием метода про-
ектирования. Метод проектирования в отличие от метода развертывания предполагал редуцирование
данных геодезических измерений с земной поверхности через поверхность уровня моря на поверхность
референц-эллипсоида. Определение высот квазигеоида и составляющих уклонений отвесных линий,
необходимых для такого редуцирования, выполнено с использованием гравиметрических данных: сна-
чала для повышения точности интерполяции астрономо-геодезических уклонений отвеса и для расчета
приращений высот квазигеоида, а затем с развитием гравиметрического метода высоты квазигеоида и
составляющие уклонений отвесных линий определялись независимо от астрономо-геодезических дан-
ных.
Постановлением Совета Министров СССР от 7 апреля 1946 г. №760 на основе результатов выпол-
ненного уравнивания была введена единая система геодезических координат и высот на территории
СССР — система координат 1942 года.
Дальнейшее распространение системы координат 1942 года на территорию СССР проводилось по-
следовательно несколькими крупными блоками полигонов триангуляции и полигонометрии 1 класса.
При присоединении каждого очередного блока координаты пунктов на границах блоков уравненной сети
принимались за жесткие. Для сгущения АГС, сформированной в виде системы полигонов, выполня-
лось их заполнение сплошными сетями триангуляции 2 класса. Сплошные сети триангуляции 2 класса
уравнивались в пределах отдельных полигонов с использованием уравненных координат пунктов три-
ангуляции 1 класса в качестве исходных.
6.1.2 Система координат 1995 года
Развитие традиционной астрономо-геодезической сети для всей территории СССР было завершено
к началу 80-х годов.
К этому времени стала очевидной необходимость выполнения общего уравнивания АГС без разде-
ления на ряды триангуляции 1 класса и сплошные сети 2 класса. Раздельное уравнивание полигонов
1 класса и последующая вставка в них сплошных сетей 2 класса приводило как к недопустимо боль-
шим ошибкам в координатах самих пунктов 1 класса, так и к значительным деформациям сплошных
сетей 2 класса вблизи рядов и особенно вблизи углов полигонов и измеренных азимутов, которые при
уравнивании также принимались за жесткие [Бовшин и др. 1995]. В то же время было показано,
что сплошная сеть пунктов 1-2 классов потенциально представляет собой значительно более жесткое
построение.
В целях подготовки к сплошному уравниванию в 80-х годах было выполнено несколько вариан-
тов общего полигонального уравнивания АГС. С учетом результатов этого уравнивания выполнялось
повторное уравнивание линий астрономо-гравиметрического нивелирования с соответствующим по-
следовательным уточнением карт высот квазигеоида над эллипсоидом Красовского. Уточненная карта
высот квазигеоида была составлена в 1987 году, данные которой были использованы затем в общем
уравнивании АГС как свободной сети.
В мае 1991 года общее уравнивание АГС было завершено. По результатам уравнивания получены
следующие основные характеристики точности АГС:
— средняя квадратическая ошибка направления — 0,7";
— средняя квадратическая ошибка измеренного азимута — 1,3";
— относительная средняя квадратическая ошибка измеренных базисных сторон — 1:260 000;
— средняя квадратическая ошибка взаимного положения смежных пунктов — 2-4 см;
— средняя квадратическая ошибка передачи координат от исходного пункта на пункты на краях
сети по каждой координате —1м.
Уравненная астрономо-геодезическая сеть включала в себя 164306 пунктов 1 и 2 классов, 3,6 тысяч
геодезических азимутов, определенных из астрономических наблюдений, и 2,8 тысяч базисных сторон,
расположенных через 170-200 км.
К моменту завершения общего уравнивания АГС на территории нашей страны независимо были
созданы две спутниковые геодезические сети: космическая геодезическая сеть ВТУ ГШ МО и допле-
ровская геодезическая сеть ГУГК.
Космическая геодезическая сеть (КГС) ВТУ ГШ МО на территории бывшего СССР включала в
себя 26 стационарных астрономо-геодезических пунктов при расстояниях между смежными пунктами
от 500 до 1500 тыс. км. Координаты пунктов КГС были определены по фотографическим, доплеров-
ским, дальномерным радиотехническим и лазерным наблюдениям ИСЗ системы ГЕО-ИК. Точность
определения взаимного положения любых пунктов КГС характеризовалась средними квадратическими
ошибками, равными 0,3-0,4 м. Использованные при построении КГС орбитальные методы космической
геодезии обеспечивали определение координат непосредственно в геоцентрической системе координат
с началом координат, теоретически совпадающим с центром масс Земли, и осью Z, направленной к
положению среднего полюса. Система координат КГС, практически реализованная координатами ее
пунктов, является составной частью более широкого набора фундаментальных геодезических парамет-
ров, получивших название «Параметры Земли 1990 года» (ПЗ-90). Этот же шифр получила и сама
система координат.
Доплеровская геодезическая сеть ГУ ГК (ДГС) состояла из 131 пункта, координаты которых опре-
делялись по доплеровским наблюдениям ИСЗ системы TRANSIT. Точность определения взаимного
положения пунктов при среднем расстоянии между ними 500-700 км характеризовалась средними
квадратическими ошибками, равными 0,4-0,6 м. ДГС строилась в своей собственной системе коор-
динат WGS-84, близкой к геоцентрической, но по ряду причин точно не совпадающей с системой
координат ПЗ-90 и существенно отличающейся по точности от системы координат с тем же наимено-
ванием WGS-84.
Для использования потенциала всех трех перечисленных сетей как независимых построений и до-
стижения максимально высокой точности распространения государственной системы координат на всю
территорию бывшего СССР было выполнено совместное уравнивание АГС, ДГС и КГС. В совместное
уравнивание были включены все указанные пункты КГС и ДГС и общие с ними (совмещенные или
близко расположенные и привязанные) пункты АГС.
Дополнительно в общее уравнивание были включены значения геоцентрических радиус-векторов
для части пунктов объединенной сети и сеть из семи пунктов, построенная по наблюдениям спутников
GPS для точной привязки о. Сахалина к АГС на материке.
Значения геоцентрических радиус-векторов вычислялись с использованием параметров общеземно-
го эллипсоида и высот пунктов над этим эллипсоидом как суммы высот квазигеоида и нормальных
высот. Высоты квазигеоида вычислялись с использованием гравиметрических данных и планетарной
модели гравитационного поля Земли. Начало системы координат, к которой относятся получаемые
радиус-векторы, теоретически совпадает с центром масс Земли. Радиус-векторы были вычислены для
35 пунктов КГС или ДГС, расположенных не ближе 1000 км друг от друга, чтобы можно было считать
эти значения взаимно независимыми.
Уравнивание выполнялось в пространственной системе координат. Поэтому данные о плановых
координатах по результатам общего уравнивания АГС были дополнены данными о геодезических вы-
сотах пунктов над эллипсоидом Красовского. Значения этих высот получались как сумма нормаль-
ных (нивелирных высот) пунктов и высот квазигеоида. Последние получались по данным обработки
астрономо-гравиметрического нивелирования, выполненного в ЦНИИГАиК в 1993 г. с использованием
данных общего уравнивания АГС 1991 г. В процессе совместного уравнивания было проведено допол-
нительное уточнение этих данных для территории Дальнего Востока, Чукотки и Камчатки. Все данные
включались в общее уравнивание с учетом их ковариационных матриц, которые или были получены
непосредственно при построении уравниваемых сетей (КГС и ДГС) или специально моделировались
(плановые координаты и высоты для АГС, геоцентрические радиус-векторы пунктов, сеть привязки
о. Сахалин). Совместное уравнивание выполнялось в несколько этапов (приближений) с последова-
тельной корректировкой используемых ковариационных матриц.
За опорную систему, в которой получались окончательные уравненные значения координат, была вы-
брана система координат КГС. В качестве определяемых неизвестных в уравнивание входили поправки
в три пространственные координаты пунктов и дополнительные параметры координатных преобразова-
ний, обеспечивающих преобразование каждой из других групп данных в систему координат КГС. При
включении в уравнивание данных ДГС и АГС дополнительно определялось по семь параметров орто-
гонального координатного преобразования (три смещения, три разворота и масштабная поправка). При
включении в уравнивание геоцентрических радиус-векторов определялись дополнительно три парамет-
ра смещения и масштабная поправка. Включение сети привязки Сахалина дополнялось определением
трех параметров смещения.
В результате такого совместного уравнивания была построена геодезическая сеть, содержащая
134 пункта при среднем расстоянии между смежными пунктами 400-500 км. При этом уравненные
координаты были получены в системе ПЗ-90, точнее в ее частной реализации совокупностью коорди-
нат всех пунктов КГС, вошедших в уравнивание. Для использования этих данных для окончательного
общего уравнивания АГС уравненные координаты были предварительно переведены в референцную
систему, достаточно близкую к СК-42. Из большого числа возможных способов формирования рефе-
ренцной системы был выбран следующий вариант. Направление осей и масштаб референцией системы
совпадает с таковыми в упомянутой выше реализации системы координат ПЗ-90, а положение начала
системы выбирается так, чтобы в результате координаты пункта Пулково во вновь создаваемой рефе-
ренцией системе были равны его координатам в системе СК-42. Такому выбору новой референцией
системы, получившей название «Система координат 1995 года», соответствовало требование минимиза-
ции поправок к системе СК-42 для промышленно развитых регионов европейской части и юга Сибири
территории России. Это условие играло главную роль в решении проблемы картографического обеспе-
чения территории России
Сеть из 134 пунктов с согласованной системой плановых координат в СК-95 и геодезических высот
была использована как жесткая исходная основа в последующем заключительном уравнивании всех
164306 пунктов триангуляции и полигонометрии 1 и 2 классов.
Точность определения взаимного планового положения пунктов, полученная из заключительного
уравнивания АГС 1995 г., характеризуется средними квадратическими ошибками:
0,02-0,04 м — при расстояниях до нескольких десятков километров;
0,2-0,5 м — при расстояниях от 1 до 9 тысяч км.
Объем измерительной астрономо-геодезической информации, обработанной при совместном уравни-
вании АГС, ДГС и КГС для установления системы координат 1995 года, превышает на порядок объем
измерительной информации, использованной для установления системы координат 1942 года.
Оценка точности уравненных координат, полученная в процессе выполнения общего уравнивания,
основана на оценках внутренней согласованности всех включенных в уравнивание данных и имеет
обобщенный характер. Более объективная и детальная оценка может быть получена только сравнением
положений пунктов в СК-95 с какими-либо более точными и независимо полученными результатами.
Реально такую возможность представляют данные, получаемые в процессе выполняемых в настоящее
время работ по построению ФАГС, ВГС и СГС-1. Такое сравнение показывает, что внутренние дефор-
мации СК-95 в целом по всей сети могут быть оценены их средними квадратическими значениями,
равными примерно 10-15 см по координатам х и у на расстоянии 100-150 км с ошибкой взаимного
положения пунктов 3-5 см для смежных пунктов. Под внутренними деформациями в данном случае
понимаются те ошибки координат пунктов, которые не могут быть исключены в результате ортогональ-
ного преобразования.
Геодезические высоты пунктов ГГС определяют как сумму нормальной высоты и высоты квазигеоида
над отсчетным эллипсоидом или непосредственно методами космической геодезии, или путем привязки
к пунктам с известными геоцентрическими координатами.
Нормальные высоты пунктов ГГС определяются в Балтийской системе высот 1977 года, исходным
началом которой является нуль Кронштадтского футштока.
Системы координат СК-42 и СК-95 по существу являются плановыми системами координат, по-
скольку высотное положение пунктов триангуляции и полигонометрии определяются со значительно
более низкой точностью. При использовании спутниковых методов пространственное представление
положений пунктов является стандартным. Во многих программных приложениях при обработке ко-
ординат в системах СК-42 и СК-95 пространственное представление положений пунктов может быть
обязательным.
6.1.3 Основные положения дальнейшего развития государственной геодезиче-
ской сети Российской Федерации
Обеспечивая многие практические потребности экономики и обороны страны, существующие назем-
ные геодезические методы по точности, оперативности, экономической эффективности не соответству-
ют некоторым крайне важным современным требованиям науки и практики. В частности требованиям,
возникающим при крупномасштабных съемках городов и поселков, при строительных изысканиях, при
геодезическом обеспечении обороны страны, решении задач морской и авиационной навигации и изуче-
нии природной среды. Эти задачи на современном уровне требований могут быть решены только с ис-
пользованием спутниковых методов. Ядром современных геодезических спутниковых методов являются
технологии оперативных определений координат (в том числе и высот), основанные на использовании
глобальных навигационных спутниковых систем ГЛОНАСС (Россия) и GPS (США).
Задание, поддержание и воспроизведение системы координат на уровне требований, обеспечиваю-
щих решение фундаментальных перспективных задач в области геодезии, геофизики, геодинамики и
космонавтики, обусловливает необходимость создания геодезической сети на качественно новом, более
высоком, уровне точности.
Чрезвычайно важной особенностью геодезических спутниковых технологий является возможность
одновременного определения с сопоставимыми точностями как плановых координат, так и геодезиче-
ских высот.
При традиционных видах геодезических измерений система высотного обеспечения развивалась
обособленно от системы планового обеспечения: высотное и плановое обеспечение создавалось пу-
тем развития двух разных видов геодезических сетей. Плановое обоснование развивалось на основе
плановых геодезических сетей триангуляции и полигонометрии, а высотное — на основе сетей геомет-
рического нивелирования.
Система нормальных высот на территории России реализована сетью высокоточного геометрическо-
го нивелирования I и II классов — главной высотной основы (ГВО) страны. Сеть нивелирования I и
II классов общей протяженностью около 400 тысяч км имеет один исходный пункт — Кронштадт, в
котором значение нормальной высоты принимается равным нулю.
Вся сеть нивелирования образует порядка тысячи замкнутых полигонов, по которым производится
уравнивание сети как свободной с опорой на один исходный пункт. Поэтому система нормальных высот
на всей протяженности нивелирной сети не имеет внешнего контроля, несмотря на то, что территория
России имеет береговую линию протяженностью около 12000 км, омываемую морями трех океанов, и в
каждом из этих морей расположено по нескольку уровнемерных постов, имеющих высокоточную связь
с главной высотной основой. Так как отличие уровня одного моря от другого может достигать метра и
более, то уровнемерные данные не могут служить контролем точности нивелирования.
Появляется вполне реальная возможность реализации метода спутникового нивелирования как аль-
тернативы геометрическому нивелированию, но в значительно более оперативном и дешевом варианте.
Для практического применения такого метода необходимо составление по гравиметрическим и спут-
никовым данным точных детальных карт высот квазигеоида на соответствующих территориях как, по
существу, нового точного вида исходного геодезического обеспечения.
Применение спутниковых технологий в соответствии с выбранной в нашей стране концепцией (1995
г.) позволяет развивать плановое и высотное обоснование с помощью одной и той же совокупности
геодезических сетей. Для согласования измеренных величин (нормальных и геодезических высот), по-
лучаемых соответственно по данным нивелирования и данным ГЛОНАСС/ОР5-измерений, необходимо
точное знание высот квазигеоида.
Высшим звеном в иерархии опорных геодезических сетей в системе геодезического обеспечения яв-
ляется одна и та же совокупность геодезических пунктов спутниковых геодезических сетей ФАГС, ВГС
и СГС-1, которые являются физической реализацией одновременно высокоточной системы координат
и системы нормальных высот.
Существующая геодезическая основа, созданная с помощью традиционных методов геодезических
измерений, не обеспечивает на должном уровне возможности использования современных высокоэф-
фективных спутниковых технологий по следующим основным причинам:
— точность существующих геодезических сетей не отвечает современным требованиям экономики
и обороны страны;
— пункты опорных геодезических сетей, как правило, располагаются в труднодоступных местах,
неблагоприятных для их последующего использования в системе геодезического обеспечения с аппа-
ратурой ГЛОНАСС/GPS;
— большой объем геодезических пунктов, существующих опорных геодезических сетей и места
их расположения делают задачу их поддержания в рабочем состоянии практически невыполнимой в
современных условиях.
1. Представление о Земле. Выпуклое блюдо, окруженное океаном (дреВнейшие ВаВилонские сочинения). -2000 -1000 -900
-800 -700 -600 -500 -400
1. Представление о гравитационном поле Земли (ГПЗ): скорость падения тел пропорциональна их Весу (Аристотель, 4 В до н.э.).
2. Земля - шар В гелиоцентрической системе Вселенной (Платон 427-347 до н.э., Аристарх 32С-25С до н.э).
-300 -200 1 Задача гравиметрии - измерение удельного веса тел {Архимед 287- 12 до из)
1. Задача геодезии - определение размеров Земли как тара (Эратосфен 276-197 до н.э. и др.) -100 п
100 200 300
3. Земля - плоский земной остроВ. 400 500
600 700 800 900
4 Земля - шар 6 геоцентрической системе Вселенной. 1000 1100 1200 1300
2. Представление о ГПЗ: действующая между Землей и телами сила притяжения пропорциональна их массам и расстоянию между ними (ал-Хазини 12 В).
2 Определение размеров Земли кок тара
1400 1450 1500 1550 1600
5. Земля - шар В гелиоцентрической системе Вселенной при неподвижных збездах (Коперник 1473-1543 В ). 3. Представление о ГПЗ: открытие законов инерции и падения твердого тела (Галилей. 1590)
4. Открытие закона колебаний физического маятника (Гюйгенс, 1673).
3. Определение размеров Земли как эллипсоида (первые определения сжатия: Ньютон 1687. Гюйгенс 1690) 1625 1650 1675 1700
5. Открытие закона Всемирного тяготения и основных законов механики (Ньютон, 1667).
4. Определение размеров Земли и изучение ее геоида (Гаусс 1823). 1775 1800
2 Изучение способов измерения УСТ и использования результатов этих измерений для
1820 определения сжатия фигуры Земли
5. Определение фигуры геоида по теории Стокса и через ортометрические высоты (Стокс 18791 1840 1860 3 Изучение ГПЗ на ее поверхности по измерениям силы тяжести и гравитационных градиентов и
1880 использование их в геодезии.
6. Земля - небесное тело, близкое к эллипсоиду.
Входящее В одну из Галактик расширяющейся
Метагалактики (Фридман 1922-1924, Хаббл 1929).
1910
1920
1930
1940
6. Появление общей теории относительности
(Эйнштейн. 1915).
1950
6. Определение во времени поверхности и 4 Изучение ГПЗ и других космических тел в
внешнего гравитационного поля Земли в единой 1960
системе координат. (Молоденский 1975. 1960). 1970 1QR6 принятой системе координат и во времени OCRS 1998) для определения их поверхности и
1. Земля - космическое тело, близкое к 033, 1990 2000 2010 внутренн го строения, а также для наук и технических средств, в которых используются данные о ГПЗ
Входящее 6 одну из Галактик и связанное с Международной небесной опорной системой (ICRS 199В).
Фиг. I. К разделу 1.3. Эволюция представлений о Земле и гравитационном поле, а также содержания
задач геодезии и гравиметрии.
uGal
маятники абсолютные
маятники относительные (иностранные)
маятники относительные (русские)
------ статические гравиметры относительные
баллистические гравиметры
Фиг. II. К разделу 5.1 Уменьшение ошибок гравиметрических приборов во времени.
Фиг. III. К разделу 6.2. Параметры Земли 1990 г: высоты квазигеоида (в метрах).
а пункты ФАГС
• пункты В ГС
AExtu
ААаы.
Фиг. IV. К разделу 6.1. Схема пунктов ФАГС и ВГС, определяемых поэтапно на территории Российской Федерации с 1999 г.
Спутниковая геодезическая сеть па 2004 г. состоит из 216 пунктов, в том числе: 19 постоянно действующих пунктов ФЛГС; 15 периодически определя-
емых пунктов ФАГС; 182 пунктов ВГС.
Ершов
Bari го,
Аральск
Элиста
Й*|-Орда
Астрахани
тезиан
Жаслык
Гу ерм&
1енко
Махачкала
Чагыф
..Дарваза
Туркменбаши
i - >*faL
>ват
.Ашхабад
Сыз&аигхСамара
Bepxj Ба"с$ 1чак
Бейнеу
Баку
Условные обозначения V'4
линии повторного нивелирования Нахчыван
+ изолинии скоростей вертикальных
91 движений с сечением 2 мм/гол
Зоны поднятии (ММ/ГОД) Зоны ОПУСКАНИИ
о р
>т-Шевченко
о
° Чел кар
о
Д’купт -Ургенч
Ртищево
к
Побочно Саи
1 *5 । А
Сал к
’ Тихорецк
Красно^ р °
Армавя^гЭврополь
Туапсе^
CO4JJ. /
о
®у«уми
X
МаЙИб” х**
ЕреваИ"
Фпг, V. К разделу 6.3. Карта современных вертикальных движений Прикаспия
62°
Карта
, современных вертикальных
ренбург J- движений
земной поверхности территории
। Прикаспийского региона
Г^ХАктю ЦНИИГАиК, 1996 год
Ю.Г.Кузнецов, В.К.Вебутова, В.И.Кафтан,
—к* “Т., А.В.Верещетина, Л.И.Серебрякова
. I .Октябрьск
Фиг. VI. К разделу 6.3. Карта современных вертикальных движений земной поверхности территории
Северо-Запада России и Финляндии (ЦНИИГАиК).
Фиг. VII. К разделу 6.3. Карта высот квазигеоида над эллипсоидом Красовского масштаба 1:11 700 000. составленная по результатам
астрономо-i равиметрического нивелирования с учетом общего уравнивания астрономо-геодезической сети страны, изданная ЦНИИГАиК.
Роскартография в 1996 г.
Государственная геодезическая сеть, создаваемая в соответствии с «Концепцией перехода
топографо-геодезического производства на автономные спутниковые методы координатных опре-
делений» (1995 г.) и с «Основными положениями о построении государственной геодезической сети
Российской Федерации» (2004 г.), структурно формируется по принципу перехода от общего к
частному и включает в себя геодезические построения различных классов точности:
— фундаментальную астрономо-геодезическую сеть (ФАГС), состоящую из 30-50 пунктов при рас-
стояниях между пунктами, равных 650-1000 км.
— высокоточная геодезическая сеть (ВГС), состоящая из 300-400 пунктов, при расстояниях между
смежными пунктами, равных в среднем 300 км;
— спутниковая геодезическая сеть 1 класса (СГС-1) при расстояниях между смежными пунктами,
равных 25-35 км.
Пункты ФАГС и ВГС связываются не менее чем с двумя пунктами ГГС и с двумя пунктами ГВО
нивелированием II класса точности, тем самым реализуя и преумножая потенциал старой ГГС. Пункты
ФАГС, ВГС и СГС-1 располагаются в легкодоступных местах.
Абсолютные определения силы тяжести выполняются по программе определения фундаментальных
гравиметрических пунктов. Периодичность этих определений на пунктах ФАГС устанавливается в
пределах 5-8 лет и уточняется в зависимости от ожидаемых изменений измеряемых характеристик.
Первый уровень в современной структуре ГГС занимает фундаментальная астрономо-геодезическая
сеть, служащая исходной геодезической основой для дальнейшего повышения точности пунктов госу-
дарственной геодезической сети. ФАГС практически реализует геоцентрическую систему координат в
рамках решения задач координатно-временного обеспечения (КВО).
В состав постоянно действующих пунктов ФАГС в соответствии с соглашением с Российской ака-
демией наук, Роскосмосом и Ростехрегулированием по согласованию включаются 8 пунктов IGS и три
пункта РСДБ РАН, а также пункты СДКМ Роскосмоса и пункты службы вращения Земли Ростехре-
гулирования.
Система постоянно действующих пунктов ФАГС помимо своего основного назначения — постро-
ения высокоточной Российской геоцентрической системы координат — служит решению проблемы
точного эфемеридного обеспечения ИСЗ ГЛОНАСС. Для этой цели в ЦНИИГАиК по соглашению
с картографо-геодезической службой Германии создан международный эфемеридный центр ИСЗ ГЛО-
НАСС, что обеспечит эффективное применение ГЛОНАСС при решении задач геодезии, в том числе и
на международном уровне.
Количество, расположение постоянно действующих и периодически определяемых пунктов ФАГС,
состав аппаратуры и программы наблюдений определяются научно-технической программой построения
и функционирования ФАГС с учетом проектов международного сотрудничества. Все пункты ФАГС
должны быть фундаментально закреплены с обеспечением долговременной стабильности их положения
как в плане, так и по высоте.
Второй уровень в современной структуре ГГС занимает высокоточная геодезическая сеть, основные
функции которой состоят в дальнейшем распространении на всю территорию России геоцентрической
системы координат и уточнении параметров взаимного ориентирования геоцентрической системы и
системы геодезических координат.
ВГС наряду с ФАГС служит основой для развития геодезических построений последующих классов,
а также используется для создания высокоточных карт высот квазигеоида совместно с гравиметриче-
ской информацией и данными нивелирования.
Сеть пунктов ФАГС и ВГС создавалась начиная с 1999 г. Спутниковая геодезическая сеть на 2005 г.
состояла из 212 пунктов, в том числе: 19 постоянно действующих пунктов ФАГС, 15 периодически
определяемых пунктов ФАГС и 178 пунктов ВГС (фиг. III, цв. вклейка).
Третий уровень в современной структуре ГГС занимает спутниковая геодезическая сеть 1 класса,
основная функция которой состоит в обеспечении оптимальных условий для реализации точностных и
оперативных возможностей спутниковой аппаратуры при переводе геодезического обеспечения терри-
тории России на спутниковые методы определения координат.
СГС-1 создается относительными методами космической геодезии, обеспечивающими определение
взаимного положения ее смежных пунктов со средними квадратическими ошибками 3 мм+110-7£> по
каждой из плановых координат и 5 мм+210-7Г> по геодезической высоте.
СГС-1 может строиться отдельными фрагментами. Создаваемый фрагмент должен опираться на
окружающие пункты ВГС и включать в себя все пункты ФАГС и ВГС, расположенные на территории
фрагмента СГС-1.
Средняя квадратическая ошибка определения положения пунктов СГС-1 относительно ближайших
пунктов ВГС и ФАГС не должна превышать 1-2 см в районах с сейсмической активностью 7 и более
баллов и 2-3 см в остальных регионах страны.
Нормальные высоты должны определяться на всех пунктах СГС-1, либо из геометрического ни-
велирования с точностью, соответствующей требованиям к нивелирным сетям П-Ш классов, либо из
спутникового нивелирования как разности геодезических высот, определяемых относительными мето-
дами космической геодезии, и высот квазигеоида.
Таким образом, для создания новой высокоэффективной государственной системы геодезического
обеспечения территории Российской Федерации, основанной на применении глобальной навигационной
спутниковой системы ГЛОНАСС и других средств и технологий, должны выполняться:
1. Высокоточные геодезические измерения с наземной спутниковой аппаратурой на пунктах созда-
ваемых ФАГС, ВГС и СГС-1;
2. Абсолютные измерения значений ускорения силы тяжести д с помощью высокоточной гравимет-
рической аппаратуры и определения нормальных высот на пунктах ФАГС и ВГС;
3. Работы по построению высокоточных карт высот квазигеоида С гравиметрическим методом, необ-
ходимых при определении нормальных высот Ну с использованием глобальных навигационных спут-
никовых систем;
4. Работы по согласованию на соответствующем уровне точности геоцентрической системы коорди-
нат, задаваемой пунктами ФАГС, с Международной небесной опорной системой (ICRS — International
Celestial Reference System) на основе данных РСДБ РАН и пунктов ГСВЧ Ростехрегулирования, кото-
рые также входят в состав пунктов ФАГС.
Математическая обработка измерений в государственной геодезической сети выполняется поэтап-
но по мере накопления материалов. В результате совместной обработки ФАГС, ВГС, СГС-1 и АГС
должны быть получены значения координат пунктов ГГС в высокоточной Российской геоцентрической
и референцией СК-95 системах координат, а также параметров взаимного перехода. По результатам
совместной обработки ГГС, данных нивелирования и гравиметрической информации составляется кар-
та высот квазигеоида на соответствующую территорию. Уравнивание сетей завершается составлением
каталогов координат и высот геодезических пунктов.
Уравненные пространственные координаты пунктов ФАГС, ВГС и СГС-1, скорости их изменения и
характеристики точности хранятся в специальных каталогах на машинных носителях в геоцентриче-
ской и геодезической системах координат с указанием эпох. Каталоги пространственных прямоугольных
координат пунктов ФАГС, совмещенных с пунктами наблюдений параметров вращения Земли ГСВЧ,
ежегодно публикуются с указанием эпохи в специальных бюллетенях ГСВЧ.
Порядок и особенности каталогизации пунктов ГГС регламентируются действующей Инструкци-
ей по составлению и изданию каталогов геодезических пунктов ГКИНП (ГНТА)-Об, утвержденной
6.02.2002 г. руководителем Федеральной службы геодезии и картографии России и согласованной
4.02.2002 г. ВРИД начальника Военно-топографического Управления Генерального Штаба Вооружен-
ных Сил Российской Федерации.
Результаты измерений и уравнивания сетей, координаты геодезических пунктов, другие количе-
ственные характеристики элементов ГГС, сведения о геодезических знаках и центрах пунктов хранят-
ся:
— на всю территорию страны — в банках геодезических данных при Роскартографии;
— на территорию регионов Российской Федерации — в региональных банках геодезических данных
аэрогеодезических предприятий Федеральной службы геодезии и картографии России и геодезических
частей Топографической службы ВС РФ, а также в территориальных инспекциях государственного
геодезического надзора.
Структура и специальное программное обеспечение региональных банков геодезических данных
идентичны и сопряжены с банками геодезических данных при Роскартографии.
6.2 Космические методы определения системы геодезических па-
раметров Земли
В.Б. Непоклонов
6.2.1 Развитие средств и методов космической геодезии
С началом освоения в конце 50-х годов прошлого столетия космического пространства и созданием
стратегических ядерных сил возникла потребность в изучении формы, размеров и гравитационного
поля Земли в целом. Это привело к необходимости создания согласованной системы геодезических
параметров Земли, обеспечивающей высокую точность и единство орбитальных, баллистических, нави-
гационных и геодезических расчетов. Возникшие новые задачи не могли быть решены традиционными
геодезическими методами в обозримые сроки и с приемлемыми затратами сил и средств. Следствием
этого стало развитие космической геодезии, обусловленное научно-технической революцией, начавшей-
ся в СССР и за рубежом в конце 1950-х годов, в особенности в ракетной технике и космонавтике,
электронной вычислительной технике, приборостроении и других направлениях.
Первые работы в области космической геодезии были выполнены в СССР и США, затем к этим
работам подключились Франция и ФРГ. К 1968 г. в США на орбиты было выведено 9 геодезиче-
ских спутников, в том числе спутники серий «Explorer» и «Geos», имевшие уголковые отражатели для
производства лазерных измерений и средства для радиодальномерных измерений. На рубеже 1970-х
годов были созданы геодезические сети глобального характера с точностью положений станций по-
рядка 10 м, развивались континентальные и региональные космические сети. Осуществлены выводы
параметров гравитационного поля Земли, в том числе зональных и тессеральных (низких порядков)
коэффициентов разложения геопотенциала в ряд по сферическим функциям. Работы в США велись с
1962 г. по национальной геодезической спутниковой программе под эгидой NASA и при участии Ми-
нистерства обороны, Министерства торговли, ряда научных учреждений, где в первую очередь должен
быть отмечен Смитсонианов институт, осуществивший вывод ряда параметров Земли, известных под
названием «Стандартная Земля».
Космическая геодезия в нашей стране начала развиваться усилиями военных геодезистов. В 1960-х
годах был разработан отечественный специализированный космический геодезический комплекс пер-
вого поколения. Особенностью этого комплекса являлось применение специальных ламп-вспышек для
синхронных фотонаблюдений, высокоточной бортовой шкалы времени, а также радиотехнической ап-
паратуры для доплеровских наблюдений. В состав комплекса входили также наземные средства управ-
ления и пункты наблюдения, оснащенные специально разработанными доплеровскими приемниками с
эталонами частоты и фотоустановками. На отдельных пунктах были созданы астрономо-геодезические
обсерватории, оснащенные высокоточными астрономическими фотоустановками ВАУ.
Эксплуатация этого космического геодезического комплекса было начата в 1972 году. Всего за
период его эксплуатации было запущено 14 космических аппаратов. Целевые задачи комплекса были
решены к 1976-1977 гг., что позволило:
— построить геоцентрическую систему координат с погрешностью положений пунктов в среднем
25 м, на территории страны — 13 м;
— получить параметры гравитационного поля Земли (в виде гармонических коэффициентов геопо-
тенциала до 32-й степени), обеспечивающие вычисление высот квазигеоида над общим земным эллип-
соидом с погрешностью в среднем по Земле 4 м;
— получить элементы ориентирования системы координат 1942 года относительно геоцентрической
системы координат с погрешностью 3-5 м для линейных элементов и 0,2" для впервые полученных
угловых элементов;
— определить параметры общего земного эллипсоида, в том числе значение его большой полуоси с
погрешностью 2 м;
— построить карты высот квазигеоида над общим земным эллипсоидом и эллипсоидом Красовского.
Основным результатом решения этих задач стал вывод новой системы геодезических параметров
под названием «Параметры Земли 1977 года». За работы по созданию, введению в эксплуатацию оте-
чественного космического геодезического комплекса и решению его целевых задач ряду специали-
стов, в том числе представителям Топографической службы ВС СССР Б.Г. Афанасьеву, Н.Н. Минееву,
И.Я. Плешакову, Г.А. Устинову, А.А. Хоманько была присуждена Государственная премия СССР. За
работы по выводу параметров модели гравитационного поля Земли, вошедших в состав «Параметров
Земли 1977 года», специалисты Топографической Службы ВС СССР и ЦНИИГАиК Н.Н. Воронков,
П.П. Медведев, Е.Л. Македонский, Э.И. Борунова, Л.П. Пеллинен, О.М. Остач и В.А. Таранов были
награждены премией имени проф. Ф.Н. Красовского.
К началу 80-х годов стало ясно, что система «Параметры Земли 1977 года» не в полной мере от-
вечает возросшим требованиям прикладных задач, в первую очередь требованиям к геодезическому
обеспечению космических навигационных систем. Возникла необходимость повышения точности ко-
ординат пунктов в составе наземного комплекса управления системой ГЛОНАСС и уточнения модели
гравитационного поля Земли, особенно в части коэффициентов низкого порядка (до 8-й степени). Воз-
можность получения более точной модели основывалась на том, что в результате выполнения планов
Мировой гравиметрической съемки, накопления зарубежных гравиметрических материалов существен-
но улучшилась изученность суши и океана в гравиметрическом отношении: число изученных трапеций
1x1° выросло с 54% в 1975 г. до 66% в 1982 г. Кроме этого, поступили материалы обработки высото-
мерных измерений с американского спутника «Geos-З», позволившие существенно дополнить каталог
средних высот геоида по трапециям 5x5°. Также имелись новые спутниковые модели геопотенциала
GEM-9, GEM-LI, GEM-L2, полученные Годдардовским центром НАСА. В результате обработки всей
имевшейся отечественной и зарубежной информации в 1982-1983 гг. был осуществлен вывод новой
модели гравитационного поля Земли в виде согласованной системы 254 точечных масс и коэффициен-
тов разложения геопотенциала в ряд по сферическим функциям до 36-й степени, в также системы 44
точечных масс. Полученная модель примерно в 1,5 раза превосходила по точности «Параметры Земли
1977 года».
Эти модели совместно с измерительной информацией первого космического геодезического ком-
плекса и новыми данными, полученными в ходе летных испытаний отечественного геодезического
комплекса второго поколения ГЕО-ИК, позволили выполнить решение координатной задачи по методу
коротких дуг. В результате этого было уточнено положение пунктов космической геодезической сети,
закрепляющих геоцентрическую систему координат. Были получены элементы ориентирования системы
координат 1942 года с погрешностью 2-3 м для линейных и 0,1" для угловых элементов. Для большой
полуоси общего земного эллипсоида было получено значение 6378 136 м. Полученные результаты (па-
раметры общего земного эллипсоида, модель гравитационного поля Земли, элементы ориентирования
системы координат 1942 года) составили содержание новой системы геодезических параметров, полу-
чившей наименование «Параметры Земли 1985 г.» (ПЗ-85). В систему ПЗ-85 были включены карты
высот геоида, а также элементы связей геоцентрической системы и системы координат 1942 года со
многими зарубежными референцными и общеземными системами координат.
Космический геодезический комплекс ГЕО-ИК, принятый в эксплуатацию в 1985 году, открыл
новый этап развития отечественной космической геодезии. Спутники ГЕО-ИК выводились на близ-
круговую орбиту с высотой около 1500 км и наклонением 74° или 83°. В состав бортовой аппаратуры
был включен радиовысотомер, измерявший высоту спутника над морской поверхностью для реализации
метода спутниковой альтиметрии. Погрешность измерения высоты для различных спутников составила
от 0,5 до 1 м. Значительно расширились средства траекторного слежения; помимо фотографической
и доплеровской аппаратуры, точность которых была существенно повышена, пункты на территории
страны оснащались радиотехническими и лазерными средствами измерения дальностей до спутников.
За разработку и ввод в эксплуатацию космического геодезического комплекса ГЕО-ИК была при-
суждена Государственная премия СССР, лауреатами которой стали представители Топографической
службы ВС СССР А.А. Кравчук и Е.В. Кораблев.
Эксплуатация комплекса ГЕО-ИК осуществлялась на фоне интенсивного развития средств и ме-
тодов решения задач космической геодезии за рубежом. Основные усилия зарубежных специалистов
в то время были направлены на повышение точности инерциальной системы координат и создание
глобальных геодезических систем координат на основе комплексного использования всей имеющейся
измерительной информации, включая лазерные и РСДБ-измерения. Значительное внимание уделялось
использованию космической навигационной системы Навстар для решения геодезических задач. В ре-
зультате в середине 1980-х годов в США были определены параметры Мировой геодезической системы
1984 г. (WGS-84), реализующие геоцентрическую систему координат (с погрешностями положения
пунктов 1-5 м) и новую модель гравитационного поля Земли. Одновременно в интересах геодинамики
была создана по наблюдениям ИСЗ Lageos мировая лазерная сеть повышенной точности (погрешности
определения положения станций лучше 1 м, по некоторым данным 0,1-0,2 м). С запуском в 1985 г.
ИСЗ Geosat в США приступили к широкомасштабному изучению детальной структуры гравитационно-
го поля Мирового океана (уклонений отвесной линии и высот геоида) с использованием спутниковой
альтиметрии. При этом важной задачей считалось повышение точности определения радиальной со-
ставляющей положения геодезических и океанографических ИСЗ до субдециметрового уровня. С этой
целью в качестве нового средства траекторного слежения на американском ИСЗ Торех была примене-
на бортовая радиоинтерферометрическая аппаратура, работающая совместно с несколькими станциями
наблюдения спутников GPS (системы Навстар).
Целевыми задачами нового космического геодезического комплекса ГЕО-ИК были создание миро-
вой геодезической сети с точностью положений пунктов в целом по сети 10 м и космической геодези-
ческой сети на территории СССР с точностью положений пунктов 3-5 м. Кроме этого ставилась задача
уточнения параметров гравитационного поля Земли. Требовалось обеспечить определение высот геоида
с погрешностью в среднем по земному шару 2-3 м и определить уклонения отвесных линий в Мировом
океане.
К 1988-1989 гг. была накоплена измерительная информация космического геодезического комплек-
са ГЕО-ИК в объемах, достаточных для решения его целевых задач с заданными точностями и вы-
вода новой системы геодезических параметров Земли, получившей наименование «Параметры Земли
1990 года». Новая система геодезических параметров предназначалась для геодезического обеспечения
космических навигационных, геодезических и картографических комплексов и систем, в том числе на-
вигационных систем ГЛОНАСС, «Парус» и «Цикада», топографического комплекса «Комета», воздуш-
ных, морских и наземных средств, систем оружия и управления войсками, создания топографических
и цифровых карт местности, специальных моделей гравитационного поля Земли, проведения научных
исследований в интересах обороны и народного хозяйства страны.
В состав «Параметров Земли 1990 года» входят параметры общего земного эллипсоида, координаты
пунктов космической геодезической сети, закрепляющие эту систему, элементы связи с референцными
системами координат; планетарные модели нормального и аномального ГПЗ. Модель АГПЗ включает в
себя коэффициенты разложения геопотенциала в ряд по сферическим функциям до 36-й степени и две
системы точечных масс с числом масс 60 и 320. Высоты квазигеоида, вычисленные по этой модели на
фиг. IV (цв. вклейка).
Определение геоцентрических координат пунктов и параметров гравитационного поля Земли осу-
ществлено путем совместного уравнивания траекторных и высотомерных измерений и гравиметриче-
ских данных. В уравнивание была включена измерительная информация 85 пятисуточных орбитальных
дуг спутников ГЕО-ИК и 149 восьмисуточных орбитальных дуг спутников ГЛОНАСС и ЭТАЛОН.
Геоцентрическая система закреплена координатами 33 пунктов космической геодезической сети на
территории стран СНГ и в Антарктиде (рис. 6.2.1). Точность координат пунктов относительно центра
80
80
40
20
О
-20
-40
-во
-во
Рис. 6.2.1. Схема расположения по-
стоянных пунктов, закрепляющих
геоцентрическую систему коорди-
нат «Параметры Земли 1990 года»
1 Мурманск, 2 Пулково, 3 Шепетовка,
4 Черновцы, 5 Симферополь, 6 Москва,
7 Сарапул, 8 Актюбинск, 9 Казах,
10 Чарджоу, 11 Алма Ата, 12 Бал-
хаш, 13 Омск, 14 Воркута, 15 Норильск,
16 Енисейск, 17 Иркутск, 18 Мир-
ный, 19 Тикси, 20 Якутск, 21 Благове-
щенск, 22 Уссурийск, 23 Комсомольск-
на-Амуре, 24 Магадан, 25 Елизово,
26 Анадырь, 27 Русская, 28 Беллинсгау-
зен, 29 Новолазаревская, 30 Молодеж-
ная, 31 Мирный, 32 Восток, 33 Ленин-
градская.
масс Земли характеризуется средними квадратическими погрешностями: 1 м по широте; 1 м по долготе;
1-2 м по высоте.
Точность данных, входящих в «Параметры Земли 1990 года», в 1,5-2,0 раза превышает точность
подобных данных, относящихся к «Параметрам Земли 1985 года». Работа по выводу и внедрению «Па-
раметров Земли 1990 года» отмечена Государственной премией РФ 2000 года, лауреатами которой стали
представители Военно-топографического управления (Н. И. Петров), 29 НИИ МО РФ (В.В. Бойков,
В.Ф. Галазин, Б.Л. Каплан, В.Г. Максимов), Центральной геодезической части (Т.Л. Сидорова-
Бирюкова), ЦНИИГАиК (Л.П. Пеллинен) и Координационного научно-исследовательского центра
(М.Г. Лебедев).
На основе «Параметров Земли 1990 года» Топографической службой ВС РФ составлены мировые
карты высот квазигеоида над общим земным эллипсоидом и эллипсоидом Красовского и осуществлен
вывод модели геопотенциала повышенной точности ГПЗ-200 в виде гармонических коэффициентов до
200-й степени [Галазин и др. 19936]. Предварительно был подготовлен и согласован с ПЗ-90 мировой
каталог средних аномалий силы тяжести по трапециям 1x1°. Для его создания использовались два
вида исходных данных: средние высоты геоида по трапециям 1x1°, полученные из обработки альтимет-
рических измерений спутников ГЕО-ИК; средние аномалии силы тяжести, полученные ТС ВС РФ и
ЦНИИГАиК по результатам гравиметрических наблюдений, выполненных на суше и в Мировом океане.
Для объединения этих видов информации 29 НИИ МО РФ был разработан метод комплексирования
альтиметрической и гравиметрической информации, основанный на локальной аппроксимации гравита-
ционного поля с использованием точечных масс. В результате объединения указанных видов исходных
данных получено 56840 значений аномалий. Остальные 7690 аномалий были вычислены с привлечени-
ем зарубежной модели геопотенциала GPM-2, после чего комплексный каталог стал содержать 64800
значений аномалий — по числу одноградусных трапеций. Технология определения гармонических ко-
эффициентов базировалась на итеративном применении метода гармонического анализа аномалий силы
тяжести по Жонголовичу с коррекцией по ПЗ-90. В результате были определены значения 32000
коэффициентов, причем коэффициенты до 36-й степени модели ГПЗ-200 равны соответствующим ко-
эффициентам ПЗ-90. Точность созданной модели характеризуется определением высот геоида в целом
по Земле со средней квадратической погрешностью 1,5 м.
С использованием спутниковых альтиметрических данных комплекса ГЕО-ИК созданы цифровые
модели высот геоида, уклонений отвесной линии (рис. 6.2.2) и аномалий силы тяжести в Мировом
океане с погрешностями 0,7 м, 3" и 10 мГал соответственно.
Высоты геоида получены непосредственно по радиовысотомерным измерениям ГЕО-ИК в соответ-
ствии с формулой С = h — Н - Д/i, где h — измеренная высота спутника над морской поверхностью,
Н — вычисленная геодезическая высота спутника над общим земным эллипсоидом, Д/i — сумма попра-
вок в измерение. Уклонения отвесной линии получены численным дифференцированием высот геоида.
-150 -100 -50 D SO ЮТ 150
Рис. 6.2.2. Уклонения отвесных линий в Мировом океане по данным ГЕО-ИК. (а — в плоскости меридиана;
б — в плоскости первого вертикала).
Аномалии силы тяжести вычислены по высотам геоида с использованием интегральной формулы. Вы-
числение высот геоида, уклонений отвесных линий и аномалий силы тяжести выполнялись по единой
технологической схеме. С целью минимизации погрешностей обработка измерительной информации
включала пять основных этапов.
На первом этапе были получены высоты геоида в подспутниковых точках, выполнена отбраковка
некачественных результатов, введены поправки за влияние ионосферы и тропосферы, лунно-солнечных
приливов, отклонений морской поверхности от геоида.
На втором этапе выполнено региональное уравнивание высотомерных трасс в десятиградусных бло-
ках путем согласования высот геоида в точках пересечения, а также с априорной моделью геоида,
полученной по зарубежным альтиметрическим данным и предварительно согласованной с моделью гео-
потенциала ПЗ-90. В число согласующих параметров включались систематическое смещение и наклон
для каждой трассы, о результате уравнивания расхождения высот геоида в точках пересечения высо-
томерных трасс уменьшились с 2,0 м до 0,5 м.
На третьем этапе в каждом десятиградусном блоке выполнялась скользящая полиномиальная ап-
проксимация высот геоида. Параметры аппроксимации подбирались адаптивно с учетом аномальности
поля, уровня погрешностей и геометрии распределения измеренных высот. По коэффициентам ап-
проксимирующих полиномов были рассчитаны значения высот геоида в узлах сетки меридианов и
параллелей с шагом 15'.
На четвертом этапе выполнялось уравнивание блоков с целью минимизации расхождений высот
геоида на их стыках. По результатам уравнивания в высоты геоида каждого блока были введены
поправки, вследствие чего расхождения на стыках уменьшились с 0,63 до 0,32 м.
На пятом этапе выполнялось вычисление уклонений отвесных линий и аномалий силы тяжести с
использованием аппроксимирующих полиномов, полученных на третьем этапе. При этом производилась
коррекция полиномов путем исключения из них составляющей модели геопотенциала ГПЗ-200 до 200-
й степени.
Созданные цифровые модели детальных характеристик гравитационного поля Земли были внедрены
в 1993 году в Главном управлении навигации и океанографии Минобороны и использовались Топогра-
фической службой для геодезического обеспечения Вооруженных Сил и отраслей промышленности.
В середине 1980-х началась разработка космической геодезической системы третьего поколения
ГЕО-ИК-2. Целевые задачи системы предусматривали дальнейшее повышение точности определения
геоцентрических координат пунктов космической геодезической сети, высот геоида и детальных харак-
теристик гравитационного поля Земли в Мировом океане. Это потребовало не только значительного
повышения точности традиционных измерительных систем, но и существенного усложнения структуры
космической системы с применением новых средств измерений.
Возникла необходимость перехода на трехъярусную схему построения, включающую среднеорби-
тальный геодезический спутник, высокоорбитальные спутники ГЛОНАСС и наземный комплекс, состо-
ящий из пунктов наблюдения, пунктов приема бортовой измерительной информации и центра обработки
геодезической информации. С целью высокоточного определения орбиты геодезического спутника, осо-
бенно по радиус-вектору, предусмотрено размещение на его борту аппаратуры спутниковой навигации.
Новый радиовысотомер за счет перехода на сигнал с линейночастотной модуляцией обеспечит точ-
ность измерений 10 см, при этом по спектру отраженного сигнала будут определяться высоты волн и
поправки за приведение к среднему мгновенному уровню водной поверхности.
6.2.2 Системы геодезических параметров Земли
Общие положения
Традиционно этапные результаты решения планетарных задач геодезии выдавались потребителям в
виде системы геодезических параметров Земли. Создано несколько таких систем. В нашей стране это
Параметры Земли 1977, 1985, 1990 гг., сокращенно ПЗ-77, ПЗ-85, ПЗ-90, созданные Топографиче-
ской службой Вооруженных Сил. В США — Мировые геодезические системы (World Geodetic System)
1960, 1966, 1972 и 1984 гг., сокращенно WGS-60, WGS-66, WGS-72 и WGS-84, созданные Картогра-
фическим управлением Министерства обороны США, преобразованным в 1996 году в Национальное
управлением по съемкам и картографированию (National Imagery and Mapping Agency, сокращенно
NIMA).
В состав геодезических параметров Земли входят: фундаментальные геодезические постоянные,
определяющие общий земной эллипсоид; координаты пунктов, закрепляющих единую геоцентриче-
скую систему координат; модель гравитационного поля Земли; модель высот геоида (квазигеоида) над
общим земным эллипсоидом; параметры связи единой геоцентрической системы координат с другими
системами координат, включая национальные референцные системы.
Таблица 6.1. Фундаментальные постоянные и параметры общего земного
эллипсоида
Наименование Обозначение Значение
Фундаментальные постоянные
Скорость света С 299792458 м/с
Геоцентрическая гравитационная постоянная (с учетом атмосферы) GM 398 600,44-109 м3/с2
Угловая скорость вращения Земли (1) 7 292 115-10—11 рад/с
Параметры общего земного эллипсоида
Большая полуось эллипсоида а 6378136 м
Знаменатель сжатия f 298,2578393
Ускорение силы тяжести на экваторе Ye 978032,8 мГал
Поправка в ускорение силы тяжести за притяжение атмо- сферы на уровне моря SYa -0,9 мГал
Нормальный потенциал u0 62636861,074 м2/с2
Зональный гармонический коэффициент второй степени C20 -484 164,953-IO"9
Зональный гармонический коэффициент четвертой степе- ни Gw 790,3-10~9
Геодезические параметры Земли 1990 года
«Параметры Земли 1990 года», изданные в 1991 г., получены по результатам наблюдений геодези-
ческих спутников ГЕО-ИК, включая доплеровские, дальномерные радиотехнические и лазерные изме-
рения, фотографирование спутника на фоне звездного неба, измерения высоты спутника над морской
поверхностью. При получении ПЗ-90 использовались также радиотехнические и лазерные измерения
дальностей до спутников ГЛОНАСС и ЭТАЛОН, гравиметрические данные на суше и в Мировом
океане.
При выводе ПЗ-90 в качестве исходных фундаментальных геодезических постоянных использова-
лись значения скорости света, геоцентрической гравитационной постоянной и угловой скорости враще-
ния Земли, рекомендованные Международным союзом геодезии и геофизики. Были уточнены значе-
ния параметров общего земного эллипсоида (большой полуоси, знаменателя сжатия, ускорения силы
тяжести на экваторе, нормального потенциала, зональных гармонических коэффициентов). Значения
фундаментальных постоянных и параметров общего земного эллипсоида ПЗ-90 приведены в табл. 6.1.
Точность отнесения системы координат ПЗ-90 к центру масс Земли характеризуется средними
квадратическими погрешностями 1-2 м. Взаимное положение пунктов в ПЗ-90 определяется с по-
грешностью около 0,3 м. Контроль положения пунктов относительно центра масс Земли, выполненный
в 29 НИИ МО РФ с использованием метода Жонголовича, показал, что вероятные линейные смеще-
ния начала системы координат ПЗ-90 относительно центра масс Земли по абсолютной величине не
превышают 1 м. Это согласуется с оценками точности определения геоцентрических координат пунк-
тов космической геодезической сети. Для контроля точности ориентировки космической геодезической
сети использовались данные регулярных определений координат полюса по информации спутников
ГЕО-ИК. Полученные результаты подтвердили приведенные выше характеристики точности координат
пунктов. Создание космической геодезической сети и ее объединение с астрономо-геодезической сетью
позволило существенно повысить точность государственной геодезической сети.
Гравитационное поле Земли ПЗ-90 описано параметрами нормального и аномального потенциалов.
Нормальный потенциал U представлен двумя способами: с использованием нормированных гармони-
ческих коэффициентов второй и четвертой степени; с использованием системы семи точечных масс,
координаты и значения которых строго согласованы с гармоническими коэффициентами нормального
потенциала.
Аномальный (возмущающий) потенциал представлен в трех вариантах: в форме нормированных
коэффициентов разложения геопотенциала в ряд по сферическим функциям до 36-й степени и порядка;
в форме параметров 60 точечных масс; в форме параметров 320 точечных масс. В начале 1990-х годов
на основе этих моделей была получена модель аномального гравитационного поля Земли повышенной
точности в виде коэффициентов разложения геопотенциала в ряд по сферическим функциям до 200-й
степени и порядка. Точность представления гравитационного поля коэффициентами до 200-й степени
в целом по земному шару характеризуется средней квадратической погрешностью высот геоида 2 м,
коэффициентами до 36-й степени и системой 320 точечных масс — 3 м, системой 60 точечных масс —
4 м.
Разнообразие форм представления гравитационного поля Земли позволяет выбрать потребителю
оптимальный вариант модели для решения конкретной задачи.
Новизна методологий и технологий решения комплекса научно-технических задач, связанных с
определением «Параметров Земли 1990 года», состояла в следующем:
1) реализована оптимальная по затратам программа создания космической геодезической сети —
фундаментальной основы для изучения формы, размеров и гравитационного поля Земли, координатно-
временного обеспечения решения задач геодезии, навигации, геофизики, океанографии и космической
картографии;
2) разработаны уникальные по составу, структуре и форме представления модели геодезических
параметров Земли, в максимальной степени ориентированные на потребителя;
3) разработаны принципиально новые методы и технологии решения фундаментальных задач геоде-
зии по созданию Единой геоцентрической системы координат, определению планетарных и детальных
характеристик гравитационного поля Земли, обеспечивающие реализацию в полной мере возможностей
отечественного космического геодезического комплекса ГЕО-ИК;
4) разработаны методы и технологии эффективного использования геодезических параметров Зем-
ли в системах ракетного оружия и военной техники, космических навигационных, картографических
системах, предназначенных для решения оборонных задач и гражданского использования в различных
отраслях экономики страны.
«Параметры Земли 1990 года» внедрены в системах управления ракетных комплексов стратегическо-
го назначения морского и наземного базирования, в наземных комплексах управления и программно-
аппаратных комплексах всех типов аппаратуры потребителя глобальных спутниковых навигационных
систем ГЛОНАСС и «Цикада», в наземном комплексе управления космического комплекса картографи-
рования; при модернизации государственной геодезической сети России.
Постановлением Правительства Российской Федерации №568 от 28 июля 2000 года геоцентриче-
ская система координат «Параметры Земли 1990 года» установлена в качестве единой государственной
системы координат для использования в целях геодезического обеспечения орбитальных полетов и ре-
шения навигационных задач. По основным параметрам система ПЗ-90 находится на уровне лучшей из
аналогичных зарубежных систем — Мировой геодезической системы 1984 года (WGS-84). Это нашло
отражение в рекомендациях Международной организации гражданской авиации (ICAO) и Междуна-
родной морской организации (IMO) использовать ПЗ-90 и WGS-84 в качестве основных геодезических
систем в комбинированных на базе ГЛОНАСС и GPS глобальных спутниковых навигационных систе-
мах.
Мировая геодезическая система 1984 года
Мировая геодезическая система 1984 года (WGS-84) [World Geodetic System 1984, 1991], создан-
ная в США по материалам наблюдений более чем 30 ИСЗ, считается лучшей из зарубежных систем
геодезических параметров Земли (с учетом проведенных в последние годы ее модернизаций). Опре-
деляющими фундаментальными геодезическими постоянными системы WGS-84 являются: большая
полуось общего земного эллипсоида а — 6378137,0 м; геоцентрическая гравитационная постоянная
GM, значение которой с учетом атмосферы было принято равным 398600,4418-10-9; нормированный
второй зональный гармонический коэффициент С2о = —484164,953-10-9; угловая скорость вращения
Земли ш = 7292 115,0-Ю-11 с-1.
Первоначальная реализация WGS-84 основывалась на наблюдениях начала 80-х годов. С развити-
ем GPS были предложены новые методы определения местоположения, точность которых существенно
превышала точность WGS-84. Исследования, проведенные Министерством обороны США, показали,
что благодаря уточнению WGS-84 можно существенно уточнить методику определения орбит спутни-
ков GPS. В 1993-1994 гг. появились новые требования к точности WGS-84 со стороны геодезических
пользователей GPS. Было признано, что создание точной сети геодезических контрольных станций по-
может выполнению указанных требований. По этой причине Картографическое управление МО США
систематизировало все требования к повышению точности WGS-84 и в середине 1993 года осуществи-
ло специальную программу, имеющую целью улучшение WGS-84. В июне 1994 г. была введена новая
версия WGS-84, получившая наименование WGS-84 (G730). В этой версии используются уточнен-
ные координаты пунктов слежения МО США за спутниками GPS, что привело к согласию системы
координат WGS-84 с системой ITRF на уровне 10 см. Картографическое управление МО США при-
ступило также к работе по уточнению модели гравитационного поля Земли и геоида. Последняя из
модификаций WGS-84 характеризуется ошибкой отнесения системы координат к центру масс Земли
1-2 м, взаимного положения геодезических пунктов 0,1 м. Особенностью современной версии WGS-
84 является включение в состав этой системы новой глобальной модели гравитационного поля Земли
EGM-96 повышенной точности и пространственного разрешения, созданной совместными усилиями
Национального управления США по съемкам и картографированию, Годдардовского центра косми-
ческих полетов НАСА и Университета штата Огайо, Модель EGM-96 представляет полный набор
коэффициентов разложения геопотенциала в ряд сферических функций до 360-й степени. В усеченном
(до 70-й степени) виде данная модель рекомендуется для использования в высокоточных орбитальных
определениях. Кроме этого гравитационное поле представлено глобальной цифровой моделью высот
геоида на сетке 15х 15'. Современный уровень точности определения высот геоида в целом по земному
шару характеризуется средними квадратическими погрешностями, лежащими в диапазоне от 0,5 до
1 м.
Связь систем координат ПЗ-90 и WGS-84
При выполнении геодезических, навигационных, картографических работ с использованием аппа-
ратуры потребителей радионавигационных систем ГЛОНАСС и GPS возникает необходимость преоб-
разования координат и их приращений из одной системы (ПЗ-90, WGS-84) в другую. Методы пре-
образований координат и их приращений из одной системы в другую, а также порядок использования
численных значений элементов трансформирования систем координат установлены ГОСТ Р 51794 —
2001 «Аппаратура радионавигационная глобальной навигационной спутниковой системы и глобальной
системы позиционирования. Системы координат. Методы преобразований координат определяемых то-
чек».
Преобразование пространственных прямоугольных координат X, Y, Z из системы I в систему J
описывается формулой Гельмерта
(6.2.1)
где Дх, Ду, Дг — линейные элементы трансформирования; шх,шу,шг — угловые элементы трансфор-
мирования; т — дифференциальное различие масштабов систем координат.
Формула обратного преобразования имеет вид
Х\ / 1
Y I = (1 — т) I
Z) I
(6.2.2)
Прямое и обратное преобразование геодезических координат В, L, Н выполняют по формулам
Bj = Bi + ДВ, Lj = Li + ДА, Hj = Hr + АН,
(6.2.3)
где АВ, AL, АН — поправки к соответствующим координатам.
Поправки AB, AL, ЛЯ в (6.2.3) получают из выражений
/ № \ Де2
—е2 sin В cos ВАа 4- I —4- 1 | N sin В cos В—-
а \ ar / 2
Л г, р" ГАГ
АВ =—-------
м + н
— (Дх cos L + Aj/ sin L) sin В + Azcos В] —
— (cox sin L — wv cos L) (1 + e2 cos 2B) — p"me2 sin В cos B;
p"
Д£ = (W + H)cosB Sl” L + Д» c“ L>+
+ tg B(1 — e2)(a>x cos L 4- wy sin L) — wz;
CL
AH = — —Aa + Я sin2 B——h (Ax cos L + Ay sin L) cos В + Az sin В—
N 2
— Ne2 sin В cos В | sin L — cos L ) 4- ( 4- H | m,
\P P / \AT J
(6.2.4)
где В, L, Я—геодезические координаты (широта, долгота, высота); а/, aj — большие полуоси эллип-
соидов в системах координат I, J; е2, е2 — большие полуоси эллипсоидов в системах координат I, J\
M,N — радиусы кривизны меридионального сечения и сечения первого вертикала эллипсоида;
Aa = aj — aj, Де2 = е2 — е2, а = 0,5(aj 4-a/), е2 = 0,5(еЗ 4-е2);
М = a(l - е2)(1 - е2 sin2 В)-3/2, N = a(l - е2 sin2 В)-1^2;
р" — число угловых секунд в одном радиане (р" = 206264,8062").
Формулы (6.2.4) обеспечивают получение поправок к геодезическим координатам с погрешностью,
не превышающей 0,3 м. Второе приближение при В = В/ + ДВ/2; L = L/ + AL/2; Н = Hi + АН/2
позволяет уменьшить погрешность преобразования (6.2.3) до 0,001 м.
Альтернативный способ предполагает получение геодезических координат через пространственные
прямоугольные координаты.
При этом сначала переходят от геодезических координат В, L, Н к прямоугольным координатам X,
Y, Z в исходной системе по следующим формулам:
X = (N + H)cosBcosL, Y = (N + Я) cos В sin L, Z = [(1 - e2)N 4- Я] sin В. (6.2.6)
Затем выполняют преобразование прямоугольных координат в другую систему по формулам (6.2.1),
после чего осуществляют обратный переход от полученных прямоугольных координат к геодезическим
координатам.
Пространственные прямоугольные координаты X, Y, Z могут быть преобразованы в геодезические
координаты В, L, Н с использованием следующего алгоритма.
Вычисляют вспомогательную величину
D = у/Х2 4- У2.
(6.2.7)
В случае D = 0 полагают
{тт/2, если
—тт/2, если
Z > 0,
Z < 0; ’
L = 0; Я = Z sin В — ау/1 — е2 sin2 В.
(6.2.8)
В случае D > 0 долготу получают как
L', если X : >0, У? >0,
2п-Н, если X : > о, У < С 0,
n — L', если X < СО, У: > 0,
тг-1- L', если X < СО, У < С 0,
(6.2.9)
где
L' = arcsin(y/D),
а для определения широты и высоты анализируют значение Z.
Если Z = 0, полагают
В = 0; Н = D - а.
В остальных случаях широту получают итеративным путем по формулам
Bi = arcsin(Z/r) + SB»; 5Bi+i = arcsin [ —ае sin 2Д . г _ + у2 + £2,
угу 1 — е2 sin2 Bi j
(6.2.10)
(6.2.11)
(6.2.12)
где i — номер приближения (г = 0,1,...).
Вычисления по формулам (6.2.12) начинают при ЬВ = 0 и повторяют до выполнения условия
|Bi+i - Вг| < е, где е — установленный допуск (е = 0,0001"). Окончательно
В = Bi, Н — D cos В + Z sin В — ал/1 — е2 sin2 В,
(6.2.13)
причем погрешность вычисления высоты ие превышает 0,003 м.
Реализация формул преобразования координат предполагает, что известны семь элементов транс-
формирования Дх, Ду, Дг, шх, wv, cuz, т. Определение этих параметров представляет собой отдельную
задачу, решение которой получают следующим способом.
Из соотношений (6.2.1) следует, что разности координат пунктов в различных системах выражаются
в виде
дх\ дг /1 = 0 0 1 0 0 X Y 0 Z -Z 0 Y \ -X Ду Дг т (6.2.14)
дд/ \° 0 1 Z —Y X 0 / Шу
Элементы трансформирования могут быть получены из решения системы уравнений вида (6.2.14)
для достаточного набора пунктов по методу наименьших квадратов с учетом матрицы весов, характе-
ризующей точность знания координат пунктов в обеих системах.
Надежность определения параметров связи систем координат WGS-84 и ПЗ-90 указанным спосо-
бом зависит от двух основных факторов.
Одним из них является число и оптимальность географического расположения исходных пунктов.
Для глобального распространения элементов связи географическое распределение исходных пунктов
также должно быть глобальным.
Вторым условием является обеспечение точного определения координат исходных пунктов в двух
названных системах. В каждой системе координат имеются так называемые опорные пункты, коорди-
наты которых определяют наилучшим образом из обработки достаточно больших объемов высокоточ-
ной спутниковой траекторной информации за продолжительный период времени наблюдений. Точность
определения положения опорных пунктов в геоцентрической системе характеризуется средними квадра-
тическими погрешностями 1-2 м по каждой составляющей. Ведутся регулярные работы по повышению
точности координат опорных пунктов. Кроме этого, координаты могут быть получены с использованием
геодезической аппаратуры потребителя навигационных систем GPS/ГЛОНАСС. Однако точность нави-
гационных определений, базирующихся на бортовых эфемеридах спутников, недостаточна для выполне-
ния современных требований к определению параметров связи двух систем координат. Для получения
надежных параметров связи систем координат ПЗ-90 и WGS-84 необходимо выполнять обработку
полученной с использованием такой аппаратуры измерительной информации ГЛОНАСС орбитальным
методом с одновременным уточнением орбит спутников и координат приемников. В этом случае мо-
жет быть обеспечено определение координат пунктов в системе ПЗ-90 с погрешностью 1 м и точнее.
Для получения координат в системе WGS-84 с такой же точностью при обработке измерительной
информации GPS используют точные эфемериды, которые стали доступными в последние годы.
Важным вопросом при определении параметров связи является оценка точности как самих пара-
метров, так и преобразования координат с их использованием. Точность параметров связи оценивают
с помощью ковариационной матрицы К, равной обратной матрице системы нормальных уравнений с
точностью до постоянного множителя, определяемого специальным образом. Точность преобразования
координат характеризуют ковариационной матрицей ВКВТ, где В — матрица преобразования (6.2.14).
Наиболее высокая точность определения параметров связи систем координат ПЗ-90 и WGS-84 в
настоящее время может быть достигнута путем привязки опорных пунктов ПЗ-90 к пунктам сети
WGS-84 (или ITRF) либо пунктов WGS-84 к пунктам ПЗ-90 с использованием точных эфемерид
спутников ГЛОНАСС и GPS.
К настоящему времени опубликовано несколько вариантов параметров связи ПЗ-90 и WGS-84,
отличающихся не только значениями, но и методами получения. Заслуживающие внимания результаты
приведены в сводной табл. 6.2.
Таблица 6.2. Параметры связи ПЗ-90 и WGS-84 (по данным различных источников)
Вариант Год DXt м Dv, м Dz, м 771, ед. 6-го зн. Шх, /1 Шу, // Ши, if
1 1993 0 0 1,5 0 0 0 -0,076
2 1994 0 0 4 0 0 0 -0,6
3 1995 -0,3 2,2 1 -0,06 -0,05 -0,01 -0,07
4 1996 0 2,5 0 0 0 0 -0,4
5 1996 0 0 1 0 0 0 -0,2
6 1997 1,08 0,27 0,9 0,125 0 0 0,16
Вариант 1 получен специалистами Топографической службы ВС РФ на основе опыта создания
геоцентрической системы координат ПЗ-90 [Бойков и др. 1993].
Варианты 2, 4 получены зарубежными специалистами по координатам спутников ГЛОНАСС в двух
системах координат [Mirsa, Abbot 1994; Mirsa et al. 1996]. При этом координаты спутников ГЛОНАСС
в системе ПЗ-90 взяты из бортовых эфемерид, а в системе WGS-84 получены по специальным тра-
екторным измерениям, распределенным глобально. С учетом особенностей обработки измерительной
информации и характера влияния орбитальных погрешностей эти результаты считаются недостаточно
надежными [Галазин и др. 1998].
Вариант 3 получен ЦНИИГАиК с использованием результатов определений координат пунктов на
территории России по наблюдениям спутников ТРАНЗИТ в период 1979-1994 гг. с учетом перехода от
системы координат WGS-82 к WGS-84 [Бовшин и др. 1995]. Полученные параметры связи практиче-
ски эквивалентны варианту 1, то есть для территории России дают идентичные поправки при переходе
от одной системы к другой.
Параметры связи в варианте 5 определены с использованием новых данных, полученных в России
при помощи совмещенного приемника сигналов ГЛОНАСС/GPS [Галазин и др. 1998].
Появление высокоточной спутниковой навигационной геодезической аппаратуры и программного
обеспечения, позволяющих определять взаимное положение пунктов, удаленных до нескольких тысяч
километров, с точностью на уровне 10“8, позволило в 1997 году осуществить уточнение параметров
связи систем координат ПЗ-90 и WGS-84, основанное на прямом сравнении координат совмещен-
ных пунктов. В рамках данного проекта использована измерительная информация с восьми пунктов
наблюдения, расположенных по территории России (рис. 6.2.3).
Полученная измерительная информация была обработана с использованием программного сред-
ства обработки навигационных измерений на сверхдлинных базах GAMIT, включая уравнивание по
программе GLOBK. Это позволило определить координаты восьми пунктов в системе WGS-84 с деци-
метровой точностью взаимного положения. Указанные пункты были привязаны к ближайшим восьми
пунктам космической геодезической сети, определенным в геоцентрической системе координат ПЗ-90.
Точность привязки выдержана на уровне 0,1 м. Таким образом, координаты совмещенных пунктов бы-
ли получены как в системе WGS-84, так и системе ПЗ-90. С использованием разностей координат по
описанной выше методике были определены параметры связи двух систем координат. Наиболее досто-
верные из полученных результатов приведены в последней строке табл. 6.2 (вариант 6). Полученные
элементы трансформирования наилучшим образом подходят к территории России и прилегающим к
ней территориям, обеспечивая пересчет координат из ПЗ-90 в WGS-84 и обратно с погрешностью (Зст)
менее 1 м.
6.3 Высотное обеспечение
6.3.1 Государственная нивелирная сеть (главная высотная основа)
Ю. Г. Кузнецов
Первые работы по геометрическому нивелированию в России были начаты в 1873 г. Корпусом во-
енных топографов (КВТ). Решению задач высотного обеспечения территории нашей страны посвящены
работы С.Д. Рильке [1894], Ф.Н. Красовского [1926, 1938], А.М. Вировца [1948а, б], А.П. Герасимова
[1930], В.Ф. Еремеева, М. И. Юркиной [1972], Л.А. Кашина [1968а, б; Кашин, Хренов 1979],
И.Н. Мещерского [1973, 1975], Ю.А. Мещерякова [1972], Н.А. Павлова [1940], А.В. Рытова [1944],
С.Г. Судакова [1948, 1967], Л.Я. Тамме [1971], М.С. Успенского [1966], И.И. Энтина [1956] и др.
В 1979 г. к столетию создания высокоточной нивелирной сети был издан выпуск сборника статей
«О нивелирной сети СССР» под общей редакцией Л.А. Кашина и Л.С. Хренова. Материалы этого
сборника приняты за основу при дальнейшем изложении подраздела.
Исходной высотной основой всех топографических съемок и картографических работ является ни-
велирная сеть. Она играет важную роль при проектировании гидротехнических сооружений, мелиора-
тивных систем и водохранилищ, съемке шельфа и составления навигационных карт. Нивелирование,
связав воедино уровенные станции, расположенные на всех морях и крупных озерах нашей страны,
позволило определить разности их уровней [Кашин, Хренов 1979]. Повторные нивелирные работы поз-
волили не только подтвердить предположения ученых о непрерывно происходящей деформации земной
коры, но и дать количественные характеристики вертикальных движений точек земной поверхности во
времени, а следовательно и градиенты их скоростей.
Первые регулярные работы по геометрическому нивелированию в России начаты в 1873 г. Корпусом
военных топографов (КВТ). Этому предшествовал выбор нуля Кронштадтского футштока за исходный
уровень русской нивелирной сети. Систематические наблюдения за уровнем Балтийского моря на одном
из старейших в мире Кронштадском футштоке были начаты в 1825 г. [Мещерский 1975]. В 1873—
1874 гг. военный геодезист Ленчевский проложил первую линию государственного геометрического
нивелирования от Москвы до С.-Петербурга. Реперы этого нивелирования сохранились до наших дней.
В 1840 г. военный геодезист М.Ф. Рейнеке проверил наблюдения за уровнем моря в Кронштадте и
вычислил средний многолетний уровень, который и был принят за начало счета высот. На уровенной
станции Кронштадта, на гранитном устое моста через Обводной канал им была нанесена горизон-
тальная черта, которая соответствовала среднему уровню моря за 1825-1840 гг. Эта черта определила
высотное положение нуля Кронштадского футштока [Козакевич 1848]. В 1913 г. на этом месте устано-
вили пластину с чертой, которую в 1951 г. закрепили специальной рамой [Энтин 1956].
Впервые высоты государственной нивелирной сети в нашей стране стали считать от нуля Крон-
штадтского футштока в 1872 г., когда российский геодезист Н.Я. Цингер прокладывал нивелир-
теодолитный ход по Балтийской железной дороге. Он же в 1871-1872 гг. осуществил первую связь
нуля Кронштадтского футштока с маркой № 173, находящейся в Ораниенбауме. Во время Великой
отечественной войны эта марка была уничтожена и все последующие связи с береговыми марками
нивелирной сети были выполнены с маркой «Витрама» в г. Ломоносове. Как правило, работы по связи
нуля Кронштадтского футштока с маркой Витрама предшествовали общему уравниванию нивелирной
сети страны в 1880, 1882, 1931, 1947, 1969 гг. Результаты передачи высоты на материк за исключени-
ем передач, выполненных недостаточно точными способами в 1872, 1875, 1886, 1888 гг., различаются
между собой незначительно — всего на 12,8 мм (рис. 6.3.1).
Анализ уровнемерных наблюдений на Кронштадтском футштоке показывает, что уровень Балтийско-
го моря практически не меняется. Это свидетельствует о высокой точности нивелировок, устойчивости
положения нуля Кронштадтского футштока и реперов на материке [Каталог 1980, Технический...
1995].
Единая система высот в нашей стране появилась не сразу — существовали некоторое время и
местные системы высот, но они постепенно аннулировались по мере продвижения государственных
нивелирных линий в отдаленные районы страны и развития государственной высотной основы на всей
территории страны.
До 1873 г. нивелирование выполнялось тригонометрическим методом нивелир-теодолитами с вер-
тикальными кругами со средней квадратической погрешностью передачи высот на 1 км хода, равной
~11 мм.
Приступая к геометрическому нивелированию, военно-топографический отдел Главного штаба
(ВТО) в 1873 г. разработал специальную инструкцию с учетом рекомендаций Международной гео-
дезической ассоциации (1864 г.), установившей, что точное геометрическое нивелирование должно
выполняться со средней погрешностью 3 мм на 1 км хода и в любом случае не более 5 мм. Были
изготовлены нивелиры с увеличением зрительной трубы сначала 6-8х, а через 2 года — 14х и ценой
деления уровня 4-5". Уровень скреплен с подставкой. Рейки применялись шашечные, расстояние меж-
ду нивелиром и рейками допускалось до 100 м. Отсчеты велись по трем нитям с записью показаний
уровня.
С 1871 по 1877 гг. КВТ было проложено 2930 верст нивелирных ходов. Ежегодно одна бригада
производила 510-550 верст. Точность геометрического нивелирования, выполненного в 1873-1976 гг.
характеризовалась случайной погрешностью 6,2 на 1 км хода, а систематической — 0,9 мм, что суще-
ственно точнее по сравнению с нивелир-теодолитными ходами.
В 1881 г. ВТО Главного штаба разработал (первую в нашей стране) общую программу и новую
инструкцию для производства точного геометрического нивелирования в России под названием «Гео-
метрические нивелировки Военно-топографического отдела Главного штаба, возобновленные в 1881 го-
ду». Нивелирная сеть была запроектирована вдоль действующих или строящихся железных дорог и
закреплялась марками, закладываемыми в стены зданий через каждые 20-25 верст.
Программа развития и построения нивелирной сети в России исходила не только из необходимости
решения практических задач, но и, определив основные направления развития точного нивелирования
на десятилетия вперед, ставила научные проблемы:
— определение уровней Балтийского, Черного и Азовского морей;
— связь нивелирной сети России через прусские и австро-венгерские нивелировки с Северным и
Средиземным морями;
— установление 3-4 особых марок и принятие мер для их хранения, с тем чтобы они «могли
послужить для позднейших исследований поднятий континента».
Схема проекта нивелирования 1881 года была следующей:
1. Линии нивелирования прокладывались от Петербурга на запад по обоим берегам Финского зали-
ва. Южная ветвь через Ригу, по побережью Балтийского моря должна была связать русские, немецкие
и голландские линии нивелирования.
2. Кронштадтский футшток по нескольким направлениям связывался с футштоками Черного и Азов-
ского морей, а через австро-венгерскую нивелирную сеть с футштоком Триеста. Всего в нивелирной
сети было 11 футштоков.
3. Всего образовалось восемь полигонов и одна висячая линия Сызрань-Оренбург. Первую очередь
нивелирования протяженностью в 13 752 версты намечалось осуществить в течение 12 лет четырьмя
наблюдателями.
Рис. 6.3.1. График изменения высоты (м) марки Витрама над нулем Кронштадского футштока. Отрезком
показаны с. к. о.
1872 — одновременное определение высот нивелир-теодолитом, 1875 — геометрическое нивелирование по льду, 1886 —
геометрическое нивелирование по льду, 1886 — водное нивелирование в штилевую погоду 1888 — геометрическое ниве-
лирование через форты, 1890 — одновременное определение высот вертикальными кругами Репсольда, 1892 — геомет-
рическое нивелирование из середины (с плашкоута), 1931 — геометрическое нивелирование по льду (по сваям), 1947 —
геометрическое нивелирование по льду (по сваям), 1969 — гидростатическое нивелирование, 1994 — нивелирование I
класса по дамбе.
Вторая очередь нивелирования должна была связать нивелирную сеть Европейской России с Боль-
шой Сибирской нивелировкой, проходящей примерно по 52-й параллели, вдоль будущей транссибирской
магистрали, а также предусматривали нивелирование, предусматривающее определение уровней Чер-
ного и Каспийского морей. В это же время в районе Омска и южнее нивелирование начало выполнять
Русское географическое общество (РГО).
С 1881 г. нивелирование стали проводить в прямом и обратном направлениях двумя исполнителями
нивелирами ВТО-I, оснащенными трубами с увеличением 30-40х. Длина визирного луча уменьша-
лась до 85 м (40 сажень). Рейки применяли шашечные двусторонние, одна сторона в делениях сажени.
Ошибка нивелирования на 1 км (версту) не должна была превосходить 3 мм, что соответствовало ре-
комендациям Международной геодезической ассоциации. Однако технические требования инструкции
оказались не реализованными: случайные погрешности нивелирования получились порядка 4,0-4,5 мм,
а систематические — до 1 мм на 1 км хода.
В 1882-1883 гг. Д.Д. Гедеонов проводит теоретический анализ выполненных в 1881-1882 гг. работ
по нивелированию и предлагает изменить конструкцию нивелира, скрепив уровень с трубой, а не с
подставкой (коромыслом). По его предложению ВТО изготовил новые нивелиры ВТО-П с ценой деле-
ния цилиндрического уровня 2-7" и увеличением зрительной трубы 35-40х и утвердил «Инструкцию
для производства нивелировок в 1883 году», в которой допускалась на 1 км (версту) хода случайная
погрешность не более 3 мм, а систематическая — до 0,5 мм.
В 1894 г. под руководством полковника С.Д. Рыльке было проведено первое уравнивание рус-
ской нивелирной сети, выполненной в 1871-1893 гг., и составлен каталог, известный под названием
«Каталог Рыльке». Каталог содержал высоты 1092 марок, укрепленных на линиях нивелирных ходов,
протяженностью 1300 км. Точность нивелирования характеризовалась погрешностью не более 3 мм
на 1 км хода и, как показала их последующая обработка совместно с нивелировками, проложенными
позднее, средние поправки на 1 км хода составили 0,28 мм при максимальных поправках на отдельных
участках 1,5-2,7 мм. Нивелирная сеть страны 1871-1893 гг. сохранила свое значение до конца 40-х
годов XX столетия. В тесной взаимосвязи науки и производства были разработаны теория и методика
высокоточного нивелирования, совершенствовались приборы, создавалась нормативная база. Большое
внимание в работах Рыльке, Цингера, Осипова уделялось вопросам влияния рефракции. Ими впервые
было установлено, что уровень Черного, Азовского, Адриатического и Северного морей ниже уровня
Балтийского моря. Черноморско-Азовский уровень оказался ниже Балтийского на 0,85 м, а уровни
Адриатического моря в Триесте и Северного у Амстердама, вычисленные через среднеевропейские ни-
велировки, — 0,68 м и 0,49 м соответственно. Эти результаты нивелирных связей уровней морей для
Рыльке и др. были полной неожиданностью. По их представлениям, это противоречило теории гра-
витационного поля Земли и не соответствовало плотностям и солености вод Черного и Балтийского
морей. Рыльке принимает уровни обоих морей одинаковыми и все вычисления проводит от среднего
Балтийско-Черноморского уровня. Балтийско-Черноморская система высот просуществовала до 1934 г.
Программа развития нивелирования КВТ, намеченная в 1881 г., последовательно осуществлялась:
в европейской части разукрупнялись полигоны, линии нивелирования прокладывались на Кавказе и
в Средней Азии, от Оренбурга через Ташкент в Красноводск. В 1901 г. началось нивелирование от
Челябинска на восток страны по Транссибирской магистрали до Владивостока. Военный геодезист
А.А. Александров за 1901-1911 гг. лично выполнил от Челябинска до оз. Байкал нивелирование про-
тяженностью 3600 км. В 1904 г. Челябинск был соединен нивелирным ходом с маркой на станции
Кинель Среднеазиатской линии нивелирования. В соответствии с решениями Международной геоде-
зической ассоциации 1912 г., изменившими требования к точности геометрического нивелирования, в
1913 г. была введена новая «Инструкция для нивелировок высокой точности, производимых Корпусом
военных топографов».
Оценку точности нивелирования рекомендовалось выполнять по формулам Лаллемана:
2 2г _2г2 2 1 Г£Д2 5>2 Д?
2[EL О» 1
i Р 2
_2 __ 1 \ А 11 -о г
L' fffe= [2^/ -ч5>]-
где т — средняя квадратическая погрешность высоты марки в нивелирном ходе длиной L; т] — случай-
ная средняя квадратическая погрешность нивелирования на 1 км хода; а — систематическая погреш-
ность на 1 км хода; Д — разности превышений между марками в прямом и обратном ходе длиной г;
з — разности превышений между марками в прямом и обратном ходе для линий длиной Li, L2, , Lp\
f — невязки полигонов, включая огибающий полигон.
Предельные значения погрешностей нивелирования на 1 км хода по Инструкции 1913 г. не должны
были превышать: для случайной погрешности ±1,5 мм, а для систематической 0,3 мм. Технические
требования к приборам не изменились, но длина визирного луча сокращалась до 65 м. Первой линией
нивелирования, выполненной в 1913-1917 гг., в соответствии с Инструкцией 1913 г., была линия
Петроград-Одесса. Всего с 1881 по 1917 г. было проложено 45,5 тыс. км нивелирных ходов. В среднем
прокладывалось около 1300 км в год. Ежегодно работало всего 4-5 нивелирных бригад.
До введения в 1902 г. в работы КВТ международной метрической системы мер метрологическая
связь длин реек с нормальными мерами была неупорядоченной. Нормальной мерой служила медная
линейка №68 длиной 42 см, которая сравнивалась через «нормальный ярд Долонда» с английской
нормальной мерой — Портландским ярдом. Высоты «Каталога Рыльке» были вычислены в этой мере, но
последующее сравнение длины линейки №68 с нормальным жезлом Пулковской обсерватории показало
разность в 0,232 мм. После этого в инструкциях большое внимание стало уделяться регулярному
эталонированию реек и сравнению контрольных рабочих метров с нормальными мерами длины.
В 1919 г. по Декрету, подписанному В.И. Лениным, было создано Высшее геодезическое управление
(ВГУ) «для изучения территории РСФСР в топографическом отношении, в целях поднятия и развития
производительных сил страны, экономии технических сил и денежных средств и времени.. . ».
Военные геодезисты выполняли высокоточное и точное нивелирование и после 1917 г. Но основные
объемы работ в стране начиная с 20-х годов выполнялись ВГУ, впоследствии Главным управлением гео-
дезии и картографии (ГУГК). За 1919-1923 гг. подразделения ВГУ выполнили 1750 км высокоточного
и точного нивелирования.
Осуществляя решение задач, возложенных советским правительством на ВГУ, его руководство —
М.Д. Бонч-Бруевич, Ф.Н. Красовский и др. приступили к составлению научно обоснованного перспек-
тивного плана постановки основных геодезических работ в стране и разработки всех вопросов, связан-
ных с техникой их выполнения. В целях координации работ ВГУ и ВТУ с февраля 1924 г. в стране
начало функционировать постоянное «Совещание ответственных работников ВТУ Штаба РККА и ВГУ
ВСНХ» (сокращенно «Совещание ВТУ, ВГУ»).
Это совещание в 1924 г. по предложению Ф.Н. Красовского рассмотрело и утвердило «Главные
основания составления проекта рядов триангуляции 1 класса и проекта полигонов линий нивелирования
высокой точности в пределах территории европейской части СССР». В основу проекта нивелирования
высокой точности были положены следующие главные требования:
1. Основная часть высокоточного нивелирования должна состоять из полигонов с периметром 800-
1000 км. Полигоны на востоке и юго-востоке России могли превышать указанные размеры.
2. В эту сеть не должны входить прежние нивелирные ходы, выполненные с меньшей точностью по
сравнению с точностью, предъявляемой к современному высокоточному нивелированию. При необхо-
димости такие нивелирные ходы должны переделываться.
3. Сеть нивелирных полигонов по возможности должна быть согласована с полигонами триангуля-
ции 1 класса и охватывать всю европейскую часть СССР до Урала.
В 1925 г. ВГУ ввело новую «Инструкцию по нивелированию высокой точности», составленную
при участии и под редакцией Ф.Н. Красовского. В Инструкции на 1 км хода средние квадратические
погрешности не должны были превышать для случайной ±1 мм, а для систематической ±0,3 мм. Но-
вые требования полностью соответствовали рекомендациям Международной геодезической ассоциации.
Инструкцией наряду с известным методом нивелирования с отсчетами по трем нитям вводился более
точный «способ наведения» с применением штриховых реек.
В развитии нивелирной сети страны значительную роль сыграли решения Первого (1926 г.) и Вто-
рого (1927 г.) геодезических совещаний, созванных Геодезическим комитетом Госплана СССР. Первое
геодезическое совещание приняло решение: считать нуль Кронштадтского футштока по-прежнему ос-
новным нулем всех высот СССР; осуществить в самом непродолжительном времени нивелирные связи
всех футштоков, расположенных на Белом, Черном, Балтийском морях и Тихом океане; провести общее
уравнивание нивелирной сети и издать каталоги высот. Второе геодезическое совещание, подтвердив
решения Первого, отметило: «Учитывая большой научный интерес и громадную практическую важ-
ность существования медленных колебаний суши, признать своевременным изучение путем повторных
нивелировок высокой точности и по возможности повторных триангуляционных работ в тех областях,
в которых такие движения можно считать заведомо установленными». Совещания проходили при уча-
стии Ф.Н. Красовского, А.А. Михайлова, М.Д. Бонч-Бруевича, Н.Д. Павлова, Н.Г. Келля и др. под
председательством акад. Ю.М. Шокальского.
Планы картографирования страны требовали, чтобы развитие нивелирной сети опережало топогра-
фические съемки. Распространение единой системы высот в СССР происходило с северо-запада на юг
и северо-восток, от Финского залива к морям Тихого и Северного Ледовитого океанов. В 1933 г. Глав-
ным геодезическим управлением (ГГУ) под руководством А.М. Вировца было проведено второе после
1894 г. уравнивание нивелирной сети европейской части СССР, включающее нивелировки, выполнен-
ные с 1875 по 1932 г. По результатам уравнивания в 1934 г. составлен каталог высот марок и реперов
высокоточного и точного нивелирования по линиям общим протяжением 69450 км. Почти половина из
них была проложена подразделениями ВГУ, ГГУ.
Уровень Черного моря на футштоках Севастополя, Одессы, Феодосии, Новороссийска оказался ниже
нуля Кронштадтского футштока на 0,41, а Азовского моря — на 0,39 м.
В 1931 г. для Сибири и Дальнего востока ВТУ был составлен «Временный каталог сибирских ниве-
лировок». Высоты в этом каталоге были вычислены от нуля Кронштадтского футштока. Но вследствие
большой разности средних уровней Балтийского моря и Тихого океана (1,873 м) было признано це-
лесообразным на Дальнем Востоке и в Восточной Сибири использовать Тихоокеанскую систему счета
высот. По мере проложения новых нивелирных линий к каталогу 1934 г. составлялись дополнения.
Проведенные в 30-е годы вычисления и каталогизация нивелирных сетей указывали на все еще имею-
щуюся неоднородность по точности и слабую обеспеченность нивелированием многих районов страны.
В 1933 г. было принято решение ввести новую классификацию: нивелирование стали делить на
высокоточное и точное. Для высокоточного нивелирования требования к точности были снижены и
снова устанавливались допуски Инструкции 1913-1921 гг.: случайная погрешность на 1 км хода не
более 1,5 мм, систематическая — 0,3 мм, а для точного нивелирования — 2,0 и 0,4 мм соответственно
на 1 км хода.
В 1938 г. Главным управлением государственной съемки и картографии (ГУГСК), заменившим ГГУ,
была издана новая инструкция по нивелированию, в которой названия «высокоточное нивелирование»
и «точное» заменялись соответственно на нивелирование I и II разрядов. Показатели точности при этом
не изменились. После выпуска инструкции 1938 г. линии нивелирования помимо стенных марок стали
закрепляться на местности грунтовыми реперами, в том числе, хотя и редко, фундаментальными и даже
вековыми. Введение фундаментальных и вековых реперов заключалось в обеспечении «неизменности»
высот знаков во времени и сведении к минимуму влияния сил мерзлотного пучения и изменения
условий гидрологического режима.
В 1939 г. был утвержден разработанный ЦНИИГАиК «Проект схемы и программы государственной
геодезической сети (триангуляционной и нивелирной)», получивший название после рассмотрения и
внесения замечаний «Основные положения о построении государственной опорной геодезической сети».
Они предусматривали проложение на территории СССР государственной нивелирной сети I (высокой
точности), II, III и IV классов. Для нивелирования устанавливались следующие предельные значения
погрешностей на 1 км хода: для I класса случайная ±1,0 мм и систематическая ±0,2 мм, для II
класса — ±2,0 мм и ±0,4 мм, для III класса — ±8,0 мм и ±0,8 мм, для IV класса — ±20,0 мм и
±2,0 мм соответственно.
Определив четкую классификацию нивелирных построений, «Основные положения 1939 года» сыг-
рали важную роль в упорядочении нивелирных работ в стране и в их дальнейшем развитии.
В 1941 г. были составлены «Временные указания по нивелированию I класса», в 1943 г. введена
новая «Инструкция по нивелированию II класса», в 1945 г. было издано «Временное наставление по
нивелированию I класса». Наставление содержало указания по проектированию нивелирных линий
с учетом инженерно-геологических условий трасс, а также указывало на необходимость выполнения
повторного нивелирования, например через 25 лет. Основным методом нивелирования I класса был
рекомендован метод совмещения нивелирами с плоскопараллельной пластинкой по инварным штрихо-
вым рейкам по особой усиленной программе. Нивелирование на станции выполнялось по двум парам
переходных точек, образуя правую и левую нивелировки. С целью уменьшения влияния рефракции
предельная длина визирного луча сокращалась до 50 м, а высота его прохождения над поверхностью
земли увеличивалась. Значения средних случайных погрешностей на 1 км хода не должны были пре-
вышать 1,0 мм, а систематических — 0,2 мм. В военные 1941-1945 гг. в СССР было выполнено 60 тыс.
км нивелирования I и II классов. Протяженность линий точного нивелирования в СССР к 1946 г.
составила около 171 тыс. км, в том числе: 13,0 тыс. км за 1871-1893 гг., 32,5 тыс. км за 1894-1917 гг.,
40,1 тыс. км за 1933-1937 гг., 25,1 тыс. км за 1933-1937 гг., 60,0 тыс. км за 1938-1945 гг.
Постановлением Совета Министров СССР от 7 августа 1946 г. «О введении единой системы гео-
дезических координат и высот на территории СССР», в частности, утверждалось, что за исходный
уровень для вычисления высот на всей территории СССР принимался уровень Балтийского моря —
нуль Кронштадтского футштока.
Вводимая постановлением коллегии ГУ ГК от 12 августа 1946 г. система высот была названа «Бал-
тийской» и должна была представлять систему ортометрических высот, полученную в результате вы-
полнения в течение 5 лет общего уравнивания нивелировок I и II классов. При этом предусматривалось:
восстановление и проложение новых нивелирных линий в районах, освобожденных от оккупантов, не
позднее 1948 г.; осуществление связи нивелирования I класса с другими высокоточными нивелирными
линиями; привязка всех футштоков на побережье Балтийского моря; перекрытие нивелировок I и II
классов (разрядов), выполненных в период с 1876 по 1917 г., новыми нивелирными линиями независимо
от количества сохранившихся на этих линиях знаков.
В 1948 г. в ЦНИИГАиК А.М. Вировцем и Н.А. Павловым были разработаны «Основные положе-
ния по общему уравниванию основной нивелирной сети СССР». В общее уравнивание включались
нивелирные линии, удовлетворяющие требованиям «Основных положений 1939 г.» общим протяжени-
ем 139 тыс. км. В первую очередь уравнивалась большая часть нивелирной сети СССР к востоку от
исходной линии I класса Кронштадт-Ленинград-Москва-Севастополь, состоящая более чем из 100
полигонов. Сеть уравнивалась по методу наименьших квадратов как свободная система с начальным
пунктом — Кронштадтским футштоком, высота которого принималась равной нулю. В измеренные
превышения вводили ортометрические поправки.
Третье уравнивание и каталогизация основной нивелирной сети СССР, начатые в 1946 г., были
завершены в 1950 г. В уравнивание было включено ПО тыс. км линий нивелирования I и II классов.
Сеть была закреплена 35 тыс. реперов. Линии нивелирования образовывали 230 полигонов. На всю
территорию страны была распространена единая система ортометрических высот, полученная в ре-
зультате уравнивания основных линий нивелирования 1 и 2 разряда (класса), вычисленных от нуля
Кронштадтского футштока. Эта система называется «Балтийской» [Мероприятия..., 1948]. Была со-
здана единая высотная основа для топографических съемок всего масштабного ряда. В 1954 г. ГУГК и
ВТУ были утверждены новые «Основные положения о государственной нивелирной сети СССР», разра-
ботанные под руководством С.Г. Судакова. Нивелирование I класса по «Основным положениям 1954 г.»
должно было выполняться с наивысшей точностью. Допуски средних квадратических погрешностей
на 1 км хода не устанавливались, хотя отмечалось, что современные способы нивелирования I класса
позволяют достигнуть на 1 км хода средней квадратической погрешности т]=0,5 мм и систематической
о=0,05 мм. Ранее во «Временном наставлении 1945 г.» значения соответствующих погрешностей со-
ставляли т]=1,0 мм и а=0,2 мм. Для нивелирования II класса значение допустимой невязки в полигоне
должно быть не более 5\/Z мм, где L — периметр полигона в километрах. Предусматривалось повто-
рение нивелирования I класса не реже чем через каждые 25 лет. При закреплении нивелирных линий
отказывались от «вековых» реперов. Это решение отражало взгляд на высокоточное нивелирование как
на призванное изучать современные вертикальные движения земной коры.
В дальнейшем в связи с разработкой теории М.С. Молоденского ортометрическая система счета
высот от геоида была заменена системой нормальных высот [Еремеев 1951; Еремеев, Юркина 1972],
которая также называется «Балтийской» и отсчитывается от нуля Кронштадтского футштока.
В 1955 г. была издана общеобязательная «Инструкция по нивелированию I, II, III и IV классов».
Переходный коэффициент от одного класса точности к другому смежному в нивелировании принят
равным 2, тогда как в триангуляции он равен 1,4-1,5, что и определило многоступенчатость триангу-
ляционных построений.
К 1967 г. сеть нивелирования I класса состояла из 20 замкнутых полигонов средним периметром
2800 км, а общая протяженность линий составила 45000 км. Сеть полигонов нивелирования II класса
периметром 400-600 км в европейской части СССР и 2000-3000 км в малообжитых районах теперь
практически покрывала всю страну, кроме Севера. Для производства нивелирования в стране были
разработаны и изготовлены прецизионные нивелиры и инварные рейки.
Программа развития нивелирной сети СССР, разработанная в ЦНИИГАиК под руководством
И.И. Энтина и утвержденная ГУГК 19 июля 1968 г., исходила, прежде всего, из необходимости
обеспечения высотной основой топографических съемок в масштабе 1:25000 на территории предсто-
ящего картографирования северных и восточных районов страны. Кроме того, она предусматривала
целенаправленные нивелирные работы для решения научно-технических задач изучения современных
движений земной коры, особенно в сейсмоактивных районах и в районах добычи нефти и других
полезных ископаемых. При проектировании нивелирных линий учитывалось и геологическое строение
земной коры. Линии на севере и востоке страны проектировались вдоль крупных рек с расчетом
обеспечения высотной основой гидрологического строительства. Упорядочивались связи нивелирной
сети с уровнемерными станциями наблюдений за вековыми изменениями уровня моря.
Программа 1968 г. впервые предусматривала поэтапное проложение нивелировок по времени с це-
лью отнесения их примерно к одной временной эпохе. В европейской части СССР нивелирование I
класса намечалось для связи с нивелирными сетями социалистических стран и для разукрупнения по-
лигонов, периметр которых сокращался до 1800 км. В соответствии с Наставлением 1945 г. повторному
нивелированию подвергались линии, проложенные 20-25 лет назад. Нивелирная сеть II класса была
запроектирована с расчетом построения сплошной сети полигонов на всей территории СССР, включая
остров Сахалин. Периметр полигонов в среднем сокращался до 400-800 км в обжитых районах и до
1000-2000 км на севере и востоке страны.
В 1971 г. была издана «Инструкция по вычислениям нивелировок» (составители В.М. Сигалов,
Н.В. Сидоркин). В 1974 г. было издано переработанное издание «Инструкции по нивелированию I, II,
III и IV классов», в соответствии с которой нивелирные знаки в труднодоступных районах страны
стали закладывать с такой же частотой и надежностью, как и в других местах. В районах вечной
мерзлоты закладывали трубчатые центры методом термореактивного бурения. Портативный термобур,
значительно облегчивший земляные работы, впервые был разработан и внедрен на предприятии №6
при активном участии М.Ю. Берецкого.
В Инструкции 1974 г. даны указания по методике нивелирования в районах вечной мерзлоты и
передачи высот через значительные водные пространства.
После очередного уравнивания нивелирной сети страны к концу 60-х годов по пятилетним планам
производства топографо-геодезических работ высокоточная нивелирная сеть практически была развита
на всей территории страны. Протяженность линий нивелирования I и II классов в начале 70-х годов
по сравнению с 1950 г., когда было завершено общее уравнивание высокоточной нивелирной сети и ее
каталогизация, увеличилось почти в три раза.
В целях сокращения разрыва во времени между производством полевых измерений и их мате-
матической обработкой коллегия ГУГК в 1969 г. утвердила технический проект нового (четвертого)
уравнивания и каталогизации нивелирования I, II, III и IV классов, которым предусматривалось за
5 лет осуществить в два этапа общее уравнивание государственной нивелирной сети СССР. В 1977 г.
было завершено четвертое уравнивание нивелирной сети СССР I и II классов.
На первом этапе уравнивались линии I класса, расположенные в европейской части и Средней
Азии СССР (блок «Запад»), Восточная граничная линия I класса блока «Запад» (Архангельск-Киров-
Казань-Аральское море-Арысь) принималась исходной для уравнивания линий нивелирования, проло-
женных на севере и востоке страны (блок «Восток»).
Общая протяженность линий нивелирования (СССР), включенных в уравнивание, составила 70 тыс.
км I класса и 360 тыс. км II класса. В уравниваемой нивелирной сети (оба блока) было образовано
более 500 полигонов различного периметра: от нескольких сотен километров на западе до 6-7 тыс. км
на востоке страны.
Уравнивание основной нивелирной сети I и II классов выполнялось по методу наименьших квадра-
тов, в блоке «Запад» — коррелатным способом, в блоке «Восток» — параметрическим. Впервые вычис-
ления проведены в системе нормальных высот от нуля Кронштадтского футштока. Исходной высотой
для уравнивания Главной высотной основы СССР являлась высота марки б/н Витрама, расположенная
в г. Ломоносов. Высота на марку Витрама была передана методом гидростатического нивелирования
от нуля Кронштадтского футштока, выполненного в 1969 г. В ходе уравнивания производилась оценка
точности включенных в уравнивание измерений. Средние квадратические погрешности на 1 км ниве-
лирного хода были получены следующие: для блока «Запад» I класс — ±1,6 мм, II класс — ±2,7 мм;
для блока «Восток» соответственно ±2,1 мм и ±3,6 мм. Величины этих погрешностей, как правило,
превышают значения, вычисленные по внутренней сходимости превышений на станции или по секции.
Полученные средние квадратические погрешности более достоверны и отражают часто не лучшую
геометрию уравненной сети, влияние неучитываемой вертикальной составляющей деформаций земной
поверхности и других факторов.
Ниже приведены названия реперов и средние квадратические погрешности их высот, полученные
относительно нуля Кронштадтского футштока при решении нормальных уравнений: Сухуми — 53,3 мм;
Астрахань — 49,4 мм; Красноводск — 71,4 мм; Арысь — 64,0; Новосибирск - 62,3 мм; Тикси —
102,3 мм; Якутск — 92,7 мм; Магадан — 106,4 мм; Советская Гавань — 109,8 мм; Владивосток —
111,6 мм; Певек — 141,9 мм; Амгуэма (Берингово море) — 148,9 мм.
Попытка учета вертикальных движений по карте на данном этапе не привела к уменьшению невязок
полигонов. Отнесение высот нивелировок к одной эпохе — необходимое условие геодезически строгой
обработки результатов нивелирования, — Л.А. Кашин считал важной научно-технической задачей на
будущее. В дальнейшем на основе высот каталога опорной нивелирной сети I и II классов 1977 г. было
выполнено уравнивание отдельных нивелирных линий II класса, не вошедших в общее уравнивание,
а также всех нивелировок III и IV классов. Созданные сводные каталоги государственной нивелирной
сети СССР I, II, III и IV классов, составленные по трапецииям масштаба 1:200000, обеспечивали
распространение единой системы нормальных высот 1977 г. на всю территорию страны.
Работы геодезистов ГУГК по созданию на территории СССР новой высокоточной нивелирной сети
внесли большой вклад в геодезию, океанографию, геофизику и другие науки о Земле. Большая за-
слуга в этом принадлежит ученым — Ф.Н. Красовскому, В.В. Данилову, А.А. Павлову, А.М. Вировцу,
И.И. Энтину, И.Н. Мещерскому и другим. Сотни геодезистов всех предприятий выполнили сложную,
требующую большого мастерства работу по созданию нивелирной сети СССР. Особо отличились ни-
велировщики: Н.А. Броновицкий, И.И. Тиханушкин, А.П. Каменский, И.П. Алексеев, В.П. Климахин,
В.С. Зайцев, В.П. Гусенок, О.В. Кашараб, Б.В. Калугин, П.Л. Казмерчук, А.П. Аристрахов, А.И. Боков,
О.И. Винокуров, И.В. Знайда, А.П. Козловский, Т.П. Кондратьев, Г.П. Кузеванов, Е.В. Летунов,
М.А. Мараев, В.Г. Примак, А.Н. Михайлов, В.М. Моденков, Г.А. Чернявский, Н.А. Куликов и многие
другие. Особая заслуга принадлежит М.С. Молоденскому как автору новой системы высот — системы
нормальных высот.
Большую работу по созданию нивелирной сети проделали предприятия №7 (Москва), №8 (Но-
восибирск), №10 (Ленинград), №11 (Пятигорск), №6 (Алма-Ата), №12 (Ташкент), №13 (Киев), №1
(Иркутск), №2 (Хабаровск) и №14 (Якутск). В этот же период в рамках научно-технического со-
трудничества геодезических служб государств Восточной Европы ЦНИИГАиК участвовал в работе по
уравниванию Единой высотной нивелирной сети (ЕВНС) государств Восточной Европы. В рамках этой
работы впервые в мире были объединены высотные сети семи государств. Для территории 23265 тыс.
км2 была получена единая система высот.
В 1990 г. была введена в действие новая Инструкция по нивелированию I, II, III и IV классов. В ней
были изложены требования к выполнению нивелирных измерений при создании государственной ниве-
лирной сети, выполнении работ в городах и населенных пунктах, на геодинамических и техногенных
полигонах. Рассмотрены вопросы проектирования, рекогносцировки, закладки реперов и марок, указа-
ны методы нивелирования разных классов. Описаны особенности нивелирования в труднодоступных
районах, включая северные и горные районы, передачи высот через большие водные препятствия. Из-
ложен порядок математической обработки нивелирных измерений. В инструкции был обобщен опыт ни-
велирных работ за предыдущие годы. Большой вклад в подготовку инструкции внес И.Н. Мещерский.
В 2004 г. была утверждена и издана Роскартографией переработанная Ю.Г. Кузнецовым и
А.И. Спиридоновым (ЦНИИГАиК) «Инструкция по нивелированию I, II, III и IV классов».
После четвертого (1977 г.) уравнивания Главной высотной основы СССР предприятия ГУГК СССР,
а затем предприятия Роскартографии в соответствии с Программами развития и модернизации ниве-
лирной сети I и II классов на территории СССР, а в дальнейшем на территории Российской Федерации
выполняли работы по развитию и модернизации ГВО России.
«Программа модернизации нивелирной сети I и II классов Российской Федерации на 2001-2010
годы» (Программа 2010), разработанная в ЦНИИГАиК (Ю.Г. Кузнецов), ставила своей целью:
— удовлетворение потребностей экономики, науки и обороны в надежных значениях нормальных
высот на всей территории страны путем проложения повторных и новых линий нивелирования I и II
классов;
— разукрупнение полигонов I класса в обжитых и необжитых районах, которые в настоящее время
достигают величин более 1 тыс. км в обжитых районах и более 3 тыс. км в труднодоступных районах
Сибири и Дальнего Востока;
— продолжение работ по ликвидации недопустимых невязок в полигонах нивелирования I и II
классов;
— поддержание нивелирной сети I и II классов на надлежащем уровне, с точки зрения учета движе-
ний и деформаций земной поверхности и утраты реперов, путем выполнения повторного нивелирования;
— обеспечение потребностей заинтересованных министерств и ведомств в определении современных
вертикальных движений земной поверхности, особенно в тектонически активных регионах;
— объединение нивелирной сети I и II классов со спутниковыми геодезическими сетями ФАГС и
ВГС для построения в будущем единой системы нормальных высот и кинематической высотной основы
на всей территории России.
Общая длина линий повторного нивелирования I класса, запланированных Программой-2010, со-
ставляет 50 тыс. км. Общая длина новых линий нивелирования I класса, запланированных Программой-
2010, как правило, для разукрупнения полигонов I класса, составляет 61 тыс. км.
В нивелирной сети I класса к 2010 г. должно быть сформировано 22 новых полигона I класса. Общее
количество полигонов I класса достигнет 198, не считая малых полигонов с периметрами 100-300 км.
Общая длина линий нивелирования I класса после завершения работ по Программе-2010 составит
примерно 171 тыс. км, в том числе повторных линий нивелирования, примерно 96 тыс. км.
Общая длина линий нивелирования II класса, запланированных к выполнению Программой-2010 со-
ставляет 37 тыс. км в том числе новых линий нивелирования 4 тыс. км и повторных линий — 33 тыс.
км. В результате выполнения работ по нивелированию II класса на территории России будет сформи-
ровано около 1000 полигонов II и I—II классов.
Из-за резкого сокращения объемов работ по нивелированию I и II классов в ГВО России
«Прогграмма-2010» выполнена на 2009 г. на 17% по I классу и на 17% по II классу нивелирования.
Главная высотная основа России на 2009 г. имеет общую протяженность 321 тыс. км линий ни-
велирования, в том числе линий нивелирования I класса — 148 тыс. км и II класса — 173 тыс. км.
Сеть состоит из 170 полигонов I класса и около 1000 полигонов II класса. Средневзвешенная эпоха
нивелирования в ГВО России соответствует 1982 г. (рис. 6.3.2).
линии нивелирования I класса /" линии нивелирования I класса
Рис. 6.3.2. Схема Главной высотной основы Российской Федерации.
Полигоны I класса с недопустимыми невязками в основном покрывают территории: вдоль Уральского
хребта, севера Красноярского края и юга Якутии.
Сеть повторного нивелирования покрывает всю территорию России. После создания в ГУГК карты
современных вертикальных движений земной коры на территорию СССР сеть повторного нивелирова-
ния, использованная при составлении карты, обновлена на 80%.
По материалам, систематизированным в ЦНИИГАиК, в 2004 г. была выполнена предварительная
оценка точности нивелирной сети России по невязкам полигонов I класса.
Средняя квадратическая ошибка нивелирования на 1 км хода подсчитывалась по невязкам полиго-
нов по формуле:
N-1,
Рис. 6.3.3. Схема связи национальных ниве-
лирных сетей России и Финляндии.
где W — полученная невязка полигона; F — периметр полигона; N — число полигонов.
В результате оценки точности нивелирования I
классов по невязкам 170 полигонов, в том числе по-
лигонов с недопустимыми невязками превышений, по-
лучена средняя квадратическая ошибка на 1 км хода,
равная ±2,6 мм/км.
Окончательная оценка точности ГВО России будет
получена по результатам уравнивания.
В рамках научно-технического сотрудничества гео-
дезических служб государств Восточной Европы ГВО
России было связано прямыми нивелирными измере-
ниями с национальными нивелирными сетями Поль-
ши, Чехословакии, Венгрии и Румынии через наци-
ональные нивелирные сети этих стран. ГВО России
связана с национальными высотными сетями Герма-
нии, Болгарии. До 90-х годов прошлого столетия ни-
велирная сеть России входила в ГВО СССР и таким
образом имеет связи с национальными высотными се-
тями Белоруссии, Украины, Эстонии, Латвии, Грузии,
Азербайджана и Казахстана. В настоящее время вы-
полняются работы по связи национальных нивелирных
сетей России и Белоруссии на новую эпоху. В рамках
СНГ прорабатывается вопрос о связи ГВО России с национальными нивелирными сетями Украины,
Грузии, Азербайджана и Казахстана на новую эпоху.
В соответствии с Программой российско-финского сотрудничества Финского геодезического инсти-
тута (ФГИ) и Роскартографии в области геодезии с 2002 г. выполняются совместные работы по связи
национальных нивелирных сетей двух стран и изучению вертикальных движений земной поверхности
на территорию Финляндии и Северо-Запада России.
В рамках международного сотрудничества в 2002-2003 гг. специалисты ЦНИИГАиК, ФГУП «Аэро-
геодезия» и ФГИ выполнили полевые измерения в шести пунктах государственной границы между Рос-
сией и Финляндией и таким образом объединили национальные нивелирные сети России и Финляндии
(рис. 6.3.3).
Непосредственную связь национальных нивелирных сетей с российской стороны осуществлял спе-
циалист ФГУП «Аэрогеодезия» В.Л. Аверин.
Запланировано выполнение нивелирных работ по двум дополнительным линиям связи (см.
рис. 6.3.3), которые разукрупнят общий полигон с периметром около 1,4 тыс. км и обеспечат надеж-
ную связь национальных нивелирных сетей на всем протяжении госграницы от Печенги до Выборга.
Четыре из восьми линий связи имеют повторные нивелирные измерения, что обеспечивает создание
Карты современных вертикальных движений земной поверхности на территорию Северо-Запада России
и Финляндии на современную эпоху.
6.3.2 Изучение современных вертикальных движений земной поверхности
Ю.Г. Кузнецов
Одной из задач, которые ставили русские геодезисты более 100 лет тому назад при создании единой
высотной сети страны, являлось изучение вертикальных движений земной поверхности. Уже в 1912 г.
была создана сеть нивелирования на Апшеронском полуострове специально для изучения вертикаль-
ных движений земной поверхности под влиянием откачки нефти. В 1928 г. Н.Н. Большаков выполнил
первое повторное нивелирование и получил надежные данные о движении земной поверхности Апше-
рона.
Систематическое использование результатов повторного государственного нивелирования для изу-
чения современных вертикальных движений земной коры (СВДЗК) на обширных территориях в СССР
началось после 1945 г. Именно в это время ГУГК СССР приступил к реализации программы создания
в стране новой сети нивелирования I и II классов, которая должна была обеспечить получение точных
количественных значений вертикальных смещений точек земной поверхности на значительных частях
европейской и среднеазиатской территорий СССР, а также вдоль ряда профилей в Сибири и на Дальнем
Востоке.
В 1948 г. издаются «Труды совещания по методам изучения движений и деформаций земной коры».
По мере реализации этой программы в ЦНИИГАиК и в некоторых других организациях велись работы
по составлению карт СВДЗК на отдельные районы СССР. Наиболее значимой работой в этом направ-
лении было завершение составления в 1956 г. карты для западной части европейской территории СССР
в масштабе 1:5000000. Результаты этой работы, выполненной ЦНИИГАиК и Институтом географии
АН СССР, были описаны в Трудах ЦНИИГАиК; вып. 123 «Современные вертикальные движений зем-
ной коры», М., Геодезиздат, 1958. Территория, для которой составлена данная карта, распространяется
от западных границ СССР до линии Ленинград-Волгоград-Ростов-на-Дону. Работы по составлению
этой карты были выполнены ЦНИИГАиК совместно с Институтом географии АН СССР. В 1963 г. был
составлен и опубликован уточненный вариант этой карты масштаба 1:12000000 в сборнике «Совре-
менные движения земной коры» №1, М., АН СССР, 1963 г.
В 1963 г. на XIII Генеральной ассамблее МГТС по предложению советских ученых был принят
международный проект «Современные движения земной коры». Проект предусматривал упорядоченное
составление сводных карт СВДЗК крупных регионов и континентов в масштабе 1:2 500 000 по про-
грамме международного сотрудничества. Повторное нивелирование I и II классов в рамках развития
современной государственной высотной сети позволило использовать его результаты для планомерного
изучения СВДЗК на всей территории СССР.
В 1965 г. была принята международная программа создания сводной карты Восточной Европы в
масштабе 1:2 500000. В результате реализации этой программы геодезическими службами НРБ, ВНР,
ГДР, ПНР, СРР, СССР, ЧССР и СФРЮ к 1971 г. была составлена карта СВДЗК Восточной Евро-
пы в масштабе 1:2500000. Эта карта была составлена под руководством советского геоморфолога и
картографа Ю.А. Мещерякова (1923-1970). Составительский оригинал карты и ее изданный вариант в
масштабе 1:10000000 был представлен состоявшейся в 1971 г. в Москве XV Генеральной ассамблее
МГТС. Карта получила высокую международную оценку. Впервые в мировой практике была состав-
лена карта СВДЗК на столь обширную территорию — около 6,5 млн. км2. Массовый тираж карты в
масштабе 1:2 500000 был выпущен ГУГК СССР в 1973 г. Со стороны СССР большой вклад в работу
по составлению карты внесли Л.А. Кашин (ГУГК СССР), И.И. Энтин (ЦНИИГАиК), Д.А. Лилиенберг
(Институт географии), С.В. Победоносцев (ГОИН).
В 1986 г. по данным нового повторного нивелирования совместно с геодезическими службами НРБ,
ВНР, ГДР, ПНР, СРР, ССР и ЧССР была составлена карта СВДЗК на территорию, охватывающую
Болгарию, Венгрию, ГДР, Чехословакию, Польшу, Румынию и европейскую часть СССР, в масштабе
1:2500000. В том же году эта карта была издана ГУГК СССР. Координатором совместной работы
по составлению сводной карты СВДЗК Восточной Европы был И.Н. Мещерский (ЦНИИГАиК), со
стороны национальных геодезических служб стран-участниц работу возглавляли Д. Арабаджийски
(НРБ), Я. Ванко (ЧССР), Т. Выжиковски (ПНР), П. Выскочил (ЧССР), И. Йоо (ВНР), Ю.Г. Кузнецов
(СССР), И.Н. Мещерский (СССР), М. Младеновски (НРБ), Й. Штейнберг (ГДР).
Учитывая актуальность изучения современных вертикальных движений земной поверхности для
развития работ по составлению сводной карты вертикальных движений территории Восточной Европы,
по согласованию между геодезическими службами стран Восточной Европы (ГССС) в 1986 г. было при-
нято решение о составлении Карты градиентов скорости вертикальных движений вдоль линий повтор-
ного нивелирования территории Восточной Европы. В 1993 г. было завершено составление и издание
данной карты. Карта была издана в масштабе 1:2 500000 Федеральной службой геодезии и картогра-
фии России. Со стороны геодезических служб стран-участниц работу возглавляли Ю. Кузнецов (Рос-
сия, координатор совместной работы), И. Йоо (Венгрия) М. Младеновски (Болгария), Й. Штейнберг
(Германия), Т. Выжиковски (Польша), И. Дрэгоеску (Румыния), Я. Ванко (Словакия), П. Выскочил
(Чехия).
В 1978-1984 гг. предприятия ГУГК СССР составили карту СВДЗК по геодезическим данным на
территорию СССР в масштабе 1:2 500000, а в 1989 г. эта карта была издана в масштабе 1:5000000.
На европейской части СССР карта идентична по содержанию карте издания 1986 г.
При составлении карты было обработано 500 тыс. км повторного нивелирования, в том числе ряд
линий, где нивелирование повторялось неоднократно (табл. 6.3).
Таблица 6.3. Протяженность линий нивелирования, выполненного на территории СССР в различные вре-
менные эпохи (циклы), в тыс. км.
I цикл II цикл III цикл IV цикл V цикл
209,4 214,2 42,4 4,5 0,7
В целом для всех отобранных для построения карты линий повторного нивелирования (213,7 тыс.
км) средний интервал измерений между циклами равнялся 26 годам. Сеть повторного нивелирова-
ния была связана с 38 уровнемерными постами скорости вертикальных движений, которые были ис-
пользованы в качестве исходных при уравнивании скоростей вертикальных движений, полученных по
нивелирным данным.
В результате анализа материалов повторного нивелирования были отобраны и использованы для
составления карты вертикальных движений 23 144 нивелирных знака. Плотность сети повторного ни-
велирования на момент составления карты для всей территории СССР была неравномерна, поэтому
изученность вертикальных движений земной коры не являлась полной и была неравномерной. От-
сутствие сети повторного нивелирования в удаленных районах Сибири и Северо-Востока страны не
позволило получить данные о вертикальных движениях на эти территории.
В 1996 г. в ЦНИИГАиК были завершены работы по составлению Карты вертикальных движений
земной поверхности на территорию Прикаспийского региона в масштабе 1:2 500 000. Карта совре-
менных вертикальных движений земной поверхности Прикаспия, составленная по данным повторного
нивелирования, служит основой для изучения геодинамических процессов Прикаспийского региона, ко-
торые протекают в течение последних десятилетий (фиг. V, цв. вклейка). В комплексе с Картой совре-
менных вертикальных движений земной коры по геодезическим данным на территорию СССР (СВДЗК)
1989 г. и Картой современных вертикальных движений земной коры Восточной Европы 1973 г. изуче-
ние геодинамических процессов в Прикаспии может осуществляться за более чем семидесятилетний
период [Кафтан 1995, Кафтан и др. 1998].
Карта Прикаспия была составлена на территорию Грузии, Армении, Азербайджана и части терри-
торий России, Казахстана, Туркменистана и Узбекистана (см. фиг. V). Для территории России при
составлении карты были использованы новые (по сравнению с предыдущей картой) данные повтор-
ного нивелирования, а для остальной территории — данные, которые ранее были использованы при
составлении Карты СВДЗК СССР.
Рис. 6.3.4. Сеть повторного нивели-
рования на территорию Северо-Запада
России и Финляндии.
Сеть повторного нивелирования, включающая в себя
только устойчивые знаки, закреплена на местности 4412
знаками. Из них фундаментальных реперов — 382, грун-
товых — 2416, стенных реперов и марок — 1519 и пунк-
тов триангуляции — 23. Среднее расстояние между знаками
около 10 км. Общая протяженность сети повторного ниве-
лирования 31,2 тыс. км, в том числе Россия — 13,0 тыс.
км, Грузия — 1,8 тыс. км, Армения — 1,3 тыс. км, Азер-
байджан — 2,0 тыс. км, Казахстан — 8,2 тыс. км, Туркме-
нистан — 3,5 тыс. км, Узбекистан — 1,4 тыс. км. Средний
интервал времени между повторными измерениями в сети
составил 29 лет.
Совместная работа ЦНИИГАиК и Финского геодезиче-
ского института по объединению национальных высотных
сетей позволили также объединить сети повторного нивели-
рования и приступить к созданию карты современных вер-
тикальных движений на территории Финляндии и Северо-
Запада России на новую эпоху.
С учетом связей национальных нивелирных сетей Рос-
сии и Финляндии появилась возможность осуществить
связь национальных сетей повторного нивелирования, что
позволяет создать Карту современных вертикальных дви-
жений земной поверхности на территорию Северо-Запада
России и Финляндии.
Первой картой вертикальных движений земной поверх-
ности на территорию Финляндии и Северо-Запада России
была карта «Современные вертикальные движения земной
коры Фенноскандии», которая была представлена T.J. Kukkamaki (Финляндия) на 4-ом Междуна-
родном симпозиуме по изучению современных движений земной коры, Москва, 1971 г. Территория
Фенноскандии, для которой была построена карта, распространялась также на территории Швеции и
Прибалтики.
В основу карты были положены результаты повторного нивелирования, данные наблюдений на уров-
немерных станциях и геолого-геоморфологические данные. Для территории России это данные по ли-
нии повторного нивелирования Мурманск-Ленинград и линии Беломорск-Обозерская, а также данные
наблюдений на уровнемерных постах Белого и Баренцева морей, Онежского и Ладожского озер. Дан-
ные повторного нивелирования России, использованные при построении карты, не были объединены в
единую сеть.
Совместная работа Финского геодезического института, ФГУП «ЦНИИГАиК» и ФГУП «Аэрогео-
дезии» позволила создать единую карту современных вертикальных движений, отражающих постлед-
никовое поднятие Скандинавского щита и его периферии: Северо-Запада России. Карта современных
вертикальных движений земной поверхности территории Северо-Запада России и Финляндии (фиг. VI,
цв. вклейка), созданная по методике ЦНИИГАиК, является предварительной [Отчет... 2008]. Фин-
ский геодезический институт (ФГИ) также составит предварительную карту вертикальных движений
на эту же территорию с использованием единых исходных данных, но по методике, принятой в Фин-
ляндии. Планируется выполнение совместного анализа национальных карт вертикальных движений и
подготовка окончательного варианта карты «Современные вертикальные движений земной поверхности
территории Северо-Запада России и Финляндии». При составлении карты современных вертикальных
движений использованы скорости, полученные из сопоставления результатов нивелирования совмест-
ной с Финляндией сети повторного нивелирования (рис. 6.3.4).
Объединенная сеть повторного нивелирования имеет общую протяженность 29,5 тыс. км. По трем
линиям повторного нивелирования, пересекающим государственную границу, осуществлена связь на-
циональных сетей повторного нивелирования России и Финляндии. Сеть повторного нивелирования
состоит из 51 полигона, в том числе 28 полигонов на территории Финляндии, 21 полигона на тер-
ритории России и 2 общих полигонов для территории России и Финляндии. В сеть повторного ни-
велирования включены висячие линии повторного нивелирования, связывающие уровнемерные посты
и линии, расположенные на территориях, где полигоны не замыкаются. Объединенная сеть повторно-
го нивелирования связана с 17 уровнемерными постами, расположенными на побережье Финского и
Ботнического заливов Балтийского моря и на побережье Баренцева и Белого морей.
Общее руководство совместными с ФГИ работами с российской стороны осуществляли
В.Ф. Хабаров (Роскартография), Г.В. Демьянов (ЦНИИГАиК), А.В. Юськевич (Аэрогеодезия), непо-
средственными исполнителями являлись Ю.Г. Кузнецов, В.И. Кафтан, Е.Л. Корчагина (ЦНИИГАиК),
Е.А. Быкова (ФГУП «Аэрогеодезия»).
6.3.3 Теоретические основы обработки нивелирования в гравитационном поле
Земли
М.И. Юркина
Теория высот в гравитационном поле основана на понятии потенциала силы тяжести. Несмотря на
повторяющиеся в печати утверждения, что понятие о потенциале введено Лагранжем и Лапласом, у
этого понятия гораздо более глубокие корни [Юркина 1987].
Теорию уровенных поверхностей при равновесии жидкости развил Л. Эйлер [Euler 1757], отметив,
что использование потенциала (Эйлер его называет I’effort, ou 1'efficace) позволяет заменить исполь-
зование трех величин — составляющих действующей силы по осям координат — одной величиной и
радикально упрощает выводы, а также, что при равновесии границы разделения слоев разной плотности
совпадают с уровенными поверхностями потенциала. В этой работе выяснена связь атмосферного дав-
ления и потенциала силы тяжести. Установленные Эйлером зависимости дают более точную и простую
основу вывода поправок за силу тяжести барометрического нивелирования, чем известная формула
Лапласа и ее упрощенные варианты (подробнее в [Юркина 1977]).
А.П. Болотов [1837], следуя французскому академику Пюиссану [Puissant An XIV = 1805, р. 230;
1819, t. 1, р. 350], отметил возможность счета высот по перпендикулярам к сфероидальным поверхно-
стям, параллельным поверхности океана. Пюиссан в книге 1805 г. описал принципы геометрического
нивелирования, не использовав термин «нивелирование» (р. 230-237), но имея в виду поправки за
рефракцию по Лапласу (р. 223-229). Разности высот считал равными разностям расстояний до цен-
тра сферической Земли. Термин «нивелирование» появился в книге Пюиссана [Puissant 1807]. Лаплас
[Laplace 1785] в томе 4, книге X дал описание астрономической и земной рефракции и измерения
высоты барометром.
Внимание геодезистов к этому кругу вопросов привлекла в 1870 г. невязка в ~1,2 м полигона
геометрического нивелирования, пересекшего Альпы у Симплона и Сен-Готарда. Позднее выяснилось,
что эта невязка — результат просчета, и влияние силы тяжести в подобных случаях едва ли будет
больше дециметра.
Непосредственные суммы элементарных нивелирных превышений из-за нецентральности земного
гравитационного поля зависят от пути нивелирования, и невязка в полигоне в общем случае безоши-
бочных измерений отлична от нуля. Поэтому, используя данные о силе тяжести вдоль нивелирных
линий, определяют разности ее потенциалов. Эти разности выражены криволинейными интегралами
J gdh, вычисляемыми вдоль пути нивелировки, здесь dh — элементарное нивелирное превышение. Ве-
личины таких интегралов зависят только от положений начальной и конечной точек. Эти интегралы
введены в практику нивелировки немецким юристом по образованию и службе, любителем матема-
тической физики Теодором Вандом [Wand 1871, с. 131] в его книге по теории потенциала. По сви-
детельству Лаллемана [Lallemand 1887], полковник Шарль Гулье (Charles Moyse Goulier) предложил
называть высоту над геоидом в линейной мере «(’altitude orthometrique», а Жан Жак Эмиль Шейссон
(J.J.E. Cheysson) предложил термин — динамические отметки (cotes dynamiques) для результата вычис-
лений в единицах потенциала. Гулье [Goulier 1887] опубликовал две статьи в Отчетах Французской
Академии наук о вычислении ортометрических высот и об их отличиях от динамических, в частности
решения Гельмерта [Helmert 1873]. Термин геопотенциал, широко применяемый теперь, ввел британ-
ский метеоролог Шоу [Shaw 1913]. У Шейссона, вероятно, не было публикаций по нивелированию, но
в каталогах Библиотеки конгресса США и Французской национальной библиотеки отмечены его мно-
гочисленные публикации по статистическим, экономическим и финансовым вопросам, о французском
кадастре.
Динамические высоты необходимы при изучении уровней моря и других водоемов.
Трудности установления среднего уровня моря и связей такого среднего с береговыми пунктами
заставили геодезистов принимать за исходную поверхность отсчета высот уровенную поверхность по-
тенциала силы тяжести некоторой точки — геоид Брунса, у нас — нуля Кронштадтского футштока.
Спутниковые альтиметрические данные в сочетании с гравиметрическими дают представления об от-
клонениях морской поверхности от уровенной вдали от берегов. Простые осреднения уровнемерных
наблюдений могут содержать в себе влияние установившихся динамических процессов. Для оценки та-
ких влияний необходимы решения гидродинамических уравнений. Объем информации, которая должна
быть при этом переработана, так велик, а требуемая точность настолько высока, что мало надежды
на практически полезный результат даже при использовании лучших современных вычислительных
средств. Возникающие математические трудности охарактеризованы Марчуком и Коганом [1977, с. 4].
В издании книги этих же авторов 1991 г. рассмотрено решение для твердой Земли и неизменного
гравитационного поля. Мнение их определенно: «... появление более совершенных ЭВМ не улучшит
соответствия между результатами расчета и данными наблюдений». Но реально сопоставить среднее
из наблюдений за уровнем моря на каком-либо футштоке с поправкой в геопотенциал при замене
влияния Луны и Солнца влиянием их масс, распределенных по их орбитам, определенным за период
времени, в который входит целое число обращений упомянутых небесных тел. Такое сопоставление
интересно для оценки разностей уровней морей. Представят трудности поправки за движение полюса,
поскольку теперь при определении таких движений в IERS используют сомнительные поправки за из-
менения ориентировки Земли в пространстве, не учитывая эффекты, указанные Эйлером, за смещение
действующих сил притяжения Земли Луной и Солнцем с центра земной массы.
Первые поправки геометрического нивелирования за силу тяжести в России вычислены Рыльке
[1894]. Приняв во внимание только нормальную часть влияния, Рыльке получил поправки, которые на
некоторых линиях в равнинных районах превзошли поправки за уравнивание. Вопрос о возможности
расширения исследования московской гравитационной аномалии при помощи сети точных нивелировок
рассмотрен инспектором классов Межевого института Г.Н. Шебуевым [1898]. В принципе вопрос был
поставлен верно: каждая невязка такого полигона накладывает условие на характеристики гравита-
ционного поля, но точность таких условий низка [Иверонов 1901]. Шебуев окончил математический
факультет Казанского университета, читал в нем курсы математической физики, метеорологии, физи-
ческой географии, был приглашен в Межевой институт в связи с реорганизацией преподавания. На
смерть Г.Н. Шебуева теплыми словами о нем откликнулись И.А. Иверонов [1901] и Ф.Н. Красовский
[1901].
М.С. Молоденский [19456] решил эту задачу вместе с задачей определения земного гравитационно-
го поля по выполняемым на земной поверхности измерениям. Высота точки над принятым эллипсоидом
представлена как сумма нормальной высоты этой точки, определяемой по измеренной разности потен-
циалов, и аномалии высоты (высоты квазигеоида). Термин «нормальная высота» отражает то обстоя-
тельство, что эта высота была бы равна высоте над эллипсоидом, если бы реальное гравитационное
поле совпадало с нормальным. Высота квазигеоида зависит от возмущающего потенциала в точках
земной поверхности — разности реального и нормального потенциалов силы тяжести.
Формула вычисления нормальной высоты дана В.Ф. Еремеевым [1951]. Ошибки, возникающие при
вычислении по этой формуле, обстоятельно проанализированы в [BeneS 1976]. Поправку можно найти,
подставив результат в упомянутое уравнение [Юркина 2004в].
Л.П. Пеллинен [1960а, б, в] конкретизировал требования к гравиметрической съемке при обработке
нивелирных данных.
Оценка Дюппе [Duppe 1972] подтвердила, что на расстоянии около 1 км на точность ортометриче-
ских высот влияют одинаково как случайные ошибки нивелировки, так и топография и неоднородности
земной коры.
Деформация уровенных поверхностей за время между нивелировками вызывает повороты отвесов
и ведет к выводам о вертикальных движениях точек земной поверхности даже при их абсолютной
неподвижности. Этот эффект описал немецкий геодезист Фоглер [Vogler 1873]. Вероятнее, конечно, что
изменения нивелирных превышений могут быть вызваны как вертикальными движениями земной коры,
так и изменениями земного гравитационного поля. Эти процессы взаимно зависимы. Простой расчет
[Юркина 1976] показывает, что преобладающее влияние на изменение нивелирных превышений может
оказать изменение направления силы тяжести, с изменением модуля ее вектора можно практически не
считаться. Для определения деформации уровенных поверхностей необходимы данные об изменениях
силы тяжести по всей земной поверхности. Поэтому неизменность модуля силы тяжести в исследуемом
районе еще не может указать на отсутствие деформаций уровенных поверхностей в этом районе; такие
деформации могут быть объяснены изменениями силы тяжести в других районах Земли, даже весьма
удаленных, если эти изменения достаточно велики или распространены по обширной территории.
Карты вертикальных движений земной коры, составленные по данным повторной нивелировки без
учета изменений гравитационного поля, правильно характеризуют изменения потенциала силы тяжести
и течения воды. Таким образом, практическое значение этих карт не зависит от изменений гравитаци-
онного поля.
Обрабатывая совместно результаты повторных нивелировок и измерений силы тяжести, можно вы-
вести как вертикальные сдвиги точек земной поверхности, так и изменения земного гравитационного
поля. Вариант решения этой задачи описан Юркиной [1986].
Важный этап в истории, теории и практике нивелирования составляет учет влияния рефракции.
Влияние рефракции на результаты геометрического нивелирования рассматривали Рыльке, Лаллеман,
Иордан, Осипов, Вархаловский, Зейдель, Коул, Куккамяки, Федосеев, Костин, Павлов, Татевян, Броке,
Кульков, Энтин и др.
В 50-х годах XX в. в ЦНИИГАиК было предпринято интенсивное исследование всех составляю-
щих методики геометрического нивелирования, итог которого подвел выпуск 111 Трудов ЦНИИГАиК,
изданный в 1956 г., который мы рассмотрим, попутно восстанавливая историческую объективность.
На титульном листе этого выпуска Исай Ильич Энтин обозначен как автор, а следовало бы на-
писать: под редакцией И.И. Энтина. В конце Введения читаем: «В выполнении некоторых иссле-
дований вместе с автором принимали участие сотрудники ЦНИИГАиК В.И. Звонов, В.Ф. Еремеев,
М.И. Синягина, В.П. Королева и В.И. Синягина».
Вклад некоторых научных работников настолько весом, что их следовало бы назвать соавторами
вместе с И.И. Энтиным, выполнившим общее редактирование. Например, М.И. Синягина была иници-
атором постановки в ЦНИИГАиК исследований по вертикальным движениям земной коры, вела такие
исследования совместно с сотрудниками Института географии АН СССР.
Вопреки написанному в конце Введения выпуска 111, В.Ф. Еремеев не работал вместе с
И.И. Энтиным. В разработку вопросов, относящихся к системе нормальных высот, вклада И. И. Энтина
нет. Разделы 4 и 5 главы I написаны И.И. Энтиным по публикациям М.С. Молоденского и
В.Ф. Еремеева с добавлением практических соображений из статьи [Еремеев, Звонов 1953]. В
изложении §4 «Изучение фигуры физической поверхности Земли» главы I допущены две ошибки:
1. Написано, что с увеличением расстояния до оси вращения Земли увеличивается кривизна уровен-
ной поверхности. 2. Для определения геоида по измерениям силы тяжести на земной поверхности
достаточно знать плотности вещества в земной коре между геоидом и земной поверхностью. Но для
определения вертикального градиента силы тяжести необходимы плотности вещества внутри геоида.
Значение этого обстоятельства для редукций силы тяжести было выявлено Еремеевым [1957]. Но на
Западе значение вертикального градиента силы тяжести при редукции гравиметрических наблюдений
до сих пор недооценивают.
Во Введении вообще не назван Иван Дмитриевич Кульков, и далее по тексту его роль принижена,
он представлен как несамостоятельный исполнитель. И.Д. Кульков до войны окончил МГУ, работал
в ГАИШ, а после войны — в ЦНИИГАиК, где занимался вопросами влияния рефракции на резуль-
таты геометрического нивелирования. Автор научно-технических отчетов за 1948 и 1950 гг. Отчеты
переданы в Архив экономики.
И.Д. Кульков был высококвалифицированным специалистом, у него был педагогический дар, он
интересно проводил семинарские занятия для сотрудников по уравнительным вычислениям — его слу-
шали с неослабевающим вниманием. На войне попал в окружение и в немецкий концлагерь, из кото-
рого бежал со второй попытки. Репрессирован не был, но пребывание в концлагере составило дефект
анкеты, из-за которого был уволен из ЦНИИГАиК в 1952 г. (якобы по сокращению штатов) вместе
с сотрудниками, имевшими разные дефекты в анкетах. Вынужденно уехав из Москвы, преподавал в
техникуме в Тульской области, а мог стать выдающимся профессором вуза.
В выпуске 111 в разделе 2 главы 3 под названием «Опытная проверка формулы Н.А. Павлова» на
с. 48 читаем: «Описанная выше опытная проверка приближенной формулы Н.А. Павлова была выпол-
нена И.Д. Кульковым», что соответствует его отчету 1948 г. Далее на с. 50 читаем: «Эта проверка
... окончательно показала, что формула Н. А. Павлова не может быть принята». Содержание отчета
И.Д. Кулькова 1950 г. и его выводы отражены на с. 53-95 выпуска 111, но без ссылки на автора.
Большое значение работ И.Д. Кулькова состоит в том, что они поколебали доверие к теоретическим
положениям, на которых базировались формулы для вычисления поправок за рефракцию, и послужили
толчком для организации в ЦНИИГАиК новых исследований и экспериментальных работ по изучению
влияния рефракции в геометрическом нивелировании.
Теория высот в гравитационном поле описана в работе В.Ф. Еремеева, М.И. Юркиной [1972].
«Совместные определения изменений гравитационного поля Земли и вертикальных сдвигов ее коры»
описаны в статье [Юркина 1978], где сделано заключение о невозможности вывода смещений центра
масс Земли из измерений на ее поверхности: такие смещения исключаются из измерений алгебраиче-
ски.
Исследования нужно продолжать, проводя необходимые экспериментальные работы, особенно с
учетом изменения гравитационного поля во времени, которое оказывает определенное влияние на ре-
зультаты повторного нивелирования.
6.3.4 Астрономо-гравиметрическое нивелирование
Б.В. Бровар
Определение высот квазигеоида (ВКГ) над референц-эллипсоидом с использованием астрономо-
геодезических уклонений отвеса и данных региональной гравиметрической съемки получило назва-
ние астрономо-гравиметрического нивелирования (АГН). Именно эти высоты, называемые астрономо-
геодезическими, используются (в сумме с нормальными высотами) для различных редукционных вы-
числений (редукций базисов и вообще линейных измерений) на поверхность референц-эллипсоида, что
необходимо при обработке геодезических сетей методом проектирования.
Метод АГН разработан в 1935 г. М.С. Молоденским и изложен в работах [М.С. Молоденский 1937;
1944; 1950; M.S. Molodenski 1937; М.С. Молоденский, Лозинская 1939; М.С. Молоденский и др. 1960].
Совместно с геометрическим нивелированием АГН позволяет определять вертикальные координаты то-
чек земной поверхности в системе принятого референц-эллипсоида. Его можно рассматривать как обоб-
щение метода астрономического нивелирования, позволившее радикально расширить практическую ре-
ализацию последнего. Первое практическое применение АГН относится к 1939 г. [М.С. Молоденский,
Лозинская 1939]. Особую актуальность практическое определение астрономо-геодезических высот гео-
ида на обширных территориях помимо чисто научного значения приобрело в связи с предложенным
Ф.Н. Красовским переходом к обработке триангуляции нашей страны методом проектирования.
Основная идея метода АГН состоит в использовании данных местной гравиметрической съемки
для учета нелинейности изменения уклонений отвеса между астропунктами, разность ВКГ в которых
подлежит определению. Превышение квазигеоида (ПКГ) определяется как сумма результата, даваемого
обычным астрономическим нивелированием, и гравиметрической поправки, вычисляемой по гравимет-
рическим данным. При этом аномалии УСТ должны быть известны в некоторой области Е вокруг
каждой пары астропунктов.
Формула для расчета ПКГ между астропунктами А и В представлена в виде
Св - Са - -[«а + W + Kl - Са + (6-3.1)
где В а и дв — астрономо-геодезические уклонения отвеса в астропунктах в направлении АВ; I —
половина расстояния между пунктами А и В; Сд.Сд и — ВКГ и гравиметрические уклонения
отвеса соответственно в пунктах А и В, обусловленные влиянием аномалий УСТ области Е.
Величины Сд,Сд и вычисляются интегрированием по формулам Стокса и Венинг-Мейнеса
или по более точным формулам современной теории, учитывающей отклонения земной поверхности от
уровенной. При этом область Е, в которой учитываются аномалии при интегрировании по указанным
формулам, должна быть строго одной и той же для каждой пары астропунктов, между которыми по
формуле (6.3.1) вычисляется ПКГ. При расчете гравиметрической поправки (члены в фигурных скоб-
ках) процедура численного интегрирования была реализована с помощью двухфокусной эллиптической
палетки, накладываемой на гравиметрическую карту [М.С. Молоденский 1937]. Фокусы палетки сов-
мещались с нанесенными на карту астропунктами, для чего при разных расстояниях использовался
набор палеток. Эллиптическая палетка сразу же вошла в практику АГН.
По мере выполнения АГН, в частности, в районах с резко выраженным рельефом, где аномальность
гравитационного поля обычно очень велика, возникала необходимость уточнения палетки, рассчитан-
ной в 1937 г., и в первую очередь при учете влияния аномалий в ближайших окрестностях астропунк-
тов. При расстояниях между астропунктами, превышающими 100 км, размеры центральных отсеков
палеток становились неадекватными густоте и точности используемой гравиметрической съемки. По-
этому появились новые уточненные варианты эллиптических палеток, предложенные М.И. Юркиной
[1957] и китайским геодезистом Фан Цзюнем [1958], они широко использовались в СССР и КНР.
С 1967 г. в ЦНИИГАиК несколько изменили методику расчета ПКГ. Все требуемые расчеты выпол-
нялись только с применением круговых палеток, но интегрирование с их помощью велось в пределах
строго одной области Е, которая в форме, близкой к прямоугольной, индивидуально назначалась для
каждой пары астропунктов. Размер ее выбирался с расчетом, чтобы обеспечить соответствующие тре-
бования теории АГН и использовать результаты проводимых параллельно расчетов гравиметрических
уклонений отвеса для всех астропунктов АГС. Чтобы получить все необходимые данные для расче-
та гравиметрической поправки, потребовалось дополнительно учесть для каждой пары астропунктов
аномалии УСТ, относящиеся к области между границей круговой палетки и почти прямоугольной гра-
ницей области Е. Окончательные расчеты выполнялись по формуле (6.3.1), чем достигалась не только
более высокая точность учета влияния центральной зоны, но и более реальная оценка точности окон-
чательного результата.
В 1969 г. в ЦНИИГАиК был предложен модифицированный метод расчета ПКГ [Остач 1970, 1994;
Ostach 1970], который имеет указанные выше преимущества и не требует какого-либо дополнительного
учета аномалий УСТ вне круговой области вокруг каждого астропункта. В теоретическом отношении
метод столь же обоснован, как и прежний. Новый метод АГН обладал значительно большей гибкостью.
В соответствии со схемой построения нашей астрономо-геодезической сети астропункты расположены
в ней более или менее равномерно с взаимными расстояниями порядка 70-150 км. При стандартном
радиусе учета влияния аномалий УСТ (305,4 км) это обеспечивает надежный расчет превышений
квазигеоида.
Результирующая формула расчета превышений между смежными астропунктами в модифицирован-
ном методе АГН имеет вид:
АС = Св - Са = -№а + + [Ф - Сд°] • (6-3.2)
Величины 6В первого слагаемого правой части представляют собой разности астрономо-
геодезических и соответствующих гравиметрических уклонений отвеса, причем последние вычис-
ляются по аномалиям УСТ круговых областей радиусом фо вокруг каждого астропункта по формуле
Венинг-Мейнеса. Величины £ во втором слагаемом получают по видоизмененной формуле Стокса
п 2л фо
Са° = 1— f f Др[5(т|>) - 5(xl>o)]sinxl>di|)da (6.3.3)
47TV J J
' О о
интегрированием в круговой зоне радиусом фо- Обозначения в формуле (6.3.3) стандартные; 5(ф0) —
значение функции Стокса на границе области интегрирования. Формулы (6.3.1) и (6.3.2) в теоретиче-
ском отношении эквивалентны, но вторая более удобна для использования на практике при массовых
расчетах.
С формальной точки зрения, метод АГН позволяет определять астрономо-геодезические ВКГ толь-
ко в астропунктах, по которым передавались превышения путем их последовательного суммирования,
начиная от исходного пункта Пулково. Для решения задачи редуцирования базисных измерений этого
по существу и достаточно. Однако при построении детальных точных карт квазигеоида на всю изуча-
емую территорию возникает проблема интерполяции системы точек различной густоты в зависимости
от аномальности района. Линейная интерполяция по узловым точкам с шагом 70-100 км приводит к
сглаживанию изображаемых на карте высот. Модифицированный метод АГН позволяет решить и эту
проблему.
В правой части формулы (6.3.2) два слагаемых этой формулы имеют различную структуру. Первое
слагаемое зависит только от плавно меняющихся с расстоянием остаточных уклонений отвеса, обуслов-
ленных влиянием аномалий средних (и дальних) зон, а второе — прямо учитывает только локальную
аномальность гравитационного поля в окрестности каждой конкретной точки (в том числе и астро-
пунктов, между которыми определяется превышение). Второе слагаемое не участвует в образовании
невязок в замкнутых полигонах сети линий АГН.
С учетом этого обстоятельства в получающейся сети полигонов АГН проводилось уравнивание толь-
ко величин, определяемых первым слагаемым. В результате получается гладкая составляющая полных
астрономо-геодезических высот, которая надежно линейно интерполируется по сети узловых точек, сов-
падающих с астропунктами, на любые другие точки или выбранную правильную систему таких точек.
Вклад локальной составляющей для каждой точки может быть учтен непосредственным расчетом по
формуле (6.3.3). Таким образом получается набор высот квазигеоида требуемой детальности, и уже
по нему путем простой интерполяции строится карта полностью соответствующая всей имеющейся
исходной информации.
Теоретически легко может быть установлено соответствие между упомянутой выше гладкой частью
высот квазигеоида, определяемой на основе астрономомо-геодезических данных и местной гравимет-
рической съемки, и сглаженными высотами, вычисляемыми по существующим детальным моделям
гравитационного поля Земли с использованием коэффициентов Qn [Ostach 1970], соответствующих
сферическому радиусу ф0. Это обстоятельство полезно использовать при экстраполяции астрономо-
геодезических высот на акваториях окраинных морей.
Начиная-с 1969 г. модифицированный метод АГН [Остан 1970] стал использоваться в практике
отечественных основных геодезических работ. Проведено несколько циклов последовательного расши-
рения (до 1980 г.), а затем (1987, 1993 гг.) уточнения карты ВКГ, построенной указанным методом на
всю территорию СССР.
К началу общего уравнивания АГС (1980-1982 гг.) существовавшая сеть была уравнена отдельными
блоками с последовательным их присоединением к ранее уравненным, при этом искажения существо-
вавших координат оказались значительными (до 20 м). Поэтому составленная к 1983 г. на основе
существовавших на то время геодезических и астрономических координат карта требовала корректи-
ровки.
Чтобы уже на начальной стадии составления новой карты ВКГ избежать существенных искажений
геодезических координат, было выполнено предварительное полигональное уравнивание АГС и полу-
чена более согласованная система координат. Уточненные в результате полигонального уравнивания
геодезические координаты и были использованы в дальнейшей работе. В 1987 г. был составлен вариант
карты ВКГ, которая явилась основой для окончательных редукционных вычислений, включенных в
выполняемое в то время общее уравнивание АГС.
Постепенному уточнению подверглись и астрономические широты и долготы, которые изменялись
в соответствии с уточнением фундаментальной астрономической системы координат (при переходе от
полюса Орлова к международному условному началу (OCI)). Соответствующий пересчет астрономи-
ческих координат всех астропунктов АГС (более 3000) занял несколько лет, так как одновременно
учитывались и поправки, связанные с уточнением долгот исходных астрономических пунктов, на ко-
торых определялись личные разности астрономов. Вынужденная поэтапность выполнения указанных
перевычислений приводила к необходимости последовательных приближений и при проведении АГН.
Общее уравнивание АГС как самостоятельного построения было завершено в 1991 г. Однако работы по
совершенствованию координатной основы страны решено было продолжить, так как к этому времени
были в основном закончены продолжавшиеся несколько лет работы по созданию на основе спутниковых
наблюдений двух новых координатных построений, а именно: космической геодезической сети (КГС) и
доплеровской геодезической сети (ДГС).
Точности этих сетей (особенно в региональном плане) оказались столь высокими, что созданные се-
ти решено было объединить в рамках строгого решения с только что уравненной АГС. Первый вариант
такого уравнивания (для общих пунктов) был завершен в 1993 г. Выполнение совместной обработки
трех независимо построенных сетей повысило точность, и поэтому соответствующие уточнения потре-
бовались и в существовавшей карте ВКГ 1987 г., построенной по данным полигонального уравнивания
АГС.
В итоге были получены результаты строгого уравнивания всей существовавшей АГС как единого
построения и полностью приведенные в единую систему результаты астрономических определений на
всех астропунктах АГС.
При совместном уравнивании трех указанных построений роль астрономо-геодезических высот воз-
росла, так как теперь они использовались для определения вертикальной координаты пространствен-
ного построения, в которое преобразовалась АГС. Поэтому возросли и требования к точности их
определения. По крайней мере, не следовало уже пренебрегать имевшимися возможностями их даль-
нейшего уточнения. Во избежание недоразумений, связанных с промежуточным введением каких-либо
дифференциальных поправок на предыдущих этапах работы, было принято решение полностью и неза-
висимо провести все вычисления, начиная от формирования узловых пунктов АГН и кончая учетом
обновленной гравиметрической информации в зонах от 48,5 км и до 305,4 км для каждого астропункта.
Неизменными были взяты только результаты интегрирования аномалий в зонах от 0 до 48,5 км, которое
было выполнено ранее с полной тщательностью с использованием (специальных) круговых палеток.
Окончательно сформированная сеть, покрывающая всю территорию страны, включает 1776 узло-
вых пунктов, 1241 из которых объединяет по 2 и более астропунктов. Общее число астропунктов,
использованных при формировании сети, равно 2897.
В результате выполненного уравнивания для всех узловых точек получены астрономо-геодезические
высоты квазигеоида, определенные от исходного пункта Пулково, где G принята равной нулю. Сравне-
ние для одноименных узловых пунктов полученных и предыдущих (1987 г.) ВКГ, подтвердило их хоро-
шее согласие. Максимальные расхождения приходятся на территории Дальнего Востока (Комсомольск-
на-Амуре), но и там они не превосходят 1,5 м. Даже для Чукотки они составляют доли метра. Это дает
объективные основания для того, чтобы подчеркнуть высокое качество предыдущих работ ЦНИИГА-
иК по составлению карты, выполненных в условиях значительно большей неопределенности исходных
данных, чем она существует теперь.
