/









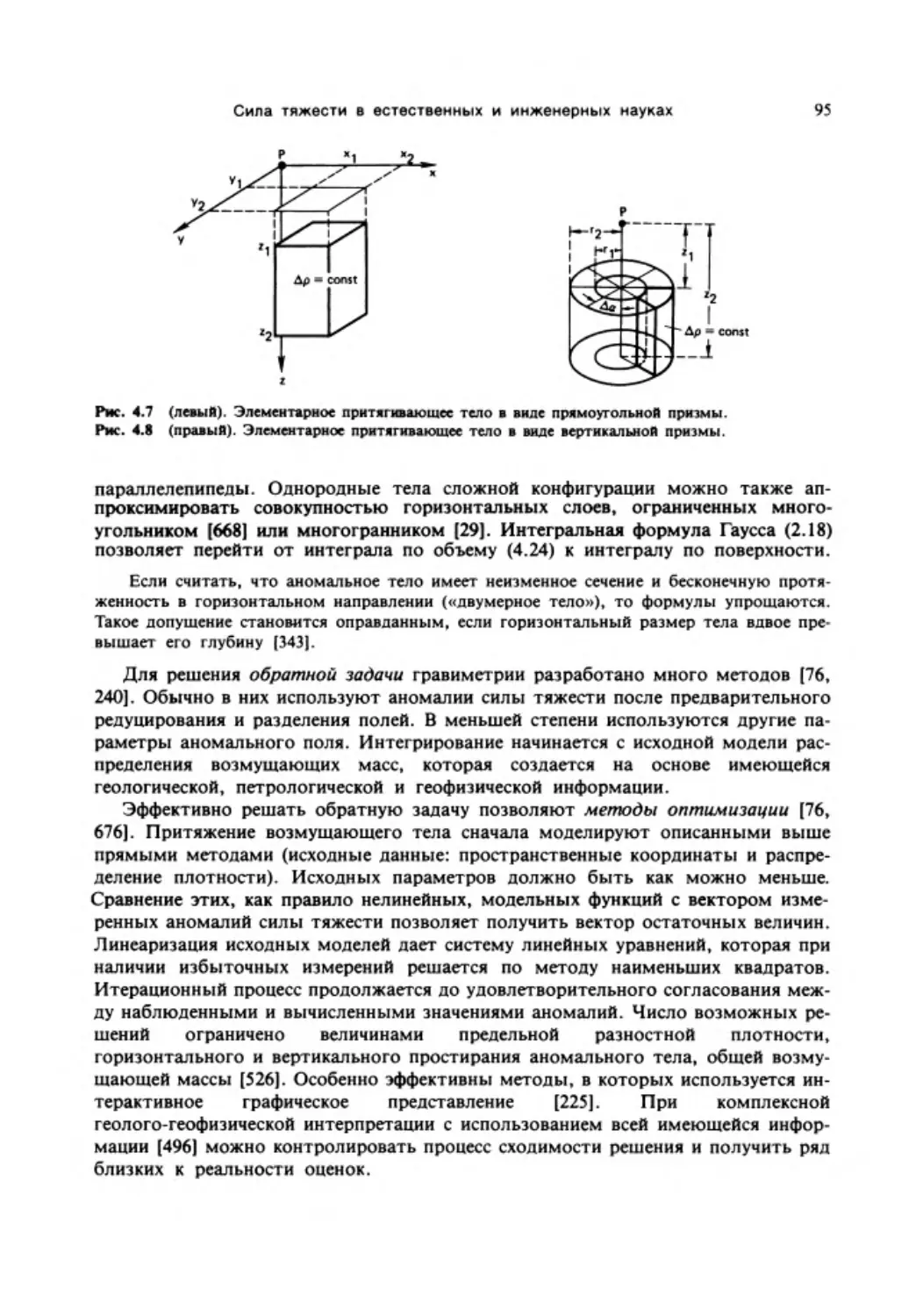


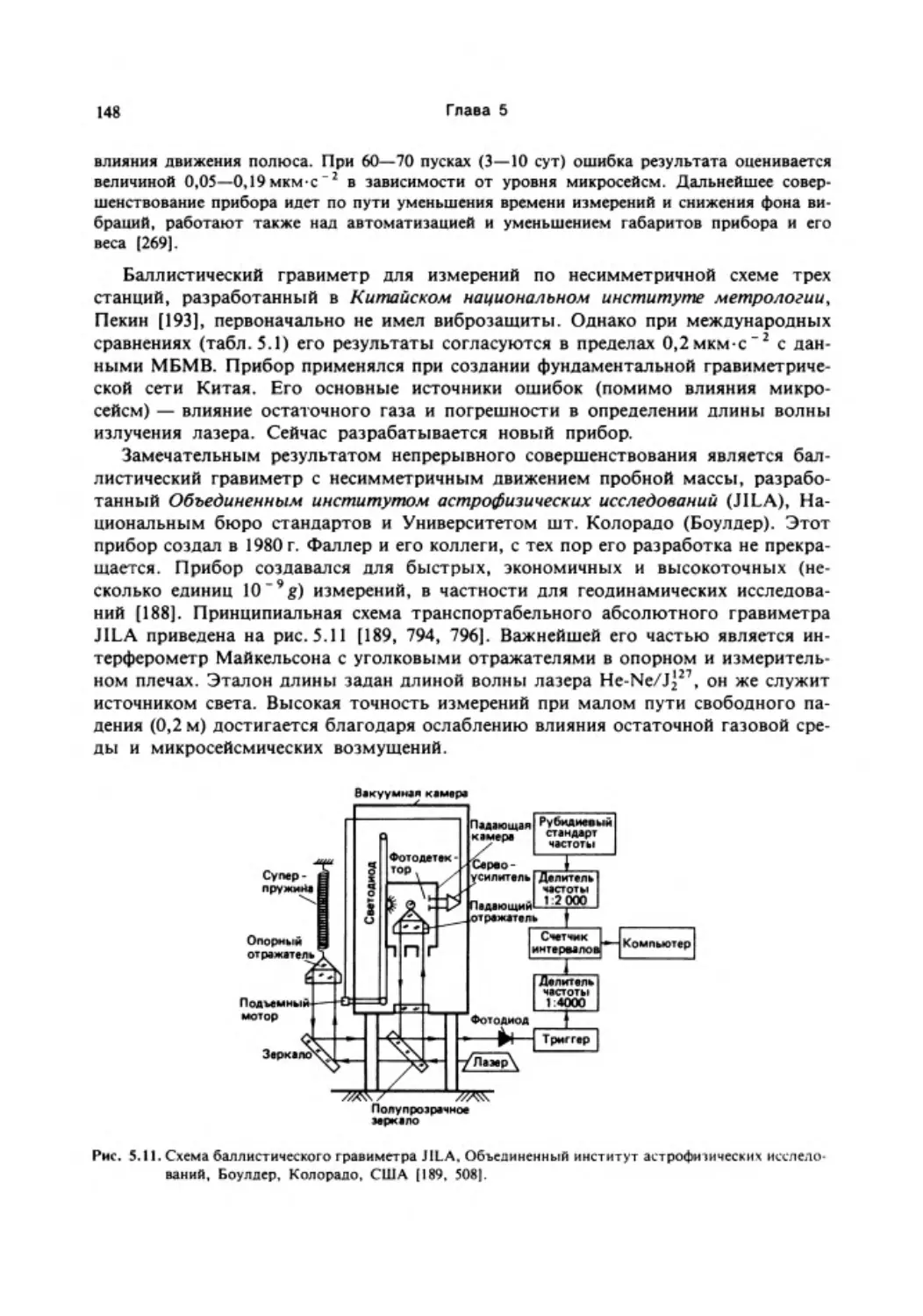

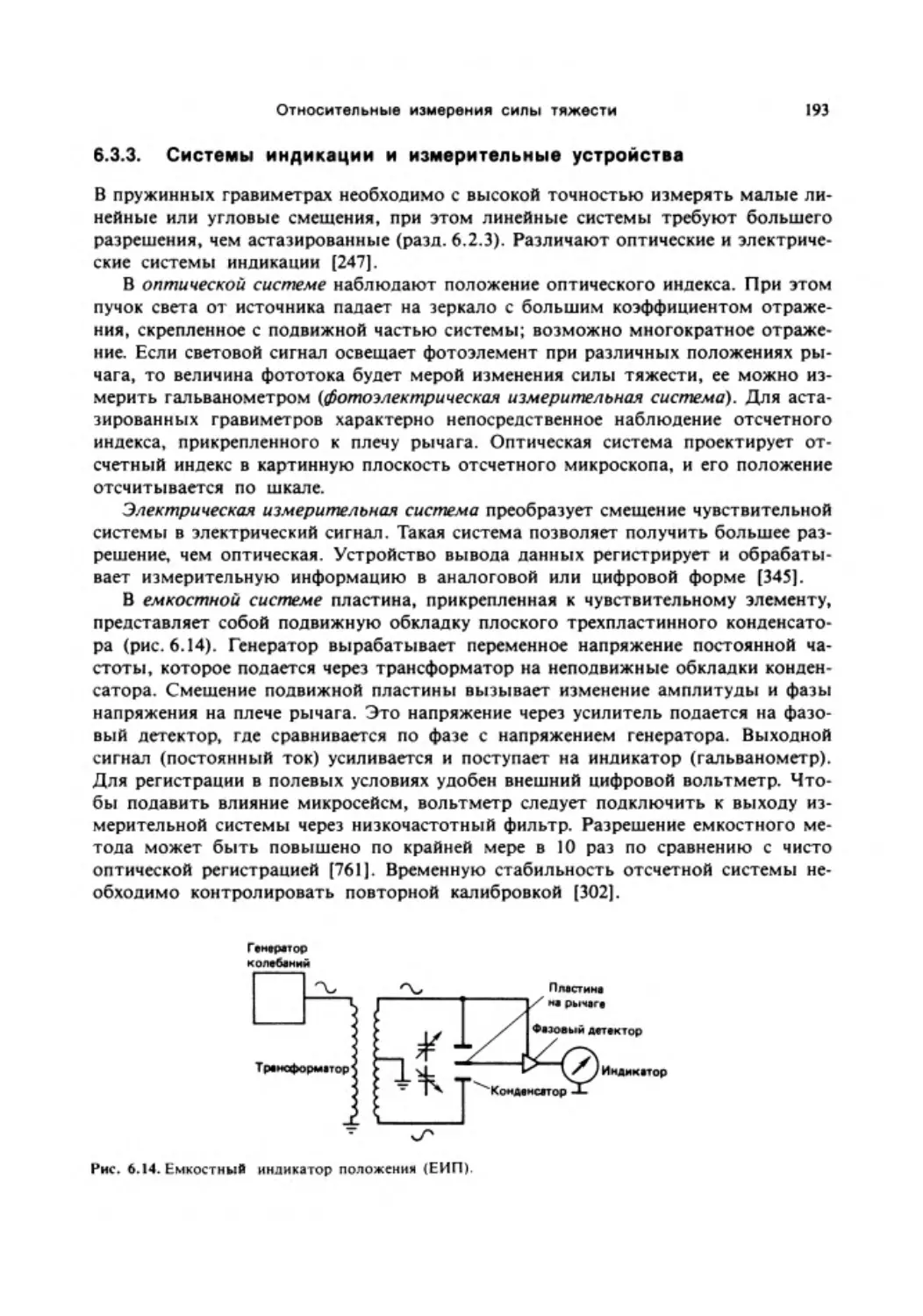
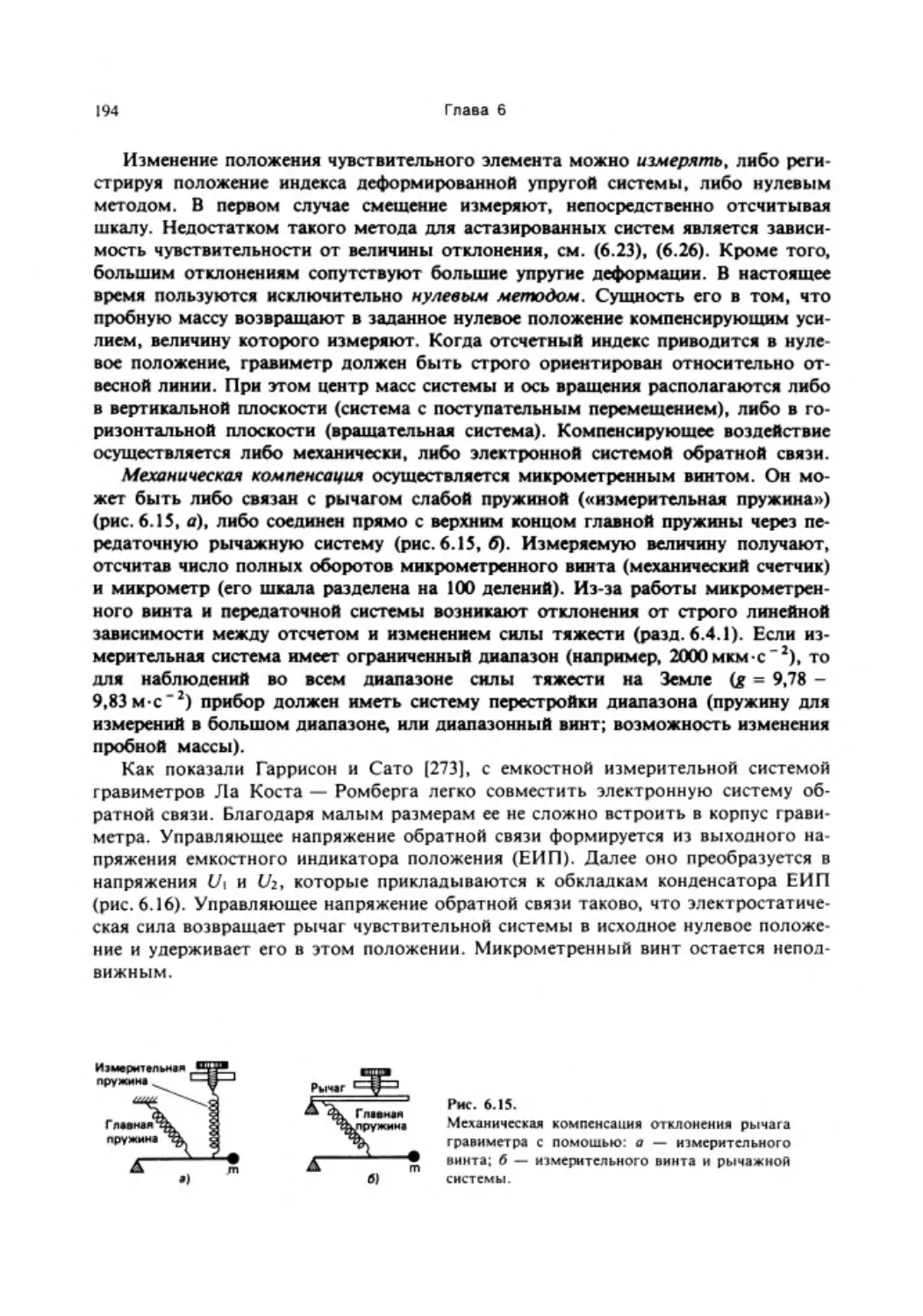
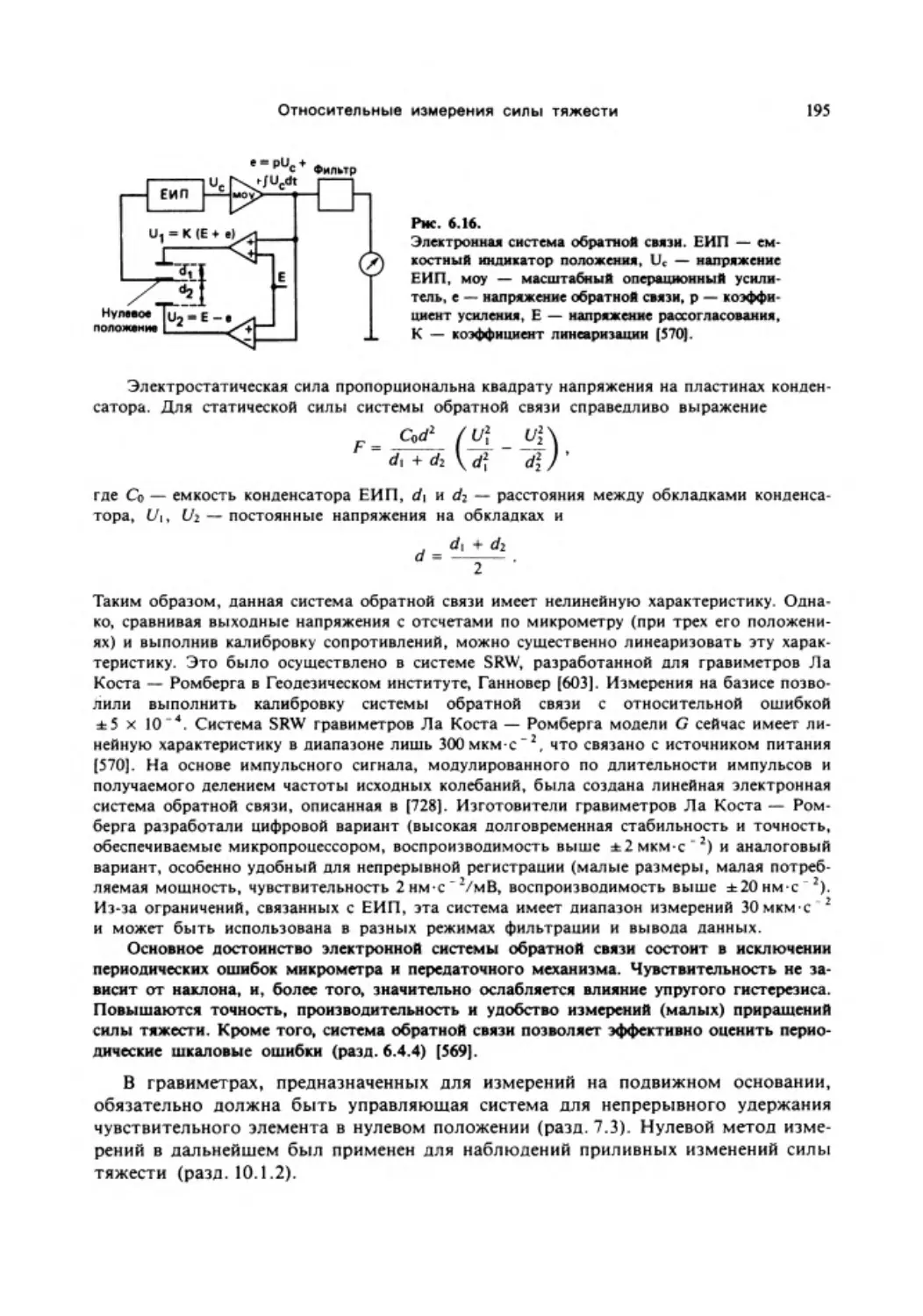
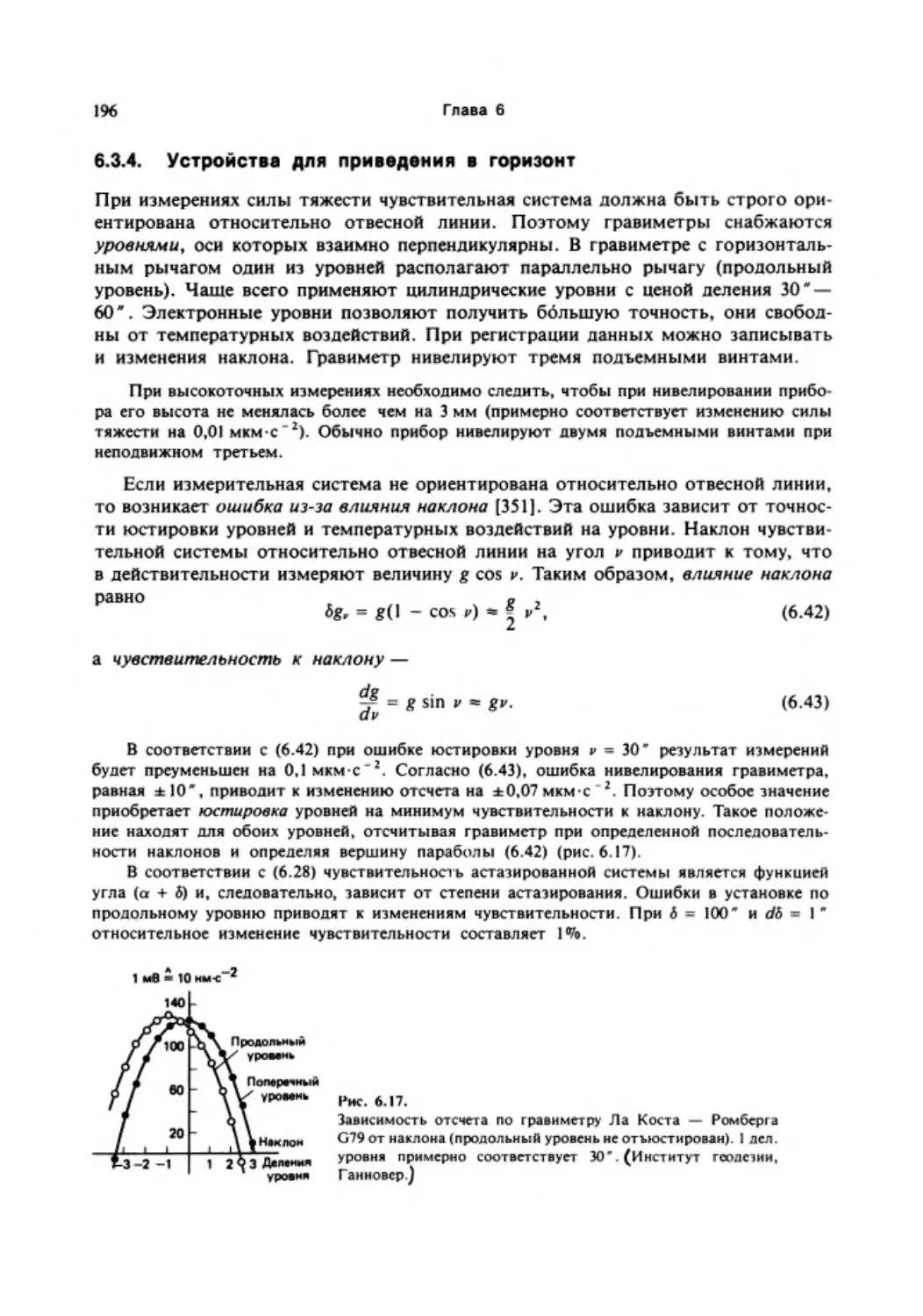






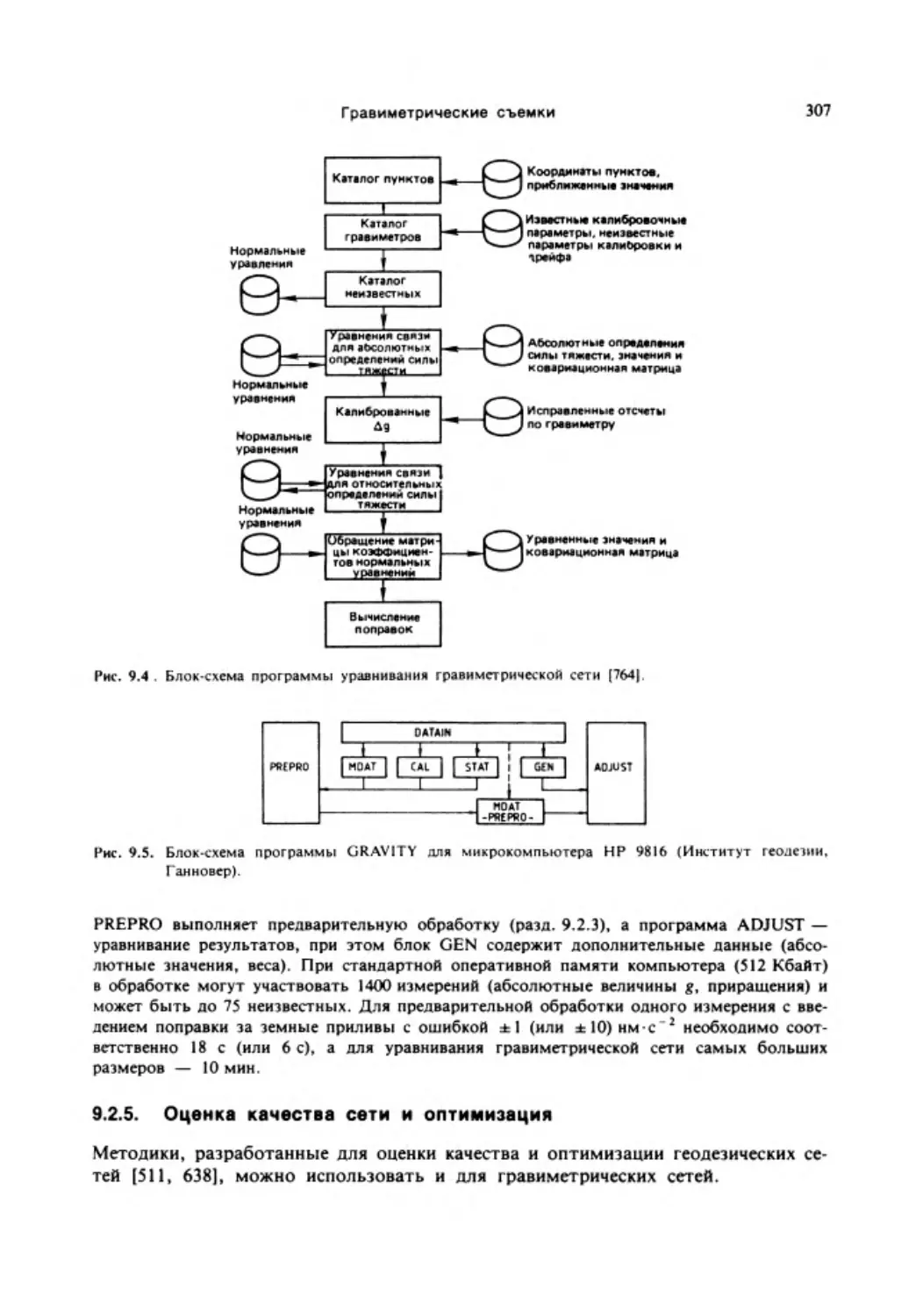
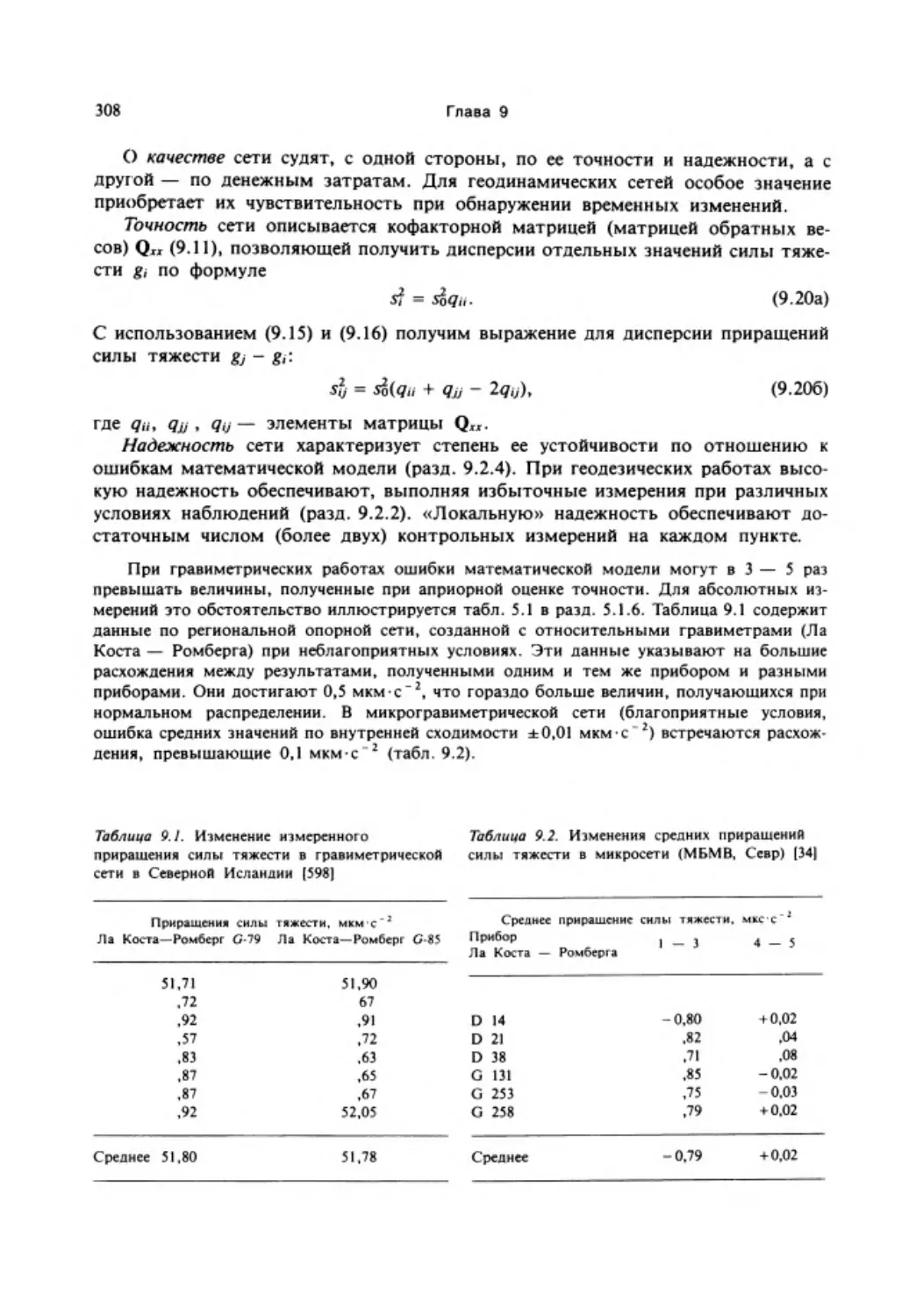
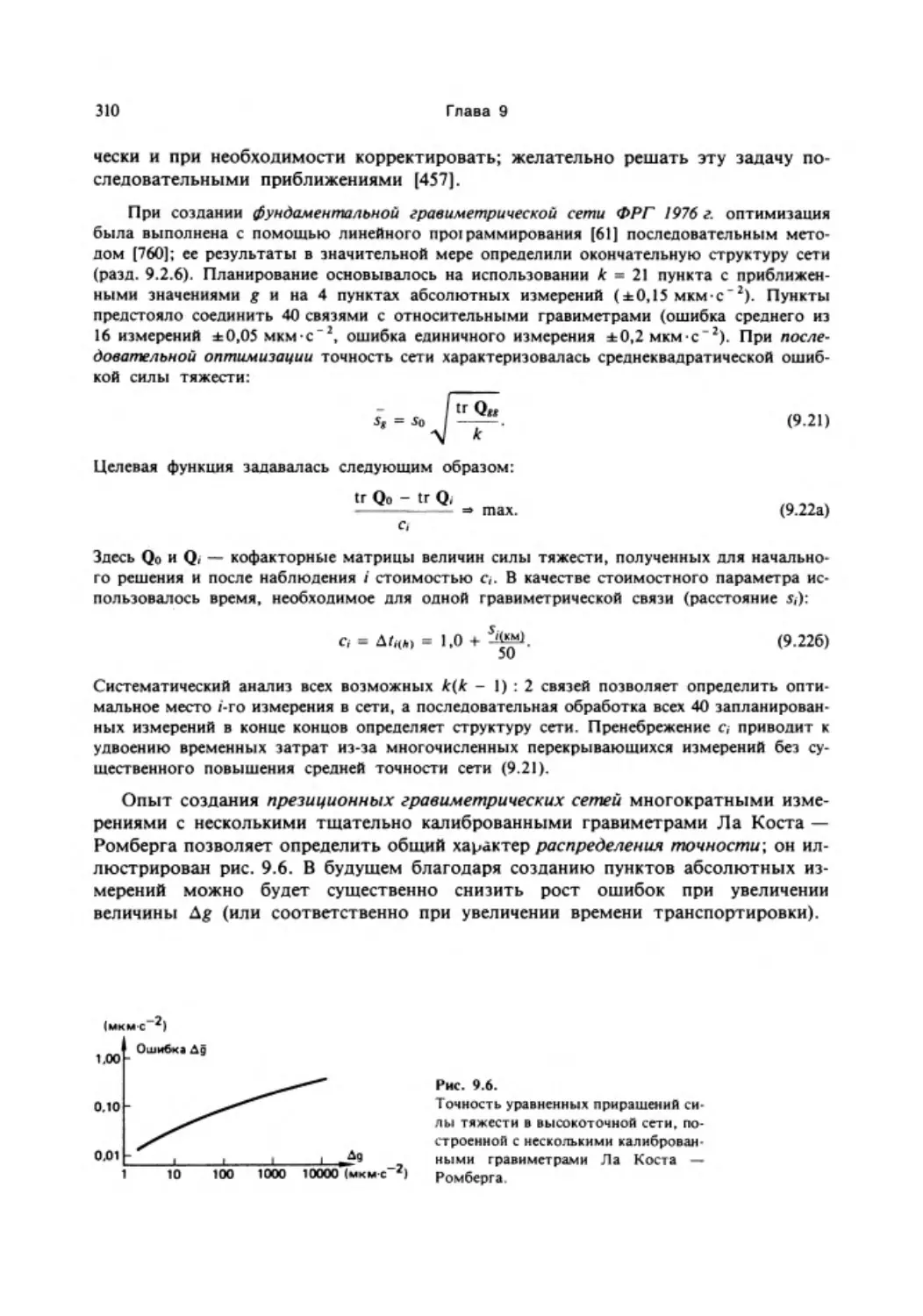
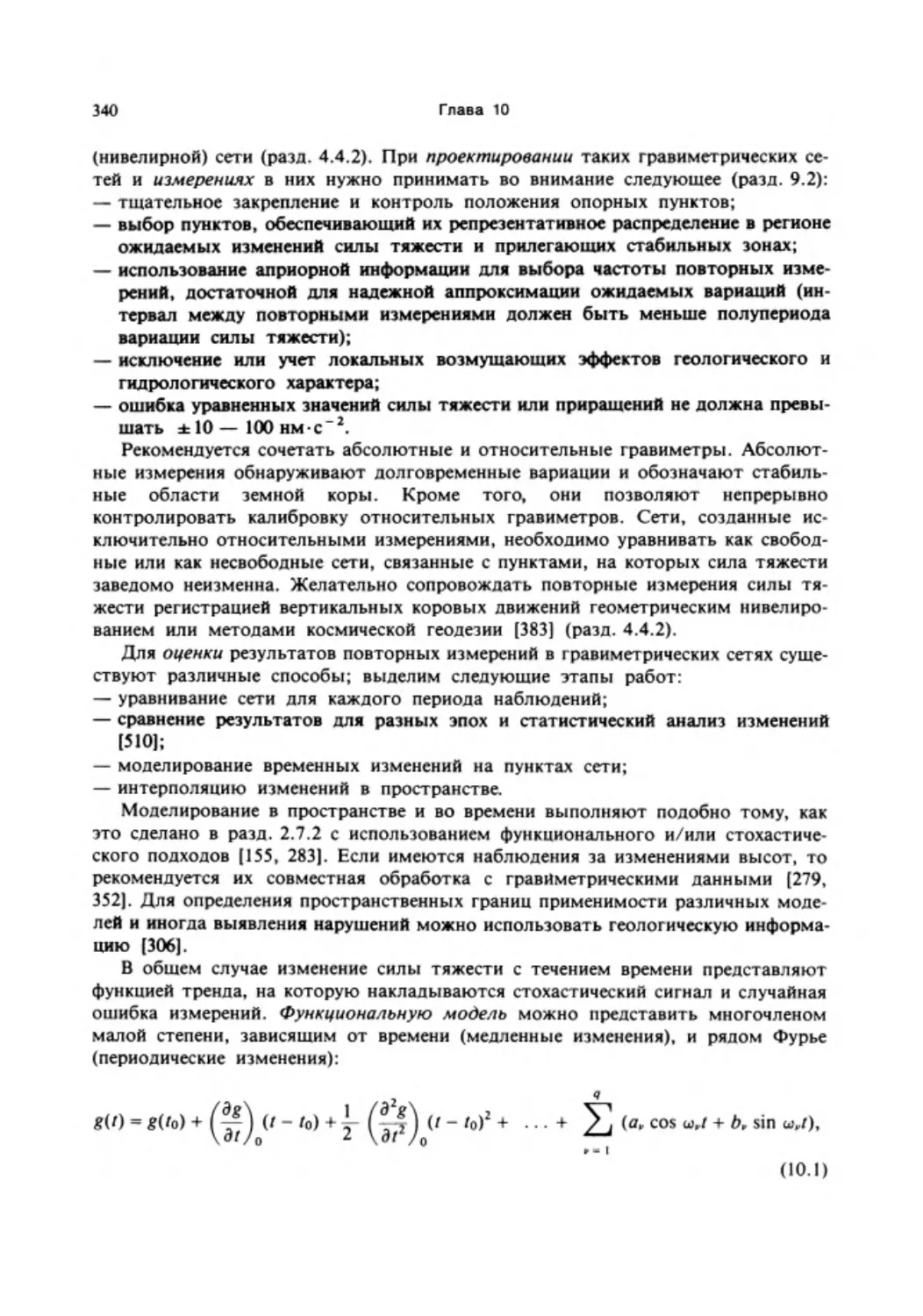
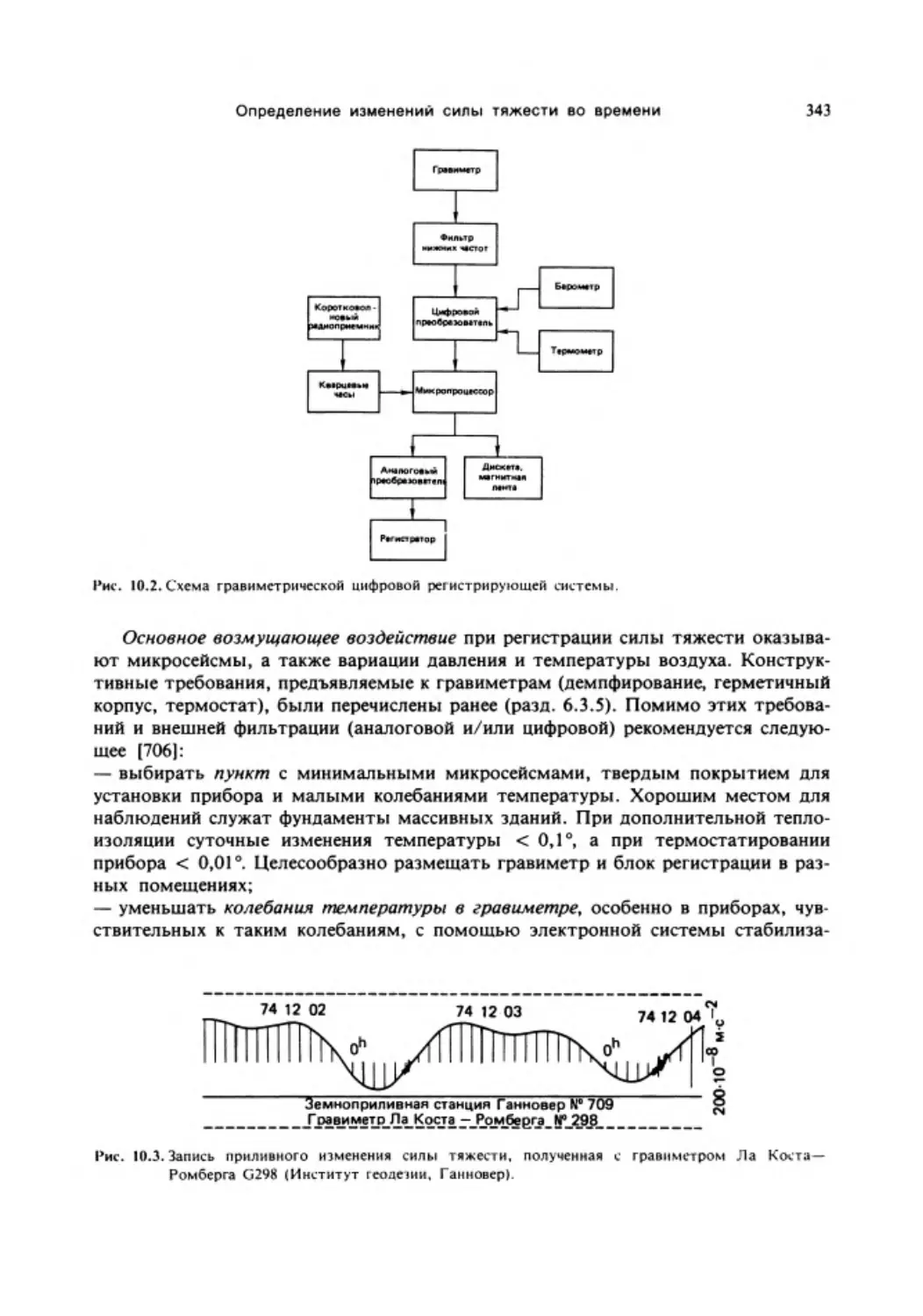



Текст
Гравиметрия
Вольфганг Торге
Гравиметрия
Перевод с английского
канд. техн. наук Г. А. Шанурова
под редакцией
канд. техн. наук А. П. Юзефовича
Москва «Мир» 1999
УДК 528.2
ББК 26.11
Т59
Т59
Торге В.
Гравиметрия: Пер. с англ. — М., Мир, 1999. — 429 с., ил.
ISBN 5-03-002809-9
В книге известного немецкого специалиста, основанной на курсе лекций в
Университете Ганновера, рассматриваются все основные разделы гравиметрии:
теория гравитационного поля Земли и его пространственно-временная
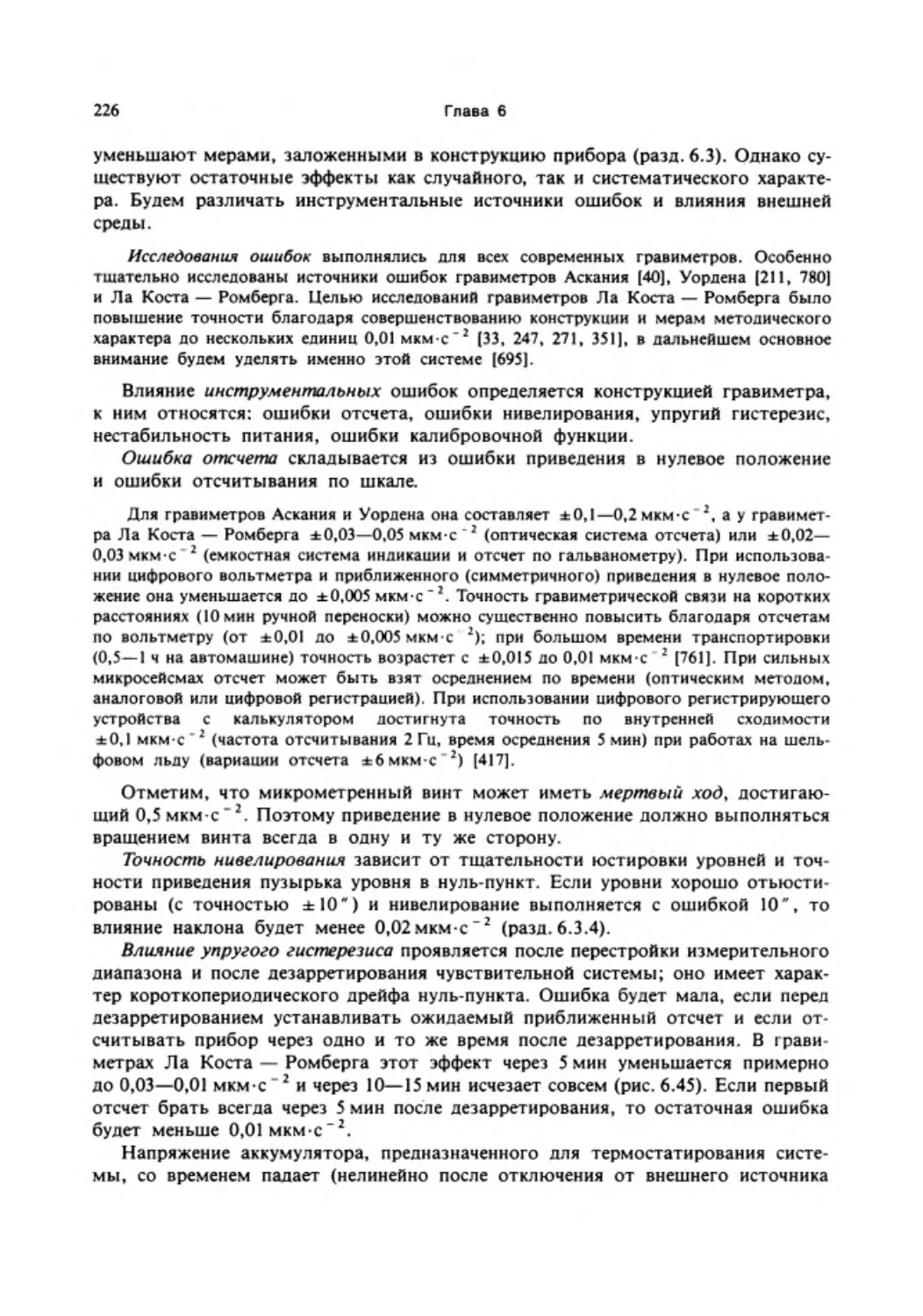
структура, измерения силы тяжести и вторых производных гравитационного
потенциала, гравиметрические съемки и изучение изменений силы тяжести во
времени. Отличается энциклопедической полнотой охвата материала и отра
жает новейшие направления (инерциальную гравиметрию, градиен-тометрию
на подвижном основании и др.). Может служить справочным руководством и
учебным пособием.
Для специалистов по геодезии и геофизике, студентов и аспирантов,
специализирующихся в указанных областях, преподавателей вузов.
ББК 26.11
Федеральная целевая программа книгоиздания России
Данное издание осуществлено при участии
Московского аэро геодезического предприятия, МИИГАиК,
Военно-топографической службы и Института физики Земли РАН.
Редакционная группа по выпуску литературы по геологии
ISBN 5-03-002809-9 (русск.)
ISBN 3-11-010702-3 (англ.)
© Copyrigt 1989 by Walter de Groyter & Со.,
Berlin
© перевод на русский язык, Шануров Г. А., 1999
©оформление, «Мир», 1999
От Федеральной службы геодезии и картографии России
Гравиметрия, родившаяся в 17 веке как раздел геодезии, развивается в последние
десятилетия быстрыми темпами. Успехи теоретических разделов геодезии и гео
физики, совершенствование методов изучения гравитационного поля и обработки
измерений, новые виды гравиметрической аппаратуры повлекли резкое повыше
ние точности и детальности гравиметрических данных и значительно расширили
области практического применения гравиметрии. Наряду с традиционными гео
дезическими и геофизическими приложениями современные методы гравиметрии
позволяют выполнять исследования геодинамических явлений, исследования для
целей инженерной геологии, археологии, прогноза землетрясений и т.д.
В России первые измерения силы тяжести были сделаны еще в 18 веке; во
второй половине 19 века начались систематические работы, к середине нашего
столетия гравиметрическая съемка, проводившаяся геодезической службой, стала
наиболее значительным сплошным массивом мировой съемки.
В геодезическое приложение гравиметрии значительный вклад внес Ф.Н. Кра
совский, выдвинувший идею о совместном использовании астрономо-геодезиче
ских и гравиметрических данных. И.А. Казанский в ЦНИИГАиК впервые в исто
рии геодезии получил высоты геоида и уклонения отвеса по измерениям силы
тяжести. Фундаментальное значение в геодезической гравиметрии имеют работы
М.С. Молоденского, обосновавшего строгую теорию определения поверхности и
внешнего гравитационного поля Земли, которая получила всеобщее признание в
мире. Теория Молоденского развита в трудах Л.П. Пеллинена, В.Ф. Еремеева,
М.И. Юркиной, В.В. Бровара.
Более полувека геодезическая служба страны занимается разработкой грави
метрической аппаратуры и методик измерений. В 1938 г. М.С. Молоденский по
строил первый отечественный статический гравиметр, модификации которого вы
пускались серийно. Создано несколько поколений маятниковых приборов для
морских и сухопутных работ (М.Е. Хейфец).
Федеральная служба геодезии и картографии России постоянно совершенству
ет опорную гравиметрическую сеть страны, которая теперь содержит фундамен
тальные пункты и строится сочетанием трех независимых методов измерения си
лы тяжести, исключительно с отечественными приборами. Национальная опор
ная сеть является одной из лучших в мире и превосходит по точности мировую
сеть. Проводятся значительные работы по созданию гравиметрических полиго
нов, исследования неприливных изменений силы тяжести, съемки на суше, в от
крытом море и на шельфе по программам национальной и мировой гравиметри
ческих съемок в геодезических целях и для изучения внутреннего строения Земли
и процессов в ее недрах.
6
Предисловие редактора перевода
Успешное решение многих научных проблем, связанных с использованием
данных гравиметрии и осуществлением больших исследовательских программ,
возможно только при тесном международном сотрудничестве. Обсуждение ре
зультатов, достигнутых в разных странах, обмен идеями и накопленным опы
том, разработка согласованных рекомендаций характерны для современного эта
па развития гравиметрии.
Углублению международного сотрудничества и знакомству с мировым опы
том исследований гравитационного поля, несомненно, будет способствовать рус
ское издание книги известного немецкого геодезиста, президента Международной
ассоциации геодезии профессора Вольфганга Торге «Гравиметрия». В книге изло
жены основные разделы гравиметрии, включая теорию гравитационного поля и
его пространственно-временную структуру, методы измерения силы тяжести и
вторых производных ее потенциала, гравиметрические съемки на суше, на море
и в воздухе. Однако от известных отечественных и зарубежных изданий книгу
отличает большое внимание к современным задачам гравиметрии, связанным с
интересами развития различных областей знаний, к геодинамическим приложени
ям (для которых автор приводит многочисленные примеры), а также к новым
ее направлениям, ранее не освещенным в систематическом изложении.
Книга будет способствовать широкому участию российских геодезистов и гео
физиков в международных программах в рамках МАГ и поможет вузам России
готовить исследователей, владеющих современными методами изучения гравита
ционного поля Земли.
Предисловие редактора перевода
Изучение гравитационного поля Земли — интереснейшая и быстро развивающая
ся область геодезии, геофизики и геодинамики, которой посвящена предлагаемая
книга Вольфганга Торге, профессора геодезии Ганноверского университета, прези
дента Международной ассоциации геодезии. Известны многочисленные работы
автора по созданию высокоточных методик в гравиметрии, построению грави
метрических сетей, аппроксимации результатов съемок, изучению локальных геодинамических явлений.
Для книги характерна энциклопедичность, она содержит все основные разде
лы гравиметрии, причем изложение каждый раз начинается с теоретических
основ и завершается практическими результатами. Впервые в книге по гравимет
рии читатель найдет описание баллистических гравиметров разных конструкций,
зарубежных методов эталонирования пружинных гравиметров с помощью кали
бровочной системы и системы обратной связи, методик прецизионных съемок,
разделы с основами инерциальной гравиметрии и градиентометрии на подвиж
ном основании, вопросы оптимизации сетей, современную постановку редукцион
ной задачи на гравиметрическом пункте и ее решение с учетом вариаций атмос
ферного давления и гидрологического режима, движения полюса, результаты
изучения техногенных изменений силы тяжести. От прежних публикаций на рус
ском языке книгу также отличают подробные сведения о применении методов
гравиметрии для локальных геодинамических исследований. Автор привел и под
Предисловие редактора перевода
7
робный исторический обзор развития гравиметрии, содержащий малоизвестные
факты.
Книга основана на лекциях В. Торге в Ганноверском университете, что сказа
лось на удачном отборе и систематизации материала, последовательности изло
жения. Она может быть хорошим справочным руководством для специалистов
и учебным пособием для студентов-геодезистов и геофизиков, а также аспи
рантов.
Автор привел сведения о состоянии гравиметрических исследований в нашей
стране, однако почти исключительно по публикациям на английском языке. Поэ
тому в примечаниях даны наиболее важные дополнения.
Появление книги на русском языке стало возможным благодаря поддержке
Московского аэрогеодезического предприятия, МИИГАиК, Военно-топографиче
ской службы и Федеральной службы геодезии и картографии России, Института
физики Земли РАН. Руководителям этих ведомств редактор и переводчик выра
жают признательность.
А. П. Юзефович
Январь 1993 г.
Предисловие к русскому изданию
Монография «Гравиметрия» была опубликована в 1989 г. в серии книг по геоде
зии и топографии на английском языке, выпускаемых издательством Walter de
Gruyter. Эта монография, задуманная как подробное справочное руководство по
наземным измерениям силы тяжести, была хорошо принята как геодезистами,
так и геофизиками, осознавшими определенный пробел в этой области. Я был
очень рад, когда доцент МИИГАиК А.П. Юзефович обратился ко мне в 1991 г.
и сообщил о намерении перевести книгу на русский язык и согласии издательства
«Мир» осуществить русское издание. Высоко оценивая работы русских ученых
и инженеров и их широкое применение в геодезической и геофизической грави
метрии, я искренне рад возможности присоединить к числу читателей своей кни
ги гравиметристов России. Благодарю доцента Г.А. Шанурова за перевод книги
на русский язык и доцента А.П. Юзефовича за инициативу и редактирование пе
ревода. Надеюсь, что русское издание «Гравиметрии» принесет пользу междуна
родному сотрудничеству в науках о Земле.
Вольфганг Торге
Ганновер, март 1993
Предисловие
История изучения гравитационного поля по измерениям силы тяжести, начиная
с открытий Галилео Галилея, насчитывает более 300 лет; при этом методы изме
рений и обработки разультатов непрерывно совершенствуются. Накопленные к
нынешнему времени гравиметрические данные и увеличение на пять порядков
точности измерений сделали весьма совершенным наше представление о про
странственно-временной структуре гравитационного поля Земли. Особо важное
значение имеют данные, полученные за последние 30 лет. Наряду с гравиметрами
с чувствительной системой на упругой пружине сейчас применяются баллистиче
ские приборы, а также приборы, использующие эффект сверхпроводимости.
Весьма перспективно использование гравиметров, устанавливаемых на подвиж
ном основании, и градиентометров. Одновременно с совершенствованием изме
рительной техники увеличивается объем гравиметрических работ на суше, на мо
ре и в воздухе. Использование новых математических моделей и методов анализа
результатов позволяет успешно решать геодинамические проблемы.
В данной монографии дан полный обзор современного состояния гравиметри
ческих измерительных систем, их применения, а также методов обработки и
Предисловие
9
оценки. Кроме того, подробно описаны источники ошибок и оценивается воз
можная точность измерений. Книга строится на хорошо изложенной теории гра
витационного поля и современных данных о гравитационных полях Земли, Луны
и планет. Междисциплинарный аспект гравиметрии подчеркивается всесторонним
рассмотрением использования гравиметрических данных в различных областях.
Книга содержит практические рекомендации о том, как создавать гравиметриче
ские сети и выполнять гравиметрические съемки. Особое внимание уделено иссле
дованию и интерпретации временных вариаций силы тяжести; это вызвано тем,
что методы изучения современных геодинамических явлений и мониторинга дви
жений близповерхностных слоев Земли пока еще разработаны не полностью. Ис
торический обзор и описание классических работ позволяют увидеть, как сочета
ние исследовательских идей с имевшейся измерительной техникой вывело грави
метрию на ее теперешний уровень. Многочисленные примеры отдельных
исследований, измерительных систем, гравиметрических съемок, моделей и мето
дов интерпретации, а также обширный список литературы позволяют судить как
о современном состоянии, так и о нерешенных проблемах гравиметрии.
Итак, данная книга создавалась как современное стандартное справочное ру
ководство для ученых и инженеров, работающих в области измерений силы тя
жести и обработки результатов, а также для специалистов по геодезии, геофизи
ке, физике и, кроме того, по космической и наземной навигации. Студенты осво
ят основы гравиметрии и моделирования поля силы тяжести; для специалистов,
занимающихся историческим аспектом наук о Земле, будут интересны историче
ские тенденции и выдающиеся достижения в данных областях.
Книга написана на основе курса, читаемого в Ганноверском университете. В
ней представлены самые современные разработки и данные исследований рабо
чей группы «Гравиметрия» Института геодезии Ганноверского университета. Я
признателен моим многочисленным коллегам за их вклад, а также благодарю
специалистов и организации, предоставившие мне иллюстративный материал.
Особую благодарность я выражаю Немецкому исследовательскому обществу,
щедро субсидирующему большинство исследовательских программ.
Хочу выразить глубокую признательность профессору Дельфу Эгге [Delf
Egge], который перевел эту книгу на английский язык, и благодарю сотрудников
Института геодезии за подготовку рукописи к изданию. И наконец, благодарю
издательство Walter de Gruyter & Со. за плодотворную совместную работу.
Эта книга посвящается памяти моих преподавателей по геодезии и гравимет
рии профессоров Вальтера Гроссмана [Walter Grossman (1897—1980)] и Альфреда
Шлезенера [Alfred Schleusener (1898—1978)], которые ввели меня в эту волную
щую область наук о Земле.
Вольфганг Торге
Ганновер, май 1989 г.
1. Введение
1.1. Задачи гравиметрии
Гравиметрия (от латинского gravis — тяжелый и греческого μετρεω — изме
ряю) — это наука об измерении силы тяжести (напряженности гравитационного
поля, нем. — die Schwere, франц. — la pesanteur), т. е. абсолютной величины
ускорения силы тяжести g:
g = |g|
(1.1)
grad g
(1.2)
и гравитационного градиента
на поверхности или близ поверхности Земли, а также других небесных тел.
В международной системе СИ единица ускорения силы тяжести имеет размер
ность м · с " 2, а единица составляющих градиента ускорения силы тяжести —
с -2. Для численного представления отклонений гравитационного поля относи
тельно поля некоторой модели и оценки точности измерений используются
единицы
1 мкм · с ~2 = 10 ~6 м · с - 2 и 1 нм · с ~ 2 = 10 _ 9 м - с -2.
(1.3)
В геодезии и геофизике обычно применяются внесистемные единицы
1 мГал = 10"5 м с -2 и 1 мкГал = 10"8 м · с ~ 2,
(1.4)
соответственно тысячная и миллионная доли единицы Гал, названной так в честь итальян
ского ученого Галилея (1 Гал = 1 см · с " 2). Во многих странах в официальных и коммерче
ских публикациях такие внесистемные единицы не приняты. В научных исследованиях,
однако, ими нередко продолжают пользоваться. В англо-американской литературе
1 мкм* с -2 часто называют единицей силы тяжести.
Для гравитационного градиента часто используется единица этвеш
1 Е = 1 0 - 9 с - 2 = 0,1 мГал/км,
(1.5)
которая также не входит в систему СИ.
Чтобы определить задачи гравиметрии более четко, рассмотрим как пример
земное гравитационное поле, которое занимает наиболее важное место в иссле
дованиях. Любая масса, участвующая во вращении Земли вокруг своей оси, ис
пытывает ускорение под действием сил тяготения (притяжения) масс Земли и
других небесных тел, а также центробежное ускорение. Результирующим являет
ся ускорение силы тяжести g. Таким образом, абсолютная величина ускорения
силы тяжести g зависит от распределения масс в Земле и во внешнем простран
стве, а также от скорости вращения Земли. Отметим, что распределение масс
12
Глава 1
и вращение подвержены изменениям во времени. Средняя на поверхности Земли
величина g равна 9,80 м - с " 2.
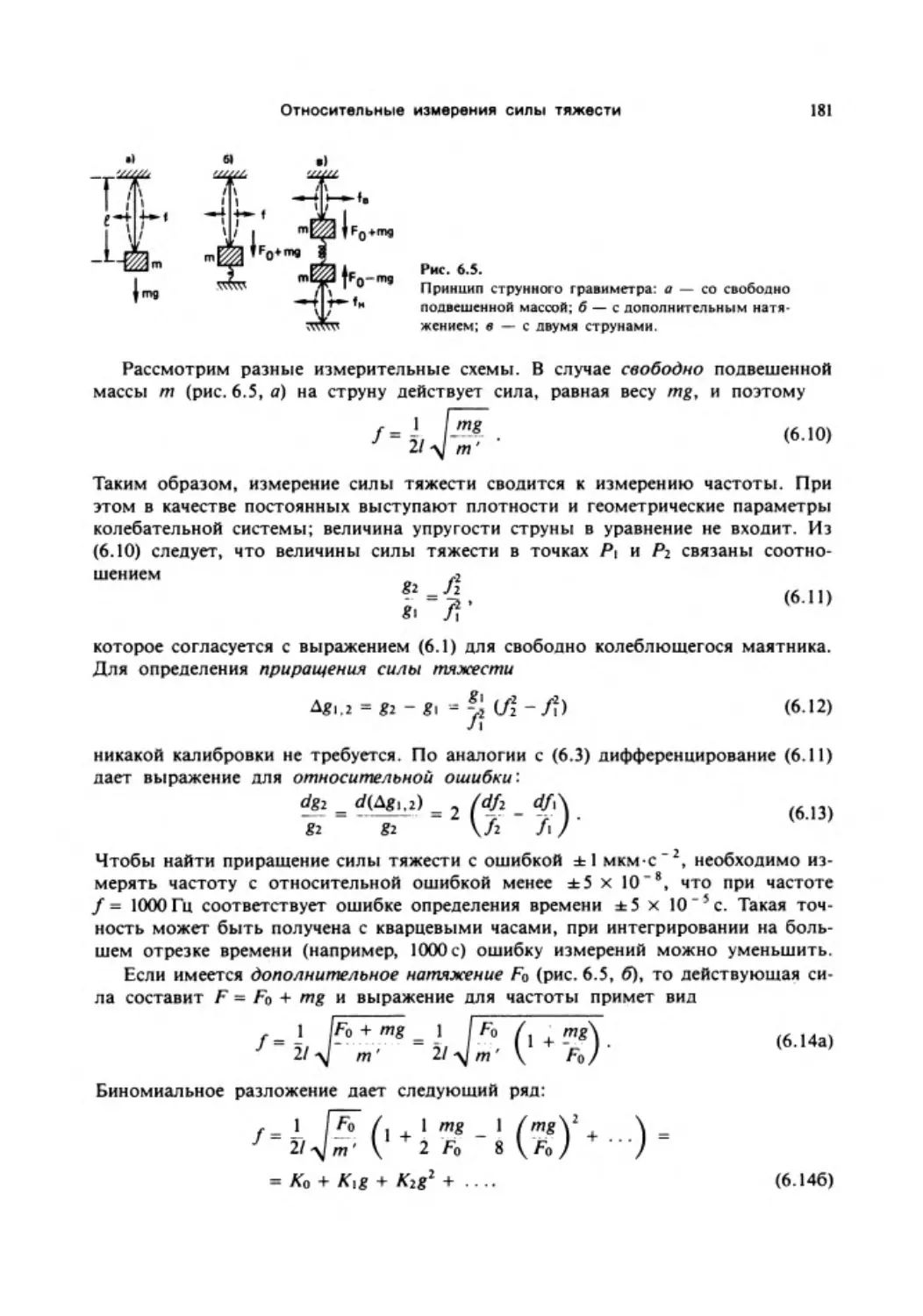
Таким образом, сила тяжести, которую измеряют на поверхности Земли, со
держит информацию о местоположении пункта наблюдений (геодезическое при
менение), распределении масс в недрах Земли (геофизическое применение) и, в
случае повторных измерений, о временных изменениях в теле Земли (геодинамическое применение). Знание гравитационного поля необходимо также в океаногра
фии, космонавтике и навигации. И наконец, сила тяжести — это фундаменталь
ный физический параметр, особенно важный в метрологии.
Различия в местоположении (от экватора до полюса) и высоте (высокие
горы — глубокое море) вызывают изменения силы тяжести не более чем
5 10"3#. Возмущающие массы (неоднородность строения Земли), расположен
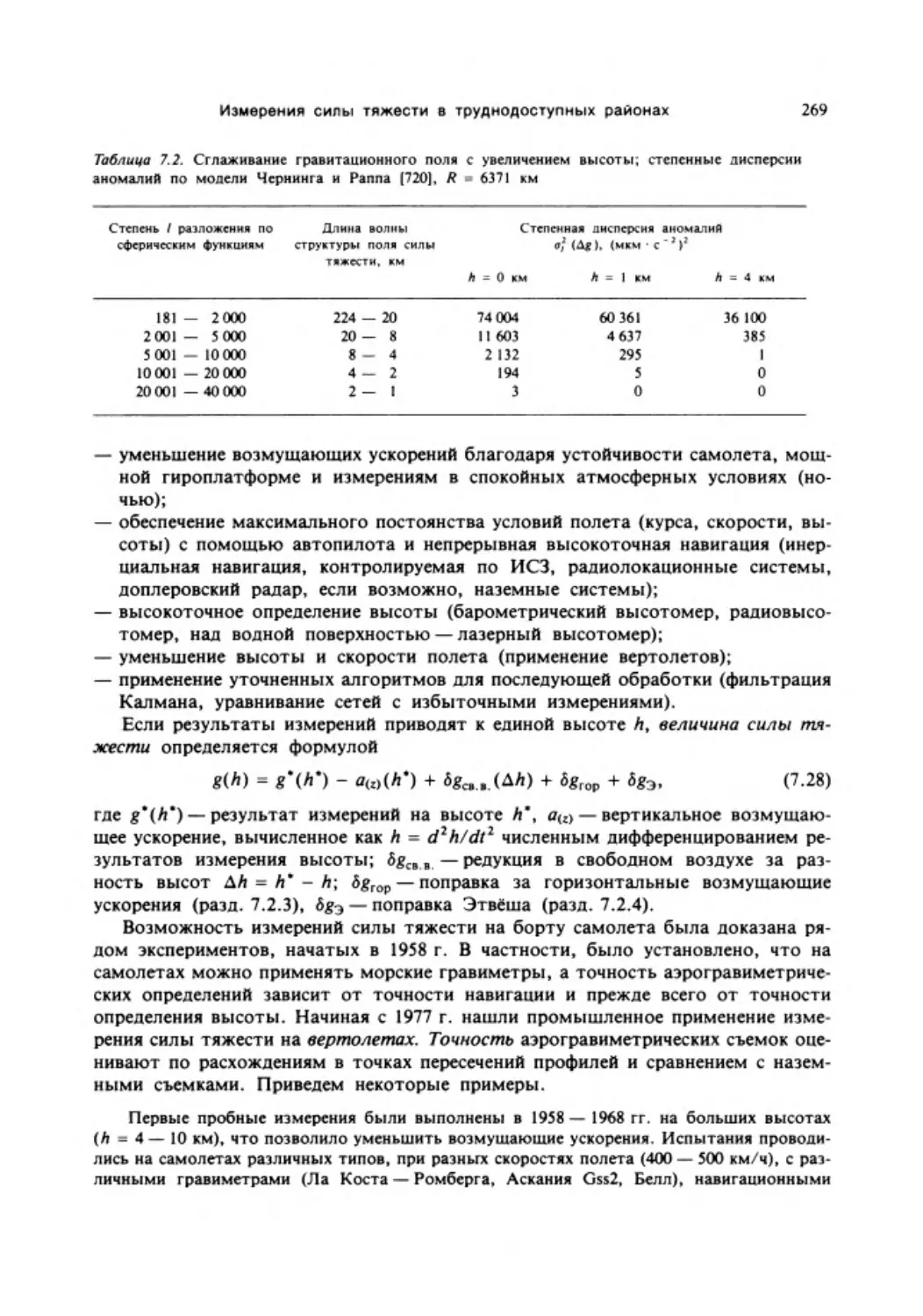
ные глубоко (в коре или мантии) или ближе к поверхности (верхние слои коры),
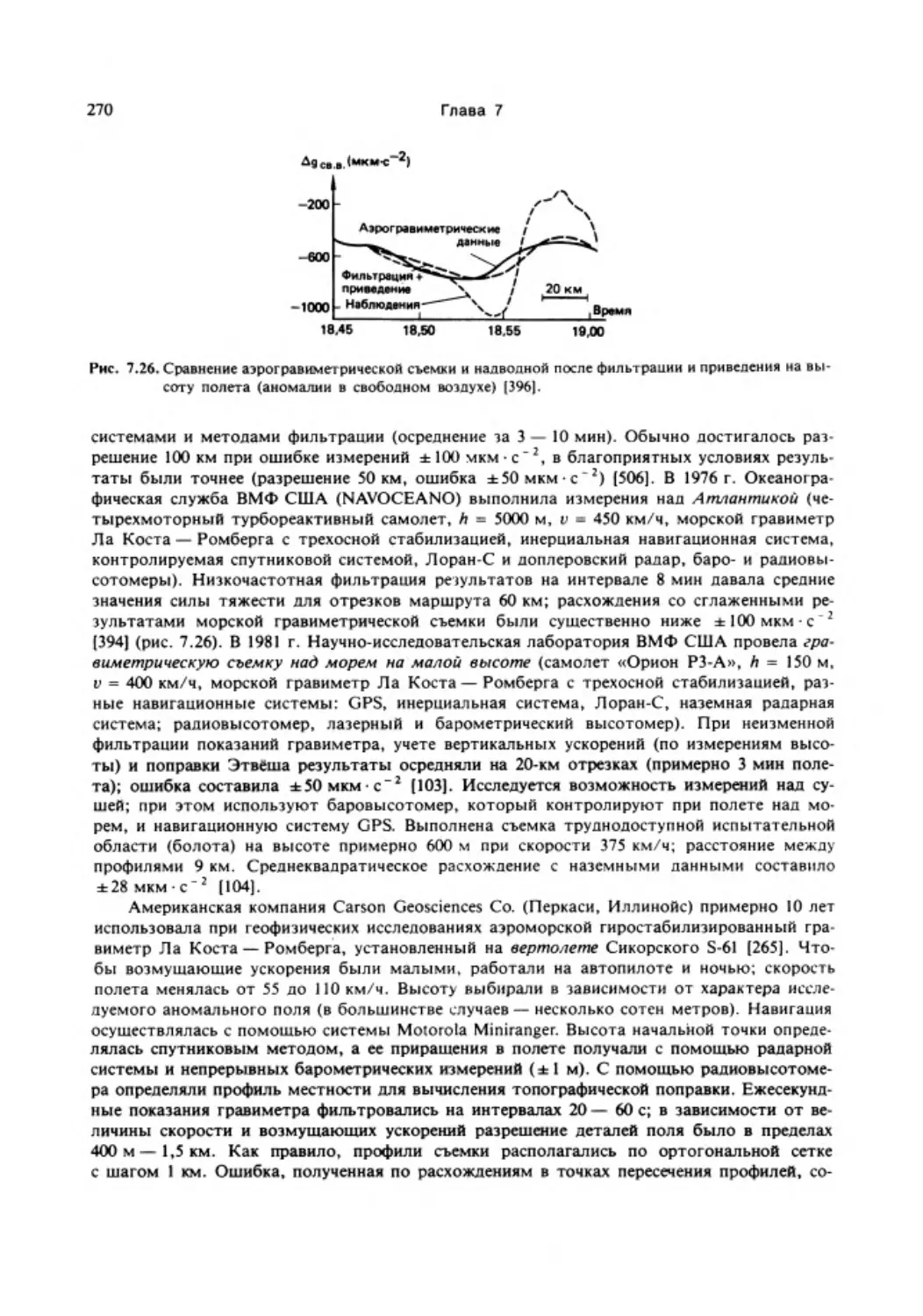
влекут изменения в зависимости от размеров региона соответственно на
5 · 10 “4 — 5 - 1 0 ' 5#. Периодические приливные эффекты достигают 3 10“ 7g,
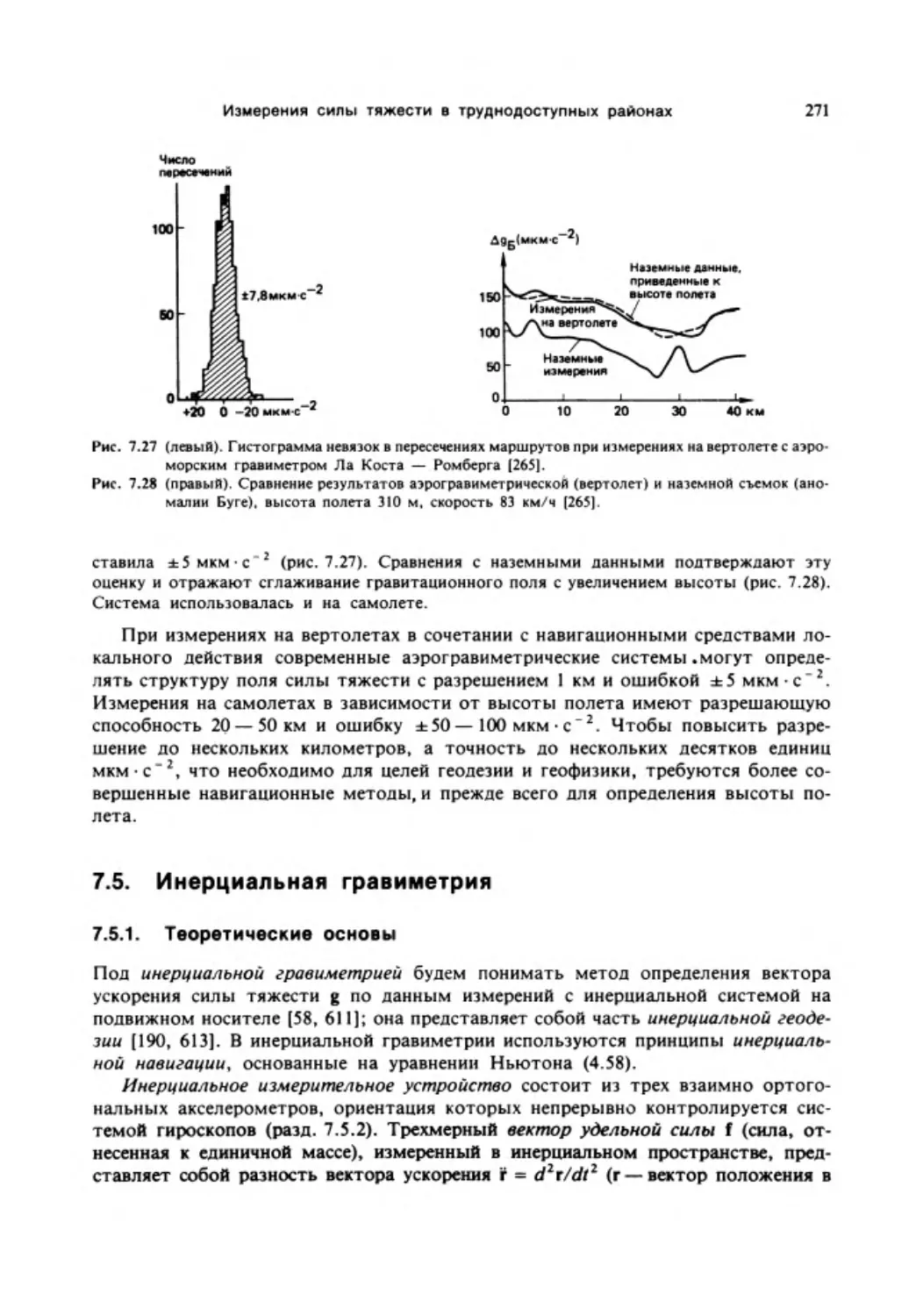
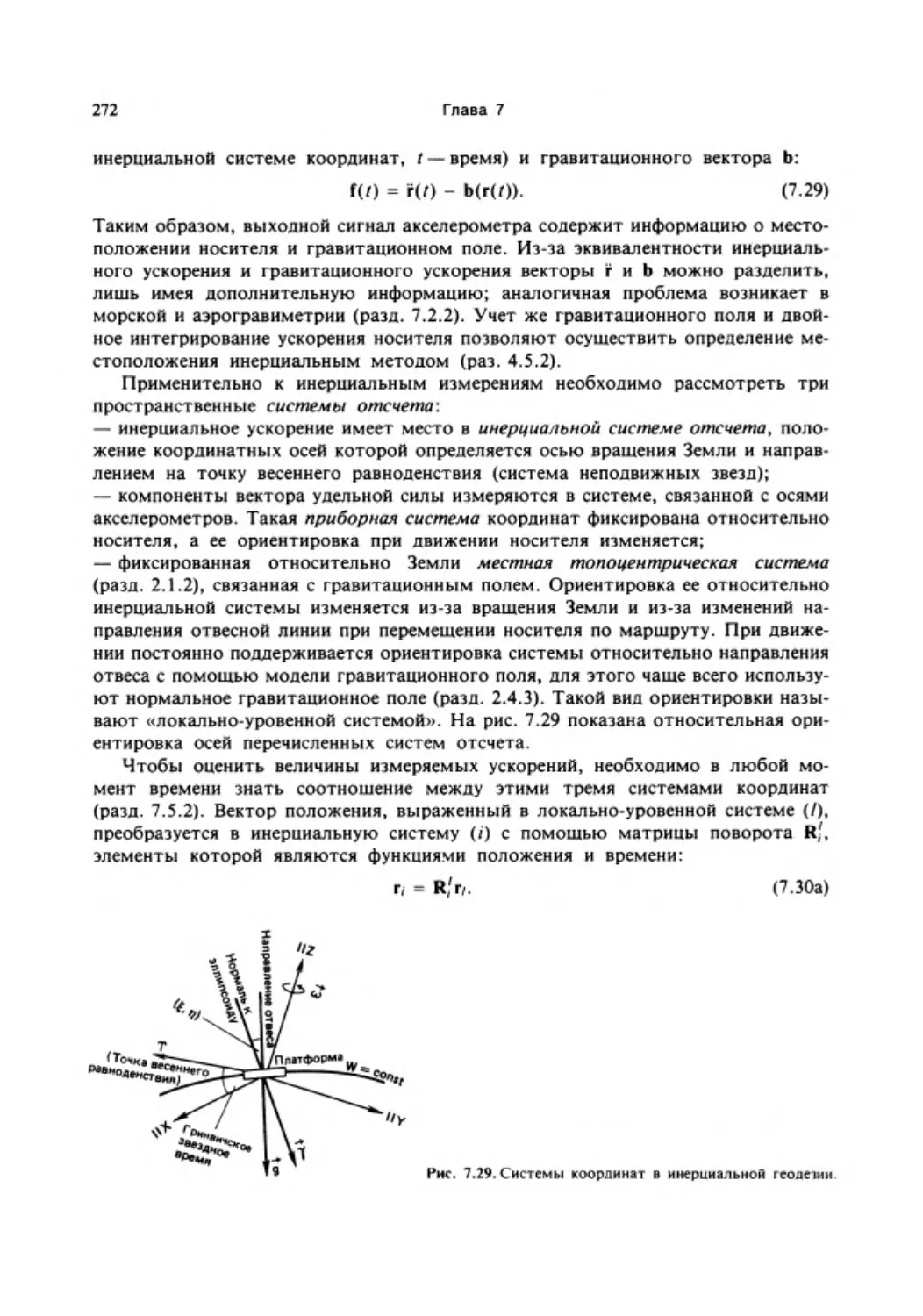
тогда как долгопериодические перемещения масс в теле Земли вызывают измене
ния силы тяжести порядка 10“ 8— 1 0 ' 9#.
Для полевых измерений используют гравиметры и гравитационные градиен
тометры (вариометры). Эти приборы представляют собой датчики с пробной
массой, поведение которой в гравитационном поле и регистрируется. Как пока
зывают приведенные величины, изучение изменений силы тяжести в зависимости
от местоположения наблюдателя становится возможным при точности измере
ний не хуже 10~4#; для оценки ate величин временных вариаций требуется точ
ность по крайней мере 10~8g, а для измерений градиентов — порядка 1 0 ' 8 —
10 " 9 с ' 2.
Итак, задачу гравиметрии можно определить следующим образом.
Задачей гравиметрии является определение гравитационного поля Земли и
других небесных тел как функции местоположения и времени по измерениям силы
тяжести и гравитационных градиентов на поверхности тела или вблизи нее.
Поэтому измерительная аппаратура, методы измерений и оценки результатов,
так же как и характер представления данных, должны быть согласованы с про
странственно-временной структурой гравитационного поля и научными задача
ми. Развитие новых технологий и методов будет способствовать постановке но
вых задач.
Определение направления вектора ускорения силы тяжести (направление отвесной ли
нии) не относят к задачам гравиметрии. Многочисленные способы решения этой задачи
дает геодезическая астрономия. Длинноволновые особенности гравитационного поля не
бесного тела изучают путем анализа возмущений орбит спутников. Соответствующие ме
тоды рассмотрены в учебниках по геодезии [64, 691, 730], где имеются также ссылки на
специальную литературу.
1.2.
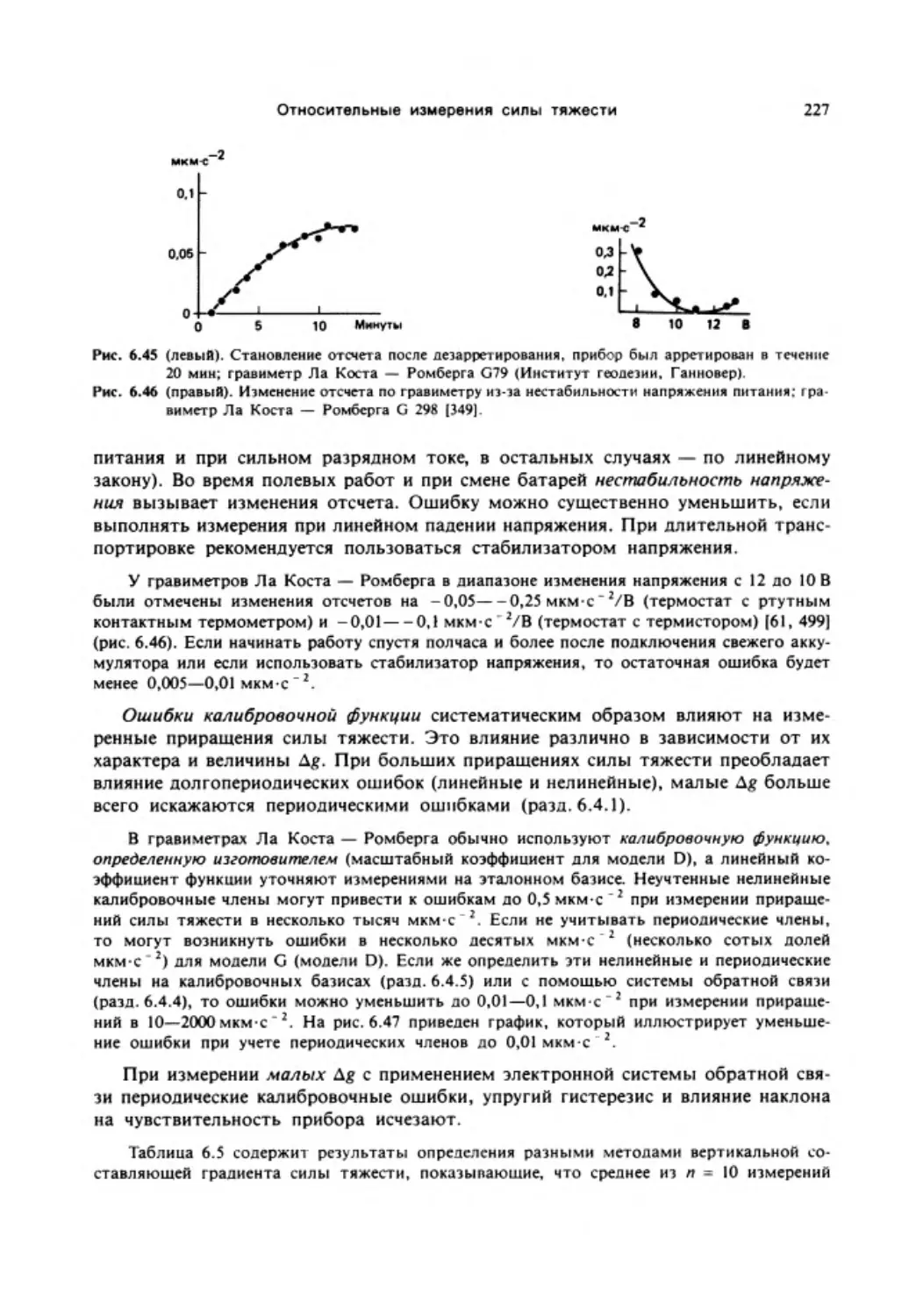
Историческое развитие
Первые измерения силы тяжести в 17 и 18 вв. были связаны с развитием механи
ки твердого и деформируемого тел. Точность измерения расстояний и времени,
необходимых для определения силы тяжести, была уже достаточно высока, что
Введение
13
бы использовать гравиметрию для задания эталона длины на основе этой естест
венной величины и, после того как была обнаружена зависимость силы тяжести
от местоположения, для изучения фигуры Земли. В дальнейшем развитие грави
метрии определяется как техническими возможностями, так и научными задача
ми геодезии и геофизики, в которых возрастающее влияние начинают оказывать
практические задачи геодезических измерений и геофизических исследований.
Особенность развития гравиметрии за последние три столетия состоит в непре
рывном расширении изученных территорий континентов и океанов, при этом
точность измерений все время возрастает.
В соответствии с применяемой аппаратурой и решаемыми задачами можно
выделить четыре этапа развития гравиметрии:
— становление теоретических основ (17 — 18 вв.);
— совершенствование маятниковых приборов и начало их использования в гло
бальных задачах геодезии и геофизики (18 — 19 вв.);
— развитие вариометров и статических гравиметров, региональные гравиметри
ческие съемки для геофизики (первая половина 20 в.);
— развитие баллистических гравиметров и создание прецизионных гравиметриче
ских сетей для решения задач геодезии, геофизики и геодинамики (вторая полови
на 20 в.).
Будем в дальнейшем придерживаться этих этапов; заметим также, что разви
тие гравиметрии после 1950-х гг. описывается более подробно в соответствую
щих разделах книги наряду со сведениями об основных работах в предшествую
щие годы.
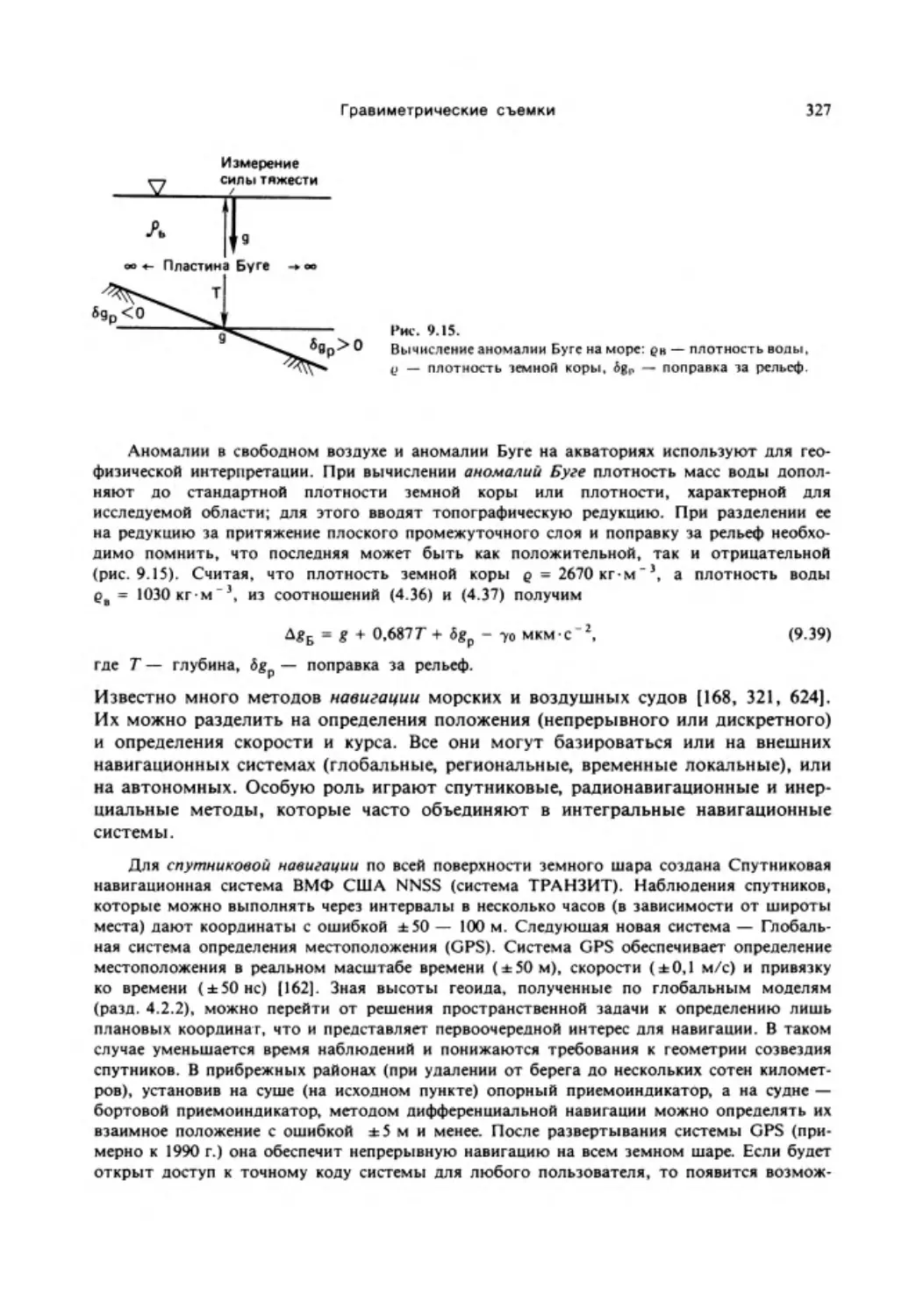
В списке литературы история гравиметрии отражена в исторических трактатах по
наукам о Земле [259], определению фигуры Земли [683] и геофизике [32]. Обзор достиже
ний до начала нашего столетия дан в работе [459].
1.2.1.
Теоретические основы (17 — 18 вв.)
Теоретические основы гравиметрии сложились в период кульминации научной ре
волюции одновременно с развитием теории тяготения, механики твердого тела
и гидростатики.
До 16-го столетия феномен гравитационного ускорения описывался теорией
Аристотеля (384 — 322 гг. до н.э.), в соответствии с которой скорость падения
тел пропорциональна их весу. Датчанин С. Стевин (1548 — 1620) и Галилео Гали
лей (1564 — 1642) смогли опровергнуть эту теорию экспериментами с падающи
ми телами. Проводя опыты с наклонными плоскостями, Галилей установил, что
свободное падение — это равноускоренное движение. И наконец, он указал, что
период колебаний маятника зависит только от его длины. Основываясь на этом,
Христиан Пойгенс (1629 — 1695) развил теорию математического и физического
маятников и создал первые маятниковые часы.
С открытием двух законов — закона свободного падения и закона колебаний
маятника — в гравиметрии были установлены два фундаментальных соотноше
ния. Более двух столетий единственным измерительным прибором оставался ма
ятник. На первых порах, однако, измеряли не величину силы тяжести, а длину
секундного маятника, т. е. длину маятника (0,994 м) с полупериодом колебаний,
равным одной секунде.
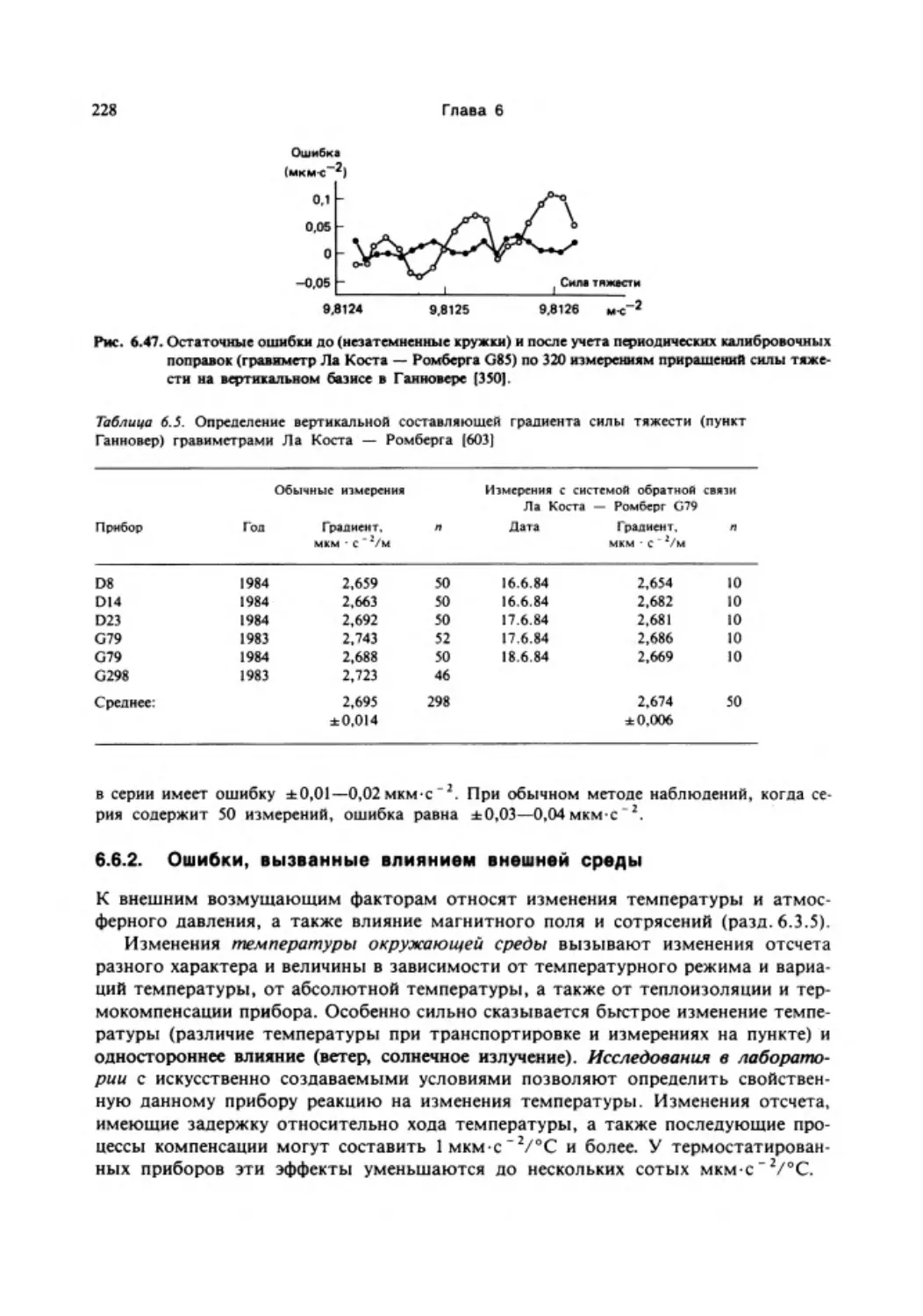
14
Глава 1
После первых определений П. Мерсена (1644) и Г.Б. Риччоли (1647) Гюйгенс в 1664 г.
предлагает определить меру длины фут как одну треть длины секундного маятника. Та
ким образом, в то время сила тяжести принималась величиной постоянной и ее предпола
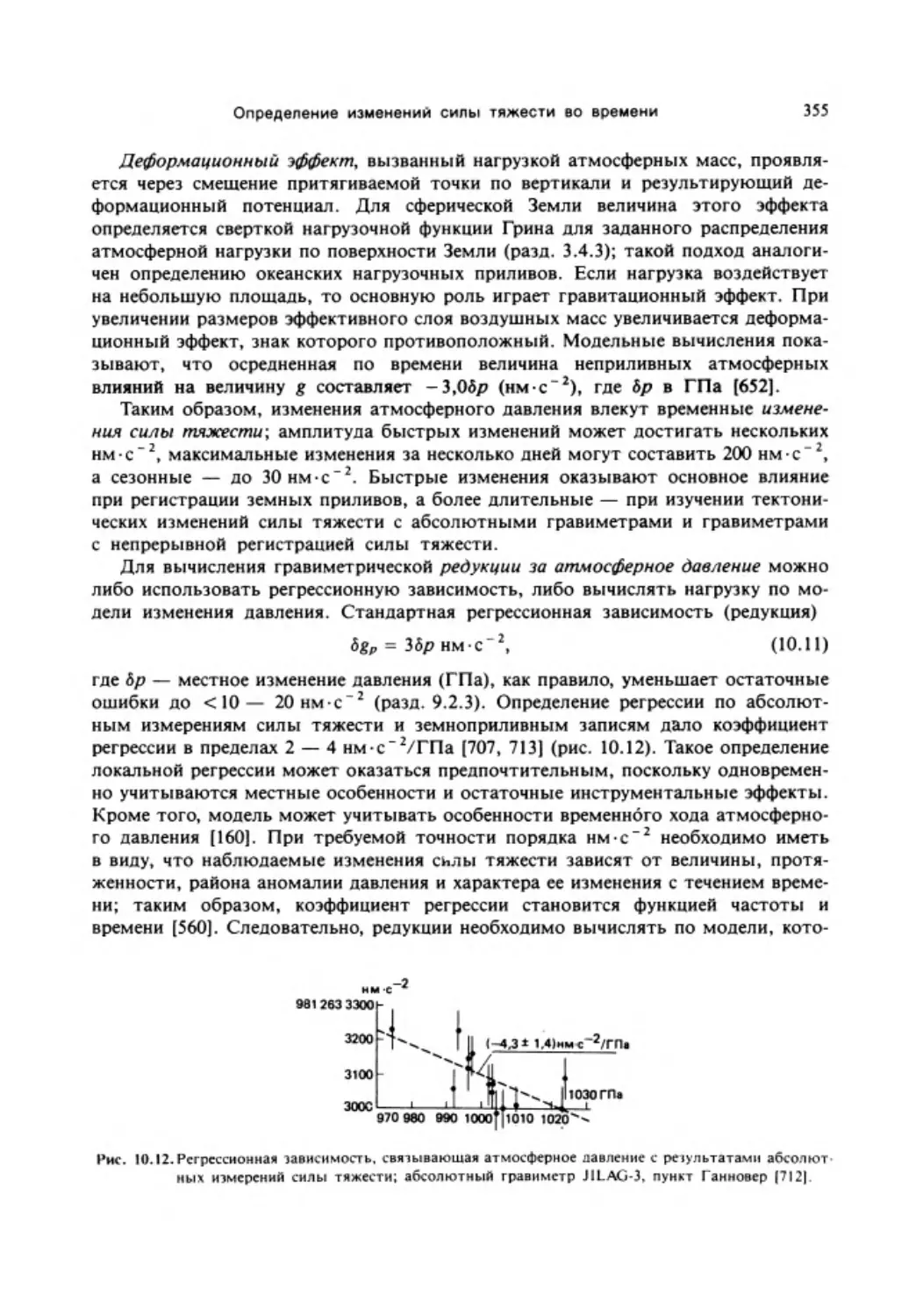
галось использовать для определения единицы длины. Через 10 лет он расширяет это
определение, учитывая зависимость длины секундного маятника от широты (см. далее).
Ж. Пикар преследовал эту же цель, выполняя маятниковые наблюдения при измерениях
дуги Парижского меридиана (1669 — 1670).
Вскоре экспедиции в низкоширотные области земного шара обнаружили зави
симость силы тяжести от местоположения. Во время пребывания в Кайене в
1672 — 1673 гг. французский астроном Ж. Рише (1630 — 1696) установил, что вы
веренные в Париже часы с секундным маятником на 2,5 мин отстают от астро
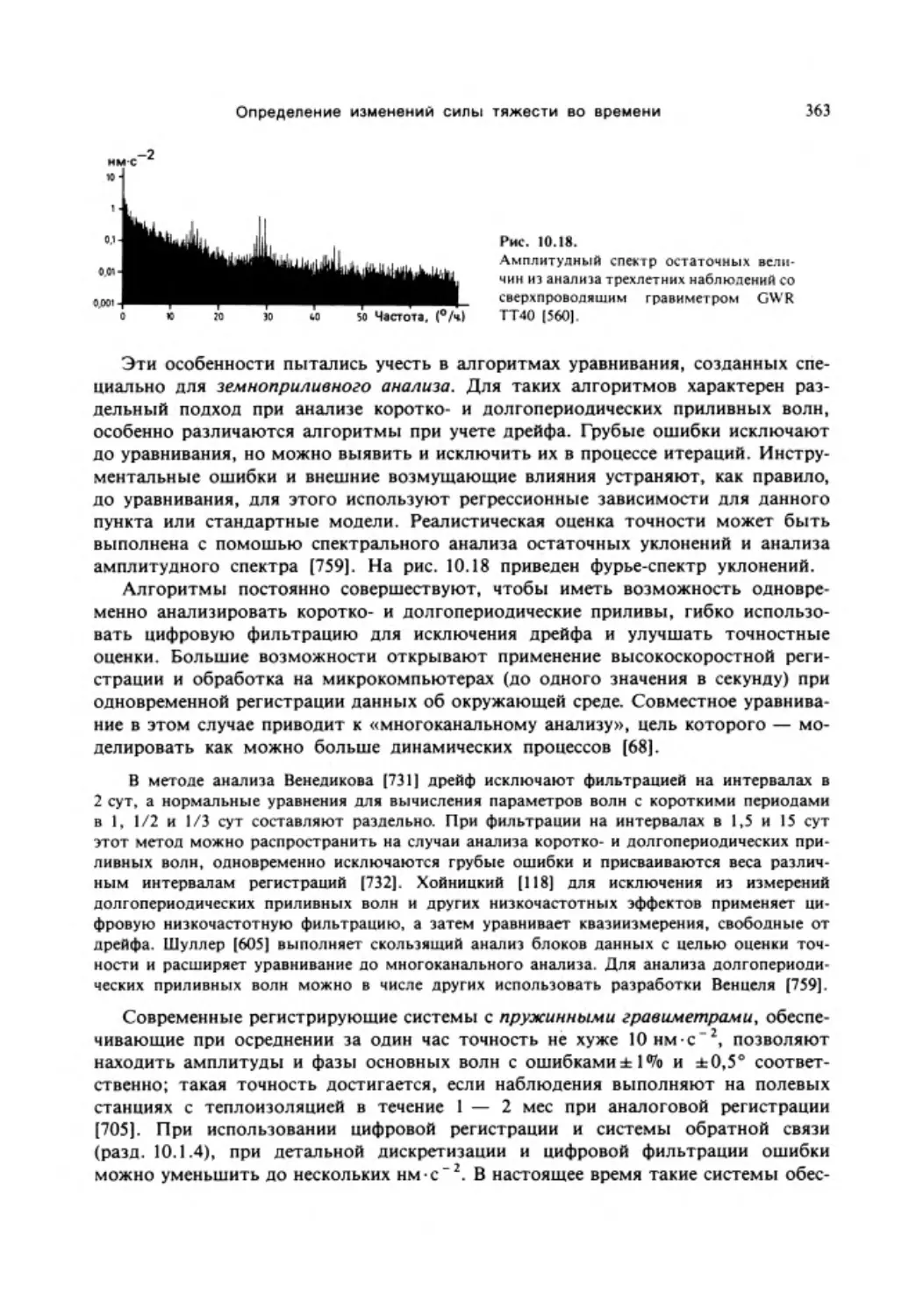
номического времени. Отставание можно было устранить, укоротив маятник на
1 1А «парижской линии» (3 мм). После возвращения в Париж зависимость перио
да колебаний маятника от местоположения была подтверждена. В 1677 —
1678 гг. во время экспедиции на остров Св. Елены английский астроном Э. Гал
лей получил подобный результат с секундным маятником, который был выверен
в Лондоне. Эти и последующие наблюдения нашли объяснение в теоретических
работах Ньютона и Гюйгенса.
Еще Аристотель дал физическое объяснение сферичности Земли, постулиро
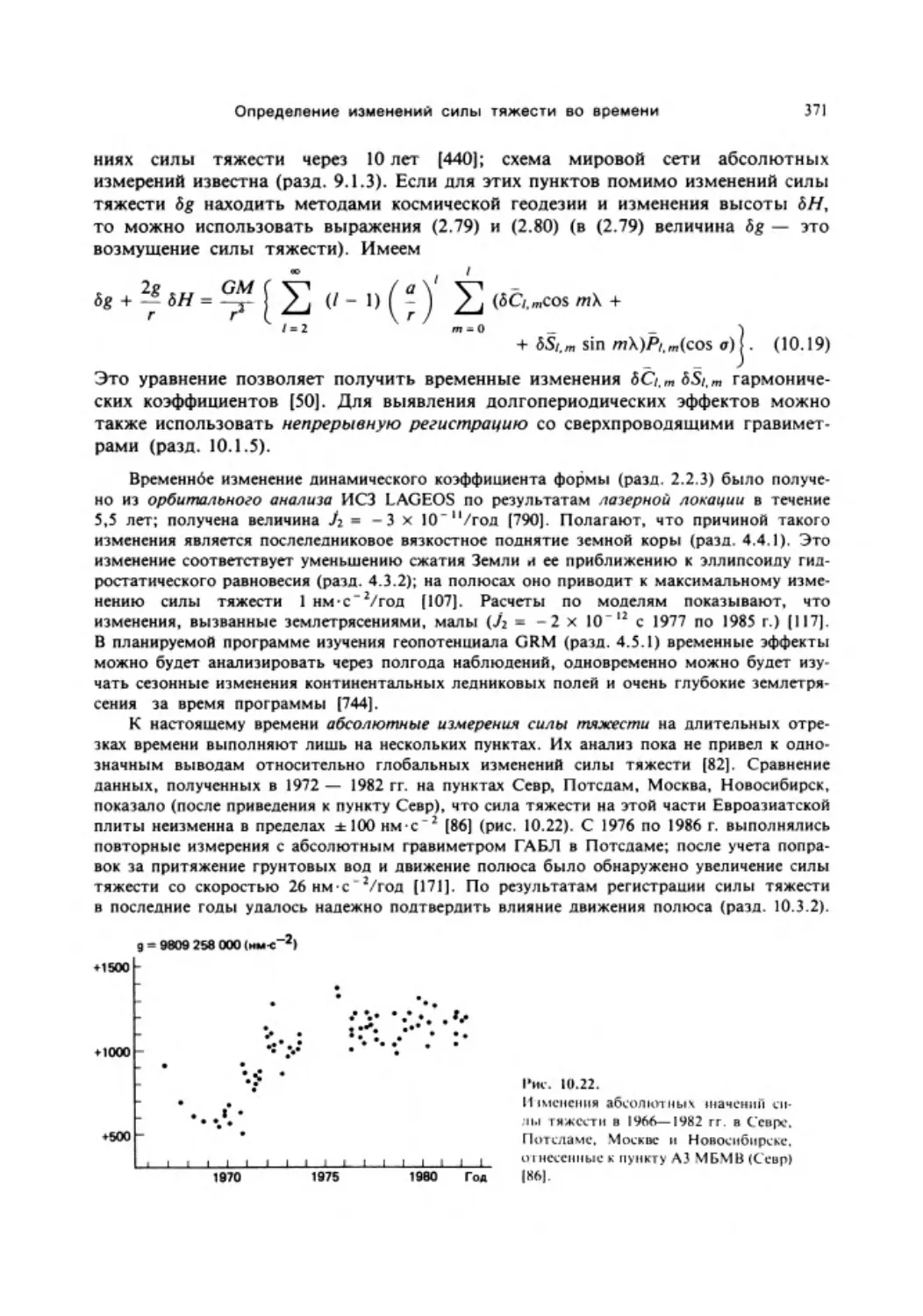
ванной в античные времена, как следствие движения элементарных частиц (кор
пускул) к центру Вселенной. Примерно в 1666 г. Исаак Ньютон (1643 — 1727)
пришел к выводу, что свободное падение — это проявление тяготения, законы
которого он вывел из законов планетарного движения Кеплера. В 1687 г. Ньютон
опубликовал закон тяготения в «Математических началах натуральной фи
лософии»:
т\тг
Ь=G
( 1. 6)
~1
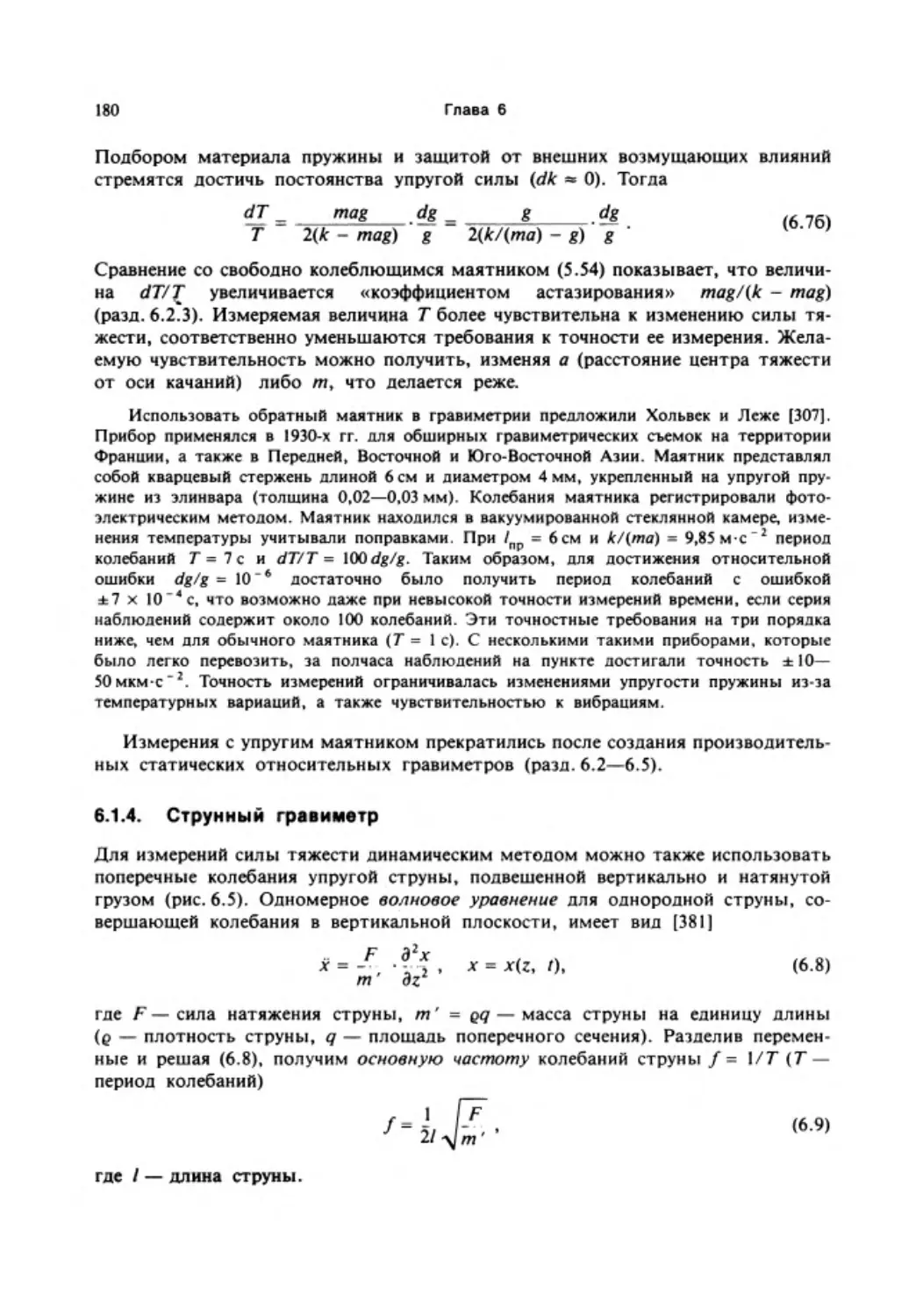
где b — сила гравитационного притяжения; G — гравитационная постоянная;
/ — расстояние между взаимно притягиваемыми массами т\ и тг.
После открытий в области тяготения и движения тела в центральном поле
(Гюйгенс, 1673) стали возможными исследования фигур равновесия вращающейся
жидкости. Используя разные подходы, Ньютон (1687) и Гюйгенс (1690) определи
ли фигуры равновесия жидкой однородной Земли, выявив при этом эффект по
лярного сжатия. По Ньютону, эта фигура представляет собой эллипсоид враще
ния, на поверхности которого сила тяжести должна возрастать от экватора к
полюсам. Гюйгенс сделал важный вывод, что на поверхности жидкого тела, на
ходящегося в равновесии, результирующая сила перпендикулярна этой по
верхности.
После классических работ Архимеда (287 — 212 гг. до н.э.) и С Стевина
(1548 — 1620) исследования в области гидростатики были продолжены в 18-м
столетии Л. Эйлером (1707 — 1783), К. Маклореном (1698 — 1746) и П. Буге
(1698 — 1758). Буге вводит понятие уровенной поверхности и распространяет
свое исследование на фигуру равновесия вращающегося тела, состоящего из кон
центрических слоев. Работы А.К. Клеро (1713 — 1765) приобрели особое значе
ние для геодезического использования измерений силы тяжести. В книге «Теория
Введение
15
фигуры Земли» [122] он приводит доказательство формулы тяготения Ньютона
и формулирует теорему, названную впоследствии теоремой Клеро. Теорема спра
ведлива для уровенного сфероида или эллипсоида вращения и не требует какихлибо предположений о распределении плотности внутри тела. Она связывает
сжатие со значениями силы тяжести на полюсе и экваторе. Следовательно, сжа
тие эллипсоида можно определить из измерений силы тяжести на двух разных
широтах при условии, что экваториальный радиус эллипсоида известен. Итак,
Клеро сформулировал гравиметрический метод высшей геодезии, позволяющий
определить геометрические параметры фигуры Земли по измерениям силы тяже
сти. В геофизике важное значение имеет дифференциальное уравнение Клеро,
определяющее сжатие слоев равной плотности в слоистых фигурах, находящихся
в равновесии.
Становление и развитие теории потенциала, принадлежащие в основном за
слугам французских математиков Ж.Л. Лагранжу (1736 — 1813), П.С. Лапласу
(1749 — 1827), А.М. Лежандру (1752 — 1833) и С.Д. Пуассону (1741 — 1840), за
вершили создание математического аппарата для гравиметрии.
1.2.2.
Маятниковые измерения и их применение в геодезии
и геофизике (17 — 18 вв.)
Длительное время, даже в значительной части 20-го столетия гравиметрические
данные, необходимые для геодезии и геофизики, получали с помощью маятнико
вых измерений.
Зависимость силы тяжести от широты пункта подтверждена наблюдения
ми во время французских градусных измерений в Лапландии (1736 — 1737, П.Л.
Мопертюи) и в Перу (1735 — 1744, П. Буге и С.М. Ла Кондамин). Маятниковые
приборы на этой ранней стадии развития гравиметрии представляли собой при
ближение к математическому маятнику. Буге [80] наблюдал в Андах зависимость
силы тяжести от высоты и нашел важную для геофизики поправку за приведе
ние силы тяжести к уровню моря.
Точность примерно ± 1 0 _5g получили Ж.Ш. Борда и Дж. Д. Кассини де Тюри
[72] во время высокоточного эксперимента в Парижской астрономической обсер
ватории. Результаты измерений с нитяным маятником (платиновый шарик диа
метром 36 мм на нити длиной 3,8 м) использовались для сравнения длины се
кундного маятника на широте 45° с новой единицей длины — метром. Период
колебаний определяли методом совпадений, предложенным Р. Бошковичем
(1711 — 1787). Метод предусматривал определение моментов одновременного
прохождения через положение равновесия двух маятников: гравиметрического и
секундного.
В первые десятилетия 19 в. развиваются новые методы измерений, растет
число пунктов и расширяются площади съемок с транспортабельными при
борами.
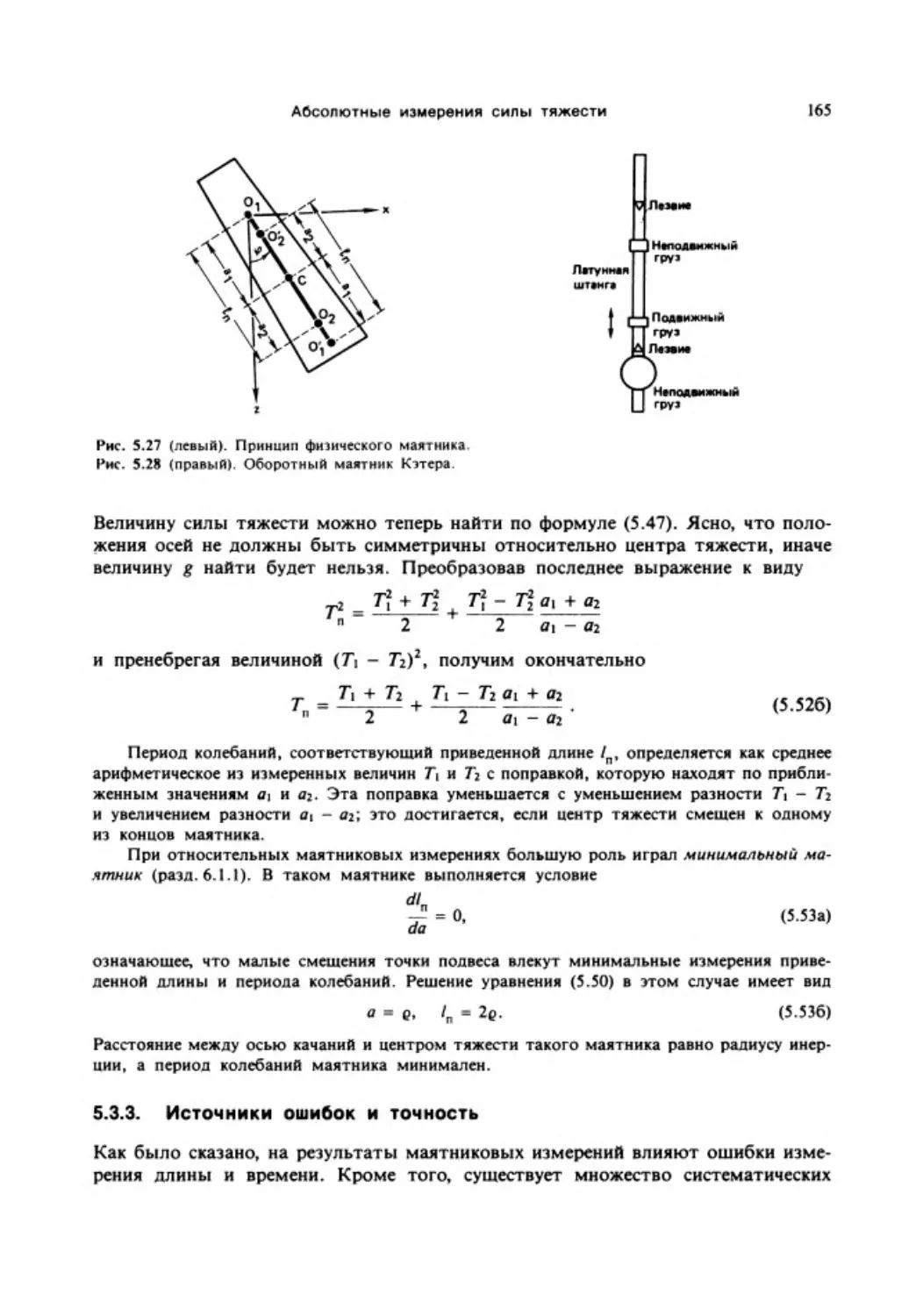
В 1811 г. Дж. Боненбергер в Германии описывает принцип оборотного маятни
ка, а англичанин X. Кэтер [356] создает первый прибор для полевых работ. Обо
ротный маятник Кэтера представляет собой бронзовую штангу с двумя призма
ми; расстояние между лезвиями призм 1 м. На штанге жестко укреплен груз мае
16
Глава 1
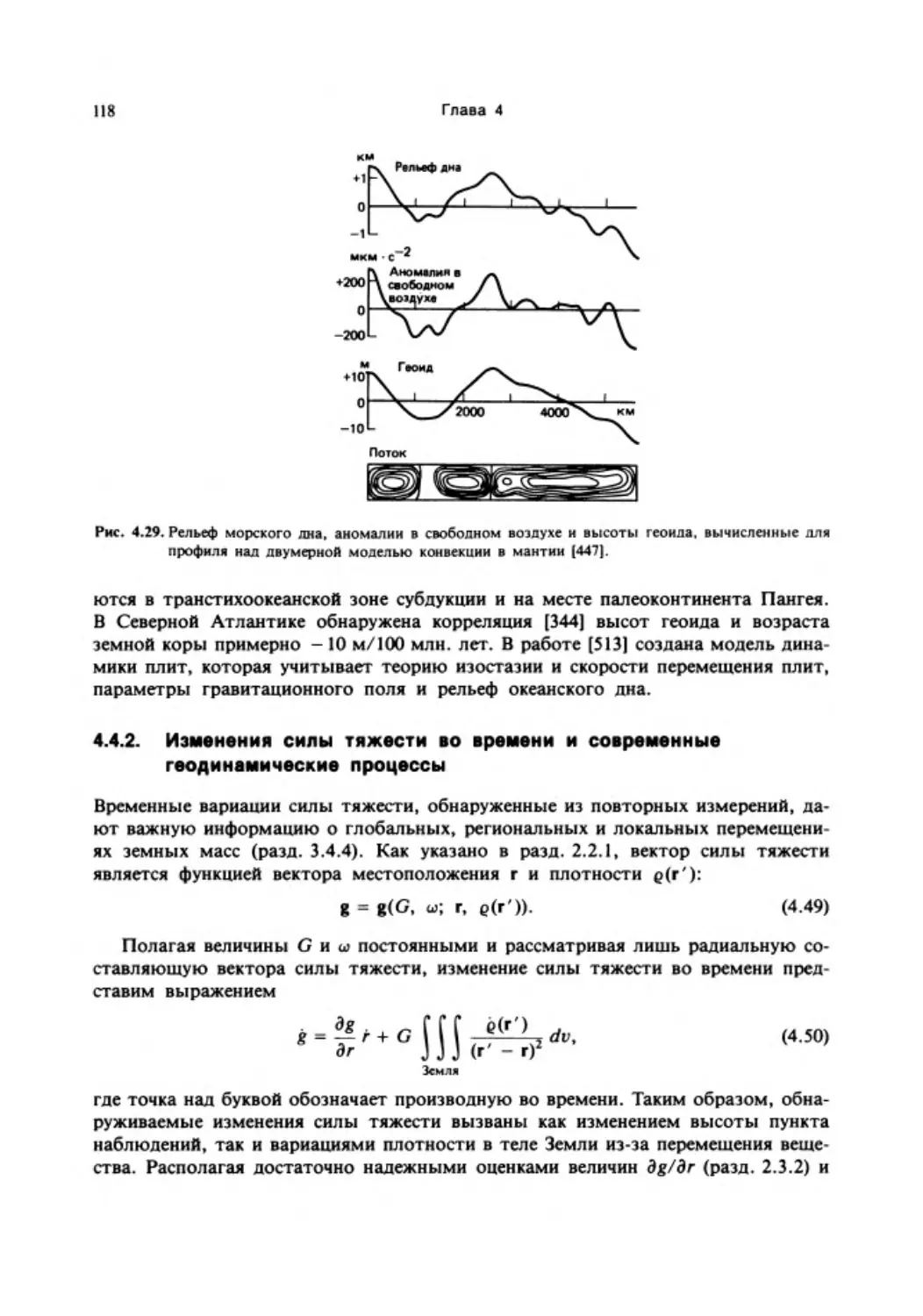
сой 1 кг и имеется подвижный груз массой 32 г. Перемещая последний,
добиваются изохронности колебаний маятника относительно обеих осей. После
успешной демонстрации в Лондоне (ошибка измерения около 350 мкм · с “ 2) этот
физический маятник утвердился в практике гравиметрии.
Однако более важным явилось создание «неизменных» маятников постоянной
длины. С такими приборами можно определять приращение силы тяжести отно
сительно некоторого исходного значения (относительные измерения силы
тяжести).
Для относительных измерений Ж.Б. Био (1774 — 1862) использует транспортабель
ный нитяной маятник Борда (длина маятника около 0,75 м), тогда как Кэтер [357] приме
няет физический маятник с одним лезвием. Измерения с такими приборами выполняли
на многочисленных пунктах французских и английских градусных измерений. В 1818 —
1831 гг. в английских, французских и русских морских экспедициях определены значения
силы тяжести на побережьях и на островах во всех областях земного шара с ошибкой
примерно 50 м к м - с -2.
Дальнейшее развитие абсолютных гравиметрических определений связано с
именем астронома Ф.В. Бесселя (1784 — 1846). Наряду с глубокими исследовани
ями в области теории оборотного маятника и источников ошибок Бессель совер
шенствует нитяной маятник. Если у нитяного маятника могут быть две оси ка
чаний, линейные измерения сводятся к измерению расстояния между этими ося
ми. Наблюдения в Кенигсберге и Берлине показали преимущества этого прибора
(ошибка около 100 мкм с -2). Однако использовался он лишь несколько раз [38,
39].
Около 1830 г. маятниковые измерения прекращают и возобновляют лишь в
1862 г. по плану работ «Среднеевропейского градусного измерения» и созданных
позднее организаций (разд. 1.2.3).
Поскольку к этому времени получены гравиметрические данные для террито
рий с большей протяженностью по широте, выполняются первые вычисления
сжатия Земли и силы тяжести на поверхности эллипсоида по теореме Клеро.
В 1799 г. французский ученый П. Лаплас [404] получает величину сжатия около
1:330 по 15 значениям силы тяжести. Для более точной формулировки краевой
задачи физической геодезии (определение фигуры Земли и ее внешнего гравитаци
онного поля по измерениям силы тяжести на поверхности Земли) приобрели
большое значение интегральные теоремы К.Ф. Гаусса (1777 — 1855) и Дж. Грина
(1793 — 1841). Гаусс [214] предлагает считать математической фигурой Земли эк
випотенциальную поверхность, совпадающую с поверхностью Мирового океана.
Позднее Дж.Б. Листинг [420] называет эту поверхность геоидом. Особую важ
ность имела работа английского математика и физика Дж.Г. Стокса (1819 —
1903). Он доказал, что не существует единственного решения обратной задачи
теории потенциала, т. е. определения распределения масс внутри Земли по ее
внешнему гравитационному полю. Эта задача очень важна в геофизике. Инте
гральная формула Стокса позволяет определять форму геоида по значениям си
лы тяжести. Эту формулу, однако, смогли использовать лишь через сто лет, ког
да для поверхности Земли уже имелось достаточно много гравиметрических
данных.
Введение
17
С середины 18 в. и в 19 в. развивалось геофизическое использование измере
ний силы тяжести, основанное на теории гравитационного поля и анализе резуль
татов маятниковых наблюдений. Сначала оно состояло в определении массы
Земли или средней плотности Земли, а также гравитационной постоянной. Для
этих целей проводили как полевые, так и лабораторные эксперименты.
Буге на основе маятниковых измерений в Перу устанавливает соотношения между
плотностью горных пород в Андах и средней плотностью Земли. Сабин [582] приходит
к заключению о возможности оценить распределение масс в верхних слоях Земли по изме
рениям силы тяжести. Определения средней плотности выполняли Дж.Б. Эри [4] в шахте
угольных копей в Дурхаме (средняя плотность 6570 к г * м _3) и Р. фон Штернек [657] в
шахте глубиной 1000 м в Прибраме, Чехия (5770 к г - м _3). Большое значение и сейчас
имеет определение гравитационной постоянной с крутильными весами. Конструкция Дж.
Мичела (1724 — 1793) была основана на взаимном притяжении масс, укрепленных на го
ризонтальном стержне, и располагаемых рядом с ними внешних масс. Г. Кавендиш
(1731 — 1810) использовал усовершенствованный прибор Мичела и выполнил успешное
определение гравитационной постоянной (6,75 · 1 0 "11 м 3 - к г _1*с~2) и средней плотности
Земли (5450 кг · м _3) [114]. Ф. фон Иол л и [339] предложил для определения средней плот
ности метод взвешивания, который в дальнейшем использовался неоднократно.
Изучение аномалий силы тяжести и направления отвесной линии вблизи гор
привело к созданию теории изостазии, фундаментальной теории геофизики; еще
Леонардо да Винчи (1452 — 1519) указывал на равновесное состояние видимых
земных масс. Термин «изостазия» введен в 1889 г. американским геологом
К.Е. Деттоном. В соответствии с этой теорией видимые избытки масс (горы)
и недостатки масс (океаны) компенсируются изменениями плотности или толщи
ны земной коры так, что на определенной глубине компенсации наступает гидро
статическое равновесие.
Уклонения отвесной линии, определенные Дж. Эверестом на юге Гймапаев, стали
основанием для разработки соответствующих теорий, опубликованных в 1885 г. англий
ским астрономом Дж.Б. Эри (1801 — 1892) и архидьяконом Дж.Х. Праттом (1809 —
1871), служившим в Калькутте. Оказалось, что величины этих уклонений меньше величин,
вычисленных с учетом влияния топографических масс [4, 541].
Созданное в 1862 г. общество «Среднеевропейское градусное измерение» сти
мулировало дальнейшую деятельность в области гравиметрии. Первоначально,
несмотря на успешные наблюдения с неизменными маятниками, продолжаются
и совершенствуются преимущественно абсолютные измерения силы тяжести.
В соответствии с рекомендациями Бесселя, Дж. Репсольд создал в Гамбурге транс
портабельный прибор с оборотным маятником (латунный маятник с расстоянием между
лезвиями ножей 1 м), который начиная с 1862 г. использовали во многих странах. Во
Франции используется прибор, созданный фирмой Brunner Bros, по разработкам X. Дефоржа (метровый и полуметровый маятники). В 1875 г. американским исследователем
К.С. Пирсом обнаружено явление сокачания штатива, зависящее от жесткости основания.
Эти приборы были сложны в обращении, и их применение не привело ни к повышению
точности (ошибка ±100 м к м - с - 2), ни к заметному увеличению производительности. В
итоге в 1884 г. Гельмерт располагал определениями с секундными маятниками лишь на
122 пунктах, включая и ранние наблюдения.
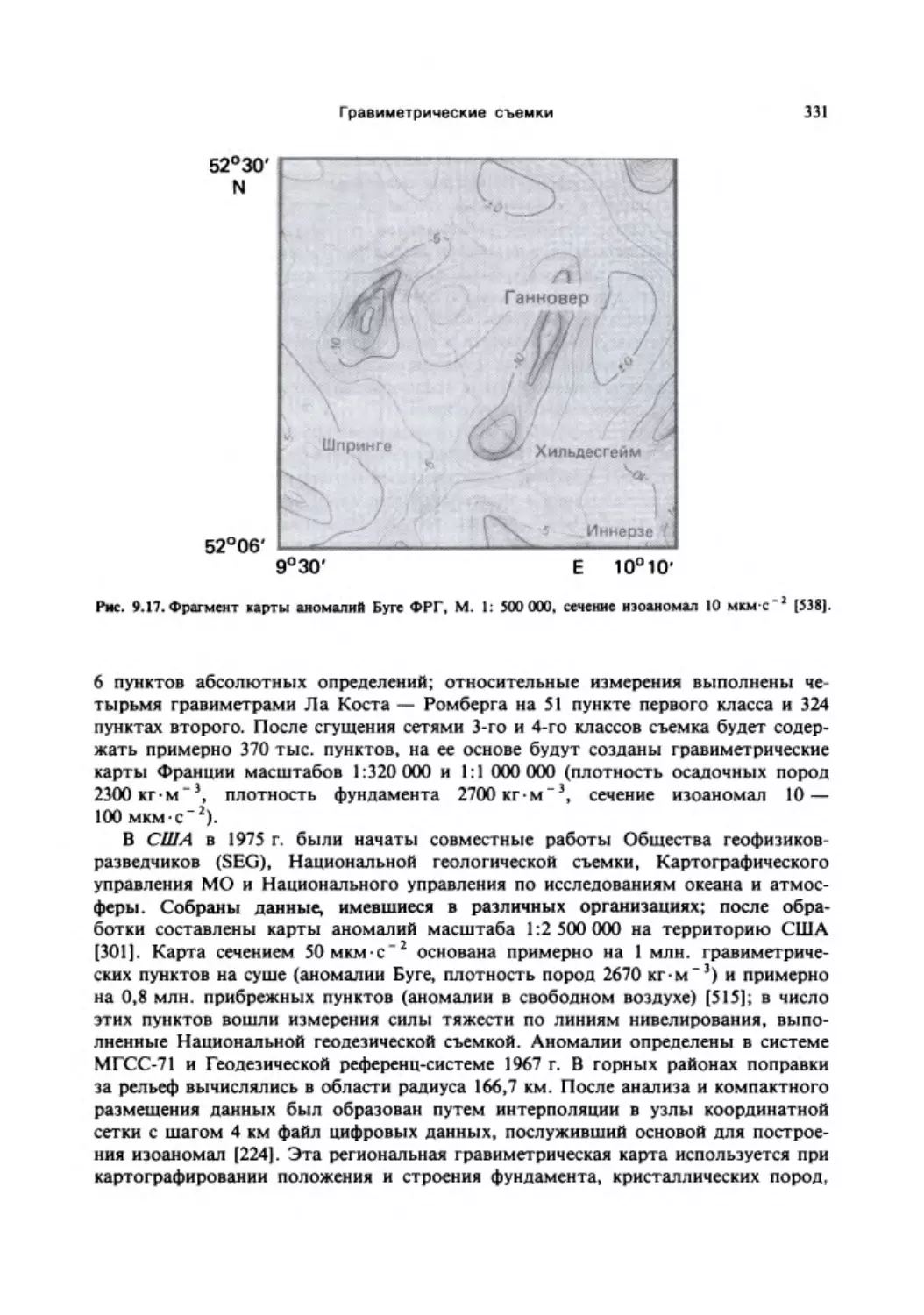
18
Глава 1
В конце 19 в. для измерения приращений силы тяжести преимущественно ис
пользуют маятниковые приборы, созданные австрийским исследователем Р. фон
Штернеком. Приращения определяют по изменению периода колебаний маятника
с неизменной длиной от пункта к пункту.
В то время использовались 25-см латунные маятники. Стало возможным постепенно
повышать точность определения приращений силы тяжести от ±100 — 200 мкм - с -2 до
±50 мкм с ' 2 за время наблюдения на пункте от полусуток до суток. Государственные
геодезические организации выполнили ряд обширных национальных программ измерений
силы тяжести. В 1912 г. имелось уже около 2500 значений силы тяжести, хотя распределе
ние гравиметрических пунктов по поверхности Земли и не было равномерным.
Переход к относительным измерениям силы тяжести требовал высокоточного
определения ее абсолютного значения. Ф.Р. Гельмерт (1843 — 1917) вначале испо
льзовал значение силы тяжести на австрийском фундаментальном пункте Военно
го географического института в Вене {Венская гравиметрическая система). После
того как Гельмерт существенно переработал теорию оборотного маятника, Ф.
Кюнен и Ф. Фуртвенглер в 1898 — 1904 гг. выполнили новые абсолютные изме
рения силы тяжести в Потсдаме. Результаты этих наблюдений послужили осно
вой Потсдамской гравиметрической системы, принятой в 1909 г. (разд. 9.1.1).
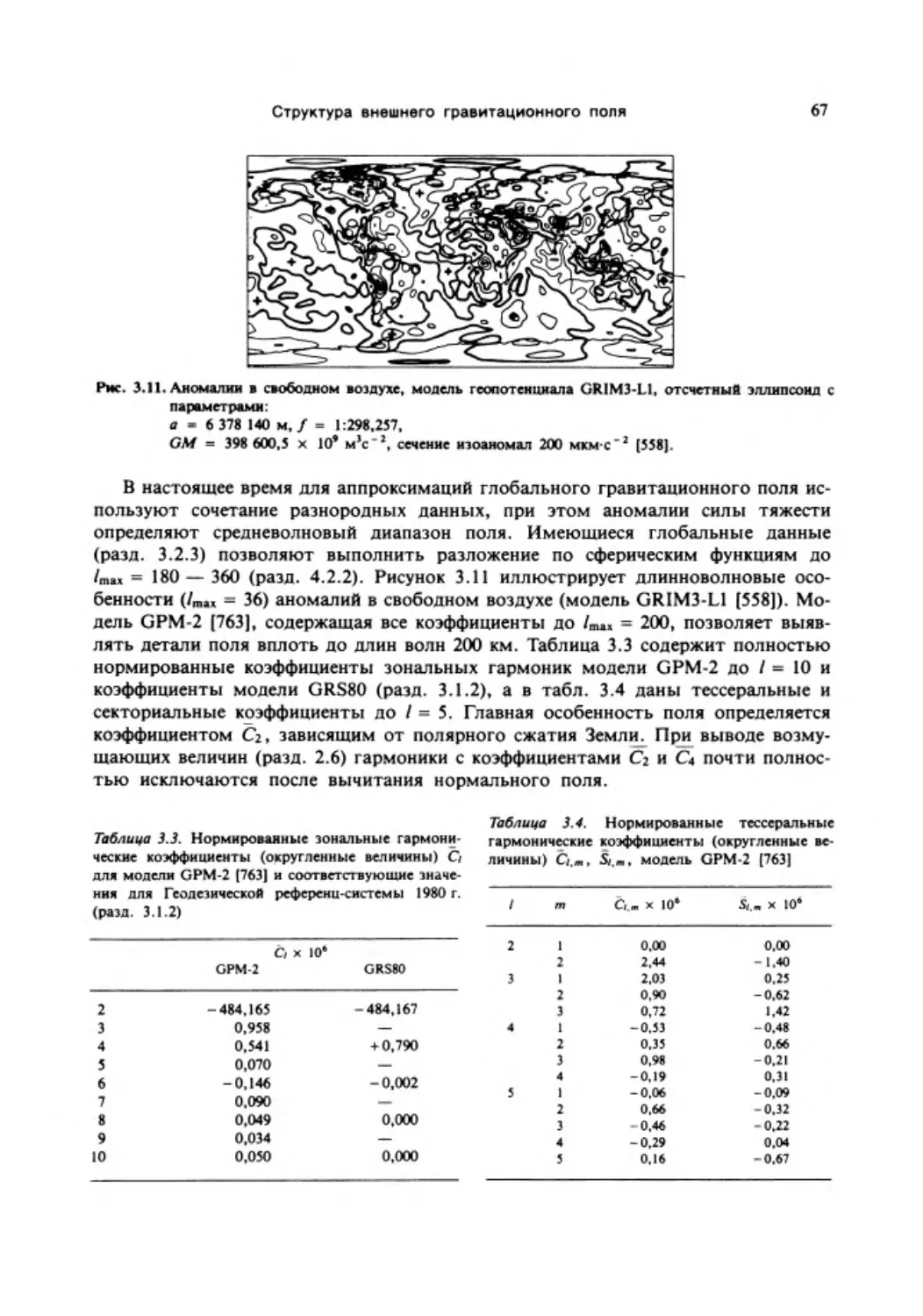
Помимо установления гравиметрической системы, а также глобальных и ре
гиональных гравиметрических съемок на континентах, совершенно необходимы
ми для целей геодезии и геофизики являются измерения силы тяжести на
океанах.
В 1899 г. в Норвегии X. Мон испытывает метод определения силы тяжести из измере
ний с гипсометром (термометром, работающим на точке кипения) и ртутным баромет
ром. В 1901 — 1909 гг. О. Геккер из Потсдамского геодезического института выполняет
более 250 измерений в экспедициях по Атлантическому, Индийскому и Тихому океанам,
а также по Черному морю. Использовав эти данные, он смог показать, что на океанах
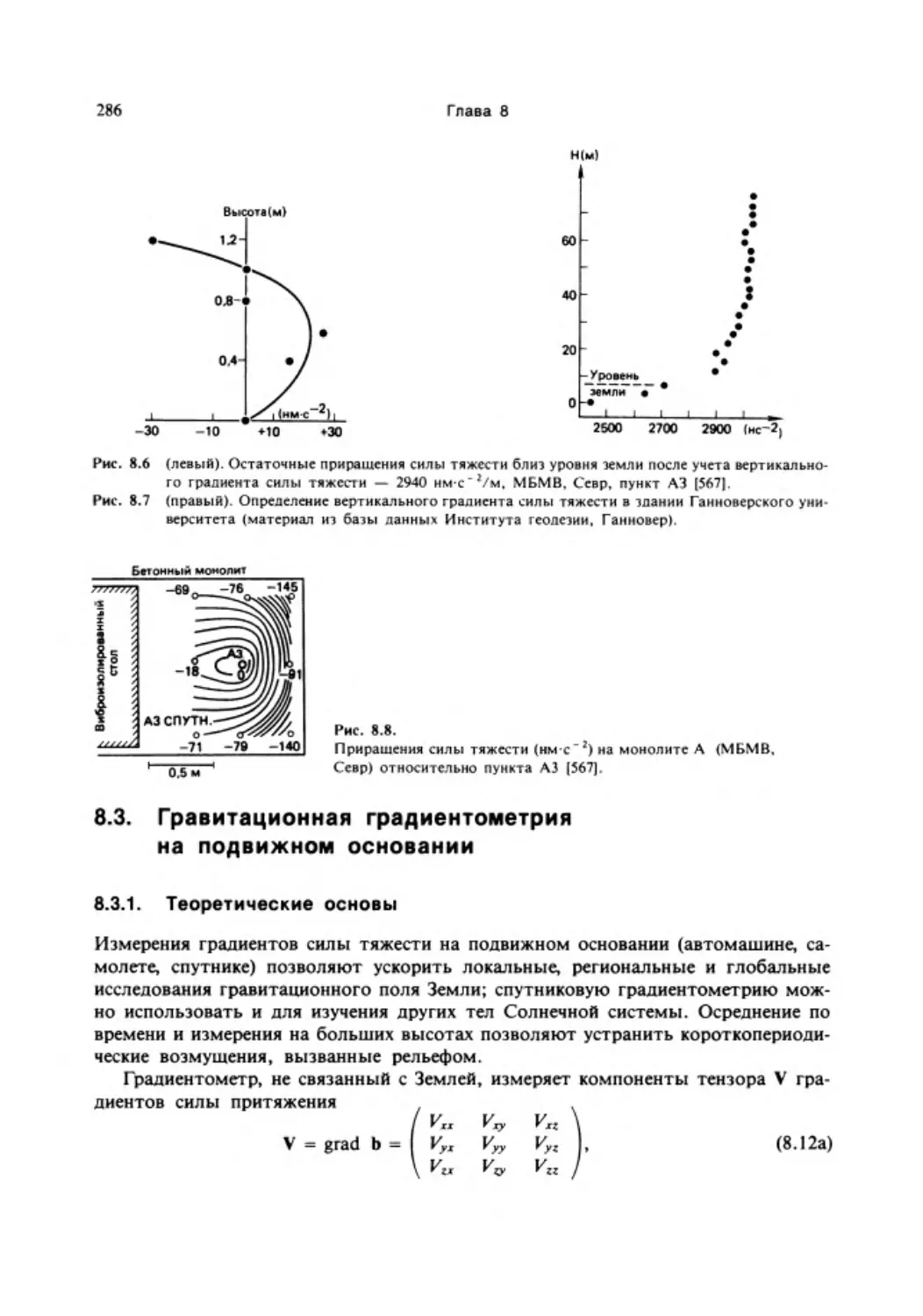
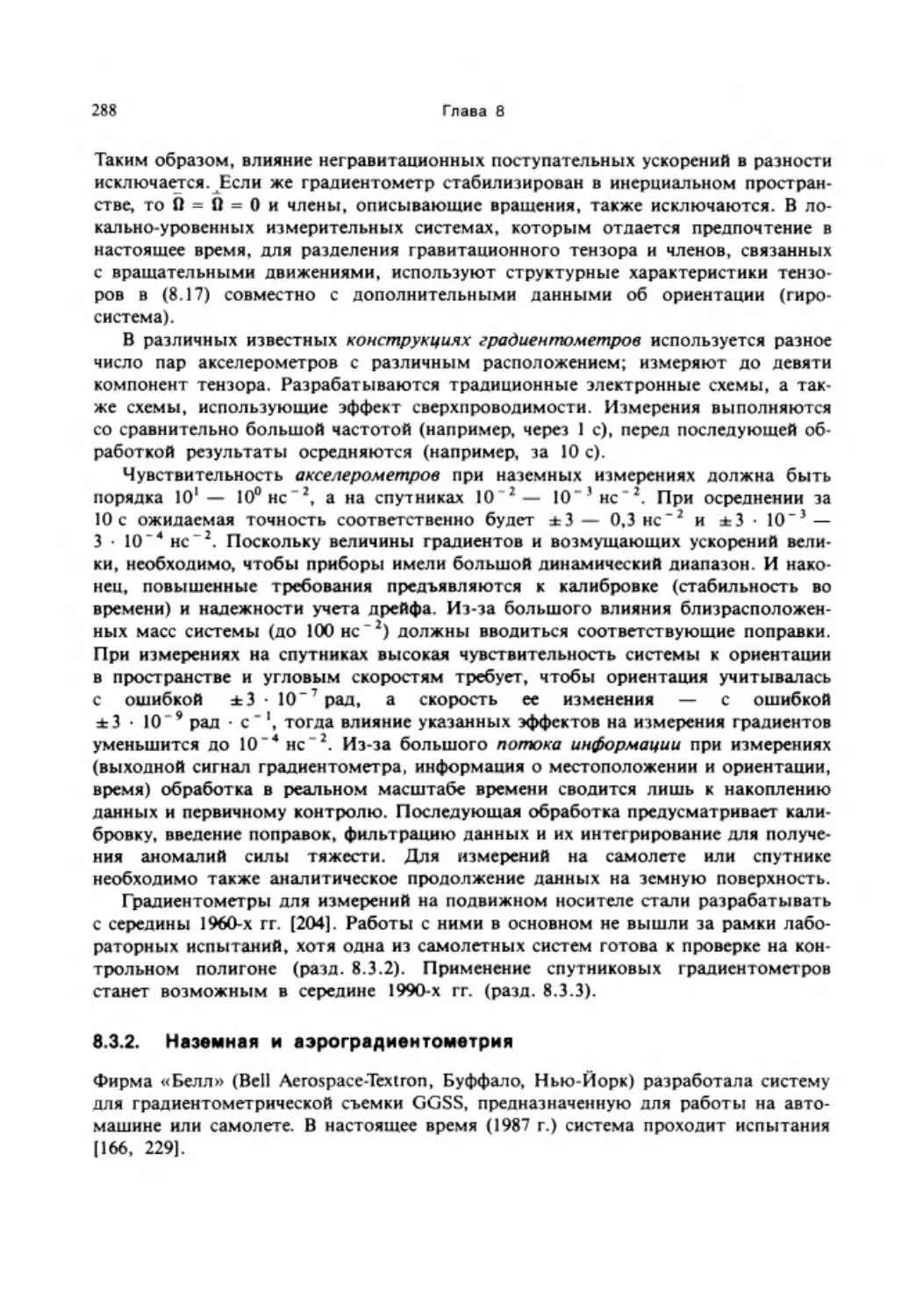
также существует изостатическая компенсация, за исключением областей глубоководных
впадин.
Использование большого числа гравиметрических данных по земному шару,
накопившихся к концу 19 в., требовало тщательных исследований вопроса о ре
дуцировании силы тяжести на уровень моря. Гельмерт [294, 295] вносит фунда
ментальный вклад в эту область. Использовав 1400 значений аномалий в свобод
ном воздухе, Гельмерт [297] получает сжатие эллипсоида 1:298,3, исключив очень
непредставительные островные пункты. Полученная в результате формула для
нормальной силы тяжести (1901 г.) после приведения к Потсдамской системе ши
роко использовалась в первые десятилетия 20 в.
1.2.3
Наблюдения с крутильными весами и гравиметрами и их
применение в прикладной геофизике (первая половина 20 в.)
Для изучения детальной структуры гравитационного поля большое значение иметю создание венгерским ученым Р. фон Этвешем (1848 — 1919) крутильных ве
совг, пригодных для полевых работ [178, 179]. Если наблюдения угла горизон
тального поворота крутильных весов Кавендиша дают лишь параметры кривиз
Введение
19
ны уровенных поверхностей, то прибор Этвеша позволяет определять
горизонтальный градиент силы тяжести, поскольку пробные массы находятся на
разной высоте.
В первом десятилетии 20 в. в Венгрии проводились обширные наблюдения с крутиль
ными весами, которые показали, что радиус кривизны уровенных поверхностей сильно
меняется (от 3 до 200 тыс. км) и что с помощью крутильных весов можно обнаружить
изменения плотности масс близ дневной поверхности.
Для начала разведки нефтяных месторождений геофизическими методами характерно
широкое применение крутильных весов. В. Швейдар [618] ставит первые измерения на со
ляном куполе в Северной Германии и разрабатывает методы редуцирования результатов
за влияние топографических масс. Он разрабатывает также крутильные весы с фотографи
ческой регистрацией, которые затем стала выпускать фирма «Аскания» в Берлине. Компа
нии, выполняющие геофизические исследования, используют крутильные весы для изуче
ния соляных куполов в равнинном районе Северной Германии и начиная с 1922 г. на побе
режье Мексиканского залива в США. В 1922 г. корпорация Amerada Petroleum под
руководством Эверетта де Голье выполняет съемку нефтеносного района Шпиндл Топ в
Техасе, которая обнаружила положительную аномалию силы тяжести над соляным купо
лом. Почти до 1940 г. крутильные весы используются для обнаружения неглубоко распо
ложенных, а позже и более глубоких соляных куполов. К 1930 г. в США эксплуатируются
125 приборов.
Начиная с 1920 г. существенно усовершенствовались относительные маятни
ковые измерения с приборами Штернека. Наблюдения стали проводить по «двух
маятниковой схеме» в вакууме с инварными или кварцевыми маятниками; тру
доемкий астрономический контроль часов был заменен приемом сигналов време
ни. Колебания маятников или моменты их совпадений с колебаниями маятника
часов регистрировали фотографическим методом. Ошибка измеренных прираще
ний силы тяжести уменьшилась до ±10 — 20 м к м - с " 2.
Однако наблюдения с маятниковыми приборами и крутильными весами оста
вались все столь же дорогостоящими, так как работы длились на каждом пункте
от 1 до 6 ч. Из-за высокой чувствительности к влиянию топографических масс
крутильные весы можно использовать лишь в равнинной местности для съемки
одиночных структур. Для быстрой съемки больших площадей были созданы ста
тические гравиметры. В них наблюдают положение равновесия пробной массы
в поле силы тяжести, компенсирующая же сила обычно создается упругой пружи
ной, а в некоторых случаях также крутильной нитью. По изменениям длины или
угла поворота, полученным из наблюдений с прибором на двух пунктах, можно
получить приращение силы тяжести, если известен калибровочный коэффициент.
Теоретические и практические основы этого метода были известны давно. Р. Гук
(1635 — 1702) в 1678 г. сформулировал закон упругости, а пружинные весы использовались
с конца 17 в. С.Д. Пуассон и О.Л. Коши (1789 — 1857) внесли существенный вклад в раз
работку теории упругости. Уже в 1833 г. Дж. Гершель (1792 — 1871) предложил использо
вать пружинные весы для измерения силы тяжести [298], однако разработка таких прибо
ров стала возможной лишь после успехов материаловедения и техники высокоточных из
мерений. В 1930 — 1950 гг. было сконструировано около 30 моделей различных
статических гравиметров, но лишь малая часть из них была изготовлена в большом коли
честве экземпляров и использована на практике. Некоторые примеры приведены ниже, де
тальное описание дано в разд. 6.1.3 и 6.5.
20
Глава 1
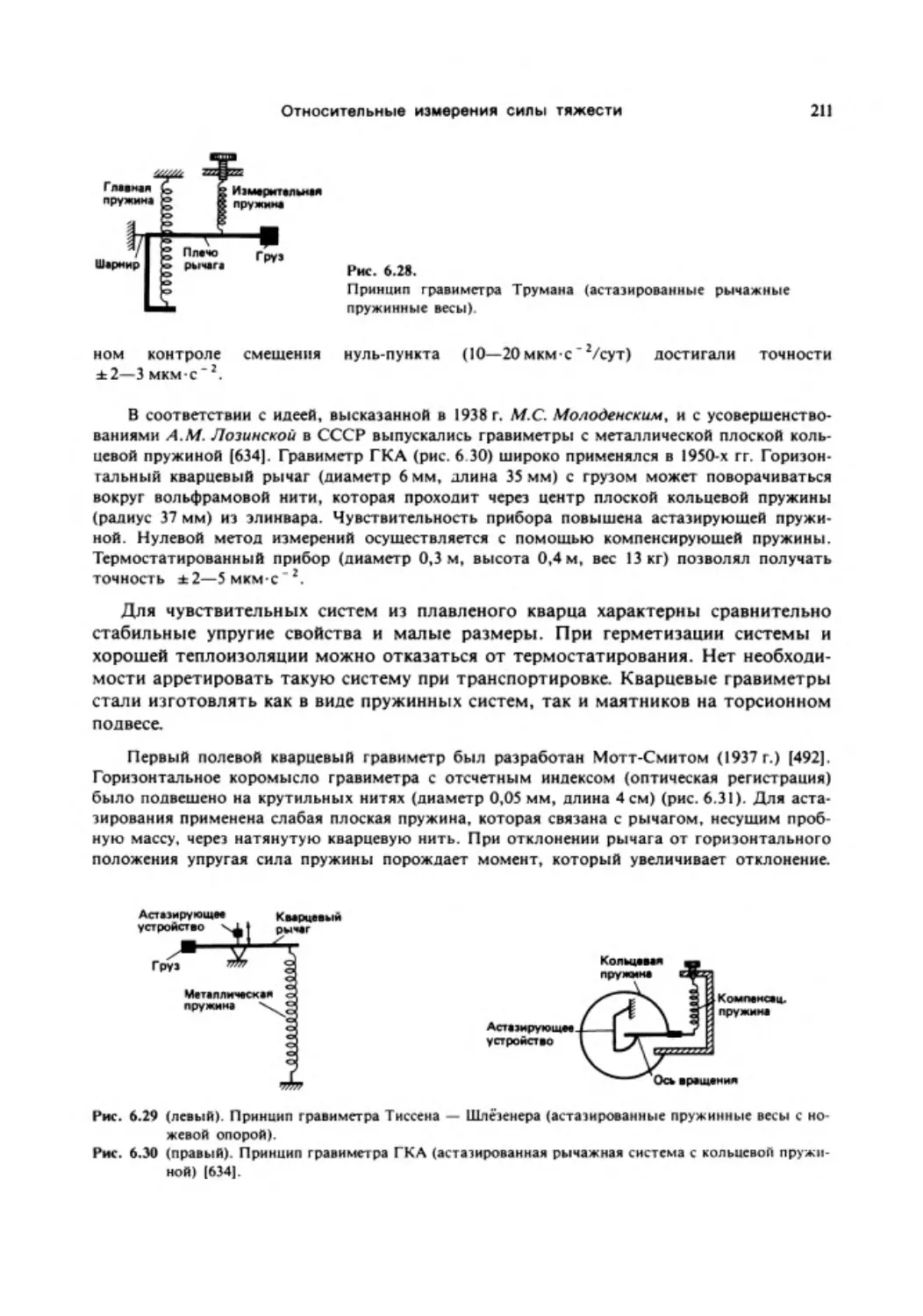
Еще в 1918 г. Дж. Изинг приступил к конструированию и ограниченному применению
вертикального обратного маятника, укрепленного на горизонтальной крутильной нити. В
1930 г. Ф. Хольвек и П. Леже используют динамический метод измерений, основанный
на наблюдении колебаний обратного маятника с плоской пружиной. Рычажные весы с
пружиной, созданные О.Х. Труманом в 1930 г., используются с 1932 г. нефтяной компани
ей Humble Oil Company. Первым прибором, изготовленным в большом количестве экзем
пляров, были пружинные весы с ножевой опорой, построенные А. Шлезенером в 1934 г.
по разработкам Ст. фон Ъюсена. Впервые в 1932 г. Харлей описывает измерительную
систему с линейной характеристикой. Точность определения приращения силы тяжести,
достигнутая с этими первыми приборами, составляет ±2 — 5 мкм - с " 2. Принцип длинно
периодного вертикального сейсмометра, предложенный в 1934 г. Л.Дж.Б. Л а Костом, поз
волил создать наиболее удачный до настоящего времени прецизионный гравиметр, кото
рый применяется с 1939 г. Гравиметр с кварцевой пружиной, разработанный Сэмом П.
Уорденом, широко применяется с 1948 г. в геофизических исследованиях. А Граф в 1938 г.
разрабатывает весы с вертикальной пружиной, а в 1942 г. — крутильные пружинные весы;
оба прибора изготовляются фирмой «Аскания» в Берлине. Они также нашли широкое при
менение. В 1938 г. А. Хойт конструирует весы с вертикальной винтовой пружиной, кото
рые широко используются компанией Gulf Oil Company на побережье Мексиканского зали
ва в США примерно до 1960 г. Ошибка измерений с этими более современными прибора
ми составляет ±0,5 — 2 мкм с -2. И наконец, отметим газовый гравиметр, который
разрабатывался X. Хаальком начиная с 1931 г. В нем компенсация силы тяжести осущест
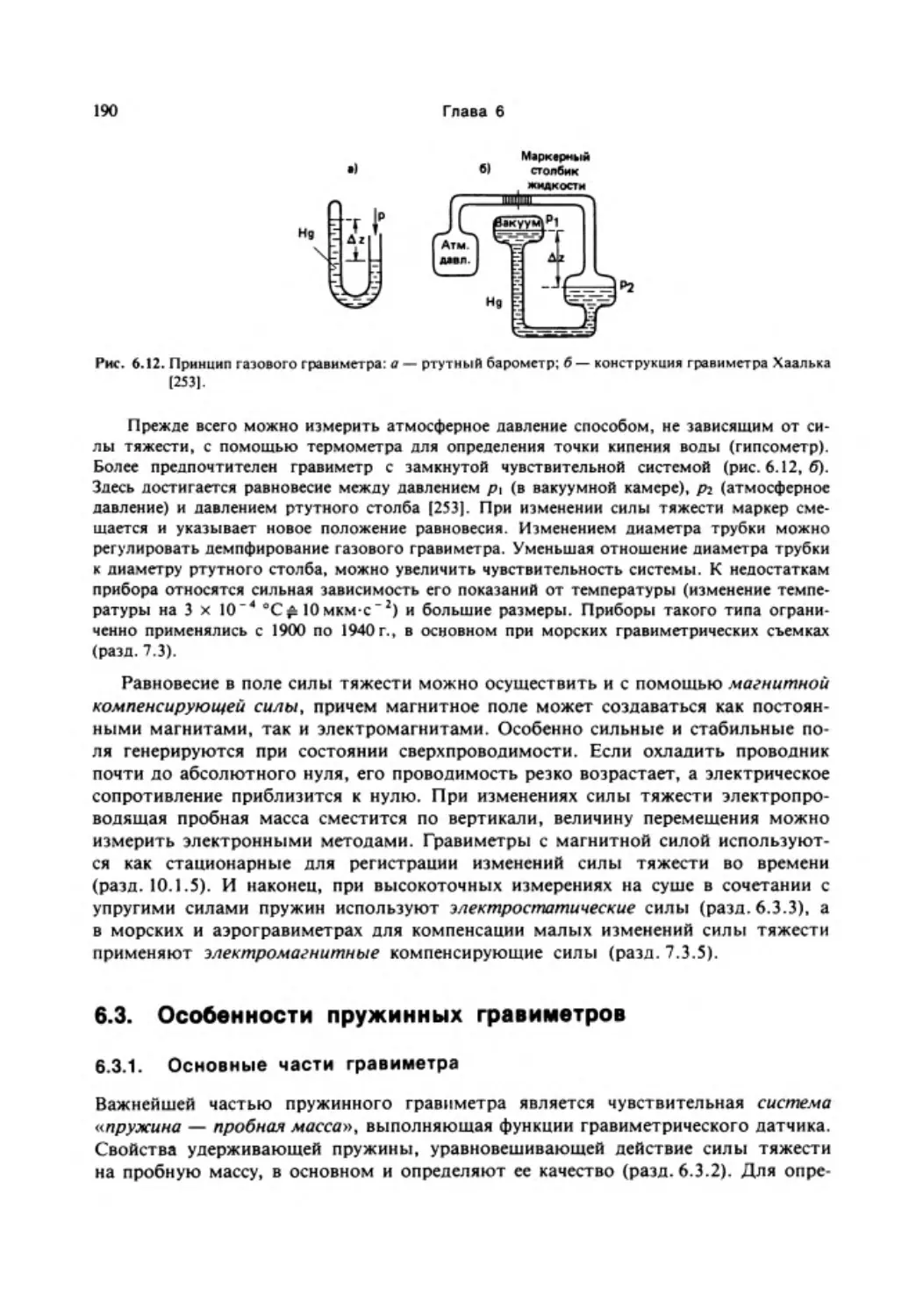
вляется давлением воздуха.
Примерно к 1939 г. в разведке нефтяных месторождений статический грави
метр почти полностью заменил крутильные весы. Время наблюдений на пунктах
сократилось теперь до 10 — 30 мин. Помимо обширных съемок частных компа
ний (в 1945 г. на территории США работало около 170 гравиметрических бригад)
гравиметрические съемки продолжали или обновляли также и государственные
организации. Их задача состояла в создании опорной гравиметрической сети и
в систематическом исследовании геологических структур и природных ресурсов
геофизическими методами.
