/


























































































































Автор: Кантор Б.Я.
Теги: механика деформируемых тел упругость деформация физика механика
ISBN: 5-12-001606-5
Год: 1990




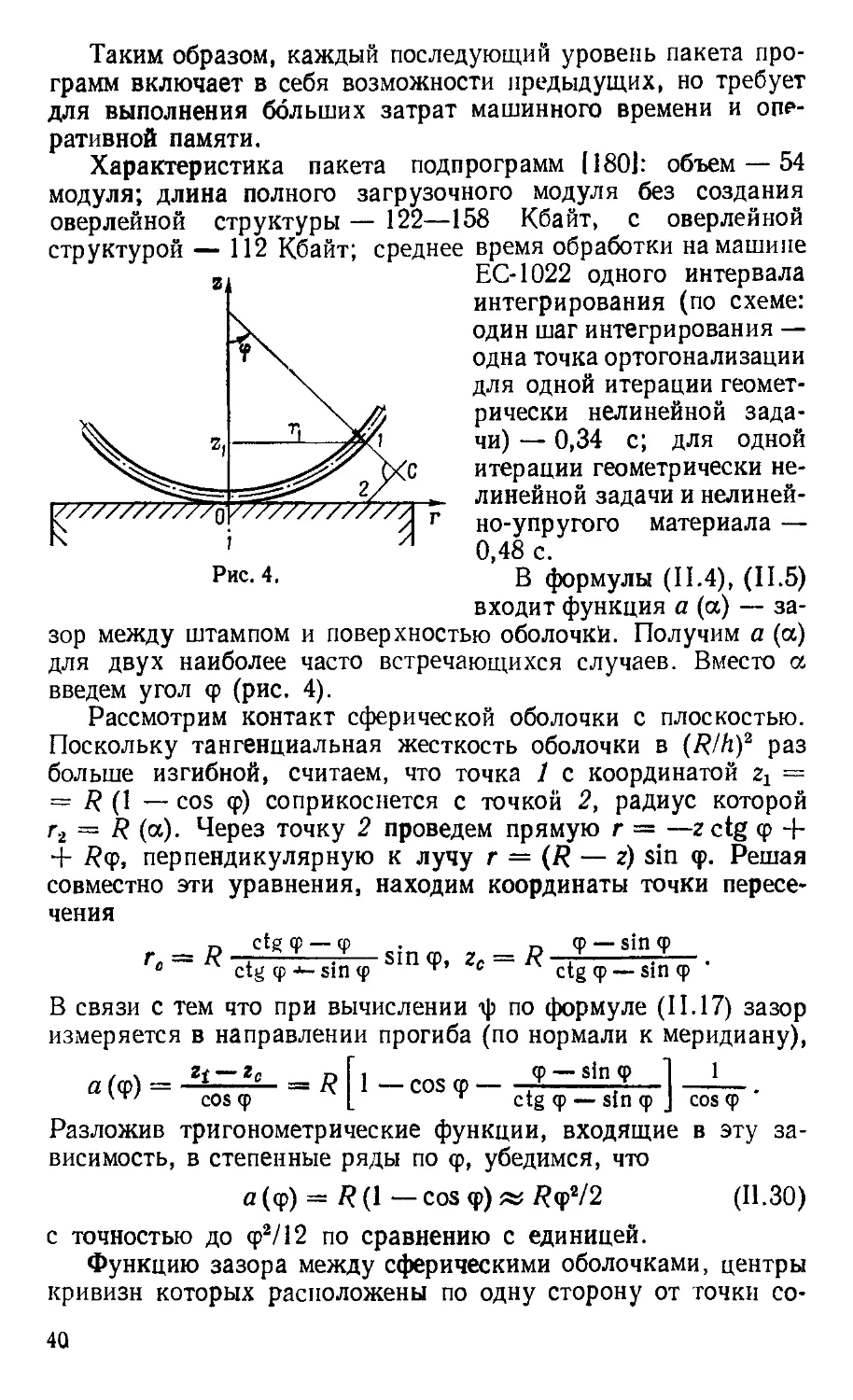
Текст
АКАДЕМИЯ НАУК УКРАИНСКОЙ ССР
ИНСТИТУТ ПРОБЛЕМ МАШИНОСТРОЕНИЯ
Б. Я. КАНТОР
КОНТАКТНЫЕ
ЗАДАЧИ
НЕЛИНЕЙНОЙ
ТЕОРИИ
ОБОЛОЧЕК
ВРАЩЕНИЯ
КИЕВ НАУКОВА ДУМКА 1990
УДК 539.3
Контактные задачи нелинейной теории оболочек вращения / Кан-
Кантор Б. Я-; Отв. ред. Подгорный А. Н.; АН УССР. Ин-т пробл. машинострое-
машиностроения.— Киев : Наук, думка, 1990.— с. 136 ISBN 5-12-001606-5.
В монографии рассмотрена проблема решения задач теорнн тонких
оболочек вращения в условиях одностороннего контакта оболочки со штам-
штампом или между двумя оболочками. Предложен новый подход, основанный
иа построении и решении методом прогонки канонических систем обыкно-
обыкновенных дифференциальных уравнений в сочетании с итеративным отыска-
отысканием юн контакта. Решены задачи определения напряженно-деформиро-
напряженно-деформированного состояния и устойчивости при одностороннем взаимодействии
оболочек вращения различных форм. Построена нелинейная теория обо-
почек, составленных из односторонне контактирующих слоев.
Для научных и инженерно-технических работников, занимающихся
вопросами расчета и проектирования оболочечиых конструкций; может
быть полезна преподавателям, аспирантам и студентам вузов.
Ил. 33. Табл. 4. Библиогр.: с. 120—133 B64 назв.).
Ответственный редактор А. Н. Подгорный
Утверждено к печати ученым советом
Института проблем машиностроения АН УССР
! НЕ БОЛЕЕ 1Й КНИГИ В
\ ОДНИ РУКИ И 2ХВДВЕ ]
КОЛОХ2А
Редакция технической литературы
Редактор Т. Б. ЯШОК
2004060000-157 g9() g()
К М221@4)-90
ISBN 5H2.00ie0fe5 © Б. Я. Кантор, 1990
ПРЕДИСЛОВИЕ
Один из наиболее сложных разделов теории оболочек, имеющий обширную
область практических приложений, составляют задачи анализа прочности
элементов тонкостенных конструкций при их одностороннем механическом
взаимодействии с другими податливыми или жесткими телами.
Основные .результаты исследования контактных задач получены при
такой постановке, когда учитывалась лишь конструктивная нелинейность —
следствие ограничений (неравенств), отражающих неотрицательность кон-
контактной реакции. Решения строились на основе линейных кинематических,
статических и физических соотношений теории оболочек. Классически!0;
подход, заключающийся в построении интегрального уравнения относи-
относительно контактного давления, существенно опирается на линейность тео-
теории, поскольку базируется на принципе суперпозиции.
Несмотря на известные успехи в развитии нелинейной теории приме-
применительно к изучению статики, динамики и устойчивости оболочек, следует
отметить некоторое отставание теории контактного взаимодействия, а
значит, н актуальность проблемы, сформулированной в названии книги.
Значительный вклад в этот раздел механики оболочек внесен авторами мо
нографий [96, 97] и статей [163—174].
В отлнчие от использованных ранее сочетаний методов конечных раз-
разностей, конечных элементов, локальных вариации с итеративными процес-
процессами, в настоящей монографии построена методика, базирующаяся на линеа-
линеаризации краевых задач, сведение их к ряду задач Коши н метод ортого-
ортогональной прогоикн С. К. Годунова. Главным в ней, однако, является не
тот или иной конкретный метод решения нелинейной краевой задачи, а
исключение контактного давления нз числа неизвестных функций введе-
введением его явной связи с поперечным обжатием податливого слоя между
оболочкой и штампом или самой оболочки. В задачах о контакте оболочки
с вннклеровым основанием такая связь возникает естественным образом,
при изучении взаимодействия оболочки со штампом она вводится ранее,
чтобы выразить прогиб через контактное давление.
Эти задачи подробно изложены в главах I н II. В главе III данный
подход развит применительно к задаче одностороннего взаимодействия
между двумя гибкими физически нелинейными оболочками. Особенность
построенного в ней итеративного алгоритма — раздельное (в каждом
г.о:ледовательном приближении) решение модифицированных краевых за-
задач для первой и второй оболочек, что заметно упрощает реализацию вы-
вычислительного процесса. Доказана его сходимость, а также рассмотрено
влияние ряда факторов на ее характер.
Развитые в главах II и III методы решения задач использованы для
численного анализа напряженно-деформированного состояния подкреплен-
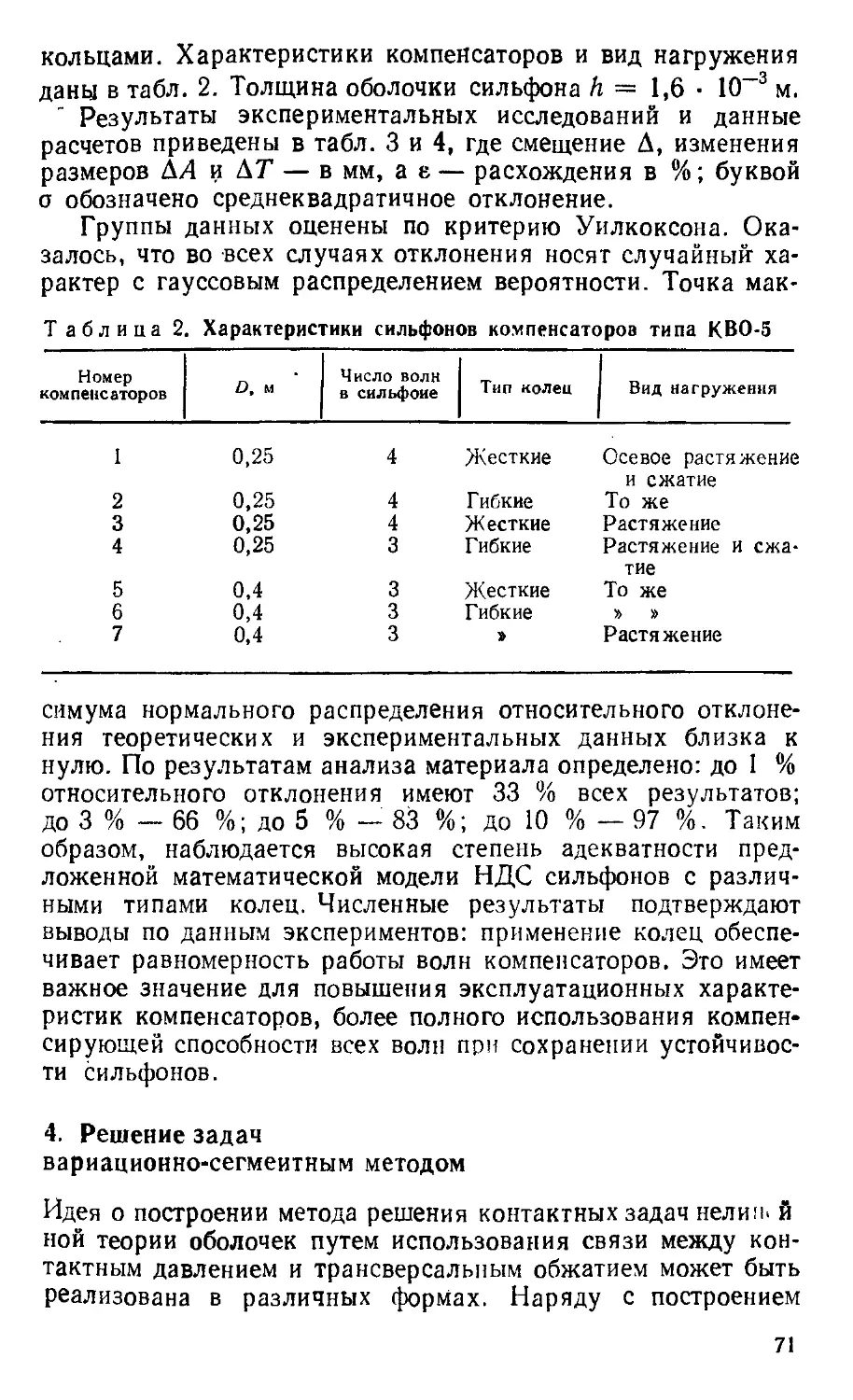
подкрепленных жесткими и гибкими кольцами сильфонов компенсаторов осевых пе-
перемещений трубопроводов в главе IV. Уделено внимание новой задаче
о кинематической связи штампов (в рассматриваемых примерах — жестких
колец кругового поперечного сечения) с оболочкой. Опнсаио применение
вариационно-сегментного метода шагового решения контактной задачи
для оболочки вращения средней толщины с учетом деформации попереч-
поперечного сдвига, физической и геометрической нелниейностеи.
Задачи устойчивости оболочек при односторонних ограничениях на
прогиб (определение особых и предельных точек иа траекториях нагруже-
ния) изучены в главе V. Здесь сформулирована концепция потерн устой-
устойчивости процесса иагружения упругих оболочек, дана более близкая к
реальной постановка задачи устойчивости оболочек под действием осадки
грунта.
В главе VI построена нелинейная теория оболочек, составленных нз
связанных лишь иа краях слоев, не спаянных между собой, а проскаль-
проскальзывающих свободно или с трением н односторонне взаимодействующих по
нормали. Особенность теорин заключается в том, что число искомых функ-
функций в ней не пропорционально числу слоев, более того, приемлемую точ-
точность решений часто можно получить при их количестве, существенно мень-
меньшем произведения чисел слоев и компонент вектор-функции в теории слоя.
Построены канонические системы обыкновенных дифференциальных урав-
уравнений для случаев, когда поведение слоев подчинено гипотезам Кирхго-
Кирхгофа — Лява н Тимошенко, а также вариационное уравнение технической
теорин слоистых оболочек этого класса.
Автор благодарит Я. М. Григоренко за полезные замечания, выска-
высказанные при подготовке рукописи, а также своих учеников Т. Л. Богаты-
реико, В. М. Роменского, А. В. Мартыненко за большую работу по числен-
численной реализации методов, изложенных в книге.
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
А, В — точки срединной поверхности
Аи А» — коэффициенты первой квадратичной формы срединной по-
поверхности
а — функция зазора между оболочкой и штампом
аи — функция зазора между k-м и k + 1-м слоями
D — цилиндрическая жесткость, D — Eh3/12 A — V2)
d —¦ приведенные жесткости винклерова основания, d = kR'llh-,
Е — модуль упругости изотропного материала
?,, Е.г — модули упругости ортотропного материала
?,., Ек — секущий и касательный модули
гюег2: ei2 — деформации в линейной теории
G — модуль сдвига
h — толщина оболочки
i — номер полинома (/ ? [ 1, п])
К — модуль объемной деформации
k — коэффициент жесткости трансверсального обжатия оболочки
в зоне контата
klt k2 — главные кривизны срединной поверхности
kw — коэффициент постели вииклерового основания
/. — длина цилиндрической оболочки
Li — нелинейные матричные дифференциальные операторы (? =
= 1, 2)
Ц — дифференциалы Фреше операторов L(
q — интенсивность нормальной нагрузки
Я\> Яг —интенсивность тангенциальной поверхностной нагрузки
<?¦*", q" — скорость изменения нормальной нагрузки на внешней
(г = Л/2) и внутренней {г = —А/2) поверхностях тела обо-
оболочки
qk — контактное давление
R — радиус-вектор точки срединной поверхности
R — радиус оболочки
s — длина дуги меридиана оболочки вращения
и, у, л> — перемещения точки срединной поверхности
и, w — скорости изменения меридионального перемещения и про-
прогиба
и j — частная производная от и по *,•
»Р ц'; — прогибы первой и второй оболочек
и% — прогиб k-то слоя
Yk (a) — вектор-функция с номером k
а, Р — криволинейные координаты точки срединной поверхности
Г — граница области контакта
у — коэффициент трения
уг —параметр граничных условий (г?[1, 6])
Д < 0 — осевое обжатие сильфона компенсатора
Д„ — оператор Лапласа
б — знак вариации
б (р) — дельта-функция Дирака
6^ • — символ Кронекера
в — допустимая относительная погрешность
8/ — интенсивность деформаций
8j, 82 — меридиональная и окружная деформации
8jj, е2а, е12 — компоненты тензора деформаций
0J, в2 — углы поворота элемента срединной поверхности
Иц. Ха2> xi2—изменения кривизны срединной поверхности
К1» "г — изменения меридиональной и окружной кривизн
% — параметр обобщенного перемещения
щ — наименьшее собственное число оператора Lt
v — коэффициент Пуассона
vt, v2 — коэффициенты Пуассона ортотропного материала
а1> а2 — меридиональное и окружное напряжения
ап, а22, а12 — компоненты тензора напряжений
Oi — интенсивность напряжений
ат — предел текучести
Ф — скорость изменения угла поворота нормали к noeepxi
Q — срединная поверхность оболочки
со — область контакта
— знак коварнантной производной по xi
— условный диаметр сильфона
Глава I
ОБЗОР ПОСТАНОВОК
КОНТАКТНЫХ ЗАДАЧ
И МЕТОДОВ ИХ РЕШЕНИЯ
Оценка прочности элементов конструкций, плотности соеди-
соединений, повреждаемости их внешних слоев требует постанов-
постановки и решения задач одностороннего механического взаимодей-
взаимодействия тонких оболочек с абсолютно жесткими телами (штампа-
(штампами), упругими основаниями и оболочками. В отличие от
двухстороннего взаимодействия, когда контактирующие тела
составляют одно целое (что достигается, например, сваркой),
при одностороннем взаимодействии реакции связей сохраняют
знак или равны нулю. Далее под контактом понимаем только
одностороннее взаимодействие, хотя е ^литературе этот термин
часто применяют при решении задач определения напряжен-
напряженно-деформированного состояния (НДС) лишь мысленно отде-
отделяемых друг от друга деталей (оболочки, ребер и т. п.). При
одностороннем контакте перемещения точек соприкасающих-
соприкасающихся тел подчинены неравенству — условию непроникновения.
Впервые задача о контакте упругих тел, первоначально
соприкасающихся в точке, сформулирована и решена Г. Гер-
Герцем. Развитие техники поставило проблему контактного взаи-
взаимодействия в ряд актуальных задач современной механики
деформируемого твердого тела. Сложность этих задач обусло-
обусловила большое число подходов и математических методов, ис-
используемых при их решении. В данной главе приведем крат-
краткий обзор состояния проблемы. Основное внимание уделяется
оценке возможности использования известных подходов
и методов к решению контактных задач для гибких оболочек,
а также оболочек из физически нелинейного материала.
1. Взаимодействие оболочки со штампом
Обширный раздел теории оболочек составляет проблема кон-
контакта тонкостенных элементов конструкций с абсолютно жест-
жесткими телами (штампами), упругим основанием и между собой.
Наиболее полно изучены задачи взаимодействия со штампами
пластин и оболочек, НДС которых описано линейной теорией.
Обзор литературы, в которой рассматриваются такие задачи,
дан в работах 169, 70, 130, 212, 214, 219], а также в моногра-
монографиях 184, 183, 184, 199—201, 203]. Наиболее важные сведения
о методах решения состоят в следующем.
Напряженно-деформированное состояние оболочки, взаи-
взаимодействующей со штампом, подчиним системе линейных
дифференциальных уравнений
(I.I)
краевым условиям GU (А) — Н {А) и условию непроникнове-
—v —»
ния штампа в тело оболочки /(/?+?/)> 0, А ? ю. Здесь L —
матричный дифференциальный оператор; U и U — искомая
вектор-функция и вектор перемещений точки поверхности Q;
F — вектор-функция внешней распределенной нагрузки;
1]) (©) = 1, ij) (А ^ ©) = 0; М — столбец, элемент которого,
отвечающий уравнению равновесия в проекции на нормаль
к поверхности Q, равен единице, а остальные — нулю; fk =
= 0 — уравнение поверхности штампа (вне штампа принято
/ > 0). Условие непроникновения обычно записывается в ли-
линеаризованной форме
?<о. A.2)
Решением задачи A.1), A.2) являются вектор-функция, зона
контакта и контактное давление. Если область © не задана,
задача «конструктивно» нелинейна. Отметим, что в ряде слу-
случаев контактная реакция может содержать сосредоточенные
по границе © поперечную силу и момент, вектор которого ка-
сателен к границе области <о.
Чаще других используется метод, основанный на приведе-
приведении задачи к интегральному уравнению Фредгольма первого
рода:
^ A ?ю, A.3)
где G {А, В) —функция Грииа, определяющая прогиб в точке
А при действии в точке В сосредоточенной силы, нормальной
к поверхности оболочки; g (А) — сумма, состоящая из выра-
выражения, описывающего форму части поверхности штампа,
вступившей в контакт, и функции, определяющей перемеще-
перемещение штампа как твердого тела.
Если уравнение A.3) получено в рамках гипотез Кирх-
Кирхгофа — Лява, то оно имеет лишь обобщенное решение: кон-
контактная реакция представляет собой сосредоточенные на гра«
нице зоны контакта силу (если зона не задана) и момент (при
8
неизвестной области ш) [70, 214]. В ряде работ уравнение A.3)
строится на основе одной из теорий, учитывающих попереч-
поперечный сдвиг. Тогда решение можно получить только в классе
функций, имеющих разрывы первого рода: при заданной об-
области со терпит разрыв поперечная сила, если область <о неиз-
неизвестна, то контактное давление на границе этой области ко-
конечно. Известно, однако, что при решении контактных задач
с использованием уравнений теории упругости на границе зо-
зоны и сосредоточенные реакции не возникают и qk = 0. Устра-
Устранить указанную трудность можно применением неклассиче-
неклассических теорий оболочек, учитывающих поперечное обжатие, но
из-за повышения порядка системы дифференциальных урав-
уравнений, описывающих НДС оболочки, такой путь неоправдан-
неоправданно усложняет задачу.
Контактную задачу теории оболочек можно сделать ма-
математически корректной методами регуляризации, сущность
которых заключается в переходе от A.3) к уравнению Фред-
гол ьма второго рода:
\G (Л, В) цк (В) dx» = / (Л). A.4)
Методы математической регуляризации основаны на понятии
регуляризирующего оператора [156, 230]. В работах 1106—
108] рассмотрены различные методы регуляризации интег-
интегральных уравнений осесимметричных контактных задач для
цилиндрических оболочек и проанализирована их эффектив-
эффективность. Установлено, что для интегрального уравнения A.3)
наиболее эффективен регуляризирующий алгоритм Лаврен-
Лаврентьева.
Наиболее сложный этап при решении задач этим мето-
методом—выбор параметра регуляризации. Необходимо опреде-
определить такое К, которое, с одной стороны, делало бы решение
устойчивым, а с другой — незначительно искажало бы перво-
первоначальное интегральное уравнение первого рода. Для выяв-
выявления значения К целесообразно использовать априорную
информацию о решении [231] как для сужения области по-
поиска, так и для окончательного его выбора. Установлено, что
достаточно общим и математически обоснованным методом вы-
выбора параметра регуляризации является метод минимизации
невязки [230, 231]. При его использовании можно обойтись
минимумом априорной информации о решении, но приходит-
приходится решать дополнительную задачу определения минимума
функционала.
Существуют и другие подходы к проблеме регуляризации
интегральных уравнений рассматриваемых контактных за-
задач. Они основаны на уточнении физической постановки
задачи, их можно назвать методами физической регуляризации.
В одном из них, предложенном почти одновременно в работах
[35—40, 80, 132, 212], в зоне контакта вводится упругий слой,
учитывающий реальные свойства микрогеометрии контакти-
контактирующих поверхностей и обладающий следующими свойства-
свойствами: деформации контактного слоя носят чисто местный харак-
характер и не зависят от перемещений контактирующих тел; взаим-
взаимное влияние контактных деформаций друг на друга исклю-
исключается, т. е. перемещение любого участка контактного слоя не
связано с перемещениями других участков; деформации кон-
контактного слоя прямо пропорциональны контактным силам
взаимодействия. Составляя условия контакта в интегральной
форме, получаем интегральное уравнение Фредгольма вто-
второго рода. Коэффициент К также является параметром регу-
регуляризации, количественно характеризующим свойства кон-
контактирующих поверхностей и определяется эксперименталь-
экспериментально [4, 98, 160, 235].
Другой метод физической регуляризации основан на уче-
учете в зоне контакта обжатия оболочки по толщине, которым
классическая теория пренебрегает. При таком подходе при-
приходим к уравнению Фредгольма второго рода A.4), но коэф-
коэффициент К здесь имеет другой физический смысл.
Термин «обжатие оболочки в зоне контакта» требует разъ-
разъяснения. Именно учет изменения расстояния между средин-
срединной и внешней поверхностями оболочки в этой зоне под дей-
действием контактного давления дает необходимый вклад в урав-
уравнение A.4). Однако обычно для регуляризации задачи вводят
фиктивный упругий слой между поверхностями штампа и обо-
оболочки. Если такой слой есть в конструкции, математическая
постановка задачи адекватна реальной, но введение фиктив-
фиктивного слоя создает впечатление о несоответствии математиче-
математической модели реальной задаче.
Представляется все же, что, оставаясь в рамках классиче-
классической теории оболочек, можем принимать во внимание поаереч-
ное обжатие в зоне контакта. Действительно, классическую
теорию можно применять, если нормальная нагрузка и кон-
контактное давление удовлетворяют одинаковому требованию:
они должны быть меньше нормальных напряжений в попереч-
поперечных сечениях оболочки настолько, чтобы в соотношениях за-
закона Гука ими можно было пренебречь.
Один нз способов определения коэффициента К в уравне-
уравнении A-4) — отождествление трансверсального обжатия со
смещением границы полупространства под действием контакт-
контактного давления [144, 145]. В работах [1,3, 44, 212] использо-
использовано выражение для нормального перемещения слоя .малой
толщины, жестко соединенного с недеформируемым основа-
10
нием [67]. Показано, что чем меньше толщина слоя, тем ближе
его механические свойства к свойствам винклерова основания
[67]. Способ учета поперечного обжатия в рамках классиче-
классической теории оболочек интегрированием соотношений закона
Гука для трансверсальной деформации при вычисленном из
уравнений равновесия нормальном напряжении описан в [42,
84, 132].
Обширные исследования влияния учета обжатия и попе-
поперечного сдвига выполнили Ю. П. Артюхин, С. Н. Карасев [9—
17, 132, 133]. Метод решения одномерных контактных задач
в этих работах основан на переходе от интегрального урав-
уравнения относительно контактного давления к краевой задаче.
Сделан вывод, что учет обжатия оболочки контактным давле-
давлением играет основную роль в приближении их результатов
к данным теории упругости, а деформация поперечного сдви-
сдвига — второстепенную. Выяснено, что обжатие хорошо опи-
описывается моделью винклерова основания, благодаря чему при
изучении взаимодействия тонких оболочек со штампами мож-
можно применять наиболее простую — классическую теорию. Та-
Такие же выводы сделаны в работах [195, 253].
Анализ корректной разрешимости контактных задач при
использовании различных теорий оболочек проведен в [13, 84,
214]. Применительно к осесимметричной контактной задаче
для круговых цилиндрических оболочек математические ас-
аспекты использования моделей Кирхгофа — Лява, Тимошенко
и учета трансверсалыюго обжатия, выяснение условий кор-
корректности задач, способы-их регуляризации рассмотрены в
[130]. Для строгого изучения этих вопросов применены теория
обобщенных функций и методы решения некорректных задач.
Приведены сведения из теории краевых задач для обыкновен-
обыкновенных дифференциальных уравнений с постоянными коэффици-
коэффициентами и основные понятия теории обобщенных функций.
С помощью фундаментальной системы решений дифференци-
дифференциального оператора построены функции Грина и функции влия-
влияния для оболочек Кирхгофа — Лява и Тимошенко. Даны
постановки задач о контакте оболочекмежду собой и сосесим-
метричными жесткими штампами. Методом сопряжения пост-
построены обобщенные решения, поскольку классическое сущест-
существует только для моделей, учитывающих трансверсальное
обжатие. Найдены обобщенные решения интегральных урав-
уравнений Фредгольма первого рода, рассмотрены методы их ап-
аппроксимации классическими (методы регуляризации).
Методы решения контактных задач, основанные, на приме-
применении интегральных уравнений A.3) или A.4), требуют знания
функций Грина, поэтому их трудно использовать, когда НДС
оболочки описывается геометрически или физически нелиней-
11
ной теорией. Отметим ряд методов, не связанных с интеграль-
интегральными уравнениями. На ряде задач предложен и проиллюстри-
проиллюстрирован [28] метод функциональных рядов, относительно коэф-
коэффициентов которых строится бесконечная система линейных
алгебраических уравнений. Метод штрафных функций, до-
добавляемых к энергетическому функционалу для выполнения
кинематического условия контакта, применен в работах [244,
245, 258, 259, 263] в сочетании с методом конечных элементов
(МКЭ) и вариационно-разностным методом. Введение штраф-
штрафной функции эквивалентно учету энергии поперечного обжа-
обжатия оболочки. Метод коллокаций для итеративного уточнения
зон контакта, МКЭ и дискретное преобразование Фурье для
отыскания матрицы коэффициентов влияния предложен в
[249]. Релаксационная процедура МКЭ, совмещающая про-
процесс решения системы уравнений равновесия и неравенств,
определяющих область контакта, дана в [225].
Широко применяется для решения контактных задач тео-
теории оболочек и пластин метод сопряжения, причем область
Q разбивается на область О— со и зону контакта оз. Ищутся
решения системы A.1) для каждой из областей в отдельности,
а затем сопрягаются на границе зоны контакта. Необходимо
априорное знание границ области со [52, 137, 184] или построе-
построение итеративного процесса их уточнения. Метод асимптотиче-
асимптотического интегрирования (вне зоны контакта) уравнений сфери-
сферической оболочки в задаче о контакте ее со сферическим вогну-
вогнутым штампом развит в 1162].
Часто используется так называемый полуобратный метод
[41], заключающийся в том, что распределение контактного
давления описывается каким-либо выражением, содержащим
произвольные постоянные. Заданные напряжения использу-
используются в качестве поверхностной нагрузки для тонкостенного
элемента. Для каждой гармоники из уравнений равновесия
находят прогиб оболочки, константы определяют из условий
контакта. Зная структуру функции искомого контактного на-
напряжения [40, 2641, эффективно применяют полуобратный
метод.
Интегральные уравнения 112, 13] подходящими дифферен-
дифференциальными операторами переводятся в дифференциальные от-
относительно контактного давления. Общие решения получен-
полученных уравнений подставляют в исходные интегральные. Из ус-
условий обращения их в тождество при выполнении равновесия
штампа определяют произвольные постоянные, содержащие-
содержащиеся в общем решении. Более совершенный способ предложен
в [10, 17], где интегральные уравнения удалось преобразовать
в одномерные краевые задачи непосредственно для искомого
контактного напряжения. В качестве примеров задач о кон-
12
такте цилиндрических и сферических оболочек с жесткими
штампами отметим работы 1100, 198, 207, 232, 257].
Взаимодействие тонкой оболочки и жесткого бандажа
рассматривается в [107, 135, 136] с учетом трения в зоне кон-
контакта. Решение строится разложением искомых функций в
степенные ряды по нормальной к поверхности оболочки коор-
координате. Подобная задача решается с помощью уравнений
теории упругости в работе [252], силы трения учтены в [106,
108].
Для решения задач о поведении механических систем с од-
односторонними связями применяют симплекс-метод [215], ди-
динамическое программирование [8, 216], а также методы реше-
решения вариационных неравенств — локальных вариаций [163—
176, 240], нелинейного программирования [29, 75, 151, 152,
155], последовательного нагружения [241]. Такие методы осо-
особенно эффективны для двумерных задач о контакте оболочек
со штампами.
Теоретико-экспериментальный метод решения одномерных
контактных задач предложен в [15]. Экспериментальному опре-
определению контактных давлений посвящена работа [223].
Решений контактных задач, в которых равновесие оболоч-
оболочки описано геометрически или физически нелинейной теорией,
в литературе значительно меньше. В основном это исследова-
исследования Г. И. Львова [163—174]. В них предложена вариацион-
вариационная постановка контактных задач для тонкостенных гибких
элементов конструкций на основе физических соотношений
деформационной теории пластичности Ильюшина, теорий
пластического течения и технических теорий нелинейной пол-
ползучести. С помощью математического аппарата вариационных
неравенств дано определение обобщенного решения и задача
сведена к проблеме минимизации функционала, заданного на
множестве допустимых решений. Минимизация функционалов
выполнена методом локальных вариаций, поперечное обжа-
обжатие оболочки в зоне контакта не учтено.
Контакту гибких мембран и физически нелинейных поло-
пологих оболочек с жестким телом лосвящены работы [163—165,
168, 171, 172], взаимодействие цилиндрических и конических
оболочек со штампом рассмотрено в [167, 169, 173]. На осно-
основе инкрементальных теорий этот подход применен к задачам
о контакте упругопластических и подверженных ползучести
оболочек вращения с жестким телом в [211], а также в [176].
Минимизировав энергетический функционал методом локаль-
локальных вариаций, авторы [138] изучили взаимодействие гибкой
(геометрическая нелинейность) тороидальной слоистой орто-
тропной оболочки с абсолютно жесткой поверхностью. В этой
работе учтены деформации поперечного сдвига и обжатия.
13
Теория вариационных неравенств применена для решения кон-
контактных задач также в работе [257]. Вариационный подход к
решению нелинейных контактных задач на основе теории Ти-
Тимошенко и с учетом трансверсального обжатия предложен
в [43].
Задача о контакте гибкой круглой пластины с жесткой
плоской плитой решена в [175] итеративным сопряжением ре-
решений краевых задач для систем обыкновенных дифференци-
дифференциальных уравнении в зоне контакта и вне ее. Деформация по-
поперечного обжатия не принята во внимание, поэтому попе-
поперечная сила на границе зоны контакта терпит разрыв.
Наиболее сложно в рассматриваемых задачах установить
область контакта со, определяемую из условия
qk(A)>0, A?Q. A.5)
В задачах о контакте штампа с элементом тонкостенной кон-
конструкции обычно область со априори неизвестна. Тогда на пер-
первой итерации вводится допущение о двухстороннем характере
связей. После решения задачи в такой постановке и нахожде-
нахождения qk (А) избавляются от указанного допущения, исключая
из области контакта участки, где условие A.5) не выполня-
выполняется. Решение повторяется снова для установленной области
и и так далее до сходимости. Подобный процесс последова-
последовательных приближений, основанных на идее спуска в некото-
некотором функциональном пространстве [142, 226], получил широ-
широкое распространение для решения задач о НДС и устойчиво-
устойчивости при одностороннем контакте [41,45,96,111,121,127, 184].
Условие разрешимости интегрального уравнения предложе-
предложено для определения зон контакта в [48].
В работах [119, 120, 123, 127] развит подход к решению
контактных задач нелинейной теории оболочек, базирующих-
базирующихся на исключении из числа неизвестных функций контактного
давления qk с помощью винклеровой связи. Такой учет об-
обжатия оболочки в зоне контакта эквивалентен постановке A.4),
но вместе с тем позволяет избавиться от трудоемкой процеду-
процедуры численного построения функций Грина и непосредственно
находить искомые решения из уравнений равновесия A.1).
На основании изложенных сведений можно сделать сле-
следующие выводы. Проблема контактного взаимодействия тон-
тонких тел со штампами получила в последние десятилетия боль-
большое развитие. Построены аналитические решения, предложен
ряд численных методов. Выявлены особенности применения
различных теорий оболочек в контактных задачах. Предло-
Предложен простой способ регуляризации, позволяющий прибли-
приблизить результаты, получаемые на основе классической теории
тонких оболочек, к данным теории упругости.
14
Вместе с тем необходимо искать новые подходы и эффек-
эффективные методы для изучения НДС гибких тонкостенных эле-
элементов с учетом физической нелинейности материала в усло-
условиях их одностороннего взаимодействия с жесткими телами
2. Односторонний контакт
между оболочками
Задачи о контактном взаимодействии между тонкими оболоч-
оболочками особенно сложны, поскольку при их решении приходится
одновременно определять НДС и зоны контакта двух и более
оболочек, в общем случае различной формы.
Наиболее проста линейная постановка для цилиндрических
оболочек разной длины, установленных с натягом. Без учета
обжатия, т. е. когда в решение входят сосредоточенные попе-
поперечные силы на границе зоны контакта, задача изучена авто-
авторами работ [37, 38, 101, 102], где решены дифференциальные
либо интегральные уравнения. Обжатие по модели Винклера
введено в работах [39, 40], по модели упругого цилиндра и
слоя — в [144, 145]. В двух последних работах контактное дав-
давление становится бесконечным на границах зон контакта. С по-
помощью теории Тимошенко эта задача исследована в 1197]. Ре-
Решение такой же задачи получено [41] представлением контакт-
контактного давления в виде суммы произведений неизвестных коэф-
коэффициентов на заданные функции, ортонормированные на
участке контакта. Коэффициенты вычисляются методом наи-
наименьших средних квадратов из кинематического условия кон-
контакта, граница зоны контакта уточняется итеративным путем.
Этот подход позволяет существенно упростить расчеты, по-
поскольку в нем не требуется решать дифференциальные или
интегральные уравнения относительно контактного давления,
результаты же полностью совпадают с данными [38, 39]. Та-
Такой же метод применен в работах [45—17] для анализа НДС
двухслойного сильфона с промежуточным податливым
кольцом.