Наибольший вклад в искажение ВКГ, получаемых из астрономо-гравиметрического нивелирования
на больших территориях, вносит косвенное влияние ошибок геодезических координат. Предпринятое
совместное уравнивание трех высокоточных геодезических построений позволило выявить региональ-
ные искажения АГС. Наибольшие из них, достигающие 3 м, приходились на указанный выше район
Дальнего Востока, Закавказье, полуостров Ямал. В основной части АГС эти искажения не превосходят
1 м. Такие изменения геодезических координат отдельно уравненной АГС по сравнению с совместным
уравниванием АГС, ДГС и КГС были учтены (через изменения астрономо-геодезических уклонений
отвеса) в определяемых ВКГ. Получено, что соответствующие изменения результатов АГН даже на
краях сети не превосходят 0,5 м. Это свидетельствует о надежности построения карты.
Для ряда крайних астропунктов АГС (восточная оконечность Чукотки и северная — полуостро-
ва Ямал) ВКГ пришлось вычислить астрономическим нивелированием из-за отсутствия данных для
включения их в сеть АГН. Общее число таких пунктов было равно 22.
В 1994 г. детальная цифровая карта ВКГ над эллипсоидом Красовсого была создана. Практически
для всей территории страны средние квадратические ошибки ВКГ (относительно исходного пункта
Пулково) не превышали 1 м. Только для наиболее удаленных участков (северная часть полуострова
Ямал, восточная оконечность Чукотки, Камчатка) эти ошибки возрастали до 1,5 м из-за передачи
высот в эти районы астрономическим нивелированием. Приращения ВКГ для точек, находящихся в
пределах одного листа карты масштаба 1:1000000, определяются со средней квадратической ошибкой
не более 0,2 м.
Непосредственным продолжением метода АГН можно считать метод построения детальной карты
ВКГ по результатам определения в отдельных, сравнительно редких точках точных ВКГ с использо-
ванием спутниковой аппаратуры и данных геометрического нивелирования. Определенные инструмен-
тально ВКГ далее интерполируются с использованием метода косвенной интерполяции на сеть точек
требуемой густоты. При этом для исходных и интерполируемых точек должны быть вычислены ВКГ
по формуле (6.3.3) интегрированием аномалий в круговых областях, радиусы которых согласуются,
как в АГН, с расстоянием между опорными пунктами. Разности инструментально определенных и
вычисленных по формуле (6.3.3) ВКГ линейно интерполируется на правильную систему точек, кото-
рая необходима для построения детальной карты, и суммируются с соответствующими слагаемыми,
полученными непосредственно для точек по формуле (6.3.3).
В создание карты ВКГ над эллипсоидом Красовского по результатам астрономо-гравиметрического
нивелирования с учетом совместного уравнивания АГС, ДГС, КГС соответствующий вклад на разных
этапах внесли О.М. Остач, Е.М. Орлова, Л.Е. Кропотова, Г.В. Демьянов, Н.В. Бурцева, Н.Г. Назарова.
На фиг. VII (цв. вклейка) показана «Карта высот квазигеоида над эллипсоидом Красовского» мас-
штаба 1:11 700000, составленная по результатам астрономо-гравиметрического нивелирования (АГН) с
учетом общего уравнивания астрономо-геодезической сети (АГС) страны, изданная в 1996 г. ЦНИИГА-
иК, Роскартография. Сечение изолиний принято равным 1 м. В сеть АГН включено 2897 астропунктов
АГС. Астрономические координаты пунктов вычислены с учетом всех необходимых редукций и от-
носятся к полюсу OCI и исходному меридиану, установленному Международной службой вращения
Земли. ВКГ в исходном пункте Пулково принята равной нулю. Средние квадратические ошибки ВКГ
на большей части карты не превосходят 1,0 м. Для наиболее удаленных от Пулково районов (Камчатка,
Чукотка) они возрастают до 1,5 м.
Подраздел составлен по материалам работ [Остач 1994; Остач, Демьянов 1994], при этом с благо-
дарностью учтены замечания, высказанные О.М. Остачем.
6.3.5 Спутниковое нивелирование
А.Н. Майоров
Термин «спутниковое нивелирование» получил распространение после внедрения в геодезиче-
скую практику спутниковых измерительных технологий. Под спутниковым нивелированием обычно
понимают метод получения нормальных высот точек земной поверхности по результатам обработки
GPS/ГЛОНАСС — измерений с точностью, предъявляемой к геодезическим определениям нормальных
высот. Традиционный способ получения наиболее точных значений нормальных высот — геомет-
рическое нивелирование — проигрывает спутниковым определениям высот и по затратам, и по
производительности. Поэтому создание условий для практического применения метода спутникового
нивелирования является одним из приоритетных направлений современного развития геодезии.
Из обработки спутниковых наблюдений получают геодезические высоты точек Н. Для того чтобы
по результатам измерений получить нормальные высоты этих же точек h, используют соотношение,
связывающее высоты названных типов
Н - h - С, = 0, (6.3.4)
где С — высоты квази геоида.
Таким образом, выполнение спутникового нивелирования требует не только производства спутни-
ковых измерений на определяемых пунктах, но и знания на этих пунктах высот квазигеоида. Высоты
квазигеоида так же необходимы для вычисления нормальных высот, как и геодезические высоты. Но
в отличие от геодезических высот высоты квазигеоида при выполнении спутникового нивелирования
получают не непосредственно из измерений, а определяют по модели высот квазигеоида. Под моделью
здесь следует понимать набор данных и математический аппарат, который позволяет получать по этим
данным для области определения модели непрерывное поле значений высот квазигеоида.
Обычно эти модели создаются специальными научными центрами и содержат наиболее точную ин-
формацию о высотах квазигеоида для конкретного региона. Региональные модели представляют собой
массив значений высот квазигеоида в узлах регулярной сетки. Чаще всего регулярная сетка опре-
деляется семейством широт и долгот, но может задаваться и плоскими координатами в некоторой
картографической проекции. Модели создаются с использованием гравиметрической информации, а
также с привлечением значений высот квазигеоида, полученных по разности геодезических высот и
нормальных высот в соответствии с формулой (6.3.4), на сети опорных пунктов. Данные на опорных
пунктах позволяют связать реализованную на них систему высот с системой геодезических коорди-
нат, а гравиметрическая информация дает возможность интерполировать высоты квазигеоида между
опорными пунктами. Точность региональных моделей оценивается на уровне первых сантиметров.
К локальным моделям высот квазигеоида относятся модели, создаваемые для территорий протяжен-
ностью не более 10-20 км. Обычно такие модели создаются исполнителями конкретных геодезических
работ для своих нужд. Как и при создании региональных моделей, высоты квазигеоида для локальных
моделей получают из измерений на нескольких опорных пунктах. По значениям высот на опорных
пунктах вычисляются параметры, позволяющие построить поверхность квазигеоида. Как правило, по-
верхность квазигеоида представляют в виде плоскости. При расстоянии между опорными пунктами
5 км погрешность такого представления для аномального района может составить 5 см. В районах
со спокойным гравиметрическим полем методическая погрешность аппроксимации поверхности высот
квазигеоида плоскостью почти равна нулю.
В отличие от геометрического нивелирования, развитие которого может выполняться только отно-
сительно пунктов с известными нормальными высотами, при выполнении спутникового нивелирования
в качестве исходных пунктов могут использоваться пункты с известными нормальными высотами, либо
пункты с известными геодезическими высотами.
Схема спутникового нивелирования, выполняемого относительно пунктов с известными нормаль-
ными высотами, принципиально не отличается от схемы геометрического нивелирования. Так же как
и при геометрическом нивелировании, спутниковыми измерениями связываются опорные пункты и все
определяемые пункты. Измеренные приращения геодезических высот дополняются соответствующими
приращениями высот квазигеоида. Полученные приращения нормальных высот используют для расчета
нормальных высот определяемых пунктов. Если опорных пунктов с известными нормальными высота-
ми больше одного, неизбежно возникает задача уравнивания. Приращения нормальных высот должны
быть уравнены как измеренные величины. Средние квадратические ошибки приращений нормальных
высот тпдд, которые используются для назначения весов, зависят от ошибок измеренных приращений
геодезических высот тпдд и ошибок приращений модельных высот квазигеоида
2 2,2
тоД/1 ~ тДН +
На практике важно иметь надежную методику оценки величин тпдн и тд^, так как от этого
зависит и выявление грубых ошибок, и распределение невязок, обеспечивающее приближение к точно-
му результату. Сложность состоит в том, что приходится использовать оценки точности, полученные
из различных источников. Результаты обработки GPS/ГЛОНАСС-измерений могут быть получены с
использованием программного обеспечения, в котором оценка точности выполняется с неизвестными
допущениями. Для многих существующих программ характерно, что полученные с их помощью оценки
точности не соответствуют реальному распределению ошибок. В то же время оценка точности высот
квазигеоида выполняется при создании модели и может иметь некоторый обобщенный характер, осред-
ненный для всей модели. Ошибки приращений высот квазигеоида существенно зависят от расстояния
между опорными и определяемыми пунктами. Чем ближе расположен определяемый пункт к опорному
пункту, тем меньше ошибка приращения высоты квазигеоида. Для спутниковых измерений анало-
гичная зависимость не так явно выражена. Поэтому использование неверных оценок при совместном
взвешивании вкладов геодезических высот и высот квазигеоида может приводить к неверному рас-
пределению невязок. Более обоснованное распределение невязок возможно, если на опорных пунктах
будут известны не только нормальные высоты, но и геодезические высоты. В этом случае уравнивание
спутниковых измерений может быть выполнено независимо от информации о нормальных высотах и
высотах квазигеоида. Кроме того, может быть исключено влияние невязок, вызванных несоответстви-
ем высот квазигеоида разности нормальных и геодезических высот на опорных пунктах. Тем самым
точность результатов обработки измерений будет выше.
При другом способе выполнения спутникового нивелирования в качестве опорных пунктов высту-
пают пункты с известными геодезическими координатами. Опорные пункты и определяемые пункты
связываются спутниковыми измерениями, в результате обработки которых на все пункты полученной
сети распространяется единая пространственная система координат. С использованием модели высот
квазигеоида от геодезических высот делается расчет нормальных высот, после чего можно полагать,
что задача спутникового нивелирования решена. Такой способ спутникового нивелирования являет-
ся наиболее прогрессивным, так как полностью соответствует представлению о трехмерной геодезии,
когда одновременно по одним и тем же измерениям определяются и геодезические координаты, и нор-
мальные высоты. По сравнению с рассмотренным ранее способом спутникового нивелирования, где
используются превышения геодезических и нормальных высот и высот квазигеоида, в данном способе
используются собственно геодезические высоты, нормальные высоты и высоты квазигеоида. Поэтому
требования к точности согласования всех типов высот при этом способе нивелирования значительно
выше.
На практике условие (6.3.4) выполняется с некоторой невязкой 6:
H-h-C = b. (6.3.5)
Оценка среднего квадратического значения этой невязки mg, может использоваться в качестве кри-
терия согласованности типов высот на конкретной территории.
Детали обработки измерений и оценки точности результатов требуют знаний о конкретных услови-
ях, в которых выполняется спутниковое нивелирование. Однако можно с уверенностью говорить о том,
что для эффективного использования спутникового нивелирования, особенно для замены геометриче-
ского нивелирования, такие условия должны создаваться.
В частности, требуется изменение практики развития и поддержания в рабочем состоянии государ-
ственной системы нормальных высот. Теоретически система высот представляет собой совокупность
значений нормальных высот, определенных относительно одной и той же точки начала счета высот, при
условии, что параметры нормального поля силы тяжести заданы. Другими словами, для определения
системы нормальных высот достаточно установить точку начала счета высот и задать параметры нор-
мального поля. С практической точки зрения система нормальных высот определяется совокупностью
значений нормальных высот, полученных для нивелирных пунктов и закрепленных в соответствующих
каталогах.
Их уточнение в результате появления новых измерений возможно только после выполнения опреде-
ленной процедуры, обеспечивающей согласованность обновленных высот с высотами пунктов, которые
изменения не затронули, а также приводящей к фиксированию изменений в каталогах.
Периодически, через установленное количество лет, выполняется общее уравнивание накопленных
измерений, выполненных в нивелирных сетях, и введение новой практической реализации системы
высот. В нашей стране государственная нивелирная сеть покрывает всю территорию и включает около
четырех сотен тысяч пунктов. Опыт эксплуатации системы нормальных высот показывает, что все
пункты со временем изменяют значения нормальных высот. За время, проходящее между эпохами
обновления системы высот, величины изменений могут составлять от долей миллиметра до нескольких
дециметров. Причины, вызывающие изменения высот, могут быть самыми разнообразными:
— влияние тектонических процессов;
— влияние хозяйственной деятельности;
— проседание (выпучивание) пунктов из-за неправильной закладки или эксплуатации;
— влияние ошибок обработки нивелирных измерений.
Приведенный список причин далеко не полон. Но он дает основание ожидать, что деформации го-
сударственной системы высот по сравнению с состоянием, зафиксированным на конкретную эпоху в
каталогах, могут охватывать целые регионы, а также проявляться на отдельных пунктах. Обнаружение
деформаций методом геометрического нивелирования очень неэффективно из-за низкой производи-
тельности и высокой стоимости работ. Кроме того, существующая методика обработки нивелирных
измерений не предусматривает выявления и учета систематических изменений высот, которые могут
быть спрогнозированы. Поэтому в результате обработки деформация не исключается, а приводит к
заведомо более высоким ошибкам высот, чем это следует из точности нивелирных измерений.
Проблема оперативного и производительного отслеживания изменений в нивелирных сетях, а также
поддержания государственной системы нормальных высот в рабочем состоянии может быть в значи-
тельной степени решена, если использовать спутниковые измерительные средства. Для этого часть
пунктов, реализующих пространственную систему координат, необходимо совместить с пунктами госу-
дарственной нивелирной сети.
Одновременно следует отметить, что использование методов спутникового нивелирования при сло-
жившейся практике поддержания государственной системы нормальных высот в рабочем состоянии
требует увеличения спутниковых измерений относительно пунктов с известными нормальными высо-
тами для надежного контроля результатов. При этом применение метода спутникового нивелирования,
в котором в качестве опорных пунктов выступают пункты только с известными геодезическими коор-
динатами, очень ограничено из-за низкой точности. Уменьшить затраты на дополнительные измерения
и тем самым поднять эффективность использования спутникового нивелирования можно, если постро-
ить сеть опорных пунктов, для которых будут известны и нормальные высоты, и пространственные
координаты.
Таким образом, задача усовершенствования методов для поддержания существующей системы нор-
мальных высот в рабочем состоянии и задача создания условий для практического применения метода
спутникового нивелирования приводят к необходимости объединения опорных сетей, реализующих
пространственную систему координат и систему нормальных высот.
6.3.6 Об установлении единой общеземной системы нормальных высот
Г.В. Демьянов, А.Н. Майоров
Основной задачей геодезии является изучение фигуры Земли и ее внешнего гравитационного поля в
единой системе координат. Смысл этой краткой, но емкой формулировки особенно ярко проявляется в
последнее время. Широкое распространение технологии GPS/ГЛОНАСС-измерений, а также создание
глобальной сети станций, непрерывно принимающих сигналы со спутников GPS и ГЛОНАСС, сделало
реальным распространение с сантиметровой точностью единой системы координат на всей поверхности
планеты. Тем самым появилась возможность геометрического описания фигуры Земли с высокой точ-
ностью. Поэтому теперь особое значение приобретает задача высокоточного изучения геопотенциала
на глобальном уровне как естественного развития революционных достижений в геодезии последних
десятилетий. Причем речь идет не только о необходимости создания условий для решения глобальных
проблем, имеющих в первую очередь фундаментальное научное значение. Высокоточное описание гра-
витационного поля Земли, характеристик геопотенциала позволит в том числе обеспечить повышение
эффективности труда геодезистов на повседневном уровне.
Например тем, что избавит их от необходимости выполнять дополнительные измерения с целью
устранения систематических противоречий, возникающих из-за несогласованности точной глобальной
геодезической системы координат и параметров геопотенциала.
Важное место в изучении геопотенциала наряду с методами гравиметрии, методами космической
геодезии, спутниковой альтиметрией занимает высокоточное геометрическое нивелирование. По ре-
зультатам обработки нивелирных измерений, по существу, определяются разности потенциала силы
Рис. 6.3.9. Пространственно-временные графики вертикальных перемещений земной коры относительно
глубинного репера и начальной эпохи (1987,4 г.) в изолиниях: а - для реперов 1, 2, 3, 4 и ВГП 7 изолинии
проведены через 0,2 мм, б - для реперов 1, 2, 3, 4, 2428, 7271 и GPS-4 изолинии проведены через 1 мм.
7, а также фундаментального репера 2428, стенного репера 7271 и марки 8018 относительно самого
глубокого рп. 1. На фоне многолетнего тренда реперов — относительного опускания рп. 2 (до -0,8 мм),
рп. 4 (до -0,2 мм), и поднятия рп. 3 (до 1,0 мм) — происходят вариации с разными периодами и
амплитудой, не превышающей 0,3 мм.
Таблица 6.4. Относительное изменение высотного положения
№п/п Пункт наблюдений, его номер и год закладки Относительное изменение высоты, мм
27.07. 29.05. 30.03. 18.11. 23.09. 04.08.
1993 1997 2000 2000 2001 2007
1 Глубинный репер N1, 1985 0 0 0 0 0 0
2 Глубинный репер N2, 1985 0 — 0,1 -0,7 -0,8 -0,5
3 Глубинный репер N3, 1985 0 — -0,1 -0,1 0,1 0,2
4 Глубинный репер N4, 1985 0 — 0,4 -0,9 0,2 0,4
5 ВГП 7, 1987 0 — -0,1 -0,5 -0,7 -1,1
6 Стенной репер N7271, 1987 0 -2 1,5 -0,6 -2,3 1,1
7 Фундаментальный репер 2428, 1987 0 — — 2,6 — 1,8
8 Пункт GPS-4, 1993, SHEP 0 -0,4 3,3 1,1 -0,6 1
9 Пункт GPS б/№, 1993, SHE2 0 — — -11,1 -12,3 -20,1
10 МАРКА N8018, 1985 0 — — -8,3 -3,1 1,5
11 Рейка футштока +3,965 м, 1998 — 0 7,7 -0,9
точностью глобальных представлений о фигуре Земли. Сегодня, когда геодезические координаты точек
могут быть получены с точностью первых сантиметров, почти метровая неопределенность начального
уровня геопотенциала является преградой не только при решении глобальных научных проблем, но и
в некотором смысле ограничением для производительного использования GPS/ГЛОНАСС-технологии
в обычной геодезической практике.
Конечно, для решения задач геодезической практики в пределах одного государства или одного
континента региональную систему нивелирных высот можно привести к формальному согласованию со
спутниковыми измерениями геодезической высоты. В этом случае, как правило, исправляется геоидаль-
ная составляющая С,, вычисленная по гравиметрическим данным, которая фактически является только
средством косвенной интерполяции гипсометрической составляющей h между опорными пунктами. Та-
кой подход решает только задачу использования GPS/ГЛОНАСС для распространения нивелирных
высот в принятой системе для данной территории, и не в коей мере не решает проблему установления
единой общеземной системы высот. Решение этой проблемы возможно только в соответствии с теорией
Молоденского.
Приведение изолированных нивелирных сетей к единому уровню является актуальной задачей со-
временной геодезии. Так, в работах М.И. Юркиной [1981] и В.В. Бровара [1988] для решения этой
задачи рассмотрена возможность определения поправок к значениям геопотенциала в исходных пунк-
тах региональных сетей нормальных высот. Точность современных спутниковых методов определения
геодезической высоты и возможности определения высот квазигеоида над общим земным эллипсоидом
по гравиметрическим данным позволяют подойти к решению этой проблемы более радикально и в то
же время, по нашему мнению, более технологично.
За поверхность геоида принимается уровенная поверхность с потенциалом Wo, равным потенциалу
нормального эллипсоида L/q на его поверхности, то есть Wo = 17о [Бурша и др. 1997; Bursha et al.
1998].
Размеры этого эллипсоида подчиняются условию равенства нулю интеграла по всей поверхности
Земли а от высот квазигеоида, вычисленных по гравиметрическим данным
J Cda = 0.
(Т
В этом случае отменяется исключительная роль исходных пунктов в уровнемерных постах для
установления начала счета высот. Нормальная высота равна нулю в той точке земной поверхности,
в которой реальный потенциал Wi равен нормальному на поверхности общего земного эллипсоида
[Демьянов 1999].
В этой же точке совпадают поверхности геоида и квазигеоида. Таким образом, понятие геоида и
его поверхность будет фактически определяться фундаментальной постоянной Uq — потенциалом на
поверхности общего земного эллипсоида, принимаемого нами в качестве нормального.
Систему нормальных высот будет определять вся совокупность пунктов, для которой с высокой точ-
ностью по результатам спутниковых измерений получены геодезические координаты (в первую очередь
геодезическая высота), а также вычислены точные значения высот квазигеоида по гравиметрическим
данным. Эти пункты должны быть связаны между собой геометрическим нивелированием.
Необходимость использования такой совокупности пунктов обусловлена следующими соображени-
ями:
— единую общеземную систему координат и единую систему нормальных высот должна определять
одна и та же совокупность пунктов;
— при вычислении точных значений высот квазигеоида необходимо использовать детальные грави-
метрические съемки (как правило, на границе суши и моря, т. е. в местах расположения уровнемерных
постов, соблюдение этого условия сложно осуществить);
— за поверхность геоида принимается уровенная поверхность с потенциалом Wo, равным нормаль-
ному потенциалу Uq, а не некоторое среднее из значений Wi в уровнемерных постах;
— для приведения региональной (национальной) системы нормальных высот к единой общеземной
(иными словами — для определения поправки к региональной системе высот) необходимо иметь доста-
точно густую сеть пунктов, равномерно распределенных по всей территории региона (государства).
В России требованиям, предъявляемым к сети геодезических пунктов, на основе которых может
быть определена единая система нормальных высот, отвечает сеть пунктов ФАГС (фундаментальной
астрономо-геодезической сети) и ВГС (высокоточной геодезической сети). Однако очевидно, что опре-
деление единой общеземной системы нормальных высот с высокой точностью в рамках территории
одного государства невозможно. Необходимо привлечение измерений, выполненных на пунктах, распо-
ложенных на всех континентах, а значит необходимо международное сотрудничество.
В качестве иллюстрации существующих систематических рассогласований геодезических высот,
нормальных высот и гравиметрических высот квазигеоида, наблюдаемых на территории России, могут
быть представлены результаты обработки измерений на пунктах ФАГС и ВГС.
На рис. 6.3.6 показана схема пунктов ФАГС и ВГС в европейской части России, созданная в
1999-2000 гг. Каждый из этих пунктов расположен в непосредственной близости к узлам полигонов
высокоточного геометрического нивелирования и связан точными GPS-измерениями с двумя смежными
реперами нивелирования I или II класса. По результатам GPS-наблюдений на этих пунктах определены
точные значения геодезической высоты и вычислены точные значения высот квазигеоида по гравимет-
рическим данным. При вычислении высот квазигеоида использовался комбинированный метод. Влияние
дальних зон определялось по параметрам планетарной модели геопотенциала. Влияние центральной зо-
ны определялось численным интегрированием с использованием регулярной сетки аномалий Фая Дд,
осредненных по трапециям размерами 5' по широте и 7'30" по долготе. Аномалии Д§ вычислялись по
гравиметрическим картам аномалий Буге масштаба 1:1000000 и топографическим картам.
Величина радиуса центральной зоны Фо ва-
рьировалась от 7° до 1° в зависимости от бли-
зости к государственным границам Российской
Федерации, за пределами которой использова-
ние точной детальной информации по трапеци-
ям 5'х 7'30" не представлялось возможным. Вли-
яние дальних зон вне радиуса Фо определялось
по моделям EGM96 и GAO98, а затем осред-
нялось. Такое решение в некоторой степени ис-
ключало влияние региональных ошибок грави-
метрических данных. Изолинии показывают ха-
рактер распределения разностей Д£ между высо-
тами квазигеоида полученными по гравимет-
рическим данным и вычисленными как разность
измеренных геодезических высот Н и нормаль-
ных (нивелирных) высот h в Балтийской системе:
Д<=(Я-Л)-С
В центре европейской части радиус интегри-
рования Фо по трапециям 5'х 7'30" равен 7° и
гравиметрические данные получены по деталь-
ным высокоточным картам. Расхождения Д< в
этом регионе имеют плавный характер и в сред-
нем равны ~25 см. Для пограничных районов на
юге и на севере эти расхождения начинают рез-
ко возрастать. По нашему мнению, это связано
с ошибками гравиметрических данных на зару-
бежную территорию, которые использовались для
вычислений высот квазигеоида, а также с влия-
Рис. 6.3.6. Схема разностей на Европейскую
часть России.
нием расхождений региональных систем высот, которые в неполной мере исключаются при создании
планетарных моделей геопотенциала.
На основе наиболее точных результатов вычислений, относящихся к пунктам ФАГС и ВГС, распо-
ложенным между 44° и 64° с. ш„ можно сделать оценку поправки в Балтийскую систему нормальных
высот. Список пунктов опубликован в статье [Демьянов, Майоров 2004]. При этом для каждого пункта
приведена следующая информация: приближенные значения широты и долготы; значение геодезиче-
ской высоты Н, полученной по результатам GPS-измерений (оценка средней квадратической ошибки
геодезических высот 2 см); значение нормальной высоты h по нивелирным данным (оценка средней
квадратической ошибки нормальных высот 3 см); значение высоты квазигеоида С вычисленной по
гравиметрическим данным (для района исследований оценка средней квадратической ошибки высот
квазигеоида 10 см); разность высот квазигеоида Д£ = (Я — h) — С
Предположим, что основная причина появления разности Д£ на указанной территории заключается
в отличии Балтийской системы нормальных высот от единой системы нормальных высот. При вычисле-
нии Д£ необходимо принимать во внимание разность размеров отсчетного эллипсоида в системе коор-
динат ITRF, в которой определено значение геодезической высоты, и общего земного эллипсоида, отно-
сительно которого вычисляются высоты квазигеоида по гравиметрическим данным. Сжатия эллипсои-
дов практически совпадают. Большая полуось эллипсоида системы координат ITRF равна 6378 137,0 м.
Оценка величины большой полуоси общего земного эллипсоида составляет 6 378 136,50±0,05 м. С уче-
том этого значение поправки к Балтийской системе нормальных высот равно 21 ±5 см.
Таким образом, если в качестве начального уровня единой системы нормальных высот принять экви-
потенциальную поверхность, на которой значение потенциала реальной силы тяжести равно значению
потенциала на поверхности Нормальной Земли (Wo = Uq), то получается, что многолетний средний
уровень моря на пункте Кронтшадт на 21 см выше уровня геоида.
В настоящее время различие систем нивелирных высот, а в ряде случаев влияние использования
ортометрических высот является одним из основных источников ошибок высот квазигеоида, влияющих
непосредственно на точность определения поправок к региональной системе высот. Для исключения
этого источника ошибок задачу определения поправок к региональным системам высот следует решать
последовательными приближениями. Полученный результат является продолжением работы по оценке
поправки к Балтийской системе нормальных высот [Демьянов и др. 19996; Demianov, Tatevian 2002].
В дальнейшем, по мере развития ФАГС и ВГС на территории России и расширения международного
сотрудничества поправка к системе нормальных высот будет уточняться.
6.3.7 GPS-технологии для деформационного мониторинга геодинамических
процессов
О. И. Галаганов
Введение
Использование искусственных спутников для геодезии было одним из ранних применений космиче-
ских технологий. В последние десятилетия для исследования геодинамических процессов, в том числе
для изучения современных движений тектонических плит, внутриплитовых деформаций и т. д., при-
мененяются методы лазерной спутниковой дальнометрии (SLR), лунной лазерной дальнометрии (LLR),
длиннобазисной интерферометрии (VLBI). Однако наиболее широкое применение во всем мире полу-
чили системы глобального позиционирования (GPS).
С середины 80-х, еще находясь в экспериментальной стадии, система GPS стала широко использо-
ваться во многих странах мира для решения геодинамических и геофизических задач. В 1991 г. система
GPS начала применяться для изучения геодинамики в ряде интересных с геолого-геофизической точки
зрения регионов СНГ. Система GPS использовалась специалистами ОИФЗ РАН для изучения сей-
смогенных деформаций в эпицентральной зоне Шикотанского землетрясения (4.10.1994 г., М=8,0) на
Южных Курилах и Нефтегорского землетрясения (27.05.1995 г., М=7,3) на Сахалине.
В 1995-1996 г.г. были начаты работы по изучению геодинамики России (проект RUSEG).
Главные научные задачи такой программы: 1) Изучение региональных деформаций и напряжений,
связанных с сильными землетрясениями на границах основных геологических структур России — Ев-
роазиатской, Охотской, Тихоокеанской плит, складчатой оконечности Русской платформы и др. 2) Изу-
чение деформаций внутри основных геологических структур, в том числе Русской платформы, Балтий-
ского щита и др. 3) Изучение современных относительных движений Евроазиатской, Тихоокеанской,
Охотской, Иранской и др. литосферных плит. 4) Изучение региональных деформаций в других актив-
ных сейсмотектонических районах. 5) Мониторинг деформаций земной коры на территории Северного
Кавказа.
В 1999 г. совместно с сотрудниками Главной астрономической Обсерватории РАН (г. Пулково Ле-
нинградской обл.) и Горного института Кольского научного центра РАН в рамках проекта RUSEG
были продолжены работы по комплексному изучению геодинамических процессов на территориях Ле-
нинградского геодинамического полигона, Республики Карелия и Кольского полуострова.
Актуальны в настоящее время и работы по изучению геодинамических процессов в районах крупных
мегаполисов (Москва, Санкт-Петербург и др.); проектированию, строительству и эксплуатации круп-
ных гидротехнических сооружений, АЭС; в районах добычи полезных ископаемых, закачки и хранения
химических, ядерных и других промышленных отходов. Такая актуальность обусловлена контролем за
влиянием техногенных воздействий на напряженно-деформированное состояние среды и экологическую
безопасность.
Деформационный мониторинг на территории Балтийско-Ладожского региона и Карелии
В последние годы вновь возрос интерес к изучению послеледникового Фенноскандинавского подня-
тия. Использование спутниковых GPS-технологий позволяет определять скорости подъема в пунктах
GPS-измерений и увеличить площади изучения вертикальных движений в сочетании с методом точных
повторных нивелировок.
Рассматриваются результаты изучения современных движений и деформаций земной коры сотруд-
никами лаборатории спутниковой геодезии и деформометрии ИФЗ РАН, выполняемых с 1993 г. на
территории Балтийско-Ладожского региона. Именно на территории этого региона на острове Финского
залива в городе Кронштадте расположен уровнемерный пост (Кронштадский футшток), по данным из-
мерений на котором получен средний многолетний уровень Балтийского моря, принятый за отсчетный
нуль при определении нормальных высот земной поверхности — начало Балтийской системы высот.
Хотя средний уровень моря в районе Кронштадского футштока имеет колебательные изменения разной
амплитуды и длительности, его линейный тренд за отдельные периоды не превышает по абсолютной
величине 0,5 мм в год [Богданов 1996, Нивелирование I и II классов 1982, Абалакин и др. 1998].
Изучение современных движений земной коры территории российской части Балтийско-Ладожского
региона проводили до недавнего времени только с использованием прецизионного нивелирования. Ско-
рости вертикальных движений региона по многолетним данным прецизионного нивелирования состав-
ляют от —1,0 до +1,5 мм/год. В связи с тем, что конструкция закрепления и расположение начала
Балтийской системы высот перестали соответствовать современному уровню требований долговремен-
ной стабильности, в 80-х годах прошлого века начались работы по реконструкции. В результате был
создан дублер старейшего в стране футштока и сеть реперов постов специальной конструкции [Абала-
кин и др. 1998].
Создание трех постов глубинных реперов (Кронштадт, Шепелево и Ломоносов) в Ленинградской
области должно было способствовать надежному и долговременному закреплению начала Балтийской
системы нормальных высот, принятой в России, а также сохранению преемственности результатов
разных эпох измерений.
Внедрение спутниковых технологий (GPS-измерений) в практику высокоточных геодезических опре-
делений и геодинамических исследований на территории Балтийско-Ладожского региона началось с
1993 г. Возникла необходимость создания на местности геодинамической сети пунктов GPS и связи их
с реперами высотной сети. Использование реперов для выполнения GPS-измерений зачастую невозмож-
но как из-за их неблагоприятного геологического расположения, так и из-за закрытости для нормаль-
ного прохождения спутниковых сигналов. Поэтому перед проведением первых эпох GPS-измерений по
международному проекту «Уровень Балтийского моря» в регионе после специальной рекогносцировки в
1993 и в 1997 гг. была выполнена закладка пунктов GPS. Как показало время, не все из этих пунктов
оказались достаточно надежными.
Реперный пост «Шепелеве»
Реперный пост представляет собой группу из четырех реперов, заложенных в углах ромба со сто-
роной 1,8 м. Конструкция репера собрана из металлических труб диаметром 89 мм, размещающихся в
обсадных трубах большего диаметра. Глубина закладки основания каждого репера различна. Основа-
ния реперов закреплены: рп. 1 — в кристаллических породах докембрийского фундамента на глубине
176,3 м, рп. 2 — в гдовских водоностных песчаниках на глубине 117 м, рп. 3 — в средней части
котлинских глин на глубине 73,2 м, рп. 4 — в кровле котлинских глин на глубине 26,6 м. Вся группа
реперов поста находится в специальной защитной камере (домике) (рис. 6.3.7). Фундамент камеры
представляет бетонный монолит, не связанный со стенами и реперами, куда заложена марка ВГП 7
(вековой гравиметрический пункт 7). К сожалению, установка глубинных реперов под крышей не поз-
воляет использовать их в качестве пунктов для спутниковых измерений. Кроме того, для выполнения
GPS-измерений по проекту «Уровень Балтийского моря» в 1993 г. заложены марки для пунктов GPS
(GPS-4 SHEP и SHE2). В июне 2008 г. на территории Шепелевской обсерватории (Государственное
геологическое унитарное предприятие «Минерал») заложен новый пункт GPS, наблюдения на котором
должны выполняться предположительно в постоянном режиме (рис. 6.3.8).
Наблюдения за вертикальными перемещениями реперов на полигоне «Шепелево» ведутся разными
организациями (Роскартография, ИФЗ РАН, ГАО РАН) с 1987 г. На рис. 6.3.9 (а и б) приведены
пространственно-временные графики вертикальных перемещений глубинных реперов 2, 3, 4 и ВГП-
Звание обсерватории
Шепелево'
2428
0
мотеоплощавно
10 м
SHEM*
Реперный
3 пост
Глубина уотамоеии
реперов, м
№1 *2 №3 №4
Рис. 6.3.7. Схема располо-
жения реперов и пунктов
GPS нивелирного полигона
«Шепелево» на территории
гидрометеорологической об-
серватории.
Рис. 6.3.8. Геологический разрез глубинного скважинного ре-
перного поста в Шепелево.
Рис. 6.3.9. Пространственно-временные графики вертикальных перемещений земной коры относительно
глубинного репера и начальной эпохи (1987,4 г.) в изолиниях: а - для реперов 1, 2, 3, 4 и ВГП 7 изолинии
проведены через 0,2 мм, б - для реперов 1, 2, 3, 4, 2428, 7271 и GPS-4 изолинии проведены через 1 мм.
7, а также фундаментального репера 2428, стенного репера 7271 и марки 8018 относительно самого
глубокого рп. 1. На фоне многолетнего тренда реперов — относительного опускания рп. 2 (до -0,8 мм),
рп. 4 (до -0,2 мм), и поднятия рп. 3 (до 1,0 мм) — происходят вариации с разными периодами и
амплитудой, не превышающей 0,3 мм.
Таблица 6.4. Относительное изменение высотного положения
№п/п Пункт наблюдений, его номер и год закладки Относительное изменение высоты, мм
27.07. 29.05. 30.03. 18.11. 23.09. 04.08.
1993 1997 2000 2000 2001 2007
1 Глубинный репер N1, 1985 0 0 0 0 0 0
2 Глубинный репер N2, 1985 0 — 0,1 -0,7 -0,8 -0,5
3 Глубинный репер N3, 1985 0 — -0,1 -0,1 0,1 0,2
4 Глубинный репер N4, 1985 0 — 0,4 -0,9 0,2 0,4
5 ВГП 7, 1987 0 — -0,1 -0,5 -0,7 -1,1
6 Стенной репер N7271, 1987 0 -2 1,5 -0,6 -2,3 1,1
7 Фундаментальный репер 2428, 1987 0 — — 2,6 — 1.8
8 Пункт GPS-4, 1993, SHEP 0 -0,4 3,3 1,1 -0,6 1
9 Пункт GPS б/№, 1993, SHE2 0 — — -11,1 -12,3 -20,1
10 МАРКА N8018, 1985 0 — — -8,3 -3,1 1,5
11 Рейка футштока +3,965 м, 1998 — 0 7,7 -0,9
Изменения превышений разных реперов и пунктов GPS относительно глубинного рп. 1 и эпохи из-
мерений 1993 г. — эпохи начала GPS-измерений по проекту «Уровень Балтийского моря» приведены в
табл. 6.4. За 14 лет в вертикальных перемещениях пункта GPS-4 (SHEP) тренда не выявлено, а ампли-
туда знакопеременных перемещений не превышает двух миллиметров. За это же время зафиксировано
значительное (до 2 см) опускание пункта GPS б/н (SHE2).
Аналогичная система исследования вертикальной составляющей организована в районе Кронштад-
ского футштока.
GPS-измерения
С 1995 г. специалистами ИФЗ РАН при участии сотрудников Главной астрономической обсерва-
тории РАН проводятся GPS-измерения в Балтийско-Ладожском регионе на пунктах Пулково (PULK),
Кронштадт (KRON), Шепелеве (SHEP, SHE2), Валаам (VALM) [Galaganov et al. 2001]. Обработка
всех эпох измерений выполнялась в ITRF1997 и ITRF2000. В качестве исходных пунктов выбраны
пункты IGS, имеющие многолетние ряды непрерывных GPS-измерений.
В качестве исходных пунктов выбраны пункты IGS, имеющие многолетние ряды непрерывных GPS-
измерений: JOEN, KIRO, METS, MDVO, ONSA, RIGA, TROM, VAAS, VISO, ZWEN. Наиболее надеж-
но скорости движений определены для пункта Пулково. По данным измерений, выполненных в разные
эпохи, вычислены скорости за разные периоды, которые приведены в табл. 6.5. Анализируя полученные
результаты, можно сказать, что скорости движений изменяются в зависимости от продолжительности
периода осреднения. Среднее значение горизонтального перемещения пункта Пулково в системе IGS
происходит со средней скоростью (24,1 ±1,8) мм/год по азимуту (63±2)° на северо-восток (по осредне-
нию за шесть интервалов, см. табл. 6.5). Скорость вертикальных движений по данным GPS-измерений
1999-2003 гг. составляет Hgps=(6,0±0,6) мм/год, по данным повторного нивелирования скорость вер-
тикальных движений в районе Пулково составляет —1 мм/год (карта 1989 г.).
Скорости горизонтальных перемещений пунктов Шепелеве и Кронштадт за отдельные временные
интервалы осреднения значительно отличаются как по величинам скоростей, так и по направлению,
а также от общего характера движений пунктов на Балтийском щите. (Хотя по данным совместной
обработки всех эпох измерений с 1999 г. по 2003 г. это отличие стало меньше.) Возможно, большие
изменения скоростей вызваны неудачным закреплением центров пунктов и в последующих измерениях
необходимо их заменить или продублировать другими пунктами. Это уже сделано на обсерватории
Шепелеве в 2007 г. (рис. 6.3.10, 6.3.11). На рис. 6.3.12 представлены векторы скоростей горизонтальных
перемещение пунктов в Кронштадте и Шепелеве относительно Пулково за 1999-2003 гг.
Развитие сети пунктов GPS-измерений на территории Карелии, начатое в 1999 г., преследовало
цель развития сети международных европейских станций на восток и уточнение данных повторных
нивелировок в регионе Ладожского озера (М.Т. Прилепин 2002 г.). Обработка выполнена с исполь-
зованием программного пакета GAMIT GLOBK ver. 5.061. Определены скорости горизонтальных и
вертикальных перемещений за разные временные интервалы от 1 до 4 лет между эпохами измерений.
В зависимости от временного интервала определения горизонтальные смещения меняются в пределах
6 мм/год, вертикальные до 50 мм/год. Горизонтальные перемещения пунктов на территории Карелии
по данным совместного уравнивания 5 эпох измерений (1999 г., 2000 г., 2001 г., 2003 г. и 2203 г.)
происходили достаточно однообразно со скоростью 23,8-26,8 мм/год на северо-восток 69-73°. Верти-
кальная составляющая движений от 3,5 мм/год до 18,7 мм/год, полученная по данным измерений GPS,
значительно отличается от скоростей вертикальных движений (1 мм/год) по данным геометрического
нивелирования (карта 1989 г.), табл. 6.6, рис. 6.3.13.
Совместно с Горным институтом КНЦ выполняются измерения GPS на Кольском полуострове для
определения кинетических характеристик современных движений и деформаций, а также изучения
влияния на них крупномасштабных разработок полезных ископаемых. К настоящему времени доста-
точно надежные результаты по горизонтальным движениям получены для пункта Имандра (IMAN),
закрепленном в скальном выходе кристаллических пород на берегу озера Имандра. По данным обра-
ботки измерений 1999, 2001 и 2002 гг. в системе координат ITRF2000 получено, что за этот временной
период пункт IMAN перемещался со скоростью (29,5±2,7) мм/год на северо-восток по азимуту 53°.
Рис. 6.3.10. Векторы скоростей горизон-
тальных перемещений с их эллипсами 95-
процентных вероятных ошибок пунктов GPS
в ITRF2000 Прибалтийского региона за пе-
риод 1999-2002 гг. За исходные пункты
приняты пункты IGS: JOEN, KIRO, METS,
MDVO, ONSA, RIGA, TROM, VAAS, V1S0,
ZWEN.
Рис. 6.3.11. Векторы горизонтальных пе-
ремещений с их эллипсами 95-процентных
ошибок пунктов GPS в ITRF2000 Прибал-
тийского региона за период 1999-2003 гг.
Рис. 6.3.12. Векторы горизонтальных пере-
мещений с их эллипсами 95-процентных ве-
роятных ошибок пунктов GPS Прибалтий-
ского региона за период 1999-2003 гг. отно-
сительно пункта Пулково.
Рис. 6.3.13. Векторы скоростей горизон-
тальных перемещений с их эллипсами 95-
процентных вероятных ошибок пунктов GPS
(1TRF2000) в Карелии за период 1999-
2003 гг.
Таблица 6.5. Сводка суммарных скоростей горизонтальных движений пунктов GPS и их погрешности по наблюдениям за разные периоды в
Балтийском регионе в ITRF1997 и ITRF2002
Пункт Долгота, град. Широта, град. Ve ± oVe, мм/год Vn ±<тУд, мм/год Vs ± oVs. мм/год As, град. Эпохи совместного уравнивания
Пулково PULK 30,325 59,769 20,5±0,5 9,1±0,4 22,5±0,6 66 1995, 1999, 2000
Пулково PULK 21,2±0,1 11,1±0,5 23,9±0,5 63 1995, 1999, 2000, 2001
Пулково PULK 23,3±0,6 11,2±0,4 25,8±0,8 64 1999, 2000, 2001
Пулково PULK 22,8±1,0 12,8±0,6 26,1±1,2 61 2000, 2001
Пулково PULK 21,0±1,0 10,5±0,7 23,5±1,2 63 2001, 2002
Пулково PULK 21,1±0,2 11,1±0,2 23,9±0,3 62 1999, 2000,2001, 2002
Пулково PULK 20,8±0,1 9,9±0,1 23,О±О, 1 65 1999, 2000,2001, 2002, 2003
Кронштадт KRON 29,762 59,989 15,7±0,7 21,6±0,5 26,8±0,9 36 1995, 1999, 2000, 2001
Кронштадт KRON 18,7±0,7 18,9±0,6 26,5 ±1,6 44 1999, 2000, 2001
Кронштадт KRON 14,4±0,9 18,6±0,5 23,5±1,0 38 2000, 2001
Кронштадт KRON 4,4±1,4 18,3±0,9 18,8±1,7 14 2001, 2002
Кронштадт KRON 11,7±0,5 18,7±0,3 22,1 ±0,6 32 1999, 2000, 2001, 2002
Кронштадт KRON 17,9±0,2 12,5±0,3 21,8±0,4 55 1999, 2000, 2001, 2002, 2003
Шепелеве SHEP 29,099 59,967 -3,7±0,7 6,6±0,5 7,5±0,9 331 1999, 2000, 2001
Шепелеве SHEP -3,2±0,7 5,1±0,4 6,0±0,8 328 2000, 2001
Шепелеве SHEP 14,5±1,0 13,0±0,7 19,5±1,2 48 2001, 2002
Шепелеве SHEP 6,3±0,4 8,6±0,3 10,7±0,5 36 1999, 2000,2001, 2002
Шепелеве SHEP 13,8±0,2 8,9±0,2 16,4±0, 57 1999, 2000,2001, 2002, 2003
Шепелеве SHE2 29,099 59,967 19,3±1,0 6,7±0,7 14,0±0,9 71 2001, 2002
17,2±0,2 13,9±0,3 22,1±0,4 51 1999, 2000,2001, 2002, 2003
Кольский полуостров
IMAN 33,008 67,602 29,5±2,7 53°, 1999, 2001, 2002,
IMAN 33,008 67,602 21,2±0,6 11,2±0,4 24,0± 0,7 62 1999, 2001, 2002, 2003
Компоненты скоростей движений с ошибками их определения: Ve — восточная, V^ — северная, Уд — вертикальная составляющая, Vs — модуль вектора скорости
горизонтального движения по азимуту As-
Таблица 6.6. Сводка суммарных скоростей горизонтальных движений пунктов GPS и их погрешности по
наблюдениям за разные периоды в Карелии в ITRF1997 и ITRF2OO2
Пункт Долго- та, град. Широ- та, град. Ve ± o’Ve, мм/год VN ±gVn, мм/год VH ± oV, мм/год Vs ± o’Vs, мм/год As, град. Эпохи урав- нивания, годы
BOTS 34,381 61,842 22,7±0,4 7,0±0,3 3,5±1,4 23,8±0,5 73 1999-0-1-2- 3
22,5±0,4 7,3±О,3 1,5±1,4 23,7±0,5 72 2000-1-2-3
21,5±0,4 7,5±0,3 1,5±1,4 22,8±0,5 71 2002-2003
GIRS 33,667 62,458 22,5±0,5 6,9±0,3 17,6±1,6 23,5±0,6 73 1999-0-1-2- 3
22,0±0,5 7,3±0,3 15,5±1,6 23,6±0,6 72 2000-1-2-3
19,2±0,9 6,6±0,7 21,2=1=3,4 20,3±1,1 71 2002-2003
VALM 30,886 61,36 24,5±0,3 9,5±0,2 19,54=0,9 26,3±0,4 69 1999-2003
25,0±0,2 9,7±0,1 18,7=1=0,7 26,8±0,2 69 1999-0-1-2- 3
24,0±0,5 10,4±0,3 11,5±1,7 26,1 ±0,6 67 2000-1-2-3
19,4±1,1 5,2±0,7 38,7±3,7 20,1±1,3 75 2002-2003
MELO 30,785 61,783 23,5±0,2 8,3±0,2 9,8±0,7 24,9±0,3 71 1999-2003
23,8±0,1 8,6±0,1 15,7±0,6 25,3±0,1 70 1999-0-1-2- 3
22,4±0,4 9,6±0,3 6,4=Ы,4 24,4±0,5 67 2000-1-2-3
21,7±0,7 5,8±0,6 43,7±3,7 21,9±0,9 75 2002-2003
Компоненты скоростей движений с ошибками их определения: Ve — восточная, Vh — северная, Vh — вертикальная
составляющая, Vs — модуль вектора скорости горизонтального движения по азимуту 4$.
Таким образом, в результате выполнения ежегодных повторных GPS-измерений и нивелирования
в Балтийско-Ладожском-Онежском регионе надежно определены скорости горизонтальных движений
восьми пунктов. Горизонтальные перемещения со средней скоростью пунктов: на берегу Финского
залива — 22,3 мм/год по направлению 57° СВ, в Карелии — 24,8 мм/год по направлению 71° СВ.
При общей тенденции перемещения пунктов на северо-восток, зафиксировано увеличение восточной
компоненты и ускорение движений пунктов расположенных в Карелии. Несмотря на то, что измерению
вертикальной составляющей движений уделялось особое внимание, нельзя утверждать о надежности ее
определения. Необходимым условием надежности определения всех составляющих движений является
развитие на территории России сети базовых пунктов GPS с постоянной регистрацией спутниковых
сигналов, на расстояниях не более 200-500 км друг от друга.
Исследование влияния внедрения жидкости на деформирование геологической среды
Влияние искусственного воздействия на недра Земли обуславливает развитие специального эко-
логического раздела геодинамических исследований. ИФЗ РАН разработан проект деформационного
мониторинга для района захоронения жидких отходов химического производства.
Захоронение жидких отходов химического производства в глубокие подземные горизонты — оче-
видное требование времени, так как оно способствует предотвращению или, по крайней мере, умень-
шению загрязнения отходами поверхности земли и грунтовых вод. Очевидно, что влияние такого ис-
кусственного воздействия на недра целесообразно изучать. Актуальность организации деформацион-
ного мониторинга вызвана необходимостью создания системы контроля за изменением напряженно-
деформационного состояния геологической среды территорий, где производится захоронение жидких
отходов промышленного производства в глубокие слои земли.
Основные задачи, которые предполагалось решать при разработке проекта: создание наблюдатель-
ной сети пунктов — геодинамического полигона, определение пространственно-временных характери-
стик современных движений и деформаций с помощью опробованных и современных геодезических
методов и методик наблюдений, обработки и анализа, разработка программ интерпретации результатов
деформационного мониторинга и моделирования возможных их последствий на окружающую среду,
выработка рекомендаций для организации экологических геодинамических полигонов в местах захоро-
нения промышленных отходов.
Рис. 6.3.14. Схема расположения пунктов геоде-
зических наблюдений на полигоне закачки: 1 —
пункты GPS-измерений и нивелирования, 2 —
реперы, 3 — трасса нивелирования, 4 — линия
геологического разреза, 5 — проекция положе-
ния приосевого грабена на дневную поверхность,
6 — предполагаемая проекция контура внедренной
Рис. 6.3.15. Геологический разрез вкрест Паром-
ненской структуры по линии, соединяющей пунк-
ты (номера пунктов геодезических наблюдений
вблизи скважин см. на рис. 6.3.14).
Объект исследований расположен в Средне-
Ахтубинском районе Волгоградской области, в
10 км к северу от жилой зоны города Волжского,
на левобережье реки Волги. По данным точно-
го государственного нивелирования, территории
Прикаспийской низменности в районе г. Волж-
ского присущи вертикальные тектонические дви-
жения со скоростью, не превышающей 1 мм в
год (карта 1989 г.). Местоположение полигона
приурочено к низкому Заволжью Прикаспийской
низменности. Территория полигона входит в со-
став западной прибортовой зоны Прикаспийской
синеклизы. Вблизи западного борта Прикаспий-
ской синеклизы по кровле соли прослеживается
Ахтубинско-Тингутинская соляная антиклиналь-
ная гряда, осложненная Паромненским и Южно-
Паромненским поднятиями. Присводовая часть
Паромненской структуры осложнена продольным
тектоническим нарушением типа сброса. Заложе-
ние основного тектонического нарушения произо-
шло, вероятно, в домеловое время. Его развитие
продолжалось на протяжении мелового и палео-
генового периодов и затухает в неогеновое время.
Основное тектоническое нарушение представле-
но двумя плоскостями сброса с уступообразным
погружением западного крыла структуры под уг-
лом 50-60°. На рис. 6.3.14 двумя параллельны-
ми линиями показаны положение на дневной по-
верхности проекции границ приосевого грабена
по отложениям палеогена. Эти границы отража-
ют положение так называемого «западного разло-
ма» [Проблемы... 2000] (рис. 6.3.15). По мнению
сторонников неудачного размещения данного по-
лигона захоронения, по разлому жидкие отходы
могут попасть в верхние слои земли и грунто-
вые воды, закачка может спровоцировать активи-
зацию деформационных процессов и сейсмично-
сти.
Закачка жидкости происходит с 1992 г. по
скважинам на глубину около 1000 м в песчаный
пласт байосского горизонта средней юры. Пласт
надежно изолирован от других горизонтов. По
расчетам, за 25 лет контур закаченной жидко-
сти будет представлять эллипсоидальную линзу площадью около 4 км2. Средний объем закачиваемой
жидкости составляет около 515 тыс. м3 за год.
В 1998 г. для контроля над изменением напряженно-деформированного состояния и выявления
пространственно-временных особенностей современных движений на территории интенсивного антро-
погенного воздействия на недра создан эколого-геодинамический полигон. На территории площадью
35 км2 были надежно закреплены 22 пункта наблюдений. Расстояние между пунктами составляет от
0,4 до 6,2 км, среднее 2,4 км. Комплекс повторных инструментальных наблюдений, включающий гео-
метрическое нивелирование и определения положения пунктов с применением спутниковых технологий
(GPS-измерения), проводился два раза в год (весной и осенью). Точное геометрическое нивелирова-
ние выполнялось по закрепленным переходным точкам. Средняя точность нивелирования составляла
0,7 мм/км. GPS-измерения выполнялись комплектом из 4-6 двухчастотных приемников Trimble 4000
SSE и SSI. Программа наблюдений предусматривала непрерывную регистрацию спутниковых сигналов
в течение всего цикла наблюдений на одном базовом пункте и синхронно в течение 6-12 часов на
остальных пунктах, с частотой замеров спутниковых сигналов 15-30 с. Для обработки высокоточных
спутниковых измерений на геодинамическом полигоне используются программы GAMIT и GLOBK,
разработанные в США. При этом координаты базового пункта принимались неизменными для всех
циклов измерений. Точность определения геодезических параметров по осреднению 9 циклов получе-
на следующая: горизонтальных компонент — ах=(1,3±0,4) мм, оу=(1,2±0,4) мм, oz=(l,8±0,5) мм,
ctjv=(0,5±0,2) мм, сте=(0,6±0,3) мм, высоты — стн=(2,3±0,7) мм, длины линии — ох=(1,0±0,8) мм
(О.Н. Галаганов и др., 2002 г.).
Результатами геометрического нивелирования выявлены следующие особенности вертикальных дви-
жений на полигоне: наличие поступательно-возвратных перемещений, дифференцированных по площа-
ди, значения амплитуд (от -8 мм до 15 мм ) которых за отдельные периоды значительно превышают
ошибки измерений, преобладание нисходящих движений небольшой амплитуды (не более 4 мм) в от-
дельные периоды вблизи места закачки, скорости движений, осредненные за весь интервал наблюдений,
не превышают 1 мм/год.
На рис. 6.3.16 представлен график пространственно-временного изменения вертикального положе-
ния реперов по профилю, пересекающему в крест структуры за более чем 5 лет. Можно считать,
что изменения в пределах ±1 мм не существенны и находятся в пределах точности метода. Наблю-
дается постепенное нарастание опускания участка закачки и увеличение его по площади. Наиболее
градиентные вертикальные движения с преобладанием поднятия характерны для участка проекции на
поверхность земли приосевого грабена (см. рис. 6.3.16).
Анализ обработки данных GPS-мониторинга на территории полигона позволяет отметить следую-
щие особенности горизонтальных движений: наличие поступательно-возвратных дифференцированных
по площади перемещений, величина модуля вектора которых за разные периоды между наблюдениями
может изменяться до 30 мм, однако при осреднении за весь более чем 4-летний период наблюдений
величина модуля вектора скорости не превышает 2 мм/год. Одни пункты сохраняют ориентировку пере-
мещений во времени, для другой группы пунктов ориентировка горизонтальных перемещений меняется
от одной эпохи измерений к другой.
В предположении кусочно-однородного деформирования участков полигона, расположенных внутри
треугольника из сторон соседних трех пунктов наблюдений, рассчитаны линейные деформации для
главных направлений и дилатация площади треугольников. Значения (составляющие в среднем п-10-6,
максимальные до 40-10-6) и направления главных деформаций значительно меняются во времени и
пространстве. Отмечено, что зона вблизи места закачки деформируется меньше, чем на удалении от
нее, а за весь период наблюдений она претерпела сжатие.
Пример площадных деформаций и векторов горизонтальных смещений за 4,5 года приведен на
рис. 6.3.17. Неустойчивый во времени характер горизонтальных перемещений, деформаций и верти-
кальных движений пунктов свидетельствует о быстро меняющемся напряженно-деформированном со-
стоянии геологической среды территории объекта исследований, возможно, отражающий нерегулярный
режим закачивания жидкости.
т, год
dH, мм
Рис. 6.3.16. Пространственно-временной график вертикальных перемещений в изолиниях по трассе между
реперами 14Р-268-1-2-4-2А-3-6-7-13-0-4Р-14-8 за период август 1998 г. — октябрь 2003 г. по дан-
ным нивелирования. Изолинии проведены через 1 мм. Черными толстыми линиями отмечено положение
проекции приосевого грабена и место закачки отходов.
Выполнено сравнение изменений превышений между эпохами измерений, определенных разными
методами в одну и ту же эпоху. По данным GPS-измерений получено, что они могут достигать значе-
ний от -5 см до 7 см. Однако значения изменений превышений между теми же пунктами, определенных
по данным точного геометрического нивелирования, на порядок меньше и варьируют от -4 мм до 9 мм,
т. е. на порядок меньше. Отсюда следует, что для мониторинга вертикальных движений и деформаций
ответственных объектов следует использовать геометрическое нивелирование. Применяемая методика
и комплекс геофизических методов может быть успешно использован для контроля за экологической
безопасностью на разработках нефтегазовых месторождений, в районе захоронений промышленных
отходов. Результаты выполненных работ доказывают необходимость проводить деформационный мони-
торинг всех полигонов захоронения жидких отходов.
Рис. 6.3.17. Карта дилатаций в изолиниях через 2-10 6 и векторы горизонтальных перемещений пунктов
за 4,5 года между эпохами наблюдений май 1999 г. — ноябрь 2003 г.
6.4 Опорные гравиметрические сети
Н.А. Гусев, С.Н. Щеглов
6.4.1 Общая часть
Для геодезических целей необходимы гравиметрические данные на всей земной поверхности, мет-
рологически правильные, с соблюдением единства измерений, в то время как для решения локальных
задач (поиск полезных ископаемых и др.) необходима высокая точность измерений на ограниченных
участках, при этом единство измерений реализуется путем создания высокоточных гравиметрических
сетей, эталонных полигонов и т. п.
В период с 1880 по 1960 г. относительные измерения ускорения силы тяжести были основным ме-
тодом, они выполнялись точнее абсолютных. Необходимость создания гравиметрических сетей разных
классов обусловлена применением относительного метода измерений гравиметрами и маятниковыми
приборами. Гравиметрические сети локализуют влияние погрешностей измерений, чтобы случайные
ошибки определения отдельных пунктов не становились систематическими погрешностями больших
площадей съемок. Сети низших классов опирались на пункты сетей высшего класса точности. Исход-
ный пункт каждой страны и сеть высшего класса образовывали гравиметрическую систему страны.
Для приведения измерений силы тяжести в единую систему в мире существовали мировые исходные
пункты и по их названию мировые системы. Так, была Венская система с погрешностью исходного
пункта около 30 мГал. На смену ей в 1906 г. пришла Потсдамская система с погрешностью исход-
ного пункта 3 мГал, но позднее выяснилось, что систематическая погрешность Потсдамской системы
равна — 14 мГал. В семидесятых годах с появлением абсолютных гравиметров Потсдамская система
утратила свое значение.
Планомерное проведение общей гравиметрической съемки территории СССР по единому плану нача-
лось после выхода Постановления Совета Труда и Обороны СССР от 20 сентября 1932 г. с плотностью
1 пункт на 1000 км2, при этом постоянство нуля съемок отдельных областей должно гарантироваться
с ошибкой 1-2 мГал. В то время такая точность обеспечивала решение первоочередных задач геологии
и геодезии.
Гравиметристы ЦНИИГАиК активно участвовали в подготовке Постановления и внедрения его
положений в производство. Они организовывали выполнение работ, готовили кадры исполнителей,
разрабатывали технологию измерений, в том числе определение высот и координат пунктов, создали
отечественную аппаратуру, разрабатывали способы обработки и оценки результатов.
В 1933 г. в ЦНИИГАиК была разработана Инструкция по гравиметрическим работам для общей
основной (маятниковой) съемки. Она перерабатывалась и уточнялась в 1935, 1937 и 1944 гг. Первона-
чально измерения выполнялись только зарубежными маятниковыми приборами типа Штюкрата и его
модификациями (Фехнер, Бамберг и др.).
Основными исходными гравиметрическими пунктами, на которых базировались все гравиметриче-
ские определения в СССР, служили Москва, Пулково, Полтава и Казань. Для этих пунктов, имевших
непосредственную связь с Потсдамом (Мировым исходным гравиметрическим пунктом) и между собой,
Н.Н. Парийский после тщательного анализа всех маятниковых измерений получил наиболее вероятные
значения ускорения силы тяжести.
В 1935 г. на заводе Аэрогеоприбор под руководством ЦНИИГАиК (С.Г. Маковер, Л.С. Казаков) со-
здается отечественный маятниковый прибор, получивший название «Аэрогеоприбор». В этом же 1935 г.
в ГАИШе Л.В. Сорокин создает облегченный вариант маятникового прибора.
Для измерений ускорений силы тяжести в труднодоступных районах в 1939 г. Г. И. Рудаковским
были разработаны упругие маятники.
В сороковых годах появился новый класс приборов — гравиметры, внедрение которых в производ-
ство увеличило объем гравиметрических определений.
Во время Великой Отечественной войны и в послевоенный период на территории нашей страны
развернулись интенсивные гравиразведочные работы, так как страна нуждалась в сырье для промыш-
ленности. Одним из методов, позволяющим быстро намечать перспективные районы для детального
изучения и поисков различных месторождений, был гравиметрический, который являлся относительно
легким рекогносцировочным и поисковым методом, охватывающим достаточно большие площади.
При сопоставлении гравиметрических карт сопредельных территорий на их границе возникали рас-
хождения, достигавшие 10 мГал и более. Это обстоятельство и быстрое увеличение объема детальных
гравиметрических съемок требовало их обеспечения опорными гравиметрическими пунктами более вы-
сокой точности и густоты, чем это предусмотрено Постановлением 1932 г. Расчеты показывали, что
гравиразведочные работы требовали создания опорных пунктов, в зависимости от их назначения, с
ошибкой 0,2-0,5 мГал. Маятниковая аппаратура того времени такую точность обеспечить не могла.
Повышение точности гравиметрических измерений требовалось не только для поисков полезных
ископаемых, но и для решения задач геодезии. В этом случае предъявляются высокие требования
к единству результатов измерений.’Возникла актуальная задача создания аппаратуры, дающей воз-
можность проводить измерения не только с высокой точностью, но и более быстрыми темпами. При
существовавшем в то время уровне технологий указанным требованиям отвечал принципиально новый
метод высокоточных относительных определений ускорения силы тяжести, основанный на применении
гравиметров.
В 30-40-х годах в Советском Союзе имелось несколько экземпляров зарубежных гравиметров раз-
ного типа: Болидена, Исинга, Норгарда и др. Эти гравиметры применялись в основном для детальных
и региональных гравиметрических съемок. Опыт работы с гравиметрами показал их перспективность.
По сравнению с маятниковой аппаратурой гравиметры были значительно меньше весом, проще и
быстрее в работе. Однако существенным недостатком всех гравиметров являлось то, что они нуждались
в эталонировании, то есть в определении цены деления отсчетного устройства, требовали довольно
частого контроля смещения нуль-пункта, а некоторые типы гравиметров имели ограниченный диапазон
и не могли применяться при измерении больших разностей ускорения силы тяжести. Маятниковые
приборы не нуждаются в эталонировании. Точность их измерений практически независима от интервала
силы тяжести, расстояния между пунктами и продолжительности рейсов.
В 1942 г. М.С. Молоденский с группой сотрудников разработали первый советский пружинный гра-
виметр ГКМ. За его разработку эта группа получила государственную премию. В 1949 г. в Ленинграде
Н.Н. Самсоновым и С.А. Поддубным был сконструирован и запущен в серийное производство кварце-
вый гравиметр СН-3, нашедший впоследствии широкое применение в гравиразведочных работах.
Осенью 1947 г. сотрудник ЦНИИГАиК М.Е. Хейфец предпринял попытку использования авиа-
ции для определения гравиметрического пункта на аэродроме в Киеве двумя гравиметрами ГКМ и
двумя гравиметрами Норгарда. Однако из-за стоявшей длительное время нелетной погоды выпол-
нить намеченные измерения не удалось. Весной 1948 г. экспедиция ЦНИИГАиК под руководством
Н.П. Грушинского, располагавшая четырьмя гравиметрами конструкции Молоденского и четырьмя гра-
виметрами Норгарда, использовала аэросъемочный самолет «Боинг» для транспортировки аппаратуры
и личного состава экспедиции и определила пункт Киев путем его вставки между исходными пунк-
тами Москва и Полтава. Средняя квадратическая ошибка определения ускорения силы тяжести на
аэродроме в Киеве оказалась всего 0,35 мГал.
Этими работами была показана возможность использования авиации для транспортировки гравимет-
ров с целью создания гравиметрических пунктов высокой точности. Однако в дальнейшем ЦНИИГАиК
практически прекратил работы с гравиметрами.
В 1948-1953 гг. в ЦНИИГАиК велись исследования по повышению точности измерений с при-
менением кварцево-металлических маятников, предложенных М.Е. Хейфецем. Эти маятники и новая
методика измерений позволили повысить точность до 0,5 мГал, величины, сравнимой с точностью
измерений, выполняемых с гравиметрами.
Общая гравиметрическая маятниковая съемка завершилась в 1956 г. Определено 16795 маятнико-
вых пунктов. Работы не прекращались даже в годы Великой Отечественной войны 1941-1945 гг.
6.4.2 Работы Аэрогравиметрической экспедиции по созданию сети опорных
гравиметрических пунктов и эталонных гравиметрических полигонов
Созданная по инициативе Ю.Д. Буланже Аэрогравиметрическая экспедиция Геофизического инсти-
тута АН СССР (АГЭ), используя гравиметры с транспортировкой их на самолетах, существенно уве-
личила (по сравнению с маятниковой аппаратурой) производительность и точность гравиметрических
определений в тот период времени.
Теоретическими и лабораторными исследованиями, а также предыдущими полевыми работами было
показано, что для определения приращения ускорения силы тяжести (Д<?) между двумя пунктами с
ошибкой ~0,2 мГал измерения следует выполнять группой приборов из 5-6 экземпляров и не менее
чем тремя независимыми рейсами. Такая связь, по предложению Ю.Д. Буланже, называлась связью
высшей точности.
Для определения Дд между двумя пунктами с ошибкой ~0,3-0,4 мГал измерения необходимо
производить группой гравиметров, состоящей не менее чем из 3 приборов и одним или двумя рейсами.
Такая связь называлась связью 1 класса.
При определении высокоточных опорных гравиметрических пунктов на больших территориях гра-
виметры должны удовлетворять следующим требованиям:
1. Диапазон измерений — не менее 1 Гала с возможностью смены диапазона в полевых условиях.
2. Точность измерения гравиметром на одной приборо-связи — не грубее 0,5 мГал.
3. Смещение нуля — настолько стабильное, что допускается его учет линейной интерполяцией по
времени для рейсов продолжительностью до 8 часов.
4. Параметры гравиметра, влияющие на величину масштабного коэффициента, настолько устойчивы,
что возможно эталонирование с относительной ошибкой ~2-10-4.
Этим требованиям отвечали шведские гравиметры Норгарда — кварцевые гравиметры с горизон-
тальной крутильной нитью и жидкостной температурной компенсацией. Эти гравиметры имели практи-
чески неограниченный диапазон измерений при точности одной приборо-связи ~0,5 мГал, имели вполне
стабильное смещение нуль-пункта и обладали достаточно устойчивыми параметрами.
В работах АГЭ в основном применялись следующие типы связей:
1. «Простая связь», применявшаяся при определении пунктов высшей точности и 1 класса, означала,
что измерения проводятся по схеме: пункт А — пункт Б — пункт А. Поправка за смещение нуль-пункта
гравиметров определяется линейной интерполяцией по времени из наблюдений на исходном пункте А.
По каждому гравиметру получается одно значение Дд между пунктами А и Б.
2. «Двойная петля», применявшаяся при измерениях в замкнутых полигонах или ходах большой
протяженности, означала, что измерения проводятся по схеме: пункт А — пункт Б — пункт А — пункт
Б. Поправка за смещение нуль-пункта гравиметров определяется линейной интерполяцией по времени
из наблюдений на пункте А при вычислении первого значения Ag и на пункте Б — при вычислении
второго значения Др. По каждому гравиметру получается два значения Др между пунктами А и Б.
Началом планомерных работ АГЭ по созданию сети опорных гравиметрических пунктов на терри-
тории СССР стал 1950 г., в котором было определено 19 связей высшей точности, 2 связи 1 класса и
16 привязок пунктов на аэродромах к маятниковым пунктам 1 и 2 классов, при этом сначала исполь-
зовался самолет Ту-4, а затем самолет Ли-2.
Измерения были выполнены по замкнутому полигону Москва-Казань-Омск-Семипалатинск-
Алма-Ата-Ташкент-Карши-Ашхабад-Красноводск-Баку-Тбилиси-Краснодар-Полтава-Москва с
обязательной привязкой этого полигона на севере к пунктам Пулково и Рига, имеющим непосредствен-
ную связь с Потсдамом, а на юге через Сталинабад (Душанбе) и Иляк Дару к маятниковому пункту
Оби-Гарм. В городах, где базировалась экспедиция, выполнялись привязки к маятниковым пунктам 1
и 2 классов.
По просьбе ГеофиАНа для контроля гравиметровых определений в 1950 и в 1952 гг. ЦНИИГАиКом
была организована группа под руководством М.Е. Хейфеца, которая выполнила маятниковые измерения
в городах Риге, Тбилиси, Якутске, Тикси, Владивостоке, Полтаве и Петропавловске-Камчатском.
Перед началом полевых работ 1950 г. было проведено эталонирование гравиметров по эталонной
разности Пулково-Полтава. Однако по мере продвижения экспедиции на юг, когда пришлось измерять
большие Др, выяснилось, что принятый эталон и масштабные коэффициенты гравиметров грубоваты и
подлежат уточнению. Пришлось Ю.Д. Буланже в качестве эталона с диапазоном ~2000 мГал принять
Др Москва (СИАН)-Оби-Гарм, определенного им в 1945-1946 гг. с помощью маятниковых приборов.
Таким эталоном пользоваться практически невозможно и чрезвычайно дорого. Поэтому поступили
следующим образом: масштабные коэффициенты всех гравиметров были вычислены по этой эталонной
разности и с полученными масштабными коэффициентами вычислили разность ускорения силы тяжести
(Др) между аэродромными пунктами Москва и Полтава диапазоном порядка 500 мГал. Это Др и было
принято в качестве основного эталона, в системе которого в последующие годы производились все
измерения.
В 1951 г. Аэрогравиметрической экспедицией были выполнены измерения на 24 связях высшей точ-
ности и 20 связях 1 класса, а в 1952 г. соответственно 31 и 49. Эталонирование приборов проводилось
по эталонной разности Москва-Полтава. Сопоставление результатов маятниковых и гравиметровых
определений на 10 пунктах в диапазоне более 2500 мГал (Тикси-Тбилиси) показало, что только на
двух из десяти разность значений ускорений силы тяжести «гравиметры-маятники» оказалась больше
удвоенной ошибки ее определения, остальные разности лежат в пределах ошибок измерений.
Результаты полевых работ АГЭ в 1950, 1951 и 1952 гг. следующие:
1. Доказана возможность создания высокоточных гравиметрических пунктов кварцевыми грави-
метрами с горизонтальной крутильной нитью и жидкостной температурной компенсацией (гравиметры
Норгарда и СН-3) с их транспортировкой на самолетах.
2. За трехлетний период определено 74 пункта высшей точности, 71 пункт 1 класса и сделано 44
привязки к маятниковым пунктам.
3. Ошибка измерения разности ускорений силы тяжести между пунктами высшей точности оказа-
лась в среднем 0,14 мГал, а пунктов 1 класса — 0,20 мГал.
4. Ошибка передачи значения ускорения силы тяжести на наиболее удаленные пункты
(Петропавловск-Камчатский, Магадан, Тикси, Тбилиси, Ашхабад и др.) от исходного гравимет-
рического пункта Москва (ГАИШ) составила около 0,5 мГал.
5. Создан основной эталонный полигон Москва-Полтава диапазоном около 500 мГал, на котором
проводилось эталонирование всех используемых в полевых работах гравиметров.
6. Создана установка для эталонирования гравиметров методом наклона в лабораторных условиях.
7. Проведены первые опытные эксперименты по эталонированию приборов геометрическим методом.
В процессе работы по эталонированию геометрическим методом отсчетных устройств гравиметров
Норгарда и СН-3 возникла мысль о построении прибора, у которого угол раствора кварцевой системы
измерялся бы не с помощью микрометренных винтов, а непосредственно по точному угломерному
кругу. В ноябре 1952 г. был изготовлен опытный экземпляр такого прибора, получивший индекс ГАЭ-1
(гравиметр Аэрогравиметрической экспедиции, первая модель).
Качающаяся часть гравиметра с двойным термостатом и кварцевой системой была взята от грави-
метра СН-3. В качестве угломерного круга был использован горизонтальный круг оптического теодоли-
та ОТ-02, изготовляемого серийно заводом «Аэрогеоприбор». В ГАЭ-1 горизонтальный круг теодолита
ОТ-02 установлен в вертикальном положении. Помимо круга использованы все оптические детали, от-
носящиеся к нему, а также оптический микрометр и отсчетный микроскоп. Первая серия гравиметров,
получившая индекс ГАЭ-2, была изготовлена в июне 1953 г. в количестве 6 экземпляров в Экспери-
ментальной приборостроительной мастерской Геофизического института АН СССР. Вес прибора ГАЭ-2
равен 38 кг. В 1955 г. было изготовлено 9 гравиметров ГАЭ-3, при этом вес одного гравиметра равнялся
26 кг.
Из теории гравиметра ГАЭ следует, что этот прибор не нуждается в определении масштабных ко-
эффициентов, однако это следовало доказать практическими результатами. Во время полевых работ
1953 г. масштабные коэффициенты всех гравиметров ГАЭ-2 и гравиметра ГАЭ-1 проконтролировали
по разности ускорения силы тяжести между пунктами Новосибирск (определения АГЭ 1951 г.) и Гарм
(определения АГЭ 1950 г.) диапазоном порядка 1960 мГал. Этими гравиметрами способом многократ-
ных измерений были выполнены определения 9 Др. О точности работы гравиметров можно судить по
разностям (р1950—1951 — <7195з) результатов повторных определений ускорения силы тяжести на ряде
пунктов в Средней Азии: +0,1 мГал для Алма-Аты; -0,2 мГал для Ташкента; +0,1 для Сталинабада;
+0,3 для Гарма.
Учитывая огромное удаление этих пунктов от исходного (Новосибирск) и измерение большой раз-
ности ускорений силы тяжести ~2000 мГал, сходимость определений 1950-1951 гг., выполненных
аналогичным методом группой гравиметров Норгарда, и измерений 1953 г. гравиметрами типа ГАЭ,
можно считать вполне удовлетворительной. Результаты определения средних масштабных коэффици-
ентов гравиметров ГАЭ-2 по пунктам с известной силой тяжести и лабораторным методом находятся
в пределах 0,99999-1,00015 с ошибкой (0,2-1,3)-10~4
Высокую точность и надежность работы гравиметров ГАЭ-3 подтвердило и измерение разности
ускорения силы тяжести диапазоном 1118 мГал между пунктами Лхаса и Синин с погрешностью всего
0,2 мГал. В то время прямых связей такого диапазона группой гравиметров не выполнял никто в мире.
После окончательной обработки результатов измерений, выполненной в Московском аэрогеодези-
ческом предприятии под руководством Дмитрия Александровича Ларина, был издан «Каталог ИФЗ
АН СССР 1958 года», в который вошли по классификации того времени 138 пунктов высшей точности
и 214 пунктов 1 класса. Ошибка определения наиболее удаленных от Потсдама пунктов составила
порядка 0,6 мГал. Сеть создавалась гравиметрами Норгарда, СН-3, ГАЭ-2 и ГАЭ-3.
При эксплуатации этой гравиметрической сети выявились следующие недостатки:
— большинство пунктов не было фундаментально закреплено на местности, и это затрудняло их
отыскание и привело к утрате значительной части пунктов, особенно на аэродромах;
— доступ гражданским организациям к пунктам на военных аэродромах был затруднен;
— к началу 60-х годов достигнутая точность этой сети перестала удовлетворять возрастающие
потребности народного хозяйства, обороны страны и развития науки;
— сопоставление результатов измерений, выполненных маятниковыми приборами ЦНИИГАиКа и
гравиметрами ИФЗ АН СССР на ряде совмещенных пунктов опорной гравиметрической сети, вновь
выявило наличие расхождений между двумя методами. Разность систем «маятники-гравиметры» ока-
залась равной 6,6±2,0-10-4.
Дискуссии о причинах такого расхождения не позволили дать объективный ответ на этот вопрос.
Высказывалось предположение о возможности накопления ошибок измерений при гравиметровых опре-
делениях, поскольку ускорение силы тяжести на пункты, наиболее удаленные от исходного, передава-
лось по ходам, состоящим из 10-15 звеньев.
Об эталонировании гравиметров
Широкое применение астазированных гравиметров типа ГАК в практике производственных грави-
метрических работ требовало их тщательного эталонирования.
Эталонирование гравиметров можно производить следующими способами:
1. Из наблюдений гравиметров на пунктах, где ускорение силы тяжести известно по измерениям
маятниковой аппаратурой.
2. Методом наклона из наблюдений гравиметров при их наклоне в плоскости оси вращения маятника
кварцевой системы.
3. Геометрическим методом по измерениям угла поворота кварцевой системы гравиметра в верти-
кальной плоскости, перпендикулярной оси вращения маятника кварцевой системы. Этот метод этало-
нирования был предложен в 1951 г. заведующим Отделом гравиметрии ГеофиАН М.С. Молоденским.
Первое опытное эталонирование гравиметров Норгарда по пунктам с известной силой тяжести было
выполнено в 1949 г. В качестве основного эталона была выбрана разность ускорений силы тяжести Др
между основными исходными гравиметрическими пунктами СССР Пулково (обсерватория) и Полтава
(обсерватория), а контрольными служили Др Пулково (обсерватория) — Москва (ГАИШ) и Полтава
(обсерватория) — Москва (ГАИШ). Сравнение масштабных коэффициентов гравиметров, вычисленных
раздельно по северному (Пулково) и южному (Полтава) эталонам, показало наличие большой система-
тической разности, которая в среднем оказалась равной +61±2,710-4, то есть в двадцать раз больше
ошибки ее определения.
Создание полигонов для эталонирования приборов по пунктам с известной силой тяжести и само
эталонирование существенно увеличивало стоимость гравиметрической съемки. В связи с этим было
решено провести серию экспериментов по эталонированию этих гравиметров методом наклона и в слу-
чае успеха предложить методику эталонирования. Эксперименты были начаты Р.Б. Рукавишниковым в
1964 г. в Отделе экспериментальной гравиметрии ИФЗ АН СССР первоначально на установке УЭГ-
ИФЗ, которая состояла из наклономерной плиты с зеркалом и теодолита ОТ-02.
В процессе проведения экспериментов вместо установки УЭГ-ИФЗ стали использовать корпус гра-
виметра ГАЭ-3, что упростило регулировку прибора в связи с отсутствием зеркала и повысило точ-
ность измерений настолько, насколько горизонтальный круг теодолита ОТ-02 точнее вертикального.
Портативная установка, разработанная Р. Б. Рукавишниковым, позволяла эталонировать узко- и широ-
кодиапазонные кварцевые астазированные гравиметры как в лабораторных, так и в полевых условиях с
ошибкой порядка 2-3-10-4. При этом была разработана методика эталонирования гравиметров и расчет
необходимых допусков при регулировке как самой установки, так и эталонируемого гравиметра.
Безусловно, эталонирование гравиметров методом наклона экономически выгоднее, однако произ-
водственные организации в 60-х годах не располагали специальными наклономерными установками,
предназначенными для эталонирования с достаточной точностью. Имелись конструкции гравиметров,
которые не Поддавались эталонированию методом наклона. Поэтому от использования эталонирования
гравиметров по пунктам отказываться было рано.
Исходя из опыта эталонирования наклоном гравиметров типа ГАК в ИФЗ АН СССР в 1964 г. были
изготовлены два макета гравиметров, получивших индекс ГАГ-1 (гравиметр астазированный геодези-
ческий, первая модель), чувствительным элементов которого стала астазированная кварцевая система
гравиметра ГАК.
В 1965 г. ОКБ ИФЗ АН СССР, лаборатория гравиразведки ленинградского Всесоюзного института
разведочной геофизики (ВИРГ) и Экспериментальный оптико-механический завод №106 приступили
к разработке гравиметра ГАГ-2, отличающегося от первой модели и внешним видом, и более совер-
шенными техническими данными. Серийное производство ГАГ-2 началось с 1967 года. Всего заводом
изготовлено более 100 экземпляров гравиметров ГАГ-2, которые нашли широкое применение. На этом
же заводе была изготовлена серия установок для эталонирования кварцевых астазированных гравимет-
ров методом наклона, в том числе с наличием термостата, который позволял определять масштабные
коэффициенты гравиметров при различной температуре.
Рис. 6.4.1. Схема сети гравиметрических пунктов, определенных Аэрогравиметрической экспедицией
ИФЗ АН СССР на территории Советского Союза в 1950-1974 гг.
В 1961 г. совместными усилиями Мингео и АН под Москвой был создан полигон диапазоном
90,40 мГал с ошибкой ±0,02 мГал, то есть с относительной погрешностью 2,2-10-4, состоявший из 7
пунктов, конечные из которых — Алабино и Павловское.
В 1965 г. для эталонирования широкодиапазонных гравиметров Мингео, ВТУ и АН было приня-
то решение о создании в районе Баксанского ущелья эталонного полигона, перевозка гравиметров
на котором могла бы осуществляться автомобильным транспортом. В создании Баксанского полигона
приняли участие ЦНИИГАиК, ИФЗ АН СССР, трест «Спецгеофизика» и трест «Геофизуглеразведка».
Измерения производились в 1965, 1966 и 1967 гг.
Пункты Баксанского полигона расположены вдоль шоссе Баксан-Тырныауз-Терскол-Азау. Общая
протяженность полигона порядка 110 км, а максимальный диапазон около 500 мГал (Баксан-Азау). На
местности пункты закреплены бетонными монолитами по площади 1 х 1 м.
О точности полигона можно судить из сопоставления маятниковых и гравиметровых измерений на
звене Нальчик-Терскол:
маятники—гравиметры=455,28±0,06 мГал—455,21±0,08 мГал=0,07±0,10 мГал, то есть 1.5-10-4.
Результаты сравнения гравиметровых и маятниковых измерений, выполненных ЦНИИГАиКом, меж-
ду пунктами Мурманск и Тбилиси оказались следующими:
маятники—гравиметры=2393,85 мГал—2394,05 мГал=0,20 мГал, то есть 0,9-10-4.
6.4.3 Создание сети 1965—1970 годов
В 1963 г. Министерством геологии и охраны недр СССР, ИФЗ АН СССР и ВТУ Генерального
штаба ВС СССР был утвержден «Проект работ по определению опорных гравиметрических пунктов
1 класса». Этим проектом на ЦНИИГАиК возлагалась задача создания 13 маятниковых, а на ИФЗ
АН СССР 70-75 гравиметровых пунктов, равномерно расположенных на территории СССР (рис. 6.4.1).
Предусматривалась обязательная привязка всех гравиметровых пунктов к ближайшим маятниковых
пунктам.
В течение 1965-1969 гг. АГЭ, используя гравиметры ГАЭ-3, ГАГ-1 и ГАГ-2, создала на территории
СССР опорную гравиметрическую сеть 1 класса, состоящую из 98 пунктов (10 пунктов из них распо-
ложены на территории соцстран), в основном определяющих опорную сеть, и 60 пунктов, вынесенных
к капитальным сооружениям в аэропортах (аэровокзал, ангар, авиационно-диспетчерская служба и
т. п.). Все пункты были закреплены на местности либо специальными марками, заложенными в бе-
тонные плиты стоянок самолетов, либо заложением бетонных столбов с маркой. Развитие авиации,
реконструкция аэродромов, различные ремонтные работы привели к тому, что ряд пунктов оказался
уничтоженным.
При проведении полевых работ были измерены разности ускорения силы тяжести на 114 зве-
ньях сети, которые образовали 29 замкнутых фигур. Средняя квадратическая погрешность измерения
Ад составила в среднем 0,04 мГал, а невязки в полигонах по абсолютной величине не превосхо-
дили 0,17 мГал. Погрешность определения наиболее удаленных от Потсдама пунктов не превышает
0,15 мГал.
В этот же период времени экспедициями ЦНИИГАиКа были выполнены определения на 21 гра-
виметрическом пункте, составившие каркас опорной гравиметрической сети 1 класса. При этом 16
пунктов расположены на территории СССР и 5 пунктов на территории стран Восточной Европы. Изме-
рения выполнены разработанным в ЦНИИГАиКе комплектом маятниковых приборов ОВМ, состоящим
из пяти приборов. Всего были выполнены измерения на 39 звеньях, которые образовали 18 замкнутых
фигур, как правило, треугольников. Средняя квадратическая погрешность уравненных маятниковых
результатов составила 0,03 мГал, а в целом по сети получена ошибка определения пункта 0,055 мГал.
Сопоставление маятниковых и гравиметровых измерений на 18 совмещенных пунктах опорной
гравиметрической сети показало, что разность систем «маятники—гравиметры» оказалась равной
0,9±0,3-10“4, а ошибка определения разности значений ускорения силы тяжести «маятники-
гравиметры» -0,09 мГал. Сходимость результатов измерений на пунктах сети, выполненных принципи-
ально различными методами, оказалась в пределах 1-Ю-4.
Таким образом, для приведения всех гравиметрических съемок в единую систему в течение 1965-
70 гг. ЦНИИГАиК совместно с ИФЗ АН на территории СССР создал государственную опорную грави-
метрическую сеть. Сеть состоит из 16 маятниковых пунктов, определенных ЦНИИГАиК, и 88 грави-
метровых пунктов, определенных ИФЗ АН. Сеть уравнена совместно, причем гравиметровые измерения
вписаны в каркас маятниковых пунктов, принятых за твердые. Окончательный Каталог опорных гра-
виметрических пунктов 1 класса на территории СССР был составлен в ЦНИИГАиК и издан.
6.4.4 Зарубежные работы ИФЗ АН и ЦНИИГАиК
Помимо работ на территории СССР АГЭ в 1955-1957 гг. выполнены работы в Китае, Вьетнаме,
КНДР, Болгарии, Венгрии, Румынии, Чехословакии, Монголии, Польше, ГДР.
Средняя ошибка связей высшей точности на территориях КНР, ДРВ, и КНДР оказалась 0,09 мГал,
а 1 класса — 0,14 мГал. Высокая точность выполненных работ подтверждена малыми невязками в
замкнутых полигонах, что показано в табл. 6.7.
В результате работ АГЭ в 1955-1957 гг. оказались увязанными в единую систему основные исход-
ные пункты ГДР, ПНР, СССР, МНР, КНР, КНДР, ДРВ. Для приведенных ниже пунктов ускорения
Таблица 6.7. Невязки в трех замкнутых полигонах
Невязки в полигонах, мГал
Пекин-Сиань-Ланьджоу- Сучжоу-Хами-Улан-Батор -Сайн-Шанд-Пекин Пекин-Циндао-Нанкин- Ухань-Сиань-Пекин Сиань-Ухань- Гуанджоу (Кантон)-Куньмин- Чунцин-Сиань
+0,18 +0,15 -0,06
силы тяжести относительно Потсдама были получены со следующими ошибками: 0,12 мГал — Варша-
ва (ПНР), 0,16 мГал — Москва (СССР), 0,35 мГал — Улан-Батор (МНР), 0,37 мГал — Пекин (КНР),
0,38 мГал — Пхеньян (КНДР), 0,42 мГал — Ханой (ДРВ).
В 1958 г. АГЭ создавала опорные гравиметрические пункты на территориях социалистических стран
Восточной Европы по программе многократных групповых измерений с помощью 9 гравиметров ГАЭ-
3. Пункт на аэродроме в Берлине вновь был связан с основным мировым исходным гравиметрическим
пунктом Потсдам (S-2). В среднем ошибка измерения Др оказалась 0,07 мГал, а величина ускорения
силы тяжести на пункте София в Потсдамской системе получена с погрешностью 0,11 мГал.
Эти работы впервые позволили создать на территории социалистических стран гравиметрические
пункты, которые послужили исходными при создании местных гравиметрических сетей и выполнении
гравиметрических съемок для геодезических и геологических целей.
В 1968 г. на самолете Ан-24 Международная гравиметрическая экспедиция, располагая пятью
комплектами ГАГ-1 и по три комплекта ГАГ-2, Gs-12 и «Шарп», выполнила относительные изме-
рения по пунктам Таллин-Вильнюс-Варшава-Берлин-Прага-Будапешт-Бухарест-София; Гданьск-
Барт-Дрезден. В этих работах также участвовали страны: ГДР, ПНР, СРР, ЧССР, НРБ, ВНР. По-
грешность Др составила 0,03-0,08 мГал.
В это же время (1968 г.) группа ЦНИИГАиК с маятниковыми приборами ОВМ выполнила отно-
сительные определения ускорения силы тяжести на пунктах Таллин, Варшава, Будапешт, Бухарест,
София. Погрешность измерения Др составила 0,03-0,05 мГал. В 1974 г. ЦНИИГАиК совместно с
МАГП повторил измерения на пунктах Москва-Таллин, София, Потсдам. Погрешности уравненных
значений Др были соответственно в 1968 г. — 0,027 мГал.а в 1974 г. — 0,022 мГал.
Сопоставление маятниковых и гравиметровых измерений на звене Таллин-София дало следующие
результаты: 1594,02 мГал (маятники)-1593,89 мГал (гравиметры)=0,13 мГал ±0,8-10-4.
В 1973 г. по просьбе Бюро минеральных ресурсов Австралии АГЭ провела измерения на австралий-
ском эталонном полигоне Лайагам-Хобарт диапазоном 2950 мГал и протяженностью около 4000 км.
Полигон был разбит на 15 звеньев, измерения на которых проводились восемью гравиметрами ГАГ-2 и
четырьмя гравиметрами ЛаКоста-Ромберг, перевозимыми на самолете типа Ли-2. Погрешность изме-
рения Др в среднем оказалась 0,02 мГал, а между концами полигона 0,07 мГал. Измерения выявили
значительные погрешности в масштабных коэффициентах гравиметров ЛаКоста-Ромберг. Масштаб,
полученный для австралийского базиса, отличается на 5-10-4 от стандарта, принятого до того в Ав-
стралии.
В 1974 г. экспедиция ЦНИИГАиК выполнила измерения маятниковыми приборами ОВМ разности
ускорения силы тяжести на участке австралийского полигона между пунктами Порт-Мосби и Хобарт,
а в 1979 г. на этих же пунктах были сделаны измерения новосибирским абсолютным лазерным балли-
стическим гравиметром (ГАБЛ). Сравнительные данные даны в табл. 6.8.
Таблица 6.8. Сравнительный анализ изменений Др в Австралии
Ag на звене Порт-Морсби-Хобарт Разности Ag по приборам
Гравиметры ГАГ-2 2215,701±0,073 ГАБЛ-ОВМ 0,050±0,210-4
Маятники ОВМ 2215,685±0,054 ГАБЛ-ГАГ 0,066±0,310-4
Абсолютный прибор ГАБЛ 2215,635±0,020 ОВМ-ГАГ 0,016±0,Ы0-4
Выполненные измерения показали высокую точность работ советских специалистов и дали возмож-
ность надежно проконтролировать масштаб австралийской гравиметрической сети, заданной измерени-
ями 1973 г.
Сотрудники АГЭ выполняли и работы по гравиметрической съемке Арктического бассейна на дрей-
фующих льдах, гравиметрические измерения по пути следования санно-тракторных поездов в глубине
Антарктиды, по созданию специальных гравиметрических полигонов для эталонирования узкодиапа-
зонных и широкодиапазонных наземных гравиметров, эталонирования морской аппаратуры по пунктам
с известной силой тяжести.
Последней работой АГЭ стало создание опорной гравиметрической сети 1 и 2 классов на территории
ДРВ в 1974 и 1975 гг. Измерения выполнены с участием вьетнамских специалистов гравиметрами ГАГ-
2, перевозимыми на самолетах, вертолетах (1 кл.) и автомашинах (2 кл.). Измерения выполнены на 99
звеньях, из которых 32 звена 1 класса и 67 звеньев 2 класса. Средняя квадратическая погрешность
измерения разности силы тяжести на звене не превышает 0,05 мГал. Ускорение силы тяжести на
основном исходном пункте Ханой было определено экспедицией ЦНИИГАиКа в 1975 г. с помощью
5 маятниковых приборов ОВМ путем измерения разности ускорения силы тяжести между пунктами
Москва и Ханой [Хейфец 1981; Пеллинен, Хейфец 1983; Хейфец и др. 1983].
Огромная заслуга в создании экспедиции и в ее успешной работе принадлежит член-корреспонденту
АН СССР, доктору физико-математических наук, профессору Ю.Д. Буланже, который был первым ее
начальником.
Многолетними участниками полевых работ экспедиции были сотрудники Геофизическо-
го института АН СССР (позднее Института физики Земли АН СССР) Ю.Д. Буланже,
В.Д. Антонов, Ю.И. Бурцев, В.А. Зубков, В.М. Иванов, К.Я. Козьякова, П.А. Неберов, С.М. Новиков,
Р.Б. Рукавишников, И.И. Рыльский, С.Н. Щеглов. В работах экспедиции в разные годы принимали уча-
стие около 60 человек, в том числе доцент МИИГАиКа П.Ф. Шокин, Л.А. Говорова (ЦНИИГАиК) и
студенты-практиканты: Ю.С. Кокош, Ю.Н. Авсюк, Б.В. Бровар, М. Бурша, Э.И. Докорина (Борунова),
З.П. Паршутина (Таранова), М.Т. Прилепин, А.Ф. Фирсов. В экспедициях принимали также участие и
гравиметристы зарубежных стран.
Максимальное значение g измерено на Ледовой точке в Арктике (экспедиция «Север-8»)
983218 мГал, минимальное значение g измерено в пункте Лхаса (КНР) 977991 мГал и разность между
этими точками составила Др=5227 мГал.
Кроме вышеуказанных работ за рубежом, выполненных с маятниковыми приборами, ЦНИИГАиКом
были выполнены определения для связи гравиметрической системы нашей страны с гравиметрическими
системами ряда стран по их просьбе, а также для сопоставления нашей системы с мировой гравимет-
рической сетью IGSN-71.
Выполнено несколько связей с Потсдамом (1966, 1967, 1974, 1982 гг.).
Определен пункт в Гаване (1967 г.) и, кроме того, по контракту на Кубе создана опорная гравимет-
рическая сеть (1983-1984 гг. совместно с МАГП).
Создан гравиметрический полигон в Судане и определен пункт в Хартуме (1971 г.)
Создана опорная гравиметрическая сеть в Йемене в 1977 г. и выполнена прямая связь исходного
пункта в Йемене с Москвой, совместно с МАГП.
Выполнена связь Ледово с Какиока, Япония (1972 г.).
Выполнена связь Ледово с Каиром (1972 г.).
Выполнена связь Лёдово с Тегераном и создан гравиметрический полигон Тегеран-Шираз (1972 г.).
Выполнена связь Лёдово с Сиднеем (1972 г.).
Создана опорная сеть во Вьетнаме (по контракту) в 1975 г.
Создана опорная сеть в Монголии, совместно с предприятиями Роскартографии.
Создана опорная сеть в Лаосе (1983 г., совместно с МАГП, по контракту).
Создана опорная сеть в Анголе (по контракту). Работа выполнена предприятиями Роскартографии.
Выполнена связь Лёдово с Могадишо совместно с МАГП (1975 г.).
Погрешность этих измерений составила около 0,05 мГал.
В семидесятых годах маятниковыми приборами определено 9 пунктов в Антарктиде (совместно с
предприятием «Аэрогеодезия» Роскартографии) с погрешностью около 0,15 мГал.
6.4.5 Создание сети 1979-1986 годов
Сеть 1965-1970 гг. не вполне удовлетворяла возрастающим требованиям как по точности определе-
ний силы тяжести, так и по плотности и надежности закрепления гравиметрических пунктов на мест-
ности. Поэтому в 1979-1983 гг. Главным управлением геодезии и картографии при участии АН СССР
создана высокоточная государственная гравиметрическая сеть на территории СССР. Сеть состоит из
Фундаментальной гравиметрической сети (ГФГС) и сети 1 класса (ГГС—1). В ЦНИИГАиК были раз-
работаны схема построения сети, инструкция (1979 г.), определяющая технологию работ. Инструкции
дорабатывались и переиздавались в 1982, 1988 и 2004 гг. Пункты сети распределены по возможно-
сти равномерно по территории страны, надежно закреплены на местности специальными центрами.
Часть пунктов в необжитых районах совмещена с пунктами плановой или высотной геодезической
сети. Каждый пункт ГГС-1 является не более чем третьим от главного гравиметрического пункта
(ГГП) по числу передач к нему значения ускорения силы тяжести. Пункты ГФГС — фундаментальные
пункты (ФП) и пункты ГГС-1 — имеют пункты-спутники, расположенные в аэропорту или в морском
порту. Географические координаты определены по картам с точностью 3", высоты — нивелированием
I или II класса. На всех ФП измерены вертикальные и горизонтальные градиенты силы тяжести с
погрешностью ^2-3 мкГал/м.
Основным прибором для измерения разностей силы тяжести был разработанный в ЦНИИГАиК ком-
плекс «Агат». За его разработку получена золотая медаль ВДНХ и он занесен в Госреестр. Средняя
квадратическая погрешность однократного измерения разности силы тяжести между пунктами маят-
никовым комплексом Агат в целом по сети оказалась равной 0,04 мГал. Такая же оценка получена по
невязкам в полигонах сети. Кроме того, были использованы статические гравиметры типа ГНУ и ГАГ.
Абсолютные измерения на фундаментальных пунктах (ФП) первой очереди выполнены разрабо-
танным в ИАиЭ Сибирского отделения АН СССР баллистическим гравиметром ГАБЛ. С 1989 г. для
абсолютных определений на ФП применяется прибор ГБЛ, разработанный совместно ЦНИИГАиК и
ИАиЭ СО АН СССР, а с 1995 г. — облегченный вариант ГБЛ — прибор ГБЛ-П. Разности силы тяже-
сти между ФП измерены во всех комбинациях маятниковым комплексом Агат. Среднее квадратическое
расхождение маятниковых и измеренных ГАБЛ абсолютных измерений на ФП первой очереди соста-
вило 0,024 мГал, средняя арифметическая разность -0,011±0,008 мГал. При последующих измерениях
разности между маятниковыми и абсолютными определениями находились в пределах ошибок изме-
рений. Гравиметрические определения выполнили МАГП и «Инжгеодезия» под научно-методическим
руководством и при участии ЦНИИГАиК. Закладка центров и нивелирные работы выполнили пред-
приятия ГУГК по зонам деятельности.
В первой очереди (1979-83 гг.) было определено 3 ФП, 257 пунктов 1 класса и столько же пунктов-
спутников. Сеть была уравнена совместно ГФГС и ГГС-1, и издан каталог пунктов в 1986 г. Общее
количество пунктов для территории СССР составило 1141, для территории России 863.
На рис. 6.4.2 приведена схема пунктов высокоточной государственной гравиметрической сети Рос-
сии на 1993 г. Средняя квадратическая погрешность, полученная из уравнивания ГФГС и ГГС-1, в
среднем по сети составила 0,029 мГал, а для пунктов ГФГС эта погрешность равна 0,006 мГал. Погреш-
ность привязок пунктов-спутников, выполненных гравиметрами ГНУ и ГАГ-2, составила 0,019 мГал
[Макаренко и др. 1990].
Образована гравиметрическая система страны, базирующаяся на совместно уравненных результа-
тах абсолютных и относительных измерений. ГФГС является высшим звеном гравиметрической сети
и служит для определения и уточнения гравиметрической системы страны и ее связи с мировой и
зарубежными системами, для метрологического обеспечения сетей низших классов, для изучения из-
менений гравитационного поля Земли во времени. Для сравнения новой гравиметрической системы с
мировой — IGSN-71 выполнены связи ФП Москвы и Новосибирска с Потсдамом. Разность оказалась
равной 0,053 мГал, что свидетельствует о недостаточной точности IGSN-71, известной по публикациям
[Буланже 1980]. Государственная гравиметрическая сеть 1 класса служит для распространения грави-
метрической системы на всю территорию страны и основой для определения пунктов 2 и 3 классов.
Сеть является уникальным построением, не имеющим на то время аналогов за рубежом по мас-
штабам своего распространения, надежности закрепления и полученной при этом точности результатов
измерений. Она позволяет на высоком научно-техническом уровне решать задачи, требующие точного
знания характеристик гравитационного поля Земли. Она фактически является реальной основой мет-
рологического обеспечения гравиметрических определений и базой для изучения вариаций ускорения
силы тяжести. Впервые гравиметрическая система определена независимо от мировой и зарубежных
систем, но надежно с ними связана.
Рис. 6.4.2. Схема пунктов высокоточной государственной гравиметрической сети России на 1993 год.
После 1983 г. сеть продолжала развиваться (2 очередь, 1984-1992 гг. и 3 очередь начиная с 1992 г.)
и к 1994 г. она насчитывала свыше 1000 высокоточных пунктов, в том числе 11 ФП. На территории
России — 8 ФП и более 870 пунктов 1 класса. В 1993 г. издан каталог, включающий результаты
новых измерений, выполненных до 1993 г. Подготовлены материалы к изданию следующего каталога.
В настоящее время на пунктах, создаваемых спутниковыми методами, фундаментальной астрономо-
геодезической сети (ФАГС) и высокоточной геодезической сети (ВГС) выполняются абсолютные опреде-
ления силы тяжести баллистическими гравиметрами. На 2007 г. в России насчитывается более 20 ФП.
Таким образом, заложена начальная эпоха данных для выполнения повторных наблюдений.
В организацию работ по созданию гравиметрических сетей 1965-1970 гг. и 1979-1986 гг.
большой вклад внес в то время первый заместитель начальника ГУГК при Совете Министров
СССР Л.А. Кашин, а в их создании участвовали следующие сотрудники ЦНИИГАиК: М.Е. Хейфец,
Ю.А. Сливин, Н.А. Гусев, В.В. Лохов, А.Г. Гойдышева, Н.Н. Королев, П.А. Неберов, З.П. Таранова,
Л.И. Климов, А.П. Метлин, С.В. Мигулев. Кроме ГФГС и ГГС-1 экспедициями Мингеологии созданы
гравиметрические сети 2 класса с погрешностью определения пунктов 0,15 мГал от исходного пункта
и гравиметрическая сеть 3 класса.
6.4.6 Национальные и мировые гравиметрические сети
В 1950-60-х годах за границей быстрыми темпами создаются различные конструкции статических
гравиметров. Поэтому одновременно с этим создаются национальные опорные сети. К 1970 г. во всех
развитых странах сети были созданы. Они имели различную конфигурацию и плотность, погрешность
уравненных значений пунктов была в пределах 0,05-0,80 мГал. В последующие годы национальные
сети уточнялись и погрешность пунктов в среднем по странам повысилась вдвое.
В эти же годы усилиями Международной Ассоциации геодезии была создана Единая мировая опор-
ная сеть 1 класса (FOWGN), объединившая имеющиеся на тот момент разрозненные гравиметрические
определения в разных странах, главным образом национальные исходные пункты. При этом был под-
нят важный вопрос о стандартизации и проблемах эталонирования. Было принято решение о создании
трех международных полигонов: Американской калибровочной линии ACL (5234 мГал, Барроу-Ла-
Пас), Европейско-Африканской калибровочной линии EACL (5090 мГал, Хаммерфест-Кейптаун) и
Восточно-Тихоокеанской калибровочной линии WPCL (4620 мГал, Барроу-Мельбурн). Эти полигоны
были созданы маятниковыми приборами Англии, Америки, Италии, Канады и Японии. Все проводив-
шиеся в это время гравиметрические определения базировались на Потсдамской системе.
В 1965 г. рабочая группа 4.05, сформированная Международной ассоциацией геодезии, начала сбор
и анализ имеющихся гравиметрических определений с целью создания мировой гравиметрической се-
ти. После анализа и уравнительных вычислений 24000 отдельных измерений разностей силы тяжести,
выполненных гравиметрами, 1200 — выполненных маятниками, и 10 пунктов абсолютных измерений
была создана Международная гравиметрическая стандартизованная сеть (IGSN-71), состоящая из 1854
пунктов. За исходный пункт фактически принят Севр, где абсолютные измерения выполнены Сакумой
и Фаллером. Средние квадратические погрешности уравненного значения ускорения силы тяжести для
пунктов сети не превосходят 0,1 мГал. IGSN-71 была принята на 15 Генеральной ассамблее Междуна-
родного союза геодезии и геофизики в Москве в августе 1971 г. взамен Потсдамской гравиметрической
системы (Резолюция №11). Описание сети и каталог пунктов опубликованы Международной ассоциа-
цией геодезии (спецпубликация №4, 1971 г.). С новыми измерениями силы тяжести баллистическими
гравиметрами выяснилось, что IGSN-71 содержит систематические погрешности. При этом ошибки
отдельных пунктов могут достигать величины 0,2 мГал и более.
В настоящее время проводятся работы по созданию Мировой сети абсолютных пунктов (IAGBN).
Три ФП России: Москва (Лёдово), С.-Петербург (Ломоносов) и Иркутск включены в эту сеть. Кро-
ме того, развивается Унифицированная гравиметрическая система в Центральной и Восточной Евро-
пе (проект UNIGRACE, 17 пунктов). На пунктах Международной сети постоянных GPS-наблюдений
для целей геодезии (IGS) по решению Международной ассоциации геодезии выполняются абсолютные
определения ускорения силы тяжести.
Таблица 6.9. Характеристики систем спутниковой альтиметрии
Характе- ристика Сроки экс- плуатации, годы Параметры орбиты
Косми- ческие аппараты Начало Оконч- ание Высота, км Наклон- ение, град. Рабочая час- тота высото- мера, ГГц Инструмент- альная погреш- ность (s), м Погрешность определения радиус-вектора, м
GEOS-3 1975 1978 840 115 13,9 0,5 0,5
SEASAT 1978 1978 790 108 13,5 0,1 0,3
ГЕО-ИК (1-9) 1985 1995 1500 73,6; 82,6 9,5 0,6-1,0 1,5
GEOSAT 1985 1989 780 108 13,5 0,07 0,2-0,3
ERS-1 1991 1999 785 98,5 13,5 0,05 0,1-0,2
ТОРЕХ/ POSEIDON 1992 — 1300 66 13,6; 5,3 0,02 0,03
ERS-2 1995 2004 780 98,5 13,5 0,03 0,1-0,2
GFO 1998 2004 780 108 13,5 0,035 0,05
JASON-1 2000 — 1300 66 13,6; 5,3 0,015
ENVISAT 2002 — 785 98,5 13,6; 5,2 0,02
JASON-2 2008 — 1300 66 0,01
ГЕО-ИК-2 2008 — 1000 94 <0,1
6.5 Спутниковая альтиметрия
П.П. Медведев, В.Б. Непоклонов, С.А. Лебедев, А.Н. Зуева, Д.И. Плешаков, М.В. Родкин
Становление космической геодезии в XX в. ознаменовалось внедрением в практику решения геоде-
зических задач одного из наиболее эффективных инструментальных методов изучения фигуры и гра-
витационного поля Земли — метода спутниковой альтиметрии, базирующегося на измерениях высоты
КА над морской поверхностью с использованием бортового радиовысотомера.
Развитие спутниковой альтиметрии условно можно разделить на три этапа [Лебедев, Костяной
2005].
Первый этап (1974-1980 гг.) — экспериментальное исследование потенциальных возможностей ис-
пользования спутниковой альтиметрии в геодезии.
Второй этап (1985-1992 гг.) — проведение целенаправленных спутниковых экспериментов для ре-
шения геодезических задач и исследования возможностей использования спутниковой альтиметрии в
других науках о Земле (океанологии, метеорологии, геологии, гляциологии и т. д.)
Третий этап (с 1993 г. по настоящее время) — использование систем спутниковой альтиметрии
в режиме постоянного мониторинга водной поверхности Мирового океана, окраинных и внутренних
морей.
Реализовано свыше 10 национальных и международных проектов в области спутниковой альтимет-
рии, в том числе отечественный проект ГЕО-ИК (1985-1995 гг.) [Лебедев, Костяной 2005; Медведев
1988; Пугачев и др. 2006; Chelton et al. 2001]. Суммарный объем спутниковой альтиметрической инфор-
мации, полученной в ходе выполнения этих программ, оценивается десятками миллионов измерений. В
стадии разработки находится еще ряд проектов в области спутниковой альтиметрии, в том числе новая
отечественная космическая геодезическая система «ГЕО-ИК-2» [Глушков и др. 1997], что подтвержда-
ет перспективность этого метода для решения широкого круга фундаментальных и прикладных задач
в области изучения геофизических полей. Характеристики созданных в разные годы и перспективных
систем спутниковой альтиметрии сопоставлены в табл. 6.9.
Метод спутниковой альтиметрии требует точного знания орбитального положения КА, в первую
очередь — его радиальной составляющей, что вызывает необходимость использования высокоточных
радиотехнических и лазерных средств траекторных определений. В последнее десятилетие существен-
ный вклад в обеспечение требуемой высокой точности определения орбит при реализации метода спут-
никовой альтиметрии вносит использование бортовой аппаратуры спутниковой навигации по сигналам
космических навигационных систем GPS и ГЛОНАСС.
Современное методическое и техническое состояние развития спутниковой альтиметрии позволяет
успешно использовать альтиметрические данные при решении различных геодезических задач. В число
этих задач входят уточнение геоцентрической системы координат, вывод глобальных моделей геопотен-
циала, определение детальных характеристик ГПЗ в Мировом океане в виде цифровых моделей высот
геоида, уклонений отвесных линий, аномалий силы тяжести, установление и поддержание общезем-
ной системы высот. Одно из основных направлений прикладного использования систем спутниковой
альтиметрии связано с обеспечением автономной навигации подводных лодок.
Использование данных спутниковой альтиметрии для решения перечисленных выше геодезических
задач имеет следующие особенности: высокие требования к точности обработки измерительной инфор-
мации; целесообразность обеспечения максимально полного, детального и однородного покрытия Ми-
рового океана данными спутниковой альтиметрии; необходимость тщательного исключения из резуль-
татов измерений влияния океанографических и метеорологических факторов [Medvedev, Nepoklonov
2001].
Существенным ограничением метода спутниковой альтиметрии является то, что как метод изучения
гравитационного поля Земли он принципиально не работает на суше. Вследствие этого для получе-
ния глобального покрытия земного шара измерениями гравитационных аномалий данные спутниковой
альтиметрии в океанах необходимо комбинировать с данными гравиметрической съемки на суше и
море.
Использование систем спутниковой альтиметрии в геодезических приложениях сталкивается так-
же с ограничениями по информативности при выполнении измерений над акваториями, покрытыми
льдом. Как следствие данный метод сам по себе не может решить проблему детального определения
гравитационных аномалий в высокоширотных районах земного шара (выше 80° с. ш.).
Анализ принципиальных основ и опыта использования спутниковой альтиметрии показал, что ос-
новным преимуществом данного метода по сравнению с наземными методами изучения гравитаци-
онного поля и фигуры Земли, в частности гравиметрической съемкой, можно считать потенциально
высокую точность измерения гравитационных аномалий в сочетании с высокой оперативностью. Сле-
дует отметить, что полномасштабная реализация метода спутниковой альтиметрии позволила в 1990-е
годы выйти на уровень точностных характеристик определения гравитационных аномалий в Мировом
океане, в значительной мере исключивший необходимость выполнения трудоемкой и дорогостоящей
площадной гравиметрической съемки на большей части акватории Мирового океана для целей геоде-
зического обеспечения [Македонский и dp. 1992; Пешехонов и др. 1989].
В этой связи значительное внимание привлекает вопрос о выяснении реальных возможностей спут-
никовой альтиметрии в плане точности и разрешающей способности, особенно с учетом взаимной
пространственной корреляции альтиметрических данных. По теоретическим оценкам спектральных
плотностей сигнала и шума, разрешающая способность систем спутниковой альтиметрии по длинам
волн ACT находится на уровне 30 км, а точность (СКП) определения ACT составляет 8 мГал. По
этим оценкам, метод спутниковой альтиметрии в 8-10 раз уступает современным средствам морской
гравиметрической съемки в плане точности и детальности определения гравитационных аномалий. Од-
нако, как показали результаты сравнения реальных данных спутниковой альтиметрической и морской
гравиметрической съемки, теоретические оценки не в полной мере соответствуют действительности.
Фактически современные данные спутниковой альтиметрии вполне могут рассматриваться в качестве
альтернативного источника информации для картографирования аномалий силы тяжести в масштабе
1:1000000 с сечением 10 мГал [Дробышев и др. 2005; Железняк, Конешов 1995]. Более того, ком-
плексирование данных, полученных различными системами спутниковой альтиметрии, потенциально
позволяет на значительной части акватории Мирового океана обеспечить определение ACT с СКП
около 5 мГал и разрешением не хуже 20 км. Наиболее высокая точность восстановления характери-
стик ГПЗ по данным спутниковой альтиметрии достигается в районах Мирового океана с достаточно
большими глубинами. В прибрежных районах, а также в районах повышенной гравиметрической и оке-
Таблица 6.10. Средние квадратические погрешности определения характеристик ГПЗ в Мировом океане по
данным спутниковой альтиметрии
Характеристики ГПЗ Спутники
ГЕО-ИК GEOSAT
Высоты геоида 1,0 м 0,3-0,5 м
Уклонения отвесной линии 1,5-3" 1-2"
Аномалии силы тяжести 8-15 мГал 6-10 мГал
анографической аномальности обеспечение требуемой на сегодняшний день и в перспективе высокой
точности определения параметров ГПЗ по данным спутниковой альтиметрии является проблематичным.
Дополнительный интерес к точностным характеристикам спутниковой альтиметрии возник в по-
следние годы в связи с получением ряда новых глобальных моделей ГПЗ по данным межспутниковых
измерений в системах CHAMP и GRACE [Gruber, Steigenberger 2002]. Ожидается, что новые спутнико-
вые модели могут быть использованы для повышения точности учета отклонений морской поверхности
от геоида. Интерпретация расхождений между высотами геоида, полученными по данным слежения
«спутник-спутник», и альтиметрическими высотами геоида требует дальнейших исследований.
Специфика геодезических задач привела к разделению программ спутниковрй альтиметрии по стра-
тегии набора измерительной информации на геодезические и океанографические (изомаршрутные). В
геодезическом режиме главным условием является обеспечение достаточно высокой плотности покры-
тия акваторий Мирового океана альтиметрической информацией по восходящим и нисходящим трассам
в расчете на единицу площади. В океанографическом режиме должна обеспечиваться достаточно вы-
сокая периодичность получения информации о состоянии морской поверхности на одном и том же
участке акватории, что достигается построением системы изомаршрутных (лежащих в полосе шириной
порядка 1-2 км) высотомерных трасс. Период повторяемости зависит от параметров орбиты спутника
и может составлять от нескольких суток до нескольких десятков суток.
Следует отметить, что, например, спутники GEOS-3, ГЕО-ИК эксплуатировались только в гео-
дезическом режиме, функционирование спутников Topex/Poseidon и Jason-1 осуществляется в оке-
анографическом режиме, а в проектах Geosat и ERS-1 был использован комбинированный (геоде-
зический+океанографический) режим набора радиовысотомерной информации. Покрытие акватории
Мирового океана высотомерными трассами в различных режимах набора измерительной информации
схематично показано на рис. 6.5.1.
Вследствие более высокого технического уровня развития зарубежных систем и их комплексного
использования результаты определения характеристик ГПЗ в Мировом океане (в виде цифровых моде-
лей ВКГ, УОЛ и ACT) по зарубежной альтиметрической информации в целом имеют более высокую
точность и детальность, чем аналогичные результаты, полученные по альтиметрической информации
отечественного КГК ГЕО-ИК. Этот вывод иллюстрируется данными, приведенными в табл. 6.10, где
сопоставлены точности определения ВКГ, УОЛ и ACT по отечественным (ГЕО-ИК) и зарубежным
(GEOSAT) данным спутниковой альтиметрии, достигнутые в первой половине 1990-х годов. Следует
отметить, что зарубежные модели, представленные в табл. 6.10, имеют детальность 5', что в три раза
выше по сравнению с детальностью аналогичных отечественных результатов.
С завершением эксплуатации отечественного космического геодезического комплекса ГЕО-ИК по-
ступление отечественных спутниковых радиовысотомерных данных прекратилось. В то же время за
рубежом был реализован ряд новых проектов в области спутниковой альтиметрии (Topex/Poseidon,
ERS-1, ERS-2 и др.), позволивших еще более повысить точность и детальность определения характе-
ристик ГПЗ. В результате точность определения УОЛ на большей части акватории Мирового океана
доведена зарубежными специалистами до уровня СКП 0,5"-1,0", что позволило, в частности, суще-
ственно продвинуть решение одной из стратегических задач Министерства обороны США в области
геодезического обеспечения — создание глобальной цифровой модели УОЛ с СКП 0,5" для систем
автономной навигации ВВС и ВМС.
Рис. 6.5.1. Программы набора спутниковой альтиметрической информации (а — геодезическая, ГЕО-ИК;
б — изомаршрутная, ERS-1, периодичность 35 сут; в — изомаршрутная, Topex/Poseidon, периодичность
10 сут.).
a
Наметившееся отставание России от ведущих зарубежных стран в области разработки и приме-
нения систем спутниковой альтиметрии должно быть в значительной мере устранено при помощи
создаваемой в настоящее время отечественной космической геодезической системы нового поколения
ГЕО-ИК-2. Данная система включает: среднеорбитальные КА, оснащенные высокоточным радиовы-
сотомером и аппаратурой спутниковой навигации; высокоорбитальные КА системы ГЛОНАСС (входят
функционально); наземный специальный комплекс (НСК). В состав НСК входят: наземные пункты
наблюдения; пункты приема бортовой измерительной информации; полигон калибровки высотомера;
Центр обработки геодезической информации и система управления [Пугачев и др. 2006].
Как было отмечено выше, метод спутниковой радиоальтиметрии базируется на радолокационных
измерениях высоты КА над морской поверхностью. Для этого на борту КА устанавливается радиовы-
сотомер, осуществляющий радиолокационное зондирование земной поверхности по нормали. Отражен-
ный сигнал принимается на борту КА. Высота КА над морской поверхностью определяется на основе
соотношения
h=^c£t, (6.5.1)
где с — скорость света, At — задержка времени
Рис. 6.5.2. Принципиальная схема метода спутни-
ковой альтиметрии.
приема отраженного сигала.
Принципиальная схема получения исходной
информации о гравитационном поле Земли по из-
меренным высотам спутника над морской поверх-
ностью показана на рис. 6.5.2 [Лебедев, Костя-
ной. 2005].
Измерение высоты спутника над поверхно-
стью океана позволяет, если известна высота
спутника над отсчетным эллипсоидом, опреде-
лить геодезическую высоту морской поверхности
в подспутниковой точке.
Исключив отклонение морской поверхности от
геоида, можно в итоге получить высоту геои-
да. Дальнейшая математическая обработка аль-
тиметрических высот геоида по формулам гео-
дезической гравиметрии позволяет получать ано-
малии силы тяжести и составляющие уклонений
отвесных линий в Мировом океане. Отклонение
морской поверхности от геоида разделяют на ква-
зистационарную (период изменения более двух
лет) и динамическую (период изменения менее двух лет) составляющие. Практика показала, что при
определении гравитационного поля в океане влияние динамической топографии можно в значительной
степени исключить путем усреднения альтиметрических измерений по времени.
Учет влияния квазистационарной составляющей связан с необходимостью дополнительных данных,
которые могут быть получены, например, гравиметрическим (аэрогравиметрическим) методом, дина-
мическим методом космической геодезии, методом измерений по линии «спутник-спутник», методом
спутниковой градиентометрии [Медведев 1980].
Таким образом, с позиции изучения аномального гравитационного поля Земли базовая математиче-
ская модель метода спутниковой альтиметрии имеет вид:
L = Н - h - bhs - bhT - bhA - bhB - 6/i, (6.5.2)
где — высота геоида над отсчетным эллипсоидом; Н — высота спутника над отсчетным эллипсоидом;
h — измеренная высота спутника над морской поверхностью; bhs — отклонение морской поверхности
от геоида; bhT — приливная поправка; bhA — влияние атмосферной рефракции; t>hB — изменение
высоты МТП, обусловленное барическим воздействием атмосферы; f>h — влияние инструментальной
погрешности.
Точность альтиметрических высот геоида определяется [Лебедев, Костяной 2005]:
— погрешностями определения орбитального положения спутника, в первую очередь по радиус-
вектору;
— инструментальной погрешностью радиовысотомера;
— погрешностями учета влияния внешней среды на прохождение радиосигнала;
— погрешностями учета отклонений МТП от геоида в моменты измерений.
Основными источниками погрешности определения орбиты спутника являются погрешности траек-
торных измерений, погрешности модели движения КА и погрешности определения координат пунктов
наблюдений. Погрешность определения радиус-вектора спутника зависит от географического положе-
ния точки (географическая корреляция) и имеет периодический характер изменения с основной со-
ставляющей, равной периоду обращения спутника. Эта составляющая является следствием главным
образом погрешностей определения параметров модели ГПЗ.
Основные пути уменьшения погрешностей орбитальной привязки радиовысотомерной информации:
— повышение точности траекторных измерений и уточнение координат пунктов наблюдения;
— уточнение модели движения спутника, в первую очередь за счет использования более точной
модели геопотенциала;
— уравнивание высотомерных трасс за условия равенства высот геоида в точках пересечения вос-
ходящих и нисходящих прохождений.
На современном этапе развития систем спутниковой альтиметрии точность средств и методов ор-
битальной привязки альтиметрической информации достигла уровня, обеспечивающего определение
радиус-вектора спутника с погрешностями до нескольких сантиметров. Это стало возможным в значи-
тельной степени благодаря высокоточным средствам траекторных определений, в том числе прецизи-
онным лазерным дальномерам, глобальным системам траекторного слежения типа DORIS, аппаратуре
спутниковой навигации по сигналам GPS и ГЛОНАСС. Существенный вклад внесло также появле-
ние новых глобальных моделей геопотенциала типа JGM3, полученных с использованием современных
реализаций динамического метода космической геодезии.
Инструментальная погрешность радиовысотомера обусловлена нестабильностью напряжения, теп-
ловыми шумами, дискретностью отсчетов, различными задержками в передающем и приемном тракте
радиовысотомера и другими факторами. Данная погрешность содержит случайную и систематическую
(медленно меняющуюся) составляющие. Влияние систематической погрешности значительно уменьша-
ется при переходе от высот геоида к их градиентам.
Основные пути уменьшения влияния инструментальной погрешности на точность определения аль-
тиметрических высот геоида:
— улучшение точностных характеристик спутниковых радиовысотомеров;
— периодическое уточнение калибровочных параметров спутникового радиовысотомера в процессе
его эксплуатации на специальном полигоне калибровки;
— обработка спутниковой альтиметрической информации по точкам пересечения и повторяющимся
высотомерным трассам.
Реализация океанографических программ спутниковой альтиметрии существенно расширила воз-
можности исследования инструментальных погрешностей с использованием повторяющихся высото-
мерных трасс. Преимущество такого подхода заключается в том, что наряду со значительным объемом
статистического материала (число повторений 100 и более) в разностях альтиметрических высот геоида
вследствие географической корреляции будет практически исключено влияние погрешности учета ГПЗ
на определение орбиты по радиус-вектору.
Один из возможных подходов к оценке погрешностей альтиметрических высот геоида с использо-
ванием повторяющихся трасс основан на анализе отклонений высот геоида по каждой отдельно взятой
трассе от среднего по всем трассам профиля высот геоида. Указанные отклонения интерпретируются
как погрешности измеренных высот геоида. Обработка этих отклонений может проводиться в частот-
ной области. В качестве примера на рис. 6.5.3 приведен график усредненной спектральной плотности
погрешности альтиметрических высот геоида (по данным спутника Geosat в районе Охотского моря на
двухлетнем интервале измерений) [Крюков, Плешаков 2001].
Погрешность определения альтиметрических высот геоида из-за влияния внешней среды (метеоро-
логических и океанографических факторов) на прохождение радиосигнала имеет следующие составля-
ющие [Лебедев, Костяной 2005]:
— погрешности, обусловленные задержками прохождения радиосигнала в тропосфере и ионосфере
(атмосферная рефракция);
— погрешность, обусловленная влиянием волнения на состояние отражающей способности морской
поверхности и форму отраженного радиосигнала (электромагнитное смещение).
Задержки прохождения радиосигнала в тропосфере обусловлены:
— рассеиванием радиоимпульса молекулами газов, входящих в состав воздуха, в первую очередь
кислорода («сухая» составляющая);
6
Рис. 6.5.3. Спектральная плотность погрешности альтиметрических высот геоида (1) и СКП ее определения
(2).
— поглощением электромагнитного излучения водяным паром («влажная» составляющая).
Задержка прохождения радиосигнала в ионосфере обусловлена рассеиванием радиоимпульса сво-
бодными электронами и ионами верхних слоев атмосферы.
Погрешности альтиметрических высот геоида, обусловленные атмосферной рефракцией, составляют:
— для «сухой» составляющей тропосферной рефракции 2-3 м;
— для влажной составляющей тропосферной рефракции 0,05-0,7 м;
— для ионосферной рефракции 0,01-0,2 м.
Устранение указанных погрешностей обеспечивается путем введения соответствующих поправок
[Лебедев, Костяной 2005]. Расчет поправок за влияние тропосферной рефракции выполняют с ис-
пользованием глобально распределенных данных о метеопараметрах, а также показаний спутниковых
радиометров.
Поправку за влияние ионосферной рефракции определяют по данным, полученным на двух частотах
радиовысотомера. При отсутствии измерений на второй частоте для определения указанной поправки
используются данные двухчастотной доплеровской системы DORIS или модельные расчеты.
По оценкам, для обеспечения необходимой точности учета атмосферной рефракции необходимо
иметь цифровые карты температуры, давления, влажности воздуха у поверхности воды и состояния
ионосферы с пространственным разрешением не хуже 1° и с периодом обновления в 6 часов. Погреш-
ность альтиметрических высот геоида, обусловленная электромагнитным смещением, вызвана несовпа-
дением среднего уровня моря с усредненной отражающей поверхностью, а также различием среднеин-
тегрального значения и медианы высот, определяемых по отраженному сигналу, что является прямым
следствием негауссовского распределения высот отражающей поверхности. Величина этой погрешно-
сти, как правило, не превышает 5 см. Учет данной погрешности обеспечивается введением поправки,
рассчитываемой по эмпирической зависимости от высоты волны и скорости приводного ветра, однако
соответствующие методики требуют дальнейшего совершенствования. Точность расчета этой поправки
за высоту волны целесообразно контролировать над специальным полигоном калибровки на начальном
этапе эксплуатации радиовысотомера.
Погрешность альтиметрических высот геоида, обусловленная барическим воздействием атмосферы
на высоту МТП, может достигать нескольких метров. Учет данной погрешности обеспечивается вве-
дением соответствующей поправки, вычисляемой по формуле «обратного барометра» с использованием
данных об атмосферном давлении на уровне моря.
Таблица 6.11. Характеристики метеорологических и океанографических факторов и их влияния на ампли-
туды и наклоны морской поверхности
Фактор Период Длина волны, км Амплитуда волны, см Наклон морской поверхности, у гл. с
Ветровые волны 2-30 с 0,001-0,3 10-4500 —
Зыбь 10-200 с 0,1-10 100-500 —
Цунами 10-60 мин 200-500 100-150 1,3
Сейши 1-10 час 200-1000 50-80 0,3
Приливы 0,5 сут 1000-5000 3-30 0,05*
1 сут 2000-5000 3-30 0,05*
Ветровые нагоны 1-5 сут 100-300 100-200 2,0
Линзы 2-20 сут 200 100 2,0
Баростатические колеба- ния 2-10 сут 1000-5000 70-80 0,1
Синоптические колеба- ния 20-60 сут 100-400 50-120 1,3
Колебания квазистацио- нариой МТП 1 год 400-800 100-200 0,3
* — остаточная погрешность учета соответствующего фактора
Отклонения МТП от геоида обусловлены различными метеорологическими и океанографическими
факторами (табл. 6.11).
В число факторов такого рода, оказывающих существенное влияние на отклонение МТП от геоида,
входят приливные явления. Различают приливы в океане, приливы в твердой Земле и полюсные прили-
вы. Океанические приливы учитывают с использованием глобальных и локальных моделей. Исследо-
вания имеющихся глобальных моделей океанских приливов показали, что в настоящее время наиболее
точными моделями приливов являются модели GOTOO.2, GOT2000, NAO99, FES99, FES2OO2, FES2003
и FES2004. Точность учета приливов в открытом океане с их использованием находится на уровне
2-3 см. Учет приливов в земной коре и полюсных приливов также осуществляется с использованием
соответствующих моделей.
Наиболее проблематичным является учет отклонений МТП под действием ветровых нагонов, линз,
баростатических и синоптических колебаний. Погрешности определения альтиметрических высот геои-
да и их градиентов, обусловленные этими факторами, могут учитываться по соответствующим моделям
с использованием оперативных метеоданных.
Проблема ослабления погрешностей учета колебаний МТП решается с использованием альтиметри-
ческих профилей геоида по повторяющимся трассам на достаточно продолжительном интервале време-
ни (порядка года), а также с использованием информации в точках пересечения трасс. По имеющимся
оценкам, опорный каркас изомаршрутных высотомерных трасс с 10-кратным повторением (расстояние
между трассами порядка 100 км) позволяет снизить влияние погрешности учета океанографических
и метеорологических факторов на точность определения градиентов высот геоида вдоль трасс в 2-3
раза (до 0,1-0,2" для открытых районов Мирового океана и 0,6-1,5" для шельфовых зон). Однако
обеспечение покрытия акватории Мирового океана однородными по точности данными об альтиметри-
ческих высотах геоида и/или их градиентах только по радиовысотомерной информации представляется
проблематичным. Решение этой задачи с гарантированно высокой точностью требует, как минимум,
построения дополнительного каркаса повторяющихся трасс с расстоянием между трассами около 15
км, привлечения гравиметрических данных и использования глобальных моделей ГПЗ повышенной
точности с разрешением по длинам волн геоида порядка 100 км.
Другой путь решения этой проблемы состоит в уточнении модели квазистационарной МТП и опре-
делении параметров динамической топографии океана одновременно с уточнением координат станций
и параметров модели ГПЗ динамическим методом. Однако кардинальным образом проблема может
быть решена путем совместного использования данных спутниковой альтиметрии и низкоорбитальной
спутниковой градиентометрии.
Таким образом, минимизация влияния внешней среды при получении и обработке спутниковой
альтиметрической информации обеспечивается:
— использованием двухчастотного радиовысотомера для повышения точности учета ионосферы;
— использованием подходящих моделей для учета отклонений морской поверхности от геоида,
атмосферной рефракции и состояния отражающей морской поверхности;
— применением специальных стратегий набора спутни-
ковой альтиметрической информации и соответствующих
процедур обработки по повторяющимся высотомерным трас-
сам (расстояние между трассами около 15 км);
Таблица 6.12. Средние квадратические
ошибки определения градиентов высот
геоида вдоль трасс, "
Трасса Вариант
1 2 3 4
1 0,6 0,6 1,4 0,8
2 1,1 1,2 1,8 1,5
3 1,1 1,1 1,5 1,4
4 0,7 0,6 1,8 0,7
5 0,8 0,7 1,2 1,3
6 1,8 1,7 1,8 2
7 1,8 1,6 2,2 2,1
8 0,9 0,9 1,7 1
9 0,6 0,6 1,6 0,8
10 0,5 0,4 1,6 0,6
нием по длинам волн геоида на уровне
— использованием оперативных метеорологических и
геофизических данных в виде цифровых карт с заданным
пространственным и временным разрешением;
— уточнением на этапе летных испытаний методик учета
внешней среды и вычисления поправок за высоту волн;
— уточнением модели квазистационарной МТП и пара-
метров динамической топографии одновременно с уточне-
нием координат пунктов и параметров модели ГПЗ динами-
ческим методом космической геодезии;
— обработкой альтиметрических высот геоида по трас-
сам с использованием методов низкочастотной фильтрации
и дополнительной информации (гравиметрических данных,
глобальных моделей ГПЗ повышенной точности с разреше-
100 км).
Повторяющиеся трассы используются для выбора и настройки фильтра низких частот, наилучшим
образом подходящего для обработки альтиметрической информации в исследуемом районе. В совре-
менных системах обработки данных спутниковой альтиметрии применяются следующие методы низ-
кочастотной фильтрации: метод оптимальной (квазиоптимальной) фильтрации; методы фильтрации с
весовыми функциями Кайзера и Паркса-Маклеллана; методы фильтрации с использованием сплайн-
функций [Галазин и др. 1993а; Крюков, Плешаков 2001].
Сравнительные оценки различных методов низкочастотной фильтрации альтиметрических высот
геоида на повторяющихся трассах приведены в табл. 6.12 (по данным обработки измерительной ин-
формации американского спутника Geosat в районе Охотского моря) [Крюков, Плешаков 2001]. В
качестве погрешностей альтиметрических высот геоида рассматривались остаточные высоты геоида по
каждой отдельно взятой трассе относительно усредненного профиля по всем повторяющимся трассам
в соответствующем коридоре.
Вариантам, приведенным в табл. 6.12, соответствуют: фильтр Винера-Хопфа (1); квазиоптимальный
фильтр (2); фильтр Кайзера (3, 4); фильтр Паркса-Маклеллана (5, 6); фильтр с использованием сплайн-
аппроксимации (7). В вариантах 1, 4, 6 информация о погрешностях была представлена спектральной
плотностью, показанной на рис. 6.5.3. В вариантах 2, 3, 5, 7 погрешности были представлены «белым
шумом» с дисперсией, равной дисперсии остаточных высот геоида.
Анализ табл. 6.12 показывает, что в большинстве случаев лучшие результаты получены с использо-
ванием фильтра Винера-Хопфа, который оптимален при выполнении условия «стационарности» погреш-
ностей. Однако общая картина такова, что по точностным характеристикам ни один из рассмотренных
вариантов реализации низкочастотной фильтрации альтиметрических высот геоида не имеет явного
преимущества перед остальными. В этой ситуации выбор фильтра представляет собой нетривиальную
задачу, решение которой может быть связано с использованием дополнительных критериев, таких, как
ограничения по априорной информации, устойчивость и надежность алгоритмов фильтрации.
Сложившиеся подходы к обработке спутниковой альтиметрической информации, базирующиеся
на многолетнем опыте эксплуатации систем спутниковой альтиметрии, схематично представлены на
рис. 6.5.4.
Общая технологическая схема решения геодезических задач по данным спутниковой альтиметрии
приведена на рис. 6.5.5 [Medvedev, Nepoklonov 2001].
Траекторная привязка спутниковой альтиметрической информации включает уточнение начальных
условий орбитальных дуг и определение точных координат центра масс спутника на моменты радиовы-
сотомерных измерений.
Предварительная обработка спутниковой альтиметрической информации включает контроль, ана-
лиз, введение корректирующих поправок, низкочастотную фильтрацию, оценку точности и отбраковку
аномальных измерений.
Вычисление высот геоида по трассам включает построение опорного каркаса высотомерных трасс,
уравнивание измеренных профилей геоида за условия в точках пересечения восходящих и нисходящих
трасс, вычисление уравненных высот геоида и их градиентов (УОЛ) вдоль трасс в подспутниковых
точках.
Формирование цифровых моделей высот геоида, уклонений отвесных линий и аномалий силы тяже-
сти сводится к пересчету высот геоида и их градиентов из подспутниковых точек в узлы равномерной
сетки меридианов и параллелей.
Эта задача, как показано на рис. 6.5.5, решается с использованием различных подходов. На совре-
менном этапе развития спутниковой альтиметрии указанные цифровые модели создаются с дискретно-
стью 1-5'.
Рис. 6.5.4. Общая схема обработки данных спутниковой альтиметрии.
Траекторная привязка
Предварительная обработка
Вычисление Высот
геоида по трассам
Формирование цифровых моделей ВГ, ACT, УОЛ
ВГ
ВГ
[УОЛ],
рвгф|1вг^ рв^вгд
| |[АСТ1с| I ||АСТ1с
УОлП. (УОЛ]£ |[У0Л1т|е 1«ОЛ1С
lACTl^J |^О/11Т|е|
Т - па трос сом, С - но сетке
Спутниковые
траекторные
данные
Уточнение
гармонических
коэффициентов
геопотенциала
Грави-
метрические
данные
Уточнение
геоцентрической
системы координат
Рис. 6.5.5. Технологическая схема решения геоде-
зических задач по данным спутниковой альтимет-
рии.
Уточнение гармонических коэффициентов гео-
потенциала осуществляется на основе комплекси-
рования данных спутниковой альтиметрии с гра-
виметрическими данными (в виде средних значе-
ний ACT по трапециям 30x30') и данными спут-
никовых траекторных измерений (в виде коэф-
фициентов спутниковой модели ГПЗ). Задача ре-
шается путем уравнивания разнородной информа-
ции по методу наименьших квадратов с уточне-
нием весов. Результатом является создание гло-
бальной модели ГПЗ в виде сферических гармо-
ник геопотенциала повышенной точности и про-
странственного разрешения.
В статьях [Родкин 2003, 2005] обращается
внимание на значительные расхождения моделей
геоида и результатов альтиметрических наблю-
дений и предполагается, что выявленные рассо-
гласования порождаются различиями в характере
эквипотенциальных поверхностей на уровне мо-
ря и на высоте пролета гравиметрических спут-
ников, а также разной выраженностью разных
типов аномалий плотностного строения на раз-
ных высотах; обсуждается постановка возможно-
сти разработки метода глубинного зондирования
плотностного строения литосферы и выявления
скрытых тектонических структур.
Преобразование альтиметрических высот гео-
ида (С) в значения составляющих УОЛ (£,,п) и
ACT (At?) базируется на соотношениях [Маке-
донский и др. 1992]:
t 1 дС, 1 дС,
£ = Бяп’ 71 = ~~Б---------Б яГ ’ (6.5.3)
RoB RcosBoL
<6-5-4»
где Со — высота геоида в определяемой точке; R — средний радиус Земли; у — нормальная сила
тяжести; г — расстояние между текущей и определяемой точками.
Расчеты по формулам (6.5.3) выполняются с использованием методов численного дифференцирова-
ния. При этом достаточно знать высоты геоида в некоторой малой окрестности определяемой точки.
Размер этой области конкретно зависит от точности и детальности исходных альтиметрических высот
геоида, сложности гравитационного поля в исследуемом районе и наличия априорной информации.
Для вычисления ACT по формуле (6.5.4) теоретически необходимо знать высоты геоида по всей
поверхности Земли. Так как ядро интеграла (6.5.4) достаточно быстро убывает с удалением от опре-
деляемой точки, на практике интегрирование выполняют только в ближней зоне. Вклад дальней зоны
учитывают с использованием глобальной модели ГПЗ в виде сферических гармоник геопотенциала.
Размеры ближней зоны зависят от точности и детальности используемой модели ГПЗ. Формула (6.5.4)
представляет собой известную обратную формулу Стокса, впервые полученную М.С. Молоденским. В
альтернативном варианте ACT вычисляются по альтиметрическим УОЛ с использованием обратного
интеграла Венинг-Мейнеса [Hwang et al. 1998]:
JJ Я(ф)(£,сов а — q sin a)dff, (6.5.5)
а
где гр — сферическое расстояние между текущей и определяемой точками; Н(гр) — ядро преобразова-
ния, определяемое выражением
= - cos^/2) Г 1 . ?3 + 2sin(ip/2)1
W 2sin(xp/2) [sin(M>/2) + 1 + sin(xp/2) '
Задача преобразования альтиметрических высот геоида-в ACT с использованием обратной формулы
Стокса была решена специалистами Международного гравиметрического бюро в 1985 г. по данным
американских спутников Geos-З и Seasat [Balmino et al. 1985]. В результате создан каталог альти-
метрических ACT с детальностью 15x15'. Независимо решение аналогичной задачи было получено
специалистами 29 НИИ МО РФ в начале 1990-х годов по данным российских спутников ГЕО-ИК
[Галазин и др. 19936].
Альтернативный подход к преобразованию ВГ в ACT при обработке данных спутниковой альти-
метрии связан с использованием метода статистической коллокации в рамках теории оптимального
линейного прогноза [Мориц 1983]. Аналогичный подход может применяться к решению задачи вычис-
ления УОЛ по ВГ, а также к преобразованию УОЛ в ACT.
Исходное соотношение коллокационного подхода для вычисления ACT по альтиметрическим высо-
там геоида имеет вид:
Др = + D)-L(C. - <о) + Дро, (6.5.7)
где <о, Дро — значения ВГ и ACT, вычисленные по глобальной модели ГПЗ; С^, Сд.вс. — соответ-
ственно ковариации ВГ и взаимные ковариации ВГ и ACT в остаточном поле; D — ковариационная
матрица погрешностей ВГ.
Преимуществом коллокационного подхода перед интегральными формулами является то, что он
может быть использован при комплексировании альтиметрических и гравиметрических данных, поз-
воляет обрабатывать информацию с пропусками, более удобен для апостериорной оценки точности
результатов.
Однако практическое применение данного подхода сопряжено с решением систем уравнений, где
число уравнений определяется количеством исходных данных. Как следствие, предъявляются повы-
шенные требования к характеристикам ЭВМ, в связи с чем применение коллокационного подхода при
обработке данных спутниковой альтиметрии в основном ограничивалось решением локальных задач.
Поиск путей повышения вычислительной эффективности процедур пересчета альтиметрических вы-
сот геоида в значения ACT и составляющих УОЛ привел к внедрению в практику обработки данных
спутниковой альтиметрии спектральных методов решения этой задачи, основанных на теории частотной
фильтрации с использованием быстрого преобразования Фурье и его модификаций. Основой спектраль-
ных методов обработки альтиметрических высот геоида служат соотношения [Македонский и др. 1992;
Schwarz et al. 1990]
I = F-Ч-iwxF(Q],
n = F-1[-icuyF(q],
(6.5.8)
(6.5.9)
(6.5.10)
Др = F-1
где F,F-:l — операторы прямого и обратного двумерного преобразования Фурье; cu^Wj, — частоты
колебаний гравитационного поля по осям х, у плоской прямоугольной системы координат; i — мнимая
единица.
Спектральный метод вычисления ACT по высотам геоида как последовательное развитие идеи при-
менения БПФ для вычисления интегралов типа свертки был предложен в середине 1980-х годов. Ис-
следования показали, что по своим точностным характеристикам спектральный метод близок к методу
численного интегрирования, но обладает значительно более высоким быстродействием.
Первоначально обработка высот геоида с использованием спектрального метода выполнялась на
плоскости. В дальнейшем этот метод был модифицирован с использованием новых подходов к вы-
числению интегралов типа свертки с использованием преобразования Фурье, разработанных в первой
половине 1990-х годов [Haagmans et al. 1993].
Реализация этих подходов дала возможность применять преобразование Фурье непосредственно на
сфере, что позволило при сохранении высокой скорости вычислений в среднем на 20% повысить точ-
ность расчетов по интегральным формулам за счет уменьшения погрешностей, связанных с переходом
на плоскость.
Представляет интерес метод преобразования альтиметрических высот геоида в ACT через состав-
ляющие УОЛ с использованием соотношения (6.5.5). В частотной области преобразование УОЛ в ACT
имеет вид [Пеллинен и др. 1980]:
5д,(Шх, шу) = гу(а£ + ш2)'1/2(ш15£,(си1, шу) + cuySn(a;a:, а>у)], (6.5.11)
где 3^шх, шу), 5т1(си1, шу) — спектры составляющих УОЛ; Зд.д(шх, шу) — спектр ACT.
Преимуществом такого подхода является то, что на этапе вычисления УОЛ вдоль подспутниковых
трасс по формулам численного дифференцирования в значительной степени исключаются медленно-
меняющиеся погрешности альтиметрических высот геоида, обусловленные орбитой, влиянием внешней
среды и другими факторами.
Эти факторы не могут быть полностью исключены при уравнивании высотомерных трасс за согла-
сование высот геоида в точках их пересечения и поэтому вносят дополнительные погрешности при
вычислении ACT непосредственно по альтиметрическим высотам геоида.
Следует отметить, что эффективность данного метода вычисления ACT зависит от угла пересечения
восходящих и нисходящих высотомерных трасс, в свою очередь, зависящего от широты места и на-
клонения орбиты спутника. Как следствие, его преимущество в наибольшей степени проявляется лишь
в достаточно высоких широтах. С учетом геометрии высотомерных трасс в близэкваториальной зоне
предпочтительным методом вычисления ACT является метод, основанный на прямом преобразовании
высот геоида в аномалии силы тяжести.
С использованием описанных методов обработки спутниковой альтиметрической информации оте-
чественными и зарубежными разработчиками в период 1990-2005 гг. получен ряд цифровых моделей
характеристик аномального ГПЗ (ВГ, УОЛ, ACT) в Мировом океане с детальностью от 15' до 1-2'.
Основные усилия отечественных разработчиков были направлены на определение детальных харак-
теристик ГПЗ в Мировом океане по данным российских спутников ГЕО-ИК. Результаты решения этой
задачи представлены в виде цифровых моделей УОЛ, ACT и ВКГ с дискретностью 15x15', полученных
Топографической службой ВС РФ. Точность определения УОЛ характеризуется следующими СКП: в
слабоаномальных районах (50% поверхности Мирового океана) — 2"; в среднеаномальных районах
(40% поверхности Мирового океана) 3"; в районах повышенной аномальности (10% поверхности Ми-
рового океана) от 4 до 6". В среднем по Мировому океану в диапазоне широт от 73° с. ш. до 65°
ю. ш. полученная цифровая модель УОЛ характеризуется СКП 3". Цифровые модели ВКГ и ACT в
целом по океану характеризуются СКП соответственно 1 м и 8 мГал. При этом СКП определения
ACT составляет: в слабоаномальных районах 6-8 мГал; в среднеаномальных районах 10-12 мГал; в
сильноаномальных районах 20-25 мГал и более. Полученные цифровые модели реализованы в 280
ЦКП ВМФ.
В результате обработки данных спутниковой альтиметрии Geosat, Topex/Poseidon, ERS-1,2 зару-
бежными специалистами разработан ряд моделей высот геоида и аномалий силы тяжести в Мировом
океане повышенной точности и пространственного разрешения.
В число этих разработок входят:
1) модели альтиметрических высот геоида:
— модель MSS95 (Университет штата Огайо, США — OSU): детальность 3,75x3,75'; диапазон от
82° с. ш. до 80° ю. ш.; высоты МТП уравнены относительно трасс Topex/Poseidon с использованием
опорной модели геопотенциала JGM-3/OSU-91A [Yi 1995];
— модели CSR-95, 98 (Центр космических исследований Техасского ун-та, США - CSR): деталь-
ность 2,5 х 2,5'; диапазон от от 82° с. ш. до 79° ю. ш.
— модели GSFC-98, 00, 01 (Центр космических полетов им. Годдарда, НАСА, США — GSFC):
детальность 2x2'; диапазон от 80° с. ш. до 80° ю. ш.; высоты МТП уравнены в каркасе повторяющихся
трасс Topex/Poseidon и интерполированы в узлы сетки с использованием метода коллокации (рис. 6.5.6)
[Wang 2001];
— модели CLS-98,01 (Центр обработки спутниковой информации, Франция — CLS): детальность
3,75x3,75' и 2x2' соответственно; диапазон от 82° с. ш. до 82° ю. ш. (рис. 6.5.7);
2) модели альтиметрических аномалий силы тяжести:
— модели серии Gravlmage (Национальное управление по изучению атмосферы и океана, США —
NOAA): детальность 1x1', 2x2'; диапазон от 72° с. ш. до 72° ю. ш.; ACT вычислены по УОЛ с
Рис. 6.5.6. Альтиметрические высоты геоида в
районе Тихого океана (по модели GSFC-01).
-30 -20 -10 0 10 20 30 40 50 60
Рис. 6.5.7. Альтиметрические высоты геоида в
районе Атлантического океана (по модели CLS-
01).
Рис. 6.5.8. Альтиметрические аномалии силы
тяжести в районе Тихого океана (по модели
Gravlmage V7.2).
Рис. 6.5.9. Альтиметрические аномалии силы тя-
жести в районе Атлантического океана (по моде-
ли GSFC-01).
использованием спектрального метода; координаты узлов заданы в проекции Меркатора (рис. 6.5.8)
[Sandwell, Smith 1997];
— модель Потсдамского центра геоисследований, ФРГ (GFZ); детальность 3x3'; получена путем
преобразование ВГ в ACT с использованием БПФ относительно опорной модели геопотенциала GRIM-
4;
— модели GSFC-98, 01: детальность 2x2’; диапазон от 80° с. ш. до 80° ю. ш.; получены путем
преобразования ВГ в ACT по обратной формуле Стокса с использованием одномерного БПФ на сфере
(рис. 6.5.9) [ Wang 2001 ];
— модели KMS-98, 99, 00, 01: детальность 3,75x3,75', 2x2', 1,5x1,5' и 2x2' соответственно;
диапазон от 80° с. ш. до 80° ю. ш.; получены путем преобразования ВГ в ACT с использованием
метода статистической коллокации в остаточном поле модели EGM96 [Andersen et al. 2001];
— модель GMGA-97: детальность 2x2'; диапазон от 82° с. ш. до 82° ю. ш.; получена путем
преобразования УОЛ в ACT по обратной формуле Венинг-Мейнеса с использованием одномерного
БПФ на сфере [Hwang et al. 1998].
Точность практически всех перечисленных моделей альтиметрических ACT оценивалась по резуль-
татам сравнения с данными морских гравиметрических съемок в контрольных районах. Результаты
сравнительных исследований показали, что в целом эти модели близки по точностным характеристи-
кам. Расхождения с гравиметрическими данными оцениваются следующими обобщенными средними
квадратическими значениями: в слабоаномальных районах 3-5 мГал; в среднеаномальных районах 6-
9 мГал; в сильноаномальных районах 10-15 мГал и более.
Проблемы, обусловленные большим объемом и сложностью обработки спутниковой альтиметриче-
ской информации, решаются при помощи автоматизированных информационных систем, использующих
современные компьютерные, информационные и коммуникационные технологии.
В число требований, которые могут быть предъявлены к системам обработки данных спутниковой
альтиметрии, входят:
— реализация достаточно высоких характеристик по быстродействию и объему памяти используе-
мых средств вычислительной техники;
— использование современных информационных технологий, в том числе технологий баз данных,
глобальных компьютерных сетей (Интернет), распределенной обработки данных и т. д.;
— обеспечение возможности комплексной обработки спутниковой альтиметрической информации,
полученной в рамках различных проектов и программ;
— обеспечение возможности комплексирования спутниковой альтиметрической информации с дру-
гими видами геодезической и геофизической информации в интересах решения широкого круга научно-
технических задач.