Благодаря пионерским работам Ф.А. Венинг-Мейнеса стали возможны более
интенсивные гравиметрические съемки океанов. В 1921 г. он создал двухмаятни
ковый прибор для измерений на подвижном основании. Этот прибор был переде
лан в трехмаятниковый для наблюдений на борту погруженной подводной лодки
(глубина 30 — 80 м). С 1923 по 1960 г. Нидерланды, США, Франция, Италия
и СССР осуществили экспедиции, в которых определили более 5000 маятниковых
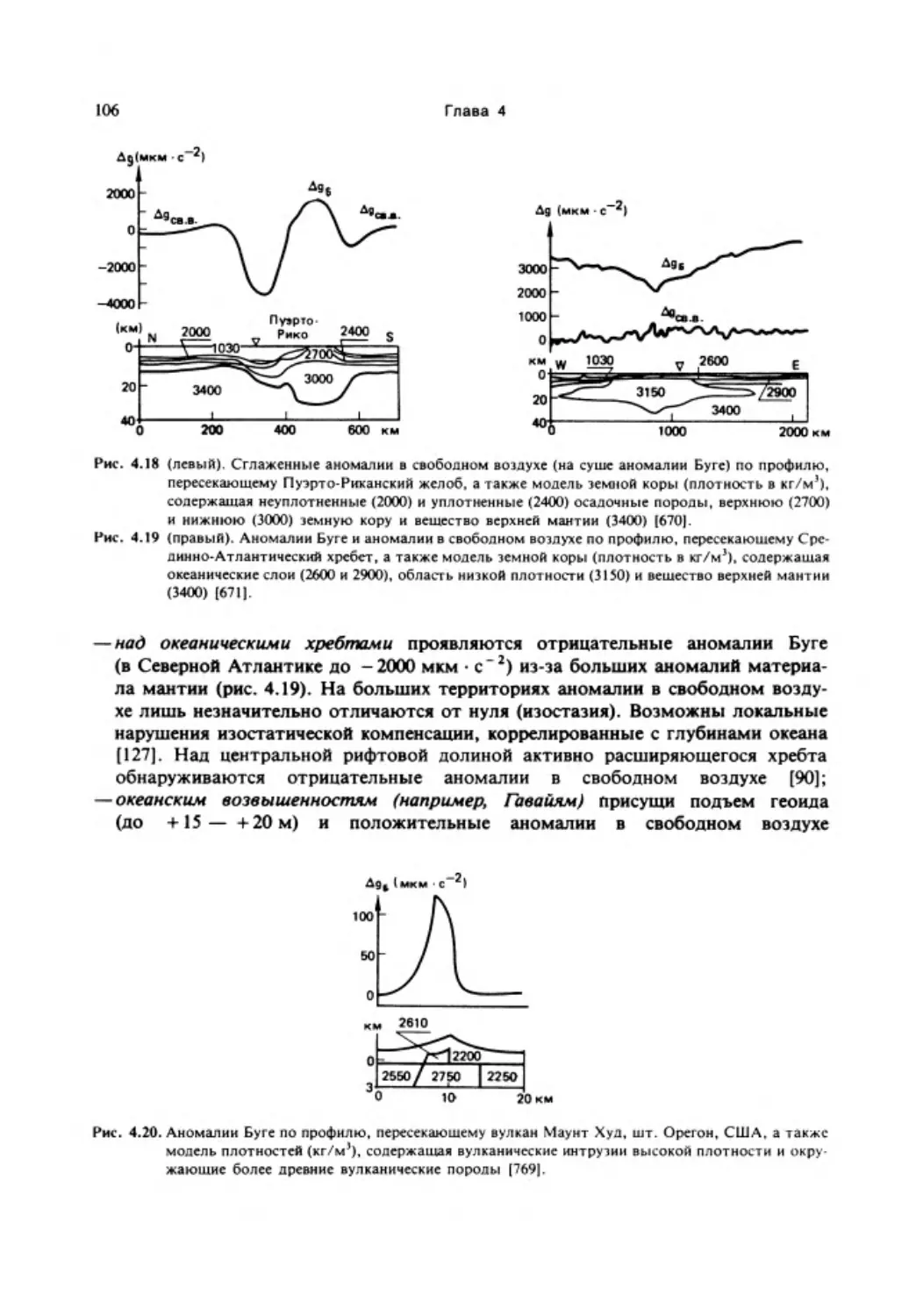
пунктов ( ± 3 0 — 100 мкм с -2).
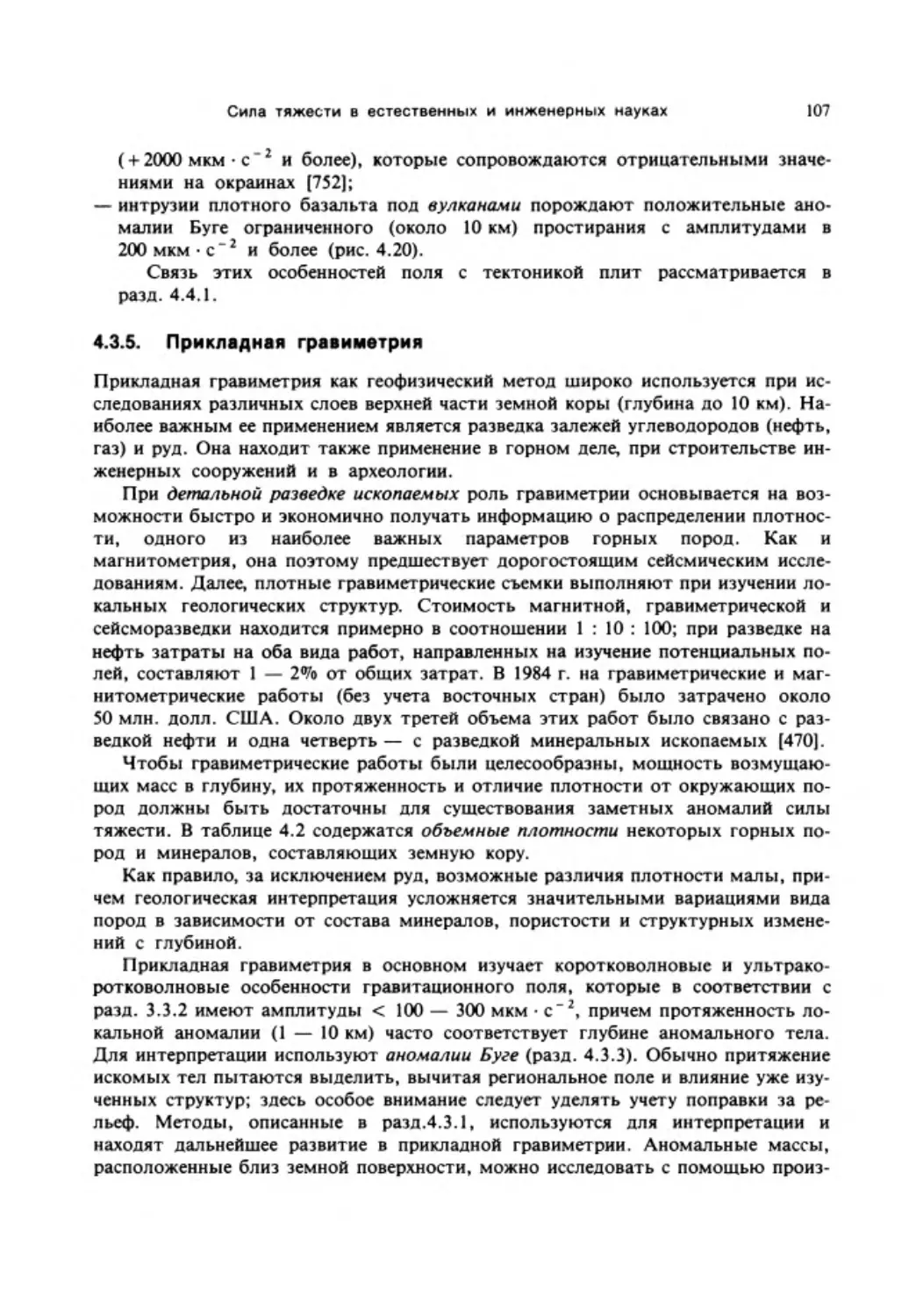
В первой половине 20 в. число гравиметрических пунктов существенно увели
чилось. Н.Ф. Журавлев [635] использовал для определения сжатия земного эллип
соида более 10000 пунктов, которые, однако, были распределены неравномерно
по поверхности Земли.
Дальнейшее расширение глобальной гравиметрической сети было продолже
но маятниковыми связями между национальными фундаментальными пунктами
и связями с пунктом абсолютных измерений в Потсдаме. Новые абсолютные
измерения с оборотными маятниками (±10 мкм с -2), выполненные Националь
ным бюро стандартов в Вашингтоне и Национальной физической лабораторией
в Теддингтоне (Великобритания), обнаружили, что значение силы тяжести в По
тсдаме завышено.
Введение
21
Теоретические достижения состояли в геодезическом и геофизическом приме
нениях гравиметрических данных. Отметим теоретические работы по изостазии,
выполненные Дж. Ф. Хейфордом [277], В. Боуи [89], В.Х. Хейсканеном [286] и
Ф.А. Венинг-Мейнесом [735], а также вывод по гравиметрическим данным новых
величин коэффициентов в формулах для нормальной силы тяжести, в том числе
для трехосного эллипсоида [287]. Международная ассоциация геодезии в 1930 г.
рекомендовала формулу силы тяжести для нормального поля уровенного эллип
соида [534, 649]. Определением геоида гравиметрическим методом занимался Г.
Джеффрис [332]. Первые вычисления фигуры геоида по гравиметрическим дан
ным выполнены в 1934 г. Хирвоненом [302]. Теоретические основы прикладной
гравиметрии заложили в 1930 — 1940 гг. Неттлтон [504], Хаммер [262], Хаальк
[254], Юнг [343] и другие.
1.2.4.
Создание гравиметрических сетей, геодезические
и геофизические результаты (вторая половина 20 в.)
Развитие гравиметрии начиная с 1945 г. характеризуется следующими достижени
ями в области приборостроения:
— разработка прецизионных статических гравиметров с широким диапазоном из
мерений (точность стационарных наблюдений ± 1 0 “ 8 м - с “ 2, полевых ± 1 0 “ 7
м · с ~2);
— создание стационарных и транспортабельных баллистических приборов того
же уровня точности;
— создание морских гравиметров.
Применяя гравиметр Уордена, Буллард [777] показал, что пружинными грави
метрами можно измерять большие приращения силы тяжести. Термостатирован
ные гравиметры с металлической пружиной работали с точностью ±0,1 —
0,5 м к м - с “ 2. К ним относятся гравиметры фирмы «Аскания» с чувствительной
системой в виде крутильных пружинных весов, имеющей линейную характери
стику, а также астазированные гравиметры Уэстерн, Северная Америка и грави
метры Ла Коста — Ромберга, основанные на принципе сейсмометра. Вплоть до
1970 г. различные организации выполняют абсолютные измерения силы тяже
сти с оборотным маятником. Как и предполагал Гийе [251], успехи в измерениях
коротких интервалов времени позволили выполнить эксперименты со свободным
падением пробной массы [739]. В первых экспериментах в качестве падающего
тела использовались калиброванные по длине стержни и получена точность ±10 —
20 мкм · с “ 2. Одновременные измерения расстояний и времени с помощью интер
ферометра Майкельсона [189, 584] позволили повысить точность до уровня
± 1 мкм · с “ 2; первый транспортабельный прибор успешно использовался при
создании мировой гравиметрической сети. Метод симметричного движения тела,
испытанный Куком [129], уменьшил эффект торможения в газовой среде. Грави
метрический прибор, основанный на принципе свободного падения тела, принято
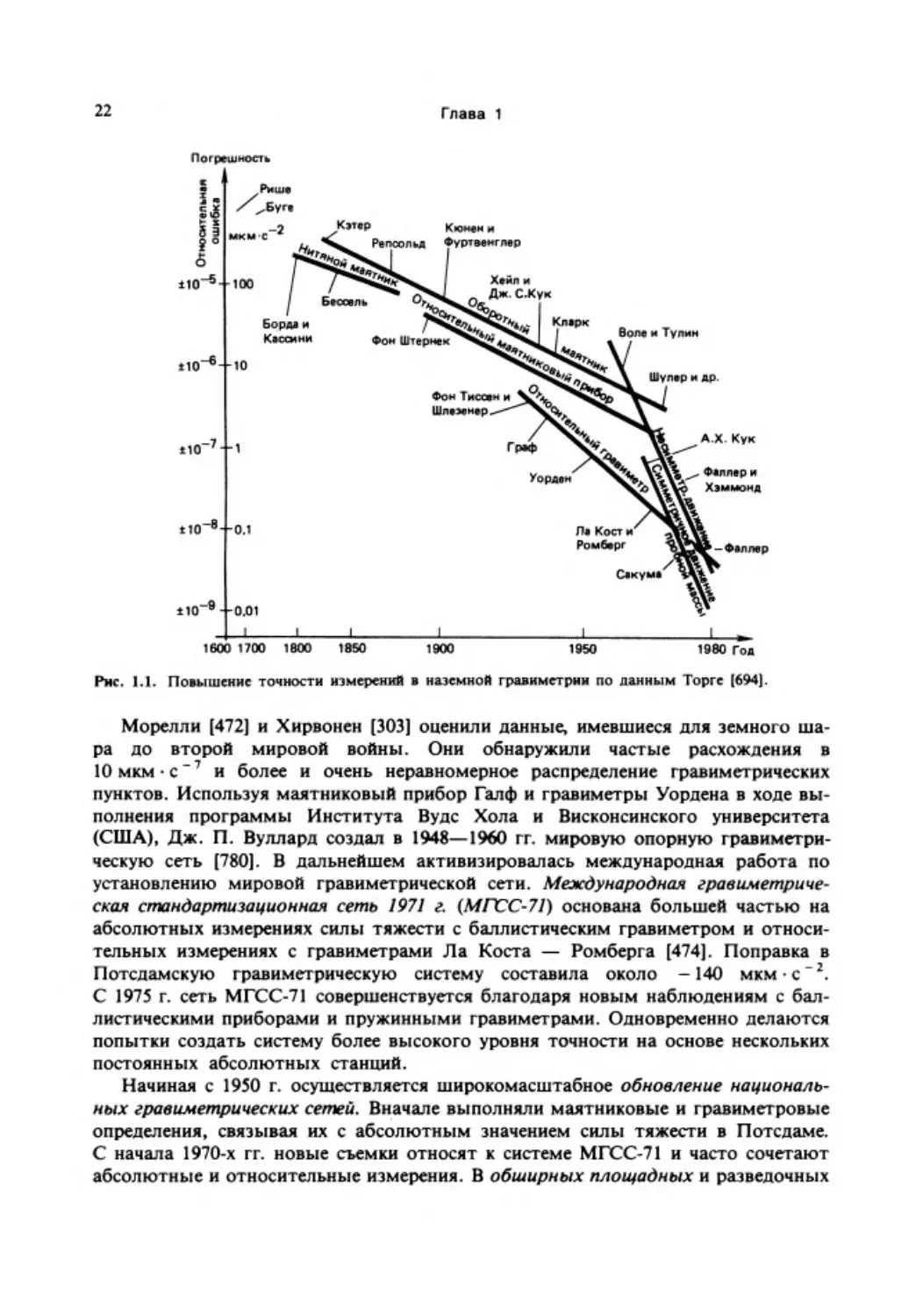
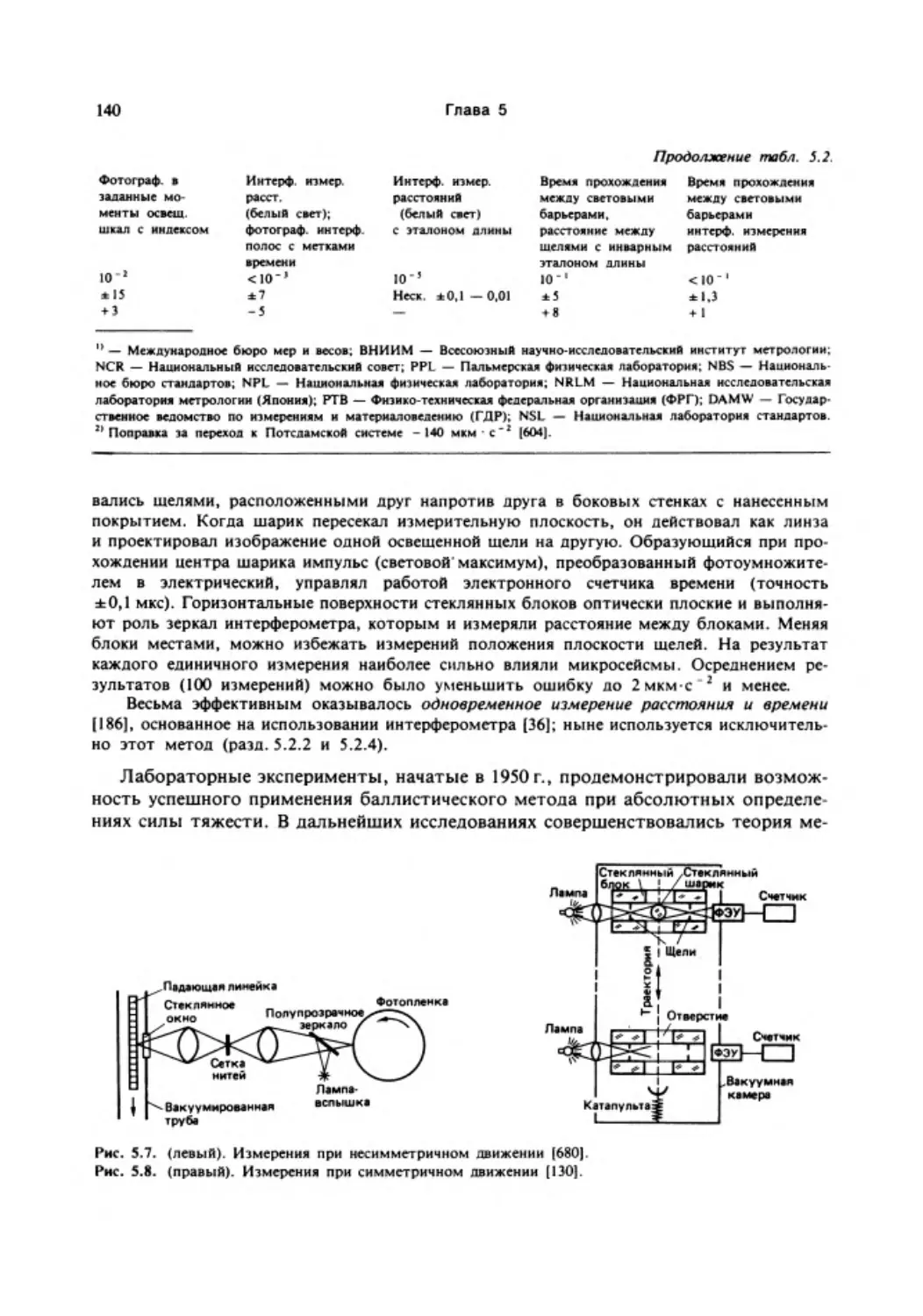
теперь называть «абсолютным гравиметром». На рис. 1.1 показано, что за три
столетия точность измерений в гравиметрии увеличилась на 4 — 5 порядков.
Новые возможности измерительных приборов стимулировали создание грави
метрических сетей и развитие гравиметрических съемок.
22
Глава 1
Погрешность
Рис. 1.1. Повышение точности измерений в наземной гравиметрии по данным Торге [694].
Морелли [472] и Хирвонен [303] оценили данные, имевшиеся для земного ша
ра до второй мировой войны. Они обнаружили частые расхождения в
10мкм*с_7 и более и очень неравномерное распределение гравиметрических
пунктов. Используя маятниковый прибор Галф и гравиметры Уордена в ходе вы
полнения программы Института Вудс Хода и Висконсинского университета
(США), Дж. П. Вуллард создал в 1948—1960 гг. мировую опорную гравиметри
ческую сеть [780]. В дальнейшем активизировалась международная работа по
установлению мировой гравиметрической сети. Международная гравиметриче
ская стандартизационная сеть 1971 г. (МГСС-71) основана большей частью на
абсолютных измерениях силы тяжести с баллистическим гравиметром и относи
тельных измерениях с гравиметрами Л а Коста — Ромберга [474]. Поправка в
Потсдамскую гравиметрическую систему составила около -140 мкм с -2.
С 1975 г. сеть МГСС-71 совершенствуется благодаря новым наблюдениям с бал
листическими приборами и пружинными гравиметрами. Одновременно делаются
попытки создать систему более высокого уровня точности на основе нескольких
постоянных абсолютных станций.
Начиная с 1950 г. осуществляется широкомасштабное обновление националь
ных гравиметрических сетей. Вначале выполняли маятниковые и гравиметровые
определения, связывая их с абсолютным значением силы тяжести в Потсдаме.
С начала 1970-х гг. новые съемки относят к системе МГСС-71 и часто сочетают
абсолютные и относительные измерения. В обширных площадных и разведочных
Введение
23
Число
пунктов
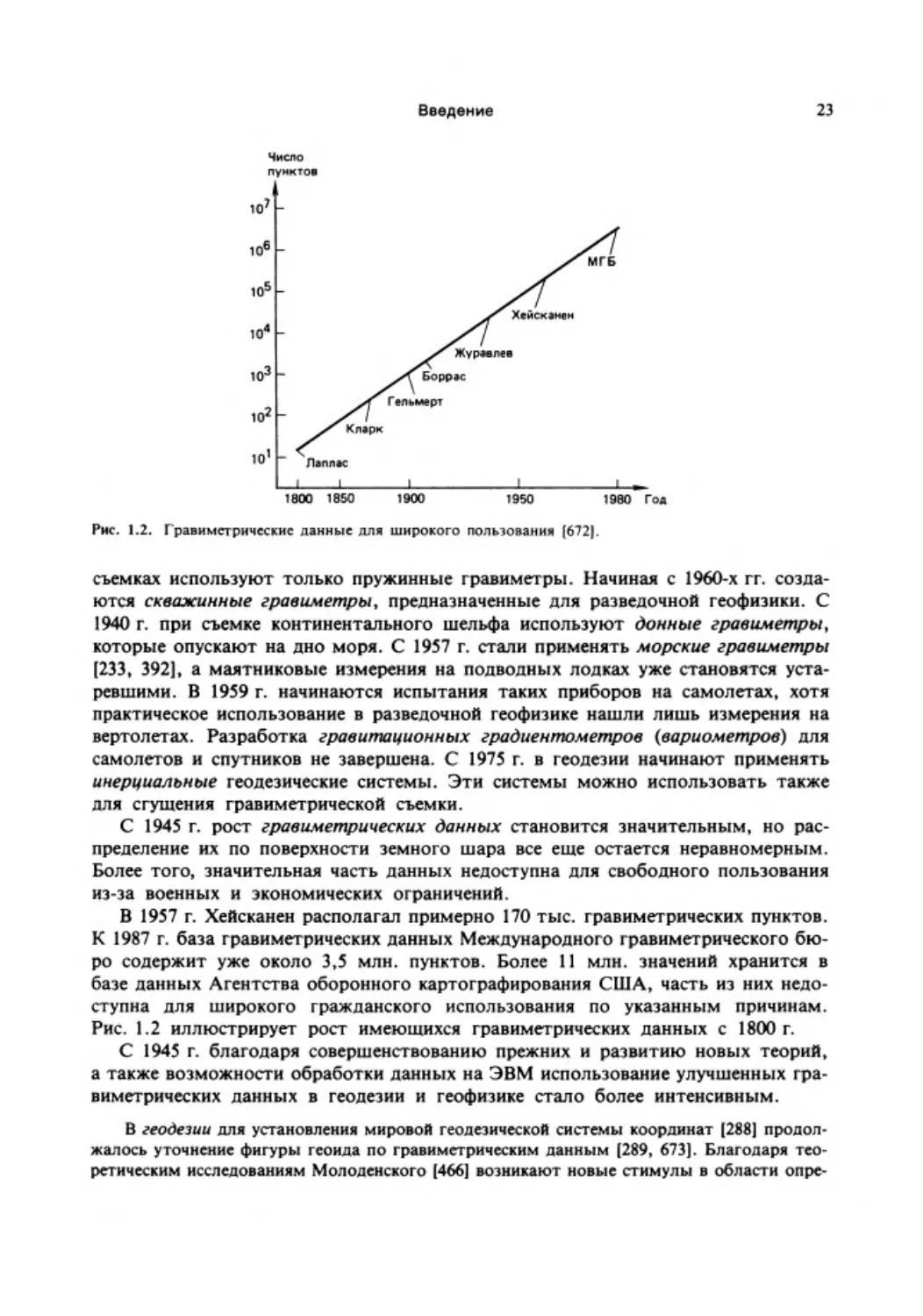
Рис. 1.2. Гравиметрические данны е для ш ирокого пользования [672].
съемках используют только пружинные гравиметры. Начиная с 1960-х гг. созда
ются скважинные гравиметры, предназначенные для разведочной геофизики. С
1940 г. при съемке континентального шельфа используют донные гравиметры,
которые опускают на дно моря. С 1957 г. стали применять морские гравиметры
[233, 392], а маятниковые измерения на подводных лодках уже становятся уста
ревшими. В 1959 г. начинаются испытания таких приборов на самолетах, хотя
практическое использование в разведочной геофизике нашли лишь измерения на
вертолетах. Разработка гравитационных градиентометров (вариометров) для
самолетов и спутников не завершена. С 1975 г. в геодезии начинают применять
инерциальные геодезические системы. Эти системы можно использовать также
для сгущения гравиметрической съемки.
С 1945 г. рост гравиметрических данных становится значительным, но рас
пределение их по поверхности земного шара все еще остается неравномерным.
Более того, значительная часть данных недоступна для свободного пользования
из-за военных и экономических ограничений.
В 1957 г. Хейсканен располагал примерно 170 тыс. гравиметрических пунктов.
К 1987 г. база гравиметрических данных Международного гравиметрического бю
ро содержит уже около 3,5 млн. пунктов. Более 11 млн. значений хранится в
базе данных Агентства оборонного картографирования США, часть из них недо
ступна для широкого гражданского использования по указанным причинам.
Рис. 1.2 иллюстрирует рост имеющихся гравиметрических данных с 1800 г.
С 1945 г. благодаря совершенствованию прежних и развитию новых теорий,
а также возможности обработки данных на ЭВМ использование улучшенных гра
виметрических данных в геодезии и геофизике стало более интенсивным.
В геодезии для установления мировой геодезической системы координат [288] продол
жалось уточнение фигуры геоида по гравиметрическим данным [289, 673]. Благодаря тео
ретическим исследованиям Молоденского [466] возникают новые стимулы в области опре
24
Глава 1
деления физической поверхности Земли по гравиметрическим данным без каких-либо гипо
тез о внутреннем строении Земли. В практику входит метод статистической интерполяции
для предсказания параметров гравитационного поля в неизученных областях [304, 477].
Разработка метода среднеквадратической коллокации [380] расширяет его до общего мето
да совместного использования геодезических данных для определения параметров гравита
ционного поля. Еще одно решение, которое учитывает дискретность гравиметрических
данных, дано Бьерхаммаром [51]. Начиная с 1958 г. анализ возмущений орбит искусствен
ных спутников Земли позволяет получить информацию о длинноволновой части земного
гравитационного поля. Уже на самой ранней стадии этот метод позволил получить вели
чины полярного сжатия и асимметрии полушарий [379, 458] более точно, чем по назем
ным данным. Большое значение приобретает совместная обработка спутниковых и назем
ных данных [432]. Вскоре такое сочетание методов стало доминировать в геодезических
приложениях, а начиная с 1975 г. в решение включают и результаты спутниковой альти
метрии [431].
В геофизике начиная с 1960 г. благодаря внедрению ЭВМ существенно расширяются
возможности моделирования распределения масс в теле Земли на основе гравиметрических
данных. Стало проще оценивать влияние топографических масс и возмущающих масс зем
ной коры, а по остаточным аномалиям силы тяжести с помощью интегрирования или
дифференцирования вычислять другие характеристики поля с минимальными дополни
тельными затратами. Подбор моделей распределения масс в теле Земли, соответствую
щих гравиметрическим данным, осуществляется последовательными приближениями с ис
пользованием численных и аналитических методов [75, 668]. Применение методов спект
рального анализа [42, 723] открывает новые возможности в интерпретации потенциальных
полей. Разумеется, неоднозначность в решении обратной задачи гравиметрии не может
быть разрешена совершенствованием методов вычислений [644]. Современные методы ге
олого-геофизической интерпретации используют разнородные данные и ориентированы на
оптимальное использование содержащейся в них информации. Локальные и региональные
аномалии силы тяжести имеют важное значение для прикладной геофизики и геофизиче
ских съемок, а крупномасштабные особенности гравитационного поля содержат информа
цию о глубоких массах. Эти особенности и вносят основной вклад в разработку геодинамических моделей, в частности при изучении тектоники литосферных плит.
1.2.5.
Изучение временных изменений силы тяжести
Временные изменения силы тяжести можно разделить на две категории. К пер
вой отнесем изменения, вызванные земными приливами и изменениями вращения
Земли, а ко второй — изменения вследствие перераспределения масс в теле
Земли.
После того как Ньютон объяснил причину океанических приливов изменением
притяжения Солнца и Луны, лорд Кельвин [679] выдвигает предположение о
приливных деформациях упругой Земли. От этих деформаций зависят наблюдае
мые амплитуды процессов, связанных с приливами, например вариаций силы
тяжести.
Швейдар [617] первым наблюдал гравиметрические приливы с помощью бифилярного
гравиметра в стволе скважины Геодезического института в Потсдаме. С более совершен
ным прибором Томашек и Шаффернихт [685] смогли повысить точность до 10 нс с -2.
Для анализа земноприливных наблюдений стали применять гармонические разложения
Дарвина [134] и Дудсона [150], основанные на представлении приливного потенциала по
Лапласу (1778). Упругие свойства Земли описываются числами Лява [422], определяющи
Введение
25
ми отношение наблюдаемых и теоретических приливных амплитуд. Вначале это отноше
ние считали постоянным для всей Земли. В 1949 г. синхронные наблюдения, проводившие
ся в течение двух недель на 26 станциях, распределенных по всей поверхности Земли, дали
величину 1,2 [21]. Длительная регистрация во время Международного геофизического года
(1957) выявила местные изменения этого коэффициента. Томашек [684] указывает на воз
можность использования такой информации для изучения неоднородностей земной коры.
После 1960 г. совершенствование приливных гравиметров приводит к повышению точнос
ти до ± 1 —10 нм с -2. Новые возможности открылись с созданием сверхпроводящего
прецизионного гравиметра с высокой долговременной стабильностью [544]. С начала
1970-х гг. гравиметрические приливные исследования стали проводиться главным образом
по глобальным программам наблюдений для изучения взаимодействия океанических и
земных приливов [388, 452].
Появление статических гравиметров положило начало успешным наблюдени
ям неприливных изменений силы тяжести. Особый интерес здесь представляют
изменения силы тяжести в активных тектонических зонах.
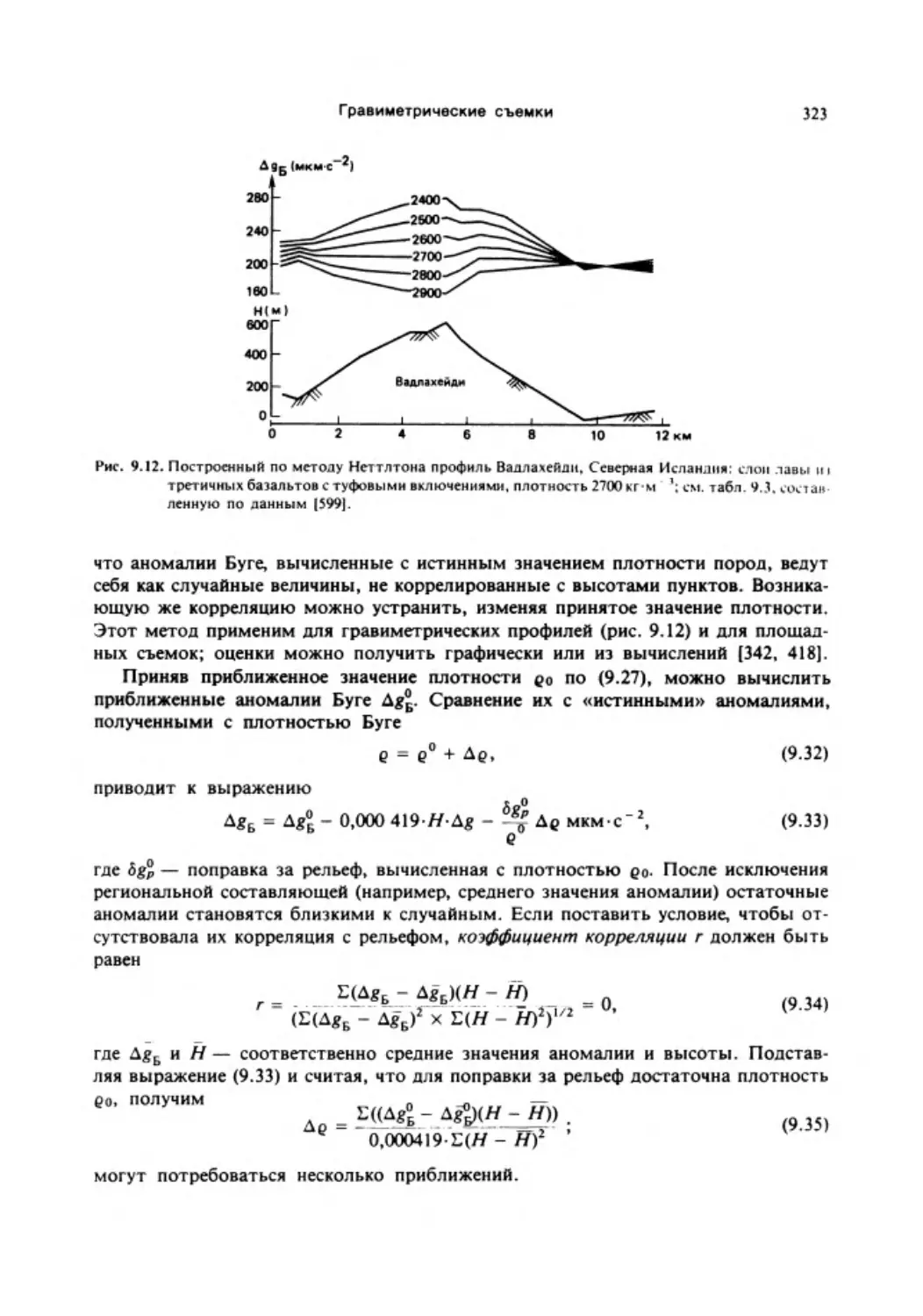
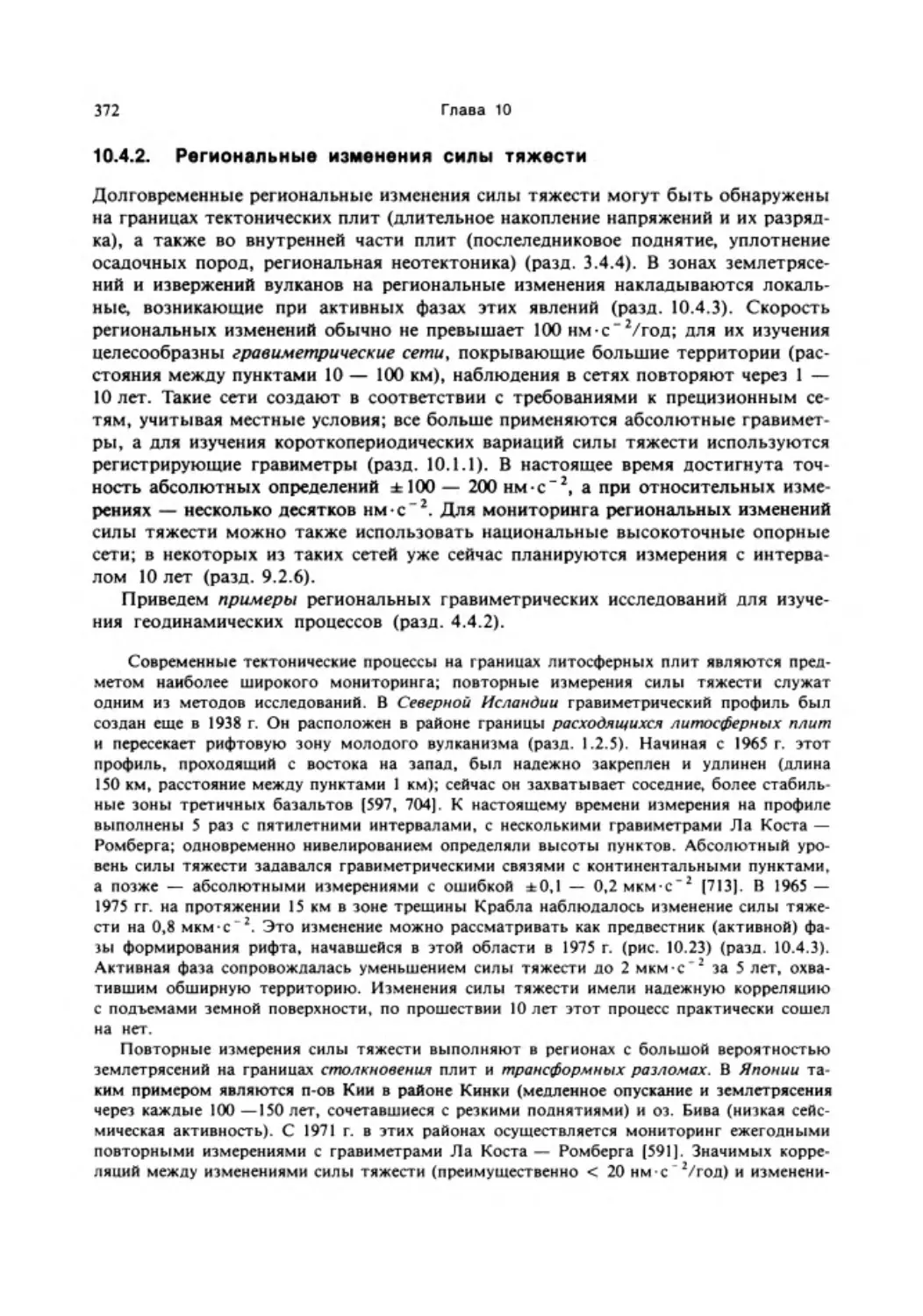
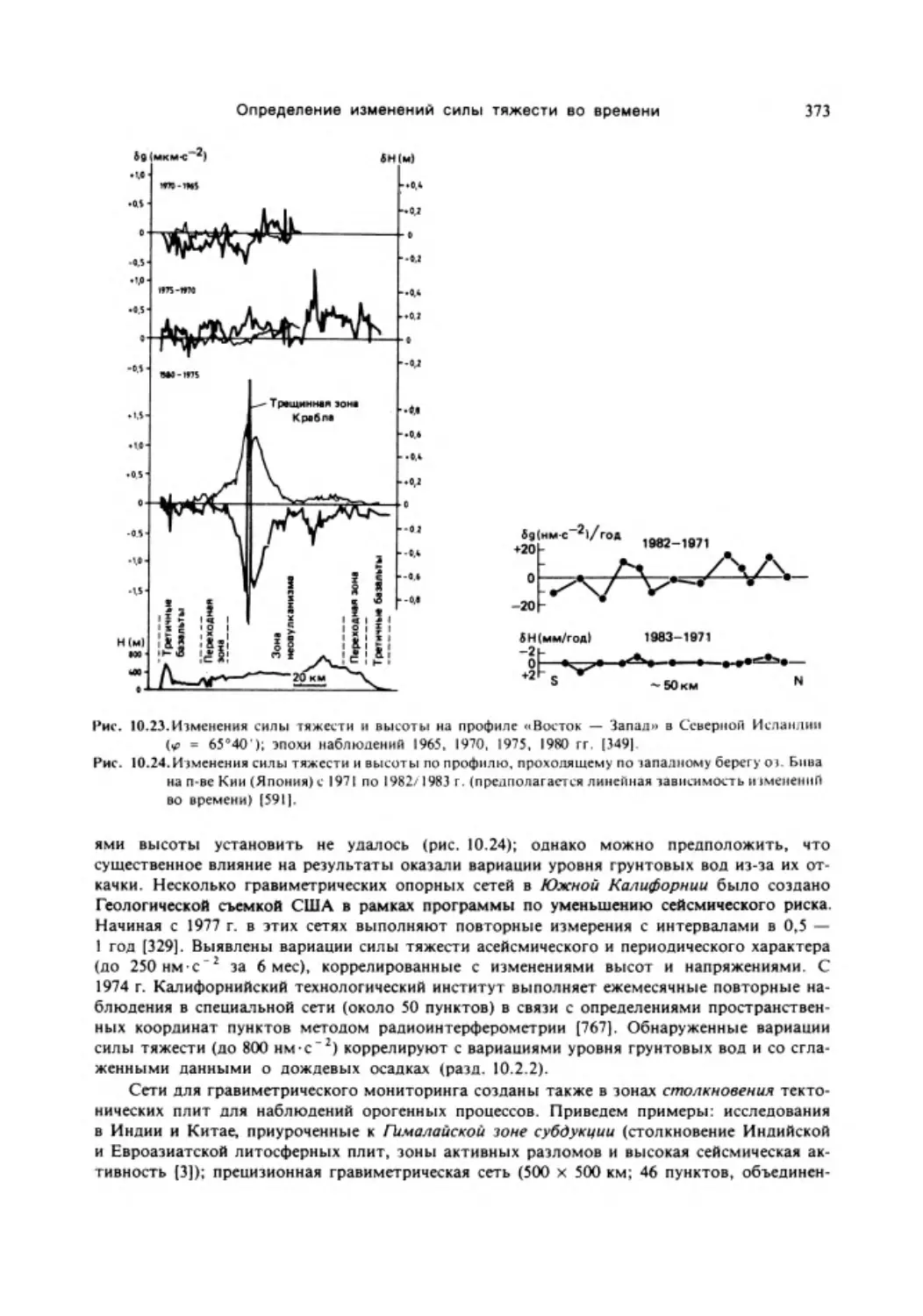
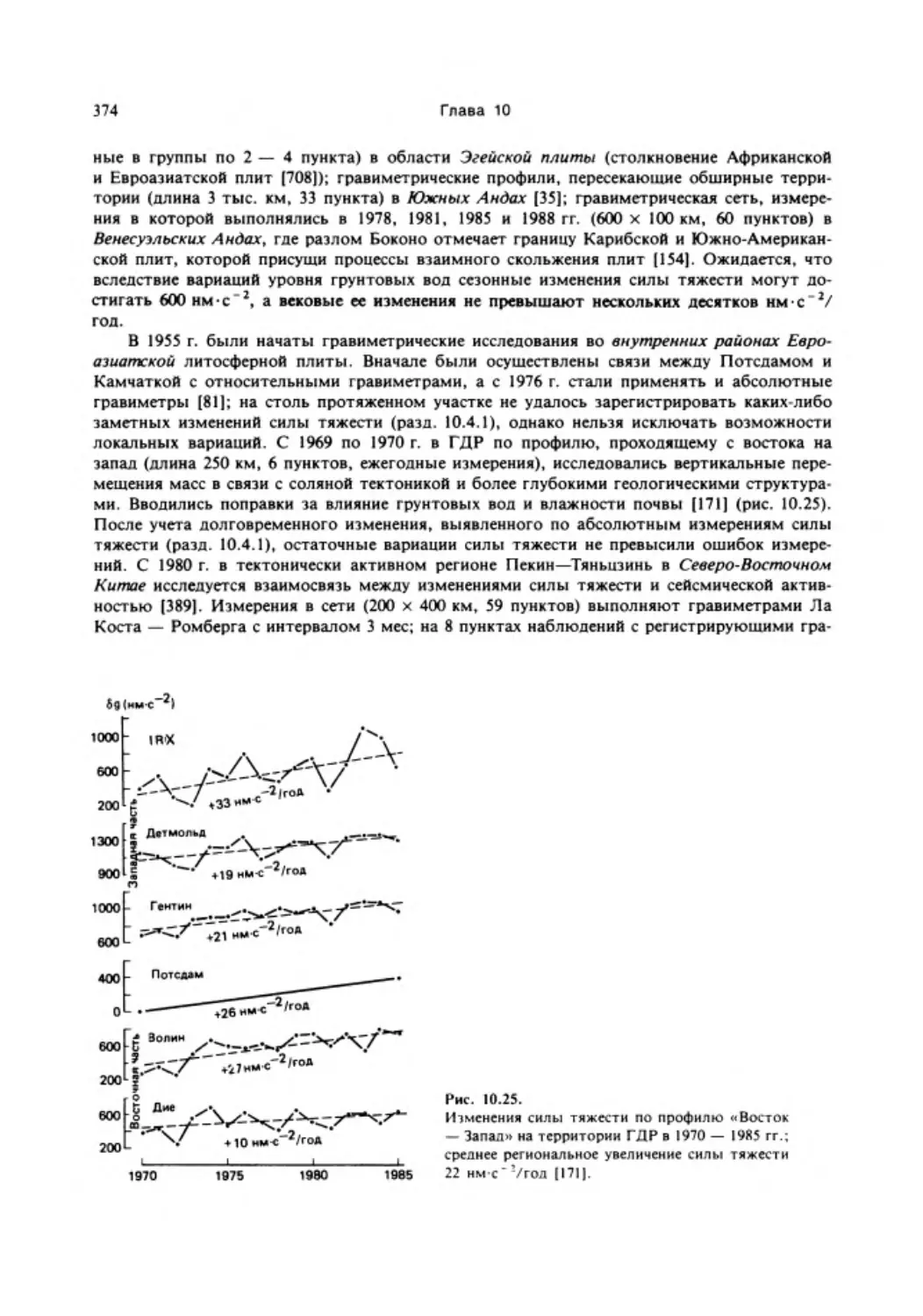
В 1938 г. Шлезенер [595] создал гравиметрический профиль в Северной Ислан
дии с целью обнаружения из повторных измерений временных вариаций силы
тяжести в зоне молодого вулканизма. Начиная с 1960 г. стали возможны повтор
ные гравиметрические наблюдения с новой аппаратурой в различных районах.
Эти наблюдения привели к обнаружению локальных изменений силы тяжести,
связанных с геодинамическими (землетрясения, вулканизм, изостатические подъ
емы) и техногенными процессами в близповерхностных слоях (добыча ископае
мых, промышленное строительство). Однако пока крупномасштабные долгопе
риодические или вековые изменения со всей определенностью не доказаны. Воз
мущающими эффектами при таких исследованиях являются локальные
перемещения масс, в их числе изменение уровня грунтовых вод и вариации ат
мосферного давления.
1.3.
Национальные и международные организации
Измерения силы тяжести выполняют многочисленные государственные и част
ные организации. Для широкого использования гравиметрических данных необ
ходимы международное сотрудничество и координация, которые осуществляет
Международная ассоциация геодезии (МАГ). Огромное значение имеют архивы
гравиметрических данных в национальных и международных базах данных.
1.3.1.
Национальные организации
Измерениями силы тяжести занимаются организации, связанные с исследования
ми по физике, геодезии и геофизике.
В области физики организации, занимающиеся метрологией и стандартиза
цией, решают задачу установления гравитационного стандарта по измерениям
силы тяжести. Это делается для установления единицы силы и других производ
ных единиц. Кроме того, некоторые организации проводят исследования с целью
определения гравитационной постоянной как фундаментальной физической ве
личины.
26
Глава 1
В качестве примеров отметим: Международное бюро мер и весов (Севр), Федераль
ный физико-технический институт (Брауншвейг), Германский институт стандартизации и
измерительной техники (Берлин), Национальную физическую лабораторию (Теддингтон),
Национальное бюро стандартов (Вашингтон), Институт метрологии (Ленинград).
Национальные гравиметрические сети создают главным образом геодезиче
ские службы. Эти сети покрывают территории стран опорными гравиметриче
скими пунктами. Кроме того, выполняется гравиметрическая съемка вдоль линий
нивелирования. Геодезические службы отвечают и за создание национальных баз
гравиметрических данных, привлекая к сотрудничеству другие организации.
Примерами таких служб являются государственные геодезические службы Федератив
ной Республики Германии, Национальная геодезическая съемка Национальной океаногра
фической съемки США, Индийская геодезическая служба и Институт географической съем
ки Японии. Иногда и научные институты также принимают участие в создании опорных
гравиметрических сетей, оказывая консультации и выполняя часть полевых работ. Приме
рами таких институтов являются Германский геодезический научно-исследовательский инс
титут (Мюнхен и Франкфурт-на-Майне), руководимый Германской геодезической комисси
ей, Центральный институт физики Земли (Потсдам), Институт геодезии и геофизики Ака
демии наук Китая (Пекин) и Центральный научно-исследовательский институт геодезии,
аэросъемки и картографии (Москва).
Гравиметрическая съемка и создание карт аномалий силы тяжести в основном
являются задачей геолого-геофизических служб.
Отметим следующие организации: Геологический исследовательский институт Ниж
ней Саксонии (Ганновер), выполняющий работы в Федеративной Республике Германии,
Геологическая съемка США, Бюро геологических исследований (Франция), Институт гео
логических наук (Великобритания), Геологическая съемка Японии и Геологическая съемка
Канады (ранее Отделение физики Земли). Некоторые из этих служб проводят также гео
физические исследования.
Гидрографические и океанографические службы, а иногда и специальные отде
лы геологических служб работают на акваториях.
Широкомасштабные морские гравиметрические работы, большей частью в сочетании
с другими океанографическими и геофизическими работами, выполняются Германским
гидрографическим институтом (Гамбург), Федеральным институтом наук о Земле и мине
ральных ресурсов (Ганновер), Институтом геологических наук (отдел морской геофизики)
и Институтом океанографических наук (Великобритания), Гидрографическим отделом
(Япония), Геологической съемкой и Национальной океанографической съемкой США, Ка
надской гидрографической службой, а также целым рядом университетских отделений,
например Ламонтской геологической обсерваторией Колумбийского университета
(Нью-Йорк).
В рамках своих основных задач гравиметрические съемки выполняют также
институты полярных исследований и военные службы.
Теоретическими, инструментальными и методологическими аспектами грави
метрических исследований занимается ряд геологических и геофизических факуль
тетов университетов. Здесь основное внимание уделяется повышению точности
измерений и обработке результатов, созданию калибровочных базисов и прецизи
онных гравиметрических сетей для изучения временных вариаций силы тяжести,
Введение
27
а также разработке моделей для последующего использования в геодезии и гео
физике.
И наконец, назовем компании, выполняющие геофизическую разведку, и гео
физические отделы больших нефтедобывающих и шахторазрабатывающих пред
приятий. Они занимаются измерениями силы тяжести для изучения геологиче
ских структур.
Основанная Л. Минтропом компания Seismos GmbH в 1921 г. стала первой компанией,
специализирующейся на прикладной геофизике. Сейчас компания Prakla-Seismos (Ганно
вер) — одна из десяти крупнейших геофизических компаний в мире. Другие компании, из
вестные во всем мире: Геофизическая служба, Инк. (Texas Instruments, Даллас и Хьюстон);
Геофизическая компания Уэстерн (Litton Industries, Хьюстон); Главная геофизическая ком
пания (Париж).
1.3.2.
Международное сотрудничество
В 17 и 18 вв. сотрудничество ученых на национальном, а вскоре и на междуна
родном уровне получило сильную поддержку благодаря созданию научных акаде
мий. Следует отметить Национальную академию наук, Рим (1603), Королевское
научном общество, Лондон (1660), Академию наук, Париж (1666), Прусскую
(1700) и Баварскую (1759) академии наук. Значительная часть исследований по
определению фигуры Земли, как указано в разд. 1.2.1 и 1.2.2, была начата и под
держана этими академиями.
В соответствии с предложением прусского генерала И.И. Байера (1794—
1885) в Берлине в 1862 г. было основано международное общество «Среднеев
ропейское градусное измерение», которое позже изменило название на «Европей
ское градусное измерение» (1867 г.) и Международное геодезическое общество
(Международную ассоциацию геодезии) (1887 г.). Первым президентом был гене
рал Байер [411]. После смерти Байера руководство ассоциацией в 1887 г. принял
Ф.Р. Гельмерт, директор Прусского геодезического института, что послужило
расширению международного сотрудничества.
К гравиметрической деятельности Международного геодезического общества с 1864
по 1914 г. относятся создание и применение маятникового прибора Репсольда, инструмен
тальные и теоретические исследования источников ошибок измерений, измерения с маят
никовыми приборами Штернека, абсолютные измерения в Потсдаме, установление миро
вой гравиметрической системы (Венская и Потсдамская системы), первые гравиметриче
ские определения на океанах, наблюдения земных приливов, а также сбор и публикация
гравиметрических данных.
В 1917 г. Международное геодезическое общество прекращает свое существо
вание, а геодезию в Международном геодезическом и геофизическом союзе
(МГГС), основанном в 1919 г., начинает представлять Международная ассоциа
ция геодезии. Проблемы гравиметрии продолжают играть важную роль в науч
ных программах МАГ.
На Генеральных ассамблеях МГГС и МАГ заслушиваются доклады по гравитацион
ному полю, изостазии и земным приливам. Основные усилия с 1922 по 1939 г. направлены
на получение гравиметрических данных по всему земному шару, определение фигуры геои
28
Глава 1
да и общеземного эллипсоида, контроль и совершенствование мировой гравиметрической
системы, выполнение измерений силы тяжести на океанах, введение формулы нормальной
силы тяжести и исследования по изостазии.
После 1945 г. раздел гравиметрии в МАГ был реорганизован и структура его
была изменена. Гравиметрией стала заниматься одна из пяти секций МАГ. В за
дачи Секции III «Определение гравитационного поля» входят (1987 г.) «абсолют
ные и относительные наземные измерения силы тяжести, неприливные вариации
силы тяжести, определение внешнего гравитационного поля и геоида методами
гравиметрии, градиентометрии, геодезической астрономии, спутниковыми и
инерциальными методами, обработка и определение параметров гравитационно
го поля». Секцией руководит президент, избираемый на четыре года, ему помо
гают два секретаря. В их задачи входит представление докладов на Генеральные
ассамблеи МАГ, проводимые каждые четыре года, и составление программ их
работы [699]. С 1951 г. работает постоянная Международная гравиметрическая
комиссия, состоящая из представителей различных стран и занятая задачами,
требующими международного сотрудничества и организации. В 1987 г. с целью
усиления международного сотрудничества для определения фигуры геоида с вы
сокой точностью была образована Комиссия по изучению геоида. На ограничен
ное время организуются Специальные исследовательские группы, решающие
проблему при тесном взаимодействии специалистов в различных областях. Осо
бенно важна роль Международного гравиметрического бюро (МГБ) как агент
ства по сбору, обработке и распространению гравиметрических данных. МГБ —
это постоянный институт Федерации астрономических и геофизических служб
(ФАГС), находится в Тулузе (Франция) под эгидой Группы исследований по кос
мической геодезии Национального центра космических исследований. Его поддер
живают Бюро геологических исследований (Орлеан), а также Национальный гео
графический институт (Париж).
Изучением земных приливов занимается Комиссия по земным приливам; она
существует с 1959 г. в составе Секции V «Геодинамика» МАГ. С 1957 г. в Коро
левской бельгийской обсерватории (Брюссель) действует Международный центр
земных приливов. Он собирает результаты наблюдений земных приливов. Кроме
того, в последние годы были осуществлены программы наблюдений по всему
миру.
За региональные рамки выходит также мировая база гравиметрических данных (Гра
виметрическая библиотека Управления МО США) при Аэрокосмическом центре Агентства
оборонного картографирования (DMAAC) США в Сент-Луисе, а также Мировой центр
данных по физике твердой Земли в Боулдере (шт. Колорадо), подчиненный Национально
му управлению по изучению океана и атмосферы (ΝΟΑΑ) и собирающий гравиметриче
ские данные по территории США и акваториям океанов.
1.3.3.
Научные сообщения и документация
Секция III МАГ «Определение гравитационного поля» проводит совместно с дру
гими секциями специальные симпозиумы во время Генеральных ассамблей МАГ.
В перерывах между ассамблеями происходят заседания Международной грави
метрической комиссии, а также симпозиумы, совещания рабочих групп и другие
Введение
29
заседания специальных исследовательских групп. Сообщения и результаты науч
ных исследований, изложенные на этих встречах, публикуются в сборниках тру
дов «Proceedings» или в научных журналах. Международное гравиметрическое
бюро и Международный центр земных приливов издают соответственно инфор
мационный бюллетень «Bureau Gravim0trique International» и журнал «Marees Ter
restres», содержащие статьи, документы и ссылки на научную литературу. Хоро
шие обзоры работ содержатся в Национальных докладах, представляемых на Ге
неральные ассамблеи МАГ.
Систематизированное изложение гравиметрических исследований содержится
в учебниках по геодезии и геофизике. В геодезических и геофизических журналах
публикуются результаты отдельных работ. Из геодезических журналов назовем
«Bulletin G6od0sique», Париж (журнал МАГ); из геофизических журналов —
«Bolletino di Geofisica teorica ed applicata», Триест; «EOS-TYansactions American
Geophysical Union», Вашингтон; «Geophysical Journal», Оксфорд (который с 1988 г.
объединяет журналы «Annales Geophysicae, Series В», «The Geophysical Journal of
the Royal Astronomical Society», а также «Journal of Geophysics/Zeitschrift fur
Geophysik»); далее журналы «Geophysical Prospecting», Гаага; «Geophysics»,
Талса, шт. Оклахома; «Gerlands Beitrage zur Geophysik», Лейпциг; «Journal of
Geophysical Research—Section B, Solid Earth and Planets», Вашингтон; «Reviews of
Geophysics», Вашингтон; «Tectonophysics», Амстердам.
Наконец, отметим следующие периодические издания: NOAA-NOS — «Natio
nal Geodetic Survey Technical Reports», Роквилл, шт. Мэриленд; «Observatoire Royal
de Belgique — Communications — Serie G6ophysique», Брюссель; «Publications of
the Finnish Geodetic Institute», Хельсинки; «Reports of the Department of Geodetic
Science and Surveying», Университет шт. Огайо, Колумбус, шт. Огайо; «Veroffentlichungen der Deutschen Geodatischen Kommission bei der Bayerischen Academie
der Wissenschaften», Мюнхен; «Veroffentlichungen des Zentralinstitutes fur Physik der
Erde», Потсдам; «Wissenschaftliche Arbeiten der Fachrichtung Vermessungswen der
Universitat Hannover», Ганновер.
2. Теория поля силы тяжести
Теория поля силы тяжести позволяет нам оценивать характеристики поля и ана
лизировать гравиметрические данные; знание основ теории необходимо и при
выполнении измерений. В дальнейшем будем рассматривать неизменное во вре
мени земное поле, но все изложенное справедливо и для других небесных тел.
Временные вариации пока можно моделировать лишь частично; речь о них идет
в разд. 3.4.
В разд. 2.1 прежде всего определим системы координат, наиболее часто при
меняемые для представления поля силы тяжести. В разд. 2.2 вводятся понятия
ускорения силы тяжести и потенциала силы тяжести как функций местоположе
ния, а также выводятся основные функциональные зависимости. Основы геомет
рии поля силы тяжести даны в разд. 2.3. Модели поля (разд. 2.4) служат для
аппроксимации реального поля и для определения элементов аномального поля
(разд. 2.6); в связи с этим особую важность приобретает вопрос о системах вы
сот (разд. 2.5). И наконец, в разд. 2.7 рассматриваются статистические методы,
обладающие рядом преимуществ при описании и анализе поля силы тяжести.
Изучению поля силы тяжести уделяется большое внимание в учебниках по те
ории потенциала [363, 641], а также по геодезии и геофизике [246, 290, 489, 534,
692].
2.1.
2.1.1.
Системы координат
Геоцентрическая система координат
Для глобального представления поля силы тяжести используют геоцентрическую
систему координат, связанную с Землей (рис. 2.1). Ее начало совмещено с цент
ром С масс Земли. Ось Ζ совпадает с неизменной во времени средней осью вра
щения Земли, которая определена средним положением полюса на эпоху
1900,0 — 1906,0 гг. (Международное условное начало, МУН). Ось X направлена
в точку пересечения Гринвичского астрономического меридиана (нулевого мери
диана Международного бюро времени) с плоскостью среднего экватора, ось У
дополняет эту декартову систему координат до правой [491].
Геоцентрическая система координат до 1980-х гг. была определена относительно цент
ра масс Земли с ошибкой ±0,5 м, ошибка направления осей составляла ±0,03". Система
была задана пространственными координатами станций, полученными из анализа орбит
спутников, и астрономическими определениями направлений отвесных линий на многочис
ленных обсерваториях в различных точках земного шара. Новые космические методы и
Теория поля силы тяжести
31
Ζ (МУН)
i‘
Условный
северный
Единичная
сфера
Υ
X
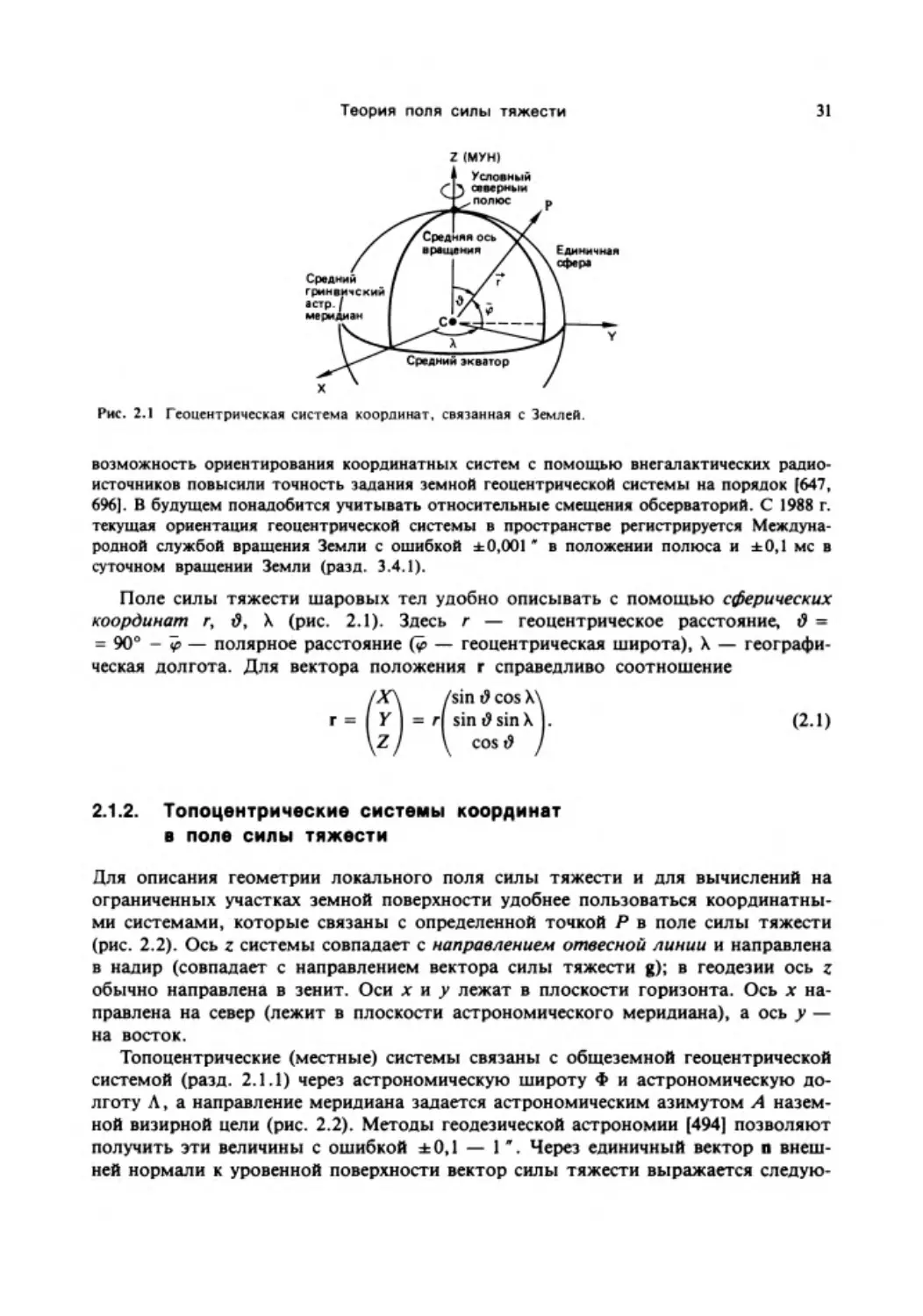
Рис. 2.1
Геоцентрическая систем а координат, связанная с Землей.
возможность ориентирования координатных систем с помощью внегалактических радио
источников повысили точность задания земной геоцентрической системы на порядок [647,
696]. В будущем понадобится учитывать относительные смещения обсерваторий. С 1988 г.
текущая ориентация геоцентрической системы в пространстве регистрируется Междуна
родной службой вращения Земли с ошибкой ±0,001 " в положении полюса и ±0,1 мс в
суточном вращении Земли (разд. 3.4.1).
Поле силы тяжести шаровых тел удобно описывать с помощью сферических
координат г, д, X (рис. 2.1). Здесь г — геоцентрическое расстояние, д =
= 90° - φ — полярное расстояние (φ — геоцентрическая широта), X — географи
ческая долгота. Для вектора положения г справедливо соотношение
( 2 . 1)
2.1.2.
Топоцентрические системы координат
в поле силы тяжести
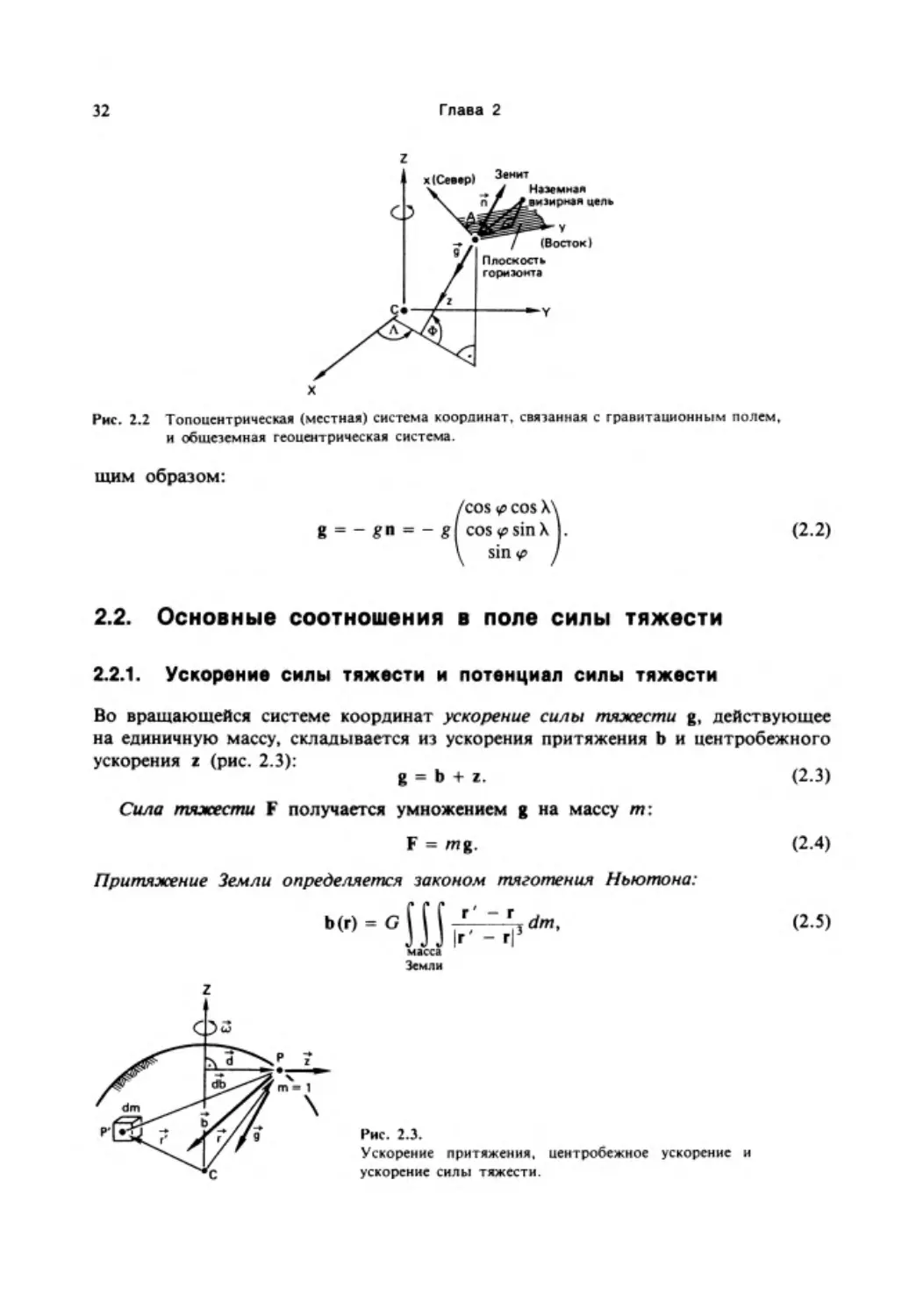
Для описания геометрии локального поля силы тяжести и для вычислений на
ограниченных участках земной поверхности удобнее пользоваться координатны
ми системами, которые связаны с определенной точкой Р в поле силы тяжести
(рис. 2.2). Ось ζ системы совпадает с направлением отвесной линии и направлена
в надир (совпадает с направлением вектора силы тяжести g); в геодезии ось ζ
обычно направлена в зенит. Оси х и у лежат в плоскости горизонта. Ось х на
правлена на север (лежит в плоскости астрономического меридиана), а ось у —
на восток.
Топоцентрические (местные) системы связаны с общеземной геоцентрической
системой (разд. 2.1.1) через астрономическую широту Ф и астрономическую до
лготу Л, а направление меридиана задается астрономическим азимутом А назем
ной визирной цели (рис. 2.2). Методы геодезической астрономии [494] позволяют
получить эти величины с ошибкой ±0,1 — 1 ". Через единичный вектор η внеш
ней нормали к уровенной поверхности вектор силы тяжести выражается следую-
Глава 2
32
ζ
х (CeeeD)
Зенит
У
Наземная
jK визирная цель
ηГ
У
(Восток)
X
Рис. 2.2
Топоцентрическая (местная) система координат, связанная с гравитационным полем ,
и общ еземная геоцентрическая система.
щим образом:
( 2 . 2)
2.2.
Основные соотношения в поле силы тяжести
2.2.1.
Ускорение силы тяжести и потенциал силы тяжести
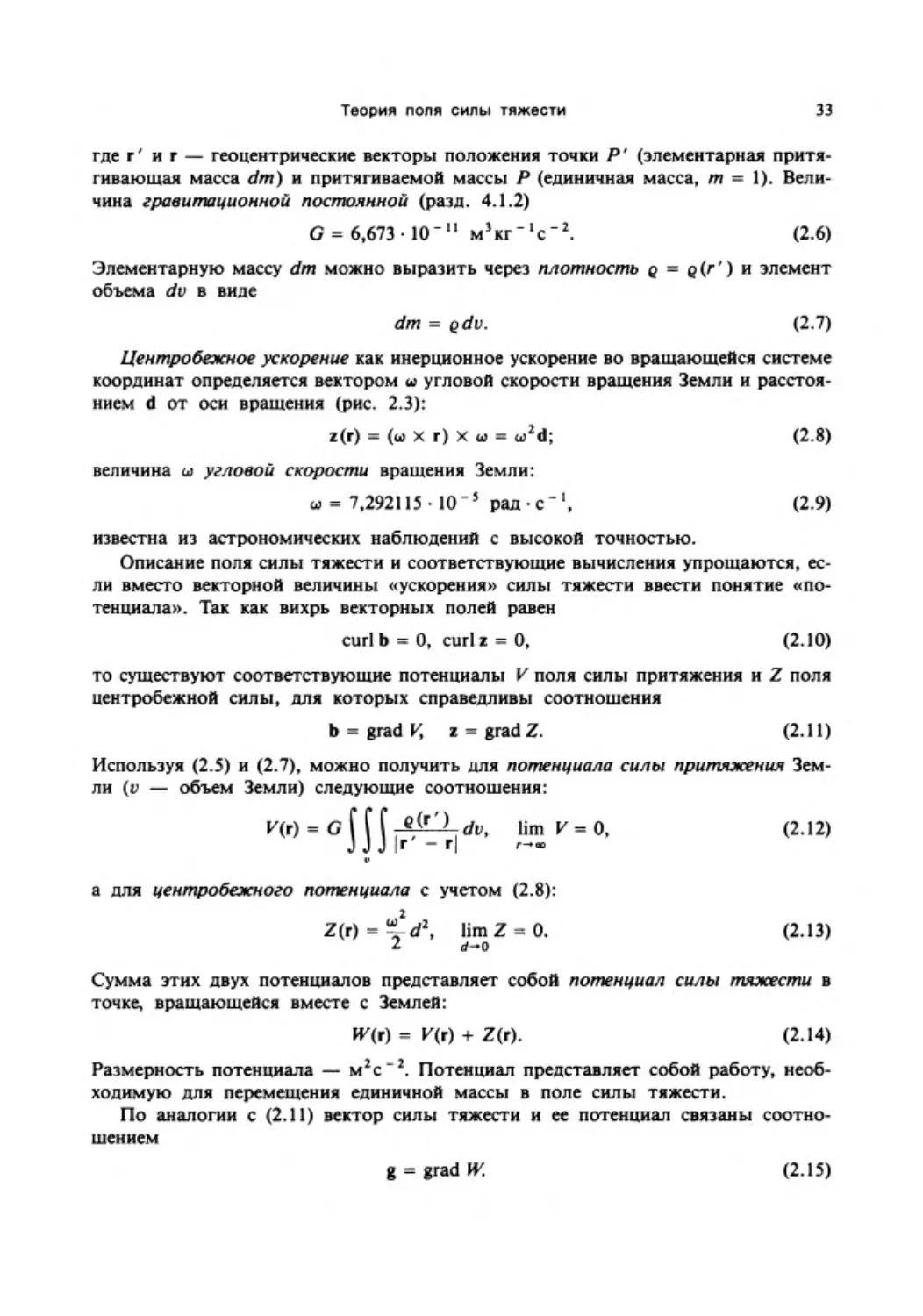
Во вращающейся системе координат ускорение силы тяжести g, действующее
на единичную массу, складывается из ускорения притяжения b и центробежного
ускорения г (рис. 2.3):
g = b + ζ.
(2.3)
Сила тяжести F получается умножением g на массу т:
F = mg.
(2.4)
Притяжение Земли определяется законом тяготения Ньютона:
(2.5)
масса
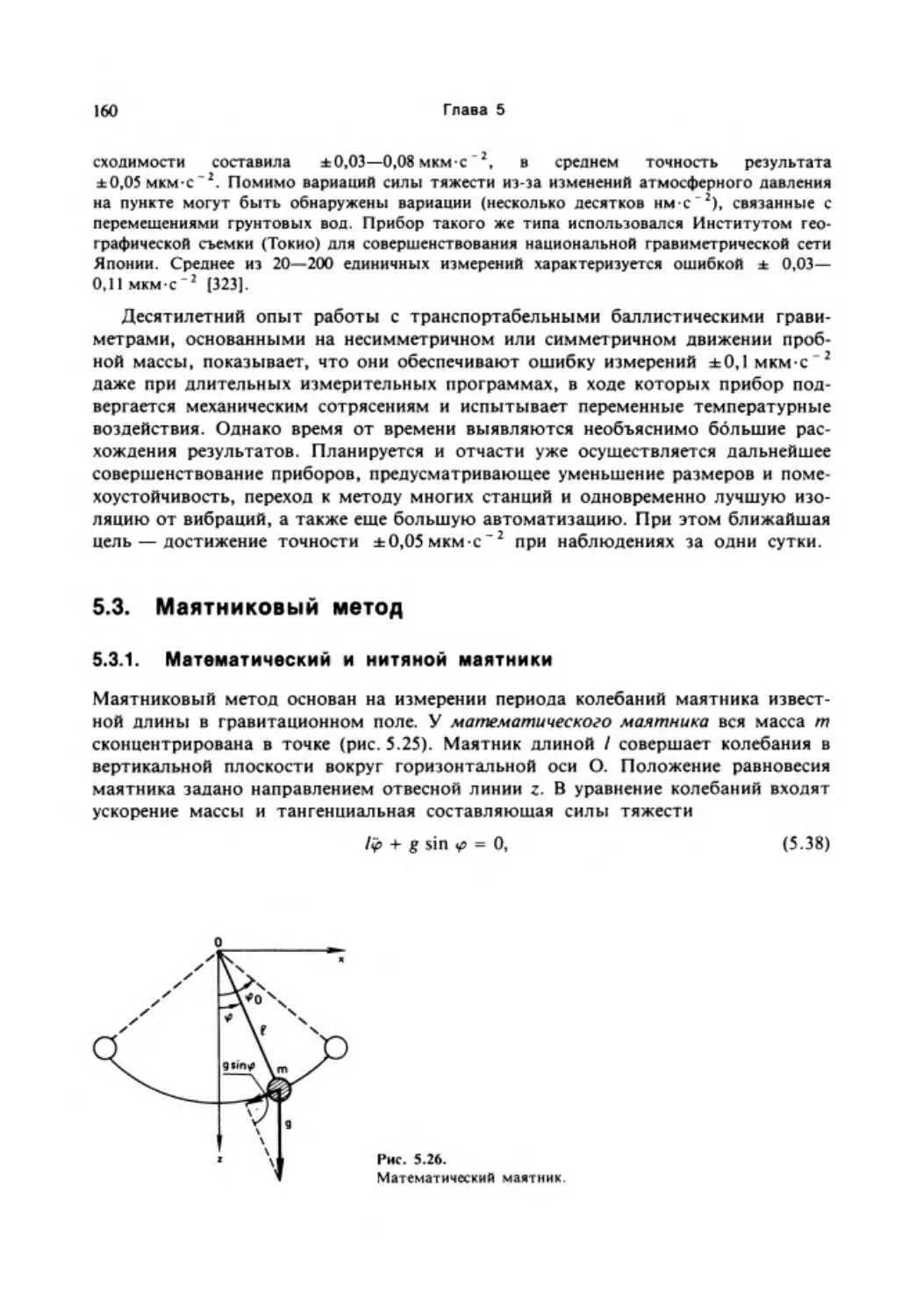
Земли
Z
Οω
ГС
Рис. 2.3.
Ускорение притяжения, центробеж ное
ускорение силы тяж ести.
ускорение
и
Теория поля силы тяжести
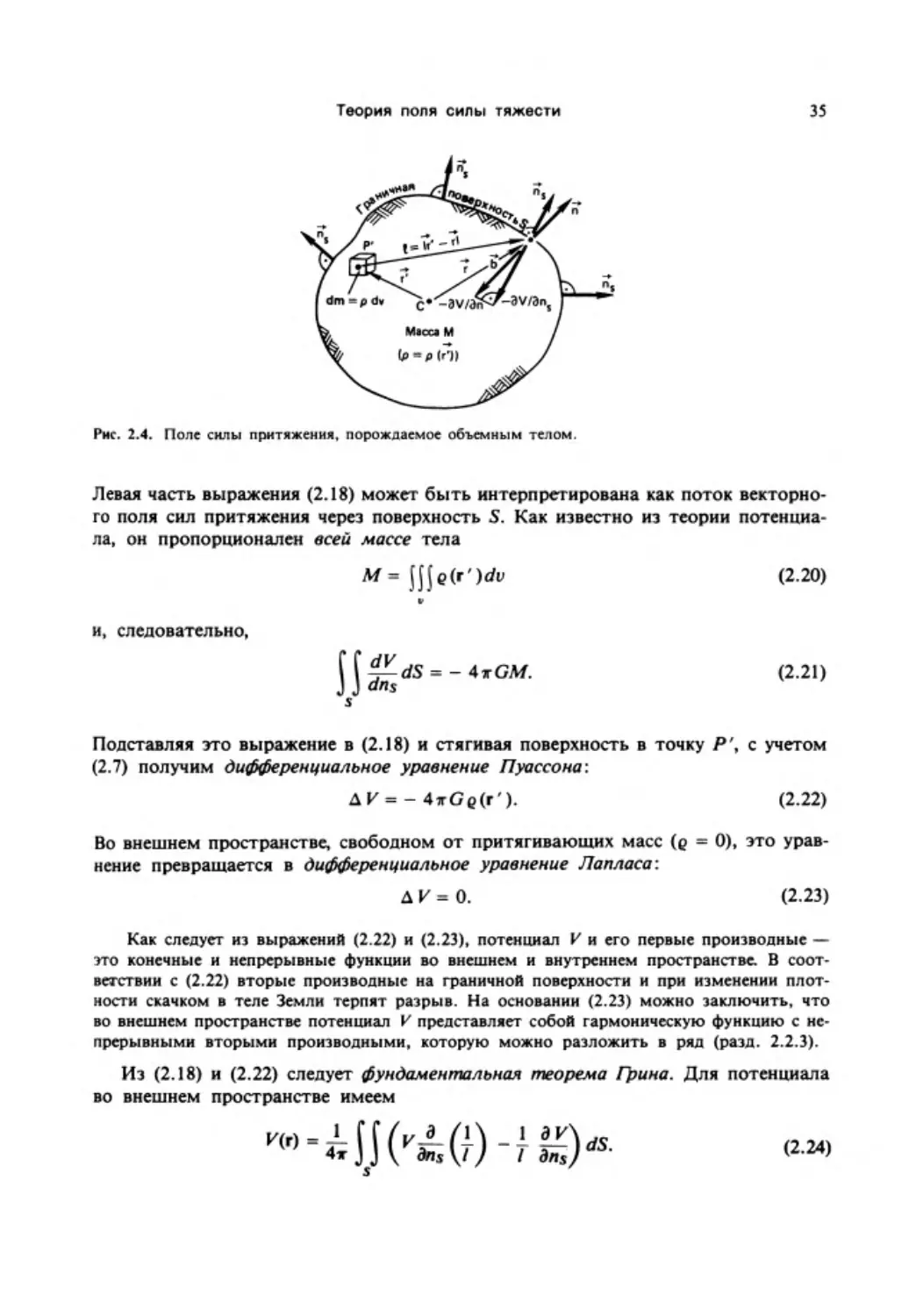
33
где г ' и г — геоцентрические векторы положения точки Р ' (элементарная притя
гивающая масса dm) и притягиваемой массы Р (единичная масса, т = 1). Вели
чина гравитационной постоянной (разд. 4.1.2)
G = 6,673-10"“
M 3 K r _ 1c “ 2.
(2.6)
Элементарную массу dm можно выразить через плотность ρ = ρ (г') и элемент
объема dv в виде
dm = ράν.
(2.7)
Центробежное ускорение как инерционное ускорение во вращающейся системе
координат определяется вектором ω угловой скорости вращения Земли и расстоя
нием d от оси вращения (рис. 2.3):
ζ ( γ)
= (ω х г) х ω = ω2ά;
(2.8)
величина ω угловой скорости вращения Земли:
ω = 7,292115· 10” 5 рад· с ’ 1,
(2.9)
известна из астрономических наблюдений с высокой точностью.
Описание поля силы тяжести и соответствующие вычисления упрощаются, ес
ли вместо векторной величины «ускорения» силы тяжести ввести понятие «по
тенциала». Так как вихрь векторных полей равен
curlb = 0, curl ж = 0,
(2.10)
то существуют соответствующие потенциалы V поля силы притяжения и Z поля
центробежной силы, для которых справедливы соотношения
b = grad К,
z = gradZ.
(2.11)
Используя (2.5) и (2.7), можно получить для потенциала силы притяжения Зем
ли (v — объем Земли) следующие соотношения:
К(г) = G j j j
V
dv,
lim V = 0,
(2.12)
а для центробежного потенциала с учетом (2.8):
Z(r) = ~ d 2,
2
lim Z = 0.
d-*o
(2.13)
Сумма этих двух потенциалов представляет собой потенциал силы тяжести в
точке, вращающейся вместе с Землей:
W( г) = Н(г) + Z(r).
(2.14)
Размерность потенциала — м 2с " 2. Потенциал представляет собой работу, необ
ходимую для перемещения единичной массы в поле силы тяжести.
По аналогии с (2.11) вектор силы тяжести и ее потенциал связаны соотно
шением
g = grad W.
(2.15)
34
Глава 2
Составляющие вектора силы тяжести по заданным направлениям будут частны
ми производными от функции W. Следовательно, в геоцентрической системе ко
ординат X , Yy Z (разд. 2.1.1) имеем
gr =OVx , WY, W z ),
(2.16)
curl g = curl grad W = 0
(2.17)
где Wx = dW/dX и т.д.
Свойство
приводит к равенствам
Wx y = Wyxy
Wx z = W z x ,
W yz = W z y ,
где Wxy = d2W/dXdY и так далее.
2.2.2.
Дифференциальная и интегральная формулы
потенциала притяжения
Потенциал центробежной силы для заданной точки можно легко получить на
основании (2.13) по известной угловой скорости вращения Земли (2.9). Потенци
ал силы притяжения у однако, нельзя определить с нужной нам точностью из
соотношения (2.12), так как функция плотности Земли ρ = ρ (г') не известна до
статочно хорошо.
Глобальные геофизические модели распределения плотности учитывают лишь ее ра
диальное изменение, что предполагает сферически симметричную структуру гравитацион
ного поля и служит первым приближением к реальному полю. Для решения региональных
и локальных задач по формуле (2.12) вычисляют притяжение масс с более сложным рас
пределением, но пространственно ограниченных, привлекая гипотезы об их плотности
(разд. 4.3.1).
Потенциал притяжения определяется из результатов разнородных наблюде
ний как на поверхности Земли, так и во внешнем пространстве. С этой целью,
а также для последующего использования данных о поле тяготения и о поле си
лы тяжести установим некоторые основные зависимости. Пренебрегая массой ат
мосферы, будем рассматривать поверхность Земли как граничную поверхность,
разделяющую внешнее пространство, в котором нет притягивающих масс, и
внутреннее пространство, заполненное притягивающими массами.
Интегральная формула Гаусса устанавливает связь между производными по
нормали dV/dns потенциала притяжения V на граничной поверхности S и вторы
ми производными потенциала Ухх = д2 У/дХ2 и т.д. (рис. 2.4):
ίί^ Ή ίί4™·
S
υ
<2,8)
Здесь Δ = div grad — дифференциальный оператор Лапласа (лапласиан). В систе
ме координат X, Y, Z
ΔК=
Ухх
+ VYY + Vzz-
(2.19)
Теория поля силы тяжести
35
Рис. 2.4. П оле силы притяжения, п ор ож даем ое объемны м телом .
Левая часть выражения (2.18) может быть интерпретирована как поток векторно
го поля сил притяжения через поверхность S. Как известно из теории потенциа
ла, он пропорционален всей массе тела
(2. 20)
V
и, следовательно,
( 2 . 21)
s
Подставляя это выражение в (2.18) и стягивая поверхность в точку Р \ с учетом
(2.7) получим дифференциальное уравнение Пуассона:
Δ V = —4 x G g (r').
( 2. 22)
Во внешнем пространстве, свободном от притягивающих масс (ρ = 0), это урав
нение превращается в дифференциальное уравнение Лапласа:
Δ К = 0.
(2.23)
Как следует из выражений (2.22) и (2.23), потенциал V и его первые производные —
это конечные и непрерывные функции во внешнем и внутреннем пространстве. В соот
ветствии с (2.22) вторые производные на граничной поверхности и при изменении плот
ности скачком в теле Земли терпят разрыв. На основании (2.23) можно заключить, что
во внешнем пространстве потенциал V представляет собой гармоническую функцию с не
прерывными вторыми производными, которую можно разложить в ряд (разд. 2.2.3).
Из (2.18) и (2.22) следует фундаментальная теорема Грина. Для потенциала
во внешнем пространстве имеем
(2.24)
Глава 2
36
На граничной поверхности справедливо соотношение:
I * Σ \ dS,
I dns)
K(r)s = SF
(2.25)
где / — расстояние между текущей точкой и точкой поверхности:
/ = |r ' - г|.
(2.26)
Выражения (2.24) и (2.25) устанавливают соотношения между величинами, изме
ренными на граничной поверхности потенциального поля, функцией потенциала
и самой граничной поверхностью.
2.2.3.
Разложение по шаровым гармоническим
функциям
При решении глобальных задач удобно разложение потенциала притяжения V
в ряд шаровых гармоник, представляющее собой одно из решений дифференци
ального уравнения Лапласа (2.23). Во внешнем пространстве это разложение в
сферических координатах г, t>, X (2 . 1) имеет вид
ОО
I
K(r) =
^
1=2
(C/.m c°s тX + S/.m sin
(cos t?)j,
(2.27)
т=О
где GM = G (Мземли + MaTMOaJ)CpbI) — геоцентрическая гравитационная постоян
ная, учитывающая атмосферу Земли, а — большая полуось общеземного эллип
соида (разд. 3.1.2).
Присоединенные функции Лежандра Pi,m степени / и порядка т выражаются
через аргумент t в виде
= (1 - t2)m/2~ P i M t ) ;
(2.28а)
для полиномов Лежандра (т = 0)
Pi.o(t) = P,(t) = 2ТУ | ? ( ' 2 - ϊ)'·
(2.286)
Если / = 0, 1, 2, то при t = cos ϋ имеем
Ро = 1.
Pi = cos t?,
Pi, 1 = sin d,
Р 2 = i( 3 c o s 2 t> - 1),
Ргл = 3 sin ύ cos д,
Ргл - 3 sin2 d.
Поверхностные сферические функции Лапласа
п ,
а Teos m\T
Pi,т(cos ύ) j .
{
(^sin m \)
описывают в (2.27) потенциал V на сфере единичного радиуса (г = 1). Нулевые значения
этих функций разделяют поверхность сферы на участки, где функции имеют разные знаки.
Участки эти ограничены сеткой меридианов и параллелей (рис. 2.5). Таким образом, раз-
Теория поля силы тяжести
т?= О
# =О
ύ= О
Р3 (cos 1?)
37
P^2 5 (cos ^) sin 5λ
Pq ( cos tf)
Рис. 2 .5 . Сферические гармоники Л апласа на сфере единичного радиуса; белы е зоны — знак функций
полож ительны й, заш трихованны е зоны — знак отрицательны й.
ложение в ряд по сферическим функциям представляет собой спектральное разложение
структуры гравитационного поля по волнам длиной в $60°// (что соответствует разреше
нию 180°//). Полиномы Лежандра (2.286) описывают осесимметричное поле, разделяя
сферу на широтные зоны (пояса); при четных значениях / зоны симметричны относитель
но экватора. Член нулевой степени соответствует потенциалу однородной или состоящей
из концентрических сферических слоев Земли; в (2.27) этот член вынесен за фигурные скоб
ки. Если начало системы координат совпадает с центром масс Земли, то члены первой
степени отсутствуют (разд. 2.1.1). С увеличением г гармоники затухают пропорционально
(й/г)'.
Из сравнения (2.27) и (2.12) видно, что коэффициенты сферических гармоник
С/, m и Sifm представляют собой интегралы по массе
к (/ - т)\
М(1 + т)\
(2.29)
Земля
где к - 1 при т = 0 и к - 2 при т ^ 0 .
В частности, коэффициенты второй степени являются функциями моментов
инерции
Jxx = j | j ( Y ' 2 + Z ' 2)dm,
Земля
J yy = j j j (Λ" 2 + Z ' 2)dm,
Земля
Jzz = Jjj (x ' 2 + Y ' 2)dm
Земля
и произведений инерции
Jx y = j j j X ' Y ' dm,
Земля
Jxz = j j j X ' Z ' d m ,
Земля
h z-
Jjj r - Z - d m
Земля
относительно осей геоцентрической системы координат.
38
Глава 2
Из (2.29) имеем
г
C2>, =
( Jxx + J yy
1
^ Jxz,
a2M
C2>2 =
S2 .I = -j j -.JyZ,
a M
./yy — /лг*
4a2M
Jzz^ ,
'
S2.2 =
(2.30)
Jxy
2a2M
Коэффициент C2 ,o = C2 характеризует полярное сжатие Земли; чаще всего его заменя
ют динамическим коэффициентом формы /2 = - Сг. Так как ось Z примерно (» 0 ,3 " ) со
впадает с главной осью инерции, то Jxz = J yz = 0 и С2 , i = 5г. i = 0. Коэффициенты Сг,2
и 5г,2 характеризуют асимметричность экваториальных масс относительно оси вращения
Земли, а также поворот главных осей инерции относительно осей принятой системы коор
динат X , У, Ζ.
Обычно для описания поля силы тяжести используют нормированные сферические
гармоники, среднее квадратическое значение которых по всей сфере равно единице. Нор
мированные полиномы Лежандра находят из выражения
k(2l + 1)(/ - m)!
Pi, т(cos ύ)
J
(/ + m)\
Pi,m(cost?),
(2.31 a)
а нормированные коэффициенты сферических функций —
ГС/.m^ _ I
(/ + т)\
(О ,ni)
(2.316)
( A mj " yjk(2/+ !)(/- m)\ (A m J’
где k = 1 при m = 0 и k = 2 при m ч* 0. Для вычисления сферических функций чаще всего
используют рекуррентные формулы [526].
Во внешнем пространстве разложение по шаровым функциям (2.27) сходится на охва
тывающей Землю сфере радиуса г - а. По теореме Рунге — Крарупа [489] разложение
в сходящийся ряд шаровых гармоник можно использовать и внутри масс до поверхности
сферы, близкой к поверхности Земли. Такой ряд может быть сколь угодно близким пред
ставлением реального поля. Разумеется, аналитическое продолжение потенциального поля
не удовлетворяет уравнению Пуассона (2.22) для реального поля внутри масс.
По сравнению с объемным интегралом (2.12) разложение в ряд шаровых
функций (2.27) имеет преимущество в том смысле, что эмпирические данные о
потенциале притяжения или его функционалы могут быть использованы для
определения коэффициентов сферических гармоник и, следовательно, потенциала
во внешнем пространстве со степенью приближения, соответствующей исходным
данным (разд. 3.3.3). Эти коэффициенты содержат обобщенную информацию о
распределении масс в Земле, что должно учитываться при выводе граничных ус
ловий для любой модели распределения плотности (разд. 4.3.2).
В соответствии с (2.1) и (2.286) центробежный потенциал также может быть
выражен разложением по шаровым функциям:
Z(r) = ^ - r 2 sin2 1? = ^ r 2( 1 - P2,o(cos0)).
(2.32)
Теория поля силы тяжести
2.3.
Геометрия поля силы тяжести
2.3.1.
Уровенные поверхности и силовые линии
39
Геометрически поле силы тяжести можно представить поверхностями постоянно
го потенциала (эквипотенциальными, или уровенными поверхностями):
W( г) = const,
(2.33)
а также силовыми линиями (рис. 2.6). Связь между изменением величины потен
циала и изменением местоположения следует из выражения (2.15)
dW = g · dr = g dr(cos g, dr).
(2.34)
При перемещении по уровенной поверхности dW = 0, т.е. никакой работы не со
вершается. Уровенные поверхности являются поверхностями равновесия.
Рис. 2 .6 . Эквипотенциальные поверхности и силовые линии вблизи зем ной поверхности.
Силовые линии пересекают уровенные поверхности по нормали. Если элемен
тарный отрезок dr совпадает с направлением силовой линии (с направлением
внешней нормали η к поверхности), то, поскольку cos(g, dr) — — 1, справедливо
соотношение
dW - - gdn.
(2.35)
Так как сила тяжести с перемещением по поверхности Земли изменяется, уровен
ные поверхности не параллельны; при увеличении силы тяжести они сближают
ся. Уровенную поверхность, наилучшим образом аппроксимирующую средний
уровень Мирового океана, назвали геоидом. Она является одной из отсчетных
поверхностей для задания системы высот (разд. 2.5.2).
2.3.2.
Градиент силы тяжести и кривизна
поля силы тяжести
При решении локальных задач большое значение имеет градиент силы тяжести.
Его составляющие являются функциями кривизны поля силы тяжести.
В топоцентрической системе координат (разд. 2.1.2) вектор силы тяжести
можно представить в виде
gT = - g n T = ( W x, w„ Wz),
(2.36)
Глава 2
40
где Wz = dW/dx и т.д. На ограниченном участке
wx < w Zy
W y < W Zt
и поэтому можно считать, что g ~ W z. Это приближение используется в при
кладной геофизике (разд. 4.3.5).
Дифференцирование выражения (2.36) дает тензор градиентов силы тяжести
(тензор Этвеша):
grad g = grad (grad W) =
wa
Wyt
W„
wv
Wyy
Wv
wxx\
W yX
Wzz)
(2.37)
Учитывая, что поле силы тяжести является потенциальным (2.17), по дифферен
циальному уравнению Пуассона (2.22) с учетом центробежного потенциала (2.13)
находим
Δ W = Wxx + Wyy + Wzz = - 4 x G e ( r ') + 2ω2.
(2.38)
Выражение (2.37) содержит лишь пять независимых параметров. Они могут
быть либо измерены во внешнем пространстве, либо вычислены по измерениям
силы тяжести.
Последняя строка в (2.37) — это градиент ускорения силы тяжести:
(gradg)r = (Им. Wv , Wzz),
(2.39)
характеризующий изменения силы тяжести по направлениям соответствующих
осей координат. Вектор горизонтального градиента силы тяжести лежит в плос
кости горизонта данного пункта; модуль вектора равен
Wzs = ( W l + W%)1/2,
(2.40а)
а азимут —
A ( W ZS) = arctg
W
^ .
Wν
(2.406)
Направление этого вектора совпадает с направлением максимального изменения
силы тяжести (рис. 2.7). Он также определяет кривизну силовой линии в точке Р.
Важное значение при редуцировании и интерпретации гравиметрических дан
ных имеет вертикальная составляющая градиента силы тяжести. Из (2.38)
имеем
Wzz = d2W dg
(2.41)
+ Wyy} — 4ttG q + 2ω
dz2
dz
-*
*2*
(Север)
(Надир)
Рис. 2.7.
Горизонтальны й градиент силы тяж ести.
41
Теория поля силы тяжести
Это соотношение содержит среднюю кривизну уровенной поверхности:
J =
i
iW*
+ w „ ).
(2.42)
Величина Wxy описывает кручение силовой линии в плоскости меридиана. Во
внешнем пространстве ρ = 0 , поэтому члены, зависящие от плотности, про
падают.
Часто при изучении распределения близповерхностных масс используют вто
рые производные:
d3w _ d2g
Wzzz
(2.43)
dz3
dz2
В системе СИ их единицей является м “ 1с “ 2; на практике применяется единица
10“ 12 м _ 1с -2. Во внешнем пространстве из выражения (2.41) вытекает равенство
w zzz = - wxxz - w»
(2.44)
На геометрию поля силы тяжести также влияет нарушение непрерывности вторых
производных потенциала при изменении плотности скачком (2.38). Таким образом, анали
тическое определение параметров поля силы тяжести возможно лишь во внешнем про
странстве. Аналитическое же продолжение поля внутрь Земли и аналитическое описание
его в этом пространстве возможно лишь там, где функция меняется кусочно-непрерывно
(в областях, где непрерывна плотность) (разд. 2.2.3).
2.4.
Модели поля силы тяжести
2.4.1.
Оптимальные и стандартные модели
Модели поля силы тяжести представляют собой некоторое приближение к реаль
ному полю, при этом должны выполняться определенные условия.
Оптимальные модели наилучшим образом соответствуют результатам изме
рений силы тяжести, а также учитывают ошибки измерений и ошибки интерпо
ляции. В глобальных моделях используют разложение по шаровым функциям
(разд. 2.2.3), ограничиваясь степенью / (обычно / < 360). Для локальных моделей
применяют плоские функциональные аппроксимации.
Уровенная поверхность гармонической модели (степени /), аппроксимирующая
геоид, называется уровенным сфероидом степени /. Описание такой модели тре
бует большого числа параметров, а уровенные поверхности поля, создаваемого
моделью, имеют сложную форму, поскольку представляют собой поверхности
высокого порядка. Такие модели играют важную роль при решении крупномасш
табных задач в науках о Земле, океанографии и навигации (разд. 4.2.2).
С другой стороны, стандартные модели достаточно просты и позволяют
сравнительно легко находить величины силы тяжести на поверхности Земли по
координатам пунктов. Тело, порождающее поле, должно иметь простую форму
и соответствовать стандартной геометрической модели Земли. Кроме того, нор
42
Глава 2
мальное поле силы тяжести этой модели должно настолько приближаться к ре
альному, чтобы их различие описывалось линейными функциями (об аномальных
величинах см. разд. 2.6). И наконец, нормальное поле силы тяжести не должно
противоречить принятым в геофизике моделям распределения плотности в теле
Земли (разд. 4.3.2), иначе станет невозможной геофизическая интерпретация ано
мальных величин. В настоящее время поле нормальной силы тяжести определя
ют как поле уровенного эллипсоида.
2.4.2.
Уровенный эллипсоид
Уровенный эллипсоид — это эллипсоид вращения с массой М и угловой скорос
тью ω. Форма эллипсоида определяется длиной а его большой полуоси и геомет
рическим сжатием
(2.45)
где Ъ — малая полуось (рис. 2.8). Поверхность эллипсоида — уровенная поверх
ность нормального поля силы тяжести. По определению его поле симметрично
относительно оси вращения и плоскости экватора. В соответствии с теоремой
Стокса—Пуанкаре внешнее поле силы тяжести этого уровенного эллипсоида пол
ностью определяется четырьмя параметрами а, /, Μ, ω и описывается нормаль
ным потенциалом силы тяжести С/(г). Уровенные поверхности нормального по
ля (сферопы)
(2.46а)
U (г) = const
не являются эллипсоидами, за исключением самого уровенного эллипсоида
(/(г) = U0.
(2.466)
Предположения о распределении масс внутри эллипсоида не требуются. Однако мож
но показать, что массы со слоистой структурой, близкой к строению недр реальной Зем
ли, могут воспроизвести поле силы тяжести такого эллипсоида [480].
_►
η
Визирная
цель
X
Рис. 2.8
Рис. 2 .9
(левый). Уровенный эллипсоид, нормальная сила тяжести и сферопы.
(правый). Геодезическая и топоцентрическая геодезическая системы координат.
Теория поля силы тяжести
43
Для вычислений в поле силы тяжести часто используют геодезические коорди
наты (эллипсоидальные координаты) φ, X, h (рис. 2.9):
φ — геодезическая широта;
X — геодезическая долгота;
h — геодезическая высота.
Широта φ связана с геоцентрической широтой φ = 90° - ι?, которая определе
на в разд. 2 . 1. 1, соотношением
tg φ
b
а
2
(2.47)
tg
Если центр эллипсоида совпадает с центром масс Земли, то вектор положения
г точки Р определяется выражением:
(Ν + Л) COS φ COS λ
(Ν + Λ) cos φ sin λ
[(1 - e2) N 4- Λ] sin φ
(2.48)
здесь
(2.49)
— квадрат первого эксцентриситета. Радиус кривизны М меридиана и радиус
кривизны N первого вертикала являются главными радиусами кривизны эл
липсоида:
Л/ =
«О - е2)
(1 - eZsin2V»)3/2’
N =
(1 - е 2 sin2#»)1/2 ‘
(2.50)
Соответствующие нормальные сечения лежат в плоскости меридиана и в плос
кости первого вертикала.
Разложение (2.48) в ряд с удержанием членов порядка сжатия позволяет полу
чить для точки на поверхности эллипсоида (Л = 0) выражение
г = а(1 - /s in 2 φ).
(2.51)
Геометрия эллипсоида вращения и вычислительные процедуры на его поверх
ности достаточно освещены в геодезической литературе (например, [64, 242]).
2.4.3.
Нормальное поле силы тяжести
Нормальное поле уровенного эллипсоида можно описать замкнутыми формула
ми [290], если пользоваться эллипсоидальными (геодезическими) координатами.
Полезно применить гармоническое разложение (2.27) потенциала. С учетом цент
робежного потенциала (2.32) нормальный потенциал силы тяжести описывается
выражением
[/(Г) =
+ Σ ( ^ У Ci.oPl.oicos t» j + у г2 sin2t>.
1=2
(2.52)
44
Глава 2
В силу симметрии, рассмотренной в разд. 2.4.2, выражение (2.52) содержит лишь
четные гармоники. Коэффициенты С/, о быстро сходятся к нулю, так что ряд
(2.52) обычно можно ограничить степенью 1 = 6 (разд. 3.1.2).
По аналогии с (2.15) вектор у нормальной силы тяжести определяется выра
жением
у = grad U.
(2.53)
Значение нормальной силы тяжести 70 на уровенном эллипсоиде (Л = 0) задается
формулой Сомильяна
aye COSV + Ьур sin2 φ
7о = , ■■ ... ■
- ■_
у/a2 COS2 φ + b2 sin2 φ
(2.54)
Здесь уе и ур — соответственно нормальная сила тяжести на экваторе и полюсах
(см. также рис. 2.8). Их можно вычислить по замкнутым формулам, если заданы
параметры уровенного эллипсоида.
Разложение этих формул в ряд с удержанием членов порядка сжатия / дает приближе
ние для теоремы Клеро:
/ +й- | m
(2.55)
и для теоремы Пицетти:
(2.56)
В этих формулах фигурируют гравиметрическое сжатие
(2.57)
и отношение экваториального центробежного ускорения к силе тяжести на экваторе:
(2.58)
Нормальная сила тяжести на поверхности эллипсоида описывается выражением
70
= 7*0 + 0sin2y>).
(2.59)
Формула (2.55) с учетом (2.59) позволяет определить сжатие эллипсоида по гравиметриче
ским данным.
С той же степенью приближения формулы, связывающие величины / (2.45), Сг,о
(2.30), β (2.57), описывающие сжатие, и величину т , имеют вид
/ = - | с 2.о + ” .
/ 3 = | с 2,о + 2т .
(2.60)
Разложения более высоких порядков даны в работе [322].
Для описания локальных особенностей поля силы тяжести введем топоцентрические геодезические системы координат, связанные с нормалью к эллипсоиду
и меридианом эллипсоида (см. рис. 2.9), где а — азимут нормального сечения
эллипсоида. Это можно сделать по аналогии с заданием топоцентрической систе-
Теория поля силы тяжести
45
мы координат, связанной с гравитационным полем (разд. 2.1.2). Пренебрегая ма
лой кривизной силовой линии нормального поля, получим
у т = - 7 Б г = (Ui, Щ, Ui),
(2.61)
где ϋχ = dU/dx и т. д.; η — единичный вектор внешней нормали к поверхности
эллипсоида. По аналогии с (2.37) тензор градиентов имеет вид
(U-x-x V-Xy
grad 7 = grad (grad U) = I Uj^ Vyy UjA.
(2.62)
Uzy
Ψ»
Дифференцируя (2.59) и учитывая, что dx = Μάφ> получим выражение для гори
зонтального градиента силы тяжести на поверхности эллипсоида:
V tx = дуо/дх = ^
sin 2φ,
UTy = 0.
(2.63)
По формулам (2.50) для радиусов кривизны эллипсоида можно вычислить эле
менты кривизны и кручения в (2.62):
-7 0
и Гх = М ’
-7 0
Щу = N ’
(2.64)
Uxy = 0 .
По аналогии с (2.41) выражение для вертикальной составляющей градиента си
лы тяжести на поверхности эллипсоида определяется из (2.64):
Uzz = 70
+ 2 ω2.
(2.65)
Нормальную силу тяжести близ поверхности Земли на высоте Л можно найти
с использованием ряда Тейлора:
У(<Р, Л) = 70 + ( | j ) 0A + \ ( J ^ ) 0* 2 + ....
(2.66а)
где 7о определяется выражением (2.54). Значения dy/dh и д2у/ЭЛ2 с учетом
Uzz = - (dy/dh)o получаются из (2.65).
Разложение в ряд с учетом членов порядка квадрата сжатия /* имеет вид [763]
(§ а) о=
~ ir ( i+ f -
Vsi" 2φ +
* &
si" 2φ +
ύη* *) - ъ*2
(2ббб)
И
Э^уХ _______ 6 γο_____
ЭЛ2/ о
а2(1 - / s i n 2 ^>)2
(2.66 b)
46
Глава 2
2.5.
Системы высот
2.5.1.
Эллипсоидальные высоты
Поскольку сила тяжести быстро меняется с высотой, особое внимание следует
уделить применяемым системам высот. Это важно еще и потому, что разные
методики измерений дают высоты в разных системах [696].
Система геодезических (эллипсоидальных) высот задается геометрически и не
зависит от поля силы тяжести (разд. 2.4.2).
Эллипсоидальные высоты определяются спутниковыми методами в любой точке Зем
ли с ошибкой ±1 м. Разности этих высот могут быть найдены из одновременных (син
хронных) наблюдений с точностью до нескольких сантиметров или дециметров при рас
стояниях между пунктами от нескольких до 100 км [73, 625]. Однако поверхности
h = const существенно отклоняются от уровенных поверхностей поля силы тяжести. Сред
нее по всей Земле отклонение составляет ±30 м; для расстояний порядка 100 и 10 км вели
чины отклонений составляют от единиц метров до дециметров соответственно. Тот же
порядок имеют и поправки в результаты геометрического нивелирования для приведения
их к геодезической (эллипсоидальной) системе высот. По этой причине многие специали
сты предпочитают системы высот, связанные с полем силы тяжести. Желательно, чтобы
такие высоты получались по результатам нивелировок наиболее просто.
Эллипсоидальная высота в нормальном поле точки Р физической поверхности
Земли может быть определена аналогично (2.35) по разности нормальных потен
циалов на поверхности эллипсоида и в этой точке из соотношений
р
(2.67)
У
о
где 7 — среднее значение нормальной силы тяжести между поверхностью эллип
соида и точкой Р; она вычисляется по формуле (2.66).
2.5.2.
Высоты в поле силы тяжести
На континентах из геометрического нивелирования получают превышения в поле
силы тяжести. Даже на больших расстояниях результаты имеют высокую точ
ность (около ±0,05 м на 100 км и ±0,5 м на 1000 км). Превышения, которые
получают из наблюдений в топоцентрической системе координат, связанной с от
весной линией (разд. 2.1.2), можно в соответствии с (2.35) преобразовать в раз
ности потенциалов, не зависящие от пути нивелирования. При вычислении соот
ветствующих поправок используются значения силы тяжести на поверхности Зем
ли. Если разности потенциалов вычислять относительно потенциала Wo на
поверхности начала счета высот (геоиде), получим геопотенциальные числа. Они
определяются из наблюдений по формуле
Р
с = Wo -
IVp = j gdfi.
о
( 2 . 68)
Теория поля силы тяжести
47
η η
Рис. 2.10.
П оверхности, вы соты и сила тяж ести для реаль
ной Земли и ее модели.
Величина С разности потенциалов связывает точку Р с уровенной поверхностью
С = const.
На практике требуются высоты в метрической системе, которые получают
разделением геодезической высоты Л (2.67) на две составляющие: высоту в поле
силы тяжести (гипсометрическую часть), задаваемую геопотенциальным числом,
и аномальную (геоидальную) часть (рис. 2.10). Нормальное и реальное поля свя
зывают условием
UQ = tVp,
(2.69а)
которое соответствует условию выбора нормального поля
Uo=JV0.
(2.696)
Разделение на нормсишю высоту H n и аномалию высоты (высота квазигеои
да) Г:
A = HN + Г,
(2.70а)
осуществляется без привлечения каких-либо предположений о строении Земли,
причем
Wq WP
Wp Up
Н„
(2.706)
-
-
У
УQ
Величина у определяется по формуле (2.67) после подстановки H n вместо А, а
УQ — по формуле (2.66). Высоту H n м о ж н о представить и как высоту точки Р
над квазигеоидом.
Ортометрическая высота Н определяется как расстояние между точкой Р и
геоидом (потенциал на геоиде Wo), отсчитанное по силовой линии. Разделение
Λ на Я и высоту геоида N дает
А = Я + Ν,
Wo - Wp
_
,
Я
KT_ W o - UPo
,
уо
/V
(2.71а)
(2.716)
48
Глава 2
где
р
*=M
8d"
о
— среднее значение силы тяжести на отрезке силовой линии; значение g можно
получить лишь с привлечением гипотез о распределении силы тяжести внутри
Земли. Поэтому однозначное задание системы ортометрических высот требует
стандартной модели топографических масс (геометрии и распределения плот
ности).
Для того чтобы перевести измеренное нивелирное превышение \dR в систему нор
мальных или ортометрических высот, в результаты нивелирования следует ввести поправ
ки. Величины поправок имеют порядок миллиметров или сантиметров. При значительных
расстояниях расхождения уровенных поверхностей с поверхностями H n = const и
Н = const могут достигать соответственно нескольких сантиметров или нескольких деци
метров.
Представление геодезической высоты в соответствии с (2.70) и (2.71) приводит
к толкованию квазигеоида и геоида как отсчетных поверхностей. Аномалия вы
соты (высота квазигеоида) f и высота N геоида над эллипсоидом связаны соот
ношением
N - Г = HN - Я = 2-^T-H n .
g
(2.72)
С использованием «средней» аномалии силы тяжести g - у можно легко перейти от
аномалии высоты к высоте геоида. Расхождение между двумя отсчетными поверхностями,
зависящее от высоты пункта, лежит в пределах от миллиметров до метра; на море эти
поверхности совпадают. Определение квазигеоида и геоида — важная задача геодезии
(разд. 4.2).
Поверхность начала счета высот в геодезии задается средним уровнем моря, опреде
ляемым по результатам многолетних наблюдений на уровнемерных постах. Поверхность
среднего уровня моря не совпадает с уровенной поверхностью. Это несовпадение называ
ют топографией морской поверхности (среднее отклонение составляет ±0,7 м), см.
разд. 4.3.6. Более того, начала счета высот в разных регионах не совпадают. Решение
задач на большие расстояния с точностью ±0,1 м по высоте требует нового определения
начала счета высот и его установления [552].
2.6.
Возмущения поля силы тяжести
2.6.1.
Возмущающий потенциал
Возмущения поля силы тяжести — это отклонения реального поля от нормаль
ного (разд. 2.4.3). Поскольку центробежный потенциал известен с высокой сте
пенью точности, эти возмущения являются отклонениями реального поля притя
жения от нормального.
Для возмущающего потенциала
Т( т) = Щг) - Щт)
(2.73)
49
Теория поля силы тяжести
во внешнем пространстве справедливо дифференциальное уравнение Лапласа
ΔΓ=0.
(2.74)
Если реальное поле связано с нормальным соотношением (2.69), а масса уровенного эллипсоида равна массе Земли, по формулам (2.27), (2.32) и (2.52) можно
получить разложение возмущающего потенциала в ряд шаровых функций:
оо
/
Ш =
р
Гу V ^ j(A C /.m cos m \ + ASi,m sin m \)P i,m(cos t?)j ,
/= 1
(2.75)
m= 0
содержащий нормированные сферические функции (2.31).
Коэффициенты Δ C/,m и ASi,m — это разности коэффициентов нормированных
сферических функций реального поля и нормального поля. Разложение в ряд ша
ровых функций для аномалии высоты и высоты геоида над эллипсоидом получа
ется по (2.70) и (2.71) из выражения (2.75), деленного на величины нормальной
силы тяжести j q и 70 соответственно.
2.6.2.
Аномалия силы тяжести
Возмущение силы тяжести и аномалию силы тяжести можно определить как воз
мущения вектора силы тяжести.
Возмущение силы тяжести
Н = g p - Ур
(2.76)
может быть определено, если известны положение точки Р в пространстве (вектор поло
жения г) и, следовательно, нормальная сила тяжести ур. Указанные величины известны
для искусственных спутников Земли и точек земной поверхности, координаты которых
определены спутниковыми методами. Это справедливо и для инерциальных измерений.
В классической геодезии плановое положение точек земной поверхности определяется гео
дезическими координатами <р, X (раз. 2.4.2), а отметки задаются нормальной высотой H n
или ортометрической высотой Н (разд. 2.5.2); высоты квазигеоида и геоида пока неизвест
ны. Нормальная сила тяжести может быть получена лишь для точки Q (где Uq - Wp)
и для точки Qo на поверхности эллипсоида (рис. 2.10).
Вектор аномалии силы тяжести задается выражением
Ag -
- 1Q-
(2.77)
Соотношения (2.36) и (2.61) определяют уклонение отвесной линии как разли
чие в направлениях векторов g и 7 . С использованием (2.73) можно получить
составляющие уклонения отвесной линии в плоскости меридиана £ и плоскости
первого вертикала η в топоцентрической системе координат, связанной с гравита
ционным полем (разд. 2 . 1.2):
Σ = Φ-ν> = -
- Т х,
У
η = (Λ - X) COS φ = - — Ту,
(2.78)
50
Глава 2
где Тх = д Т/дх и Ту = д Т/ду. Модуль (2.77) называют смешанной аномалией си
лы тяжести. В сферическом приближении, полученном с использованием (2.76)
и (2.706), она имеет вид
*g = g p - y Q = - ^ - 2 j = b g - ^ f t ,
(2.79)
причем уклонение отвеса не учитывается. Подстановка Т и дТ/дг в (2.79) из (2.75)
дает гармоническое разложение аномалии силы тяжести в сферическом прибли
жении (ошибка не более 10 м к м - с " 2):
ОО
/
ίΣ ( '- о
1=2
m=0
+ ΔS/,m sin rnX)P/,m(cos )j .
+
д * (')= ™
(2.80)
Из (2.75) можно получить разложение и для уклонений отвеса (2.78).
Коэффициенты сферических гармоник можно определить по аномалиям силы
тяжести с использованием свойства ортогональности нормированных сфериче
ских функций:
г2
1
GM I - 1
(2.81)
σ
где σ — поверхность единичной сферы, da = sinddddX — элемент этой по
верхности.
Аномалия силы тяжести (2.79), по определению Мол од ейского, задана на поверхности
Земли и называется смешанной аномалией в свободном воздухе. Она определяется без ка
ких-либо гипотез о строении Земли по измеренной величине gp и нормальной силе тяжести
уq , которая может быть найдена из (2.66) по нормальной высоте Hn (высоте точки Q
над эллипсоидом).
2.6.3. Вторые производные возмущающего потенциала
Вторые производные возмущающего потенциала в топоцентрической системе ко
ординат, связанной с гравитационным полем (раз. 2 . 1.2), можно получить из вы
ражений (2.37) и (2.62) вместе с (2.78) и (2.79), а также из выражений (2.63) —
(2.65) в виде
Тхх = - уЬс, Тху = - у$у = - У4х, Τχζ = -
* Д&г,
(2.82)
Туу = - уriy, Tyz = - yη * Agy , Tzz = у (£r + rfr) * Agz,
где ic = д£/дх и т.д., Agx = ЗАg/dx и т.д. и Тху = ТуХу Txz = 7 ^, Tyz = 7 ^ , а так
же Τχχ + Туу + Tzz = Q (соотношения (2.17), (2.23)). По аналогии с (2.37) из этих
компонентов можно образовать тензор аномальных гравитационных градиентов
grad (grad Т).
На величины вторых производных возмущающего потенциала сильно влияют
близлежащие топографические массы.
Теория поля силы тяжести
2.7.
51
Статистическое описание гравитационного поля
2.7.1. Ковариационная функция аномалий силы тяжести
Во многих задачах гравиметрии требуется полная изученность поля силы тяже
сти, без белых пятен. Однако измерения силы тяжести выполняют лишь в от
дельных точках, далеко отстоящих друг от друга; на обширных участках земной
поверхности измерений вообще не было. Поэтому возникает необходимость в ин
терполяции параметров гравитационного поля и оценке неизвестных коротковол
новых составляющих этого поля. Оптимальные методы интерполяции основаны
на предположении о том, что аномалии силы тяжести являются случайными ве
личинами с нулевым математическим ожиданием. Более того, считают, что сто
хастические характеристики поля на любой территории (на всем земном шаре
или локальном районе) не зависят от положения (свойство однородности) и от
направления (свойство изотропности) [237, 482]. При этих условиях становится
возможным описывать характеристики поля ковариациями Agi, Agj, которые за
висят только от расстояния между точками Р, и Pj, Ковариация определяется
как среднее значение всех произведений Agi, Agj для некоторого заданного рас
стояния:
соу (Agi Agj, ф) = \I\ Ag iA gjU ,
(2.83)
где М — оператор математического ожидания, а ф — угловое расстояние на сфе
ре единичного радиуса (рис. 2 . 11).
Дисперсия — это ковариация при расстоянии ф = 0:
a2(Ag) = M{ A g 2 ].
(2.84)
Ковариация (2.83) характеризует взаимную корреляцию аномалий силы тяжести и свя
зана с коэффициентом корреляции соотношением
r(Agi, A gj,
ψ) =
cov (Ag,, Agj, ψ)
о (Ag)
(2.85)
С увеличением ф корреляция уменьшается (рис. 2.12).
Гармоническое разложение позволяет описать ковариационную функцию в
аналитическом виде:
cov (Agi, Agj, ^) = Σ ( ^ )
°hAg) Pi (cos ψ).
( 2 . 86)
1= 2
где принято, что среднее по всей поверхности Земли значение Ag (член нулевой
степени в разложении по сферическим функциям) равно нулю:
Ago = M{ Ag ] =
4π
Agdo = 0.
(2.87)
Из-за совпадения центра уровенного эллипсоида с центром масс Земли Δ#ι = 0
(разд. 2.2.3).
52
Глава 2
Рис. 2.11 (левый). О пределение ковариационной функции.
Рис. 2.12 (правый). Ковариационная функция аномалий силы тяж ести .
Коэффициенты af(Ag) представляют собой степенные дисперсии аномалий,
характеризующие дисперсии гармоник поля данной степени / (разд. 2.7.3). Функ
ции P/(cos ф) — это полиномы Лежандра (2.286) с аргументом cos ф, a R — ради
ус сферы, на которой определена функция a}{Ag).
Практически всегда имеется лишь ограниченное число измерений, идет ли
речь о мировой или региональной съемке. Определению статистических характе
ристик поля должно предшествовать выделение систематических эффектов (трен
дов). В качестве тренда чаще всего используются средняя эмпирическая величина
(аномалии), полином низкой степени или разложение по шаровым функциям. За
тем по (2.83) вычисляются значения ковариации для разных расстояний, по кото
рым можно вывести эмпирическую ковариационную функцию.
Эта функция позволяет на основании (2.86) оценить степенные дисперсии ано
малии, но при условии, что гравиметрические данные распределены по всей по
верхности Земли (разд. 2.7.3). В случае региональной съемки эмпирические кова
риации можно аппроксимировать экспоненциальными функциями вида
cov (Agi, Agjy ф) = а е х р (- Ь ф )
(2.88)
или
cov(Agi, Agj, ψ) = а е х р ( - Ь ф 2).
График ковариационной функции показан на рис. 2.12.
2.7.2.
Интерполирование в гравитационном поле
Параметры гравитационного поля можно интерполировать с использованием со
ответствующих функциональных моделей (разложение в ряд шаровых функций,
полиномы на плоскости и др. [491, 718]). В зависимости от дискретности и каче
ства имеющихся данных эти модели можно детализировать лишь до определен
ной степени /, при этом коэффициенты разложения находят по методу наимень
ших квадратов [52, 305]. Задание функциональной модели равнозначно определе
нию функции тренда, как указано в разд. 2.7.1. При таком функциональном
подходе можно аппроксимировать основные особенности поля. Если известна ко
Теория поля силы тяжести
53
вариационная функция аномалий силы тяжести, можно выполнить статистиче
скую интерполяцию, чтобы получить аномалию для пункта, где измерения не
выполнялись. Оптимальный результат дает предсказание по методу наименьших
квадратов [482], при этом дисперсия ошибки интерполированной величины будет
минимальной.
Интерполированное значение аномалии Agp силы тяжести в точке Р определя
ется выражением
Agp = Cj>(C + D ) - ‘Ag.
(2.89)
В этом выражении
Δ g г = (Δ # ι,
Ag2, ..., Agi, ..., Agn)
— вектор аномалий силы тяжести Agi (i = 1 ... п), определенных в п пунктах. Матрица
Du
···
Du
Din
Ail
···
DnnJ
— ковариационная матрица ошибок измерений, ее элементы А , вычисляют по ковариаци
онной функции ошибок измерений (разд. 3.2.3); вектор
C p iC /v
С р г , . . . , Ср. у . . . , С р п)
— вектор ковариаций AgP и Agi; матрица
/С ц
. ..
С1л\
C ' \сСл1 С
..."
сСлл /
— ковариационная матрица аномалий Agi.
Элементы СР. и Qj можно получить для любого заданного расстояния ф между пунк
тами на основе ковариационной функции аномалий, позволяющей определять ковариации
cov(Ag,-, Agj, ф). Необходимо отметить, что такое предсказание дает результаты, близкие
к реальным, лишь в пределах расстояния корреляции. Это расстояние, при котором
co\(Agit Agj, ф) = i a2(Agt Ag) (рис. 2.12). Результаты предсказания аномалий можно
считать независимыми от вида ковариационной функции.
2.7.3.
Степенные дисперсии аномалий
Степенные дисперсии аномалий aj(Ag), входящие в выражение (2.86), — это сред
неквадратические величины /-й гармоники в разложении по сферическим функци
ям (2.80):
(2.90)
σ
где
оо
Ag = Σ &8i1= 2
54
Глава 2
С учетом ортогональности сферических функций величина af(Ag) вычисляется по
коэффициентам этих функций следующим образом:
/
afrAg) = (/ - I )2
( ^ ) 2' Σ ( Α ^ +
т =О
(2.91)
Степенные дисперсии аномалий определены на сфере радиуса R (R = 6371 км).
Они характеризуют спектральный состав поля аномалий, определяя дисперсии
аномалий с длиной волны 360°// для разных степеней / разложения [разд. 2.2.3].
Спектральное разложение вида (2.86) позволяет также найти степенные дис
персии аномалий по ковариационной функции, полученной по имеющимся грави
метрическим данным:
т
aj(Ag) = 2/ 2 1 I cov (Δ#/, Agj, \p)Pi(cos\p)sin\pd<p.
ψ=0
(2.92)
3.
Пространственно-временная структура
внешнего гравитационного поля
Проектирование измерений силы тяжести для глобальных, региональных и ло
кальных исследований, а также использование результатов упрощаются, если
учитывать имеющиеся данные о структуре гравитационного поля. Существую
щие стандартные модели Земли и связанные с ними модели нормального грави
тационного поля позволяют вычислять аномалии силы тяжести и другие ано
мальные величины (разд. 3.1). Модели гравитационного поля с высоким разре
шением основаны на аномалиях в свободном воздухе, которые получают по
результатам измерений силы тяжести (разд. 3.2). Крупномасштабные структуры
стационарного поля Земли рассмотрены в разд. 3.3, а спектр временных измене
ний — в разд. 3.4. Гравитационные поля Луны и планет, изученные межпланет
ными станциями, описаны в разд. 3.5.
Глобальные модели гравитационного поля подробно описаны в геодезической
литературе (например, [691, 730]). Региональные и локальные особенности рас
сматриваются в геофизической литературе [213, 291, 505]. Подробные сведения
о структуре временных изменений можно получить как из геодезических, так и
геофизических публикаций [49, 451].
3.1.
3.1.1.
Нормальное поле силы тяжести Земли
Формулы нормальной силы тяжести
Формулы нормальной силы тяжести описывают ее как функцию геодезической
широты φ и геодезической высоты h для определенной модели Земли (эллипсои
да) (разд. 2.4.3). Начиная с 1900 г. зависимость от широты дается в формулах
в виде ряда (2.59) с удержанием членов порядка / 2:
7о = 7*0 + 0sin2y? - βι sin2 2у?),
(3.1а)
здесь уе — нормальная сила тяжести на экваторе, а /3 — гравиметрическое сжатие
(2.57). Величина βι связана со сжатием / (2.45) и величиной т (2.58) выражением
/3. = - | / 2 + | / т .
(3.16)
Точность формулы (3.1) составляет 1 мкм с -2, что вполне достаточно для боль
шинства практических целей.
В табл. 3.1 даны коэффициенты формул, наиболее часто используемых для
вычисления гравитационных аномалий. Рис. 3.1 иллюстрирует изменение нор
мальной силы тяжести с широтой.
56
Глава 3
Таблица 3.1. Параметры формул нормальной силы тяжести
Название
Уе , М
*С
2
Гельмерт, 1901 [297]
9,780 30
9,780 39
Береговая и гео
дезическая съемка США
(Боуи, 1917) [89]
9,780 49
Международная
формула (нормальной)
силы тяжести
(Кассинис, 1930) [113]
9,780 318
Геодезическая
референц-система 1967 г. (с учетом массы
атмосферы)
(МАГ, 1971) [322]
9,780 327
Геодезическая
референц-система 1980 г. (с учетом массы
атмосферы)
(Мориц, 1984) [489]
β
/3.
/
0,005 302
0,005 294
0,000 007
0,000 007
1 : 298,3
1 : 297,4
0,005 2884
0,000 0059
1 : 297,0
0,005 3024
0,000 0059
1 : 298,247
0,005 3024
0,000 0058
1 : 298,257
7q(m*c 2)
Р ис. 3.1.
Нормальная сила тяжести на эллипсоиде.
Значение уе в формулах нормальной силы тяжести 1901, 1917 и 1930 гг. определя
лось из уравнивания измерений силы тяжести в пунктах, распределенных по значительной
части земной поверхности. Измерения редуцировали на уровень моря, значение / принима
ли неизменным, а величину β\ вычисляли по геофизическим моделям. Коэффициенты фор
мул 1967 и 1980 гг. найдены по параметрам соответствующих геодезических референцсистем. Эти системы основаны на наблюдениях ИСЗ и далеких космических аппаратов
и, следовательно, учитывают притяжение атмосферы Земли (разд. 3.1.2).
Зависимость нормальной силы тяжести от высоты обычно описывают вер
тикальной производной (2 .666 ), удерживая члены порядка / и принимая φ = 45 °:
ду
Ж
3.1.2.
= - 3086н · с -2 = - 3,086мкм · с “ 2/м .
(3.2)
Геодезическая референц-система 1980 г.
В 1979 г. Международная ассоциация геодезии приняла Геодезическую референцсистему 1980 г. (GRS80) [489].
Структура внешнего гравитационного поля
57
Ее основой является геоцентрический уровенный эллипсоид со своим нормаль
ным гравитационным полем. Систему задают следующие параметры (разд. 2.4.2
и 2.4.3):
экваториальный радиус земного эллипсоида (большая полуось):
*7 = 6 378 137 м,
геоцентрическая гравитационная постоянная Земли (включая массу атмосферы):
G M = 398 600,5· 109 м 3· с -2,
(3.3)
динамический коэффициент формы, в котором исключена постоянная прилив
ная деформация (разд. 2.2.3):
h = 1082,63· 10 " 6,
угловая скорость суточного вращения Земли:
ω = 7,292115 · 1 0 ' 5 р а д - с -1.
Текущие (на 1987 г.) значения этих величин следующие: *7 = 6 378 136 м, GM =
= 398 600,440 · 109 м3 · с * 2, h = 1082,626 · 10* 6 [119].
Наиболее важные производные параметры системы GRS80 равны (округленно):
малая полуось эллипсоида:
Ь = 6 356 752,3 м,
геометрическое сжатие:
/ = 0,003352811 = 1 : 298,2572,
нормальный потенциал на поверхности эллипсоида:
1/о = 6,2636861 · 107 м2 с ~2,
коэффициенты разложения по сферическим функциям:
С4.о = 2,37091 · 10 ~6.,
С6.о = - 0,00608 · 10 *6.
С»,о = 0,00001 · 10 * 6,
нормальная сила тяжести на экваторе и на полюсе:
7 , = 9,780 3268 м· с * 2,
у„ = 9,8321864 м с * 2,
гравиметрическое сжатие:
β = 0,005 302 440.
Нормальную силу тяжести уо можно вычислить по формуле (2.54), а проще
по формуле
70 =
Уе
1 + к sin2 φ
(1 - e2 sin2 * ) " 2’
(3.4)
где γ« = 9,780 326 7715 м - с * 2,
к = —ϋί. — i = 0,001 931 851 353,
ауе
e2 = а ~2b = 0,0066943800229.
Из формулы (3.4) можно получить градиент (2.63) нормальной силы тяжести
в направлении меридиана: 8,13 sin 2φ нс "2 или 8,13 sin 2ψ мкм · с "2/км. Нормаль-
58
Глава 3
Рис. 3.2.
Редукция силы тяжести за притяжение атм осф еры .
ная сила тяжести на полюсе больше экваториальной на 0,05186 м · с 2. Среднее
значение нормальной силы тяжести на поверхности уровенного эллипсоида равно
ут
= 9,797645 м - с -2.
Зависимость у от высоты вблизи поверхности эллипсоида определяется фор
мулой (2.66). Разложение ее в ряд с удержанием членов порядка / дает
Ί (φ, А) = γο - 3,0877· 10-б (1 - 0,001 42 sin2 *>) Л + 0,75· 10“ 12Л2м · с _2,
(3.5)
где h — высота над эллипсоидом в метрах.
Если аномалии силы тяжести вычислять по формуле (3.4), следует иметь в
виду, что 7 о содержит притяжение атмосферных масс. Это эквивалентно конден
сации масс атмосферы на поверхность эллипсоида. Если считать атмосферу со
стоящей из однородных слоев, результаты измерений силы тяжести будут сво
бодны от притяжения атмосферных масс, лежащих выше пункта наблюдений.
Формулу для поправки за атмосферное притяжение, зависящей от высоты, мож
но получить, задав модель атмосферы [165]. На поверхности эллипсоида поправ
ка достигает величины 8,7 м к м - с -2, а на высоте 35 км не превышает
0,05 мкм с -2 (рис. 3.2). В диапазоне высот рельефа 0 ^ h ^ 8 км эту поправку
можно представить в виде [763]
5 2атм = 8,74 - 9,9 · 10- 4 Л(м) + 3,56 · 10~ 8Л2М) м к м - с -2.
(3.6)
При вычислении аномалий силы тяжести поправку 6#атм надо прибавлять к из
меренной силе тяжести. Действительное распределение атмосферных масс отли
чается от модели атмосферы из-за рельефа и широтного эффекта. Однако их вли
яние обычно меньше 0,1 мкм с -2 [10].
3.2.
Аномалии в свободном воздухе
3.2.1.
Точечные аномалии в свободном воздухе
Аномалии в свободном воздухе (на физической поверхности) (разд. 2.6.2) получа
ют, вычитая из измеренного в точке Р значения силы тяжести ее нормальное
59
Структура внешнего гравитационного поля
значение (2 .66) в точке Q:
Д* - * - [ W + ( £ ) „ « . + ± ( § ) . » & ] ■
(3.7.)
В системе GRS80 величина у вычисляется по формулам (3.4) и (3.5). Для редук
ции в свободном воздухе обычно используют линейное приближение (3.2):
Ag = g - (у0 - 3,086HN) мкм - с " 2,
(3.76)
где высота Ны выражена в метрах; зависимость от координат пункта отсут
ствует.
Если отметки пунктов заданы не в системе нормальных высот //* , применяют какуюлибо другую из известных систем высот (разд. 2.5.2). При определении высот геоида ано
малии в свободном воздухе считают заданными на его поверхности (4.21).
Аномалии в свободном воздухе, которые вводят в базы гравиметрических
данных, находят по результатам гравиметрических съемок на суше и море
(разд. 9.3). Распределение наблюдений по земному шару неравномерно, а для
трети поверхности Земли гравиметрические данные отсутствуют. Точность ано
малий в свободном воздухе составляет на суше ± 1 — 20 мкм · с " 2, а на море
±10 — 50 мкм* с -2. На море ошибки могут быть и больше в зависимости от
вида съемки и метода определения координат. Корреляция ошибок, вызываемая
систематическими эффектами (например, ошибки калибровки, ошибки определе
ния координат), поддается оценке с трудом (разд. 3.2.3).
Графически аномалии силы тяжести могут быть представлены на картах ли
ниями равных значений аномалий (изоаномалами). Поскольку аномалии в сво
бодном воздухе сильно зависят от высоты (разд. 3.2.2), на мелкомасштабных
картах изоаномалы часто сглаживают.
Ю°1
Рис. 3 .3 .
Ю*6Е
K fl
1& Е
К арты аномалий силы тяж ести в свободном воздухе (слева) и высоты (справа) на тер р и тор и ю
Западного Гарца, Ф РГ; сечения изоаномал и горизонталей соответствен но 50 м к м -с" 2 и
50 м (база данны х Ганноверского геодезического института).
Глава 3
60
Глобальную картину аномалий (с сечением изоаномал 250 мкм - с -2 ) дают Атлас ано
малий в свободном воздухе (масштаб на экваторе 1 :8 000 000) и мировая карта
(1 :21 300 000) Бовина и др. [93]. Карта аномалий в свободном воздухе на район Западного
Гарца (рис. 3.3) приведена как пример карты района с плотной гравиметрической съемкой.
Из-за корреляции с высотой карты аномалий в свободном воздухе малопригодны для
представления локального гравитационного поля на суше.
3.2.2.
Зависимость от высоты
Из-за влияния топографических масс существует положительная корреляция ано
малий в свободном воздухе с высотами точек в коротковолновом диапазоне
[725]. Для ограниченных участков эта зависимость описывается линейным урав
нением регрессии (рис. 3.4)
Ag = а + ЬН,
(3.8)
где величина а зависит от распределения масс в земной коре, а коэффициент b —
функция средней плотности топографических масс; локальные отклонения от ре
грессии происходят из-за влияния топографических или подземных аномальных
масс. Коэффициент Ь меняется от 0,7 · 10“ 6 с “ 2 до 1,4· 10 ~6 с -2; его средняя ве
личина равна 1 · 10 “ 6 с “ 2 = 1 мкм · с " 2/м. Зависимость от высоты для аномалий
Буге, которые свободны от влияния топографических масс, рассматривается в
разд. 4.3.3.
Исследование зависимости силы тяжести от высоты и учет топографических
эффектов требуют создания цифровых моделей местности. Эти модели могут
быть созданы преобразованием аналоговой информации карт с горизонталями
в цифровую форму или вычислением средних высот. Для моделей с высоким раз
решением необходимы топографические карты более крупных масштабов
(1 : 25 000, 1 : 50000 ).
А 9 св .в.(м к м
с
2)
Рис. 3 .4 . Связь м еж ду точечными аномалиями в св ободн ом воздухе и вы сотам и, Западная Венесуэла
(8,8° < φ < 9,6° с.ш ., 288,4° < X < 289,8°, 127 пунктов), коэффициент регрессии 1,20
м к м -с_2/ м (информация базы данны х Ганноверского геодезического института).
Структура внешнего гравитационного поля
61
При вычислениях для своей поверхности Земли используются разложение рельефа по
сферическим функциям до /, т = 180 [550], а также средние высоты по трапециям 1° х 1°
(данные Международного гравиметрического бюро). Для различных районов определены
средние высоты по трапециям меньших размеров — 5 ' х 5 ', 6 ' х 10' [709]. Во Всемир
ном центре данных физики твердой Земли (Боулдер, шт. Колорадо, США) хранится ин
формация о средних высотах по трапециям с размерами 5 ' х 5 ' для всей поверхности
Земли. В некоторых странах [664] создаются цифровые модели с высокой разрешающей
способностью (с растрами 500 м х 500 м, 1000 м х 1000 м или 30" х 30").
3.2.3.
Средние аномалии в свободном воздухе
Зависимость точечных аномалий в свободном воздухе от высоты можно умень
шить, если сформировать средние значения этих аномалий для участков опреде
ленных размеров. Такие значения используют в глобальных и региональных ис
следованиях [разд. 4.2 и 4.3].
Среднее значение Ag на площадке Δσ сферы σ единичного радиуса будет
равно
__
Ag = - Ч Agda,
(3.9)
Δσ
причем Δσ ограничивается обычно координатными линиями геодезической систе
мы координат φ, X (разд. 2.4.2). Для элементарного участка do имеем
do = cos φ (Τκάφ.
(3.10)
При осреднении по таким участкам, форма которых близ экватора почти
квадратная, подавляются структуры поля с длиной волны 2 уГАо (происходит
сглаживание поля).
Осредняя точечные аномалии в свободном воздухе по каждому участку, нахо
дят эмпирические средние значения. Чтобы получить хорошее приближение к
(3.9), не должно быть белых пятен в распределении точечных аномалий, т. е.
они должны охватывать всю площадь участка и весь интервал высот. Если это
условие не соблюдается (что часто случается в горных районах, где гравиметри
ческую съемку выполняют в основном по дорогам), то путем интерполяции мож
но получить регулярную сетку точечных аномалий (разд. 2.7.2). Хорошие резуль
таты дает учет зависимости аномалий в свободном воздухе от высоты
(разд. 3.2.2). Если известны коэффициенты а и Ь уравнения регрессии (3.8), систе
матический тренд перед интерполяцией можно исключить. Учитывая поправку
за рельеф (разд. 4.3.3), точечные аномалии можно получать путем интерполяции
даже в горных районах с ошибкой в несколько десятков м к м - с " 2 [665]. Если
известны средние высоты Н (разд. 3.2.2) для заданных участков, в соответствии
с (3.8) средняя аномалия в свободном воздухе имеет вид
Ag = а + ЬН.
(3.11)
Точность средней аномалии в свободном воздухе зависит от ошибок точеч
ных аномалий и от ошибки представительства. Последняя зависит от сложности
поля и распределения пунктов наблюдений на участке [478]. На суше точечные
аномалии получают точнее, чем на море (разд. 3.2.1). Однако ошибка представи-
62
Глава 3
Рис. 3 .5 . Распределение точечны х гравиметрических данны х по поверхности Земли; база гравиметри
ческих данных М еж дународного гравиметрического б ю р о , сентябрь 1986 г.
тельства на суше бывает больше из-за влияния топографических масс и неравно
мерного распределения пунктов. Иногда, если имеются перекрытия разных съе
мок, можно определить корреляцию ошибок, вызванную систематическими эф
фектами. По аналогии с (2.83) она может быть описана ковариационной
функцией ошибок, зависящей от расстояния:
co\(eAgt, eAgJl ψ) = M[eAgi · ε~Δ&)+,
(3.12)
где eAgi — ошибка средней аномалии Agi на участке с номером /, а М —
оператор среднего.
Базы глобальных гравиметрических данных (разд. 9.4.2) содержал помимо точечных
значений средние одноградусные аномалии в свободном воздухе (средние значения по
трапециям 1° х 1°, что соответствует площадке ПО х НО км2 на экваторе), а для обла
стей с хорошей гравиметрической съемкой — средние аномалии для площадок 307 х 30';
рис. 3.5 иллюстрирует распределение имеющихся данных. Они охватывают примерно 70%
поверхности Земли. Не изучены обширные участки Азии, Африки и Южной Америки, а
также отдельные южные районы Мирового океана, Гренладия и полярные области. Дис
персия ошибок одноградусных аномалий в свободном воздухе составляет 2500 — 40000
(мкм с - 2)2. Иногда встречаются ковариации ошибок порядка 100 (мкм · с ~2)2 на расстоя
ниях до нескольких сотен километров [754].
В некоторых регионах с плотной гравиметрической съемкой (Северная Америка, Япо
ния, Европа) средние значения аномалий можно определить и для участков меньших раз
меров. Вычисляют средние аномалии в свободном воздухе для трапеций 5 ' х 5 ' и
6 ' х 10' (которые образуют на экваторе и на широте φ = 53° сетку примерно
10 х 10 км), а также средние для трапеций 10' х 10' и 12' х 20' [207, 710]. Дисперсия
ошибок этих средних величин лежит в интервале от 2500 до 10000 (мкм с - 2 )2, причем
она различна на суше и море. Для Европы и близлежащих акваторий ковариации ошибок
можно вычислить и аппроксимировать аналитически [755] (рис. 3.6). На рис. 3.7 помещен
фрагмент карты средних аномалий в свободном воздухе по трапециям 6 ' х 10', на кото
ром виден эффект крупномасштабных топографических масс и подводных структур (Ис
ландия и Срединно-Атлантический хребет).
63
Структура внешнего гравитационного поля
335
340
345
cov (10 мкм · с
Рис. 3 .6 . Средняя (по разны м источникам) ковариационная функция ош ибок для осредненны х по тр ап е
циям 6 ' х 10' аномалий в св ободн ом воздухе на акваториях [755].
Рис. 3 .7 . Аномалии в св ободн ом воздухе на территории И сландии и прилегающ их морях на основе
данны х по трапециям 6 ' х 10' из базы данных Ганноверского геодезического и нститута,
сечение и зоаном ал 100 м к м -с-2 [710].
3.3.
Глобальная и региональная структуры
гравитационного поля Земли
3.3.1.
Корреляция аномалий в свободном воздухе
Будем рассматривать аномалии в свободом воздухе как случайные величины, обпадающие свойствами однородности и изотропности (разд. 2.7.1). Для точечных
аномалий эмпирическая дисперсия составляет
<72(Δ^) = 179500 (мкм с " 2)2,
(3.13)
что соответствует среднеквадратической величине аномалии ±424 мкм · с ” 2. Глобальная ковариационная функция аномалий быстро уменьшается с увеличением
расстояния (из-за коротковолнового влияния рельефа), при этом расстояние кор
реляции составляет 50— 100 км, а примерно при 4 тыс. км корреляция пропадает
[358].
Диапазон изменения аномалий в свободном воздухе на Земле составляет 8 · 103
мкм · с “ 2. Максимальные значения аномалий и их градиентов приурочены к границам тек
тонических плит с глубоководными впадинами и островными дугами (Пуэрто-Риканский
желоб: — 3550 мкм · с2, Большие Антильские острова: +2000 мкм · с ~2). К молодым орогенным зонам (Анды, Альпы, Гималаи) приурочены положительные аномалии до 2000
64
Глава 3
Рис. 3 .8 . Эмпирическая ковариационная функция для аномалий в св ободн ом воздухе, осредненны х по
равновеликим трапециям 1° х 1° [720].
мкм · с “2у тогда как на самих тектонических плитах аномалии не превышают 500
мкм · с ~ 2.
Для средних одноградусных аномалий имеем
σ2(Δ£),. = 92000 (мкм с ’ 2)2,
(3.14)
что соответствует среднеквадратической аномалии ±303 мкм - с -2. Эмпирическая
глобальная ковариационная функция показана на рис. 3.8 [720]. Она определена
по аномалиям, осредненным по равновеликим одноградусным трапециям (участ
кам, близким к квадрату со стороной 110 км). В длинноволновом диапазоне
(1 = 2 — 100) параметры этой функции согласуются с результатами спутниковых
наблюдений.
Региональные ковариационные функции определяют по данным для конкрет
ного района. Длинноволновые компоненты поля (длина волны превышает разcov (10 мкм · с“ 2 ) 2
Рис. 3.9.
Ковариационная функция аномалий в св ободном воздухе, осредненны х по трапециям
6 ' х 10' и освобож денны х от тренда [710].
Структура внешнего гравитационного поля
65
мер района) исключают вычитанием функции тренда (разложение по сфериче
ским гармоникам для всей поверхности Земли, полином для конкретного района,
скользящие средние). В результате получают однородное и изотропное остаточ
ное поле [606]. Исключение тренда приводит к уменьшению дисперсии и расстоя
ния корреляции по сравнению с глобальной ковариационной функцией. Вид же
функции остается практически неизменным.
На рис. 3.9. показана ковариационная функция аномалий по площадкам 6 ' х 10' для
Европы и омывающих морей [710]. На континентах из-за влияния топографических масс
увеличивается дисперсия и уменьшается расстояние корреляции по сравнению с теми же
характеристиками более гладкого гравитационного поля Северного моря и Северной Ат
лантики.
3.3.2.
Модель степенных дисперсий
Спектр глобального гравитационного поля можно описать степенными дисперси
ями аномалий (разд. 2.7.3). Если ковариационная функция, на которой основаны
все вычисления, была определена по осредненным аномалиям (разд. 3.2.3), необ
ходимо иметь в виду, что при осреднении поле сглаживается. Региональные сте
пенные дисперсии аномалий можно получить по глобальным дисперсиям, масш
табируя их соответствующими дисперсионными отношениями [765].
Чернинг и Рапп [720] использовали глобальную ковариационную функцию
(разд. 3.3.1) для вывода модели степенной дисперсии аномалий:
f
0
754
-
для / = 0 , 1,
д л я / =2,
0,999617(/+2) для / > 3
( м к м С- 2)2.
(3.15)
Рисунок 3.10 иллюстрирует эту модель, а также степенные дисперсии, получен
ные по модели гравитационного поля GPM-2 (разд. 3.3.3) до / = 200. Табл. 3.2
(Ад) (10 мкм · с
Рис. 3.1 0 . Степенные дисперсии аномалий по модели Чернинга и Раппа [720J и модели геопотенциала
G PM -2 [763].
66
Глава 3
Т аб ли ц а 3.2. Степенные дисперсии аномалий a f ( A g ) и вы сот геоида a f ( N ) для м одели Ч ернинга
и Раппа [720]
Коротковолновая
У льтракоротко
волновая
2
5
10
20
Длина волны,
360°//
2 — 36
3 7 — 180
180° — 10°
10° — 2°
181 — 2000
001 — 5 000
001 — 10 000
001 — 20 000
001 — 40 000
20
8
4
2
—
—
—
—
8
4
2
1
о
Длинноволновая
Средневолновая
Степень
/
к>
0
1
Структура
поля
км
км
км
км
EojW ) ,
(мкм · с ' 2)2
Σα ^ Ν) ,
м2
40 975
928,7
50 603
4 ,6
Экстраполяция
74 004
0,22
11 603
650 х 1 0 ’ 6
2 132
23 х 1 0 ‘ 6
194
0 ,6 х 1 0 ' *
3
0
179 514
933,5
содержит степенные дисперсии аномалий по модели (3.15) для разных диапазо
нов длин волн. Показаны также степенные дисперсии высот геоида, которые
в соответствии с (2.75), (2.80) и (2.71) вычислены по формуле
οΚΝ)
= - - - * г ofiAg).
(* -
О
(3.16)
Ут
В диапазоне средних длин волн (/> 70), как видно на рис. 3.10, эта модель
хорошо согласуется с более современными моделями, а при более низких степе
нях возникают большие расхождения. Для / > 180 она уже не подтверждается
результатами измерений (при экстраполяции). Можно показать, однако, что для
территории Европы региональное гравитационное поле хорошо аппроксимирует
ся моделью (3.15), масштабированной коэффициентом 2/3, вплоть до / = 2000.
По данным табл. 3.2 существенная часть спектра аномалий располагается в
средне- и коротковолновом диапазонах (среднеквадратическая величина
±350 м к м - с ’ 2). Это обусловлено особенностями региональных геологических и
топографических структур (горные массивы, осадочные бассейны). В диапазоне
ультракоротких волн (±120 мкм с " 2) проявляется возмущающее влияние мест
ных топографических масс и близповерхностных аномальных масс (соляные ку
пола, магматические интрузии и т.д.). Длинноволновые же составляющие прева
лируют в высотах геоида, который является геометрическим представлением по
тенциала силы тяжести.
3.3.3.
Гармоническая модель
Разложение по шаровым гармоническим функциям (разд. 2.2.3) можно выпо
лнить лишь до некоторой степени /тах в зависимости от распределения данных
по всему земному шару. Расстояние между смежными пунктами, на которых
имеется измерительная информация, определяет разрешающую способность
180°//max» т. е. 1/2 длины волны наименьшей структуры поля, которую можно
выявить.
67
Структура внешнего гравитационного поля
Рис. 3 .1 1 . Аномалии в св ободн ом воздухе, м одел ь геопотенциала GRIM 3-L1, отсчетны й эллипсоид с
параметрами:
а = 6 378 140 м , / = 1:298,257,
G M = 398 600,5 х 109 м 3с " 2, сечение и зоаном ал 200 мкм с " 2 [558].
В настоящее время для аппроксимаций глобального гравитационного поля ис
пользуют сочетание разнородных данных, при этом аномалии силы тяжести
определяют средневолновый диапазон поля. Имеющиеся глобальные данные
(разд. 3.2.3) позволяют выполнить разложение по сферическим функциям до
/шах = 180 — 360 (разд. 4.2.2). Рисунок 3.11 иллюстрирует длинноволновые осо
бенности (/т ах = 36) аномалий в свободном воздухе (модель GRIM3-L1 [558]). Мо
дель GPM-2 [763], содержащая все коэффициенты до /щах = 200, позволяет выяв
лять детали поля вплоть до длин волн 200 км. Таблица 3.3 содержит полностью
нормированные коэффициенты зональных гармоник модели GPM-2 до / = 10 и
коэффициенты модели GRS80 (разд. 3.1.2), а в табл. 3.4 даны тессеральные и
секториальные коэффициенты до / = 5. Главная особенность поля определяется
коэффициентом C i, зависящим от полярного сжатия Земли^ При выводе возму
щающих величин (разд. 2.6) гармоники с коэффициентами Сг и Са почти полнос
тью исключаются после вычитания нормального поля.
Т а б ли ц а 3.3. Н ормированны е зональны е гарм они
ческие коэффициенты (округленные величины) С/
для м одели G PM -2 [763] и соответствую щ ие значе
ния для Геодезической референц-системы 1980 г.
(разд. 3.1.2)
С/ х 106
2
3
4
5
6
7
8
9
10
GPM-2
GRS802345678910
- 4 8 4 ,1 6 5
0,958
0,541
0,070
- 0,146
0,090
0,049
0,034
0,050
- 4 8 4 ,1 6 7
—
+ 0 ,7 9 0
—
- 0,002
—
0,000
0,000
Т аб лица 3.4. Н орм ированны е тессеральны е
гармонические коэффициенты (округленные ве
личины) С /,т , 5 /.т , м одель G PM -2 [763]
/
т
С,,т х 106
Si.rn х 106
2
1
2
1
2
3
1
2
3
4
1
2
3
4
5
0,00
2,44
2,03
0,90
0,72
-0,53
0,35
0,98
-0,19
-0,06
0,66
-0,46
-0,29
0,16
0,00
-1,40
0,25
-0,62
1,42
-0,48
0,66
-0,21
0,31
-0,09
-0,32
-0,22
0,04
-0,67
3
4
5
68
Глава 3
3.4.
Временное вариации силы тяжести
3.4.1.
Изменения гравитационной постоянной
и суточного вращения Земли
Исходя из космологических представлений, Дирак в 1938 г. [145] предсказал веко
вое уменьшение гравитационной постоянной G (2.6). По Дираку, величина G об
ратно пропорциональна возрасту Вселенной, что соответствует относительному
изменению G/G = ( - Ю -10 — 10_11)/год (G = dG/dt). Ожидаемое глобальное
уменьшение силы тяжести составляет 1 — 0,1 нм · с _2/год; уменьшение давления
в недрах Земли должно привести к ее расширению на 0,1 — 1 мм/год, что предо
пределяется также и другими соображениями [109].
До сих пор лабораторные эксперименты и теоретические исследования убедительно
не подтвердили, что G ^ 0 [220]. В 1987 г. Ван Фландерн [197] сообщил, что по результа
там лазерной локации Луны относительное изменение G/G равно
G/G = - (6 ± 2)· 10 _1'/год.
Вектор ω угловой скорости вращения Земли подвержен вековым, периодиче
ским и нерегулярным вариациям [248], что приводит к изменению центробежно
го ускорения г (2.8(. В сферическом приближении радиальная составляющая это
го ускорения равна
Zr
= - ω2/? cos2 φ.
(3.17)
Продифференцировав это выражение, можно оценить влияние на силу тяжести
изменения широты δφ (из-за движения полюса) и изменения угловой скорости
δω (в соответствии с изменением длительности суток):
bZr =
ω 2Κ ύ η 1 φ δ φ
-
2 o >/? c o s 2 ^ 0c j .
( 3 . 18)
Движение полюса (перемещение мгновенной оси вращения относительно среднего по
люса МУН — международного условного начала (разд. 2.1.1)) происходит из-за совмест
ного влияния свободной нутации упругой Земли (чандлеровский период в 435 сут), возму
щаемой случайными сейсмическими процессами, и вынужденных колебаний из-за метеоро
логических, океанических и гидрологических процессов (годичный период). Вековое
смещение полюса (0,003 " в год по меридиану с долготой X = 280°) можно объяснить гло
бальными тектоническими и гляциологическими изменениями. Движения полюса приво
дят к долгопериодическим изменениям широты с амплитудой 0,5", что в соответствии
с (3.18) приводит к изменению силы тяжести на 82 н м - с -2 на широте 45°.
Угловой скорости ω свойственно вековое уменьшение, характеризующееся относитель
ной величиной ώ/ω = 2 · 10"8 в столетие. Оно вызвано преимущественно приливным тре
нием, особенно проявляющимся в мелких морях [100]. Относительное приливное замед
ление на -2 ,6 · 10 8 в столетие частично компенсируется ускорением +0,6 · 10"8 в столе
тие из-за послеледникового поднятия в мантии Земли [119]. Периодические вариации
(годовые и полугодовые, месячные и полумесячные) вызваны метеопроцессами и прилив
ными явлениями. Нерегулярные изменения, в частности, обусловлены сейсмотектониче
скими перемещениями масс, при этом ώ/ω остается в пределах 10 " 8. В течение длительно
го времени возможны вариации порядка 10 " 7, что, согласно (3.18), может привести к из
менениям силы тяжести максимум до 0,7 — 7 нм · с " 2.
Структура внешнего гравитационного поля
3.4.2.
69
Гравиметрические приливы на абсолютно жесткой Земле
Периодически меняющееся приливное ускорение bt представляет собой разность
двух векторов: переменного вектора притяжения b небесного тела (Солнца, Лу
ны), порождающего приливы, и центробежного ускорения Ьо, действующего оди
наково на все точки Земли (рис. 3.12). Вектор Ьо вызван вращением Земли, Луны
и Солнца вокруг общего центра тяжести, в центре Земли С он компенсируется
притяжением (равновесная система).
Для жесткой Земли вектор Ь* можно определить, если известны положения
и массы Луны и Солнца, а также положение притягиваемой точки [451]. Понятие
приливного потенциала Vt Луны и Солнца можно ввести на основании вы
ражения
Ъг = Ъ + bo = grad Vt .
(3.19)
Потенциал Vt можно разложить в ряд шаровых функций (2.27). Поскольку систе
ма находится в равновесии, в разложении будут присутствовать члены только
со степенями / ^ 2. Для 1 - 2 имеем
(3.20)
где Mt — масса (точечная масса), п — расстояние, Zt — геоцентрическое зенитное
расстояние Луны или Солнца, г — расстояние от притягиваемой точки до центра
Земли. В соответствии с (2.35) потенциал К, вызывает сдвиг уровенных поверхно
стей на расстояние
g
(3.21)
Для поверхности Земли (г = R = 6371 км) отношение г/п достигает 1/60 для Луны,
1/23 000 для Солнца. Если пользоваться выражением (3.20), то погрешность составит ме
нее 2% приливного потенциала Луны и 0,004% солнечного. При г = R член в формуле
(3.20), стоящий перед скобками (постоянная Дудсона), равен 2,6277 и 1,2085 м 2с -2 соот
ветственно для Луны и Солнца. Следовательно, солнечные приливы составляют около
46% от лунных приливов.
На величину земной силы тяжести влияет радиальная составляющая прилив
ного ускорения. Когда эта составляющая направлена во внешнее пространство
(это направление считается положительным), она уменьшает силу тяжести. Со
гласно (3.20),
(3.22)
Рис. 3.12. Приливное ускорение.
70
Глава 3
Приливные изменения силы тяжести достигают максимальных значений, когда небес
ные тела находятся в зените или надире (Ζ, = 0° и Ζ, = 180°) и в перпендикулярных им
положениях (Ζ, = 90° и Ζ, = 270°). На поверхности твердой Земли (R = 6371 км) их вели
чины достигают 1,65 м к м - с " 2 (для Луны) и 0,76 м к м - с " 2 (для Солнца).
Член третьей степени в гармоническом разложении лунного потенциала достигает
27 нм · с “ 2. При современной точности измерений силы тяжести этим членом нельзя пре
небрегать. Остальные лунно-солнечные члены остаются в пределах 1 нм· с -2.
Теперь определим положение притягиваемой точки в фиксированной относи
тельно Земли системе координат геоцентрической широтой φ и географической
долготой X (разд. 2.4.2), а положение небесного тела, порождающего прилив, —
экваториальными координатами: часовым углом ht и склонением dt . По форму
лам сферической тригонометрии можно выразить зенитное расстояние Zt через
координаты точки и координаты небесного тела. Далее, величины ht и X связаны
соотношением
ht = θο 4- X — a t у
где θο — гринвичское звездное время, at — .прямое восхождение (рис. 3.13). Ис
пользуя (3.22), получим
+ sin 2φ sin 26/ cos ht + cos2 φ cos2 6t cos 2ht .
(3.23)
Величины Г/, δ, и ht изменяются с разными периодами. Из (3.23) следует, что прилив
ное ускорение состоит из трех основных членов. Первый член зависит от б/, и его измене
ние долгопериодическое (для Луны — 14 сут, для Солнца — полгода); второй и третий
члены зависят от ht (соответственно суточный и полусуточный период). И наконец, посто
янная часть первого члена вызывает уменьшение (постоянное во времени) силы тяжести
на экваторе на 0,30 м к м - с " 2 и ее увеличение на полюсе на 0,61 мк м* с~ 2.
Поскольку выражение (3.23) содержит произведения различных функций вре
мени, оно не вполне удобно для анализа приливных наблюдений. Но эфемериды
Луны и Солнца можно выразить через гармонические функции времени, завися
щие от кеплеровых элементов орбит и средних долгот Луны и Солнца. Таким
образом, для приливов также можно получить разложение по сферическим гарz
Северный
Tov
весенн
равноденсп
h
Рис. 3.13.
X
Н ебесны е и земные системы координат.
71
Структура внешнего гравитационного поля
Таблица 3.5. Основные приливные волны (/ — лунные, s — солнечные)
Условное обозначение
Период Т (в еди Амплитуда грави
ницах солнечного тационных волн
времени)
для твердой Земли
(*> = 45°, Λ = 0),
и · мс "2
Долгопериодические волны:
МО — постоянный / прилив
SO — постоянный s прилив
Ssa — деклинационный прилив
Mm — эллиптический прилив
M f — деклинационный прилив
Суточные волны:
ΟΙ — основной суточный / прилив
Р1 — основной суточный 5 прилив
Q1 — эллиптический прилив
К1 — основной суточный
Is
деклинационный прилив
Полусуточные волны:
основной / прилив
М2 —
S2 —
N2 —
К2 —
основной s прилив
эллиптический прилив
деклинационный прилив
1/3-суточные волны:
— 1/3-суточ н ы й / прилив
М3
00
ао
182,62 сут
27,55 сут
13,66 сут
102,9
47,7
14,8
16,8
31,9
25,82
14,07
26,87
23,93
ч
ч
ч
ч
310,6
144,6
59,5
436,9
12,43
12,00
12,66
11,97
ч
ч
ч
ч
375,6
174,8
71,9
47,5
8,28 ч
5,2
72
Глава 3
моникам. Приливное ускорение будет равно сумме косинусоидальных функций
времени (отдельных волн), каждая из которых имеет постоянные частоту и ам
плитуду; их начальные фазы также можно вычислить. Основные приливные во
лны указаны в табл. 3.5. Из выражения (3.23) следует, что отдельные волны
имеют широтную зависимость. Амплитуды основных волн гравиметрических
приливов (для твердой Земли) приведены на рис. 3.14, а детальное описание дано
в работе [798].
Гармоническое разложение Картрайта и Тейлера [111], а также Картрайта и Эддена
[110] основано на разложении в ряд сферических гармоник до / = 3 (для Луны) и / = 2
(для Солнца). Оно содержит 505 отдельных волн,,и его ошибка менее 1 нм · с -2. В 1971 г.
МГГС рекомендовал это разложение в качестве модели для вычисления приливов в твер
дой Земле (теоретические земные приливы) [552]. Для анализа наблюдений наивысшей
точности (разд. 10.1.5) были получены выражения до / = 4 (ошибка менее 0,01 нм - с " 2).
Формула Кси [785] содержит 1187 отдельных волн, она согласована с Системой астроно
мических и геофизических постоянных 1984 г. и отнесена к эпохе 2000.0.
3.4.3.