Взаимодействие двух соосных цилиндрических оболочек
разной длины с зазором между ними при нагружении внут-
внутренним давлением оболочки меньшего радиуса жучено в [245,
250]. Авторы работы [250] сопрягают аналитические решения
уравнений равновесия оболочек в зоне контакта и вне ее, по-
получают систему уравнений относительно произвольных по-
постоянных, находят осевую координату границы зоны контак-
контакта, решая систему трансцендентных уравнений. Сочетание ва-
вариационно-разностного метода с методом штрафной функции
применено в 1245]. Обжатие в обеих работах не учтено, исполь-
использованы теории Кирхгофа — Лява, Тимошенко, Рейсснера.
15
Взаимодействие двух сферических оболочек рассмот-
рассмотрено по теории Кирхгофа — Лява в [232], причем обнаружено,
что контактная реакция — распределенная по окружности со-
сосредоточенная сила. Решение этой же задачи основано на тео-
теории Тимошенко в [207]. На границе зоны контакта получено
контактное давление, равное нулю, хотя оно должно было бы
принять конечное значение.
Контакт двух круглых пластин, установленных с зазором
при нагружении одной из них, изучен в [10] с использованием
теории Жермен — Лагранжа — Кирхгофа. На границе
зоны контакта обнаружены сосредоточенные сила и момент.
Теория Рейсснера позволила получить конечное значение кон-
контактного давления qk на границе [248]. Задача о контакте меж-
между двумя прямоугольными пластинами решена вариационно-
разностным методом в [246]. Перечисленные исследования ис-
исходят из линейной теории оболочек.
Геометрически нелинейная теория оболочек применена в
работах [57, 58] для изучения МКЭ контакта между слоями
гофрированных мембран. Условия контакта здесь представ-
представлены специальными физически нелинейными элементами меж-
между узлами слоев, входящими в соприкосновение.
Проблема изучения механического поведения слоистых
оболочек с неидеальным сопряжением слоев представляет со-
собой особый класс контактных задач. Для построения теории
таких оболочек и методов их расчета обычно используют
дискретный подход, заключающийся в том, что для каждого
из слоев записывают полную систему соотношений выбранной
теории оболочек и замыкают ее кинематическими и статиче-
статическими условиями сопряжения слоев (равенствами и неравен-
неравенствами). Порядок системы дифференциальных уравнений, по-
получаемый таким путем, в iV раз больше {N — число слоев)
порядка системы для слоя.
В случае, если нормальные перемещения и напряжения на
соприкасающихся поверхностях слоев совпадают, а касатель-
касательные напряжения равны нулю, приходим к задаче об оболочке
с проскальзывающими без трения слоями. Зоны контакта при
этом известны, что существенно упрощает задачу. В указан-
указанной постановке решены задачи статики слоистых цилиндри-
цилиндрических [59] и сферических [196] оболочек. Метод последова-
последовательных приближений, основанный на «принципе поочеред-
поочередной непрерывности», в соответствии с которым краевые задачи
для слоев решаются на каждой итерации независимо, применен
в [208, 238, 239] для изучения слоистых цилиндров и цилинд-
цилиндрических оболочек. Более сложная задача для цилиндров,
слон которых в некоторых зонах сцеплены, а в других про-
проскальзывают, решена в [189]. В этой работе получил развитие
для случая проскальзывания слоев без отрыва [50, 51] метод
энергетической континуализации, основанный на разложении
по полиномам от аппликаты компонент НДС пакета слоев.
Такой прием позволяет понизить порядок системы уравне-
уравнений, но приводит к неустранимой погрешности при малом чис-
числе слоев, поскольку используемые в нем полиномы — непре-
непрерывные функции аппликаты.
Дискретный подход для пластин со слоями Тимошенко реа-
реализован в [202] с помощью предложенного авторами матрич-
матричного метода, приводящего задачу к системе интегральных
уравнений относительно контактного давления в неизвестных
априори зонах. Здесь учтена возможность появления разры-
разрывов областей соприкосновения слоев. Наиболее полно разра-
разработана дискретная теория в [157, 158, 201], где построены си-
системы уравнений и функционалы, учитывающие весь спектр
возможных условий неидеального контакта слоев.
Все рассмотренные работы основаны на линейных теориях
слоя. Трудности решения задач в соответствии с этими тео-
теориями возрастают пропорционально числу слоев. Это побуди-
побудило нас к построению теории, в которой прямая связь числа ис-
искомых функций и числа слоев отсутствует, причем равновесие
слоев можно- описать нелинейными уравнениями [119, 120,
122—126]. Контактное давление исключено из числа искомых
функций с помощью связи по Винклеру с поперечным обжати-
обжатием, выраженным через разность прогибов соседних слоев.
Представление искомой вектор-функции слоя суммой произве-
произведений новых неизвестных, зависящих от координат точек сре-
срединной поверхности пакета, на полиномы дискретного аргу-
аргумента (аппликаты поверхности отсчета слоя) позволило по-
получить разрешающие системы дифференциальных уравнений,
порядок которых не зависит от числа слоев. Термин «конти-
«континуальная теория» в названиях работ [119, 120] неудачен, его
следовало бы заменить на «дискретно-континуальная теория»,
поскольку зависимость искомых вектор-функций от номера
слоя в этой-теории описана ортоиормированной системой по-
полиномов дискретного аргумента. Предложенный в [119] ите-
итеративный процесс одновременно уточняет границы зон кон-
контакта и уменьшает невязку нелинейных уравнений' равнове-
равновесия оболочек.
Новые методы решения нелинейных задач о контакте меж-
между двумя оболочками разной формы и эквидистантными сло-
слоями изложены в третьей и шестой главах книги.
2 9-S378 17
3. Устойчивость элементов
тонкостенных конструкций при односторонних
кинематических ограничениях
Исследованию устойчивости элементов тонкостенных конст-
конструкций, связанных с упругой средой, посвящено большое ко-
количество работ, которые подробно проанализированы в [109,
ПО]. В этих работах предполагается наличие безотрывного
контакта оболочки со средой и исследование проводится обыч-
обычными методами теории устойчивости деформируемых систем.
Напомним, что при большой относительной жесткости двух-
двухстороннего упругого основания d0 = kwR2/Eh ^> 1 [146], от-
отношение критических значений напряжения при сжатии вдоль
оси цилиндрической оболочки, связанной с основанием а* и
свободной о0: о = а*/а0 = V\ + d0, a0 = [1/^3A — v2)] (Eh/R).
Таким образом, с ростом d0 величина о* увеличивается. По-
Поведение оболочки, прогиб которой ограничен односторонне,
отличается качественно. Из физических соображений ясно,
что в этом случае o\d^x = const.
Задачи устойчивости оболочек в случае их одностороннего
взаимодействия с упругим или жестким основанием сущест-
существенно сложнее. Это связано с конструктивной нелинейностью
системы, вызываемой включением и выключением односто-
односторонних связей, а значит, и самой структуры разрешающих
уравнений. Публикации в этой области немногочисленны.
Вначале рассмотрим те из них, в которых изучается бифур-
бифуркация форм равновесия.
Впервые подобная задача решена А. П. Варваком. Методом
Ритца исследована устойчивость сжимаемой осевыми усили-
усилиями длинной тонкой шарнирно опертой цилиндрической обо-
оболочки, внутри которой помещен сплошной упругий цилиндр
[56]. Сопротивление этого заполнителя перемещениям оболоч-
оболочки к оси моделируется упругим основанием по Винклеру.
Собственная форма принималась осесимметричной
w = f sin (mnx/L), A.6)
где т — число волн вдоль меридиана оболочки; х — осевая
координата. При выборе формы в виде A.6) критическое на-
напряжение о* неограниченно растет с увеличением жесткости
заполнителя, что не соответствует действительности. Решив
задачу для формы
w = /0 + /„ sin (mnx/L), A.7)
автор работы [56] обнаружил, что с ростом жесткости запол-
заполнителя отношение о стремится к У^З. Функция A.7) не удов-
удовлетворяет условиям свободного оиираиия, поэтому решение от-
18
вечает бесконечно длинной оболочке. При конечном значении
da величина о* существенно зависит от Rlh.
Аналогичная задача, но для оболочки конечной длины, ре-
решена вариационно-разностным методом [7], форма потери ус-
устойчивости также принята осесимметричной. Для определе-
определения границ зон контакта использован принцип оптималь-
оптимальности Р. Беллмана, но с априорной оценкой параметров
управления. Предельным переходом получены значения о для
абсолютно жесткого одностороннего основания: при шарнир-
шарнирном опирании а = 1,09; для жесткого защемления о = 1,7.
Сделан вывод о независимости а от геометрического парамет-
параметра оболочки /i#~' (/?L~')a, что противоречит эксперименту.
Прямым интегрированием уравнений устойчивости [104]
определено критическое значение осевого сжимающего уси-
усилия для цилиндрической оболочки в зависимости от жесткости
односторонней связи. Рассмотрена только осесимметричная
форма потери устойчивости Предельным переходом показано
[105], что для оболочки на абсолютно жестком основании а =
= 1,661, причем величина а не зависит от характера закреп-
закрепления торцов оболочки и положения одностороннего основа-
основания относительно срединной поверхности оболочки. Этот вы-
вывод не подтверждается ни теоретическими результатами дру-
других авторов, ни данными эксперимента [105].
Отметим, что А. И. Ермичев впервые обратил внимание на
то, что расчетные схемы в работах [7, 56] отвечают постановке
задачи устойчивости, не реализуемой в конструкциях. Зазор
а между оболочкой и основанием считается полностью выбран-
выбранным при докритическом деформировании оболочки, так что
а = \Ra*IE и контактное давление равно нулю.
Как видим, выводы, полученные в работах [7, 56, 104, 105],
не совпадают между собой. В них различными приближенными
методами определена только осесимметричная форма потери
устойчивости -при линейном докритическом состоянии. При-
Приведенные ниже результаты экспериментов качественно и ко-
количественно отличаются от теоретических.
Особое место в теоретических исследованиях занимают ра-
работы, выполненные В. А. Баженовым, А. И. Оглоблей,
Е. А Гоцуляком, по изучению неосесимметричных форм по-
потери устойчивости при одностороннем контакте о упругим ос-
основанием колец, цилиндрических оболочек и пологих панелей,
нагруженных давлением 118—26, 76—79]. Здесь учтены ли-
линейное (кольцо, цилиндрические оболочки) и нелинейное (па-
(панели) докритические состояния. Дифференциальные уравне-
уравнения устойчивости заменяются системой однородных алгебра-
алгебраических уравнений. Методом продолжения решения по
2* 19
параметру жесткости заполнителя в сочетании с методом после-
последовательных приближений находится расчетная схема систе-
системы (зоны контакта). Определение критической нагрузки при
известной области контакта ш сводится к отысканию наимень-
наименьшего собственного числа системы однородных алгебраических
уравнений. Поведение заполнителя при контакте с оболочкой
описывается в рамках гипотезы Винклера. Так, в работах [19,
96] рассмотрены цилиндрические оболочки средней длины при
шарнирном опирании и жестком закреплении торцов. Рассчи-
Рассчитаны оболочки с Rlh, равными 50; 100; 200 в диапазонах отно-
относительного коэффициента постели d0 0—0,6; 0—0,4; 0—0,2.
Показано существенное отличие полученных значений кри-
критической нагрузки q* от критической нагрузки qKp для случая
двухстороннего контакта при тех же значениях d0. При этом
q = qKJq* увеличивается с ростом Rlh. При наибольших ис-
исследованных значениях d0 величина q*B 3—4 раза превышала
верхнее критическое q0 свободной оболочки Для одних и тех
же значений d0 величина критической нагрузки q* при жест-
жестком защемлении торцов на 2—3 % выше, чем при шарнирном
опирании. С ростом d0 число волн в окружном направлении
возрастало. Вдоль меридиана возникала одна полуволна.
Следует отметить, что при решении этой задачи докрити-
ческое состояние принималось безмоментным, вследствие че-
чего не учитывалась зависимость контактного давления от ме-
меридиональной координаты в зонах краевого эффекта у краев
оболочки. В главе V показано, что моментность докритиче-
ского состояния резко уменьшает критическое давление.
Колонна в форме цилиндра с полусферическим днищем, со-
состоящая из толстого и жесткого наружного слоя и внутренней
облицовки в виде тонкой изотропной оболочки, рассмотрена
в [260]. Исследована потеря устойчивости облицовки, т. е. ее
отслоение от внешнего слоя под действием осевого сжатия и
внешнего давления. Задача на собственные значения записана
в матричной форме, причем в меридиональном направлении
реализована дискретизация оболочки методом конечных эле-
элементов, а в кольцевом перемещения представлены в тригоно-
тригонометрической форме, учитывающей одностороннюю связь, на-
накладываемую на облицовку наружным слоем. Для различных
параметров оболочки и краевых условий в случае внешнею
давления оценено увеличение критической нагрузки, вызван-
вызванное односторонней связью.
Изучена устойчивость кольца, заключенного в равномер-
равномерно сжимающуюся абсолютно жесткую круговую обойму [246,
247]. Считалось, что при потере устойчивости кольцо может
отходить от обоймы. Однако при этом на краях зон контакта
в решении возникали сосредоточенные усилия, что объясня-
20
ется неучетом деформации обжатия при вычислении полной
энергии деформации кольца. Представленные результаты но-
носят приближенный характер.
Геометрически нелинейная задача об устойчивости в боль-
большом и о неосесимметричной бифуркации гибкой сферической
оболочки, взаимодействующей с жесткой преградой, решена
в работах [82, 257, 261, 262]. Нелинейное поведение пологой
арки, деформируемой к центру кривизны плоским жестким
штампом, подробно проанализировано методом продолжения
решения по параметру 185]. Устойчивость гибкой арки под дей-
действием давления одностороннего упругого основания изуче-
изучена в [96], а задачи динамики пластинок и оболочек на односто-
одностороннем упругом основании — в [97].
По-видимому, первая попытка экспериментально оценить
влияние одностороннего ограничения перемещения оболочки
на критическую нагрузку предпринята Л., В. Андреевым и
Е. Ф. Прокопало в 1969 г. [7]. Испытывались тонкие (R/h рав-
равно 425 и 720) цилиндрические оболочки средней длины, изго-
изготовленные из листовой стали Х18Н9-Н (Е = 1,85 • 105 МПа,
v = 0,3), помещенные в стальной кожух и нагруженные внеш-
внешним давлением. Принимались специальные меры, устраняю-
устраняющие возможность склеивания оболочки с кожухом. Во всех
испытаниях потеря устойчивости происходила хлопком с об-
образованием глубоких вмятин, как и при отсутствии кожуха.
Однако при ограничении прогибов число вмятин было в 2 раза
большим. Критическая нагрузка q* превышала верхнюю клас-
классическую <7о в 11 — '2 раз, а при исключении зазора между обо-
оболочкой и обоймой — в 17 раз, поэтому учет влияния зазора
в теоретических исследованиях необходим. Потеря устойчи-
устойчивости наблюдалась в упругой области работы материала.
Устойчивость цилиндрической оболочки при осевом сжа-
сжатии и наличии внутри оболочки жесткого вкладыша изучена
в [8]. Испытана тонкая оболочка (R/h — 260) средней длины,
изготовленная из листовой нержавеющей стали Х18Н9-Н, на
стальном барабане, который впоследствии служил вкладышем.
Для свободной оболочки получено критическое напряжение
сжатия ас = 0,86а0, а для оболочек с вкладышем зафиксиро-
зафиксирована только неосесимметричная форма потери устойчивости
с превышением а*1% в пределах от 1,210 до 1,257 раз. Влияние
зазора на а* не оценено. Материал оболочки не выходил за
предел упругости.
Попытка исключить влияние зазора на величину ^сдела-
^сделана в [7]. Для этого создан предварительный натяг оболочки
до уровня радиальных напряжений, возникающих при потере
устойчивости ранее испытанных оболочек без натяга. Очевид-
Очевидно, что даже в этом случае зазор выбран едва ли больше, чём
21
наполовину. Испытание оболочек с натягом показало, что по-
потеря устойчивости происходит по осесимметричной форме с об-
образованием одной складки в середине оболочки. При этом о =
= 2,07, но следует учесть, что материал оболочки работал в
пластической области.
В статье [104] описана серия экспериментов по исследова-
исследованию устойчивости при осевом сжатии цилиндрических оболо-
оболочек о ограничением прогиба внутрь, наружу и свободных от
односторонних ограничений на нормальные перемещения сре-
срединной поверхности. Испытывались точеные на оправке обо-
аочки из полимера ВНПМ, стали СтЗ, бронзы Бр.ОФ-03. Все
>болочки тонкие (Rlh = 18...91), средней длины, шарнирно
опертые. При испытании свободных оболочек получено крити-
критическое напряжение сжатия ос = 0,1 о0, поэтому в эксперимен-
эксперименте зафиксировано только снижение а* по отношению к а0. При
испытании оболочек с вкладышем наблюдалась только осе-
симметричная форма потери устойчивости с образованием одной
кольцевой складки у места закрепления оболочки. Величи-
Величина а0 = а*1ос принимала значения от 1,09 до 1,20. В отдель-
отдельных экспериментах имело место резкое снижение о*. Оболоч-
Оболочки в обойме геряли устойчивость как по осесимметричной, так
и по неосесимметричной формам, причем ас = 1,1...2,8. От-
Отмечено сильное влияние первоначального зазора между штам-
штампом и оболочкой на величину а* и форму потери устойчивости.
Оболочки геряли устойчивость за пределом упругости.
Таким образом, данные эксперимента указывают на зави-
зависимость критических нагрузок и форм потери устойчивости от
зазора, расположения основания, стадии работы материала.
Приведенные сведения почти исчерпывают известную ли-
литературу по проблеме устойчивости оболочек, на прогибы ко-
которых наложены односторонние ограничения. Необходимо
развитие теории, построение эффективных методов решения
задач этого класса, причем особенно важно учитывать реаль-
реальные зазоры (натяги), возникающие между оболочкой и штам-
штампом в докритическом состоянии, а также геометрическую и фи-
физическую нелинейности задачи.
4. Методы решения задач
нелинейной теории оболочек
Методика решения контактных задач для тонкостенных эле-
элементов конструкций, поведение которых подчинено нелиней-
нелинейным соотношениям, включает в себя сочетание итеративных
процессов отыскания зон контакта и нелинейного анализа
НДС и устойчивости оболочек. Нелинейной теории оболочек
22
посвящена обширная литература. Приведем основные сведе-
сведения по проблеме прочности и устойчивости тонких оболочек
среднего прогиба при малых деформациях и (или) физически
нелинейных свойствах материала.
Большой вклад в развитие геометрически нелинейной тео-
теории деформирования и устойчивости линейно-упругих плас-
пластин и оболочек внесли С. А. Алексеев, Н. А. Алумяэ, В. В. Бо-
Болотин [49—51], Н. В. Валишвили [55], В. 3. Власов [61],
А. С. Вольмир [63—65], И. И. Ворович [67], К. 3. Галимов
[68], Э. И. Григолюк [80—85], Я. М. Григоренко [86—91],
А. Н. Гузь [93, 94], В. И. Гуляев, В. А. Баженов, П. П. Ли-
Лизунов [95], М. С. Корнишин [148, 149], В. А. Крысько [154],
А. И. Лурье, X. М. Муштари [185], В. В. Новожилов [190,
191], В. В. Петров [204, 205], А. В. Погорелов [209], И. М. Ра-
Рабинович [217], Р. Б. Рикардс, Г. А. Тетере [222], В. И. Фео-
досьев [234].
Вопросам прочности и устойчивости гибких оболочек с
учетом нелинейных физических свойств материала посвятили
свои книги А. В. Бурлаков, Г. И. Львов, О. К. Морачковский
[54], А. С. Вольмир [63—65], В. С. Гудрамович [92], А. Н. Гузь,
И. Ю. Бабич [93], В. И. Гуляев, В. А. Баженов, Е. А. Гоцу-
ляк [961, Л. В. Енджиевский 1103], В. В. Кабанов [112],
Б. Я- Кантор, С. И. Катаржнов 1113, 118], В. Д. Клюшников
[140, 141], В. И. Королев [150], В. И. Мяченков, И. В. Гри-
Григорьев, В. П. Мальцев, А. В. Кармишин, В. А. Лясковец,
A. Н. Фролов 1134, 186, 187], В. Ольшак, А. Савчук.[1941,
B. Г. Пискунов, В. Е. Вериженко [206], А. Н. Подгорный,
В. В. Бортовой, В. Д. Коломак 1210], А. О. Рассказов,
А. С. Дехтярь [220, 221], Р. Б. Рикардс, Г. А. Тетере [222, 228],
А. Г. Угодчиков, Ю. Г. Коротких [233]. В упомянутых моно-
монографиях изложены постановки задач, методы и результаты их
решения, приведены обзоры, позволяющие проследить за эта-
этапами становления нелинейной механики оболочек. Точные ре-
решения получены только для геометрически нелинейных за-
задач деформирования равномерно распределенной нормальной
нагрузкой круглой пластины, длинных пластин и пологой па-
панели цилиндрической оболочки [90]. Поэтому необходимо раз-
развитие и применение вычислительных методов математической
физики, строительной механики.
Существенная особенность численных методов нелинейной
теории оболочек — необходимость построения итеративных
процессов решения исходных нелинейных уравнений и мето-
методов, основанных на их линеаризации.
Один и л подходов реализуется сочетанием метода началь-
начальных параметров, прогонок задач Коши для системы нелиней-
нелинейных обыкновенных дифференциальных уравнений, с итера-
23
тивным процессом отыскания параметров из уравнений, представ-
представляющих собой краевые условия в конце интервала [55]. При
использовании вариационного метода строят решение, мини-
минимизируя неквадратичный функционал неградиентными мето-
методами нелинейного математического программирования [60,
99, 236].
Линеаризация разрешающих уравнений и применение раз-
различных шаговых процессов — основа большей части иссле-
исследований. Такой путь неизбежен при описании поведения ма-
материала оболочки инкрементальными соотношениями (теории
пластического течения, ползучести). В этом случае физиче-
физический закон представлен тензорно линейными соотношениями
между скоростями (приращениями) тензоров деформаций и на-
напряжений. Так, методом линеаризации нелинейные функцио-
функционалы сведены к квадратичным [113, 118], для их алгебраиза-
ции применен метод Ритца в высоких приближениях, а также
использован самокорректирующийся шаговый процесс пер-
первого порядка, что позволило резко снизить вычислительные
затраты. Начальные приближения определены экстраполяци-
экстраполяцией по решениям, найденным на предыдущих шагах. Примене-
Применена кубическая экстраполяция, благодаря чему процесс Нью-
Ньютона обеспечивал приемлемую точность за одну — три ите-
итерации.
Линеаризованные краевые задачи решают методами конеч-
конечных разностей 196, 148, !49, 227], вариационно-разностным
[103], конечных элементов [182, 193], методами Ритца [113] и
Бубнова — Галерки на [154]. Перечисленные методы сводят
задачу к системе линейных алгебраических уравнений (СЛАУ)
и удобны для оболочек сложной формы. Особый интерес пред-
представляют направленные на подавление погрешности, вызыва-
вызываемой жесткими смещениями элементов оболочки, метод криво-
криволинейных сеток [76—79] и моментная схема конечных элемен-
элементов [182]. Эти методы позволяют существенно увеличить шаги
сетки по пространственным координатам при сохранении вы-
высокой точности результатов [27].
Для расчета оболочек вращения, а также оболочек с пря-
прямоугольным параметрическим планом широко используется
аппроксимация системы дифференциальных уравнений в част-
частных производных системой в обыкновенных производных и
метод Ньютона. Линеаризованная краевая задача решается
сведением ее к ряду задач Коши с дискретной ортогонализа-
цней но Годунову [90, 91, 134, 186, 187]. Такой подход позво-
позволяет построить эффективные алгоритмы числеииого изучения
прочности, устойчивости, собственных и вынужденных коле-
колебаний оболочек с учетом геометрической и физической нели-
пейностей задачи. Развитая в последующих главах методика
24
решения контактных задач основана на модификации именно
этого подхода.
Нелинейные уравнения теории оболочек в их исходной фор
ме содержат параметр, пропорционально которому изменяет-
изменяется внешняя нагрузка. Поэтому обычно находят не одно реше
ние, отвечающее фиксированному значению параметра, а
совокупность решений для ряда его значений. Затраты на
вычисления существенно зависят от организации процесса
получения решений.
Известны особенности характера кривых «параметр нагруз-
нагрузки Я, — обобщенное перемещение w», присущие гибким обо-
оболочкам (точки, в которых dkldw = 0, точки бифуркации).
Трудность получения решения в окрестности этих (предель-
(предельных и особых) точек привела к необходимости поиска эффек-
эффективных способов выбора параметра, его смены либо введения
такого параметра, продолжение решения по которому воз-
возможно вдоль всей траектории состояний равновесия A. (w).
Обобщение, систематизация и модификация шаговых про-
процессов продолжения решения по параметру проведены в мо-
монографии Э. И. Грнголюка, В. И. Шалашилнна [85], дан об-
обзор применения этих алгоритмов к решению нелинейных задач
теории оболочек. Различают две формы продолжения решения:
дискретную и непрерывную. При дискретной форме для выбо-
выбора начального приближения используют информацию о ре-
решениях для ряда значений параметра, предшествующих дан-
данному; нелинейная задача на каждом шаге решается одним из
итеративных методов. Непрерывное продолжение решения по-
получают численным решенгем задачи Коши, строяшейся диф-
дифференцированием по параметру исходной нелинейной системы
уравнений.
Из анализа обзора [85] следует, что дискретное продол-
продолжение решения геометрически нелинейных задач теории пла-
пластин и пологих оболочек впервые применил М. С. Корнишин
[148]. Для изучения гибких упругопластических оболочек этот
подход реализован в [113], где в качестве параметра введен
прогиб оболочки в центре, что позволило исключить труднос-
трудности получения решения в окрестности предельных точек. Для-
их прямого определения (без построения траектории состоя-
состояний равновесия) проведено продолжение решения по геомет-
геометрическому параметру подъемистости оболочки, система урав-
уравнений равновесия дополнена уравнением det (/) = 0, где / —
матрица линеаризованной системы алгебраических уравне-
уравнений, полученной методом Ритца.
Непрерывное продолжение решения по параметру в теории
упругих гибких пологих оболочек применили впервые
В. В. Петров [204], И" И. Ворович, В. Ф. Зипалова [66],
25
причем в работе [66] в качестве параметра предложено вы-
выбрать длину кривой X (w). Это позволило обойти алгоритми-
алгоритмические трудности, связанные со сменой параметра в процессе
движения по траектории X (w).
Введение параметра в систему обыкновенных дифференци-
дифференциальных уравнений для анализа гибких оболочек вблизи пре-
предельных точек описано Я. М. Григоренко, А. П. Мукоед [90].
Методы продолжения решения по параметру — основной ин-
инструмент численного решения задач статической устойчивос-
устойчивости оболочек, односторонне взаимодействующих с упругим ос-
основанием,— в [96], где в качестве параметра принят его коэффи-
коэффициент жесткости.
Приведенные здесь сведения далеко не исчерпывают всего
многообразия методов решения нелинейных задач теории тон-
тонких оболочек. Вместе с тем они помогут читателю лучше по-
понять предлагаемые в книге подходы к изучению контактных
задач.
Глава II
МЕТОД РЕШЕНИЯ ЗАДАЧ О КОНТАКТЕ
ОБОЛОЧКИ ВРАЩЕНИЯ И ШТАМПА
Основная идея предлагаемого метода изучения контактных
задач с учетом геометрической и физической нелинейностей
соотношений теории тонких оболочек заключается в решении
краевой задачи для системы A.1) при явном задании связи
контактного давления qk с нормальным перемещением (про-
(прогибом) ш срединной поверхности оболочки. Такой подход име-
имеет следующие преимущества. Отпадает необходимость пост-
построения на каждом шаге итеративного процесса функций Гри-
Грина, входящих в уравнение A.3) классического метода решения
контактных задач. Получение этих функций в аналитической
форме невозможно, численное их определение представляет
весьма трудоемкую процедуру. Контактное давление исклю-
исключается из числа искомых и является непрерывной функцией,
равной нулю на границах зон контакта. Итеративный процесс
решения нелинейных уравнений совмещается с процессом
уточнения областей контакта и становится единым процессом
решения конструктивно, геометрически и физически нелиней-
нелинейной задачи.
В главе приведены вывод формулы qk ~ ш, основные соот-
соотношения нелинейной теории оболочек вращения, уравнения
равновесия оболочки, односторонне и осесимметрично взаимо-
взаимодействующей со штампом. Даны канонические системы исход-
исходных и линеаризованных уравнений для оболочки и конструк-
конструкции. Рассмотрена теория осевого смещения кольцевых штам-
штампов, кинематически связанных с оболочкой, изложены
сведения о программе для ЭВМ.
1. Связь контактного давления
с поперечным обжатием тонкой оболочки
Изучение этого вопроса начнем с решения задач для слоя тол-
толщиной 2(.
Пусть в зоне длиной 21 слой нагружен давлением q, сим-
симметричным относительно осей х, г (рис. 1). Ограничиваясь
плоским случаем и представляя давление разложением
00
q(x) = ? Ат cos р*. р = tnnll,
используем решение для напряжений [227]
Ох = 2 ? ^mF^ (Z) COS Р*, Ог = - 2 ? Л„^+ (z) COS Р*.
m m
Р* __ W ch fl< T sh PQ ch fe — рг sh ^г sh $t
т ~~ sh
Принимаем q (х) = —ог (jc, /)• В случае плоского деформи-
деформированного состояния
**= дЫгкг) =1Г Kl-va)a,-v(l + v)a,l.
1
Интегрируя данное соотношение по z и учитывая, что \ oxdz =
о
= 0, поскольку внешняя нагрузка вдоль оси х отсутствует,
получаем
t
/а •—vS f j о 1—v" V л ch2B*— 1 D
и.(х, 0 = ——j ozdz = 2—^- 2j ^ p(d,2p< + 2(tf) COSPX-
Разлагая числитель и знаменатель дроби в ряд по р/ == с,
имеем
1—«
A-^-^+ ...)cospx =
1ф ]
Заменяя далее обозначение толщины слоя 2t на h, приходим
к формуле, связывающей трансверсальное обжатие А = 2
и2 X (х, t) с функцией q (x)
Аналогичную формулу можно получить и для антисимметрич-
антисимметричного относительно оси г распределения давления.
Изучим обжатие того же слоя двумя симметричными отно-
относительно осей х, z гладкими штампами, не имеющими углов
(рис. 2).
28
Решение контактной задачи, в которой иг (х, t) — функция,
заданная на интервале — / < х^.1, удовлетворяет уравнению
1219]
00
J q (?) К (-
= юоиг (х, t),
(H.2)
если вне интервала \х\ ^ / при \г\ = t выполнены условия
аг — т = 0. Здесь
ch 2u — 1 cos i
sh 2u + 2« и
So~ 2A—v2) '
Решение уравнения A1.2) в виде
cos updu,
21
Рис. 1.
Рис. 2.
приведено в [2], где с помощью разложения - = -j- +
¦+• 2 #/#B/) получено
К* ДО == -т- б0 (р) -f я ? (— 1)' йFо ' ДО.
Здесь 6(?й — производная 2t-ro порядка.
Найдем решение в явном виде, воспользовавшись зави-
зависимостями [147]:
29
- J / (t) e?" (^ - E) dC - /Br (x), | x | < /.
Ввиду четности функции К*(р), имеем К* 1 ~- ] = К* (*~7 ]•
Подставив ряд для u/L (и) в решение уравнения (II.2), про-
проинтегрировав его в пределах —/, / с учетом соотношений для
обобщенных функций, получим
/IE 'iv
V \*^/ ~~~ 0/1 2\ . 1*^2 \*^> / ^^^ i-*!* W; ~1~ *-'О»' **2 - ¦ • • ¦•
Разложим u/L (u) в ряд по и
и и (sh 2и -(- 2«) о /1 I ' 4 i \
L (и) ch 2и — 1 \ "•" 45 • • > J •
Тогда, в соответствии с записанным выше представлением,
имеем НА = 2, В, = О, fi2 = 2/45. В итоге находим
Я(х)
1 Е_
1-v2 h
(П.З)
Прямой подстановкой можно убедиться в том, что соотноше-
соотношения (II.1) и (II.3) взаимно обратны. Из этих формул следует,
что при отсутствии деформаций изгиба и растяжения средин-
срединных поверхностей пластин в рассмотренных двух задачах для
слоя связь между обжатием и контактным давлением отлича-
отличается от винклеровой слагаемыми с производными четвертого
и выше порядков, умноженными на малые коэффициенты. Да-
Даже при hll = 1 (/— характерный размер зоны контакта) пер-
первый из этих коэффициентов равен 1/720, а при контакте меж-
между оболочками обычно h <^ I.
Таким образом, можно полагать, что винклерова модель
A1.3) обладает достаточно высокой точностью. К этому вы-
выводу пришли и авторы работы [3], выполнив асимптотический
анализ точного решения для слоя.
При учете тангенциальных деформаций, возникающих в
случае изгиба и растяжения контактирующих пластин и обо-
оболочек, коэффициент при А изменяется и появляются малые до-
дополнительные слагаемые. Так, из формулы для обжатия [199)
в случае пластин
^=4(l + tOl-2v,4-tA +
30
Из формулы для обжатия [80] можно найти зависимость
qk = ~~[b + o(h*A0w)].
Аналогичные формулы получены в [40], сравнение подобных
соотношений выполнено з \42].. Отличаются они лишь коэффици-
коэффициентом при E/h, который во всех формулах близок к единице.
Учитывая приведенные оценки, а также тот факт, что в ли-
литературе при решении контактных задач теории оболочек
Кирхгофа — Лява используется винклерова связь между об-
обжатием и контактным давлением, далее выражаем контактное
давление между оболочкой и штампом через разность Д =
= w — а, где до — нормальное перемещение срединной по-
поверхности [3, 84, 199, 219]
qk = k-%-(w-a). (II.4)
Здесь а > 0.
При решении задачи о контакте между двумя оболочками
qt = k-?-(w1 — a — w2). (II.5)
Нумерация оболочек отвечает положительному направлению
нормали к меридиану. Если контакт имеет место, то qk > 0.
Как уже отмечалось выше, коэффициент k близок к единице.
Если между оболочками имеется тонкая прокладка, ее учи-
учитывают, изменяя значение k. Формула (II.5) записана для слу-
случая контакта оболочек с одинаковыми значениями Е и h. Если
это не так, то
Сложим эти равенства с учетом условия wzA я") = ^1 (-п~)
Заменяя 1/A — v2) на k и вводя зазор, находим
В реальных задачах дробь перед правой частью имеет порядок
единицы, поэтому далее в целях упрощения применяем соот-
соотношение (II.5), считая в нем Е и h характерными величинами.
Функция qk (ay), определяемая формулами (II.4), (II.5), ли-
линейна относительно меры трансверсального обжатия оболоч-
оболочки в зоне контакта. Использование нелинейной связи qk с про-
прогибом до не усложняет построения развитой далее методики ре-
решения контактных задач, так как она основана на замене в
уравнениях равновесия qk явным выражением qk (до). Более
того, эта подстановка выполняется в уравнениях нелинейной
теории оболочек.
31
2. Основные соотношения нелинейной
теории тонких оболочек вращения
Соотношения нелинейной теории тонких оболочек вращения
известны. Здесь они приводятся-для полноты изложения мето-
метода решения контактных задач и основаны на теории, подчи-
подчиненной гипотезам Кирхгофа — Лява.
Отнесем срединную поверхность
оболочки вращения к системе коор-
координатных кривых, совпадающих с
линиями главной кривизны (рис. 3).
Главные направления на поверхности
взаимно перпендикулярны, поэтому
система криволинейных координат
ортогональна. Считаем, что орты ко-
координатной системы образуют правый
трехгранник.
Срединная поверхность оболочки
образована вращением плоской кри-
кривой вокруг оси Z, поэтому координат-
координатные кривые а, Р — const совпадают с
параллелями и меридианами поверх-
поверхности вращения, а параметры, определяющие геометрию обо-
оболочки,— функции г (ос), Z (а). Параметры Ляме при таком за-
задании геометрии: Ах = t(r'J + (Z'J]4\ A.2 = г (а); парамет-
параметры кривизны &х = da/ds, k2 = cos air.
Обозначим перемещения точки срединной поверхности
оболочки в направлениях изменения координат а, Р и по нор-
нормали и (а, Р), v (а, р), w (a, Р). Тогда в соответствии с геомет-
геометрически нелинейной теорией тонких оболочек среднего проги-
прогиба деформации и изменения кривизны срединной поверхнос-
поверхности [187] определятся формулами
Рис. 3.
9i/2, е12 = е
е12
А2 д (v/A2) At д (u/At)
Ai da A« d& '
да
(И6)
+ kxu,
x12 —
_
At da
1 дАг
па7~Ь~о~"*
e2,
A,2), (a,P), (u,v)
(II.7)
32
Здесь и далее символы в скобках A,2), (а, р), (и, v) означают,
что остальные компоненты могут быть получены циклической
перестановкой. В случае осесимметричного нагружения, ког-
когда v = 0а = е12 = е12 = х,2 = 0, выражения (II.6), (II.7) при-
принимают вид
е2 = е2,
,>1,Л2
1
d(x
и + k2w, (II.8)
Приведенные соотношения записаны с точностью до деформа-
деформаций и углов поворота по сравнению с единицей. Деформация
волокна, отстоящего от срединной поверхности оболочки на
расстояние г, определяется известными выражениями
ei? - ец + гхп, е® = е12 + 2zx12, A, 2). (II.9)
Уравнения равновесия элемента срединной поверхности
оболочки [90, 186]
L (Л\, N2, S)
A, 2), (а, р),
A1.10)
да ' д$ 1 2 v 1 1
Поперечные силы определяются как
Qx = [L (M, Mit Н) — N& — Se2]MH2. A.2), (а, р).