В современных условиях особое значение приобретает обеспечение возможности удаленного досту-
па к информационным и вычислительным ресурсам рассматриваемых систем для различных категорий
специалистов, заинтересованных в использовании результатов обработки спутниковой альтиметриче-
ской информации.
К настоящему времени действующие образцы таких информационных систем созданы на базе ря-
да зарубежных центров: Colorado Center for Actrodinamics Research; NASA/GSFC Ocean Pathfinder
CNES Archivig, Validation, and Interpretation of Satellite Oceanographic data (AVISO); Delft Institute
for Earth-Oriented Spase Research Radar Altimeter Database System (RADS); Deutsches Geodatisches
Forschungsinstitut (Miinchen, Germany); Open Altimeter Data Base (Open ADB) и др.
Представляют интерес реализованные в этих разработках подходы к систематизации спутниковой
альтиметрической информации. Так, в зависимости от степени обработки различаются четыре вида
(уровня) этой информации:
— начальный уровень (L0): измерительная, значения различных поправок и дополнительные данные
на момент измерений, хранящиеся в виде отдельных файлов по высотомерным трассам;
— первый уровень (L1): результаты анализа и предварительной обработки высотомерной информа-
ции по трассам (профили высот МТП, расхождения высот МТП в точках пересечения восходящих и
нисходящих высотомерных трасс, каркасы изомаршрутных трасс и т. д.)
— второй уровень (L2): данные интерполяции измеренных высот МТП из точек высотомерных трасс
в узлы равномерной сетки меридианов и параллелей с определенной периодичностью;
— третий уровень (L3): данные предметно-ориентированной обработки альтиметрической информа-
ции в виде моделей уровня и гравитационных аномалий Мирового океана, временных рядов (диаграмм)
аномалий уровня в заданных точках акватории Мирового океана.
Большинство зарубежных систем обработки данных спутниковой альтиметрии имеют ограничения
по характеристикам выдаваемой информации и ориентированы в основном на пользователей, специа-
лизирующихся в области океанологии и контроля окружающей среды.
Объем спутниковой альтиметрической информации, имеющейся в различных международных цен-
трах данных, на сегодняшний день превышает 500 Гб и постоянно увеличивается. Все это является
источником затруднений в плане эффективного использования спутниковой альтиметрической инфор-
мации в научных исследованиях, особенно для исследователей, не имеющих необходимого опыта обра-
ботки такого рода информациии.
С учетом этого в Геофизическом центре РАН при участии специалистов 29 НИИ МО РФ создана
принципиально новая система автоматизированной обработки спутниковых альтиметрических и геофи-
зических данных с удаленным доступом для фундаментальных и прикладных исследований в науках о
Земле, ориентированная в первую очередь на потребности российских ученых. Создание данной систе-
мы осуществлялось поэтапно при поддержке РФФИ (гранты 96-07-90106, 03-07-90174) [Непоклонов
и др. 2004].
Цель создания новой системы состояла в организации комплексной мультизадачной обработки аль-
тиметрической информации различных спутников, как имеющейся в ГЦ РАН, так и вновь поступаю-
щей, в комбинации с анализом отдельных видов дополнительной геодезической информации.
Основой системы автоматизированной обработки спутниковых альтиметрических и геофизических
данных является интегрированная база российских и зарубежных спутниковых альтиметрических дан-
ных (ИБДСА), государственный реестр 4989 [Лебедев, Костяной 2005].
Интегрированная база данных сформирована на основе результатов обработки радиовысотомерных
сигналов спутников GEOSAT, ГЕО-ИК, TOPEX/Poseidon, GFO-1 и Jason-1 с учетом инструмен-
тальных погрешностей и поправок за влияние окружающей среды. В процессе объединения решаются
следующие задачи:
— отнесение измерительной информации и сопутствующих геофизических данных к единой геофи-
зической системе отсчета;
— оптимизация поправок за влияние окружающей среды на распространение радиолокационного
сигнала;
— унификация алгоритмов интерполяции модельных данных и дополнительная информация вдоль
подспутниковых высотомерных трасс;
— унификация формата выдачи спутниковой альтиметрической информации (табл. 6.13).
Автоматизация решения задач, возникающих на различных этапах обработки спутниковой альти-
метрической информации, обуславливает целесообразность включения в состав систем обработки дан-
ных спутниковой альтиметрии необходимых информационных, технических и программных средств,
обеспечивающих функционирование системы в соответствии с ее предназначением. Состав системы
автоматизированной обработки данных спутниковой альтиметрии, созданной в ГЦ РАН, схематично
показан на рис. 6.5.10.
Комплекс средств информационного обеспечения (баз данных) указанной системы включает: базу
альтиметрических данных; базу геофизических данных, необходимых для обработки альтиметрической
информации (модели динамической топографии, гравитационного поля и рельефа Земли и другие дан-
ные); базу данных результатов обработки (цифровые модели геофизических полей, карты и временные
ряды изменений уровня Мирового океана).
Комплекс технических средств включает: автоматизированные рабочие места сбора и обработки
информации, сервер баз данных, web-сервер, с входом в Интернет для поддержки удаленного доступа,
локальную вычислительную сеть.
Комплекс средств программного обеспечения включает: общее программное обеспечение, системы
управления базами данных, программы обработки спутниковых альтиметрических и геодезических
данных, средства графического отображения информации на базе пакетов Surfer и GMT, средства
поддержки интерфейсных форм пользователя.
В число основных задач, решаемых с использованием рассматриваемой системы, входят: сбор, на-
копление и обновление исходной спутниковой альтиметрической и сопутствующей геофизической ин-
формации; формирование цифровых моделей альтиметрических высот геоида и аномалий силы тяжести;
выдача информации о высотах геоида и аномалиях силы тяжести на заданные районы (в числовом и
графическом виде) и отдельные точки (с использованием методов интерполяции); построение и выда-
ча временных рядов изменений уровня и карт динамической топографии районов Мирового океана. В
настоящее время в системе реализовано около 20 типовых задач предметно-ориентированой обработки
спутниковой альтиметрической и геофизической информации. Примеры решения этих задач приведены
на рис. 6.5.11-6.5.13.
Удаленный доступ к спутниковой альтиметрической информации и результатам ее обработки осу-
ществляется через соответствующие интерфейсные web-формы, разработанные с использованием язы-
ковых средств HTML, JavaScript и PHP.
В настоящее время режим удаленного доступа реализован для следующих видов информации:
— точечные значения высот геоида, аномалий силы тяжести, уклонений отвесных линий, вычис-
ленные по глобальным моделям ГПЗ до 360-й степени сферических гармоник (EGM-96, ГАО-98) с
детальностью 15x15';
Таблица 6.13. Формат представления альтиметрической информации в интегрированной базе данных спут-
никовой альтиметрии.
Поле № Размер, байт Тип Параметр Размерность
1 19 char Дата в символьном виде день—месяц—год час:мин:с
2 8 real Всемирное время UTC (от начала 1985 года) С
3 4 int Широта 10-6 град.
4 4 int Долгота 10-6 град.
5 2 int Высота морской поверхности (с поправками) СМ
6 1 int Число точек на интервале усреднения 1 с —
7 2 int СКП измерений высоты моря на интервале 1 с см
8 2 int Дополнение к высоте морской поверхности м
9 2 int Поправка обратного барометра мм
10 2 int Средняя высота моря см
11 2 int Высота геоида см
12 2 int Аномалия силы тяжести 10-4 гал
13 2 int Эластичный океанский прилив ММ
14 2 int Полный океанский прилив ММ
15 2 int Прилив земной коры ММ
16 1 int Полюсный прилив ММ
17 2 int Средняя динамическая топография, рассчитанная по гидрологическим измерениям см
18 2 int Глубина океана
19 2 int Значимая высота волны мм
20 1 int Скорость приводного ветра см/с
21 2 int Массив признаков —
Массив признаков характеризует тип радиовысотомера, качество измерения, тип подстилающей поверхности (вода,
лед, суша), условия проведения измерений, режим работы радиовысотомера, использование поправок (за состояние
подстилающей поверхности, влияние тропосферы и ионосферы).
Рис. 6.5.10. Состав системы обработки данных спутниковой альтиметрии.
— точечные значения высот геоида, аномалий силы тяжести, уклонений отвесных линий, вычис-
ленные по глобальным моделям ГПЗ до 360-й степени сферических гармоник (EGM-96, ГАО-98) с
детальностью 15x15';
Рис. 6.5.11. Отбор и выдача сети высотомерных трасс на заданный район.
72_J2433
Шфсгк 44 742420 Долгот* 31111068
64.1315
ИЗфОть 59395008 Долгота 158949387
49000 49500 50000 50500 51000 51500 52000 49000 49500 60000 50500 51000 51500 52000
Время (UJD) Время (ИО)
28ЛЛ992 - 7KJ2XQ
28*71692 - 27/7/2002
а
Рис. 6.5.13. Построение альтиметрических карт аномального ГПЗ в районе Охотского моря (а — высоты
геоида, м; б — аномалии силы тяжести, мГал).
Рис. 6.5.12. Построение временных рядов изменений уровня (а — Черное море, б — Охотское море).
б
б
— средние значения аномалий силы тяжести по трапециям 30x30', фактические и вычисленные по
моделям до 360-й степени EGM-96, ГАО-98 и др.;
— топографические высоты земной поверхности с детальностью 5x5' (по данным американской
модели JGP95E);
— гравиметрические высоты геоида на территорию Европы (по данным модели EGG-97, 10x15') и
на территорию России (по данным модели ГЦ РАН и 29 НИИ МО РФ, 5x5');
— альтиметрические высоты средней морской поверхности по данным GFZ (ФРГ), NASA/GSFC
(США), CLS (Франция) с детальностью 2x2';
— альтиметрические аномалии силы тяжести по данным NOAA, NASA/GSFC (США), Тайванского
университета, KMS (Дания) с детальностью 1x1' и 2x2';
— аномальные высоты уровня с детальностью 1x1° по альтиметрическим данным спутников
TOPEX/POSEIDON, ERS-1, GEOSAT;
— средние динамические высоты морской поверхности (1x1°) по данным климатологических моде-
лей Национального океанографического центра, США;
— временные ряды альтиметрических высот морской поверхности (в графическом виде) для задан-
ных точек Черного, Каспийского, Охотского, Балтийского, Белого и Баренцева морей.
В настоящее время суммарный объем спутниковой альтиметрической и геофизической информации,
представленной в рассматриваемой системе, превышает 50 Гб. В системе используется свыше 10 паке-
тов прикладных программ, в том числе оригинальные отечественные разработки. Результаты разработ-
ки и опытной эксплуатации показали, что информационная технология, лежащая в основе созданной
Системы, позволяет существенно повысить оперативность и расширить возможности использования
высокоточных данных спутниковой альтиметрии для фундаментальных и прикладных исследований.
Данная технология обеспечивает возможность реализации Системы на различных вычислительных
платформах и последовательного наращивания ее возможностей как по объему и составу используе-
мых данных, так и по составу решаемых задач.
Система разработана с учетом требований компактности и простоты ведения баз данных, уни-
версальности (по видам обрабатываемой информации, числу и типам спутников), быстроты поиска,
отбора и обработки данных, наглядности представления результатов. Эффективность обработки боль-
ших объемов исходных данных достигнута за счет преобразования измеренных величин в систему
фиксированных точек с заданными координатами, расположенных либо в узлах равномерной сетки,
либо вдоль подспутниковых трасс, а также использования усовершенствованных индексаций данных.
При подготовке подраздела 6.5 соавторы использовали материалы архива Петра Петровича
Медведева, предоставленные его сыном Дмитрием Петровичем Медведевым. Эту работу авторы
посвящают светлой памяти Петра Петровича Медведева — видного ученого, организатора науки
и обаятельного человека.
6.6 Гравидериватный метод определения геодезических данных
Б. В. Бровар
Как известно, потенциал W силы тяжести имеет следующие дериваты: три первых производных
Wx,Wy,W2 и шесть вторых производных Wxx, Wxy, Wxz, ГУТО, Wyz, Wzz.
Метод определения геодезических данных, основанный на использовании первых и вторых произ-
водных гравитационного потенциала, предлагается называть гравидериватным методом (ГДМ).
Для краткости изложения предлагается в зависимости от количества определяемых вторых произ-
водных потенциала следующее разделение гравидериватного метода:
ГДМ-6 — определяются все шесть вторых производных Wxx, Wxy, Wxz, Wyl,, Wyz, Wzz,
ГДМ-4 — определяются три вторых производных Wxz, ГУу2, Wxy и разность вторых производных
= Wyy - Wxx,
ГДМ-2 — определяются две вторых производных Wxz,Wyz;
ГДМ-2К — определяются две вторых производных Wxy и ГУд, называемых градиентами кривизн
уровенной поверхности.
Из наблюдений гравитационным градиентометром можно определить лишь горизонтальные градиен-
ты ускорения силы тяжести Wxz, Wyz, а гравитационным вариометром — лишь величины Wxz, Wyz, Wxy
и ТУд [Михайлов 1939; Шокин 1960; Юзефович, Огородова 1980]. Для определения всех вторых про-
изводных необходимы данные измерений в общем случае от трех взаимно перпендикулярных гравигра-
диентных датчиков (ГГД) или бортовых гравитационных градиентометров (БГГ).
Для случая, когда имеются располагающиеся по маршруту точки с номером г, принимающим зна-
чения от 1 до п, в которых определяются координаты Xi,yi,Zi в километрах и вторые производные
(Wxz)i, (Wyz)i, (Wzz)i в этвешах (Э=1 мГал/10 км= 10-9с-2), выражение для приращения ускорения
силы тяжести Agn,i = Уп — 91 в мГал в конечной точке п относительно первой можно записать в
следующем виде:
п—1 3
Д5П11 = 0,1 52 £[(ТУртз)< • AS?], (6.6.1)
г=1 р=1
где индексы х, у, z заменены на индексы 1,2,3 соответственно; AS? принимают значения Да:* = а:*+1 -
Xi, &yi = y*+i — yi, Azt = Zi+i — Zi при p = 1,2,3 соответственно; m — индекс среднего на интервале
AS?.
Учитывая, что приращение высоты АНпд = — -(zn-zi), выражение (6.6.1) можно
представить так:
ДЯП,1 = -х • а, (6.6.2)
где х = 1/W3,3 - 3,24 м/мГал, а = Дуп>1 - 0,1 ^=1 [(%тз)г • ASf],
Из выражения (6.6.2) следует, что если между точками с номерами 1 и п определить приращение
ускорения силы тяжести, например, с помощью гравиметрического автоматизированного прибора (ГАП)
и по маршруту, соединяющему эти точки, измерить вторые производные (Wxz)i, (Wyz)i и соответству-
ющие приращения координат Дз^, Ду;, то появляется возможность определения приращения высоты
между первой и последней точками и дважды приращения ускорения силы тяжести.
При определении составляющих уклонений отвесных линий с помощью ГДМ выражения для при-
ращений значений составляющих между точками п и 1 можно представить в виде:
л 1 // л—1 3
ди,1 = Е Е • Д5?ь
У г=1 р=1
П 1 Qlf 3
АЛп,1 = Пп - Л1 = £ l(W2mp)i • AS?],
' г=1 р=1
(6.6.3)
где Wn = Wxx = ш2 - 0,5(Wzz + Мд); W22 = Wyy = ш2 - 0,5(WZZ - Мд); ш — угловая скорость
вращения Земли ; у — нормальное ускорение силы тяжести.
Тогда формулу приращения высоты квазигеоида можно записать следующим образом:
ДСы = in - ii = + ^-^ДЯ/
L Р" Ym
(6.6.4)
где -В — уклонение отвеса в азимуте а, представляемое через составляющие уклонения отвеса в плос-
кости меридиана £, и в плоскости первого вертикала т) с помощью известных зависимостей
В = Е, cos а + т) sin а; ДЕ* = Дз\ cos ос, + Д^ sin ос,;
(в ~ Y)» ~ аномалия ускорения силы тяжести в точке г; ут — среднее значение нормального ускорения
силы тяжести на маршруте; ДЯ? = ^7+1 ~ Щ = ~(zi=i ~ zi)-
Если производную Wzz нельзя получить из измерений, то при определении ускорения силы тяжести
и высоты эту производную либо принимают равной нормальному значению 3086 Э, либо заблаговремен-
но определяют путем проложения вариометрического хода с измерением (Wxz)i, (Wyz),, Ах,, Ду, между
двумя точками с известными значениями координат, высоты и ускорения силы тяжести и последующего
вычисления с использованием формулы (6.6.2).
При определении составляющих уклонений отвесных линий и высоты квазигеоида вследствие того,
что одного опорного пункта с известными Е,,т], i недостаточно, необходимо прокладывать маршрут с из-
мерением Wxz, Wyz,Wxy, Мд, Дхь Дуь Д^, проходящий через определяемую точку С и опирающийся
на два опорных пункта А и В, и использовать следующие выражения:
(is - £а) sin осав — (Лв - Ла) cos осав = Ява — Qba,
(Е,с — is) sin освс — (Лс — Лв) cos освс = Ясв — Qcb, *
(Е,с - £а) sin осас — (Лс - Ла) cos осас = Яса - Qca, ,
(6.6.5)
где
Qj,k = [0,5И^ sin2aJ>fc + W™z cos 2ajifc] ,
Qj.fc = ~~ № sin ocj'k - W™ cos aJtjt].
Для всех производных правых частей выражений (6.6.5) необходимо представлять их средние зна-
чения между пунктами j и к.
Таблица 6.14. Возможные варианты использования гравидериватного метода для определения геодезических
данных.
Исходные данные в исходном пункте Число исходных пунктов ГДМ Измеряемые вто- рые производные гравитационного потенциала Определяемые данные
х,2/,Я7,£„П,^9 1 ГДМ-6, ГАП wxx,wxy,wxz, Wyy,WyZ,WZZ IP'.t.n.C дважды g
х,у,Ну,Е,,^,С,9 1 ГДМ-4, ГАП wxz,wyz,wxy, Wa = Wyy - Wxx Я7, дважды g
2 ГДМ-4, ГАП wxz,wyz,wxy, TVa = Wyv - Wxx Ну,£,,т\,С дважды g
1 ГДМ-2, ГАП wxz,wyz IV, дважды g
2 ГДМ-2К, ГАП Wxy, Wa
Для реализации ГДМ необходимо иметь навигационные средства, БГГ и ГАП.
Возможные варианты использования гравидериватного метода для определения геодезических дан-
ных показаны в табл. 6.14. Поясним ее.
Помимо плановых координат, определяемых навигационными средствами, применение ГДМ-6 поз-
воляет от одного исходного пункта с известными данными х,у,НУ, Е,,т), получить в определяемом
пункте Н7, Е,,т), £ и дважды д: один раз с помощью ГАП и второй — с помощью БГГ.
Применение ГДМ-4 позволяет от одного исходного пункта с известными данными х,у,Я7,£,,т),
получить в определяемом пункте Н7 и дважды д, а от двух исходных пунктов, кроме того, — т), С-
Применение ГДМ-2 позволяет от одного исходного пункта с известными данными х,у, Е,,т),
получить в определяемом пункте Н7 и дважды д.
Применение ГДМ-2К позволяет от двух исходных пунктов с известными данными х,у,Ну
получить в определяемом пункте £,,п, £ и с помощью ГАП — д.
Комплексирование БГГ с ИНС и другими системами необходимо решать с использованием систем-
ного подхода. Этот вопрос рассмотрен в разделе 9.2.
6.7 Спутниковая градиентометрия
В. Б. Дубовской
Рассмотрим наиболее значительные проблемы, разрешение которых напрямую зависит от уточнения
гравитационной модели Земли.
Исследование отклонений от изостазии позволит продвинуться в понимании конвекции в мантии
Земли, определить реологические характеристики литосферы и астеносферы, определить зоны зем-
ной коры, где в настоящее время действуют тектонические силы, исследовать осадочные бассейны на
возможное присутствие углеводородов.
Океаническая циркуляция оказывает значительное влияние на климат в различных масштабах вре-
мени. Для решения проблем переноса отравляющих веществ, для навигации и для исследования круп-
ных климатических изменений на нашей планете очень важно знать структуру течений и определить
их динамику. Океанские течения формируются под воздействием солнечного излучения, ветрового
давления, сил Кориолиса и границ континентов. В северном полушарии преобладают течения, осу-
ществляющиеся по часовой стрелке, в южном — против. Усложненные системы течений возникают
в районе экватора и вокруг Антарктики. Эти течения претерпевают значительные изменения в ши-
рокой полосе пространственной и временной шкалы. В результате этих течений поверхность океана
существенно отличается от геоида. Отличие поверхности океана от геоида достигает 0,5-1 м, а наклон
10-7-10~5 радиан.
Таким образом, уточнение модели геоида и сравнение ее с альтиметрическими данными внесет
существенный вклад в понимание океанической циркуляции двояким образом: первое — через обес-
печение формы геоида на поверхности моря, и второе — путем уточнения альтиметрии за счет более
точной гравитационной модели на высоте спутников.
Земная кора претерпевает непрерывные изменения под воздействием тектонических сил. Мы не зна-
ем с уверенностью, как первоначально она формировалась в геологическое время. Сценарии разрыва
протоконтинентов уходят в прошлое примерно на 250 млн. лет. Наши знания более ранних периодов
умозрительны и форма гравитационного поля резко ограничивает возможные сценарии тектонических
процессов. Детальные измерения гравитационного поля являются необходимым шагом на пути к пони-
манию геодинамики. Гравитационное поле планет земного типа дает информацию для проверки моделей
их внутреннего строения и его эволюции. Сравнение этих полей с земным, расхождение гравиметри-
ческих аномалий на большом и среднем масштабе и их связь с топографией и тектоникой поверхно-
сти является средством понимания истоков и истории температурного режима, и физико-химических
свойств планет.
Градиентометр может служить и в качестве инструмента определения масс тел, таких, как асте-
роиды. И безусловно не вызывает сомнения, что успешная реализация спутникового градиентомет-
рического проекта существенно повлияет на повышение качества геодезического и навигационного
обеспечения, повышение точности GPS и альтиметрических измерений.
В связи с рядом технологических достижений в семидесятые годы прошлого столетия резко воз-
рос интерес к спутниковым методам сплошного картирования гравитационного поля Земли с высоким
разрешением. Были рассмотрены различные схемы реализации этого проекта: спутниковый градиен-
тометр, расположенный на борту космической станции, и система спутник-спутник с высокоточным
определением взаимной скорости двух автономных спутников. В надежде реализации спутниково-
го градиентометра были разработаны градиентометры различного типа: комбинации акселерометров,
криогенные градиентометры, градиентометры ротационного типа. Наиболее интенсивно аппаратурные
разработки проводились в США, Европе и, в меньшей степени, в СССР.
Техника спутник—спутник состоит в измерении скорости между двумя спутниками, расположен-
ными в следующей конфигурации: высокий спутник и другой низкий спутник (НВ); два спутника,
расположенных на близких орбитах (НН) на расстоянии 50-300 км. Идеология НВ была опробована
на спутниках GEOS и ATSG, что позволило лишь в принципе проверить возможность такого метода,
так как GEOS располагался достаточно высоко — 800 км. Идеология НН была опробована во время
совместного полета «Апполон-Союз», но по ней нельзя было сделать выводов из-за сложных паразит-
ных движений и ионосферных возмущений орбиты. Более перспективным представляется метод НН,
для которого были сделаны несколько проектов: SLALOM, DIABOLO, SFB78 и МВВ в рамках ASE,
основанные на лазерной технике измерения GRAVSAT-A с радиометрической техникой (~110 ГГц).
Наиболее успешным является проект CHAMP. С использованием данных трехмесячной немецко-
французкой миссии (2002 г.) спутника CHAMP и современных достижений GPS-технологий (D. Kuang,
Y. Bar-Server, W. Bertiger, S. Desai, B. Haines, B. Lijima, G. Kruizinga, Th. Meehan, L. Romans, 2001 r.)
и прецизионного трехосного акселерометра (Р. Touboul, Е. Willemenot, В. Foulon, V. Josselin, 1999 г.)
(разрешение 3-10“10 д в области частот 0,01-10-4 Гц) по возмущению орбит была построена наиболее
успешная модель орбитального гравитационного поля EIGEN-IS без привлечения данных наземной
гравиметрии и спутниковой альтиметрии [Reigber et al. 2002].
По сравнению с предыдущими моделями преимуществом этого проекта является практически пол-
ное покрытие земной поверхности благодаря полярной орбите (склонение 87,3°), одновременное отсле-
живание 12 GPS-спутников, учет негравитационных ускорений спутника за счет использования преци-
зионного акселерометра и небольшой высоты круговой орбиты (начальная высота 454 км с убыванием
ее до 1,5 км/мес).
Градиентометрическая техника состоит в измерении одной или нескольких компонент тензора вто-
рых производных потенциала гравитационного поля в осях, связанных со спутником.
Предварительно был проведен большой цикл работ по конструированию и испытанию в наземном
исполнении различных типов градиентометров: ротационных, комбинации прецизионных акселеромет-
ров, криогенных градиентометров.
Многочисленные задачи могли бы быть решены при пространственном разрешении Л/2 порядка
110-160 км (1 х1° и 1,5х1,5° соответственно) и точностью разрешения аномалий силы тяжести 10~6д.
Можно определить полосу высот спутников и необходимую инструментальную точность для достиже-
ния поставленных целей.
Достижение необходимого качества компонент градиентометра требует решения многочис-
ленных научно-технических проблем, и в первую очередь — достаточно полного представле-
ния об инерциальных помехах на борту космических объектов. Это привело к проведению
большого комплекса исследований как в лаборатории, так и на орбитальных станциях, летаю-
щих лабораториях и зондах [Дубовской 1981; Авдуевский и др. 1988; Дубовской, Обуденни-
ков 2002]. Достаточно полная информация о вибрационной обстановке и средствах ее реали-
зации представлена в библиографии по исследованию микрогравитации (более 50 публикаций)
(www. lerc. nasa. gov/ www/MMAP/PIMS/HTMLS/bibliography. htm).
Реализация в ближайшие годы градиентометрического проекта на низких орбитах (160-180 км) с
использованием градиентометров с чувствительностью 10“3-10“4 Э при времени осреднения 1-1000 с,
позволит решить широкий круг важнейших задач: выбора наиболее реального механизма горообра-
зования, понимания динамики ядра, определения механических свойств земной коры, построения ре-
гиональных геологических моделей для оценки минеральных ресурсов, существенного продвижения в
области изучения океанической циркуляции, улучшения гравитационных моделей для существенного
повышения точности траекторных и GPS-измерений.
Данные градиентометрии, дополняя и контролируя данные морских и наземных гравиметрических
измерений, а также данные спутниковой альтиметрии могут позволить устранить систематические
погрешности, присущие каждому отдельному методу.
Таким образом, в настоящее время есть все предпосылки для бурного развития основополагаю-
щих направлений геофизики, геодезии, навигации и связанных с ними разделов науки и техники.
Намечающиеся экономические сдвиги в стране позволяют надеяться, что отечественные специалисты
используют свои мощные потенциальные возможности в реализации проектов спутниковой градиенто-
метрии.
6.8 Гравиметрическая изученность Земли
В.А. Таранов
Гравиметрические съемки земной
поверхности и акваторий морей и океа-
нов дают необходимую исходную ин-
формацию как для решения научных
задач физической геодезии (изучение
гравитационного поля, фигуры и раз-
меров Земли), так и для решения
других задач геодезического производ-
ства (редукция геодезических измере-
ний на эллипсоид, обработка высоко-
точного нивелирования и др.), научных
и прикладных задач геофизики (раз-
ведка полезных ископаемых, изучение
строения литосферы), а также различ-
ных специальных прикладных задач.
До недавнего времени (до появле-
ния искусственных спутников Земли)
Рис. 6.8.1. Гравиметрическая изученность земной поверхности
по трапециям 1x1° по данным, собранным в Международном
гравиметрическом бюро (г. Тулуза, Франция) по состоянию
на 1986 г.
гравиметрические съемки были основным, а во многих случаях и единственным источником информа-
ции для изучения гравитационного поля Земли. И даже с запуском ИСЗ и появлением спутниковой
альтиметрии гравиметрические съемки не потеряли своего значения, а, лишь несколько изменив об-
ласть своего применения, продолжают занимать важное место в ряду основных источников информации
о тонкой структуре гравитационного поля Земли, с большой детальностью отражая его локальные осо-
бенности наряду с другими видами информации, включая и спутниковую альтиметрию в Мировом
океане и на шельфе.
К настоящему времени гравиметрически-
ми съемками покрыты большие площади
как на континентах, так и в морях и оке-
анах. На рис. 6.8.1 показана гравиметриче-
ская изученность различных районов зем-
ной поверхности по трапециям 1x1° по дан-
ным, собранным в Международном грави-
метрическом бюро (г. Тулуза, Франция) по
состоянию на 1986 г. Показанная на рисун-
ке изученность включает 3 362 575 грави-
метрических пунктов, взятых из 2584 источ-
ников гравиметрической информации. Пред-
ставленные на рис. 6.8.1 сведения об изу-
ченности охватывают лишь данные, зане-
сенные на машинные носители и включен-
ные в базу данных этого центра. Сюда не
вошли материалы гравиметрических измере-
ний, представленных только на гравиметри-
ческих картах и не включенных в каталоги
на технических носителях, а также матери-
алы отечественных измерений и материалы,
собранные в других центрах данных, в част-
ности в США.
Гравиметрическая изученность Мира по
наземным и морским гравиметрическим
съемкам до середины 80-х годов была весь-
ма неравномерной, однако за последние де-
сятилетия степень изученности земной по-
верхности существенно выравнялась.
Рис. 6.8.2. Фрагмент схемы гравиметрической изучен-
ности района Карибского моря по материалам Между-
народного гравиметрического бюро.
На рис. 6.8.2 показан фрагмент схемы гравиметрической изученности района Карибского моря по
материалам Международного гравиметрического бюро.
Характеризуя исторически, в общих чертах, гравиметрическую изученность отдельных континентов
и Мирового океана, не обращаясь к перечню первоисточников, отметим лишь основные сводные источ-
ники гравиметрической информации и приведем обобщенные сведения, отражающие общую картину
гравиметрической изученности.
6.8.1 Гравиметрическая изученность континентов
Из основных сводных источников, обобщающих гравиметрическую изученность зарубежных стран
и Мирового океана, следует отметить:
— гравиметрическую карту масштаба 1:15000000, составленную во ВНИИ Зарубежгеологии Мин-
гео СССР по состоянию изученности на 1986 г.;
— картосхемы средних значений аномалий в свободном воздухе для трапеций 1x1° для всей по-
верхности Земли, составленные по материалам Международного гравиметрического бюро и Ламонтской
геологической обсерватории по состоянию на 1988 г. и 1985 г. соответственно.
Европа. Гравиметрическая изученность стран Западной Европы представляет довольно пеструю
картину. Большая часть стран покрыта гравиметрическими съемками и, как правило, детальными, но
в то же время для некоторых стран Европы мы либо вообще не имеем материалов гравиметрических
съемок (Югославия, Албания), либо эти данные весьма скудны (Греция).
Основным общим источником гравиметрической информации на западноевропейские страны можно
считать сводную карту аномалий Буге на Западную Европу и Северную Африку, составленную в
Международном гравиметрическом бюро в масштабе 1:10000000.
Азия. Гравиметрическая изученность стран Азии особенно неравномерна. Наряду со странами, где
гравиметрические съемки ведутся весьма интенсивно и составляются сводные карты всей или большей
части территории стран (Индия, Япония, Сирия, Ирак), в ряде стран Азии остаются неизученными
высокогорные области Тибета и Гималаев, а также территории Турции, Южного Афганистана.
Африка. В последние годы наметился определенный прогресс в развитии гравиметрических съе-
мок на Африканском континенте. Однако гравиметрическая изученность стран Африки все еще весьма
неоднородна. Ряд стран в значительной мере покрыт детальными гравиметрическими съемками, вы-
полненными в основном с целью разведки полезных ископаемых. К таким странам относятся Мали,
Сенегал, Нигер, Дагомея, Того, Верхняя Вольта, Чад, Алжир, Тунис, Марокко, ЮАР, Уганда, Танза-
ния. Частично покрыты детальными съемками ОАР, Кения, Гана, Эфиопия. Другие страны — Замбия,
Южная Родезия, Малави, Камерун, Габон, ЦАР, Гвинея, Либерия — покрыты лишь редкой сетью ма-
ятниковых и гравиметровых пунктов. В ряде стран (Ангола, Западная Сахара, Гвинея (Бисау), Лесото)
гравиметрические измерения вообще отсутствуют.
Наиболее хорошо изучена северо-западная часть Африканского континента, менее изучены северо-
восточные и юго-восточные районы Африки.
В качестве общего источника можно указать гравиметрическую карту Африки масштаба 1:5000000,
составленную во ВНИИ Зарубежгеологии и изданную в 1975 г. Карта составлена с использованием
около 70 источников гравиметрической информации.
Америка. Гравиметрическая изученность Северной Америки более однородна, чем Азии и Африки.
На территорию США и большую часть Канады имеются сводные карты масштаба 1:2500000. Относи-
тельно слабее изучены Аляска, западные и северные районы Канады.
Из основных источников следует отметить карту Северной Америки и прилегающих акваторий,
составленную во ВНИИГеофизике Мингео СССР в масштабе 1:5000000. При составлении карты ис-
пользованы сведения о гравиметрической изученности Северной и Центральной Америки, а также
прилегающих акваторий, содержащиеся в 65 публикациях.
Слабо изучены значительные территории в Мексике и Центральной Америке, нет съемки на острове
Гаити и в Панаме.
Страны Южной Америки, за небольшим исключением, гравиметрически изучены довольно слабо.
В значительной степени покрыты съемками лишь Аргентина, Чили и Уругвай. В Бразилии, Венесуэле,
Британской Гвинее, Суринаме и Колумбии детально изучены лишь отдельные районы. Слабо изуче-
на территория Перу, лишь опорные гравиметрические сети имеются в юго-восточной части Бразилии,
в Боливии и Эквадоре. Отсутствуют сведения о гравиметрических определениях в Парагвае, Гайане,
Гвинее, в центральных и северных областях Бразилии и Перу. Общим источником информации яв-
ляется сводная гравиметрическая карта Южной Америки, составленная во ВНИИ Зарубежгеологии в
масштабе 1:5000000 и изданная в 1982 г.
Австралия и Океания. Достаточно равномерно изучена территория Австралии и акватория приле-
гающего шельфа. Большая часть территории континента покрыта детальными съемками, по которым
издаются листы карты масштаба 1:500000 и 1:1 000000. В 1965 г. в Австралии почти на всю террито-
рию страны составлена сводная карта масштаба 1:2 534400. На территорию островов Новой Зеландии
в 1965 г. Департаментом научных и технических исследований составлена сводная карта масштаба
1:4000000.
Кроме того, во ВНИИ Зарубежгеологии в масштабе 1:5000000 составлена и издана в 1980 г. свод-
ная карта Австралии и Океании. Карта охватывает территорию Австралии, примыкающих акваторий
Тихого и Индийского океанов, а также острова: Тасмания, Новая Зеландия, Новая Гвинея, Новая
Каледония, Новая Британия и Соломоновы.
Антарктида. Изучением гравитационного поля Антарктиды и прибрежных районов океана зани-
маются во многих странах мира. Гравиметрические измерения на материке проводили: СССР, США,
Япония, Англия, Австралия, Франция, Новая Зеландия, Бельгия, Чили. В 1975 г. опубликована карта
Антарктиды в масштабе 1:5 000000, составленная ГАИШ и ВНИИ Зарубежгеология. Всего в Антарк-
тиде по имеющимся у нас сведениям создано около восьми тысяч гравиметрических пунктов.
6.8.2 Гравиметрическая изученность морей и океанов
В 1960-е годы был заметен большой прогресс в развитии морских гравиметрических работ. Под-
водные, донные, ледовые, аэрогравиметрические и особенно надводные гравиметрические измерения
выполнялись многими странами и в большом объеме. Гравиметрическими исследованиями в Миро-
вом океане занимаются специалисты СССР, США, Японии, Австралии, Голландии, Канады, Англии,
Италии, Дании и многих других стран.
Правда, не все измерения одинаково точны и надежны. Ряд надводных гравиметрических съемок,
особенно выполненных в первые годы работ на море, в силу случайных, систематических и полусисте-
матических ошибок измерений не может быть использован без соответствующего анализа и корректи-
ровки.
Из акваторий Мирового океана наиболее хорошо изучен Атлантический океан. При осреднении
аномалий по трапециям 1хГ в северной и центральных частях океана почти нет неизученных обла-
стей. Хуже изучена южная часть океана, особенно его самые высокие широты. В 1987 г. авторским
коллективом в составе ЦНИИГАиК, ГАИШ МГУ, Севморгео, ИФЗ АН СССР в основном по материа-
лам, собранным в ЦНИИГАиКе, по состоянию изученности на 1984 г. опубликована карта аномалий,
осредненных по трапециям 1x1°, в масштабе 1:10000000. Карта составлена в трех редукциях — в
аномалиях в свободном воздухе, Буге и изостатических.
В 1989 г. в международном геолого-геофизическом Атласе Атлантического океана опубликована в
масштабе 1:10000000 карта аномалий в свободном воздухе, составленная по непосредственным из-
мерениям в океане. Там же приведены карты масштаба 1:30000000 аномалий в свободном воздухе,
Гленни и изостатических, составленные по аномалиям, осредненным по трапециям 1x1°.
В Индийском океане достаточно хорошо изучена лишь акватория северного полушария, в южном
полушарии проложены лишь отдельные маршруты.
Из сводных источников гравиметрической информации на акваторию Индийского океана следует
отметить карту масштаба 1:5000000, составленную М. Тальвани (США) для геолого-геофизического
Атласа Индийского океана, 1975 г. Там же опубликована карта осредненных по трапециям 1x1° ано-
малий Буге.
Гравиметрическая изученность Тихого океана существенно улучшена лишь в последние годы. К
настоящему времени достаточно хорошо изучена северная часть океана, несколько хуже изучена цен-
тральная часть, и только отдельные маршруты надводных гравиметрических измерений имеются в
южных областях океана. Авторским коллективом сотрудников ЦНИИГАиКа, ГАИШ МГУ, ИФЗ РАН
составлены гравиметрические карты для Международного геолого-геофизического Атласа Тихого оке-
ана в том же наборе, как и для Атласа Атлантического океана.
В Северном Ледовитом океане гравиметрической съемкой в основном масштаба 1:1000000 покрыта
большая часть прибрежных районов окраинных морей и южная часть океана, включая шельф России.
Такова гравиметрическая изученность мира по опубликованным данным непосредственных грави-
метрических измерений, собранных и хранящихся в ЦНИИГАиКе.
Существенным дополнением гравиметрической изученности Мирового океана, полученным по непо-
средственным морским гравиметрическим измерениям, служит информация о гравитационном поле,
рассчитанная с использованием данных спутниковой альтиметрии. Из таких материалов прежде все-
го следует указать аномалии силы тяжести в свободном воздухе для трапеций 15x15', полученные в
Международном гравиметрическом бюро (г. Тулуза, Франция) по данным с ИСЗ «Seasat» и «Geos-З»
для акватории Мирового океана, ограниченной параллелями 72° с. ш. и 60° ю. ш., и более поздние
публикации материалов, полученных с использованием геодезических программ ИСЗ «GEOSAT» и ИСЗ
«ERS-1».
Отметим, что при сравнительно высокой точности этих аномалий в открытом океане в прибрежных
акваториях и в районах островных дуг их точность несколько снижается.
6.8.3 Гравиметрическая изученность территории СССР. Отечественные грави-
метрические съемки в Мировом океане
Началом широкомасштабных систематических, гравиметрических измерений можно считать 1932 г.,
когда с выходом Постановления Совета Труда и Обороны СССР были начаты работы по проведению
общей маятниковой съемки в СССР.
В 1956 г. общая гравиметрическая маятниковая съемка была завершена. В результате проведенной
работы была создана сеть, содержащая 16 795 пунктов, более или менее равномерно покрывающая
территорию страны.
В середине 50-х годов в связи с возросшими требованиями к точности гравиметрических измерений
и знанию параметров гравитационного поля Земли начался новый этапа обширных гравиметрических
работ в стране и на акватории Мирового океана.
На ЦНИИГАиК были возложены задачи по организации равномерной съемки Мирового океана с
помощью подводных маятниковых наблюдений. С 1955 г. морские подводные гравиметрические экс-
педиции стали достаточно регулярными. К началу 70-х годов гравиметристами страны была создана
равномерная сеть маршрутов с морскими маятниковыми измерениями, покрывающими акваторию Ми-
рового океана со средним расстоянием между маршрутами порядка 1000 км и расстояниями между
пунктами — 70-90 км. За это время было создано более 4000 подводных маятниковых пунктов, играв-
ших роль опоры и контроля для морских надводных измерений.
С конца 60-х годов прежде всего силами гравиметристов Академии наук начали выполняться над-
водные гравиметрические измерения на научно-исследовательских судах в Мировом океане. К 1974 г.
уже было выполнено около 20 рейсов с гравиметрическими измерениями в Тихом, Атлантическом и
Индийском океанах.
В 1960-70-х годах с помощью маятниковой аппаратуры ЦНИИГАиКом велись гравиметрические
работы по созданию высокоточной сети пунктов на территории СССР, в странах Восточной Европы и
исходных гравиметрических пунктов в 17 государствах. Силами предприятий Министерства геологии
на территории СССР активно выполнялась гравиметрическая съемка масштаба 1:1 000000, были начаты
работы по выполнению гравиметрической съемки масштаба 1:200000 экономически развитых районов
СССР.
Новый этап активизации гравиметрических работ связан с выходом в 1976 г. Постановления Пра-
вительства о проведении Мировой гравиметрической съемки (МГС). В 1984 г. это Постановление было
пролонгировано до 1990 г.
В соответствии с этим Постановлением в 1978 г. силами предприятий ГУГК СССР были начаты ра-
боты по созданию высокоточных государственных гравиметрических сетей — фундаментальной (ГФГС)
и I класса (ГГрС-I). Предприятиями Мингео СССР создавались опорные сети более низких классов.
Работы по созданию высокоточных сетей продолжаются по настоящее время. К 2006 г. на территории
бывшего СССР определено около 1050 пунктов ГГрС-1, 14 пунктов ГФГС.
Интенсивно продолжались морские гравиметрические подводные, надводные, донные и ледовые
съемки в Мировом океане и на шельфе.
К 1992 г. силами гравиметристов Министерства геологии СССР, ГУНиО МО, ГУГК СССР, Ака-
демии наук и Минвуза выполнены и приняты специальными ведомственными и межведомственной
комиссией материалы 261 экспедиций, по всей акватории Мирового океана.
Таблица 6.15. Гравиметрическая изученность земной поверхности по равновеликим трапециям 1x1° и
30x30'.
Годы Трапеции 1x1° Трапеции 30x30'
Число трапеций Площади, % Число трапеций Площади, %
1974 20446 50
1981 28556 69
1984 30750 75
1997 154200 94
2005 159800 97,4
Были продолжены также работы Министерства геологии СССР по выполнению гравиметрической
съемки масштабов 1:200000 и 1:50000 на территории бывшего СССР.
Таким образом, к настоящему времени съемкой масштаба 1:200000 покрыто около 98% и съемкой
масштаба 1:50000 — порядка 33% территории бывшего СССР.
6.8.4 Банки гравиметрических данных
В связи с возрастающими объемами исходной гравиметрической информации и требованиями к ав-
томатизации процессов ее обработки и дальнейшего использования, возникла необходимость создания
автоматизированных банков цифровых гравиметрических данных.
Такие банки, аккумулирующие однородную, систематизированную информацию как в виде катало-
гов отдельных пунктов площадных и маршрутных гравиметрических съемок, так и в виде осредненных
значений аномалий силы тяжести, заданных на регулярную сетку, были созданы во многих странах,
ведущих гравиметрические измерения. Материалы, хранящиеся в этих банках, достаточно хорошо ха-
рактеризуют общую гравиметрическую изученность мира.
Кроме вышеупомянутого банка гравиметрических данных Международного гравиметрического бю-
ро следует упомянуть такие банки, как Банк национального геофизического центра данных США
(NGDC), Банк Национального картографического агентства США (NIMA), Банк гравиметрических
данных ЦНИИГАиК Роскартографии.
База гравиметрических данных «GEODAS» Банка NGDC содержит материалы геофизических съе-
мок в Мировом океане, выполненных 36 странами и организациями. В базу данных вошли гравимет-
рические измерения более чем на 4,8 млн. пунктах, выполненные 20 организациями разных стран.
База данных Банка NIMA включает исходную информацию в виде аномалий силы тяжести, осред-
ненных по трапециям 30x30', в виде двух файлов «Гравиметрия» и «Альтиметрия».
Файл «Гравиметрия» включает порядка семидесяти тысяч значений средних аномалий трапеций
30x30' на континентальной части земного шара, включая территорию бывшего СССР, что составляет
около 90% всей территории суши, и порядка двадцати семи тысяч значений средних аномалий на
акваторию морей и Мирового океана.
Файл «Альтиметрия» содержит более 157 тысяч аномалий трапеций 30x30' на акваторию морей
и Мирового океана, вычисленных по спутниковым альтиметрическим измерениям с ИСЗ «GEOSAT»
(геодезическая миссия) и «ERS-1».
В состав гравиметрического банка ЦНИИГАиК входит ряд распределенных баз данных, представ-
ленных файлами аномалий силы тяжести, отнесенных на регулярную сетку 5x7,5' (на территорию
бывшего СССР), 30x30' и 1x1° (на всю земную поверхность), файлами аномалий гравиметрических
пунктов электронных версий листов государственной гравиметрической карты масштаба 1:200000, а
также база морских гравиметрических данных, включающая материалы отечественных и зарубежных
гравиметрических экспедиций.
В табл. 6.15 приведены нарастающим итогом данные по изученности земного шара по трапециям
1хГ и 30x30* по материалам, собранным и хранящимся в ЦНИИГАиК.
Таким образом, в настоящее время гравиметрическая изученность земной поверхности с использо-
ванием всей совокупности всех видов информации о гравитационном поле Земли по трапециям ЗОхЗО'
составляет 97,4%.
В последние годы (2004-2006 гг.) в Интернете и в печати прошел ряд первых публикаций, содержа-
щих материалы исследований гравитационного поля Земли (ГПЗ) с использованием межспутниковых
измерений по линии «низкий — низкий» и «низкий — высокий». В качестве примера можно привести
публикацию модели ГПЗ GGM и модели EIGEN-GL, представленных в виде коэффициентов разло-
жения геопотенциала в ряд по сферическим функциям и аномалиям силы тяжести, осредненным по
трапециям 30x30'. К настоящему времени модель ГПЗ по программе GRACE (The Gravity Recovery
and Climate Experiment) представлена тремя последовательными версиями GGM01, GGM02, GGM03 в
двух видах: как чисто спутниковая модель и как комбинированная модель, построенная с использова-
нием спутниковых, альтиметрических и гравиметрических данных.
Являясь дополнительным источником информации, основанным на новом принципе исследования
гравитационного поля Земли, материалы спутниковых моделей представляют также определенный ин-
терес с точки зрения гравиметрической изученности, так как покрывают всю поверхность Земли, вклю-
чая полярные шапки, где альтиметрические данные отсутствуют. Поэтому дальнейшее уточнение ис-
ходной гравиметрической информации и повышение степени изученности гравитационного поля Земли,
по-видимому, будет связано именно с использованием межспутниковых измерений по линии «низкий-
низкий» и «высокий-низкий», а также с использованием данных спутниковой градиентометрии.
6.9 Гравиметрическая изученность Луны, Марса и Венеры
А.А. Конопихин
В последнюю треть двадцатого века благодаря прогрессу в развитии космической технологии уда-
лось значительно расширить имеющиеся знания о гравитационных полях ближайших к Земле планет-
ных тел Венеры и Марса, а так же естественных спутников Луны и Фобоса. Наибольшие успехи в
этом были достигнуты при изучении гравитационного поля (ГП) Луны.
Гравитационные поля небесных тел планетного типа могут быть охарактеризованы рядом физиче-
ских параметров: потенциалом притяжения, составляющими УСТ по направлениям координатных осей,
градиентами этих ускорений, уклонениями отвесной линии и др. При описании ГП планет земной
группы обычно применяют классическое разложение потенциала по сферическим функциям.
Однако при описании коротковолновых вариаций характеристик ГП оказывается необходимым учи-
тывать большое число членов ряда. Поэтому используют иные подходы к представлению планетарных
ГП в виде совокупности точечных масс, гравитирующих дисков и др.
На современном этапе планетных исследований принято ГП небесного тела представлять состоящим
из нормального и аномального. Нормальная часть соответствует некоторой простой модели планетарно-
го тела, которая достаточно близка (в общем виде) к реальности и определяется совокупностью знаний
о фигуре, внутреннем строении и ГП изучаемого тела.
Аномальная часть ГП образуется после исключения из реального поля его нормальной части.
Существенное значение при изучении ГП имеет понятие гравитационной фигуры планеты, при этом
имеют в виду замкнутую поверхность потенциала УСТ, близкую к средней физической поверхности
планеты. Для того, чтобы зафиксировать эту поверхность, находят уровенную поверхность, проходя-
щую через определенную точку планеты или удовлетворяющую какому-либо иному условию. Для Луны
таким условием, например, может быть равенство массы реального тела Луны и массы, заключенной
внутри выбранной эквипотенциальной поверхности. Для Марса — это высота барической поверхно-
сти марсианской атмосферы с численным значением давления 6,1 амбар марсианских миллибар, где
|бар|=см-1-г-с-2), соответствующая тройной точке воды. По аналогии с Землей, где уровенную по-
верхность, совпадающую со средней поверхностью морей и океанов, называют геоидом, гравитационную
фигуру Луны иногда называют селеноидом, а в случае Марса — ареоидом, Венеры — афродитоидом.
В зависимости от величины потенциала силы тяжести условно начальной уровенной поверхности
эти планетарные геоиды могут полностью или частично проходить над твердой поверхностью небесного
тела. В принципе такая поверхность может быть представлена сферой, сфероидом, эллипсоидом вра-
щения или трехосным эллипсоидом. Если же при этом предположить, что плотность вещества внутри
небесного тела изменяется с глубиной по некоторому простому закону, да к тому же совпадают массы и
угловые скорости вращения реального тела и ее модели, то оказывается целесообразным рассматривать
такую правильную отсчетную поверхность как уровенную поверхность нормального потенциала силы
тяжести.
К настоящему времени накопленный опыт по изучению фигуры и внешнего ГП Земли используется
и при изучении ГП других планет. С конца 60-х годов исследователи стали активно применять метод,
который ранее не мог быть использован при изучении земного ГП. В основе этого метода лежит
алгоритм определения лучевых ускорений КА по линии визирования «космический аппарат — Земля».
В этом методе КА выступает как пробное тело, которое под действием неоднородного ГП планеты в
своем движении по орбите изменяет направление и величину скорости. Наблюдения за изменениями
скорости КА производятся на станции слежения на Земле с использованием эффекта Доплера. По
данным доплеровских измерений вычисляется средняя на временном интервале т лучевая скорость КА
Й = - / V6(t)dt = - j Д/di,
о о
где й — средняя составляющая относительной скорости вдоль направления «KA-Земля»; к = Vp/ fa —
коэффициент перевода осредненной разности частот Д/ в скорость.
Луна
В доспутниковую эпоху информацию о ГП Луны получали, в основном, двумя способами. В одном
из них представления о лунном ГП основывались на сведениях о рельефе видимой с Земли стороны
Луны, гипотетических данных о внутреннем строении лунного тела и состоянии вещества в его недрах
[Чуйкова 1968, 1969].
Другой способ изучения формы селеноида основывался на предположении, что наблюдаемые от-
клонения некоторых параметров лунной орбиты (средние вековые движения узла и перигея) от вычис-
ленных объясняются отличием реального лунного ГП от центрального. Здесь, опираясь на полученное
из астрономических наблюдений среднее значение наклонения лунного экватора к эклиптике, стреми-
лись подобрать параметры гравитирующего селеноида таким образом, чтобы согласовать наблюдаемые
и предвычисленные возмущения орбиты Луны. Расчет селеноида до членов второго порядка выпол-
нен в работе [Biro 1966] и [Ledersteger 1967]. В работе Грушинского и Сагитова [1962] выведена
формула распределения нормальной силы тяжести, основанная на данных о моментах инерции Луны,
полученных из наземных астронаблюдений.
Качественно новый этап изучения лунного ГП начался с запуска искусственных спутников Луны.
Появилась возможность непрерывно следить с Земли за движением ИСЛ от его восхода до захода
за лунный горизонт, для чего достаточно иметь только две станции наблюдения с разностью долгот
в 180°. Более медленное по сравнению с Землей осевое вращение Луны позволяет с большей точно-
стью учитывать влияние особенностей ГП на движение спутника. Практическое отсутствие лунной
атмосферы снимает вопрос об учете атмосферных возмущений в движениях ИСЛ и к тому же позво-
ляет сформировать их рабочие орбиты с малой высотой над лунной поверхностью. Отношение величин
аномалий ГП к полной величине для Луны заметно больше, чем для Земли.
Вместе с тем можно отметить и ряд обстоятельств, которые затрудняют изучение гравитационного
поля Луны. В этом отношении достойны упоминания такие источники погрешностей, как: ошибки,
возникающие из-за неточности знания положения ИСЛ относительно Луны и последующих редукций
вычисленных параметров ГП; ошибки, порождаемые несовершенством процедуры пересчета результатов
доплеровских измерений в характеристики поля; ошибки, связанные с погрешностями определения
положения ИСЛ относительно станции слежения на Земле, вызванные неточностью знания лунных
эфемерид.
Первоначально для анализа данных траекторных измерений ИСЛ активно применяли опыт, получен-
ный при изучении земного ГП по результатам анализа орбит ИСЗ. Для Луны значения гравитационного
потенциала получали опосредствованно. Вычислялись возмущения в элементах орбит ИСЛ, происхо-
дящие из-за неоднородности лунного ГП, а по ним уже получали гармоники разложения потенциала
W.
В способах длинных дуг данные спутниковых наблюдений группировались по дуге протяженностью
до нескольких сотен оборотов ИСЛ. Обычно такие дуги разбивались на серии менее длинных дуг, про-
тяженностью в несколько оборотов спутника, по которым вычисляли кеплеровские a, e,i, си,П элементы
для каждой орбиты. Для каждого элемента находилась своя аппроксимирующая функция времени, из
дифференцирования которой затем получали долгопериодические изменения элементов орбиты ИСЛ, и
далее выводились величины гармонических коэффициентов Спт и snm [Аким 1966, 1977; Ferrari 1973,
1977]. Однако были и работы, где определения гармонических коэффициентов выполнялись способом
коротких дуг, например [Gapcynski et al. 1969].
Предложено уже около двух десятков гравитационных моделей Луны, различия в которых мож-
но объяснить, в основном, различием в составе отобранных наблюдательных данных и методах их
обработки.
Самое первое определение гармонических коэффициентов гравитационного поля Луны по наблю-
дениям ИСЛ выполнено Э.Л. Акимом [1966] по наблюдениям ИСЛ «Луна-10». Параметры лунного
гравитационного поля вычислены им до 4 порядка. Значения с2о и s2o согласуются со значениями,
полученными по либрационным наблюдениям. Последующие определения особенностей гравитацион-
ного поля были выполнены в основном по траекторным измерениям спутников серии Lunar Orbiter и
лунных исследований по программе «Аполлон», когда были выведены гармонические коэффициенты
16-20 порядка.
Затем по данным наблюдений ИСЛ «Lunar-Orbiter-1,-3,-4» последовали публикации [Tolson,
Gapcynski 1968; Lorell 1970; Liu, Laing 1971; Sjogren 1971; Michael, Blackshear 1972].
Лунное ГП в целом (для областей видимой и невидимой сторон) лучше представляется в тех моде-
лях, где гармонические коэффициенты вычисляются по возмущениям в элементах орбит ИСЛ. Прямые
методы наблюдений, где параметры ГП подбираются так, чтобы они наилучшим образом соответство-
вали бы изменениям в координатах и скоростях ИСЛ, дают особенно хороший результат в тех районах
Луны, над которыми проходили орбиты лунных спутников.
С конца шестидесятых годов для изучения лунного ГП стали использовать новый метод, основанный
на анализе величин лучевых ускорений, возникающих из-за вращения Земли, орбитальных движений
Луны и ИСЛ. Здесь ИСЛ рассматривается как пробное тело, которое под действием неоднородного ГП
Луны в своем движении по орбите изменяет направление и величину орбитальной скорости. Оценке
подвергается только одна компонента скорости: проекция на направление «ИСЛ — станция слежения
на Земле», которая понимается как лучевая скорость спутника.
В общем случае изменение лучевой скорости зависит от перемещения земной станции наблюдения в
результате суточного вращения Земли, движения центра масс Луны вокруг барицентра системы Земля-
Луна, движения ИСЛ по кеплеровской орбите вокруг центра масс Луны, вследствие неоднородностей
лунного гравитационного поля и неправильности ее фигуры. Кроме того, на ИСЛ действуют возмуща-
ющий потенциал Солнца и планет, световое давление, сжатие Земли, приливные эффекты самой Луны
и пр. После учета и исключения нежелательных эффектов для анализа остаются величины лучевых
ускорений, которые можно трактовать как результат существования некоторых аномальностей внутрен-
него строения и фигуры Луны. Анализ вариаций лучевой скорости окололунного спутника позволил с
большей детальностью изучить ГП видимой стороны Луны и открыть интереснейшие образования на
Луне — масконы.
Масконы (mass concentrations — концентрация масс) являются специфическими коровыми образо-
ваниями, территориально совпадающими с лунными морями. Они создают существенные, как правило,
положительные локальные аномалии ГП (за исключением маскона в Заливе Радуги). Первооткрывате-
ли масконов [Muller, Sjogren 1968] за обнаружение этих феноменальных структур были награждены
золотой медалью Магеллана Американского философского общества. В последующее за этим десятиле-
тие появилось свыше сотни работ, в которых излагались различные гипотезы происхождения масконов
и механизм их образования.
Определения УСТ экипажами КК «Аполлон-11, -12» были сделаны посредством трехкомпонентных
акселерометров (PIPA — pulsed integrating pendulous accelerommeter), смонтированных на посадочных
ступенях лунных модулей КК. Значения УСТ д вычислены по показаниям х, у, z акселерометров, рас-
положенных в трех ортогональных направлениях д = \/х2 + у2 + z2. Ошибка полученных значений д,
по заверениям [Nance 1971] — ~13 мГал.
Относительные определения УСТ на лунной поверхности специально разработанным для этого
струнным гравиметром TG (Travers Gravimeter) выполнены астронавтами КК «Аполлон-17». По оцен-
ке [Talwani, Kahle 1976], ошибка определений УСТ составляет порядка нескольких миллигалов. В
программе «Аполлон-17» в 1972 г. впервые была осуществлена гравиметрическая связь между Землей
и Луной с ошибкой ±5 мГал и выполнены также гравиметрические измерения на 12-километровом
профиле лунной долины Таурус-Литтров, состоящим из 11 пунктов наблюдений. Сводка результатов
прямых измерений УСТ на лунной поверхности приводится в [Сагитов 1979].
Марс
В доспутниковую эпоху сведения о ГП Марса получали из результатов наземных астрометриче-
ских наблюдений. Наиболее точные оптические измерения Марса были выполнены с помощью мик-
рометра двойного изображения. Дольфюс [Dollfus 1972] проанализировал результаты 20-летних теле-
скопических измерений радиуса планетного тела Марса и получил размеры двухосного эллипсоида:
.йэкв = 3398±3 км; ЛПол = 3371±4 км; а — 0,0079 ±0,0020. Наземные радиолокационные наблюдения
высотных профилей поверхности Марса, по [Downs et al. 1973, Downs, Reichley 1975; Pettengill et al.
1969, 1973, 1974], дали более точное значение экваториального радиуса планеты Лэкв = 3394 ±2 км.
Данные, полученные из телескопических измерений вековых возмущений в движениях орбит есте-
ственных спутников Марса (Фобоса и Деймоса), позволили вычислить значение коэффициента Ji,
характеризующего полярное сжатие планеты. В [Sinclair 1972; Шор 1976] опубликованы величины
этого коэффициента, соотвественно, Ji = 0,001966±0,000003 и Ji = 0,001962±0,000005, а для GM
было получено значение 42840±40 км3/с2.
Обзор основных результатов определений фигуры Марса методами наземной астрономии приведен
в работах и Ш. Мишо [1970] и А. Дольфюс [1974].
Более детальная информация получена о фигуре и размерах Марса из радиорефракционных ис-
следований, а также из анализа результатов инфракрасной и ультрафиолетовой спектроскопии с КА
«Марс», «Маринер», «Викинг» [Cain et al. 1973; Standisch 1973; Hanel, Conrath 1972; Hanel et al.
1972a, b; Hord et al. 1972, 1974]. Хорошо проявил себя метод, в котором анализировались момен-
ты исчезновения и появления радиосигнала при покрытии планетным телом Марса КА «Маринер-9»,
находящегося на околопланетной орбите (метод «радиозатмений»). Физическая поверхность Марса бы-
ла аппроксимирована трехосным эллипсоидом [Cain et al. 1973] (а = 3400,12 км, Ь = 3394,19 км,
с = 3375,45 км); [Standisch 1977] (а = 3399,3±0,7 км, Ь = 3394,0±0,7 км, с = 3376,0±0,5 км).
Существенный прогресс в изучении марсианского ГП стал возможен, когда появилась возможность
применить к огромному массиву накопленных данных радиотраекторных измерений методы корректной
математической обработки измерительной информации и тщательно учитывать влияние различных
возмущающих факторов. Были выведены более полутора десятка моделей ГП Марса: [Born 1974;
Jordan, Lorell 1975; Sjogren et al. 1975; Daniels et al. 1977; Gapcynski et al. 1977; Christensen, Balmino
1978; Кристенсен, Уиллямс 1979; Balmino et al. 1982].
В работе [Born 1974] впервые вычислены значения 28 гармонических коэффициентов, позволив-
шие вывести модель марсианского ГП до четвертого порядка. Через год появились сразу три варианта
поля. Авторы работы [Jordan, Lorell 1975] из анализа данных радиослежения за КА «Маринер-9»
предлагают свою модель поля также до четвертого порядка. Набор моделей марсианского ГП до ше-
стого, седьмого и до восьмого порядков предложен в работе [Reasenberg, Shapiro 1975]. Еще более
эффективно использовали доплеровские данные слежения за «Маринером-9» исследователи [Sjogren
et al. 1975], которые представили модель до девятого порядка, полученную по методу коротких дуг с
помощью представления планетного потенциала 92 точечными массами. Тот же метод коротких дуг и
информацию по радиослежению за КА «Маринером-9» и «Викингом-1, -2», что и в работе [Sjogren
et al. 1975], применен в [Gapcynski et al. 1977], что позволило вычислить значения гармонических ко-
эффициентов до шестого порядка и заметно улучшить оценки гармонических коэффициентов. Эти же
данные траекторного слежения использовала группа исследователей [Daniels et al. 1977] и получила
свою модель марсианского гравитационного поля до седьмого порядка.
Э.Дж. Кристенсен и Б.Г. Уиллямс [1979] также использовали огромный массив данных по слеже-
нию за этими космическими аппаратами, применив более сложную методику его обработки. Процедура
построения модели предусматривала сначала сглаживание по методу наименьших квадратов данных
слежения, полученных с двух или более витков «Викингов», определение параметров гравитационного
поля до шестого порядка и последующее согласование гармонических коэффициентов, вычисленных
по каждой дуге, для формирования обобщенной модели. Полученная планетарная модель уравнена с
моделью гравипотенциала, выведенной по данным слежения за КА «Маринер-9».
Авторы [Christensen, Balmino 1978] представили модель с коэффициентами до 12-й степени, а в
[Balmino, Moynot, Vales 1982] — до 18 степени. В основе стратегии вывода этих моделей марсианского
гравитационного поля лежат методики, которые были применены ранее при определении гармониче-
ских коэффициентов ГПЗ в модели GRIM-2, что позволило выполнить одновременную обработку для
длинных и коротких дуг КА «Маринер-9» и «Викинг-1, -2».
Наряду с моделями, где ГП Марса представлялось в виде разложения в ряд по шаровым функ-
циям, разрабатывались модели поля с целью выявить детальную структуру ГП планеты. Необходимо
отметить успешную попытку изучения детального ГП по вариациям лучевых скоростей КА по линии
визирования КА — станция наблюдения на Земле [Sjogren 1979]. Этот подход к изучению коротко-
волновых особенностей ГП планетных тел дал хорошие результаты еще при исследовании лунного
ГП. Для Марса анализ вариаций лучевых скоростей ИСМ «Викинг-2» позволил выявить гравитацион-
ные аномалии с поперечником около 300 км. Наибольшие аномалии оказались приурочены к районам
Olimpus Vons и Alba Patera. Существенная положительная аномалия отмечена в вулканической об-
ласти Tharsis. Найдены структурные образования поверхности, в которых, как и в лунных масконах,
понижения топографического рельефа сочетаются с положительными аномалиями ГП.
Сравнительный анализ моделей марсианского ГП выполнен в [Мещеряков, Церклевич 1987]. Срав-
нению подвергались модели, полученные в [Jordan, Lorell 1975; Born 1974; Reasenberg et al. 1975;
Sjogren et al. 1975; E.P. Daniels et al. 1977; Gapcynsky et al. 1977; Christensen, Balmino 1978; Balmino
et al. 1982]. Сравнение статистических характеристик согласия указанных моделей показало, что во
всех моделях (кроме модели [Born 1974]) гармоники до 4-й степени согласуются достаточно хорошо.
Весьма близки между собой модели [Sjogren et al. 1975; Daniels et al. 1977; Gapcynsky et al. 1977].
По мнению авторов, модель [Balmino et al. 1982], содержащая гармонические коэффициенты до
18-й степени, дает весьма детальное и наиболее точное описание ГП Марса и ее можно признать
наиболее предпочтительной моделью.
Венера
При составлении обзора основных сведений о ГП Венеры целесообразно руководствоваться резуль-
татами трех этапов исследования этой планеты с околопланетных орбит космическими аппаратами:
«Пионер-Венера» (1978 г.), «Венера-15, -16» (1983 г.) и «Магеллан» (1991 г.)
Собственно гравиметрические исследования Венеры начались с выводом на венерианскую орбиту
КА «Пионер-Венера-1» [Phillips et al. 1979; Ananda et al. 1980], из анализа наблюдений долгоперио-
дических вариаций параметров орбиты этого ИСВ построили модель ГП планеты в виде разложения по
сферическим функциям до 6-й степени. Это дало возможность авторам построить карту вертикальной
составляющей силы тяжести для высоты 100 км над поверхностью планеты. Амплитуда изменений
УСТ на этой карте достигала 90-100 мГал (от -40 мГал в юго-западной части равнины Гиневры до
4-50 мГал в южной части области Фетиды). Для выполнения адекватного сравнения особенностей ГП и
рельефа планеты, информацию о котором получили из обработки результатов альтиметрических изме-
рений [Pettengill et al. 1980], была рассчитана топографическая модель Венеры до 6-й степени. В табл.
коэффициенты корреляции в основном отрицательные.
Таблица 6.16. Коэффициенты корреляции между силой тяже-
сти и рельефом для гармонических моделей Венеры и Земли,
по [Ananda et al. 1980].
Степень разложения Коэффициенты корреляции
Венера Земля
2 +0,44 -0,66
3 +0,84 -0,09
4 +0,24 +0,61
5 +0,07 -0,40
6 +0,14 +0,45
6.16 приведены коэффициенты корреляции между УСТ и рельефом для каждой степени разложения
моделей Венеры и Земли. На Венере корреляция между УСТ и рельефом в диапазоне гармоник низ-
кого порядка всегда положительна и порой весьма высока. На Земле же в этом диапазоне гармоник
Анализ вариаций лучевых скоро-
стей КА «Пионер-Венера» позволил
авторам [Siogren et al. 1983] составить
карту УСТ для высоты 200 км в ши-
ротном поясе —30° ... + 55°. Наиболее
примечательными деталями карты ста-
ли области Бета и Атлы. Для этих рай-
онов планеты получены пиковые значе-
ния УСТ в 70 мГал. Однако авторы по-
шли дальше: они предприняли попытку
составить карту гравитационных ано-
малий в редукции Буге. Для этого сна-
чала по данным топографической моде-
ли Венеры [Pettengill et al. 1980] были вычислены теоретические ускорения по лучу зрения, обуслов-
ленные притяжением рельефа, находящегося выше уровенной поверхности среднего радиуса планеты.
При этом использовалось значение плотности материала венерианской поверхности, равное 2,7 гем-3.
Величины аномалий Буге получали вычитанием значений теоретических ускорений по лучу зрения из
фактических. Наибольшая аномалия Буге (свыше — 200 мГал) зафиксирована в районе Земли Афро-
диты; в областях Беты, Атлы и Эйстлы значения аномалий вдвое меньше.
Высокая степень корреляции между параметрами ГП и топографией на Венере позволили предпо-
ложить, что механизмы компенсации рельефа могут быть как статического типа (модели Эри, Пратта,
тепловой изостазии), так и динамического (например, поддержка рельефа конвектирующей мантией).
В этом аспекте [Phillips et al. 1981] исследовали ГП Венеры с помощью адмиттанс-функции. При
этом адмиттанс (или изостатическая функция отклика) представляла собой безразмерное отношение
УСТ к рельефу, рассчитанное для определенной длины волны (или диапазона волн) гравитационно-
го и топографического полей. Адмиттанс-функция позволяет судить о глубине компенсации структур
рельефа соответствующего размера. Для района Земля Афродиты авторы получили значение глубины
компенсации примерно 115±30 км.
Б.Г. Вильямс и Н.А. Моттингер в 1983 г. досконально исследовали орбитальные смещения ИСВ
«Пионер-Венера» и опубликовали свою версию модели ГП планеты.
Второй этап изучения венерианского ГП наступил после реализации программы «Венера-15, -16».
Этими космическими аппаратами исследовалось в основном северное полушарие Венеры (севернее +30°
широты), частично с перекрытием зоны гравиметрической съемки КА «Пионер-Венера».
Детальный анализ особенностей венерианского ГП по результатам миссий КА «Пионер-Венера» и
«Венера-15, -16» выполнили авторы [Smrekar, Phillips 1990]. Они исследовали связи между парамет-
рами ГП и рельефа, анализируя характер отношений геоид — топография (GTR) для 14 планетарных
структур, расположенных в разных областях венерианской поверхности. Это исследование подтвердило
обоснованность деления крупных положительных поверхностных образований на два типа: сводовые
поднятия и платообразные возвышенности. Заметное отличие Венеры от Земли, заключающееся в
сильной корреляции гравитационного и топографического полей Венеры, позволило [Phillips 1986] вы-
сказать предположение о том, что на Венере, возможно, отсутствует низковязкий астеносферный слой.
Эта гипотеза в свою очередь стала основой для формирования весьма обоснованного представления о
геологическом строении верхних слоев планетного тела Венеры.
КА «Магеллан» произвел съемку практически всей поверхности Венеры (97%) с пространственным
разрешением (100-200 м). На заключительных этапах функционирования КА «Магеллан» он был пе-
реведен на низкую, почти круговую орбиту. По альтиметрическим измерениям «Магеллана» составлена
точная топографическая карта поверхности Венеры [Ford, Pettengill 1992], а через два года построе-
на детальная гармоническая модель рельефа планеты вплоть до 360-й степени и порядка [Rappaport,
Plaut 1994].
В первой половине 90-х годов по
данным с «Магеллана» выведен целый
ряд гравитационных моделей Венеры
[Konopliv et al. 1993; Balmino 1993;
Konopliv, Sjogren 1994]. Причем в мо-
дели [Konopliv, Sjogren 1994] значе-
ния гармонических коэффициентов бы-
ли получены до 60-й степени и по-
рядка. Эти же авторы составили кар-
ту аномалий Буге. Для ее построе-
ния использовали результаты топогра-
фической съемки КА «Магеллан», при-
няв при этом значение плотности ве-
Таблица 6.17. Коэффициенты корреляции между УСТ и ре-
льефом Венеры по результатам миссии «Магеллан».
Регионы rl г2 гЗ
Область Бета 0,877 0,819 0,934
Область Фебы 0,765 0,821 0,845
Горы Максвелла 0,842 0,857 0,864
Гора Гулы 0,890 0,897 0,918
Область Белл 0,775 0,799 0,812
Область Овды 0,790 0,794 0,805
Область Атлы 0,949 0,964 0,968
Вся планета 0,753 0,745 0,772
щества поверхностного слоя равным
2,9 г/см3,а значение средней плотности планеты 5,248 г/см3. В табл. 6.17 представлены коэффици-
енты корреляции между УСТ и рельефом на Венере по данным топографической модели 360-й степени
и порядка по [Rappaport, Plaut 1994] и трем гравитационным моделям: ri — [Konopliv et al. 1993,
гг — Balmino 1993, гз — Konopliv, Sjogren 1994].
В работе [Simons et al. 1994] выполнено глобальное исследование взаимосвязи УСТ и рельефа путем
сопоставления вариаций длинноволновых (свыше 700 км) ондуляций высот геоида Венеры и ее рельефа
через адмиттанс-функцию. Полученные глобальные и региональные значения адмиттанса на Венере в
несколько раз превышают адмиттанс, вычисленный для Земли в тех же диапазонах гармоник. Большие
значения венериаского адмиттанса подтверждают гипотезу, высказанную ранее [Phillips 1986], что на
этой планете практически отсутствует зона пониженной вязкости в верхней мантии.
В работе [Arkani-Hamed. 1996] также исследовалась связь силы тяжести и рельефа для всей Венеры
путем сравнения расчетного потенциала, обусловленного рельефом и наблюдаемого.
Авторы работы [Kucinskas, Turcotte 1994, 1996] пришли к выводу, что для исследуемых регионов
характерны механизмы изостатической компенсации. Для областей Овды и Фетиды больше соотвест-
вует модель компенсации по Эри с мощностью коры 50-60 км. Для областей восточной части Земли
Афродиты предпочтительнее сочетание компенсаций по Эри и тепловой, а районам Областей Беты и
Атлы — механизму тепловой компенсации. Наблюдаемый рельеф горного обрамления плато Лакшми
и гравитационные аномалии над ним объяснили с позиций фазовых переходов и превращений относи-
тельно легкого базальтового вещества в тяжелый эклогит.
Оригинальное исследование соотношений рельефа и УСТ на всей поверхности Венеры с использо-
ванием специально для этого построенных карт «остаточного рельефа» выполнено в работе [McKenzie,
Bowin 1994]. Остаточный рельеф г вычислялся по формуле
где h — высота наблюдаемого рельефа, д — УСТ, Z — значение адмиттанса. Эти карты свидетельству-
ют, что гравитационные аномалии на Венере значительно больше по амплитуде и по протяженности,
чем на Земле; ряд небольших гравитационных аномалий на венерианской поверхности хорошо корре-
лируют с конкретными аномалиями остаточной топографии.
Совместный анализ пространственного распределения особенностей ГП, рельефа планеты и данных
фотогеологических исследований позволил существенно продвинуться в плане геологического исследо-
вания этой планеты. На поверхности Венеры удалось выявить существование двух типов региональ-
ных возвышенностей, которые различаются строением ГП и общей геологией и, очевидно, отражают
разные режимы конвекции в мантии планеты. Первый тип — сводовые поднятия и пологие склоны —
характеризуется максимальными из выявленных аномалиями УСТ в свободном воздухе (200-250 мГал)
[Sjogren et al. 1997]. Эти аномалии очень сильно коррелируют (коэффициент корреляции достигает
значений 0,934-0,968) с высотами поверхности [Rappaport, Plaut 1994]. В то же время аномалии Бу-
ге в этих районах сравнительно невелики (от —100 до —150 мГал) [Konopliv, Sjogren 1994]. Второй
тип региональных возвышенностей имеет платообразную форму, умеренные величины аномалии УСТ
в свободном воздухе (порядка 40-80 мГал) [Konopliv, Sjogren 1994], причем эти аномалии заметно
слабее коррелируют с рельефом (коэффициент корреляции не превышает 0,8-0,85) [Rappaport, Plaut
1994]. Напротив, аномалии Буге здесь достигают очень больших значений (до -400 мГал) [Konopliv,
Sjogren 1994].
7. Использование геодезических и
гравиметрических данных при
решении прикладных задач
7.1 Требования прикладных задач к геодезическим и гравимет-
рическим данным
В. Б. Непоклонов
Известно, что гравитационное поле Земли (ГПЗ) относится к факторам, оказывающим существенное
влияние на траектории полета космических аппаратов (КА) и ракет, работу инерциальных навигаци-
онных систем, результаты геодезических измерений. В связи с этим решение целого ряда прикладных
задач связано с необходимостью точного учета влияния характеристик ГПЗ (УСТ, ВКГ, СУОЛ и др.).
Например, повышение точности учета ГПЗ при подготовке данных на пуски баллистических ракет
позволяет повышать точность стрельбы. Как утверждают военные специалисты, если при увеличении
мощности заряда боеголовки ракеты в два раза ее поражающая способность возрастает на 40%, то
двукратное повышение точности попадания в цель увеличивает поражающую способность ракеты на
400%.
В настоящее время в качестве одного из основных методов учета ГПЗ в прикладных задачах исполь-
зуется метод математического моделирования. Математические модели находят применение не только
как средство хранения, воспроизведения и преобразования информации о ГПЗ, но и как средство
обеспечения взаимодействия потребителей этой информации.
Система математических моделей ГПЗ объединяет в себе взаимосвязанные формы математического
представления, цели, объекты, методы, средства и критерии оптимальности моделирования. Область
применения современных математических моделей ГПЗ включает в себя целый ряд направлений, в том
числе:
— баллистику (расчет траекторий КА и баллистических ракет, планирование траекторных измере-
ний);
— инерциальную навигацию (подготовка опорной навигационно-геодезической информации для
инерциальных навигационных систем на районы базирования и маршруты передвижения ракетных
комплексов наземного и морского базирования);
— геодезию (обоснование методов изучения фигуры и внешнего ГПЗ, установление систем коорди-
нат и высот, вывод параметров земного эллипсоида, решение редукционных задач);
— гравиметрию (обработка гравиметрических определений, картографирование и интерпретация
гравитационных аномалий, изучение вариаций УСТ во времени);
— геофизику (обоснование физических моделей Земли, изучение внутреннего строения Земли, зем-
ных и океанических приливов, отклонений морской топографической поверхности от геоида, движений
земной коры и других геодинамических явлений).
Разработка моделей ГПЗ в значительной степени базируется на качественных и количественных
требованиях к исходным геодезическим и гравиметрическим данным для конкретных прикладных за-
дач. В условиях таких стран, как Россия, США, Китай, требования к математическим моделям ГПЗ в
значительной степени формируются под влиянием задач геодезического обеспечения объектов вооруже-
ния и военной техники, в первую очередь космических средств и ракетных комплексов стратегического
назначения. В число этих требований, как показывает табл. 7.1, входят требования к форме представ-
ления и составу определяемых характеристик ГПЗ, области действия модели, точности определения
параметров модели, точности и детальности определения выходных характеристик модели.
Таблица 7.1. Состав требований к моделям ГПЗ для прикладных задач
Вид модели Вид требований
Нормальная формула УСТ Точность определения коэффициентов формулы
Ряд сферических гармоник геопотенци- ала Максимальная степень разложения. Точность определения гар- монических коэффициентов. Точность определения ВКГ над общим земным эллипсоидом
Потенциал системы точечных масс (пла- нетарная) Число масс. Точность определения ВКГ над общим земным эл- липсоидом
Потенциал системы точеных масс (ло- кальная) Число масс. Точность баллистических расчетов. Границы обла- сти действия модели
Средние значения ACT и ВКГ по стан- дартным трапециям. Размеры трапеций. Точность определения средних значений ACT и ВКГ по трапециям заданного размера. Обеспечиваемый регион
Цифровые модели (карты) УОЛ, ACT и ВКГ. Точность определения УОЛ, ACT и ВКГ. Дискретность пред- ставления характеристик ГПЗ. Границы обеспечиваемого рай- она
Одним из основных требований является требование к точности представления ГПЗ. По обобщен-
ным оценкам, на современном этапе актуальной задачей является создание моделей ГПЗ, обеспечива-
ющих определение ВКГ, ACT и СУОЛ со средними квадратическими погрешностями соответственно
0,3-0,5 м, 3-5 мГал, 0,5-1,0".
Особенностью требований, предъявляемых к прикладным моделям ГПЗ, является то, что требования
к различным характеристикам одной и той же модели или группы моделей могут быть противоречивы-
ми, например, требования к точности и экономичности. Так, повышение точности часто достигается за
счет усложнения структуры и увеличения числа параметров модели, что, в свою очередь, ведет к росту
затрат на ее разработку и последующую эксплуатацию.
Противоречивый характер требований наглядно проявляется, например, в специализированных мо-
делях возмущающего потенциала для расчета траекторий полета ракет. В связи с ограниченными воз-
можностями вычислительных средств, привлекаемых для решения баллистических задач такие модели
должны обеспечивать высокую точность учета влияния составляющих аномального гравитационного
ускорения на траектории полета ракеты, но при этом затраты времени на расчет траекторий должны
быть небольшими. С аналогичной противоречивостью приходится сталкиваться разработчикам цифро-
вых моделей СУОЛ и ACT для навигационных комплексов. В аномальных районах реализация требо-
ваний к точности определения СУОЛ и ACT приводит к необходимости создания моделей, детальность
которых находится на пределе возможностей имеющихся штатных средств вычислительной техники по
объему информации.
Вследствие противоречивости требований построение моделей ГПЗ с заданными характеристиками
может приводить к необходимости решения задачи оптимизации, связанной с поиском компромисса
между удовлетворением каждого требования в отдельности и интегрального выполнения всей сово-
купности предъявляемых требований. Значительный вклад в разработку теории, методов и алгоритмов
оптимизации математических моделей ГПЗ внесли отечественные ученые — математики, баллисти-
ки, геофизики, геодезисты, в том числе В.Н. Страхов, Ю.С. Соловьев, Б.В. Бровар, Е.Л. Македонский,
В.Ф. Галазин, И.П. Чугунов, П.Э. Яковенко и др.
В последнее десятилетие благодаря достижениям в области космической геодезии и геодезиче-
ской гравиметрии получен значительный объем новой, более точной и подробной информации о ГПЗ.
С развитием вычислительной техники и информационных технологий появились более эффективные
средства и методы ее накопления, анализа и переработки. В результате достигнут прогресс как в плане
повышения точности и детальности моделей ГПЗ в традиционных формах представления (сферические
гармоники, точечные массы), так и в области разработки и реализации новых форм математического
представления гравитационных аномалий. При этом все более широкое распространение среди нетра-
диционных методов моделирования ГПЗ получают методы представления гравитационных аномалий
при помощи упомянутых выше цифровых моделей.
Современная трактовка цифровых моделей ГПЗ отражена в ГОСТ Р-51353-99 «Геоинформацион-
ное картографирование. Метаданные электронных карт. Состав и содержание». Принято относить к
цифровым моделям ГПЗ модели в виде совокупности упорядоченных дискретных значений одной или
нескольких характеристик аномального ГПЗ — ACT, ВКГ, СУОЛ, заданных, как правило, в узлах рав-
номерной сетки координатных линий в единой системе координат, высот и гравиметрической системе,
закодированных в цифровом виде и записанных на машинный носитель информации в установленном
формате. Одним из требований, достаточно часто предъявляемых к цифровым моделям ГПЗ, являет-
ся то, что в состав модели должен входить определенный алгоритм интерполяции, обеспечивающий
получение промежуточных значений моделируемых характеристик ГПЗ с необходимой точностью и
гладкостью. Обычно имеют в виду использование простейших алгоритмов интерполяции. В геодезии
цифровые модели ГПЗ находят применение, в частности, в виде каталогов средних значений ACT и
ВКГ по трапециям различных размеров, а также как одна из основных форм представления результатов
определения детальных характеристик ГПЗ по гравиметрической и/или спутниковой альтиметрической
информации [Македонский и др. 1992].
7.2 Методы моделирования аномального гравитационного поля
Земли
В.Б. Непоклонов
7.2.1 Задачи моделирования
Математическое моделирование как метод исследования ГПЗ в общем случае должно включать
в себя построение подходящей математической модели, целенаправленное исследование ее свойств и
перенос полученных сведений на изучаемый объект. Различаются прямые и обратные задачи модели-
рования.
К прямым задачам моделирования обычно относят получение теоретических следствий модели и
определение численных значений характеристик гравитационного поля по заданному набору параметров
модели.
Обратные задачи заключаются в определении параметров и/или структуры модели по заданным
характеристикам объекта моделирования. Такие задачи могут быть отнесены к задачам идентифика-
ции объектов. Процедура идентификации делится на три этапа: выбор структуры модели на основе
априорной информации и эвристических соображений; выбор критерия близости исследуемого объек-
та и модели с учетом ее специфики; определение параметров модели, оптимальных с точки зрения
выбранного критерия.
Общим для прямых и обратных задач моделирования является то, что в большинстве случаев они
сводятся к задачам вида
У = А(х), (7.2.1)
где у е У — вычисляемая величина; х е X — известная величина; А — оператор преобразования
х —» у; X, Y — соответствующие функциональные пространства.
Задачи вида (7.2.1) в зависимости от их постановки делятся на корректные и некорректные.
Корректными (по Адамару) называют задачи, для которых при любых исходных данных решение
существует, является единственным и обладает устойчивостью к малым изменениям исходных данных.
Значительная часть задач моделирования ГПЗ, как обратных, так и прямых, относится к некоррект-
но поставленным задачам. Методологической базой их решения является общая теория регуляризации
некорректных задач, разработанная отечественными учеными А.Н. Тихоновым, М.М. Лаврентьевым и
В.К. Ивановым. Эффективность применения теории регуляризации в геодезии и гравиметрии обоснова-
на в работах [Нейман 1979; Тихонов и др. 1980].
7.2.2 Система математических моделей гравитационного поля Земли
Принципы классификации моделей
Разнообразие задач, условий, средств и методов моделирования ГПЗ в сочетании с различными под-
ходами к этой проблеме находит свое выражение в создании и использовании моделей, существенно
различающихся между собой по составу, содержанию, форме представления, точности, полноте, по-
дробности и иным характеристикам. В связи с этим возникла необходимость классификации моделей
ГПЗ по объектным, методологическим и эксплуатационным признакам.
Под объектными признаками понимаются признаки, позволяющие классифицировать модели ГПЗ
по свойствам соответствующих объектов моделирования {Непоклонов и др. 2007].
Под методологическими признаками понимаются признаки, позволяющие классифицировать модели
ГПЗ с точки зрения методологии моделирования и используемого математического аппарата.
Под эксплуатационными признаками понимаются признаки, характеризующие возможности созда-
ния и условия применения моделей ГПЗ, затраты на их разработку и эксплуатацию.
Классификация по объектам моделирования
Практика показывает, что в прикладных задачах используются объекты моделирования, различаю-
щиеся по:
— физической сущности — энергетические, информационные;
— представительности — нормальные, аномальные, полные;
— размерности (в геометрическом смысле) — линейные (одномерные), площадные (двумерные)
и объемные (трехмерные);
— размерности (в физическом смысле) — скалярные (одна переменная состояния), векторные
(несколько переменных состояния);
— протяженности — планетарные, региональные, локальные;
— связности — непрерывные, дискретные;
— наблюдаемости — наблюдаемые (измеряемые) и гипотетические;
— стабильности — статические (стационарные), динамические (нестационарные);
— пространству состояний — фазовые (функции координат и времени), частотные (спектральные
функции);
— характеру поведения — детерминированные и стохастические.
Выбор объекта обычно осуществляется при постановке и уяснении задачи моделирования. Основным
критерием выбора является соответствие объекта решаемой задаче (комплексу задач).
Классификация по методологии моделирования
В зависимости от методологии решения задач моделирования и используемого математического
аппарата традиционно различаются качественные, аналитические и расчетно-аналитические модели. В
связи с расширением использования средств вычислительной техники все большее распространение
получают новые виды моделей — компьютерные и информационные.
Качественные модели. Характеризуются отсутствием явных функциональных зависимостей меж-
ду исходными и определяемыми величинами, в частности, модели, базирующиеся на теории множеств.
Примерами качественных моделей, используемых в прикладных задачах, могут служить формализо-
ванные схемы районирования земного шара или его регионов по гравитационной аномальности, схемы
изученности (обеспеченности) земного шара или его регионов в гравиметрическом отношении.
Аналитические модели. Базируются на математических соотношениях, логических условиях и пре-
образованиях символьной информации, приводящих к явным функциональным зависимостям для опре-
деляемых величин. Примерами аналитических моделей, используемых в прикладных задачах, могут
служить: краевые условия для возмущающего потенциала на поверхности сферы и земной поверхности
в линейной постановке задачи Молоденского, интегральные формулы физической геодезии (Стокса,
Венинг-Мейнеса, Пуассона, Молоденского).
Расчетно-аналитические модели. Базируются на комплексном использовании аналитических и
численных методов моделирования. При этом аналитические методы обычно применяют для упроще-
ния математических соотношений, приведения уравнений к определенному каноническому виду, умень-
шения вычислительных погрешностей и т. д. Численные методы обеспечивают доведение результатов
моделирования до конкретных числовых значений, как правило, с использованием вычислительной
техники.
Компьютерные модели. Предназначаются для проведения вычислительных экспериментов, сжа-
тия и отображения информации. Реализуются в виде комплекса программных средств и баз данных
[Непоклонов 1998]. Дополняются в необходимых случаях элементами компьютерной графики и ги-
пертекста. Могут эффективно использоваться в задачах анализа структуры ГПЗ, восстановления его
характеристик при различных исходных данных и начальных условиях, математической обработки из-
мерительной (экспериментальной) информации с учетом действия различных факторов, отображения
результатов моделирования ГПЗ на электронных картах.
Информационные модели. Предназначаются для оптимизации представления различных видов
информации о ГПЗ в компьютерных базах данных. Реализуются в виде комплекса математических
средств описания состава, структуры, допустимых преобразований, ограничений целостности и дру-
гих свойств информации о ГПЗ. Наибольшее распространение в современных системах управления
базами данных имеют модели реляционного типа. В основе таких моделей лежит понятие отношения.
Прототипом отношения является обычная плоская таблица. К основным преимуществам моделей реля-
ционного типа относят простоту, достаточно высокий уровень унификации структур данных, наличие
продвинутой теории и эффективных средств реализации.
Классификация по эксплуатационным характеристикам
Модели ГПЗ, используемые в прикладных задачах, различаются по таким эксплуатационным ха-
рактеристикам, как специализация, область действия, размерность, точность, пространственное разре-
шение и ряду других характеристик.
Специализация. Характеризует пригодность модели для решения определенных задач, соответ-
ствие потенциальных возможностей модели ее формальному предназначению. В зависимости от спе-
циализации различают универсальные и проблемно-ориентированные модели ГПЗ. Универсальные
модели могут использоваться для решения широкого круга задач. Проблемно-ориентированные модели
создаются для решения отдельных задач с повышенной эффективностью.
Область действия. Представляет собой область пространства, в которой данная модель может быть
использована с требуемой (ожидаемой) эффективностью. В зависимости от области действия различа-
ют глобальные, региональные и локальные модели ГПЗ. Обычно область действия характеризуют
площадью ее проекции на земную поверхность. Согласно распространенным критериям, этот показа-
тель составляет: для глобальных моделей — 109 км2 и более; для региональных моделей — от 108 до
106 км2; для локальных моделей — от 105 до 102 км2 и менее.
Размерность. Выражается числом степеней свободы (числом свободных параметров) модели. Раз-
личают модели конечномерные (с конечным числом параметров) и бесконечномерные (с неограни-
ченным числом параметров). Размерность модели позволяет косвенно судить о ее сложности и трудо-
емкости реализации.
Точность. Характеризует адекватность воспроизведения объекта моделирования. Является одной
из основных характеристик. Может рассматриваться на трех уровнях — требуемом, достижимом и
фактическом. Требуемый уровень определяется целевым назначением модели. Достижимый уровень
определяется характеристиками исходных данных (точность, полнота, подробность, информативность и
т. д.), методов и технических средств их обработки. Фактический уровень представляет собой точность,
полученную при практической реализации потенциальных возможностей в реальных условиях.
Разрешающая способность. Характеризует «внутренний масштаб» модели [Nihoul 1991], опреде-
ляет граничные частоты (длины волн) гравитационного поля, описываемые моделью, позволяет судить
о ее подробности (детальности). В зависимости от разрешающей способности модели ГПЗ делятся
на планетарные (обобщенные) и детальные (модели тонкой структуры). Указанное деление является
условным. На протяжении последних лет граница между планетарными и детальными моделями систе-
матически сдвигается в сторону более высоких частот. На сегодняшний день к планетарным моделям
могут быть отнесены модели с разрешением по длинам волн геоида до 100 км (360-й степени разло-
жения геопотенциала в ряд сферических функций). Это примерно в 1,5-2 раза выше уровня середины
1980-х гг.
Экономичность. Характеризует степень использования ресурсов ЭВМ при создании и эксплуата-
ции модели. Часто оценивается по затратам времени счета на выполнение узловых вычислительных
процедур — решение системы линейных алгебраических уравнений при определении параметров моде-
ли, вычисление базисных функций, связывающих параметры модели с определяемыми величинами, вы-
полнение преобразований по интегральным формулам физической геодезии (Стокса, Венинг-Мейнеса,
Молоденского и др.). Более полное представление об экономичности моделей дает учет всей совокупно-
сти затрат технических, информационных и интеллектуальных ресурсов на разработку и эксплуатацию
модели, включая затраты на разработку программного обеспечения и баз данных.
Технологичность. Характеризует степень сложности используемых математических средств, воз-
можность реализации модели в виде ограниченного набора процедурных (алгоритмы, программы) и
информационных (служебные файлы) модулей, открытость модели для подключения дополнительных
средств, обеспечивающих расширение и/или модификацию ее функциональных возможностей.
7.3 Средства и методы автоматизации подготовки исходной
гравиметрической информации
В.Б. Непоклонов
7.3.1 Базы гравиметрических данных
В связи с необходимостью обработки больших объемов гравиметрической и сопутствующей инфор-
мации показатели эффективности систем моделирования ГПЗ, в том числе систем цифрового модели-
рования, в значительной степени определяются уровнем организации данных. Практика показала, что
представление данных о ГПЗ на машинных носителях в виде отдельных файлов ограничивает возмож-
ности комплексной автоматизации процессов моделирования. В современных условиях предпочтительно
использование технологии компьютерных баз данных.
Технология компьютерных баз данных предусматривает объединение данных конкретной предмет-
ной области под централизованным программным управлением с целью уменьшения избыточности
хранимой информации, преодоления ограничений по представлению в памяти ЭВМ сложных информа-
ционных структур, снижения трудоемкости разработки и модернизации прикладных программ.
В настоящее время крупные базы гравитационных данных, как общего назначения, так и тематиче-
ские (проблемно ориентированные), созданы в США и странах Западной Европы. Держателями этих
баз данных являются международные организации (Международное гравиметрическое бюро), государ-
ственные службы, ведомства и учреждения, как гражданские, так и военные (в США — Национальное
управление по съемкам и картографированию), научно-исследовательские учреждения и университеты,
нефтедобывающие компании. Зарубежный опыт подтверждает эффективность использования техноло-
гии баз данных в задачах математического моделирования ГПЗ. Примерами успешного использования
баз данных о ГПЗ могут служить: вывод модели геопотенциала EGM-96 до 360-й степени; созда-
ние детальных цифровых моделей ACT в рамках ряда континентальных гравиметрических проектов;
разработка цифровой модели ВКГ в рамках проекта «Европейский гравиметрический геоид».
В России также проводятся работы в области создания и использования компьютерных баз данных
для математического моделирования ГПЗ. В этих работах основное участие принимают организации
Минобороны, Роскартографии, Минприроды и Академии наук. Сведения об отечественных базах дан-
ных приведены в табл. 7.2.
Таблица 7.2. Отечественные базы данных о гравитационном поле Земли
Министерство, ведомство Организация- держатель Специализация
Министерство обороны 29 НИИ МО РФ Глобальные, региональные и локальные модели ГПЗ в раз- личных формах представления для решения широкого круга научно-исследовательских задач
4 ЦНИИ МО РФ Исходные данные и модели для оценочных расчетов в области баллистического и навигационного обеспечения
Центральная геодези- ческая часть Электронные гравиметрические карты и каталоги, цифровые модели СУОЛ и ACT, средние значения ACT и высот по стан- дартным трапециям, данные спутниковой альтиметрии (ГЕО- ИК).
Центральное картогра- фическое производство ВМФ Данные морской гравиметрической съемки, морские гравимет- рические карты, навигационная информация
Роскартография ЦНИИГАиК Средние значения ACT по трапециям различных размеров, дан- ные морской гравиметрической съемки
Минприроды СпецИКЦ «Полевая геофизика», ВИРГ — Рудгеофизика Результаты обработки гравиметрических карт масштабов 1:1 000 000, 1:200 000 на средствах цифрования (банк данных ГРАВИМАГ)
РАН Геофизический центр Зарубежные и отечественные данные спутниковой альтимет- рии, глобальные модели геопотенциала
7.3.2 Цифровые гравиметрические карты
j X- ГИНЭЭга V-КПг lilltnt -*"***
Рис. 7.3.1. Использование программно-
го средства «Панорама» для цифрова-
ния приложений к гравиметрической
карте масштаба 1:200000
Известно, что одним из основных видов исходной ин-
формации для математического моделирования ГПЗ слу-
жат результаты гравиметрической съемки, представленные
в виде гравиметрических карт различных масштабов. Об-
работка этой информации на ЭВМ связана с необходимо-
стью преобразования гравиметрических карт из аналоговой
в цифровую форму. Ранее это приводило к большим тру-
дозатратам. В последние годы ситуация коренным образом
изменилась. Появились технические средства (сканеры, ди-
гитайзеры), позволяющие автоматизировать ввод гравимет-
рических карт в ЭВМ. Создано специальное программное
обеспечение обработки гравиметрических карт на средствах
цифрования. В результате в период 1990-2000 гг. организа-
циями Минприроды, Минобороны и РАН выполнен значи-
тельный объем работ по переводу гравиметрических карт
в цифровую форму. Основные усилия были направлены на
цифрование гравиметрических карт бывшего СССР в мас-
штабе 1:200000. Практика показала, что весьма эффектив-
ным способом решения этой задачи является способ электронного цифрования с использованием ска-
нера. При этом основным источником информации служат не карты, а приложения к ним. Оцифров-
ку выполняют по отметкам и подписям гравиметрических пунктов. Реализация описанного способа
на ЭВМ требует использования специального программного обеспечения. В качестве примера можно
отметить отечественные программы «Электронный дигитайзер» (Международный научный центр по
окружающей среде РАН) и «Панорама» (рис. 7.3.1). Указанные программы позволяют практически пол-
ностью автоматизировать определение координат гравиметрических пунктов. При этом ввод семанти-
ческой информации (аномалий, высот, поправок за рельеф) осуществляется с использованием удобных
интерфейсных форм. Применение указанных программных средств позволяет практически полностью
автоматизировать распознавание и определение координат гравиметрических пунктов. Семантическая
информация (аномалии, высоты, поправки за рельеф) вводится клавиатурным путем с использованием
удобных интерфейсных форм. Предусмотрены синтаксический и логический контроль и возможность
редактирования вводимой информации.
7.3.3 Цифровые модели рельефа
С повышением требований к точности и подробности гравитационных моделей возрастает роль
информации о высотах топографической поверхности Земли. Такая информация необходима для учета
разновысотности исходных ACT, заданных на физической поверхности Земли, перехода от аномалий
Буге к аномалиям в свободном воздухе, решения других редукционных задач.
Современные методы моделирования ГПЗ предусматривают использование этой информации в виде
цифровых моделей рельефа (глобальных, региональных, локальных). При создании глобальных мо-
делей, как правило, используются разнородные источники информации, вследствие чего их реальная
точность и разрешающая способность могут существенно меняться в зависимости от географического
положения исследуемого района. Поэтому при повышенных требованиях к точности исходной высот-
ной информации используются региональные и локальные цифровые модели рельефа, создаваемые на
основе крупномасштабных топографических карт.
Среди задач моделирования ГПЗ, требующих учета детальной информации о высотах рельефа, сле-
дует отметить вычисление СУОЛ и ВКГ по гравиметрическим данным с погрешностью, соответственно,
не более 3" и 0,5 м. Для решения этих задач в нашей стране используются средние значения высот по
трапециям 5x7,5', а также более детальные данные о рельефе, получаемые по топографическим картам
масштаба 1:200000-1:50000.
С точки зрения подготовки данных о ГПЗ в масштабах земного шара представляют интерес гло-
бальные цифровые модели рельефа, созданные за рубежом, в том числе:
— JGP95E (США, 1995 г), модель 5'х5' — кооперация NIMA и Huges STX Corp.;
— GTM2000 (США, 2000 г.), модель 2'х2' — Годдардовский центр космических полетов НАСА;
— GLOBE (США, 1998 г), модель 30"х30" — кооперация Национального управления по изучению
океана и атмосферы и Национального управления по съемкам и картографированию. Охватывает около
60% суши. Точность характеризуется средней квадратической погрешностью 30 м;
— GTOPO30 (США, 1996 г.), модель 30"х30" — кооперация центра данных EROS Геологической
съемки и NIMA.
Наряду с данными о высотах рельефа суши при решении ряда прикладных задач гравиметрии ис-
пользуют информацию о рельефе дна Мирового океана. Важнейшим источником информации о топо-
графии дна Мирового океана были и остаются батиметрические карты. В последние годы российскими
гидрографами разработана новейшая батиметрическая карта рельефа дна Северного Ледовитого океана
масштаба 1:5000000. Завершено составление батиметрической карты Западной Антарктики в масштабе
1:850000. Кроме этого, по данным Национального океанографического комитета, Россия участвует в
региональных проектах картографирования Мирового океана «Генеральная батиметрическая карта оке-
анов» (ГЕБКО), «Международная батиметрическая карта Средиземного моря», «Международная бати-
метрическая карта западной части Тихого океана», «Международная батиметрическая карта западной
части Индийского океана», «Международная батиметрическая карта Арктического бассейна».
7.4 Методики определения составляющих уклонений отвесных
линий и высот квазигеоида по гравиметрическим данным
В. Б. Непоклонов
7.4.1 Исходные положения
Традиционно одним из основных приложений гравиметрического метода является определение СУ-
ОЛ и ВКГ. При этом исходными данными служат результаты наземной, морской, а в последние годы
и воздушной гравиметрической съемки.
Гравиметрический метод до середины 1970-х годов был основным методом определения СУОЛ и
ВКГ на суше и в Мировом океане. В последующие годы его значение для Мирового океана умень-
шилось, что было обусловлено развитием спутниковой альтиметрии. Тем не менее, гравиметрический
метод сохраняет свои позиции как основной метод определения СУОЛ и ВКГ в районах суши, шельфа,
ледовой зоны Арктического бассейна, а также в ряде особых районов Мирового океана, требующих
повышенной точности подготовки исходных геодезических данных.
В нашей стране существенный вклад в развитие теории и практики вычислением ВКГ и СУОЛ по
гравиметрической информации внесли М.С. Молоденский, М.И. Юркина, В.Ф. Еремеев, Л.П. Пеллинен,
О.М. Остач, В.В. Бровар, Б.В. Бровар, Б.Е. Иванов, Е.Л. Македонский, А.А. Маслов, Ю.М. Нейман,
В.Б. Непоклонов, С.В. Переверткин, П.Э. Яковенко.
Методы вычисления ВКГ и СУОЛ по гравиметрической информации могут быть разделены на
следующие группы: методы интегральных преобразований; методы параметрической аппроксимации;
методы статистической коллокации; комбинированные методы.
Методы интегральных преобразований базируются на классических интегральных формулах Стокса
и Венинг-Мейнеса
(4 = 2- ff (cos4 Лг, (7.4.2)
(nJ 4тгу JJ dip (sin A J
где С — высота квазигеоида Е,,т) — составляющие уклонения отвесной линии в плоскости меридиана и
первого вертикала; Дд — исходная ACT (в свободном воздухе); ст — земная сфера; R — радиус земной
сферы; у — нормальное значение УСТ; ф — сферическое расстояние между определяемой точкой и
элементом d; S(ip) — функция Стокса.
При современных требованиях науки и практики к определению ВКГ и СУОЛ точность формул
(7.4.1)-(7.4.2) во многих случаях недостаточна, что приводит к необходимости использования более
точных методов, базирующихся на теории М.С. Молоденского. При этом формулы Стокса и Венинг-
Мейнеса дают начальное приближение, а конечные значения ВКГ и СУОЛ получают в виде
С = Со + ЬС, (7.4.3)
<74-4>
(nJ (По J (6nJ
где Со.^о.По — значения высоты квазигеоида и составляющих уклонений отвесных линий, определяе-
мые выражениями (7.4.1)-(7.4.2); ЬС, £>£., £>п — поправки, являющиеся результатом применения теории
Молоденского.
Формула М.С. Молоденского для вычисления £.,п может быть записана в виде
где Ьд — поправка Молоденского; В, L, Ну — геодезические координаты (широта, долгота) и нормаль-
ная высота определяемой точки.
В первом приближении
5ffl = EjJXo^-Z^dCT, (7.4.6)
сг
где Хо — вспомогательная величина, определяемая выражением
<747>
Исследования В.Ф. Еремеева показали, что формулы Молоденского первого приближения позволяют
вычислять СУОЛ с погрешностью 0,2-0,3" в районах любой аномальности. Такая точность достаточ-
на для большинства приложений, однако ее практическая реализация связана с большим объемом
вычислений.
С учетом потребностей практики Л.П. Пеллиненом был разработан более удобный метод вычисления
СУОЛ, сопоставимый по точности с формулами Молоденского первого приближения. В соответствии с
данным методом
( Ч = J- ff (Д</ 4- 2nGDH + 5д) (C0Sdff + ( д Ч , (7.4.8)
(nJ 4тгу JJ dip [sinAJ (At]J
(Д£,1 GDR2 rr H - Ho f 1 1\ (cos Al , . o.
1ДЛ) = — <74”
<7.4 10)
a u
где Др — аномалия в неполной топографической редукции; 2nGDH — поправка Буге; Д£,,Дт] —
поправки в СУОЛ, обусловленные влиянием топографических масс; д — поправка в аномалии УСТ
за разновысотность; г — расстояние между текущей и определяемой точками; то — проекция г на
горизонтальную плоскость; Н — высота текущей точки; Hq — высота определяемой точки; G — грави-
тационная постоянная; D — плотность пород.
В результате развития теории М.С. Молоденского были разработаны альтернативные методы вычис-
ления ВКГ и СУОЛ, в число которых входят метод В.В. Бровара [Brovar 1974] и метод аналитического
продолжения [Moritz 1969]. Л.П. Пеллинен [1971, 1974] и позднее Г. Мориц [1983] доказали эквива-
лентность различных методов.
В вычислительном отношении одним из наиболее удобных является метод аналитического продол-
жения [Марыч 1965, 1967]. В этом методе исходные аномалии редуцируются с физической поверхности
Земли на отсчетную сферу с использованием разложения в ряд Тейлора. Формулы для вычисления УОЛ
по методу аналитического продолжения могут быть представлены в виде [Мориц 1983]
= J_ [[д/ад Wba + y (cosMda, (7.4.11)
(т) J 4тгу J J dip (sm A J 4тгу J J dip sin A J
9о = &д, 9n = -^{H-H0)mLm{gn-ml (7А.12)
m=l
Ln(Aff) = lL1[Ln_1(Aff)], (7.4.13)
п
Li (Др) = 1 JJ* ^g~Ag0do-. (7.4.14)
сг
Установлено, что первое приближение метода аналитического продолжения уступает по точности
первому приближению метода Молоденского. Необходимость второго приближения влечет за собой
существенное увеличение объема вычислений при использовании обычных методов интегрирования.
Поэтому для вычисления интегралов вида (7.4.11), (7.4.14), представляющих собой интегралы типа
свертки, было предложено использовать быстрое преобразование Фурье, а впоследствии — преобразо-
вание Хартли [Брейсуэлл 1990], что позволило разработать эффективные вычислительные алгоритмы,
реализация которых дает большую экономию времени счета. Следует отметить, что этот эффект обу-
словлен, с одной стороны, многократным сокращением числа арифметических операций при вычислении
свертки в частной области, с другой стороны, параллельным вычислением характеристик гравитацион-
ного поля на множестве расчетных точек, заданных в узлах равномерной сетки.
Традиционным вариантом является применение двумерного преобразования Фурье на плоскости.
Это обусловлено простотой представления вычисляемых интегралов в терминах свертки на плоско-
сти. Однако переход на плоскость является источником дополнительных погрешностей. Поэтому в
последние годы стали применяться варианты использования преобразования Фурье на сфере. Наибо-
лее высокую точность дает одномерное преобразование на сфере, но при этом уменьшается скорость
выполнения расчетов, особенно по сравнению с двумерным преобразованием на плоскости.
В целом интегральные методы в их современной интерпретации относятся к числу наиболее широко
используемых в настоящее время методов вычисления высот квазигеоида и уклонений отвесных линий
по гравиметрической информации как в нашей стране, так и за рубежом. В Топографической службе
ВС РФ на основе метода аналитического продолжения разработана методика определения уклонений
отвесных линий со средней квадратической погрешностью 0,5"-1" в районах любой аномальности на
территории России [Непоклонов, и др. 1996].
Методы аппроксимации предусматривают получение значений ВКГ и СУОЛ в соответствии с фор-
мулами
N
i=i
(7.4.15)
№)1
W)J
(7.4.16)
где Р — определяемая точка; fi(P) — базисная функция аппроксимации; qi — параметр аппрок-
симации; х,у — топоцентрические координаты. Параметры аппроксимации определяются из решения
системы линейных алгебраических уравнений, связывающих эти величины с исходными значениями
аномалий УСТ.
Наибольшее распространение среди методов данной группы получили метод сферических гармоник,
метод Аронова и метод точечных масс.
Метод сферических гармоник базируется на известных формулах разложения характеристик ГПЗ в
усеченный ряд по сферическим функциям
52 (Cnm cos mA + Snm sin mA) Pnm (sin cp),
m=0
(7АЛ7)
52 52 (Cnm cos mA + Snm sin mA)Pnm(sincp),
П=2 771=0
(7АЛ8)
n=2
/ли/ N
52 (Cnm cos mA + Snm sin mA)Pnm (sin <p),
771=0
(7.4.19)
i A^Pnrn(sin<p)
nm cos mA + Snm sin mA)-----------
O(p
(7.4.20)
N dfi(P) '
=12) 2Е*
i=l .
N
Т =
N
N
X-W * jf N 71
GM у /ау у
yr2 cos <p •“ \г/
1 T tt—9 m —
>nm cos mA - Cnm sinmA)Pnm(sin ср),
(7.4.21)
где G — гравитационная постоянная; M — масса Земли; у — нормальное значение УСТ; а — большая
полуось общего земного эллипсоида; ср, А, г — сферические координаты (широта, долгота, радиус-
вектор) определяемой точки; Cnm,Snm — полностью нормированные коэффициенты разложения;
Pnm (sin ср) — полностью нормированные функции Лежандра; п — степень гармоники; тп — порядок
гармоники; N — предел суммирования.
Функции Лежандра Pnrn(sin(p) определяются соотношениями
- , - = 2п +1 _
Poo = 1, Рпп = Рп-1,п-1СО8(рл/—---------5п-1, при П > 0,
V 2,п
4n2 —1 р /[(n-l)2-m2](2n+l) _пи
п2-т5 Рп-2,ту (П2_та)(2п-3) > ПРИ П > т'
при п < т,
пт
Рп— l,m
О,
(7.4.22)
где Ьт =
2,
1,
при т = 0;
при т 0.
Коэффициенты CnTn,SnTn определяются и периодически уточняются специализированными орга-
низациями России с использованием имеющейся гравиметрической и спутниковой информации. Ре-
зультаты решения этой задачи выдаются под названием «Параметры общего земного эллипсоида и
гравитационного поля Земли». К настоящему времени создано несколько десятков глобальных моде-
лей ГПЗ в виде сферических гармоник геопотенциала различной точности и детальности. В последнее
десятилетие работы по созданию планетарных моделей ГПЗ выполнялись в США, России, Германии,
Франции, Китае. В нашей стране в этих работах принимали участие специалисты 29 НИИ МО РФ и
ЦНИИГАиК.
С точки зрения современных задач вычисления ВКГ. и СУОЛ наибольший интерес вызывают вы-
сокостепенные модели (7V > 180). Одной из лучших на сегодня моделей данного класса является
американская модель EGM-96 до 360-й степени, точность которой по высотам квазигеоида в целом
по земному шару характеризуется средней квадратической погрешностью 0,5-1,0 м. Сопоставимые
точностные характеристики имеет отечественная модель ГАО-98 (М=360) [Демьянов и др. 1999а].
Область применения метода сферических гармоник в рассматриваемых задачах на данный момент
ограничивается описанием планетарных и региональных составляющих ВКГ и СУОЛ.
Метод В.И. Аронова [1976] применялся для вычисления СУОЛ с погрешностью 1" в центральной
и ближней зоне. В данном методе параметрами аппроксимации служат заглубленные внутрь Земли
фиктивные аномалии, подбираемые так, чтобы их аналитическое продолжение вверх через интеграл
Пуассона совпадало, в пределах требуемой точности, с исходными аномалиями. Полученные аномалии,
могут быть пересчитаны в значения ВКГ и СУОЛ на физической поверхности Земли. В частности,
значения СУОЛ вычисляются по формуле
1 N
27гу£г
Xi - X + y/(Xi - xj2 + (yi - у)2 + Н2
yi - У + у/(Xi - х)2 + (yi - у)2 + Я?
(7.4.23)
где N — число блоков; Agi — значение ACT в г-м блоке; х,у — плоские прямоугольные координаты
определяемой точки; Xi,yi,Hi — плоские прямоугольные координаты центра и глубина г-го блока; у —
нормальное значение УСТ.
Метод точечных масс предусматривает аппроксимацию аномального поля потенциалом системы
точечных масс. Формулы для вычисления уклонений отвесных линий по точечным массам могут быть
представлены в виде
\ Х^ X
\yi-y
(7.4.24)
где N — число точечных масс; G — гравитационная постоянная; М» — значение г-й точечной массы;
Xi, yi — плоские прямоугольные координаты г-й точечной массы; т\ — расстояние от определяемой точки
до г-й точечной массы. Основной проблемой является определение параметров точечных масс, так как
исходным аномалиям может соответствовать бесчисленное множество реализаций системы точечных
масс. Существует несколько различных способов решения этой задачи. При составлении карт СУОЛ с
погрешностью 0,5-2" в ТС ВС использовался способ, в соответствии с которым подбор точечных масс
осуществляется итеративным путем без решения общей системы уравнений. Однако, как показала
практика, в аномальных районах из-за размещения масс на малых глубинах сходимость итеративного
подбора точечных масс замедляется, что ограничивает возможности использования данного способа
для высокоточного определения СУОЛ.
Методы статистической коллокации позволяют вычислять ВКГ и СУОЛ на основе использования
статистических связей определяемых величин с исходными ACT. Уравнения коллокации для уклонений
отвесных линий имеют вид
где С£.д3,Сг|Дз — векторы ковариаций между СУОЛ и исходными аномалиями УСТ; Сд3дэ — автоко-
вариационная матрица исходных аномалий; Дд — вектор исходных аномалий.
Преимуществом метода коллокации является то, что он позволяет в едином алгоритме выполнять
обработку разнородной информации и оценивать точность полученных результатов. Однако это требу-
ет знания ковариаций между исходными и определяемыми величинами. На практике истинные значе-
ния ковариаций заменяются модельными, что ограничивает реальные точностные возможности метода.
Необходимость обращения ковариационной матрицы накладывает определенные ограничения на объем
обрабатываемой информации. С целью повышения вычислительной эффективности метода коллокации
предложена его модификация, названная «быстрой коллокацией» [Bottom, Barzaghi 1993]. В настоя-
щее время модифицированный метод коллокации находит применение за рубежом в задачах создания
цифровых моделей геоида [Barzaghi et al. 1996].
7.4.2 Особенности практической реализации методов вычисления уклонений
отвесных линий и высот квазигеоида по гравиметрическим данным
В настоящее время задачи вычисление ВКГ и СУОЛ по гравиметрической информации в боль-
шинстве случаев решаются на основе интегральных преобразований. При этом с учетом зависимости
вклада исходных аномалий от расстояния до определяемой точки поверхность земного шара как область
интегрирования делится на три зоны: центральную, ближнюю и дальнюю.
Центральная зона представляет собой непосредственную окрестность определяемой точки. Обычно
размеры центральной зоны по радиус-вектору лежат в диапазоне 100-200 км. Исходная информация
задается с наибольшей детальностью, вплоть до использования оцифрованных гравиметрических карт
масштаба 1:200000. Ближняя зона представляет собой пояс окаймления центральной зоны. Внешняя
граница ближней зоны удалена от определяемой точки на расстояние порядка 1000 км. Исходная
информация задается в виде средних значений аномалий силы тяжести по трапециям с размерами
от 5 х 7,5' до 1 х 1°. Дальняя зона представляет собой всю остальную часть геосферы. Исходная
информация задается в виде гармонических коэффициентов геопотенциала.
Искомые значения высоты квазигеоида С и составляющих уклонений отвесных линий т| получают
в соответствии с формулами
Со = Ci + Сг + Сз; to = Ci + £.2 + Сз; ло = Л1 + Л2 + лз; (7.4.26)
где 0,1,2,3 — подстрочные индексы, означающие по порядку; полное влияние аномального ГПЗ иа
С, £., Л в общеземной системе координат, заданной действующими «Параметрами Земли», влияние даль-
ней, ближней и центральной зон.
Преобразование ВКГ и СУОЛ в референцную систему координат выполняют в соответствии с
формулами
Ср — Со + &С; Ср = Со + &С + SCZ; Лр=Ло + &Л, (7.4.27)
где ДС, ДС, Дл — поправки за переход в референцную систему координат, вычисляемые по линейным
и угловым элементам ориентирования; 6 С7 — поправка за переход от гравиметрических к астрономо-
геодезическим СУОЛ, значение которой (в угловых секундах) определяется соотношением [Бровар и
др. 1961]
f>E! = 0,171" Н sin 2В, (7.4.28)
где Н — высота точки в километрах.
При решении конкретных задач варьируются форма и размеры зон, детальность задания и способы
подготовки исходной информации в каждой зоне, алгоритмы ее обработки.
Традиционно центральная и ближняя зоны задавались в форме сферических сегментов. Поиск пу-
тей автоматизации вычислений указал на целесообразность задания этих зон в форме сферических
(сфероидических) трапеций. Именно такой подход принят в методике автоматизированного создания
цифровых карт СУОЛ с погрешностью 0,5" [Непоклонов и др. 1996]. Изменение традиционной формы
областей интегрирования потребовало модификации соответствующих квадратурных формул. Решение
этой задачи теоретически было получено под руководством Ю.М. Неймана [Нейман, Руденя 1992;
Neyman et al. 1996] и доведено до практической реализации 29 НИИ МО РФ.
Одним из определяющих факторов успешного применения современных методов вычисления ВКГ и
СУОЛ по гравиметрической информации является качество подготовки исходных данных, в том числе
данных о высотах рельефа в виде средних значений по трапециям 5x7,5' и детальных цифровых моде-
лей рельефа масштаба 1:50000-1:200000. Высотная информация обеспечивает учет топографии земной
поверхности при обработке гравиметрических данных, что необходимо для достижения требуемой вы-
сокой точности определения ВКГ и СУОЛ.
К исходным данным предъявляются определенные требования по составу, точности и детальности
в зависимости от решаемой задачи. Высота квазигеоида в основном зависит от аномалий дальней
и ближней зон, а уклонения отвесных линий — от аномалий ближней и центральной зон. Поэтому
вычисление СУОЛ связано с необходимостью использования в окрестности определяемой точки более
точной и детальной информации, а вычисление ВКГ требует повышенной точности учета ГПЗ в дальней
зоне.
Анализ опыта применения интегральных методов вычисления ВКГ и СУОЛ показал, что в настоя-
щее время находят применение два подхода к учету дальней зоны.
Классический (интегральный) подход предусматривает прямой учет влияния ACT в дальней зоне
методом фильтрации сферических гармоник с весовыми коэффициентами Qn, подбираемыми исходя из
определенного критерия оптимальности. При этом формулы для вычисления ВКГ и СУОЛ в дальних
зонах могут быть представлены в виде
GM ул (а \ 71 ——_ J Qn А ^пт (S*n COS + $пт sin mA), 771=0 (7.4.29)
Ь = GM Л , уг2 А1 71=2 (a\nrt' V dPnm(sin<p) = . ] Qti / ъ xS^nm COS mA + &птп Sill 772Л), 771=0 (7.4.30)
П1 = GM yr2 cos <р N п п У^ (°) Qn У^ mPnm(sin <p)(5nm cos mA - Спт sin mA). тг=2 m=0 (7.4.31)
С повышением точности глобальных моделей геопотенциала получил распространение альтернатив-
ный подход, называемый «удалением—восстановлением». Наиболее широко данный подход использует-
ся для вычисления ВКГ. При этом преобразование аномалии Др в высоту квазигеоида £, осуществляется
в соответствии с формулой
С = £о + 5(Др-Дро), (7.4.32)
где Со, ^9о — значения ВКГ и ACT, определяемые по заданной планетарной модели геопотенциала в
виде сферических гармоник; S — оператор Стокса.
Аналогичное преобразование имеет место для СУОЛ. Основным преимуществом техники
«удаления—восстановления» по сравнению с классическим подходом и его модификациями яв-
ляется простота и технологичность, особенно в сочетании с использованием алгоритма быстрого
преобразования Фурье.
Применение быстрого преобразования Фурье связано с интерполяцией аномалий УСТ гравиметри-
ческих пунктов, имеющих в общем случае нерегулярное расположение, в узлы равномерной сетки. Эта
процедура называется гридингом. Для ее осуществления используются различные методы интерполя-
ции произвольно расположенных дискретных данных — метод обратных расстояний, метод кригинга и
др. В последние годы широкое распространение получили методы сплайн-функций, в частности метод
дифференциальных сплайнов (метод наименьшей кривизны) [Василенко 1983], позволяющий избежать
резких осцилляции на участках, недостаточно хорошо обеспеченных исходными данными.
При использовании метода наименьшей кривизны интерполированное значение ACT определяется
выражением
1 N
Ьд(х, у) = а + Ьх + су + - [(х “ xi)2 + (У ~ У*)2]ln [(^ “ xi)2 + (у - у»)2], (7.4.33)
2 г=1
где х, у — плоские прямоугольные координаты определяемой точки; xifyi — плоские прямоугольные
координаты г-го исходного гравиметрического пункта; N — число исходных пунктов; а, b, с, Aj.,..., An —
параметры сплайна, получаемые по исходным значениям аномалий Дух,... из решения системы
линейных алгебраических уравнений
0 Р12 Pin 1 Xl У1" Ai" 'Ду/
Р21 0 P2N 1 X2 У2 Аг Дуг
PN1 PN2 Pnn 1 XN УЫ An = &PN (7.4.34)
1 1 1 0 0 0 a 0
Х1 Х2 XN 0 0 0 b 0
. У1 У2 yN 0 0 0 c 0
с коэффициентами
Pij = | [(х “ ^)2 + (У “ У*)2]ln [(z - xi)2 + (у - Уг)2] • (7.4.35)
£
При определении детальности подготовки исходной гравиметрической информации учитывается ано-
мальность (категория сложности) исследуемого района. Ю.М. Нейман и В.А. Бывшее разработали спо-
соб определения дискретности задания исходной гравиметрической информации в центральной зоне с
использованием значений дисперсии D и радиуса корреляции р поля ACT. При этом оптимальный шаг
Д задания исходных ACT предложено определять из выражения
где т — заданная средняя квадратическая погрешность определения СУОЛ.
Составляющие уклонений отвесных линий в центральной зоне вычисляются по формулам (7.4.11)-
(7.4.14) до второго приближения включительно. С учетом относительно малых размеров центральной
зоны задача решается на плоскости. В этом случае
4 у ш 4 z
Ух = -(Я-Яо)М(Ду), (7-4-38)
д2 = —(Н - H0)2L2^g) - (Я - H0)LM, (7.4.39)
(Ду) = ГГ ^9-°^dxdy, (7.4.40)
27Г Г°
ш
L2(^g) = h1[L1^g)], (7.4.41)
£
где х,у,Н и хо,уо,Но — плоские прямоугольные координаты и высота, соответственно, текущей и
определяемой точек; г — расстояние между точками (х,у) и (а^о, J/о); to — проекция центральной зоны
на плоскость.
Правые части выражений (7.4.37), (7.4.40) являются интегралами типа свертки. Использование
преобразования Фурье позволяет заменить интегрирование более простой операцией — перемножением
функций (теорема Бореля о свертке). В результате формулы для вычисления составляющих уклонений
отвесных линий в центральной зоне могут быть представлены в виде
F(Ag + 51 + g2)-,- 1 =
\/ш2х + шр
91 = ~(Н0 - H)F-T [f^)^ + ц>2 ] ,
52 = -(Но - H)2F~l
сц2 + W2 Г /-------1
Н(Д5)-*2 У ~ (Но - H^F-1 [F(ffl) ^/а>2 + а>2 ] .
(7.4.42)
(7.4.43)
(7.4.44)
Таким образом, к числу факторов, обеспечивших создание высокоточных цифровых моделей СУОЛ
по гравиметрической информации, относятся: автоматизация подготовки исходных данных; оптимиза-
ция коэффициентов усечения, используемых для учета ACT в дальней зоне; модификация функции
Венинг-Мейнеса в ближней зоне; учет поправок за разновысотность исходных УСТ в центральной
зоне.
7.5 Модели гравитационного поля Земли для расчета траекторий
полета ракет
Ю.С. Соловьев
7.5.1 Методы представления возмущающего потенциала
Реальное применение при расчете траекторий полета ракет получили три метода представления
возмущающего потенциала Земли: метод сферических функциям, метод точечных масс и комбиниро-
ванный метод, использующий преобразованную формулу Стокса.
Метод сферических функций. Традиционно возмущающий потенциал Земли Т представляют в
виде разложения в ряд по сферическим функциям (7.4.17). Выражения для составляющих аномального
гравитационного ускорения получают как частные производные от возмущающего потенциала Земли
по осям выбранной системы координат.
В методе сферических функций формулы для расчета этих частных производных имеют вид
55ф =
cos mA + Snm sin mA) x
x [mtg<pPnm(sin <p) - >/6m(n - m)(n + m + l)Pn,m+i(sin ср) 1 , (7.5.1)
'nm sinmA)Pnm(sin <p),
m=0
GM Д
&5x =-------->
arcoscp
• —1
(—Cnm cos mA + Snm sinmA)mPnm(sin <p).
771=0
(7.5.2)
(7.5.3)
N
n
Переход в прямоугольную геоцентрическую систему х, у, z координат осуществляется по формулам
xz х
' r^X2+Y2 г
YZ Y
rVX2+Y2 г
y/X2+Y^ Z_
___У _\
VX2+Y2
___X
VX2+Y2
О /
(7.5.4)
На начальном этапе развития ракетной техники достаточно было учитывать только нормальный
потенциал притяжения Земли. В дальнейшем с использованием моделей возмущающего потенциала в
виде сферических функций были получены оценки влияния аномального ускорения, показавшие необ-
ходимость учета возмущающего потенциала Земли при решении баллистических задач (П.Ф. Иванов,
Б.В. Бровар, 1969 г.).
Комбинированный метод учета влияния аномального гравитационного поля (АГПЗ) Земли бази-
руется на работах М.С. Молоденского [1945, 1969], М.С. Молоденского, В.Ф. Еремеева, М.И. Юркиной
[1960], Л.В.Огородовой [1966]. Применительно к расчету траекторий полета баллистических ракет
этот метод разрабатывался П.Ф. Ивановым и Б.В. Броваром (1969-1970 гг.), а в дальнейшем —
Б.В. Броваром, Ю.С. Соловьевым и В.С. Гречищевым. В комбинированном методе поверхность геосфе-
ры делят на две зоны — ближнюю, в виде сферического сегмента, и дальнюю (вся остальная часть
геосферы). Влияние АГПЗ учитывают в дальней зоне — по гармоническим коэффициентам потенци-
ала, в ближней зоне — по более детальной гравиметрической информации при помощи обобщенного
интеграла Стокса.
Таким образом, в соответствии с комбинированным методом возмущающий потенциал представля-
ется в виде
д2 2^°
Т=— A^S(r,xp)sinxpdipda+
4л J J
о о
Ry _ _ _
+ -у 52 ~ х 52 (Спт cosmA + S™ sinmA)Pnm(sin ср), (7.5.5)
71=2 771=0
где
Qn — J S (т,ф) Рп (созф) sinфс?ф; (7.5.6)
'Ро
R — радиус отсчетной сферы; ф — угол между радиус-векторами точки (ср, Л, г) внешнего пространства
и текущей точки i поверхности сферы; a — азимут направления на текущую точку г сферы, определя-
емый в точке пересечения этой сферы радиус-вектором г точки (ср, А, г) внешнего пространства; у —
нормальное УСТ; фо — центральный угол, определяющий радиус ближней зоны; N — предел суммиро-
вания сферических гармоник; Q® — обобщенные (для внешнего пространства) коэффициенты влияния
дальней зоны; 5(г,ф) — обобщенная функция Стокса, определяемая следующими выражениями:
с, п 2 1 Зп 57? 37? п + г — R cos фi ,7R7x
S(r, ф) =----F------=-----5- созфг----=- созф, In-------------, (7.5.7)
п г г г2 г2 zr
ri = y/r2 + R2 - 27?r созф,, (7.5.8)
где Гг — расстояние между точкой (ф,А,т) внешнего пространства и текущей точкой г геосферы в
пределах ближней зоны.
Первое слагаемое в правой части (7.5.5) учитывает влияние аномалий в ближней зоне (0 ф фо).
С помощью второго слагаемого учитывается влияние аномалий в дальней зоне. Как и в методе сфери-
ческих функций, сначала получают составляющие аномального ускорения по осям системы координат
Ф,А, г. Затем по формулам (7.5.4) они пересчитываются в проекции на оси прямоугольной системы
координат.
Составляющие ускорения, обусловленные влиянием аномалий дальней зоны, 8g'v,bg'x,f>g'r, опреде-
ляются выражениями
Rv - пл
=-----52 Qn (п - 1) 52 ^пт cosm^ + S™ Sin mA) x
n=2 m=0
r 1-1
x m tg<pPnm (sin <p) — у (n — m)(n + m + 1)-—Pn,m+i(sin <p) , (7.5.9)
Oml
6sl = --“L-
2r cos (p
N n
52 Qn(n - 1) E ($nm sinm^ - cosmA)mPnm (sin <p),
n=2 m=0
Юл n
63' = —— 52 (Qn + ^)(n - 1) 52 (Clim cosmA + Snm sinmA)Pnm(sin <p),
71=2 771=0
Фо
Qn = ЯВ(г,ф0) j Pn(cosip) sinipdip, +Qen
0
r2 - R2 r Pn(cosi|>) .
Kn = —2------R J p
Фо
(7.5.10)
(7.5.11)
(7.5.12)
(7.5.13)
Составляющие ускорения 5д",5д^,5д", обусловленные влиянием аномалий ближней
вид
зоны, имеют
60ф = J J Aff^^^sinipcos4dAdip,
0 0
= ~^лт J Т Ag~Sfab^ sinфsinAdAdф,
0 0
R2 2r'r° r2 — R2 27*гДп
--— I I ДдВ(г,ф) sin ipdA dip------Я2 f Г —sinxpdAdip,
27tr J J 4nr J J ra
00 00
где R — радиус отсчетной сферы; A — сферический азимут.
Производная от функции Стокса по сферическому расстоянию определяется как
(7.5.14)
ЗВ(г,ф)
дф
= Язшф
2г
г?
3 5 3 Г1+т —Ясозф
---1" ~2 ~2 11 о-----
Fir rz rz 2r
3R(r + Г1)созф
Г1Г2(Г1 + г — Ясозф)
(7.5.15)
На ЭВМ интегралы (7.5.14) рассчитывают с использованием формул численного интегрирования
, и 1 Л . (dS(r, ф)\ .
бд<р “ ~ 47ГГ ^2 Дст‘ 52 ^9i3 ( дф ) cos Aii ’
» j \ v / *j
с и 1 V* Л А (Ф) \ • л
6дх = “ 4^ £ Дст‘ Е Ьдц ( —) sin Аъ-,
i j \ ^ / ij
1 _ _ r2 — р2 I
6д" = -2^ Е Дст‘ Е Д^-5(г,ф)ъ - 52 Да< 52 Д5о
» 3 i 3 *3
(7.5.16)
(7.5.17)
(7.5.18)
где Д</у — среднее значение ACT по трапеции с центром в точке с координатами Д^ —
площадь трапеций с широтой центра В,; A,j могут быть получены по формулам:
Uij = cos Bi sin (Lj — Lo) > Vij = sin Bi cos Bo — cos B, sin Bq cos (Lj — Bq) >
О, если Vij = О;
< / ГТ. . \
arctg I рЯ ), если Vy 0;
, если 0, — 9;
2л- aij, если Utj < О, > 0;
л + aij, если Utj <0, Vij > 0;
п- dij, если > 0, Vij < О,
где Bq,Lq — координаты исследуемой точки; тру определяется выражением
cosipij = sin Bq sin Bi + cos Bo cos Bi cos(Lj — Lq).
(7.5.19)
(7.5.20)
В центральной зоне (радиусом примерно 5 км) формулы (7.5.16)-(7.5.18) не могут быть использо-
ваны, так как при г —» 0 значения S(r, ф) и стремятся к бесконечности. Поскольку значения
аномалий в центральной зоне изменяются незначительно, их влиянием на горизонтальные состав-
ляющие аномального ускорения можно пренебречь, а для вертикальной составляющей использовать
аналитический способ учета, предусматривающий представление ACT в виде
Лд = Лд0 + ^ф, (7.5.21)
(7ф
5Дд
где = const в каждом направлении А.
В дополнение к этому при малых значениях ф функция Стокса может быть представлена в виде
5(г,ф) =
Г1
С использованием выражений (7.5.21), (7.5.22) интеграл (7.5.15) в центральной зоне может быть
представлен в виде
Я
г2
Я2 , Я \ А 1 / Я2 , Я 4 8
In —— Адо + - го + In ——
5 гд + 5 / 8 \ 5 то+ 5
Д(г2 - Я2)
2т2
k=l
1 1, Н \ 1/1 1 я 4 8
— ~|~ — In----- | -f- — I — -f- — In -
Я 5 г0 + 5J У0 8 \т0 5 то+ 5
к=1
где го — радиус центральной зоны.
Формульная схема расчета составляющих аномального ускорения в комбинированном методе яв-
ляется более громоздкой и сложной, чем в методе сферических функций. Основным достоинством
комбинированного метода является высокая точность, обусловленная использованием детальной исход-
ной информации в ближней зоне. В связи с этим он использовался как образцовый метод для оценки
точностных характеристик других методов представления АГПЗ.
Метод точечных масс. Использование достаточно громоздких формул метода сферических функ-
ций и комбинированного метода на вычислительной технике с ограниченными возможностями было
затруднительным. В связи с этим получил распространение другой метод представления возмуща-
ющего потенциала — метод точечных масс, позволяющий получать компактные модели возмущаю-
щего потенциала Земли и вычислять составляющие аномального ускорения с меньшими затратами
машинного времени. Существенный вклад в развитие теории и практики данного метода точечных
масс в приложении к задачам расчета траекторий полета баллистических ракет внесли Ю.С. Соловьев,
Е.Л. Македонский, И.П. Чугунов, П.Э. Яковенко, Т.М. Машимова, В.Л. Крамаренко,'В.В. Виноградов,
Р.Г. Попко, А.Н. Беляков, В.Ю. Фрибель, Д.И. Плешаков.
Метод точечных масс основан на представлении возмущающего потенциала Земли в виде суммар-
ного потенциала притяжения системы точечных масс
T = (7.5.22)
Tt
t=i 1
где rt = у/(Х - Xt)2 + (К — Yi)2 + (Z - Zt)2-, X,Y,Z — прямоугольные геоцентрические координаты
точки внешнего пространства; Xt,Yt,Zt — прямоугольные геоцентрические координаты точечной массы
с номером t, G — гравитационная постоянная; Mt — значение точечной маСсы с номером t; п — число
точечных масс.
Составляющие аномального ускорения в геоцентрической системе координат определяются по фор-
мулам
^x = -^^{x-xtY bgY = -^^Y-YtY bgz = -^^Z-Zt). (7.5.23)
t=i * t=i Tt t=i
Простота и однотипность выражений (7.5.23) способствовала широкому внедрению метода точеч-
ных масс в практику баллистических расчетов. Однако наиболее важным достоинством этого метода
является то, что при определенных условиях он позволяет эффективно учитывать особенности влия-
ния АГПЗ на траекторию полета ракет. Составляющие аномального ускорения оказывают наибольшее
влияние на начальном участке траектории (П.Ф. Иванов, Б.В. Бровар, 1969 г.). По мере удаления от
точки старта это влияние постепенно ослабевает, на конечном участке траектории оно практически
не проявляется. Исходя из этого, было предложено описывать возмущающий потенциал выражением
Т = 7г + Тр + 7л, где 7г,7р,7л — компоненты, представляющие собой вклад глобальной, региональ-
ной и локальных подсистем модели гравитационного поля, каждая из которых имеет вид (7.5.22).
Подсистемы создаются по принципу последовательного наращивания точности. Сначала формируется
планетарная подсистема, описывающая гравитационное поле в целом, затем создается региональная
подсистема, детализирующая представление гравитационных аномалий на значительной части земной
сферы, а после этого — локальные подсистемы, еще более подробно описывающие аномалии, но на
меньшей площади. Перед определением параметров точечных масс очередной подсистемы из исходных
данных исключается влияние точечных масс всех предыдущих подсистем. Окончательные значения то-
чечных масс региональной и локальной подсистем получают из их совместного уравнивания за выбор
нормального потенциала.
При расчете траектории полета ракеты сначала существенное влияние оказывают все подсистемы
модели гравитационного поля. Затем вклад локальной подсистемы становится незначительным. На
конечном участке ограничиваются использованием только глобальной подсистемы модели.
Использование региональных и локальных подсистем точечных масс позволило не только суще-
ственно повысить точность учета АГПЗ на траектории полета ракет при сравнительно небольшом
суммарном числе точечных масс в модели, но и реализовать эту точность в условиях неполной гра-
виметрической изученности Земли. Ранее на всю поверхность Земли имелись аномалии, осредненные
по крупным трапециям. Этого было достаточно для определения параметров глобальной подсистемы
модели. Средние значения аномалий по одноградусным трапециям обеспечивали получение региональ-
ной подсистемы модели. Детальная гравиметрическая информация, имевшаяся на территорию страны,
позволяла определять параметры локальной подсистемы модели.
Изложенный подход к построению моделей возмущающего потенциала Земли не утратил своей
актуальности и в настоящее время, несмотря на то, что быстрыми темпами растут возможности вычис-
лительной техники, уже получены коэффициенты разложения возмущающего потенциала Земли в ряд
по сферическим функциям до 360-й и более высокой степени. В современных условиях расчет траекто-
рий полета требуется выполнять в реальном масштабе времени с помощью бортовых вычислительных
средств, причем делать это многократно. Здесь, может быть, в еще большей степени, чем раньше,
требуется обеспечить высокую точность представления при небольшом количестве параметров моде-
ли возмущающего потенциала Земли. Эту задачу успешно решает метод точечных масс, с помощью
которого можно вполне адекватно учитывать влияния аномалий, осредненных по трапециям 5x7,5'.
Со времени разработки и внедрения метода точечных масс в практику расчета траекторий полета
ракет прошло несколько десятилетий. Появились многочисленные публикации, в которых этот метод
упоминается. Однако в этих публикациях не описана методика определения параметров точечных масс,
входящих в модель вида (7.5.22). Это наиболее сложная задача, которая в методе точечных масс реша-
ется заблаговременно. Причем труднее всего получить параметры глобальной и региональной подсистем
модели. Параметры локальной подсистемы рассчитываются гораздо проще с использованием детальной
гравиметрической информации, заданной в ограниченной области краевой поверхности. В связи с этим
ниже дано краткое изложение методики определения параметров точечных масс глобальной и регио-
нальной подсистем модели.
Параметры локальной подсистемы точечных масс рассчитываются относительно просто с исполь-
зованием детальной гравиметрической информации, заданной в ограниченной области. Более сложной
задачей является вывод параметров глобальной и региональной подсистем модели. Решение этой задачи
базируется на соотношении
Д<7 = - £ ^(r2 - 2rl - XXt - YYt - ZZt).
г Tf
(7.5.24)
Считается, что аномалии Дд заданы на поверхности общего земного эллипсоида как средние анома-
лии по трапециям заданного размера, как правило достаточно крупного. Необходимо определить коор-
динаты и значения точечных масс, при которых оптимально выполняется условие (7.5.24). В качестве
критерия оптимальности обычно используют минимум среднего квадратического значения остаточ-
ных аномалий, или средней квадратической погрешности аппроксимации поля аномалий выражением
(7.5.24):
“о = 4 (52 - - x*xi - Y*Yj - z*z^ (7-5.26)
rtj
где Дф — исходная аномалия для трапеции с номером j; Pj — вес исходной аномалии с номером j;
к — число исходных аномалий.
Минимизируемая функция (7.5.24) представляет собой функцию многих переменных. Для опреде-
ления ее минимума был разработан специальный комбинированный метод, в который вошли отдельные
элементы известных детерминированных методов поиска. Сущность его состоит в следующем.
Вся совокупность неизвестных параметров модели делится на две группы: координаты и величины
= GMt, которые для простоты будем называть массами. Процесс поиска осуществляется путем
последовательного уточнения этих групп неизвестных.
Поскольку зависимость функции Дд от |it линейная, значения рц при фиксированных координатах
легко определяются по методу наименьших квадратов из решения системы нормальных уравнений
АтРАу. = АтРд,
(7.5.27)
где А,д — матрица коэффициентов и вектор свободных членов уравнений поправок; Р — весовая мат-
рица исходных аномалий; ц — вектор определяемых масс; Т — операция транспонирования матрицы.
В развернутом виде
А
kxn
оц ai2 Oin\
021 0.22 O2n I Ф р
.................... I 'kxk
Ofci Ofc2 a-kn)
Pi 0 0 \
0 P2 0 I _
55 =
.00 Рк)
(Ьдл
&92
\Адк/
/щ\
Н2
\Цп/
После определения параметров уточняются координаты точечных масс. Один из возможных
методов решения этой задачи состоит в следующем.
Сначала производится два одномерных поиска минимума функции (7.5.25) по методу наискорейшего
спуска (В.И. Дмитриев 1982 г.). Как известно, в методе наискорейшего спуска каждый одномерный
поиск осуществляется в направлении, обратном градиенту. В данном случае
(7.5.28)
до _ Ht
dXt а(к j
до _ Ht г
dYt a(k - 4n) j
J=1
do _ M-t p
dZt o{k — 4n) " J
3(Xj-Xt)atj , 3Xj-4Xf
„2 + „3
ГУ Ttj
r2 + r3
rtj 4 J
3(Zj — Zt)atj 3Zj — 4Zt
9 l" Я
(7.5.29)
Mtatj
rj
(7.5.30)
где £ = 0,1.
В результате одномерного поиска определяют величину Л, при которой в данном направлении имеет
место минимум ст.
После получения точек 1 и 2 производят одномерный поиск величины Л, дающей минимум ст по
направлению 02 и получают точку
+ Л
2
(7.5.31)
Далее при полученных значениях координат вновь определяют величины щ. Процесс продолжается
до тех пор, пока суммарное уменьшение величины ст станет меньше наперед заданного числа е.
Известно, что из условий, накладываемых на выбор нормального потенциала, следует равенство
нулю коэффициентов так называемых запретных гармоник в выражении возмущающего потенциала
Земли. Применительно к моделям точечных масс эти условия имеют вид
п п п п п п
£> = 0; £цеХ(=0; £iitrt = 0; = £цеВД = О; ^^^ = 0. (7.5.32)
t=i t=i t=i t=i t=i t=i
Первое из условий (7.5.32) обеспечивает равенство массы уровенного эллипсоида массе Земли (ра-
венство нулю гармонического коэффициента возмущающего потенциала нулевой степени). Следующие
три условия соответствуют требованию совпадения центра уровенного эллипсоида с центром масс
Земли (равенство нулю гармонических коэффициентов возмущающего потенциала первой степени).
Согласно последним двум условиям, главная ось инерции уровенного эллипсоида должна совпадать со
средним положением оси вращения Земли.
Включение условий (7.5.32) в алгоритм поиска минимума величины ст приводит к задаче на услов-
ный минимум нелинейной функции многих переменных, для решения которой может быть использован
метод неопределенных множителей Лагранжа [Крылов 1950]. В результате на этапе определения пара-
метров |it вместо системы (7.5.27) решается расширенная система вида
АТРА В\ (ц\ _ (АтРд\
в о;^Х; о )’
(7.5.33)
/ 1 1 1 \
Х1 х2 хп
’= £ 1 zZ • (7-534>
XiZx x2z2 xnzn
\KxZi Y2Z2 YnZn)
где Л — вектор множителей Лагранжа.
Учет условий (7.5.32) при определении координат точечных масс приводит к необходимости уточне-
ния координат путем поиска минимума функционала
п п п п п п
Q = с + Ai У) + Лг У^ foXt + Аз У) HtVt + Л4 У) №tZt 4- Л5 У) \itXfZt + Лб У^ \itYtZt, (7.5.35)
t=i t=i t=i t=i t=i t=i
частные производные которого по координатам точечных масс определяются выражениями
+ Ht (А2 + AsZt); = -7=- + Ht(A3 + AeZt); + Ht(A4 + A5JG + AgYi).
oXt oXf ait oYt oZt oZt
(7.5.36)
Реализация изложенной методики предполагает, что заданы число и начальное положение точеч-
ных масс. Определение начального расположения точечных масс — сложная самостоятельная задача,
решение которой связано с необходимостью привлечения дополнительной информации.
Известно, что положительные аномальные массы порождают положительные высоты квазигеоида
над общим земным эллипсоидом. Это позволяет использовать для определения начальных геодезиче-
ских координат точечных масс карту ВКГ. Начальные глубины точечных масс могут быть определены в
предположении, что экстремальное значение высоты квазигеоида обусловлено гравитационным эффек-
том одной массы, расположенной под точкой экстремума. При таком допущении расстояние от массы
до поверхности эллипсоида может быть получено по формуле
1 (7-5.37)
Если используется разложение возмущающего потенциала по сферическим функциям, то
(N \ / N \ -1
£(П + 1)Т" 5 (7.5.38)
п=2 / \п=2 /
Тп = ( “) / . cosmA + Snm sin mA) Pnm(sin (p). (7.5.39)
771=0
Возможны другие подходы к определению начального расположения точечных масс, например, ис-
пользование поля радиальных производных от возмущающего потенциала Земли более высокого по-
рядка и другие.
Веса исходных данных при определении параметров планетарной подсистемы точечных масс мож-
но назначить исходя из средних квадратических погрешностей средних аномалий с учетом площади
трапеций осреднения. Для региональной подсистемы веса исходных данных могут назначаться исходя
из требуемой точности выполнения краевого условия в заданной области земного шара. В пределах
этого региона измерениям должны быть приписаны наибольшие веса, по мере удаления от региона
веса могут уменьшаться в соответствии с уменьшением влияния аномалий в этой области на точность
расчета траекторий полета ракет, стартовые позиции которых находятся в данном регионе. Например,
закон изменения весов может быть задан в виде
Р(ф) = Р0е~с^2, (7.5.40)
где Ро — максимальное значение веса; гр — сферическое расстояние от точки старта до текущей точки
области; С — коэффициент, определяющий степень убывания Р(гр).
Предварительные значения параметров региональной и локальной подсистем определяются под усло-
вием наилучшего представления соответствующей исходной информации методом итеративного подбо-
ра. Суть метода состоит в пошаговой минимизации суммы квадратов остатков, получаемых исключе-
нием из исходных аномалий суммарного влияния всех точечных масс, параметры которых определены.
На каждой итерации определяют параметры нескольких пробных масс. Из них выбирают ту, которая
обеспечивает минимум. Влияние этой массы исключают из исходных аномалий для данной итерации.
Полученные остаточные аномалии принимают в качестве исходных для следующей итерации. Проб-
ные массы размещают под наибольшими по абсолютной величине исходными аномалиями на глубине,
определяемой размерами трапеции и значениями остаточных аномалий в данной и соседних трапе-
циях. После определения значения пробной массы уточняют ее глубину по остаточным аномалиям в
ближайшей окрестности. Исходные аномалии должны быть свободны от влияния всех ранее подобран-
ных точечных масс. Уточненное значение глубины получают из решения системы линеаризованных
уравнений, связывающих исходные аномалии с определяемой массой. Далее по уточненному значению
глубины рассчитывают уточненное значение массы. В результате на последнем шаге процесса получа-
ется совокупность точечных масс, уравненных за минимум дисперсии остаточного поля аномалий силы
тяжести.
Окончательные значения точечных масс региональной и локальной подсистем уравниваются с це-
лью взаимного согласования различных видов исходных данных с учетом точностных характеристик.
Уравнивание выполняется по методу наименьших квадратов с дополнительными условиями, анало-
гичными (7.5.32). Экспериментальным путем установлено, что, как правило, достаточно использовать
только первое условие. В данном случае это обеспечивает приемлемую точность выполнения остальных
условий.
7.5.2 Использование моделей возмущающего потенциала Земли для расчета
уклонений отвесных линий и высот квазигеоида
Подготовка исходных данных на пуски ракет включает в себя определение ВКГ и СУОЛ в точ-
ке старта. Эти задачи могут с достаточной точностью решаться на основе описанных выше моделей
возмущающего потенциала Земли и следующих известных соотношений
(7.5.41)
(Ч=--И5ф)> <7-5-42)
bl YlW
где у — нормальное ускорение силы тяжести в определяемой точке.
На основе комбинированного метода расчета аномального ускорения был разработан так называе-
мый «машинный гравиметрический метод расчета составляющих уклонения отвеса и высот квазигеои-
да» (Б.В. Бровар, 1972 г.). Точность данного метода существенно зависит от размеров ближней зоны и
предельного значения N степени учитываемых сферических гармоник геопотенциала. В базовом вари-
анте радиус ближней зоны принят равным 1000 км. Экспериментально установлено, что в этом случае
при вычислении уклонений отвесных линий в дальней зоне можно ограничиться значением N — 8.
При увеличении N точность определения СУОЛ возрастает незначительно, что обусловлено быстрым
убыванием коэффициентов Qn при увеличении п.
Уменьшение времени счета при интегрировании аномалий в ближней зоне обеспечивается путем
уменьшения их детальности по мере удаления от определяемой точки. В центральной зоне радиусом
5 км исходная информация задается с максимальной подробностью. Далее в пределах трапеции 3x3°
используются средние аномалии по трапециям 5 х 7,5'. В остальной части ближней области учиты-
ваются средние аномалии по трапециям 1 х 1°. При этом, по экспериментальным оценкам, возможно
получение ВКГ и СУОЛ со средними квадратическими погрешностями соответственно 2-3 м и 1-2".
Свою эффективность в плане вычисления ВКГ и СУОЛ показали локальные модели гравитационно-
го поля в виде точечных масс, создаваемые с использованием детальной гравиметрической информации.
