/














































































































































































































































































































































































































Текст
ПРОБЛЕМЫ
И ОСВОЕНИЯ
МИРОВОГО
ОКЕАНА
ТЕХНИКА
ОСВОЕНИЯ
ОКЕАНА
ТЕХНИКА
ОСВОЕНИЯ
ОКЕАНА
«УЖЕ СЕГОДНЯ
ДОСТАТОЧНО ВАЖНЫ И АКТУАЛЬНЫ
ТАКИЕ ГЛОБАЛЬНЫЕ ПРОБЛЕМЫ,
КАК СЫРЬЕВАЯ ИЛИ ЭНЕРГЕТИЧЕСКАЯ,
ЛИКВИДАЦИЯ НАИБОЛЕЕ ОПАСНЫХ
И РАСПРОСТРАНЕННЫХ ЗАБОЛЕВАНИИ
И ОХРАНА ОКРУЖАЮЩЕЙ СРЕДЫ,
ОСВОЕНИЕ КОСМОСА
И ИСПОЛЬЗОВАНИЕ РЕСУРСОВ МИРОВОГО ОКЕАНА
В ПЕРСПЕКТИВЕ ОНИ БУДУТ ОКАЗЫВАТЬ
ВСЕ БОЛЕЕ ЗАМЕТНОЕ ВЛИЯНИЕ
НА ЖИЗНЬ КАЖДОГО НАРОДА,
НА ВСЮ СИСТЕМУ
МЕЖДУНАРОДНЫХ ОТНОШЕНИЙ».
Из Доклада
Генерального секретаря ЦК
Л. И. БРЕЖНЕВА
XXV съезду
Коммунистической партии
Советского Союза
ПРОБЛЕМЫ
ИССЛЕДОВАНИЯ
И ОСВОЕНИЯ
МИРОВОГО
ОКЕАНА
Под редакцией
д-ра техн. наук
А. И. ВОЗНЕСЕНСКОГО
ЛЕНИНГРАД
«СУДОСТРОЕНИЕ»
1979
П78
УДК 551.46
СЕРИЯ «ТЕХНИКА ОСВОЕНИЯ ОКЕАНА»
Редакционная коллегия серии:
И. Б. Иконников (ответственный редактор), В. И. Баранцев,
В. М. Гаврилов, А. Н. Дмитриев, Б. В. Исупов, В. В. Серебряков,
К. Г. Суворов, Н. П. Чикер, А. И. Шапошников, А. П. Юрнев, В С. Ястребов
Составитель М. И. ГИРС
Проблемы исследования и освоения
Мирового океана/Под ред. д-ра техн.
наук А. И. Вознесенского.— Л.:
Судостроение, 1979.— (Техника
освоения океана).
Рассмотрены современная стратегия
исследования океана, вопросы
международного сотрудничества в деле его
освоения и защиты от загрязнений.
Проанализировано состояние
надводных, подводных и аэрокосмических
методов океанологических
исследований, а также средств освоения
биологических и минеральных ресурсов
океана.
Книга предназначена для широкого
круга читателей, и прежде всего
специалистов, занятых в этой области
науки.
World Ocean Exploration and
Engineering Problems/Ed. by Doctor of
Technical Sciences A. I. Vosnesen-
sky.—L.: Shipbuilding, 1979.—(Ocean
Reclaiming Technique).
The book written by known Soviet
scientists-researchers headed by
academician Brehovskih, Corresponding
Member of the Academy of Sciences
of the USSR E. P. Popov and others,
deals with modern problems of ocean
exploration and different aspects of
its pollution protection international
cooperation.
Abovewater, underwater and air
space oceanographic exploration
methods. Mineral and biological ocean
resources engineering facilities. Sea
depth man living facilities problems.
Ocean pollution protection problems.
20806—068
———— 4—79 3605030000 © Издательство «Судостроение», 1979 г.
СОДЕРЖАНИЕ
От издательства 7
Раздел I.
Общие задачи
в области исследования
и освоения
Мирового океана
Л. М. Бреховских. Современная стратегия в исследованиях и
освоении Мирового океана 11
А. С. Монин, Е. А. Цветкова. Международное сотрудничество в
изучении Мирового океана . : 37
Л. Л. Любимов. Международное регулирование освоения Мирового
океана ::.... 51
М. Т. Мелешкин. Экономико-экологические проблемы освоения
Мирового океана 67
A. И. Симонов. Мониторинг химического загрязнения морских вод 93
Раздел II.
Методы
исследования
океана
Б. А. Нелепо. Космическая океанография: проблемы и перспективы 111
B. В. Шарков. Аэрометоды изучения океана и его дна 135
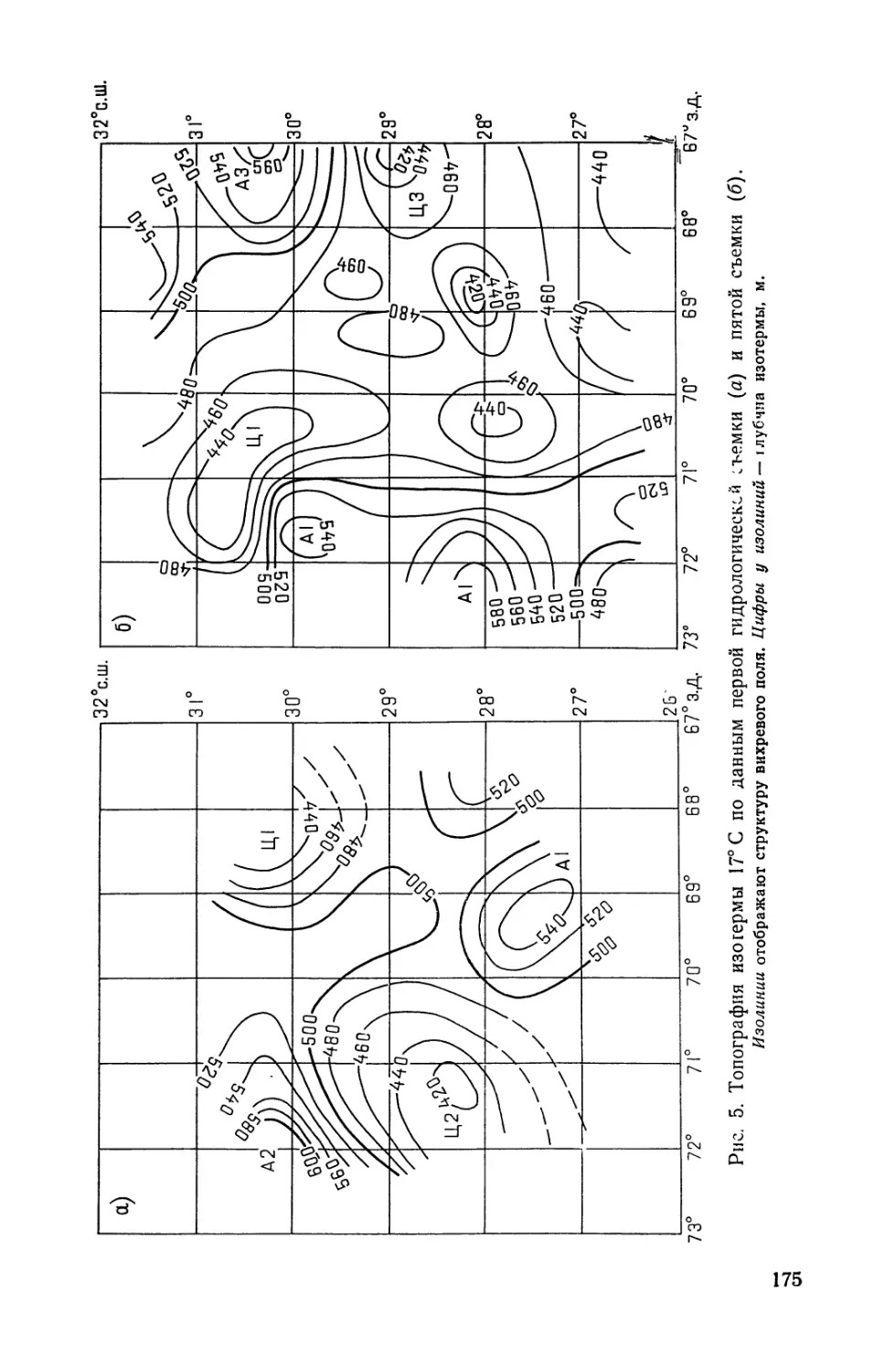
В. Г. Корт. Океанские вихри 167
Б. В. Шехватов. Океанографические буи и буйковые лаборатории 183
Г. К. Крупное. Научно-исследовательские суда 205
B. И. Винокуров. Проблемы использования радиоэлектронного
оборудования при освоении и исследовании океана 221
Раздел III.
Добыча минеральных
и биологических
ресурсов океана
C. С. Сальников, С. Б. Слевич. Хозяйственное освоение ресурсов
океана 235
Г. М. Лезгинцев. Задачи создания техники и технологии для
разработки подводных месторождений твердых полезных ископаемых . 249
1В. Н. Самарский] , К. Г. Суворов. Пути создания технических
средств морской добычи нефти и газа 265
П. А. Моисеев. Биологические ресурсы Мирового океана и
перспективы их использования 287
В. П. Зайцев, А. Н. Дмитриев. Технический аспект развития мари-
культуры 297
A. Д. Дружинин, Б. П. Пшеничный. Некоторые проблемы
глубоководного рыбного промысла 315
Раздел IV.