Оператор L (...) в (II.9) и последней формуле имеет вид
1
Ai
д (A\W)
A,2),
'•"'- да да '
Интенсивность поверхностной нагрузки в меридиональном,
окружном и нормальном направлениях обозначена qu q2, q со-
соответственно.
В случае осесимметричного нагружения уравнения A1.10)
принимают вид
N\ -J- ц (Л/j — N2) -f- ftjQj = — qu
Ml + (i (Mt - M2) - Qt — N& = 0, (II л!)
где
Соотношения A1.6) — A1.11) являются квадратично нелиней-
нелинейными.
»* - Л2 ' ^ * ¦> ~ \ Ax ) da •
3 »-3378
КОЛОХВА
I НЕ БОЛЕЕ Ш КНИГИ В
I ОДНИ РУКИ И 2ХВ ДВЕ !
33
Для определения произволов, содержащихся в общем
решении системы уравнений равновесия, используют гра-
граничные условия. В случае осесимметричного деформирования
на каждом торце должна быть задана непротиворечивая ком-
комбинация из трех статических, кинематических или смешан-
смешанных граничных условий
Nl = Nu Ml = Ми Qt = Qu и = и*, w = w*, Q, = 9,'. A1.12)
Звездочкой помечены заданные числа.
Приведем физические соотношения. Поведение ортотроп-
ного линейного упругого материала при деформировании обо-
оболочки описываем законом Гука. Использование гипотез Кирх-
Кирхгофа — Лява приводит к выражениям, отвечающим обобщен-
обобщенному напряженному состоянию:
° = (S + VJi> ° = Gs EV = EV A2^
A1.13)
Для случая малых деформаций нелинейно-упругого ма-
материала примем соотношения, описывающие поведение среды
Генки [177]:
ai, — 6tja = -^-^-(eu~6tje), i, /=1,2,3; A1.14)
о = /Се, а{ = о,- (et),
где о, е —средние напряжения и деформации, о = 6,yaf//3,
e = 6,y-8t//3 (i, j= 1, 2, 3).
Внутренние нормальные Nu Nu и сдвигающее S усилия,
изгибающие Mlt M2 и крутящий Я моменты связаны с тан-
тангенциальными и изгибными деформациями следующим обра-
образом [5]:
Ьпв.г + апхг + а12х2, S = b3tsl2 + 2а3х12,
Mi = СцЩ -f с22к2 + аи8! -f als!e2, (II. 15)
Я = 2с3к12 + аае12, A,2).
В частном случае неоднородного по толщине линейно-упруго-
линейно-упругого материала
ft/2
= f T
ft/2
ft/2
^ @, 1.2),
Для однородного материала находим au = a22 = flr2 = o3 =
= 0. В качестве поверхности приведения г —. 0 принята
срединная поверхность оболочки.
34
3. Построение разрешающей
системы уравнений
осесимметричного деформирования оболочки,
взаимодействующей со штампом
Рассмотрев контактное взаимодействие оболочки со штампом
в соответствии с методикой [119, 121, 127], учтем в третьем
уравнении A1.11) контактное давление qk и выразим его через
прогиб оболочки по формуле (II.4)
Qi + V-Qi — *i#i — ktNa = — (? — qtf), qt^k-j-iw— a).
A1.16)
Здесь функция
A1.17)
равна единице в зоне контакта и нулю вне ее. Из-за наличия
множителя t|) уравнение A1.16) нелинейное, а задача в целом
конструктивно нелинейная. Конструктивная нелинейность,
связанная с возможностью включения и выключения одно-
односторонних связей и сопровождаемая геометрической и физи-
физической нелинейностями, делает наиболее приемлемым метод
последовательных приближений. При этом совмещается ши-
широко используемый для решения нелинейных задач-теорий обо-
оболочек метод Ньютона с процессом уточнения границ зон кон-
контакта.
Рассматривая осесимметричную контактную задачу, вво-
вводим вектор Y неизвестных функций
У\ = #i, у2 = Qu Уз = Ми у4 = «, у„ = w, ув = 0Х. A1.18)
Учитывая вклад контактного давления, записываем получен-
полученную в [134, 186, 187] из соотношений (II.6) — A1.16) канони-
каноническую систему шести обыкновенных дифференциальных
уравнений
y't*-ft{a,Y), fed. 61, A1.19)
где
= \i (N2 — уг) — kYy2 — qlt f2 = kxyx — \iy2 + k.lN2 —q
/, = ji (M2 - ya) + y2 + у1Ул, U = El - kiy& - yl/2, A1.20)
Здесь функции
Bi = O/i — Ь12е2 — «nXj — а12хг)/Ьп, А = bncu — an
— au {yl~ 6iae2 — а12хг)]А~
,y ( 1 1,^1)
35
и деформации
Усилие Л/2 и момент М2 определяются по формулам A1.15)
при подстановке в них обозначений A1.18). Система A1.19)
отличается от известной [134] подчеркнутым в A1.20) слага-
слагаемым. Система A1.19) шести обыкновенных дифференциаль-
дифференциальных уравнений первого порядка должна удовлетворять гра-
граничным условиям A1.12). Если осесимметрично нагружен-
нагруженная оболочка вращения — составная часть односвязной
оболочечной конструкции, то вместо A1.12) уравнения A1.19)
должны удовлетворять условиям сопряжения оболочек или
условиям перехода через упругое кольцо.
Пусть односвязная оболочечная конструкция представля-
представляет собой набор из N оболочек вращения, соединенных по тор-
торцам (а = const) непосредственно или шпангоутами. На каж-
каждую из оболочек может действовать система распределенных
поверхностных нагрузок и сил контактного давления. Шпан-
Шпангоуты могут обыть нагружены системой внешних погонных
усилий и моментов, приведенных к центру тяжести попереч-
поперечного сечения (считаем его недеформируемым). Материал шпан-
шпангоута упругий, оболочки — упругий или нелинейно-упругий.
Для рассматриваемого варианта конструкции получены со-
соотношения, связывающие компоненты вектора решения Yn+\
на торце п + 1-й оболочки а = «о"+1> с компонентами век-
вектора Yn на торце л-й оболочки а = а?\
п+1~[ 0 1е22]\Y"+
\[е3]]
[o\'
причем элементы матриц [ещ], [ея] зависят от площади и осе-
осевого момента инерции кольца, приложенных к нему нагру-
нагрузок и координат концов меридианов примыкающих к нему обо-
оболочек относительно полюса поперечного сечения кольца A87].
Разрешающая система уравнений для конструкции, со-
состоящей из N оболочек, составляется из N систем (II. 19). К гра-
граничным условиям на торцах конструкции присоединяется
N — 1 условие сопряжения оболочек A1.23). Сформулиро-
Сформулированная нелинейная краевая задача может быть сведена к си-
системе нелинейных алгебраических или трансцендентных урав-
уравнений и к задаче Коши для начального вектора. Однако в си-
силу жесткости задачи Коши подобный алгоритм решения
нелинейных задач неустойчив. Более эффективно применение
итерационного процесса, на каждом шаге которого решается
линейная краевая задача в сочетании с устойчивым числен-
численным методом прогонки [30, 90, 134, 186]. В практике решения
36
нелинейных задач теории оболочек хорошо зарекомендовал
себя метод линеаризации Ньютона [131] в сочетании с диск-
дискретной ортогонализацией по С. К. Годунову [72].
Линеаризуем уравнения равновесия A1.19) в соответствии
с [131, 187] и запишем их для п-\\ итерации
У = F (a, Y, К„_.) + Ф (а, К„_,). A1.24)
Здесь Y = (уъ ..., ув)т; компоненты вектор-функций F и Ф
имеют вид
h = И (N2 — yi) = kj/t, fs = k^ — \iy2 + k2N2,
fs = ii (M2 — ya)
ye~ltfi,
h = kiy4 — f/e. /e = «i;
<Pi = —</i. Фа = —9 +
A1.25)
ф6 = °. Фб = 0- .
Величины N2, М2, хь х2, et, e2 определяются выражениями
A1.15), A1.21), A1.22). Соотношения для а, Ъ, с в случае нели-
нелинейно-упругого материала [186, 1871 также линеаризуются
по Ньютону (символ п опущен)
N = [С,г_,] Р— [С,,-,] P,;-i — ?„_ь A1.26)
Здесь
Л/ = [Nlt N2, Mlt M2]T, P = [elt 82) к1( х2]7,
^1 ^12 Й1 «12
а.г
ах а12 с1
^32
h/2
-ft/2
(И.27)
„= - f el9A-dz, @, 1, 2), (b, а, с),
-ft/2 ^
ft/2
/t = j ffftZ^z, / = 0, 1, k = 1, 2,
37
J
9K
A1.28)
Ec I -2
Sl = o, - .-?- , A = ^ - ё!2, A, 2),
3E
4 (z) = ^i + zxi,
^c~ 2(l + v) '
„ A ??-' (El -
I —
(El + e2), A,2),
e, =
3A —2v)
(в, -
??-'
A1.29)
Для определения внутренних усилий A1.26) на л-й итера-
итерации необходимо знать компоненты вектора рп-\ на предыду-
предыдущем приближении итерационного процесса и диаграмму рас-
растяжения материала оболочки at (s(). Линеаризованные уравне-
уравнения A1.21) остаются нелинейными в конструктивном смысле,
поскольку распределенные по поверхности оболочки связи
могут включаться и выключаться в любой области контак-
контакта. Фактическая расчетная схема конструкции в деформиро-
деформированном состоянии подлежит определению на каждом прибли-
приближении итерационного метода. Для этой цели предложено
применять [120] итерационный процесс, уточняющий границы
зон контакта.
Используя винклерову связь между обжатием и контакт-
контактным давлением (II.4), переписываем второе уравнение систе-
системы A1.25) в виде
= *tfi — НУ г
= - q — k ~
Линеаризуем это уравнение, используя информацию о
границах зон контакта из предыдущего приближения итера-
итерационного процесса, уточняющего эти границы. Совместим ите-
итерационный процесс по границе зон контакта с приближения-
приближениями по Ньютону — Канторовичу
kiNs + k -j- w\pn-u Ф2=-?-*7 ai|),,_i,
38
где ф,г_1 — функция ty для п — 1-го приближения по грани-
границе зон контакта, tyn-\ = [1 + sign (од„_1 — а)]12.
При решении контактной задачи в качестве исходного при-
приближения выбирается решение линейной бесконтактной за-
задачи. Эффективность подобного подхода при решении контакт-
контактных задач нелинейной теории оболочек продемонстрирована
в работах [121,127, 129]. Линейные краевые задачи решаются
методом ортогональной прогонки С. К. Годунова. Коэффици-
Коэффициенты матрицы [С] и вектора [D] A1.27) получаем численным
интегрированием по формулам Ньютона — Котеса четвертого
порядка. Уравнения A1.24) — A1.29), дополненные гранич-
граничными условиями (П. 12) и условиями сопряжения A1.23), пол-
полностью определяют НДС осесимметрично нагруженной кон-
конструкции из оболочек вращения на n-м приближении итера-
итерационного процесса. Если необходимо получить ряд решений
при пошаговом изменении нагрузки q, то начальное прибли-
приближение для <7,„ находим экстраполяцией по решениям для qm-\, ...
... ,(/m_4. Процесс последовательных приближений заканчивает-
заканчивается, когда модуль максимального относительного расхождения
компонент ус вектора решения Y для каждой точки ортогона-
лизации меньше наперед заданного значения
max
<e, г ?[1,6].
Изложенный алгоритм решения контактных задач реали-
реализован в виде программы для ЕС ЭВМ на языке ПЛ/1. Про-
Программа выполнена в соответствии с модульным принципом,
что позволило осуществить раздельное программирование,
отладку и тестирование составных частей пакета программ, а
также простую модернизацию и настройку пакета на решение
задач различного уровня сложности. Скомпилированные мо-
модули хранятся в библиотеке загрузочных модулей на диско-
дисковых магнитных носителях прямого доступа и в зависимости
от решаемой задачи собираются редактором связей операци-
операционной системы в тот или иной выполняемый загрузочный мо-
модуль. Можно выделить три уровня собираемых из загрузоч-
загрузочных модулей программ для определения НДС конструкций
из оболочек вращения: по линейной теории и при фиксирован-
фиксированном уровне статического или кинематического нагружения;
по геометрически нелинейной теории и одностороннем кон-
контакте со штампом при произвольном распределении шагов
по параметру нагрузки; по физически и геометрически нели-
нелинейным теориям при одностороннем контактном взаимодей-
взаимодействии со штампом и произвольном распределении шагов по па-
параметру нагрузки.
39
Таким образом, каждый последующий уровень пакета про-
программ включает в себя возможности предыдущих, но требует
для выполнения больших затрат машинного времени и опе-
оперативной памяти.
Характеристика пакета подпрограмм [180]: объем — 54
модуля; длина полного загрузочного модуля без создания
оверлейной структуры — 122—158 Кбайт, с оверлейной
структурой — 112 Кбайт; среднее время обработки на машине
ЕС-1022 одного интервала
интегрирования (по схеме:
один шаг интегрирования —
одна точка ортогонализации
для одной итерации геомет-
геометрически нелинейной зада-
задачи) — 0,34 с; для одной
итерации геометрически не-
нелинейной задачи и нелиней-
нелинейно-упругого материала —
0,48 с.
В формулы (II.4), (II.5)
входит функция а (а) — за-
зазор между штампом и поверхностью оболочки. Получим а (а)
для двух наиболее часто встречающихся случаев. Вместо а
введем угол ф (рис. 4).
Рассмотрим контакт сферической оболочки с плоскостью.
Поскольку тангенциальная жесткость оболочки в (R/hJ раз
больше изгибной, считаем, что точка / с координатой zx =
— R A — cos ф) соприкоснется с точкой 2, радиус которой
r2 = R (а). Через точку 2 проведем прямую г = —г ctg ф +
+ /?ф, перпендикулярную к лучу г = (R — z) sin <p. Решая
совместно эти уравнения, находим координаты точки пересе-
пересечения
. п Ctgcp-ф _ ф - Sin ф
Рис. 4.
'""" i4 ctg ф*-sin«p °'"^' *c~ '
В связи с тем что при вычислении г|э по формуле (П. 17) зазор
измеряется в направлении прогиба (по нормали к меридиану),
Д(ф)= г*~г° ^ /? Г1 — cos Ф — Ф — sin ф 1 —1_
VT/ COS ф I т Ctg ф — Sin ф J COS ф
Разложив тригонометрические функции, входящие в эту за-
зависимость, в степенные ряды по ф, убедимся, что
а (Ф) = R A — cos <p) да Rq>42 A1.30)
с точностью до ф2/12 по сравнению с единицей.
Функцию зазора между сферическими оболочками, центры
кривизн которых расположены по одну сторону от точки со-
4Q
прикосновения, получаем, учитывая, что после деформирова-
деформирования в контакт войдут точки, связанные равенством /?1ф1 =
= Я2ф2. Координаты этих точек rc = Rt sin ф*, г,- = Rt A —
— cos <fr), i= 1, 2. Расстояние между ними, определяемое
формулой а = V(j\ — r2J + {гх — z2)a разложим в ряд по ф;.
Пренебрегая значением ф; по сравнению с единицей, находим
функцию зазора
В случае, когда центры кривизн меридианов расположены по
разные стороны от точки соприкосновения,
^ (И.32)
Последние формулы получены в предположении, что косину-
косинусы углов между нормалями к дугам р точках 1,2 ц прямой,
проходящей через эти точки, отличаются от единицы на пре-
пренебрежимо малую величину.
Отметим соответствие точности полученных формул и точ-
точности описания геометрической нелинейности. Обычно квад-
квадратично нелинейную теорию оболочек (именно такая теория
использована в данной работе) считают верной до прогибов
порядка пяти толщин [55, М8]. Формула A1.30) получена с
точностью ф2/12 по сравнению с единицей. Пусть ф2/12 < е.
Тогда
1 a h ^
— Х1Г<е'
отсюда, чем меньше относительная толщина оболочки, «м
больший относительный зазор описывает эта формула.
Укажем, что в приведенных выше формулах под радиусом
окружности следует понимать радиус соприкасающейся по-
поверхности оболочки, т. е. вместо R принимать R ± Л/2. В те-
теории тонких оболочек, однако, h/R <^ 1, поэтому этой поправ-
поправкой можно пренебречь.
4. Анализ взаимодействия
цилиндрической оболочки
с жестким основанием
При создании и отладке пакета программ тестовыми служили
задачи, решенные численно в [134, 186, 187]. Эффективность
используемого подхода к решению контактных задач нели-
нелинейной теории оболочек продемонстрируем на задаче о кон-
контакте шарнирно опертой тонкой цилиндрической оболочки,
установленной в жестком бандаже с зазором а = 10~4 м [1711,
41
для определения НДС которой использован метод лбкальных
вариаций. Решение получено для цилиндрических оболочек
с конечной сдвиговой жесткостью и в рамках гипотез Кирх-
Кирхгофа — Лява по геометрически нелинейной теории. Обжатие
оболочки по толщине в зоне контакта не учтено.
Расчетные параметры цилиндрической оболочки: R =
= 0,2 м; h = 0,004 м; L = 0,075 м (рис. 5). На торцах выпол-
выполняются условия шарнирного опирания и = w — УИХ = 0. В си-
силу симметрии ищем решение для половины оболочки с ВЫПОЛ-
ВЫПОЛ30
\\\Щ\\\\
Tffi
н м i ¦ ¦ \\ \ \ \ н \
К- и
Рис. 5.
20
ГО
,МПа
Г
1
\
10
0.2 0.4 0.6 0,6 x
Рис. 6.
нением в середине граничных условий и = 6Х = Qx = 0. Ма-
Материал оболочки нелинейно-упругий с диаграммой
8Т, о, = ат(e(-/eT)
0l2
A1.33)
0~3;
и параметрами Е = 2,1 • 105 МПа; ет = 10~3; стт = 2,1 х
X 102 МПа; v = 0,495. Задача решена в рамках разработан-
разработанного пакета подпрограмм на ЭВМ ЕС-1045. Число точек ор-
тогонализации в интервале интегрирования равно 30. Итера-
Итерационный процесс прекращался при максимальном расхожде-
расхождении всех компонентов вектора решения на двух соседних
приближениях е = 0,001. Решение получено для q = 10 МПа
за 6 итераций, для q =? 20 МПа — за 7. Распределение кон-
тактногс давления при k = 0,5 показано сплошными линиями
на рис. 6. Штриховой и штрихпунктирной линиями представ-
представлены решения [171] с учетом конечной сдвиговой жесткости и
по классической теории соответственно.
Компоненты вектора перемещения и, w во всех случаях
практически совпадают с данными [171]. Распределение сило-
силовых факторов и контактного давления ближе к решениям
Г. И. Львова, учитывающим поперечный сдвиг, чем к данным
теории Кирхгофа — Лява. Учет обжатия оболочки по толщи-
толщине в зоне контакта позволил получить на ее границе qk = 0 в
42
отличие от конечных значений (вертикальные участки пунк-
пунктирных линий), отвечающих теории, в которой трансверсаль-
ная деформация в зоне контакта не учтена.
5. Учет смещения штампа
при кинематической связи
с оболочкой вращения
Количество работ, посвященных контактным задачам теории
оболочек, велико, однако вопрос об учете смещения штампа к
положению равновесия под действием сил контактного дав-
давления ранее никем не рассматривался. Вместе с тем очевидно,
что при кинематической связи оболочки вращения и кольце-
кольцевого штампа подобное перемещение может существенно влиять
на общую картину НДС оболо-
чечной конструкции.
Конкретным объектом прило-
приложения рассматриваемой матема-
математической модели могут служить
сильфоны — компенсирующие
элементы (КЭ), широко приме-
применяемые во многих отраслях совре-
современного машиностроения (энер-
(энергетического, атомного, нефтехи-
нефтехимического и т. д.). Компенсирующие элементы работают в
режиме циклического нагружения, при этом в них возни-
возникают упругопластические деформации. В соответствии с
существующими стандартами I143J максимальное значение ин-
интенсивности упругопластической деформации, возникающей от
расчетной системы нагрузок, служит основным параметром
при оценке малоцикловой прочности КЭ. Известны методы,
позволяющие рассчитывать КЭ без армирующих колец с уче-
учетом нелинейных факторов. Однако в случае армирования
сильфона компенсатора кольцами методика конструирования
КЭ основана на использовании эмпирических формул или при-
приближенных подходов, что требует значительных затрат средств
и времени на выполнение экспериментов, но не гарантирует на-
надежности КЭ. Предложенная ниже математическая модель
контакта оболочки со штампом в условиях их кинематическо-
кинематического взаимодействия позволяет, в частности, корректно постро-
построить расчетную схему КЭ, армированного кольцами.
Рассмотрим конструкцию из оболочек вращения и кольце-
кольцевого штампа с поперечным сечением гладкой формы, связан-
связанного кинематически с оболочками [178]. Осесимметричное на-
гружение оболочечной конструкции приводит к контактному
взаимодействию тонкостенных элементов, со штампом. Испы-
43
тывая давление со стороны контактирующей с ним оболочки,
штамп будет перемещаться до тех пор, пока система сил, дей-
действующих на него, не придет в равновесие. Очевидно, что при
осесимметричном деформировании и отсутствии внешней на-
нагрузки на. штамп должна уравновешиваться только осевая
составляющая сил контактного давления. В этом случае
штамп перемещается вдоль оси Z конструкции как абсолютно
жесткое тело на величину Д, а зазор между штампом и обо-
оболочкой становится функцией А как параметра.
Опишем положение точек поверхности штампа в полярных
координатах Ф, р с центром Za, Ya в полюсе его сечения; нача-
начало декартовой системы Z, Y поместим в центре кривизны по-
поверхности оболочки (рис. 7). Тогда до нагружения точка А
поверхности оболочки будет связана по нормали с точкой В
поверхности штампа следующими формулами:
Za + р sin ф = — (R2 -f a) cos а, Yn — р cos ф = (#2 -f а) sin а.
A1.34)
Если штамп получает перемещение А вдоль оси Z, то точка А
будет связана с новой точкой контакта С
Zn — А + р* sin ф* = — (R2 + а + a*) cos a,
Уц— p*«^* = (/?2 + a + a*)sina, (Ц.35
где а*—приращение зазора. Вычитая из A1.34) выражения
11.35), получаем
А + р sin ф — р* sin ф* = a* cos a,
pcos<p — p*costp* = a* sin a. A1.36)
Уравнение прямой, проходящей через точки А, В в системе
координат ф, р до нагружения оболочки:
р (ф) cos (ф + а) = — Za sin a — Кц cos a, A1.37
а после переноса штампа вдоль оси влево на величину А
р* (ф*) cos (ф* 4- а) = — (Zu -f A) sin a - Кц cos a. A1.38)
Уравнения A1.36) — A1.38) дополним уравнением равнове-
равновесия штампа, приравнивая нулю осевую равнодействующую
сил контактного давления на штамп со стороны оболочки:
2пК -f- j (w — а ~ а*) \ (ф*) г (Ф*) cos ас(ф* = 0, A1.39)
(Л
где Ах — параметр Ляме поверхности штампа.
Рассмотрим частный случай, когда штамп представляет
собой кольцо кругового сечения с радиусом R. Приняв р (ср) =
= Р* (ф*) = R, \ = R, из A1.38) найдем
Ф = arccos [— [Zu sin a + Ул cos a)/R] — а, A1.40)
44
а формулы (И.36) запишем в виде
A -f R (sin ф — sin ф*) = a* cos a, R (cos ф — cos ф*) = а* sin а.
(Н.41)
Подставим A1.41) в A1.38)
] [(ш — a) cos а — R (sin ф — sin ф*)] г (ф*) dtp — Ay (ф*) dq> =
= 0. A1.42)
Из этого уравнения получаем
A = /4-1(/i-/a + /3). (П.43)
где
1Х — j (w — а) г (ф*) cos а (ф*) с/ф*, /2 = R j r (ф*) sin ф?(ф*,
h = Л J Г (ф*) Sin ф*^ф*, Л - J Г (ф*) ^ф*.
Интегралы llt /2 вычисляются по формулам Ньютона — Ко-
теса, а /3, /4 определяются аналитически по теореме Лейб-
Лейбница — Ньютона.
Поскольку уравнения A1.42), A1.43) нелинейные относи-
относительно границ зон контакта,'на каждом приближении по Нью-
Ньютону необходимо использовать итерационный процесс, уточ-
уточняющий Д до тех пор, пока не выполнится условие равновесия
A1.42). Формулы итерационного процесса по Д на п + 1-м
приближении имеют вид (символ п опущен)
Д„+| = Д + Г/, _/, + /,_ J г (Ф*) a* cos а (Ф*) <VI IT1. (И-44)
Условия прекращения процесса приближений следующие:
|АЯ-Ая_,|<е/А|1|, A1.45)
| Д„+1 - А„ | > | Д„ - Д„_, /¦ Л» > 2, (И.46)
где Паиа — заданное максимальное число итераций.
Выражение A1.45) — нормальное условие прекращения
итерационного процесса. Формула A1.47) обычно использу-
используется, когда малое приращение Д в A1.44) вызывает качествен-
качественное перераспределение областей контакта. Прекращение ите-
итерационного процесса по условию A1.46) означало бы расхож-
расхождение итерационного процесса A1.44), что на практике не
наблюдалось.
45
Сходимость итерационного процесса к решению обеспечи-
обеспечивается единственностью решения линеаризованной задачи
механики оболочек и выполнением для каждого приближения
по Ньютону условия равновесия штампа.
Представляет интерес учет влияния силы трения, возни-
возникающей в зоне контакта, на НДС оболочки и перемещение
штампа. Считаем, что модуль ее интенсивности — \q1\ = qky,
а знак определяется функцией X = sign (ик — us), где ик и
ws — меридиональные перемещения соприкасающихся по-
поверхностей штампа и оболочки. Произведение у% обозначим
через у.
Условие равновесия A1.39) примет теперь вид
ЕС —
2лК-?- ) (w — а — а*) Лх (ф*) г (<р*) (cos а — у sin а) dcp* = 0.
A1.48)
Для случая штампа в виде кольца круглого поперечного
сечения выражение A1.48) с учетом A1.41) представим сле-
следующим образом:
r (a*) {(w — а) (cos а — у sin а) — Д —
— R [sin <р — sin ф* — у (cos <р — cos ф*)]} dtp* = 0, A1.49)
откуда найдем
Д = /Г1 D - /„ + /,-/.+ /.- /,), (И.50)
где 1и /2, /3, /4 определяются формулами A1.43), а остальные
интегралы записываются как
/6 = у J (w — а) г (<р*) sin а (<р*) dtp*,
/e = Ry j г (ф*) cos фdф*, /7 = Ry j r (ф*) cos ф*dф*,
причем ф — полярный угол, определяемый по формуле A1.40).
Интегралы /6, /в подсчитываем по квадратурным формулам
Ньютона — Котеса, /7 — аналитически. Итерационный про-
процесс уточнения величины А на п + 1-м приближении имеет вид
Дя+, = Д +/, — /,+ /„_ /5 + /, - /7 —
— ] г (ер*) a* (cos а — у sin а) йц>* /Г ,
(Л 1
условия его прекращения — выражения A1.45) — A1.47).
Глава III
МЕТОД РЕШЕНИЯ ЗАДАЧ
ОДНОСТОРОННЕГО ВЗАИМОДЕЙСТВИЯ
МЕЖДУ ОБОЛОЧКАМИ ВРАЩЕНИЯ
Из обзора, приведенного в параграфе 2 главы I, следует, что
одной из мало изученных является задача о контактном вза-
взаимодействии между оболочками, в частности оболочками вра-
вращения, особенно при нелинейном характере их деформиро-
деформирования. В данной главе из. о жен метод решения задач этого
класса. Построен итеративный процесс, на ia-кдом шаге ко-
которого решаются модифицированные линеаризованные кра-
краевые задачи для каждой из оболочек; изучена сходимость та-
такого процесса, получены разрешающие системы уравнений.
Приведены сведения об адаптивном алгоритме, на основе ана-
анализа контактного краевого эффекта даны рекомендации по вы-
выбору шага интегрирования. Получены решения задач о кон-
контакте между цилиндрическими оболочками.
1. Постановка задачи и построение
итеративного процесса
Рассмотрим задачу об осесимметричном одностороннем меха-
механическом взаимодействии между двумя соосными оболочками
вращения с меридианом произвольной формы [46, 121]. Обо-
Оболочки считаем тонкими, их НДС опишем классической тео-
теорией Кирхгофа — Лява, дополненной учетом квадратичной
геометрической и физической нелинейностей по теории малых
упругопластических деформаций. Предположим, что контакт-
контактное давление (нормальное к поверхности напряжение) намного
меньше нормальных напряжений в сечениях оболочек и обо-
оболочки в зонах контакта свободно проскальзывают.
Выбор классической теории оболочек обусловлен тем фак-
фактом, что на НДС и распределение контактного давления де-
деформации поперечного сдвига влияют значительно слабее,
чем поперечное обжатие в зоне контакта [132], [133]. Учет
последнего фактора — одна из основ предлагаемого под-
подхода.
47
Запишем исходную систему дифференциальных уравнений
контактирующих оболочек в форме A.1)
U.(Pi) "Fi-<7Л>М. U(?/*) = Fa + qtfM. (III. 1)
Здесь Ui — вектор-функции с компонентами и, w, Qlt Nlt Qlt
Mly размещение которых отличается от A1.18); F( — векторы
внешней нагрузки; i — номер оболочки, отсчитываемый в по-
положительном направлении нормали к меридиану t = 1,2;
М — столбец, второй элемент которого равен единице, а ос-
остальные — нулю. Контактное давление, пропорциональное
трансверсальному обжатию w^ — а — w2 в зоне контакта обо-
оболочки:
а функцию tjj, по аналогии с A1.17), запишем в виде
ij) = [1 -{- sign {wt — а — w2)]/2. (III.3)
Под операторами Lt (?/,) будем понимать однородную часть
системы A1.19), записанной для каждой из оболочек:
[ys-fs}, s€[l, 6], (Ш.4)
где Д — однородная часть соотношений /, A1.20). Тогда ком-
компоненты вектора F будут /г = —qu /2 = — q + qkty, /, = 0
при s ^ 3. Здесь индекс (, указывающий номер оболочки,
опущен.
Если исходное расположение оболочек (функция зазора а)
и нагрузка таковы, что при деформировании они в контакт
не вступают, то \|) == 0 и система (III. 1) распадается на две
независимые системы обыкновенных дифференциальных урав-
уравнений шестого порядка. В противном случае матричные урав-
уравнения (III.1) связаны, поскольку в выражение для контакт-
контактного давления qk входят прогибы обеих оболочек. Подставляя
в (III. 1) контактное давление, по формуле (II 1.2) получаем
Вместе с обычными для теории осесимметричного дефор-
деформирования граничными условиями, которыми на краях обо-
оболочек задаются непротиворечивые комбинации меридиональ-
меридионального усилия Nt, поперечной силы Ql7 изгибающего момента
Мх, меридионального и и нормального w перемещений и угла
поворота 01( система (II 1.5) составляет конструктивно, гео-
геометрически и физически нелинейную задачу двенадцатого по-
48
рядка. Непосредственное ее решение затруднено. Попытаем-
Попытаемся построить такой итеративный процесс, на каждом шаге ко-
которого уравнения (III.5) можно было бы решать раздельно.
На первый взгляд, для этого достаточно записанное в правых
частях — (III.5) контактное давление брать из предыдущей
итерации. Можно показать, однако, что такой процесс при
k ~ 0A) расходится.
Перенесем в левые части уравнений (III.5) слагаемые с w1
и w2, введем номер итерации п. Получим следующий процесс
итераций:
Lx (UT) + k -L %-iw?}M = Fl + k 4 Ы + wi"-l)] ^_,yW,
(III.6)
M^n)) + k -f ^-rf-"yW = F2 + k -jj- [wTX) - а] 1|>Я_,Л1.
(III.7)
Каждая из систем (III.6) и (III.7) вместе с обычными краевы-
краевыми условиями представляет собой модифицированную (вве-
(введением слагаемых, пропорциональных кЕЬГх) краевую заха-
чу для одной из оболочек. Решим ее сочетанием методов Нью-
Ньютона и С. К. Годунова и докажем сходимость процесса итераций,
опирающегося на последовательное решение краевых задач
для систем уравнений (Ш.б)-и (III.7) [126].
2. Анализ сходимости процесса итераций
Процесс итераций (III.6), (III.7) состоит в последовательном
решении несвязанных краевых задач для первой и второй обо-
оболочек, выполняемом на каждом шаге алгоритма Ньютона. Для
доказательства его сходимости введем гильбертово простран-
пространство вектор-функций щ, подчиненных статическим и кинема-
кинематическим краевым условиям, и энергетическую норму [127].
Пусть
Uf = 0( -f ef\ (HI.8)
где Ui — точное решение; ef" — вектор-функция погрешнос-
погрешности. Обозначая через б'/" вторую компоненту ef (погрешность
прогиба w{) и подставляя (III.8) в (III.6) или (III.7), приходим
к уравнениям сЬ( (е(/°) + gn&T = gn$?t\ i = U 2, умножая
которые на е("} скалярно, получаем
с (LfiP, еГ) + (*„6(Л еГ) = (*п-в?Д ef). (III.9)
Здесь с = kEh~l\ gn = tyn-iM. Первое слагаемое с точностью
4 в-3378 49
до множителя — норма погрешности по энергии. Деформа-
Деформации считаем малыми, поэтому потеря устойчивости процесса
деформирования (образование шейки) не возникает. Прини-
Принимаем, что нагрузка не достигает значения, при котором про-
происходит потеря устойчивости оболочек. При указанных ус-
условиях операторы Lt положительно определенные [31], сле-
следовательно, существуют такие значения |д; > 0, что
Поскольку г|> = ОV1, то, учитывая, что отлична от нуля
лишь вторая компонента М, получаем
б<">||. (III. 11)
Здесь || б,- р — интеграл по области контакта от квадрата
погрешности функции прогиба w(. Используя соотношения
(ШЛО), (III.11), с помощью (III.9) находим
Следовательно,
II вГ II < A + <rV, || еГ |Р || вГ |Г2Г' I! в?5" II- О И. 12)
В соответствии с (III. 11) оценим величину
«б1")Г<|1^|1||бГ|1»еГ||<||^|||еГ|Р. A11.13)
Здесь норма |j gn || = || ty~_ М | характеризует отосительную
длину зон контакта и уровень погрешности | б'1 по сравне-
сравнению с || гТ ||.
Теперь соотношения (III. 12), (III. 13) приводят к форму-
формулам
В связи с тем что процесс итераций состоит в последователь-
последовательном решении уравнений (III.6) и (Ш.7) при i = 1, 2, полу-
получаем
ЦбПКЯЛПб'Г"!. (II 1.15)
Таким образом, погрешность прогиба в зоне контакта с ростом
номера итерации п убывает. Учитывая соотношения (II 1.9),
(ШЛО), имеем
откуда по неравенству треугольника
50
В силу формулы (III. 15) правая часть этого неравенства стре-
стремится к нулю. Таким образом, итеративный процесс сходится.
Отметим, что доказательство проведено в предположении
неизменности границ зон контакта в процессе итераций. Опыт
решения многих задач с помощью предложенного в работе
итеративного процесса показывает, что смещение границ зон
контакта практически не увеличивает число итераций, необ-
необходимое для получения результатов приемлемой точности.
Рассмотрим возможности ускорения сходимости. Извест-
Известна эффективная формула [153]
U* = ?/„_, + Р„ (?/„_, - Un), A11.16)
где U* — скорректированная вектор-функция;
- (un+i-Un,un+1-un)
Рп — Ш . . 91,
Эта формула обобщает б2-процесс Эйткена I157J
Г)
на случай, когда решение представляет собой функцию, а не
число. Для вычисления коэффициента р„, содержащего в зна-
знаменателе вторую разность, необходимо определить вектор-
функции [/n_i, Un, Un+i (в нашем случае — решить краевые
задачи для оболочек) с излишне высокой точностью.
Построим формулу коррекции решения, в которую войдут
лишь первые разности последовательных векторов. Номер обо-
оболочки временно опустим. Полагая
w — wn = bn, w~wn+\ = 8пкп, (III.18)
где w — точное решение для прогиба, находим
" (Ш — Wn) —
Перейдем к случаю, когда искомой является вектор-функция.
Заменим числитель и знаменатель нормами
Здесь Х„ играет роль произведения Х,Х2в соотношении (III.15).
Вычитая из первой формулы (III. 18) вторую, получаем
Тогда из второй формулы (III. 18) следует
. w* = ш„+, + рв(ш„+1 - ш„), р„ = КA - КГ1- (Ш.20)
В скалярном случае это выражение совпадает с (III. 17). По-
Поскольку компоненты вектор-функции погрешности е„ взаим-
взаимно связаны, вместо (III.19) можно использовать формулу
" ~—«77 ГП—'
однако формула (III. 19) более эффективна, если при вычис-
вычислении норм интегрировать по зонам контакта. В формулу
(III. 19) входят лишь первые разности, что повышает устойчи-
устойчивость вычислительного процесса к погрешностям. Поэтому
далее проводим коррекцию:
U*i = Uf+l) +-р„ (U?+l) — Uf\ 1 = 1, 2, (III.22)
где Р„ определяется выражением (II 1.20).
Из численного анализа следует, что Хп в процессе итераций
почти не изменяется. Построим алгоритм таким образом, что-
чтобы Хп вычислялось только вначале, когда потеря значащих
цифр при подсчете по формуле (III.21) наименьшая. Следую-
Следующее определение Кп можно допускать только после проверки
того, что это число имеет не менее двух верных знаков. Рас-
Расчеты показывают, что дальнейшее повышение точности этого
коэффициента практически не ускоряет сходимости, однако
резко увеличивает затраты машинного времени.