Гравиметрические земные приливы и океанские
нагрузочные приливы
Под влиянием приливных сил Земля испытывает упругие деформации (земные
приливы). Океанские приливы тоже вызывают деформации Земли из-за того, что
создают нагрузку. Эти деформации приводят к дополнительным изменениям си
лы тяжести на земной поверхности [451].
Теория Лява [422] описывает земные приливы для сферически симметричной
невращающейся упругой Земли. Приливный потенциал Vt (3.20) вызывает ради
альное смещение Δ rei притягиваемой точки Р. Соответствующие перемещения
масс порождают дополнительный потенциал за счет деформации Vd (рис. 3.15).
Величины Vd и Arei пропорциональны соответственно приливному потенциалу Vt
и смещению Ап (3.21). Приливный потенциал упругой Земли определяется вели
чинами Vt и Vd и изменением потенциала gArei> которое в соответствии с (2.35)
вызвано смещением точки наблюдений на величину Агег.
Vei = Vt+ V d - gArel = Vt( 1 + к - h),
(3.24)
где числа Лява к = к (г) и h = h(r) — коэффициенты пропорциональности. Числа
к и h зависят от степени разложения приливной деформации в ряд сферических
гармоник.
W + V t + Vd = const
W + Vt = const
Деформированная
Δ re£ =h Δ rt
поверхность Земли
Недеформированная
W = const
g
Р ис. 3.15.
Вертикальное см ещ ение уровенной поверхности и п о
верхности твердой Земли, вы званное приливным п о
тенциалом .
Структура внешнего гравитационного поля
73
По сейсмическим данным и наблюдениям собственных колебаний Земли были созда
ны плотностные модели Земли, состоящей из сферических слоев. Для заданного распреде
ления плотности, сжимаемости и твердости можно вычислить приливные эффекты [467].
На земной поверхности (г = R) числа Лява второй степени (/ = 2) равны
Иг =
0,61,
к2 =
0,30,
(3.25)
см. также разд. 4.3.2. Земное ядро жидкое, и поэтому суточные волны должны слабо
зависеть от частоты. Вар [745] построил модели земных приливов для различных эллипсои
дальных моделей вращающейся Земли с жидким внешним и твердым внутренним ядром
(отклонения менее 0,1 %). Параметры этих моделей зависят от широты (изменения поряд
ка 1%). Дальнейшие уточнения основаны на учете латеральных неоднородностей в мантии
(разд. 10.3.3).
Наблюдаемые гравиметрические земные приливы можно предвычислить по
гармоническому разложению теоретических приливов (разд. 3.4.2). В отличие от
модели жесткой Земли изменяется амплитуда Ai каждой отдельной волны /?, (с
круговой частотой ω, = 2 т : 7/), а также из-за неэластичности и океанских нагру
зочных приливов возникает фазовый сдвиг ΔΦ,:
P i(t) =
6М,(теор.) cos (ω,7
+
Ф/(теор.)
+
ΔΦ,),
(3.26)
где
ΔΦ, = Ф,(набл.) - Ф,(теор.).
(3.27а)
Отношение амплитуд наблюденного и теоретического приливов выражается гра
виметрическим фактором (амплитудным фактором):
di = Л,(набл.): Л,(теор.).
Он является функцией чисел Лява
сферической гармоники:
ь, =
h
и
к
(3.276)
и, следовательно, зависит от степени
1 + 1 h, -
(3.28а)
При разложении по сферическим функциям до / = 2 имеем
δ2 = 1 + Λ 2 - ~ * 2.
Принимая для
Земли:
Иг
и
кг
(3.286)
значения из (3.25), получим гравиметрический фактор для всей
6 = 1,16.
(3.29)
Следовательно, амплитуды гравиметрических приливов жесткой Земли (разд. 3.4.2) необ
ходимо увеличивать примерно на 16%, что дает максимальное изменение в 2,80 мкм · с " 2.
В модели эллипсоидальной вращающейся Земли величина 6 зависит от широты φ (разд.
10.33). Для стационарных приливов МО, SO (разд. 3.4.2) приходится полагать Ь = 1,0,
так как соответствующие числа Лява неизвестны.
Помимо непосредственного гравитационного воздействия океанские приливы
оказывают периодическую нагрузку на земную кору, что приводит к изменениям
силы тяжести вследствие сдвига масс (потенциал деформации), а также к верти-
74
Глава 3
Рис. 3.16.
Влияние нагрузочного океанского прилива для волн М2
на силу тяж ести в Европе и Африке; изолинии, со о т в ет
ствую щ ие удвоенной ам плитуде, выражены в нм с -2
[158].
кальному перемещению гравиметра. Если распределение океанских приливов из
вестно, влияние океанской приливной нагрузки можно определить и для модели
упругой Земли.
Для наиболее важных волн существуют глобальные модели океанских приливов. Ат
лас Центра надводных вооружений (NSWC) ВМС США, содержащий таблицы и карты
океанских приливов, дает амплитуды и фазы отдельных волн Ssa, Mm, Mf, Ql, Ol, PI,
ΚΙ, N2, М2, S2, K2 по сетке 1° х 1°, что позволяет учесть океанские приливы примерно
на 90% [619, 620]. Для некоторых акваторий существуют локальные модели шельфовых
приливов. Помимо частотно-зависимых моделей, первые попытки моделирования океан
ских приливов и течений во временном домене изложены в работе [390].
Для определения приливного нагрузочного эффекта океанская нагрузка рас
сматривается как тонкий слой на сферической модели Земли и раскладывается
в ряд сферических гармоник. Результирующие вертикальные сдвиги и возмуще
ния гравитационного потенциала описываются нагрузочными числами Лява /г/,
к[. Они определены Фаррелом [191] для различных моделей Земли. Разложение
потенциала нагрузки в ряд сферических функций необходимо выполнять до высо
ких степеней (/ = 10000), так как поверхность Земли сложная [798]. Влияние же
нагрузки на силу тяжести определяется аналогично вычислению земных приливов
по (3.24).
Влияние океанской нагрузки можно также определить, если представить нагрузку, за
висящую от положения точки на сфере, с помощью функции Грина. Функция Грина зави
сит от сферического расстояния между элементом нагрузки и данной точкой и образуется
как бесконечная сумма сферических гармоник для точечной нагрузки, учитывающая нагру
зочные числа Лява. Гоуд [222] разработал метод для вычисления влияния нагрузки, ис
пользующий интегралы функций Грина. Наиболее удачно сочетание гармонического раз
ложения до невысоких степеней (например, /тах = 15) с интегрированием по ограниченной
круговой области на сфере (например, со сферическим расстоянием 5°) [314].
При высоких океанских приливах нагрузочная деформация влечет опускание поверх
ности и соответствующее увеличение силы тяжести; опускание с удалением от берега ста
новится меньше. Сопутствующее смещение масс уменьшает этот эффект, и прямое грави
тационное влияние океанского прилива на изменение силы тяжести обычно приуменьшает
ся. Как правило, суммарное влияние океанских приливов составляет лишь несколько
процентов от гравиметрических приливов. В глобальном масштабе влияние нагрузочных
Структура внешнего гравитационного поля
75
приливов в лунном приливе М2 изменяется от 0,1 мкм · с “ 2 (Южная Америка, Южная
Африка) до 0,01 мкм · с -2 (Центральная Азия, Австралия) [158]. Рисунок 3.16 иллюстриру
ет это влияние на территории Европы и Африки. В прибрежных областях возможны воз
мущения до 0,2 мкм · с " 2, однако результаты вычислений могут быть неуверенными из-за
несовершенства модели.
3.4.4.
Смещения земных масс
Смещения земных масс можно эквивалентно представить изменениями плотнос
ти в соответствующей притягивающей точке. Вертикальные движения земной ко
ры и сопутствующие смещения наблюдателя в поле силы тяжести во многом
вызваны процессами в близповерхностных слоях земной коры. Изменения силы
тяжести при смещениях масс в отличие от локальных процессов, происходящих
недолгое время, лежат в пределах ошибок измерений ( ± 1 0 — 100 нм с -2). Ис
следование и разработка моделей в этой области еще только начинаются [170].
Временные изменения силы тяжести такого рода могут иметь различный ха
рактер (резкие мгновенные, периодические или квазипериодические, вековые). В
зависимости от пространственной протяженности они могут быть локальными,
региональными или глобальными; при этом глубина источника изменений силы
тяжести возрастает с увеличением площади, на которой эти изменения ощутимы.
Обычно силы, действующие длительное время, вызывают пластические деформа
ции, а короткопериодические или квазипериодические силы — упругие деформа
ции. Мгновенные *локальные процессы обычно приводят к необратимым изме
нениям.
Рисунок 3.17 дает общее представление о масштабах и длительности этих про
цессов [695].
бд
Глава 3
76
Глобальные изменения силы тяжести (область проявления более 104 км) мо
гут быть вызваны смещениями эксцентричного земного ядра относительно ман
тии [30], перемещениями масс в мантии (конвекция в мантии) и литосфере (дви
жение тектонических плит), а также повышением уровня Мирового океана. Реги
ональные изменения (102 — 104 км) происходят одновременно с послеледнико
выми процессами изостатической компенсации, тектоническими процессами (го
рообразование) и накоплением осадочных пород. Глобальные и региональные из
менения носят вековой или очень длительный характер на интервалах 103 — 108
лет; вместе с тем нельзя исключить долгопериодические компоненты. Локальные
изменения (10° — 102 км) связаны в основном с сейсмотектоническими процесса
ми, а также с явлениями до и после землетрясений, с вулканическими процесса
ми, с движениями в зонах разломов земной коры и грабенов. Землетрясения и
вулканическая активность влекут резкие мгновенные и короткопериодические из
менения силы тяжести, для асейсмических движений характерны временные ин
тервалы 10° — 102 лет. Изменения уровня грунтовых вод и другие гидрологиче
ские процессы, как и вариации атмосферного давления, приводят к нерегулярным
периодическим изменениям силы тяжести в течение 10"2 — 10° лет. И наконец,
отметим смещения масс и связанные с ними изменения силы тяжести в результа
те человеческой деятельности (откачка воды, нефти, газа, горные разработки, со
здание крупных инженерных сооружений) в течение 10° — 102 лет.
3.5.
Гравитационные поля Луны и планет
Крупномасштабные структуры внешних гравитационных полей Луны и ближай
ших к Земле планет были изучены на основе анализа орбит далеких космических
аппаратов, а также спутников Луны и планет. Для внешних планет Солнечной
системы эти данные были дополнены наземными астрономическими наблюдени
ями (оптическими и радиотехническими методами). Измерения силы тяжести бы
ли выполнены и на самой поверхности Луны. Современное состояние исследова
ний гравитационных полей Луны и планет описано в работе [46], гравитацион
ные поля Луны и планет земной группы рассмотрены в [532], а также в работе
[331]. Обширная монография о гравитационном поле Луны написана Сагитовым
и др. [583]. В рамках будущих исследовательских программ обсуждается примене
ние орбитальных гравитационных градиентометров (разд. 8.3.3).
3.5.1.
Гравитационное поле Луны
Используя селеноцентрическую гравитационную постоянную [45]
GMM = (4 902,799 ± 0,003) · 109 м3с ' 2
и угловую скорость суточного вращения
ωΜ = 2,661699· 10“6 р а д - с " 1,
(3.30)
(3.31)
получим для модели Луны, состоящей из сферических слоев (средний радиус
1737,53 км), среднюю величину силы тяжести на поверхности:
(3.32а)
gM — 1,63 м · с
Структура внешнего гравитационного поля
77
Т а б лица 3.6. Н ормированны е гарм они
ческие коэффициенты (округленные зна
чения) поля силы тяж ести Луны [45]
/
т
С/.т х 106
2
0
1
2
0
1
2
3
0
1
2
3
4
0
1
2
3
4
5
- 9 0 ,5 3
-0 ,1
34,5
- 3 ,4
22,0
14,1
15,9
3,9
- 4 ,8
-8 ,1
0,5
- 3 ,5
- 0 ,7
- 9 ,7
3,7
-0 ,4
0,6
- 6 ,7
3
4
5
х 10‘
_
0
0
—
6,6
4,8
-2 ,4
—
1,9
- 6 ,8
- 1 4 ,4
- 0 ,6
—
- 1 ,5
-2 ,4
4,9
-6 ,6
11,6
(примерно 1/6 от земной силы тяжести), а также среднюю плотность Луны:
qm
= 3 340 кг · м " 3.
(3.326)
Экспедиции «Аполлон-11, -12, -14, -17» выполнили измерения силы тяжести
на поверхности Луны. В месте посадки КЛА «Аполлон-17» (1972 г.) было получе
но g = 1,626 95 ± 0,00005 мс~2 (разд. 7.1.3).
По результатам доплеровского слежения за субсателлитами «Аполлоном-15,
-16» (1971/72 г.), ИСЛ «Лунар Орбитер» 1—5 (США, 1966/67 г.), а также лазер
ной локации с использованием уголковых отражателей, установленных на види
мой стороне Луны (в местах посадки КЛА «Аполлон-11, -14, -15» и станции «Лу
на-17»), была получена модель поля силы тяжести Луны в виде разложения в
ряд сферических гармоник до /, т = 16 с разрешением 340 км. В таблице 3.6
приведены коэффициенты разложения до / = 5. Для / ^ 10 и невидимой стороны
Луны поле силы тяжести изучено недостаточно хорошо [583].
Рис. 3 .1 8 . П ол е силы тяж ести Луны: аномалии в св обод н ом в оздухе, полученные по сферической м о д е
ли (радиус 1738 км), сечение иэоаномал 500 мкм с - 2 ; 1 — М оре Д о ж д ей , S — М оре Я сности
[45].
78
Глава 3
Гравитационные поля видимой и невидимой сторон Луны имеют много общего и ха
рактеризуются среднеквадратическим изменением ±500 мкм - с -2 (рис. 3.18). На видимой
стороне в областях круговых морей обнаруживаются положительные аномалии силы тя
жести до 3000 мкм · с “ 2 (масконы — концентрации масс). Спектр поля (степенные диспер
сии аномалий) отличается от монотонно убывающего спектра вблизи / = 5 (различия ре
льефа морей и плоскогорий) и вблизи / = 10 (масконы). Сравнение аномального поля с
рельефом указывает на существование изостатической компенсации, которая, однако, про
является слабее, чем на Земле [532]. Решение обратной задачи гравиметрии с учетом сейс
мических исследований позволило создать модели коры и мантии [94].
Для лунных приливов (модель твердой Луны), вызванных притяжением Земли, имеем
cos 2Z m +
:
(3.33)
·
Максимальная величина приливного изменения силы тяжести составляет примерно
1,5 *10“ 5 от величины силы тяжести на Луне; влияние солнечного прилива — менее
0,15 мкм* с -2. Различные упругие модели дают значения гравиметрического фактора
δ < 1.01 (3.276), следовательно, наблюдения приливных вариаций силы тяжести были бы
лишь в малой степени чувствительны к внутреннему строению Луны [451].
3.5.2.
Гравитационные поля планет
Внутренние планеты Солнечной системы (Меркурий, Венера и Марс) исследова
лись в ходе следующих космических программ: космические зонды «Маринер»
(США, программа начата в 1962 г.), в их числе спутник Марса КА «Маринер-9»
(1971/72 г.) и зонд «Маринер-10» (первое исследование Меркурия, 1975 г.), КА
«Венера» (с 1961 г.) и КА «Марс» (СССР, с 1962 г.), КА «Викинг-1, -2» (США,
с 1975 г.) с искусственными спутниками Марса и спускаемым аппаратом, спутник
«Пионер-Венера Орбитер» (США, 1978 г., начавший систематические исследова
ния Венеры). Исследование внешних планет было целью дальних космических ап
паратов «Пионер-10, -11» (США, Юпитер 1973/74 г., Сатурн 1979 г.), а также
«Вояджер-1, -2» (США, Юпитер 1979 г., Сатурн 1980 г., Уран 1986 г., Нептун
1989 г.). Таблица 3.7 содержит некоторые геометрические и физические парамет
ры планет, а также средние значения силы тяжести и плотности.
Т аблица 3.7. Геометрические и физические параметры планет [18, 46, 642]
Планета
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
Экваториальный
радиус, км
GM, км3с 2
2440
6052
6378
3393
71 492
60 268
25 662
24 830
22 032
324 858
398 600
42 828
126 687 х 103
37 931 х 103
5 794 х 105
6 809 х 103
У2
X ю6
60
6
1 083
1 959
14 736
16 480
3 349
4 300
Средняя сила
тяжести на
поверхности,
м · с ■2
Средняя плот
ность, кг · м ' 3
3,70
8,87
9,80
3,72
24,8
10,5
8,4
11,6
5400
5200
5500
3900
1300
700
1300
1800
Структура внешнего гравитационного поля
79
Гравитационные поля Марса и Венеры изучены и проанализированы особенно
хорошо [532]. Для Марса по результатам доплеровского слежения за его искус
ственными спутниками было получено разложение потенциала по шаровым
функциям до /, т = 18 (разрешение 600 км), однако коэффициенты, начиная с
/ = 10 и выше, недостоверны [26]. Геоид Марса (уровенная поверхность реально
го поля, подобранная для отсчетного эллипсоида Марса) имеет высоты до
±1000 м (ошибка ±5 — 10 м), его крупномасштабные особенности коррелируют
с рельефом. Для Венеры имеется гармоническое разложение до /, т = 18 (разре
шение 1100 км) [47]. Региональные исследования обеспечивают разрешение в
250 — 1000 км [643]. Для длинноволновой части спектра аномалий в свободном
воздухе характерна положительная корреляция с рельефом, причем поле относи
тельно гладкое (среднеквадратическое значение аномалий ±300 м к м - с " 2). Для
внешних планет гармонические коэффициенты определены до / = 6 (Юпитер, Са
турн) и / = 4 (Уран).
Спектры поля силы тяжести Земли, Луны, Марса и Венеры сходным образом затуха
ют с увеличением их степени; отклонения можно объяснить нестохастичностью характери
стик поля. Для Марса быстрое убывание спектра вызвано доминирующим влиянием пла
то Тарсис (1 = 2 — 3), где на высоте 8 — 10 км аномалии составляют 3000 мкм - с -2
(диаметр плато 4 тыс. км). На Венере аномальное поле обусловлено длинноволновыми
топографическими структурами. Геофизическое применение данных о гравитационных по
лях планет обобщено в работе [450].
4. Сила тяжести в естественных
и инженерных науках
В этой главе подробно рассматривается, как информация о поле силы тяжести
используется в естественных и инженерных науках. В физике сила тяжести имеет
очень важное значение при определении многих величин. Более того, гравитаци
онная постоянная является фундаментальным параметром (разд. 4.1). Гравимет
рические данные интенсивно используются в двух основных науках о Земле:
геодезии (разд. 4.2) и геофизике (разд. 4.3); они необходимы и для инженерных
разделов этих наук. Растет интерес к изучению и анализу длинноволновых со
ставляющих поля, изучению временных вариаций силы тяжести, поскольку они
обеспечивают данные о кинематике и динамике Земли (разд. 4.4). В астрономии
и космонавтике параметры гравитационного поля необходимы для вычисления
орбит естественных и искусственных небесных тел. Некоторые методы наземной
навигации тоже требуют знания гравитационного поля (разд. 4.5).
Геодезическое применение данных о гравитационном поле детально рассмот
рено в геодезической литературе [246, 290, 468, 488, 528, 641, 730]; геодезические
модели рассмотрены в работе [293]. Применение гравиметрического метода в фи
зике Земли рассматривается в геофизической литературе. Отметим работы [77,
334, 362, 652], и особенно книги по экспериментальной гравиметрии [138, 212,
291, 722]. Обширные исследования в области прикладной геофизики рассмотрены
в работах [148, 343, 462, 505].
4.1.
4.1.1.
Сила тяжести в физике
Гравиметрические данные в метрологии
В физике знание величины ускорения силы тяжести необходимо для установления
единиц силы и производных единиц. Наиболее тесно с этой метрологической за
дачей связана механика. В Международной системе единиц СИ, принятой в
1960 г. 11-й Генеральной ассамблеей мер и весов, единицей силы является нью
тон (Н):
1 Η = 1 м · кг · с
(4.1)
Таким образом, один ньютон — это сила, придающая телу массой 1 кг ускорение
1 м · с " 2. Килограмм в системе СИ определяется эталоном массы, хранящимся
в Международном бюро мер и весов (МБМВ/В1РМ) в Севре близ Парижа. Срав
нение масс сейчас возможно с относительной ошибкой ± 1 0 -8 — 10-9 [375]. Сле
довательно, для определения силы необходимо знать ускорение силы тяжести в
данной точке.
Сила тяжести в естественных и инженерных науках
81
Следующие величины являются производными от силы и потому зависят от
ускорения силы тяжести:
давление (механическое напряжение) — единица паскаль (Па):
1 Па = 1 Н · м ~ 2 = 1 м " 1 · кг · с -2,
(4.2)
работа (энергия) — единица джоуль (Дж):
1 Дж = 1 Η · м = 1 м2 · кг · с ~2,
(4.3)
мощность (поток энергии) — единица ватт (Вт):
1 Вт = 1 Дж · с" 1 = 1 м2 · кг · с -3.
(4.4)
Через единицы силы и давления ускорение силы тяжести входит не только в механиче
ские единицы. Так, в теории электричества основная единица силы электрического тока
ампер (А) — сила тока, проходящего через расположенные определенным образом два
проводника длиной 1 м, при которой сила их электродинамического взаимодействия равна
2 · 1 0 ' 7 Н. В термодинамике давление — важная величина для воспроизведения Между
народной практической температурной шкалы. В этой системе точки 0°С и 100°С шкалы
Цельсия определяются соответственно как точки замерзания и кипения воды при нормаль
ном давлении воздуха (1 атм = 101 325 Па). В оптике понятие нормального давления ис
пользуется при определении основной единицы силы света — канделы.
Итак, гравиметрические данные необходимы в физико-технических лаборато
риях для практической реализации стандартов силы и производных от нее вели
чин. Такие лаборатории имеются в национальных институтах стандартов
(разд. 1.3.1), в научно-исследовательских центрах и организациях, связанных с из
мерениями (например, при испытаниях материалов) или изготовляющих измери
тельные устройства (весы, барометры и т.п.). Если для институтов стандартов
установлены высокие точностные требования ( ± 1 0 " 8g), то для технических при
ложений обычно достаточна точностью 10"6.
4.1.2.
Определение гравитационной постоянной
Гравитационная постоянная G — это естественная постоянная, являющаяся фун
даментальной физической константой. Абсолютное численное значение G имеет
первостепенное значение для наук о Земле и астрономии, не рассматривающих
ее гипотетическое непостоянство во времени. Зная произведение GM, можно
определить массу М и среднюю плотность небесного тела. Величина G необходи
ма и при сравнении лабораторных определений плотности горных пород с ре
зультатами, полученными из измерений силы тяжести и по геофизическим
моделям (разд.9.3.4).
Для некоторых планет величина GM известна с весьма высокой точностью из анализа
орбит космических зондов и спутников (разд. 3.1.2, 3.5.2). Для Земли с учетом массы
атмосферы принято значение GM = (398 600,44 ± 0,01) · 109 м3 · с -2 (резолюция 1 МАГ,
Гамбург, 1983 г.). В классической теории показано, что величина силы тяжести на поверх
ности невращающегося однородного земного шара равна
GM
(4.5)
82
Глава 4
Таким образом, величину GM можно определить, зная силу тяжести g и радиус Земли
R. Средняя плотность Земли Qm получается из соотношения
(4.6)
Величину G определяют лабораторными и полевыми методами [62]. Обстоя
тельный обзор и библиография даны в работе [220].
В лабораторных экспериментах обычно используют метод Кавендиша с при
менением крутильных весов; в прошлом применяли крутильный маятник и ры
чажные весы.
Крутильные весы состоят из подвешенного на крутильной нити горизонталь
ного коромысла (длиной /) с массами т на концах (рис. 4.1). Если к этим массам
поднести к горизонтальной плоскости массу т , в результате ее притяжения коро
мысло отклонится на угол ϋ. Уравнение равновесия для коромысла имеет вид
GI
тт
— тд = 0,
~ж
(4.7)
где г — крутильная постоянная нити, d — расстояние между массами m и т ,
которые считают точечными. Величину т можно определить, зная период колеба
ний Т и момент инерции J крутильных весов, из соотношения
Т = 2π
(4.8)
Если внешние массы помещать в положения (1) и (2), можно измерить угол 2д.
Крутильные весы можно использовать и как крутильный маятник. Тогда из
меряют период колебаний коромысла дважды, при двух взаимно перпендикуляр
ных положениях притягивающих масс (рис. 4.2). В положении (1) период
собственных колебаний становится меньше, а в положении (2) он увеличивается.
В этом методе влияния высокочастотных возмущений меньше, чем при измере
нии угла закручивания. В рычажных весах Иолли используется внешняя масса,
которую помещают под пробной массой весов. Смещение последней, вызванное
влиянием внешней массы, компенсируют с помощью дополнительной массы.
Рис. 4.1
Рис. 4.2
(левый). Принцип крутильных весов.
(правый). Принцип крутильного маятника
Сила тяжести в естественных и инженерных науках
83
Основные ошибки в рассмотренных экспериментах вызваны неоднородностями взаи
модействующих масс, что очень затрудняет определение положения их центров тяжести.
Кроме того, сказываются несовершенства упругих подвесов, температурные, магнитные
и электрические воздействия на чувствительную систему, а также внешние возмущающие
ускорения. В начатых экспериментах стараются уменьшить относительную ошибку, ныне
превышающую ± 1 0 " 4, до величины ± 1 0 -5.
Геофизические методы используют изменение силы тяжести с высотой, вызван
ное притяжением горных пород. При измерениях на вертикальном профиле (в
шахте) у поверхности Земли (go) и на глубине z (gz) справедливо следующее ра
венство (разд. 9.3.4):
gz
- go = 2 ~ z - 4 wG qz>
R
(4.9)
где принято, что слой горных пород однородный. Если плотность горных пород
ρ известна, величину G можно вычислить. При более сложном распределении
масс гравитационный эффект следует рассчитывать по более точным моделям.
Такие эксперименты впервые проводили Буге и Эри (разд. 1.2.2). Изначально их
целью было определение средней плотности Земли ρηι. Заменяя G в (4.9) с использованием
формул (4.5), (4.6), получим
gz
~
go
- go = 2 - z
R
(4.10)
При измерениях на вертикальных профилях глубиной до 1 км в шахтах Квинсленда (Ав
стралия) было получено G = (6,72 ± 0,02) · 10" 11 м3 · к г " 1 · с " 2, одновременно выполня
ли многочисленные определения плотности горных пород [724]. Основным источником
ошибок этого метода является неоднородное распределение плотности, которое трудно
учесть. Точность можно повысить, если выполнять профильные измерения в местах с
однородным распределением масс — в плоскослоистых осадочных породах, озерах, толще
льда, на высоких башнях.
Исследования зависимости гравитационной постоянной от химического соста
ва тел, внешних влияний, а также от местоположения и направления пока не
дали определенных результатов. В частности, ее неизменность в пространстве
подтверждена с точностью ± 1 0 “ 3 для лабораторных расстояний и с точностью
± 1 0 " 8 в планетарном масштабе [647]. Также не установлена уверенно и времен
ная зависимость (разд. 3.4.1).
В последнее время появились теории, расширяющие понятие ньютоновского гравита
ционного потенциала. Они основываются, с одной стороны, на расхождениях в результа
тах лабораторных и геофизических методов, а с другой стороны, на повторном анализе
выполненных Этвешем исследований зависимости притяжения от химического состава.
В качестве первого приближения принято следующее соотношение:
GaoHI
V( r)= -
r
(1 + a exp ( - r/\)).
(4.11)
По данным [196] для параметров (4.11) можно принять: а = -0,01 и X = 200 м. Таким
образом, G
Geo на больших расстояниях (г > X), а лабораторные эксперименты (X ► г)
должны давать величины С, меньшие на 1%. Возможной причиной этого непостоянства
84
Глава 4
считают дополнительную отталкивающую силу межатомного взаимодействия, действую
щую на коротких расстояниях; величина силы зависит от отношения барионного числа
к атомному весу.
В решение этих вопросов существенный вклад могут внести гравиметрические экспе
рименты, в которых абсолютные измерения силы тяжести выполнялись бы с падающими
телами разного химического состава, а также эксперименты, основанные на сравнении из
меренного и вычисленного притяжения хорошо изученных тел очень большой массы [653].
Указанные геофизические эксперименты могут оказаться полезными особенно при наблю
дениях перемещения масс, легко поддающихся оценке (например, масс воды в доке или
водохранилище при заполнении и осушении), хотя результат и будет искажен нагрузочны
ми эффектами. Поскольку, как полагают, искомый эффект имеет порядок 1°7о от G, выпо
лнять измерения силы тяжести и оценивать малые возмущающие влияния надо с
относительной ошибкой не более 0,1 °7о. Баллистические эксперименты со свободно пада
ющими телами, изготовленными из меди и урана, не выявили различий, превышающих
5 · 10" 10 g [509].
В настоящее время для гравитационной постоянной принято значение
G = (6,67259 ± 0,00085) х 10" 11 μ3κγ" ^ " 2
(4.12)
(система физических констант Комитета по данным для науки и техники —
CODATA 1986 г.) [126]. Недавние определения (с крутильным маятником) дали
величину
(6,6726 ± 0,0005) х 10"11
[425];
МАГ
приняла
значение
(6,673 ±0,001) х 10" 11 (Резолюция 1 МАГ, Гамбург, 1983 г.).
4.2.
Поле силы тяжести и геодезия
4.2.1.
Сила тяжести и определение местоположения
пунктов
Основная задача геодезии состоит в определении поверхности Земли. Большин
ство измеряемых для этой цели величин L в общем виде могут быть представле
ны как нелинейные функции векторов местоположения пункта наблюдений и
визирной цели (гь гг) и гравитационного потенциала W{r) [282]:
L = F(ru r2, Щг)).
(4.13)
Таким образом, в задачу геодезии входит и определение внешнего гравитацион
ного поля.
В настоящее время при определении местоположения на больших расстояниях основ
ную роль выполняют наблюдения ИСЗ, орбиты которых зависят от особенностей грави
тационного поля. Инерциальные геодезические системы, применяемые для сгущения
геодезических сетей, чувствительны как к движениям носителя, так и к вектору силы тяже
сти (разд. 4.5.2). И наконец, измерения на поверхности Земли горизонтальных и верти
кальных углов, а также превышений при геометрическом нивелировании сопровождаются
ориентированием геодезического инструмента относительно отвесной линии (разд. 2.1.2).
Для того чтобы получить из наблюдений декартовы (разд. 2.1.1) или геодези
ческие координаты (разд. 2.4.2) пункта (геометрические величины), необходимо
Сила тяжести в естественных и инженерных науках
85
моделировать гравитационное поле. Системы высот в гравитационном поле Зем
ли (разд. 2.5.2) также предполагают, что информация об этом поле имеется. Не
зависимо
от
перечисленных
измеряемых
величин
при
определении
гравитационного поля превалируют непосредственные определения вектора силы
тяжести (направления отвесной линии Ф, Л и величины силы тяжести g), а также
ее потенциала W. По величинам силы тяжести, измеренным на поверхности Зем
ли (или редуцированным на нее), определяют также и геометрию этой поверхнос
ти. При этом справедливо выражение, сходное с (4.13),
gs = Fs(S9
Ws)
(4.14)
(#s — вектор силы тяжести, Ws — потенциал силы тяжести на поверхности 5);
его необходимо решить как граничную (краевую) задачу [488].
Краевая задача гравиметрии по Молоденскому [458] формулируется в виде
нелинейного интегрального уравнения, в котором к потенциалу W применена те
орема Грина (2.25):
—2 ttW +
! Ы (г)
1
1 dW
''jdS +
I dns
+ 2 τ ω \Χ 2 + У 2) + 2ω2 j j j у = 0.
(4.15)
υ
Здесь S — поверхность, v — объем Земли, ω — угловая скорость вращения Зем
ли, ns — внешняя нормаль к поверхности, / — расстояние между текущей точкой
поверхности и притягиваемой точкой (рис. 2.4). Выражение (4.15) можно линеа
ризовать, используя нормальное гравитационное поле (разд. 2.4.3). При этом
вместо потенциала силы тяжести появляется возмущающий потенциал Т (2.73),
а вместо силы тяжести — ее аномалия Ag (2.77). Земная поверхность аппрокси
мируется теллуроидом (рис. 2.10), а положение точки Q на теллуроиде определя
ется в геодезической системе величинами Ф, Λ, W, найденными из наблюдений
в точке Р поверхности Земли:
φς> = Фр,
\
q
=Λρ,
Uq
= WP.
(4.16)
Расстояние по вертикали между точкой Q и уровенным эллипсоидом называется
нормальной высотой Н н точки Р (2.70).
Линеаризация уравнения (4.15) приводит к интегральному уравнению для воз
мущающего потенциала Т. Эквивалентную формулировку краевой задачи дают
дифференциальное уравнение Лапласа для Т (2.74) и граничное условие (2.79).
При определении местоположения необходимо ввести понятия геометрических
параметров гравитационного поля: аномалия высоты f (2.70) или высота геоида
N(2.71) и составляющие уклонения отвесной линии £, η (2.78). Эти параметры
нужны для перехода от величины Η ν или Н и астрономической широты Ф и
долготы Λ, определяемых в гравитационном поле Земли, к геодезическим коор
динатам h, φ, X. Их можно получить по возмущающему потенциалу Т после
решения краевой задачи. При вычислении координат пунктов геодезических сетей
необходимо знать величины f (или N ) с ошибкой ±0,5 м, а величины £, η с
86
Глава 4
ошибкой ± 1". В то же время для перехода от высот в реальном поле к геодези
ческим высотам необходима точность ± 0,01 - 0,1 м (разд. 4.2.4). Если поверх
ность Земли известна, гравитационное поле во внешнем пространстве можно
определить путем его аналитического продолжения (разд. 4.2.3). Если стационар
ную поверхность Мирового океана, известную на больших площадях из спутни
ковой альтиметрии, принять за поверхность геоида (разд. 2.5.2), можно
сформулировать смешанную краевую альтиметрии и гравиметрии [15,589].
4.2.2.
Глобальные модели гравитационного поля
Глобальные модели гравитационного поля требуются при решении задач для
больших регионов земной поверхности (определение орбит ИСЗ, обработка изме
рений с инерциальными геодезическими системами, создание геофизических и геодинамических моделей), а также являются моделями относимости для
предоставления местных полей (разд. 4.2.3). Глобальные модели основаны на
разложении в ряд по шаровым функциям возмущающего потенциала Т (2.75) или
аномалий Ag (2.80).
Из-за неравномерного расположения пунктов с известными аномалиями силы
тяжести (рис. 3.7), а также поскольку имеются глобальные данные иного рода,
при создании моделей предпочитают комбинированные решения. При этом рас
полагают следующими исходными данными:
— результатами наблюдений искусственных спутников Земли;
— средними аномалиями в свободном воздухе в трапециях 1° х 1° (разд. 3.2.3);
— средними одноградусными альтиметрическими высотами геоида для Мирово
го океана (разд. 4.3.6).
Коэффициенты гармоник можно определять из обработки этих данных по ме
тоду наименьших квадратов либо интегрированием их по поверхности Земли
[556].
При обработке по методу наименьших квадратов гармонические коэффици
енты получают по уравнениям связи через величины Ag и Т (с учетом N = 77у
(2.71)), а также из результатов спутниковых наблюдений.
На основе совместного использования перечисленных данных были получены полные
разложения по сферическим гармоникам до /, m = 36 (модели GEM 10В [408], GRIM3-L1
[558]). Они содержат информацию о длинноволновой структуре гравитационного поля
(ошибка ± 10 мкм · с -2), но в соответствии с разд. 3.3.2 не отражают составляющие по
ля, среднеквадратическая величина которых ± 370 мкм с -2 (рис. 4.3).
Комбинируя гармонические коэффициенты, полученные из предшествующей обработки
спутниковых определений, с выводами по трапециям 1° х 1°, можно получить разложе
ния более высоких порядков. При создании модели геопотенциала GPM-2 [763]
выполнялась совместная обработка коэффициентов модели GEM-L2 (разд. 4.5.1) и следу
ющих данных для одноградусных трапеций: 55 454 значений аномалий в свободном возду
хе и альтиметрических высот для 27 723 трапеций по ИСЗ GEOS-3 и для 34 380 по ИСЗ
SEASAT-1. При этом учитывали топографию поверхности Мирового океана по океаногра
фической модели [413] при разложении до /, пг = 20. В модели GPM-2 длинноволновые
(/ ^ 10) составляющие поля определены по спутниковым данным, а средневолновые ком
поненты (/ ^ 60) — по данным спутниковой альтиметрии и по аномалиям силы тяжести.
Точность этой модели (для точечных значений) иллюстрируется в табл. 4.1. Сравнение
Сила тяжести
Рис.
4.3.
Карта высот геоида в системе модели геопотенuиала
GRIM3-Ll,
параметры отсчетного эл
липсоида: а = 6 378 140 м,f = 1 : 298,257, СМ= 398 600,5 х 109 м 3
Таблица 4. /.
GPM-2 [763)
сечение горизонталей
' - 2,
[559).
м
10
87
в естественных и инженерных науках
Ошибки точечных величин, модель гравитаuионного поля
Характеристика поля
Средиеквадратическое
Ошибка модели
уклонение
(в соответствии
с разд.
±0,52 м
± 298 мкм . с - 2
±4,4"
Аномалия высоты
Аномалия силы тяжести
Уклонение отвеса
3.3.2)
±0,42 м
±290 мкм· с- 2
±4,3"
различных моделей, имеющих высокое разрешение, показывает, что вследствие ошибок
исходных
данных
и
белых
пятен
моrут
возникать
расхождения,
превышающие
lОООмкм · с- 2 и до lОм.
По методу интегрирования rармонические коэффициенты определяют инте
грированием гравитационных аномалий по поверхности Земли в соответствии с
Объем вычислений оказывается меньше, чем при уравнивании. Однако в
(2.81).
этом случае необходимы однородные данные, равномерно распределенные по
всей поверхности Земли. Поэтому возникает необходимость в предварительной
обработке информации, заключающейся в трансформации гравитационного поля
(по
альтиметрическим
[разд.
4.3.6))
Рапп
(549),
высотам
геоида
и интерполяции [разд.
получают
аномалии
силы
тяжести
2.7.2).
основываясь на rармонических коэффициентах модели
и одноrрадусных аномалиях, получил полную модель до
/,
т
=
180;
GEM-9
[разд.
4.5.1)
при этом значения
аномалий были определены по наземным измерениям и альтиметрическим данным ИСЗ
GEOS-3
и
SEASAT-1.
основаны на модели
Модели
GEM-L2
OSU86E/F [557) содержат коэффициенты до/, т = 360.
(до /, т = 20) и наземных аномалиях силы тяжести по
Они
тра-
88
Глава 4
пециям 1° х 1°, а для ограниченных территорий по трапециям 30' х 30'; кроме того, ис
пользованы аномалии по трапециям 30' х 30', полученные из спутниковой альтиметрии
для акваторий (разд. 4.3.6).
Мировая геодезическая система 1984 г. (WGS84) Министерства обороны
США представляет собой приближение к геоцентрической референцной системе
[разд. 2.1.1] и содержит модель гравитационного поля в виде разложения по сфе
рическим гармоникам до /, т = 180 [147].
Глобальные модели гравитационного поля позволяют получать аномалии вы
соты или высоты геоида (по аномалиям высоты, (2.72)) с точностью, достаточ
ной для многих целей. Ошибка же определения уклонения отвеса для
геодезических приложений слишком велика. Анализ ошибок, вызванных неполно
той данных, показывает, что заметного повышения точности можно ожидать
лишь при использовании массивов данных с более высокой разрешающей способ
ностью (разд. 4.5.1).
4.2.3.
Локальная аппроксимация гравитационного поля
Локальное описание гравитационного поля требуется при создании опорных гео
дезических сетей для задач высшей и прикладной геодезии, прикладной геофизи
ки и геодинамики. Измеряемые параметры гравитационного поля, в частности
аномалии в свободном воздухе, известны с высоким разрешением на ограничен
ном участке. Данные обрабатываются с использованием интегральных методов
или методов статистической аппроксимации; в предельном случае непрерывных
данных статистическая аппроксимация сводится к использованию интегральных
формул [486, 717]. Если имеются данные по регулярной сетке, то для быстроты
при оценках по интегральным формулам и формулам коллокации очень эффек
тивно использовать быстрое преобразование Фурье [612]. По Молоденскому кра
евая задача гравиметрии (разд. 4.2.1) может быть решена в сферическом
приближении с использованием интеграла по поверхности. Достаточно точную
аппроксимацию дает соотношение
Т =~
j j (Ag + 6gp) Stt)da.
(4.17)
σ
Здесь аномалии Ag в свободном воздухе, исправленные гравиметрической поправ
кой за рельеф 0#р(разд. 4.3.3) (аномалии Фая), интегрируют по поверхности Зем
ли (единичная сфера σ, радиус Земли R). Функция Стокса
оо
$ (* ) =
Σ
1-2
J Z T f P,(cos *>·
(4· 18)
которую можно представить в конечном виде, определяет веса аномалий в зави
симости от сферического расстояния ф до притягиваемой точки. Зная возмущаю
щий потенциал Ту аномалию высоты ξ можно получить из соотношения (2.70)
по формуле
т
(4.19)
Г= —,
УQ
Сила тяжести в естественных и инженерных науках
89
а высоту геоида N — по формуле (2.72). Из (2.78) можно получить формулу
для составляющих уклонения отвесной линии:
(4.20)
а
где а — азимут направления на текущую точку поверхности. Весовая функция
dS(\l/)/d\J/ быстро убывает с увеличением расстояния ф; при ф = 100° влияние ано
малий достигает лишь 1*.
Формулы (4.17) — (4.20) можно непосредственно использовать для вычислений геои
да. При этом необязательно учитывается поправка за рельеф, а измеренная на поверхнос
ти Земли сила тяжести g редуцируется на поверхность геоида с помощью ортометрической
высоты Н. По аналогии с (3.7) аномалию в свободном воздухе на геоиде находят по
формуле
Δ *«.Β
=
Ζ -
—
Η
~ Ί 0
=
& +
t e C B - 70.
(4.21)
где dg/dH — вертикальная составляющая градиента силы тяжести во внешнем простран
стве. Приведение в свободном воздухе (поправка 6#св в) эквивалентно конденсации топо
графических масс на поверхность геоида (в виде простого слоя), что соответствует
принципу эквивалентности (разд. 4.3.1). При этом геоид становится граничной поверхнос
тью земных масс. Интегральные формулы для параметров геоида, соответствующие
(4.17) и (4.20), были получены Стоксом (1849 г.) [658] и Венинг-Мейнесом (1928 г.) [733].
Для вычисления Н и dg/dH необходима некоторая гипотеза об изменении силы тяже
сти вдоль отвесной линии. Модель, учитывающая притяжение топографических масс,
определяет полученный «геоид в свободном воздухе». Если же, как обычно, dg/dH заме
нить на dy/dh , выражение (4.21) превращается в формулу для «аномалии на физической
поверхности» (3.7).
На участках с плотной гравиметрической съемкой недостатки приведенных
выше интегральных формул можно преодолеть с помощью комбинированных ре
шений. Аномалии силы тяжести учитывают лишь при интегрировании на огра
ниченном участке (радиус интегрирования фо < π). Используя модель в виде
гармонического разложения, из гравитационных аномалий вычитают длинновол
новую составляющую, а информацию для участков, где измерения отсутствуют,
получают интерполяцией (разд. 2.7.2). В результате интегрирования остаточных
аномалий (суммирования осредненных величин) находят величины f, £ и η. Влия
ние же аномалий на всей остальной поверхности, вне зоны интегрирования, вы
числяют по гармонической модели. После перехода к общей характеристике поля
(т.е. к возмущающему потенциалу) возможно оптимально сочетать разные воз
мущающие величины в спектральном домене. Радиус интегрирования задают на
основе моделей ошибок исходных данных и расчета ошибки из-за ограничения
области интегрирования аномалий (высокочастотные компоненты поля вне зоны
со сферическим расстоянием фо) [641, 762].
Для Европы и прилегающих акваторий вычислены высоты квазигеоида и уклонения
отвеса по сетке 12' х 20'[710]. Исходными данными послужили гармонические коэффици
енты модели GEM9, одноградусные аномалии в свободном воздухе ( ф о = 20° при вычис
лении f и 10° при вычислении £ и η), а также средние аномалии по трапециям
Глава 4
90
Рис. 4 .4 .
К вазигеоид в восточной части С редизем ного моря, сечение горизонталей 1 м, референцная
систем а G RS80 (разд. 3.1.2) [7121.
6' х 10'(^о = 3°). На рис. 4.4 приведена поверхность квазигеоида для восточной части
Средиземного моря. Превышения квазигеоида определены с ошибкой ± 0,5 м/200 км
(±1,1 м/1000 км), а уклонения отвеса — с ошибкой ± 2". Основным источником ошибок
при вычислениях квазигеоида были систематические погрешности в одноградусных анома
лиях, а ошибки уклонений отвеса обусловлены преимущественно неучтенными ультрако
ротковолновыми (/ > 1800) составляющими поля. Точность можно повысить, если
использовать точечные гравиметрические данные и/или учитывать влияние топографиче
ских масс (разд. 4.2.4).
Среднеквадратическая коллокация позволяет аппроксимировать поле стати
стическими методами. В отличие от интегрального метода она предусматривает
использование имеющихся разнородных точечных данных и позволяет предска
зать любые элементы гравитационного поля на основе их взаимной корреляции
[484, 487]. После исключения тренда, который можно моделировать (гармониче
ская модель), для оценки какого-либо параметра Sp поля в точке Р используют
остаточные значения измеряемых аномальных величин (аномалии силы тяжести,
уклонения отвеса, аномалии градиента силы тяжести и т.д.). Аналогично пред
сказанию по формуле (2.89) имеем
Sp =
Ck.C + D) - ‘(L - Ах),
(4.22)
где L — вектор измеряемых характеристик гравитационного поля, Ах — тренд,
который можно моделировать (А — матрица коэффициентов, х — вектор пара
метров). Вектор Ср и матрица С содержат ковариации разнородных параметров
гравитационного поля в точке Р и в пунктах измерений. Их можно получить
по основной ковариационной функции, которая определена эмпирически и пред
ставлена моделью (разд. 2.7.1), используя при этом линейное соотношение между
различными параметрами поля (разд. 2.6.2). Для обеспечения однородности и
изотропности поля должны, особенно в горных районах, вводиться топографиче
91
Сила тяжести в естественных и инженерных науках
ские и, если необходимо, изостатические поправки (разд. 4.3.3). Матрица D со
держит дисперсии и ковариации ошибок измерений. Из-за трудностей при
обработке больших массивов неравномерно распределенных данных этот метод
применяли лишь для ограниченного количества данных и/или на ограниченных
областях [719]. Для больших территорий разработаны способы объединения раз
розненных частей поверхности геоида [718].
Точность аппроксимаций локального гравитационного поля достаточна для
редуцирования расстояний и горизонтальных углов на поверхность эллипсоида.
Однако для определения абсолютного местоположения гравиметрический метод
не используют, поскольку ошибка уклонения отвеса в Г соответствует ошибке
координат ±30 м (на экваторе).
Аналитическое продолжение локального гравитационного поля во внешнее
пространство состоит в решении первой внешней краевой задачи для сферы
(г = R) через интеграл Пуассона. Аномалия силы тяжести в точке Р (с геоцентри
ческим расстоянием гр) получается интегрированием аномалий по поверхности
Земли:
(4.23)
а
где / — расстояние между притягиваемой и текущей точками поверхности.
4.2.4.
Сила тяжести и высота
При создании опорных геодезических сетей и инженерно-геодезических работах
пользуются системами высот, связанными с полем силы тяжести (нормальные
высоты, ортометрические высоты) (разд. 2.5.2). Для перехода к этим системам
в результаты геометрического нивелирования следует ввести гравиметрические
поправки. Последние, однако, настолько малы, что вполне достаточно измерять
силу тяжести вдоль линий нивелирования с ошибкой ±10мкм с -2. Методика
измерений силы тяжести зависит от характера гравитационного поля, связанного
с рельефом, изменением направления хода нивелирования, распределением близповерхностных аномальных масс. Для достаточно надежной интерполяции на
точки хода расстояние между гравиметрическими пунктами должно быть при
мерно 1 км в горах, а в равнинных районах 10 км и более.
При создании геодезических сетей и контроле на больших расстояниях все
большее применение находят спутниковые методы (разд. 2.5.1). Спутниковая
система глобального определения местоположения NAVSTAR (GPS) позволяет
определять разность геодезических высот с ошибкой ±0,01 — 0,1 м для расстоя
ний от нескольких километров до 100 км и более [166, 627]. Такая точность пол
ностью
соответствует точности геометрического нивелирования.
Для
совместного использования геодезических высот, полученных спутниковым мето
дом, и высот в гравитационном поле необходимо с соответствующей точностью
задать отсчетные поверхности для данных систем высот (квазигеоид, геоид), что
требует дальнейшей разработки методов аппроксимации локального гравитаци
онного поля.
92
Глава 4
Для этой цели успешно используют гравиметрические данные с высоким раз
решением (точечные аномалии силы тяжести, по возможности дополняемые ас
трономо-геодезическими уклонениями отвеса). Длинноволновые составляющие
(длины волн > 200 км) содержатся в глобальной модели гравитационного поля
(разд. 4.2.2). Ультракоротковолновые компоненты (длины волн 20 — 2 км) мо
гут быть достаточно хорошо аппроксимированы притяжением топографических
масс; при этом возможен учет плотностных аномалий с помощью моделей (на
пример, для соляных куполов). Такой подход применим, во всяком случае, в рав
нинных и холмистых районах. После исключения из точечных данных всех
перечисленных составляющих поля остаточные величины можно обработать по ме
тоду среднеквадратической коллокации на ограниченных участках с целью фильтра
ции данных и трансформации поля (разд. 4.2.3). Если расстояния между грави
метрическими пунктами 1 — 10 км (±10 мкм · с -2), то высоты регионального гео
ида или квазигеоида можно получить с ошибкой ±0,05 м/100 км и ± 0,2 м/1000 км
[140]. Требования к исходным данным рассмотрены в работе [360].
В равнинной части Северной Германии удалось получить точность ±0,02 м/50 км при
расстояниях между пунктами 2 — 3 км. Использовалась модель GPM-2 разложения по
сферическим гармоникам (разд. 4.2.2), область учитываемых при коллокации данных име
ла радиус 150 км. Если имеется модель рельефа [139] с высоким разрешением (например,
1 км х 1 км), то расстояние между пунктами можно увеличить. При комбинированных
решениях и использовании топографо-изостатических моделей с хорошим разрешением
высокие точности возможны и в горных районах [664].
4.3.
Поле силы тяжести и геофизика
4.3.1.
Гравитационное поле и распределение плотности
Задача физики Земли как раздела геофизики состоит в изучении твердой Земли
(и других небесных тел) физическими методами, а также применении результатов
для разработки статических и динамических моделей Земли. При этом выделяют
глобальные (разд. 4.3.2), региональные (разд. 4.3.4) и локальные (разд. 4.3.5)
задачи.
Важным источником информации служат измеренные во внешнем простран
стве элементы гравитационного поля, которые рассматривают как функции рас
пределения земных масс. Поскольку для заданной точки центробежное ускорение
можно вычислить, гравиметрический метод позволяет определить функцию
плотности ρ = ρ ( Γ ') по данным о гравитационном поле (разд. 2.2.1).
Измерительные методы гравиметрии имеют ряд преимуществ: измерения можно про
водить на суше, на море и в воздухе; получаемые дискретные данные о гравитационном
поле обладают высоким разрешением при сравнительно небольших затратах. Для геофи
зической интерпретации используют в основном непрерывные представления поля, кото
рые получают интерполяцией ограниченного числа наблюдений, имеющих некоторые
ошибки (разд. 2.7.2). Методы среднеквадратического предсказания и коллокации
(разд. 2.7.2 и 4.2.3) называют «кригингом» [142]. Для последующей обработки использу
ют цифровое (точечные величины, заданные на регулярной сетке) и аналоговое представ
ления поля (разд. 4.3.3).
Сила тяжести в естественных и инженерных науках
93
Поскольку притяжение сферически симметричной Земли зависит лишь от ее
общей массы, изучение внешнего гравитационного поля помогает выявить лишь
латеральные вариации плотности. Нормальное поле при интерпретации исключа
ют (разд. 2.4.1). Наиболее важной возмущаемой величиной, связанной с грави
тационным полем, является аномалия силы тяжести, получаемая из измерений.
При интерпретации используют и другие величины, которые измеряют или вы
числяют при трансформациях поля (разд. 2.6).
При увеличении порядка производных возмущающего потенциала более отчетливо
проявляются коротковолновые компоненты поля, а длинноволновые ослабляются; замет
нее становится влияние локальных возмущений и ошибок исходных данных. Графики на
рис. 4.5 и 4.6 иллюстрируют различные элементы поля близ возмущающих тел простой
формы (шар, горизонтальный слой).
Интерпретация аномального поля осложняется тем, что результаты измере
ний отражают суммарное влияние всех земных масс. Используя топографиче
скую, геологическую и геофизическую информацию, влияние известных масс
можно учесть поправками (разд. 4.3.3). В частности, для исключения длинновол
новых («региональное поле») и коротковолновых («остаточное поле») составляю
щих аномалий используют фильтрацию [252]. Эффект сглаживания достигается
также при аналитическом продолжении гравитационного поля во внешнее про
странство, основанном на интеграле Пуассона (4.23) [131]. И наконец, дополни
тельно можно использовать производные более высоких порядков (разд. 8.1.1).
Обратная задача гравиметрии, т. е. определение функции плотности (положе
ние, форма и плотность аномальных масс) по измеренным параметрам поля,
Рис. 4.5
Рис. 4.6
(левый). Гравитационный потенциал и его частные производны е для одн ор од н ого шара (глу
бина 5 км, разностная плотность 1000 к г/м 3) и эквивалентных возм ущ аю щ их масс.
(правый). Гравитационный потенциал и его частные производны е для горизонтального полубесконечного слоя (глубина 1 км, толщ ина 1 км, разностная плотн ость 1000 к г /м 3).
94
Глава 4
приводит в соответствии с (2.5) к интегральному уравнению, для которого не
существует единственного решения [76].
Неоднозначность обратной задачи, вытекающая из теории потенциала, проявилась
уже в разд. 2.4.2 при применении теоремы Стокса к гравитационному полю уровенного
эллипсоида. Для поля аномалий, созданного данным распределением масс, можно подо
брать бесчисленное множество эквивалентных распределений масс, глубины которых
меньше глубины данного возмущающего тела (рис. 4.5). Однозначно можно определить
лишь общую массу тела (поверхностный интеграл аномалий силы тяжести, см. также
(2.21)), плановое положение центра масс (экстремум гравитационной аномалии) и плот
ность поверхностного слоя Земли (особый случай эквивалентного распределения масс).
При определенных условиях можно установить предельные величины для максимальной
глубины, плотности (разности плотностей), толщины и горизонтальных размеров возму
щающего тела [516].
На практике при решении обратной задачи встречаются с прямой задачей гравиметрии, т. е. с определением притяжения, создаваемого известным распределе
нием масс; при этом положение, форма и плотность масс заданы. По закону
всемирного тяготения (2.5) эта задача имеет единственное решение [667]. В мест
ной декартовой системе координат (разд. 2.1.2) вертикальная составляющая при
тяжения (аномалия силы тяжести) определяется формулой
Д£(г) = G
Ae(r')(z'
-z)
(4.24)
----;--------- γϊ--- dl)
где Δρ — разность плотностей возмущающего тела и окружающего вещества;
dv = d x 'd y 'd z ' — элемент объема.
Для большого числа тел простой формы и постоянной плотности интеграл (4.24) имеет
замкнутую форму (выражается в квадратурах). Пусть начало координат лежит в точке
поверхности. Тогда в плоскости ху для шара радиуса R с постоянной плотностью или
состоящего из концентрических слоев справедливо выражение
(4.25)
= t- πΟΛ3Δρ —------ ^----3-3^,
3
(дг + у ' + ζ У
где х у у> ζ — координаты центра шара. Для прямоугольного параллелепипеда с координа
тами вершин * 1 , *2 , У\у угу ζ ь Zi (рис. 4.7) имеем [498]
Ag = G · Δρ
III
- х In (у + г) - у In (дг + г) + ζ arctg - — I*2
1Уг I*2,
Х\ У\ Ζ\ ’
z г
(4.26)
где Г = yJx2 + у 2 4· Z2.
В случае вертикального цилиндра (рис. 4.8) для точки на его оси можно по
лучить следующее соотношение в цилиндрической системе координат г, α, ζ:
A g = G A g ia i -
a i)(V /i + ύ
-I- V r f + Z2 -
V r i + Zi -
V r? + Z \ ,
(4.27)
где z = r cos а, у = r sin a, a n , /*2 и αι, аг — предельные значения радиуса и
азимута соответственно.
Тела неправильной формы с неоднородной плотностью можно предоставить
совокупностью элементарных тел. Среди последних наибольший интерес пред
ставляют однородные шары (эквивалентные точечным массам) и прямоугольные
Сила тяжести в естественных и инженерных науках
95
Рис. 4.7 (левый). Элементарное притягивающее тело в виде прямоугольной призмы.
Рис. 4.8 (правый). Элементарное притягивающее тело в виде вертикальной призмы.
параллелепипеды. Однородные тела сложной конфигурации можно также ап
проксимировать совокупностью горизонтальных слоев, ограниченных много
угольником [668] или многогранником [29]. Интегральная формула Гаусса (2.18)
позволяет перейти от интеграла по объему (4.24) к интегралу по поверхности.
Если считать, что аномальное тело имеет неизменное сечение и бесконечную протя
женность в горизонтальном направлении («двумерное тело»), то формулы упрощаются.
Такое допущение становится оправданным, если горизонтальный размер тела вдвое пре
вышает его глубину [343].
Для решения обратной задачи гравиметрии разработано много методов [76,
240]. Обычно в них используют аномалии силы тяжести после предварительного
редуцирования и разделения полей. В меньшей степени используются другие па
раметры аномального поля. Интегрирование начинается с исходной модели рас
пределения возмущающих масс, которая создается на основе имеющейся
геологической, петрологической и геофизической информации.
Эффективно решать обратную задачу позволяют методы оптимизации [76,
676]. Притяжение возмущающего тела сначала моделируют описанными выше
прямыми методами (исходные данные: пространственные координаты и распре
деление плотности). Исходных параметров должно быть как можно меньше.
Сравнение этих, как правило нелинейных, модельных функций с вектором изме
ренных аномалий силы тяжести позволяет получить вектор остаточных величин.
Линеаризация исходных моделей дает систему линейных уравнений, которая при
наличии избыточных измерений решается по методу наименьших квадратов.
Итерационный процесс продолжается до удовлетворительного согласования меж
ду наблюденными и вычисленными значениями аномалий. Число возможных ре
шений
ограничено
величинами
предельной
разностной
плотности,
горизонтального и вертикального простирания аномального тела, общей возму
щающей массы [526]. Особенно эффективны методы, в которых используется ин
терактивное
графическое
представление
[225].
При
комплексной
геолого-геофизической интерпретации с использованием всей имеющейся инфор
мации [496] можно контролировать процесс сходимости решения и получить ряд
близких к реальности оценок.
96
4.3.2.
Глава 4
Глобальные плотностные модели
Оптимальная глобальная модель распределения плотности должна наилучшим
образом соответствовать имеющимся экспериментальным данным, и в частнос
ти гармонической модели внешнего гравитационного поля (разд. 3.3.3). Стан
дартные модели содержат малое число параметров и служат общей основой,
например, при междисциплинарных исследованиях. Гравитационное поле стан
дартной модели должно согласовываться с нормальным полем уровенного эл
липсоида (разд. 2.4.1).
Глобальные плотностные модели предполагают в соответствии с сейсмологи
ческими данными слоистую структуру Земли, а в первом приближении — сфери
ческую симметрию распределения плотности [106]. В этом случае плотность
будет лишь функцией расстояния от центра масс Земли:
(4.28)
Q = Q(r).
Более совершенные модели сохраняют предположение о слоистом строении, но
учитывают полярное сжатие. В последние годы на основе анализа времени рас
пространения волн, вызванных землетрясениями, для верхних слоев Земли были
созданы трехмерные модели распределения плотности (разд. 4.3.4).
При практическом использовании этих моделей предполагают однородный химиче
ский состав слоев и их гидростатическое равновесие. Между плотностью вещества ρ и
давлением р в этом случае существует соотношение
dp
= j!
к'
(4.29)
где К — модуль объемного сжатия. В соответствии с (2.35) основное уравнение гидростатики
dp = - g(r)e(r)dr
(4.30)
показывает, что поверхности равного давления совпадают с поверхностями равного потен
циала и равной плотности. Величину ρ/Κ можно получить, зная скорости продольных
(волны сжатия) и поперечных (волны сдвига) сейсмических волн:
= Vp -
17s-
(4.31)
Из (4.29) — (4.31) следует уравнение Адамса—Вильямсона
de _
dr
g(r)e(r)
vp
-
(4.32)
Vs
На основании (2.21) и с учетом
дУ/дп = -g (r),
т(г) = 4π j g (r')r'2dr'
можно получить выражение для силы тяжести внутри Земли
г
.
4 ttG Г .
,2 . , ^ т(г)
g(r) = - у - I Q(r )r dr = G --у -,
(4.33)
Сила тяжести в естественных и инженерных науках
97
где т(г) — масса, ограниченная поверхностью г = const; массы, расположенные вне этой
поверхности, не притягивают. На основе уравнений (4.32), (4.33) можно определить
распределение плотности и силы тяжести в зависимости от глубины, взяв за исходные
граничные значения g и ρ. В косвенных методах применяют способы решения обратной
задачи (разд. 4.3.1). Исследуя большое число возможных моделей, получают модель реги
она, которая согласуется с исходными данными и известными ограничениями [164].
При разработке моделей помимо зависимостей от глубины скорости объемных и по
верхностных сейсмических волн учитывают наблюдения собственных колебаний Земли.
Для проверки модели используют наблюдения земных приливов (разд. 10.3.1), измерения
теплового потока и результаты петрологических исследований при высоких давлениях.
При уточнении модели принимают во внимание зависимость плотности от температуры,
химического состава и фазового состояния вещества.
Любая глобальная модель должна быть согласована с ограничениями, связан
ными с реальным гравитационным полем, в частности, относительно общей мас
сы М или средней плотности дт и главным моментом инерции Jzz относительно
оси вращения. Из (2.6), (3.3) и (4.5) имеем
М = 5,974 X 1024 кг,
Ст = 5515 кг · м ~ 3.
(4.34)
Момент инерции Jzz можно определить, зная динамический коэффициент Сг
(2.30), определяемый из анализа гравитационного поля, и величину динамическо
го (механического) сжатия
Н = {Jzz - i - (Jxx + J yy))/Jzz ,
(4.35a)
которую получают из высокоточных астрономических наблюдений. Известно,
что
Jzz = ~ 77 а2М,
(4.356)
Н
где а - большая полуось земного эллипсоида. Полагая Сг = - 1082,63 х 10“ 6 и
Н = 1/305,441 [554], получим
Jzz = 0,3307 а2М.
(4.35в)
Для Земли с постоянной плотностью Jzz = 0,4 а2М; следовательно, с увеличением
глубины плотность Земли увеличивается. Этот вывод подтверждается величиной средней
плотности земной коры 2800 кг м " 3. Условиям (4.34) и (4.35) может удовлетворять
большое число плотностных моделей, и потому эти условия не позволяют уверенно вы
брать какую-либо модель.
На рис. 4.9 приведена схема глобальной модели Земли. Для неоднородных об
ластей земной коры и верхней мантии необходима более детальная стратифика
ция с учетом реологических свойств твердых и вязких тел при высоком давлении.
Распределение плотности, давления и силы тяжести показано на рис. 4.10. Уве
личение плотности к центру Земли сопровождается скачком на границах кора—
мантия (граница Мохоровичича) и мантия—ядро (граница Вихерта—Гутенберга).
Сила тяжести остается примерно постоянной вплоть до поверхности ядра, а за
тем уменьшается почти линейно к центру. Глобальные модели содержат также
радиальное распределение упругих параметров, что позволяет вычислять пара
метры земных приливов (разд. 3.4.3). Имеющиеся плотностные модели согласо-
98
Глава 4
Рис. 4 .9
(левый). Сферическая м одель строения Земли, состоящ ая из однор одн ы х слоев, разделенных
зонами нарушения одн ор одн ости (D), м асш таб не соблю дается [164].
Рис. 4.10 (правый). П лотн ость ρ (103 к г /м 3), давление р (1011 Па) и сила тяж ести g (м с ' 2) внутри Земли
[164].
ваны с нормальным полем уровенного эллипсоида [439].
Из гармонического разложения гравитационного поля Земли (разд. 3.3.3) сле
дует, что существуют отклонения от гидростатического равновесия. Они вызы
вают напряжения в теле Земли, которые частично компенсируются
геодинамическими процессами (разд. 4.4.1).
Глобальные отклонения проявляются в коэффициентах четных зональных гармоник.
В частности, Сг = - 1082 х 10 _6, тогда как для эллипсоида, находящегося в гидростатиче
ском равновесии, при граничных условиях для реальной Земли этот коэффициент равен
-1071 х 10-6. Последнее значение соответствует геометрическому сжатию 1/299,8 [363].
Такое заметное расхождение можно объяснить избытком масс на экваторе или «остаточ
ным» сжатием вязкой мантии. Нечетные зональные и тессеральные коэффициенты указы
вают на существование аномальных масс в мантии и земной коре (разд. 4.3.4). Сравнение
измеренных гравитационных параметров земных приливов с полученными по моделям
земных и океанских приливов дополнительно подтверждает латеральные неоднородности
в литосфере и верхней мантии (разд. 10.3.3).
4.3.3.
Аномалии Буге, изостатические аномалии
Из-за сильной зависимости аномалий в свободном воздухе А#свв от высоты их
нельзя использовать для исследования локальных и региональных возмущающих
масс (разд. 3.2.2). В аномалиях Буге Agh притяжение топографических масс ис
ключается введением топографической редукции δ#τοπ. По аналогии с (4.21)
= i + bgcв.в - δ «τοπ ~У0 = Д£св.в “ δ £τοπ>
(4 ·36)
где 6gCBв — редукция в свободном воздухе, 70 — нормальное значение силы тя
жести (3.1). Таким образом, аномалия Буге отражает влияние возмущающих
масс, расположенных ниже поверхности относимости (обычно геоида). Редуциро-
Сила тяжести в естественных и инженерных науках
99
вание нельзя считать строгим из-за отличия нормального вертикального градиен
та силы тяжести в поправке за высоту от истинного значения, а также из-за
неадекватности топографических моделей.
Аномалии Буге используют при создании региональных и в особенности ло
кальных плотностных моделей. При этом в первом приближении топографиче
скую редукцию можно заменить редукцией Буге 5#пл. Она соответствует
притяжению бесконечной горизонтальной пластины (промежуточного слоя) тол
щиной Н. Считают, что пластина проходит через точку на физической поверхнос
ти и имеет «плотность Буге» (рис. 4.11). Учитывая в (4.27), что аг - &ι = 2π,
r\ = 0 , Г2 = оо, Ζ2 - Ζ\ = //, имеем
0#пл = 2 ttG qH = 0,0419 х 10_2р //м к м · с “ 2,
(4.37а)
где ρ выражается в кг · м -3, а Н — в метрах.
На акваториях (глубина 7) поправка за притяжение пластины эквивалентна
переходу от плотности воды ρΒ (1030 кг · м _3) к плотности ρ:
<$£Пл ( ° к е а н ) = 27Г^ ( е в “ в )
т
( 4 .3 7 6 )
Таким образом, слой земной коры толщиной 1 м и плотностью 2400 кг · м " 3 притя
гивает с силой 1 мкм с -2 независимо от высоты пункта. Можно также считать, что вы
ражение (4.37) описывает притяжение сферической пластины Буге ограниченной
протяженности; для притяжения слоя с постоянной плотностью, покрывающего всю сфе
ру, можно в соответствии с (4.33) получить 4 ttGqH. П л о т н о с т ь такого слоя можно рас
сматривать как средневесовую плотность поверхностных слоев Земли, но в основном она
зависит от плотности ближних масс. Сравнив (4.36) и (4.37) с (3.8), убедимся, что анома
лия в свободном воздухе, из которой исключено уменьшение силы тяжести с высотой,
соответствует аномалии Буге, вычисленной с учетом притяжения плоскопараллельного
слоя.
При повышенных требованиях к точности и существенных отклонениях зем
ной поверхности от плоскости (горные районы) для учета притяжения топогра
фических масс следует вводить и поправку за рельеф δ#Ρ. Эта поправка
соответствует устранению избытка или недостатка топографических масс при пе
реходе к модели рельефа в виде пластины Буге (рис. 4.11). Для вычисления этой
поправки массы рельефа обычно разбивают на элементарные тела с постоянной
плотностью и со средней высотой Н (разд. 4.3.1). При вычислениях для неболь
шого числа пунктов полезно разбиение на цилиндрические призмы в соответст
вии с выражением (4.27), где Ζι = 0, ζι = Η - Η [261, 594]. При массовых
вычислениях обычно пользуются цифровой моделью, в которой местность разде-
Рис. 4.11.
М одель рельефа для вычисления топографической ре
дукции и пластина Буге.
Глава 4
100
лена сеткой, образованной координатными линиями географической или плоской
прямоугольной системы координат. Поправку dgp находят, суммируя в соот
ветствии с (4.26) притяжение прямоугольных призм. Вычисления выгодно выпол
нять с переходом в частотный домен с помощью быстрого преобразования
Фурье [200, 636]. Теперь топографической редукцией будет разность
δ *τοπ =
( 4 ·3 8 )
которая известна как неполная топографическая редукция.
При составлении карт аномалий Буге на обширные территории обычно используют
плотность 2670 кг · м “ 3 (плотность гранита), а притяжение рельефа сферической Земли
учитывают до расстояния 166,7 км от данного пункта в соответствии со схемой Хейфорда
и Боуи [278]. Для локальных исследований обычно принимают плотность горных пород,
характерную для данного участка или региона. Для учета поправки за рельеф, как прави
ло, достаточно выполнить вычисления для области радиусом до 20 км; поправка за ре
льеф всегда положительна. Она может составить: в равнинных районах 1 — 10 мкм - с -2,
в холмистых 10 — 100 мкм · с" \ в высокогорье 100 — 1000 мкм « с -2 (разд. 9.3.4). Для
интерполяции аномалий Буге можно применить методы, описанные в разд. 2.7.2. Для
территории США получены эмпирические ковариации аномалий Буге с поправкой за ре
льеф (аномалии в неполной топографической редукции) по средним величинам этих анома
лий для трапеций 30' х 30' [223].
Если известно геологическое строение района, то можно ввести дополнительные по
правки за притяжение аномальных масс (геологические редукции). При изучении более
глубоких масс влияние осадочных пород, расположенных над фундаментом, а также гра
нитных слоев, слоев габбро и базальта можно эффективно исключить «расслоением зем
ной коры» [263]. Такие поправки вводят, например, при изучении изменений глубины
залегания фундамента и границы кора—мантия и различия плотностей [686]. И наоборот,
если учесть известные неоднородности этих граничных поверхностей, можно облегчить
интерпретацию осадочных Слоев [686].
По моделям изостатической компенсации (разд. 4.3.4) в земной коре и верхней
мантии можно вычислить изостатические редукции
и получить изостатические аномалии:
AS« = ё + ^св.в - δ«τοπ + δ#Η - 70.
(4.39)
2 *·
26*
28*
30 *
24*
26*
28 *
30* W
Рис. 4.12. Сглаженные аномалии Буге (слева) и изостатические аномалии (м одель Э ри, глубина компен
сации 30 км, разностная плотность 600 к г/м 3) (справа) в восточной части С реди зем н ого моря,
сечение изоаном ал 200 м к м -с" 2 [198].
Сила тяжести в естественных и инженерных науках
101
При этом топографические массы как бы преобразуются в однородный слой по
стоянной толщины. Отличие Д#и от нуля говорит об отклонении от состояния
изостазии и позволяет в некоторых пределах, ограниченных низкой разрешающей
способностью, выявить несовершенства модели изостазии; изостатические анома
лии играют также важную роль в геодинамических исследованиях на больших
территориях.
Осредненные аномалии в свободном воздухе можно считать приближением
к изостатическим аномалиям, поскольку они соответствуют случаю, когда топо
графические массы сконденсированы на поверхности компенсации нулевой глуби
ны. На рис. 4.12 показаны аномалии Буге и изостатические аномалии для района,
где изостатическая компенсация отсутствует (разд. 4.4.1). При вычислении изостатических аномалий необходимо учитывать притяжение топографических и
компенсирующих масс по всей Земле. Вычисления упростятся, если применить
разложение по сферическим гармоникам [550].
4.3.4.
Гравитационное поле и граница кора— мантия
В земной коре и верхней мантии существуют значительные отклонения от сфери
чески симметричного строения и гидростатического равновесия [274]. Для по
строения плотностных моделей преимущественно используются данные о
распределении скорости сейсмических волн в зависимости от глубины. Трехмер
ные модели (сейсмическая томография) нижней [163] и верхней [776] мантии поз
воляют
выявить
конвекционные
потоки
(разд. 4.4.1).
Лабораторные
исследования и полевые наблюдения дают возможность установить соотношение
между скоростью сейсмических волн, плотностью пород, давлением, температу
рой, типом породы, а также ее структурой.
Для некоторого среднего атомного веса Бёрч [48] установил, что существует почти
линейная зависимость между плотностью вещества и скоростью P-волн (интервал плот
ности 2600—5000 кг · м “ 3). Для изучения земной коры имеет важное значение зависи
мость между плотностью и скоростью Р- и S-волн, описанная Людвигом и др. [424].
Обширные экспериментальные исследования выполнены Буллардом [778].
Более полную информацию при определении плотности получают методами геологии
(отбор поверхностных образцов пород, бурение), петрологии, геохимии и магнитометрии.
Заметный вклад при построении моделей вносят аномалии силы тяжести. Они ограничи
вают число возможных решений и позволяют выполнять интерполяцию между профиля
ми, построенными по наблюдениям сейсмическими методами преломленных (при
определении глубин) и отраженных волн. При решении обратной задачи гравиметрические
методы позволяют определять плотностные различия с ошибкой ± 50 — 200 кг · м _3, а
относительные глубины граничных поверхностей с ошибкой ± 5 — 20%. Чтобы получать
согласованные решения, желательно в качестве общей модели использовать стандартную
модель земной коры и литосферы [742].
Аномалии Буге изменяются на поверхности Земли в диапазоне
6 х 103 мкм · с -2. На небольших участках они не коррелируют с рельефом, а на
обширных территориях проявляется сильная корреляция с рельефом суши и мор
ского дна. На суше аномалия уменьшается приблизительно на 1000 мкм · с " 2 с
увеличением высоты на 1000 м, а на море увеличивается на 1000 мкм · с " 2 с уве
102
Глава 4
личением глубины на 1000 м, хотя встречаются и большие изменения аномалий
[291, 779]. Эти величины согласуются с теорией изостазии, в соответствии с ко
торой почти на всей (около 90%) поверхности Земли протяженные области с из
бытком топографических масс (континенты) или их недостатком (океаны)
уравновешиваются компенсирующими массами в зоне контакта коры и верхней
мантии. Начиная с определенной глубины, называемой глубиной компенсации,
устанавливается гидростатическое равновесие (разд. 4.3.2). Компенсация избытка
или недостатка масс происходит за счет изменения толщины земной коры или
изменения плотности вещества в латеральном направлении.
При построении моделей изостазии следует иметь в виду положения плитовой тек
тоники (разд. 4.4.1). Они предусматривают существование региональной (протяженность
100—2000 км) компенсации нагрузки топографических масс в пределах литосферной плиты
за счет изгиба и изменения плотности. Верхняя литосфера (кора) обладает свойствами
упругой плиты, нижняя же литосфера (самая верхняя часть мантии) упруго-пластична. Та
ким образом, аномалии силы тяжести можно анализировать с учетом изгибной жесткости
[753]. В лежащей ниже пластичной астеносфере сдвиговые напряжения уменьшены
вследствие малой вязкости.
Классические модели изостазии Эри [286] и Пратта [277] представляют собой
упрощенные крайние случаи реального механизма компенсации (разд. 1.2.2). Они
предполагают локальную компенсацию в вертикальных блоках пород и равен
ство их масс. В модели Эри принято, что плотность пород ρο постоянна, а тол
щина коры меняется, образуя «корни гор» и океанические «антикорни» (толщина
d). Толщина «нормальной коры» (с нулевой высотой над уровнем моря) равна
То. В соответствии с рис. 4.13
для континентальной коры Δρ · */(конт.) = ρ0//,
(4.41)а)
для океанической Δρ · ^(океан.) = (ρο - ρΒ) Τ>
где Δρ — разность плотностей земной коры и верхней мантии; ρΒ — плотность
воды; Н — высота блока; Т — глубина океана. При Δρ = 400 кг · м “ 3,
Нагрузочные топографические
Невозмущенная кора
Рис. 4.13 (левый). М одель изостазии по Эри (левая часть) и П ратту (правая часть).
Рис. 4.14 (правый). Региональная модель изостазии Венинг — Мейнеса.
Сила тяжести в естественных и инженерных науках
Океан
Осадочные
Лавовые
103
Континент
Осадочные породы
010 -
20-
30Глубина
(км)
Базальт... габбро 2 7 0 0 -3 1 0 0
Граница Мохоровичича
Vp > 7 , 8 k m c “ '
Рис. 4.15 Структура земной коры, п лотность горных пород (к г/м 3) и скорость продольных сейсмических волн.
ρο = 2850 кг · м 3, ρΒ = 1030 кг · м 3 вариации толщины коры составят
на континентах d(конт.) = 7 //, на океане </(океан.) = 4 7!
(4.406)
В модели Пратта глубина компенсации неизменна. Равновесие же поддерживает
ся латеральными изменениями плотности пород. В этом случае справедливы со
отношения
ρ(κθΗΤ.) (70 + Η) = ρ0 Г0,
(4.41)
ρΒΓ Η- ρ (океан.)(Го — Г) = ρο Го.
В модели региональной компенсации Венинг-Мейнеса [735] нагрузка топогра
фических масс уравновешивается региональными изгибами упругой коры
(рис. 4.14).
Обычно при вычислениях, связанных с изостазией, принимали ρ = 2670 кг · м _3 и
= 600 кг · м _3. Ранее известные гравиметрические оценки величины То по изостатическим аномалиям основаны на моделях, которые удовлетворяют соотношениям (4.40),
(4.41). Условие же, что аномалии — это случайные величины с нулевым математическим
ожиданием, приводит к оценкам То = 20 — 40 км (Эри) и Го = 100 — 120 км (Пратт). Эти
оценки дают соответственно глубину границы Мохо и границы литосферы. Сейчас сейс
мическими и другими методами эти глубины можно определять с большей точностью.
На основе глобальной модели рельефа (разд. 3.2.2) и модели гравитационного поля
(разд. 3.3.3) создана топографо-изостатическая модель потенциала до л, т = 180, предпо
лагающая региональную компенсацию [662].
Δρ
Результаты сейсмических, гравиметрических и других исследований позволя
ют с учетом данных реологии построить модель слоя кора—мантия. В упрощен
ной форме она иллюстрируется рис. 4.15. Под топографическими массами
(континенты и океаны с глубокими впадинами и океаническими хребтами) распо
лагается кора, которая разделена на слои. Континентальная кора разделяется по
верхностью Конрада (глубина 10— 15 км) на гранитный слой (средняя
плотность ρ = 2700 кг · м _3) и на зону габбро-базальта (ρ = 2900 кг · м _3); кора
содержит также обширные бассейны осадочных пород (ρ = 2400 кг · м " 3). На ак
ваториях мощные осадочные слои континентальных окраин сменяются глубоко
водными осадочными слоями (ρ = 2100 кг · м _3), а под ними располагаются
лавовые базальты (ρ = 2700 кг · м ~ 3). Границей кора—мантия считается реги
104
Глава 4
стрируемая сейсмическими методами граница Мохоровичича (или Мохо, переход
ная зона толщиной в несколько километров); эта граница расположена на
глубине в среднем 35 км под континентами и 10 км под океанами. В высокогор
ных районах (Гималаи) в соответствии с принципом изостазии граница Мохо мо
жет располагаться на глубинах до 60 — 80 км. На этой границе с переходом к
ультраосновным породам мантии (перидотит, ρ = 3300 кг · м _3) плотность уве
личивается на 300 — 500 кг · м ~ 3. Глубже располагается зона верхней мантии, от
носящаяся к литосфере. На глубине 70 — 150 км начинается астеносфера с
мощностью 100 — 200 км. В этой области с малыми скоростями сейсмических
волн плотность пород уменьшается примерно на 50 кг · м _3. Для мезосферы, под
которой на глубине 650 км начинается нижняя мантия, характерны фазовые пере
ходы и увеличение плотности. Здесь присутствуют лишь сверхдлинноволновые
отклонения от гидростатического равновесия и сферически симметричного
строения.
При построении моделей коры и мантии важное место отводится анализу гра
витационного поля, представленного как глобальными моделями (разд. 3.3.3),
так и региональными особенностями (разд. 4.3.3). Полагают, что длинноволно
вые компоненты поля (степень / < 5) возникают из-за аномалий плотности и/или
температуры в нижней мантии (возможно, на границе мантия — ядро). Подоб
ные аномалии в мантии порождают гармоники со степенями / = 10 — 20, в то
время как те же самые неоднородности в литосфере сильно влияют на степени
/ > 30 [532]. Составляющие поля с более короткими волнами (/ > 180) в основном
порождаются корой [348]. Фигура геоида в основном содержит информацию о
подкоровой зоне и поэтому весьма пригодна для интерпретации длинноволновых
особенностей поля.
Определения корреляционных зависимостей аномалий силы тяжести или высот геои
да с другими данными для области кора—мантия дали важные соотношения, хотя имеют
ся и региональные различия. Аномалии в свободном воздухе коррелируют с рельефом в
коротковолновой области, а аномалии Буге — в средневолновой (разд. 3.2.2, 4.3.3). Для
изостатических аномалий, а также для средне- и длинноволновых составляющих аномалий
в свободном воздухе корреляция в значительной мере пропадает [779]. Обнаружена зависи
мость между глубиной поверхности Мохо и аномалиями Буге или высотами геоида, раз
личная в разных регионах. Она выражается в увеличении силы тяжести до 100 мкм с -2
на 1 км подъема поверхности Мохо или в увеличении высоты геоида на 1 дм — 1м при
понижении поверхности Мохо на 1 км [128, 773]. Отрицательную глобальную корреляцию
между тепловым потоком Земли и длинноволновыми структурами гравитационного поля
можно объяснить меньшей плотностью разогретых пород.
Для многих районов выполнена региональная интерпретация гравитационного
поля [93, 138, 291, 301]. Изостатические аномалии и длинноволновые аномалии
в свободном воздухе подтверждают изостатическую компенсацию на большей ча
сти поверхности Земли, но выявляют и нескомпенсированные районы. К послед
ним относятся глубоководные желобы (изостатические аномалии до
- 2000 мкм · с “ 2 и более) и районы послеледниковых поднятий в Фенноскандии
и Канаде (аномалии до -500 мкм · с -2 и более, разд. 4.4.1). Из совместного ана
лиза региональных гравиметрических, магнитометрических, топографических и
сейсмических данных можно получить детальную информацию не только о гео
Сила тяжести в естественных и инженерных науках
105
логических и тектонических структурах, но и о механических свойствах литосфе
ры [276].
Для больших тектонических структур можно сделать следующие выводы
[359]:
— из-за изостатической компенсации молодые складчатые горы характеризуются
отрицательными аномалиями Буге (-2000 мкм · с~2 и более). В длинноволно
вой и средневолновой части спектра к региону Анд приурочены положитель
ные высоты геоида (до + 50 м) и аномалии в свободном воздухе (до
+1000 мкм · с -2). Менее выражена корреляция в районах Альп и Гималаев
[366], что указывает на существование различных тектонических процессов
(рис. 4.16);
— континентальные грабены проявляются отрицательными аномалиями Буге (в
Восточной Африке более -2000 мкм · с~ 2 [221]), что можно объяснить присут
ствием осадочных пород и/или аномальными массами с пониженной плотнос
тью в мантии. После введения соответствующих редукций возникают
положительные аномалии из-за меньшей толщины земной коры (рис. 4.17);
— глубоководным желобам (например, Идзу-Бонинский, Чилийский, ПуэртоРиканский желобы) присущи отрицательные аномалии в свободном воздухе
(до -2000 ------ 3000 мкм · с -2) и высоты геоида (понижения в 1 0 —15 м с
большими градиентами). Отчасти это объясняется мощными слоями осадоч
ных пород и рельефом морского дна [115]. С удалением к суше появляются
большие положительные аномалии в свободном воздухе и подъемы геоида
(рис. 4.18);
Д д (м км
с 2)
ЛдБ (м к м · с
Рис. 4.16 (левый). О бобщ енны е изостатические аномалии (м одель Э ри, глубина компенсации 32 км,
разностная плотность 500 к г /м 3), аномалии Буге (плотность топографических масс 2670 кг/
м 3), высоты рельефа и глубина границы М охо по профилю , проходящ ем у через Ц ентральны е
Альпы , поправки за влияние молассовой осадочной толщ и интрузивного тела Ивреа (Ivrea)
введены о т 46° с.ш ., 9° в.д. д о 4 7 °3 0 ' с.ш ., 8° в .д. [372, 373].
Рис. 4.17 (правый). О бобщ енны е аномалии Буге по профилю, проходящ ем у через Восточно-А фрикан
скую рифтовую систем у, а такж е м одель земной коры (плотность в к г /м 3), включающая вул
канические покровы на флангах и заполнения грабена (2000, 2200), кору (2900) и верхню ю
мантию (3300), с вещ еством мантии с низкой п лотн остью (3200) и коровыми интрузиями
(3050) [771].
106
Глава 4
Рис. 4.18 (левый). Сглаженны е аномалии в св ободном воздухе (на суше аномалии Буге) по профилю ,
пересекающему П уэрто-Риканский ж елоб, а такж е м одель земной коры (плотность в к г /м 3),
содержащ ая неуплотненные (2000) и уплотненные (2400) осадочны е породы , верхню ю (2700)
и ниж ню ю (3000) зем ную кору и вещество верхней мантии (3400) [670].
Рис. 4.19 (правый). А номалии Буге и аномалии в св ободном воздухе по профилю , пересекающ ему С ре
динно-Атлантический хр ебет, а такж е модель зем ной коры (плотность в к г/м 3), содерж ащ ая
океанические слои (2600 и 2900), область низкой плотности (3150) и вещество верхней мантии
(3400) [671].
— над океаническими хребтами проявляются отрицательные аномалии Буге
(в Северной Атлантике до -2000 мкм - с " 2) из-за больших аномалий материа
ла мантии (рис. 4.19). На больших территориях аномалии в свободном возду
хе лишь незначительно отличаются от нуля (изостазия). Возможны локальные
нарушения изостатической компенсации, коррелированные с глубинами океана
[127]. Над центральной рифтовой долиной активно расширяющегося хребта
обнаруживаются отрицательные аномалии в свободном воздухе [90];
— океанским возвышенностям (например, Гавайям) присущи подъем геоида
(до + 1 5 — + 20м ) и положительные аномалии в свободном воздухе
Лд6 ( м км · с
Рис. 4.2 0 . Аномалии Буге по профилю, пересекающему вулкан Маунт Х уд, ш т. О регон, СШ А, а такж е
модель плотностей (к г /м 3), содержащ ая вулканические интрузии высокой плотности и окру
ж аю щ ие более древние вулканические породы [769].
Сила тяжести в естественных и инженерных науках
107
( + 2000 мкм · с -2 и более), которые сопровождаются отрицательными значе
ниями на окраинах [752];
— интрузии плотного базальта под вулканами порождают положительные ано
малии Буге ограниченного (около 10 км) простирания с амплитудами в
200 мкм · с “ 2 и более (рис. 4.20).
Связь этих особенностей поля с тектоникой плит рассматривается в
разд. 4.4.1.
4.3.5.
Прикладная гравиметрия
Прикладная гравиметрия как геофизический метод широко используется при ис
следованиях различных слоев верхней части земной коры (глубина до 10 км). На
иболее важным ее применением является разведка залежей углеводородов (нефть,
газ) и руд. Она находит также применение в горном деле, при строительстве ин
женерных сооружений и в археологии.
При детальной разведке ископаемых роль гравиметрии основывается на воз
можности быстро и экономично получать информацию о распределении плотнос
ти, одного из наиболее важных параметров горных пород. Как и
магнитометрия, она поэтому предшествует дорогостоящим сейсмическим иссле
дованиям. Далее, плотные гравиметрические съемки выполняют при изучении ло
кальных геологических структур. Стоимость магнитной, гравиметрической и
сейсморазведки находится примерно в соотношении 1 : 10 : 100; при разведке на
нефть затраты на оба вида работ, направленных на изучение потенциальных по
лей, составляют 1 — 2% от общих затрат. В 1984 г. на гравиметрические и маг
нитометрические работы (без учета восточных стран) было затрачено около
50 млн. долл. США. Около двух третей объема этих работ было связано с раз
ведкой нефти и одна четверть — с разведкой минеральных ископаемых [470].
Чтобы гравиметрические работы были целесообразны, мощность возмущаю
щих масс в глубину, их протяженность и отличие плотности от окружающих по
род должны быть достаточны для существования заметных аномалий силы
тяжести. В таблице 4.2 содержатся объемные плотности некоторых горных по
род и минералов, составляющих земную кору.
Как правило, за исключением руд, возможные различия плотности малы, при
чем геологическая интерпретация усложняется значительными вариациями вида
пород в зависимости от состава минералов, пористости и структурных измене
ний с глубиной.
Прикладная гравиметрия в основном изучает коротковолновые и ультрако
ротковолновые особенности гравитационного поля, которые в соответствии с
разд. 3.3.2 имеют амплитуды < 100 — 300 мкм · с -2, причем протяженность ло
кальной аномалии (1 — 10 км) часто соответствует глубине аномального тела.
Для интерпретации используют аномалии Буге (разд. 4.3.3). Обычно притяжение
искомых тел пытаются выделить, вычитая региональное поле и влияние уже изу
ченных структур; здесь особое внимание следует уделять учету поправки за ре
льеф. Методы, описанные в разд.4.3.1, используются для интерпретации и
находят дальнейшее развитие в прикладной гравиметрии. Аномальные массы,
расположенные близ земной поверхности, можно исследовать с помощью произ-
Глава 4
108
Т а б л и ц а 4 .2 . Объемная плотность горных пород и минералов по
данным [148, 772] и др.
Порода/минерал
Объемная1 плотность,
кг • м ” 3
Осадочные породы (с увеличением глубины
плотность повышается):
неуплотненные
1400 — 2300
песчаник
2000 — 2700
известняк
2500 — 2800
глинистые сланцы
2500 — 2800
бурые угли
1000 — 1500
битумные угли
1200 — 1800
Эффузивные породы:
базальт
диабаз
2700 — 3300
2800 — 3100
Интрузивные породы:
гранит
габбро
перидотит
2500 — 2800
2800 — 3100
3100 — 3300
Метаморфические породы:
сланцы
гнейсы
2500 — 2900
2600 — 3100
Минералы:
галит (каменная соль)
ангидрит
сфалерит
халькопирит
хромит
2100
2900
3900
4100
4300
— 2400
— 3000
— 4200
— 4300
— 4600
водных потенциала более высоких порядков (разд. 8.1.1). Методы спектрального
анализа позволяют выполнить первичное изучение также и сложных структур
[43, 527].
При планировании гравиметрической съемки необходимо, исходя из структуры иссле
дуемого объекта, выбрать расположение пунктов и найти нужную точность вычисления
аномалий. При этом может оказаться полезным соотношение между притяжением тел
простой формы и их глубиной, предназначенное для первичной интерпретации [78]. В свя
зи с этим рассмотрим максимальное значение аномалии, порождаемой шаром (радиус /?,
глубина залегания центра шара /), используя (4.25):
Δ# = у ttGAq
(4.42)
а также горизонтальным двумерным цилиндром с бесконечным простиранием вдоль оси
У'
β2
A g
= 2t t G
A
q
—
.
(4.43)
ί
Если принять, что все массы сконцентрированы в центре шара или на оси цилиндра, то
оказывается, что они расположены на глубине 2/3 (для сферы) и 1/2 (для цилиндра)
Сила тяжести в естественных и инженерных науках
109
от ширины полуамплитуды, т. е. на расстоянии по горизонтали между точками, в кото
рых Ag = 0,5Agmax· Для вертикального цилиндра соответствующую оценку можно полу
чить на основе выражения (4.27).
Рельеф границ (разностная плотность Δρ), лежащих примерно горизонтально, можно
определить по формуле для гравитационной аномалии, порождаемой двумерной горизон
тальной пластиной толщиной dz на глубине z\. Для точки Р на поверхности (рис. 4.21)
справедливо следующее соотношение:
d(Ag) = 2G A q
- arctg — ^ dz.
(4.44а)
Интегрирование от глубины z\ до zi дает притяжение двумерной вертикальной ступени.
При х\ -► оо найдем
Ag = ttG A q A z ;
(4.446)
мы получили притяжение полупластины Буге. На достаточно большом горизонтальном
расстоянии от сброса (высота сброса ζι - Ζι = Αζ) притяжение пластины Буге будет равно
максимальной величине
Ag
=
I t G qA z .
( 4 . 44 b )
Если известна разность плотностей, то эта формула позволяет определить высоту сброса.
В зависимости от глубины и размеров аномального тела расстояние между пункта
ми гравиметрической съемки может меняться от нескольких километров до нескольких
метров, а требуемая точность определения аномалий — от величины порядка 10 мкм - с -2
до нескольких единиц 10 нм · с -2. Средний шаг съемки должен быть меньше глубины ано
мального тела. Точность аномалий Буге в основном зависит от точности введенных по
правок (разд. 4.3.3). На территориях с неровным рельефом можно ожидать ошибок ±1 —
10 мкм с -2 (разд. 9.3). Когда притяжение аномального тела выделено, глубина его зале
гания может быть определена с относительной ошибкой от нескольких процентов до
10 — 20<7о.
Рассмотрим структуры, которые наиболее часто исследуют методами при
кладной гравиметрии.
При разведке нефти и газа исследуют осадочные бассейны, где вследствие
океанического происхождения, возможности миграции, а также вероятного обра
зования тектонических (антиклинали, зоны разломов, соляные купола) или стра
тиграфических ловушек (рифы) предполагают наличие углеводородов. Из 600
осадочных бассейнов, расположенных по всей поверхности Земли, лишь треть
исследована достаточно полно [265]. Региональные рекогносцировочные съемки
служат в основном для определения мощности осадочных слоев и для обнаруже
ния отдельных структур, подлежащих более детальной съемке. Из-за различия
Глава 4
110
Ag6 (мкм · с
Рис. 4.22 (левый). Сглаж енны е аномалии Буге по профилю, пересекающему соляной купол Ф орхоп,
Северная Германия, а также м одель распределения плотностей (к г /м 3), содержащ ая тр етич
ные (2150), меловы е (2400), юрские (2400—2550) и триасовы е (2450— 2600) формации [631].
Рис. 4.23 (правый). А номалии Буге и полож ение гравиметрических пунктов над хром итовы м м е ст о
рож дением объ ем ом 24 000 т (зачерненная область), провинция К амагуэй, К уба, сечение изоаномал 0 ,2 мкм с " 2 [135].
плотности пород в 200 — 300 кг · м ~2 к соляным куполам приурочены гравита
ционные минимумы (аномалии от нескольких десятков до сотен мкм · с ~2, за ис
ключением соляных куполов с мощной кровлей из ангидритов) (рис. 4.22). Их
крылья можно проследить вплоть до глубины 1000 м с ошибкой ± 100 м. Для
антиклиналей (обычно с гравитационными максимумами) характерны аномалии
в несколько десятков мкм с -2; в районах разломов возникают большие градиен
ты силы тяжести, а на известняковых рифах амплитуды аномалий составляют
всего лишь несколько мкм · с " 2.
При рудной разведке [262] обнаруживаются аномалии весьма малой протя
женности (порядка десятков или сотен метров) и с амплитудами в единицы или
десятки мкм - с " 2 (рис. 4.23). Большая плотность искомых минералов (табл. 4.2)
позволяет непосредственно убедиться в существовании месторождения, при ма
лом содержании руды и трансгрессивном залегании поиски осложняются. Для
планирования разработки месторождений важно определить общую массу полез
ных ископаемых. Формула Гаусса (2.21) в плоском приближении позволяет для
этой цели получить соотношение [397]
y)d xd y = 2-kGM.
(4.45)
лгу
В угольной промышленности методы гравиметрии можно использовать для
обнаружения угольных бассейнов (минимумы силы тяжести порядка
10 мкм · с -2) и исследования их структуры [681] (рис. 4.24). Подземные измере
ния можно использовать для обнаружения пустот, а повторные измерения — для
отслеживания различных изменений; повторные измерения могут служить и для
обеспечения безопасности горных работ (разд. 10.2.3).
В инженерном строительстве измерения силы тяжести можно использовать
для изучения строения верхних слоев земли (пустоты, осыпи) [184], для поиска
Сила тяжести в естественных и инженерных науках
111
Д дБ(мкм · с
30 км
Рис. 4 .2 4 . О бобщ енны е остаточны е аномалии Буге (введена редукция за влияние слоя осадочны х п ор од,
глубина редуцирования 60 м) по профилю, пересекающ ему залеж и каменного угля, Рурская
область, Германия, а такж е м одель распределения плотности (к г /м 3).
и определения местоположения подземных водотоков (толщи рыхлых пород на
фундаменте) [7] и для исследований соляных куполов (система каверн). Поиски
пустот гравиметрическими методами также можно применить в задачах археоло
гии. Из-за малых величин аномалий (порядка м к м * с"2) необходима высокая
точность измерений и обработки данных [56].
Использование методов гравиметрии для изучения перемещений подземных
масс и изменений высот, вызванных эксплуатацией месторождений углеводоро
дов, шахтными работами и откачкой подземных вод, рассмотрено в разд. 4.4.2.
4.3.6.
Гравитационное поле и топография поверхности
Мирового океана и его дна
Поверхность океана не совпадает с эквипотенциальной поверхностью гравитаци
онного поля Земли (разд. 2.3.1) из-за влияния различных астрономических, мете
орологических, гидрологических и океанографических факторов. В числе этих
факторов отметим приливные силы (разд. 3.4.2), изменения атмосферного давле
ния и плотности воды; последние в свою очередь зависят от температуры, соле
ности и давления. К ним же относятся изменения в выпадении осадков, притоке
воды и ее испарении [419].
Уклонения поверхности Мирового океана от геоида называют топографией
морской поверхности (ТМП), (рис. 4.25). Ее горизонтальный градиент совместно
с силой Кориолиса, вызванной вращением Земли, и ветровыми воздействиями
приводит к возникновению морских течений.
ТМП можно условно разделить на меняющуюся во времени динамическую компонен
ту и (квази) стационарную компоненту. В открытом океане первая из них находится на
субметровом уровне, и ее можно моделировать (приливы) или исключать осреднением за
длительное время. Тем самым осуществляется переход от мгновенной топографии мор
ской поверхности к среднему уровню моря (СУМ). Вторая, стационарная компонента
ТМП обычно меняется в пределах ± 0,7 м (максимальное изменение около 2 м). Она про
являет ярко выраженную широтную (зональную) зависимость с общим повышением 1,5 м
от полярных районов к экватору. Крупномасштабные (1000 — 10 000 км) наклоны водной
поверхности имеют порядок 10"6 и 10"7 рад, в районах морских течений обнаружены
наклоны на небольших расстояниях (около 100 км) величиной 10"6 рад и более.
112
Глава 4
Спутник с
альтиметром
Рис. 4.25. Морская топографическая поверхность, поверхность относим ости и спутниковая альти
метрия.
Изучение ТМП — это одна из главных задач физической океанографии; в на
стоящее время стремятся получить высокое пространственно-временное разреше
ние и точность по меньшей мере ± 0,1 м. В геодезии ТМП нужна для
редуцирования результатов гравиметрических съемок на единую уровенную по
верхность. На суше эти результаты редуцируют по-разному в зависимости от
выбора отсчетной поверхности (разд. 2.5.2), связанной с ТМП через измерения
на уровнемерных постах. Игнорирование ТМП влечет долгопериодические ошиб
ки ± 0,1 — 0,6 м в определении высот гравиметрического геоида [566]. Результа
ты морских гравиметрических работ также следует приводить к единой
уровенной поверхности относимости.
Топографию морской поверхности можно изучать океанографическими мето
дами, а также сочетая данные альтиметрического и гравиметрического методов.
Океанографические методы основываются либо на основном уравнении гидро
статики, либо на гидродинамическом уравнении движения; измеряют температу
ру воды, ее соленость, скорость морского течения и атмосферное давление. Из-за
неравномерного распределения данных на разных акваториях океанографические
методы позволяют определять лишь длинноволновые составляющие стационар
ной ТМП с ошибкой ± 0,1 — ±0,2 м [413]; на акваториях с достаточно густой
сетью станций можно получить сантиметровую точность [441]. Разложение ТМП
по сферическим гармоникам выполнено до степени / = 36 [175].
Спутниковая альтиметрия дает на основе радарных измерений расстояние
5СП по вертикали от морской поверхности до спутника. Зная орбиту спутника,
можно вычислить его высоту Лсп над эллипсоидом. Топография морской поверх
ности (сумма статической и динамической составляющих) получается из соот
ношения
(4.46)
ТМП
+ ТМПпин = Λ - s - N y
где N — высота геоида (рис. 4.25).
Сила тяжести в естественных и инженерных науках
113
С помощью спутниковой альтиметрии для Мирового океана ТМП получена с высокой
разрешающей способностью в широтном поясе ± 70° [471]. При односекундном осредне
нии измерений с ИСЗ GEOS-3 (1975—1978 гг.) достигнута точность ± 0,5 м [654], а по
ИСЗ SEASAT-1 (1978 г.) ± 0,7 м [674]. Орбиты этих ИСЗ были уточнены до уровня
± 1 — ± 2 м уравниванием невязок в точках пересечений подспутниковых трасс. Такое
уточнение требует достаточно частых определений орбит, а также хороших моделей гра
витационного поля (разд. 4.5.1). Пространственное разрешение вдоль орбиты составляет
примерно ±10 км. Расстояния между подспутниковыми трассами меняются в пределах
от нескольких километров до 100 км (SEASAT-1). Для всей изученной части Мирового оке
ана получены средние значения суммы высоты геоида над эллипсоидом и высоты морской
поверхности над геоидом по трапециям 1° х 1° и 0,5° х 0,5°, причем ошибка не превыша
ет ± I м [433, 553]; при региональных исследованиях можно достичь более высокого раз
решения (до 20 км) и большей точности (±0,1 м) [99].
Если пренебречь ТМП или учесть ее океанографические модели, то после обращения
формулы (4.17), связанной с (4.19), по высотам геоида можно вычислять аномалии в сво
бодном воздухе [405]. Для точки на поверхности Земли имеем
Δg
P
=
-
—
N
p
-
(4.47)
R
где у т — среднее значение силы тяжести, R — радиус Земли, ф — текущее сферическое
расстояние между определяемой и текущей точками поверхности, σ — единичная сфера.
Рассмотренным способом были вычислены средние по трапециям Г х 1° аномалии в сво
бодном воздухе по данным GEOS-3 и SEASAT-1 с ошибками соответственно ±80 и
±50 мкм · с" 2 [548, 553]. Средние для трапеций 30' х 30" и 1° х 1° аномалии
(± 110 мкм* с -2) по данным GEOS-3 и SEASAT-1 получены методом среднеквадратиче
ской коллокации [555]. Другие комбинированные решения позволили получить точечные
аномалии в свободном воздухе для всей изученной поверхности Мирового океана по сетке
15' х 15', при этом учитывалась топография морской поверхности [27]. Сравнение с ре
зультатами морских гравиметрических съемок выявило среднеквадратическое расхождение
± 110 мкм - с" 2. Таким образом, средневолновая и коротковолновая составляющие грави
тационного поля в настоящее время известны для акваторий точнее, чем для континентов.
Ожидается, что альтиметрические программы, планируемые на 1989 г. и последующие
годы (т.е. европейский спутник дистанционного зондирования ERS-1, эксперимент НАСА
по изучению топографии поверхности океана ТОРЕХ), улучшат пространственно-времен
ное разрешение. Начиная с 1985 г. Океанографическая служба ВМФ США осуществляет
научную программу с геодезическим спутником Земли ВМФ (GEOSAT), оборудованным
высокоточным альтиметром. По результатам этой программы ТМП получается с разре
шением примерно 10 км при точности ± 0,1 м. По повторным данным для одних и тех
же подспутниковых трасс составляющую вектора аномального поля вдоль трассы можно
получить с точностью ± 10 мкм с -2 и ± 1 0 " 6 рад [443].
Как следует из (4.46), вычисление ТМП по результатам спутниковой альти
метрии требует точного определения высот геоида с высоким разрешением. Это
реально, если использовать совместно коэффициенты разложения по сферическим
гармоникам, полученные из анализа орбит ИСЗ (длинноволновые компоненты
поля), и аномалии силы тяжести на поверхности Земли в соответствии с
разд. 4.2.2 и 4.2.3.
Совместная обработка данных, содержащих гармонические коэффициенты модели
GEM-L2 (разд. 4.5.1), аномалии силы тяжести по трапециям 1° х 1° и результаты альти
114
Глава 4
метрии SEASAT, позволила получить длинноволновую часть ТМП (до / = 6) с ошибкой
± 0,2 м [176]. В работе [783] обсуждаются вопросы совместной обработки океанографиче
ской, альтиметрической и гравиметрической информации для определения циркуляции в
океане и фигуры геоида.
Фигура геоида, полученная по результатам спутниковой альтиметрии, а также
детальный гравиметрический геоид могут быть коррелированы с батиметриче
скими и тектоническими структурами морского дна. Таким образом, данные о
гравитационном поле полезны и при определении рельефа морского дна [588],
при этом на возможности опознавания отдельных структур сильно сказываются
глубина моря и механизм изостатической компенсации. Наряду с обнаружением
подводных горных хребтов, впадин и зон разломов альтиметрия позволила вы
являть подводные горы (к ним приурочены повышения геоида на несколько
метров).
4.4.
Гравитационное поле и геодинамика
4.4.1.
Гравитационное поле, тектоника и изостазия
Если вычесть коротковолновые составляющие гравитационного поля, в его
структуре станут ярче проявляться латеральные изменения плотности в глубин
ных частях тела Земли, что в свою очередь указывает на отклонения от гидро
статического равновесия (разд. 4.3.4). При исследованиях глобального
гравитационного поля можно использовать его представления средними анома
лиями в свободном воздухе (разд. 3.2.3), разложение аномалий по сферическим
гармоникам (разд. 3.3.3) или поверхность геоида (разд. 4.2.2). Для проверки мо
делей изостазии используют редуцированные аномалии силы тяжести
(разд. 4.3.4). Фундаментальное положение в этих исследованиях занимают теория
тектоники плит и теория изостазии. Таким образом, одним из наиболее важ
ных условий при построении геодинамических моделей является их соответствие
реальному внешнему гравитационному полю [16].
Теория тектоники плит, обобщающая множество геологических и геофизических дан
ных, содержит теорию дрейф а ко н т и н ен т о в [756] и теорию р а с ш и р е н и я дна океана [144,
299]. Согласно этой теории, дно океана в настоящее время расширяется по обе стороны
от системы срединно-океанских хребтов с характерными осевыми рифтовыми долинами,
повышенными тепловым потоком и сейсмичностью. Авторы работы [738] обнаружили
полосы чередующихся положительных и отрицательных магнитных аномалий, параллель
ные хребтам. По данным об изменении полярности магнитного поля Земли и радиометри
ческим данным стало возможным определить возраст океанского дна (менее 200 млн.
лет), который увеличивается с удалением от хребта, а также среднюю скорость расшире
ния дна ( 1 - 2 0 см/год).
В соответствии с теорией т ект о ни чески х п л и т [446, 475] земная кора состоит из 6
крупных и более 20 меньших сравнительно жестких литосферных плит. Средняя толщина
плит на океанах доходит до 100 и 150 км на континентах. Плиты перемещаются отно
сительно друг друга по поверхности более теплой астеносферы, обладающей низкой вяз
костью [406] (рис. 4.26). Для границ плит характерны зоны землетрясений различной
интенсивности. На границах растяжения (срединно-океанические хребты) вследствие под-
115
Сила тяжести в естественных и инженерных науках
\
\
\
___ ..JJ
,,.
_,,, /
Северо
1
,/
Американская
\
мита
Тихоокеанская
плита
плита
Индийский
Антарктическая плита
хребет
Рис.
4.26.
Основные литосферные плиты и направления их движения; сокращения АН
АР
-
-
Арабская, КА
Карибская, КО
-
Сомалийская плиты, по данным
[206],
Кокос, НА
-
Наска, ФИЛ
дополненным работой
-
Анатолийская,
Филиппинская, СО
[60].
нятия магмы из астеносферы формируется новая океаническая кора (рис.
4.27).
Движение,
вызванное формированием новой коры, приводит к столкновениям и горообразованию на
границах сжатия.
Более холодная тяжелая океаническая плита изгибается и опускается
(происходит субдукция), углубляясь на
800 - 900
км в менее плотную мантию (зона суб
дукции), где и разрушается. Так формируются глубоководные желобы и островные цепи,
которым
присущи
высокая
сейсмическая и
вулканическая
активность
(например,
Идзу
Бонинский желоб и Японские острова), а также высокие горы (например, Перуанско-Чи
лийский желоб и Анды). При столкновении двух континентальных плит образуются гор
ные
цепи
существуют
(система
Альпы-Гималаи).
«трансформные
разломы»
И
наконец,
(например,
на
разлом
границах
скольжения
Сан-Андреас,
плит
Калифорния).
Основываясь на данных о скорости расширения океанского дна, а также о геологических
сдвигах и сдвигах, вызванных землетрясениями, Минстер и Джордан
(463]
создали модель
движения плит за последние несколько миллионов лет. С этими геологическими результа-
V
Средмнно
океанический
хребет
Океаническая
кора
Горный илиОстровная
хребет
РNГ&
о~:=§~=:=::Е:~~~~;:;;;;;;;;50
100
магма
~~бин:\ r:нвекция в манти:\
(км)
Рис.
4.27.
Схема движения литосферных плит, а также границы расходящихся и сходящихся плит; вер
тикальный масштаб схемы увеличен.
116
Глава 4
тами хорошо согласуются оценки современных движений плит, полученные методами кос
мической геодезии [655].
Полагают, что движение тектонических плит вызвано обширными тепловыми к о нвек
ц и о н н ы м и пот окам и вещества в подлитосферных слоях [574]. В то же время существуют
различные представления о типе, размерах и глубине конвективных ячеек (стационарность/нестационарность, конвекция в верхней части или во всей толще мантия/
подстилающий слой), а также о взаимодействии литосферы и астеносферы [562]. В зонах
дивергенции плит горячее вещество мантии поднимается вверх (повышенный тепловой по
ток), а в зонах конвергенции более холодное вещество опускается.
Таким образом, длинноволновая часть гравитационного поля определяется
двумя главными причинами: изменениями плотности вещества литосферы и из
менениями температуры в мантии. Последние также приводят к изменениям
плотности в соответствии с выражением
dQ = - a vQdty
(4.48)
где αν — температурный коэффициент объемного расширения, t — температура.
Рассматривая напряжения, вызываемые плотностными различиями, можно
считать литосферу эластичной (верхняя часть, короткопериодические напряже
ния) или вязкоэластичной средой. На больших пространствах достигается изостатическая компенсация (разд. 4.3.4), а остаточные напряжения компенсируются
прочностью литосферы. В ледниковых областях Северной Америки и Фенноскандии после таяния масс льда возник дисбаланс, устраняемый послеледниковыми
изостатическими подъемами.
В Ф енноскандии отрицательные аномалии в свободном воздухе (средние по трапециям
1° х 1°) достигают -5 0 0 мкм · с -2 , а после исключения длинноволновых (/ < 10) состав
ляющих высот геоида обнаруживается его понижение до - 8 — - 9 м. Впадина геоида
хорошо коррелировала с зоной поднятия (максимальная скорость 9 мм/год) [53]
(рис. 4.28). В областях со слабой сейсмической активностью на процесс вязкоупругой ком
пенсации накладываются постоянные тектонические движения [346, 347].
В А л ь п а х обнаружены за последние 70 — 80 лет поднятия с максимальной скоростью
1 мм/год, коррелированные с отрицательными аномалиями Буге (до -1800 мкм с -2 ) и
отрицательными изостатическими аномалиями (до -5 0 0 мкм · с -2 ). Полагают, что отча
сти эти подъемы вызваны изостатическим выравниванием; в южной части превалируют
процессы горообразования в результате столкновения Евроазиатской и Африканской плит
[250].
Если считать, что границы конвекционных ячеек недеформируемы, то во
внешнем гравитационном поле Земли в зонах подъема горячего вещества мантии
должны существовать отрицательные аномалии силы тяжести, а в зонах опуска
ния холодного вещества — положительные. Однако конвекционные потоки вызы
вают существенные деформации этих границ (ядро/мантия, нижняя/верхняя
мантия, астеносфера/литосфера), так что смена знака в аномальном поле проис
ходит часто [445]. Помимо того что решение обратной задачи для гравитацион
ного поля в общем виде отсутствует (разд. 4.3.1), моделирование происходящих
под литосферой динамических процессов осложняется «маскирующим» влиянием
самой литосферы, а в длинноволновой части спектра — деформациями переход
ных зон и изменчивостью реологических свойств мантии. Введение редукций, на-
Сила тяжести в естественных и инженерных науках
117
Рис. 4.28. Сглаж енны е аномалии в св ободн ом воздухе (слева) и остаточны е вы соты геоида (справа) (м о
дель геопотенциала GPM -2 (разд. 4 .2 .2 ) ,гармоники со степенями 1 = 2 — 10 исключены) в
Фенноскандии, сечение изолиний соответствен но 200 мкм*с“ 2 и 1 м (база гравиметрических
данных Ганноверского геодезического института).
пример «расслоением земной коры», уменьшает влияние этих возмущающих
эффектов (разд. 4.3.3). В разд. 4.3.4 говорилось, что между параметрами грави
тационного поля и структурами плитовой тектоники существуют корреляцион
ные связи переменной интенсивности. Длинноволновые компоненты геоида
(/ ^ 10) вызваны в основном неоднородностями верхней мантии; если эти компо
ненты исключить, то возможна корреляция остаточного геоида с «мантийными
плюмами» (ограниченные области мантии, состоящие из нагретого вещества, ко
торое поднимается от теплового граничного слоя вокруг внешнего ядра [476])
[91]. Перегретое вещество расплывается под литосферой в виде шляпки гриба
и порождает вулканизм «горячих точек» планеты (например, Исландия, Гавайи).
Построение моделей конвекционных процессов в мантии либо выполняется
только для определенных регионов, либо сопровождается существенными упро
щениями [330]. В качестве наблюдаемых величин служат параметры гравитаци
онного поля и «остаточные аномалии глубины» (изменения глубины океана, не
связанные с субдукцией тектонических плит в толщу мантии); дополнительными
граничными данными являются, в частности, тепловой поток на поверхности
Земли, а также деформации поверхности [257, 445, 524]. Рисунок 4.29 иллюстри
рует связь конвекции, аномалий в свободном воздухе, геоида и батиметрии для
двумерной модели. Связь между кинематикой плит и длинноволновой частью ге
оида обсуждается в работе [630], согласно которой максимумы геоида располага
Глава 4
118
Рис.
4.29. Рельеф морского дна, аномалии в свободном воздухе и высоты геоида, вычисленные для
профиля над двум ерной м одел ью конвекции в мантии [447].
ются в транстихоокеанской зоне субдукции и на месте палеоконтинента Пангея.
В Северной Атлантике обнаружена корреляция [344] высот геоида и возраста
земной коры примерно -1 0 м/100 млн. лет. В работе [513] создана модель дина
мики плит, которая учитывает теорию изостазии и скорости перемещения плит,
параметры гравитационного поля и рельеф океанского дна.
4.4.2.
Изменения силы тяжести во времени и современные
геодинамические процессы
Временные вариации силы тяжести, обнаруженные из повторных измерений, да
ют важную информацию о глобальных, региональных и локальных перемещени
ях земных масс (разд. 3.4.4). Как указано в разд. 2.2.1, вектор силы тяжести
является функцией вектора местоположения г и плотности ρ (ι*'):
g = g(G,
ω; г, ρ (Γ ')).
(4.49)
Полагая величины G и ω постоянными и рассматривая лишь радиальную со
ставляющую вектора силы тяжести, изменение силы тяжести во времени пред
ставим выражением
к
dg
г+G
дг
(4.50)
Земля
где точка над буквой обозначает производную во времени. Таким образом, обна
руживаемые изменения силы тяжести вызваны как изменением высоты пункта
наблюдений, так и вариациями плотности в теле Земли из-за перемещения веще
ства. Располагая достаточно надежными оценками величин dg/dr (разд. 2.3.2) и
Сила тяжести в естественных и инженерных науках
119
ρ ( Γ ') , можно по величине временных вариаций силы тяжести найти вертикаль
ные перемещения пункта. Если значения г известны из геодезических измерений,
то величины изменений силы тяжести служат известным ограничением при опре
делении изменений плотности. Такая динамическая обратная задача гравиметрии
не имеет единственного решения, как и статическая задача (разд. 4.3.1).
Рисунок 3.17 дает предоставление о порядке величины и развитии во времени
изменений силы тяжести, вызванных перемещением земных масс. При современ
ной точности измерений ± 1 0 — ± 100 нм с -2 короткопериодические возму
щения, вызванные микросейсмами и собственными колебаниями Земли, либо
неощутимы, либо влияние их можно существенно уменьшить, применяя соответ
ствующую методику измерений. При землетрясениях сейсмические толчки исклю
чают, как правило, самую возможность измерений. Особый интерес
представляют изменения силы тяжести, вызванные внутренними геодинамическими процессами. Изменения силы тяжести, связанные с землетрясениями и ак
тивным вулканизмом, имеют большое значение как предвестники этих явлений.
Измерения до и после активной фазы важны для разработки динамических моде
лей накопления и разрядки напряжений при землетрясениях, а также моделей ми
грации вещества магмы и вариаций плотности в вулканах.
Таким образом, гравиметрический метод имеет достаточно важное значение
для предсказания землетрясений. Особенно интенсивные исследования в этой об
ласти ведутся в Японии, Китае, США и СССР в рамках национальных программ
по предсказанию землетрясений и своевременным мерам [255, 564].
Изучение изменений силы тяжести, связанных с крупными региональными
тектоническими процессами, послеледниковой изостатической компенсацией и
осадочными уплотнениями, требует повторных измерений с ббльшими проме
жутками времени. Изменения силы тяжести тектонического происхождения мож
но ожидать особенно на границах литосферных плит; они также содержат
информацию о перемещениях масс под литосферой. Измеренные изменения вы
соты и силы тяжести учитывают при моделировании термомеханических процес
сов [522]. Примеры региональных и локальных изменений силы тяжести
приведены в разд. 10.4.2 и 10.4.3. В районах последникового поднятия земной
коры или ее опускания измеренные вариации дают информацию о реологии (вяз
кости) верхней мантии (разд. 4.4.1).
Сезонные изменения атмосферного давления и перемещения подземных вод
создают возмущающие эффекты. Гидрологические эффекты особенно осложняют
интерпретацию вариаций силы тяжести тектонической природы. И наконец, из
менения силы тяжести, вызванные деятельностью человека, отчасти могут быть
использованы для мониторинга. При откачке подземных вод, нефти или газа,
как и в районах геотермальных источников, одновременно с оседаниями дневной
поверхности происходят и изменения силы тяжести, при этом локальные измене
ния зависят от типа осадочных пород и процесса опускания. Можно использо
вать контрольные съемки для изучения запасов месторождения. Например, при
добыче угля измеренные изменения силы тяжести могут указывать на возникшие
проседания и медленные смещения в шахте и их можно использовать для прогно
за возможных аварий. Примеры даны в разд. 10.2.
При моделировании плотностных изменений и деформаций поверхности мож
120
Глава 4
но использовать методы, описанные в разд. 4.3.1. Такое моделирование выполне
но при изучении различных деформационных процессов: при землетрясениях
[465, 747], вулканизме [464, 575] и послеледниковом поднятии [9]. В локальных
моделях большей частью рассматривают источники разуплотнений или разрыв
ные движения на протяженных разломах, сопровождаемые перемещениями жид
кого вещества (магма, вода).
Для ограниченной области можно принять линейное соотношение между из
менением силы тяжести и вертикальным смещением земной поверхности, кото
рое зависит от характера процессов в недрах Земли. Дифференциальное
соотношение изменений силы тяжести и высоты выразим через измеренные вели
чины bg и ЬН:
g „ Sg
н ~ ьн
(4.51)
Величина b g /b H может претерпевать большие изменения, но обычно лежит в пределах
от -1 ,5 до -3 ,5 мкм · с -2/м [326]. Величина - 3 мкм · с “2/м , соответствующая подъему
над Землей, наиболее часто встречается при локальных исследованиях; она справедлива
для вертикального смещения при неизменной массе (расширяющийся шар) (разд. 3.2.1).
Для больших площадей часто получают величины, близкие к «отношению Буге», равному
- 2 м к м
с " 2/ м , ч т о
указывает на перемещения внутренних масс (сбросовые движения)
(разд. 4.3.3). Следовательно, отношение b g /b H , полученное из одновременных измерений
силы тяжести и высоты, можно использовать при создании геофизических моделей или
при проверке имеющихся. Необходимо иметь в виду, что величина b g /b H может получить
ся весьма неуверенной из-за малости измеряемых изменений силы тяжести и высоты, а
также из-за ошибок измерений. При исследованиях в Северной Исландии ошибка величи
ны b g /b H составила 25%, а величина bg равнялась 1 мкм · с ~ 2 [693]. Это осложняет иссле
дование возможной нелинейности в зависимости bg и ЬН> а также изучение ее локальных
и временных вариаций.
Связь изменений силы тяжести с изменением высоты позволяет применить
гравиметрический метод для мониторинга изменения высот [49, 279, 696].
Районы, где предполагают современные движения земной коры, могут быть эконо
мично и быстро изучены с помощью повторных измерений силы тяжести. Изменения
силы тяжести можно перевычислить в изменения высот, используя коэффициент перевода,
средняя величина которого - 2 мкм · с -2/м; точность измерений силы тяжести позволяет
выявить вертикальные перемещения, превышающие 2 — 5 см. Для более детальных иссле
дований можно применить более точный, но и более дорогой метод геометрического ни
велирования.
Существующие геодезические сети, предназначенные для изучения вертикальных дви
жений земной коры, созданы методом геометрического нивелирования. Повторные изме
рения дают разности потенциалов (2.68) либо ортометрических высот (2.71), либо
нормальных (2.70); влияние возможных изменений силы тяжести, как правило, на 3 —
4 порядка меньше и им можно пренебречь [369]. В будущем методами космической геоде
зии ^GPS-измерения) будет осуществляться контроль таких сетей на больших простран
ствах (расстояние между станциями более 100 км) и будет достигнута точность в
несколько сантиметров на 100 км. Одновременное определение радикальных смещений Ьг
(соответствующих изменениям высоты над эллипсоидом) методами космической геодезии
и изменений высоты Ь Н требует также, чтобы были известны изменения положения нача
Сила тяжести в естественных и инженерных науках
121
л а счет а вы со т (геоида или квази геоида):
6г = δ Η + 6Ν .
(4.52)
На основании (4.17) и (4.19), принимая во внимание (3.7), можно по изменениям силы
тяжести и высоты определить величину δ Ν [660]:
δ Ν = ——
I I ( h g - — δ Η ) S(\p)da,
4x7 m J J \
dr
)
(4.53а)
a
где σ — единичная сфера, у т — среднее значение силы тяжести, 5(ψ) — функция Стокса.
Практически достаточно выполнить интегрирование по зоне возмущений (радиус $о). В
этом случае (4.53а) принимает вид
6 Ν = — 6g + 2 - δΗ .
Уm
(4.536)
R
Как правило, 6 Ν на 1 — 2 порядка меньше величины δΗ .
Повторные измерения силы тяжести экономичны, их ошибки не зависят от расстоя
ния между пунктами, поэтому их можно успешно использовать для контроля стабильнос
ти высот в обширных н и в е л и р н ы х сет ях. При этом абсолютные определения силы
тяжести позволяют контролировать долговременную стабильность. Гравиметрический ме
тод можно также использовать вместо нивелирования на архипелагах, где нивелированию
препятствуют большие расстояния между островами. В этом случае неточность в коэффи
циенте перехода от приращения силы тяжести к превышению, который необходимо опре
делять эмпирически, приводит к ошибке модели. Целесообразно, чтобы расстояние между
гравиметрическими пунктами не превышало 100 км [792].
4.5.
Гравитационное поле и орбитальные расчеты
4.5.1.
Астрономия и космонавтика
Гравитационное поле Земли необходимо знать для определения орбит естествен
ных небесных тел (Луны, планет) и искусственных (ИСЗ, космические станции,
дальние космические аппараты). При запусках к Луне и планетам требуется так
же знание их гравитационных полей (разд. 3.5). Наконец, параметры гравитаци
онного поля участвуют в баллистических расчетах.
Определение орбиты (вектор положения г(/)) тела, обладающего массой m,
основано на втором законе Ньютона
d2r
К = т — Т = тх.
dt2
(4.54)
Существенной частью силовой функции К является сила тяготения, порождаемая
притягивающим телом. Она аппроксимируется разложением по сферическим гар
моникам (разд. 2.2.3). Дважды проинтегрировав уравнение (4.54), получим век
тор положения спутника в виде
Ts = rs(c,; GMy Ci,ту Si,m\ pj\ 0·
(4. 55)
Этот вектор является функцией постоянных интегрирования с,(/ = 1, ..., 6), пред
ставляющих собой элементы кеплеровой орбиты в начальную эпоху, общей мае-
122
Глава 4
сы притягивающего тела, гармонических коэффициентов C/,m, Si>m и других
возмущающих параметров pj. На достаточно большом удалении от притягиваю
щего тела определяющую роль играет первый член в гармоническом разложении.
Он равен GM и, следовательно, представляет притяжение центрального тела
(разд. 4.3.2). При вычислении орбит искусственных спутников Земли необходимо
разложение до более высоких степеней (разд. 4.2.2).
Местоположение спутника Земли в пространстве, задаваемое вектором г$,
нужно знать для предсказания его орбиты и пространственной привязки измере
ний, выполняемых непосредственно со спутника. Высокие точностные требова
ния предъявляют геодезия и океанография. Местоположение станции слежения
Р9 задаваемое вектором гр, получается из измерений различных величин s, связы
вающих спутник и станцию Р:
гр = Ts - s.
(4.56)
В случае спутниковой альтиметрии выражение (4.56) превращается в (4.46) и слу
жит для определения топографии морской поверхности.
Гравитационный потенциал, помимо вычислений г$, нужен также для интер
поляции орбиты между отдельными точками. Положение этих точек определяет
ся с наземных станций слежения. Точность интерполирования зависит от степени
разложения и качества гармонической модели; для высоких спутников достаточ
но разложения до низких степеней [743].
В настоящее время действуют следующие спутниковые системы навигации и опреде
ления местоположения: навигационная спутниковая система ВМС США (NNSS), известная
также как система Транзит, с высотой орбит спутников примерно 1200 км [378], и система
НАВСТАР глобального определения местоположения (GPS) с высотой орбит примерно
20000 км [74, 622]. Координаты спутников определяются с ошибкой ±1 — 10 м, а грави
тационные модели ограничены степенью / < 20 — 36. Примерно такая же точность была
получена при альтиметрических программах GEOS-3 и SEASAT-1 (разд. 4.3.6). Для низких
спутников (высоты в несколько сотен километров) ошибка интерполяции при использова
нии моделей с высоким разрешением (/ = 100 — 200) может быть менее 0,1 м. Согласую
щие модели, специально созданные для конкретных исследовательских программ,
позволяют уменьшить ошибки радиальной составляющей положения спутника до несколь
ких дециметров, например модель GEM-L2 для определения орбиты ИСЗ LAGEOS (высо
та 5900 км) и модель GEM-ΤΙ НАСА (/, т = 36) для программы ТОРЕХ (разд. 4.3.6) [434].
Из наблюдений ИСЗ на основе соотношений (4.55) и (4.56) можно определить коэффи
циенты разложения по сферическим функциям. Однако такие чисто спутниковые модели
гравитационного поля имеют ограниченную разрешающую способность из-за того, что
чувствительность спутника как пробной массы быстро убывает с увеличением высоты.
Модель GEM-9 [407], полученная в Годдардовском центре космических полетов НАСА,
а также модель GEM-L2 (GEM-9 плюс результаты лазерной локации ИСЗ LAGEOS) [409]
содержат коэффициенты до /, т = 20. Модели гравитационного поля Луны и планет рас
смотрены в разд. 3.5. В «Программе исследования геопотенциала» (GRM), планируемой
на начало 90-х годов, будут использованы два низких (Λ = 160 км) спутника, расположен
ные на полярных орбитах и свободные от торможения; среднее расстояние между спутни
ками 300 км. Методом «спутник—спутник» их относительная скорость будет измеряться
с ошибкой ± 1 0 " 6 м/с. Ожидают, что будет получена модель гравитационного поля до
/ = 180 и выше, что позволит определить средние гравитационные аномалии для трапеций
Г х Г с ошибкой ±10 — 30 мкм с " 2, а также высоты геоида с ошибкой ±0,1 м [609,
678]. После установки на спутниках градиентометров, планируемой на середину 1990-х гг.,
можно ожидать дальнейшего повышения разрешающей способности моделей гравитаци
Сила тяжести в естественных и инженерных науках
123
онного поля (разд. 8.3.3). Эти методы позволят устранить недостатки нынешних комби
нированных моделей
(разд. 4.2.2),
вызванные неравномерным
распределением
гравиметрических данных на поверхности Земли.
4.5.2.
Наземная навигация
Для определения положения различных транспортных средств в воздухе, на море
и суше широко используются инерциальные навигационные системы. Инерциаль
ный измерительный модуль содержит систему из трех взаимно ортогональных
акселерометров и гироскопическую систему, обеспечивающую пространственную
ориентацию (инерциальная платформа). Измеряемой величиной является вектор
ускорения [613]
т
(4.57)
где К — сила, т — масса. В инерциальной системе координат величина f содер
жит ускорение подвижного носителя г и гравитационное ускорение Ь:
f = г - Ь.
(4.58)
В системе координат, жестко связанной с Землей, необходимо также учесть цент
робежное и кориолисово ускорения (разд. 7.5.1). После исключения этих двух
ускорений из измеренного можно, проинтегрировав один или два раза уравнение
движения (4.58), получить соответственно вектор скорости и вектор положения:
(4.59)
Точностные требования к параметрам гравитационного поля, которые нужны
для обработки измерений, зависят от устройства системы и ее назначения. В
большинстве случаев для воздушной и морской навигации достаточны нормаль
ная модель гравитационного поля (разд. 3.1) или глобальные модели
(разд. 4.2.2). Для геодезических приложений (инерциальные геодезические систе
мы) необходима точность порядка 10 мкм с -2. Таким требованиям удовлетворя
ют локальные аппроксимации гравитационного поля (разд. 4.2.3), измерения
силы тяжести или определения вектора аномалии силы тяжести по измеритель
ным сигналам (разд. 7.5). Разрабатывается еще один метод определения гравита
ционного поля, основанный на измерениях с градиентометрами (разд. 8.3).
Сопоставление различных методов определения гравитационного поля с точки
зрения их эффективности для инерциальной навигации дано в работе [341].
Глобальное гравитационное поле необходимо и для спутниковой навигации.
При использовании спутниковой системы NNSS в морской навигации выражение
(4.56) преобразуется для получения плановых координат: широты и долготы. Ес
ли необходимую информацию о высоте получают по модели геоида, то доста
точно гармоническое разложение лишь до низких степеней. Трехмерное решение
в системе GPS также можно сделать более устойчивым, вводя данные по модели
геоида.
5. Абсолютные измерения силы тяжести
Абсолютные определения силы тяжести основаны на измерении фундаменталь
ных величин — расстояния и времени, через которые выражается ускорение; при
этом наблюдают свободное движение пробной массы в гравитационном поле.
В настоящее время применяют только метод свободного падения и достигают
точности ±107 — \0 ~ 9g (разд. 5.1). Дальнейшее совершенствование измеритель
ной аппаратуры и методики наблюдений позволит выявить источники системати
ческих ошибок и расширить возможности метода в полевых условиях (разд. 5.2).
Долгое время (около 300 лет) основным методом абсолютных измерений был
маятниковый метод, но сейчас его совершенствование и применение повсеместно
сокращены (разд. 5.3).
Обзор абсолютной гравиметрии дан в работах [129, 235], современное состоя
ние рассмотрено в [187, 587, 698].
5.1.
5.1.1.
Основы баллистических методов
Свободное падение
При описании свободного падения используют местную систему отсчета
(разд. 2.1.2), связанную с гравитационным полем (рис. 5.1). Уравнение движения
тела массой т , свободно падающего в гравитационном поле, имеет вид
(5Л)
mz = mg(z)y
где z = d2z/dt2 (t — время). Считая гравитационное поле в окрестности траекто
рии падения однородным, выполним интегрирование (5.1) и получим скорость
и положение падающего тела:
(5.2)
Z = Zo + gt,
Z = Zo +
(5.3)
iot + J t2.
Постоянные интегрирования zo и io представляют собой путь и скорость падаю
щего тела в момент / = 0. Поскольку величины zo и zp точно неизвестны
(разд. 5.1.5), определить g по формуле (5.3) можно, наблюдая тело по крайней
мере в трех положениях (1,2,3), т. е. измеряя каждый раз пройденный путь и
время. Исключив из уравнений величины zo и zo, найдем ускорение силы тяжести
по приращениям пути и времени:
_
8
, (Z3 -
Zi)(h -
/l) -
(Z2 -
Z\)(h -
(h - h)(t2 - h) ( h - h)
11)
(5.4)
Абсолютные измерения силы тяжести
г
Рис. 5.1
Рис. 5.2
125
(м)
(левый). Н есимм етричное движение: зависим ость пути от времени.
(правый). Н есимм етричное движение: зависим ость скорости падения от расстояния.
Из (5.2) и (5.3) следует, что скорость падения — это линейная функция времени.
Положив zo = Zo = 0, имеем
т
= gt = V2Ш ) ·
(5.5)
Рисунок 5.2 иллюстрирует увеличение скорости с расстоянием, которое прошло
падающее тело.
В современных абсолютных гравиметрах обычно наблюдают не три, а боль
шее число положений тела (метод многих станций), поэтому уравнение (5.3) игра
ет роль уравнения связи при обработке по методу наименьших квадратов.
5.1.2.
Симметричное движение
В случае симметричного движения пробную массу подбрасывают вертикально
вверх (начальная скорость примерно 2—3 м/с), она достигает верхней точки тра
ектории и падает вертикально вниз.
Считая гравитационное поле однородным и приняв положительным направле
ние оси z в зенит, можно записать уравнение движения при подъеме в виде
(рис. 5.3)
m z= -m g.
(5 .6 )
Выполнив интегрирование, получим выражения для скорости и пройденного
пути:
i = Zo - gt,
(5.7а)
Z = Zo + tot -
1
t2,
(5.8a)
где zo = z (t = 0), to = z (t = 0). В верхней точке (апексе) траектории (t = ta) имеем
Za = z(ttt) = 0 и с учетом (5.7а) получим
to = gt„.
(5.9)
Подставив это выражение в два предшествующих, получим
Z = g(ta - t),
(5.76)
Z = ZO + gtat - I t2.
(5.86)
Глава 5
126
Рис. 5.3.
Симметричное
времени.
движение:
зависим ость
пути
от
При движении вниз на основании (5.2) и (5.3) имеем
z = g ( t - to),
(5.10)
г =
(5.11)
+ I (/ - ta)\
Сравнение (5.10) с (5.76) показывает, что пробное тело проходит через измери
тельные точки при подъеме и падении с одинаковой скоростью (симметричная
схема измерений). Следовательно, разность моментов между прохождениями од
ной и гой же точки измерения / при подъеме и падении равна
Ati = 2(ti - ta) = 2 - ,
g
(5.12)
причем u > ta. На основании (5.10) и (5.11) можно образовать разности
г | - г? = g2(tj - ή ) - 2g2ta(tz - h),
Zz - Ζι = Αζ = I ( / | - ή ) - gta(tz - t\).
Комбинируя эти равенства и измеряя величину (5.12), получим
2gAz = i \ - Ζι = J (Δί| - At2),
И
г =
8Λζ
g At2 - At2
(5.13)
Таким образом, для определения g достаточно двух точек измерения; измеряемы
ми величинами являются расстояния между этими точками и разности моментов,
в которых пробное тело проходит данные положения при подъеме и падении.
5.1.3.
Свободное падение в неоднородном
гравитационном поле
Поскольку сила тяжести уменьшается с высотой примерно на Зм км -с"2 на метр
подъема (разд. 3.1.1), игнорирование неоднородности гравитационного поля в из
мерительной системе длиной 0,1 — 1м при желаемой точности ±0,01 —
±0,1мкм*с-2 приведет к значительным ошибкам. Считая, что сила тяжести с
Абсолютные измерения силы тяжести
127
высотой меняется линейно, получим уравнение движения при свободном падении
в виде
ζ = g(z) = go + gzZ,
(5.14)
где go = g (ζ = 0), a gz — вертикальная составляющая градиента силы тяжести
gz
_ dg
dz '
=
(5.15)
Выполнив интегрирование при условии zo = Zo = 0, получим [129]
z = — (cosh V&T/ - 1).
gz
(5.16а)
Разложив cosh >/&V в ряд Тейлора, имеем
z“ Т
+ΊΓ ' 2+ " '
(5.166)
При заданном интервале / расстояние ζ получается больше, чем при падении в
однородном поле. Решая уравнение (5.166) относительно /, получим
t
(5.17)
■ © “ ( - δ · ί * · · · )
При заданном расстоянии время падения уменьшается на величину поправочного
члена.
Таким образом, свободное падение в реальном гравитационном поле можно
свести к падению в однородном поле, если уменьшить измеренное расстояние
в соответствии с (5.166) либо увеличить измеренное время в соответствии с
(5.17); результатом будет величина силы тяжести go.
Если при методе многих станций начальное положение пробной массы (t = 0,
g = go, Zo = 0) будет одновременно и первым измерительным положением, сред
нее значение определяемой величины из п измерений вычисляется по формуле
[793]
п\(8о+f *°'2) dt=8° 0+t O'
*= т
(5.18)
Следовательно, полученное значение ускорения силы тяжести равно ускорению
в момент нахождения пробного тела ниже начального положения zo на отрезок
zn/ 3, где Zn = z(tn)· Последнее можно соотнести с zo> использовав выражение
(5.18).
В случае симметричного движения на основании (5.166), полагая t2 = 2z/go,
получим
(5.19)
t ' 2=z H i ) ·
Подставив в это выражение Z i ( t i ) и Z 2 U 2 ) и считая, что /,· = Δ/,/2, см. (5.12), после
небольших преобразований получим
I (Δ/f - Α ή ) = t e - Ζι) ( l - A te + Z2>) ,
128
Глава 5
или, обозначив ζι - Ζι = Δζ,
go
(Δζ + 2ζι)
8
(5.20)
Сравнив последнее выражение с (5.13), получим окончательно
g = go
(5.21)
Отсюда следует, что вычисленная величина g соответствует положению пробной
массы на расстоянии ζι/3 + Δζ/6 ниже вершины траектории Ζσ. Эта величина
связана с go соотношением (5.21).
Для определения окончательного значения ускорения силы тяжести из наблю
дений по несимметричной или симметричной схеме в любом случае должна быть
задана эффективная высота (например, 1 м над поверхностью основания).
Если точностные требования не слишком высоки, в приведенных выше соотношениях
для gz можно использовать нормальное значение вертикального градиента 3,09* 10_6 с - 2.
Однако из-за возмущающего влияния близких масс реальное значение gz может существен
но отличаться от нормального, что может внести ошибку порядка 0,1мкм-с~2
(разд. 8.1.2). Чтобы избежать таких ошибок, нужно использовать величину gz именно для
данного места. Ее можно получить как дополнительный параметр из обработки абсолют
ных измерений (метод многих станций) либо определить из отношения Ag/Az из измере
ний с относительными гравиметрами. Подобные измерения всегда требуются для редуци
рования величины силы тяжести, полученной на эффективной высоте, на любую высоту
вплоть до уровня основания прибора. Это позволит выполнять гравиметрические связи
с приборами, имеющими другие эффективные высоты.
5.1.4.
Измерения расстояний и времени
Точность измерения расстояний и времени должна быть согласована с желаемой
точностью ± 1 0 " 7 - ± 1 0 " 8g. На основании (5.5) относительная ошибка ускоре
ния силы тяжести определяется соотношением
dg - dz _ 1 Ж
(5.22)
g
z
t
Если она не превышает 10 " 9, при длине пути 0,5 м (время падения 0,3 с) ошибки
измерения расстояния и времени будут соответственно ±0,5 нм и ±0,2 нс. Такая
точность может быть достигнута с использованием лазерных интерферометров
и электронных устройств для измерения времени; с основами электронных мето
дов измерений можно ознакомиться, изучив работу [345].
Возможность использовать баллистический метод для прецизионных определений си
лы тяжести появилась лишь после создания методов измерения коротких временных ин
тервалов. К 1950-м гг. достигнута кратковременная стабильность кварцевых часов 10 ~9.
Вплоть до 1965 г. в технике измерения расстояний использовались два основных принци
па. Носителем эталонного расстояния было само падающее тело, или измерительные
плоскости задавали оптико-механическими методами. В качестве падающего тела чаще
всего использовался жезл (стальной, инварный, кварцевый; обычная длина — 1м). Длина
пути составляла около метра. На жезле либо имелась шкала, которую фотографировали
Абсолютные измерения силы тяжести
129
при падении, либо на его поверхность наносили светочувствительный слой и экспонирова
ли его при падении короткими световыми вспышками заданной частоты. Обработка полу
ченных временных меток позволяла получать соотношения между пройденным путем и
временем, используемые в формуле (5.3). Измерительные плоскости могут быть реализо
ваны в виде оптических барьеров. В момент пересечения такого барьера падающее тело
действует как оптический элемент и возбуждает световой сигнал. Импульсы, генерируе
мые фотоумножителем, включают и выключают электронный счетчик временных интер
валов, работой которого управляют кварцевые часы. Расстояние между измерительными
плоскостями определяли интерференционным методом с источниками белого света (отно
сительный интерференционный метод. — Прим. перев.). В первых такого рода баллисти
ческих экспериментах расстояние и время измерялись с относительной ошибкой ±10~7.
Ошибка окончательного значения силы тяжести, полученного из большего числа (10—100)
баллистических пусков, из-за различных систематических влияний обычно была больше
10мкм*с~2. Существенным источником ошибок были временные смещения интервалов
измерения времени и пройденного пути.
Примерно с 1960 г. благодаря развитию лазерной техники и разработке атом
ных часов появилась возможность существенно повысить точность абсолютных
измерений. Интерференционный метод измерения расстояний был усовершен
ствован с применением когерентного и монохроматического излучения лазера.
Используются стабилизированные гелий-неоновые газовые лазеры (длина во
лны Х = 632,8 нм), кратковременная стабильность частоты которых 10“ 10 —
10 “ 12, а долговременная — 10“ 8 — 10 “ 9, так что сравнение с частотой стандар
та необходимо делать лишь через сравнительно большие интервалы времени.
Особенно стабильна по времени частота излучения лазера, стабилизированного
по йодной ячейке поглощения. Появилась возможность измерять время по атом
ным стандартам частоты. Наиболее часто используются рубидиевые эталоны
с долговременной частотной стабильностью Ю“ 10/год и выше. Электронные
счетчики временных интервалов имеют разрешающую способность ±0,1—1нс.
В последних конструкциях полный путь падения составляет 0,2—1 м.
Путь и время измеряют одновременно. Для измерения пути используется ин
терферометр Майкельсона с двумя уголковыми отражателями (триппельпризмы). Один из них неподвижен и играет роль опорного, другой же может
двигаться по вертикали. Таким образом, путь свободного падения — это одно
из плеч интерферометра (рис. 5.4). Светоделительный оптический элемент разде
ляет пучок лазерного излучения на опорный и измерительный пучки. Триппельпризмы отражают свет параллельно падающим пучкам. Отраженные пучки из
опорного и измерительного каналов вновь попадают на делитель, где они интер
ферируют. Перемещение падающего тела на Х/2 каждый раз приводит к периоди
ческому чередованию максимумов и минимумов света на фотодетекторе (интер
ференционные полосы). Световой сигнал превращается в электрический, усилива
ется и преобразуется в последовательность прямоугольных импульсов. Электрон
ный счетчик регистрирует число таких импульсов (по нулевому уровню). Если
сосчитано п импульсов, пройденное расстояние равно
Az = n j -
(5.23)
130
Рис. 5 .4 .
Глава 5
Принцип интерф ером етра М айкельсона, используемый при несимметричном движении.
Частота интерференционных полос пропорциональна скорости падения пробной мас
сы. На основе (5.5) и (5.23) эта частота определяется соотношением
/полосы =
I*
=
2f
·
(5.24)
В начальный момент наблюдений / = 0, а спустя 0,3 с / = 9 МГц. При длине пути свобод
ного падения в 0,5 м и X = 632,8 нм необходимо сосчитать примерно 1,6· 106 полос. Поэто
му, чтобы определить пройденный путь с ошибкой 0,5 нм, необходимо измерить фазу ин
терференции с ошибкой 2-10 “ 3 полосы.
Счет интерференционных полос начинается почти сразу же после начала сво
бодного падения, в момент начала счета времени. Время измеряется вплоть до
момента прохождения наперед заданного числа интерференционных полос. Рису
нок 5.5 иллюстрирует принцип одновременного счета полос и измерения времени
при заданном числе полос [793].
Момент времени, в который регистрируется п-я интерференционная полоса,
равен
tn = win? δ/л»
(5.25)
где тп — число временных импульсов, зарегистрированных электронным счетчи
ком, т — временной интервал между импульсами. Временной интервал btn от мо
мента прохождения п-го интерференционного импульса до момента т-το импуль
са от часов измеряется таймером с ошибкой ±0,1 нс. Если, например, принять,
что путь равен 0,5 м, а измерения выполняются каждый раз после прохождения
10000 интерференционных полос, то получается примерно 160 значений измеряе
мой величины, которые можно использовать в уравнивании на основе уравнения
связи (5.3). В некоторых абсолютных гравиметрах выполняется 1000 и более из
мерений за один пуск. В самых современных приборах для обработки измерений
используется микрокомпьютер. С его помощью также осуществляются управле
ние и мониторинг измерительного процесса.
При измерениях симметричным методом нужно различать подъем и падение
тела. Изменение направления движения можно проследить по характерному из-
Абсолютные измерения силы тяжести
131
Рис. 5.5. Временная привязка интерференционного сигнала, преобразованного в цифровую форму
[792].
менению фазы интерференционного сигнала. При падении тела показания счетчи
ка интерференционных полос убывают до достижения соответствующей измери
тельной точки (измерение времени). Если используется более двух измерительных
плоскостей, то величину силы тяжести можно получить и при подъеме, и при
падении (внутренний контроль). В этом методе исключаются ошибки измерения
времени, пропорциональные скорости падения (разд. 5.1.5).
В настоящее время интервалы пути и времени измеряют с ошибками, меньшими на
нометра и наносекунды соответственно. Абсолютный эталон длины задан определением
метра (XVII Генеральная конференция по весам и мерам, 1983): «Метр — это расстояние,
которое свет проходит в вакууме за отрезок времени в 1/299792458 с». При таком опреде
лении скорости света фиксация метра сводится к измерению временного интервала. С по
мощью цезиевого стандарта возможно определение частоты излучения гелий-неонового
лазера, стабилизированного по поглощению в йоде (He-Ne/J]27) с относительной ошибкой
± 1 0 " 9, причем имеется возможность повысить эту точность на несколько порядков. При
недавнем сравнении различных лазеров He-Ne/Jj27 получены средние квадратические рас
хождения всего лишь ±5 х 10"11 [316].
5.1.5.
Давление окружающей среды и микросейсмы
При измерениях баллистическим методом наибольшие внешние возмущающие
воздействия оказывают атмосферное торможение и микросейсмические движения
основания.
Из-за вязкого трения атмосферное давление можно рассматривать как проти
водействующую силу; ее воздействие дополняется воздействием аэростатической
выталкивающей силы. Величина атмосферного торможения зависит от материа
ла, из которого изготовлено пробное тело, формы тела и скорости его падения,
Глава 5
132
а также от плотности воздуха. Для отдельного эксперимента [129] можно счи
тать, что
^сопр = Я *-),
η = 1, 2, . . . .
(5.26)
При нормальном атмосферном давлении ошибка измерений имеет порядок
10 " 3g, при разрежении воздуха до 1 Па влияние уменьшается до 10 “4g. В вакуу
ме при давлении ^ 10 " 3 Па движение газа будет свободно-молекулярным и моле
кулы газа будут взаимодействовать с падающим телом как отдельные частицы.
В этом случае сила сопротивления будет линейной функцией скорости падения.
Приняв в (5.26) л = 1 , получим уравнение движения (5.1) в виде
mz + kz = mg,
(5.27)
где к — коэффициент трения. При zo = io = 0 путь падающего тела определяется
после двойного интегрирования выражением
z=I
—= (1
(5.28а)
где к = к/т . Разложив в ряд Тейлора, получим
+ ■"
·§'2( ' - 1*, + ■·■)'
(5.286)
Если решить (5.286) относительно /, то временная задержка, вызванная торможе
нием остаточного газа, пропорциональным скорости, при заданном пути выра
зится поправочным членом:
t=
♦ т * g‘
(5.29)
Чтобы уменьшить влияние газовой среды на результаты измерений до уровня
10"8 — 10"9g, применяют различные методы. В глубоком вакууме (10"5 Па)
влияние торможения газа уменьшается до 10~9#. Однако столь низкую величину
давления можно достигнуть лишь при значительных затратах, кроме того, аппа
ратура при этом подвергается сильным напряжениям. При давлении 10 " 3 —
10"4 Па торможение можно моделировать и учитывать его влияние поправкой,
зависящей от давления; в этом случае коэффициент трения определяют по пара
метрам измерительной системы либо получают экспериментально. В зависимос
ти от остаточного давления р величины поправок лежат в интервале 100—
1000мкм с " 2П а _1. Влияние торможения существенно уменьшается, если проб
ная масса помещена в вакуумированную камеру, устраняющую торможение, дви
жение которой синхронизировано с движением падающего тела с помощью сле
дящей системы. Уравнение движения падающего тела, защищенного таким обра
зом, имеет вид
z + k(z - гкамерЬ1) = g.
(5.30)
Поскольку движение камеры надежно контролируется, второй член в (5.30) очень
мал, а скорость падения пробной массы относительно молекул газа в камере
Абсолютные измерения силы тяжести
133
практически равна нулю. По этой причине торможение остаточной среды удается
учесть с достаточной точностью при давлении газа в 10 ~3 — 10"4 Па.
При симметричном движении (разд. 5.1.2) уравнение движения вверх (5.6)
преобразуется в соответствии с (5.27). После интегрирования и разложения в ряд
Тейлора получим, что время подъема ta от начального положения (zo = 0) до вер
шины траектории Za(z = 0) равно
Сравнение этого выражения с формулой (5.29) показывает, что влияние торможе
ния среды, пропорциональное скорости падения, исключается, если измерять ин
тервал времени между прохождениями одного и того же положения. Это спра
ведливо, если считать, что величина к одинакова при подъеме и падении. Поэто
му при симметричной схеме достаточно разрежение воздуха до 10 _1 — 10" 2 Па,
что вполне могут обеспечить сравнительно простые вакуумные насосы.
Величина аэростатической выталкивающей силы пропорциональна плотности среды
и при давлении 10-1 Па доходит до 10- 6 кг м -2 . Если плотность падающего тела равна
3 х 103кг*м_3, то ускорение, вызванное аэростатической силой, составляет 0,3 х 10"9g,
и, следовательно, им можно пренебречь.
Вертикальные смещения, вызванные микросейсмами, воздействуют на опор
ный отражатель баллистического гравиметра (разд. 5.1.4) и не влияют на падаю
щее тело. Микросейсмы имеют широкий спектр, сильно меняющийся в зависи
мости от места и времени. Природные микросейсмы вызываются, в частности,
волнением моря; их периоды 1—10 с и амплитуды 0,1—Юмкм. Техногенные мик
росейсмы, вызываемые промышленными объектами и транспортом, сильно ме
няются в зависимости от места с периодами 0,01—0,5 с и амплитудами
0,1—1 мкм.
Вертикальное смещение из-за микросейсм можно представить суперпозицией
периодических функций
Z = Z M COS ( ω Μί -
φ Μ) ,
(5.32)
где ζ м — амплитуда, ojм = 2π /Γ м — круговая частота (Тм — период), м — фаза
сейсмического колебания. Соответствующее максимальное ускорение будет
(5.33)
Например,
для
Тм = 5 с и ζΜ = 1 мкм максимальное ускорение равно
1,5 мкм·с-2 . Высокочастотные возмущения вызывают еще ббльшие ускорения; так, для
Тм = 0,2 с и ζΜ = 0,1 мкм максимальное ускорение равно 99 мкм-с “ 2. Учитывая соотно
шения между частотой и фазой микросейсм и длительностью падения, иногда можно су
щественно уменьшить влияние этих возмущающих воздействий. Поскольку фаза φΜ не
коррелирована с началом измерений, ее влияние на результаты повторных экспериментов
будет случайным. Большие ошибки могут возникнуть, если длительность падения кратна
периоду микросейсм. Для конкретного спектра возмущений можно сделать детальные мо
дельные расчеты [129]. Особенно критичны движения импульсного характера, поскольку
они в полной мере влияют на результат измерений. Были обнаружены микросейсмические
влияния порядка 1—10мкм*с"2 при повторных измерениях, когда аппаратура не была
134
Глава 5
надлежащим образом защищена. Если требуется точность по меньшей мере 0,1 мкм*с 2,
влияние микросейсм необходимо уменьшить на 1—2 порядка.
При продолжительности серии измерений с большим числом пусков, во много
раз превосходящей период микросейсм, возмущения можно сильно уменьшить,
применив рандомизацию. Например, при 100—1000 пусках и случайном характере
микросейсм можно ослабить их влияние в 10—20 раз. Слишком большое число
пусков существенно не улучшит положение из-за временных затрат и системати
ческих влияний.
Если микросейсмы регистрировать вертикальным сейсмометром, в результа
ты измерений можно ввести соответствующие поправки. Более эффективна ком
пенсация с помощью обратной связи и специальной системы управления. Нако
нец, опорный уголковый отражатель можно защитить от микросейсм, применяя
длиннопериодную колебательную систему, с периодом колебаний Го, много
большим периода микросейсм Гм (например, Го = 20 с), которую можно считать
псевдоинерциальной системой. Как следует из формулы (6.19) для периода коле
баний пружинного маятника, можно использовать инертную массу вертикального
сейсмометра или длинную пружину. Чем менее эффективны компенсация или ви
брозащита, тем большее число экспериментов необходимо для уменьшения влия
ния микросейсм; по экономическим соображениям следует повысить автоматиза
цию измерительной системы.
S.1.6.
Источники ошибок и точность измерений
На результаты баллистических измерений оказывает влияние множество источников
случайных и систематических ошибок. Эти влияния зависят от конструкции аппара
туры, методики измерений и обработки, а также от местоположения пункта.
К случайным относятся ошибки из-за ограниченного разрешения интерферен
ционного сигнала, ошибки привязки этого сигнала к временным импульсам
(разд. 5.1.4), а также влияние микросейсм (разд. 5.1.5). Ошибки первого типа
уменьшают, применяя метод многих станций. Влияние микросейсм ослабляют,
выполняя повторные наблюдения. Ударные воздействия в момент начала паде
ния пробного тела можно ослабить лишь частично. Их влияние конструктивны
ми мерами можно свести к малой величине, при этом симметричная схема изме
рений предъявляет к ним более жесткие требования. Ошибка уменьшится, если
начинать измерения спустя некоторое малое время после начала движения проб
ной массы.
Из повторных наблюдений с современной аппаратурой получены следующие
среднеквадратические ошибки измерений:
— для единичного измерения ± 0,5—З м к м -с '2 и более; в приборах с хорошей
виброзащитой точность выше;
— для серии от 10 до 100 и более наблюдений: ±0,05—0,3 мкм-с ~2; если вибро
защита слабая или совсем отсутствует, требуется большее число измерений;
— для последовательности из 10—30 серий, охватывающих от 1 до 3 сут:
± 0,02—0,1 мкм ·с “ 2.
Рисунок 5.6 иллюстрирует дисперсию в серии измерений, в значительной мере
обусловленную микросейсмами.
Абсолютные измерения силы тяжести
135
мкм-с
12.4.1986 слабый ветер
1987 пусков
± 0,84 м км'С~2/пуск
10.4.1986 сильный ветер
2 936 пусков
± 1,90 мкм с~^/пуск
Рис. 5.6.
Разброс измерений силы тяжести (несимметричная схема), вызванный микросейсмами, при
разных внешних условиях, пункт 101, Институт геодезии Ганноверского университета.
Систематические ошибки следует анализировать, принимая во внимание кон
струкцию прибора и измерительный метод. Их источниками могут быть этало
ны, изменения оптического пути, электронная система измерения времени, негра
витационные воздействия.
Эталон длины задается длиной волны лазерного излучения. Стабильность ча
стоты излучения необходимо контролировать путем калибровки и учитывать по
правкой, если это возможно, замеченный уход частоты. Остаточная ошибка мо
жет быть уменьшена до порядка 10 нм-с-2 . Временной эталон задается стандар
том частоты: при хорошем контроле его стабильности остаточная ошибка
<5 нм*с“ 2.
На изменения длины оптического пути влияет множество возмущающих фак
торов. Особо опасны отклонения лазерного пучка от вертикали (наклон), посколь
ку они искажают измеряемое расстояние и вносят ошибку в определяемую вели
чину силы тяжести, равную
&gH = g( 1 - cos ύ) = g ^
,
(5.34)
где ύ — угол отклонения лазерного луча от вертикали. Автоколлимация луча с
помощью искусственного горизонта (например, ртутного горизонта) позволяет
уменьшить отклонение до 10“4—10“ 5 рад. Остаточная ошибка будет в пределах
5—50нм-с“ 2. Иногда в момент начала падения возникает вращение пробного те
ла. Если его оптический центр и центр масс не совпадают, длина пути светового
пучка меняется. Этот эффект эквивалентен возмущающему ускорению, вносяще
му ошибку
*8» = «ίρ*
(5-35)
где ωΒρ — угловая скорость, d — расстояние между оптическим центром и цент
ром масс. Особая конструкция, оптическая юстировка и калибровка позволяют
добиться, чтобы величина d была менее 0,1мм, а ωΒρ — в пределах
0,01рад*с-1 . К другим источникам ошибок, влияющим на оптический путь, от
носятся поперечные движения пробной массы после начала ее падения и дефор
136
Глава 5
мации отражателя, приводящие к нарушению параллельности отраженного и па
дающего лучей.
И наконец, конечность скорости света с приводит к тому, что измерительное
положение ζ достигается с временнбй задержкой
« * := - = # - t2.
с
2с
(5.36)
Подставляя в (5.3) измеренное время (/ - 6tc) и дважды дифференцируя, получаем
z = g - 1 Zo - з ^ t + 4 4 t2.
с
с
2с
(5.37а)
Таким образом при малых to и t в результат измерения нужно вводить поправку
6gc = - 3 ^ t .
С
(5.376)
При длительности падения 0,1с получим, что dgc = -0 ,1 м к м -с~ 2. И наоборот,
согласно (5.36), поправку можно ввести в результат измерения времени.
Ошибки электронной системы измерения времени происходят из-за временных
задержек, вызванных в цепи фотодетектора изменением частоты интерференцион
ных полос. Возникающие фазовые сдвиги постоянны или линейно зависят
от частоты; их влияние эквивалентно ошибкам в начальном положении и началь
ной скорости падения пробного тела. Они не сказываются на ускорении свобод
ного падения. Электронная система измерения времени может быть проверена
синусоидальным сигналом постоянной частоты, при этом измеренное ускорение
должно быть равным нулю.
Негравитационные воздействия вызываются магнитным и электростатиче
ским полями. Возмущающие магнитные силы возникают, когда ферромагнетик
движется в неоднородном магнитном поле Земли. Кроме того, в электропрово
дящем материале индуцируются электрические токи, порождающие магнитное
поле, что создает дополнительные возмущения. Магнитные эффекты можно све
сти к минимуму, применяя немагнитные материалы. Из-за остаточного трения
в окружающей среде на падающем теле может накопиться электростатический
заряд; его можно существенно уменьшить, применив, например, электропроводя
щее покрытие.
Если использовать описанные выше стандартные меры, влияние остаточных
эффектов газовой среды будет менее 10 нм-с-2 , иногда вводят эмпирические по
правки за давление (разд. 5.1.5).
И наконец, необходимо отметить гравитационный эффект масс самого прибо
ра, которые расположены несимметрично относительно вакуумной камеры. Вли
яние достигает нескольких нм*с“ 2; если возможно, его учитывают поправкой.
В заключение можно сказать следующее. В современной аппаратуре при
обычных условиях случайная часть ошибки может быть сведена при большом
числе измерений до уровня ±50нм*с~2. Остаточные систематические ошибки в
большинстве случаев имеют порядок 1 0 н м с '2. Если сложить квадраты система
тических ошибок, из-за их независимости результирующая систематическая
часть будет близка к случайной ошибке. Полную ошибку абсолютных измерений
Абсолютные измерения силы тяжести
137
силы тяжести баллистическим методом обычно оценивают величиной
±100нм*с“ 2. Стационарные баллистические приборы, в которых применяют
симметричную схему измерений, дают несколько большую точность.
В рамках бюджета ошибок баллистического метода нами не рассмотрены ошибки,
возникающие при редуцировании абсолютного значения силы тяжести (отнесенного к
определенной эффективной высоте) на уровень основания прибора, при учете приливных
влияний, атмосферного давления и притяжения грунтовых вод (разд. 9.2.3).
Независимый контроль точности измерений осуществляется сравнением ре
зультатов, полученных на одном и том же пункте разными приборами. Для ис
ключения влияния возможных временных вариаций силы тяжести измерения с
разными приборами должны быть одновременными. Поскольку эти одновремен
ные измерения не выполняются на одном и том же пункте и, кроме того, у раз
ных приборов различны эффективные высоты, результаты необходимо испра
вить за различия в плановом положении и по высоте; ошибки связей, выполняе
мых относительными гравиметрами, входят в общую ошибку сравнения
(разд. 6.6.4).