Освоение
глубин
океана
B. С. Ястребов. Необитаемые подводные аппараты: состояние и
перспективы развития 323
Е. П. Попов. Системы управления робототехнических комплексов 343
А. Н. Дмитриев. Обитаемые подводные аппараты: состояние и
перспективы развития 361
П. А. Боровиков, М. И. Гире, А. Е. Коваленко, А. М. Подражанский.
Проблемы подготовки подводных специалистов 379
П. А. Боровиков. ОбжЪвание человеком морских глубин. Системы
жизнеобеспечения 391
От издательства
Комплексное освоение
Мирового океана, как и освоение
космического пространства,—
одна из важнейших и
чрезвычайно сложных проблем
современности. Решить ее можно,
только разработав четкую
стратегию и определив формы
международного
сотрудничества в деле освоения океана и
сохранения его как целостной
экологической системы.
Этим вопросам, а также
анализу состояния и перспектив
развития надводных,
подводных и аэрокосмических
методов океанографических
исследований, рассмотрению средств
освоения минеральных и
биологических ресурсов Мирового
океана, перспектив обживания
морских глубин человеком и
посвящен настоящий сборник.
На его страницах выступают
виднейшие советские ученые,
в том числе академик АН
СССР Л. М. Бреховских,
академик АН УССР Б. А. Нелепо,
члены-корреспонденты АН
СССР А. С. Монин, Е. П.
Попов и другие.
Сборник рассчитан на
широкий круг читателей, прежде
всего специалистов, связанных
с исследованием и освоением
Мирового океана,
интенсивность которых нарастает с
каждым днем. В связи с этим
издательство планирует и в
дальнейшем освещать главные
направления этих процессов,
а также публиковать
наиболее интересные результаты,
основное внимание уделяя
технике освоения океана.
Все замечания и пожелания
просьба направлять по адресу:
191065, Ленинград, ул.
Гоголя, 8.
I.
ОБЩИЕ
ЗАДАЧИ
В ОБЛАСТИ
ИССЛЕДОВАНИЯ
И ОСВОЕНИЯ
МИРОВОГО
ОКЕАНА
Леонид Максимович Бреховских,
академик, член Президиума АН
СССР, академик-секретарь
Отделения океанологии, физики
атмосферы и географии АН СССР,
главный редактор журнала
«Океанология». Специалист в
области акустики океана, один из
участников открытия подводного
звукового канала (1946 г.),
руководитель многочисленных
океанических экспедиций, в том числе
эксперимента «Полигон-70».
Лауреат Ленинской и
Государственных премий, лауреат Золотой
медали Релея Акустического
общества Великобритании,
Л. М. Бреховских
СОВРЕМЕННАЯ
СТРАТЕГИЯ
В ИССЛЕДОВАНИЯХ
И ОСВОЕНИИ
МИРОВОГО
ОКЕАНА
Ресурсы океана далеко не так безграничны, как до недавнего
времени думали, но все-таки очень велики. Они приобретают
все большее значение по мере того, как население земного шара
растет, а биологические, минеральные и другие ресурсы
континентов все более интенсивно расходуются. Сейчас на каждого
жителя нашей планеты приходится в среднем около 15 кг
добываемой из океана и прилегающих к нему морей биомассы. Эта
цифра может быть существенно увеличена в дальнейшем при
правильном подходе к использованию биологических ресурсов
океана. Около Vs части мировой добычи нефти и газа в
настоящее время приходится на глубины прибрежного шельфа.
Велики и пока еще почти совершенно не тронуты минеральные
богатства дна открытого океана. В самой морской воде
растворено более 70 различных элементов периодической таблицы
Менделеева, включая уран и золото. Пока добывать, скажем,
золото из морской воды экономически нерационально, но зато
другие элементы, например магний, калий, бром, уже сейчас
в больших количествах добывают в океанах и морях.
Грандиозны и энергетические ресурсы океана, пока еще
мало используемые.
Около половины кислорода, которым дышит население
нашей планеты, продуцируется в процессе фотосинтеза в верхнем
слое океана.
Океан является важной транспортной артерией. Фрахт
многих десятков тысяч транспортных судов, бороздящих океан,
исчисляется ежегодно во многих миллиардах рублей.
И
Без всякого преувеличения можно сказать, что океан
определяет погоду на нашей планете. На большей части нашей
страны, например, погода определяется процессами,
протекающими в Атлантике и Северном Ледовитом океане.
Сотни научно-исследовательских судов, принадлежащих
разным странам, непрерывно находятся на просторах океана.
С этих судов, а также с исследовательских подводных лодок,
опускающихся в глубины океана, со спутников и обитаемых
космических лабораторий десятки тысяч научных сотрудников
непрерывно следят за океаном, познавая его тайны. Для
решения наиболее сложных проблем стало традицией объединять
усилия многих стран при проведении совместных
экспериментов. Иногда в них занято одновременно несколько десятков
исследовательских судов.
Советские ученые-океанологи имеют совместные
программы исследований с учеными Польши, ГДР, Болгарии,
Англии, Франции, США. Несмотря на все это, мы должны
признать, что океан остается еще во многом таинствен.
Исследован он пока совершенно недостаточно. Постепенно
перед нами раскрываются все новые и новые стороны его жизни.
Однако имеющиеся сейчас представления об океане — о
движении его вод, строении дна, особенностях биологической системы
и т. д.— пока могут считаться знаниями «в первом
приближении».
Океан изучают физики, геологи, биологи, химики и ученые
многих других специальностей. Задачей физиков является
исследование динамических процессов в океане, т. е. движений
водных масс всех масштабов, от океанских течений
планетарных масштабов до мелкой ряби на поверхности воды; изучение
взаимодействия атмосферы и океана, а также различных
физических полей в океане — гравитационного, магнитного,
акустического и др. Геологи изучают строение океанского дна как
в прибрежных зонах, так и в открытом океане. Это необходимо
для установления закономерностей распределения полезных
минеральных ископаемых в толще дна океана, а также для
понимания истории нашей планеты, строения континентов и океанов
в геологическом прошлом.
Биологи изучают закономерности развития жизни в океане
на всех ее уровнях. Они определяют взаимодействие различных
звеньев биологической структуры океана для того, чтобы
определять наиболее рациональные способы эксплуатации
биологических ресурсов.
Химики вместе с биологами занимаются изучением
химического состава вод океана, особенно в целях предотвращения его
загрязнения.
Остановимся теперь на основных направлениях изучения
Мирового океана, на современной стратегии и современных
методах его исследования.
12
1. Синоптическая изменчивость океана.
Океанские вихри
Изучение динамики океана, т. е. движения его водных масс,
приносит все новые открытия. Около 15 лет назад советскими
учеными было открыто экваториальное подповерхностное
противотечение в Атлантическом океане. Оказалось, что вдоль
экватора с запада на восток на глубине 300—500 м течет мощная
река шириной в несколько сот километров. На поверхности
течение направлено в противоположную сторону. Годом позже
в Индийском океане также советскими учеными было открыто
аналогичное противотечение, названное течением Тареева.
Установлено, что экваториальное противотечение имеется и в
Тихом океане. Оно впервые было открыто американскими
учеными и названо течением Кромвелла.
Выдающееся открытие было сделано советскими учеными
в процессе эксперимента «Полигон-70» в Атлантике в 1970 г.
Целью эксперимента было выяснение устойчивости морских
течений в зоне, где они, как предполагалось, наиболее стабильны.
Для этого была выбрана зона северо-пассатного течения и
район со сравнительно ровным дном. Здесь впервые в большом
масштабе был использован полигонный метод исследований (об
этом методе см. подробнее в разделе 9). На акватории
площадью 200x200 км2 ученые разбили большой
исследовательский полигон, расположили на нем огромную океанскую
крестообразную «антенну», состоящую из 17 буйковых станций. На
каждой буйковой станции на разных горизонтах были
размещены измерители течений и температуры. Опыт длился
полгода. Уже в первые несколько недель выяснилось, что характер
течения не имеет ничего общего с тем, что представлялось
ранее и что изображалось на всех морских картах. Удалось
установить, что через полигон проходят гигантские вихри
размерами в несколько сот километров. Эти вихри в известном
смысле аналогичны циклонам и антициклонам в атмосфере.
Скорость водных масс, участвующих во вращении вихря,
составляет 15—20 см/с. Скорость продвижения вихря на запад
с небольшой южной составляющей была около 4 см/с. Вихревое
движение захватывало практически всю толщу океана *.
Несколько лет спустя, в 1973 г. американские ученые
провели аналогичный эксперимент в Саргассовом море.
Исследовались течения на глубинах от 500 м до дна. Эксперимент
назывался MODE-I (Mid Ocean Dynamical Experiment). В нем
применялись те же методы, что и в эксперименте «Полигон-70», но
*и Полигонный гидрофизический эксперимент в тропической зоне
Атлантики/Л. М. Бреховских, М Н. Кошляков, К. Н. Федоров,
Л. М. Фомин, А. Д. Ямпольский.-Докл. АН СССР, 1971, т. 198, № 6,
с 1434—1437.
13
дополнительно использовались акустические буи нейтральной
плавучести. Эти буи (подробнее см. раздел 9) двигаются на
заданных глубинах вместе с водными массами и с помощью
акустических сигналов сообщают о своем местонахождении.
Результаты этого и других экспериментов показали, что
вихревое движение той или иной силы существует в океане
практически повсеместно, даже подо льдами Северного Ледовитого
океана. Правда, здесь размеры их несколько меньше (около
50 км). Они найдены также в приантарктических водах.
Оказалось, что в ряде районов кинетическая энергия вихревого
движения в десятки, а иногда и в сотни раз больше кинетической
энергии известных течений.