Итеративный процесс целесообразно прекращать по ус-
условию
|| (Л — U?+l) HI U?+1)|Г' < е. (II 1.23)
Левая часть условия (III.8) представляет собой относитель-
относительную поправку. Такое условие предотвращает ранний обрыв
вычислительного процесса, который может иметь место при
использовании соотношения | U?+i) — UT || || Uf+i) |Г* < е.
Последнее условие при медленной сходимости простых ите-
итераций может оказаться выполненным, хотя отличие решения
от точного может быть еще велико. Процесс итераций в це-
целом ведем, применяя коррекцию по формуле (III.22), после
определенного числа простых итераций.
В заключение отметим, что в случае контакта оболочки с
абсолютно жестким телом система (II 1.1) переходит в одно one-
Р
раторное уравнение L (U) = F — k —^- M (w — a) if, процесс
итераций для которого имеет вид
52
и состоит лишь в уточнении границ зон контакта. Опыт реше-
решения различных контактных задач показывает, что этот про-
процесс сходится за две — четыре итерации при допустимой от-
относительной погрешности порядка одного процента [117, 121].
3. Определение одностороннего взаимодействия
длинных цилиндрических оболочек
Рассмотрим некоторые особенности предложенного алгоритма
на примере безмоментной задачи о контакте двух длинных ци-
цилиндрических оболочек (плоская деформация).
Составляя уравнения равновесия с учетом выражения
(III.2) для контактного давления при а == 0, получаем
Е R2 . , Е , , .
X wi = Я "иг- + d IT У (w* ~ wi)>
Разделив эти уравнения па Elh и приведя их к виду (III.6),
(III.7), найдем
A + i|xQ w?+l) = u-l p4n)d, A + *d)K»i"H) - фсоГЧ A11.24)
где и — радиальное перемещение одного кольца, и = qR2IEh.
Точное решение системы A11.24) имеет вид
Проведем процесс последовательных приближений. На
первой итерации считаем, что' контакта нет, т. е. ф = 0. Тог-
Тогда из уравнений(III.24) w^ = и, a4" = 0, -ф = [lH-signx(ay,—
— w.2)V2 = 1. Последовательно решая уравнения (III.24),
находим
ud
+ (тттГ +
(Ш.26)
Введем обозначение dl{\ + Ф = ?,. Тогда (III.26) переходит в
шз = ^1- (П 1.27)
53
Поскольку сумма прогрессии
(=0,2,... ' + Ы
формулы (III.27) переходят в точное решение (II 1.25). Ана-
Анализируя формулы (III.26), делаем вывод, что при d ^> 1 про-
процесс сходится медленно, так как значение ? хотя и меньше еди-
единицы, но близко к ней. Используя формулы (III. 19), (II 1.20)
и A11.26), получаем кп = A + (Г1)~2 = К, р„ = BсГ1 +
+ d~2)~x. Параметры Кп и р„ в данной задаче не зависят от но-
номера итерации, что позволяет подсчитывать их по результа-
результатам второй, третьей и четвертой итераций. На поздних стади-
стадиях процесса возникли бы малые разности.
Применение к результатам (III.26) коррекции по формуле
(III.22) дает точное решение (III.25). Это связано с отсутстви-
отсутствием' погрешностей вычислений и с тем, что в данном примере
определяются не функции меридиональной координаты (с
возможным при контакте оболочек изменением границ зоны
контакта в процессе итераций), а числа w{.
Пусть между бесконечно длинными цилиндрическими обо-
оболочками податливая прокладка отсутствует. Тогда k « 1 и при
малых значениях hlR параметр ? близок к единице. Рассмот-
Рассмотрим вопрос о возможности искусственного уменьшения коэф-
коэффициента понижения жесткости обжатия оболочек по толщи-
толщине k при сохранении необходимой в практике точности резуль-
результатов.
Преобразуем формулы (III.25) к безразмерному виду-^- =
= -?±|_ ~ A + d-72)/2, -^- = (l-d-1/2)/2,^=(l_
— d~~'/2)/2. При непосредственном контакте изотропных обо-
оболочек k = 0 A). Если hlR < 10 *, то решение на 0,5 % от-
отличается от 0,5. Допуская погрешность результата итератив-
итеративного процесса с (в %), принимаем, что
1 j_i in—2 и 50 ( h \2 /ttT no.
~2-(Г=с-10 , k = — ^-jfj • (III.28)
Так, при hlR = 10~2, с — 1, k = 5 • 10~3 величина ?,, опре-
определяющая скорость сходимости итераций, равна 0,98 вместо
0,9999 при k = 1. Дополнительные сведения о выборе кеэф-
фициента k даны далее.
В случае, когда жесткость одной из оболочек выше, чем
другой, сходимость возрастает.
Запишем уравнения равновесия рассматриваемой модель-
модельной задачи при различных толщинах и модулях упругости
54
оболочек
E L E
h2 \ R ' "™ """ "
Здесь Е, h — характерные значения. Введем обозначения
г? П2
d, = & -=г- -л-, i = 1, 2. Разделив уравнения на EJht, полу-
С/ ПП{
чим
В соответствии с формулой (III. 15) запишем условие сходи-
сходимости
IIб„+, ||< A + rfrV A + diT11«k,Ц. (И1.29)
Пусть Ех = Е, h1 == h2 = h, тогда множитель при [| 6„ ||
равен
Чем больше значение Е2 по сравнению с Ё, тем меньше этот
множитель. Последнее ускоряет сходимость, так как нера-
неравенство (II 1.29) усиливается.
Рассмотрим влияние физической нелинейности на сходи-
сходимость. Считая, что напряжение и деформация кольца связа-
связаны зависимостью а2 ~ Ес (е2) е2, получаем
Ес . Е . _ R2
-~— ш2 + d — (ш., — tWj) ib = 0.
С1едовател ыю,
„(п+1) _ U + w2 d (n+1) _ d
, ?с = EJE.
Er+d l+d
Тогда
I б("+1)|! = (l + сг'^^цб'"'!!. (Ш.30)
Таким образом, с ростом уровня пластических деформаций
(значение Ес падает) сходимость замедляется. В реальных слу-
случаях Ес — число порядка единицы, поэтому влияние физиче-
физической нелинейности на скорость сходимости простых итераций
невелико.
55
4. Адаптивный алгоритм
и блок-схема программы
На основе результатов, полученных в предыдущем разделе,
построим алгоритм, реализующий предложенный метод ре-
решения задач о контактном взаимодействии между оболочка-
оболочками. Блок-схема адаптивного алгоритма решения контактной
задачи показана на рис. 8. Широкой стрелкой указана пере-
передача управления при выполненном условии. Блок 1 осущест-
осуществляет операции, необходимые для подготовки к счету: очи-
очищаются массивы исходных приближений yQl, yQ2, массивы
ТМ1, ТМ2, в которых далее будут содержаться дополнитель-
дополнительные упругопластические жесткости; засылается нуль в мас-
массив значений функции т|? и счетчик ступеней нагрузки SOQ,
вычисляется заданная функция зазора а; устанавливается
начальное значение нагрузки Q; задается коэффициент k; пе-
печатаются исходные данные для обеих оболочек.
С метки STAQ начинается счет для данного значения пара-
параметра нагрузки, с метки STAK — итеративный процесс ре-
решения контактной задачи. В блоке 2 очищается счетчик ите-
итераций ST, устанавливается число обращений СТ к операто-
операторам блока 3, равное четырем. На каждом шаге этого цикла
процедура PERE выполняет пересылки таким образом, что
сохраняются три подряд идущих результата обращений к
процедуре PLSD, решающей краевую задачу для первой и
второй оболочек. Здесь же накапливается число итераций,
по формулам (III.2), (II 1.3) вычисляются контактное давле-
давление и функция т]5. Выполнение четырех итераций подряд в на-
начале процесса необходимо, поскольку на первой итерации
оболочки рассчитывают при отсутствии контакта (в общем слу-
случае заранее неизвестны границы зон контакта) и для первого
применения формулы коррекции (III.22) следует знать wn—\,
wn, wn+\- Обычно после второй итерации имеется зона, где
г|>#0.
После каждой итерации в блоке 4 проверяется наличие
контакта, если его нет, qk = 0 и управление передается бло-
блоку 13. Назначение блоков 5,6 — выяснить, достаточно ли от-
отличаются функции прогиба на соседних итерациях, чтобы зна-
значение % по формуле (II 1.21) имело не менее двух верных зна-
знаков. Действительно, число верных знаков в решении краевых
задач с относительной погрешностью, ие превышающей
EMM, есть lg Е'КМ, а в норме разности \\ wn.Li — к.\, \\ —
— \g(\\wn+i — wn || [| w,,+i Ц-1) верных знаков. Тогда, чтобы
для подсчета X оставалось не менее двух верных знаков,
необходимо выполнение неравенства
— !g ЕКМ + lg (| wn+\ — wn |||i w,,+i 'f])> 2,
56
|Т Подготобт
IE
STAC:
ST=O;
CI=4
_L
STA!<:
Цикл на CI
PERE; Pt,SBfI); PLS2®
ST=_ST+;;«f>;qK
X
5
ЕМ-
= 0,
7
R
t
ЕМ>ЕКМ
15
С1=2
Адаптация ЕКМ
9 Коррекция, w
1Oj Контроль аодшос-
mu\\w-wntJ,\\lw\r'>tps
17
±
EKM = EKMMIN
18J PRINT «PEEUCE к
OR EKMMIW»
ST<STM
13 SOQ-SOQfl
!*+—'POS;PE№
PRINT
STOP
Рис. 8.
откуда и следует условие ЕМ > ЕКМ блока б. Если оно вы-
выполнено, то по формуле (III.21) можно подсчитать коэффици*
епты К, р (блок 7). Однако прежде чем осуществить в блоке
9 коррекцию по формуле (III.22), проверяется сходимость
(блок 8). Если процесс еще не сошелся (блок 10) и количество
57
итераций не превышает предельного (блок //), число циклов
блока 3 устанавливается равным двум (блок 12) и процесс
продолжается. До начала работы схемы блоков 5—11 выпол-
выполняется по две итерации, что целесообразно для установления
процесса после каждой новой итерации.
Если процесс сошелся или исчерпано допустимое коли-
количество итераций (блоки 10, 11), то в блоке 13 процедурой ROB
экстраполируется начальное приближение для следующею
значения нагрузки, проводятся необходимые пересылки, пе-
печатаются результаты. Затем проверяется, для всех ли нагру-
нагрузок решена задача (блок 14).
Рассмотрим блок 6. Если для вычисления Я, в начале про-
процесса (С/ = 4) точность решения краевых задач недостаточ-
недостаточна, предпринимается попытка уменьшения допустимой по-
погрешности процедуры Кутта — Мерсона ЕКМ (блоки 15, 16).
Однако наименьшее значение ЕКМ ограничено некоторой за-
заданной величиной EKMMIN. При выполнении условия бло-
блока 17 печатается рекомендация уменьшить податливость k слоя
между оболочками или увеличить затрату машинного времени
(из-за уменьшения EKMMIN, т. е. повышения точности ре-
решения краевых задач).
Таким образом, описанный алгоритм допускает вычисле-
вычисление X только при обеспечении необходимой его точности (обыч-
(обычно это происходит в самом начале процесса итерации), чем
предотвращается неустойчивость процесса. В разумных пре-
пределах выполняется также адаптация точности решения кра-
краевых задач (ЕКМ) к потребностям блоков коррекции.
Отметим, что процедура ROB (блок 13) экстраполирует на-
начальное приближение так же, как это сделано в работе [113].
В случае, когда решается задача о контакте оболочки с
жестким телом вращения, второе обращение к PLSD в блоке
3 заменяется засылкой нулей в массив прогиба второй обо-
оболочки. При анализе НДС оболочки, подкрепленной упругим
кольцом, второе обращение к PLSD заменяется вычислением
по контактному давлению радиальной нагрузки на кольцо, его
радиального перемещения и, и прогиба второй оболочки в ви-
виде распределения функции w2 как проекции и, на нормаль к
контуру поперечного сечения кольца.
Алгоритм реализован на языках АЛГОЛ и ПЛ/1 на ма-
машинах БЭСМ-6 и ЕС-1045.
5. Учет контактного краевого эффекта
и выбор шага интегрирования
Краевые задачи (III.6) и (III.7) решаются сведением их кря-
кряду задач Коши. Поэтому возникает вопрос о характере реше-
решений и влиянии его на точность численного интегрирования.
58
В случае контакта двух цилиндрических оболочек конеч-
конечной длины уравнения их равновесия, приведенные к итера-
итеративной форме, имеют следующий вид:
(III.31)
Запишем общее решение однородного уравнения, одинаковое
для обеих оболочек при ij) = 1, т. е. в зоне контакта
w = е~{х~х^с [A, sin (х - хн) ре + А2 cos (x - х„) ре] +
+ е-(х«~х)*с [ А3 sin (хк - х) р, + Л4 cos (xK - х) рс],
где хн, хк — координаты начала и конца зоны контакта;
ре = Vх 3 A - v2) Yk + h2R~'2 hT1. A11.32)
Скорость изменения прогиба при интегрировании задачи
Коши определяется поведением функции ехр (—Р^х). Отметим,
что в случае контакта тонких (h2R~7 <^ 1) изотропных (k ~
csi I, v = 0,3) оболочек рс = l,285/i~f. Если считать зоной
краевого эффекта 1С область изменения аргумента, в которой
экспонента изменяется в 102 раз, то lji~l с*. 3,6.
Таким образом, на расстоянии, равном примерно двум —
четырем толщинам, в области, примыкающей к х = хн, про-
прогибы оболочек wlt w2, а значит, и контактное давление, про-
пропорциональное их разности, претерпевают резкие изменения.
Назовем это явление контактным краевым эффектом. Оно ус-
установлено ранее при решении контактных задач для тонких
тел с учетом поперечного обжатия в зоне контакта [16, 84].
Отметим существенно отличие контактного краевого эф-
эффекта от обычного краевого эффекта цилиндрической оболоч-
оболочки, для которого из соотношения (II 1.32) при k = 0 получа-
получаем известную формулу ро = 1,285 (Rh)'. Ширина зоны здесь
в VRlh раз больше. Искусственное уменьшение коэффици-
коэффициента к способствует ускорению сходимости итераций (см. па-
параграф 3 главы III). Выясним, как это отразится на характе-
характере всплесков контактного давления у границы зоны контакта
и скорости изменения'решений. Приведем выражение (III..32)
к виду
Р, = 1,285
59
Пренебрегая с!~х по сравнению с единицей, записываем рс =
= 1,285 \Z~ktr\ тогда
IJi-1 = З.б/у'Т A11.33)
Следовательно, при уменьшении значения коэффициента k зо-
зона контактного краевого эффекта расширяется, т. е. имеет мес-
место размывание всплесков контактного давления. Так, при k =
= 10~2 ширина этой зоны возрастает в 3,16 раза. При неболь-
небольших значениях hIR участок меридиана, на котором наблюда-
наблюдается всплеск контактного давления, все же мал.
Полагая d = 102, из формулы (II 1.33) находим lch~] ^
о* УШ, т. е. le ~ УЖ-
Таким образом, при k — l02h2R~2 ширина зоны контакт-
контактного краевого эффекта приблизительно в три раза меньше ши-
ширины зоны обычного краевого эффекта.
Учитывая, что НДС слабо зависит от того, вводят ли в ре-
решение сосредоточенные силовые факторы или, в соответствии
с решением в классе непрерывной функции, контактное дав-
давление имеет всплески на краях зоны контакта, считаем ука-
указанный способ выбора значения k приемлемым.
Оценим значение шага, необходимое для получения при-
приемлемых результатов в процессе интегрирования задач Коши.
Исходим из того, что при интегрировании уравнения у' =
= ту, у @) ~ 1 (точное решение у — е*) методом Кутта —
Мерсона четвертого порядка погрешность решения на одном
шаге [159] е = (тАх)ъ/720, где Дд;— шаг интегрирования.
Поскольку решение (III.31) изменяется какехр (Р^х), где рс =
= 1,285 Vkh~', полагая k = lOW, получаем ft, ~
с* 4(Rh)~l/t. Следовательно, можно принять е = [4{Rh)~4' x
X ДхР/720. Отсюда Ах(Як)~'!' = 0,25 УШг. При е = 1(Г3
Да: Уяк « 0,234, тогда для Rlh = 100 имеем Да: « 2,ЗЛ.^?
Таким образом, начальный шаг интегрирования выбираем
равным нескольким толщинам. В программе используем про-
процедуру Кутта — Мерсона с автоматическим выбором шага по
заданной точности.
В заключение отметим, что хотя проанализирован частный
пример контакта цилиндрических оболочек, полученные вы-
выводы мало зависят от формы меридиана, поскольку поведе-
поведение решений для прогиба определяется наличием в уравнении
четвертой производной, умноженной на жесткость, и про-
прогиба с множителем kElh.
60
6. Анализ контакта между цилиндрическими
оболочками конечной длины
Исследованию осесимметричного взаимодействия соосных ци-
цилиндрических оболочек одинаковой длины в линейной поста-
постановке посвящена работа [256]. Решение задачи получено авто-
авторами с использованием теории Рейсснера без учета обжатия
оболочек по толщине. Расчетная схема дана на рис. 9. Две
w-105,m
1/3 2/3
Рис. 9.
Рис. 10.
жестко закрепленные цилиндрические оболочки длиной /=
= 0,1524 м одинаковой толщины h = 0,254 • 10~2 м с радиу-
радиусом внутренней Rx — 7,62 • 10~2 м расположены с зазором
а = 0,0127 • 10~2 м; внутренняя оболочка нагружена давле-
давлением. Материал оболочек линейно-упругий, его физические ха-
характеристики следующие: Е — 2,1 • 105 МПа; v = 0,3. Из-
за симметрии рассчитана половина оболочки, число точек ор-
тогонализации на интервале интегрирования равно 30.
Кривые /, 2 (рис. 9) для первой и второй оболочек при q =
= 20,67 МПа показывают распределение прогибов [121], сов-
совпадающее с решением, полученным в [256]. Кривые 3, 4 соот-
взтствуют контактному давлению для значений коэффициен-
коэффициента понижения жесткости обжатия оболочек k, равных 0,01 и
0,1; кривая 5 — решению [256].
С увеличением коэффициента k возрастает всплеск контакт-
контактного давления у края зоны контакта, однако НДС изменяется
мало. Контактное давление на краю зоны контакта равно ну-
нулю в отличие от конечного значения [256]. Это объясняется
тем, что в предложенном методе использована математическая
61
модель, учитывающая в зоне контакта обжатие оболочек по
толщине.
Число итераций при допустимом относительном расхожде-
расхождении результатов двух последних приближений, равном 10~3,
для указанных значений k составляет 12 и 16, машинное вре-
время на БЭСМ-6 не превышает 1,5 мин.
Задача осесимметричного взаимодействия двух соосных ци-
цилиндрических оболочек разной длины из нелинейно-упругого
несжимаемого материала решена в работе [169]. Расчетная схе-
схема представлена на рис. 10. Внутренняя оболочка шарнирно
оперта, внешняя -^свободна. Численные результаты полу-
получены для оболочек с размерами: /?, = 0,2 м; R2 = 0,202; h =
= 2 • \0~3; lx =0,6; /2 = 0,3 м. Параметры схематизирован-
схематизированной диаграммы деформирования те же, что и в параграфе 5
главы II. Внутренняя оболочка нагружена равномерным дав-
давлением q = 5 МПа. Коэффициент Пуассона в расчете по изло-
изложенному методу равен 0,495. Для учета натяга (|а| = 5 X
х 10~4 м), с которым собраны оболочки, число а считаем от-
отрицательным. Из-за симметричного закрепления оболочек от-
относительно их середины рассматриваем половину каждой из
них; число точек ортогонализации па интервале интегриро-
интегрирования первой оболочки равно 50, второй — 25. Коэффициент
понижения жесткости обжатия оболочек k = 10~2. Решение
получено за 16 итераций.
Распределения прогиба, меридиональных перемещений и
изгибающего момента, найденные предложенным методом, сов-
совпадают с данными работы [169]. Однако распределения кон-
контактного давления у края зоны контакта отличаются. Вместо
большого конечного значения (штриховая линия [1691) полу-
получен всплеск, причем на краю зоны w имеем qk = 0. Интеграль-
Интегральные характеристики Ми Mlt Nlt Nt близки к результатам
[1691, поскольку радиальная сосредоточенная сила, статиче-
статически эквивалентная всплеску контактного давления , в обоих
расчетах слнпакова.
Глава IV
НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ
СОСТОЯНИЕ СИЛЬФОННЫХ КОМПЕНСАТОРОВ,
ПОДКРЕПЛЕННЫХ КОЛЬЦАМИ
Во многих отраслях машиностроения для компенсации темпе-
температурных расширений элементов тепловых установок и трубо-
трубопроводов применяются сильфонные или линзовые компенса-
компенсаторы. К сильфонным относятся волнистые компенсаторы,
изготовленные из бесшовных или продольношовных тонкостен-
тонкостенных трубчатых заготовок методом гидравлической или меха-
но-гидравлической формовки. Линзовые компенсаторы обыч-
обычно имеют сварные швы в вершинах гофров, поэтому обладают
меньшей надежностью и ограниченной компенсирующей
способностью. Такие компенсаторы по сравнению с сальнико-
сальниковыми, еще применяемыми в промышленности, компактны,
удобны в эксплуатации и полностью исключают утечку тепло-
теплоносителя .
В настоящее время методика проектирования сильфонных
(линзовых) компенсаторов основана на использовании фор-
формул, построенных с помощью введения ряда упрощающих за-
задачу предположений и коэффициентов, полученных обработ-
обработкой экспериментальных данных. Это приводит к значитель-
значительным затратам средств и времени.
Существующие отраслевые стандарты и нормали [62, 143,
192] предусматривают работу компенсаторов за пределом уп-
упругости. Вследствие гибкости сильфона представляется не-
необходимым также учет геометрической нелинейности задачи.
Определение НДС сильфонов, изготовленных без армирующих
колец, с учетом нелинейных факторов выполнено, например,
в работах [32, 33, 73, 74]. Для расчета на ЭВМ указанных
сильфонов можно воспользоваться также методами и програм-
программами [114, 118, 134, 186]. Методика оптимизации линзовых
компенсаторов осевых перемещений приведена в [116].
При высоком внутреннем давлении среды применяют силь-
фоны, подкрепленные во впадинах кольцами [143]. Известны
статьи [161, 243], посвященные их расчету, однако в них НДС
оболочки описано линейной теорией, что не отвечает реальным
условиям работы.
63
Приведем результаты исследований НДС волнистых и оме-
гообразных сильфонов, армированных жесткими и гибкими
кольцами. Задачи одностороннего контактного взаимодей-
взаимодействия оболочки с кольцами решены методами, изложенными в
главах II и III.
1. Анализ напряженно-деформированного
состояния волнистого
и омегообразного сильфонов
Изучим взаимодействие тонкой оболочки волнистого сильфона
с жесткими кольцами круглого поперечного сечения и гибки-
гибкими кольцами в виде разомкнутых тороидальных оболочек.
Половины сечения колец представлены на рис. 11. Волнистый
сильфон составлен из тороидальных оболочек (радиусы внут-
внутреннего и внешнего торов равны соответственно 17,7 • 10~3 и
7,5 • 10~3 м) и кольцевых пластин (гв — 0,3605 м; rN =
= 0,328 м). Зазор между кольцом и поверхностью оболочки
в нижней половине тора равен нулю, между кольцом и пла-
пластиной он определен формулой A1.30).
В случае жесткого кольца решаем задачу о контакте обо-
оболочки и штампа по методике главы II, взаимодействие гибкого
кольца и оболочки изучаем по методу, построенному в гла-
главе III. Физически нелинейные свойства материала заданы ста-
стабилизированной диаграммой стали 08Х18Н10Т (? = 2,1 X
X 105 МПа; v = 0,3):
В{ ot, МПа
0,00200
0,00315
0,00530
0,00738
0,00940
0,01145
0,02560
400
460
520
550
570
580
640
Толщина оболочки h — 0,66 • 10 3 м. Граничные условия
для рассматриваемого полугофра следующие: в точке D при-
принимаем условия симметрии и = вх = Qj = 0; в точке А —
— и — А, @х = Qt = 0, где А < 0 (А > 0) — осевое обжа-
обжатие (растяжение) компенсатора, приходящееся на половину
гофра.
На рис. 11 представлено деформированное состояние обо-
оболочки, подкрепленной жестким кольцом, при воздействии
внутреннего давления ц = 0,6 МПа (кривая /), а также при
совместном воздействии давления q — 0,6 МПа и осевого сме-
смещения верхнего края полугофра на растяжение Д = 0,3583 X
64
rv-2
10 2 м (кри-
X 10 м (кривая 2) и обжатие Д = —0,3583
вая .3). Приведено также распределение интенсивности дефор-
деформаций на внутренней поверхности оболочки вдоль меридиана
при тех же значениях нагрузок и q = 0,6 МПа, Д = 0 без
учета геометрической нелинейности (кривая 4). Распределение
контактного давления при указанном характере нагрузок да-
дано на рис. 12. Наибольшее значение контактное давление при-
принимает при совместном воздействии внутреннего давления и
обжатия сильфона (кривые /—3 соответствуют обозначениям
рис. 11).
В практике используются
сильфоны [143], подкреплен-
DmopN пластина 8 тор А
Рис. П.
.2
D тор N пластина В тор А
Рис. 12.
ные не только жесткими, но и гибкими кольцами. При этом
возникает задача о контакте между оболочками вращения, ре-
решение которой получено для рассмотренного выше сильфона
с гибким кольцом толщиной hK = 5 • 10~3 м (см. главу III).
Процесс последовательных приближений при q = 0,6 МПа,
Д = —0,3588 • 10-
сходится за 8 итераций. Материал
кольца не выходит за предел упругости. Качественная кар-
картина распределения НДС и контактного давления не изменя-
изменяется, но максимальные значения е,- и qk уменьшаются соответ-
соответственно от 0,84 % и 25 МПа до 0,63 % и 19 МПа.
Проанализируем НДС омегообразного сильфона, подкреп-
подкрепленного жесткими или гибкими кольцами (рис. 13). Сильфон
нагружен внутренним давлением, осевым растяжением и об-
обжатием. Размеры рассчитываемого полугофра: радиусы внут-
п—3
реннего и внешнего торов равны 5,8 • 10 и 4,95 • 10 " м;
rD = 0,05 м; га = 0,07 м; rN = 0,0592 м; гв = 0,0642 м; тол-
толщина оболочки h = 0,3 • 10~3 м; число гофров 12. Тороидаль-
Тороидальное гибкое кольцо имеет толщину Лк = Л, угол полураствора
Фо = 30,7°. Краевые условия для кольца следующие; в точке D
полукольца принимаем условия симметрии и = Qt = Qx = 0;
5 9-3378
65
на свободном крае Nx — Qx — М^ = 0. Полугофр разбивается
на три сегмента (рис. 13): участок DN — тор I, участок NB —<¦
тор 2, участок ВА — тор 3. Число точек ортогонализации в
зоне контакта для оболочки сильфона М = 25, для кольца
М — 19. Коэффициент понижения жесткости обжатия обо-
оболочек k = 0,01. Функция зазора определяется формулсй
A1.32). Компенсатор состоит из двух проскальзывающих без
трения слоев, между кото-
которыми отсутствует зазор.Дав-
зазор.Давление на один слой прини-
принимается равным половине рас-
расчетного.
0,5
0,4
0.3
0,2
0,1
0,6; 0,03
Л
К
/
J
ч^—¦-
70;0,01
N 8
Рис. 14.
Расчеты выполнены для двух вариантов армирования ком-
компенсатора: жесткими кольцами круглого поперечного сече-
сечения, прилегающими без зазора к впадине гофра, и гибкими
кольцами в виде разомкнутых тороидальных оболочек. На
рисунках результаты, отвечающие жесткому кольцу, показа-
показаны сплошными линиями, гибкому — штриховыми.
Осевое усилие, действующее на компенсатор, при задан-
заданном давлении и осевом перемещении вычислено по формуле
Р = 2nrAMNiA — я (г a — r%) q,
где Nia — осевое усилие в слое в точке А; М — число слоев.
Зависимости осевого усилия Р от обжатия (А < 0) и рас-
растяжения сильфона для разных значений внутреннего давле-
66
ния q (числа на графике) приведены на рис. 13. Треугольни-
Треугольниками отмечены данные эксперимента, проведенного в СКТБ
«Компенсатор» (Ленинград).При обжатии компенсатора, вр-
мированного жесткими кольцами, значение осевого усилия
больше, чем при армировании гибкими. Распределение интен-
интенсивности деформаций et вдоль меридиана оболочки для раз-
различных значений q и Д приведено на рис. 14, где первая цифра
соответствует q, в МПа, вторая — А, в м. Отметим, что харак-
характер кривых при подкреплении жесткими и гибкими кольцами
существенно различается. В случае гибкого кольца щ имеет
максимальное значение на торе 1, что вызвано податливостью
кольца. В то же время е^ тах при армировании гибким кольцом
всегда меньше, чем при армировании жестким кольцом.
Время счета для одной нагрузки на ЭВМ БЭСМ-6 и число
итераций при подкреплении жесткими кольцами в среднем
составили соответственно 4 мин и 5 итераций; при подкрепле-
подкреплении гибкими кольцами — 7 мин и 9 итераций.
Таким образом, установка гибких колец вместо жестких
позволяет увеличить компенсирующую способность при том
Же ЗНачеНИИ Е; max-
2. Учет кинематической связи колец
с оболочкой сильфона
В параграфе 1 настоящей главы в качестве расчетной схемы
сильфона, имеющего некоторое число волн, принят полугофр.
Удобство такого приема заключается в том, что кольцо, рас-
расположенное во впадине гофра, можно считать неподвижным в
осевом направлении. Осевое перемещение при этом задается на
правом конце меридиана полугофра. Напряженное состояние
крайних и средних гофров различно, поэтому представляет
интерес расчет всего сильфона. Если он подкреплен кольца-
кольцами, возникает задача учета осевых смещений колец под дей-
действием контактного давления и снл трения (см. параграф 5
главы И).
Рассмотрим подкрепленный жесткими кольцами трехвол-
новой сильфон (рис. 15). Радиус сечения кольца гк = 0,01 м;
внутренний и наружный радиусы сильфона гг = 0,20 м и г2 =
= 0,23 м; толщина оболочки h = 2 . 10~3 м; Е = 2,1 • 105 МПа;
v = 0,3. Задача решена в геометрически нелинейной постанов-
постановке без учета и с учетом трения при у = 0,1 (сплошные и штри-
штриховые линии на рис. 15 и 16). Краевые условия на левом кон-
конце оболочки и = A, w = 0Х = 0, на правом и = 8Х = Qx «
= 0. Решения получены с допустимой погрешностью е •= 5 X
X 10~fi за четыре приближения по Ньютону. На первом при-
5* 67
ближении выполнено семь итераций, уточняющих положение
колец, на втором — пять, на третьем и четвертом — по одной.
Итерационный процесс отыскания осевых перемещений колец
прекращался по условию A1.45).
-200
-адо
Рис. 15.
Распределение меридионального изгибающего момента,
возникающего в оболочке при Д = 2 • 10~ м, приведено на
рис. 15, зоны контакта указаны штриховыми линиями. На оси
абсцисс даны номера точек меридиана. Отметим, что в зонах
контакта оболочки с кольцами | Мг | на 25 % меньше, чем в
вершине внешнего тора. Эпюры
контактного давления представ-
представлены на рис. 16, зоны контакта
расположены в местах перехода
внутреннего тора в кольцевые
пластины. Влияние сил трения
невелико и проявляется в асим-
асимметрии графиков Мг и qk. Мак-
Максимальные значения контактно-
контактного давления на первое (опорное)
кольцо 137 МПа, на второе (ар-
(армирующее) — 139 МПа. Функции дь на левой и правой сторонах
второго кольца одинаковы при у = 0. Напряженные состояния
внутренних полугофров практически совпадают, что позво-
позволяет находить НДС сильфона, рассчитывая лишь одну по-
половину волны. Однако при изучении устойчивости компенси-
компенсирующих элементов необходимо определять докритическое со-
состояние всего сильфона. Если он не подкреплен кольцами, это
не вызывает затруднений, в противном случае следует исполь-
использовать предложенную методику.
Рис. 16.
68
3. Сравнение результатов расчета
с данными эксперимента
Сопоставим теоретические результаты с данными эксперимен-
экспериментов, выполненных во ВНИИНЕФТЕМАШе (Москва). Сильфо-
ны с омегообразным гофром, изготовленные из стали Х18Н10Т
подкрепленные кольцами, испытывали осевым растяжением
и сжатием. Рассчитывали половину сильфона. В сечении посе-
посередине ставились условия симметрии, на левом крае и = ±Д,
ни = 6j = 0. Значения осевой силы для шести вол нового силь-
сильфона, армированного жестки-
жесткими кольцами, приведены в
табл. 1. Внутренний и наруж-
наружный радиусы оболочки гг —
= 79 • 10~3 м и г2 = 119 х
X 10~3м, радиусы тороидаль-
тороидальных впадин и выступов гофра
Таблица 1. Зависимость осе вого
усилия сжатия от перемещения
торца сильфоиа
Д-10»,
Рт, кН
г = 15 • 10 м, толщина обо-
оболочки h = 2 • 10"
0
3,05
5,90
9,10
11,50
14,40
18,00
20,20
0
3,00
5,95
8,90
11,80
14,70
17,65
20,50
0
— 1,66
0,84
—2,24
2,54
2,04
-1,98
1,46
м, радиус
кольца г„ = 14 • 10~3 м.
Среднее отклонение теорети-
теоретических результатов от экс-
экспериментальных составляет
1,82 %. "
Оценим, являются ли различия теоретических и экспери-
экспериментальных данных (индексы «т» и «э») существенными (зна-
(значимыми) или случайными. Применим критерий Уилкоксоиа,
в соответствии с которым для двух независимых выборок {х\, ...
..., Хп\) и {х}, ..., х],?) из множеств Xх и Хэ строится число об-
образуемых инверсий [53]. В качестве контрольной величины
принимается я — полное число инверсий. Если отклонения
мчкду элементами выборок Xх и Хэ носят случайный харак-
характер, то п не должно сильно отличаться от своего математиче-
математического ожидания Мп = я,«2/2. В нашем случае п, = п2 = 8.
Для результатов табл. 2 имеем я = 2 + 2 + 4 + 4 + 5 +
+ 7 + 7 = 31. Табличное значение критерия па = 19. Та-
Таким образом, поскольку | п — Mn \ <С.па, то отклонения экспе-
экспериментальных результатов от теоретических имеют случай-
случайный характер, связанный с условиями проведения экспери-
эксперимента.
Следует подчеркнуть высокую адекватность математиче-
математической модели реальной работе КЭ. Как и в эксперименте, в ме-
месте расположения кольца № 1 (рис. 17) наблюдались макси-
максимальные значения напряжений и деформаций, превышающие
69
qK,Mna I
соответствующие величины в районе колец № 2—4 на 5
10 %. Распределение контактного давления по поверхности
колец при различных значениях Л приведено на рис. 17.
Серия экспериментов выполнена также для сильфонов ком-
компенсаторов типа КВО-5 (Ру = 2,5 МПа; D = 0,25 м и D ---=
= 0,4 м) с точеными и штампованными (жесткими и гибкими)
70
кольцами. Характеристики компенсаторов и вид нагружения
даны в табл. 2. Толщина оболочки сильфона h — 1,6 • 10~3 м.
Результаты экспериментальных исследований и данные
расчетов приведены в табл. 3 и 4, где смещение А, изменения
размеров АЛ и Д7" — в мм, а е — расхождения в %; буквой
о обозначено среднеквадратичное отклонение.
Группы данных оценены по критерию Уилкоксона. Ока-
Оказалось, что во всех случаях отклонения носят случайный ха-
характер с гауссовым распределением вероятности. Точка мак-
Таблица 2. Характеристики сильфонов компенсаторов типа КВО-5
Номер
компенсаторов
1
2
3
4
5
6
7
D, и
0,25
0,25
0,25
0,25
0,4
0,4
0,4
Число волн
в сильфоие
4
4
4
3
3
3
3
Тип колец
Жесткие
Гибкие
Жесткие
Гибкие
Жесткие
Гибкие
*
Вид нагружения
Осевое растяжение
и сжатие
То же
Растяжение
Растяжение и сжа-
сжатие
То же
» »
Растяжение
симума нормального распределения относительного отклоне-
отклонения теоретических и экспериментальных данных близка к
нулю. По результатам анализа материала определено: до 1 %
относительного отклонения имеют 33 % всех результатов;
до 3 % — 66 %; до 5 % — 83 %; до 10 % — 97 %. Таким
образом, наблюдается высокая степень адекватности пред-
предложенной математической модели НДС сильфонов с различ-
различными типами колец. Численные результаты подтверждают
выводы по данным экспериментов: применение колец обеспе-
обеспечивает равномерность работы волн компенсаторов. Это имеет
важное значение для повышения эксплуатационных характе-
характеристик компенсаторов, более полного использования компен-
компенсирующей способности всех волн при сохранении устойчивос-
устойчивости сильфонов.