Начиная с 1976 г. в Международном бюро мер и весов (МБМВ, Севр, Франция) срав
нивают различные абсолютные гравиметры [85, 88]. Результаты сравнений даны в
табл. 5.1. Средние квадратические ошибки отдельных определений, которые приведены в
табл. 5.1, оцениваются наблюдателями величиной ±0,05—0,1 мкм с 2 (для прибора Ν1Μ
несколько больше). Однако между различными определениями обнаруживаются расхожде
ния до 0 ,4 мкм-с"2, что свидетельствует о невыявленных систематических ошибках. Срав
нения приращений силы тяжести, измеренных одним и тем же абсолютным гравиметром,
с результатами по относительным гравиметрам усиливают подозрения, что отчасти эти
эффекты связаны с каждым конкретным прибором и в разности исключаются
(разд. 5.2.3).
5.2.
Баллистические эксперименты и результаты
5.2.1.
Лабораторные эксперименты 1950— 1970 гг.
С 1950 по 1970 г. было выполнено более десяти лабораторных баллистических
экспериментов. Вначале эти абсолютные определения служили целям метрологии
(разд. 4.1.1), но вскоре стали использоваться для контроля мировой гравиметри
ческой сети (разд. 9.1.1). В табл. 5.2 содержатся некоторые технические характе
ристики, а также информация о точности этих экспериментов. Основы методов
даны в разд. 5.1.
Часть экспериментов основывалась на фотографировании падающей линейки через за
данные интервалы времени [742] или на освещении падающего жезла вспышками фиксиро
ванной частоты. В качестве примера на рис. 5.7 показан принцип измерений, описанный
в работе [681]. Падающая линейка (градуировка через 1 мм) освещалась вспышками (дли
тельность 0,3 мкс, частота 100 Гц). С помощью оптической системы изображения шкалы
линейки и неподвижной отсчетной шкалы проектировались на фотопленку, закрепленную
на вращающемся барабане. Измерялись расстояния между изображениями отсчетного
штриха и освещенным штрихом шкалы. Моменты световых вспышек были известны, и
138
Глава 5
Т аблица 5.1. А бсол ю тны е измерения в М БМВ (Севр [698])
Прибор (разд. 5.2.3)
Эпоха
IMGC
Май 1976
И ю нь 1976
Январь 1977
М арт 1977
Апрель 1982
И ю нь 1985
1976
Сентябрь 1977
Октябрь 1981
Н оябрь 1991
И ю нь 1985
Н оябрь 1981
И ю нь 1985
Апрель 1980
И ю нь 1985
МБМВ (стац.)
ГАБЛ
J1LA
NIM
МБМВ (Jaeger)
IGPP
JIL A G -3/IfE
М арт
И ю нь
И ю нь
И юнь
Сила тяжести в Примечания
МБМВ (Севр),
пункт А, мкм · с ~2
9 809 250
+ 9,77
9,87
9,81
9,91
9,85
9,95
9,90
9,94
9,98
9,96
10,02
9,78
9,99
10,04
10,16
1982
1985
1985
1986
9,97
9,76
10,13
9,97
Среднее (л = 19)
9,93
С имметричное движ ение
С имметричное движение
Н есимм етричное движ ение
Н есимм етричное движение
Н есимм етричное движ ение без
виброзащ иты
Симметричное движение
Н есимм етричное движ ение
Н есимм етричное движ ение
+ 0,22 мкм · с 2 (поправка за
коллимацию)
IMGC — Институт метрологии им. Дж. Колоннетти (Турин).
МБМВ — Международное бюро мер и весов (Севр), стад. — стационарный, Jaeger — транспортабельный прибор фирмы
«Jaeger», Отдел аэронавтики, Леваллуа-Перре.
ГАБЛ — Гравиметр абсолютный баллистический лазерный Института автоматики и электрометрии. Сибирское отделение
АН СССР (Новосибирск).
JILA — Объединенный институт астрофизических исследований, Национальное бюро стандартов и Университет Колорадо
(Боулдер).
NIM — Национальный институт метрологии (Пекин).
IGPP — Институт геофизики и планетарной физики, Скриппсовский океанологический институт, Калифорнийский универси
тет (Сан-Диего).
JILAG -3/ ΙΓΕ — Гравиметр JILA № 3, Институт геодезии Ганноверского университета.
потому этих расстояний достаточно для вычислений по формуле (5.3). Поскольку число
измерений каждый раз было более трех, то возникала необходимость в уравнивании. В
таких экспериментах сильное влияние оказывали ошибки определения пройденного пути.
Кроме того, возникали ошибки из-за наклонов и вращения линейки при падении.
Результаты первых экспериментов сильно искажались влияниями воздушной среды.
Метод падения пробного тела внутри падающей камеры (Агалецкий и др. [1], [678]), а
также предложенный Воле [741] и реализованный Куком [130] метод симметричного дви
жения пробного тела впервые наметили пути (помимо глубокого вакуумирования) умень
шения барометрического влияния. Особенно успешным был эксперимент Кука с симмет
ричным движением; его принцип показан на рис. 5.8. В качестве пробной массы использо
вался стеклянный шарик. После срабатывания катапульты, двигаясь строго вертикально,
он пролетал сквозь отверстия в двух стеклянных блоках. Измерительные плоскости зада-
139
Абсолютные измерения силы тяжести
Таблица 5.2. Технические данны е и точность абсолю тны х измерений м етод ом св обод н ого падения,
лабораторны е эксперименты 1950 — 1970 гг.
Организация0
Местонахождение
Эпоха
Публикация
Метод
Падающее
тело (длина),
высота падения
Измерение
пути и
времени
Давление, Па
Ошибка результата,
мкм · с "2
Уклонение от при
нятого значения2),
мкм · с "2
Организация0
Местонахождение
Эпоха
Публикация
Метод
МБМВ
Севр
1951
[741]
ВНИИМ
Ленинград
1954 — 1959
[1]
Несимметричное движение, метод многих станций
Жезл с фотоэм.
Инвар, /бронз.
Латунный/кварц.
линейки
(0,15 м), совмещен жезл (0,15 м)
с фотоэм.
(1,2/1,3 м)
ное падение
Фотограф, в
Фотограф, в
Фотограф, в
заданные моменты заданные моменты заданные моменты
проекции щели
освещаемой линейки проекции щели
и отсчетного индекса камеры на жезл
на жезл
Около 102
105
102
Неск. единиц
±16
±13
+ 47
+ 61
DAMW
РТВ
Брауншвейг
Берлин
1969
1969/70
[215]
[143]
Несимметричное движение
метод многих станций
метод трех станций
-100
NRLM
Какиока
1965/67
[632]
МБМВ
Севр
1957/58
[680]
Платиноиридиев.
линейка
(1 м)
Фотограф, в
заданные моменты
освещаемой линейки
и отсчетного индекса
10 " '
±10
+
20
NSL
Сидней
1970
[36]
Симметричное движе
ние, метод
двух станций
Уголковый отра
жатель 0,2 м
Падающее тело
(длина), высо
та падения
Инвар/кварц.
жезлы (1 м)
Кварц, жезл
с фотоэм.
(2 м)
Измерение пути
и времени
Фотограф, в
заданные мо
менты осве
щаемой линейки
Фотограф, в
заданные мо
менты проек
ции щели на жезле
Давление, Па
Ошибка результата,
мкм · с "2
Уклонение от
принятого значения,
мкм · с "2
10- 1
< 1 0 '2
<io-J
<5 х 10 2
±10
±20
±5
±2
-13
PPL
Принстон
+3
0
МБМВ
Севр
NCR
Оттава
1958/59
[542]
1962
[186]
Несимметричное движение,
метод трех станций
Стальной жезл (2 м) Зеркальнос 3 стекл. шкалами линзовый
отражатель, 5 см
+
10
Латунный цилиндр
(0,1 м)
с прозр. маркой,
1м
Время прохож
дения между
светов. барье
рами, путь — по
эталону длины
NBS
Гайтерсбург,
Мэриленд
1965
1967 — 1983
[677]
[584, 585]
Симметричное дви Несимм. движение,
жение, метод двух метод трех станций
станций
Триппель-призма
Кварц, трубы (1 м) с
0,4 м
3 щелями в баллист,
камере
Интерф. измерения
расст. (белый свет)
с эталоном длины
NPL
Теддингтон
1965
[130]
Симм. движение,
метод двух станций
Стеклянный шар,
1м
Глава 5
140
Продолжение табл. 5.2.
Фотограф, в
заданные мо
менты освещ.
шкал с индексом
Интерф. измер.
расст.
(белый свет);
фотограф, интерф.
полос с метками
времени
1 0 "2
< 10"3
±15
±7
-5
+3
Интерф. измер.
расстояний
(белый свет)
с эталоном длины
1СГ5
Неск. ±0,1—0,01
Время прохождения
между световыми
барьерами,
расстояние между
щелями с инварным
эталоном длины
Время прохождения
между световыми
барьерами
интерф. измерения
расстояний
10 - 1
< 10"1
±5
±1,3
+
8
+1
υ — Международное бюро мер и весов; ВНИИМ — Всесоюзный научно-исследовательский институт метрологии;
NCR — Национальный исследовательский совет; PPL — Пальмерская физическая лаборатория; NBS — Националь
ное бюро стандартов; NPL — Национальная физическая лаборатория; NRLM — Национальная исследовательская
лаборатория метрологии (Япония); РТВ — Физико-техническая федеральная организация (ФРГ); DAMW — Государ
ственное ведомство по измерениям и материаловедению (ГДР); NSL — Национальная лаборатория стандартов.
2) Поправка за переход к Потсдамской системе - 140 мкм ■с “2 [604].
вались щелями, расположенными друг напротив друга в боковых стенках с нанесенным
покрытием. Когда шарик пересекал измерительную плоскость, он действовал как линза
и проектировал изображение одной освещенной щели на другую. Образующийся при про
хождении центра шарика импульс (световой* максимум), преобразованный фотоумножите
лем в электрический, управлял работой электронного счетчика времени (точность
±0,1 мкс). Горизонтальные поверхности стеклянных блоков оптически плоские и выполня
ют роль зеркал интерферометра, которым и измеряли расстояние между блоками. Меняя
блоки местами, можно избежать измерений положения плоскости щелей. На результат
каждого единичного измерения наиболее сильно влияли микросейсмы. Осреднением ре
зультатов (100 измерений) можно было уменьшить ошибку до 2 м к м с -2 и менее.
Весьма эффективным оказывалось одновременное измерение расстояния и времени
[186], основанное на использовании интерферометра [36]; ныне используется исключитель
но этот метод (разд. 5.2.2 и 5.2.4).
Лабораторные эксперименты, начатые в 1950 г., продемонстрировали возмож
ность успешного применения баллистического метода при абсолютных определе
ниях силы тяжести. В дальнейших исследованиях совершенствовались теория ме-
Лампа
Счетчик
ш н и
.
Счетчик
IsE b-O
Вакуумиро ванная
труба
Лампавспышка
Рис. 5 .7 . (левый). И змерения при несимметричном движении [680].
Рис. 5 .8 . (правый). И змерения при симм етричном движении [130].
Вакуумная
камера
Абсолютные измерения силы тяжести
141
тода и измерительная аппаратура. Ошибки первых экспериментов составили око
ло 10мкм-с~2. В недавних работах систематические ошибки удавалось умень
шить настолько, что ошибка среднего из 30—100 и более измерений была сущест
венно меньше ошибки единичного измерения (±10—5 0 м к м с~ 2). Ошибка
окончательного результата составляла несколько м км -с"2 и складывалась в
основном за счет остаточных систематических эффектов. На основе опыта, на
копленного в лабораторных экспериментах, в начале 1970-х гг. стали создавать
транспортабельные абсолютные гравиметры, точность которых порядка
0,1 м к м -с '2 (разд. 5.2.3 и 5.2.4).
5.2.2.
Стационарные абсолютные гравиметрические станции
В начале 1960-х гг., продолжая эксперименты Воле и Тулина (разд. 5.2.1), А. Сакума приступил к разработке стационарного баллистического прибора с симмет
ричным движением пробной массы. Работа выполнялась в Международном бю
ро мер и весов (МБМВ), Севр, и основывалась на одновременном измерении вре
мени и пройденного пути методом интерференции [585]. Постоянное совершен
ствование и использование преимуществ метода позволили проводить с этим
прибором непрерывные измерения силы тяжести на постоянной станции МБМВ
[588, 590].
Важнейшей частью прибора является интерферометр Майкельсона, работающий в ва
кууме около 10"5 Па. Уголковый отражатель, выполняющий роль одного из зеркал ин
терферометра, подбрасывается вверх. Вдоль траектории на расстоянии 0,4 м зафиксирова
ны два горизонтальных уровня (станции), задающие плоскости сопряжения двух зеркал
из плавленого кварца, помещенных в горизонтальное плечо интерферометра. Эти зеркала
образуют концевой эталон длины в 0,8 м. Интерференционная картина в белом свете, фор
мирующаяся в моменты прохождения отражателем обоих уровней вначале при подъеме,
а затем при падении (в общей сложности 4 раза), детектируется фотоумножителем. По
скольку обычный источник белого света не обеспечивает достаточно высокое отношение
сигнал/шум в интерференционной картине, применяли импульсную ксеноновую лампу.
Она включалась одновременно с прохождением отражателем каждой станции. Определе
ние длины концевого эталона осуществлялось сравнением с длиной волны гелий-неоново
го лазера He-Ne/Jj27 (стабилизированного по йодной ячейке поглощения) в том же самом
интерферометре для измерения силы тяжести. Пробное тело (его высота 10 см, масса
430 г) состояло из двух уголковых отражателей. Отражатели ориентированы строго про
тивоположно и скреплены так, что их вершины совпадают, при этом оптический центр
каждого отражателя совмещен с центром масс пробного тела с точностью ±10мкм. Ка
тапульта, установленная на вибропоглощающем основании, подбрасывает пробное тело,
причем скорость его вращения <0,01 рад с " 1. Чтобы уменьшить влияние колебаний проб
ного тела, возникающих в момент старта, наблюдению на нижней станции предшествует
его подъем в течение 56 мс. Колебания в результате становятся <0,1 нм. Особое внимание
было уделено уменьшению вибрационных эффектов до нескольких нанометров. Горизон
тальная вакуумная камера интерферометра Майкельсона подвешена на специальном уста
новочном столе на металлических нитях, демпфирующих горизонтальные ускорения. Для
вибрационного контроля в вертикальной плоскости использовалась электронная система
обратной связи между вертикальным акселерометром и пьезоэлектрическим компенсато
ром. Второй пьезоэлемент, управляемый длиннопериодным вертикальным сейсмометром,
компенсировал влияние долгопериодических микросейсм. Третий пьезоэлемент использо
142
Глава 5
вался для компенсации горизонтальных смещений установочного стола из-за нестабильно
го основания. Опорный уголковый отражатель был закреплен на рычаге сейсмометра с
большим (около 30 с) периодом колебаний, при этом измеряли остаточные вибрации ин
терферометра относительно этого отражателя. Для учета земных приливов применяли
модифицированный пружинный гравиметр (Уэстерна), в котором нулевой метод измере
ний осуществлялся с помощью электростатической системы обратной связи (чувствитель
ность 2 н м -с-2, дрейф < 10 н м с -2/сут). Абсолютный гравиметр позволил контролиро
вать долгопериодический дрейф и чувствительность пружинного гравиметра.
Точность измерений с абсолютным гравиметром МБМВ по внутренней сходи
мости удалось повысить с ± 0 ,1 м к м с -2 (1967г.) до ±0,01 м км -с"2 (с 1975г.).
Наблюдения, проводившиеся с 1967 г., обнаружили необъясненное пока увеличе
ние силы тяжести примерно на 0 ,4 м к м с “ 2 за 1969—1972 гг. Начиная с 1976 г.
сила тяжести испытывает лишь случайные изменения в пределах ± 0,1 м км -с"2.
Для дальнейшего изучения подобных вариаций устанавливают гравиметрические
пункты-спутники (например, в Орлеане, на расстоянии в 130 км). Через заданные
интервалы времени будут измеряться приращения силы тяжести между фунда
ментальной станцией и пунктами-спутниками. С 1983 г. на этом пункте стали вы
полнять наблюдения с транспортабельным прибором, созданным Jaeger
(разд. 5.2.4).
В 1975 г. в Международной широтной обсерватории в Мидзусава, Япония, при со
действии МБМВ [520] начались работы по созданию еще одной постоянной гравиметриче
ской станции. Абсолютный гравиметр аналогичен прибору МБМВ. Первые наблюдения
(1981г.) показали, что точность единичного измерения составила ±0,3—0,5 мкм с -2, а
точность среднего из 10—20 измерений была ±0,1—0,2мкм-с-2.
Целью постоянных станций является слежение за долговременными изменени
ями силы тяжести глобального характера; кроме того, они служат контрольнымы пунктами для различных абсолютных гравиметров (разд. 9.1.3).
5.2.3.
Транспортабельные баллистические гравиметры
Начиная с 1970 г. были разработаны, исследованы и успешно применялись десять
транспортабельных баллистических гравиметров с несимметричным и симмет
ричным движением пробного тела. Таблица 5.3 содержит их технические характе
ристики. Отметим, что большинство приборов непрерывно совершенствовалось
по мере развития измерительной техники. Эти приборы применяют для создания
фундаментальных гравиметрических сетей (разд. 9.2) и для изучения временных
вариаций силы тяжести (разд. 10.1.1).
Во всех конструкциях предусматривается одновременное измерение времени и
расстояния с помощью интерферометра Майкельсона с гелий-неоновым лазером.
Приборам с несимметричным движением пробной массы свойственны менее
сложная механическая часть и быстрое получение данных. Приборы с симмет
ричным движением (разд. 5.2.4) отличаются симметрией процесса измерений
(равная скорость при прохождении одних и тех же положений), поэтому они ме
нее чувствительны к влиянию остаточного газа и некоторым эффектам в элек-
Абсолютные измерения силы тяжести
143
Таблица 5.3. Технические данны е и точность транспортабельны х баллистических гравиметров
(по публикациям)
О рганизация0
М естополож ение
Эпоха
Публикация
М етод (вы сота падения)
Давление, Па
Микросейсмы
Университет Весли
М идлтаун, Коннектикут,
СШ А 1968/69
[268]
Н есимм етричное движ е
ние (1 м ), м етод трех
станций
< 1 (Г 4
Виброизоляция У О 61 с
сей см ом етром
Длительность:
— единичного измерения i 30 с
— серии (число единич.
изм ер.)2)
0,5 ч (50)
— работы на пункте
1 нед
(число серий)2)
(20 — 30)
Ср. кв. ошибка серии,
мкм ‘ с ~ 2
± 0 ,3
Точность результата0 ,
мкм · с ~ 2
± 0 ,5
Организация
М естополож ение
М икросейсмы
Длительность:
— единичного измерения
— серии (число единич.
и зм ер.)2)
— работы на пункте
(число серий)2)
Ср. кв. ошибка серии,
мкм · с ” 2
Точность результата,
мкм · с " 2
ERI
Токио, Япония
С 1976 г. (эксп.)
[497]
ИАЭ
Н овосибирск, СССР
С 1976 г.
[14]
Н есим м етричное дви
ж ение (1 м ), м етод
трех станций
< 1 0 '3
Виброизоляция УО с
сей см ом етр ом
3 — 4 мин
15 с
1 ч (20)
3 — 4 сут
(5)
0,5 ч (100)
2 — 4 сут
(20 — 25)
± 0 ,0 3
± 0 ,1 5
± 0 ,1
± 0 ,1
ILO
JIL A 5’
Боулдер, К олорадо, США М идзусава, Япония
Эпоха
С 1981 г.
Публикация
[189]
М етод (вы сота падения) Несимм. движение (0,2м),
м етод многих станций
Давление, Па
1MGC
Турин, Италия
С 1976 г.
[6]
Симметричное движ ение
(0,5 м ), м етод двух
станций/м ногих станций
ю - 1
Виброизоляция УО с
сейсм ом . + пьезоэлектр.
демпфир.
С 1982 г.
[269]
Несимм. движение (0,3м),
метод многих станций
10 “ 3— 10 "4 + баллистич. < 2 х 1 0 ‘ 5
камера
УО изолир. с суперП ьезоэлектр. изол +
пружиной
поправка по показаниям
сейсм ом етра
2 — 10 с
Неск. минут
—
1GPP
С ан-Д иего, К алиф ор
ния, СШ А
С 1984 г.
[797]
Несимм. движение
(0,2м), метод многих
станций
1 0 " 3 + баллистич.
камера
Виброизоляция УО с
сейсм. + поправка
10 с
5 — 20 мин (50 — 150)
< 1 сут
(5 — 20)
1 нед
(30 — 70)
± 0 ,1 — 0,2
± 0 ,5 — 1 (1 измер.)
± 0 ,1
± 0 ,1
± 0 ,1 5
± 0 ,1
AFG L
База ВВС, Ханском,
М ассачусетс, СШ А
1 9 7 8 — 1981 гг.
[268]
ΝΙΜ
Пекин, Китай
Jaeger S .A .4>
Л еваллуа-П ерре,
Франция
С 1980 г.
[686]
С 1979 г. (эксп.)
[193]
20 мин (100)
1 сут (10)
144
Глава 5
Продолжение табл. 5.3.
Н есимм етричное движ е Н есимм етричное движ е
ние (0,3 м ), м етод
ние (0,6 м ), м етод
многих станций
многих станций
10’ 3
10 ~ 4 + баллист, камера
Виброизоляция УО
Запуск с управлением
долгопериодной
сейсм ом етром
пружиной
3 — 5 мин
3 мин
0,5 ч (30 — 50)
1 нед
2 — 3 сут
Н есимм етричное движ е
ние (0,4 м ), м етод
многих станций
(20)
(10 — 20)
(10 — 20)
± 0 ,4 (1 эксп.)
± 0 ,1 5
± 0 ,1 5
± 0 ,7
± 0 ,1 5
± 0,1
С имметричное движ е
ние (0,4 м), м етод
многих станций
<1СГ3
< 1 0 '2
Без виброизоляции
(первая модель)
Антивибр. подвес с
помощ ью пьезоэлектр.
системы
< 5 мин
0,5 ч (10)
2 сут (10)
1 — 2 мин
1 ч (20)
1 сут
± 0 ,0 4
± 0,1
^IMGC — И нсти тут метрологии им. Д ж . К олоннетти, И А Э — И нститут автоматики и электром ет
рии Сибирского отделения Академии наук СССР, ERI — Исследовательский институт землетрясений,
AFGL — Геофизическая лаборатория ВВС, Н И М — Национальный институт м етрологии, J1LA —
Объединенный институт астрофизических исследований, Н ациональное б ю р о стандартов, Универси
тет К олорадо, 1LO — М еж дународная ш иротная обсерватория; IGPP — И нсти тут геофизики и плане
тарной физики, Калифорнийский университет.
2) Ч исло единичных измерений в серии и число серий на пункте меняется в зависимости от прибора
и уровня микросейсм.
3) Данны е содерж ат обы чно случайные ошибки, полученные по повторны м измерениям, и рассчитан
ные систематические ошибки.
4) П риборы типа G A 60 в настоящ ее время (1987 г.) используются в И нституте географической съемки
(Ц укуба, Япония) и М БМ В (Севр).
5) В 1985 — 1986 гг. в JILA были созданы шесть новых усовершенствованных приборов, используе
мых сейчас в разных организациях.
6) УО — уголковый отражатель.
тронной части прибора, зависящим от частоты (систематические ошибки измере
ния времени).
После приборов 19-го столетия с оборотным маятником первым транспорта
бельным прибором для абсолютных измерений стал баллистический гравиметр,
созданный Фаллером и Хэммондом в Университете Весли совместно с Нацио
нальным бюро стандартов и при поддержке Кембриджской исследовательской
лаборатории ВВС США (AFCRL). В 1968—1969 гг. с ним выполнили измерения
на восьми пунктах Мировой гравиметрической сети [267] (разд. 9.1.1).
Основной частью прибора был лазерный интерферометр для мониторинга свободного
падения уголкового отражателя. При определении пути выполняли интерференционные
измерения для моментов, близких к началу свободного падения, его середине и концу.
Для подсчета числа интерференционных полос между первым и вторым положением, а
также между первым и третьим использовались два счетчика; стандарт частоты позволял
находить соответствующие промежутки времени с ошибкой ±2 нс. Мощность излучения
стабилизированного лазера He-Ne/J^27 обеспечивала для каждой интерференционной поло
сы эмиссию с фотокатода 105 электронов; это позволило добиться разрешающей способ
ности по расстоянию выше чем в 1/100 интерференционной полосы. Аппаратура, вес кото
рой составлял 800 кг, была не очень удобна как при транспортировке, так и в работе.
Случайная ошибка единичного измерения достигала ±1 мкм-с” 2 и более. С учетом оста
Абсолютные измерения силы тяжести
145
точных систематических эффектов (ошибки временной привязки, уклонения от вертикали,
торможение остаточной среды, воздействия электростатического и магнитного характера)
можно считать, что величина силы тяжести, определявшаяся как среднее из 20—30 серий
(примерно по 50 пусков в серии), получалась с ошибкой ±0,5 м к м -с '2. Обоснованность
этой оценки подтверждена сравнениями в Национальной физической лаборатории (НФЛ)
в Теддингтоне (Великобритания) и МБМВ (Севр). Время работы на пункте, включая ошиб
ку и демонтаж аппаратуры, составляло 1—2 нед.
Разработка прибора Хэммонда и Фаллера была продолжена в Геофизических
лабораториях ВВС США. Основные направления разработки состояли в техниче
ском совершенствовании (для уменьшения в 100—200 раз влияния остаточного
газа использовали метод совмещенного падения отражателя и камеры), уменьше
ния размеров вдвое и веса до 700 кг, автоматизации измерений [268].
Для регистрации временных интервалов между измерительными станциями (их число
было велико — 500—700) использовался цифровой счетчик с высоким разрешением
(0,125 нс). Работой счетчика управлял рубидиевый стандарт частоты; результаты измере
ний вводились в мини-компьютер. Обработка выполнялась в реальном масштабе времени
и предусматривала анализ данных (отбраковка, оценка точности, вибрационные влияния)
и введение земноприливных поправок. Конечным результатом было значение силы тяже
сти и ее вертикального градиента. В 1979—1980 гг. прибор использовали более чем на де
сяти пунктах на территории США; за двое суток наблюдений достигалась точность
±0,1м км -с~2. На этом программа Геофизических лабораторий ВВС США по созданию
абсолютного гравиметра была завершена [320].
Баллистический абсолютный гравиметр ГАБЛ с несимметричным движением
пробной массы Института автоматики и электрометрии Сибирского отделе
ния АН СССР начал использоваться как транспортабельный с 1976 г. [14]. Балли
стическая камера прибора изготовлена из немагнитной нержавеющей стали.
Пробная масса (уголковый отражатель) содержит ферритовый элемент. Он ну
жен для того, чтобы удерживать массу в стартовом положении магнитным по
лем, создаваемым электромагнитом. Горизонтальными смещениями сердечника
электромагнита обеспечивается однородное силовое воздействие, и вращательные
движения пробной массы при падении сводятся к минимуму. В конце падения
пробная масса попадает в пружинную ловушку. Электромагнит, управляемый
электромотором, движется по внешней стороне вакуумной камеры и поднимает
пробную массу вместе с кареткой в исходное положение. Включением и выключе
нием электромагнитов, как и движением каретки, управляют позиционно
чувствительные элементы электронного блока управления. Откачка воздуха из
камеры осуществляется расположенной снаружи системой вакуумирования. Из
мерения остаточного давления используются в дальнейшем для вычисления по
правок. После того как излучение лазера He-Ne/J^27 разделится на два пучка, из
мерительный пучок направляется вертикально и сквозь стеклянное окно попадает
снизу в баллистическую камеру. Отраженный от пробной массы пучок взаимо
действует с опорным световым пучком (для защиты от микросейсм опорный от
ражатель подвешен на рычаге сейсмометра с периодом колебаний в 4 с). В плос
кости фотодетектора образуется интерференционная картина, а фотодетектор
преобразует световой сигнал в электрический. После усиления этот сигнал с по
мощью нулевого дискриминатора превращается в последовательность импульсов
146
Глава
Рис.
5
S.9.
Баллистический гравиметр ГАБЛ, Институт автоматики и элек
трометрии СО АН СССР (материал любезно предоставлен проф.
Ю.Д.
Буланже,
Междуведомственный
геофизический
комитет
СССР).
и через делитель частоты (коэффициент деления
счетчик. Спустя
0,08
800)
попадает в электронный
с после начала падения начинаются измерения интервалов
времени между моментами прохождения наперед заданного числа интерференци
онных полос (6,4 х 1os Л/2, 8 х 1os Л/2, 2,56 х 10 6 Л/2, где Л лучения лазера).
длина волны из
Интервалы времени измеряются суммированием числа меток
времени с частотой
100 МГц
от генератора, управляемого частотой
5 МГц
руби
диевого стандарта. Процесс измерений полностью автоматизирован. После уста
новки, калибровки и вакуумирования прибора (примерно за половину суток) при
ступают к серии измерений
20-30
мин).
Перерывы
(80-120
единичных измерений в каждой серии за
между сериями
(10 мин)
используются для обработки
данных и при необходимости для дополнительной калибровки. Необходимое чис
ло серий определяют по дисперсии получаемых результатов, зависящей от фона
вибраций и микросейсм. Осреднением результатов влияние случайных ошибок
можно снизить до ±0,03-0,04 мкм·с ские
ошибки
возникают
из-за
Наиболее существенные систематиче
2•
остаточных
влияний
давления
( ± 0,030,04 мкм·с - 2 ), из-за погрешностей определения длины волны лазерного излуче
ния ( ±0,02 мкм·с - 2 ), из-за оптических эффектов и ошибок измерения времени.
Высота прибора 2 м, вес в рабочем положении 350 кг; при транспортировке весь
комплект оборудования (700 кг) упаковывают в 18 ящиков (рис. 5.9).
Прибор ГАБЛ применяли в различных регионах, в частности для контроля Мировой
гравиметрической сети и выявления долгопериодических вариаций силы тяжести. Повтор
ные наблюдения в Лёдово (близ Москвы) и Сингапуре в
1976-1984 п. (Буланже и др.
[87)) обнаруживают лишь случайные расхождения до ::1::0,l-0,15 мкм·с - 2 • Большой объем
измерений выполнен в 1979 г. в Австралии и Папуа-Новая Гвинея (12), Восточной Европе
(Потсдам [84], Финляндия [13), Польша, Чехословакия, Венгрия, Румыния); планируются
повторные измерения. Сравнение баллистических гравиметров в МБМВ (Севр) подтверди
ло, что точность измерений составляет ::1::0,lмкм·с- 2 , см. табл.5.1 1 ).
I)
В современном приборе ГАБЛ-М (рис.
5.9),
появившемся в середине 1980-х
метод многих (6СЮ) станций, точность измерений
± 0,02 мкм · с -
9. вес прибора 250 кг.
в ЦНИИГ АиК.
-
Прим. ред.
rr., используется
±0,05 мкм· с- 2 (по внутренней сходимости
Близкий по конструкции прибор ГБЛ изготовлен малой серией
Абсолютные измерения силы тяжести
147
Рис. 5.10. Схема баллистического гравиметра ILO М еж дународной ш иротной обсерватории в М идзусава [269].
Институт исследования землетрясений (ERI), Токио, и Международная ши
ротная обсерватория (ILO), Мидзусава [269, 497], разработали баллистические
гравиметры для измерений по несимметричной схеме многих станций. В обоих
приборах пробная масса представляет собой отражатель «кошачий глаз», а в ка
честве источника излучения используется лазер He-Ne/J^27, стабилизированный
по йодной ячейке поглощения. Размеры пробной массы меньше размеров уголко
вого отражателя.
На рис. 5.10 показан принцип работы гравиметра ILO. Интерферометр Майкельсона регистрирует мгновенное положение отражателя «кошачий глаз» (эф
фективный диаметр 2 мм), падающего в камере с высоким вакуумом; длина пути
30 см. Благодаря специальному пусковому механизму с магнитным подвесом по
вороты падающего тела вокруг горизонтальных осей за время падения составля
ют менее 10". Двухпозиционный датчик местоположения отслеживает вращение
с помощью отраженного лазерного пучка. Лавинный фотодиод регистрирует интерференционый сигнал и преобразует его в электрический. Затем сигнал перево
дят из аналоговой формы в цифровую и записывают на кассетном накопителе.
Окончательное значение силы тяжести получают из уравнивания 250 измерений
времени и пройденного пути. Чтобы избежать механических вибраций, интерфе
рометр изолируется от вакуумной камеры. Влияние микросейсм регистрируется
и учитывается с помощью вертикального сейсмометра, имеющего большой пери
од собственных колебаний, а сильные толчки основания гасятся более чем в 10
раз с помощью пьезокерамики.
Прибор применяли для обнаружения временных вариаций силы тяжести в зоне субдукции литосферных плит (десять станций в районе Тохоку, Япония; первые наблюдения
выполнены в 1984 г., повторные планировались через 2—3 года), а также для регистрации
Глава 5
148
влияния движения полюса. При 60—70 пусках (3—10 сут) ошибка результата оценивается
величиной 0,05—0,19мкм-с“ 2 в зависимости от уровня микросейсм. Дальнейшее совер
шенствование прибора идет по пути уменьшения времени измерений и снижения фона ви
браций, работают также над автоматизацией и уменьшением габаритов прибора и его
веса [269].
Баллистический гравиметр для измерений по несимметричной схеме трех
станций, разработанный в Китайском национальном институте метрологии,
Пекин [193], первоначально не имел виброзащиты. Однако при международных
сравнениях (табл. 5.1) его результаты согласуются в пределах 0 ,2 м к м с ~ 2 с дан
ными МБМВ. Прибор применялся при создании фундаментальной гравиметриче
ской сети Китая. Его основные источники ошибок (помимо влияния микро
сейсм) — влияние остаточного газа и погрешности в определении длины волны
излучения лазера. Сейчас разрабатывается новый прибор.
Замечательным результатом непрерывного совершенствования является бал
листический гравиметр с несимметричным движением пробной массы, разрабо
танный Объединенным институтом астрофизических исследований (JILA), На
циональным бюро стандартов и Университетом шт. Колорадо (Боулдер). Этот
прибор создал в 1980 г. Фаллер и его коллеги, с тех пор его разработка не прекра
щается. Прибор создавался для быстрых, экономичных и высокоточных (не
сколько единиц 10"9#) измерений, в частности для геодинамических исследова
ний [188]. Принципиальная схема транспортабельного абсолютного гравиметра
JILA приведена на рис. 5.11 [189, 794, 796]. Важнейшей его частью является ин
терферометр Майкельсона с уголковыми отражателями в опорном и измеритель
ном плечах. Эталон длины задан длиной волны лазера He-Ne/J^27, он же служит
источником света. Высокая точность измерений при малом пути свободного па
дения (0,2 м) достигается благодаря ослаблению влияния остаточной газовой сре
ды и микросейсмических возмущений.
Вакуумная камера
Супер пружийа
--------" Ж
Полупрозрачное
зеркало
Рис. 5.11. Схема баллистического гравиметра JILA, Объединенный институт астрофизических и сследо
ваний, Б оулдер, К олор адо, США [189, 508].
Абсолютные измерения силы тяжести
149
Вакуумная камера
>ото Хамера,I
етектор ^ /устраняющая влияние
*~” 1/ торможения газа
^Сагк^ировый шарик
Светодиод
-Пробная масса
Направляющие рельсы
Рис. 5.12 (левый). П адаю щ ая камера абсол ю тн ого гравиметра JILA [189].
Рис. 5.13 (правый). Принцип суперпружины абсол ю тн ого гравиметра JILA (189].
Для уменьшения влияний остаточного газа использован метод совмещенного падения
отражателя и камеры (рис. 5.12). Падающее пробное тело (аллюминиевый цилиндр высо
той 8,4 см, диаметром 3,2 см, весом 68 г со встроенным отражателем) расположено на
кинематическом подвесе в управляемой сервомеханизмом вакуумированной баллистиче
ской камере. При измерении эта камера падает внутри большой вакуумной камеры. Проб
ное тело содержит сапфировый шарик, который служит коллиматором для оптического
детектора положения. Последний содержит светодиод, установленный на камере, и фото
детектор. В момент старта падающей вакуумной камере сообщается ускорение и она бы
стро смещается вниз на 2 мм. Вслед за этим сапфировый шарик пересекает горизонталь
ный световой пучок и возникает соответствующий сигнал, который через сервоусилитель
и мотор управляет движением камеры таким образом, что она движется синхронно со
свободно падающим отражателем. Итак, отражатель перемещается вместе с оставшимися
в камере молекулами газа, а не сквозь них. Сервосистема используется также для плавно
го торможения пробной массы в конце пути и для возвращения ее в исходное положение.
Благодаря быстрому возврату измерения можно повторять часто — через каждые 2 с.
Прямолинейные направляющие на несущих опорах исключают возможность вращения
подвижной камеры в горизонтальной и вертикальной плоскостях. Эта камера, как элек
тропроводящая емкость, экранирует пробную массу от воздействия электростатических
полей. Магнитные возмущающие эффекты также отсутствуют, поскольку для удержания
пробного тела не используются магнитные подвески.
Для изоляции опорного отражателя от вибраций использована «сверхпружина»
(рис. 5.13), представляющая собой систему с большим периодом (Т = 30—60 с) собствен
ных колебаний [565]. Обычная подвешенная вертикально пружина при Т = 60 с имела бы
длину порядка километра, и потому столь большой период собственных колебаний дости
гается средствами электроники. Точка подвеса главной пружины (длина примерно 30 см,
Т = 1 с), несущей пробную массу, контролируется сервосистемой. Эта система работает
так, что амплитуда колебаний пружины соответствует амплитуде пружины с большим
периодом собственных колебаний, если ее обрезать на 30 см выше пробной массы. Глав
ная пружина и пробная масса поддерживаются кронштейном с двумя несущими пружина
150
Глава 5
ми; кронштейн может смещаться по вертикали. Позиционно-чувствительная система
управляет перемещениями пробной массы. Усиленный выходной сигнал изменяет напря
женность магнитного поля и перемещает рамку, а с ней и верхний конец пружины таким
образом, чтобы выполнялось сформулированное выше условие. Вся система суперпружи
ны весит примерно 15 кг и размещается в цилиндре высотой 1 м. Пробная масса на пру
жине содержит опорный отражатель интерферометра. Благодаря описанной системе ви
броизоляции разброс результатов от пуска к пуску уменьшается в зависимости от уровня
микросейсм в 10—100 раз. Период собственных колебаний и демпфирование системы мож
но регулировать электронными устройствами.
Оптическая система сходна с системами других приборов. Пучок линейнополяризованного лазерного излучения проходит сквозь фокусирующую линзу, диафрагму
и коллиматор и падает на поворотное зеркало; это устройство позволяет настраивать ин
терферометр. С помощью двух неподвижных зеркал, светоделителя и световода свет на
правляется на падающий и опорный отражатели. Отраженные пучки образуют интерфе
ренционную картину, регистрируемую светоприемником — высокоскоростным лавинным
фотодиодом.
Принцип измерений времени показан на рис. 5.5. Фотодиод генерирует моду
лированный по частоте синусоидальный электрический сигнал, порождаемый ин
терференционной картиной. Этот сигнал с помощью частотно-независимого де
тектора перехода аналогового сигнала через нулевой уровень и пересчетного уст
ройства преобразуется в последовательность 50 прямоугольных импульсов. Каж
дый из этих импульсов соответствует отрезку пути в 6000 длин световых волн
(12 000 интерференционных полос или 3,8 мм). С помощью обычной электронной
системы (электронный счетчик времени, управляемый рубидиевым стандартом
частоты) измеряются моменты прихода этих импульсов относительно момента
начала падения, результат заносится в память микрокомпьютера HP 200. Обра
ботка данных (уравнивание) занимает 2 с, и поэтому 100 пусков можно сделать
менее чем за 4 мин. Ошибка линейных измерений остается в пределах 0,001 X,
что соответствует 0,6 нм.
Оценка точности основана на случайном разбросе результатов серии пусков
и на анализе систематических ошибок. В зависимости от уровня микросейсм слу
чайная ошибка единичного измерения составляет ±0,3—З м к м -с '2, а для серии
(50—150 пусков) равна ±0,1—0,2мкм с~ 2. На каждом пункте выполняют 10—20
серий, случайная ошибка окончательного результата составляет ±0,01 —
0 ,0 5 м к м с“ 2. Известные систематические ошибки приведены в табл. 5.4. Здесь
учтено влияние отдачи основания, обнаруженное при работе на неустойчивых
фундаментах и вызванное наклоном базы интерферометра. Реальная точность
±0,1мкм*с“ 2 подтверждается независимыми измерениями.
Из наблюдений гравиметрических земных приливов точность оценивается ошибкой
±0,06 мкм с ~2 (рис. 5.14) [189]. Годичные измерения, выполнявшиеся в JILA (Боулдер),
продемонстрировали высокую долговременную стабильность результатов; среднеквадра
тическое отклонение составило ±0,1 мкм-с ~2. Эффективность прибора была окончатель
но подтверждена при международных сравнениях баллистических гравиметров в МБМВ
(см. табл. 5.1), а также измерениями в 1981 г. на 12 пунктах в США (общее время работы
8 нед, общее расстояние перевозок 20000 км) [795]. Во время работ непрерывно поддержи
вали вакуум. Разгрузка и установка аппаратуры занимали примерно 2 ч. После того как
примерно в течение 1 ч прибор принимал температуру окружающей среды, начинали на-
Абсолютные измерения силы тяжести
151
Т а б ли ц а 5.4. И звестны е источники систематических ош ибок
абсол ю тн ого гравиметра JILA [435]
Источник ошибки
Длина волны лазера
С тандарт частоты
Фазовый сдвиг
Электростатические эффекты
Градиент магнитного поля
И зменение давления
И зменение температуры
П ритяжение масс прибора
И зменение оптического пути
Вращение
Смещ ение
Наклон светового луча
О тдача основания
Полная ср. кв. ошибка
Ошибка, нм · с 2
10
5
15
10
5
10
10
5
10
10
10
5
10
±34
блюдения. В зависимости от уровня микросейсм они длились от нескольких часов до су
ток. Для демонтажа аппаратуры и погрузки достаточно примерно одного часа. Напряже
ние питания ПО или 220 В, потребляемая мощность — 2 КВт.
В дальнейшем прибор совершенствовался (печатные электронные платы, бо
лее прочные детали, изготовленные из цельного куска металла, более мощные
компьютеры и т. д.) [508]. Начиная с 1986 г. испытываются или находятся в ра
боте шесть абсолютных гравиметров малой серии. Они работают в различных
организациях: JILA (Боулдер), Геологическая съемка Канады, Институт геодезии
Ганноверского университета, Национальная геодезическая съемка и Военно
картографическое агентство (Хельсинки), Институт метеорологии и геофизики
Венского университета.
Расположение частей прибора в рабочем состоянии показано на рис. 5.15 и
5.16. Камера, в которой происходит падение, устанавливается на складном шта
тиве. Под камерой расположены интерферометр и элементы оптической схемы.
Там же установлена суперпружина, параллельная камере. Перед транспортиров
кой всю систему (250 кг) разбирают и размещают в 8 ящиках (общий вес 450 кг).
Ее перевозят в небольшом автофургоне, а для работы требуются 2 человека.
мкм-с
Рис. 5.14.
Гравиметрические зем ны е приливы по измерениям с
абсол ю тн ы м гравиметром JILA [189].
152
Глава
5
Ионный
---------------,
насос
Вакуумная
баллистическая
1,44 м
камера
Рис.
5.15. Основные
части и размеры абсолютного гравиметра
Рис.
5.16. Общий вид абсолютного гравиметра JILA, Институт геодезии Ганноверского университета:
а - гравиметр с суперпружиной и вакуумная камера на основании интерферометра; зубчатая
JILA [189).
рейка суперпружины, сервомеханизм баллистической камеры, электронный блок измерения
времени, блок управления лазером и компьютер НР
интерференционные сигналы.
9816;
б
-
баллистическая камера; в
-
Абсолютные измерения силы тяжести
153
Обратимся в опыту, приобретенному при работе с гравиметром JILAG-3 в
Геодезическом институте Ганновера, и опишем усовершенствования прибора, сде
ланные в этом институте [712, 713].
Ошибка частоты рубидиевого стандарта (EFRATOM, модель FRK) составляет
5 х 10“ и , его долговременная стабильность не хуже 10" 10 в год. Надежный и простой
в обращении частотно-стабилизированный гелий-неоновый лазер (компания LASEANGEL,
модель RB 1) может излучать свет с одной из двух длин волн (красный или синий свет).
Средняя частота сохраняется постоянной в пределах 2 х 10“9 в год. Его калибровку по
излучению лазера, стабилизированного по поглощению в йоде (долговременная стабиль
ность 10 “ 12), необходимо выполнять каждые полгода или год. При работах с прибором
непрерывно поддерживается вакуум (10 “4 Па), а во время переезда ионный насос питается
от аккумулятора автомобиля. При установке на стабильном основании (изменение накло
на в пределах нескольких угловых секунд за несколько часов) в помещениях, расположен
ных на уровне земли, где поддерживается постоянная комнатная температура 15—25°
(в пределах ±2 °С), получают результат с ошибкой в несколько сотых долей мкм-с “2
за 500—2000 пусков (время наблюдений 2—56 ч). На рис. 5.17 приведены гистограммы
уклонений от среднего для одного и того же пункта при разном уровне микросейсм. На
пунктах с сильными техногенными микросейсмами рекомендуется работать ночью или в
выходные дни.
Для компьютера HP 9816 была составлена программа для оценки результатов в ре
альном масштабе времени и введения всех необходимых поправок (приливные изменения
силы тяжести с ошибкой ±0,01 мкм-с “ 2, влияние атмосферы и движений полюса, учет
конечной скорости света). Уменьшив частоту следования импульсов в 4000 раз, регистри
руют счетчиком времени всего 200 импульсов пониженной частоты. Это соответствует
фиксации 200 измерительных положений падающего отражателя, разделенных равными
отрезками пути примерно в 1,25 мм (4000 полуволн излучения лазера). Микрокомпьютер
уравнивает результаты измерений в реальном масштабе времени и записывает значение
силы тяжести на дискету. Единичное измерение длится около 2 с; для передачи данных
и их обработки требуется еще 8с. Таким образом, один цикл наблюдений занимает Юс.
Блоки по 50 пусков при каждой длине волны излучения лазера (красная/синяя) объединя
ют в полусерию; на пункте выполняют от 10 до 30 и более полусерий. Юстировку прибора
обычно проверяют после каждых 10 полусерий. Табл. 5.5 содержит фрагмент журнала на
блюдений на пункте.
Работу на пункте можно выполнить за одни сутки, при этом процесс измерений пол
ностью автоматизирован (вручную задают лишь количество серий наблюдений). Прира
щение силы тяжести между эффективной высотой абсолютного гравиметра (0,8 м) и осно
ванием измеряют двумя гравиметрами Ла Коста — Ромберга, снабженными электронны
ми системами обратной связи. Ошибка этих измерений ±0,01—0,02 мкм с “ 2 (разд. 8.2.2).
-20%
-
±1,90 мкм с ^
10%
-
20%
-
10%
0,84 мкм-с
................ Il f fl l
— I------1--------- I------ 1-------- I------ 1-------- 1------ Г
-4
-2
0
2
1--------
4 мкм-с'
— Г—
—4
I----г
-2
4 мкм-с
-2
Рис. 5.17. Г истограм м а результатов, полученных с гравиметром JILAG-3 (исходны е данны е те ж е, что
на рис. 5.6).
Глава 5
154
Т а б ли ц а 5.5. Ф рагмент журнала наблю дений на пункте с абсол ю тн ы м гравиметром JILAG-3
П родолж ительность программ ы около 2,5 ч
Количество серий
Количество измерений в серии
Стартовы й импульс счетного устройства
Импульс останова счетного устройства
Пункт
Ш ирота
Д ол гота
Вы сота
Давление, ГП а
Н орм альное атм осф ерное давление, ГП а
Поправка за давление, нм · с ~ 2
Поправка за движ ение полю са, нм · с " 2
Вы сота баллистической камеры над основанием, м
Вы сота плоскости относим ости над основанием, м
Вертикальный градиент силы тяж ести, нс “ 2
10
50
20
175
Ганновер 101
52°, 39000
9°, 71389
53,455 м
1014,2
1006,8
29
-9
0,975
0,806
2850
1. С ерия/лазер с красным излучением
Время,
Прилив,
g,
Пуск
UT
мкм · с ~2
МКМ · С - 2
Zo,
to,
СМ
см/с
1
2
3
4
09:19:52
09:20:00
09:20:09
09:20:17
9812631,68
9812630,72
9812629,65
9812630,19
0,82
0,82
0,82
0,82
0,252600
0,252775
0,252074
0,251796
15,062209
9,882467
10,048227
14,864388
50
09:27:02
9812631,47
0,81
0,251021
14,765716
Лазер с красным излучением
Лазер с синим излучением
Ср. кв. укл.,
мкм · с ‘ 2
Серия
1
3
5
7
9
Начало
Число
пусков
09:19:52
09:47:43
10:15:44
10:43:44
11:11:46
48
48
48
47
47
Среднее:
g,
мкм · с 2
9812631,23
9812631,23
9812630,88
9812630,97
9812631,14
9812631,09
пуска
серии
Серия
Начало
Число
пусков
0,97
,76
1,03
,86
,97
0,14
2
4
6
8
10
09:33:43
10:01:43
10:29:44
10:57:46
11:25:47
47
48
49
49
49
,11
,15
,12
,14
g,
мкм · с 2
9812630,47
9812630,33
9812630,39
9812630,40
9812630,48
Среднее: 9812630,75.
Среднеквадратическое уклонение: ± 0 ,0 3 .
В 1986—1988 гг. с этим прибором были выполнены абсолютные измерения примерно
на 80 пунктах в Центральной, Западной и Северной Европе, а также Гренландии и Венесуэ
ле. На рис. 5.18 приведены результаты, полученные за двухлетний период на пункте Ган
новер 101; сходимость результатов в пределах ±0,1 мкм с “ 2. В табл. 5.6 приведены рас
хождения с результатами измерений, выполненных абсолютным гравиметром Института
метрологии им. Дж. Колонетти (Турин) (разд. 5.2.4). По этим данным и данным междуна
родных сравнений в МБМВ (Севр) (см. табл. 5.1) точность оценивается ошибкой около
155
Абсолютные измерения силы тяжести
Н М 'С
-2
+100
Среднее
0-
1 -+
-100
1986
1987
Год
Рис. 5.18. Значения силы тяж ести в течение 2 лет, полученные с гравим етром JILAG-3 на пункте 101
(среднее значение 9,81263308 м с " 2), И нститут геодезии, Ганновер.
Т аб ли ц а 5 .6 . Сравнение наблю дений с приборами JILAG-3 и IMGC (измерения с прибором 1MGC
обработаны с величинами градиентов по данны м И нститута геодезии, Ганновер) [712]; результаты
по J1LAG-3 исправлены поправкой за коллимацию + 0 ,2 2 мкм - с " 2
Пункт
Брауншвейг
Гамбург
М юнхен
Висбаден
Севр АЗ
Копенгаген
Дата
8 6 /0 3 /2 7
8 6 /0 4 /1 7
8 6 /0 4 /2 0
8 6 /0 4 /2 2
8 6 /0 6 /0 7
8 6 /0 8 /2 0
g (JILAG-3),
мкм · с ~2
9
9
9
9
9
9
812
813
807
810
809
814
529,36
636,78
231,33
368,67
259,35
956,13
g (IMGC),
мкм · с "2
Разность,
мкм · с " 2
Разность после исклю
чения систем расхож
дения, мкм с -2
... ,23
,92
,28
,67
,17
,82
+ 0,13
-0 ,1 4
+ 0,05
0
+ 0,18
+ 0,31
+ 0,04
- 0 ,2 3
- 0 ,0 4
- 0 ,0 9
+ 0,09
+ 0,22
+ 0,09
Среднее:
Ср. кв. расхождение:
0,00
± 0 ,1 4
±0,1 мкм с -2, однако сравнения с другими приборами выявляют расхождения. Данные
табл. 5.6 позволяют также заключить, что систематические расхождения существенно
уменьшаются, если сравнивать расхождения после учета систематической части.
С 1984 г. Институт геофизики и планетарной физики Скриппсовского океано
графического института при Калифорнийском университете (Сан-Диего, США)
применяет абсолютный гравиметр с несимметричным движением пробной массы
для изучения временных вариаций силы тяжести [797] (рис. 5.19). Основой этой
разработки был прототип гравиметра JILA (см. выше). Совершенствование при
бора шло по пути обеспечения удобства работы, виброзащиты и дальнейшей ав
томатизации. Измерительная система общим весом 250 кг обслуживается двумя
наблюдателями и транспортируется в трех контейнерах. Юстировка светового
пучка по вертикали выполняется по ртутному горизонту; установка на пункте
и подготовка к измерениям сокращены до одного часа. Вывод данных на ком
пьютер и автоматическое введение поправок позволяют выполнить одну серию
(100 пусков) за 18 мин. Затем учитывают влияние приливов, выполняют уравни
вание результатов и их анализ. Объем измерений на пункте составляет 100 серий
и может быть выполнен за сутки. Применение сейсмометра с периодом собствен-
156
Глава 5
Рис. 5.19. Гравиметр IG PP с несимметричны м движением И нститута геофизики и планетарной физики
(Скриппсовский океанографический институт, Калифорнийский университет) [797).
ных колебаний 1 с позволяет за два часа наблюдений уменьшить влияние вибра
ций до 0,01мкм-с"2. Регистрируя микросейсмы и учитывая поправки, разброс
результатов от пуска к пуску можно дополнительно уменьшить.
В 1984—1985 гг. с прибором выполнены измерения на 15 пунктах в Калифорнии и
Неваде, ошибка измерений составила ±0,08—0 ,2 3 м к м с“ 2. Планируется разместить при
бор на подвижном носителе, что повысит производительность и гибкость метода (воз
можность работы на линиях нивелирования), а также улучшит изоляцию баллистической
камеры от микросейсм.
5.2.4.
Транспортабельные гравиметры с симметричным
движением пробной массы
Транспортабельные абсолютные гравиметры с симметричным движением
пробной массы разрабатывались в двух институтах при сотрудничестве с МБМВ
(разд. 5.2.2).
С прибором Института метрологии им. Дж. Колонетти (Турин) [6, 95] на
чиная с 1976 г. в разных районах мира определено более 50 пунктов.
Принципиальная схема прибора приведена на рис. 5.20. Уголковый отража
тель (элемент интерферометра с гелий-неоновым лазером, стабилизированным
по провалу Лэмба) подбрасывается вверх катапультой и улавливается в конце
падения. Скорость вращения отражателя менее 0,01 рад/с, а отклонение светово
го луча от вертикали менее 10"4 рад); эффективная высота прибора 0,5 м. Про
цесс измерений полностью автоматизирован и не требует вмешательства наблю
дателя. Интерференционные полосы регистрируются двумя фотодетекторами,
которые управляют электронным счетчиком. Для измерения пройденного пути
и времени используются реверсивный счетчик числа интерференционных полос
и два временных счетчика. Счет интерференционных полос начинается через не-
Абсолютные измерения силы тяжести
157
Сейсмо
метр
ВвкуумнаА
камера
Рис.
5.20
-1-1
_
_,_-'-Подвижна.1й
i
1
отражатель
1
~
(левый). Принцип гравиметра
IMGC
гнн им. Дж. Колонетти, Турин
Рис.
5.21
(правый). Общий вид прибора
с симметричной схемой измерений Института метроло
[6].
IMGC
(Институт метрологии им. Дж. Колонетти, Турин,
Италия).
сколько миллисекунд после начала подъема в
момент прохождения
отражателем
нижней измерительной станции. Первый временной счетчик измеряет время д/2
до момента второго прохождения этой же станции при падении (рис.
5.22).
Вто
рой временной счетчик сбрасывается на нулевое показание каждый раз, когда при
подъеме достигается заданное целое число интерференционных полос, и прекра
щает счет с появлением первой интерференционной полосы в начале падения.
Эта полоса обнаруживается при смене фазы сигнала интерферометра на противо
положную; временной интервал, измеренный этим. счетчиком, обозначен д/1. Ре
версивный счетчик определяет количество интерференционных полос при подъ
еме и при падении пробной массы. За последние два года измерительная схема
двух станций заменена на многопозиционную схему. В приборе использованы два
типа антивибрационных устройств. Опорный отражатель снабжен инерционным
подвесом на рычаге вертикального сейсмометра с большим периодом собствен
ных колебаний
( ~ 20 с).
Кроме того, для защиты от вертикальных вибраций ин
терферометр установлен на трех пьезоэлектрических опорах, работающих как ак
тивные компенсаторы. Эти меры позволяют уменьшить влияние микросейсм бо
лее чем в
20
раз.
Наблюдения стараются выполнять при низком уровне мик
росейсм.
При
0,5
х
транспортировке
0,5 м,
вес
600 кг
(рис.
прибор,
5.21),
высота
которого
1,4 м,
размеры
основания
разбирают на основные блоки (интерферометр,
вакуумированный цилиндр), но вакуум поддерживают. В зависимости от уровня
микросейсм ошибка единичного измерения лежит в пределах
а
среднее
из
серии
наблюдений
(20
пусков)
имеет
±0,2-0,5 мкм·с - 2 ,
случайную
ошибку
± 0,03 мкм· с - 2 • Наиболее существенные систематические ошибки возникают из
за погрешности определения длины волны излучения лазера ( ±0,05 мкм·с - 2 ), на
клона светового пучка ( ±0,05 мкм·с - 2 ), а также задержки сигнала в электронных
цепях, влияющей на измерение времени (±0,ОЗмкм·с- 2 ). Ускорение силы тяже-
158
Глава 5
Интерферен ·
♦ц и о н н ы й
1 сигнал
0 1 2 3
4
5
Счет при подъеме-*Установка нуля
54
3
2
1 0
ил. J_L
г
Остановка
Счет при
паД®нии
Интерференционные
х импульсы
Δ ΐ ,- Ч с четчик времени|
Счетчик
времени
Рис. 5.22. Привязка ко времени интерференционных полос, гравиметр IMGC [788].
сти на пункте получают из 100 измерений с ошибкой ±0,1 мкм-с“ 2. Сравнитель
ные испытания в МБМВ (Севр) (см. табл. 5.1) и измерения в США подтверждают
эту оценку.
Большой объем измерений выполнен в Европе (рис. 5.23). В 1976—1977 г. определены
17 пунктов, часть из которых расположена на линии Катания — Хаммерфест; эти пункты
образуют гравиметрический эталонный базис, служат для контроля Мировой гравиметри
ческой сети и являются основой для национальных гравиметрических сетей [108]. В 1978—
1990 гг. определены 7 пунктов в Швейцарии: создана основа для национальной сети, со
здан вертикальный эталонный базис, стало возможным изучение поднятия Альп [436]; да
лее в 1980 г. определены 4 пункта в Австрии, в 1979 и 1981гг. два дополнительных
пункта — в Италии в Триесте (сейсмический район Фриули) и близ Сиены (геотермальное
поле Т^авале). В 1977 и 1980 гг. измерения проведены также на 11 пунктах в США: в наци
ональной опорной сети и сейсмоактивном районе Аляски [5]; в 1981 г. определены 11 пунк
тов в Китае [788]. В ходе этих программ подтвердилась хорошая работа прибора при
различных условиях транспортировки (автомашина, поезд, самолет). В последнем случае
возникали некоторые сложности из-за сотрясений и вибраций.
Первым коммерческим транспортабельным абсолютным гравиметром был
прибор GA 60 для измерений по симметричной схеме (типа прибора А. Сакумы),
созданный французской компанией Jaeger S.A. (Отдел астронавтики) [586].
Рис. 5.23. А бсол ю тны е измерения силы тяж ести в Европе в 1976 — 77 гг. с гравиметром IMGC [108].
Абсолютные измерения силы тяжести
159
Полулроэрачное
зеркало
Вакуумна11
камера
"+-'-"'=-...а Каталульта
Принтер
Рис.
5.24.
Гравиметр
GA-60
Датчик давлени11
с симметричной схемой движения (компания
Jaeger S.A.,
Отдел аэронавти
ки, Леваллуа-Перре, Франция).
Рисунок
иллюстрирует принцип работы этого прибора. Положение под
5.24
вижного отражателя
(высота
5 см,
вес
70 г)
непрерывно регистрируют
с по
мощью интерферометра с лазером, стабилизированным по поглощению в йоде,
и субнаносекундным цифровым преобразователем. За время движения отражате
ля можно выполнить большое число измерений (около
1300).
МикроЭВМ вычис
ляет значения силы тяжести, ее вертикального градиента, коэффициент регрессии
между остаточным давлением и скоростью падения, а также влияния остаточных
вибраций интерферометра.
приборе
IMGC
щий вес 400 кг,
высота 1,95 м.
Система виброизоляции аналогична применяемой в
(см. выше). Внешний вид прибора показан на рис.
об
в рабочем положении прибор занимает площадь
5.25. Его
0,9 х 0,9 м,
его
При транспортировке вакуум поддерживается ионным насосом.
После установки прибора (двумя наблюдателями за полдня) измерения можно
начинать
после
10-мин
прогрева.
Чтобы
ошибка
результата
стала
меньше
±О, 1 мкм· с - 2 , достаточно сравнительно небольшого объема измерений (от 5 до
10
серий по
10-20
пусков в каждой' серии) за
1-2
дня наблюдений.
Прибор применялся Французским бюро по исследованиям в области геологии и шахт
(Орлеан) совместно с МБМВ для абсолютных определений на
сети Франции
[514).
При
50-350
6
пунктах гравиметрической
единичных измерениях на пункте точность по внутренней
Рис.
5.25.
Общий вид абсолютного гравиметра
териал предоставлен компанией
GA-60 (ма
Jaeger S.A., От
дел аэронавтики, Леваллуа-Перре, Франция).
Глава 5
160
сходимости составила ±0,03—0,08 мкм-с " 2, в среднем
точность
результата
±0,05 мкм-с ' 2. Помимо вариаций силы тяжести из-за изменений атмосферного давления
на пункте могут быть обнаружены вариации (несколько десятков н м -с"2), связанные с
перемещениями грунтовых вод. Прибор такого же типа использовался Институтом гео
графической съемки (Токио) для совершенствования национальной гравиметрической сети
Японии. Среднее из 20—200 единичных измерений характеризуется ошибкой ± 0,03—
0,11 м к м -с '2 [323].
Десятилетний опыт работы с транспортабельными баллистическими грави
метрами, основанными на несимметричном или симметричном движении проб
ной массы, показывает, что они обеспечивают ошибку измерений ±0,1 м км -с"2
даже при длительных измерительных программах, в ходе которых прибор под
вергается механическим сотрясениям и испытывает переменные температурные
воздействия. Однако время от времени выявляются необъяснимо большие рас
хождения результатов. Планируется и отчасти уже осуществляется дальнейшее
совершенствование приборов, предусматривающее уменьшение размеров и поме
хоустойчивость, переход к методу многих станций и одновременно лучшую изо
ляцию от вибраций, а также еще большую автоматизацию. При этом ближайшая
цель — достижение точности ±0,05 м км -с"2 при наблюдениях за одни сутки.
5.3.
Маятниковый метод
5.3.1.
Математический и нитяной маятники
Маятниковый метод основан на измерении периода колебаний маятника извест
ной длины в гравитационном поле. У математического маятника вся масса т
сконцентрирована в точке (рис. 5.25). Маятник длиной / совершает колебания в
вертикальной плоскости вокруг горизонтальной оси О. Положение равновесия
маятника задано направлением отвесной линии ζ. В уравнение колебаний входят
ускорение массы и тангенциальная составляющая силы тяжести
lip + g sin φ = 0,
Рис. 5.26.
М атематический маятник.
(5.38)
Абсолютные измерения силы тяжести
161
где φ = φ(ί) — угол элонгации маятника, φ = d2<p/dt2 — угловое ускорение. Ум
ножив (5.38) на lip, можно получить
a w ’ - 2 f a , cos*’, - ° ·
Выполнив интегрирование этого выражения, имеем
ip2 - 2 ^
COS
φ=
С.
Постоянная интегрирования с определяется из условия, что скорость перемеще
ния массы в крайнем ее положении равна нулю. Будем считать началом отсчета
времени момент, когда <p(t = 0) = 0, а время одного колебания (в прямом и об
ратном направлениях) обозначим Т. В крайней точке, где происходит изменение
направления движения маятника на противоположное, величина φ равна <ро, a ip
(t = 774) = 0. Отсюда
с = - 2 ? cos φο
и после подстановки
Определив dt и интегрируя по одному периоду колебаний, получим
7У4
0
0
Учитывая, что
cos φ = 1 - 2 sin2 ^ , cos φο = \ - 1 sin2
,
и заменяя
•
φ
.
<Ρό
.
.
sin £ = sm 2 sin ф,
после простых преобразований получим окончательно
π /2
(5.39а)
о
При малой амплитуде φο подынтегральное выражение этого эллиптического ин
теграла можно разложить в быстро сходящийся ряд:
Почленное интегрирование дает выражение для периода колебаний
(5.396)
162
Глава 5
Подставив сюда
> φο
"“ Т
Ψο
48 + · · ·>
получим окончательно
,л
φΐ? +
ГГ /
11
11
\
1б" + 3072
(5.39в)
Для колебаний с бесконечно малой амплитудой справедливо соотношение
Т=2ж
(5.39г)
а величина силы тяжести определяется выражением
8 = 4тг2 -L .
(5.40)
В данном случае период Т не зависит от амплитуды колебаний, это свойство
называют изохронностью математического маятника.
При φο 0 выражение (5.38) будет дифференциальным уравнением гармониче
ского осциллятора:
•φ + ^ φ = 0.
(5.41а)
Как следует из (5.39г), решение этого уравнения описывает гармоническое ко
лебание
φ
=
φο
COS
(5.416)
ω ί
с круговой частотой
(5.41 в)
С некоторым приближением математический маятник реализуется в виде ни
тяного маятника. Он представляет собой груз из тяжелого материала, подве
шенный на тонкой проволоке. Чтобы найти период его колебаний, воспользуемся
выражением для физического маятника.
Если груз имеет форму шара (радиус г, масса т)у то справедливо соот
ношение
1/2
/
2
1тД
1+5
3 т
(5.42а)
1т'
= 2lJ s
2+
2 т
/
где т ' — масса проволоки, / — расстояние от оси качаний (точки подвеса) до
центра шара. При т ' < т формула упрощается :
1/2
Т=
(5.426)
Абсолютные измерения силы тяжести
163
Эту формулу можно получить из (5.47) и (5.48), используя выражение для момен/
та инерции Jc
= у2 тг 2 и полагая, что центр шара совпадает с центром масс.
Трудности, связанные с реализацией точечного подвеса, приводят к система
тическим ошибкам при определении длины маятника (разд. 5.3.3). Поэтому, по
предложению Бесселя, измеряют периоды колебаний Т\ и Тг маятника при раз
личных длинах 1\ и h нити. Образовав разность двух выражений вида (5.40), по
сле простых преобразований получим
g = 4π 2
lx - h
Τ\ - T\
(5.43)
Как видно, при таком разностном методе необходимо знать лишь разность длин
маятника; систематические ошибки, связанные с подвесом маятника, существен
но уменьшаются.
5.3.2.
Физический и оборотный маятники
Физический маятник — это твердое тело произвольной формы и с произволь
ным распределением масс, которое под действием силы тяжести совершает коле
бания относительно горизонтальной оси О, не совпадающей с центром тяжести
С (рис. 5.27). Если отклонить такой маятник от вертикали ζ (от положения рав
новесия) на угол φ и отпустить, он будет совершать колебательное движение,
описываемое выражением
Jo<p = mga sin φ.
(5.44)
Здесь Jo — момент инерции, т — общая масса маятника, а — расстояние от оси
качаний до центра тяжести. Напишем уравнение движения в виде
φ+
sin φ = 0.
(5.45)
Введем приведенную длину маятника
/п = 70
п та
(5.46)
Уравнение (5.45) превращается при этом в уравнение колебаний математического
маятника (5.38). Период колебаний физического маятника равен периоду колеба
ний математического маятника с длиной /п. При малых амплитудах колебаний
в соответствии с (5.39в) и (5.39г)
(5.47а)
Т=
Отсюда ускорение силы тяжести
g
1
4π 2 Λ
та Т2
(5.476)
Глава 5
164
Величины Jo, т и а невозможно определить с требуемой точностью, и потому
указанный способ не позволяет получить силу тяжести с относительной ошибкой
1 0 -6 g.
Приведенная длина оборотного маятника физически реализуема^ ее можно
непосредственно измерить. Теорема Штейнера связывает моменты инерции J0,
Jc относительно параллельных осей, проходящих через точки О (ось качаний) и
С (главная оси инерции):
Jo = Jc + a2m = m(Q2 + a2).
(5.48)
Радиус инерции
(5.49)
соответствует среднему расстоянию элементарных масс от центра тяжести. Для
приведенной длины (5.46) маятника имеем
Π
Jc + a2m _ ρ 2 + a2
am
a
(5.50)
При заданной длине /п это уравнение имеет два решения:
σι,2 = ^ (/„ ±
где
- 4е2).
/п = а ( + а2.
(5.51а)
(5.516)
Отложив отрезок /п на Oi С, найдем положение центра качаний О2, находящего
ся на расстоянии а2 от центра тяжести С (рис. 5.27). Колебания относительно
параллельных осей, проходящих через точки 0\ и Ог, совершаются с одним и
тем же периодом (5.47а).
Существует множество осей, связанных соотношениями (5.50) и (5.51), колеба
ния относительно которых совершаются с одинаковыми периодами. Эти оси па
раллельны главной оси инерции физического маятника. Две такие пары, (Οι, Ог)
и (О/, 0 2'), проходят через линию ОС.
Сопряженные оси Οι и О2 оборотного маятника находят, смещая одну из осей
или, что предпочтительнее, перемещая дополнительную массу, расположенную
близ оси. После этого измеряют расстояние между осями (рис. 5.28). Как показал
Бессель, если периоды колебаний Т\ и Т2 близки друг к другу, то устраняются
трудности идеальной юстировки и поддержания строго неизменного расстояния
между осями качаний. В соответствии с (5.47а) и (5.50) имеем
<t\g ’
2
a2g
При этом справедливо следующее выражение для идеального (приведенного) пе
риода колебаний Тп маятника с приведенной длиной /п:
Т2 = αιΤ] - α2Τ\
а\ - а2
(5.52а)
Абсолютные измерения силы тяжести
165
Рис. 5.27 (левый). Принцип физического маятника.
Рис. 5.28 (правый). О боротны й маятник К этера.
Величину силы тяжести можно теперь найти по формуле (5.47). Ясно, что поло
жения осей не должны быть симметричны относительно центра тяжести, иначе
величину g найти будет нельзя. Преобразовав последнее выражение к виду
2 = Т \+ Т\
п
2
Т\ - t j а, + аг
2
а \ - а2
и пренебрегая величиной ( Т\ - Т2)2, получим окончательно
_ Т Х + Т2
"
Τ χ - Τ 2 αχ + α2
2
2
а х - а2
(5.526)
Период колебаний, соответствующий приведенной длине /п, определяется как среднее
арифметическое из измеренных величин Т\ и Т2 с поправкой, которую находят по прибли
женным значениям а\ и а2. Эта поправка уменьшается с уменьшением разности Τχ - Т2
и увеличением разности а\ - а2\ это достигается, если центр тяжести смещен к одному
из концов маятника.
При относительных маятниковых измерениях большую роль играл минимальный ма
ятник (разд. 6.1.1). В таком маятнике выполняется условие
dl
~ = 0,
da
(5.53а)
означающее, что малые смещения точки подвеса влекут минимальные измерения приве
денной длины и периода колебаний. Решение уравнения (5.50) в этом случае имеет вид
я = <?,
/п = 2ρ.
(5.536)
Расстояние между осью качаний и центром тяжести такого маятника равно радиусу инер
ции, а период колебаний маятника минимален.
5.3.3.
Источники ошибок и точность
Как было сказано, на результаты маятниковых измерений влияют ошибки изме
рения длины и времени. Кроме того, существует множество систематических
166
Глава 5
влияний, вызванных смещениями оси качаний и внешними воздействиями [23,
235], что справедливо и для нитяного маятника [319]э и для оборотного [604].
Относительная ошибка определения силы тяжести связана с относительными
ошибками длины маятника и времени соотношением, которое следует из форму
лы (5.39г) и аналогично (5.22):
dg = d [ _ r dT
g
I
Τ'
(5.54)
Чтобы удовлетворить реальное требование к точности определения силы тяже
сти ± 1 0 “ 7g или 1 мкм-с " 2 с маятниками длиной 1 и 0,25м, периоды колебаний
которых соответственно 2 и 1 с, длину маятников необходимо измерять с ошиб
кой ±0,1 и ±0,025 мкм, а период колебаний— с ошибкой ±0,1 и ±0,05 мкс
соответственно. Такая точность может быть достигнута при измерении расстоя
ний интерференционным методом, а измерения времени необходимо выполнять
электронными счетчиками эталонных сигналов времени.
Точностные требования снижаются с увеличением длины маятника. Однако при коле
баниях бблыних масс возрастают трудности учета или исключения систематических влия
ний, одновременно усложняется перевозка таких приборов.
Если положение осей качаний и положение центра масс (для нитяного маятни
ка) известны с требуемой точностью, то длину маятника можно определить ин
терференционным методом, сравнивая ее с эталоном длины (относительный ме
тод интерферометрии). Ось качаний реализуется системой, состоящей из лезвия
призмы и плоской поверхности; призма укреплена либо на маятнике, либо на
штативе. Однако при механической обработке в процессе изготовления лезвие
призмы получается в виде цилиндрической поверхности с радиусом кривизны г
(рис. 5.29); в результате износа материала лезвия величина г изменяется со
временем.
Чтобы найти расстояние между осью качаний и центром тяжести нитяного маятника
или между двумя осями качаний оборотного маятника, необходимо измерить расстояние
до опоры и исправить его поправкой за радиус кривизны г; при этом 9чем больше длина
маятника, тем меньше влияние величины г. Необходимо отметить, что маятник подвер
жен растяжению под действием собственного веса. Поэтому определение длины маятника
необходимо выполнять при его рабочем положении. Если периоды колебаний оборотного
маятника выравнены с ошибкой около 1 мкс, расстояния до центра тяжести достаточно
измерять с ошибкой ±0,1 мм.
Рис. 5.29.
Колебания маятника на лезвии с цилиндрической п о
верхностью .
Абсолютные измерения силы тяжести
167
Изменения температуры t приводят к изменению длины маятника на ве
личину
Ы = сцЩ - /о),
(5.55)
где а/ — температурный коэффициент линейного расширения, to — начальная
температура. Влияние температуры можно в значительной степени исключить
термостатированием прибора, подбором материала маятника (для кварцевого
стекла оц = 2—4 х 10- 7/°С, для инвара оц ~ 1—2 х 10" 6/°С, а для латуни
сц ~ 2 х 10" 5/°С) и введением эмпирических поправок. Чтобы температуру ма
ятника определять достаточно точно, термометр должен находиться в тех же ус
ловиях, что и сам маятник.
Ошибки определения периода колебаний уменьшаются при увеличении дли
тельности серии колебаний маятника.
В старых маятниковых измерениях находили промежутки времени между моментами
одновременного прохождения через положение равновесия гравиметрического маятника и
маятника часов; ход часов проверяли по астрономическим определениям времени. При
фотографической регистрации колебаний маятника и меток времени (от кварцевых часов,
проверяемых по сигналам времени) стало возможным измерение длительности серии коле
баний с ошибкой ± 1 мс. Увеличение времени наблюдений до нескольких часов позволяло
уменьшить ошибку периода колебаний до 10" 6—10“ 7 с.
Высокая точность (±10 нс) достигнута при регистрации момента прохождения
светового луча, отраженного от зеркала маятника, через оптическую щель. Воз
никающий световой импульс преобразуется в электрический сигнал, поступаю
щий в электронный счетчик времени, управляемый кварцевыми часами. Чтобы
уменьшить систематические ошибки блока измерения времени, а также возмуща
ющее влияние микросейсм (см. далее), наблюдают 500—1000 колебаний ма
ятника.
Процесс колебаний сопровождается многочисленными возмущениями, влия
ние которых можно учесть инструментально и методически, а также введением
поправок.
Поправкой за амплитуду измеренный период Т приводят к бесконечно малой
амплитуде колебаний, см. (5.39а). Для небольших амплитуд (φ0 < 30') с доста
точной точностью полагают
Щ Ы = -
(5.56)
Особенно сильно на движения маятника влияют форма лезвия опорной при
змы и упругие деформации лезвия. При колебаниях маятника происходит перека
тывание рабочей поверхности лезвия (с одновременным смещением оси качаний),
возникают деформации лезвия призмы и опорной площадки (рис. 5.29). Эти эф
фекты стараются уменьшить подбором материала и поправками. Если призма
укреплена на маятнике, то влияние формы лезвия в значительной степени исклю
чают сменой призм, если же призма укреплена на опоре (штативе), то этого же
эффекта достигают наблюдениями маятника в прямом и повернутом положени
ях. В разностном методе используют два маятника разной длины, но с одинако
вой массой. В этом случае в соответствии с (5.43) исключаются систематические
ошибки определения длины, связанные с деформацией.
Глава 5
168
При колебаниях происходят деформации (изгиб, растяжение стержня) маятни
ка, что особенно важно для оборотного маятника. Эти эффекты можно умень
шить подбором формы маятника (например, двутавровое сечение) и поправками.
У нитяного маятника нить также деформируется. Картина осложняется тем, что
система нить — груз маятника при колебаниях ведет себя как двойной маятник.
Груз совершает дополнительные колебания вокруг точки крепления нити. Колеб
лющийся маятник раскачивает штатив, пилон, на котором установлен прибор,
и грунт, что приводит к возникновению эффектов сокачания. Опора маятника
подвергается действию возмущающего горизонтального ускорения х , вектор ко
торого лежит в плоскости колебаний; величина этого ускорения зависит от кон
струкции штатива и пилона, а также от свойств основания. С учетом этого урав
нение движения маятника при малой амплитуде имеет вид
(5.57)
где / — длина нитяного маятника или приведенная длина. Из-за сокачания пери
од колебаний может увеличиться на 1—100мкс. Эффект сокачания можно опреде
лить экспериментально, наблюдая второй маятник, установленный на том же
штативе. Вначале он висит неподвижно, но постепенно начинает раскачиваться
из-за движений штатива. Более эффективно использование на одном штативе
двух маятников одинаковой длины с одинаковым распределением масс, соверша
ющих колебания в одной плоскости с одной и той же амплитудой, но в противо
положных фазах (двухмаятниковый метод) (рис. 5.30). Среднее из периодов коле
баний, предварительно выравненных до 10” 6 с, в значительной мере свободно
от эффекта сокачания.
К внешним источникам ошибок относятся влияние окружающего воздуха,
микросейсм, а также магнитные и электростатические эффекты.
Влияние атмосферы приводит к некоторой потере веса маятника из-за аэро
статического эффекта, при этом период колебаний несколько увеличивается, а си
ла тяжести получается преуменьшенной. Противоположный эффект возникает
из-за увлекания маятником молекул окружающего воздуха, при этом увеличива
ются колеблющаяся масса и момент инерции. И наконец, трение маятника о воз
дух приводит к затуханию колебаний. С учетом сопротивления воздуха, пропо
рционального скорости, уравнение движения маятника (5.41а) принимает вид
φ
+
2 δ ίρ
+
γ- φ
— 0,
X
Рис. 5.30.
Сокачание ш татива и двухмаятниковый м етод .
(5.58а)
Абсолютные измерения силы тяжести
169
где δ — коэффициент затухания колебаний. Вследствие сопротивления амплитуда
колебаний φ уменьшается со временем /, подчиняясь зависимости
<р(() = ^>ое(-4,).
(5.586)
Если прибор вакуумирован, то рассмотренные влияния в значительной мере ис
ключаются. Кроме того, можно ввести поправки, зависящие от давления среды
и формы маятника; эти поправки следует определять экспериментально. Если
оборотный маятник симметричен относительно его осей, то эффект увлекания
воздуха исключается и не сказывается на результате измерений.
Микросейсмические возмущения (разд. 5.1.5) вызывают вертикальные и гори
зонтальные возмущающие ускорения z и х в плоскости колебаний χζ, действую
щие на штатив маятника (рис. 5.30). Выразив тангенциальные составляющие
ускорений, получим
ip +
j
(g - Z) sin φ 4- j
X COS
φ = 0.
(5.59)
При малых амплитудах влияние ускорения z имеет второй порядок малости, и
поэтому (5.59) превращается в (5.57). Если вид функции х = x(t) известен, тоэпро
интегрировав (5.59), можно найти влияние микросейсм на период колебаний Т.
В двухмаятниковом методе наблюдений влияние микросейсм, как и эффект сокачания, исключается. И наконец, влияние вертикальной составляющей уменьшает
ся с увеличением продолжительности наблюдений, и остаточное влияние микро
сейсм станет менее 1 0 " 8— 10 ~ 9 с.
Если маятники изготовлены из металлического сплава, то период колебаний
искажается при изменениях магнитного поля, в этом случае необходимы магнит
ные экраны. На кварцевых маятниках может накапливаться электростатический
заряд; этого можно избежать, покрыв маятник электропроводящим слоем.
Наконец, отметим, что в неоднородном гравитационном поле полученную ве
личину силы тяжести с достаточной точностью можно отнести к положению
центра масс маятника (нитяной маятник) или к центру качаний (оборотный
маятник).
Анализ сравнительно недавних маятниковых определений показывает, что ма
ятниковый метод подвержен большому числу источников ошибок, часть из кото
рых трудно исключить или учесть поправками (разд. 5.3.4). Несмотря на тща
тельное конструирование маятниковой аппаратуры и выбор методики наблюде
ний, в результаты измерений все же необходимо вводить многочисленные по
правки, связанные отчасти со свойствами материала. Наиболее существенные
остаточные ошибки вызваны упругостью маятников, а также деформациями и
смещениями в узле лезвие — опора.
Остаточные ошибки определяют предел точности, который невозможно пре
взойти какими угодно усовершенствованиями, и даже увеличением числа серий
наблюдений. Этот предел равен нескольким десяткам мкм*с' 2 для нитяного ма
ятника и нескольким единицам мкм-с " 2 для оборотного маятника. Принимая
также во внимание, что маятниковый метод требует длительных наблюдений,
можно заключить, что он не может конкурировать в настоящее время с балли
стическим методом, ошибка которого не более 0 , 1 мкм*с~2.
Глава 5
170
5.3.4.
Маятниковые наблюдения и результаты
При конструировании маятниковых приборов и разработке методики наблюде
ний и обработки результатов всегда стремились свести к минимуму влияние раз
личных источников ошибок, используя современные достижения науки и техники.
Из-за возникавших при этом противоречивых требований найденные решения,
как правило, носили компромиссный характер. Наиболее важными инструмен
тальными и методическими подходами были следующие:
— нитяной или оборотный маятник;
— стационарный или транспортабельный прибор;
— выбор метода измерений длины и расстояния;
— длина, материал и форма маятника;
— конструкция призмы и ее опоры;
— использование одного или нескольких маятников;
— защита от внешних возмущающих факторов.
В табл. 5.7 приведены основные сведения о наиболее важных недавних опреде
лениях. Впервые измерения силы тяжести нитяным маятником были выполнены
в 18 в., позже их совершенствование продолжил Бессель (разд. 1.2.2). В 19 в. эти
измерения были немногочисленными. Наблюдения с нитяным маятником,
Т аблица 5.7. Технические данны е и точность абсолю тны х измерений силы тяжести маятниковым
м етодом
NPL
Организация0
GIP
NBS
Вашингтон
Теддингтон
Местонахождение
Потсдам
1898-1904
1939
Эпоха, г.
1936
[384]
Публикация
[300]
[123]
Метод
Обор, маятн. Обор, маятн.*2* Обор, маятн.
(3)
(5)
0)
ВНИИМ
Ленинград
1954-1959
[1]
Обор, маятн.
(3)
1 (4 м)
0,25 (1 м)
Труба
1
1
Труба
Двутавр
0,4, 0,6,
0,75
Двутавр
Материал
Латунь
Кварц
Υ-сплав
Кварц
Вес, кг
3 -6 /3
2, 3, 4
23
5
105 - 1034
±30
<10
±30
<10"‘
±16
<50
±4
+ 140
-6 0
+ 12
+ 19
Привед. длина
маятн., м
Форма маятника
Давление, Па
Ошибка резулът.3), м к м -с'2
Уклонение от
принятого значе
ния^, мкм - с " 2
ZPE
FGI
Хельсинки
Потсдам
1970
1969
[604]
[319]
Нит. маятн.,
Обор, маятн.,
диф. метод
парные качания
(4)
7,8/3,8
0,25, 0,375
0,50, 0,70
Цилиндр/жезл Нить с маятн.
чечевицей
Фосфорная
Латунь/кварц
бронза и медь
0,02/0,01 и 8
4/3
(чечевица)
1 0 -5 0
10 ■2/102 — и г 1
±17
±3
+1
+ 59
"G IP — Геодезический институт, Потсдам; NBS — Национальное бюро стандартов; NPL — Национальная физическая лаборатория;
ВНИИМ — Всесоюзный научно-исследовательский институт метрологии, ΖΡΕ — Центральный институт физики Земли, FGI — Фин
ский геодезический институт.
’ Большое число измерений с зтими маятниками выполнено также в Буэнос-Айресе [24].
м Новые вычисления и исключение систематических ошибок существенно уменьшили срсднеквадратическис уклонения [333].
4’ Поправка за приведение к Потсдамской системе -140 мкм ■с г [604].
Абсолютные измерения силы тяжести
171
выполненные в 1970 г. в Финском геодезическом институте (Хельсинки), позво
лили оценить возможности метода и возникающие сложности [319].
Груз маятника (размером примерно 12 х 12 см) был подвешен на нити диаметром
0,6 мм к стержню, вмурованному в скалу. Регулируемый подвес (зажим или изгибающий
цилиндр) позволял применять маятник различной длины (7,8 и 3,8 м) с одной и той же
осью качаний (разностный метод) (разд. 5.3.1). Разность длин определялась интерференци
онным методом (± 1 мкм). При измерении времени применяли вспышки света, возникав
шие всякий раз в момент прохождения нити через положение равновесия. Световой им
пульс, поступавший на фотоумножитель, заставлял срабатывать электронный счетчик.
Единичный период колебаний измеряли с ошибкой ±10мкс; выполнив серию из 500 коле
баний, можно было найти период с ошибкой ±0,02 мкс. В результаты измерений вводили
множество поправок, причем большие длины маятников вызвали ряд затруднений. Необ
ходимо было считаться с существенными отклонениями этих маятников от математиче
ского (изгибами и деформациями нити), а также с поворотом плоскости колебаний маят
ника (эффект Фуко, вызванный суточным вращением Земли). Были выполнены три серии
измерений с различным подвесом, каждая из которых состояла из десяти единичных изме
рений (ср. кв. ошибки ±50—60 мкм -с-2 ). Большое различие между величиной среднеква
дратической ошибки и уклонением результата от истинного значения силы тяжести
(табл. 5.7) говорит о неучтенных систематических ошибках. Основными из них являются:
эффект двойного маятника, изменения в подвесе и сокачание.
После того как Кэтер создал оборотный маятник, особое значение имели
работы Бесселя. Фирмы «Репсольд» и «Бруннер Брош» создали транспорта
бельные приборы, применявшиеся в последние десятилетия 19 в. (рис. 5.31)
(разд. 1.2.2). Однако, даже после того как штатив Репсольда сделали более жест
ким и стали учитывать сокачание, результаты измерений имели ошибку в
100м км с “ 2 и более. Основываясь на работах Гельмерта (1898) [296], Кюнен и
Фуртвенглер в 1898—1904 гг. выполнили в Потсдамском геодезическом институ
те фундаментальное определение силы тяжести с оборотными маятниками [384].
Применяли пять оборотных маятников симметричной формы и с эксцентричным по
ложением центра тяжести; для этого один из грузов (чечевиц) маятника был полым. По
мимо скрепленных с маятниками призм с ножевыми опорами использовалась универсаль
ная призма, подходящая ко всем маятникам. На маятниках укреплялись и опорные пло
щадки. Измерения выполняли длительными сериями как при нормальном давлении возду
ха, так и при пониженном давлении. Приборы были установлены на двойном пилоне
··.$■
О боротны й маятник Репсольда [459] (материал предоставлен фирмой F. Vieweg und Sohn, Висбаден).
Глава 5
172
пункта SO в маятниковом зале Геодезического института; пилон был изолирован от грун
та. Длину маятника определяли сравнением (с помощью микроскоп-микрометра) с этало
ном длины, период колебаний — методом совпадений. В табл. 5.8 содержатся средние ре
зультаты, полученные из 40 независимых определений с различными маятниками и систе
мами лезвие — опорная площадка.
Из уравнивания результатов получено значение силы тяжести
g = 9,81274 ± 0,00003 м с ' 2,
для пункта в маятниковом зале с координатами
φ = 52°22',86 с.ш., X = 13°04\06 в.д., Н = 87 м.
Этот результат завышен на 0,00014 м с ”2. Теперь это можно отнести за счет ошибок в
определении времени и длины маятников, неточного учета изгиба маятников и аэростати
ческого выталкивания, упругих деформаций опорных призм и нестрогой обработки. Неод
нократные повторные вычисления с несколько иными поправками и исключением некото
рых измерений дали величины 9,81260 и 9,81265 м с " 2 [129].
Результаты двух экспериментов с оборотными маятниками, осуществленных
в 1930-х гг. для метрологических целей, подтвердили систематическую ошибку
силы тяжести в Потсдаме. Этим и последующим измерениям, выполненным для
улучшения мировой гравиметрической системы, были свойственны повышенная
точность измерения времени, вакуумирование, а также более совершенный учет
систематических влияний ошибок в целом: изгиб маятников, сокачания. Теперь
маятники имели плоские площадки, опиравшиеся на лезвия призм, укрепленных
на штативе (материал: сталь, агат). Длина маятников составляла от 0,25 до 1 м,
а отношение расстояний между осями качаний и центром тяжести — от 1:2 до
1:5. Появилась возможность уменьшить продолжительность серии наблюдений
с нескольких часов до 15 мин и менее. Во всех случаях наблюдали большое число
серий при самых разных условиях. Данные о более поздних экспериментах со
держатся в табл. 5.7. С 1900 по 1970 г. точность измерений оборотными маятни
ками удалось повысить на порядок. Как следует из сравнения среднеквадратиче
ских ошибок с отклонениями от истинной величины, в более поздних эксперимен
тах систематические эффекты учитывались точнее. Точность измерений с нитя
ным маятником ниже, чем с оборотным.
Наблюдения с оборотным маятником, выполненные в 1969 г. в Центральном
институте физики Земли в Потсдаме, оказались успешными [604].
Т аблица 5.8. Результаты измерений с обор отны м маятником в П отсдам ском геодезическом
институте 1898— 1904 гг; средние значения составляю т 981 + ... мкм · с " 2 (число отдельны х
измерений) [604]
Маятник
П ризма
маятника
Универе.
призма
Лезвие
на подставке
Австрийский маятник
легкий
тяжелый
маятн.
2605(9)
2606(1)
2786(1)
2682(4)
2656(2)
2580(1)
2573(1)
2729(1)
2619(1)
2645(2)
2554(4)
2590(1)
2702(1)
2309(7)
Маятн. геод.
института
Итал. маятн.
2616(4)
0,25-м
Абсолютные измерения силы тяжести
173
Стеклянные
пластинки
Рис. 5.32.
П рибор с кварцевыми обор отн ы м и маятниками (Ц ентраль
ный институт физики Земли, П отсдам [604]).
Чтобы уменьшить влияние сокачания и микросейсм, впервые при абсолютных измере
ниях был использован двухмаятниковый метод (разд. 5.3.3). Применялись пара латунных
маятников и три пары кварцевых маятников. Остальные подробности содержатся в
табл. 5.7. Л а т у н н ы е м а я т н и к и были снабжены ножевыми призмами, поворот маятников
осуществлялся поворотом корпуса маятникового прибора вокруг горизонтальной оси. Из
мерение периода колебаний выполнялось с помощью электронного счетчика, работой ко
торого управляли световые импульсы, превращаемые фотоумножителем в электрические;
серия измерений содержала 500 колебаний. Среднее значение получено по большому числу
измерений периода колебаний при разных комбинациях ножевых призм и опорных площа
док (агат, сталь) и при смене призм. Между сериями наблюдений измеряли длину маятни
ков, сравнивая расстояния между опорными плоскостями с кварцевым эталоном длины
с помощью интерферометра. Температуру измеряли специальным маятниковым термо
метром. Вводились поправки за амплитуду (она равнялась 14'), изменения температуры,
остаточное сокачание, эксцентричность центра тяжести, упругие деформации лезвия и его
опоры, перемещения лезвия и длину эталона. Опорные поверхности к в а р ц е в ы х м а я т н и к о в
были плоскими, так что в смене ножевых призм необходимости не было. Благодаря уста
новке прибора на двойной гранитный пилон уменьшилось сокачание штатива (рис. 5.32).
Измерения длин выполнялись раздельно в пространстве и во времени путем интерферен
ционного сравнения с кварцевым эталонным жезлом. В отличие от латунных для кварце
вых маятников влияния температурных изменений, сокачания и узла лезвие — подставка
удалось свести к минимуму. В табл. 5.9 даны результаты определений, приведенные к ма
ятниковому пилону SO (к которому отнесены результаты Кюнена и Фуртвенглера 1906 г.).
Т а б л и ц а 5 .9 . Результаты измерений с оборотными маятниками в 1969 г., приведенные к двойному
пилону SO в маятниковом зале Потсдамского геодезического института на высоте 87 м [604]
Маятник
Латунный (0,25 м)
Кварцевый (0,375 м)
Кварцевый (0,50 м)
Кварцевый (0,75 м)
Среднее
g = 981 ... (мкм · с~2)
+ 2618,9
2602,4
2591,0
2602,4
±
2602,4
±
±
±
±
8,3
6,3
4,4
4,1
4,1
6. Относительные измерения силы тяжести
При относительных измерениях силы тяжести гравиметрический прибор позволя
ет измерять прямо или косвенно лишь одну из двух основных величин (время
или длину), определяющих ускорение. Неопределенность разрешается измерением
этой же самой величины на последующем пункте, а вторую, неизмеряемую вели
чину полагают неизменной. По измеренным приращениям времени или длины
вычисляют приращение силы тяжести между пунктами наблюдений. Относи
тельные измерения гораздо эффективнее по экономическим затратам, чем абсо
лютные измерения.
Динамический метод основан на измерении периода свободных или вынуж
денных колебаний чувствительного элемента. В настоящее время динамические
относительные гравиметры используются лишь для некоторых специальных за
дач (разд. 6.1). В статическом методе чувствительный элемент обычно удержива
ется в неподвижном состоянии силой упругости так, что достигается равновесие.
Чувствительная система сильно демпфирована. Наблюдают изменение положе
ния равновесия при перемещении с одного пункта на другой (разд. 6.2). Основные
характеристики таких приборов описаны в разд. 6.3. Из-за конструктивных осо
бенностей чувствительного элемента возникает необходимость в калибровках от
носительных гравиметров (разд. 6.4). Начиная с 1930-х гг. создано большое число
статических (относительных) гравиметров, характеристики которых соответство
вали в свое время уровню развития техники. Случайные и систематические воз
действия на чувствительную систему могут быть уменьшены инструментальны
ми и методическими мерами. Ошибка измерений современными приборами на
неподвижном основании (сухопутные гравиметры) лежит в пределах ± 10 " 7—
\0 ~ 9g (разд. 6 .6).
Теория относительных гравиметров основывается на механике твердого тела
[292]. Теория и методы относительных измерений силы тяжести рассмотрены в
учебной литературе по геодезии и геофизике [235, 246, 306, 462, 722]. Обзоры
современного состояния содержатся в работах [672, 694].
6.1.
6.1.1.
Динамический метод
Относительные маятниковые измерения:
основы метода
При относительных маятниковых измерениях определяют периоды колебаний Т\
и Тг физического маятника постоянной длины (неизменный маятник) на двух
пунктах Р\ и Рг. Для описания метода можно применить с некоторыми измене-
Относительные измерения силы тяжести
175
ниями теорию свободно колеблющегося маятника в том виде, как она дана в
разд. 5.3.1 и 5.3.2; более подробное описание можно найти в книге П.Ф. Шокина
[634], а также в статье Броуна [102].
Применив (5.47а) дважды, получим отношение значений силы тяжести gi и
Я2 = 7?
gi
7?
(6. 1)
Если величина gi известна, то g2 однозначно определяется по периодам Τ ι и Т 2
и приращение силы тяжести g2 - gi получается без калибровки. Преобразовав
(6. 1):
g2 _ / Т2 - (Тг - Тх) \ 2 _ / ,
«i
V
Тг
)
Т2 - Т { \ 2
Тг
V
)
'
получим приращение силы тяжести
А
,
Тг - Г.
{Тг - Г,)2
Δ^ι ,2 = g2 - gi = —2gi — =— + g i ----- =2-----·
Тг
Т{
(6 .2a)
Разложение в ряд дает
А
Тг - Т\
(Т г - Т \)2
Agi,2 = —2gi — - — + 3 g i----- ------- -- .
.
(
6
.
2
6
)
где уже второй член имеет порядок мкм-с" .
Выполнив дифференцирование (6.1), найдем связь относительных ошибок при
ращения силы тяжести и периода колебаний
dg2 _ d(Agi,2) _ 0 / dT\
Ъ
\Ί\
dT2\
~Ъ/'
(6.3)
Систематические ошибки, не зависящие от положения пунктов и времени, в раз
ности исключаются. Если приращение силы тяжести надо определить с ошибкой
± \ м км -с"2, то измерения времени следует выполнять с относительной ошибкой
не более ±5 х 10” 8. Из выражения (5.54) для приращений периода колебаний
Т и длины маятника /
dT _ }_d[
Т
2 I
(6.4)
следует, что длина маятника должна поддерживаться неизменной с точностью
± 1 0 “ 7. Как правило, использовали маятники с / = 0,25 м и Т = 1 с, для которых
в соответствии с разд. 5.3.3 точностные требования составляют ±0,05 мкс для
измерения периода колебаний и ±0,025 мкм для постоянства длины маятника.
При относительных измерениях влияние различных источников ошибок мень
ше, чем при абсолютных измерениях. Период колебаний легко измерить с ошиб
кой ± 1 0 нс с помощью фотоэлектрической регистрации и электронных счетчиков,
управляемых сигналами времени. Увеличив продолжительность наблюдений до
часа и более, можно уменьшить систематические ошибки измерения времени, а
176
Глава 6
также влияние вертикальных возмущающих ускорений. Разностная схема измере
ний позволяет, кроме того, в значительной степени уменьшить влияние формы
лезвия и деформаций маятника. Если амплитуда колебаний, температура и дав
ление на всех пунктах примерно одинаковы, то соответствующие влияния на при
ращения периода колебаний существенно уменьшаются. И наконец, влияния сокачания штатива и микросейсмических движений в горизонтальной плоскости ис
ключаются при двухмаятниковом методе.
Главным источником ошибок являются изменения приведенной длины маят
ника, т. е. изменения момента инерции, массы и расстояния от оси качаний до
центра масс (5.47). Эти изменения вызываются старением, окислением и корро
зией материала, износом лезвия и опоры, но прежде всего механическими сотря
сениями и быстрыми изменениями температуры при транспортировке и установ
ке прибора. В частности, эти эффекты приводят к неупругим деформациям, име
ющим как непрерывный, так и дискретный характер. Они обнаруживаются при
наблюдениях с несколькими парами маятников и повторными наблюдениями на
контрольных пунктах; учесть же их можно, задавшись моделью дрейфа периода
колебаний и исключив сильно отличающиеся результаты (выбросы). При созда
нии обширных опорных гравиметрических сетей часто использовали следующий
порядок измерений на пунктах: 1—2—1 и т. д. При профильных и площадных
работах наблюдения обычно выполняли по схеме петли в такой последователь
ности: 1—2—3 ...3 —2—1 или 1—2—3—4—1—5—6—7—1 и т. п. (разд. 6.6.3).
6.1.2.
Относительные маятниковые приборы и результаты
Обширные относительные маятниковые измерения выполняли в течение первых десятиле
тий 19 в. совместно с точными абсолютными измерениями или после них (разд. 1.2.2).
Вслед за появлением относительных маятниковых приборов фон Штернека (1887 г.) [657]
с 1890 по 1950 г. были выполнены обширные работы для создания национальных грави
метрических сетей и связи их с пунктами абсолютных определений (разд. 9.2.6). После
создания в 1930 г. статических гравиметров роль относительных маятниковых измерений
уменьшилась и свелась к крупномасштабному контролю гравиметрических сетей и уста
новлению эталонных гравиметрических базисов (разд. 6.4.5). С 1890 по 1970 г. на основе
достижений техники того времени было разработано несколько типов маятниковых при
боров для относительных измерений.
Относительный маятниковый прибор содержит следующие основные части:
маятник (обычно длиной 0,25 м), массивный штатив, регистрирующее устрой
ство и систему измерения времени. Маятники снабжены ножевыми призмами из
твердого материала, опирающимися на плоские площадки. Призмы и опорные
площадки изготавливают обычно из агата. Маятник чаще всего представляет со
бой стержень с тяжелой чечевицей (сдвоенный усеченный конус), укрепленный на
стержне, либо просто цилиндрический стержень. Для первого маятника фон
Штернека (рис. 6.1) было характерно малое сопротивление воздуха, а более позд
ний, минимальный маятник (рис. 6 .2) был нечувствителен к изменениям длины
(разд. 5.3.2). Так, у минимального маятника (Т = 1с) сдвиг опорного лезвия на
0,1 мм влечет изменение периода колебаний лишь на 1 0 " 7 с, тогда как у матема
тического маятника — на =ь 10 ~4 с [449]. Первоначально маятники изготавливали
Относительные измерения силы тяжести
Рис.
Рис.
6.1
6.2
177
(левый). Маятник фон Штернека для относительны х измерений.
(правый). Минимальный маятник фирмы G u lf Oil C orporation [780].
из латуни и бронзы, длина их сильно зависела от температуры. Позже чаще все
го использовали кварц (на таких маятниках мог накапливаться электростатиче
ский заряд), инвар (ферромагнетик, скачкообразные изменения длины), а также
молибден. Для уменьшения изменений длины, вызванных внутренними напряже
ниями, применяли искусственное старение материала.
Внешние возмущающие влияния можно уменьшить экранированием и методи
ческими мерами. Теплоизоляция предохраняет прибор от быстрых изменений
температуры. Благодаря отстойке перед началом измерений маятники восприни
мали температуру окружающей среды, термостатирование применялось весьма
редко. Инварные маятники необходимо было регулярно размагничивать. Их
экранировали катушкой Гельмгольца от воздействия изменений внешнего маг
нитного поля. Уменьшая давление воздуха до -1 0 0 Па и менее, можно было
уменьшить барометрическое влияние и поддерживать его практически неиз
менным.
Поправки за температуру (приведение к средней температуре) и давление
окружающей среды (приведение к среднему давлению) находили эксперименталь
но. Кроме того, необходима поправка за амплитуду (< 30').
Измерительная аппаратура более поздних конструкций упаковывалась в
удобные контейнеры (общий вес до 200 кг). С учетом установки прибора, време
ни, необходимого для восприятия окружающей температуры (несколько часов),
измерений (час и более) и упаковки работы на пункте могут занимать полдня
или даже целый день. Для повышения точности необходимо размещать прибор
на весьма стабильном основании — пилон или твердый грунт — в помещении,
защищенном от ветра и солнечных лучей.
К концу 19 столетия с одномаятниковым прибором удалось достигнуть точ
ности лишь ± 100—ЗООмкм-с-2 . С 1900 по 1950г. благодаря двухмаятникову ме
тоду, повышению точности измерений времени и вакуумированию приборов
ошибка уменьшилась до ±10—20мкм с " 2. В 1950—1970 гг. применение несколь
ких пар маятников и совершенствование учета вариаций температуры позволило
снизить ошибки до ± 2 —5мкм с " 2 в зависимости от внешних условий маятнико-
Глава
178
Рис.
6.3.
6
Четырехмаятниковый прибор (типа фон Штернека). (Институт геодезии, Ганновер.)
вой связи. Оставались трудности, связанные с частыми скачками в периодах ко
лебаний и коррешщией результатов по маятникам, находившимся в одинаковых
условиях.
Отметим некоторые из последних маятмиковых приборов. Среди них
-
четырехма
итннковый прибор фирмы «Аскании», Берлин (25-сантиметровые инварные позолоченные
маятннu), типа прибора Штернека (рис.
6.3);
Кембриджский двухмаятниковый прибор (с
инварными маятниками и катушкой Гельмгольца); термостатированный двухмаятниковый
прибор Обсерватории доминиона, Оттава (бронзовые маятники), а также прибор Цент
рального
научно-исследовательского
института
геодезии,
аэросъемки
и
картографии
(ЦНИИГАиК), Москва (кварцево-металлические маятниu, ошибка измерений уменьшена
до ±0,5-1 мкм·с- 1 благодари усовершенствованИJIМ прибора, увеличению числа измере
ний на пункте и применению нескольJСИХ пар маятников) 1 >. Двухмаятннковый прибор (ми
нимальный маятник из плавленого кварца длиной
32,5 см
1935 гг.),
а с
1950 г. -
20 см)
(1930-
и приведенной длиной
корпорации «Галф Ойл» широко применился при поисках полезных ископаемых
при создании мировой гравиметрической сети. Трехмаятниковый
метод Венинг-Мейнеса (разд.
7.3.1)
послужил основой дли создании приборов с кварцевы
ми и молибденовыми маятниками Института геофизической съемки
(Touo)
и Итальян
ской геодезической комиссии.
Начиная примерно с
1950 г.
пружинные гравиметры стали обеспечивать высо
кую точность на больших расстояниях и при больших приращениях силы тяже
сти между пунктами. Вследствие этого относительные маятниковые измерения
использовались ограниченно вплоть до
1970 г.;
перечисленные приборы применя
ли для создания мировой гравиметрической основы и гравиметрических калибро
вочных базисов
(474, 780)
(разд.
9.1.l).
Ныне в связи с созданием транспортабель-
•) Двухмаятниковый термостатированный и вакуумированный прибор АГАТ ЦНИИГАиК широ
I класса. Ошибка связи с комплектом из трех
приборов 0,2 - 0,4 мкм · с - 2 ; точность уравненной маятниковой сети ( - 500 пунктов) 0,29 мкм · с - 2 ,
систематические расхождения с абсолютными определениями отсутствуют. - Прим. ред.
ко применяется при построении гравиметрической сети
Относительные измерения силы тяжести
179
ных абсолютных гравиметров (разд. 5.2.3, 5.2.4), точность которых ±10 8g, от
носительные маятниковые измерения потеряли свое значение.
6.1.3.
Упругий маятник
Относительный динамический гравиметр можно построить также на основе
упругого (обратного) маятника. В положении покоя центр масс С маятника рас
положен строго над осью качаний О и удерживается в равновесии крутильной
нитью или плоской пружиной (рис. 6.4). При отклонении массы от вертикали на
угол φ на нее воздействуют два вращающих момента: момент mag sin φ силы
тяжести, увеличивающий отклонение от положения равновесия, и противодей
ствующий момент, вызванный упругой силой пружины. При малых смещениях
последний момент пропорционален углу φ. Изменив знак гравитационного мо
мента и выразив момент пружины, получим на основании (5.44) уравнение колебаний
Jo<p - mag sin φ + k<p = 0,
(6.5)
где к — постоянная пружины.
Период колебаний можно получить, преобразовав (5.47а) для случая малой
амплитуды
( 6 . 6)
для устойчивости системы необходимо, чтобы выполнялось условие k/(ma) > g.
Для определения приращения силы тяжести Agi ,2 по аналогии с (6.1) необходимо
измерить периоды колебаний Т\ и 7г, а постоянную к/(та) следует определить
на калибровочном базисе (разд. 6.4.5).
Преимущество упругого маятника перед свободно колеблющимся неизмен
ным маятником (разд. 6 . 1. 1) состоит в более высокой чувствительности к измене
нию силы тяжести. Это можно показать, дифференцируя (6 .6); в результате
получим
dT _ rna_dg_- dk
T
2(k - mag)
mg sin
φ
Пру*
Рис. 6.4.
Принцип упругого маятника.
(6.7a)
Глава 6
180
Подбором материала пружины и защитой от внешних возмущающих влияний
стремятся достичь постоянства упругой силы (dk « 0). Тогда
dT =
mag
Т
2(к - mag)
dg =
g______ dg
g
2(k/(ma) - g) g
(6.76)
Сравнение со свободно колеблющимся маятником (5.54) показывает, что величи
на dT /T увеличивается «коэффициентом астазирования» mag/(k - mag)
(разд. 6.2.3). Измеряемая величина Т более чувствительна к изменению силы тя
жести, соответственно уменьшаются требования к точности ее измерения. Жела
емую чувствительность можно получить, изменяя а (расстояние центра тяжести
от оси качаний) либо т , что делается реже.
Использовать обратный маятник в гравиметрии предложили Хольвек и Леже [307].
Прибор применялся в 1930-х гг. для обширных гравиметрических съемок на территории
Франции, а также в Передней, Восточной и Юго-Восточной Азии. Маятник представлял
собой кварцевый стержень длиной 6 см и диаметром 4 мм, укрепленный на упругой пру
жине из элинвара (толщина 0,02—0,03 мм). Колебания маятника регистрировали фото
электрическим методом. Маятник находился в вакуумированной стеклянной камере, изме
нения температуры учитывали поправками. При / = 6 см и к/(та) = 9,85 м с “ 2 период
колебаний Т = 7 с и dT/T = 100 dg/g. Таким образом, для достижения относительной
ошибки dg/g = 10"6 достаточно было получить период колебаний с ошибкой
±7 х 10 ”4 с, что возможно даже при невысокой точности измерений времени, если серия
наблюдений содержит около 100 колебаний. Эти точностные требования на три порядка
ниже, чем для обычного маятника (Т = 1 с). С несколькими такими приборами, которые
было легко перевозить, за полчаса наблюдений на пункте достигали точность ± 10—
50мкм*с-2. Точность измерений ограничивалась изменениями упругости пружины из-за
температурных вариаций, а также чувствительностью к вибрациям.
Измерения с упругим маятником прекратились после создания производитель
ных статических относительных гравиметров (разд. 6.2—6.5).
6.1.4.
Струнный гравиметр
Для измерений силы тяжести динамическим методом можно также использовать
поперечные колебания упругой струны, подвешенной вертикально и натянутой
грузом (рис. 6.5). Одномерное волновое уравнение для однородной струны, со
вершающей колебания в вертикальной плоскости, имеет вид [381]
x =
( 6 . 8)
где F — сила натяжения струны, m ' = q q — масса струны на единицу длины
(ρ — плотность струны, q — площадь поперечного сечения). Разделив перемен
ные и решая (6 .8), получим основную частоту колебаний струны / = 1/ Т (Т —
период колебаний)
(6.9)
где / — длина струны.
Относительные измерения силы тяжести
181
Рис. 6.5.
Принцип струнного гравиметра: а — со св обод н о
подвеш енной массой; б — с дополнительны м натя
жением; в — с двумя струнам и.
Рассмотрим разные измерительные схемы. В случае свободно подвешенной
массы т (рис. 6.5, а) на струну действует сила, равная весу mg, и поэтому
( 6 . 10)
Таким образом, измерение силы тяжести сводится к измерению частоты. При
этом в качестве постоянных выступают плотности и геометрические параметры
колебательной системы; величина упругости струны в уравнение не входит. Из
(6.10) следует, что величины силы тяжести в точках Pi и Р2 связаны соотно
шением
f2
82
л
Si
Л
( 6 . 11)
которое согласуется с выражением (6 . 1) для свободно колеблющегося маятника.
Для определения приращения силы тяжести
Δ*Ι.2 = * 2 - * Ι = 5 ί / ! - / ? )
(6-12)
никакой калибровки не требуется. По аналогии с (6.3) дифференцирование (6.11)
дает выражение для относительной ошибки:
dgi = d(Agi,2) _ , ( d h _ d/ Λ
(6.13)
g2
g2
\ Λ ' 7i /
Чтобы найти приращение силы тяжести с ошибкой ±1 м км -с"2, необходимо из
мерять частоту с относительной ошибкой менее ±5 х 10 ~8, что при частоте
/ = 1000 Гц соответствует ошибке определения времени ±5 х 10 " 5 с. Такая точ
ность может быть получена с кварцевыми часами, при интегрировании на боль
шем отрезке времени (например, 1000 с) ошибку измерений можно уменьшить.
Если имеется дополнительное натяжение Ро (рис. 6.5, б), то действующая си
ла составит F = Ро + mg и выражение для частоты примет вид
/
■ E т . ·21 yj Iт* \ ( i. w
)
Ро /
21 <yj
(6.14а)
Биномиальное разложение дает следующий ряд:
= *0 +
Kxg
+
K2gz
+ ....
( 6 . 146)
Глава 6
182
Постоянные прибора Ко, К \у Кг, . . . определяют калибровкой. При выводе при
ращения силы тяжести величина Ко исключается. Вертикальные возмущающие
ускорения, обычно сопровождающие измерения на подвижном основании, приво
дят к заметной ошибке в среднем значении силы тяжести из-за нелинейного чле
на Kig2 (разд. 7.2.2).
Сдвоенная струнная система содержит два груза (рис. 6.5, в). Для верхней и
нижней струны силы натяжения равны соответственно F0 + mg и F0 - mg. Поэ
тому для частот / в (верхняя струна) и / н (нижняя струна) знаки коэффициентов
К i, * 3, . . . в выражении (6.146) будут противоположными. Для разностной ча
стоты имеем
Δ / = / в - /„ = ко + kig + k2g2 + k3g 3 + . . . ,
где
ко = Я * , - ^ 0(н)>
= Ацв) - * 1(н)
(6.15а)
и т. д.
Для симметричных колебательных систем последнее выражение приобретает вид
Δ / = kig + . . . ,
*, =2tfi.
(6.156)
Таким образом, нелинейные эффекты в значительной мере исключаются. Для
разности результатов на двух пунктах имеем окончательно
Δ/ ι ,2 = 4/2 - Δ/ι = ki(g2 - gi) + . . . .
(6.16)
Струна гравиметра (лента, проволока из электропроводящего материала) совер
шает колебания с резонансной частотой в магнитном поле. При этом на ее кон
цах возникает переменное электрическое напряжение той же частоты; оно усили
вается и используется с помощью системы обратной связи для поддержки коле
баний. Искомое приращение частоты определяют сравнением с частотой
стандарта.
Преимущества струнного гравиметра состоят в малых размерах, возможнос
ти непрерывно получать и передавать выходной сигнал, независимости от упру
гих свойств струны и, кроме того, большом диапазоне измерений. Гравиметры
этого типа используют на подвижном основании (надводные суда), в скважинах
и на морском дне. Струнный гравиметр применяли для измерений силы тяжести
на поверхности Луны. Разные конструкции приборов описаны в разд. 7.3.4. Они
позволяют работать с точностью ±1 — Юмкм-с"2.
6.2.
Статический метод
6.2.1.
Вертикальные пружинные весы
В статическом методе действие силы тяжести на пробную массу компенсируется
для достижения равновесия некоторой противодействующей силой, которую
можно измерять. Чаше всего эта противодействующая сила создается упругой
пружиной. Применение неупругих сил рассмотрено в разд. 6.2.4.
Принцип вертикальных пружинных весов (рис. 6 .6 ) использован в гравимет
рах нескольких типов. Расположенная вертикально пружина (спиральная или вин-
Относительные измерения силы тяжести
183
Г
Статическое
равновесие
mg
ζ
Рис. 6.6.
Принцип весов с вертикальной пружиной.
товая) без нагрузки имеет длину /о. Под действием силы тяжести пробная масса
растягивает пружину до длины /, при этом наступает статическое равновесие. Ес
ли удлинение невелико, то по закону Гука деформация пропорциональна прило
женной силе. Поэтому условие равенства упругой силы и силы тяжести имеет
вид
к(1 - /о) = mg,
(6.17)
где к — постоянная пружины, которая зависит от ее геометрии и упругих
свойств. Выражение (6.17) описывает линейную зависимость между силой тяже
сти и длиной пружины. Для перехода от приращения длины к приращению силы
тяжести необходима калибровка (разд. 6.4).
Система пружина — груз вертикальных пружинных весов представляет собой
простой пружинный маятник, который может совершать вертикальные колеба
ния относительно положения равновесия (ζ = 0 ).
Положительное смещение z = ζ(0 увеличивает восстанавливающую силу на
величину kz, таким образом, сумма действующих сил описывается соотношением
mz = mg - k(I - /0) - k z.
С учетом (6.17) уравнение движения имеет вид
mz + kz = 0 .
(6.18)
Таким образом, недемпфированный пружинный маятник совершает гармониче
ские колебания по закону
Z = Zo
cos (ωοί - φ),
(6.19а)
где zo — амплитуда, ωο = yfk/m — круговая частота колебаний, φ — начальная
фаза.
Период колебаний
гТ0 = 2π
~ Ζт
— = 2ж
ώο
<\k
(6.196)
не зависит от силы тяжести, и поэтому в данном случае динамический метод
(разд. 6.1) применить нельзя. При больших значениях к (более жесткая пружина)
период колебаний уменьшается и, согласно (6.17), удлинение тоже уменьшается.
184
Глава 6
Из (6.17) следует соотношение, связывающее период колебаний и длину
пружины:
То
=
2тг
Ί-Ιο
(6.19в)
что согласуется с (5.47).
Если необходимо измерить удлинение пружины, то колебания надо погасить демпфи
рованием. Полагая, что сила сопротивления пропорциональна скорости, напишем выраже
ние (6.18) в виде:
mz + βζ + kz = 0 ,
(6 .20а)
где β — коэффициент трения. Введем коэффициент затухания δ = /3/(2т). Тогда с учетом
(6.19) имеем
Ζ + 2&Ζ + ωΐζ = 0.
(6.206)
Решением уравнения (6.206) будет уравнение затухающих колебаний, амплитуда которых
уменьшается со временем по экспоненциальному закону; круговая частота колебаний
ω2 = «о —δ1.
(6.20в)
При увеличении демпфирования частота колебаний уменьшается. Можно получить режи
мы апериодического затухания (ω%- δ2 < 0), затухающих колебаний (ω£ - δ2 > 0) и крити
ческого демпфирования (с*>о - δ2 = 0).
Дифференцируя (6.19), получим выражение для механической чувствительнос
ти вертикальных пружинных весов:
d[ _ т _ То
dg~ к
4 ТГ1
( 6 . 21)
Для пружины, у которой / - /о = 0,1 м, период колебаний составит Т0 = 0,6 с, а
чувствительность dl/dg = 0,01 с2. Чтобы оценить изменение силы тяжести с
ошибкой ± 10 _8g (что соответствует величине ± 0,1 мкм-с-2), удлинение пружи
ны необходимо измерять с ошибкой ± 1 нм; это примерно 10 диаметров атома
водорода. Именно поэтому необходимо иметь высокочувствительное устройство
для регистрации положения груза и пружину с постоянными во времени характе
ристиками (разд. 6.3.2, 6.3.3).
Вместо удлинения спиральной пружины можно измерять угол поворота ее нижнего
конца под воздействием приложенной нагрузки. Здесь также существует линейная зависи
мость между изменением силы тяжести и углом поворота. Высокая чувствительность мо
жет быть достигнута применением торсионной пружины, изготовленной из узкой ленты.
Как следует из (6.21), чувствительность простых вертикальных пружинных ве
сов может быть повышена лишь до некоторого предела. Увеличение длины пру
жины до 1м (Т = 2 с) привело бы к повышению чувствительности лишь в 10
раз; такой гравиметр уже не будет портативным полевым прибором. Дальней
шее повышение чувствительности возможно с применением нелинейных рычаж
ных пружинных весов (разд. 6 .2 .2).
Относительные измерения силы тяжести
185
Рис. 6.7.
Принцип бифилярного гравиметра.
Высокую чувствительность имели пружинные весы с нитяным подвесом. Такие при
боры представляли собой бифилярные и трехнитяные гравиметры с чувствительной систе
мой в виде диска или эллипса, подвешенного на двух или трех нитях (рис. 6.7). Поворот
пробной массы в горизонтальной плоскости вызывает крутильный момент, противодей
ствующий моменту закрученной пружины. Регулируя угол поворота, можно получить
сколь угодно близкое приближение к положению неустойчивого равновесия (разд. 6.2.3).
Малые изменения силы тяжести тогда повлекут большие угловые смешения. Высокая чув
ствительность к наклону прибора, нелинейная характеристика, сильная зависимость от
температуры и вибраций ограничили применение таких гравиметров исключительно ста
ционарными наблюдениями приливных изменений силы тяжести (разд. 10.1.2).
6.2.2.
Рычажные пружинные весы
Гравиметры, основанные на принципе рычажных пружинных весов, нашли широ
кое применение; в них используют закрученные или спиральные пружины.
Рассмотрим сначала рычажные крутильные пружинные весы (рис. 6 .8). Точеч
ная масса т расположена на конце рычага длиной а, который может поворачи
ваться вокруг горизонтальной оси О. Угол между рычагом и отвесной линией
равен а. Закрученная пружина, скрепленная с рычагом в точке О, создает кру
тильный момент, пропорциональный углу а. Принимая, что вся масса рычага
равна т , запишем уравнение равновесия для моментов силы тяжести и упругой
силы:
mga sin а - r(^o + α) = 0 ,
( 6 . 22 )
где τ — постоянная кручения, зависящая от длины, толщины и упругости нити,
ао — угол начального закручивания пружины.
В данном случае изменения силы тяжести влекут изменения угла закручива
ния, при этом возникает нелинейное соотношение. Дифференцирование (6.22) поз
воляет получить выражение для механической чувствительности системы в
виде
da _
та sin а
(6.23а)
dg
τ - mga cos а
Чувствительность можно увеличить подбором параметров системы. Преобразо
вав (6.23а) с учетом (6.22), получим
da =
ао + а
(6.236)
dg # 0 - («о + ос) ctg а) '
186
Рис. 6.8
Рис. 6.9
Глава 6
(левы й).П ринцип рычажных весов с торсионной пружиной.
(правый). Принцип рычажных пружинных весов.
Отсюда следует, что максимальную механическую чувствительность можно до
стичь при определенном сочетании величин а 0 и а (разд. 6.2.3).
Особый интерес представляют случаи, когда а = 0° и а = 90°. При а = 0°
система превращается в упругий маятник, который можно использовать для из
мерений силы тяжести динамическим методом (разд. 6.1.3). При а = 90° получим
горизонтальные рычажные пружинные весы. Их чувствительность определяется
выражением
,
d a _ та _ «q.+jr /2
„ 24)
dg~ τ - - g
'
К’ }
из которого следует, что измерительная система является линейной. При точнос
ти измерений ± 0,1 мкм-с " 2 и при ао + а = 2ж требуется угловое разрешение в
0" ,013. При длине рычага 0,1м это соответствует необходимой точности 6 нм
при регистрации смещения рычага.
Если удерживающая сила создается спиральной пружиной, то это случай
обычных рычажных пружинных весов (рис. 6.9). Упругая сила k(l - /о) может
действовать на рычаг с пробной массой m под произвольным углом. Линия, со
единяющая ось вращения О с верхней точкой крепления пружины, отклоняется
от вертикали на угол δ. Как следует из рис. 6.9, вращающий момент пружины
описывается выражением
MF = k(l - lo)h = k(l - lo)b j sin a.
Условие равновесия для моментов, создаваемых силой тяжести и упругой силой
пружины, имеет вид
mga sin (α + δ) - kbd -
sin α = 0.
Выполнив дифференцирование этой формулы, получим
(6.25)
Относительные измерения силы тяжести
187
Согласно рис. 6.9,.
I1 = d2 -l· b2 - 2bd cos а
и, таким образом,
dl = -J- sin ado..
Подстановка dl дает выражение для чувствительности
da
dg
та sin (о: + δ)
kbd
l
(6.26)
Чувствительность такой нелинейной системы может быть существенно повыше
на подбором параметров.
Если длина ненагруженной пружины близка к нулю (пружина нулевой длины),
то выражения (6.25) и (6.26) при /о = 0 принимают вид
mga sin (а + 6) - kbd sin а = О,
da _ sin (α + δ) sin a
dg
g sin δ
(6.27)
(6.28)
В этом случае расстояние d становится пропорциональным силе тяжести
, _ та sin (α + δ)
kb sin a
8
(6.29)
Чувствительность можно повысить подбором ό и а (разд. 6.2.3).
6.2.3.
Астазирование
Под астазированием понимают повышение механической чувствительности сис
темы вращательного типа. Оно достигается благодаря сближению характери
стик вращающих моментов (соотношения между моментом М и углом а) силы
тяжести и упругой силы пружины. Для этого можно либо уменьшить восстанав
ливающий момент пружины, либо соответственно увеличить момент силы тяже
сти, что осуществимо конструктивными мерами. Можно также использовать
воздействие дополнительных пружин [343]. При этом положения устойчивого и
неустойчивого равновесия сближаются, а при полном астазировании получается
неопределенное равновесие.
Равновесие достигается, когда разность вращающих моментов, порожденных
силой тяжести Mg(g, а) и упругой силой пружины M f(o ), равна нулю:
M = Mg — MF = o,
см. формулы (6.22), (6.25). В данном случае имеем
ЪМ/Ъа < 0 для устойчивого равновесия,
дМ/да > 0 для неустойчивого равновесия,
дМ/да = 0 для безразличного равновесия.
(6.30)
188
Глава 6
Mg,MF
Рис. 6.10 (левый). Вращ ающ ие мом енты линейного гравиметра.
Р ис. 6.11 (правый). Вращ ающ ие м ом енты астазированного гравиметра.
На рис. 6.10 приведены характеристики вращающих моментов для линейной сис
темы. Изменение силы тяжести на величину dg приводит к тому, что момент
становится равным Mg(g + dg, а) и положение равновесия наступает при угле
а + da.
Формула для чувствительности получается дифференцированием (6.30):
дМ ,
дМ ,
А
dM = — dg + -5— da = 0 ,
dg
да
да _ _ дМ/dg _ _
dMg/dg
dg
дМ/da
д Щ - M F)/da ’
(6.31)
см. (6.23), (6.26).
Получим соотношение между периодом колебаний рычага и чувствительнос
тью, Уравнение движения для системы вращательного типа имеет вид
Jodt + М ( а ) = 0,
(6.32а)
где Jo — момент инерции относительно оси вращения. Если вся масса т рычага
сконцентрирована в точке на расстоянии а от оси вращения, то Jo = а2т. Разло
жение функции М ( а ) в ряд Тейлора для положения равновесия (О) дает
М ( а ) = М( а ) о +
а +
Поскольку М(а)о = 0, уравнение (6.32а) становится уравнением движения при гар
монических колебаниях:
(дМ/ d a ) о
а = 0.
а + (6.326)
Jo
Из выражения (6.31) следует формула, связывающая период колебаний и чувстви
тельность по аналогии с (6 .21); она имеет вид
Jo
da
Jo
То = 4тг2 (дМ/ d а)о = 4πζ (dM/dg)odg *
(6.33)
Когда M g и M F сближаются, величина д М/ d a уменьшается, а чувствительность
d a / d g увеличивается (рис. 6.11). При этом система становится более чувствитель
Относительные измерения силы тяжести
189
ной к ошибкам приведения в горизонт (разд. 6.3.4). Устранить зависимость чув
ствительности от угла а можно, применяя нулевой метод измерений (разд. 6.3.3).
Из (6.33) следует, что чувствительность повышается с увеличением периода коле
баний. Устойчивость системы понижается по мере приближения к безразличному
равновесию дМ/да = 0 (То = оо). В зависимости от того, насколько сходны вра
щающие моменты, астазирование повышает чувствительность системы на 2—3
порядка.
Из выражения (6.236) следует, что для весов с закрученной пружиной полное астази
рование достигается, когда выполняется условие
ао = tg а - а.
(6.34)
На основании (6.28) можно заключить, что чувствительность рычажных весов с пружиной
нулевой длины будет высокой при малых δ. Из (6.27) при 5 = 0 имеем
mga - kbd = 0.
При
дМ/да = 0,
da/dg = оо,
(6.35)
Т = оо
(6.36)
положение безразличного равновесия будет при любом значении а. Положение, близкое
к полному астазированию, достигается при малом δ и а =* 90°. Если а + δ = 90°,
δ = 100", то da/dg = 2 х 10"2 р ад /м с"2, что следует из (6.28). Таким образом, для дости
жения ошибки измерения 0,1 мкм с " 2 требуется угловое разрешение в 4 ", т. е. при длине
рычага 0,1 м ошибка измерения линейного перемещения должна быть 2мкм. По сравне
нию с линейной системой (разд. 6.2.1) чувствительность в данном случае увеличилась в
2000 раз.
6.2.4.
Неупругие компенсирующие силы
В некоторых гравиметрах для уравновешивания силы тяжести используются неу
пругие компенсирующие силы. Этим самым устраняются главные недостатки
упругих пружин, т. е. отклонения от закона Гука и временные изменения упругих
свойств (разд. 6.3.2, 6.6.3). Между тем, как правило, неупругие системы более
дорогостоящие и обладают иными недостатками (сильная зависимость от темпе
ратуры, ограниченный диапазон измерений). Поэтому они либо изготовлялись
как единичные опытные экземпляры, либо использовались только для специаль
ных целей.
В газовых гравиметрах для компенсации действия силы тяжести на столбик
ртути (плотность ρ, высота Αζ) используется давление воздуха р. При гидроста
тическом равновесии для ртутного барометра будет справедливо следующее ра
венство (рис. 6 . 12, а):
Р = QgAz.
Поскольку
(6.37)
dg = _ d(Az) dp
g
Δζ
ρ 9
то изменения силы тяжести можно определить по изменениям высоты ртутного
столба при условии, что изменения атмосферного давления известны. Исследова
лись и осуществлялись различные подходы.
190
Глава 6
»)
б)
Маркерный
столбик
Рис. 6.12. Принцип газового гравиметра: а — ртутный баром етр; б — конструкция гравиметра Хаалька
[253].
Прежде всего можно измерить атмосферное давление способом, не зависящим от си
лы тяжести, с помощью термометра для определения точки кипения воды (гипсометр).
Более предпочтителен гравиметр с замкнутой чувствительной системой (рис. 6.12, б).
Здесь достигается равновесие между давлением р\ (в вакуумной камере), рг (атмосферное
давление) и давлением ртутного столба [253]. При изменении силы тяжести маркер сме
щается и указывает новое положение равновесия. Изменением диаметра трубки можно
регулировать демпфирование газового гравиметра. Уменьшая отношение диаметра трубки
к диаметру ртутного столба, можно увеличить чувствительность системы. К недостаткам
прибора относятся сильная зависимость его показаний от температуры (изменение темпе
ратуры на 3 х 10"4 °С £ 1 0 мк мс ~ 2) и большие размеры. Приборы такого типа ограни
ченно применялись с 1900 по 1940 г., в основном при морских гравиметрических съемках
(разд. 7.3).
Равновесие в поле силы тяжести можно осуществить и с помощью магнитной
компенсирующей силы, причем магнитное поле может создаваться как постоян
ными магнитами, так и электромагнитами. Особенно сильные и стабильные по
ля генерируются при состоянии сверхпроводимости. Если охладить проводник
почти до абсолютного нуля, его проводимость резко возрастает, а электрическое
сопротивление приблизится к нулю. При изменениях силы тяжести электропро
водящая пробная масса сместится по вертикали, величину перемещения можно
измерить электронными методами. Гравиметры с магнитной силой используют
ся как стационарные для регистрации изменений силы тяжести во времени
(разд. 10.1.5). И наконец, при высокоточных измерениях на суше в сочетании с
упругими силами пружин используют электростатические силы (разд. 6.3.3), а
в морских и аэрогравиметрах для компенсации малых изменений силы тяжести
применяют электромагнитные компенсирующие силы (разд. 7.3.5).
6.3.
Особенности пружинных гравиметров
6.3.1.
Основные части гравиметра
Важнейшей частью пружинного гравиметра является чувствительная система
«пружина — пробная масса», выполняющая функции гравиметрического датчика.
Свойства удерживающей пружины, уравновешивающей действие силы тяжести
на пробную массу, в основном и определяют ее качество (разд. 6.3.2). Для опре
Относительные измерения силы тяжести
191
деления изменений положения равновесия при изменениях силы тяжести служит
система индикации. К разрешающей способности этой системы должны предъ
являться строгие требования (разд. 6.3.3). В приборе имеются и дополнительные
пружины. Поэтому условие равновесия должно учитывать порождаемые ими си
лы или вращающие моменты. Для ориентирования системы относительно отвес
ной линии требуется уровень (разд. 6.3.4). Чтобы максимально уменьшить внеш
ние возмущающие влияния, зависящие от положения пункта и времени наблюде
ний, помимо подбора материала пружины применяют специальные компенси
рующие и/или экранирующие устройства (разд. 6.3.5). Для освещения шкал, для
питания электрических измерительных схем и термостатов используют электри
ческие батареи.
6.3.2.
Упругие пружины
Упругие пружины создают силу, противодействующую силе тяжести. Обычно
это спиральные, реже плоские пружины с разным поперечным сечением, круглым
или прямоугольным. Спиральные пружины растягиваются или закручиваются, а
плоские — изгибаются. Особый интерес представляют пружины «нулевой дли
ны», длина которых /о в отсутствие нагрузки равна нулю (разд. 6.2.2); это свой
ство достигается предварительным напряжением пружины.
Если требуется относительная точность ± 1 0 -8, то и стабильность компенси
рующей силы должна быть такой же; на основании (6.17) имеем
^
g
к
.
(6.38)
Материал пружины должен удовлетворять следующим требованиям:
— большой модуль упругости Е для того, чтобы натяжение пружины могло
быть большим. В соответствии с законом Гука напряжение σ при упругой де
формации пропорционально относительному удлинению:
σ =Е ^ ,
где Δ/ — удлинение пружины; / — длина пружины;
— малый термоэластический коэффициент
АЕ
ε =
EAt 9
(6.39)
(6.40)
т. е. малую зависимость модуля упругости от температуры (Δ/ — изменение
температуры);
— малый температурный коэффициент линейного расширения
А1
(6.41)
IAt 9
т. е. малое изменение длины пружины с температурой;
— наименьшие отклонения от идеальной упругости, т. е. малый упругий гистере
зис (запаздывание при изменении нагрузки) и малая по возможности линейная
ползучесть (деформация при неизменной нагрузке) (рис. 6.13);
192
Глава 6
Рис. 6.13. Зависимость деформации упругой пружины от напряжения (слева) и от времени (справа).
— малое влияние магнитных и электрических полей;
— простота изготовления пружины.
Производство пружин нужного качества началось лишь в 30-е гг.; когда мате
риаловедение и технологические возможности достигли должного уровня, пружи
ны стали изготавливать из металла и кварца. Металлические сплавы в основном
состоят из железа, никеля и хрома (элинвар). Из такого сплава сравнительно лег
ко изготавливать пружины; они обладают высокой твердостью и прочностью
на разрыв. Делать пружины из плавленого кварца сложнее, однако выплавка от
дельных элементов без внутренних напряжений обещает ряд преимуществ. Упру
гие и термические свойства материалов пружин улучшают предварительной обра
боткой. При этом внутренние напряжения устраняют, выдерживая заготовку под
нагрузкой и подвергая ее термической обработке (искусственное старение). Из
всей партии изготовленных пружин отбирают лишь те, которые обладают на
илучшими свойствами, и именно их устанавливают в гравиметры. Основные ха
рактеристики элинвара и кварца приведены в табл. 6 . 1.
Т аблица 6.1. Характеристики металлических и кварцевых пружин (средние значения)
Характеристика
М одуль упругости Е ( Н м - 2 )
Термоэластический коэффициент
ε (1 /° С )
Температурный коэффициент
линейного расширения
а/ (1 /° С )
П олзучесть
Влияние магнитного поля
Элинвар
Кварц
1 х 10"
2 х 10"
0 — ± 10 х 10 “ 6100 х 1 0 " 6 (-л и н е й н ы й )
1 х 1 0 _6
3 х 10"7
Малая
Имеется
Значительная ( - линейная)
Нет
Из данных таблицы следует, что металлические пружины имеют личшие тер
моупругие характеристики, а кварцевые — меньший коэффициент температурно
го расширения. Обеспечение температурной стабильности требует дополнитель
ных мер, особенно в гравиметрах с металлическими пружинами. Кроме того, не
обходимо устранить магнитные влияния. Обычно системы с металлическими
пружинами тяжелее и занимают больший объем, чем системы с кварцевыми пру
жинами, которые можно изготовить из одной плавки.
Относительные измерения силы тяжести
6.3.3.
193
Системы индикации и измерительные устройства
В пружинных гравиметрах необходимо с высокой точностью измерять малые ли
нейные или угловые смещения, при этом линейные системы требуют большего
разрешения, чем астазированные (разд. 6.2.3). Различают оптические и электриче
ские системы индикации [247].
В оптической системе наблюдают положение оптического индекса. При этом
пучок света от источника падает на зеркало с большим коэффициентом отраже
ния, скрепленное с подвижной частью системы; возможно многократное отраже
ние. Если световой сигнал освещает фотоэлемент при различных положениях ры
чага, то величина фототока будет мерой изменения силы тяжести, ее можно из
мерить гальванометром (фотоэлектрическая измерительная система). Для астазированных гравиметров характерно непосредственное наблюдение отсчетного
индекса, прикрепленного к плечу рычага. Оптическая система проектирует отсчетный индекс в картинную плоскость отсчетного микроскопа, и его положение
отсчитывается по шкале.
Электрическая измерительная система преобразует смещение чувствительной
системы в электрический сигнал. Такая система позволяет получить большее раз
решение, чем оптическая. Устройство вывода данных регистрирует и обрабаты
вает измерительную информацию в аналоговой или цифровой форме [345].
В емкостной системе пластина, прикрепленная к чувствительному элементу,
представляет собой подвижную обкладку плоского трехпластинного конденсато
ра (рис. 6.14). Генератор вырабатывает переменное напряжение постоянной ча
стоты, которое подается через трансформатор на неподвижные обкладки конден
сатора. Смещение подвижной пластины вызывает изменение амплитуды и фазы
напряжения на плече рычага. Это напряжение через усилитель подается на фазо
вый детектор, где сравнивается по фазе с напряжением генератора. Выходной
сигнал (постоянный ток) усиливается и поступает на индикатор (гальванометр).
Для регистрации в полевых условиях удобен внешний цифровой вольтметр. Что
бы подавить влияние микросейсм, вольтметр следует подключить к выходу из
мерительной системы через низкочастотный фильтр. Разрешение емкостного ме
тода может быть повышено по крайней мере в 10 раз по сравнению с чисто
оптической регистрацией [761]. Временную стабильность отсчетной системы не
обходимо контролировать повторной калибровкой [302].
Генератор
колебаний
'V
Трансформатор)
Рис. 6.1 4 . Емкостный
индикатор положения ( ЕИП).
Пластина
194
Глава 6
Изменение положения чувствительного элемента можно измерять, либо реги
стрируя положение индекса деформированной упругой системы, либо нулевым
методом. В первом случае смещение измеряют, непосредственно отсчитывая
шкалу. Недостатком такого метода для дегазированных систем является зависи
мость чувствительности от величины отклонения, см. (6.23), (6.26). Кроме того,
большим отклонениям сопутствуют большие упругие деформации. В настоящее
время пользуются исключительно нулевым методом. Сущность его в том, что
пробную массу возвращают в заданное нулевое положение компенсирующим уси
лием, величину которого измеряют. Когда отсчетный индекс приводится в нуле
вое положение, гравиметр должен быть строго ориентирован относительно от
весной линии. При этом центр масс системы и ось вращения располагаются либо
в вертикальной плоскости (система с поступательным перемещением), либо в го
ризонтальной плоскости (вращательная система). Компенсирующее воздействие
осуществляется либо механически, либо электронной системой обратной связи.
Механическая компенсация осуществляется микрометренным винтом. Он мо
жет быть либо связан с рычагом слабой пружиной («измерительная пружина»)
(рис. 6.15, а), либо соединен прямо с верхним концом главной пружины через пе
редаточную рычажную систему (рис. 6.15, б). Измеряемую величину получают,
отсчитав число полных оборотов микрометренного винта (механический счетчик)
и микрометр (его шкала разделена на 100 делений). Из-за работы микрометрен
ного винта и передаточной системы возникают отклонения от строго линейной
зависимости между отсчетом и изменением силы тяжести (разд. 6.4.1). Если из
мерительная система имеет ограниченный диапазон (например, 2000 мкм с ~2), то
для наблюдений во всем диапазоне силы тяжести на Земле (g = 9,78 9,83 м-с-2) прибор должен иметь систему перестройки диапазона (пружину для
измерений в большом диапазоне, или диапазонный винт; возможность изменения
пробной массы).
Как показали Гаррисон и Сато [273], с емкостной измерительной системой
гравиметров Ла Коста — Ромберга легко совместить электронную систему об
ратной связи. Благодаря малым размерам ее не сложно встроить в корпус грави
метра. Управляющее напряжение обратной связи формируется из выходного на
пряжения емкостного индикатора положения (ЕИП). Далее оно преобразуется в
напряжения U\ и Ui, которые прикладываются к обкладкам конденсатора ЕИП
(рис. 6.16). Управляющее напряжение обратной связи таково, что электростатиче
ская сила возвращает рычаг чувствительной системы в исходное нулевое положе
ние и удерживает его в этом положении. Микрометренный винт остается непод
вижным.
Рис. 6.15.
Механическая компенсация отклонения рычага
гравиметра с помощ ью : а — изм ерительного
винта; б — измерительного винта и рычажной
системы .
Относительные измерения силы тяжести
195
Рис. 6.16.
Электронная система обратной связи. БИП — ем
костный индикатор положения, Uc — напряжение
БИП, моу — масштабный операционный усили
тель, е — напряжение обратной связи, р — коэффи
циент усиления, Б — напряжение рассогласования,
К — коэффициент линеаризации [570].
Электростатическая сила пропорциональна квадрату напряжения на пластинах конден
сатора. Для статической силы системы обратной связи справедливо выражение
р = Codl ( Ά d\ + di \ d\
d\ ) '
где Со — емкость конденсатора ЕИП, d\ и dz — расстояния между обкладками конденса
тора, Ui, U2 — постоянные напряжения на обкладках и
, d\ + d2
d=~ ^~ ·
Таким образом, данная система обратной связи имеет нелинейную характеристику. Одна
ко, сравнивая выходные напряжения с отсчетами по микрометру (при трех его положени
ях) и выполнив калибровку сопротивлений, можно существенно линеаризовать эту харак
теристику. Это было осуществлено в системе SRW, разработанной для гравиметров Л а
Коста — Ромберга в Геодезическом институте, Ганновер [603]. Измерения на базисе позво
лили выполнить калибровку системы обратной связи с относительной ошибкой
±5 х 10 ~4. Система SRW гравиметров Л а Коста — Ромберга модели G сейчас имеет ли
нейную характеристику в диапазоне лишь ЗООмкм с " 2, что связано с источником питания
[570]. На основе импульсного сигнала, модулированного по длительности импульсов и
получаемого делением частоты исходных колебаний, была создана линейная электронная
система обратной связи, описанная в [728]. Изготовители гравиметров Л а Коста — Ром
берга разработали цифровой вариант (высокая долговременная стабильность и точность,
обеспечиваемые микропроцессором, воспроизводимость выше ± 2 м к м -с '2) и аналоговый
вариант, особенно удобный для непрерывной регистрации (малые размеры, малая потреб
ляемая мощность, чувствительность 2нм с _2/мВ, воспроизводимость выше ± 2 0 н м с ~ 2).
Из-за ограничений, связанных с ЕИП, эта система имеет диапазон измерений ЗОмкм с -2
и может быть использована в разных режимах фильтрации и вывода данных.
Основное достоинство электронной системы обратной связи состоит в исключении
периодических ошибок микрометра и передаточного механизма. Чувствительность не за
висит от наклона, и, более того, значительно ослабляется влияние упругого гистерезиса.
Повышаются точность, производительность и удобство измерений (малых) приращений
силы тяжести. Кроме того, система обратной связи позволяет эффективно оценить перио
дические шкаловые ошибки (разд. 6.4.4) [569].
В гравиметрах, предназначенных для измерений на подвижном основании,
обязательно должна быть управляющая система для непрерывного удержания
чувствительного элемента в нулевом положении (разд. 7.3). Нулевой метод изме
рений в дальнейшем был применен для наблюдений приливных изменений силы
тяжести (разд. 10.1.2).
Глава 6
196
6.3.4.
Устройства для приведения в горизонт
При измерениях силы тяжести чувствительная система должна быть строго ори
ентирована относительно отвесной линии. Поэтому гравиметры снабжаются
уровнями, оси которых взаимно перпендикулярны. В гравиметре с горизонталь
ным рычагом один из уровней располагают параллельно рычагу (продольный
уровень). Чаше всего применяют цилиндрические уровни с ценой деления 30" —
60". Электронные уровни позволяют получить большую точность, они свобод
ны от температурных воздействий. При регистрации данных можно записывать
и изменения наклона. Гравиметр нивелируют тремя подъемными винтами.
При высокоточных измерениях необходимо следить, чтобы при нивелировании прибо
ра его высота не менялась более чем на 3 мм (примерно соответствует изменению силы
тяжести на 0,01 мкм-с~2). Обычно прибор нивелируют двумя подъемными винтами при
неподвижном третьем.
Если измерительная система не ориентирована относительно отвесной линии,
то возникает ошибка из-за влияния наклона [351]. Эта ошибка зависит от точнос
ти юстировки уровней и температурных воздействий на уровни. Наклон чувстви
тельной системы относительно отвесной линии на угол ν приводит к тому, что
в действительности измеряют величину g cos ν. Таким образом, влияние наклона
равно
q ,
bg, = g(l - cos о) * I V2,
(6.42)
а чувствительность к наклону —
ds
-у- = g sin ν « gv.
dv
(6.43)
В соответствии с (6.42) при ошибке юстировки уровня ν = 30" результат измерений
будет преуменьшен на 0 ,1 м к м с -2. Согласно (6.43), ошибка нивелирования гравиметра,
равная ± 1 0 ", приводит к изменению отсчета на ±0,07 мкм-с~2. Поэтому особое значение
приобретает юстировка уровней на минимум чувствительности к наклону. Такое положе
ние находят для обоих уровней, отсчитывая гравиметр при определенной последователь
ности наклонов и определяя вершину параболы (6.42) (рис. 6.17).
В соответствии с (6.28) чувствительность астазированной системы является функцией
угла (а + 6) и, следовательно, зависит от степени астазирования. Ошибки в установке по
продольному уровню приводят к изменениям чувствительности. При δ = 100" и db = 1 "
относительное изменение чувствительности составляет 197о.
1 мВ = 10 нм-с
Рис. 6.17.
Зависимость отсчета по гравиметру Л а К оста — Ром берга
G79 от наклона (продольный уровень не отъю стирован). 1 дел.
уровня примерно соотв етств ует 30". (И н ст и т у т геодезии,
Ганновер.)
Относительные измерения силы тяжести
6.3.5.
197
Компенсирующие и экранирующие устройства
Отбор и предварительная обработка материала пружин (разд. 6.3.2) не позволя
ют полностью исключить переменные возмущающие влияния на чувствительную
систему. Поэтому для компенсации этих влияний или для защиты от них необхо
димы дополнительные устройства. К источникам ошибок относятся изменения
температуры, атмосферного давления, напряженности магнитного поля, а также
механические сотрясения. Результаты исследований этих возмущений имеются
для всех гравиметров новейших типов; для гравиметров с металлическими пру
жинами типа Л а Коста — Ромберга они изложены в работах [98, 249, 350, 499].
Изменение температуры пружины вызывает изменение ее упругости и дли
ны; изменение отсчета по гравиметру является функцией температуры, ее вре
менного градиента, а также зависит от особенностей теплообмена в измеритель
ной системе. Уменьшить возмущения такого рода позволяют следующие меры:
— термоизоляция с помощью корпуса и изолирующего слоя. Весьма эффективна
установка чувствительной системы в термос с зеркальным покрытием (сосуд
Дьюара); между стенками термоса создан вакуум;
— применение термокомпенсирующих элементов (например, биметаллов), что
бы по возможности уменьшить влияние изменений температуры на всю систе
му. В сочетании с сосудом Дьюара это позволяет существенно уменьшить
температурные влияния в кварцевой пружинной системе;
— использование термостата для поддержания постоянства температуры с точ
ностью ±0,01—0,001 °С. При этом влияние изменений температуры окружаю
щей среды уменьшается более чем в сто раз. Температура термостатирования
должна быть по крайней мере на несколько градусов выше ожидаемой самой
высокой температуры окружающей среды; до начала измерений необходим
достаточно долгий (несколько часов) предварительный прогрев прибора. Тем
пературные эффекты можно существенно ослабить, если установить второй
термостат, что может сделать как изготовитель прибора, так и пользователь.
Термостаты, как необходимую меру, применяют в гравиметрах с металличе
скими пружинами и при измерениях с наивысшей точностью. Следует иметь
в виду, что при перевозке гравиметра в упаковочных ящиках возможны возму
щающие тепловые влияния, которые можно избежать, если создать циркуля
цию воздуха.
К заметным ошибкам приводит нестабильность напряжения питания в слу
чае разрядки батарей термостата или их замены. При использовании ртутных
контактных термометров такие ошибки больше, чем при использовании терми
сторов. Эти флуктуации можно избежать, включив в цепь питания стабилизатор
напряжения (±0,1 В).
Изменения атмосферного давления вызывают изменения аэростатической силы,
действующей на пробную массу гравиметра. При этом измеренная величина силы
тяжести получается заниженной в соответствии с g{ 1 - ρα/ρ™), где ρβ — плотность
воздуха, Qm — плотность пробной массы. При ρβ = 1,13 к г м -3 и Qm = 2200 к гм "3
изменение давления воздуха на 0,1% изменяет показания прибора на 5 мкмс-2.
Если давление воздуха быстро меняется, могут проявиться адиабатические
эффекты, т. е. изменения температуры в соответствии с уравнением состояния
198
Глава 6
газа ρ υ /Τ = const (р — давление газа, v — объем, Т — абсолютная температура).
Во избежание таких эффектов применяют следующие меры:
— устройство, компенсирующее изменение аэростатического выталкивания. Во
вращательных системах используют полое тело (объем vc), укрепляемое на
рычаге на расстоянии с от оси вращения таким образом, чтобы компенсиро
вать аэростатическое выталкивание, действующее на пробную массу (объем
Vm> расстояние от оси вращения а).
При этом должно выполняться условие
cVe = avm\
(6.44)
— герметизацию измерительной системы. Такой подход, особенно в сочетании
с аэростатической компенсацией, предпочтительнее. В большинстве случаев
при этом в герметичном объеме создают небольшое разрежение воздуха.
Эффекты притяжения аномальных масс атмосферы и деформаций, связанных
с изменениями атмосферного давления, рассмотрены в разд. 10.2.1.
На показания гравиметров с металлической чувствительной системой оказы
вает влияние изменение напряженности магнитного поля (горизонтальной и вер
тикальной составляющих). В сочетании с размагничиванием пружины применяют
экранирование системы с покрытием из пермаллоя (сплав NiFe). Бывают случаи,
когда из-за механических сотрясений или большой напряженности магнитных по
лей эффективность экранирования падает. Поэтому время от времени необходим
контроль с применением катушки Гельмгольца.
Механические воздействия (возмущающие ускорения различного периода и
амплитуды) оказывают влияние на прибор при транспортировке и измерениях.
Они вызывают изменения длины удерживающей пружины, возникающие
вследствие относительных смещений молекул (релаксация внутренних напряже
ний) и малых смещений элементов передаточного механизма. Характер этих из
менений различный, они могут быть как обратимыми, так и необратимыми. Ме
ханические воздействия зависят от способа транспортировки (пеший, на автома
шине, самолетом и т. д.) и от условий (характер местности, качество дороги и
т. д.). Особенно велико воздействие сильных ударов и ускорений в области ча
стот, критичных для данного прибора. Полезны следующие меры:
— арретирование чувствительной системы при транспортировке. В системах с
очень малой пробной массой (кварцевая система) и малым упругим гистерези
сом достаточно ограничить максимальное отклонение массы;
— дополнительная амортизационная установка гравиметра. Для поглощения
энергии резких толчков рекомендуется применять пенистые материалы; хоро
шую защиту чувствительной системы от высокочастотных резких механиче
ских воздействий обеспечивают контейнеры на пружинном подвесе.
Пользователи гравиметров предложили транспортировочные приспособления с раз
личной изоляцией: на упругих тросах, на стальных пружинах, на мягкой резине, с воздуш
ным демпфированием. Изолирующие устройства с собственной частотой колебаний 5—
10 Гц и демпфирование уменьшают воздействие возмущающих ускорений при транспорти
ровке на автомашине до 45% [350].
При измерениях (когда прибор дезарретирован) на чувствительную систему
воздействуют сотрясения, вызванные микросейсмами (разд. 5.1.5). Можно реко
Относительные измерения силы тяжести
199
мендовать следующие меры:
— применение чувствительной системы с большим периодом собственных коле
баний (6.19); астазированные системы здесь имеют преимущества (разд. 6.2.3);
— демпфирование чувствительной системы для получения ее апериодической ха
рактеристики (6.20). Для малых масс достаточно демпфирование окружающим
воздухом. Кроме того, можно применить специальные воздушные демпферы
или компенсирующие пружины.
Даже если приняты меры для компенсации и защиты от внешних возмущаю
щих воздействий, существуют остаточные влияния, особенно при прецизионных
измерениях. Отчасти их можно учесть поправками (разд. 6.6.2).
6.4.
Калибровка относительных гравиметров
6.4.1.
Калибровочная функция
Калибровочная функция гравиметра нужна для перехода от отсчета по гравимет
ру к единицам силы тяжести. Как показывают выражения для механической чув
ствительности (6.21), (6.24) и (6.26), для такого перехода необходимо знать физи
ческие и геометрические характеристики чувствительной системы, а также пара
метры измерительного устройства. Однако определить калибровочную функцию
по величинам отдельных параметров нельзя. Поэтому создают модель калибро
вочной функции, а параметры модели находят из измерений известных прираще
ний силы тяжести.
Определим калибровочную функцию, пренебрегая временной зависимостью:
g = F(z),
(6.45)
где z — отсчет в делениях шкалы. При конструировании прибора стараются, что
бы зависимость между z и g была линейной. Однако применение измерительной
пружины (из-за изменения диаметра пружины ее коэффициент упругости зависит
от растяжения) и особенности передающей системы рычагов приводят к отклоне
ниям от этой линейной зависимости. Кроме того, из-за эксцентриситета, ошибок
градуировки шкалы измерительного винта, погрешностей редукционных передач
в приборе возникают периодические ошибки (разд. 6.3.3).
Долгопериодические (линейные и нелинейные) составляющие калибровочной
функции можно аппроксимировать полиномом низкой степени:
^„ол„„(г) = Νο+ Σ YkZk,
k =1
(6.46)
где No — постоянная, У* — калибровочный коэффициент степени к. Периодиче
ские составляющие моделируют рядом Фурье, причем частоты гармоник опреде
ляются конструкцией прибора [350, 381]:
п
^период**) =
Σ А>C°S
(ω ,Ζ -
φ,),
(6.47а)
Глава 6
200
где Αι — амплитуда, ω/ — (круговая) частота, φι — начальная фаза гармоники
степени /. Преобразовав косинус разности, получим
п
^период
период W
= Σ (X/ C0S ω/г + У/ sin 0)1ζ).
(6.476)
где
X/
Α ι
= Ai cos
φ ι,
yi = Ai sin
= (xf + yf)U2,
φ ι,
φι = arctg — .
■X/
Таким образом, полная калибровочная функция имеет вид
~ ^полин^)
(6.48)
^период
период
При лабораторном определении калибровочной функции, задавая малое прира
щение силы тяжести Sg, находят соответствующее малое изменение отсчета δζ
по гравиметру. Далее, пользуясь (6.45), для отсчета ζ можно найти масштабный
коэффициент F '(z ):
(6.49)
Теперь на основании (6.45) и (6.49) можно получить формулу для приращения
силы тяжести между пунктами / и j в виде
(6.50а)
Zi
Как следует из (6.46), для калибровочного полинома второй степени справедливо
(6.506)
Zi
Неизвестная постоянная прибора No в разности исключается.
Фирма-изготовитель прибора при лабораторных и полевых исследованиях на
ходит приближенную калибровочную функцию. Относительная ошибка линейно
го коэффициента такой функции может составить ± 1 0 _3—10~4 [703]. Поэтому
в любом случае пользователю необходимо определять соответствующую поправ
ку. Если предстоят измерения с наивысшей точностью, то пользователь должен
найти нелинейные члены калибровочной функции, а также периодические члены;
такие данные изготовитель, как правило, не предоставляет. Эти члены более вы
соких степеней лежат в пределах 0,01—0,1мкм с ” 2. Если отсчеты исправлены
приближенными поправками, полученными с приближенной функцией Fo(z):
Ζ = Fo(z),
(6.51)
то выражение (6.45) принимает вид
F(z) = F0(z) + Vo + AF(z),
(6.52a)
Относительные измерения силы тяжести
201
причем функцию
т
п
ΔΡ(ζ) = Σ YkZk + Σ № cos ω/Ζ + yt sin wz)
к=1
/= i
(6.526)
должен определять пользователь. В приведенном уравнении величины У*, ху, pi
представляют собой поправки в приближенные калибровочные коэффициенты,
см. (6.46), (6.476).
Если имеются добавочные отсчетные устройства (цифровой вольтметр, система об
ратной связи, регистратор (разд. 6.3.3)), то их необходимо калибровать по счетчику грави
метра. Для этого поворачивают микрометренный винт на заданное число оборотов и
сравнивают это число с изменением отсчета по добавочному устройству. Влияние нелиней
ности необходимо исключить юстировкой прибора, методическими приемами (симметрич
ные наблюдения относительно нулевого положения) либо учесть поправками. При нуле
вом методе измерений необходима калибровка с ошибкой ± 10_3—10 ~4.
Когда измерительная система подвергается изменениям (механические повреждения,
ремонт, переделки), калибровочная функция меняется. Если приведение в нулевое положе
ние осуществляется мягкой «измерительной пружиной», то изменение ее постоянной со
временем может вызвать изменение калибровочной функции. У гравиметров с кварцевыми
пружинами за несколько лет наблюдались изменения в -1 х 10"3/год и более; эти изме
нения можно объяснить постепенным подтеканием частичного вакуума и, как следствие,
увеличением аэростатической силы. Изменения температуры приводят к изменению масш
табных коэффициентов до +1 х 10-4/°С [211]. Не удалось объяснить изменения масштаб
ного коэффициента гравиметра Ла Коста — Ромберга D на 6,7 х 10_5/год, которое на
блюдали в течение 4 лет [249].
Параметры калибровочной функции определяют лабораторными и полевыми
методами. При лабораторных методах задают кажущееся изменение силы тяже
сти и сравнивают с ним отсчеты по гравиметру (разд. 6.4.2—6.4.4). В этом случае
невозможно определить с требуемой точностью коэффициент линейного члена
калибровочной функции. В полевых методах пользуются калибровочными бази
сами, или калибровочными системами с известными значениями £, или прираще
ний силы тяжести (разд. 6.4.5).
6.4.2.
Калибровка методом наклона
Изменение наклона чувствительной системы гравиметра относительно отвесной
линии приводит к кажущемуся изменению силы тяжести bg> которому соответ
ствует изменение отсчета δζ (разд. 6.3.4). С помощью наклонного стола (экзаме
натора), такого, например, как при исследованиях уровней, определяют масш
табный коэффициент F'(z) для отсчета z для заданных интервалов в ограничен
ном диапазоне (рис. 6.18). На основании (6.49) и (6.42) получим
(6.53)
где V — угол наклона.
Этот метод часто применяют для калибровки кварцевых пружинных гравиметров с
малым диапазоном измерений (порядка 1000мкм-с 2). Наклон на 50' соответствует изме-
Глава 6
202
Р
пасса
(180 дел. шкалы)
Доп. масса
(20 дел. шкалы)
К<
гр
о
500
1000 Деления шкалы
Рис. 6.18 (левый). М асш табны й коэффициент, полученный м етод ом наклона, для гравиметра ГАК -4М
№ 505 [416].
Рис. 6.19 (правый). У стр ойство для калибровки гравиметров Л а К оста — Р ом берга с пом ощ ью д о п о
лнительной массы [382].
нению силы тяжести на 1038 мкм с -2. Поскольку механическая чувствительность астазированных систем зависит от наклона, их калибруют, наклоняя в плоскости, перпендику
лярной рычагу чувствительной системы.
На основании (6.53) можно получить зависимость возможной точности от
относительных ошибок измеренных величин:
dF ' (z) _ dg _ ά
F 'iz)
(6.54)
g
Относительная ошибка dg/g = 1 х 10" 6 обеспечивается всегда; ошибку отсчета можно
принять равной d(bz)/bz = 1 х 10 " 4. Основная ошибка возникает при измерении наклона.
При V - 50' и dv - ±0,5" получим, что 2d v / v - 3,3 х 10”4.
На практике возможная точность составляет ±1 х 10_3—5 х 10-4 , и поэто
му, как правило, надежно можно определить лишь линейный калибровочный ко
эффициент. В отличие от остальных лабораторных методов метод наклона поз
воляет выполнить калибровку в единицах силы тяжести0 .
6.4.3.
Калибровка изменением массы
Кажущееся изменение силы тяжести bg можно также задать, изменяя эффектив
ную пробную массу чувствительной системы. Это достигается навешиванием ли
бо смещением дополнительной массы Ьт. Если Ьт помещается в центр масс,
то справедливо следующее:
Sg _ Ьт
g
m
(6.55)
l) В отечественной практике ш ироко применяются серийные терм остатированны е установки для
калибровки м е т о д о м наклона У Э ГП -3 конструкции ИФЗ РА Н ; наклон изм еряю т с п ом ощ ью лим ба.
И з нескольких приемов калибровки (2 — 3 ч) находят вероятнейш ее значение м асш табн ого коэффици
ента (точность 1 0 " 4 — 1 0 _5) и величины шкаловых поправок (точность 0,0 2 — 0,10 мкм · с - 2 ). —
Прим. ред.
Относительные измерения силы тяжести
203
Из (6.17) следует выражение, связывающее изменение длины пружины 61 в чув
ствительной системе с поступательным перемещением груза и изменение массы
6т:
— Ы - L· Ьт = 0.