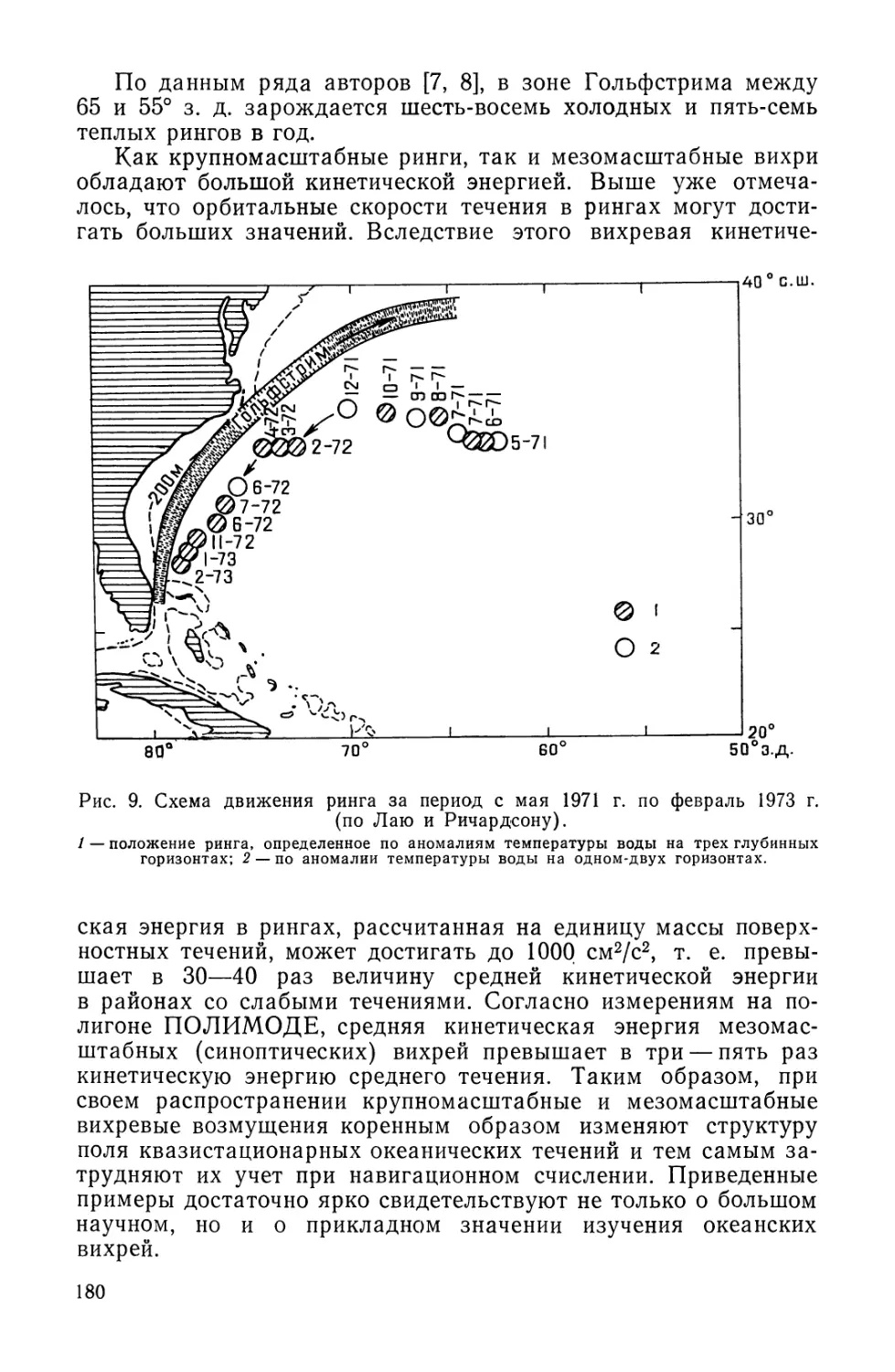
Наиболее эффективная программа изучения вихрей в океане
была реализована в процессе международного эксперимента
ПОЛИМОДЕ. Название этого эксперимента возникло из
комбинации первой половины слова «Полигон» и названия
американского эксперимента МОДЕ и очень точно отражает суть дела.
Это в основном советско-американский эксперимент, цель
которого— выяснить, как возникают океанские вихри и как они
взаимодействуют друг с другом, а также со средними океанскими
течениями и какова их конечная судьба. Уже выяснилось, что
существуют вихри, как минимум, двух видов. Вихри первого
вида, так называемые ринги (кольца), возникают в
Атлантическом океане в результате отпочковывания меандров
Гольфстрима. Эти ринги путешествуют дальше по океану
самостоятельно, живут около двух-трех лет, а потом снова
захватываются Гольфстримом. Ежегодно рождается около пяти рингов,
и, следовательно, в каждый данный момент в Атлантическом
океане существует около 15 «бродячих» рингов. Вихри второго
вида — вихри открытого океана — возникают вследствие
неустойчивости движения водных масс, или, как говорят океанологи,
бароклинной неустойчивости. Эти вихри несколько другого
строения, чем ринги. Температурные контрасты и вихревые
скорости течения в них менее выражены.
2. Волновые движения в океане
Большое внимание исследователи уделяют изучению
разнообразных волновых процессов в океане. Мы рассмотрим процессы
механической природы, т. е. не будем останавливаться, скажем,
на электромагнитных волнах, распространяющихся в морской
среде. Самый широкий диапазон частот и самую большую
скорость распространения среди волн механической природы имеют
звуковые волны. Они распространяются со скоростью около
5400 км/ч. Звуки низких частот обладают весьма малым
затуханием и могут пересечь даже самый большой Тихий океан.
Правда, на это им потребуется более двух часов. Самые низко-
14
частотные звуковые волны с периодом около 1 с (такие звуки
уже не различимы человеком и называются инфразвуками)
генерируются подводными извержениями вулканов и подводными
землетрясениями. По ним можно судить о приближении волны
цунами. (Вопрос о звуковых волнах рассмотрен подробнее ниже).
Волна цунами возникает при подводном землетрясении или
подводном извержении вулкана. Безобидная в открытом океане,
она становится все круче с приближением к берегу и выходом
на мелководье. Налетая многометровой стеной на побережье,
она несет в себе огромную разрушительную силу. Ученые много
работают над изучением как самой волны цунами, так и над
отысканием способов предупреждения населения прибрежных
районов о ее приближении. Для прогнозирования цунами
в опасных районах существуют две службы: непрерывной
регистрации сейсмических волн, возникающих одновременно с
цунами во время землетрясения, и слежения за уровнем
поверхности воды в море. Однако во время подводного землетрясения
или извержения вулкана, как уже было сказано, возникает
также низкочастотная звуковая волна, которая продвигается во
много раз быстрее цунами. Приняв ее вблизи берега
специальными приборами — гидрофонами, можно предупредить
население о приближающейся волне.
Интересны законы распространения цунами в открытом
океане. Академик М. А. Лаврентьев установил, что подводные
хребты могут служить для нее своеобразными волноводами,
вдоль которых она распространяется на большие расстояния
без заметного ослабления.
Когда говорят о волнах в океане, то прежде всего
представляют его волнующуюся поверхность. Изучение поверхностных
волн началось давно, так как управляющие ими законы очень
важно знать для мореплавания и судостроения.
Однако до последнего времени далеко не все тайны
поверхностных волн разгаданы. В частности, пока еще нет теории,
достаточно точно описывающей возникновение и нарастание волн
под действием ветра. Трудности возникают из-за того, что волна
сама изменяет характеристики ветрового поля. Мало пока
экспериментально изучены пространственно-временные спектры
поверхностных волн.
Практический интерес имеют поверхностные волны самого
различного периода, от долей секунды (капиллярные волны) до
десятков секунд. Сложность изучения поверхностных волн в
открытом океане связана и с тем, что нелегко найти неподвижную
базу для измерения их параметров. Часто приборы
располагаются на судне, которое само колеблется на волне, и в
результате измерений регистрируется суммарный эффект движения
самой волны и судна на волне. Выносные приборы —
волномеры, располагающиеся в удалении от судна, пока дают мало
сведений о пространственных характеристиках волн.
15
В последнее время стали развиваться методы изучения
волнения с искусственных спутников Земли. Эти методы могут
оказаться весьма перспективными.
Поверхность океана может быть совершенно гладкой и
спокойной, но это не значит, что нет никакого движения во всей
его глубине. В толще воды океана могут бушевать внутренние
волны, размах которых достигает сотен метров. Правда, слово
«бушевать» в данном случае не совсем подходит, поскольку
внутренние волны — очень медленные, с периодами,
измеряемыми десятками минут и даже многими часами, но это не
мешает им проявляться роковым образом. Есть предположение,
что американская подводная лодка «Трешер» затонула, попав
в зону именно такой волны.
Внутренние волны в известной мере аналогичны
поверхностным. Действительно, поверхность воды — это граница воды
и воздуха, т. е. двух сред с различной плотностью. Внутри
океана также имеются слои различной плотности, хотя перепад
последней между ними и невелик. Представим теперь границу
между двумя такими слоями. В покое она, как и поверхность
воды, горизонтальна. Допустим, что какая-то причина
заставила тяжелый слой подняться, выгнуться горбом. Под действием
силы тяжести он затем опустится вниз. Образовавшееся
возмущение будет распространяться во все стороны. Это и будут
внутренние волны. По своей природе они богаче поверхностных.
Внутренние волны могут перемещаться не только в
горизонтальной плоскости, как поверхностные, но и в вертикальной, а также
под любым другим углом наклона к поверхности. Оказалось,
что эти волны в океане существуют практически повсеместно и
в любое время. Однако, каковы главные источники внутренних
волн, как эти волны взаимодействуют друг с другом, с
поверхностными волнами и турбулентностью, где, в конечном счете,
затухает их энергия,— все эти вопросы пока еще остаются
невыясненными.
Другой вид океанских волн — волны Россби — имеют самый
большой период. Он составляет 1,5—2 месяца. Эти волны,
длины которых меняются от десятков до сотен километров,
медленно, со скоростью несколько сантиметров в секунду,
движутся с востока на запад и захватывают всю толщу океана.
Интересно, что при этом перенос энергии происходит в обратном
направлении — с запада на восток. Волны такого рода
впервые были открыты в атмосфере и часто называются волнами
Россби—Блиновой *.