4. Решение задач
вариационно-сегментным методом
Идея о построении метода решения контактных задач нелил. й
ной теории оболочек путем использования связи между кон-
контактным давлением и трансверсальиым обжатием может быть
реализована в различных формах. Наряду с построением
71
Таблица 3. Изменение ширины выступов волн н шагов снльфонов компенсаторов типа КВО-5
д
2,3
4,3
7,2
7,6
9,7
11,1
12,5
13,3
14,0
15,5
0.10=
4,2
3,7
8,0
7,3
0,2
0,45
0,9
0,85
1,15
1,35
1,55
1,60
1,65
1,95
0,45
0,50
1,00
0,85
дг1
0,23
0,43
0,85
0,87
1,16
1,34
1,51
1,63
1,70
1,93
0,48
0,48
0,96
0,89
13,0
—4,6
—5,9
2,3
0,9
—0,7
-2,6
1,8
2,9
—1,0
4,0
2,3
6,2
—4,2
—4,2
4,5
0,6
1,10
1,8
1,95
2,55
2,80
3,15
3,30
3,65
3,85
1,1
0,90
2,00
1,90
0,58
1,12
1,85
1,93
2,50
2,78
3,22
3,32
3,61
3,85
1,09
0,93
2,03
1,85
8
АГ5
Д1-Т
Обжатие
—3,4 0,7
1,8 1,2
2,7 1,8
— 1,0 2,0
—2,0 2,3
—0,7 2,8
2,2 3,1
0,6 3,5
— 1,1 3,4
б 3,9
5,0
1,8
Растя
—0,9 1,1
3,2 0,9
1,5 2,0
-2,7
1,8
0,67
1,19
1,81
2,00
2,4
2,86
3,04
3,40
3,39
3,94
же и и
1,09
0,88
2,02
1,82
-4,5
—0,8
0,5
0
4,2
2,1
—2,0
—0,3
—0,3
1,0
5,0
5,5
е
0,9
—2,3
1,0
1.1
АЛ]
0,2
0,3
0,6
0,7
0,9
1,1
1,3
1,45
1,5
1,7
0,4
0,3
0,6
0,5
ДЛ1
0,2
0,29
0,59
0,70
0,88
1,14
1,32
1,42
1,55
1,70
0,40
0,30
0,57
0,52
0
—3,4
—1,7
0
-2,3
3,5
1,5
—2,1
3,2
0
6,0
2,4
0
0
—5,3
3,8
0,2
0,3
0,6
0,7
1,0
1,1
1,5
1,5
1,7
1,7
0,5
0,3
0,7
0,5
0,21
0,29
0,55
0,70
0,94
1,14
1,44
1,42
1,75
1,70
0,49
0,30
0,69
0,52
е
5,0
—3,4
—9,0
0
—6,4
3,5
—4,2
—5,6
2,9
0
9,0
и
-2,0
0
—1,4
3.8
11,9
П.1
13,8
13,4
15,5
14,9
a-10s
1,45
1,35
1,70
1,55
1,90
1,80
1,46
1,33
1,70
1,59
1,91
1,77
0,7
—1,5
0
2,5
0,5
— 1,7
2,0
3,4
3,05
2,85
3,45
3,35
3,90
3,80
3,00
2.82
3,48
3,41
3,90
3,79
—1,7
—1,1
0,9
1,76
0
—0,30
3,0
3,9
2,9
2,7
3,5
3,6
3,9
3,7
2,98
2,81
3,44
3,40
3,88
3,79
2,7
1,4
—1,7
—0,6
—0,5
2,4
3,0
10,8
1,0
0.8
1,1
1,0
1,3
1.0
0,92
0.77
1,09
0,91
1,32
1,0
—8,7
—3.9
—0,9
-9,9
1,5
0
4,0
3,0
1,0
0,8
1,2
0,9
1,4
1,0
0,93
0,77
1,17
0,91
1,43
1,00
-2.0
-2.Ь
1.1
2,1
0
5,0
2,0
Примечание Над чертой — значения для сильфона компенсатора № 1. под чертой — компенсатора № 2.
Таблица 4. Изменение шагов сильфоиов компеисаторов типа КВО-5
д
2,1
2.7
5.2
5,1
8,0
8,1
9,4
9,9
0,7
1,0
1,9
1,9
2,5
2,7
3,1
3,4
AT?
0,77
1,02
1,74
1,81
2,62
2,79
3,05
3,37
9,1
2,0
—9,2
—5,0
—4,6
3,2
— 1,6
—0,9
0,5
0,9
1,4
1,3
2,2
2,4
2,6
3,1
0,49
0,84
1,40
1,51
2,22
2,49
2,63
3,07
е
&ТЭ3
Обжа тяе
—2,0 0,5
—7,1 0,4
0 1,0
13,9 0,9
0,9 1,7
3,6 1,5
1,1 1,9
— 1,0
1,7
лгт3
0,47
0,44
1,08
0,88
1,63
1,42
1,91
1,74
е
—6,4 .
9,1
7,4
—2,3
—4,3
—5,6
0,5
2,3
0,4
0,4
0,9
1.0
1,6
1,5
1,8
1,7
дг!
0,37
0,40
0,98
0,90
1,53
1,40
1,81
1,72
е
-8.1
0
8.2
—4,6
—7,1
0,5
1.2
Продолжение табл. 4
л
10,9
11.4
0-1О2
2,8
3,2
5,7
6,0
9,0
8,8
10,8
10,0
12,7
П.7
3,5
3,8
0,9
1,0
2,0
2,1
3,1
3,2
3,8
3,7
4,5
4,2
3,53
3,86
0,93
1,05
1,94
2,12
3,14
3,15
3,80
3,59
4,48
4,21
к
0,8
1,5
6,8
3,2
4,8
—3,1
0,9
1,3
— 1,6
0
-3,1
—0,4
0,2
3,2
6,5
3.1
3,6
1,0
0,9
2,0
1,9
3,1
2,8
3,9
3,3
4,4
3,7
лгт2
е
3,07 —1,0
3,53 —2,0
2,1
1ГГ
Р а с т я ж е
1,00 0
0,94 4,3
2,00 0
1,89 —0,5
3,16 1,9
2,80 0
3,80 —2,6
3,19 —3,4
4,47 1,6
3,75 1,3
5,7 '
5,3
2,2
2,0
н и е
0,4
0,5
0,9
0,9
1,4
1,3
1,6
1,5
1,9
1,8
ДГз
2,20
2,01
0,44
0,47
0,86
0,91
1,36
1,33
1,62
1,52
1,91
1,77
8
0
0,5
4,9
4,3
9,1
—6,4
—4,6
1,1
—2,9
2,3
1,2
1,3
0,5
— 1,7
5,9
2,3
ЛГ4Э
2,1
2,0
0,5
0,7
0,8
1,1
1,4
1,5
1,5
1,5
1,9
2,0
A7-I
2,10
2,00
0,43
0,64
0,90
1,08
1,34
1,52
1,58
1,70
1,84
1,97
8
0
0
4,9
2,9
— 16,3
—9,4
11,0
— 1,9
—4,5
1.3
5,0
11,8
—3,3
— 1.5
7,3
6,6
Примечание. Над чертой — значения для сильфона компенсатора № 5, под чертой — компенсатора № 6.
краевых задач для систем дифференциальных уравнений и ре-
решением их с помощью одного из известных алгоритмов возмож-
возможно применение вариационных принципов. Покажем путь моди-
модификации вариационно-сегментного метода [1181 для решения
контактных задач.
Используем тензорно-линейную форму физического зако-
закона, поэтому все соотношения записываем для скоростей изме-
изменения заданных и искомых функций. Рассматриваем осесим-
метричную контактную задачу для оболочек вращения с уче-
учетом деформации поперечного сдвига по теории Тимошенко и
изменения метрики по толщине. Компоненты вектора скорос-
скоростей перемещений точки тела оболочки
Ul = u + z(p, ы„ = 0, u3 = w, (IV.1)
где ф — угол поворота нормали к срединной поверхности.
Исходя из тензора конечных деформаций Грина
2е„ = V,«,- + V,u,
учитывая (IV. 1) и оставаясь в рамках теории среднего изгиба,
а также следуя работе [222], записываем кинематические со-
соотношения в физических компонентах
Eff - A + Zkj-1 (п., + 2ф,5 + *iO») +
+ A + Zkz)~X [W,s —k1(u+ 2ф)] [tt»lS — k1(u + 2ф)],
E22 = A + ZkJT1 [A2AT1 (« + Zip) + kzW\, (IV.3)
2e(,? = A + zkj-1 (ф + w.s — kxu).
Здесь запятая и индекс s обозначают производную по мериди-
меридиональной координате; функции ы, w, ф известны к данному ша-
шагу по параметру нагружения. При расчете тонких оболочек
можно принять A + zkc) = 1, i = 1, 2. В модели Кирхгофа —
Лява ф = kxu — w.s.
Тензорно-линейный физический закон представим в виде
otj =¦ Lijkidl]. Для случая осесимметричной деформации обо-
оболочки Тимошенко находим
где индексам т, п = 1, 2, 3 отвечают исходные 11, 22, 13; вмес-
вместо е13 следует подставить 2е<]з) = у13. Матрица Lmn симметрич-
симметричная, ее компоненты для изотропного, трансверсально изот-
изотропного, ортотропного упругого материала и для теории
упругопластического течения приведены в книге [118].
При отсутствии одностороннего контакта приращение пе-
перемещений оболочки в соответствии с [218] определяется
76
вариационным уравнением
[ [a '/fie,, + ~ а{'8 (V^VjU*)] dV = Г q
V L J Q
где Кий объем и поверхность, а их дифференциалы dV =
= AtA2 (I + zkx) A + 2ft2) d?2*d2, dQ± = A ± A^/2) A ±
±hkJ2) A^A^dadfy, где fi* и Q*— элементы площади средин-
срединной и лицевых поверхностей оболочки.
Подставляя (IV.3) и (IV.4) в (IV.5), получаем
4-«П-
(w,s - kxuf) dV =
г Q
= б J qwdQ* + [Л2 (iV^u + itoi&p + Qi6©)]]«. (IV.6)
Суммирование проводится по /, m,. В уравнении (IV.6)
q = q+(l -f hkj2) A + AAg/2) + <7~ A — A
где ах — накопленная к данному шагу известная функция s,
г; Nlt Mlt Qx — заданные на краях оболочки функции.
Пусть в процессе нагружения оболочка входит в области
со в односторонний контакт с упругим основанием или штам-
штампом. Тогда в левой части (IV.6) следует учесть слагаемое,
отвечающее энергии трансверсального обжатия. Умножая урав-
уравнение (IV.6) на квадрат приращения параметра (А02> заменя-
заменяем в нем скорости изменения функций приращениями (напри-
(например, w => Ддо и т. п.) и прибавляем к его левой части слагае-
слагаемое
ДЭ* = -j- k ~ J [(да„_, + Дш — af — (wn-i — aJ] rpdat =
(О
@ @
Здесь /г — номер шага по нагрузке. В результате вариацион-
вариационное уравнение равновесия гибкой упругопластической обо-
оболочки средней толщины, взаимодействующей со штампом,
приобретает форму
б(ДЭ + ДЭ* — ДЛ+ AAk) = O, (IV.8)
где ДЭ и ДЛ — умноженные на (А?J левая и правая части
(IV.6) без знака вариации, а ДЛА — второе слагаемое правой
части (IV.7). Это слагаемое учитывает погрешность решения
на предыдущем п — 1-м шаге по нагрузке и отвечает примене-
76
нию самокорректирующегося шагового процесса первого по-
порядка, существенно ускоряя сходимость.
На каждом шаге по нагрузке выполняется итеративное
уточнение зоны контакта а>„. ри этом функция if>fiv (v — номер
итерации) для v = 1 принимается равной г|?„, причем
ynv = 11 -f sign (wn + Awv — a)]/2. (IV.9)
Здесь Ашу — искомое приращение прогиба на /г-м шаге по на-
нагрузке и v-й итерации.
Уравнение (IV.8) позволяет по заданному приращению
параметра иагружения найти приращения перемещений и,
д qK,Mna
s/l, О
Рис. 18.
w, ф, а следовательно, деформаций и напряжений. В процессе
деформирования изменяется функция ifnv (IV.9), а значит —
зона контакта и контактное давление. Уравнение на каждом
шаге можно решись любым прямым методом.
Воспользуемся далее вариационно-сегментным методом
[118], по которому конструкция представляется совокупностью
сегментов (оболочек с канонической формой меридиана), для
описания НДС каждого из них применяется метод Ритца в
высоких приближениях, а объединение решений выполняется
методом сил.
В качестве примера рассмотрим деформирование омегооб-
разного сильфона Ду 125, армированного жесткими кольцами
круглого поперечного сечения, нагруженного внутренним
давлением q и осевым обжатием Л. Внутренний и наружный
диаметры сильфона DBH = 0,13 м, DH = 0,174 м; радиусы
внутренней и внешней поверхностей торовых участков (впа-
(впа3 3
дины и вершины) гвн = 5 • 10~3 м, гв = 8 • 10~3 м; шаг гоф-
гофров Т = 19,5 • 10~3 м; число гофров — 10, толщина оболочки
Л = 0,3 • 10~3 м; материал 08Х18Н10Т с пределом текучести
от = 263 МПа; Е = 2,1 • 106 МПа; модуль упрочнения ?х =
77
= 4200 МПа; v = 0,3; относительное сужение образца ti =*
= 0,57; а_, = 165 МПа.
Расчетная схема выбрана в виде полугофра, состоящего из
двух тороидальных сегментов (рис. 18). Зазор между внешней
поверхностью первого сегмента (тороидальная оболочка —
впадина) и кольцом до нагружения равен нулю. Функция за-
зазора между кольцевой пластиной и внешним тороидальным
сегментом определяется формулой A1.32). На левом крае за-
заданы граничные условия и = Qx = Qx = 0, на правом Аи =
= —A, Qi = @i — 0. Приращения давления и осевого сме-
смещения на каждом шаге составляют At? = 0,8 МПа, А =
= 0,15 • 10~3 м. Выполнено 10 шагов, общее число коорди-
координатных функций, принятых для аппроксимации Аы, Ддо, Aq>
сегмента, составило 36, причем для Aw— 12.
Распределения контактного давления и интенсивности
напряжений на наружной поверхности оболочки приведены
на рис. 18. Сплошные и штриховые линии отвечают нелиней-
нелинейной и линейной задачам. Разгрузка не возникала ни в одной
расчетной точке тела оболочки. Решение, полученное вариа-
вариационно-сегментным методом по теории течения с изотропным
упрочнением, практически не отличается or результатов рас-
расчета этой же оболочки по теории малых упругопластических
деформаций (см. главу II).
Расчетные данные позволили определить по формуле Мэн-
сона — Коффина
= (in 7T=-^)V (<Ч - а-х1Е)?> Аер = е, гоах -
число циклов нагружения до разрушения сильфона N = 2332.
Глава V
УСТОЙЧИВОСТЬ ОБОЛОЧЕК ВРАЩЕНИЯ
ПРИ ОДНОСТОРОННИХ
КИНЕМАТИЧЕСКИХ СВЯЗЯХ
В проблеме устойчивости оболочек основополагающими явля-
являются математические понятия о предельных и особых точках
на траекториях состояний равновесия, т. е. функциях, свя-
связывающих параметры нагружения и обобщенного перемеще-
перемещения. Определенные успехи в решении этой проблемы достиг-
достигнуты не только благодаря созданию эффективных численных
методов, но и потому, что указанные понятия четко отражают
механический смысл явления и постановку задачи. Это поло-
положение, однако, относится в полной мере лишь к наиболее рас-
распространенному случаю отсутствия ограничений на переме-
перемещения точек поверхности оболочки. При наличии кинемати-
кинематических связей сама постановка задачи устойчивости требует
большей тщательности, при этом недостаточно дополнить
условие нетривиальности решения однородной задачи неравен-
неравенствами-ограничениями. Необходим учет моментности докри-
тического состояния, а также зазоров (натягов), возникаю-
возникающих при воздействии внешних сил, способа передачи нагрузки
на оболочку со стороны упругого основания.
В данной главе построены уравнения и алгоритм числен-
численного решения задач устойчивости тонких оболочек вращения,
основанные на уточненном подходе к проблеме. Обсуждаются
особенности, возникающие при варьировании нелинейных
уравнений равновесия и наличии односторонних ограниче-
ограничений. Показано, что известные результаты можно рассматри-
рассматривать как частный случай в рамках этого подхода. Изучены
задачи устойчивости цилиндрических оболочек, нагружен-
нагруженных давлением или контактным давлением со стороны упру-
упругого основания, сферических оболочек под действием штампов
разной формы и давления упругого основания, сильфонов,
подкрепленных кольцами.
1. Уравнения устойчивости оболочек
вращения при одностороннем контакте
Исследуем устойчивость осесимметрично нагруженных кон-
конструкций из оболочек вращения в рамках статической кон-
концепции Эйлера, по которой неустойчивость системы харак-
79
теризуется появлением смежной формы равновесия, беско-
бесконечно близкой к исходной. Задача о бифуркации форм рав-
равновесия сводится к нахождению собственных чисел и функций
линеаризованной системы дифференциальных уравнений.
Уравнения устойчивости оболочек вращения при односторон-
одностороннем контакте получим вариацией исходных нелинейных
уравнений A1.10)
L(8Nlt 6Nt, 6S) + д(уЯ) + k,-^- 6Я + AlA,kl6Ql = 0,
fiQ1 = (ЛИаГ1 [l^.FAflf 6Л*„ 6H) — в1Ш1 — N^}, (V.I)
A,2), (а, C),
Линеаризованные кинематические и физические соотноше-
соотношения приведем позже.
Рассмотрим подчеркнутое слагаемое последнего уравне-
уравнения (V.1). Напомним, что контактное давление в произволь-
произвольной точке J поверхности оболочки Q определяется так:
qk = c{w — а) у, c = kElh, (V.2)
где \р = [1 + sign (ш — а)]/2 V J € Q — Г. В точках / G Г бу-
будем считать г|5 = 0; функция г|5 обеспечивает выполнение од-
одностороннего ограничения qk ~^s 0: if = 1 для точек У ? ы — Г,
¦ф = 0 — для точек д /?Q — ыД Г. Действительно, при на-
наличии контакта ш — а > 0, qk > 0, в противном случае
Як = 0.
Проварьируем зависимость (V.2)
bqk (/) = с [6 (w (/) - а (/)) ф + (w (/) - а (/)) Ц (/)]. (V.3)
В области со — Г имеем г|з = 1 и бг|з = 0, на ее границе до —
— а = 0, бг|з = 0. Таким образом, второе слагаемое в (V.3)
равно нулю. Учитывая, что 8а = 0, из (V.3) находим
8qk = сбшг|з. (V.4)
Отсюда следует, что вариация контактного давления отлична
от нуля в той области, в которой не равно нулю и контактное
давление, определенное в докритическом состоянии. Функция
\р в (V.4) при решении задачи устойчивости известна, так как
подсчитивается по до, а не по бдо, и не изменяется при перехо-
переходе от исходного к (бесконечно близкому) смежному состоя-
состоянию равновесия.
Известно [71], что если на функцию, входящую в некото-
некоторое уравнение, наложено одностороннее ограничение, на-
например / ^ 0, то при варьировании этого уравнения вариа-
80
ция функции должна быть подчинена ограничению б/ ^ 0.
В уравнении равновесия qk > 0, следовательно, в получен-
полученном из него варьированием уравнении устойчивости должно
быть bqk > 0. Таким образом, третье уравнение (V.1) необхо-
необходимо дополнить неравенством
8<Ь>0, V/€g). (V.5)
Выполнение неравенства (V.5) возможно лишь при догруже-
догружении оболочки контактным давлением, поэтому возникает за-
задача об отыскании такого значения параметра нагружения
конструкции, превышение которого ведет к потере устойчи-
устойчивости процесса нагружения. Для того чтобы пояснить это по-
положение рассмотрим в качестве примера задачу о потере ус-
устойчивости кольца, под действием сжимающего его односто-
одностороннего кругового основания. В основном (осесимметричном)
состоянии равновесия контактное давление, действующее на
кольцо, qk = c(w — a) ij>, причем а < 0; w — а > 0; ij> г= 1 в
силу осевой симметрии. Подчеркнем, что величина w — а име-
имеет конечное значение, поэтому бесконечно малые отклонения
бш(Р) от радиального перемещения w не могут привести к от-
отрыву кольца от основания и, как показано выше, зоны кон-
контакта в смежном и основном состояниях совпадают. Если от-
отбросить условие (V.5), получим критическую нагрузку для
кольца, спаянного с основанием в зоне контакта, возникшей
в докритическом состоянии. Такой подход отвечает задаче
о потере устойчивости состояния равновесия.
Будем исходить из необходимости выполнения условия
(V.5), тогда вариацию контактного давления с учетом (V.4)
следует представить в виде
8<7*=«e|8a>|i|>, (V.6)
что обеспечивает догружение кольца (далее — оболочки)
контактным давлением и соответствует задаче о потере устой-
устойчивости процесса нагружения.
Одностороннее ограничение на вариацию контактного дав-
давления и положение о том, что зона контакта в особой точке
траектории нагружения совпадает с зоной, полученной в ос-
основном состоянии, имеют аналогию в теории устойчивости
упругопластических тел. Еще Ф. Шенли отметил странное
на первый взгляд явление: критические нагрузки, получен-
полученные по деформационной теории пластичности (без учета раз-
разгрузки), лучше совпадают с данными эксперимента, чем вы-
вычисленные по более строгим, инкрементальным теориям. Этому
явлению сначала было дано экспериментальное объясне-
объяснение, состоящее в том, что на начальном этапе выпучивания
стержня за пределами упругости ожидаемая разгрузка
6 9-3378 gj
волокон со стороны выпуклости не наблюдалась. Устойчивость
терялась при активном догружении конструкции. Строгое
объяснение парадокса дано В. Д. Клюшниковым [140J, сформу-
сформулировавшим концепцию продолжающегося нагружения и по-
понятие о границе устойчивости не состояния, а процесса
нагружения. С математической точки зрения это означает вы-
выполнение односторонних ограничений на физические соотноше-
соотношения: зоны пластичности в докритическом и критическом со-
состояниях совпадают в каждой точке тела, в момент потери
устойчивости должно возникать только догружение. Анало-
Аналогичная ситуация имеет место и при односторонних кинемати-
кинематических ограничениях: бифуркация основного процесса де-
деформирования сопровождается активным догружением кон-
конструкции контактным давлением. Именно поэтому, как будет
показано ниже, критическая нагрузка при одностороннем
контакте всегда меньше, чем при двухстороннем.
Возвращаясь к формуле (V.6) и рассматривая ту подоб-
подобласть в со, в которой бш <С 0) (оболочка стремится отойти от
основания), сопоставляем ей растяную часть сечения сжима-
сжимаемого уцругопластического стержня. Догружение стрежня
ликвидирует растяжение, т. е. разгрузку на диаграмме
а ~ е. Величина догружения тем больше, чем больше рас-
растяжение, возникающее на неустойчивой ветви процесса
нагружения стержня. Знак модуля в (V.6) обеспечивает ана-
аналогичное догружение оболочки. Оно имеет место и в подоб-
.ласти, где 8w > 0, так же как и в сжатой части сечения стер-
стержня в начале процесса потери устойчивости.
Отметим существенное отличие в явлениях потери устой-
устойчивости процесса нагружения при одно- и двухсторонних ки-
кинематических и физических ограничениях. В первом случае
поведение критических нагрузок "У, получаемых с учетом и
без учета ограничения, качественно различно: с ростом жест-
жесткости основания Я* неограниченно растет при двухсторонней
кинематической связи оболочки с основанием и стремится к
конечному пределу при односторонней. Во втором — упруго-
пластическое тело без односторонних ограничений и с ними —
разница между приведенно-модульным и касательно-модуль-
ным значениями Я* лишь количественная.
Приведем вариации кинематических и физических соот-
соотношений. Вариации деформаций в срединной поверхности сле-
следуют из (II.6):
беи = 6еи + 9^9,, бе12 = 8е12 + в^в,, A,2). (V.7)
Формулы, описывающие изменения кривизн бха, 6х22> 6х12 и
компоненты беа, 8е22, 8е12, 89lt 6Э2, по-прежнему определя-
определяются соотношениями (П.6), (II.7), но теперь в этих выражени-
82
ях под U, v, w следует понимать смещения, возникающие при
потере устойчивости, т. е. вариации бы.би, бш.
Соотношения упругости (II.7) — (П.9) остаются в силе и
в смежном равновесном состоянии. При этом выражение A1.26)
переходит в связь вариаций 8N = [А] ЬР, где
8N = [бЛ^, 8N2, 6М1( 6М2) 8S, 8Н]\
8Р ~ [беи, бе2г, бх11( 8х22, бе12, 26х12]*,
-[о {D][
Элементы матриц [С] и ID] представляют собой интегралы по
толщине оболочки от эффективных жесткостей, зависящих от
касательного, секущего модулей упругости и докритического
НДС [186]. Интегралы вычисляем по формуле Ньютона — Ко-
теса четвертого порядка.
Граничные условия относительно искомых в смежном со-
состоянии функций однородные
8и = бш = 6ЭХ = 6у = О,
8JV, = 8Q, + д (^ = ЬМ1 = 8S + 2КгЬН = 0. (V.8)
На каждом крае оболочки принимается непротиворечивая
комбинация из четырех условий (V.8).
2. Алгоритм решения задач устойчивости
Условие единственности основного процесса нагруження в
регулярных точках соответствует существованию нетривиаль-
нетривиального решения системы (V.1) с граничными условиями (V.8).
В случае бифуркации основного состояния при достижении
параметром нагружения критического значения к* вектор 8Y
приобретает бесконечно малые, но отличные от нуля значения.
Функции, входящие в разрешающую систему уравнений
устойчивости, представим в виде (символ вариации б опущен)
Ф! (а, Р) = ? <Di/ (а) cos (//ф), Фг (а, Р) = f Ф>; (а) sin (//ф),
(V.9)
где Ф1 == [и, w> Qlt eu, ег2, хп, х2г> Л^„ Л^2, Mlt M» QJ7", Ф2 =
= (и, Э2, е12, х12, 5, Н, Q2]T, что позволяет удовлетворить ус-
условиям периодичности в окружном направлении. Для постро-
построения канонической системы уравнений устойчивости подста-
подставим в статические, кинематические и физические соотношения
разложения (V.9), умножим их на cos(/nP), sin (jnf>) и про-
проинтегрируем по Р в пределах 0, 2я. Ограничиваясь в (V.9)
6* 83
m членами, получаем т связанных между собой систем восьмо-
восьмого порядка
y't = fi(a,Y,j), i = 1, 2 8; / = 0,1 т—\.
(V.10)
Вектор Y имеет компоненты
ух = My, у2 = 6QL + п8Н, ys = 6Mlt г/« = 6S + 2k2bH,
уь = 8u, y6 = bw, y7 = 6Э,, y8 = 8u;
функции ft запишем
fi = — I-1 (У\ — &N2) — n (yt —
ft = - fij/i - n FQ2 + 2цбЯ)
+ k28N2 + я j 6% cos (/
(V.ll)
f5 = бе„ —
fe = к1Уь — Ут fi =
f8 = 6el2
Система уравнений устойчивости свободной оболочки и выра-
выражения для бе11( бе12, б92, 6xu, 8N2, 8H, 8Q2> 8M2 приведены
в [187]. Система (V. 11) отличается от системы [187] наличием
последнего слагаемого в /2. Функции Nlt Qlt г|) находятся при
определении докритического состояния. Решения уравне-
уравнений (V. 10) должны удовлетворять краевым условиям (V.7) или
условиям сопряжения оболочек.
Далее ограничиваемся одним членом в рядах (V.9). Ищем
собственную функцию бш в форме 8w = б [w (a)] (cos п ср — 1).
Тогда последнее слагаемое функции /2 в (V. 11) —ci|> | 8w (a) \ =
= —сг|збш sign (8w). Наличие нелинейного множителя
sign (ба>) требует выполнения итераций, на каждой из которых
функция sign (8w (а)) считается известной из предыдущего при-
приближения.
Линейные однородные краевые задачи решаются методом
сведения к ряду задач Коши с ортогонализацией по С. К. Го-
Годунову. Прогонки осуществляются методом предиктор — кор-
корректор переменного порядка с автоматическим уточнением
84
дэ сходимости [237, 254, 255]. Равенство нулю определителя
D (К, п) системы линейных алгебраических уравнений отно-
относительно неизвестных значений искомых функций на левом кон-
конце интервала интегрирования означает наличие нетривиаль-
нетривиального решения однородной краевой задачи устойчивости.
Собственный вектор 8Y, соответствующий найденному критиче-
критическому значению параметра нагружения к*, строится по мето-
методике [186].
Особенность алгоритма решения задачи устойчивости —
объединение двух этапов: безусловной минимизации по п и
поиска корня нелинейного уравнения D (к, п) = 0. Задача фор-
формулируется следующим образом: найти N действительных
корней к"т, принадлежащих пространству RN:
и выбрать среди них минимальный
min С :#*->/?. (V. 14)
Здесь под N понимается число исследуемых гармоник разло-
разложения (V.9).
Существенными трудностями при решении задачи (V.13),
(V. 14) являются: отсутствие аналитического выражения для
функции D (к, п) и ее якобиана / {%., п)\ значительная нели-
нелинейность D (К п); ограничения на шаг Нтгх поиска корня к*,
связанные с обеспечением устойчивого продолжения реше-
решения системы A1.19) по параметру к; отсутствие сведений о гра-
границах начального интервала, содержащего корень.
Обычно применяют различного рода гибридные алгоритмы
[99], суть которых сводится к построению приемлемых локаль-
локальных моделей и выбору на их основе направления и шага
поиска.
Одним из первых возникает вопрос о направлении поиска
корня. В случае глобального поиска по к направление цели-
целиком определяется продолжением решения A1.19). Для гло-
глобального поиска по п используется метод наискорейшего спу-
спуска, который устанавливает шаг поиска Н, если он не превы-
превышает Ящах- В противном случае шаг определяется на
основании адаптивной модели [115, 242]
К=*К-\ + Ня, Hn+i = Hnexp(st), (V.I 5)
где
D(kn, n) —D(kn ., п)
< в |/)(>».«) +В (Х„1>В)|
Здесь коэффициент s = 0,5...2,4 и, как показал численный экс-
эксперимент [179—181], может быть эффективно модифицирован
по формуле s — 1,4 — 0,5/.
После отделения корня Я* ? [Л«_1, Хп], т. е. выполнения
условия sign (D (кп, п)) Ф sign (D (in-i, n)), его значение
уточняется по методу хорд.
3. Определение устойчивости
цилиндрических оболочек
при одностороннем контакте
с упругим основанием
Цилиндрические оболочки — наиболее употребляемые в прак-
практике объекты, относящиеся к классу оболочек вращения.
Часто по условиям эксплуатации конструкции, содержащие в
виде тонкостенных элементов цилиндрические оболочки, ис-
испытывают различного рода кинематические ограничения на
перемещения точек поверхности. К такого рода конструкци-
конструкциям относятся различные обшивки и тонкостенные вкладыши,
элементы нефте- и газопроводов, подземные резервуары и хра-
хранилища, наконец, многослойные оболочки, у которых слои
связаны между собой односторонне. Задача устойчивости ци-
цилиндрических оболочек, помещенных в грунт (одностороннее
винклерово основание), сформулирована и решена в [19, 96].
Особенность постановки задачи в этих работах заключается в
том, что действие основания заменено внешним давлением и
принято, что в момент потери устойчивости оболочка по всей
поверхности находится в контакте с основанием. Иначе гово-
говоря, при достижении нагрузкой q критического значения qKp,
отвечающего задаче об устойчивости оболочки, соприкаса-
соприкасающейся с основанием, прогиб оболочки в докритическом.со-
докритическом.состоянии w* < 0 равен зазору uf = а. При этом любое беско-
бесконечно малое приращение бау (форма потери устойчивости) при-
приводит к изменению границ зоны контакта. В реальных условиях
обжатие оболочки создается самой упругой средой, т. е.
контактным давлением, что в рамках развиваемого здесь под-
подхода эквивалентно неравенству а <С w*, причем параметром
нагружения является а < 0.
Покажем, что критические давления цилиндрической обо-
оболочки, безмоментной в основном состоянии, получаемые на
основе соотношений а — w* [96] и а < ш*, совпадают. Для это-
этого достаточно рассмотреть семейство решений уравнений ус-
устойчивости (V.10) в диапазоне изменения контактного и внеш-
внешнего давлений от нуля до значений, определяющих критиче-
критическую нагрузку [179], и доказать, что величина критической на-
86
грузки q*p цилиндрической оболочки при исходном безмомент-
ном состоянии не зависит от заданного зазора а, если а ^ и?.
Важно отметить, что в такой постановке qk (так же, как и q) не
зависят от меридиональной координаты. Рассматривая струк-
структуру второго уравнения системы A1.19) Уг = КУх— Мг +
+ k2N2 — q -\- Cjk§' устанавливаем, что оболочка в докритиче-
ском состоянии испытывает внешнее распределенное по поверх-
поверхности давлениеqx — —q + qk, гдеqk = с (ш — а). Поскольку при
а< до* ни уравнения равновесия A1.19), ни уравнения устой-
устойчивости (V.10) не изменяют свой вид, величина критической
нагрузки <7кР = ?s" не зависит от зазора а. В случае а > ш*
минимальная критическая нагрузка q0 достигается при а >
> w0, причем величины q0, w0 определяются классическими
формулами теории устойчивости оболочек, контактирующих
с упругой средой. С уменьшением зазора, т. е. при w0 > а >
> w*, величина критической нагрузки q-z увеличивается, что
связано с поддерживающим влиянием одностороннего основа-
основания, поэтому q0 <C qz <C qKp. Момент потери устойчивости при
выполнении последних неравенств однозначно связан с мо-
моментом отрыва оболочки от среды, когда нормальное переме-
перемещение w срединной поверхности оболочки становится равным
зазору а: (ш = а) =>¦ (—q + qk = q%).
Очевидно, если зазор больше w* на бесконечно малую Ее-
личину 6: а — б = от", величина критической нагрузки q$
мэньше qKp на малую величину е: q^ = qKp — в. Таким обра-
образом, критическая нагрузка qKp при а — от* не может быть
больше </кр (поскольку в этом случае оболочка теряла бы устой-
устойчивость при q = <7кР) и не может быть меньше qKp (так как
lim (а — б) = w* =>¦ (?кР > <7кР)> следовательно qKp = q'Kp:
б-»0
^кР ~\ > qKp\
. _ \=> q*P = qKp.
В реальных задачах прогиб оболочки в. докритическом со-
состоянии не является константой, имеются зазоры (натяги),
давление на оболочку создается самим основанием, поэтому
условие а — w* [96] не выполняется.
На основе предлагаемой методики в качестве тестовых при-
примеров решены задачи устойчивости цилиндрических оболо-
оболочек с R/h, равным 50, 100, 200, при шарнирном и жестком за-
закреплениях краев оболочки с различными значениями коэф-
коэффициента постели d — kR2!i~~. Оболочки в докритическом
состоянии считались безмоментными, в разложениях (V.9)
сохранялся один член ряда. Зазор а выбирался произвольно в
87
Рис. 19.
диапазоне а < w* и а > w* — q*Kph/(kE). Результаты расче-
расчетов совпали с данными работы [96] по величине критической
нагрузки, числу волн п в окружном направлении и форме
волнообразования вдоль меридиана.
На рис. 19 представлена зависимость отнесенной к q0 кри-
критической нагрузки от жесткости основания для случаев двух-
двухстороннего (штрихпунктирная линия) и одностороннего
(сплошная линия — [96], штриховая—[179]) контакта при
шарнирном опиранин торцов оболочки (/ — Rlh = 100; 2 —
Rlh = 50).
Особо следует подчеркнуть необходимость учета момеы-
ности докритического состояния оболочки, оказывающей весь-
ма существенное влияние на результаты решения задач
устойчивости оболочек с односторонними кинематическими
ограничениями. Действительно, в рассмотренной задаче фак-
фактическое давление, испытываемое оболочкой со стороны упру-
упругой среды, изменяется вдоль меридиана, что связано с кра-
краевым эффектом. Учет этого явления приводит к значительно-
значительному снижению критической нагрузки, осреднениое значение
которой представлено на рис. 19 нижней штриховой линией. Во
всех случаях вдоль меридиана наблюдалось (как и в [96])
образование одной полуволны независимо от h, R/h, d,an вида
основания.
В главе I отмечалось, что впервые задача об устойчивости
оболочек при односторонних кинематических ограничениях
сформулирована [56] следующим образом: пусть тонкая, шар-
нирно опертая по торцам цилиндрическая оболочка помеще-
помещена без зазора в сплошную обойму и нагружена осевой сжима-
сжимающей силой. Требуется найти верхнюю критическую нагруз-
нагрузку. В качестве модели упругой среды обоймы используется
винклерово основание, сопротивляющееся вдавливанию обо-
оболочки и не сопротивляющееся ее отрыву. Именно такую по-
постановку задачи использовали авторы [7, 105], получившие
основные экспериментальные результаты.
На примере цилиндрической оболочки: R/h — 100; LIR =
= 2,5; Е = 2,06 • 105 МПа; v = 0,3 покажем влияние жест-
жесткости основания на величину критической нагрузки и форму
волнообразования при потере устойчивости [179]. Точки вет-
ветвления решения соответствуют классической проблеме би-
бифуркации состояния [141].
Докритическое осесимметричное НДС оболочки опреде-
определяется в соответствии с методами, приведенными в главе II.
При этом если на торцах оболочки задавать граничные усло-
условия в виде Nt = —Р, Мх = Qi = 0, то рассматриваемый ва-
вариант будет соответствовать случаю безмоментного докрити-
ческого состояния, а при Л^ = —Р, w = Мг = 0 — момент-
ной форме исходного НДС. В обоих случаях в уравнениях
устойчивости используются граничные условия w = Мг =
= Мх = v = 0.
Изменение критического напряженного состояния в зави-
зависимости от относительного коэффициента постели d приведено
на рис. 20. Вдоль оси ординат отложены критические напряже-
напряжения а*, отнесенные к а0 = 0,6O5Eh/R, так что а = а*/а0. Штрих-
пунктирной линией показаны результаты для двухстороннего
основания, сплошной и штриховой — для одностороннего ос-
основания соответственно с учетом и без учета докритическою
НДС. Видно, что с ростом d число волн в окружном направ-
направлении увеличивается следующим образом: п = 0 при 0 ^ d <
< 0,01, п = 1 при 0,01 < d < 10, п = 2 при 10 < d < 200,
п ¦-- 3 при </ > 200.