В отличие от интегральных формул, в методе точечных масс расчет ВКГ и СУОЛ выполняется по ана-
литическим выражениям. В связи с этим нет необходимости преодоления проблемы неограниченного
возрастания функции Стокса при приближении к исследуемой точке и ухудшения точности численного
интегрирования при уменьшении детальности исходной гравиметрической информации. Эксперимен-
тально установлено, что современные локальные модели точечных масс обеспечивают получение ВКГ
и СУОЛ со средними квадратическими погрешностями соответственно 1-2 м и 0,5-1,0" (в зависимости
от аномальности района).
8. Гравиметрия и геодинамика
8.1 Введение
В.И. Кафтан
В системе наук, именуемой «геодинамика», предметом изучения являются силы, воздействующие на
Землю в целом как на небесное тело и также на ее части от регионального до локального масштабов.
В ряду основных сил одной из главных, если не главнейшей, является сила тяжести. Именно поэтому
такая естественнонаучная дисциплина, как гравиметрия, теснейшим образом связана с геодинамиче-
скими исследованиями всех без исключения пространственно-временных масштабов.
Настоящая глава книги посвящена основным проблемам, возникающим и решаемым «на стыке»
гравиметрии и геодинамики. В ней представлены новейшие результаты исследований и разработок
ведущих ученых и специалистов тесно взаимосвязанных научных областей, таких, как гравиметрия,
геодезия, астрономия и геофизика.
Первый раздел главы «Гравиметрия и геодинамика» представляет детальную пространственно-
временную классификацию геодинамических явлений и процессов, оказывающих влияние на изме-
нения силы тяжести и одновременно обусловленных ее непосредственным воздействием. В разделе
представлены амплитудно-временные спектры вариаций силы тяжести, связанные с геодинамиче-
скими процессами различных масштабов — от локальных до планетарных. Для каждого из видов
рассмотренных взаимодействий приводятся обобщенные количественные оценки.
Глобальная кинематика и динамика Земли с учетом важнейших элементов ее внутреннего строения
и внешнего материального пространства рассматривается во втором разделе главы. Процесс перерас-
пределения масс внутри и вне Земли как важнейший геодинамический фактор является объектом
исследования гравиметрии как науки. Основные проблемы глобальной геодинамики решаются ком-
плексно с учетом самых современных представлений не только о гравитационном поле, но и о других
наблюдаемых геофизических полях, таких, как геомагнитное поле (механизм земного динамо связыва-
ется с перераспределением земных масс), движения земной коры, сейсмичность, ротационный режим
Земли и динамика атмосферы. При этом гравиметрия играет ведущую роль. Именно поэтому в решении
планетарной проблемы, эффективно используя знания смежных научных областей, участвуют ведущие
российские исследователи в области гравиметрии.
В разделе 8.3.2 излагаются современные данные о строении, составе и вязких свойствах ядра Земли
(жидкого и твердого). Основное внимание уделено учету влияния мантии, находящейся в неравновес-
ном состоянии, на собственные колебания твердого ядра, вызывающего расщепление экваториальных
частот [Пасынок 1999а, б, в]. Этот эффект подтвержден наблюдениями на сверхпроводящих гравимет-
рах.
В разделе 8.3.3 рассмотрен механизм наблюдаемых горизонтальных движений земной коры и при-
ливного торможения Земли, обусловленный изостатической неуравновешенностью коры Земли. Иссле-
дование прямого эффекта приливного торможения на мантию показывает его несущественность за вре-
мя наблюдений. Поэтому торможение мантии может быть обусловлено только динамическим эффектом
давления изостатически неуравновешенной коры на мантию.
Результаты моделирования взаимодействия земной коры и мантии как изостатически неуравнове-
шенной системы показывают, что гравитационные механизмы могут оказывать влияние не только на
крупномасштабные вертикальные, но и на горизонтальные движения земной коры, перемещающейся
относительно мантии. Отсюда вытекает необходимость совершенствования земных геодезических си-
стем отсчета, обеспечивающих регистрацию поверхностных перемещений верхних частей земной коры
и внешних земных оболочек в единой системе координат.
В разделе 8.3.4 рассматривается влияние атмосферы на вращение Земли. В разделе 8.3.5 изложена
современная теория нутации Земли. На основе наблюдательных данных учтен вклад динамических
сжатий и смещений оболочек Земли (коры, мантии, ядра), динамики атмосферы, неупругих свойств
мантии, распределения вязкости в жидком ядре в нутационное движение оси вращения Земли.
В публикациях о приливных процессах и приливной силе нет обсуждения некоторых невязок между
экспериментальными материалами и теоретическими расчетами, а также нет обзора затруднений, на
которые обращали внимание основоположники объяснения приливного воздействия внешних небесных
тел на исследуемое тело, конкретно на Землю, а также на Луну. Поэтому третий раздел главы «Грави-
метрия и геодинамика» начинается с изложения именно тех вопросов глобальной динамики приливов,
которым уделялось мало внимания в научной литературе. В данном разделе представлено аналити-
ческое описание возмущений в наблюдаемых приливных процессах. При этом учитывается влияние
динамики внутреннего ядра. К объяснению приливов привлекаются оригинальные данные анализа
лунотрясений. Уточняется объяснение тригерного воздействия. Показано соответствие цикличностей
орбитального движения Земли и периодичностей изменения широт. Авторы отмечают неполноту тео-
ретического описания приливной силы, что отражается в несоответствиях теории эксперименту.
Четвертый раздел главы посвящен исследованиям изменений силы тяжести в тектонически ак-
тивных районах. В отличие от теоретических проблем, представленных в предшествующих разделах,
данные исследования выполняются на основе дорогостоящих полевых экспедиционных работ — натур-
ных наблюдений. Поэтому в связи с экономическими условиями отечественные исследования данных
проблем крайне ограничены и раздел представляет собой краткий обзор зарубежных исследований в
районах активного горообразования и рифтогенеза. Исследования описаны в лекциях широко известно-
го исследователя в области гравиметрии профессора Вольфганга Торге. Представлены лишь наиболее
яркие примеры продолжительных наблюдений за изменениями силы тяжести. Тем не менее, в конце
прошлого столетия повторные измерения ускорения силы тяжести силами ЦНИИГАиК проводились на
вулкане Карымский (Камчатка), и в последние годы учеными ГАИШ МГУ проводятся периодические
наблюдения за изменениями силы тяжести на вулкане Эльбрус.
В пятом разделе главы М.И. Юркина обращает внимание на необходимость учета изменений силы
тяжести при интерпретации наблюдаемых вертикальных движений земной поверхности. Отсутствие
такого учета приводит к ошибочным геодинамическим выводам. Даются рекомендации по учету этих
изменений путем совместной обработки повторных GPS/ГЛОНАСС измерений, гравиметрических опре-
делений и нивелирования.
Глава завершается исследованиями скрытых периодичностей в рядах многократных абсолютных
определений силы тяжести и других космогеофизических характеристик. Представленные результа-
ты анализа носят разведывательный характер и представляют собой новый эмпирический материал,
способствующий уточнению представлений о физических причинах изменения гравитационного поля
Земли и геодинамических процессов.
8.2 Временные вариации силы тяжести
А.А. Конопихин
Земное гравитационное поле — это результирующее силовое поле, создаваемое земными массами,
массами других космических тел и ротационным режимом Земли. Элементы, характеризующие гра-
витационное поле Земли, в частности величина и направление силы тяжести, в любой точке земной
поверхности непостоянны во времени.
К рассмотрению проблемы временных изменений земного гравитационного поля можно подходить
с разных позиций. Можно, например, из всего спектра явлений, приводящих к вариациям гравита-
ционного поля, выделить определяющие группы возмущающих причин и последовательно исследовать
влияние каждой из них. Можно сгруппировать возмущающие геодинамические явления по длитель-
ности существования самого возмущения или по его амплитуде. Можно, наконец, анализировать ход
изменения гравитационного поля, сообразуясь с протяженностью области, на которой наблюдаются
вариации силы тяжести.
На схеме (рис. 8.2.1) приведены причинно-логические связи между различными геодинамическими
явлениями и процессами, оказывающими возмущающее воздействие на гравитационное поле нашей
планеты. Основное смысловое разделение проведено между двумя категориями возмущений: «При-
ливными» и «Неприливными» изменениями силы тяжести. Категория «Приливных изменений» в свою
очередь делится на два блока: «Приливные изменения силы тяжести в твердой Земле» и «Приливные
изменения силы тяжести в океане».
Более сложна иерархия категории «Неприливные изменения силы тяжести». Здесь уже можно вы-
делить четыре блока: «Вековые изменения силы тяжести», «Периодические изменения силы тяжести»,
«Непериодические изменения силы тяжести» и «Неприливные изменения силы тяжести в океане», при-
чем в трех первых блоках превалируют временные аспекты гравитационных вариаций.
В блок «Вековые изменения силы тяжести» входят три группы природных явлений, которые оказы-
вают (или могли бы оказать) влияние на параметры гравитационного поля: во-первых, реакция плане-
ты на реально существующие «Изменения центробежной силы», во-вторых, гипотетически возможное
«Изменение гравитационной постоянной G», в третьих, обширный комплекс явлений, порожденный
«Глубинными процессами в недрах Земли». В состав этого комплекса входят такие геодинамические
явления, как: «Движение литосферных плит», «Вековая компонента движения земной коры», «Измене-
ние физических свойств вещества Земли», «Перемещение глубинных планетных масс».
Блок «Периодических изменений силы тяжести» так же определяется тремя группами возмущающих
гравитационное поле явлениями и процессами. В их число входят: «Колебания атмосферного давления»,
«Сезонные осадки», «Миграция грунтовых вод».
Самый обширный блок «Непериодические изменения силы тяжести» включает в себя вдвое большее
число групп возмущающих явлений. Эти явления существенно отличаются между собой по амплитуде
возмущения и по длительности их существования. В трех группах геодинамических явлений внимание
акцентировано на временной нерегулярности их проявления: «Непериодические колебания скорости
осевого вращения Земли», «Непериодические колебания атмосферного давления», «Непериодические
колебания уровня грунтовых вод». К ним примыкает еще группа из двух геодинамических явлений,
имеющих отчетливо эпизодический характер проявления своей активности: «Землетрясения и вулка-
низм» и «Выпадение осадков». Кроме того, к этому блоку по нерегулярности своего воздействия на
земное гравитационное поле следует отнести такое «экзотическое» современное явление, как «Техно-
генное воздействие человека».
И, наконец, четвертый блок, объединяющий геодинамические процессы с неприливным механизмом
воздействия на параметры гравитационного поля — «Неприливные изменения силы тяжести, порожден-
ные Мировым океаном». Здесь собраны геодинамические процессы, ответственные за вариации силы
тяжести очень широкого временного диапазона, от нескольких секунд до десятков миллионов лет, и
не менее различных амплитуд возмущений. В силу особой склонности основной субстанции Мирово-
го океана к изменению формы, высокой подвижности и реактивности воздействие на гравитационное
поле многих геодинамических явлений через водные массы оказывается существенно иным, чем через
твердую землю. В появлении неприливных вариаций силы тяжести через посредство водных масс Ми-
рового океана принимают участие группа геодинамических явлений из блока «Вековые изменения силы
тяжести», отдельные явления из блока «Периодические изменения силы тяжести» и большая группа из
блока «Непериодические изменения силы тяжести».
В принципе амплитудный спектр вариаций земной силы тяжести не слишком велик. Так, различие
в широтном положении точки наблюдения (от экватора до полюса) предопределяет изменение силы
тяжести не более чем на 5-10—3<у. Такую же величину можно получить за счет перепада высот точки
наблюдения (высокие горы — глубокое море). Плотностная неоднородность земных недр (кора-мантия)
порождает вариации гравитационного поля порядка (510-4-5-10-5)р. Долгопериодические процессы,
постоянно происходящие глубоко в теле Земли, вызывают изменения силы тяжести в пределах (10-8-
Ю-9)^. Лунно-солнечное приливное воздействие на земное гравитационное поле характеризуется ве-
личиной 31О-70. Таким образом, можно заключить, что для изучения особенностей «стационарного»
земного гравитационного поля достаточно выполнять наблюдения не грубее 10-4р. Для оценки же
величин временных вариаций силы тяжести требуется уже точность наблюдений порядка 10-8р. Наи-
более хорошо на сегодня изучено приливное лунно-солнечное воздействие на земное гравитационное
поле.
Временные изменения силы тяжести
Рис. 8.2.1. Схема причинно-логических связей вариаций силы тяжести.
Под интегральным воздействием масс Луны и Солнца возникают приливообразующие силы, которые
представляют собой разность между силами притяжения возмущающего тела (Луны и/или Солнца) в
точке центра Земли и в любой другой точке нашей планеты. Вертикальная компонента приливной силы
Увер изменяет силу тяжести на величину
л тг ( 2 1\
Рвер — 3G • (COS Z — — I ,
где G — гравитационная постоянная, R — радиус Земли, т — масса возмущающего тела, г — расстоя-
ние между Землей и возмущающим телом, z — зенитное расстояние возмущающего тела. Формула для
вертикальной составляющей указывает на периодическую зависимость ускорения силы тяжести от вре-
мени (от значения z). Ускорение силы тяжести на поверхности Земли максимально уменьшается, когда
z = 0, п на 0,109 мГал или на 1 • Ю-7^. Для Солнца максимальное значение вертикальной компоненты
составит 0,041 мГал.
Горизонтальная компонента Fr может быть определена по формуле
Fr = 1,5GmrR~3 sin 2z.
Величина горизонтальной компоненты максимальна, когда зенитное расстояние z = 45° и достигает
0,082 мГал для Луны и 0,037 мГал для Солнца. Разделив значения горизонтальных компонент на д,
получим поправку за уклонение отвесной линии. Максимальная величина поправки в уклонение отвеса
из-за приливных воздействий Луны составит Вдуна = 0,017", а для Солнца ®солн = 0,008".
Из-за суточного вращения Земли и из-за орбитальных движений Земли, Луны и Солнца приливо-
образующая сила в каждой точке земной поверхности непрерывно меняется во времени, никогда точно
не повторяясь. Непосредственное лунно-солнечное приливное воздействие на земное гравитационное
поле удобно характеризовать оценкой вклада основных приливных волн (табл. 8.1) [Торге 1999]
Однако в приведенных выше цифрах не учитывается влияние приливообразующих сил на твердые
части самого тела Земли. Это влияние выражается в изменении формы Земли (земной прилив), а это,
естественно, влечет за собой и изменение земного гравитационного поля [Melchior 1968]. Кроме того,
проявляется еще один аспект земного прилива — изменение гравитационного потенциала за счет сме-
щения точки наблюдения в радиальном направлении. Приливные волны, возникающие в твердой Земле,
могут вызывать вертикальные смещения в твердой земной поверхности до 50 см, а горизонтальные —
до 5 см.
Под влиянием приливных сил на нашей планете возникают и океанские приливы водных масс, ко-
торые, в свою очередь, также приводят к изменению силы тяжести из-за переменной дополнительной
нагрузки на земную кору. Эта периодически появляющаяся океанская приливная нагрузка также приво-
дит к смещениям земных масс (своеобразный потенциал деформации) и вертикальным перемещениям
точки наблюдения (гравиметра) [Goad 1980].
Высокие океанские приливы приводят к опусканию земной поверхности и соответствующему уве-
личению силы тяжести (интенсивность опускания поверхности с удалением от моря уменьшается).
Однако сопутствующее этому эффекту некоторое смещение масс несколько уменьщает общее сум-
марное изменение силы тяжести. В любом случае интегральное воздействие океанской нагрузки на
изменение ускорения силы тяжести не превышает единиц процентов от гравиметрического приливного
воздействия (в пределах 0,1-0,2 мкмс-2).
На параметры, характеризующие земное гравитационное поле, оказывают влияние приливные вари-
ации атмосферного давления. Изменение нагрузки атмосферных масс на земную поверхность вызывает
деформационный эффект, который проявляется в виде смещения притягиваемой точки по вертикали и
в появлении соответствующего деформационного потенциала. Модельные расчеты [Stacey 1977] дают
следующую оценку интенсивности влияния неприливных атмосферных изменений на силу тяжести:
Д&тм = -(2 4- 4) • ЬР нм • с-2,
где ЬР — амплитуда изменения атмосферного давления в ГПа.
Таблица 8.1. Основные приливные волны
Разновидность приливных волн* Период Амплитуда, н-м-с 2
Долгопериодические волны
МО — постоянный 1-прилив ОО 102,9
SO — постоянный s-прилив оо 47,7
Ssa — деклинационный прилив 182,62 сут 14,8
Мт — эллиптический прилив 27,55 сут 16,8
Суточные волны
01 — основной суточный /-прилив 25,82 ч 310,6
Р1 — основной суточный s-прилив 14,07 ч 144,6
Q1 — эллиптический прилив 26,87 ч 59,5
К1 — основной суточный Is деклинационный прилив 23,93 ч 436,9
Полусуточные волны
М2 — основной /-прилив 12,43 ч 375,6
S2 — основной s-прилив 12,00 ч 174,8
N2 — эллиптический прилив 12,66 ч 71,9
К2 — деклинационный прилив 11,97 ч 47,5
1 /3-суточные волны
М3 — 1/3-суточный / прилив 8,28 ч 5,2
*1 — лунный прнлнв; s — солнечный прилив
Изменения атмосферного давления охватывают временной диапазон от нескольких часов до 1 года.
Быстрые (единицы часов) апериодические изменения и атмосферные приливы, в основном солнечного
происхождения, имеют величину меньшую 1 ГПа.
Приливное атмосферное воздействие на гравитационное поле весьма небольшое. Оно выражается
в очень слабых суточных и несколько более сильных полусуточных изменениях атмосферного дав-
ления. Четкое выделение приливных изменений чрезвычайно затруднено из-за активного воздействия
на параметр давления других характеристик атмосферы. Амплитуды приливных вариаций давления
максимальны в тропической зоне и сильно уменьшаются в умеренных и высоких широтах.
Далее рассмотрим два вопроса изменения силы тяжести, связанные, во-первых, с изменениями силы
тяжести из-за гипотетически возможного уменьшения гравитационной постоянной G и, во-вторых, из-
за вариаций суточного вращения Земли и движений полюса.
Согласно [Dirac 1938], интенсивность изменения гравитационной постоянной G не превышает
(-10-10-10-11)/год, а по [van Flandern 1984] — ее величина (—6 ± 2)10-11. Если это так, то воз-
можное глобальное уменьшение силы тяжести не превышает (1-0,1) нм с-2/год.
Изменение величины угловой скорости вращения нашей планеты ш приводит к изменению центро-
бежного ускорения дш на величину дш = —си2/?cos2 <р, где ш — угловая скорость вращения планеты;
<р — широта точки наблюдения.
По дифференциалу этого выражения dgw — a)2/?sin2cpd(p — 2a)7?cos2 <pda> можно получить пред-
ставление о характере влияния на силу тяжести изменения широты dtp (как следствие эффекта движе-
ния полюса) и собственно изменения угловой скорости dw (из-за неравномерности осевого вращения
планеты).
Интенсивность изменения угловой скорости вращения Земли dw достигает значений (10-8-10-7) в
столетие, что может привести к появлению вариаций силы тяжести порядка (0,7-7) нм-с-2.
Перемещения мгновенной оси вращения Земли относительно полюса МУН (СЮ) вызывают изме-
нения широты точки на земной поверхности до 0,5", что может, в принципе, изменить д на величину
порядка 80 нм с-2. Для ее вычисления может быть применена формула
6<7пол = 8nM4J27?sin2(p(icos А — у sin А),
Рис, 8.2.2. Условный амплитудно-временной спектр вариаций силы тяжести (суша).
где 6Пол — значение амплитудного фактора за движение полюса (обычно это 1,0 или 1,2) [Wdhr 1985],
х,у — координаты мгновенного полюса относительно полюса МУН (СЮ).
Представляется интересным рассмотреть проблему временных вариаций силы тяжести с точки зре-
ния протяженности областей, в пределах которых фиксируются эти вариации. Следуя общепринятой в
физике Земли (как раздела геофизики) традиции, здесь также можно выделить три блока геодинами-
ческих явлений, которым приписывают «ответственность» за вариации земного гравитационного поля:
глобальный, региональный и локальный (рис. 8.2.2) [Торге 1999].
В глобальном блоке превалируют геодинамические явления с диаметром области существования
этих явлений свыше 104 км. Для региональных явлений характерна область их проявлений диамет-
ром порядка 102-104 км. К локальным явлениям относят геодинамические процессы, протекающие на
площадях менее 102 км2.
Размах вариаций ускорения силы тяжести, причиной которых могут быть геодинамические явления
глобального масштаба может отличаться по величине на два порядка и достигать единиц миллигал.
Время существования таких вариаций — от нескольких лет до 1000 лет. Изменения гравитационного
поля глобального масштаба могут быть вызваны, например, спонтанными смещениями земного ядра,
особенностями проявления тепловой конвекции в мантии, сопряженными перемещениями литосферных
плит, изменением уровня Мирового океана, перемещением масс при землетрясениях и вулканизме.
Вариации ускорения силы тяжести регионального уровня имеют весьма широкий диапазон — от
1 мкГал до 0,1 мГал. Временной интервал существования этих вариаций чрезвычайно широк (от минут
до многих сотен лет). Наиболее ощутимые региональные вариации (постледниковая изостатическая
компенсация, процессы осадконакопления, современные движения земной коры) имеют многолетний,
вековой характер.
Изменения параметров гравитационного поля, относимые к разряду локальных вариаций, вызыва-
ются, в основном, современными сейсмо-деформационными процессами, природными микросейсмами,
антропогенными (техногенными) воздействиями человеческой цивилизации, местными вариациями ат-
мосферного давления и изменениями уровня грунтовых вод. Асейсмические подвижки земной поверхно-
сти ответственны за вариации ускорения силы тяжести со временем существования годы—десятилетия.
Вариации атмосферного давления, изменения уровня грунтовых вод и другие гидрологические процессы
ответственны за изменения гравитационного поля нерегулярного или квазипериодического характера
длительностью от нескольких суток до нескольких месяцев.
Перепады атмосферного давления (порядка
±60 гПа), вызываемые мощными циклонически-
ми образованиями, имеют квазипериодический
характер, а длительность их существования до-
ходит до нескольких суток. Такие образования
могут охватывать территории поперечником от
нескольких сотен до тысячи километров. Отме-
тим, что изменения такого масштаба (±10 гПа
и более) имеют, как правило, сезонный харак-
тер [Ramsayer 1954]. Антропогенные воздействия
современной цивилизации (промышленная откач-
ка — закачка флюидов и углеводородного сырья,
горные разработки, крупные инженерные соору-
жения) также приводят к локальным изменениям
ускорения силы тяжести в диапазоне от десятых
долей до нескольких микрогал.
Определенный интерес представляет анализ
воздействий на земное гравитационное поле
быстро изменяемого состояния водной массы Ми-
рового океана (рис. 8.2.3). Ярким индикатором
мин час сут мес год лет лет
происходящих гидротермодинамических измене- Рис. 8.2.3. Условно-амплитудный спектр вариаций
ний в количественном и качественном составах силы тяжести (Мировой океан).
водной среды является высотное положение вод-
ной поверхности (уровень) океана. Изменение высотного положения внешней поверхности моря на 1 мм
предопределяет изменение ускорения силы тяжести примерно на 3 мкГал.
В высотных изменениях поверхности Мирового океана можно выделить три группы возмущающих
причин, отличающихся «механизмом» воздействия на земное гравитационное поле. В первой группе
основным источником возмущений являются приливные силы — прямое гравитационное приливное
воздействие Луны и Солнца на водные массы Мирового океана, приводящее к соответственному изме-
нению формы и уровня морской поверхности, а следовательно и силы тяжести. Эти же силы опосредо-
ванно влияют на высоту водной поверхности, но уже через воздействие земных приливов.
Ко второй, наиболее многочисленной, группе относят: вариации гравитационного поля, объясняемые
переменным состоянием океанских водных масс, причиной которых являются атмосферные изменения
над Мировым океаном. Различают непосредственное и косвенное влияния атмосферы на высотный
уровень океанской воды.
К атмосферным факторам, непосредственно воздействующим на высотное положение водной поверх-
ности, относят: атмосферные ситуации, при которых становятся возможными процессы, реализующие
принцип «обратного барометра»; изменения в океане, вызываемые мощными и/или долгодействующими
ветрами; вариации океанских, морских и медленных круговых течений от высоких широт к экватору
и обратно. Сюда же следует отнести влияние эффекта интегрального баланса воды, поступающей в
Мировой океан (атмосферные осадки и речной сток) и испаряющейся с океанской поверхности.
Косвенное влияние атмосферы на положение уровня усматривается в ряде особенностей ее тепло-
и массообмена с Мировым океаном. Именно этот обменный процесс в основном определяет соленость
и плотность поверхностных вод, а следовательно и структуру океанической циркуляции воды.
Третья группа — это колебания уровня океана, вызываемые процессами, проходящими в земных
недрах, их источник — внутренняя энергия планеты. Это прежде всего цунами — последствия под-
водных землетрясений, это и медленные колебания уровня океана вследствие изменения объема океа-
нических впадин в результате геологической эволюции Земли. К этой же группе, в принципе, можно
отнести и колебания уровня, связанные с вариациями ротационного режима планеты и смещения ее
полюса.
Во влиянии атмосферных факторов на гравитационное поле можно усмотреть три аспекта: прямое
гравитационное действие избыточных (или недостаточных) воздушных масс в зонах повышенного или
пониженного атмосферного давления Мирового океана. Два других аспекта связаны, во-первых, с
изменениями высоты водной поверхности под воздействием ветровых волн, зыби, сгонно-нагонных
явлений и, во-вторых, с реакцией внешней поверхности воды на изменение атмосферного давления.
Изучение гравитационных возмущений как результата влияния ветровых волн и зыби из-за боль-
шой нерегулярности и неопределенности существования этих явлений весьма затруднено. Однако для
небольшого количества областей, подверженных сильным ветровым воздействиям и штормам, получены
оценки некоторых параметров ветровых возмущений. Наибольшие возмущения ускорения силы тяже-
сти, вызванные ветровыми волнами, характерны для средних широт (40-50°), которые могут достигать
величин 200-250 мГал при высоте волн в десятки метров (правда, в штормовые сезоны).
Сгонно-нагонные эпизодические (длительностью до нескольких суток) колебания уровня океанской
воды также являются результатом относительно длительного ветрового воздействия. Пространствен-
ные масштабы этих возмущений достигают сотен километров. Высота уровня океана при этом может
изменяться на 1,5-2,0 м, а ускорение силы тяжести в таких областях — на 0,4-0,5 мГал.
Гравиметрическая реакция океанской водной массы на изменение атмосферного давления в случае,
когда перепады атмосферного давления компенсируются только изменением высоты водной поверхности
(принцип «обратного барометра»), может быть выражена формулой
Ьд = 0,021(Ро — Ра) мГал,
где Ро = 1013 мбар — нормальное атмосферное давление, Ра — реально наблюдаемое атмосферное
давление.
Особенно заметные возмущения в гравитационное поле Мирового океана вносят локальные неод-
нородные барические образования типа тропических циклонов. Их характерной особенностью является
крайне низкое атмосферное давление в центральной зоне циклона. Перепад атмосферного давления
в центральной и периферийной частях тропического циклонического образования, отстоящих друг от
друга на 200-300 км, может достигать 100 мбар и более, что, в конечном счете, «порождает» появление
локальной вариации ускорения силы тяжести в несколько миллигал.
8.3 Кинематика и динамика оболочек Земли
Н.А. Чуйкова, В.Е. Жаров, С.Л. Пасынок, Т. Г. Максимова, С.А. Казарян
8.3.1 Вступительные замечания
Кинематика и динамика Земли как системы связанных и взаимодействующих оболочек обусловлены
действием внешних и внутренних сил. Внешними силами являются силы гравитационного притяжения
Земли Луной и Солнцем, внутренние силы определяются неравновесным состоянием оболочек планеты.
В настоящее время по наблюдательным данным Земля надежно разделяется на следующие оболочки:
внутреннее ядро, внешнее ядро, мантию, кору и атмосферу.
Эффект внешнего воздействия различен для этих оболочек и зависит как от их геометрических и
физических свойств (формы границ, расстояния от центра масс Земли, массы, вязкоупругих свойств),
от параметров связи между оболочками, так и от длительности силы воздействия.
Если бы Земля находилась в состоянии гидростатического равновесия, то все силы давления внут-
ри Земли были бы направлены по нормали к уровенным поверхностям, совпадающим с поверхностями
равной плотности и давления. Поэтому внутри равновесной Земли не существует сил, которые мо-
гут вызвать какие-либо движения. Таким образом, имеет смысл говорить о кинематике и динамике
оболочек только для неравновесной Земли.
В настоящее время имеется множество наблюдательных фактов, свидетельствующих о неравновес-
ном состоянии всех оболочек Земли, к которым относятся: 1) временные вариации магнитного поля
Земли, 2) аномалии гравитационного поля, 3) горизонтальные и вертикальные движения земной коры,
4) сейсмичность, 5) вариации скорости вращения Земли, 6) движения в атмосфере. Поэтому, прежде
чем говорить о кинематике и динамике отдельных оболочек Земли, нужно исследовать неравновес-
ное состояние этих оболочек. Только после решения этой задачи можно определить силы и моменты
сил, действующие на отдельные оболочки Земли, и сравнить полученные кинематические следствия с
наблюдательными данными.
Необходимость рассмотрения Земли как динамической системы взаимодействующих оболочек вы-
звана повышением точности и увеличением временного разрешения астрономических и геофизических
наблюдений. Отличие результатов наблюдений от теоретических результатов дает основание говорить
о несовершенстве используемых моделей Земли.
Одним из важнейших наблюдательных эффектов, обусловленных динамикой и кинематикой обо-
лочек Земли, являются вариации параметров вращения Земли (ПВЗ). Под действием сил притяжения
Солнца, Луны и планет мгновенная ось вращения Земли, ось ее фигуры и ось углового момента движут-
ся относительно инерциальной системы отсчета. Это движение называется прецессионно-нутационным
движением. Период прецессии равен ~ 26 000 лет. На прецессионное движение оси накладываются
нутационные гармоники, периоды которых определяются параметрами орбит Земли и Луны, а также
обращающихся вокруг Солнца планет.
Традиционным методом построения теории нутации Земли является следующий: на основе приня-
той модели Земли вычисляется амплитудно-частотная передаточная функция, которая умножается на
амплитуды нутационных гармоник, вычисленных для абсолютно твердой Земли. Затем добавляются по-
правки, учитывающие отклонение модели от реальной Земли. Используя этот метод, автор [Wahr 1981]
получил нутационную серию из 106 гармоник для упругой эллипсоидальной Земли с жидким внешним
ядром и упругой мантией. Эта серия в 1980 г. была принята Международным Астрономическим Сою-
зом (МАС) в качестве стандарта для астрономических вычислений [Seidelmann 1982]. Используемая
модель Земли определяет ее нормальные моды, т. е. резонансные свойства Земли. В модели Земли, ис-
пользуемой Варом, определены три нормальные моды: чандлеровское колебание (CW), почти суточная
нутация (FCN) и наклонная мода (ТОМ). Отличие реальной Земли от модели приводит к изменению
частот нормальных мод (а также к появлению новых мод) и к изменению амплитуды усиления. Это
особенно важно, если частоты лунно-солнечного потенциала лежат вблизи частот нормальных мод.
С начала 80-х годов начались регулярные наблюдения на радиоинтерферометрах со сверхдлинной
базой (РСДБ). К настоящему времени РСДБ вносят основной вклад в определение нутационного дви-
жения (IERS 2000). Ошибки определения нутационных амплитуд методами РСДБ в настоящее время
не превышают 0,1 мс дуги для большинства нутационных гармоник. В результате 20-летних наблюде-
ний РСДБ получены поправки к теории МАС1980 (IERS 2000). Разности «наблюдения—теория» лежат
в пределах —15... + 15 и —5... + 5 мс дуги для нутации в долготе и наклоне, соответственно. Эти
разности значительно превышают ошибки наблюдений, что говорит о достоверности результатов.
Важнейшим результатом наблюдений является доказательство неравновесного состояния жидкого
ядра: для согласия теории с наблюдениями необходимо дополнительно увеличить сжатие ядра примерно
на 4% (по сравнению с гидростатическим сжатием).
Кроме прецессионно-нутационного движения оси вращения Земли в пространстве существует дви-
жение этой оси относительно земной системы координат. Основными причинами движения полюса
и неравномерности вращения Земли также являются динамические процессы в ядре, мантии и атмо-
сфере. Поэтому сравнение теории с наблюдениями позволит уточнить динамическую модель Земли,
состоящую из неравновесных оболочек.
8.3.2 Кинематика и динамика ядра Земли
Открытие существования твердого ядра и жидкого ядра Земли
В 1906 г. Олдгем обнаружил, что примерно на половине пути до центра Земли скорость Р-волн
(продольных сейсмических волн) внезапно уменьшается, а S-волны (поперечные сейсмические волны)
исчезают. Известно, что поперечные волны не распространяются в жидкости. Скорость поперечных
волн vs = х/р/Р (где |i — модуль сдвига, р — плотность), в жидкости обращается в нуль в силу
равенства нулю модуля сдвига для жидкости. Таким образом, было обнаружено, что Земля обладает
протяженным жидким ядром.
В 1936 г. датский сейсмолог Леманн обнаружила быстрое увеличение скорости продольных волн на
глубине около 5000 км. Скорость продольных волн равна vp = y/(Ks + 4|i/3)/p (Ks — адиабатический
модуль всестороннего сжатия). Наблюдаемое увеличение скорости продольных волн легко объясняется,
если предположить, что на этой глубине волна опять распространяется в твердом теле. Так было
открыто существование твердого ядра Земли.
Сферически симметричная гидростатически равновесная модель распределения плотности внут-
ри Земли
Для описания физического явления строится некоторая модель, отражающая основные характери-
стики рассматриваемого явления. Под моделью Земли понимают совокупность физических параметров
Земли (сейсмических скоростей, плотности, температуры и т. д.), заданных как функции глубины (или
радиального расстояния), долготы и широты. Если определить функцию Ф, как Ф = Ks/p = Vp — 4v|/3
и принять предположение о сферической симметрии Земли, то уравнение, описывающее распределение
плотности гидростатически равновесной Земли, может быть записано в виде [Жарков и др. 1971]:
dp Gm(r)p /оом
-т- = —^Г^аРт- (8.3.1)
dr г2Ф
где а — коэффициент объемного расширения, т — нададиабатический градиент температуры, G —
гравитационная постоянная, тп(г) = 4л py2dy — масса внутри сферы радиуса г. Последний член
уменьшает dp/dr в среднем на 2% в химически однородных зонах и при построении сейсмических
моделей распределения плотности нададиабатическим градиентом часто пренебрегают. В этом случае
уравнение (8.3.1) называют уравнением Адамса-Вильямсона.
Физические и химические характеристики твердого ядра и жидкого ядра
Если заданы граничные условия для уравнения (8.3.1) и определена функция сейсмических скоро-
стей Ф, то (8.3.1) может быть проинтегрировано, и функция распределения плотности в зависимости
от радиуса может быть построена. Распределение плотности, сейсмических скоростей и добротностей
согласно модели PREM [Dziewonski, Anderson 1981] приведены в табл. 8.2. В ней добротности <ЭИ и
<Эк, а также другие параметры даны для периода сейсмических волн 1 с. В случае учета еще и угло-
вой зависимости уравнение, описывающее распределение плотности внутри Земли, сильно усложняется
[Жарков и др. 1971].
В настоящее время предполагают, что жидкое ядро состоит из железа с примесью легкой компонен-
ты. Обычно в качестве легкой компоненты рассматривается кремний [Брагинский 1964]. Постоянно
идет процесс кристаллизации твердого ядра, в результате которого образуется избыток легкой ком-
поненты. Фракции легкой компоненты всплывают, что и служит основной причиной конвекции, в
Таблица 8.2. Распределение плотности, сейсмических скоростей и добротностей по модели PREM
Регион Радиус, км Плотность, г-см-3 vp, км-с-1 км-с-1 Си Qk
Внутреннее твердое ядро 0-1221,5 13,0885 -8,8381-х2 11,2622 -6,3640-х2 3,6678 -4,4475-х2 84,6 1327,7
Внешнее жидкое ядро 1221,5-3480,0 12,5815 -1,2638-х -3,6426-х2 -5,5281 -х3 11,0487 -4,0362-х +4,8023-х2 -13,5732-х3 0 ОО 57823
Таблица 8.3. Величина динамической вязкости по различным данным [Secco 1994]
Из глобальных геодинамических данных (наблюдений за свободными колеба- ниями Земли и их затуханием, параметрами прецессии и нутации, движениями полюсов) 10" 41012 Пуаз
Из сейсмических наблюдений за затуханием сейсмических продольных и попе- речных волн 10® 4-1012 Пуаз
Из геомагнитных данных 10-24-10® Пуаз
Из данных теории поведения жидких металлов 10-2-г104 Пуаз
процессе которой и формируется магнитное поле Земли. Согласно оценкам Брагинского, запасов энер-
гии для генерации магнитного поля Земли осталось приблизительно на 100-300 млн. лет. Марс уже
израсходовал свой запас энергии и не обладает собственным магнитным полем (имеется в виду поле,
возникающее в результате конвекции в ядре). Согласно Брагинскому, процентное содержание кремния
в настоящее время составляет 25-30%.
Температура в жидком ядре составляет (4-?5)-103 К, достигая 6-103 К в центре твердого ядра [Жар-
ков и др. 1971]. Проводимость жидкого ядра составляет 0,6-1016 с-1, откуда для коэффициента теп-
лопроводности по закону Видемана-Франца получают значение 0,155 кал/(см-К) [Брагинский 1964].
Удельная изобарическая теплоемкость (удельная теплоемкость при постоянном давлении) составляет
0,15 кал/(г-К). Коэффициент температуропроводности составляет 0,1 см2с-1. Давление в жидком ядре
l-i-3-106 атм, а адиабатическая скорость звука 9,5-103 м/с. Коэффициент температурного расширения
равен 7-106 К-1.
Согласно работе Секко [Secco 1994], вязкость жидкого ядра, определяемая различными методами,
лежит в диапазоне от 10-2 до 1012 Пуаз. Частично такой разброс значений объясняется тем, что кро-
ме влияния молекулярной (реологической) вязкости свой вклад в наблюдаемую величину диссипации
могут вносить и другие процессы. Например, на механические движения могут влиять и невязкие дис-
сипативные процессы, такие, как Джоулева диссипация. Поэтому определяемая по ним вязкость будет
отличаться от обычной (реологической) вязкости (табл. 8.3).
Важна также и радиальная зави-
симость вязкости. Недавно в институ-
те физики высоких давлений (ИФВД
РАН) в экспериментах по кристалли-
зации железа под сверхвысоким дав-
лением была уточнена кривая плавле-
ния жидкого железа [Бражкин, Ляпин
2000]. На основе этих результатов бы-
ла предложена новая модель распреде-
ления вязкости в жидком ядре Земли
(рис. 8.3.1).
Если принять такую функциональ-
ную зависимость, то окажется, что ре-
зультаты вычислений прецессии и ну-
тации Земли требуют ограничения ди-
намической вязкости на границе твер-
дое ядро — жидкое ядро величиной
т]я = 1,318-108 Па-с [Zharov, Pasynok
1999].
В общем случае вязкость входит в
1g (п Пас)
внутреннего ядра
Рис. 8.3.1. Модель распределения вязкости в жидком ядре.
уравнения вращения совместно с пара-
метрами магнитного поля [Жаров, Па-
сынок 2001]. Как видно из рис. 8.3.1,
вязкость очень быстро возрастает с уменьшением расстояния до центра Земли и велика только в тон-
ком слое толщиной около 100 км вблизи поверхности твердого ядра. Поэтому в большинстве задач по
земному ядру вязкость можно не учитывать (как в задаче о собственных трансляционных колебаниях
внутреннего ядра Земли) или считать малым фактором (как в задаче о вращении Земли). Разумеется,
решение о том, учитывать ли вязкость, принимается исходя из требований к точности решения.
С вязкостью тесно связано значение коэффициента диффузии. Произведение коэффициента диф-
фузии на кинематическую вязкость равно величине, которую в земном ядре приблизительно можно
считать постоянной [Брагинский 1964; Мусихин, Есин 1962]. При динамической вязкости 1 Па-с ко-
эффициент диффузии равен примерно 10-6 см2/с. Известно, что значения коэффициента диффузии
кремния и железа в жидком чугуне составляют примерно 10-4 см2/с при температуре 2-103 К [Муси-
хин, Есин 1962]. Если же вязкость составит 108 Па-с, то для коэффициента диффузии получится около
10-14 см2/с. Увеличение значения коэффициента диффузии объясняется высоким давлениям в жидком
ядре.
Динамика твердого и жидкого ядра как важная составляющая часть общей динамики зем-
ных оболочек. Система уравнений движения для жидкого и твердого ядер включает в себя следую-
щие уравнения: уравнение Навье-Стокса для вязкой проводящей жидкости, уравнение непрерывности,
уравнение для изменения концентрации процентного содержания легкой компоненты (кремния) для
двухкомпонентной смеси, уравнение состояния вещества жидкого ядра, уравнение Пуассона для грави-
тационного поля, уравнение для магнитного поля (уравнение генерации и равенства нулю дивергенции
магнитного поля), уравнение движения твердого ядра и уравнение вращения твердого ядра:
pdv/dt = —S7p — pVUef — p2Q x v + Fb + F^,
dp f \
~at = ~ ~(pv)'
V28 = 4тгА:р,
D„
dL, . dS ,c
p— = —divi, p— = —divi + 0,
dt dt
= rot (v x B) — rot (Dm rot B),
= c2(47tff)_1, div В = 0,
5?(5y + + 2Q fk x + Q2 (1 - —(kx kx t), =
J dt2 \ dt J \ as J
4 _ Л , Ai ( aF\ dR
--TiGaF 1-— Xi + — +1-— —,
3 \ as J rF \ as / oxi
^ + QxHs = Fs,
dt
d-d^(vx7\ F isVT + £Q
___ + (v.V)) FB--jxB, F„ ——V-7t, i --------.
Здесь v — скорость жидкости в системе координат, вращающейся вместе с Землей с угловой скоро-
стью (П = 0,73 • 10-4 с-1); Uef = U - (П х г)2/2 ; U — гравитационный потенциал; к — ньютоновская
постоянная; р — плотность жидкости; £. — массовая концентрация легкой примеси (кремния); р —
давление; Т — температура; S — энтропия на единицу массы; Fb — магнитная сила; F„ — сила
вязкости; i, q, is — плотности молекулярных потоков примеси, тепла и энтропии; 0 — возникновение
энтропии; 52 <2 — сумма всех источников тепла; ц — химический потенциал, определенный так, что
de = pp-1dp + TdS + pdE, (где e — внутренняя энергия на единицу массы); к — единичный вектор в
направлении вращения; бу — символ Кронеккера, индексы i,j принимают целые значения от 1 до 3;
-41 = Ап, Аг = Ви, Аз = Ащ — коэффициенты разложения в ряд по сферическим функциям гравита-
ционного потенциала Земли за вычетом твердого ядра, rF — радиус жидкого ядра, R — возмущающая
функция; xi = х,Х2 = у,хз = z — координаты центра твердого ядра Земли; msotik ~ тензор при-
соединенных масс, ms — масса твердого ядра Земли, as — плотность твердого ядра Земли, aF —
плотность жидкого ядра Земли; Я — угловая скорость вращения мантии и коры Земли в инерциальной
системе отсчета; Ид — момент импульса твердого ядра; и, наконец, Гд — момент сил, действующих
на внутреннее твердое ядро.
Эти уравнения могут быть решены при задании начальных и граничных условий. Граничные усло-
вия на границе твердое-жидкое ядро зависят от относительного расположения твердого и жидкого
ядер. Кроме того, сила сопротивления движению твердого ядра со стороны вещества жидкого ядра
зависит от поля скоростей в нем. Это означает, что движение твердого ядра зависит от движения жид-
кого ядра. Но движение жидкого ядра в свою очередь зависит от движений твердой оболочки Земли
и атмосферы за счет граничных условий на границе жидкое ядро-мантия. Таким образом, движение
всех основных оболочек Земли взаимосвязано. Чтобы его определить, необходимо решать полную си-
стему уравнений, в которую кроме уравнений для жидкого и твердого ядра входят также аналогичные
уравнения для мантии и атмосферы. В общем случае эта задача очень сложна. Для решения задачи
о вращении Земли ситуация аналогична. В случае решения задачи о генерации магнитного поля си-
стема уравнений осложняется еще больше, так как необходимо учитывать возможность возникновения
развитой турбулентности [Брагинский 1964].
Оказывается, что задача может быть существенно упрощена, если разложить эту систему в ряд по
малым параметрам, а затем отбросить несущественные члены. Какие из членов будут несущественны-
ми, зависит от рассматриваемой задачи и требований к точности результата.
Можно выделить следующие направления, в которых используются уравнения динамики ядра:
1. Теория вращения Земли (и задачи о вращении твердого ядра и жидкого ядра).
2. Теория поступательного движения ядра (и задача о собственных трансляционных колебаниях
внутреннего ядра Земли как ее важный частный случай).
3. Магнитная гидродинамика земного ядра (и объяснение возникновения магнитного поля Земли).
4. Теория малых возмущений (собственные колебания Земли, магнитогидродинамические волны в
жидком ядре и др.)
Собственные трансляционные колебания внутреннего ядра Земли. Сначала рассмотрим влия-
ние неравновесной оболочки Земли на собственные трансляционные колебания внутреннего ядра Зем-
ли. В этой задаче рассматривается поступательное движение внутреннего ядра Земли как твердой сфе-
ры под действием гравитационных сил, сил гидростатического и динамического давления жидкости,
а также сил инерции. Первой самой грубой оценкой спектра собственных трансляционных колебаний
внутреннего ядра Земли является его оценка в рамках модели невращающейся Земли. Такие оценки
были сделаны в работах Шлихтера [Slichter 1961], Монина [1973], Авсюка [1996]. Для невращаю-
щейся Земли спектр состоит из одной гармоники с единственным периодом, равным приблизительно 4
часам. При этом свободная мода существует для колебания ядра в любом направлении.
Учет вращения расщепляет единственную полярную гармонику собственных колебаний невращаю-
щейся Земли на три составляющих [Busse 1974]: приблизительно 4 часа — период колебаний в поляр-
ном направлении, приблизительно 4,4 часа для «прямой» экваториальной моды колебаний и 3,7 часа
для «обратной» экваториальной моды колебаний. «Прямая мода» означает, что относительно вращаю-
щейся Земли ядро опережает в своем движении по эллипсу вращение Земли, а для «обратной» моды —
наоборот. Таким образом, влияние вращения Земли сказывается в том, что движение ядра теперь
непрямолинейно и является суперпозицией трех мод: полярной прямолинейной, прямой эллиптической
экваториальной и обратной эллиптической экваториальной. При этом полярные колебания сохраняют
то же значение частоты, которое они имели и для невращающейся Земли.
Решение уравнений гидродинамики [Пасынок 1999а, б, в] показывает, что тензор присоединенных
масс зависит от частот экваториальных мод. Для полярных колебаний эта задача была решена Буссе
[Busse 1974]. В результате влияние частотной зависимости тензора присоединенных масс приводит к
расщеплению полярного периода на две составляющих с величиной расщепления около 0,01 часа, так
что суммарный спектр состоит из четырех частот.
Влияние неравновесной оболочки Земли на динамику ядра Земли. Влияние гравитационно-
го поля неравновесной оболочки приводит к дополнительному расщеплению экваториальных частот
(величина расщепления составляет 0,001 часа), так что суммарный спектр состоит из шести гармо-
ник [Баркин 1996; Пасынок 1997; Чуйкова и др. 1997]. Другим эффектом влияния неравновесной
оболочки Земли является смещение положения равновесия относительно геометрического центра ман-
тии (приблизительно на 400 м), которое определяется коэффициентами Сю, Си и Оц в разложении
гравитационного потенциала в ряд по сферическим функциям.
Влияние гравитационного поля неравновесной оболочки Земли на вращение внутреннего ядра Земли
было рассмотрено Пасынком [1999а, б, в]. Было показано, что влияние гравитационного поля нерав-
новесной оболочки Земли на вращение внутреннего ядра Земли составляет несколько секунд дуги и
должно учитываться в современной теории нутации.
Сравнение с наблюдениями. Свободные колебания являются общим решением однородного диф-
ференциального уравнения второго порядка. Чтобы из него выделить частное решение, необходимо
задаться начальными условиями. При этом часть коэффициентов общего решения может обратиться
в нуль. Д.Е. Смайлом [Smylie 1992] в результате обработки длинного ряда наблюдений на сверх-
проводящих гравиметрах были получены следующие периоды: 4Л,015 ± 0Л,001, 3\ 5820 ± 0h, 0008,
3h, 7677 ± 0h, 0006. Эти периоды близки к трем из полученных модельных периодов. Поэтому можно
предположить, что эти периоды соответствуют собственным колебаниям внутреннего ядра Земли. Сам
Смайл объясняет эти колебания собственными колебаниями жидкого ядра при неизменном положении
твердого ядра за счет сил упругости. Однако такие колебания должны были бы иметь, по крайней
мере, в 1000 раз меньшие амплитуды, чем собственные трансляционные колебания твердого ядра для
создания такого же гравитационного эффекта на поверхности Земли. Если принять, что амплитуда ко-
лебания твердого ядра составляет 1 м, то соответствующая амплитуда изменения ускорения свободного
падения составит около 0,17 мкГал. Амплитуда, выделенная Смайлом, по порядку величины совпадает
с этой оценкой. Энергетические оценки показывают, что источником возбуждения таких колебаний
вполне могут являться землетрясения [Busse 1974].
Магнитная гидродинамика земного ядра. В настоящее время разработаны, в основном, кине-
матические аспекты динамо: по заданным скоростям находят магнитное поле как решение уравнений
генерации и условия соленоидальности магнитного поля. И.С.Брагинский показал [Магницкий 1995],
что существует распределение скоростей, которое может полностью объяснить наблюдаемое магнитное
поле Земли и его особенности. При этом сам механизм динамо связан с крупномасштабными движе-
ниями. По теории И.С. Брагинского, изменение дипольной компоненты (приблизительно в 1,5 раза) с
периодом 8000 лет обусловлено взаимодействием между тороидальным и полоидальным полями в про-
цессе крупномасштабной конвекции. Движение и распад крупных неоднородностей магнитного поля
с периодами 600-1800 лет обусловлено неустойчивостью осесимметричного радиального потока веще-
ства в низких широтах. Возмущения с периодами около 60 лет вызваны крутильными колебаниями
в системе ядро-мантия, возникающими при движении альвеновской волны в жидком ядре Земли. А
возмущения с периодами 4-40 лет — мелкомасштабной турбулентностью в верхних частях ядра.
Однако, как уже отмечалось выше, уравнения для магнитного поля связаны с уравнениями движе-
ния проводящей жидкости, и чтобы понять, насколько хорошо теория описывает генерацию магнитного
поля Земли, необходимо совместное решение полной системы уравнений.
8.3.3 Кинематика и динамика мантии и коры Земли
Динамический эффект давления коры на мантию
В настоящее время не вызывает сомнений наличие горизонтальных движений земной коры, фикси-
руемых как изменение координат пунктов в системе осей Тиссерана. Долгопериодическая компонента
таких движений обычно объясняется движением литосферных плит относительно мантии, энергети-
чески связанным с конвективными движениями в мантии. Однако вполне возможен другой механизм
горизонтальных движений, связанный со смещением блоков коры относительно мантии. Энергетика
такого движения обусловлена изостатической неуравновешенностью коры, а его возможность связана
с наличием слоя пониженной вязкости вблизи границы кора-мантия.
Горизонтальное движение коры может иметь как общую для всей Земли составляющую, интер-
претируемую как вращение коры относительно мантии, так и локальную, различную для различных
регионов Земли. Наличие вращения коры относительно мантии подтверждается наблюдательными дан-
ными [Ricard et al. 1991] и объясняется вариациями вязкости в верхней мантии под океанами и
континентами. Момент сил, вызывающий относительное вращение мантии и коры, обусловлен несим-
метричным смещением центров инерции коры и мантии относительно центра инерции Земли [Чуйкова
и др. 1996]. Такое смещение приводит к изостатически неуравновешенному давлению коры на мантию.
Если момент сил давления превышает момент сил трения на границе кора-мантия, то может произойти
сдвиг мантии относительно менее жесткой и реологически ослабленной коры и, соответственно, сдвиг
коры в противоположном направлении. Эффект вращения коры может проявиться в долгопериодиче-
ских вариациях параметров ориентации Земли относительно небесной системы координат. Поскольку
теория вращения Земли строится относительно осей Тиссерана для мантии Земли, а реально оси коор-
динат определяются как оси Тиссерана для коры Земли, то вращение коры вызывает поворот осей, не
отраженный в теории.
Ниже мы приводим математическое и геофизическое обоснование указанного механизма и даем
численные оценки возможных наблюдательных эффектов в вариациях скорости вращения Земли.
Интегральные моменты сил негидростатического давления коры на мантию. Для гидростати-
чески уравновешенной Земли все силы давления внутри Земли направлены по нормали к уровенной
поверхности, совпадающей с поверхностью равной плотности и давления, поэтому не существует мо-
мента сил, вызывающего относительное вращение оболочек Земли. Отсюда при расчете момента сил,
которые могут вызвать вращение коры относительно мантии, следует учитывать только негидроста-
тическую часть давления коры на мантию. Эта часть обусловлена, в основном, отклонением высот
рельефа и высот поверхности мантии (так называемой поверхности Мохоровичича М) от соответству-
ющих поверхностей гидростатического равновесия. Наличие неоднородностей плотности внутри коры
учитывается в используемой нами для расчета модели эквивалентного (т. е. однородного по плотности)
рельефа [Чуйкова и др. 1996] и в модели глубин М [Чуйкова, Максимова 1996], полученной нами
на основе осредненных сейсмических данных, где вклад разноплотностных слоев суммируется в об-
щем годографе. Модель [Чуйкова и др. 1996] была нами уточнена путем привлечения новых данных о
плотности и мощности осадочного покрова Земли [Корякин и др. 1998].
Силу давления р отдельного блока коры на мантию, направлен-
ную по нормали к уровенной поверхности, можно разложить на две
компоненты: — рп (вызывающую вращение мантии) и pt (вызывающую
горизонтальные движения блоков коры), направленные, соответствен-
но, по внутренней нормали и по касательной к поверхности мантии
(рис. 8.3.2).
Рассмотрим три ортогональных компоненты интегрального враща-
тельного момента сил давления масс коры на мантию: Lz — направ-
лена вдоль оси z вращения Земли, LX,LV — соответственно, вдоль
оси х, лежащей в плоскости Гринвичского меридиана (А = 0°) и оси
у (А = 90°). Для них можно записать следующие выражения:
тг/2 2тг мантию.
Bx,y,z = cos cpdAtp,
—п/2 0
где lx,VlZ — (г2 х pn)w; г2(<р,А) = [Г?2(1 - esin2 ср) + Н2(<р, А)]гг — радиус-вектор мантии;
Я2 = 6348660 м — средний радиус поверхности Мохоровичича М [Чуйкова, Максимова 1996];
е = 0,00334 — гидростатическое сжатие; pn(<p,A) = —(pcosa)n — негидростатическая сила дав-
ления коры на мантию, направленная по внешней нормали п к поверхности мантии; р(ср, А) =
(Ri/R2)2OiHigi - G2H292 — негидростатическое давление коры на мантию по внутренней норма-
ли к уровенной поверхности; а(ср,А) — угол наклона поверхности мантии по отношению к уро-
венной поверхности; R\ = 6369240 м — средний радиус эквивалентной поверхности рельефа;
Я1,2(<Р,А) = 52„=1 cosmA + Впт^ sinmA)P™(sin<p) — высоты эквивалентного рельефа
(1) и поверхности Мохоровичича (2) относительно соответствующих гидростатических эллипсоидов;
Рис. 8.3.2. Разложение си-
лы давления блока коры на
Ci = 2,67- IO3 кг/м3, Ст2 = 2,85 • 103 кг/м3 — средние плотности коры вблизи поверхности и вблизи
мантии; рхДф.А) = ^(l + Psin2 <р) + ДрхДф, А) — ускорение силы тяжести на поверхности и вблизи
мантии; 3 = 0,00530, д^ = 9,78 м/с2;
/ X У Z \ tx = r2 cos ф cos A, Pnx — Pn ’
Г X pn = 1 rx rv rz j ; rv = r2 cos ф sin A, Pny = Pn’b,
\Pnx Pny Pnz / rz = r2 sin ф, Pnz = Pn ’ c;
а, Ь, с — направляющие косинусы внешней нормали п к поверхности мантии по отношению к уровенной
поверхности:
а — (уф sin (р cos А + ул sinA + cos ф cos А) • cos а,
Ь = (у ф sin ф sin А — уд cos А + cos ф sin А • а,
с = (-Уф cos ф + sin ф) • а;
5Н2 дН2 м
Ул = -------zr,y<o = —z— — наклоны поверхности Мохоровичича по долготе и широте, соответ-
ггсозудА г2Оф
1
ственно; cosa= —, —г.
Произведя необходимые выкладки, получим
1Х = -Рп’"2(У<р8тА-ул8ШфСОзА),
1У = -рпГ2 (у<р COS А - Ул sin ф sin А),
(8.3.2)
lz = -РпГгУА COS ф-
Оценим величину возможного эффекта. В силу малости а,у, $,H/R, (Ях — R2)/R, можно решать
2 । 2
задачу в линейном приближении. Полагая cos a и 1 — « 1, Hgrl « Hg^RZ, к = 9122. = const,
2 giffi
получим LXiViZ = L0(Lx,l,z - кь£у,г), где
Lq = ffiSi0)^2 = 1.052 • 1018 кг/с2,
rd 2) ГГ и f дН2 . , дН2 . \
1Д.' ' = rii 2 I -z— sin Л---—- sin ф cos Л cos фоАаф,
JJ ’ у Оф cos фоА )
/А1-2) = ff Hi 2 ( cos А---——тгг sin Ф sin А | cos <pd\d<p,
v JJ ’ у Оф созфоА /
L<1,2) = ff -У^С08ф(/А«/ф,
JJ оЛ
Учитывая следующие формулы:
= 52 52 т(~А™ sin mA + -Snm cos mA) Р™ (sin ф),
n=l m=l
0H2 г—\ г—\ (21 . A r>(21 \ cJ-P-TVsin ф)
= 52 52 (sin mA + ВЦ cos mA)------—-----,
= -mtgVPnm + Pnm+1 =rntgVP--an.in_1Pnm-1 + 6ro_1P„m+1,
On.m-i - (n - m + l)(n + m),
получим после некоторых преобразований
дн2 . у дн2 . у
—— sin А-------— sin ср cos А =
аср cos (рал
1 N п
= 2 52 52 [6™-1(Лйп-1 sin mA - cos тХ)Р™+
П=1 771=0
+ “п,т(лйп+1 sinmA - BSn+i cos mA) F^1,
0Я2 , дн2 . . г
—— cos Л-------—- sin ср sin Л =
о<р cos (роЛ
_ N п
= 2 52 52 cosmA + Bnin-i sinmA)P™-
П=1 771=0
- an.mC^^+i cos mA - B^2)m+1 sin mA) F™,
где 60 = 2,5m>0 = 1, an,m = (n- m)(n + m - 1).
Учитывая затем свойство ортогональности сферических функций, получим после интегрирования и
перехода к нормированным (по Каула) коэффициентам:
N п
Lx =2nL0 52 52 у/Ьтп-1(п -т + l)(n + т)х
х (А^ В™ — Л(1) В^ 4- Л(2) — А(1) В^ 1
х ^n.m-l^n.m лп,тп—1-°п,т + /in,m-Dn,m-1 лп,т°п,т-1/«
N п _______________________________
Ly —2nLo 52 52 л/^т-1(л - т + 1)(п + т) х
X Г-Л(2) Л(1) 4- Л(1) Л(2) 4- в<2) в(1) - в<М й(2) 1
х \ лп,т—1лп,7п ‘ ^71,771—1лп,т ' Dn,m-Dn,m—1 -^п.тп^п.тп—1/»
N п
Lz =4nL0 £ £ т(А^В^ - А^В^).
Отсюда видно, что в случае полной изостатической компенсации рельефа на границе Мохоровичича,
т. е. при о'1Я1(ф,А) = -&о2Н2(<р, А), где До2 — скачок плотности на М, имеем
л(2) о(2)
лпт ____ Dnm
лС1) дС1)
лпт -Опт
= const
и, следовательно, получим Lx = Ly = Lz = 0.
Из формул также видно, что моменты равны нулю также при условии совпадения одной из поверх-
ностей (М или рельефа) с уровенной (т. е. при Апт = Впт = 0) или даже при различном уровне
компенсации для гармоник различных степеней (т. е. при const = const(n)). Значит, только изостати-
чески нескомпенсированный для какой-либо степени п рельеф может вызвать ненулевой момент сил
давления коры на мантию.
Наглядно проявление данного эффекта проиллюстрировано на рис. 8.3.3.
а) Для каждой гармоники рельеф изостатически скомпенсирован на границе М. В этом случае нет
сдвига какой-либо гармоники рельефа относительно противоположной по знаку гармоники высот М.
Поэтому возникающие для отдельных блоков коры моменты давления |pnra|cosa взаимно компенсиру-
ются и не вызывают общего вращения мантии. Отсутствует также общая тангенциальная компонента
Pt, вызывающая горизонтальные движения блоков коры. Аналогичные выводы получаются в случае
совпадения одной из поверхностей с уровенной.
Рис. 8.3.3. Общий момент сил давления для вариантов: а) ие отличен от нуля, б) отличен от нуля.
пени N детальности представления
рельефа.
б) Нет полной изостатической компенсации, т. е. имеется
сдвиг какой-либо гармоники рельефа относительно проти-
воположной по знаку гармоники высот М. В этом случае в
силу отличия величин сил давления для отдельных блоков
коры общий момент сил давления отличен от нуля. Также
отлична от нуля общая тангенциальная компонента pt.
На рис. 8.3.4 представлены графики моментов Lx,Ly,Lz
в зависимости от N (т. е. от степени детальности представ-
ления рельефа), рассчитанные нами на основе наших моде-
лей эквивалентного рельефа и поверхности Мохоровичича.
Из рисунка видно, что в настоящее время существуют прак-
тически постоянные по знаку (вне зависимости от N) ком-
поненты интегрального момента давления коры на мантию,
достигающие |L| « 5 • 1025 Нм при = 30.
При наличии нежесткой связи между корой и манти-
ей, они могут привести к замедлению вращения мантии от-
носительно коры (Lz < 0) и к относительному ускорению
движения мантии в направлении, определяемом Lx > 0 и
Lv>0.
Для оценки существенности полученных моментов при-
ведем оценку лунно-солнечного момента сил, действующего
на Землю и вызывающего изменение во вращении Земли:
2
^max = GM^ J2P21(cOSP) »
И 2,5 1022 Нм,
^ = 0,5^,
где GM = 3,986 • 1014 м3/с2, d = 3,844- 10е м, |Р21|тах « 1, Л » Ю"3, = 0,735 • 1023 кг, р = 90° - 5,
= 6,378-10® м, 5 0 = 23,5°.
Таким образом, полученные моменты примерно на три порядка больше, чем лунно-солнечный мо-
мент сил.
Момент сил трения. Поскольку при любом относительном движении возникает сила трения, то
для оценки возможного движения коры относительно мантии необходимо учесть момент сил трения.
Как известно, FTp = fP, где /=0,05-^0,6 — коэффициент трения скольжения, величина которого
зависит от вязких свойств пограничного слоя, Р = р(<р, Л) + — общее давление коры на ман-
тию, о = 2,76 • 103 кг/м3 — средняя плотность коры, Ро = 22,4 км — средняя глубина поверхности
Мохоровичича, д = 9,82 м/с2.
Поскольку сила трения направлена по касательной к поверхности мантии и по знаку противопо-
ложна направлению движения мантии, то имеем для компонент силы трения по долготе и по широте
РдР = —fPcosyx, РфР = —fPcosyv, и, следовательно, для трех ортогональных компонент момента
сил трения получим
= —f Рг2(совуф sin Л — cos у д sin <р cos Л),
= —fPr2(cosyv COS Л + COSyASintpsinA),
= —/Ргг(со8ул cos<p).
Сравнивая полученные выражения с соответ-
ствующими выражениями (8.3.2) для моментов
сил давления, мы видим, что движение возможно
при условии
f |р(Ф,Л)|-Л И |P!-fcP2| , ,
[р(<р, Л) + сРоё] cosy Р(<Р, Л) ’
(8.3.3)
где D — глубины от поверхности рельефа до по-
верхности Мохоровичича. Поскольку рассчитан-
ные нами наклоны поверхности мантии у для
достаточно больших площадок (соответствующих
разложению до степени N = 30) не превышают
0,06 рад, то для возможности мгновенного от-
носительного смещения коры и мантии необхо-
димо, чтобы между ними существовал погранич-
ный слой очень низкой вязкости с коэффициен-
том трения f < 0,06.
Такому условию удовлетворяет, например, во-
да. Для долговременной нагрузки требование к
вязкости становится менее сильным, и движение
может начаться при большем f с некоторой фазо-
вой задержкой, когда интенсивность горизонталь-
ных напряжений начнет превышать предел теку-
Рис. 8.3.5. Распределение горизонтальных напря-
жений |Д|, обусловленных касательной составля-
ющей силы давления коры Р вблизи поверхности
мантии.
чести пород пограничного слоя.
На рис. 8.3.5 представлено распределение горизонтальных напряжений |Р|, обусловленных ка-
сательно^ составляющей силы давления коры Р вблизи поверхности мантии: |Р|| = |Ptcosa| =
\/Рд + Р2 — полная величина напряжения, А = arctg — азимутальное направление, Рд — —Р-ух —
составляющая давления, направленная по касательной к параллелям, Рф = —Р • уд — к меридианам.
Максимальные значения напряжений достигают 7,2 -107 Па в регионах Аденского залива Красного
моря и Гималаев, что может превосходить предел текучести большинства горных пород при высоких
температурах и длительных нагрузках. Для осуществления процесса изостатического выравнивания с
периодом т ~ 104 лет вязкость приграничных слоев коры должна быть ~ Р - т < 2 -1019 Па-с.
На рис. 8.3.6 представлено векторное распределение горизонтальных давлений на границе Мохо-
ровичича, обусловленных изостатически невыравненной нагрузкой: ДРф1д = —ДР • уф,л, где ДР —
(С1Д1(<р,Л) + Дс2Й2(<Р,Л))р. Это и есть те давления, которые могут вызвать глобальные движения
коры относительно мантии.
О 100 200 300
Рис. 8.3.6. Векторное распределение горизонтальных давлений на границе Мохоровичича, обусловленных
изостатически невыравненной нагрузкой.
Максимальные напряжения достигают 0,3-107 Па и соответствуют, в основном, прибрежным зонам
материков.
Геофизическое обоснование возможности относительного движения коры. Наличие между ко-
рой и мантией в нижней части коры общепланетарного переходного слоя пониженной вязкости подтвер-
ждается многими геофизическими данными: сейсмическими, данными о тепловом потоке, об электро-
проводности коры, о расположении мелкофокусных источников землетрясений, источников вулканизма
[Резанов 1984; Сорохтин 1993; Леви 1991; Павленкова 1996а; Pavlenkova 1988]. Анализ данных
приводит к выводу о природе этого слоя как рубежа смены пород, различающихся по химическому
и минеральному составу, степени обводненности, частичному плавлению пород и другим физическим
характеристикам.
Согласно сейсмическим данным, граница М является единственной повсеместно просматриваемой
сейсмической границей во внешней зоне земного шара, ниже которой земное вещество значительно
более однородно по своим физическим свойствам, более плотное и более жесткое, чем выше ее. Распо-
ложение и физические свойства границы М являются следствием трех основных факторов: давления,
температуры и накопления во внешней зоне Земли продуктов вулканизма и дегазации планеты, главным
из которых является вода.
Совместное влияние этих факторов приводит к тому, что на поверхности М создаются условия,
при которых вещество мантии становится нестабильным и резко меняет свои свойства в сторону
разуплотнения. Такое разуплотнение выражается в менее плотной упаковке атомов за счет соедине-
ния основных компонентов мантийного вещества с водой, кремнеземом, щелочами и пр. В силу разных
физико-химических условий существует несколько основных моделей границы М.
Число разбелов
60 100 140 180
Группа внутрикоровых
разбелов (Н«20 км)
Подошва
коры (Н=30-60 км)
I группа побкоровых разделов
(Н=70-80 км)
II группа (Н:90-100 км)
III группа (Н-100-110 км)
IV группа 114=140-150 км)
20
40
120.
200
8.3.7. Распределение числа сей-
Побошва литосферы
кратонов (Н»190 км|
Рис.
смических горизонтальных разделов
по разрезу литосферы.
На континентах под древними платформами граница М служит рубежом, разделяющим ультра-
основные породы мантии и расположенные выше серпентинизированные (т. е. соединенными с водой)
породы. Резкое снижение скорости сейсмических волн в зоне границы М объясняется более сильным
проявлением серпентинизации в этой узкой зоне. При давлении от 200 до 250 Па в зоне границы М
серпентиниты становятся настолько пластичным материалом, что в нем под давлением вышележащих
пород все поры на подошве коры полностью закрываются и серпентинизация прекращается. Следо-
вательно, при дальнейшей дегазации мантии на поверхности М могут быть линзы воды (флюидов)
[Pavlenkova 1988; Павленкова 19966].
Под высокогорными районами континентов (типа Памира) в силу большой глубины залегания М
граница М может представлять контакт частично расплавленных гипербазитов вверху и полностью
твердых внизу. Под складчатыми поясами континентов граница М разделяет высокометаморфирован-
ные породы пониженной плотности и прочности вверху и более плотные эклогиты внизу. В океанах
граница М в основном является рубежом обводненных гипербазитов вверху и десерпентинизированных
внизу. Поскольку повсеместно переходная зона (т. е. низшие слои коры) характеризуется пониженными
прочностными свойствами или повышенной пластичностью, то вполне реалистично допустить, что при
наличии соответствующих сил возможно взаимное смещение коры и мантии Земли. О существовании
таких горизонтальных движений в зоне границы М говорят следующие геофизические данные.
Данные глубинного сейсмического зондирования свиде-
тельствуют о наличии в низших слоях коры максимума
субгоризонтальных отражающих площадок, так называе-
мых зон «рефлективити» [Павленкова 1996а, Moss, Mathur
1984; Bois et al. 1990; Matthews et al. 1990; Brown 1991;
Meissner et al. 1991; Peddy, Hobbs 1987; Failly et al. 1993].
В [Failly et al. 1993] даны три различных общепринятых
объяснения данных наблюдений: существование свободной
жидкости (флюидов) в низших слоях коры [Matthews 1986],
наличие субгоризонтальных сдвигов [Reston 1988], магма-
тические интрузии из верхней мантии [Nelson 1991].
Отсюда можно сделать вывод об ослаблении прочност-
ных свойств пограничного с мантией слоя коры. Геологи-
ческая и тектоническая структура границы мантии и осо-
бенности деформации литопластин вблизи нее свидетель-
ствуют об их проскальзывании относительно друг друга в
процессе развития [Павленкова 1996а; Волож, Перфильев,
1997].
На рис. 8.3.7 представлено распределение числа сей-
смических горизонтальных разделов по разрезу литосферы,
приведенное в [Леви 1991]. На подошве коры отмечается
резкий пик горизонтальной расслоенности литосферы. Приведенный в [Леви 1991] анализ других
геофизических полей показал, что увеличению расслоенности соответствует приращение плотности
теплового потока, увеличение скорости деформаций и плотности активных в кайнозое разломов.
Все эти физические характеристики свидетельствуют об относительном максимуме горизонтальных
движений в коре, соответствующем границе М. Расположение же очагов мелкофокусных землетрясе-
ний в нижних слоях коры в местах, где резко меняется толщина коры (т. е. где максимальный наклон
поверхности М), свидетельствует о том, что в тех частях границы М, где существует минимальное
ограничение на коэффициент трения [Чуйкова и др. 1996], подвижки вдоль нее наиболее вероятны.
В заключение данного раздела отметим, что как в земной коре, так и в верхних слоях мантии
отмечается еще ряд сейсмических разделов (граница Конрада, или Форша, астеносферный слой), вдоль
которых возможны горизонтальные подвижки. Однако в силу неповсеместности данных границ (грани-
цы Конрада, или Форша отмечаются только в земной коре древних платформ, астеносферный слой —
только под океанами), вдоль них невозможно общее движение верхних слоев Земли относительно
Н,
нижележащих слоев, а возможны только локальные подвижки, вызванные также давлением вышеле-
жащих слоев. Все эти подвижки, возможно, и создают сложную картину движения литосферных плит
и блоков коры. Так, по данным Павленковой [Pavlenkova 1996], в мантии существует повсеместно
прослеживаемая граница на глубине 80-100 км (от поверхности Земли), отделяющая горизонтально
расслоенные слои верхов мантии от нижней, практически не расслоенной части. По-видимому, на эту
прилегающую к границе М часть мантии может частично передаваться момент давления коры и созда-
вать горизонтальные подвижки. О наличии горизонтальных движений в верхах мантии говорит и новая
обработка сейсмических данных [Vinnik 1997]. О том же, что глобальное горизонтальное перемещение
(перетекание) вещества может быть связано только с переходной зоной кора-мантия, косвенно свиде-
тельствует тот факт, что в основном в этой зоне осуществляется изостатическое равновесие земной
коры [Чуйкова и др. 1996].
Энергетика процесса и некоторые астрономические и геодинамические следствия. В силу
закона сохранения общего момента вращения Земли, вращение мантии, обусловленное силами изоста-
тически неуравновешенного давления коры на мантию, приводит к вращению коры в противоположном
направлении. Момент сил 1к, вызывающий вращение коры, обусловлен касательными составляющими
Рд и Рф сил давления коры:
1к = К-Р<р +Л) х ГаЬ = pr2(Y<p sinA - уд sin <р cos Л) cos а,
1У = [(-Рф + Ра) х г2]1/ = -pr2(y<p cos Л + Уд sin ср sin Л) cos а,
1к = (Рд X Г2)г = РГ2 cos <р cos а.
Сравнивая полученные формулы с (8.3.2), убеждаемся, что 1ку z = —lx,y,z-
Линейные добавки 5а> для вектора вращения коры по отношению к общему вектору вращения
Земли можно определить из следующей системы уравнений
Jx,y,z^d)XiytZ = LXyZ + Lrp,
где Jx,y,z — компоненты момента инерции коры, Lky<z = —Lx<yiZ — момент сил негидростатического
давления мантии на кору, LTp — момент сил трения, направление которого противоположно направле-
нию Lk.
Движение возможно, если |LTp| < |ЬЛ|, причем выполнение условия зависит от физических свойств
(в основном вязкости) пограничного слоя кора-мантия.
Момент вращения коры возникает, как мы убедились выше, только в случае нарушения изостати-
ческого равновесия коры. Основными причинами, нарушающими изостатическое равновесие, являются
как процессы, связанные с земной поверхностью (денудация гор, осадконакопление, глобальное оле-
денение и таяние ледников, а также другие процессы, энергетика которых обусловлена солнечной
энергией), так и процессы, происходящие во всей толще коры (тектонические явления и приливное
торможение).
Остановимся более подробно на последней причине — приливном торможении. Приливные неупру-
гие деформации в основном сконцентрированы в гидросфере Земли и в слоях с наименьшими значе-
ниями модуля жесткости и вязкости, т. е. в слоях, наиболее поддающихся деформациям. Поэтому и
основные расходы приливной энергии должны быть связаны с торможением в этих слоях, а именно, в
мелководных эпиконтинентальных морях и в нижних слоях коры на границе с мантией. О том, что внут-
ри самой мантии неупругие приливные деформации должны были отсутствовать практически во весь
период неогена (t > -1,5-109 лет), свидетельствует следующий результат [Чуйкова, Максимова 1996]:
гармонический анализ глубин поверхности Мохоровичича, полученных по данным прямого глубинного
сейсмического зондирования, показал, что полярное сжатие поверхности мантии е = 0,0053 ± 0,0001
значительно превышает гидростатическое сжатие ео = 0,0033. Такому увеличению значения сжатия в
случае гидростатического равновесия соответствует увеличение скорости вращения.
Используя формулу для гидростатического сжатия [Жарков и др. 1971]
5 т
ео = 2[2 + П(г)]’
где т = тя§г,11(г) = ^77 — функция, зависящая от распределения плотности внутри Земли, ко-
торую можно считать постоянной за период неогена, получим следующую приблизительную оценку
для увеличения скорости вращения Земли, соответствующего изменению гидростатического сжатия на
Лео = 0,0020:
си 2е0
Используя расчеты о замедлении скорости вращения Земли по палеонтологическим данным за
440 млн. лет си = -5 • 10-22 рад/с2 [Мельхиор 1976] и полагая, что в среднем за период неогена это
замедление носило линейный характер [Сорохтин, Ушаков 1993], получим, что время, когда мантия
приобрела свое современное сжатие, равно:
Деи 0,3(1) а
Д£ =-----=------~ —0,44 • 1017 с = —1,4 • 109 лет,
си си
т. е. начало периода неогена.
Полагая время релаксации At = 0,4-1017 с и модуль сдвига для мантии |i ~ 1011 Па [Жарков и др.
1971], получим оценку для вязкости мантии г| « 4 • 1027 Па-с, что соответствует вязкости твердого, не
поддающегося пластическим деформациям за t < At тела Гука.
Полученная оценка для вязкости мантии довольно сильно отличается от значений (1021-1025 Па-с),
полученных на основе оценки скорости послеледниковых поднятий (для вязкости верхней мантии)
[Мельхиор 1976; Wu 1997] и векового замедления вращения Земли (для вязкости нижней мантии)
[Жарков и др. 1971]. Однако, как показано в [Резанов и др. 1984], природа гляциоизостазии хорошо
объясняется незначительным горизонтальным перетеканием серпентинитов в нижней части коры, а
вовсе не наличием в верхней мантии Земли астеносферного слоя, который, по данным сейсмологии,
как раз и отсутствует под Фенноскандинавией и Канадой. А вековое замедление вращения Земли
связано, в основном, с процессами торможения в земной коре. Поэтому нельзя получить правильную
оценку для вязкости мантии по данным гляциоизостазии и приливного торможения.
Отметим здесь, что, в отличие от мантии, сжатие внешней границы коры однородной плотности,
т. е. эквивалентного рельефа, е = 0,0032 [Чуйкова и др. 1971], хорошо соответствует сжатию гид-
ростатического эллипсоида Земли, что свидетельствует о хорошей пластичности или реологической
ослабленности коры Земли.
Таким образом, можно утверждать, что вся энергия приливного торможения за период неогея вы-
делялась только в коре Земли: в основном в мелководных морях и в слое, пограничном с мантией.
Выделение приливной энергии в пограничном слое к тому же привело к его прогреванию и, следова-
тельно, к еще большему увеличению его пластичности.
В силу действия приливного торможения только на кору Земли она должна испытывать постоянно
действующий сдвиг относительно мантии. Наши расчеты показали, что такой сдвиг действительно
существует. Общий сдвиг коры относительно мантии по долготе в плоскости ху (вектор поворота коры
совпадает с направлением оси z) равен
ДА =--------------------, где Snm = (а& А& + ™™ ) .
4л£о Ё Ё m2Snm
п=1 т=1
Сдвиг коры относительно мантии по широте в плоскости zx (вектор поворота коры совпадает с
направлением оси у) равен
N
4л£о Ё (А) + Si - S2)
П=1
Рис. 8.3.8. Сдвиг коры по трем направ-
лениям
Сдвиг коры относительно мантии по широте в плоскости yz (вектор поворота коры совпадает с
направлением оси х)
т к
Д02 = ------„-----’ ГДО Л° = W- В° = W
4тг£о 52 (-Во + Si + S2)
П=1
S. = 2(та2 + п)4‘> + £ -2- _ тЛs_,
От-1 \ От-1 /
Ш=1
S2 = X ^т-Юп,т-2 ['/^(^VSn-2 + Л^^/т-г) + •
т=2
Формулы получены в линейном приближении из усло-
вия равенства нулю соответствующих моментов при малых
поворотах коры, а именно:
а) при повороте коры вокруг оси z на угол ДА должно
выполняться равенство
£2(Я1(ф,А)Я2(ф,А)) =0, где I = Л + ДА;
б) при повороте коры вокруг оси х на угол Д02
Ь1(Я1(Р,1)Я2(<р,А)) = 0, где cos |3 cos I — cos ф cos Л,
cos P sin I = cos ф sin A cos Д02 + sin ф sin Д02,
sin P = sin ф cos Д 02 — cos ф sin A sin Д02;
в) при повороте коры вокруг оси у на угол Д01
£1/(Я1(Р,/)Я2(ф,А)) = 0, где cos Р sin I = cos ф sin А,
COSPCOSZ = СОвфСОвАсОЗ Д01 — 8Шф8П1Д01,
sinP = 8тфсозД0! + cos ф cos Asin Д0ь
На рис. 8.3.8 представлены в градусах полученные ве-
личины общего сдвига коры по трем направлениям в за-
висимости от N (т. е. от степени детальности представле-
ния рельефа): а) сдвиг по широте в плоскости гх(Д02), б)
сдвиг по широте в плоскости гх(Д0!), в) сдвиг по долготе
(ДА). На рисунках виден практически постоянный по зна-
ку для всех степеней N отрицательный сдвиг коры по А,
т. е. направленный в сторону, противоположную направле-
нию вращения Земли, и положительный сдвиг по 0102- Однако, поскольку при наличии сдвига коры
относительно мантии сразу же нарушается ее изостатическое равновесие, то возникает момент сил
L, пропорциональный величине сдвига, стремящийся восстановить это равновесие. Так как возника-
ющий момент действует на кору в направлении, противоположном сдвигу коры, то может возникнуть
колебательный процесс, период которого Т зависит как от момента инерции коры, так и от физи-
ческих условий на границе кора-мантия (вязкости, наклона поверхности М, величины давления на
поверхность).
Наличие такого процесса скажется в результатах астрономических наблюдений, а именно, должно
обнаружиться изменение скорости вращения Земли и движение полюса вращения Земли относительно
ее поверхности.
Поскольку, как видно из рис. 8.3.4 и 8.3.8, в настоящее время Lkz — —Lz > 0, ДА < 0, то сейчас
на фоне общего приливного замедления вращения Земли на поверхности Земли должно наблюдаться
некоторое ускорение ее вращения. Такой процесс отчетливо прослеживается в результатах обработки
солнечных затмений за 2500 лет [Stephenson, Morrison 1995]. Тщательная обработка таких наблюдений
приводит к выводу, что в настоящее время по сравнению с общим замедлением вращения Земли
ш = — 6,1 -10—22 рад/с2, вызванным приливным торможением, отмечается существенное положительное
ускорение ш = 1,6 • 10-22 рад/с2. Кроме того, авторы работы [Stephenson, Morrison 1995] отмечают и
периодический процесс изменения скорости вращения с периодом Т » 1500 лет.
Из рис. 8.3.4 и 8.3.8 видно, что в настоящее время = -Lx < 0, Д02 > 0, Ly = — Ly < 0, A0i > 0.
Поскольку малые величины Д01, Д02 характеризуют сдвиг коры по широте, в наблюдениях положения
полюса должно проявляться его смещение в противоположном направлении. В силу противоположно-
сти знаков моментов и сдвигов в настоящее время должно отмечаться соответствующее замедление
движения полюса. Для обнаружения данного эффекта в силу его долгопериодического характера (по-
видимому, порядка периода изостатического выравнивания, оцененного по времени постгляциологиче-
ского поднятия Фенноскандинавии и Канадского щита как Т >10000 лет) необходимы наблюдения
движения полюса за более длительный период, чем они имеются.
Таким образом, движение коры относительно мантии имеет вековую, или долгопериодическую
составляющую, период которой, по-видимому, соответствует периоду изостатического выравнивания
(« 104 лет), и периодическую, с периодом, определяемым параметрами коры Земли как колебательной
системы. В качестве примера оценим период Tz движения коры под действием сил негидростатического
давления мантии на кору и сил приливного трения. Такое движение может привести к изменению дли-
тельности суток, фиксируемому на поверхности Земли, с периодом Tz = 2n/wz, где wz определяется
следующим уравнением:
СДЦ>г = + iTp + Lq.
Здесь С = 8,34 • 1035 кг м2 — момент инерции коры [Жаров 1996]; Дсо2 = ДА; L* + LTp =
(1 — L* = —кАХ — суммарный момент сил давления мантии на кору и сил трения на границе
М, вызванный негидростатическим смещением ДА коры относительно мантии; к — неизвестный ко-
эффициент связи; Lq = Сш — момент сил приливного трения, действующий только на кору Земли и
вызывающий смещение коры относительно мантии ДАо; ш = —4,5 • 10-22 рад/с2 — вековое приливное
замедление вращения Земли, зафиксированное на поверхности Земли [Stephenson, Morrison 1995] и
соответствующее вековому (с Т > 104 лет) замедлению вращения коры относительно мантии.
Решение полученного уравнения С ДА = —ЛА + Lq имеет следующий вид:
ДА = asin(a>zi + a) + ДА0,
где а и a — амплитуда и фаза, зависящие от начальных условий, си2 = 1с х, ДАо = Lok 1
Так как начальные условия нам неизвестны,
то, полагая, что колебания коры относительно
среднего векового сдвига ДА0 имеют амплиту-
ду a С. ДА0, получим ДАо « ДА(£ = 0) «
—0,02 ± 0,005 рад. Здесь использован средний
сдвиг коры для разложения степени N = 5 ± 30
(см. рис. 8.3.8), соответствующий учету основных
гармоник рельефа и границы М.
Подставляя значения С, ДА0 и Lo = —3,7 •
1014 Н м, получим к = = 1,8 • 1016 Н м,
ш2 = 1,4-1O-10 с”1, Т = 4,5-Ю10 с= 1,5-103 лет.
Полученный период хорошо согласуется с на-
блюдениями изменения продолжительности су-
ток за последние 2500 лет [Stephenson, Morrison
Рис. 8.3.9. График изменения продолжительности
суток
1995], где на фоне общего замедления вращения Земли четко фиксируется периодическая составля-
ющая с периодом « 1,5 -103 лет. Из приведенного графика [Stephenson, Morrison 1995] изменения
продолжительности суток (рис. 8.3.9) видно, что сделанное нами предположение ДА0 ~ ДА(£ = 0)
соответствует наблюдениям.
Полученная оценка к и значение Lk » (2 4- 4) • 1025 Нм, соответствующее учету основных гармоник
разложения рельефа, позволяют оценить и средний коэффициент трения на границе кора-мантия.
Имеем
fcAA
Lkz
1 - IO"11.
Рис. 8.3.10. Горизонтальная составляющая скоро-
сти движения точек земной поверхности.
Таким образом, эффективный коэффициент
трения f на границе М для долгопериодических
движений является величиной того же порядка
малости, что и наклон поверхности мантии у, что
согласуется с нашей предварительной оценкой
условий осуществимости таких движений (8.3.3).
Дифференциальное вращение коры относи-
тельно мантии, приводящее к изменению на-
блюдаемой на поверхности длительности суток,
подтверждается исследованиями, приведенными
в [Ricard et al. 1991]. Анализ скоростей движе-
ния точек земной поверхности в системе коор-
динат, фиксированной относительно так называе-
мых «горячих точек» (предположительно связан-
ных с мантией Земли и проявляющихся на по-
верхности в виде цепочек вулканов), выявил общую тороидальную составляющую, соответствующую
вращению коры относительно мантии со скоростью ~ 1,7 см/год» 10-16 рад/с относительно полюса
с координатами <р = -56°, Л = 84° (т. е. примерно в направлении, противоположном общему враще-
нию Земли) На рис. 8.3.10 приведена горизонтальная составляющая скорости движения точек земной
поверхности в системе координат, фиксированной относительно горячих точек, согласно [Ricard et al.
1991]. Поскольку, согласно геологическим данным и физическим условиям в мантии [Сорохтин, Уша-
ков 1993] источники «горячих точек» расположены, по-видимому, в самых верхах мантии, то полу-
ченные параметры вращения характеризуют перемещение именно коры (а не литосферы) относительно
мантии.
Полученные параметры довольно хорошо согласуются с нашими оценками тороидального сдвига
коры Земли относительно мантии, соответствующего учету основных гармоник рельефа и М, т. е. для
N = 5 -? 30: Дф = УДЛ2 + ДО2 + Д0| = 1° — общий сдвиг, ср = -67... - 56°, Л — 88 4- 50° —
координаты полюса вращения коры.
Полюс вращения коры также хорошо соответствует посчитанному нами для тех же гармоник направ-
лению вектора интегрального момента сил давления коры на мантию: <р = —71... — 58°, Л = 88...46°,
противоположного направлению вектора углового ускорения коры.
Исключив из обработки наблюдений периодическую составляющую с Т = 1500 лет, соответству-
ющую собственным колебаниям коры Земли, можно получить оценку периода Т\ изостатического
выравнивания, вызывающего вековое ускорение (на фоне приливного торможения) вращения Земли
ш = 1,6 10-22 рад/с2 [Stephenson, Morrison 1995].
Для определения Ti = 2п/ш\ запишем систему уравнений:
ДЛ1(£) = ai sin(a>1t + ai) = ДЛ(£) — ДЛо — asin(a>i),
Дц>1(£) — aia>i cos(a>ii 4- ai) - - Да>(£) — aa>cos(a>£),
ДсЬ1(£) = —aia>2 sin(a>ii + ai) = Дш(4) + aa>sin(a>£),
где a> = a>t = 1,4 • IO-10 рад/с.
Поскольку вековой ход изостатического выравнивания для всей Земли в целом определяется, в
основном, гармониками низкой степени, то имеем при t = 0 для N = 2:
ДЛ1 = ai sin eq = —21° = —0,36 рад
ДШ1 = aiu>icosai = —10~16 рад/с
Albi — -aiiOj sinai = 1,6~22 рад/с
(рис. 8.3.8),
[Ricard et al. 1991],
[Stephenson, Morrison 1995].
- Да” = —1СГ5, a « -n/2.
/ Дц>1
Отсюда получим a>i — </- = 2,1 • 10 с \ ctgai =-------—- —
V ДЛ1 о>1ДЛ1
Таким образом, имеем оценку для периода изостатического выравнивания Ti = 10-4 лет, хорошо
согласующуюся с геологическими данными [Мельхиор 1976; Wu 1997]. В настоящее время положение
коры соответствует максимальному сдвигу по долготе в западном направлении, максимальному поло-
жительному ускорению вращения коры и минимальной абсолютной скорости вращения. Примерно при
t = —Т/2 = -5 103 лет, т. е. в конце последнего оледенения должен был быть максимальный сдвиг
коры на восток, а при t = —Т/4 должна была быть максимальная скорость вращения коры.
Отметим здесь, что в силу различия физических параметров коры Земли для различных регионов
Земли (т. е. для материков и океанов) колебательные процессы для них будут иметь разные частот-
ные и амплитудные характеристики. Поэтому для выявления общего изменения параметров вращения
коры Земли необходимо иметь наблюдения для всех регионов Земли. В силу этого различия нельзя
рассматривать движение коры относительно мантии как единого целого. Очевидно, разные блоки коры
могут иметь различные направления и скорости движения. Так, наши расчеты вращательных моментов
отдельно для континентальных и океанических участков коры (см. рис. 8.3.11, графики а) показали,
что моменты динамического давления коры на мантию в основном противоположны по знаку. Однако в
силу наличия ненулевой общей компоненты момента сил для всей коры во всех этих движениях мож-
но выявить общее направление, что и проявляется как общее вращение коры относительно мантии.
Причем из-за неровности поверхности мантии общая горизонтальная компонента движения должна
проявляться в наибольшей степени в средней коре, лежащей выше верхней границы мантии. Так, из
рис. 8.3.116 видно, что как раз в средней коре происходит смена знаков моментов. Расчет моментов
для различных слоев коры показал, что слои, лежащие выше и ниже границы с глубиной залегания
D « 25 км, имеют различные направления горизонтальных давлений. Следовательно, слои коры, при-
мыкающие к этой границе, должны быть наиболее реологически ослаблены и наиболее подвержены
горизонтальным сдвигам. Таким образом, кинематика движения блоков коры должна проявляться в
строении коры как смена вертикальной расслоенности верхней коры на субгоризонтальную в средней и
на границе М, т. е. кора должна иметь надвигово-пластинчатую структуру. Такое строение коры нахо-
дит подтверждение в глубинных сейсмических исследованиях [Павленкова 1996а, б; Pavlenkova 1988].
Из рис. 8.3.11 видно, что замедление вращения коры в основном обусловлено давлением океанической
коры на мантию (Lz < 0, L° < 0, Lcz > 0). По-видимому, глубокие корни материков, вмороженные в
мантию, движутся вместе с мантией (т. е. в направлении, противоположном движению коры), а смена
направлений движений происходит по слою, совпадающему со средней корой под континентами и с
переходной зоной кора-мантия под океанами.
Полученные результаты позволяют заключить, что
— при отсутствии изостатической компенсации коры на границе Мохоровичича возникает ненулевой
момент сил давления коры на мантию (относительно центра инерции Земли),
— в настоящее время интегральный момент давления коры на мантию превышает 1025 Нм, что на
три порядка больше лунно-солнечного момента сил, вызывающего возмущения во вращении Земли,
— расчет сил трения на границе кора-мантия приводит к выводу о возможности долгопериодичного
относительного движения коры и мантии при наличии пограничного слоя пониженной вязкости,
— геофизические данные подтверждают как существование приграничного слоя коры пониженной
вязкости, так и наличие относительного максимума горизонтальных движений в коре вблизи границы
Мохоровичича,
— наличие итогового дифференциального вращения коры относительно мантии подтверждается
данными астрономических наблюдений измерения продолжительности дня за последние 2500 лет, а
также анализом движения точек земной поверхности относительно «горячих точек»,
— анализ частотных характеристик приводит к выводу о наличии векового и колебательного про-
цессов в движении различных блоков коры относительно мантии с общими периодами «104 лет и
1.5-103 лет и общей амплитудой, не превышающей 210.
Средняя кора под континентами и переходный слой кора-мантия под океанами являются тем основ-
ным слоем, в котором происходит смена направлений горизонтальных давлений.
Таким образом, именно вдоль этого слоя может осуществляться дифференциальное вращение коры
и мантии.
Ly 1024 Нм
Ly 1024 Нм
LZIO24 Нм
1а-океаническая кора (Hi<0)
-------2а-континентальная кора (Hi^O)
-------16 - верхняя кора (Н&-ЗЛ км)
------- 26- нижняя кора (Н j< -3,3 км)
------- За-вся кора
------- 36-всякора
Рис. 8.3.11. Вращательные моменты для континентальных и океанических участков коры
Вязко-упругая диссипация и прецессионное движение оси вращения Земли
Как известно из теории очень вязких жидкостей, при воздействии с достаточно большим периодом
(больше времени релаксации) даже тела, являющиеся при малых периодах воздействия твердыми, начи-
нают вести себя как вязкие жидкости. Из приливных гармоник таким периодом является только период
прецессии, который составляет около Тр « 25 770 лет. В результате того, что ось вращения Земли из-
меняет свое положение относительно инерциальной системы отсчета, изменяется положение Земли по
отношению к лунной орбите. Угол наклона средней оси вращения Земли к оси прецессии совпадает с
углом наклона эклиптики к небесному экватору и составляет е = 23°26'21",448 « 0,409 рад.
Приливной потенциал. На таких больших временах Луну можно представить в виде кругового
кольца с массой, равной массе Луны, «размазанной» по средней лунной орбите. Решение уравнения
Лапласа во внутренней области представимо в виде ряда по шаровым функциям rnYnm. Дубошиным
[1961] эти ряды представлены в виде:
U — У У rn(anm cos rrik + bnm sin mA)F^m\cos0), (8.3.4)
n=0 7П=0
где G Гг-(п+1) (^^p^^cose^Ke^drsinededX.
\bnm J bm(n + m)\ J \sin mA/ n ’ 4 ’ ’ ’
Откуда для кругового кольца получим:
аоо = —г—> Ьоо = 0, bim = aim = 0 (начало СК в центре масс),
. ь „ <8-35>
бог = 0, a,Q2 = —т-д—, озш = азщ = 0 и т. д.
лтм
Для приливной силовой функции тогда получится выражение:
3GmMR2 (г\2 /1 2 \
ЗСтпм 7?^
Величина Dm = —^-3------ = 2,6206 м2/с2 называется приливной постоянной Дудсона для Луны
[Мельхиор 1968]. С учетом этого обозначения выражение для приливного потенциала примет вид:
_ f т \2 f 1 9 „
W2 = DM ( p ) 5 - cos2 0
x Л / \ О
(8.3.6)
Некоторые полезные соотношения. Для дальнейшего нам понадобятся некоторые свойства при-
ливной силовой функции. Дифференцируя (8.3.6), получим:
dW2 _ 2DM (Xi R \ d2W2 _ 2DM (Ьц , , \
dxi r2 13 z6i3) ’ dxidxj R2 V 3 bJi3bi3)
Здесь малые латинские индексы пробегают значения от 1 до 3. Отсюда нетрудно получить следую-
щие соотношения, которые неоднократно будут использованы в дальнейшем:
dW2 2W2 d2W2 1 dW2 d2W2
П1 Q — , Пг „ a — a > njTlj „ a —
OXi Г OXiOXj Г OXj OXiOXj
,dW2 dw2 2W2 . d2W2
^n,)^ - r2 x^ (bij ^)д^дх_
2W2
2W2
= ~'
(8.3.7)
d2W2 2W2
—-— = AW2 =-----------j- (уравнение Лапласа).
CrtCiCrtC j Г
По двум дважды повторяющимся индексам подразумевается суммирование от 1 до 3 (правило
суммирования Эйнштейна).
Вычисление мощности работы вязких сил. Представим производные от приливной силовой функ-
ции в виде:
dW2 _ х* д / х*х*\д'
дх* г г дх? ”1” \ г г) dxi 2’
где первое слагаемое есть проекция градиента потенциала на радиальное направление, а второе - на
плоскость, перпендикулярную радиальному направлению.
Тогда приливные смещения будут равны:
St = -г
h(r) — l(r) х* xj д Z(r) д
g(r) г г дх? g(f) дх*
W2.
(8.3.8)
С точностью до долей процента от главного эффекта можно пользоваться сферическим приближе-
нием для ускорения силы тяжести:
47tG(pen) _ -
9(г) =---о---г = 9Г-
о
Тогда приливные смещения будут равны:
/Г Tj л Л '
Si = -_ (h(r)-l(r))+ /(Г)_ W2. (8.3.9)
g т т ох3 их*
Переходя в комплексную область и полагая, что зависимость от времени смещений определяется
множителем ехр{г2тй/Т} = exp{io>t}, получим для комплексной скорости:
х* х? д .. д I
77а7 + /(г)а7
Vi = (h(r)~l(r.
где множитель е появился в результате того, что при вычислении скорости должна быть учтена только
переменная часть смещений.
Изменение энергии соответствующей оболочки Земли определяется мощностью работы вязких сил:
= - f n(r)v-A»dV.
* vL
Если трактовать это изменение как изменение угловой скорости вращения Земли, то
*еп
Не будем приводить здесь всех промежуточных вычислений, которые достаточно долги, а приведем
лишь конечный результат:
V TlpTlj^ 4“ /7lp(6sj jpW,3 +
rg‘
(h___ZtlJ^E^
+ ~2g2--------- ~ n’nf) ~ ^П,ТЧ] WjW,. +
o>2e2 r ,jd2i зап ,.(&i
+ g2 ЧЭг2 +rdj +(2/l 1}\дт2
Я2
„ I 3 дГ\ .
д-? + ~7Г +
дг2 г дт
3 /dl dh\
г \ дт дт )
dr2
дт2
.2
' 4W2
Используя свойства (8.3.7), можно привести это выражение к виду:
гЛДи =
5Z(/i - /)о>2£2
г252
(VW2)2 -
4УУ22'
г2
/ц>2Е2
-I----
заг
дт2 г дт
(VW2)2+
cu2e2
52
' „(д21 зап ,,fd2i d2h sfdi a/n\i 4iv22
- 0 hrs + + 2k - 0 hr? “ ТГ2 + - hr - аг —
\отл тог/ \дгл огл г \ог дт / / rz
и аналогично для остальных производных. Главным членом будет являться следующий:
[t> At>]max
5Z(/i — Z)cu2e2
(VW2)2 -
41V2'
r2
(8.3.10)
у2р2
Остаточный член имеет вид:
lw2i2 Г д21 3 <3Z 1 . 2
7Г^ + -7Г W +
от2 т дт
ш2е2
Ч---=2—
92
f/L \д21 3 3Z1 fnL ,,[d2l d2h 3
S (h — Z) Ч---------+ (2/г — I) 'а~2 ~ ~а~2 ----------
( \_дт2 г orj [от2 от2 г
0ЦП 41У22
.2
di______
дт дт
Для жидкого тела числа Лява С и h равны единице. Следовательно, на малых частотах имеет место
следующее разложение чисел Лява в ряд Тейлора:
5[v*Av] = - -2
, 1 ( 91 \
1 = 1 + 0) —
\9wJo
Известно, что на главной приливной гармонике I = lt. Тогда
Z^t Z _
------, где h = ht. Тогда на частоте прецессии:
u>t
It-I . / dh \
----. Аналогично -—
cut-\9ш/0
, ,_Tt,, , х di _ Tt dit dh _ Tt dht
Tp( * dr Tpdr’ dr Tp dr
Если рассматриваются приблизительно однородные по своему строению оболочки, то это означает,
что производные по радиальному расстоянию от чисел Лява малы. Отсюда и следует, что член (8.3.9)
будет главным и будет иметь вид:
TO
Заметим, что:
[v*Av] = 5(/it - lt)
/ 3cu£ \2 (TA
\47tG(pen) J уТр/
5 (VW2)2-
4IV22'
r2
(VW02=^|l(l + 3.:os2e), ^ = ^t(l-6cos20 + 9c°s40),
^[(™у2-в]=^(9со5гв_9соа.е).
Тогда:
Йеп _ 5(/lt - It)
Поеп Aen
Так как
E-Dm \ 2 ( ^Oen \ 2 /Tt \
2nG{pen)R2J \ Tp J \TpJ
cos2 0 — 9 cos4 0)dV.
1 /35
J*(9cos2 0 — 9 cos4 0) sin0d0 = 9 J" (i2 — x4)dx = 9
1 - 12
-i" 5’
fien 6n(ht — It) / zDm \2 /Tben\2 /Ti \ Г , . 2 ,
fioen-- Aen ^G(pen)7?2J V Tp J \TpJ j ЩГ}Г r
*en
Момент инерции оболочки Aen = —7t(pen) \ r^ey -
Интеграл J n(r)r2dr » ^e)
v.n
о
Тогда:
Пеп = 15(/it - lt) / tDM \2 (TQen\2 (ТА 4) ~ r(i) , ,
Поеп 4 \nG{pen)R2 / \ Tp J \ТР) (pen)
Для слоев, расположенных от границы ядро-мантия и до поверхности Земли, можно считать, что
J^Oen = ^0»^еп = ТоГДЭ
Йеп = 15(fct - It) ( еРм \2 /7о\2 (ТА г(е) - r(i) , .
По 4 \nG(pen)7?2/ \TpJ yTpJ (реп) (г5е) _ г5^
Численная оценка для мантии.
I = lt = 0,178, (п) = Ю26^, То = 1 сут, Tt = 18,6 лет, h = ht = 0,662, (р) = 5500 кг/м3,
Тр = 25 770 лет, е = 0,409, DM - 2,620б£, R = г(е) = 6,378 • 106 м, r(i) = 3,485 10е м.
Тогда:
= -3 10~24 с"1 = -10"14(100 лет)'1.
По
Для сравнения, полный вековой приливной эффект
— = -(2,71 ± 0,05) 10~8( 100 лет)"1.
а>о
8.3.4 Современная теория нутации
Учет неупругих свойств мантии и ядра и динамики атмосферы
Под действием сил притяжения Солнца, Луны и планет мгновенная ось вращения Земли, ось ее
фигуры и ось углового момента движутся относительно инерциальной системы отсчета. Это движение
называется прецессионо-нутационным движением. Период прецессии равен «26000 лет. При длитель-
ности телескопических наблюдений «300 лет можно считать, что прецессионное движение — это
линейное (или вековое) движение оси, на которое накладываются нутационные гармоники. Периоды
этих гармоник определяются параметрами орбит Земли и Луны, а также обращающихся вокруг Солн-
ца планет. Главная гармоника нутации имеет период 18,6 лет и связана с периодом движения узлов
орбиты Луны. Максимальная амплитуда нутации составляет « 9". Остальные нутационные гармоники
имеют меньшие амплитуды.
Нутационное движение оси является эллиптическим, так как оно представляет результат сложения
двух круговых движений оси, имеющих одинаковый период, но разную амплитуду и происходящих в
противоположных направлениях. Движение оси против часовой стрелки, если смотреть с северного
полюса мира, совпадающее с направлением вращения Земли, мы будем называть прямым, а по часовой
стрелке — обратным. Другое представление нутационного движения — это разложение его на две
компоненты: нутацию в долготе и нутацию в наклоне.
В последние десятилетия в связи с ростом точности наблюдений стало ясно, что предложенную
Варом [Wahr 1981] теорию нутации следует заменить на другую, которая удовлетворяла бы пользо-
вателей. В 1994 г. на XXII Генеральной Ассамблее МАС (Гаага, Нидерланды) было принято решение
о создании рабочей группы «Non-rigid Earth Nutation Theory». Главной задачей рабочей группы МАС
была разработка новой теории нутации, которая могла бы использоваться для определения положения
Земли в пространстве с субмиллиарксекундной точностью. В отчете рабочей группы [Dehant et al.
1999] подробно рассмотрены задачи, которые необходимо было решить для построения новой теории.
К числу наиболее плохо смоделированных эффектов рабочая группа отнесла влияние жидкого ядра,
океанов и атмосферы на нутацию. Поэтому в нашей теории мы основное внимание уделили именно
этим эффектам. В основе теории лежит аналитический подход, разработанный в работе [Mathews et al.
1991], который состоит в следующем. Сначала записывается система уравнений моментов для всей
Земли и тех из ее оболочек, которые входят в модель (жидкого ядра и твердого ядра в [Mathews
et al. 1991], исключая мантию. При переходе в частотную область получается алгебраическая систе-
ма уравнений. Решение однородной системы дает частоты и амплитуды нормальных мод. Решение
неоднородной системы представляется в виде произведения передаточной функции на амплитуды нута-
ции абсолютно твердой Земли. Затем добавляются поправки, учитывающие дополнительные эффекты,
которые не вошли в модель (поправки, учитывающие неупругую диссипацию в мантии и влияние океа-
нов). Параметры внутреннего строения Земли, которые точно не известны (например, сжатие границы
ядро-мантия), определяются из наилучшего согласия теории и наблюдений.
МАС 2000 принял в качестве новой теории МАС теорию МНВ2000. Однако было отмечено, что ряд
эффектов, таких, как влияние жидкого ядра, океанов и атмосферы на нутацию рассмотрены недоста-
точно хорошо. Поэтому необходимо развивать исследования в этой области и рекомендовать разработку
новых более точных теорий нутации.
Все основные теории нутации Земли можно разделить по основным методам построения на сле-
дующие группы: 1) аппроксимация РСДБ, ЛЛЛ (LLR) (лазерная локация Луны) наблюдений (см.
[McCarthy 1996; Shirai, Fukushima 2000]); 2) полуаналитические методы [Mathews et al. 1991, 2000];
3) теория, основанная на решении уравнений вращения в форме Гамильтона и вариационных прин-
ципах [Getino, Ferrandish 1991, 1999]; 4) чисто геофизические приближения, в которых передаточная
функция нетвердотельной Земли получается интегрированием уравнений деформаций, разложенных по
нормальным модам или прямым численным интегрированием [Wahr 1981а; Dehant, Defraigne 1997;
Shastok 1997; Huang 1999, 2001].
Аналитические теории основаны на аналитическом решении уравнений вращательного движения,
причем все параметры внутреннего строения Земли определяются из тех или иных моделей внутрен-
него строения Земли. Однако не все параметры внутреннего строения Земли определяются теориями
ее внутреннего строения с достаточной точностью. Поэтому наибольшее развитие получили полуана-
литические теории, в которых неизвестные параметры внутреннего строения Земли определяются из
условия наилучшего согласия теоретических нутационных амплитуд с наблюдаемыми [Mathews et al.
1991, 2000]. Наша теория также является полуаналитической.
Главными отличиями нашей теории от существующих являются следующие:
1. Атмосфера учитывается добавлением к системе уравнений моментов для всей Земли, твердого
ядра, жидкого ядра, еще одного уравнения моментов для атмосферы. Именно такой учет атмосферы
является корректным в рамках полуаналитической теории нутации. Это было показано на рассмотрении
трех специально подобранных моделей нутации Земли [Пасынок, Жаров 2000];
2. При вычислении момента сил давления атмосферы на поверхность Земли был учтен реальный
рельеф поверхности Земли. Среднее значение сжатия атмосферы было получено обработкой наблюда-
тельных данных National Center for Environmental Predictions (NCEP);
3. В нашей теории решена проблема отрицательных мнимых частей собственных частот вращения
Земли. Компоненты вязко-магнитного тензора имеют физически допустимые значения;
4. Наша теория обеспечивает точность на уровне лучших современных теорий МНВ 2000 [Getino,
Ferrandish 1999, Huang 2001].
Для описания вращения Земли как согласованных оболочек было использовано шесть систем коор-
динат. Начало каждой из этих систем координат помещено в центр масс Земли. Первая — инерциальная
система координат, вторая — вращается относительно первой со средней угловой скоростью вращения
Земли По- Оси земной системы координат ®i, ?2. гз связаны со средними тиссерановыми осями для
мантии. Оси трех других систем координат связаны с осями Тиссерана для жидкого ядра, твердого
ядра и атмосферы. Будем полагать, что вектор угловой скорости вращения мантии Земли Q связан с
угловыми скоростями жидкого ядра, твердого ядра и атмосферы соотношениями:
Q = По + ш = По(1з + т),
Q/ = Q + cu/ = Qo(i3-rm-|-m/),
= Q + cus = Q0(i3 + m + ms),
Qq = Q + cuQ = Qofa + m + mQ),
Безразмерные векторы m, m/,mS)ma характеризуют вращение оболочек относительно второй си-
стемы координат.
Учет вязкости и магнитного поля. Вязко-магнитный тензор. Последние эксперименты, про-
веденные в ИФВД РАН (Институте Физики Высоких Давлений РАН) позволили уточнить кривую
плавления железа под высоким давлением [Бражкин, Ляпин 2000] . Согласно этой работе, поведе-
ние вязкости в зависимости от давления Р и температуры Т для всех типов расплавов описывается
активационным уравнением аррениусовского типа:
(P'act(P'} \ /о Q I I \
П=Поехр1—(8.3.11)
причем обычно полагают, что активационная энергия Eact = Eacto + VactP — линейная функция
давления. Для описания вязкости расплавов металлов обычно полагают, что вязкость вдоль кривой
плавления не меняется или меняется незначительно. Эта модель хорошо работает в рамках обычных
давлений, но это не дает права автоматического ее распространения и на высокие давления. С целью
выяснить поведение вязкости вдоль кривой плавления при высоких давлениях в Институте Физики
Высоких Давлений РАН были проведены эксперименты по исследованию кристаллизации железа под
высокими давлениями. Оказывается, что при достаточно больших скоростях охлаждения Т = 103 К/с
для достаточно чистых расплавов выполняются условия гомогенного образования и роста кристалли-
ческих зерен. В рамках теории гомогенного образования и роста кристаллических зерен с достаточной
точностью выполняется закономерность:
“ d{py
где п(Р) — вязкость при температуре плавления, соответствующей давлению Р, a d(P) — размер
кристаллического зерна образца, кристаллизующегося при давлении Р. Это дает возможность экспе-
риментально определить значения вязкости на кривой плавления и определить зависимость Eact(P)-
При этом в эксперименте были достигнуты очень высокие значения давления — до 0,1 Мбар. Распро-
страняя эту экспериментальную зависимость на условия внутри Земли (условия в ядре соответствуют
1,35-3,3 Мбар) по известной зависимости давления от радиуса, и была построена модель распределения
вязкости Бражкина:
1) при rf > г > rs +Ьг (где 6г «100 км) вязкость меняется в среднем по закону г| — В ехр {Аг0,8}
(А, В — постоянные) от 102 4-103 до 10е 4-109 Па с;
2) при га + 8г > г > га (где 8г «100 км) вязкость меняется в среднем по закону т] = В ехр {Аг0 ,7}
(но с другими постоянными А, В) от 10е 4-109 до Ю10 4-1013 Па-с.
Для этой радиальной зависимости вязкости нами были получены выражения для моментов вязких
сил [Zharov, Pasynok 1999] следующим образом. При интегрировании уравнений движения жидкости
в жидком ядре получается уравнение моментов в виде [Mathews et al. 1991]:
= - fpr®GdV, (8.3.12)
ut J
V
где G = |VP+V(<ps + <pc(£ly)), p и P — плотность и давление, соответственно; <ps — гравитационный,
а <pc — центробежный потенциалы. Далее показывается, что момент сил, стоящий в правой части
(8.3.12), настолько мал, что им можно пренебречь. В нашем же случае к правой части (8.3.12) еще
добавится момент вязких сил:
Г™ = фг®р™</$, P™=n(r)£ + (8-3.13)
Sf г,3=1 x •> '
где v — нетвердотельновращающаяся часть поля скоростей жидкости, 7V — единичная нормаль к
соответствующей точке поверхности Sf (поверхности жидкого ядра). Аналогичные формулы можно
выписать для моментов вязких сил, действующих на мантию и внутреннее ядро. При этом, согласно
закону сохранения момента импульса:
г<л) + Г™ + Г^л) = о,
где и — моменты вязких сил, действующих на мантию и на ядро соответственно. Согласно
принятой модели распределения вязкости в жидком ядре, вязкость на границе ядро-мантия составляет
около 103-104 Пуаз и может не учитываться вплоть до тонкого слоя (толщиной приблизительно 100 км)
вблизи границы твердое ядро — жидкое ядро. Поэтому член в последней формуле может быть
опущен, в результате чего получим:
(8.3.14)
Кроме того, по тем же причинам интегрирование в (8.3.13) и аналогичной формуле для момента
сил, действующих на внутреннее ядро, ведется только по границе твердое ядро — жидкое ядро.
Таким образом, если нам известна нетвердотельновращающаяся часть поля скоростей v, мы можем
по формуле (8.3.13) найти момент вязких сил, действующих на жидкое ядро, ГуЛ\ затем по (8.3.14)
найти момент вязких сил Нл\ действующий на твердое ядро.
Однако именно задача нахождения непосредственно поля невращательных скоростей v является
той трудоемкой задачей, которой хотелось бы избежать. И смысл выбора разбиения поля скоростей
на вращательную и невращательную части при построении тиссерановой системы отсчета в теории
СОС [Sasao et al. 1980] или «почти тиссерановой» системы отсчета Мэтьюса состоит именно в том,
чтобы исключить нетвердотельновращающуюся часть поля скоростей v. Это достигается требованием
равенства нулю момента, обусловленного этой частью поля скоростей.
Поэтому, чтобы остаться в рамках тех же усредненных моделей, приходится сделать некоторые
эвристические, но вполне логичные предположения относительно вида нетвердотельновращающейся
части поля скоростей.
Во-первых, предположим, что на смещения частиц жидкости, обусловленных упругими деформаци-
ями, вязкость практически не влияет. Это вполне логично, так как упругие смещения имеют порядок
О(т)(определение безразмерного параметра т будет дано ниже, пока же отметим, что т не превышает
4- 10-8 [Mathews et al. 1991а] в области суточных частот), а вязкий момент, как мы увидим далее,
имеет также порядок О(т). Поэтому член, обуславливающий их взаимное влияние друг на друга,
должен иметь порядок О(т2). В теории же Мэтьюса и др. такие члены не учитывались.
Во-вторых, в силу первого предположения будем считать, что добавочные моменты, обусловленные
как нетвердотельновращающейся частью поля упругих смещений, так и нетвердотельновращающейся
частью поля скоростей, связанных с вязкостью, по отдельности равны нулю с соответствующей точ-
ностью. Таким образом, система отсчета, вращающаяся с «угловой скоростью вращения жидкого ядра»
относительно инерциального пространства, остается тиссерановой для жидкого ядра.
В-третьих, будем считать, что скорости неупругой части нетвердотельновращающегося поля скоро-
стей распределены следующим образом:
о' _ о
v(r) = П(г) ® г, fl(r) = fls + —^(r - rs) + О(6г2), (8 3 15)
Та + 6г > т > тя,
где fls — угловая скорость вращения тиссерановой системы твердого ядра Земли относительно инерци-
ального пространства, fl — угловая скорость вращения слоя жидкости, расположенного на расстоянии
т от центра Земли, 6г — толщина слоя повышенной вязкости, внутри которого вращение нетвердо-
тельно, fl' — угловая скорость твердотельного вращения остальной части жидкого ядра (вне слоя с
повышенной вязкостью). Во избежание недоразумений отметим, что сама твердотельновращающаяся
часть, как уже было отмечено выше, определяется так, чтоб момент вращения, обусловленный нетвер-
дотельновращающейся частью поля скоростей, был равен нулю. Приравнивая нулю этот момент, можно
получить, что:
fl' = fl; + О(7ПЕ2), (8.3.16)
где fl/ — угловая скорость вращения твердотельновращающейся части поля скоростей жидкости, или,
что то же самое в данной постановке задачи, угловая скорость вращения тиссерановой системы жидкого
ядра относительно инерциального пространства.
На границе твердое ядро — жидкое ядро, согласно (8.3.13):
(8.3.17)
Используя поле скоростей (8.3.15) с условием (8.3.16), получим:
Подставляя это выражение в (8.3.17), придем к формуле:
з з
р(п) = -n(rs)£2 Z2 e<pfc
i,j=l p,fc=l
3
( ^fp \ (Qfp ^sp \
I —- j njXk +2^ eJpfc [ 6r—- I Wk
' ' p,fc=l ' '
или
Pn ) = -П(га)П/, ® Г.
or
(8.3.18)
Для внутреннего ядра получим выражение такого же вида, но с обратным знаком. (Так как внешняя
нормаль для внутреннего ядра является внутренней для жидкого ядра и наоборот.) Подставляя (8.3.18)
в (8.3.13), получим:
® nd<p sin Odd.
Используя формулу для двойного векторного произведения, получим:
fl f ““ fl О fl f flo
n $ ----- ® n = -----
or or
C fl/ — fl, „ fl/ — fl,
n ® —Ц® nd<p = 2n—Ц----------------
J or or
((Q/i — Qsi) sin2 0 \
(fl/2 - fle2)sin20 I.
2 (fl/з - П»з) cos2 0/
Используя известные интегралы:
J" sin3 0d0
о
= J (l-x2)da:=
jcos2 Osin6d0 = j x2dx =
о -i
7t 1
J" sin 0d0 = J~ dx = 2,
о -i
7t 271 f-v л-1
о о
f ilf — fls
— n —----------n
\ or
получим
r r fl/ — fls / fl/ — fl, \ 8л (fl/ — fl,)
——-----------n ——----------n dtp sin 0a0 = —---------—--------.
J J 6r \ 6r J 3 6r
о 0 L 4 ' J
(8.3.19)
Откуда для момента сил, действующих на жидкое ядро, получим
г?> - -л(г.)^(П'~П,)г;. (8.3.20)
J 6 or
Для момента сил, действующих на твердое ядро, учитывая знак нормали, получим
Г<л)=п(гЛ^П/^.Пд)< (8.3.21)
о or
Формулы (8.3.20) и (8.3.21) находятся в полном согласии с (8.3.14), как и должно быть.
Теперь, чтобы использовать эти выражения согласно теории Мэтьюса [Mathews et al. 1991], необ-
ходимо воспользоваться следующим представлением для угловых скоростей:
Q = Qo + си = По(1з + т),
ilf = SI + Wf = Л0(1з + m + my), (8.3.22)
Sls = SI + cus = Q0(i3 + m + mJ,
где По — постоянная часть угловой скорости вращения Земли; 1з — ось мгновенной системы главных
осей тензора инерции Земли, соответствующая максимальному моменту инерции, с точностью до чле-
нов более высокого порядка малости (более подробно см. [Mathews et al. 1991]). Равенства (8.3.22)
фактически являются определением безразмерных векторов m, m/,ms через соответствующие угловые
скорости относительно инерциальной системы координат. Учитывая равенства (8.3.22), мы сразу же
получим:
Г(л) = -и(г J = т|(rj 8ЯУ (т/ ~т*) (8.3.23)
J 3 or 3 5r
Согласно [Buffet 1992], комплексный момент магнитных сил равен
Г = 1 Г Br(r ® b)dS = 2mtcr4s Да>, (8.3.24)
ц J L J J s
где b — дополнительное магнитное поле, индуцированное дифференциальным вращением, Вг — ради-
альная компонента невозмущенного вектора магнитной индукции, <тс — проводимость жидкого ядра.
Глубина проникновения:
А' (jw| J у V2|a>lr(Br)’
f(BT) — комплексная функция, равная единице для слабого поля, Да> = Slofhf для границы ядро-
мантия, Да> = Slotfrif — тя) для границы твердое ядро — жидкое ядро.
Тогда магнитные силы, согласно [Mathews et al. 1998], учитываются добавлением Ксмв +
KICBAs/Aj к М22, —KICBAS/Af к М23, К1СВ к М33, и -К1СВ к М32. Введем вязко-магнитный
тензор Sab согласно обозначениям:
Re(S22) = е, + Re (ксмв + ^-К1СВ^ ,
Im(S22) = Im(7<CMB) + AaIm(^CB) ~
Af
Re(S23) = -^-Re (KlCB) >
Re(S32) = -Re (KICB),
Re(S33) = Re (KICB),
W — Aaha(KICB)
1т(52з) =-------г--------,
Af
Im(S32) = T" - hn(KICB),
Im(S33) = + Im(tf/CB),
Ад
1аблица 0.4. члены, входящие в коэффициент и.
j (степень) 7П (ПОРЯДОК)
2 -1 ( 0,508-Ю-9, -0,11610"7)
2 0 ( O.lOl-lO"7, -0,173-IO-11)
4 -2 ( -0.532-10-9, -О.58ЫО-10)
4 -1 (-0,314-Ю-9, 0,718-Ю-8)
где Аг и Аа- моменты инерции жидкого ядра и твердого ядра, W =т| (rs) *------вязкий параметр,
oOfSZq
Mij — компоненты матрицы уравнений моментов и наклонов в частотном представлении.
Зная Sab, можно найти, вообще говоря, только следующие комбинации величин:
Re (KICB) = Re(S33), Аа1т(К1СВ} - W = AeIm(S33),
ef + Re (Ксмв) = Re(S22) - £не($зз), lm(KCMB) = Im(S22) - ф-1т(533).
Ay Af
Но так как действительная часть Ксмв равна мнимой части для такого поля [Mathews et al. 1998],
то можно вычислить еще е/ и Re(KCMB) = 1т(Ксмв):
Re(KCMB) = Im(KCMB) = Im(S22) - ф-1т(533),
Af
е/ = Re(S22) — Im(S22) + (Im(S33) - Re(S33)).
Учет атмосферы. Для того чтобы учесть атмосферу, мы добавили к уравнениям моментов для всей
Земли, жидкого ядра и твердого ядра:
ан „ „ т ан/ тт ан., „ „ т
+ fl ® Н = L, ——-----Wf ® Н/ = 0, —— + fl ® Н, = Ls
at at at
еще одно уравнение для атмосферы:
^ + fl®Ha = La, (8.3.25)
dt
где Н, H/,Hs,Ha — векторы углового момента для всей Земли с атмосферой, жидкого ядра, твердого
ядра и атмосферы, а L, Ls,La — моменты сил, действующих на всю Землю с атмосферой, твердое ядро
и атмосферу.
Будем полагать, что момент сил, действующих на атмосферу, выражается через возбуждающие
атмосферные функции посредством соотношения:
La = Lal + iLai = iUeA (x? + ix2), (8.3.26)
где A — момент инерции всей Земли, а xf2 — возбуждающие атмосферные функции (член давления).
Член ветра в системе осей Тиссерана обращается в нуль. Коэффициент U зависит от рельефа реальной
поверхности Земли и вычисляется аналитически для эллипсоидальной поверхности Земли. Для того
чтобы вычислить его для реальной поверхности Земли, нами было использовано разложение рельефа
в ряд по сферическим функциям. Главные члены, входящие в коэффициент U приведены в табл. 8.4.
Заметим, что составляющая степени 2 и порядка 0 соответствует эллипсоидальной Земле. Вто-
рым важным членом является член степени 2 и порядка -1. Его мнимая часть приблизительно равна
действительной части составляющей степени 2 и порядка 0.
Среднее значение динамического сжатия атмосферы вычислялось на основе данных Национального
Центра Предсказаний по Окружающей Среде (National Center for Environmental Predictions (NCEP)).
Для него было получено значение еа = 0,0145. Для коэффициента было получено значение U =
(1,791;-0,431).
Уравнения упругости. Интегральный вид уравнений упругости представляет собой линейные со-
отношения между отклонениями тензора инерции от равновесного значения сз = схз + гсгз и безразмер-
ными векторами угловой скорости вращения оболочек т = mi + im2 и потенциала внешних приливных
сил <р:
Сз — A[fc(m - ф) 4- £.т/ + С,тв] + cf (1 + к'),
= Af[-y(m - ф) + ₽т/ + 5ms] + cf (5,/т + hc),
Сз = Д8[0(т - ф) + yrhf + vme] + cf («j/т + he),
= сз т - П°Д5
v Ar’ 3GA ‘
Упругие коэффициенты этих формул к, £,£, к1,у, 0,5, hc,Q,x,v,h3 определяются численным инте-
грированием уравнений упругости и были определены в работах [Sasao et al. 1980, Sasao, Wahr 1981,
Mathews et al. 1991].
Учет неупругой диссипации в мантии. Если мантия неупругая, то коэффициенты Ламе становят-
ся частотно-зависимыми комплексными числами, которые дают вклад в out-of-phase часть нутационных
амплитуд [Defiant 1987]. Была использована а-степенная зависимость коэффициента Ламе от частоты
[Anderson, Minster 1979], радиальная зависимость фактора добротности Q из модели QMU [Sailor,
Dziewonski 1978] и референц-период Tq и степень а были взяты равными 200 секунд и 0,15 соответ-
ственно [Wahr, Bergen 1986]. Сам фактор добротности Q был включен в число недостаточно точно
известных параметров, которые нужно определить из анализа РСДБ наблюдений. В нашей модели для
него было получено значение 193,49.
Учет океанов. Для учета океанов использовалась океаническая серия поправок к 343 нутационным
амплитудам [Huang et al. 2001].
Учет активных процессов в жидком ядре Земли. В работе Жарова и Пасынка [2001] было об-
ращено внимание на то, что компоненты магнитного поля, которые получаются в теории МНВ2000, не
имеют диссипативного характера, а потому не могут быть обусловлены вязкими и магнитными силами.
В статье [Mathews et al. 2001] предлагается следующее объяснение этого явления: предполагается, что
именно таким образом проявляет себя нелинейная зависимость упругих коэффициентов от частоты. Но
так как упругие коэффициенты можно разложить в ряд Тейлора по частоте (для малых частот), то мож-
но полагать, что поправка должна иметь порядок самого коэффициента, умноженного на частоту. Для
чандлеровской частоты получится, что поправка должна составлять максимум доли процента от значе-
ния коэффициента, в то время как в теории МНВ2000 она составляет 10% от значения коэффициента,
так что предложенное в [Mathews et al. 2001] объяснение представляется весьма сомнительным.
В жидком ядре Земли происходят активные процессы. Прямым доказательством этого является
существование магнитного поля Земли. Такое магнитное поле может существовать только при конвек-
ции и перемешивании проводящей жидкости в жидком ядре. В настоящее время наиболее вероятной
причиной конвекции считается дифференциация легкой и тяжелой компонент жидкого ядра: тяже-
лая компонента кристаллизуется на твердом ядре, что приводит к его росту, а легкая компонента —
всплывает под действием архимедовой силы [Брагинский 1964]. Таким образом, вещество жидкого
ядра постоянно перемешивается. Активные процессы в жидком ядре Земли также должны оказывать
влияние на вращение.
В нашей новой теории мы встали на точку зрения, что часть энергии от активных процессов внутри
Земли может передаваться во вращение. Для описания этого явления был использован тот же форма-
лизм возбуждающих функций, который был использован при учете атмосферы. В результате мнимые
части собственных частот в нашей модели либо строго положительны для всех частот, кроме часто-
ты свободной нутации ядра, для которой отрицательная мнимая часть по абсолютной величине не
превосходит 2-10-5, что сравнимо с отбрасываемыми нелинейными членами в рамках нашего прибли-
жения. Кроме того, поскольку диссипативные части значительно больше, то учет нелинейности погасит
генерацию на этой частоте за счет обмена энергией между различными модами.
Сравнение теории с другими теориями и наблюдениями. В результате свертки нашей пере-
даточной функции с серией нутационных амплитуд абсолютно твердой Земли RDAN97 и добавления
поправок за влияние океанов и диссипацию в мантии была получена окончательная серия нутационных
амплитуд нетвердотельной Земли ZP2001. В табл. 8.5 приводятся амплитуды основных нутационных
гармоник нашей теории и других нутационных теорий.
Из табл. 8.5 видно, что основные нутационные гармоники нашей теории вполне согласуются с основ-
ными нутационными гармониками других достаточно точных теорий. Однако поскольку нутационная
серия современной теории нутации состоит не меньше чем из 300 гармоник, то такое сравнение на са-
мом деле может лишь помочь отсеять теории с действительно грубыми ошибками. Поэтому интересней
сравнивать теории между собой и наблюдения с теориями не в частотном, а во временном диапазоне.
Рис. 8.3.12 иллюстрирует отклонения нутационных углов, вычисляемых по нашей теории и по тео-
риям МНВ2000, GF99, [Huang et al. 2001] от IERS наблюдений. Видно, что все теории обеспечивают
примерно одинаковую точность для нутации в наклоне, но различаются по точности для угла в широте.
Здесь теории располагаются в следующем ряду: GF99, МНВ2000, ZP2001, [Huang et al. 2001]. Однако
здесь нужно еще учитывать следующие детали. Теория [Huang et al. 2001] содержит неполный нутаци-
онный ряд в 343 гармоники. Теория GF99 благодаря использованию вариационных принципов обладает
большей свободой варьирования. Теория МНВ2000 содержит еще некоторые эмпирические поправки,
которые позволяют улучшать ее значения. Без этих поправок теория МНВ2000 обеспечивает примерно
такую же точность, как и наша теория. Но если говорить в общем и не вдаваться в детали, то все эти
четыре теории обладают примерно одинаковой точностью. Может показаться, что вышеперечисленные
детали как раз и очень важны, однако, все познается в сравнении.
Есть еще один факт, который гораздо важнее. Каждая из рассмотренных теорий достигает наилуч-
шего согласия с наблюдениями при разных поправках к постоянной прецессии IAU1980 и смещении
полюса. К каким же следствиям это приводит на длительных интервалах? Чтобы оценить это, мы по-
строили график отклонений нашей теории, теории GF99 и теории [Huang et al. 2001] относительно
теории МНВ2000 на интервале от 1900 до 2100 г. (рис. 8.3.13). Оказывается, что даже за один основ-
ной период нутации (18,61 г.) расхождение теории и наблюдений может достигнуть полмиллисекунды
и более, в то время как различие между теориями из-за других факторов не превышает 200 мкс.
Таким образом, в настоящее время в теории нутации чрезвычайно важно было бы определить по-
стоянную прецессии с точностью лучше, чем 1 мсек, за сто лет. При такой точности знания постоянной
прецессии вопрос выбора лучшей теории разрешится сам собой.
8.3.5 Основные выводы
Земля — это сложная динамическая система неравновесных оболочек (атмосфера, кора, мантия,
внешнее ядро, внутреннее ядро). Кинематика и динамика оболочек обусловлена, в основном, их нерав-
новесным состоянием. Вклад внешнего гравитационного воздействия Луны и Солнца в динамику и
кинематику оболочек различен для различных оболочек и обусловлен их физическим состоянием (вяз-
костью, упругими свойствами, распределением плотности и т. д.)
Наблюдательные эффекты, вызванные кинематикой и динамикой оболочек Земли, основные из ко-
торых — вариации ПВЗ и горизонтальные и вертикальные движения земной коры, неоднозначно объ-
ясняются существующими теориями.
Отклонения современных теорий нутации от наблюдений не превышают 0,5 мс дуги на интервале
10-20 лет. На интервалах ~ 100 лет существует линейное расхождение между теориями, обусловленное
неточным знанием постоянной прецессии. Поскольку постоянная прецессии зависит от внутреннего
строения всей Земли, то для выбора наилучшей теории требуется более длительный период наблюдений
и более точное знание внутреннего строения Земли.
Вековые и долгопериодические изменения скорости вращения Земли и движение полюса могут
быть объяснены динамическим эффектом давления коры на мантию, приводящим к смещению коры
относительно мантии.
Работа выполнена при финансовой поддержке РФФИ (грант 01-02-16529).
2000 —
1000
о —
.1000 —
.2000 —
>3000 —
2000 —
1000 —
о —
.1000 —
.2000
>3000 ““
3000 —
2000 —
1000 —
о —
.1000 —
.2000 —
2000 —
1000
о ——
.1000 —
-2000 “
♦3000 ““
1080
12000
-8000
12000 ——|
Я -4000
-8000
12000
12000 ^—J
-4000 —“
I" | ” I "|---------------------1 | I |-------------------1 | -8000 -------
1084 1888 1992 1988 2000 що
1—*1—I—I—I—I—I—I—I—I
1884 1888 1992 1998 2000
Рис. 8.3.12. Разности теоретических и наблюдаемых (IERS)dE и dip в мкс дуги для теорий (сверху вниз):
ZP2001, МНВ2000, GF99, [Huang et al. 2001].
2400000 2*420000 2440000 2460000 2460000 2500000
2400000 2420000 2440000 2460000 2480000 2500000
ВЭлианская дата
Рис. 8.3.13. Отклонение теорий [Huang et at. 2001] (2), GF99 (3), ZP2001 (4) от теории МНВ2000 (1) с
1900 по 2100 г. в мксек дуги.
Таблица 8.5. Сравнение основных амплитуд нутационных серий современных теорий нутации Земли, (в мсек дуги)
18,6 лет 1/2 года
Теория т|>.р sin фор COS г.р sin Eop COS Теория i|>ip sin Фор COS £ip sin Cop COS
IERS96 -17206,277 3,645 1,553 9205,356 IERS96 -1317,014 -1,400 -0,464 573,058
DD90 -17205,39 9204,87 DD90 -1316,94 572,95
GF99 -17206,251 3,235 1,450 9205,403 GF99 -1317,028 -1,749 -0,625 573,005
МНВ2000 -17206,458 3,334 1,533 9205,175 MHB2000 -1317,159 -1,382 -0,459 573,061
Huang2001 -17206,271 3,267 1,309 9205,147 Huang2001 -1316,971 -1,435 -0,432 572,904
ZP2001 -17206,348 3,156 1,415 9205,122 ZP2001 -1317,104 -1,385 -0,427 573,00
1 год 13,66 суток
Теория ф.р sin Фор COS Cip sin £op COS Теория ф;р sin Фор COS Cip sin £op COS
IERS96 147,538 1,121 -0,198 7,388 IERS96 -227,720 0,269 0,136 97,864
DD90 147,52 7,40 DD90 -227,82 97,90
GF99 147,550 1,247 -0,445 7,256 GF99 -227,733 -0,407 -0,153 97,869
МНВ2000 147,557 1,197 -0,203 7,400 MHB2000 -227,588 0,333 0,163 97,814
Huang2001 147,567 0,250 -0,173 7,423 Huang2001 -227,718 0,328 0,178 97,858
ZP2001 147,497 1,475 -0,060 7,471 ZP2001 -228,164 0,267 0,141 97,027
8.4 Определение приливной силы, соответствующее реальному
орбитальному движению исследуемого тела
Ю.Н. Авсюк, З.П. Светлосанова
8.4.1 Проблематика приливного воздействия — это проблематика небесной ме-
ханики тел, имеющих конкретные геометрические размеры
Небесная механика рассматривает движение материальных точек. Естественен следующий шаг —
рассмотрение орбитально-вращательного движения тел, имеющих геометрические размеры, на первых
шагах без конкретизации их агрегатного состояния (жидкое, упругое, упруго-вязкое и т. д.). Тело име-
ет размер, например, шар радиуса R, неточность знания которого ±ДЯ. В следующем приближении,
когда будут обсуждаться эволюционные изменения вращательных и орбитальных параметров исследу-
емого тела, будет необходимо конкретизировать агрегатное состояние исследуемого тела. Добротность
складывающего тело материала Q позволяет оценивать потерю механической работы, переходящей в
тепло.
Принципиально неверно объяснять приливную силу, считая Землю неподвижной, и обращающихся
вокруг нее Луну и Солнце. Такой подход к объяснению приливной силы был подвергнут анализу и
критике. Э. Мах [1909] писал: «Не всегда с достаточной ясностью указывается на то, что явление
должно было бы по существу быть другим, если бы Земля и Луна не наблюдались друг относительно
друга в ускоренном движении, а в состоянии относительного покоя». Это замечание Э. Мах иллюстри-
рует рисунком (рис. 8.4.1), на котором показано, что в случае неподвижной Земли и обращающейся
вокруг нее Луны приливная деформация имела бы «однобокий» вид. Э. Мах комментирует рисунок
следующими словами: «Таким образом в точке А вес воды уменьшился бы, а в точке С увеличился бы.
Уровень воды в А повысился бы, а в С понизился бы и вода поднялась только на стороне, обращенной
к Луне». В «Принципах механики и динамики» [Tomson, Tait 1962] написано: «Отсюда, если центры
Земли и Луны были бы оба фиксированы, то наблюдался бы подъем уровня в точке ближайшей к Луне,
и падение уровня в точке наиболее удаленной».
К такому заключению несложно прийти, повторив по-
строения Маха или анализ Томсона. Тем не менее, объяс-
нение природы приливного воздействия Луны и Солнца во
всех учебниках по геофизике проводится в предположении,
что Земля неподвижна.
Так, в книге [Стейси 1972] можно прочитать: «Пери-
одическое изменение потенциала в любой выбранной точ-
ке земной поверхности в основном определяется вращением
Земли в гравитационном поле Луны и Солнца.
Наиболее полное изложение теории земных приливов и
наблюдений над ними дано в книге П. Мельхиора. Изло-
жение теории приливов у П. Мельхиора [1968] также про-
водится в предположении о неподвижности Земли. Читаем:
«Величина и направление вектора силы тяжести не могут,
строго говоря, рассматриваться как постоянные, поскольку
точку. Притяжение изменяется во времени вместе с положением обоих небесных тел. Это явление
и служит причиной океанских приливов». При таком определении приливной силы нет необходимо-
сти знать орбитальное движение Земли в пространстве, и то, какие возмущения сопутствуют этому
движению.
Получается парадоксальная ситуация. Небесная механика, рассматривая планеты и спутники Сол-
нечной системы как материальные точки, дала точное описание их орбитального движения и объяснила
силовую природу их возмущений. Более того, по возмущениям определены массы планет, не имеющих
спутников, а планета Нептун была найдена по анализу возмущений. И в то же время, когда переходят
Рис. 8.4.1. Приливная деформация в
случае неподвижной Земли. Иллю-
страция из книги Э. Маха «Механика»
(с. 38).
и Солнце, и Луна притягивают эту же
от точечных размеров к реальным размерам планет и спутников и начинают обсуждать приливные
эффекты, — возмущения вдруг выпадают из рассмотрения. Чтобы проанализировать эту ситуацию,
надо, следуя И. Ньютону, дать строгое описание приливной силы. Потом рассмотреть частный слу-
чай — задачу двух тел, когда исследуемое и внешнее тело движутся по кеплеровой невозмущенной
орбите. Получить формулу и сопоставить ее с формулой Лапласа. После этого получить характеристи-
ку приливной силы для случая реального возмущенного движения Земли, принадлежащей к системе
Солнце-Земля-Луна.
8.4.2 Изучение приливных сил — раздел геодинамики
И. Ньютон дал объяснение приливов и объяснение возмущений орбитального движения Луны на
основании одного и того же геометрического построения (предложение LXVI, теорема XXVI следствия
19, 20), поэтому его подход был динамический, и, как известно, в «Началах» статика не обсуждается
[Ньютон 1936].
Динамический подход к изучению действующих на исследуемое тело сил всегда связан с введением
в рассмотрение силы инерции. Сила инерции — это произведение массы частицы 8т исследуемого тела
на ускорение реального движения исследуемого тела, которому принадлежит частица 8т. Приливное
воздействие на частицу исследуемого тела есть, когда есть внешние тела; когда внешних тел нет,
нет прямого приливного эффекта. Используя такой «предельный переход», можно получить строгое
определение приливной силы.
Пусть в пространстве движется п тел, имеющих массы Mi, (г = 0,1,2.. .п) и взаимодействующих
согласно закону всемирного тяготения. На одном из этих тел массы Mq в системе координат с началом
в его центре масс изучаются перемещения частицы 6m, скрепленной с телом Мо пружиной. Пусть тело
Мо жесткое, сферически симметричное, обладающее собственным вращением. Уравнение движения
частицы 5m имеет вид [Ландау, Лифшиц 1973]:
j27 jtt и я с
8т—j = ——|- 5т[ГоП] + 25т[«Й] + 5т[Й[ГоП]] + f—Ц—Pi — 8тао, (8.4.1)
atz alo р^
где I — радиус-вектор частицы в описанной системе отсчета, Iq — радиус-вектор частицы в начальный
момент времени, U — потенциал внутренних сил, действующих на частицу 5m, U = Ui + U2, где Ui —
потенциал собственного притяжения тела Мо, U2 — потенциал внутренней энергии связи частицы с
телом Мо, например упругой; f — гравитационная постоянная; Mi — массы внешних тел (внешние
тела могут иметь произвольное строение, в этом случае Mi следует рассматривать как составные части
внешних тел); р, — радиус-векторы, соединяющие частицу 5m с внешними телами Mit oq — ускорение
инерции тела Мо, определяется в системе координат с неподвижными осями и с началом в центре масс
всех тел, рассматриваемых в задаче; [ГоЙ] — ускорение, возникающее из-за неравномерности вращения
тела Мо; 2[«Й] — кориолисово ускорение, [Й[Г0Й]] — центробежное ускорение.
Предположим, что все внешние по отношению к Мо тела удалены в бесконечность. Тогда тело Мо,
оставшись одно, будет двигаться равномерно и прямолинейно, т. е. ао = 0, и гравитационное воздей-
ствие внешних тел на частицу 5m также превратится в нуль, т. е. ум<5тр»/р?. Все остальные
члены уравнения (8.4.1) останутся без изменений.
Определение Приливная сила Fn, действующая на пробную частицу массы 5m исследуемого тела,
равна векторной разности между силами гравитационного притяжения частицы внешними телами мас-
сы Mi и силы инерции этой частицы 6m, представляющей собой ускорение центра масс исследуемого
тела ао, умноженное на массу частицы 5m, т. е.
- „М,8т _ -
Fn = f—з~Р‘ “ Ьтао- (8.4.2)
1 Р‘
В случае деформируемого тела Mq на прямой приливный эффект наложится косвенный эффект,
обусловленный изменением U 7^ const, Й / const. Пользуясь определением и формулой (8.4.2), можно
рассчитать приливную силу, действующую на частицы Ьтп исследуемого тела, которое может вхо-
дить в произвольную конфигурацию взаимодействующих небесных тел. Чтобы вычислить первый член
Л.М£6ш_
У J—j—Pi, нужно знать массы Mi и их взаимные расстояния р^. Для вычисления второго члена —
1 Р*
Ьтао, необходимо знать, как движется исследуемое тело в рассматриваемой конфигурации небесных
тел, его степени свободы.
Напомним, по какому признаку можно сделать заключение, что
рассматриваемая формула, описывающая приливную силу, относится
к случаю кеплерова движения исследуемого и внешнего тела.
Рассмотрим произвольную плоскую траекторию. Изменения поло-
жения точки М заданы полярными координатами г, А (рис. 8.4.2). Вто-
рые производные по времени изменения положения точки на траекто-
рии, спроектированные по направлению радиуса аг и по направлению,
перпендикулярному радиусу (трансверсали) — ат, имеют вид:
аг = г — гА2, ат =--^-(г2А), (8.4.3)
г at
Рис. 8.4.2. Кинематика
произвольного плоского
движения точки.
т. е. в общем случае произвольное движение точки на плоскости ха-
рактеризуется радиальной аг и трансверсальной ат компонентами
ускорения йо.
В обозначениях формулы 8.4.3 закономерность,
И. Кеплером (второй закон), эквивалентна условию r2A = const. В этом случае трансверсальное уско-
1 & . о \ т» » _
рение ат = -~т(г равно нулю. И такой вид движения, когда ускорение ао имеет только радиальную
г at
компоненту, в небесной механике называют невозмущенным кеплеровым.
установленная
Допустим, что исследуемое и внешнее тело движутся по кеплеровским орбитам вокруг их общего
центра масс. Понятно, что в этом случае ускорение йо исследуемого тела ориентировано по направ-
лению радиуса г, соединяющего центры Mq и Mi. Поэтому приливная сила в случае движения двух
сферически симметричных по распределению масс тел, движущихся по кеплеровым орбитам, имеет
вид:
- „М\Ьт_ . .Mi
Fn =/-Л—Pi -
Pi тй
(8.4.4)
Изящество формулы, характеризующей приливную силу, в случае кеплерова движения объясняется
простотой характеристики ускорения йо, которое имеет вид:
1 „MqMxt3
а° = —=—
Mq Т
Имеет смысл обратить внимание на небольшую деталь, на вариант прочтения характеристики при-
ливной силы (8.4.4), соответствующей кеплеровому движению.
Действительно, формула (8.4.4) останется без изменений, если второй член правой части будет
записан подобным образом, как и первый:
Fn = f
Mi8m
Р?
.М1&т_
Р1 ~ f ~гз г‘
(8.4.5)
Но в этом случае формулу можно прочитать следующим образом: приливная сила есть векторная
разность между силами притяжения внешнего тела Mi, приложенными к произвольно расположенной
частице Ьт и к такой же частице 5m, расположенной в центре масс исследуемого тела. Формула, выве-
денная на основании динамического определения приливной силы и относящаяся к частному кеплерову
виду движения исследуемого тела, при таком прочтении полностью утрачивает свою динамическую
содержательность и становится описанием статического вычислительного приема. Это прочтение фор-
мулы и критикует Э. Мах. Оно вошло практически во все учебники и монографии по приливам.
Так, приливное воздействие Луны на Землю F\ предлагается вычислить на примере (8.4.5), подста-
вив только массу Луны Mi, и радиус-векторы pi и п, соединяющие частицу Ьт с центром масс Луны,
и вектор fi, соединяющий центры Земли и Луны, т. е.
Fi = f—— pi - bmf—^гг. (8.4.6)
Pi ri
Это только кеплерова часть приливного воздействия в изолированной системе Земля-Луна. Это
неполное описание приливной силы. Реальное орбитальное движение Земли вокруг центра масс Земля-
Луна (барицентра) возмущенное.
Рекомендация Г.Дж. Дарвина вычислять приливное воздействие Солнца по аналогии с вычислением
приливного воздействия Луны вошла практически во все учебные пособия по приливам без какого-либо
критического разбора [Стейси 1972, Мельхиор 1968, Melhior 1984]. На наш взгляд, как уже говорилось
раньше, эта рекомендация ошибочна. Во-первых, астрономы не наблюдают парного движения Земли
и Солнца вокруг общего центра масс. Во-вторых, наблюдается движение системы Земля-Луна вокруг
Солнца. Какое есть движение, такое и надо рассматривать при обсуждении приливного воздействия
Солнца на Землю. Это уже задача трех тел. Астрономы регистрируют сложное движение Земли, кото-
рая обращается месячным движением вокруг центра масс Земля-Луна (лунное неравенство L = 6", 44).
Барицентр с годичной периодичностью обращается вокруг Солнца, точнее вокруг центра масс Солнце-
Земля-Луна. Понятно, что притяжение Солнца динамически уравновешено в барицентре, а не в центре
Земли.
8.4.3 Характеристика приливной силы в случае возмущенного орбитального
движения исследуемого тела
И. Ньютон дал исчерпывающий анализ движения всех тел Солнечной системы, в том числе и
Земли. В «Началах» сказано: «Если учитывать, что Земля и Луна обращаются вокруг их общего центра
тяжести, то и движение Земли возмущается подобными же силами» (Предложение XXV, Задача VI)
[Физика и астрономия Луны 1973].
Напомним, что еще в 1747 г. Л. Эйлер опубликовал работу «Более точное исследование возмущений
движения Земли, производимых Луной» [Авсюк 1976], в которой показал, что возмущения в движении
Луны, которые регистрируются визуально в изменениях долготы А и параллакса л:
А = L + 377х sin М + 40' sin 2D + 13' sin 2М + ...,
л = 3424" + 187" cos М" + 28 cos 2D + 10" cos 2М + ...,
характеризуют и особенности орбитального движения Земли вокруг барицентра.
Не вдаваясь в подробное объяснение каждого из членов, отметим, что третьи члены справа —
возмущения, и модуль члена 40/sin2£>, пересчитанный в см/с2, составляет порядка 1,1-10"Зсм/с2, а
периодичность 2D соответствует половине синодического месяца Тс, который связан с продолжитель-
ностью сидерического лунного месяца и сидерического года 7© как
2л _ 2л 2л _ 2л
т~с ~ ~
Движение Земли относительно центра масс Земля-Луна представляет собой точное отображение
движения Луны, уменьшенное примерно в 80 раз. Кажется очевидным, что если в описание приливной
силы (8.4.1) входит характеристика ускорения ао, то и все возмущения должны также присутствовать в
характеристике приливной силы. Тем более что И. Ньютон оговаривал включение в описание прилив-
ной силы членов, соответствующих возмущениям орбитального движения Земли вокруг барицентра.
Модуль этого члена равен примерно 19-10-6см/с2, т. е. эта величина не пренебрежимо малая.
Реальные движения небесных тел всегда возмущенные. В зависимости от точности регистрации
возмущения могут оставаться незамеченными, или ими могут пренебречь и рассматривать сглаженную
траекторию. Все закономерности движения небесных тел имеют строгое механическое объяснение в
рамках классической динамики.
Все вышесказанное можно наглядно продемонстрировать, определяя ускорение каждого из тел си-
стемы Солнце-Земля-Луна через форму Лагранжа. Не вдаваясь в подробности, отметим, что кине-
тическая энергия записывается в строгом соответствии со степенями свободы каждого тела системы
(рис. 8.4.3).
Так, для системы Земля-Луна-Солнце кинетическая энергия характеризуется выражением
MiM2r2\2E (Мг + M2)M3flgA| MiM2r2 (M1 + M2)M3Rl
~ 2(Mi + M2) + 2(Mi + M2 + M3) + 2(Mi + M2) + 2(Mi + M2 + M3) ’
Потенциальная энергия гравитационного взаимодействия, записанная через векторы взаимного рас-
стояния Земля-Луна, Земля-Солнце, Луна-Солнце, т. е. через т, /?1,Я2, соответственно, имеющая вид
(8.4.7)
Mi М2
MiM3 ,М2М3
~Ri f R2 ’
(8.4.8)
должна быть приведена к тем же векторам,
ние (8.4.9) при этом принимает вид
MiM2 . M3(Mi + М2)
в которых записана кинетическая энергия.
M3MiM2 г2 ГЗ
Выраже-
Ro
^cos2(Ab-As) - J ,
(8.4.9)
(Mi + M2) [2
после чего можно находить такие ком-
поненты ускорения, соответствующие
. d fdL\
степеням свободы, как — —— =
at \oq )
dL
—, L = T — V, где в нашем случае
dq
Рнс. 8.4.3. Система Земля—Луна—Солнце. (Земля — Mi, Лу-
на — М2, Солнце — Мз, центр масс Земля—Луна—Солнце —
О.)