Есть предположение, что система океанских вихрей,
обнаруженная в ходе эксперимента «Полигон-70», является системой
* Чл.-корр. АН СССР Е. Н. Блинова впервые разработала наиболее
полную теорию таких волн.
16
волн Россби. Движения частиц воды в волнах Россби
направлены почти строго горизонтально. В так называемых баротроп-
ных волнах Россби вся масса воды, от поверхности до дна,
движется с одинаковой скоростью. Однако существует большое
разнообразие «бароклинных» волн Россби, характеристики
которых меняются с глубиной.
3. Мелкомасштабная структура вод океана
Океан непрерывно поглощает энергию солнца и ветра,
превращая ее в энергию течений, вихрей, внутренних и поверхностных
волн. Однако возникает вопрос, на что расходуется энергия
этих движений? Где, как говорят ученые, находится ее сток?
Оказалось, что приток энергии от солнца и ветра происходит
в основном в крупных масштабах, а ее сток, т. е. превращение
этой энергии, в конечном счете, в тепло,— в неоднородностях
воды очень мелких масштабов. Это прежде всего участки
мелкомасштабной турбулентности (характерные масштабы — доли
миллиметра). Кроме того, мелкомасштабная структура вод
океана влияет на многие другие процессы, в частности, на
распространение звуковых и оптических волн. Поэтому ее
изучению уделяют большое внимание.
Исследование строения мелкомасштабной, или тонкой,
структуры вод океана стало возможным только в последнее время,
когда учеными и инженерами были созданы так называемые
зонды — очень чувствительные щупы с разрешающей
способностью до долей миллиметра. Такие зонды позволяют изучить
детально, например, зависимость температуры и солености воды
от глубины. Раньше считали, что эта зависимость плавная,
а получавшиеся в опытах отклонения приписывали просто
несовершенству приборов. Но вот приборы стали совершенными,
и оказалось, что при изменении глубины температура и
соленость меняются очень своеобразно: они остаются
постоянными в некоторых тонких слоях (толщины этих слоев
меняются от десятков сантиметров до десятка метров) и быстро,
почти скачкообразно меняются при переходе из одного слоя
в другой.
Таким образом, океан представляет собой как бы большой
слоеный пирог.
В дальнейшем исследователи научились делать приборы,
которые с такой же большой разрешающей способностью
измеряют вертикальную структуру горизонтальных течений в океане.
Оказалось, что то же самое происходит с течениями. С
помощью таких приборов было обнаружено, что течения внутри
некоторых слоев также почти постоянны и быстро изменяются
при переходе границы между слоями. Это так называемая
тонкая структура течений в океане.
17
Горизонтальная протяженность таких тонких слоев может
составлять десяток километров. Тонкая структура в данном
месте может сохраняться почти неизменной в течение
нескольких суток. Это значит, что исследователь может многократно-
зондировать океан в течение нескольких суток, и кривая
зависимости, скажем, температуры от глубины во всех тонкостях
будет повторяться раз от разу.
Как возникает эта необычайно своеобразная тонкая
структура вод океана? Пока точно этого никто не знает. Одно ясно:
она играет весьма существенную роль во всей энергетике
океана. Кроме того, тонкая структура порождает ряд
чрезвычайно интересных явлений. Например, на границах этих, почти
однородных, слоев распространяются относительно
высокочастотные внутренние волны с периодами, равными десяткам
секунд и даже минутам. Никто до этого не предполагал, что
внутренние волны таких высоких частот могут распространяться
в океане.
Тонкая структура, безусловно, влияет и на развитие низших
ступеней жизни в океане. Разные виды планктона и бактерий
могут задерживаться на границах слоев, где существует скачок
плотности, и не один, как раньше предполагали (так
называемое жидкое дно), а сотни.
4. Взаимодействие океана и атмосферы.
Погода и климат планеты
Большая часть солнечной энергии, падающей на нашу планету,,
приходится в основном на тропические области океана. Там она
поглощается верхним слоем воды толщиной 10—20 м и затем
в виде тепла частично уносится с течениями, а частично
переходит из океана в атмосферу. Механизм этого перехода таков:
вода испаряется с поверхности океана, поднимается в виде пара
вверх, там конденсируется в более холодных слоях
атмосферы. При этом выделяется скрытая теплота конденсации,
которая и прогревает атмосферу. Вследствие ее разного
прогрева на разных географических широтах возникают ветры,
которые в свою очередь разгоняют поверхностные воды
океана, и т. д. Таким образом, существует непрерывная
энергетическая связь между атмосферой и океаном. Кроме того,
атмосфера и океан обмениваются веществом и количеством
движения.
Общеизвестно, что состояние океана кардинальным образом"
определяет погоду на суше. Однако пока никто точно не знает,
как предсказать погоду на месяц или несколько месяцев вперед
с учетом влияния океана. Для того чтобы решить эту проблему,
важную для всего человечества, ученые разных стран
объединили свои усилия — создана большая международная научно-
18
исследовательская программа ПИГАП (Программа
исследования глобальных атмосферных процессов).
Закономерно, что первый большой эксперимент по этой
программе был проведен в тропических областях Атлантики. В этом
эксперименте в 1974 г. участвовало около 40 судов разных
стран (13 из Советского Союза), а также самолеты и
искусственные спутники Земли.
Было получено большое количество информации о состоянии
глубин океана и всей толщи атмосферы в этих районах, которая
еще полностью не обработана. Но и предварительные
результаты чрезвычайно интересны, они показывают связь атмосферы
и океана, а также роль океана в формировании погоды.* Были
выявлены и детально исследованы квазидвухлетняя
цикличность явлений в верхних слоях атмосферы и влияние этой
цикличности на погоду. Установлено, что подповерхностное течение
Ломоносова не является стационарным. По его стволу бегут
волны, длиной около полутора тысяч километров, подобно тому,
как бегут волны по веревочке, которую мы дернули. Однако
нельзя ограничиться исследованием только тропических
районов. В полярных областях происходит интенсивная передача
энергии из океана в атмосферу. Этот процесс тоже оказывает
большое влияние на формирование погоды. Поэтому советскими
учеными были осуществлены в рамках программы ПИГАП два
подпроекта «ПОЛЭКС-Север» и «ПОЛЭКС-Юг» **.
В рамках этих проектов предстояло выяснить, каким
образом теплота поступает из экваториальных районов в полярные?
Раньше считалось, что эта энергия переносится атмосферой.
Теперь выяснилось, что значительная ее часть, может быть
около половины, переносится океанскими течениями.
В эксперименте, проведенном в 1976 г. в основном
учреждениями Государственного комитета гидрометеорологии и
контроля природной среды СССР, участвовали десять
научно-исследовательских судов, два самолета-лаборатории и около 90
наземных аэрологических станций. Эксперимент охватывал се-
веро-европейский бассейн и северную часть Тихого океана.
После того как было определено, что значительная часть
энергии в северные районы поступает с океаническими течениями,
предстояло определить, меняется или нет год от года
теплосодержание этих течений. Раньше считалось, что положение
более или менее стабильно и теплосодержание этих течений почти
не меняется. Эксперименты показали, что эти течения в значи-
* Интересно, что ученые-метеорологи при составлении программы ПИГАП
вначале не привлекли к участию в ней ученых-океанологов, но уже через
несколько лет выяснилось — без детального прослеживания поведения океана
поставленные проблемы решить невозможно.
** Трешников А. Ф. Основные итоги исследований в океанических
районах полярных широт (программа «ПОЛЭКС»).— Докл. на I Съезде
океанологов СССР, 1977, июнь.
19
тельной мере изменчивы, и это затрудняет долговременный
прогноз погоды.
В южной полярной области наибольшее значение имеет
исследование самого мощного в Мировом океане
Циркумполярного антарктического течения, опоясывающего Антарктиду. Оно
имеет ширину около 2 тыс. км и переносит в 10 раз больше
воды, чем Гольфстрим. В совместных экспериментах 1975/76 г.
советские и американские ученые уточнили мощность этого
течения: оно переносит около 3 млн. км3 воды в год*.
Несмотря на обширные эксперименты, проведенные в
полярных и тропических областях, процессы, определяющие погоду
на нашей планете, и роль в этом океана остаются еще далеко
не выясненными. Большие надежды в этом отношении
возлагаются на первый глобальный международный эксперимент,
который начат в феврале 1979 г. Исследования охватывают все
океаны, а также материки. Следует упомянуть, что последние
имеют несколько большую отражательную способность
относительно солнечного света, чем океаны. Поэтому они поглощают
меньше солнечного тепла и нагреваются летом меньше, чем
океаны. Зимой же, наоборот, материки успевают сильнее, чем
океаны, остыть. Температурный контраст между океанами и
материками создает ветры в широтном направлении. Этот вопрос
тоже должен быть детально изучен в первом глобальном
эксперименте**.
Наряду с проведением крупных экспериментов, ученые
строят математические модели циркуляции атмосферы и океана.
Одна из таких моделей разработана в Ленинградском
отделении Института океанологии АН СССР. В ней учитывается
состояние (температура, ветры, течения) атмосферы и океана на
многих горизонтах в большом числе точек (квадратов) океанов
и материков. Модель дала много интересного. Так, если
представить себе океан однородным и покоящимся вначале, а
потом включить в действие атмосферные ветры и обмен теплом,
массой и количеством движения между атмосферой и океаном,
то, как оказалось, последнему потребуется около 200 лет для
того, чтобы прийти в то состояние движения и стратификации,
которое наблюдается сейчас. Это показывает, насколько
инерционна система океана.
Другая математическая модель циркуляции атмосферы и
океана разработана в Вычислительном центре Сибирского
отделения АН СССР под руководством академика Г. И. Марчука.
* Суммарный годовой сток всех рек земного шара составляет около
40 тыс. км3.
** Концепция взаимодействия атмосферы, океана и континентов развита
в докладе акад. В. В. Шулейкина «Крупномасштабное взаимодействие между
океаном, атмосферой и материками» на I Съезде океанологов СССР, 1977,
июнь.
20
На ее основе были получены результаты, важные для
долгосрочного прогноза погоды.
В ходе реализации программы ПИГАП предстоит также
выяснить механизмы, которые определяют климат на земном
шаре, и тенденции его изменения в настоящее время *.