Вместе с переходом на каждую новую ветвь по п кривизна
кривой a (d) быстро убывает. С ростом d исчезают различия
между решениями, построенными с учетом и без учета мо-
ментности докритического состояния. Это явление обуслов-
обусловлено тем, что при увеличении d зона краевого эффекта
89
значительно сужается и практически вся оболочка находится в
безмоментном состоянии.
Полученные результаты хорошо согласуются с экспери-
экспериментальными данными [105] (см. параграф 3 главы I). При ис-
испытании цилиндрических оболочек из бронзы Бр. ОФ—03 с
Rlh = 80...90 и LIR = 2, помещенных с различным зазором
в обойму, наблюдалась неосесимметричная форма потери ус-
устойчивости с сильным изгибом в средней части (на рис. 2) та-
такая форма представлена для d — 200, п = 3 при среднем по
поверхности значении контактного давления, равном 8,01 МПа).
1
—--
л=3
200
Рис. 20.
критической
300
нагрузки
d
составляла
100
Величина относительной
а = 1,1...1,75.
Существенное влияние зазора на величину критической на-
нагрузки отмечалось во всех экспериментальных работах по изу-
изучению устойчивости оболочек с односторонними ограничени-
ограничениями перемещений [6,7, 105], однако теоретически исследовать
этот факт ранее не представлялось возможным ввиду специ-
специфики подходов [6—8, 56, 104, 105].
Считаем, что функция зазора а постоянна вдоль мериди-
меридиана оболочки и может быть выбрана произвольно в диапазоне
0 < а < ав, а0 = \RajE. (V. 16)
Если не учитывать моментности исходного состояния, то, как
показано выше, величина а не зависит от зазора и остается
постоянной на всем интервале (V. 16). При учете моментности
докритического состояния характер зависимости а ~ а ка-
качественно одинаков для любого коэффициента постели d и по-
поэтому может быть представлен для какого-то одного значения.
На рис. 21 сплошной линией дан график расчетного критиче-
критического напряжения, отнесенного к а0 свободной оболочки с
моментным докритическим состоянием; точками указаны ре-
результаты эксперимента [104, 105] для оболочек с Rlh = 85...90;
LIR = 2; Е = 1,6_- 105 МПа; v = 0,3; по оси абсцисс отло-
отложены a_=_alaQ и х = xlL; d = 150. Характерная особенность
связи а (а) заключается в быстром падении величины крити-
критической нагрузки а при увеличении зазора отнулядоа0/2. При
а = 0,75 наблюдается снижение а на 10 % по сравнению со
значением для бесконтактной моментной формы потери ус-
устойчивости. Аналогичный характер зависимости критической
нагрузки от зазора получен А. И. Ермичевым при анализе
-w, 6
0,5
\
о
(\
i
0
/
.——"^
0,25
0,5 0,75
Рис. 21.
Г.О
а,х
результатов испытания оболочек в жесткой обойме [104, 105].
На рис. 21 приведена также форма потери устойчивости при
а = 0,5, nj= 2, т. е. зависимость — w(x) для х< 0,5. С уве-
увеличением а форма постепенно перестраивается так, что зоны
наибольшего прогиба смещаются к середине оболочки.
Значительный интерес представляет исследование устой-
устойчивости оболочек, подкрепленных односторонним основанием,
за пределом упругости. Это связано в первую очередь с тем,
что оболочки при одностороннем контакте теряют устойчи-
устойчивость, как правило, при более высоком уровне напряженно-
напряженного состояния, чем свободные оболочки.
Теоретические и экспериментальные исследования устой-
устойчивости упругопластических систем за последние десятиле-
десятилетия опровергли предположение, что выпучивание за пределом
упругости -происходит при неизменной внешней силе [140].
Показано, что устойчивость теряется при росте напряжений
91
выше значения касательно-модульной нагрузки, т. е. при
продолжающемся на/ружении. Причина выпучивания, в про-
противоположность случаю упругости материала, заключается
не в неустойчивости состояния равновесия, а в неустойчивости
процесса деформирования. Концепция продолжающегося на-
гружения значительно упрощает решение задач об устойчи-
устойчивости оболочек, поскольку при этом нет необходимости уста-
устанавливать границу зон разгрузки и догрузки. Таким обра-
образом, рассматривая докритическое деформирование оболочек
в рамках деформационной теории пластичности и используя
соотношения A1.13) — (II.15), определяем устойчивость обо-
оболочек вращения при одностороннем контакте и за пределом
упругости.
На примере сжатых в осевом направлении и помещенных
без зазора в обойму цилиндрических оболочек из стали
Х18Н10Т с LIR = 2,5, Rlh = 100...250 покажем влияние
жесткости основания на критическую нагрузку и форму вол-
! оэбразования. Если оболочка свободна от обоймы (d = 0), а
исходное докритическое состояние считается однородным и
безмоментным, то критическое усилие для сжимаемого мате-
материала описывается известной формулой [83]
N Jf_
0 /3 /3 + 2(l-2v)?c/? — A— 2v)a?K?c/?2 R '
Для оболочки с Rlh = 250, No = 785 Н/м при интенсивности
напряжения at = 400,1 МПа, для Rlh = 100, No = 1,03 кН/м
при а,- = 460,1 МПа. Поскольку в монографии учитывается
моментность исходного состояния, полученные при числен-
численном анализе значения критического усилия No составляли
647,5 и 853,5 Н/м соответственно. Значения интенсивности
напряжений при докритическом деформировании соответст-
соответствовали указанным выше ot (эти величины определены в зоне
краевого эффекта в местах наибольшего моментного деформи-
деформирования). Во всех случаях наблюдается осесимметричная
форма потери устойчивости.
С увеличением d возрастает критическая сила сжатия и
наряду с осесимметричной формой потери устойчивости на-
наблюдается иеосесимметричная (рис. 22). С увеличением жест-
жесткости основания, а следовательно, с уменьшением размаха
интенсивности напряжений в зоне краевого эффекта форма
потери устойчивости перестраивается от образования коль-
кольцевой складки у места закрепления к выпучиванию в средней
части оболочки (рис. 22). Подобный характер выпучивания у
оболочек, теряющих устойчивость в упругопластической ста-
стадии, установлен экспериментально [104, 105].
П
Существенным является тот факт, вытекающий из анализа
проблемы устойчивости процесса деформирования, что потеря
устойчивости оболочки происходит при достижении одного и
того же значения ut независимо от коэффициента постели d.
В связи с этим можно объяснить подкрепляющее воздействие
одностороннего основания на оболочку: при наличии ограни-
ограничений на перемещения, во-первых, уменьшается деформиру-
деформируемость самой оболочки, во-вторых, выравниваются напряже-
напряжения в зоне краевого эффекта и НДС оболочки приближается
к безмоментному. Естественно, что процесс повышения кри-
критической нагрузки с ростом d не может продолжаться до беско-
бесконечности, поскольку с увеличением коэффициента постели их
следовательно, контактного давления быстро возрастает ок-
окружное сжимающее усилие, приводящее к потере устойчивос-
устойчивости оболочки по форме комбинированного нагружения — осе-
осевое сжатие и внешнее давление. Подобный эффект отмечен в
экспериментах [104, 105].
4. Анализ действия штампа
и упругого основания
на сферическую оболочку
Задачи о деформировании гибких сферических оболочек мож-
можно в определенном смысле назвать классическими. Их анализ
позволил объяснить смысл верхних и нижних критических
нагрузок, отвечающих предельным точкам траектории нагру-
нагружения, развить эффективные численные методы решения
93
нелинейных задач теории оболочек. Именно поэтому, а также
из-за возможных практических приложений представляют
интерес исследования воздействия штампов различной формы
и упругого основания на гибкие сферические оболочки.
В рамках классической линейной теории точные решения
задачи о сжатии сферической оболочки двумя симметрично
расположенными штампами с параболической, сферической
и конической поверхностями построены в работе 1232]. Штам-
Штампы считались жесткими, обжатие оболочки по толщине в зоне
контакта не учитывалось, поэтому контактная реакция пред-
представляла собой сосредоточенную силу, приложенную на ок-
окружности, ограничивающей область, внутри которой <^ = 0.
Вдавливание плоского штампа в относительно толстую
(R/h = 30) сферическую оболочку по геометрически нелиней-
нелинейным уравнениям Рейсснера, учитывающим деформацию по-
поперечного сдвига, изучено в [261, 262]. При малой осадке штам-
штампа зона контакта <о представляет собой круг, контактное дав-
давление на ее границе принимает конечное значение, а внутри
оно отлично от нуля. Это является следствием трансверсаль-
ной жесткости оболочки в теории, принятой для решения зада-
задачи. С ростом осадки радиус зоны контакта увеличивается, а
контактное давление в центральной зоне становится меньше,
чем у края области контакта. Начиная с некоторого значения
осадки штампа, происходит отрыв от него центральной облас-
области оболочки, причем осевая сила, с которой штамп действует на
оболочку, продолжает расти.
Квазистатическая задача о контакте сферической оболочки
с жесткой плоской преградой под действием гравитационной
нагрузки исследована в работе [82), где поведение оболочки
разбито на три стадии: образование плоского участка контак-
контакта; прощелкивание этой части оболочки; бифуркация ее по
неосесимметричной форме.
Рассмотрим геометрически нелинейную задачу о сжа-
сжатии сферической оболочки с R/h = 100; h = 10~ м; Е = 1 X
X 104 МПа; v = 0,3 двумя штампами: плоскими, отрицатель-
отрицательной и положительной гауссовой кривизны с радиусами 2R (на
рис. 23 им отвечают сплошная, штриховая и штрихпунктир-
ная линии). Параметром нагружения служит осевое переме-
перемещение штампов А.
Зависимости изгибающего момента в полюсе от отношения
А к толщине оболочки приведены на рис. 23. Крестиком отме-
отмечен момент отрыва центральной зоны оболочки от штампа,
после которого круговая область контакта быстро преобра-
преобразуется в кольцевую. Моменту отрыва предшествует точка
бифуркации по осесимметричной форме. Для плоского и вы-
выпуклого штампов смежное и основное состояния совпадают.
94
,кН-м/к
В случае вогнутого штампа в точке бифуркации происходит
ветвление основного процесса (пунктирная линия), характе-
характеризующееся наличием обширной области отлипания оболочки
от штампа. Во всех случаях точку бифуркации на траекториях
деформирования удалось идентифицировать как точку смены
вида эпюры qk: от максимального значения qk в полюсе к об-
образованию локального минимума в полюсе с максимальным
значением контактного давления вблизи границ зоны контак-
контакта. Характер перераспределения контактного давления для
случая плоского штя_мна при Аг = 0,9 < Дкр, Д„ = 1,02 =
= Дкр,_Л3 = 1,1 > ллр (схемы 1—3) приведен на рис. 23.
Здесь Дкр — значение Л/Л в момент отрыва полюса оболочки
от штампа. Собственная форма дана на схеме 2 рис. 23 штри-
штриховой линией.
В исследованном диапазоне изменения Д независимо от
формы штампа наблюдается рост осевой силы, что качествен-
качественно отличается от поведения функции Р (А) при воздействии
95
tv
плоского штампа на гибкую арку [82] и совпадает с данными
[261, 262] для сферической оболочки, сжимаемой плоскими
штампами. Более чувствительной к изменению А в рассмот-
рассмотренной задаче является локальная характеристика НДС, по-
поэтому в качестве траектории нагружения принята связь мо-
момента в полюсе с осадкой штампа.
Применяемое нами соотношение между контактным давле-
давлением и обжатием позволило получить решения, в которых
qk = О, "V/ 6 Г.
Рассмотрим теперь жестко закрепленную сферическую
оболочку (рис. 24) с углом полураствора <р0 = 20°, Rlh = 200,
при этом р = 2 [3A — \*)tu(Hlh)lu = 9, где v = 0,3; при-
принимаем Е — 2,1 • 106 МПа. Задача о нагружении этой обо-
оболочки внешним давлением и бифуркации ее при подведении к
внешней поверхности одностороннего упругого винклерова
основания с коэффициентом жесткости kElh = с = 10s МПа/м
изучена методом конечных разностей [96]. В отличие от по-
постановки задачи [96] вместо внешнего давления задаем обжатие
15
w
о
/
у-
Лс
К
V
оболочки винклеровой средой, считая параметром нагружения
натяг а < 0 в формуле для контактного давления qk = c(w —
— а). Результаты расчета представлены сплошной линией на
рис. 24, где по оси ординат отложено среднее по поверхности
оболочки контактное давление, отнесенное к Е, q = qlE, a_ по
оси абсцисс — отношение прогиба в центре к толщине w =
— w@)/fi; штриховая линия—данные [96).
Точка бифуркации А отвечает свободной оболочке, нагру-
нагруженной давлением, точка В — действию давления при нали-
наличии односторонней связи с основа-
основанием. Значение qe, полученное по
нашей методике при задании давле-
давления ио(ф) = w(q>) (имитация под-
подхода [96]), точно совпадает с дан-
данными [95], однако число волн рав-
равно 9 в отличие от [96], где п = 5.
Можно предположить, что в [961
получено п = 5, поскольку в ка-
качестве начального приближения
принимали значения п для бифур-
бифуркации состояния равновесия сво-
свободной оболочки (точка А).
Отличие наклона траекторий
нагружения (рис. 24) в докрити-
ческой области связано с тем, что контактное давление рас-
распределено неравномерно, причем так, что одному и тому
же значению среднего контактного и внешнего давления от-
отвечают различные прогибы в центре.
Критическая нагрузка qc при обжатии оболочки винкле-
винклеровой средой отвечает п — 8 (точка с). Распределение контакт-
контактного давления (от заделки к центру, х = 1 — ф/фо) для Я ~ Яс
приведено на рис. 25. Точка D (см. рис. 24) является точкой
бифуркации оболочки при двухстороннем взаимодействии со
средой. В предельной точке F происходит процесс осесиммет-
ричного ухода оболочки из-под основания при существенно
неравномерном графике qk (x) (q = qF на рис. 25).
5. Определение устойчивости сильфонов,
подкрепленных кольцами
Особенность сильфонов — компенсаторов осевых перемеще-
перемещений—заключается в экспериментально наблюдаемой потере
устойчивости при внутреннем давлении. В этом случае, как и
при воздействии осевой сжимающей силы, искривляется перво-
первоначально прямолинейная форма оси компенсатора. Впервые,
0,25 0.5 0,75
Рис 25.
7 «-3378
97
По-видимому, явление потери устойчивости КЭ под действием
внутреннего давления описал и объяснил Дж. Х^рингс [251).
Им же была получена приближенная формула для определе-
определения критической нагрузки, аналогичная выражению Эйлера
для центрально сжатого стержня.
Вопрос об устойчивости подкрепленных КЭ ранее не рас-
рассматривался, хотя и представляется важным при прогнози-
прогнозировании работы компенсаторов и оптимизации параметров КЭ
в жестких условиях эксплуатации. Предложенные в данной
книге алгоритмы и методы расчетов конструкций из оболочек
i.o
0,05
0,1 0,15
Рис. 26.
0,2
вращения при одностороннем контакте позволяют проводить
подобные комплексные исследования [128, 180].
В качестве примера рассмотрим влияние подкрепляющих
колец на устойчивость серийного четырехволнового компен-
компенсатора Ду150: RB = 0,106 м; RBB = 0,0777 м; /^ = R2 =
= 0,0117 м; h = 5 . КГ4 м, Е = 2 . 105 МПа, v = 0,3. Тор-
Торцы компенсатора жестко защемлены. Исходное докритиче-
ское осесымметричное НДС определяется в моментной и гео-
геометрически нелинейной постановке.
Критическое давление для неподкрепленного компенса-
компенсатора q0 = 0,7174 МПа. Форма потери устойчивости КЭ приве-
приведена на рис. 26, штриховой линией изображена искривленная
при бифуркации ось компенсатора. С увеличением жесткости
подкрепляющих колец вплоть до k = 5 • 10~6 отношение кри-
критической нагрузки к <70 медленно возрастает. Одновременно
перестраивается форма потери устойчивости так, что при би-
бифуркации первый гофр оказывается практически недеформи-
рованным, на втором гофре возникает местное выпучивание.
Смена формы потери устойчивости от общей к местной харак-
характеризуется быстрым ростом критического давления. Однако
дальнейшее увеличение жесткости колец вызывает сильный
изгиб второго гофра (штрихпунктирная линия) и падение кри-
критической нагрузки. Во всех случаях в окружном направлении
образуется одна волна я = 1.
Псдоэпая зависимость критического давления от жесткос-
жесткости колец при равномерном уменьшении максимальной интен-
интенсивности деформаций сильфона приводит к тому, что при
переходе от армирования КЭ гибкими кольцами к жестким
ведущим критерием назначения параметров компенсатора
становится не прочность, а устойчивость.
7*
Глава VI
ДИСКРЕТНО-КОНТИНУАЛЬНАЯ ТЕОРИЯ
ОБОЛОЧЕК ИЗ НЕСПАЯННЫХ СЛОЕВ
Необходимость развития теоретических исследований оболо-
оболочек с несовершенным контактом слоев отмечена в параграфе 2
главы I. Выделим два различных типа задач. Первый — за-
задачи анализа напряженного состояния слоистых оболочек со
спаянными слоями при наличии отдельных зон несовершенно-
несовершенного контакта слоев, возникающего вследствие технологических
дефектов или особенностей эксплуатации конструкции. &гой
проблеме посвящены многие работы, среди которых особо от-
отметим [188, 201, 203]. Второй тип задач возникает при расчете
оболочек, составленных из эквидистантных слоев, связанных
между собой только на краях оболочки и взаимодействующих
односторонне. Конструкции, включающие в качестве элемен-
элементов эти оболочки, широко распространены в технике, напри-
например слоистые днища, сосуды, трубопроводы, сильфоны и т. д.
Для таких оболочек характерно большое число слоев. Иногда
внешние слои пакета отличаются от внутренних толщиной и
механическими свойствами, возможно наличие зазоров между
слоями. Слои, как правило, проскальзывают с трением или
свободно. Появление зон сцепления маловероятно, посколь-
поскольку контактное давление между слоями невелико. В данной
главе изложена теория, предназначенная для изучения имен-
именно таких оболочек. Условия контакта между слоями могут за-
зависеть от координат и включают все виды несовершенного од-
одностороннего контакта. Условия спайки слоев (в нормальном
направлении на отрыв, в тангенциальном — на сдвиг) не рас-
рассматриваются. Поведение слоев подчинено одной из нелиней-
нелинейных теорий оболочек, одинаковой для всех слоев. Функции
контактного давления между слоями исключены из числа не-
неизвестных, аналогично тому, как это сделано в главах II и
III. Порядок разрешающей системы дифференциальных урав-
уравнений меньше или равен произведению числа слоев на поря-
порядок системы уравнений для слоя.
В главе построена общая теория и ее частные случаи при-
применительно к технической теории гибких оболочек и теориям
100
оболочек вращения со слоями Кирхгофа — Лява или Тимо-
Тимошенко. Дано описание алгоритма для задачи определения
НДС слоистых оболочек вращения при осесимметричном
нагружении. Приведены примеры.
Важными особенностями предложенной теории являются
возможность применения для ее реализации на ЭВМ всего
спектра методов и программ расчета оболочки — слоя после
относительно простой модификации, а также экономия вы-
вычислительных затрат при большом числе слоев. Если слоев
мало, теория становится точной благодаря просто достигае-
достигаемому устранению погрешности аппроксимации искомых функ-
функций по толщине пакета.
1. Основные положения
Рассмотрим тонкую оболочку, состоящую из N одинаковых
прилегающих друг к др>гу (возможно, с заданными малыми
зазорами) слоев [119, 120, 122]. Пусть равновесие каждого
слоя описывается одной и той же теорией оболочек с искомой
вектор-функцией Yk (a, Р). При использовании классической
теории оболочек компоненты Yk'— проекции вектора переме-
перемещения uk, vk, wk; в теории оболочек Тимошенко вводятся еще
две компоненты — углы поворота нормали. Пусть zk — зна-
значение координаты г (отсчитываемой по нормали к срединной
поверхности пакета), отвечающее срединной поверхности слоя
с номером k. Разницей направлений нормалей к Qk, возника-
возникающей вследствие зависимости зазоров ak (a, Р) от координат,
пренебрегаем, полагая а„ 4С Л.
Считаем Yk — функцию, зависящую от континуальных ко-
координат a, р, значением вектор-функции Y трех координат, две
из которых есть а, р, а третья — zk принимает дискретные
значения. Тогда Yk (а, р). = Y (a, |J, zk).
Аппроксимируем функцию Y разложением
Пес, Мк) = ? 1Л(а, p)ABK), t€H,n]'. (VI.1)
Здес-, n^.N; Vt — новые неизвестные 'вектор-функции;
Pi izk) — полная система функций дискретного аргумента,
ортонормированных со скалярным произведением
N
{Pi>Pl)=lL pl(zk)p,(zk) = 8t/. (VI.2)
В качестве р{ далее используем полиномы, полученные из си-
системы (zs, s = 0, 1, ..., п — 1) ортонормированием по Граму —
Шмидту. Относительно приведенной координаты С = z/Г1 Х
101
X (N — 1) (—V2 ^ ? ^ V2) полиномы pi имеют вид
(N* - 1) (Л'* - 2*) l> '2 (Л' - IJ
20/7 (/V— lK Г^з 1 3/V« — 7
3) L • 20 (N-
70 Гну-iL Г
1/
-5=1 |ъ 14 (N —
П (N* - s2)
1 560 • (Л^—IL
252 КП (/V— 1)' L5 5 (Л'2 —7)
1/
Л' П
s=l
.5 5 (Л2-7) y3 ,
5=5 |> 18 (Л/-1J Ь "+¦
П
1 15^-230^ + 407 J
"Г Ю08 (iV-l)« 4' ( '
На основании формулы (IV. 1) при л = 1 (первое приближе-
приближение) все У'к совпадают, так как в соответствии с (IV.3)
Pi x (zk) — const. Напряженно-деформированное состояние сло-
слоев одинаково, изгибная и мембранная жесткости пакета рав-
равны суммам жесткости слоев. С ростом п различие в поведении
слоев, связанное с рапределением зон контакта между ними,
описывается все точнее. Численным анализом установлено,
что при больших Af можно получить результаты приемлемой
для практики точности, принимая п ¦< N. Это прежде всего
относится к интегральным характеристикам НДС оболочки.
При п = N число исходных Yк и новых искомых вектор-функ-
вектор-функций У; совпадает и на первый взгляд преобразование (IV. 1)
теряет смысл. Однако, как будет видно из дальнейшего, это
преобразование позволяет и в случае п — N получить сущест-
существенные преимущества при построении процесса решения мно-
многоконтактной задачи, так как приводит к системе уравнений
вместо системы уравнений и неравенств — условий контакта
между слоями.
Соотношение (IV. 1) представляет собой лишь одно из ис-
исходных положений предлагаемой теории, второе заключается
в представлении контактного давления между слоями форму-
формулой типа (П.5). Рассматривая промежуточный слой с номером
102
k и учитывая контактное давление, действующее на. него со сто-
стороны соседних слоев, представляем нормальную нагрузку
зависимостью
Яи^с-т- Кда*-1 — ak — wk)^k-i — (wk— ak+i — Wk+i) iy,
(VI 4)
% = [1 + sign (wk — ak+i — wk+i)]/2.
Здесь и далее слои перенумерованы в положительном направ-
направлении координаты г, константа k в формуле (II.5) заменена на
с. Отметим, что в qk входят прогибы трех слоев, а функции
i|V-i, tyk содержат информацию о распределении зон контакта
между ними. Аналогично (IV.4) можно представить и интен-
интенсивность тангенциальной нагрузки на слой, возникающей при
учете трения скольжения.
Разрешающие системы дифференциальных уравнений и
функционалы развиваемой здесь дискретно-континуальной
теории получим проекционным и вариационным методами.
Представим первый из них следующим образом.
Пусть система дифференциальных уравнений равновесия
слоев и отвечающих им краевых условий имеет вид
Ak (Yk) ^ L (Yk) + M (Yk) + R (/*_,, Yk, Yk+l) -Fk = 0, (VI.5)
Здесь L, I, M, m — линейные и нелинейные матричные опера-
операторы; R — оператор, учитывающий одностороннее взаимо-
взаимодействие слоев в зонах контакта; Fk, fk — вектор-столбцы, от-
отвечающие распределенной нагрузке и заданным на контуре
кинематическим и статическим функциям. Проектируя Ак
и Ък на систему функций pt по правилу
S Ак B ViPi (zk)) Pi (гк) = 0, 2 К (? VtPi {zk)\ p, (zk) = О
и учитывая (VI.2), получаем краевую задачу относительно п
неизвестных Vt
А,- = L (V,) + М (V) + R (V) - F, - О, (VI .7)
Вектор V в (VI.7) составлен из всех Kf; операторы, помечен-
помеченные тильдой, найдены проектированием исходных:
N N
Fi = 2 ^P/fe), // -= 2
l ftl
Линейные операторы в (VI 5), (VI.6) и (VI.7), (VI.8) ссвлада-
ют. В частном случае линейных соотношений для слоя (М =
103
= m = 0) системы уравнений Л, = 0 и краевых условий bt =
= 0 связаны лишь оператором R (V).
При отсутствии трения оператор R в (VI.5) — столбец, в
котором отлична от нуля лишь компонента qk, отвечающая
уравнению равновесия в проекции на нормаль к срединной
поверхности оболочки. Оператор R также содержит одну ком-
компоненту
9l = 2j QkPi \zk)> (»'•")
к
причем qk определяется формулой (VI.4), в которой wk =
п
= S ViV{a, $)pi{zk)\ viv — компонента вектор-функции Vc;
v — номер компоненты wk в Yk.
Краевая задача (VI.7), (VI.8) нелинейна геометрически,
физически в силу наличия операторов М, т, а также конст-
конструктивно, поскольку распределение зон контакта заранее не-
неизвестно, а функции % входят в оператор R через соотношения
(VI.4), (VI.9). Итеративный процесс решения краевой задачи,
выполняемый в связи с нелинейностью теории слоя, естест-
естественно совместить с процессом уточнения границ зон контакта
между слоями. Методика построения соответствующего ал-
алгоритма приведена в параграфе 5 настоящей главы. Для вы-
выполнения каждого шага процесса итераций можно с неболь-
небольшими изменениями воспользоваться любыми (из обширного
арсенала известных) алгоритмами и программами решения
нелинейных задач для оболочки — слоя.
В заключение отметим, что особенность предложенной
теории — сохранение всех исходных соотношений теории обо-
оболочек, принятой для слоя. Аппроксимация (VI.1) устанавли-
устанавливает лишь закон изменения компонент вектора Yk (одинако-
(одинаковый для всех компонент) при переходе от слоя к слою. Свой-
Свойства полиномов р( (VI.3) таковы, что новые искомые функции
являются средним арифметическим, а также первой, второй и
т. д. разностями исходных функций с точностью до множите-
множителя. Это обеспечивает быструю сходимость решений по п.
2. Техническая теория
гибких слоистых оболочек
В качестве примера построения вариационного уравнения
дискретно-континуальной теории рассмотрим квадратично гео-
геометрически нелинейную задачу деформирования оболочки со
свободно проскальзывающими упругими изотропными слоя-
104
ми при отсутствии зазоров. Для описания НДС слоя исполь-
используем техническую теорию [113], в которой Yk имеет две ком-
компоненты — прогиб wk (a, P) и функцию усилий ц>к (а, Р). За-
Запишем смешанный функционал, точка стационарности кото-
которого тождественно удовлетворяет условиям равновесия слоя
с номером k:
Фк = [ \l (wk, фЛ) y wkT (wk, cpk) — qkwk Ids, (VI. 10)
где
-°(Ф*.
k k Ь (VI.ll)
О(a>ft, cyft) = ?) {(V wk) — 2A — v) [Wa.'yWfs — (^is) ]}•
Оператор G (фл, ф^ отличается от (VI.ll) множителем (Eh)~l
и знаком при v; Л0Ф* — известный оператор второго порядка,
учитывающий кривизну оболочки; Т (w, ф) = Доаафзр —
— 2а;арфар + а>рцфаа- Индексами а, р обозначены ковариант-
ные производные по соответствующим переменным; qk — ин-
интенсивность заданной внешней нагрузки на слой g номером k.
Подставляя в (VI. 10) разложения
где и{, vt — новые искомые функции, учитывая энергию обжа-
обжатия слоев в зонах контакта, равную
(это слагаемое можно также трактовать как функцию штрафа)
и суммируя по k, получаем функционал
1 "
s,r,/=l
¦ gi gk g) "iPt (zJJ & + т с т g^
(VI.13)
где
N
Clirj = Zj Pt (z*) Pr (zft) Pi (zk)> Apik ==: Pi (Zfc+l) — Pf (zft)- (VI. 14)
При выводе формулы (VI. 12) принимали в (VI.4) ак = 0; coft
обозначает область контакта между fe-м и k + 1-м слоями.
8 9-3378 Ю5
Здесь в соответствии с [17, 84, 213] в выражении для обжатия
слоя по толщине отброшены малые слагаемые, связанные с
тангенциальными деформациями. Отметим, что вследствие
(VI.4) контактное давление заведомо равно нулю на границах
зон контакта, что соответствует точному решению задачи в
трехмерной постановке.
Поскольку гк отсчитывается от срединной поверхности па-
пакета, система pt состоит из четных и нечетных функций. По-
Поэтому многие из usri равны нулю, что уменьшает вызванную
геометрической нелинейностью связанность системы квадрат-
квадратных алгебраических уравнений, получаемых прямыми мето-
методами отыскания точки стационарности функционала (VI. 13).
В геометрически линейном случае системы уравнений относи-
относительно пар щ, vt связаны лишь слагаемыми с множителем cElh.
В связи с тем, что Apik s= 0, система относительно иъ v1 ока-
оказывается изолированной. Ее решение отвечает первому при-
приближению — средним по толщине пакета значениям w и q>.
Функции щ, vt, допускаемые к сравнению в (VI. 13), долж-
должны удовлетворять лишь главным краевым условиям, причем
тем же, что и wk, q>ft. Для щ, и,- (i ? [2, п]) краевые условия —
однородные, это обнаруживается при проектировании крае-
краевых условий для wk, фЛ на ортонормированнуюсистему pt (zk).
Итеративный процесс, необходимый для отыскания точки
стационарности функционала (VI.13) из-за геометрической не-
нелинейности, можно использовать и для уточнения границ зон
контакта между слоями. Полагая фА = 0, из (VI. 13) получаем
функционал задачи об изгибе многослойной пластины.
3. Построение разрешающей системы
уравнений для оболочек
из слоев Кирхгофа — Лява
Рассмотрим осесимметричное НДС тонкой оболочки вращения,
состоящей из N одинаковых слоев, равновесие каждого из ко-
которых описывается геометрически нелинейной теорией [134]
тонких ортотропных оболочек. В зонах контакта учитываем
трение по закону Кулона. Используем для слоя соотношения
и обозначения, принятые в [134].
Обозначим вектор-функции ^основных неизвестных функ-
функций слоя с номером к следующим образом:
у\ = Т\и у\ = (#,, у\ = М\и у\ = и", у\ = w\ y\ = 9?.
(VI. 15)
Компоненты тензора деформаций, изменения кривизны
срединной поверхности, окружные усилие и момент запишем
106
в виде
Ли
Ец «= (tfi — J
= (?>„?„-У
-(</?¦
С22 =
У 22 = O12?;ii
M*2 = АпЕп
Вх%Еп — t
In)"' IC^t"
- BxiEkn -
№ + hb
4- B22E22
^12^22 — AnK\\)l Bn>
-Al2E22 — Dl2Kk22)Bn
"^ *"l2-*\22/ **lli»
k T,k k
t V\ f^ t T\ If *
~T *-fl2'\l\ "Г ^22*^22»
(VI. 16)
Отметим, что все функции (VI.16) линейны относительно ком-
компонент вектора (VI. 15).
Система дифференциальных уравнений рановесия слоя с
номером k
(уЧ)' = /J + ft* + ф*. se{l, 6].
Здесь
/t = |x Gt - yt) - ^г/2, & = -
;* = ц (Ж|2-^) + y2ft, /*
/5 = kxys —yG, /6 = ^Сн.
причем
Ь\ = - ,*, ftS = -q\ b\ = -mf, bj = b\ = ftg - 0,
фз - yfye, Ф4 = - (^бJ/2, Ф? = 0, t = 1, 2, 5, 6.
Граничные условия при а = ax имеют вид
К - и/*) A - vi) + (Qn - Qu) V2 = 0, (VI.20)
(ef - вГ) (i - у») + (Mf, - мг,) Y3 = 0.
Остальные три условия (при a = a2) совпадают с приведен-
приведенными по форме при замене -у( на -уё+з- Считаем, что заданные
на краях значения и*, w*, 9 одинаковы для всех слоев. Кине-
Кинематическим условиям отвечают yt = 0 (i g [1, 6]), статиче-
статическим — Yi — 1- Рассматриваемые элементы конструкций
обычно связаны по краю с другими (не слоистыми), относи-
относительно более жесткими телами, сваркой, что соответствует ки-
кинематическим краевым условиям. Если край оболочки сво-
свободен, то свободны края всех слоев и усилия (равные нулю),
а также моменты на краях всех слоев одинаковы. Такое же
положение возникает в сечениях оболочки вращения, относи-
относительно которых НДС симметрично, т. е. там, где и* = 9* =
8* 107
= Qn = 0. При задании неоднородных статических условий
считаем величины Тп, Qn, Mn одинаковыми для всех слоев
и в N раз меньшими полных.
По"формуле (VI. 1) представим совокупность Yk (k ? [1, N])
одной функцией трех переменных и разложим последнюю в ряд
Yk(a)^Y(a,zk)^t Vt (a) Pi (zk).
(=1
Для компонент Yk имеем
Разрешающие соотношения относительно новых искомых функ-
функций vt найдем проекционным методом.
Разлагая функции, входящие в формулы (VI.16), в ряды
Ей - 2 E[lPt Mk22 = ? M'aPl
(здесь для коэффициентов при Pi оставлены прежние обозна-
обозначения), заменяя в (VI. 16) yks их выражениями (VI.21) через v't,
умножая соотношения (VI. 16) на Pi (z^) и суммируя по k, по-
получаем те же формулы (VI. 16) с заменой обозначений у\ на
vls, Еп на Е\х и т. д. Система уравнений (VI. 17) при таком пре-
преобразовании переходит в каноническую систему 6/г-го порядка
-Bi+Fi(V), s?[l, 6], ]?[l,n]. (VI.22)
Здесь К/ — вектор с компонентами v[, vi, ..., и^; V — вектор,
состоящий из всех К,. Слагаемые f{ совпадают с функциями
(VI. 18) с заменой индекса k на / и у\ на и{;
w
В/ = S 6*/»/(zft), г = 1, 2, 3; В{ = 0, i = 4, 5, 6, (VI.23)
п п
Fз = >j agr/frf6, ^4 = s- 2j a«r/f6f6» (VI.24)
«./¦=1 ^ ?,/•=!
остальные Z7/ равны нулю.
Краевые условия (VI.20) в результате аналогичного пре-
преобразования переходят в условия для v's
(vi — u*ej)(\ — Yi) + (f i — TV/) vi = 0.
(vi — w*e,)(l — v») + (t»i — Qne,) v2 == 0, (VI.25^
108
где ех = /Vv\ et — 0 (/ ? [2, 6]), так что условия для v{ при
/ Ф 1 однородные.
Первые три уравнения системы (VI.22) следует дополнить
слагаемыми, учитывающими контактное взаимодействие сло-
слоев. Считаем, что контактное давление пропорционально раз-
разности нормальных перемещений соседних слоев, а тангенци-
тангенциальная нагрузка от трения соприкасающихся поверхностей
оболочек пропорциональна контактному давлению и приведе-
приведена к меридиональной силе и распределенному моменту. Учи-
Учитывая (VI.4) в частном случае отсутствия зазоров между слоя-
слоями (ak = 0), вместо (VI. 19) имеем
Ь\ = - q\ = - су [(г/* - ytl) 4-i - <г/5+1 — уЬ dk],
- y\)\, (VI.26)
= - m'i = cy A Hyl - yt
Здесь (Rk) — оператор, (Rk) = Rktyk; dk — функция, опре-
определяющая направление силы трения в зависимости от знака
разности тангенциальных перемещений на поверхностях сло-
слоев, dk = sign {yt- — у*+). В последней формуле
„*+! ,/-H ,Л+1 h й
г/4- = Ыг=—А/2 = « д"
h йЛ'+' ,,*+' Н
/4 + — г/б
2~
k
— г/б
Принимая во внимание, что
yt+l - г/5 = S у5 [ + Р *
(=1 1=1
и подставляя выражения (VI.26) в (VI.23), находим
п N—1
В{ = — су S ^5
i=l /fe=l
/V л JV—1
Bi = — 2 <7*Р/ (г*) + с 2 f 5 S
Bi = cy 4 S ^ 2 Др«Р/*1|>А, (VI.27)
P/fc = P/ (Zft+l) + p, (Zk).
Если между слоями оболочки имеются зазоры (ак Ф 0), то
при получении формул (VI.26) следует воспользоваться пол-
полными выражениями (VI.4) для контактного давления. Тогда
109
к правым частям соотношений (VI.27) необходимо добавить
соответственно
Л'—I
В{ = — су ? akykdkkplk,
Л'—1 Л/—1
В) = с g] а*%Ар/ь fij = cv -f I( а^Л/»/*- (VI-28)
Система уравнений (VI.22) вместе с краевыми условиями
(VI.25) представляет собой совокупность связанных между со-
собой и ^ N краевых-задач для гармоник разложения (VI.21).