У , Гц)) А£/, Ад, у I ) -*ЧЭ) ''Ey ''3’
Если называть движения барицен-
тра (Mi + М2) и тела М3 вокруг цен-
тра масс (Mi + М2 + М3) перенос-
ными, а движения тел Мх и М2 во-
круг барицентра (Mi+M2) относитель-
ными, то нетрудно заметить, что для
тела, находящегося только в перенос-
ном движении, характеристика уско-
рения более простая, чем для тела,
участвующего в обоих видах движе-
ния. Для того чтобы получать харак-
теристики ускоренного относительного
движения, дифференцируем лагранжи-
ан по г, Ro,\eX- Можно ограничить-
ся нахождением ускорения одного из
тел — или Mi, или М2, так как модули их ускорений обратно пропорциональны отношению их масс.
Например, для Mi имеем:
сРт М2 _ MiM2 -2 t M3MiM2 т 2
M1dt2Mi + M2 f г2 М! + М2ГАе /(Mi + M2)7?3(3cOS ( Е s)
, п к (0Л.1Ш
d М2Г2 . \ „ М3М1М2 г .
Mi — ( —— Ад I = —3f——, ... -=зСОз(Ад - As) sm(AE - As).
dt \Mi + М2 / Mi + М2 До
Дифференцируя лагранжиан по RoXa,Ro,Xa, получим характеристики ускорения переносного дви-
жения барицентра или тела М3. Компоненты переносного ускорения барицентра (Mi + М2) по радиусу
Ro и по направлению, перпендикулярному радиусу соответственно равны:
М3
(M1 + =(М1 + M^(M^M^W) = f----------%------
_ (Ml + M2)BqM3A2 3 M3MiM2r2(cos2(Ag - Ла) - 1)
; (Mi + М2 + М3) +2;
(Mi + М2)а'т = (Mi + М2) — f +М° + М
(Lt \ М\ + М.2 -г Л13
М3М1М2т2 .
= 3/(М1 + М2)^ cos<Xi' - Xs> sm(XE - Xs)-
(Mi + м2 + М3)Я£
(8.4.11)
Абсолютное ускорение тела М3, совершающего только переносное движение, характеризуется фор-
мулой (8.4.11), содержащей возмущения второго порядка малости по отношению (г/Ro)2. Абсолют-
ные ускорения тел Mi и М2, совершающих более сложное движение, имеют компоненты переносного
(8.4.11) и относительного движения (8.4.10), которые содержат возмущения первого порядка по отно-
шению (t/Ro).
Правильность вывода абсолютных ускорений тел системы проверяется удовлетворением классиче-
ских интегралов сохранения. Несложно убедиться в том, что в рассмотренном случае они удовле-
творены. Постоянство импульса системы при выводе уравнений (8.4.10), (8.4.11) соблюдено: за начало
отсчета был взят центр масс всех трех тел, который, согласно первой аксиоме Ньютона, при отсутствии
других материальных тел движется прямолинейно и равномерно. Интеграл энергии тождественно удо-
влетворен, так как лагранжиан составлен из характеристик потенциальной и кинетической энергий
системы. Кинетический момент системы К, равный сумме кинетического момента относительного
движения Ki тел Mi и М2 вокруг барицентра и кинетического момента переносного движения К2
барицентра (Mi + М2) и тела М3 вокруг центра масс (Mi + М2 + М3), постоянен, то есть
К = A'i + К2 = const или = + (8.4.12)
dt dt dt
откуда следует, что компенсируются моменты сил, а не ускорения возмущений относительного и пере-
носного движений.
Усложнение конфигурации до четырех, пяти и т. д. взаимодействующих тел, учет некомпланарно-
сти и эксцентричности орбит ничего нового в принципы нахождения возмущенной и невозмущенной
части ускорения движения исследуемого тела не вносят. Вычисления становятся более трудоемкими.
Для Солнечной системы все виды конфигураций взаимодействующих тел отнаблюдены и изучены. Ха-
рактеристики ускорений каждого тела в системе отсчета с началом в центре масс всех тел Солнечной
системы известны. Неопределенность знания абсолютного ускорения этого центра по отношению к
Галактическому центру составляют 1-10~8 см/с2 [Чеботарев 1965]. Это значение можно рассматри-
вать в качестве верхнего предела точности описания ускорения каждого из тел Солнечной системы.
Точность регистрации приливных эффектов на Земле обычно на несколько порядков ниже — это
10-5-10-6 см/с2. В пределах этой точности должно быть представлено ускорение исследуемого тела
со всеми его возмущениями, модуль которых превышает точностные ограничения. Вполне возможно,
что при заданной точности исследования приливных эффектов в характеристике ускорения одного из
тел рассматриваемой конфигурации возмущений не будет, а у других тел они сохранятся. Это уже след-
ствия поставленной точности. Например, в исследованиях движения Луны Хиллом орбита барицентра
принималась за невозмущенный кеплеровый эллипс.
После всего сказанного вернемся опять к рекомендации Дж.Г. Дарвина вычислять приливное воз-
действие Солнца на Землю по аналогии с обсужденной задачей двух тел — Земли и Луны. Почему эта
рекомендация вошла в научный обиход, и не только для вычисления приливного воздействия Солнца,
но и для вычисления приливного воздействия всех тел Солнечной системы на Землю? Почему прилив-
ное воздействие рекомендуется вычислять попарно, т. е. Земля-Луна, Земля-Солнце, Земля-Юпитер,
Земля-Сатурн и т. д.? А если необходимо найти приливное воздействие тел Солнечной системы на
Луну, то рекомендуется вычислять по однообразным формулам для пар Луна-Земля, Луна-Солнце,
Луна-Юпитер, Луна-Венера, Луна-Марс и т. д. Или для Солнца: Солнце-Земля, Солнце-Юпитер,
Солнце-Сатурн, Солнце-Уран и т. д. Почему, когда изучены и объяснены все особенности и возму-
щения орбитального движения тел Солнечной системы, приливные силы вычисляются суммированием
задач двух тел? Ответ достаточно простой. Эта рекомендация следует из упрощенного нахождения йо
исследуемого тела М(и), для которого вычисляется приливное воздействие внешних тел М^. Предпо-
лагается, что ускорение do есть вторая производная от вектора положения Ru, т. е.
_ _ d2Ru _ 1 А .МгМи -
а° dt2 Mu^f R*u
1=1 ги
Отсюда, после подстановки в формулу (8.3.2) для приливной силы получают:
р А .МгЬт 1 ^МгМ
и, соответственно, сумму приливных сил парного взаимодействия, т. е.
- (г,М1Ьт_ с . Мх \ / М25т_ с , М2 = \
F = f----— Pi - bmf-^Riu + f—— P2 - bmf—rR2u +
X Pl -Klu / X P2 U2u J
f.M3bm_ _ , Af3- \ . Mi - \
+ ( f з Рз - f>mf^-R3u j + I f—— Pi - bmf-^-Riu j + ...
X Рз •'лЗи J X Pi ^iu J
Если ускорение ищется через изменение вектора положения, то это отступление от буквального на-
писания второго закона Ньютона, который гласит: «Изменение количества движения пропорционально
движущей силе»... и согласно определению II: «Количество движения есть мера таковой, устанавли-
ваемая пропорционально скорости и массе».
Так как скорость каждого из тел Солнечной системы равна сумме составляющей ее скоростей, на-
о on
пример, для Земли — это скорость переносного движения центра масс Земля-Луна —— плюс скорость
dt
о о п
относительного движения Земли вокруг центра масс Земля-Луна —, то результирующая скорость ——
dt dt
„ df dRo _ = _ =
может быть определена только через — и Векторному равенству Ru = t + Rq сопутствует соотно-
си dt
шение модулей R2 = г2 - 2Rqt cosD + R%. Пока не определены составляющие, результирующий вектор
не имеет самостоятельного значения, поэтому процедура нахождения do через неконкретизированный
вектор положения Ru остается неопределенной.
Таким образом, процедура нахождения приливной силы, действующей на исследуемое тело, отно-
сится к задачам небесной механики тел конечных размеров. Она решается поэтапно: 1) нахождение
приливной силы в случае невозмущенного (кеплерова) движения (задача двух тел), 2) нахождение
приливной силы в случае возмущенного движения (задача п тел).
В небесной механике исследование движения всех тел Солнечной системы описаны подробно, по-
этому тем, кто занимается исследованием приливных сил, многое уже объяснено и описано. Например,
если исследуются приливы на Земле, то можно взять подробное описание движения Луны, теорию ее
движения, и читать эти труды, как предлагал Л. Эйлер, применительно к Земле, т. е. уменьшив модули
периодических членов в 81,3 раза.
8.4.4 Факты, подтверждающие реальность проявления возмущений в наблю-
даемых приливных процессах
Для подтверждения обоснованности проявления возмущений орбитального движения исследуемого
тела в приливных наблюдаемых процессах рассмотрим материалы регистрации лунотрясений, получен-
ные во время эксперимента «Аполлон» 1969-1975 гг.
В теории движения Луны последовательно излагаются характеристики ее кеплерова движения, а
потом рассматриваются налагающиеся на эти движения возмущения. Такая поэтапность позволяет
проанализировать в реальном движении природу каждого возмущения [Куликов, Гуревич 1972], и
такой подход аналогичен выделению нормального и аномальных полей в геофизических изысканиях.
Формула Лапласа характеризует только невозмущенную (кеплерову) часть приливного воздействия.
Чтобы характеристика приливной силы соответствовала реальному движению небесного тела, в ней
должны содержаться члены, определяющие как невозмущенную часть (формула Лапласа), так и воз-
мущения. Это — общее правило. Для Луны модуль возмущенных членов сопоставим с модулем невоз-
мущенных членов, и поэтому их учет обязателен [Физика и астрономия Луны 1973 ]. В исследованиях
наших американских коллег это не было сделано, что вызвало затруднения в интерпретации сейсмиче-
ских наблюдений.
Приливное воздействие Земли и Солнца на Луну представлено в виде компонент силы в местной
(задаваемой широтой ср, долготой ДД и расстоянием до центра Луны I) лунной горизонтальной систе-
ме координат. Ось Z ориентирована по местной вертикали, две другие оси — в плоскости горизонта по
направлению север-юг и восток-запад. При точности исследований «2-10“5 см/с2, значениях модулей
/AfJ/r3 « 1,2 • 10-3 см/с2 (кеплерова часть воздействия Земли), fM2l/R^ «0,7- 10-Б см/с2 (кепле-
рова часть воздействия Солнца), fМ2М1Т/R$(M2 + Mi) «1,5- 10-3 см/с2 (возмущение орбитального
движения Луны Солнцем) и порядке отношений l/г ~ 4- 10-3, l/Ro ~1,510”6 (I — радиус Луны),
Г1 = тМ1/(Мо 4- Mi), ti/Rq ~2,6-10“3 формула для компонент приливной силы имеет вид:
А (3cos2 z, _ 1) + (3cos> z, -1) -
M2ti ,M2ti
— 3/ 3 cos D cos Z2 — f 3 cos Zi ,
«о Яо J
Fsn „ .Mil . M21 .
---=3/—=- cosZi smZi cos Ai 4- 3/-=^- cosZ2 sin Z2 cos A2 —
bm ta 7?g
. fM2ri '
— 3/ 3 cos D sin Z2 cos A2 — j 3 sin Zi cos Ai ,
*4) -*4) J
Few r, rr • л , rj rr • a
—— =3/—=- cos Zi sin Zi sin Ai 4-3/-^q-cosZ2sinZ2sinA2 —
bm r3 Rq
\.М2Г1 r, „ A rr A
— 3f 3 cos D sin Z2 sin A2 — /—-= sin Zi sin Ai ,
^o J
где Mo, Mi, М2 — массы Луны, Земли, Солнца; Rq — радиус орбиты барицентра вокруг Солнца; I —
радиус Луны; Zi,Z2,Ai,A2 — зенитные углы и азимуты Земли и Солнца, которые в последующем
приводятся к эклиптическим координатам Земли и Солнца. Не вдаваясь в подробности, отметим, что
выводятся довольно громоздкие формулы с тригонометрическими функциями долгот узла П, перигея
Г, аномалии W Луны, долготы А2 Солнца, звездного времени S [Авсюк 1976].
Таким образом, получено выражение компонент приливной силы в виде гармоник, периодичность
каждой из которых определяется через естественные периоды исследуемого и приливообразующих тел
и через периоды изменения элементов их орбит. Заметим, что члены в квадратных скобках не равны
нулю в центре Луны при I = 0. Поэтому имеются возможности исследовать особенности характера при-
ливного воздействия как внутри, так и на поверхности Луны непосредственно в течение того времени,
когда сейсмографы регистрировали изменение напряженного состояния недр Луны (1971-1975 гг).
Рис. 8.4.4. Сравнение относительной мощности гармоник приливной силы, рассчитанной: а — по формуле
Лапласа; б — с учетом возмущений (описание Ньютона); в — со спектрами энергии приливных лунотрясе-
ний. Горизонтальная ось — периоды (сут), вертикальная — относительные амплитуды мощности.
Начнем с глубокофокусных маломощных лунотрясений. Как уже отмечалось выше, их эпицентры
приурочены к глубинам 800-1000 км и концентрируются в приэкваториальных районах. В повторяемо-
сти лунотрясений выделены четкие пики: самый значительный — на 13,6 суток; в 2-5 раз слабее пики
с периодом 27,2 и 206 суток (рис. 8.4.4).
График энергии основных волн (см. рис. 8.4.4а) приливной силы без учета пертурбационных членов
отличен от графика повторяемости сейсмических событий. Из формулы Лапласа никак не следует,
что сейсмические события могут происходить на глубине, так как для глубин 800-1000 км модуль
приливной силы уменьшается вдвое по сравнению с модулем на поверхности. Приближение Лапласа
не дает объяснения ни периодичности, ни локализации по глубине очагов лунотрясений.
Таким образом, из сопоставления временных особенностей глубокофокусных лунотрясений с вре-
менными вариациями полного выражения компонент приливной силы намечается достаточно убеди-
тельная причинно-следственная часть (см. рис. 8.4.4в и б). Теперь можно высказать некоторую гипотезу
реализации приливного воздействия в глубокофокусных сейсмических событиях на Луне.
Так как глубокофокусные очаги приурочены к зоне раздела пластического материала ядра с жест-
кой оболочкой и происходят вблизи моментов полнолуния и новолуния, то силовое воздействие можно
схематизировать следующим образом. В эти моменты Луна ускоряется от Земли, следовательно, пла-
стический материал ядра оказывает дополнительное давление на стенку оболочки, ориентированную к
Земле. Этот эффект аналогичен эффекту «присоединенной массы».
Предложенная схема не противоречит наблюдениям, а именно: в приэкваториальных районах, ориен-
тированных к Земле главным образом в полнолуние и новолуние, фиксируются слабые потрескивания.
Переходим к поверхностным, более мощным лунотрясениям (табл. 8.6). Они названы тектонически-
ми и тем самым как бы противопоставлены приливным. Как видно, с января 1972 до марта 1973 г.
лунотрясения происходили только в восточном полушарии, затем активным стало западное полушарие.
Следует заметить, что время максимальной сейсмической активности поверхностных лунотрясений
было приурочено ко времени максимума физической либрации Луны. Физическая либрация в долготе —
Таблица 8.6. Календарь тектонических лунотрясений
№ п/п Год День года Магнитуда по земной шкале Глубина, КМ Координаты эпицентра
Широта Долгота AL
1 1971 107 2,8 25 47° с. 33° в.
2 1971 140 2,0 25 39° с. 24° з.
3 1971 192 1,9 25 43° с. 42° с. 35° с. 32° с. 47° з. 60° з. 56° з. 66° 3.
4 1972 0,02 1,9 25 55° с. 45° с. 97° в. 120° в.
5 1972 261 1,0 154 13° с. 43° в.
6 1972 341 1,4 1,0 43° с. 50° с. 42° в. 45° в.
7 1972 344 1.2 25 29° ю. 37° ю. 74° в. 58° в.
8 1973 039 0,8 121 43° с. 48° с. 28° в. 33° в.
9 1973 072 3,2 217 82° ю. 113° з.
10 1973 171 2,2 278 0° 15° с. 68° з. 72° з.
11 1973 274 1,1 25 35° ю. 31° ю. 27° з. 34° з.
12 1974 054 0,7 25 34° с. 43° с. 15° з. 30° з.
13 1974 086 1,7 — 49° ю. 103° з.
14 1974 109 0,9 — 37° ю. 38° в.
15 1974 149 0,6 — 30° к востоку от Апеннин
16 1974 192 2,7 247 21° с. 16° с. 86° в. 42° в.
17 1975 003 3,2 46 30° с. 25° с. 96° з. 97° з.
это малые покачивания всего тела Луны относительно прямой, соединяющей центры масс Земли и
Луны.
Рис. 8.4.5. Иллюстрация повторяемости моментов
полнолуний, совпадающих с прохождением пери-
гея орбиты 11(74).
В системе координат с началом в центре масс
Луны долготную либрацию создает момент си-
лы Few- Помимо поворота тела Луны как це-
лого, сила, создающая момент, может создавать
либо локальные растяжения, либо сжатия, если
ее модуль для разных точек на одной параллели
непостоянен. Поэтому для интервала времени с
января 1972 по декабрь 1973 г. были посчитаны
вариации компоненты приливной силы Few и их
разности для точек, лежащих на параллели 45°
и отстоящих от нулевого меридиана к востоку
и к западу на 45°. Выявилась следующая осо-
бенность: полушарие сейсмически активно, если
разности компонент силы Few на долготе ±45°
и на долготе 0° имеют тенденцию уменьшаться;
полушарие пассивно, если происходит рост этой
Таблица 8.7. Изменения продолжительности аномалистического месяца в течение года и от года к году
Год Календарный месяц
Январь Февраль Март Апрель Май Июнь
1957 28,40 28,53 28,45 28,12 27,10 25,04 27,15
1958 25,77 27,96 28,41 28,50 28,39 28,06 27,06
1959 27,86 25,36 26,17 28,00 28,37 28,44 28,34
1960 28,36 27,71 25,18 26,48 27,97 28,32
1961 28,52 28,52 28,29 27,55 25,19 26,60 27,94
1962 27,56 28,33 28,51 28,46 28,20 27,47 25,27
1963 26,66 24,44 27,70 28,32 28,45 28,39 28,15
1964 28,05 26,27 25,31 27,75 28,28 28,41
1965 2856 28,42 27,93 26,07 25,59 27,72 28,23
1966 28,18 28,49 28,52 28,34 27,72 25,99 25,76
1967 24,66 27,22
Год Календарный месяц
Июль Август Сентябрь Октябрь Ноябрь Декабрь
1957 28,06 28,35 28,44 28,36 27,92 25,74
1958 25,08 27,15 28,09 28,41 28,50 28,39
1959 28,04 27,08 25,02 27,19 28,16 28,47 28,53
1960 28,40 28,34 28,07 27,04 24,88 27,36 28,26
1961 28,30 28,42 28,39 28,12 26,94 24,79
1962 26,60 27,93 28,33 28,46 28,43 28,12
1963 27,45 25,25 26,63 27,98 28,39 28,53 28,46
1964 28,37 28,16 27,47 25,09 26,72 28,08 28,47
1965 28,39 28,38, 28,20 27,48 24,86 26,93
1966 27,70 28,23 28,41 28,43 28,24 27,38
разности. То есть особенность сейсмической активности Луны имеет эквивалент в особенностях изме-
нения локальных разностей приливной силы.
Эти примеры, которые можно рассматривать как первое приближение, указывают на необходимость
дальнейшего углубления анализа лунных сейсмических материалов, которые интересны не только сами
по себе, но и содержат аналоги, применимые к земной сейсмичности.
Из вышесказанного напрашивается вывод, что в «тектонических» лунотрясениях приливные воз-
действия тоже важны. Они обеспечивают накапливание необходимой энергии за много циклов, а реа-
лизация удара происходит в интервалы времени, соответствующие определенной тенденции изменения
приливного воздействия. Поэтому под термином «триггер» можно понимать не резкий скачок, а скорее
перестройку хода изменения напряженного состояния.
В наличии возмущений орбитального движения Луны можно непосредственно убедиться, открыв
астрономический ежегодник и выписав изменение продолжительности аномалистического месяца за
время, например, с 1957 по 1966 гг. (табл. 8.7).
Из этой сводки непосредственно видно, что из-за возмущений продолжительность месяца меняется
в диапазоне от 28,6 до 24,4 суток, т. е. на 4 суток. Если следить за повторением короткого месяца,
то выявляются периодичности 206 и 412 суток. На рис. 8.4.5 показано, что повторяемость полнолуния
и прохождения перигея происходит через 412 суток из-за перемещения перигея с периодом 8,85 года.
Период 206 суток — это чередование полнолуний и новолуний при прохождении перигея. Через этот
интервал времени повторяются самые короткие аномалистические месяцы (25 суток).
8.4.5 Перемещения оси вращения в теле Земли — процесс, связанный с воз-
мущениями Солнцем орбитального движения Земли вокруг центра масс
Земля-Луна
«Движение Земли относительно центра инерции системы Земля-Луна представляет точное отобра-
жение движения Луны, но уменьшенное приблизительно в 80 раз. Поэтому уже приближенная теория
движения Луны позволяет с большой точностью найти возмущения Земли, вызываемые существовани-
ем Луны». Л. Эйлер.
Повторяем еще раз замечание классиков науки о том, что не надо игнорировать факта реального
месячного движения Земли. Рассмотренные на предыдущих страницах статьи возмущения в движении
Луны и приведенная таблица изменения продолжительности аномалистического месяца дают обосно-
вание модельному объяснению процесса перемещения оси вращения в теле Земли.
В общем случае движение твердого тела в пространстве характеризуется шестью координатами:
три координаты x,y,z, определяют положение системы отсчета, связанной с вращающимся телом,
три угловых координаты определяют ориентацию этой системы относительно неподвижной. В частном
случае принимают положение начала в исследуемом теле неизменным, т. е. Дх(Т) = 0, &у(Т') = 0,
Az(T) = 0, и изучают изменение только трех углов ориентации. После открытия датским сейсмологом
Ингой Леманн в 1936 г. наличия у Земли твердого ядра (IC) радиуса 1200 км, «взвешенного» в
окружающем его жидком внешнем ядре, логично изучать вращение структурно-неоднородной Земли, у
которой может изменяться положение начала, т. е. Ах(Т) / 0; Ду(Т') / 0; Дг(7’) / 0.
Так как большая полуось орбиты Земли (Луны) не остается фиксированной в пространстве (период
обращения перигея равен 8,85 года), то совпадение полнолуния с прохождением перигея повторяется в
момент Тз = 71 + 412 суток. Момент 7г фиксирует новолуние, совпадающее с прохождением перигея.
Положение начала относят к центру масс исследуемого тела, который описывает траекторию его
орбитального движения. В то же время, из-за перемещения структур может изменяться его относи-
тельное положение в теле. Ось вращения отслеживает эти относительные перемещения, которые на
поверхности Земли, в частности, будут регистрироваться как изменение положения географического
полюса, т. е. как процесс изменяемости широт.
Таким образом, у структурно-неоднородного твердого тела (в частности у Земли) изменение положе-
ния оси вращения в теле может реализовываться не только в случае свободной нутации, но и в случае
вынужденных перемещений начала подвижной системы отсчета, которая фиксируется положением оси
вращения в эпоху наблюдения.
Модель, объясняющая процесс изменяемости широт с позиций подвижного начала референц-
системы, не должна вступать в противоречие с материалами регистрации вынужденной прецессии и
нутации и их интерпретацией с использованием уравнений Пуассона, а также должна объяснять всю
имеющуюся на настоящее время эмпирику, описывающую процесс изменяемости широт.
Материалы наблюдений за вынужденной прецессией и нутацией интерпретируются с привлечением
уравнений Пуассона, вывод которых проведен при условии, что перераспределения масс порядка (А —
В) = 1 - 1О40 г-см2 не обнаруживаются при оптических наблюдениях с точностью 0", 001. Следовательно,
допустима неопределенность знания положения начала системы отсчета порядка МДх2 — 1О40 г-см2
при М = 6 • 1027 г), т. е. Дх(Т'); Ду(Т'); Ди(Т') < 1 • 103 м.
Повторим еще раз сказанное в начале статьи. Вокруг Солнца с годичной цикличностью движется
система Земля-Луна. Земля, так же как Луна, движется с месячной цикличностью вокруг барицентра
по эллиптической, наклоненной на 5° к эклиптике орбите. Притяжение Солнца динамически урав-
новешено в барицентре. На центр Земли действует меняющееся во времени возмущение с модулем
19 • IO"3 см/с2 и цикличностью, зависящей от разности долгот Земли Л© и Солнца Л0, т. е.
Л© — Л© = п + г + W — Л© = (П + Г — Л©) + W,
где П,Г — долготы узла и перигея орбиты Земли (Луны) вокруг барицентра, W — аномалия.
Периодичности изменения Q, Г, W хорошо известны применительно к Луне, но они являются так-
же характеристиками орбитального движения Земли, они соответственно равны 18,6 лет, 8,85 лет,
27,5 суток.
Возмущения по модулю меняются от месяца к месяцу, поэтому при опросе с шагом в месяц (т. е.
через период изменения W) выявляется цикличность, выделенная скобками, то есть (Q + Г — Л0),
равная 412-437 суток. При дискретности опроса шагом в год выделяется цикличность (П + Г), равная
6 годам. При дискретности опроса в сутки выявляется цикличность, кратная 27,5 суток.
С. Чандлер по среднемесячным значениям широт в 1891 г. установил периодичности вариаций широт
продолжительностью 365 суток (год) и продолжительностью в 410-440 суток (среднее 427 суток). Ма-
териалы службы широт расширили спектр особенностей изменяемости широт: был обнаружен «Z-член»
(Results of the international Institute service in a homogeneous system 1899-1973, 1980 г.), периодич-
ности 0,5 и 0,8 года [Rudnick 1959], длиннопериодические вариации продолжительностью 6, 42 года
[Рыхлова и др. 1991]. При наблюдениях (VLBI) выявлена двухнедельная вариация.
Сопоставление цикличностей орбитального движения Земли с периодичностями процесса изме-
няемости широт показывает их полное частотное соответствие. Оценки смещений начала референц-
системы (Дх, Ду, Дг) из-за вынужденных перемещений внутреннего ядра IC дают удовлетворительное
объяснение амплитуд смещения полюса, т. е. следа компоненты а>з. Так как смещения IC изменя-
ют моменты инерции на величину, много меньшую величины (А — В), то интерпретация материалов
наблюдений за вынужденной прецессией не претерпевает никаких изменений.
Модель вращения структурно-неоднородной Земли с подвижным началом референц-системы дает
непротиворечивую интерпретацию материалов наблюдений за вынужденной прецессией и нутацией и
всем характеристикам процесса изменяемости широт. Контроль за изменением положения начала мо-
жет быть реализован скоординированными гравиметрическими методами по программе, аналогичной
синхронным астрометрическим наблюдениям. Эта модель может вызвать интерес у магнитологов, за-
нятых проблемой генерации магнитного поля. В настоящее время в публикациях заметно повышенное
внимание к проблемам внутреннего ядра.
8.4.6 Невязки при сопоставлении материалов регистрации приливного воздей-
ствия с теоретическими расчетами по формуле Лапласа
В материалах регистрации приливных вариаций силы тяжести и наклонов также присутствуют
невязки, которые могут быть уменьшены при сравнении эксперимента с полным описанием силы, дан-
ным Ньютоном.
Приливные вариации — изменения силы тяжести, наклона, уровня артезианских колодцев, уровня
моря, зарегистрированные приборами в различных пунктах земного шара, в большинстве случаев си-
стематически отличаются от аналогичных вариаций, посчитанных теоретически по формуле Лапласа
на тот же интервал времени. Эти отклонения описаны в монографиях по приливам и в журнальных
публикациях [Стейси 1972, Мельхиор 1968, Melhior 1984, Авсюк 1996].
В соответствии с формулой Лапласа компонента восток-запад не имеет волн с периодом больше
суточного, полусуточного. У Мельхиора [1968] по этому поводу сказано: «Как мы видим, в состав-
ляющей восток-запад долгопериодические члены отсутствуют. Это можно было заранее предвидеть,
ибо они обусловлены зональной сферической функцией». И в то же время по фактическим регистро-
граммам наклономеров, деформографов, записывающим вариации воздействия компоненты приливной
волны по направлению восток-запад, выделяются двухнедельные и месячные волны. Амплитуда этих
волн достигает величины порядка 10-20-10-6см/с2.
Несоответствие теории эксперименту проявляется и в значениях факторов 6 и у, которые пред-
ставляют собой частное от деления амплитуды измеренной ан на амплитуду, вычисленную по формуле
Лапласа, ат, т. е. 8 = ан/ат для волн вертикальной компоненты приливной силы и у — ан/ат для
волн горизонтальных компонент: восток-запад, север-юг. Так, значения у характеризуются величи-
нами от 0,52 до 0,8; значение 8 определяется в диапазоне 1,081-1,250. П. Мельхиор [1968] пишет:
«... разности в амплитудных факторах продолжают оставаться загадочными... », и несколько дальше:
«... гравиметры в Азии (СССР) показывают относительно более слабую деформацию, чем в Европе,
... с другой стороны, горизонтальные маятники указывают на сильную деформацию», т. е. |8| для Азии
меньше |8| для Европы, хотя |у| для Азии больше |у| для Европы! Поэтому, прежде чем приступить к
интерпретации материалов регистрации, необходимо понять, в чем причина систематических расхожде-
ний. «Две величины, которые в настоящее время лучше всего определены экспериментально, приводят
к двум несогласованным геофизическим выводам, но природа этого расхождения все еще не ясна» [Ка-
ула 1971]. Наблюдения на уровнемерных станциях, расположенных в диапазоне широт от 7°S до 51°Л\
выявляют систематическую разность между наблюденными и посчитанными теоретически по формуле
Лапласа отношением амплитуд волн О\/М2.
По материалам, сведенным в таблицу [Мельхиор 1968], видно, что предвычисленная теоретиче-
ски величина модуля внешнего силового воздействия меньше величины, проявляющейся фактически
(табл. 8.8). Влияние деформации Земли и перераспределение масс, вызванные этим силовым воздей-
ствием, при проведенном выше сопоставлении, в первом приближении, устранено тем, что сравниваются
отношения амплитуд (в данном случае О1/М2), а не значения амплитуд.
Таблица 8.8. Систематическая разность между наблюденными и посчитанными теоретически по формуле
Лапласа модулями внешнего силового воздействия
Станция Киабуква Карлсбад Окридж Айова-сити Духов Тюрн-хаут
Широта -7°47' +32° 18' +35°55' +44°39' +50°37' +51°19'
Теор. (О1/Мз)т 0 0,33 0,37 0,51 0,67 0,81
Набл. (01/М2)н 0,11 0,52 0,60 0,74 1,01 1,04
(01/М2)н> (01/М2)т 0 1,57 1,62 1,45 1,51 1,28
Того же порядка расхождения теории и эксперимента выявляются по материалам регистрации вари-
аций высоты уровня озер Байкала и Танганьики, где у волны М2 оценивается как 0,54, 0,52, 0,55, а у
волны К2 оценивается как 0,72, 0,73 [Мельхиор 1968, Каула 1971]. Следовательно, по этим материалам
можно составить аналогичные приведенным в таблице соотношения, в которых опять же фактически
, » (/С1/Л/г)набл 1 ос т
регистрируемая величина больше той, которую предсказывает теория, т. е. ----------= 1,36. Такое
(Л1/Л22)теОр
расхождение можно проиллюстрировать сравнением компонент (восток-запад), (север-юг), материала-
ми абсолютных определений д [Авсюк 1996]. Эти расхождения в настоящее время пытаются примирить
с теорией введения поправок в измеренные вариации приливной силы. Теоретическое описание ком-
понент приливной силы считается исчерпывающе полным и не нуждающимся в коррекции. Поэтому
ищут какие-либо сопутствующие явления, несвязанные или опосредованно связанные с приливом. Ча-
ще всего к рассмотрению привлекают движение атмосферных масс или перемещение океанических масс
воды. Техника вычисления поправок за перераспределение масс и деформацию коры под нагрузкой этих
переменных масс подобна вычислениям влияния удаленных масс, используемых в гравиразведке. По
уточнению техники вычисления поправок ведется полемика, но, на наш взгляд, введением поправок
за барические фронты и перемещение океанических масс проблема систематических расхождений не
исчерпывается. Поправки не разрешают проблему, об этом читаем у Каулы [1971]: «Однако значитель-
ные вариации 6 = 1 — (ЗКг/З + /гг) °т 1.Ю до 1,27 имеют место даже для участков, расположенных
далеко от берега. Наблюденные значения у = (1 + К2 - /гг) имеют диапазон от 0,54 до 0,82 со средним
значением 0,68». В ряде случаев поправки ухудшают положение, например [Мельхиор 1968]: «Расчет
нагрузки в четырех зонах, расположенных симметрично к северу и к югу от станции, явно показал
очень значительные изменения. Однако влияние этих изменений давления имеет противоположный
знак по сравнению с наблюденным изменением наклона». Таких примеров можно найти очень много,
но это не цель нашего исследования. Настоящий обзор систематических расхождений нужен нам толь-
ко для того, чтобы показать, что в настоящее время материалы регистрации приводят исследователей
к пониманию неполноты теоретического описания приливной силы формулой Лапласа.
Так, можно предположить, что расхождения в значениях 6 и у факторов объясняется неучетом в
теоретической амплитуде членов, соответствующих возмущениям, которые, как это видно из (8.4.11),
для разных интервалов регистрации могут иметь различные значения. Компонента Few (восток-запад)
при учете возмущений имеет долгопериодические члены, что соответствует материалам регистрации.
Поэтому нет необходимости длиннопериодные вариации в Few относить полностью за счет побочных
факторов. Косвенные эффекты или побочные факторы безусловно влияют на показания приборов и на
приливные процессы. Мы считаем, что существенную роль играет косвенный «эффект ядра», который
обсуждался нами в статье [Авсюк 1981]. Понятно, что к интерпретации косвенных эффектов нужно
подходить, используя полное описание приливной силы.
Проведенное рассмотрение как теории приливного воздействия, так и материалов регистрации при-
ливных процессов на Земле и на Луне, со всей очевидностью указывает на то, что описание приливной
силы только формулой Лапласа неполное, и в тех случаях, когда модуль пертурбационной части сопо-
ставим с модулем невозмущенной (кеплеровой) части приливного воздействия, пертурбационные члены
не следует игнорировать.
Работа, изложенная в подразделе 8.4, выполнена при финансовой поддержке Российского фонда
фундаментальных исследований по проектам 04-05-64862 и 07-05-00387а.
8.5 Изменения земного гравитационного поля и определение
вертикальных движений земной коры
М.И. Юркина
Ускорение силы тяжести может изменяться из-за приливных влияний (непосредственные лунное и
солнечное влияния и вызванные ими деформации земного тела), смещений масс вблизи измерительных
точек и во всем теле Земли (на вулканах до извержений до 0,5 мГал, из-за изменения влагонасыщенно-
сти почв — до 0,1 мГал), из-за изменения радиус-вектора измерительной точки (изменения ее положе-
ния относительно земного тела) до 0,3 мкГал на миллиметр высоты. Основными методами определения
вертикальных движений земной коры служат геометрическое нивелирование и GPS-наблюдения.
Нивелир устанавливается по отвесу. Если гравитационное поле изменяется, отвесы могут повора-
чиваться относительно их первоначальных положений. Тогда превышения изменятся без вертикальных
движений. Этот эффект был описан Фоглером (1873 г.). Изменения результатов GPS-наблюдений ино-
гда могут быть объяснены не вертикальными движениями, а смещениями геоцентра. Они могут достичь
нескольких миллиметров (по мнению Гротена — субдециметрового уровня).
Для определения отдельно вертикальных движений и изменений гравитационного поля необходи-
мы повторные измерения силы тяжести и повторные нивелировки по площади изучаемого района в
сочетании со спутниковыми определениями GPS или ГЛОНАСС [Юркина 1986].
8.6 Циклы природных процессов и изменений силы тяжести по
данным инструментальных наблюдений
В.И. Кафтан
8.6.1 Вступительные замечания
Одной из важнейших особенностей современного периода развития науки и технологии на сего-
дняшний день является значительный объем измерительной информации о временных изменениях
различных природных процессов, накопленный за последние десятилетия. Так, например, в геодезиче-
ской практике получены продолжительные ряды наблюдений, выполненных с помощью высокоточных
измерительных средств, таких, как абсолютные измерения ускорения силы тяжести, точные GPS-
определения, спутниковые альтиметрические наблюдения за уровнями морей, результаты повторных
измерений с использованием традиционных технологий и др. В смежных естественнонаучных дисци-
плинах, например таких, как астрономия и геофизика, также накоплен значительный объем измери-
тельной информации. Все это обеспечивает возможность комплексного анализа имеющихся данных с
целью выявления новых закономерностей и проверки существующих теорий.
Ввиду того, что земные процессы подвержены циклическим изменениям, обусловленным, по всей
вероятности, процессами космического масштаба, значительный интерес на сегодня представляет выяв-
ление скрытых периодичностей в накопленных временных рядах и последующий сравнительный анализ
их спектров.
В данной работе основное внимание уделено анализу временных изменений силы тяжести и связан-
ных с ними процессов локального, глобального и космического масштабов.
8.6.2 Циклические изменения силы тяжести и других природных процессов
Основными и наиболее изученными периодическими закономерностями изменений силы тяжести
являются океанические и твердоземные приливы, среди которых доминирующими являются суточные
и полусуточные волны, вызванные притяжением Луны и Солнца. Изучаются также долгопериодиче-
ские приливные волны с периодом, например, 18,6 года. В течение многих лет исследуется характер
изменения силы тяжести за счет свободной нутации Земли. Это известные периоды Чандлера (продол-
жительностью около 430 суток) и Эйлера (продолжительностью около 305 суток).
Периодические изменения широт, точек земной поверхности, установленные разными исследова-
телями, подробно рассматриваются в работе [Авсюк 1996]. Выявлены суточные колебания широт с
амплитудами 0,03-0,08" [Парийский 1963]. В изменениях их амплитуд замечена периодичность по-
рядка 2,1 года [Миронов 1973]. В среднемесячных значениях широт разных наблюдательных станций
выявлена цикличность с периодом 14 месяцев [Михайлов 1971а, б; Yumi 1970]. Изменение год от го-
да периода Чандлера в диапазоне 412-437 суток показано Мельхиором [1968]. Джеффрис, Рыхлова,
Яцкив и Курье дают оценки периода Чандлера от 433 до 441 суток. Недавние исследования [Горш-
ков и др. 2000] показали, что чандлеровское колебание разделяется на две компоненты с периодом
1,191 года (435 суток) и 1,2-1,3 года (456 суток), причем амплитуда первой компоненты существенно
больше второй. Независимое подтверждение этого результата будет представлено в последующих раз-
делах настоящей работы. Установлена годичная периодичность изменения члена Кимуры (z-члена) с
амплитудой порядка 0,07". Отмечаются также периоды 19, 25 и 54 месяца [Корсунь, Федоров 1973;
Naito, Sugawa 1973; Wako 1972]. В работе [Rudnick 1959] в движении полюса выявлены колебания с
периодом 0,5 и 0,8 лет. Разными авторами показано существование долгопериодических изменений с
периодами 6, 42, 16 и 26 лет [Куликов 1962, Манк, Макдональд 1964, Рыхлова 1971]. Двухнедельная
вариация в изменениях широт обнаружена в результатах наблюдений средствами радиоинтерферомет-
рии со сверхдлинной базой [Nothnagel et al. 1992]. Связь изменений координат полюса с изменениями
силы тяжести убедительно продемонстрирована, например, в Интернет-сайте [Applications... 2001].
Периодичности в изменениях высот пунктов земной поверхности также могут отражаться на из-
менениях силы тяжести. Многие авторы [Zerbini et al. 2001; Vespe et al. 2001, и др.] в результате
анализа непрерывных GPS-измерений на постоянно действующих пунктах отмечают высокую веро-
ятность существования годичных (сезонных) колебаний в изменениях геодезических высот. Следует
отметить, что сезонная цикличность в изменениях нивелирных превышений, многократно измеренных
на геодинамических полигонах бывшего СССР, была обнаружена еще в 70-80 гг. прошлого столетия.
Итальянскими исследователями [Vespe et al. 2001] в многолетних рядах непрерывных GPS-измерений,
кроме сезонных, выявлены полугодовые, а также 88-92, 120-134, 219 и 251-дневные периодические
компоненты с амплитудами 1,1-4,4 мм. Взаимосвязь сезонных изменений высот и ускорений силы
тяжести обсуждается в работе [Zerbini et al. 2001].
Другим существенным фактором, оказывающим влияние на изменения силы тяжести, являются из-
менения как наземной, так и подземной гидросферы Земли. Зависимость изменений силы тяжести от
уровня грунтовых вод в пункте наблюдений рассматривается как фактор понижения точности измере-
ний абсолютными гравиметрами [Niebauer et al. 1995]. Периодичности в изменениях уровня подземных
вод исследуются гидрогеологами [Деч, Кнорине 1985]. Связь морских приливов и изменений гравита-
ционного поля обсуждается в работе [Virtanen, Poutanen 2001].
Достигнутый на сегодня уровень точности измерений силы тяжести требует также учета динамики
распределения атмосферных масс, что является одним из важных факторов, при измерениях высоко-
точными абсолютными или относительными, в особенности высокоточными, сверхпроводимыми грави-
метрами. Этот фактор также проявляет себя в значительной мере циклически, о чем свидетельствуют
исследования климатологов.
Кроме перечисленных основных наиболее вероятных источников периодических изменений силы
тяжести возможна также опосредованная связь других природных процессов, например таких, как
изменения солнечной активности с колебаниями силы тяжести. В работе [Туренко 1983] этот фактор
рассматривается как одна из причин изменений скорости вращения Земли, которые также связаны с
изменениями силы тяжести на ее поверхности, но не столь значительны, как вышеназванные факторы.
Глобальное перераспределение масс оказывает влияние на вращение Земли, изменения гравитаци-
онного поля и, как полагают авторы работы, на изменения положений геоцентра, определяемого как
центр фигуры Земли по отношению к центру ее масс. В работе моделируются годовые и полугодовые
периодические компоненты вариаций положения геоцентра, обусловленные атмосферной и океанской
нагрузкой, а также поверхностными грунтовыми водами.
Результаты рассмотренных выше исследований свидетельствуют о высокой вероятности существо-
вания периодических изменений силы тяжести в разных временных масштабах, не только в пределах
суток, что достаточно хорошо изучено с использованием относительных гравиметров, но и на более про-
должительных интервалах — от недель до десятилетий. Накопленные к настоящему времени продол-
жительные измерения силы тяжести абсолютными гравиметрами на ряде комплексных геодезических
обсерваторий позволяют провести анализ таких периодичностей, результаты которого рассматриваются
в настоящей работе.
8.6.3 Методика анализа скрытых периодичностей
Выявление периодичностей осуществлялось путем аппроксимации рядов наблюдений гармониче-
скими функциями по методу наименьших квадратов (МНК). Вычислительная процедура состоит из
следующих этапов. 1) Определение и исключение из наблюдений трендовой (линейной) компоненты.
2) Последовательное выявление и исключение наиболее высокоамплитудных периодических компонент
(гармоник), вдвое превышающих стандарты их определения.
После исключения трендовой компоненты ряд наблюдений аппроксимируется периодической функ-
цией вида
п
у = ^2(Mi + Aisin(u>it + cpi)), (8.6.1)
г=1
где г — порядковый номер гармоники, п — общее число гармоник, участвующих в аппроксимации, М —
среднее значение функции (ордината оси гармонической компоненты), А — амплитуда колебания, а> —
частота гармоники, t — временная координата, ср — начальная фаза гармоники.
По методу наименьших квадратов (МНК) последовательно для определения каждой гармоники
(начиная с наиболее высокоамплитудной) решается система уравнений поправок к приближенным зна-
чениям неизвестных параметров колебаний
v = Bx + l, (8.6.2)
где В — [1 sin(a>ot + ср0) Aotcos(a>ot + сро) Ао cos(a>ot + ср0)] — вектор коэффициентов уравнений
поправок; х = [хм ха хш ят<р] — вектор искомых поправок к приближенным значениям неизвест-
ных Мо, Ао, a>o, сро; I = у0 — у — вектор свободных членов уравнений поправок; уо = Мо + Ао sin(a>ot +
Фо).
Ввиду того, что точные значения коэффициентов уравнений поправок априори неизвестны, нахож-
дение параметров гармоник осуществляется методом последовательных приближений. Для первого
приближения В и I вычисляется с использованием приближенных значений х, полученных путем визу-
ального анализа графика функции у. Во втором приближении для этих целей используются результаты
решения уравнения (8.6.2) первого приближения и так далее, решение уравнений (8.6.2) методом наи-
меньших квадратов многократно повторяется до тех пор, пока два последовательных решения не будут
отличаться друг от друга на некоторую малую величину, значение которой в последующем анализе
устанавливалось равным 10-7.
Из решения по МНК определяются не только вероятнейшие значения амплитуды, фазы и периода
соответствующей гармонической компоненты, но и оцениваются стандарты их определения по извест-
ным из теории МНК формулам. __________
Определяется эмпирическая оценка стандарта ц = у/[п — fc)-1 527=1 vl одиночного наблюдения и
вектор оценок стандартов искомых fc параметров соответствующих гармонических компонент S =
МлЛ2й> где Qu ~ диагональные элементы матрицы Q = (ВТВ)-1.
После определения первой высокоамплитудной гармоники полученная синусоидальная функция вы-
читается из исходного временного ряда, и ряд остаточных значений используется для определения
следующей гармоники и т. д.
Повторения описанной выше процедуры позволяют последовательно оценить параметры домини-
рующих высокоамплитудных компонент и стандарты их определения. Из общего ряда вычисленных
гармоник отбирались те, амплитуда которых более чем вдвое (в отдельных случаях в 1,5 раза) превы-
шала оценку стандарта ее определения.
Рассмотренная методика применялась автором ранее для анализа и прогнозирования изменений
уровня Каспийского моря [Кафтан 1994, Kaftan 1995], солнечной активности [Demianov et al. 1999],
скорости вращения Земли и других природных процессов [Kaftan, Lilienberg 1999]. Эффективность
применения разработанной методики подтверждается оправдавшимися прогнозами прекращения ано-
мального подъема уровня Каспия [Кафтан 1994] и умеренного уровня солнечной активности в теку-
щем одиннадцатилетнем цикле [Demianov et al. 1999].
8.6.4 Анализ абсолютных определений силы тяжести
Абсолютные определения силы тя-
жести на Московском гравиметриче-
ском пункте выполняются начиная с
80-годов прошлого столетия. Последу-
ющие измерения проводились балли-
стическими гравиметрами типа ГБЛ и
ГБЛ-П, прототипом которых являлся
отечественный гравиметр ГАБЛ, раз-
работанный Институтом автоматики и
электрометрии СО РАН. К настоящему
времени на Московском гравиметриче-
ском пункте, который является основ-
ным гравиметрическим пунктом в си-
стеме топографо-геодезического обес-
печения России, накоплен продолжи-
тельный ряд измерений силы тяжести абсолютными баллистическими гравиметрами. Ежегодно про-
водилось от 8 до 27 абсолютных определений. Общее число измерений на пункте превышает 200.
Более продолжительные ряды абсолютных определений силы тяжести на других пунктах автору насто-
ящей работы неизвестны. Проведение абсолютных измерений на Московском гравиметрическом пункте
выполнялось специалистами ЦНИИГАиК Н.А. Гусевым и Н.Н. Королевым. Следует отметить, что про-
ведение столь важной и значимой работы требовало высочайшей квалификации и огромных трудовых
затрат. В процессе накопления столь продолжительного ряда измерений использовались семь абсолют-
ных гравиметров. Обобщенные результаты измерений этими гравиметрами представлены в табл. 8.9.
Как видно из табл. 8.9, результаты, полученные разными гравиметрами, значительно различаются.
Разности средних значений изменяются от 5 до 24 мкГал. Тем не менее, такие различия не являются
чем-то необычным, так как разные образцы гравиметров могут иметь собственные инструменталь-
ные погрешности и могут варьировать за счет влияния неучтенных внешних факторов [Sakuma 1973,
Таблица 8.9. Средние характеристики силы тяжести, опреде-
ленные разными гравиметрами
Типы гра- виметров Среднее значение AG С. К. 0. Число измерений
ГБЛ №1 725,8 15,4 26
ГБЛ №2 704,2 5,1 8
ГБЛ №3 727,6 10,6 99
ГБЛ №4 722,4 7,0 7
ГБЛ №5 714,0 — 1
ГАБЛ 719,3 14,0 3
ГБЛ-П 712,0 10,3 46
Marson et al. 1995, Фомин и др. 2001]. Полученные результаты были использованы в статистическом
анализе с целью выявления возможных линейных и периодических компонент в характере временных
изменений силы тяжести [Kaftan 2001].
Описанная выше методика анализа была последовательно использована в анализе измерений, вы-
полненных раздельно гравиметрами ГБЛ №1, ГБЛ №3 и ГБЛ-П. Результаты анализа скрытых пе-
риодичностей в рядах измерений на Московском пункте представлены в табл. 8.10-8.15. Выявленные
гармонические компоненты систематизированы в таблице по строкам. Как можно видеть из таблиц,
большинство гармоник близки друг другу не только по периоду и амплитуде, но также и по фазе,
что свидетельствует о реальности их существования в исследуемых временных рядах, полученных
независимо различными гравиметрами.
Для получения более убедительных результатов следует привлечь к анализу другие имеющиеся
на сегодня независимые измерения. Такой ряд долговременных измерений был любезно предоставлен
автору сотрудником Финского геодезического института Яакко Макиненом в виде графического файла,
отражающего результаты многократных абсолютных определений силы тяжести на пункте Метсахови
(Финляндия). Цифровой ряд абсолютных определений был получен путем оцифровки графика с помо-
щью графического редактора Paint. Результаты анализа изменений силы тяжести на пункте Метсахови
также представлены в табл. 8.10-8.15.
К анализу также были привлечены и другие менее продолжительные ряды абсолютных определе-
ний силы тяжести на опорных гравиметрических пунктах. Это ряд наблюдений на пункте Ганновер,
представленный в диссертации Рудигера Рёдера [Roder 1994], ряд наблюдений на пункте Севр, рас-
смотренный в работе Авсюка [1996], а также наблюдения на пункте Талая, представленные в докладе
Арнаутова с соавторами [2000]. Результаты анализа периодичностей в указанных рядах также пред-
ставлены в табл. 8.10-8.15.
Как показывают результаты анализа, в рядах многократных абсолютных определений силы тяжести
выявляются сходные статистически значимые гармонические компоненты. Наиболее интересными, на
наш взгляд, являются проявившиеся во всех четырех рядах независимых определений гармонические
компоненты с периодами 2,5-2,7 лет, 1,1-1,9 лет, 300 и 226 дней, 55-58 дней (двухмесячные), 16
дней (двухнедельные), 7-8 дней (недельные). Причем недельные и двухнедельные гармоники проявля-
ются в каждом из рядов дважды с разными фазами. Годичная (сезонная или приливная) компонента
обнаружена в московских измерениях и не проявилась в измерениях на пункте Метсахови.
Обращает на себя внимание факт присутствия близких по своим периодам гармонических компонент
в наблюдениях за другими природными процессами, как это показано в научных публикациях, рас-
смотренных в одном из предыдущих разделов. Представляет безусловный интерес выявление сходств
и различий в колебаниях силы тяжести и других взаимосвязанных характеристик, чему и посвящен
анализ, представленный в последующих разделах настоящей работы.
8.6.5 Анализ периодичностей в изменениях координат полюса
Как отмечено выше, периодичность изменений широт пунктов наблюдений и координат полюса
исследовалась многими авторами. На настоящее время в распоряжении исследователей имеется до-
статочно большой объем определений координат полюса на основе результатов высокоточных GPS-
наблюдений, радиоинтерферометрии со сверхдлинной базой, лазерной локации Луны и искусственных
спутников Земли. Эти данные доступны широкому кругу пользователей всемирной компьютерной сети
Internet. Они содержатся, например, в бюллетенях Международной службы вращения Земли. Времен-
ные ряды ежесуточных значений координат полюса Бюллетеня А Международной службы вращения
Земли были проанализированы автором с целью выявления периодичностей и последующего моделиро-
вания их будущих изменений.
Результаты анализа периодических компонент в изменениях координат полюса представлены в
табл. 8.16. Как можно видеть из результатов анализа, наибольшую статистическую значимость, как
этого и следовало ожидать, имеет Чандлерово колебание с оценкой периода 1,188-1,196 года (в сред-
нем 435 дней). На втором месте по высоте амплитуды находится годичная (сезонная или приливная?)
Таблица 8.10. Сопоставление периодов низкочастотных гармоник с периодами год и более
№ гарм. Период колебаний (год) Москва ГБЛ-1 (1989-1996, п=26) Москва ГБЛ-3 (1989-2001, п=99) Москва ГБЛ-П (1994-2001, 71=46) Метсахови GILAg-5 (1988-2001, п=70) Талая ГАБЛ-М (1992-2001, 71=16) Ганновер GILAg-3 (1986-1992, п=25) Севр Сакума* (1966-1982, п=30)
1 10-11 Наличие близких гармоник
— 10,7±3,8 — — — — 10,4±0,8
2 5-8 5,3±0,8 6,0±0,6 — — 6,1 ±0,8 — 7,7±0,3
3 2,5-2,8 2,8±0,1 2,5±0,1 2,7±0,1 2,5±0,2 — 2,6±0,2 —
4 1,6-1,9 1,8±0,2 1,58±0,05 1,9±0,1 1,8±0,1 — 1,4±0,1 —
5 0,95-1,03 0,97±0,04 1,03±0,02 1,02±0,02 0,97±0,01 — 0,98±0,04 0,95±0,02
Таблица 8.11. Сопоставление амплитуд низкочастотных гармоник с периодами год и более
№ гарм. Период колебаний (год) Москва ГБЛ-1 (1989-1996, 71=26) Москва ГБЛ-3 (1989-2001, 71=99) Москва ГБЛ-П (1994-2001, 71=46) Метсахови GILAg-5 (1988-2001, 7i=70) Талая ГАБЛ-М (1992-2001, 71=16) Ганновер GILAg-3 (1986-1992, 7i=25) Севр Сакума* (1966-1982, п=30)
Наличие близких гармоник (амплитуды и стандарты их остаточных отклонений даны в мкГал)
1 10-11 — 1,4±0,8 — — — — 4,8±1,4
2 5-8 2,0±1,1 2,3±0,8 — — 3,1±1,2 — 19,1 ±2,5
3 2,5-2,8 13,4±3,0 4,2±1,4 7,1±1,2 0,8±0,4 — 4,8±1,8 —
4 1,6-1,9 1,7±1,0 3,1±1,2 1,1±0,6 0,9±0,3 — 3,4±1,8 —
5 0,95-1,03 2,1±1,4 3,8±1,3 2,9±1,0 3,6±0,8 — 3,2±1,7 4,5±2,0
Таблица 8.12. Сопоставление фаз низкочастотных гармоник с периодами год и более
№ гарм. Период колебаний (год) Москва ГБЛ-1 (1989-1996, п=26) Москва ГБЛ-3 (1989-2001, 71=99) Москва ГБЛ-П (1994-2001, 71=46) Метсахови GILAg-5 (1988-2001, 7i=70) Талая ГАБЛ-М (1992-2001, 71=16) Ганновер GILAg-3 (1986-1992, 7i=25) Севр Сакума* (1966-1982, 71=30)
Наличие близких гармоник (фазы и стандарты их остаточных отклонений даны в годах)
1 10-11 — 89,5±2,6 — — — — 92,6±0,8
2 5-8 97,8±0,6 98,3±0,7 — — 95,9±0,8 — 94,1 ±0,3
3 2,5-2,8 96,6±0,2 98,1 ±0,3 97,6±0,3 96,7±0,7 — 98,5±0,2 —
4 1,6-1,9 97,6±0,31 97,8±0,24 98,0±0,33 98,6±0,4 — 98,00±0,08 —
5 0,95-1,03 98,14±0,14 98,30±0,13 98,45±0,11 97,99±0,10 — 98,01±0,04 98,22±0,02
Таблица 8.13. Сопоставление периодов высокочастотных гармоник колебаний силы тяжести с периодами менее года
№ гарм. Период колебаний (год) Москва ГБЛ-1 (1989-1996, 71=26) Москва ГБЛ-3 (1989-2001, п=99) Москва ГБЛ-П (1994-2001, 71=46) Метсахови GILAg-5 (1988-2001, 7i=70) Талая ГАБЛ-М (1992-2001, 71=16) Ганновер GILAg-3 (1986-1992, п=25) Севр Сакума* (1966-1982, 71=30)
Наличие близких гармоник (периоды и стандарты остаточных отклонений выражены в годах)
1 298 — 0,79±0,02 — 0,84±0,02 — — —
2 236 0,64±0,01 0,65±0,01 — — — — —
3 226 0,62±0,02 — — 0,62±0,01 — — —
4 172* — 0,49±0,01 0,45±0,03 0,54±0,01 0,54±0,01 0,46±0,01 0,45±0,004
5 153 — 0,44±0,01 — 0,40±0,01 — — —
6 131* — 0,38±0,02 — 0,36±0,003 — 0,34±0,02 —
7 80 — 0,22±0,001— — — — 0,22±0,002 —
8 75 0,20±0,01 — — 0,20±0,001 — 0,20±0,002 —
9 65 — 0,17±0,01 — — 0,18±0,01 0,18±0,002 —
10 52 0,14±0,000 0,16±0,01 0,14=1=0,000 0,14±0,000 0,14±0,01 0,14±0,001 —
11 47 0,13±0,000 — 0,13±0,000 0,13±0,01 — — 0,12±0,000
12 39 — 0,11 ±0,001 0,11 ±0,000 — 0,11 ±0,001 0,10±0,000 —
13 25 — — — — — — 0,068±0,001
14 20 — — — — — 0,054±0,000 —
15 16,3* 0,044±0,000 0,044±0,000 0,044±0,000 0,046±0,000 — —
16 16,4* — — — 0,045±0,000 — — —
17 15,7* 0,043±0,000 0,043±0,00 0,043±0,00 0,043±0,000 0,043±0,000 — —
18 12,3* — 0,034±0,000 0,034±0,000 — — — 0,033±0,000
19 7,6* 0,020±0,000 0,023±0,000 0,020±0,000 0,020±0,000 0,020±0,000 — 0,022±0,000
20 6,9* 0,018±0,000 0,020±0,000 0,019±0,000 0,018±0,000 0,018±0,000 — 0,017±0,005
Таблица 8.14. Сопоставление амплитуд высокочастотных гармоник колебаний силы тяжести с периодами менее года
№ гарм. Период колебаний (год) Москва ГБЛ-1 (1989-1996, п=26) Москва ГБЛ-3 (1989-2001, п=99) Москва ГБЛ-П (1994-2001, п=46) Метсаховн GILAg-5 (1988-2001, п=70) Талая ГАБЛ-М (1992-2001, 71=16) Ганновер GILAg-3 (1986-1992, п=25) Севр Сакума* (1966-1982, п=30)
Наличие близких гармоник (амплитуды н стандарты остаточных отклонений даны в мкГал)
1 298 — 1,8±0,9 — 1,4±0,5 — — —
2 236 4,7±2,5 1,8±0,9 — — — — —
3 226 2,0±1,2 — — 2,5±0,6 — — —
4 172 — 2,0±1,0 4,8±1,4 1,5±0,6 2,1±0,9 2,1±1,4 3,8±2,1
5 153 — 1,9±1,1 — 0,7±0,3 — — —
6 131 — 3,4±1,2 — 1,1 ±0,4 — 1,6±0,4 —
7 80 — 2,9±1,1 — — — 1,9±0,5 —
8 75 2,6±1,0 — — 1,0±0,4 — 2,1±1,0 —
9 65 — 1,8±0,9 — — 0,7±0,4 2,4±1,4 —
10 52 8,6±2,2 1,8±1,0 2,5±0,7 1,3±0,5 0,9±0,4 4,0±1,1 —
11 47 3,8±1,3 — 1,2±0,5 1,2±0,5 — — 4,4±2,0
12 39 — 2,5±1,2 1,4±0,6 — 1,4±1,0 2,1 ±0,9 —
13 25 — — — — — — 3,1±1,7
14 20 — — — — — 2,2±0,7 —
15 16,3 3,8±1,8 2,1±1,1 3,0±1,0 1,6±0,6 — —
16 16,4 — — — 1,4±0,5 — — —
17 15,7 2,0±0,8 1,8±0,9 2,6±0,8 0,6±0,3 — — —
18 12,3 — 1,7±1,1 2,2±0,8 — — — 2,4±1,2
19 7,6 3,4±1,6 2,9±1,1 1,2±0,6 1,8±0,6 1,2±0,5 — 3,2±1,5
20 6,9 3,7±1,7 2,2±0,9 1,4±0,7 0,9±0,4 2,2±0,6 — 5,2±2,9
Таблица 8.15. Сопоставление фаз высокочастотных гармоник колебаний силы тяжести с периодами менее года
№ гарм. Период колебаний (год) Москва ГБЛ-1 (1989-1996, 71=26) Москва ГБЛ-3 (1989-2001, п=99) Москва ГБЛ-П (1994-2001, 71=46) Метсахови GILAg-5 (1988-2001, п=70) Талая ГАБЛ-М (1992-2001, 71=16) Ганновер GILAg-3 (1986-1992, 7i=25) Севр Сакума* (1966-1982, 71=30)
Наличие близких гармоник (фазы и стандарты остаточных отклонений выражены в годах)
1 298 — 98,27±0,15 — 98,67±0,19 — — —
2 236 98,86±0,07 98,69±0,15 — — — — —
3 226 98,59±0,08 — — 98,98±0,08 — — —
4 172 — 98,93±0,07 98,92±0,04 98,83±0,10 98,68±0,07 98,88±0,09 98,67±0,06
5 153 — 98,69±0,09 — 98,98±0,13 — — —
6 131 — 98,82±0,05 — 98,90±0,08 — 98,88±0,02 —
7 80 — 98,78±0,03 — — — 98,86±0,01 —
8 75 98,81 ±0,03 — — 98,86±0,04 — 98,96±0,02 —
9 65 — 98,98±0,04 — — 98,84±0,03 98,86±0,02 —
10 52 98,88±0,01 98,85±0,03 98,84±0,01 98,87±0,03 98,98±0,02 98,87±0,01 —
11 47 98,96±0,01 — 98,99±0,02 98,91±0,03 — — 98,92±0,01
12 39 — 98,90±0,02 98,96±0,02 — 98,96±0,03 98,99±0,01 —
13 25 — — — — — — 98,95±0,01
14 20 — — — — — 98,99±0,01 —
15 16,3 98,86±0,07 98,96±0,01 98,956±0,01 98,99±0,01 — —
16 16,4 — — — 98,962±0,01 — — —
17 15,7 98,98±0,01 98,957±0,00 98,97±0,01 98,97±0,001 98,97±0,02 — —
18 12,3 — 98,99±0,01 98,97±0,01 — — — 98,97±0,01
19 7,6 98,985±0,00 98,986±0,00 98,988±0,01 98,988±0,00 98,99±0,003 — 99,00±0,003
20 6,9 98,992±0,00 98,996±0,00 98,997±0,01 98,997±0,00 98,98±0,002 — 98,99±0,004
Таблица 8.16. Периоды изменений координат полюса
Эмпирические гармоники тх ± о Период (день) Эмпирические гармоники ту ± о Нормирован- ная разность фаз Возможный источник
Амплитуда (угл. сек.) Период (год) Фаза (год) Амплитуда (угл. сек.) Период (год) Фаза (год)
0,004±0,001 13,6±2,5 93,7±2,9 Солнечный цикл 11 лет
0,168±0,006 1,188±0,02 98,829±0,030 435 0,161 ±0,007 1,196±0,003 98,568±0,036 0,22
0,077±0,003 1,001 ±0,02 98,516±0,026 366 0,080±0,003 1,003±0,002 98,271 ±0,029 0,24 Сезонный
0,030±0.002 1,304±0,01 98,017±0,062 487 0,021 ±0,002 1,363±0,006 97,802±0,074 0,16
0,020±0,002 1,101±0,004 98,376±0,053 408 0,034±0,002 1,135±0,003 98,238±0,050 0,12
0,009±0.002 3,87±0,10 95,491 ±0,402 0,010±0,002 3,37±0,08 97,36±0,39 0,52
0,006±0,001 1,62±0,02 98,454±0,216
0,005±0,001 0,815±0,007 98,844±0,139 298
0,016±0,008 38,6±18,2 98,2±4,7
0,003±0,001 0,554±0,004 98,752±0,107 194 0,007±0,002 0,507±0,002 98,886±0,077 0,25 Солнечный прилив 180 дней
0,003±0,001 0,215±0,001 98,837±0,043 79
0,003±0,001 2,74±0,11 98,13±0,64 0,006±0,001 2,06±0,04 97,872±0,304 0,11
0,003±0,001 0,687±0,007 98,98±0,17 248
0,003±0,001 0,101±0,001 98,946±0,022 37
0,002±0,001 0,130±0,003 98,898±0,035 47
0,002±0,001 0,153±0,001 98,971 ±0,035 56
0,002±0,001 0,783±0,011 98,242±0,224 286
0,002±0,001 1,257±0,022 98,858±0,266 446 0,003±0,001 1,185±0,018 98,819±0,250 0,03
0,002±0,001 5,96±0,41 96,78±1,09 0,006±0,001 4,40±0,17 98,99±0,62 0,42
0,004±0,002 0,020±0,000 98,993±0,004
0,008±0,001 1,045±0,006 98,973±0,090
гармоника. А вот на третьем и четвертом местах располагаются гармонические компоненты с перио-
дами, близкими к известной Чандлеровской компоненте 1,304-1,364 года (в среднем 487 дней), что в
определенной мере согласуется с результатами других авторов [Горшков и др. 2000], и 1,101-1,135 лет
(в среднем 408 дней).
Последняя оценка также близка по своему периоду к Чандлеровскому колебанию, но автор не
встречал упоминаний об этом колебании в опубликованных работах.
Другими, по нашему мнению, наиболее интересными гармониками являются полугодовая (в среднем
194 дня), которую можно отождествить с известной приливной компонентой, и гармоника с периодом
2,1-2,7 лет, которая близка к одной из наиболее значимых низкочастотных гармоник изменений силы
тяжести 2,5-2,8 лет (см. предыдущий раздел). Высокую амплитуду имеет также гармоника с периодом
3,4-3,9 лет.
Целый ряд гармоник, проявившихся в изменениях абсциссы положения полюса, не выявлен в из-
менениях ординаты. На это следует обратить внимание при последующей интерпретации результатов
и выявлении причин изменения положений полюса. Можно предположить, что для данных колебаний
траектория движения полюса не является строго круговой (о чем свидетельствуют и теоретические
исследования) или точность определения ординат полюса по каким-то причинам ниже точности опре-
деления абсцисс, что не позволяет обнаружить эту компоненту в изменениях по оси у. Не исключена
также неоднородная чувствительность принятой методики к используемым в анализе данным наблюде-
ний за изменениями положения полюса.
Так как основной целью настоящей работы является анализ изменений результатов абсолютных
определений ускорения силы тяжести и связанных природных процессов, мы не будем останавливаться
на подробном анализе полученных характеристик изменений
Но, доверяя полученным результатам, мы все же сдела-
ем попытку моделирования изменений положения полюса и
его прогноза на будущее с целью очередной будущей про-
верки прогнозных свойств используемой методики.
На рис. 8.6.1 представлена модель изменений положения
полюса вращения Земли, полученная на основе использова-
ния статистически значимых гармоник, представленных в
табл. 8.11.
8.6.6 Анализ периодичностей изменений
GPS-высот
На данном этапе исследований автором была исполь-
зована возможность анализа изменений высот земной по-
верхности, регистрируемых в течение последнего десяти-
летия на пунктах непрерывных GPS-наблюдений на пунк-
тах Международной сети GPS для геодинамики и им ана-
логичных пунктах других постоянно действующих сетей.
На таких пунктах накоплены продолжительные ряды из-
менений их пространственных координат с интервалом по-
вторений одни сутки. Это объясняется принятой частотой
выполнения соответствующих уравниваний глобальной гео-
динамической сети, ее так называемых суточных решений.
Для обеспечения возможности сопоставления данных опре-
делений высот с результатами абсолютных определений си-
лы тяжести были выбраны постоянно действующие пункты
GPS Звенигород (Подмосковье) и Метсахови (Финляндия).
Цифровые данные для анализа периодичностей были по-
положения полюса.
Рис. 8.6.1. Полигармоническая модель
изменений положения полюса с 1989
по 2002 годы по данным наблюдений
до января 2001 года (значения по осям
даны в угловых секундах). Окружно-
стью отмечено фактическое положение
полюса на последнюю дату прогнозно-
го интервала 2001,97 года. Продолжи-
тельность прогнозного интервала со-
ставила 0,97 года.
Таблица 8.17. Сравнение доминирующих гармоник в изменениях высот на пунктах Метсахови и Звени-
город
Метсахови Звенигород Т (день)
Ампл. А (мм) Период Т (год) Фаза (год) Ампл. А (мм) Период Т (год) Фаза (год)
2,5±0,8 2,59±0,13 97,0±0,2 1,2±0,06 2,69±0,45 96,41 ±0,59
7,9±0,7 1,10±0,01 98,99±0,04
0,9±0,7 0,43±0,01 98,57±0,11 157
2,2±0,7 0,61±0,01 98,78±0,07 2,5±0,7 0,51 ±0,01 98,89±0,05 205
1,5±0,7 0,046±0,00 98,998±0,01 1,7±0,06 0,049±0,00 98,99±0,007 17
2,2±0,7 0,042±0,00 98,97±0,001 0,95±0,57 0,040±0,00 98,97±0,01 15
1,0±0,6 0,046±0,00 98,984±0,01 1,6±0,6 0,046±0,00 98,97±0,01 17
2,0±0,7 0,063±0,00 98,97±0,01 1,2±0,6 0,061±0,00 98,95±0,01 23
1,4±0,7 0,15±0,001 98,90±0,02 1,9±0,6 0,14±0,001 98,89±0,02 53
0,86±0,56 0,11±0,001 98,90±0,03 31
0,89±0,57 0,10±0,001 98,92±0,02 32
1,1±0,6 0,16±0,001 98,92±0,03 58
0,9±0,7 0,17±0,001 98,97±0,04 1,8±0,6 0,17±0,001 98,93±0,02 62
1,3±0,7 0,018±0,00 98,990±0,00 1,1 ±0,6 0,018±0,00 98,98±0,003 7
3,1±0,7 1,53±0,04 97,9±0,1 3,4±0,7 1,85±0,08 98,99±0,16
0,8±0,6 0,20±0,002 98,83±0,05 1,7±0,6 0,21 ±0,001 98,92±0,03 73
2,1±0,7 0,18±0,001 98,99±0,02 69
1,1±0,7 0,020±0,00 98,987±0,00 1,1±0,6 0,020±0,00 98,991 ±0,00 7
1,2±0,7 0,53±0,01 98,58±0,09 1,6±0,6 0,58±0,01 98,54±0,08 203
1,9±0,7 0,88±0,02 98,70±0,10 321
2,1 ±0,7 0,81±0,01 98,32±0,09 2,2±0,7 0,70±0,02 98,41±0,08 276
1,4±0,6 0,29±0,003 98,92±0,05 106
1,7±0,7 4,5±0,5 95,1±0,6 2,6±0,7 5,2±0,7 95,6±0,5
1,6±0,6 0,086±0,00 98,98±0,01 31
0,7±0,7 0,007±0,00 98,999±0,00 2,6
лучены путем оцифровки графических файлов, скопированных из архивов, помещенных в Internet
международной организацией SOPAC.
Результаты.анализа и их сопоставление приведены в табл. 8.17. В одних и тех же строках табл. 8.17
помещены характеристики близких гармонических компонент изменений высот на пунктах Метсахо-
ви и Звенигород. О степени их близости можно судить по их разностям и значениям эмпирических
стандартов их определений.
8.6.7 Дискуссия и основные выводы
На основе полученных результатов исследования скрытых периодичностей в изменениях силы тя-
жести и других связанных природных процессов попытаемся провести их сопоставление, пока на каче-
ственном уровне, так как детальный анализ полученных результатов целесообразно делать на основе
более тщательного анализа каждой из компонент, что является задачей будущих исследований. Рас-
смотрим основные наиболее статистически значимые компоненты колебаний результатов абсолютных
определений силы тяжести и сопоставим с ними полученные спектры колебаний других связанных
природных процессов, характеристики колебаний которых были получены в настоящей работе.
В табл. 8.18 представлены периоды наиболее значимых низкопериодических (с периодом год и более)
гармонических компонент колебаний силы тяжести и отмечено наличие близких по периоду компонент
других временных рядов. Результаты анализа продолжительности суток взяты из работы [Kaftan 2001].
Следует отметить, что не выявленные в изменениях силы тяжести, но обнаруженные в других
временных рядах гармонические компоненты в сравнении не участвуют.
На основании сопоставления низкочастотных
гармоник можно сделать вывод о достаточно вы-
сокой вероятности их существования и констати-
ровать важность их дальнейшего исследования.
Отсутствие 10-14-летней компоненты в рядах из-
менений высот можно объяснить малой (менее
десяти лет) продолжительностью соответствую-
щих временных рядов. Следует отметить также и
другие разногласия. Например, сезонная компо-
нента в рядах изменений силы тяжести и высот
пункта Метсахови не проявилась как значимая.
Причины этого обстоятельства, так же как и дру-
гих разногласий, заслуживают изучения, так как
их установление позволит продвинуться по пути
объяснения природы выявленных колебаний.
Как показывают результаты сравнения
табл. 8.14, наибольшее число близких гармо-
ник имеют ряды изменений силы тяжести и
высот пунктов. Этот результат не является
неожиданным, так как изменения высот в значи-
тельной степени обусловливают изменения силы
тяжести. В меньшей степени сходны спектры
колебаний продолжительности суток и координат
полюса с изменениями силы тяжести. Частич-
ным объяснением тому могут быть следующие
обстоятельства.
Первое — в результаты измерений силы тяже-
сти вводятся соответствующие поправки за из-
менение координат полюса, и второе — прямое
влияние изменений скорости вращения Земли на
ускорение силы тяжести незначительно на совре-
менном уровне точности гравиметрических опре-
делений, и совпадение соответствующих гармо-
ник можно отнести к опосредованному влиянию
изменений скорости вращения на измеряемое зна-
чение силы тяжести, например, за счет эффек-
та центрифуги в перераспределении подземных
флюидов и др.
В заключение следует отметить, что получен-
ные результаты пока не дают достаточных осно-
ваний объяснить наблюдаемые вариации силы тяжести, а носят в значительной мере разведывательный
характер. По мнению автора, существенным является уже то, что колебательные компоненты опреде-
лены с высокой статистической значимостью и проявляются в процессах, взаимно обуславливающих
друг друга. В итоге исследований получен новый эмпирический материал, последующий всесторонний
анализ которого представит возможность уточнить представления о физических причинах изменения
гравитационного поля Земли и геодинамических процессов.
Таблица 8.18. Сопоставление периодов низкоча-
стотных гармоник
№ гар- моник Периоды колебаний силы тя- жести (год) Наличие близких гармоник
Дли- тель- ность суток Коорди- наты полю- са Изменения высот
1 10,7 12,3 13,6 —
2 5.3-6.0 5 4,4- 4,5-
6,0 5,2
3 2,5-2,8 2,4 2,1- 2,6-
2,7 2,7
4 1,8-1,9 1,8 —
5 1,5-1,6 — 1,6 1,5-
1,8
6 0,97-1,03 1 1 1,1
Таблица 8.19. Сопоставление периодов высоко-
частотных гармоник
№ гар- моник Периоды колебаний силы тя- жести (год) Наличие близких гармоник
Дли- тель- ность суток Коорди- наты полю- са Изменения высот
1 300 278 298 321
2 259 — 286 276
3 226 226 248 205
4 226 183 194 203
5 142 124 — 157
6 77 73 79 73
7 58 — 56 58
8 55 — 62
9 55 — 47 53
10 40 — 37 32?
11 16,4 17,2 — 17
12 16,4 — — 17
13 15,7 — — 15
14 12,4 — — —
15 7,7 7,7 — 7
16 6.9 6,9 — 7
17 2,6 — — 2,6
9. О перспективах развития
гравиметрии и геодезии
9.1 О развитии гравиметрических работ в интересах геодезии
Б.В. Бровар, Н.А. Гусев, М.И. Юркина
В настоящее время научно-технический прогресс, проникая во все области деятельности человече-
ства, и в том числе — в области геодезии, астрономии и гравиметрии, поставляет все более совершен-
ную измерительную информацию. Это приводит к необходимости соответственного уточнения теории,
в частности теории фигуры Земли, и пересмотру стратегии развития геодезии и гравиметрии как наук,
так и топографо-геодезического и гравиметрического производства. Развитие геодезии, гравиметрии,
астрономии и других наук идет к созданию комплексных систем измерения данных о координатах,
ориентации и различных характеристик гравитационного поля. Общегосударственные интересы Рос-
сийской Федерации обусловливают необходимость межведомственной координации гравиметрических
работ в целях наиболее рационального расходования материальных, трудовых и финансовых ресурсов.
На определенном этапе такая координация была достигнута в рамках работ по планам Мировой гра-
виметрической съемки (МГС), выполненных в соответствии с постановлениями Правительства. После
выполнения программ МГС работы по развитию государственной фундаментальной гравиметрической
сети выполнялись Роскартографией.
Работы по созданию гравиметрических сетей на текущем этапе определяются «Основными поло-
жениями о государственной геодезической сети Российской Федерации», 2004 г. В настоящее время
государственная значимость гравиметрических работ не уменьшилась. Возросли потребности в высо-
коточной гравиметрической информации (главным образом, о гравитационном возмущающем потен-
циале), связанные с широким внедрением спутниковых технологий при решении геодезических за-
дач и навигационном обеспечении. В высокоразвитых в техническом отношении странах выполняется
большой объем гравиметрических определений, ведутся научно-исследовательские работы в области
инструментальной и геодезической гравиметрии. В ряде стран такие измерения проводят на пунктах
спутниковых наблюдений баллистическими гравиметрами, а непрерывные измерения силы тяжести
выполняются криогенными гравиметрами.
О частном и системном подходах к решению главной задачи геодезии
Учитывая комплексность главной задачи геодезии и возросший уровень техники, целесообразно
нашу задачу решать системно.
Для большей ясности процитируем В.В.Бровара [2004]: «Основной научный принцип, сформули-
рованный Декартом [1637], гласит: “.. .делить каждое из исследуемых мною затруднений на столько
частей, насколько это возможно и нужно для лучшего их преодоления”». Принцип прекрасно оправдал
себя в математике и физике. На его идейной основе разработан мощный метод дифференциальных
уравнений. В небесной механике он позволяет изучать движение отдельных тел Солнечной системы,
но принцип оказывается малоэффективным для изучения всей системы как целого. Афоризм Аристо-
теля «целое — больше его частей» выражает идейную основу системного исследования. Он говорит,
что в целом проявляются новые свойства, которых нет в частях. Как видим, исследование систем не
отрицает изучения частей, но считает их подготовительным этапом.
При системном подходе необходимо правильно поставить цель исследования и найти объективный
метод выявления элементов той системы, которая соответствует именно поставленной цели. Метод
выявления элементов должен обязательно рассматривать целое как исходное данное. Найденные эле-
менты системы должны реально существовать, что проявляется как взаимодействие их между собой.
Метод выявления элементов обычно не ограничивает их числа, поэтому следует искать в системе необ-
ходимое наименьшее число элементов. Свойства целого определяются не столько свойствами частей,
сколько их отношениями, их организацией, их системностью. Если методология Декарта имеет дело с
«организованной простотой», в случайных процессах возникает «неорганизованная сложность», то в си-
стемных исследованиях «организованная сложность».'После решения задач всех этих этапов остается
простейшее — истолкование полученной системы». Конец цитаты.
В настоящее время можно констатировать, что в геодезии этап развития, основанный на принци-
пе изучения частей целого, заканчивается. Этот принцип в дальнейшем будем называть частным, а
последующий принцип — системным.
Ввиду следования частному принципу и принципу минимума работы в геодезии вынужденно создан
целый ряд специализаций: при разработке соответствующих типов аппаратуры, способов измерений,
теоретических результатов и при подготовке кадров. Это позволило относительно простыми специ-
ализированными приборами и специалистами «узкого профиля» решать частные задачи геодезии на
подготовительном этапе, характеризуемом не очень высокой точностью, особенно если речь идет о
больших расстояниях. Геодезисты создали пункты, в которых определены только частные данные:
— на реперах нивелирования имеются высокоточные значения нормальных высот, но отсутствуют
значения их координат и УСТ;
— на гравиметрических пунктах имеются высокоточные значения УСТ, но их плановые координа-
ты определены приближенно, а точность определения их высот не всегда соответствует требованиям
существующих инструкций;
— на пунктах геодезической сети имеются точные значения плановых координат, но точность опре-
деления их нормальных высот невысока, а значения УСТ отсутствуют.
Такое положение обусловлено методами, применяемыми в геодезии: обычно в триангуляции сигналы
(пункты) размещены на господствующих высотах, в нивелировании реперы заложены вдоль дорог, при
проведении гравиметрических работ высокоточные пункты закладываются в обсерваториях и в местах,
где влияние микросейсм по возможности минимально.
С помощью теоретической геодезии по геодезическим и гравиметрическим данным определена миро-
вая геодезическая система, соединяющая воедино геодезические системы, существующие в различных
районах земного шара. Если для решения локальных задач (поиск полезных ископаемых и др.) необхо-
дима высокая точность гравиметрических измерений на ограниченных участках, то для геодезических
целей необходимы данные на всей земной поверхности, метрологически правильные, с соблюдением
единства измерений, которое реализуется путем создания высокоточных гравиметрических сетей. Так
как в разных странах отсчет нормальных высот осуществляется от разных футштоков уровнемерных
постов, и при этом уровень морей и океанов в этих футштоках отличается на величину, превышающую
метр, то возникают дополнительные методические погрешности в смешанных аномалиях УСТ.
Если иметь в виду погрешности определения высот, равные ~1-3 см, то единство измерений в си-
стеме нормальных высот в целом для Земли не соблюдается, соответственно не соблюдается и единство
измерений в целом для Земли в системе смешанных аномалий.
В идеальном случае измерения на пунктах должны выполняться одновременно: в этом случае ре-
зультаты точнее приводятся к одному моменту времени, а влияние внешних условий на показания
аппаратуры ослабевает. Дальнейшее повышение точности представления ГПЗ связано с повышением
точности теории, с приведением геодезических и гравиметрических измерёний в единую систему коор-
динат всех национальных сетей (нормальных) высот и смешанных аномалий, а также с повышением
точности и плотности гравиметрических определений и их местоположения.
Это приведет к тому, что в Российской Федерации система нормальных высот будет опираться не на
один пункт (Кронштадтский футшток), как это происходит в настоящее время, а на все пункты ФАГС
и ВГС [Юркина 1981, 1996г; В.В. Бровар 1988; Демьянов 2003]. При этом точность определения
нормальных высот повысится. В пунктах ФАГС и ВГС будут определяться (и уже определяются)
помимо трех координат нормальные высоты, ВКГ и абсолютные УСТ.
Благодаря научно-техническому прогрессу и в первую очередь — созданию систем GPS, ГЛОНАСС
и высокоточной гравиметрической аппаратуры, появилась реальная возможность строить новую систему
геодезического обеспечения на системном принципе.
О создании новой высокоэффективной государственной системы геодезического обеспечения
Если развивать геодезию, руководствуясь системным принципом, то в зависимости от финанси-
рования вполне реально создать в широком смысле единую государственную (или международную)
систему геодезических координат и параметров внешнего ГПЗ, в которую войдут опирающиеся на
пункты высокоточных спутниковых сетей как составные части: и новая трехмерная геоцентрическая
система координат, и новая система нормальных высот, и обновленная гравиметрическая система, и
новая международная земная опорная система (ITRS), связанная с международной небесной опорной
системой (ICRS). Связи координатных систем ICRS и ITRS должны быть уточнены. Теперь в основе
этой связи лежит постулат, установленный в XVII в. для поля постоянной тяжести (условий на земной
поверхности), и принцип Аристотеля о центре Мира — центре Земли, к которому стремятся тяжелые
тела. Отличие гравитационного поля от однородного ведет к значительным усложнениям даже в меха-
нике Ньютона и геометрии Эвклида. Из-за отличий Земли от сферической симметрии, прежде всего
ее сжатия, возникает смещение результирующих сил притяжения Земли и Луны, Земли и Солнца с
центра масс Земли.
Такие смещения были известны Ньютону (это следует из изложения первой книги «Начал») и
Л. Эйлеру (отмечено во многих публикациях и в гл. 16 его известной, часто цитируемой книги [Euler
1765b]). Если точку приложения результирующей силы определять минимумом возмущающего вра-
щательного момента, как рекомендовано Миндингом и Гамильтоном, упомянутая точка может быть
смещена с центра земной массы до 350 м из-за влияния Луны и 80 см из-за влияния Солнца. Учет упо-
мянутых смещений сил и смещений их точек приложения с центра масс Земли ведет к уточнению углов
Эйлера, ориентирующих земную систему координат относительно небесной системы, и следовательно
к уточнению движения полюса.
В разложениях гравитационных полей Земли и Луны, Земли и Солнца возникают сферические
функции первой степени. Влияния Луны и Солнца на Землю не имеют равнодействующей силы,
что усложняет расчеты [Юркина, Бондарева 1989; Юркина 1992]. Смещение возмущающих сил притя-
жения Луны и Солнца с центра масс Земли ведет к смещению оси вращения Земли — геометрического
места минимальных ускорений — с этого центра, что может проявиться в гравиметрических наблюде-
ниях: смещение оси вращения Земли на 20 м изменяет центробежную силу и силу тяжести на экваторе
Земли на 1 мкГал [Юркина 1992].
Повышение точности гравиметрических измерений должно быть связано с уточнением интерпре-
тации действующих сил на чувствительный элемент гравиметрического прибора и уточнением теории
обработки результатов измерений. Краткий обзор с историческими справками дан в статье [Юркина,
Бондарева 1989].
При движении Земли по орбите силы притяжения и центробежные уравновешиваются в интеграль-
ном среднем, а в отдельных точках могут быть существенные отличия, обусловливающие приливные
явления. Остаточные силы центробежной природы в отдельных точках могут не удовлетворять уравне-
нию Лапласа и создать впечатление обсуждаемой пятой силы. В экстремальных случаях несовпадение
реального ускорения с действующими силами создает напряжения, которые могут вызвать разруше-
ния. Центробежная сила при движении Земли по орбите ночью уменьшает силу тяжести, днем —
увеличивает. На широте 45° при склонении Солнца 23° эффект достигает 18 мкГал [Юркина 1992].
Повышение точности определения пространственных координат гравиметрических пунктов с помо-
щью спутниковых технологий позволяет вернуться к рассмотрению возможности определения ускоре-
ния силы притяжения по измерениям УСТ и геодезическим координатам [Юркина 1996а, с. 165].
В соответствии с концепцией развития системы геодезического обеспечения территории России, си-
стему координат, высот и силы тяжести формирует одна и та же совокупность геодезических пунктов
ФАГС, ВГС. На каждом пункте ФАГС, входящем в состав ГФГС, по методике измерений на пунктах
ГФГС выполняются абсолютные определения УСТ с помощью баллистических гравиметров с погреш-
ностью, не превышающей 5 мкГал (10~8м-с-2) и определяются нивелированием не ниже И класса
нормальные высоты. Периодичность этих определений на пунктах ФАГС устанавливается в пределах
5-8 лет и уточняется в зависимости от ожидаемых изменений измеряемых характеристик.
ГФГС, задающая гравиметрическую систему, служит основой для гравиметрических съемок и изу-
чения вариаций УСТ во времени.
Нормальные высоты и абсолютные определения УСТ выполняются также на пунктах ВГС, которые
гравиметрически связываются с пунктами 1 класса. Измерения на пунктах ГФГС и ВГС дадут воз-
можность в дальнейшем определить периодичность повторных измерений на пунктах геодезических и
гравиметрических сетей и выявить возможные причины изменений координат пунктов ФАГС и ВГС
и/или изменений УСТ во времени.
Одна из основных задач исследования ГПЗ — это высокоточное определение возмущающего потен-
циала, необходимого, в частности, для вычисления ВКГ с ошибкой, соответствующей ошибке определе-
ния пунктов ФАГС и учитывающей особенности существующих систем координат и систем нормальных
высот, распространенных на территории России.
Так как спутниковые приборы позволяют точно определять все геодезические координаты
то возникла реальная возможность с более высокой точностью рассчитывать чистые аномалии дд, явля-
ющиеся функцией широты В и геодезической высоты Н. Смешанная аномалия Ад является функцией
широты В и нормальной высоты ГГ1'. Вопрос о переходе от смешанных аномалий к чистым рассмат-
ривался в работе [В.В. Бровар 1971]. Эти и дальнейшие исследования показали предпочтительность
использования чистых аномалий по отношению к смешанным. Чистым аномалиям соответствует бо-
лее разработанная краевая задача (более простая связь точности гравиметрических данных и точности
решения задачи определения поля). Переход от смешанных к чистым аномалиям позволяет исполь-
зовать вместо сингулярных интегралов абсолютно сходящиеся. Сейчас, когда спутниковая аппаратура
повсеместно внедряется в практику, необходимо решить вопросы, связанные с переходом от смешанных
аномалий Дд к чистым аномалиям 5д и модернизацией топографо-геодезического обеспечения грави-
метрических определений. Возможно, всех устроит вариант использования и смешанных, и чистых
аномалий.
Новый ряд требований к точности гравиметрических и геодезических измерений должны быть
согласованы, монополия одного физического метода при построении высокоточных сетей не должна
допускаться, и при создании гравиметрической аппаратуры парк гравиметрической аппаратуры должен
быть унифицирован.
В связи с предстоящим существенным повышением точности гравиметрических сетей становится
актуальной задача уточнения ранее выполненных гравиметрических съемок путем использования ин-
тегрального уравнения (3.5.5) из работы [В.В. Бровар, Б.В. Бровар 1999] для поверхностной плотности
реальной Земли в сферических координатах для высокоточной интерполяции аномалий УСТ между
пунктами гравиметрических сетей. Этот подход, указанный В.В. Броваром в 1999 году, по сути дела,
является еще одним способом косвенной интерполяции.
Встречается стратегически ошибочный подход решения научных задач, сводящийся к утвержде-
нию, что достаточно только повысить точность измерений, составить и решить соответствующие урав-
нения погрешностей. При этом в цикле: прибор—эксперимент—теория—модель—оценивание точности
модели—доработка прибора и теории и т. д. этап доработки теории забывается.
К обоснованию необходимости развития гравиметрической сети 1 класса
Пункты сети 1 класса равномерно распространяют гравиметрическую систему на всю территорию
страны. Эта сеть создана в 1979-83 гг. и дополнена в начале 90-х годов. Сеть состоит из основных и
рядовых пунктов 1 класса. Средняя квадратическая погрешность уравненного значения УСТ пунктов
в среднем по сети составляет 29 мкГал. В связи с тем, что прошло уже много времени со дня создания
сети, необходимо выполнить обследование пунктов 1 класса, а в случае их утраты — восстановить
центры и выполнить новые измерения. В ряде районов для обеспечения развития сетей низших классов
целесообразно выполнить сгущение сети 1 класса.
Таблица 9.1. Предлагаемая классификация государственной гравиметрической сети Российской Федерации
Пункты сетей О’, мкГал Расстояние между пунктами, км Ну, класс нивелирования B,L,H
Главная фундаментальная сеть (ГГФГС) 3 1,5-4,0 тыс. I GPS
Фундаментальная сеть (ГФГС), включая ФАГС 5 500-700 I-I1 GPS
Спутники ГФГС 5* До 150 I-II GPS
Основные пункты сети 1 класса и пункты вы- сокоточной геодезической сети (ВГС) 8 250-350 I-II GPS
Спутники осн. сети 1 кл. 8* До 60 I-II GPS
Грав. сеть 1 класса и пункты ВГС 10 100-300 1-Ш GPS
Грав. сеть 2 класса и пункты СГС-1 10* 55-80 I-IV GPS
Грав. сеть 3 класса 10* 15-25 I-IV GPS
* ст — ошибка определения Дд относительно исходного пункта.
Так как в практику работ внедряются баллистические абсолютные гравиметры высокой точности и
спутниковые приборы, позволяющие точно определять все геодезические координаты В, L, Н, возникла
реальная возможность упорядочить сети на новом уровне точности.
При выполнении абсолютных измерений на пунктах ВГС (в соответствии с требованиями Основ-
ных положений) с погрешностью 8 мкГал эти пункты будут относиться к основным пунктам 1 класса,
точность которых выше рядовых пунктов 1 класса. Выполнив относительные измерения между пунк-
тами, мы получим ряд полигонов. После совместных уравнительных вычислений ГФГС (ФАГС), ВГС,
основных и рядовых пунктов 1 класса получим модернизированную сеть, точность которой повысится
не менее чем в два раза. Новая гравиметрическая сеть, как и прежде, будет служить основой для
развития сетей низших классов и гравиметрических съемок всех масштабов. Возможен также вари-
ант раздельного уравнивания. Координатное и высотное обеспечение гравиметрических определений
следует осуществлять на основе GPS/ГЛОНАСС-технологий.
В соответствии с п. 1.3 [Инструкция по развитию государственной гравиметрической сети 2
класса 1984] средняя квадратическая погрешность неуравненных определений УСТ на пунктах 2 клас-
са относительно исходных не должна превышать 150 мкГал.
Пункты 2 класса по своей точности не обеспечивают обоснование съемки 1:50000 масштаба и
крупнее. Как записано в проекте Инструкции по гравиразведке 2004 (п. 2.11), при выполнении съемки
пункты 2 класса не используют, а для обоснования съемки создают опорную сеть пунктов 3 клас-
са, гравиметрически привязанную к пунктам 1 класса. Погрешность пунктов вновь создаваемой сети
3 класса меньше пунктов 2 класса.
Таким образом, сеть 2 класса остается в стороне от метрологического ряда: ГФГС — 1 класс — 2
класс — 3 класс. При этом пункты сети 2 класса недостаточно хорошо закреплены на местности, воз-
можно, что часть пунктов пропала. Следует провести анализ как прежних измерений в сети 2 класса,
так и измерений во вновь создаваемой сети 3 класса.
Современная аппаратура позволяет выполнять измерения точнее чем 150 мкГал как минимум в два
раза, поэтому необходимо разработать новую инструкцию по развитию гравиметрической сети 2 клас-
са. Целесообразно работы по созданию сети 2 класса передать Роскартографии, которое располагает
аппаратурой и кадрами для выполнения этой работы.
В табл. 9.1 представлены основные технические требования к гравиметрическим сетям. Ошибки
определения пунктов 2 и 3 классов одинаковы вследствие различных расстояний между пунктами.
Некоторые организации для выполнения гравиметрических съемок крупных масштабов используют
свободную опорную гравиметрическую сеть в условном уровне. Такое положение дел недопустимо. Все
ранее изданные учебники [Веселов 1986], инструкции по гравиразведке и проект новой инструкции
2004 г. (п. 2.3) требуют, чтобы съемка опиралась на государственные гравиметрические сети всех
классов.
В целях поиска полезных ископаемых в настоящее время должны быть созданы условия для вы-
полнения гравиметрических съемок масштаба 1:50000 и 1:25000 на обширные районы Российской
Федерации. Вся гравиметрическая информация, получаемая различными ведомствами и частными ор-
ганизациями, должна поступать в фонд гравиметрических данных в цифровом виде на согласованных
носителях.
Измеренные приращения УСТ на малых площадях могут исказить общую картину аномалий в
данном районе. При этом нарушается единство измерений, и лоскутная гравиметрическая съемка не
дает общей картины региональной гравиметрической информации. Такие материалы непригодны для
использования в геодезии. Требование привязки всех гравиметрических съемок к государственным
сетям следует закрепить соответствующими нормативными актами.
О методах решения некорректных задач
В теории фигуры Земли для определения внешнего ГПЗ по распределению аномалий силы тяже-
сти на некоторой отсчетной поверхности — плоскости или сфере, или эллипсоиде применяют методы
решения некорректных задач математической физики.
Если между земной поверхностью и отсчетной расположены притягивающие массы, задача может
оказаться некорректной, например, аналитическое продолжение невозможно через точечные массы. В
этом случае распределение массы или аномалий УСТ на отсчетной поверхности, которое объясни-
ло бы аномалии УСТ на земной поверхности, не существует. Поскольку методики счета, например
А.Н. Тихонова или М.М. Лаврентьева, отработаны, то их можно применять формально, но при этом
нельзя надеяться на сколь угодно точное решение, так как их некорректность может проявиться в ос-
цилляции результатов, например, определяемых на соседних участках. Такая же картина наблюдалась
при обработке гравиметрических данных горного района по методике В.И. Аронова [1976]. Осцилля-
цию корней удалось уменьшить, приблизив отсчетную плоскость к земной поверхности. Некоррект-
ность проявляется в ограниченности точного счета: последующие приближения могут не приводить к
повышению точности.
В.И. Страхов [1999, 2004] оценил метод и теорию А.Н. Тихонова, а также схожий подход
М.М. Лаврентьева как дефектные, поставил задачу разработки новых методов для решения за-
дач геофизической практики, и с группой сотрудников активно включился в разработку новых
методов —методов линейных интегральных представлений [Страхов 1999, 2004; Страхов и др. 1999].
Как выяснено математиком Жоржем Жиро [Giraud 1936, 1939], задача Молоденского относится к
корректным задачам и имеет единственное, безусловное решение. Результаты Жиро описаны в книге
[Миранда 1957].
Нерационально решать корректную задачу некорректными методами. Связи измеренных аномалий
силы тяжести с плотностью простого слоя осложнены необходимостью учета земного рельефа. Сооб-
ражения по принципам такого учета изложены В.И. Страховым [2004] в статье «Об эффективных по
быстродействию и точности методах построения линейных аналитических аппроксимаций в геодезии,
геоинформатике и гравиметрии».
В геодезии возможны два пути.
1. Разработка методов счета на реальной, то есть имеющей рельеф земной поверхности, без перехода
к отсчетной. Здесь нужен практически реализуемый метод определения простого слоя на земной поверх-
ности по аномалиям силы тяжести путем решения интегрального уравнения на этой же поверхности,
а также метод счета возмущающего потенциала и его производных путем численного интегрирования
по распределению плотности простого слоя.
2. Использование известных приемов геофизической интерпретации для определения тела, препят-
ствующего аналитическому продолжению, удаление влияния этого тела из данных измерений, вы-
полнение необходимых вычислений хотя бы некорректным методом, но теперь приближающимся к
корректному, а затем восстановление выделенного влияния в результаты. Второй путь может оказаться
предпочтительным из-за наблюдаемого стремления приблизить выполняемые вычисления к методам,
отработанным на основе применения теории Стокса. Нужны новые методы, рассчитанные на примене-
ние теории Молоденского, такие, которые позволили бы реализовать преимущества этой теории.
В целях обеспечения решения производственных задач, подготовки технической и метрологической
базы высокоточных гравиметрических определений, а также эффективного использования полученных
результатов необходимо выполнить комплекс научно-исследовательских и опытно-конструкторских раз-
работок по следующим основным направлениям.
1. Отработка связи ICRS с 1TRS.
2. Развитие фундаментальных исследований по изучению (ГПЗ) и создание его высокоточных
моделей на основе разработки уровней взаимно согласованных требований к точности определения
геодезических и гравиметрических данных, анализа существующих требований к гравиметрическим се-
тям, съемкам и картам и пересмотра состава данных, классификации и систематизации существующих
(наземных, морских и альтиметрических) и планируемых гравиметрических и топографо-геодезических
измерений, а также совершенствования и разработки методик представления гравитационного потенци-
ала с использованием различных методов (включая использование простого слоя и метод разложения
потенциала в ряд по эллипсоидальным функциям) и сравнительного оценивания разработанных мето-
дик представления гравитационного потенциала.
3. Создание детальных цифровых моделей высот квазигеоида на основе разработки методики
определения высот квазигеоида, соответствующей точности определения пунктов ФАГС и учитываю-
щей особенности существующих систем координат и систем нормальных высот, распространенных на
территории России, а также развития метода спутникового нивелирования.
4. Унификация, развитие и поддержание цифровых банков рельефа и гравиметрических дан-
ных на основе уточнения состава, разработки и согласования с заинтересованными министерствами и
ведомствами технического задания по созданию унифицированного перечня цифровых карт рельефа и
гравиметрических карт на 2006-2010 гг., сбора, систематизации и формирования базы высокоточных
гравиметрических данных (на поверхности Земли и полученных по спутниковым альтиметрическим
данным) и базы рельефа максимальной детальности и точности.
5. Разработки портативных отечественных высокоточных абсолютных и относительных
гравиметров с ошибкой, удовлетворяющей точности определения высот с использованием ГЛО-
НАСС/GPS, с целью внедрения комплексной автоматизации в гравиметрические работы на основе
использования современных достижений измерительной и вычислительной техники для решения
фундаментальных задач геодезии и геодинамики.
6. Развитие надежной системы обеспечения единства гравиметрических определений.
Сохранение единства гравиметрических определений должно быть достигнуто на основе регулярных
измерений на главных фундаментальных пунктах, сравнений баллистических гравиметров, создания
эталонных гравиметрических полигонов для проверки работы и определения цены деления гравимет-
ров, поддержания в актуальном состоянии государственной гравиметрической сети на новом уровне
точности.
Главные фундаментальные пункты создаются в Санкт-Петербурге, Москве, Новосибирске, Хаба-
ровске, Иркутске и в Петропавловске-Камчатском. Пункты состоят из трех и более фундаментальных
пунктов, жестко связанных между собой относительными связями с погрешностью, не превышающей
5 мкГал. С целью контроля и исследования стабильности ГПЗ на них выполняются регулярные гра-
виметрические наблюдения с помощью баллистических гравиметров, а также определение координат
и высот пунктов. На главном гравиметрическом пункте Москва, на пунктах Новосибирск-Боровое и
в Подмосковье-Ледово такие измерения уже проводятся. Одновременно с гравиметрическими опреде-
лениями выполняется измерение температуры и давления окружающей среды, изменение уровня грун-
товых вод, параметры сейсмической активности на пунктах наблюдений. Эти пункты будут являться
носителями эталонной меры значений УСТ в нашей стране, в том числе для выполнения сравнения
высокоточных баллистических гравиметров и аттестации гравиметрической аппаратуры.
7. Высокоточные геодезические и гравиметрические измерения на пунктах геодинамических по-
лигонов (ГДП) для планомерного изучения предвестников землетрясений и разработки соответствую-
щих методик, позволяющих уменьшить риск непрогнозируемых катастроф, связанных с гибелью людей
и громадными разрушениями промышленных и жилых объектов.
8. Высокоточные измерения абсолютного значения УСТ на пунктах ГФГС, ФАГС, ВГС и СГС-1
в соответствии с нормативной документацией и на пунктах государственной гравиметрической сети
1 класса, а также разработка дополнений к каталогу пунктов государственной гравиметрической сети.
9. Развитие государственной гравиметрической сети 1 класса, включающее обследование и
восстановление пунктов государственной гравиметрической сети 1 класса, разработку проекта модер-
низации, выполнение измерений и уравнивание модернизированной гравиметрической сети, подготовку
нового каталога и позволяющее повысить точности последующих классов гравиметрической сети и
гравиметрических съемок.
Все это в совокупности позволит обеспечить нужды экономики и науки страны, и в частности —
повысить точность геодинамических выводов.
Переход к этапу системного развития геодезии возможен и по пути создания комплексных при-
боров, определяющих все необходимые для геодезии данные или большинство из этих данных. В
качестве прототипа такой аппаратуры может служить (не созданный) каскадный прибор, который по
известным геодезическим широте и долготе исходного пункта позволяет выполнять в исходном пункте
абсолютные определения геодезической высоты, вектора ускорения силы притяжения, вектора УСТ,
ориентации, составляющих уклонения отвесной линии, а в движении измерительной камеры — абсо-
лютные определения вектора ускорения силы притяжения, вектора УСТ и относительные определения
координат и ориентации подвижного объекта. Подробное изложение дано в разделе 9.3.
Решение задач гравиметрии в интересах геодезии при выполнении перечисленных выше мероприя-
тий позволит:
— уточнить единую (целостную) геодезическую систему координат, геодезических и нормальных
высот, а также высот квазигеоида и УСТ для всей территории страны;
— сохранить и развить научно-технический и производственный потенциал для решения приори-
тетных задач в области гравиметрии, повысить качество гравиметрической продукции и ее конкурен-
тоспособности на международном информационном рынке;
— создать новую эффективную систему геодезического и гравиметрического обеспечения террито-
рии Российской Федерации, закладывающей научно-технический фундамент для перехода к системно-
му этапу развития гравиметрии и геодезии в перспективе.
9.2 О задачах бортовой гравитационной градиентометрии
М.Г. Васин, Д.И. Попков
Исследования гравитации выполняются по основополагающим на-
правлениям фундаментальных наук, народнохозяйственных и военно-
прикладных применений. Это связано с важностью понимания физики гра-
витации, ее роли с точки зрения фундаментальных законов природы: про-
исхождения, современного состояния и эволюции Вселенной, физики про-
цессов, происходящих на Земле, а также с целью разработки современных
гравитационных технологий для повседневных социально-экономических
применений.
Бортовая гравитационная градиентометрии является многообещающим
техническим средством для решения целого ряда прикладных задач, а
именно: навигации, геодезии, геофизики и геологии, а также при прове-
дении фундаментальных научных исследований (рис. 9.2.1).
Бортовой гравитационный градиентометр (БГГ) — это высокоточный из-
мерительный прибор, предназначенный для наблюдения вторых производ-
навигация
и геодезия
геофизика <-(Бр-> геология
фундаментальные
исследования
Рис. 9.2.1. Области
эффективного приме-
нения бортовой гра-
витационной гради-
ентометрии
ных по координатам от гравитационного потенциала в возмущенных условиях подвижного основания
аппарата-носителя. В соответствии с конкретной конструкторской схемой в этом приборе использу-
ют принцип измерения микроперемещений (линейных или угловых), характеризующих относительное
расположение системы пробных масс, образующих его чувствительный элемент (ЧЭ).
ГИНС
_______т.......
9чет блияния
^хгробианомаДъц^
ИНС БГГ
Квординатно-бремрнное
обеспечение- СГ опреЗеление
угловой ориентации
Рис. 9.2.2. Структура гравиинерциаль-
ной навигационной системы
Регистрация и последующая математическая обработка результатов указанных измерений микро-
перемещений (под действием инерционного и гравитационного силовых полей) дает возможность по-
лучить информацию о требуемых характеристиках гравитационного поля непосредственно на борту
движущихся аппаратов различного назначения и базирования. Создание за рубежом БГГ с необходи-
мой точностью и быстродействием стало возможным благодаря последним достижениям прецизионного
приборостроения и разработке принципиально новых методических подходов решения задач навигации
и управления.
Фундамент бортовой гравитационной градиентометрии
на современном этапе ее становления составляют инер-
циальные чувствительные элементы и создаваемые с
их использованием инерциальные навигационные системы
(ИНС) [Парусников и др. 1982], а также комплексные
информационно-измерительные технические средства на ос-
нове гравиинерциальных навигационных систем (ГИНС)
[Britting et al. 1972; Васин 1990], являющихся дальней-
шим развитием ИНС путем внедрения в их состав БГГ
(рис. 9.2.2).
Системный подход при решении задач гравиинерциаль-
ной навигации является плодотворным, так как предостав-
ляет методологию построения ГИНС и ее функционирова-
ния, проработку наиболее целесообразных схем построе-
ния и рациональных направлений технической реализации,
и в конечном итоге обеспечивает разработку конструкции
ГИНС, различных необходимых узлов и подсистем, эксплуатационных технологий проведения измере-
ний и базового математического обеспечения ГИНС с гарантированной реализацией выходной инфор-
мации, необходимой точности и надежности в интересах конкретного потребителя.
Полагается, что при производстве съемки тонкой структуры аномального гравитационного поля
происходит единый взаимоувязанный процесс, в котором БГГ измеряет весь тензор вторых произ-
водных по координатам от гравитационного потенциала и одновременно осуществляется непрерывная
координатно-временная привязка результатов выполняемой съемки и решение задачи ориентации.
Такое объединение также необходимо для учета всех действующих инерциальных и гравитационных
помех и возмущений различной природы, оперативного контроля точности проводимых измерений.
Главная причина неудач в разработке ГИНС в прошлые десятилетия в нашей стране связана с
отсутствием необходимой методической базы, а также со значительной наукоемкостью бортовой грави-
тационной градиентометрии, которая базируется на тонких и сложных технологиях с использованием
высокоточных измерителей гравитационных характеристик с максимальной точностью и пространствен-
ным разрешением непосредственно в процессе возмущенного движения аппарата-носителя информаци-
онного средства.
Стоимость доли научно-исследовательских работ в общих затратах на научно-исследовательские и
опытно-конструкторские работы по космической градиентометрии может достигать 50% [Wells 1984].
На современном этапе развития градиентометрии за рубежом основной акцент смещается от решения
чисто инструментальных вопросов к всесторонней проработке методов интерпретации информации,
получаемой с использованием градиентометрических измерений. В последнее время к созданным в
процессе выполнения этих работ технологиям производства инструментальных датчиков — рассекре-
ченным БГГ военно-прикладного назначения — ряд стран получил доступ с целью дальнейшей тех-
нической проработки БГГ коммерческого назначения. С начала 1980-х годов конкретное содержание
научно-методических результатов, полученных в процессе выполнения фундаментальных исследований
в бортовой градиентометрии, структуры и состава созданного алгоритмического и математического
обеспечения, в целом, является коммерческой тайной.
Определение оптимальных технических параметров БГГ требует проведения всестороннего,
исчерпывающего анализа всей измерительной системы, создаваемой на основе его применения в
составе носителя и предназначенной для решения конкретной практической задачи.
В бортовой гравитационной градиентометрии можно отметить следующие ключевые аспекты си-
стемного подхода:
1. Выбор оптимальных технических характеристик чувствительных элементов в составе инструмен-
тальных средств бортовой градиентометрии на основе анализа информативного содержания измеряемых
параметров гравитационного поля и диапазонов возможных изменений их значений с целью эффектив-
ного решения конкретной целевой задачи.
2. Решение задачи гарантированного выделения полезного сигнала БГГ, проектируемых как по
«тепловой» схеме, так и по криогенной схеме, с удалением инструментальных ошибок и контролем
точности выполняемых измерений.
3. Учет влияния собственных гравитационных эффектов от близлежащих конструкционных масс
(входящих в состав аппаратных компонент и транспортного аппарата) на выходные результаты грави-
градиентометрических измерений.
4. Определение уровня динамических и вибрационных помех и возмущений, а также влияния из-
менения массовой «конфигурации» транспортного аппарата для учета их влияния на показания БГГ, а
также для обоснования конструкционных требований, например, к гиростабилизированной платформе
и к техническим средствам контроля состояния масс транспортного аппарата (например, для контроля
уровня топлива).
ГИНС, в которой в реальном масштабе времени измеряется тензор вторых производных, по сво-
ей сути является центральным ядром информационно-измерительных средств, использующих БГГ и
предназначенных для решения практически всех вышеперечисленных задач.
Таким образом, для создания инструментальных средств бортовой гравитационной градиентометрии
необходимо разработать унифицированное информационно-измерительное средство с использованием
БГГ для измерения тонкой структуры гравитационного поля с максимальной точностью и простран-
ственным разрешением, а также проработать способы его адаптации в интересах эффективного реше-
ния современных задач навигации, геодезии, геофизики и геологии, а также фундаментальных задач
гравитации.
О методах гравиинерциальной навигации
Среди методов навигации, разработанных применительно к инструментальным измерительным сред-
ствам, использующим БГГ, выделяют три главных направления:
1. Корреляционно-экстремальные методы навигации, выполняемые путем совместной обработки те-
кущей измерительной информации, формируемой с помощью БГГ в сочетании с другой информацией,
хранящейся в виде карт значений вторых производных по координатам от геопотенциала для заранее
подготовленных районов. Данный метод позволяет определять координаты местоположения и предна-
значен для использования в районах повышенной аномальности, поскольку в районах слабой аномаль-
ности метод неработоспособен.
2. Методы, основанные на совместной обработке результатов измерения тензора вторых производ-
ных по координатам от геопотенциала и информации о ГПЗ в виде математической модели геопотен-
циала. Здесь определяются плановые координаты и высота [Дизел 1964], а также параметры угловой
ориентации. Такие методы предложены для решения задачи навигации космических аппаратов.
3. Методы, основанные на формировании вектора гравитационного ускорения путем интегрирования
по перемещению измеренного тензора вторых производных и использовании, таким образом, сформи-
рованного вектора гравитационного ускорения в основном уравнении инерциальной навигации.
Из сравнения этих трех групп основных методов навигации наиболее привлекательными будут
методы третьей группы, которые являются непосредственным развитием традиционного метода инер-
циальной навигации [Парусников и др. 1982; Britting et al. 1972]. На базе методов третьей группы
можно разработать комплексный метод навигации, объединяющий суммарные возможности всех пере-
численных методов.
Применение БГГ для формирования вектора гравитационного ускорения с целью использования
этой информации в навигационных системах связано с двумя основными аспектами:
— ГПЗ обладает стабильными характеристиками и в системе координат жестко связанной, на-
пример, с вращающейся Землей, в первом приближении является функцией радиус-вектора, причем
отношение радиальной аномальной части к его нормальной достигает ~ 5 • 10-4;
— принципиально возможно сформировать тензор вторых производных от гравитационного потен-
циала на борту движущегося носителя, на движение которого не накладывается никаких ограничений.
Это могут быть аппараты сухопутного, морского, воздушного и космического базирования.
С точки зрения физики явления возможность использования БГГ в процессе движения транспортно-
го аппарата основана на различии пространственно-временных характеристик воздействия активных и
гравитационных сил на некоторую совокупность наблюдаемых пробных тел, входящих в состав гради-
ентометров и образующих его чувствительный элемент. При такой постановке никакой тождественно-
сти между реакциями совокупности пространственно разнесенных пробных тел на указанные воздей-
ствия не существует [Forward 1981; Reinhardt et al. 1982]. Поэтому в замкнутом объеме, регистрируя
относительные смещения пробных тел, без использования внешней информации можно достоверно
обнаружить и измерить отличие в действии этих сил.
В инерциальной (произвольной) системе координат ОЕ, вектор гравитационного ускорения для
вращающейся Земли является функцией радиус-вектора Е, и времени t: = g^(E,,t) и, следовательно,
dgr dgr dL, Эдг
полная производная по времени от вектора ускорения равна -г- = + -х—.
dt at, dt at
В общем случае измерение характеристик пространственной изменчивости гравитационного поля
dgr
не позволяет определить полную производную по времени ——. С целью интегрирования приведенного
dt
уравнения для (при условии задания начальных значений) требуется измерить тензор и
dt ос,
к а,
каким-то образом сформировать частную производную
В некоторых случаях при проведении высокоточных измерений может потребоваться учет вариаций
Здг,
во времени силы тяжести путем введения дополнительных поправок в член . В задачах навигации
dt
и геодезии с требуемой степенью точности можно не учитывать этих изменений гравитационного поля
со временем. Поэтому в данном случае явная зависимость от времени связана только с поворотом
АГПЗ вместе с вращающейся Землей.
В инерциальной системе координат вектор гравитационного ускорения Земли имеет вид д^ =
gt(f,,t), где зависимость от времени связана с вращением ГПЗ вместе с поворотом самой Земли, и
dgr
поэтому для полной производной по времени имеет место приведенная формула для ——. Как принято
dt
в теории гравитационного поля, будем считать геопотенциал аналитической функцией, регулярной на
бесконечности. Для частной производной имеем:
= u^-gt,~ Te^ui. Е,),
где иг. — вектор абсолютной угловой скорости вращения Земли.
Основное уравнение инерциальной навигации при использовании результатов градиентометрических
измерений для нахождения вектора гравитационного ускорения [Britting et al. 1972], можно записать
Ё = = Д + g^ = TiV^ + Uf, x д^, где — вектор относительной скорости материальной
точки М (отождествляемой с реальным аппаратом навигации), равный х Е,. Начальные
условия для этой системы уравнений 9-го порядка задаются для точки расположения чувствитель-
ной массы пространственного акселерометра (или приведенной точки в случае применения одноосных
акселерометров) и имеют вид Е,(0) = Ед, Uf_(O) — v^q, fft(O) — g^Q.
В рассматриваемом случае определение гравитационного ускорения производится путем интегриро-
вания результатов измерения тензора вторых производных от гравитационного потенциала по коорди-
натам непосредственно на траектории движения. При этом требуется задание вектора гравитационного
ускорения в начальной точке. При использовании градиентометрических измерений информация при-
меняется как в процессе выставки ГИНС, так и для задания начальных условий в процессе интегриро-
вания модифицированной формы представления основного уравнения навигации.
В случае использования результатов измерения всего тензора вторых производных по координатам
от гравитационного потенциала возможно получение семейства модифицированных методов представ-
ления основного уравнения инерциальной навигации (например [Васин 1990]). В общем случае каж-
дому модифицированному методу представления основного уравнения инерциальной навигации будет
соответствовать некоторая динамическая система со своими конкретными динамическими свойствами.
Определение в вычислителе гравитационного ускорения путем интегрирования результатов градиен-
тометрических измерений приводит, как и в случае традиционного построения ИНС, к неустойчивости
вертикального канала. Это является принципиальным свойством всех систем инерциальной навигации,
включая рассматриваемые ГИНС. Для борьбы с расходимостью вертикального канала следует вос-
пользоваться дополнительной информацией о высоте движения, например, с помощью неинерциальных
измерительных средств. Горизонтальные каналы рассматриваемой ГИНС характеризуются наличием
периодических колебаний на шулеровской частоте.
Работа традиционной ИНС позволяет непрерывно в процессе движения транспортного аппарата
определять его текущие геодезические координаты и строить (аппаратно или аналитически в зависи-
мости от типа ИНС) нормаль к принятому эллипсоиду вращения.
Поскольку в процессе решения прикладных задач навигации и управления точность определения
вертикали является важнейшей характеристикой, то при решении задач анализа и синтеза законов
управления ГИНС с БГГ возможно использование трех типов вертикалей, соответствующих текущим
геодезическим координатам транспортного аппарата, его астрономическим координатам, и координатам,
связанным с направлением вектора гравитационного ускорения.
Согласно современному подходу, задача инерциальной навигации сводится к анализу модельного
движения некоторой материальной точки в известном гравитационном поле. В качестве такой точ-
ки рассматривается чувствительная масса пространственного акселерометра или приведенная точка
в случае применения триады ортогональных одноосных акселерометров. Задача гравиинерциальной
навигации ставится как задача исследования движения указанной точки в неизвестном грави-
тационном поле. Анализируются свойства гравитационного поля применительно к задаче навигации
и устанавливается ограничение на вид потенциальной функции. В случае движения в гравитационном
поле Земли выявленное ограничение на характер поведения потенциальной функции будет всегда удо-
влетворяться, что, в свою очередь, обуславливает корректность метода гравиинерциальной навигации.
Основное уравнение инерциальной навигации описывает движение упомянутой выше материальной
точки, моделируемое в бортовом вычислителе. Необходимая информация о векторе кажущегося уско-
рения формируется с помощью, например, акселерометрических измерений. Вектор-гравитационного
ускорения получается на основе бортовой модели геопотенциала, хранящейся в вычислителе ИНС.
В гравиинерциальной навигации подразумевается применение чисто инерциальных чувствительных
элементов, измеряющих характеристики инерционного и гравитационного силовых полей. Измерения
используются для определения вектора гравитационного ускорения, действующего на рассматривае-
мую материальную точку. В отличие от традиционного метода инерциальной навигации ставится более
сложная задача — задача гравиинерциальной навигации. Здесь возможно получение различных моди-
фицированных форм представления основного уравнения инерциальной навигации, учитывающих из-
мерительную информацию, доставляемую БГГ, при этом необходимо подробно рассмотреть методику
получения уравнений ошибок с разделением последних на динамическую и кинематическую составля-
ющие [Парусников и др. 1982; Васин 1990].
Следует подробно проанализировать динамические свойства ГИНС различного типа построения и
указать на важность выбора конкретного типа ГИНС, а также соответствующую структуру и состав
бортового алгоритмического обеспечения. Для рассматриваемых ГИНС за счет выбора метода гра-
виинециальной навигации чисто алгоритмически (т. е. путем организации соответствующих потоков
информации) можно варьировать их динамические свойства и объемы используемой информации. Вы-
бор метода гравиинециальной навигации в конечном итоге будет определять точность решения целевой
задачи.
Для повышения точности и надежности ГИНС возможно учитывать основную часть гравитацион-
ного поля с помощью модели геопотенциала, например в виде нормальной Земли. Аномальную часть
поля можно определять по показаниям БГГ.
На основе проведенного исследования свойств рассматриваемого метода гравиинерциальной нави-
гации, анализа ряда возможных подходов к решению задачи навигации с использованием БГГ, в том
числе варианта применения градиентометра в режиме «гравитационного» высотомера [Дизел 1964],
имеется возможность построения корректируемой навигационной системы на базе инерциальных чув-
ствительных элементов при использовании априорной информации о гравитационном поле (в виде про-
стой модели геопотенциала и, возможно, карт гравитационных характеристик) с устойчивыми тремя
каналами.
Подготовка системных требований к облику информационно-измерительного средства грави-
разведки на основе БГГ
Вторые производные от геопотенциала непосредственно характеризуют пространственное распреде-
ление плотности залегающих пород. В результате обработки гравиградиентометровых измерений осу-
ществляется обнаружение и определение характеристик залегающих гравиконтрастных тел и структур,
а также пустот, разломов и трещин. Применяемые в настоящее время измерители вторых производ-
ных имеют точность 10"-15 Э (1 Этвеш =10-9с-2) при времени измерения 15-20 минут и 1-2 Э при
времени измерения несколько часов.
При выполнении гравиразведки помимо гравиметрических работ проводятся и топогеодезические
работы. В настоящее время удельный вес гравиразведки составляет порядка 30% при изучении регио-
нальных аномалий и порядка 15% при изучении тонкой структуры гравитационного поля.
Здесь целесообразна разработка измерителей полного тензора вторых производных по координа-
там местоположения от геопотенциала, обладающих максимальной информативностью, с точностью на
уровне 1 Э и выше, а также необходимой надежностью. Быстродействие таких приборов может со-
ставить несколько секунд. При этом имеется возможность одновременного решения такой сложной
задачи, как непрерывное осуществление высокоточной координатно-временной привязки результатов
градиентометровых измерений с одновременным решением задачи ориентации.
Разработка компактного, мобильного и автономного средства с БГГ, новых методов измерений обес-
печивает создание передовой технологии поиска и разведки полезных ископаемых [Dransfield 1994;
Matthews 2002].
Конструкторско-технологическая реализуемость БГГ была продемонстрирована в конце 70-ых го-
дов прошлого века рядом фирм США (C.S. Draper Laboratory, Hughes Aircraft, Bell Aerospace/Textron
[Wells 1984]), создавших по заказу МО США лабораторные образцы БГГ, которые прошли удовлетво-
рительные лабораторные испытания. После того как МО США остановило свой выбор на БГГ фирмы
Bell Aerospace/Textron, последовал этап доработок вращающегося акселерометрического градиентомет-
ра и всей измерительной системы, создаваемой на его базе. В 1982 г. БГГ этой фирмы, разработанный
для подводных лодок и измеряющий полный тензор вторых производных от геопотенциала, прошел
успешные морские испытания, а затем в 1987 г. — запланированный цикл воздушных испытаний.
Параллельно, а в ряде случаев с опережением проводились научно-методические работы по обеспече-
нию требуемой надежности градиентометрических измерений, а также для выполнения интерпретации
результатов градиентометрических измерений в интересах решения целевых задач.
Особый интерес представляют результаты практических проработок, выполненных в рамках
проекта ВНР Falcon (ВНР Billiton — австралийская горнодобывающая компания). Компания Bell
Aerospace/Textron (позже Bell Aerospace/Textron вошла в состав Lockheed Martin) успешно проде-
монстрировала измерение всех девяти компонент тензора на подвижном основании подводной лодки.
Задача группы специалистов ВНР Falcon состояла в модернизации БГГ, используемого на подводной
лодке, для установки его на борт легкого самолета, где действующие ускорения, акустика, вибрации и
другие источники шума были очень большими. Цель группы — создание «первой в мире» авиационной
градиентометрической системы в интересах гравиразведки с максимально возможной точностью и про-
странственным разрешением при высоких эксплуатационных характеристиках. Созданное программное
обеспечение реализует оперативное получение геологической карты по измерениям, выполненным в те-
чение рабочего дня до начала следующего дня полетов. Проект Falcon объединил усилия специалистов
ВНР, тесно связанных с заказчиками, расположенными в Восточной Австралии и Северной Америке.
В проекте принимали участие геофизики, имеющие опыт полевых работ, что привело к постановке
важных вопросов, которые обычно не возникали в коллективах разработчиков инструментальных
средств.
Система АГГ (авиационный гравитационный градиентометр) была создана на базе Lockheed Martin
в Буффало штат Нью-Йорк при активном участии ВНР. Эта система АГГ была установлена на борт са-
молета Cessna Grand Caravan в сочетании с магнитометром на цезиевых парах, лазерной сканирующей
системой совместно с аппаратурой GPS (для детальной картографии местности) и сцинтилляционным
спектрометром. Первая система ВНР Falcon под названием Эйнштейн с октября 1999 г. непрерыв-
но эксплуатировалась в Канаде, Австралии и Южной Африке с общей протяженностью наработки
160000 км. Вторая система Ньютон применялась в Северной и Южной Америке с апреля 2000 г. с
наработкой 105000 км. Погрешность определения вертикального градиента на легком самолете — 5Э,
минимальная длина маршрута — 10км, разрешение — от 100 до 400м, высота полета — от 80 до 120м,
производительность — 500-800 км на полет, наработка в неделю — от 2500 до 5000 км. Третья система
Галилео планировалась для использования в Австралии с конца 2002 г., а четвертая полностью цифро-
вая система АГГ под названием Фейнман — с начала 2004 г. Семь лет и 30 миллионов австралийских
долларов понадобились специалистам ВНР Falcon для достижения высоких результатов.
На основе анализа разработанных в США БГГ тепловой схемы построения и опыта их практическо-
го применения прорабатывается в разных странах за рубежом ряд проектов систем АГГ, основанных
на новых схемах конструктивного исполнения, для задач коммерческого применения, прежде всего для
поиска и разведки полезных ископаемых: создается гравитационный градиентометр UWA (Университет
Западной Австралии) с уровнем шума 1 Э (1 ст) за время 1 с (лабораторные условия) [Matthews 2002];
проект Rio Tinto/Gedex/UWA (Канада), основанный на дальнейшем развитии схемы градиентометра
UWA на борту самолета для целей гравиразведки; градиентометр разработки университетов Мэриленд
(США)/Оксфорд (Англия); градиентометр разработки университета в Бирмингеме (Англия); гравитаци-
онный градиентометр Gravitec AVOSS (Новая Зеландия), который в настоящее время прорабатывается
в университете Стратклайда, и другие проекты. Авторам не известны отечественные разработки такого
уровня точности.
При создании отечественной аппаратуры необходимо рассмотреть следующие вопросы:
1. Совместную задачу проведения гравиградиентометрической съемки и осуществления коорди-
натной привязки результатов измерений градиентометром с решением задачи ориентации. В качестве
практического перспективного варианта инструментальной реализации указывают на целесообразность
внедрения БГГ в состав аппаратуры ИНС с реализацией ГИНС.
2. Анализ различных подходов реализации ГИНС на основе БГГ с учетом основных технических
характеристик (достижимая точность и быстродействие градиентометров) для возможных вариантов
базирования (сухопутное, морское, воздушное и др.) и оптимальных технологий выполнения съемок в
интересах гравиразведки.
3. Анализ практических процедур определения погрешностей БГГ (методических погрешностей,
связанных с определением и учетом гравитационного влияния на показания БГГ собственных масс
градиентометра, окружающих узлов и подсистем, масс применяемого транспортного средства [Molny et
al. 1982], а также инструментальных погрешностей градиентометров). В качестве предлагаемого подхо-
да алгоритмического обеспечения точности рассматривают метод решения задачи коррекции ГИНС при
использовании дополнительной навигационной информации. Предлагаемое техническое решение зада-
чи определения погрешностей БГГ с целью непрерывного контроля их точности можно применять на
практике в реальном масштабе времени в процессе осуществления гравиградиентометрической съемки
[Dransfield 1994].
4. Общий анализ и подготовку практических рекомендаций в части комплексирования дополнитель-
ными датчиками полезной информации для получения наиболее полной геологической информации,
а также вспомогательными датчиками информации, обеспечивающими надежное функционирование
всей системы. Также прорабатывают вопросы технического и информационного обслуживания и рабо-
чие режимы.
О путях создания аппаратных составных частей унифицированных
информационно-измерительных средств на основе ГИНС
Здесь основной задачей является определение и конструкторская проработка на аппаратном уровне
технических подсистем унифицированного информационно-измерительного средства с обоснованием
реализуемости его основных технических и эксплуатационных характеристик.
Результатом выполнения указанных работ является подготовка конструкторско-технологического
задела на создание БГГ чувствительностью 1-10 Э, разработка подробных математических моделей
прибора и его отдельных узлов, подготовка требований к проверочному и испытательному оборудо-
ванию с анализом возможности его приобретения или создания, разработка ТЗ на создание промыш-
ленной конструкции трехосного гравитационного градиентометра, разработка ТЗ на создание ГИНС (с
использованием трехосного градиентометра) и унифицированного информационно-измерительного ком-
плекса, создаваемого на ее базе, подготовка рекомендаций по промышленной разработке указанного
унифицированного средства.
Как показывает зарубежный опыт, первый работоспособный БГГ, созданный в США фирмой Bell
Aerospace/Textron с целью решения навигационно-геодезических задач, был с использованием акселе-
рометрических приборов. Акселерометрическая схема построения используется для БГГ в космической
программе GOCE для проведения глобальных геофизических исследований. Поэтому ниже рассмотрены
технические вопросы для схем построения БГГ на основе высокоточных акселерометров с указанием
рекомендаций по обеспечению требуемых точности и быстродействия. О состоянии работ по другим
конструктивным схемам БГГ было указано в разделах 5.5. и 6.9.
Для пояснения используемой терминологии сделаем следующие замечания.
Термин «одноосный», «двухосный», «трехосный» относятся к акселерометрам, имеющим соответ-
ствующее число измерительных осей для измерения ортогональных компонент ускорения. Кроме то-
го, термин «одноосный», «двухосный», «трехосный» также может относиться к градиентометрическим
измерителям в зависимости от числа измеряемых компонент тензора вторых производных от грави-
тационного потенциала, так как на практике используется модуляционный подход построения БГГ
на основе принудительного вращения чувствительных элементов (акселерометров или гантелей), то
понятие «осности» тесно связано с конкретной осью вращения.
Термин «двуканальный» также используется по отношению к акселерометрам (типа «акселерометр
в акселерометре»), указывая на иерархическую структуру построения рассматриваемого прибора с по-
мощью двух каналов измерений для обеспечения расширенного динамического диапазона. Так, УСТ
равно д (т. е. 9.8 м/с2), а наименьшая измеряемая величина ускорения, например, должна составить 10-
12 g, т. е. динамический диапазон равен 12 порядкам. Традиционный компенсационный акселерометр
позволяет выполнять измерения примерно в диапазоне 6 порядков. Применение усложненной схемы
построения акселерометра с использованием второго канала позволяет измерять остальные 6 порядков,
т. е. первый канал является «грубым», а второй — «точным».
Акселерометр включает в себя механическую часть, к которой применяется термин «чувствительный
элемент» и датчик момента, применяемого для получения силового воздействия, компенсирующего
измеряемое кажущееся ускорение (удельную силу). Другой составной частью акселерометра является
электронный блок, включающий блок преобразования перемещения в электронный сигнал и далее его
усиление и аналогово-цифровое преобразование.
Как чувствительный элемент, так и электронный блок подвержены воздействию тепловых броунов-
ских шумов вследствие случайного движения молекул газа, присутствующего в корпусе акселерометра,
что ограничивает предельные точностные характеристики механических и электронных приборов. По-
мимо влияния броуновского движения случайное движение электронов в электрических цепях вызы-
вает шумы Найквиста в этих цепях, что приводит к дополнительным погрешностям. Так как эти шумы
сильно зависят от температуры, то очевидной задачей является ее снижение до технически возможного
уровня с обеспечением прецизионной стабилизации.
На показания акселерометров в составе БГГ оказывают серьезное влияние угловые и линейные
(фоновые) вибрации гиростабилизированной платформы (ГСП) и подвижного аппарата-носителя. При
этом величина отношения (фон)/(полезный сигнал) достигает 11-12 порядков. Так, оценки влияния
фонового сигнала от угловой вибрации на выходной сигнал БГГ могут давать помеху на уровне 109Э,
а от линейных вибраций — до 104Э. Существенного снижения влияния угловых вибраций можно
добиться путем введения дополнительного антивибрационного устройства в составе ГСП.
Структуру погрешности акселерометра определяют две составляющие: аддитивная (не зависящая
от измеряемого ускорения) и мультипликативная, или погрешность масштабного коэффициента (зави-
сящая от измеряемого ускорения). Модуляционный принцип измерения в БГГ (на основе применения
вращающихся дифференциальных акселерометров) позволяет снизить аддитивную составляющую до
уровня тепловых шумов. Для устранения погрешности требуется проводить непрерывную калибровку.
Масштабный коэффициент акселерометра проявляется как 1/u>q, где u>q — частота собственных коле-
баний маятника акселерометра. В БГГ, построенном с помощью двух пар разнесенных акселерометров
с относительным смещением Ь, аналог этой погрешности проявляется в виде погрешности общей моды,
5 си а
равной выражению 2—-, где а равно линейному ускорению по оси чувствительности акселерометров,
о>о о
а 6о) определяется рассогласованием частот собственных колебаний маятников акселерометров. Для
БГГ акселерометрической схемы построения точностью 1 Э величина 6ш в типовых случаях должна
находиться на уровне 10-7Гц, что накладывает жесткие ограничения на величину допустимого рас-
согласования частот. Наряду с компенсацией погрешности общей моды и масштабных коэффициентов
акселерометров в составе БГГ будет одновременно ликвидироваться влияние механических воздей-
ствий: линейных вибраций, акустических шумов и ударов, поскольку они проявляются как ускорение
а, структурно входящее в выражения для погрешности общей моды.
Для измерения тензора вторых пространственных производных может использоваться конструкция
из трех одноосных градиентометров, оси вращения которых ортогональны друг другу. В одноосном
градиентометре акселерометры устанавливаются так, чтобы их точки подвеса были расположены на
периферии вращающегося основания, а плечи маятников направлены радиально по направлению к оси
вращения. Такое расположение акселерометров позволяет на порядок и более повысить чувствитель-
ность акселерометров: при малом отклонении маятника акселерометра от радиального направления
вследствие воздействия гравитационного ускорения синфазно будет действовать нескомпенсированная
проекция центробежной силы, приводящая к дополнительному моменту и, следовательно, к угловому
движению маятника (что является проявлением положительной обратной связи).
БГГ рассматриваемой схемы построения для измерения всех компонент тензора может выдавать
полный набор навигационной информации по линейным ускорениям, а также угловым скоростям и
ускорениям, т. е. из него может быть построена «малая» бесплатформенная инерциальная навигаци-
онная система (БИНС). Это открывает возможность решать задачу корректируемой навигационной
системы и контролировать точность работы БГГ.
Далее перечислены основные вопросы, решение которых необходимо в обеспечение инструменталь-
ной проработки унифицированного информационно-измерительного средства на основе ГИНС с БГГ:
1. Обоснование фундаментальных, технологических основ инструментальной разработки промыш-
ленного гравитационного градиентометра и всего информационного средства с его применением.
Решение технических проблем осуществления инструментальных высокоточных измерений механи-
ческими датчиками первичной информации на борту движущихся аппаратов в условиях сильных помех
и возмущений различной природы включает:
оценку уровня броуновских шумов в ЧЭ и шумов Найквиста в электронике; прецизионную балан-
сировку ЧЭ (например гантельного типа) и ГСП с учетом расположения на ней БГГ; обеспечение созда-
ния ЧЭ заданной формы, упругих подвесов с требуемыми параметрами, регистрации микроперемещений
пробной массы, а также реализацию оптимальной схемы двухканального акселерометра; прецизионную
температурную стабилизацию ГСП и БГГ; проработку цифро-аналоговых и аналогово-цифровых
преобразователей применительно к БГГ; стабилизацию размерных, магнитных и других физических
свойств материалов, предназначенных для изготовления деталей БГГ; анализ современного состояния
и тенденций развития БГГ и их математического обеспечения; определение конструкционного обли-
ка унифицированного информационно-измерительного комплекса на базе ГИНС и требований к его
подсистемам.
2. Проработка основных инструментальных проблем создания БГ включает:
исследования по разработке электростатического датчика момента акселерометра, при этом в каче-
стве опорного элемента в электрических цепях вводится высокостабильный (эталонный) источник тока;
проработку вопроса о совмещении функций датчика угла и датчика моментов с помощью одних и
тех же электродов; исследования по разработке магнитоэлектрического датчика момента акселеромет-
ра; проведение расчетов механической (упругой части), электрической и магнитной системы, а также
обеспечение взаимной совместимости системы сил: центробежных, переносных, кориолисовых и сил об-
ратной связи, при этом используется стенд для определения упругости, в электрическую часть акселе-
рометра вводится эталонный источник тока; подготовку уточненной модели погрешности и проработку
основных моментов технологии изготовления; разработку конструктивной схемы эталона электриче-
ского тока; обоснование необходимости введения высокостабильного (эталонного) источника тока в
базовые электрические цепи акселерометров в составе БГГ; исследования по разработке двухканаль-
ной схемы акселерометров; проработку вопроса минимизации уровня механических взаимовлияний
указанных каналов акселерометров; разработку конструктивной схемы двухканального акселеромет-
ра с обеспечением выполнения требований минимизации взаимовлияний; разработку электрической
схемы; построение схемы и расчет элементов контура прецизионной термостабилизации; определение
основных блоков измерительной системы БГГ; анализ и оценку возможностей размещения радиоэлек-
троники по поверхности механических деталей: маятников (собственно электроника акселерометров),
поверхности полости ротора; подготовку перечня необходимого стендового оснащения; детальное
проектирование упругих подвесов, согласование (выравнивание) их жесткостей, частот свободных ко-
лебаний, датчиков углов и моментов, выполнение балансировки характеристик каналов, рассмотрение
возможности использования настройки каналов на резонанс в режиме периодической перестройки на
повышенное демпфирование с целью обеспечения требуемого сочетания высокой чувствительности (при
одновременном механическом и электрическом резонансе) с требуемым быстродействием (за счет введе-
ния периодического повышенного демпфирования), с постановкой задачи оптимизации этой процедуры
(для определения оптимальной продолжительности и частоты смены участков с резонансом и демп-
фированием); оценку уровня влияния механических шумов (вибрационных, ударных, акустических)
и помех различной природы (магнитных, радиотехнических, температурных, внутренних и внешних
гравитационных градиентов вследствие гравитационного влияния конструкционных масс самого прибо-
ра и аппарата-носителя градиентометрической системы); проработку конструкторско-алгоритмических
способов определения и учета влияния этих помех на показания БГГ; определение основных конструк-
ционных параметров узлов и элементов, их оптимизация с учетом решения основных технических
проблем; разработку эскизной проектной документации узлов и прибора в целом; разработку мето-
дик проверок технических параметров и калибровок с привязкой к существующему или планируемому
стендовому оснащению; подготовку конкретных технических рекомендаций; разработку предложений
по метрологическому обеспечению БГГ в широком диапазоне измеряемых параметров с проведением
анализа существующих методик, разработанных для акселерометров и измерителей угловых скоростей
на основе применения наклонно-поворотного и скоростного стендов для традиционных диапазонов из-
мерения (метрологическое обеспечение первого, грубого канала акселерометра для двухканальной схе-
мы его построения); проработку применимости метода измерения изменения расстояний до тяжелых
(например свинцовых) масс для второго, точного канала двухканального акселерометра; разработку
методики и схемно-технического решения прецизионной стабилизации скорости вращения роторной
части БГГ по показаниям акселерометров.
3. Обоснование схемы и проработка основных элементов и узлов БГГ включает:
анализ наиболее известных схем БГГ гантельного и акселерометрического типов с учетом зару-
бежного опыта; определение схемы БГГ, позволяющей совместное получение выходной информации по
вторым производным по координатам от гравитационного потенциала с обеспечением пространственной
привязки и контролем точности выполняемых измерений; выбор схемы прецизионной балансировки для
гантельного и маятникового вариантов чувствительного элемента; проработка магнитоэлектрического
и электростатического датчиков момента с целью измерения ускорений в широком диапазоне путем
реализации двухканальной схемы акселерометра; проработку способов компенсации погрешностей ти-
па «общей моды» в БГГ (погрешности масштабного коэффициента в акселерометре) с учетом влияния
вибраций, шумов и ударов; проработку схем сужения диапазона измерения гравитационного градиента
для повышения результирующей точности выходной информации; проработку схем источника тока вы-
сокой стабильности для обеспечения требуемой точности БГГ за счет введения этого источника в цепь
обратной связи акселерометра с целью непрерывной калибровки; проработку принципиальной схемы
построения эталона единицы гравитационного градиента; проработку возможности эффективного ре-
гулирования быстродействия измерительного процесса в случае резонансной настройки акселерометра.
В обеспечение соответствия параметров БГГ основным техническим требованиям конструкторской
и технологической документации нормативным документам отрасли и ГОСТ во время всего жизненного
цикла создания БГГ должны проводиться их контроль, настройка и калибровка.
Подготовка и формирование экспериментального производства для БГГ должна проводиться с ис-
пользованием накопленного опыта и сбора статистических данных на предприятиях прецизионного
приборостроения. Результаты более высокого уровня могут быть получены при установлении меж-
отраслевых контактов с предприятиями, которые ведут многолетние практические исследования по
созданию БГГ.
9.3 Определение вектора ускорения силы притяжения,
ориентации и координат движущегося объекта каскадным
методом
Б.В. Бровар
Наблюдаемая многие десятилетия дифференциация наук отражает в геодезии и гравиметрии специ-
ализацию измерительной аппаратуры и методов ее использования. Наряду с этим повышение уровня
развития техники стимулирует тенденцию к интегрированию наук и сулит на этом пути достижение
новых крупных результатов.
При всем разнообразии геодезических, гравиметрических, астрономических и навигационных изме-
рений все они имеют общность, и их, в конечном счете, можно свести к измерению длины и моментов
времени, учитывая равенство гравитационной и инерционной масс. В связи с этим важным вопросом
становится выбор системы координат, относительно которой рассматриваются измерения.
Если текущие координаты свободно движущегося тела измеряются в соответствующие моменты
времени относительно принятой за инерциальную системы координат, то этих данных достаточно для
определения составляющих скорости, ускорения и последующих производных по времени, то есть для
решения прямой задачи определения параметров движения наблюдаемого тела относительно этой же
системы координат.
Если известны параметры движения движущихся тел и измеряются их координаты в соответству-
ющие моменты относительно пункта наблюдения, то этих данных достаточно для решения обратной
задачи определения координат пункта наблюдения. Отсюда очевидна взаимная обусловленность гео-
метрических характеристик местоположений свободно движущихся тел относительно наблюдателя и
характеристик внешнего гравитационного поля.
Наиболее наглядно системность главной задачи геодезии, состоящей в определении во времени по-
верхности и внешнего ГПЗ в принятой системе координат, проявляется при использовании ИСЗ и в
каскадном методе определения вектора ускорения силы притяжения, ориентации и координат движу-
щегося объекта.
Рассмотрим в принципе решение задачи определения вектора ускорения силы притяжения, ориен-
тации и приращения координат движущегося объекта.
Как известно, ускорение свободного падения относительно системы координат, жестко связанной
с Землей, называется ускорением силы тяжести (УСТ), а относительно системы координат, жестко
связанной с удаленными галактиками, — ускорением силы притяжения.
Под кажущимся ускорением ак, наблюдаемым относительно движущейся системы координат, по-
нимают разность абсолютного ускорения аЛ(ускорения инерции), определяемого по отношению к инер-
циальнои системе координат, и ускорения силы притяжения а , то есть а = а — а
При определении УСТ в движении или при определении координат ИНС измеряется кажущееся
ускорение, то есть разность между ускорением инерции и ускорением притяжения.
В первом случае из ускорения инерции необходимо исключить кажущееся ускорение, а во втором
случае к кажущемуся ускорению необходимо добавить ускорение силы притяжения. При выполнении
измерений УСТ в движении должна решаться и навигационная задача. Известен метод определения
УСТ на движущемся объекте, в котором измеряют влияние вертикальных инерционных ускорений
движения и УСТ [Пантелеев 1983; Веселов 1982, 1986].
Из этого влияния на основе частотной селекции исключают инерциальные ускорения движения.
Этим методом на море получают удовлетворительные результаты определения УСТ. В аэрогравиметрии
для устранения части инерциальных ускорений движения, спектр частот которых близок или совпадает
со спектром УСТ, измеряют высоту самолета или его вертикальную скорость и по результатам этих
измерений вычисляют, а затем и исключают инерционные ускорения движения. При этом измерения
высоты или скорости необходимо выполнять неинерционными средствами.
Главный недостаток рассмотренного метода состоит в его неработоспособности при совпадении
спектров частот ускорений силы тяжести и инерции. Трудности по разделению гравитационных и
инерционных ускорений при измерениях на борту различных транспортных средств УСТ — первых
производных гравитационного потенциала — привели ряд исследователей к выводу о целесообразности
использования бортовых гравитационных градиентометров (БГГ) — измерителей вторых производных
гравитационного потенциала [Веселов, Сагитов 1968].
Действительно, метод, основанный на использовании навигационной аппаратуры, например инерци-
альной навигационной системы и БГГ, позволяет решать задачу определения приращений вектора УСТ
и приращений координат в принципе в любых условиях, в том числе и на суше. Помимо серьезных тех-
нологических трудностей при создании БГГ этот метод имеет следующие недостатки. Показания БГГ
подвержены существенному влиянию вращательных ускорений (другие ускорения влияния не оказыва-
ют), и поэтому необходимо использование высокоточных гиростабилизированных платформ. Погрешно-
сти определения составляющих УСТ, получаемых путем интегрирования измеряемых соответствующих
вторых производных потенциала по пройденным приращениям координат, даже при отсутствии погреш-
ностей определения соответствующих приращений координат возрастают с увеличением пройденного
пути. Показания БГГ подвержены значительному влиянию близко находящихся масс (обратно пропор-
ционально расстоянию в третьей степени).
Указанных недостатков лишен каскадный метод определения вектора ускорения силы притяжения,
ориентации и приращений координат движущегося объекта [Бровар 1984, 1996, 2004а, б].
Суть каскадного метода состоит в том, что в измерительной камере с известными координатами
и ориентацией в пространстве создают вещественную модель поля ускорения притяжения с независи-
мой (в пределах погрешностей измерений) от измерительных средств камеры инерциальной системой
отсчета. Для этого образуют каскад (созвездие) движущихся в вакууме измерительной камеры одна
за другой пробных масс q, получающих заданные начальные скорости относительно измерительной
камеры (рис. 9.3.1). При этом одновременно решаются прямая задача определения начальных условий
движения вновь поступающих пробных масс по известным начальным условиям движения измери-
тельной камеры и обратная задача определения начальных условий движения камеры по известным
начальным условиям движения уже существующих в камере пробных масс. Каскадная система долж-
на содержать измерительную камеру, позволяющую измерять координаты пробных масс и моменты
времени, устройства, позволяющие сообщать пробным массам заданные начальные скорости движе-
ния, и бортовой вычислительный комплекс, предназначенный для обработки информации в реальном
масштабе времени, получаемой каскадной системой. Величина силы броска пробной массы в общем
случае должна быть такой, чтобы сообщить пробной массе скорость, достаточную для пролета всей
области, где выполняются измерения. В случае выполнения этого условия вид движения камеры может
быть практически произвольным. То есть и в случае невесомости каскадный метод позволяет опреде-
лять ускорение силы притяжения, ориентацию и координаты объекта. При этом точность определения
модуля ускорения притяжения не зависит от длины маршрута.
Применение каскадного метода избавляет от необходи-
мости использовать акселерометры (гравиметры), гироста-
билизированную платформу и различные инструментальные
(в основе которых лежат бортовые гравитационные градиен-
тометры) или расчетные способы (в основе которых лежат
рабочие модели аномального гравитационного поля Земли),
предназначенные для учета влияния аномального гравита-
ционного поля Земли на показания измерительных средств
в навигационных системах.
При работе каскадным методом используются следую-
щие правые системы координат:
Х{0, XI, Х2, ХЗ} — жестко связана с измерительной
камерой; начало системы находится в точке О, располагаю-
щейся в одном из нижних углов измерительной камеры так,
чтобы в исходном пункте ось XI была направлена под аст-
рономическим азимутом а, а ось ХЗ — в астрономический
зенит;
У{0, У1, Y2, УЗ} — жестко связана с Землей; начало
системы находится в точке О', располагающейся в центре
Рис. 9.3.1. Измерительная камера с
пробными массами д, пролетающими
через заданные координатные плоско-
сти
масс Земли; ось УЗ совпадает с осью вращения Земли; ось У1 лежит в плоскости экватора Земли и
проходит через начало счета долгот;
Z{0, Zl, Z2, Z3} — начало системы находится в точке О', располагающейся в центре масс Зем-
ли, ось Z3 совпадает с мгновенной осью вращения Земли; ось Z1 направлена на точку весеннего
равноденствия; в момент времени t = 0 системы У и Z совпадают.
Рассмотрим вариант, когда в исходном пункте известны геодезические широта Во, долгота Lq,
высота Hq в системе общего земного эллипсоида и астрономические широта сро» долгота Ао и азимут
<хо одной из осей (XI) измерительной камеры.
В этом случае порядок работы каскадным методом состоит в следующем.
1. По геодезическим координатам Bq, Lq, Hq рассчитывается начало Уо{У1о, У2о, УЗо} координат
системы X в системе У, а по астрономическим широте <ро. долготе Ао и азимуту oto рассчитывается
матрица Со поворота системы X относительно системы У в исходном пункте:
У1о = (М) + Hq) cos Во cos Lq!
У20 = (No + Но) cos Bq sin Lq;
УЗо = [Яо(1 - ё2) + Яо] sin Во.
(9.3.1)
Со —
— sin A sin а — sin ср cos A cos а
cosA sin а — sin ср sin A cos а
cos ср cos а
sin A cos а — sin ср cos A sin а
— cos A sin а — sin ср sin A sin а
cos ср sin а.
cos ср cos А
cos ср sin А
sin ср
(9.3.2)
где а, е — большая полуось и эксцентриситет общего земного эллипсоида;
No = а(1 — е2 sin2 Во) %. (9.3.3)
В матрице Со для компактности в сро. Ао и ао опущен подстрочный индекс 0.
Если измерения продолжительны, то астрономические данные необходимо привести к среднему
полюсу.
Далее выполняется решение прямой задачи в следующей последовательности.
2. По ориентации Со и началу УЬ координат системы измерительной камеры XI, Х2, Хз|,
известным в исходном пункте, и по измеренным координатам Xq пробных масс q — ц, к,... в системе X
на момент времени ti определяются координаты Zq пробных масс q в инерциальной системе координат
z{o',Zl,Z2,Zs}:
Zqti = Zqi= Di(C0Xq + Уо), (9.3.4)
где Di — матрица поворота системы Y относительно системы Z является функцией угловой скорости
вращения Земли П и времени ti.