Известно, что в северном полушарии сравнительно теплыми были
1945—1946 гг. С тех пор наблюдалось непрерывное
похолодание климата северного полушария вплоть до 1970 г. Затем, по-
видимому, вновь стало проявляться некоторое систематическое
потепление. Возможно, оно обусловлено антропогенным
воздействием, т. е. воздействием человека на природу, в частности,,
увеличением выбросов углекислоты в атмосферу и так
называемым тепличным эффектом. Если это так, то потепление будет
продолжаться еще многие годы и последствия его могут
оказаться неблагоприятными для нашей планеты как среды
обитания человека. Однако вполне возможно, что это потепление
обусловлено естественными флуктуациями климата, которые
отмечались и в прошлом нашей планеты, и через некоторое
время оно сменится похолоданием.
Решить эти поистине жгучие для всего человечества вопросы
невозможно без детального знания свойств и состояния океана.
Пока же об океане в Мировые центры сбора
гидрометеорологической информации поступает примерно в тысячу раз меньше
данных, чем об атмосфере. Это показывает, насколько должны
быть расширены исследования океана, чтобы достичь
необходимого уровня.
5. Акустика океана
Звуковые волны — единственный вид волн, которые могут
распространяться в морской воде без большого ослабления на
значительные расстояния (несколько тысяч километров для низких
частот звука). Электромагнитные волны и даже мощный луч:
лазера могут проникать в толщу морской воды не больше чем
на километр. В морских экспериментах звук от небольших
взрывов принимался на расстоянии 22 тыс. км, а монохроматический
звук — на расстоянии до 28 тыс. км. О звуковых волнах в океане
уже говорилось выше, однако они стоят того, чтобы на них
остановиться подробнее.
Без использования звука не обходится ни одна наука об
океане. Только благодаря весьма простому, но важному
акустическому прибору — эхолоту, мы теперь неплохо знаем рельеф
дна Мирового океана и прилегающих к нему морей. С его
помощью были открыты мощные системы срединных океанических
хребтов. Это открытие легло в основу новой теории земной коры
* Климатом называют погоду, усредненную за 10—30 лет.
21
(об этом будет сказано ниже). С помощью особых акустических
лриборов, называемых гидролокаторами бокового обзора,
удается гораздо точнее и быстрее, чем с помощью эхолота,
обследовать рельеф морского дна и обнаруживать даже
сравнительно небольшие, лежащие на нем предметы. Другими
словами, можно составить своего рода фотографическую карту
морского дна.
Акустические волны служат и для просвечивания морского
дна, а следовательно, для обнаружения в его толще полезных
ископаемых. Чем ниже частота звука, тем глубже в морское
дно он может проникнуть. Исследуя же рассеяние звука в толще
воды, можно выявить так называемые звукорассеивающие слои
биологической природы. При этом можно определить размер
небольших рыбок и концентрацию их скоплений, характерных
для такого слоя. Метод' настолько чувствителен, что позволяет
обнаружить наличие одной небольшой рыбки длиной, скажем,
несколько сантиметров в 100 м3 воды.
Звук широко применяется для управления автономными
приборами, работающими под водой и доставляющими
информацию о многочисленных свойствах океана (подробнее см.
в разделе 9).
Выдающимся событием в развитии подводной акустики
было открытие в 40-х годах XX столетия подводного звукового
канала американскими и советскими учеными независимо друг
от друга. Оказалось, что в глубинах океана существуют слои
воды, в которых скорость звука меньше, чем в окружающих
слоях, и поэтому они служат волноводами для распространения
звука. Распространяясь в таком волноводе, звук не касается
поверхности воды и дна, где бы он мог рассеяться и
поглотиться. В самой воде звук низких частот поглощается
незначительно (например, звук частотой 50 Гц может пройти
расстояние до 10 тыс. км, и его энергия уменьшится при этом всего
лишь в 10 раз). Это свойство используется, в частности, для
передачи информации под водой.
Ученым, занимающимся акустикой океана, предстоит
изучить многостороннее взаимодействие звуковых волн, волнения
на поверхности воды и дна с учетом его сложного рельефа и
сложной внутренней структуры, звукорассеивающих слоев
биологической природы в океане, турбулентности вод океана,
внутренних волн, тонкой вертикальной структуры вод и т. д. Так
называемые синоптические вихри, о которых говорилось выше,
также существенным образом влияют на распространение
звука. Вихри с холодным ядром в определенных условиях
фокусируют, а вихри с теплым ядром — дефокусируют звуковые
волны. Существенным образом искажают пути звуковых волн
океанические фронты; которые встречаются в течениях типа
Гольфстрим, Куросио и др. Важной задачей подводной
акустики в настоящее время является изучение стабильности зву-
22
ковых полей на фоне весьма большой изменчивости океана. При
ее решении акустикам следует работать бок о бок с
океанологами. Последние должны детальнейшим образом изучать
океанологическую обстановку, на фоне которой распространяется
звук.
Интереснейшим явлением в подводной акустике являются
собственные шумы океана. Океан шумит. Его голос можно
непрерывно прослушивать в воздухе. Однако океан далеко не
беззвучен и на глубине. Природа подводных шумов может быть
самой разной. В области низких частот (от 1 до 20 Гц)
основной их причиной является сейсмическая активность Земли. На
нашей планете ежедневно происходят сотни и тысячи мелких
землетрясений, которые создают непрерывный фон колебаний
земной коры — так называемых микросейсм. Они-то и
порождают подводные шумы. Шумы несколько более высоких частот
производятся волнующейся поверхностью воды. Оказалось, что-
две поверхностные волны, взаимодействуя друг с другом, могут
порождать звуковые волны, излучающиеся в атмосферу и в
глубины океана.
Звуковые волны в океане могут возникать также от
штормов, которые разыгрываются в атмосфере над океаном, и т. д.
Шумы с частотами 100—300 Гц вызваны шумами,
порожденными при плавании судов. В каждый данный момент, скажем,,
в Атлантическом океане находятся многие сотни, а иногда ir
тысячи судов, двигатели и гребные винты которых непрерывно
излучают звуки.
Шумы еще более высоких частот обязаны своим
происхождением захлопыванию воздушных пузырьков, возникающих при
обрушивании волны. Это кавитационный шум, аналогичный
шипению чайника перед его кипением. Шумы той же природы
создают при быстром вращении гребные винты скоростных
судов.
Большой интерес представляют биологические • шумы, хотя
они, как правило, не очень сильны. Морские животные, рыбы,
оказывается, очень разговорчивы. Действительно, связь их друг
с другом под водой достигается с помощью звуковых волн^
а многие, например дельфины, лишь при помощи подводной
звуковой локации могут обнаружить свою жертву.
Таким образом, когда исследователи опускают
воспринимающие звук приборы — гидрофоны — под воду, они получают
богатую информацию о состоянии океана, деятельности
удаленных вулканов, приближающейся волне цунами, биологическое
жизни в океане, о процессах, происходящих на поверхности
океана, и т. д. Поэтому важной задачей подводной акустики
является дальнейшее изучение подводных шумов в океане. Не
надо также забывать, что подводные шумы — естественная
помеха для работы различных подводных акустических
приборов.
23-
6. Исследование дна океана
Все наиболее существенные сведения о строении дна океана
были получены за последние 20—30 лет. Эпоха великих
открытий в этой области началась с обнаружения срединно-океаниче-
ских хребтов. Оказалось, что на дне Мирового океана имеется
единая система таких хребтов общей протяженностью свыше
60 тыс. км. Каждый хребет представляет собой вал шириной от
200 до 3000 км с рифтовой долиной посредине, разбитой
поперечными и продольными трещинами. В зоне хребтов
наблюдаются повышенные сейсмическая активность, тепловой
поток, а также характерные гравитационные и магнитные
аномалии.
Не менее важные открытия были связаны с проведением
глубинного бурения земной коры под океаном по
международной программе на американском буровом судне «Гломар Чел-
ленджер», которое позволяет при глубинах океана до 6 км
пробуривать более чем полуторакилометровый слой океанских
осадков (рекордная глубина бурения в настоящее время
составляет около 2 км). Оказалось, что возраст всех осадков,
пробуренных до консолидированных пород, нигде не превышает
160—170 млн. лет. Однако известно, что океан существует около
3 млрд. лет. Спрашивается, куда делись более старые осадки?
Решение этого вопроса привело к возрождению гипотезы Ве-
генера о движении континентов. Когда все данные о строении
осадков на дне океана и его рельефа, о магнитных аномалиях
на дне были сведены воедино, ученые пришли к выводу, что
в районе срединно-океанических хребтов из внутренних слоев
Земли непрерывно поступает расплавленный материал. Это
приводит к непрерывному раздвижению морского дна, а это значит,
что, например, Европа и Америка удаляются друг от друга со
скоростью примерно 3 см/год.
Так была создана сравнительно стройная концепция
тектоники литосферных плит. В соответствии с этой концепцией вся
земная кора (континентальная и океаническая) состоит из
громадных плит, которые плавают на более мягком слое
(астеносфере), лежащем на глубине около 100 км. Были разработаны
и теории, объясняющие такое движение *.
В нашей стране особенно остро проходили дискуссии между
так называемыми «фиксистами» и «мобилистами», т. е.
учеными, которые отрицали большие горизонтальные перемещения
земной коры, и учеными, которые в основе всей тектоники
нашей планеты рассматривали это движение. В настоящее время
окончательно признано, что мобилизм является единственно
верной концепцией в объяснении тектонических процессов
планеты. Конечно, в этой проблеме еще много неясного, но так
* Монин А. С. История Земли.—Л., Наука, 1977.
24
всегда бывает в науке — чем больше мы открываем, тем больше
возникает вопросов.
Интересно, что без акустической техники осуществление
глубинного бурения дна океана было бы невозможно. Для того
чтобы проводить бурение, судно нужно удерживать над
скважиной с точностью до 10—15 м при глубинах до 6 км. Ясно, что
постановкой судна на якорь такая задача не может быть
решена. Эта задача, как и задача повторного вхождения бурового
инструмента в буровую скважину, решается при помощи
существенного использования звуковых волн *.