Задача в целом нелинейна геометрически, поскольку в (VI.22)
входят слагаемые (VI.24), и конструктивно ввиду нелинейно-
нелинейности соотношений (VI.26), учитывающих наличие зон контак-
контакта между слоями, границы которых не заданы.
Представляется целесообразным развить теорию приме-
применительно к случаю нелинейно-упругого материала слоев. Бу-
Будем исходить из известных [134] формул для усилий и момен-
моментов
Т[\ = В\\Е\\ -\- ВпЕо-2 + А \\K\\ + А 12^22,
Мки = Л1,??, + AknE%, + DUf, + D\2Kk72, (I, 2).
Заменяя жесткости суммами упругих и пластических состав-
составляющих и считая, что слои однородны по толщине, получаем
Dkn = Dn + On, Ь?2 = DM + Df2,
где слагаемые без индекса ^ и с ним — упругие и пластические
части жесткостей. Последние определяются по формулам
(VI.3), (VI.4) работы [134].
Представим (VI.29) в форме
T*i 1,
Мкп = DuKn + D12Kk22 + Mkn, A,2), (VI.30)
где
Гц = fin^ii -f B12E22 + А\\К\\ + А12К22,
Mfi = Л?,??, + АЪЕЬ + DknKkn + Df2/C22,
и будем считать пластические добавки известными из преды-
предыдущей итерации функциями меридиональной координаты. Из
ПО
(VI.30) находим
En — (yi —Bli
(V I.o 1)
/Си = (t/з - Dl2Kk22)/Du + Kn = Я и + fffi,
где
Учитывая (VI.30), (VI.31), записываем формулы для
в виде *
1 22 = ОцСн + ?522^22 + / 22 = 1 22 "Г / 22,
где f*2 = Г2*2 + ВпЁкп, МЪ = М\, + Dl2Rn.
Таким образом, формулы для Г22, M*2, ?и, /Си представ-
представлены в виде сумм линейных и нелинейных относительно ук
слагаемых. Подставляя эти суммы в (VI.18), приходим к си-
системе уравнений равновесия k-vo слоя
о#'=/J + й + ф? + rt, sen,6]. (vi.32)
Формулы для f\ совпадают с (VI. 18) после замены в них Ггг,
Мп, Ей, Ки функциями Г22, M%2, Ekn, Kn- Функции /* име-
имеют вид
tf = А 1\ = k2fk U = \iM%2, It = Ё\и & = 0, & = Кп.
Для получения разрешающей системы уравнений теории
физически нелинейной слоистой оболочки теперь достаточно
к найденным ранее уравнениям (VI.22) добавить слагаемые
, 6]
и считать их известными из предыдущей итерации.
4. Построение разрешающей системы
уравнений для оболочек
из слоев Тимошенко
Построим разрешающие уравнения для оболочки вращения,
равновесие ортотропных слоев которой описано теорией Ти-
Тимошенко. Считаем контактное взаимодействие слоев односто-
односторонним; изменением метрики по толщине пакета пренебре-
Ш
гаем. Рассматриваем осесимметричное НДС с учетом квадра-
квадратичной геометрической нелинейности.
Исходим из системы уравнений и соотношений для слоя
[186]. Введем вектор-функцию Yk с компонентами у\ — Гц,
у\ =» Qn, Уз = Мкц, г/* = и», у\ =- tv*. г/* = Ф*. Опуская ин-
индекс k (номер слоя), приводим каноническую систему урав-
уравнений равновесия слоя
Ы = U + bs + ф„ s б Ц,6]. (VI.33)
Здесь
/з = И (^22 - Уз) + Уъ ft = 5ц - Л,у8, (VI.34)
/s = *i^4 — Ув + Уг«~'. /в = Яш
bi = — <7т> h = —q, b3 = — mT, ЬА = Ьь=*Ьй = 0; (VI.35)
Ф1 = Фг == 0, Ф3 = г/i (f/в + g),
. Ф4 = - (г/в + gJ/2, ф5 = в-'фз, Ф6 = о, (VI.36)
где g = — (уг + У1ул)/(е + уг), е = (Б/в) G,A
Формулы (VI.34)—(VI.36) дополним алгебраическими вы-
выражениями
?22 = M.J/4
^y1 — viEn, Kn= -Q^-y3 — v2Kta, (VI.37)
( + in) ( iu)
При построении системы (VI.33) авторы [186] исходили из ки-
кинематических соотношений
Еи = и' + k,w + е?/2, ?22 - ци + /г2ш,
?„ . Ф - et, et = - и»' + *!«, /<Т1 = ф', /(„ = ^
(штрих обозначает производную по длине дуги меридиана) и
уравнений равновесия. Граничные условия совпадают с
(VI.20), но в третьем из них следует 0j заменить на ф.
Заменим в (VI.34), (VI.37) компоненты вектора Yk конеч-
конечными рядами (VI.21), умножим полученные формулы на pt (zk)
и просуммируем их по k. Из-за линейности формулы (VI.34),
(VI.37) сохраняют свой вид, но индекс k всюду изменятся на
/', а у на v. Прежде чем подставлять (VI.21) в (VI.36), линеари-
линеаризуем (VI.36) по Ньютону — Канторовичу на итерации с но-
номером v -)- 1 по формуле
Ф(a, Kv + AYV) - Ф(а, Y4) + ^ -?- (ys,v+l - у„). (VI.39)
112
Записывая ф5 в виде <ps + cps, в соответствии с [186] имеем
(VI.40)
Далее
Ф, = (/—1N!^, cp4 = (V2-06b фБ = е-'ф3, (VI.41)
где t = yltV/(e + yi,v), 9i = (et/6,v —f/2,v)/(e+«/i.v).
Функции с номером v известны из предыдущей итерации; фор-
формулы (VI.40) линейны относительно ys,v+i- Введем индекс k
и преобразуем ф5 проекционным методом, подставив (VI.21)
в компоненты z/stV+i- Из (VI.40), (VI.41), полагая F{ = F{ +
+ F{, находим
Л N "
Б Р« К1 — ^J 0i'yu.v+i + i
S P/ Б
n й*
Z5/* 2j Pik —i—~ (eiyb\v+i + V2i,v+\ — ev6llV+i),
Fi^e-% р,к = р,(гк), (VI.42)
а также
H = 2 (<* - 1) O^fvP/ь F{ - S [~ - П
k=\ k=\
H = ё-Щ. (VI.43)
Прибавляя к (VI.35) так же, как и в параграфе 3, силы кон-
контактного взаимодействия, получаем соотношения (VI.26),
(VI.27).
В итоге приходим к разрешающей системе вида (VI.22),
в которой f, определяется формулами (VI.34) при замене в них
ys на vh Е\\, Тй, Мп на Е{\, Т'>2, М»2; слагаемые F{ преобра-
преобразуются в суммы (VI.42) и (VI.43). Краевые условия (VI.25)
остаются теми же, но 9] следует заменить на ф*.
5. Алгоритм решения
многоконтактных задач
Нелинейные краевые задачи (VI.22) для слоев Кирхгофа —
Лява и слоев Тимошенко решаем методом Ньютона с одновре-
одновременным уточнением зон контакта методом простых итераций.
113
Линеаризованные слагаемые для теории Тимошенко представ-
представлены формулами (VI.42), (VI.43). Выполним по (VI.39) ли-
линеаризацию соотношений (VI.24), входящих в уравнения сло-
слоистых оболочек, основанные на применении к слоям клас-
классической теории. Тогда F{ (s = 3, 4) будут представлены
суммами F{ = F{ + F'SA.,
где
/ч П П
^3 = X X agrj (t)f,v+it)o>v + f f.vf6,v+l).
g=l r=\
F{ = - X X a«r/f|v+iW6.v, (VI.44)
g r
FLv = — X X agr/vf.vV6,v, F'4,v = -s- X X agr/w|vO6.v. (VI.45)
g /¦ г '
С учетом выполненных преобразований систему (VI.22) запи-
запишем в виде
s?!l, 61, /€[1, п]. (VI.46)
Все п подсистем системы (VI.46) связаны, так как в фор-
формулы (VI.27), (VI.42), (VI.44) входят неизвестные функции
yj>v_l-i для всех i — \, ..., п. Попытаемся построить такой ал-
алгоритм, на каждом шаге которого необходимо было бы решать
краевую задачу лишь для одной из п гармоник.
Обращаясь к выражениям (VI.27), отвечающим нагрузке
на слой от контактного взаимодействия, замечаем, что в их
правой части на (v + 1)-й итерации, для которой записана
система (VI.46), функции меридиональной координаты vi,
q>k, ^должны быть помечены индексом v + 1. Для построения
итеративного уточнения зон контакта методом простых ите-
итераций выделим в уравнениях /-й подсистемы слагаемое с v{,v+\,
остальные пометим индексом v и будем считать известными
из предыдущей итерации как q^ и dk. Тогда из (VI.27) получим
В{ = в{,,+1 + BU (VI.47)
для s = 2
Л'—1
X
*1
iV—1
Bi.v = — X qkPik + с X Ws.v X
Слагаемые В{, Bl преобразуем аналогично.
Для устранения связности п подсистем, обусловленной
линеаризованными слагаемыми, учитывающими геометриче*
114
скую нелинейность, представим (VI.42), (VI.44) в виде сумм
главных слагаемых с индексами /, v + 1 и «побочных», в KOTO-
KOTO'S -
рых i Ф /, а индекс v + 1 заменен на v. Тогда, полагая F{ =
А .
= Fs,v+i + fs,v> s = 3, 4, 5, из (VI.42), например для s = 4,
находим
N e*
F4.V+1 — 2j Pjk
и (
"Г J/|,v
^ ; (VI.48)
^3, ^5 в (VI.42) ь F3, fi в (VI.44) преобразуем аналогично. Так,
например, из (VI.44) имеем
Fa = F4.V+1 +
K - S a«r/ufv, ^6,v. (VI.49)
Учитывая (VI.42) — (VI.45), (VI.48) и (VI.49), в итоге по-
получаем общую (для обеих теорий слоя) формулу F{ —
= F's,v+i + F{,v, F{,v = F'SA + F's,v. Здесь функции f(v+1 за-
еисят только от искомой на v + 1-й итерации вектор-функ-
вектор-функции V/,v+i» а во. второе слагаемое FSiV, известное из преды-
предыдущей итерации, входят Vt (i Ф /). Напомним, что отличны
от нуля в случае классической теории слоя F{, F{, а в тео-
теории слоя Тимошенко F3, F'a, Н-
С учетом выполненных преобразований на v -Ь 1-й итера-
итерации система 6п уравнений (VI.22) распадается на п независи-
независимых систем шестого порядка (/?[1, п])
(i/?v+i)' = Н(У}л+\) + B's,v+l + F{,v+l + fliv + FU s^ll, 6].
В качестве начального приближения все искомые вектор-
функции полагаем равными нулю и считаем т|зй = 0, что соот-
соответствует отсутствию контаиа между слоями. Начальное при-
приближение для следующего шага по нагрузке целесообразно
определять кубической экстраполяцией по четырем решениям,
отвечающим предыдущим ее значениям, что существенно уско-
ускоряет сходимость вычислительного процесса [113]. Этой же це-
цели может способствовать использование самокорректирующих-
самокорректирующихся шаговых методов 1118]. Линейные краевые задйчи на каж-
каждой итерации решаем методом ортогональной прогонки [1861.
115
При решении контактной задачи с помощью предложен-
предложенной теории процесс итераций качественно отличается от про-
процесса, построенного в главе III для анализа взаимодействия
двух оболочек различной формы. В этом случае последова-
последовательно решаются модифицированные краевые задачи для пер-
первой и второй оболочек, причем скорость сходимости сущест-
существенно зависит от коэффициента с в формуле для контактного
давления. В рассматриваемой теории слоистых оболочек стро-
строятся и решаются краевые задачи для гармоник разложения
(VI.21), причем вектор-функции Vt (a) — конечные разности
исходных вектор-функций К*. Следствием этого является поч-
почти полное отделение задачи для средней по толщине пакета
функции Vl ~ (J^Yk\/N от задач для их конечных разностей,
I * /
несущих информацию о контактах между слоями.
Для того чтобы пояснить это положение, рассмотрим си-
систему уравнений для двухслойной круглой пластины
DAAwx = q1 -f- c(w2 — wt) i|), DAAw2 = q2 — с (w2 — h>i) i|),
ф = [1 -f-sign К— w2)]/2. (VI.50)
Складывая и вычитая уравнения, получаем
ОД Д {wx + w2) = </Ч- q2, ОД Д (w2 — w{) + 2с (ш2 — wj if> = 0.
(VI.51)
К этим же уравнениям приходим, полагая п — N = 2 и пред-
представляя прогиб слоя в виде wk = v^ (zk) + v2pt (zk), k = 1, 2,
где pt определяются формулами (VI .3), причем tt = —х/2,
t,2 = V2; при этом щ + w2 ~ V2vt, wi — w1 — V2v2. Си-
Система уравнений (VI.51) относительно vt и v2 связана только
функцией ¦ф. Если считать л|> = 1, то уравнения разделяются:
. первое дает решение для пакета слоев с суммарной жестко-
жесткостью, второе — для контактного давления между ними. Ите-
Итерации необходимы только для уточнения функции ¦ф и, как
показывают обширные численные эксперименты, сходимость
их весьма высока. Величина с в уравнении (VI.51) на сходи-
сходимость не влияет.
Отметим еще одну возможность экономии вычислительных
затрат. При расчетах оболочек, между слоями которых нет
зазоров, можно пренебречь геометрически нелинейными сла-
слагаемыми для всех V/, кроме Vu так как конечные разности
У[ф\ вектор-функций Yk имеют по сравнению с их взвешенной
суммой Vj существенно меньший порядок.
Теория оболочек с неспаянными слоями и описанный здесь
алгоритм реализованы на ЕС ЭВДО. ПЛ-программа учитывает
116
кроме геометрической нелинейности и заданных между слоями
зазоров физическую нелинейность по деформационной тео-
теории и теории течения, а также различие функций толщины
слоев hk (а) и их упругих характеристик [124—126, 129, 224].
6. Анализ напряженно-деформированного
состояния слоистых пластин и оболочек
Рассмотрим задачу о нагружении давлением по внутренней
части поверхности пятислойной цилиндрической оболочки со
свободными торцами (рис. 27). Размеры оболочки: R ~ 0,1 м;
L = 0,4 м; / — 0,1 м; толщина слоя h = 0,001 м. Между сло-
слоями заданы зазоры ак = а = 10~4 м. Оболочка выполнена из
стали: Е = 2 • 105 МПа; v = 0,3. _.;?J
Давление q — 4 МПа. Для описа-
описания деформирования слоя исполь-
использована классическая линейная тео-
Т/2,
U2
се
4
Рис. 27.
0,25
Рис. 28.
рия. Расчеты выполнены при л, равных 3, 4, 5. Итеративный
процесс уточнения границ зон контактов между слоями сошел-
сошелся за 4 итерации при допустимой относительной погрешности
е = 0,5 %.
На рис. 28 показано распределение прогибов, отнесенных
к толщине слоя. Цифрами отмечены номера слоев; х = x/(L/2).
Штриховые и сплошные линии отвечают п — 3 и п — 4 соот-
соответственно. При п ~ N = 5 результаты совпали с данными
расчета, полученными при п — 4. Отметим, что при отсутствии
зазоров для решения этой задачи потребовалось сохранить в
разложении (VI. 1) только одну гармонику. Распределение от-
отнесенного к q контактного давления qk между слоями с номе-
номерами k и k -f I (#•? [1, 4]) показано на рис. 29. На краю зон
117
контакта qk = 0. Ширина зоны контакта с ростом k уменьша-
уменьшается. У границ этих зон виден характерный для контактных
задач теории оболочек максимум функции qk (x).
Хотя на первый взгляд рассмотренная задача проста, по-
получить ее решение с помощью обычных подходов весьма слож-
сложно. Действительно, для этого
пришлось бы решать систему
дифференциальных уравнений
30-го порядка вместе с четырь-
четырьмя кинематическими условиями
контакта w/,+\ -\- a = wk (k =
= 1, 2, 3, 4) и определять гра-
0,5
0,25
;
2
3
4
(
1
\
\
\\
Л!
ШЖЖУШ
ШШШ///Ш
0,725
Рис. 29.
ММ ММ I М М
-я
Рис. 30.
ницы зон контакта. Если при этом не учтена трансверсальная
деформация слоев в зонах ак, то неизвестными будут и сосре-
сосредоточенные поперечные силы на границах зон.
0,2 0Л 0,6 г 2
Приведем результаты решения геометрически и физиче-
физически нелинейной задачи для трехслойной свободно опертой по
наружному краю круглой пластины с отверстием, нагружен-
нагруженной давлением (рис. 30). Расчеты выполнены при « = 3 и за-
задании трех вариантов функции зазоров: ат = 0,1Л A —г);
118
0B, = 0,\h [A — г) Л2; а<з) = 0,\h (r = r/R). Зазоры между
первым и вторым, вторым и третьим слоями принимали одина-
одинаковыми. Внешний и внутренний радиусы пластины Rt ~ 0,1 м,
#2 = 0,02 м; h ==, 0,01 м. Материал слоев одинаков АМцТ—6:
Е = 7,2 • 10s МПа, v = 0,3; диаграмма о, fa) приведена в
[134]. Для описания равновесия слоя принята теория Кирх-
Кирхгофа — Лява, дополненная учетом квадратичной геомегри-
ц=0,6МПа
1.8
2.4
Рис. 33.
ческой нелинейности и теорией малых упругопластических
деформаций.
Распределение контактного давления между первым и вто-
вторым слоями при а = а(з) показано для ряда значений внутрен-
внутреннего давления на рис. 31. С увеличением давления зоны кон-
контакта быстро расширяются. Контактное давление на краю
отверстия (г = Ri) меньше, чем у периферии области со, где
функция qk (r) имеет максимум.
Графики зависимости интенсивности деформации на внеш-
внешней поверхности нагруженного (первого) слоя при q =
— 2,4 МПа приведены на рис. 32. Номера кривых совпадают
с номерами вариантов функций зазоров. Распределение зон
пластичности в нагруженном слое дано на рис. 33.
СПИСОК ЛИТЕРАТУРЫ
1. Александров В. М. О приближенном решении одного типа интеграль-
интегральных уравнений // Прикл. математика и механика.— 1962.— 26,
вып. 5.— С. 934—943.
2. Александров В. М., Бабешко В. А. Контактные задачи для упругой
полосы малой толщины // Изв. АН СССР. Механика.— 1965.— № 2.—
С. 95—107.
3. Александров В. М., Мхитарян С. М. Контактные задачи для тел с
тонкими покрытиями и прослойками,— М. : Наука, 1983.— 488 с.
4. Александров В. М., Ромалис Б. Л. Контактные задачи в машинострое-
машиностроении.— М. : Машиностроение, 1986.— 176 с.
5. Амбарцумян С. А. Теория анизотропных оболочек.— М. : Физматгиз,
1961.—384 с.
6- Андреев Л. В., Дьяченко В. Е., Заварыкин Л. Г. Расчет упругопласти-
ческого изгиба пластин при наличии ограничений методом динами-
динамического программирования // Теория оболочек и пластин : Тр. IX Все-
союз. коиф. по теории оболочек и пластин, Л., 24—29 дек. 1973 г.—
Л., 1973.—С. 80.
7. Андреев Л. В., Прокопало Е. Ф. Об устойчивости оболочек под внеш-
внешним давлением при стиснении деформаций от центра кривизны //
Тр. VII Всесоюз. коиф. по теории оболочек и пластин, Днепропет-
Днепропетровск, 10—16сент. 1969 г.—М., 1970.—С. 65—68.
8. Андреев Л. В., Прокопало Е. Ф., Дьяченко В. Е. Устойчивость при
осевом сжатии цилиндрической оболочки, опирающейся иа упругое
основание // Прикл. механика,— 1972.— 8, № 2.— С. 33—39.
9. Артюхин Ю. П., Карасев С. Н. Действие жесткого штампа иа поло-
пологую сферическую оболочку и пластинку // Исслед. по теории пластин
и оболочек.— 1972.—Вып. 9.—С. 211—219.
10. Артюхин Ю. П., Карасев С. Н. Некоторые контактные задачи теории
тонких пластин//Там же.— 1973.—Вып. 10.—С. 159—166.
11. Артюхин Ю. П., Карасев С. Н. Определение напряжений в пологой
сферической оболочке при действии жесткого штампа // Там же.—
1975.—Вып. И.—С. 159—166.
12. Артюхин Ю. П., Карасев С. //. Влияние поперечного сдвига и обжатия
на распределение контактных напряжений // Там же.— 1976.—
Вып. 12.—С. 21—29.
13. Артюхин Ю. П., Карасев С. Н. Применение уточненной теории обо-
оболочек при решении контактных задач // Теория оболочек с учетом по-
поперечного сдвига.— Казань, 1977.— С. 132—153.
14. Артюхин 10. П. Одномерные контактные задачи для тонкостенных
трансверсально изотропных элементов // Исслед. по теории пластин
и оболочек.— 1978.— Вып. 13.— С, 68—82.
120
15. Артюхин Ю. П., Геркина В. С. Применение георетико-эксперимен-
тальиого метода для решения одномерных контактных задач теории
пластин и оболочек//Там же.— 1978.—Вып. 13.—С. 104—112.
16. Артюхин Ю. П. Контактные задачи для круглых пластин и сфериче-
сферических оболочек // Там же.— 1979.— Вып. 14.— С. 123—139.
17. Артюхин 10. П. Одномерные контактные задачи теории оболочек //
Изв. АН СССР. Механика тверд, тела.— 1981.—№ 3.—С. 55—65.
18. Баженов В. А., Гайдачук В. В., Оглобля А. И. Нелинейный анализ
устойчивости механических систем с односторонними связями // Со-
Сопротивление материалов а теория сооружений.— 1980.— Вып. 36.—
С. 3—8.
19. Баженов В. А., Гоцуляк Е. А., Оглобля А. И, Численное исследование
устойчивости цилиндрической оболочки, односторонне контактиру-
контактирующей с упругой средой // Там же.— 1980.— Вып. 37.— С. 3—7.
20. Баженов В. А., Оглобля А. И. Устойчивость подкрепленной шпанго-
шпангоутом цилиндрической оболочки под действием внешнего давления с
учетом одностороннего взаимодействия с упругой средой // Там же.—
1981.— Вып. 38.—С. 7—12.
21. Баженов В. А. Построение траекторий нагружения нелинейных меха-
механических систем с ограничениями // Там же.— 1982.— № 40.— С. 55—
65.
22. Баженов В. А., ГоцулякЕ. А., Оглобля А. И. Влияние односторонне"
сти контакта на устойчивость гибких цилиндрических панелей, под"
крепленных винклеровским основанием//Изв. вузов. Стр-во и архи-
архитектура.— 1984.— № 3,— С. 33—38.
23. Баженов В. А., Гоцуляк Е. А.. Оглобля А- И. Устойчивость гибкой
конической капели, односторонне контактирующей с упругой средой
при действии внешнего давления // Теорет. и прикл. механика.—
1984.— Л"? 15.—С. 60—65.
24. Баженов b. A-, Оглобля А- И., Шевчмко А. С. Исследование устой-
устойчивости осесимметричных оболочек, односторонне взаимодействующих
с упругой средой при действии внешнего давления // Сопротивление
материалов и теория сооружении.— 1984.— № 44.— С. 7—13.
25. Баженов В. А., Оглобля А. И. Исследование устойчивости незамкну-
незамкнутых цилиндрических труб в упругой среде с одиосторонинми связями //
Вестн. Львов, политехи, ии-та.— 1984.— № 183.— С. 5—10.
26. Баженов В. А., Оглобля А. И. Деформирование спиральной оболочки,
односторонне взаимодействующей с упругим основанием // Сопротив-
Сопротивление материалов и теория сооружений.— 1985.— № 46.— С. 3—8.
27. Баженов В. А. и др. Расчет иа устойчивость оболочек сложной фор-
формы : Методические указания по использованию комплекса программ
НЕКРИС-2 / Баженов В. А., Гуляев В. И., Гоцуляк Е. А. и др.—
Киев : Киев. инж.-строит, ин-т, 1987.— 134 с.
28. БалабухЛ- И., Молчанова А. Г. Решение контактных задач при одно-
односторонних связях методом функциональных рядов // Расчет про-
пространств, конструкций.— 1979.— Вып. 18.— С. 3—20.
29. Бахтин А. Г. Особенности численного расчета осесимметричных кон-
конструкций с односторонними связями // Изв. вузов. Машиностроение,—
1986.— № 5.— С. 3—6.
30. Беллиан Р., Калаба Р. Квазилииеаризация и нелинейные краевые
задачи.— М. : Мир, 1968.— 180 с.
31. Бердичевский В. Л. Вариационные принципы механики сплошной
среды.— М. : Наука, 1983.— 448 с.
32. Берлянд В. И. Расчет замкнутых оболочек вращения с учетом физи-
физической нелинейности при циклически симметричном нагружении //
Прикл. механика,— 1982.— 18, № 6.— Q. 57—62,
9 »-im 121
33. Берлянд В. И. Упругопластический расчет напряженного состояний
линзовых компенсаторов прн изгибе и комбинации изгиба с осесим-
метричными нагрузками// Машиноведение.— 1983.—№ 1.— С. 67—
74.
34. Биргер И. А. Некоторые общие методы решения задач теории пластич-
пластичности//Прикл. метаматика и механика.— 1951.— 15, вып. 6.—
С. 765—770.
35. Биргер И. А. Упругий контакт стержней// Расчеты на прочность.—
1969.—Вып. 14.—С. 127—136.
36. Биргер И. А. Контактные задачи теории стержней, пластинок и обо-
оболочек // Теория оболочек и пластин: Тр. IX Всесоюз. конф. по теории
оболочек и пластин, Л., 24—28 дек. 1973 г.— Л., 1975.— С. 23—25.
37. Блох М. В., Цукров С. Я- Осесимметричный контакт тонких цилинд»
рических оболочек // Расчет пространственных систем в стронтель-
- ной механике.—Саратов, 1972.—С. 79—82.
38. Влох М. В., Цукров С. Я- Об осесимметричиом контакте тонких ци-
цилиндрических оболочек // Прнкл. механика.— 1973.— 9, № 11.—
С. 23—28.
39. Блох М. В., Цукров С. Я- О влиянии изменения толщины стенки иа
осесимметричный контакт тонких цилиндрических оболочек // Там
же.— 1974.— 10, № 4.— С. 31—37.
40. Блох М. В. Одномерный односторонний контакт стержней, пластин
и оболочек// Теория оболочек и пластин: Тр. IX Всесоюз. конф. по
теории оболочек и пластин, Л., 24—28 дек. 1973 г.— Л., 1975.— С. 25—
28.
41. Блох М. В., Гинц А. А., Кантор Б. JI. Об одном методе решения кон"
тактной задачи для цилиндрических оболочек // Пробл. машннострое"
ния.— 1977.—Вып. 5.—С. 38—41.
42. Блох М. В. К выбору модели в чадачах о контакте тонкостенных тел //
Прикл. механика.— 1977.— 13, № 5.— С. 34—42.
43. Блох М. В. О вариационном подходе к расчету упругого и упруго-
пластического контакта оболочек• средней толщины //Пробл. проч-
прочности.- 1978.— № 7.— С. 65-70.
44. Богатыренко Т. Л., Кантор Б. Я-. Липовский Д. Е. О контакте обо-
оболочек вращения через тонкий упругий слой / АН УССР. Ин-т пробл.
машиностроения.— Харьков, 1982.— 9 с.— Деп. во ВНИИИС Гос-
Госстроя СССР 23.03.83, № 3570.
45. Богатыренко Т. Л. О напряженно-деформированном состоянии двух-
двухслойного линзового компенсатора с промежуточным податливым кон-
концом/АН УССР. Ин-т пробл. машиностроения.— Харьков, 1984.—
21 с— Деп. в ВИНИТИ 3.04.84, № 1860.
46. Богатыренко Т. Л. О контакте двух гибких упругопластических обо-
оболочек вращения // Смешанные задачи механики деформируемого те«
ла: Тез. докл. III Всесоюз. конф., Харьков, 3—6 июня 1985 г.—
Харьков, 1985.—С. 83—84.
47. Богатыренко Т. Л., Шишкина Э. G. К анализу влияния двухпарамет-
рического нагруження иа контакт двух гонких оболочек // Пробл.
машиностроения.— 1985.—Вып. 23.—С. 68—71.
48. Богатыренко Т. Л., Кантор Б. Я-. Перчик Е. Л. Определение зон
контакта из условий разрешимости интегрального уравнения задачи //
Докл. АН УССР. Сер. А.— 1986.—№ 5.—С. 27—29.
49. Болотин В. В. Неконсерватнвиые задачи упругой устойчивости.—
М. : Фнзматгнз, 1961.—340 с.
50. Болотин В. В. Об изгибе плит, состоящих из большого числа слоев//
Изв. АН СССР. Механика и машиностроение.— 1964.— № 1.— С. 61 —
66.
122
61. Болотин В. В., Новичков Ю. Н. Механика многослойных конструк-
конструкций.— М;: Машиностроение, 1980.— 373 с.
52. Бондаренко В. А. Контакт тонкостенной сферической оболочки с жест-
жестким шаром//Прикл. механика.—1971,—7, № 12.—С. 51—57.
53. Бронштейн И. #., Семендяев К> А. Справочник по математике,—
М. : Наука, 1981.—720 с.
54. Бурлаков А. В., Львов Г. И., Морачковский 0. К> Ползучесть тонких
оболочек.— Харьков : Вища школа, 1977.— 124 с.
55. Валишвили Н. В. Методы расчета оболочек врашения на ЭЦВМ.—
М. : Машиностроение, 1976.— 278 с.
56. Варвак А. П. Применение модели основания с односторонними связя-
связями в задаче устойчивости цилиндрической оболочки с упругим запол-
заполнителем // Тр. VII Всесоюз. конф. по теории оболочек и пластин, Дне-
Днепропетровск, 10—16 сент. 1969 г.—М., 1970.—С. 126—130.
57. Варвак П. М., и др. Осесимметричиая задача о контакте нескольких
тонких оболочек при конечных перемещениях / П. М. Варвак,
Н. М. Медведева, А. В. Перельмутер и др.// Тр. IV Всесоюз. съезда
по теорет. и прикл. механике, Киев, 21—28 мая 1976 г.— Киев, 1976,—
С. 85.
58. Варвак П. М. и др. Осесимметричиая задача о контакте нескольких
тонких оболочек при конечных перемещениях / П. М. Варвак,
Н. М. Медведева, А. В. Перельмутер, А. Г. Пиискер // Прочиосп
конструкций.— 1978.—№ 3.—С. 35—41.
59. Василенко А. Т., Григоренко Я. М., Панкратова Н. Д. Решение за-
задач статики толстостенных цилиндрических оболочек при нежесткои
контакте слоев // Докл. АН УССР. Сер. А.— 1983.— № 11.— С. 40—43.
60. Васильев Ф. П. Численные методы решения экстремальных задач.—
М. : Наука, 1980.— 520 с.
61. Власов В. 3. Общая теория оболочек и ее приложеняе к технике,—
М. : Гостехиздат, 1949.— 756 с.
62. Волнистые компенсаторы : Каталог / ВНИИНЕФТЕМАШ,— М, :
ЦИНТИХИМНЕФТЕМАШ, 1978.— 20 с.
63. Вольмир А. С. Гибкие пластинки и оболочки.— М. : Гостехиздат,
1956.— 419 с.
64. Вольмир А. С. Устойчивость упругих систем.—М. : Физматгиз,
1963.— 879 с.
65. Вольмир А. С. Устойчивость деформируемых систем.— М. : Физмат-
Физматгиз, 1967,-984 с.
66. Ворович И. И., Зипалова В. Ф. К решению нелинейных краевых задач
теории упругости методом перехода к задаче Коши // Прикл. матема-
математика и механика.— 1965.— 29, вып. 5.—С. 894—901.
67. Ворович И. И., Александров В. М„ Бабешко В. А. Неклассическш
смешанные задачи теории упругости.— М. : Наука, 1974.— 456 с.
68. Галимов К- 3. Основы нелинейной теории тонких оболочек,— Казань :
Изд-во Казан, ун-та, 1975.— 325 с.
69. Галин Л. А. Контактные задачи теории упругости,— М, : Гостехиз-
Гостехиздат, 1953.— 213 с.
70. Галин Л. А. Развитие теории контактных задач в СССР,— М. : Нау-
Наука, 1976.—492 с.
71. Гловински Р.. Лионе Ж.—Л., Тремольер Р. Численное исследован»
вариационных неравенств.— М. : Мир, 1979.— 574 с.
72. Годунов С. К- О численном решении краевых задач для систем обык
иовенных линейных дифференциальных уравнений // Успехи мат.
наук.— 1961.—18, вып. 3.—С. 171—174.
73. Гокун М. В. Расчет линзовых компенсаторов, работающих в упруго-
пластической области//Хим. и нефт, машиностроение.— 1976.—
№ 3,—С. 13—15.
9Ф 123
74. Гокун М. В., Кантор Б. Я- Влияние геометрической нелинейности на
НДС компенсирующих элементов, работающих в упругопластической
области // Пробл. прочности.— 1986.— № 7.— С. 92—95.
75. Гордеев В. Н., Перельмутер А. В. Расчет упругих систем с односто-
односторонними связями, как задача квадратичного программирования //
Исслед. по теории сооружений.— 1967.— Вып. 15 С. 208—212.
76. Гоцуляк Е. А., Ермишев В. Н., Жадрасинов Н. Т. Сходимость метода
криволинейных сеток в задачах теории оболочек // Сопротивление
материалов и теория сооружений.—1981.—Вып. 39.—С. 80—84.
77. Гоцуляк Е. А., Ермишев В. Н., Жадрасинов Н. Т. Применение метода
криволинейных сеток к расчету оболочек / Киев, инж.-строит. ин-т.—
Киев,-1981.—33 с—Деп. в УкрНИИНТИ 6.01.81. № 2557.
78. Гоцуляк Е. А., Жадрасинов Н. Т., Киричук А. А. Устойчивость гиб-
гибких составных оболочек вращения // Сопротивление материалов и те-
теория сооружений 1982.— Вып. 41.— С. 35—39.
79. Гоцуляк Е. А., Гуляев В. И., Ермишев В. Н. Упругое равновесие со-
составной оболочки спиральной камеры гидротурбины // Прикл. пробл,
прочности и пластичности.— 1986.— Вып. 34.— С. 104—115.
80. Григолюк Э. И., Толкачев В. М. Цилиндрический изгиб пластины жест-
жесткими штампами // Прикл. математика и механика.— 1975.— 39,
вып. 5,— С. 876—883.
81. Григолюк Э. И., Толкачев В. М. Модификация уточненной теории плас-
тии для контактных задач // Изв. АН АрмССР.— 1977.— 30, № 3.—
С. 33—45.
82. Григолюк Э. И., Мамай В. И. Нелинейное поведение сферической обо-
оболочки при ее взаимодействии с жесткой преградой // Тез. докл.
V Всесоюз. конф. по проблемам устойчивости в строительной механи-
механике, М., 3—5 февр. 1977 г.—М., 1977.—С. 101—102.
83. Григолюк Э. И., Кабанов В. В. Устойчивость оболочек.— М. : Наука,
1978.— 360 с.
84. Григолюк Э. И., Толкачев В. М. Контактные задачи теории пластин
и оболочек.— М. : Машиностроение, 1980.— 411 с.
85. Григолюк Э. И., Шалашилин В. И. Проблемы нелинейного деформи-
деформирования: Метод продолжения решения по параметру в нелинейных
задачах механики твердого деформируемого тела.— М. : Наука, 1988.—
232 с.
86. Григоренко Я- М. Изотропные и анизотропные слоистые оболочки
вращения переменной жесткости.— Киев : Наук, думка, 1973.— 228 с.
87. Григоренко Я. М., Мукоед А. П. Решение задач теории оболочек на
ЭВМ.— Киев : В ища шк., 1979.— 280 с.
88. Григоренко Я- М., Василенко А. Т. Теория оболочек переменной жест»
кости.— Киев : Наук, думка, 1981.— 516 с.
89. Григоренко Я- М., Крюков Н. Н. Один подход к численному решению
краевых задач статики гибких оболочек // Докл. АН УССР. Сер. А.—
1982.—№ 4.—С. 21—24.
90. Григоренко Я- М., Мукоед А. П. Решение нелинейных задач теории
оболочек иа ЭВМ,— Киев : Вища шк., 1983.— 286 с.
91. Григоренко Д. М., Крюков Н. Н. Численное решение задач статики
гибких слоистых оболочек с переменными параметрами.— Киев : Наук,
думка, 1988.— 264 с.
92. Гудрамович В. С. Устойчивость упругопластических оболочек.— Киев :
Наук, думка, 1987.— 216 с.
93. Гузь А. Н., Бабич И. Ю. Пространственные задачи теории упругости
и пластичности: В 6-ти т. Трехмерная теория устойчивости деформи-
деформируемых тел,— Киев : Наук, думка, 1985.— Т. 4.— 280 с.
94. Гузь А. Н. Основы трехмерной теории устойчивости деформируемых
тел.— Киев : Вища шк., 1986,— 511 с,
124
95. Гуляев В. И., Баженов В. А., Лизунов П. П. Неклассическая теория
оболочек и ее приложение к решению инженерных задач.— Львов :
Вища шк., 1978.— 192 с.
96. Гуляев В. И., Баженов В. А., Гоцуляк Е. А. Устойчивость нелинейных
механических систем.— Львов : Вища шк., 1982.— 254 с.