3. По полученным в п. 1 координатам Zq на момент времени ti вычисляют приращения координат в
системе Z и приращения соответствующих моментов времени, по которым определяют условия движе-
ния (vi — скорость, gi — ускорение притяжения, bi — производная ускорения притяжения по времени)
пробных масс q из решения системы уравнений
Ui = T-^Zi,
(9.3.5)
где Ui — матрица-столбец из неизвестных, Ti — матрица системы, AZ; — матрица-столбец свободных
членов,
^г+2
(tj+l — ti)2 (ti+1 — ti)3
(ti+2-ti)2 (ti+2-ti)3
(ti+3-ti)2 (ti+3-ti)3
^i+i
Zi+2
Zi+3
Решение обратной задачи выполняют в следующей последовательности.
4. По известным начальным условиям движения Uq пробных масс q, отнесенным к координатам Z?
в момент времени ti, определяют координаты Z? пробных масс q в инерциальной системе Z на момент
времени tn > t<:
Zqn = Z? + TqDq (9.3.6)
где q = ц, к, и, e...
5. По измеренным координатам пробных масс ц, к в системе Z на момент времени tn
определяют ориентацию Сп измерительной камеры на момент времени tn :
(*£ - Х*)Сп = D™(Z£ - Z*). (9.3.7)
6. По измеренным координатам Х%, X* пробных масс ц, к и ориентации Сп измерительной камеры
на момент времени tn определяют начало координат измерительной камеры У^к в системе Y или Z„K
в системе Z на момент времени tn:
улик = DmZ, _ СпХ^ Z^K = Zft-DnCnX}t = Z^-DnCnX^ (9.3.8)
Далее цикл определений повторяют, начиная с п. 2, но с новыми текущими значениями ориентации
Сп, начала координат измерительной камеры Упик и координат Хп для последующих пробных масс v, е
на моменты времени tn.
Для выполнения работ каскадным методом необходимо в исходном пункте знать координаты и
ориентацию измерительной камеры в пространстве и до начала движения измерительной камеры отно-
сительно Земли определить начальные условия движения каскада пробных масс.
В работах [Б.В. Бровар 2004а, б] рассмотрены еще два способа: способ автономного определения
геодезической высоты измерительной камеры каскадной системы в исходном пункте, для которого из-
вестны геодезические широта Во и долгота Lq в системе общего земного эллипсоида и способ автоном-
ного определения начальной ориентации измерительной камеры и составляющих уклонений отвесной
линии в исходном пункте каскадным методом путем выполнения измерительных и вычислительных
операций с помощью самой каскадной системы, без использования внешних измерительных средств и
дополнительной детальной информации.
Таким образом, каскадный метод по известным геодезическим широте и долготе исходного пунк-
та позволяет выполнять в исходном пункте абсолютные определения геодезической высоты, вектора
ускорения силы притяжения, вектора УСТ, ориентации, СУОЛ, а в движении измерительной каме-
ры каскадной системы — абсолютные определения вектора ускорения силы притяжения, вектора УСТ
и относительные определения координат и ориентации подвижного объекта. Одним из возможных
технических решений, реализующих каскадный метод, является конструктивная схема измерительной
камеры, выполненная на основе электронно-баллистического преобразователя ускорений в электриче-
ский сигнал с временной формой его представления.
В настоящее время научно-технический прогресс особенно значителен в областях вычислительной
техники и измерений интервалов времени и отрезков расстояний, что способствует развитию динами-
ческих и кинематических способов измерений. В этой области находится и каскадный метод. Приме-
нение каскадной системы в принципе избавляет от необходимости знать высоту, начальный азимут
и СУОЛ в исходном пункте, использовать акселерометры, гиростабилизированную платформу и раз-
личные инструментальные (в основе которых лежат БГГ) или расчетные способы (в основе которых
лежат рабочие модели АГПЗ), предназначенные для учета влияния АГПЗ на показания измерительных
средств в навигационных комплексах и в системах автономного определения геодезических данных.
В случае создания высокоточных каскадных систем их можно использовать и для целей геодезии в
качестве геодезических систем оперативного определения геодезических широты, долготы и высоты,
СУОЛ и УСТ в заданных геодезических пунктах. Измерения, выполняемые с помощью высокоточных
каскадных систем на сейсмических станциях, на пунктах ГФГС и ФАГС, позволят практически исклю-
чить влияние микросейсм на точность определения УСТ, определять во времени ряд дополнительных
параметров (составляющие УСТ и ускорения силы притяжения, координаты измерительной камеры в
инерциальной системе координат), использование которых будет иметь научное и практическое зна-
чение для геодинамических исследований, и в том числе — для прогнозирования землетрясений и
извержений вулканов. Измерения составляющих ускорения силы притяжения (и УСТ), выполняемые
с помощью каскадных систем на различных объектах, в том числе на ИСЗ, могут быть использованы
для решения научных и прикладных задач уточнения фундаментальных постоянных Земли.
9.4 Модернизация гравиметра ГАГ-3
В.В. Дубовской, В.И. Леонтьев, А.В. Сбитнев
С целью проверки возможности использования стандартных кварцевых гравиметров для регистра-
ции вариаций УСТ на уровне долей микрогала на базе одного из опытных образцов гравиметра ГАГ-3
был изготовлен макет гравиметра с цифровым отсчетом. Лазерный датчик перемещения, использован-
ный в гравиметре, был перенесен из разработанного нами спутникового датчика гравиинерциальных
ускорений ИМУ-Ш. Шумы датчика в широком диапазоне частот 0,1-0,001 Гц не превышают несколь-
ких ангстрем, что соответствует шумам гравиметра 10-1°-10-11g. Диапазон цифровой регистрации
УСТ, реализованный с помощью аналого-цифрового преобразователя ПА572 ПВ1, вмонтированного в
корпус гравиметра, составлял 2 мГал, разрешение 0,5 мкГал.
Время осреднения отсчета гравиметра 6 с выбрано близко к периоду основной шумовой моды мик-
росейсм. В стационарном состоянии была проведена серия измерений из 80 отсчетов, среднеквадрати-
ческое отклонение единичного отсчета от линейного дрейфа за 40 мин измерения составило 1.5 мкГал,
при времени осреднения 3,5 мин — 0,3 мкГал. Возможности измерения малых приращений УСТ про-
верялись нулевым методом при времени осреднения отсчета 2 мин и интервалом между очередными
установками прибора на одной и той же точке, равном 2 мин. Среднеквадратическое отклонение отсче-
тов от линии дрейфа гравиметра составило величину 0,8 мкГал.
Минимальный сигнал, регистрируемый гравиметром за время осреднениях, определяется уровнем
сейсмических возмущений. На частотах ниже 0,03 Гц
. . 2(10“11 4- 1О-10)
ст(т) = —---.-------где т — время осреднения отсчета.
\А(с)
Интересно, что броуновские шумы чувствительной системы гравиметра имеют тот же спектр, и
ошибка осреднения отсчета ст(т) за время т равна
10-9
= w
где Q — добротность упругой системы; М — масса маятника; Т — период собственных колебаний
упругой системы гравиметра. Для гравиметра ГАГ-3 М = 0,02 г, Т = 6 с, Q = 2,5
, ч 18 • 1О~10
о-(т) = ——д.
При времени осреднения 6 с о'(т) = 0,7 мкГал, 2 мин — 0,16 мкГал, 3,5 мин — 0,1 мкГал.
Таким образом, применение в гравиметре ГАГ-3 оптимально сконструированного оптического дат-
чика перемещения и цифровой системы регистрации позволяет в лабораторных условиях реализовать
предельную чувствительность упругой системы гравиметра на уровне броуновских шумов.
Для достижения предельной чувствительности гравиметра в реальных условиях необходимо исклю-
чить или снизить влияние на чувствительную систему гравиметра ряда возмущающих факторов.
Для лабораторного макета ГВГ на базе гравиметра ГАГ-3 была разработана и реализована антисей-
смическая подвеска прибора с собственным периодом 0,3-0,5 с, так как уровень техногенных шумов
в реальных условиях превышает уровень предельного разрешения гравиметра в 10-100 раз. Учиты-
вая высокую помехозащищенность (сейсмическую, тепловую, барическую, электромагнитную и др.)
конкретной реализации прибора и большой запас по шумам датчика перемещений, вполне реально
довести разрешение до сотых долей Этвеша в приборе некриогенного типа за счет увеличения мас-
сы пробного тела. В случае конструирования бортовых систем градиентометрии требуются глубокие
проработки по многоступенчатой виброзащите гиростабилизирующих устройств.
Современная техника измерения перемещений позволяет на различных физических принципах по-
лучать предельные разрешения менее 1О“10 см. Выбор оптимального метода зависит от совместимости
конструктивных параметров, необходимых для решения поставленной задачи. Практическое отсутствие
силового воздействия на пробную массу обусловливает предпочтительное использование фотоэлектри-
ческих преобразователей для приборов с системой отрицательной обратной связи [Дубовской 1970].
В качестве источника света могут быть использованы инжекционные лазеры, в которых диаметр
пучка излучения достигает величины 10-4 см.
Используемый в гравиметре инжекционный лазер имел выходное отверстие 5 • 10~3 см, световая
мощность, падающая на фотодиод датчика гравиинерциальных ускорений ИМУ, составляет 4-10-5 Вт,
квантовый выход — 0,25. Модельный эксперимент с неподвижным пробным телом в осесимметричной
конструкции свидетельствует о применимости данных оценок для реальной конструкции.
В земных условиях сейсмический шум в отдаленных от океана районах в спокойные периоды имеет,
так же как и броуновский шум, величину спектральной плотности ускорений, не зависимую от частоты,
равную 2-Ю-11 в полосе частот 4-Ю-2 - 10-3 Гц. Для регистрации столь малых сигналов [Дубовской
и др. 1994] требование к параметрам датчика сводятся к выполнению неравенства М > 2500 • f • Q~1 [г],
т. е. при / = 0,1 Гц и Q = 1 масса составит 250 г. Примерно такие же требования предъявляются и
к датчику гравиинерциальных ускорений в составе градиентометра со спектральной плотностью шума
10-1Е>/Гц.
Таким образом, гравиметр ГАГ-3, разработанный в ИФЗ, по основным параметрам превосходит
отечественные аналоги. Модификация этого прибора, проводимая в последние годы, вывела его на
высший международный уровень. Использование ряда ноу-хау, обеспечивающих существенное сниже-
ние дестабилизирующих факторов (барометрический эффект, температурные, динамические, неупругие
эффекты), позволили в реальных условиях производить измерения на уровне величины броуновских
шумов, т.е. фактически на уровне физического запрета. На рис. 9.4.1 приводится запись земных при-
ливов, качественно характеризующая гравиметр ГАГ-ЗМ.
Столь существенное продвижение в качестве измерений позволяет ставить ряд новых фундамен-
тальных и прикладных задач. Фактически открывается новое направление микрогравиметрии, позво-
Рис. 9.4.1. Пример записи земных приливов гравиметром ГАГ-
ЗМ.
Таблица 9.2. Пример изме-
рения градиента УСТ
Поло- жение Время, час Др. мкГал
низ 13,38 724,5
верх 13,45 1133,9
низ 13,52 695,1
верх 13,58 1111,5
низ 13,70 674,9
верх 13,82 1090,6
низ 13,87 654,0
Д^низ — Д^верх — 426,5 i
0,9 мкГал, или = 3010±
6 Э
ляющее выявлять аномалии УСТ во времени и пространстве на уровне 10-10д и измерения градиента
силы тяжести на уровне 1 Э. Т. е. в реальных условиях измерений ошибка градиента УСТ не превы-
шала 6 Э. Пример измерения градиента УСТ с вертикальной базой 1417 мм на строительной площадке
в зоне прокладки подземного туннеля Третьего транспортного кольца г. Москвы в феврале 2003 г. при
на наличии порывистого ветра и высокого уровня вибропомех от строительных механизмов и проходки
подземного коллектора приводится в табл. 9.2. Модернизированный гравиметр ГАГ-ЗМ использовался
при изучении тонкой структуры ГПЗ на площадке Ленинградской атомной станции (ЛАЭС), выявлении
неприливных вариаций ГПЗ на Ленинградском гравиметрическом полигоне, картировании плотностных
неоднородностей на многих ответственных сооружениях Москвы.
9.5 Микронивелир НИ-3
В.Б. Дубовской, В.Г. Жильников, В.И. Леонтьев, А.В. Сбитнев
Основным методом контроля за деформационными процессами зданий и сооружений является ни-
велирование, осуществляемое с помощью высокоточных нивелиров типа Н-05, Ni-002, Ni-007 и т.д.
Применение этого метода осложняется метеорологическими факторами и необходимостью выполнения
условия прямой видимости точек наблюдения. В условиях интенсивного строительства это условие ча-
сто нарушается транспортом и временными постройками. Нами предлагается альтернативная система
наблюдений, свободная от вышеизложенных трудностей, не уступающая ей по точности и осуществля-
емая с помощью наклономерных измерений.
В ИФЗ РАН разработан автоматизированный микронивелир с цифровым отсчетом с разрешением
2 • 10~6рад (рис. 9.5.1), что по отношению к стандартному шагу нивелирных измерений сооружений
(10 м) соответствует точности нивелирования 0,02 мм [Бычков 1993; Дубовской 1993; Алешин, Дубов-
ской 1995а, б]. Оперативность получения информации позволяет решить задачу массового деформаци-
онного мониторинга ответственных сооружений Москвы с периодичностью раз в год. Преимущество
микронивелирных измерений заключается в следующем:
1. Абсолютный характер измерений: углы наклонов определяют относительно вектора силы тяжести,
что обеспечивает независимость и автономность обследования контролируемых точек.
2. Информация, получаемая с помощью микронивелира, легко пересчитывается в напряженное со-
стояние исследуемой конструкции.
3. Нет необходимости в прямой видимости марок.
4. Отсутствуют ошибки, связанные с рефракцией.
5. Высокая оперативность метода.
6. Требуется один исполнитель для проведения наблюдений.
Технические характеристики микронивелира НИ-3
1. База измерений ..........
2. Диапазон измерения
углов наклона ..............
стрелы прогиба .............
3. Разрешение:
углы наклона ...............
стрелы прогиба .............
4. Масштабный коэффициент .
5. Нелинейность ............
6. Температурный коэффициент
7. Питание .................
.................1,5 м
±1000"(5 • 10“3 отн. ед.)
......±3 • 10-6 отн. ед.
....±0,5" (2,5-10—6 рад)
......±7 • 10-6 отн. ед.
...............0,5"/mV
.................0,01%
...........0,2-0,5"/°С
...................±9 В
8. Потребление ........................................................................0,2 Вт
9. Габариты .................................................................. 1,5x0,08x0,04 м
10. Вес ...............................................................................2,7 кг
В разных модификациях прибор позволяет измерять наклоны как
в вертикальном, так и в горизонтальном направлении. Угол отклоне-
ния линии, соединяющей оси марок от вертикали или горизонтали
при их первоначальном заложении, не должен превышать диапазона
измерений прибора (5 • 10-3 рад). Для измерения вариации наклонов
относительно уровенной поверхности в корпусе микронивелира орга-
низованы две плоские опорные площадки из сапфира, разнесенные на
расстояние 1,5 м. Для контроля пространственного положения метал-
лической конструкции (например, стенка в грунте с металлическим
армированием) относительно вектора силы тяжести НИ-3 снабжен
магнитными опорами. Это позволяет оперативно устанавливать при-
бор на контролируемый объект и нормировать нагрузку на измеряемые
точки. Вариант с термостатированным чувствительным элементом мо-
жет быть рекомендован для контроля за высокоточным оборудовани-
ем, ускорителями элементарных частиц и т. д.
Измерения углов осуществляют в прямом и обратном направлени-
ях. В результате получают значение абсолютного угла наклона линии,
соединяющей оси двух марок, жестко соединенных с исследуемой кон-
струкцией относительно вектора силы тяжести. Время измерений на
одной точке составляет примерно одну минуту.
Прибор выполнен в виде прямоугольного профиля. Два датчика
угла, построенные на базе спутникового акселерометра, закреплены
взаимно перпендикулярно внутри полой конструкции. В датчике угла
используются лазерный датчик перемещения и система электромаг-
нитной обратной связи на основе постоянных магнитов с высокой ани-
зотропией (самарий-кобальт). Благодаря наличию жесткой обратной
связи нелинейность прибора не превышает 0,01% от диапазона изме-
рений. Температурный коэффициент микронивелира менее 0,04%/°С.
Для контроля изгибных деформаций контролируемого объекта в корпус микронивелира вмонтирован
индикатор стрелы прогиба. Аттестация НИ-3 производится на установке для эталонирования грави-
метров УЭГП-2, разработанной в ИФЗ РАН.
Микронивелир в разных модификациях последние 10 лет широко использовался при деформаци-
онном мониторинге наиболее ответственных строек Москвы: ТРК «Манежная площадь», Хорватский
дом, Итальянский дом и т. д. Для оценки качества работы микронивелира НИ-3 на отдельно стоя-
щем здании были организованы 12 пар точек микронивелирных наблюдений. Здание кирпичной кладки
представляет собой одноэтажное строение размером 10 х 10 м. с наличием многочисленной микротре-
щиноватости в восточной части и трех дверных проемов — в южной. На эталонном объекте за 10
Рис. 9.5.1. Микронивелир
НИ-3
1) цифровой индикатор,
2) переключатель режимов,
3) индикатор стрелы прогиба,
4) шток индикатора прогиба,
5) магнитные опоры
часов было выполнено 17 серий микронивелирных измерений по периметру здания с замыканием на
исходную точку. СКО замыкания, вычисленная по 17 сериям измерений, не превышала 0,1 мм.
Предлагаемый микронивелир является перспективным инструментом определения напряженного со-
стояния различных конструкций: деформации оснований зданий, изгибы «стены в грунте», изменение
наклонов несущих конструкций (колонны, щелевые фундаменты и т. д.) Высокая точность и много-
функциональность прибора, высокая оперативность работы с ним позволяют надеяться на широкое
применение предлагаемого метода в композиции с традиционными методами геодезии.
9.6 Скважинный инклинометр НИ-2
В.Б. Дубовской, В.И. Леонтьев, Д.Д. Латышев, А.В. Сбитнев, А.А. Четверикова
Сотрудниками института ИФЗ РАН был найден ряд нестандартных научно-технических решений,
позволивших получить высокую точность скважинных инклинометрических измерений и фактически
создать новое направление подземной геодезии, не уступающее по качеству классической геодезии (т. е.
определение планового положения геомассива на различных уровнях с погрешностью не хуже 2-3 мм).
Для обеспечения надежных и высококачественных результатов при инклинометрических измерени-
ях необходимо решить как минимум две задачи: создание собственно чувствительной системы прибора,
обеспечивающей достаточную чувствительность при жестких механических нагрузках на прибор во
время его спуска и подъема по скважине и определение азимута прибора во время измерений с доста-
точной точностью. Ошибка определения азимута прибора в скважине у большинства существующих
инклинометров составляет величину около 1°. Погрешность пространственного положения вектора на-
клона скважины 5j определяется соотношением &i = i cos(5A) = 0,5 • i • 5А2 , где i — угол наклона
скважины (относительно отвесной линии), 5А — ошибка определения азимута.
При малых углах наклона скважины (до 1°) относительная ошибка измерения угла, определяемая
погрешностью азимутальной составляющей, имеет величину менее 0,015%. При больших углах наклона
г вклад азимутальной ошибки 5А в погрешность измерения угла 5г может быть весьма существенной.
При создании инклинометра в ИФЗ перед разработчиками ставилась конкретная задача: простыми
средствами и в короткие сроки изготовить прибор, который позволил бы определять пространственное
положение скважины глубиной до 100 м с погрешностью не более 2-3 мм. Для инклинометрических
измерений предполагалось применение стандартных цельнотянутых или сварных труб.
Вариации (неровности) рельефа внутренней поверхности таких труб из-за ржавчины и дефектов
изготовления могут достигать величины порядка 1 мм. В этой связи при повторных измерениях в
скважине высокие требования предъявляются к установке измерительного снаряда на той же глубине
и в том же азимуте, что и в предшествующих измерениях.
Прибор состоит из измерительной штанги, опорные ролики которой прижимаются к внутренней
поверхности скважины. Два верхних и два нижних ролика расположены под углом 120° к оси при-
бора. Стойки, на которых закреплены ролики, расположены перпендикулярно измерительной штанге и
имеют возможность осевого поворота на угол 30°. Расстояние между опорными роликами определяет
измерительную базу прибора (1,75 м).
Технические характеристики скважинного инклинометра НИ-2
Диапазон измерений
глубина ....................................................................до 100 м
углы отклонения от вертикали ..................................................±5°
Точность измерений
угла наклона ...........................................................±2" + а. 10-4
плановое смещение .......................................±0,1 (мм)+/г (мм) а (рад)-Ю-4
Шаг измерений по глубине .....................................................2,24 м
Точность определения азимута ...................................................5'
Крутизна сигнала ...........................................................10"/mV
Нелинейность ................................................................0,01%
Температурный коэффициент .............................................0,1-0,2"/°С
Погрешность в диапазоне .............................................................1-2"
Питание наклономера .................................................................±9В
Потребляемая мощность...........................................................0,1-0,2 Вт
Габариты ..................................................................d=70 мм, h=2 м
Вес .................................................................................3 кг
Диаметр скважины ...............................................................75-120 мм
Прижим измерительной штанги к внутренней поверхности скважины осуществляется с помощью
регулируемой (в зависимости от диаметра скважины) ленточной пружины. На ленте также установлен
ролик. В нижней части измерительной штанги устанавливается съемный контейнер с двумя датчиками
наклона, расположенными перпендикулярно друг другу, и датчиком для измерения температуры среды
в скважине.
В верхней части измерительной штанги с помощью шпильки и цангового зажима крепится первая
ориентирная штанга. Второй конец ориентирной штанги снабжен специальным наконечником с отвер-
стием для установки визирного устройства и посадочной плоскости для установки последующих штанг.
Посадочная плоскость наконечника параллельна или перпендикулярна плоскости измерения одного
из датчиков наклона. Длина ориентирной штанги равна 1,75 м. Остальные ориентирные штанги имеют
описанные наконечники с двух сторон. Технология установки наконечников на штангу обеспечивает
непараллельность посадочных плоскостей не хуже 15 угл. сек. Для того чтобы ориентирные штанги
по мере опускания снаряда не имели контакта со скважиной (из-за опасности затирания) и для обес-
печения безопасности эксплуатации электрического кабеля от датчиков, на каждой штанге имеется
свободно вращающийся резиновый ролик с отверстием, в которое укладывается кабель.
Визирное устройство имеет вид прицельной планки длиной 0,5 м с биссектором и позволяет ориен-
тировать прибор в двух взаимно перпендикулярных направлениях.
На каждой точке наблюдения оно устанавливается в отверстие в наконечнике ориентирной штанги,
перпендикулярной посадочной плоскости. Опускание и подъем измерительного снаряда производится с
помощью тросика, конец которого закреплен на измерительной штанге.
Конструкция инклинометра обеспечивает легкое движение снаряда в стволе скважины и ориенти-
рование его в любом заданном направлении, при этом визирное устройство всегда указывает плоскость
чувствительности одного из датчиков.
В состав датчика наклона входят лазерный датчик перемещения, электромагнитный преобразова-
тель с жесткой обратной связью и прецизионный термостат. В зависимости от сложности решаемых
задач применяются различные конструктивные решения прибора.
Зонд помещен во влагонепроницаемый контейнер. Габаритные размеры съемного контейнера: внеш-
ний диаметр — 60 мм, длина — 170 мм. Схематически прибор изображен на рис. 9.6.1. Разрешающая
способность прибора — 1 угл. сек. На базе 1,75 м погрешность определения планового положения
снаряда равна 0,01 мм. Особо отметим, что способ измерений, примененный в этом приборе, — аб-
солютный. Это означает, что на каждой точке измерений все погрешности за счет несовершенства
балансировки нуля измерительного устройства исключаются при повороте измерительной системы с
помощью жестких на скручивание штанг на 180°. Скважинные измерения проводятся дискретным
методом пошаговым опусканием зонда на фиксированное расстояние, равное 2,24 м.
В зонде установлен датчик температуры, что позволяет дополнительно производить измерения тем-
пературы по стволу скважины с погрешностью не более 0,02°С.
Скважинный инклинометр эксплуатировался на многих объектах для измерения изгибных дефор-
маций. Одним из показательных примеров является работа на 2-ом блоке Бушерской АЭС в Иране,
где требовалось определить плановое положение стволов трех скважин, пробуренных по периметру ре-
акторного отделения. Предполагалось использовать эти скважины глубиной до 100 м для выполнения
сейсмопросвечиваний через зону реактора и вне ее. Знание точного положения скважин в простран-
стве обеспечивало повышение точности томографических построений. Для проведения этих работ был
использован скважинный инклинометр НИ-2. Методика измерений, описанная выше, предусматривала
измерение абсолютных углов наклона скважины, определение с высокой точностью азимута ориенти-
ровки прибора (не хуже 5') и измерение температуры в скважине с точностью 0,02°С. Это позволило
1 — инклинометр, 2 — цифровой регистратор, 3 — объ-
ект исследования, 4 — штанга, 5 — скважина
Рис. 9.6.2. Сравнение результатов измерения пла-
нового положения скважины в трех циклах изме-
рений
определить плановое положение стволов скважин с погрешностью ±1,5 мм при глубине измерений
до 80 м. На рис. 9.6.2 представлен график сравнения результатов измерения планового положения
скважины в трех циклах измерений.
Описанная аппаратура и методика измерений позволяет с высокой точностью определять простран-
ственное положение ствола скважины. При проведении повторных измерений с периодичностью, опре-
деляемой характером изучаемого процесса, существует принципиальная возможность изучения зави-
симости планового смещения грунта с глубиной скважины, что является эффективным средством изу-
чения развития медленных геодинамических процессов, включая оползневые и карстовые, изгибных
деформаций стенки в грунте и т. д.
Последние 10 лет инклинометр широко используется при контроле за деформационными процессами
подземных сооружений в период проведения строительных работ и для изучения оползневых процессов
на склонах р. Москвы в черте города\Дубовской 1993; Алешин, Дубовской 1995а, б]. В ряде случаев
при геофизических изысканиях предложенный метод является безальтернативным.
Послесловие
Б.В. Бровар
1. При подготовке книги «Гравиметрия и геодезия» была поставлена задача передать молодым ис-
следователям накопленные знания и опыт по этим наукам, показать изменения в содержании задач
геодезии и гравиметрии во времени, помочь сориентироваться в море теоретических и технических
проблем, в океане литературы, сыграть роль советчика в выборе собственного пути исследований.
Начинать исследования необходимо с формулирования проблемы, цели и задач, решение которых
с помощью разработанного средства должно привести к решению проблемы и к достижению постав-
ленной цели. При этом следует иметь в виду, что проблема — это противоречие (вопрос); цель —
положительный эффект (повышение точности, оперативности способа или уменьшение размеров и
массы прибора); средство — способ или прибор. В название работы не следует выносить название
проблемы, так как проблема может быть решена различными способами, а выносить следует название
разрабатываемого средства, с указанием его отличительных и ограничительных признаков. Чем больше
ограничительных признаков, тем уже область исследований. Цель не может быть средством или про-
блемой. Сформулированным в работе задачам должны отвечать соответствующие результаты (выводы).
Теория, физические и вычислительные эксперименты, методы и способы создания приборов, аппара-
туры и другой техники являются «средством» для решения «проблем» и достижения поставленных
«целей».
2. Ранее носителями системы геодезических координат были геодезические пункты, которые в ре-
зультате горизонтальных и вертикальных движений земной поверхности изменяли свои координаты
(обычно со скоростями, измеряемыми в мм/год), затем к геодезическим пунктам присоединились ИСЗ
ГНСС, постоянно изменяющие свои координаты (эфемериды) со скоростями, измеряемыми в км/сек.
Но формулировка главной задачи геодезии, в соответствии с теорией Молоденского, — «определение во
времени поверхности и внешнего гравитационного поля Земли в принятой системе координат», — на-
столько обща, что в нее вписываются задачи и «координатно-временного обеспечения», и «координатно-
временного навигационного обеспечения», и «метагеодезии» [Тетерин 2006] применительно к Земле,
отличием которых являются выделенные какие-либо части целого, то есть попытка свести целое к
частному.
Право на введение нового термина необходимо доказывать, как изобретатель доказывает новиз-
ну, отличительные признаки и положительный эффект предлагаемого изобретения по отношению к
принятому аналогу.
3. Внедрение системного подхода можно свести к задаче определения (желательно в небольшом
интервале времени) в заданных точках земной поверхности (пунктах ФАГС, ВГС, и по возможности
СГС-1) трех геодезических координат (GPS/ГЛОНАСС-измерения с ошибкой ~2-3 см), нормальных
высот (нивелирование I-II кл.) и значений УСТ (с ошибкой ~2-5 мкГал) и высот квазигеоида (грави-
метрический метод с ошибкой ~1-2 см). Необходимо согласовать требования различных наук о Земле к
точности измерений времени, геодезических, астрономических и геофизических параметров и данных.
4. Предшествующие поколения геодезистов показали пример настойчивости в достижении цели: по-
требовались гравиметрические данные, и появились полевые маятниковые приборы и астрономические
приборы для определения координат гравиметрических пунктов; потребовалось оперативное производ-
ство гравиметрических измерений, и появились гравиметры. Эффективное (в конечном счете) решение
задач топографо-геодезического, высотного и гравиметрического обеспечения следует искать в ком-
плексировании спутниковых, нивелирных и гравиметрических работ, а также в создании систем типа
каскадного метода. Системно решая свои задачи геодезического обеспечения, геодезия попутно решает
и задачи геодинамики.
5. Повышение точности гравиметрических определений и широкое распространение спутниковых
приемников различного назначения, создание временно и постоянно работающих спутниковых диф-
ференциальных геодезических станций на пунктах ФАГС и ВГС и СГС-1 качественно меняет облик
геодезического обеспечения. Становится практически возможным разделение УСТ на ускорение си-
лы притяжения и центробежное ускорение [Юркина 1996а, с. 165], а также использование чистых
аномалий УСТ [В.В. Бровар 1971] и чистых аномалий ускорения силы притяжения.
6. Как отмечалось в разделе 9.1, смещение возмущающих сил притяжения Луны и Солнца с центра
масс Земли ведет к смещению оси вращения Земли — геометрического места минимальных ускоре-
ний — с этого центра, что может проявиться в гравиметрических наблюдениях. В разложениях гра-
витационных полей Земли и Луны, Земли и Солнца возникают сферические функции первой степени.
Поэтому разработку теоретических вопросов [Авсюк 1981, 1996; Юркина, Бондарева 1989; Юркина
1992; Вильке 2006, 2007] в этом направлении следует продолжить и довести до практики.
7. Вызывает озабоченность монополия баллистического метода определения УСТ, так как достовер-
ным можно считать результат, если он получен независимыми методами. Должен быть независимый
метод абсолютного определения УСТ и соответствующая ему аппаратура — пусть даже громоздкая, но
обеспечивающая ошибку <1 мкГал.
8. Гравиметрический метод использовался сначала как относительный метод, повышающий точ-
ность интерполяции астрономо-геодезических данных, имеющихся в пунктах. После решения задачи
учета влияния аномалий УСТ в дальней области на рассчитываемые высоты квазигеоида и составля-
ющие уклонений отвесных линий, метод применялся как абсолютный. Гравиметрический метод стал
составной частью спутникового нивелирования. Если повысить точность возмущающего гравитацион-
ного потенциала до 5 -10-5, в том числе за счет повышения точности их методов расчета и приведения
гравиметрических и геодезических измерений в единую систему отсчета, то гравиметрический метод
вновь станет абсолютным.
По ряду причин имеется заметное отставание во внедрении разработанных методов определения
различных характеристик гравитационного поля Земли [Остач 1982; В.В. Бровар 1996; В.В. Бровар,
Б.В. Бровар 1999; М.И. Юркина 1996а, в, 2004а и др.].
9. Профессор А.М. Вировец на лекциях, желая показать важность методических ухищрений при
производстве измерений, говорил, что опытному наблюдателю дайте хоть трубу от самовара, он обсто-
ятельно исследует ее и выполнит измерения с необходимой точностью. То, что необходимо исследовать
и приборы, и какому закону подчиняются получаемые измерительные данные — известно всем студен-
там. Но необходимо исследовать и применяемые методы и выявлять их методические ошибки. Примером
могут служить работы акад. В.И. Страхова [1999, 2004], в которых он доказал дефектность методов
М.М. Лаврентьева, А.Н. Тихонова и конструкции «аддитивной регуляризации». Хотя методы регуля-
ризации формально применять на практике можно, В.Н. Страхов и др. [1999] считают необходимой
разработку новых методов, которые были бы свободны от недостатков указанных методов.
10. Математик Жиро выяснил, что задача Молоденского относится к корректным задачам и имеет
единственное, безусловное решение. Решать корректную задачу некорректными методами нерациональ-
но. Принципы учета рельефа, осложняющего связи измеренных аномалий УСТ с плотностью простого
слоя, изложены в работе В.Н. Страхова [2004].
11. Геодезия и гравиметрия — науки, востребованные обществом, развивающиеся, осваивающие
достижения научно-технического прогресса. Качественно более высокий уровень технологий позволяет
разрабатывать геодезические и гравиметрические приборы более точными, портативными и устойчи-
выми к воздействиям и изменениям внешних условий. Наблюдаемые тенденции повышения точности
измерений интервалов времени и отрезков расстояний делают кинематические способы измерений пред-
почтительными. Необходимо создать портативный комплекс высокоточного, оперативного определения
трех геодезических координат и абсолютного УСТ.
12. Повышение точности методов измерений возобновляет интерес к дальнейшей конкретизации
вопроса: «Где и что измеряем? Что и как вычисляем?»
Приложение
Вклад ученых в теорию и практику и эволюция содержания глав-
ных задач геодезии и гравиметрии
Б.В. Бровар, М.И. Юркина
~ 4000 до н. э. - ранние астрономические наблюдения в Египте, Центральной Америке, Англии (Стоун-
хендж) (БС «Астрономы» 1986).
~ 3000 до н. э. — первые астрономические записи в Египте, Вавилоне, Китае (БС «Астрономы» 1986).
2697 до н. э. — древнейшие из сохранившихся сообщений о солнечном затмении (Китай) (БС «Астрономы»
1986).
2315-2287 до н. э. — первые сведения о появлении комет (Китай) (БС «Астрономы» 1986).
Мефрес - властитель в 1125 до н. э. воцарился в верхнем Египте. Его приемник Мисфрагмутосис вступил
в длительную войну с пастухами, которые питались мясом и приносили людей в жертву подобно финикиянам.
Египтяне кормились лишь плодами земли, и им было отвратительно мясоедение. До того времени Греция и вся
Европа были населены кочующими киммерийцами и скифами (по Ньютону [2007]).
Идумеяне (1048-1034 до н. э.) по Ньютону [2007, с. 38-42]: астрономия, мореплавание и письменность появи-
лись у идумеян; они были побеждены и рассеяны Давидом; расселившись вдоль восточного берега Средиземного
моря, называли себя финикиянами. В Египте при правлении Аммона также наблюдали звезды.
Сесак (1002 до н. э.) по Ньютону [2007, с. 47]: в Египте воцарился Сесак, сын Аммона. Он отмерял участ-
ки земли воинам, положив начало практической геометрии, геодезии, межеванию. С Сесаком связано и начало
географии.
1. Представление о мире в древнейших вавилонских сочинениях: Земля имеет вид выпуклого острова,
окруженного океаном, а небо — просто твердый купол, опирающийся на земную поверхность. На этом
куполе прикреплены небесные светила, причем он отделяет воды, находящиеся «внизу» (океан, обтекаю-
щий земной остров), от вод, находящихся «наверху» (дождевых вод). Солнце восходит утром, выходя из
небесных ворот, а вечером, заходя, проходит через западные ворота и ночью движется где-то под Землей.
Мерид (Mceris) (<~ХХ-Х1Х вв. до и. э. по принятой хронологии) — египетский фараон, который
описал совместно основы геодезической съемки (у Ньютона — surveying) и геометрии, заложив
основы этой науки и геодезии. Ньютон приводит 13 вариантов имени этого фараона. Первое дано
в Энциклопедическом словаре Брокгауза и Ефрона (СПб, 1896. М. 37. с. 118). В скобках указано
имя, приведенное в Le Grand Dictionnaire encylopedique Larousse, t. 7, 1984, Paris, с указанием,
как и в русском словаре, что оно было дано озеру, созданному в результате больших ирригационных
работ, выполненных под руководством Мерида, ставшего впоследствии фараоном. Согласно Ньютону
(1728 г. [2007, с. 383]), начало ирригационных работ Мерида относится к 860 г. до н. э. Эти работы были проведены
при фараоне Сенусрете II (Sesostris ou Senousret, см. t. 9, 1985 г. указанного издания, где они отнесены ко времени
<~1906—~1888 до н. э., а также в Большой советской энциклопедии, 3-е издание, т. 9, столбец 85). В. Водовозов
в статье «Египет» в Энциклопедическом словаре Брокгауза и Ефрона, том 11-а СПб, 1894, на с. 523 заметил, что
«Хронологический вопрос о начале египетского государства до сих пор не может считаться решенным; разногласия
между учеными достигают громадной цифры 2079 лет».
Чу Конг (~1100 до н.э.) - китайский астроном, измерил наклон эклиптики к экватору (БС «Астрономы»
1986).
1. Задача геодезии — определение размеров Земли как шара.
Астрономическая эра Набонассара (747 до н. э.) по Ньютону [там же]: начало «астрономической эры
Набонассара».
В VII-VI вв. до н. э. — установление в Вавилоне периодичности повторяемости солнечных и лунных затмений
(БС «Астрономы» 1986). В этот период вавилонские жрецы выполняли интенсивные астрономические наблюдения.
Представления и открытия вавилонских математиков и астрономов после взятия Вавилона (331 до н. э.) войсками
Александра Македонского были переданы Аристотелю. Этими результатами воспользовались и другие греческие
астрономы: Гиппарх (II в. до н. э.), Клавдий Птолемей (И в. н. э.) Жрецы Вавилона и Египта могли предсказывать
солнечные затмения. Ориентировка египетских пирамид указывает, что их строителям было известно понятие
о меридиане. Шарообразность Земли была известна в Древнем Египте. Высокий уровень развития астрономии
и геометрии позволил определить размеры Земли. В арабских источниках IX-XI вв. сохранились результаты
древних определений размеров Земли, выраженные в вавилонской, сирийской и других мерах длины. В частности,
приписанная легендарному древнеегипетскому мудрецу Гермесу (Тотхе) длина земной окружности в метрической
мере составляет 40005 км. Труды Гермеса хранились в Александрийской библиотеке [Клименко 1980].
Пифагор Самосский (580-500 до н. э.) — древнегреческий мыслитель, религиозный и поли-
|В^В тический деятель, математик. Основатель пифагореизма, исходившего из представления о числе
как основе всего существующего. Числовые соотношения — источник гармонии космоса, структура
которого мыслилась как физико-геометрико-акустическое единство. С его именем связывают систе-
матическое введение доказательств в геометрию, построение планиметрии прямолинейных фигур,
создание учения о подобии, доказательство теоремы, носящей его имя, учение о четных и нечетных,
простых и составных, о фигурных и совершенных числах, об арифметических, геометрических и
гармонических пропорциях и средних. По легенде, Пифагор первым из греческих ученых высказал
идею о шарообразности Земли, свободно висящей в мировом пространстве. Возможно, он узнал об этом от вави-
лонских или египетских жрецов, и даже их определения размеров Земли. По древним свидетельствам, Пифагор
долго пребывал в Египте и учился у гелиопольского жреца Ониуфиса [Клименко 1980].
Демокрит (460-370 или 360 до н. э.) — древнегреческий материалист. Разработал атомистиче-
скую теорию мира, сыгравшую большую роль в развитии естествознания и философии. Согласно
его взглядам, вселенная бесконечна, ее материя вечна, а количество миров бесчисленно, некоторые
из миров похожи друг на друга, другие — совершенно отличны. Эти тела не есть постоянное: они
возникают и исчезают, находясь в различных стадиях развития. Белесоватую мерцающую полосу
Мр&уАу на небе (Млечный Путь) Демокрит принимал за скопление колоссального количества весьма тесно
расположенных звезд. Звезды называл очень далекими солнцами; о Луне говорил, что она похожа
на Землю, имеет горы, долины и т. д. Его взгляды были явно атеистичны, они считались «опасными»
для народных масс. Чтобы помешать их распространению, например, Платон и его ученики скупали
сочинения Демокрита и уничтожали их (до нас дошли лишь незначительные отрывки из них). В результате этого
смелые материалистические идеи Демокрита имели лишь незначительное влияние в ту эпоху, когда они возникли.
2. Представление о Земле у древних греков: шар в гелиоцентрической системе Вселенной.
Евдокс Книдский (<~408-355 до н. э.) — путешествовал по Греции и Египту, где обучался в
Гелиопольской астрономической обсерватории близ Каира. После путешествия поселился на родине в
Книде, основал обсерваторию, школу математиков и астрономов. Построил теорию движения планет
как комбинацию вращений 27 концентрических сфер, с учетом ретроградного движения планет.
Труды Евдокса изучал Эратосфен. Эти труды дошли до нас только в пересказе других ученых
[Huxley 1971; Клименко 1980].
Платон (427-347 до н. э.) (прозвище - широкий; настоящее имя — Аристокл) — древнегре-
ческий философ-идеалист, ученик Сократа, основатель школы, получившей название Академии. По
утверждению В. И. Вернадского, Платон склонялся, как и его последователи, к гелиоцентрической
системе устройства мира. То есть, видимо, допускал и другие варианты. Его же последователь Ари-
старх Самосский без колебаний утверждал, что Земля вращается вокруг Солнца, находящегося в
центре сферы неподвижных звезд.
1. Представление о гравитационном поле Земли по Аристотелю: скорость падения
тел пропорциональна их весу.
Аристотель (384-322 до н. э.) — древнегреческий философ и ученый, ученик Платона. Сочине-
ния Аристотеля охватывают все отрасли тогдашнего знания. Считал, что Земля имеет сферическую
форму, так как тень Земли при затмении Луны круглая. Дана ссылка на математиков, вычислив-
ших длину окружности Земли, равную 400000 стадиям. Способ определения математиками длины
окружности Земли неизвестен. Полученная величина приблизительно в два раза больше действи-
тельной. Гравитационное ускорение описывается по его теории, в которой скорость падения тел пропорциональна
их весу. С точки зрения прогресса естественно-научного миропонимания, древнегреческая идеалистическая фило-
софия, достигшая наивысшего развития в учении Аристотеля, несомненно являлась шагом назад по сравнению с
учением Демокрита.
Ши Шень (IV в. до н. э.) — китайский астроном, составил звездный каталог, содержавший 800 звезд.
Эпикур (341-270 до н. э.) — философ античного материализма. Отстаивал учение о бесчисленно-
сти миров и ясно показал, что из этого учения необходимо вытекает представление о пространствен-
ной бесконечности вселенной. Бесконечность вселенной Эпикур выводил из того, что «вселенная»
означает «всесодержащая», так что вне ее ничего нет и быть не может. Он утверждал: «Вселенная
бесконечна, пространство не имеет ни низа, ни верха, ни какого-нибудь окончания; вселенная беско-
нечна, потому что все ограниченное имеет нечто вне себя; внешнее ведь предполагает другое рядом с
собой, с чем и можно было бы его сравнить, но именно такого другого нет рядом со вселенной и ни с
чем поэтому ее нельзя сопоставить. Таким образом, нет ничего внешнего, и поэтому у вселенной нет
границ — следовательно, она — бесконечна н неограниченна». Связывал гравитацию со свойством
атомов.
Аристарх Самосский (320-250 до н. э.) — древнегреческий астроном, первым высказал идею ге-
лиоцентризма: утверждал, что Земля движется вокруг неподвижного Солнца, находящегося в центре
сферы неподвижных звезд.
Евклид (III в. до н. э.) — древнегреческий математик, работал в Александрии. Главный труд «На-
чала» (15 книг), оказавший огромное влияние на развитие математики, содержал основы античной
математики: элементарной геометрии, теории чисел, общей теории отношений и метода определения
площадей и объемов, включавшего элементы теории пределов. Евклид имел работы по астрономии,
оптике, теории музыки.
Эратосфен Киренский (276-194 до н. э.) — древнегреческий ученый, ученик Евклида, заложил
основы математической географии, имел труды по математике (теория чисел), астрономии, филоло-
гии, философии, музыке. Был главным хранителем Александрийской библиотеки. Перешел к счету
времени от устанавливаемого по правлениям царей и династий к устанавливаемому по векам и
годам. Впервые измерил дугу меридиана (в Египте) и определил с погрешностью ~2% радиус земно-
го шара на основании геометрических (астрономо-геодезических) принципов, получивших название
градусных измерений. Ввел координатную сетку в виде меридианов и параллелей.
Архимед (287-212 до н. э.) — древнегреческий математик и механик, родом из Сиракуз, опреде-
лил площади, поверхности и объемы различных фигур и тел посредством разработанных им методов,
ИОг которые через два тысячелетия развились в интегральное исчисление, дал в основоположных работах
Ий Г по статике и гидростатике образцы систематического применения математики к задачам естествозна-
ния и техники, применял физико-математические знания к конструированию разнообразных машин
и сооружений. Предложил определение понятия о центре масс. Его принцип определения центра
,| массы соответствует определению центра притяжения сферически несимметричных небесных тел. В
его трудах указана длина земной окружности 300000 стадий, возможно, из того же источника, что
и у Аристотеля [Клименко 1980].
1. Задача гравиметрии — измерение удельного веса тел.
Гиппарх (190-125 до н. э.) — древнегреческий ученый, один из основоположников астрономии.
впервые поставивший ее на научную основу, разработал две теории видимого движения Солнца:
одну - с эксцентрическими кругами, другую - с эпициклами, определив элементы этого движения,
вычислил длину солнечного (тропического) года с ошибкой, не превышающей 6 мин. Создал теорию
движения Луны, определил расстояние до Луны, составил таблицы движения Солнца и Луны и
каталог положений 850 (или 1022) звезд, в котором разделил их по блеску на 6 классов, ввел гео-
графические координаты, составил таблицу хорд, используемую для определения синусов. По оценке
И. Ньютона [2007, с. 156] «... первым из всех пришел к выводу, что точки равноденствий смещают-
ся назад по сравнению с неподвижными звездами». Ньютон назвал Гиппарха великим астрономом.
О прецессии, видимо, узнал у египтян. Звездный каталог Гиппарха вошел в «Альмагест» Птолемея.
Птолемей Клавдий (90-160 н. э.) — древнегреческий ученый, большую часть жизни провел в
Александрии, где в 127-151 гг. производил астрономические наблюдения, создатель геоцентрической
системы мира, разработал математическую теорию движения планет вокруг неподвижной Земли, поз-
волявшую предвычислять их положение на небе. Система Птолемея изложена в его труде «Великое
математическое построение астрономии в XII книгах», получившем название «Альмагест», — эн-
циклопедии астрономических знаний древних. «Альмагест» содержит изложение прямолинейной и сферической
тригонометрии, таблицу синусов, описание астрономических инструментов, два из которых (астролябия и стенной
круг) были введены им в употребление, каталог положений и величин 1022 (или 1025) звезд. В труде «География»
дана сводка географических сведений античного мира: дана картографическая сетка в современном ее понимании
и составлена карта от Скандинавии до Верховьев Нила и от Атлантического океана до Индокитая.
Ж Чжан Хэн (78-139) — китайский астроном и математик. Родился в г. Наньяне. Несколько лет
был придворным астрономом, в 116 покинул столицу и поселился в провинции. Изобрел несколько
астрономических инструментов. Армиллярная сфера - прибор, состоящий из нескольких взаимо-
связанных металлических колец, каждое из которых соответствует различным кругам на небесной
сфере (экватору, меридиану, эклиптике). Окружность в армиллярной сфере Чжана Хэна разделена
на 365 1/4 градуса (по числу дней в году). Изготовил планетарную армиллярную сферу, на которой
были показаны взаимные положения Солнца, Луны, пяти планет и звезд. Этот прототип современ-
ных планетариев приводился в движение водой из клепсидры. Многие годы изучал небо и наблюдал за движением
светил с помощью изобретенных им инструментов. Описал 2500 видимых в Китае звезд и сгруппировал их в
124 созвездия. Одним из первых правильно объяснил причину лунных затмений и заключил, что Луна отражает
свет Солнца, объяснил смену фаз Луны. Определил величину наклона плоскости эклиптики к экватору равной
24 китайским градусам (23°40' в принятой теперь угловой мере). В своей книге «Армиллярная сфера» (ок. 120)
изложил теорию «Беспредельное небо», согласно которой Вселенная безгранична во времени и пространстве (БС
«Астрономы», 1986).
3. Представление о Земле в Европе: плоский земной остров.
И Синь (683-727) — китайский астроном, монах, в 723 выполнил измерения Полярной звезды
и длины теней от предметов, освещаемых Солнцем. Полученная длина дуги 1° вдоль меридиана
AjsrfjBi приблизительно на 20% больше действительной. Сравнивая полученные им координаты звезд с ко-
ординатами, известными из более ранних источников, установил, что некоторые звезды созвездия
Стрельца изменили свое положение, и на этом основании высказал идею о существовании собствен-
/KmKSk, ного движения звезд, которое было открыто Э. Галлеем спустя тысячелетие. Изготовил вращающий-
** ИГ ся звездный глобус (БС «Астрономы» 1986).
Абдалла аль-Мамун (814) — калиф, в период правления которого арабы определили расстояние,
при котором высота Полярной звезды изменяется на 1°. Длина дуги 1° вдоль меридиана получилась
приблизительно на 20% меньше действительной.
Ибн Юнис (Абу-л-Хасан Али ибн Аби Саид, Абд ар-Рахман ибн Ахмад ибн Юнис ас-Садафи) (950-1009) —
арабский астроном, работал около Каира, составил употреблявшиеся около двухсот лет таблицы движения Луны,
Солнца и планет, измерил время с помощью маятника. Открыл вековое ускорение среднего движения Луны. Ре-
зультаты его астрономических наблюдений были использованы спустя восемь веков как доказательство изменений
эксцентриситета земной орбиты.
4. Представление о Земле: шар в геоцентрической системе Вселенной.
2. Задача геодезии - определение размеров Земли как шара.
2. Представление о ГПЗ: действующая между телами сила притяжения пропорциональна их массам и
расстоянию между ними (Аль-Хазини XII в).
Аль-Хазини (XII в.) — арабский ученый, считал, что действующая между телами сила притяжения пропор-
циональна их массам и расстоянию между ними. Упоминание об этом есть у И. Ньютона в «Началах», книга I,
Раздел XIII, Предложение 88, теорема 45 и Предложение 89, Теорема 46.
Го Шоуцзин (1231-1316) — китайский астроном и математик. Занимал должности главного
t астронома, инспектора ирригационных сооружений, был членом палаты ученых при императорском
дворе. По его проекту построена Чжоугунская обсерватория, на которой был установлен гномон вы-
сотой 12,8 м. Создал 13 астрономических приборов (армиллярные сферы, эллиптические теодолиты,
квадранты, небесные глобусы и др.), многие из которых имели круги, разделенные на градусы и
четвертные доли градуса. Разработал календарь «Шоуши ли», который был введен в Китае в 1281.
По этому календарю продолжительность года составляет 365,2425 суток, т. е. совпадает с продолжи-
______ тельностью года по современному григорианскому календарю, введенному в Европе на три столетия
’ позже. Был противником астрологии, по его настоянию из календаря исключены разделы предска-
' заний земных событий по расположению небесных светил.
Улугбек Мухаммед Тарагай (1394-1449) — узбекский астроном и математик, в окрестностях Са-
yjflh марканда создал в 1428-1429 совместно с привлеченными им астрономами обсерваторию, по своему
оснащению и результатам проведенных работ не имевшую себе равных ни в его эпоху, ни много
позднее. Важнейший труд - «Новые астрономические таблицы» - содержит изложение теоретиче-
ских основ астрономии и каталог положений 1019 звезд (издан в 1665 в Оксфорде), определенных
после Гиппарха и с точностью, остававшейся непревзойденной до наблюдений Тихо Браге. Этот каталог, планетные
таблицы, а также определения наклона эклиптики к экватору, годичной прецессии, выполненные на обсерватории.
имели большое значение для развития астрономии.
5. Представление о Земле: шар в гелиоцентрической системе Вселенной при неподвижных звездах
(Коперник, XVI в.)
Коперник Николай (Kopernik, Copernicus) (1473-1543) — польский астроном, совершил перево-
рот в естествознании, предложив заменить геоцентрическую систему Вселенной, принятую в течение
многих веков, гелиоцентрической, и объяснил видимые движения небесных светил вращением Земли
вокруг оси и обращением планет, в том числе Земли, вокруг Солнца. Звезды считал неподвижными.
Свое учение изложил в сочинении «Об обращениях небесных сфер», 1543.
Фризий Гемма (1508-1555) - применил прямые засечки с концов измеренного базиса для уточ-
нения топографической съемки. В «Принципах астрономической космографии» предложил хрономет-
рический метод определения долготы, но в то время точные и компактные часы еще не были созданы.
Меркатор Герард (Mercator Gerardus) (van Kremer) (5.3.1512-2.12.1594) — фламандский кар-
тограф, предложил новые математически обоснованные принципы составления карт. Предложенная
им картографическая проекция (1569) получила всеобщее распространение при создании морских и
других навигационных карт. Исследуя земной магнетизм, вычислил координаты магнитного полюса.
Итогом его деятельности явился сборник карт европейских стран, изданный после его смерти (1595)
и получивший название «Атлас».
Фернель (1527) сосчитал число оборотов колеса экипажа в Париже и получил результат, экви-
валентный длине окружности Земли 36500 км.
Браге Тихо (1546-1601) — датский астроном, в 1576 построил обсерваторию на острове Вен близ
Копенгагена, наблюдал новую звезду в созвездии Кассиопеи, открыл два неравенства в движении
Луны (годичное неравенство и вариацию), доказал, что кометы представляют собой небесные тела,
отстоящие от Земли дальше Луны, составил таблицы рефракции. Предложил собственную систему
мира, представляющую сочетание учения Птолемея с системой Коперника: Солнце движется вокруг
Земли, стоящей в центре мироздания, а планеты — вокруг Солнца. В 1597 вынужденно переехал в
Германию, затем в 1599 в Прагу, где в помощники к нему поступил Кеплер. Ценнейшие наблюдения
Т. Браге, оставшиеся Кеплеру после его смерти, послужили основанием для вывода законов движения планет.
3. Представление о ГПЗ: путь, пройденный свободно падающим телом, в первую секунду своего па-
дения численно равен половине ускорения силы тяжести. Открытие законов инерции и падения твердого
тела (Галилей, 1590).
Галилей Галилео (Galilei) (1564-1642) - итальянский ученый, выдвинул идею об относительно-
сти движения, установил законы инерции, движения тел по наклонной плоскости, сложения движе-
ний, произвел в 1590 первое определение силы тяжести и открыл закон падения твердого тела, по
которому путь, пройденный свободно падающим телом, в первую секунду своего падения численно
равен половине ускорения силы тяжести: h — д/2. Открыл изохронность колебаний маятника, пер-
вым исследовал прочность балок, построил телескоп с 32-кратным увеличением и открыл горы на
Луне, 4 спутника Юпитера, фазы Венеры, пятна на Солнце. Активно защищал гелиоцентрическую
систему мира, за что был подвергнут суду инквизиции (1633).
Кеплер Иоганн (1571-1630) — немецкий астроном, открыл три закона движения планет. 1-ый за-
кон Кеплера: каждая планета движется по эллипсу, в одном из фокусов которого находится Солнце.
2-ой закон Кеплера: каждая планета движется в плоскости, проходящей через центр Солнца, причем
площадь сектора орбиты, описанная радиусом-вектором планеты, изменяется пропорционально вре-
мени. 3-ий закон Кеплера: квадраты времен обращения планеты вокруг Солнца относятся как кубы
их средних расстояний от Солнца. Законы Кеплера были объяснены и уточнены И. Ньютоном на
основе закона тяготения.
Снеллиус Виллеброрд (Snellius) (1580-1626) — нидерландский астроном и математик, установил
закон преломления света, нашел решение задачи Потенота, имел труды по плоской и сферической
тригонометрии. В Голландии и Франции в 1615-1617 им проведены первые градусные измерения с
применением метода триангуляции. Градусные измерения позволяют приближенно определять сред-
ние кривизны уровенной поверхности Земли на изучаемых отрезках дуг.
Кавальери (Cavaglieri) Бонавентура (1598, Милан - 30.11.1647, Болонья), итальянский матема-
тик. Монах ордена иеронимитов. С 1629 по рекомендации Г. Галилея занимал кафедру математики
в Болонском университете. В труде «Геометрия» (1635) Кавальери развил новый метод определе-
ния площадей и объемов, так называемый «неделимых» метод. Неделимыми Кавальери называются
параллельные между собой хорды плоской фигуры и параллельные плоские сечения тела. Ввел по-
нятие «суммы всех неделимых», проведенных внутри контура фигуры. Отношение двух «сумм всех
неделимых» явилось зародышевой формой отношения двух определенных интегралов. Труды Кава-
льери сыграли большую роль в формировании исчисления бесконечно малых. На родине Кавальери, в Милане,
ему поставлен памятник.
Гевелий Ян (Hevelius) (1611-1687) — польский астроном, основатель селенографии. Построил
Н обсерваторию в Гданьске. Создал первые подробные карты Луны, изданные в книге «Селенография,
или описание Луны» 1647, открыл ее оптическую либрацию. Составил первый систематический
обзор всех наблюденных комет и каталог положений 1564 звезд, имевший ошибку 2'. Открыл 4
кометы.
Меркатор Николаус (Kaufmann) (1620-1687) — немецкий математик, астроном, инженер. Учился
и работал в Копенгагене, в 1660 переехал в Лондон, позднее работал в Париже. Основное матема-
тическое сочинение «Логарифмотехник» (1668) содержит разложение 1п(1 +з;) в ряд, что является
первым (после геометрической прогрессии) примером степенного разложения. Во Франции участвовал в сооруже-
нии фонтанов Версаля.
Пикар Жан (Picard) (1620-1682) — французский астроном в 1669-1670 использовал телескоп
для измерения углов, и из наблюдений звезды в созвездии Кассиопея пришел к выводу, что вблизи
‘ Парижа длина дуги 1° равна 111,2 км. Результат Пикара получен с ошибкой 0,1%. Пришел к выводу,
ФЗ что Земля не имеет точной формы шара. Ему принадлежит идея определения прямых восхождений
п0 наблюдениям моментов прохождения звезд через меридиан с помощью маятниковых часов. Пред-
1 «• ® k » J дожил установить в меридиане квадрант (1669), что было сделано Парижской обсерваторией (1683).
Основал астрономический ежегодник (1679), был составителем и редактором его первых 4 томов.
Данные о размерах Земли, полученные Пикаром, были использованы И. Ньютоном для численного подтверждения
закона всемирного тяготения.
Кассини Джованни Домениеко (Cassini) (Жан Доминик) (08.06.1625-1712) — французский
е (итальянец по происхождению) астроном и геодезист, родился в Италии. Астрономическое образо-
вание получил под руководством Дж.Б. Риччиоли и Ф.М. Гримальди. С 1650 работал профессором
в Болонском университете. В 1669 переехал во Францию. Управлял строительством Парижской об-
серватории, а затем руководил ею до конца жизни. В 1662 опубликовал составленные им солнечные
таблицы. Разработал первую точную теорию атмосферной рефракции. В 1664 определил период вра-
щения Юпитера, его сжатие и описал его систему полос. Установил период осевого вращения Марса.
В 1668 издал таблицы движения спутников Юпитера. Кассини открыл спутники Сатурна: второй — Япет (1671),
третий - Рею (1672), еще два — Тетис и Диону (1684). В кольце Сатурна выделил две части, разделенные темной
полосой, предположил, что кольцо состоит из отдельных частиц. Составил карту Луны (1679), дал первое научное
объяснение зодиакального света (1683). В 1672 наблюдал Марс во время противостояния одновременно с Ж. Реше
и Ж. Пикаром. В итоге получено первое приемлемое значение параллакса (9,5"). Кассини продолжил градусные
измерения Пикара по французской дуге меридиана. Недостаточная точность измерений и близость сравниваемых
частей дуги меридиана привели его к ошибочному выводу, что Земля сжата по экватору. Кассини положил на-
чало династии, четыре поколения которой руководили Парижской обсерваторией, внесли значительный вклад в
астрономию и геодезию, составили первую правильную карту Франции.
4. Представление о ГПЗ: открытие закона колебаний физического маятника (Гюйгенс, 1673).
Гюйгенс Христиан (Ch. Huygens) (1629-1695) — нидерландский ученый, изобрел маятниковые
часы со спусковым механизмом, дал их теорию, установил законы колебаний физического маятника,
заложил основы теории удара (1657). Дал зависимость между периодом колебания S маятника и его
длиной I (1673). Создал в 1678 и опубликовал в 1690 волновую теорию света, объяснил двойное
лучепреломление. Совместно с Р. Гуком установил постоянные точки термометра. Усовершенство-
вал телескоп. Автор одного из первых трудов по теории вероятностей (1657). В работе «О причине
тяжести» (1690) определил сжатие Земли (1:578) при крайне неоднородной плотности, когда вся
земная масса сконцентрирована в ее центре, полагая силу притяжения на поверхности и внутри Зем-
ли постоянной и всегда направленной к центру, имея в виду отличие формы Земли от сферической,
обусловленное центробежной силой, и считая земную поверхность уровенной и перпендикулярной
силе тяжести. В.И. Вернадский считал, что, по-видимому, Гюйгенс первым пришел к принципу со-
хранения энергии.
Гук Роберт (Hook Robert) (1635-1703) — английский естествоиспытатель, энциклопедист, раз-
носторонний ученый и экспериментатор, архитектор и градостроитель. Открыл (1660) названный его
именем закон, устанавливающий линейную зависимость между упругой деформацией твердого тела
и приложенным механическим напряжением. Высказал гипотезу тяготения. Сторонник волновой теории света.
Улучшил и изобрел многие приборы, установил (совместно с X. Гюйгенсом) постоянные точки термометра. Усовер-
шенствовал микроскоп и установил клеточное строение тканей, ввел термин «клетка». В книге 1674 опубликовал
идею движения планет и закона всемирного тяготения в виде трех предположений: 1) небесные тела притягивают
вещество к своим центрам, не только свои собственные части, но и другие небесные тела, которые находятся внут-
ри сферы их действия, 2) все тела сохраняют прямолинейное движение, пока на них не подействуют какие-либо
внешние силы, 3) силы притяжения тем более мощны в своем действии, чем ближе находится тело, на которое
они действуют. М.В. Ломоносов и современные астрономы, включая международные службы, следуя Гуку, счита-
ли и считают, что действующие на Землю силы притяжения Луны и Солнца проходят через центр земной массы,
тогда как из-за земного сжатия такие силы могут быть смещены с этого центра, что отмечено во многих работах
Л. Эйлера. В цикле лекций, спонсированном Джоном Катлером, освещал вопросы механики, гравитации, земле-
трясений. Предвидел изменяемость УСТ с местом наблюдения и со временем, изменяемость земного сжатия со
временем, движение полюсов земного вращения. С 1677 г. - секретарь Королевского общества (Боголюбов А.Н.,
1984, Роберт Гук. М.: Наука, 240 с.)
Норвуд (1637) — измерил расстояние от Лондона до Йорка шагами и с помощью каната. Измерив также
высоту Солнца в меридиане, он получил длину дуги 1°, равной 367 196 футов, или приблизительно 90,9 км.
Рише Жан (Richer Jean) (1640-1696) — французский астроном, член французской академии (1666). По пору-
чению академии вел астрономические, приливные и гравиметрические наблюдения во Франции, в Новой Англии
(Северная Америка) и во французской Гвиане в Кайенне (на 5° севернее экватора. Южная Америка). По его аст-
рономическим наблюдениям были уточнены наклонность эклиптики и астрономическая единица. Обнаружил, что
астрономические часы с маятником постоянной длины, выверенные в одном месте, изменяют свой ход в другом
месте вследствие различия УСТ в пунктах наблюдений (1672). Длина секундного нитяного маятника вблизи эк-
ватора оказалась короче, чем в Париже на линию с четвертью. В 1738 в газете «Санкт-Петербургские ведомости»
Л. Эйлер написал, что гравиметрические наблюдения Рише в Кайенне и во Франции установили форму Земли
как сжатого эллипсоида до французских экспедиций в Лапландию и Перу (Е. Rosen. Jean Richer. Dictionary of
Scientific biography, v. 11, 423-425. №4. ch. Scribner’s sons, 1975).
5. Представление о ГПЗ: открытие закона всемирного тяготения - основного фактора, определяющего
форму небесных тел, и основных законов классической механики (Ньютон, 1687).
3. Задача геодезии: определение размеров Земли как эллипсоида. Первые определения сжатия: Ньютон
1687, Гюйгенс 1690.
2. Задача гравиметрии — изучение способов измерения силы тяжести и использование результатов
этих измерений для определения сжатия фигуры Земли.
Ньютон Исаак (Newton I.) (4.1.1643-31.3.1727) — английский математик, механик, астроном
а и физик, обосновал закон всемирного тяготения, открыл основной фактор, определяющий форму
планеты. Разработал независимо от Г. Лейбница дифференциальное и интегральное исчисление,
открыл дисперсию света, хроматическую аберрацию, исследовал интерференцию и дифракцию, раз-
вивал корпускулярную теорию света, высказал гипотезу, сочетавшую корпускулярные и волновые
представления, построил зеркальный телескоп. Сформулировал основные законы классической ме-
ханики, дал теорию движения небесных тел, создав основы небесной механики. Пространство и
время считал абсолютным. Определил сжатие уровенной поверхности однородной Земли (1687). Дал
первую формулировку теоремы о связи силы тяжести и широты места, названную именем Клеро.
Был директором Монетного двора, наладил монетное дело в Англии. Занимался хронологией древних царств.
Лейбниц Готфрид Вильгельм (Leibniz) (1.07.1646-14.11.1716) — немецкий философ, математик.
физик, языковед, один из создателей дифференциального исчисления и интегрального исчисления,
предвосхитил некоторые моменты современной математической логики («Об искусстве комбинато-
рики», 1666). В 1663 окончил университет со степенью бакалавра и званием De Principle Individui.
В 1663 приступил к написанию докторской диссертации, которую позже успешно защитил. В 1666
вышла в свет его первая книга «Dissertatio de arte combinatoria». С 1667 жил во Франкфурте и ра-
ботал над различными проектами в области политики, литературы и науки. При этом он продолжал
заниматься правом. Одной из основных жизненных целей ученого стала унификация всех конфессий
и классификация всех знаний, накопленных человечеством за всю его историю. Он первым пред-
положил, что, возможно, Земля изначально находилась в расплавленном состоянии. Был одним из
главных разработчиков бинарной системы исчисления.
Бернулли Яков (Bernoulli Jacob) (1654-1705) — швейцарский математик, выходец из Голландии,
положил начало вариационному исчислению, обнаружил расходимость гармонического ряда, решил
некоторые задачи комбинаторики и открыл числа, позднее названные бернуллиевыми числами, дока-
зал «теорему Бернулли» — важный частный случай закона больших чисел, имеющего основное значение в теории
вероятностей и ее приложениях к статистике. Работал в области физики по определению центра качания тел и
сопротивления тел различной формы, движущихся в жидкости. Им показана форма «упругой линии», которая
образуется упругим стержнем, один конец которого закреплен, а другой несет на себе груз.
Бернулли Иоганн (Bernoulli Jean) (1667-1748) — швейцарский математик, младший брат Якоба
Бернулли, был деятельным сотрудником Лейбница в разработке дифференциального и интегрально-
го исчислений, в области которых им был сделан ряд открытий: учение о показательных функциях;
правило раскрытия неопределенностей вида 2, несправедливо носящее имя Лопиталя; интегрирова-
ние рациональных дробей и др. Поставил и классическую задачу о геодезических линиях и нашел
характерное геометрическое свойство геодезических линий, а позднее вывел их дифференциальное
уравнение. Ему принадлежат ценные исследования по механике: теория удара, движение тел в со-
противляющейся среде, учение о живой силе, аналитическое правило равновесия, дал четкое понятие
работы.
Маклорен Колин (С. Maclaurin) (1698-1746) — шотландский математик, установил интеграль-
ный признак сходимости числовых рядов, называемый теперь признаком Коши, доказал, что сжатый
сфероид действительно является фигурой равновесия жидкой массы, которая вращается с постоян-
ной угловой скоростью около неизменной оси, совпадающей с малой осью сфероида, использовал
термин «level surface» в связи с фигурой Земли.
Мопертюи Пьер Луи Моро де (Maupertuis) (1698-27.07.1759) — французский ученый, член Па-
рижской АН (1743), иностранный почетный член Петербургской АН (1738), президент Берлинской
АН (1745-1753). В 1718-22 служил в армии; с 1723 числился при Парижской АН. В 1741 переехал в
Берлин. В 1736-1737 руководил градусными измерениями в Лапландии (Финляндии), результаты их
показали, что Земля — сфероид, сплюснутый у полюсов. Впервые сформулировал принцип наимень-
шего действия (1740). Автор трудов по математике, астрономии, географии, биологии и философии.
Буге Пьер (Bouguer Р.) (1698-1758) — французский ученый, сторонник Ньютона. В 1734 срав-
нил величины силы тяжести при действии законов плотности земли по Ньютону и Гюйгенсу и ввел
термин «1е niveau» — уровень. Участвовал в экспедиции французской академии в Перу 1735-43.
Описал градусные измерения в Перу, охарактеризовал уровень моря как неправильную сложную по-
верхность, длина градуса которой меняется от места к месту (1744). Описал редукцию силы тяжести
его имени (1749), отметил возможность изостатической компенсации Анд, заметил, что их влияние
на геодезические измерения меньше, чем следовало бы по их массе над уровнем моря.
Бернулли Даниил (Bernoulli Daniel) (1700-1782) — швейцарский математик, сын Иоганна Бер-
нулли, занимался физиологией, медициной, но больше всего математикой и механикой. Академик
и иностранный почетный член Петербургской АН. Ему принадлежат: метод численного решения
алгебраических уравнений с помощью возвратных рядов; работы по обыкновенным дифференциаль-
ным уравнениям, по теории вероятностей с приложением к статистике народонаселения и, отчасти,
к астрономии. В работе о колебании струны (1755) впервые применил к решению соответствующего
дифференциального уравнения с частными производными тригонометрические ряды, впоследствии
названные рядами Фурье. Вывел носящее его имя основное уравнение стационарного движения иде-
альной жидкости. Швейцарские математики Бернулли разработали теорию физического маятника
(1691-1726).
Коцдамин Шарль Мари де ла (Condamine) (1701-1774) - французский геодезист, иностранный
почетный член Петербургской АН (1754). Участник Перуанской экспедиции по измерению дуги
меридиана в Андах (1735-1742). Им были предприняты попытки измерений УСТ с использованием
нитяного маятника.
Эйлер Леонард (Euler) (1707-1783) — по происхождению швейцарец, родился в Базеле. Мате-
матик, механик, физик и астроном, ученик И. Вернули, жил в Петербурге (1727-41 и 1766-83 гг.) и
Берлине (1741-66 гг.) Академик Берлинской и Петербургской академий наук. Его список трудов со-
держит примерно 850 названий, при жизни опубликовано около 550 книг и статей. Его круг занятий
охватывал все отделы современной ему математики и механики, теории упругости, математическую
физику, оптику, теорию музыки, теорию машин, баллистику, морскую науку, страховое дело и т. д.
В 40-е и 50-е годы участвовал в нескольких научных и философских дискуссиях: против учения о монадах и пред-
установленной гармонии Лейбница и Вольфа, спорил с Ж. Даламбером о свойствах логарифмов отрицательных и
мнимых чисел, с Ж. Даламбером и Д. Бернулли - о природе решений дифференциального уравнения колеблющей-
ся струны. Его работы по механике с 1736 пронизаны использованием понятия о потенциале силы. Он выразил
явно потенциал притяжения материальной точки, понятие о потенциале силы тяжести использовал, закладывая
основу барометрического нивелирования для атмосферы в статическом равновесии. Составил дифференциальное
уравнение для жидкости и газа, связывающее приращения давления и потенциала силы с плотностью вещества. •
Высказал соображения о форме уровенных поверхностей потенциала силы тяжести в пространстве, в частности
далеко от Земли. Составил уравнение, связывающее вторые частные производные от гармонической функции по
декартовым координатам, называемое именем Лапласа. Развивая основы статической теории приливов, рассмотрел
разность влияний возмущающего небесного тела на исследуемую точку и центр Земли. Развил динамическую
теорию вращения твердого тела, в частности небесного.
Бошкович Руджер Иосип (Boskvic) (1711-1787) — физик, математик, астроном, геодезист, по-
четный член Петербургской АН с 1760 г., родился в Дубровнике (Далмация), работал в Италии,
Франции. Подготовил диссертацию «О фигуре Земли» (1739). В работе «Изменяемость силы тя-
жести» (1741) высказал сомнение в возможности представить фигуру Земли точным эллипсоидом
вращения. В основном труде «Теория натуральной философии» (1758) развил качественную теорию
строения вещества и высказал гипотезу о едином универсальном законе взаимодействия частиц.
Ломоносов Михаил Васильевич (1711-1765) — русский ученый-естествоиспытатель, поэт, ху-
дожник, историк. С 1742 - адъюнкт, с 1745 - первый русский академик Петербургской АН. Развивал
атомно-молекулярные представления о строении вещества. В противоположность теории теплорода
утверждал, что теплота обусловлена движением корпускул. Сформулировал принцип сохранения ма-
терии и движения. Создал ряд оптических приборов. Открыл атмосферу на планете Венера. Описал
строение Земли, объяснил происхождение многих полезных ископаемых и минералов. Считал (вслед
за Гуком), что притягивает центр Земли. Опубликовал руководство по металлургии. Возродил ис-
кусство мозаики и производство смальты. Поставил задачу определения изменения УСТ с течением
времени (1756), построил оригинальную аппаратуру, и в том числе прибор, предназначенный для
регистрации периодических суточных вариаций УСТ.
Клеро Алексис Клод (A. Clairaut) (1713-1765) — французский математик, развил теорию фи-
гуры и внутреннего строения Земли, вращающейся в гидростатическом равновесии, установил за-
висимость между скоростью вращения, сжатием и плотностью слоев внутри Земли. Развив теорию
возмущений, повысил точность расчета движения Луны на основе закона Ньютона.
Кант Иммануил (I. Kant) (1724-1804) — немецкий философ и ученый, основоположник класси-
ческого немецкого идеализма, автор работ «Всеобщая естественная история и теория неба» (1755),
«Новое освещение первых принципов метафизического познания» (1755), «Грезы духовидца» (1766),
«Критика чистого разума» (1781), «Критика практического разума» (1788), «Критика способности
суждения» (1790). С 1770 профессор логики и метафизики Кенигсбергсого университета, где до
1797 преподавал цикл дисциплин - философских, математических, физических. Его труды оказали
огромное влияние на дальнейшее развитие мировой философской мысли.
Кавендиш Генри (Cavendish) (1731-1810) — английский физик и химик. Исследовал свойства
многих газов, получил водород и углекислый газ (1766), определил состав воздуха (1781), химиче-
ский состав воды (1784). С помощью изобретенных им крутильных весов подтвердил закон всемир-
ного тяготения. Определил массу Земли (1798). Установил закон взаимодействия электрических зарядов (1879).
Экспериментально исследовал электрические и тепловые явления.
Борда Ж. (Borda J.) (1733-1799) и Кассини Яков (Cassini Jacques) (1748-1845) — члены ко-
миссии, образованной Парижской академией наук для разработки вопроса об установлении новой
системы мер, основная единица которой была бы заимствована из природы: за единицу длины пред-
дожили принять длину секундного маятника для широты 45°. В 1792 заново определили длину
секундного маятника в Парижской обсерватории. Отвес состоял из небольшого металлического
/Zf ж* стержня, подвешенного на остром ребре призмы и имеющего период колебания близкий к перио-
•’* ' ду самого маятника, равному 2 секундам. Нить состояла из тонкой железной проволоки, вес которой
принимался во внимание. Длина секундного маятника для Парижа была найдена равной 993,827 мм,
УСТ — 980867 мГал. В длине секундного маятника абсолютная ошибка составила 0,08 мм, погрешность измерений
УСТ - 76 мГал.
Румовский Степан Яковлевич (1734-1812) — русский ученый, астроном, геодезист, гравимет-
рист. Образование получил в Петербургском университете. Ученик М.В. Ломоносова и Л. Эйлера.
Почетный член Шведской академии наук(1763), ординарный академик Петербургской академии на-
ук (ПАН) (1767). Руководил Астрономической обсерваторией ПАН (1763-1803), с 1766 по 1786
вместе с Л. Эйлером - Географическим департаментом академии, который создавал астрономо-
геодезическую основу страны и издавал карты, выполнял географическое изучение территории, за-
нимался подготовкой кадров. Возглавил экспедицию в Сибирь для наблюдений 26 мая 1761 про-
хождения Венеры по диску Солнца. Материалы наблюдений в Селенгинске, Стокгольме, на мысе
Доброй Надежды и в других пунктах использованы для уточнения солнечного параллакса и расстояния между
Землей и Солнцем. Наблюдал прохождения Венеры и Меркурия по диску Солнца, солнечные и лунные затмения,
определял астрономические широты и долготы пунктов европейской и азиатской частей России для создания ос-
новы географических карт. Опубликовал Каталог астрономических пунктов Российской империи (1786), точность
которого, по мнению В.Я. Струве, для XVIII в. очень высокая: вероятная ошибка долгот не превышала 32®. Раз-
работал программу определений фигуры Земли (1799), но проект поддержки не получил. В 1802 опубликовал
теоретическое исследование фигуры Земли. По определениям длины градуса в Лапландии, Перу, Франции, Ав-
стрии, Италии и Венгрии получил сжатие эллипсоида от 1:666 до 1:102 и сделал вывод, что фигура Земли заметно
отличается от сфероида. Это исследование развивает идеи Буге (1748) об уровне моря как неправильной сложной
поверхности, длина градуса изменяется от места к месту, не подчиняясь какому-либо закону. Эта статья, видимо,
послужила Гауссу (1828) основой для введения в геодезию вспомогательной поверхности, которую Листинг (1872)
впоследствии назвал геоидом.
Лагранж Жозеф Луи (Lagrange) (1736-1813) — французский математик и механик, иностран-
ный почетный член Петербургской АН (1776). Разработал основные понятия и методы вариационного
исчисления, имеет труды по теории чисел, алгебре, дифференциальному и интегральному исчисле-
нию. Усовершенствовав теорию возмущений, уточнил движение Луны, спутников Юпитера, влияние
комет на движение планет; развил теорию вековых изменений элементов движения планет, уточнил
теорию поля двух неподвижных центров, теорию эллиптического сфероида. В «Курсе аналитической
механики» (1788) развил формализм, облегчающий составление уравнений движения и их практи-
ческое использование. Две статьи посвятил теории вариаций произвольных постоянных в задачах
механики (1809, 1810). Преподавал в Нормальной и Политехнической школах. Изданы труды в 15 томах (1867-
1892) (Jean Hard. Dictionary of scientific biography, v. 7, 559-573. Ch. Scribner’s sons. N.Y. 1973).
Лаплас Пьер Симон (Laplace) (1749-1827) — французский астроном, математик, физик, автор
классических трудов по теории вероятностей и небесной механике (динамика Солнечной системы
в целом и ее устойчивость и др.) Имел много трудов по дифференциальным уравнениям, мате-
матической физике, теории капиллярности, теплоте, акустике, геодезии и др. Предложил (1796)
космогоническую гипотезу. В работе «Sur la reduction de la longueur du pendule au niveau de la mer»
(Annales de chimie et de physique par Gay-Lussac et Arago, 1825, t. 50, 381-387) им описана редукция
в свободном воздухе.
Лежандр Адриен Мари (Legendre) (1752-1833) — французский математик, имел труды по тео-
рии чисел, эллиптическим интегралам, геодезии и др. Автор классического курса элементарной
геометрии. Разработал основы теории полиномов — базы сферических функций. Вместе с Лапла-
сом разработали принцип разложения по сферическим функциям. Установил возможность решения
достаточно малого сферического треугольника как плоского при выделении из его углов по трети
сферического избытка, что имело большое значение при создании геодезической основы в XVIII -
первой половине XX в.
Бонненбергер (Bohnenberger J.) (1765-1831) — немецкий астроном, предложил в 1811 принцип оборотного
маятника.
Кэтер (Н. Kater) (1777-1835) — английский физик, в 1818 сконструировал оборотный (поворотный) маятник.
Гаусс Карл Фридрих (Gauss) (1777-1855) — немецкий ученый, внес вклад в высшую алгебру,
в теорию чисел, в дифференциальную геометрию, в математическую физику, в теорию электриче-
ства и магнетизма, в вычисления эллиптических планетных орбит, в разработку метода наименьших
квадратов, в геодезию и во многие разделы астрономии. Им фактически создана наука (1842-1847),
названная «высшей геодезией», задача которой состоит в установлении формы земной поверхности
не в упрощенном, а в действительном ее виде. Основы этой дисциплины даны в его труде «Ис-
следования о предметах высшей геодезии». Им изобретен гелиотроп, необходимый при выполнении
геодезической съемки. В работе «Общие изыскания о кривых поверхностях» (1828) показано, что при
изучении поверхности как бесконечно тонкой гибкой пленки основное значение имеет не уравнение поверхности в
декартовых координатах, а дифференциальная квадратичная форма, через которую выражается квадрат элемента
длины и инвариантами которой являются все собственные свойства поверхности — прежде всего ее кривизна
в каждой точке. Созданная таким образом внутренняя геометрия поверхностей послужила образцом для созда-
ния n-мерной римановой геометрии. В 1823 предложил новый в геодезии объект изучения «поверхность Земли в
геометрическом смысле», т. е. предложил под фигурой Земли подразумевать уровенную поверхность силы тяже-
сти, совпадающую в открытом море с невозмущенной приливами, изменением атмосферного давления и волнами,
свободной поверхностью воды, названной позднее Листингом геоидом.
4. Задача геодезии — определение размеров Земли и изучение ее геоида (Гаусс, 1823).
3. Задача гравиметрии — изучение распределения силы тяжести Земли по ее поверхности посредством
точных измерений.
Пуансо Луи (Poinsot Louis) (1777-1859) — французский механик и математик, разработал гео-
метрические методы исследования механических систем, построил геометрическую статику, постро-
УумВ ил теорию пар сил, разработал теорию вращения твердого тела в отсутствие сил и ввел понятие
эллипсоида инерции. Его книга «Начала статики» в течение 1804-1848 гг. выдержала девять при-
жизненных изданий (русский перевод 1920 г.) На с. 137 сделан вывод: «... так как в природе силы
тяжести не бывают ни точно параллельными, ни точно сходящимися..., то... тела не могут иметь
истинного центра тяжести, т. е. одной такой точки, около которой все силы... уравновешивались бы
при любом положении тела... погрешность в небольших телах незаметна» (R. Taton. 1975. Dictionary of scientific
biography, v. 11, 61-62. N. Y. Scribner’s sons).
Пуассон Симеон Дени (Poisson) (1781-1840) — французский механик, физик и математик. Мно-
гочисленные его работы охватывают разнообразные проблемы теоретической и небесной механики,
У' ] математики и математической физики. По теории притяжения особый интерес представляют работы
А £ , о притяжении однородных эллипсоидов в «Traite de mecanique» (1811, 1833) и сфероидов (1826), «За-
мечания об уравнении в теории притяжении сфероидов» (1813), где выведено известное уравнение
Пуассона. Ему принадлежат работы по внешней баллистике, теории упругости, гидромеханике, по
электростатике и магнетизму, по определенным интегралам, по уравнениям в конечных разностях.
по теории дифференциальных уравнений с частными производными, теории вероятностей.
Теннер Карл Иванович (1783-1860) — русский геодезист и астроном, генерал от инфантерии,
почетный член Петербургской АН (1832). Поступив в 1802 прапорщиком в генеральный штаб, он
вскоре затем отправился в Китай в составе миссии гр. Головкина и занимался геодезическими и
топографическими работами, помогая астроному экспедиции, академику Шуберту. В 1807 состоял
при нашей армии, действовавшей в Пруссии против Наполеона, был в нескольких сражениях; участ-
вовал в кампаниях 1812-1813. В 1816-1859 руководил работами по триангуляции юго-западных
губерний России. В результате работ К.И. Теннера и В.Я. Струве измерена дуга меридиана от Дуная
до Ледовитого океана, равная 25°20'. В 1858 получил место сенатора в Варшаве.
Бессель Фридрих Вильгельм (F.W. Bessel) (1784-1846) — немецкий астроном, построил в 1810
в Кенигсберге обсерваторию, где произвел наблюдения 75011 звезд, разработал теорию ошибок аст-
рономических инструментов, открыл личное уравнение (личную разность), то есть систематическую
ошибку, присущую конкретному наблюдателю. Выполнил тщательное определение абсолютного зна-
чения силы тяжести при помощи нитяных маятников (1825-1826). Изобрел базисный прибор, сов-
местно с Байером произвел триангуляцию в Восточной Пруссии и на основании десяти лучших
градусных измерений определил элементы земного сфероида, которыми пользовались около ста лет.
Мебиус Август Фердинанд (Mobius August Ferinand) (17.11.1790-26.9.1868) — немецкий геометр
и астроном. Родился в Шульпфорте. Астрономию изучал под руководством К. Гаусса. С 1816 начал
вести самостоятельные астрономические наблюдения в Плейсенбургской обсерватории, в 1818 стал
ее директором, позже - профессором Лейпцигского университета. Труды по проективной геометрии.
Впервые ввел систему координат и аналитические методы исследования, установил существование
односторонних поверхностей (листов Мебиуса), многогранников, для которых неприменим «закон
ребер» и которые не имеют объема. Мебиус - один из основоположников теории геометрических
преобразований, а также топологии, теории векторов и многомерной геометрии. Получил важные
результаты в теории чисел (функция Мебиуса).
Фарадей Майкл (Faraday) (1791-1867) — английский физик, создатель учения об электромаг-
нитном поле. Обнаружил химическое действие электрического тока, взаимосвязь между электриче-
ством и магнетизмом, магнетизмом и светом. В 1831 открыл электромагнитную индукцию - явление,
которое легло в основу электротехники, в 1833-34 установил законы электролиза, открыл пара- и
диамагнетизм, вращение плоскости поляризации света в магнитном поле, доказал тождественность
различных видов электричества, высказал идею существования электромагнитных волн.
Паррот Ф.Г. (1791-1841) — первовосходитель на Большой Арарат (5165 м) по восточному лед-
нику в 1829. Являясь профессором Дерптского университета, в 1829 маятниковым прибором, изго-
товленным по его заданию механиком Брюккером, выполнил относительные наблюдения в Дерпте,
Тифлисе, на склоне г. Арарат и в 1831 в Дерпте. В. Струве произвел обработку наблюдений, вывел
сжатие земного сфероида 1:312 и 1:279.
Лобачевский Николай Иванович (1.12.1792-24.02.1856) — магистр (3.09.1811), адъюнкт-
профессор (1814), экстраординарный профессор (1815), декан физико-математического отделения,
ректор (1827-1836) Казанского университета, автор учебников для гимназий «Геометрия» (1823) и
«Алгебра» (1825), родился в Нижнем Новгороде в семье мелкого чиновника. Привезен матерью в
Казань и устроен на казенном содержании с двумя братьями в гимназию, где учитель Г.И. Карташев-
ский увлекательно преподавал математику. В результате в 14 лет становится студентом университета
(казеннокоштным). Его руководителем стал М.Ф. Бартельс. В 1812 представил «Теорию эллипти-
ческого движения небесных тел» и в 1813 — «О разрешимости алгебраического уравнения г’1 — 1 = 0». На
факультете 23.02.1826 делает доклад «Сжатое изложение начал геометрии со строгим доказательством теоремы о
параллельных». В 1829-1830 в «Казанском вестнике» издан его труд «О началах геометрии». Открытие сделано
им на путях принципиального пересмотра самых начальных геометрических понятий, принятых в геометрии со
времен Евклида (III век до н.э.). Дано уточнение понятия функции, приписанное Дирихле. Лобачевский четко
разграничивает непрерывность функции и ее дифференцируемость. Им проведены глубокие исследования по три-
гонометрическим рядам, опередившие его эпоху на много десятилетий. Им разработан метод численного решения
уравнений, несправедливо получивший впоследствии имя Греффе. С 1835 по 1838 публикует обширную рабо-
ту «Новые начала геометрии с полной теорией о параллельных». Несмотря на непонимание коллег мужественно
боролся за научную истину. Последний его труд «Пангеометрия» (1855).
Грин Джордж (Green George) (14.7.1793-31.3.1841) — английский математик и физик, автор трудов по инте-
гральному исчислению, теории электричества и магнетизма, теории упругости, заложил основы решения краевых
задач. Место рождения и смерти — Снейн-тон, близ Ноттингема. Самостоятельно изучал математику и лишь
в 1837 окончил Кембриджский ун-т. В сочинении «Опыт применения математического анализа к теориям элек-
тричества и магнетизма» (1828) использовал термин «потенциал» и развил теорию электричества и магнетизма,
опираясь на найденное им соотношение между интегралами по объему и по поверхности. Эта работа оставалась
неизвестной до ее переиздания (1845). В 1839 выполнил важную работу об отражении и преломлении света в
кристаллических средах, в которой также вывел основные уравнения теории упругости.
Струве Василий Яковлевич (15.4.1793-23.11.1864) — русский астроном и геодезист, академик
Петербургской АН (1832). Родился в Альтоне вблизи Гамбурга в семье директора гимназии. Окончил
Дерптский университет по специальности «филология» (1810). Защитил магистерскую диссертацию
на тему «О географическом положении Дерптской обсерватории» (1813), стал экстраординарным
профессором Дерптского университета и астрономом-наблюдателем университетской обсерватории.
Читал курсы сферической и практической астрономии, геодезии. В 1818-1820 возглавлял кафедру
астрономии. В 1818-1839 - директор Дерптской обсерватории. Детально разработал общий план
работы и программу астрономических наблюдений обсерватории, дал (1845) описание всех ее ин-
струментов. В 1827 опубликовал каталог 3110 двойных и кратных звезд («Новый каталог»), в 1837
- труд «Микрометрические измерения двойных звезд», в 1852 - каталог «Средние положения» 2874 звезд. В
1822-1827 под его руководством было произведено измерение дуги меридиана длиной 3°35' от острова Гогланд в
Финском заливе до г. Якобштадта. В 1828 эта дуга была сопряжена с дугой, измеренной на юго-западе России
под руководством К.Н. Теннера, так что общая длина дуг стала равной 8°2'. Эти измерения продолжены на север
и на юг. Длина дуги, получившая название русско-скандинавской, или дуги Струве, была доведена до 25°20/.
Литке Федор Петрович (1797-1882) — русский мореплаватель и географ, член-корреспондент
(1829) и президент (1864-82) Петербургской АН. Участник кругосветной экспедиции (1817-1819)
В.М. Головина. В 1821-24 руководил исследованиями Новой Земли и Баренцева моря, в 1826-1829,
будучи капитаном, совершил кругосветное путешествие на шлюпе «Сенявин», во время которого
были произведены различные научные исследования. Наблюдения с маятниковым прибором Кэтера
были выполнены в Гринвиче, Вальпараисо, Ново-Архангельске на Аляске, дважды в Петропавловске
на Камчатке, на трех тропических островах в Тихом океане и острове Св. Елены в Атлантическом
океане, в Петербурге. Суммарная ошибка относительных определений не превышала 10 мГал, если
исключить постоянную разность почти в 60 мГал, обусловленную неучетом сокачания.
Эри Джордж Биделл (Airy G.B.) (27.7.1801-2.1.1892) — английский астроном, геодезист, гео-
физик, директор Гринвичской обсерватории (1835-1881). Предложил одну из схем изостатической
компенсации земной топографии (1855), нашедшей практическое применение наряду со схемой Джо-
на Генри Пратта (1885). Работы Эри посвящены выводу Лапласа формулы Клеро без гипотезы о
внутреннем строении Земли (1826), градусным измерениям (1846), определению средней плотности
Земли по маятниковым наблюдениям на земной поверхности и в глубине шахты (1856), локальным
отклонениям отвеса вблизи Москвы (1863), определению высот барометрическим нивелированием (1867). Усовер-
шенствовал теорию приливов, развитую Лапласом, разработал способы параллакса Солнца и апекса его движения.
обработал наблюдения Луны и планет, выполненные в Гринвичской обсерватории в 1750-1830, предложил метод
исследования цапф, сконструировал ряд новых инструментов, развил теорию дифракции света в объективах теле-
скопов, обнаружил явление астигматизма человеческого глаза и ввел в употребление цилиндрическо-сферические
линзы для исправления этого дефекта зрения, предложил современную теорию радуги. Четырежды избирался
президентом Лондонского королевского астрономического общества.
Бойяи Янош (венг. Bolyai Jdnos\ 15.12.1802-27.01.1860) — венгерский математик, один из пер-
евооткрывателей неевклидовой геометрии (называемой теперь геометрией Лобачевского). В русских
источниках встречаются следующие варианты написания его фамилии: Больяи, Больяй, Бойаи, Бояи,
Бояй и Болье. Бойяи родился в трансильванском городе Колошвар; в наши дни это Клуж-Напока,
Румыния, а тогда город принадлежал Австро-Венгрии. Отец его, известный математик Фаркаш
Бойяи, еще в раннем возрасте преподал сыну основы математических знаний. В 1822 заканчивает
Военно-инженерный колледж в Вене, сдав семилетний курс за 4 года. В колледже он увлекся иссле-
дованием пятого постулата Евклида. Вскоре он приходит к выводу, что пятый постулат недоказуем и
независим от остальных. Это означало, что, заменив его на альтернативный, можно построить новую геометрию,
отличную от евклидовой. В 1820-1823 заканчивает трактат с описанием новой геометрии. В 1823 направлен на
армейскую службу млад, лейтенантом в военно-инженерные войска. Отсулжил 11 лет. Владел 9 языками, включая
китайский и тибетский. Никогда не пил и не курил. В 1832 отец публикует свое сочинение, а в приложении
к нему — работу сына, вошедшую в историю математики под именем Appendix (приложение). Полное название
труда Бойяи: «Приложение, содержащее науку о пространстве, абсолютно истинную, не зависящую от ис-
тинности или ложности XI аксиомы Евклида (что a priori никогда решено быть не может)». «Аппендикс»,
как и работы Лобачевского, остался непонятым и незамеченным. После его смерти были обнаружены более 20000
листов незаконченных математических рукописей. В его честь назван кратер Bolyai на Луне.
Миндинг Фердинанд Готлибович (11 (23).1.1806, Калиш - 1 (13).5.1885, Тарту), русский гео-
метр, почетный член Петербургской АН (1879; член-корреспондент 1864). По происхождению немец.
Окончил Берлинский университет (1827). С 1843 профессор Дерптского (Тартуского) университета.
Важнейшие результаты его работ: в интегрировании дифференциальных уравнений 1-го порядка,
теории поверхностей и линий, лежащих на них, и особенно в теории поверхностей постоянной кри-
визны.
Листинг Иоган Бенедикт (Listing J.) (1808-1882) — немецкий математик и физик, известен
работами по топологии, им предложен сам термин «топология». Обсудил данные своего времени о
размерах Земли. В работе по геодезии (1873) предложил термин геоид, имея в виду средний уровень
моря.
Фай Эрве Огюст Этьенн Альбан (Faye Н.) (1814-1902) — французский астроном, известен ра-
ботами, посвященными исследованиям физического строения Солнца, природы комет. Занимался
усовершенствованием астрономических инструментов. Применял редукцию силы тяжести в свобод-
ном воздухе, обосновал редукцию, названную его именем, представляющую собой сумму редукции
в свободном воздухе и поправки за рельеф.
5. Задача геодезии — определение фигуры геоида по теории Стокса с использованием ор-
тометрических высот (Стокс, 1849).
Стокс Джорж Габриель (G.G. Stokes) (13.08.1819-01.02.1903) — английский физик и математик,
член (1851) и президент (1885-90) Лондонского королевского общества. Родился в Ирландии, умер в
Кембридже (Великобритания). Вел исследование по гидродинамике (уравнение Навье-Стокса, закон
Стокса), в частности исследовал движение жидкости с внутренним трением, позже названным вяз-
костью. В статьях (1849) выразил распределение УСТ на поверхности эллипсоида (формула Клеро)
и высоту регуляризированного геоида через распределение УСТ на его поверхности замкнутой фор-
мулой и разложением по сферическим функциям. При этом получил решение первой краевой задачи
для уравнения Лапласа раньше, чем этой задачей стал заниматься П.Г. Дирихле, именем которого
часто называют эту задачу. В. Серафимов (1903) оценил результат Стокса как прорыв из заколдованного круга
гидростатической Земли. Занятия Стокса чистой математикой были побуждены физическими задачами, связан-
ными также со светом, акустикой, теплотой, метеорологией, солнечной физикой. Занимался упругостью твердых
тел, волнами в них, дифракцией и аберрацией света. Изданы пять томов его математических и физических статей
(1880-1905), лекции о свете в Абердине (1883-1885) составляют том. Был глубоко верующим человеком и зани-
мался натуральной теологией, опубликованы его лекции по этой тематике, а также два тома мемуаров и научной
корреспонденции (1907), в частности переписка с Кельвином (Е. М. Parkinson, Dictionary of scientific biography, v.
13, 74-79. N.Y.: Ch. Scribner’s sons, 1976).
И Рош Эдуард (Roche Edouard) (17.10.1820-18.04.1883) — французский астроном, родился в Мон-
пелье. Его отец был помощником мэра, а затем в 1829 — главным секретарем префектуры Эро. Рош
окончил факультет наук в университете Монпелье, основанном во второй половине XII в. 1844-
1847 провел в Париже, где изучал небесную механику, эллипсоидальные уровенные поверхности, их
устойчивость, притяжение эллипсоидов. В 1848 избран членом секции астрономии Академии наук и
словесности, в 1852 получил звание профессора чистой математики. За работу о строении и проис-
хождении Солнечной системы (1873) получил звание член-корреспондента парижской Академии по представлению
Фая (Faye). Тиссеран описал работы Роша в отчетах академии (1883). Рош в 1849 оценил высоту, выше которой
может существовать жидкий спутник малой массы над планетой, сжатой у полюсов, при круговой орбите и син-
хронном движении, т. е. при равенстве периодов вращения спутника вокруг своей оси и его обращения по орбите.
Понятия о пределе Роша, при котором спутник начинает разрушаться, и о компонентах Роша, касающихся двойных
звезд, начали распространяться в астрономии почти через сто лет после того, как они были им сформулированы.
Кэли Артур (Cayley Arthur) (16.08.1821-26.01.1895), английский математик. Родился в Ричмон-
.МЩЦМ де. Вырос в Петербурге, где его отец занимался торговлей. Окончил Тринити-колледж Кембриджско-
' го университета, стал членом совета колледжа в 1842. Первые работы по математике опубликовал
1 в 1841 в «Кембриджском журнале» («Cambridge Journal»). В 1843 стал адвокатом в Лондоне и в
П течение следующих 20 лет совмещал адвокатскую практику с занятиями математикой. В 1863 при-
[< vAk нял предложение занять кафедру чистой математики в Кембриджском университете, где преподавал
почти 30 лет. Кэли принадлежит более 200 работ, посвященных различным областям математики.
' Наиболее известны Мемуары о формах (Memoirs on Quantics, 1854-1878), в которых Кэли раз-
вивает теорию алгебраических инвариантов. Кэли первым начал исследования геометрии п-мерного
пространства и достиг успехов в уяснении взаимоотношений между проективной и метрической
геометриями. Ввел принятое ныне обозначение для определителя, исследовал дифференциальные уравнения и
эллиптические функции. Именем Кэли названы теорема и кривая. Умер в Кембридже.
Риман Георг Фридрих Бернгард (Georges Friedrich Bernhard Riemann) (1826-1866) — великий
немецкий математик, один из создателей теории функций комплексного переменного, в которой
положил начало новому геометрическому направлению. Родился в Брезеленце (в настоящее время
провинция Ганновер, Германия). Образование получил в Геттингенском и Берлинском университетах.
С 1857 — профессор Геттингенского университета. Его работы по теории функций комплексного
переменного, по геометрии, механике, математическому анализу и теории чисел составили эпоху
в каждой из этих областей и до сегодняшнего дня не утратили своего значении. Для развития
математики и геометрии важное значение имела прочитанная Риманом в 1854 лекция «О гипотезах,
лежащих в основе геометрии». В этой лекции впервые был высказан общий взгляд на геометрию
как на теорию аналитических многообразий (римановых пространств), в которых каждый элемент
определяется при помощи упорядоченной совокупности чисел, а расстояние между двумя бесконечно близкими
элементами — при помощи некоторой квадратичной формы.
Бредихин Федор Александрович (1831-1904) — русский математик, астроном и гравиметрист,
указывал на возможность судить по данным площадной гравиметрической съемки о распределении
массы в земной коре и об отклонениях отвеса. В статье (1871) о внутреннем строении Земли отме-
чал как задачу астрономии путем изучения приливов, общей фигуры Земли и местных уклонений
отвеса дать средства для суждения о состоянии земных недр, затрагивал вопрос о предсказании
землетрясений. Под его руководством группа межевых инженеров выполнила гравиметрические на-
блюдения оборотными маятниками Репсольда в районе Московской аномальной области (1877). За-
нимался исследованиями колебаний штатива, производимых качаниями маятника, и влиянии первых
на последние, определил абсолютную величину УСТ на обсерватории Московского университета, ис-
следовал длину секундного маятника в Москве (1882), участвовал в гравиметрических экспедициях
Константиновского межевого института в 6 губерниях (1888).
Менделеев Дмитрий Иванович (1834-1907) — русский ученый, открыл периодический закон
химических элементов (1869), являющийся естественнонаучной основой современного учения о ве-
ществе. Им был создан чувствительный дифференциальный барометр, пригодный для практического
нивелирования. Ему принадлежат важнейшие работы в области метрологии. Изготовил нитяной ма-
ятник длиной 36 м, располагавшийся в специально построенном для него помещении в Главной
палате мер и весов. Погрешность наблюдений УСТ составила около 30 мГал.
Т^ИКЯВ Ньюкомб Саймон (Newcomb) (1835-1909) — американский астроном, известен трудами по ис-
I следованиям движения планет, их спутников, Луны и определению астрономических постоянных.
' Первый его каталог звезд издан в 1872, в 1898 вышел фундаментальный каталог склонений и пря-
г*|Вг1гж мых восхождений 1257 звезд. Ньюкомб объяснил деформациями Земли отличие периодов Эйлера и
Чандлера в движении полюса.
Слудский Федор Алексеевич (1841-1897) — русский механик и геодезист, в 1863 защитил
диссертацию «Об уклонении отвесных линий» и получил степень магистра астрономии, а в 1865
защитил две диссертации: на степень доктора астрономии по теме «Триангуляция без базиса» и
доктора прикладной математики по теме «О равновесии и движении капельной жидкости при вза-
имодействии ее частиц». В 1872, опираясь на теорему Гаусса, предложил интегральные формулы
определения избыточной массы гравитирующего объекта по наблюдениям уклонения отвеса и изме-
нения длины секундного маятника. Тем самым он стал реальным основоположником интегральных
методов интерпретации. В 1881 вышел «Курс теоретической механики». Его учеником был Н.Е. Жу-
ковский. В области геодезии развил теорию триангуляции в земном гравитационном поле и теорию фигуры Земли
по гравиметрическим данным в виде разложений по сферическим функциям, теорию вращения Земли с полостями,
заполненными жидкостью (1891-1895).
Ли Мариус Софус (Lie Marius Sophus) (17.12.1842-18.02.1899), норвежский математик. Родился
в Нордфьордейде. С 1872 — профессор университета в Кристиании (Осло), в 1886-1896 — профес-
сор Лейпцигского университета. Первые работы Ли относились к чисто геометрическим вопросам. В
1870 он ввел т. н. контактные преобразования, позволяющие устанавливать взаимно однозначное со-
ответствие между совокупностью сфер и совокупностью прямых. Большую часть жизни Ли посвятил
теории групп и ее приложениям к другим областям математики, особенно к теории дифференциаль-
ных уравнений. Ли — создатель классической теории непрерывных групп, ныне называемой теорией
групп Ли. Эта теория оказала глубокое влияние на развитие оснований геометрии, топологии, теоретической
физики. Умер в Кристиании.
Певцов Михаил Васильевич (21.05.1843-25.02.1902) — русский географ-путешественник, гео-
дезист, астроном, генерал-майор (30.08.1891). Совершал путешествия: в Джунгарию (Китай) (1876);
через Монголию по пустыне Гоби в Калган (1878-1879), в Кашгарию и в Куньлунь (1889-1890). В
1896-1902 — состоял в числе четырех генералов, положенных по штату в Главном штабе. Материа-
лы путешествий обрабатывал и публиковал. Интересна его карта «Восточный Туркестан и северные
окраины Тибетского нагорья» масштаба 100 верст в дюйме. Разработал метод определения геогра-
фической широты из наблюдений двух звезд на равных высотах («способ Певцова»). Член русского
географического общества (РГО) с 1867, награжден медалями РГО. Его именем назван ледник Монгольского
Алтая.
Гельмерт Фридрих Роберт (R. Helmert) (31.07.1843-1917) — немецкий геодезист и гравимет-
рист, родился во Фрейбурге (Саксония). В 1863 окончил Дрезденский политехнический институт и
стал ассистентом Саксонского градусного измерения. В 1886 поступил в Лейпцигский университет,
проучился два семестра и защитил докторскую диссертацию по геодезии, рассмотрев уравнитель-
ные вычисления при большом объеме данных. Составил руководство «Математические и физические
теории высшей геодезии» в двух томах (1880, 1884) Написал руководство по уравнительным вычис-
лениям, выполняемым по способу наименьших квадратов (1872, 1907). Содействовал организации
международной службы широты, уточнению астрономического нивелирования и совершенствова-
нию приборов для измерения УСТ. Использовал гравиметрические данные для определения сжатия
земного эллипсоида и распределения УСТ на его поверхности (1884, 1901-1909, 1915) Разрабатывал вопросы
редукции гравиметрических данных к общему уровню и их геофизическую интерпретацию, в частности в высоких
горах, отметив в нескольких публикациях, что такие редукции связаны с использованием гипотетических данных,
а потому всегда более или менее ошибочны. Рассмотрел влияние отклонений в распределении массы земной коры
от изостатического равновесия на силу тяжести, в частности у островов.
Дарвин Джордж Ховард (09.07.1845-1912) — английский математик, физик, родился в Дауне
(графство Кент). Был пятым ребенком в семье знаменитого натуралиста Чарльза Дарвина. Окончил
Тринити-колледж в Кембридже. С 1883 стал профессором астрономии в Кембриджском универ-
ситете. Был членом Лондонского Королевского общества, в 1899-1900 президентом Королевского
астрономического общества, в 1890-1892 и 1911-1912 — президентом Кембриджского философского
общества, почетным членом многих академий. В его работах рассмотрены: влияние геологических
изменений в Земле на положение ее оси вращения (1877), влияние эллиптичности планет на их
орбитальное движение, прецессия упругого сфероида, история развития Земли, приливы в упругом
сфероиде (1879), вековые изменения орбиты спутника, двигающегося около планеты, возмущаемой приливами, и
вековой эффект приливного трения (1880), напряжения внутри Земли, вызываемые континентами и горами, из-
менения положения отвеса из-за упругости Земли, гармонический анализ долгопериодных приливов, численная
оценка твердости Земли, инструментальное обнаружение и измерение силы тяжести (1882), гармонический анализ
приливных наблюдений (1883), эйлерова нутация земной оси (1903). В «Эллипсоидальном гармоническом анализе»
(1901) Дарвин имеет в виду трехосный эллипсоид, упрощая использование функций Ламе. В 1884 опубликовал
работу о фигуре планет, неоднородных по плотности и вращающихся в равновесии, а в 1889 — исследование
фигуры равновесия Земли с учетом малых членов второго порядка. Популярная книга «Приливы и родственные
им явления в Солнечной системе» вышла первым изданием в 1898, первым русским - в 1923.
Тиссеран Франсуа Феликс (1845-1896) — французский ученый, астроном, механик. Родился в
Нюи-Сен-Жорж французского департамента Кот-д’Ор в 1845, умер в Париже в 1896. По окончании
высшей нормальной школы был приглашен Леверье в Парижскую обсерваторию, в 1868 защитил
докторскую диссертацию, в которой развил на основе принципов Якоби теорию движения Луны,
участвовал в работе обсерваторской геодезической службы. С 1873 — директор Тулузской обсерва-
тории и профессор астрономии Тулузского университета. Занимался переоснащением обсерватории,
теорией и практикой расчета орбит астероидов и спутников, теорией потенциала. С 1874 — член-
корреспондент Академии наук в Париже, с 1878 — сотрудник Парижского факультета наук, где
преподавал небесную механику. В 1885 получил значительный результат в решении задачи трех тел,
в 1889 — «критерий Тиссерана» в орбите астероида или кометы вблизи планеты. С этого же года начал пуб-
ликовать «Курс небесной механики», четыре тома которого содержат осовремененный по тому времени материал
аналогичного курса Лапласа. Тиссеран усовершенствовал изложение новых результатов других авторов. В 1892
был назначен директором Парижской обсерватории. По книге (J.R. L6vy 1974. Dictionary of scientific biography.
N.Y., v. 14, 422-424).
Брунс Генрих Эрнст (Henrich Bruns) (4.09.1848-23.09.1919) — немецкий астроном, геодезист и
математик, член Берлинской АН (1906). Работал (1872-1873) вычислителем в Пулковской обсерва-
тории, затем (1873-76) наблюдателем в Юрьевской обсерватории, с 1882 — директор обсерватории
и профессор университета в Лейпциге. Разрабатывал теорию фигуры Земли, задачу многих тел
в небесной механике, теорию вероятностей и математической обработки результатов наблюдений,
создал новую теорию интерполирования статистического материала, основанную на полиномах Че-
бышева. Определил геоид как уровенную поверхность, проходящую через некоторую точку Земли.
Этвеш Лоранд (Роланд) (Eotvos) (1848-1919) — барон, венгерский физик, занимался исследо-
ваниями капиллярности, проблемами земного магнетизма и гравитационного поля. Сформулировал
закон, связывающий изменение поверхностного натяжения с температурой; изобрел гравитационный
вариометр. С помощью гравитационного вариометра экспериментально доказал положение основно-
го закона всемирного тяготения: гравитирующая сила пропорциональна только инертной массе и
не экранируется промежуточными телами. Установил, что вес тел на движущихся объектах вслед-
ствие вращения Земли изменяется в зависимости от скорости и направления движения. Этот эффект
назван его именем. Его именем названа единица измерения градиента ускорения силы тяжести — этвёш (Э).
Клейн Феликс Христиан (Klein Felix Christian) (25.4.1849-22.6. 1925) — немецкий математик,
родился в Дюссельдорфе. Член-корреспондент Берлинской Академии Наук (1913) В 1865 поступил
в Боннский университет, где преподавал в то время К. Плюккер. После смерти Плюккера Клейн под-
готовил к печати его труды. Большое влияние на творчество Клейна оказали немецкий математик
Р. Клебш и норвежский математик С. Ли. С 1872 Клейн работает в Эрлангене, с 1875 —профессор
высшей технической школы в Мюнхене, а с 1880 — профессор университета в Лейпциге. В 1886
переехал в Геттинген. Основные труды по неевклидовой геометрии, теории непрерывных групп, тео-
рии алгебр, уравнений, теории эллиптических функций, теории автоморфных функций. Свои идеи
в области геометрии Клейн изложил в работе «Сравнительное рассмотрение новых геометрических исследова-
ний» (1872), известной под названием «Эрлангенская программа». По Клейну, каждая геометрия является теорией
инвариантов специальной группы преобразований. Расширяя или сужая группу, можно перейти от одного типа гео-
метрии к другому. Евклидова геометрия — наука об инвариантах метрической группы; проективная геометрия —
наука об инвариантах проективной группы. Классификация групп преобразований дает классификацию геометрий;
теория алгебр, и дифференциальных инвариантов каждой группы дает аналитическую структуру геометрии. Опи-
раясь на исследования Бельтрами, Клейн строго доказал непротиворечивость неевклидовой геометрии. Исследуя
дискретные группы, Клейн рассмотрел группы многогранников и показал, что этими и близкими им группами
можно, обобщая метод Галуа, воспользоваться для алгебр, решения уравнений некоторых типов. Рассматривал
группы симметрий правильных многогранников трехмерного пространства (1884); стремился раскрыть внутренние
связи между отдельными ветвями математики, с одной стороны, физикой и техникой - с другой. Перед первой
мировой войной организовал Международную комиссию по реорганизации преподавания математики. На русский
язык переведены книги Клейна «Высшая геометрия» (М.; П., 1939); «Элементарная математика с точки зрения
высшей» (М.; Л., 1934-1935); «Неевклидова геометрия» (М.; Л., 1936); «Лекции о развитии математики в XIX
столетии» (М.; Л. 1937)
Витрам Федор Федорович (17.09.1854-1914) — русский геодезист, астроном, гравиметрист, пре-
подаватель, родился в Риге. В 1872 окончил губернскую гимназию, в 1872-1877 - обучался в
Дерптском университете; в 1878-1914 - в Пулковской обсерватории, где состоял сверхштатным аст-
рономом, затем с 1879 - вычислителем, с 1885 — адъюнктом, а с 1907 - старшим астрономом. В
1883 защитил диссертацию, получил степень магистра, а в 1885 - доктора астрономии и геодезии;
с 1887 - ординарный профессор практической астрономии и геодезии Геодезического отделения Ни-
колаевской академии Генерального штаба, с 1912 - заслуженный профессор этой академии. С 1891
по 1914 - «совещательный астроном» ВТО Главного штаба, а с 1895 - и Морского ведомства. Кроме
преподавательской деятельности, активно участвовал в различных геодезических, астрономических и гравиметри-
ческих работах. В частности, определил с помощью телеграфа разность долгот Пулково—Архангельск, Хабаровск
— село Орловское (1896). В 1890 произвел определение УСТ с помощью прибора Штернека в Хабаровске, Вла-
дивостоке и в Гонгконге. В 1910 произвел первый опыт определения долготы по радиотелеграфу (Мариенхами
— маяк Богшер). Принимал активное участие в деятельности в Русского географического общества и Русского
астрономического общества (РАО). С 1910 по 1913 - председатель РАО. С 6.12.1904 — действительный статский
советник.
Гедеонов Дмитрий Данилович (19.11.1854-24.9.1908) — русский геодезист и астроном. Родился
£в Веневе (ныне Тульской обл.). В 1878-1880 работал в Пулковской обсерватории. В 1881 окон-
чил геодезическое отделение Академии Генерального штаба. В 1881-1887 и в 1889 участвовал в
экспедициях по определению координат астрономо-геодезических пунктов. В 1890-1900 - директор
Ташкентской обсерватории, в 1899 руководил строительством международной широтной станции
вблизи Чарджуя. С 1900 - начальник Туркестанского военно-топографического отдела. Провел вы-
сокоточные наблюдения изменяемости широты Ташкента. Предложил способ определения поправок
часов по наблюдениям звезд (способ Гедеонова) и доказал его преимущество по сравнению со спосо-
бом определения времени по наблюдениям звезд в вертикале Полярной звезды. Наблюдал покрытия
звезд Луной, прохождения Меркурия по диску Солнца. Определял положения звезд на меридианном круге. На-
гражден Серебряной (1885) и Золотой (1905) медалями им. Ф.П. Литке Русского географического общества. (БС
«Астрономы», 1986).
Пуанкаре Жюль Анри (Poincare) (29.04.1854-1912) — французский математик, физик и фило-
соф, член Французской академии наук (1887) по секции геометрии, президент академии (с 1906),
Л гХ й член Бюро долгот (с 1893), член Международной геодезической ассоциации (с 1903) родился в Нан-
си. Опубликовал 547 работ. Развивая теорию аналитических функций, разработал их автоморфные
| формы, послужившие основой дальнейшего развития нескольких ветвей математики, в частности
I I теории дифференциальных уравнений. Фуксовы преобразования таких функций применил к гео-
метрии Лобачевского. Получил новые результаты в небесной механике и математической физике:
продвинул решение задачи трех тел, теории фигур небесных тел и устойчивости движения. Основал
алгебраическую ветвь топологии, ему принадлежит формула, связывающая числа ребер, вершин и граней любого
замкнутого многогранника. В 1902-1912 огромный резонанс у широкой общественности имели его работы «Наука
и гипотеза», «Ценность науки», «Наука и метод», «Последние мысли», посвященные философско-методологическим
проблемам развития науки. В 1905 опубликовал работу «О динамике электрона», в которой независимо от А. Эйн-
штейна построил основы специальной теории относительности.
Ляпунов Александр Михайлович (1857-1918) — русский математик и механик, ученик П.Л. Че-
бышева создал теорию устойчивости равновесия и движения механических систем, определяемых
С МИ конечным числом параметров. Большой цикл исследований посвящен теории фигур равновесия вра-
щающейся жидкости, частицы которой взаимно притягиваются по закону всемирного тяготения. Им
впервые строго поставлен вопрос об устойчивости для сплошной среды (жидкости) и с помощью
>,тонкого математического анализа исследована устойчивость фигур равновесия. В частности, им до-
казана неустойчивость грушевидных фигур равновесия. В его труде «О некоторых вопросах, связан-
ных с задачей Дирихле» (1898) исследованы свойства потенциала от зарядов и диполей, непрерывно
распределенных по некоторой поверхности, исследован потенциал двойного слоя, получены важные результаты,
касающиеся поведения производных решения задачи Дирихле при приближении к поверхности, на которой задано
граничное условие. Им впервые доказаны симметрия функции Грина для задачи Дирихле и формула, дающая
решение этой задачи в виде интеграла по поверхности от произведения функции, входящей в граничное условие,
на нормальную производную функции Грина. При всех этих условиях на граничную поверхность налагаются неко-
торые ограничения. Поверхности, удовлетворяющие им, называются теперь поверхностями Ляпунова. В теории
вероятностей им предложен метод характеристических функций. На основе обобщения исследований П.Л. Чебы-
шева и А.А. Маркова им доказана центральная предельная теорема теории вероятностей при значительно более
общих условиях, чем у его предшественников.
Циолковский Константин Эдуардович (1857-19.09.1935) — русский ученый, пионер космонав-
тики и ракетной техники, родился в селе Ижевское под Рязанью. После перенесенной в детстве
скарлатины почти полностью потерял слух, что лишило его возможности поступить в учебное за-
ведение. Образование получил самостоятельно, в 1879 экстерном сдал экзамены на звание учителя.
Преподавал физику и математику в Боровском уездном училище Калужской губернии, а затем в
гимназии и епархиальном училище в Калуге, где проработал до выхода на пенсию в 1920. Первые
работы посвящены разработке конструкций цельнометаллического управляемого дирижабля, обтека-
емого аэроплана, поезда на воздушной подушке. В 1897 построил первую в России аэродинамиче-
скую трубу и провел испытания простейших моделей. В 1890-х начал заниматься исследованиями,
связанными с использованием реактивного движения для создания межпланетных летательных аппаратов. В ста-
тье «Исследование мировых пространств реактивными приборами» (1903) и последовавших работах (1911-1914)
вывел уравнение движения ракеты как тела с переменной массой, обосновал возможность применения ракет для
межпланетных сообщений, предсказал явление невесомости, изложил основы теории жидкостных ракетных дви-
гателей, рассмотрел и рекомендовал к использованию различные топлива (в качестве наиболее эффективного —
смесь жидких кислорода и водорода). Высказал идею создания околоземных орбитальных станций как промежу-
точных баз для межпланетных полетов. В 1929 опубликовал работу «Космические ракетные поезда», в которой
изложил теорию особого вида составных ракет. В позднем творчестве центральное место занимает грандиозная
планетарная и космическая утопия в создании идеального общества. В 1924 избран почетным профессором Ака-
демии воздушного флота им. А.Е.Жуковского.
Пицетти Паоло (Pizzetti Paolo) (1860-1918) — итальянский геодезист. С 1900 — профессор теоретической
геодезии Пизанского университета. Предложил использовать эллипсоид вращения, уровенный относительно по-
тенциала силы тяжести, и поле такого эллипсоида как отсчетные в теории фигуры Земли и развил соответствую-
щую теорию. Опубликовал курс теоретической геодезии (1895, 1905), книгу «Основы механической теории фигуры
планет» (1913, русский перевод А.А. Михайлова, 1933), статьи, в частности по теории ошибок. Отмечал невоз-
можность определения геоида Гаусса-Листинга без сведений о внутреннем гравитационном поле Земли. Вслед
за У. Томсоном (Кельвином) и Тэтом развивал теорию тел, эквивалентных относительно ньютонова притяжения,
то есть изменение внутреннего гравитационного поля и геоида может не повлечь изменения поля вне земной
поверхности и на ней.
Гильберт Давид (1862—1943) — немецкий математик и логик, основатель Геттингенской матема-
тической школы. Основные работы относятся к теории алгебраических инвариантов, теории алгебра-
ических чисел, к основаниям математики и математической логики. В работе «Основания геометрии»
(1899) строго аксиоматически построил геометрию Евклида, что в значительной степени предопре-
делило дальнейшее развитие исследований по аксиоматизации научного знания (Аксиоматический
метод). Большое значение имеют работы Гильберта в области исчисления высказываний и исчис-
ления предикатов. В начале XX в. Гильберт сформулировал основы нового подхода к обоснованию
математики, который привел, с одной стороны, к появлению концепции формализма в основаниях
математики, а с другой — к возникновению нового раздела математики — метаматематики (теории доказательств).
Голицын Борис Борисович (1862-1916) — князь, русский физик и геофизик, создатель сей-
смологии, изучал сложнейшие физические явления: световое давление, температурное излучение,
критическое состояние вещества, рентгеновские лучи, расширение спектральных линий, метеороло-
гию и сейсмологию, которая благодаря его трудам превратилась в точную физико-математическую
дисциплину. Дал решение задачи сейсмологии (1902): определение очага землетрясения по данным
одной сейсмической станции. Первым разработал полную теорию и конструкцию электродинамиче-
ских сейсмографов и ввел их в практику. Принцип сейсмометра Голицина лег в основу целого класса
приборов, предназначенных для относительного измерения ускорения силы тяжести - гравиметров. В оптике вме-
сте со своим ассистентом И.И. Вилипом провел экспериментальное доказательство эффекта Доплера.
Блажко Сергей Николаевич (17.11.1870-1956) — российский астроном Московской обсерватории
и ГАИШ, профессор Московского университета, член-корреспондент АН СССР. Его научные работы
посвящены практической астрономии и переменным звездам. Одним из первых получил фотографию
спектра метеора (1904). Им опубликованы: «Курс практической астрономии» (1938, 1940, 1951,
1979); «Курс сферической астрономии» (1948, 1954); «Курс общей астрономии» (1947). В 1934 издана
книга С.Н. Блажко и К.А. Цветкова «Астрономия в военном деле» под редакцией А.А. Михайлова.
Бонч-Бруевич Михаил Дмитриевич (24.02.1870, Москва — 3.08.1956, Москва). Из дворян.
Окончил московский Константиновский Межевой институт (1891), военно-училищный курс Мос-
ковского пехотного юнкерского училища (1892), Академию Генштаба (1898). С 1913 полковник. В
1914 командир пехотного полка. В августе — сентябре 1914 генерал-квартирмейстер штаба 3-й армии
Юга-Западного фронта, затем — штаба Северо-Западного фронта; с января 1915 генерал-майор. С
апреля 1915 начальник штаба 6-й армии, дислоцированной в Петрограде и его окрестностях, затем
до февраля 1916 начальник штаба Северного фронта. С марта 1916 начальник гарнизона Пскова, где
находилась Ставка главкома Северного фронта. С сентября 1917 командующий Северным фронтом.
В годы Гражданской войны — начальник Полевого штаба РВСР, руководитель Высшего военного
совета. В конце 1918 — начале 1919 преподавал в Межевом институте, затем возглавлял работу по созданию
Высшего геодезического правления. 23 июня — 22 июля 1919 начальник Полевого штаба РВС Республики, затем
на научной и педагогической работе; ген.-лейтенант (1944).
6. Представление о Земле: небесное тело, близкое к эллипсоиду, входящее в одну из Га-
лактик расширяющейся Метагалактики (Фридман, 1924, Хаббл, 1929).
Фридман Александр Александрович (1888-1925) — российский математик и геофизик, в 1922-
1924 гг. нашел, что уравнения тяготения Эйнштейна имеют нестационарные решения, что легло в
основу современной космологии. Совместно с Л.В. Келлером заложил основы современной статисти-
ческой теории турбулентности. Опубликовал основополагающие работы по динамике атмосферы.
Хаббл Эдвин Пауэлл (Hubble) (1889-1953) — американский астроном, доказал звездную приро-
ду внегалактических туманностей (галактик), оценил расстояние до некоторых из них, разработал
основы их структурной классификации, установил (1929) закономерность разлета галактик. В ре-
зультате анализа красного смещения в спектрах удаленных галактик доказал крупномасштабную
однородность и расширение Вселенной, тем самым подтвердив правильность кинематической модели
А.А. Фридмана в космологии (1924).
Кюнен и Фуртвенглер в 1898-1904 гг. измерили абсолютное ускорение силы тяжести оборот-
ными маятниками в Потсдаме, принятое в то время за исходное для всех относительных измерений
мира.
Красовский Феодосий Николаевич (1878-1948) — российский ученый, геодезист, один из ру-
ководителей и организаторов государственной службы СССР. Автор фундаментальных трудов по
высшей геодезии и статей по картографии. Им было доказано, что полное решение геодезических
'« задач возможно только с использованием данных гравиметрии. По его инициативе в СССР в 1928
„ j Главным Геодезическим Управлением СССР (ГГУ) была утверждена единая схема и программа раз-
вития государственной триангуляции страны. В схеме Красовского передача координат на большие
расстояния осуществлялась проложением рядов триангуляции 1-го класса, образующих при взаим-
ном пересечении полигоны с периметром 800-1000 км. Им был осуществлен переход от метода
развертывания геодезических данных к методу проектирования их на поверхность эллипсоида. По инициативе
Б.В. Нумерова и А.А. Михайлова им заменены изостатические редукции гравиметрическими данными в обработке
астрономо-геодезической сети. Именем Ф.Н. Красовского назван эллипсоид, выведенный согласно его установкам
и принятый в СССР и ряде других стран при обработке геодезических измерений.
Архангельский Андрей Дмитриевич (1879-1940) — российский ученый, геолог, связал поисково-
разведочные работы с теоретическими вопросами геологии. С 1917 начал составление сводной мил-
I J, лионной геологической карты. В 1918 читал лекции по геологии в Межевом институте, МВТУ, МГУ,
М^-^В Московской горной академии. Совместно с П.П. Лазаревым разрабатывал вопрос о связях аномалий
BL^fl УСТ с магнитными аномалиями и геологическим строением Русской платформы. Содействовал раз-
И витию геофизических методов изучения геологической структуры и поисков полезных ископаемых.
Академик с 1929. В 1932-34 опубликовал «Геологическое строение СССР. Европейская и Средне-
азиатская части. Сибирь и Казахстан». Интерпретировал региональные гравиметрические и магнитные съемки на
Курской магнитной аномалии, в районе Баку, на Западно-Сибирской низменности. Был одним из инициаторов
общей гравиметрической съемки страны. С 1934 — директор Геологического института АН СССР.
Идельсон Наум Ильич (1885-1951) — российский астроном, преподаватель. С 1919 работал в
У i J Вычислительном институте (г. Петроград), где руководил астрометрическим отделом, издававшим
Астрономические ежегодники. Одновременно руководил вычислительными работами в Пулковской
обсерватории. Его работы касались вопросов вращения Земли, небесной механики, теории фигуры
Земли, их истории, обработки наблюдений. Автор книги «Теория потенциала с приложениями к тео-
рии фигуры Земли и геофизике» 1932 и 1936. Несколько его публикаций, собственных и совместно
с Н.Р. Малкиным, посвящены разным подходам к выводу формулы Стокса высоты геоида над от-
счетным земным эллипсоидом, определениям уклонений отвеса, обработке измерений в астрономо-геодезических
сетях при учете влияний уклонений отвеса от нормалей к отсчетному эллипсоиду.
Сорокин Леонид Васильевич (12.08.1886-1954) — российский ученый, астроном, гравиметрист,
а преподаватель, основоположник отечественной морской гравиметрии, лауреат Государственной пре-
мии, награжденный орденом Трудового Красного Знамени, орденом Ленина, медалью «За оборону
Москвы». Родился в Борисоглебске. В 1905 окончил с золотой медалью Александровскую гимназию
Борисоглебска, в 1911 получает диплом 1-й степени Московского университета по специальности
астрономия. В 1917 — преподаватель космографии в мужской гимназии, в 1920 — вычислитель гео-
дезического отдела Корпуса военных топографов (КВТ) при Генеральном штабе РККА, в 1921 —
ассистент кафедры астрономии и геодезии 1-го МГУ, в 1921-1926 гг. — участник маятниковых и
вариометрических наблюдений УСТ Курской магнитной аномалии, а также разработки теории при-
боров и методики интерпретации измерений, в 1926 — доцент МГУ, читающий курс гравиметрии, в 1926-1929 гг.
— консультант ряда центральных научных и производственных геофизических организаций СССР, по поручению
академика И.М. Губкина проводил маятниковые определения УСТ на Апшеронском полуострове и Прикаспий-
ской низменности, в 1935 — профессор, в 1936 — д-р физ.-мат. наук (без защиты). Один из создателей школы
разведочной гравиметрии, которая развивает методику и осуществляет гравиметрическую съемку в ряде районов,
перспективных в отношении нефти и газа (Прикаспийская низменность, Кубань, Татария и Башкирия и др.). В
1929, через год после знакомства с публикациями Венинг-Мейнеса, создает свой первый морской маятниковый
прибор. С ним он на подводной лодке проводит экспедиции: в 1930 г., 1933-1935 гг. - на Черном море, в 1937 - в
Охотском и Японском морях, в 1948 - в Баренцевом море. Им изобретено и усовершенствовано более 50 различных
устройств и приборов для целей гравиметрии и службы времени. Его кварцевые часы для магнитных измерений
были удачно применены в 1955 в морской гравиметрической экспедиции ГАИШ в Северном Ледовитом океане. В
1930-1941 гг. Л.В. Сорокин был по совместительству профессором кафедры прикладной геофизики МГРИ им. С.
Орджоникидзе. В 1943-1953 гг. возглавлял кафедру геофизических методов разведки в МНИ им. И.М. Губкина.
В предвоенные годы некоторое время читал лекции по геодезии и гравиметрии в ВИА. Его «Курс гравиметрии и
гравиметрической разведки» дополнялся и переиздавался в 1937, 1951 и 1953 гг.
Венинг-Мейнес Феликс (F.A. Vening Meinesz) (1887-1966) — голландский геофизик и грави-
метрист, разработал метод одновременного наблюдения двух качающихся маятников, позволяющий
исключить влияние горизонтальных возмущающих ускорений (1923), создал прибор, дающий непо-
средственно запись колебаний фиктивного маятника (1925), определил на разных океанах и морях
своим прибором, установленным в кардановом подвесе, на подводной лодке, 486 гравиметрических
пунктов (1925-1934), вывел из формулы Стокса зависимость между аномалиями силы тяжести и
уклонением отвеса (1928), предложил вариант гипотезы изостазии (1931).
Михайлов Александр Александрович (1888-1983) — российский астроном, директор Пулковской
обсерватории (1947-1964), имел груды по теории и предвычислению затмений, проверке эффекта
Эйнштейна, теории фигуры Земли, гравиметрии, написал учебник «Курс гравиметрии и теории фи-
гуры Земли» для геодезических вузов (1933 и 1939) А.А. Михайлов был инициатором исследований
по обобщению теории Стокса — нерегуляризированного геоида. В частности, он развил принципы
использования моделей, отражающих земные условия, для оценки точности формул теории фигуры
Земли (1936-1940). В этом случае по заданному распределению массы можно рассчитать УСТ, как
бы измеренную на поверхности модели, и, применяя формулы теории фигуры Земли, исследовать
формулу Стокса в условиях, отличных от идеальных, например, из-за рельефа — оценить возника-
ющие погрешности. При «регуляризации» земной модели и приведения силы тяжести на ее геоид.
Так были выявлены ошибки в аномалиях силы тяжести до 10-30% величины из-за отличий вер-
тикальных градиентов, нормального и реального, и сделан вывод, что применение формулы Стокса
к нерегуляризированной Земле недопустимо. Описанный им метод исследований на моделях нашел
применение в ЦНИИГАиК.
Джеффрис Харольд (Jeffreys) (1891-1989) — английский астроном и геофизик, занимался изу-
чением строения, движения и развития Земли. Окончил Кембриджский университет (1914). Про-
фессор астрономии в Кембридже (1946-1958). Им составлен новый годограф времен пробега сейсмических волн,
имеющий широкое применение для определения эпицентров очагов дальних землетрясений. Исследовал влияние
вязкости Земли на постоянную нутации, открыл границу раздела в упругих свойствах земной коры на глубине
около 400 км. Принимал участие в разработке гипотезы о происхождении планет путем столкновения Солнца с
другой звездой. С Виченте (R.O. Vicente) развил теорию нутации упругой Земли (1957). Применил формулу Грина
к реальной Земле для обоснования редукции в свободном воздухе, не выходя из рамок теории Стокса.
Нумеров Борис Васильевич (1891-1941) — российский ученый, астроном и гравиметрист, ор-
ганизовал (1917) постоянную комиссию по определению силы тяжести, которая систематизировала
ранее выполненные работы и организовывала гравиметрические экспедиции по определению опор-
ных пунктов на территории страны. Организовал (1919) Вычислительный институт для вычисления
эфемерид малых планет, опубликовал (1925-1931) ряд статей о геофизической интерпретации на-
блюдений силы тяжести и вариометрических измерений, о топографических поправках тех и других,
о вычислении нормальных значений силы тяжести и производных от ее потенциала, об определении
вертикального градиента силы тяжести по карте ее аномалий, об обработке наблюдений и представ-
лении результатов, по усовершенствованию конструкции вариометра, по результатам изучений в Соликамске и
Березняках, у озера Баскунчак, на Эмбе, у Грозного, у Шуваловского озера. Им обоснована нецелесообразность
гравиметрической съемки с расстоянием между пунктами 100 и даже 50 км, отмечена полезность гравиметриче-
ской съемки для геодезических работ, опирающихся на астрономические пункты. Был инициатором и одним из
организаторов общей гравиметрической съемки СССР. Под его руководством после постановления Совета Труда и
Обороны в 1932 об общей гравиметрической съемке было организовано 77 экспедиций и определено 2086 пунктов.
По его инициативе были созданы четверть- и полусекундные маятниковые приборы (первый весил примерно 10 кг),
вспомогательное оборудование, новые вариометры, модели приборов с упругими маятниками Леже, гравиметры.
Опубликовал статьи: «Вычисление уклонений отвеса по аномалиям силы тяжести по формуле Венинг-Мейнеса и
вторых производных от потенциала» (1933), «Вычисление уклонения отвеса по аномалиям силы тяжести» и в со-
авторстве с Н.А. Артемьевым «Теория упругого вертикального маятника и применение его для определения силы
тяжести» (1934).
Жонголович Иван Данилович (1892-1981) — российский ученый, астроном, военный гидро-
граф, опубликовал первую работу «Относительное определение силы тяжести прибором Штюкрата в
Петрограде, Пулкове и Петергофе» (1920). Участвовал в исследовании Курской магнитной аномалии.
•( Выполнял работы по астрономо-геодезическому обеспечению гидрографических съемок и по грави-
* tJg метрии и земному магнетизму на Новой Земле, на Белом, Баренцевом и Карском морях. Подобным
образом четыре года работал на Памире. В 1935-1937 участвовал в высокоширотных экспедициях
на ледоколах «Садко» и «Малыгин», в разработке научной программы папанинской экспедиции на
Северный полюс. В 1952 опубликовал капитальную работу «Внешнее гравитационное поле Земли
и фундаментальные постоянные, связанные с ним», использовав все известные результаты мировой
гравиметрической съемки и представив результат разложением по сферическим функциям до восьмой степени.
Дробышев Федор Васильевич (6.07.1894-28.07.1986) российский ученый-геодезист, родился в
станице Шелкозаводская Терской области. В 1912-1914 обучался в Военно-топографическом учили-
ще. В период 12.11.1914 — 1916 прикомандирован к 65-му пехотному Московскому полку, в составе
которого принимал участие во многих боевых действиях в Польше, Латвии, Литве, был команди-
'jF ром роты. У деревни Травлины (Литва) 16.05.1915 тяжело ранен. Поручик — 19.07.1915. В период
17.05.1916-1918 был на съемке Юго-Западного пограничного пространства. В 1917 прикомандирован
к съемке Петроградской губернии и Финляндии. В 1919-1920 — составитель карт Южного ВТО.
Демобилизован 09.1920. В 1920-1922 преподавал геодезию в Политехническом институте во Владикавказе. В
1921 окончил высшие маркшейдерские курсы при Горном институте в Екатеринославе. В 1922-1926 — началь-
ник топографической партии в Северо-Кавказском округе ВГУ, в 1926-1929 — инженер в оптико-механическом
отделе ВГУ и одновременно лаборант на кафедре фотограмметрии ММИ. В 1928 командирован в Германию на
Международную авиационную выставку, посетил некоторые оптико-механические заводы. 1929-1940 — работал в
ЦНИИГАиК и одновременно преподавал в МИИГАиК. С 1939 — доктор техн, наук, профессор,
Г в 1940-1971 — преподаватель, а с 1950 — заведующий кафедрой фотограмметрии в МИИГАиК.
Ь*. , Сконструировал ряд впоследствии широко известных фотограмметрических приборов. Лауреат Ста-
линской (1946) и Ленинской (1970) премий. С 1971 — на пенсии.
J Мазаев Александр Васильевич (17.08.1894-16.10.1976) — российский ученый, занимавшийся
5 , геодезической астрономией, доктор техн, наук (1947), профессор (1948), заслуженный деятель нау-
Kfl ки и техники РСФСР. Один из первых астрономов в стране, который исследовал и внедрил радио-
телеграфный способ определения долготы, лично определил несколько десятков астрономических
пунктов. Разработал способ совместного определения географической широты и поправки часов из наблюдений
серии звезд на одном и том же зенитном расстоянии, но на разных азимутах. Этот способ равных высот назван
«способом Мазаева» (1946). В 1914-1916 — студент физ.-мат. факультета Императорского Московского универ-
ситета, в 1916 — призван на военную службу, окончил ускоренный курс Тифлисского военного училища (ТВУ) с
производством в прапорщики. В 1916-06.1918 — прикомандирован к штабу Кавказского военного округа и одно-
временно преподаватель ТВУ. В 1.08.1919-1921 — командир взвода учебной команды артиллерийского дивизиона
Харьковского военного округа. Участник боевых действий по разгрому отрядов Н.И. Махно. В 10.08.1921-1924
— в запасе РККА. В 1921-1926 обучался на геодезическом факультете Московского межевого института. В пе-
риод 3.11.1924-1932 помощник астронома, с 1.10.1926 — ВрИД астронома, с 1.05.1928 — астроном военного
астрономо-радиотелеграфного отряда. В 1926-1927 на астрономических работах на пунктах триангуляции 1-го
класса. В 15.01.1931-04.1931 — помощник командира военно-геодезического отряда, 04.1931-1932 — преподава-
тель на военно-геодезическом факультете Московского геодезического института, 26.05.1932-1937 — начальник
учебной части военно-геодезического факультета Военной технической академии, с 1.02.1937-1967 — препода-
ватель кафедры астрономии и геодезии, с 15.04.1943 — инженер-полковник, с 20.03.1944 — зам. начальника, с
30.05.1953 — начальник кафедры сфероидической геодезии и астрономии ВИА им. Куйбышева. Автор более 30
научных трудов, руководств, пособий.
Яновский Борис Михайлович (1894-1967) — российский ученый, геофизик-магнитолог и мет-
ролог, преподаватель, автор известного учебника «Земной магнетизм», выдержавшего три издания,
и соавтор первого учебника по магнитной разведке (1934). Инициатор постановки исследований в
разных аспектах наук о Земле: магнитотеллурический метод изучения проводимости Земли - метод
магнитотеллурического зондирования, физика магнитосферы, а также всемерно поддерживал сейсмо-
логические и геоэлектрические исследования. С его именем связано: создание эталонов магнитного
момента, напряженности магнитного поля, электрического сопротивления и силы тока, абсолютные
определения гиромагнитного отношения протона в слабых полях, а также разработка методов опре-
деления компонент геомагнитного поля методом свободной ядерной индукции.
Урмаев Николай Андреевич (19.12.1895-13.01.1959) — российский ученый, военный геодезист и
преподаватель. Основные вехи: 1917 — прапорщик (русской армии); 1937 — профессор; 1940 — док-
rjfS’.F* тор технических наук; 16.08.1938 — бригинженер; 27.01.1943 — генерал-майор технических войск.
Студентом 1-го курса физико-математического факультета Московского университета принимал уча-
стие в вычислении данных для наблюдения солнечного затмения (19.09.1914). В 1916 призван на
• действительную военную службу. В 1918 вступил в Красную Армию, а с 1920 находился в составе
Корпуса военных топографов. В 1931 переходит на преподавательскую работу и с 1932 служил в
ВИА им. Куйбышева, где в течение 20 лет возглавлял сначала кафедру геодезии, а затем кафед-
ру сфероидической геодезии и астрономии. Им опубликованы: «Руководство по обработке триангуляции» (1932);
уравнивание полигонов астрономо-геодезической сети по способу посредственных измерений, причем нормальные
уравнения решаются последовательными приближениями (1937); оригинальный способ оценки точности положе-
ния узловых пунктов астрономо-геодезической сети, успешно применявшийся при уравнивании геодезической сети
во Франции; монография «Сфероидическая геодезия» (1955); книга «Элементы фотограмметрии» (1941); учебное
пособие «Математическая картография» (1941); работы «Методы изыскания новых картографических проекций»
(1947), «Исследования по математической картографии» (1953), «Теория томографического преобразования и ее
применение к математической картографии и составлению карт» (1965), «О теоретической основе способов и
технических приемов составления карт» (1955).
Малкин Николай Романович (1899-1970) — российский математик, геофизик, предложил вари-
ант решения задачи определения геоида без регуляризации, явно выразив интегральной формулой
высоту нерегуляризированного геоида (1934-1935). Позднее М.С. Молоденским показано, что для
* определения реального геоида нужно знать не только силу тяжести на нем, но отдельно и ту ее
АЛ часть, которая вызвана притяжением только континентальных масс, то есть определение нерегуляри-
зированного геоида не снимало проблему редуцирования гравиметрических наблюдений. Малкиным
высказана идея об определении реальной земной поверхности хотя бы ценой усложнения теории.
Парийский Николай Николаевич (1900-1996) — российский ученый, астроном, геофизик, пре-
' подаватель, вел плодотворные научные изыскания в области гравиметрии, астрономии, космогонии
? и геофизики. Им получены исходные для всех советских работ значения силы тяжести для четырех
гравиметрических пунктов: Пулково, Москва, Полтава и Казань (1935). Был одним из активных
участников как ниспровержения теории Джинса, так и становления новой космогонической концеп-
ции Шмидта. Многолетние наблюдения, проведенные сотрудниками лаборатории под руководством
Н.Н. Парийского, подтвердили выводы сейсмологии о жидком состоянии внешнего ядра Земли, про-
явившем себя в заниженном значении гравиметрического фактора б в частоте суточной волны К1. В работах,
выполненных со своими учениками, доказал, что наблюдаемое вековое замедление вращения Земли объясняется
действием морских приливов.
Моисеев Николай Дмитриевич (1902-1955) — российский математик и астроном, зав. кафед-
рой небесной механики (1938-1955), директор ГАИШ (1939-1943), в статьях 1933, 1934 и 1935
г. первым получил решение поставленной по инициативе А.А. Михайлова задачи об определении
реального геоида Земли — нерегуляризированного геоида, составив интегральное уравнение отно-
сительно высоты такого геоида над отсчетной сферой. Затем решения этой задачи были получены
Н.Р. Малкиным и М.С. Молоденским. Позднее выяснилось, что определение реального геоида: 1)
не снимает задачи редукций силы тяжести внутрь притягивающих масс (этой задаче — редукции
Прея-Пуанкаре — посвящена вторая статья Н.Д. Моисеева, 1933), 2) не решает задачи обработки
геодезических измерений.
Зверев Митрофан Степанович (16.04.1903-1991) — российский ученый, астроном, гравиметрист.
Под руководством Л.В. Сорокина работал ответственным наблюдателем в районе Курской магнит-
jf ной аномалии (1932), затем в лаборатории исследования маятниковой аппаратуры (ГАИШ), где была
мНМ отработана методика определения температурных и барометрических коэффициентов маятников. В
1936 в соавторстве с Л.С. Казаковым, И.А. Казанским, М.С. Молоденским и Ю.Д. Буланже состав-
лен «Справочник и руководство по гравиметрическим работам». Эта книга сыграла большую роль в
развитии гравиметрической съемки. В области геодезической гравиметрии им опубликованы статьи:
в соавторстве с Н.В. Киселевым — о выводе гравиметрических уклонений отвеса, численном инте-
грировании формулы Венинг-Мейнеса, о предложенной палетке с точностью 1" (1936); в соавторстве
с Н.Н. Парийским — «Об оценке точности и классификации полевых гравиметрических пунктов» (1940). В обзоре
«Фундаментальная астрометрия», опубликованном в сборнике «Астрономия в СССР за тридцать лет» (1948), им
уделено внимание гравиметрическим наблюдениям и каталогу звезд для астрономо-геодезических работ.
Шокин Пантелеймон Федорович (1903-1979) — российский гравиметрист, преподаватель. Ра-
ботал главным инженером и начальником гравиметрической партии, а в 1933 начальником партии
морских гравиметрических работ, которые возглавлял проф. Л.В. Сорокин. Кандидатская диссерта-
ция «Уравнительные вычисления гравиметрических пунктов высших классов» (1944), выполненная
под руководством Н.Н. Парийского, опубликована в виде монографии в 1949. В 1947-1948 возглавил
исследования первых серийных отечественных гравиметров Молоденского ГКМ-5 и ГКМ-6. С уча-
стием 30 студентов были проведены подробные лабораторные испытания в МИИГАиК 22 приборов
и испытания на базисе с диапазоном 150 мГал. Сделано эталонирование на базисе МИИГАиК—
ВНИИМ (Ленинград) с наблюдениями на железнодорожных станциях при остановках поезда. В
1950-1956 в составе Аэрогравиметрической экспедиции Геофизического института АН СССР участвовал в из-
мерениях с кварцевыми гравиметрами при построении государственной опорной сети, исследовал влияние усло-
вий транспортировки, температуры и последействия наклона гравиметра. В 1951 разработал способ вычисления
приливных гравиметрических поправок. Вплоть до 1966 научные и производственные организации пользовались
графиками поправок, рассчитанными на 1-2 года вперед и издаваемыми в МИИГАиК. С 1948 читает курс гра-
виметрии для астрономо-геодезистов, сменив своего учителя и основателя этого курса А.А. Михайлова. В 1960
издан учебник Шокина «Гравиметрия», который был основным для геодезистов в течение 20 лет. За учебник ему
была присуждена ученая степень доктора технических наук (1962)
Еремеев Владимир Федорович (1904-1985) — российский ученый, геодезист, до 1933 работал
в полевых партиях: базисной, астрономической, маятниковой, вариометрической, а затем работал на
гравиметрической съемке. В 1937 перешел на работу в ЦНИИГАиК. В 1945 им опубликована палет-
Т ка для численного интегрирования при вычислении влияния зоны в радиусе 1000 км на уклонения
отвеса и высоты геоида по формулам Венинг-Мейнеса и Стокса, нашедшая широкое практическое
применение вплоть до внедрения в практику ЭВМ. Палетка предназначена для использования как
при обосновании топографических съемок мелких масштабов на астрономических пунктах, так и при
гравиметрической съемке местности. Затем она нашла применение при астрономо-гравиметрическом
нивелировании. Начиная с 1945 занимался практической реализацией разработок М.С. Молоденского по опреде-
лению фигуры земной поверхности и земного гравитационного поля по геодезическим и гравиметрическим данным
на поверхности Земли. В 1950 расчетами на модели Земли показал, что вычисления по формуле Венинг-Мейнеса
при редукциях в свободном воздухе приводят к приближенным уклонениям отвеса на земной поверхности, а
не на геоиде. В 1951 им получены рабочие формулы для определения нормальных высот. В совместной работе
М.С. Молоденского, В.Ф. Еремеева и М.И. Юркиной (1962) показано, что формальное разложение по сфери-
ческим функциям аномалий УСТ, заданных на земной поверхности с рельефом, может вызвать недопустимые
погрешности в первых же членах ряда Стокса. Еремеев много занимался вопросами численного интегрирования
уравнений Молоденского. В 1971 в соавторстве с А.И. Шабановой выполнено вычисление уклонений отвеса на
модели Земли, которое выявило преимущество метода Молоденского и его модификаций, предложенных В.В. Бро-
варом и Л.П. Пеллиненом, сравнительно со стандартным процессом последовательных приближений. В 1972 в
соавторстве с М.И. Юркиной изложена теория высот в земном гравитационном поле, выяснено, что при эллипсо-
идальном отсчетном поле, в отличие от сферического, для разрешимости уравнений Молоденского не возникает
условия отсутствия в аномалиях силы тяжести сферической функции первой степени, решение этого уравнения
единственно и безусловно, интегральное уравнение Молоденского относительно плотности простого слоя преоб-
разовано к несингулярному виду. За исследования в области теоретической геодезии В.Ф. Еремееву посмертно
(2003) присуждена Премия имени Ф.Н. Красовского.
Мудрецова Екатерина Алексеевна (1904-1995) — российский ученый, геофизик, преподаватель,
автор около 100 научных работ, из которых около 70 опубликовано. В числе публикаций — три
монографии: «Таблицы топографических и топографо-изостатических поправок» (1940); «Методика
подземных гравиразведочных работ на рудных месторождениях. Поправки за влияние рельефа мест-
ности при высокоточных измерениях с гравиметрами в шахтах, штольнях и на дневной поверхности»
(1963) и «Интерпретация материалов гравиметрической съемки на неструктурных месторождениях
нефти и газа» (1979). Научный редактор фундаментального Справочника геофизика, т. V, Гравираз-
ведка, 1968, 1981 и 1990 гг. издания; объем ее статей в справочнике более 7 печатных листов.
Пудовкин Иван Михайлович (1905-1979) — российский ученый, геофизик, занимался вопроса-
ми практики и теории интерпретации магнитных аномалий в магниторазведочном плане. Им под-
черкивалась мысль о том, что исследование магнитного поля Земли является мощным и весьма
эффективным средством изучения внутреннего строения Земли и физических процессов, развива-
ющихся в ее недрах, в том числе динамики внутриземных явлений. Им исследовались мировые
аномалии магнитного поля и их связи с другими геофизическими явлениями. Так, в результате
этих исследований была установлена связь поля (при вычислении которого за нормальное поле при-
нималось поле эксцентричного диполя) с тепловым потоком, элементами глобальной тектоники и
гравитационным полем. Интересные результаты им получены при исследовании связи мировых магнитных анома-
лий с элементами фигуры Земли. Им показано, что поле коррелирует с высотами квазигеоида таким образом, что
в северном полушарии положительные аномалии территориально совпадают с отрицательными высотами квази-
геоида, а отрицательные — с положительными, тогда как в южном полушарии такая корреляция имеет обратный
знак: здесь с отрицательными аномалиями совпадают понижения высот квазигеоида и геоида, а с положительны-
ми — повышения. Поскольку гравитационные аномалии не могут быть вызваны электрическими токами, то этими
токами нельзя объяснить и наличие мировых магнитных аномалий, скорее всего связанных с неравномерным
распределением намагниченности вещества твердой оболочки Земли. Им опубликовано 85 научных работ.