Много работают советские ученые по международной
программе «Корреляция», цель которой — объяснить геологическое
строение нашей планеты с учетом достижений геологии
континентов и Мирового океана **.
Интенсивно разрабатывается геология шельфовых зон
океанов и морей, что объясняется их перспективностью на нефть и
газ. По данным прогнозов, в 1980 г. из шельфовых зон будет
добываться нефти и газа примерно столько же, сколько
несколько лет тому назад добывалось с суши.
Не менее богаты шельфовые районы оловом, золотом, ти-
таномагнетитами, фосфатами и другими полезными
ископаемыми ***.
Велики и сравнительно мало изучены минеральные
богатства открытого океана, в частности железомарганцевые
конкреции, распространенные главным образом на больших
глубинах океана (от 4 до 6 км). Они содержат около 35 разных
элементов. Иногда масса железомарганцевых конкреций на 1 м2
площади дна составляет 50—70 Кг.**** Железомарганцевые
конкреции содержат в ряде случаев железа до 20—25%,
марганца— до 20—30%, а также медь, кобальт, никель и другие
элементы, хотя последние имеются в сравнительно малых
количествах (максимально до 1%). Однако и они представляют
интерес для промышленности. В Тихом океане, в северных
тропических широтах находится простирающийся примерно вдоль
параллели пояс, длиной около 4 тыс. км и шириной несколько
сотен километров, в котором практически повсеместно
распространены конкреции.
* О глубинном бурении подробнее см. в статье В. Н. Самарского,
К. Г. Суворова в наст, сборнике.— Прим. сост.
** Пейве А. В., Пущаровский Ю. М. Состояние и проблемы
геологии океанов — Докл. на I Съезде океанологов СССР, 1977, июнь.
*** Ф е д ы н с к и й В. В. и др. Геофизические исследования дна морей
и океанов в связи с проблемой использования минерального сырья
континентального шельфа СССР и Мирового океана.— Докл. на I Съезде геологов
СССР.
**** Безруков П. Л. Геологические перспективы освоения твердых
полезных ископаемых дна океанов.— Докл. на I Съезде океанологов СССР,
1977, июнь.
25
Имеют практическое значение и металлоносные осадки на
дне океана с повышенным содержанием металлов. Впервые они
были обнаружены в 1958 г. во время третьего рейса д/э «Обь».
Последнее время ученые Института океанологии АН СССР
детально изучали металлоносные осадки на дне в районе
Восточно-Тихоокеанского поднятия. Повышенное содержание
металлов отмечается также в районах срединно-океанических
хребтов. Запасы ценных металлов содержатся в горячих
рассолах и металлоносных осадках в Красном море, в области,
которая является продолжением Индоокеанического хребта. По
некоторым зарубежным данным, только в одной из впадин в
Красном море в слое осадков толщиной до 10 м содержится
цветных и благородных металлов на несколько миллиардов
долларов.
7. Биологические ресурсы океана*
В настоящее время из океана изымается в основном рыба, улов
которой за последние годы стабилизировался на уровне
примерно 70 млн. т в год. Оценки запасов рыбы, сделанные
учеными разных стран, показывают, что ежегодный максимальный
вылов рыбы в Мировом океане не должен превышать 100—
150 млн. т. Таким образом, вылов рыбы близок к предельному.
Несмотря на это, биологические ресурсы океана остаются
фактически нетронутыми. Действительно, площадь океана во много
десятков раз превышает площадь возделываемых земель на
суше и, кроме того, в океане для производства пищевой
продукции можно использовать весь верхний слой порядка 10—15 м,
куда проникают солнечные лучи и где, следовательно, может
происходить фотосинтез. Однако всего океан дает пока
примерно 1% пищевых продуктов (это составляет около 18%
белков). Потенциальные же возможности океана грандиозны.
В частности, в океане ежегодно производится 500 млрд. т
фитопланктона, с которого начинается вся биологическая цепь
в океане. Правда, в каждый данный момент в океане
содержится всего около 2 млрд. т фитопланктона, что обусловлено
жизненным циклом более высоких по развитию организмов.
Он быстро выедается ими, но также быстро растет,
поддерживаемый водой. Его со всех сторон окружают питательные
вещества, ему не нужно создавать систему корней и стволов, как
растениям на суше.
Масса растительного планктона огромна, но тем не менее
* В этом разделе использованы материалы доклада М. Е. Виноградова и
Н. М. Ворониной «Развитие сообществ океанической пелагиали» на I Съезде
океанологов СССР, 1977, июнь.
Подробнее о биологических ресурсах океана см. в статье П. А. Моисеева
в наст, сборнике.— Прим. сост.
26
она составляет всего лишь 7го всей биомассы океана. Общее
же количество ее оценивается примерно 35 млрд. т.
Каковы же возможные пути использования этих ресурсов
океана? Есть три таких пути. Первый путь — человек может
изымать из океана не только рыбу, но и зоопланктон, который
в большом количестве имеется в антарктических водах.
Зоопланктон— это маленькие рачки, или так называемый криль,
ранее он выедался китами, но теперь численность их вследствие
истребления человеком значительно понизилась, а криль
размножается в больших количествах. Белок, получаемый из
криля, весьма питателен, содержит много ценных аминокислот
и является в известной степени лечебным средством.
Вылавливаемая масса криля может в несколько раз превышать массу
вылавливаемой в настоящее время рыбы. В данном случае
возникают в основном технические проблемы. Надо создать
специальные орудия лова и разработать технологию отделения
жесткого хитинового панциря с маленьких нежных рачков.
Второй путь — использование биологических ресурсов
открытого океана. Хорошо известно, что биологическая
продуктивность океана особенно велика в области подъема глубинных
вод, богатых питательными веществами,— это так называемые
апвеллинги. Например, апвеллинг у побережья Перу составляет
всего лишь 0,02% площади Мирового океана, но дает 15%
мирового вылова рыбы. Существование апвеллингов, хотя,
вероятно, и не с такими характеристиками, возможно в открытом
океане. В частности, в синоптических вихрях с холодным ядром,
о которых речь шла выше, происходит подъем глубинных вод
кверху и вынос питательных веществ. Эти области отличаются
повышенной биологической продуктивностью. Вполне
возможно, что в некоторых районах океана можно устроить
искусственные апвеллинги. В других областях следует удобрять
морские воды для повышения биопродуктивности различных форм
жизни, от водорослей до рыб.
Третий путь — культурное разведение живых организмов
в океане. По отношению к океану мы находимся в сущности
еще в положении первобытного человека и занимаемся только-
охотой. Настала пора перейти к разведению рыб, выращиванию
мидий, водорослей и т. д. Особенно перспективны в этом
отношении мелководья, бухты, заливы. Культивирование новых для
данных районов рыб, мальки которых привезены из других
морей, даже океанов, часто дает очень большой эффект.
Однако какой бы путь мы ни избрали, необходимо прежде
всего знать биологическую структуру океана, т. е. как
распределена биомасса в океане, как взаимодействуют друг с другом
различные организмы, как переносится энергия по пищевой
цепи от более простых к более сложным организмам, какие
условия необходимы для более быстрого размножения тех или
иных звеньев биологической цепи и т. д.
27
Роль физических условий ярче всего иллюстрируется
явлением апвеллинга, однако практически во всех других случаях
они играют весьма существенную роль. Рассмотрим, например,
размножение фитопланктона в районе Антарктики. Наибольшая
продуктивность его отмечается примерно через два месяца
после максимума солнечной освещенности. Спрашивается,
почему? Казалось бы, наличия питательных веществ и солнечного
света вполне достаточно для быстрого его размножения, однако
дело обстоит не так просто. Фитопланктон быстрее
размножается, когда в верхних слоях океана создается подходящая
стратификация, а именно существует слой скачка и воды
верхнего слоя океагна перестают перемешиваться с более глубокими.
Такие условия как раз и наступают примерно через два месяца
после максимума освещенности, т. е. после того как верхние
слои океана хорошо прогреются.
Этот пример убедительно показывает, что необходимо
создать теорию биологического сообщества океана в целом или
хотя бы в отдельных регионах с учетом физических, химических
и других условий. Ее следует разрабатывать, как
разрабатывают теории больших систем,— с использованием современных
математических методов и электронных вычислительных
машин. Только тщательно изучив взаимоотношения различных
цепей биологической системы океана, мы сможем наиболее
эффективно использовать его ресурсы, не подрывая ее основ. Над
этим сейчас работают ученые всего мира, в том числе и АН
СССР и многих других ведомств.
8. Загрязнение Мирового океана
Одной из многих функций Мирового океана, имеющих
решающее значение для существования человечества, является
переработка и нейтрализация многочисленных выбросов,
поступающих в него из рек или непосредственно, например, аварийные
выбросы нефти при морской добыче, авариях танкеров и т. д.
В океан поступают многие вредные промышленные отходы,
в т,ом числе тяжелые металлы — свинец, ртуть и др. Северная
Атлантика, например, в сильной степени загрязнена такими
отходами. Наконец, с полей поступают в реки, а затем в моря и
океаны многочисленные ядохимикаты, пестициды, часть
которых, в конечном счете, потребляется нами же вместе с рыбой.
До недавнего времени океан справлялся со своей функцией
очистителя. Однако теперь появились опасения, что нагрузка на
него в части загрязнения становится чрезмерной, и это может
иметь необратимые последствия. Возьмем, например, вопрос
0 загрязнении нефтью и нефтепродуктами. Очень тонкий (около
1 мм) поверхностный слой воды в океане в значительной
степени регулирует обмен теплом и влагой между атмосферой и
28
океаном. При появлении нефтяной пленки характеристики этого
слоя также изменяются, в результате чего процессы
взаимодействия атмосферы и океана протекают уже по-иному. Это может
оказать существенное влияние на погоду и климат, на
подводную жизнь в океане, на поступление солнечной энергии в его
воды и т. д.
Еще более нагляден другой пример. Роль атомной
энергетики непрерывно возрастает и будет расти в дальнейшем. При
этом возникает вопрос, как поступать с вредными
радиоактивными отходами атомных электростанций? Среди них имеются
элементы с периодом полураспада в миллионы лет. Таким
образом, захоронение должно быть исключительно надежным.