(6.56)
т
т
При изменении отсчета по гравиметру на 6ζ соответствующее изменение силы
тяжести, согласно (6.55), составит
bg - F'(z)bz = — bm,
а масштабный коэффициент
(6.57)
Эта зависимость справедлива и для вращательных систем. В работах [607, 640]
рассмотрена подробная теория применительно к гравиметрам Аскания. Если от
счет ζ изменять с помощью дополнительных масс, то можно определить масш
табный коэффициент на всем измерительном диапазоне.
На рис. 6.19 показано калибровочное устройство с дополнительной массой, которое
применяется в гравиметрах Л а Коста — Ромберга [382]. На груз, подвешенный к рычагу,
с помощью специального контейнера можно навесить два дополнительных грузика: один
или сразу оба. Задавая тем самым известное заранее изменение показаний примерно на
20, 180 и 200 делений шкалы, берут отсчеты по гравиметру. С помощью диапазонного
винта можно охватить весь измерительный диапазон.
Гравиметр Аскания тоже можно калибровать, применяя дополнительные грузики. В
гравиметре Gs-12 предусмотрено изменение диапазона с шагом примерно 900мкм*м"2
установкой дополнительных грузиков на плече рычага; тем самым можно охватить общий
диапазон в 17 000мкм-с " 2. На рис. 6.20 приведен график масштабного коэффициента,
определенного таким методом.
На основании (6.57) получим выражение для расчета точности:
dF' (z) = dg _ ά(βζ) + d(bm)
F '(z)
g
bz
bm
(6.58)
Общую массу т точно можно определить лишь по измерениям на калибровочном
гравиметрическом базисе (при этом составляющей ошибки dg/g = 1 х 10"6 можно прене-
0
20
40
60 Деления шкалы
Рис. 6.2 0 . График функции м асш табного коэффициента, полученной м етол ом дополнительной массы.
гравиметр Аскания G sl2 № 85а [688].
Глава 6
204
м км-с ^/двл.
Рис. 6.21. График функции м асш табного коэффициента, полученной (изготовителем ) м етод ом д оп ол н и
тельной массы , гравиметр Л а К оста — Ром берга G 220 [382].
бречь). Массу дополнительного грузика Ьт = 20 мг у первых гравиметров Аскания находи
ли взвешиванием с ошибкой ±3 х 10~4 мг. Таким образом, составляющая d{bm)/bm =
= 1,5 х 10 ~5 также оказывается малой. В относительной ошибке калибровки с дополни
тельной массой поэтому доминирует величина d(bz)/bz = 1—2 х 10 ~4.
Ошибка калибровки методом дополнительной массы лежит в пределах ± 2 —
3 х 10" 4, так что можно оценивать отклонения от линейной функции. На
рис. 6.21 приведен график масштабного коэффициента гравиметра Ла Коста —
Ромберга, полученный изготовителем. Калибровка с применением дополнитель
ной массы на всем диапазоне измерений может быть выполнена за 10—12 ч. Если
необходимо также определить периодические члены калибровочной функции, то
требуется большое количество отдельных измерений, равномерно распределен
ных на нескольких периодах изменения соответствующего члена; в этом случае
процедура калибровки затягивается до 2—3 недель [116].
6.4.4.
Калибровка с системой обратной связи
С помощью электронной системы обратной связи (разд. 6.3.3) можно определить
функцию масштабного коэффициента F'(z) и периодические члены калибровоч
ной функции.
Для определения долгопериодических нелинейных членов калибровочной
функции необходимо обеспечить с помощью диапазонного устройства измерения
во всем диапазоне прибора. Тогда по известным приращениям bg и bz, равномер
но распределенным в измерительном диапазоне, можно определить значение
масштабного коэффициента
F'(z) = % .
ΟΖ
(6.59)
Эти приращения получают для всего диапазона системы обратной связи (обычно
несколько десятков, максимум — несколько сотен мкм-с-2): соответственно как
калиброванные разности отсчетов по системе обратной связи и разности отсче
тов по шкале счетчика. В соответствии с разд. 6.3.3 относительная точность ме-
Относительные измерения силы тяжести
205
Рис. 6.2 2 . П ериодические составляю щ ие калибровочной функции гравиметра Л а К оста — Р ом берга G79
с периодами 1 дел. шкалы (слева) и 7,88 дел. шкалы (справа), определенны е калибровкой с
пом ощ ью обр атной связи (точечные результаты ) и на калибровочном бази се (сглаженная кри
вая) [569].
тода составляет ±5 х 10 ~4; линейный калибровочный коэффициент определяют
на гравиметрическом базисе.
Периодические члены калибровочной функции можно получить, если их пери
од не превышает измерительного диапазона обратной связи. Для этого измеряют
выходное напряжение системы обратной связи при различных положениях изме
рительного винта, определенным образом заданных на исследуемом интервале.
Имея калибровочную систему обратной связи, на основании формулы (6.47)
можно вычислить амплитуды и начальные фазы периодических калибровочных
членов.
Для модели D гравиметра Ла Коста — Ромберга, снабженного системой обратной
связи SRW, квадратичный и кубический члены калибровочной функции удалось определить
за 12ч работы; при этом полный измерительный диапазон (примерно 2000мкм*с-2) раз
деляли на интервалы по 5 0 м к м с~ 2. В гравиметрах моделей G и D таким способом опре
делили периодические компоненты (период менее 100 мкм с ~2) с одинаковой точностью
(амплитуда ±5 —1 5 н м с “2, фаза ± 5 —20°); на это потребовалось примерно в 10 раз
меньше времени, чем при калибровке на гравиметрическом базисе [569] (рис. 6.22). Пол
ную процедуру калибровки гравиметра модели D с системой обратной связи, включая и
измерения на базисе, можно выполнить в течение недели.
6.4.5.
Калибровочные базисы и калибровочные системы
Наиболее важен для пользователя метод калибровки гравиметров на пунктах с
известными значениями g или известными приращениями силы тяжести. Такие
пункты образуют калибровочные базисы или калибровочные системы. В зави
симости от диапазона силы тяжести, числа пунктов, а также от точности ба
зиса можно определить линейные, нелинейные и периодические члены калибро
вочной функции. В большинстве случаев калибровочные параметры получают
в результате уравнивания на основании формул (6.46), (6.47) или (6.52)
(разд. 9.2.4).
Чтобы получить линейный калибровочный коэффициент («масштабный коэффици
ент»), необходимо располагать по меньшей мере двумя пунктами с достаточно большим
приращением силы тяжести. В общем случае для определения коэффициентов калибровоч
ного полинома степени к необходимо иметь к + 1 пункт. Для повышения точности и ста
206
Глава 6
тистического контроля коэффициентов более высоких порядков выполняют наблюдения
на ббльшем числе пунктов. Калибровочный базис лишь с одним известным приращением
силы тяжести тоже можно использовать для определения коэффициентов нелинейных чле
нов калибровочной функции для гравиметра с ограниченным диапазоном (например, Ла
Коста — Ромберга D), если измерять одно и то же приращение при разной настройке диа
пазона [226]. В этом случае полагают, что калибровочная функция не зависит от положе
ния диапазонного винта. Калибровочные коэффициенты считаются определенными лишь
для интервала силы тяжести данного базиса, экстраполяция на другие диапазоны недопу
стима. Для определения периодических членов необходимо, чтобы приращение силы тяже
сти между пунктами не превышало половины периода искомого члена. Чтобы определить
амплитуду и фазу искомого члена, этот период должен содержать по крайней мере 2—3
пункта.
В соответствии с формулой (6.506) линейный масштабный коэффициент У\
вычисляется по заданному приращению силы тяжести и измеренной разности от
счетов по гравиметру Δζ следующим образом:
(6.60)
а точностная оценка его определения
dYi _ d(Ag) _ d(Az)
Yi
Ag
Az
(6.61)
Как видно, при неизменной точности пунктов базиса и точности измерений ли
нейный калибровочный коэффициент получается тем точнее, чем больше прира
щение силы тяжести. При d(Ag) = 0,1 м км -с"2, d(Az) = 0,01 дел. шкалы, диапазо
не базиса Δg = 103м км -с"2 (или 104м км -с"2) и при разности отсчетов Az = 100
(или 1000) дел. шкалы получим, что относительная ошибка составляющих в
(6.61) будет 1 х 10"4 или 1 х 10"5.
Приращение силы тяжести, необходимое для калибровки приборов, может
быть задано как на горизонтальных, так и на вертикальных гравиметрических
базисах. Для горизонтальных базисов используют изменение силы тяжести с ши
ротой (разд. 3.1.1). При изменении широты на 10° сила тяжести меняется на
9 х 103 м км -с"2. К недостаткам таких базисов относятся необходимость перевоз
ки гравиметров на большие расстояния и возможные сотрясения приборов, кото
рые влияют на их точность (разд. 6.6.2). Для вертикальных базисов используют
изменение силы тяжести с высотой (разд. 3.1.1). Если такой базис расположен
в горах, то превышению в 1000 м соответствует (с учетом притяжения топогра
фических масс (разд. 4.3.3)) изменение силы тяжести на 2 х 103 м км -с"2. В вы
сотном здании превышению в 100м соответствует диапазон в 300м км -с"2; на
столько изменяется сила тяжести при подъеме над землей. При калибровке в гор
ной местности к недостаткам метода относятся резкие изменения температуры
и давления воздуха; измерения в высотных зданиях могут сопровождаться возму
щениями, вызванными ветровыми нагрузками.
До 1970-х гг. гравиметрические базисы и калибровочные системы создавали относи
тельными маятниковыми измерениями (разд. 6.1.1), иногда их сочетали с гравиметровыми. Из-за остаточных систематических ошибок в маятниковых измерениях даже при дли
207
Относительные измерения силы тяжести
тельных наблюдениях и больших приращениях силы тяжести была возможна относитель
ная ошибка лишь ± 1 —2 х 10-4 . В настоящее время для создания базисов все больше
применяют транспортабельные абсолютные гравиметры (разд. 5.2.3, 5.2.4). Если ошибка
измерений составляет ±0,1 мкм-с-2 , то на таких базисах можно определять линейные
калибровочные коэффициенты (± 1 —3 *10_ 5) и коэффициенты долгопериодических нели
нейных членов калибровочной функции. Измерения с относительными гравиметрами поз
воляют улучшить базис и разделить его на интервалы с небольшими приращениями силы
тяжести для определения периодических составляющих калибровочной функции [351].
Для калибровки относительных гравиметров можно пользоваться любой сетью доста
точной точности и достаточно большим диапазоном силы тяжести. Мировой сетью слу
жит Международная гравиметрическая стандартизационная сеть 1971 (МГСС71), точ
ность которой лучше ±1 мкм-с"2 (разд. 9.1.1). При калибровке в глобальном диапазоне
5 х 104 мкм-с-2 можно определить линейный калибровочный коэффициент с ошибкой по
рядка ±2 х 1 0 '5 [500]. Однако в региональном диапазоне (Ag = 103—104 мкм-с-2) масш
таб МГСС может варьировать в пределах 1 х 10 " 4,и поэтому коэффициенты членов более
высоких порядков определить нельзя [707]. Отметим наиболее надежные базисы (точность
Ag для смежных пунктов, а также для близких пунктов равна ±0,2—0,5 мкм-с-2): Амери
канский базис (Пойнт Барроу, США — Мехико, диапазон 4,8 х 104 мкм-с-2), Евроафриканский базис (Хаммерфест, Норвегия — Найроби, Кения — Маубрей, Южная Африка,
диапазон 5,1 х 104 мкм-с-2) и Западно-Тихоокеанский базис (Фэрбенкс, США — Сингапур,
Малайзия — Крайсчерч, Новая Зеландия, диапазон 4,2 х 104 мкм-с-2) [666].
Абсолютные измерения силы тяжести стали выполнять при создании национальных
опорных сетей и калибровочных базисов с середины 1970-х гг. К таким базисам относится
базис Катания, Италия — Хаммерфест, Норвегия (Ag = 2,6 х 104 мкм-с-2), разеделенный
с шагом 103 мкм-с-2 (рис. 5.23). В центральной и северной частях базиса пункты абсолют
ных определений связаны многократными измерениями гравиметрами Ла Коста — Ром
берга G и D; линейный и некоторые квадратичные калибровочные параметры гравимет
ров находили из общего уравнивания (рис. 6.23). Ганноверская гравиметрическая калибро-
g = 9,801 м с
8°
9°
10°
11° Е
Рис. 6.23 (левый). Калибровочная сеть «Северная и Центральная Европа» с больш им диап азон ом силы
тяж ести [349].
Рис. 6.24 (правый). Гравиметрический калибровочный базис «Куксхафен — Ганновер — Гари» [353].
Глава 6
208
Т аблица 6.2. Ганноверская гравиметрическая калибровочная система [353]
Калибровочный базис
А бсолю тны й калибровочный
базис Х ам м ерф ест— Мюнхен
Базис Куксхафен— Ганновер—
Гарц
Вертикальный калибровочный
бази с в Ганновере
Диапазон силы
тяжести,
мкм · с "2
Шаг базиса,
Ошибка уравнен
мкм · с "2
ного Ag,
мкм · с "2
1,9 X 104
- 1,7 х 103
± 0 ,0 7
3,1 х 103
- 0 , 1 х 103
± 0 ,0 2
10
2
0,2
210
20
2
± 0 ,0 1
вочная система помимо десяти упомянутых пунктов абсолютных определений содержит
калибровочный базис Куксхафен — Ганновер — Гарц (рис. 6.24) и вертикальный базис в
Ганновере (в многоэтажном здании высотой 76 м) [353]. Выбранный шаг этих базисов поз
воляет находить периодические шкаловые ошибки гравиметров Ла Коста — Ромберга
(разд. 6.5.4), а также нелинейности шкал гравиметров модели D. Значения g на пунктах
базиса были определены в 1977—1986 гг. с 35 гравиметрами Л а Коста — Ромберга моде
лей G и D (~ 12 тыс. измерений Ag). Базис Куксхафен — Гарц в 1987 г. был усилен 9 пунк
тами абсолютных определений. В табл. 6.2 приведены диапазоны базисов, шаг и точность
калибровочной системы.
На рис. 6.25 представлен график кубической калибровочной функции гравиметра Ла
Коста — Ромберга модели D, определенной на этой калибровочной системе в разное вре
мя. Как видно, пренебрежение нелинейными членами может вызвать ошибки до
±0,3 мкм-с"2. Таблица 6.3 содержит параметры периодических членов калибровочной
функции, полученные из наблюдений на пунктах этой системы. В 1986 г. в Китае создана
калибровочная система такой же точности. Она содержит базисы в горах Лушань
(2000 мкм-с " 2, 24 пункта), связанные с пунктами абсолютных определений [501], и базисы
в Ухане (высотном здании, 19 пунктов при Ag = 200 мкм с “2; 11 пунктов при
Ag = 20мкм-с-2 [786]).
Т аблица 6.3. Уравненные значения периодических параметров калибровочной
функции гравиметров Л а К оста— Ром берга, 1 дел. шкалы = 10 м к м - с " 2 [353]
Прибор
Л а К оста— Ром берг G79
Л а К оста— Ром берг G298
Ла К оста— Ромберг G14
Период,
дел. шкалы
1,00
7,88
35,47
70,94
1,00
7,88
35,47
70,94
1,625
Амплитуда,
им · с 2
44
81
75
111
8
43
38
66
14
±
±
±
±
±
±
±
±
±
5
5
11
14
4
5
8
8
3
Начальная
фаза, (°)
185
357
358
119
93
180
180
244
243
± 8
± '4
± 8
± 7
± 29
± 7
± 11
± 8
± 12
Относительные измерения силы тяжести
209
Рис. 6.25.
Калибровочная функция (различие с резуль
татам и изготовителя) гравиметра Л а К оста
— Р ом бер га D23, полученная на калибровоч
ном бази се Ганновер — Гарц в разны е эпохи
и при различных полож ениях диап азон н ого
винта [354].
6.5.
Статические пружинные гравиметры
6.5.1.
История развития до 1950 г.
С 1930 по 1950 г. было создано большое число разных пружинных гравиметров.
Некоторые из них (около 20) изготавливались серийно и впоследствии широко
использовались в прикладной геофизике и при национальных гравиметрических
съемках. Ниже рассматриваются принцип и основные особенности типичных при
боров. Подробное описание дается, например, в работах [235, 505]. Примерно
в 1960 г. разработчики сконцентрировались лишь на нескольких типах гравимет
ров (разд. 6.5.2—6.5.4). Некоторые из них после необходимых переделок можно
использовать для измерений на подвижном основании (разд. 7.3.2) и наблюдений
приливных изменений силы тяжести (разд. 10.1.4).
По принципу измерений и в зависимости от материала пружины гравиметры
разделяют на неастазированные и астазированные; астазированные приборы бы
вают металлические и кварцевые.
Некоторые неастазированные металлические гравиметры основаны на прин
ципе вертикальных пружинных весов (разд. 6.2.1). Системы с поступательным
перемещением груза были разработаны Хартлеем [275] и Графом [231]. С по
мощью оптической или фотоэлектрической системы регистрации, нулевого мето
да измерений, термостатирования и герметизации прибора удавалось достичь
точности ± 10мкм-с"2.
В ранней конструкции Хартлея (диаметр 0,3 м, высота 1,1м) удлинение пружины пре
образовывалось с помощью горизонтального рычага в изменение угла поворота. Послед
нее компенсировалось измерительной пружиной с помощью микрометренного винта
(рис. 6.26). Конструкция Графа была реализована в первых приборах компании «Аскания»
в Берлине (например, гравиметр Gs 3: диаметр 0,5 м, высота 1 м, вес 57 кг).
Хойт в качестве меры изменения силы тяжести использует закручивание вер
тикальной спиральной ленточной пружины (рис. 6.27).
Поворот пружины (длина 0,3 м, сечение 0,5 х 0,5 мм2) отслеживается оптической сис
темой с многократным отражением от зеркала на пробной массе (чувствительность
1 мкм-с" 2/ 1 "). Гравиметр (диапазон измерений без перестройки 300 м к м с " 2, вес 40 кг,
более поздних моделей — 12кг) имел малое смещение нуль-пункта (несколько мкм с " 2/
сут) и более высокую точность измерений (± 2 —Змкм с " 2). С 1935 по 1960г. его широко
применяли в изысканиях компании Gulf Research and Development Со. [784].
210
Глава 6
Микро мет ренный
Рис. 6.26 (левый). Принцип гравиметра Хартлея (система с вертикальным перемещ ением).
Рис. 6.27 (правый). Принцип гравиметра Х ой та (вертикальная крутильная система).
И наконец, начиная с 1940 г. нашли широкое применение гравиметры фирмы
«Аскания», использующие принцип крутильных пружинных весов Графа
(разд. 6.5.2).
Вскоре высокая точность была получена с пружинными рычажными весами,
содержащими горизонтальный рычаг и металлические пружины. Для этих кон
струкций характерно использование пружины, длина которой близка к нулю, и
высокая степень астазирования (пружина установлена почти вертикально)
(разд. 6.2.3). Система отсчета оптическая, по нулевому методу; обычно применя
ли термостатирование и барометрическую компенсацию. Разные модификации
различаются в основном расположением удерживающей пружины и типом ком
пенсационного устройства.
В приборе, созданном в 1930 г. Труманом, вертикальная удерживающая пружина при
креплена к нижнему концу рычага, что повышает чувствительность в 200 раз (рис. 6.28).
Начиная с 1932 г. этот гравиметр (диаметр 0,6 м, высота 1 м, вес 60 кг) применялся нефтя
ной компанией Humble Oil Со., точность измерений составляла ±2 —Зм км -с"2. С 1939г.
выпускаются и успешно применяются астазированные рычажные пружинные весы с на
клонной металлической пружиной нулевой длины, идея которых и первая реализация при
надлежат Люсьену Ла Косту (1934 г.) (разд. 6.5.4).
На иных принципах конструировались гравиметры Тиссена и Шлёзенера, а
также Л/.С. Молоденского, в которых применялась металлическая пружина.
В пружинных весах с опорным ребром конструкции Тиссена и Шлёзенера (1934 г.) име
ется кварцевый рычаг с массой 20 г, который может наклоняться. Равновесие достигается
с помощью вертикальной металлической пружины длиной 0,5 м (рис. 6.29). Центр масс
всей системы расположен выше плоскости рычага. Это достигается с помощью дополни
тельной массы, которую можно смещать по вертикали; в результате система становится
слабоастазированной (в 30—40 раз). В помощью оптического устройства фиксируют точ
ки реверсии колебательной системы (Г = 6—8 с). В приборе предусмотрена теплоизоляция
(материалом корпуса и водной оболочкой), а также барометрическая компенсация; в кор
пус помещены две чувствительные системы, повернутые относительно друг друга на 180°.
Фирма Seismos GmbH (Ганновер) выпустила более ста гравиметров этого типа
(0,3 х 0,3 х 0,8 м, 20 кг), которые применялись во всей Центральной Европе. При надеж-
Относительные измерения силы тяжести
211
Рис. 6.28.
Принцип гравиметра Трум ана (астазированны е рычажные
пружинные весы).
ном контроле
±2 —3 мкм-с ”2.
смещения
нуль-пункта
(10—20мкм с 2/сут)
достигали
точности
В соответствии с идеей, высказанной в 1938 г. М.С. Молоденским, и с усовершенство
ваниями А.М. Лозинской в СССР выпускались гравиметры с металлической плоской коль
цевой пружиной [634]. Гравиметр ГКА (рис. 6.30) широко применялся в 1950-х гг. Горизон
тальный кварцевый рычаг (диаметр 6 мм, длина 35 мм) с грузом может поворачиваться
вокруг вольфрамовой нити, которая проходит через центр плоской кольцевой пружины
(радиус 37 мм) из элинвара. Чувствительность прибора повышена астазируюшей пружи
ной. Нулевой метод измерений осуществляется с помощью компенсирующей пружины.
Термостатированный прибор (диаметр 0,3 м, высота 0,4 м, вес 13 кг) позволял получать
точность ± 2—5 мкм ·с " 2.
Для чувствительных систем из плавленого кварца характерны сравнительно
стабильные упругие свойства и малые размеры. При герметизации системы и
хорошей теплоизоляции можно отказаться от термостатирования. Нет необходи
мости арретировать такую систему при транспортировке. Кварцевые гравиметры
стали изготовлять как в виде пружинных систем, так и маятников на торсионном
подвесе.
Первый полевой кварцевый гравиметр был разработан Мотт-Смитом (1937 г.) [492].
Горизонтальное коромысло гравиметра с отсчетным индексом (оптическая регистрация)
было подвешено на крутильных нитях (диаметр 0,05 мм, длина 4 см) (рис. 6.31). Для астазирования применена слабая плоская пружина, которая связана с рычагом, несущим проб
ную массу, через натянутую кварцевую нить. При отклонении рычага от горизонтального
положения упругая сила пружины порождает момент, который увеличивает отклонение.
Дегазирующее
устройство
Груз
*
Кварцевый
рычаг
X
Металлическая о
пружина
Дегазирующее
устройство
'/}/)/
Ось вращения
Рис. 6.29 (левый). Принцип гравиметра Тиссена — Ш лёзенера (астазированны е пружинные весы с н о
жевой опорой).
Рис. 6.30 (правый). Принцип гравиметра ГК А (астазированная рычажная систем а с кольцевой пруж и
ной) [634].
Глава 6
212
Пружина
Маятник
Кварцевая
крутильная нить
d
Рычаг
Кварцевая
рамка
Рис. 6.31 (левый). Принцип гравиметра М отт — С м ита (астазированная кварцевая крутильная
система).
Рис. 6.32 (правый). Принцип гравиметра Изинга (астазированны й кварцевый крутильный обратны й
маятник).
При установке в тройном жидкостном термостате была достигнута точность ± 1 м к м -с '2.
Кварцевые пружинные системы, изготовленные целиком из единой отливки (система Уор
дена), применяли в гравиметрах почти 40 лет; производятся они и поныне (разд. 6.5.3).
При использовании маятника с крутильной нитью, когда в отличие от динамическо
го упругого маятника (разд. 6.1.3),измеряют величину его отклонения, нет необходимости
в применении пружин. В этой конструкции компенсирующий момент создается самой кру
тильной нитью. В 1918 г. Изинг предложил использовать упругий (обратный) маятник как
астазированный гравиметр. В 1930-х гг. такие приборы выпускались, однако они нашли
лишь ограниченное применение [324] (рис. 6.32).
В приборе Норгарда (1945 г.) [512] имеется горизонтальный кварцевый маятник (дли
на 15 мм, вес 0,5 г), удерживаемый в положении равновесия кварцевой нитью (диаметр
0,2 мм, длина 12 см) (рис. 6.33). Эта неастазированная чувствительная система помещена
в вязкую жидкость для демпфирования и температурной компенсации. Отклонение маят
ника наблюдают оптическим методом с помощью неподвижного и подвижного зеркал;
последнее укреплено на маятнике. Наклоном прибора добиваются совмещения двух отра
женных оптических лучей. Для двух пунктов / и у, где углы наклона равны соответственно
ν, и vj, соблюдается условие
g, cos vi = g, cos vj.
(6.62)
Приращение силы тяжести находят по формуле
Agij = gj - gi = givAvij,
(6.63)
где
ν
= ?
(vi
+
vj),
A vij
=
vj -
Vi.
С изменением угла наклона v меняется чувствительность прибора; для v = 20' полу
чим, что dg/dv = 0,3 мкм-с ' 2/ 1 ". Для калибровки можно использовать метод наклона
(разд. 6.4.2). В 1940-х и 1950-х гг. изготовлено более 200 гравиметров Норгарда
(0,2 м х 0,3 м х 0,4 м, 13 кг без термостата, а позже — с термостатом), которые применя-
Маятник
Крутильная
/ ' нить
Подвижное
зеркало
Неподвижное
зеркало
Кварцевая
рамка
Рис. 6.33.
Принцип гравиметра Н оргарда (горизонтальный кварце
вый маятник).
213
Относительные измерения силы тяжести
ли в Северной и Восточной Европе. Большой диапазон измерений (до 2 х 104 м к м с -2)
позволял выполнять обширные съемки. Смещение нуль-пункта составляло 5—
Юмкм с 2/сут, достигалась точность ± 2—4 мкм с?-2 [308]. Одновременно подобные раз
работки осуществлялись в СССР (Институт физики Земли, Москва); в г р а в и м е т р а х Г А Э
и Г А Г для измерения угла наклона использован лимб оптического теодолита. Дегазиро
ванным гравиметром ГАГ-2 (0,25 м х 0,25 м х 0,45 м, 25 кг), широко применявшимся в
Восточной Европе с 1960-х г., даже при больших приращениях силы тяжести достигали
точность ±1 —1,5мкм-с"2 [206]!).
6.5.2.
Рычажные крутильные пружинные весы (система Аскания)
В 1940—1970 гг. берлинская фирма Askania-Werke выпустила серийно большое
число гравиметров различных типов с неастазированными крутильными пружин
ными весами (разд. 6.2.2). Эти приборы основывались на конструкции Графа
(1942г.) [232]. Конструкции более поздних приборов (Gs 9, Gs 11, Gs 12, Gs 15,
Gs 16) в значительной степени идентичны [235].
Рисунок 6.34 иллюстрирует конструкцию современных гравиметров Аскания.
Пара горизонтальных спиральных пружин (изоэластик), предварительно закру\
^
Зеркальный
гальванометр
Шкала
гальванометра
лЛампа
Окуляр
Щель
Уровни
Дифференциальный
фотоэлемент
Линза
Зеркало
Арретир
Зеркало
Барокомпенсатор
Главная пружина
Устройство для калибровки
Микрометр
Прецизионная
шкала
Измерительная
пружина
Диапазонная
пружина
Арретир
Г руз
Воздушный демпфер'
Рычаг
Рис. 6.34. Конструкция гравиметра Аскания (фирма «Аскания», данны е 1957 г.).
l) С 1986 г. серийно выпускается геодезический гравиметр ГА Г-3 конструкции ИФЗ Р А Н ; вес при
бор а (с двумя встроенны ми аккумуляторами — основны м и резервным) 12 кг. При наблю дениях с
углом ером (лимб ди ам етр ом 14,8 см) и A g = 5 · 103 мкм · с ' 2 в рейсах дли тельностью 6 — 10 ч т оч
ность одной приборо-связи ± 0 ,4 мкм с - 2 ; при наблю дениях с измерительны м винтом ± 0 ,1 5 — 0,20
мкм · с " 2 (рейсы по 4 — 6 ч, A g = 200 — 300 мкм · с " 2), а при микрогравиметрической съемке (полу
часовые рейсы) 0,06 — 0,08 м к м · с - 2 . С оздан а модификация прибора с электрооптической систем ой
регистрации, акустической и сейсм озащ итой; ошибка приборо-связи (в л аборатор н ы х условиях)
6 нм · с " 2. — П р и м . ред.
214
Глава 6
|M f-y
Г (o q + α )
b
m 6m
a
Рис. 6.35.
ji
Z
5m g
Принцип гравиметра Аскания (неастазированны е рычаж
ные весы с торсионной пружиной).
mg
ченных на 360°, удерживает рычаг длиной 15 см с грузом 200 г, центр масс и ось
вращения рычага лежат в одной горизонтальной плоскости. Две слабые компен
сирующие пружины прикреплены вблизи центра масс рычага. Для возвращения
рычага в горизонтальное положение служит тонкая измерительная пружина,
скрепленная с микрометренным винтом (1 оборот = 100—200мкм с~ 2). Более
жесткая пружина служит для перестройки диапазона измерений (диапазон без пе
рестройки в Gs 11 — 8000 м к м с -2 , в Gs 12 — 13 ОООмкмс-2 , полный диапазон
измерений — 0,05 м*с~2).
Первоначально применяли фотоэлектрическую регистрацию. Зеркало, укреп
ленное на рычаге, направляло световой блик на дифференциальный фотоприем
ник; при нулевом положении рычага фототок отсутствовал. При отклонении ры
чага фототок поступал на зеркальный гальванометр, величину тока определяли
по положению светового блика на шкале гальванометра. В приборах Gs 15 и
Gs 16 (с 1970 г.) (разд. 6.3.3) применяли емкостные устройства. Изменение дли
ны измерительной пружины при нулевом положении рычага отсчитывалось по
прецизионной шкале (цена деления 0,5 мм, точность отсчета ±0,5 мкм) у верхне
го конца пружины. При этом погрешности измерительного винта не влияют на
отсчет (разд. 6.4.1).
С учетом упругих моментов крутильных пружин (6.22) и измерительных пру
жин (6.25) при d = / уравнение равновесия имеет вид
(6.64)
mga sin а - τ(αо -I- а) - k(l - lo)b sin а = 0,
см. рис. 6.35. Дифференцирование этого уравнения по g, а и / с учетом
dl — bdot
дает выражения для чувствительности (6.31) в момент измерений (а = 90°):
(6.65)
Система не астазирована, поскольку знаменатель содержит лишь положительные
ненулевые члены.
При к < т, «о + а = 2π, а = 0,15 м имеем
i
а = 90°
=
-π
g
= 0,64 рад/м с
2
= 0 ",013/0,1 мкм-с
2,
Относительные измерения силы тяжести
215
а период колебаний, согласно (6.33),
Го = 2π VO, 15-0,64 = 2 с.
Для компенсации влияния внешних возмущений и для защиты от их воздействий исполь
зуют различные методы. Влияние температуры уменьшают компенсирующими пружина
ми, расположенными по осям крутильных пружин, а также двойным термостатированием
(переключение на разную температуру, ±0,01°). Влияние изменений атмосферного давле
ния исключается герметизацией чувствительной системы, а также благодаря полым ци
линдрам на плече рычага для аэростатической компенсации. Для экранирования магнит
ных влияний применяют покрытие из пермаллоя. Демпферный колокол, имеющийся на
рычаге, уменьшает влияние сотрясений. При транспортировке чувствительная система арретируется. Для термостатирования и освещения шкалы служат два 6-вольтовых аккуму
лятора.
Наклонив прибор на 90°, можно поместить на рычаг (или снять) дополнитель
ную массу (стальной шарик диаметром 2 мм и весом 20 мг). Кажущееся измене
ние силы тяжести составит при этом около 9 0 0 м к м с-2 . Тем самым пользова
тель может выполнить калибровку измерительной пружины методом дополни
тельной массы (разд. 6.4.3).
В соответствии с предложением Рамзайера [548] в сочетании с измерительной
пружиной при измерении силы тяжести можно использовать набор дополнитель
ных масс при условии, что их вес известен с высокой точностью. Этот принцип
был реализован в гравиметрах Аскания Gs 12 и Gs 15. В них шарики (из специаль
ного магазина) можно размещать в маленьких канавках симметрично относи
тельно рычага. Различными комбинациями шариков можно компенсировать из
менения силы тяжести с шагом около 9 0 0 м км с~ 2 (рис. 6.36). Таким образом,
при 19 шариках, пользуясь измерительной пружиной в интервале менее
5 0 0 м км с-2 , можно выполнять измерения в общем диапазоне 17 0 0 0 м к м с” 2.
Поскольку используется менее 10% диапазона пружины (13 ОООмкмс-2), умень
шается влияние упругого гистерезиса и долгопериодических членов калибровоч
ной функции; по этой причине такие приборы особенно эффективны при измере
нии больших приращений силы тяжести. Методом дополнительной массы можно
выполнить калибровку пружины в ббльшем ее диапазоне (рис. 6.20).
Теория измерений силы тяжести с дополнительными массами и изменением длины
пружины была разработана Шульце [607]. Для рабочего положения (а = 90°) справедливо
выражение, вытекающее из (6.64) (рис. 6.35):
mga - τ(α0 + α) - k(I - lo) b - dmg(a 4- Δα) = 0,
(6.66)
где m — масса системы, расположенная на расстоянии а от оси вращения, Ьт — дополни
тельная масса (на расстоянии а + Δα). Для упругих моментов пружин и калибровочной
функции /(г), зависящей только от отсчета ζ по шкале, имеем соотношение
{am + (а + Aa)6m)g - {а + Δα)/(ζ) = 0;
перепишем это выражение с учетом
т
а + Δα *
------- т ,
а
(6.67а)
216
6
Глава
получим
(т·
От)g - f(z) =О.
+
(6.67б)
Если выражение для ускорения силы тяжести
f(z)
g
= т·
(6.68)
+От
разложить в ряд Тейлора, то после некоторых преобразований можно получить следую
щую формулу для приращения силы тяжести между пунктами
дg;,j
=&
- g;
1
= т·
i
и
}:
( 1 - от·)
т; (f' (Zm)дz - g;дт),
(6.69)
где
=
d~~Z)
= Zj
- Z;,
f' (z)
Дz
Масштабный коэффициент
(разд.
6.4.3),
f' (z)
'
Zm
1
=l
дт =
(Z;
Omj -
+
Zj),
от;.
находят при калибровке с дополнительными массами
массы дополнительных грузиков от получают прецизионным взвешиванием.
Величину т·, как калибровочный коэффициент, необходимо определять на гравиметриче
ских базисах (разд.
6.4.5).
Если для интерполяции результатов по разным дополнитель
ным массам использовать лишь измерительную пружину, то точность величины дg будет
почти полностью определяться точностью приращения Дz (с учетом дрейфа), не считая
ошибки линейного калибровочного коэффициента.
В
На рис. 6.37 показан гравиметр Gs 11 (диаметр 0,35 м, высота 0,5 м, вес 22 кг).
1950-1970 rr. гравиметры Аскания исполъзовались во всем мире (кроме Север
ной Америки) для построения гравиметрических сетей и при геофизических иссле
дованиях. Впоследствии гравиметры
Gs 12
внесли существенный вклад в создание
гравиметрической сети МГСС71 в Европе и Африке
[688)
(разд.
9.1.1).
Смещение
нуль-пункта у современных приборов при стационарных наблюдениях не превы
шает 1 мкм·с- 2 /сут, при работе в поле на него накладывается дрейф от О до
Маrа314н
Отверстие
tАПА
I шарика
Рис.
6.36
(левый). Калибровочное устройство гравиметра Аскания
1957 г.).
Аскания Gs15 (фирма
Gsl2
с дополнительными массами
(фирма «Аскания», данные
Рис.
6.37
(правый). Гравиметр
«Аскания», данные
1957 r.).
Относительные измерения силы тяжести
217
± 1 м км -с“ 2/ч (линейный в течение нескольких часов), связанный с транспорти
ровкой. Если смещение учитывается надежно, то малые приращения силы тяже
сти можно измерить с ошибкой ±0,1—0,3 мкм*с-2 . При больших Ag (1000—
ЮОООмкм с " 2) и/или длительный транспортировке (более 5—10 ч) ошибка (без
учета ошибки масштабного коэффициента) увеличивается до ±0,5—1мкм с -2 .
Примерно с 1970 г. гравиметры Аскания стали заменять более удобными при
борами (разд. 6.5.3 и 6.5.4). Модифицированные гравиметры Аскания длительное
время применяют для наблюдений приливных изменений силы тяжести
(разд. 10.1.4).
6.5.3.
Кварцевые пружинные гравиметры
(система Уордена)
После разработки в 1947 г. Уорденом [777] процесса изготовления астазирован ных чувствительных систем из одной плавки кварца эти приборы нашли широ
кое применение. Сейчас они чаще всего используются при разведке место
рождений.
Принцип конструкции чувствительной системы иллюстрирует рис. 6.38, а.
Изогнутый рычаг (длиной примерно 4 см), укрепленный на горизонтальной рам
ке, несет пробную массу (5 мг). Рамка удерживается двумя короткими кварцевы
ми нитями (диаметр 3 мкм), образующими малый торсионный шарнир. Ниже
центра масс системы к рычагу прикреплена вертикальная удерживающая пружи
на (для астазирования). При некотором предварительном напряжении она эквива
лентна пружине нулевой длины (разд. 6.2.2). Измерительная система располага
ется на кварцевой раме, прикрепленной к металлическому цилиндру. Верхний ко
нец удерживающей пружины через температурный компенсатор (см. ниже) связан
с противоположной стороны с рамой через шарнир. Компенсационные пружины
также прикреплены к плечам рычага; эти пружины из-за уменьшения рычагами
----- Индекс
Рис. 6 .3 8 . а — Конструкция гравиметра У ордена (фирма Texas Instruments Inc., Х ью стон , Техас); 6 —
принцип гравиметра У ордена (астазированны е кварцевые рычажные пружинные весы).
218
Глава 6
их силового воздействия могут иметь большие размеры, чем главная пружина.
При наблюдениях на пункте нулевое положение рычага (горизонтальное положе
ние плоскости, содержащей центр масс и ось вращения) устанавливается микрометренным винтом (малая шкала) через слабую измерительную пружину; второй
винт (большая шкала) связан с диапазонной пружиной и позволяет настраивать
диапазон прибора. Торсионный шарнир несет отсчетный индекс, который оканчи
вается горизонтальным стержнем. Этот индекс освещен и виден в микроскоп
(оптический метод). Отсчет по микрометренному винту в более современных мо
делях заменен на цифровой.
Все необходимые соотношения для такой системы вытекают из уравнений ры
чажных весов с пружиной нулевой длины, полученных в разд. 6.2.2 [343]. По
рис. 6.38, б при /о = 0 можно получить выражения для моментов силы тяжести
и упругой силы пружины:
Mg = mga cos (α + δ - 90°) = mga sin (a + δ),
M F = khl = kbd sin ( a + β ) .
Аналогично (6.27) условие равновесия имеет вид
М - mga sin (α + δ) - kbd sin (α + β) = 0.
(6.70а)
Согласно (6.31), выражение для чувствительности
(6.71а)
При горизонтальном рабочем положении имеем а + δ = 90° и, таким образом,
mga - kbd sin (α + β) = 0.
(6.706)
Поскольку
= - k b d cos (α + β) < 0 при (α + β) < 90°.
имеем положение устойчивого равновесия (разд. 6.2.3). Для чувствительности
получим
(6.716)
Система астазируется подбором величины (а + β). При
а + β = 90°
получается безразличное равновесие
(6.70в)
mga - kbd = 0,
(6.71в)
(разд. 6.2.3). При
ос Λ- β —90° —с,
ε > 0,
Относительные измерения силы тяжести
219
выражение (6.706) принимает вид
mga - kbd cos ε = 0,
(6.70г)
а выражение (6.716) становится
(!)
I
а + 6 = 90°
= ctg ε
(6.71 г)
g
Следовательно, высокая чувствительность достигается при малых углах ε.
При ε = 10' и а = 0,04м чувствительность составит (da/dg) = 35 рад/м-с~ 2 = О'7,7/
0,1 мкм-с” 2, и в соответствии с (6.33) период колебаний рычага То = 2π>/δ^04·35 = 7,4с.
Внешние возмущающие воздействия хорошо устраняются устройствами компенсации
и защиты. Особенно важно уменьшение температурных влияний. В чувствительной систе
ме имеется устройство для температурной компенсации. Оно состоит из двух рычагов
с разными коэффициентами температурного расширения, которые сходятся у верхнего
конца главной пружины (рис. 6.38, а). Рычаги прикреплены к рамке в разных точках таким
образом, что изменения температуры вызывают поворот, компенсирующий изменение
длины пружины. Компенсация осуществляется в ограниченном диапазоне силы тяжести
(16 000 мкм-с” 2), а расширение этого диапазона (до 66 000 мкм-с” 2) возможно с помощью
нелинейного элемента (полная компенсация). Чувствительная система герметизирована
(частичный вакуум ~103Па) и помещена в сосуд Дьюара из нержавеющей стали. Из-за
особых тепловых свойств кварца (разд. 6.3.2) отпадают необходимость в термостатировании и связанные с ним большие затраты на источник питания. Даже при значительных
изменениях температуры дрейф обычно остается в пределах 1 мкм-с ” 2/ч. Термостатирование (±0,1 °С) целесообразно при более высоких точностных требованиях и при больших
вариациях внешней температуры. Из-за малой массы измерительной системы нет необхо
димости в устройствах демпфирования и арретирования; при транспортировке достаточно
ограничить колебания рычага.
Измерительный винт калибруется методом наклона (разд. 6.4.2); шкала при
бора линейная с точностью до 110 3 в интервале силы тяжести 1000—
3000м км -с"2 (в зависимости от типа прибора), измеряемом без перестройки диа
пазона. В моделях, предназначенных для работ на больших территориях (геоде
зические модели), диапазонный винт также калибруют и получают функцию
масштабного коэффициента нелинейного вида с точностью ±1 х 10" 3. В прибо
ре с калиброванными измерительным и диапазонным винтами пользователь мо
жет выполнить сравнительную калибровку этих винтов.
Нелинейности калибровочной функции могут внести ошибки до 0,5 мкм-с” 2 в преде
лах диапазона измерений [209]. Обнаружено, что калибровочная функция диапазонного
винта содержит периодические члены (период 1000—10000 мкм-с" 2) с амплитудами 2—
30 мкм-с” 2 [780].
На рис. 6.39 показан очень компактный (диаметр 0,18 м, высота 0,36 м) и лег
кий (3,4 кг, а с термостатом и аккумулятором 4,4 кг, с упаковочным ящиком
7,1—8,3 кг) гравиметр Уордена фирмы “Texas Instruments, Inc“, Хьюстон, Техас
(ранее выпускавшийся Хьюстонскими техническими лабораториями).
Модели «Проспектор» и «Мастер» (с термостатом) выпускаются с разными дополни
тельными устройствами. Их малая шкала имеет цену деления 0,8—1,1 мкм-с ” 2/дел. шка
лы, диапазон измерений в 2100дел. шкалы и отсчетную точность 0,1 мкм-с”2. С по-
Глава
220
Рис.
6.39
6
(левый). Гравиметр Уордена, модель «Мастер» (фирма
Texas Instruments Inc.,
Хьюстон,
Техас).
Рис.
6.40
(правый). Гравиметр Синтрекс
Instrumentation and Services,
CG-3
Автограв. (Фирма
Scintrex Geophysical and Geochemical
Конкорд, Онтарио, Канада).
мощью перестройки полный диапазон можно увеличить до
52 000-66 ООО мкм ·с - 2 • В гра
виметре геодезического типа можно использовать для измерений диапазонный винт (цена
деления 65-120мкм·с- 2 /дел. шкалы) в интервале 800дел. шкалы. С 1947 г. выпущено бо
лее
1200
гравиметров Уордена.
Другие изготовители также выпускают кварцевые пружинные гравиметры, основан
(World Wide lпstr. lпс.,
Sharpe Instr. of Canada, Уиллоудейл, Онта
ные на тех же принципах и имеющие лишь небольшие отличия
Хьюстон, Техас; Sciпtrex, Конкорд, Онтарио;
рио). Приборы фирмы
Sodin (Gravity) Ltd.,
Уиллоудейл, Онтарио,имеют примерно такое
же дополнительное оборудование и такие же возможности, что и гравиметры Уордена
(термостат, геодезическая модель). В СССР изготовление и непрерывное совершенствова
ние кварцевых пружинных гравиметров началось в
приборы
эффективны
при
измерении
1951
г. с приборов типа ГАК. Такие
небольших
приращений
силы
тяжести
(800-1300 мкм. с - 2 ) I).
Гравиметр Scintгex
представляет
(рис.
6.40).
собой
CG-3 Autograv,
реализуемый с
автоматизированный
1987 г.
гравиметр
фирмой
на
Scintrex
Со.,
микропроцессорах
Для него характерно сочетание чувствительной системы из плавленого
кварца с элементами, созданными по новейшим технологиям. В его компактном
корпусе размещены гравиметрический датчик, система управления, сбора и обра
ботки данных, а также источник питания
(312).
Пробная масса уравновешивается пружиной и компенсирующей электростатической
силой. Смещения груза отслеживаются емкостным преобразователем, а цепь обратной
связи
осуществляет
непрерывное
приведение
в
нулевое
положение
(разд.
6.3.3).
С
по
мощью встроенного аналого-цифрового преобразователя напряжение обратной связи пре
образуется в цифровой сигнал и подается в блок управления, сбора и обработки данных.
1> Завод
«Нефтекип» (Москва) выпускает кварцевые астазированные узкодиапазонные гравимет
ры ГНУ-КВ и ГНУ-КС. Приборы не термостатированы. Ошибка одной приборо-связи в 4-час рейсах
не более 0,3 и 0,6 мкм · с - 2 соответственно. - Прим. ред.
Относительные измерения силы тяжести
221
Результат обработки выдается на дисплее (32-символьный, на жидких кристаллах) и зано
сится в оперативную память (объем 16 Кбайт, для записи на 420 гравиметрических пунк
тах). Нивелирование прибора выполняется по двум электронным уровням, измеряется
также внутренняя температура. Выходные данные о наклоне и температуре позволяют
автоматически компенсировать изменения наклона (в интервале ±200"), а также опреде
лить температурную поправку (менее 0,01 мкм-с ”2/°С). Вакуумированная чувствительная
система, аналого-цифровой преобразователь, электронные схемы и наклономеры помеще
ны внутри двойного термостата. Калибровка прибора выполняется на наклономерной
плите (±1 х 10“4) (разд. 6.4.2), контроль линейности калибровочной функции — на бази
се с диапазоном 1200 мкм ·с " 2. Предусмотрена внутренняя автокалибровка аналого-цифро
вого преобразователя. Отсчеты (с точностью 0,1 мкм-с ~2) берут нажатием клавиши; они
получаются как средние из показаний по секундным интервалам; время усреднения выби
рается в зависимости от местных микросейсмических условий (обычно 20 с). Для исключе
ния грубых ошибок предусмотрена статистическая обработка в реальном масштабе време
ни. Возможны также наблюдения с непрерывной автоматической записью без нарушения
цикла. Поскольку напряжение обратной связи перекрывает интервал силы тяжести более
70000 мкм-с ”2, перестройка диапазона не требуется. Выводимая на дисплей и записывае
мая информация содержит калиброванные показания гравиметра в миллигалах, исправ
ленные за влияние приливов, среднеквадратические ошибки измерений, величины наклона,
внутреннюю температуру прибора, дату, время, длительность измерений (по встроенным
часам), а также данные о пункте. Возможен вывод на принтер, на кассетный накопитель
или на дисплей. Корпус прибора (0,24 м х 0,31 м х 0,32 м, вес 12 кг со встроенным акку
мулятором) служит также и упаковочным ящиком, при транспортировке нет необходи
мости в арретировании.
При работе в поле смещение нуль-пункта кварцевых пружинных систем не
превышает 0,5—1 мкм-с ” 2/ч за короткое время, нелинейные отклонения могут
достигать 1—10 мкм-с ” 2/сут. При расстояниях между пунктами 10 км и более
приращение силы тяжести можно определить с точностью ±0,1—0,3 мкм-с” 2
[209, 537, 782]. Такую же точность можно получить с термостатированными при
борами при расстояниях 100—200 км на малой шкале и при надежном контроле
нуль-пункта [370]. Для удаленных пунктов (транспортировка на самолете) при
измерениях по большой шкале получена точность ± 1 —2 м км -с"2 [210, 780].
6.5.4.
Астазированные гравиметры с металлической пружиной
(система Ла Коста — Ромберга)
Астазированные пружинные весы с горизонтальным коромыслом и наклонной
(примерно на 45°) удерживающей пружиной нулевой длины применяются в на
иболее точных относительных гравиметрах, которые широко используются в
геодезии и геофизике.
В 1939 г. идея длиннопериодного вертикального сейсмометра с пружиной нулевой дли
ны (Ла Кост [391]) привела к созданию первого гравиметра Ла Коста — Ромберга (грави
метр LCR). Начиная с 1945 г. после его описания в патентах США (1942, 1945 гг.) фирма
La Coste and Romberg Gravity Meters, Inc. (Остин, Техас) выпустила большое число (около
1000) наземных гравиметров. В дальнейшем совершенствовались конструкция, отсчетное
устройство и передаточный механизм. С выпуском донных, аэроморских, скважинных и
приливных гравиметров фирма La Coste and Romberg стала изготовителем наиболее раз
нообразных приборов.
222
Глава 6
Конструкция гравиметра Л а Коста — Ромберга показана на рис. 6.41 [272].
Горизонтальное коромысло с пробной массой (около Юг) удерживается наклон
ной пружиной, которая прикреплена к центру тяжести коромысла. Пружина из
готовлена из металлического сплава, ее длина 3,5 см. Эту пружину навивают так,
что создается предварительное напряжение, при котором сочетание этой пружи
ны с короткой нитью позволяет получить пружину нулевой начальной длины
(/о = 0). Сила натяжения пружины пропорциональна ее длине (разд. 6.2.2). Коро
мысло связано с корпусом прибора двумя симметрично расположенными гори
зонтальными пружинами. Линия, соединяющая точки подвеса этих пружин, об
разует горизонтальную ось вращения коромысла. Такая конструкция «плавающей
опоры» без трения поглощает напряжения, вызванные сотрясениями,и не переда
ет их на чувствительную систему. Верхняя точка подвеса удерживающей пружи
ны лежит примерно над осью вращения.
Положение коромысла фиксируется оптическим или электронным устрой
ством. При оптической регистрации используют сетку горизонтальных нитей,
укрепленную на коромысле вблизи груза. Оптическая система проектирует тень
одной из нитей на шкалу (перекрестье нитей), ее наблюдают в окуляр отсчетного
микроскопа. При электроемкостной регистрации (чувствительность 10 мВ/
/0,01 мкм-с ~2) используют встроенный гальванометр, можно также подключить
к прибору дополнительный цифровой вольтметр (разд. 6.3.3). Измерения выпол
няют нулевым методом, за нулевое принимается горизонтальное положение ры
чага. При /о = 0 условие равновесия следует из выражения (6.27), в котором а = Ь
(рис. 6.9). При горизонтальном рабочем положении (а + δ = 90°) это условие
имеет вид
mg - kd sin а = 0.
(6.72)
Ha основе (6.28) получим по аналогии с (6.71 г) выражения для чувстви
тельности
1 sin а _ tg а _ ctg δ
(6.73)
g sin δ
g
g
Использовав (6.29), определим расстояние между верхней точкой пружины и
осью вращения
0 =- ^
(6.74а)
к sin а
Между изменениями этого расстояния и силы тяжести будет существовать линей
ная зависимость:
Ad = - Ag.
(6.746)
g
Коромысло устанавливают в нулевое положение, смещая по вертикали точку
подвеса удерживающей пружины. Так компенсируется приращение силы тяжести
Ag.
При d - 0,025 м компенсация в пределах всего измерительного диапазона гравиметра
Ла Коста — Ромберга модели G (70 000 мкм с " 2) достигается изменением длины всего на
0,175 мм. Чтобы выполнять измерения с ошибкой 0,1 мкм-с"2, необходима точность при
ведения в нулевое положение 0,25 нм.
Относительные измерения силы тяжести
223
f— i Шкала
Корпус
зубчатой передачи
Измерительный^
винт
Опора из
драгоценного'
камня
пружина
u Шари к
Длинный рычаг
Рис. 6.41 (левый). Принцип гравиметра Л а К оста — Р ом бер га (LCR) (астазированны е ры чажны е пру
жинные весы) (фирма La C oste and Romberg Gravity Meters, О стин, Техас).
Рис. 6.42 (правый). Зубчатая передача и измерительный винт гравиметров Л а К оста — Р ом бер га м о д е
ли G (до прибора с серийным ном ером 457) [382].
Из (6.73) следует, что чувствительность системы определяется величиной угла накло
на 6. При а = 0,025 м, 6 = 60' (или 100*) чувствительность составит da/dg = 7,2* (или
4,3*) на 0,1 мкм-с ~2, а период собственных колебаний в соответствии с (6.36) То = 19 с
(или 14 с.) Изменяя угол 6, пользователь может подобрать чувствительность, приемлемую
для местных условий, определяемых в основном микросейсмами. Обычно выбирают
То = 15—20 с.
Перемещение верхней точки пружины осуществляется передаточным механиз
мом, состоящим из лимба, шестерней, микрометренного винта и двойного рыча
га (рис. 6.42).
В гравиметре модели G одному обороту лимба соответствует изменение силы тяже
сти примерно на 10мкм-с” 2, а в модели D — примерно на 1 мкм-с” 2; лимб разделен на
100 частей. Условимся считать делением шкалы один оборот лимба модели G, соответ
ствующий 10 оборотам лимба модели D и приращению Ag = 10мкм-с” 2. У основания
лимба имеется счетчик, показывающий число оборотов лимба. Через систему шестерен
вращение лимба передается на микрометренный винт, соотношение числа оборотов лимба
и винта зависит от передаточного числа (рис. 6.42). Передаточные числа имеют следую
щие значения: у гравиметров модели G до серийного номера G457—70,94:1, а начиная с
номера G458—73,33:1; у модели D—32,5:1. Микрометренный винт вращается внутри
стержня с резьбой, вращательное движение преобразуется в вертикальное перемещение.
Рычажная система приводится в движение шариком из закаленного металла, расположен
ным у нижнего конца винта, что позволяет уменьшить смещение верхней точки пружины.
Система рычагов состоит из нижнего рычага и верхнего, скрепленного с пружиной, и из
двух соединительных элементов (плоские пружины).
Несовершенства передающей системы вызывают отклонения от линейного
соотношения (6.746).
Периодические члены появляются вследствие погрешностей микрометренного винта,
соединительного элемента винт — рычаг и из-за эксцентриситета шестерен зубчатой пере
дачи. Периоды этих членов можно вычислить, зная соотношения числа зубьев шестерен.
Установлены следующие периоды: для модели G до серийного номера G457—1,00, 7,88,
Глава
224
6
дел. шкалы, а начиная с номера G458-l,OO, 7,33, 36,67, 73,33 дел . шкалы;
D-0,100, 0,722, 1,625, 3,250 дел . шкалы . В первых приборах модели G возмож
ны амплитуды до 0,35 мкм·с - 2 (для периодов в 35,5 и 70,9 дел . шкалы (272)) . Обычно
амплитуды не превышают 0,1 мкм·с- 2 [501) . В модели D передаточное число другое и
периодические члены меньше в 17 раз (см . табл . 6.3). Из - за конструктивных недостатков
рычажной системы могут появиться нелинейные члены порядка 10 - 3-10 - 4 • Эти нелиней
35,47, 70,94
для модели
ности с достаточной точностью определяются фирмой-изготовителем путем калибровки
с дополнительными массами (разд.
6.4.3)
и приводятся в таблице масштабных коэффици
ентов; абсолютная величина масштабного коэффициента определяется из измерений на
гравиметрическом базисе с диапазоном Дg = 2 419 мкм ·с - 2 • У гравиметров модели D
масштабный коэффициент всегда постоянен с точностью до ± 1 х 10 - 3 •
Конструкция чувствительной системы и защитные устройства корпуса прибо
ра уменьшают влияние внешних возмущающих факторов. Коромысло с воздуш
ным демпфером снабжено барометрическим компенсатором, пружина размагни
чена.
Измерительная
система
действий и термостатирована
нер покрыт
герметизирована,
(50 ± 0,05
изнутри термоизолирующим
защищена от
магнитных воз
°С). Кроме того, алюминиевый контей
мягким
от сотрясений. На съемной верхней панели (рис.
материалом,
6.43)
предохраняющим
имеются лимб и счетчик,
окуляр отсчетного микроскопа, шкала гальванометра, окна, через которые видны
уровни с ценой деления
50" ,
связанные с чувствительной системой, подъемные
винты для нивелирования, закрепительный винт и табло для регистрации темпе
ратуры внутри прибора.
На рис.
1956 г.
2,3 кг,
6.44
представлен
(размеры
0,2
х
0,2
х
гравиметр Ла Коста
0,2 м,
вес с упаковочным ящиком
вес
3,2 кг,
10,0 кг).
-
Ромберга,
выпускаемый с
12-вольтовые сухие батареи весом
Модель
G
имеет измерительный диа
пазон около 70000мкм·с- 2 (9,77-9,84м·с- 2 ), ошибка измерений менее
± 0,4 мкм· с - 2 • Диапазон модели О без перестройки составляет 2000 мкм · с - 2 , а
ошибка измерений не превышает О, 1 мкм· с - 2 ; диапазонный винт позволяет охва
тить весь интервал изменения силы тяжести на земной поверхности. В настоящее
Рис.
6.43
(левый). Верхняя панель гравиметра Ла Коста
-
Ромберга модели
G
(Институт геодезии,
Ганновер).
Рис.
6.44
- Ромберга с батареей
La Coste and Romberg Gravity Meters, lnc"
(правый). Гравиметр Ла Коста
аккумуляторов и упаковочным ящи
ком (фирма
Остин, Техас).
Относительные измерения силы тяжести
225
время (1987 г.) исследуется, как лучше использовать данные калибровки диапазон
ного винта.
Имеется обширный материал, позволяющий исследовать точность полевых
измерений с гравиметром [690, 695]. С достаточно хорошим приближением мож
но считать, что за короткое время смещение нуль-пункта остается линейным и
оценивается величиной 0—0,05 мкм-с " 2/ч, а после эксплуатации прибора в тече
ние 2—3 лет долгопериодическое смещение нуль-пункта — в пределах
0,1 мкм-с "VcyT. При качественной калибровке прибора и надежном учете смеще
ния нуль-пункта можно получить точность ±0,1 м км -с"2 при Ag < 100м км -с"2,
±0,1—0,3 м км -с"2 при 100 < Δ# < 5000мкм-с ~2 и ±0,3—1 м км -с"2 при
5000 < Ag < 20000м км -с"2. Величины ошибок зависят от конкретного прибора
и внешних условий. Точность можно повысить специальными мерами
(разд. 6.6.4). Таблица 6.4 содержит фрагмент журнала измерений с гравиметром.
Т а б ли ц а 6.4. Ф рагмент из журнала гравиметрической съемки; гравиметр Л а К оста — Р ом бер га с внеш
ним цифровым вольтм етр ом (И нсти тут геодезии, Ганновер)
Прибор: Ла Коста — Ромберг G298
переводной коэффициент
дел. вольтм./дел. шк. = 1,00
Объект: Западный Гарц
Пункт
Время,
ч:мин
Отсчет по гравиметру
Лимб,
Шкала вольтм. ,
Счетчик,
мВ
дел. шкалы дел. шкалы
Лимб + шк.
вольтм., дел.
шкалы
Дата: 18 июля 1985 г.
Наблюдатель: Рёдер
Давление, Высота прибора,
мм
ГПа
11
563
551
06:52
08:58
09:18
4779
4607
4617
,690
,950
,320
- 14
-8
+2
,676
,942
,322
1010
926
931
210
210
210
11
14:43
4779
,580
+9
,589
1005
210
С гравиметрами Ла Коста — Ромберга схожи по конструкции и принципу измерений
приборы Фрост, Северная Америка и Уэстерн (примерно с 1940 по I960 г.); имеются разли
чия в конструкции оси вращения и передаточной системы. В гравиметрах Северная Амери
ка [235] нулевое положение устанавливают, смещая ось вращения рычага по вертикали
(1 нм £0,1 мкм-с"2). При этом вращают микрометренный винт, связанный с осью враще
ния (проволочным шарниром) через компенсационную пружину, горизонтальный рычаг,
а также плоские пружины. Такие приборы имели малое смещение нуль-пункта и даже при
больших приращениях силы тяжести обеспечивали точность ±1 мкм -с'2 и выше [161].
6.6.
Источники ошибок и точность измерений
6.6.1.
Инструментальные источники ошибок
На измерительную систему пружинного гравиметра (систему пружина — масса,
систему регистрации и компенсационную систему) влияют многие возмущающие
факторы. Воздействие их на результаты измерений в значительной степени
226
Глава 6
уменьшают мерами, заложенными в конструкцию прибора (разд. 6.3). Однако су
ществуют остаточные эффекты как случайного, так и систематического характе
ра. Будем различать инструментальные источники ошибок и влияния внешней
среды.
Исследования ошибок выполнялись для всех современных гравиметров. Особенно
тщательно исследованы источники ошибок гравиметров Аскания [40], Уордена [211, 780]
и Ла Коста — Ромберга. Целью исследований гравиметров Ла Коста — Ромберга было
повышение точности благодаря совершенствованию конструкции и мерам методического
характера до нескольких единиц 0,01 м к м -с '2 [33, 247, 271, 351], в дальнейшем основное
внимание будем уделять именно этой системе [695].
Влияние инструментальных ошибок определяется конструкцией гравиметра,
к ним относятся: ошибки отсчета, ошибки нивелирования, упругий гистерезис,
нестабильность питания, ошибки калибровочной функции.
Ошибка отсчета складывается из ошибки приведения в нулевое положение
и ошибки отсчитывания по шкале.
Для гравиметров Аскания и Уордена она составляет ±0,1—0,2 м к м -с '2, а у гравимет
ра Л а Коста — Ромберга ±0,03—0,05 мкм-с ~2 (оптическая система отсчета) или ±0,02—
0,03 мкм-с"2 (емкостная система индикации и отсчет по гальванометру). При использова
нии цифрового вольтметра и приближенного (симметричного) приведения в нулевое поло
жение она уменьшается до ±0,005 м к м -с '2. Точность гравиметрической связи на коротких
расстояниях (10 мин ручной переноски) можно существенно повысить благодаря отсчетам
по вольтметру (от ±0,01 до ±0,005 мкм-с 2); при большом времени транспортировки
(0,5—1 ч на автомашине) точность возрастет с ±0,015 до 0,01 м к м -с '2 [761]. При сильных
микросейсмах отсчет может быть взят осреднением по времени (оптическим методом,
аналоговой или цифровой регистрацией). При использовании цифрового регистрирующего
устройства с калькулятором достигнута точность по внутренней сходимости
±0,1 м к м -с '2 (частота отсчитывания 2 Гц, время осреднения 5 мин) при работах на шель
фовом льду (вариации отсчета ± 6 м к м -с '2) [417].
Отметим, что микрометренный винт может иметь мертвый ход, достигаю
щий 0,5 мкм-с-2 . Поэтому приведение в нулевое положение должно выполняться
вращением винта всегда в одну и ту же сторону.
Точность нивелирования зависит от тщательности юстировки уровней и точ
ности приведения пузырька уровня в нуль-пункт. Если уровни хорошо отъюсти
рованы (с точностью ± 10") и нивелирование выполняется с ошибкой 10", то
влияние наклона будет менее 0,02 мкм-с - 2 (разд. 6.3.4).
Влияние упругого гистерезиса проявляется после перестройки измерительного
диапазона и после дезарретирования чувствительной системы; оно имеет харак
тер короткопериодического дрейфа нуль-пункта. Ошибка будет мала, если перед
дезарретированием устанавливать ожидаемый приближенный отсчет и если от
считывать прибор через одно и то же время после дезарретирования. В грави
метрах Ла Коста — Ромберга этот эффект через 5 мин уменьшается примерно
до 0,03—0,01 мкм-с-2 и через 10—15 мин исчезает совсем (рис. 6.45). Если первый
отсчет брать всегда через 5 мин после дезарретирования, то остаточная ошибка
будет меньше 0,01 мкм-с-2 .
Напряжение аккумулятора, предназначенного для термостатирования систе
мы, со временем падает (нелинейно после отключения от внешнего источника
Относительные измерения силы тяжести
227
Рис. 6.45 (левый). Становление отсчета после дезарретирования, прибор был арретирован в течение
20 мин; гравиметр Л а К оста — Р ом берга G79 (И н сти тут геодезии, Ганновер).
Рис. 6.46 (правый). И зм енение отсчета по гравиметру из-за нестабильности напряжения питания; гра
вим етр Л а К оста — Р ом берга G 298 [349].
питания и при сильном разрядном токе, в остальных случаях — по линейному
закону). Во время полевых работ и при смене батарей нестабильность напряже
ния вызывает изменения отсчета. Ошибку можно существенно уменьшить, если
выполнять измерения при линейном падении напряжения. При длительной транс
портировке рекомендуется пользоваться стабилизатором напряжения.
У гравиметров Л а Коста — Ромберга в диапазоне изменения напряжения с 12 до 10 В
были отмечены изменения отсчетов на -0,05 ---- 0,25 мкм-с " 2/В (термостат с ртутным
контактным термометром) и -0 ,0 1 ---- 0,1 мкм-с " 2/В (термостат с термистором) [61, 499]
(рис. 6.46). Если начинать работу спустя полчаса и более после подключения свежего акку
мулятора или если использовать стабилизатор напряжения, то остаточная ошибка будет
менее 0,005—0,01 мкм-с"2.
Ошибки калибровочной функции систематическим образом влияют на изме
ренные приращения силы тяжести. Это влияние различно в зависимости от их
характера и величины Δg. При больших приращениях силы тяжести преобладает
влияние долгопериодических ошибок (линейные и нелинейные), малые Ag больше
всего искажаются периодическими ошибками (разд. 6.4.1).
В гравиметрах Ла Коста — Ромберга обычно используют калибровочную функцию,
определенную изготовителем (масштабный коэффициент для модели D), а линейный ко
эффициент функции уточняют измерениями на эталонном базисе. Неучтенные нелинейные
калибровочные члены могут привести к ошибкам до 0,5 мкм-с 2 при измерении прираще
ний силы тяжести в несколько тысяч мкм-с"2. Если не учитывать периодические члены,
то могут возникнуть ошибки в несколько десятых м к м -с '2 (несколько сотых долей
мкм-с"2) для модели G (модели D). Если же определить эти нелинейные и периодические
члены на калибровочных базисах (разд. 6.4.5) или с помощью системы обратной связи
(разд. 6.4.4), то ошибки можно уменьшить до 0,01—0,1 мкм-с"2 при измерении прираще
ний в 10—2000 мкм-с " 2. На рис. 6.47 приведен график, который иллюстрирует уменьше
ние ошибки при учете периодических членов до 0,01 мкм-с 2.
При измерении малых Ag с применением электронной системы обратной свя
зи периодические калибровочные ошибки, упругий гистерезис и влияние наклона
на чувствительность прибора исчезают.
Таблица 6.5 содержит результаты определения разными методами вертикальной со
ставляющей градиента силы тяжести, показывающие, что среднее из п = 10 измерений
228
Глава 6
Ошибка
(мкм-с~^)
Рис. 6.47. Остаточные ошибки до (незатемненные кружки) и после учета периодических калибровочных
поправок (гравиметр Ла Коста — Ромберга G85) по 320 измерениям приращений силы тяже
сти на вертикальном базисе в Ганновере [350].
Т аблица 6.5. О пределение вертикальной составляющ ей градиента силы тяжести (пункт
Ганновер) гравиметрами Л а К оста — Р ом берга [603]
Обычные измерения
Прибор
Год
D8
D14
D23
G79
G79
G298
1984
1984
1984
1983
1984
1983
Среднее:
Градиент,
мкм · с _2/м
Измерения с системой обратной связи
Ла Коста — Ромберг G79
п
2,659
2,663
2,692
2,743
2,688
2,723
50
50
50
52
50
46
2,695
± 0 ,0 1 4
298
Дата
16.6.84
16.6.84
17.6.84
17.6.84
18.6.84
Градиент,
мкм · с “ 2/м
п
2,654
2,682
2,681
2,686
2,669
10
10
10
10
10
2,674
± 0 ,0 0 6
50
в серии имеет ошибку ±0,01—0,02 мкм с 2. При обычном методе наблюдений, когда се
рия содержит 50 измерений, ошибка равна ±0,03—0,04 мкм· с -2.
6.6.2.
Ошибки, вызванные влиянием внешней среды
К внешним возмущающим факторам относят изменения температуры и атмос
ферного давления, а также влияние магнитного поля и сотрясений (разд. 6.3.5).
Изменения температуры окружающей среды вызывают изменения отсчета
разного характера и величины в зависимости от температурного режима и вариа
ций температуры, от абсолютной температуры, а также от теплоизоляции и тер
мокомпенсации прибора. Особенно сильно сказывается быстрое изменение темпе
ратуры (различие температуры при транспортировке и измерениях на пункте) и
одностороннее влияние (ветер, солнечное излучение). Исследования в лаборато
рии с искусственно создаваемыми условиями позволяют определить свойствен
ную данному прибору реакцию на изменения температуры. Изменения отсчета,
имеющие задержку относительно хода температуры, а также последующие про
цессы компенсации могут составить 1мкм*с"2/°С и более. У термостатирован
ных приборов эти эффекты уменьшаются до нескольких сотых мкм с _2/°С.
Относительные измерения силы тяжести
229
Рис. 6.48 (левый). Изменение отсчета из-за резкого изменения температуры (гравиметр Уордена
№ 227), средний суточный дрейф исключен [308].
Рис. 6.49 (правый). Изменение отсчета при периодических изменениях температуры (гравиметр Уорде
на Hi 53) [473].
На рис. 6.48 и 6.49 показано, как резкие и сильные периодические изменения темпера
туры влияют на показания нетермостатированного гравиметра Уордена. Рисунок 6.50 ил
люстрирует сложную связь между изменениями наружной и внутренней температуры гра
виметра Ла Коста — Ромберга (малый чехол с более слабой теплоизоляцией).
В полевых условиях температура внешней среды меняется по-разному в зави
симости от места и времени наблюдений и влечет коротко- и долгопериодические
изменения отсчета, знак которых также меняется [61, 216]. У гравиметра Ла Ко
с т а — Ромберга были обнаружены изменения 0—0,03 мкм с “ 2/°С (рис. 6.51). До
настоящего времени не удалось получить приемлемых результатов при модели
ровании связующей функции и выводе формул для вычисления поправок. Су
щественно уменьшить температурное влияние можно дополнительным термостатированием.
Способы нахождения связующей функции основаны на реологической модели измери
тельной системы и на модели системы контроля [217], либо на выводе связующей функ
ции по реакции на изменения температуры [33]. Эксперименты по определению поправок
по внутренней температуре прибора с применением уравнений регрессии не дали хороших
результатов. Для гравиметров Северная Америка и Уэстерн в 1954 г. Мартин получил
коэффициент регрессии в 0,3—0,8 мкм-с~2/0,01 °С [437]. Кангессер [349] исправляет отсче
ты по гравиметру Ла Коста — Ромберга (с малым чехлом) с коэффициентом
-0,013 мкмс~2/0,01 °С (рис. 6.52), в результате чего при коротких связях (время
транспортировки 5 мин) и больших изменениях наружной температуры точность повыша
ется примерно на 25^о. При измерениях на больших расстояниях такое повышение точнос
ти возможно, если применять алюминиевый термостатированный контейнер.
Изменения атмосферного давления влияют на отсчет по гравиметру, если из
мерительная система герметизирована недостаточно. Кроме того, они могут де
формировать корпус гравиметра и тоже привести к изменениям отсчета. Подоб
ные влияния становятся заметными при сильных изменениях давления, когда ра
бота ведется в горах или на больших расстояниях. Атмосферные влияния можно
исследовать в лаборатории (барокамера) и в общем случае аппроксимировать ли
нейным уравнением регрессии; тогда при необходимости можно вводить поправ
ки за давление. Прямые и косвенные гравитационные эффекты изменений давле
ния рассмотрены в разд. 10.2.1.
230
Глава 6
Температура
Рис. 6.50 (левый). Связь м еж ду изменениями внешней температуры и внутренней (температуры чув
ствительной системы ), гравиметр Л а К оста — Р ом берга G298 [350].
Рис. 6.51 (правый). И зм енение отсчета при переменной внешней тем пературе, гравиметр Л а К о с т а Р ом бер га G258 [216].
В гравиметрах Уордена отмечены барометрические влияния величиной 0,003—
0,03 мкм-с"2/100Па, проявляющиеся вместе с гистерезисом [97, 208], гравиметры Аскания
обнаруживают зависимость 0,001—0,01 мкм-с' 2/ 100Па. Влияние атмосферного давления
на гравиметры Ла Коста — Ромберга всегда меньше 7,5 нм с " 2/100 Па [272]. При лабора
торных исследованиях получен коэффициент регрессии 0,1—2 нм с -2/ 100 Па [61, 349]
(рис. 6.53). Изменения давления между соседними пунктами наблюдений обычно не превы
шают 1000 Па, и, следовательно, их влияние на показания гравиметров Л а Коста — Ром
берга столь мало, что им можно пренебречь. При высокоточных работах на больших рас
стояниях или в горах при необходимости можно вводить поправки.
Влияние магнитного поля проявляется в гравиметрах с металлическими пру
жинами, если компенсация или экранирование в них недостаточны. Часто такая
защита теряет эффективность после сотрясений, и поэтому рекомендуются перио
дические проверки. При этом полезны исследования с катушкой Гельмгольца, со
здающей искусственное магнитное поле. Они позволяют найти зависимость изме
нений отсчета от изменений горизонтальной и вертикальной составляющих маг
нитного поля. По измерениям в разных азимутах легко определить зависимость
отсчета от ориентировки прибора в магнитном поле Земли. Зависимость отсчета
Рис. 6.52 (левый). Корреляция м еж ду отсчетом по гравиметру и изменением внутренней тем пературы ,
гравиметр Л а К оста— Р ом берга G298 [350].
Рис. 6.53 (правый). Регрессионная зависимость между отсчетом по гравиметру и изменением а т м о с
ф ерного давления, гравиметр Л а К оста— Ром берга G432 [61].
Относительные измерения силы тяжести
231
нм с
+200 I+100
-20
0
α<:
.# *^4 0 +60 +80+100 Микротеслы
Рис. 6.54 (левый). Регрессионная зависимость м еж ду отсч етом по гравиметру и вертикальной состав
ляющей напряженности магнитного поля, гравиметр Л а К оста— Р ом бер га G298 [350].
Рис. 6.55 (правый). Влияние м агнитного поля на отсчет по гравиметру в зависим ости от азим ута, гра
виметр Л а К оста— Ром берга G298 [567].
от напряженности магнитного поля можно представить линейным уравнением
регрессии, а зависимость от азимута — синусоидальной функцией. Если побли
зости отсутствуют магнитные аномалии (залежи руды, стальные сооружения),
то остаточная ошибка всегда будет меньше 0,1 мкм-с ~2. Для этого необходимо
также, чтобы измерительная система была ориентирована в магнитном поле
всегда одинаково или же нужно вводить поправки (для этого измеряют напря
женность магнитного поля).
У гравиметров Аскания установлена зависимость 0,001—0,004 мкм-с ~2/мкТ для гори
зонтальной составляющей напряженности магнитного поля и 0,004—0,03 мкм-с “ 2/мкТ —
для вертикальной [688]. У гравиметров Л а Коста — Ромберга этот эффект всегда меньше
0,1 мкм-с"2 для горизонтальной составляющей и пренебрежимо мал для вертикальной
[272]. При лабораторных исследованиях для обеих составляющих была найдена регресси
онная зависимость 0,1—2нм-с~2/мкТ [349] (рис. 6.54); азимутальные вариации могут
иметь амплитуду до 0,04 мкм-с"2 [247, 567] (рис. 6.55). Поскольку вариации напряженнос
ти магнитного поля Земли лежат в пределах 40 мкТ для горизонтальной и 70 мкТ для
вертикальной составляющей, их влияние на измеренные величины Ag между соседними
пунктами обычно остается менее 0,01 мкм-с"2 даже при больших расстояниях между
ними. При сильной азимутальной зависимости показаний или при наблюдениях в зданиях,
могут потребоваться специальные меры предосторожности.
Сотрясения, действующие при транспортировке и во время наблюдений, вы
зывают изменения отсчета, зависящие от характера и силы сотрясений, а также
конструкции гравиметра. При транспортировке (арретированная система или
система с механическими ограничителями) их воздействие определяется способом
транспортировки и видом дополнительной защиты гравиметра. Различные усло
вия транспортировки (ручная переноска, на автомашине по дороге или по бездо
рожью, на вертолете, на самолете) вызывают различные возмущающие ускоре
ния и реакции измерительной системы; на показаниях гравиметра совместно ска
зываются прямые эффекты и компенсационные процессы. Особенно большие из
менения происходят при совпадении частоты возмущений с резонансной частотой
арретированной измерительной системы.
Резонансные частоты арретированных гравиметров Л а Коста — Ромберга лежат в
интервале 30—70 Гц. При этом возмущающие ускорения 0,5—1 g, действующие в течение
232
Глава 6
1 мин и дольше, могут изменить отсчет более чем на 1 мкм-с-2. В диапазонах 47—50 Гц
и 60—65 Гц могут возникать скачки [260]. Лабораторные эксперименты (вибрационный
стол) показали, что в частотном диапазоне 50—52,5 Гц (вибрация в самолете) ускорения,
превышающие 0,2 g,в течение 5 мин приводят к изменениям отсчета на 1—2 мкм-с-2 . При
транспортировке на автомашине характерны ускорения, не превышающие 0,1 g с частотой
примерно 5 Гц; влияние их на отсчет не обнаружено [349, 350].
Моделировать изменения отсчета, вызванные сотрясениями, пока не удалось.
Для уменьшения влияния сотрясений при транспортировке применяют ряд мер:
— для поглощения энергии толчков и фильтрации вибраций транспортного средства испо
льзуют массивные транспортировочные контейнеры в пружинной подвеске [33, 349];
— для уменьшения остаточных напряжений в чувствительной системе длительность транс
портировки перед началом измерений увеличивают (примерно до получаса) [371];
— аккуратное обращение с гравиметром при перевозке и во время работы на пункте (избе
гать сотрясений и больших ускорений).
Сильные возмущающие ускорения и сотрясения влекут скачки в отсчетах порядка
1 мкм-с"2. Остаточные эффекты порядка 0,01—0,1 м к м -с '2 интерпретируют как смещение
нуль-пункта гравиметра (разд. 6.6.3).
При измерениях на пункте (дезарретированный гравиметр) проявляется воз
действие естественных и искусственных микросейсм (разд. 5.1.5), а также прямое
и косвенное (сотрясения почвы) воздействие ветра. Их влияние на отсчет имеет
порядок 0,01—0,1 мкм-с-2 и зависит от периода собственных колебаний измери
тельной системы и ее демпфирования. Эти возмущающие влияния можно умень
шить соответствующим выбором пунктов (в стороне от больших дорог, на ста
бильном скальном основании и т. п.), применяя ветровой экран, осредняя резуль
таты. Причиной возмущений в 10м км -с"2 и более могут быть сейсмические яв
ления на большом удалении от пункта.
6.6.3.
Смещение нуль-пункта гравиметра
При стационарных наблюдениях и работе в поле с течением времени изменяется
отсчет пружинных гравиметров; этот эффект называют смещением нудь-пункта
(дрейфом) гравиметра. Дрейф вызван ослаблением упругих свойств пружины и
внешними воздействиями, которые не удалось компенсировать или от которых
прибор не защищен полностью (разд. 6.3.5, 6.6.2).
Характер и величина дрейфа гравиметра зависят от:
— типа и характеристик данного прибора. Из-за своих термоэластических
свойств кварцевые пружинные системы имеют больший дрейф, чем гравимет
ры с металлическими пружинами;
— возраста прибора и интенсивности его использования. У гравиметра Ла Ко
ста — Ромберга средний суточный дрейф, определенный за большой период
времени, уменьшился за несколько лет с 0,5 мкм-с-2/сут до нуля (рис. 6.56);
у кварцевых пружинных гравиметров он остается большим (1 —10мкм-с-2/
сут);
— флуктуаций окружающей температуры при транспортировке и измерениях, а
также вибраций и сотрясений чувствительной системы;
Относительные измерения силы тяжести
233
м км с ^/сут
Рис. 6.56.
Уменьшение среднесуточного дрейфа гравиметра,
гравиметр Ла К оста— Р ом бер га G298 [706].
— нескомпенсированных изменений атмосферного давления и напряжения источ
ника питания.
Реакцией пружины на эти возмущения являются ее упругие и пластические
деформации, а также резкие изменения длины, сопровождающиеся разного рода
компенсационными процессами переменного характера. В гравиметрах с метал
лическими пружинами могут также произойти резкие изменения из-за небольших
смещений в соединительных элементах измерительной системы.
На дрейф нуль-пункта гравиметра, вызванный внешними условиями и особенностями
прибора, накладываются временные изменения силы тяжести. В короткопериодической
области наиболее заметное влияние оказывают приливы, кратковременные изменения ат
мосферного давления, уровня грунтовых вод, а также влажности почвы. Если точностные
требования невысоки (порядка 0,1 мкм с -2), а смещение нуль-пункта надежно контролиру
ется, эти эффекты могут быть включены в модель дрейфа и влияние их, таким образом,
будет уменьшено (см. ниже). При высокой точности измерений (порядка 0,01 мкм с -2)
приливные изменения силы тяжести, а также изменения атмосферного давления необходи
мо учитывать с помощью моделей. Попытки моделирования влияния грунтовых вод и
влажности почвы не удались. Влияния более длительного характера сказываются на всех
результатах, а также при сравнении измерений, выполненных в течение длительного вре
мени (создание обширных гравиметрических сетей, геодинамических сетей) (разд. 9.2,
10. 1. 1).
Если смещение нуль-пункта контролируется надежно, то обычно можно вы
явить большие скачки (1 мкм с -2 и более) и исключить из дальнейшей обработки
ненадежные измерения. Смещение нуль-пункта между моментами нарушения не
прерывности представляет собой наложение непрерывных процессов и малых
«элементарных» скачков. Дрейф можно разложить на две составляющие:
стационарный дрейф (старение пружины, долгопериодические вариации темпера
туры и давления), который можно выявить длительными наблюдениями на
пункте, и дрейф при транспортировке (сотрясения, короткопериодические флук
туации температуры и др.), проявляющийся при полевых измерениях. Последний
почти линеен на коротких интервалах времени (несколько часов), однако в тече
ние дня часто появляются нелинейности. Дрейф, который часто можно наблю
дать, когда прибор долго находится в состоянии покоя (длительные перерывы
в работе, ночью), отчасти компенсирует влияние транспортировки.
Глава 6
234
Моделирование смещения нуль-пункта гравиметра основано на разложении в
ряд Тейлора функции отсчета ζ по времени t [153]:
.(О - «ад - (!)о« - ад♦‘ (£)„<> - ад’ +
+ l ( 9 \ v - '°1’ + ····
<6'75а)
где ίο — начальный момент измерений. Введя коэффициенты дрейфа di, d i, Λ,
напишем (6.75а) как полином
z(t) — z(to) + d\ ( t — to)
+ dz(t — to)1 + ds(t — ί0γ + ...
= Z(t0) + Σ dp{t - t0)p = z(t0) + D(t),
P =
(6.756)
1
где z(to) представляет собой отсчет в момент, начиная с которого задается мо
дель дрейфа. Из-за различий дрейфа при транспортировке и стационарного дрей
фа выражения (6.75) используют обычно для наблюдений в течение одного рабо
чего дня. Для небольшого и примерно линейного дрейфа возможно моделирова
ние и на больших интервалах времени (в течение всей съемки). В более сложных
моделях дрейф подразделяют на стационарный и полевой, а также вводят пара
метры, учитывающие нарушения непрерывности [371], или используют сплайны
[757]. После определения дрейфа (при уравнивании сети) для оценки выбранных
моделей можно сделать статистическую проверку (разд. 9.2.5).
Коэффициенты дрейфа находят из повторных измерений, которые следует по
возможности равномерно распределять во времени в зависимости от типа (ли
нейный, нелинейный, скачкообразный) и величины дрейфа, а также от требуемой
точности и применяемой модели. Разработаны различные схемы полевых изме
рений, изучена их эффективность, в частности и при определении дрейфа [752].
Пригодными оказались следующие схемы (рис. 6.57):
— разностный метод с оперативным контролем дрейфа в каждой связи; последо
вательность пунктов: 1—2—1, 1—2—1—2, 1—2—1—2—1—2 и т. п.;
3
Рис. 6.57. М етоды определения дрейфа гравиметров: а — разностный м етол (3 перехода для каждой
связи); б — м етод звезды; в — ступенчатый м етод (двойной петли); ^ — м етод профиля (с
повторением) [751].
Относительные измерения силы тяжести
235
мкм-с ^
Рис. 6.58. Графическое определение дрейфа из измерений по м етоду двойной петли [751].
— метод звезды с привязкой к центральному пункту и оперативным контролем
дрейфа; последовательность наблюдений 1—2—1—3—1—4—1 или подобная;
— ступенчатый метод (метод двойной петли), в котором при быстром продвиге
работ на каждом пункте наблюдают по крайней мере три раза; последователь
ность 1—2—1—2—3—2—3—4—3 или подобная;
— профильный метод, в котором наблюдения на пунктах выполняют в порядке
их расположения на профиле один, два или несколько раз; последовательность
1—2—3—4—. . . — 1 или 1—2—3—4—. . . —4—3—2—1 или подобная.
Частые повторные наблюдения (разностный метод, метод звезды, ступенча
тый метод) позволяют оценить короткопериодический дрейф, а частые повторе
ния на опорном пункте — длиннопериодический.
Н ео б х о д и м о о т м е т и т ь , ч то врем я, п отр ач ен н ое на уточн ен ие др ей ф а, б у д е т п отер я н
ным для оп р едел ен и я новы х пунктов. С д р угой с т о р о н ы , п о в т о р н ы е н абл ю д ен и я п ов ы ш а
ю т н а д еж н о сть и т о ч н о ст ь оп р еделен и й силы т я ж ест и . П о э т о м у при пл анировании р а б о т
н е о б х о д и м о оп т и м а л ь н о учиты вать то ч н о ст н ы е и экон ом ич ески е пок азател и .
Для получения первичных оценок величины дрейфа, для выявления нарушений
непрерывности и при невысоких точностных требованиях можно определить
дрейф графически.
П ри эт о м отсч еты на пунктах, по котор ы м о п р ед ел я ю т др ей ф , н ан ося т на график
как ф ункцию врем ени , зат ем точки графика со ед и н я ю т кривы ми (рис. 6 .5 8 ). П ар ал л ел ь
ны м п ер ен осом о б ъ ед и н я ю т ф рагм ен ты кривой таким о б р а з о м , ч тобы п ор я д ок кривой
бы л как м о ж н о м ен ьш и м , при эт о м д оп уск аю тся о ста т о ч н ы е р асхож ден и я (и з-за ош и бок
изм ер ен ий ). Х отя такая п р оц ед ур а д а ет , как правило, уд о в л етв о р и т ел ь н ы е р езул ь тат ы ,
они не св о б о д н ы о т субъективн ы х влияний; графический м е т о д не п о зв о л я ет пол учи ть
статистически е характеристики (степень п ол и н ом а, т о ч н о ст ь , корреляц ию м е ж д у о т
счетам и).
После того как дрейф из отсчетов исключен, в них все-таки можно обнару
жить корреляцию. Ее можно оценить, используя поправки, полученные из урав
нивания, и с их помощью уточнить дрейф [153] (разд. 9.2.4).
Гравим етры Аскания и м ею т линейны й или квадратичны й дн евн ой д р ей ф д о
1 м к м с ' 2/ч при тр ан сп ор ти р ов к е на автом аш и н е; п р и м ер н о такие ж е характеристики
дрейф а у кварцевы х пр уж инны х гр ави м етр ов [535] (рис. 6 .5 9 ). В гр ави м етр ах У ор ден а у д а
лось об н а р у ж и т ь [349] сущ ествен н ую корреляцию (врем я корреляции 2 ,6 ч) оста т о ч н ы х п о
правок п осл е исклю чения из изм ер ен ий др ей ф а, о п и сан н ого п о л и н о м о м в т о р о й степени .
Глава 6
236
„—2
4
2
-
О-Χ
ΙΟ.00
12.00
14.00
16.00
Время, ч
Р ис. 6 .5 9 . Д невной дрейф , гравиметр У орлдвайд № 8 [535].
И зм ерени я с гр ави м етр ам и Аскания G s 12 на бол ьш и х расстоян иях (т р ан сп ор ти р овк а на
са м о л ет е) выявили на ин тервалах в несколько суток линейны й или квадратический дрейф
д о 0,5 м к м -с ~ 2/ч ; обн ар уж ен ы так ж е ком пенсацион ны е процессы при дл и тел ьн ы х о с т а
новках [688].
В бол ьш и н ств е случаев дн евн ой дрейф гр ави м етр ов Л а К ост а — Р о м б ер га порядка
0 — 0,1 м к м -с " 2/ч и м еет линейны й характер, одн ак о бы ли обн ар уж ен ы д р ей ф ы , оп и сы вае
м ы е квадратичны м и и кубичны ми п ол и н ом ам и , о с о б ен н о в п р и бор ах м о д ел и D [33]
(рис. 6 .6 0 ). Л а м б е р т и др. [400] пок азали , ч то дрейф зави си т о т условий тр ан сп ор ти р ов к и .
П о их данным^ т о ч н о ст ь изм ер ен ий наи больш ая при ручной переноске (ош ибка м енее
± 0 ,0 3 мкм с " 2, время переноски 6 м и н), ниж е при т р ан сп ор ти р овк е на а в т ом аш и н е (х о р о
ш ие д о р о ги ± 0 ,0 5 м к м -с “ 2, п л охие д о р о ги ± 0 ,0 9 м к м -с “ 2, время т ран сп орти ровк и
30 м ин) и ещ е ни ж е при тр ан сп ор ти р овк е на в ер т ол ет е (д о ± 0 ,1 2 мкм с " 2, время
тран сп орти ровк и 18 м ин). С ущ ествен н о ум ен ьш и ть дрейф м о ж н о д оп ол н и т ел ь н ы м т ер м о стати р ован и ем и защ и т ой о т сотр ясен и й . П ри т р ан сп ор ти р овк е на а в т ом аш и н е с п р уж и н
ны м п о д в есо м гр ави м етр а дрей ф ум еньш ается с 0,1 д о 0,01 м к м -с " 2/ч [247]. Таким с п о с о
б о м К ан ги зер [349] повы сил т о ч н о ст ь на 30% при н еблагоп ри ятн ы х условиях (т р а н с п о р т и
ровка на «л ен д р о в ер е» в течение 1 ч). П о сл е исклю чения д н ев н о го др ей ф а отсч еты по гра
ви м етрам при тр ан сп ор ти р ов к е за 4 5 — 60 мин обн а р у ж и в а ю т лиш ь сл а б у ю корреляцию
(время корреляции п р и м ер н о 20 м ин) [153, 757]. П ри изм ерен иях на очень бол ьш и х р а с с т о
яниях, длящ ихся несколько дн ей (на ав т ом аш и н е или на са м о л ет е ), см ещ ен и е нуль-пункта
м о ж н о п р ед став и ть как ли н ей н ое со ск ор ост ь ю 0 ,1 — 0 ,2 м к м - с ~ 2/с у т или бо л ее, на к о т о р о е
во врем я переры вов в р а б о т е нак лады вается кор откопери одич ески й д р ей ф [371, 689]
(рис. 6 .6 1 ).
Таким образом, наиболее эффективны следующие методы уменьшения влия
ния дрейфа [151, 371]:
м км с
^
Лейгасколи
+0,4
+0,5
+0,7
Научный ин-т Р е й кь я ви к.
S 7 А э р . Акюрейри
п
С
а *Г
Аэр. Рейкьявик
а> J ·—«г
Аэр. Кефлавик
+0,6 .
μ
- I
G
α> 1 *”* Аэр. Лондон
+0.4 _
Έ
• A3D.
.
Я
....... Λ о ι0 ^
мариж
•
0,4
2
/
Z
А
0,2
•
Ω-
•Ч — - г
у%
Г
Средний дрейф
+ 0,07 мкм*с /сут.
Аэр. Ганновер · +0 3 " *
i 2
оГанновер А а·*··-·-··· +0,3 \ л а
Л м км с
г. Рейкьявик Η *” · ' * ’ / и ™
25.4. 1983
т
i
i
14.00
20.00
1 1 1 1 1 1 1 1 1 1 1 1
Время, ч
4. 5. 6. 7. 8. 9 .1 0 .11 .12.13.1 4.15 .9.19 70
Рис. 6.60 (левый). Дневной дрейф, гравиметр Ла К оста— Р ом берга D16 [33].
Рис. 6.61 (правый). Дрейф при связях на больш ие расстояния (на сам олете), гравиметр Л а К о с т а Р ом берга G85 [689].
237
Относительные измерения силы тяжести
— периодическая проверка юстировки измерительной системы (уровни), а также
защиты и экранирования (от давления, температуры, магнитного поля);
— предельно осторожное обращение с гравиметром при транспортировке и изме
рениях (избегать сотрясений и резкого одностороннего нагрева или охлажде
ния прибора);
— по возможности выбирать пункты с учетом их стабильности (сотрясения, воз
действия температуры, гидрологический режим);
— исключение аномального дрейфа, приуроченного к началу измерений;
— единообразная последовательность измерений на каждом пункте;
— измерения при стабильных внешних условиях (изменения температуры менее
5°—10 °С/сут);
— защита гравиметра от возмущающих воздействий (ветер, солнечное из
лучение);
— достаточно частое определение дрейфа (2—3 ч);
— применение дополнительного транспортировочного контейнера с термо
статом.
6.6.4.
Точность измерений
Точность относительных измерений силы тяжести можно оценить априори, зная
бюджет ошибок, а после измерений — по их результатам. Для гравиметров
Аскания и Уордена, как и для более ранних приборов, точностные характеристи
ки даются в их описаниях (разд. 6.5) или известны из анализа источников ошибок
(разд. 6.6.1—6.6.3). Ограничимся рассмотрением ошибок гравиметров Ла Ко
ста — Ромберга (разд. 6.5.4).
В табл. 6.6 приведен бюджет ошибок гравиметров Ла Коста — Ромберга мо
делей D и G, составленный по различным источникам [349, 695].
Т а б л и ц а б. б. Бюджет ошибок гравиметров Л а Коста — Ромберга (единичное измерение Ag, средние
условия измерений, Δg < 1 000 мкм * с - 2 ) по данным В. Торге [695]
Источник ошибок
Ошибка при обычной
методике, мкм *с ~2
Высокоточные измерения
Дополнительные меры
Ошибка, мкм *с 2
Прибор
отсчет
± 0,03
нивелирование
± 0,05
неупругое последействие
нестабильность напряжения
питания
К а л и б р о в к а !)
длинноволновые компоненты
± 0,05
± 0,05
Дополнительный
вольтметр
Улучшенные уровни,
заданное время ста
новления отсчета
После дезарретирования
Стабилизатор напряжения
±0,01
± 0 ,0 2
±0,01
±0,01
±0,15/1000 мкм*с-2 Калибровочная система с ±0,05/1000 мкм* с -2
абсолютными определе
ниями и промежуточ
ными пунктами
Глава 6
238
Продолжение табл. 6.6.
Источник ошибок
Периодические компоненты:
— Модель G
— Модель D
Ошибка при обычной
методике, мкм · с "2
Высокоточные измерения
Дополнительные меры
Ошибка, мкм · с “2
±0,15
± 0 ,0 2
Специальный калибровом- ±0,01
ный базис и/или кали- ±0,01
бровка с использованием
обратной связи
температура
±0,1
давление воздуха
±0,01
магнитное поле
± 0,03
сотрясения
±ο,ι
Малые изменения темп.
или дополнительное
термостатирование
Контроль, возможно введение поправок
Контроль, возможно введение поправок
Осторожность при перевозке или дополни
тельный контейнер
Влияния внешней среды:
± 0 ,0 2
±0,01
±0,01
±0,05
Временные изменения силы
тяжести
гравитационные приливы
±0,1
флуктуации атмосферного
давления
± 0,05
флуктуации уровня грунтовых
вод и влажности почвы
±0,05
Использование моделей
±0,01
приливов для упругой
Земли и океанов или
измеренных приливных
параметров
Введение поправок за при- ±0,005
ведение к стандартным
метеоусловиям
(Приведение к стандартно-±0,05
му уровню грунтовых
вод пока невозможно)
Среднеквадратическая ошибка
V
случайная ошибка
случайная + систематическая
составляющие
— Модель G
— Модель D
± 0,17
± 0,06
± 0,27
± 0,22
± 0,08
± 0,08
± 0,08
Общая ошибка , включающая временные изменения силы тяжести:
— Модель G
— Модель D
± 0 ,3 0
±0,25
± 0 ,1 0
± 0 ,1 0
!) Обычная программа: калибровочные таблицы изготовителя + линейный калибровочный коэффициент, полученный на базисе;
2> Сумма квадратов ошибок.
Таблица содержит средние значения отдельных ошибок (среднеквадратические ошиб
ки) и однократного измерения Ag; по разным литературным источникам их величины
могут различаться в зависимости от конкретных условий. Данные таблицы основаны на
результатах, полученных в региональных и локальных гравиметрических сетях
(Δ# ^ 1000мкм с -2) при типичных условиях (транспортировке на автомашине, без резких
сотрясений и изменений температуры, определение дрейфа через 1—2 ч). Помимо измере
239
Относительные измерения силы тяжести
ний по обычной программе рассмотрены высокоточные измерения, при которых принима
лись дополнительные предосторожности (разд. 6.6.1—6.6.3). В бюджет входит также не
оцененное отдельно влияние изменений силы тяжести во времени.
Полная ошибка при стандартных методиках измерений с учетом ошибки кали
бровки равна ±0,2—0,3мкм с " 2, при высокоточных измерениях она уменьшает
ся до ±0,1 мкм с -2 . Главными источниками ошибок остаются погрешности ка
либровочной функции, флуктуации температуры и сотрясения. При Ag = 50—
IOOmkm c -2 эти влияния , как и изменения силы тяжести во времени, существенно
уменьшаются и можно ожидать ошибки ± 0,05 мкм с “ 2 и менее.
Случайные ошибки можно уменьшить повторными измерениями при различных усло
виях («рандомизация»); если использовать разные гравиметры, то будет отчасти ослабле
но влияние нелинейных и периодических ошибок калибровки [249] (разд. 9.2.2).
Среднеквадратические ошибки, полученные из уравнивания локальных и реги
ональных измерений, подтверждают справедливость этих точностных оценок.
Таблица 6.7 содержит данные различных измерительных программ. Как видно,
однократное измерение по высокоточным методикам позволяет определить ма
лые приращения силы тяжести с ошибкой ±0,05—0,15 мкм с - 2 . При ббльших
приращениях (до 1000—2000мкмс _2) и ббльшем времени транспортировки
ошибка увеличивается до ±0,1—0,2мкм с ~ 2. И лишь при больших A g и больших
расстояниях между станциями (транспортировка на самолете) из-за сильных из
менений внешних условий, недостаточно надежного определения дрейфа и долго
периодических погрешностей калибровочной функции ошибка измерений увеличи
вается до ±0,5—1 мкм-с-2.
Таблица 6.7. Среднеквадратические ошибки единичного измерения
Ромберга (модели G и D)
П роект
мкм
Вертикальный калибро
вочный базис, Ганновер
Гравиметрический профиль
для изучения поднятия
зем ной коры
в Фенноскандии
Калибровочный базис
Ганновер — Гарц
Опорная сеть
Северной Исландии
Ф ундаментальная гра
виметрическая сеть ФРГ
Гравиметрические связи
континент — Исландия
Региональная сеть
Европа — Африка
О ш ибка,
С редн ее Δ #,
· с "2
мкм
G, D : ± 0,05
< 6
G : ± 0,04 — 0,18
G, D : ± 0,11
G : ±
D : ±
D : ±
10 — 1000 G, D
0,1 — 0,15
0,12
0,03 — 0,14
: ± 0,1 — 0,2
100 — 2000 G : ± 0,07 — 0,21
10 000
П р и м еч а н и я
И сточни к
■с ‘ 2
<10
<100
Ag с гравиметрами Л а К оста —
G : ± 0,2 — 0,8
1000 — 20000G : ± 0,3 — 0,8
Расстояния м еж ду пунк
тами несколько метров
Расстояния меж ду
пунктами д о 200 км
Расстояния меж ду
пунктами 5 — 15 км
[351]
[249, 371]
[33, 351]
Слож ны е условия
[349]
Расстояния меж ду
пунктами 100 — 200 км
П еревозка на сам олете,
трудности с оп озн ава
нием пунктов
Н едостаточны й контроль
дрейфа
[639]
[703]
[689]
240
Глава 6
Измерения на станции МБМВ (Севр), выполнявшиеся для приведения резуль
татов к единой точке как в плане, так и по высоте, показали ([567], см. табл. 6.6),
что при использовании электронной системы обратной связи на малых расстоя
ниях (малое время транспортировки, Ag = 1—Ю мкм-с"2) можно получить ошиб
ку ±0,02—0,05 мкм с - 2. Это оказалось возможным благодаря стабильности
внешних условий и отсутствию ошибок калибровки.
7
Измерения силы тяжести
в труднодоступных районах
и на подвижных основаниях
Для решения региональных и локальных геодезических и геофизических задач
требуются гравиметрические съемки на акваториях Мирового океана (71% по
верхности Земли) и в труднодоступных районах континентов (полярные области,
пустыни, джунгли); по экономическим соображениям съемки желательно прово
дить быстро. Измерения силы тяжести на морском дне, в скважинах и на по
верхности небесных тел (к настоящему времени на Луне) могут помочь в реше
нии локальных задач. В таких труднодоступных местах можно использовать спе
циально приспособленные сухопутные относительные гравиметры, получая точ
ность ±10“ 7— 10“ 8 # (разд. 7.1). Съемку обширных территорий можно
ускорить, если установить гравиметр на подвижном носителе (судне, вертолете,
самолете). Но при этом на прибор воздействуют большие возмущающие ускоре
ния, вызванные сотрясениями, а также инерциальные ускорения из-за движения
носителя (разд. 7.2). Следовательно, морские и аэрогравиметрические системы
должны содержать устройства, обеспечивающие либо защиту от таких возмуща
ющих эффектов, либо учет их влияния (разд. 7.3). Современные измерительные
системы и методики наблюдений позволяют получать точности ±0,5 — 5 х
х 10“ 6 g (разд. 7.4). Разрабатывается способ применения инерциальных систем
для интерполяции вектора силы тяжести, причем уже достигнута относительная
ошибка ±10“ 6 g (разд. 7.5).
Обзоры морской и аэрогравиметрии сделаны в работах [138, 198, 393]. Осно
вы метода и современное состояние инерциальных съемок рассмотрены в рабо
тах [482, 484, 611, 612, 622].
7.1.
7.1.1.
Измерения силы тяжести в труднодоступных
районах
Измерения на морском дне
Измерения на дне моря с сухопутными гравиметрами возможны при условии,
что гравиметр:
• погружается вместе с наблюдателем в подводном колоколе или на подводной
лодке или
• превращается в донный гравиметр с соответствующей защитой и дистанцион
ным управлением.
В 1940-х гг. с применением подводных колоколов выполнялись обширные съемки на
шельфе Мексиканского залива (разведка нефти). Иногда при исследовании локальных гео-
242
Глава 7
логических структур использовались подводные лодки. В частности, была выполнена гра
виметрическая съемка магматического очага у Восточно-Тихоокеанского поднятия (глуби
на 2500 м) с гравиметром Л а Коста — Ромберга на подводной лодке «Алвин» [426].
Донный гравиметр содержит следующие основные части: блок гравиметра (с
дополнительным грузом), который опускается с судна на морское дно; блок дис
танционного управления с отсчетным устройством, установленный на судне, и
электрический соединительный кабель. Для подъема и спуска гравиметра на суд
не должна быть лебедка с тросом. Донные гравиметры имеют следующие осо
бенности:
— герметический внешний кожух, защищающий от давления и воды;
— широкое основание, обеспечивающее устойчивость;
— дистанционное управление для арретирования/дезарретирования прибора и
его нивелирования;
— дистанционное управление для индикации положения чувствительного элемен
та и отсчитывания, а также для перестройки диапазона;
— сильное демпфирование и в некоторых случаях дополнительную компенсацию
повышенных колебаний основания из-за волнения моря.
После того как гравиметр опущен на дно, измерения с помощью блока дис
танционного управления выполняют так же, как и на суше. При надежном кон
троле дрейфа (по отсчетам на береговых пунктах) в зависимости от состояния
моря и характера дна измерения характеризуются ошибкой ±0,2 — 2 м к м - с - 2 .
В зависимости от глубины моря (до 200 м) и расстояния между пунктами (от
нескольких сотен метров до нескольких километров) в течение дня можно отнаблюдать от 10 до 20 пунктов.
С начала 1940-х гг. на основе сухопутных стали разрабатывать донные гравиметры,
которые широко применялись для съемки шельфовых зон (1°7о поверхности океана).
Одним из первых был донный гравиметр фирмы «Галф» (карданов подвес, фотоэлектри
ческий датчик положения уровней, нивелирование с помощью электромотора, фотографи
ческая индикация положения рычага) [530]. Используя донный гравиметр Уэстерн с фото
электрическим датчиком, сотрудники Геофизической экспериментальной обсерватории
(Триест, Италия) с 1953 по 1960 г. выполнили детальную съемку морей, омывающих Ита
лию [121]. В СССР был создан донный гравиметр ГАК с термостатированной кварцевой
системой и фотоэлектрической индикацией °.
Начиная с 1946 г. выпускался донный гравиметр Л а Коста — Ромберга как
модификация сухопутного гравиметра (рис. 7.1) (разд. 6.5.4). Благодаря сильно
му демпфированию он мог работать при значительных колебаниях основания
(бурное море и мягкое дно при небольшой глубине). Первая модель W (диапазон
измерений 1500 м к м - с “ 2) имела сейсмокомпенсатор, который через сервосисте
му с емкостным датчиком изменял положение прибора относительно подвижно
го внешнего кожуха так, что измерительная система оставалась неподвижной.
Модель Н (диапазон измерений 70000 мкм с -2, вес 160 кг со свинцовым грузом,
υ С 1965 г. московский завод «Н ефтекип» выпускает кварцевый донны й гравиметр Г Д К с ф о т о
электрической индикацией полож ения рычага; прибор снабжен струнны м глубином ером . Ошибка из
мерения Δ g не бол ее ± 1 ,5 мкм с " 2 при длительности рейса д о 8 ч. — П р и м . ред.
243
Измерения силы тяжести в труднодоступных районах
Рис.
7.1.
Донный гравиметр Ла Коста
-
Ромберга (фотография предоставле
на фирмой La Coste and Romberg Gravity Meters; !пс., Остин, Техас).
вес блока управления
18
кг, высота
0,75
м, размеры треноги
1
х
1
х
1 м)
была
исключительно сильно демпфирована и настроена на почти бесконечную чувстви
тельность. Отсчет можно было взять до достижения равновесия, что позволяло
сэкономить
время.
Такая возможность появилась благодаря измерению остаточной скорости пе
ремещения чувствительного элемента (которая пропорциональна разности между
упругой силой пружины и силой тяжести) и введению соответствующей поправки
(разд.
7.3.2).
Толчки прибора при установке на дно и при подъеме на судно смяг
чались пружинной подвеской. Существуют также более легкие и компактные мо
дели подобных гравиметров, предназначенные для работы на малых судах и вер
толетах.
Вертолетная съемка используется в труднодоступных районах с неус
тойчивым грунтом. При дрейфе нуль-пункта менее 10 мкс - 2 /мес ошибка измере
ний с гравиметрами Ла Коста - Ромберга лежит в пределах от ± 0,2 мкм · с - 2
(при хороших условиях) до ± 1 мкм· с - 2 ; они были испытаны на глубинах до
м
900
[41].
Измерения в скважинах
7.1.2.
Скважинные гравиметры применяют д,1я получения вертикальных профилей си
лы тяжести
[601].
известными
превышениями
По приращениям силы тяжести между пунктами профиля с
можно
род в окрестностях профиля (разд.
ских
карт,
разведке
полезных
4.3).
ся
пористости
изучения
среднюю
плотность
горных
по
что требуется при создании геологиче
ископаемых
рических съемок (разд.
далее для
определить
9.3.4),
и
интерпретации
наземных
гравимет
Информация о плотности горных пород использует
пород (определения
запасов
углеводородов),
а также для интерпретации результатов бурения с отбором керна и интерпрета
ции
сейсмических данных.
Скважинные гравиметры должны удовлетворять следующим требованиям:
-
малые размеры
(диаметр О,
1 м);
измерения при высокой температуре (более
10°
100
°С) и наклонах скважины до
и более;
- диапазон измерений до нескольких тысяч мкм· с - 2 (до глубины в несколько
километров);
-
дистанционное управление
процессом
-высокая точность (±0,lмкм·с- 2 ).
измерений;
7
Глава
244
Рис.
7.2.
Скважинный гравиметр Ла Коста
тография
предоставлена
Romberg Gravity Meters,
-
фирмой
Ромберга (фо
La Coste
Этим требованиям удовлетворяют струнные гравиметры (разд.
чажные пружинные гравиметры (разд.
В 1960-х
rr.
нефтяными компаниями
гравиметра. Гравиметр компании
са
1г
из платины;
Esso
апd
!пс., Остин, Техас).
6.1.4)
и ры
6.2.2).
Shell
и
Esso
были разработаны два струнных
(вольфрамовая струна длиной
колебания в постоянном
магнитном
0,05
м, пробная мас
поле на резонансной
частоте
625 Гц). вакуумирован до 10- 3 - 10- 4 Па, чтобы свести к минимуму потери энергии. При
бор термостатирован при 125 °С и может работать при углах наклона до 4°. При точнос
ти измерения времени в ± 1 мкс и интегрировании в течение 100 ООО периодов колебаний
( 160 с) ошибка измерений на пункте равна ±О, 1 мкм · с - 2 ; работа на пункте занимает
20 мин (четырехкратное время измерений) [311]. Скважинный гравиметр Ла Коста - Ром
берга - это уменьшенная (диаметр О, 1 м) и сильнодемпфированная модификация сухопут
ного гравиметра (разд. 6.5.4) (рис. 7.2). Он работает при температуре до 125 °С и при
углах наклона до 14,5°. При расстояниях \.fежду пунктами до 20 м (время между юмере
ниями менее 18 мин) прирашения силы тяжести и~ меряются с ошибкой ±О, 1 мкм · с 2
При увеличении расстояния
7.1.3.
точность падает.
Измерения на Луне
Измерения силы тяжести на поверхности небесных тел можно использовать для
решения геодезических (радиальные расстояния, средний радиус и т. д.) и гео
физических
задач
(плотностные
модели,
4.2, 4.3). Пока такие измерения
«Аполлон-11, -12, -14, -17» [583).
(разд.
Во время программы «Аполлон-11»
локальные
аномали
силы
тяжести)
ныполнены лишь на Луне по программам
(1969
г.) была определена сила тяжести в точке
посадки лунного модуля по показаниям маятниковых акселерометров инерциальной нави
гационной системы
[502].
В программе «Аполлон-17»
(1972
г.) была осуществлена грави-
245
Измерения силы тяжести в труднодоступных районах
метрическая связь между Землей и Луной; в окрестностях пункта посадки лунного модуля
(долина Таурус-Литтров) были выполнены успешные измерения на гравиметрическом
профиле (12 км, И пунктов) [669]. При этом роль гравиметрического датчика выполнял
струнный акселерометр American Bosch Arma со сдвоенной струнной системой (Лаборато
рия Чарльза Дрейпера, Массачусетсский технологический институт) (разд. 6.1.4 и 7.3.4).
Струны колеблются в постоянном магнитном поле с частотами 9,25 — 9,75 кГц. Разност
ная частота Δ / (примерно 28 Гц) измеряется подсчетом числа импульсов, генерируемых
часами на частоте 125 кГц, что соответствует 1536 циклам (примерно 55 с). С помощью
уравнения (6.15) можно найти значение силы тяжести, если постоянные прибора известны
(из калибровки). На эти постоянные сильно влияет дрейф прибора. Во время программы
дрейф определяли по измерениям после поворота прибора на 180° в вертикальной плос
кости. Гравиметрический датчик был установлен в кардановом подвесе, отклонения от
вертикали определяли с помощью двух вертикальных маятников и устраняли при помощи
шаговых двигателей (± 3"). Двойное термостатирование поддерживало температуру сис
темы равной 322 ± 0,01 К. При измерениях на профиле (7 ч) дрейф нуль-пункта был пре
небрежимо мал. Приращения силы тяжести относительно пункта посадки были определе
ны с ошибкой ±18 мкм с ' 2. Гравиметрическая связь с Землей осуществлена с ошибкой
±50 мкм с -2 .
7.2.
Измерения силы тяжести на подвижном основании
7.2.1.
Теоретические основы
Измерения силы тяжести на подвижном носителе дают непрерывный ряд значе
ний измеряемой величины вдоль съемочного профиля (при цифровой записи —
через 1 — 10 с и с аналоговой записью для быстрого и наглядного контроля теку
щих результатов). При неизменной скорости носителя v силу тяжести, являющу
юся функцией пройденного пути, можно представить функцией времени t:
g = g(vt).
(7.1)
На измерительную систему воздействуют возмущающие ускорения различных
частот и амплитуд:
- </(/),
(7.2)
их влияние может быть значительным. Они зависят от внешних условий (состоя
ния моря, ветра, турбулентности), вида и конструкции носителя (судно, подвод
ная лодка, вертолет, самолет), от управления носителем (навигация) и от места
установки гравиметра на носителе. Вертикальная составляющая возмущающего
ускорения непосредственно складывается с силой тяжести (возмущающий эффект
первого порядка), а горизонтальные составляющие оказывают меньшее влияние,
величина которого зависит от ориентации измерительной системы в данной точ
ке относительно отвесной линии и направления ускорения (возмущающие эффек
ты второго порядка).
На судах среднего водоизмещения (1000— 3000 т) при умеренном волнении (сила вет
ра 2 — 4 балла, волны менее 1 м) вертикальные ускорения составляют 0,05— 0,1 g; при
сильном волнении (сила ветра 2 — 7 баллов, высота волн до 5 м) вертикальные ускорения
могут достигать 0,2 g; горизонтальные ускорения достигают примерно таких же вели
246
Глава 7
чин. Периоды ускорений лежат в интервале 2 — 20 с, их максимум приходится на 5 — 10 с
(в зависимости от состояния моря). При погружении подводной лодки на глубину
20— 100 м амплитуды ускорений уменьшаются примерно в 10 раз. Изменения курса и
глубины (для подводных лодок), зависящие от погрешностей системы управления лодкой,
имеют большие периоды (более 30 — 60 с) и существенно меньшие амплитуды. На само
летах и вертолетах амплитуды возмущающих ускорений не превышают обычно 0,02 g>
но их периоды лежат в большем интервале — от 1 до 300 с. И в этом случае из-за измене
ний курса и высоты возникают долго- и короткопериодические эффекты. На всех носите
лях, особенно на самолетах и вертолетах, присутствуют высокочастотные вибрации
(Т < 1 с).
Наконец, следует учитывать инерциальные ускорения, вызванные непрерыв
ным перемещением носителя относительно Земли; они также накладываются на
измеряемый гравитационный сигнал (разд. 7.2.4).
При измерениях силы тяжести на подвижном основании применяют следую
щие меры, часто в различных сочетаниях:
— сильное инструментальное демпфирование колебаний чувствительного эле
мента;
— предотвращение горизонтальных перемещений датчика чтобы
он перемещался лишь в вертикальной плоскости;
— виброизоляция с помощью демпфирующей подвески;
— исключение влияния короткопериодических вертикальных возмущающих уско
рений низкочастотной фильтрацией;
— учет долгопериодических вертикальных возмущающих ускорений по навигаци
онным данным;
— исключение влияния горизонтальных возмущающих ускорений мерами инст
рументального и методического характера, а также вычислительными сред
ствами;
— учет зависящих от параметров движения судна инерциальных ускорений по
навигационным данным;
— разделение гравитационного и инерциального ускорений по измерениям гради
ентов ускорений (в стадии разработки).
Измерения силы тяжести на подвижном основании выполняют с пружин
ными гравиметрами (разд. 7.3.2 и 7.3.3), реже со струнными гравиметрами
(разд. 7.3.4), а также с помощью принудительно уравновешенных акселеромет
ров (разд. 7.3.5).
Под воздействием силы тяжести g и вертикального возмущающего ускорения
aiZ) (направление z совпадает с направлением отвесной линии (разд. 2.1.2)) чув
ствительная система пружинного гравиметра совершает вынужденные колеба
ния, которые в соответствии с (6.20) описываются уравнением
Z + 2Ы
+
<j>lz = g +
<Z(z)
- /,
(7 .3 )
где / — вертикальная составляющая упругой силы пружины, приведенная к еди
ничной массе (для системы с вертикальной пружиной (6.17), для рычажной пру
жинной системы (6.25)). Правая часть (7.3) представляет собой входной сигнал
системы, который преобразуется линейным осциллятором (ωο — частота соб
ственных колебаний; δ — коэффициент затухания) в отклонение z. В данном слу
Измерения силы тяжести в труднодоступных районах
247
чае в отличие от измерений на неподвижном основании (влиянием микросейсм
пренебрегаем) tf(Z> ^ 0 . Величину g + a^Z) можно измерить по-разному [506]:
— непрерывно удерживая измерительную систему в нулевом положении и вы
полняя измерения. При z = z = z = 0 выражение (7.3) приобретает вид
£ + tf(z>=/;
(7.3а)
— регистрируя положение чувствительного элемента в момент равновесия перед
приведением в нуль и затем вводя поправку за отклонение. При z = z = 0,
z г* 0 имеем
g + β(ζ) = / +
(7.36)
— регистрируя движение чувствительного элемента до прохождения нулевого по
ложения и вводя поправки за отклонение и движение. При z, z, z ^ 0 выраже
ние (7.3) необходимо использовать в его полной форме.
7.2.2.
Вертикальные возмущающие ускорения
Значение силы тяжести можно освободить от влияния вертикальных возмущаю
щих ускорений, если частотный диапазон последних отличается от частотного
диапазона гравитационного сигнала (методы фильтрации) или если имеется
внешняя независимая информация для их учета (навигационные данные, градиен
ты силы тяжести). В настоящее время при измерениях силы тяжести на море
и в воздухе требуется точность ± 10 мкм · с “ 2, что соответствует пространствен
ному разрешению гравитационного поля в 1 — 2 км (разд. 3.3.2). При возмущаю
щих ускорениях 1 м · с ~2 и более отношение возмущающего сигнала к полезному
гравитационному сигналу достигает 105.
Амплитуду вертикального возмущающего ускорения, описываемого гармонической
функцией, можно, зная период Т и амплитуду перемещения ΔΛ, определить по формуле
4π 2
aiz) = —г ΔΛ.
Т2
(7.4)
В табл. 7.1 приведены амплитуды ускорений для различных вертикальных перемещений.
Влияние возмущающих ускорений на отклонение чувствительного элемента
гравиметра уменьшается в 103 — 105 раз сильным инструментальным, как правиТ а б л и ц а 7. 1. Максимальные амплитуды ускорений (м · с 2) при различных
вертикальных перемещениях
Период Г, с
Амплитуда
АА, м
0,01
0,1
1
1
5
10
60
300
0,39
3,95
39,5
0,016
0,158
1,58
0,004
0,039
0,39
0,1 х 1 0 '*
1,1 х 1 0 ' 3
11 х И Г 3
4 х Ю '6
44 X 1 0 ' 4
439 х 1 0 ' 4
Глава 7
248
ло апериодическим, демпфированием (демпфирование жидкостью, магнитное,
воздушное). Демпфирование должно быть линейным, что проверяют, моделируя
ускорения при лабораторных испытаниях (вертикальные перемещения по синусо
идальному закону с периодами, характерными для морской качки).
Влияние короткопериодических ускорений подавляется с помощью низкоча
стотной фильтрации. Как следует из (7.3), входной сигнал содержит длинновол
новую гравитационную составляющую #(/) и коротковолновую составляющую
fl(Z)(/) возмущения:
*(') = g(0 + aiz)(t).
(7.5)
При линейной фильтрации выходной сигнал y(t), полученный за время фильтра
ции Δ/, свободен от tf(z)(/), если At существенно больше периода возмущающего
ускорения. В общем случае выходной сигнал получается как свертка
У(0 = ] h(r)x(t - τ) dr,
(7.6)
- оо
где г — временной сдвиг при накоплении входного сигнала; Л(т) — весовая функ
ция. Вид функции Н(т) определяется характером возмущающих ускорений, кото
рые предстоит исключить, а также критериями ошибок (минимизация остаточ
ных ошибок, сохранение спектра полезного сигнала) [479]. С помощью комплекс
ной частотной характеристики (передаточная функция) Η(ω) (ω — круговая часто
та), являющейся преобразованием Фурье функции А(т):
#(ω ) = j И(т)е ~'ωτ dr,
(7.7a)
- оо
изменение спектра входного сигнала из-за фильтрации (зависящее от частоты по
давление амплитуды и фазовый сдвиг) определяется выражением
Υ(ω) = Η(ω) Χ( ω) ,
(7.76)
где Κ(ω), Χ(ω) представляют собой спектр (преобразование Фурье) функций y( t ),
x(t). Это изменение увеличивается по мере уменьшения разности частот сигнала
и возмущающего ускорения.
Для фильтрации можно использовать аналоговые и/или цифровые фильтры.
Аналоговая фильтрация выполняется с помощью электронных цепей (активные
низкочастотные фильтры). При этой фильтрации, которая происходит в реаль
ном масштабе времени, интегрирование выражений (7.5) и (7.6) выполняется по
значениям входного сигнала в прошедший период времени. Поэтому в выраже
нии (7.6) А(т) = 0 при г < 0. Помимо уменьшения амплитуды возникает и фазо
вый сдвиг. В настоящее время все шире применяется цифровая фильтрация бла
годаря ее гибкости и точности. Если при этом выбрать симметричную весовую
функцию, то можно избежать фазового сдвига. Демпфирование амплитуды при
водит к сглаживанию гравитационного сигнала, который можно в значительной
мере восстановить процедурой обратной фильтрации.
Рисунок 7.3 иллюстрирует уменьшение амплитуд косинусоидального гравитационного
сигнала ( Т = 480 с) и наложенного на него возмущающего сигнала в виде синусоиды
Измерения силы тяжести в труднодоступных районах
249
Рис. 7.3. Эффект фильтрации (фильтр с нулевым фазовым сдвигом) при определении аномалии силы
тяжести [394].
(Т = 240 с) в результате фильтрации. После процедуры, обратной свертке, амплитуда сиг
нала почти полностью восстанавливается. Повторение этой процедуры улучшает резуль
тат [394].
Простейшим видом фильтрации является формирование простого или скользящего
среднего значения из измеряемых величин за время Δ/ = h - t\ > Tmax (наибольший пери
од подлежащих подавлению возмущающих ускорений). Осреднение дает среднее значение
силы тяжести для пройденного отрезка пути:
t:
g = --
Δ/J
(g(0 + aiz)(t)) dt.
(7.8)
/1
Структуры гравитационного поля с длинами волн <2ν·Δί (ν — скорость носителя) выде
лить нельзя.
При морских гравиметрических съемках результаты обычно осредняют на интервалах
1— 5 мин, получая средние значения силы тяжести для расстояний 0,3 — 2 км (и =
= 20 км/ч). Измерения на вертолете (ν = 50— 100 км/ч) или самолете (ν = 300 —
700 км/ч), осредненные за одноминутный интервал, дают средние значения g для расстоя
ний 0,8 — 1,7 км и 5 — 12 км соответственно. Если измерения на самолете осреднять за
5 мин, можно получить средние для расстояний 25 — 60 км.
При измерениях на судне долго- и апериодических вертикальных ускорений
нет, поскольку гравиметр движется практически по одной и той же уровенной
поверхности. На самолете из-за навигационных погрешностей возникают долго
периодические (больше нескольких минут) уклонения от изобарической поверх
ности. Как показывает табл. 7.1, уклонения всего лишь в несколько десятых до
лей метра вызывают возмущающие ускорения с амплитудой, близкой к величине
изменения силы тяжести на отрезке маршрута, пройденного за время фильтра
ции Δ/. Здесь фильтрация не достигает своей цели. Возмущающие ускорения при
ходится вычислять по высокоточным измерениям высоты и учитывать поправки
(разд. 7.4.2). В будущем для разделения ускорения силы тяжести и возмущающих
ускорений станет возможным использовать дополнительные измерения гравита
ционных градиентов (разд. 8.1.1).
Глава 7
250
7.2.3.
Горизонтальные возмущающие ускорения
Гравиметрическую измерительную систему можно установить в кардановом под
весе, в котором она может совершать свободные колебания, либо на гиростабилизированной платформе, обеспечивающей принудительное нивелирование. В за
висимости от способа установки горизонтальное возмущающее ускорение
h(t) = (а2х) + 4 ) ) 1/2
(7.9)
(где Aw, Aoo — составляющие ускорения вдоль осей х и у соответственно) будет
оказывать разное влияние на показания прибора.
На судах, для того чтобы горизонтальные возмущающие ускорения были минималь
ными, гравиметр устанавливают на пересечении продольной и поперечной осей судна.
При установке в кардановом подвесе измерительная система самопроизвольно
совмещается с направлением результирующей (мгновенной вертикалью), образо
ванной силой тяжести, вертикальным возмущающим ускорением а и горизон
тальным ускорением (рис. 7.4). Измеряемой величиной, если пренебречь а(г),
будет
g \ t ) = (g2 + h ( t f ) l/2\
(7.10)
направление мгновенной силы тяжести определяется углом
я» - *'>.
(7.11)
Как показано в работе Броуна [101], ускорение h(t) преувеличивает значение си
лы тяжести. Разложив (7.10) в ряд, получим поправку Броуна
5£бр = g
-
g‘ =
-
—
2g
■
=
-
f β (0 2·
2
(7.12)
Для вычисления поправки необходимо непрерывно измерять либо обе составляющие
горизонтального ускорения ортогональными горизонтальными акселерометрами, либо не
прерывно отслеживать направление мгновенной вертикали с помощью длиннопериодиче
ских маятников. При h - 0,1 (или 1) м с 2 δ#Βρ = -510 (или -5 0 968) мкм с 2. По
скольку возмущающее ускорение имеет периодический характер, интегрирование (7.10) за
один период Т дает среднюю величину
г
*· = J .[(« 2 + Ао sin2 со/)172
о
(7.13)
после разложения в ряд поправка имеет вид
^Бр = g - g' =
·
(7-14)
Из-за сложности определения поправки Броуна при больших горизонтальных
ускорениях (более 0,5 мс-2) и благодаря разработке мощных стабилизированных
платформ применение карданова подвеса в середине 1960-х гг. стало нецелесоо
бразным.
Измерения силы тяжести в труднодоступных районах
251
h(t)
Mt)
g
Рис. 7.4
Рис. 7.5
(левый). Влияние горизонтальны х возмущ аю щ их ускорений h(t) при установке гравиметра
в кардановом подвесе.
(правый). С овм естное влияние остаточны х наклонов гироплатформы v(t) и горизонтальны х
ускорений h(t).
Установка измерительной системы на гиростабилизированной платформе
обеспечивает высокоточное ориентирование ее относительно вертикали ( ± 1' и
точнее).
Ориентация осуществляется с помощью двух одноосных гироскопов или одного двух
осного гироскопа (карданов подвес), в некоторых случаях можно использовать трехосные
гироскопы (дополнительная стабилизация по курсу). Электрические сигналы горизонталь
ных акселерометров, установленных на стабилизированной платформе, непрерывно по
ступают на гироскопы. Изменения направления мгновенной вертикали можно демпфиро
вать с помощью различных фильтров, выбираемых в зависимости от величин возмущаю
щих ускорений. Остаточные уклонения осей гироскопов от истинной вертикали имеют пе
риодический характер, и их влияние аналогично влиянию наклонов платформы (см. далее).
После установки гравиметра на платформе ее горизонтальное положение непрерывно под
держивается сервомоторами, которые получают входной сигнал от гироскопов. При этом
задержка сигнала в системе управления (фазовый сдвиг до 88°) вызывает соответствующую
ошибку в нивелировании. И наконец, гироплатформы содержат компенсационные устрой
ства с процессорами для учета эффектов, вызванных вращением Земли, а также изменениями
скорости и курса судна. Гиростабилизированные платформы работают при углах наклона
±20 — 40° и рассчитаны на горизонтальные возмущающие ускорения до 0,15 g и более.
Остаточные ошибки гироскопов и системы управления приводят к отклонени
ям гироплатформы от горизонтальной плоскости и влияют на результат измере
ния как ошибка нивелирования. На рис. 7.5 видно, что при угле наклона p(t)>
вызванном горизонтальным ускорением Л(/), будет измерена величина
g* = g cos v(t) + h(t) sin p(t)y
для малых углов это выражение приобретает вид
(7.15)
Исходя из этого, поправку за уход платформы из горизонта запишем следую
щим образом:
(7.16)
Глава 7
252
В этом выражении первый член учитывает статическое влияние наклона (6.42),
а второй член — динамическую ошибку [271].
Для периодических процессов
h = ho sin ωΐ,
ν = vo sin (ωί + ε)
интегрирование по времени, равному одному периоду Г, дает выражение для поправки
в виде
5
Л0νο
δ£ΓΟρ = g - g = £ ~ “ ‘у
cos ε *
(7.17)
Если ho = 0,1 (или 1) м - с " 2, v0 = 1', ε = 85°, получим δ#Γορ = 0,2 - 1,3 (или - 12,7) =
= -1,1 (или 12,5) м к м -с” 2. Таким образом, ошибка, вызванная уходом гироплатформы
из горизонта,невелика.
В пружинных гравиметрах с горизонтальным рычагом (разд. 6.2.2) могут воз
никать эффекты перекрестных связей (кросс-каплинг) (рис. 7.6). Вертикальное
ускорение tf(Z)(0 вызывает отклонение а(Г) рычага, а горизонтальное ускорение
/?(Г), действующее с определенным фазовым сдвигом, создает дополнительный
вращающий момент
М и = mah(t) sin a(t) * mah(t)a(t).
(7.18)
Показанием гравиметра будет
g' = g - h(t)a(t).
(7.19)
При одинаковых периодах ускорений a(Z)y h и наклонов а
h = ho sin ω/,
а = «о sin (ωί + χ)
после интегрирования по периоду Т получим поправку за кросс-каплинг ( с о :
bgcc =
= 2 hooto cos χ.
(7.20)
Таким образом, кросс-каплинг является функцией переменного фазового сдвига между
И и а. Он зависит и от величины возмущающих ускорений. Связь между отклонением
Рис. 7.6.
Эффект кросс-каплинг в гравиметре с горизонтальны м ры
чагом, вызванный горизонтальны м h(t) и вертикальным
а ,( 0 возмущ аю щ ими ускорениями.
Измерения силы тяжести в труднодоступных районах
253
а и вертикальным ускорением α(Ζ) определяется чувствительностью и степенью демпфи
рования измерительной системы. При Л0 = 0,1 (или 1) м - с " 2, ао = 1 0 '3 д(г), aiZo) =
= 1 м с - 2, х = 0°, поправка равна dgcc = 50 (или 500) мкм с -2 .
Кросс-каплинг учитывают, непрерывно измеряя a (t) и h(t) и вводя поправку
(вычислитель кросс-каплинга). Кроме того, его можно уменьшить усилением
демпфирования, постоянным приведением рычага в горизонт, выполнением из
мерений при сходных условиях в прямом и обратном направлениях или по одно
временным измерениям с двумя гравиметрами, развернутыми относительно друг
друга на 180° (смена знака эффекта). Кросс-каплинг имеет переменный характер
и зависит от внешних условий и характеристик прибора, а его учет с точностью
±5 м к м - с " 2 трудоемок и сопряжен с дополнительными ошибками. Системы с
поступательным перемещением пробной массы свободны от кросс-каплинга
(разд. 7.3.3).
7.2.4.
Инерциальные ускорения, связанные с вращением Земли
Поскольку носитель совершает вращательное движение относительно Земли, воз
никают центробежное ускорение (вращение Земли не обязательно) и кориолисово
ускорение (при вращающейся Земле). Вертикальные составляющие этих инерци
альных ускорений влияют на измеряемую величину силы тяжести (эффект Этвёша [180]).
Для сферической модели Земли (разд. 4.3.2) и неподвижной измерительной
системы, вращающейся вместе с Землей, выражение для силы тяжести определя
ется соотношениями (2.5) и (2.8):
GM
2
(7.21)
g = - 5 - “ ω г COS φ ,
r
где G M — геоцентрическая гравитационная постоянная, ω — угловая скорость
вращения Земли, г — расстояние от центра Земли, φ — географическая широта.
Чтобы вычислить кориолисово ускорение, необходимо разложить вектор скорос
ти носителя V на составляющие в направлениях на восток и север (рис. 7.7). Пер
вая из них прибавляется к (или вычитается из) ω, поскольку представляет собой
угловую скорость V sin а/(г cos φ) движения носителя на восток (запад), где а —
азимут. Вторая же составляющая вызывает центробежное ускорение в плоскости
меридиана. Для движущейся измерительной системы измеряемой величиной
будет
GM
ν sin а
v cos a
- ω+
г COS φ (7.22)
g =
г cos φ
г
Вычитая это выражение из (7.21), получим поправку Этвёша (для сферической
Земли)
v2
= g - g* = 2ων cos φ sin a + .
(7.23a)
r
При измерениях на самолетах может быть полезной формула с учетом сжатия
Земли [270]
2ων cos φ sin a +
r
a
(1 - cos2 <p(3 - 2 sin2 a)),
(7.236)
254
Рис.
Рис.
Глава 7
7.7
7.8
(левый). Эффект Э твёш а при измерениях силы тяж ести на подвиж ном основании.
(правый). Н еобходи м ая точность определения скорости и и азимута а на ш ироте φ = 4 5 е
для вычисления поправки Э твёш а с точностью ± 5 м к м - с '2.
где V — скорость над поверхностью Земли, а — большая полуось, / — сжатие отсчетного эллипсоида, h — высота над эллипсоидом.
В морской гравиметрии (г = R = 6371 км) поправку можно вычислять по
формуле
6g3 = 40 V cos φ sin α + 0,012 v 2 мкм · с - 2,
(7.24)
где скорость v выражена в км/ч. При движении с запада на восток (а = 90°)
на экваторе (φ = 0°) со скоростью v = 20 км/ч поправка равна 6g3 = 800 + 5 =
= 805 мкм - с " 2. При измерениях на самолете для v = 400 км/ч и h - 1000 м по
лучим 6g3 = 1,00016 (16000 + 1920) = 17 923 м к м - с " 2.
Для вычисления поправки Этвёша необходима непрерывная навигационная
информация. Влияние ошибок определения у, а и φ на точность этой поправки
можно оценить, продиффенцировав формулу (7.24):
d(bg3) = (40 cos φ sin a + 0,024 v) dv +
+ 40y(cos φ cos a da - sin φ sin α άφ) мкм · с " 2,
(7.25)
где v и dv выражены в км/ч.
Заметим, что при движении по параллели (меридиану) необходимо опреде
лять с высокой точностью скорость (азимут). По графикам на рис. 7.8 можно
оценить точностные требования при измерениях υ и а для φ = 45° в зависимости
от курса и скорости; если эти требования выполняются, ошибка поправки не пре
высит 5 м к м - с " 2. Как видно, скорость необходимо определять с ошибкой
±0 , 1 — 0,2 км/ч, а азимут — с ошибкой ±0,5° (судно) и ±0,03° (самолет). На
больших территориях такая точность обеспечивается спутниковыми навигацион
ными системами; при локальных исследованиях используют навигационные сис
темы наземного базирования (разд. 9.3.5).
Измерения силы тяжести в труднодоступных районах
7.3.
Морские и аэрогравиметрические системы
7.3.1.
Первые измерения силы тяжести на море
255
Для измерений на судах Геккер [290] и Хаальк [253] разработали газовые грави
метры (разд. 6.2.4), которые были испытаны и некоторое время применялись;
их точность была соответственно ±300 мкм- с ~2 и ±50 мк м- с ~ 2 (разд. 1.2.2 и
1.2.3).
Трехмаятниковый прибор Венинг-Мейнеса [735] весьма успешно использовал
ся на подводной лодке (разд. 1.2.3). На штативе, установленном в кардановом
подвесе, располагались три маятника Штернека (разд. 6.1.2) с одинаковыми пе
риодами колебаний; маятники совершали колебания в одной вертикальной плос
кости (рис. 7.9). Крайние маятники (1) и (2) колебались в противофазе, сущест
венно уменьшая таким образом эффекты сокачания штатива (разд. 5.3.3). Сред
ний маятник (3) первоначально находился в покое, но затем под действием гори
зонтальных
возмущающих
ускорений
начинал
совершать
колебания.
Горизонтальные ускорения влияли на все три маятника одинаково, а их влияние
в разностях колебаний маятников (1), (3) и (2), (3) отсутствовало. Записав для
двух пар маятников выражения вида (5.57) и вычитая одно из другого, получим
уравнение колебаний фиктивного маятника, углы элонгации которого равны со
ответственно (<Р \ - <р з ) И (<Р2 - <р ъ ) ‘(7.26)
Разности φ\ - <ръ н <рг - φι формировались оптической системой, в которой световой
пучок отражался от зеркал маятников и поступал в фотографический регистратор. Одно
временно фиксировали метки времени, что позволяло определить период колебаний и по
формуле (6.2) вычислить приращение силы тяжести для двух пунктов.
С 1923 по 1960 г. обширные маятниковые наблюдения проводились на подводных
лодках (глубина погружения 30 — 80 м, скорость несколько км/ч). Влияние вертикальных
возмущающих ускорений удавалось в значительной мере ослабить, двигаясь на постоян
ной глубине и осредняя результаты за 30 мин. Поправку Броуна (7.12) определяли по из
мерениям отклонения мгновенной вертикали с помощью двух длиннопериодных маятни
ков ( Т = 25 — 30 с). Ошибки измерений (±10 — 20 мкм с " 2), ошибки поправок Броуна и
Этвёша, а также ошибки навигации под водой давали суммарную ошибку измерений
± 3 0 — 100 мкм с -2 [736, 781]. В СССР успешно применяли 4-маятниковый прибор (две
Маятниковый штатив
Рис. 7.9.
Принцип трехмаятникового прибора Венинг-Мейнеса.
h(t)
256
Глава 7
пары кварцевых маятников, совершавших колебания в параллельных плоскостях на гиростабилизированной платформе) на большом надводном судне (± 5 0 — 100 мкм · с " 2) °.
Создание и широкое использование морских гравиметров (разд. 7.3.2 — 7.3.5)
сделало маятниковые измерения на море нецелесообразными (устаревшими).
7.3.2.
Рычажные пружинные системы
Начиная с середины 1950-х гг. рычажные пружинные весы (разд. 6.2.2), успешно при
менявшиеся в сухопутных гравиметрах, стали приспосабливать для работ на море и испы
тывать на подводных лодках. В 1957 г. начаты пробные измерения на надводных судах
(морские гравиметры), а в 1958 г . — на самолетах (аэрогравиметры). Особенно широкое
применение нашли крутильные пружинные весы (система Аскания) и астазированные ры
чажные гравиметры (система Ла Коста — Ромберга).
Морская гравиметрическая система Kss5 (Bodenseewerk Geosystem GmbH, Иберлинген, Германия) содержит гравиметрический датчик с электронным управлени
ем, гиростабилизированную платформу с электронным блоком управления, ис
точник питания и блок регистрации данных. Гравиметрический датчик Gss20 ра
ботает по принципу гравиметров Аскания моделей Gsll/Gsl5 (разд. 6.5.2) и пред
ставляет собой усовершенствованную упругую систему морского гравиметра
Gss2 [234, 608] (рис. 7.10). Плоский алюминиевый рычаг (длина 0,3 м, период ко
лебаний Т - 6 с) удерживается в положении равновесия горизонтальными спи
ральными пружинами. Боковые смещения ограничены 8 проволочными растяж
ками из вольфрама, а повороты в значительной степени подавляются магнит
ным демпфированием. Фотоэлектрический сигнал положения рычага использует
ся для возвращения его в нулевое положение с помощью системы управления
(усилитель, шаговый сервомотор), микрометренного винта и слабой измеритель
ной пружины; положение пружины непрерывно регистрируется (в аналоговой
или цифровой форме). Интерфейс навигационной системы позволяет записывать
всю информацию, необходимую для последующей обработки (кросс-каплинг, эф
фект Этвёша). Для стабилизации двухосной платформы (0,95 х 0,72 х 0,76 м,
230 кг, диапазон наклонов ±23°, период колебаний 5 мин) используется верти
кальный гироскоп фирмы Anschutz, подключенный к платформе через контур
системы регулирования и обеспечивающий долговременную точность ± 3 ' (при
горизонтальных ускорениях менее 0,3 g, 25 с). Общий вид системы показан на
рис. 7.11.
Диапазон измерений датчика Gss20 составляет 70 000 м к м - с “2, величина дрейфа
нуль-пункта лежит в пределах 30 мкм с " 2/мес. Ошибка измерений в стационарном поло
жении ±1 мкм с -2, а в динамическом режиме в зависимости от состояния моря ±10 —
30 мкм с " 2. При обычных съемках с последующей обработкой (разд. 7.4.1) ошибки со
ставили ±7 мкм с " 2 (штиль) и ± 10 мкм · с “2 (бурное море), a{z)(t) = 0,15 — 0,8 м · с 2,
h ( t ) = 0,025 — 0,25 м · с ~2 .
υ О тм ети м морские автом атизированны е маятниковые приборы конструкции Ц Н И И Г А иК :
АМ П-1 (1968 г.), главным о бр азом для работы на подводны х лодках, А М П -2 (1971 г.) с цифровой
фильтрацией единичных периодов колебаний маятников, а такж е донно-поплавковый прибор П ДМ .
М аятниковые измерения на м ор е служ ат преимущ ественно как опорны е для контроля надводны х гра
вим етров. — П р и м . ред.
257
Измерения силы тяжести в труднодоступных районах
Рис.
7.10
Gss20 морского гравиметра
Geosystem GmbH, Иберлинген (1979 r.).
7.11 (правый). Морской гравиметр Kss5 с гироплатформой, вертикальным гироскопом и грави
метрическим датчиком.Gss20, фирма Bodeпseewerk Geosystem GmbH, Иберлинген (1979 г.).
(левый).
Kss5,
Рис.
Чувствительная система гравиметрического датчика
фирма Bodeпseewerk
Аэроморской
гравиметр Ла
силънодемпфированную
(почти
Коста
1965
неопределенное
-
Коста- Ромберга
(воздушное
демпфирование)
равновесие)
модификацию
[393)
и
представляет
собой
силъноастазированную
сухопутного
гравиметра
Ла
6.5.4).
До
Ромберга с ограничением боковых смещений рычага (разд.
г. прибор устанавливался в кардановом подвесе, а направление мгновенной
вертикали
определялось
с
помощью
двух
длиннопериодных
маятников
( Т = 2 мин). С этим прибором при вертикальных ускорениях до 0,5 м ·с - 2 была
достигнута точность ± 40 мкм · с - 2 • С 1965 г. гравиметр стали устанавливать на
гироплатформе (гироскоп фирмы
наклонов
± 30°,
ТОЧНОСТЬ не хуже
Помимо
Honeywell 0,56
х
0,71 х 0,64 м, 70 кг, диапазон
4 до 17 мин, долговременная
регулируемый период колебаний от
± 1 ').
гравиметрического
датчика
и
гироплатформы
система
содержит
электронный блок управления и блок регистрации (в аналоговой или цифровой
форме, с магнитной записью) (рис.
7.12).
Коромысло гравиметра медленно воз
вращается автоматической системой управления в нулевое положение с помощью
микрометренного винта и удерживающей пружины. Если в
(7.3)
основную роль
будет играть демпфирующий член, после осреднения средняя величина силы тяжести
составит
-
-
g = 20.t
и с учетом
(6. 74)
при а ,..,
+J
(7.27а)
90°
-
g =
-
2ы
k -
+ - d.
(7.27б)
т
Среднее измеренное значение полхчается, таким образом, по скорости движе
ния рычага и среднему расстоянию
жины).
Для вычисления величины
d
(от оси вращения до точки крепления пру-
_
g по формуле
(7 .27б)
регистрируют отклонения ко
ромысла и положение микрометренного винта. Компьютер обрабатывает эти
258
Глава
7
Вычисnитеnь
Гориз, ускор.
Кросс-капnинг
кросс-каnnинга
Коррекционное
устройство
Гориэ. ускор.
Обратная
Фиnьтр
связь
..."
"
....
:i
~
:i
а.
ЭЁ
!11
~
о
с:
о
&
с:
:z:
"""
ЗЕ
....
•
:I:
с:
1
:z:
t
;
о:
i"
7
Поnожение рычага
:z:
:z:
~
u
о
с:
о
...:z:
....о:
"
"
с:
с:
!
с:
"
"
8
8.
:..:
о:
о:
:z:
О(
!.
u
с:
Регистрация (магнит. nента, самописец)
Рис.
7.12.
Схема аэроморского гравиметра Ла Коста
-
Ромберга
(393).
результаты, а также фильтрует вертикальные ускорения (зависящие от состояния
моря) и вычисляет поправку за кросс-каплинг (по измерениям горизонтальных
ускорений).
взаимной
корреляции
между показаниями гравиметра и скоростью судна или ускорениями;
Дополнительно
может
выполняться
анализ
кроме того,
может быть введена поправка, устраняющая эту корреляцию. Можно использо
вать трехгироскопную инерциальную навигационную систему для вычисления по
правки Этвёша в реальном масштабе времени. С
1982
г. появилась возможность
использовать микропроцессорный блок управления и регистрации данных для
контроля положения осей гироплатформы и гравиметра, а также для регистра
ции
гравиметрических
рис.
7.13
данных
и
записи
их
на
магнитную
ленту
[729].
показан общий вид системы.
Рис.
7.13.
Аэроморской гравиметр Ла Коста
-
Ромберга с грави
метрическим датчиком и блоком сбора и обработки
данных (фотография предоставлена фирмой
and Romberg Gravity Meters, lnc.,
La Coste
Остин, Техас).
На
Измерения силы тяжести в труднодоступных районах
259
Диапазон измерений аэроморского гравиметра составляет 120 000 м к м - с -2. Дрейф
нуль-пункта практически линейный и не превышает 10 мкм · с -2/мес. Статическая ошибка
±0,1 мкм с -2, ошибка в динамическом режиме ±2,5 мкм · с " 2 в лабораторных условиях,
на море— ±10 мкм с -2 при ускорениях до 1 м · с -2. Прибор работает при вертикальных
ускорениях до 5 м - с -2 (Г = 7 с) и Ю м е -2 (Г = 3,5 с). На вертолете можно получить
точность ±20 м к м - с -2, а. на самолете ± 5 0 — 100 м к м - с -2 (разд. 7.4.2).
В 1960-х гг. морские гравиметры были созданы в СССР (Институт физики Земли Ака
демии наук) по принципу гравиметра Норгарда (разд. 6.5.1) с жидкостным демпфировани
ем кварцевой системы и фотоэлектрической регистрацией. При работе с кардановым под
весом и осреднении за 5 — 10 мин получена точность ±30 — 80 мкм - с " 2*\ В 1970-х гг.
в Китае (Государственное сейсмологическое бюро Института сейсмологии) был создан
гравиметр ΖΥΖΥ с металлической пружиной (пружина нулевой длины, электрическая ин
дикация положения рычага, двойное термостатирование, вычислитель кросс-каплинга, ги
роплатформа); точность измерений с гравиметром (включая ошибки определения коорди
нат) составляет несколько м к м - с -2 [786]. С 1983 г. успешно используется система DZY-2.
7.3.3.
Измерительные системы с вертикальной пружиной
В отличие от систем с горизонтальным рычагом (круговое движение центра
масс) гравиметры, в которых пробная масса перемещается только по вертикали
(разд. 6.2.1), свободны от эффекта перекрестной связи между вертикальными и
горизонтальными ускорениями (разд. 7.2.3).
Аэроморская гравиметрическая система Kss30/31 (Bodenseewerk, Иберлинген,
Германия) состоит из гравиметрического датчика, гироплатформы и основного
электронного блока для гравиметра и гиростабилизации, который содержит про
цессор и блок вывода информации (регистрация аналоговая и на магнитной лен
те) (рис. 7.14). Гравиметрический датчик Gss30 (ранее, с 1970 г., применялся
морской гравиметр Аскания Gss3) содержит неастазированную осесимметричную
систему с массой, подвешенной на пружине (рис. 7.15). Груз, изготовленный в
виде вертикальной трубки, удерживается пятью горизонтальными нитями, каж
дая из которых натянута пружиной, так что он может перемещаться без трения
лишь по вертикали.
Пружина, находящаяся внутри трубки, противодействует силе тяжести и со
здает равновесие. Смещение груза воспринимается емкостным датчиком; после
преобразования сигнала датчика в электронном блоке выходное напряжение бло
ка используется для приведения груза в нулевое положение и демпфирования вер
тикальных возмущающих ускорений. Компенсация и демпфирование осуществля
ются благодаря катушке на нижнем конце трубки, находящейся в поле постоян
ного магнита. Изменения положения катушки порождают электрический ток,
пропорциональный изменению силы тяжести; сигнал поступает в блок накопле
ния данных. Измерительная система помещена в герметичный контейнер с двой
ным термостатированием и магнитным экраном. Пользователь может контро
лировать калибровочный коэффициент (±0,5% ) с помощью дополнительной мас-
l) С 1974 г. московский завод «Н ефтекип» выпускает надводны й гиростабилизированны й кварце
вый гравиметр ГМ Н конструкции В Н И И Геоф изики, построенны й по зам кнутой схем е. Точность из
мерений ± 5 м к м - с " 2 при ускорениях д о 0,3 м - с - 2 . — П р и м . ред.
260
Глава 7
Навигационные данные Центральный Регистрация
блок системы
данных *
Сигнал гирокомпаса
управления
Электр, блок
гравимлатника
П реобразователь
Управление
напряжения
платформой
Г
равиметр
питания
датчик Диалог, регистр,
Гироскоп Платформа
3a™ek <JD
магнит, ленту
ТелетайН
J t t
.
еЧЁ=1
--------- 1
блок питания
С /— п
;------- О
Кабели питания
Рис. 7.14. Аэром орская гравиметрическая систем а Kss30 фирмы Bodenseewerk Geosystem G m bH , Иберлинген (1981).
сы в виде шарика (разд. 6.4.3). Система стабилизации состоит из двухосного вер
тикального гироскопа Anschutz и гироплатформы (0,52 х 0,52 х 0,69 м, 72 кг,
диапазон углов наклона ±40°) (рис. 7.16). Основной блок (0,55 х 0,65 х 1,83 м,
200 кг) выполняет и контролирует нивелирование, вывод измеренных данных,
обработку и фильтрацию, запись и вывод информации, а также проверяет источ
ник питания. Основной блок также обрабатывает навигационную информацию,
поступающую через интерфейс. В зависимости от состояния моря для фильтра
ции измерений используются различные низкочастотные фильтры (10 — 75 с).
После прогрева измерительная система может работать автоматически в контей
нере с кондиционером. В системе Kss31 гравиметр и стабилизированная платфор
ма объединены в компактный блок. На рис. 7.17 приведен общий вид системы.
Диапазон измерений гравиметра Gss30 составляет 100 000 м к м с 2, дрейф нуль-пунк
та не превышает 30 мкм · с " 2/мес. В стационарных условиях ошибка измерений равна
±2 мкм с ' 2; в динамическом режиме без специальных методов обработки данных она
лежит в пределах от ±5 м к м - с ' 2 (вертикальные ускорения менее 0,15 мс -2) до
±20 мкм с -2 (вертикальные ускорения 0,8 — 2 м с"2). Если имеется достаточная инфор
мация об изменениях курса и скорости, можно выполнять наблюдения во время поворо-
мкостной
преобразователь
Компеисвтор
Катушка с
юмпфирующим
устройством
1остоянный
магнит
]ГКонтроль
^ температуры
Рис. 7.15. Гравиметрический датчик G ss30 (фирма Bodenseewerk Geosystem G m bH , И берлинген, 1981 г.).
Измерения силы тяжести в труднодоступных районах
Рис.
7.16
(левый). Гравиметрический датчик
фирмой Bodeпseewerk
7.17
Рис.
Gss30
Geosystem GmbH,
и гироплатформа КТ
Gss30,
Kss31
Geosystem GmbH,
уменьшить ошибку измерений еще на
1980
г.
с гироплатформой, гравиметриче
Иберлинген).
тов судна и движения по криволинейному маршруту.
Примерно в
предоставлена
подсистемой управления данными и принтером (фотография предо
ставлена фирмой Вodenseewerk
тикальных ускорениях до
30 (фотография
Иберлинген).
(правый). Аэроморская гравиметрическая система
ским датчиком
261
400Jo.
Последующей обработкой можно
Прибор сохраняет работоспособность при вер
4 мс - 2 •
появился гравиметр Ла Коста
тельным перемещением пробной массы
[395].
-
Ромберга с поступа
В этом приборе осесимметричный
цилиндрический груз удерживается в равновесии двумя наклонными пружинами
нулевой длины, прикрепленными к грузу с разных сторон (рис.
с корпусом шестью горизонтальными тягами
(5
7.18).
Груз связан
жестких и одна упругая) и мо
жет перемещаться лишь по вертикали. Чувствительность этой сильно астазиро
ванной системы можно изменять с помощью упругой связи. Величина смещения
регистрируется
емкостным
датчиком,
система
приводится
в
нулевое
положение
с помощью плоской пружины, которая связана с корпусом через микрометрен
ный винт и прикреплена к верхнему концу удерживающей пружины. Смещения
Ось
чувствительности
i
Точка
«-~-!--. креллениА
Рис.
7.18.
Улруга11........:::::;...;;~..+-..
Принцип осесимметричного гравиметра Ла Коста
свАэь
га
(395).
-
Ромбер
262
Глава 7
груза остаются небольшими благодаря сильному жидкостному демпфированию
(силиконовая жидкость). В отличие от систем с горизонтальным рычагом
(разд. 7.3.2) система с поступательным перемещением помимо отсутствия кросскаплинга малочувствительна к ударам и вибрациям; более того, она имеет ряд
преимуществ при изготовлении и калибровке. Пробные измерения при различном
волнении моря показали точность не хуже ±1 0мк м- с" 2 [727] (разд. 7.4.1).
В 1980-х гг. в Уханьском институте геодезии и геофизики Академии наук Ки
тая была создана система с поступательным перемещением пробной массы (гра
виметр CHZ). Эта система аналогична осесимметричному гравиметру Ла Кос
т а — Ромберга. Она может работать при вертикальных ускорениях до 5 м - с ' 2
и горизонтальных ускорениях до 2 м * с ~ 2. При сравнениях с системой Kss30
(разд. 7.3.2) расхождения в среднем составили ± 1 4 м к м с “ 2 [791].
7.3.4.
Струнные гравиметры
Гравиметры, основанные на принципе вибрирующей струны, по сравнению с
пружинными при работе на подвижном основании имеют ряд преимуществ (ма
лые размеры, большой динамический диапазон, малая чувствительность к сотря
сениям, простота цифровой обработки данных, малый кросс-каплинг)
(разд. 6.1.4). Первый струнный гравиметр был создан Джильбертом в 1949 г.
для работы на подводных лодках [218]. Позже морские струнные гравиметры
разрабатывались и успешно применялись в Японии, США и СССР. Ошибки из
мерений составляли ±10 — 20 мкм · с " 2.
Морской надводный гравиметр Токио (TSSG), созданный в Геофизическом
институте Токийского университета, представляет собой систему с одной стру
ной. Струна из сплава бериллия и меди (длина 25 мм, ширина 0,1 мм, толщина
0,01 мм, 15 г) совершает колебания в магнитном поле на резонансной частоте
(около 2000 Гц), колебания поддерживаются с помощью обратной связи [687].
Горизонтальные перемещения исключаются благодаря четырем нитям, связыва
ющим пробную массу с корпусом. Прибор установлен на платформе с верти
кальным гироскопом. Частота измеряется в интервалах 5 или 100 с. После пре
образования в величину ускорения выполняется цифровая низкочастотная филь
трация. С начала 1960-х гг. гравиметр TSSG широко применялся при съемках
в северо-западной части Тихого океана [628].
□
□
Магнит
^ Струна
Грузь
■Слабая
пружина
^ Струна
I
I Пмагиит
7 ///
Рис. 7.19.
Принцип струнного акселером етра M1T (М ассачусетсского т ех
нологического института) [770].
Измерения силы тяжести в труднодоступных районах
263
Акселерометр с вибрирующей струной (VSA) Массачусетсского технологиче
ского института [770] представляет собой двухсистемный гравиметр (бериллиевые струны, длина 10 мм) (рис. 7.19). Измеряемая величина получается по раз
ностной частоте (основная частота 7 Гц); нелинейные эффекты существенно
ослаблены (6.15, 6.16). Поперечные смещения грузов исключаются растяжками.
При работе на гироплатформе отсутствует кросс-каплинг. Начиная с 1967 г. при
бор использовался на судах Океанографического института Вудс Хола и Висконсинского университета [92].
В СССР для морской и аэрогравиметрической съемки был создан струнный грави
метр системы «МАГИСТР» (Всесоюзный научно-исследовательский институт геофизиче
ских методов разведки и Институт физики Земли АН СССР) [423] 1).
7.3.5.
Акселерометры принудительно уравновешенного типа
(сервоакселерометры)
Некоторые морские гравиметры представляют собой модификации акселеромет
ров коммерческого пользования с нулевым способом отсчета. Они обеспечивают
точность ±10 — 20 мкм · с " 2.
В морском гравиметре Белл (Bell Aerospace, Буффало, Нью-Йорк) применен
акселерометр, созданный первоначально для инерциальной навигационной систе
мы. Чувствительный элемент состоит из пробной массы в виде диска (диамет
ром 4 мм), помещенного в катушку; поперечные смещения диска устраняются
тремя слабыми пружинами (рис. 7.20). Пробная масса может перемещаться по
вертикали между северными полюсами двух постоянных магнитов. Положение
равновесия достигается электромагнитной силой, порождаемой катушкой. Изме
нения силы тяжести вызывают вертикальное смещение пробной массы, реги
стрируемое емкостным датчиком. Возникающий электрический ток поступает в
катушку и создает электромагнитную силу, возвращающую пробную массу в ну
левое положение. Электрический сигнал, пропорциональный изменению силы тя
жести, фильтруется и выводится в цифровой форме (отсчетная точность
± 2 м к м * с ' 2). Прибор термостатирован и весьма компактен (диаметр 23мм,
высота 34 мм), он устанавливается на гиростабилизированной платформе; кросскаплинг не возникает (рис. 7.21).
С 1967 г. гравиметр Белл (ныне BGM-3) использовался ВМФ США и различными
разведочными компаниями. Его дрейф менее 1 мкм · с 2/сут, а диапазон измерений
300 000 мкм с 2. Результаты обширных испытаний приведены в работе [37]. По повтор
ным измерениям и из сравнения с донной съемкой получены средние квадратические рас
хождения ±5 мкм с -2 при разрешающей способности 1 км. Комбинации таких акселеро
метров применялись при разработках гравитационного градиентометра (разд. 7.3.2). Ак
селерометр также нашел применение в морском гравиметре N1PROR1-1, разработанном
в Японии (Национальный институт полярных исследований и Институт исследования оке
ана Токийского университета), для измерений в полярных районах на борту ледокола
(сильные удары, экстремальные температурные условия и условия плавания) [629]. В этом
!) В 1970-х гг. бы л создан аэрогравиметрический комплекс «Гравитон » (А . М. Лозинская), сод ер
жащий струнны е гравиметры с ж идкостны м демпф ированием груза, струнны е акселером етры и из
мерители вертикальной скорости. — П р и м , р е д .
264
Глава
Kopnyc
7
и3
МIГНМТОПl)ОllОДАЩIГО
М8Т8ри8/11
Котуwки
ПРV*И111
Емкостна.1е
Обо<ЛllАКИ
Рис.
7.20.
Принцип морского гравиметра Белл.
приборе цилиндрическая пробная масса укреплена на горизонтальном маятнике, регистра
ция осуществляется с помощью индуктивного датчика. Сервоакселерометр имеет следую
щие характеристики: малые размеры (диаметр корпуса
демпфирование, термостабилизацию
( ±0,01
°С),
50
мм, длина
110
мм), жидкостное
магнитное экранирование и
стабилизацию питающего напряжения. Прибор работает на гироплатформе
надежную
( ± 1 ').
Для
линейного преобразования выходного сигнала цифрового вольтметра в величину ускоре
ния,
фильтрации
и
вывода
результата
тической экспедиции в
каждую
± 10 g.
Гравиметр выдерживает удары по
1980- 1981
гг.
минуту
используется
мини-компьютер.
Он успешно использовался в Японской антарк
[355).
Источники ошибок и точность измерений
7.4.
7.4.1.
Морская гравиметрия
В морской гравиметрии различают следующие источники ошибок:
-
инструментальные ошибки гравиметра и внешние влияния;
остаточные влияния вертикальных возмущающих ускорений (разд.
Рис.
7.21.
Акселерометр модели
VllB
фирмы
Bell Aerospace (336).
7 .2.2);
Измерения силы тяжести в труднодоступных районах
265
— остаточные влияния горизонтальных возмущающих ускорений (разд. 7.2.3);
— погрешности при определении поправки Этвёша (разд. 7.2.4).
Современные морские гравиметры (разд. 7.3.2 — 7.3.5) и навигационные сис
темы (разд. 9.3.5) имеют следующие особенности:
•Инструментальная точность в статическом режиме ±0,1 — 1мкм с ' 2. При
больших приращениях силы тяжести нелинейности калибровочной функции мо
гут вызвать ошибки в несколько единиц мкм · с " 2 и более, так что для работы
в требуемом диапазоне измерений пользователь должен сам калибровать при
бор (разд. 6.4.5). Приборы надежно защищены от внешних воздействий (тем
пературы, атмосферного давления, магнитного поля, ударов и вибраций). Меж
ду тем могут остаться незамеченными скачкообразные и нелинейные составля
ющие долговременного дрейфа нуль-пункта (10 — 30 мкм · с _2/мес) из-за обыч
но недостаточно надежного его учета (по измерениям в портах захода и при
пересечениях профилей).