Мигаль Николай Константинович (1905-1979) — украинский ученый, геодезист, в 1937 рас-
смотрел вопрос об определении высот геоида и уклонений отвеса по вариометрическим данным. В
1938 рассмотрел формулу Венинг-Мейнеса как уравнение относительно аномалий силы тяжести.
Включившись в разработку теории нерегуляризированного геоида, начатую по инициативе А.А. Ми-
хайлова, предложил составлять краевое условие соответствующей задачи математической физики
для физической поверхности Земли (1939) Использовал при этом среднее значение нормальной си-
лы тяжести внутри материковых масс на отрезке между геоидом и земной поверхностью. Искомой
предполагалась высота нерегуляризированного геоида над отсчетной сферой (эллипсоидом). Реше-
ние полагал возможным выразить формулой Стокса, хотя для этого не было никаких оснований. Во
второй статье того же года дал новую интерпретацию аномалии в свободном воздухе: вместо обычной редукции
измеренной силы тяжести на геоид им предложена редукция нормальной силы тяжести на земную поверхность.
Достоинство такой интерпретации видел в том, что притягивающие массы никуда не перемещаются, что суще-
ственно для гравиразведки. Этот взгляд на аномалии сохранен в теории Молоденского. В работах 1949 и 1959
построил теорию определения фигуры и размеров регуляризированной Земли без использования нормального от-
счетного поля. Как отсчетую Мигаль использовал неуровенную поверхность, в частности это мог быть эллипсоид
с центром, не совпадающим с центром инерции Земли. Отсчетная поверхность должна быть внешней относительно
геоида. Поскольку не использовано отсчетное поле, он оперировал с полными величинами силы тяжести, сохранив
во множителях при силе тяжести члены порядка четвертой степени эксцентриситета, что обеспечило точность
вычисления порядка 1 мГал. Использовал функции Ламе и их вырожденный случай для двухосного эллипсоида
— функции Лежандра. Его подход вскрыл значение четырех параметров теории фигуры Земли: потенциала си-
лы тяжести в начале счета высот и координат центра инерции Земли в геодезической системе, и возможность
их определения по гравиметрическим и астрономо-геодезическим данным. Дополнив теорию Стокса уравнениями.
определяющими эти параметры, Молоденский согласовал подходы Стокса и Н.К. Мигаля [Молоденский и др.
1960].
Королев Сергей Павлович (12.01.1907-14.01.1966) — выдающийся конструктор и ученый, ра-
ботавший в области ракетной и ракетно-космической техники. Дважды Герой Социалистического
Труда, лауреат Ленинской премии, академик Академии наук СССР, он являлся создателем отече-
ственного стратегического ракетного оружия средней и межконтинентальной дальности и основопо-
ложником практической космонавтики. Его конструкторские разработки в области ракетной техники
представляют исключительную ценность для развития ракетного вооружения, а в области космо-
навтики имеют мировое значение. Он по праву является отцом отечественной ракетно-космической
техники, обеспечившей стратегический паритет и сделавшей наше государство передовой ракетно-
космической державой.
Изотов Александр Александрович (1907-1988) — российский ученый, геодезист, преподаватель,
известен исследованиями по определению фигуры и размеров Земли. Сначала под руководством Ф.Н.
Красовского, а затем самостоятельно, в результате большой работы коллектива получил параметры
земного эллипсоида, получившего имя Красовского. Ф.Н. Красовскому (посмертно) и А.А. Изото-
ву за исследования по определению формы и размеров Земли присуждена Государственная премия.
Эллипсоид, названный именем Ф.Н. Красовского, был принят в СССР и ряде других стран при об-
работке астрономо-геодезических сетей. Включившись в исследования, связанные с использованием
ИСЗ в геодезических целях, А.А. Изотов организовал в ЦНИИГАиК лабораторию космической гео-
дезии, коллектив которой в 1974 под его руководством и редакцией опубликовал монографию «Основы спутниковой
геодезии». В 1945 и 1975 им рассмотрены принципы глобальной геодинамики.
Загребин Дмитрий Владимирович (1908-1989) — российский ученый, астроном, преподаватель,
известен работами, посвященными проблемам теории потенциала, гравиметрии, геодезии, сфериче-
ской астрономии, методики вычисления данных «Астрономического ежегодника СССР». С 1940 он
Работает в Астрономическом институте (с 1943 Институт теоретической астрономии АН СССР —
ИТА). В 1941 защитил кандидатскую диссертацию на тему «Уровенный трехосный эллипсоид и сила
тяжести на его поверхности», в 1949 — докторскую на тему «Теория регуляризированного геоида».
• ’ Основные научные результаты относятся к теории потенциала и гравиметрии. Им получено строгое
решение проблемы Стокса для трехосного уровенного эллипсоида с привлечением аппарата функций
Ламе. Получена также обобщенная формула Клеро для случая трехосной Земли, которую он приме-
нил для уточнения сжатия Земли. Вел преподавательскую работу в Ленинградском государственном университете,
где регулярно читал основной курс сферической астрономии студентам - астрономам и географам.
Федынский Всеволод Владимирович (1908-1978) — российский ученый, геофизик, астроном,
организатор, преподаватель. В 1947 за работу «Гравитационная характеристика межгорных впадин»
ему была присуждена докторская степень (минуя кандидатскую). При его участии во ВНИИгео-
аге- физики разработан первый донный гравиметр (ДГПМ) (1948), в основу которого были положены
конструкции первых отечественных пружинных гравиметров (системы М.С. Молоденского). При его
руководстве и участии в НИИПГ созданы и внедрены пружинные гравиметры (1950). Им получены
авторские свидетельства за создание гравиметров-высотомеров. С 1952 начался серийный выпуск
гравиметров-высотомеров ГВ-52. В 1950 в ИФЗ АН СССР организована лаборатория под его ру-
ководством для разработки новой аппаратуры и методов измерения силы тяжести и ее градиентов в движении
(на кораблях, самолетах, в буксируемой за кораблем гондоле и т. п.). Он был инициатором создания и широко-
го внедрения для этих целей струнных датчиков. В 1961-1965 разработанные в лаборатории струнные датчики
были использованы при изучении ускорений на самолетах, кораблях и т. п.). Им осуществлялось общее научное
руководство морскими геологоразведочными работами. С учетом специфических условий арктических морей были
разработаны и внедрены в производство методические и технические приемы ведения аэромагнитных, гравимет-
рических и сейсмических работ и создан рациональный комплекс региональных геофизических исследований для
арктических и северо-восточных морей. Под его научным руководством впервые в СССР были начаты исследова-
ния по созданию серии геофизических карт Тихого океана и Тихоокеанского подвижного пояса. В.В. Федынский
вместе с А.Д. Архангельским и Э.Э. Фотиади является основателем методологии геологической интерпретации
гравитационных и магнитных аномальных полей.
6. Задача геодезии по Молоденскому: определение внешнего гравитационного поля и поверхности Земли
в единой системе координат во времени и изучение их столь точно, сколь позволяют измерения.
Молоденский Михаил Сергеевич (15.06.1909-12.11.1991) — российский геодезист и геофизик,
Lx освободивший геодезию от гипотез о внутреннем строении Земли и превративший ее в точную на-
уку. Принимал участие в организации общей гравиметрической съемки СССР, разработал метод
|***В1^^ астрономо-гравиметрического нивелирования, создал первый отечественный гравиметр ГКМ (грави-
| метр кольцевой Молоденского), на базе которого после войны был создан прибор ГКА (гравиметр
|' , ,• « кольцевой астазированный). Им в 1945-1960 детально обосновано: задача геодезии состоит в опре-
делении внешнего гравитационного поля и поверхности Земли в единой системе координат. Введены
новые понятия, заменяющие или обобщающие старые. Появились нормальные высоты, вычисляемые
по измеренным данным, аномалии высот (высоты квазигеоида), определяемые внешним возмущающим потенци-
алом и строго согласованные с нормальными высотами. При этом аномалии высот стали относиться к точкам
земной поверхности. Аномалии силы тяжести по способу вычисления не изменились, но стали определяться на
земной поверхности, и редуцируется нормальная сила тяжести, а не реальная. Любые измеряемые величины ни-
куда не следует редуцировать, а для сравнения измеряемых величин с нормальными последние следует вычислять
по возможности в местах измерений. Краевое условие для возмущающего потенциала должно относиться не к
поверхности геоида, а к поверхности реальной Земли, где выполняются все геодезические измерения. Теория Мо-
лоденского рассматривает и использует именно те измерения, которые можно реально выполнить в настоящее
время или в будущем, она объединила изолированные разделы геодезии, как например триангуляцию и нивелиро-
вание, установила их взаимосвязь, освободила геодезию от принципиальной приближенности ее решений. Теория
Молоденского не может устареть от замены одного способа решения другим или от усовершенствования способов
обработки или при появлении нового вида измерений. Новые виды измерений, в том числе и пока не созданные,
хорошо вписываются в эту теорию, предъявляя лишь повышенные требования к ее точности. И исследования по
повышению точности теории ведутся, но это не будет новой теорией, а всего лишь ее развитием. Ему присуждены
Государственные премии в 1946 и 1951 и Ленинская премия 1963. М.С. Молоденским разработана и общая теория
упругих колебаний Земли (1989).
Проворов Константин Леонтьевич (1909-1992) — российский ученый, геодезист, работавший с
1937 по 1953 в системе ГУ ГК начальником цеха, затем главным инженером крупного АГП. Под
। его руководством были выполнены обширные топографо-геодезические работы в различных районах
страны. В 1954 успешно закончил аспирантуру в МИИГАиК, и за оригинальные исследования по
оценке точности сплошных сетей триангуляции ему присвоена ученая степень доктора технических
наук и звание профессора. С 1954, являясь проректором, а затем с 1956 по 1970 ректором НИИГАиК,
К.Л. Проворов проводил большую работу по совершенствованию подготовки инженерных кадров
ННВИВВ для топографо-геодезического производства. Под его руководством институт превратился в крупный
научно-учебный геодезический центр на востоке нашей страны. По его инициативе создано несколько
новых факультетов. Им опубликовано свыше 85 научных работ, среди которых фундаментальные монографии
«О точности сплошных сетей триангуляции», «О построении сплошных сетей триангуляции», учебные пособия
«Радиогеодезия», «Сфероидическая геодезия» и др. Им подготовлено 20 кандидатов наук.
Агалецкий Павел Николаевич (1909-1988) — российский ученый ленинградской школы метро-
логин, основанной Д.И. Менделеевым. В 1934 окончил физический факультет Киевского государ-
ственного университета и поступил в аспирантуру. Работая во ВНИИМе до 1942, выполнил ряд
ж! ’ НИР в области измерения скоростей, ускорений, сил и высокочастотных радиоизмерений. Тема кан-
дидатской работы посвящена развитию методов измерения пьезоэлектрических преобразователей.
;» С 1942 — организатор и директор Государственного института мер и измерительных приборов в
К.-. 2^1 Томске. Институт работал по заказам фронта, промышленности Сибири, Средней Азии и Дальнего
Востока. В 1945 — член коллегии Комитета по делам мер и измерительных приборов при СМ СССР
и директор Московского государственного института мер и измерительных приборов. С 1949 — зам. директора
ВНИИМ по научной работе. Участник создания ЦНИИ радиоизмерений (ВНИИФТРИ) и его первый директор. В
1955-1966 возглавляет во ВНИИК лабораторию динамических измерений. Выполнил ряд крупных работ в области
гравиметрии, радиоизмерений, динамических измерений и виброметрии. За участие в создании государственного
эталона частоты удостоен Государственной премии СССР. В 1966 возглавил научно-метрологический отдел ВНИ-
ИФТРИ. Под его руководством созданы и аттестованы государственные эталоны, усовершенствованы системы
образцовых средств измерений, решены основополагающие вопросы метрологии и метрологического обеспечения
народного хозяйства, воспитаны 22 кандидата наук. Им выполнены абсолютные измерения УСТ во ВНИИМ им.
Д.И. Менделеева тремя методами (поворотными маятниками и баллистическим) с погрешностями измерений от
0,4 до 2,0 мГал при систематической разности между методами 3,7 мГал
Хейфец Михаил Евелевич (4.10.1911-23.05.1993) — российский ученый, гравиметрист, родился
в бывшей Эстляндской губернии. После окончания геодезического факультета МИИГАиК в 1934
работал в Московском аэрогеодезическом предприятии. В 1937 поступил в аспирантуру ЦНИИГАиК.
С 1947 до ухода на пенсию работал в ЦНИИГАиК. В 1946 защитил кандидатскую диссертацию
и в 1965 — докторскую. Внес большой вклад в развитие маятникового метода гравиметрических
измерений на суше, на море, и в теорию, и в конструирование, участник и организатор подводных
и надводных гравиметрических экспедиций. Награжден орденами Трудового Красного Знамени и «Знак Почета»,
медалью «За доблестный труд».
Буланже Юрий Дмитриевич (1911-1997) — российский ученый, гравиметрист, выдающийся ор-
ганизатор и популяризатор науки, занимавшийся в разные годы решением целого круга проблем:
измерениями силы тяжести маятниками, созданием сети опорных гравиметрических пунктов в на-
шей стране и в ряде других стран, изучением неприливных изменений силы тяжести, созданием
комплексных геодинамических полигонов для исследования современных движений земной коры,
измерением силы тяжести абсолютными гравиметрами и их метрологическим международным срав-
нением в Севре, гравиметрической съемкой в акваториях Мирового океана, возрождением морской
обсерваторской сети и уровнемерных постов в районе Ленинграда и др.
Маловичко Александр Кириллович (1911-1996) — российский ученый, геофизик, известен свои-
ми работами по определению контактной поверхности, аналитическому продолжению аномалий силы
тяжести в нижнее полупространство, учету поправок за влияние рельефа, методике гравиметриче-
ской съемки, методике решения прямых и обратных задач гравиразведки в различных геологических
условиях, использованию высших производных гравитационного потенциала и др. Им опубликова-
но 125 научных статей, 13 монографий и учебник «Основной курс гравиразведки» (в двух томах),
подготовлено 9 докторов наук и 26 кандидатов наук.
Дубовской Борис Владимирович (1912-1978) — родился в г. Новочеркасске в семье потомствен-
ных казаков. В 1930 поступил в МГУ на астрономическое отделение. После его окончания в 1934
поступил работать в ЦНИИГАиК. В 1937 в условиях слабой гравиметрической изученности Земли
им были получены коэффициенты двух разложений по сферическим функциям до 6-й степени. В
работе использовано около 14200 гравиметрических пунктов. Разложение аномалий проведено по
способу Неймана с использованием вспомогательного табличного материала, опубликованного Пре-
ем. Для территории СССР средние аномалии получены по картам аномалий масштаба 1:1000000 и
1:10000000. В 1941-1943 Джеффрис опубликовал разложение до 3-й степени. В 1945 эти результаты
М.С. Молоденский анализирует и далее использует разложения Б.В. Дубовского для оценки сред-
него квадратического влияния дальних зон на высоту геоида (согласно теории Стокса) и составляющие уклонения
отвесной линии. Результаты Дубовского были реализованы при разработке теории Молоденского и исследовании
основных практических задач геодезической гравиметрии, возникающих при использовании мировой гравиметри-
ческой съемки и при создании геодезической основы на базе астрономических пунктов. В 1941 в первые дни
войны добровольцем ушел на фронт. С 1946 по 1954 работал в Главсевморпути, а затем с 1954 по 1976 в Со-
юзморниипроекте. Автор более десятка изобретений в области астрономо-геодезии, создал отдел аэрофотосъемки
в министерстве морского флота, который практически обладал полной экономической и научной самостоятельно-
стью. Был начальником многих арктических и двух антарктических экспедиций. Под его руководством и при его
непосредственном участии была проделана большая работа по созданию топографических крупномасштабных карт
на огромные территории заполярных областей, побережья и островов Северного Ледовитого океана, что способ-
ствовало безопасности плавания по Северному морскому пути; выполнены большие картографические работы в
Антарктиде. За создание топографических и общегеографических карт Атласа Антарктики Б.В. Дубовскому и его
коллегам отдела аэрофотосъемки была присуждена Государственная премия (1971).
Лозинская Анна Марковна (1913-1993) — российский ученый, пионер в области создания
и внедрения отечественных гравиметров и радиогеодезических систем, основоположница аэрогра-
виметрии в СССР, кандидат физико-математических наук (1949), лауреат Государственной пре-
мии (1951). Ею разработаны конструкции отечественных пружинных гравиметров, конструкция
гравиметра-высотомера, первых отечественных радиогеодезических систем «Поиск». Соавтор радио-
геодезического курсопрокладчика РГП, автор оригинального метода барометрического нивелирова-
ния, в котором использованы струнные датчики. В 1960-1970 руководитель и непосредственный
участник разработки серии приборов на базе струнных датчиков: струнного гравиметра с жидкост-
ным демпфированием, струнного горизонтального акселерометра, струнного измерителя вертикаль-
ной скорости, струнного высотомера, струнного барометра, струнного термометра и необходимой для аэрограви-
метрии счетно-регистрирующей и обрабатывающей аппаратуры. В 1972 под ее руководством создан аэрогравимет-
рический комплекс «Гравитон» для гравиметрических съемок масштаба 1:1000000 с борта самолета. Автор около
70 научных публикаций и 10 авторских свидетельств на изобретения.
Бузук Виталий Вячеславович (21.03.1913-22.03.2001) — российский геодезист родился в де-
ревне Горбаневичи Бобруйского района Могилевской области в семье учителя. В 1940 поступил в
МИИГАиК на геодезический факультет. С октября 1941 по ноябрь 1943 участвовал в боях Вели-
кой Отечественной Войны, несколько раз был ранен. В 1948 с отличием окончил МИИГАиК. В 1952
, ВТИ защитил кандидатскую диссертацию на тему «Опыт определения широких волн геоида по астрономо-
геодезическим и гравиметрическим данным». С 1952 по 1957 работал в Новосибирском инженерно-
строительном институте (НИСИ) на кафедре геодезии. С 1957 работал в НИИГАиКе (СГГА) доцен-
том кафедры высшей геодезии и деканом геодезического факультета (7 лет), заведующим кафедрой астрономии
и гравиметрии, проректором по научной работе (1968-1988), заведующим кафедрой астрономии и гравиметрии
(1988-1994), профессором (1994-1999), профессором-консультантом и заведующим научно-исследовательской ла-
бораторией «Физическая геодезия» (с 1999 г.) В 1993 избран членом-корреспондентом, а в 1996 - действительным
членом Международной академии наук высшей школы по секции Естественных наук. Им опубликовано около 200
работ. По его инициативе в 1989 в СГГА открыта специальность «Космическая геодезия». Под его руководством
защитили кандидатские диссертации 18 аспирантов и соискателей. Основные научные интересы: 1. Определение
планетарных характеристик гравитационного поля Земли, Луны, Марса, Венеры и других планет Солнечной си-
стемы и их спутников по гравиметрическим и спутниковым данным. 2. Разработка методов изучения динамики
гравитационного поля и фигуры Земли планетарного, регионального и локального характера. 3. Постановка про-
блемы и развитие теории динамической геодезии как пространственно-временной геодезической краевой задачи
Молоденского. 4. Исследование связей гравитационного поля и фигуры Земли с напряженным состоянием земных
недр. Награжден орденами «Красной Звезды», «Знак почета», «Отечественной войны первой степени», «Дружбы
народов» и двенадцатью медалями. В.В. Бузуку присвоены звания «Заслуженный работник геодезии и картографии
РСФСР» (1984), «Почетный член Всесоюзного астрономо-геодезического общества» (1990).
Крамер Марианна Васильевна (1914-1989) — один из крупнейших российских специалистов
- в области математического моделирования сложных геофизических процессов. На основании про-
ft веденных ею (совместно с Н.Н. Парийским) модельных расчетов была доказана несостоятельность
ft / гипотезы Джинса об образовании Солнечной системы в результате отрыва от Солнца близко проле-
тевшей звездой протопланетного вещества «сигарообразной» формы. Большую известность получили
*/ результаты проделанных ею совместно с М.С. Молоденским расчетов суточных земных приливов и
нутации для модели Земли с упругой оболочкой и жидким ядром (1961) Спустя 18 лет, в 1979,
именно эти результаты были рекомендованы Международным Астрономическим Союзом в качестве
базовой теоретической модели для сравнения с данными наблюдений. В 1970-е и 1980-е годы ею были получены
важные и также получившие широкую известность результаты в области компьютерного моделирования собствен-
ных колебаний Земли и приливов в теле сферически несимметричной Земли.
Грушинский Николай Пантелеймонович (25.11.1915-25.04.2001) родился в г. Тамбове в семье
офицера Пантелеймона Михайловича Грушинского. Мать — Лидия Дмитриевна Чичканова, дед по
линии отца — священник, дед по линии матери — из крестьян. Окончив в Москве школу-семилетку,
поступил на 3-й курс рабфака и окончил его в 1933. В 1939 окончил с отличием механико-
математический факультет (ММФ) МГУ им. М.В. Ломоносова и был принят в ЦНИИГАиК, где
под руководством М.С. Молоденского участвовал в сборке и испытаниях грех первых отечественных
гравиметров Молоденского и провел полевые производственные испытания их в Восточной Сибири,
опробовав одновременно предложенный М.С. Молоденским метод астрономо-гравиметрического ни-
велирования. В 1946 защитил кандидатскую диссертацию на тему «О динамическом температурном эффекте в
гравиметрах». В 1948 начал читать курс высшей геодезии на астрономическом отделении ММФ МГУ, продолжая
работу в ЦНИИГАиК. В 1954 перешел на работу в МГУ в должности доцента, где читал курсы: «Высшая геоде-
зия», «Гравиметрия», «Теория фигуры Земли». В 1955 для систематического изучения гравитационных аномалий
Мирового океана организовал в ГАИШ постоянно действующую морскую экспедицию, в которой постоянно рабо-
тали сотрудники ГАИШ В.А. Гладун, П.А. Строев, В.Н. Коржев, М.У. Сагитов, Т.С. Чеснокова, И.Н. Капцова. Во
II Антарктической экспедиции на д/э «Обь» в 1956-1957 работали Н.П. Грушинский (начальником гравиметриче-
ского отряда), В.А. Гладун, П.А. Строев, И.А. Епишин. В 1960-1967 Н.П. Грушинский - заместитель директора
ГАИШ. В 1962 организовал в Каире (Египет) станцию для наблюдений ИСЗ и защитил докторскую диссертацию
на тему «Гравитационное поле Земли и некоторые выводы о строении земной коры и фигуры Земли». В 1963 ему
присвоено звание профессора и им издан учебник «Теория фигуры Земли», который был дополнен и переиздан в
1976 Совместно с женой Н.Б. Сажиной написал учебник «Гравитационная разведка», изданный в 1966, 1972, 1981
и 1988 В 1971 г. этот учебник переведен на английский. В 1976 им написана работа «Основы гравиметрии». В
1972-1973 работал в Индии руководителем Проекта ЮНЕСКО «Передовые научные исследования в университетах
Индии». В ряде университетов им прочитан курс лекций по геофизике и гравиметрии. 1981-й год провел на Кубе в
качестве советника ректора Университета Сант-Яго де Куба. Уделял много внимания популяризации науки. Десять
учеников Н.П. Грушинского стали кандидатами наук, четверо — докторами.
Магницкий Владимир Александрович (1915-2005) — российский геофизик, преподаватель, ав-
тор около 130 работ, выдвинул и обосновал гипотезу, превратившуюся позднее в экспериментально
подтвержденную теорию, о распаде вещества нижней мантии на окислы, получившую его имя. Его
кандидатская диссертация «О связи научных задач геодезии и постановки геодезических исследо-
ваний с проблемой изучения твердой оболочки земного шара» (1944) и докторская диссертация
«Исследование строения Русской платформы по геодезическим и гравиметрическим данным» (1948)
продемонстрировали большое значение астрономо-геодезических материалов в постановке и решении
общих задач тектогенеза и в изучении конкретных регионов. Им написаны учебники и монографии
«Основы физики Земли», 1953, «Теория фигуры Земли», 1961 (в соавторстве с В.В. Броваром и Б.П. Шимбиревым),
«Внутреннее строение и физика Земли», 1965.
Бровар Всеволод Владимирович (4.10.1918-29.12.1999) — российский ученый, геодезист, пре-
подаватель, занимался внешними краевыми задачами в геодезии, изучением гравитационного по-
£ ля Луны, вопросами проектирования гравиметрических съемок и экспериментальной гравиметрии,
" оптимизацией размера эллипсоидальной модели Земли (1995), контролем глобальных астрономо-
геодезических материалов Земли и влиянием пятой силы (1993). Впервые предложил метод изучения
' гравитационного поля в замкнутом объеме без требования на бесконечности (1983). Получил инте-
Ж тральную формулу Стокса в наиболее общем виде (1996). Выполнил сравнение точности различных
преобразований формулы Стокса при совместном использовании местной гравиметрической съемки
и в дальних зонах разложения по сферическим функциям (1993). Предложил три способа решения
элементарной краевой задачи Молоденского. Нашел метод составления интегрального уравнения с малым ядром
порядка земного сжатия. Решил задачу Стокса в интегральной форме для эллипсоидальной Земли с погрешностью
порядка квадрата сжатия (1996). Составил интегральное уравнение (1996), позволяющее решить краевую задачу
Молоденского для реальной Земли, дал его решение и получил формулу для расчета потенциала реальной Земли
с методической погрешностью 5 • 10-s(1999). В 1957-58 им прочитаны лекции в Китае, которые были изданы в
Институте геодезии и картографии г. Ухань на русском и китайском языках в 1958. В 1961 под редакцией В.А.
Магницкого издан учебник «Теория фигуры земли», половина текста которого написана В.В. Броваром. Это бы-
ли первые учебники, основой изложения которых на всех этапах служила теория Молоденского. В 1964 сделан
перевод учебника 1961 на немецкий (Берлин, ГДР) и английский (Огайо, США) языки. В 1983 опубликован его
оригинальный труд «Гравитационное поле в задачах инженерной геодезии».
Кашин Леонид Андреевич (1920-2002) — российский геодезист, производственник, ученый и
выдающийся организатор геодезической отрасли. После окончания МИИГАиК в 1944 работал в
топографо-геодезическом производстве, выполняя базисные измерения, высокоточные угловые из-
мерения в сетях триангуляции, высокоточное нивелирование. Руководил вычислительным цехом,
камеральным топографо-геодезическим производством, возглавлял планово-производственный отдел
АГП. Назначен главным инженером Северо-Кавказского предприятия в 1951 и Казахского — в 1959.
В 1966 назначен заместителем начальника ГУГК СССР, а в 1972-1986 — первым заместителем на-
чальника, входил в состав коллегии ГУГК. В 1972 защитил кандидатскую диссертацию. Л.А. Каши-
ным во многом инициированы такие работы, как уравнивание астрономо-геодезической и высотной
сетей страны, изучение движений земной коры с целью выявления предвестников землетрясений, широкое внед-
рение ЭВМ, крупномасштабные съемки городов и населенных пунктов, картографирование шельфа и внутренних
водоемов. Им опубликовано более 100 работ, монография «Построение классической геодезической сети России
и СССР (1816-1991)» 1999, и книга «Топографическое изучение России (исторический очерк)» 2001. Награжден
орденами Трудового Красного Знамени и «Знак Почета», орденом Дружбы народов, несколькими медалями. В 2001
Леониду Андреевичу присуждена премия им. Ф.Н. Красовского.
Романюк Валентин Антонович (13.10.1920-08.01.2009) — российский ученый, гравиметрист. В
1938-1941 — студент МИИГАиК. В 1941 ушел на фронт, в 1947 окончил службу в Советской Ар-
мии. В 1948-1954 работал в МАГП и заочно учился на механико-математическом факультете МГУ
им. М.В. Ломоносова. С 1954 по 1975 работал в ИФЗ им. О.Ю. Шмидта. Кандидат (1957), доктор
(1968) физ.-мат. наук. В 1975-1980 возглавлял гравиметрическую лабораторию в ЦНИИГАиКе. В
1980-1989 — старший, ведущий научный сотрудник, в 1990-1996 — консультант ИФЗ АН СССР.
И Известен разработками теоретических основ инструментальной гравиметрии, конструированием и
изготовлением приборов, руководил полевыми гравиметрическими работами. В области теоретиче-
ских разработок им создана общая теория измерения ускорения силы тяжести маятниками, установленными на
подвижном основании с шестью степенями свободы.
Веселов Константин Евграфович (4.01.1921-9.04.2006) — российский ученый, геофизик, пре-
подаватель, родился в г. Боброве (Воронежская обл.) в семье портного (в семье было 6 детей). В
1938 окончил среднюю школу и поступил в Московский геологоразведочный институт. В начале
войны служил в армии, затем строил укрепления под Москвой. С 1943, после окончания МГРИ,
работал под руководством известного гравиразведчика Н.Н. Самсонова. Проводил региональную
и детальную съемку на Таймыре. При геологической интерпретации материалов один из первых в
СССР начал вычислять вторые и более высокие производные и «аналитическое продолжение» в ниж-
нее полупространство. Широко известен разработками аппаратуры для измерения УСТ на морских
судах и самолетах, высокоточной наземной гравиметрической аппаратуры и методик измерений и
геологической интерпретации их результатов. Первым в мире 'обосновал принципиальную возможность разделения
гравитационного и инерционного полей по признаку различной их изменяемости по направлению, во времени и
пространстве, сформулировал основные принципы конструкции морских гравиметров, участвовал в изготовлении
образца морского набортного гравиметра, провел его испытания. Созданный им коллектив во ВНИИГеофизике
довел свои разработки до серийных выпусков на заводах 8 типов высокоточных наземных гравиметров, а также
морских гравиметров. Для реализации принципа разделения сил инерции и тяготения в аэрогравиметрии предло-
жил гравиметрический датчик на основе измерения третьей производной потенциала силы тяжести, свободной от
действия инерционных полей. В список его трудов входят: «Курс гравиметрической разведки» [1968] в соавторстве
с'М.У. Сагитовым, «Гравиметрическая съемка» [1986], еще три монографии, свыше 100 статей и свыше 50 изоб-
ретений, методики съемки и геологической интерпретации результатов гравиразведочных работ, три справочника
по гравиразведке. Им подготовлено около 30 кандидатов и три доктора наук.
Пеллинен Леонард Павлович (14.04.1922-7.04.1992) — российский ученый, геодезист, подгото-
вил кандидатскую работу «Исследование уклонений отвеса и вывод фигуры квазигеоида на Кавка-
зе» (1949), ставшую первым практическим применением теории Молоденского. Им развита теория
оценки необходимого и достаточного минимума дополнительных к общей гравиметрической съемке
, i страны гравиметрических наблюдений, обеспечивающих заданную точность астрономо-геодезической
сети и нивелирования [1960]. Оценил продольный и поперечный сдвиги ряда триангуляции, а также
ошибку передачи высоты квазигеоида [1978, 1983]. Показал, что наклоны уровенных поверхно-
стей относительно эллипсоида влияют на определение высот в горах в 20-30 раз больше, чем в
равнинных районах, и что непараллельность уровенных поверхностей отсчетной может оказывать
большее влияние, чем рефракция. В докторской работе (1962) в результате практического совместного использо-
вания астрономо-геодезических, гравиметрических и первых спутниковых данных им получены параметры общего
земного эллипсоида, нормального гравитационного потенциала и коэффициенты разложения геопотенциала в ряд
по сферическим функциям до 16-ой степени, элементы связи координатных систем с Землей. Определенная им
большая полуось а = 6378137±14 м практически совпадает с современным выводом а = 6378136,46±0,10 м
(без приливных поправок). В работах 1962-69 преобразовал поправки Молоденского в аномалии силы тяжести:
вместо сингулярного интеграла, существующего в смысле главного значения по Коши, поправки были представ-
лены абсолютно сходящимся интегралом. Обосновал принципиальную тождественность главных частей поправок,
предложенных разными авторами: М.С. Молоденским, В.В. Броваром, М.И. Марычем, Г. Морицем (1971). Для
определения коэффициентов разложения геопотенциала в ряд по сферическим функциям с использованием на-
земных гравиметрических данных предложил в измеренные величины силы тяжести вводить поправки за рельеф
местности [1966]. Оценил с О.М. Остачем влияние эллипсоидальности Земли на вывод стоксовых постоянных
(1966). В 1982 определил поправки за земное сжатие в возмущающий потенциал и аномалии силы тяжести и
рассмотрел определение стоксовых постоянных при учете сжатия, вывел поправки за переход от сферической
системы координат к геодезической, сопоставил разные способы учета эллипсоидальности и рассмотрел решение
задачи Молоденского на море. Оценил ковариации аномальной части силы тяжести и установил закономерность
изменения степенной вариации в зависимости от номера гармоники (1970). Описал использование альтиметри-
ческих спутниковых данных для вывода аномалий силы тяжести на море (1984, 1991). Рассмотрел совместное
использование гравиметрических и альтиметрических данных при глобальных исследованиях земного гравитаци-
онного поля (1991). В 1978 изданы его лекции «Высшая геодезия (теоретическая геодезия)». Книга переведена на
немецкий язык и издана в ГДР в 1982. За исследования в области теоретической геодезии Л.П. Пеллинену в 1983
присуждена Премия имени Ф.Н. Красовского.
Юркина Мария Ивановна (1923 г. р.) — российский ученый, геодезист, опубликовала свыше
220 научных работ, посвященных, главным образом, разработке методов определения поверхности
и внешнего гравитационного поля Земли в соответствии с теорией Молоденского. Кандидатская
диссертация (1951) посвящена вычислению уклонений отвеса в горном районе Крыма по формулам
Молоденского, докторская (1976) — обоснованию корректности топографических редукций силы
тяжести, при этом сделано обобщение на случай несовпадения полярной оси координатной системы
и оси вращения Земли. В соавторстве с В.Ф. Еремеевым ею представлены основные уравнения теории
Молоденского в сфероидальных координатах и доказано, что краевая задача Молоденского имеет единственное
решение и безусловна, разработана теория высот в земном гравитационном поле. Серии работ посвящены влиянию
возможных изменений земного гравитационного поля на выводы вертикальных движений земной коры, уточнению
связи высоты квазигеоида с возмущающим потенциалом, определению общего земного эллипсоида, уточнению
расчета нутации для сферически несимметричных небесных тел, учета земного сжатия в случае, когда аномалии
силы тяжести заданы как функции сфероидальных координат в виде поправки к результату вычисления по формуле
Стокса через функции Грина и др. За исследования в области теоретической геодезии М.И. Юркиной в 2003
присуждена Премия имени Ф.Н. Красовского.
Пик Милош (Pick Milos) (1.09.1923-2007) — чешский ученый, геодезист, преподаватель, специ-
алист по теории фигуры Земли и ее гравитационного поля, родился в Восточной Чехии, в г. Луже.
Окончил реальную гимназию в 1942, в 1944 был арестован и до конца войны находился в концла-
герях Klein Stein и Osterrode. После освобождения окончил Высшую школу специальных наук (по
специальности геодезия) в 1950 и был принят в Геофизический институт Чешской академии наук. В
1951-1953 командирован в военное учреждение, где он создал основу для построения Геодезической
отсчетной системы 1952 на эллипсоиде Красовского. В 1956 защитил кандидатскую диссертацию
«Трансформирование Чехословацкой тригонометрической сети на эллипсоиде Красовского», в 1963
— докторскую диссертацию «Теория поля силы тяжести. С 1967 читает лекции по теории ньютонова
потенциала в пражском Карловом университете, с 1994 — профессор высшей геодезии Технического университета
в Праге. Содействовал организации двух международных симпозиумов: по определению фигуры Земли (Прага,
1964) и по физической геодезии (Прага, 1964). Пик опубликовал более 180 научных работ. В 1960-1970 был
директором Геофизического института. В Чехословацкой академии наук был членом научной коллегии по аст-
рономии, геофизике, геодезии и метрологии, председателем Чехословацкого национального комитета геодезии и
геофизики, председателем комиссии по защите кандидатских и докторских диссертаций. Награжден медалью Маха
(1838-1916) — известного физика, философа и физиолога чешского происхождения.
Мещеряков Герман Алексеевич (9.2.1924-6.9.1992) — российский ученый, геодезист, родился
в г. Петровске Саратовской губернии в семье учителей. Его деятельность связана с МИИГАиКом
(1944-1969) и с 1969 с Львовским политехническим институтом. Развил теорию построения гло-
бальных моделей Земли и планет — их фигуры и распределения плотности в недрах как решения
обратной задачи потенциала на базе данных о внешнем гравитационном поле, в частности разложе-
►- ний потенциала по сферическим функциям, стоксовых постоянных. Развивал мультипольное пред-
ставление и многоточечные модели геопотенциала, использовал гравитирующие диски как предел
объемного распределения массы. Его научные интересы распространялись на космическую и дина-
мическую геодезию, геофизику, астрономию, математическую картографию, прикладную математику.
У него около 160 публикаций, три монографии (1968, 1987, 1991).
Сливин Юрий Ананьевич (1925-1973) — крупнейший российский специалист в области грави-
метрии и гравиметрического приборостроения, родился в семье служащих в г. Сталинграде (Волго-
r J граде). После окончания средней школы поступил в МИИГАиК, откуда в 1942 был призван ряды
Советской армии, и начиная с 1943, до окончания войны участвовал в боях в должности помощника
командира взвода топографической разведки. После демобилизации в 1950 поступил учиться в МИ-
ИГАиК. В 1955 окончил МИИГАиК по специальности «астрономо-геодезия». С июля 1955 по март
1973 работал в ЦНИИГАиК. В 1967 защитил кандидатскую диссертацию на тему «Разработка аппа-
ратуры и методики высокоточных маятниковых измерений силы тяжести». Талант экспериментатора,
приборостроителя, инициатива, энергия и изобретательность Ю.А. Сливина позволили ему внести значительный
вклад в исследование и конструирование наземной и морской маятниковой аппаратуры, в разработку методики
измерений ускорения силы тяжести и методов высокоточных маятниковых измерений на суше. Участвовал в 5
труднейших походах на подводных лодках, был руководителем в двух из них. Выполнял измерения ускорения
силы тяжести во многих странах (Австралия, Болгария, Венгрия, ГДР, Египет, Иран, Польша, Румыния, Чехосло-
вакия, Япония), в том числе при определении полигона Таллинн—София. Опубликовал 17 печатных работ, в том
числе 10 авторских свидетельств. Награжден медалями «За отвагу» и «За победу над Германией» в 1945, «30 лет
Советской Армии» в 1948, орденом «Знак Почета» в 1966 и медалью Болгарии «Кольо Фичето».
Сагитов Марат Усманович (8.07.1925-15.11.1988) — российский ученый, гравиметрист, препо-
даватель, автор 117 работ по экспериментальной, практической и астрономической гравиметрии, 4
изобретений, учебника «Гравиметрическая разведка» (1968) в соавторстве с К.Е. Веселовым, моно-
графий «Постоянная тяготения и масса Земли» (1969) и «Лунная гравиметрия» (1979). Им введен
термин «камерная гравиметрия». Родился в пос. Аргояш Челябинской области. В 1943 из школы
был призван в ряды Советской Армии и зачислен курсантом Севастопольского училища зенитной
артиллерии, находившегося тогда в г. Уфе. В том жё году окончил училище и был отправлен на
фронт в должности командира огневого взвода. После демобилизации в 1946 поступил на механико-
математический факультет МГУ, который окончил в 1951. Будучи учеником проф. Л.В. Сорокина, он занимался
гравиразведкой, а также (в 1952-1958) морской гравиметрией, участвуя в экспедициях и совершенствуя методику
морской гравиметрии. К 1968 им практически была закончена разработка теории эксперимента по определению
гравитационной постоянной. За эту работу М.У. Сагитову присвоена ученая степень доктора физ.-мат. наук. Под
его руководством было защищено 10 кандидатских диссертаций. Профессор Сагитов оставил большое наследие по
экспериментальной, практической и астрономической гравиметрии. Долгие годы возглавлял отдел гравиметрии ГА-
ИШ, несколько лет занимал должность заместителя директора ГАИШ по научной работе. За заслуги в годы войны
награжден орденом Красной звезды (1944), орденами Отечественной Войны II степени (1945 и 1985), несколькими
медалями. За успехи в научной, педагогической и общественной деятельности награжден медалью «За трудовую
доблесть», знаками «Отличник высшей школы» и «Отличник геодезин н картографии». В 1985 присвоено звание
«Заслуженный деятель науки РСФСР».
Каула Вильям Мэсон (Kaula William Mason) (1926-2000) — геофизик, геодезист, родился в
Сиднее в Австралии. В 1948 окончил военную академию в США, в 1953 изучал геодезию в уни-
верситете штата Огайо, в 1975 получил степень доктора наук. В 1957-1960 служил геодезистом в
армии США. В эти годы выполнил статистический и гармонический анализ ГПЗ с учетом неравно-
мерного распределения данных ограниченной точности, разработал применение обобщенных ковари-
ационных функций и метод, названный коллокацией. Одним из первых оценил значение ИСЗ для
геодезии, содействовал их практическому освоению. В 1960-1963 изучал орбитальную динамику и
планетарные структуры в НАСА, с 1963 — профессор геофизики в Калифорнийском университете
в Лос-Анжелесе, где занимался тектонофизикой и планетологией. В 1984-1987 — глава Национальной геодезиче-
ской съемки, в этот период выполнено уравнивание североамериканской плановой NAD83 и вертикальной NAVD87
сетей. В статье 1986 высказал суждение о роли правительства в геодезических работах. С 1987 — член Националь-
ной академии наук. Соавтор (вместе с Nerem и Jekeli) обзорной статьи 1995 об изучении земного гравитационного
поля. Список публикаций содержит около 280 названий. Дед деда Каулы после подавления революции в Европе
спасся в США, где основал поселение Богемия.
Попов Евгений Иванович (1926-1999) — российский ученый, гравиметрист, внесший большой
вклад в развитие морских гравиметрических измерений с надводных судов, создатель морских ги-
ростабилизированных кварцевых гравиметров различной модификации, разработчик методики пло-
щадных съемок морскими гравиметрами.
Крамаренко Виктор Леонидович (10.02.1927 г. р.) родился в семье учителей в г. Улан-Удэ. В
1944 закончил 10 класс Ростовской-на-Дону специальной артиллерийской школы. В мае 1945 окон-
чил Сумское артиллерийское училище. Служил в артиллерийских частях Северной группы войск
(Польша) и Белорусского военного округа. В 1960 закончил с отличием по астрономо-геодезической
специальности Военно-инженерную академию им. Куйбышева и был направлен в РВ СН, где при-
нимал участие в геодезическом обеспечении ракетных полков и дивизий 43-й ракетной армии и
в 1962 в проведении стратегической операции «Анадырь» на о. Куба. В 1966-1977 - начальник
лаборатории геодезического обеспечения в 4 НИИ МО, кандидат технических наук (1975). Под
его руководством проводились работы: по совершенствованию методов, обеспечивающих повышение
точности оперативного определения данных, необходимых для обеспечения пусков баллистических
ракет различного базирования; по практической реализации гравиметрического метода определения
уклонений отвесных линий, высот квазигеоида и учета влияния аномального поля на полет балли-
стических ракет; по контролю за устойчивостью шахтных ракетных комплексов в ходе испытаний на воздействие
ядерных взрывов; определению азимутов исходных и контрольных направлений гироскопическим методом для
прицеливания ракет шахтных комплексов. По этим направлениям были защищены 5 кандидатских диссертаций. В
1977 демобилизован по возрасту. Полковник в отставке. В 1977-2000 работал в ЦНИИ машиностроения в должно-
сти ведущего научного сотрудника. Занимался вопросами повышения геодезического обеспечения пусков морских
баллистических ракет. Разработал: предложения по повышению уровня геодезического обеспечения пусков ракет в
ходе их испытаний; проектный облик геодезического космического аппарата для изучения тонкой структуры ГПЗ
на акватории морей и океанов. В марте 1980 организовал проведение межведомственного семинара, где предложил
открыть работы по созданию региональных моделей ГПЗ, включающих 150 точечных масс. Предложение реали-
зовано. В дальнейшем занимался вопросами, связанными с использованием ГЛОНАСС в военной и гражданской
областях.
Гусев Николай Александрович (1.12.1929 г. р.) — российский гравиметрист, сначала под ру-
ководством М.Е. Хейфеца, а затем самостоятельно разрабатывал гравиметрическую аппаратуру.
3 Изобретатель и активный участник разработок ряда известных гравиметрических приборов: ВМП
\ - высокоточный маятниковый прибор, ОВМ - опытный вакуумный маятниковый прибор, АГАТ -
портативный маятниковый прибор, ГБЛ - лазерный баллистический гравиметр, ГБЛ-П - лазер-
ный баллистический гравиметр полевой, СМК - стационарный маятниковый комплекс. Разработчик
проекта создания Единой гравиметрической сети социалистических стран, научно-методического ру-
ководства по созданию государственной фундаментальной гравиметрической сети и государственной
гравиметрической сети I класса, работавшему во многих местах Советского Союза, а также на Шпицбергене, в
Германии, Румынии, на Кубе, в Болгарии, Венгрии, Польше, Чехословакии, Франции, Египте, Иране, Японии,
Австралии, Папуа — Новой Гвинее, Сомали, Йемене. Автор свыше 70 работ. Совместно с Н.Н. Королевым полу-
чил многолетнюю (с 1989) серию из более 250 регулярных абсолютных наблюдений на Главном гравиметрическом
пункте России (Москва, Протопоповский переулок, 25).
Бурша Милан (Bursa Milan) (1929 г. р.) — чешский ученый, геодезист, гравиметрист, в 1948-
1951 учился в высшей школе специальных наук при Техническом университете в Праге, окончил
МИИГАиК в 1955, на производственной практике самостоятельно выполнил наблюдения на 15 пунк-
тах триангуляции на Северном Кавказе и Кубани, на преддипломной практике был наблюдателем в
экспедиции Института физики Земли АН СССР по созданию опорной гравиметрической сети СССР,
v ' По окончании МИИГАиК по рекомендации ректората был аспирантом М.С. Молоденского. С 1956 по
* 1974 работал в Научно-исследовательском институте геодезии, топографии и картографии в Праге.
Затем получил приглашение в Астрономический институт Чехословацкой академии наук, где орга-
низовал отдел динамики Солнечной системы. С 1970-х годов сотрудничал с военным географическим институтом
в решении научных задач, связанных со спутниковой геодезией. В 1964 на кафедре геодезии и картографии Воен-
ной академии в Брно ввел предмет «Спутниковая геодезия». Опубликовал свыше 400 научных работ (некоторые
в соавторстве). Бурша во многом содействует распространению на западе теории Молоденского, развивает между-
народное сотрудничество, в частности в специальных исследовательских группах Международной геодезической
ассоциации по актуальным вопросам глобальной геодезии.
Щеглов Сергей Николаевич (6.09.1930 г. р.) российский гравиметрист, родился в г. Улан-Удэ
_ Бурятской АССР в семье служащего. В период 1948-1953 обучался в МИИГАиКе специальности
я > инженера астронома-геодезиста. В 1953 начал работать в составе Аэрогравиметрической экспеди-
ЛТЯ ции в должности инженера-оператора, с 1955 — младшим научным сотрудником, а затем старшим
научным сотрудником Геофизического института АН СССР (ныне Институт физики Земли РАН).
Основная область производственной и научной деятельности — высокоточные определения УСТ.
Являлся руководителем экспедиций, выполнявших работы как на территории СССР, так и за рубе-
жом. Под его руководством и непосредственном участии создавалась опорная гравиметрическая сеть
1 класса на территории СССР, социалистических стран Восточной Европы, Китайской Народной Республики и
Демократической Республики Вьетнам. Эти работы обеспечили единство гравиметрических съемок, проводимых
различными ведомствами. Участник работ по гравиметрической съемке территории советского сектора Северного
Ледовитого океана. В качестве начальника отряда принимал участие в работах по определению высот геодезиче-
ским методом и выполнению гравиметрических измерений по маршруту Мирный—Комсомольская в Антарктиде.
Принимал участие в работах на Австралийском эталонном гравиметрическом базисе Хобарт—Лайагам диапазо-
ном около 3000 мГал. Результатом работ явилось перевычисление значений ускорения силы тяжести на пунктах
всей Национальной опорной гравиметрической сети Австралии. Участвовал в измерениях силы тяжести абсо-
лютным баллистическим гравиметром в Австралии, Сингапуре, Финляндии, Франции, Мадагаскаре, Корейской
Народно-Демократической Республике и в социалистических странах Восточной Европы. По результатам этих
работ представилось возможным получить поправку Потсдамской системы и установить ошибку нуля и масштаба
Международной опорной гравиметрической сети IGSN-71. Канд. техн, наук (1971), автор и соавтор 72 научных
статей и отчетов.
Урмаев Михаил Сергеевич (1.07.1931-4.07.2002) — российский геодезист, ученый, преподава-
тель. В 1957 закончил аэрофотогеодезический факультет МИИГАиКа. В 1958-1967 работал ин-
женером и научным сотрудником в 29 НИИ ВТС. В 1963 защитил кандидатскую диссертацию,
посвященную математической обработке радиогеодезических измерений. Участвовал в создании спе-
циализированной ЭВМ, предназначенной для автоматизации обработки результатов геодезических и
астрономических измерений. В 1967-1969 - доцент кафедры геодезии и картографии географиче-
ского факультета МГУ. В 1969 перешел в МИИГАиК на должность доцента кафедры астрономии
и космической геодезии геодезического факультета. Прекрасно преподавая и выполняя научные исследования в
области космической геодезии и космической фотограмметрии, разработал метод автономного определения ор-
бит низкоорбитальных ИСЗ по бортовой фотограмметрической информации, поставил несколько учебных курсов,
стал доктором технических наук и профессором. Под его руководством более полутора десятков соискателей под-
готовили и успешно защитили кандидатские диссертации. Автор более 100 научных и научно-педагогических
работ, среди которых монография «Орбитальные методы космической геодезии» (1981) и учебник «Космическая
фотограмметрия» (1989). Чтение лекций сочетал с административной деятельностью: в 1978-1985 декан аэрофо-
тогеодезического факультета, в 1983-1984 исполняющий обязанности проректора по учебной работе, в 1985-1986
декан геодезического факультета, в 1993-1994 заместитель председателя учебно-методического объединения в
области геодезии и картографии Минобразования Российской Федерации.
Тулин Владимир Александрович (1931 г. р.) — российский ученый, изобретатель, разработчик
гравиметрической и сопутствующей аппаратуры, внесший существенный вклад в планомерное изу-
чение гравитационного поля Мирового океана. Им разработаны первые в СССР кварцевые часы для
..Ь» 'Л1’ маятниковых наблюдений, автоматизированы процессы регистрации и последующей обработки на-
' блюдений морскими гравиметрами, создан автоматизированный морской гравиметр (АМГ), который
применялся более двух десятилетий. На основе его разработок в 1968 впервые в практике отече-
> v Zjf ственных исследований были проведены успешные наблюдения на непрерывном транстихоокеанском
профиле. По его техническому заданию сконструирован и изготовлен четырехкомпонентный стенд,
позволяющий имитировать судовые возмущения при любом соотношении амплитуд и взаимных фаз
вертикальных и горизонтальных ускорений. В течение нескольких лет силами руководимой им постоянно дей-
ствующей морской гравиметрической экспедиции на всех крупнотоннажных судах были организованы постоянные
гравиметрические лаборатории, и планомерные наблюдения в рамках государственной программы Мировой грави-
метрической съемки велись более двух десятилетий.
Пантелеев Валерий Леонтьевич (1931 г. р.) — российский ученый, гравиметрист, преподаватель,
„? ‘Д предложил новую модификацию асимптотического метода построения решения дифференциально-
го уравнения колебания маятника на подвижном основании, показал теоретически и эксперимен-
। ЯчЯП тально существование параметрического резонанса в движении «фиктивного маятника». Руководил
разработкой новых моделей морских гравиметров и участвовал в морских экспедициях на подвод-
ц. л : ных лодках и на надводных судах. Исследовал устойчивость систем автоматического регулирования
гравиметров с обратной связью, развил теорию технической линеаризации, указал на возможные
систематические ошибки, связанные с несовершенством динамических систем, адаптировал теорию
гироскопической стабилизации.
Мориц Гельмут (Moritz Helmut) (1931 г. р.) — австрийский ученый, геодезист, преподаватель,
член Австрийской Академии Наук, в 1979-1983 — президент Международной ассоциациии геодезии,
в 1991-1995 — президент Международного союза геодезии и геофизики, в 1998-2002 — директор
Международного университетского центра в Дубровнике, с 1988 — президент Международной лиги
гуманистов, автор 230 публикаций н 7 книг. В 1951-1956 обучался геодезии в Техническом универ-
ситете Граца (TUG). Его книги по физической геодезии переведены на китайский, русский, сербский, хорватский,
испанский и турецкий языки.
Таранов Вадим Андреевич (19.03.1932 г. р.) — российский ученый, геодезист. После оконча-
ния МИИГАиК с 1955 работает в ЦНИИГАиК сначала под руководством М.С. Молоденского, за-
тем — Л.П. Пеллинена. Кандидатская диссертация на тему «Определение размеров Земли и эле-
ментов ориентирования основных систем геодезических координат» (1969). Основные направления
научных исследований: вывод параметров гравитационного поля Земли, элементов ориентирования
общего земного эллипсоида; сбор, систематизация, анализ и обработка гравиметрических данных;
подготовка глобальных карт высот квазигеоида, гравиметрических карт Мирового океана, каталогов
осредненных аномалий ускорения силы тяжести и автоматизированных баз гравиметрических дан-
ных; научно-методическое руководство гравиметрическими работами предприятия Роскартографии; прием и оценка
материалов, полученных по планам мировой гравиметрической съемки. Автор более 40 печатных работ. За иссле-
давания в области теоретической геодезии в 1983 В.А. Таранову присуждена Премия имени Ф.Н. Красовского,
награжден отраслевым знаком «Почетный геодезист».
Страхов Владимир Николаевич (3.5.1932 г. р.) — канд. физ.-мат. наук (1962), доктор физ.-мат.
_____ наук (1973), профессор (1986), член-корр. АН СССР (1987), академик РАН (1992), — родился в
f___семье ученого-геолога. В 1955 окончил с отличием геофизический факультет Московского геоло-
горазведочного института (МГРИ). В 1958 окончил без защиты диссертации аспирантуру МГРИ.
Кандидатская диссертация на тему «К теории аналитического продолжения двухмерных потенциаль-
W К •М’1 НЬ1Х полей* (1962), докторская — на тему «Некоторые применения функционально-аналитических
И методов в математической теории интерпретации гравитационных и магнитных аномалий» (1972).
Избирался директором ИФЗ АН СССР в 1988, директором ОИФЗ РАН в 1993, заместителем
академика-секретаря ОГГГН РАН в 1989. Основные направления научной деятельности: теория и
методы интерпретации гравитационных и магнитных аномалий; математическая геофизика; теория некорректно
поставленных задач (прежде всего линейных); вычислительная математика. Им опубликовано свыше 540 работ,
из них 8 имеют монографический характер. Не только для геодезистов большой интерес представляет статья акад.
В.П. Страхова [1999], в которой он доказал дефектность методов М.М. Лаврентьева, А.Н. Тихонова и конструк-
ции так называемой аддитивной регуляризации. Хотя классические методы регуляризации применять на практике
можно, В.П. Страхов и др. [1999] считают необходимой разработку новых методов, которые были бы свободны от
недостатков классических методов.
Огородова Людмила Валентиновна (27.11.1932 г. р.), родилась в Иркутске. В 1956 окончила МИ-
ИГАиК по специальности «астрономо-геодезия». Выполняла триангуляционные работы в Восточно-
Сибирском и Московском аэрогеодезическом предприятии. Училась в аспирантуре кафедры высшей
ВЯ геодезии МИИГАиК (руководитель В.В. Бровар), позднее на кафедре аэросъемки занималась обра-
боткой первых снимков Луны с космических зондов. Затем работает на кафедре высшей геодезии:
} < с 1968 — ассистентом кафедры высшей геодезии, с 1972 — доцентом, с 2000 — профессором. Ведет
лекционные курсы по теории фигур планет и гравиметрии, высшей геодезии и геодезической грави-
метрии для трех специальностей геодезического факультета. Соавтор двух учебников по гравиметрии
(1978, 1980) и практикума по высшей геодезии (1982), автор учебника «Высшая геодезия. Ч. III. Теоретическая
геодезия» (2006) и методических изданий по теоретической геодезии. Автор многочисленных публикаций по ис-
следованиям гравитационного поля Луны и Марса, теории высокоточных инженерно-геодезических построений в
поле силы тяжести, по сфероидической геодезии, по выбору нормального гравитационного поля, спутниковому
нивелированию, правомерности формулы Стокса для плоской Земли, по теории фигуры Земли и геодезического
образования в России.
Сакума Акинико (1933-2004) — японский гравиметрист, внес большой теоретический и практи-
аческий вклад в развитие гравиметрического приборостроения. В 1960-80 проф. Сакума разрабатывал
аппаратуру для абсолютных измерений ускорения силы тяжести (важной метрологической величи-
ны) в международном бюро мер и весов (Bureau International des Poids et Mesures — BIPM) в Севре
(Франция). Результатом работы явился созданный им самый точный на тот момент стационарный
баллистический гравиметр, погрешность измерений которого была равна 3 мкГал. В приборе приме-
нено много оригинальных решений: симметричный метод измерений, интерференция в белом свете,
рубидиевый генератор частоты, оригинальная защита от микросейсм и вибраций, эталон длины —
кварцевая трубка, катапульта для подбрасывания пробного тела и др. Этим прибором с 1967 по 1981 им был вы-
полнен ряд измерений для выявления изменения УСТ во времени. Практически исходный пункт международной
сети IGSN-71 был принят по результатам определений А. Сакумы. Для изучения вековых вариаций геопотенциа-
ла под его руководством в Мицусаве (Япония) создан баллистический гравиметр, прототипом которого является
гравиметр в BIPM. На основе прибора в BIPM под руководством А. Сакумы создан полевой франко-итальянский
баллистический гравиметр с использованием симметричного метода измерений, с которым выполнен большой ряд
измерений.
Фаллер Джеймс Е. (Faller James Е.) (17.01.1934 г. р.) — американский ученый, гравиметрист,
преподаватель, доктор философии (1963), магистр гуманитарных наук (1957) в Принстонском уни-
верситете, бакалавр гуманитарных наук (1955) в Индианском университете (с отличием), родился в
г- Мишавака, Индиана. Обладатель ряда престижных премий и наград. Является мировым лидером
в измерении и изучении гравитации: проверял закон всемирного тяготения Ньютона, использовал
лазерный интерферометр для измерения ускорения силы тяжести, провел ряд экспериментов по
। посылке на Луну и отражению лучей лазера, используя определенным образом ориентированные
отражатели, размещенные в заданном месте Луны астронавтами Аполлона. Фирма Micro-g Solution
имеет практический результат — коммерчески доступный абсолютный гравиметр FG-5. Коммерциализация этой
технологии, разработанной Фаллером, делает возможным для геодезии всех стран и для метрологии измерения д
с точностью
иг®.
Авсюк Юрий Николаевич (29.07.1934 г. р.) — российский ученый, геодезист, гравиметрист и
геофизик, родился в Москве, окончил МИИГАиК по специальности «астрономо-геодезия» (1957).
Учился под руководством профессоров А.А. Изотова, В.В. Бровара, В.А. Магницкого, К.А. Цветко-
ва. Доктор физ.-мат. наук (1989), член-корр. РАН (1997). С 1957 в ИФЗ РАН им. О.Ю. Шмидта
работал старшим лаборантом, м. н. с., ст. н. с. в лаборатории гравиметрии Ю.Д. Буланже. Принимал
участие в экспедиции «Север-8» (1956). Зимовал в Антарктиде (1957-1959). В период геофизиче-
ского года был штурманом-гравиметристом санно-тракторных поездов. В 1958 штурман похода и
открытия станции «Полюс недоступности». Проводил по профилю Мирный—Полюс недоступности
как гравиметрист совместную работу с сейсмологами О.Г. Сорохтиным, В.Н. Коптевым. Был открыт подледный
рельеф по профилю Восточной Антарктиды (горы Гамбурцева, горы Голицына, равнина Шмидта), установлена изо-
статическая компенсация ледовой нагрузки. Принимал участие в первом перелете 1961-1962 Москва—Антарктида
как оператор-гравиметрист. Участвовал в экспедиционных работах по определению силы тяжести в океане и морях
на подводных лодках (1962, 1963, 1964) и на экспедиционных судах Института океанологии АН РАН «Академик
Курчатов», «Дмитрий Менделеев» (1965, 1967, 1970, 1973). С 1972 работал в лаборатории теоретической геофизи-
ки, руководимой академиком В.А. Магницким. Занимался вопросами гравиметрии, приливной эволюции системы
Земля—Луна—Солнце, процессом изменения широт (открытие С. Чандлера, гипотеза Ньюкомба), процессами в
ядре Земли, вопросами генерации магнитного поля. Опубликовал более 100 научных статей, монографию «При-
ливные силы и природные процессы», делал доклады на конференциях, тектонических совещаниях, семинарах.
Ряд работ приведен в списке литературы книги. Ю.Н. Авсюк был и. о. директора ИФЗ (1992), заведующим отде-
лением №1, с 1990 заведующим лабораторией гравиметрии №101; председателем: Ученого Совета D 002.001.01;
Экспертного Совета РФФИ; Экспертного совета ВАК; Научного Совета по проблемам физики Земли; Издатель-
ского Совета РИСО. Награжден орденами «Знак почета», «Дружбы народов»; медалью «Почетный полярник» и др.
Астроном А. Маркос, открыв в 1983 малую планету 1983СЦ1, дал ей имя (3324) Avsyuk.
Баграмянц Владимир Оганесович (2.12.1934 г. р.) — российский ученый, гравиметрист, родился
в г. Баку в семье рабочего. В 1954 поступил в МГУ им. М.В. Ломоносова на геологический фа-
культет, по окончании которого с 1958 работает во «ВНИИГеофизике» (сначала под руководством
К.Е. Веселова). По рекомендации В.В. Федынского, начиная с 3 курса института, участвовал во
многих плаваниях, испытывая разрабатываемые морские надводные гравиметры. Созданию морских
гравиметров посвящены кандидатская (1966) и докторская (1987) диссертации. Под его руководством
разработаны комплексы гравиметрической аппаратуры (ГМКП, ГМН-К, ГМН-КМ «Флагман»), пред-
назначенной для измерения УСТ на надводных и подводных кораблях. В его гравиметрах с доста-
точно высокой точностью осуществлена компенсация низкочастотной компоненты (полезный сигнал
Ag(t) и эффект Этвеша Д<?э), а ускорения, обусловленные качкой корабля, эффективно подавлены демпферным
устройством самой упругой системы. В гравиметрах этого типа удалось воспользоваться освоенными промыш-
ленностью микрометрическими компенсационными устройствами для наземных гравиметров. Гравиметры ГМН-К,
ГМН-КМ «Флагман» выпускались серийно.
Соловьев Юрий Степанович (10.02.1935 г. р.) — автор решения подбора точечных масс для
представления гравитационного поля Земли в общем виде (1968), родился в поселке Николаевском
Волгоградской обл. в семье служащего. Окончил Харьковское артиллерийское подготовительное
училище (1953), Рязанское артиллерийское училище (1956). В 1956-1959 служил в отдельном кор-
пусном артиллерийском полку, в 1959-1964 учился в ВИА им. Ф.Э. Дзержинского. С 1964 работает
в 4 ЦНИИ МО. Защитил кандидатскую (1970) и докторскую (1984) диссертации. В 1989 — про-
фессор, лауреат Государственной премии СССР в области науки и техники, в 1996 — заслуженный
деятель науки Российской Федерации. Основные направления исследований — баллистическое обес-
печение летательных аппаратов, разработка моделей гравитационного поля и атмосферы Земли для проведения
баллистических расчетов. Автор 170 научных работ, в том числе 53 печатных.
Медведев Петр Петрович (2.12.1936-19.08.2005) — российский ученый и организатор науки в
области геодезической гравиметрии, полковник в отставке, родился в Павловском Посаде Москов-
ской области. В 1959 окончил МИИГАиК по специальности «астрономо-геодезия». С 1959 по 1992
проходил службу в Вооруженных силах в составе Военно-топографической службы ГШ. В 1961 при-
нимал участие в подводной гравиметрической экспедиции в Тихом океане по программе Мировой
гравиметрической съемки. В 1969 закончил адъюнктуру при 29 НИИ МО и защитил кандидатскую
диссертацию на тему, связанную с созданием планетарных моделей гравитационного поля Земли по
спутниковым наблюдениям. Являлся одним из разработчиков отечественного космического геодези-
ческого комплекса ГЕОИК со спутниковым радиовысотомером. Возглавлял лабораторию космической геодезии и
изучения гравитационного поля Земли. С 1992 работал в ГЦ РАН старшим научным сотрудником, а с 2000 —
заместителем директора ГЦ РАН. Инициатор и организатор исследований, связанных с созданием интегриро-
ванной базы данных спутниковой альтиметрии, включающей данные с российских спутников, исследования по
изучению гравитационного поля Земли и обработки GPS/ГЛОНАСС-измерений для изучения современных движе-
ний земной коры. Был членом директората Международного гравиметрического бюро и членом Международной
исследовательской рабочей группы по сравнению абсолютных гравиметров. В течение ряда лет являлся нацио-
нальным представителем России в Международной гравиметрической комиссии и комиссии по геоиду, а также
членом Специальной исследовательской группы по спутниковой альтиметрии. Им опубликовано большое коли-
чество научно-технических статей и монографий, в том числе переводных (Стандартная Земля. Геодезические
параметры Земли на 1966 — М.: «Мир», 1969, 277 с.). Принимал активное участие в подготовке научных кад-
ров. Лауреат премии им. Ф.Н. Красовского за исследования в области теоретической геодезии (1982). Награжден
медалью за боевые заслуги.
Остач Олег Михайлович (21.05.1938-16.02.2010) — российский ученый, геодезист, преподава-
тель, известен работами, посвященными, главным образом, разработке методов определения поверх-
ности и внешнего гравитационного поля Земли в соответствии с теорией М.С. Молоденского. Ра-
ботал в ЦНИИГАиК (1961-1995), предложил метод астрономо-гравиметрического нивелирования
с использованием круговых палеток (1970). Оценил влияние эллипсоидальности Земли на вывод
стоксовых постоянных [Остач, Пеллинен 1966, Остач 1971]. В 1969 защитил кандидатскую дис-
сертацию на тему «Применение метода Грина к решению задач теории фигуры Земли». Одна из
его работ посвящена определению возмущающего потенциала и стоксовых постоянных Земли ме-
тодом функций Грина (1969). В другой работе им дано решение задачи Стокса для эллипсоидальной граничной
поверхности методом функций Грина (1982). Ему принадлежат работы: «О выборе нормального эллипсоида», «Об
учете влияния топографических масс при вычислении уклонений отвеса и высот квазигеоида», «О применении
длиннобазисной радиоинтерферометрии и светолокации Луны в геодезии», «Вопросы совместного использования
спутниковых, гравиметрических и астрономо-геодезических данных для определения фигуры и гравитационного
поля Земли», «Программа астрономо-геодезических и гравиметрических работ и исследований по прогнозу зем-
летрясений», «Аппроксимация внешнего гравитационного поля Земли моделью гравитирующих точечных масс»,
«Карта вертикальных движений земной коры на территорию СССР» и др. Возглавляя лабораторию геодинамики (с
1978) и геодезический отдел ЦНИИГАиК (1989-1995), он внес определяющий вклад в составление карты высот
квазигеоида на территорию СССР с использованием астрономо-гравиметрического нивелирования, в организа-
цию геодинамических полигонов на территории СССР и разработку соответствующего методического обеспечения
геодезических работ на указанных полигонах, в разработку рекуррентных каталогов пунктов государственной фун-
даментальной гравиметрической сети и государственной гравиметрической сети I класса, в разработку «Основных
положений о построении государственной геодезической сети». За исследования в области теоретической геодезии
О.М. Остачу в 1983 присуждена Премия имени Ф.Н. Красовского. С 1995 преподавал в МИИГАиК.
Нейман Юрий Михайлович (3.06.1936 г. р.) — российский ученый-геодезист, преподаватель, спе-
циализирующийся в области математических методов физической геодезии, родился в Москве. По
окончании МИИГАиК в 1959 работал в Аэрогеодезическом управлении Северо-Восточного геологи-
ческого управления и одновременно учился на заочном отделении физико-математического факуль-
тета Дальневосточного государственного университета. В 1967 защитил кандидатскую диссертацию,
в 1975 - докторскую, в 1980 получил звание профессора. Своими основными учителями считает
профессоров В.В. Бровара и Л.П. Пеллинена. Основной круг научных интересов связан с вопросами
изучения внешнего гравитационного поля Земли. Впервые в нашей стране обосновал эффективность
решения задач физической геодезии методами коллокации и указал связь среднеквадратической коллокации с
регуляризацией некорректных задач теории фигуры Земли. Опубликовал более ста работ, в том числе: «Вариа-
ционный метод физической геодезии», 1979; «Оп functional properties of the basic operators of physical geodesy»,
1983 (в соавторстве с Л.П. Пеллиненом и В.А. Бывшевым); «Improperly posed problems in geodesy and methods
of their solution», 1984; «Методы вычислений в геодезии», 1988 (в соавторстве с И.Г. Журкиным); «Spectral and
filtering methods of physical geodesy», 1993; «The main concepts of the Kalman filtering», 1994; «Generalised formulas
for computing the influence of distant zone in physical geodesy», 1995; «Modification of Stokes and Vening-Meinesz
formulas for the inner zone of arbitrary shape by minimization of upper bound truncation errors», 1997; «Сферические
функции и их применение в геодезии». 2005 (в соавторстве с Л.С. Сугаиповой); «Уравнения связи спутниковой
градиентометрии», 2006 (в соавторстве с Л.С. Сугаиповой). С 1990 заведует кафедрой высшей математики МИ-
ИГАиК. Ведет активную педагогическую работу, в том числе за рубежом. По персональному приглашению читал
курсы лекций в университетах Китая, Вьетнама, Австрии, Ирана, Аргентины для магистров и докторантов. Пе-
ревел с английского языка (совместно с П.П. Медведевым и Л.С. Сугаиповой) и отредактировал две монографии
(Г. Мориц «Современная физическая геодезия», 1983, и Б. Гофман-Велленгоф, Г. Мориц «Физическая геодезия»,
2007).
Юзефович Александр Павлович (26.08.1938 г. р.) — российский ученый-геодезист, преподава-
тель, в 1961 окончил МИИГАиК по специальности «астрономо-геодезия». Работал в Московском
А АГП исполнителем гравиметрической съемки и астрономом. С 1964 учился в очной аспирантуре ка-
КТ федры высшей геодезии МИИГАиК, выполнял исследования по аэрогравиметрии под руководством
П.Ф. Шокина и А.М. Лозинской. С 1967 — ассистент, с 1972 — доцент, с 2001 — профессор кафед-
ры высшей геодезии. Ведет курсы гравиметрии на геодезическом, заочном и вечернем факультетах.
Соавтор учебников по гравиметрии для специальностей «прикладная геодезия» (1978) и «астрономо-
геодезия» (1980). Опубликовал исследования гравитационного поля Луны и Марса, исследования
по использованию локального поля силы тяжести в инженерно-геодезических задачах, применению микрограви-
метрической и вариометрической съемок в редукционной задаче на высокоточных гравиметрических пунктах и
при изучении историко-архитектурных территорий, по теории абсолютных измерений силы тяжести, косвенной
интерполяции астрономо-геодезической аномалии высоты, по истории гравиметрии в России.
Графарецд Эрик В. (Grafarend Erik W.) (1939 г. р.) — немецкий ученый и организатор нау-
вки, преподаватель, родился в г. Ессен (Германия) в 1939 Выпускник Технического университета
Клаусталь-Целлерфельда по специальностям «горное дело и геодезия» (1964) и «физика» (1968). В
этом же университете получил степень доктора философии. В 1971 становится профессором Бонн-
ского Университета и в 1975 поступает в Университет Вооруженных Сил в Мюнхене, где создает
Институт физической и астрономо-геодезии. С 1980 по 2005 был директором Геодезического инсти-
тута Университета Штутгарта. Его интересы охватывают теорию спутниковых измерений, картогра-
фическое проектирование, физическую и геометрическую геодезию, релятивизм, деформационный
пространственно-временной анализ, математическую статистику и случайные тензоры. Им опубли-
ковано более 300 статей и 10 книг. Является лауреатом первой премии Бомфорда Международной Ассоциации
Геодезии 1975. премии Сеньора и Хейсканена 1975 (Университет штата Огайо) и премии Старшего Исследователя
Национальной Академии Наук США 1989 г. (Вашингтон), награжден медалью Гейзенберга Фонда Гумбольдта.
Имеет звание почетного доктора университетов Стокгольма, Дармштадта, Будапешта, Мюнхена, Тегерана и г.
Ухань (Китай). Является членом Общества Лейбница и Академии Наук Австралии.
Демьянов Глеб Викторович (7.04.1939 г. р.) — российский ученый-геодезист, родился в Москве
в семье преподавателей МИИГАиК. После окончания МИИГАиКа в 1963 распределен в ЦНИИГА-
Л иК, где в 1971 защитил кандидатскую диссертацию на тему «Спектральный анализ короткопери-
одических возмущений ИСЗ», в 1995 возглавил геодезический отдел, в 2005 защитил докторскую
диссертацию на тему «Разработка принципов развития системы нормальных высот на основе совре-
’ менных спутниковых технологий». К основным направлениям его деятельности можно отнести: 1.
,« ЛВ Разработку методики автоматизированной обработки астрономо-геодезических, гравиметрических и
ДрД ’ спутниковых данных, позволяющих решать современными методами актуальные задачи физической
геодезии, включая выводы высокоточных моделей гравитационного поля Земли. 2. Разработку про-
граммного обеспечения по введению единой государственной системы координат СК-95. 3. Разработку концепций
и программ по переходу на спутниковые технологии геодезического обеспечения страны. 4. Научно-методическое
руководство работами по построению современной высокоточной спутниковой геодезической сети (ФАГС и ВГС)
на основе наблюдений ГЛОНАСС/GPS на территории Российской Федерации. Опубликовал более 50 работ. Автор
более 40 научно-технических отчетов. Г.В. Демьянов — член международной гравиметрической комиссии в составе
Международной Ассоциации Геодезии, лауреат Премии имени Ф.Н. Красовского за исследования в области теоре-
тической геодезии (1983), с 2006 заведующий кафедрой «Высшей геодезии» МИИГАиК. Награжден отраслевыми
знаками отличия: «Отличник геодезии и картографии», «Почетный геодезист», ему присуждено почетное звание
«Заслуженный работник геодезии и картографии РСФСР».
Арнаутов Геннадий Петрович (1940 г. р.) — российский ученый, гравиметрист, известен высо-
коточными измерениями абсолютных значений ускорения силы тяжести лазерным интерферометри-
ческим методом. Им решены общие вопросы построения лазерного баллистического гравиметра, на
основе чего под его руководством и при конструктивном участии разработан и создан абсолютный
лазерный баллистический гравиметр (ГАБЛ) и ряд его модификаций: в 1972 стационарный, в 1976 —
транспортабельный. Средняя квадратическая погрешность определения абсолютного значения уско-
рения силы тяжести гравиметром ГАБЛ-М не превышает 1 мкГал, не исключенная систематическая
погрешность — менее 5 мкГал.
©Чуйкова Надежда Алексеевна (24.02.1940 г. р.), родилась в г. Куровское Московской обл. Отец
—Чуйков Алексей Михайлович, офицер, погиб во время Великой Отечественной войны на фронте
под Ленинградом 22.07.1943, мать — Чуйкова Анна Кондратьевна работала в детском саду. В 1963
окончила физический факультет МГУ им. М.В. Ломоносова. Своими учителями считает М.У. Саги-
това, Н.П. Грушинского, Н.П. Дубошина, В.В. Бровара. В 1969 защитила кандидатскую диссертацию
на тему «Фигура и гравитационное поле Луны», а в 1991 — докторскую на тему «Гравитационные
поля на физических поверхностях планет». Основные направления исследований: гравитационные
поля небесных тел, геодинамика. Опубликовала 60 статей (без тезисов).
Сорока Александр Иванович (30.04.1940 г. р.), родился в семье рабочих оборонного завода
*им. Малышева. Окончил МИИГАИК по специальности «астрономо-геодезия» (1964). В 1962 на-
блюдал на пунктах триангуляции 2 и 3 кл. в Ивановской и Горьковской обл., в 1963 — пункты
полигонометрии 1 кл. по меридиану Сургут-Салехард. Дипломная работа под руководством полков-
... ника В.А. Величко выполнена на базе завода №106 ВТУ. В качестве инженера-геофизика Сорока
''к работает в экспедициях по проведению гравиметрической съемки масштаба 1:200000 и по отработке
Ml гравиметрических съемок с разрешением 0,02-0,04 мГал и картографирования в масштабе 1:25 000
(1964-1966). С 1966 работает в научно-исследовательской лаборатории в ВВИА им. проф. Н.Е. Жу-
ковского. Совместно с докт. техн. наук. А.А. Красовским, Б.И. Назаровым и В.Ф. Фатеевым им разработана
система корреляционно-экстремальной навигации летательных аппаратов по аномальному ГПЗ с использованием
картосхем уклонений отвеса и бортовых гравитационных вариометров ротационного типа (РГВ), разработаны и
изготовлены 6 комплектов конструкторско-технологической документации и изготовлено, отлажено и испытано 6
экспериментальных образцов РГВ гантельного типа. Разработал основы системы автоматизированного проекти-
ровнаия (САПР) РГВ с использованием ЭВМ. Основные узлы, системы и блоки РГВ представлены в виде 23
экспонатов на международных технических выставках, где были отмечены 6 золотыми, 4 серебряными и 4 брон-
зовыми медалями, а также 4 золотыми медалями лауреата ВДНХ/ВВЦ и золотой медалью «Гарантия качества и
безопасность». Имеет 22 изобретения, более 100 публикаций и более 70 научно-технических отчетов по НИОКР.
Макаренко Николай Лукич (24.03.1941 г. р.) — ученый, канд. техн, наук (1970), геодезист.
организатор научных исследований в области геодезии, гравиметрии, аэросъемки и картографии.
Окончил с отличием МИИГАиК по специальности «астрономо-геодезия» (1965). С 1968 после окон-
чания аспирантуры МИИГАиК работает в ЦНИИГАиК им. Ф.Н. Красовского в должностях млад,
науч, сотр., зав. лабораторией, зам. директора, а с 1981 по 2009 — директора ЦНИИГАиК. Ав-
тор около 40 научных работ в области фигуры Луны, спутниковой геодезии, астрономо-геодезии,
гравиметрии (соавтор монографий: «Основы спутниковой геодезии», «Геодезия и картография на со-
временном этапе развития 1919-1985», статей: «О концепции перехода топографо-геодезического
производства на автономные методы спутниковых координатных определений», «Система координат СК-95 и пути
дальнейшего развития государственной геодезической сети»). Лауреат премии им. Ф.Н. Красовского (2000).
Бровар Борис Всеволодович (30.03.1941 г. р.), родился в Москве в семье студентов МИИГАиК.
В 1964 окончил МИИГАиК по специальности «астрономо-геодезия». В 1962 наблюдал на пунктах
триангуляции 2 и 3 кл. в Восточных Саянах. В 1963 в ИФЗ АН СССР — на пунктах государ-
ственной гравиметрической сети СССР от Мурманска до Петропавловска-Камчатского. Руководил
дипломной работой Ю.Д. Буланже. Разрабатывая способы определения геодезических данных грави-
метрическим , гравидериватным, гипсо-гравиметрическим, каскадными методами, Бровар стал канд.
техн, наук (1972) и докт. техн, наук (1989). В 1993 переведен в ЦНИИГАиК. Продолжая работать
в области теории фигуры Земли, активно участвовал в подготовке документов «Основные положе-
ния о построении государственной геодезической сети Российской Федерации» (2004), «Руководство
пользователя по выполнению работ в системе координат 1995 года (СК-95)» (2004), а также в обосновании и ме-
тодическом сопровождении Федеральной целевой программы «Использование спутниковых навигационных систем
для геодезического обеспечения территории России» и последующих ее корректировок. Имеет более 120 трудов,
из них пять авторских свидетельств, 38 закрытых и 16 открытых печатных работ, 5 изобретений.
Дубовской Владимир Борисович (7.06.1941 г. р.), родился в Москве в семье астрономо-
геодезистов. Окончил физический факультет МГУ им. М.В. Ломоносова по специальности физик
Г -4 (1964). Работал ассистентом в университете Дружбы народов им. П. Лумумбы (1964-1966). С 1966
V у/J по 1969 — очный аспирант ИФЗ АН СССР, далее младший, старший, ведущий научный сотруд-
ник. С 1990 по настоящее время заведующий лабораторией медленных геофизических процессов.
Wyw Кандидат физ.-мат. наук (1970). Руководитель многочисленных оригинальных разработок в области
геофизического прецизионного приборостроения (гравиметры, деформографы, барографы, термогра-
фы, скважинные инклинометры, микронивелиры, наклономеры) и космических технологий (спутни-
ковые акселерометры, градиентометры). Разработал теорию явления упругого последействия, которая существенно
дополняет феноменологическое выражение зависимости деформации от времени, введенное академиком Ю.Н. Ра-
ботновым, давая возможность определять реологические характеристики при неизотермическом режиме. Решение
контактной задачи Герца показывает существенное преимущество перед традиционной геодезией, аппаратурой
и технологией микронивелирования, разработанной под руководством В.Б. Дубовского, позволяющей без пере-
счета в большинстве случаев с достаточной точностью оценивать напряженное состояние среды. Разработанные
гравиметры ГАГ-ЗМ работают на уровне термодинамического шума (физического запрета), что позволило в гради-
ентометрическом варианте их использования выявлять ослабленные зоны верхних слоев земной коры. Скважинные
инклинометры оригинальной конструкции позволяют на множестве объектов регистрировать оползневые процессы
по всему разрезу до известняков на самом начальном этапе их развития. Разработанные им спутниковые при-
боры на протяжении более четверти века неизменно присутствуют на всех российских обитаемых орбитальных
станциях, а в последнее время — на МКС, решая широкий спектр задач космических технологий. Работы под руко-
водством В.Б. Дубовского осуществлялись в тесном сотрудничестве с десятками академических и ведомственных
учреждений и нашли широкое применение в наземных, морских и космических исследованиях для решения как
фундаментальных, так и прикладных задач. Автор более 100 публикаций и отчетов, автор четырех монографий.
Зубинский Владимир Иванович (14.01.1942 г. р.) — канд. техн, наук (1979), родился в Куйбыше-
ве. Родители — профессиональные строители. Вплоть до окончания школы объездил с ними многие
крупнейшие стройки СССР. Окончил МИИГАиК по специальности «астрономо-геодезия» (1965). Ра-
ботал на триангуляции и в геодезической астрономии. С 1969 сотрудник ЦНИИГАиК — от инженера
до старшего научного сотрудника и руководителя лаборатории спутниковой геодезии. Область дея-
тельности — теория и практика использования спутниковых методов в геодезии. Принимал активное
участие в создании ГГС, начиная с использования фотографических и доплеровских наблюдений
спутников до применения GPS/ГЛОНАСС-технологий. Соавтор монографии «Основы спутниковой
геодезии». Лауреат премии им. Ф.Н. Красовского за создание системы координат 1995 г. В настоя-
щее время работает ст. науч. сотр. ЦНИИГАиК и руководителем группы тестирования GPS/ГЛОНАСС-аппаратуры
и программного обеспечения в московском Технологическом центре фирмы TOPCON.
Стусь Юрий Федорович, родился 22 апреля 1947 в деревне Коромыслово Тута-
евского района Ярославской области. Калиш Евгений Николаевич, родился 12 июля
1947 в г. Сретенске Читинской области. После защиты дипломов в 1970 в Новоси-
бирском государственном университете оба по распределению приняты стажерами-
исследователями в Институт автоматики и электрометрии (ИАиЭ СО АН СССР)
в лабораторию, где начинались работы по созданию гравиметра абсолютного бал-
листического лазерного (ГАБЛ). На первом этапе основную группу разработчи-
ков лазерного гравиметра составляли Л.Д. Гик, В.П. Коронкевич, Г.П. Арнаутов,
Е.Н. Калиш, Ю.Ф. Стусь, И.С. Малышев. При разработке гравиметра решались
теоретические, технологические и конструкторские задачи. Первый макет ГАБЛа построен в в 1972. На нем
проводились исследования влияния на точность измерения д вибрационных и сейсмических помех, остаточного
газа в баллистическом блоке, электромагнитных полей и других помех. В 1974 создан транспортабельный вари-
ант ГАБЛ и в 1975 при поддержке Ю.Д. Буланже были проведены испытания гравиметра на пункте «Лёдово» и
на опорных пунктах гравиметрической сети СССР в Таллине и Тбилиси. Международное признание гравиметра
ГАБЛ, занявшего по результатам международных метрологических сравнений одно из лидирующих мест в мире
по точности измерения д, проявилось начиная с 1976 во включении его в различные международные программы
исследований гравитационного поля Земли. Стусь и Калиш принимали непосредственное участие в создании и
совершенствовании всех пяти поколений гравиметров типа ГАБЛ, в уточнении и расширении международной гра-
виметрической сети и в исследовании неприливных вариаций ускорения силы тяжести. В различных точках Земли
этими гравиметрами создано около 50 опорных гравиметрических пунктов высшей точности. Проводимый в ИАиЭ
СО РАН мониторинг гравитационного поля Земли в Байкальской рифтовой зоне и в платформенной области имеет
принципиальное значение для решения проблем геодинамики, и в частности — при поиске предвестников сильных
землетрясений. Другой, не менее важной задачей по этой тематике является создание Государственной поверочной
схемы в области гравиметрии. В 2003 Ю.Ф. Стусь защитил диссертацию на соискание ученой степени кандидата
технических наук по теме «Разработка и исследование оптической системы баллистического лазерного гравимет-
ра», а Е.Н. Калиш защитил диссертацию на соискание ученой степени кандидата физико-математических наук по
теме «Разработка и исследование измерительно-вычислительной системы баллистического лазерного гравиметра».
С 1994 г. — оба работают старшими научными сотрудниками. В результате гравиметры последнего поколения по
массе и габаритам в десятки раз меньше приборов первых поколений, а точность измерений достигла 2 мкГал.
Молоденский Сергей Михайлович (1949 г. р.) — доктор физ.-мат. наук, специалист в области
теории земных приливов и нутации Земли. Им впервые была разработана динамическая теория при-
ливов и нутации для модели Земли с неидеально упругой слабо сферически несимметричной мантией
и неидеально жидким ядром; одновременно и независимо с японским геофизиком Т. Cacao и амери-
канским геофизиком Дж. Варом им было рассчитано влияние океанических приливов на амплитуды
и фазы вынужденной нутации Земли. Впервые были получены устойчивые решения задачи о прили-
вах и нутации Земли с неоднородным сжимаемым и гравитирующим жидким ядром (в соавторстве с
Т. Cacao и Е. Гротеном), а также с электромагнитной связью между жидким ядром, твердым ядром
и оболочкой; путем сравнения результатов построенной им теории с данными современных радиоинтерферомет-
рических наблюдений были найдены области допустимых значений механических параметров мантии, внешнего
жидкого ядра и внутреннего твердого ядра, а также величины электромагнитной связи между ними. Получены
новые оценки реологических свойств мантии Земли в диапазоне сверхнизких частот, соответствующих основным
компонентам приливных волн, значения эффективного динамического сжатия границ жидкого ядра с мантией и
с внутренним твердым ядром и верхний предел турбулентной вязкости жидкого ядра. Эти работы были отмечены
премией им. О.Ю. Шмидта Президиума АН СССР (1990), международной премией Фонда им. А. Гумбольдта
(1994) и премией им. Б.Б. Голицына Президиума РАН за 2006 г.
Галаганов Олег Николаевич (1950 г. р.) — зам. директора Института физики Земли им. О.Ю.
Шмидта РАН, заведующий лабораторией спутниковой геодезии и деформометрии. Родился в 1950.
Окончил Московский физико-технический институт по специальности «летательные аппараты», ас-
пирантуру ИФЗ РАН — по специальности «геофизика». Кандидат физико-математических наук. Ав-
тор и соавтор более 70 научных статей. В настоящее время основное направление научных интересов
— экспериментальные исследования геодинамических процессов с использованием современных ме-
тодов спутниковой геодезии.
Кафтан Владимир Иванович (5.06.1951 г. р.) — российский геодезист, канд. техн, наук (1988),
родился в Москве в семье служащего. Московский топографический политехникум закончил в 1971
по специальности техник-геодезист. По распределению работал в полевых экспедициях МАГП тех-
ником, руководителем координационной группы по уравниванию АГС. Без отрыва от производства
окончил МИИГАиК (1978) по специальности «прикладная геодезия». Занимался восстановлением
пунктов ГГС, построением городских геодезических сетей, камеральной обработкой результатов гео-
дезических измерений. Обучался в заочной аспирантуре ЦНИИГАиК (1985-1988). Тема кандидат-
1г*
ской диссертации «Математико-статистический анализ геодезических наблюдений за движениями земной поверх-
ности». С 1990 работал в ЦНИИГАиК старшим научным сотрудником. В 1995 переведен в центральный аппарат
МЧС России ведущим специалистом в отдел природных чрезвычайных ситуаций. В 1997 становится заведую-
щим лабораторией спутниковой геодезии и геодинамики ЦНИИГАиК. Награжден нагрудными знаками «Отличник
геодезии и картографии» (1999) и «Почетный геодезист» (2001). Обучение в докторантуре Московского государ-
ственного университета путей сообщения в завершил защитой (2003) докторской диссертации на тему «Времен-
ной анализ геопространственных данных: кинематические модели». Почетный выпускник Московского колледжа
геодезии и картографии (2005). Совмещает научную работу в ЦНИИГАиК с педагогической деятельностью в МИ-
ИГАиК, являясь профессором кафедры высшей геодезии. Основные направления научной работы: геодезические
методы решения геодинамических задач, математическая обработка повторных геодезических измерений, анализ
и интерпретация временных изменений геопространственных характеристик. Автор одного из наиболее точных
прогнозов 23 солнечного цикла. По завершении четырехлетних отчетных периодов трижды являлся соавтором На-
циональных отчетов, представляемых на Генеральную ассамблею Международной ассоциации геодезии, Комиссии
6 «Современные движения земной коры». Автор и соавтор более 70 научных публикаций.
7. Представление о Земле: космическое тело, близкое к общему земному эллипсоиду (ОЗЭ), входящее
в одну из Галактик и связанное с Международной небесной опорной системой (ICRS 1998), опирающейся
на 212 квазаров.
Б. Задача гравиметрии — изучение ГПЗ и других космических тел в принятой системе координат и во
времени (ICRS 1998) для определения их поверхности и внутреннего строения и для дисциплин, в которых
используются данные о ГПЗ.
Список литературы
Абалакин В.К., Краснорылов И.И., Плахов Ю.В. 1996.
Геодезическая астрономия и астрометрия. Справочное пособие.
М.: Картгеоцентр-Геодезиэдат, 435 с.
Абалакин В.К., Богданов В.И., Буланже Ю.Д., Медведев
М.Ю., Тайбаторов К.А., Трошков Г.А. 1998. Изменения уров-
ня Балтийского моря по наблюдениям с 1977 г. на Кронштад-
ском футштоке // Докл. РАН. 359, 2, 249-250.
Абашидзе В.Г. 1958. К вопросу определения температур-
ных коэффициентов кварцевых гравиметров с жидкостной тем-
пературной компенсации // Тр. VIII научн. сессии Ин-та гео-
физ. АН ГССР. Тбилиси.
Абашидзе В.Г. 1966. Исследование влияния температуры
в кварцевых астазированных гравиметрах // Строение земной
коры территории Грузии по геофизическим данным. Тр. Ин-та
геофиэ. АН ГССР. Тбилиси: Мецниереба. 24, 133-147.
Абашидзе В.Г., Капанидзе Д.А., Ниаури Г.А., Цагурия
Г.А. 1983. Термические эффекты в гравиметрах ГНУ и ГАГ-2
// Повторные гравиметрические наблюдения (Результаты тео-
ретических исследований и наблюдений на полигонах). М., 7,
77-85.
Абашидзе В.Г., Капанадзе Д.А., Ниаури Г.А. 1986. Иссле-
дование влияние температуры на цену деления шкалы квар-
цевых астазированных гравиметров // Сообщ. АН Гр.ССР.
122(3), 525-528.
Абашидзе В.Г, Балавадзе Б.К. 1966. Тбилисский грави-
метрический базис для эталонирования гравиметров // Тр. Ин-
та геофиэ. АН Груз. ССР. 24, 148-151.
Абельский М.Е. 1958. Гравиметр ГАК-ЗМ. Описание и ин-
струкция. Л., 32 с.
Авсюк Ю.Н. 1976. Поправка в приливную силу // ДАН
АН СССР. 229, 5, 1071-1074.
Авсюк Ю.Н. 1981. Учет пертурбационных членов в дей-
ствующей на Луне приливной силе и ее сопоставление с сей-
смической активностью Луны. Препринт ИФЗ АН СССР, 8, 25
с.
Авсюк Ю.Н. 1986. Колебательный режим эволюции систе-
мы Земля—Луна и его сопоставление с геологическими процес-
сами фанероэоя // ДАН СССР. 287, 5, 1097-2000.
Авсюк Ю.Н. 1996. Приливные силы и природные процессы.
М.: ОИФЗ РАН, 188 с.
Аким Э.Л. 1966. Определение поля тяготения Луны по
движению искусственного спутника Луиы «Луна-10» // ДАН
СССР. 170, 4, 799-802.
Аким Э.Л., Власова З.П. 1977. Модель гравитационного
поля Луны по наблюдениям за движением ее искусственных
спутников «Луна -10,12,14,15 и 22» // ДАН СССР. 235, 1,
38-41.
Александров С.Е. 1935. Новый маятниковый прибор кон-
струкции Астрономического института // Астр, журнал. 12.
Алексеев А.Д., Бронников К.А., Колосницын НИ., Мель-
ников В.Н., Радынов А.Г. 1994. Моделирование процедуры из-
мерения гравитационной постоянной на спутнике Земли // Из-
мерительная техника. 1, 3-5.
Алешин А.С., Дубовской В.Б. 1995а. Система деформаци-
онного контроля оснований крупных инженерных сооружений
// Всероссийская научио-техиическая конференция «Экология
и геофизика». Материалы. М., 17.
Алешин А.С., Дубовской В.Б. 19956. Деформационный мо-
ниторинг опасных природных процессов // Прикладная геоэко-
логия, чрезвычайные ситуации, земельный кадастр и монито-
ринг. М.: ИЛСАН, 1.
Алешин А.С., Дубовской В.Б., Ильичев В.А., Коновалов
П.А., Леонтьев В.И., Никифорова Н.С. 2000. Высокоточный
деформационный мониторинг окружающих конструкций ТРК
«Манежная площадь» // Сергеевские чтения. М.; 2, 174-179.
Андреев В.И. 1985. Лабораторные исследования гироста-
билизаторов пассивного типа // Метрологическое обеспечение
и результаты морских и аэрогравитационных измерений. Под
ред. И.В. Беляева. Л.: Севморгеология, 39-47.
Антонов В.Ф. 1968а. Определение основных параметров
упругой системы сильно демпфированного гравиметра // Разра-
ботка и исследование элементов гиростабилизированного силь-
но демпфированного гравиметра и контрольной аппаратуры.
М.: ИФЗ АН СССР, 4-14 (Деп. ВИНИТИ за №438-69).
Антонов В.Ф. 19686. Способы регулировки жидкостной
температурной компенсации упругой системы кварцевого гра-
виметра // Разработка и исследование элементов гиростабили-
зированного сильно демпфированного гравиметра и контроль-
ной аппаратуры. М.: ИФЗ АН СССР, 15-24 (Деп. ВИНИТИ за
№438-69).
Антонов В.Ф. 1969. Демпфирование упругих систем мор-
ских гравиметров // Иэв. АН СССР. Физика Земли. 2, 92-100.
Антонов В.Ф. 1970. О температурной компенсации упру-
гих систем гравиметров // Аппаратура и методы измерения си-
лы тяжести на море. М.: Наука, 155-157.
Антонов В.А., Холшевников К.В. 1980. О возможности
использования ряда Лапласа для гравитационного потенциала
на поверхности планеты // Астрономический журнал. 57, 6,
1323-1330.
Антонов В.А., Холшевников К.В. 1985. О скорости убы-
вания общего члена ряда Лапласа для гравитационного потен-
циала // Вестник ЛГУ. 22, 85-87.
Антонов В.Ф., Башилов И.П., Кобрин Л.В., Савченко
А.А., Чурбаков А.И. 1966. Автоматическое устройство ГАЛ-
ЦПАВ для измерения ускорения силы тяжести на подвижном
основании // Приборы для определения силы тяжести на море
и их исследование. Под ред. Ю.Д. Буланже. М.: Наука, 5-25.
Антонов В.Ф., Жучков Л.А., Кутепов В.С. 1973. Влияние
горизонтальных ускорений на показания гравиметра с упругой
системой вращательного типа из кварцевого стекла // Иэв. АН
СССР. Физика Земли. 7, 116-118.
Антонов В.Ф., Кутепов В.С., Наумкин О.В. 1983. Выбор
расчетной схемы кварцевой упругой системы морского грави-
метра // Иэв. вузов. Геодезия и аэрофотосьемка. (4), 104-107.
Антонов В.А., Тимошкова Е.И., Холшевников К.В. 1988.
Введение в теорию ньютоновского потенциала. М.: Наука.
270 с.
Антонюк П.Н., Бронников К.А., Мельников В.Н. 1993.
Определение гравитационной постоянной при движении части-
цы в окрестности точек либрации // Измерительная техника.
8, 3-6.
Аристотель. 1981. О небе // Сочинения. Т. 3. М.: Мысль,
263-378.
Арнаутов ГП. 1969. Об уменьшении влияния изменений
температуры в жидкостных гравитационных градиентометрах
// Геофизические измерения. Новосибирск, СО АН СССР, 1.
Арнаутов Г.П., Гик Л.Д., Калиш Е.Н. , Коронкевич В.П.,
Малышев И.С., Нестерихин Ю.Е., Стусь Ю.Ф., Тарасов ГГ
1972. Высокоточный лазерный гравиметр // Автометрия. 5, 29-
38.
Арнаутов Г.П., Калиш Е.Н., Стусь Ю.Ф. 1975а. Измере-
ние ускорения свободного падения методом многих станций //
Автометрия. 5, 38-43.
Арнаутов Г.П., Калиш Е.Н., Ладынин А.В., Сарычева
Ю.К., Стусь Ю.Ф. 19756. Задачи н перспективы абсолютных
измерений силы тяжести лазерным гравиметром // Методи-
ческие вопросы исследования современных движений земной
коры. Новосибирск, ИГГ СО АН СССР.
Арнаутов Г.П., Гик Л.Д., Калиш Е.Н., Коронкевич В.П.,
Малышев И.С., Нестерихин Ю.Е., Стусь Ю.Ф., Тарасов Г.Г.
1975в. А.С. 468156 СССР. Устройство для измерения ускоре-
ния свободного падения. Опубл. 1975. Бюл. 15.
Арнаутов Г.П., Коронкевич В.П., Стусь Ю.Ф. 1982а. Ин-
терферометр абсолютного лазерного баллистического гравимет-
ра. Новосибирск. Препр. АН СССР. СО ИАиЭ; 196.
Арнаутов Г.П., Калиш Е.Н., Коронкевич В.П., Смирнов
М.Г., Стусь Ю.Ф., Тарасюк В.Г. 19826. Прецизионное измере-
ние гравитационного ускорения лазерным интерферометриче-
ским методом // Иэв. АН СССР. Физика. 46, 10, 2055-2060.
Арнаутов Г.П., Калиш Е.Н, Смирнов М.Г., Стусь Ю.Ф.,
Тарасюк В.Г. 1994. Лазерный баллистический гравиметр
ГАБЛ-М и результаты наблюдений силы тяжести // Авто-
метрия. 3, 3-11 (Optoelectronics, Instrumentation and Data
Processing, 1994, 3).
Арнаутов Г.П., Калиш E.H., Стусь Ю.Ф., Смирнов М.Г.,
Тимофеев В.Ю. 2000. Экспериментальные наблюдения вари-
аций силы тяжести, обусловленных движениями внутреннего
ядра Земли // Внутренне ядро Земли. Геофизическая информа-
ция о процессах в ядре. Всероссийская конференция, Москва
27-29 ноября 2000., Тезисы докладов. М.: ОИФЗ РАН, 66.
Аронов В.И. 1976. Обработка на ЭВМ значений аномалий
силы тяжести при произвольном рельефе поверхности наблю-
дения. М.: Недра, 129 с.
Афанасьева Л.В., Боярский Э.А., Железняк Л.К. 1990.
Поперечное сглаживание морских съемок // Гравиинерциаль-
ные приборы и геофизические исследования. М.: ИФЗ АН
СССР, 142-149.
Баератуни Г.В., Ганьшин В.Н., Данилевич Б.Б., Закатов
П.С., Киселев М.И., Лукьянов, Хейфец Б.С. 1984. Инженер-
ная геодезия. Учебник для вузов. Изд. 3-е, перераб. и доп. М.:
Недра, 344 с.
Балабушевич И.А. 1954. О принципиальной возможно-
сти аэрогравиметрической съемки. Киев: Публикация Киевской
астрономической обсерватории, КГУ, 6.
Баранова С.М., Пущина Л.В., Рукавишников Р.Б. и др.
1988. Определение чувствительности кварцевых астаэирован-
ных гравиметров // Повторные гравиметрические наблюдения.
М.: ИФЗ АН СССР, 10, 41-49.
Баранова С.М., Пущина Л.В., Рукавишников Р.Б., Штей-
ман М.Б. 1991а. Эталонирование кварцевых астаэированных
гравиметров методом наклона на пунктах с различными значе-
ниями ускорения свободного падения // Разведочная геофизи-
ка. М.: Наука, 112, 111-114.
Баранова С.М., Пущина Л.В., Рукавишников Р.Б. 19916.
Эталонирование методом наклона кварцевых астаэированных
гравиметров класса А с использованием установок УЭПГ //
Метрология в гравиметрии. III Всес. научн.-техн. конф. Тезисы
докл. Харьков, 12-14.
Баранова С.М., Лебедева Л.А., Мамаева Д.А., Пущи-
на Л.В., Рукавишников Р.Б. 1992. Эталонирование кварцевых
астаэированных гравиметров с особо узким диапазоном мето-
дом наклона иа установке УЭПГ-3 // Геодезия и картография.
3, 7-10.
Баранова С.М., Пущина Л.В., Рукавишников Р.Б., Си-
галов Б.А. 1993. Исследования методом наклона кварцевого
астаэированного гравиметра ГНУ-КВ // Разведочная геофизи-
ка. 115, 83-88.
Баркин Ю.В. 1996. К динамике твердого ядра Земли //
Труды ГАИШ. LXV, 121.
Беленький Е.Г. 1991. Построение опорной сети и уточне-
ние координат северного полюса Венеры (по материалам радио-
локационной съемки с АМС «Венера-15,16»). Автореф. дисс.
канд. тех. наук. М, 22 с.
Береза А.Д., Ривкин С.С. 1983. Общая характеристика по-
грешностей гиростабнлиэированного гравиметра при качке ко-
рабля // Гравиинерцнальные измерения. М., 129-143.
Береза А.Д., Костров А.В., Ривкин С.С. 1982. Исследова-
ние методов фильтрации при гравиметрических измерениях //
Физико-техническая гравиметрия (Аппаратура и методы изме-
рений). М.: ИФЗ АН СССР, 61-88.
Береза А.Д., Костров А.В., Ривкин С.С. 1984. Погрешно-
сти намерений гравиметрами из-за ускорений и наклонов гиро-
стабилиэированной платформы // Прикладная геофизика. М.:
Недра, 108, 89-94.
Берталанфи Л. фон. 1973. История и статус общей теории
систем // Системные исследования. Ежегодник. Пер. с англ.
М.: Наука, 20-37.
Беспалов Н.А. 1980. Методы решения задач сфероидиче-
ской геодезии. М.: Недра, 288 с.
Бицадзе А.В. 1982. Уравнения математической физики. М.:
Наука, изд. 2. 336 с.
Блауберг И.В. 1973. Системный подход как предмет
нсторико-научной рефлексии // Системные исследования. Еже-
годник. М.: Наука, 7-19.
Бобров Ю.В., Веселов К.Е., Гайнанов А.Г., Гладун В.А.,
Лугинец А.П., Смирнов Л.П. 1967. Автоматизированный на-
бортный гравиметр // Прикладная геофизика. М.: Недра, 50,
150-162.
Богородицкий Д.В., Рожковский Д.В., Шайденко А.Я.,
Карпов В.К. 1965. Исследование динамики работы стенда ИС-
ВГУ для моделирования возмущений, действующих на грави-
метрическую и гироскопическую аппаратуру, помещенную на
подвижном основании // Иэв. АН СССР. Механика машин,
5-6, 61-69.
Бовшин Н.А., Зубинский В.И., Остач О.М. 1995. Совмест-
ное уравнивание общегосударственных опорных геодезических
сетей // Геодезия и картография. 8, 6-17.
Богданов В.И. 1996. Современный нуль-пункт Кронштад-
ского футштока // Геодезия и картография. 1, 26-29.
Бойков В.В., Галазин В.Ф., Каплан Б.Л. и др. 1993. Опыт
создания геоцентрической системы координат ПЗ-90 // Геоде-
зия и картография. 11, 17-21.
Болотов А.П. 1837. Геодезия или руководство к исследо-
ванию общего вида Земли, построению карт и производству
тригонометрической и топографической съемок и нивелировок.
Часть II: проекции карт, нивелирование, топография. СПб.: К.
Вингебер, 445 с.
Боярский Э.А., Коган М.Г 1968. Линейное сглаживание
измерений с морскими гравиметрами // Иэв. АН СССР. Физи-
ка Земли. 10, 95-100.
Боярский Э.А., Афанасьева Л.В., Никифорова О.Д. 1980.
Программа «Эталон» для обработки результатов эталонирова-
ния гравиметров (ФОРТРАН-4 ЕС ЭВМ) // Метрология в гра-
виметрии. 21-22.
Боярский Э.А., Афанасьева Л.В., Никифорова О.Д. 1985.
Программы для обработки гравиметрических измерений. Ма-
териалы Мирового центра данных Б.М. 1983-1985 гг., 7 вы-
пусков общим объемом 396 с.
Брагинский С.И. 1964. Магнитогидродинамика земного
ядра // Геомагнетизм и аэрономия. 4, 5, 898-916.
Брагинский В.Б., Панов В.И. 1971. Проверка принципа эк-
вивалентности инертной и гравитационной масс // ЖЭТФ. 61,
3, 873-879.
Брагинский В.Б., Минакова И.И., Степунин П.М. 1965.
Абсолютное измерение энергии и мощности по электромагнит-
ному давлению в оптическом диапазоне длин волн. // ПТЭ. 3,
183-187.
Бражкин В.В., Ляпин А.Г. 2000. Универсальный рост вяз-
кости металлических расплавов в мегабарном диапазоне дав-
лений: стеклообразное состояние внутреннего ядра Земли //
Успехи физических наук. 170, 5, 535-551.
Брейсуэлл Р. 1990. Преобразование Хартли. М.: Мир,
176 с.
Бриллюэн Л. 1972. Новый взгляд на теорию относительно-
сти. Перевод с англ. М.: Мир. 142 с.
Бровар Б.В. 1984. Каскадный способ определения вектора
ускорения силы притяжения, ориентации и приращений коор-
динат движущегося объекта. А.С. 1832959 от 13.10.1992 г. с
приоритетом от 5.9.1984 г.
Бровар Б.В. 1996. Об определении вектора ускорения силы
притяжения, ориентации и приращений координат движущего
объекта // Научно-технический сборник по геодезии, аэрокос-
мическим съемкам и картографии. Физическая геодезия. М:
ЦНИИГАиК, 234-248.
Бровар Б.В. 2004а. Об автономном определении геодези-
ческой высоты каскадным методом. // Научно- технический
сборник по геодезии, аэрокосмическим съемкам и картографии.
Физическая геодезия. - М: ЦНИИГАиК, 209-220.
Бровар Б.В. 20046. Об автономном определении ориента-
ции и составляющих уклонений отвесных линий каскадным
методом // Научно-технический сборник по геодезии, аэрокос-
мическим съемкам и картографии. Физическая геодезия. М:
ЦНИИГАиК, 221-230.
Бровар Б.В., Юркина М.И. 2005. О трудах Бориса Влади-
мировича Дубовского // Геодезия и картография, 8, 51-59.
Бровар В.В. 1954. Отзыв на статью А.К. Маловичко «Ис-
следования по аналитическому продолжению гравитационных
аномалий» // Труды МИИГАиК. 18, 77-81.
Бровар В.В. 1958. О выводе и исследовании формулы Сток-
са // Труды МИИГАиК. 33, 15-18.
Бровар В.В. 1965. О формулах для вычисления возмущаю-
щего потенциала и составляющих отклонения отвеса на земной
поверхности // Иэв. вузов. Геодезия и аэрофотосъемка. 2, 97-
104.
Бровар В.В. 1970. Роль гравитационного поля в геодезии
// Иэв. вузов. Геодезия и аэрофотосъемка. 2, 66-72.
Бровар В.В. 1971. О возможности повышения точности
гравиметрических выводов в геодезии // Астрономический
журнал. 48, 6, 1327-1332.
Бровар В.В. 1983. Гравитационное поле в задачах инже-
нерной геодезии. М.: Недра, 112 с.
Бровар В.В. 1988. Потенциал начальных пунктов изолиро-
ванных сетей // Геодезия и картография. 2, 21-24.
Бровар В.В. 1995. Оптимизация модели нормальной Земли
// Геодезия и картография. 9, 10-13.
Бровар В.В. 1996. К решению краевой задачи Моло-
денского с относительной погрешностью 5-10_® // Научно-
технический сборник по геодезии, аэрокосмическим съемкам и
картографии. Физическая геодезия. М.: ЦНИИГАиК, 156-164.
Бровар В.В. 2004. Системность масс при эволюционном
развитии // Научно-технический сборник по геодезии, аэрокос-
мическим съемкам и картографии. Физическая геодезия. М.:
ЦНИИГАиК, 24-38.
Бровар В.В., Бровар Б.В. 1999. Высокоточный метод опре-
деления внешнего возмущающего потенциала реальной Землн
// Научно-технический сборник по геодезии, аэрокосмическим
съемкам и картографии. Физическая геодезия. М.: ЦНИИГА-
иК, 14-54.
Бровар В.В., Калядин Ю.А. 1990. О гравиметрических экс-
периментах по проверке закона Ньютона // Известия вузов.
Геодезия и аэрофотосъемка. 2, 60-78.
Бровар В.В., Юркина М.И. 1996. Михаил Сергеевич Моло-
денский. Жизнь и творчество // Научно-технический сборник
по геодезии, аэрокосмическим съемкам и картографии. Физи-
ческая геодезия. М.: ЦНИИГАиК, 1, 11-45.
Бровар В.В., Юркина М.И. 1997. Становление теоретиче-
ской геодезии XX века // Развитие гравиметрии и магнитомет-
рии. М.: ОИФЗ РАН, 5-61.
Бровар В.В., Магницкий В.А., Шимбирев Б.П. 1961. Тео-
рия фигуры Земли. М.: Геодеэиэдат. 256 с.
Бровар В.В., Еремеев В.Ф., Макаров Н.П., Пеллинен Л.П.,
Шимбирев Б.П., Юркина М.И. 1963. К вопросу об определении
внешнего гравитационного поля и фигуры Земли // Геодезия и
картография. 10, 74-76.
Бровар В.В., Павлова М.В., Строев П.А. 1995. О методе
определения гравитационной постоянной по гравиметрическим
данным // Геодезия и картография. 1, 3-8.
Бровар В.Я. 1960. Силы тяжести и морфология животных.
М.: АН СССР, 240 с.
Бровар В.Я. 1996. Теория научного знания. М.: Квартет,
382 с.
Бровар В.Я. 2007. Рост и онтогенез. К теоретическим осно-
вам учения о росте животных (в пяти частях, 1946 г.) объемом
406 с. под №13 ВС-2007. Ответственный редактор А.В. Ши-
лова. Рукопись аннотирована в 2.2 выпуске электронного из-
дания БД «Агрос» №0220510769 в НТЦ «Информрегистратор»
за 2007 г. Справка о депонировании рукописи №17 / 19586 от
28.04.2007 г.
Бронников К.А., Колосницын Н.И., Константинов М.Ю.,
Мельников В.Н., Радынов А.Г. 1993а. Измерение параметров
гравитационного взаимодействия иа спутнике Земли // Изме-
рительная техника. 8, 6-10.
Бронников К.А., Колосницын И.И., Константинов М.Ю.,
Мельников В.Н., Радынов А.Г. 19936. Численное моделирова-
ние траекторий частиц для измерения гравитационной посто-
янной иа ИСЗ // Измерительная техника. 9, 3-6.
Бронштейн И.И., Семендяев К.А. 1986. Справочник по
математике для инженеров и учащихся ВТУЗ. 13 издание, ис-
правленное. М.: Наука, Физматлит, 544 с.
Брызжев Л.Д. 1970. Работа ХГНИИМ по подготовке опре-
деления гравитационной постоянной весовым методом // Тези-
сы доклада симпозиума, КАПГ. М.
Брылевская Л.И. 1999. Исследование геометрии простран-
ства Вселенной в работах Н.И. Лобачевского // Астрономия и
история науки. C-Пб.: Искусство России, 27-31.
Буданов В.Г., Евдокимов Ю.С. 1966. Эталонирование
кварцевых астазированных гравиметров методом наклона //
Бюлл. НТИ. М.: ВИЭМС, 2 (55), 74-75.
Буданов В.Г, Евдокимов Ю.С. 1967. Устройство для эта-
лонирования иеастаэироваиных гравиметров: Авт. свид. СССР.
Кл. G 01с. №203949. Заявл. 21.10.66. Опубл. 25.12.67.
Буданов В.Г, Евдокимов Ю.С. 1969. Высокоточное эта-
лонирование морских неастаэироваииых гравиметров СЗ-
ВНИИГеофизика методом наклона // Прикладная геофизика.
М.: Недра, 57, 166-180.
Буданов В.Г, Евдокимов Ю.С., Юдина Р.А. 1967. Устрой-
ство для эталонирования астазированных гравиметров: Авт.
свид. СССР. Кл. G 01с. №197204. Заявл. 26.07.66. Опубл.
25.07.67.
Буланже Ю.Д. 1952. О некоторых систематических ошиб-
ках кварцевых гравиметров с горизонтальной нитью // Иэв.
АН СССР. Геофизика. 2, 31-37
Буланже Ю.Д. 1956а. Влияние сжимаемости компенсаци-
онной жидкости в кварцевых гравиметрах с горизонтальной
крутильной нитью // Иэв. АН СССР. Геофизика. 9, 1114-1120.
Буланже Ю.Д. 19566. О точности измерений кварцевыми
гравиметрами с горизонтальной крутильной нитью // Иэв. АН
СССР. Геофизика. 8, 927-939.
Буланже Ю.Д. 1980. Некоторые результаты высокоточных
определений силы тяжести // Геодезия и картография. 5, 16-
24.
Буланже Ю.Д., Попов Е.И. 1955. Кварцевый гравиметр для
определения опорных гравиметрических пунктов // Тр. Геофиэ.
ин-та АН СССР. М.: 30 (157), 240-249.
Буланже Ю.Д., Щеглов С.Н. 1993. III Международное
сравнение абсолютных гравиметров, Севр, Франция, 1989. М.:
Национальный геофизический комитет РАН. 43 с.
Буланже Ю.Д., Романюк В.А., Ковригин И.А., Певзнер
Б.Н., Жукова Г.И., Новиков С.М., Рукавишников Р.Б. 1967.
Устройство для эталонирования гравиметров: А.С. СССР. Кл.
G 01с. №203948. Заявл. 17.10.66. Опубл. 25.12.67.
Булгаков Б.В. 1955. Прикладная теория гироскопов. М.:
Гостехиэдат.
Бурша М. 1996. Фундаментальные геодезические постоян-
ные // Геодезия и картография. 5, 15-22.
Бурша М., Демьянов Г.В., Юркина М.И. 1997. Об опреде-
лении модели Земли - общего земного эллипсоида // Геодезия
и картография. 4, 9-13.
Бурша М., Ватрт В., Войтишкова М., Радей К., Шима
3„ Коуба К., Трю С.А. 1998. Оценка точности геопотенциаль-
ных моделей EGM Х01-Х05, EGM 96М // Геодезия и карто-
графия. 8, 10-13.
Бухгольц Н.Н. 1938-1939. Основной курс теоретической
механики. М-Л.: Гостехтеориэдат, ч. 1, 352 с., 1938; ч. 2, 256 с.,
1939.
Бывшее В.А. 1989. Уточнение теории и алгоритмов средней
квадратической коллокации // Изв. вузов. Геодезия и аэрофо-
тосъемка. 6, 9-20.
Бывшее В.А. 1997. Точностные расчеты при интерполи-
ровании геофизических полей дифференциальными сплайнами
минимальной кривизны // Иэв. вузов. Геодезия и аэрофото-
съемка. 2-3, 3-22.
Бычков О.Д. 1993. Уровни и микроннвелиры и их примене-
ние для геодезической выверки конструкций. М.: Недра, 112 с.
Вавилов С.Н. 1989. Исаак Ньютон. 1643-1727. 4-е изд.,
дополнен. М.: Наука, 215 с.
Василенко В.А. 1983. Сплайи-функции: теория, алгорит-
мы, программы. Новосибирск: Наука.
Васильев Б.В. 1998. Электрическая поляризация, индуци-
рованная тяготением в электронно-ядерной плазме, и связан-
ные с ней эффекты. Препринт ОИЯИ Р17—98—257. Дубна, 14 с.
Васин М.Г. 1990. Об одном способе представления основ-
ного уравнения инерциальной навигации при использовании
градиеитометрических измерений // Иэв. АН СССР МТТ. 2,
9-18.
Вернадский В.И. 1981. Очерки по истории современного
научного мировоззрения // Избранные труды по истории нау-
ки. М.: Наука, 32-185.
Веселов К.Е. 1955. Элементарная теория пружинных гра-
виметров, построенных по принципу пружинных весов // При-
кладная геофизика. М.: Гостоптехиэдат, 12, 127-156.
Веселов К.Е. 1956. О статическом способе измерений силы
тяжести на море с помощью упругой системы вращательного
типа // Прикладная геофизика. М.: Гостоптехиэдат, 15, 91-102.
Веселов К.Е. 1958. Способ статического определения силы
тяжести на море: А.С. №103391. Бюлл. иэобрет. №6.
Веселов К.Е. 1960. О влиянии вертикальных ускорений на
отсчет морского гравиметра // Прикладная геофизика. М.: Го-
стоптехиэдат, 26, 107-112.
Веселов К.Е. 1961. Кварцевые астазированные гравиметры.
Теория приборов, их устройство и работа с ними. М.: Гостопте-
хиэдат. 176 с.
Веселов К.Е. 1964. Измерения элементов гравитационного
поля в движении // Прикладная геофизика. 40.
Веселов К.Е. 1982. Некоторые перспективы развития аэро-
гравиметрии // Морские гравиметрические исследования. М.:
ВАГО АН СССР, МГУ, ГАИШ, 38-42..
Веселов К.Е. 1986. Гравиметрическая съемка. М.: Недра,
312 с.
Веселов К.Е. 1998. Концепция релятивистской геодинами-
ки // Геофизика. 2, 52-57.
Веселов К.Е., Геренблат Н.М. 1965. Влияние вибрации на
показания кварцевого астаэированного бестермостатного гра-
виметра // Прикладная геофизика. М.: Недра, 46, 140-148.
Веселов К.Е., Горин В.П. 1989. Повышение точности квар-
цевых астазированных гравиметров за счет устранения упру-
гого последействия // Прикладная геофизика. М.: Недра, 121,
119-127.
Веселов К.Е., Лозинская А.М. 1975. Состояние и перспек-
тивы измерений силы тяжести иа море // Морские гравимет-
рические исследования. М.: МГУ, 8, 15—21.
Веселов К.Е., Пантелеев В.Л. 1958. О влиянии возмущаю-
щих ускорений при измерении силы тяжести статическим гра-
виметром на море // Прикладная геофизика. М.: Гостоптехиз-
дат, 20, 86-100.
Веселов К.Е., Сагитов М.У. 1968. Гравиметрическая раз-
ведка. Учебник по предмету: Геофизические методы поисков
и разведки месторождений полезных ископаемых. М.: Недра,
512 с.
Веселов К.Е., Лукавченко П.И., Петров Е.М. 1954. Квар-
цевый астазированный гравиметр ГАК-ЗМ. Теория, устройство
и способ применениия. М.: Гостоптехиэдат, 39 с.
Визгин В.П. 1981. Релятивистская теория тяготения. Ис-
токи н формирование. 1900 - 1915. М.: Наука, 350 с.
Визгин В.П. 2001. Об открытии уравнений гравитационно-
го поля Эйнштейном и Гильбертом (новые материалы) // УФН,
171, 2, 1347 с.
Вилк Л.С. 1971. Центробежно-сбалансированный грави-
тационный градиометр. Патент США. Кл. 73-382 №3630086,
28.12.71. Перевод №2783. Под ред. А.И. Сорокн. М.: ОВТИ
ВВИА им. Н.Е. Жуковского, 1973.
Вильке В.Г. 2006. Об относительных движениях твердого
ядра н мантии Земли в гравитационном поле Луны и Солнца
// Конференция «Сагитовские чтения», 6-7 февраля 2006. М.:
ГАИШ.
Вильке В.Г. 2007. Модель Солнечной системы с диссипа-
цией и неустойчивость стационарных конфигураций. // Конфе-
ренция «Сагитовские чтения», 5-6 февраля 2007. М.: ГАИШ.
Виноградов А.П. 1962. Происхождение оболочек Земли //
Вести АН СССР, 9.
Вировец А.М. 1948а. Основная нивелирная сеть СССР //
Научно-техн, и пронэв. статьи, М.: Геодеэиэдат, XIX, 38-52.
Вировец А.М. 19486. Уравнивание основной нивелирной
сети СССР // Научио-техн. и произв. статьи, М.: Геодезиздат,
XVII, 36-44.
Витязев В.В. 2001. Системы отсчета и будущее наземной
астрометрии // Труды ИПА РАН. 6, 93-101.
Владимирский Б.М. 1995. Измерение гравитационной по-
стоянной и гелиогеофиэические электромагнитные возмущения
// Биофизика. 40, 4, 916-922.
Волков В.А., Гриднев Д.Г., Ковалева О.В., Кузнецов М.В.
2002. Наблюдения приливных вариаций силы тяжести на Орен-
бургском газоконденсатном месторождении // Иэв. РАН. Фи-
зика Земли. 9, 1-4.
Волож Ю.А., Перфильев А.С. 1997. Геологическая, геофи-
зическая и тектоническая границы верхней мантии // Сборник
тезисов международного совещания «Структура верхней ман-
тии Земли». М.: Геос, 105.
Вотяков А.А. 2006. Основания механики. Часть II. Аль-
тернативные формулировки закона всемирного тяготения. М.:
ЦЭМИ РАН, 112 с.
Вулард Э. 1963. Теория вращения Земли вокруг центра
масс. Перевод с англ. А.А. Гурштейна и В.В. Нестерова. М.:
Физматгиэ. 143 с.
Гайнапов А.Г, Пантелеев В.Л. 1991. Морская гравимет-
рия. М.: Недра, 219 с.
Галазин В.Ф. и др. 1993а. Об определении детальных ха-
рактеристик геопотенциала в Мировом океане с использовани-
ем ГЕО-ИК // Геодезия и картография. 11, 27-31.
Галазин В.Ф., Зуева А.Н., Македонский Е.Л. и др. 19936.
Опыт создания планетарных моделей гравитационного поля
Земли с использованием ГЕО-ИК // Геодезия и картография,
11.
Галазин В.Ф. и др. 1998. Система геодезических парамет-
ров Земли «Параметры Земли 1990 года» (ПЗ-90). М.: КНИЦ.
Галилей Г. 1638. Беседы и математические доказатель-
ства... Сочинения. Т. 1. Пер. с итал. М.-Л.: Гос. технико-
теоретическое иэд-во, 1934. 31-606.
Гаусс К.Ф. 1936. Лекции по теоретической астрономии, за-
писанные Купфером // Труды акад. А.Н. Крылова, М.-Л.: АН
СССР, 6, 229-452.
Гаусс К.Ф. 1952. Избранные труды по земному магнетизму.
М.: АН СССР, 341 с.
Гаусс К.Ф. 1957. Избранные геодезические сочинения. Под
общей ред. С.Г. Судакова. Т. I. Способ наименьших квадратов.
Под ред., с введением Г.В. Багратуни. Пер. с лат., нем. Н.Ф.
Булаевского. М.: Геодезиэдат, 152 с.
Гаусс К.Ф. 1958. Избранные геодезические сочинения. Под
общей ред. С.Г. Судакова. Т. II. Высшая геодезия. Под ред., с
введением и комментариями Г.В. Багратуни. Пер. с нем. Н.Ф.
Булаевского, Рудштейна. М.: Геодезиэдат, 245 с.
Геодезия. 1949. Справочное руководство. Под общей ред.
М.Д. Бонч-Бруевича. Л.-М.: Министерство коммунального хо-
зяйства РСФСР, 1, 423 с.
Гельмерт Ф.Р. 1962. Математические и физические теории
высшей геодезии. Под общей ред. С.Г. Судакова. Т. I. Матема-
тические теории. Под ред., с вступительной статьей и примеча-
ниями Г.В. Багратуни. Пер. с нем. Рудштейна. М.: Геодезиэдат,
408 с.
Герасимов А.П 1930. Медленные движения суши и их изу-
чение // Труды Второго геодезического совещания. М.: План-
хоэгиэ, 127-138.
Гершун А. 1900. Об одном методе определения средней
плотности Земли и гравитационной постоянной // Иэв. Русско-
го Астрономического общества, 8, 4-6, 15-32.
Гильберт Д. 1979. Основания физики // Альберт Эйн-
штейн и теория гравитации. Сборник статей. М.: Мир.
Гладун В.А., Воропаев Е.Г., Пантелеев В.Л., Ломоносов
М.Н. 1975. Морской автоматизированный гравиметр (МАГ) //
Морские гравиметрические исследования. М.: МГУ, 8, 84-95.
Глушков В.В., Насретдинов К.К., Пугачев Г.В., Косенко
В.Е. 1997. Космическая геодезическая система ГЕОИК-2 - про-
ект XXI века // Геодезия и картография. 11, 10-13.
Гобсон Е.В. 1952. Теория сферических и эллипсоидальных
функций. Пер. с англ. М.: ИЛ. 476 с.
Горин В.П., Науменко-Бондаренко О.И. 1991. Новые воз-
можности кварцевого астазированного гравиметра с низкоча-
стотным чувствительным элементом (ГВНТ). М.: ВНИИГео-
физика, И с. (Деп. ВИНИТИ. М1549-В91).
Горошко В.Я. 1954. Теория пружинного гравиметра М.С.
Молоденского // Исследования по геодезической гравиметрии.
Тр. ЦНИИГАиК. М.: Геодезиэдат, 103. 119-135.
Горшков В.Л., Миллер Н.О., Наумов В.А., Персиянинова
Н.Р., Прудникова Е.Я. 2000. Исследования основных составля-
ющих вектора вращения Земли по результатам Пулковских и
международных наблюдений. Внутренне ядро Земли. Геофизи-
ческая информация о процессах в ядре. Всероссийская конфе-
ренция, Москва, 27-29.11. 2000. Тезисы докладов. М.: ОИФЗ
РАН, 73.
ГОСТ 8.417-2002 «ГСИ. Единицы величин». М.: Изд. стан-
дартов, 2003, 28 с.
Гран Б.В. 1964. Теоретические и экспериментальные иссле-
дования по разработке макета вертикального гравитационного
вариометра. Дисс. канд. техн. наук. Л.: ВИРГ.
Грушинский Н.П., Сагитов М.У. 1962. Некоторые сообра-
жения о поле силы тяжести Луны // Астрономический журнал.
35, 1, 151-157.
Грушинский Н.П., Сажина Н.Б. 1959. К вопросу об опре-
делении абсолютного значения силы тяжести // Вестник МГУ.
Астрономия. 8.
Губанов В.С., Финкельштейн А.М., Фридман П.А. 1983.
Введение в радиоастрометрию. М.: Наука, 280 с.
Гусев Н.А. 1974 Абсолютные определения силы тяжести в
Международном бюро мер и весов (BIPM, Севр). Исследования
по гравиметрии // Труды ЦНИИГАиК, 208, 18-35.
Гусев Н.А. 1975. Абсолютные определения силы тяжести в
международном бюро мер и весов (BIPM, Севр) // Тр. ЦНИИ-
ГАиК. М„ 208, 18-35.
Гусев Н.А. 1977. Маятниковый комплекс «Агат» // Резуль-
таты высокоточных маятниковых измерений. М.: Сов. радио,
57-71.
Гусев ГА., Манукин А.Б. 1980. Емкостной преобразова-
тель кваэистатических перемещений // Иэв. АН СССР. Физика
Земли. 7, 91-94.
Гусев Н.А., Остач О.М. 1993. Проблемы метрологическо-
го обеспечения гравиметрических работ // Доклады ведом-
ственного семинара «Метрологическое обеспечение топографо-
геодезического производства». М.: ЦНИИГАиК, 25-29.
Гусев НА., Сливин Ю.А. 1973а. Зарубежная транспор-
табельная аппаратура для определения абсолютного значения
ускорения силы тяжести // Труды ЦНИИГАиК. 201, 118-127.
Гусев Н.А., Сливин Ю.А. 19736. Современное состояние
национальных опорных сетей и эталонных гравиметрических
базисов // Труды ЦНИИГАиК. 201, 29-86.
Гусева Т.В. 1980. Особенности современных движений в
эоне перехода от Памира к Тяиь-Шаню. М.: ИФЗ РАН. 122 с.
Декарт Р. 1950. Рассуждение о методе // Избранные про-
изведения. М.: Гос. иэд-во политической литературы. 257-317.
Деменицкая Р.М. 1967. Кора и мантия Земли. — М.: Нед-
ра. 280 с.
Демьянов Г.В. 1999. К вопросу о построении системы гео-
дезического обеспечения на основе спутниковых навигацион-
ных систем GPS и ГЛОНАСС // Физическая геодезия. Науч.-
тех. сб. по геодезии, аэрокосмическим съемкам и картографии.
М.: ЦНИИГАиК. 3-13.
Демьянов Г.В. 2003. Концепция современного развития си-
стемы нормальных высот // Иэв. вузов. Геодезия и аэрофото-
съемка. 3, 3-20.
Демьянов Г.В., Майоров А.Н. 2004. К вопросу об установ-
лении единой общеэемиой системы нормальных высот // Физи-
ческая геодезия. Науч.-тех. сб. по геодезии, аэрокосмическим
съемкам и картографии. М.: ЦНИИГАиК. 168-182.
Демьянов Г.В., Крюкова А.В., Пашина Н.Н., Таранов В.А.
1996. Построение планетарных моделей гравитациоииого по-
ля Земли // Физическая геодезия. Науч.-тех. сб. по геодезии,
аэрокосмическим съемкам и картографии. М.: ЦНИИГАиК.
109-129.
Демьянов Г.В., Бровар Б.В., Крюкова А.В., Майоров А.Н.,
Назарова Н.Г., Пашина Н.Н., Таранов В.А. 1999а. Модель гра-
витационного поля Земли ЦНИИГАиК, ГАО-98 // Физическая
геодезия. Науч.-тех. сб. по геодезии, аэрокосмическим съемкам
и картографии. М.: ЦНИИГАиК. 88-116.
Демьянов Г.В., Кафтан В.И. и др. 19996. Международ-
ный проект «Уровень Балтийского моря» // Физическая геоде-
зия. Науч.-тех. сб. по геодезии, аэрокосмическим съемкам и
картографии. М.: ЦНИИГАиК. 142-153.
Деч В.Н., Кнорине Л.Д. 1985. Методы изучения периоди-
ческих явлений в геологии. Л.: Недра, 255 с.
Джеффрис Г. 1960. Земля, ее происхождение, история и
строение. М.: ИЛ, 484 с.
Дизел Л.Р. 1964. Новый метод построения вертикали с ис-
пользованием градиента гравитационного поля // Ракетная тех-
ника и космонавтика, 2, 7, 30-40.
Дикке Р. 1965. Об экспериментальном базисе общей тео-
рии относительности // Гравитация и относительность. Под
ред. X. Цэю, В. Гофмана. М.: Мир. 49-72.
Димитров Л.В. 1958. Способ ускоренной обработки на-
блюдений с гравиметрами СН-3 и Норгарда // Иэв. АН СССР.
Физика Земли. 10, 1248-1249.
Дольфюс А. 1974. Диаметры планет и спутников // Пла-
неты и спутники. М.: Мир, 59-172.
Дравских А.Ф., Красинский Г.А., Финкельштейн А.М.
1975. Радиоастрономическая инерциальная система координат,
основанная на измерениях дуг между радиоисточниками //
Письма в Астрономический журнал. 5, 43-46.
Дражнюк А.А. 2007. Руководители государственной
картографо-геодезической службы. Лица и судьбы: 1919-2007
гг.: Справочник. М.: Картгеоцентр, 84 с.
Дробышев Н.В., Железняк Л.К., Клевцов В.В., Конешов
В.Н., Соловьев В.Н. 2005. Оценка потенциальных возможно-
стей спутниковой альтиметрии при изучении гравитационного
поля Мирового океана // Гироскопия и навигация. 3 (50), 14-
25.
Дубовской В.Б. 1981. Измерение низкочастотных ускоре-
ний. М.: Наука, 108 с.
Дубовской В.Б. 1993. Мониторинг деформационных про-
цессов // Инженерно-геологический и геофизический монито-
ринг природных объектов и инженерных сооружений. М., 21-
25.
Дубовской В.Б., Леонтьев В.И., Удинцев В.Г. 1994. Ин-
ститут планетарной геофизики // Основные результаты работы
в 1992-1993 гг. М.: ОИФЗ РАН. 1, 147-164.
Дубовской В.Б., Леонтьев В. И., Сбитнев А.В. 2002. Мо-
дернизация гравиметра ГАГ-3 // Доклады Междунар. научно-
технической конференции, посвящ. 225-летию МИИГАиК. М.,
263-268.
Еремеев В.Ф. 1951. Теория ортометрических, динамиче-
ских и нормальных высот // Труды ЦНИИГАиК. М.: Геоде-
зиздат, 86, 11-51.
Еремеев В.Ф. 1957. Расчет палетки для вычисления вы-
сот кваэигеоида и уклонений отвеса по формулам Стокса и
Венинг-Мейнеса // Труды ЦНИИГАиК. 121. М.: Геодеэиэдат.
121, 43-75.
Еремеев В.Ф., Звонов В.И. 1953. О системе высот ниве-
лирования сети СССР // Труды ЦНИИГАиК. М.: Геодезиздат,
96, 3-26.
Еремеев В.Ф., Юркина М.И. 1955. Динамические высоты
и их применения // Статьи по геодезии ГУГК. 10, 23-38.
Еремеев В.Ф., Юркина М.И. 1969. О выводе граничного
условия теории фигуры Земли // Труды ЦНИИГАиК. М.: Нед-
ра, 176, 9-14
Еремеев В.Ф., Юркина М.И. 1972. Теория высот в грави-
тационном поле Земли. М.: Недра, 145 с.
Еремеев В.Ф., Юркина М.И. 1973. К выводу плотности
простого слоя на лунной поверхности // Астрономический вест-
ник. 7, 3, 129-138.
Жолковский Е.А., Демьянов Г.В., Майоров А.И, Бровар
Б.В., Таранов В.А., Юркина М.И. 1998. Гравиметрия и совре-
менная спутниковая геодезия // Материалы юбилейной научно-
технической конференции «Современное состояние и перспек-
тивы развития геодезии, аэрофототопографии, картографии и
геоииформационных систем», посвященной 850-летию Москвы,
Москва, ЦНИИГАиК, сентябрь 1997г. Часть 1. М.: ЦНИИГА-
иК, 3-11.
Жарков В.Н., Трубицын В.П. 1983. Внутреннее строение
Земли и планет // Изд. 2-е, перераб. и дополнен. М.: Наука,
415 с.
Жарков В.Н, Трубицын В.П., Самсоненко Л.В. 1971. Фи-
зика Земли и планет. Фигуры и внутреннее строение. М.: На-
ука.
Жаров В.Е. 1996. Масса и момент инерции Земли // Труды
ГАИШ. 65, 148-151.
Жаров В.Е., Пасынок С.Л. 2001. Теория нутации иеупру-
гой Земли // Астрономический журнал. 78, 11, 1034-1048.
Железняк Л.К. 1992. Площадная съемка в океане грави-
метрами различных типов // Физика Земли. 3, 50-55.
Железняк Л.К. 2001. Применение высокоточных гравимет-
рических съемок для поиска нефтегазоносных структур // Фи-
зика Земли. 9, 62-68.
Железняк Л.К. 2003. Развитие морской гравиметрии в
ИФЗ РАН // Наука и технология в России. 6-7. 54-56.
Железняк Л.К., Конешов В.Н. 1995. Оценка погрешности
данных спутниковой альтиметрии по сравнению с гравиметри-
ческими материалами // Физика Земли. 1, 76-81.
Железняк Л.К., Элинсон Л.С., Боярский Э.А. 1983. Этало-
нирование наклоном гравиметров с упругой системой крутиль-
ного типа // Гравиинерциальиые исследования. М., 144-181.
Жидков Н.П. 1977. Линейные аппроксимации функциона-
лов. М.: МГУ, 262 с.
Жонголович И.Д. 1968. Космическая триангуляция. Земля
и вселенная. 3.
Жучков Л.А., Кутепов В.С., Полосатое Л.П., Тулин В.А.
1977. Стенд для испытания морской гравиметрической аппара-
туры // Иэв. вузов. Геодезия и аэросъемка. 6, 54-58.
Жучков Л.А., Кутепов В.С., Тулин В.А. 1987. Уменьшение
влияния орбитального движения основания в двойной упругой
системе крутильного типа // Физика и структура земной коры
окраинных морей Тихого океана. Владивосток, 93-97.
Забрейко П.П., Кошелев А.И., Красносельский М.А., Мих-
лин С.Г., Раковщик Л.С., Стеценко В.Я. 1968. Интегральные
уравнения. Справочная математическая библиотека М.: Наука.
448 с.
Зайцев Н.А., Колосницын Н.И. 1989. Динамическая про-
верка ньютоновского закона тяготения на пробных телах //
Экспериментальные тесты теории гравитации. М.: МГУ, 38-
55.
Закон РФ *06 обеспечении единства измерений» 1993.
Ведомости Съезда народных депутатов Российской Федерации
и Верховного Совета Российской Федерации, №23, ст. 811.
Зверев М.С. 1936. Определение постоянных маятниковых
приборов в лаборатории б. ВТОГ и ГР // Иэв. ВТОГ и ГР. 6,
1-68.
Зверев М.С. 1970. О методе Крейнина - Муррн абсолют-
ного определения склонений экваториальных звезд // Астроно-
мический журнал. 47, 6, 1300-1307.
Зиман Я.Л., Непоклонов Б.В., Родионов Б.Н. 1970. Опре-
деление вектора вращения планет // Астрономический журнал.
47, 6, 1277-1281.
Иванов М.Г. 2007. Антигравитационные двигатели «летаю-
щих тарелок». Теория гравитации. Издание второе, исправлен-
ное и дополненное. М.: ЛКИ, 351 с.
Иверонов И.А. 1901. Георгий Николаевич Шебуев. Некро-
лог // Памятная книжка Константиновского межевого ин-
ститута за 1899-1990 годы. 107-131; Труды Топографо-
геодезической комиссии Географического отделения Общества
любителей естествознания, антропологии и этнографии, состо-
ящего при Московском университете. 13, 3-18.
Игнатова М.П. 1965. Оценка точности формулы Нумерова
для вертикального градиента силы тяжести на модели Земли //
Труды ЦНИИГАиК. 157, 125-134.
Идельсон Н.И. 1949. Лобачевский - астроном // Историко-
математические исследования. М.: Гостехиэдат, 2, 137-167.
Измайлов В.П., Карагиоз О.В. 2006. О влиянии Земли на
измерение гравитационной постоянной // Измерительная тех-
ника. 6, 3-5.
Измайлов В.П., Карагиоз О.В., Кузнецов А.В., Мельни-
ков В.Н., Росляков А.Е. 1993. Временные и пространственные
вариации измеряемых значений гравитационной постоянной //
Измерительная техника. 10, 3-5.
Иноземцев А.Г., Иноземцев П.А., Иноземцев В.Г. 2005.
Тайны теории относительности, природы н жизни. М. Спут-
ник-!-, 156 с.
Инструкция о построении государственной геодезиче-
ской сети СССР. 1966. М.: Недра.
Инструкция по развитию государственной гравиметри-
ческой сети 2 класса. 1984. М., 8 с.
Инструкция по развитию высокоточной государствен-
ной гравиметрической сети России. 2004. ГКИНП (ГНТА)-
04-122-03. М.: ЦНИИГАиК, 218 с.
Исматходжаев С.К. 1965а. Измерение ускорения силы тя-
жести статическими гравиметрами на подвижном основании //
Аппаратура и методы морских гравиметрических наблюдений.
М„ 72-87.
Исматходжаев С.К. 19656. Статистическая оценка точно-
сти осреднения показаний гравиметров //Аппаратура и методы
экспериментальных исследований по гравиметрии. М., 98-109.
Исматходжаев С.К. 1969. Определение оценок статисти-
ческих характеристик случайных процессов при гравиметриче-
ских наблюдениях на надводных судах // Передача информа-
ции и математическое моделирование технологических процес-
сов. Ташкент: Фан, 101-132.
Исматходжаев С.К. 1979. Методы теории случайных
функций в надводных гравиметрических наблюдениях. М.: На-
ука, 191 с.
Казьмин А.И., Михайлов Н.Н., Савченко А.А. 1966а. Циф-
ровые вычислительные устройства автоматического гравиметра
ГАЛ-ЦПАВ // Приборы для определения силы тяжести на мо-
ре и их использование. Под ред. Ю.Д. Буланже. М.: Наука,
36-45.
Казьмин А.И., Кобрин Л.В., Михайлов Н.Н., Савченко
А.А., Чурбаков А.И. 19666. Исследование работы автомати-
ческого гравиметра ГАЛ-ЦПАВ на море // Приборы для опре-
деления силы тяжести на море и их использование. Под ред.
Ю.Д. Буланже. М.: Наука, 45-56.
Канторович Л.В. 1934. Об одном новом методе прибли-
женного решения уравнений в частных производных. ДАН
СССР, 3 (2), 9, 532-536.
Канторович Л.В. 1949. О методе Ньютона // Труды Мате-
матического института им. В.А. Стеклова. 28, 104-144.
Канторович Л.В., Акилов ГП. 1977-1984. Функциональ-
ный анализ в нормированных пространствах. М.: Наука, 744 с.;
Функциональный анализ. Третье издание, переработанное. М.,
Наука, 1984. 752 с. Английский перевод: Kantorovich L., Akilov
G. 1964. Functional analysis in normed spaces. Macmillan, New
York; Second edition 1982. Oxford - N.Y. - Toronto - Sydney -
Paris - Frankfurt. Pergamon press, 589 p.
Капусткин В.В. 1969. О применении полупроводниковых
преобразователей при измерении параметров поля силы тяже-
сти // Геофизическая аппаратура. Л., Недра, 39, 155-157.
Карагиоз О.В., Измайлов В.П. 1996. Измерение гравитаци-
онной постоянной крутильными весами // Измерительная тех-
ника. 10, 3-9.
Карагиоз О.В., Силин А.А. Измайлов В.П. 1981. К вопросу
о зависимости постоянной тяготения от расстояния между вза-
имодействующими массами // Иэв. АН СССР. Физика Земли.
1, 92-97.
Карагиоз О.В., Измайлов В.П., Силин А.А., Духовской
Е.А. 1987. Измерение гравитационной постоянной при различ-
ных расстояниях между взаимодействующими массами // Все-
мирное тяготение и теории пространства и времени. М.: РУДН,
102-110.
Карагиоз О.В., Измайлов В.П., Кузнецов А.И. 1992а. Ме-
тодика и результаты исследований путей повышения точности
гравитационной постоянной Кавендиша // Изв. вузов. Геодезия
и аэрофотосъемка. 3, 91-101.
Карагиоз О.В., Измайлов В.П., Пархомов А.Г. 19926. Ис-
следование флуктуаций результатов измерений гравитацион-
ной постоянной на установке с крутильными весами. Препринт
МНТЦ ВЕНТ, М„ 21. 25 с.
Карцивадзе И.Н. 1965. Нёкоторые вопросы теории потен-
циала АН Грузинской ССР // Труды вычислительного центра
Тбилиси. Тбилиси: Мецниереба. VI, 3, Вопросы теории функ-
ций, 53-68.
Каталог. 1980. Каталог высот марок и реперов нивелиро-
вания 1 и II классов Главной высотной основы СССР.-М.: ГУГК
СССР.
Каула У. 1971. Введение в физику планет земной группы.
М.: Мир, 534 с.
Кафтан В.И. 1986 Анализ устойчивости геодезических
пунктов и определение векторов смещений земной коры // Гео-
дезия и картография. 5, 9-12.
Кафтан В.И. 1994. Колебания уровня моря и вертикаль-
ных движений земной поверхности в Каспийском регионе //
Напряжения в литосфере (глобальные, региональные, локаль-
ные). Тезисы докладов Первого Международного семинара. М.:
ИГиРГИ, 79.
Кафтан В.И. 1995. Анализ периодичностей космогеофи-
зичесих процессов и изменений уровня Каспия // Каспийский
регион: экономика, экология, минеральные ресурсы. Рефераты
Международной конференции «Каспий-95». Москва, июнь 20-
23. 14.
Кафтан В.И., Кузнецов Ю.Г, Лилиенберг Д.А., Серебря-
кова Л.И. 1998. Исследование современных вертикальных дви-
жений земной коры в Кавказском регионе по геодезическим
данным. М., Картгеоцентр-Геодезиздат, Геодезия и Картогра-
фия, 3.
Кашин Л.А. 1968а. О программе высокоточного нивелиро-
вания и его научно-техническом значении // Геодезия и карто-
графия. 10, 11-17.
Кашин Л.А. 19686. О развитии высокоточной нивелирной
сети СССР и повторном нивелировании // Современные дви-
жения земной коры. М., 3, 38-43.
Кашин Л.А. 1999. Построение классической астрономо-
геодезической сети России и СССР (1816-1991 гг.) Научно-
технический и исторический обзор. М.: Картгеоцентр, Геодез-
издат, 192 с.
Кашин Л.А., Хренов Л.С. 1979. О нивелирной сети СССР
(к 100-летию создания высокоточной нивелирной сети). М.:
Недра, 144 с.
Киреев К.Н., Кутепов В.С., Тулин В.А., Черемисенов Г.В.
1978а. Демпфирование гиромаятникового стабилизатора для
уменьшения ошибок гравиметра // Изв. АН СССР. Физика
Земли. 3. 92-95.
Киреев К.Н., Кутепов В.С., Пущина Л.В., Тулин В.А. Че-
ремисенов Г.В. 19786. Стабилизация морского гравиметра. М.:
Наука, 78 с.
Клейн Ф. 1936. Неевклидова геометрия. Пер. с нем. М.-Л.:
ОНТИ. Оригинал 1928. 355 с.
Клеро А. 1947. Теория фигуры Земли, основанная на нача-
лах гидростатики. Пер. с франц. М.: АН СССР, 1-189. Ориги-
нал 1743.
Клименко А.В. 1980. О происхождении упоминаемых Ари-
стотелем и Архимедом результатов определения размеров Зем-
ли // Историко-астрономические исследования. 15, 189-197.
Клионер С.А. 1990. Релятивистский аспект синхронизации
наземных часов. Препринт Института прикладной астрономии.
Л., 25, 52 с.
Клюшин Е.Б. 2005. Лекции по физике, прочитанные само-
му себе. Издание второе, исправленное и переработанное. М.:
Бумажная Галерея, 336 с.
Козакевич П. 1848. Об уровне Балтийского моря. Зап. Гос.
Деп. Морск. Мин-ва. СПб. VI.
Козьякова К.Я., Романюк В.А., Рукавишников Р.Б., Бо-
ярский Э.А., Коган М.Г. 1979. Эталонирование гравиметров
методом наклона. М.: Наука.
Козьякова К.Я., Рукавишников Р.Б. 1976. О нелинейности
температурной зависимости цены деления гравиметров CG-2
(Шарп) // Результаты исследований по эталонированию грави-
метров. М., 12-20.
Козьякова К.Я., Щеголькова Т.П. 1976. Эталонирование
морских автоматизированных гравиметров (АМГ) методом на-
клона // Результаты исследований по эталонированию грави-
метров. М., 27-41.
Коломбет В.А. 1992. Макроскопические флуктуации, мас-
сы частиц и дискретное пространство-время // Биофизика. 34,
492-499.
Колосницын Н.И. 1993. Новый способ измерения гравита-
ционной постоянной // Измерительная техника. 9, 6-10.
Колосницын Н.И., Осипова А.В. 1978. О возможности про-
верки нарушения принципа эквивалентности по наблюдениям
приливов // Проблемы теории гравитации и элементарных ча-
стиц. 9, 155-160.
Колосницын Н.И., Осипова А.В. 1981. Принцип эквива-
лентности и аномальные движения тел солнечной системы //
Астрономический журнал. 58, 888-897.
Колчинский И.Г., Корсунь А.А., Родригес М.Г. 1986. Аст-
рономы. Биографический правочник. Издание второе перерабо-
танное. Киев: Наукова думка, 512 с.
Кондратьев Г.М. 1957. Тепловые измерения. М.-Л.: Маш-
гиз.
Кондратьев Б.П. 1989. Динамика эллипсоидальных грави-
тирующих фигур. М.: Наука, 272 с.
Коперник Н. 1964. О вращении небесных сфер. М.: Наука,
653 с.
Корсунь А.А., Федоров Е.П. 1973. О совместном определе-
нии координат полюса и неравномерности вращения Земли //
Астрономический журнал. 3, 615-621.
Корякин Е.Д., А.Н.Грушинский, Строев П.А. 1998. О гло-
бальном распределении мощности и плотности осадочного по-
крова Земли при осреднении по трапециям 5-5° // Известия
ВУЗов. «Геология и разведка». 5, 89-109.
Костина Л.Д., Юркина М.И. 2002. Об одной статье Эйле-
ра 1765 г., определении пространственной ориентировки Земли
и движения полюса по земной поверхности // Изв. вузов. Гео-
дезия и аэрофотосъемка. 2, 69-77.
Костров А.В., Ривкин С.С., Бочаров А.Ф. 1985. Анализ
погрешностей гиромаятникового стабилизатора гравиметра. //
Изв. АН СССР. Механика твердого тела. (4), 20-25.
Кочетков Б.М., Манукин А.Б., Матюнин В.П., Попов
Е.И. 1983. Гравиметр для сухопутной и авиадесентной съемок
типа ГАД // Гравиинерциальные исследования. М., 43-55.
Крамер X., Лидбеттер М. 1969. Стационарные случайные
процессы. Пер. с англ. М.: Мир, 398 с.
Красиков Н.Н. 1968а. К проблеме применения эффекта
Мессбауэра при измерении поля силы тяжести // Геофизиче-
ская аппаратура. Л.: Недра, 36, 169-171.
Красиков Н.Н. 19686. Об электронном гравиметре, исполь-
зующем стоячую ультравысокочастотную волну // Геофизиче-
ская аппаратура. Л., Недра, 36.