Даже малейшая часть этих отходов не должна попасть в
природный кругооборот в течение миллионов лет.
Примерно десять лет тому назад за рубежом были
разработаны проекты захоронения контейнеров с радиоактивными
отходами в самых глубоких впадинах Мирового океана.
Советские ученые резко выступили против этих проектов (большая
заслуга в этом отношении принадлежит покойному чл.-корр.
АН СССР В. Г. Богорову). Они показали, что даже в самых
глубоких океанических впадинах существуют течения, и воды
из этих впадин постепенно смешиваются с водами всего океана.
В результате эти проекты не были осуществлены. В
последующие годы были выявлены дополнительные факты,
показывающие, что глубоководные впадины являются областями
наибольшей сейсмичности. В этих областях, расположенных на
окраинах океанов, океанская земная кора подползает под
континентальную. Поэтому там часты всякого рода катаклизмы:
извержения вулканов, землетрясения и т. д. и велика опасность
самого обычного механического разрушения контейнеров.
В последнее время возникли новые проекты, в которых
предлагается контейнеры с радиоактивными отходами помещать
в середине тектонических плит. Считается, что в этих местах
сейсмическая обстановка наиболее спокойна. Обсуждению этого
проекта посвящен целый номер журнала Вудсхолского
океанографического института США «Oceanus» *.
Таким образом, опасностей, грозящих океану, много. Роль
ученых — во-время выявить их, найти решения проблем,
стоящих перед человечеством на пути его освоения.
9. Новые методы и средства исследования океана
С течением времени совершенствуются как методы, так и
средства исследования океана. За последние пять-восемь лет
широкое распространение получил так называемый полигонный
* «Oceanus», 1977, vol. 20, N 1.
29
метод исследований, впервые широко примененный в
эксперименте «Полигон-70» в тропической зоне Атлантического океана.
Суть метода заключается в том, что на сравнительно большой
акватории океана располагаются суда или автономные буйковые
станции, с которых ведутся длительные синхронные
наблюдения за состоянием океана (на поверхности и на разных
глубинах), а также за атмосферой. Такие эксперименты позволяют
получить достаточно надежные ответы на вопросы о характере
и природе протекающих в глубинах океана процессах, а также
о взаимодействии океана и атмосферы. Практиковавшийся
ранее метод проведения исследования на разрезах или в
определенных точках океана с одного судна либо выполнения
многосуточных станций оказывается менее эффективным.
Действительно, удается получить данные в разных точках океана и
в разное время. При этом зачастую нельзя определить,
вследствие чего меняется состояние океана при переходе из одной
точки в другую — из-за изменения географических координат
или просто из-за того, что прошло некоторое время. Конечно, и
сейчас много данных получают с одиночных судов, но
тенденция заключается в планировании больших полигонных
экспериментов.
Другой, развивающийся сейчас, весьма перспективный
метод исследования океана связан с использованием космических
средств — орбитальных станций или искусственных спутников
Земли. Возможно, что только он позволит получить
достаточное количество информации о состоянии океана, равное
количеству данных о состоянии атмосферы.
Остановимся теперь на средствах исследования океана.
Основным прибором, использовавшимся до недавнего времени
советскими исследователями для измерения течений в океане,
была буквопечатающая вертушка Алексеева. Она сослужила
большую службу и применялась, в частности, при проведении
«Полигона-70». Однако этот прибор имеет ряд существенных
недостатков. Один из них заключается в том, что результаты
измерений фиксируются на бумажную ленту, затем их
приходится переносить на перфоленту ручным способом для
последующей обработки с помощью электронно-счетной машины.
Сейчас начинается широкое распространение автономных
приборов, которые записывают данные на магнитную пленку или
фотопленку с механизированной передачей их в электронно-
счетную машину для обработки. При этом важным
преимуществом обладают те приборы, которые дают не мгновенное, а
усредненное за определенный промежуток времени значение
вектора скорости течения. Аналогичные приборы существуют
также для измерения температуры и солености воды. Такого
рода приборы, как вертушки, при буйковых постановках
подвешивают на разных горизонтах к тросу, идущему от якоря к
поверхностному или притопленному бую.
30
Однако непрерывная зависимость скорости течения от
глубины может быть получена только с помощью приборов
непрерывного зондирования, одним из которых является прибор со
скрещенными ультразвуковыми пучками (Gross beam).
Скорость течения при этом определяется по эффекту Доплера для
ультразвуковых волн. Прибор опускается на кабеле в воду до
достаточно больших глубин с дрейфующего судна. На борту
судна непрерывно записываются получаемые данные. С
помощью именно такого прибора советские ученые впервые
обнаружили тонкую прослоенность течений в океане.
Существуют свободно падающие зонды течений. Как
правило, они основаны на явлении электромагнитной индукции.
Частицы воды, протекая между двумя электродами в магнитном
поле Земли, создают разность электрических напряжений на
этих электродах.
Много интересных данных об океанских течениях получают
с помощью дрейфующих буев с подводным парусом или буев
нейтральной плавучести. В первом случае поверхностный буй
соединен тросом с парусом, располагаемым на той глубине, где
измеряется течение. Течение, воздействуя на парус, перемещает
поверхностный буй. За перемещением последнего следит или
судно, или искусственный спутник Земли.
В отличие от них буи нейтральной плавучести автономные.
После сбрасывания в воду они опускаются на определенную,
наперед заданную глубину, уравновешиваются, а затем
перемещаются вместе с водными массами. Местоположение буев
периодически определяют с помощью акустических сигналов,
посылаемых ими и принимаемых на ряд (не меньше трех)
акустических приемных станций. Именно таким способом
американские исследователи получили в районе Саргассова моря
много интересных данных о течениях в вихрях синоптических
масштабов.
Температура и соленость на различных глубинах до
недавнего времени почти всегда измерялись при помощи
опрокидывающихся термометров и батометров. Теперь основные данные
получают с помощью непрерывно заглубляющихся зондов,
которые одновременно измеряют температуру, электропроводность
(а по ним вычисляется соленость) и глубину. Это значительно
более оперативный метод, чем проведение гидрологических
станций с помощью опрокидывающихся термометров.
Оперативные измерения температуры в верхних слоях океана
(примерно до 700 м) можно выполнять с судна или с самолета
с помощью «теряемых» батитермографов. В этом случае
прибор, сбрасываемый с судна или с самолета, тонет и передает
информацию о вертикальном профиле температуры по тонкому
проводу на судно или по радио на самолет. Прибор после
каждого опыта теряется, но стоит он недорого, во всяком случае,
дешевле получаемой при этом информации.
31
Кроме того, имеются зонды, которые регистрируют также
многие компоненты химического состава воды: кислород,
фосфор, углекислый газ, рН и т. д.
Существуют весьма сложные многофункциональные буи,
которые устанавливают в определенных точках океана на якорь.
Они передают информацию о состоянии глубин океана
(течения, температура, соленость), а также приводного слоя
атмосферы на искусственные спутники Земли. Это надежные, но
довольно дорогие системы. Имеется международный проект
ОГСОС (Объединенная глобальная система океанских
станций), предусматривающий постановку нескольких сотен таких
буев по всему Мировому океану. Однако, к сожалению, этот
проект будет стоить очень дорого.
Надо отметить, что в небольшом количестве точек в океане
уже длительное время несут непрерывную вахту «корабли
погоды» ряда стран, в том числе и Советского Союза. Сведения об
измеряемых с этих судов характеристиках океана и атмосферы
над ним передаются в Международные центры данных.
Подобные многолетние измерения имеют большую научную ценность.
Для исследований применяют также стационарные
платформы, стоящие на дне, на мелководье. С них можно
непрерывно измерять характеристики волнения и любые другие
параметры водной и воздушной масс в данном районе. Одна из
таких платформ находится в Каспийском море, в 30 км от Баку.
Ученые АН Азерб. ССР, а также Института океанологии и
Института физики атмосферы АН СССР получили много
интересных данных, касающихся динамики волнения, характеристик
внутренних волн, а также тонкой прослоенности водных масс.
Однако такие платформы нельзя ставить на глубоком месте.
В этих случаях используют стабилизированные заякоренные
буи. Одним из таких буев является «Флип» Скриппского
института океанографии США. Это сооружение можно буксировать
на любые расстояния, как судно. В заданной точке он
поворачивается, принимает вертикальное положение и становится на
якорь. Вследствие удлиненной формы он стоит почти
неподвижно, даже на большой волне. Ученые со своей аппаратурой
располагаются в специальной лаборатории, в верхней части буя
над водой, и могут проводить наблюдения за волнением,
течениями, подводными шумами океана и т. д.
Флуктуации течений, обусловленные сравнительно мелкой
турбулентностью (масштабы от нескольких сантиметров до
десятков метров), измеряются со стабилизированных буев,
платформ или судов при помощи приборов, называемых турбули-
метрами. Это малоинерционные приборы, которые непрерывно
регистрируют три компонента скорости течения как функции
времени.
Очень непрост вопрос об исследовании внутренних волн
в океане. В американском эксперименте МОДЕ использовалась
32
сложная треногая конструкция от дна до поверхности
(расстояние между опорами — около 5 км). На «ногах» сооружения
было установлено большое количество датчиков течений и
температуры. Такая система в идеале позволяет определить все
необходимые пространственные и временные характеристики
внутренних волн, однако она очень сложна и дорога. Чаще
исследования внутренних волн проводят методом небольших
полигонов, на которых за судном протаскивают цепочки датчиков
температуры. Судно выполняет так называемую звездочку —
систему галсов в различных направлениях. Этот способ не
приемлем в том случае, если волны сильно нестационарны и их
характеристики изменяются в процессе осуществления самого
эксперимента, длящегося обычно около 15—20 часов.
По инициативе советских ученых исследования внутренних
волн стали проводить, применяя так называемые
распределенные датчики температуры. Вместо того чтобы измерять
температуру в одной точке, с их помощью измеряют среднюю
температуру в определенном интервале глубин. При таком
усреднении температуры по глубине (обычно в пределах 10—20 м)
удаляют из записей мешающие многочастотные шумы, что
позволяет точнее выделить сами внутренние волны. Однако
экспериментальное изучение внутренних волн все еще представляет
большие сложности.