• После сильного демпфирования осуществляется низкочастотная фильтрация с
помощью электронных схем или в цифровой форме. При времени фильтрации
2 — 10 мин остаточные влияния вертикальных возмущающих ускорений не пре
вышают нескольких мкм*с-2 (в зависимости от состояния моря) даже при
очень бурном море.
• Благодаря высокой точности гиростабилизированных платформ остаточные
влияния горизонтальных возмущающих ускорений остаются в пределах несколь
ких мкм -с"2 (в зависимости от состояния моря). В системах с горизонтальным
рычагом величину такого же порядка имеет остаточный кросс-каплинг.
• Погрешности навигационных систем при определении курса, скорости и коор
динат судна влияют на точность поправки Этвёша.
Как показывают точностные оценки средств навигации, до середины 1960-х гг. по
правка Этвёша могла содержать ошибку ±100 мкм · с -2 и более при измерениях в откры
том океане (в мертвых зонах навигационных систем, при астрономических определениях
координат) и ±50 мкм с -2 и более в прибрежных районах (радионавигационная система
Декка). С появлением спутниковых навигационных систем (с 1967 г. навигационная спут
никовая система ВМФ США) и глобальных наземных радионавигационных систем (Омега,
Лоран-С) эти ошибки уменьшились до ±20 — 50 мкм с " 2, в частности благодаря инте
гральным навигационным системам (инерциальным системам с контролем по ИСЗ и ра
дионавигационным системам). В прибрежных районах (в пределах нескольких сотен кило
метров от берега) высокоточные наземные радионавигационные системы (Хай-Фикс, Силедис) позволяют получить поправку Этвёша с ошибкой ± 10 мкм · с~2. К концу 1980-х гг.
с созданием непрерывно функционирующий глобальной системы определения местополо
жения GPS в любой точке поверхности Земли станет возможной точность ±5 —
10 мкм с " 2; при этом исчезнут ошибки, вызванные изменениями курса и скорости между
моментами определения координат (разд. 9.3.5).
Из-за многочисленных источников ошибок с различным характером их влияния
едва ли возможно создать детальную модель ошибок (в виде функции типа при
бора и его особенностей, состояния моря, курса судна и вида навигационной сис
темы). Тем не менее априорные данные о величинах различных ошибок можно
обосновать, основываясь на достигнутой точности измерений. Для этого суще
ствуют следующие возможности:
266
Глава 7
— многочисленные повторные измерения во время съемки. Если морскую грави
метрическую съемку выполняют одновременно с другими работами (напри
мер, сейсмическими), ее контроль ограничен (пункты, расположенные в бух
тах, редкие случайные пересечения профилей). Специальные же проекты гра
виметрической съемки предусматривают расположение профилей в виде регу
лярной сетки. По невязкам в точках пересечения профилей можно получить
достоверные точностные оценки; уравнивание по методу наименьших квадра
тов позволяет повысить ее точность (разд. 9.3.5);
— сравнение с результатами независимых измерений других экспедиций. Точеч
ные значения силы тяжести можно сравнить, если имеются измерения с дон
ными гравиметрами (шельфовые зоны) или надводные съемки (профили). Ког
да сравнивают осредненные гравиметрические данные (например, средние ано
малии в свободном воздухе по трапециям 6' х 10') из разных источников, то
расхождения объясняются не только ошибками измерений силы тяжести на
море (остаточные систематические ошибки проявляются в корреляции оши
бок), но и ошибками при осреднении (зависящими от плотности и распределе
ния пунктов, а также структуры гравитационного поля) (разд. 3.2.3).
Приведем примеры морских гравиметрических съемок:
Гравиметрические данные для земного шара, имеющиеся в банке Ламонтской геоло
гической обсерватории (Колумбийский университет, Нью-Йорк), — 2,6 млн. точечных
значений силы тяжести, измеренных в 1960— 1985 гг. 16 различными ведомствами,—
были оценены по невязкам в более чем 63 тыс. точках пересечения гравиметрических
галсов [766]. Среднеквадратическое расхождение ±224 мк м- с ~2 удалось уменьшить до
±140 м к м - с -2 после уравнивания результатов, учитывая систематические ошибки и ли
нейный дрейф гравиметров. Выявлена четкая зависимость невязок от точности навигации,
которая постоянно повышалась в течение последних 20 лет, а также от величин регио
нальных градиентов силы тяжести: к областям с большими градиентами приурочены наи
большие ошибки. В 1984 г. Принс и Форсайт по невязкам при пересечениях профилей про
анализировали измерения, выполненные в 1963 — 1977 гг. в экваториальных областях с
разными морскими гравиметрами (Аскания Gss2, Ла Коста — Ромберга (разд. 7.3.2)) и на
вигационными системами [543]. После учета постоянных поправок до ±100мкм*с~2 по
лучены среднеквадратические расхождения ±41 — 125мкм с 2 (в среднем ±105 мкм с 2).
Основными источниками ошибок были навигационные ошибки, недостаточный учет
кросс-каплинга и смещения нуль-пункта гравиметров. После моделирования и уравнива
ния измерений на профилях удалось уменьшить среднеквадратическое расхождение до
±27 мк м - с “ 2 (рис. 7.22).
В 1979 г. была выполнена гравиметрическая съемка Северного моря у берегов Голлан
дии с гравиметрической системой Kss5 (усовершенствованный гравиметр Аскания Gss2);
профили располагались по регулярной сетке с шагом 20 км. Гравиметр был установлен
на судне водоизмещением 1000 т (длина 60 м) на гироплатформе Anschutz, вводилась
поправка за кросс-каплинг (0 — 50 мкм · с "2 при хороших погодных условиях, 50 —
100 мкм с " 2 при средних и 100 — 200 мкм - с " 2 при плохих), положение судна определя
лось системой Хай-Фикс, 10-секундные результаты сглаживали на интервале 1 мин.
Ошибка измерений в зависимости от погодных условий составила ±10 — 40 мкм с 2.
После осреднения на 8-мин интервалах (около 2 км пути судна) и уравнивания по невязкам
при пересечении профилей (моделирование в зависимости от погодных условий) среднеква
дратическое расхождение составило ±17 мкм с 2.
Измерения силы тяжести в труднодоступных районах
267
Число
пересечений
Рис. 7.22 (левый). Г истограм м а невязок в точках пересечения галсов, выполненных в 1963 — 1977 гг.
с разными гравиметрами и навигационными системами: а — по первоначальным данным;
б — после уравнивания галсов по м етоду наименьших квадратов [543].
Рис. 7.23 (правый). Гистограм м а невязок в точках пересечения галсов, выполненных с осесим м етрич
ным гравиметром Л а К оста— Р ом бер га [428].
Среднеквадратическая разность ± 8 мкм · с “ 2 для двух морских гравиметров Ла Кос
та — Ромберга (разд. 7.3.2) была получена из анализа невязок в 400 точках пересечений;
соответствующие величины для осесимметричного гравиметра Ла Коста — Ромберга
(разд. 7.3.3) составили ±7 мкм - с " 2 [728] и ±11 м к м - с ”2 (навигационная система Лоран-С [429]) (рис. 7.23). Сравнение двух гравиметров Ла Коста — Ромберга с осесиммет
ричным гравиметром (работа на одном судне, различные погодные условия, регистрация
показаний за 10 с, фильтрация на интервале 10 мин, 5-мин интервал вывода данных) вы
явило систематические расхождения в 4 — 32 мкм с ” 2 и среднеквадратические расхожде
ния ±5 — 8 мк м - с “ 2. Сравнение измерений системой с горизонтальным рычагом (после
учета апостериори поправки за остаточный кросс-каплинг) и системой с вертикальным
перемещением пробной массы не выявило различий [727].
При наблюдениях с гравиметрами Аскания Gss3 и Kss30 (разд. 7.3.3) выявлены сред
неквадратические расхождения ±10 — 40 м к м - с " 2 в точках пересечений профилей с недо
статочной точностью навигационного ообеспечения [536]. Существенно лучшие результа
ты получены при хорошей навигационной точности. На рис. 7.24 приведены записи изме
нений силы тяжести, поправки Этвёша и аномалии в свободном воздухе, а на рис. 7.25
даны гистограммы невязок для 917 точек пересечений галсов (сила ветра 3 — 8 баллов,
судно водоизмещением 500 т, длиной в 74 м); среднеквадратическое расхождение до урав
нивания ± 4 мкм · с " 2, после уравнивания ± 2 мкм · с ~2 [540].
Таким образом, современные морские гравиметры при хорошем навигацион
ном обеспечении позволяют изучать гравитационное поле с разрешением 1 —
2 км и определять силу тяжести с ошибкой ±10 — 20 мкм с -2; в наиболее бла
гоприятных случаях ошибка равна ±5 мкм с -2. Дальнейшее совершенствование
измерений на море будет идти по следующим направлениям:
— вычисление точных поправок Этвёша с помощью более совершенных систем
навигации (GPS и интегральных систем);
268
Глава 7
б)
Число
пересечений
Рис. 7.24 (левый). Ф рагмент записи силы тяж ести , поправки Э твеш а и аномалии в св ободн ом воздухе,
полученные с гравиметром Kss30 на надводном судне [540] (материал предоставлен фирмой
Prakla — Seism os AG, Ганновер).
Рис. 7.25 (правый). Г и стограм м а невязок в пересечениях галсов, выполненных с гравиметром Kss30:
а — по первоначальным данным; б — после уравнивания [540] (материал предоставлен фир
мой Prakla — Seism os AG, Ганновер).
— совершенствование обработки данных от разных измерительных систем (гра
виметра, навигационной системы, горизонтальных акселерометров, эхолота)
в реальном масштабе времени с бортовым компьютером (включая вычисление
аномалий силы тяжести);
— увеличение рабочего времени в плавании (измерения при бурном море, на кри
волинейных маршрутах);
— улучшение последующей обработки данных (анализ, моделирование, уравнива
ние) и соответственно повышение точности.
7.4.2.
Аэрогравиметрия
Для измерений на самолете или вертолете с аэрогравиметром в отличие от мор
ской гравиметрии характерно следующее:
— высокая скорость носителя требует ограничить время осреднения (разд. 7.2.2)
и обеспечить высокую точность навигационного обеспечения (разд. 7.2.4);
— широкий спектр возмущающих ускорений (разд. 7.2.1) требует помимо демп
фирования и фильтрации высокочастотных ускорений регистрации и учета
низкочастотных ускорений;
— изменения высоты вызывают изменения силы тяжести на ± 3 м к м с _2/м
(разд. 3.1.1);
— сглаживание поля силы тяжести с увеличением высоты (разд. 2.2.3, 4.2.2).
Как показано в табл. 7.2, разрешающая способность в области малых длин
волн с увеличением высоты быстро уменьшается. Таким образом, при совре
менной точности измерений структуры гравитационного поля протяженнос
тью <8 км трудно обнаружить на высотах >1 км.
Разрешение в несколько километров и ошибка примерно =ь10мкм с~2
возможны, если приняты следующие меры:
269
Измерения силы тяжести в труднодоступных районах
Т аблица 7.2. Сглаживание гравитационного поля с увеличением высоты; степенные дисперсии
аномалий по модели Чернинга и Раппа [720], R = 6371 км
Степень / разложения по
сферическим функциям
181
2 001
5 001
10 001
20 001
— 2000
— 5000
— 10 000
— 20 000
— 40 000
Длина волны
структуры поля силы
тяжести, км
224
20
8
4
2
— 20
— 8
— 4
— 2
— 1
Степенная дисперсия аномалий
o f ( A g ), (мкм · с "2)2
h = 0 км
h = 1 км
74 004
11 603
2 132
194
3
60 361
4 637
295
5
0
И
= 4 км
36 100
385
1
0
0
— уменьшение возмущающих ускорений благодаря устойчивости самолета, мощ
ной гироплатформе и измерениям в спокойных атмосферных условиях (но
чью);
— обеспечение максимального постоянства условий полета (курса, скорости, вы
соты) с помощью автопилота и непрерывная высокоточная навигация (инер
циальная навигация, контролируемая по ИСЗ, радиолокационные системы,
доплеровский радар, если возможно, наземные системы);
— высокоточное определение высоты (барометрический высотомер, радиовысо
томер, над водной поверхностью — лазерный высотомер);
— уменьшение высоты и скорости полета (применение вертолетов);
— применение уточненных алгоритмов для последующей обработки (фильтрация
Калмана, уравнивание сетей с избыточными измерениями).
Если результаты измерений приводят к единой высоте Λ, величина силы тя
жести определяется формулой
g(h) = g \ h ') - <ιω (Λ*) + 6gCBB (Ah) + δ£Γ0ρ + 6g3,
(7.28)
где g*(h*) — результат измерений на высоте Λ*, α(Ζ>— вертикальное возмущаю
щее ускорение, вычисленное как h = d 2h /d t2 численным дифференцированием ре
зультатов измерения высоты; 0gCBB — редукция в свободном воздухе за раз
ность высот Ah = h* - h; δ#Γθρ— поправка за горизонтальные возмущающие
ускорения (разд. 7.2.3), 6g3 — поправка Этвёша (разд. 7.2.4).
Возможность измерений силы тяжести на борту самолета была доказана ря
дом экспериментов, начатых в 1958 г. В частности, было установлено, что на
самолетах можно применять морские гравиметры, а точность аэрогравиметрических определений зависит от точности навигации и прежде всего от точности
определения высоты. Начиная с 1977 г. нашли промышленное применение изме
рения силы тяжести на вертолетах. Точность аэрогравиметрических съемок оце
нивают по расхождениям в точках пересечений профилей и сравнением с назем
ными съемками. Приведем некоторые примеры.
Первые пробные измерения были выполнены в 1958 — 1968 гг. на больших высотах
(Λ = 4 — 10 км), что позволило уменьшить возмущающие ускорения. Испытания проводи
лись на самолетах различных типов, при разных скоростях полета (400 — 500 км/ч), с раз
личными гравиметрами (Ла Коста — Ромберга, Аскания Gss2, Белл), навигационными
270
Глава 7
Ддсв.в.<м к м *с 2 )
Рис. 7.26. Сравнение аэрогравиметрической съемки и надводной после фильтрации и приведения на вы
соту п олета (аномалии в св обод н ом воздухе) [396].
системами и методами фильтрации (осреднение за 3 — 10 мин). Обычно достигалось раз
решение 100 км при ошибке измерений ±100 м к м - с “ 2, в благоприятных условиях резуль
таты были точнее (разрешение 50 км, ошибка ±50 мк м*с " 2) [506]. В 1976 г. Океаногра
фическая служба ВМФ США (NAVOCEANO) выполнила измерения над Атлантикой (че
тырехмоторный турбореактивный самолет, h = 5000 м, υ = 450 км/ч, морской гравиметр
Ла Коста — Ромберга с трехосной стабилизацией, инерциальная навигационная система,
контролируемая спутниковой системой, Лоран-С и доплеровский радар, баро- и радиовы
сотомеры). Низкочастотная фильтрация результатов на интервале 8 мин давала средние
значения силы тяжести для отрезков маршрута 60 км; расхождения со сглаженными ре
зультатами морской гравиметрической съемки были существенно ниже ± 1 0 0 м к м с -2
[394] (рис. 7.26). В 1981 г. Научно-исследовательская лаборатория ВМФ США провела гра
виметрическую съемку над морем на малой высоте (самолет «Орион РЗ-А», h = 150 м,
υ = 400 км/ч, морской гравиметр Ла Коста — Ромберга с трехосной стабилизацией, раз
ные навигационные системы: GPS, инерциальная система, Лоран-С, наземная радарная
система; радиовысотомер, лазерный и барометрический высотомер). При неизменной
фильтрации показаний гравиметра, учете вертикальных ускорений (по измерениям высо
ты) и поправки Этвёша результаты осредняли на 20-км отрезках (примерно 3 мин поле
та); ошибка составила ± 5 0 м к м с “ 2 [103]. Исследуется возможность измерений над су
шей; при этом используют баровысотомер, который контролируют при полете над мо
рем, и навигационную систему GPS. Выполнена съемка труднодоступной испытательной
области (болота) на высоте примерно 600 м при скорости 375 км/ч; расстояние между
профилями 9 км. Среднеквадратическое расхождение с наземными данными составило
±28 мкм · с " 2 [104].
Американская компания Carson Geosciences Со. (Перкаси, Иллинойс) примерно 10 лет
использовала при геофизических исследованиях аэроморской гиростабилизированный гра
виметр Л а Коста — Ромберга, установленный на вертолете Сикорского S-61 [265]. Что
бы возмущающие ускорения были малыми, работали на автопилоте и ночью; скорость
полета менялась от 55 до ПО км/ч. Высоту выбирали в зависимости от характера иссле
дуемого аномального поля (в большинстве случаев — несколько сотен метров). Навигация
осуществлялась с помощью системы Motorola Miniranger. Высота начальной точки опреде
лялась спутниковым методом, а ее приращения в полете получали с помощью радарной
системы и непрерывных барометрических измерений (±1 м). С помощью радиовысотоме
ра определяли профиль местности для вычисления топографической поправки. Ежесекунд
ные показания гравиметра фильтровались на интервалах 20 — 60 с; в зависимости от ве
личины скорости и возмущающих ускорений разрешение деталей поля было в пределах
400 м — 1,5 км. Как правило, профили съемки располагались по ортогональной сетке
с шагом 1 км. Ошибка, полученная по расхождениям в точках пересечения профилей, со-
Измерения силы тяжести в труднодоступных районах
271
Число
пересечений
ДдБ (м км с 2 )
Рис. 7.27 (левый). Г и стограм м а невязок в пересечениях м арш рутов при измерениях на вертол ете с аэроморским гравиметром Л а К оста — Ром берга [265].
Рис. 7.28 (правый). Сравнение результатов аэрогравиметрической (вертолет) и наземной съемок (ано
малии Буге), вы сота полета 310 м, скорость 83 км/ч [265].
ставила ±5 м к м - с " 2 (рис. 7.27). Сравнения с наземными данными подтверждают эту
оценку и отражают сглаживание гравитационного поля с увеличением высоты (рис. 7.28).
Система использовалась и на самолете.
При измерениях на вертолетах в сочетании с навигационными средствами ло
кального действия современные аэрогравиметрические системы .могут опреде
лять структуру поля силы тяжести с разрешением 1 км и ошибкой ±5 мкм - с " 2.
Измерения на самолетах в зависимости от высоты полета имеют разрешающую
способность 20 — 50 км и ошибку ± 5 0 — 100 мкм с -2 . Чтобы повысить разре
шение до нескольких километров, а точность до нескольких десятков единиц
м к м с - 2 , что необходимо для целей геодезии и геофизики, требуются более со
вершенные навигационные методы, и прежде всего для определения высоты по
лета.
7.5.
Инерциальная гравиметрия
7.5.1.
Теоретические основы
Под инерциальной гравиметрией будем понимать метод определения вектора
ускорения силы тяжести g по данным измерений с инерциальной системой на
подвижном носителе [58, 611]; она представляет собой часть инерциальной геоде
зии [190, 613]. В инерциальной гравиметрии используются принципы инерциаль
ной навигации, основанные на уравнении Ньютона (4.58).
Инерциальное измерительное устройство состоит из трех взаимно ортого
нальных акселерометров, ориентация которых непрерывно контролируется сис
темой гироскопов (разд. 7.5.2). Трехмерный вектор удельной силы f (сила, от
несенная к единичной массе), измеренный в инерциальном пространстве, пред
ставляет собой разность вектора ускорения г = d 2r/d t2 (г — вектор положения в
Глава 7
272
инерциальной системе координат, t — время) и гравитационного вектора Ь:
f ( 0 = г( 0 - Ь(г(/)).
(7.29)
Таким образом, выходной сигнал акселерометра содержит информацию о место
положении носителя и гравитационном поле. Из-за эквивалентности инерциаль
ного ускорения и гравитационного ускорения векторы г и b можно разделить,
лишь имея дополнительную информацию; аналогичная проблема возникает в
морской и аэрогравиметрии (разд. 7.2.2). Учет же гравитационного поля и двой
ное интегрирование ускорения носителя позволяют осуществить определение ме
стоположения инерциальным методом (раз. 4.5.2).
Применительно к инерциальным измерениям необходимо рассмотреть три
пространственные системы отсчета:
— инерциальное ускорение имеет место в инерциальной системе отсчета, поло
жение координатных осей которой определяется осью вращения Земли и направ
лением на точку весеннего равноденствия (система неподвижных звезд);
— компоненты вектора удельной силы измеряются в системе, связанной с осями
акселерометров. Такая приборная система координат фиксирована относительно
носителя, а ее ориентировка при движении носителя изменяется;
— фиксированная относительно Земли местная топоцентрическая система
(разд. 2.1.2), связанная с гравитационным полем. Ориентировка ее относительно
инерциальной системы изменяется из-за вращения Земли и из-за изменений на
правления отвесной линии при перемещении носителя по маршруту. При движе
нии постоянно поддерживается ориентировка системы относительно направления
отвеса с помощью модели гравитационного поля, для этого чаще всего использу
ют нормальное гравитационное поле (разд. 2.4.3). Такой вид ориентировки назы
вают «локально-уровенной системой». На рис. 7.29 показана относительная ори
ентировка осей перечисленных систем отсчета.
Чтобы оценить величины измеряемых ускорений, необходимо в любой мо
мент времени знать соотношение между этими тремя системами координат
(разд. 7.5.2). Вектор положения, выраженный в локально-уровенной системе (/),
преобразуется в инерциальную систему (/) с помощью матрицы поворота R,·,
элементы которой являются функциями положения и времени:
(7.30а)
Ну
9
Рис. 7.29. Системы координат в инерциальной геодезии.
Измерения силы тяжести в труднодоступных районах
273
Дважды выполнив дифференцирование по времени, получим следующие соотно
шения:
Г/
= R'r, + R'r,,
(7.306)
if, = R'r, + 2R'r, + R'r,.
(7.30b)
Введя матрицу Ω, зададим составляющие вектора угловой скорости вращения
Земли ω:
,
/
0 -ω ζ
ωΛ
Ω = I ωζ
0 -« х ·
(7.31а)
0/
\ -ω γ
ωχ
С учетом
R,· = R/Ω и Й/ = R^ftfl + ίϊ)
(7.316)
выражение (7.30в) приобретает вид
г, = R/ (г, + 2Ωί, + (ΩΩ + Ω)γ,(
(7.31в)
где
2Ωγ/ = 2ω X г/,
ΩΩγ/ = (ω
х г /)
х
ω,
(iri
= ω X Г/.
Поскольку измерения выполняются во вращающейся координатной системе,
в (7.31 в) входят также кориолисово и центробежное ускорения (разд. 7.2.4, 2.2.1).
Если величина Ω равна нулю, то подстановка в (7.29) дает выражение для изме
ряемой величины в локально-уровенной системе координат:
f, = г, + 2Ωί, - gI,
(7.32а)
где вектор силы тяжести имеет вид
g/ = b - ΩΩγ/,
(7.326)
а кориолисово ускорение равно 2Ωγ/. Следовательно, чтобы по результатам из
мерений определить g, необходимо знать г, г и г [614].
Чтобы линеаризовать (7.32), вводят понятие нормального гравитационного
поля (разд. 2.4.3):
g = 7 + Sg,
(7.33а)
где у — вектор нормальной силы тяжести (2.53), a 6g — вектор возмущения силы
тяжести (2.76). По аналогии с (2.78) последний можно представить в виде разло
жения по осям локально-уровенной системы координат, использовав составляю
щие уклонения отвеса £, η и возмущение силы тяжести 6g в виде
£gr = (т£> УУ* <$£).
(7.336)
При частых остановках (контрольная точка с нулевой скоростью — Zero Velocity
Update — ZUPT) инерциальной системы, необходимых для контроля точности ее
работы, скорость и ускорение равны нулю, т. е. г/ = г/ = 0. Выражение (7.32) с
учетом (7.33) тогда принимает вид
f(ZUPT) = - ( у + 6g).
(7.34)
274
Глава 7
Если местоположение известно достаточно хорошо, чтобы вычислить γ, и име
ется возможность уверенно исключить ошибки измерений величины 6g, можно
определить вектор ускорения силы тяжести (разд. 7.5.2).
7.5.2.
Инерциальные измерительные системы и методика измерений
Основой инерциальной измерительной системы является инерциальный измери
тельный блок с системами акселерометров и гироскопов (рис. 7.30). Имеются
также цифровой компьютер, хранитель информации, блок контроля и вывода
данных, а также источник питания [494].
Акселерометры измеряют составляющие вектора удельной силы, действую
щие на пробную массу в направлениях измерительных осей. Они могут быть вы
полнены в виде систем с поступательным или вращательным перемещением мас
сы и использовать соответственно электромагнитные силы или вращающий мо
мент (рис. 7.31). Измеряемые величины примерно пропорциональны действую
щим ускорениям, см. также системы для измерения силы тяжести (разд. 6.2.1,
6.2.2). При чувствительности 10~5— 10~6 g возможен большой измерительный
диапазон: ±30 — 100 g.
Благодаря быстрому вращению гироскопы сохраняют ориентацию своих осей
в пространстве. Повороты измерительной системы в инерциальном простран
стве измеряются с помощью двух (2 степени свободы) или трех гироскопов. В
настоящее время используют механические гироскопы; разрабатываются лазер
ные гироскопы с датчиками поворотов. При помощи выходных сигналов гиро
скопов и коррекции за вращение Земли и нормальное поле силы тяжести сохраня
ется неизменной ориентировка измерительной системы в пространстве.
В зависимости от вида измерительной системы и способа сохранения ориен
тировки различают следующие системы:
— систему (связанную с носителем), ориентировка осей которой рассчитывается
аналитически на основе сигналов, полученных в результате обработки некото
рой исходной информации. Механическая часть системы проста, однако тре
буется сложное программное обеспечение; к настоящему времени (1987 г.) точ
ность таких систем пока недостаточна для того, чтобы их можно было испо
льзовать в геодезии;
— систему, находящуюся на карданной платформе, положение которой стабили
зировано в пространстве или же сохраняется неизменная ориентировка в ло-
Рис. 7.30.
Принцип построения инерциальной системы , состоящ ей иъ
гироскопов (G), акселерометров (А) и интеграторов [621].
Измерения силы тяжести в труднодоступных районах
275
Рис. 7.31. Принципы акселерометра: а — поступательная (осевая, с подвешенной массой) система;
б — вращательная (маятниковая) система.
кально-уровенной системе координат. Именно такой принцип ныне использу
ется в инерциальных геодезических системах.
Съемочные работы с инерциальной системой, установленной на автомашине
или вертолете, состоят из следующих этапов [112]:
— прогрев инерциального измерительного блока до рабочей температуры, а так
же ориентирование платформы (относительно отвесной линии и направления
на север) в локально-уровенной системе координат в начальной точке маршру
та; продолжительность работы < 1 ч;
— переезд или перелет на первую определяемую точку; в это время через неболь
шие интервалы (<20мс) измеряют ускорения и углы поворота, а также вы
полняют интегрирование для определения вектора скорости на отрезках вре
мени < 10 с;
— остановка на новой точке, отсчет координат, определение возмущения силы
тяжести и уклонения отвеса из сравнения результатов измерений с известным
вектором нормальной силы тяжести; целесообразно совмещать эту процедуру
со следующим:
— измерением на контрольном пункте (ZUPT), см. (7.34); такие остановки нуж
ны для учета нелинейно-зависящих от времени ошибок (разд. 7.5.3) через ин
тервалы в 3 — 5 мин (что при транспортировке на автомашине соответствует
расстоянию между пунктами в несколько километров, а на вертолете — при
мерно десяти километрам); скорость является конечным выходным сигналом
инерциальных геодезических систем;
— дальнейшее следование по маршруту;
— привязка к твердому пункту через 1 — 2 ч;
— в некоторых случаях повторное прохождение маршрута и наблюдения на нем
(разд. 7.5.3).
Первые инерциальные геодезические системы появились в начале 1970-х гг., разработ
ка таких систем отнюдь не завершена. В инерциальной геодезической системе G E O
S P I N I I фирмы Honeywell Inc. (Клиавота, Флорида, США) используется ориентация в
инерциальном пространстве. К локально-уровенным относятся система Autosurveyor
LASS II фирмы Litton Syst. (Вудлэнд-Хиллз, Калифорния, США) (рис. 7.32) и система
Ferranti Inertial Land Surveyor MK II фирмы Ferranti (Эдинбург, Великобритания). Аппара-
276
Глава
Рис.
7.32.
7
Прибор Litton's Autosurveyor System LASSII
Guidance and Control Systems, Вудлэнд Хиллз,
(фотография предоставлена
фирмой
Litton
Калифорния).
тура Aerial Profiling of Теггаiп System (АРТS) была разработана в лаборатории Charles
Stark Draper lnc. (Кембридж, Массачусетс, США) для съемок на самолетах и вертолетах.
Она содержит инерциальную навигационную систему и лазерный профилограф ( ±0,15 м)
для измерения высот рельефа. Координатная привязка выполняется с помощью лазерного
дальномера и наземных отражателей.
Одновременно можно определять силу тяжести,
при этом ожидаемая ошибка составляет ± 10 - 20 мкм · с -
2•
Такая точность достижима
при условии, что работы ведутся на небольших площадях и при малой высоте полета
[648].
7.5.3.
Источники оwибок и точность измерений
На результаты инерциальной съемки влияет множество ошибок
[614).
К источни
кам ошибок относятся неортогональность осей акселерометров и гироскопов, а
также уход нуля и ошибки калибровки (включая нелинейные составляющие) аксе
лерометров и гироскопов. Особенно опасны ошибки, зависящие от времени, ко
торые проявляются в виде линейных и нелинейных дрейфов выходных сигналов
акселерометров и гироскопов. И наконец, на все измерения на маршруте влияют
ошибки определения положения, скорости и ориентировки на начальном пункте.
Чтобы выявить указанные ошибки и уменьшить их величину, применяют сле
дующие
меры:
-калибровку и юстировку систем акселерометров и гироскопов;
-определение накопления ошибок на пунктах
ZUPT
(разд.
7.5.2)
и на твердых
пунктах с известными координатами и силой тяжести;
-моделирование и распределение ошибок при обработке результатов во время
измерений или при дальнейшей обработке. Из-за ошибок
времени, для пункта ZUPТ вместо
(7 .34)
of(t),
зависящих от
будет справедливо следующее соотно
шение:
f(ZUPТ)
Выделение
of
из
og -
+ of
= - ( ')'
(7 .35)
ЭТО основная трудность инерциальной гравиметрии. Если
такое разделение выполнено, то вектор
тами ZUPТ (разд.
+ og).
2.7.2).
og
можно интерполировать между пунк
Для разделения можно использовать функциональные
Измерения силы тяжести в труднодоступных районах
277
модели ошибок в работе системы, а также различия спектральных характеристик
этих ошибок и возмущений силы тяжести; для этого необходимо 6g(r) преобра
зовать в 6g(/). При определении текущего вектора состояния (координаты, сила
тяжести) и оценке ошибок эффективна фильтрация Калмана. Таким образом, из
мерения вплоть до этапа текущей пошаговой обработки используются для оцен
ки в реальном масштабе времени интересующих неизвестных для последующего
уравнивания результатов. Это уравнивание учитывает априорную информацию
о кинематических свойствах измерительной системы и статических характеристи
ках ошибок, меняющихся во времени [203, 615]. Некоторого повышения точнос
тей можно достичь окончательным уравниванием, при котором используются все
данные, полученные на маршруте или в сети, включая твердые пункты и усло
вия, возникающие в точках пересечения маршрутов. Таким образом, детермини
рованный подход (моделирование ошибок системы аппроксимирующими функ
циями или учет известных и зависящих от времени характеристик системы) мож
но сочетать со стохастическим (среднеквадратическая коллокация (разд. 4.2.3,
[202]).
Маршруты длиной в несколько десятков или сотен километров стараются де
лать как можно ближе к прямолинейным для меньшего накопления ошибок. Ес
ли маршрут проходят в прямом и обратном направлениях, то можно выделить
систематические ошибки, зависящие от направления движения. Еще более надеж
ный контроль и повышение точности достигаются, если маршруты образуют
сеть пересекающихся линий и содержат пункты с твердыми значениями коорди
нат (пункты GPS-наблюдений) и силы тяжести. Ожидается, что важную роль
будет играть совместное использование инерциальных измерительных систем и
постоянно работающих приемоиндикаторов GPS. Выделение параметров движе
ния носителя позволит непрерывно определять вектор силы тяжести. Кроме то
го, отпадет необходимость в пунктах ZUPT.
В настоящее время возможна точность ±10 — 50м км *с-2 и ±1" [59, 203];
на небольших площадях с плавным рельефом можно получить и более высокую
точность. В день можно определить более 50 пунктов, если расстояния между
ними невелики. При улучшении программного обеспечения и окончательного
уравнивания результатов станут возможными точности выше ± 1 0 м к м - с “ 2 и
±
0,1
—
1" .
В таблице 7.3 приведены среднеквадратические расхождения с наземными данными
результатов измерений с инерциальными системами при нескольких прохождениях (прямо
и обратно) по профилю на автомашине (длина профиля 24 км, время работы 2 — 3 ч, ин
тервалы между пунктами ZUPT 2 — 5 мин) и на вертолете (длина профиля 32 км, время
работы 1 — 1,5 ч, интервалы 4 мин). Профили расположены в горном испытательном по
лигоне Кананаскис (Канада). Работа выполнена с системой Ferranti Mark II [201].
8. Гравитационная градиентометрия
Тензор градиентов силы тяжести содержит информацию о локальном гравитаци
онном поле, весьма важную для многих задач геодезии и геофизики (разд. 2.3.2).
Примерно с 1900 г. для определения компонентов этого тензора стали разраба
тывать специальные гравитационные градиентометры и методики измерений.
Из-за малости измеряемых величин точностные требования к приборам высоки
(разд. 8.1). До 1940 г. использовались крутильные весы; для решения специальных
задач градиент силы тяжести можно измерять относительными гравиметрами
(разд. 8.2). Непрерывные измерения градиента на подвижном носителе позволя
ют оперативно получать информацию о гравитационном поле с высоким разре
шением, причем появляется возможность разделять гравитационные и
инерциальные эффекты. Измерительные системы для подвижного основания на
чали разрабатывать в 1970-х гг. (разд. 8.3).
Описание крутильных весов можно найти в очень давних работах по геодезии
и геофизике [23, 504]. Первые разработки динамических градиентометров описа
ны Форвардом [204], современное состояние проблемы — в работе [758]. Основы
спутниковой градиентометрии рассмотрены Руммелем в работах [571, 572].
8.1.
8.1.1.
Теоретические основы
Приложения тензора градиентов силы тяжести
Компоненты тензора градиентов силы тяжести (2.37) — далее для краткости бу
дем называть их градиентами силы тяжести — описывают локальную структуру
гравитационного поля через кривизны этого поля. Их использование в геодезии
связано с решением задач дифференциальной геометрии [438]. Совместно с други
ми параметрами гравитационного поля они обеспечивают определение поля с вы
соким разрешением [281] (разд. 4.2.3). При создании гравиметрических сетей
часто приходится изучать градиент силы тяжести вблизи опорных пунктов для
того, чтобы передать измеренные значения g на соседние точки (разд. 9.2.3).
В прикладной геофизике наземные измерения градиентов силы тяжести можно
использовать для изучения близповерхностных возмущающих масс [2], обнаружения
пустот [82] и определения плотности на вертикальных профилях. Если градиенты
получать по приращениям силы тяжести, то расстояния между пунктами измерений
должны быть малыми. Отметим, что измерения градиентов на поверхности Земли
сильно подвержены влиянию ближних масс (топографические массы, подземные во
ды, почвенная влага), так что при геофизической интерпретации необходим тща-
Гравитационная градиентометрия
279
тельный учет поправок. Поэтому часто предпочитают вычислять сглаженный
градиент силы тяжести (обычно его вертикальную составляющую), основываясь на
трансформациях поля, полученного из региональных гравиметрических съемок.
При измерениях на самолетах или спутниках влияние короткопериодических
топографических эффектов сильно ослабевает. Градиентометрия на подвижных
носителях позволяет быстро и с высоким разрешением изучать гравитационное
поле, при этом после обработки получают полный вектор силы тяжести: возму
щение силы тяжести и уклонение отвеса. Поскольку на измерения гравитацион
ным градиентометром с пространственно стабилизированной измерительной
системой не влияют возмущения и инерциальные ускорения, выгодно их сочета
ние с аэрогравиметрией (разд. 7.4.2) и инерциальной гравиметрией (разд. 7.5.2)
[481, 485]. Совместное использование спутниковой гравиметрии и спутниковой
альтиметрии позволит с высоким разрешением определять топографию поверх
ности Мирового океана исключительно по наблюдениям из космоса (разд. 4.3.6).
8.1.2.
Градиенты нормального поля силы тяжести
и аномалии градиентов
Компоненты тензора градиентов можно вычислить для нормального поля силы
тяжести уровенного эллипсоида (разд. 2.4.3). В геодезической референц-системе
1980 г. (разд. 3.1.2) для поверхности эллипсоида определены величины
и хх ® иуу = - 1540 н с ' 2,
(/ = 4 ^ = 3086 н с ' 2,
ζζ όζ
UXy =
Uyy - Uxx = 10,4 cos2*> н с ' 2,
t/,„ =
дх
= 8,1 sin 2φ н с"2,
= 0.
(8.1)
Градиенты силы тяжести, измеренные у поверхности Земли, могут существен
но отличаться от нормальных значений из-за притяжения близлежащих топогра
фических масс и из-за близповерхностных аномалий плотности.
На равнинной и всхолмленной территории площадью 50 км2 (средний угол наклона
2°) были получены величины Wyy - WXXy
W^ и Wxy, превышающие ±200 нс-2 [284].
После исключения систематической составляющей -13 нс-2 среднеквадратическая величи
на Wzy оставалась равной ±24 нс-2, после учета поправки за рельеф она уменьшилась
до 18 нс-2 [284]. В умеренно гористой местности Центральной Германии были обнаруже
ны отклонения величины Wzz от нормального значения до ±1400 нс-2; после учета по
правки за рельеф отличая достигали ±300 нс-2 [57].
Если исключить нормальное гравитационное поле, получим тензор градиен
тов гравитационного возмущения grad (grad 7), где Т — возмущающий потенци
ал, см. (2.82). Его статистические характеристики можно описать с помощью
глобальной модели степенных дисперсий аномалий силы тяжести (разд. 3.3.2).
Для поверхности Земли получены следующие среднеквадратические значения со
ставляющих градиента силы тяжести [716]:
σ(Τζχ) = σ(Τφ) = ±59 нс-2,
σ(Τζζ) = ± 8 4 нс-2.
( 8 . 2)
280
Глава 8
С увеличением высоты эти величины быстро убывают. Так, для высот 1, 10 и
250 км среднеквадратические значения Τζζ равны соответственно ±40, ±10 и
±0,3 нс-2. Для того чтобы измерения градиентов имели смысл, их необходимо
выполнять на земной поверхности или вблизи нее с точностью ±1 — 10нс "2,
а на низких спутниках с точностью ±0,01 — 0,0001 н с"2.
8.1.3. Принцип гравитационных градиентометров
Гравитационный градиентометр, ориентированный в топоцентрической системе
координат, связанной с гравитационным полем (разд. 2.1.2), измеряет компонен
ты тензора градиента силы тяжести (2.37)
(8.3)
либо их линейные комбинации. В системе координат, не вращающейся вместе
с Землей, выражение (8.3) представляет собой тензор градиентов притяжения.
Из-за того что поле безвихревое и справедливо уравнение Лапласа, тензоры гра
диентов силы тяжести и силы притяжения содержат лишь пять независимых эле
ментов (разд. 2.3.2).
В гравитационном градиентометре измеряют смещения двух или большего
числа пробных масс в неоднородном гравитационном поле измерительной систе
мы; при этом полагают, что градиент постоянен. В качестве системы отсчета
принимают топоцентрическую систему координат, связанную с направлением
отвеса. Ее начало совпадает с центром масс прибора С (рис. 8.1). Если пробная
масса точечная, то сила тяжести получается из разложения в ряд Тейлора в
точке СI
grad W = g = gc + Wcr/,
(8.4a)
где расстояние до центра масс в принятой системе координат определяется выра
жением
гТ = (ж, у, z).
(8.46)
Подобное выражение справедливо и для второй пробной массы.
Разность ускорений, воздействующих на близкие пробные массы, получается
по измерениям разности их перемещений (осевая система с поступательным дви
жением), либо углов поворота (вращательная система). Эти перемещения измеря
ют оптическими или электрическими устройствами (разд. 6.3.3).
2
Рис. 8.1.
Принцип гравитационного градиентометра.
281
Гравитационная градиентометрия
Рис. 8 .2 . Гравитационны е градиентом етры с осевыми системами при продольн ом (слева и в центре)
и поперечном (справа) расположении.
В системе с поступательным движением (осевая система) датчиком служит
пара акселерометров (рис. 8.2). Составляющие удельного вектора силы (ускоре
ния) f действуют в направлениях осей чувствительности акселерометров. Раз
ность двух выражений вида (8.4) позволяет получить
A f = f 2 - fi = W c (r2 - Π)/ = W cA r,.
(8.5)
Таким образом, компоненты W можно определить по величинам A f и по разно
стям координат пробных масс. При этом диагональные элементы (8.3) получа
ются при расположении акселерометров вдоль базы прибора, а недиагональные
элементы — при соответствующем поперечном расположении.
Например, при вертикальном расположении, симметричном относительно центра
масс, имеем
Ах = Ау = 0 ,
(W„)c
И
Az = Z2 - Ζι
= ( W y z ) c = О,
таким образом, вертикальная компонента определяется выражением
W zz =
( 8 .6 )
Az
При расстоянии между пробными массами 1 м разность вертикальных ускорений на
земной поверхности составляет 3086 нм · с -2 » 3 х 10- 7 #. Чтобы получить градиент с
ошибкой ±1 нс" 2у необходимо измерять ускорение с ошибкой ±1 нм · с " 2, что соответ
ствует 10 _ 10 g . На высоте 200 км эта разность составит 2800 нм · с “ 2 и при заданной точ
ности градиента ± 1 0 - 3 нс-2 ускорение нужно измерять с ошибкой ± 1 0 _13g.
В системе вращательного типа коромысло, на котором укреплены пробные
массы, может вращаться вокруг своей оси (рис. 8.3). Изменяя ориентировку оси
вращения и геометрию чувствительной системы, измеряют различные комбина
ции градиентов.
При горизонтальном расположении чувствительной системы, как показано на
рис. 8.3, составляющая ускорения описывается выражением
/ = Wy QOS ωί - Wx sin ωί.
(8.7a)
Вращающий момент в точке (1) определяется соотношением
М\
=
т~ f\
=
т γ - ( Wy cos
ωί
- Wx sin
ωί),
(8.76)
282
Глава 8
Рис. 8.3.
Вращательная система гравитационного градиентом етра;
вращение в плоскости ху.
где т — пробная масса, 1/2 — ее расстояние от оси вращения, ω — угловая ско
рость вращения, t — время. На основании (8.4) и с учетом равенств
χ = γ - cos ωί> у = - - sin ω/, ζ = 0
получим составляющие ускорения в виде
Wx = у- ( Wxx cos
ωί
+ Wxy sin
ω ί)}
(8.S)
Wy = — ( Wxy COS
ωί
+ Wyy sin
ω ί).
После подстановки в (8.7а) получим выражение для ускорения
/ = ~ (Wxy cos2 ω ί + Wyy sin
ωί
cos
ωί
- Wxx sin
ωί
cos
ωί
- W^ sin2w/)
или
/ = T (( Wyy ~
Wxx)
sin 2Z>t +
2Wxy cos 2Z,() ■
(8-9a)
Вращающие моменты действуют одинаково на пробные массы (1) и (2), поэтому
общий вращающий момент будет
Мм = mlf.
(8.96)
Гравитационные градиентометры содержат комбинации пар датчиков с раз
личной пространственной ориентировкой. Например, ортогональное расположе
ние трех систем с поступательным движением, образованных трехосными
акселерометрами, позволяет получить все девять компонент W, четыре из кото
рых будут избыточными величинами. С тремя ортогональными вращательными
системами можно определить пять независимых компонент тензора W.
Соотношения (8.4) — (8.9) справедливы для градиентометров, установленных
на Земле неподвижно (стационарный режим). При непрерывных наблюдениях на
подвижном основании (динамический режим) возникают дополнительные инерци
альные ускорения, влияние которых, однако, можно в значительной мере исклю
чить (разд. 8.3.1).
Гравитационная градиентометрия
8.2.
Стационарная гравитационная градиентометрия
8.2.1.
Крутильные весы
283
Роланд фон Этвёш видоизменил крутильные весы Кавендиша и создал статиче
ский гравитационный вариометр, который стали применять примерно с 1900 г.
Крутильная система, описанная выше, была изменена таким образом, что масса
тг располагалась на расстоянии h ниже горизонтального коромысла (рис. 8.4).
Горизонтальная составляющая силы тяжести, воздействуя на две массы т\ и т г ,
вызывает вращающий момент. Крромысло (длиной I) поворачивается до тех пор,
пока противодействующий момент крутильной нити (постоянная кручения г) не
уравновесит этот момент.
Если т\ = тг = т, а остальные массы пренебрежимо малы, то центр масс
измерительной системы будет расположен на И/ 2 ниже точки подвеса коромыс
ла. С помощью (8.96) и с учетом z = h/2 можно получить условие равновесия
крутильной системы в виде
т(д - ϋ0) = γ ((W„ - Wxx) sin 2ct + 2Wv cos 2a) - — (W „ sin a - Wzy cos a),
2
(8.10a)
где момент инерции
y = ^ _ m/2.
(8.106)
Здесь ϋ0 — нулевое направление коромысла в однородном гравитационном поле
(при незакрученной нити), at? — измеренное направление коромысла в азимуте
а.
Отношение J/ τ можно определить в лаборатории, измерив период колебаний
коромысла; величины т , / и h измеряют непосредственно. Для определения неиз
вестных Wyy — Wxxt Wxyy Wzxy Wjyy а также начального направления t?o необходи
мы измерения в пяти азимутах, по возможности равномерно распределенных в
горизонтальной плоскости. Как правило, прибор содержит две чувствительные
системы, которые параллельны, но развернуты на 180°. Из-за неизвестного на
чального направления для второй системы число неизвестных увеличивается до
Рис. 8.4.
Принцип крутильных весов Э твеш а.
284
Глава 8
шести; для их определения достаточны наблюдения в трех азимутах (0, 120,
240°).
На основании (6.33) можно заключить, что чувствительность системы можно по
высить, увеличив период колебаний, что, согласно (4.8), означает увеличение J и уменьше
ние т. Из-за большого периода колебаний время (зависящее от воздушного
демпфирования) установки коромысла в положение равновесия, при котором берут отсчет,
увеличивается. В серийных вариометрах период колебаний составлял 20 — 30 мин, а время
успокоения 40 — 60 мин. Отклонения в 1 0 ^ 15" соответствовали величине градиента
1 н с"2.
Основными источниками ошибок были быстрые изменения температуры и толчки,
вызванные порывами ветра; несколько меньше сказывались неупругие эффекты в крутиль
ной нити и сотрясения при транспортировке. Эти влияния уменьшали конструктивными
и методическими мерами. Крутильную нить изготовляли из платиново-иридиевого сплава
или вольфрама, температурные эффекты ослабляли многослойным металлическим покры
тием. Для предохранения от воздействия ветра и солнечного излучения прибор защищали
палаткой; для надежного определения дрейфа по окончании цикла наблюдений вновь на
блюдали в начальном азимуте. Как правило, угол закручивания определяли оптическим
методом с многократными отражениями светового пучка от зеркала на крутильной нити
либо применяли фоторегистрацию. Процесс измерений (дезарретирование, приведение в
исходное положение, регистрация, поворот в следующий азимут, арретирование) был ав
томатизирован .
Крутильные весы различных конструкций выпускались, в частности, фирмами «Аскания», Берлин, и «Suess», Будапешт. В 1950-х гг. дальнейшие разработки продолжались в
Геофизическом институте им. Роланда Этвёша, Будапешт [579]. Вариометр Е-54 имел сле
дующие характеристики: / = 0,2 м, т = 9 г, h = 0,3 м, J/τ = 32 000, период колебаний
20 мин. Перевозили прибор в двух ящиках (каждый по 50 кг).
Работа на пункте, включая установку прибора и его демонтаж, длилась 3 —
6 ч; при этом достигалась инструментальная точность ±1 — 3 н с ' 2. В зависи
мости от типа прибора, метода измерений (наблюдения в дополнительных ази
мутах, повторные измерения) и расстояния между пунктами за день удавалось
отнаблюдать 3 — 8 пунктов.
Из-за сильного влияния ближних топографических масс измерения с варио
метром рекомендуется выполнять лишь на равнинной или умеренно всхолмлен
ной местности. В радиусе 3 м вокруг прибора местность должна быть
практически плоской (влияние наблюдателя, стоящего вблизи прибора, может
превышать 10 н с ' 2). Для вычисления поправки за рельеф выполняли нивелирова
ние в радиусе 100 м вокруг пункта, влияние более далеких топографических масс
учитывали по топографическим картам (для расстояний до 5 —50 км вокруг
пункта); формулы поправок аналогичны (4.26), (4.27). Из-за неточностей поправ
ки за рельеф в величинах градиентов, подлежащих дальнейшей обработке, обна
руживались ошибки db 10 нс " 2.
С 1920 по 1940 г. крутильные весы (вариометры) широко использовались в локальных
и региональных геофизических съемках (разведка на нефть) на равнинных участках (США,
Северная Германия, грабен Верхнего Рейна), расстояния между пунктами обычно были
невелики (100 м — 1 км). Геодезические применения были редкими и состояли в интерпо
ляции уклонений отвеса, аномалий силы тяжести и определении локального геоида [И,
284]. Эти данные можно использовать и сейчас при составлении карт аномалий силы тя
285
Гравитационная градиентометрия
жести
(538].
С
1940
г. вариометр больше не мог конкурировать с относительными грави
метрами.
8.2.2.
Измерение градиентов с гравиметрами
Статическими пружинными гравиметрами можно измерять малые приращения
силЬ1 тяжести дg с ошибкой ±О, 1 мкм · с - 2 , а при высокоточных методиках с ошибкой ± 10 нм · с - 2 (разд. 6.6). При небольших расстояниях в плане и по вы
(2.39)
соте составляющие гравитационного градиента
(grad g{:::::: (дg/ дх,
дg/ ду,
можно представить в виде
дg/ Дz).
(8.11)
Для измерения вертикальной составляющей градиента дg/ Дz
меняют специальные штативы высотой до
8.5).
ными платформами (рис.
3м
имеет ошибку ±IОнс- 2
дg/ дН при
При обычной методике по внутренней сходимости
достигают точности в несколько десятков нс с гравиметром Ла Коста
=
с фиксированными или подвиж
[227). Среднее из 1О измерений
- Ромберга с электронной системой обратной связи
[569), см. также табл. 6.4 ..
2
При измерениях на земной поверхности сильно влияет притяжение топографических
масс в окрестностях пункта (разд. 8.1.2). В здании МБМВ (Севр, Франция) обнаружены
локальные вариации до 600 нс- 2 • В интервале высот О - 1,2 м выявлено изменение на
55 нс - 2 (рис. 8.6). Рисунок 8. 7 иллюстрирует зависимость величины дg/ дН от высоты
в многоэтажном здании. На высоте примерно 40 м нелинейность вертикального градиента
практически исчезает. На большей высоте он быстро приближается к нормальному. Изме
рения на высотах
0,5 -
1, 7
км в вертикальном профиле (аэрогравиметрия) выявили укло
нения в 1,5 OJo при среднем значении градиента 3073 нс - 2 [266].
Хорошие оценки горизонтального градиента
(2.40)
дают измерения силы тя
жести по профилям и площадям при расстояниях между пунктами
с учетом поправок за высоту
[774).
10 -
100
м
При этом может быть получена точность
± 10 нс- 2 [264). Горизонтальный градиент может иметь большие значения и не
линейность в зданиях и на постаментах гравиметрических пунктов, как показано
на рис.
8.8.
Рис.
8.5.
Штатив с подвижной подставкой для измерения вертикального гра
диента силы тяжести с гравиметром Ла Коста
тут геодезии, Ганновер) .
-
Ромберга (Инсти
286
Глава 8
Н(м)
Высота(м)
60 -
40 -
20- Уровень
земли «
_L
2500
Рис. 8.6
Рис. 8.7
_L
_L
2700
_I__ I__^
2900
{н с -2 }
(левый). О статочны е приращения силы тяжести близ уровня земли после учета вертикально
го градиента силы тяж ести — 2940 н м - с ' 2/ м , М БМ В, Севр, пункт АЗ [567].
(правый). Определение вертикального градиента силы тяжести в здании Ганноверского уни
верситета (материал из базы данных И н ститута геодезии, Ганновер).
0,5 м
Рис. 8.8.
Приращения силы тяж ести (нм с - 2 ) на м он ол ите А (М БМ В,
Севр) относительно пункта АЗ [567].
8.3.
Гравитационная градиентометрия
на подвижном основании
8.3.1.
Теоретические основы
Измерения градиентов силы тяжести на подвижном основании (автомашине, са
молете, спутнике) позволяют ускорить локальные, региональные и глобальные
исследования гравитационного поля Земли; спутниковую градиентометрию мож
но использовать и для изучения других тел Солнечной системы. Осреднение по
времени и измерения на больших высотах позволяют устранить короткопериоди
ческие возмущения, вызванные рельефом.
Градиентометр, не связанный с Землей, измеряет компоненты тензора V гра
диентов силы притяжения
/ Vxx К*,
у = grad b = УуХ Vyy
(8.12а)
\ Vzx Vv
Гравитационная градиентометрия
287
что соответствует (8.3). Если полный тензор измерен на профиле, то гравитаци
онное ускорение в точке Р получается интегрированием по пути РоР ;
t
grad V = b = bo + j Vfdt,
(8.126)
'o
где bo — ускорение в начальной точке Ро в момент to. Чтобы вычислить г = dx/
dt, необходимо знать пройденный путь г = г(/). Чем выше требования к точнос
ти градиентометрических данных, тем точнее должны определяться координаты.
Разработаны итерационные методы для определения орбит спутников и их ме
стоположения и одновременно гравитационного тензора [573].
В отличие от измерений на неподвижном основании при работе в динамиче
ском режиме приборная топоцентрическая система координат движется относи
тельно системы координат, фиксированной в пространстве; при этом возникают
линейные ускорения подвижного носителя и его повороты [481]. В соответствии
с (7.31) связь ускорения в инерциальной (/) и топоцентрической (/) системах коор
динат описывается выражением
( R 'r 'r , = г, + 20г, + ΩΩγ, + Пт, + (R,·)" ‘а,.
(8.13)
Здесь, как и ранее, R,- — матрица поворота для перехода от топоцентрической
к инерциальной системе. Матрица
α>ν \
-ω χ
(8.14)
ο /
теперь содержит составляющие угловой скорости подвижной системы коорди
нат. Таким образом, возникают члены, описывающие кориолисово и центробеж
ное ускорения, а также вращательное ускорение, поскольку величина В не будет
пренебрежимо малой. И наконец, а,· — это вектор линейного ускорения начала
координат.
По аналогии с (7.29) введем для измеряемой величины вектор удельной силы
f. Получим
0
ωζ
—ωγ
-ω ζ
0
ω*
f, = if/ + 2Ωγ; + ΩΩγ, + Ьт, - b, + (R,·) - ‘a,.
(8.15)
Величина а/ является равнодействующей гравитационной силы Ьс в центре масс
и других внешних сил а* (торможения спутника в атмосфере, давления солнечно
го излучения):
а/
=
(be
+
a ) i .
Если в соответствии с (8.4) разложить вектор Ь/ в ряд и отнести его к центру
масс, то удельная сила для системы с обратной связью (г/ = г/ = 0) будет описы
ваться соотношением
f, = ( - у с + ΒΩ + Й)г/ + а/\
(8.16)
Образуя, согласно (8.5), разность ускорений, измеренных парой акселеромет
ров, получим основное уравнение градиентометрии на подвижном основании;
Ati = (f2 - fi)/ = ( - V c + ΒΩ + Ω)Δγ/.
(8.17)
288
Глава 8
Таким образом, влияние негравитационных поступательных ускорений в разности
исключается. Если же градиентометр стабилизирован в инерциальном простран
стве, то Ω = Ω = 0 и члены, описывающие вращения, также исключаются. В локально-уровенных измерительных системах, которым отдается предпочтение в
настоящее время, для разделения гравитационного тензора и членов, связанных
с вращательными движениями, используют структурные характеристики тензо
ров в (8.17) совместно с дополнительными данными об ориентации (гиро
система).
В различных известных конструкциях градиентометров используется разное
число пар акселерометров с различным расположением; измеряют до девяти
компонент тензора. Разрабатываются традиционные электронные схемы, а так
же схемы, использующие эффект сверхпроводимости. Измерения выполняются
со сравнительно большой частотой (например, через 1 с), перед последующей об
работкой результаты осредняются (например, за 10 с).
Чувствительность акселерометров при наземных измерениях должна быть
порядка 101— 10° нс-2, а на спутниках 10~2 — 10“ 3 нс“ 2. При осреднении за
10 с ожидаемая точность соответственно будет ±3 — 0,3 н с ' 2 и ±3 · 10“ 3 —
3 · 1 0 ' 4 н с ' 2. Поскольку величины градиентов и возмущающих ускорений вели
ки, необходимо, чтобы приборы имели большой динамический диапазон. И нако
нец, повышенные требования предъявляются к калибровке (стабильность во
времени) и надежности учета дрейфа. Из-за большого влияния близрасположенных масс системы (до 100 н с ' 2) должны вводиться соответствующие поправки.
При измерениях на спутниках высокая чувствительность системы к ориентации
в пространстве и угловым скоростям требует, чтобы ориентация учитывалась
с ошибкой ±3 · 10“ 7 рад, а скорость ее изменения — с ошибкой
±3 · 10“ 9 рад с ' 1, тогда влияние указанных эффектов на измерения градиентов
уменьшится до 1 0 ' 4 н с ' 2. Из-за большого потока информации при измерениях
(выходной сигнал градиентометра, информация о местоположении и ориентации,
время) обработка в реальном масштабе времени сводится лишь к накоплению
данных и первичному контролю. Последующая обработка предусматривает кали
бровку, введение поправок, фильтрацию данных и их интегрирование для получе
ния аномалий силы тяжести. Для измерений на самолете или спутнике
необходимо также аналитическое продолжение данных на земную поверхность.
Градиентометры для измерений на подвижном носителе стали разрабатывать
с середины 1960-х гг. [204]. Работы с ними в основном не вышли за рамки лабо
раторных испытаний, хотя одна из самолетных систем готова к проверке на кон
трольном полигоне (разд. 8.3.2). Применение спутниковых градиентометров
станет возможным в середине 1990-х гг. (разд. 8.3.3).
8.3.2.
Наземная и аэроградиентометрия
Фирма «Белл» (Bell Aerospace-Textron, Буффало, Нью-Йорк) разработала систему
для градиентометрической съемки GGSS, предназначенную для работы на авто
машине или самолете. В настоящее время (1987 г.) система проходит испытания
[166, 229].
Гравитационная градиентометрия
289
Ось
вращения
Рис. 8.9.
Принцип вращ ающегося гравитационного градиенто
метра [336].
Основными частями системы являются три ортогональных гравитационных
градиентометра, установленные с наклоном в 35° на трехосной гироплатформе
для непрерывной ориентации в топоцентрической системе координат, связанной
с гравитационным полем. Каждый градиентометр содержит две пары акселеро
метров фирмы Белл (расстояние 0,1 м), установленных ортогонально по краю
диска (диаметр 0,2 м); их измерительные оси ориентированы по касательной к
диску (рис. 8.9). Ускорение пробной массы, укрепленной на маятниковом подвесе,
измеряется двумя кольцевыми емкостными датчиками, расположенными по обе
стороны от этой массы. Выходной сигнал датчиков усиливается и преобразуется
в ток. Ток подается в катушку для возвращения пробной массы в нулевое поло
жение. Величина тока является мерой ускорения [336]. Диск медленно вращается
(0,25 Гц), что порождает вынужденные гармонические колебания, при этом вы
ходной сигнал градиентометра модулируется с частотой, равной удвоенной ча
стоте вращения. При совместном движении и демодуляции выходных сигналов
компенсируются такие систематические ошибки, как дрейф, различия масштаб
ных коэффициентов, неортогональность осей датчиков. Для каждого градиенто
метра формируется линейная комбинация выходных сигналов акселерометров.
Если измерительная система определенным образом ориентирована относитель
но приборной системы координат (ось ζ совпадает с осью вращения), то справед
ливо следующее выражение, см. (8.9а):
(А + /г) - Иъ + Λ) = KWyy - Wxx) sin 2ώΐ + 2lWxy cos 2ωί,
(8.18)
где ω — угловая скорость вращения диска. Различные линейные комбинации вы
ходных сигналов трех градиентометров позволяют получить все компоненты
тензора градиентов. Поступательные возмущающие ускорения какого-либо влия
ния не оказывают.
Система фирмы Белл содержит также приемоиндикатор спутниковой системы
GPS, обеспечивающий в сочетании с акселерометрами и гироплатформой инфор
мацию о местоположении и ориентации, блок регистрации данных, компьютер
и источник питания (рис. 8.10). Система с кондиционером предназначена для ра
боты в автомобильном фургоне, который в свою очередь можно разместить в
самолете (С-130) для измерений в воздухе.
Для обработки результатов можно применять различные методы, однако при
выполнении обширных программ большой объем данных требует совершенство-
290
Глава
Рис.
8
8.10. Платформа геодезического гравитационного градиентометра (GGSS), установленная на стол
Скорсби для лабораторных калибровок (фотография предоставлена фирмой «Белл» и Геофи
зической лабораторией ВВС США).
вания
(разд.
нии
стандартных
4.3.2) [337).
выходного
зультатов
на
методов
(например,
среднеквадратической
коллокации)
Окончательная обработка результатов заключается в определе
сигнала
отсчетную
градиентометров,
поверхность
и
интегрировании,
совместном
редуцировании
использовании
с
ре
наземными
данными.
Оценить точность измерений можно по результатам их моделирования и по моделям
ошибок [335]. При величине случайной ошибки
секундных интервалах оцениваются ошибкой
40
км/ч (автомобиль) или
ственно с шагом
100
мили
± 10 ±3-
25 нс - 2 скользящие средние на 108 нс - 2 • При скорости движения
400 км/ч (самолет) выходная информация выдается
1 км. Чтобы распределение ошибок измерений было
соответ
наиболее
благоприятным, применяемая схема предполагает наблюдения по прямолинейным профи
лям (длина
< 100 км),
образующим сеть с опорой на исходные пункты. При площадных
600 м, точ
10 мкм · с - 2 (гравитационное
возмущение) и ±0,2 п (уклонение отвеса) или меньше [105, 341]. Из измерений (ошибка
± 1 нс- 2 ) на высоте 10 км и при расстоянии между профилями 0,3° среднее значение ано
малий по трапециям 5' х 5' и 15' х 5' можно определить с ошибкой ± 30 мкм · с - 2 •
Программа испытаний была выполнена в 1987 r. [336].
съемках (расстояние между профилями
5
км), когда самолет летит на высоте
ность точечных результатов характеризуется ошибками ±
Спутниковая градиентометрия
8.3.3.
В настоящее время разрабатываются гравитационные градиентометры, которые
основаны на традиционных или сверхпроводящих устройствах и будут установле
ны на спутниках, планируемых на 1990-е
rr. [758).
Спутники будут запущены на
практически круговые полярные орбиты с высотами от
что за
1°
х
1°
6
и
160 до 250
км. Полагают,
мес работы средние значения аномалий силы тяжести (по трапециям
0,5°
х
0,5°)
при разрешении
100 -
50
км будут получены с ошибкой
Гравитационная градиентометрия
291
±20 — 50 мкм с " 2. Приведем примеры разработок, основанных на разных при
нципах.
Французская программа GRADIO (Национальное бюро по аэродинамическим
исследованиям и Исследовательская группа по космической геодезии) предусмат
ривает создание градиентометра на базе традиционной технологии [25]. В этом
приборе имеется несколько микроакселерометров, которые расположены симмет
рично относительно центра масс по углам многоугольника так, что можно опре
делить полный гравитационный тензор. Трехосные электростатические
акселерометры должны иметь разрешение 10“ 12 м · с “ 2. При максимальных воз
мущающих ускорениях около 10“ 4 м · с “ 2 (на высоте 200 км) прибор должен
иметь динамический измерительный диапазон 108; для непрерывного контроля
и калибровки акселерометров предусмотрена бортовая калибровочная система.
Примером сверхпроводящего градиентометра является прибор Пайка, со
зданный в Университете штата Мэриленд, США [520]. Основными элементами
этой невращающейся системы служат сверхпроводящие акселерометры. Акселе
рометр содержит пробную массу на мягком подвесе, магнитный преобразователь
и усилитель с низкими шумами (сверхпроводящее квантовое интерференционное
устройство сквид — SQUID) в состоянии сверхпроводимости. Магнитное поле,
создаваемое катушками преобразователя, модулируется при движении пробной
массы, в сквиде происходит детектирование и усиление модулирующего сигнала,
который затем преобразуется в выходное электрическое напряжение.
Сверхпроводящая схема позволяет непосредственно суммировать и вычитать
сигналы акселерометров. Это в свою очередь дает возможность измерять компо
ненты тензора градиентов силы тяжести, а также линейные и угловые ускорения
носителя, необходимые для вычисления поправок. В системах с продольным рас
положением акселерометров сигналы пропорциональны диагональным элемен
там Vu тензора и линейным (поступательным) ускорениям. Системы же с
перекрестным расположением акселерометров дают недиагональные элементы и
угловые (вращательные) ускорения (рис. 8.11). Объединяя такие акселерометры
в различные конфигурации, можно сконструировать градиентометры для опреде
ления диагональных элементов тензора или полного тензора. Стремятся полу-
Сверхпроводящий
квантовый
Р и с. 8 .1 1 . П р и н ц и п с в е р х п р о в о д я щ е г о г р а в и т а ц и о н н о г о г р а д и е н т о м е т р а с п р о д о л ь н ы м (сл ев а) и п ере
крестны м
(справа) р а сп о л о ж е н и ем
датчиков
[520].
292
Глава 8
чить чувствительность порядка 1 0 "4 нс-2; вероятно, будет возможно повысить
ее до 1 0 " 6 н с"2, если подвесить пробную массу в силовом поле.
Работа при сверхнизких температурах (под этим сейчас понимают температуру ниже
4,2°К: точки кипения жидкого гелия при давлении в одну атмосферу) дает реальные пре
имущества (разд. 10.1.5). В этих условиях коэффициент температурного расширения, со
противление и емкость приближаются к нулю. Поэтому по сравнению с комнатной
температурой ослабевают термомеханические процессы, определяющие дрейф, деформа
цию и диссипацию энергии. Явление сверхпроводимости в электрических проводниках
можно использовать для создания окружающей среды прибора, защищенной от электро
магнитных воздействий. И наконец, сверхтекучий жидкий гелий, используемый для охлаж
дения, обладает очень высокой теплопроводностью, что обеспечивает однородное
распределение температуры внутри прибора. Сквид-усилители можно использовать для
регистрации относительных смещений пробной массы с ошибкой 10"15м. В этом они
сходны со сверхпроводящими объемными резонаторами, которые также находятся сейчас
в стадии исследований (преобразователь смещения в частоту, выходной сигнал — сдвиг
частоты). Таким образом, градиентометры будут иметь базу 0,1 м, чувствительность око
ло 3 х 10"4 нс-2 и большой динамический диапазон.
При современной технологии и использовании специальных сосудов Дьюара гелий
можно поддерживать в жидком состоянии в течение 70 — 90 суток, создаются устройства
для более длительного хранения. Эту проблему можно решить также, используя холо
дильные установки замкнутого цикла или применяя материалы, обладающие сверхпрово
димостью при более высокой температуре (разд. 10.1.5).
Во второй половине 1990-х гг. НАСА планирует программу измерений со сверхпрово
дящим гравитационным градиентометром (МСГГ — SGGM) [521]. Комплект прибора
МСГГ, по всей видимости, будет состоять из трехосного сверхпроводящего градиентомет
ра, объединенного с 6-осным сверхпроводящим акселерометром и 6-осным вибратором,
предназначенным для активного управления платформой. Порог чувствительности гради
ентометра составляет 10"4 нс-2; чувствительность акселерометра к линейным ускорениям
равна 10" 12 м с“ 2, а к угловым ускорениям — 10“ 11 рад с -2. Прибор будет помещен на
спутнике, свободном от влияния атмосферного торможения (круговая близполярная орби
та, высота 200 км), и предназначен для глобального изучения гравитационного поля с точ
ностью 20 — 30 мкм · с -2 и разрешением 50 км.
9
Гравиметрические съемки
Гравиметрические съемки различают по охватываемой площади, по расстояниям
между пунктами и точности измерений, а также в зависимости от их назначения.
Строго говоря, измерения силы тяжести должны быть отнесены к мировой гра
виметрической системе (разд. 9.1). Гравиметрические сети образуют мировую, ре
гиональные и локальные системы опорных гравиметрических пунктов (разд. 9.2).
Для площадных съемок, выполняемых в целях геодезии, геофизики и геодинами
ки, эти пункты служат исходными (разд. 9.3). Имеющиеся гравиметрические дан
ные наряду с другой измерительной информацией накапливаются в банках
данных и отображаются на гравиметрических картах (разд. 9.4).
Ссылки на источники информации о выполнении и обработке гравиметриче
ских съемок можно найти в геодезической и геофизической литературе, например
[462, 505, 695].
9.1.
9.1.1.
Гравиметрические референцные системы
Международная гравиметрическая стандартизационная
сеть 1971 г. (МГСС-71)
При гравиметрических съемках больших территорий необходимо, чтобы грави
метрические данные не содержали заметных систематических ошибок. К числу
последних относятся, в частности, ошибки в абсолютном значении силы тяжести
и долгопериодические эффекты, влияющие на относительные измерения, напри
мер ошибки калибровки. Поэтому МАГ уже 100 с лишним лет проявляет боль
шую активность в создании глобальных гравиметрических референтных систем
[700] (разд. 1.3.2).
Потсдамская гравиметрическая система существовала с 1909 по 1971 г. и сыграла
важную роль [563]. Она основывалась на абсолютном определении силы тяжести, выпо
лненном на рубеже 19 — 20 вв. с оборотными маятниками в Потсдамском геодезическом
институте; для пункта наблюдений было получено 9,81274 м с-2 (разд. 5.3.4). Эта система
была распространена по всему миру пересчетом ранее полученных величин g и связями
с относительными маятниковыми приборами, выполнявшимися вплоть до середины 20 в.
До середины 1960-х гг. определенные таким образом национальные опорные пункты слу
жили исходными для региональных съемок с маятниками и гравиметрами (разд. 9.2.6).
После 1945 г. наблюдатели в западных странах вместо Потсдама использовали пункт БадГарцбург в Западной Германии. Значения силы тяжести в Потсдамской системе были за
вышены примерно на 140 мкм с -2, что было вызвано ошибкой в абсолютных измерени
294
Глава 9
ях; кроме того, связи с Бад-Гарцбургом содержат ошибку примерно ± 1 0 м к м с ~ 2 [244].
Систематические ошибки относительных маятниковых измерений могут вызвать искаже
ния в региональных гравиметрических сетях до 200 мкм с -2, а также долгопериодические
калибровочные ошибки в несколько десятков мкм с -2 на 10 000мкм-с~2 (разд. 9.1.2).
В 1950 — 1970 гг. при сотрудничестве разных стран была создана новая миро
вая гравиметрическая сеть; эта сеть была принята МГГС (резолюция №11,
Москва, 1971 г.) как Международная гравиметрическая стандартизационная
сеть 1971 г. (МГСС-71). Она заменила Потсдамскую систему [474].
Общий масштаб МГСС-71 задан десятью абсолютными измерениями
(±0,1 — 1 мкм с -2) на 8 пунктах с транспортабельным прибором Хэммонда и
Фаллера с несимметричной схемой измерений и стационарными приборами. Кука
в Теддингтоне и Сакумы в Севре (разд. 5.2.1 — 5.2.3). Кроме того, масштаб сети
обеспечивался примерно 1200 последними относительными маятниковыми изме
рениями (± 2 — 4 мкм-с-2) (разд. 6.1.2), результаты которых в целом по земно
му шару согласуются с абсолютными значениями в пределах 2 х 10“ 5. Сеть
МГСС-71 в основном образована примерно 24 000 гравиметровых измерений
(±0,2 — 2 мкм-с-2). Эти измерения были выполнены преимущественно с грави
метрами Ла Коста — Ромберга; также использовались гравиметры Уэстерн, Се
верная Америка и Аскания, особенно в Евро-Африканском регионе (разд. 6.5.2 —
6.5.4). На рис. 9.1 показано положение пунктов абсолютных измерений, а также
основные гравиметровые связи большой протяженности с большими величинами
Ag. МГСС-71 содержит 1854 пункта, из которых 500 являются основными;
остальные пункты — преимущественно пункты-спутники (пункты на аэродромах
и другие). Значения g определялись из уравнивания, их точность характеризуется
ошибкой менее ±1 мкм с -2. Особенно хорошо определены Американский, ЕвроАфриканский и Западно-Тихоокеанский гравиметрические базисы, простирающие
ся с севера на юг (разд. 6.4.5). В отдельных местах возможны систематические
ошибки масштаба ± 1 0 -4 и более [707].
Необходимо отметить, что после исключения гравиметрических земных при
ливов к значениям g в системе МГСС-71 был вновь добавлен постоянный во вре-
Рис. 9.1.
М е ж д у н а р о д н а я г р а в и м е т р и ч е с к а я с т а н д а р т и з а ц и о н н а я с е т ь 19 7 1 ( I G S N 7 1 ) ; п у н к т ы - а б с о л ю т
ных определений
и ч асть грав и м етр и ч еск и х связей
[474].
Гравиметрические съемки
295
мени член MO/SO (поправка Хонкасало [309]); поэтому опубликованные данные
содержат этот зависящий от широты член. Однако в соответствии с решением
МАГ (резолюция № 15, Канберра, 1979) влияние приливов должно быть полнос
тью исключено из всех геодезических измерений. Чтобы удовлетворить это тре
бование, в соответствии с (3.23) в данные МГСС-71 необходимо ввести поправку:
5g(M0/S0) = 0,37 (1 - 3 sin2^>) м км -с"2,
где φ — геоцентрическая широта.
Создание МГСС-71 означало возникновение глобальной гравиметрической ре
ференцией системы, обеспечивающей достаточную точность при вычислении ано
малий силы тяжести. Имеющиеся и новые гравиметрические съемки должны
быть отнесены к этой системе, что способствует ее контролю и дальнейшему
развитию (разд. 9.1.2). Строго говоря, МГСС-71 нельзя использовать для изуче
ния временных изменений силы тяжести. К ее недостаткам относятся неравно
мерное распределение пунктов по земному шару, а также увеличивающиеся
потери пунктов, расположенных в небезопасных местах (вблизи дорог, в аэропор
тах). Также нарушает сеть ненадежное закрепление и содержание пунктов.
9.1.2.
Гравиметрические связи с МГСС-71
Региональные гравиметрические сети можно привязать к МГСС-71 различными
способами.
Для более старых сетей рекомендуется пересчет имеющихся гравиметрических
данных, обычно заданных в Потсдамской системе. При таком пересчете исполь
зуют определенное число равноценных пунктов, для которых сила тяжести из
вестна в обеих системах. В большинстве случаев достаточно линейное
преобразование по формуле
^(МГСС-71) = #(Потсд.) + а + 6 (£(Потсд.) - g0).
(9.1)
Здесь go —некоторое постоянное значение силы тяжести (наименьшее или среднее
значение для преобразуемой сети). Если имеется более двух равноценных пунк
тов, то неизвестные а (смещение общего уровня, постоянная поправка) и Ъ
(масштабный коэффициент) находят из уравнивания.
Более современные гравиметрические сети, связанные с пунктами МГСС-71,
также можно перевести в эту мировую систему, выполнив их повторную обра
ботку. Результаты измерений в сети уравнивают совместно с величинами силы
тяжести в МГСС-71; последние представляют собой квазиизмерения, которые ис
пользуются с соответствующими стандартными уклонениями (для приведения к
реальной точности их необходимо умножить на V2) и в некоторых случаях кова
риациями ошибок (разд. 9.2.4).
В качестве примера приведем преобразование гравиметрической сети 1962 г. Федера
тивной Республики Германии (DSN62) в систему МГСС-71 (разд. 9.2.6). Параметры преоб
разования определены из уравнивания, а формула преобразования имеет вид
^(МГСС-71) = g(DSN62) - 150,6 + 29 · 10-5(s(DSN62) - 9806330) мкм-с-2.
296
Глава 9
Остаточные расхождения из уравнивания не превышают 1 мкм с -2 [149]. Примером пре
образования опорной гравиметрической сети региона в МГСС-71 является Латиноамери
канская гравиметрическая стандартизационная сеть 1977 г. (LAGSN77) [445].
С середины 1970-х гг. региональные гравиметрические сети стали создавать,
применяя совместно транспортабельные абсолютные гравиметры и относитель
ные гравиметры, имеющие ошибки ±0,1 — 0,2 м км -с"2. В таких сетях при срав
нениях с МГСС-71 могут обнаруживаться расхождения до 1 мкм-с " 2 и различия
в масштабе в несколько единиц 10 " 4. Подобные сети, уравненные как свободные,
можно считать равноценными МГСС-71, если они связаны с достаточным чис
лом пунктов абсолютных определений (решение Международной гравиметриче
ской комиссии 1979 г.). При этом исключается необходимость пересчитывать
такие сети для объединения с сетью МГСС-71, что могло бы снизить качество
новой сети.
9.1.3.
Мировая абсолютная гравиметрическая сеть
В настоящее время проектируется сеть пунктов абсолютных измерений высокой
точности ( ± 0,1 мкм с -2 и точнее), распределенных по всему земному шару; из
мерения в сети будут регулярно повторяться (через несколько лет). Основное на
значение такой сети — слежение за долговременными изменениями силы тяжести
на обширных территориях (разд. 3.4.4). Кроме того, пункты этой сети могут ис
пользоваться для контроля региональных гравиметрических сетей и служить
опорными пунктами для испытаний и сравнения разных абсолютных грави
метров.
Для выбора и закрепления пунктов абсолютных определений существуют сле
дующие критерии [726]:
— геологическая и сейсмическая стабильность;
— гидрологическая стабильность (малые колебания уровня грунтовых вод, уда
ленность от рек и побережий на несколько километров);
— малые искусственные микросейсмы;
— расположение пункта в специальном помещении на нижнем этаже капитально
го здания, электроснабжение;
— стабильное основание, не подверженное наклонам (возможно, изолированный
монолит), малые и короткопериодические изменения температуры;
— легкая доступность (связь с транспортными магистралями) и возможность
контактов с местными учреждениями (геодезическая или геологическая служ
ба, научные институты);
— связь с геодезическими станциями наблюдений ИСЗ и пунктами национальных
геодезических сетей для контроля плановых и высотных координат, а также
силы тяжести;
— местный геометрический контроль плановыми и высотными определениями;
— местный гравиметрический контроль привязкой к пунктам-спутникам
(разд. 9.2.1).
Пункты должны быть закреплены постоянными центрами, для них необходи
мо составить полное описание (разд. 9.4.1). Параметры, необходимые для выво
да редукций, также должны быть определены и опубликованы (разд. 9.2.3).
Гравиметрические съемки
297
Предложение Леваллуа в 1971 г. [410] о создании мировой абсолютной гравиметриче
ской сети было развито в нескольких резолюциях МАГ. Учитывая геодинамические явле
ния в разных регионах земного шара, специальная исследовательская группа 3.87 МАГ
разработала проект Международной опорной сети абсолютных определений (IAGBN).
Предполагается, что сеть будет содержать 36 пунктов в разных районах Земли, а также
дополнительные пункты [60]. В настоящее время начинаются работы по созданию такой
сети силами различных организаций; в сеть должны входить и пункты непрерывных на
блюдений (разд. 5.2.2).
9.2.
Гравиметрические сети
9.2.1.
Назначение, выбор пунктов
Гравиметрические сети создаются для образования систем опорных пунктов; эти
пункты должны быть закреплены центрами. Значения силы тяжести на опорных
пунктах определяют из измерений (разд. 9.2.2) с последующей их обработкой
(разд. 9.2.4). Координаты пунктов, значения силы тяжести и другие необходимые
данные должны быть занесены в описание (формуляр) пункта и включены в базу
гравиметрических данных (разд. 9.4.1, 9.4.2).
Опорные пункты служат основой для детальных гравиметрических съемок,
как профильных, так и площадных; повторные измерения на этих пунктах ис
пользуются для мониторинга временных вариаций силы тяжести. Различают сле
дующие типы сетей:
— мировые гравиметрические сети с расстояниями между пунктами от несколь
ких сотен до нескольких тысяч километров. Они являются главными элемен
тами референцных гравиметрических систем и создаются по международным
программам (разд. 9.1);
— региональные сети с расстояниями между пунктами от нескольких километров
до сотен километров. Они создаются как национальные сети и, как правило,
являются фундаментальными гравиметрическими сетями с сетями сгущения
(разд. 9.2.6);
— локальные гравиметрические сети с расстояниями от нескольких сотен метров
до десятков километров. Их создают преимущественно для целей геофизики
и геодинамики (разд. 9.3.1, 10.1.1).
По возможности должна быть обеспечена долговременная сохранность опор
ных пунктов мировых, региональных и геодинамических сетей (несколько десяти
летий и более), а при повторных измерениях условия наблюдений должны
обеспечивать достижение точности не хуже 0,01 — 0,1 м км -с"2.
Некоторые основные положения, касающиеся выбора опорных гравиметриче
ских пунктов и их взаимного расположения, можно сформулировать так:
— равномерное, насколько возможно, расположение опорных пунктов на терри
тории работ, исключением могут быть локальные геодинамические сети;
— мировые и региональные сети должны содержать определенное число пунктов
для непрерывных и повторных наблюдений;
— геологическая, сейсмическая и гидрологическая стабильность в окрестностях
пунктов;
298
Глава 9
— стабильное основание для установки прибора (наземные основания в зданиях,
пилоны, скальные основания, бетонный пол), закрепление пункта; выгодно
использовать существующие центры плановых или высоких геодезических
сетей;
— определение 2 —3 пунктов-спутников ( ± 0 ,0 1 — 0,1 мкм-с-2) для контроля
неизменности основного пункта относительно фундаментальной гравиметриче
ской сети (расстояние до спутников от нескольких сотен метров до нескольких
километров, Ag < 100 мкм с -2);
— определение плановых координат и высот относительно пунктов националь
ных геодезических сетей;
— плановая ( ± 1 см) и высотная ( ± 1 мм) привязка к ближайшим геодезическим
пунктам.
Для пунктов, на которых предстоят наблюдения с абсолютными гравиметра
ми, должны соблюдаться дополнительные условия (внутреннее устройство зда
ния, подвод электропитания и др.). В сетях сгущения и при пониженной точности
работ требования к выбору опорных пунктов могут быть ослаблены. Однако
и в таких сетях необходимо свести к минимуму влияние близких притягивающих
масс, чтобы полученные аномалии силы тяжести были представительными для
большой территории (разд. 9.3.1).
9.2.2.
Измерения
Гравиметрические сети создают как абсолютными, так и относительными грави
метрами.
По затратам средств и времени на определение одного пункта с одинаковой точнос
тью (имея в виду необходимое число повторных измерений) в настоящее время (1987 г.)
абсолютные и относительные измерения соотносятся как 10:1. В работах по абсолютным
определениям используют около 10 транспортабельных приборов, тогда как число приме
няемых пружинных гравиметров составляет несколько тысяч.
Гравиметры до начала измерений в сети должны пройти исследования и кали
бровку. К ним относятся:
— лабораторные исследования для определения зависимости показаний прибора
от атмосферного давления, температуры, магнитного поля, сотрясений и дру
гих факторов;
— изучение характера смещения нуль-пункта пружинных гравиметров
(разд. 6.6.3);
— калибровка стандартов длины и времени у абсолютных гравиметров
(разд. 5.1.4);
— калибровка пружинных гравиметров на калибровочной системе, диапазон
которой превышает изменение силы тяжести на территории съемки
(разд. 6.4.5);
— сравнение различных приборов из измерений на одних и тех же пунктах или
из измерений одних и тех же приращений силы тяжести.
Такие исследования позволяют:
— оценить точность, достижимую с данным прибором;
Гравиметрические съемки
299
— выявить источники систематических ошибок, которые необходимо учитывать
поправками или инструментальными мерами;
— сделать заключение о частоте повторных измерений в сети.
Мировые и региональные фундаментальные гравиметрические сети, а также
геодинамические сети должны иметь высокую точность. Для таких сетей нужны
избыточные данные из повторных наблюдений при различных условиях (разные
гравиметры, различный характер внешних влияний). При этом
— выявляются грубые и систематические ошибки;
— влияние остаточных систематических ошибок приобретает случайный
характер;
— оценка точности дает величины ошибок, близкие к реальным.
Теория оптимизации помогает составить рациональный график построения се
тей (разд. 9.2.5).
При создании фундаментальных гравиметрических сетей все больше исполь
зуют абсолютные гравиметры (сейчас расстояния между пунктами 100 —
300 км). Наряду с ними применяют прецизионные пружинные гравиметры (на
пример, гравиметры Ла Коста — Ромберга), при этом рекомендуется немедленно
после измерения на определяемом пункте возвращаться на исходный пункт (раз
ностный способ); при транспортировке по воздуху удобен метод звезды
(разд. 6.6.3). Таким образом создают сети, состоящие из треугольников и четы
рехугольников. Абсолютные измерения и связи с перекрытиями стабилизируют
сеть, особенно на краях.
Сочетание абсолютных и относительных измерений позволяет калибровать гравимет
ры и осуществлять взаимный контроль приборов. Более того, такое сочетание позволит
уточнить абсолютный масштаб (уровень) силы тяжести в сети. Например, если 4 пункта
абсолютных определений (±0,1 мкм-с” 2, систематические ошибки отсутствуют) связаны
«безошибочно» измеренными приращениями силы тяжести, то ошибка масштаба силы
тяжести уменьшается и становится равной ±0,1/\/4 = ±0,05 мкм-с” 2.
Измерения в сетях более низких классов выполняют относительными грави
метрами, а пункты этих сетей часто располагают между пунктами фундамен
тальной сети в виде ходов, измерения выполняют методом профилей или
ступенчатым методом (разд. 6.6.3). Контроль смещения нуль-пункта следует осу
ществлять через несколько часов. Примеры фундаментальной сети и сетей сгуще
ния можно найти в разд. 9.2.6 и 9.3.6.
В дальнейшем геодинамические сети будут создаваться не только относитель
ными измерениями, но и абсолютными. Абсолютные определения в таких сетях
позволят контролировать изменения силы тяжести за длительные промежутки
времени (разд. 10. 1. 1).
Возможная точность измерений сильно зависит от внешних условий. Неблагоприят
ные условия (очень высокая или низкая температура, быстрые ее изменения, ветер, силь
ные микросейсмы, плохие условия транспортировки и т.п.) могут настолько снизить
точность, что потребуются дополнительные измерения. Иногда для принятия мер полезен
анализ качества (разд. 9.2.5). Если на каждом пункте пользоваться одной и той же мето
дикой измерений (т.е. последовательностью и длительностью операций), отчасти будет ис
ключаться влияние систематических ошибок данных измерений.
300
Глава 9
Измерения силы тяжести частично автоматизируют благодаря цифровой ре
гистрации и предварительной обработке данных. Обработав полученные на
пункте результаты (вычисление среднего и т.д.), можно оценить полученную точ
ность и выявить грубые ошибки. Из-за большого потока поступающей информа
ции наиболее современные абсолютные гравиметры всегда снабжают системой
сбора и обработки данных (разд. 5.2.3). Относительные гравиметры имеют та
кие регистрирующие устройства лишь в редких случаях.
В Национальном географическом институте, Брюссель [539], была разработана и ис
пользовалась цифровая система сбора и первичной обработки данных для гравиметра Ла
Коста — Ромберга. Она состоит из цифрового блока регистрации и обработки, установ
ленного на общем основании с гравиметром. Кроме того, имеются блок регистрации вре
мени, источник питания и цифровой кассетный накопитель. Блок регистрации и обработки
фильтрует выходной электрический сигнал гравиметра осреднением во времени, записыва
ет внешнюю информацию (отсчет по микрометру, время, атмосферное давление, темпера
туру, номер пункта) и контролирует источник питания. В полевых условиях при
осреднении данных, полученных в 10-секундных интервалах, ошибка составила
±5 нм-с~2. Модификацию такой системы можно использовать для регистрации земных
приливов (разд. 10.1.4). Представителем кварцевых пружинных гравиметров с микропро
цессором является гравиметр Синтрекс CG-3 (разд. 6.5.3).
9.2.3.
Приведения отсчетов и поправки
Прежде чем приступить к обработке сети, в отсчеты по гравиметру следует вве
сти различные поправки. Таким образом осуществляют по крайней мере прибли
женный перевод отсчетов в единицы ускорения силы тяжести, учитывают
систематические инструментальные влияния, а также изменения силы тяжести во
времени и, наконец, относят данные к исходному пункту.
При абсолютных измерениях сам процесс обработки единичного пуска уже
учитывает данные калибровки. Отсчеты по относительному гравиметру преобра
зуют в величины силы тяжести в помощью калибровочной функции, полученной
фирмой—изготовителем прибора, либо с дополнительными поправками, опреде
ляемыми пользователем (разд. 6.4.5). Инструментальные поправки в абсолют
ные измерения учитывают в настоящее время конечность скорости света
(разд. 5.1.6). Для гравиметров с металлической пружиной можно построить зави
симость отсчета от напряженности магнитного поля (разд. 6.6.2). При точных
измерениях этот эффект можно учесть, измерив горизонтальную и вертикальную
составляющие магнитного поля (магнитометром), ориентировав прибор на маг
нитный север и поправками для данного прибора.
Можно создать модели временных изменений силы тяжести, учитывая зем
ные приливы, движение полюса и изменения атмосферного давления. В то время
как на относительные измерения влияют лишь короткопериодические вариации,
результаты абсолютных измерений необходимо редуцировать и за влияние дол
гопериодических эффектов.
Поправки за приливные изменения силы тяжести можно определить в зависи
мости от нужной точности различными способами (разд. 3.4.2, 3.4.3):
— вычисление по разложению в ряд приливного потенциала для жесткой Земли
по Картрайту—Тейлеру—Эддену (рекомендация МАГ № И, 1971 г.), причем гло
Гравиметрические съемки
301
бальный гравиметрический фактор δ = 1,16, а фазовая задержка равна нулю. Ря
ды с ограниченным числом членов (например, ежегодно публикуемые таблицы
в «Geophysical Prospecting» с δ = 1,2) могут дать ошибки до 0,1 м км -с"2;
— вычисление по разложению в ряд потенциала жесткой Земли с амплитудными
факторами для упругой Земли (модель 1066 Гйльберта и Дзевонского [219]) по
Вару [745] и с учетом влияния океанских приливов на амплитуды и фазы главных
волн [619] в соответствии с резолюцией № 9 МАГ, 1983 г. [552];
— измерение приливных вариаций силы тяжести на гравиметрическом пункте
или интерполяция параметров земных приливов по измерениям на пунктах, рас
положенных вблизи района работ (разд. 10.3.3).
Два последних метода дают поправки за земные приливы с ошибкой не хуже
нескольких сотых долей м км -с"2, время измерений необходимо фиксировать с
точностью ±1 мин.
Гравиметрическая поправка за движения полюса имеет долгопериодический
характер (разд. 3.4.1). Необходимые мгновенные координаты полюса х и у (со
ставляющие отклонения мгновенного полюса от МУН в направлении меридианов
X = 0° и X = 270°) можно экстраполировать в пределах одного года по данным,
публикуемым МБВ (±0,05") [633]. Преобразовав (3.18), получим поправку в
виде
Ч поп = δΠ0„ω2Λ sin 2φ(χ cos X - у sin X).
(9.2)
Для амплитудного фактора 6П0Л можно принять значения 1,0 или 1,2 (прилив
ный фактор) [746]; имеются результаты первых определений этой величины
(разд. 10.3.2).
Прямое и косвенное влияние вариаций атмосферного давления вызывает из
менение силы тяжести на - 3 — - 4 нм -с“ 2/ГП а (разд. 10.2.1). Если параметры
регрессионной зависимости для данной местности неизвестны, то поправку сле
дует вычислять с коэффициентом - З н м - с " 2/ГП а (резолюция МАГ № 9,
1983 г.). Такая поправка необходима, чтобы учесть отличие реального давления
воздуха р (измерения барометром с ошибкой ± 1 ГПа) от нормального давления
рн на пункте; ее вычисляют по формуле
bgp = Ц р - АДгПа) Нм с" 2·
(9-3а)
Величину р н находят по высоте пункта Н для стандартной атмосферы (модель
DIN 5450, которая хорошо согласуется со стандартной атмосферой США 1962 г.)
по формуле [61]’
р п = 1013,25 ( 1 - 0,0065 я <м>λ
V
288,15 /
ГПа.
(9.36)
Атмосферное давление обычно меняется не более чем на ±50 ГПа, и влияние
его изменений на абсолютную величину g достигает 0,15 м км -с"2. При измере
нии приращений силы тяжести вариации давления в основном остаются меньше
10 ГПа, что соответствует = 0,03 м км -с"2.
Изменения уровня грунтовых вод и влажности почвы могут вызвать измене
ния силы тяжести до нескольких десятых долей м км -с"2. При создании фунда
ментальных гравиметрических сетей и геодинамических сетей рекомендуется
Глава 9
302
приводить измеренную силу тяжести к нормальным для данного пункта услови
ям. Разработка способов приведения пока еще в начальной стадии (разд. 10.2.2).
Для приведения измерений к единой точке (марке пункта) необходима поправ
ка за смещение прибора в плане и по высоте; точность поправки должна состав
лять ± 0,01 м км -с"2.
Абсолютные значения силы тяжести (для эффективной высоты около 1 м) приводят
к марке наземного центра, измеряя приращение силы тяжести и превышение, либо исполь
зуя зависимость силы тяжести от высоты для данного пункта. При высокоточных измере
ниях относительными гравиметрами прибор нужно всегда устанавливать на одну и ту же
высоту (3 мм = 0,01 мкм-с-2). Если считать, что вертикальный градиент силы тяжести
на пунктах одинаков, редуцирование за высоту выполнять не нужно. При неодинаковых
высотах гравиметра, как правило, достаточна редукция с нормальным градиентом
-3086 нм*с_2/м. При больших различиях высоты прибора и/или значительной аномалии
градиента (в зданиях) могут потребоваться определения истинного значения (разд. 8.2.2).
Если на пункте одновременно работают абсолютный и относительный гравиметры либо
несколько относительных гравиметров, может потребоваться учет внецентренности их
планового положения. Если такой внецентренности избежать не удается (при одновремен
ных измерениях экономится время), для введения поправок приходится измерять измене
ние силы тяжести в плане [567] либо определять его по локальной модели градиента [173].
9.2.4.
Обработка результатов
Величины силы тяжести и другие неизвестные находят из уравнивания сети с из
быточными измерениями (число измерений больше числа неизвестных). Уравни
вание выполняют по методу наименьших квадратов [52, 305]. При этом
реальный физический объект аппроксимируется математической моделью, со
держащей функциональную и случайную части. В большинстве случаев при урав
нивании применяют параметрический способ [530], который будет рассмотрен
ниже.
Функциональная модель описывает связь между результатами измерений и не
известными в виде параметрического уравнения связи
I + ν = Ах.
(9.4)
Здесь 1 — вектор п измерений, а х — вектор и неизвестных, которые необходимо
оценить (п > и). Матрица А размерностью п х и, состоящая из коэффициентов
модели, связывает результаты измерений с неизвестными. Вектор поправок ν
определяется влиянием неучтенных ошибок измерений. Как обычно, при обра
ботке гравиметрических сетей будем считать, что зависимость описывается ли
нейной функцией. Если зависимость нелинейная, ее линеаризуют разложением в
ряд Тейлора, используя при этом приближенные величины.
Стохастическая модель описывает характер ошибок измерений через ковари
ационную матрицу
\
Q2I0201
(9.5)
Qn 1 On О l
/
Гравиметрические съемки
303
где σ2 — дисперсия, а ρ — коэффициенты корреляции. В общем случае нормиро
вание матрицы Σ// выполняют после введения весов измерений
Pi =
(9.6)
где σο — дисперсия единицы веса (р = 1). Получим матрицу обратных весов (кофакторную матрицу)
Q// = X Σ„
(9.7а)
Р// = Q/71·
(9.76)
σο
и весовую матрицу
Из основного условия уравнивания
ντ Ρν =» min
(9.8)
следует алгоритм уравнивания. Из системы нормальных уравнений
Νχ - Аг PI = 0,
N = Аг РА
(9.9)
получим величины неизвестных
х = N “ *АГ Р1,
(9.10)
матрицу обратных весов уравненных значений неизвестных
Qxx = N - ' = (Аг РА) - 1
(9.11)
и вектор поправок
V
— Ах —1.
(9.12)
Оценкой величины σο служит эмпирическое среднеквадратическое отклонение еди
ницы веса; оно определяется формулой
vT Vv
η- и
=
(9.13)
Точность неизвестных определяется ковариационной матрицей
Σχχ
= soQxx-
(9.14)
Оценить точность функций неизвестных (например, приращений силы тяжести)
можно, используя закон переноса ошибок. Для линейных функций
*> = f rx
(9.15)
дисперсия вычисляется по формуле
4 = f rE„f.
(9.16)
Уравнивание по методу наименьших квадратов устраняет невязки в сети и дает на
илучшие оценки (минимальные среднеквадратические уклонения) неизвестных. Для наблю
дений с нормальным распределением ошибок получаются также вероятнейшие значения.
304
Глава 9
В гравиметрических сетях распределение ошибок близко к нормальному, если измерения
выполняются выверенными гравиметрами и в максимально различных условиях
(разд. 9.2.2).
Установим математическую модель измерений силы тяжести [698].
При абсолютных определениях время является непосредственно измеряемой
величиной. После каждого эксперимента измеренные интервалы преобразуются
в значения силы тяжести, и после введения необходимых поправок среднее значе
ние для каждого пункта используется как квазиизмерение /. Уравнение связи име
ет вид
(9.17)
I + υ = g.
После обработки данных, полученных на пункте, и оценки остаточных система
тических ошибок получают среднеквадратическую ошибку результата для этого
пункта (разд. 5.1.6). Поскольку каждый прибор имеет свои систематические
ошибки, весьма вероятно, что значения силы тяжести, полученные одним и тем
же прибором, будут коррелированы. Так как до сих пор нельзя было определить
эти корреляции, то полагают, что ковариационная матрица ошибок (9.5) абсо
лютных измерений диагональная, и на ее главной диагонали располагаются дис
персии, значения которых определены априори.
При относительных измерениях силы тяжести непосредственно измеренными
величинами являются «деления шкалы счетчика» z. После предварительной кали
бровки, редуцирования (разд. 9.2.3), определения калибровочной функции (6.52)
и смещения нуль-пункта (6.75) уравнение связи для исправленного отсчета имеет
вид
/ + V = g - N o - AF(z) ■
+■D(t).
(9.18)
Помимо значения силы тяжести в (9.18) входят дополнительные параметры, та
кие, как неизвестный исходный уровень N0, калибровочные параметры (корректи
рующая функция калибровки AF(z)) и параметры смещения нуль-пункта (функция
дрейфа D(t)). Если поправки за калибровку были определены с помощью кали
бровочной системы и введены в модель, то из уравнивания можно определить
лишь линейный масштабный коэффициент, который, возможно, будет и более
точным (разд. 6.4.5).
Смещение нуль-пункта в большинстве случаев учитывают введением неизвестного об
щего уровня для каждого прибора и на каждый день измерений (разд. 6.6.3). Если измере
ния в сети выполняются длительное время, модель (9.18) будет содержать большое число
неизвестных, определяющих общий уровень и смещение нуль-пункта; это приводит к уве
личению объема уравнительных вычислений. Объем вычислений можно уменьшить, если
образовать квазиизмеренные величины как разности последовательных отсчетов.
Уравнение связи для разности отсчетов Δl,j = lj - /, имеет вид
Δk j + Vij = gj - gi - (AF(zj) - AF(Zl)) + (D(tj) - D(ti)).
(9.19)
Неизвестные, определяющие общий начальный уровень, исключаются. Посколь
ку разность моментов измерений /, и /, мала, достаточно описывать дрейф поли
номами низких степеней.
Существуют многочисленные подходы к исследованию точности относитель
ных измерений по результатам полевых и лабораторных наблюдений. Неполный
Гравиметрические съемки
305
учет смещения нуль-пункта и влияние других остаточных систематических оши
бок приводят к возникновению физической корреляции результатов наблюдений.
При увеличении времени транспортировки среднеквадратическая ошибка разно
стей отсчетов увеличивается (разд. 6.6.4). Для сетей с большим числом избыточ
ных измерений эти корреляции можно оценить по поправкам, полученным после
предварительного уравнивания; последние используют для вычисления эмпириче
ских коэффициентов корреляции, их описывают зависящей от времени ковариаци
онной функцией [33].
Для приращений силы тяжести, полученных в Северной Исландии из следующих друг
за другом измерений с гравиметрами Ла Коста — Ромберга по последовательной схеме
(время транспортировки 5 — 15 мин), определен средний коэффициент корреляции, рав
ный г = -0 ,3 0 ± 0,04 [349]; для Δ#, полученных из наблюдений по непоследовательным
схемам, коэффициент уменьшается до г < 0,1. Необходимо отметить, что при использова
нии формулы (9.19) смежные Ag с идентичным отсчетом на общем пункте алгебраически
коррелированы с коэффициентом г - -0 ,5 . Игнорирование этого обстоятельства приво
дит к искажению значений силы тяжести на величину порядка среднеквадратической
ошибки; оцененные точности оказываются завышенными [153]. Зачастую не имеет смысла
принимать во внимание эту алгебраическую корреляцию, поскольку на нее накладывается
более сильная физическая корреляция, которую обычно определить точно невозможно.
В общем случае в уравнивание сети входят абсолютные и относительные из
мерения силы тяжести. Роль измеренных абсолютных значений g могут играть
величины, полученные из уравнивания сети более высокого класса; их включают
в уравнивание как квазиизмерения со своей кофакторной матрицей (9.11) или по
крайней мере с их среднеквадратическими ошибками. Это случай иерархического
построения национальных гравиметрических сетей (разд. 9.2.6). Если имеются
лишь абсолютные измерения, то в уравнивании нет необходимости. Выполнить
уравнивание сети, в которой сделаны лишь относительные измерения силы тяже
сти, можно, зафиксировав одно значение g (например, принимая значение g на
одном из пунктов как безошибочное); можно также уравнять такую сеть как сво
бодную [461]. В последнем случае исходный уровень определяется по аппрокси
мации значений силы тяжести на всех пунктах сети.
На рис. 9.2 приведены измеренные приращения силы тяжести (средние значе
ния), невязки полигонов и уравненные приращения Ag в локальной опорной сети,
измеренной с гравиметрами Ла Коста — Ромберга. Исходный уровень силы тя
жести в этой сети фиксируется ее величиной на пункте Акюрейри, связанном с
МГСС-71.
Разработаны пакеты программ уравнивания гравиметрических сетей на боль
ших и мини-ЭВМ. Приведем две разработки Института геодезии Ганноверского
университета.
Пакет программ GNLSA предназначен для большого компьютера CDC Cyber 76/18
[764]. Программа предварительной обработки GNPREN выполняет пересчет отсчетов по
гравиметрам в единицы силы тяжести и вычисляет поправки за земные приливы
(рис. 9.3). Исправленные отсчеты по гравиметрам записывают на магнитный диск и вво
дят в главную программу GNLSA, выполняющую совместное уравнивание абсолютных
и относительных измерений в сети (рис. 9.4). Процедура уравнивания основана на пара
метрическом способе, в котором в качестве измеренных величин принимают разности от-
306
Глава 9
Рис. 9 .2 . М естная гравиметрическая опорная сеть (м асш таб не сохранен) в Северной И сландии, в скоб
ках указано число связей, верхнее число — среднее значение измеренной величины, нижнее
число — ее уравненное значение (м к м -с" 2), невязки даны в единицах 0,01 м к м - с '2 (из базы
данных И нсти тута геодезии, Ганновер).
счетов (9.19). Система нормальных уравнений (9.9) строится последовательно, по мере
поступления данных. После обращения матрицы коэффициентов нормальных уравнений
вычисляют уравненные значения силы тяжести, калибровочных параметров и дрейфа, а
также поправки из уравнивания (9.10), (9.12); кофакторную матрицу (9.11) можно записать
в память. Эти поправки можно использовать для статистического анализа (разд. 9.2.5).
Число относительных измерений практически неограниченно, количество абсолютных зна
чений не должно превышать 31, а максимальное число относительных гравиметров — 40.
Наибольшее число неизвестных равно 950.
Пакет программ GRAVITY был разработан для м и к р о к о м п ь ю т е р а типа HP 9816.
Программы составлены на языке HP-Basic 3.0 и обеспечивают обработку и оценку данных
в квазиреальном масштабе времени. Поэтому качество измерений в сети можно оценивать
прямо в ходе полевых работ (рис. 9.5). Входными данными служат файлы результатов
измерений (MDAT), параметров калибровки (CAL) и параметров пункта (STAT). Програм
ма DATAIN служит для формирования и преобразования файлов данных. Программа
Рис. 9 .3 . Блок-схема программы вычисления и учета поправок в гравиметрических данных [764].
Гравиметрические съемки
Каталог пункто в
Каталог
гравиметров
Нормальные
уравления
—Θ
—Θ
307
Координаты п ункто в ,
приближенные значения
Известные калибровочные
параметры, неизвестные
параметры калибровки и
ярейфа
Каталог
неизвестных
Θ
^
J
ч.__✓
**
I Уравнения связи
для а&сототных
определений силы
'jk
------ I4—
V
” _ тяжести___
Нормальные
уравнения
Калиброванные
Дд
Нормальные
уравнения
J
—Θ
4
Абсолютные определения
силы тяжести, значения и
ковариационная матрица
Исправленные отсчеты
по гравиметру
Уравнения связи ]
θ = |
Нормальные
уравнения
для относительных
определений силы |
тяжести
I
Уравненные значения и
(Обращение матри-1
С
К ------ А----- цы коэффициен- ----------- ► Г ' ----- - ковариационная матрица
I
J
тов нормальных
V— у
уравнений
Вычисление
поправок
Рис. 9.4 . Блок-схема программы уравнивания гравиметрической сети [764].
Рис. 9 .5 .
Блок-схема программы GRAVITY для микрокомпью тера HP 9816 (И нститут геодезии,
Ганновер).
PREPRO выполняет предварительную обработку (разд. 9.2.3), а программа ADJUST —
уравнивание результатов, при этом блок GEN содержит дополнительные данные (абсо
лютные значения, веса). При стандартной оперативной памяти компьютера (512 Кбайт)
в обработке могут участвовать 1400 измерений (абсолютные величины g , приращения) и
может быть до 75 неизвестных. Для предварительной обработки одного измерения с вве
дением поправки за земные приливы с ошибкой ±1 (или ±10) нм с “2 необходимо соот
ветственно 18 с (или 6 с), а для уравнивания гравиметрической сети самых больших
размеров — 10 мин.
9.2.5.
Оценка качества сети и оптимизация
Методики, разработанные для оценки качества и оптимизации геодезических се
тей [511, 638], можно использовать и для гравиметрических сетей.
308
Глава 9
С) качестве сети судят, с одной стороны, по ее точности и надежности, а с
другой — по денежным затратам. Для геодинамических сетей особое значение
приобретает их чувствительность при обнаружении временных изменений.
Точность сети описывается кофакторной матрицей (матрицей обратных ве
сов) Q** (9.11), позволяющей получить дисперсии отдельных значений силы тяже
сти gi по формуле
sf = soQii·
(9.20а)
С использованием (9.15) и (9.16) получим выражение для дисперсии приращений
силы тяжести gj - g,:
sfj = So(<7,7 + qjj - 2qu),
(9.206)
где qu, qjj , qtj — элементы матрицы Q**.
Надежность сети характеризует степень ее устойчивости по отношению к
ошибкам математической модели (разд. 9.2.4). При геодезических работах высо
кую надежность обеспечивают, выполняя избыточные измерения при различных
условиях наблюдений (разд. 9.2.2). «Локальную» надежность обеспечивают до
статочным числом (более двух) контрольных измерений на каждом пункте.
При гравиметрических работах ошибки математической модели могут в 3 — 5 раз
превышать величины, полученные при априорной оценке точности. Для абсолютных из
мерений это обстоятельство иллюстрируется табл. 5.1 в разд. 5.1.6. Таблица 9.1 содержит
данные по региональной опорной сети, созданной с относительными гравиметрами (Ла
Коста — Ромберга) при неблагоприятных условиях. Эти данные указывают на большие
расхождения между результатами, полученными одним и тем же прибором и разными
приборами. Они достигают 0,5 м км -с"2, что гораздо больше величин, получающихся при
нормальном распределении. В микрогравиметрической сети (благоприятные условия,
ошибка средних значений по внутренней сходимости ±0,01 мкм -с"2) встречаются расхож
дения, превышающие 0,1 мкм -с"2 (табл. 9.2).
Т аблица 9.1. И зменение измеренного
приращения силы тяжести в гравиметрической
сети в Северной И сландии [598]
Т аб лица 9.2. И зменения средних приращений
силы тяжести в микросети (М БМ В, Севр) [34]
Приращения силы тяжести, мкм с 2
Ла Коста—Ромберг С-79 Ла Коста—Ромберг С-85
Среднее приращение силы тяжести,
Прибор
1- 3
Ла Коста — Ромберга
с 2
4 —5
МКС
51,71
,72
,92
,57
,83
,87
,87
,92
51,90
67
,91
,72
,63
,65
,67
52,05
D
D
D
G
G
G
14
21
38
131
253
258
- 0 ,8 0
,82
,71
,85
,75
,79
+ 0,02
,04
,08
- 0 ,0 2
- 0 ,0 3
+ 0,02
Среднее 51,80
51,78
Среднее
- 0,79
+ 0,02
Гравиметрические съемки
309
Точность и надежность сети можно оценить статистическими тестами,
основанными на вычислении точностных характеристик и определении поправок
из уравнивания. С помощью таких тестов оцениваются:
— однородность сети (одинаковая точность по всей сети);
— значимость параметров моделей, которые невозможно определить физически
(члены калибровочной функции и функции дрейфа более высоких порядков);
— наличие грубых ошибок. Для их исключения эффективен метод контроля гру
бых ошибок, называемый «data snooping» [19];
— параметры стохастической модели (9.5) по оценкам дисперсионно
ковариационных компонент [339]. Эта модель особенно эффективна при оцен
ке отношений дисперсий между достаточно большими и сильно связанными
группами измерений (например, выполненными разными приборами); реже
поддается оценке физическая корреляция.
В результате тестирования выявляют слабые участки сети. Их можно уси
лить, выполнив дополнительные измерения и уточнив параметры моделей. Луч
ше, если при создании сети выполняется постоянный качественный контроль с
дополнительными измерениями на слабых участках.
При создании высокоточных гравиметрических сетей (фундаментальные, геодинамические сети) рекомендуется использовать методы математической опти
мизации сети; соответствующие методики для геодезических сетей уже
разработаны [238, 600]. Поскольку в общем случае исходный уровень силы тяже
сти устанавливается из абсолютных измерений на пункте, условия размещения
которого определены в разд. 9.2.1, оптимизации подлежит лишь проект распре
деления измерений в сети (создаваемой или обновляемой) [236]. При этом целе
вая функция определяет точностные требования для данной сети (кофакторная
матрица Q**), которые должны удовлетворять заданным условиям (максималь
ная стоимость). После определения сетевой матрицы А находят весовую матрицу
Р//. Если точность отдельных измерений известна, задача сводится к определе
нию числа повторных измерений для каждой связи.
В качестве целевых функций можно использовать обобщенную точностную
характеристику — след матрицы Qxjr(tr Q^) или критериальную матрицу Qxjr [20].
Последняя характеризует заданную точность сети; помимо среднеквадратических
ошибок значений g в эту матрицу могут быть также введены, например, точност
ные характеристики Δg> зависящие от расстояния между пунктами. Оптимальное
согласование между Qxjr и Qxx можно получить по методу наименьших квадратов
или с помощью линейного программирования. Затем выполняется оптимизация
сети по имеющимся программам уравнивания, в которых точность, получаемая
в результате каждого дополнительного наблюдения, максимизируется с каждым
шагом. В работе [590] исследована процедура формирования и аппроксимации
критериальных матриц для гравиметрических сетей.
Результаты оптимизации сильно зависят от вида целевой функции, принятой
модели ошибок измерений (например, зависимости измеренных приращений си
лы тяжести от длительности транспортировки), а также от налагаемых ограни
чений.
Поскольку
моделирование
некоторых
ограничений
затруднено
(максимальная продолжительность наблюдений за рабочий день, плохие условия
транспортировки), результаты оптимизации необходимо анализировать крити
310
Глава 9
чески и при необходимости корректировать; желательно решать эту задачу по
следовательными приближениями [457].
При создании фундаментальной гравиметрической сети ФРГ 1976 г. оптимизация
была выполнена с помощью линейного προι раммирования [61] последовательным мето
дом [760]; ее результаты в значительной мере определили окончательную структуру сети
(разд. 9.2.6). Планирование основывалось на использовании к = 21 пункта с приближен
ными значениями g и на 4 пунктах абсолютных измерений (±0,15 мкм-с-2). Пункты
предстояло соединить 40 связями с относительными гравиметрами (ошибка среднего из
16 измерений ±0,05 мкм-с-2, ошибка единичного измерения ±0,2 мкм-с-2). При после
довательной оптимизации точность сети характеризовалась среднеквадратической ошиб
кой силы тяжести:
Sg = So
Qgg
к
(9.21)
Целевая функция задавалась следующим образом:
tr Qo - tr Q,
---------------- => max.
(9.22a)
Ci
Здесь Qo и Qi — кофакторные матрицы величин силы тяжести, полученных для начально
го решения и после наблюдения / стоимостью с,. В качестве стоимостного параметра ис
пользовалось время, необходимое для одной гравиметрической связи (расстояние $,·):
с, = Ati(h) = 1 0 + Ь.Ш
50
(9.226)
Систематический анализ всех возможных к(к - 1) : 2 связей позволяет определить опти
мальное место ι-го измерения в сети, а последовательная обработка всех 40 запланирован
ных измерений в конце концов определяет структуру сети. Пренебрежение с, приводит к
удвоению временных затрат из-за многочисленных перекрывающихся измерений без су
щественного повышения средней точности сети (9.21).
Опыт создания презиционных гравиметрических сетей многократными изме
рениями с несколькими тщательно калиброванными гравиметрами Ла Коста —
Ромберга позволяет определить общий характер распределения точности; он ил
люстрирован рис. 9.6. В будущем благодаря созданию пунктов абсолютных из
мерений можно будет существенно снизить рост ошибок при увеличении
величины Δg (или соответственно при увеличении времени транспортировки).
(м км -с 2)
Рис. 9.6.
Точность уравненных приращений си
лы тяж ести в высокоточной сети, по
строенной с несколькими калиброван
ными гравиметрами Л а К оста —
Р ом берга.
Гравиметрические съемки
9.2.6.
311
Национальные гравиметрические сети
Создание национальных гравиметрических сетей начиная с конца 19 столетия
можно условно разделить на три этапа, каждый из которых имеет свои
особенности.
До 1930-х гг. национальные сети строились в Потсдамской системе относи
тельными маятниковыми измерениями (разд. 9.1.1). В дальнейшем стали все
больше применять пружинные гравиметры. При создании фундаментальных се
тей вначале использовали и маятниковые измерения, однако в конце концов их
роль свелась к определению гравиметрических калибровочных базисов. Начиная
с 1970-х гг. начали создавать новые национальные сети, привязывая относитель
ные измерения к сети МГСС-71 либо используя совместно относительные и абсо
лютные измерения; при этом число абсолютных измерений росло (разд. 9.1.2). По
строение новых гравиметрических сетей стало особенно необходимым вследствие:
— появления системы МГСС-71;
— утери заметного количества пунктов имеющихся сетей;
— повышения требований к точности и надежности сетей;
— возрастающего интереса к мониторингу временных измерений силы тяжести;
— возможности использовать новые абсолютные и относительные приборы и
новые методики.
Национальные гравиметрические сети, как правило, делят на несколько клас
сов; сети разных классов создаются последовательно, а при их обработке значе
ния силы тяжести на пунктах высших классов считают твердыми для пунктов
более низких классов (разд. 9.2.4). Преимущество такой иерархической структуры
в том, что гравиметрические данные могут использоваться до завершения по
следнего этапа сгущения сети. Среднее расстояние между пунктами опорных се
тей в значительной степени определяется территорией страны (для
фундаментальной гравиметрической сети это 100 — 300 км, в сети 1-го класса —
несколько десятков километров, в сети 2 -го класса — около 10 км, в сети 3-го
класса — несколько километров). Приведем примеры.
В Федеративной Республике Германии гравиметрическая опорная сеть 1976 г.
(DSGN 76) была создана Немецким геодезическим исследовательским институ
том под эгидой Немецкой геодезической комиссии [639]. Сеть состоит из 21 пунк
та, каждый из них имеет три пункта-спутника; на 4 пунктах выполнены
абсолютные определения Институтом метрологии (Турин) (рис. 9.7). Согласно
оптимизации сети, были сделаны 44 гравиметровые связи. Все они измерены
дважды и независимо в последовательности 1—2 , 2— 1 двумя бригадами, каждая
из которых располагала двумя гравиметрами Ла Коста — Ромберга; всего полу
чено 656 приращений силы тяжести. Пункты закреплены металлическими марка
ми в пилонах или фундаментах зданий (рис. 9.8); как правило, пункты
располагались в капитальных общественных зданиях; пример описания пункта
приведен в разд. 9.4.1. Общее время измерений составило 200 дней. В результате
уравнивания по методу наименьших квадратов величины силы тяжести получены
с ошибкой ± 0 ,0 6 — 0,11 м к м -с '2; максимальное приращение силы тяжести
(8000 мкм с ~2) определено с ошибкой ±0,15 мкм с ~2. Последующие измерения
предполагается проводить примерно каждые 10 лет.
312
Рис. 9.7
Рис. 9.8
Глава 9
(левый). Гравиметрическая опорная сеть 1976 (DSGN76) Федеративной Республики Германии
[692].
(правый). Марка пункта гравиметрической опорной сети 1976 (ФРГ).
Геодезические ведомства выполнили сгущение DSGN 76 сетями трех классов.
В табл. 9.3 приведены информация о плотности пунктов и другие данные для
земли Нижняя Саксония (47 000 км2) [285]. Гравиметрические пункты совмещены
с центрами плановых и высотных опорных сетей; для укрепления пунктов 1-го
и 2-го классов имеются пункты-спутники. На рис. 9.9 приведена схема гравимет
рической сети 1-го класса в Нижней Саксонии. Сеть ФРГ 1-го класса DHSN 82
была полностью измерена и уравнена в системе DSGN 76 с применением соответ
ствующей ковариационной матрицы; сеть содержит 289 пунктов, которые опре
делены с ошибкой ± 0 ,0 8 — 0,14 мкм-с " 2 [132].
Сети DSGN 76 предшествовали маятниковая сеть, которая создавалась начиная с
1934 г. Потсдамским геодезическим институтом для обеспечения гравиметрической съемки
Германии (около 100 пунктов с шагом 50 — 100 км) [596] (разд. 9.3.6), а также Немецкая
гравиметрическая опорная сеть DSGN 62 [374]. Последняя содержала 43 пункта (9 маятни
ковых пунктов, измерения с гравиметрами Аскания, Северная Америка и Уордена), она
была построена с 1950 по 1957 г. в виде петель большой протяженности и приведена в
Потсдамскую систему (±1 м км -с"2).
В США гравиметрическая опорная сеть, состоящая из 59 пунктов (у каждого
не менее трех пунктов-спутников), была создана Береговой и геодезической съем-
Гравиметрические съемки
313
Рис. 9.9. Сеть, 1-го класса земли Нижняя Саксония, Федеративная Республика Германии [385].
кой США в 1966—1967 гг. и обновлена в 1975—1976 гг. с 4 гравиметрами Л а
Коста — Ромберга; измерения выполняли по схеме петли. После уравнивания по
лучена точность ±0,2 м к м -с '2. Абсолютные измерения силы тяжести образова
ли Среднеконтинентальный калибровочный базис от Форт-Дейвис, Техас, до
Грейт-Фолс, Монтана (диапазон силы тяжести 16 000 м км -с"2). Национальная
геодезическая съемка Национального управления США по изучению океана и ат
мосферы, а также Гидрографический и топографический центр Военно
картографического агентства МО США планируют создание фундаментальной
абсолютной гравиметрической сети; она будет служить отсчетной для всех от
носительных измерений [531] (рис. 9.10). Сеть состоит из 11 основных и 40 допо
лнительных пунктов, среднее расстояние между пунктами 300 км. Измерения
выполняются абсолютным гравиметром JILA (разд. 5.2.3). В Канаде националь
ная гравиметрическая сеть также укрепляется пунктами абсолютных определений
[403].
Китайская гравиметрическая опорная сеть 1985 г., содержащая 57 пунктов,
была создана в 1982 — 1985 гг. Государственным геодезическим и картографичеТаблица
9 .3 .
Гравиметрические сети сгущения земли Нижняя Саксония [385]
Класс
Плотность
пунктов
Число
пунктов
Число
приборов
Метод
измерений
1-й
2-й
1/1000 км2
1/100 км2
1/5 км2
56
425
- 9 000
4]
2J
Разности 1—2, 2— 1
~ 1 год
В треугольниках
- 5 лет
Измерения по схеме
- 1 3 лет
петли по профилям
в прямом и обратном
направлениях
3-й
1 — 2
Продолжительность
наблюдений
314
Глава 9
Рис. 9.10. Проект гравиметрической опорной сети абсолютных определений США: δ — первокласс
ные, □ — первоклассные дополнительные, о — второклассные пункты [531].
ским бюро [650]. Она включает 6 пунктов абсолютных определений
(±0,1 м км -с"2). Относительные измерения сделаны с 9 гравиметрами Л а
Коста — Ромберга по схеме петли (±0,2 м км -с"2); выполнены связи с внешними
пунктами сети МГСС-71, которая не распространялась на территорию Китая. Ре
зультаты уравнивания имеют ошибку ± 0,08 мкм ·с ~ 2 (для максимального прира
щения силы тяжести ошибка равна ±0,13 м км -с"2).
9.3.
Региональные и локальные гравиметрические съемки
9.3.1.
Цели работ, распределение пунктов
Региональные и локальные гравиметрические съемки выполняют для решения за
дач геодезии, геофизики и геодинамики (разд. 4.2 — 4.4). Для трансформации и
интерпретации данных о гравитационном поле обычно по измеренным величи
нам силы тяжести находят гравитационные аномалии, на основе которых с по
мощью интерполяции получают единообразное представление поля. Сами
значения силы тяжести на земной поверхности необходимы для изучения времен
ных вариаций. Такие исследования рассмотрены в разд. 10.1.1.
Плотность пунктов и точность гравиметрической съемки зависят от разме
ров территории, вида и величины исследуемых особенностей поля силы тяжести
или распределения аномальных масс, порождающих это поле. При региональных
съемках (национальные гравиметрические съемки, съемки общего назначения)
стремятся к равномерному распределению пунктов, локальные съемки больше
ориентированы на выявление особенностей поля; для некоторых специальных за
дач выполняют съемку по профилям. При выборе пунктов стараются избегать
близких возмущающих масс (например, крутых склонов) и создают такое распре
деление пунктов, которое было бы представительным как в плане, так и по высо
те (например, в горной местности пункты не выбирают только в долинах).
Ошибка точечных аномалий определяется ошибками измерений силы тяжести и
гравиметрической редукции (разд. 9.3.3, 9.3.4).
В геодезии для вычисления высот гравиметрического геоида или квазигеоида,
а также уклонений отвеса необходимо знать аномалии в свободном воздухе для
Гравиметрические съемки
315
всего земного шара. Поскольку сейчас созданы глобальные модели гравитацион
ного поля, то сбор гравиметрических данных при решении региональных и ло
кальных задач проводится лишь для исследуемой территории и ее окрестностей
(разд. 4.2.2, 4.2.3). На линиях нивелирования значения силы тяжести требуются
для определения ортометрических или нормальных высот (разд. 4.2.4). Для гео
дезических целей гравитационные аномалии нужно знать с ошибкой
±10 мкм-с -2 при среднем расстоянии между пунктами в несколько километров.
В таком случае можно определять превышения регионального геоида или квазигеои
да, а также высоты в гравитационном поле на сантиметровом уровне точности, а уклоне
ния отвеса — с ошибкой не более ± 1"; остаточные ошибки из-за влияния
высокочастотных составляющих гравитационного поля не превысят соответственно
0,001 м и 0,4" (разд. 3.3.2). В области со сложным рельефом для точного определения
уклонения отвеса на пункте необходима дополнительная съемка повышенной плотности
вокруг этого пункта в ближней зоне радиусом в несколько километров [518]. Если притя
жение топографических масс можно учесть по моделям рельефа с высоким разрешением,
то расстояние между пунктами съемки может быть до 5 —10 км.
При национальных гравиметрических съемках в целях геофизики желательны
расстояния между пунктами в 1 — 5 км; точность аномалий Буге должна быть
± 5 — 10 м к м -с '2. На больших территориях в начальной стадии съемки плот
ность пунктов меньше (шаг 10 — 20 км) и располагаются они в основном вдоль
дорог; так же поступают при рекогносцировочных съемках в прикладной геофи
зике. Локальные съемки выполняют для решения специальных задач геологии
(определение глубины кристаллического фундамента, поиск локальных осадочных
бассейнов, соляных структур, тектонических нарушений) и при разведке полезных
ископаемых (разд. 4.3.5). В зависимости от конкретного объекта могут предъяв
ляться специфические требования к шагу съемки, который меняется от 50 до
500 м, и точности измерений от ±1 до ±5 мкм с -2. В угольных районах и при
рудной разведке, как правило, расстояние между пунктами составляет несколько
десятков метров, а ошибка измерений не превышает ±1 мкм с -2. При микрогравиметрических исследованиях, создании инженерных сооружений и поиске пустот
шаг съемки равен нескольким метрам, а ошибка составляет ± 0,1 мкм с -2.
Если национальная гравиметрическая сеть имеет высокую плотность пунктов
(разд. 9.2.6), она может полностью или частично служить региональной гравиметриче
ской съемкой. Однако создание плотной опорной сети занимает много времени, тогда как
для изучения природных ресурсов требуется быстро оценить данные региональной съемки.
Поэтому чаще всего задачу решают поэтапно путем сбора, предварительной обработки
и комбинирования данных, предоставляемых различными ведомствами (разд. 9.4.2).
9.3.2.
Методика съемки и обработка результатов
Региональные и локальные гравиметрические съемки выполняют исключительно
с пружинными гравиметрами. Удобно, когда к гравиметрическому пункту мож
но подъехать на автомобиле (рассчитанном на переезды по шоссе, в некоторых
случаях — на автомобиле, пригодном и для бездорожья). В труднодоступных
районах возможна транспортировка на вертолете. При локальных и специальных
съемках (например, подземных съемках в шахтах) с гравиметром выполняют и
316
Глава 9
Рис. 9.11. Местная гравиметрическая опорная сеть для региональной съемки; невязки в мкм-с 2 (535].
пешие переходы. Для снижения затрат на определение плановых координат и вы
сот гравиметрические пункты должны быть совмещены с хорошо закрепленными
пунктами геодезических сетей либо должны опознаваться на топографических
картах (если они имеются на данный район) (разд. 9.3.3).
Если национальная гравиметрическая сеть не очень плотная или не обеспечи
вает точность, нужную для специальных задач, создают опорные сети для де
тальных съемок. Опорные пункты (с расстояниями 10 км и менее) должны быть
легкодоступными и хорошо опознаваться (относительно зданий, дорог, конту
ров местности). Опорные сети связывают с национальными сетями, измерения
выполняют хорошо исследованными гравиметрами с надежным контролем (дву
кратные измерения), преимущественно по схеме петли; пример приведен на
рис. 9.11 [535]. Значения силы тяжести находят по методу наименьших квадратов
(разд. 9.2.4).
Детальная съемка, как правило, выполняется в виде простых профилей, при
вязанных к опорным пунктам. Опорные отсчеты следует брать примерно через
каждые два часа, с тем чтобы контролировать смещение нуль-пункта и обнару
живать его скачки. Невязки распределяют пропорционально времени, а прилив
ными поправками часто пренебрегают. Такая методика обеспечивает точность по
внутренней сходимости ±0,5 мкм-с-2, при повышении точностных требований
соответственно возрастает объем дополнительных работ.
Время измерений на пункте составляет всего несколько минут (отыскание
пункта, установка прибора, нивелирование, дезарретирование, приведение индекса
в нулевое положение, отсчитывание, арретирование, упаковка). Даже при небла
гоприятных условиях (сильные микросейсмы) или при соблюдении специальных
мер для повышения точности (разд. 6 .6 . — 6.6.3) время работы на пункте не бу
дет более 10 мин. В зависимости от условий транспортировки за день можно
определить (при однократном наблюдении) 50 (или 30) пунктов при расстояниях
между ними в несколько сотен метров (или несколько км). Для быстрого выпол
нения детальной съемки можно использовать неисчерпанные возможности верто
летной гравиметрии (разд. 7.4.2), а также наземной и аэроградиентометрии
(разд. 8.3.2).
Гравиметрические съемки
9.3.3.
317
Определение планового положения и высот пунктов
Плановые и высотные координаты гравиметрических пунктов устанавливают их
положение и используются при вычислении гравиметрических редукций. Для
определения местоположения можно использовать многие методы геодезии и фо
тограмметрии. Выбранный метод должен соответствовать требуемой точности
с учетом экономических аспектов и рассчитан на имеющиеся материалы (катало
ги пунктов геодезических сетей, топографические карты, аэрофотоснимки).
В отличие от пунктов геодезических сетей положение гравиметрических пунктов, как
правило, не требуется устанавливать с максимальной точностью; исключение составляют
сложные опорные сети, предназначенные для мониторинга временных измерений силы тя
жести (разд. 10.1.1). Лучше выбирать такие методы, при которых временные затраты со
измеримы с затратами на измерения силы тяжести и обеспечивается требуемая точность.
Опыт работ показывает, что геодезическое обеспечение съемки часто недооценивают, осо
бенно в неизученных районах.
Для определения положения гравиметрических пунктов нужно определить их
плановые координаты, с тем чтобы эти пункты можно было опознавать на кар
тах, а последующие оценки выполнять в численном виде. При региональных
съемках, как правило, достаточна точность планового положения ± 1 0 — 100 м
(что соответствует ошибкам от ±0,2 мм в масштабе карты 1 : 50000 до ±0,4 мм
в масштабе 1 : 250000). При локальных съемках может потребоваться точность
координат ± 0,1 — 1 м.
Для вывода аномалий в свободном воздухе и аномалий Буге требуются грави
метрические редукции, зависящие от плановых координат и высоты пункта
(разд. 3.2.1, 4.3.3). Они зависят также от вертикальной составляющей градиента
силы тяжести и плотности горных пород; вычисление редукций рассмотрено в
разд. 9.3.4.
Дифференцируя формулу (3.76) для редукции в свободном воздухе 6gCBB, по
лучим зависимость ошибки этой редукции от ошибки определения высоты
Щ м, = 0M(bgCBв)(мкм.с-2).
(9.23)
Если d(6gCBB) = 0,1 мкм-с -2 (точность измерения силы тяжести), то высоту
нужно находить с ошибкой ±0,03 м. Для вычисления топографической редукции
(4.36) требуется знать отметку пункта и высоты рельефа. Разделив на части
(4.38), объединим поправки за притяжение пластины б#пл (4.37) и редукцию в
свободном воздухе в общее выражение, зависящее от высоты. Дифференцируя
это выражение, найдем
dHM = (3 - 0,0004ρ) “ ld(6gCBB - ^ пл) < « - > ·
<9·24)
Чтобы получить редукцию с ошибкой 0,1 мкм-с “ 2 (ρ = 2700 кгм-3), высоту не
обходимо знать с ошибкой ±0,05 м. Для вычисления поправки за рельеф с ошиб
кой 1 мкм-с -2 (равнинный район) или 10 мкм-с -2 (горы) разрешающая
способность и точность топографических моделей (цифровых моделей рельефа)
должны быть различными в зависимости от сложности рельефа и расстояния
до притягиваемой точки.
Глава 9
318
В ближней зоне (0 — 100 м) либо не должно быть сильных нарушений рельефа, либо
нужно выполнить простейшую топографическую съемку (ошибка высот ±0,1 — 1 м). Для
кольцевой зоны с радиусами от 0,1 до 2 км вокруг пункта необходимы отметки рельефа
с ошибкой ±5 — Юм и разрешением до 0,1 км х 0,1 км; это возможно, если имеются
топографические карты масштабов 1 : 5000 — 1 : 25 000. Влияние зоны с радиусами 2 —
50 км можно учесть по модели местности с разрешением 1 км х 1 км (ошибки отме
ток ±10 — 100 м), такая модель может основываться на картах масштаба 1 : 25 000 —
1 : 250 000. Для области за пределами 50 км необходимо разрешение 10 км х 10 км
(±100 м). Предпочтительно для разных зон использовать разные оценочные алгоритмы
[55].
При вычислении аномалий в свободном воздухе и аномалий Буге необходимо
находить нормальную силу тяжести 70 , которая является функцией геодезиче
ской широты φ. На основании (3.1 в) имеем
άφ (р а д )
—
- — :—
У е$
S in
— -
2φ
dyo =
-----
S in
2φ
dy о
,
.
(мс )
(9.25)
Для dyo = 0,1 мкм-с 2 наибольшая требуемая точность (φ = 45°) составит
άφ = ±0,4" = 12 м.
Геодезические методы определения координат и высот можно разделить сле
дующим образом: методы определений по имеющимся картам и аэрофотосним
кам, методы космической геодезии и традиционные наземные геодезические
методы. Для обеспечения региональных и локальных гравиметрических съемок,
как правило, выполняют привязку к пунктам национальных опорных сетей. Под
робные описания способов привязки можно найти в геодезической литературе
[64, 243, 258, 377, 626, 691].
Координаты и высоты точек можно взять с топографической карты, если положение
гравиметрических пунктов опознается на ней однозначно. По картам масштабов 1 : 25 000
(1 : 50 000) плановые координаты можно получать с ошибкой примерно ± 1 0 м (±20 —
50 м), а высоты — с ошибкой ±1 — 5 м (для точек с подписанными отметками ±0,3 —
1 м). Для определения координат можно также использовать трансформированные аэро
фотоснимки масштаба 1 : 1 0 000 — 1 : 50 000, по стереопарам можно получить высоты
пунктов [325]. Фотографии из космоса (станция Spacelab I) уже сейчас обеспечивают пла
новые и высотные координаты с ошибкой ± 1 0 м [376]. Пункты обоснования, необходи
мые для пользования аэрофотоснимками, определяют методами, которые описаны ниже.
Среди методов, основанных на наблюдениях космических объектов, для определения
координат гравиметрических пунктов методы геодезической астрономии, требующие
больших затрат времени, не играют существенной роли (разд. 2.1.2). Ошибке определения
широты и долготы этими методами ± Г' соответствуют в линейной мере ±30 м; в дей
ствительности эта ошибка на порядок больше из-за неизвестных уклонений отвеса, кото
рые определены с точностью ±1" — 2" лишь для некоторых территорий. Большое
значение приобрели методы космической геодезии [192, 623]. Можно приобрести приемоиндикаторы, позволяющие оперативно определять пространственные декартовы коорди
наты пунктов в общеземной геоцентрической системе (разд. 2.1.1). Эти координаты
можно преобразовать в геодезические (эллипсоидальные) координаты (широту, долготу,
высоту) (разд. 2.4.2). Навигационная спутниковая система ВМС США (система Транзит)
начала работать в штатном режиме с 1970 г. и будет функционировать примерно до
1995 г.; при измерении доплеровской частоты с использованием бортовых эфемерид она
обеспечивает определение координат с ошибкой ±10 — 30 м по одному прохождению
Гравиметрические съемки
319
ИСЗ; накапливая измерения в течение нескольких суток, можно уменьшить ошибку до
±3 — 5 м. Из одновременных наблюдений на двух или нескольких станциях, расположен
ных не далее 500 км друг от друга, разности их координат получают с ошибками ±0,2 —
0,5 м [378]. Вводится в строй (завершение около 1990 г.) Глобальная система определения
местоположения Навстар (GPS); в любой точке на Земле можно будет одновременно на
блюдать не менее 4 спутников этой системы.
Измерения времени прохождения радиосигнала от спутника до приемоиндикатора ли
бо доплеровского сдвига частоты позволят получать координаты пункта в реальном
масштабе времени [365, 622]. При использовании кода С/А (coarse acquisition — код моду
ляции несущей частоты L1), который предназначен для рядовых гражданских пользовате
лей, местоположение в реальном масштабе времени определяется с ошибкой ±30 м. При
многократных измерениях она уменьшается до нескольких метров. При одновременных
наблюдениях двумя или более приемоиндикаторами, установленными на расстояниях друг
от друга в 10 —20 км, приращения их координат определяются с ошибкой в несколько
сантиметров, а при расстояниях в несколько сотен километров — с дециметровой точнос
тью. Отметим, что полученные таким образом отметки пунктов представляют собой вы
соты над эллипсоидом; при вычислении аномалий силы тяжести от этих высот
необходимо перейти к ортометрическим или нормальным высотам, зная соответственно
высоты геоида или квазигеоида (разд. 2.5).
Наземными методами измерений выполняют по существу интерполяцию между
опорными пунктами, координаты которых определены национальными геодезическими
службами или получены спутниковыми методами. Для определения пространственных ко
ординат на больших расстояниях с ошибками ±0,1 — 0,5 м на 10 — 50 км можно исполь
зовать инерциальные геодезические системы [613, 621]. Рекомендуется такие измерения
сочетать с GPS-измерениями. При локальных съемках можно использовать метод тахео
метрии (дециметровая точность). Для определения плановых координат можно приме
нять классические методы, основанные на измерении расстояний и углов (электронный
дальномер и теодолит); измерения можно выполнять по различным схемам (например,
ходами), ошибки определения координат исчисляются сантиметрами или дециметрами.
Особо важно определение высот. Высокую точность (±0,01 м/1 км — ±0,1 м/100 км
и точнее) обеспечивает геометрическое нивелирование, однако оно требует больших затрат
времени. Более экономично, особенно в горных областях, тригонометрическое нивелиро
вание (или тахеометрия); оно почти на порядок грубее геометрического нивелирования.
Барометрическое нивелирование позволяет определять превышения с ошибкой примерно
± Δ # (Μ)/100 при условии, что надежно учитываются изменения атмосферного давления и
дрейф прибора (применение барографа, привязка к реперам, использование нескольких ба
ронивелиров). Характерно, что этот метод не зависит от наличия прямой видимости меж
ду пунктами; в этом отношении он аналогичен гравиметрическому методу и потому
весьма экономичен. Даже при неблагоприятных условиях (транспортировка на вертолете
в пустынях и полярных районах) барометрическое нивелирование обеспечивает точность
±1 -
Ю м [201].
При обработке геодезических измерений необходимо помнить, что наряду с общезем
ной системой координат существует множество национальных координатных систем. Они,
как правило, не являются геоцентрическими и в качестве поверхностей относимости испо
льзуют разные эллипсоиды (широта и долгота) и аппроксимации геоида (поверхность на
чала счета высот). В качестве системы плановых координат используют также плоские
декартовы координаты, обычно связанные с некоторой конформной проекцией. Поэтому
возникает необходимость в переходе от одной системы координат к другой, особенно ког
да сочетают методы космической геодезии с наземными методами и когда пользуются
имеющимися опорными пунктами и картами [64]. Параметры перехода (от локальной гео
дезической системы к геоцентрической системе WGS 84) даны в работе [147].
320
Глава 9
При определении плановых координат и высот для национальных гравимет
рических съемок желательно использовать топографические карты в сочетании,
если возможно, с аэрофотоснимками и дополнительными измерениями в данном
районе. На слабоизученных территориях для планового обеспечения рекогносци
ровочных съемок можно использовать аэрофотоснимки с пунктами спутниковых
определений, высоты можно определять барометрическим нивелированием. При
детальных высокоточных съемках может потребоваться определение координат
спутниковыми методами (GPS) и/или наземными методами (геометрическое ни
велирование).
9.3.4.
Определение плотности
Для вычисления аномалий Буге и изостатических аномалий необходимо знать
плотность топографических масс. Ошибки в определении плотности приводят к
фиктивным аномалиям и последующим ошибкам в интерпретации. Знание вели
чины плотности необходимо и для вычисления аномалий в свободном воздухе
с поправкой за рельеф (разд. 4.2.3, 4.3.3).
Плотность глубоких масс описывается плотностными моделями расслоения земной
коры. Необходимую информацию о плотности получают в первую очередь по соотноше
нию плотность/глубина, которую выводят из сейсмических данных; эта информация мо
жет уточняться по результатам глубокого бурения (разд. 4.3.3, 4.3.4).
Для вычисления поправок нужна трехмерная модель реального распределения
плотности горных пород. Такая объемная плотность определяется на основе
плотности минерального скелета ρΜ горных пород с учетом содержания в их
порах воды р (%) по формуле
e = ем - p (Qm - в.).
(9·26)
где ρΒ— плотность воды; предполагается, что в естественных условиях почти
всегда наступает насыщение. Объемные плотности основных горных пород и ми
нералов приведены в табл. 4.1 (разд. 4.3.5). Реально удается моделировать лишь
наиболее крупные комплексы горных пород (порядка км3). В этом случае необхо
димо знать объемную плотность формации, определяемую объемной плотнос
тью горных пород с учетом трещин и степени выветривания.
Рассмотрим точность определения плотности, необходимую для вычисления
аномалий Буге. Топографическую редукцию можно представить состоящей из по
правки за притяжение плоского промежуточного слоя 5#пл и поправки за рельеф
6gp (разд. 4.3.3):
д £в = 8 - ~^н н - bgnn + dgp - 7о,
или
.
Agb = g - 3,086Η - 0,000419qH + 6gp - y0 м км -с"2.
(9.27)
Из этого соотношения следует связь ошибки определения плотности и ошибки
поправки за промежуточный слой:
*
_ 2400 _
0 0(К Г/ М 3) “
гг
^(М )
.
^ П л ) ( М К М С " 2)·
(9.28)
Гравиметрические съемки
321
Если поправка необходима с точностью ±1 м км -с"2, то при Н = 100 м (или
1000 м) допустима ошибка определения плотности ± 2 4 к г · м " 3 (или
±2,4 к г-м "3), или в относительной мере 1% (или 0,1%).
Поправка за рельеф линейно зависит от плотности. Если нужно определить
эту поправку с точностью 1 м км -с"2, то допустимая относительная ошибка в
определении плотности составит 10% для равнинных территорий, а в горных
районах уменьшится до 1%.
Для вычисления топографической редукции используются различные подходы. Как пра
вило, для больших геологических формаций или даже для всего района считают, что распре
деление плотности с глубиной однородно; это приводит к понятию однородной плотности
Буге. Часто используют значение плотности 2670 кг ·м " 3 (кристаллические горные поро
ды). По результатам геологической съемки, зная средние значения плотностей
(табл. 4.1), выделяют участки с теми или иными плотностными характеристиками;
иногда также выполняют специальные определения плотности (см. далее). Так, плотность
консолидированных осадочных пород примерно равна 2300 fcr- м -3, а плотность магмати
ческих и метаморфических пород — 2700 к г - м ' 3. Из-за смешанного состава горных пород
и сильных локальных изменений плотности при региональной съемке не имеет смысла
подразделение по плотности < 50 кг ·м “ 3 [656]. Детализация плотностной модели по
глубине возможна, если из результатов бурения, по сейсмическим данным или данным
геологического профилирования известно вертикальное распределение горных пород. В
большинстве случаев форма граничных поверхностей принимается простейшей (горизон
тальные и наклонные плоскости). Если вычислять топографическую редукцию, отсчиты
вая высоту от выбранной поверхности (например, проходящей через самую низкую точку),
то можно уменьшить ошибки аномалий силы тяжести из-за погрешности в принятой
плотности глубоких масс.
Для вычисления редукции в свободном воздухе необходимо знать вертикаль
ный градиент силы тяжести dg/dH. Из (9.27) имеем
d(dg/dH)c- г = - - j - d(6gCBB){uc-2y
(9.29)
"(Μ)
При d(6gCBв ) = 1 мкм с " 2 и Н = 100 м (или 1000 м) допустимая ошибка гради
ента ±10 (или ±1) н с"2, или в относительной мере 0,3% (или 0,03%). Если по
льзоваться стандартным нормальным значением градиента, ошибка может быть
существенно больше (разд. 8.1.2)°.
В региональных и локальных исследованиях особую роль играют разности аномалий
Буге. Поскольку объемная плотность формации и вертикальный градиент силы тяжести
изменяются достаточно медленно (исключение составляют зоны разрывов), ошибки из-за
гипотезы о постоянных величинах плотности и вертикального градиента сильно коррелированы. При расстоянии между пунктами в несколько километров коэффициент корреля
ции г величины плотности может составлять 0,5 — 1 [152]. Из выражения (9.20) следует,
что в таком случае ошибка разности аномалий существенно уменьшается в (1 — г)1/2 раз.
Методы определения плотности подробно описаны в геофизической литера
туре [462, 505]. Дадим лишь их обзор.
!)) А н ом алию в св ободном воздухе находят на физической поверхности Земли, пользуясь нор
мальным значением д у / д Н вертикального градиента силы тяж ести, поэтом у указанная ошибка не
возникает. — П р и м . ред.
322
Глава 9
Объемную плотность можно определить непосредственно, измерив массу и
объем проб горных пород, взятых из молодых выходов пород на поверхность
или кернов. Особенно прост гидростатический метод. Образец взвешивают на
пружинных весах дважды: сначала в воздухе, а затем погрузив его в воду. Проис
ходит потеря веса, равная весу воды, вытесненной образцом. Уменьшение веса
определяется формулой
mg - (mg - mBg) = mBg ,
(9.30a)
где m — масса образца, v — его объем, тъ — масса вытесненной воды. По
скольку
т = QVy
тв = QBvt
(9.306)
то плотность образца будет равна
(9.31)
где ρΒ— плотность воды.
Взвешивание позволяет определить плотность с высокой точностью. Однако из-за
слабой представительности образца небольших размеров (вес его менее нескольких кило
граммов) результаты сильно меняются как на ограниченном участке, так и по региону.
К систематическим ошибкам приводят изменения при извлечении образца из горной фор
мации (уменьшение давления, потеря капиллярной воды). Для восстановления насыщения
образца водой его приходится смачивать. Если число взятых образцов достаточно пред
ставительно для территории, то средняя плотность горной формации может быть опреде
лена с ошибкой ± 5 0 — 100кг-м_3 (табл. 9.4).
Т аб ли ц а 9.4. П лотн ость горных п ор од, полученная взвешиванием их образц ов,
Северная Исландия [598]
Горная порода
пунктов
Третичные базальты
Третичные туфы
Кварцевые базальты
Гиалокластические
п ороды (туфы
и брекчия)
5
4
14
6
Количество
образцов
27
19
89
40
Плотность, к гм 3
2
2
2
1
500
100
100
700
—
—
—
—
3
2
3
2
000
600
000
500
Средняя плотность,
к г м '3
2
2
2
2
830 ±
330 ±
650 ±
100 ±
70
110
60
80
Объемную плотность формации для структур ограниченной протяженности
можно определять по измерениям силы тяжести с использованием соотноше
ния, связывающего зависимость силы тяжести от высоты с плотностью пород
(разд. 3.2.2). Этот метод применим при измерениях как на земной поверхности,
так и на вертикальных профилях.
Как показано в работе Неттлтона [503], определение плотности топографи
ческих структур гравиметрическим методом основывается на предположении,
Гравиметрические съемки
323
Рис. 9.12. П остроенны й по м етоду Н еттлтон а профиль Вадлахейди, Северная Исландия: слои лавы in
третичных базальтов с туфовы ми включениями, п лотность 2700 кг м
ленную по данны м [5991.
3; см. табл. 9.3, состав
что аномалии Буге, вычисленные с истинным значением плотности пород, ведут
себя как случайные величины, не коррелированные с высотами пунктов. Возника
ющую же корреляцию можно устранить, изменяя принятое значение плотности.
Этот метод применим для гравиметрических профилей (рис. 9.12) и для площад
ных съемок; оценки можно получить графически или из вычислений [342, 418].
Приняв приближенное значение плотности ρ 0 по (9.27), можно вычислить
приближенные аномалии Буге Δ#Β. Сравнение их с «истинными» аномалиями,
полученными с плотностью Буге
ρ = ρ° + Δρ,
(9.32)
приводит к выражению
£
д0
Agb = Ag°b - 0,000 419·//·Δ# -
Δρ мкм с " 2,
(9.33)
ρ
где
— поправка за рельеф, вычисленная с плотностью ρο· После исключения
региональной составляющей (например, среднего значения аномалии) остаточные
аномалии становятся близкими к случайным. Если поставить условие, чтобы от
сутствовала их корреляция с рельефом, коэффициент корреляции г должен быть
равен
L(Agh - Ag,)(H - Η)
= 0,
(L(AgE - AgEr x Σ(Η - Η) 2 \) 1/2
(9.34)
где Δ#Β и Η — соответственно средние значения аномалии и высоты. Подстав
ляя выражение (9.33) и считая, что для поправки за рельеф достаточна плотность
ρο, получим
η
-л
—
Δρ =
;
(9.35)
*
0,000419 Σ ( Η - Η ) 2
могут потребоваться несколько приближений.
324
Глава 9
Одновременно с определением плотности из уравнивания по методу наимень
ших квадратов можно определить и региональную составляющую поля. Если
представить функцию AgB поверхностным полиномом, уравнение поправок в со
ответствии с (9.27) имеет вид
п
т
V= Σ Σ
ι =0 7=0
a U x 'yJ
- (3,086 - 0,000419ρ) Η - g - 6g 4- 70 м км -с"2.
(9.36)
В результате уравнивания находят коэффициенты полинома atj и плотность ρ.
Гравиметрический метод Неттлтона — очень эффективный метод определения объем
ной плотности топографических масс в области с гравиметрической съемкой; ошибка
определения плотности ± 20 — 5 0 к г * м '3 (т.е. относительная ошибка 1 — 2%). При ис
пользовании метода предполагается следующее:
— распределение плотности не зависит от рельефа. Если же рельеф определяется строени
ем нижележащих геологических структур, то метод не работает;
— однородное распределение плотности в исследуемой (ограниченной) области;
— достаточно большие (более 100 м) перепады высот и представительное распределение
гравиметрических пунктов как в плане, так и по высоте;
— удовлетворительная модель регионального поля, влияние которого необходимо исклю
чать из используемых данных.
Вертикальные гравиметрические профили можно построить в шахтах и сква
жинах (применение скважинных гравиметров (разд. 7.1.2)) [398]. Из измерений
силы тяжести в двух точках Pi и Р 2, лежащих на одной вертикали, можно опре
делить объемную плотность для слоя (толщина Az = Zi - Ζ\) между этими точка
ми (рис. 9.13). Вычисления выполняются в три этапа. Сначала введением
редукции
исключают влияние топографических масс (притягиваемая точка
Pi), затем для разности высот между Pi и Рг вводят редукцию в свободном воз
духе, и после этого редукцией δ#^2)π восстанавливается влияние масс (притягивае
мая точка Р 2). На основании (9.27) получим
Δ« = g2 - gi = - <5 4 ^ + 6gCBB - Sg(T2Jn =
= - (2тгG qAz - δ ^ 0) + ψ - Az - (2 тгG qA z - bg™)
—
Рис. 9.13.
Вертикальный гравиметрический профиль (шахтный профиль) для
определения плотности пород.
Гравиметрические съемки
325
или
Ag =
ΟΖ
Δζ - 4π ϋ ρ Α ζ + δ#*0 + δ#<2).
ν
ν
(9.37)
Переходя к дифференциалам, выражение (9.37) можно преобразовать в дифферен
циальное уравнение Пуассона (2.22).
Объемная плотность пород вычисляется по формуле:
(dg/dz)Az - Ag + δ£<υ + dgP*
в = ---------------------------и
,
*
4 wGAz
(9.38)
причем вместо dg/dz обычно используется нормальное значение 3086 н с"2.
Вертикальные профили, как правило, содержат большее число гравиметрических пунк
тов. При измерениях в скважинах расстояния между пунктами составляют 10 — 100 м.
Плотность пород может быть получена из уравнивания, в число неизвестных можно
включить также параметры изменения плотности по высоте и аномалию вертикального
градиента силы тяжести. При работе в шахтах поправками учитывают влияние полостей.
Относительная ошибка определения плотности пород не превышает 1%.
В скважинах можно также определять плотность близлежащих пород (в пределах от
нескольких сантиметров до нескольких дециметров), используя метод гамма-гамма каро
тажа, основанного на эффекте Комптона. Гамма-излучение радиоактивного источника те
ряет часть своей энергии при столкновении с атомами горных пород. Потеря
интенсивности излучения, регистрируемого детектором, является функцией плотности
пород.
Результаты разных методов определения плотности могут различаться до
5%. Расхождения вызваны локальными изменениями плотности и ее отличием
от плотности формации, изменением плотности извлеченного образца от
плотности породы in situ и модельными погрешностями гравиметрического
метода (допущение об однородности слоев, использование нормального градиен
та силы тяжести). Рекомендуется применять разные методы и сочетать их ре
зультаты.
9.3.5.
Морская и аэрогравиметрическая съемки
В морской и воздушной гравиметрии выполняют квазинепрерывные измерения
на подвижном основании (разд. 7.3). На съемочных профилях накапливается
большой объем данных; в аэрогравиметрии регистрация осуществляется с шагом
1 с, а на море — примерно через 10 с. При последующем сжатии информации
при работе на судах и вертолетах получают значения силы тяжести, осредненные
на отрезке маршрута около 1 км. Расстояние между профилями выбирается для
каждого проекта и лежит в пределах от 10 до 50 км при работах на море и от
1 до 5 км — на вертолете. Для определения положения профиля, вычисления по
правки Этвеша и гравиметрических поправок надо знать координаты носителя,
его курс и скорость, а также высоту (самолет) и глубину с привязкой по времени.
Калибровочную функцию гравиметра необходимо определять на базисе. Из-за
того что точностные требования для подвижных систем несколько ниже, в боль
шинстве случаев достаточен лишь линейный масштабный коэффициент
(разд. 6.4.5). Абсолютный уровень силы тяжести определяют привязкой к опор
ным пунктам. Для морской гравиметрии эти пункты создают в портах, в аэро
Глава 9
326
гравиметрии исходные значения получают путем аналитического продолжения
силы тяжести на высоту полета над данным пунктом. Повторные привязки в
течение съемки помогают выявить (и оценить) долговременный дрейф, иногда
скачки отсчетов, а при достаточно большой области съемки можно проконтроли
ровать и калибровку. Для контроля результатов и повышения точности использу
ют пересечения профилей, особенно надежные результаты получаются при
съемке в виде сетки пересекающихся профилей (рис. 9.14). В большинстве случаев
профили проектируются в направлениях с севера на юг и с запада на восток;
иногда их ориентируют в зависимости от исследуемой структуры (перпендику
лярно ее простиранию). Невязки в точках пересечения профилей зависят от точ
ности измерений силы тяжести, поправки Этвеша и определения координат. Эти
невязки моделируют полиномами, как функции времени или расстояния, и вы
полняют уравнивание по методу наименьших квадратов. В большинстве случаев
для прямолинейных профилей достаточно ввести в результаты измерений посто
янную поправку. При измерениях на море расхождения можно уменьшить до
±5 — 20 мкм-с " 2 (разд. 7.4.1, 7.4.2).
Качество морских и аэрогравиметрических съемок в значительной мере опре
деляется точностью навигационного обеспечения. Точностные требования можно
кратко сформулировать следующим образом.
Для определения положения пунктов, как правило, достаточно знать коорди
наты с ошибкой ± 50 — 100 м. Для вычисления поправки Этвеша в средних ши
ротах с ошибкой ±5 мкм-с ' 2 необходимо соблюдать следующие требования:
скорость судна должна определяться с ошибкой ±0,05 м/с, а курс — с ошибкой
±0,5°, скорость самолета необходима с ошибкой ±0,04 м/с, а его курс — с
ошибкой ±0,03° (разд. 7.2.4). Глубины должны измеряться с ошибкой ±1 — 5 м
(при этом ошибка поправки за промежуточный слой не будет превышать 1 —
4 м км -с"2), а высота полета— с ошибкой не более ±3 м (что соответствует
ошибке редукции за высоту ±10 м км -с"2). Более жесткие требования предъявля
ются к точности определения изменений высоты полета (до ± 0,1 м), если их ис
пользуют для вычисления вертикальных возмущающих ускорений.
N
Рис. 9.1 4 . Морские гравиметрические профили в голландской части Северного моря (И нсти тут геодезии
Д елф тского технологического университета [660].)
Гравиметрические съемки
327
Рис. 9.15.
Вычисление аномалии Буге на море: ρ» — п лотность воды ,
ρ — п лотность земной коры, 5gp — поправка за рельеф.
Аномалии в свободном воздухе и аномалии Буге на акваториях используют для гео
физической интерпретации. При вычислении аномалий Буге плотность масс воды допол
няют до стандартной плотности земной коры или плотности, характерной для
исследуемой области; для этого вводят топографическую редукцию. При разделении ее
на редукцию за притяжение плоского промежуточного слоя и поправку за рельеф необхо
димо помнить, что последняя может быть как положительной, так и отрицательной
(рис. 9.15). Считая, что плотность земной коры ρ = 2670 кг м " 3, а плотность воды
ρΒ = 1030 кг· м " 3, из соотношений (4.36) и (4.37) получим
Δ#Β = £ + 0,687Г + 5gp -
уо
м к м с -2,
(9.39)
где Т — глубина, 6gp — поправка за рельеф.
Известно много методов навигации морских и воздушных судов [168, 321, 624].
Их можно разделить на определения положения (непрерывного или дискретного)
и определения скорости и курса. Все они могут базироваться или на внешних
навигационных системах (глобальные, региональные, временные локальные), или
на автономных. Особую роль играют спутниковые, радионавигационные и инер
циальные методы, которые часто объединяют в интегральные навигационные
системы.
Для спутниковой навигации по всей поверхности земного шара создана Спутниковая
навигационная система ВМФ США NNSS (система ТРАНЗИТ). Наблюдения спутников,
которые можно выполнять через интервалы в несколько часов (в зависимости от широты
места) дают координаты с ошибкой ±50 — 100 м. Следующая новая система — Глобаль
ная система определения местоположения (GPS). Система GPS обеспечивает определение
местоположения в реальном масштабе времени (±50 м), скорости (±0,1 м/с) и привязку
ко времени (±50 нс) [162]. Зная высоты геоида, полученные по глобальным моделям
(разд. 4.2.2), можно перейти от решения пространственной задачи к определению лишь
плановых координат, что и представляет первоочередной интерес для навигации. В таком
случае уменьшается время наблюдений и понижаются требования к геометрии созвездия
спутников. В прибрежных районах (при удалении от берега до нескольких сотен километ
ров), установив на суше (на исходном пункте) опорный приемоиндикатор, а на судне —
бортовой приемоиндикатор, методом дифференциальной навигации можно определять их
взаимное положение с ошибкой ±5 м и менее. После развертывания системы GPS (при
мерно к 1990 г.) она обеспечит непрерывную навигацию на всем земном шаре. Если будет
открыт доступ к точному коду системы для любого пользователя, то появится возмож
328
Глава 9
ность обойти многие трудности при гравиметрических съемках0. Астрономические опре
деления координат из наблюдений звезд и Солнца (± 2 — 4 км) в значительной мере
утратили свою роль (разд. 9.3.3).
В радионавигационных методах применяют наземные базисные станции, излучающие
электромагнитные волны; сигналы принимаются приемоиндикатором подвижной станции
и обрабатываются, реализуя режим линий положения (геометрический способ определения
координат с использованием сетки изолиний, например гипербол). Дальность действия и
точность зависят от несущей частоты, геометрии линий положения (угла, под которым
они пересекаются) и от состояния атмосферы. Существуют различные системы: система
Омега (10 кГц, дальность 8000 км, ошибка ±1 — Зкм) является глобальной, большая
часть поверхности Мирового океана входит в зону действия системы Лоран-С (100 кГц,
дальность до 2000 км, ошибка ±100 м — 1 км), базисные станции цепочек системы Декка
(100 кГц, дальность до 450 км, ±20 — 100 м) установлены по основным судовым фарвате
рам. Рабочие зоны высокоточных систем (± несколько метров), например Силедис
(450 МГц) или Хай-Фикс (2 МГц), охватывают прибрежные акватории (до 150 —200 км).
Для локальных съемок можно также применить подвижные системы морской и воздуш
ной навигации. К их числу, например, относится система Мини-Рэйнджер (из измерений
времени прохождения микроволновых радиоимпульсов определяют расстояния от подвиж
ной станции до базисных, дальность 180 км, ошибка ±3 м), а также дальномерная систе
ма ANA (фирма Prakla — Seismos, Ганновер) с односторонним распространением
радиоволн. В этой системе, разработанной для морских и аэрогеофизических исследова
ний, на передающей и приемной станциях установлены атомные стандарты частоты;
дальность действия системы 900 км, ошибка ± (Ю м -I- 8 м/час). С использованием судо
вого радара и антенн, установленных на суше или буях, местоположение судна при удале
нии на несколько десятков километров можно определять засечкой с ошибкой ±50 м.
Для интерполирования между точками абсолютных или относительных определений
координат носителя используют бортовые навигационные средства, независимые от
внешних систем. Для определения курса служат компасные системы (магнитные и гиро
компасы). Скорость судна традиционно определяется с помощью лага (необходимы по
правки за скорость ветра и морских течений); на участках с плоским дном можно
применить доплеровский гидролокатор, использующий отражение звуковых волн от мор
ского дна (при глубинах до 200 м скорость судна определяется с ошибкой ±0,05 м/с). При
аэронавигации можно использовать метод доплеровского радара. Он обеспечивает опреде
ления курса и скорости относительно земной поверхности на высотах 0,1 — 1 км, а в соче
тании с гиросистемой и при интегрировании по времени позволяет определять положение
относительно исходных пунктов (ошибка не более 1% от длины маршрута) [63]. Инерци
альные навигационные системы представляют собой универсальное средство навигации
(ошибка ±0,05 м/с), однако при увеличении времени наблюдений их ошибки быстро воз
растают (разд. 4.5.2, 7.5).