Краснов А.А., Несенюк Л.П., Пешехонов В.Г., Соколов
А.В., Элинсон Л.С. 2007. Морской гравиметр нового поколения
// Доклады международного симпозиума «Наземная, морская
и аэрогравиметрия: измерения на неподвижных и подвижных
основаниях», 20-23.08.2007 г. СПб.: ЦНИИ «Электроприбор»,
3-4.
Красносельский М.А., Забрейко П.П., Пустыльник Е.И.,
Соболевский П.Е. 1966. Интегральные операторы в простран-
ствах суммарных функций. М.: Наука. 499 с.
Красовский Ф.Н. 1901. Работы Г.Н. Шебуева по высшей
геодезии // Труды Топографо-геодезической комиссии Геогра-
фического отделения Общества любителей естествознания, ан-
тропологии и энтографии, состоящего при Московском универ-
ситете. 13, 24-28.
Красовский Ф.Н. 1926. Руководство по высшей геодезии.
Ч. I. М„ 468 с.
Красовский Ф.Н. 1938. О современной постановке высоко-
точного и точного нивелирования. М.: Геодезист, 3; 1956. Избр.
соч. Т. II. М.: Геодезиэдат, 101-117.
Красовский Ф.Н., Данилов В.В. 1939. Внешние причины
ошибок нивелирования; действие рефракции // Руководство по
высшей геодезии. М.: ГУГК СНК СССР, I, (2), §130, 359-365.
Крейнин Е.И., Мурри С.А. 1973. Определение абсолютных
склонений экваториальных звезд из микрометрических наблю-
дений вблизи экватора // Астрономический журнал. 50, 3, 606-
614.
Крейнин Е.И., Толчельникова-Мурри С.А. 1981. Определе-
ние однородных по точности координат звезд в единой системе
из наблюдений с астролябиями // Астрометрия и астрофизика.
Киев.: 44, 60-70.
Кристенсен Э. Л., Уиллямс Б.Г. 1979. Оценка гравитаци-
онного поля Марса по данным навигационных наблюдений за
космическими аппаратами «Викинг-1» и «Викинг-2» // Ракет-
ная техника и космонавтика, 17, 9, 146-152.
Крылов А.Н. 1950. Лекции о приближенных вычислениях.
М.-Л.: Гостехиздат, 400 с.
Крылов Г.О., Маслов И.А., Науменко-Бондаренко И.И.
1973. Тензорные модели в гравиметрии. Под ред. Ю.Д. Бу-
ланже. М.: ИФЗ АН СССР, Деп. №5880-73.
Крюков С.В., Плешаков Д.И. 2001. Анализ альтиметри-
ческих измерений поверхности моря и их использование при
определении градиента геопотенциала // Геодезия и картогра-
фия. 2, 6-10.
Кузиванов В.А. 1958. Определение силы тяжести грави-
метром на море // Изв. АН СССР. Геофизика. 5, 648-654.
Кузиванов В.А. 1959. Определение силы тяжести грави-
метром иа движущемся основании // Вопросы инструменталь-
ной гравиметрии. Тр. ИФЗ АН СССР. М.: 8 (175), 68-71.
Кузиванов В.А., Лифшиц М.И. 1978. К вопросу об иссле-
довании дифференциального уравнения движения сильиодемп-
фированного маятника // Некоторые вопросы теории и методи-
ки гравиметрии. М.: ИФЗ АН СССР, 113-121. (Деп. ВИНИТИ.
№2366-78).
Кузиванов В.А., Коган М.Г., Магницкая Е.И. 1966. О сов-
местном влиянии горизонтальных и вертикальных ускорений
на показания сильно демпфированного гравиметра // Изв. АН
СССР. Физика Земли. 3. 63-73.
Куликов К.А. 1962. Изменяемость широт и долгот. М.:
Физматгиз, 400 с.
Куликов К.А., Гуревич В.Б. 1972. Основы лунной астро-
метрии. М.: Наука, 391 с.
Кун Т. 1977. Структура научных революций. Изд. 2-е. Пер.
с англ. М.: Прогресс, 300 с.
Кусов В.С. 2007. Измерение Земли. История геодезических
инструментов. М.: Дизайн. Информация. Картография. 256 с.
Кутепов В.С. 1971. Стабилизатор морского гравиметра, по-
строенный по принципу гиромаятника // Изв. АН СССР. Фи-
зика Земли. 1, 107-113.
Кутепов В.С. 1986. Средства динамических испытаний
морских гравиметров. Под ред. Л.Д. Немцова. М.: Наука, 72 с.
Кутепов В.С., Марков Г.С., Попов Е.И. 1970. Оценка вли-
яния возмущающих ускорений и наклонов на показания мор-
ского гиростабилизированного гравиметра // Аппаратура и ме-
тоды измерений силы тяжести на море. М.: Наука, 67-80.
Кэри У. 1991. В поисках закономерностей развития Зем-
ли и Вселенной. История догм в науках о Земле. Пер. с англ.
Оригинал 1988. М.: Мир.
Лебедев С.А., Костяной А.Г. 2005. Спутниковая альтимет-
рия Каспийского моря. М.: Море, 366 с.
Леви К.Г. 1991. Неотектоннческие движения в сейсмоак-
тивных зонах литосферы. Тектонический анализ. Новосибирск:
Наука, 166.
Левицкая З.Н. 1971. О задаче оптимальной фильтрации в
приложении к гравиметрическим измерениям. М.: МГУ, 26 с.
Деп. ВИНИТИ. №3204-71.
Левицкая З.Н. 1972. Эффект орбитального движения в
морской гравиметрии (cross-coupllng-эффект) // Морские гра-
виметрические исследования. М.: МГУ, 6, 5-26.
Логинова Г.П., Селиханович В.Г. 1963. Иллиодор Ивано-
вич Померанцев. М.: Госгеолтехиздат, 102 с.
Логунов А.А. 2006. Релятивистская теория гравитации.
М.: Наука, 253 с.
Логунов А.А., Мествиришвили М.А. 1985. Основы реля-
тивистской теории гравитации. М.: МГУ, 80 с.
Лозинская А.М. 1950. Кольцевой астазированный грави-
метр ГКА // Развед. и промысл, геофизика. М.: Гостоптехиз-
дат, 1, 24-26.
Лозинская А.М. 1951. Гравиметр ГКА-НИИГГР. Описание
и руководство для работы. М.-Л., Гостоптехиэдат. М-во нефт.
пром-сти. Главнефтегеофизика. Науч.-исслед. нн-т геофиз. и
геохим. методов разведки НИИГГР. 43 с.
Лозинская А.М., Смирнов Л.П. 1948. Гравиметр ГКМ-
НИИПГ-5 (Описание и эксплуатация). М.: ЦИМТНефть, 30 с.
Лозинская А.М., Яшаяев И.Л. 1970. Опытные аэрограви-
метрические измерения над Каспийским морем // ДАН СССР.
193, 1, 80-82.
Ломоносов М.Н., Пантелеев В.Л. 1988. Опыт восстанов-
ления входного сигнала морского гравиметра // Гравиметриче-
ские исследования на море. М.: Наука, 52-58.
Лукавченко П.И., Веселов К.Е. 1953. Кварцевый астазиро-
ванный гравиметр КГА // Развед. и промысл, геофизика. М.-
Л.: Гостоптехиэдат, 6, 15-18.
Лукашова М.В., Свешников М.Л. 2004. Эфемеридная аст-
рономия. Глава 8 // Тр. ИПА РАН. 10, 186-206.
Ляховец В.Д. 1986. О пространственных вариациях гра-
витационной постоянной // Изв. АН СССР. Физика Земли. 8,
98-99.
Ляховец В.Д. 1987. О геофизическом способе определения
гравитационной постоянной и коэффициента поглощения гра-
витации // Всемирное тяготение и теории пространства и вре-
мени. М.: РУДН, 158-161.
Магницкий В.А. 1995. Общая геофизика. М.: МГУ.
Мазья В.Г. 1988. Граничные интегральные уравнения //
Итоги науки и техники ВИНИТИ. Современные направления
математической физики. Фундаментальные направления. 27,
131-228.
Майсов Н.А. 1964. Устройство для измерения градиента
поля тяготения. Кл. 42с 44, А.С. №170697, 20.04.64.
Макаренко Н.Л., Гусев Н.А., Лохов В.В. 1990. О государ-
ственной гравиметрической сети СССР // Геодезия и картогра-
фия. 11, с. 1-5.
Макаренко Н.Л., Демьянов Г.В., Новиков Е.В., Бровар
Б.В., Ефимов Г.Н., Зубинский В.И., Майоров А.Н., Назарова
Н.Г. 2000. Единая государственная система геодезических ко-
ординат 1995 года (СК-95). Справочный документ. Под общей
ред. А.А. Дражнюка. Федеральная служба геодезии и карто-
графии России. М.: ЦНИИГАиК., 33 с.
Македонский Е.Л., Непоклонов В.Б., Задорожко Л.И.
1992. Моделирование гравитационного поля Земли для коррек-
ции измерительных и навигационных средств. СПб.: ЦНИИ
«Электроприбор», 58 с.
Малкин З.М. 1997. Решение задач фундаментального
координатно-временного обеспечения классическими и спутни-
ковыми методами. Автореф. дисс. докт. физ.-мат. наук. СПб.,
ИПА, 30 с.
Манк У., Макдональд Г. 1963. Вращение Земли. М.: Мир,
260 с.
Манк У., Макдональд Г. 1964. Вращение Земли. М.: Мир,
384 с.
Маррей К.Э. 1986. Векторная астрометрия. Киев, Наукова
думка, 326 с.
Марчук Г.И., Коган Б.А. 1977. Океанские приливы. Ма-
тематические модели и численные эксперименты. Л.: Гидроме-
теоиздат, 296 с.
Марыч М.И. 1965. Об определении отклонений отвеса на
физической поверхности Земли // Геодезия, картография и
аэрофотосъемка. 3, 54-58.
Марыч М.И. 1967. Приведение формулы В.В. Бровара,
определяющей фигуру Земли, к ряду Тейлора // Геодезия, кар-
тография и аэрофотосъемка. 6, 42-47.
Математическая энциклопедия, т. 1-5, 1977-1984. М.:
Сов. Энциклопедия.
Маишмов М.М. 1998. Земные сфероиды, нормальная Зем-
ля и геодезические системы отсчета // Геодезия и картография.
7, 12-17.
Медведев П.П. 1980. Исследование гравитационного поля
и фигуры Земли новыми методами космической геодезии //
Геодезия и аэросъемка. Итоги науки и техники ВИНИТИ АН
СССР. М„ 17, 1-99.
Медведев П.П. 1988. Изучение топографической поверхно-
сти Мирового океана.- В кн.: Итоги науки и техники. Геодезия
и аэросъемка. М.: ВИНИТИ АН СССР, 26, 76-129.
Мельхиор П. 1968. Земные приливы, М.: Мир, 482 с.
Мельхиор П. 1976. Физика и динамика планет. М.: Мир,
часть II.
Мельхиор П., Садовский А.М. 1986. Приливные аномалии
и тепловой поток в Европе // ДАН СССР. 286, 6, 1351-1354.
Мещерский И.Н. 1973. Точное нивелирование. Итоги науки
и техники // Геодезия и аэросъемка. М.: ВИНИТИ, 8, 83-113.
Мещерский И.Н. 1975. Из истории создания исходного
пункта нивелирной сети СССР // Геодезия и картография. 3,
72-75.
Мещеряков Ю.А. 1972. Рельеф СССР (Морфоструктура
и морфоскульптура). Предисл. акад. И.П. Герасимова. М.:
Мысль, 519 с.
Мещеряков Г.А. 1991. Задачи теории потенциала и обоб-
щенная Земля. М.: Наука, 216 с.
Мещеряков Г.А., Церклевич А.Л. 1987. Гравитационное по-
ле, фигура и внутреннее строение Марса. Киев: Наукова дум-
ка, 240.
Мизнер Ч., Торн К., Уилер Дж. 1977. Гравитация. М.:
Мир, 2, 525 с.; 3, 510 с.
Милюков В.К. 1985. Экспериментальная проверка закона
тяготения для лабораторных расстояний // ЖЭТФ, 88, 2, 321 —
328.
Миранда К. 1957. Уравнения с частными производными эл-
липтического типа. Пер. с итал. Т.Д. Вентцель, под ред. О.А.
Олейник. М.: ИЛ, 256 с.
Миронов В.С. 1980. Курс гравиразведки. Учебник для ву-
зов по спец. Геофизические методы поисков и разведки место-
рождений полезных ископаемых. Второе изд., перераб. и доп.
Л.: Недра, Ленинградское отделение, 543 с.
Миронов Н.Т. 1973. О природе медленных изменений ши-
рот // Астрономический циркуляр. 769, 7-8.
Митрофанов В.П., Пономарева О.И. 1987. О возможно-
сти экспериментальной проверки закона тяготения на малых
расстояниях // Всемирное тяготение и теории пространства и
времени. М.: РУДН, 111-113.
Михайлов А.А. 1939. Курс гравиметрии и теории фигуры
Земли. Изд. 2-е, перераб. и доп. М.: Редбюро ГУГК при СНК
СССР, 432 с.
Михайлов А.А. 1968. О вековых изменениях географиче-
ских координат // Астрономический журнал. 45, 3, 473-477.
Михайлов А.А. 1970. О приведении астрономических опре-
делений широты, долготы и азимута к единой эпохе // Астро-
номический журнал. 47, 3, 613-618.
Михайлов А.А. 1971а. Движение земных полюсов // Успе-
хи физических наук. 105, 4, 776-787.
Михайлов А.А. 19716. О движениях земных полюсов //
Астрономический журнал. 48, 6, 1301-1304.
Михайлов А.А. 1973. Об определении точки экватора при
наблюдениях склонений звезд // Астрономический журнал. 50,
6, 1280-1283.
Михлин С.Г. 1962. Многомерные сингулярные интегра-
лы и интегральные уравнения. М.: Гос. изд-во физико-
математической литературы. 254 с.
Михлин С.Г., Радева Р.К. 1974. О приближенном решении
сингулярных интегральных уравнений // Изв. вузов. Матема-
тика. 5, 158-162.
Мишо Ш. 1970. Планета Марс: физические свойства //
Пер. с англ. К.А. Любарского. Оригинал 1967 г. М.: Мир,
223 с.
Молоденский М.С. 1937. Определение фигуры геоида при
совместном использовании астрономо-геодезических уклоне-
ний отвеса и карты аномалий силы тяжести // Тр. ЦНИИГАиК.
17, 9-32; Избранные труды. 2001. М.: Наука, 35-58.
Молоденский М.С. 1940. Работы по гравиметрическому ин-
струментостроен ию // Геодезист. 5, 21-22.
Молоденский М.С. 1944. Основные вопросы, связанные с
выполнением астрономо-гравиметрического нивелирования на
большой территории // Статьи ГУГК. М.: IV, 3-11.
Молоденский М.С. 1945а. Пружинный гравиметр. Теория
гравиметра с ленточной кольцевой пружиной // Прикладная
геофизика. М.-Л., 11-29; Избранные труды М.С. Молоденско-
го 1999. М.: ОИФЗ, 156-169; Избранные труды М.С. Моло-
денского 2001. М.: Наука, 174-188.
Молоденский М.С. 19456. Основные вопросы геодезиче-
ской гравиметрии // Тр. ЦНИИГАиК. 42, 107 с.; Избранные
труды М.С. Молоденского 2001. М.: Наука, 74-173.
Молоденский М.С. 1948. Внешнее гравитационное поле и
фигура физической поверхности Земли. Изв. АН СССР. Гео-
графия и геофизика. 12, 3, 193-211; Избранные труды М.С.
Молоденского 2001. М.: Наука, 202-220;
Молоденский М.С. 1950. К постановке астрономо-
гравиметрического нивелирования в СССР // Тр. ЦНИИГАиК.
М.: 75, 78-84; Избранные труды М.С. Молоденского 2001. М.:
Наука, 235-241.
Молоденский М.С. 1953. Земные приливы и вопросы внут-
реннего строения Земли // Тр. Геофиз. ин-та. 19, 3-52.
Молоденский М.С. 1954. Новый метод решения геодезиче-
ских задач // Тр. ЦНИИГАиК. 103. 3-21; Избранные труды
М.С. Молоденского 2001. М.: Наука, 250-268.
Молоденский М.С. 1956. Решение задачи Стокса с относи-
тельной погрешностью порядка квадрата сжатия Земли // Тр.
ЦНИИГАиК, 112, 3-8.
Молоденский М.С. 1958. Современные задачи изучения
фигуры Земли // Геодезия и картография. 7, 3-5.
Молоденский М.С. 1959. Проблемы и задачи геодезической
гравиметрии (отзыв на книгу М.К. Маловичко) // Геодезия и
картография, 6, 50-56.
Молоденский М.С. 1961. Теория нутации и суточных зем-
ных приливов // Земные приливы и нутация Земли. М.: АН
СССР, 3-25.
Молоденский М.С. 1969. Точность вычисления аномальной
части гравитационного поля вне Земли // Тр. ЦНИИГАиК, М.:
Недра, 176, 3-8; Избранные труды М.С. Молоденского 2001.
М.: Наука, 288-292.
Молоденский М.С. 1989. Общая теория упругих колебаний
Земли. М.: Недра, 80 с.; Избранные труды М.С. Молоденского
2001. М.: Наука, 506-566.
Молоденский М.С. 2001. Избранные труды. М.: Наука,
570 с.
Молоденский М.С., Коган М.Г. 1974. Ошибки в морских
гравиметрических измерениях из-за действия горизонтальных
ускорений // Изв. АН СССР. Физика Земли. 8, 81-84.
Молоденский М.С., Лозинская А.М. 1939. Астрономо-
гравиметрическое нивелирование по 51-й и 56-й параллелям
от 30-го до 56-го меридиана // Сб. ЦНИИГАиК, М.: ГУГК
при СНК СССР, 3, 10-26; Избранные труды 2001: М.: Наука,
59-73.
Молоденский М.С., Федынский В.В. 1947. Тридцать лет
советской гравиметрии (1917 - 1947) // Изв. АН СССР. Гео-
графия и геофизика. XI, 5, 395-408; Избранные труды М.С.
Молоденского 2001. М.: Наука, 189-201.
Молоденский М.С., Еремеев В.Ф., Юркина М.И. 1960. Ме-
тоды изучения внешнего гравитационного поля и фигуры Земли
//Тр. ЦНИИГАиК. 131,251 с.
Молоденский С.М. 1981. Влияние океана и вязкости обо-
лочки на нутацию Земли. Физика Земли. 6, 3-17.
Молоденский С.М. 1984. Приливы и внутреннее строение
Земли. М.: Наука, 297 с.
Молоденский С.М. 1999. Модели приливных деформаций
Земли, наилучшим образом согласующиеся с данными о нута-
ции Земли // Физика Земли. 4, 3-11.
Молоденский С.М. 2000. Об эффектах вязкости жидкого
ядра в теории нутации Земли // Физика Земли. 2, 17-24.
Молоденский С.М. 2004а. Влияние электромагнитной свя-
зи ядра с мантией на иутацию Земли. I Основные соотношения
// Физика Земли. 8, 3-13.
Молоденский С.М. 20046. Влияние электромагнитной свя-
зи ядра с мантией на нутацию Земли. II. Сравнение с данными
наблюдений. Физика Земли. 9, 3-13.
Молоденский С.М. 2006. Сравнение моделей неупругой
Земли, построенных по астрометрическим и приливным гра-
виметрическим данным // Физика Земли. 7, 12-16.
Молоденский С.М., Крамер М.В. 1980. Влияние крупно-
масштабных горизонтальных неоднородностей мантии на зем-
ные приливы // Изв. АН СССР. Физика Земли. 1, 3-20.
Молоденский С.М., Cacao Т. 1995. Об одном новом под-
ходе к теории нутации Земли. 1. Основные уравнения. Физика
Земли. 12, 24-38.
Монин А.С. 1973. О внутреннем вращении Земли // ДАН
СССР. 211, 5, 1097.
Мориц Г. 1983. Современная физическая геодезия. Пер. с
англ. П.П. Медведева под ред. Ю.М. Неймана. Оригинал 1980.
М.; Недра, 392 с.
Мориц Г. 1993. Релятивистские эффекты в геодезии // Из-
вестия вузов. Геодезия и аэрофотосъемка. 4, 42-51.
Мориц Г., Мюллер А. 1992. Вращение Земли: теория и на-
блюдения. Киев: Наукова Думка, 512.
Мусихин В.И., Есин О.А. 1962. ДАН СССР. 145, 2, 360.
Неберов П.А. 1970. О постоянстве цены деления кварцевых
астаэированных гравиметров // Теоретические и эксперимен-
тальные исследования по инструментальной гравиметрии. М.,
24-29. (Деп. ВИНИТИ. №2435-70).
Невская Н.И. 1964. Ф.А. Бредихин. М.-Л.: Наука, 253 с.
Нейман М.С. 1937. Стабилизация частоты в радиотехнике.
М.: Связьиздат.
Нейман Ю.М. 1979. Вариационный метод физической гео-
дезии. М.: Недра, 200 с.
Нейман Ю.М., Руденя Н.Р. 1992. Учет влияния дальней
зоны при вычислении высот квазигеоида в области прямоуголь-
ной формы // Изв. вузов. Геодезия и аэрофотосъемка. 4, 39-53.
Немцов Л.Д. 1959. О повышении точности работ с грави-
метром ГАК-ЗМ // Развед. и промысл, геофизика. М.: Госто-
птехиздат, 30, 54-59.
Непоклонов В.Б. 1998. Компьютерные модели аномального
гравитационного поля Земли // Изв. вузов. Геодезия и аэрофо-
тосъемка. 6, 104-106.
Непоклонов В.Б., Яковенко П.Э., Кузьмин Ю.А., Пере-
верткин С. В. 1996. О создании цифровых карт уклонений от-
весной линии // Геодезия и картография. 9, 2-6.
Непоклонов В.Б., Плешаков Д.И., Медведев П.П. 2004.
Система автоматизированной обработки данных спутниковой
альтиметрии // Доклады Международной научно-техн, конф.,
поев. 225-летию МИИГАиК. Геодезия. М.: МИИГАиК, 178-
181.
Непоклонов В.Б., Зуева А.Н., Плешаков Д.И. 2007. Во-
просы разработки и применения систем компьютерного моде-
лирования для глобальных исследований гравитационного поля
Земли // Изв. вузов. Геодезия и аэрофотосъемка. 2, 79-97.
Нивелирование / и II классов (практическое руковод-
ство) 1982. ГУГК при СМ СССР. М.: Недра, 264 с.
Носовский Г.В., Фоменко А.Т. 2002. Какой сейчас век? М.:
Аиф-Принт, 512.
Носовский Г.В., Фоменко А.Т., Калашников В.В. 2000.
Астрономический анализ хронологии. Альмагест. Зодиаки. М.:
Фининсовый издательский дом «Деловой Экспресс», 896 с.
Нумерова В.Б. 1935. Применение вертикального маятника
Голицына к определению силы тяжести // Бюлл. астрой, ин-та.
Л., 37.
Ньютон И. 2007. Исправленная хронология древних
царств // Пер. с англ. изд. 1728 г. М.: РИМИС, 646 с.
Огородова Л.В. 1966. Влияние аномалий силы тяжести в
дальних зонах на возмущающий потенциал и его производные
во внешней точке // Известия вузов. Геодезия и аэрофотосъем-
ка. М.: МИИГАиК, 2, 113-124.
Огородова Л.В. 2006. Высшая геодезия. Ч. III. Теоретиче-
ская геодезия. Учебник для вузов. М.: Геодезкартиздат, 384 с.
Окороков В.В. 1998. О противоречивости экспериментов,
подтверждающих некоторые выводы общей теории относитель-
ности. Препринт 27-98 ИТЭФ. 6 с.
Окунь Л.Б. 1989. Понятие массы // Успехи физических
наук. 158, 3, 511-530.
Осипов А.П. 1993. Гипотеза о рождении атомов и глобаль-
ные звездно-планетные явления. Препринт №43 МНТЦ ВЕНТ,
М., 54 с.
Осипова А.В. 1993. Об ограничениях на параметры теоре-
тической модели движения пробных тел в спутниковом экспе-
рименте по уточнению гравитационной постоянной // Измери-
тельная техника, 12, 3-6.
Основные положения о государственной геодезической
сети Российской Федерации 2004. М., 28 с.
Остач О.М. 1970. К методике астрономо-
гравиметрического нивелирования // Рефераты ЦНИИГАиК,
6, 28-33.
Остач О.М. 1971. О влиянии сжатия Земли на ее стоксовы
постоянные // Тр. ЦНИИГАиК. 188, 3-19.
Остач О.М. 1982. Решение задачи Стокса для эллипсо-
идальной граничной поверхности методом функций Грина. //
Исследования по определению фигуры и гравитационного поля
Земли. ЦНИИГАиК. 233, 3-20.
Остач О.М. 1994. Астрономо-гравиметрическое нивелиро-
вание: ретроспективный взгляд // Геодезия и картография. 3,
28-33.
Остач О.М., Демьянов Г.В. 1994. Подготовка карты вы-
сот квазигеоида по результатам астрономо-гравиметрического
нивелирования с учетом совместного уравнивания АГС, ДГС,
КГС // Итоговый научно-технический отчет по теме 11.881.
Этап 2, ЦНИИГАиК, 9-13.
Отчет. 1990. Научно-технический отчет по теме 05.894.
Определение на основе регулярных наблюдений иа ГДП па-
раметров деформаций земной коры в сейсмоактивных регио-
нах. Этап 2 «Подготовка краткого сводного отчета о результа-
тах геодезических работ на геодинамических полигонах». М.:
ЦНИИГАиК.
Отчет. 2005. Научно-технический отчет ТП ЦН 10.0104
«Изучение геодинамики Балтийского региона и установление
единой системы высот». Этап 6. ЦНИИГАиК.
Отчет. 2008. Составление совершенного варианта кар-
ты вертикальных движений исследуемых территорий Северо-
Запада России и Финляндии. НИР 08.156, этап 10.
Павленкова Н.А. 1996а. Развитие представлений о сейсми-
ческих моделях земной коры // Геофизика. 4, 11-19.
Павленкова Н.А. 19966. Роль флюидов в формировании
сейсмической расслоенности земной коры // Физика Земли. 4,
51-61.
Павлов Н.А. 1940. Исследования влияния рефракции на
результаты нивелирования в производственных условиях // Ис-
следования по геодезии. ЦНИИГАиК. Под ред. проф. В.В. Да-
нилова. М.: Геодезиздат, 9, 71-123.
Павлов Н.А. 1947. Нивелирование I класса. Научно-
технические и производственные статьи по геодезии, картогра-
фии, топографии, аэросъемке и гравиметрии. М.: Геодезиздат,
15, 50-64.
Панов В.И., Фронтов В.Н. 1979. Эксперимент Кавендиша
на больших расстояниях // ЖЭТФ. 77, 1701-1707.
Пантелеев В.Л. 1983. Основы морской гравиметрии. М.:
Недра, 256 с.
Пантелеев В.Л., Смирнов Л.П. 1968. Оптико-
механический гравиметр ОМГ // Прикладная геофизика. М.:
Недра, 51, 115-123.
Пантелеев В.Л., Живицкая И.Н., Исматходжаев С.К.
1969. Анализ статистических характеристик возмущающих
ускорений // Морские гравиметрические исследования. М.:
МГУ, 4, 10-21.
Параметры общего земного эллипсоида и гравитацион-
ного поля Земли (Параметры Земли 1990 года). 1991. М.:
РИО ТС ВС РФ, 68 с.
Паренаго П.П. 1954. Курс звездной астрономии. М.: ГИЗ,
476 с.
Парийский Н.Н. 1935. Ускорения силы тяжести в основных
опорных пунктах Союза: Пулкове, Москве, Полтаве и Казани
// Известия ВТОГ и ГР. М.
Парийский Н.Н. 1963а. К открытию суточной нутации //
Астрономический журнал. 40, 3, 556-560.
Парийский Н.Н. 19636. Земные приливы и внутреннее
строение Земли // Изв. АН СССР. Геофизика 2, 193-215.
Парийский Н.Н. 1963в. Открытие новой нутации Земли //
Вестник АН СССР. 3, 77-81.
Парийский Н.Н., Барсенков С.Н. 1973. Наблюдения при-
ливных изменений силы тяжести в азиатской части СССР. Изу-
чение приливных деформаций Земли. М.: Наука, 6-44.
Парусников Н.А., Морозов В.М., Борзов В.И. 1982. Задача
коррекции в инерциальной навигации. М.: МГУ, 174 с.
Пасынок С.Л. 1997. Свободные колебания внутреннего яд-
ра Земли для неравновесной модели Земли // Вестник МГУ.
Физика. Астрономия. 5, 43.
Пасынок С.Л. 1999а. Вращение твердого ядра Земли в по-
ле неравновесной оболочки Земли // Вестник МГУ. Физика.
Астрономия. 2, 59-62.
Пасынок С.Л. 19996. Учет тензора присоединенных масс
в задаче о свободных колебаниях внутреннего ядра Земли //
Вестник МГУ. Физика. Астрономия, 1, 46.
Пасынок С.Л. 1999в. Влияние гравитационного поля
неравновесной оболочки Земли на собственные трансляцион-
ные колебания и вращение внутреннего ядра Земли // Дисс.
на соискание ученой степени канд. физ.-мат. наук.
Пасынок С.Л., Жаров В.Е. 2000. Новая теория нутации //
Материалы конференции «Астрометрия, геодинамика и небес-
ная механика на пороге XXI века». Санкт- Петербург: ИПА
РАН, 71-72.
Паули В. 1947. Теория относительности. Пер. с нем. В.Л.
Гинзбурга и Л.М. Левина. М.-Л.: ОГИЗ. 300 с.
Пеллинен Л.П. 1960а. Использование дуги градусных из-
мерений для вывода размеров общего земного эллипсоида //
Научно-технические и производственные статьи по геодезии.
11, 3-4.
Пеллинен Л.П. 19606. Ошибки вычисления уклонений от-
веса при равномерной гравиметрической съемке // Тр. ЦНИИ-
ГАиК. 139, 83-87.
Пеллинен Л.П. 1960в. Требования к гравиметрической
съемке, связанные с обработкой астрономо-геодезических и ни-
велирных сетей // Тр. ЦНИИГАиК, 139, 3-20.
Пеллинен Л.П. 1971. Согласование различных формул вто-
рого приближения для возмущающего потенциала и уклонений
отвеса // Геодезия, картография и аэрофотосъемка. Львов, 13,
85-95.
Пеллинен Л.П. 1974. О тождественности различных реше-
ний задачи Молоденского // Изв. вузов. Геодезия и аэрофото-
съемка. 3.
Пеллинен Л.П., Хейфец М.Е. 1983. Развитие гравиметри-
ческих исследований в ЦНИИГАиК // Развитие гравиметрии и
гравиметрического приборостроения в СССР. М.: ЦНИИГАиК,
3-12.
Пеллинен Л.П. и др. 1980. Точностные вопросы вычисле-
ния уклонений отвеса по сглаженным аномалиям силы тяже-
сти// Изв. вузов. Геодезия и аэрофотосъемка. 5, 38-44.
Перцев Б.П. 1956. О решении задачи Стокса с относи-
тельной погрешностью порядка квадрата сжатия Земли // Тр.
ЦНИИГАиК. 112, 9-12.
Пешехонов В.Г., Несенюк Л.Г., Старосельцев Л.П. 1989.
Судовые средства измерения параметров гравитационного по-
ля Земли. Обзоры по судостроительной технике. Л.: ЦНИИ
«Румб», 29 с.
Писаренко Г.С. 1963. Рассеяние энергии при механических
колебаниях. Киев: Изд-во АН УССР, 376 с.
Пицетти П. 1933. Основы механической теории фигуры
планет. Пер. с итал. М.-Л. Гостехтеориздат, 170 с. Оригинал
1913.
Плешаков И.Я., Макаренко Н.Л., Демьянов Г.В., Зубин-
ский В.И., Бровар Б.В. 1998. Состояние и переспективы раз-
вития системы геодезического обеспечения страны в условиях
перехода на спутниковые методы. В кн.: Материалы юбилей-
ной научно-технической конференции «Современное состояние
и перспективы развития геодезии, фототопографии, картогра-
фии и геоинформационных систем», посвященной 850-летию г.
Москвы (Москва, ЦНИИГАиК, сентябрь 1997 г.). Часть 1. —
ЦНИИГАиК, 21-30.
Поддубный С.А. 1974. Геодезический астазированный гра-
виметр ГАГ-2 // Тр. ВНИИ геофиз. методов разведки. 20, 72-
77; (РЖ Геофизика, 1975, 4Г276).
Подобед В.В. 1968. Фундаментальная астрометрия. М.:
Наука, 452 с.
Померанцев И.И. 1897. О фигуре геоида в районе Фер-
ганской области // Записки Военно-топографического отдела
Главного штаба. СПб., 54, 76-120.
Попов Е.И. 1959а. Кварцевый гравиметр для морских на-
блюдений // Вопросы инструментальной гравиметрии. М., 8,
32-41 (Тр. ИФЗ АН СССР. 175).
Попов Е.И. 19596. Морские измерения гравиметрами ГАЛ
// Изв. АН СССР. Геофизика. 12, 1793-1798.
Попов Е.И. 1967. Определение силы тяжести на подвиж-
ном основании с помощью сильно демпфированных гравимет-
ров. М.: Наука, 218 с.
Постнов К.А. 1998. Астрофизические источники гравита-
ционных волн. Автореф. дис. докт. физ.-мат. наук. М.: Физи-
ческий ф-т МГУ, 24 с.
Пуанкаре А. 1973. О динамике электрона // В сб/. «Прин-
цип относительности». Под ред. А.А. Тяпкина. М.: Атомиздат,
118-161. Оригинал 1906.
Пуанкаре А. 1990. Наука и гипотеза // О науке. Пер. с
франц. М.: Наука, 5-196. Оригинал 1903.
Пугачев Г.В., Капилевич Д.И., Непоклонов В.Б. 2006. Роль
29 НИИ МО РФ в реализации отечественных программ косми-
ческой геодезии // 70 лет 29 Научно-исследовательскому ин-
ституту Министерства обороны Российской Федерации. М.: 29
НИИ МО РФ. 288 с.
Резанов И.А., Файтельсон А.Ш., Краснопевцева Г.В.
1984. Природа границы Мохоровичича. М.: Недра, 219.
Родкин М.В. 2003. Флюидогеодинамическая модель лито-
сферы Южного Каспия // Геотектоника. 1, 43-53.
Родкин М.В. 2005. Структура и геодинамика бассейна
Каспийского моря по результатам совместного использования
обычных геофизических данных и спутниковых альтиметри-
ческих измерений // V International Conference «Petroleum
geology and hydrocarbon potential of Caspian and Black Sea
region», Abstract. Baku, 2005, 97-100.
Рожанская M.M. 1991. Абу-л-Фатх Абд ар-Рахман ал Ха-
зини, XII век. М.: Наука, 190 с.
Розенбергер Ф. 1936. История физики за последнее столе-
тие. Пер. с нем. М.;Л.: ОНТИ, 3, 2. 447 с. Оригинал 1890.
Ройтенберг Я.Н. 1966. Гироскопы. М.: Физматгиз.
Романюк В.А. 1961а. Определение ускорения силы тяже-
сти гравиметром, установленном на подвижном основании. //
Тр. ИФЗ АН СССР. 18 (185), 3-97.
Романюк В.А. 19616. Наблюдения маятников на гироста-
билизированной платформе // Тр. ИФЗ АН СССР. 18(185).
Романюк В.А. 1963а. Влияние условий закрепления верх-
ней части упругого плоского подвеса маятника на его период
колебания // Тр. ИФЗ АН СССР. Экспериментальные исследо-
вания по гравиметрии. 29 (196), 67-73.
Романюк В.А. 19636. О точности юстировки и нивелиров-
ки гравиметров с горизонтальной упругой нитью // Тр. ИФЗ
АН СССР. Экспериментальные исследования по гравиметрии.
29 (196), 74-84..
Романюк В.А. 1963в. Относительные определения ускоре-
ния силы тяжести маятником на упругом подвесе // Тр. ИФЗ
АН СССР. Исследования по инструментальной гравиметрии.
29(196), 53-66.
Романюк В.А. 1970. Наблюдение гравиметра с двумя упру-
гими системами, установленного на подвижном основании //
Аппаратура и методы измерения силы тяжести на море. М.,
3-35.
Романюк В.А. 1974. Измерение абсолютного значения
ускорения силы тяжести (теория). Messung des absoluten
Wertes der Schwerbeschleunigung (Teorie) // Geodatische
und geophysikalische Veroffentlichungen, herausgegeben vom
Nationalkomitee fur Geodaeie und Geophysik bei der Akademie
der Wissenschaffen der DDR. Reihe 3. Helt 30. 294 s. (на русск.).
Нем. резюме. Берлин, 8-13.
Романюк В.А., Рукавишников Р.Б. 1966. Эталонирование
гравиметров с горизонтальной крутильной нитью методом на-
клона. М.: Наука, 126 с.
Романюк В.А., Певзнер Б.Н., Науменко Б.Н. 1970. Способ
изготовления подвижного центральносимметричного отражаю-
щего тела. А.С. N 274 410. Бюл. изобр. №21.
Роуз Дж. 1969. Круги. // Земля и Вселенная. 2, 53 с; (Из-
ложено по статье «The Е = тпс2 of solid Earth theory. A simple
proposition wraps up earthquakes, metal deposits, gravity and the
magnetic field at once.* About George E. Rouse and Ramon E.
Bisque. Science news 1968, March 30, 93, 13, 301-302).
PTM 68-6-94 «Работы гравиметрические наземные вы-
сокоточные и морские. Термины и определения*.1995. М.:
ЦНИИГАиК, 20 с.
Рудаковский Г.И. 1938а. Определение силы тяжести упру-
гими маятниками // Геодезист. 5, 37-48.
Рудаковский Г.И. 19386. Прибор с упругим маятником //
Геодезист. 2.
Рукавишников Р.Б. 1972а. Эталонирование кварцевых
астазированных гравиметров методом наклона в пунктах с раз-
личным значением силы тяжести // Исследования по эталони-
рованию гравиметров. М/ ИФЗ АН СССР, 137 с. (Деп. ВИ-
НИТИ. №5104-72).
Рукавишников Р.Б. 19726. О поправке за нелинейность
отсчетной шкалы кварцевых астазированных гравиметров //
Исследования по эталонированию гравиметров. М.: ИФЗ АН
СССР, 18-41 (Деп. ВИНИТИ. №5104-72).
Рукавишников Р.Б. 1972в. Некоторые вопросы точности
эталонирования кварцевых астазированных гравиметров мето-
дом наклона // Исследования по эталонированию гравиметров.
М.: ИФЗ АН СССР, 42-63 (Деп. ВИНИТИ. №5104-72).
Рукавишников Р.Б. 1972г. Эталонирование широкодиапа-
зонного кварцевого астазированного гравиметра // Исследова-
ния по эталонированию гравиметров. М.: ИФЗ АН СССР, 64-
75 (Деп. ВИНИТИ. №5104-72).
Рукавишников Р.Б. 1981а. Эталонирование узкодиапазон-
ных кварцевых астазированных гравиметров методом наклона
// Повторные гравиметрические наблюдения. М„ 26-40.
Рукавишников Р.Б. 19816. Сравнение результатов этало-
нирования узкодиапазонных кварцевых астазированных грави-
метров методом наклона и по пунктам с известными значения-
ми силы тяжести // Повторные гравиметрические наблюдения.
М„ 41-56.
Рукавишников Р.Б. 1981в. Исследование кварцевых аста-
зированных гравиметров методом наклона // Геодезия и карто-
графия. 8. 19-23.
Рукавишников Р.Б. 1994. Метрологическая аттестация на-
земных кварцевых астазированных гравиметров // Физика Зем-
ли. 11. 89-94.
Рыкунов Я.Н. 1967. Микросейсмы. Экспериментальные ха-
рактеристики естественных микровибраций грунта в диапазоне
периодов 0,07-8 с. Сейсмология. М.: Наука, 7, 86 с.
Рыльке С.Д. 1894. Каталог высот русской нивелирной сети
с 1871 по 1893 г. Предисловие геи.-лейт. Стебницкого. СПб.:
Военно-топографический отдел Генерального штаба. 106 с.
Рытое А.В. 1944. Государственная сеть высокоточного и
точного нивелирования // Научно-техн, и произв. статьи. М.:
Геодезиздат, V, 38-49.
Рыхлова Л.В. 1971. Анализ Чандлеровской составляющей
движения полюса за 119 лет // Сообщения ГАИШ. 170, 6, 1-
31.
Рыхлова Л.В., Курбасова Г.С., Рыболова М.Н. 1991. Ана-
лиз положения полюса Земли на интервале с 1846,00 по
1927,95 гг. // Научные информации Института Астрономии
АН СССР. 69, 3-21 (РЖ Геодезия и аэросъемка 1993, №2,
реф. 02.52.65).
Сагитов М. У. 1979. Лунная гравиметрия. М.: Наука. Физ-
матлит, 432 с.
Сагитов М.У., Милюков В.Р., Монахов Е.А., Назаренко
В.С., Таджитдинов К.Г. 1977. Новое определение кавендише-
вой гравитационной постоянной // ДАН СССР. 245, 3, 567-
569.
Сахаров А.Д. 1967. Вакуумные квантовые флуктуации
в искривленном пространстве и теория гравитации // ДАН
СССР. 177, 1, 70-71.
Сахаров А.Д. 1995. Научные труды. М.: Центрком, 525 с.
Сахаров А.Д. 1996. Воспоминания. В двух томах. М.: Пра-
ва человека. 1, 910 с.; 2, 961 с.
Сергеев С.В., Долгов Е.И. 2001. Военные топографы рус-
ской армии. М.: СиДиПресс, 592 с.
Сергеев С.В., Долгов Е.И. 2005. Военные топографы Крас-
ной Армии. М.: РИЦ МО РФ, 656 с.
Серебрякова Л.И., Юркина М.И. 1998. О некоторых
задачах геодинамики // Материалы Юбилейной научно-
технической конференции «Современное состояние и перспек-
тивы развития геодезии, фототопографии, картографии и геонн-
формационных систем», посвящ. 850-летию г. Москвы, Москва,
ЦНИИГАиК, сент. 1997. М.: ЦНИИГАиК, 1, 79-83.
Серкеров С.А. 1999. Гравиразведка и магниторазведка. М.:
Недра. 438 с.
Синг Дж. 1963. Общая теория относительности. Пер. с ан-
гл. Б.Т. Вавилова. М.: ИЛ, 432 с.
Сливин Ю.А. 1973а. Зарубежная маятниковая аппаратура
для относительных измерений силы тяжести // Тр. ЦНИИГА-
иК. 201, 87-117.
Сливин Ю.А. 19736. Маятниковая аппаратура ЦНИИГАиК
для высокоточных относительных определений силы тяжести
(комплект ОВМ) // Тр. ЦНИИГАиК. 201, 3-23.
Слудский Ф.А. 1865. Триангуляция без базиса. М.: Уни-
верситетская типография (Избранные геодезические труды, М.:
Недра, 1967. 57-91).
Смирнов Л.П. 1951. Кварцевый гравиметр с горизонталь-
ной крутильной нитью и жидкостной температурной компен-
сацией. Руководство по работе с прибором. М.-Л., Госто-
птехиздат (М-во нефт.пром-сти. Главнефтегеофизика. Науч,-
исслед.ин-т геофиз. и геохим. методов разведки «НИИГГР»),
73 с.
Сорока А.И. 1969. Корреляционные исследования аномаль-
ного гравитационого поля Земли и выбор параметров гравита-
ционного датчика // Тр. ВВИА им. Н.Е. Жуковского. 1240,
66-77.
Сорока А.И. 1972. Техническое описание и комплект чер-
тежей лабораторного макета гравитационно-градиентного дат-
чика. М.: ВВИА им. Н.Е. Жуковского.
Сорока А.И. 1973. Анализ основных конструктивных по-
грешностей модуляционных гравитационно-градиентных дат-
чиков //Научно-методические материалы по проектированию
и расчету контуров управления и элементов систем автомати-
ческого управления полетом летательных аппаратов. Под ред.
Ю.А. Вавилова. М.: ВВИА им. Н.Е. Жуковского, 35-40.
Сорока А.И. 1974. Разработка и экспериментальные ис-
следования отдельных узлов и элементов лабораторного ма-
кета вращающегося гравитационного градиентного датчика //
Научно-методические материалы по проектированию элемен-
тов и узлов систем автоматического управления полетом лета-
тельных аппаратов. Под ред. А.И. Сучкова, М.: ВВИА им. Н.Е.
Жуковского, 47-62.
Сорока А.И. 2000. Анализ состояния разработок бортовых
гравитационных градиентометров и перспектива их использо-
вания в интегрированных бортовых комплексах двойного на-
значения // Научно-технический сборник. Редактор Н.А. Зе-
лянин. М.: ЦНИИ 30 МО РФ. 438, 51-64.
Сорока А.И., Лисовой В.Т., Лукьященко В.И., Успенский
Г.Р., Азеев М.Р., Егоров В.Ф., Масленников Л.В., Августов
Л.И., Будкин В.Л., Терсенов Ю.Г., Мосолов А.С., Кузоятов
О.П., Звонарь В.Д., Косенко В.В., Трутнев К.М., Пономарев
А.А., Саликов Р.С. 2003. Проект космического эксперимента
«Метрика» по определению гравитационно-градиентного порт-
рета российского сегмента международной космической стан-
ции //Тезисы Пятой международной научно-практической кон-
ференции «Пилотируемые полеты в космос». 4-10 апреля 2003.
Звездный городок, Моск, обл.: РФ, 146 - 148.
Сорока А.И., Джанджгава Г.И., Августов Л.И. 2007. Со-
стояние разработок бортового гравиградиентного модуля для
систем автономной навигации и контроля окружающей среды
// Тр. V научно-практической конференции «Микротехнологии
в авиации и космонавтике», 18-19 сентября 2007. М.: РНИИ
КП, 127-137.
Сорокин Л.В. 1934а. Определение значений силы тяжести
на Черном море // Доклады сов. делегации VII конф. Бал-
тийской геодезической комиссии. М.-Л.-Грозный-Новосибирск:
Горгеонефтеиздат, V, 11-43.
Сорокин Л.В. 19346. Кратковременные определения силы
тяжести // Доклады VII конференции Балтийской геодезиче-
ской комиссии. М.-Л. 6.
Сорокин Л.В. 1953. Гравиметрия и гравиметрическая раз-
ведка. Учебник для геофизических специальностей геол.-разе,
видов и фак. и гравиметрических специальностей университе-
тов. 3-е изд., исправл. и доп. М.-Л.: Гостоптехиздат, 484 с.
Сорохтин О.Г., Ушаков С.А. 1993. Природа тектонической
активности Земли // Итоги науки и техники. Физика Земли.
М., 12.
Справочник геофизика. 1968. Т. 5. Гравиразведка. М.:
Недра, 512 с.
Стейси Ф. 1972. Физика Земли. М_: Мир, 342 с.
Страхов В.Н. 1995. О развитии Российской геофизики в
современных условиях // Изв. РАН. Физика Земли. 10, 77-95.
Страхов В.Н. 1999. Критика классической теории линей-
ных некорректных задач // Геофизика и математика. Материа-
лы 1-й Всероссийской конференции, М., 22 - 26.11.1999. М.:
ОИФЗ. РАН, 171-173.
Страхов В.Н. 2004. Об эффективных по быстродействию
и точности методах построения линейных аналитических ап-
проксимаций в геодезии, геоинформатике и гравиметрии // Ак-
туальные проблемы геофизики и геоинформатики, М.: ОИФЗ
РАН, 105-138.
Страхов В.Н., Степанова И.Э., Гричук Л.В., Керимов
И.А., Страхов А.В. 1999. Метод линейных интегральных пред-
ставлений при решении задач гравиметрии и магнитометрии.
Сб. Геофизика и математика. Материалы 1-й Всероссийской
конференции. М. 22 - 26.11.1999. М. ОИФЗ. РАН 1999, 173-
183.
Стрельцов В.Н. 1997. Воздействует ли гравитационное по-
ле на световой луч? Сообщение ОИЯИ. 3 с.
Строев П.А. 1969. О гравиметрических измерениях Л.В.
Сорокина на акваториях Японского и Охотского морей // Мор-
ские гравиметрические исследования. М.: МГУ, 4, 5-9.
Строев П.А., Пантелеев В.Л., Левицкая З.Н., Чеснокова
Т.С. 2007. Подводные экспедиции ГАИШ: из истории науки.
М.: КДУ. 240 с.
Судаков С.Г. 1948. О введении единой системы геодезиче-
ских координат и высот на территории СССР // Сб. научно-
техн. и произв. статей. М.: Геодезиэдат, XVII, 5-21.
Судаков С.Г. 1967. Основные топографо-геодезические ра-
боты за 50 лет Советской власти // 50 лет советской геодезии
и картографии. М.: Недра, 21-91.
Суходольский В.В. 1963. Установка ИС-М для исследова-
ния и испытания приборов в условиях воздействия ускорений
и наклонов. М.: ГОСЦНТИ (Передовой научно-технический и
производственный опыт, №31-63-192/4).
Сухоруков Г.И., Сухоруков В.И., Сухоруков Р.Г. 1993. Ре-
альный физический мир без парадоксов. Иркутск: ИрГУ, 168 с.
Тамме Л.Я. 1971. Передача высот «Кронштадт - Ломоно-
сов» методом гидростатического нивелирования // Геодезия и
картография. 5, 30-35.
Татевян С.К., Кузин С.П., Ораевская С.П. 2004. Исполь-
зование спутниковых позиционных систем для геодинамиче-
ских исследований // Геодезия и картография. 6, 33-44.
Тетерин Г.Н. 2006. Теория развития и метасистемное по-
нимание геодезии. Новосибирск: СГГА. 161 с.
Тетерин Г.Н. 2008. История геодезии (до XX в.). Новоси-
бирск: СГГА, 300 с.
Технический отчет «Нивелирование I класса по линии
Горская - Кронштадт - Ломоносов - Шепелева». 1995.
10.03.2014, СПб.: «Аэрогеодезия».
Тихонов А.Н., Арсенин В.Я. 1979. Методы решения некор-
ректных задач. Учебное пособие для вузов по специальности
«Прикладная математика». 2-е изд., перераб. и доп. М.: Нау-
ка, 285 с.
Тихонов А.Н., Большаков В.Д., Нейман Ю.М. 1980.
Некорректные задачи геодезии // Изв. вузов. Геодезия и аэро-
фотосъемка. 1, 45-53.
Толчельникова-Мурри С.А. 1987. Использование принципа
относительности движений для построения устойчивой систе-
мы сферических координат // Современная астрометрия. Л.,
439-446.
Толчельникова С.А. 1997. Ньюком и определения фунда-
ментальных координат звезд // Наука и техника. Вопросы ис-
тории и теории. Материалы конф. Национального комитета по
истории и философии науки и техники. СПб.: XIII, 79-80.
Толчельникова-Мурри С.А. 1999а. К критике представле-
ний о неевклидовости пространства Вселенной // Астрономия
и история науки. Спб.: Искусство России, 44-56.
Толчельникова-Мурри С.А. 19996. Расстояния во вселен-
ной и «искривленность» пространства // Астрономия и история
науки. СПб.: Искусство России, 32-43.
Толчельникова С.А. 2002. Международная небесная опор-
ная система координат ICRS и революция в астрометрии //
Геодезия и картография. 9, 13-20.
Толчельникова С.А. 2005. Пуанкаре и проблема времени //
Международная конференция «Четвертые Окуневские чтения»,
СПб.: Ill, 126-135.
Толчельникова-Мурри С.А., Крейнин Е.И. 1980. Определе-
ние абсолютных прямых восхождений с малыми пассажными
инструментами // Изв. ГАО. 198, 66-77.
Толчельникова-Мурри С.А., Чубей М.С. 1997. Звездная
аберрация при возросшей точности наблюдений и при больших
скоростях движения наблюдателя // Проблемы пространства,
времени, движения. Труды 4-й Международной конференции.
СПб.: РАН, СПб - Технология, 1, 92-100.
Толчельникова-Мурри С.А., Юркина М.И. 1994. Они бы-
ли учеными и гражданами своего отечества. К 200-летию па-
рижских Политехнической и Нормальных школ // Геодезия и
картография. 9, 52-56.
Торге В. 1999. Гравиметрия: пер. с англ. М.: Мир, 430 с.
(Torge W. 1989. Gravimetry. Berlin—New York: Walter de
Gruyter).
Треногий В.А. 2002. Функциональный анализ. Учебник
для студентов, обучающихся по специальностям «Математика»
и «Прикладная математика». Третье изд. испр. М.: Физматлит,
488 с.
Троицкий В.С. 1995. Экспериментальные свидетельства
против космологии большого взрыва // Тезисы докладов 26
Радиоастрономической конференции. СПб., 40-41.
Трубицын В.П. 2000. Принципы тектоники плавающих
континентов. Физика Земли. 9, 4-40.
Труды ВНИИМ. 1988. Работы по исследованию баллисти-
ческих гравиметров // Тр. Научно-производственного объеди-
нения «ВНИИМетрологии им. Менделеева». Под ред. В.С. Со-
ловьева. Л., 131 с.
Труды ХГНИИМ. 1972. Измерение ускорения силы тяже-
сти и гравитационной постоянной // Труды метрологических
институтов СССР. Харьков: ХГНИИМ. 8.
Тулин В.А. 1961. Устройство для непрерывного регулиро-
вания температуры термостата // А.С. №139157 с приоритетом
от 02.09.60, опубл, в бюлл. изобр. №12, 1961.
Тулин В.А. 1962а. Способ уменьшения ошибки совмещения
зеркал гравиметра ГАЭ // Исследования по инструментальной
гравиметрии. Тр. ИФЗ АН СССР. 24 (191), 80-85
Тулин В.А. 19626. Кварцевый неастазированный грави-
метр, содержащий кварцевую упругую систему с горизон-
тальной упругой нитью. // А.С. №149897 с приоритетом от
11.03.61, опубл, в бюлл. изобр. №17, 1962.
Тулин В.А. 1962в. О принципиальных возможностях тер-
мостата с релейным регулированием // Исследования по ин-
струментальной гравиметрии. Тр. ИФЗ АН СССР. 24 (191),
45-58.
Тулин В.А. 1962г. Термостат с непрерывным регулирова-
нием и независимым датчиком // Исследования по инструмен-
тальной гравиметрии. Тр. ИФЗ АН СССР. 24 (191), 59-67.
Тулин В.А. 1962д. Экспериментальное исследование тер-
мостата с непрерывным регулированием // Исследования по
инструментальной гравиметрии. Тр. ИФЗ АН СССР. 24 (191),
67-79. .
Тулин В.А. 1962е. Об измерении температуры внутри тер-
мостата // Исследования по инструментальной гравиметрии.
Тр. ИФЗ АН СССР. 24 (191), 28-35.
Тулин В.А. 1962ж. Об увеличении чувствительности тер-
мометра сопротивления // Исследования по инструментальной
гравиметрии. Тр. ИФЗ АН СССР. 24 (191), 36-44.
Тулин В.А. 1963а. О влиянии наружной температуры на
упругую систему гравиметра ГАЭ-3 // Экспериментальные ис-
следования по гравиметрии. Тр. ИФЗ АН СССР. 29 (196), 94-
101.
Тулин В.А. 19636. Сравнительная оценка термостатов раз-
личного принципа действия // Экспериментальные исследова-
ния по гравиметрии. Тр. ИФЗ АН СССР. 29 (196), 112-121.
Тулин В.А. 1963в. Анализ двух схем для измерения малых
изменений температуры // Эксмериментальные исследования
по гравиметрии. Тр. ИФЗ АН СССР. 29 (196), 102-111.
Тулин В.А. 1963г. Гравиметр ГАЭ-4 // Экспериментальные
исследования по гравиметрии. Тр. ИФЗ АН СССР. 29 (196),
85-93.
Тулин В.А. 1969. Способ относительного измерения уско-
рения силы тяжести // А.С. СССР. Кл. G 01v. №241033. Заявл.
24.05.67. Опубл. 01.04.69. Бюлл. №13.
Тулин В.А. 2006. Гравиметр с магнитной пружиной // Гео-
физика XXI столетия: 2005 год. // Тр. Седьмых геофизических
чтений им. В.В. Федынского. Москва 3-5 марта 2005. М.: На-
учный Мир, 409-413.
Тулин В.А., Кузиванов С.В. 1988. Экспериментальное изу-
чение кросс-каплинг эффекта // Гравиметрические исследова-
ния на море. М., 76-85.
Тулин В.А., Осинская С.В. 1970. Морской гравиметр с ав-
томатизированным отсчетом // Аппаратура и методы измере-
ния силы тяжести на море. М.: Наука, 93-101.
Тулин В.А., Савченко А.А. 1964. Полевой измеритель тем-
пературы для гравиметра ГАЭ // Исследование и расчет грави-
метрических приборов. Тр. ИФЗ АН СССР. М., 31 (198) 68-76.
Туренко В.И. 1983. Возможности изучения вращения Зем-
ли по материалам наблюдений всемирного времени классиче-
скими методами и некоторая геометрическая интерпретация
неравномерности этого вращения // Вращение Земли и гео-
динамика. Тр. Всесоюзного совещания, Китаб, 12-14 ноября
1981. Под ред. В.П. Щеглова. Ташкент: ФАН, 33-42.
Тяпкин А.А. 2004. Об истории возникновения «теории от-
носительности». Изд. второе, испр. Объединенный институт
ядерных исследований. 152 с.
Уилл К.М. 1985. Теория и эксперимент в гравитационной
физике. Пер. с англ. М.: Энергоатомиздат, 294 с.
Урмаев М.С., Фролов А.В. 1999. Определение параметров
преобразования геоцентрических систем с использованием ал-
гебры кватернионов // Изв. вузов. Геодезия и аэрофотосъемка.
4, 46-51.
Успенский М.С. 1966. Исследования по закреплению гео-
дезических пунктов на территории СССР. Тр. ЦНИИГАиК. М.:
Недра, 167, 192 с.
Файтельсон А.Ш., Юркина М.И. 1973. Влияние вековых
изменений силы тяжести на результаты повторного нивелиро-
вания // ДАН СССР. 213, 6, 1274-1275.
Файтельсон А.Ш., Юркина М.И. 1974. О вековых изме-
нениях силы тяжести и современных вертикальных движениях
земной коры // Геодезия и картография. 7, 13-19.
Фан Цзюнь. 1958. Палетка для вычислений по астрономо-
гравиметрическому нивелированию // Sclentica sinica. 7, 12,
1321-1337; (Acta geodaetlca et cartographlca smlca. 1958, 4;
1959, 3, 3).
Федоров E.C. 1885. Начала учения о фигурах // Записки
Санкт-Петербургского минералогического общества. 2-я серия,
ч.21, 1-VII1, 1-277. (Переизд. в сер. «Классики науки». М.: АН
СССР, 1953. 1-365).
Федоров Е.П. 1958. Нутация и вынужденное движение по-
люсов Земли. Киев: АН УССР, 144 с.
Федоров Е.П. 1960. Общий взгляд на астрометрию // Гео-
динамика и астрометрия, Киев: Наукова думка, 74-109.
Федоров Е.П. 1974. О системах координат, применяемых
службами широты и времени // Астрометрия и астрофизика.
23, 3-20.
Федынский В.В. 1959. О разработке аппаратуры для гра-
виметрических измерений в движении // Изв. АН СССР. Гео-
физика. 1, 146-152.
Физика и астрономия Луны. 1973. Пер. с англ. Под ред.
3. Копала, М.: Мир, 318 с.
Фок В.А. 1961. Теория пространства-времени и тяготения.
Изд. второе, дополн. М.: Физматлит, 563 с.; (Изд. 3-е, М.:
ЛКИ, 563 с.).
Фомин С.П., Боярский Э.А., Сорокин В.Л., Афанасьева
Л.В. 2001. Синхронные броски в двух баллистических абсо-
лютных гравиметрах как средство их юстировки // Физика
Земли. 11, 107-112.
Форвард Р.Л. 1975. Геодезия с гравиметрическими градио-
метрами // Использование искуственных спутников для геоде-
зии. Пер. с англ. М.: Мир, 339-345.
Фролов А.И. 1948. О влиянии вертикального температур-
ного градиента на определение силы тяжести свободными маят-
никами // Научно-техн, и произв. статей по геодезии, картогра-
фии, топографии, аэросъемке и гравиметрии. М.: Геодезиздат,
16, 9-22.
Хейфец М.Е. 1962. Новый маятниковый прибор гравимет-
рической лаборатории ЦНИИГАиК // Тр. ЦНИИГАиК. М.:
Геодезиздат, 145, 83-150.
Хейфец М.Е. 1981. 50 лет инструментально-методических
исследований по гравиметрии в ЦНИИГАиК // Геодезия и кар-
тография, 2, 47-53.
Хейфец М.Е., Гусев Н.А., Лохов В.В. 1983. Высокоточная
наземная маятниковая аппаратура ЦНИИГАиК // Междуве-
домств. тематич. сб. науч. тр. ЦНИИГАиК. М., 80-87.
Циолковский К.Э. 1964. Механика в биологии // Собрание
сочинений. М.: Наука, 4, 161-263.
Цицин Ф.А. 1994. Когда был большой взрыв? // Конферен-
ция «Астрофизика и космология после Гамова», посвящ. 90-
летию Гамова, Одесса, 5-10.09.1994. М.: Космосинформ, 24 с.
Черемисенов Г.В. 1971а. Теория ротационного гравиметра
// Автореф. дисс. канд. физ.-мат. наук. М.: ИФЗ, 19 с.
Черемисенов Г.В. 19716. Теория ротационного гравиметра.
М.: ИФЗ АН СССР, 190 с. (Деп. ВИНИТИ. №2983-71).
Чернышев В.А. 1967. Вертикальные крутильные весы как
датчики для измерения элементов гравитационного поля в дви-
жении // Изв. АН СССР. Физика Земли, 6, 126-129.
Чоботов В.Н. 1968. Радиально вибрирующий вращающий-
ся датчик градиента поля тяготения // Ракетная техника и кос-
монавтика. 6, 4, 195-201.
Чуйкова Н.А. 1968. Гравитационное поле и фигура Луны
// Астрономический журнал. 45, 6, 1293-1302.
Чуйкова Н.А. 1969. Методы определения фигуры и грави-
тационного поля Луны // Вестник МГУ. Физика и астрономия.
5, 81-88
Чуйкова Н.А., Максимова Т.Г. 1996. Гармонический и ста-
тистический анализ глубин поверхности Мохоровичича // Тру-
ды ГАИШ. М„ 65, 33-50.
Чуйкова Н.А., Грушинский А.Н., Максимова Т.Г. 1996а.
Гармонический и статистический анализ эквивалентного релье-
фа Земли и его изостатическая компенсация // Тр. ГАИШ. 65,
51—85.
Чуйкова Н.А., Жаров В.Е., Максимова Т.Г, Казарян С.А.
19966. Учет динамических сжатий и смещений оболочек Земли
при расчете нутаций // Труды конференции «Современные про-
блемы и методы астрометрии и геодинамики» 23-27 сентября
1996. СПб, 314-321.
Чуйкова Н.А., Казарян С.А., Пасынок С.Л. 1997. Учет гра-
витационного и магнитного полей в анализе полярных колеба-
ний внутреннего ядра Земли // Вестник МГУ. Физика. Астро-
номия. 2, 40-43.
Шебуев ГН. 1898. О влиянии местных аномалий земной
коры на результаты нивелирования. Памятная книжка Кон-
стантиновского межевого института за 1897-98 годы. Прило-
жения 1-28. М.: Университетская типография.
Шкловский И. 1991. Эшелон. М.: Новости, 222 с.
Шнирман ГЛ. 1938. Элементарная теория пружинного
подвеса вертикального сейсмографа // Тр. сейсмологического
института АН СССР. 83.
Шноль С.Э., Коломбет В.А., Удальцова Н.В., Намиот
В.А., Бодрова Н.Б. 1992. Закономерности в дискретных распре-
делениях результатов измерений (космофизические аспекты) //
Биофизика. 37, 3, 467-488.
Шноль С.Э., Пожарский Э.В., Коломбет В.А., Зверева
И.М., Зенченко Т.А., Конрадов А.А. 1997. О создаваемой кос-
мофизическими причинами дискретности результатов измере-
ний хода во времени процессов разной природы // Российский
химический журнал. 41, 3, 1-10.
Шокин П.Ф. 1960. Гравиметрия. М.: Геодезиздат, 316 с.
Шор В.А. 1976. Движение спутников Марса с 1877 по 1973
гг. и новые системы параметров их орбит // Тр. Ин-та теорет.
астрономии. 15, 91-113.
Шпаков П.Д., Дегтярев Г.М., Цветков О.В. 2006. Боль-
шой взрыв: сказка или реальность? СПб.: Астерион, 116 с.
Шэн Э.Л. 1977а. О вариационном подходе к построению
плотностной модели Земли // Геофиз. сб. АН УССР. 80, 11-
17.
Шэн Э.Л. 19776. О перераспределении масс в недрах Зем-
ли // Гравитационная модель земной коры и верхней мантии.
Киев: Наукова думка, 30-33.
Шэн Э.Л. 1980. Гравитационная энергия и внутренняя
структура планет. Автореф. дисс. канд. физ.-мат. наук. Киев,
14 с.
Эддингтон А.С. 1934. Теория относительности. М.
Эйнштейн А. 1966. Геометрия и опыт // Собрание науч-
ных трудов. Пер. с нем. М.: Наука, 2, 83-94. Оригинал 1921.
Эйнштейн А. 1965-1967. Собрание научных трудов. М.:
1-4.
Эйнштейн А., Гроссман М. 1965. Проект обобщенной тео-
рии относительности и теории тяготения // Собрание научных
трудов А. Энштейна, М.: Наука, 1, 227-266. Оригинал 1913.
Энтин И.И. 1956. Высокоточное нивелирование // Тр.
ЦНИИГАиК. М.: Геодезиэдат, 111, 340 с.
Этвеш Р. 1910. Опыты над тяготением и земным магнетиз-
мом. Исследование о поверхностях уровня и об изменении силы
тяжести и магнитной силы. Определение градиентов силы тя-
жести и ее поверхностей уровня при помощи крутильных весов
// Рефераты и переводные статьи по геодезическим вопросам,
№3. Приложение к 63 части Записок Военно-топографического
управления. СПб.: 3, 127 с.
Юзефович А.П., Огородова Л.В. 1980. Гравиметрия. М.:
Недра, 320 с.
Юркина М.И. 1957. Эллептическая палетка М.С. Молоден-
ского для вычиления превышений квазигеоида // Тр. ЦНИИ-
ГАиК. 121, 25-40.
Юркина М.И. 1976. Об интерпретации результатов повтор-
ного геометрического нивелирования // Геодезия и картогра-
фия. 10, 15-19.
Юркина М.И. 1977. Вклад Эйлера и Гаусса в решение за-
дачи о счете высот. // Историко-математические исследования.
М.: Наука. 22, 225-228.
Юркина М.И. 1978. О совместном определении изменений
гравитационного поля Земли и вертикальных сдвигов ее коры
// Геодезия и картография. 4, 30-35.
Юркина М.И. 1980. Развитие теории вращения твердого
небесного тела на основе уравнения Гамильтона - Якоби. Де-
пои. ОНТИ ЦНИИГАиК 18 марта 1980 г. №24-80. (Деп. РЖ
Астрономия 7.51.154 доп).
Юркина М.И. 1981. Потенциал в начале счета высот и кон-
троль геометрического нивелирования // Геодезия и картогра-
фия, 10, 11-15.
Юркина М.И. 1984. Обоснование приливных поправок и
установление неприливиых изменений силы тяжести // Повтор-
ные гравиметрические наблюдения (вопросы теории и резуль-
таты). 8, 23-27.
Юркина М.И. 1985. О приливных поправках в геодезии.
Определение стоксовых постоянных при учете влияния Луны
и Солнца // Геодезия и картография. 11, 14-17.
Юркина М.И. 1986. О совместном определении изменений
гравитационного поля и вертикальных движений по повторным
гравиметрическим и нивелирным наблюдениям // Геодезия и
картография. 11, 6-10.
Юркина М.И. 1987. К истории теории потенциала в связи
с теорией фигуры Земли. Вклад Леонарда Эйлера // Историко-
астрономические исследования. М.: Наука, 19, 103-122.
Юркина М.И. 1988а. «Начала» Ньютона и возник-
новение современной теории фигуры Земли // Историко-
астрономические исследования. М.: Наука, 20, 56-63.
Юркина М.И. 19886. Развитие понятия о потенциале в свя-
зи с теорией фигуры Земли во второй половине XVIII века //
Вопросы истории геодезии. Новосибирск: НИИГАиК, 13-27.
Юркина М.И. 1992. О влиянии центробежной силы на си-
лу тяжести // Геодезия и картография. 2, 2-5.
Юркина М.И. 1993. Некоторые задачи отсчета при изуче-
нии вертикальных движений земной коры // Геодезия и карто-
графия. 1, 18-20.
Юркина М.И. 1996а. Использование функции Грина для
определения возмущающего потенциала с учетом земной эл-
липсоидальное™ // Научно-технический сборник по геодезии,
аэрокосмическим съемкам и картографии. Физическая геоде-
зия. М.: ЦНИИГАиК, 165-179.
Юркина М.И. 19966. О работах по теории фигуры Земли с
сохранением относительной точности порядка земного сжатия
// Научно-технический сборник по геодезии, аэрокосмическим
съемкам и картографии. Физическая геодезия. М.: ЦНИИГА-
иК, 66-87.
Юркина М.И. 1996в. Об уточнении ряда Стокса с ис-
пользованием сфероидальных функций // Научно-технический
сборник по геодезии, аэрокосмическим съемкам и картографии.
Физическая геодезия. М.: ЦНИИГАиК, 180-190.
Юркина М.И. 1996г. Общеземная система высот и мор-
ская поверхность // Научно-технический сборник по геодезии,
аэрокосмическим съемкам и картографии. Физическая геоде-
зия. М.: ЦНИИГАиК, 46-65.
Юркина М.И. 1996д. Об одном сомнениии Эйлера по по-
воду определения вращения Земли и небесных тел // Научно-
технический сборник по геодезии, аэрокосмическим съемкам и
картографии. Физическая геодезия. М.: ЦНИИГАиК. 2, 226-
233.
Юркина М.И. 1997. Эффект Эйлера и небесномеханиче-
ские выводы // Проблемы пространства, времени, движения,
том I // Труды IV Международной конференции, посвящен-
ной 400-летию Декарта и 350-летию Лейбница, 23-29.09.1996,
Санкт-Петербург. СПб.: РАН, СПб-Технология, 1, 146-153.
Юркина М.И. 1998. Геоид или квазигеоид? // Геодезия и
картография. 5, 28.
Юркина М.И, 1999. Уточнение связи высоты квазигеоида
с возмущающим потенциалом // Научно-технический сборник
по геодезии, аэрокосмическим съемкам и картографии. Физи-
ческая геодезия. М.: ЦНИИГАиК, 55-70.
Юркина М.И. 2004а. Об определении ориентировки Земли
в пространстве // Научно-технический сборник по геодезии,
аэрокосмическим съемкам и картографии. Физическая геоде-
зия. М.: ЦНИИГАиК, 89-101.
Юркина М.И. 20046. Обзор суждений, противоречащих
принятому допущению о независимости орбитального и враща-
тельного движений небесных тел, сферически несимметричных
// Научно-технический сборник по геодезии, аэрокосмическим
съемкам и картографии. Физическая геодезия. М.: ЦНИИГА-
иК, 52-80.
Юркина М.И. 2004в. Чтобы уточнить высоту до долей мил-
лиметра. О теоретической проверке тождества, определяющего
в теории Молоденского нормальную высоту // Геодезистъ. 2,
19-20.
Юркина М.И., Бондарева М.Д. 1989. К расчету центро-
бежной силы в поле тяжести Земли // Геодезия и картография.
4, 21-24.
Юркина М.И., Файтелъсон А.Ш. 1975. Вековые вариации
земного гравитационного поля и движения полюса // Астроно-
мический журнал. 52, 1, 171-177.
Янушаускас А.И. 1985. Задача о наклонной производной
теории потенциала. Новосибирск: Наука, 263 с.
Achilli V., Baldi Р„ Casula G., Errani M., Focardi S.,
Palmonari E, Pedrielli F. 1997. A geophysical experiment on
Newton’s Inverse-square law. Nuovo Clmento. 112B, 775-804.
Ananda M.P., Sjogren W.L, Philips R.J. et al. 1980. A Low-
order global gravlti of Venus and dynamical Implications // J.
Geophys. Res., 85, A13, 8303-8318.
Andersen О., Knudsen P., Trimmer R. 2001. The KMS
2001 global mean sea surface and gravity field IAG // Scientific
Assembly Vistas for geodesy in the New Millenium, Budapest, 2-
7 sept. 2001. Abstracts. 137 (РЖ Геодезия и аэросъемка 2005,
11, реферат 75, 12.
Anderson D.L., Minster J.В. 1979. The frequency dependence
of Q in the Earth and implications for mantle, rheology and
Chandler wobble // Geophys. J. R. Astr. Soc. 58, 431.
Antony D. 1971. Gradiometer applications and status of
sensor development // Enviromental Research Papers 355,
AFCRL-71-0314, 1 june, 1971 (Пер. с англ. 2703, Под ред. А.И.
Сороки. М.: ОВТИ ВВИА им. Н.Е. Жуковского, 1973).
Aoki Shinko 1969. Friction between mantle and core of the
Earth as a cause of the secular change in obliquity // The
Astronomical Journal. 74, 2, 284-291.
Applications of high-precision absolute gravimetry. 2001.
http://ww.grdl.noaa.gov/GRD/GRAVITY/GRAV_APPL.html.
Arabelos D., Tscheming C.C. 1990. Simulations of regional
gravity field recovery from satellite gravity gradiometer data
using collocation and FFT // Bulletin Gdoddsique. 64, 4, 363-
382.
Arkani-Hamed J. 1996. Analysis and interpretation of high-
resolution topography and gravity of Ishtar Terra, Venus // J.
Geophys. Res. 101, E2, 4691-4710,4711-4724.
Armstrong T.R., Fitzgerald M.P. 2003. New measurement of
G using the Measurement Standards Laboratory torsion balance
// Phys. Rev. Lett., 91, 20. 201101-4.
Austing L., Thwing C.B. 1897. An experimental research on
gravitational permeability // Phys. Rev., 5, 294-300.
Bagley C.H., Luther G.G. 1997 // Phys. Rev. Lett. 78, 3047-
50.
Baily F. 1842. An account of some experiments with the
torsion rod, for determining the mean density of the Earth //
Philosophical Magazine. 21, 111-121.
Baker T., Edge R., Jeffries G. 1989. European tidal gravity:
an improved agreement between observations and models //
Geophys. Res. Let. 16, 10, 1109-1112.
Baker T., Curtis D., Dodson A. 1996. A new test of earth
tide models in Central Europe // Geophys. Res. Let. 23, 24, 3559-
3562.
Ballentine L.E. 1982. Comment on Indirect evidence for
quanmum gravity // Phys. Rev. Lett. 48, 7, 522 p.
Balmino G. 1993. The spectra of the topography of the Earth,
Venus, and Mars // Geoph. Res. Lett. 20, 4, 1063-1066.
Balmino G„ Moynot B., Vales N. 1982. Graviti field model
of Mars In spherical harmonies up to degree and order eigteen //
J. Geophys. Res. 87, 12, 9735-9746.
Balmino G, Moynot B, Sarraieh M, Vales N. 1985. Free
air gravity anomalies over the oceans from Seasat and GeoS-3
altimetry data // Bureau Gravimetrique Int. Bull. d’Information,
Dec. 57, 9-24
Barnes R.T.H., Hide R„ White A.A., Wilson C.A. 1983.
Atmospheric angular momentum fluctuations, length-of-day
changes and polar motion. // Proc. Roy. Astr. Soc. A387, 31-
73.
Barrow J.D. 1978. A cosmological limit on the possible
variation of G. // Mon. Not. R. Astron. Soc.184, 677-682.
Barton E.H. 1916. Gravitation and temperature // Nature
(London), 97, 461-462.
Bayer L.A. 1907. Results of careful weighings of a magnet in
various magnetic fields // Phys. Rev. 25, 498-499.
Bell C.C. 1968. Torsionally resonant gravity gradient sensor.
Патент США. Кл. 73-382, №3564921,2.02.68. (Перевод в жур-
нале «Экспресс-информация», Испытательные приборы и стен-
ды, 39, 1971).
Bell R.E. 1998. Gravity gradiometry // Scientific American.
June, 56-61.
Bertalanffy L. von. 1969. General system theory. Foundation,
development, application. N.Y.: G. Braziller, XV, 289.
Biro P.A. 1966. Hold egyensulyi alakja // Geod. es kartogr.
18, 3, 221-222.
Bisque R.E., Rouse G.E. 1968. Geoid and magnetic field
anomalies; their relationship to the core-magnetic field anomalies;
their relationship to the core-mantle interface// Mines Mag. 58,
5, 20-22 (РЖ Геофизика, 1968. 12Г42; Science news. 1968. 93,
13, 301-302; Земля и Вселенная. 2, 53).
Boedecker G., Flury J. 1995. International Absolute Gravity
Basestation Network IAGBN // Catalogue of stations and
observations, Edition 1995, International Association of geodesy,
International Gravity Commission, Working Group 2 «World
Gravity Standards», 79.
Boer H., Haars H., Michaelis W. 1987. A new experiment
for the determination of the newtonian gravitational constant //
Metrologia. 24, 171-174.
Bois C. et al. 1990. Major geodynamic processes studied from
the ECORS deep seismic profiles in France and adjacent areas //
Tectonophysics. 173, 397-410.
Bom G.H. 1974. Mars physical parameters as determined
from Mariner 9 observationss of the natural satellites and doppler
tracking // J. Geophys. Res. 79, 32, 4837-4844.
Bottoni G., Barzaghi R. 1993. Fast Collocation // Bull. Geod.
67, 1-2.
Boys C.V. 1889. On the Cavendish experiment // Proc. Roy.
Soc. London. 46, 253-268.
Braun C. 1897a. A new determination of the gravitation
constant and the mean density of the Earth // Nature (London).
127-128.
Braun C. 1897b. Die gravltations-constante, die masse
und mlttlere dichte der erde nach einer neuen experlmenteilen
Bestlmmung // Denkschrlften der Academle von Wlssenschaft
zu Wien, Mathematisce und Naturwissenschaftliche Klasse. 64,
187-258.
Brelot M. 1954. La therie moderne du potentiel // Annales
de I’lnstltut Fourier, 4.
Brelot M. 1970. Historical introduction in «Potential theory».
Roma: Centro Internationale matematica estivo I ciclo. Stresa, 2-
10 luglio 1969.
Brelot M. 1972. Les etapes et les aspects multiplies de la
thdorie du potentiel // L’enselgnement mathematlque, II serie.
Genbve, 18, 1, 1-36.
Britting K.R., Madden S.J., Hildebrant R.A. 1972. The
impact of gradiometer techniques on the performance of inertial
navigation systems // AIAA Paper. 72-850, 1-9.
Brovar V. V. 1974. On the solution of Molodendky’s boundary
value problem // Bull. Geod. 72.
Brovar V. V., Kopeikina Z.S., Pavlova M.V., Yurkina MJ.
2003. Solution of the Dirichlet and Stokes exterior boundary for
the Earth’s ellipsoid // Journal of Geodesy. 74, 767-772.
Brown L.D. 1991, A new map of crustal 'terranes’ in the
United States from COCORP deep seismic reflections profiling //
Geophys. J. Int. 105, 3-13.
Brown J.M., Niebauer T.M., Richter B., Klopping
F.J., Valentine J.G., Buxton W.K. 2005. Miniaturized
gravimeter may greatly improve measurements. Web site at
http://www.microgsolutions.com/.
Ви-Xi Gao, Xu-Hua Zhou. 1996. The variation of the
geocentre's position and it’s geophysical causes. Int. Symp.
Grav., Geoid, and Mar. Geod. (GraGeoMar96). Tokyo. (РЖ 1998
2.52.92)
Buffet B.A. 1992 J. Geophys. Res., 97, 19 581.
Burgess G.K. 1902. A new form of Cavendish balance //
Phys. Rev., 14, 247-256.
Buria M. 1995a. Primary and derived parameters of common
relevance of astronomy, geodesy, and geodynamics // Earth,
Moon, and Planets. 69, 1, 51-63. (РЖ Астрономия 1996,
04.51.1).
Buria M. 1995b. Special commission SC3 // Fundamental
Constants (SCFC). Travaux de 1’Assoclation Internationale de
Gdoddsle. T.30. Rapports Gdndraux et Rapports Techniques,
dtablls a ['occasion de la 21 АссетЫёе generale. Boulder, U.S.A.,
Paris: Secrdtarlat de [’Association. 370-384.
Buria M., РёС К. 1993. Gravity field and dynamics of the
Earth. Berlin, Heidelberg, New York: Springer, 333 p.
Bursha M., Demianov G., Yurkina M. 1998. On the
determination of the Earth's model - the mean equipotential
surface // Studla Geophyslca et Geodaetlca. Praga, 42, 4. 467-
471.
Buria M., Kouba J. Kumar M., Mailer A., Radij K., True
S.A., Vatrt V., Vojtiikova M. 1999a. Geoldal geopotential and
World height system // Studla Geophyslca et Geodaetlca. 43, 4,
327-337.
Buria M., Kouba J„ Mailer А., Radij К., True S.A.,
Vatrt V, Vojtiikova M., Kumar M. 1999b. Differences between
mean sea levels for the Pacific, Atlantic and Indian oceans
from TOPEX/POSEIDON altimetry // Studla Geophyslca et
Geodaetlca. 43, 1, 1-6.
Buria M., Kouba J., Radij R„ True S.A., Vatrt V.,
Vojtiikova M. 1999c. Temporal variations in sea surface
topography and dynamics of the Earth's Inertia ellipsoid // Studla
Geophyslca et Geodaetlca. 43, 1, 7-19.
Buria M.j Kenyon S., Kouba Sima Z., Vatrt V.,
Vojtiikova' M. 2002. Dimension of the Earth’s general ellipsoid
// Earth, Moon, and Planets. 91, 31-41.
Busse F. H. 1974. On the oscillation of the Earth's Inner Core
// J. Geophys. Res. 753.
Cain D.L., Kliore A.J., Seidel B.L. et al. 1973.
Approximations to the mean surface of Mars and Mars
atmosphere using Mariner 9 occultation // J. Geoph. Res. 78,
20, 4352-4354.
Cavendish H. 1798. Experiments to determine the density of
the Earth // Phylos. Trans. R. Soc. London. 88, 469-526.
Chan H.A., Paik H.I. 1984. Experimental test of a spatial
variation of the Newtonian gravitational constant at large
distatces // US Dep. Commer. Nat. Bur. Stand. Spec. Publ.,
617: Precis. Meas, and Fundam. Constants 11. Proc. 2 Int. Conf.,
Gaithersburg, Md., June 8-12, 1981. 601-606.
Chelton, D. B., Ries J. C., Haines B. J., Fu L.-L., Callahan
P. S. 2001. Satellite altimetry // Satellite Altimetry and Earth
Sciences. A Handbook of Techniques and Applications. Ed. by
L.-L. Fu, A. Cazenave. Academic Press, 1-131.
Chen Y.T., Cook A.H., Metherell A.J.F. 1984. An
experimental test of the inverse square law of gravitation at range
of 0.1 m // Proc. Roy. Soc., A394, 1806, 47-68.
Cheng M., Tapley D. 1999. Seasonal variation in low-degree
zonal harmonics of the Earth's gravity field from satellite laser
ranging observations // J. Geophys. Res. 104 (B2), 2667-2681.
Christensen E.L., Balmino G. 1978. Development and
analysis of a twelf th degree and order gravity model for Mars //
J. Geophys. Res. B. 84, 7943-7953.
Compton A.H. 1920. Radioactivity and the gravitational field
// Philos. Mag. 39, 659-662.
Cook A.H. 1954. Magnetic perturbations of invar pendulums
used for relative gravity measurements // Montly Notices Roy.
Astron. Soc. Geophys. 7, 1.
Cook A.H. 1959. Preparations for a new absolute
determination of gravity at the national physical laboratory
Teddington // Bulletin Gdoddslque. 51, 63-71.
Cook A.H. 1968. A new determination of the constant of
gravitation // Contemp. Phys. 9, 227-238.
Cook A.H. 1988. Experiments on gravitation // Rep. Prog.
Phys. 51, 707-757.
Cook J.J., Flowers W.L., Arnold C.B. 1962. Measurement of
laser output by light pressure // Proceedings of the Institute of
Radio Engineers. N.Y., 50, 7, 1693.
Cornaz A., Hubler B., Kundig W. 1994. Determination of the
gravitational constant at an effective Interaction distance of 112
m // Phys. Rev. Lett. 72, 8, 21 February, 1152-1155.
Cornu A., Bailie J. 1873. Determination nouvelle de la
constante de 1'attractlon et de la density moyenne de la terre
// C.R. Acad. Scl. 76, 954-958.
Cowsic R. 1981. A new torsion balance for studies in
gravitation and cosmology // Indian J. Phys. 55B, 497-502.
Cremiev V. 1907. Recherches compares sur les forces de
gravitation dans les gaz et les liquldes // J. Phys. (Paris). 6,
284-298.
Cremiev V. 1919. Recherches experimentales sur la
gravitation // C.R. Acad. Scl. 168, 227-230.
Damour T., Piazza F., Veneziano G. 2002. Runaway dilaton
and equivalence principle, gr-qc/0204094.
Daniels E.P., Tolson R.H., Gapcynski J.P. 1977. Spherical
harmonic representation of the martian gravity using a schort -
arc technique // J. Spacecraft and Rockets. 14, 6, 323-327.
Darwin G.H. 1897. Periodic Orbits // Acta Mathematics. 21,
99-242.
Dehant V. 1987. Integration of the gravitational motion
equations for an elliptical uniformly rotating Earth with an
Inelastic mantle // Phys. Earth Planet. Inter. 49, 242.
Dehant V, Defraigne P. 1997. New transfer functions for
nutations of a non-rigid Earth // J. Geophys. Res. 102, 27 659-
27 688.
Dehant V. et al. 1999. Considerations for the future of non-
rigid Earth nutation theory // Celest. Meeh. Dyn. Astr. 72, 245-
310.
Demianov G.V., Kaftan V.I., Zubinsky V.I. 1999.
Participation of the Central Research Institute of Geodesy, Aerial
Surveying and Cartography In the third Baltic Sea Level GPS
campaign, Final results of the Baltic Sea Level 1997 GPS
campaign, Research works of the SSC 8.1 of the International
Association of Geodesy. Reports of Finnish Geodetic Institute,
127-132.
Demianov G., Tatevian S. 2002. Integrated geodynamical
network in Russia // Advances in Space Reserch. 30, 2, 407-412.
Dickey J.P. et al. 1994. Lunar Laser Ranging: A Continuing
Legacy of the Apollo Program // Science. 265, 482-490.
Dollfus A. 1972. New optical measurements of planetary
diameters. P.4. Planet Mars // Icarus. 17, 3, 525-539.
Downs G.S., Reichley D.E. 1975. Radar measuremtnts of
martian topography andd surface properties: the 1971 and 1973
oppsitions // Icarus. 26, 3, 273-312.
Downs G.S., Goldstein R.M., Green R.R. et al. 1973. Martian
topography and surface properies as seen by radar: the 1971
opposition // Icarus. 18, 1, 8-21.
Dransfield M.H. 1994. Airborne Gravity Gradiometry.
Presented for the degree of Doctor of Philosophy. Department of
Physics University of Western Australia. Department of Physics.
Duglas P.T. 1967. Acceleration due to Gravity measurement
at NBS // Technical News Bulletin. March, 5, 50.
Duncombe R.L., Seidelmann P.K., Van Flandern T.C. 1974—
1975. Celestial reference systems derived from solar dynamics //
Proc. IAU Colloq. Torun, Warsaw, 26, 223-224.
Diippe R.-D. 1972. Gravimetrische Bestimmung von
anomalen Dichtestrukturen fiir Lotkriimmungen und
ortometrischen Hohen. Dissertation. Rhelnlsche Universitat zu
Bonn. Bonn, 140.
Dziewonski A.M., Anderson D.L. 1981a. Preliminary
reference Earth model // Physics of the Earth and Planetary
Interiors. 25, 297-356.
Dziewonski A.M., Anderson D.L. 1981b. Phys. Earth Planet.
Inter. 25, 297.
Eanes R.J. 1995. Observational constraints on time variations
of the Earth’s mass distribution from monitoring satellite orbits
and geocenter motion. Int. Union Geod. and Geophys. 21st Gen.
Assembly, Boulder, Colo. 2-14.07.1995. (РЖ 1996 Геодезия и
аэросъемка 3.52.125)
Eichendorf W., Reinhardt M. 1977. How constant are
fundamental physical quantities? // Z. Naturforsch, Teil A. 32,
532-537.
Eotvos R. 1891. Ueber die Anzlehung der Erde auf
verschledene Substanzen // Belblatter zu den Annalen der Physik.
15, 688-689.
Eotvos R. 1896. Untersuchungen uber Gravitation und
Erdmagnetlsmus. // Ann. der Phys, und Chem. F. 59, 354-400.
Ebtvtis R., Pekar D., Fekete E. 1922. Beitrage zur Gesetze
der Proportlonalltat von Traghelt und Gravitat. // Ann. der Phys.
68, 1-56.
Euler L. 1757. Princlpes gdndraux de 1’etat d'dqullibre des
fluids // Mdmolres de I’Acaddmle Royale des Sciences. Annde
1755. t. 11, 217-273 (A Berlin; L. Eulerl opera omnia, ser. 2, 12,
2-53; Lausannae 1954. Orell Fiissel Turlcl).
Euler L. 1765a. Remarques gdndrales sur le movement dlurne
des plandtes // Mdmolres de 1’Acaddmle Royale des Sciences et
Belles-Lettres. (A Berlin Annde 1758, 14, 194-218; Opera omnia,
ser. 2, 29, 199-219. Turlcl, 1961.)
Euler L. 1765b. Theoria motus corporum solidorum. 624 p.
(Opera omnia, ser. 2, 3, 327 p. Bernae 1948, 4, Lipsiae of Berollni,
1950, 359 p.)
Euler L. 1766. Recherches sur le movement de rotation des
corps celestes // Mdmoires de 1 'Acaddmle Royale des Sciences et
Belles-Lettres. (A Berlin. Annde 1759, 15, 265-309; Opera omnia,
ser. 2, 29, 220-256. Turlcl, 1961).
Euler L. 1862. Astronomia mechanlca // Opera Postuma.
Mathematlca et Physica. Tomus Alter. Petropoll Apud Eggers et
Socios, Rigal Apud S. Schmidt, Lipsiae apud L. Voss, 175-316.
Facy L., Pontikis C. 1971. Determination de la constante de
gravitation par la methode de resonance // C.R. Acad. Sci. 272,
1397-1398.
Failly M., Singh S.C., Hobbs R.W. 1993. Lower crustal
reflectivity from waveform Inversion // Geophys. J. Int. 115, 410-
420.
Faller J.E. 1963. An absolute interferometric determination of
gravity. Ph. d. dissertation, Princeton University, Princeton, N-
Y, 1963 cavailable from University microfilms, Inc., Ann. Arbor,
Mich, 64-2680.
Faller J.E. 1967. Precision Measurement of the Acceleration
of Gravity // Science. 158, 60-66.
Faller J.E., Marson I. 1988. Ballistic methods of measuring
g — the direct free-fall and symmetrical rise- and fall-method
compared // Metrologia. 25.
Faller J.E., Vitouchkine A. 2001. Prospects for a truly
portable absolute gravimeter // 1AG International Symposium
on Recent Crustal Movements, Helsinki, Finland, August 27-
31, 2001. Abstracts. Ed. by Markku Poutenen, Finnish Geodetic
Institute, Kirkkonumi, 9.
Feng Yong-yuan, Zhang Guang-yuan, Li De-xi, Qiu Xiao-
mei, Zhou Jing-hua, Gao Jing-Lung, Huang Da-Lun, Huang
Cheng-qing, Guo You-Guang. 1982. A transportable absolute
gravimeter for determining the acceleration due to the Earth’s
gravity//Metrologia. 18, 139-143.
Ferrari F.J. 1977. Lunar gravity: harmonic analysis, //
Gophys. Res. 82, 20, 3065-3084.
Fitzgerald M.P., Armstrong T.R. 1999. The measurement of
G using the MSL torsion balance // Meas. Sci. Technol., 10(6),
439-444.
Ford P.G., Pettengill G.H. 1992. Venus topography at
kilometer-scale slope // J. Geophys. Res., 97, E8, 13103-13114.
Forward R.L. 1969. Measurement of static force field
gradients. Патент США. Кл. 73-382, 3273397, 5.06.64. (Пере-
вод 2595. Под ред. А.И. Сороки. М.: Изд. ОВТИ ВВИА им.
Н.Е. Жуковского, 1969.)
Forward R.L. 1981. Gravity sensors and the principal of
equivalence // IEEE Trans. Aerospace and Electronic Systems.
AES-17, 4, 511-519.
Fujii Y. 1972. Scale Invariance and gravity of hadrons // Ann.
Phys. (NY). 69 (2), 494-521.
Galaganov O.N., Guseva. T.V., Mishin A.V., Bogdanov V.l.
2001. Some results of geodynamic researche on eastern frame
of the Baltic shield // Poutanen M. Abstracts IAG SRCM’01.
Helsinki, 95-96.
Gapcynski I.P., Blackshear W.T., Compton H.R. 1969. Lunar
gravitational field as determined from Lunar Orbiter tracking data
// AIAA Journ. 7, 10, 1905-1908.
Gapcynski J.P., Tolson R.H., Michael W.Jr. 1977. Mars
gravity field combined Viking and Mariner 9 results. // J.
Geophys. Res. 82, 28, 4325-4327.
Gauss K.F. 1825. Allgemelne Auflosung der Aufgabe: die
Thelle elner gegebnen Flache auf einer andern gegebnen Flache
so abzubllden, dass die Abbildung dem Abgebildeten in der
klelnsten Theilen ahnlich wird. Astronomische Abhandlungen,
herausgegeben von H.C. Schumacher. 3 Heft, 5-30; Gauss'sche
Werke, 4. 189-216. Gottingen, 1873: Ostwald’s Klassiker der
exakten Wissenschaften, 55, 101.
Gauss K.F., J.J. Bayer 1853. 22 Junius 1853. Gottingen //
C.F. Gauss Werke. 9. Leipzig: Teubner, 1903. 99-102.
Gauss K.F. 1903. Bestimmung des Breltenunterschledes
zwischen den Sternwarten von Gottingen und Altona durch
Beobachtungen am Ramsdenschen Zenithsector (Gottingen.
Werke; Gottingen: Teubner, 1828. 9, 1-64).
Geigel R. 1903. Ueber Absorption von Gravitation-senergie
durch radioaktiv Substanz // Ann. Phys. (Leipzig). 10, 429-435.
Gerber P. Die Fortpflanzungsgeschwindigkeit der Gravitation
// Annalen der Physik. 1898. 52. 4. 415-444.
Getino J., Ferrandiz J.M. 1991. A Hamiltonian theory for an
elastic Earth; first order analytical integration // Celesl. Meeh.
51, 35-65.
Getino J., Ferrandiz J.M. 1999. Accurate analytical nutation
series // Man. Not. R. Astr. Soc. 306, L 45-L 49.
Gibbings D.L., Pattarson J.B., Bell G.A. 1971. The absolute
determination of the gravitational acceleration at Sydney,
Australia // Bull. Geod. 100, 147-157.
Gilvarry J.J., Muller P.M. 1972. Possible variation of the
gravitational constant over the elements // Phys. Rev. Lett. 28,
1665-1669.
Giraud G. 1936. Equations a integrates principales d’ordre
quelconque // Annales Scientifiques de i’Ecole Normale
Superleure 3-e sdrle. 53, 1, 1-40.
Giraud G. 1939. Nouvelle methode pour trailer certains
probldmes relatifs aux dquations du type elliptique // Journal de
Mathematiques Pures et Appliqudes, Neuvidme. 18, 111-143.
Goulier Ch.M. 1887. Sur les nivellements de precision //
Comptes rendus des seances de 1'Acaddmie des sciences, 105,
5, 270-273; 6, 306-309.
Gray S. 1733. A letter to Cromwel Mortimer? M. D. Seer.
R.S., containing several experiments concerning electricity //
Philosophical transactions. 37, 1731, 1732, 18-44.
Green G. 1871. Mathematical papers. London: Macmillan, 82.
Green G. 1828. An essay on the application of mathematical
analisys to the theories of electricity and magnetism. Nottingham,
print, by T. Wheelhouse. 72 p.
Gross R.S. 1992, Correspondence between theory and
observations of polar motion // Geophys. J. Int. 109, 162-170.
Gruber Th., Steigenberger P. 2002. Impact of new gravity
field missions for sea surface topography determination // Gravity
and Geoid — 3rd Meeting of the International Gravity and Geoid
Commission, Thessaloniki, Greece, August 26-30, 2002. 320-
325.
Guinot B. 1981. Comments on the terrestrial pole of
reference, the origin of the latitudes, and on the determination
of UT1 // Reference Coordinate System for Earth Dynamics,
Proceedings of 55-th Coll, of IAU, Reidel, Dordrecht, 400 p.
Gundlach J.H., Merkowitz S.M. 2000. Measurement of
Newton’s constant using a torsion balance with angular
acceleration feedback // Phys. Rev. Lett. 85, 2869-2872.
Haagmans R., de Min E., van Gelderen M. 1993. Fast
evaluation of convolution integrals on the sphere using ID FFT
and a comparison with existing methods for Stokes integral //
Manuscr. Geodatica. 18. 227-241.
Hamilton W.R. 1866. Elements of quaternions. Dublin
(Second enlarged edition. 1, 1899; 2, 1901; Third edition: Chelsea
publishing company, 1969, 1, 594 p., 2, 502 p.).
Hammond J.A., Faller J.E. 1967. Laser-Interferometer System
for the Determination of the Acceleration of Gravity // J. of
Quantum Elektronics. November, QE-3, 11, 597-602.
Hammond J., Faller J. 1971a. Results of Absolute Gravity
Determinations at a Number of Different Sites // J. of Geophysical
Research, 76, 32.
Hammond J.A., Faller J.E. 1971b. PMFC (1), NBS Special
Publication, 343, 457.
Hanel R.A., Conrath B.K., Hovis W.A. et al. 1972.
Investigation of the martian environment by infrared spectroscopy
of Mariner 9 // Icarus. 17, 2, 423-442.
Hansens S. 1973. Method and apparatus for
gravitygradiometry. Патент CHIA. Кл. 73-382. 3769840, 6.11.73.
Heine E. 1843. Ueber einige Aufgaben, welche auf partielle
Differentialgleichungen fiihren // J. Fiir Die Reine und
Angewandte Mathematik. 26. 3.185-216.
Heine E. 1851. Theorie der Anziehung eines Ellipsoids // J.
Fiir Die Reine iind Angewandte Mathematik. 42, 70-82.
Heine E. 1861. Handbuch der Kugelfunctionen. Berlin: G.
Reimer, 382.
Heiskanen W.A., Moritz H. 1967. Physical geodesy. W.H.
Freeman. San Francisco and London, 364 p. Reprint of the
Institute of Physical Geodesy. Technical university. Graz. Austria.
Helmert F.R. 1873. Zur Theorie des geometrischen
Nivelllrens // Astronomische Nachrichten. 81, 1939, 297-300.
Helmert F.R. 1880-1884. Die mathematischen und
physikalischen Theorlen der hoheren Geodasie. I. Teil: Die
mathematischen Theorlen, XV1+632 S., 1880: II. Teil:
Die physikalischen Theorien mit Untersuchungen liber die
mathematische Erdgestalt auf Grund der Beobachtungen. 610
S., 1884. Leipzig, B.G. Teubher. (Unveraenderter Nachdruck:
Minerva G.M. B.H. Frankfurt am Main; Stuttgart. B.G. Teubner.
Leipzig, 1962.)
Heyl P.R. 1930. A redermination of the constant of
gravitation // Nat. Bur. Stand. (U.S.) J. of Res. 5, 1243-1290.
Heyl P. 1936. Report on absolute value of gravity at
Washington // Transactions of the American Geophysical Union,
Part 1.
Heyl P.R., Chrzanowski P. 1942. A new redermination of the
constant 11 of gravitation // Nat. Bur. Stand. (U.S.) J. of Res.,
29, 1-31.
Hirakawa H. 1980. Experimental examination of the Inverse
square law of gravitation // Proc. 2. Marsel Grossmann Meet.
Gen. Relativ., Trieste, 5-11 luly, 1979. Amsterdam a.e., 1982, Pt
B. 1005-1011.
Hirakawa H., Tsubono K., Oide K. 1980. Dynamical test of
the law of gravitation // Nature. 283, 184-185.
Hirvonen R.A. 1960. New theory of the gravimetric
geodesy // Suomalaisen tiedeakatemian toimituksia, sarja A, III.
Geologica-geographica, Helsinki, 56. VIII+50.
Hoffmann W.F. 1963. 22-cps pendulum gravimeter for
monitoring the gravitational constant as a function of time //
Bull. Am. Phys. Soc. 8, 29.
Hord C. W., Barth C.A., Stewart A.J., Lane A.L. 1972.
Mariner 9 ultraviolet spectrometer experiment: photometry and
topography of Mars // Icarus. 17, 2, 443-456.
Hord C.W., Simmons K.E., McLaughlin L.K. 1974.
Mariner 9 ultraviolet spektrometer experiment: pressure-altitude
measurements on Mars // Icarus. 21,2, 292-302.
Hoskins J.K., Newman R., Spero R.E., Scultz J. 1985.
Experimental test of the gravitational inverse square law for mass
separations from 2 to 105 cm // Phys. Rev. D, Part and Fields.
12, 3084-3095.
Hotine M. 1969. Mathematical geodesy. ESSA Monograph 2.
Washington: U.S. Department of commerce., 416+XIV p.
Huxley G.L. 1971. Eudoxus of Cnidus // Dictionary of
scientific biography. N.Y., 4, 464-467;
Huang C.-L. 1999. A study of the nutation of non-rigid Earth
with ocean and atmosphere // PhD thesis, Shanghai Astronomical
Observatory, Chinese Academy of Sciences (in Chinese).
Huang C.-L., Jin W.-J., Liao X.-H. 2001. A new nutation
model of a non-rigid earth with ocean and atmosphere // Geophys.
J. Int. 146, 126-133.
Hwang С., Kao E., Parsons B. 1998. Global derivation
of marine gravity anomalies from Seasat, Geosat, ERS I and
Topex/Poseidon altimeter data // Geophys. J. 2(134), 449-459.
IERS. 1996. Conventions // IERS Tech. Note 21.
Observatoire de Paris, 1996.
JERS. 1999. Annual Report. Paris: Observatoire de Paris,
2000.
Inouye T., Kitsunezaki T., Senda O., Ando K. 1971. A
determination of the Acceleration due to Gravity at Kakioka Japan
// Bull. National Research Laboratory of Metrology. 23.
Jacobi G.G.J. 1827. Ueber eine besondere Gattung
algebraischer Functionen, die aus der Entwicklung der Function
(1 — 2xz + z2)1/2 entstehen // Journal Fiir Die Reine und
Angewandte Mathematik. 2, 223-226; Gesammelte Werke, 6, 21-
25.
Jeffreys H., Vicente R . 1957. The theory of diurnal Earth
tides and nutation. II. Roche’s model of the liquid core // Mon.
Not., 109, 670-687.
Jolly Ph. 1878. Die Anwendung der Wage auf Probleme der
Gravitation // Ann. d. Phys, und Chem. 5, 112-134.
Jordan J.E., Lorell J. 1975. Mariner 9: an instrument of
dynamical science // Icarus. 25, 11, 146-165.
Jung К. 1956. Figur der Erde // Handbuch der Physik,
herausgegeben von S. Fliigge. Geophysik I. Berlin-Gottingen-
Heidelberg: Springer, 47, 534-639.
Kaftan V.I. 1995. Sea level fluctuations and vertical land
movements in Near-Caspian Region // Geophysics and the
Environment, XXI General Assembly, Boulder, Colorado, July 2-
14 1995, Abstracts Week A. A38.
Kaftan V.I. 2001. Gravity Variation at the Moscow Fiducial
Station, Paper presented to the EUREF 2001 Symposium,
Dubrovnik, May 2001.
Kaftan VI., Lilienberg D.A. 1995. 6. Recent crustal
movements // National report to the International Association
of Geodesy of the International Union of Geodesy and Geophysics
1991-1994, Moscow 1995, 40-61.
Kaufmann W. 1903. Bemerkungen zu der Arbeit des
H.R.Geigel: «Ueber 78 die Absorption von Gravitatlonsenergle
durch radioaktlv Substanz» // Ann. Phys. Leipzig, 10, 894-896.
Kennard E.H. 1916. Electrical action and the gravitation
constant // Science. 43, 928-929.
Kleinevoss U., Meyer H., Schumacher A., Hartmann S.
1999. Absolute measurement of the Newtonian force and a
determination of G // Meas. Sci. Technol., 10(6), 492-494.
Klopping F„ Sasagawa G., Winester D., Wilmes H.,
Richter B., Murakami M., Courtier N., Stiza D., Weingarth
L„ Liard J., Gagnon C., Canutson E„ Zumberge M. 1997.
Report on the 1995 Table-Mountain international absolute-
gravity-meter Intercomparison // International Association of
Geodesy Symposia, Vol. 117: Segawa et al. - eds. Gravity, Geoid
and Marine geodesy, Springer-Verlag Berlin Heidelberg. 40-46.
Konig A., Richarz F. 1884. Eine neue Methode zur
Bestimmund der Gravitations-Constante // Sitzungsberichte der
Koniglich Preussischen Akad. Wissenschaft zu Berlin, 1203-
1205.
Konopliv A.S., Borderies N.J., Chodas P.W. et al. 1993.
Venus gravity and topography: 60th degree and order model //
Geophys. Res. Lett. 20, 4, 2403-2406.
Konopliv A.S., Sjogren W.L. 1994. Venus spherical harmonic
gravity model to degree and order 60 // Icarus. 112, 42-54.
Koop R. 1993. Global gravity field modelling using satellife
gravity gradiometry. Publcations on geodesy. New series. 38, 231
p. Netherlands geodetic commission. Delft.
Koop R„ Stelpstra D. 1989. On the computation of the
gravitational potential and its first and second order derivations
// Manuscripts Geodaetlca. 14, 6, 373-382.
Kopejkin S.M. 1988. Celestial coordinate reference systems
in curved space-time // Celestial Mechanics. 44, 1-2, 87-115.
(РЖ, 1989 07.51.145).
Kopejkin S.M. 1991. Relativistic manifestations of
gravitational fields In gravimetry and geodesy // Manuscripts
Geodaetica. 16, 5. 301-312. (РЖ, 1992 07.52.86).
Kovalevsky J. 1974. Some Problems Related to the Definition
of Reference Systems // Proceedings of IAU Colloquium. Warsaw,
Poland, 26, 123-132.
Kreuzer L.B. 1966. The equivalence of active and passive
gravitational mass // Ph. D. Thesis, Princeton University, 107 p.
Kucinskas A.B., Turcotte D.L. 1994. Isostatic compensation
of equatorial highlands on Venus // Icarus, 112, 104-116.
Kucinskas A.B., Turcotte D.L., Arkani-Hamed J. 1996.
Isostatic compensation of Ishtar Terra, Venus // J. Geophys. Res.
101, 4725-4736.
Kunz J. 1930. Resonanzmethoden fur die Bestimmung der
Gravitatlonskonstante // G. Phys. Z. 31, 764-768.
Kuroda K. 1995. Does the Time-of-Swing Method Give a
Correct Value of the Newtonian Gravitational Constant? // Phis.
Rev. Lett. 75, 15, 2796-2798.
Kuroda K., Hirakawa H. 1985. Experimental test of the law
of gravitation. // Phys. Rev. D. 32, 342-346.
Lallemand Ch. 1887. Note sur la thdorie du nivellement //
Annales des Ponts et Chausses. Memoires et Documents. 6, 14,
2e semester, 491-521.
Lambert W.D. 1961. The gravity field of an ellipsoid of
revolution as a level surface. Publ. Inst. Geod., Photogram.
And cartography N 14. The Ohio State Univ., Columbus, Ohio;
Suomaialsen tiedeahatemian tolmituksia, Sarja A, III, 57, 42 p.
Helsinki.
Lamd G. 1837. Mdmoire les surfaces isothermes dans les
corps solides homogdnes en dquilibre de temperature // Journal
de Mathdmatiques Pures et Appliqudes. 2. 147-183.
Lamd G. 1838. Note sur des integrates ddfinles ddduites de
la thdorie des surfaces orthogonales // Journal de mathdmatiques
pures et appliqudes. 3, 552-555.
Lamd G. 1839. Second mdmoire sur Г dquilibre des
temperatures dans les corps solides homogdnes de forme
ellipdoidale, concernant particulidrement les ellipsoides de
revolution // Journal de Mathdmatiques Pures et Appliqudes. 4,
351-385.
Langevin P. 1942. Resonance et forces de gravitation // Ann.
Phys. 49 (Paris), 17, 265-271.
Lapiedra R., Palacios J.A. 1981. Time-varying newtonian
gravity: an upper limit for the rate of change of the gravitational
constant //Astron. Astrophys., 98, 382-383.
Laplace P.S. 1785. Theorie des attractions des sphdroides et
de la figure des plandtes // Memo ires de Mathdmatique et de
Physique, Annde 1782. 113-196. Paris (Oeuvres. 10. 339-419.
Paris. Gauthier-Villars, 1894).
Laplace P.S. Traitd de mdcanique celeste, t. 1 (An VII =
1798-99), t. 2 (An VII = 1798-99), t. 3 (An XI = 1802), t. 4
(An XIII = 1805), t. 5, 1825. Есть переиздания и перевод иа
английский язык.
Laska W. 1889. Uber einer neuen Apparat zur Bestimmung
der Erddichte // Zschr. fur Instrumentekunde. 9, 354-355.
Ledersteger K. 1967. The equilibrium figure of the Moon //
Use artific. satellites, Athens, Publ. Nat. Tech. Univ., 2, 539.
Li Ruihao, Sun Heping, Chen Dongsheng. 1985. Preliminary
studies on relation between the space distribution characteristics
of the tidal delta-factor and the crust structure in China // Proc.
X Intern. Symp. Earth Tides, Madrid. 669-678.
Liapounoff A.M. 1898. Sur certains questions qui se
rattachent au probleme de Dirichlet // J. de mathdmatiques pures
et appliques, 5 sdrle, 4, 3. 241-311.
Lindemann F.A., Burton C.V. 1917. The temperature
coefficient of gravity // Nature (London). 98, 349.
Listing J.B. 1873. Ueber unsere jetzige Kenntuis der Gestalt
und Grosse der Erde // Nachrichten von der Georg-Augusts
Universitat, Gottingen. 3, 33-98.
Liu A.S., Laing P.A. 1971. Lunar gravity analysis from long-
term effekts // Science. 173, 4001, 1017-1020.
Long D.R. 1976. Experimental examination of the
gravitational inverse square law // Nature (London). 260, 417—
418.
Long D.R. 1980. Vacuum polarization and non-newtonlan
gravitation // Nuovo Cimento. 55, 252-256.
Long D.R. 1981. Current measurements of the gravitational
'constant* as a function of mass separation // Nuovo Cimento. 62,
130-138.
Long D.R. 1984. Vacuum Polarization and recent
measurements of the gravitational constant as a function of mass
separation. US Dep. Commer. Nat. Bur. Stand. Spec. Publ., 617.
Lorel J., Born G.N., Christensen E.J. et al. 1973. Gravity feld
of Mars from Mariner 9 tracking data // Icarus. 18, 2, 304-316.
Luo L, Hu Z.K., Fu X.H., Fan S.H., Tang M.X. 1999.
Determination of the Newtonian gravitational constant G with
a nonlinear fitting method // Phys. Rev., D 59, 042001-6.
Luo J., Liu Q., Tu ,-C., Shao C.-G., Liu L.-X., Yang S.-Q.,
Zhang Y.-T. 2009. Determination of the Newtonian Gravitational
Constant G with Time-of-Swing Method // Phys. Rev. Lett., PRL
102, 240801-4.
Luther G.G., Towler W.R. 1982. Redermination of the
newtonian gravitational constant G // Phys. Rev. Lett. 48, 121 —
123.
Mack Sidney F. 1959. Discontinuities of second derivatives
of single-layer potentials // Mathematische Annalen. 137, 5, 417—
426.
Mdchain, Delambre. 1792. Base du systeme metrlque
ddcimal, ou mesure de 1’arc du mdridien compris ent re les
paralleles de Dunkerque et Barselone, executde en 1792 et anndes
suivantes. Paris. 3. 704+62 p.
Maddox J. 1984. Continuing doubt on gravitation // Nature.
310, 723.
Majorana Q. 1930. Quelques recherches sur 1’absorption de
la gravitation // J. Phys. Radium. 1, 314-324.
Marson Faller J.E., Cerutti G., De Maria P., Chartier
J.-M., Robertson L., Vitushkin L., Friederich J., Krauterbluth
K., Stizza D., Liard J., Gagnon C., Lothammer A., Wilmes
H., Makinen J., Murakami M., Rehren F., Schnull M., Ruess
D., Sasagawa G.S. 1995. Fourth International Comparison of
Absolute Gravimeters // Metrologia. 32, 137-144.
Martinec Z„ Grafarend E.W. 1997. Construction of Green's
function to the external Dirichlet boundary value problem for
the Laplace equation on an ellipsoid of revolution // Journal of
Geodesy, 71, 9, 562-570.
Massa C. 1993. A new limit on time-dependence of
the gravitational constant from gravity modified quantum
electrodinamics // Astrophysics and Space Science. 209, 2, 307-
308.
Mathews R. 2002. Mobile Gravity Gradiometry. Presented
for the degree of Doctor of Philosophy. Department of Physics
University of Western Australia.
Mathews P.M., Shapiro 1.1. 1992. Nutations of the Earth //
Ann. Rev. Earth and Plan. Sc. 20, 3-65.
Mathews P.M., Buffet B.A., Herring T.A. 1991. Forced
nutations of the Earth: influence of inner core dynamics // I.
Theory., J. Geophys. Res. 96, (B5), 8219-8242.
Mathews P.M., Buffet B.A., Herring T.A., Fessel M.
1998. The magnetic coupling contribution to nutation //
Observatoire de Paris, Departement d’astronomie fondamentale,
UMR 8630/CNRS, Systemes de reference spatio-temporales,
Paris, 21-23 septembre, 86-91.
Mathews P.M., Herring T.A., Buffett B.A. 2000. Improved
models for precession and nutation // Proc. 1AV Colloquium 180,
212-222, eds Johnston K.J. et al. Washington, DC, USA.
Mathews P.M., Buffet B.A., Herring T.A. 2001. Modeling of
nutation-precession: New nutation series for nonrigid Earth, and
Insights into the Earth’s Interiror // J. Geophys. Res.
Matthews D.H. 1986. Seismic reflections from the lower crust
around Britain, in Nature of the Lower Continental Crust. Ed. by
Dawson J.B., Carswell D.A., Hall J., Wedepohl K.H. // Geol. Soc.
Lond. Spec. Pub. 24, 11-22.
Matthews D.H. et al. 1990. the BIRPS Group Progress in
BIRPS deep seismic reflection profiling around the British Isles
// Tectonophysics. 173, 387-396.
McCarthy D.D. - ed. 1996. IERS Conventions, Central
Bureau of IERS, Paris.
McKenzie D., Bowin C. 1994. The relationship between
dathymetry and gravity in the Atlantic Ocean // J. Geophys. Res.
81, 11, 1903-1915.
Mechain, Delambre. 1810. Base du systeme mdtrique
ddcimal, ou mesure de 1’arc du mdridien compris entre les
paralleles de Dunkerque et Barcelone, exdcutde en 1792 et annees
suivantes. Paris. 1806, 1, 180+551; 1807, 2, XXIV+844; 1810,
704+62.
Medvedev P.P., Nepoklonov V.B. 2001. The use of satellite
altimetry data in geodesy // Proceedings of International
Conference «AstroKazan-2001», September 24—29. Kazan State
University, 210-212.
Meissner R. et al. 1991. The DEKORP surveys: major results
in tectonic and reflective styles // Continental Litosphere: Deep
Seismic Reflections. Ed. by Meissner R., Brown L., Durbaum H-
J., Franke W., Fuchs K., Seifert F. // Am. Geophys. Un. Geodyn.
Ser. 22, 69-76.
Melhior P. 1968. Земные приливы / nep. с англ., под ред.
Н.Н. Парийского. М.: Мир, 482.
Melhior Р. 1984. Report of International center for Earth
Tides during the period 1980—1983 // Marees Terrestres. Bull.
91, 5954-5962.
Melhior P. 1986. The physics of the Earth core. Oxford:
Pergamon press, 256.
Melchior P. 1995. A continuing discussion about the
correlation of tidal gravity anomalies and heat flow densities //
Phys. Earth and Plan. Inter. 88, 223-256.
Melchior P., Ducarme B., Francis 0. 1995. The response
of the Earth to tidal body forces described by second and third
degree spheroidal harmonics as devided from a twelve years series
measurements with the superconducting rdavimeter GWR.T3 in
Bruxelles// Phys, of the Earth and Plan. Inter. 58, 431-440.
Michael W.H., Blackshear W.T. 1972. Recent results on the
mass, gravitational field and moments of inertia of the Moon //
Moon. 3, 3/4, 388-402.
Michaelis W., Haars H., Augustin R. 1996. A New Precise
Determination ol Newtons Gravitational Constant // Metrologia.
32, 4, 267-276.
Minding F. 1838. Handbuch der theoretischen Mechanik.
Berlin: F. Diimmler. 348.
Mineo C. 1933 On the limits of validity of a theorem of
Stokes regarding the figure of the Earth // The quarterly Journal
of Mathematics. Oxford series. 4, 184-192.
Mio N., Tsubono K., Hirakawa H. 1984. Measurement of
gravitational interaction at small distances // Jap. J. AppL Phys.
1, 23, 8, 1159-1160.
Mirsa P.N., Abbot R.I. 1994. SGS85-WGS84 Transformation
// Manuscripta Geodaetica. 19, 300-308.
Mirsa P.N., Abbot R.L, Gaposchkin E.M. 1996. Integrated
use of GPS and GLONASS: Transformation between WGS-84
and PZ-90. Pres, at the Inst, of Navigation, ION GPS-96.
Molny M.J., Summer D.L., Weiss LD. 1982. Ship-
gradient effects on vertical deflection estimation capability of a
gravity gradiometer // IEEE PLANS’82: Position Location and
Navigation Symp. Record, Atlantic City, 1982. N.Y.: IEEE. 395-
398.
Molodenski M.S. 1937. Bestimmung der Gestalt des
Geoidsunder gemeinsamer Anwendungastronomisch-geodatischer
Lotabwechungen und Schwerestorungen // Verhandlungen des
neunten Tagung der Baltlschen Geodatischen Kommisslon.
Helsinki, 203-223.
Molodensky S.M, Groten E. 1996. On «pathological
oscillations» of rotating fluids in the theory of nutations // J.
Geod. 70, 603-621.
Molodensky S.M., Groten E. 1997. On atmospheric excitation
of out-of-phase nutational components // Astronomy and
Astrophys. 327, 800-812.
Molodensky S.M., Groten E. 1998. On the dynamical effects
of an inhomogeneous liquid core in the theory of nutation // J.
Geod. 72, 385-403.
Molodensky S.M., Groten E. 1999. The dynamical effects of
heterogeneous liquid core in the theory of Chandler wobble //
Geophys. Journ. Int. 118, 134-156.
Morganstem R.E. 1972. Time variation of gravity constant
// Nature (London), 237, 198.
Moritz H. 1968. Klnematlcal Geodesy. Munchen.
Moritz H. 1969. Nonlinear solution of the geodetic boundary
value problem. Rep. N 126 Dept of Geod. Scl., Ohio State Univ.
Moritz H. 1970. Least-squares collocation. Deut. Geod.
Komm., A, 70, 1970.
Moritz H. 1973. Stepwise and Sequential Collocation. Dep. of
Geodetic Science, OSU, Report No. 203.
Moritz H. 1976. Special Study Group 5.39. Fundamental
geodetic constants // Trav. de I’AIG, 25. Rapports generaux et
rapports techniques. XVI Ass. Gener. Grenoble, Sept. 1975, Paris.
411-418.
Moritz H„ Hofmann-Wellenhof B. 1993. Geometry,
Relativity, Geodesy. Karlsruhe: Wlshmann, 367 p.
Morrison D., Hill H.A. 1973. Current uncertainty In the ratio
of the active-to-passlve gravitational mass // Phys. Rev. D, 8,
2731-2733.
Moss F.J., Mathur S.P. 1984. A review of continental
reflection profilings in Australia // Reflection Seismology: a
Global Perspective. Ed. by Barazagi M., Brown L. Am. geophys.
Un. Geodyn. Ser. 13, 67-76.
Muller C. 1951. Die Potentiale einfacher und mehrfacher
Flaachenbelegungen // Mathematische Annalen. 123, 3, 235-262.
Muller P.M., Sjogren W.L. 1968. Mascons: Lunar mass
concentrations // Science. 161, 3842, 680-684.
Naito I., Sugawa C. 1973. On the relation between the
meridianally asymmetric mass distribution on the Earth and Z-
term in the latitude variation // Proc. Intern. Lat. Obs. Mizusawa.
13, 84-95.
Nance R.L. 1971. Gravity Measured at the Apollo 14 Landing
site//Science. 174, 4013, 1022-1023.
Nelson K.D. 1991. A unified view of craton evolution
motivated by recent deep seismic reflection and refraction resukts
// Geophys. J. Int. 105, 25-35.
Neumann F.E. 1838. Ueber eine neue Eigenschaft der
Laplace’schen und ihre Anwendung zur analytlschen
Darstellung derjenlgen Phanomene, welche Functiouen der
geographfschen Lange und Breite sind // Astronomische
Nachrichten. 15, 355, 313-324 (Werke. 1912, 3, 425-437. Leipzig,
B.G. Teubner).
Neumann F.E. 1848. Entwicklung der in elliptischen
Coordlnaten ausgedriickten reciproken Entfernung zweler Punkte
In Relhen, welche nach den Laplace’schen y(") fortschrelten; und
Anwendung dieser Relhen zur Bestimmung des magnetischen
Zustandes eines Rotatlonselllpsoids, welcher durch vertheilende
Krafte erregt ist // Journal fiir die reine und angewandte
Mathematik. 37, 1, 21-50 (Werke, 3. 439-484, 1912. Leipzig.
Teubner).
Neumann F. 1880. Neue Satze liber das Newton’sche
Potential // Mathematische Annalen. 16, 432-438.
Neville D.E. 1980. Experimental bounds on the coupling of
torsion potentials // Phys. Rev. D. 21, 2075-2080.
Newcomb S. 1906. A Compendium of Spherical Astronomy.
N.-Y.: Macmillan. 444 p.
Newton Is. 1728. The chronology of ancient kingdoms
amended. London, print for J. Tonson (Русский перевод 2007
г.: Исправленная хронология древних царств. М.: РИМИС,
646 с.).
Niebauer Т.М., Sasagawa G.S., Faller J.E., Hilt R., Kloping
F. 1995. A new generation of absolute gravimeters // Metrologia.
32, 159-180.
Niethammer Th. 1932. Nivellement und Schwere als
Mittel zur Berechnung wahrer Meereshohen. Veroffentlichung
des Schweizerischen Geodatlschen Kommosslon. Basel: E.
Birkhauser. 51.
Nieto M.M., Coldman T. 1980. Measurement of G/h using
a superconducting as losephson effect // Phys. Lett. A. 79, 449-
453.
Nihoul J.C.P. 1991. Dissection of a mathematical model //
Math, and Comput. 15. 12. 117-122.
Niven C. 1880. On the conduction of heat In ellipsoids of
revolution // Philosophical Transactions of the Royal Society of
London. 171, I, 117-151.
Nolting F„ Schurr J., Schlamminger S., Kundig W. 1999.
A value for G from beam-balsance experiments // Meas. Sci.
Technol. 10(6), 487-491.
Nordtvedt R. 1973. Post-Newtonian Gravltalonal Effects in
Lunar Laser Ranging // Phys. Rev. D. 7, 2347 -2356.
Nothnagel A., Nicolson G.P., Cumpbel J., Sccchuh H.
1992. Radiointerferometric polar motion observations with high
temporal resolution // Bull. Geodes. 66, 4, 346-355.
Ogava У, Tsubono K., Hirakawa H. 1982. Experimental test
of the law of gravitation // Phys. Rev. D. 26, 729-734.
Ostach O.M. 1970. On the procedure of astro-gravimetric
levelling // Studia Geophysica et Geodaetlca, 14, 222-225.
Pad P. 1877. Sopra la funzione potenzlale di una massa
distrlbuta su di superficie // Giornale di matematiche ad uso degli
student! delle uni versit a italiane publicato per cura del professore
G. Battaglini, 15, settembre ё ottobre. 289-298.
Page D.N., Geilker C.D. 1981. Indirect evidence for quantum
gravity // Phys. Rev. Lett. 47, 979-982.
Paik H.J. 1996. Fundamental gravity experiments on the
Space Station // NASA/JPL Low Temperature Microgravity
Physics Workshop, Pasadena, April 9-11.
Pavlenkova N.I. 1996. General features of the uppermost
mantle stratification from long-range seismic profiles //
Tectonophysics, 254, 261-278.
Pavlenkova N.I. 1988. The nature of seismic boundaries in
the continental lithosphere // Tectonophysics. 154, 211-225.
Peddy C.P., Hobbs R.W. 1987. Lower crustal reflectivity of
the contintntal margin southwest of Britain // Ann. Geophys.
5B(4), 331-338.
Pettengill G.H., Counselman C.C., Rainwille L.P., Shapiro
I.I. 1969. Radar measurements of martian topograpy // Astron. J.
74, 3, 461-482.
Pettentill G.H., Shapiro I.I, Rogers A.R.E. 1973. Topography
andradar scattering properties of Mars // Icarus. 18, 1, 22-28.
Pettentill G.H., Chandler J.F., Campbell D.B. et al. 1974.
Martian surface properties from recent radar observations // Dull.
Astron. Soc. 6, 3, 372.
Pettengill G.H., Eliason E., Ford P.G. et al. 1980. Pioneer
Venus radar results: Altimetry and surface // J. Geophys. Res.
85, A13, 8261-8270.
Phillips R.I. 1986. A mechanism for tektonic deformation on
Venus// Geophys. Res. Lett. 13, 11, 1141-1144.
Phillips R.I., Sjogren W.L., Abbott E.A. et al. 1979. Gravity
field of Venus: A preliminary analysis // Science. 205, 93-96.
Pick M. 1978. Gravity potential of the normal body in the
outer and inner space // Studia Geophysica et Geodaetica. 22, 1,
23-27.
Pick M. 1990. On the normal gravity formulae // Studia
Geophysica et Geodaetica. 3, 289-312.
Pick M., Picha J., Vyskouil V. 1973. Theory of the Earth’s
Gravity Field. Amsterdam: Elsevier, 538 p.
Pizzetti P. 1906-1925. Hohere Geodasie. Encyklopadie
der mathematischen Wissenschaften mit Einschluss ihrer
Anwendungen 6. Bd., erster Tell // Geodasie und Geophysik.
Leipzig. B.G.Teubner, 117-243.
Poincard H. 1887. Sur le probleme de la distribution
dlectrlque // Comptes Rendus Hebdomadaires des Seances de
I’Academie des Siences. 104, 1, 44-46.
Poincard H. 1890. Sur les equations aux ddrivees partielles
de la physique mathematique // American journal of mathematics.
12, 3, 211-294.
Poincard H. 1899. Thdorie du potentiel Newtonien. Paris: G.
Саггё et C. Naud eds. 366 p.
Poincard H. 1900. Le thdorie de Lorentz et le princlpe
de rdaction // Archives Neerlandaises des sciences exactes et
naturelies. 2, 5, 252-278 (Oeuvres. 9, 464-488. Paris: Gauthler-
Villars, 1954).
Poincard H. 1901. Sur les ddviations de la verticale en
gdodesie // Bulletin Astronomique. 18. 257-276 (Oeuvres. 8,
175-192. Paris, 1952).
Pontikis C. 1972. Determination de la constante de
gravitation par la methode de resonance // C.R. Acad. Sci. 274,
437-440.
Poynting J.H., Phyllips P. 1905. An experiment with the
balance to find if change of temperature has any effect upon
weight // Proc. R. Soc. London.A, 76, 445-447.
Preston-Thomas H. 1959. Absolute determination of g at
Ottava // Bulletin Geodesique, 51.
Preston-Thomas H., Turnbull L., Green E., Dauphinee,
Karla S. 1960. An Absolute Measurement of the Acceleration
due to Gravity at Ottava // Canadian Journal of Physics. 38, 6,
June, 824-852.
Puissant L. 1805. An XIV. Traite de gdodesie, ou Exposition
des methodes astronomiques et trigonomdtriques, appliqudes soit
a la mesure de la Terre, soit a la confection du canevas des cartes
et des plans. A Paris: Courcier, 318 p. (deuxieme edition, 1819.
1, 376 p„ 2, 360 p.).
Puissant L. 1807. Traitd de topographie, d’arpentage et de
nivellement. A Paris: Courcier, 332 p.
Quinn T.J., Speake C.C., Richman S.J., Davis R.S., Picard
A.A. 2001. A new determination of G using two methods // Phys.
Rev. Lett. 87, 11, 111101-4.
Rappaport N., Plaut J.J. 1994. A 360-degree and -order model
of Venus topography // Icarus. 112, 27-33.
Reich F. 1838. On the repetition of the Cavendish experiment
for determining the mean density of the Earth // Philos. Mag.
12, 283-284.
Reigber C., Balmino G., Schwintzer P., Biancale R., Bode
A., Lemoine J.-M., Kdnig R., Loyer S„ Neumayer H., Marty
C., Barthlemes F., Perosanz F, Zhu S.Y. 2002. A high-quality
global gravity field model from CHAMP GPS tracking data and
accelerometry (EIGEN-IS) // Geophys Res Lett 29(14): 1692.
Reinhardt V.S., Bun F.O., Turneaure J.P. 1982. A
supersensitive accelerometer for spacesraft gradiometry // IEEE
PLANS’82: Position Location and Navigation Symp. Record,
Atlantic City, N.Y.: IEEE. 279-288.
Reston T.J. 1988. Evidence for shear zones in the lower crust
offshore Britain // Tectonics. 7, 929-945.
Ricard Y., Doglioni C., Sabadini R. 1991. Differential
rotation between lithosphere and mantle: a consequence of lateral
mantle viscosity variations // J. Geophys. Res. 96, 8407-8415.
Richarz F., Krigar-Menzel O. 1899. Waage zur Bestimmung
der mittleren Dichtigkeit der Erde // Z. fur Instrumentenkunde.
19, 40-56.
Robertson L., Francis O., vanDam T.M., Faller J., Ruess D.,
Delinte J.-M., Vitushkin L., Liard J., Gagno C., Guo You Guang,
Huang Da Lun, Fang Youg Yuan, Xu Jin Yi, Jeffries G., Hopewell
H., Edge R., Robinson L, Kibble B„ Makinen J., Hinderer J.,
Amalvict M., Luck B., Wilmes H., Rehren F, Schmidt K„ Cerutti
G„ Germak A., Zabek Z., Pachuta A., Arnautov G., Kalish E.,
Stus Y., Stizza D., Friederich J., Chartier J.-M., Marson I.
2001. Results from the fifth International Comparison of absolute
gravimeters, ICAG97 // Metrologia. 38, 71-78.
Roder R.H. 1994. Zum Einsatz des Absolutgravimeters
JILAG-3 in Prazisionsschwerenetzen // Wissenschaftliche
Arbelten, Der Fachrichtung Vermessungswesen der Universitat
Hannover, 205, Hannover.
Romaides A.J., Sands R. W, Eckhardt D.H., Fischbach E.,
Talmadge C„ Kloor H.T. 1994. Second tower experiment: Further
evidence for Newtonian gravity // Phys. Rev. D. 50, 6, 3608-
3613.
Roosbeek F., Dehant V. 1998. Precession, obliquity-rate, and
nutations for a rigid Earth from the torque approach // Celest.
Meeh. Dyn. Astr. 70, 215.
Rothman T., Matzner R. 1982. Scale-covariant gravitation
and primordial nucleosynthesis // Astrophys. J. 257, 450-455.
Rudnick P. 1959. The spectrum of the variation in latitude //
Trans. Amer. Geophys. Union. 37, 137-143.
Rummel R. 1986. Satellite gradiometry // Lecture Notes In
Earth Sciences. 7, 317-363.
Rummel R., Colombo O.L. 1985. Gravity field determination
from satellite gradiometry // Bulletin Geoddslque. 59, 3, 233-246.
Sailor R.V., Dziewonski A.M. 1978. Measurements and
interpretation of normal mode attenuation // Geophys. J. R. Clslr.
Soc. 53, 559.
Sakuma A. 1973. A permanent station for the absolute
determination of gravity approaching one micro-gal accuracy
// Presented at the International Symposium on the Earth’s
Gravitational Field and Secular Variation in Position, Sydney,
2630 November 1973, Bureau International des Poids et Mesures,
92310 Sevres. 674-684.
Salstein D.A., Rosen R.D. 1994. Topograflc forcing of the
atmosphere and a rapid change in the length of day // Science.
264, 407-409.
Sanders A.J., Deeds W.E. 1992. Proposed new determination
of the gravitational constant G and tests of Newtonian gravitation
// Phys. Rev. D. Particles, Fields, Gravitation and Cosmology.
Third Series, 46, 2, 489-503.
Sanders A.J., Gillies G.T. 1997. Problems in experimental
gravitation // Gravitation and Cosmology. Moscow. 3, 4(12), 285-
286.
Project SEE (Satellite Energy Exchange): Proposal for Space-
based
Sandwell, D.T., Smith W.H.F. 1997. Marine gravity anomaly
from GEOSAT and ERS-1 satellite altimetry // J. Geoph. Res.
102(B5), 10039 - 10054.
Sasao T.S., Okubo S., Saito M. 1980. A simple theory of
dynamically effects of stratified fluid core upon nutatlonal motion
of the Earth. Proc, of IAU Symp. 78, Nutation and the Earth’s
rotation, 1980. Ed. by E. Fedorov, M. Smith, P. Bender, D. Reidel,
Hingham. Mass.
Sasao T., Wahr J.M. 1981. An exitation mechanism for the
free 'core nutation’ // Geophys. J. R. Astr. Soc. 64, 729-746.
Saulnier M.S., Frisch D. 1989. Measurement of the
gravitational constant without torsion // Am. J. Phys. 57, 5,
May, 417-420.
Savet P.H. 1969. Gravity field Exploration by new gradient
technigne // J. of Spacecraft. 6, 6.
Schastok J. 1997. A new theoretical series for a more realistic
model earth // Geophys. J. Int. 130, 137-150.
Schlamminger S., Holzschuh E., Kundig W. 2002.
Determination of the Gravitational Constant with a Beam Balance
// Phys. Rev. Lett., 89, 16, 161102-4.
Schlamminger S., Holzschuh E., Kundig W., Nolting N.,
Pixley R.E., Schurr J., Straumann U. 2006. A measurement of
Newton’s gravitational constant // Phys. Rev. D, 74, 8, 082001-
25.
Schubert T.F. 1859. Essai d’une determination de la veritable
figure de la Terre. St.-Pdtersbourg, 32 p. (Mdmoires de 1’Acad.
Imp. Sci. 7 sdr., 1, 6).
Schubert T.F. 1860. Sur 1’influence des attractions locales
dans les operations gdodesiques, et partlculdrement dans I'ars
Scandlnavo-Russe // Astronom. Nachrlchten. 52, 1245/1247,
321-362.
Schubert T.F. 1861. Ueber die Flgur der Erde // Astronom.
Nachrlchten. 55, 1303, 97-112.
Schwarz К.-P., M.G. Sideris, R. Forsberg 1990. Use of FFT
methods in physical geodesy // Geophys. J. Int. 100, 485-514.
Secco R.A. 1994. Viscosity of the Outer Core //
American Geophysical Union Handbook of Physical Constant. Ed.
T.J.Ahrens.
Seidelmann P.K. 1982. 1980 IAU theory of nutation — the
final report of the IAU Working Group on Nutation // Celestial
Mechanics. 27, 79-106.
Shaw N. 1913. Units for meteorological measurements.
Introductory Memorandum on the Extension of the Centimetre
- Gramme - Second System of units to meteorological
measurements // The Observers handbook. IX-XXIV (London,
Meteorological office: Darling and son, 1955. Selected
meteorological papers. London: Macdonald, 156-165).
Shaw P.E., Davy N. 1923. The effect of temperature on
gravitative attraction // Proceeding of the Royal Society of
London. Series A. 102, 46-47.
Shirai T., Fukushima T. 2000. Improvment of non rigid Earth
nutation series by adding a model free core nutation term //
Proc. IAU Colloquium 180, 223—229. Ed. Johnston K.J. et al.
Washington, DC, USA.
Simons M., Hager B.H., Solomon S.C. 1994. Global
variations In the geoid/topography admittance of Venus //
Science. 264, 798-803.
Sinclair A.T. 1972. The motions of the satellites of Mars //
Mon. Notlc. Roy. Astron. Soc., 155, 249-274.
Sjogren W.L. 1971. Lunar gravity estimate: Independent
confirmation // J. Geophys. Res. 76, 29, 7021-7025.
Sjogren W.L. 1979. Mars gravity: High-resolution results
from Viking Orbiter 2 // Science. 203, 1006-1010.
Sjogren W.L., Lorell J., Wong L„ Downs W. 1975. Mars
gravity field based on a short-arc technigue // J. Geophys. Res.
80, 20, 2899-2908.
Sjogren W.L., Phillips R. J., Birkeland P.W., Wimberly N.
1980. Gravity anomalies on Venus // J. Geophys. Res. 85, №A13,
8295-8302.
Sjogren W.I., Banerdt W.B., Chodas P.W. et al. 1997. The
venuslan gravity and other geodetic parameters // Venus II
Geology, Geophysics, Atmosphere, and Solar wind envlroment.
Eds S.W. Bougher, D.M. Hunten, R.J. Phillips. Tucson: Univ.
Arizona Press, 1125-1161.
Slichter L.B. 1961. The fundamental free mode of the earth’s
inner core // Proc. Nat. Acad. Sci. U.S.A. 47, 186.
Slichter L.B., Caputo M., Hager C.L. 1965. An experiment
concerning gravitational shielding // J. Geophys. Res. 70, 6,
1541-1551.
Smith M. L. 1974. The scalar equations of Infinitesimal
elastic-gravitational motions for a rotating, slightly elliptical
Earth // Geophys. J. R. Astron. Soc. 37, 491-526.
Smith M.L., Dahlen F.A. 1980. The period and Q of the
Chandler wobble // Geophys. J. R. Astron. Soc. 64, 223-284.
Smrekar S.E., Phillips R.J. 1990. Geoid to topography
ratios for 14 venusian features: implications for compensation
mechanisms. Lunar and Planet //Sci. Conf. XVI. Abstract. 1176—
1177.
Smylie D.E. 1992. The Inner Core Translation Triplet and the
Density Near Earth’s Center // Science. 255, 1678.
Soldner Joh. 1801. Ueber die Ablenkung elnes Lichtstrals
von seiner geradlinigen Bewegung, durch die Attraktion eines
Weltkorpers, an welchem er nahe vorbei geht // Astronomisches
Jahrbuch, fur das Jahr 1804. Berlin, 161-172.
Southerns L. 1910. A determination of the ratio of mass to
weight for a radioactive substance // Proc. R. Soc. London. 84,
325-344.
Speake C.C., Metherell A.J.F. 1984. The testing of a beam
balance for a determination of G // US Dep. Kommer. Nat. Bur.
Stand. Spec. Publ. №617: Precis Meas, and Fundam. Constans
II. Proc. 2 Int. Conf., Gaithersburg, Mot. June 8-12, 579-679.
Spero R.E., Hoskins J.K., Newman R. et al. 1980. Test of the
gravitational inverse square law at laboratory distances // Phys.
Rev. Lett. 44, 1645-1648.
Stacey F.D. 1984. Gravity // Sci. Progr. 69, 273, 1-17.
Stacey F.D., Tuck G.J. 1981. Geophysical evidence for non-
newtonian gravity // Nature (London). 292, 230-232.
Stacey F.D., Tuck G.J. 1984. Non-Newtonlan gravity:
geophysical evidence // US Dep. Commer. Nat. Bur. Stand. Spec.
Publ., 617.
Stacey F.D., Tuck G.J., Holding S.C. et al. 1981. Constraint
on the planetary scale value of the Newtonian gravitational
constant from the gravity profile within a mine // Phys. Rev.
D. 23, 1683-1692.
Standisch E.M.Jr. 1973. The figure of Mars and its effect on
radar-ranging // Astron, and Astrophys. 26, 3, 463-466.
Stephenson F.R., Morrison L.V. 1995. Long-term fluctuations
in the Earth’s rotation: 700 BC to AD 1990 // Phil. Trans. R. Soc.
Lond. A, 351, 165-202.
Stimler M., Slawsky Z.I., Grantham R.E. 1964. Torsion
Pendulum Photometer // Rev. Sci. Instruments. 35, 3, 311-313.
Stolz A., Larden D.R. 1979. Seasonal displacement and
deformation of the Earth by the atmosphere // J. of Geoph. Res.
84, Bl 1, 6185-6194.
Stone R. 1972. Интерференционный градиентометр для
исследования поля сил тяжести. Патент США. Кл. 73-382
№3688584, 5.09.72.
Szabo В., Anthny D. 1967. Aerial gravimetry for direct
observation of the external gravity field // Osterr z.
Vermessungewesen, 55 Sondern, 25, 80-85 (Results of AFCRL,
experimental aerial dravity measurements // Bulletin Gdoddslque.
1971, 100).
Szabo B„ Anthny D. 1971. Results of afcrl’s experimental
aerial gravity measurements (Результаты экспериментальных
аэрогравиметрических определений Кэмбриджского научно-
исследовательского центра ВВС) // Bulletin Gdoddsique. 100.
179-2002 (РЖ Геодезия и аэросъемка 1971, 12 52.72).
Takeuchi Н. 1951. On the Earth tide // J. Faculty Sci. Univ.
Tokyo, Sect. II, 56-89.
Takeshi E. 1985. An experimental study of regional
heterogeneities of gravity tides in Japan // Bull. Earthquake Res.
Inst. Univ. Tokyo, 60, 1, 39-86.
Talwani M., Kahle H.G. 1976. Apollo 17: Traverse
gravimeter experiment (Prelim. Res) // Geol. Jahrb. E, 7, 85-
91.
Tang Boxiong, Yan Shenmei, Zhang Lifen. 1985.
Observation of gravity earth tides at Kungmin station and
earthquake prediction // J. Seism. Res. China. 8, 6, 673-678.
Tangl K. 1926. Versuch uber die Gravitation mit einer
Drehwaage, deren Gehage in Wasser taucht // Mathematische
und Naturwissenschaftliche Anzeiger der Akademie der
Wissenschaften zu Budapest. 43, 342-350.
Thomson J.J. 1909. Ratio of weight to mass for a radioactive
substance // Presidential Address of British Association,
Winnipeg, Manitoba, Canada.
Tisserand F. 1891. Traite de mecanique cdleste, t. 2. Theorie
de la figure des corps celestes et de leur movement de rotation.
Paris: Gauthier-Villars, 552 p.
Tolchelnikova-Murri S.A. 1986. On the Problem of
Classifying Modern Methods for the Right Ascension
Determination // Bull. De 1’Obs. de Belgrade, 136, 20-23.
Tolchelnikova-Murri S.A., Sadjakov S., Dachich M.,
Stanchich Z. 1991. The Present Situation with the Absolute
Methods of Observations in Fundamental Astronomy // Astroph.
and Space Science. Dordrecht: Kluwer, 177, 495-498.
Tolson R.H., Gapcynski J.P. 1968. An analysis of the lunar
gravitational field as obtained from Lunar Orbiter tracking data
// Moon and Planets, II. Amsterdam, 178-186.
Truman V.S. 1971. Cryogenic Gravity Meter // Proceedings
12th International Conference on Low Temperature Phisics,
Kyoto, 1970. Tokyo, 859-861.
Tscherning C.C. 1974. A FORTRAN program for the
determination of the anomalous potential using stepwise least
squares collocation. Dep. of Geodetic Science, OSU, Report No.
212.
Tscherning C.C. 1978. On the convergence of least squares
collocation // Boll. geod. e sci. affini, 37, 2-3.
Tscherning C.C., R.H. Rapp 1974. Closed Covariance
Expressions for Gravity Anomalies, Geoid Undulations, and
Deflections of the Vertical Implied by Anomaly Degree-Variance
Models. Reports of the Department of Geodetic Science No. 208,
The Ohio State University, Columbus, Ohio.
Vermeer M. 1990. Observable quantities in satellite
gradiometry // Bulletin Geoddsique. 64, 4, 347-361.
Vespe F., Ferraro C, Nardi A. 2001. Quality assessment and
signals detection from GPS time series // Paper presented to the
EUREF 2001 Symposium, Dubrovnik, May 2001.
Vinnik L.P. 1997. Seismic Anisotropy and Mantle Flow //
Geonissensheoffen. 15, 3-4, 100-104.
Virtanen H„ Poutanen M. 2001. The effect of the Baltic Sea
level on gravity at the Metsahovi station // IAG International
Symposium on Resent Crustal Movements, SRCM’01, Helsinki,
Finland, August 27-31, 2001. Abstracts. Ed. by Markku
Poutanen, Kirkkonummi, 2001, 33-34.
Vogler Chr. August. 1873. Ueber Ziele und Hilfsmittel
geometrlscher Praeisions-Nivellements. Miinchen. Literarisch-
artistische Anstalt (Th. Riedel) vormals der Cotta’schen
Buchhandlung. 103 S.
Voltaire 1771. De la chronologie reformde par Newton, qui
fait le monde moins vleux de cinq cent ans // Collection complette
des oeuvres de Vх xx, 14. Melanges philosophiques, litteraires,
historlques etc. Geneve, 2, 100-103.
Wahr J.M. 1981a. A normal mode expansion for the forced
response of a rotating earth // Geophys. J. R. Astr. Soc. 64,
651-675.
Wahr J.M. 1981b. Body tides on an elliptical, rotating, elastic
and oceanless earth // Geophys. J. R. Astr. Soc. 64, 705-727.
Wahr J. 1981b. The forced nutations of an elliptical, rotating,
elastic and oceanless Earth // Geophys. J. R. Astron. Soc. 64,
705-727.
Wahr J.M. 1982. The effects of the atmosphere and oceans
on the Earth’s wobble: 1.Theory // Geophys. J.R. Astr. Soc. 70,
349-372.
Wahr J.M., Bergen. Z. 1986. The effects of mantle
anelasticity on nutations, Earthly tides and tidal variations of
rotation rate // Geophys. J. R. Astr. Soc. 87, 633.
Wahr J.M., Sasao T.A. 1981. Diurnal resonance in the
ocean’s load responce // Geoph. J. Roy. Astron. Soc. 64, 747-
765.
Walesch H., Meyer H., Piel H., Schurr J. 1995. The
Gravitational Forse at Mass Separations from 0,6 m to 2,1
m and Precise Measurement of G // IEEE Transactions on
Instrumentation and Measurement. 44, 2, April, 491-493.
Walter H.G., Sovers O.J. 2000. Astrometry of Fundamental
Catalogues (The Evolution from Optical to Radio Reference
Frames). Berlin: Springer, 231 p.
Wand Th. 1871. Die Principien der mathematischen Physik
und Potentialtheorie. Leipzig: B.G. Teubner, 184 S.
Wang Y.M. 2001. GSFC00 mean sea surface, gravity
anomaly, and vertical gravity gradient from satellite altimeter data
// J. Geophys Res. 106, C12, 31167-31174.
Watkins M.M., Fanes 1993. Tidally coherent diurnal and
semdiurnal geocentr variations observed with Lageos laser
ranging. AGU/MSA/GS. Spring Meet. Baltimore.
Watts A.B., Korner G.D., Wessel P., Hastings J. 1985. Global
gravity data bank system. N.Y., 85 p. (Techn. Rep./Lamont-
Doherty geol. Observ.; 4).
Weber J. 1966. Gravitational schielding and absorption //
Phys. Rev. 146, 935-937.
Wells WCS. - ed. 1984. Spaceborne Conference Gravity
Gradiometers. Science Application, Inc. P.O. Box 1303 McLean,
VA 22102. NASA CP-2305. 86 p.
Williamson R.R. 1963. Gravity sensing instrument. Патент
САШ. Кл. 73-382, №3114264, 17.12.63.
Wilsing J. 1889. Bestimmung der mittleren Dfchtigkeit der
Erde mit Hulfe eines Pendelapparates // Publ. des Astrophys.
Obs. Zu Potsdam. 6, 23, 133-193.
Wilson L. 1971. Noninertial strapping-down gravity gradient
navigation. Патент США. Кл. 73-151, №3445266. 15.03.71 (Пе-
ревод №2784. Под ред. А.И. Сороки. М.: ОВТИ им. Н.Е. Жу-
ковского).
Wu Р. 1997. Effect of viscosity structure on fault potential
and stress orientations in eastern Canada // Geophys. J. Int. 130,
365-382.
Wu Xuefang. 1994. Theoretical basis and method lor
earthquake prediction by earth tides // J. of Earthquake
Predicition Research. 3, 305-312.
Yang J., Schramm D.N., Steigman G., Rood R.T. 1979.
Constraints on cosmology and neutrino physics from big bang
nucleosynthesis // Astrophys. J. 227, 697-704.
Yeremeyev V.F., Yurkina MJ. 1969. On the derivation of
the boudary condition in the Earth figure theory. ACC-TC-1580.
Aeronautical Chart and Information Center. St-Louis.
Yi Y. 1995. Determination of gridded mean sea surface from
Topex, ERS-1 and Geosat altimeter data. Report No. 434. Dep.
Geod. Science and Surveying. The Ohio State University.
Yu H.-Т., Ni W.-T., Hu C.-C. et al. 1979. Experimental
determination of the gravitational forces at separations around
10 meters // Phys. Rev. D. 20, 1813-1815.
Yumi S. 1970. Polar motion in recent years // Earthquake
Displacement Field and the Rotation of the Earth. Dodrecht, 45-
53.
Yurkina M.l. 1985. Sur 1'histore de la notation du potentlel
// Bulletin Geodesique. 59, 2, 150-166.
Yurkina M.l. 1993. Some reference problems in vertical
crustal movements // J. of Geodinamics. 18, 1—4, 153-157.
Yurkina M.L, Simon Z., Zeman A. Constant part of the Earth
tides in the Earth figure theory // Bulletin Geodesique. 60, 339-
343.
Zaradnicek J. 1933. Resonanzmethode fur die Messung der
Gravitatlonsconstante mittels der Drehwaage // Phys. Zeltschr.
34, 126-133.
Zharov V., Pasynok S. 1999. Atmospheric angular
momentum variations and diurnal polar motion. Polar motion:
historical and scientific problems // Proceedings of 1AU
Colloquium 178 held in Cagliari, Sardinia, Italy 27-30 September
1999. Astronomical Society of the Pacific Conference Series. 208,
555-564, ed. by S. Dick, D. McCarthy, B. Luzum. U.S. Naval
Observatory, Washington, D.C., USA.
Zerbini S., Negusini M., Romagnoli C., Domenichini F.,
Richter B., Simin D. 2001. Height and gravity variations by
continuous GPS and gravity measurements in the southern
PO Plain // 1AG International Symposium on Resent Crustal
Movements, SRCM'01, Helsinki, Finland, August 27-31, 2001.
Abstracts. Ed. by Markku Poutanen, Klrkkonummi, 29-30.