97. Гуляев В. И. и др. Устойчивость периодических процессов в нелиней-
нелинейных механических системах / В. И. Гуляев, В. А. Баженов, Е. А. Го-
Гоцуляк и др.— Львов : Вища шк., 1983.— 288 с.
98. Демкин Н. Б. Контактирование шероховатых поверхностей.— М. :
Наука, 1970.—228 с.
99. Дэнкис Дж., Шнабель Р. Численные методы безусловной оптимиза-
оптимизации и решения нелинейных уравнений.—М. : Мир, 1988.— 440 с.
100. Детинко Ф. М., Фастовский В. М. Посадка короткой втулки на ци-
цилиндрическую оболочку // Вестн. машиностроения.— 1967.— № 7.—
С. 42—45.
101. Детинко Ф. М., Фастовский В. М. Контактная задача о посадке двух
цилиндрических оболочек разной длины // Изв. АН СССР. Механи-
Механика тверд, тела.— 1974,—№ 3,—С. 118—121.
102. Детинко Ф. М., Фастовский В. М. О посадке бандажа на цилиндри-
цилиндрическую оболочку//Прикл. механика.— 1975.— 11, № 2.— С. 124—
126.
103. Енджиевский Л. В. Нелинейные деформации ребристых оболочек.—
Красноярск : Изд-во Краснояр. ун-та, 1982.— 295 с.
104. Ермичев А. И. Устойчивость цилиндрических оболочек с вкладышем //
Тр. МВТУ. Расчет тонкостенных элементов конструкций.—¦ 1977.—
№ 241.—С. 17—23.
105. Ермичев А. И. Устойчивость цилиндрических оболочек с односторон-
односторонними связями//Изв. вузов. Машиностроение.— 1984.— № 1.—
С. 20-24.
106. Зозуля В. В., Ищенко И. М. Осесимметричная контактная задача для
цилиндрических оболочек вращения / Харьк. автомоб.-дор. ин-т.—
Харьков, 1982.— 10 с— Деп. в УкрНИИНТИ 4.05.82, № 3542.
107. Зозуля В. В., Ищенко И. М. Применение регулярнзующих алгорит-
алгоритмов при решении контактных задач для цилиндрических оболочек
с учетом вил треиия //' Совершенствование эксплуатации и ремонта
корпусов судов: Тез. докл. III науч.-техн. коиф. 24—28сент. 1984 г.—
Калининград, 1984.—С. 122—123.
108. Зозуля В. В. О решении контактных задач теории оболочек при нали-
наличии сил-трения в зоне контакта//Смешанные задачи механики де-
деформируемого тела: Тез. докл. Ш Всесоюз. конф., Харьков, 3—6 ию-
июня 1985. г.— Харьков, 1985,— С. 95—96.
109. Иванов В. А. Обзор литературы по устойчивости оболочек с упругим
заполнителем // Тр. семинара по теории оболочек.— 1971.— Вып. 2.—
С. 5-25.
ПО. Иванов В. А., Ильгамов И. А., Гулин Б. В. Расчет оболочек с упру-
упругим заполнителем.— М. : Наука, 1987.— 260 с.
111. Ивченко Е. В. Деформация кругового кольца на одностороннем осно-
основании // Контактная прочность пространственных конструкций.—
Киев, 1976.—С. 126—138.
112. Кабанов В. В. Устойчивость неоднородных цилиндрических оболо-
оболочек.— М. : Машиностроение, 1982.— 254 с.
113. Кантор Б. Я- Нелинейные задачи теории неоднородных пологих
оболочек.— Киев : Наук, думка, 1971.— 134 с.
114. Кантор Б. ft., Миткевич В. М., Шишкина Э. С. К расчету тонкостен-
тонкостенных конструкций вращения методом конечных элементов.— Харь-
Харьков, 1976.— 58 с.— (Препринт / АН УССР. Ин-т пробл. машиностро-
машиностроения; № 25).
125
115. Кантор Б. Я-, Степенская И. Д., Шелудько Г. А. Об одной модифи-
модификации метода скользящего допуска.— Харьков, 1977.— 22 с.—
(Препринт / АН УССР. Ин-т пробл. машиностроения; № 52).
116. Кантор Б. Я-, Шишкина Э. С. Оптимизация линзовых компенсато-
компенсаторов осевых перемещений.— Харьков, 1977.— 43 с.— (Препринт/
АН УССР. Ин-т пробл. машиностроения; № 58).
117. Кантор Б. Я-. Стрельникова Е. А., Фильштинский Л. А. Контакт-
Контактная задача теории упругости для плоской анизотропной среды,
ослабленной криволинейным разрезом // Исслед. по теории пластин
и оболочек.— 1981.—Вып. 16.—С. 99—106.
118. Кантор Б. Я-, Каторжное С. И. Вариационно-сегментный метод
в нелинейной теории оболочек.— Киев : Наук, думка, 1982.— 136 с.
119. Кантор Б. Я- К построению континуальных теорий оболочек, со-
состоящих из многих иеспаянных слоев / АН УССР. Ин-т пробл. маши-
машиностроения.— Харьков, 1982.— 20 с— Деп. в ВИНИТИ 30.09.82,
№ 5018—82.
120. Кантор Б. Я- Континуальный подход к анализу оболочек, состоя-
состоящих из многих иеспаянных слоев//Докл. АН УССР,—Сер. А.—
1983.—№ 10.—С. 30—33.
121. Кантор Б. Я-, Богатыренко Т. Л. Контактные задачи нелинейной
теории оболочек // Тр. Всесоюз. совещ.-семинара: В 2-х ч., Тбилиси,
27 нояб.—3 дек. 1984 г.—Тбилиси:, 1984.—Ч. 2.—С. 164—174.
122. Контор Б. Я- Нелинейная теория оболочек, составленных из неспа-
неспаянных слоев // Тр. I Всесоюз. симпоз. по нелинейной теории тонко-
тонкостенных конструкций и биомеханике, Кутаиси — Ткибули, 22—24 мая
1985 г.—Тбилиси:, 1985.—С. 260—264.
123. Кантор Б. Я- Прочность, устойчивость и колебания оболочек, со-
состоящих из неспаянных слоев // Смешанные задачи механики дефор-
деформируемого тела: Тез докл. 111 Всесоюз. конф., Харьков, 3—6 июня
1985 г.—Харьков, 1985.—С. 99.
124. Кантор Б. Я-. Роменский В. М. К физически нелинейной теории гиб-
гибких оболочек вращения, составленных из неспаяиных слоев /
АН УССР. Ин-т пробл. машиностроения.— Харьков, 1985.— 15 с—
Деп. в ВИНИТИ 01.11.85, № 7682.
125. Кантор Б. Я-, Роменский В. М. К задаче термоупругости оболочек
вращения с односторонне контактирующими слоями разной толщины /
АН УССР. Ин-т пробл. машиностроения.— Харьков, 1985.— 15 с—
-¦ Деп. в ВИНИТИ 15.11.85, № 7941.
126. Кантор Б. Я-, Роменский В. М. К учету различия кривизны слоев
в теории гибких оболочек, составленных из неспаянных слоев /
АН УССР. Ин-т пробл. машиностроения.— Харьков, 1986.— 11 с.—
Деп. в ВИНИТИ 13.01.86, № 273.
127. Кантор Б. Я-> Богатыренко Т. Л. Метод решения контактных задач
нелинейной теории оболочек // Докл. АН УССР. Сер. А.— 1986.—
№ 1.—С. 18—21.
128. Кантор Б. Я., Мартыненко А. В. Программный комплекс для рас-
расчета на устойчивость сильфонных компенсаторов, армированных
кольцевыми бандажами // Информ. листок о науч.-техн. достиже-
достижении.— Харьков : ЦНТИ, 1987.— № 87—172.— 3 с.
129. Кантор Б. Я-, Роменский В. М. Of) одном численном методе исследо-
исследования многослойных оболочек вращения с заторами между слоями //
Прикл. механика.— 1987.— 23, ЛЬ 4.— С. 27—32.
130. Кантор Б. Я-, Зозуля В. В. Контактные задачи теории оболочек:
математические аспекты проблемы/ АН УССР. Ин-т пробл. машино-
машиностроения,—Харьков, J988.— 95 с,—Деп. в ВИНИТИ 16.02.88,
№ 1251.
126
131. Канторович Л. В., Акилов Г. Р. Функциональный анализ в нормиро-
нормированных пространствах.— М. : Физматгиз, 1959.— 684 с.
132. Карасев С. Н., Артюхин Ю. П. Влияние поперечного сдвига и обжа-
обжатия на распределение контактных напряжений // Исслед. по теории
пластин и оболочек.— 1976.— Вып. 12.— С. 68—77.
133. Карасев С. Н. О некоторых контактных задачах теории тонких плас-
пластин и оболочек // Изв. АН СССР. Механика твердого тела.— 1978.—
№ 5.—С. 170—178.
134. Кармишин А. В. н др. Статика и динамика тонкостенных оболочеч-
ных конструкций / А. В. Кармишин, В. А. Лясковец, В. И. Мячен-
ков, А. Н. Фролов — М. : Машиностроение, 1975.— 376 с.
135. Карпенко Т. Н. Задача о контактном взаимодействии цилиндриче-
цилиндрической оболочки с жестким штампом // Хим. машиностроение.— 1975.—
№ 22.— С. 6—14.
136. Карпенко Т. Н. Контактная задача для цилиндрической оболочки
конечной длины // Прикл. механика.— 1976.— 12, № 6.— С. 70—75.
137. Карпенко Т. П., Гофман М. Н. Определение НДС цилиндрической
оболочки, опирающейси на жесткий ложемент // Там же.— 1986.—
22, № 2.— С. 47—52.
138. Кваша Н. Э., Прусаков А. П. Некоторые контактные задачи слоистых
тороидальных оболочек // Статика сооружений.— Кнеи, 1978.—
С. 127—132.
139. Кеч Б., Теодореску П. Введение в теорию обобщенных функций с
приложениями в технике.— М. : Мир, 1978,— 520 с.
140. Клюшников В. Д. Устойчивость упругопластическнх систем.— М. :
Наука, 1980.— 240 с.
141. Клюшников В. Д. Лекции по устойчивости деформируемых систем.—
М. : Изд-во МГУ, 1986.— 224 с.
142. Коваленко 0. Ф. Некоторые методы решения |Гнелинейных задач меха-
механики упругого тела // Исслед. по строит, конструкциям.— 1968.—
№ 14.—С. 36—41.
143. Компенсаторы сильфонные. Технические условия: ОСТ 26—02—
2079—83.— М. : ВНИИНЕФТЕМАШ, 1982.— 94 с.
144. Конверистов Г. Б. Осесимметричная контактная задача для цилинд-
цилиндрической оболочки // Сопротивление материалов и теория сооруже-
сооружений.— 1975.—Вып. 27.—С. 119—124.
145. Конверистов Г. Б., Спирина Н. И. Контактные напряжения взаимо-
взаимодействия цилиндрической оболочки с бандажем // Прикл. механи-
механика.— 1979.— 15, № 2.— С. 65—70.
146. Корбут Б. А., Саксонов С. Г. Устойчивость цилиндрических оболо-
оболочек с упругим заполнителем при осевом сжатии // Там же.— 1965.—
1, №6,—С. 17—23.
147. Корн Г., Корн Т. Справочник по математике.— М. : Наука, 1968.—
720 с.
148. Корнишин М. С. Нелинейные задачи теории пластин н пологих обо-
оболочек и методы их решения.— М. : Наука, 1964.— 192 с.
149. Корнишин М. С, Исанбаева Ф. С. Гибкие пластины и панелн.— М. :
Наука, 1968.—260 с.
150. Королев В. И. Упругопластические деформации оболочек.— М. :
Машиностроение, 1971.— 304 с.
151. Кравчук А. С. Постановка задачи о контакте нескольких деформиро-
деформированных тел как задачи нелинейного программироиания // Прикл.
математика и механика.— 1978.— 42, вып. 3.— С. 466—474.
152. Кравчук А. С, Васильев В. А. Численное решение задачи о поиске
оптимальной формы штампа при контакте двух тел // Расчеты на
прочность.- 1981,—Л» 22.—С. 38—50.
J27
153. Красносельский М. А. и др. Приближенное решение операторных
уравнений / М. А. Красносельский, Г. Г: Вайннкко, П. П. Забрей-
ко и др.— М.: Наука, 1969.— 456 с. '
154. Крысько В. А. Нелинейная статика и динамика неоднородных обо-
оболочек.— Саратов : Изд-во Саратов, ун-та, 1976.— 214 с.
155. Кузнецова Р. Е. Применение нелинейного программирования к рас-
расчету статически неопределимых систем, имеющих в числе лишних
односторонние связи // Исслед. по строит, конструкциям.— 1968.—
№ 14.—С. 51—54.
156. Лаврентьев М. М., Романов В. Г., Шшиатский С. П. Некорректные
задачи математической физики и анализа.— М. : Наука, 1980.—
287 с.
1-57. Лазько В. А. Напряженно-деформированное состояние слоистых ани-
анизотропных оболочек при наличии зон неидеального контакта слоев.
I. Вариационный принцип теории упругих слоистых анизотропных
систем при наличии зон неидеального контакта // Механика компо-
композит, материалов.—1981.—№ 5.—С. 832—836.
158. Лазько В. А. Напряженно-деформированное состояние слоистых ани-
анизотропных оболочек прн наличии зон неидеального контакта слоев.
II. Обобщенные уравнения ортотропиых слоистых оболочек при раз-
разрывных перемещениях на границе раздела // Там же.— 1982.— № 1.—
С. 77—84.
159. Ланс Дж. Н. Численные методы для быстродействующих вычисли-
вычислительных машин: Пер. с англ.; под ред. В. М. Курочкина.— М. :
Изд-во иностр. лит., 1962.— 208 с.
160. Левина 3. М., Решетов Д. М. Контактная жесткость машин.— М. :
Машиностроение, 1971,— 264 с.
161. Луганцев Л. Д. Исследование напряженно-деформированного состоя-
состояния сильфонного компенсатора высокого давления // Расчеты на
прочность.— 1976.—Вып. 17.—С. 144—156.
162. Л у каш П. А., Божкова Л- В., Ильина Л. Г. Применение метода
асимптотического интегрирования к решению контактных задач тео-
теории оболочек//Тр. Моск. инж.-строит. ин-та.— 1981.— № 157.—
С. 167—177.
163. Львов Г. И. Взаимодействие упругопластической оболочки с жестким
штампом//Прикл. механика.— 1980.— 16, № 11.— С. 58—64.
164. Львов Г. И. Упругопластическое деформирование мембран, стесиеи-
ных ограничениями //Динамика и прочность машин.— 1981.—
Вып. 33.—С. 6—11.'
165. Львов Г. И. Неосесиммегричная контактная задача упругопласти-
ческого деформирования круглой мембраны // Там же.— 1981.—
Вып. 34.—С. 8—12.
166. Львов Г. И. Вариационная постановка контактной задачи для линей-
линейно-упругих н физически нелинейных пологих оболочек // Прикл.
математика и механика.— 1982.— 46, вып. 5.— С. 841—846.
167. Львов Г. И. Осесимметричная периодическая контактная задача уп-
ругопластического деформирования цилиндрической оболочки //
Пробл. машиностроения.— 1982.— Вып. 17.— С. 44—49.
168. Львов Г. И. Пластическое течение пологих оболочек, взаимодейству-
взаимодействующих с жесткими штампами // Докл. АН УССР. Сер. А.— 1983.—
№ 3.— С. 45—48.
169. Львов Г. И., Одинцова Е. В. Контактные напряжения в составных
цилиндрических гильзах из нелинейно-упругого материала // Изв.
вузов. Машиностроение.— 1983.— № 8.— С. 7—11.
170. Львов Г. И. Об одном классе контактных задач для цилиндрической
оболочки//Прикл, механика,—1983,—19, № 7,—С. 38—42.
128
171. Львов Г. И. Исследование контактного взаимодействия нелинейно-
> упругих оболочек конечной сдвиговой жесткости со штампами //
\ Там же.— 1984.— 20, № 3.— С. 49-54.
172. Львов Г. И. Контактные задачи ползучести пологих оболочек // Изв.
АН СССР. Механика тверд, тела.— 1984.— № 5.—С. 116—124.
173. Львов Г. И. Упругопластнческое деформирование конических оболо-
оболочек жесткими штампами // Пробл. машиностроения.— 1984.—
Вып. 22.—С. 45—49.
174. Львов Г. И. Взаимодействие сферических оболочек и пластин с жест-
жесткими ложементами в условиях ползучести // Прикл. механика.—
1985.— 21, № 6.— С. 74—79.
175. Лысенко С. В., Львов Г. И. Численное решение осесимметричных кон-
контактных задач упругопластического деформирования оболочек //
Динамика и прочность машин.— 1983.— Вып. 37.— С. 55—61.
176. Лысенко С. В., Сукиасов В. Г. Численное решение физически нелиней-
нелинейных контактных задач теории тонких оболочек // Актуальные проб-
проблемы механики оболочек: Тез. докл. Всесоюз. школы молодых уче-
ученых и специалистов, Казань, 24—30 июня 1983 г.— Казань, 1983.—
С. 113—114.
177. Малинин Н. Н. Прикладная теория пластичности и ползучести.— М. :
Машиностроение, 1975.— 400 с.
178. Мартыненко А. В. К учету смещения штампа, кинематически связан-
связанного с оболочкой вращения // Повышение эффективности строитель-
строительства: Тр. XI науч.-техн. конф. ХИСИ.— Харьков, 1986.—С. 202—
206.— Деп. в ВНИИИС Госстроя СССР, 25.06.86, № 7115—86.
179. Мартыненко А. В. Устойчивость сжатых в осевом направлении ци-
цилиндрических оболочек при ограничении перемещений от центра
кривизны // Тез. докл. XV науч.-техн. коиф. молодых ученых, Харь-
Харьков, 21—23 апр. 1987 г.— Харьков, 1987.—С. 36—37.
180. Мартыненко А. В. Комплекс программ для расчета сильфонных ком-
компенсаторов, армированных кольцевыми банджами // Информ. лис-
листок о науч.-техи. достижении.— Харьков : ЦНТИ, 1987.— № ЭТ-
ЭТИК—3 с.
181. Мартыненко А. В. Напряженное состояние и устойчивость конструк-
конструкций из оболочек вращения при одностороннем контакте: Дис. ...
канд. техн. иаук: 01.02.03.—Защищена 04.03.88; Утв. 10.08,88;
04880005719.— Харьков, 1988.— 140 с.
182. Метод конечных элементов в механике твердых тел / Под общ. ред.
А. С. Сахарова и И. Альтенбаха.— Киев : Вища шк., 1982.— 480 с.
183. Моссаковский В. И., Гудрамович В. С. Контактные задачи теории
оболочек // Контактная прочность пространственных конструкции.—
Киев, 1976.-С: 3—40.
184. Моссаковский В, И., Гудрамович В. С, Макеев Е. М. Контактные за-
задачи теории оболочек и стержней.— М. : Машиностроение, 1978.—
248 с.
185. Муштари X. М., Галимов К- 3. Нелинейная теория упругих оболо-
оболочек.— Казань : Таткнигоиздат, 1957.—431 с.
186. Мяченков В. И., Григорьев И. В. Расчет оболочечиых конструкций
на ЭВМ: Справочник.— М. : Машиностроение, 1981.—216 с. .
187. Мяченков В. И., Мальцев В. П. Методы н алгоритмы расчета про-
пространственных конструкций на ЭВМ ЕС— М. : Машиностроение,
1984.— 280 с.5Ч
188. Немировский Ю.. В., Резников Б. С. Прочность элементов конструк-
конструкций из композитных материалов.— Новосибирск : Наука, 1986.—165 с.
189. Новичков Ю. Н. Осесимметричная деформация многослойных цилин-
цилиндров с учетом проскальзывания между слоями // Тр. Моск. энерг.
ин-та,— 1976,—Вып. 227.—С. 109—118.
129
190. Новожилов В. В. Основы нелинейной теории упругости.— М. ;Д. :
Гостехиздат, 1948.— 212 с. /
Ш.Новожилов В. В. Теория тонких оболочек.—Л. : Судостроение,
1962.— 324 с.
192. Нормы расчета на прочность элементов реакторов, парогенераторов,
сосудов и трубопроводов атомных электростанций, опытных и иссле-
исследовательских ядерных реакторов и установок.— М. : Металлургия,
1973.-408 с.
193. Оден Дж. Конечные элементы в механике сплошных сред.— М.:
Мир, 1976.—464 с.
194. Ольшак В., Савчук А. Неупругое поведение оболочек: Пер. с англ.;
под ред. Г. С. Шапнро.— М. : Мир, 1969.— 144 с.
195. Панасюк В. В., ТеплийМ. /. Деяю контакта! задач! теорп пружиос-
п.— К- : Наук, думка, 1975.— 195 с.
196. Панкратова Н. Д. Деформация толстостенных неоднородных сфери-
сферических оболочек при нежестком контакте слоев // Докл. АН УССР.
Сер. А— 1984.— № 6.—С. 49—52.
197. Пелех Б. Л., Сысак Р. Д. К вопросу о горичей посадке бандажа на
цилиндрическую оболочку // Фнз.-хим. механика материалов,—
1971.—7, № 4.—С. 94—96.
198. Пелех Б. Л. Обобщенная теория оболочек.— Львов : Виша шк.,
1978.— 159 с.
199. Пелех Б- Л-, Сухорольский М. А. Контактные задачи теории упругих
анизотропных оболочек.— Киев : Наук, думка, 1980.— 216 с.
200. Пелех Б. Л. Контактная проблема теории оболочек // Численные ме-
методы решения задач теории упругости и пластичности: Материалы
VII Всесоюз. конф.— Миасс, 1—3 июня 1981 г.— Новосибирск,
1982.-С. 29—32.
201. Пелех Б. Л., Лазько В. А. Слоистые анизотропные пластины и обо-
оболочки с концентраторами напряжений.— Киев : Наук, думка, 1982.—
296 с.
202. Пелех Б. Л-, Максимук А. В. Матричный метол решения смешан-
смешанных граничных задач для слоистых структур II Докл. АН УССР.
Сер. А.— 1982.— № 7.— С. 51—54.
203. Пелех Б. Л., Максимчук А. В., Коровайчук И. М. Контактные зада-
задачи для слоистых элементов конструкций н тел с покрытиями.— Киев :
Наук, думка, 1988.— 280 с.
204. Петров В. В. Метод последовательных нагружений в нелинейной тео-
теории пластин н оболочек.— Саратов : Изд-во Саратов, ун-та, 1975.—
119 с.
205. Петров В. В., Овчинников И. Г., Ярославский В. И. Расчет пласти-
пластинок и оболочек из нелинейно-упругого матеряала.— Саратов : Изд-во
Саратов, ун-та, 1976.— 133 с.
206. Пискунов В. Г., Вериженко В. Е. Линейные и нелинейные задачи рас-
расчета слоистых конструкций.— Киев : Буд1вельник, 1986.— 176 с.
207. Питько В. В. Решение некоторых задач для сферической оболочки //
Строит, механика и расчет сооружений.— 1973.— Ms 6.— С. 21—26.
208. Погодин В- К-, Цвик Л. Б. Принцип поочередной непрерывности в
задаче о контакте соосных цилиндров // Изв. АН СССР. Механика
тверд, тела.— 1979.— № 5.— С. 72—81.
209. Погорелое А. В. Геометрические методы в нелинейной теории упру-
упругих оболочек.— М. : Наука, 1966.— 266 с.
210. Подгорный А. Н., Бортовой В. В., Колонок В. Д. Ползучесть и устой-
устойчивость пологих оболочек вращения.— Киев: Наук, думка, 1982.—
104 с.
211. Ползучесть элементов машиностроительных конструкций / Под ред.
А. Н. Подгорного.— Киев : Наук, думка, 1984.— 264 С,
130
212. Попов Г. Я- О контактных задачах для оболочек и пластин // Тр. X
Всесоюз. конф. по теории оболочек и пластин, Кутаиси, 22—29 сент.
1975 г.— Тбилиси, 1975.—Т. 1.—С. 244—250.
213. Попов Г. Я- Об интегральных уравнениях контактных задач для тон-
тонкостенных элементов // Прикл. математика и механика.— 1976.—
40, вып. 4.— С. 662—673.
214. Попов Г. Я-, Толкачев В. М. Проблема контакта жестких тел с тонко-
тонкостенными элементами // Изв. АН СССР. Механика тверд, тела.—
1980.— № 4.- С. 192—206.
215. Портаев Л. П. Расчет систем с односторонними связями на возраста-
возрастающую нагрузку// Там же.— 1978.—№ 1.—С. 183—186.
216. Почтман Ю. М., Бараненко В. А. Динамическое программирование
в строительной механике.— М. : Стройиздат, 1975.— 110 с.
217. Рабинович И. М. Вопросы теорив статического расчета сооружений
с односторонними связями.— М. : Стройиздат, 1975.— 144 с.
218. Работное Ю. Н. Ползучесть элементов конструкций.— М. : Наука,
. 1966.— 752 с.
219. Развитие теории контактных задач в СССР / Под ред. Л. А. Галина.—
М. : Наука, 1976.— 493 с.
220. Рассказов А. 0., Дехтярь А. С. Предельное равновесие оболочек.—.
.Киев : Вища шк„ 1978.— 171 с.
221. Рассказов А. 0., Соколовская И. И., Шульга Н. А. Теория и расчет
слоистых ортотропных пластин и оболочек.— Киев : Вища шк.,
1986.— 191 с.
222. Рикардс Р. Б., Тетере Г. А. Устойчивость оболочек из композитных
материалов.— Рига : Зинатне, 1974.— 310 с.
223. Розанов Б. В., Линц В. П., Финогеев 0. А. Экспериментальное опре-
определение контактных давлений // Вестн. машиностроения.— 1978.—
Ms П.—С. 27—28.
224. Роменский В. М. Статика оболочек вращения с односторонне кон-
контактирующими слоями : Дис. ... канд. техн. наук: 01.02.04.— Защи-
Защищена 09.04.87; Утв. 09.12.87; 04.8.70 007194.— Харьков, 1987.—
192 с.
225. Рыжов Э. В., Сосало В. И., Подменов Ю. П. Решение контактных
задач релаксационным методом конечных элементов // Машинове-.
дение.— 1980.-№ 6.—С. 64—69.
226. Сливкер В. И. О расчете конструкций на упругом основании при одно-
односторонней связи с основанием // Строит, механика и расчет сооруж.—
1967.—№ 4.—С. 27—31.
227. Стрельбицкая А. И,, Колгадин В. А., Матошко С. П. Изгиб прямо-
прямоугольных пластин за пределом упругости,— Киев : Наук, думка,
1971.—224 с.
228. Тетере Г. А. Сложное нагружеиие и устойчивость оболочек из поли-
полимерных материалов.— Рига : Зииатие, 1969.— 335 с.
229. Тимошенко С. П., Гудьер Дж. Теория упругости.— М. : Наука,
1975.— 575 с.
230. Тихонов А.Н.. Арсения В. Я- Методы решения некорректных задач.—
М. : Наука, 1979.— 228 с.
231. Тихонов А. Н. и др. Регуляризующяе алгоритмы и априорная инфор-
информация / А. Н. Тихонов, А. В. Гончаровский, В. В. Степанов, А. Г. Яго-
ла.— М. : Наука, 1983.— 200 с.
232. Толкачев В. М. Контактная задача для сферической оболочки // Тео-
Теория пластин и оболочек.—М., 1971.—С. 271—277.
233. Угодников А. Г., Коротких Ю. Г. Некоторые методы решения на
ЭЦВМ физически нелинейных задач теории пластин и оболочек,—
Киев : Наук, думка, 197J,— 220 с,
13}
234. Феодосьев В. И. Упругие элементы точного приборостроения.— М. :
Оборонгиз, 1949.— 344 с.
235. Хворсстухин Л. А., Шишкин С. В. Об осесимметричном контакте
двух толстостенных оболочек с учетом шероховатости посадочных
поверхностей // Изв. вузов. Машиностроение.— 1980.— № 2.— С. 5—
П.
236. Химмельблау Д. Прикладное нелинейное программирование.— М. :
Мир, 1975.—534 с.
237. Холл Дж., Уатт Дж. Современные численные методы решения обык-
обыкновенных дифференциальных уравнений.— М. :Мир, 1979.— 312 с.
238. ЦвикЛ. Б. Расчет напряженного состояния многослойных цилиндри-
цилиндрических оболочек итерационным методом // Пробл. прочности.—
1977.—№7,—С. 37—40.
239. ЦвикЛ. Б. Принцип поочередной непрерывности при решении задач
теории поля по частям//Докл. АН СССР.— 1978.—243, № 1.—
С. 74—77.
240. Черноусько Ф. Л.. Баничук Н. В. Вариационные задачи механики и
управления,— М. : Наука, 1973.— 236 с.
241. Шевелева Г. И., Гундаев С. А. Решение контактной задачи методом
последовательного нагружения // Изв. вузов. Машиностроение.—
1986.—№ 9.-С. 10-15.
242. Шелудько Г. А. Адаптивный метод отделения вещественных корней
алгебраических и трансцендентных уравнений // Журн. вычисл. ма-
математики н мат. физики.— 1970.— J0, № 4.—С. 1016—1021.
243. Шуваев Д. Н. Численное исследование НДС сильфонного компенса-
компенсатора с подкрепляющими кольцами // Прикл. пробл. прочности и
пластичности.— 1979.—Вып. 13.—С. 140—145.
244. Шуваев Д. Н. Численный анализ взаимодействия оболочек с упругой
средой // Материалы IV науч. конф. молодых ученых.— Горький,
1979.— С. 199—211.— Деп. в ВИНИТИ 24.02.79, № 2856.
245. Шуваев Д. Н. Численное решение задачи о контакте тонких осесим-
метричных оболочек //Материалы VI науч. конф. молодых ученых.—
Горький. 1981.—С. 75—84.—Деп. в ВИНИТИ 14.01.81, № 202.
246. Друмев В. К- Някои изследоваиия на устойчивоста на кръгов пръстен
върху еластична основа // Теоретическая и прикл. механика.—
1980.—И, № 3.—С. 94—101.
247. El-Bayomy L. Buckling of a circular elastic ring confined to a uniformly
contracting circular boundary // Trans. ASME.— 1972.— E 39, N 3.—
P. 542-551.
248. Essenburg F., Gulati S. T. On the contact of two axisymmetric plates //
Trans. ASME.— 1966.— E 33, N 2.— P. 341—346.
249. Fortune D., Bezine G. Sur le contact sans frottement de deux plaques
chargees en flexion Hi. Mec— 1981,— 20, N 3.— P. 475—494.
250. Jielking J. Т., Schapery E. A. A method for shell contact analysis//
Comput. Meth. Appl. Mech. and Eng.— 1981.—26, N 2.—P. 181—
195.
251. Haaringx J. A- Instability of thin-walled cylinders subjected to inter-
internal pressure//Phillips Res. Rep.— 1952.-7, N 2.—P.. 17—21.
252. Hill L. R., Cakmak A. S., Mark R. Shrink lift of a thickwalled cylin-
cylinder with contact shear // Trans. ASME.— 1968.— E 35, N 4.— P. 729—
736.
253. Keer L. M., Miller G. R. Contact between an elastically supported
circular plate and a rigid indenter//Int. J. Eng. Sci.— 1983.—21,
N 6.— P. 681—690.
264. Krogh F. T. Predictor-corrector methods of high order with improved
stability characteristics-//J. Ass, Comput. Math.— 1966.—13.—
P. 374-385,
132
255. Krogh F. Т. Changing stepsize in the integration of differential equa-
equations using modified divided differences//Lect. Notes in Math.,
New York : Springer, 1974.—P. 22—71.
256. Kulkarni S. V., Frederick D. The contact problem of two coaxial cy-
cylindrical shells // Int. J. Mech. Sci.— 1973.— 15, N 5.— P. 367—379.
257. Lovisek J. Analyza variacnej nerovnosti v contaktnej ulohe pre valco-
vi skrupinu a tuhy raznik // Strojn. Cas.— 1982.— 33, N 2— P. 241—
255.
258. Ohtake K-. Oden I. T., Kikuchi N. Analysis of certain unilateral prob-
problems in von Karman plate theory by a penalty method.— Pt. 1. A Va-
riational Principle with Penalty // Сотр. Meth. Appl. Mech. and Eng,—
1980.— 24, N 2.— P. 187—213.
259. Ohtake K-, Oden I. T., Kikuchi N. Analysis of certain unilateral prob-
problems in von Karman plate theory by a penalty method.— Pt 2. Appro-
Approximation and Numerical Analysis //Сотр. Meth. Appl. Mech. and
Eng.— 1980— 24, N 3.— P. 317—337.
260. Shimizu Yasuhiro, Moriwaki Yoshikazu. Buckling strength of lining
shells inside pressure vessel. 1st Rept. Buckling analysis of cylindrical
lining shells//Pressure Eng.—1983.—N 1.—P. 9—15.
261. Updike D. P., Kalnis A. Axisymmetric postbuckling and nonsymmet-
ric buckling of a spherical shell compressed between rigid plates //
Trans. ASME.— 1972.— E 39, N 2.— P. 36—47.
262. Updike D. P., Kalnins A. Contact pressure between an elastic spheri-
spherical shell and a rigid plate // Trans. ASME.— 1962.— E 39, N 4,—
P. 1110—1114.
263. Yagawa G. et al. Analysis of contact problem of shell structures using
finite element method with penalty function / G. Yagawa, H. Hira-
yama, A. Miyoshi, Y. Ando//Trans. Jap. Soc. Mech. Eng.— 1982.—
A 48, N 428.— P. 454—463.
264. Zwiesele R. Spannungsuntersuchungen an kreiszylindrischen Behtil-
tern auf Sattellagern.— Stuttgart : Diss., Dokt. Ing., Techn, Hochschu-
le, 1967.-207 p.
ОГЛАВЛЕНИЕ
Предисловие 3
Основные условные обозначения 5
Глава I
Обзор постановок контактных задач и методов их ре-
решения
1. Взаимодействие оболочки со штампом 7
2. Односторонний контакт между оболочками 15
3. Устойчивость элементов тонкостенных конструкций прн одно-
односторонних кинематических ограничениях . 18
4. Методы решения задач нелинейной теории оболочек ...... 22
Глава II
Метод решения задач о контакте оболочки вращения
и штампа
1. Связь контактного давления с поперечным обжатием тонкой обо-
оболочки 27
2. Основные соотношения нелинейной теории тонких оболочек вра-
вращения 32
3. Построение разрешающей системы уравнений осесямметричного
деформирования оболочки, взаимодействующей со штампом 35
4. Анализ взаимодействия цилиндрической оболочки с жестким ос-
основанием ". ; 41
5. Учет смещения штампа при кинематической связи с оболочкой
вращения 43
Глава III
Метод решения задач одностороннего взаимодейст-
взаимодействия между оболочками вращения
1. Постановка задачи н построение итеративного процесса '.,,., 47
2. Анализ сходимости процесса итераций 49
3. Определение одностороннего взаимодействия длинных цилинд-
цилиндрических оболочек 53
4. Адаптивный алгоритм и блок-схема программы 56
5. Учет контактного краевого эффекта и выбор шага интегрирования 58
6. Анализ контакта между цилиндрическими оболочками конечной
длины 61
Глава IV
Напряженно-деформированное состоииие сильфонных
компенсаторов, подкрепленных кольцами
134
1. Анализ напряженно-деформированного состояний волнистого
и омегообразиого сильфонов 64
2. Учет кинематической связи колец с оболочкой сильфоиа ... 67
3. Сравнение результатов расчета с данными эксперимента ... 69
4 Решение задач вариационно-сегмеитиым методом 71
Глава V
Устойчивость оболочек вращения при односторонних
кинематических связях
1. Уравнения устойчивости оболочек вращения при одностороннем
контакте 79
2. Алгоритм решения задач устойчивости 83
3. Определение устойчивости цилиндрических оболочек при одно-
одностороннем контакте с упругим основанием 86
4. Анализ действия штампа и упругого основания на сферическую
оболочку 93
5. Определение устойчивости сильфонов, подкрепленных кольцами 97
Глава VI
Дискретно-континуальная теория оболочек из неспа-
яиных слоев
1. Основные положения . . . Г01
2. Техническая теория гибких слоистых оболочек 104
3. Построение разрешающей системы уравнений для оболочек из
слоев Кирхгофа — Лява 106
4. Построение разрешающей системы уравнений для оболочек из
слоев Тимошенко 111
5. Алгоритм решения многоконтактных задач 113
6. Анализ напряженно-деформированного состояния слоистых плас-
пластин и оболочек 117
Список литературы 120
Научное издание
Кантор Борис Яковлевич
КОНТАКТНЫЕ ЗАДАЧИ
НЕЛИНЕЙНОЙ ТЕОРИИ
ОБОЛОЧЕК ВРАЩЕНИЯ
Художественный редактор И. М. ГАЛУШКА
Технический редактор С. Г. МАКСИМОВА
Корректоры Л. С. ТРИЛЕВИЧ,
И. В. ТОЧАНЕНКО, Т. Я. ЧОРНАЯ
I1GM 10957
Сдано в набор 10.10.89. Подп. в печ. 09.02.90. БФ 02019. Формат
84X108/32. Бум. тип. № 2. Лит. гарн. Вые. печ. Усл. печ: л. 7.14.
Усл. кр.-отт. 7,46. Уч.-изд. л: 8.37: Тираж 1000 экч: Закач
9—3378. Цена 1 р. 90 к. ^
Издательство «Наукова думка». 252601. Киев 4, ул. Репина. з
Отпечатано с матриц Головного предприятия Республиканского
производственного объединения «Полиграфкнига>. 2520.57, Киев,
ул. Довженко, 3. в Нестеровской городской типографии. 292310,
Нестеров, Львовской обл., ул. Горькою. 8. Зак. № 1152.