Интегральные навигационные системы сочетают хорошую долговременную стабиль
ность абсолютных методов определения координат с непрерывностью методов определе
ния курса и скорости, для которых характерна кратковременная стабильность. Объединив
их с автопилотом, можно исключить быстрые изменения траектории на съемочном про-
0 Завершен этап разверты вания космического сегмент а GPS. П о со ст оян ию на ф е в р а л ь 1994 г.
он сод ер ж и т 24 рабочих и 3 резервных И СЗ. В отечественной практике ш ироко используется система
Г Л О Н А С С , во м н огом схож ая с систем ой GPS; точность м гновенного определения плановы х коорди
нат - 100 м; в ф еврале 1994 г. си стем а содер ж ал а 13 И СЗ. П осл е завершения разверты вания (1995 г.)
она б у д ет состоя ть из 24 И СЗ (включая 3 резервны х), размеш енны х в трех плоскостях на высоте
19100 км с п ер и одом обращ ения 11,25 ч и наклонением 6 4 , 8 ° . — П р и м . ред.
Гравиметрические съемки
329
Последующая
обработка
Рис. 9.16. Схема получения информации в морском гравиметре Kss3() (включая системы иашпанип и
обработки данных) [540] (материал фирмы Prakla — Seism os, Ганновер).
филе. Особенно удачным оказалось сочетание спутниковых навигационных систем (ТРАН
ЗИТ, GPS) и/или радионавигационных систем с компасными блоками и инерциальными
навигационными системами [775]. Интегральные системы обеспечивают в любом месте
земного шара точность ±100 — 200 м, в прибрежных областях достижима точность не
хуже ± 10 м.
Измерения глубины выполняют акустическими эхолотами с точностью примерно
±0,1 °7о (на мелководье около ±0,1 м). Высоту полета измеряют, главным образом ис
пользуя одновременно баровысотомер и радиовысотомер или лазерный высотомер (при
полете над водной поверхностью); на сравнительно небольших высотах ошибка составляет
± 1 м. В качестве вспомогательных средств могут использоваться система GPS и инерци
альные геодезические системы; в будущем эти системы позволят регистрировать и учиты
вать короткопериодические вертикальные возмущающие ускорения по высокоточным
измерениям вариаций высоты полета.
Обработка морских и аэрогравиметрических съемок выполняется либо на
борту носителя, либо после съемки при окончательной обработке. Обработка в
реальном масштабе времени служит для текущего контроля и позволяет непо
средственно в процессе съемки судить о необходимости повторных наблюдений.
На борту носителя необходима мощная система для регистрации, обработки и
выдачи информации (в цифровой или аналоговой форме). Для сбора, первичной
обработки и фильтрации гравиметрических данных используется центральный
330
Глава 9
процессор. Навигационные и временные данные, поступающие из навигационной
системы, служат для контроля гиросистем, для вычисления поправки Этвеша и
гравиметрических редукций. Невязки в точках пересечения профилей и аналоговая
информация (приращения силы тяжести, поправки Этвеша, аномалии в свобод
ном воздухе) позволяют качественно оценивать гравиметрические данные. На
рис. 9.16 приведена блок-схема потока информации при обработке наблюдений
в реальном масштабе времени. Повысить точность возможно при окончательной
обработке благодаря сглаживанию определений курса и скорости, более надежно
му выявлению грубых ошибок и применению при уравнивании наиболее совер
шенных моделей. Обработка завершается интерполяцией аномалий силы тяжести
в узлы координатной сетки и построением карты изоаномал (разд. 9.4.3).
9.3.6.
Примеры региональных и локальных
гравиметрических съемок
Рассмотрим некоторые примеры региональных и локальных съемок.
В Германии гравиметрическая съемка была осуществлена в 1935—1945 гг. в
рамках национальной геофизической съемки под руководством Геологической
службы [125]. Связями с пунктом абсолютных определений в Потсдаме была со
здана маятниковая сеть (=ь5 — 10 мкм-с-2). После включения в нее опорных се
тей, созданных с гравиметрами Тиссена—Шлезенера и Аскания, плотность этой
сети была повышена и расстояния между пунктами составили от 2 до 5 км
(±1 — 3 мкм-с-2) (разд. 9.2.6, 9.3.2). В обширных равнинных районах Германии
была также проведена съемка с вариометрами (съемка по профилям, расстояние
между профилями несколько километров, шаг по профилю несколько сотен мет
ров) (разд. 8.2.1). По результатам 45 тыс. измерений силы тяжести были созда
ны карты масштаба 1:200 000 (аномалии Буге). На территории ФРГ съемка была
продолжена в 1950-х гг. Государственной геологической службой земли Нижняя
Саксония (Ганновер). Вслед за построением опорных сетей была выполнена съем
ка территорий, ранее недостаточно обеспеченных гравиметрическими пунктами
либо совсем не изученных. Применялись приборы фирмы «Аскания» и кварцевые
пружинные гравиметры (±0,2 — 0,3 мкм-с-2). По этим данным, включающим
также съемки с вариометрами и протяженные локальные съемки, выполненные
частными организациями (поиски нефти), создается карта аномалий Буге масшта
ба 1:500 000 (3 листа) с сечением изоаномал 10 мкм-с " 2 [538] (рис. 9.17). Значения
силы тяжести отнесены к системе МГСС-71, а нормальная сила тяжести опреде
лена в Геодезической референц-системе 1967 г. (разд. 3.1.2). Притяжение проме
жуточного слоя вычисляли для сферического сегмента (радиус 166,7 км) с
плотностью 2670 кг-м -3, влияние топографических масс при вычислении поправ
ки за рельеф учитывалось на расстояниях до 23 км. В ГДР создание гравиметри
ческой сети (с гравиметрами Аскания) было завершено в 1961 г. [592]. Она
разделена на 3 класса (расстояния между пунктами примерно 50, 15 и 3 — 4 км),
в последующей региональной съемке среднее расстояние между пунктами соста
вило 1,5 км.
Во Франции национальная гравиметрическая сеть была создана Управлением
научно-исследовательских работ по геологии и шахтам (Орлеан). Сеть содержит
Гравиметрические съемки
331
52°30' .
N
52°06'
9°30'
Е
10°10·
Рис. 9.17.Фраrмент карты аномалий Буrе ФРГ, М. 1: 500000, сечение изоаномал 10 мкм · с- 2 (538) .
6
пунктов абсолютных определений; относительные измерения выполнены че
тырьмя гравиметрами Ла Коста
-
Ромберга на
51
пункте первого класса и
324
пунктах второго. После сгущения сетями 3-го и 4-го классов съемка будет содер
жать примерно
370
тыс. пунктов, на ее основе будут созданы гравиметрические
1:320 ООО и 1: 1 ООО ООО (плотность осадочных пород
2300 кг· м - 3 , плотность фундамента 2700 кг· м - 3 , сечение изоаномал 1О 100 мкм·с- 2 ).
В США в 1975 г. были начаты совместные работы Общества геофизиков
разведчиков (SEG), Национальной геологической съемки, Картографического
карты Франции масштабов
управления МО и Национального управления по исследованиям океана и атмос
феры .
Собраны
данные,
имевшиеся
в
различных
организациях;
после
обра
ботки составлены карты аномалий масштаба 1:2 500 ООО на территорию США
[301). Карта сечением 50 мкм·с- 2 основана примерно на 1 млн. гравиметриче
ских пунктов на суше (аномалии Буге, плотность пород 2670 кг· м на
0,8
этих
млн. прибрежных пунктов (аномалии в свободном воздухе)
пунктов
вошли
измерения
силы
тяжести
по
линиям
3)
и примерно
(515);
в число
нивелирования,
выпо
лненные Национальной геодезической съемкой. Аномалии определены в системе
1%7 г. В горных районах поправки
166,7 км. После анализа и компактного
МГСС-71 и Геодезической референц-системе
за рельеф вычислялись в области радиуса
размещения данных был образован путем интерполяции в узлы координатной
сетки с шагом
ния изоаномал
4 км файл
(224). Эта
цифровых данных, послуживший основой для построе
региональная гравиметрическая карта используется при
картографировании положения и строения фундамента, кристаллических пород,
332
Глава 9
структурных и литологических провинций, ослабленных зон земной коры, нару
шений баланса масс в литосфере, геометрии осадочных бассейнов, а также рас
пределения экструзивных и интрузивных магматических пород.
Примером поэтапного создания региональной гравиметрической карты для
большой территории может служить карта Индии [3]. Национальная программа
гравиметрических работ предусматривает площадную съемку со средним шагом
15 км, опирающуюся на фундаментальную сеть (с шагом -100 км). К 1986 г. ре
гиональная съемка покрывала примерно 55% территории страны. Она дополнена
специальными геофизическими съемками и измерениями по нивелирным линиям,
в результате к 1986 г. имелось 26 тыс. пунктов; распределение пунктов иллюстри
рует рис. 9.18. Гравиметрические данные представлены аномалиями в свободном
воздухе, Буге и изостатическими аномалиями.
Во многих областях Земли были выполнены региональные гравиметрические
съемки с целью изучения процессов тектоники литосферных плит, эти работы,
как правило, сочетались с другими геофизическими методами (разд. 4.4.1). Отме
тим региональные исследования в области Центральных Анд (Кордильер), пред
ставляющих собой классический пример горной формации, образовавшейся в
результате субдукции океанической коры под континентальную [225] (рис. 9.19).
С 1982 по 1986 г. гравиметрами Л а Коста — Ромберга было определено около
2600 пунктов на площади 850 х 500 км. Обычно измерения выполнялись вблизи
транспортных магистралей (с шагом около 5 км), высоты пунктов определяли,
как правило, барометрическим нивелированием с привязкой к нивелирной сети.
Плановое положение находили по топографическим картам масштаба 1:50 000—
1:500 000. Вслед за созданием базы гравиметрических данных, содержащей все
имеющиеся значения силы тяжести и цифровую модель местности (для трапеций
3' х 3'), была создана карта аномалий Буге с сечением 100мкм-с ~ 2 (МГСС-71,
Рис. 9.18 (левый). С хем а региональных гравиметрических съемок И ндии по состояни ю на 1986 г. [3].
Рис. 9.19 (правый).Гравиметрические профили и аномалии Буге региональной съемки в Центральных
А ндах (систем а М ГСС-71,
500 м к м -с" 2 [228].
плотн ость
2670
кг м - 3 ),
сечение
сглаж енны х
изоаномал
Гравиметрические съемки
33 3
Рис. 9.20. М орские гравиметрические профили (1965— 1972 гг.) в западной части С редизем ного моря
(О бсерватория экспериментальной геофизики, Триест) [195].
Рис. 9.2 1 . Аномалии Буге над соляным куполом Форхоп в Северной Германии, сечение сглаж енны х
изоаномал 10 м к м - с '2 [631].
плотность пород 2670 кг м -3, определение поправки за рельеф в области ра
диусом 100 км).
В 1965 — 1972 гг. Геофизическая экспериментальная обсерватория Триеста со
вместно с другими организациями выполнила обширную гравиметрическую
съемку Средиземного моря. Сложность строения этого региона обусловлена
столкновением Африканской и Евразийской литосферных плит. Гравиметрические
работы сочетались с наблюдениями отраженных сейсмических волн и измерения
ми напряженности магнитного поля; общая протяженность профилей, на кото
рых выполнены измерения, около 220 тыс. км (рис. 9.20). Результаты
представлены на картах (аномалии в свободном воздухе и аномалии Буге) с сече
нием 100 мкм с -2 [195].
В качестве примера локальной съемки для прикладной геофизики приведем
гравиметрическую съемку соляного купола Форхоп, выполненную фирмой
Prakla — Seismos (Ганновер) (рис. 9.21). Расстояния между пунктами составляют
от нескольких сотен метров до 1 км, высоты определяли геометрическим нивели
рованием, а координаты по картам масштаба 1:25 000. Шаг съемки и точность
аномалий Буге (±1 мкм-с-2) позволяют строить карты изоаномал с сечением
в несколько мкм-с -2 (рис. 9.21).
9.4.
Хранение результатов измерений
9.4.1.
Описание гравиметрического пункта
Описание (формуляр) гравиметрического пункта определяет его положение отно
сительно местных контуров, а также на топографических картах или аэрофото
снимках. Особенно важны такие описания для опорных гравиметрических
334
Рис.
Глава
9.22. Карточка
9
rравиметрическоrо опорноrо пункта, состоящая из описательной и документаль
ной частей (639). Топоrрафическая карта М. 1:50 ООО L3724 (1982). (С разрешения Земельноrо
управления и Управления топоrрафических съемок Нижней Саксонии - В4 - 687 /88).
Опорная rравиметрическая сеть
1976
г.
(DSGN76).
Федеративная Республика Германии
Пункт
4/0
Местоположение
Ганновер, центр
Название
Институт геодезии, Университет
Шифр
IGSN71: 21629А, DSGN62: 3624/ 57 PS
Металлическая марка с надписью «Schweregruпdпet z
Тип центра
1976»,
1акреплен
Институт геодезии, Ганноверский университет, Nieпburger
Str. 1, 3000
ная на пилоне высотой
Описание
Наппоvеr
Координаты
1,
0,8
м
пилон в подз емном калибровочном помещении
Координаты в национальной системе
DHDN
9°42' 51",7в.д. R = 3548630
<{J
52° 23' 12", 4 с.ш. н = 5806023
Высота в национальной системе DHHN
н = 54,287 м
Л
=
=
Гравиметрические съемки
335
пунктов и базисных пунктов региональных сетей, поскольку позволяют легко
опознавать их при повторных измерениях и привязке к этим пунктам и, кроме
того, контролировать возможные изменения на пункте. Описания пунктов по
данным и другой информации из локальных съемок, а также по определениям
высот и плановых координат пунктов приводятся в разд. 9.2.1, 9.3.3.
Формуляр опорного гравиметрического пункта состоит из описательной и
иллюстративной частей [639] (рис. 9.22).
Описательная часть должна содержать следующее:
— номер пункта, его название (название местности или района);
— описание положения пункта и его закрепления;
— географическую широту и долготу пункта ( ± 0 , 1 ") и плановые координаты
(± 1 м) в национальной системе координат;
— высоту пункта (до нескольких миллиметров) в национальной системе счета
высот;
— указание о возможной принадлежности пункта другим гравиметрическим
сетям.
Полезно также указывать приближенное значение силы тяжести (±м км с “ 2).
Для пунктов базисной гравиметрической сети необходимо указывать адрес орга
низации, осуществляющей надзор. И кроме того, следует приводить, если воз
можно, данные, специфические для каждого пункта (земноприливные параметры,
локальный градиент силы тяжести, дополнительную геологическую и гидрологи
ческую информацию).
Иллюстративная часть должна содержать следующее:
— фотографии гравиметрического пункта и ближайших окрестностей;
— общее описание и абрис с данными привязок и промеров;
— выкопировку из крупномасштабной карты, например масштаба 1:2500 (карты
кадастра, карты городов);
— выкопировку из топографической карты, например масштаба 1:50 000.
При пользовании фотографиями, абрисами и выкопировками из крупномасш
табных карт необходимо обращать внимание на возможные изменения на
пункте.
Не столь жесткие требования предъявляются к описанию пунктов сетей сгу
щения региональных и локальных съемок. Требуется отметить их на топографи
ческой карте и составить абрис.
9.4.2.
Базы гравиметрических данных
Результаты мировой и региональных гравиметрических съемок хранятся в базах
гравиметрических данных. Такие базы должны удовлетворять следующим требо
ваниям: возможности первичной обработки большого массива данных, поскольку
данные поступают более или менее регулярно от различных организаций, в раз
нообразном виде и разного качества; возможности обработки и вывода результа
тов в различных форматах в соответствии с требованиями пользователя.
Возникающие затруднения можно устранить, пользуясь системами управления
базой данных [716]. Такие системы содержат отдельные программы и подпро
граммы, причем возможны их различные комбинации. Помимо разработок
336
Глава 9
Рис. 9.23. Управление базой гравиметрических данных [79].
основных гравиметрических организаций можно использовать коммерческие вер
сии пакетов программ. Тйпичные функции такой системы иллюстрирует
рис. 9.23. Входные данные (результаты съемок, содержание других баз данных)
преобразуются в стандартный формат, вводятся в центральную базу данных и
подвергаются контролю качества (исключению грубых ошибок). В процессе внут
ренней обработки данных они приводятся в единую референцную гравиметриче
скую систему, в них вводят стандартные редукции, выполняются уравнивание
гравиметрических сетей и повторный контроль качества. В большинстве случаев
гравиметрические данные представляют в виде аномалий силы тяжести, которые
и выдают потребителю. Необходимо обеспечить возможность выдачи полного
объема информации в цифровом или аналоговом виде, оперативно и в гибкой
форме (в зависимости от различных критериев выбора).
База данных по земному шару существует под эгидой МАГ в Международном
гравиметрическом бюро (МГБ, ТУлуза, Франция). В ее архивном файле использу
ется стандартный формат (160 знаков) и хранится самая разная информация. Она
выводится полностью или избирательно для отдельных источников, стран или
территорий (в виде записей на магнитной ленте или распечаток на бумаге); воз
можны также последующая обработка данных и их вывод в соответствующем
формате (разд. 9.4.3).
Информация, хранимая в базе данных МГБ, содержит:
— номер источника информации по нумерации МГБ;
— номер блока, широту и долготу;
— точность координат, указание системы координат;
— класс точности (например, пункт национальной сети 1-го класса);
— тип местности (например, суша, поверхность моря), высоту пункта и ее точ
ность, способ определения высоты;
— измеренное значение силы тяжести (до 0,1 мкм с -2), дополнительную инфор-
Гравиметрические съемки
337
мацию о силе тяжести (например, инструментальные поправки, поправку
Этвеша), точность измерения силы тяжести;
— систему отсчета (например, МГСС-71), исходные пункты, калибровочные
параметры;
— аномалию в свободном воздухе и аномалию Буге (1 мкм*с“ 2), их точность,
информацию о поправке за рельеф и принятом значении плотности, величину
поправки за рельеф;
— название прибора для измерения силы тяжести, условия измерений;
— изостатические аномалии;
— скорость судна, поправку Этвеша;
— время наблюдений;
— шифр пункта (в соответствии с оригиналом);
— код страны, источник исходной информации, порядковый номер.
Различными организациями США и других стран созданы не только регио
нальные базы гравиметрических данных; геолого-океанографические службы со
брали гравиметрические данные на акватории (разд. 1.3.2, 1.3.1). Во многих
странах существуют национальные гравиметрические базы данных. Часто они
содержат также первичную гравиметрическую информацию и все результаты
уравнивания (уравненные значения силы тяжести с их ковариационной матрицей,
калибровочные параметры, поправки в результаты измерений) (разд. 9.2.3,
9.2.4).
В ФРГ гравиметрическая информация по опорным сетям и сетям сгущения
хранится в Германском геодезическом научно-исследовательском институте, от
дел 1 (Мюнхен), и государственных геодезических агентствах. Результаты регио
нальных гравиметрических съемок находятся в Геологической службе земли
Нижняя Саксония (Государственная геологическая служба). В США база грави
метрических данных была создана в Национальном центре геофизической инфор
мации (Боулдер, Колорадо), входящем в Национальное управление по
исследованию океана и атмосферы. Эта база данных объединяет гравиметриче
скую информацию различных организаций (разд. 9.3.6). Она играет роль центра
по обеспечению гравиметрической информацией сухопутных измерений на терри
тории США и морских работ на всей акватории Мирового океана [768]. Геофизи
ческий отдел Геологической съемки Канады создал национальную базу
гравиметрических данных с коммерческой системой управления [443]. Результаты
сухопутных и морских съемок, а также наблюдений в опорных сетях поступают
в гравиметрический архив, в них вводят поправки, выполняют уравнивание, а
затем результаты преобразуют в готовую для коммерческого пользования форму
(аномалии силы тяжести, опорные пункты, измерения в сетях, гравиметрические
данные). Создается цифровая модель местности, высокоточные измерения для
исследования региональной геодинамики земной коры обрабатывают отдельно.
В настоящее время (1987 г.) эта национальная база содержит 575 тыс. значений
силы тяжести (128 тыс. на суше, 404 тыс. надводных измерений, 43 тыс. измере
ний на морском дне или на льду).
338
9.4.3.
Глава 9
Гравиметрические результаты
Первичные гравиметрические результаты содержат:
— проверенные и уравненные точечные значения силы тяжести с необходимой
дополнительной информацией, разд. 9.4.2;
— точечные аномалии силы тяжести, разд. 3.2.1, 4.3.3.
Во многих случаях пользователю нужна следующая продукция, которую полу
чают из перечисленной выше:
— средние аномалии силы тяжести, разд. 3.2.3;
— карты изоаномал, разд. 3.2.1, 4.3.3.
Большие базы гравиметрических данных могут самостоятельно выполнять по
крайней мере часть необходимой обработки, а именно:
— интерполяцию точечных аномалий силы тяжести и формирование регулярной
сети, разд. 2.7.2;
— интерполяцию изоаномал между узлами сетки;
— автоматическое вычерчивание изоаномал с использованием соответствующего
математического обеспечения (рис. 9.24).
Масштаб и проекцию карты изоаномал можно выбирать произвольно. Реко
мендуется постоянное сечение, которое определяется масштабом карты, структу
рой гравитационного поля, а также точностью аномалий. Примеры вычислений
средних аномалий силы тяжести и составления карт приведены в разд. 3.2.1,
3.2.3, 4.3.4, 9.3.6. Для предоставления пользователю обзорной информации по
лезны схемы гравиметрической изученности (рис. 9.25).
Рис. 9.24. Аномалии Буге на пунктах (мкм-с " 2) и изоаномалы , сечение 20 мкм-с " 2 (база гравиметриче
ских данны х И н ститута геодезии, Ганновер).
Рис. 9.25. Гравиметрическая изученность ю го-восточной части Бразилии (база гравиметрических д ан
ных И н сти тута геодезии, Ганновер).
10 Определение изменений силы тяжести
во времени
Временные изменения силы тяжести выявляют из повторных измерений. Для
этого необходима высокая точность наблюдений, а частота повторений должна
быть согласована со скоростью (периодом) изменения силы тяжести (разд. 3.4).
Для мониторинга долгопериодических изменений в исследуемом районе создают
прецизионные гравиметрические сети; измерения в таких сетях выполняют абсо
лютными и относительными гравиметрами, для мониторинга сравнительно ко
роткопериодических изменений используют гравиметр с системой непрерывной
регистрации (регистрирующие гравиметры) (разд. 10.1). Локальные возмущения
вызываются вариациями атмосферного давления, уровня подземных вод и влаж
ности почвы, а также техногенными перемещениями масс; при регистрации и
описании подобных явлений отмечаются лишь отдельные успехи (разд. 10.2). Не
прерывное слежение за силой тяжести позволяет изучать гравиметрические зем
ные приливы и другие глобальные периодические эффекты; изучение этих
изменений проводится сейчас весьма успешно (разд. 10.3). Изменения силы тяже
сти геодинамического происхождения обнаруживают в различных районах по на
блюдениям в локальных и региональных гравиметрических сетях. Основная цель
при этом состоит в мониторинге изменений высоты пунктов; воссоздать точный
характер этих изменений часто бывает трудно. В будущем станет возможным
изучение долговременных глобальных эффектов, причем абсолютные определе
ния будут сопровождаться мониторингом силы тяжести (разд. 10.4). Глубокие
исследования в области измерений гравиметрических приливов и их анализа про
водил Мельхиор [451]; современное состояние изучения неприливных вариаций
силы тяжести описано Буланже [82]. Биро [49] рассматривает связь между вре
менными изменениями силы тяжести и высоты, а Торге [697] исследует эффек
тивность методов гравиметрии для слежения за современными вертикальными
движениями.
10.1.
10.1.1.
Приборы и методы измерений
Прецизионные гравиметрические сети
Долговременные изменения силы тяжести глобального, регионального и локаль
ного характеров можно выявлять повторными измерениями с абсолютными и/
или относительными гравиметрами в прецизионных гравиметрических сетях.
Из-за сильной взаимной зависимости изменений силы тяжести и высоты грави
метрические пункты должны быть привязаны к реперам высотной геодезической
340
Глава 10
(нивелирной) сети (разд. 4.4.2). При проектировании таких гравиметрических се
тей и измерениях в них нужно принимать во внимание следующее (разд. 9.2):
— тщательное закрепление и контроль положения опорных пунктов;
— выбор пунктов, обеспечивающий их репрезентативное распределение в регионе
ожидаемых изменений силы тяжести и прилегающих стабильных зонах;
— использование априорной информации для выбора частоты повторных изме
рений, достаточной для надежной аппроксимации ожидаемых вариаций (ин
тервал между повторными измерениями должен быть меньше полупериода
вариации силы тяжести);
— исключение или учет локальных возмущающих эффектов геологического и
гидрологического характера;
— ошибка уравненных значений силы тяжести или приращений не должна превы
шать ± 1 0 — 1 0 0 нм*с"2.
Рекомендуется сочетать абсолютные и относительные гравиметры. Абсолют
ные измерения обнаруживают долговременные вариации и обозначают стабиль
ные области земной коры. Кроме того, они позволяют непрерывно
контролировать калибровку относительных гравиметров. Сети, созданные ис
ключительно относительными измерениями, необходимо уравнивать как свобод
ные или как несвободные сети, связанные с пунктами, на которых сила тяжести
заведомо неизменна. Желательно сопровождать повторные измерения силы тя
жести регистрацией вертикальных коровых движений геометрическим нивелиро
ванием или методами космической геодезии [383] (разд. 4.4.2).
Для оценки результатов повторных измерений в гравиметрических сетях суще
ствуют различные способы; выделим следующие этапы работ:
— уравнивание сети для каждого периода наблюдений;
— сравнение результатов для разных эпох и статистический анализ изменений
— моделирование временных изменений на пунктах сети;
— интерполяцию изменений в пространстве.
Моделирование в пространстве и во времени выполняют подобно тому, как
это сделано в разд. 2.7.2 с использованием функционального и/или стохастиче
ского подходов [155, 283]. Если имеются наблюдения за изменениями высот, то
рекомендуется их совместная обработка с гравиметрическими данными [279,
352]. Для определения пространственных границ применимости различных моде
лей и иногда выявления нарушений можно использовать геологическую информа
цию [306].
В общем случае изменение силы тяжести с течением времени представляют
функцией тренда, на которую накладываются стохастический сигнал и случайная
ошибка измерений. Функциональную модель можно представить многочленом
малой степени, зависящим от времени (медленные изменения), и рядом Фурье
(периодические изменения):
я
= 1
(ЮЛ)
Определение изменений силы тяжести во времени
341
здесь ω = (2ж/Т) — круговая частота, Т — период; Л = \!а2 + Ь2 — амплитуда;
φ = (arctg b/a) — начальная фаза волны v. До сих пор уверенно определяется
лишь линейный член полинома, поскольку эпохи наблюдений пока немного
численны.
Функциональное моделирование часто не приводит к оптимальному результа
ту [701], поскольку остаточную корреляцию между временными изменениями си
лы тяжести не удается описать простыми функциями. При большом числе
измерений с удачным пространственно-временным распределением можно опре
делить остаточные вариации методом среднеквадратического предсказания. Это
соответствует статистической модели представления поля [352].
При предсказании основная трудность состоит в определении эмпирических ковариа
ций для остаточных изменений bg. По аналогии с (2.83) их вычисляют пространственновременным осреднением и аппроксимируют экспоненциальной моделью (в предположении
стационарности, однородности и изотропности), например, в виде
cov (bg, bg) = a exp ( - b (s 2 + KAt2)xn),
(10.2)
где s — расстояние между пунктами; At — время между эпохами наблюдений; К — пара
метр, зависящий от расстояния и времени и обеспечивающий пространственно-временную
изотропность. Теперь по аналогии с (2.89) можно вычислить изменения силы тяжести для
любой точки поверхности и на любую эпоху. Если же известны и изменения высоты, то
можно вычислить взаимную ковариацию между изменениями высоты и силы тяжести и
выполнить предсказание методом среднеквадратической коллокации в соответствии с
разд. 4.2.3.
Рисунок 10.1 иллюстрирует автоковариационную функцию аномалий силы тяжести
для гравиметрического профиля в Северной Исландии. Эта функция была определена для
интервала времени в общей сложности 16 лет по измерениям на 140 пунктах с промежут
ками 1 год и 5 лет и при расстояниях между пунктами от 0,1 до 1 км, из результатов
вычиталось среднее значение [349]. После уравнивания получено К = 0,5; эта величина
определена как отношение расстояний корреляции 1,75 км (по оси профиля) и 3,5 года (по
оси времени). Для данного профиля ковариационная функция представляется формулой
cov (bg, bg) = 0,65 exp (-0 ,4 0 (s2
KM + 0 ,5 Δ /^ )1/2) м км -с"2.
cov (δ g , δ g)
Рис. 10.1. П ространственно-временная автоковариационная функция изменений силы тяж ести bg (но
результатам повторных измерений на гравиметрическом профиле в Северной Исландии)
[349].
342
10.1.2.
Глава 10
Гравиметровые системы с непрерывной регистрацией:
основные принципы
Гравиметр, работающий в режиме непрерывной регистрации, должен иметь сле
дующее:
— достаточно высокое разрешение (желательно не хуже Юнм с " 2);
— высокую кратковременную стабильность, а если возможно, то и долговремен
ную (малый дрейф);
— надежную защиту от изменений температуры и атмосферного давления;
— электрический выходной сигнал.
Регистрирующая гравиметрическая система содержит такие главные части
[759]:
— гравиметр;
— низкочастотный фильтр;
— блок регистрации;
— блок времени (часы).
Большинство известных систем основано на пружинных гравиметрах с ем
костным индикатором положения рычага (разд. 10.1.4). Более высокое разреше
ние и временная стабильность свойственны сверхпроводящим гравиметрам
(разд. 10.1.5).
Для записи измерительной информации в память все больше применяют ци
фровую регистрацию. Для этого необходимы аналого-цифровой преобразователь
(12— 16 бит, 1 — 10нм -с_ 2/мВ) и мощный микрокомпьютер. Цифровая обра
ботка обеспечивает большую плотность записи информации (например, с интер
валами 1 или 10 с), позволяет выполнять предварительную обработку
(исключение выбросов и скачков, интерполяцию при пропуске отдельных измере
ний), цифровую фильтрацию для ослабления влияния возмущений (микросейсм)
и выделения полезного сигнала (например, осреднение за 10 или 60 с), моделиро
вание (вычисления дрейфа и регрессий), а также обеспечивает вывод информации
в удобной форме (например, средние за 10 мин или 1 час при регистрации прили
вов) на магнитные диски или ленту. Компьютер можно также использовать для
анализа данных (например, вычисления величин приливных изменений). Часто ко
входу блока регистрации подключают электронный фильтр (временное запазды
вание 10 — 20 с). Для временной привязки гравиметрических данных обычно до
статочны небольшие кварцевые часы, ход которых контролируют по
радиосигналам времени. На рис. 10.2 приведена принципиальная схема гравиметровой системы с цифровой регистрацией.
До недавнего времени широко использовались аналоговые регистрирующие
устройства (разрешение около 2 мм / 10 нм-с-2, скорость движения бумажной
ленты 2 см/ч, часовые метки времени) (рис. 10.3). После сглаживания получен
ной кривой наблюдателем (эффект фильтрации) результаты с шагом 1 ч перево
дятся в цифровую форму с помощью дигитайзера. Такой метод требует много
ручной работы, кроме того, при сильных деформациях бумаги из-за изменения
влажности необходимы частые проверки и учет поправок. Однако аналоговая
запись позволяет эффективно контролировать результаты во время наблюдений,
и потому во многих цифровых регистраторах имеется и аналоговый вывод.
Определение изменений силы тяжести во времени
343
Рис. 10.2. Схема гравиметрической цифровой регистрирующ ей системы .
Основное возмущающее воздействие при регистрации силы тяжести оказыва
ют микросейсмы, а также вариации давления и температуры воздуха. Конструк
тивные требования, предъявляемые к гравиметрам (демпфирование, герметичный
корпус, термостат), были перечислены ранее (разд. 6.3.5). Помимо этих требова
ний и внешней фильтрации (аналоговой и/или цифровой) рекомендуется следую
щее [706]:
— выбирать пункт с минимальными микросейсмами, твердым покрытием для
установки прибора и малыми колебаниями температуры. Хорошим местом для
наблюдений служат фундаменты массивных зданий. При дополнительной тепло
изоляции суточные изменения температуры < 0 , 1°, а при термостатировании
прибора < 0,01°. Целесообразно размещать гравиметр и блок регистрации в раз
ных помещениях;
— уменьшать колебания температуры в гравиметреу особенно в приборах, чув
ствительных к таким колебаниям, с помощью электронной системы стабилиза-
i
Земноприливная станция Ганновер № 709
g
____________ Гра ви мет^э_Ла_Коc j а —_Ромбе рга_ N°_2_98____________
Рис. 10.3. Запись приливного изменения силы тяж ести , полученная с гравиметром Л а
Ром берга G298 (И нсти тут геодезии, Ганновер).
К оста-
344
Глава 10
ции
температуры,
управляемой
термистором,
либо
дополнительных
термостатов;
— регистрировать температуру (±0,01°С) и давление воздуха (±0,1 ГПа) для
последующей цифровой обработки с целью определения регрессионных зависимо
стей; следует всегда приводить результаты к стандартному атмосферному давле
нию (разд. 10.2 . 1).
И, наконец, особенно важно обеспечить постоянное и непрерывное электропитание всех блоков гравиметра. При нарушениях основного питания темпера
турный режим некоторое время может поддерживаться, если источник питания
подключен к прибору через аккумуляторы со стабилизацией напряжения. Авто
номный источник переменного тока также обеспечит работу гравиметра с непре
рывной регистрацией.
10.1.3.
Калибровка гравиметров с непрерывной
регистрацией
Преобразование входного сигнала x(t) измерительной системой (гравиметр, ана
логовый фильтр, блок регистрации) описывается выражением [759]
оо
6g(t) = Е ■y(t) = Ε ·
j h(T)x(t - T)dr,
г=0
(10.3)
где Sg(t) — изменение силы тяжести, y(t) — регистрируемый выходной сигнал,
Е — масштабный коэффициент, Л(т) — весовая функция, г — временной сдвиг.
Выражения для амплитудной частотной характеристики (А — амплитуда)
ϋ(ω) = Ау(ш)/АХ(Ш
)
(10.4)
и для фазовой частотной характеристики
ΔΦ(ω) = Φ*(ω) - Φ^(ω)
(10.5)
следуют из комплексной частотной характеристики (передаточной функции
системы) Η(ω), которая представляет собой преобразование Фурье функции Л(г)
(разд. 7.2.2):
#(ω) = ρ(ω) + /<7(ω),
( 10.6)
£>(ω) = V/?2(a>) + <72(ω)
(10.7)
ΔΦ(ω) = arctg —
ρ(ω)
(10. 8)
причем
И
Калибровка системы гравиметра с непрерывной регистрацией предусматрива
ет следующее:
— определение масштабного коэффициента Е (нм*с” 2/ед. кода, нм*с_ 2/мм) для
преобразования показаний прибора в единицы силы тяжести;
— определение передаточной функции (зависимость демпфирования D амплиту
Определение изменений силы тяжести во времени
345
ды и приборного сдвига фазы ΔΦ от частоты) системы чувствительный элемент
гравиметра — блок регистрации.
Точности ± 0 , 1% для масштабного коэффициента, демпфирования амплитуды
и ±0,05° для фазового сдвига установлены требованиями земноприливных на
блюдений; для сверхпроводящих гравиметров эти требования на порядок выше.
Поскольку измеряемые величины имеют ограниченный диапазон (например,
I O m k m c - 2 ), метод калибровки и используемый эталон должны обеспечивать
ошибку не более ± 1 0 нм-с~2.
Величину масштабного коэффициента определяют при отклонении чувстви
тельного элемента под воздействием известной силы и измерении выходного сиг
нала; величина действующей силы известна либо в абсолютной мере (в единицах
ускорения), либо в относительной (в делениях шкалы, единицах напряжения или
тока).
К относительным принадлежат следующие методы калибровки:
— метод поворота измерительного (микрометренного) винта (например, на
1 дел. шкалы) и определения приращения выходного сигнала. Метод применим
для любых гравиметров.
— электромагнитный метод калибровки. В этом методе смещения рычага гра
виметра компенсируют с помощью магнитной индукции, возникающей при взаи
модействии постоянного магнита на рычаге гравиметра и укрепленной на
корпусе прибора индукционной катушки (система обратной связи). Метод успеш
но использован в гравиметрах Л а Коста — Ромберга [96] и Аскания Gsl5 и Gs25;
— электростатический метод калибровки с электронной системой обратной
связи, имеющий преимущества для применения в астазированных гравиметрах
(Геодайнемикс, Ла Коста — Ромберга (разд. 6.4.4)).
Этими методами можно быстро выполнить относительную калибровку с
ошибкой ±0,1 — 0,2%. Они позволяют обнаруживать и определять временные
изменения масштабного коэффициента.
Для абсолютной калибровки измерительного винта или выходного электриче
ского сигнала можно использовать методы, описанные в разд. 6.4.
Широко используется калибровка на гравиметрическом базисе (разд. 6.4.5).
При этом точность масштабного коэффициента снижается до ±0,2 — 0,5%, что
вызвано внешними влияниями при транспортировке гравиметра, а также корот
копериодическими ошибками калибровочной функции. Для неастазированных
гравиметров особенно эффективна ( ± 0 ,2 %) калибровка методом наклона
(разд. 6.4.2) [241].
Земноприливные гравиметры можно аттестовать по наблюдениям на фунда
ментальной земноприливной станции в Брюсселе [156]. Аттестация выполняется
на основе следующих величин, известных для этого пункта:
— амплитудного фактора и фазового сдвига для суточной лунной приливной во
лны ΟΙ:
δ(ΟΙ) = 1,161, ΔΦ(ΟΙ) = - 0,20°;
— фазового сдвига для полусуточной лунной приливной волны М2 :
ΔΦ(Μ2) = + 2,80°.
Таким образом, этот метод позволяет определить и инструментальную фазо
вую задержку. Он предусматривает регистрацию в течение нескольких месяцев;
Глава 10
34$
его результаты зависят от точности известных параметров, которые определены
по многолетним наблюдениям с гравиметрами Аскания; при этом нельзя исклю
чить расхождений до 0,5% с данными других абсолютных методов калибровки
[146, 167].
В некоторых особых случаях пользуются другими методами калибровки.
Масштабный коэффициент можно определить на вертикальном лабораторном кали
бровочном базисе (например, высотой 1 м) при условии, что приращение силы тяжести
на базисе было измерено калиброванными гравиметрами или вычислено с учетом распре
деления масс здания (±0,3 — 0,5%) [65].
Представляют интерес новые абсолютные методы калибровки [31]. При калибровке
методом дополнительных масс внешние массивные тела располагают различным образом
относительно гравиметра и регистрируют соответствующие смещения пробной массы гра
виметра [245]. Предложены следующие варианты дополнительных массивных тел: шар
(недостаток: деформируется основание и наклоняется столб, на котором установлен при
бор) и тор, перемещаемый по вертикали (преимущество: столь массивное тело можно раз
мещать совсем близко к чувствительному элементу). При калибровке по ускорению
гравиметр совершает колебания по вертикали по синусоидальному закону с заданной ам
плитудой и частотой. При экспериментальных исследованиях (амплитуда 2 см, период
200 — 1000 с) гравиметр Л а Коста — Ромберга был калиброван с ошибкой ±0,2% [578].
Полагают, что точность обоих методов составляет 0,1% и выше, поэтому после тщатель
ного исследования их планируют применить к сверхпроводящим гравиметрам
(разд. 10.1.5).
Масштабный коэффициент регистрирующей системы можно также определить по до
статочно длительным одновременным измерениям гравиметром с непрерывной регистра
цией и абсолютным гравиметром, сравнивая выходные сигналы, вызванные приливами.
При современной точности абсолютных измерений такой метод позволит выполнить ка
либровку лишь с ошибкой около 1%.
У всех гравиметров с непрерывной регистрацией во время работы необходимо
контролировать повторной калибровкой зависимость масштабного коэффициен
та от времени. Масштабный коэффициент линейных (неастазированных) систем
(гравиметры Аскания) остается неизменным в течение длительного времени, поэ
тому достаточна ежемесячная относительная калибровка [146]. Чувствитель
ность астазированных гравиметров (Ла Коста — Ромберга и других) является
функцией угла наклона (разд. 6.2.2). Относительное изменение чувствительности
и соответственно масштабного коэффициента при изменении наклона, согласно
(6.28), для гравиметров Л а Коста — Ромберга (а + δ = 90°) составит
dE
= ctg δ db.
(10.9)
E
Вполне возможно, что за несколько недель угол наклона изменится на несколько
угловых секунд; при чувствительности современных гравиметров это приведет
к изменению масштабного коэффициента на несколько процентов. Поэтому необ
ходимы частая относительная калибровка (один или два раза в неделю) и учет
изменений масштабного коэффициента со временем (интерполяция). График на
рис. 10.4 иллюстрирует изменения масштабного коэффициента гравиметра Ла
Коста — Ромберга, установленного на временной земноприливной станции. Если
применяется система обратной связи (разд. 6.3.3), с которой непрерывно осу
Определение изменений силы тяжести во времени
347
нм с ^/мм
16-
1 2 »* i
30.
i
i
1____ I_____I_____I---------1--------1----------1--------1--------1------- L
10. 20. 30. 10. 20. 30.
Июль
Август
10. 20. 30. 10. 20. 30.
Сентябрь
Октябрь 1978
Рис. 10.4. Н аблю денны е и интерполированные значения м асш табн ого коэффициента для гравиметра
Л а К оста — Р ом берга G298 на земноприливной станции М аракайбо (Венесуэла) [22].
ществляется нулевой метод измерений, то величина масштабного коэффициента
не будет зависеть от наклона и поверку можно выполнять реже (примерно раз
в месяц) [577].
Передаточная функция гравиметровой системы с непрерывной регистрацией
определяется передаточными функциями ее составных частей. Передаточную
функцию гравиметра можно получить по его реологической модели, которую
представляют совокупностью тел Кельвина (сочетание упругого тела Гука и вяз
кого тела Ньютона). Высокочастотные перемещения демпфируются, а на долго
периодические движения система реагирует как упругая. Для линейных
(неастазированных) гравиметров можно составить приближенные реологические
модели [714]. Для астазированных систем возникают существенные трудности.
Однако их передаточную функцию можно определить эмпирически по записи от
клика системы на входной сигнал, возникающий при коротких последовательных
подстройках измерительного винта (функция отклика на ступенчатое изменение
входного сигнала). На основании (10.3) весовую функцию h(r) можно получить
для данной импульсной функции х численным дифференцированием функции у
отклика на импульс (рис. 10.5) [759]. Последующее преобразование Фурье позво
лит получить передаточную функцию, амплитудную и фазовую частотные харак
теристики, см. ( 10.6) — ( 10.8).
В короткопериодической части спектра приливных вариаций (в пределах одних суток)
коэффициент демпфирования линейных гравиметров равен 1,000, а фазовый сдвиг около
h (г)
Рис. 10.5.
Весовая функция h(r), полученная дифференцированием
отклика на ступенчатый входной сигнал для гравимет
ров Аскания G sl2 № 130 BN и Л а К оста — Ром берга
G298 с системой регистрации [759].
348
Глава 10
0,1° (для приливной волны М2). Коэффициент демпфирования астазированных гравимет
ров около 0,995 (М2) и фазовый сдвиг 1° и более [706]. При использовании систем обрат
ной связи демпфирование почти исчезает, а фазовый сдвиг уменьшается примерно до 0,1 °.
10.1.4.
Пружинные гравиметры с непрерывной регистрацией
С середины 1950-х гг. для регистрации приливных изменений силы тяжести стали
применять линейные (Аскания) и астазированные (Геодайнемикс, Ла Коста —
Ромберга) пружинные гравиметры. В настоящее время большинство астазиро
ванных гравиметров оснащено системой обратной связи в силу ее принципиаль
ных преимуществ (разд. 6.3.3) [167]. Осуществляется переход от аналоговой
регистрации к цифровой.
Первоначально в линейных гравиметрах Аскания использовали фотоэлектри
ческое устройство (разд. 6.5.2). Примерно в середине 1970-х гг. Бонац [67] приме
нил в гравиметрах Аскания Gs9, Gsll и Gsl2 емкостные датчики (Аскания BN).
В гравиметрах Gsl5 и Gs25 (приливные гравиметры, фирма Bodenseewerk, Иберлинген) также установлен электроемкостный индикатор положения рычага. Бла
годаря этому удалось повысить точность регистрации примерно на половину
порядка. Калибровка выполняется методом поворота измерительного винта, ме
тодом наклона и электромагнитным методом (Gs25). В более современных систе
мах возможна как аналоговая, так и цифровая регистрация [146, 593]. Таким
линейным системам свойственны очень высокая стабильность масштаба и малые
инструментальные фазовые задержки. Вместе с тем должны соблюдаться жест
кие требования к постоянству температуры (суточные колебания менее 0,01 °С).
В 1980-х гг. Институтом сейсмологии в Ухане (Китай) был создан земноприлив
ный гравиметр; в нем применена система с вертикальной пружиной и электроемкостным устройством и возможна как цифровая, так и аналоговая
регистрация, стабильность внутренней температуры составляет ± 10 - 4 оС.
В результате усовершенствований астазированных гравиметров типа Северная
Америка с металлической пружиной (разд. 6.5.4) были созданы приливные грави
метры типа Геодайнемикс TRG-1 (емкостное устройство, электростатическая сис
тема калибровки), которые используются в исследованиях на обширных
территориях [388]. Для непрерывной регистрации гравиметрической информации
нашли широкое применение астазированные гравиметры Ла Коста — Ромберга.
Полевые гравиметры моделей G и D с электроемкостным устройством и предва
рительной низкочастотной фильтрацией можно легко приспособить для аналого
вой регистрации; они уже устанавливались на многочисленных временных
станциях (продолжительность наблюдений от нескольких недель до нескольких
месяцев) [705]. При дрейфе несколько десятков нм*с“ 2 в сутки (рис. 10.6) можно
достичь уровня шума (среднеквадратическое изменение показаний) в несколько
десятков н м -с"2. Земноприливный гравиметр модели ЕТ принадлежит к прибо
рам с ограниченным измерительным диапазоном (100 м км -с"2), механической
петлей обратной связи и высокой временной стабильностью (двойной термостат,
дрейф менее 3 мкм*с“ 2/мес) [124] (рис. 10.7). В этом приборе сигнал электроемкостного датчика положения рычага управляет работой электродвигателя, с по
мощью которого через измерительный винт рычаг гравиметра постоянно
349
Определение изменений силы тяжести во времени
Нарушение
кондиционирования
о 30.
10.
20.
30.
10.
Июль
20.
30.
20.
зо.
10.
20.
Октябрь
Август
30.
1978
-1
-2
-3
Рис.
10.6.
Дрейф гравиметра Ла Коста
-
Ромберга
G298
на земноприливной станции Маракайбо
(22).
удерживается в нулевом положении. Прибор полностью автоматизирован, имеет
аналоговую и цифровую (на магнитной ленте) регистрацию. Электронные систе
мы обратной связи, разработанные в 1980-х
денсатора
в
емкостном
индикаторе
- Ромберга
6.3.3).
гравиметрах Ла Коста
Геодайнемикс (разд.
rr.,
положения
моделей
подключаются к обкладкам кон
рычага;
G, D
их
можно
установить
в
и ЕТ, а также в гравиметрах
Регистрирующая система с почти линейной характеристикой была создана Гаррисо
ном и Сато
[273];
в приборах, в которых нулевое положение рычага находится примерно
посередине между обкладками конденсатора, они применили два напряжения смещения.
Большое отклонение от такого положения можно компенсировать с помощью системы
SRW,
созданной в Геодезическом институте Ганновера. Систему можно разместить в кор
пусе гравиметра. Она может стать мощной регистрирующей системой, если ее дополнить
цифровым вольтметром, микрокомпьютером НР
9816 (для регистрации, калибровки, ци
1 с, расчета теоретического прилива,
фровой фильтрации данных, поступающих с шагом
оценки дрейфа, уравнивания приливных параметров) и блоком записи информации на дис
кете
ском
[569].
На рис.
институте
10.8
приведен общий вид такой системы. В Национальном географиче
(Брюссель)
разработан
цифровой
предназначенный для полевых измерений (разд.
Рис.
10.7
(левый). Приливный гравиметр Ла Коста
-
10.8
(правый). Гравиметр Ла Коста
ливов
с
цифровым
Ганновер).
-
вольтметром
и
обработки
данных,
La Coste апd Romberg Inc., Остнн, Техас).
G для цифровой реп~страшш земных прн
микрокомпьютером НР 9816 (Инстнтут геодез1111,
Ромберга мод.
и
сбора
этот блок можно также использо-
Ромберга ЕТ: гравиметрическнй датчнк (спра
ва), блок управления и регистратор (фнрма
Рис.
блок
9.2.2);
350
Глава 10
вать для автоматической регистрации информации (в течение 10 сут) при наблюдениях
приливных вариаций силы тяжести (время интегрирования 60 с). Фирма Л а Коста — Ром
берг предложила линейную электронную систему обратной связи (диапазон 30м км -с“ 2,
габариты 15 х 23 х 13 см, вес 2,5 кг), которая непрерывно осредняет первичные данные
и выдает величины, сглаженные на 10-минутных интервалах [728].
В Ламонтской обсерватории Колумбийского университета (Нью-Йорк) разработан ге
офизический океанский донный прибор для одновременной регистрации гравиметрических
и океанских приливов, донных течений и температуры в открытом океане (продолжитель
ность непрерывных наблюдений 5 — 6 мес). Проведены успешные наблюдения на глуби
нах до 4 км [71]. Гравиметр (высота 15 см) содержит чувствительную систему с пробной
массой, подвешенной на вертикальной пружине (резонансная частота 2 Гц), и емкостным
устройством индикации. При диапазоне измерений 10 мкм-с"2 и времени интегрирования
200 с разрешение прибора составляет 3 нм с " 2. Системой управляет микропроцессор, она
имеет температурную стабилизацию (±0,02 °С), карданов подвес и сильное демпфирова
ние; система непрерывно ориентирована по отвесной линии.
Точность регистрирующих гравиметрических систем определяется следующи
ми факторами:
— разрешающей способностью системы и ее стабильностью во времени;
— защищенностью от воздействия микросейсм, вариаций давления и температу
ры воздуха;
— качеством калибровки;
— удачным выбором пункта наблюдений (уровень микросейсм, стабильность
основания, изменения температуры, источник питания).
Для оценки точности можно использовать следующее:
— среднеквадратические уклонения результатов измерений (как правило, ежечас
ных результатов земноприливных наблюдений);
— среднеквадратические уклонения полученных земноприливных параметров
(разд. 10.3);
— сравнение результатов (параметров земных приливов) по разным приборам на
одном и том же пункте;
— сравнение результатов, полученных одной и той же измерительной системой
на разных пунктах.
Результаты оценки точности зависят от учета изменяющихся во времени фак
торов (земных приливов, изменения давления воздуха, дрейфа гравиметра), моде
ли, принятой при уравнивании, а также от надежности выявления
систематических ошибок (например, ошибок калибровки). Выполнены многочис
ленные исследования на различных приливных станциях и с разными гравиметра
ми [454]. По данным для 215 станций в работе [120] сделана попытка оценить
результаты земноприливных наблюдений точностными характеристиками. В за
ключение можно сделать следующие выводы:
— наивысшей точностью обладают астазированные гравиметры с электронной
системой обратной связи;
— цифровые регистрирующие системы позволяют получить более высокую точ
ность, чем аналоговые; это достигается за счет более высокой плотности записи
информации и большей гибкости таких систем;
— условия работы на станции в основном определяются стабильностью пункта
(устойчивостью к наклонам) и постоянством температуры;
Определение изменений силы тяжести во времени
351
— при благоприятных условиях на станции точность регистрации земных прили
вов за несколько месяцев можно характеризовать среднеквадратическими уклоне
ниями величин, полученных в течение часа; для гравиметров Аскания Gsll и Gsl2
с фотоэлектрической регистрацией среднеквадратическое уклонение составляет
примерно ± 5 0 н м -с~ 2; для гравиметров Аскания, Геодайнемикс и Л а Коста —
Ромберга с емкостными устройствами оно равно ±10 н м -с"2, а при использова
нии системы обратной связи ±5 нм с -2;
— реальная точность системы в значительной мере определяется ошибками ее
калибровки ( ± 0 ,2 — 0,5%).
10.1.5.
Сверхпроводящий гравиметр
В сверхпроводящих гравиметрах действие силы тяжести на пробную массу ком
пенсируется противодействующей магнитной силой. При сверхпроводящем со
стоянии пробной массы и катушки с током, которая создает магнитное поле,
прибор приобретает высокую долговременную стабильность.
Металлы обладают свойством сверхпроводимости при температуре ниже 10 °К. При
критической температуре для данного металла его электрическое сопротивление резко па
дает и становится столь малым, что его нельзя измерить. Магнитное поле сверхпроводя
щих катушек электромагнита поддерживается без внешнего источника энергии и
стабильно во времени. Температура сверхпроводимости достигается с помощью жидкого
гелия (точка кипения 4,2 К) (разд. 8.3.3). Совсем недавно были найдены металлические
сплавы, которые становятся сверхпроводящими уже при температурах < 100 К; это силь
но упрощает задачу (охлаждение жидким азотом) [364].
Сверхпроводящий гравиметр был создан в конце 1960-х гг. [544, 560]. Основ
ными элементами гравиметра являются сверхпроводящая пробная масса в виде
шарика (полая алюминиевая сфера диаметром 25 мм, покрытая тонким слоем
свинца, критическая температура для алюминия 1,2 К, для свинца 7,2 К) и сверх
проводящие катушки (рис. 10.9). Магнитное поле катушек индуцирует поле проб
ной массы, имеющее противоположную направленность; соответствующим
подбором напряженности поля можно привести сферу в подвешенное состояние
(состояние левитации). Изменения силы тяжести вызывают отклонения сферы от
нулевого положения. Эти отклонения регистрируются емкостным индикатором
перемещений и компенсируются с помощью контура обратной связи (разд. 6.3.3).
Компенсирующий ток, текущий в управляющей катушке, служит измерительным
сигналом, он создает дополнительное магнитное поле, которое непрерывно удер
живает сферу в нулевом положении.
Пробная масса и вся чувствительная система помещены в медный кожух со
сверхпроводящим магнитным экраном; кожух вакуумирован, температура в нем
поддерживается неизменной до нескольких микрокельвинов. Внутренняя часть
прибора заключена в медный контейнер с дополнительным магнитным экраном.
Вся система помещена в сосуд Дьюара (термос с очень высокой теплозащитой),
заполненный жидким гелием. Корпус гравиметра укреплен с помощью трубы из
стекловолокна на несущей раме, опирающейся тремя подъемными винтами на
пилоны гравиметра. Наклон гравиметра непрерывно контролируют два криоген
ных электронных наклономера; два подъемных микрометренных винта служат
352
Глава
10
Клеммы
электронных
Стойка
Сосуд
Дьюара
Жидкий
гелий
ПробнаR масса
и обкладки
емкостн.датчика
Катушки
liJ~~~~~~~~~~;;
1
/ Подставка
сосуда Дьюара
Рис.
10.9
(левый). Устройство сверхпроводящего гравиметра
его, Калифорния)
l'ис.
10.10
GWR
(фирма
GWR-lnstruments,
Сан-Ди
(560].
(правый). Сверхпроводящий гравиметр
GWR
с гравиметрическим датчиком в сосуде Дыоа
ра, помещенный на стойке, а также компрессор и система регистраuии данных (фотограф11я
фирмы
GWR-lnstruments,
Сан-Диего, Калифорния).
для нивелирования системы (положение, при котором чувствительность к накло
ну равна нулю) (разд.
6.3.4).
Сверхпроводящий гравиметр
GWR
создан фирмой
GWR-Instruments,
Сан-Диего, Кали
форния (ныне выпускается модель ТТ70). Основными его элементами являются блок гра
виметрического датчика (диаметр
0,5
м, высота
0,65
м, вес
80
кг) с блоком электроники,
два криогенных наклономера с электронными схемами, 200-литровый сосуд Дьюара (диа
метр
0,6
1,6 м, вес 140 кг) с индикатором уровня гелия и устройством для его
10.10). Дополнительная система компенсации учитывает малые измене
пилонов, точность наклономеров О, 1 мкрад. Из-за постепенного испарения
м, высота
пополнения (рис.
ния наклона
гелия его
приходится пополнять примерно каждые два месяца;
дополнительное
охлажде
ние с помощью криогенного генератора может продлевать срок до года и более.
Для абсолютной калибровки системы предложен метод дополнительной мас
сы (±О, 1OJo ). Кроме того, масштабный коэффициент можно контролировать, вы
полняя одновременно наблюдения с калиброванным пружинным гравиметром
либо испытаниями на фундаментальной земноприливной станции в
Перспективным
(разд.
10.1.3.).
оказался
метод
калибровки
по
дополнительному
Брюсселе.
ускорению
Временную стабильность масштабного коэффициента можно не
прерывно контролировать встроенной электростатической системой.
С помощью стального шара, наполненного ртутью
нии
25 -
50
(325
кг), помещаемого на расстоя
см от гравиметра, удалось выполнить калибровку с точностью
±0,20Jo [750).
В Институте прикладной геодезии (Франкфурт-на-Майне) при калибровке по дополнитель
ускорению (высота подъема О, 1 мм,
период
1 мин, максимальное ускорение
1, 1 мкм· с - 2 ) исследовали применение пьезоэлектрических преобразователей [560].
ному
При регистрации данных в качестве выходного сигнала можно использовать
напряжение в контуре обратной связи, либо неотфильтрованное, либо после элек-
Определение изменений силы тяжести во времени
353
CN
I
|t
105 сут
Рис. 10.11. Д рейф сверхпроводящ его гравиметра GWR. Сверху вниз: выходной сигнал гравиметра; сиг
нал, исправленный за приливные изменения силы тяж ести; вариации атм осф ерн ого давле
ния; сигнал после исключения влияния земных приливов и изменений атм осф ерн ого давления
(фирма GWR-Instruments, С ан-Д иего, Калифорния).
тронного фильтра. Последующая цифровая фильтрация позволяет применять
любые алгоритмы с известными характеристиками и без фазовых задержек
(разд. 10.1.3).
В приборе Института прикладной геодезии (Франкфурт-на-Майне) фильтрация земно
приливных наблюдений вызывает демпфирование колебаний с периодами < 30 с (времен
ная задержка 10 — 20 с); при модовой фильтрации усиливаются колебания с
резонансными частотами собственных колебаний Земли и одновременно демпфируются
колебания всех других областей спектра. После фильтрации приливный сигнал записыва
ется в цифровой форме, интегрируется за 1 с и используется в качестве входного сигнала
при вычислениях скользящего среднего с окном в 10 измерений. Блок регистрации с про
цессором обрабатывает сигнал гравиметра, записывает и учитывает изменения атмосфер
ного давления, температуры, наклона, а также осуществляет привязку ко времени. После
ввода средних за 10 с в массив данных информация периодически записывается на дискеты
и становится таким образом пригодной для окончательной обработки (например, величи
ны для каждого часа) на главном компьютере.
Сверхпроводящие гравиметры уже несколько лет постоянно используются в
ряде институтов (Калифорнийском университете, Институте прикладной геодезии
во Франкфурте-на-Майне, Бельгийской королевской обсерватории в Брюсселе).
Их основным назначением является изучение долгопериодических приливных из
менений силы тяжести, движения полюса и тектонических процессов, в частнос
ти, как предвестников землетрясений [160, 230, 559]. Относительно точности и
временной стабильности имеющийся опыт позволяет заключить следующее:
— после учета поправок за приливные вариации силы тяжести и движения полю
са результаты измерений сильно коррелированы с атмосферным давлением
(рис. 10.11) (разд. 10.2.1);
— после учета атмосферного давления начинает проявляться дрейф; в начале ра
боты гравиметра он экспоненциально уменьшается в течение нескольких месяцев;
Глава 10
354
в дальнейшем дрейф становится пренебрежимо малым (как правило, не превыша
ет 50 нм с _2/год). Долгопериодический дрейф можно аппроксимировать полино
мом малой степени (квадратичным, кубическим);
— остаточный инструментальный шум при осреднении измерений в течение часа
не превышает 1 — 2 н м -с"2 на коротких отрезках времени и не превосходит
10 нм -с"2 за длительное время [559, 749].
Долгопериодический дрейф может быть вызван изменениями в элементах электрон
ной схемы прибора и изменениями напряженности магнитного поля. Влияние первого из
указанных эффектов можно уменьшить совершенствованием электронной схемы, а влия
ние последнего — измерениями со сверхпроводящими квантовыми интерференционными
приборами (сквидами); проводятся экспериментальные работы в этой области [230, 560].
Помимо этого на результаты измерений оказывают влияние не поддающиеся учету долго
периодические вариации атмосферного давления и изменения уровня грунтовых вод. При
пополнении жидкого гелия и корректировках наклона возникают скачки и короткоперио
дический дрейф в показаниях прибора.
10.2.
Гравитационные эффекты нетектонического
происхождения
10.2.1.
Атмосферные эффекты
Вариации атмосферного давления влияют на выходной сигнал гравиметра двоя
ко: непосредственно, через притяжение атмосферных масс, и косвенно, через де
формационный эффект [749]. Инструментальные эффекты, связанные с
изменениями давления, можно свести к минимуму (разд. 5.1.6, 6.6.2).
Изменения атмосферного давления охватывают временной спектр гармоник с перио
дом от нескольких часов до одного года. Быстрые (несколько часов) апериодические изме
нения и атмосферные приливы, вызванные солнечным излучением, как правило, < 1 ГПа;
лишь особо сильный полусуточный солнечный прилив имеет амплитуду, превышающую
0,1 ГПа. Изменения давления, связанные с (анти)циклонами (максимальные изменения
±60 ГПа), носят квазипериодический характер (несколько дней) и охватывают обширные
территории (от нескольких сотен до тысячи километров). И наконец, существуют глобаль
ные изменения сезонного характера (±10 ГПа) [547].
При известном распределении атмосферного давления гравитационный эф
фект можно вычислить по закону всемирного тяготения. В первом приближении
влияние изменения давления можно представить притяжением слоя Буге (4.37а):
Й2атм = - 27гОЯатм6еаТм-
(10.10а)
где / / атм — толщина, а δρΕΤΜ— изменение плотности слоя однородных масс ат
мосферы. Представив изменение давления в виде
Ьр = gH3Tj e атм»
для прямого гравитационного эффекта получим
5Яатм = - 2ж ~ Ь р = - Л,ЪЬр н м -с"2,
где величина Ьр выражена в гектопаскалях.
(10.106)
Определение изменений силы тяжести во времени
355
Деформационный эффект, вызванный нагрузкой атмосферных масс, проявля
ется через смещение притягиваемой точки по вертикали и результирующий де
формационный потенциал. Для сферической Земли величина этого эффекта
определяется сверткой нагрузочной функции Грина для заданного распределения
атмосферной нагрузки по поверхности Земли (разд. 3.4.3); такой подход аналоги
чен определению океанских нагрузочных приливов. Если нагрузка воздействует
на небольшую площадь, то основную роль играет гравитационный эффект. При
увеличении размеров эффективного слоя воздушных масс увеличивается деформа
ционный эффект, знак которого противоположный. Модельные вычисления пока
зывают, что осредненная по времени величина неприливных атмосферных
влияний на величину g составляет - 3 ,0 Ьр (нм*с“ 2), где Ьр в ГПа [652].
Таким образом, изменения атмосферного давления влекут временные измене
ния силы тяжести; амплитуда быстрых изменений может достигать нескольких
нм-с“ 2, максимальные изменения за несколько дней могут составить 200 нм -с-2,
а сезонные — до 30 нм -с-2. Быстрые изменения оказывают основное влияние
при регистрации земных приливов, а более длительные — при изучении тектони
ческих изменений силы тяжести с абсолютными гравиметрами и гравиметрами
с непрерывной регистрацией силы тяжести.
Для вычисления гравиметрической редукции за атмосферное давление можно
либо использовать регрессионную зависимость, либо вычислять нагрузку по мо
дели изменения давления. Стандартная регрессионная зависимость (редукция)
bgp = Здр нм с -2,
(10.11)
где Ьр — местное изменение давления (ГПа), как правило, уменьшает остаточные
ошибки до < 1 0 — 20 нм -с" 2 (разд. 9.2.3). Определение регрессии по абсолют
ным измерениям силы тяжести и земноприливным записям дало коэффициент
регрессии в пределах 2 — 4 н м с ~ 2/ГП а [707, 713] (рис. 10.12). Такое определение
локальной регрессии может оказаться предпочтительным, поскольку одновремен
но учитываются местные особенности и остаточные инструментальные эффекты.
Кроме того, модель может учитывать особенности временного хода атмосферно
го давления [160]. При требуемой точности порядка н м -с"2 необходимо иметь
в виду, что наблюдаемые изменения силы тяжести зависят от величины, протя
женности, района аномалии давления и характера ее изменения с течением време
ни; таким образом, коэффициент регрессии становится функцией частоты и
времени [560]. Следовательно, редукции необходимо вычислять по модели, котонм с
981263 3300
3200
| (—4 ,3 * 1,4)нм-с~2/ГПа
3100
ЗООС
1030 ГПа
1
1 1
970 980 990 1000 ' 1010 1020'"’"
Рис. 10.12. Регрессионная зависим ость, связывающая атм осф ерн ое давление с результатам и а б со л ю т
ных измерений силы тяжести; абсолю тны й гравиметр JILAG-3, пункт Ганновер [712].
356
Глава 10
рая учитывает мировые и региональные (область радиусом 1000 — 2000 км) дан
ные об изменениях давления [133, 652]. Для пунктов, расположенных не ближе
нескольких сотен километров от побережья, хорошие результаты дает регресси
онная модель (редукция) [547]:
6gp = 3,36/7 - 0,56/7 - 0,96/7, нм с -2,
(10.12)
здесь 6/7 — местное изменение атмосферного давления
средние значения (ГПа) по площади радиусом 2000 км. Значения 6/7 получают по
данным для суши и акваторий, а для вычисления 6/7 пользуются лишь данными
для суши. Учет гравиметрических редукций за атмосферное давление позволил
существенно улучшить точностные характеристики при непрерывной регистрации
силы тяжести (уменьшились среднеквадратические уклонения, улучшены земно
приливные параметры) [412, 760].
10.2.2.
Гидрологические эффекты
Временные изменения уровня грунтовых вод и влажности почвы, как и измене
ния уровня воды (в водоемах), оказывают прямое воздействие на силу тяжести;
при большой нагрузке проявляются и косвенные деформационные эффекты.
Эти процессы протекают сравнительно быстро, от нескольких часов до нескольких
дней, в зависимости от времени года они вызываются либо выпадением дождя, либо тая
нием снега. В большинстве случаев эти процессы невозможно моделировать достаточно
точно; причина частых затруднений заключается в сложности гидрогеологической обста
новки (тип почвы, структура, протяженность и пористость водоносного пласта) и недоста
точной гидрогеологической информации.
Деформационным эффектом обычно можно пренебречь. Тогда гравиметриче
ский эффект, вызванный изменениями уровня воды и влажности почвы, можно
определить по закону всемирного тяготения. Первым приближением — одинако
вые изменения в однородных горизонтальных слоях — является модель в виде
пластины Буге (4.37а). Эффект, вызванный изменением уровня грунтовых вод,
выражается формулой
6gB = 2v G qbP6H = 4,2 РЬН,
н м с " 2,
(10.13)
bgBn = 2irGeBm P = 4,2 ΗδΡ нм с " 2,
(10.14)
а при изменении влажности почвы имеем
где ρΒ— плотность воды, Н — толщина (в метрах) данного слоя, Р — запо
лненное водой поровое пространство (%). При свободном объеме пористых по
род в 10% его насыщение при повышении уровня грунтовых вод на 1 м влечет
изменение силы тяжести на 42 нм -с-2. Такой же результат получается при изме
нении на 10% влажности нарушенного почвенного слоя толщиной 1 м [66].
Для установления взаимосвязи между гидрологическими процессами и измене
ниями силы тяжести была определена корреляция гидрологических данных (объ
ем дождевых осадков, влажность почвы, уровень грунтовых вод) и показаний
гравиметра. Оказалось, что короткопериодические изменения (из-за дождя) хоро
шо коррелированы, а их величина достигает нескольких сотен н м с -2
Определение изменений силы тяжести во времени
357
Рис. 10.13 (левый). Запись показаний сверхпроводящ его гравиметра GWR и количество выпавших о са д
ков [230].
Рис. 10.14 (правый). И змеренны е изменения силы тяж ести (доверительный интервал 90% ) на мысе
Кап-П еле (Н ью-Брансуик, Канада); двумерная м одель изменения уровня грунтовы х вол с
весны по осень 1975 г. и приливные изменения масс воды; изменения силы тяж ести при р аз
личной пористости пород для разных соотнош ений пористости п ород в районах I и II. Н а
илучшее согласование м еж ду измеренными и модельными величинами достигается при о т
ношении 30:12 [399].
(рис. 10.13); сезонные изменения (грунтовые воды) <50 — 100 нм с " 2. Вычисле
ния по моделям дают хорошую сходимость с измерениями лишь для простых
гидрологических ситуаций.
В песчаных формациях с простой структурой и моделью в виде пластины Буге (см.
выше) получена хорошая сходимость значений месячных изменений (50 нм с -2) прираще
ний силы тяжести, полученных из измерений и вычисленных по данным о влажности по
чвы и уровне грунтовых вод [430]. Оказались успешными вычисления корреляции по
сглаженным данным о дождевых осадках и об уровне воды в скважинах для осадочных
пород в Южной Калифорнии (максимальное изменение 800 нм с -2) [768]. По данным об
уровне грунтовых вод в простых геологических структурах Ламберта и Бомона [399] мо
делировали сезонные вариации силы тяжести до 100 нм с - 2 и более по модели (изменения
уровня грунтовых вод в несколько метров за год) (рис. 10.14); при сложных гидрологиче
ских условиях их модель неэффективна. Сезонные изменения силы тяжести до 300 нм с -2,
совпадающие по времени с тропическими ливнями, были отмечены на склоне Венесуэль
ских Анд [155]. На профиле в равнинном районе Северной Германии (осадочный бассейн)
удалось выполнить сглаживание результатов ежегодных повторных измерений силы тяже
сти благодаря гидрологическим редукциям (±50 нм с -2), которые получали с местными
величинами коэффициента регрессии (до 140 нм с -2 на один метр изменения уровня грун
товых вод); последние находили по измерениям уровня [172]. Оказалось несложным моде
лировать сезонные вариации (до 600 нм с -2), вызванные изменением уровня воды в
озерах (на несколько метров) [151]. Изменения силы тяжести до 450 нм с - 2 в бассейне
Миссисипи объясняются локальным изменением высоты из-за дополнительной нагрузки,
связанной с изменениями состояния реки [181].
В проблемах, связанных с современной динамикой земной коры, полагают,
что гравитационные сигналы имеют обычно тот же или даже меньший порядок
величины, что и гидрологические эффекты; таким образом, учет гидрологических
редукций имеет огромное значение (разд. 10.4). Изменения уровня грунтовых вод
358
Глава 10
вследствие вмешательства человека и связанный с ними гравиметрический эффект
рассмотрены в разд. 10.2.3.
10.2.3.
Техногенные изменения силы тяжести
Перемещения масс, обусловленные деятельностью человека, могут вызвать измене
ния силы тяжести как вследствие прямого гравитационного эффекта, так и из-за
деформаций земной поверхности. Доступные измерениям вариации происходят
при эксплуатации нефтяных и газовых месторождений, геотермальных полей, от
качке воды, добыче угля, а также заполнении и спуске больших водохранилищ.
Выемка близповерхностных масс приводит к возникновению внутренних компен
сационных процессов, связанных с уплотнением осадочных пород или разрушени
ем горных пород, что в свою очередь вызывает опускание дневной поверхности;
одновременно происходят изменения гидрологического режима.
Для мониторинга вертикальных движений, моделирования перемещений масс
и исследований водохранилищ в числе других методов используют повторные
измерения силы тяжести. Длительные изменения, связанные с добычей ископае
мых, накапливаются за месяцы и годы, их можно наблюдать по измерениям си
лы тяжести на профилях и по площадям, повторяя измерения через
определенные интервалы времени (разд. 9.2.1, 9.2.2). Если ожидаются быстрые
изменения (от нескольких часов до нескольких суток) сейсмического или горно
механического происхождения (эксплуатация геотермальных полей, работы в
шахтах, заполнение водохранилищ), то большую роль играют наблюдения через
короткие интервалы времени или непрерывная регистрация силы тяжести.
Для однозначной интерпретации выявленных изменений силы тяжести (изменения
высот и/или перемещения внутренних масс) необходимо одновременно измерять высоты
по крайней мере в некоторых контрольных точках. Анализ может быть основан на опре
делении отношений изменений силы тяжести и высоты либо на изменениях силы тяжести,
исправленных за изменение высоты 6Н соотношением - 3 х 10_65 / / м с " 2 (δΗ в метрах)
(разд. 4.4.2).
Приведем несколько примеров использования методов гравиметрии при мони
торинге техногенных перемещений масс и интерпретации.
При многолетней эксплуатации нефтяных и газовых месторождений могут возник
нуть заметные опускания дневной поверхности (порядка дециметра в год) и изменения
силы тяжести. Для исследований на нефтяном месторождении Тия-Хуана (восточный бе
рег оз. Маракайбо) была создана сеть пунктов, в которой были сделаны нивелировки и
измерения силы тяжести (площадь около 30 км2, 40 пунктов). С 1978 по 1983 г. измерения
в сети выполняли ежегодно, максимальное изменение силы тяжести составило
+ 250 нм-с~2/год. По результатам выполнены вычисления для всей площади методом
прогнозной фильтрации (ошибка прогноза ± 15 нм*с"2/год) [155] (рис. 10.15).
Измерения силы тяжести широко используются в связи с эксплуатацией геотермаль
ных полей. В 1974 — 1977 гг. в центральной части района Гейзерс-Стимфилд в Калифор
нии были выполнены измерения с относительными гравиметрами. Выявленное
уменьшение силы тяжести (достигающее 1200 нм-с-2) было объяснено изменением плот
ности вследствие ухода воды; полученные данные стали основой при построении модели
(объем и глубина резервуара, скорость повторного заполнения) [141]. На этом поле более
Определение изменений силы тяжести во времени
359
Рис. 10.15 (левый). Гравиметрические пункты и изменения силы тяжести (нм -с_2/год ) на нефтяном
месторождении Тйя-Хуана (Венесуэла), полученные прогнозной фильтрацией по наблюде
ниям 1978-1983 гг. (предполагается линейная зависимость изменений во времени) [155].
Рис. 1 0 .1 6 .(правый). Гравиметрические пункты и изменения силы тяж ести (в м к м -с" 2) с 1961 по
1967 г. на некоторы х пунктах, а такж е изолинии с сечением 1 м к м - с '2; геотерм альное поле
Уаиракеи (Новая Зеландия); часть поля с продуктивными скважинами заш трихована [8].
трех лет применяли и сверхпроводящие гравиметры. По их данным выявлена корреляция
между экстремальными значениями силы тяжести (интервал 10 — 20 сут, амплитуда око
ло 10 нм с -2) и землетрясениями магнитудой >2,2, вызванными инъекциями воды [230].
В 1961 — 1983 гг. измерения силы тяжести проводились на пунктах сети нивелирования,
расположенных в геотермальном поле Уаиракеи и его окрестностях в Новой Зеландии;
в каждой из 7 эпох наблюдения были выполнены на 60 — 120 реперах. Из-за оседания
земной поверхности (максимальная скорость 45 см/год) в измеренные изменения силы тя
жести вводили редукцию в свободном воздухе. Остаточные величины (до - 800 нм ·с “ 2/
год) позволили выполнить детальное моделирование с целым рядом параметров, таких,
как потеря массы, заполнение после извержения, изменения зоны, заполненной паром, по
нижение уровня грунтовых вод [8]. В начальной фазе эксплуатации значительные вариации
силы тяжести были обнаружены также за пределами зоны бурения (рис. 10.16). С 1979 г.
на геотермальном поле Травале в Италии выполняют повторные нивелировки и измере
ния силы тяжести с интервалами примерно в 2 года [194]. Обнаружены изменения до
100 нм с -2. Общий уровень силы тяжести контролируют на пункте абсолютных определе
ний, расположенном вне геотермального поля.
При откачке подземных вод понижающиеся водные горизонты в большинстве случа
ев образуют конические формы; в районах с уплотняющимися осадочными породами это
приводит к необратимым опусканиям дневной поверхности, охватывающим обширные
территории (в г. Мехико более 9 м). Обычно мониторинг изменений силы тяжести в райо
нах таких опусканий показывает, что увеличение силы тяжести достаточно сильно коррелировано с изменением высоты (Токио, 1963—1970: 100 нм*с"2/год; Хьюстон, Техас,
1966—1973: 350 нм-с_2/год) [256, 662]. Вместе с тем различия гидрологических условий
могут привести к большим различиям в соотношениях для изменений силы тяжести и
высоты.
В районах угольных шахт плотные гравиметрические съемки (с шагом 20 — 30 м)
на дневной поверхности и под землей могут помочь в выявлении опусканий поверхности
и характера перераспределения масс [428]. В местах с опасным уровнем деформаций мно
360
Глава 10
гократные повторные гравиметрические съемки (с интервалами 1 — 6 мес) выявляют
очень сильные изменения силы тяжести, возрастающие с течением времени [183].
Одновременные измерения силы тяжести и высот во время заполнения больших водо
хранилищ могут быть использованы для изучения нагрузочных явлений, при этом особый
интерес представляют локальные отклонения от упругости, неоднородности деформаций
и латеральное просачивание воды. Профильные измерения на водохранилище La Grande-2
(Квебек, Канада) после учета прямого гравитационного эффекта выявили увеличения силы
тяжести до 140 нм с -2 [401].
10.3.
Измерение приливных изменений силы тяжести
10.3.1.
Области применения
Измерение приливных вариаций силы тяжести является частью работ по изуче
нию земных приливов наземными и космическими методами. Из наблюдений на
ходят изменения амплитуды и фазы приливных волн, которые представляют
собой отклик тела Земли на приливные силы. Для абсолютно жесткой Земли
амплитуды и фазы отдельных волн, имеющих разные частоты, известны с высо
кой точностью по астрономическим данным. Наблюдаемые вариации являются
функциями реологических характеристик тела Земли, а также океанических и ат
мосферных возмущающих эффектов (разд. 3.4.2, 3.4.3). Движение полюса также
имеет периодический характер и может рассматриваться аналогично; мониторинг
положения полюса осуществляют методами космической геодезии.
Данные земноприливных наблюдений служат для редуцирования результатов
геодезических измерений и геофизического моделирования. Отметим, что общее
изменение силы тяжести не превышает 3 м км -с"2, а максимальный вклад полу
суточной лунной волны (М2) составляет 300 — 400 нм ·с “ 2 в средних широтах
и достигает 900 нм-с" 2 на экваторе. Наблюдаемый приливный эффект складыва
ется из приливного эффекта в деформируемом теле Земли, притяжения и нагру
зочного эффекта океанических масс (особенно для полусуточных волн), а также
атмосферных эффектов (редукция по регрессионным моделям).
Перечислим наиболее важные области применения гравиметрических земно
приливных наблюдений [451]:
— расчет земноприливных поправок в измерения силы тяжести и другие высоко
точные измерения (определение местоположения спутниковыми методами, ра
диоинтерферометрия, высокоточное нивелирование), в которых учитывают
функции чисел Лява h и к (разд. 3.4.3). На результаты относительных измерений
силы тяжести влияют короткопериодические (не более суток) приливные волны,
а при абсолютных измерениях — также и долгопериодические приливы и движе
ния полюса; в настоящее время ошибки измерений силы тяжести лежат в преде
лах ± 1 0 — 100 нм с -2;
— исследование глобальных моделей Земли (после учета океанских приливов по
моделям). Амплитуды основных приливных волн для различных моделей упру
гой Земли, предполагающих, что она состоит из однородных концентрических
слоев, варьируют в пределах 1 — 2%. Резонансный эффект жидкого ядра (резо
нансная частота 15,073°/ч) приводит к столь же небольшим вариациям в суточ-
Определение изменений силы тяжести во времени
361
, ι-Δ δ (М2) (<5(измер.)-1,16] /1,16
-4 % у
4 ° Μ 4 Δ Φ (Μ 2 )Задержка -
°°
Континентальная часть СШ А
-4’ LH.O
,_____ t
j---------------------1
Опережение!- g j
120°
90°
W
< о
Рис. 10.17.
П араметры зем ного гравиметрического прилива
М2 на трансконтинентальном профиле СШ А [388].
ных волнах с близкими к этой величине частотами. Неидеальная упругость
мантии увеличивает амплитуду менее чем на 0,5% (разд. 10.3.3);
— оценка региональных моделей земной коры и мантии после исключения влия
ния океанских приливов и приливов в теле Земли, определяемых по соответству
ющим моделям. Остаточные амплитуды и фазы указывают на латеральные
неоднородности в литосфере и верхней мантии. Результаты вычислений по моде
лям показали, что можно ожидать аномалий в пределах 1,5% для δ и 0,1°
для ΔΦ [469];
— оценка глобальных и региональных моделей океанских приливов. При этом
из наблюдений необходимо исключить приливы в теле Земли и океанские нагру
зочные приливы (по моделям стандартной Земли и региональным моделям зем
ной коры). Для волны М2 влияния океанских приливов не превышают 20 —
100 нм с " 2; при удалении от береговой линии на несколько сотен километров
они, как правило, не превышают 10 нм*с“ 2 (рис. 10.17);
— изучение взаимосвязи приливов в твердой Земле и океанских нагрузочных при
ливов с современными геодинамическими процессами (землетрясениями, извер
жениями вулканов); эти исследования находятся в начальной стадии.
Для вычисления поправок амплитудные факторы основных приливных волн
нужно определять с ошибкой не более ±1% (для фаз ±0,5°). Для оценки геофи
зических моделей желательна точность ±0,1%. Чтобы регистрировать прилив
ные волны с малыми амплитудами или разделять волны, близкие друг к другу,
необходимо, чтобы:
— инструментальная точность и временная стабильность измерительной системы
были достаточно высокими, а условия на пункте — достаточно хорошими
(разд. 10.1.2— 10.1.5);
— влияние внешних возмущающих факторов (например, изменений атмосферного
давления) было достаточно малым (разд. 10.2.1, 10.2.2);
— длительность наблюдений была выбрана так, чтобы охватить большое число
периодов исследуемых приливных волн; также необходимо учитывать отношение
сигнал/шум;
— выбранная методика обработки и анализа результатов основывалась на мате
матической модели, согласованной с инструментальной точностью (разд. 10.3.2).
362
10.3.2.
Глава 10
Оценка, результаты, точность
Приливные изменения силы тяжести наблюдают регистрирующими системами
с пружинными гравиметрами и сверхпроводящими гравиметрами (разд. 10.1.4,
10.1.5). Из наблюдений обычно получают данные, осредненные за один час
(разд. 10.1.2). Измеренные величины помимо приливного сигнала содержат ин
формацию об изменяющихся со временем инструментальных влияниях (напри
мер, вызванных изменениями температуры и давления воздуха, старением
материала пружины), перемещениях окружающих масс (атмосферные, гидрологи
ческие, тектонические процессы); они также искажены ошибками измерений. Зем
ные приливы моделируют выражением (3.26), а некоторые возмущающие
сигналы описывают линейными регрессионными зависимостями (разд. 10.2.1,
10.2.2). Ошибки моделей и ошибки измерений разделяют на две составляющие:
дрейф, описываемый аналитической функцией (разд. 6.6.3), и случайную состав
ляющую. Таким образом, уравнивание по методу наименьших квадратов основы
вается на следующем уравнении поправок:
п
т
l(t) + v(t) = Σ 5И,-(теор.) cos (ω,7 + Ф/(теор.) + ΔΦ,) + Σ
/=1
bjFj(i) + D(t). (10.15)
7=1
Здесь l(t) — результат регистрации (измеренная величина); v(t) — поправка; 6, и
δΦ, — амплитудный фактор и фазовый сдвиг приливной волны / (круговая часто
та ω, амплитуда Л , фаза Ф). Коэффициенты регрессии bj описывают связь между
параметрами состояния Fj и отсчетом; D(t) описывает дрейф (в большинстве слу
чаев в виде многочлена малой степени, зависящего от времени).
Измеренная величина должна быть исправлена масштабным коэффициентом,
а отдельные волны — с помощью частотной характеристики (частотной переда
точной функции) измерительной системы (разд. 10.1.3). Из-за того что прилив
вызывает воздействие инерциального ускорения на гравиметр, следует ввести
инерциальную поправку. Для полусуточной волны М2 этот эффект не превышает
2 н м -с"2 [523].
Систему уравнений (10.15), которую следует составить для периода регистра
ции, можно решать подбором параметров по методу наименьших квадратов, при
этом обычно полагают, что результаты измерений некоррелированы и равноточ
ны (разд. 9.2.4). Однако и процедура уравнивания в одном блоке, и корректная
оценка точности окончательных результатов осложнены некоторыми особен
ностями:
— обрабатывают большие массивы данных, которые могут содержать грубые
ошибки и пропуски, когда не было измерений;
— измерения физически коррелированы и неравноточны (шумы, зависящие от ча
стоты и возрастающие при увеличении длины волны прилива);
— частоты некоторых приливных волн очень близки между собой;
— частоты приливного сигнала принадлежат двум частотным диапазонам (ко
ротковолновые приливы ^ 1 сут, длинноволновые приливы с периодом
> 14 сут);
— с приливным сигналом смешаны шумовые сигналы, вызванные нестабильнос
тью прибора, а также возмущающие сигналы с частотами, близкими к частотам
полезного сигнала (полусуточные, суточные, сезонные).
Определение изменений силы тяжести во времени
363
НМ'С
10^
0,01 0,001 -I
50
Частота, (°/ч)
Рис. 10.18.
Амплитудны й спектр остаточны х вели
чин из анализа трехлетних наблю дений со
сверхпроводящ им
гравиметром
GWR
ТТ40 [560].
Эти особенности пытались учесть в алгоритмах уравнивания, созданных спе
циально для земноприливного анализа. Для таких алгоритмов характерен раз
дельный подход при анализе коротко- и долгопериодических приливных волн,
особенно различаются алгоритмы при учете дрейфа. Грубые ошибки исключают
до уравнивания, но можно выявить и исключить их в процессе итераций. Инстру
ментальные ошибки и внешние возмущающие влияния устраняют, как правило,
до уравнивания, для этого используют регрессионные зависимости для данного
пункта или стандартные модели. Реалистическая оценка точности может быть
выполнена с помошью спектрального анализа остаточных уклонений и анализа
амплитудного спектра [759]. На рис. 10.18 приведен фурье-спектр уклонений.
Алгоритмы постоянно совершествуют, чтобы иметь возможность одновре
менно анализировать коротко- и долгопериодические приливы, гибко использо
вать цифровую фильтрацию для исключения дрейфа и улучшать точностные
оценки. Большие возможности открывают применение высокоскоростной реги
страции и обработка на микрокомпьютерах (до одного значения в секунду) при
одновременной регистрации данных об окружающей среде. Совместное уравнива
ние в этом случае приводит к «многоканальному анализу», цель которого — мо
делировать как можно больше динамических процессов [68].
В методе анализа Венедикова [731] дрейф исключают фильтрацией на интервалах в
2 сут, а нормальные уравнения для вычисления параметров волн с короткими периодами
в 1, 1/2 и 1/3 сут составляют раздельно. При фильтрации на интервалах в 1,5 и 15 сут
этот метод можно распространить на случаи анализа коротко- и долгопериодических при
ливных волн, одновременно исключаются грубые ошибки и присваиваются веса различ
ным интервалам регистраций [732]. Хойницкий [118] для исключения из измерений
долгопериодических приливных волн и других низкочастотных эффектов применяет ци
фровую низкочастотную фильтрацию, а затем уравнивает квазиизмерения, свободные от
дрейфа. Шуллер [605] выполняет скользящий анализ блоков данных с целью оценки точ
ности и расширяет уравнивание до многоканального анализа. Для анализа долгопериоди
ческих приливных волн можно в числе других использовать разработки Венцеля [759].
Современные регистрирующие системы с пружинными гравиметрами, обеспе
чивающие при осреднении за один час точность не хуже 10 нм с -2, позволяют
находить амплитуды и фазы основных волн с ошибками± 1% и ±0,5° соответ
ственно; такая точность достигается, если наблюдения выполняют на полевых
станциях с теплоизоляцией в течение 1 — 2 мес при аналоговой регистрации
[705]. При использовании цифровой регистрации и системы обратной связи
(разд. 10.1.4), при детальной дискретизации и цифровой фильтрации ошибки
можно уменьшить до нескольких нм -с"2. В настоящее время такие системы обес
364
Глава 10
печивают точность ±1% и ±0,5° за 2 — 3 нед наблюдений [569]. После непре
рывной регистрации в течение 4 — 6 мес можно уже анализировать группу из
10 — 12 короткопериодических приливных волн (основные волны — с ошибками
в несколько ±0,1% и несколько ±0,1°; системы с обратной связью обеспечивают
более высокую точность) [460]. В табл. 10.1 дается пример результатов на близэкваториальной станции (малые суточные волны). После непрерывной регистра
ции более чем за 6 мес в диапазоне суточных волн удалось разделить волны Р1
и К1.
Т а б ли ц а 10.1. Уравненные приливные параметры (для 1 2 групп волн,
округленные значения), станция изучения земны х приливов М аракайбо
(φ = 1 0 ° ,6 7 5 с.ш ., X = 7 1 ° , 6 2 1 з.д ., Я = 3 5 м),
гравиметр Л а К оста — Р ом бер га G 298, 27 июня — 24 ноября 1978 г. [22]
Группа волн
Q1
οι
Ml
P1S1K1
л
001
2N2
N2
М2
L2
S2K2
М3
Амплитуда,
н м -с '2
Отношение
сигнал/шум
25,3
135,7
10,4
191,9
11,1
6,9
24,7
164,6
867,0
22,8
407,4
15,4
36
195
15
276
16
10
18
123
649
17
305
28
Ср. кв. ошибка (ежечасные наблюдения) ± 12 нм с'
Амплитудный
фактор
1,171
1,202
1,174
1,208
1,250
1,422
1,116
1,187
1,197
1,116
1,209
1,100
±
±
±
±
±
±
±
±
±
±
±
±
0,033
0,006
0,078
0,004
0,078
0,143
0,060
0,010
0,002
0,065
0,004
0,039
Фазовая
задержка, (°)
+ 1,1
+ 0,7
- 1 0 ,2
- 0,4
+ 0,5
+ 10,8
+ 4,3
+ 1,4
+ 1,0
- 0,7
+ 0,2
+ 0,7
± 1 ,6
± 0 ,3
± 3 ,8
± 0 ,2
± 3 ,6
± 5 ,8
± 3,1
± 0 ,5
±0,1
± 3 ,4
± 0 ,2
±2,1
2
О качестве полученных данных можно судить по тому, насколько надежно
получены малая (несколько нм -с“ 2) волна S1, при определении которой сказыва
ются изменения атмосферного давления, и волна ι/ί , частота которой близка к
резонансной частоте ядра (табл. 10.2). Если регистрация длится более года, то
можно выделить 40 — 50 групп долгопериодических волн; для этого необходимы
высокая стабильность измерительной системы, стабильные условия на станции
и, кроме того, надежный контроль калибровки. При соблюдении этих требова
ний (цифровая регистрация, система обратной связи) параметры основных при
ливных волн можно определять с ошибками ±0,1 — 0,2% и ±0,1 — 0,2° [17,
706]. Увеличение длительности наблюдений до нескольких лет позволяет умень
шить ошибки до нескольких ±0,01% и нескольких ±0,01° соответственно [146].
Сверхпроводящие гравиметры имеют весьма малый дрейф (рис. 10.19) и
очень высокую разрешающую способность (±0,1 нм с ” 2). Уже сейчас обработка
их месячных записей позволяет определять параметры основных волн с ошибка
ми ±0,1%, а после года работы — с ошибками в несколько ±0,01% и несколько
±0,01°; параметры долгопериодических волн можно определять с ошибками в
Определение изменений силы тяжести во времени
365
Т а б лица 10.2. Уравненные значения приливных параметров (фрагмент данны х
для 47 приливных волн, округленные значения), станция изучения
земны х приливов Б ад-Х ом бург (φ = 50°,228 с.ш ., X = 8°,611 в .д ., Н = 190 м),
сверхпроводящ ий гравиметр GWR ТТ40, май 1981 г. — апрель 1984 г. [560]
Прилив
А м плитуда,
А мплитудны й
Ф а зо в а я за д е р ж к а ,
нм ·c - 2
фактор
(°)
S sa
23
1 ,0 8 1 0
Mm
26
1 ,1 2 7 4
M f
49
1 ,1 4 6 2
Q1
ο ι
67
1 ,1 4 4 3
306
1 ,1 4 4 9
PI
142
1 ,1 4 5 9
- 0 ,1 3
±
2 ,5 0
0 ,0 1 0 4
+ 0 ,1 3
±
0 ,5 3
0 ,0 0 5 6
+ 0 ,3 3
±
0 ,2 8
0 ,0 0 0 5
- 0 ,3 1
±
0 ,0 3
0 ,0 0 0 1
- 0 ,0 7
±
0 ,0 1
0 ,0 0 0 2
+ 0 ,0 5
±
0 ,0 1
0 ,0 1 3 9
+ 3 ,0 7
±
0 ,6 8
0 ,0 0 0 1
+ 0 ,1 0
±
0 ,0 1
0 ,0 0 9 6
+ 0 ,9 5
±
0 ,4 4
0 ,0 0 0 3
+ 2 ,0 7
±
0 ,0 2
0 ,0 0 0 1
+ 1 ,6 5
±
0 ,0 1
0 ,0 0 0 2
+ 0 ,2 1
0 ,0 0 0 6
+ 0 ,4 6
±
±
0 ,0 1
1 ,1 8 6 4
±
±
±
±
1 ,0 6 8 7
±
0 ,0 0 2 8
+ 0 ,0 3
-н
o'
±
±
±
±
0 ,0 4 7 4
±
±
3
1 ,1 8 3 1
K1
428
1 ,1 3 3 1
ф\
3
1 ,2 4 9 8
N2
59
1 ,1 7 0 0
M2
308
1 ,1 8 3 5
S2
143
1 ,1 8 5 7
K2
39
М3
4
SI
±
±
±
0 ,0 3
несколько процентов и несколько ±0,1° [160, 559] (табл. 10.2). По многолетним
записям можно даже выявить гравиметрический эффект движения полюса
(рис. 10.20) (разд. 3.4.1). Из анализа пятилетних записей Рихтер [561] получил
для этого эффекта амплитудный фактор 1,20 ±0,01.
0
200
400
600
800
1000 Сутки
Рис. 10.19.
Долговременны й дрейф сверхпроводящ его грави
метра GWR ΤΤ 40 (влияние земны х приливов и из
менений атм осф ерного давления исключено) [560]
Рис. 10.20.
О статочны е величины при анализе
земноприливных наблю дений со
сверхпроводящ им
гравиметром
GWR и теоретические изменения
силы тяж ести для 432-суточного
Чандлеровского периода [560].
Глава 10
366
Если сравнивать результаты для одной и той же станции по разным измери
тельным системам, то зачастую обнаруживается, что амплитудные факторы
основных приливных волн расходятся на 1 — 2°/о (табл. 10.3). В основном такие
расхождения возникают из-за ошибок калибровки и (для астазированных грави
метров) зависимости чувствительности прибора от наклона.
Т а б лица 10.3. Уравненные значения ам плитудного фактора и их среднеквадратические уклонения
(средние значения, округленные величины), станция изучения земны х приливов, Ганновер
(φ = 52°,387 с.ш ., X = 9°,712 в .д ., Н = 50 м) [706]
Прибор
К-во
суток
ΟΙ
(350)
Приливные волны (амплитуды в нм с 2)
P1S1K1
М2
S2K2
(157)
(334)
(485)
Ср. кв. ошибка
ежечасных
наблюдений,
НМ'С'2
Аскания
G sl2 № 130
(фотоэлектр.)
LCR G260
LCR G298
296
206
410
LCR D8
52
LCR G299
(с обр. связью)
Геодайнемикс 74
63
Аскания G sl2 130BN
(емкостной)
LCR G318
LCR ЕТ18
Среднее
170
332
103
304
1936
1,149
± ,014
1,145
1,191
1,198
,010
,010
,022
1,150
1,137
1,183
,002
,001
,001
1,162
1,149
1,194
1,185
,003
1,198
,002
,001
,001
,002
1,170
,004
1,151
,004
1,160
,005
1,162
,005
1,169
,003
1,160
1,152
,003
1,140
1,192
,003
1,184
,002
,002
1,149
,003
1,156
,004
1,158
1,194
1,190
,003
1,195
,002
,002
1,151
1,193
,001
,001
,002
1,180
,006
1,190
,005
1,193
,006
1,199
,006
1,194
,004
1,197
,003
1,159
± 0 ,0 0 3
1,148
1,191
1,192
,002
,001
,001
,002
±44
6
6
7
7
13
19
8
6
Международный центр земных приливов ICET в Бельгийской королевской обсервато
рии (Брюссель) занимается сбором земноприливных наблюдений и их анализом, включая
разработку программного обеспечения и интерпретацию данных. Особое внимание уделя
ется стандартизации измерений и методов учета поправок. База земноприливных данных
ICET [157] по состоянию на 1987 г. содержит результаты измерений на 261 приливной
станции, расположенной в разных районах Земли. Начиная с 1973 г. ICET выполнил на
блюдения на 121 станции, которые образуют мировую систему гравиметрических
земноприливных профилей (Европа, Африка, Южная и Юго-Восточная Азия, Австралия,
Южная Америка). Применялись гравиметры Л а Коста — Ромберга и Геодайнемикс
(время наблюдений, как правило, 6 мес и более), методика наблюдений унифициро
вана [453, 454]; приборы калиброваны на фундаментальной земноприливной станции в
Брюсселе (разд. 10.1.3). Исследования земных приливов выполняют и другие организации,
Определение изменений силы тяжести во времени
36 7
нередко в сотрудничестве с ICET. Например, в Китае созданы 7 приливных станций (время
наблюдений 0,5 —1 год) [456]; опубликованы данные наблюдений с 7 различными грави
метрами на фундаментальной станции Учан [313].
10.3.3.
Применение результатов
Мировые гравиметрические профили ICET (Брюссель) сделали возможным вы
вод параметров земных приливов (амплитудный фактор δ, фазовая задержка ΔΦ)
для десяти групп волн (Q1, ΟΙ, PI, К1, N2, М2, S2, К2, М3) для большого числа
континентальных станций. На некоторых станциях в течение нескольких лет ве
дется регистрация долгопериодических волн. Такие данные позволяют выполнить
анализ еще большего числа (до 50) приливных волн, включая долгопериодиче
ские, а короткопериодические приливы можно определять с более высокой точ
ностью. Гармонический анализ отдельных частей записей не выявил заметных
временных изменений в параметрах короткопериодических земноприливных волн
[560].
На большей части земной поверхности среднее расстояние между станциями 1000 —
3000 км. Меньшая плотность станций — в Северной Америке, Центральной Азии и в по
лярных районах, однако на некоторых высокоширотных станциях осуществляется дли
тельная регистрация (Шпицберген [70], Центральная Антарктика [602, 645]). Меньшее
расстояние между станциями (несколько сотен километров) характерно для Западной, Се
верной и Центральной Европы [453]. На рис. 10.21 показано распределение земноприлив
ных параметров для волны М2.
Для районов с плотной сетью станций интерполяцией наблюденных парамет
ров можно определить гравиметрическую поправку за приливы с ошибкой не бо
лее ± 1 0 н м с -2 (ошибки параметров ±0,5%, ±0,5°) [159]. При меньшей
плотности станций и в прибрежных зонах (океанский нагрузочный эффект) ошиб
ки больше. В этих случаях необходимы либо временные наблюдения земных при
ливов (разд. 10.3.2), либо вычисления приливных параметров по моделям для
приливов в теле Земли и для океанской нагрузки; можно ожидать ошибок ±10 —
20 нм с -2 [313] (разд. 9.2.3).
|*ис. 1 0 .2 1 . Гравиметрические
земноприливные параметры: амплитудный фактор (слепа) и гапамыилнне фазы (справа) для волны М2 (Западная Европа) [159].
368
Глава 10
Для геофизического использования измеренных параметров приливов объеди
ним, следуя Мельхиору [451], значения δ и ΔΦ для волновой группы i (амплитуда
Л) в вектор наблюдений
о, = 0 /(6, А(теор.), ΔΦ,·).
(10.16)
Этот вектор можно представить как сумму
о, = пи/ + I/ + Х|,
(10.17)
где ш/ — приливный сигнал упругой модели Земли, без океанов и латерально
однородный; ядро Земли — жидкое; 1, — вектор океанской нагрузки, а х, — при
ливная аномалия. Вектор х,· содержит остаточные ошибки измерений и обработ
ки (например, ошибки калибровки), а также ошибки моделей (модель Земли,
модель океанских приливов). Эти модели можно уточнять, сравнивая наблюден
ную приливную аномалию с соответствующими величинами по моделям. Прили
вы в Земле были рассчитаны для различных моделей упругой Земли (модели
Молоденского, модели Вара); определение эффектов глобальной океанской на
грузки базируется в основном на моделях океанических приливов Свидерского
(разд. 3.4.3).
Проверка глобальных моделей Земли возможна по параметрам суточных при
ливных волн, в которых доминирует резонансный эффект жидкого земного ядра.
Средние для всей Земли амплитудные факторы волн ΟΙ, PI, К 1 после исключения
влияния океанской нагрузки хорошо согласуются. Параметры для малой волны
фи полученные из длительных наблюдений со сверхпроводящими гравиметрами,
также согласуются с вычисленным резонансным эффектом жидкого ядра [749]
(табл. 10.4). Для сравнительной оценки разных моделей Земли нужно повысить
точность до 0 , 1%.
В эллиптической вращающейся модели Вара [745] амплитудные факторы за
висят от широты:
5,(1 сут) = δ<0) + δ!υ ~ (7 sin2* - 3),
4
δ i i - сут j = δ(0) + δ(1) Ц (7 sin2* - 1).
Т а б лица 10.4. А м п литудн ы е факторы суточных приливных волн,
содерж ащ ие влияние р езонансного эффекта ж идкого зем ного ядра
[451, 560]
Волна
ΟΙ
Р1
К1
*1
Амплитудный фактор
Результаты измерений
Модель Молоденского I
1,160
1,153
1,137
1,242
1,162
1,152
1,143
1,250
± 0,009
± 0,014
± 0,008
± 0,010
(10.18)
Определение изменений силы тяжести во времени
369
Значения δ для суточных волн зависят от частоты /. Сравнение с мировыми дан
ными ICET подтверждает существование зависимости от широты; однако значе
ния 6, полученные из наблюдений, превышают примерно на 1% величины,
вычисленные по моделям [451]. Модель Земли, предложенная в 1986 г. Дехантом
[136] (эллиптическая равномерно вращающаяся Земля с упругим внутренним
ядром, жидким внешним ядром и с неупругой мантией), позволяет уменьшить
расхождения до ~0,5%; причина расхождений — в невозможности исключить ка
либровочные погрешности (табл. 10.5).
Т аб ли ц а 10.5. Коэффициенты δ(0), ό(1) (округленные значения)
амплитудны х ф акторов, зависящих от ш ироты , для некоторых
основны х приливных волн; из результатов наблю дений не исключен
инерциальный эффект (относительное ускорение гравиметра) [137]
Волна
ΟΙ
Р1
К1
М2
*1
δ(0)
δ(,)
δ(0)
δ(,)
δ(°)
δ(,)
δ(0)
δ(ΐ)
Модель Вара
Коэффициенты
Модель Деханта
Наблюдения
1,152
- 0 ,0 0 6
1,147
- 0 ,0 0 6
1,132
- 0 ,0 0 6
1,160
- 0 ,0 0 4
1,155
-0 ,0 0 1
1,150
- 0 ,0 0 2
1,135
- 0 ,0 0 2
1,161
-0 ,0 0 1
1,161
- 0 ,0 0 3
1,154
- 0 ,0 0 3
1,144
- 0 ,0 0 3
1,170
- 0 ,0 0 2
Глобальные модели океанских приливов для упругой Земли [158] позволяют
вычислять параметры океанских нагрузочных приливов с ошибкой ± 1 0 —
20 нм-с “ 2. Для точного определения параметров приливов в приморских обла
стях необходимы локальные модели приливов на шельфе либо котидальные кар
ты; в таких областях нагрузочные эффекты велики (100 нм -с " 2 и более) и
подвержены быстрым местным изменениям [314]. Все чаще применяют прилив
ные аномалии, получаемые после учета по моделям приливов в теле Земли и
нагрузки океанских масс (см. 10.17). Для всей поверхности Земли известны пара
метры основных приливных волн [452, 455]; амплитуда волны М2 изменяется
от 5 до 50 нм с " 2. Достаточно надежно исключаются влияние ошибок котидальных карт и остаточные инструментальные ошибки. Следовательно, такие анома
лии можно анализировать для изучения реологических свойств литосферы и
верхней мантии, а также для оценки качества моделей окенских приливов. В ито
ге создаются более совершенные реологические модели (латеральные неоднород
ности, вязкость и упругость) Земли и уточняются модели океанских приливов.
В целом по земному шару обнаруживаются корреляции (волна М2) с тепловым пото
ком, сейсмичностью, а также крупными геотектоническими структурами [789]. На обшир
ных территориях (Китай) выявлены корреляции с толщиной земной коры и аномалиями
Буге [414]. В Японии на протяжении нескольких сотен километров обнаружено уменьше
ние коэффициентов δ для волны М2 на 1,5% и для ΟΙ на 3% [174]. Проверка местных
моделей земной коры (глубина границы Мохоровичича) подбором параметров окенских
370
Глава 10
нагрузочных приливов затруднена из-за малой чувствительности нагрузочного эффекта к
изменениям модели. Более успешны проверка и, возможно, улучшение местных моделей
морских приливов. В работе [750] описано использование сверхпроводящих гравиметров
для контроля параметров нагрузочных приливов для волн 01 и М2 в Калифорнии; резуль
таты совпадают с точностью 0,2%. При изучении морских приливов в шельфовых зонах
из анализа измерений приливных вариаций силы тяжести в обширных областях Фенноскандии выявлены существенные отклонения от рассчитанных фазовых сдвигов океанских
приливов [17]. Получены первые результаты вычислений для распределения параметров
океанских приливов (основные волны) по наблюдениям приливных вариаций силы тяже
сти и наблюдениям на уровнемерных станциях [387]; при увеличении числа земноприлив
ных станций можно ожидать повышения точности и надежности результатов.
Некоторое время предполагали, что существует связь между напряжениями,
вызванными приливами (они на несколько порядков меньше тектонических на
пряжений), и некоторыми сейсмовулканическими явлениями. Однако современные
исследования роли приливов как спускового крючка не привели к однозначным
выводам.
При определении корреляции между модельными приливными напряжениями и сейс
мическими предвестниками извержений вулканов выявлены лишь отдельные значимые
корреляции, что объясняется разными характеристиками вулканов [498]. В течение месяца
после землетрясения в Японии наблюдали аномальное поведение среднесуточного ампли
тудного фактора (значения изменялись от 1,1 до 1,6); однако использование таких измене
ний для анализа землетрясений лишь начинается [564].
10.4.
Изменения силы тяжести вследствие перемещения
земных масс
10.4.1.
Глобальные изменения силы тяжести
Глобальные изменения силы тяжести вызываются перемещениями масс в теле
Земли, происходящими в течение длительного времени (разд. 3.4.4). К другим
возможным причинам относятся (гипотетическое) изменение гравитационной по
стоянной и изменения вектора суточного вращения Земли (разд. 3.4.1). Переме
щения масс приводят к изменениям параметров сферической гармонической
модели гравитационного поля Земли и проявляются как изменения коэффициен
тов низких степеней; для степени / ^ 2 их можно интерпретировать как измене
ния размеров, положения центра масс, полярного и экваториального сжатия, а
также направления главных осей инерции Земли (разд. 2.2.3).
Глобальные изменения силы тяжести можно выявить по гармоническим коэф
фициентам, которые получают из анализа спутниковых орбит, и измерениям си
лы тяжести по всей поверхности Земли. Поскольку порядок величины этих
изменений < 1 — 10 нм*с_ 2/год, измерения необходимо выполнять в течение до
статочно длительного времени; продолжительность наблюдений зависит от точ
ности и временной стабильности измерительных систем. Модельные расчеты
показывают, что мировая опорная сеть, состоящая примерно из 25 пунктов абсо
лютных определений, может дать начальную информацию о глобальных измене
Определение изменений силы тяжести во времени
371
ниях силы тяжести через 10 лет [440]; схема мировой сети абсолютных
измерений известна (разд. 9.1.3). Если для этих пунктов помимо изменений силы
тяжести 6g находить методами космической геодезии и изменения высоты ЬН,
то можно использовать выражения (2.79) и (2.80) (в (2.79) величина bg — это
возмущение силы тяжести). Имеем
bg + Ц ЬН = Щ * ί 2
(/ - 1) ( а- )
2
(ЬС,.т cos т \ +
+ 05/,т sin /77\)P/,m(COS σ) | .
(10.19)
Это уравнение позволяет получить временные изменения bQ,m bSi,m гармониче
ских коэффициентов [50]. Для выявления долгопериодических эффектов можно
также использовать непрерывную регистрацию со сверхпроводящими гравимет
рами (разд. 10.1.5).
Временное изменение динамического коэффициента формы (разд. 2.2.3) было получе
но из орбитального анализа ИСЗ LAGEOS по результатам лазерной локации в течение
5,5 лет; получена величина Л = - 3 х 10_11/год [790]. Полагают, что причиной такого
изменения является послеледниковое вязкостное поднятие земной коры (разд. 4.4.1). Это
изменение соответствует уменьшению сжатия Земли и ее приближению к эллипсоиду гид
ростатического равновесия (разд. 4.3.2); на полюсах оно приводит к максимальному изме
нению силы тяжести 1 нм*с"2/год [107]. Расчеты по моделям показывают, что
изменения, вызванные землетрясениями, малы (Л = - 2 х 10" 12 с 1977 по 1985 г.) [117].
В планируемой программе изучения геопотенциала GRM (разд. 4.5.1) временные эффекты
можно будет анализировать через пол года наблюдений, одновременно можно будет изу
чать сезонные изменения континентальных ледниковых полей и очень глубокие землетря
сения за время программы [744].
К настоящему времени абсолютные измерения силы тяжести на длительных отре
зках времени выполняют лишь на нескольких пунктах. Их анализ пока не привел к одно
значным выводам относительно глобальных изменений силы тяжести [82]. Сравнение
данных, полученных в 1972 — 1982 гг. на пунктах Севр, Потсдам, Москва, Новосибирск,
показало (после приведения к пункту Севр), что сила тяжести на этой части Евроазиатской
плиты неизменна в пределах ±100 н м -с"2 [86] (рис. 10.22). С 1976 по 1986 г. выполнялись
повторные измерения с абсолютным гравиметром ГАБЛ в Потсдаме; после учета попра
вок за притяжение грунтовых вод и движение полюса было обнаружено увеличение силы
тяжести со скоростью 26нм с " 2/год [171]. По результатам регистрации силы тяжести
в последние годы удалось надежно подтвердить влияние движения полюса (разд. 10.3.2).
g = 9809 258 000 (нм-с- 2 )
Рис. 10.22.
Изменения абсолютных значений си
лы тяжести в 1966— 1982 гг. в Севре,
Потсдаме, Москве и Новосибирске,
отнесенные к пункту АЗ МБМВ (Севр)
( 86 ].
372
10.4.2.
Глава 10
Региональные изменения силы тяжести
Долговременные региональные изменения силы тяжести могут быть обнаружены
на границах тектонических плит (длительное накопление напряжений и их разряд
ка), а также во внутренней части плит (послеледниковое поднятие, уплотнение
осадочных пород, региональная неотектоника) (разд. 3.4.4). В зонах землетрясе
ний и извержений вулканов на региональные изменения накладываются локаль
ные, возникающие при активных фазах этих явлений (разд. 10.4.3). Скорость
региональных изменений обычно не превышает 100 нм с " 2/год; для их изучения
целесообразны гравиметрические сети, покрывающие большие территории (рас
стояния между пунктами 10 — 100 км), наблюдения в сетях повторяют через 1 —
10 лет. Такие сети создают в соответствии с требованиями к прецизионным се
тям, учитывая местные условия; все больше применяются абсолютные гравимет
ры, а для изучения короткопериодических вариаций силы тяжести используются
регистрирующие гравиметры (разд. 10.1.1). В настоящее время достигнута точ
ность абсолютных определений ±100 — 200 нм -с-2, а при относительных изме
рениях — несколько десятков н м -с"2. Для мониторинга региональных изменений
силы тяжести можно также использовать национальные высокоточные опорные
сети; в некоторых из таких сетей уже сейчас планируются измерения с интерва
лом 10 лет (разд. 9.2.6).
Приведем примеры региональных гравиметрических исследований для изуче
ния геодинамических процессов (разд. 4.4.2).
Современные тектонические процессы на границах литосферных плит являются пред
метом наиболее широкого мониторинга; повторные измерения силы тяжести служат
одним из методов исследований. В Северной Исландии гравиметрический профиль был
создан еще в 1938 г. Он расположен в районе границы расходящихся литосферных плит
и пересекает рифтовую зону молодого вулканизма (разд. 1.2.5). Начиная с 1965 г. этот
профиль, проходящий с востока на запад, был надежно закреплен и удлинен (длина
150 км, расстояние между пунктами 1 км); сейчас он захватывает соседние, более стабиль
ные зоны третичных базальтов [597, 704]. К настоящему времени измерения на профиле
выполнены 5 раз с пятилетними интервалами, с несколькими гравиметрами Ла Коста —
Ромберга; одновременно нивелированием определяли высоты пунктов. Абсолютный уро
вень силы тяжести задавался гравиметрическими связями с континентальными пунктами,
а позже — абсолютными измерениями с ошибкой ±0,1 — 0 ,2 м к м с " 2 [713]. В 1965 —
1975 гг. на протяжении 15 км в зоне трещины Крабла наблюдалось изменение силы тяже
сти на 0,8 мкм-с“ 2. Это изменение можно рассматривать как предвестник (активной) фа
зы формирования рифта, начавшейся в этой области в 1975 г. (рис. 10.23) (разд. 10.4.3).
Активная фаза сопровождалась уменьшением силы тяжести до 2 мкм*с“2 за 5 лет, охва
тившим обширную территорию. Изменения силы тяжести имели надежную корреляцию
с подъемами земной поверхности, по прошествии 10 лет этот процесс практически сошел
на нет.
Повторные измерения силы тяжести выполняют в регионах с большой вероятностью
землетрясений на границах столкновения плит и трансформных разломах. В Японии та
ким примером являются п-ов Кии в районе Кинки (медленное опускание и землетрясения
через каждые 100 —150 лет, сочетавшиеся с резкими поднятиями) и оз. Бива (низкая сейс
мическая активность). С 1971 г. в этих районах осуществляется мониторинг ежегодными
повторными измерениями с гравиметрами Л а Коста — Ромберга [591]. Значимых корре
ляций между изменениями силы тяжести (преимущественно < 20 нм с _2/год) и изменени-
Определение изменений силы тяжести во времени
5 д (н м с ^ ϊ / г о д
+20h
-20 h
373
1982-1971
,ν /ν -'Λ Α
5Н(мм/год)
-2
0
Рис. 1 0 .2 3 .Изменения силы тяжести и высоты на профиле «Восток — Запад» в Северной Исландии
(φ = 6 5 °4 0 '); эпохи наблюдений 1965, 1970, 1975, 1980 гг. [349].
Рис. 1 0 .2 4 .Изменения силы тяжести и высоты по профилю, проходящ ему по западном у берегу оз. Бива
на п-ве Кии (Япония) с 1971 по 1982/1983 г. (предполагается линейная зависим ость изменений
во времени) [591].
ями высоты установить не удалось (рис. 10.24); однако можно предположить, что
существенное влияние на результаты оказали вариации уровня грунтовых вод из-за их от
качки. Несколько гравиметрических опорных сетей в Южной Калифорнии было создано
Геологической съемкой США в рамках программы по уменьшению сейсмического риска.
Начиная с 1977 г. в этих сетях выполняют повторные измерения с интервалами в 0,5 —
1 год [329]. Выявлены вариации силы тяжести асейсмического и периодического характера
(до 250 нм с -2 за 6 мес), коррелированные с изменениями высот и напряжениями. С
1974 г. Калифорнийский технологический институт выполняет ежемесячные повторные на
блюдения в специальной сети (около 50 пунктов) в связи с определениями пространствен
ных координат пунктов методом радиоинтерферометрии [767]. Обнаруженные вариации
силы тяжести (до 800 нм-с-2) коррелируют с вариациями уровня грунтовых вод и со сгла
женными данными о дождевых осадках (разд. 10.2.2).
Сети для гравиметрического мониторинга созданы также в зонах столкновения текто
нических плит для наблюдений орогенных процессов. Приведем примеры: исследования
в Индии и Китае, приуроченные к Гималайской зоне субдукции (столкновение Индийской
и Евроазиатской литосферных плит, зоны активных разломов и высокая сейсмическая ак
тивность [3]); прецизионная гравиметрическая сеть (500 х 500 км; 46 пунктов, объединен
374
Глава 10
ные в группы по 2 — 4 пункта) в области Эгейской плиты (столкновение Африканской
и Евроазиатской плит [708]); гравиметрические профили, пересекающие обширные терри
тории (длина 3 тыс. км, 33 пункта) в Южных Андах [35]; гравиметрическая сеть, измере
ния в которой выполнялись в 1978, 1981, 1985 и 1988 гг. (600 х 100 км, 60 пунктов) в
Венесуэльских Андах, где разлом Боконо отмечает границу Карибской и Южно-Американ
ской плит, которой присущи процессы взаимного скольжения плит [154]. Ожидается, что
вследствие вариаций уровня грунтовых вод сезонные изменения силы тяжести могут до
стигать 600 нм ·с " 2, а вековые ее изменения не превышают нескольких десятков нм ·с " 2/
год.
В 1955 г. были начаты гравиметрические исследования во внутренних районах Евро
азиатской литосферной плиты. Вначале были осуществлены связи между Потсдамом и
Камчаткой с относительными гравиметрами, а с 1976 г. стали применять и абсолютные
гравиметры [81]; на столь протяженном участке не удалось зарегистрировать каких-либо
заметных изменений силы тяжести (разд. 10.4.1), однако нельзя исключать возможности
локальных вариаций. С 1969 по 1970 г. в ГДР по профилю, проходящему с востока на
запад (длина 250 км, 6 пунктов, ежегодные измерения), исследовались вертикальные пере
мещения масс в связи с соляной тектоникой и более глубокими геологическими структура
ми. Вводились поправки за влияние грунтовых вод и влажности почвы [171] (рис. 10.25).
После учета долговременного изменения, выявленного по абсолютным измерениям силы
тяжести (разд. 10.4.1), остаточные вариации силы тяжести не превысили ошибок измере
ний. С 1980 г. в тектонически активном регионе Пекин—Тяньцзинь в Северо-Восточном
Китае исследуется взаимосвязь между изменениями силы тяжести и сейсмической актив
ностью [389]. Измерения в сети (200 х 400 км, 59 пунктов) выполняют гравиметрами Л а
Коста — Ромберга с интервалом 3 мес; на 8 пунктах наблюдений с регистрирующими гра-
бд(нмс
Изменения силы тяж ести по профилю «В осток
— Запад» на территории Г Д Р в 1970 — 1985 гг.;
среднее региональное увеличение силы тяж ести
Определение изменений силы тяжести во времени
375
Рис. 10.26а.
Скорость поднятия земной коры (м м /г о д ) и грави
метрические профили в Фенноскандии [169].
Δ 9 (мкм-с 2)
Д д (м к м с 2 )
Рис. 10.266.
Обобщенные изменения силы тяжести
(1%5— 1985 гг.) для западной и вос
точной частей гравиметрического про
филя на широте 63° в зоне поднятия
земной коры в Фенноскандии [169].
виметрами Геодайнемикс (цифровая регистрация и обработка данных) отмечены коротко
периодические вариации силы тяжести.
Эффекты восстановления изостатического равновесия особенно активно исследуют
ся в Фенноскандии с использованием нивелирования, наблюдений уровня моря и измере
ний силы тяжести [347]. Для изучения поднятия земной коры были созданы четыре
гравиметрических профиля, приращения силы тяжести между смежными пунктами не пре
вышают 10 м км -с"2 (рис. 10.26а). Начиная с 1966 г. профиль, проходящий по параллели
φ = 63° с.ш. (1000 км, 8 пунктов), был измерен семь раз с большим числом гравиметров
Ла Коста — Ромберга (± 50 н м -с"2) [430]. Рисунок 10.266 иллюстрирует изменения вели
чин Ag между пунктами профиля, расположенными к западу и к востоку от центрального
максимума поднятия земной поверхности. Сравнение этих данных с изменениями высоты,
полученными из нивелирования (изменение высоты геоида составляет менее 5% от них),
позволило получить величины отношения изменений силы тяжести к изменению высоты,
соответственно -2 ,3 и -2 ,2 мкм-с"2/м [169] (разд. 4.4.2). Сходные эффекты, связанные
с поднятием земной коры в Канаде, исследуются с помощью абсолютных измерений силы
тяжести [402].
10.4.3.
Локальные вариации силы тяжести
Локальные изменения силы тяжести эпизодического характера наиболее часто
связаны с сейсмотектонической и вулканической активностью на границах литос
ферных плит, а также и во внутренних областях этих плит (разд. 3.4.4). Пред
376
Глава 10
вестники таких явлений и последующие вариации не превышают, как правило,
10 — 100 нм с _2/год. Однако непосредственно перед наступлением активной фа
зы и в течение ее возможны вариации в 1 — 2 мкм-с-2, часто квазипериодические (несколько недель или месяцев). Желательно, чтобы гравиметрические сети
или профили (расстояния между пунктами от нескольких сотен метров до не
скольких километров) покрывали район очага события и соседние, более стабиль
ные области, измерения следует повторять с интервалами 0,5 — 1 год, в период
активной фазы интервалы должны быть еще меньше. Короткопериодические эф
фекты (от нескольких дней до нескольких недель) изучают непрерывной регистра
цией силы тяжести (см. также разд. 10.1.1).
Приведем примеры гравиметрических исследований, связанных с изучением
сейсмической и вулканической активности. В большинстве случаев одновременно
с измерениями силы тяжести выполняют повторные определения высот пунктов,
благодаря этому при интерпретации можно использовать отношения изменений
силы тяжести к изменениям высоты bg/bH (разд. 4.4.2).
Ранее уже наблюдались изменения силы тяжести в несколько мкм-с-2, связанные с
землетрясением на Аляске (1964, М = 8,4) и в Сан-Фернандо (1971, М = 6,5) [28, 517].
Отношение изменения силы тяжести к изменению высоты оказалось равным
- 2 мкм-с-2/м, оно согласуется с величиной, полученной по модели деформаций при сме
щениях в глубинных разломах. Для периода роя землетрясений в Мацусиро в Японии
(1965—1967 гг.) было получено отношение bg/bH, равное - 2 — - 3 мкм-с-2, предельные
значения составили от - 4 до - 10 мкм-с-2/м, что указывает на более сложные процессы
[367]. В 1975 г. на п-ве Идзу, районе высокой вулканической и сейсмической активности,
началось поднятие земной поверхности, оно сопровождалось уменьшением силы тяжести
(максимум 0,3 мкм-с-2/год) с соотношением bg/bH = - 3 мкм-с-2/м; такую величину
можно объяснить повышением давления газа в магматической камере [255]. За год до
землетрясения в Таншане (1976, М = 7,8) в Китае после исключения линейного тренда бы
ло обнаружено увеличение силы тяжести до 1 мкм-с-2 (эпицентр) (рис. 10.27); оно прекра
тилось примерно через год после землетрясения. Это увеличение хорошо описывает
модель очага в виде тела, прошедшего сжатие, объемное расширение и восстановление
[414].
С помощью сверхпроводящих гравиметров, размещенных на территории Калифор
нии, наблюдались вариации силы тяжести (амплитуды 100 нм с -2) с периодами от не
скольких суток до нескольких месяцев. Эти вариации были коррелированы с объемом
дождевых осадков (разд. 10.2.2). Оценка корреляции с записями сейсмографов показала,
Год
11972 11973 1 1974' 1975 1197Θ 11977 ' 1978'1979 119801
Рис. 10.27.
Изменения силы тяжести ло и после
Таншаньского землетрясения в Китае
(М = 7,8) [414].
Определение изменений силы тяжести во времени
377
что землетрясениям с М > 2,2 соответствуют пики (10 — 30 нм -с ~2) на регистрограммах
силы тяжести [230]. В сетях, созданных для мониторинга землетрясений на о. Ванкувер
и в Квебеке (Канада), в течение первых 10 лет повторные измерения выполняли через каж
дые полгода, в дальнейшем мониторинг ограничили изучением долговременных деформа
ций и наблюдения стали повторять через 2 —3 года [151]. В СССР изменения силы
тяжести тектонического происхождения в течение длительного времени изучали на геодинамических полигонах. На Ашхабадском гравиметрическом профиле (12 км, 7 пунктов),
созданном в 1971 г., в месте пересечения им тектонического разлома наблюдались измене
ния силы тяжести со скоростью 100 нм с " 2/год; эти изменения имели циклический харак
тер, были коррелированы с землетрясениями (М = 6,5 — 7,2) и указывали на увеличение
подземных масс [83].
Большой объем наблюдений за изменениями силы тяжести с последующей интерпре
тацией выполняется в некоторых районах с активными вулканическими структурами
[580].
В декабре 1975 г. в Северной Исландии начались проявления высокой вулканической
активности, связанной с формированием рифта; они зарождались в зоне оси рифта и охва
тывали сегмент зоны трещин Крабла, имеющий ширину 5 км и длину около 100 км; ак
тивность сохранялась и в 1985 г. [54]. Помимо растягивающего напряжения спусковым
механизмом этого процесса послужило повышение давления в магматическом бассейне
Крабла, расположенном на глубине в несколько километров. Рифтовый процесс состоял
более чем из 20 сильных интрузивных событий (от одних суток до нескольких суток),
сопровождавшихся горизонтальными перетеканиями базальтовой лавы; часть лавовых по
токов, двигаясь вертикально, достигла дневной поверхности. Мониторинг этого процесса
осуществлялся с помощью повторных гравиметрических и нивелирных измерений (150
пунктов) по площади кальдеры (вулканической впадины) Крабла, серии измерений повто
рялись через несколько месяцев; первоначально гравиметрическая сеть была предназначена
для мониторинга высокотемпературного геотермального поля Крабла (разд. 10.2.3) [338].
В промежутках от нескольких недель до нескольких месяцев в районе кальдеры наблюда
лись медленные поднятия (до 6 — 10 мм/сут), четко коррелированные с уменьшениями
силы тяжести. При извержении магмы произошли резкие опускания и соответствующие
увеличения силы тяжести (рис. 10.28). В 1975 — 1981 гг. измерения силы тяжести и ниве
лировки повторялись ежегодно, они выполнялись по профилям в самой рифтовой зоне
и ее окрестностях; в результате в ограниченной центральной части рифта были выявлены
увеличения силы тяжести (до 1 м к м с ~ 2/год) и оседания поверхности (до 0,5 м/год), а
Рис. 10.28. Изменения силы тяжести (в единицах мкм-с :) (слева) и изменения высоты в мезрах (справа),
полученные в январе 1978 г. при оседании земной коры в кальдере Крабла (Северная Исландия)
1338].
378
Глава 10
69
-2
(м км -e )
+1
0
-1
+1
-1
+1
о
-0 ,5
+0,5
β 1979-1978
- 1 —0,5
+1 - +0,5
1980-1979
о
-1 — 0,5
+1 -+ 0 ,5
о
-1
1981-1980
-0 ,5
S§
/
оз.
J Миватн
тГ*'<
W **&·
Р Г ?
г.Наумафьядль
-
W
Рис. 10.29.
Изменения силы тяжести (черные кружки) и изменения высот
по профилю Наумафьядль (Северная Исландия) при формиро
вании рифта в 1975— 1981 гг. [703].
I_________ I_________ I_________ I_________ L
1980
1981
1982
1983
1984
Рис. 10.30 (левый). Изменения силы тяжести на пунктах в зоне кальдеры Лонг-Вэлли (Калифорния) и вокруг
нее в 1980— 1983 гг.: верхний пункт расположен примерно в 25 км на северо-запаэ от края кальде
ры, а нижние пункты — от 3 до 50 км от этого края [328].
Рис. 10.31 (правый). Изменения приращений силы тяжести до и после извержения вулкана Мауна-Кеа (Га
вайи); пункт ML-1 расположен близ центра деформаций, С-1 — в 5 км к северу, МГ-8 — и 7 км
к юго-востоку от центра [421].
Определение изменений силы тяжести во времени
379
в периферийной части — соответственно уменьшения силы тяжести и подъемы [703]. В
результате такого мониторинга, осуществлявшегося на большой площади, удалось также
проследить изменения активности с течением времени (разд. 10.4.2). Отношения измене
ния силы тяжести к изменению высоты лежали в пределах от -1 ,2 до -4 ,3 мкм-с-2/м
(средние значения - 1,9 — -2 ,0 мкм-с-2/м), при этом проявлялись различия соответству
ющих величин для зон опускания и поднятия земной поверхности, а также временные из
менения (рис. 10.29). Максимальное значение +13 мкм-с-2/м было обнаружено в районе
молодой рифтовой формации [693]. Долговременное изменение силы тяжести и высоты
можно моделировать в пространстве и во времени с применением среднеквадратической
коллокации [704] (разд. 10.1.1).
В 1980 г. начала проявляться сейсмическая активность в районе кальдеры Лонг-Вэлли
в Калифорнии; она была связана с подъемом в центральной зоне (до 0,5 м), предполагае
мой причиной ее является поступление магмы в магматическую камеру на глубине 5 км.
При мониторинге с промежутками в пол года или год в числе прочих методов применяют
ся измерения силы тяжести и нивелирование; после введения поправок за притяжение
грунтовых вод получены величины изменений до -0 ,2 мкм-с-2/год и bg/
ЬН = -2 ,5 мкм-с-2/м [328] (рис. 10.30). Изменения силы тяжести и измеренные напряже
ния используют для разработки детальных моделей этого деформационного процесса
[576].
Активные вулканы были исследованы и на Гавайях. В 1975 г. на Килауэа были обна
ружены изменения силы тяжести +2,3 мкм-с-2, связанные с извержением; эти изменения
были сильно коррелированы с дефляцией (bg/bH = -1 ,7 мкм-с-2/м) [327]. Сеть мони
торинга, созданная на Мауна-Лоа в 1975 — 1976 гг., была наблюдена повторно после
извержения 1984 г. [421]. Если до извержения изменения силы тяжести не превышали
0,2 мкм с -2, то после в центральной зоне опускания земной поверхности произошло уве
личение силы тяжести на 1,5 мкм-с-2, затухавшее по экспоненциальному закону в течение
примерно 2 мес; в пунктах, расположенных на склоне вулкана на расстоянии в несколько
километров, изменения силы тяжести достигали лишь нескольких десятых мкм-с-2
(рис. 10.31). В 1983 — 1985 гг. вблизи неизвергающих, но активных жерл фумарол вулкана
Поас (Коста-Рика) были обнаружены периодические изменения силы тяжести (период
около 30 сут, амплитуда 1,4 мкм-с-2), предполагаемая причина которых в изменениях
плотности вещества в магматическом канале [581].
Литература
1. Агалецкий П.Н., Егоров К.Н., Марциняк А.И. Абсолютные определения ускоре
ния силы тяжести в пункте ВНИИМ. Тр. ВНИИМ, вып. 32 (92)-Стандартгиз,
1958.
2. A
, С. A., J. О. L
: Vertical gravity gradient surveys: field results and
interpretations in British Columbia, Canada. Geophysics 47, 919-925, 1982.
3. A G A R W A L , G. С., C. S. J
(eds.): National Report on the Geodetic and Gravi
metric Work done in India 1983-86. Pres. XIX. Gen. Ass. I.U.G.G., Vancouver
1987.
4. AlRY, G. B.: On the computation of the effect of the attraction of mountainmasses, as disturbing the apparent astronomical latitude of stations in geodetic
surveys. Phil. Trans. Roy. Soc., London, 145, 101-104,1855.
5. A L A S I A , F., L. C A N N I Z Z O , G. C
, I. M A R S O N : Absolute measurements
with the IMGC transportable gravity meter within 1979 and 1981. BGI No.
49, 27-37, 1981.
6 - A
, F., L. C
, G. C
, I. M
: Absolute gravity acceler
ation measurements: Experiences with a transportable gravimeter. Metrologia
18, 221-229, 1982.
7. Аы, H. O., R. J. WHITELEY: Gravity exploration for groundwater in the Bara
Basin, Sudan. Geoexploration 19, 127-141, 1981.
8. A
, R. G., T. M. H
: Analysis of exploitation — induced gravity changes
at Wairakei geothermal field. Geophysics 51, 1647-1660, 1986.
9. ANDERSON, A . J .: The geoid, crustal structure and land uplift. Univ. of Uppsala,
Inst, of Geophysics, Dep. of Geodesy, Rep. No. 23, Uppsala 1984.
g a r
i a r d
o s h i
e r u t t i
l a s i a
l l i s
10. A
nderson,
a n n i z z o
e r u t t i
a r s o n
u n t
E . G ., C . R iz o s , R . S. M
ather:
A tm o s p h e ric effects in p h y s ic a l
geodesy. Unisurv. No. G 23, 23-41, Univ. of New South Wales, Kensington,
1975.
11. A r a b e l o s , D., С. C. TsC H ER N lN G : Computation of the gravity vector from
torsion balance data in southern Ohio. JGR 92, 8157-8168, 1987.
12. A
, G. P., Y
. D. B
, G. D. E
, S .
N. S
:
Absolute determinations of gravity in Australia and Papua New Guinea during
1979. Bureau of Mineral Resources J. of Australian Geology and Geophysics 4,
383-393, 1979.
13. A r n a u t o v , G. P ., Y e . N . K a l i s h , A . K i v i n i e m i , Y u . F . S t u s , V . G. T a r a
, S . N. S C H E G L O V : Determination of absolute gravity values in Finland
using laser ballistic gravimeter. Publ. Finn. Geod. Inst., No. 97, Helsinki 1982.
14. A
, G. P., Y
. D. B
, E. N. K
, V. P. K
,
Y u . F . S T U S , V . G. T
C
: “Gabl”, an absolute free-fall laser gravimeter.
Metrologia 19, 49-55, 1983.
15. A
, К.: The mixed boundary value problem of geodesy. Gerlands Beitr. z.
Geophysik 92, 391-406, 1983.
r n a u t o v
u
o u l a n g e r
a r n e r
c h e g l o v
s i u k
r n a u t o v
u
o u l a n g e r
a r a s y
r n o l d
k
a l i s h
o r o n k e v i t c h
Литература
16. Артюшков Е.В. Геодинамика. - М.: Наука, 1979.
17. A S C H , G., Т . J a h r , G. J e n t z s c h , A. K i v i n i e m i , J . K a a r i a i n e n : M e a s u r e
ments of gravity tides along the “Blue Road Goetraverse” in Fennoscandia.
Publ. Finn. Geod. Inst., No. 104, Helsinki 1987.
18 .T he A s t r o n o m i c a l A l m a n a c for the Year 1985. Washington and London 1985.
19.BAA R D A, W.: A testing procedure for use in geodetic networks. Netherl. Geod.
Comm. Publ. on Geodesy, New Series 2, No. 5, Delft 1968.
20 B A A R D A , W.: S-Transformations and criterion matrices. Netherl. Geod. Comm.,
Vol. 5, No. 1, Delft 1973.
2 L B A A R S , B .: Gravity effect of earth-tides. Geophys. Prosp. 1, 82-110, 1953.
22. B A D E L L , С., H. D r e w e s , W. T o r g e , H.-G. W e n z e l : Gravimetric earth tide
observations in western Venezuela. Marees Terrestres No. 87, 5603-5614, 1982.
23. B A E S C H L I N , C. F.: Lehrbuch der Geodasie. Orell Fiissli, Zurich 1948.
24. B A G L I E T T O , E.: Gravedad absoluta en Buenos Aires. Bull. Geod. No. 51, 52-62,
1959.
25.
B A L M IN O , G ., A . B
ernard:
S a te llite g r a v ity g ra d io m e try fo r th e d e te r m in a tio n
of the geopotential. In: Proc. of an ESA Special Workshop on “Solid Earth Sci
ence and Application Mission for Europe” (SESAME), Chiemsee, F.R.Germany
1986, 95-101, (ESA SP-1080).
26. B a l m i n o , G., B. M o y n o t , N. V a l e s : Gravity field model of Mars in spherical
harmonics up to degree and order eighteen. JGR 87, 9735-9746, 1982.
27. B a l m i n o , G., B. M o y n o t , M. S a r r a i l h , N. V a l e s : Free air gravity anomalies
over the oceans from SEASAT and GEOS-3 altimeter data. EOS 68, 17-19,
1987.
28. B A R N E S , D. F.: Gravity changes during the Alaska earthquake. JGR 81, 451-456,
1966.
29. B a r n e t t , С. T.: Theoretical modelling of the magnetic and gravitational fields of
an arbitrary shaped three-dimensional body. Geophysics 41, 1353-1364, 1976.
3 0 -B a r t a , G.: Mass distribution of the earth on the surface and at depth and the
global secular variation of the gravity field. BGI No. 44, 24-29, 1979.
31.BAR TA, G., A. H A J0 S Y , P. VARG A: Possibilities for the calibration of recording
gravimeters. In: R. Vieira (ed.), 1986, 27-34, 1986.
3 2 „B a t e s , C. C., T . F . G a s k e l l , R . B . P r i c e : Geophysics in the affairs of man.
Pergamon Press, Oxford etc. 1982.
33. B e c k e r , M.: Analyse von hochprazisen Schweremessungen. DGK, Reihe C, Nr.
294, Mfinchen 1984.
34. B e c k e r , M., E. G r o t e n : Relative gravimeter measurements at the 1981 absolute
gravimeter campaign in Paris-Sevres. BGI No. 52, 86-96, 1983.
35rB e c k e r , Μ., X. M. G a o , E. G r o t e n : First results of precise gravity measure
ments on the “A-B-C” profile. Tectonophysics 130, 33-47, 1986.
36. B e l l , G. A., D. L. H. G i b b i n g s , J. B. P a t t e r s o n : An absolute determination
of the gravitational acceleration at Sydney, Australia. Metrologia 9, 47-61,
1973.
3 7 . B e l l , R . E ., A . B. W a t t s : E v a lu a tio n o f th e BGM-3 sea g r a v ity m e te r syste m
onboard R/V Conrad. Geophysics 51, 1480-1493, 1986.
38. B E S S E L , F. W.: Untersuchungen fiber die Lange dee einfachen Sekundenpendels.
Abh. Kgl. Preufi. Akad. d. Wiss. zu Berlin, math. Kl., Berlin 1828.
39. B E S S E L , F. W.: Construction eines symmetrisch geformten Pendels mit reciproken
Axen. Astronomische Nachr., Altona 30, 1-16, 1849.
40. B E T T A C , W.: Messungen grofier Schwereunterschiede mit einem nicht astasierten
Federgravimeter mit veranderbarer Masse (Askania-Gravimeter Gsl2). DGK,
Reihe C, Nr. 55, Mfinchen 1963.
381
Литература
382
41.
B e y e r , L . A ., R . E .
von
H uene, T. H. M
cC ullo h
, J . R . L o v e t t : M e a s u rin g
gravity on the sea floor in deep water. JGR 71, 2091-2100, 1966.
42. B hATTACHARYYA, В. K.: Two-dimensional harmonic analysis as a tool for mag
netic interpretation. Geophysics 30, 829-857, 1965.
43. B h ATTACH ARYYA, В. K.: Some general properties of potential fields in space and
frequency domain: a review. Geoexploration 5, 127-143, 1967.
4 4 - B i a l a s , V.: Erdgestalt, Kosmologie und Weltanschauung. K. Wittwer, Stuttgart
1982.
45. B i l l s , B. G., A. J. F e r r a r i : A harmonic analysis of lunar gravity. JGR 85,
1013-1025, 1980.
46. B i l l s , B. G., S. P. S y n n o t t : Planetary geodesy. Rev. Geoph. 25, 833-839,1987.
47. B i l l s , B. G., W. S. K i e f e r , R. L. J o n e s : Venus gravity: A harmonic analysis.
JGR 92, 10335-10351, 1987.
48. B lR C H , F.: Composition of the earth’s mantle. Geophys. J. R. Astr. Soc. 4, 295311, 1961.
49. B IR 0 , P.: Time variation of height and gravity. H. Wichmann, Karlsruhe 1983.
50.
B IR 0 ,
P., N. C.
T H O N G : T im e v a ria tio n in g e o p o te n tia l in s p h e ric a l h a rm o n ic s .
Acta Geodaet., Geophys. et Montanist. Hung. 21, 31-40, 1986.
5 l.B JE R H A M M A R , A.: A new theory of geodetic gravity. Trans. Roy. Inst. Techn. No.
243, Stockholm 1964.
52. BJE R H AM M AR , A.: Theory of errors and generalized matrix inverses. Elsevier
Scient. Publ. Comp., New York 1973.
53. BJE R H AM M AR , A.: The uplift process in Fennoscandia and the corresponding
geopotential field from satellites. In: Proc. 4th Int. Symp. Geodesy and Physics
of the Earth, Karl-Marx-Stadt 1980, Veroff. Zentralinst. f. Physik d. Erde, Nr.
63/III, 554-581, Potsdam 1981.
54. B j o r n s s o n , A.: Dynamics of crustal rifting in NE Iceland. JGR 90, 10151-10162,
1985.
55. B l a i s , J. A. R., R. F e r l a n d : Optimization in gravimetric terrain correction.
Can. J. Earth Sci. 21, 505-515, 1984.
56.
B LIZKO VS KY, M . : P ro ce ssin g a n d a p p lic a tio n s in m ic ro g r a v ity su rve ys. G e o ph ys.
Prosp. 27, 848-861, 1979.
H.: Beitrag zur Messung und Auswertung vertikaler Schweregradienten. ZfV 85, 101-112, 1960.
58. BO EDECKER, G.: Gravity vector recovery by inertial geodesy — why and how is
it possible? In: К. P. Schwarz (ed.), 1986a, 85-103, 1986a.
59. BOEDECKER, G.: Inertial gravimetry in a test network. In: К. P. Schwarz (ed.),
1986a, 161-172, 1986b.
6 0 . B 0 EDECKER, G., T h . FR ITZER : International Absolute Gravity Basestation Net
work. I.A.G.-SSG 3.87 Status Report March 1986. Veroff. Bayer. Komm. fiir
die Intemat. Erdmessung der Bayer. Akad. d. Wissensch., Astron.-Geod. Arb.,
Heft Nr. 47, Miinchen 1986.
61. BOEDECKER, G., B. R IC H TER : Das Schweregrundnetz 1976 der Bundesrepublik
Deutschland (DSGN76). Teii II: Netzentwurf, instrumentelle Vorarbeiten und
Datenaufbereitung. DGK, Reihe B, Nr. 271, Miinchen 1984.
6 2 . DE BO E R , H .: Experiments relating to the Newtonian Gravitational Constant. In:
B. N. Taylor, W. D. Phillips (eds.), Precision Measurement and Fundamental
Constants II, Nat. Bur. Stand. (U.S.), Spec. Publ. 617, 561-572, 1984.
63. BOIE, D.: Untersuchungen zur Doppler-Navigation und -Ortung von geophysikalischen und photogrammetrischen Mefifliigen. Wiss. Arb. Univ. Hannover Nr.
39, 1970.
57.
BO DEM ULLER,
Литература
383
64. BoMFORD, G.: Geodesy. 4.ed., Clarendon Press, Oxford 1980.
65. BONATZ, M.: Uber die Eichung von Registriergravimetern mittels einer vertikalen
Laboreichstrecke. DGK, Reihe C, Nt. 84, Munchen 1965.
66. BONATZ, M.: Der Gravitationseinflnfi der Bodenfeuchtigkeit. ZfV 92, 135-139,
1967.
67* B o n a t z , M.: Experiences and results from 20 transformed Askania-Gravimeters.
In: M. Bonatz, P. Melchior (eds.), 1977, 165-175, 1977.
68. BONATZ, M.: Multichannel analysis and instrumental drift of spring gravimeters.
Marees Terrestres No. 99, 6753-6755, 1987.
69. B o n a t z , M., P. M e l c h io r (eds.): Proc. 8th Intemat. Symp. on Earth Tides,
Bonn 1977, Inst. f. Theor. Geod. Univ. Bonn 1977.
7 0 . B o n a t z , M . , P . M e l c h i o r , B . D u c a r m e : Station Longyearbyen Spitsber
gen. Astro-geo projekt Spitsbergen 1968-1970. Mesures faites dans les 3 composantes avec 6 pendules horizontaux VM et 3 gravimetres Askania. Obs. Roy.
Belg., Bull. Obs. Mar. Terr. 4, Fasc. 1, 1-110, 1971.
71. B o o k b i n d e r , R., J. H o r s t m a n n , A. H u b b a r d , J. T. K u o , W. M c D o n a l d :
Geophysical ocean bottom instrument (GOBI). In: J. T. Kuo (ed.), 1983, 329339, 1983.
7 2 - B o r d a , J. C ., J. D. C a s s in i d e T h u r y : Experiences pour connaitre la longeur
du pendule, qui bat les secondes a Paris. Base du Systeme metrique decimal,
T. Ill, Paris 1792.
73. B o s s l e r , J. D.: The impact of VLBI and GPS on geodesy. EOS 64, 569-572,
1983.
7 4 . B o s s l e r , J . D ., C. C. G o a d , P. L . B e n d e r : Using the G lo b a l Positioning
System (GPS) for geodetic positioning. Bull. Geod. 54, 553-563, 1980.
75. BOTT, Μ. Η. P.: The use of rapid digital computing methods for direct gravity
interpretation of sedimentary basins. Geophys. J. R. Astr. Soc. 3, 63-67, 1960.
76. BOTT, Μ. Η. P.: Inverse methods in the interpretation of magnetic and gravity
anomalies. In: B. A. Bolt, B. Adler, S. Fembach, R. Rotenberg (eds.), Methods
in computational physics. 133-162, Academic Press, London-New York 1973.
77. Bott, M.H.P’: The interior of the Earth. 2. rev. ed. Elsevier Science Pybl., Amsterdam
1982. [Имеется перевод издания 1971 г.: Ботт М. Внутреннее строение Земли. М.: Мир, 1974.]
78.
В О Т Т , M . Н . P ., R . A . S M ITH : T h e e s tim a tio n o f th e lim it in g d e p th o f g r a v ita tin g
bodies. Geophys. Prosp. 6, 1-10, 1958.
С., K. P o d e r , C. R. S c h w a r z , С. C. T s c h e r n in g : Introduction
to and report from the symposium on management of geodetic data, August
1981. BGI No. 56, 106-114, 1982.
80. BOUGUER, P.: La figure de la terre determinee par les observations environs de
l’equateur. Paris 1749.
81 .B o u l a n g e r , J . D .: On non-tidal gravity variations. B G I No. 49, 19-26, 1981.
82. B o u l a n g e r , J. D.: Non-tidal gravity variations. I.A.G.-SSG 3.40 Report, I.A.G.
Gen. Assembly Hamburg 1983. Travaux de l’AIG, Tome 27, 268-295, Paris
1984.
83. B o u l a n g e r , Y u . D., T. E. D e m y a n o v a : Changes in gravity in the Ashkhabad
city area. BGI No. 62, 75-78, 1988.
79.
B oucher,
84.
B o u lan g er ,
Yu. D., G. P.
A
rnautov,
E. N.
K
a l is h
,
Yu. F.
St u s ,
V. G.
G. H a r n i s c h : A new determination of the absolute gravity value
in Potsdam (russ.). Gerlands Beitr. z. Geophysik 87, 9-18, 1978.
85. B o u l a n g e r , J. D., G. P. A r n a u t o v , S. N. S c h e g l o v : Results of comparison
of absolute gravimeters, Sevres 1981. BGI No. 52, 99-124, 1983a.
T a r a s iu k ,
Литература
384
86.
87.
88.
89.
90.
91.
92.
93.
94.
95.
96.
97.
98.
99.
100.
J. D., G. P. A r n a u t o v , S. N. S c h e g l o v : On non-tidal gravity
variations. BGI No. 53, 120-125, 1983b.
B o u l a n g e r , Y u . D., G. P. A r n a u t o v , E. N. K a l i s h , Y u . F. S t u s , S. N.
S C H E G L O V : Recent definition of absolute gravity at Singapore-2 site. BGI No.
55, 17-26, 1984.
BOULANGER, Yu. D . , J . E . F a l l e r , E . GROTEN e t al. (e d s.): R e s u lts o f th e
second international comparison of absolute gravimeters in Sevres 1985. BGI
No. 59, 89-103, 1986.
B o w i e , W.: Investigations of gravity and isostasy. U.S. Coast and Geodetic Sur
vey, Spec.Publ. No. 40, Washington 1917.
BOWIN, C., J. MILLIGAN: Negative gravity anomaly over spreading rift valleys:
Midatlantic ridge at 26° N. Tectonophysics 113, 233-256, 1985.
B o w i n , C., G. T h o m p s o n : Residual geoid anomalies in Atlantic Ocean basin:
Relationship to mantle plumes. JGR 89, 9905-9918, 1984.
B O W IN , C., T. C. A l d r i c h , R . A. FOLINSBEE: VSA gravity meter system: Tests
and recent developments. JGR 77, 2018-2033, 1972.
B o w i n , C., W. W a r s i , J. M i l l i g a n : Free-air gravity anomaly map of the world.
Woods Hole Oceanographic Institution, distr. by the Geological Society of
America, Map and Chart Series MC-45 and MC-46, 1982.
B r a t t , S. R ., S. C. S o l o m o n , J . W . H e a d , C. H . T h u r b e r : T h e deep s tr u c
ture of lunar basins: Implications for basin formation and modification. JGR
90, 3049-3064, 1985.
B ray , A., I. MARSON: Measurement of gravity acceleration in Europe, America,
Asia: 1976-1981, an example of international scientific cooperation. Istituto di
Miniere e Geofisica applicata delTUniversita, Trieste, contrib. n. 77, 1982.
B r e i n , R.: Report on some investigations concerning gravimeter recordings in
Frankfurt a. M. In: Proc. 7th Intemat. Symp. on Earth Tides, Sopron 1973,
661-666, E. Schwozerbart, Stuttgart 197f
BREIN, R., K. GERKE: Untersuchung des Luftdruckeinflusses bei Worden-Gravimetem. ZfV 86, 33-36, 1961.
BREIN, R., C. G e r s t e n e c k e r , A. K i v i n i e m i , L. P e t t e r s s o n : Report on high
precision gravimetry. Landmateriet Tekniska Skrifter 1977/1, Gavle 1977.
B r e n n e c k e , j ., d . L e l g e m a n n , W. T o r g e , H.-G. W e n z e l : Validation of
SEASAT-1 altimetry using ground truth in the North Sea region. DGK, Reihe
B, Nr. 263, Frankfurt a. M. 1982.
BROSCHE, P., J. SUNDERMANN (eds.): Tidal friction and the earth’s rotation I,
II. Springer, Berlin 1978/1982.
B o u lan g er ,
101. Brow ne, B.C. S econ d order correction to pendulum ob servation at sea. M on thly N or.
R oy. Astr. S oc. G eop h ys. Su p pl., 4, 2 7 1 - 2 7 9 , 1937.
[И м еется п ер ев о д в книге:
Ф.А. Венинг-М ейнес. Г равим етри ческ и е н аблю дения на м о р е. Т еори я и п р а к т и к а М.: Г ео д ези зд а т . 1 9 4 0 , с. 3 1 0 —3 1 4 .]
102. BROWNE, В. С.: Memorandum on the technique of measuring relative gravity
values on land by means of pendulums. Bull. Geod. No. 64, 145-168, 1962.
103. BROZENA, J. M.: A preliminary analysis of the NRL airborne gravimetry system.
Geophysics 49, 1060-1069, 1984.
104. BROZENA, J. M., M. F. P eters : An airborne gravity study of eastern North
Carolina. Geophysics 53, 245-253, 1988.
105. BRZEZOWSKI, S. J., W. G. HELLER: Gravity gradiometer survey errors. Geo
physics 53, 1355-1361, 1988.
Литература
106, Bullen, К.Е.: The earth’s density. Chapman and Hall, London, 1975 [Имеется пере
вод:
Буллен
К.E.
Плотность
Земли.
— М.:
Мир,
1978.]
107. B u r .SA, М.: A note on secular variation of gravity due to non-tidal geodynamic
phenomena. Studia Geophys. et Geod. 30, 31-33, 1986.
1 0 8 C a n n i z z o , L., G. C e r u t t i , I. M a r s o n : Absolute-gravity measurements in Eu
rope. П Nuovo Cimento 1C, 39-85, 1978.
1 0 9 .C A R E Y , S. W.: The expanding earth. Elsevier Publ. Comp., Amsterdam 1976.
1 IO C a r t w r i g h t , D . E ., A. C. E d d e n : Corrected tables of tidal harmonics. Geo
phys. J. R. Astr. Soc. 33, 253-264, 1973.
lll.CARTWRlGHT, D. E., R. J. TAYLER: New computations of the tide-generating
potential. Geophys. J. R. Astr. Soc. 23, 45-74, 1971.
112;CASPARY, W.: Inertial positioning-principles and procedures. In: W. M. Welsch,
L. A. Lapine (eds.), Proc. Inertial, Doppler and GPS Measurements for Na
tional and Engineering Surveys. Schriftenreihe Verm.wesen, Univ. d. Bundeswehr Miinchen, Heft 20-1, 11-20, Munchen 1985
113. CASSINIS, G.: Sur Гadoption d ’une formule Internationale pour la pesanteur nor
male. Bull. Geod. No. 26, 40-49, 1930.
114. C avendish , H.: Experiments to determine the density of the earth. Phil. Trans.
Roy. Soc., London, 88, 469-526, 1798.
115.C a z e n a v e , A., C. R o s e m b e r g - B o r o t , M. R a b i n o w i c z : Geoid lows over deepsea trenches. JGR 91, 1989-2003, 1986.
116. C H A O , D., E. M. B A K E R : A study of the optimization problem for calibrating
a LaCoste and Romberg “G” gravity meter to determine circular errors. OSU
Rep. No. 364, 1985.
117. C H A O , B. F o n g , R. S. G r o s s : Changes in the earth’s rotation and low-degree
gravitational field induced by earthquakes. Geophys. J. R. Astr. Soc. 91, 569596, 1987.
118.
C H O JN IC K I, T . : E in V e rfa h re n z u r E rd g e z e ite n a n a ly s e in A n le h n u n g a n das P r in -
zip der kleinsten Quadrate. Mitt. Inst. f. Theor. Geod. Univ. Bonn, Nr. 15,
Bonn 1973.
119. C H O V IT Z , B./'H.: Parameters of common relevance of astronomy, geodesy, and
geodynamics. In: С. C. Tscheming (ed.), The Geodesist’s Handbook 1988 —
Bull. Geod. 62, 359-367, 1988.
120. C H U E C A , R., B. D u c a r m e , P. M e l c h i o r : Preliminary investigation about a
quality factor of tidal gravity stations. Marees Terrestres No. 94, 6334-6337,
1985.
121. CIANI, A ., C. GANTAR, C. MORELLI: Rilievo gravimetrico sullo zoccolo epicontinentale dei mari italiani. Boll. Geof. teor. appl. II, 289-386, 1960.
122. Clairaut, A.C.: Theorie de la figure de la terre, tiree des principes de l’hydrostatique.
Paris 1743. [Имеется перевод: Клеро А. Теория фигуры Земли, основанная на
началах
гидростатики.
- М·! Изд-во
АН
СССР,
1947.]
123. CLARK, J. S.: An absolute determination of the acceleration due to gravity. Phil.
Trans. Roy. Soc;, London, A 238, 65-123, 1939.
124 C l a r k s o n , Η . N ., L . J . B . L a C o s t e : Im p ro v e m e n ts in t id a l g r a v ity m e te rs a n d
t h e ir s im u lta n e o u s c o m p a ris o n . EOS 38, 8-16, 1957.
125. CLOSS, H.: Die geophysikalische Reichsaufnahme und ihre Vorgeschichte. In: H.
Birett et al. (Herausg.), Zur Geschichte der Geophysik, 115-130, Springer,
Berliq etc. 1974.
126.
COHEN, Ё . R ., B . N . T a y l o r : T h e 1986 a d ju s tm e n t o f th e fu n d a m e n ta l p h y s ic a l
constants. Rep. CODATA task group on fundamental constants, CODATA
385
Литература
386
Bull. 63, Pergamon, Elmsford NY 1986 (Physics Today 40, No. 8, part 2, BG11BG15, 1987).
127 C O LE T TE , B . J., J. V e r h o e f , A . F . J. DE M u l d e ic G r a v it y a n d a m o d e l o f
th e m e d ia n v a lle y. J. G e o ph ys. 47, 9 1 -9 8 , 1^80.
1 2 8 .
C O L I C , K . , S. P
: Correlation between gravity anomalies, geoid heights
and Mohorovicic discontinuity depths in the Dinaric-Pannonian region of Yu
goslavia. In: Proc. of the I.A.G. Symposia, XVIII. I.U.G.G. Gen. Ass., Hamburg
1983, Vol. 1, 137-146, Dep. of Geod. Science and Surveying, The Ohio State
Univ., Colujnbus, Ohio, 1984.
129. COOK, A. H.: The absolute determination of the acceleration due to gravity.
Metrologia 1, 84-rll4, 1965.
130. COOK, A. H.: A new absolute determination of the acceleration due to gravity at
the National Physical Laboratory, England. Phil. Trans. Roy. Soc., London, A
261, 211-252, 1967.
131. CRUZ, J. Y., P. LaskowskI: Upward continuation of surface gravity anomalies.
OSU Rep. No. 360, 1984:
132. CZUCZOR, E., P. LUX: Hauptschwerenetz der Bundesiepublik Deutschland 1982
(DHSN82) fertiggesteUt. ZfV 112, 450-458, 1987.
133/Dam , T. M. VAN, J. M. W ahr : Displacement of the earth’s surface due to
atmospheric loading: effects on gravity and baseline measurements. JGR 92,
1281-1286, 1987.
134. DARWIN, G. H.: The harmonic analysis of tidal observations. Scient. Papers Cam
bridge Univ. Press, Vol. I, 1-69, 1883.
135. D avis, W. E., W. H. J ackson , D. H. R ich ter : Gravity prospecting for chro
mite deposits in Camaguey Province, Cuba. Geophysics 22, 848-869, 1957.
e t r o v i c
136.
D E H A N T , V . : B o d y tid e s fo r an e llip tic a l r o ta tin g e a rth w it h an in e la s tic m a n tle .
137.
DEHANT, V., B. DUCARME: Comparison between the theoretical and observed
In: R. Vieira (ed.), 1986, 367-378, 1986.
138.
139.
140.
141.
142.
143.
144.
145.
146.
tidal gravimetric factors. Phys. of the Earth and Planetary Interiors 49, 192212, 1987.
Dehlinger, P.: Marine gravity. Elsevier Scient. Publ. Comp, Amsterdam etc. 1978..
[Имеется перевод: Делинджер П. Морская гравиметрия.-Μ.: Недра, 1982.]
DENKER, H., H.-G. WENZEL: Local geoid determination and comparison with
GPS results. Bull. Geod. 61, 349-366, 1987.
D e n k e r , H., D . L e l g e m a n n , W . T o r g e , G. W e b e r , H.-G. W e n z e l : S tra te
gies and requirements for a new European geoid determination. In: Proc. Int.
Symp. on the Definition of the Geoid, Vol. 1, 207-222, 1st. Geogr. Mil. Ital.,
Firenze 1986.
DENLINGER, R. P., W. F. I sherwood , R. L. K ovach : Geodetic analysis of
reservoir depletion at the Geysers steam field in northern California. JGR 86,
6091-6096,1981.
DERMANIS, A.: Kriging and collocation — a comparison. Manuscripta Geodaetica
9, 159-167, 1984.
DIETRICH, M.: The absolute determination of the acceleration due to gravity at
the DAMW Berlin. BGI No. 24, 37-38, 1970.
DlETZ, R. S.: Continent and ocean basin evolution by spreading of the sea floor.
Nature 190, 854-857, 1961.
DlRAC, P. A. M.: A new basis for cosmology. Proc. Roy. Soc., London, A 165,
199-208,1938.
DITTFELD, H.-J.: Some results of an eight years gravimetric registration series
In: Proc. 5th Int. Symp. “Geodesy and Physics of the Earth”, Magdeburg 1984,
Veroff. Zentralinst. f. Physik d. Erde Nr. 81/1, 82-91, Potsdam 1985.
Литература
147. DMA: Department of Defense World Geodetic System 1984. DMA Techn. Rep.
8350.2, 1987.
148. DOBRIN, Μ. B.: Introduction to geophysical prospecting. McGraw-Hill, New York
etc. 1976.
149. DOERGE, W . , E . REIN H AR T, G. B o e d e c k e r : Das International Gravity Stan
dardization Net 1971 in der Bundesrepublik Deutschland. DGK, Reihe B, Nr.
225, Miinchen 1977.
150. DOODSON, A . T.: The harmonic development of the tide-generating potential.
Proc. Roy. Soc., London, A 100, 305-329, 1922.
151. D r a g e r t , H., A. L a m b e r t , J. L i a r d : Repeated precise gravity measurements
on Vancouver Island, British Columbia. JGR 80, 6097-6106, 1981.
152. DREWES, H.: Berechnung regionaler Geoidundulationen durch gravimetrisches
Nivellement mit Pradiktion der Schwereanomalien. Wiss. Arb. Univ. Hannover
Nr. 63, 1976.
153 D r e w e s , H.: Zur Ausgleichung von Gravimetemetzen. ZfV 103, 485-496, 1978.
154. DREWES, H.: Gravimetric investigations for monitoring recent tectonics along
the Caribbean-South American plate boundary in Venezuela. Zentralblatt fur
Geologie und Palaontologie, Teii 1 , 1381-1388, Schweizerbart, Stuttgart 1986.
155. D r e w e s , H., R. B e n i t e z , D. B r a v o : Time series analysis of gravity variations.
In: Proc. of the I.A.G. Symposia, XVIII. I.U.G.G. Gen. Ass., Hamburg 1983,
Vol. 1 , 180-194, Dep. of Geod. Science and Surveying, The Ohio State Univ.,
Columbus, Ohio, 1983.
156.
DUCARME, B.: A fundamental station for transworld gravity profiles. Phys. of the
Earth and Planetary Interiors II, 119-127, 1975.
157. DUCARME, B.: A data bank for earth tides. Marees Terrestres 91, 5963-5980,
1983.
158.
D u c a r m e ,
В., P.
M e l c h io r :
A prediction of tidal oceanic loading and attraction
effects on gravity measurements in continents. BGI No. 52, 77-85, 1983.
159 D u c a r m e , В., C. P o i t e v i n , J. L o o d t s : Precise tidal corrections for high pre
cision gravity measurements. BGI No. 46, 48-70, 1980.
160, D u c a r m e , В., M. VAN R u y m b e k e , C. P o i t e v i n : Three years of registration
with a superconducting gravimeter at the Royal Observatory of Belgium. In:
R. Vieira (ed.), 1986, 113-130, 1986.
161. D uclaux, F., J. Martin, C. B lot , R. R emiot : Etablissement d’un reseau
general de stations gravimetriques en Afrique, a Madagascar, a la Reunion et
a Pile Maurice. ORSTOM, Paris 1954.
162 D u v e n , D . J ., D . A . ARTIS: Global positioning system surface navigation accu
racy study. Marine Geodesy 9, 145-173, 1985.
163. DziEWONSKl, A. M.: Mapping the lower mantle: determination of lateral hetero
geneity in P velocity up to degree and order 6 . JGR 89, 5929-5952, 1984.
164. DZIEWONSKI, A. M., D. L. A n d e r s o n : Preliminary reference earth model. Phys.
of the Earth and Planetary Interiors 25, 297-356, 1981.
165. ECKER, E., E. MlTTERMAYER: Gravity corrections for the influence of the atmo
sphere. Boll. Geof. teor. appl. XI, 70-80, 1969.
166. ECKHARDT, D. H.: Status of the gravity gradiometer survey system. BGI No. 59,
81-87,1986.
167. E d g e , R. J., T. F. B a k e r , G. J e f f r i e s : Improving the accuracy of tidal gravity
measurements. In: R. Vieira (ed.), 1986, 213-222, 1986.
168. EGGE, D., G. SEEBER: Mefiverfahren zur genauen Positionsbestimmung im Meeresbereich. Wiss. Arb. Univ. Hannover Nr. 93, 1979.
38 7
388
Литература
169. ΕΚΜΑΝ, М., J. M a k i n e n , A. M i d t s u n d s t a d , О. R e m m e r : Gravity change
and land uplift in Fennoscandia 1966-1984. Bull. Geod. 61, 60-64, 1987.
170. ELSTNER, C l .: Zut Grofienordnung moglicher Schwerevariationen in verschiedenen Spektralbereichen. Gerlands Beitr. z. Geophysik 89, 195-204, 1980.
171. ELSTNER, C l .: On common tendencies in repeated absolute and relative gravity
measurements in the central part of the G.D.R. Gerlands Beitr. z. Geophysik
96, 197-205, 1987.
172. ELSTNER, C l ., H. K autzleben: Results of annual gravity measurements along a
W-E profile inside the GDR for the period 1970-1980. In: Proc. Gen. Meeting
of the I.A.G., 341-348, Tokyo 1982.
173. ELSTNER, C l ., R . F a l k , A . K i v i n i e m i : D e te rm in a tio n o f th e lo c a l g r a v ity fie ld
by calculations and measurements. Rep. Finn. Geod. Inst. 85:3, Helsinki 1986.
174. ENDO, T.: Regional heterogeneities of the earth tides in central Japan as revealed
by tidal gravity observations. J. Phys. Earth 32, 485-510, 1984.
175. ENGELIS, T h .: Spherical harmonic expansion of the Levitus sea surface topogra
phy. OSU Rep. No. 385, 1987.
176. ENGELIS, TH., R. H. R a p p : Global ocean circulation patterns based on SEAS AT
altimeter data and the GEM L2 gravity field. Marine Geophys. Res. 7, 55-67,
1984.
177vE ngelis, T h ., R. H. R a p p , Y. B o c k : Measuring orthometric height differences
with GPS and gravity data. Manuscripta Geodaetica 10, 187-194, 1985.
178. Eotvos, R. von: Untersuchungen uber Gravitation und Erdmagnetismus. Ann. d. Physik
59, 354—400, 1896. [Имеется перевод: Этвеш P. Опыты над тяготением и земным
магнетизмом. Сб. рефератов и переводных статей по геодезическим вопросам.
Приложение к "Запискам Военно-топографического управления Главного шта
ба",
ч.
63,
С:Пб.,
Воен.
тип.,
1910,
с.2-49.]
179. Eotv6 s, R.von: Bestimmung der Gradienten der Schwerkraft und ihrer Niveauflachen
mit Hilfe der Drehwaage. Verh. D. XV allg. Konf. der Intern. Erdmessung 1906, Db. I,
337—395, Budapest 1908. [Имеется перевод: Этвеш Р. Определение градиентов
силы тяжести и ее поверхностей уровня при помощи крутильных весов. Сб. ре
фератов и переводных статей по геодезическим вопросам. Приложение в "Запис
ках Военно-топографического управления Главного штаба", ч. 63, СтПб., Воен.
тип., 1910, 73-127.]
180. E0TVOS, R. VON: Experimenteller Nachweis der Schwereanderung, cue ein auf
normal geformter Erdoberflache in ostlicher oder westlicher Richtung bewegter
Korper durch diese Bewegung erleidet. Ann. d. Physik, Ser. 4, Vol. 59, 743-752,
1919.
181. E r v i n , C. P., L. D. M c G i n n i s : Temporal variations in the gravitational field of
the Mississippi embayment. JGR 91, 9161-9168, 1986.
182. FAJKLEWICZ, Z.: Gravity vertical gradient measurements for detection of small
geologic and anthropogenic forms. Geophysics 41, 1016-1030, 1976.
183. FAJKLEWICZ, Z.: Neue Perspektiven der Mikrogravimetrie — Teil der Gebirgsschlagprognose. Neue Bergbautechnik 12, 140-143, 1982.
184. FAJKLEWICZ, Z.: Origin of the anomalies of gravity and its vertical gradient over
cavities in brittle rock. Geophys. Prosp. 34, 1233-1254, 1986.
185. FALLER, J. E.: An absolute interferometric determination of the acceleration of
gravity. Thesis, Princeton University 1963.
186. FALLER, J. E.: Results of an absolute determination of the acceleration of gravity.
JGR 70, 4035-4038, 1965.
187. FALLER, J. E. , I. MARSON: Ballistic methods of measuring g — the direct freefall and symmetrical rise-and-fall methods compared. Metrologia 25, 49-55,
1988.
Литература
389
188. FALLER, J. E., R. L. R inker , M. A. ZuMBERGE: Absolute gravity as a recon
naissance tool for vertical height changes and for studying density changes. In:
Proc. Second Int. Symp. on Problems Related to the Redefinition of North
American Geodetic Networks, 919-932, Ottawa 1980.
189. Faller , J. E., Y. G. Guo, J. G schwind, T. M. N iebauer , R. L. R inker , J.
XUE: The JILA portable absolute gravity apparatus. BGI No. 53, 87-97, 1983.
190. FARKAS-Jandl, T.: Einfuhrunc in die Inertialvermessung. H. Wichmann, Karlsruhe 1986.
191 Farrell , W. E.: Deformation of the earth by surface loads. Rev. Geoph. 10,
761-797, 1972.
192. F ell, P. J.: Transit and GPS — a report on geodetic positioning activities. Bull.
Geod. 60, 181-192, 1986.
193. F eng , Y., G. Zhang, D. Li , X. Qui, J. Zhou , J. G ao , D. H uang , C h .
H U A N G ,
Y. GUO: A transportable absolute gravimeter for determining the
acceleration due to the earth’s gravity. Metrologia 18, 139-143, 1982.
194 F ilippo , M. D., I. Marson , F. P almieri, B. T oro , A. Rossi: Microgravity
variations observed in two geothermal fields in Italy. BGI No. 62, 86-92, 1988.
195tFlNETTl, L, C. Morelli: Geophysical exploration of the Mediterranean Sea.
Boll. Geof. teor. appl. XV, 263-344, 1973.
196. F ischbach, E., D. Sudarsky, A. Szafer , C. T almadge, S. H. A ronson:
Reanalysis of the Eotvos Experiment. Physical Review Letters 56, 3-6, 1986.
197. FLANDERN, T. C. van: Is the gravitational constant changing? In: B. N. Taylor,
W. D. Phillips (eds.), Precision Measurement and Fundamental Constants II,
Nat. Bur. Stand. (U.S.), Spec. Publ. 617, 625-628, 1984.
198. FLEISCHER, U.: Schwerestorungen im ostlichen Mittelmeer nach Messungen mit
einem Askania-Seegravimeter. Deutsche Hydrogr. Zeitschr. 17, 153-164, 1964.
199. F leischer , U.: Seegravimetrie. J. Geophys. 40, 1-35, 1974.
200. FORSBERG, R.: Gravity field terrain effect computations by FFT. Bull. Geod. 59,
342-360, 1985.
201. FORSBERG, R.: Gravity measurements in Jameson Land neighbouring parts of
East Greenland. Meddelelser om Gr0 nland, Geoscience 15, 1986.
202. FORSBERG, R.: A new covariance model for inertial gravimetry and gradiometry.
JGR 92, 1305-1310, 1987.
203. F orsberg , R., A. A. Vassiliou, К. P. Schwarz, R. V. C. W ong : Inertial
gravimetry — a comparison of Kalman filtering-smoothing and post-mission
adjustment techniques. Bull. Geod. 60, 129-142, 1986.
204. F orward, R. L.: Review of artificial satellite gravity gradiometer techniques
for geodesy. In: G. Veis (ed.), The use of artificial satellites for geodesy and
geophysics, 157-192, Athens 1974.
205. FRANCHETEAU, J.: Die ozeanische Kruste. Spektrum der Wissenschaft Heft 11,
80-94, 1983.·
206. FREY, R., G. HARNISCH: Das sowjetische Gravimeter GAG-2. Vermessungstechnik 20, 179-182, 1972.
207. G aneko , Y.: 1 0 ' x 10' detailed gravimetric geoid around Japan. Marine Geodesy
7, 291-314, 1983.
208. GANTAR, C., C. MORELLI: Some pressure effects on the behaviour of Worden
gravity meters. Geophys. Prosp. 8 , 111-117, 1960.
209. GANTAR, C., C. MORELLI: Measurements with gravity-meters along the northern
part of the European Calibration Line: Bad Harzburg-Bodo. Boll. Geof. teor.
appl. IV, 183-228, 1962a.
210. GANTAR, C., C. Morelli: First order world gravity loop. Boll. Geof. teor. appl
IV, 229-270, 1962b.
Литература
390
211. GANTAR, С., С. MoRELLI: New experimental data about temperature and pres
sure effects on Worden gravity meters. Boll. Geof. teor. appl. V, 175-186, 1963.
212. Garland, G.D.: The earth’s and aravity. Pergamon Press, Oxford etc. 1965. [Имеется
перевод: Гарленд Дж. Д. Форма Земли и сила тяжести. - М.: Мир, 1968.]
213. GARLAND, G. D.: Introduction to Geophysics. 2.ed., W. B. Saunders Co., Phila
delphia etc. 1979.
214. GAUSS , C. F.: Bestimmung des Breitenunterschiedes zwischen den Stemwarten
von Gottingen und Altona durch Beobachtungen am Ramsdenschen Zenithsector. Vandenhoeck u. Ruprecht, Gottingen 1828.
215. G E R M A N , S.: g-measurements in PTB Braunschweig. BGI No. 24, 1-39-40, 1970.
216. GERSTENECKER, C.: Die genaue Messung von kleinen Schwereunterschieden.
DGK, Reihe C, Nr. 191, Miinchen 1973.
217. GERSTENECKER, C.: A model for studying temperature effects on LaCoste-Rom
berg gravimeters. BGI, No. 49, 64-71, 1981.
218. GILBERT, R. L. G.: A dynamic gravimeter of novel design. Proc. Phys. Soc.
London, Ser. В 62, 445-454, 1949.
219. G i l b e r t , F., A. M. D z i e w o n s k i : An application of normal mode theory to the
retrieval of structural parameters and source mechanism from seismic spectra.
Phil. Trans. Roy. Soc., London, A 278, 197-269, 1975.
220. GILLIES, G. T.: The Newtonian Gravitational Constant. Metrologia 24 (Suppl.),
1-56, 1987.
221. GIRDLER, R. W.: The great negative Bouguer anomaly over Africa. EOS 56,
516-519, 1975.
222.
G o a d , С . C .:
Gravimetric tidal loading computed from integrated Green’s func
tions. JGR 85, 2679-2683, 1980.
223.
Goad,
С. С.,
С. C. T
s c h e r n in g ,
M . M . C h i n : G r a v ity e m p iric a l co va ria n ce
values for the continental United States. JGR 89, 7962-7968, 1984.
224. GODSON, R. H.: Preparation of a digital grid of gravity-anomaly values of the
conterminous United States. In: W. J. Hinze (ed.), 1985, 38-45, 1985.
225.
G 0TZE,
H.-J., B.
LAH M EY ER :
Application of three-dimensional interactive mod
eling in gravity and magnetics. Geophysics 53, 1096-1108, 1988.
226. G0TZE, H.-J., B. MEURERS: Some results of calibration factor determination
of LaCoste and Romberg gravity meters (model D). J. Geophys. 52, 136-139,
1983.
2 2 7 . G 0 T Z E , H.-J., O . R o s e n b a c h , W. S c h o l e r : Zur Reproduzierbarkeit vo n Vertikalgradientenmessungen. Osterr. Z. f. Verm.wesen u. Photogrammetrie 63,
146-157, 1976.
228. G0TZE, H.-J., S. S t r u n k , S. S c h m i d t : Central Andean gravity field and its
relation to crustal structures. In: Lecture Notes in Earth Science, 17, 199-208,
Springer, Heidelberg 1988.
229. GOLDSBOROUGH, R. G., Lt . T e r r y F u n d a K : The gravity gradiometer survey
system. In: К. P. Schwarz (ed.), 1986a, 651-661, 1986.
230. GOODKIND, J. M.: Continuous measurement of nontidal variations of gravity.
JGR 91, 9125-9134, 1986.
231. GRAF, A.: Ein neuer statischer Schweremesser zur Messung und Registrierung
lokaler und zeitlicher Schwereanderungen. J. Geophys. 14, 152-172, 1938.
232. G r a f , A.: Ein neuer kieiner Schweremesser. Beitr. z. angew. Geophysik 1 0 , 18-34,
1942.
233. GRAF, A.: liber die bisherigen Erfahrungen und Mefiergebnisse mit dem Seegravimeter. J. Geophys. 23, 4-25, 1957.
Литература
234.
Graf, A.: Improvements on sea gravimeter GSS2. JGR 66, 1813—1821, 1961.[Имеется
перевод: Граф А., Шульц P. Модернизация м ор ск ого гравиметра GSS-2. Геофиз.
методы разведки и аппаратура. Сб. переводов № 33. МГ и ОН СССР ОКБ ОНТИ,
Г еод ези зд ат , 1962, 7 9 - 9 2 ] .
235.
G
r a f , A.: Gravimetrische Instmmente und Mefimethoden. In: Jordan-EggertKneifil, Handbuch der Vermessungskunde, Band Va, B. J. Metzler, Stuttgart
236.
G RAFAREND,
1967.
E. W.: Second order design of geodetic nets. ZfV 100, 158-168,
1975.
237.
G RAFAREND,
E. W.: Geodetic applications of stochastic processes. Phys. of the
Earth and Planetary Interiors 1 2 , 151-179, 1976.
238. GRAFAREND, E. W., F. Sanso (eds.): Optimization and design of geodetic net
works. Springer-Verlag, Berlin-Heidelberg 1985.
239. GRAFAREND, E., A. KLEUSBERG, B. SCHAFFRIN: An introduction to the variance-covariance-component estimation of Helmert type. ZfV 105, 161-180,
1980.
240.
GRANT, F. S.: Review of data processing and interpretation methods in gravity
241.
GRIDNIEV, D. G.: L’etalonnage des gravimetres “Askania” et la determination de
and magnetics. Geophysics 37, 647-661, 1972.
248.
l’echelle d’enregistrement des marees de la pesanteur par inclinaison. Marees
Terrestres No. 71, 4056-4073, 1975.
GROSSMANN, W.: Geodatische Rechnungen und Abbildungen in der Landesvermessung. 3ed., K. Wittwer, Stuttgart 1976.
GROSSMANN, W.: Vermessungskunde I, II, III (Bd. II: W. Grossmann and H. Kahmen 1983). 15., 13. u. 11. Aufl., W. de Gruyter, Berlin-New York 1976/1983.
G r o s s m a n n , W., H. PESCHEL: Bestimmung der Schweredifferenz zwischen Pots
dam und Bad Harzburg mit Askania-Gravimetern. Bull. Geod. No. 74, 335-340,
1964.
GROTEN, E.: Calibration of a gravimeter by using a heavy mass. Obs. Roy. de
Belgique, Comm. A 9, S. Geophys. No. 96, 197-202, 1970.
GROTEN, E.: Geodesy and the earth’s gravity field. F. Diimmler, Bonn 1979/1980.
GROTEN, E. (ed.): Report on high precision gravimetry, Vol. II. Nachr. aus dem
Karten- und Verm.wesen, Reihe II, Nr. 41, Frankfurt a. M. 1983.
GROTEN, E.: The motion of the earth. In: Landolt-Bomstein, 1984, 9-46, 1984.
249.
GROTEN, E., M. BECKER: Microgravimetry. In: К. P. Schwarz, G. Lachapelle
242.
243.
244.
245.
246.
247.
(eds.), Geodesy in Transition — to Helmut Moritz 50th birthday, 241-260,
Calgary 1983.
250.
G U BLE R , E ., H . - G . K
ah le
: R e ce n t c ru s ta l m o ve m e n ts a n d g e o p h ysica l in te r
pretation of geodynamic processes in the Alpine mountain belt. In: Proc. 5th
Int. Symp. “Geodesy and Physics of the Earth”, Magdeburg 1984, Veroff. Zentralinst. f. Physik d. Erde, Nr. 81 /III, 90-97, Potsdam 1985.
251 .GuiLLET, A.: Mesure precise de l’acceleration g de la chute des corps dans le vide.
Comptes Rendus Acad. Sci. Paris 207, 614-616, 1938.
252. GUPTA, V. K., N. R amani: Some aspects of regional-residual separation of grav
ity anomalies in a Precambrian terrain. Geophysics 45, 1412-1426, 1980.
253.
HAALCK,
H.: Der statische (barometrische) Schweremesser fiir Messungen auf
festem Lande und auf See. Beitr. z. angew. Geophysik 7 , 285-316, 392-448,
1939.
254.
HAALCK,
H.: Lehrbuch der angewandten Geophysik. Gebr. Bomtraeger, Berlin-
Nikolassee 1953.
391
Литература
392
255. H A G IW A R A , Y.: Gravity changes associated with seismic activities. In: C. Kisslinger, Z. Suzuki (eds.), 1978, 137-146, 1978a.
256. H AG IW A R A , Y.: Recent non-tidal gravity changes during earthquake activities in
Japan. Boll. Geof. teor. appl. XX, 390-400, 1978b.
257. H AG IW A R A , Y.: Relationships between gravity anomaly and the other kind of geo
physical survey results. In: Proc. of the I.A.G. Symposia, XVIII. I.U.G.G. Gen.
Ass., Hamburg 1983, Vol. 1,125-136, Dep. of Geod. Science and Surveying, The
Ohio State Univ., Columbus, Ohio, 1983.
258. HAKE, G.: Kartographie I. 6 . Aufl., W. de Gruyter, Berlin-New York 1982.
259.
HALL, D. H.: History of the earth sciences during the scientific and industrial
revolutions. Elsevier Scient. Publ. Comp., Amsterdam-Oxford-New York 1976.
A. С., B. G. B rule: Vibration-induced drift in LaCoste and Rom
berg geodetic gravimeters. JGR 72, 2187-2197, 1967.
261. HAMMER, S.: Terrain corrections for gravimeter stations. Geophysics 4, 184-194,
1939.
262. H A M M E R , S.: Estimating ore masses in gravity prospecting. Geophysics 10, 50-62,
1945.
263. HAMMER, S.: Deep gravity interpretation by stripping. Geophysics 28, 369-378,
1963.
264. HAMMER, S.: Relative precision of vertical and horizontal gravity gradients mea
sured by gravimeter. Geophysics 44, 99-101, 1979.
265. HAMMER, S.: Airborne gravity is here. Geophysics 48, 213-223, 1983.
266. HAMMER, S., W. R. G umert : Airborne measurement of the vertical gradient of
gravity. EOS 65, No. 16, 196, 1984.
267. HAMMOND, J. A., J. E. Faller : Results of absolute gravity determinations at
a number of different sites. JGR 76, 7850-7854, 1971.
2 6 8 . H A M M O N D , J. A., R. L. I l i f f : The AFGL absolute gravity program. In: I. I.
Mueller (ed.), Applications of geodesy to geodynamics. OSU Rep. No. 280,
245-249, 1978.
269. HANADA, H., T. TsUBOKAWA, M. OoE: Results of absolute gravity surveys in
Tohoku district, Japan. BGI No. 57, 97-112, 1985.
270. HARLAN, R. B.: Eotvos corrections for airborne gravimetry. JGR 73, 4675-4679, 1968.
271. H ARRISON, J. C.: The measurement of gravity at sea. In: Methods and techniques
of modem geophysics, 211-229, Wiley Interscience, New York 1960.
272. HARRISON, J. C., L. J. B. LaC oste : The measurement of surface gravity. In: I.
I. Mueller (ed.), Applications of geodesy to geodynamics. OSU Rep. No. 280,
239-243, 1978.
273. H arrison , J. C., T. S ato : Implementation of electro-static feedback with a
LaCoste-Romberg model G gravity meter. JGR 89, 7957-7961, 1984.
274. HART, P. J. (ed.): The earth’s crust and upper mantle. Geophys. Monogr. 13,
Americ. Geophys. Union, Washington, D. C. 1969.
275. H A R TLE Y , K. A.: A new instrument for measuring very small differences in grav
ity. Physics 2, 123-130, 1932.
276. H a x b y , W. F., G. D. E a rn er , J. L. T a B recque , J. K. W eissel : Digital
images of combined oceanic and continental data sets and their use in tectonic
studies. EOS 64, No. 52, 995-1004, 1983.
277. HAYFO RD, J. F.: The figure of the earth and isostasy from measurements in fhe
United States. U.S. Co$st and Geod. Survey, Washington, D. C. 1909.
278*HAYFO RD , J . F ., W . B o w i e : The effect of topography and isostatic compensation
upon the intensity of gravity. U.S. Coast and Geod. Survey, Spec. Publ. No.
It), Washington 1912.
260.
H A M IL T O N ,
Литература
279. HECK, В., Н. M alzer : On some problems connected with the determination of
recent vertical crustal movements from repeated levellings and gravity mea
surements. Tectonophysics 130, 299-305, 1986.
280. Hecker, O.: Bestimmung der Schwekraft auf dem Atkantishen Ozean, sowie in Rio de
Janeiro, Lissabon und Madrid. Veroff. Kgl. Preup. Geod. Inst., N.F. Nr. 11, Berlin 1903.
[Имеется перевод: Геккер О. Определение силы тяжести в Атлантическом оке
ане. Сб. рефератов и переводных статей по геодезическим вопросам. Приложение
к ’’Запискам Военно-топографического управления Главного штаба”, ч. 63, вып.
9, 1917.]
281. HEIN, G. W.: Untersuchungen zur terrestrischen Schweregradiometrie. DGK, Reihe C, Nr. 264, Miinchen 1981.
282. HEIN, G. W.: Integrated geodesy — state of the art 1986 reference text. In: H.
Siinkel (ed.), 1986, 505-548, 1986.
283. H ein , G. W., R. KiSTERMANN: Mathematical foundation of non-tectonic effects
in geodetic recent crustal movement models. Tectonophysics 71, 315-334, 1981.
284. HEINEKE, U.: Untersuchungen zur Reduktion und geodatischen Verwendung von
Drehwaagemefigrofien. Wiss. Arb. Univ. Hannover Nr. 8 6 , Hannover 1978.
285. HEINEKE, U.: A new precise gravity network — activities of the land surveying
authorities in Hannover. BGI No. 53, 168-171, 1983.
286. HEISKANEN, W. A.: Untersuchungen fiber Schwerkraft und Isostasie. Veroff. Finn.
Geod. Inst., No. 4, Helsinki 1924.
287. H eiskanen, W. A.: 1st die Erde ein dreiachsiges Ellipsoid? Gerlands Beitr. z.
Geophysik 19, 356-377, 1928.
288. H eiskanen: W. A.: On the World Geodetic System. Veroff. Finn. Geod. Inst.,
Nr. 39, Helsinki 1951.
289. HEISKANEN: W. A.: The Columbus geoid. Trans. Am. Geophys. Union 38, 841848, 1957.
290 . H eiskanen , W. A ., H. M oritz : Physical geodesy. W. H. Freeman and Co., San
Francisco and London 1967.
291. H eiskanen , W. A., F. A. V ening -M einesz : The earth and its gravity field.
McGraw-Hill, New York 1958.
292. HEITZ, S.: Mechanik fester Korper. Diimmler, Bonn 1980/1983.
293. HEITZ, S.: Grundlagen kinematischer und dynamischer Modelle der Geodasie (2.
erw. Aufl.). Mitt. Geod. Inst, der Univ. Bonn, Nr. 63, Bonn 1986.
294. Helmert, F.R.: die mathematischen und physikalischen Teorien in hoheren Geodasie.
Teubner, Leipzig 1880/1884. (Nachdruck Minerva GmbH, Frankfurt a. M. 1962.)
[Имеется перевод I тома: Гельмерт Ф.Р. Математические и физические теории
высшей геодезии, т. I. - М.: Геодезиздат, 1962.]
295. HELMERT, F. R.: Die Schwerkraft im Hochgebirge, insbesondere in den Tyroler
Alpen. Veroff. Kgl. Preufi. Geod. Inst., No. 1, Berlin 1890.
296. HELMERT, F. R.: Beitrage zur Theorie des Reversionspendels. Veroff. Kgl. Preufi.
Geod. Inst, und Centralbur. Int. Erdmessung, Berlin 1898.
297.
HELMERT, F. R.: Der normale Theil der Schwerkraft im Meeresniveau. Sitz. ber.
Kgl. Preufi. Akad. d. Wiss.sch. zu Berlin, 328-336, 1901.
298. Herschel, J.F.W.: A treasure on astronomy. Longman, London, 1833. [Имеется пере
вод: Гершель Дж. Очерки астрономии, т. I и II. —М., 1861—1862.]
299. H e s s , H. Н.: History of ocean basins. In: Petrologic Studies — A. F. Buddington
Memorial Volume. Geol. Soc. Am., 599-620, New York, N. Y. 1962.
300. H E Y L , P. R., G. S.
Cook:
The value of gravity at Washington. J. Res. Nat. Bur.
Stand. 17, 806-839, Washington 1936.
39 3
Литература
394
301.
Η ΙΝ Ζ Ε ,
W. J. (ed.): The utility of regional gravity and magnetic anomaly maps.
Society of Exploration Geophysicists, Tulsa, Oklahoma, 1985.
3 0 2 . HIRVONEN, R . A . : The continental undulations of the geoid. Veroff. Finn. Geod.
Inst., No. 19, Helsinki 1934.
303. HIRVONEN, R. A.: On the establishment of the values of gravity for the na
tional reference stations. Ann. Acad. Sci. Fennicae, Ser. H III, Geol. Geogr. 17,
Helsinki 1948.
304.
HIRVONEN,
R. A.: On the statistical analysis of gravity anomalies. Publ. Isostat.
Inst. Int. Assoc. Geod., No. 37, Helsinki 1962.
305. H 0 P C K E , W . : Fehlerlehre und Ausgleichsrechnung. W . de Gruyter, Berlin-New
York 1980.
306. H O LD A H L, S. R.: Readjustment of leveling networks to account for vertical coseismic motions. Tectonophysics 130, 195-212, 1986.
307. HOLWECK, F., P. LEJAY: Un instrument transportable pour la mesure rapide de
la gravite. Comptes Rendus Acad. Sci. Paris, 190, 1387-1388, 1930.
308. H O NKASALO , T.: Gravity survey of Finland in the years 1945-1960. Veroff. Finn.
Geod. Inst.* No. 55, Helsinki 1962.
309. H O N K AS ALO , T.: On the tidal gravity correction. Boll. Geof. teor. appl. VI, 34-36,
1964.
310. HOSPERS, J., E. G. FIN N STR 0 M, J. S. RATHO RE: A regional gravity study of
the northern North Sea (56-62° N). Geophys. Prosp. 33, 543-566, 1985.
311. H o w e L l , L.G., K . O . H e i n t z , A . BARRY: T h e d e v e lo p m e n t a n d use o f a h ig h precision downhole gravity meter. Geophysics 31, 763-772, 1966.
312. H U G IL L , A . : The design of a gravimeter with automatic readout. Thesis, Flinders
Univ. of South Australia, 1984.
313. HSU, Η. T.: Tide corrections of gravity measurements in China. BGI No. 53,
207-211, 1983.
314. Hsu, Η. T.: Error estimation of gravity loading correction. Marees Terrestres No.
99, 6880-6896, 1987.
315. HSU, H. T., H.-Q. M a o , X.-L. S o n g : Gravity tide observations in Wuchang,
China. In: J. T. Kuo (ed.), 1983, 145-150, 1983.
316.
HURST, R . B . , N . B
row n,
V . D . D a n d a w a t e e t a l.: In te r n a tio n a l c o m p a ri
son of iodine-stabilized Helium-Neon lasers at 633 i?m involving ten standard
laboratories. Metrologia 24, 39-44, 1987.
317. Huygens, Chr.: Horologium oscillatorium. Hagae 1673. [Имеется перевод: Гюй
генс X. Маятниковые часы. В кн. ’’Три мемуара по механике. —М.: Изд-во АН
СССР, 1951, с. 7-210.]
318. HUYGENS, CHR.: Traite de la lumiere ... Avec un discours de la cause de la
pesanteur. Leide 1690.
319. H Y T O N E N , E.: Absolute gravity measurement with long wire pendulum. Publ.
Finn. Geod. Inst., No. 75, Helsinki 1972.
3 2 0 .IL IF F , R . L., R . W . S a n d s : The AFGL absolute gravity system’s error budget
revisited. BGI No. 60, 107-125, 1987.
3 21.IN G H A M , A. E.: Sea surveying. John Wiley and Sons, London etc. 1975.
3 2 2 .I n t e r n a t i o n a l A s s o c ia t io n o f G e o d e s y : Geodetic Reference System 1967.
Bull. Geod., Publ. Spec. No. 3 , Paris 1971.
323.ISHH, Η ., Y . N a k a h o r i , M . M u r a k a m i : Absolute gravity measurements by
GSI. BGI No. 62, 42-45, 1988.
324.IS IN G , G.: Use of astatized pendulums for gravity measurements. Amer. Inst. Min.
Met. Eng. Techn. Publ. 828/L51, New York 1937.
Литература
325. JAAKKOLA, J.: Photogrammetric height determination of gravity points. Rep.
Finn. Geod. Inst., No. 82:5, Helsinki 1982.
326. JACHENS, R. C.: Temporal gravity changes as applied to studies of crustal defor
mation. In: Proc. of Conf. VII Stress and Strain Measur. related to Earthquake
Prediction, 7.-9.9.1978, U.S. Geol. Survey Open-File Report 79-370, 1978.
327. JACHENS, R . C ., G. P . E a t o n : Geophysical observations of Kilauea volcano,
Hawaii I. Temporal gravity variations related to the 29 November earthquake
and associated summit collapse. J. Volcanol. Geotherm. Res. 7, 225-240, 1980.
328. JACHENS, R . C ., C . W . ROBERTS: T e m p o ra l a n d a re a l g r a v ity in v e s tig a tio n s a t
Long Valley Caldera, California. JGR 90, 11210-11218, 1985.
329. J achens , R. C., W . T hatcher , C. W . R oberts , R. S. S t e in : Correlation
of changes in gravity, elevation, and strain in southern California. Science 219,
1215-1217, 1983.
330. J aco by , W. R., A. J. A nderson : Mantle convection — gravity, plate motion,
convection. Terra Cognita 4, 151-155, 1984.
331.
JA N LE , P ., R . MEISSNER: S tr u c tu re a n d e v o lu tio n o f th e te rr e s tria l p la n e ts . S u r
veys in Geophysics 8 , 107-186, 1986.
332. JEFFREYS, H.: An application of the free-air reduction of gravity. Gerlands Beitr.
z. Geophysik 31, 378-386, 1931.
333. JEFFREYS, H.: On the absolute measurements of gravity. Monthly Not. Roy. Astron. Soc., London, Geophys. SUppl. 5, 398-408, 1949.
334. Jeffreys, H.: The Earth-its origin, history and physical constitution. S. ed., Cambridge
Univ. Press 1970. [Имеется перевод 4-го изд.: Джеффрис Г. Земля, ее происхож
дение, история и строение. - М.: ИЛ, I960.]
3 3 5 . J ekeli , С.: Analysis of airborne gravity gradiometer survey accuracies. Manuscripta Geodaetica 9, 323-379, 1984.
336. J ekeli, C.: The Gravity Gradiometer Survey System (GGSS). EOS 69, No. 8 ,
105/117, 1988.
337. J e k e l i , C ., J . V . W
h it e
, J . D . G o l d s t e i n : A re v ie w o f d a ta p ro ce ssin g in
gravity gradiometry. In: К. P. Schwarz (ed.), 1986a, 675-685, 1986.
338. JOHNSEN, G. V., A. BJORNSSON, S. SiGURDSSON: Gravity and elevation changes
caused by magma movement beneath the Krafla caldera, north-east Iceland. J.
Geophys. 47, 132-140, 1980.
339. JOLLY, P h . v o n : Die Anwendung der Waage auf Probleme der Gravitation. Ann.
d. Physik 5, 112-134, 1878.
340. J o rd a n , S. K.: Status of moving-base gravity gradiometry. In: К. P. Schwarz
(ed.), 1986a, 639-647, 1986.
341. JORDAN, S. K., J. L. CENTER: Establishing requirements for gravity surveys for
very accurate inertial navigation. Navigation 33, 90-108, 1986.
342. J u n g , K . : Zur gravimetrischen Bestimmung der Bodendichte. Gerlands Beitr. z.
Geophysik 6 8 , 269-279, 1959.
343. J u n g , K.: Schwerkraftverfahren in der angewand ten Geophysik. Akad. Verlagsgesellschaft Geest u. Portig KG, Leipzig 1961.
344. J u n g , W.-Y., P. D. R abinow itz : Residual geoid anomalies of the North Atlantic
Ocean and their tectonic implications. JGR 91, 10383-10396, 1986.
345. KAHMEN, H.: Elektronische Mefiverfahren in der Geodasie. 3. Aufl., H. Wichmann,
Karlsruhe 1978.
346. KAKKURI, J.: Die Landhebung in Fennoskandien im Lichte der heutigen Wissenschaft. ZfV 1 1 0 , 51-59, 1985.
395
396
Литература
347. KAKKURI, J.: Newest results obtained in studying the Fennoscandian land uplift
phenomenon. Tectonophysics 130, 327-331, 1986.
348. K A N E , M. F., R. H. G o d s o n : Features of a pair of long-wavelength (>250 km)
and short-wavelength (< 250 km) Bouguer gravity maps of the United States.
In: W. J. Hinze (ed.), 1985, 46-61, 1985.
349. KANNGIESER, E.: Untersuchungen zur Bestimmung tektonisch bedingter zeitlicher
Schwere- und Hohenanderungen in Nordisland. Wiss. Arb. Univ. Hannover Nr.
114, 1982a.
350. KANNGIESER, E.: Investigations of calibration functions, temperature and trans
portation effects at LaCoste-Romberg gravimeters. In: Proc. Gen. Meeting of
the I.A.G., Tokyo 1982, 385-396, Special Issue Geod. Soc. of Japan, Tokyo
1982b.
351. KANNGIESER, E.: Genauigkeitssteigerungen in der Relativgravimetrie. ZfV 108,
1 8 0 -1 8 9 , 1983a.
352. KANNGIESER, E.: Applications of least-squares collocation to gravity and height
variations associated with a recent rifting process. Tectonophysics 97, 265-277,
1983b.
353. KANNG IESER, E ., K . K U M M E R , W . T o r g e , H.-G. W E N Z E L: Das GravimeterEichsystem Hannover. Wiss. Arb. Univ. Hannover Nr. 120, 1983a.
3 5 4 . KANNGIESER, E ., R . H. R o d e r , H.-G. W e n z e l : In v e s tig a tio n o f n o n -lin e a r
calibration terms for LaCoste-Romberg model D gravity meters. BGI No. 5 3 ,
190-195, 1983b.
355.
K A S U G A , T . , K . K A M IN U M A , J . S e g a w a : G r a v ity m e a su re m e n t o n b o a rd th e
icebreaker “Fuji” during the Japanese Antarctic research expedition 1980-1981.
J. Geod. Soc. of Japan 28, 1-21, 1982.
356. KATER, H . : An account of experiments for determining the length of the pendulum
vibrating seconds in the latitude of London. Phil. Trans. Roy. Soc., London, A
108, 33-102, 1818.
357* KATER, H.: An account of experiments for determining the variation in the length
of the pendulum vibrating seconds, at the principal stations of the Trigonomet
rical Survey of Great Britain. Phil. Trans. Roy. Soc., London, A 109, 337-508,
1819.
358. K AULA, W. M.: Statistical and harmonical analysis of gravity. JGR 64, 24012421, 1959.
359. KAULA, W. M.: A tectonic classification of the main features of the earth’s grav
itational field. JGR 74, 4807-4826, 1969.
360. KEARSLEY, A. H. W.: Data requirements for determining precise relative geoid
heights from gravimetry. JGR 91, 9193-9201, 1986.
361. KELLOG, O.: Foundations of potential theory. Dover Publ., New York 1953.
362. KERTZ, W.: Einfiihrung in die Geophysik. Bibl. Inst. Mannheim-Wien-Zurich
1969/1971.
363. K han , M. A.: General solution of the problem of hydrostatic equilibrium of the
earth. Geoph. J. R. Astr. Soc. 18, 177-188, 1969.
364. KHURANA, A.: Even lanthanum copper oxide is superconducting. Physics Today
40, 17-22, 1987.
365. K ing , R. W., E. G. M aster s , C. R izos , A. S tolz , J. C ollins : Surveying
with Global Positioning System - GPS. F. Diimmler, Bonn 1987.
366. K issling , E., S t . M ueller , D. W erner : Gravity anomalies, seismic structure
and geothermal history of the Central Alps. Annales Geophysicae 1 , 37-46,
1983.
Литература
367. KISSLINGER, С.: Processes during the Matsushiro, Japan, earthquake swarm as
revealed by levelling, gravity, and spring-flow observations. Geology 3, 57-62,
1975.
368. K isslinger , C., Z. S uzuki (eds.): Earthquake precursors. Center for Acad. Publ.
Japan/Japan Scientific Societies Press, Tokyo 1978.
369.
370.
371.
372.
373.
374.
375.
376.
KISTERMANN, R ., G. H e in : Der Einflufl sakularer Schwereanderungen auf das
Wiederholungsnivellement. ZfV 104, 471-475, 1979.
KIVINIEMI, A.: The first order gravity net of Finland. Veroff. Finn. Geod. Inst.
No. 59, Helsinki 1964.
KIVINIEMI, A.: High precision measurements for studying the secular variation in
gravity in Finland. Publ. Finn. Geod. Inst. No. 78, Helsinki 1974.
KLINGELE, E., E. KISSLING: Zum Konzept der isostatischen Modelle in Gebirgen
am Beispiel der Schweizer Alpen. Geod.-geophys. Arb. i. d. Schweiz, Band 35,
3-36, Schweiz. Geod. Komm. 1982.
KLINGELE, E., R. OLIVIER: La nouvelle carte gravimetrique de la Suisse. Beitr.
z. Geologie der Schweiz, Serie Geophysik Nr. 20, 54, 1980.
KNEISSL, M.: Das Deutsche Schweregnmdnetz. DGK, Reihe B, Nr. 23, I-VII,
Miinchen 1956-1960.
KOCHSIEK, M.: The mass unit “Kilogramm”, precision measurement of mass,
attainable uncertainties, and possibilities of a new definition. In: B. N. Taylor,
W. D. Phillips (eds.), Precision Measurement and Fundamental Constants II,
Nat. Bur. Stand. (U.S.), Spec. Publ. 617, 427-435, 1984.
KONECNY, G.: Die photogrammetrische Kameramission auf Spacelab-1. ZfV 109,
257-264, 1984.
377. KoNECNY, G., G. L eh m a n n : Photogramme trie. 4. Aufl., W. de Gruyter, Berlin-
New York 1984'
378. KOUBA, J.: A review of geodetic and geodynamic satellite Doppler positioning.
Rev. Geoph. 21, 41-50, 1983.
379. KOZAI, Y.: The earth’s gravitational potential derived from the motion of satellite
1958/32. Smithsonian Astrophysical Observatory, Research in Space Science,
Spec. Rep. 22, 1959.
380. K R A R U P, T . : A c o n tr ib u tio n to th e m a th e m a tic a l fo u n d a tio n o f p h y s ic a l geodesy.
Danish Geod. Inst., Medd. No. 44, Copenhagen 1969.
381. KREYSZIG, E.: Advanced engineering mathematics. 3.ed., John Wiley and Sons
Inc., New York etc. 1972.
382. KRIEG, L. A.: Mathematical modelling of the behaviour of the LaCoste and
Romberg “G” gravity meter for use in gravity network adjustments and data
analyses. OSU Rep. No. 321, 1981.
383. K roger , P. M., J. M. D avidson , E. C. G ardner : Mobile Very Long Baseline
Interferometry and Global Positioning System measurement of vertical crustal
motion. JGR 91, 9169-9176, 1986.
384. KUHNEN, F., P h . F urtwangler : Bestimmung der absoluten Grofie der Schwerkraft zu Potsdam mit Reversionspendeln. Veroff. Kgl. Preufi. Geod. Inst. Pots
dam, N.F. Nr. 27, Berlin 1906.
385*KU M M ER , K.: Das Schwerefestpunktfeld (SFP-Feld) in Niedersachsen — Aufbau
und Stand der Arbeiten. Nachr. Nieders. Vermessungs- u. Kataster-Verw. 33,
1 7 8 -2 0 4 , 1983.
386.KUO, J. T. (ed.): Proc. 9th Intemat. Symp. on Earth Tides, New York 1982, E.
Schweizerbart, Stuttgart 1983.
397
Литература
398
387.
388.
С. J a c h e n s : In d ir e c t m a p p in g o f ocean tid e s b y s o lv in g th e
inverse problem for the tidal gravity observations. Ann. Geophys. 33, 73-83,
1977.
KU.O, J . T . , R . C. J a c h e n s , M . E w i n g , G . W h i t e : T ra n s c o n tin e n ta l t id a l
gravity profiles across the United States. Science 168, 969, 1970.
KUO , J. Т ., R .
389. Kuo, J. T., W.
390.
B row n,
D.
C a r m ic h a e l , G o n g - X
u
Gu, K
e-R en
L iu :
A
US/China joint research project on the relationship between gravity variations
and earthquake occurences in the Beijing-Tianjin region. In: J. T. Kuo (ed.),
1983, 673-693, 1983.
K U O , J . T . , Y . H . C h u , N. M . C h e n : T im e -d o m a in fin ite e le m e n t m o d e lin g o f
the global ocean tides. In: R. Vieira (ed.), 1986, 559-576, 1986.
391.
L a C o s t e , L . J . B . : A n e w ty p e lo n g p e rio d v e rtic a l s e ism o g ra p h . P h ysics 5 ,
392.
L a C o s t e , L . J . B .: S urface s h ip g r a v ity m e a su re m e n ts o n th e Texas A a n d M
178-180, 1934.
College ship “Hidalgo”. Geophysics 24, 309-322, 1959.
393. L a C o s t e , L. J. B.: Measurement of gravity at sea and in the air. Rev. Geoph.
5, 477-526, 1967.
394. L a C o s t e , L. J. B.: Deconvolution by successive approximations. Geophysics 47,
1724-1730, 1982.
395. L a C o s t e , L. J. B.: LaCoste and Romberg straight-line gravity meter. Geophysics
48, 606-610, 1983.
396.
L a C o s t e , L . J. B ., J. F o r d , R . B o w l e s , K . A
rcher:
G r a v ity m e a su re m e n ts
in a n a irp la n e u s in g s ta te -o f-th e -a rt n a v ig a tio n a n d a ltim e tr y . G e o p h ysics
397.
398.
399.
400.
401.
402.
403.
404.
405.
406.
407.
47,
832-838, 1982.
LAFEHR, T. R.: The estimation of the total amount of anomalous mass by Gauss’s
theorem. JGR 70, 1911-1919, 1965.
L a F ehr , T. R.: Rock densities from borehole gravity surveys. Geophysics 48,
341-356, 1983.
LAMBERT, A., C. B eaumont : Nanovariations in gravity due to seasasonal
groundwater movements: Implications for the gravitational detection of tec
tonic movements. JGR 82, 297-306, 1977.
LAMBERT, A., J. O. L iard , H. D ragert : Canadian precise gravity networks
for crustal m o v e m e n t studies: an in stru m e n ta l evaluation. Tec,tonophysics 52,
87-96, 1979.
LAMBERT, A., J. O. L iard , A. M ainville : Vertical movement and gravity
change near the La Grande-2 reservoir, Quebec. JGR 91, 9150-9160, 1986.
L a m b e r t , A., J. O. L i a r d , N. C o u r t i e r , R. K. M c C o n n e l l : The importance
of absolute gravimetry for gravity standards and geodynamics in Canada. BGI
No. 62, 41, 1988.
LANDOLT-B0RNSTEIN: New Series, Group V: Geophysics and Space Research Vol.
1: Physikalische Eigenschaften der Gesteine, ed. G. Angenheister; Vol. 2: Geo
physics of the Solid Earth, the Moon and the Planets, eds. K. Fuchs, H. Soffel.
Springer, Heidelberg-New York-Tokyo 1982/1984.
LAPLACE, P. S.: Mecanique Celeste. Tome 2, livre III, 146-152, Paris 1799.
LELGEMANN, D.: On the recovery of gravity anomalies from high precision al
timeter data. OSU Rep. No. 239, 1976.
LE PlCHON, X., J. FRANCHETEAU, J. B onnin : Plate tectonics. Developm. in
Geotectonics, Vol. 6, Elsevier Scient. Publ. Comp., Amsterdam 1973.
L e r c h , F. J., S. M. K l o s k o , R. E. L a u b s c h e r , C. A. W a g n e r : Gravity model
improvement using GEOS-3 (GEM 9 and 10). JGR 84, 3897 3916, 1979.
Литература
408.
L
erch,
F . J ., В . H . P u t n e y , C . A . W
agner,
399
S. Μ . K
lo sko :
G o d d a rd E a r th
models for oceanographic applications (GEM 10 В and 10 C). Marine Geodesy
5, 145-187, 1981.
4 0 9 . L e r c h , F . J ., S. M . K l o s k o , G . B . P a t e l , C . A. W a g n e r : A g r a v ity m o d e l
for crustal dynamics (GEM-L2). JGR 90, 9301-9311, 1985.
410. LEVALLOIS, J. J.: Quelques consequences geophysiques des nouvelles methodes de
haute precision de mesures absolues de g. Bull. Geod. No. 99, 111-112, 1971.
411. LEVALLOIS, J. J: The history of the International Association of Geodesy. In: The
Geodesist’s Handbook 1980 — Bull. Geod. 54, 249-313, 1980.
412. L evine , J., J. C. H arrison , W. D ew hurst : Gravity tide measurements with
a feedback gravity meter. JGR 91, 12835-12841, 1986.
413. L evitus , S.: Climatological atlas of the world ocean. NOAA, Geophys. Fluid
Lab., Profess. Paper 13, Dep. of Commerce, Washington, D. C. 1982.
414. Li RuiHAO, F u ZHAOZHU: Local gravity variations before and after the Tangshan
earthquake (M — 7.8) and the dilatation process. Tectonophysics 97, 159-169,
1983.
415. L i R u i h a o , S u n H
e p in g
, C h e n D o n g s h e n g , J ia n D a
x i,
F u Z h a o z h u : P re
liminary studies on relations between the space distribution characteristics of
the tidal factors delta and the crust structure in China. In: R. Vieira (ed.),
1986, 669-678, 1986.
416. LIN D N E R , H ., K . - D . H a n e m a n n : G ra v im e te re ic h u n g n a ch d e r N e ig u n g s m e th o d e .
Neue Bergbautechnik 11, 343-346, 1981.
417. LINDNER, K., R. S tuhlmuller : Datengewinnung bei LaCoste-Romberg-Gravimetem mit einem rechnenden Digitalmultimeter. Allg. Verm. Nachrichten 91.
120-124, 1984.
418. LlNSSER, H.: A generalized form of Nettleton’s density determination. Geophys
Prosp. 13, 247-258, 1965.
419. L lS IT Z lN , E.: Sea level changes. Elsevier Scient. Publ. Comp., Amsterdam etc
1974.
420 l LISTING, J. B.: Uber unsere jetzige Kenntnis der Gestalt und Grofle der Erde.
Nachr. d. Kgl. Gesellsch. d. Wiss. und d. Georg-August-Uni versitat, 33-98,
Gottingen 1873.
421.L ockw ood , J. P., N. G. B anks , T. T. E nglish , L. P. G reenland , D.
B. J ackson , D. J. J ohnson , R. Y. K oyanagi, K. A. M c G e e , A. T.
O kamura , J. M. R hodes : The 1984 eruption of Mauna Loa Volcano, Hawaii.
EOS 66, 169-171, 1985.
422. L ove , A. E. H.: The yielding of the earth to disturbing forces. Proc. Roy. Soc.,
London, A 82 , 73-88, 1909.
423. Лозинская A.M. Струнный графиметр для измерения силы тяжести на мореИзв. АН СССР, серия геофиз., №3, 1959, 398-409.
424. L udw ig , W., J. E. N a fe , С. L. D rake : Seismic refraction. The Sea 4, 53-84,
Wiley Interscience, New York 1970.
425. L uther , G. G., W. R. T ow ler : Redetermination of the Newtonian gravita
tional constant “G”. In: B. N. Taylor, W. D. Phillips (eds.), Precision Mea
surement and Fundamental Constants II, Nat. Bur. Stand. (U.S.), Spec. Publ.
617, 573-576, 1984.
426. LUYENDYK, В. P.: On-bottom gravity profile across the East Pacific Rise crest
at 21° north. Geophysics 49, 2166-2177, 1984.
427. LYNESS, D.: The gravimetric detection of mining subsidence. Geophys. Prosp. 33,
567-576, 1985.
Литература
400
428.
M acnab,
R., В. D. L oncarevic , R. V. C o o pe r , P. R. G irouard , M. D.
HUGHES, F an S h o u zh i : A regional marine multiparameter survey south of
Newfoundland. In: Current Research, part B, Geological Survey of Canada,
paper 85-IB, 325-332, 1985.
429. MAKINEN, J., S. T attari: Soil moisture and groundwater: Two sources of gravity
variations. BGI No. 62, 103-110, 1988.
430. MAKINEN, J., M. E kman , A. MiDTSUNDSTAD, O. R em m er : The Fennoscandian
land uplift gravity lines 1966-1984. Rep. Finn. Geod. Inst. No. 85:4, 1986.
4 3 1 . M a r s h , J . G., E . S. CHANG : D e ta ile d g ra v im e tric ge o id c o n firm a tio n o f sea
surface topography detected by the Skylab S-193 altimeter in the Atlantic
Ocean. Bull. Geod. 50, 291-299, 1976.
4 3 2 . M AR SH , J . G., S. V IN C E N T : Global detailed gravimetric geoid computation and
model analysis. Geophys. Surveys 1, 481-511, 1974.
433. M arsh , J. G., A. C. B renner , B. D. B eckley , Τ η. V. M artin : Global mean
sea surface based upon the SEASAT altimeter data. JGR 91, 3501-3506, 1986.
4 3 4 . M a r s h , J . G ., F . J . L e r c h , В . H . P utney e t a l.: A n e w g r a v ita tio n a l m o d e l
for the earth from satellite tracking data: GEM-ΤΙ. JGR 93, 6169-6215, 1988.
^35. MARSON, I., J. E. FALLER: g — the acceleration of gravity: its measurement and
its importance. J. Phys. E. Sci. Instr. 19, 23-32, 1986.
436. M arson , I., H.-G. K ahle , F. C haperon , S t . M ueller , F. A lasia : Absolute
gravity measurements in Switzerland. Bull. Geod. 55, 203-217, 1981.
437. MARTIN, J.: Etalonnage des gravimetres sur les bases pendulaires Europeennes.
Exp. Pol. Franc., Res. Sc., No. NS III.3, Paris 1954.
438. MARUSSI, A.: Intrinsic geodesy. Springer, Berlin etc. 1985.
439. M arussi, A., H. M o r itz , R. H. R a p p , R. O. V ic en te : Ellipsoidal density
models and hydrostatic equilibrium: Interim Report. Phys. of the Earth and
Planetary Interiors 9, 4-6, 1974.
440. M ather , R. S., E. G. M asters , R. C oleman : The role of non-tidal gravity
variations in the maintenance of reference systems for secular geodynamics.
Univ. of New South Wales Reports G 26, 1-25, Kensington, N.S.W. 1977.
4 4 1 . M a u l , G. A., A. H e r m a n : Mean dynamic topography of the Gulf of Mexico
with application to satellite altimetry. Marine Geodesy 9, 27-44, 1985.
442. M c A d oo , D. C., D. T. Sandwell : GEOSAT’s exact repeat mission. EOS 69,
1569, 1988.
443. McCONNELL, K.: The organisation and management of Canada’s national gravity
data base. Bull. Geod. 56, 134-148, 1982.
4 4 4 . M c C o n n e l l , R. K . , P . J . W i n t e r , R. F . G e l l e r : L a t in A m e ric a n G r a v ity
Standardization Network 1977 (LAGSN 77). Earth Physics Branch, Ottawa,
Canada, 1979.
445. McKENZIE, D. P.: Surface deformation, gravity anomalies and convection. Geo
phys. J. R. Astr. Soc. 48 , 211-238, 1977.
446. M c K enzie , D. P., R. L. P arker : The North Pacific: an example of tectonics
on a sphere. Nature 216, 1276-1280, 1967.
447. M c K enzie , D. P., A. W atts , B. P arsons , M. R oufosse : Planform of mantle
convection beneath the Pacific Ocean. Nature 288, 442-446, 1980.
448. M c N u t t , S. R., R. J. BEAVAN: Patterns of earthquakes and the effect of solidearth and ocean-load tides at Mt. St. Helens prior to the May 18. 1980, eruption.
JGR 89, 3075-3086, 1984.
449.
MEISSER, O.: Instrumente der gravimetrischen Aufschlufimethoden. In: B. Guten
berg (Herausg.), Handbuch der Geophysik, Band VI, 236-312, Berlin 1931.
Литература
450. MEISSNER, R., P . JANLE: Planetology of terrestrial planets. In: Landolt-Bomstein
1984, 379-417, 1984.
4M.Melchior P. The tides of the planet Earth. Pergamon Press, Oxford etc. 1983. [Имеет
ся перевод 1966 г.: Мельхиор П. Земные приливы. —М.: Мир, 1968.]
452. M elch io r , Р ., М. de B ec k er : A discussion of world-wide measurements of
tidal gravity with respect to oceanic interactions, lithosphere heterogeneities,
Earth’s flattening and inertial forces. Phys. of the Earth and Planetary Interiors
31, 27-53, 1983.
4 5 3 , M e l c h io r , P ., J. T. K u o , B. D u c a r m e : Earth tide gravity maps for Western
Europe. Phys. of the Earth and Planetary Interiors 13, 184-196, 1976.
454. M elch io r , P ., B. D ucarm e , M. van R uym beke , C. P o itev in : Trans world
tidal gravity profiles. Obs. Royal de Belgique, Bull. d’Observ.: Marees Ter
restres, Vol. V, Fasc. 1, Section Geodynamique, 1-102, Bruxelles 1984a.
455, M elc h io r , P ., B. D ucarm e , M. van R uym beke , C. P o itev in , M. de B ek KER: Interactions between oceanic and gravity tides, as analysed from world
wide earth tide observations and ocean models. Marine Geophys. Res. 7, 77-91,
1984b.
456*M elch io r , P ., B. D ucarm e , M. van R uym beke , C. P o itev in , F ang T sun ,
Hsu Hou T s e , Li R ui H ao , C hen D ong S h en : Studies on the earth tidal
observations in China. Obs. Royal de Belgique Comm. В 134, Bruxelles 1985.
457. M eph a m , M., E. K rakiw ski : Interactive network design and analysis. In: R.
Sigl, 1982, Vol. Ill, 90-96, 1982.
458. MERSON, R. H., D. G. K ing -H ele : The use of artificial satellites to explore the
earth’s gravitational field; results from Sputnik 2 (1957/3). Nature 182 , 640-641,
1958.
459. MESSERSCHMITT, J. B.: Die Schwerebestimmung an der Erdoberflache. F. Vieweg
u. Sohn, Braunschweig 1908.
460. MEURERS, B.: Comparison of earth tide observations in Vienna. Marees Terrestres
No. 100, 6942-6953, 1987.
461. MIERLO, J. VAN: Free network adjustment and S-transformation. DGK, Reihe B,
Nr. 252, 41-54, Miinchen 1980.
4 6 2 . MlLlTZER, H ., F . W e b e r : Angewandte Geophysik. Springer, Wien-New *огк
1984.
463. M in s t e r , J. В ., T. H. J ordan : Present-day plate motions. JGR 83, 5331-5354,
1978.
464. MOGI, K.: Relations between the eruptions of various volcanoes and deformations
of the ground surfaces around them. Bull. Earthquake Res. Inst. 36, 99-134,
1958.
465. MOGI, K.: Dilatancy of rocks under general triaxial stress states with special
reference to earthquake precursors. In: C. Kisslinger, Z. Suzuki (eds.), 1978,
203-217, 1978.
466. Молоценский M.C. Основные вопросы геодезической гравиметрии. Тр.
ЦНИИГАиК. Вып. 42. М., Геодезиздат, 1945; Молоденский М.С. Внешнее гра
витационное поле и фигура физической поверхности Земли-Изв. АН СССР.
Сер. географическая и геофизическая. Т. ХП, N* 3, 1948, с. 193-211.
4 6 7 . М о л о д ен ск и й М.С. Т еор и я нутац и и и сут оч н ы х зе м н ы х п р и л и в ов . В с б . М о л о д ен с
к и й М .С., К р а м ер М .В. З е м н ы е приливы и нутац и я З ем л и .- М.* И зд -в о А Н СССР,
1 9 6 1 , с. 3 - 2 5 .
4 6 8 . М о л о д ен ск и й
М .С ., Е р ем еев В.Ф ., Ю ркина М.И. М етоды и зуч ен и я в н еш н его гра-
ф и т а ц и о н н о г о п ол я и ф и гу р ы З е м л и . -
Т р. Ц Н И И К А и К , 1 9 6 0 , вы п. 1 31.
401
402
Литература
469. MOLODENSKY, S. M.: On some models of the earth’s elastic deformations and
gravity variations. Manuscripta Geodaetica JO, 165-171, 1985.
470. MONTGOMERY, G. E.: Geophysical activity in 1984. Geophysics: The leading edge
of exploration, selected papers, Vol. 04, issue 04, 33-54, 1985.
4 7 1 . M o o e r s , C. N . K . , D. E. B a r r i c k , R . E. C h e n e y , D. B . L a m e , J . G. M a r s h :
The potential of satellite-based radar altimeters. EOS 65, 81-87, 1984.
472. MORELLI, C.: Compensazione della rete intemazionale della stazione de riferimento per le misure di gravita relativa. Inst. Geofis. Publ. No. 211, Trieste
1946.
4 7 3 . MORELLI, C.: Gravimetria. Del Bianco, Udine 1968.
474. M o r e l l i , C., C. G a n t a r , T. H o n k a s a l o , R. K. M c C o n n e l l , J. G. T a n n e r ,
B. Szabo, U. UOTILA, C. T. WHALEN: The International Standardization
Net 1971 (ISGN71). I.U.G.G.-I.A.G.-Publ. Spec. No. 4, Paris 1974.
475. MORGAN, W. J.: Rises, trenches, great faults, and crustal blocks. JGR 73, 19591982, 1968.
476. MORGAN, W. J.: Deep mantle convection plumes and plate motions. Amer. Assoc.
Petrol. Geol. Bull. 56, 203-213, 1972.
477. MORITZ, H.: Interpolation and prediction of point gravity anomalies. Publ. Isostat. Inst. Int. Assoc. Geod., No. 40, Helsinki 1963.
478. MORITZ, H.: Accuracy of mean gravity anomalies obtained from point and profile
measurements. Publ. Isostat. Inst. Int. Assoc. Geod., No. 45, Helsinki 1964.
479. MORITZ, H.: Optimum smoothing of aerial gravity measurements. DGK, Reihe
A, Nr. 57, Miinchen 1967.
480. MORITZ, H.: M ass distributions for the equipotential ellipsoid. Boll. Geof. teor.
appl. X, 59-65, 1968a.
481. MORITZ, H.: Kinematical geodesy. DGK, Reihe A, Nr. 59, Miinchen 1968b.
482. MORITZ, H.: Least-squares estimation in physical geodesy. (OSU Repv No. 130),
DGK, Reihe A, Nr. 69, Miinchen 1970.
483. M o r i t z , H.: Kinematical geodesy II. OSU Rep. No. 165, 1971.
484. MORITZ, H.: Least squares collocation. DGK, Reihe A, Nr. 75, Miinchen 1973.
485-MORITZ, H.: Combination of aerial gravimetry and gradiometry. OSU Rep. No.
223, 1975.
486 i M o r i t z , H.: Integral formulas and collocation. Manuscripta Geodaetica J, 1-40,
1976.
487. MORITZ, H.: Least-squares collocation. Rev. Geoph. 16, 421-430, 1978.
488. Moritz H.: Advanced physical geodesy. H. Wichmann-Abacus Press, Karlsruhe-Tunbridge
Wells, 1980. [Имеется перевод: Мориц Г. Современная физическая геодезия. М.: Недра, 1983. ]
489. MORITZ, Н.: Geodetic Reference System 1980. In: С. C. Tscherning (ed.), The
Geodesist’s Handbook 1984 — Bull. Geod. 58, 388-398, 1984.
490. MORITZ, Η., I. I. M ueller : Earth rotation. The Ungar Publ. Co. New York
1987.
491. MORITZ, H., H. SuNKEL: Approximation methods in geodesy. H. Wichmann,
Karlsruhe 1978.
492. MOTT-SMITH, L. M.: Gravitational surveying with the gravity meter. Geophysics
2, 21-32, 1937.
493. MUELLER, I. I.: Spherical and practical astronomy. F. Ungar Publ. Co., New York
1969.
494. MUELLER, I. I.: Inertial survey systems in the geodetic arsenal. Bull. Geod. 55,
272-285, 1981.
403
Литература
495. MUELLER, I. L: Reference coordinate systems and frames: concepts and realiza
tion. Bull. Geod- 59, 181-188, 1985.
496. MUNDT, W.: Zum Problem der geologisch-geophysikalischen Komplexinterpretation. Gerlands Beitr. z. Geophysik 80, 483-490, 1971.
4 9 7 . M u r a t a , J.: A tr a n s p o rta b le a p p a ra tu s fo r a b s o lu te m e a su re m e n ts o f g ra v ity .
Bull. Earthquake Res. Inst. 53, 49-130, 1978.
498. N a g y , D.: The gravitational attraction of a right angular prism. Geophysics 31,
362-371, 1966.
4 9 9 . NAKAGAWA, I . , M . S a t o m u r a , T . S e t o , Y . H a s e g a w a , K . T s u k a h a r a , Y .
H a g iw
ara,
H . T a j im
a
, S. I z u t u y a , I .
M
urata,
S. N
a k a i,
O. N aka-
K.
K
500.
T. I s h i h a r a , N. S a t o , K.
T a j i m a , S. O h k a w a , Y . S u d a , M . M i s h i n a : On characteristics of LaCoste
and Romberg gravimeters (model G). J. Geod. Soc. of Japan 19, 1 0 0 - 1 1 2 , 2 0 ,
133-142, 1973/1974.
N a k a g a w a , I . , S. N a k a i , H . T a j i m a , S. I z u t u y a , Y . K o n o , R . S h i c h i , T .
H i g a s h i , H . F u j i m o t o , K . T a j i m a , M . M u r a k a m i , M . F u n a k i : Precise
calibration of scale values of LaCoste and Romberg gravimeters and interna
tional gravimetric connection along the Circum-Pacific zone. In: Proc. Gen.
Meeting of the I.A.G., 298-308, Tokyo 1982.
50 1 .
N akagaw
a,
g o m i,
o iz u m i,
H . F u j im o t o , Y . U
I . , R . S h i c h i , S. N a
k a i,
dagaw a,
K. Nakam
ura
, T. H
ig a s h i,
R. L i , Y.
Japan-China international gravimetric connection and char
acteristics of LaCoste and Romberg gravimeters. Report Geophysical Institute,
Kyoto Univ., 1987.
502. N a n c e , R. L.: Gravity: First measurement on the lunar surface. Science 166,
384-385, 1969.
503. NETTLETON, L. L.: Determination of density for the reduction of gravimeter
observations. Geophysics 4, 176-183, 1939.
504. N e t t l e t o n , L . L . : Geophysical prospecting for oil. McGraw-Hill, New York,
N.Y. 1940.
505. N e t t l e t o n , L. L.: Gravity and magnetics in oil prospecting. McGraw-Hill, New
York etc. 1976.
506. Nettleton L.L.L.J.B. La Coste, J.C. Harrison. Tests of an air borne gravity meter.
Geophysics 25, 181—202, 1960. [Имеется перевод: Неттлтон Л.Л., Ла Кост Л.,
Харрисон Дж. Испытания аэрогравиметра. — ОНТИ ВИМС, МГ и ОН СССР, сер.
геофиз., вып. 12, М., 1961.]
507. Newton I. Philosophiae naturalis principia mathematica. London 1687. [Имеется пе
ревод: Ньютон И. Математические начала натуральной философии. Пер. А.Н.
Крылова. Собрание трудов акад. А.Н. Крылова, т. 7.-М.-Л.: Изд-во АН СССР,
1936.]
508. N IEB AU E R , T . M . , J . К . HOSKINS, J . Е . F a l l e R: Absolute g ra v ity : A re co n
naissance tool for studying vertical crustal motions. JGR 91, 9145-9149, 1986.
509. N lE B A U E R , T . M., M. P . H u g h , J . E . F a l l e r : G a lile a n te s t fo r th e f i f t h force.
Phys. Rev. Letters 59, 609-612, 1987.
510. NIEMEIER, W.: Statistical tests for detecting movements in repeatedly measured
geodetic networks. Tectonophysics 71, 335-351, 1981.
511. NlEMElER, W.: Netzqualitat und Optimierung. In: H. Pelzer (Herausg.), Geodatische Netze in Landes- und Ingenieurvermessung II, 153-224, K. Wittwer,
Stuttgart 1985.
512. N0 RGAARD, G.: Et nyt gravimeter og nogle denned udf0 rte maalinger. Geod.
Inst. Skrifter, 3. Raekke, Bd. VII, Copenhagen 1945.
C hen, D. W
ang
:
404
Литература
513, O FF IC E R , С . В . , С . L . D
rake
: P la te d y n a m ic s a n d is o s ta s y in a d y n a m ic s yste m .
J. Geophys. 54, 1-19, 1983.
514. O g i e r , Mm A. SAKUMA: Mesures absolues de pesanteur en France. BGI No. 53,
98-113, 1983.
515 O ’ H A R A , N . W . , P . L . LYONS: P re p a ra tio n a n d o v e rv ie w o f th e g r a v ity a n o m a ly
m a p s o f th e U n ite d S ta te s. In : W . J . H in z e (e d .), 1985, 3 3 -3 7 , 1985.
516.OLDENBURG, D. W.: The inversion and interpretation of gravity anomalies. Geo
physics 39, 526-536, 1974.
517.O l i v e r , H. W ., S. L. R o b b i n s , R. B. G r a n n e l l , R. W. A l e w i n e , S. B i e h LER: Surface and subsurface movements determined by remeasuring gravity,
Sam Fernando earthquake — geology and geophysics. Calif. Div. Mines Geol.
Bull. 196, 195-211, 1975.
518.O n o , S.: Accuracy of gravimetric deflections of the vertical and optimization of
gravity networks. Bull. Geod. 59, 275-288, 1985.
5 1 9 .O o e , Μ., T. S u z u k i , H . H a n a d a , T. T s u b o k a w a , K . H o s o y a m a : implemen
tation of the free rise-and-fall (Sakuma type) apparatus for absolute measure
ment of gravity and obtained values at Mizusawa. In: Proc. Gen. Meeting of
the I.A.G., 349-357, Tokyo 1982.
520. PAIK, H. J.: Superconducting tensor gravity gradiometer. Bull. Geod. 55, 370381, 1981.
521. P a i k , H. J., J.-S. L e u n g , S. H. M o r g a n , J. P a r k e r : Global gravity survey
by an orbiting gravity gradiometer. EOS 69, 1601, 1610-1611, 1988.
522. P a l m a s o n , G.: Crustal rifting, and related thermo-mechanical processes in the
lithosphere beneath Iceland. Geol. Rundschau 79, 244-260,1981.
523. Парийский H.H., Перцев Б.П. Влияние инерционных сил на наблюдаемые прилив
ные изменения силы тяжести и наклонов-В сб.: Изучение земных приливов . М.: Наука, 1980, 22-35.
5 2 4 . PARSONS, В . , S. D a l y : T h e re la tio n s h ip b e tw e e n su rfa ce to p o g ra p h y , g r a v ity
anomalies, and temperature structure of convection. JGR 88, 1129-1144, 1983.
525. PAUL> Μ. K.: Recurrence relations for the integrals of associated Legendre func
tions. Bull. Geod. 52, 177-190, 1978.
526. PEDERSEN, L. B.: Constrained inversion of potential field data. Geophys. Prosp.
27, 726-748, 1979a.
527. PEDERSEN, L. B.: Wavenumber domain methods for fast interpretation of poten
tial field data. Geoexploration 17, 205-221, 1979b.
528. Пеллинен Л.П. Высшая геодезия.-М.; Недра, 1978.
529. PELZER, H.: Grundlagen der mathematischen Statistik und der Ausgleichsrechnung; Ubcrpriifung von Ausgleichsmodellen. In: H. Pelzer (Herausg.), Geodatische Netze in Landes- und Ingenieurvermessung II, 3-152, K. Wittwer,
Stuttgart 1985.
530. PEPPER, T. B.: The Gulf underwater gravimeter. Geophysics 6 , 34-44, 1941.
53).PETER, G., R. E. M o o s e , R. B. B e r u f f : New U.S. absolute gravity program.
EOS 67, 1393, 1986.
5 3 2 . P H IL L IP S , R. J., K. L A M B E C K : Gravity fields of the terrestrial planets: L o n g wavelength anomalies and tectonics. Rev. Geoph. 16, 27-76, 1980.
533.
P ic
k
, M ., J. P ic h a , V . V
y s c o c il :
T h e o r y o f th e e a r th ’s g r a v ity fie ld . E ls e v ie r
Scient. Publ. Comp., Amsterdam-London-New York 1973.
534. PIZETTI, P.: Sulla espressione della gravita alia superficie del geoide, supposto
ellissoidico. Atti R. Accad. Lincei, Ser. V, Vol. 3, 1894.
535. PLAUMANN, S.: Die Basisnetze fur gravimetrische Regionalvermessungen im Bereich des Rheinischen Schildes. Geol. Jahrbuch, Reihe E, Heft 16, 5-18, 1979a.
Литература
405
536. PLAUMANN, S.: Eine seegravimetrische Vermessung in der westlichen Ostsee. Geol.
Jahrbuch, Reihe E, Heft 14, 25-42, 1979b.
537. PLAUMANN, S.: Das Basisnetz fiir die gravimetrische Regionalvermessungin Nordbayem. Geol. Jahrbuch, Reihe E, Heft 24, Hannover 1982.
538. PLAUMANN, S.: Die Schwerekarte 1:500000 der Bundesrepublik Deutschland
(Bouguer-Anomahen), Blatt Nord. Geol. Jahrbuch, Reihe E, Heft 27, Hannover
1983.
5 3 9 . POITEVIN, C.: A digital data acquisition system for LaCoste-Romberg gravimeter.
BGI No. 47, 76-92, 1980.
540. PRAKLA-SEISMOS: Information No. 36. Hannover 1982.
541. PRATT, J. H.: On the deflection of the plumb-line in India, caused by the at
traction of the Himalaya Mountains and of the elevated regions beyond, and
its modification by the compensating effect of a deficiency of matter below the
mountain mass. Phil. Trans. Roy. Soc., London, 149, 745-778, 1859.
542.
P reston-T
homas,
H ., L . G . T
u r n bu ll,
E. G
reen,
T . M . D a u p h i n e e , S.
N. KALRA: An absolute measurement of the acceleration due to gravity at
Ottawa. Canad. J. Phys. 38, 824-852, 1960.
r i n c e , R. A., D. W . F o r s y t h : A s im p le o b je c tiv e m e th o d fo r m in im iz in g
crossover errors in marine gravity data. Geophysics 49, 1070-1083, 1984.
5 4 4 . PROTHERO, W. A. J r ., J. M . G o o d k i n d : A s u p e rc o n d u c tin g g ra v im e te r. R e v.
Sci. Inst г. 39, 1257-1262, 1968.
545. PROTHERO, W. A. J r ., J. M. GOODKIND: Earth-tide measurements with the
superconducting gravimeter. JGR 77, 926-936, 1972.
546. RABBEL, W., J. ZSCHAU: Static deformation and gravity changes at the earth’s
surface due to atmospheric loading. J. Geophys. 56, 81-99, 1985.
547. R a m s a y e r , K.: Gravimetermessungen mit Eichgewichten. DGK, Reihe B, Nr. 16,
Miinchen 1954.
548. R a pp , R. H.: Global anomaly and undulation recovery using GEOS-3 altimeter
data. OSU Rep. No. 285, 1979.
549. R a pp , R. H.: The earth’s gravity field to degree and order 180 using SEASAT
altimeter data, terrestrial gravity data, and other data. OSU Rep. No. 322,
1981.
543.
P
JE.
degree va riances o r th e e a rth s p o te n tia l, to p o g r a p h y a n d it s isos ta tic c o m p e n s a tio n s . B u ll. G eod. 56, 8 4 -9 4 , 1982.
R. H.: The need and prospects for a world vertical datum. In: Proc. of the
I.A.G. Symposia, XVIII. I.U.G.G. Gen. Ass., Hamburg 1983, Vol. 2 , 432-445,
Dep. of Geod. Science and Surveying, The Ohio State Univ., Columbus, Ohio,
1983a.
552. R a pp , R. H.: Tidal gravity computations based on recommendations of the Stan
dard Earth Tide Committee. Marees Terrestres, No. 89, 5814-5819, 1983b.
5 5 3 . R a pp , R. H.: The determination of geoid undulations and gravity anomalies from
SEASAT altimeter data. JGR 8 8 , 1552-1562, 1983c.
554. RAPP, R. H.: Report of Special Study Group No. 5.39 of I.A.G. — Fundamental
Geodetic Constants. In: Travaux de l’Association Internationale de Geodesie,
Tome 27, 464-478, Paris 1984.
555. R a pp , R. H.: Gravity anomalies and sea surface heights derived from a combined
Q E O S -3 /S E A S A T altimeter data set. JGR 91, 4867-4876, 1986a.
556. R a pp , R. H.: Global geopotential solutions. In: H. Siinkel (ed.), 1986, 365-415,
1986b.
5 5 7 . R a p p , R. H., J. Y. C ruz: Spherical harmonic expansions of the earth’s gravi
tational potential to degree 360 using 30* mean anomalies. OSU Rep. No. 376, 1986.
551. R a p p ,
Литература
406
Сн., G. B a l m i n o , Η. M u l l e r , W . B o s c h , B . M o y n o t : GRIM
gravity model improvement using LAGEOS (GRIM3-L1). JGR 90, 9285-9299,
1985.
559. RICHTER, B.: The spectrum of a registration with a superconducting gravimeter.
In: R. Vieira (ed.), 1986, 131-139, 1986.
560. RICHTER, B.: Das supraleitende Gravimeter. DGK, Reihe C, Nr. 329, Frankfurt
a. M. 1987.
558.
R e ig b e r ,
561. RIC H TER , B .: T h e lo n g p e rio d ic e la s tic b e h a v io u r o f th e e a rth . P ro ce e d . X I X .
IUGG Gen. Ass. Vancouver 1987, Interdisc. Symp. U4, 1988.
562.
R ic h t e r , F . M ., D . P . M
c K e n z ie :
O n som e consequences a n d p o ssib le causes
of layered mantle convection. JGR 8 6 , 6133-6142, 1981.
563. RlECKMANN, E ., S. G e r m a n : Das Potsdamer Schweresystem, seine vollstandige
Definition und seine richtige Ubertragung. DGK, Reihe B, Nr. 50, Miinchen
1957.
564. RIKITAKE, T.: Earthquake forecasting and warning. Center for Academic Publ.
Japan/Tokyo — D. Reidel Publ. Co./Dordrecht-Boston-London 1982.
565. RlNKER, R. L., J. E. F a l l e r : “Super Spring” — a long period vibration isolator.
In: B. N. Taylor, W. D. Phillips (eds.), Precision Measurement and Fundamen
tal Constants II, Nat. Bur. Stand. (U.S.), Spec. Publ. 617, 411-417, 1984.
566.
RIZOS, C.: The role of the geoid in high precission geodesy and oceanography.
DGK, Reihe A, Nr. 96, Miinchen 1982.
H., H.-G. W E N Z E L: R e la tiv e g r a v ity o b s e rv a tio n s a t B I P M , Sevres
in 1985 and 1986. BGI No. 59, 177-183, 1986.
568. R0DER, R. Η., M. S c h n u l l , H.-G. W e n z e l : Ein elektronisches Regel- und
Mefisystem fiir LaCoste-Romberg Gravimeter. ZfV 109, 494-497, 1984.
569.
R 0 D E R , R . Η ., M . S c h n u l l , H.-G. W e n z e l : Gravimetry with an electrostatic
feedback system. BGI No. 57, 72-81, 1985.
570. R o d e r , R. Η., M. S c h n u ll , H.-G. W e n z e l : SRW feedback for LaCoste-Romberg gravimeters with extended range. BGI No. 62, 46-50, 1988.
571. RUMMEL, R.: Satellitengradiometrie. ZfV 110, 242-257, 1985.
572. R u m m el , R.: Satellite Gradiometry. In: H. Siinkel (ed.), 1986, 317-363, 1986.
573. RUMMEL, R., O. L. COLOMBO: Gravity field determination from satellite gra-
567. R 0 D E R , R .
diometry. 3uI2. <Seo3 S&, 233-246, £385.
574.R u n c o r n , S. K.: Convection currents in the earth’s mantle. Nature 195, 12481249, 1962.
575#RUNDLE, J. B.: Deformation, gravity and potential change due to vplcanic loading
of the crust. JGR 87, 10729-10744, 1982.
576. RuNDLE, J. B., J. H. WHITCOMB: Modeling gravity and trilateration data in
Long Valley, California, 1983-1984. JGR 91, 12675-12682, 1986.
577. RUYMBEKE, M. VAN: Transformation of nine LaCoste Romberg gravimeters in
feedback systems. Marees Terrestres No. 93, 6202-6228, 1985.
578.
RUYMBEKE, M. VAN: Calibration of LaCoste-Romberg gravimeters by the inertial
force resulting from a vertical periodic movement. In: R. Vieira (ed.), 1986, 3542, 1986.
579. R y b a r , J.: Eotvos torsion balance model El-54. Geof. Pura e Applicata 37, 79-89,
1957.
580. RYMER, H., G. C. BROWN: Gravity fields and the interpretation of volcanic
structures: geological discrimination and temporal evolution. J. of Volcanology
and Geothermal Research 27, 229-254, 1986.
581. RYMER, H., G. C. B row n : Causes of microgravity change at Poas volcano, Costa
Rica: an active but non-erupting system. Bull. Vulcanol. 49, 389-398, 1987.
Литература
5 8 2 . S a b i n e , E .: A n a c c o u n t o f e x p e rim e n ts to d e te rm in e th e fig u re o f th e e a rth b y
583.
S
means of the pendulum vibrating seconds in different latitudes. London 1825.
, M. U., B. B o d r i , V. S. N a z a r e n k o , K h . G. T a d z h i d i n o v : Lunar
gravimetry. Academic Press, London-Orlando 1986.
a g it o v
584. S a k u m
a
, A . : E t a t a c tu e l de la n o u v e lle d e te r m in a tio n ab so lue de la p e s a n te u r au
Bureau International des Poids et Mesures, Sevres. Bull. Geod. No. 69, 249-260,
1963.
585. SA K U M A , A . : A p e rm a n e n t s ta tio n fo r th e a b s o lu te d e te r m in a tio n o f g r a v ity a p
proaching one micro-gal accuracy. In: R. S. Mather, P. V. Angus-Leppan (eds.),
Proc. Symp. on Earth’s Gravitational Field and Secular Variations in Position,
The School of Surveying, The University of New South Wales, 674-684, Sydney
1973.
586.S a k u m a , A.: An industrialized absolute gravimeter: Type GA 60. BGI No. 53,
114-118, 1983.
587, S a k u m a , A.: Gravitational acceleration, mass, and electrical quantities. In: B. N.
Taylor, W. D. Phillips (eds.), Precision Measurement and Fundamental Con
stants II, Nat. Bur. Stand. (U.S.), Spec. Publ. 617, 397-404, 1984.
588.SANDWELL, D. T.: A detailed view of the South Pacific geoid from satellite al
timetry. JGR 89, 1089-1104, 1984.
589. S a n s o , F .: R e ce n t advances in th e th e o ry o f th e g e o d e tic b o u n d a ry va lu e p ro b le m .
Rev. Geoph. 19, 437-449, 1981.
590. S a r h i d a i , A.: Design of fundamental gravity networks based on the approxima
tion of the given variance-covariance matrix. Bull. Geod. 60, 355-376, 1986.
5 91.S a t o m u r a , Μ . , I. N a k a g a w a , H . T s u k a m o t o , T . H i g a s h i , Y . F u k u d a , K.
N a k a m u r a : Secular changes of gravity observed in Kinki district, Japan. BGI
No. 59, 215-223, 1986.
592.SCHADLICH, M., A. L a n g , M. S o m m e r : Das staatliche gravimetrische Netz I.
Ordnung der Deutschen Demokratischen Republik. Arb. a. d. Geod. u. Kart.
Dienst, Bd. 3, 55-83, Leipzig 1964.
593. ScHERNECK, H.-G.: Tidal gravimetry: Physical models and numerical methods
for the reduction of environmental and instrumental problems in applications to
earth and ocean tide measurements. Doctoral Dissertation, Uppsala University
1986.
594. ScHLEUSENER, A.: Nomogramme fur Gelandeverbesserung von Gravimetermessungen in der angewandten Geophysik. Beitr. z. angew. Geophysik 8 , 415-430,
1940.
595.SCHLEUSENER, A.: Die Gravimetermessungen. In: O. Niemczyk, Spalten auf Is
land, 124-175, K. Wittwer, Stuttgart 1943.
596.SCHLEUSENER, A.: Grundlagen der grofiregionalen Gravimetermessungen fur das
Amt fur Bodenfbrschung. Geol. Jahrbuch fur 1943-1948, Bd. 64, 187-199, 1950.
597.ScHLEUSENER, A., W. TORGE: Investigations of secular gravity variations in
Iceland. J. Geophys. 37, 679-701, 1971.
598. ScHLEUSENER, A., W. TORGE, H. D r e w e s : Prazisionsschweremessungen in
Nordostisland 1970/71 DGK, Reihe B, Nr. 206, Miinchen 1974.
599. ScHLEUSENER, A., W. TORGE, H. D r e w e s : The gravity field of Northeastern
Iceland. J. Geophys. 42, 27-45, 1976.
600.SCHMITT, G.: Optimal design of geodetic networks. In: R. Sigl (ed.), 1982, Vol.
Ill, 7-12, 1982.
601 .ScHMOKER, J. W.: Accuracy of borehole gravity data. Geophysics 43, 538-542,
1978.
407
Литература
408
Μ. Μ.: Erste Beobachtungen der Schweregezeiten in der zentralen
Antarktis. Gerlands Beitr. z. Geophysik 80, 4 9 1 -4 9 6 , 1971.
603.SCHNULL, M., R. H. R 0 D E R , H.-G. W enzel : An improved electronic feedback
for LaCoste-Romberg gravity meters. BGI No. 55, 27-36, 1984.
604. SCHULER, R., G. HARNISCH, H. FISCHER, R. F r e y : Absolute Schweremessungen
mit Reversionspendeln in Potsdam 1968-1969. Veroff. Zentralinst. f. Physik d.
Erde Nr. 10, Potsdam 1971.
605. SCHULLER, K.: Ein Beitrag zur Auswertung von Erdgezeitenbeobachtungen.
DGK, Reihe C, Nr. 227, Munchen 1976.
6 0 2 .SCHNEIDER,
6 0 6 . SCHULLER, K . : S im u lta n e o u s t id a l a n d m u lti- c h a n n e l in p u t a n a ly s is as im p le
mented in the HYCON-method. In: R. Vieira (ed.), 1986, 515-519, 1986.
607. Schulze , R.: Gravimetermessungen fiber grofie Entfernungen. DGK, Reihe B,
Nr. 35, Munchen 1957.
608. Schulze , R.: Automation of the sea gravimeter Gss2 . JGR 67, 3397-3401, 1962.
609.S chutz , B. E., B. D. T apley , J. B. L undberg , P. H alamek : Simulation of
a Geopotential Research Mission for gravity studies. Manuscripta Geodaetica
12, 51-63, 1987.
610.Schwarz , K. P.: Grundgleichungen und Fehlermodelle fur inertiale Mefisysteme.
ZfV 104, 447-460, 1979.
6 1 1 .SCHWARZ, K. P.: Inertial surveying and geodesy. Rev. Geoph. 21, 8 7 8 -8 9 0 , 1983.
612.SCHW ARZ, K- P.: Data types and their spectral properties. In: К. P. Schwarz
(ed.), Proc. Beijing Int. Summer School “Local gravity field approximation”,
1 -6 5 , Div. of Surv. Eng., Univ. of Calgary, 1985.
613.S chwarz , K. P. (ed.): Inertial technology for surveying and geodesy. Proc. Third
Int. Symp., Banff, Canada 1985. The Division of Surveying Eng., The Univ. of
Calgary, Canada 1986a.
614.SCHWARZ, K. P.: Inertial modelling — a survey of some open problems. Bull.
Geod. 60, 105-120, 1986b.
615. S chwarz , K. P.: The error model of inertial geodesy — a study in dynamic
system analysis. In: H. Siinkel (ed.), 1986, 463-504, 1986c.
616.SCHWARZ, K . P ., G . L a c h a p e l l e : L o c a l c h a ra c te ris tic s o f th e g r a v ity a n o m a ly .
B u ll. G e o d. 54, 2 1 -3 6 , 1980.
617. SCHWEYDAR, W.: Beobachtung
der Anderung der Intensitat der Schwerkraft
durch den Mond. Kgl. Preufi. Akad. d. Wiss., phys.-math. Cl., 454-465, 1914.
618.SCHWEYDAR, W.: Die Bedeutung der Drehwaage von Eotvos fur die geologische
Forschung nebst Mitteilung der Ergebnisse einiger Messungen. Z. f. prakt. Geologie 26, 157-162, 1918.
619.SCHW IDERSKI, E. W.: On charting global ocean tides. Rev. Geoph. 18, 243-268,
1980.
620.SCHW IDERSKI, E. W.: Atlas of ocean, tidal charts and maps, part I: The semidi
urnal principal lunar tide М2 . Marine Geodesy 6 , 219-266, 1983.
621.SEEBER, G.: Inertiale Vermessungssysteme und ihre Anwendungsmoglichkeiten in
der Geodasie. ZfV 104, 460-471, 1979.
622.SEEBER, G.: Die Rolle des NAVSTAR Global Positioning Systems fiir die Losung
geodatischer Aufgaben. ZfV 109, 1-11, 1984.
623.SEEBER, G.: Netze der Satellitengeodasie. In: H. Pelzer (Herausg.), Geodatische
Netze in Landes- und Ingenieurvermessung II, 335-372, K. Wittwer, Stuttgart
1985a.
624.SEEBER, G.: Point positioning in marine geodesy (1 9 7 9 -1 9 8 3 ). Marine Geodesy
9, 3 6 5 -3 8 0 , 1985b.
Литература
625. SEEBER, G.: Use of GPS for the determination of precise height differences —
models and results. In: Proc. Int. Symp. on the Definition of the Geoid, Vol. 2,
545-554, 1 st. Geogr. Mil. Ital., Firenze 1986.
626. SEEBER, G.: Satellitengeodasie. W. de Gruyter, Berlin-New York 1989.
627. SEEBER, G., A. SCHUCHARDT, G. W ubbena : Beobachtung eines grofiraumigen
GPS-Netzes mit Zweifrequenzempfangem. ZfV 112, 397-401, 1987.
628. S eg a w a , J., C. BowiN: The Tokyo surface ship gravity meter: Recent develop
ments and results of comparison measurements. Geophysics 40, 246-255, 1975.
629* S egawa , J., K. K aminuma , T. K asuga : A new surface ship gravity meter
“NIPRORI-1 ” with a servo accelerometer. J. Geod. Soc. of Japan 27, 102-130,
1981.
630.S e id l e r , E., T. L em m ens , W . R. J a co by ;· On the global gravity field and plate
kinematics. Tectonophysics 96, 181-202, 1983.
631.SEISMOS — Angewandte Geophysik seit 1921. Herausg. zum 6 . Welt-Erdol-Kongress, Frankfurt a. M. 1963, Seismos GmbH, Hannover 1963.
632. S e n d a , O ., T. K it u n e z a k i , T. I n o u y e , K. A n d o : A determination of the
acceleration of gravity of the NRLM. Rep. Nat. Res. Laboratory of Metrology
20, 89-173, 1971.
6 33.S H E N G , Y. Z.: Prediction of polar motion. Bull. Geod. 56, 258-273, 1982.
634. Шокин П.Ф. Гравиметрия г M.: Геодезиздат, 1960.
635. Журавлев Н.Ф. Определение сжатия земного эллипсоида по измерениям силы тя
жести.-Тр. ГАИШ, т. 14, ч. 2, М., 1940.
636.S ID E R IS , M. G.: A fast Fourier transform method for computing terrain correc
tions. Manuscripta Geodaetica 10, 66-73, 1985.
637. S lG L , R. (ed.): Proc. Int. Symp. on Geod. Networks and C o m p u ta tio n s , Munich
1981, Vol. Ill: Optimal design of geodetic networks, Vol. V: Network analysis
models. DGK, Reihe B, Nr. 258, Miinchen 1982.
6 3 8 .S IG L , R.: Introduction to potential theory. Abacus Press, Cambridge, MA, 1985.
639.S ig l , R., W. T o rge , H. B eetz , K. S t u b e r : Das Schweregrundnetz 1976
der Bundesrepublik Deutschland (DSGN76), Teii I. DGK, Reihe B, Nr. 254,
Miinchen 1981.
6 4 0 .S IM O N , Z .: A more precise mechanical theory o f Askania gravity meters. Studia
Geophys. et Geod. 29, 1-31, 1985.
641.S JO BE R G , L. E.: Integral formulas for heterogeneous data in physical geodesy.
Bull. Geod. 53, 297-315, 1979.
642.S jo g r en , W. L.: Planetary geodesy. Rev. Geoph. 21, 528-537, 1983.
643.S j o g r e n , W. L., B. G. B il l s , P. W. B ir k e l a n d , P. B. E s p o s it o , A. R.
KONOPLIV, N. A. MOTTINGER, S. J. RlTKE: Venus gravity anomalies and
their correlations with topography. JGR 88, 1119-1128, 1983.
644.Sk e e l s , D. C .: Ambiguity in gravity interpretation. Geophysics 12, 43-56, 1947.
645.S l ic h t e r , L. B., W. Z u r n , E. S y r s t a d , L. K n o p o f f , W. D. S m y t h e , H.
UFFELMANN: Long-period gravity tides at the south pole. JGR 84, 6207-6212,
1979.
646.Smith , D. E., D. C. C hristodoulidis, R. K olenkiewicz , S. F ricke , S.
B lackwell: A global geodetic reference frame from LAGEOS ranging
(SL5.1AP). JGR 90, 9221-9233, 1985.
647. SOFFEL, Μ ., H. RUDER, M. S c h n e id e r : Uber die Grundlagen der heutigen
Raum-Zeit-Vorstellung. In: M. Schneider (Herausg.), Die Arbeiten des Sonderforschungsbereichs 78 Satellitengeodasie der Techn. Univ. Miinchen. Veroff.
Bayer. Komm. fur die Intemat. Erdmessung, Astron.-Geod. Arb., Nr. 43, 173187, Miinchen 1983.
409
410
Литература
J. A.: Gravity disturbance models in the APT System. In: К. P. Schwarz
(ed.), 1986a, 137-160, Banff 1986.
64 9 .S O M IG L IA N A , C.: Teoria generale del campo gravitazionale delTellisoide di rotazione. Mem. della Soc. Astron. ItaL, Vol. IV, Milano 1929.
650.SONG X ingh , Hsu H o u tze , Hou Z hangwai: On the adjustment of national
gravity fundamental network in China. BGI No. 59, 129-132, 1986.
651JSPRATT, R. S.: Modelling the effect of atmospheric pressure variations on gravity.
Geophys. J. R. Astr. Soc. 71, 173-186, 1982.
652. Stacey, F.D. Physics of the Earth w. ed., John Wiley and Sons Jnc., New York etc.
1977. [Имеется перевод издания 1969 г.: Стейси Ф. Физика Земли. М., Мир,
1972.]
653.S t a c e y , F. D., G. J. T u c k , I. M o o r e , S. С. H o l d i n g . В. С. G o o d w i n , R.
ZHO U: Geophysics and the law of gravity. Rev. of Modern Physics 59, 157-174,
1987.
654.S t a n l e y , H. R.: The GEOS-3 Project. JGR 84, 3779-3783, 1979.
655.STEIN, R. S.: Contemporary plate motion and crustal deformation. Rev. Geoph.
25, 855-863, 1987.
656.STEINHAUSER, P., D. R uess , D. Z uch , H. H aitzmann , G. W alach : Thegeoid
in Austria: Digital models of mean topographic heights and rock densities.
In: Proc. of the I.A.G. Symposia, XVIII. I.U.G.G. Gen. Ass., Hamburg 1983,
Vol.l, 322-338, Dep. of Geod. Science and Surveying, The Ohio State Univ.,
Columbus, Ohio, 1983.
657.STERNECK, R. VON: Der neue Pendelapparat des k. u. k. Militar-Geographischen
Institutes. Mitt d. К. K. Milit.-Geogr. Inst., VII, Wien 1887.
658.Stokes G.G. On the variation of gravity on the surface of the Earth. Transact. Cambrid
ge Phil. Soc. 8, 672—695, 1849. [Имеется перевод: Стокс Д. О силе тяжести на
земной поверхности.-В сб.1 Статьи о силе тяжести и фигуре Земли.-М.! Геодез издат, 1961,9—44.]
659. S t r a n g v a n H e e s , G. L.: Zur zeitlichen Anderung von Schwere und Hohe. ZfV
102, 444-450, 1977.
6 6 0 .S t r a n g v a n H e e s , G. L.: Gravity survey of the North Sea. Marine Geodesy 6,
167-182, 1983.
661. STRANGE, W . E., D . G . C a r r o l l : T h e re la tio n o f g r a v ity change a n d e le v a tio n
change in s e d im e n ta ry basins. EOS 56, 1105, 1974.
662.SUNKEL, H.: An isostatic earth model. OSU Rep. No. 367, 1985.
6 6 3 .SUN KEL, H. (ed.): Mathematical and numerical techniques in physical geodesy.
Lecture Notes in Earth Sciences 7, Springer, Berlin etc. 1986.
664.SUNKEL, H.: Gravity field determination — made in Austria. Gerlands Beitr. z.
Geophysik 96, 54-74, 1987.
665.Sv n k e l , H., G. K r a ig e r : The prediction of free-air anomalies. Manuscripta
Geodaetica 8, 229-248, 1983.
6 6 6 . Sz ABO, B.: World calibration standard, first order gravity net and absolute gravity
system. Boll. Geof. teor. appl. V, 251-259, 1963.
6 6 7 „T a l w a n i , M.: Computer usage in the computation of gravity anomalies. In: B .
Alder et al. (eds.), Methods in computational physics, 13, 343-389, 1973.
648.S O LTZ,
6 6 8 . T A LW A N I, M . , M . E w
in g
: R a p id c o m p u ta tio n o f g r a v ita tio n a l a t t r a c t io n o f th re e -
dimensional bodies of arbitrary shape. Geophysics 25, 203-225, 1960.
669. T A LW A N I, M., H.-G. K A H L E : Apollo-17 traverse gravimeter experiment: prelim
inary results. Geol. Jahrbuch, Reihe E, Heft 7, 85-91 (Sonderband Mond- und
Planet enforschung), 1976.
Литература
a n i , М . , G. H . S u t t o n , J. L . W o r z e l : A crustal section across the Puerto
Rico trench. JGR 64, 1545-1555, 1959.
T a l w a n i , Μ., X. L e P i c h o n , M. E w i n g : Crustal structure of the mid-ocean
ridges 2 . Computed model from gravity and seismic refraction data. JGR 70,
341-352, 1965.
6 7 0 .T a l w
671
672.TANN ER, J . G ., W . T
orge,
D . N a g y : M o d e m g r a v im e tr y a n d it s ro le in geodesy.
In: Proc. Canad. Inst, of Surveying, Centennial Convention 1, 427-451, 1982.
6 7 3 /T a n n i , L.: On the continental undulations of the geoid as determined from the
present gravity material. Publ. Isostat. Inst, of I.A.G., No. 18, Helsinki 1948.
674. T a p l e y , B. D., G . H. B o r n , Μ. E. P a r k e : The SEASAT altimeter data and
its accuracy assessment. JGR 87, 3179-3188, 1982.
675. T a p l e y , B . D ., B . E . S c h u t z , C. K . S h u m , J . C. R i e s , D . N . Y u a n : T h e
TOPEX gravity model: a status report (abstract). EOS 67, 261, 1986.
6 76. TARANTOLA, A ., B. VALETTA: Generalized nonlinear inverse problems solved
using the least squares criterion. Rev. Geoph. 2 0 , 219-232, 1982.
677. T ate , D. R: Acceleration due to gravity at the National Bureau of Standards. J.
Res. Nat. Bur. Stand., Washington, D. C., C72, 1-20, 1968.
678. T a y l o r , P. T., T. K e a t i n g , W. D. K a h n , R. A. L a n g e l , D. E. S m i t h , C .
C. SCHNETZLER: GRM: Observing the terrestrial gravity and magnetic fields
in the 1990’s. EOS, 609-611, 1983.
6 7 9 . T h o m s o n , W . : On the rigidity of the earth, shiftings of the earth’s instantaneous
axis of rotation; the irregularities of the earth as a timekeeper. Phil. Trans.
Roy. Soc., London, 1863.
6 8 0 . THULIN, A.: Une determination absolue de g au pavilion de Breteuil, par la
methode de la chute d’une regie divisee. Ann. Geophys. 16, 105-127, 1960.
681. T hyer , R. F.: Geophysical exploration — Australia. Geophysics 28, 273-305,1963
682. THYSSEN, St . v ., A. SCHLEUSENER: Ein neuer Schweremesser. 01 und Kohle,
382-384, 1934.
683. TODHUNTER, I.: A history of the mathematical theories of attraction and the
figure of the earth. Macmillan and Co. 1873 (Dover Publ. Inc., New York 1962).
684. TOMASCHEK R.: Tides of the solid earth. In: S. Fliigge (Herausg.), Handbuch der
Physik, 48, 775-845, Springer-Verlag,Berlin-Gottingen-Heidelberg 1957.
685. T
omaschek,
R ., W . S c h a f f e r n i c h t : l i b e r d ie p e rio d is c h e n V e ra n d e ru n g e n d e r
Vertikalkomponente der Schwerebeschleunigung in Marburg a. d. Lahn. Sitz.
Ber. Ges. Beford. ges. Naturwiss., Marburg 67, 151-174, 1932.
686. T O M O D A , Y., H. F U JIM O T O : G r a v ity a n o m a lie s in th e w e s te rn P a c ific a n d geo
physical interpretation of their origin. J. Phys. Earth 29, 387-419, 1981.
6 8 7 . T O M O D A , Y., J . S e g a w a , T . T a k e m u r a : C o m p a ris o n m e a su re m e n ts o f g r a v ity
at sea using a TSSG and a Graf-Askania sea gravimeter. J. Phys. Earth 2 0 ,
267-270, 1972.
6 8 8 . T o r g e , W.: Untersuchungen zur Genauigkeit moderner Langstreckengravimetermessungen. Wiss. Arb. Univ. Hannover Nr. 29, 1966.
689. TORGE, W.: Grofiraumige Schweremessungen mit LaCoste-Romberg-Gravimetern
1964-1970. DGK, Reihe B, Nr. 183, Miinchen 1971.
6 9 0 „ T o r g e , W.: Zum Aufbau von Prazisionsschwerenetzen. In: Festschrift fiir Walter
Hopcke zum 70. Geburtstag, Wise. Arb. Univ. Hannover Nr. 83, 155-167, 1978.
6 9 1 . T o r g e , W.: Geodesy — an introduction. W. de Gruyter, Berlin-New York 1980a.
6 9 2 . T o r g e , W.: Das Schweregrundnetz 1976 der Bundesrepublik Deutschland
(DSGN76). ZfV 105, 454-457, 1980b.
6 9 3 . TORGE, W . : Gravity and height variations connected with the current rifting
episode in northern Iceland. Tectonophysics 71, 227-240, 1981.
411
Литература
412
694.TORGE, W.: The present state of relative gravimetry. In: Proc. Gen. Meeting of
the I.A.G., 319-324, Tokyo 1982.
695 .T o r g e , W.: Observation strategy and -technique in gravimetry. In: B. G. Hars-
son (ed.), Optimization of geodetic operations, 126-210, Norges Geografiske
Oppmaling, Publ. 3/1984.
696. TORGE, W.: Accuracy and stability of height reference surface. In: H. Pelzer,
W. Niemeier (eds.), Determination of heights and height changes, 69-82, F.
Dummler, Bonn 1986a.
697. T o r g e , W.: Gravimetry for monitoring vertical crustal movements: potential and
problems. Tectonophysics 130, 385-393, 1986b.
698. T o r g e , W.: Absolute Schweremessung mit transportablen Gravimetem — ein
Umbruch in der Gravimetrie. ZfV 1 1 2 , 224-234, 1987.
699#T o r g e , W.: I.A.G. Section III — Determination of the gravity field. Rep. of
Activities 1983-1987, In: Travaux de ГAssociation Internationale de G£odesie,
Tome 28, 241-252, Paris 1988a.
700.T o r g e , W.: Zum Aufbau von Schwerebezugssystemen. In: Festschrift Rudolf Sigl
zum 60. Geburtstag, DGK, Reihe B, Nr. 287, 207-217, Miinchen 1988b.
7 0 1 *T o r g e , W., H. D r e w e s : Gravity variations with time in northern Iceland. J.
Geophys. 43, 771-790, 1977.
702. T o r g e , W., E. K a n n g i e s e r : Periodic calibration errors of LaCoste and Romberg
model G and D gravity meters. DGK, Reihe B, Nr. 252, 81-94, Miinchen 1980.
703. T o r g e , W., E. K a n n g i e s e r : Gravity and height variations connected with the
recent rifting process in northern Iceland 1975-1981. J. Geophys. 53, 24-33,
1983.
7 0 4 . T o r g e , W., E. K a n n g i e s e r : Regional and local vertical crustal movements in
northern Iceland, 1965-1980. JGR 90, 10173-10177, 1985.
705. T o r g e , W., H.-G. W e n z e l : Gravimetric earth tide observations in Iceland.
Marees Terrestres No. 74, 4312-4318, 1976.
7 0 6 . TOR GE, W . , H.-G. W e n z e l : C o m p a ris o n o f e a rth tid e o b s e rv a tio n s w it h n in e
different gravimeters at Hannover. In: M. Bonatz, P. Melchior (eds.), 1977,
632-640, 1977.
707. TOR GE, W., G . B o e d e c k e r , W. D o e r g e : Eichung von LaCoste-RombergGravimetem auf der europaischen Gravimetereichlinie zwischen Miinchen und
Bodo. DGK, Reihe B, Nr. 219, Miinchen 1976a.
708.
TOR GE, W . , L . N . M
a v r id is ,
H. D
rew es,
D. A
r abelo s:
A n la g e eines Schwe-
renetzes hoher Prazision im Bereich der Agaischen Platte. ZfV 101, 213-220,
1976b.
709. T o r g e , W., G. W e b e r , H.-G. W e n z e l : 6 ' x 1 0 ' Bouguer anomalies and eleva
tions of Europe including marine areas. BGI No. 55, 37-45, 1984a.
7 1 0 . TO R G E, W . , G . W e b e r , H . - G . W e n z e l : 6 ' x 10' free air gravity anomalies of
Europe including marine areas. Marine Geophys. Res. 7, 93—111 , 1984b.
711. T o r g e , W., G. W e b e r , H.-G. W e n z e l : High resolution gravimetric geoid
heights and gravimetric vertical deflections of Europe including marine areas.
Marine Geophys. Res. 7, 149-175, 1984c.
712. T o r g e , W., R. H. R o d e r , M. S c h n u l l , H.-G. W e n z e l , J. E. F a l l e r : First
results with the transportable absolute gravity meter JILAG-3. Buff. Geod. 61,
161-176, 1987.
713. T o r g e , W., R. H. R o d e r , M. S c h n u l l , H.-G. W e n z e l , J. E. F a l l e r : Lab
oratory and field tests of JILAG-3 absolute gravimeter. BGI No. 62, 36-40,
1988.
413
Литература
714.
TR ESL, J .: R e a c tio n o f lin e a r g ra v im e tric m e a s u rin g syste m s to d is tu rb a n c e s o f
715.
TSCHER.NING,
equilibrium state. Studia Geophys. et Geod. 29, 32-43, 1985.
С. C.: Covariance expressions for second and lower order derivatives
of the anomalous potential. OSU Rep. No. 225, 1976.
7 1 6 . TS C H E R .N IN G , С. C.: (ed.): Proceedings of the International Symposium “Manage
ment of Geodetic Data”, K0benhavn 24.-26. August 1981. Geod. Inst. Medd.
No. 55, Kobenhavn 1981.
717. TSCHERNING, C. C.: Comparison of some methods for the detailed representation
of the earth’s gravity field. In: E. W. Grafarend, R. H. Rapp (eds.), Advances
in Geodesy, 91-99, Washington 1984.
718. TSCHERNING, C. C.: Current problems in gravity field approximation. In: Proc.
1. Hotine-Marussi-Symp., Rome 1985, 363-384, Politecnico di Milano, 1986.
719. TSCHERNING, C. C., R. F o r s b e r g : Geoid determination in the Nordic countries
from gravity and height data. In: Proc. Int. Symp. on the Definition of the
Geoid, Vol. 1, 325-352, 1st. Geogr. Mil. Ital., Firenze 1986.
720. TSCHERNING, C. C., R. H. R a pp : Closed covariance expressions for gravity
anomalies, geoid undulations, and deflections of the vertical implied by anomaly
degree variance models. OSU Rep. No. 208, 1974.
721. T sc h e r n in g , C. C., F. S a n so , D. A r a b e l o s : Merging regional geoids — pre
liminary considerations and experiences. In: Proc. Int. Symp. on the Definition
of the Geoid, Vol. 1, 41-60, 1st. Geogr. Mil. Ital., Firenze 1986.
722.
TSU BO I,
C h .: Gravity. George Allen and Unwin, London 1983.
Сн., T. F u c h i d a : R e la tio n s b e tw e e n g r a v ity values a n d c o rre s p o n d in g
subterranean mass distribution. Bull. Earthquake Res. Inst. Tokyo Univ. 15,
636-649, 16, 273-284, 17, 351-384, 1937/1939.
724. Тиск, G. J., F. D. S t a c e y , S. C. H o l d in g , G. I. M o o r e : Large scale mea
surements of the Newtonian gravitational constant. BGI No. 59, 162-166, 1986.
725. U O T IL A , U. A.: Analysis of correlation between free-air anomalies and elevations.
OSU Rep. No. 94, 1967.
723.
TS U B O I,
726. UOTILA, U. A.: Report on activities of working group no. 2 of IGB “ World
Gravity Standards”. BGI No. 51, 32-33, 1982.
H. D.: Field trials with the LaCoste and Romberg straight fine gravi
meter. Geophysics 48, 611-617, 1983.
728 V A L L IA N T , H. D.: An inherently linear electrostatic feedback method for gravity
meters. JGR 91, 10463-10469, 1986.
7 2 9 .V a l l i a n t , H . D ., J . H a l p e n n y , R. V . C o o p e r : A microprocessor-based con
troller and data aquisition system for LaCoste and Romberg air-sea gravity
meters. Geophysics 50, 840-845, 1985.
730У а ш с ЁК, P., E. J. K r a k iw sk y : Geodesy: The Concepts. 2. rev. ed., Elsevier
Scient. Publ. Comp., Amsterdam-New York 1986.
731VENEDIKOV, A. P.: Analysis of earth tidal data. In: M. Bonatz, P. Melchior (eds.),
1977, 129-152, 1977.
727.
V A L L IA N T ,
732.
V E N E D IK O V , A . P ., P . M
e l c h io r ,
B. D
ucarm
E: N e w re s u lts o b ta in e d fro m
the analysis of 20 years of earth tides measurements. In: R. Vieira (ed.), 1986,
149-155, 1986.
733. Vening-Meinesz F.A.: A formula expressing the deflection of the plumb-lines in the
gravity anomalies and some formulae for the gravity field and the gravity potential
outside the geoid. In: Proc. Koninkl. Ned. Akad. Wetenschap 31, 315-331, Amster
dam 1928. [Имеется перевод: Венинг-Мейнес Ф. Формула, выражающая уклоне
Литература
414
ния отвеса через гравитационные аномалии и некоторые формулы для гравита
ционного поля и гравитационного потенциала вне геоида-В сб. Статьи о силе
тяжести и фигуре Земли. ~М.; Геодезиздат., 1961, 137-152.]
734. Vening-Meinsz, F.A.: Theory and practice of pendulum observation at sea, Vol. I, II.
Publ. of the Netherlands Geodetic Comm., Delft 1929/1941. [Имеется перевод:
Венинг-Мейнес Ф.А. Гравиметрические наблюдения на море. Теория и практика
- М..' Геодезиздат, 1940.]
735. V E N IN G -M E IN E S Z , F. A.: Une nouvelle methode pour la reduction isostatiquc
regionale de l’intensite de la pesanteur. Bull. Geod. No. 29, 33-51, 1931.
736. V E N IN G -M E IN E S Z , F. A.: Gravity expeditions at sea 1923-1938, Vol. IV. Publ.
of the Netherlands Geodetic Comm., Delft 1948.
737. V IE IR A , R. (ed.): Proc. 10th Intemat. Symp. on Earth Tides, Madrid 1985. Consejo Superior de Invest. Scient., Madrid 1986.
738. V in e , F. J., D. H. M atthew s : Magnetic anomalies over ocean ridges. Nature
199, 947-949, 1963.
739. V olet , C h .: Sur la mesure absolue de la gravite. Comptes Rendus Acad. Sci.
Paris 222, 373-375, 1946.
740.
V o let , C h .: L’intensite de la pesanteur determinee par l’observation de la chute
741.
V O L E T , C h .:
d’un corps. Comptes Rendus Acad. Sci. Paris 224, 1815-1816, 1947.
M e su re de l ’a c c e le ra tio n due a la p e sa n te u r, a u P a v ilio n de B re te u il.
Comptes Rendus Acad. Sci. Paris 235, 442-444, 1952.
742 .VYSCO CIL, V . : On the problem of constructing density models of the lithosphere.
Studia Geophys. et Geod. 22, 402-410, 1978.
7 4 3 . W AG N ER, C. A . : R a d ia l v a ria tio n s o f a s a te llite o r b it due to g r a v ita tio n a l e rro rs:
implications for satellite altimetry. JGR 90, 3027-3036, 1985.
7 4 4 . W AG N ER, C . A . , D. C . M c A d o o : T im e v a ria tio n s in th e e a r th ’s g r a v ity fie ld
detectable with Geopotential Research Mission intersatellite tracking. JGR 91,
8373-8386, 1986.
745. W A H R , J. M.: Body tides on an elliptical, rotating, elastic and oceanless earth.
Geophys. J. R. Astr. Soc. 64, 677-704, 1981.
746. W A H R , J. M.: Deformation induced by polar motion. JGR 90, 9363-9368, 1985.
747. WALSH, J. B., J. R. R ice : Local changes in gravity resulting from deformation.
JGR 84, 165-170, 1979.
748. W ARBURTO N, R. J., J. M. G o odkin d : The influence of barometric pressure
variations on gravity. Geophys. J. R. Astr. Soc. 48, 281-292, 1977.
749. W arburton , R. J., J. M. G o odkin d : Detailed gravity tide spectrum between
1 and 4 cycles per day. Geophys. J. R. Astr. Soc. 52, 117-136, 1978.
750. W arburton , R. J., C. B eaum ont , J. M. G o odkin d : The effects of ocean
tide loading on tides of the solid earth observed with the superconducting
gravimeter. Geophys. J. R. Astr. Soc. 43, 707-720, 1975.
751 .W ATERM AN N, H.: Uber systematische Fehler bei Gravimetermessungen. DGK,
Reihe C, Nr. 21, Miinchen 1957.
752. W atts , A. B.: Gravity and bathymetry in the central Pacific Ocean. JGR 81,
1533-1553, 1976.
75 3 .
W
atts,
A . B , J . R . COCHRAN: G r a v ity a n o m a lie s a n d fle x u re o f th e lith o s p h e re
along the Hawaiian-Emperor Seamount Chain. Geophys. J. R. Astr. Soc. 38,
119-141, 1974,
754. W E B E R , G.: Hochauflosende mittlere Freiluftanomalien und gravi met rische Lotabweichungen fur Europa. Wiss. Arb. Univ. Hannover Nr. 135, 1984.
Литература
415
755 .W e b e r , G ., Κ .-G . W en z e l : Error covariance functions of sea gravity data and
implications for geoid determination. Marine Geodesy 7, 199-226, 1983.
756. W egener , A.: Die Entstehung der Kontinente. Petermanns Mitt. 58, 185-195,
253-256, 305-309, 1912.
757. W eichel , В. C.: Methoden zur Genauigkeitssteigerung in der Prazisionsgravimetrie. DGK, Reihe C, Nr. 260, Miinchen 1980.
758. W E L L S , W . C. (ed.): Spacebome gravity gradiometers. NASA Conference Publ.
2305, Proc. of a workshop held at NASA Goddard Space Flight Center, Greenbelt, Md, Febr. 28 - March 2, 1983. NASA 1984.
759>W e n z e l , H.-G.: Zur Genauigkeit von gravimetrischen Erdgezeitenbeobachtungen. Wiss. Arb. Univ. Hannover Nr. 67, 1976.
760. W E N Z E L, H.-G.: Zur Optimienmg von Schwerenetzen. ZfV 102, 452-457, 1977.
761. W enzel . H.-G.: Evaluation of digital voltmeter residing for LaCoste-Romberg
model D and G gravity meters. Boll. Geof. teor. appl. XX, 423-430, 1978.
762 . W enzel , H.-G.: Zur Geoidbestimmung durch Kombination von Schwereanoma-
lien und einem Kugelfunktionsmodell mit Hilfe von Integralformeln. ZfV 106,
102-111, 1981.
763 W E N Z E L, H.-G.: Hochauflosende Kugelfunktionsmodelle fur das Gravitationspotential der Erde. Wiss. Arb. Univ. Hannover Nr. 137, 1985a.
7 6 4 . W enzel , H.-G.: Schwerenetze. In: H. Pelzer (Herausg.), Geodatische Netze in
Landes- und Ingenieurvermessung II, 457-486, K. Wittwer, Stuttgart 1985b.
765. W e n z e l , H.-G., D. A r a b e l o s : Zur Schatzungvon Anomalie-Gradvarianzen aus
lokalen empirischen Kovarianzfunktionen. ZfV 106, 234-243, 1981.
766.
W ESSEL, P ., A . B . W
atts:
O n th e a c c u ra c y o f m a rin e g r a v ity m e a su re m e n ts.
JGR 93, 393-413, 1988.
767. W hitcom b , J. H., W. O. F ranzen , J. W. G iv en , J. C. P echm an , L. J.
R u f f : Time-dependent gravity in Southern California, May 1974 to April 1979.
JGR 85, 4363-4373, 1980.
768 . W il c o x , L. E ., D. M. SCHEIBE: Gravimetry. Rev. Geoph. 21, 537-543, 1983.
769. W illiams , D. L., C. F in n : Analysis of gravity data in volcanic terrain and
gravity anomalies and subvolcanic intrusions in the Cascade Range, U.S.A.,
and at other selected volcanoes. In. W. J. Hinze (ed.), 1985, 361-374, 1985.
770 W in g , C. G.: MIT vibrating string surface-ship gravimeter. JGR 74, 5882-5894,
1969.
771W O H LEN B ER G , J.: The structure of the lithospere beneath the East African
Rift zones from interpretation of Bouguer anomalies. In: A. Pilger, E. Rosier
(eds.), Afar between continental and oceanic rifting, 125-130, E. Schweizerbart,
Stuttgart 1976.
772 W O HLENBERG , J.: Dichte. In: Landolt-Bomstein, 1982, 66-119, 1982.
773 W O L F , H.: Geoid und Mohorovicic-Diskontinuitat. ZfV 96, 373-378, 1971.
774 W o l f , H.: Lokale gravimetrische Bestimmung von Schwere-Horizontalableitungen. DGK, Reihe B, Nr. 194, Miinchen 1972.
775. W o n g , R. V. С., К. P. S chwarz , J. H agglund , G. Lachapelle : Interpre
tation of inertial and GPS-satellite tecfiniques for precise marine positioning.
Marine Geodesy 9, 213-226, 1985.
776.
W OODHOUSE,
J. H., A. M.
D ziE W O N S K I:
Mapping the upper mantle: three-
dimensional modeling of earth structure by inversion of seismic waveforms.
JGR 89, 5953-5986, 1984.
777.
WOOLLARD, G. P.: The gravity meter as a geodetic instrument. Geophysics 15,
1-29, 1950.
778. WOOLLARD, G. P.: Crustal structure from gravity and seismic measurements.
JGR 64, 1521-1544, 1959.
416
779.
Литература
G. Р.: Regional variations in gravity. In: P. J. Hart (ed.), 1969,
320-341, 1969.
780. W O O L I.A R D , G. P., J. C. R o s e : International gravity measurements. S.E.G.
Monogr., Univ. of Wisconsin, Geophys. and Polar. Res. Center, Madison, Wis
consin 1963.
781. W O R Z E L , J. L.: Pendulum gravity measurements at sea 1936-1959. John Wiley
and Sons Inc., New York 1965.
782. W U N D E R L IC H , M.: Messungen Dait dem Gravimeter Scintrex CG-2G. Vermessungstechnik 34, 88-89, 1986.
783. WUNSCH, С., E. M. GAPOSCHKIN: On using satellite altimetry to determine the
general circulation of the oceans with application to geoid improvements. Rev.
Geoph. 18, 725-745, 1980.
784. W Y C K O F F , R. D.: The Gulf gravimeter. Geophysics 6 , 13-33, 1941.
785.
W O O LLAR D ,
X l Q lN W E N : A n e w c o m p le te d e v e lo p m e n t o f th e tid e -g e n e ra tin g p o te n tia l fo r th e
epoch J2000.0. Marees Terrestres No. 99, 6786-6812, 1987.
786. Xu, J., S. Liu, Zh . Zhu , G. Liu : Analysis of gravity measurements in the East
China Sea and their tectonic interpretation. In: Proc. of the I.A.G. Symposia,
XVIII. I.U.G.G. Gen. Ass., Hamburg 1983, Vol. 1 , 10-23, Dep. of Geod. Science
and Surveying, The Ohio State Univ., Columbus, Ohio, 1983.
787. Xu, J ., S. Z h u , X. Liu, W . T o r g e , R. H. R o d e r , M. S ch n u ll , H.-G. W en
zel : Vertical gravimeter calibration line Wuhan/China. BGI No. 62, 119-125,
1988.
788. X u S h a n , Q ui Q ix ia n , J ian Z h ih e n g , F. A la sia , G. C e r u t t i , S. D e so g u s ,
I. MAR SO N : Sino-Italian joint absolute gravity measurements in China. BGI
No. 59, 149-159, 1986.
789. Y a n sh in , A. L., P . M e l c h io r , V. I. K eilis -B o r o c k , M. de B e c k e r , B.
D ucarm e , A. M. S a d o vsk y : Global distribution of tidal anomalies and an
attempt of its geotectonic interpretation. In: R. Vieira (ed.), 1986, 731'-755,
1986.
790. Y o d er , C. F., J. G. W illiams , J. O. D ickey , B. E. S chutz , R. J. E a n e s , B.
D. TAPLEY: Secular variation of earth’s gravitational harmonic J2 coefficient
from LAGEOS and nontidal acceleration of earth rotation. Nature 303, 757762, 1983.
791. Z h a n g , S h ., X. Li, C h . L ia n g , R. L iu , X. P a n , X. Z h a n g : The newly devel
oped CHZ sea gravimeter. BGI No. 59, 70-75, 1986.
7 9 2 . Z h a n g ZHENG LU: Zur Stabilisierung von wiederholt gemessenen Hohennetzen
durch absolute und relative Schweremessungen. Wiss. Arb. Univ. Hannover
Nr. 139, 1985.
793. ZUMBERG E, M . A.: A p o rta b le a p p a ra tu s fo r a b s o lu te m e a su re m e n ts o f th e e a r th ’s
gravity. Ph. D. thesis, Univ. of Colorado, Dep. of Physics, Boulder, Col. 1981.
7 9 4 . ZUMBERGE, M. A., R . L. R iN K E R , J. E. F a l l e r : A portable apparatus for
absolute measurements of the earth’s gravity. Metrologia 18, 145-152, 1982.
795.
ZUMBERGE, M . A . , J . E . F a l l e r , G . G s c h w i n d : R e su lts fro m an a b s o lu te
gravity survey in the United States. JGR 8 8 , 7495-7502, 1983.
796. ZUMBERGE, M. A., J. E. FALLER, R . L. R iN K E R : A new, portable, absolute
gravimeter. In: B. N. Taylor, W. D. Phillips (eds.), Precision Measurement and
Fundamental Constants II, Nat. Bur. Stand. (U.S.), Spec. Publ. 617, 405-409, 1984.
797. ZUMBERGE, M. A., G. S asagawa , M. K a p p u s : Absolute gravity measurements
in California. JGR 91, 9135-9144, 1986.
7 9 8 . Z u r n , W., H. W i l h e l m : Tides of the earth. In: Landolt-Bornstein, 1984, 259299, 1984.
Предметный указатель
А бсол ю тн ы е измерения силы тяж ести
— гравиметрическая сеть 296
— маятниковый м етод 160
— маятниковый прибор 14, 170
— пункты 141, 296, 334
— св ободн ое падение 124
А кселером етр 123, 263, 271, 274, 281
— Bell Aerospace 263
А номалия высоты 47, 85
А номалия в свободном воздухе 50, 58, 88
— ковариационная функция 63
— корреляция с вы сотой 60
— на поверхности геоида 55, 89
— на физической поверхности Земли 50, 58,
88
— осредненны е 61, 62, 86, 101
— точечны е 58, 63, 92
Аномалии силы тяж ести 49, 93, 94
— аналитическое продолж ение 91, 93
— Б у г е 60, 98, 101, 107, 315, 323, 327
— вектор 49
— гармоническое разлож ение 50, 67
— дисперсия 63
— изостатические 100, 104
— интерполяция 53
А р и с т о т е л ь 13
А р х и м е д 14
Аскания
— гравиметр 21, 209, 213, 348
— гравитационный вариом етр 19, 284
— маятниковый прибор 178
— морской гравиметр 256, 259
А стазирование 190, 199, 232, 237
А стеносф ера 104, 114
А тм осф ера Земли, поправка за притяжение 58
А тм осф ер н ое давление
— вариации 76, 301, 354
— нормальное 301
А эрогравим етр 257, 268
Аэрогравиметрическая съемка 269, 325
— измерение вы соты 329
— вертолет 270
Аэростатический эффект
— маятниковый прибор 168, 177
— св ободн ое падение 133
— статический гравиметр 197, 229
База гравиметрических данны х 335
— земны х приливов 28, 367
— М ирового центра данны х по физике
твердой Земли, СШ А 28, 61
— национальные 26, 337
— М ГБ 23, 336
Базис гравиметрический 205, 294
Б а й ер 27
Баллистический гравиметр
— магнитны е влияния 136
— м етод многих станций 125, 127
— микросейсмы 133
— совмещ енное падение 132, 145, 149
— стационарны й 21, 137
— транспортабельны й с несимметричной
схем ой измерений 21, 142, 298, 339
— транспортабельны й с симметричной
схем ой измерений 156
— уголковый св етоотр аж атель 129
— Ф а лле р а —Х е м м о н д а , СШ А 144
— эффективная вы сота 128
— Г А Б Л , СССР 145
— AFG L, США 145
— ERI, Япония 146
— IGPP, США 155
— 1LO, Япония 142, 146
— IM GC, Италия 156
— Jaeger, Франция 158
— J1LA, СШ А 148
— N1M, К итай 138, 148
Баллистический м е т о д , несимметричная схема
измерений 124
— точность 134, 141, 159
Баллистический м ето д , симметричная схема
измерений 125
Барометрические эффекты
— баллистический м е т о д 131
— гравиметр 197, 229
— гравиметровая систем а с непрерывной
регистрацией 353, 364
— маятниковый м етод 168, 177
Б ессель 16, 163, 171
Био 16
Б о н ен б е р ге р 15
Б о р д а и К а сси ни 15
Б о ш к о в и ч 15
418
Предметный указатель
Б р о у н , поправка 250, 255
Б у ге 14, 15, 17, 83
— аномалии см. Аномалии силы тяж ести
— пластина 99, 109, 317, 320
В а р у м одель земны х приливов 301, 368
Вектор удельной силы 271, 274, 287
Б е н и н е — М ей н ес 21
— изостатическая м одель 103
— ф ормула 89
Влаж ность почвы 301, 356
Возм ущ аю щ ие ускорения 245, 264
— вертикальные 169, 250
— горизонтальны е 133, 169, 246
Возмущ аю щ ий потенциал 48, 85, 88
Возмущ ение силы тяж ести 49, 273, 276
Вращение Земли 31, 33
— вариации во времени 68, 370
В торы е производны е
— возм ущ аю щ его потенциала 50
— поправка за рельеф 284
— силы тяж ести 41
Вулканизм 76, 120, 370, 375
Вы соты 46
— в гравитационном поле 46
— геодезические 43, 46, 85
— изменения во времени 120, 339
— нормальны е 47, 85, 91
— ортометрические 47, 91
— осредненны е 61
Гал, единица 11
Г а л и л е й 11, 13
Г а л л е й 14
Гармоническая функция 35
Гармоническое разлож ение
— аномалий силы тяж ести 50, 86
— гравитационного потенциала Луны 76
— гравитационного потенциала планет 78
— ковариационной функции аномалий 51
— океанского нагрузочного потенциала 74
— потенциала притяжения 36, 37
— приливного потенциала 69, 70
— рельефа 61
— топограф ии морской поверхности 113
— центробеж ного потенциала 38
Г а усс ф ормула 34, 95, 112
Г еккер газовы й гравиметр 18
Г е л ь м е р т 18, 27
Геодезическая референц-система
— 1967 г. (GRS 67) 55, 330, 331
— 1980 г. (GRS 80) 55, 56, 67, 279
Геоид 16, 39, 47, 49, 85, 113, 314
— м одель 86
— определение вы сот 21, 23, 86, 89, 92
— степенные дисперсии 66
Геопотенциал, м одели
— GEM 86, 89, 113, 122
— G PM -2 86, 92
— GRIM3-L1 67, 86
— O SU 87
Геопотенциальное число 46
Г еотермальны е поля 119, 358
Геоцентрическая гравитационная постоянная
36, 57
Г е р ш е л ь 19
Гидростатическое равновесие 17, 96, 98, 371
Гиростабилизация 251, 274, 276
— гироплатф орма 123 , 251, 265
Глубина
— аномального тела 109
— границы М охо 104
— компенсации 103
Глубоководны е ж елобы 63, 105
Горизонтальная пластина, притяжение 109
Г равиметр
— адиабатический эффект 197
— арретирование 198, 211
— баллистический см. Баллистический
гравиметр
— бифилярный 24, 185
— влияние наклона 196
— влияние транспортировки 231
— газовый 20, 189, 255
— кварцевый 192, 211, 217
— магнитны е влияния 198, 230
— микросейсмы 232
— ош ибка отсчета 226
— с кольцевой пружиной 211
— с поступательны м перемещ ением груза
182, 209, 261
— сверхпроводящ ий 352
— скважинный 23, 243, 324
— струнный 180, 245, 246, 261
— температурная компенсация 197
— термоэластический коэффициент 191
— чувствительность к наклону 196, 226
— Аскания см. Аскания
— ГА Г, геодезический 213
— Г А К 220, 242
— Геодайнемикс 348
— ГК А 211
— И зинга 20, 212
— Л а К о ст а — Р о м б ер га см. Л а К о с т а —
Р о м б ер га гравиметр
— М о т т — С м ит а
— Н о р га р д а 212
— Северная Америка 21, 225
— Синтрекс 220, 300
— С о д и н 220
— Тиссена и Ш лезенера 20, 210
— Т р ум ана 20, 210
Предметный указатель
— У орд ен а 21
— У эст ерн 21
Гравиметр донны й 23, 241
— Галф 242
— Л ам онтской обсерватории 350
Г равим етр морской 256
— карданов подвес 250
— кросс-каплинг 252, 256, 259
— Bell Aerospace 263, 269
— GSS 30, аэром орской 259
— М1Т, струнный 262
— N1PRORI-1 263
— TSSG 262
— ZYZY 259
Гравиметр пружинный 209
— астазированный 187, 217, 221
— с поступательны м перемещением груза
182
— точность 225, 237, 304
Гравим етр, система индикации
— емкостная 193, 214, 220, 222
— оптическая 193, 218, 222
— фотоэлектрическая 193, 214, 256
— электрическая 193
Гравиметрическая изученность 23, 62
Гравиметрическая карта 26, 59, 100, 330, 338
Гравиметрическая система
— Венская 18, 27
— П отсдамская 18, 27, 293, 311
— МГСС-71 13, 207, 293, 311
Гравиметрическая съемка 20, 293, 354
— воздуш ная см. Аэрогравиметрическая
съемка
— координаты 317, 318, 327
— локальная 108, 297, 314, 317, 330, 335
— мировая 293
— морская 251, 264, 325
— национальная 330
— определение вы сот 317, 319
— региональная 314, 330
— схема рейса 234
Гравиметрические пункты
— вы бор 296, 297, 315, 390
— описание 333
Гравиметрические сети 297
— геодинамические 297, 339, 372, 375
— м естны е 297, 315, 376
— мировая 22, 293, 297, 370
— национальные 22, 26, 310, 311, 315
— оптимизация 299, 307
— региональные 297, 314, 372
— МГСС-71 22, 207, 293, 311
Гравиметрический м етод геодезии 15, 85
Гравиметровая система с непрерывной
регистрацией 342, 348
Гравитационная градиентом етрия 283
419
— на п одвиж ном основании 286
Гравитационйая постоянная 14, 17, 33, 84
— зависим ость о т расстояния 83
— изменение во времени 66, 370
— определение 81
Гравитационное поле 60, 93
— интерпретация 101, 104, 107, И З
Гравитационный вариом етр 18, 283
Гравитационный гради ен том етр 12, 23, 280,
288
— GGSS фирмы Bell 288
Гравитационный потенциал 33, 39, 85
— нормальный 42, 43, 57
Градиент силы тяж ести
— аномальный 50, 279
— вертикальный 40, 286, 321
— горизонтальны й 19, 40, 286
— нормальный 45, 56, 58, 279
Градиентометрия спутниковая, программ а
С Р А 10 291
Г раф 20, 213
Г р и н теор ем а 16, 35, 85
Г у к 19, 191
Г ю й г е н с 13, 14
Д а р в и н 24
Д виж ение полю са 31, 68
— изменение силы тяж ести 301, 360, 365
Демпф ирование гравиметра 184
— донный 243
— надводный 246, 257
— с непрерывной регистрацией 344
— статический 198
Д е т т о н 17
Д еф орж 17
Динамический коэффициент формы 38, 57, 97
Дрейф 232
— инерциальная геодезическая система 276
— маятник 176
— моделирование 234, 304
— морской гравиметр 265
— пружинный гравиметр 216, 221, 225, 234,
252, 304
— регистрирующ ий гравиметр 348
— сверхпроводящ ий гравиметр
Дрейф континентов 114
Д у д с о н 24, 69
Землетрясения
— изменения силы тяж ести 76, 370, 376
— прогноз 119, 372
Земля
— геофизическая м одель 42, 96, 103, 360,
368
— масса 35, 97
— мом енты инерции 38
420
Предметный указатель
— расширение 68
— средняя плотн ость 82, 97
— угловая скорость 33, 57, 68, 273
— центр масс 30
Земная кора 97
— м одель 103, 361
— п лотность 101
Земноприливный анализ 363
Земноприливный профиль 366
Земные приливы гравиметрические
— амплитудны й ф актор 301, 362
— гармонический анализ 363
— наблю дения 360
— параметры 98, 367
— фундаментальная станция, Брюссель 345,
366
Земные приливы, модель
— жесткая Земля 69, 300
— упругая Земля 72, 301, 361, 368
И зостази я 102
Инерциальная гравиметрия 272
Инерциальная навигация 123, 328
Инерциальные геодезические системы 272, 275
Инерциальные ускорения 246, 253, 272
И нтерф ером етр 129, 141
И о л л и 17
— рычажные весы 82
И скусственные спутники Земли
— альтиметрия 24, 86, 112, 122
— анализ возмущ ений орбиты 12, 24, 122
— градиентом етрия 290
— определение местополож ения 91, 122
— программ а G R A D IO 291
— программ а GRM 122
К а в ен д и ш 17, 82
Калибровка гравиметра
— базис 205, 346
— гравиметр с непрерывной регистрацией
344, 352
— дополнительны е массы 202, 215, 223, 260
— м ето д наклона 201, 219
— обратная связь 204
Калибровочная систем а 205, 206, 298
Калибровочная функция 199, 227
— изменение во времени 201
— периодические члены 199, 208, 227
Карданов подвес 250
К а р т р а й т а — Т ей лер а — Э д д ена приливная
м одель 72, 300
К вазигеоид 47, 48, 314
К е л ь в и н 24
К л е р о 15, 16, 44
Ковариация 53, 62, 90
— функция 51, 63, 341
К омпенсирующ ая сила
— давление газа 189
— магнитная 190
— упругая 182
— электростатическая 190
К о н р а д а граница 103
К онтинентальны е грабены 105
К о ш и 19
Коэффициенты сферических гармоник 37, 57,
67, 121
— изменения во времени 370
— нормированны е 38, 49, 54
Краевая задача 85, 86
Кривизна 40, 41, 43
Кросс-каплинг 252, 256, 259
К рутильны е весы 17, 18, 82
— пружинные 20, 185, 210
Крутильный маятник 82
К э т е р , оборотны й маятник 15, 165, 171
К ю н е н и Ф ур т в ен гл ер 18, 171
Л агранж 15
Л а К о н д а м и н 15
Л а К о с т 20
Л а К о ст а — Р о м б ер га гравиметр (LCR)
— аэром орской 257, 269
— донны й 242
— земноприливный 349
— с поступательны м перемещ ением груза
261
— скважинный 243
— сухопутны й (м одели G и D)
Л а п л а с 15, 16
— дифференциальное уравнение 35
— сферические гармоники 36
Л еж андр
— полиномы 36
— присоединенные функции 36
Л е о н а р д о да В и н ч и 17
Л итосф ерны е плиты 102, 114, 332
Л и с т и н г 16
Л уна 76, 244
Л я в 24, 72, 74
М агнитны е влияния
— баллистический гравиметр 136
— маятниковый прибор 169, 177
— статический гравиметр 198, 230
М а к л о р ен 14
Мантия Земли 73, 97, 101
— конвекция 101, 116
М асш табны й коэффициент 200, 206, 344
Маятник
— деформации лезвия 167
— математический 13, 15, 160
— минимальный 165, 176
Предметный указатель
— нитяной 16, 162, 170
— обор отны й 15, 16, 18, 21, 164, 169
— приведенная длина 163, 176
— старение 192
— упругий 179
— физический 13, 163
Маятник с крутильной нитью 212
М аятниковые измерения
— абсол ю тн ы е 160
— относительны е 174
— точность 165, 169, 177
М аятниковый прибор 15
— В е н и н г — М ей неса 20, 255
— Галф 22, 178
— магнитны е влияния 169, 177
— м е т о д совпадений 15, 167
— микросейсмические влияния 169
— Р еп с о л ь д а 17, 27, 171
— сокачание ш татива 168, 172, 176
— Ш т ернека 18, 19, 27, 176
М еж дународная ассоциация геодезии (М АГ)
21, 27, 56, 84
М еж дународная гравиметрическая комиссия
(М Г К ) 28
М еж дународная комиссия по земны м
приливам 28
М еж дународная служ ба вращения Земли
(IERS) 31
М еж дународное б ю р о мер и весов (М БМ В)
17, 80, 137, 141
М еж дународное гравиметрическое бю р о (М ГБ)
28, 61, 336
М еж дународное условное начало (М У Н ) 30
М еж дународны й геодезический и географиче
ский со ю з (М ГГС) 27
М еж дународны й центр земны х приливов 28, 366
М ер сен 14
Микросейсмические влияния 133
— баллистический гравиметр 133
— маятниковый прибор 169
— регистрирую щ ая гравиметровая система
343
— статический гравиметр 232
Мировая геодезическая система 1984 г.
(W GS84) 88, 319
М и ч е л 17
М одуль упругости 191
М олоденский
— гравиметр 211
— ф ормула 88
М о н 18
М о п е р т ю и 15
М о х о р о в и ч и ч а граница 97, 104
Навигационные системы 122, 265, 327
Н агрузочны е эффекты
421
— водохранилищ е 360
— океанские приливы 74, 369
— уровень реки 357
Н еод н ор од н ое гравитационное поле
— баллистический м е т о д 127
— гравитационная градиентом етрия 279
— маятниковы е измерения 169
Н е т т л т о н а м етод 322
Нивелирование 46, 91, 120, 319
Н ормальная сила тяж ести 44, 49, 55, 57, 273.
318
— ф ормула 18, 21, 44, 55
Н орм альное поле силы тяж ести 42, 55, 279
Н ь ю т о н 14, 24
— закон тяготения 14, 32
— уравнение движения 121
О братная задача гравиметрии 24, 93, 94
О братная связь 194, 349
Океанские приливы 74, 360, 369
О пределение координат
— аэрогравиметрическая съемка 270
— морская съемка 266
— сухопутная съемка 318
О пределение п лотности п ород 320, 322, 324
О птимизация гравиметрической сети 299, 307
Отвесная линия 12, 30
О тносительны е измерения силы тяж ести
— динамический м ето д 174
— статический м ето д 182
О тсчетны е поверхности 48, 121
П а с к а л ь , единица 81
П и к а р 14
П и р с 17
П и ц е т т и теорем а 44
П ланеты , гравитационное поле 78
П лотностная модель 96, 103
П лотн ость 99, 101, 107, 320
П одзем н ы е воды 76, 111, 119, 301, 356, 359,
373
П олзучесть 192
П отенциал
— притяжения 33
— центробеж ны й 23, 38
П отенциал силы тяж ести 33, 39, 85
— нормальный 42, 43, 57
П р а т т 17, 103
П редсказание 53, 341
Прикладная гравиметрия 107, 278
— геотерм альны е поля 119, 358
— добы ча газа 109, 119, 358
— инж енерное строительство ПО
— разведка ископаемых 19, 107, 109
— угледобы ча ПО, 119, 359
Приливное ускорение 69
422
Предметный указатель
Приливные аномалии 368
Приливные волны 72, 364
Приливный потенциал 69, 72, 300
Приливы гравиметрические 69, 72, 78, 363
Приливы , м одели 72, 300, 369
П руж ина нулевой длины 191, 218, 221, 261
П руж инны е весы 20, 182, 209
П рямая задача гравиметрии 94
П рямоугольная призм а, притяжение 94, 99
П уа сс о н 15, 19
— дифференциальное уравнение 35, 38
— интеграл 91
Рельеф Земли, гармоническая м одель 61
Р еп с о л ъ д 17, 27, 171
Р и ч ч о л и 14
Р и ш е 14
С а б и н 17
С верхпроводим ость 190, 290
— гравиметр 25, 351, 364
— гради ен том етр 291
Сверхпруж ина 149
С ж атие
— геометрическое 14, 42, 57, 98
— гравиметрическое 44, 57
— динамическое 97
Сила тяж ести 32
— внутри Земли 96
— нормальная см. Н ормальная сила
тяж ести
— тен зор градиентов 40, 45, 50, 278, 279
— ускорение 11, 32, 273
Сила тяж ести , изменения во времени 24, 66,
75, 118, 300
— антропогенны е 76, 358
— глобальны е 66, 75, 370
— локальные 76, 119, 375
— неприливные 25, 75, 1 18, 339
— региональные 75, 119, 372
Сила тяж ести, поправки
— геологическая 100
— за вы соту 59, 98, 317
— за рельеф 99, 317, 321
— изостатическая 101
— приливная 300, 360, 367
— топографическая 100, 317
С истем а глобального определения м естоп ол о
жения C F 91, 122, 277, 319, 327
С истем ы координат
— астрономическая 31
— геодезическая (эллипсоидальная) 43
— геоцентрическая 30, 31, 43
— м естная, связанная с гравитационны м
полем 31, 94, 272, 280
— сферическая 31
— топоцентрическая 44
Скорость света 131
— поправка 136
С о м и л ь я н а ф ормула 44
Спектральный анализ 24, 108
Спрединг 114
Спутниковая альтиметрия 86, 113, 122
С тандарты частоты 129, 135
С т еви н 13, 14
Степенны е дисперсии аномалии 52, 53
— м одель 65 , 269, 279
С т ок с
— интегральная ф ормула 16, 88, 121
— обращ енная ф ормула 113
— теор ем а 42, 94
— функция 88, 121
Струнный гравиметр 182, 244, 245
Субдукция 373
Сферические функции 36
Сф ероид 41
Т еллуроид 85
Температурны е влияния
— гравиметр 197, 228
— гравиметр с непрерывной регистрацией
343
— маятниковый прибор 167, 177
— тен зор гравитационных градиентов 280,
286
Топография морской поверхности 42, 86, 111
Уклонение отвеса 49, 85, 273
— гравиметрическое 89, 315
У орд ен 20
Упругий гистерезис 191, 226
Уравнение равновесия гравиметра 183, 185,
186, 189, 214, 218, 222
Уравнивание
— геодинамическая сеть 339
— гравиметрическая сеть 304, 311, 316
— наблю дения гравиметрических приливов
362
Уровенная поверхность 14, 39, 41
Ускорение
— возм ущ аю щ ее см. В озм ущ аю щ ее
ускорение
— К о р и о л и с а 253, 273, 287
— центробеж ное 1 1, 33,, 273, 287
Фильтрация
— аэроморская гравиметрия 246, 265, 268
— гравиметр с непрерывной регистрацией 342
— зем ны е приливы 363
Х а а л ь к газовый гравиметр 20, 190
Х о н к а с а л о поправка 294
Предметный указатель
Ц илиндр, притяжение
— вертикальный 94, 99
— горизонтальный 108
Цифровая регистрация 193, 265, 288, 291, 309,
342
Ч астотн ы е характеристики
— аэроморской гравиметр 248
— гравиметр с непрерывной регистрацией
344
Ч увствительность
— дегазированная система 188, 196, 218, 222
— гравиметр с непрерывной регистрацией
346
— гравитационный вариометр 283
— гравитационный градиентом етр 288
— линейная система 184, 214
— упругий маятник 179
Шар, притяжение 94
Ш вейд ар 19, 24
Ш лезенер 20, 25
Ш т ейнер теор ем а 164
Ш т ернек 17, 18
Эверест 17
Э й л е р 14
Эквивалентные аномальны е массы 94
Э ллипсоид 21, 42, 57, 98
Э р и 17, 83, 102
Э т веш 18
— единица 11
— эффект 253, 256, 265
Я дро Земли 73, 97, 364, 368
423
Содержание
О т Ф ед ер а л ь н о й сл у ж бы г ео д ези и и к артограф ии ...................................................................................
П редисловие редактора перевода .............................................................................................................................
П редисловие к русскому изданию .............................................................................................................................
5
6
8
П редисловие
8
1.
Введение
1.1
1.2
1.3.
2.
...........................................................................................................................................................................
Задачи гравиметрии ....................................................................................................................................
И сторическое развитие ................................................................................................................................
1.2.1. Теоретические основы (17 — 18 вв.) ....................................................................................
1.2.2. Маятниковые измерения и их применение в геодезии и геофизике (17 — 18 вв.)
1.2.3. Н аблю дения с крутильными весами и гравиметрами и их применение в
прикладной геофизике (первая половина 20 в.) ...........................................................
1.2.4. С оздание гравиметрических сетей, геодезические и геофизические результаты
(вторая половина 2 0 в .) ................................................................................................................
1.2.5. И зучение временных изменений силы тяжести ..............................................................
Н ациональные и м еж дународны е организации ...........................................................................
1.3.1. Н ациональные организации .......................................................................................................
1.3.2. М еж дународное сотрудничество .............................................................................................
1.3.3. Научные сообщ ения и документация ..................................................................................
Теория поля силы тяж ести
2.1.
2.2.
2.3.
2.4.
2.5.
2.6.
2.7.
...................................................................................................................................
11
11
12
13
15
18
21
24
25
25
27
28
..................................................................................................................................
30
Системы координат ....................................................................................................................................
2.1.1. Геоцентрическая система координат ....................................................................................
2.1 .2 . Топоцентрические системы координат в поле силы тяжести ..............................
О сновные соотнош ения в поле силы тяжести ...........................................................................
2.2 .1 . Ускорение силы тяжести и потенциал силы тяжести ..............................................
2.2.2. Дифференциальная и интегральная формулы потенциала притяжения .........
2.2.3. Р азлож ение по ш аровым гармоническим функциям ..................................................
Геометрия поля силы тяжести .............................................................................................................
2.3.1. Уровенные поверхности и силовые линии .......................................................................
2.3.2. Градиент силы тяжести и кривизна поля силы тяжести .......................................
М одели поля силы тяж ести ..................................................................................................................
2.4 .1 . О птимальны е и стандартны е модели ..................................................................................
2.4 .2 . Уровенный эллипсоид ..................................................................................................................
2.4 .3 . Н орм альное поле силы тяжести ...........................................................................................
Системы вы сот ...............................................................................................................................................
2.5 .1 . Э ллипсоидальны е высоты ...........................................................................................................
2 .5 .2 . Вы соты в поле силы тяжести ...................................................... .....................................
Возмущ ения поля силы тяжести .........................................................................................................
2.6 .1 . В озмущ аю щ ий потенциал ...........................................................................................................
2.6 .2 . А номалия силы тяжести .............................................................................................................
2.6 .3 . Вторы е производны е возм ущ аю щ его потенциала .......................................................
Статистическое описание гравитационного поля .......................................................................
2.7.1. Ковариационная функция аномалий силы тяжести ....................................................
2.7 .2 . И нтерполирование в гравитационном поле ....................................................................
2.7 .3 . Степенные дисперсии аномалий .............................................................................................
30
30
31
32
32
34
36
39
39
39
41
41
42
43
46
46
46
48
48
49
50
51
51
52
53
425
Содержание
3.
П ространственно-временная структура внешнего гравитационного поля
................................
55
Н орм альное поле силы тяжести Земли ............................................................................................
3.1.1. Ф ормулы нормальной силы тяжести ..................................................................................
3.1 .2 . Геодезическая референц-система 1980 г...................................................................................
Аномалии в св ободн ом воздухе ............................................................................................................
3.2 .1 . Точечные аномалии в св ободном воздухе .........................................................................
3.2 .2 . Зависимость о т высоты ..............................................................................................................
3.2.3. Средние аномалии в св ободн ом воздухе ............................................................................
Глобальная и региональная структуры гравитационного поля Земли .........................
3.3.1. Корреляция аномалий в св ободн ом воздухе ..................................................................
3.3.2. М одель степенных дисперсий ..................................................................................................
3.3.3. Гармоническая м одель ..................................................................................................................
Временны е вариации силы тяжести ..................................................................................................
3.4.1. Изменения гравитационной постоянной и суточного вращения Земли ............
3.4 .2 . Гравиметрические приливы на абсол ю тн о жесткой Земле ........................................
3.4 .3 . Гравиметрические земны е приливы и океанские нагрузочные приливы .........
3.4.4. Смещения земны х масс ................................................................................................................
Гравитационные поля Луны и планет ..............................................................................................
3.5.1. Гравитационное поле Луны .......................................................................................................
3 .5 .2 . Гравитационные поля планет ..................................................................................................
55
55
56
58
58
60
61
63
63
65
66
68
68
69
72
75
76
76
78
Сила тяж ести в естественных и инженерных науках ...........................................................................
80
3.1.
3.2.
3.3.
3.4.
3.5.
4.
4.1.
4.2.
4.3.
4.4.
4.5.
5.
Сила тяжести в физике ..............................................................................................................................
4 .1 .1 . Гравиметрические данны е в м етрологии ............................................................................
4 .1 .2 . Определение гравитационной постоянной .........................................................................
П оле силы тяжести и геодезия ...........................................................................................................
4 .2 .1 . Сила тяжести и определение местополож ения пунктов ...........................................
4 .2 .2 . Глобальные м одели гравитационного поля .....................................................................
4 .2 .3 . Локальная аппроксимация гравитационного поля .......................................................
4 .2 .4 . Сила тяжести и высота ..............................................................................................................
П оле силы тяжести и геофизика .........................................................................................................
4 .3 .1 . Гравитационное поле и распределение плотности .......................................................
4 .3 .2 . Глобальные плотностны е модели .........................................................................................
4 .3 .3 . А номалии Буге, изостатические аномалии .......................................................................
4 .3 .4 . Гравитационное поле и граница кора — мантия .........................................................
4 .3 .5 . Прикладная гравиметрия ..............................................................................................................
4 .3 .6 . Гравитационное поле и топография поверхности М ирового океана и его дна
Гравитационное поле и геодинамика ................................................................................................
4 .4 .1 . Гравитационное поле, тектоника и изостазия ................................................................
4 .4 .2 . И зменения силы тяжести во времени и современны е геодинамические про
цессы ......................................................................................................................................................
Гравитационное поле и орбитальны е расчеты ...........................................................................
4 .5 .1 . А строномия и космонавтика ....................................................................................................
4 .5 .2 . Н аземная навигация ......................................................................................................................
А бсолю тны е измерения силы тяжести
5.1.
5.2.
80
80
81
84
84
86
88
91
92
92
%
98
101
107
111
114
114
118
121
121
123
.........................................................................................................
124
Основы баллистических м етодов .........................................................................................................
5.1.1. С вободное падение .........................................................................................................................
5.1.2. Симметричное движение .............................................................................................................
5.1.3. С в ободное падение в н еоднородн ом гравитационном поле .....................................
5.1.4. Измерения расстояний и времени .........................................................................................
5.1.5. Давление окружающ ей среды и микросейсмы ..............................................................
5.1.6. Источники ош ибок и точность измерений .......................................................................
Баллистические эксперименты и результаты ................................................................................
5.2.1. Л абораторны е эксперименты 1950 — 1970 гг..................................................................
124
124
125
126
128
131
134
137
137
426
Содержание
5.2.2. Стационарны е абсолю тны е гравиметрические станции ...........................................
5.2.3. Транспортабельные баллистические гравиметры ...........................................................
5.2 .4 . Транспортабельные гравиметры с симметричным движением пробной массы
Маятниковый м етод ....................................................................................................................................
5.3.1. Математический и нитяной маятники ................................................................................
5.3.2. Физический и оборотны й маятники ....................................................................................
5.3.3. Источники ош ибок и точность ...............................................................................................
5.3.4. Маятниковые наблюдения и результаты ...........................................................................
141
142
156
160
160
163
165
170
О тносительны е измерения силы тяжести ....................................................................................................
174
6.1.
174
174
176
179
180
182
182
185
187
189
190
190
191
193
196
197
199
199
201
202
204
205
209
209
213
217
5.3.
6.
6.2.
6.3.
6.4.
6.5.
6.6.
7.
Динамический м етод ....................................................................................................................................
6 .1 .1 . О тносительны е маятниковые измерения: основы м етода ........................................
6.1 .2 . О тносительны е маятниковые приборы и результаты ..............................................
6.1 .3 . Упругий маятник .............................................................................................................................
6.1 .4 . Струнный гравиметр ....................................................................................................................
Статический м етод ......................................................................................................................................
6.2 .1 . Вертикальные пружинные весы .............................................................................................
6.2 .2 . Рычажные пружинные весы ......................................................................................................
6.2 .3 . Д егазирование ....................................................................................................................................
6.2 .4 . Неупругие компенсирующие силы .........................................................................................
О собенности пружинных гравиметров .............................................................................................
6 .3 .1 . О сновные части гравиметра ....................................................................................................
6.3.2. Упругие пружины ...........................................................................................................................
6.3 .3 . Системы индикации и измерительные устройства .......................................................
6.3 .4 . У стройства для приведения в горизонт ...........................................................................
6.3 .5 . К омпенсирую щ ие и экранирующие устройства ..............................................................
Калибровка относительны х гравиметров .........................................................................................
6 .4 .1 . Калибровочная функция ...............................................................................................................
6 .4 .2 . Калибровка м етод ом наклона ..................................................................................................
6 .4 .3 . Калибровка изменением массы ................................................................................................
6.4 .4 . Калибровка с системой обратной связи ...........................................................................
6.4 .5 . К алибровочные базисы и калибровочные системы ....................................................
Статические пружинные гравиметры ................................................................................................
6.5 .1 . И стория развития д о 1950 г, ....................................................................................................
6.5 .2 . Рычажные крутильные пружинные весы (система А ск а н и я )..................................
6 .5 .3 . Кварцевые пружинные гравиметры (система Уордена) ...........................................
6.5 .4 . Д егазированны е гравиметры с металлической пружиной (система Л а К оста —
Ром берга) .............................................................................................................................................
Источники ош ибок и точность измерений ....................................................................................
6.6.1. И нструментальны е источники ош ибок ................................................................................
6.6 .2 . Ошибки, вызванные влиянием внешней среды .............................................................
6.6 .3 . Смещ ение нуль-пункта гравиметра ......................................................................................
6.6.4. Точность измерений ......................................................................................................................
221
225
225
228
232
И змерения силы тяж ести в труднодоступны х районах и на подвижных основаниях . . .
241
7.1.
241
241
243
244
245
245
7.2.
7.3.
И змерения силы тяжести в труднодоступны х районах .........................................................
7.1 .1 . Измерения на морском дне ......................................................................................................
7.1.2. И змерения в скважинах ........................................................................ ..................................
7.1.3. И змерения на Луне ........................................................................................................................
Измерения силы тяжести на подвижном основании .............................................................
7.2.1. Теоретические основы ....................................................................................................................
7.2.2. Вертикальные возмущ аю щ ие ускорения . ............................................................................
7.2.3. Горизонтальные возмущ аю щ ие ускорения ......................................................................
7.2.4. Инерциальные ускорения, связанные с вращением Земли ....................................
Морские и аэрогравиметрические системы ....................................................................................
7.3.1. Первые измерения силы тяжести на море ..................................................................
250
253
255
255
Содержание
7.3 .2 . Рычажные пружинные системы ..............................................................................................
7.3 .3 . И зм ерительны е системы с вертикальной пружиной ..................................................
7.3.4. Струнны е гравиметры ..................................................................................................................
7.3.5. Акселерометры принудительно уравновеш енного типа (сервоакселерометры )
Источники ош ибок и точность измерений .....................................................................................
7.4.1. Морская гравиметрия ....................................................................................................................
7.4.2. Аэрогравиметрия ..............................................................................................................................
Инерциальная гравиметрия .......................................................................................................................
7.5.1. Теоретические основы ....................................................................................................................
7.5.2. И нерциальные измерительны е системы и методика и зм ер ен и й ...........................
7.5.3. Источники ош ибок и точность измерений .......................................................................
256
259
262
263
264
264
268
271
271
274
276
Гравитационная градиентом етрия ....................................................................................................................
8.1. Теоретические основы ..................................................................................................................................
8.1.1. П риложения тен зора градиентов силы тяжести ...........................................................
8.1.2. Градиенты нормального поля силы тяж ести и аномалии градиентов .........
8.1.3. Принцип гравитационных градиентом етров ........................................................................
8.2. Стационарная гравитационная градиентом етрия .......................................................................
8.2.1. Крутильные весы .............................................................................................................................
8.2.2. И змерение градиентов с гравиметрами ..............................................................................
8.3.
Гравитационная градиентометрия на подвиж ном основании ..............................................
8.3.1. Теоретические основы ....................................................................................................................
8.3.2. Н аземная и аэроградиентометрия .........................................................................................
8.3.3. Спутниковая градиентометрия ..................................................................................................
278
278
278
279
280
283
283
285
286
286
288
290
7.4.
7.5.
8.
9.
Гравиметрические съемки
....................................................................................................................................
293
Гравиметрические референцные системы .........................................................................................
9 .1 .1 . М еж дународная гравиметрическая стандартизационная сеть 1971 г. (М ГСС-71)
9 .1 .2 . Гравиметрические связи сМГСС-71 ........................................................................................
9.1 .3 . Мировая абсолю тная гравиметрическая сеть ..................................................................
9.2. Гравиметрические сети ................................................................................................................................
9.2 .1 . Назначение, вы бор пунктов .......................................................................................................
9.2.2. Измерения .............................................................................................................................................
9.2.3. Приведения отсчетов ипоправки
...........................................................................................
9.2.4. О бработка результатов ................................................................................................................
9.2 .5 . Оценка качества сети и оптимизация ..................................................................................
9.2 .6 . Н ациональные гравиметрические сети ...................................................................................
9.3. Региональные и локальные гравиметрические съемки ...........................................................
9.3 .1 . Цели работ, распределение пунктов ....................................................................................
9.3.2. М етодика съемки и обработка результатов ..................................................................
9.3.3. Определение планового положения и вы сот пунктов ................................................
9.3.4. Определение плотности ................................................................................................................
9.3.5. Морская и аэрогравиметрическая съемки .........................................................................
9.3.6. Примеры региональных и локальных гравиметрических съемок .......................
9.4. Хранение результатов измерений .........................................................................................................
9.4.1. Описание гравиметрического пункта ....................................................................................
9.4.2. Базы гравиметрических данных ..............................................................................................
9 .4.3. Гравиметрические результаты ..................................................................................................
293
293
295
296
297
297
298
300
302
307
311
314
314
315
317
320
325
330
333
333
335
338
Определение изменений силы тяжести во времени ...........................................................................
339
9.1.
10.
427
10.1.
Приборы и методы измерений ..........................................................................................................
10.1.1. Презиционны е гравиметрические сети .................................................................................
10.1.2. Гравиметровые системы с непрерывной регистрацией: основны е принципы
10.1.3. Калибровка гравиметров с непрерывной регистрацией .........................................
10.1.4. Пружинные гравиметры с непрерывной регистрацией ...........................................
10.1.5. Сверхпроводящ ий гравиметр ..................................................................................................
339
339
342
344
348
351
428
Содержание
10.2. Гравитационные эффекты нетектонического происхождения ..............................................
10.2.1. А тм осф ерны е эффекты .............................................................................................................
10.2.2. Гидрологические эффекты .........................................................................................................
10.2.3. Техногенные изменения силы тяжести ..............................................................................
10.3. И зм ерение приливных изменений силы тяжести .......................................................................
10.3.1. О бласти применения ....................................................................................................................
10.3.2. Оценка, результаты , точность
........................................................................................
10.3.3. П рименение результатов ...........................................................................................................
10.4. Изменения силы тяжести вследствие перемещения земны х масс ..................................
10.4.1. Глобальные изменения силы тяжести ..............................................................................
10.4.2. Региональные изменения силы тяжести ............................................................................
10.4.3. Локальны е вариации силы тяжести ..................................................................................
Литература .............................................................................................................................................................................
П редметны й указатель ....................................................................................................................................................
354
354
356
358
360
360
362
367
370
370
372
375
380
417
Научное издание
Вольфганг Торге
ГРАВИМЕТРИЯ
Зав. редакцией В. В. Герасимовский
Ведущий редактор В. Н. Соколова
Художник В. А. Медников
Художественный редактор Н. В. Дубова
Технический редактор Т. К. Такташова
Корректор В. И. Киселева
Лицензия ЛР № 010174 от 20.05.97 г.
Подписано в печать 10.01.99. Формат 70 х 100/16.
Бумага офсетная. Печать офсетная. Гарнитура Таймс.
Объем 13,50 бум. л. Уел. печ. л. 35,10. Уч.-изд. л. 33,18.
Изд. N° 2/9192. Тираж 1000 экз. Зак. 85 С005.
Издательство «Мир»
Государственного комитета Российской Федерации по печати.
129820, ГСП, Москва, 1-й Рижский пер., 2.
Производственно-издательский комбинат ВИНИТИ.
140010, г. Люберцы Московской обл., Октябрьский пр-т, 403.
Тел. (095) 554-21-86