Для исследований деталей рельефа дна океана широко
применяют гидролокатор бокового обзора, о котором речь уже шла
выше, а для исследования внутренней структуры дна — сейсмо-
профилограф. В этом 'приборе имеется низкочастотный
излучатель звука — «воздушная пушка», периодически
выбрасывающая в воду под повышенным давлением определенный объем
воздуха. Последний, расширяясь, рождает звуковую волну,
которая проходит всю толщу океана, затем проникает в дно и
распространяется в нем вниз, последовательно отражаясь от
различных неоднородностей. Отраженные волны принимаются
приемниками звука, расположенными в гидроакустической косе,
буксируемой за судном. Этот метод позволяет непрерывно по
ходу судна определять структуру дна до глубин в несколько
километров.
Конечно, при изучении структур нескольких верхних
километров осадочной толщи дна наиболее результативным, хотя и
наиболее дорогостоящим, является способ непосредственного
бурения дна.
Важные результаты о строении поверхности и толщи дна
океана можно 'получить с исследовательских подводных лодок.
Недавно такие исследования на подводных лодках «Пайсис»
были проведены советскими учеными во впадине озера Байкал.
Американские, французские, английские ученые при помощи
исследовательской подводной лодки «Алвин», способной
опускаться на глубины до 6 км, исследовали строения Срединно-
2 Заказ № 1190
33
Атлантического хребта. При этом были зафиксированы
излияния лавы, свидетельствующие о непрерывном поступлении
расплавленного материала из глубин Земли в данном районе.
Перспективными следует признать и автономные
необитаемые средства исследования дна и толщи океана. Они могут
быть управляемыми по кабелю-тросу или работать
самостоятельно по заданной программе.
Неоднократно дно моря исследовалось с помощью
обитаемых подводных аппаратов, в которых длительное время
находились акванавты. Они выходили в открытый океан, вели
непрерывные наблюдения за состоянием окружающей среды, брали
образцы и т. д. Эти аппараты являются перспективными для
обслуживания подводных промышленных установок.
В процессе развития находятся космические средства
исследования океана. Из космоса по рассеянию электромагнитных
волн на поверхности океана можно определить
пространственный и частотный спектры морского волнения. Зная последний,
можно рассчитать скорость приповерхностного ветра, а также
скорость течения в приповерхностных слоях воды. По
инфракрасному излучению поверхности определяется поверхностная
температура воды, по коэффициенту отражения
электромагнитной волны от границы воздух — вода — электропроводность,
а значит, и соленость воды. По ее цвету можно устанавливать
степень загрязненности, а также развитость биологической
жизни в данном районе.
Из космоса можно обнаружить рыбные скопления, а также
изучать особенности рельефа дна в мелководных районах и
даже наблюдать внутренние волны. Используя
гидродинамические и термодинамические модели океана, можно по данным
о поверхности и верхних слоях океана сделать некоторые
заключения и о состоянии его внутренних слоев.
10. Организация исследований в океане
Координацией научных исследований в международном
масштабе занимается ряд организаций, крупнейшая из которых —
Межправительственная океанографическая комиссия при
ЮНЕСКО. Под эгидой этой комиссии уже осуществлен ряд
крупных исследований, в частности исследования Индийского
океана, зоны Карибского моря, зоны течения Куросиво и т. д.
Важнейшие научные вопросы международного характера,
касающиеся исследования океана, прорабатываются в рамках
Международного совета по изучению океанов (национальным
членом этого совета в СССР является Комиссия по проблемам
Мирового океана АН СССР).
Сотрудничество ученых СССР, Польши, ГДР, Болгарии,
Румынии и Кубы по изучению океана координируется в рамках
34
СЭВ специальным координационным центром, существующим
при Институте океанологии АН СССР. При Комитете по науке
и технике Совета Министров СССР действует научный совет
по изучению Мирового океана и использования его ресурсов.
XXV съезд Коммунистической партии Советского Союза
поставил задачу исследования Мирового океана и
использования его ресурсов в ряд главнейших задач советской науки.
Организация и координация этих исследований, в которых
принимают участие тысячи научных сотрудников на сотнях
исследовательских судов и многие научно-исследовательские
организации, становится чрезвычайно важной. План комплексных
исследований океана, утвержденный Государственным комитетом
СССР по науке и технике на десятую пятилетку, составлен
Комиссией по проблемам Мирового океана АН СССР совместно
с другими ведомствами по новому принципу. Он состоит в
основном из научных программ-проектов, предусматривающих
исследования в четко определенных направлениях. Предусмотрено
участие в проектах разных ведомств под руководством
головного ведомства. Это позволит не только концентрировать усилия
ученых разных институтов на наиболее важных вопросах, но
и сделать исследования более эффективными. Достаточно
вспомнить, что еще не так давно экспедиции разных ведомств
выходили в один и тот же океан, в один и тот же год, и при
этом каждое судно работало по своему плану.
Остановимся на наиболее существенных проектах изучения
океана. О некоторых из них, как, например, о международных
программах ПИГАП и ПОЛИМОДЕ, а также о
международном проекте глубинного бурения в океане говорилось выше.
Будут продолжены работы в рамках международного
проекта «Геодинамика», задача которого — изучение
пространственных неоднородностей земной коры и мантии в океане,
переходных зон коры океанического типа к коре
континентального типа, усовершенствование гипотезы о происхождении и
развитии океанского дна.
Существенное значение имеют и национальные проекты,
в которых концентрируются усилия советских ученых. Одним
из них является проект «Биоталасса». Его задача —
исследование основ формирования биопродуктивности перспективных
в рыбопромысловом отношении районов открытого океана.
Интерес вызывают работы по межведомственному проекту
«Геос». Цель его — изучение геологического строения
осадочного слоя в океанах и морях, сопоставление геологических
разрезов в разных частях Мирового океана, выяснение
закономерности осадконакопления, а также черт геологической структуры
на основе данных непрерывного сейсмопрофилирования.
Важным является также проект «Волна», задача которого —
изучение поверхностных и внутренних волн в океане.
2*
35
Андрей Сергеевич Монин, член-
корреспондент АН СССР,
директор Института океанологии АН
СССР им. П. П. Ширшова.
Занимается проблемами геофизической
гидродинамики, ведет активную
работу по осуществлению
программ международного научного
сотрудничества в области
исследования Мирового океана, в
частности советско-американских
исследований океанических
течений и динамики океана (проект
ПОЛИМОДЕ).
Елена Алексеевна Цветкова,
научный сотрудник, ученый
секретарь Комиссии по
международным научным связям Института
океанологии АН СССР им. П. П.
Ширшова. Занимается вопросами
международного научного
сотрудничества в области
исследования Мирового океана.
А. С. Монин,
Е. А. Цветкова
МЕЖДУНАРОДНОЕ
СОТРУДНИЧЕСТВО
В ИЗУЧЕНИИ
МИРОВОГО ОКЕАНА
Стремление получить в кратчайший срок наибольший
экономический эффект от морских исследований, в максимальной
степени исключить дублирование в их проведении, добиться более
рационального использования научных сил и затрачиваемых
материальных ресурсов привело к тому, что ряд стран уже
разработал, разрабатывает или предполагает в ближайшее время
разработать долгосрочные национальные программы
океанологических исследований. Этим же стремлением вызвано создание
в ряде государств координирующих органов по
океанологическим исследованиям в виде национальных комитетов, советов
или других учреждений, наделенных большими
полномочиями.
Однако всестороннее самостоятельное изучение Мирового
океана — задача, непосильная ни для одной страны. Так, ни
одна страна не может выделить для исследования океанических
процессов, изменяющихся иногда в течение нескольких часов
на значительной акватории, необходимое число специальных
исследовательских судов и научных кадров. Только в
результате тесного сотрудничества ученых и специалистов разных
стран, работающих над одними и теми же океанологическими
проблемами, может быть получено, в конечном итоге, точное
научное представление об океане в целом и о происходящих
в нем процессах и найдены наиболее эффективные пути
использования его ресурсов. Такое сотрудничество возможно лишь при
его рациональной организации и координации в
международном масштабе.
37
1. Цели и формы международного сотрудничества
в области изучения Мирового океана
Каким же образом международное сотрудничество способствует
решению задач, стоящих перед океанологами разных стран,
в каких областях океанологических исследований оно более
всего необходимо, каковы его наиболее рациональные формы?
Опыт последних лет показывает, что нужны не только обмен
научной информацией и взаимная стандартизация приборов и
методов измерений, но также совместные экспедиционные
исследования океана, сотрудничество в области контроля за
состоянием и охраны морской среды, использование средств
навигации.
Обмен научной информацией, позволяющий специалистам
различных направлений океанологии получать необходимые
данные об океанах в масштабе всей планеты быстро и без
больших материальных затрат, возможен только на основе
международной кооперации.
Публикация научных результатов, получаемых
океанологами разных стран, в специальных научных журналах, многие
из которых имеют широкое распространение и общее число
которых растет год от года, участие в международных встречах
по наиболее актуальным проблемам океанологии, обмен
учеными между учреждениями стран, заинтересованных в развитии
морской науки, укрепление контактов между ними и, наконец,
получение необходимых сведений через мировые центры
данных— все это испытанные пути обмена научной информацией
на международной основе.
Существующая система мировых центров данных включает
в себя центры данных А и Б (океанография) соответственно
в США (Вашингтон) и СССР (Москва), а также другие
постоянные центры (дисциплинарные, региональные и
национальные). Созданная еще в период проведения Международного
геофизического года (1957—1958 гг.) эта система полностью
оправдала себя. В центры данных поступают результаты
исследований, проводимых по объявленным национальным
программам, полученные в ходе совместных международных
мероприятий, добровольные вклады государств и отдельных ученых.
Затем эти сведения после регистрации и максимально возможной
унификации обрабатываются и распространяются между
заинтересованными сторонами. Таким образом становится
возможным исследование океанических явлений во всемирном
масштабе и изучение междисциплинарных взаимосвязей между
различными явлениями.
Взаимная калибровка и стандартизация приборов и методов
измерений — необходимое условие для сравнения результатов
наблюдений в океане, выполняемых разными странами. При
этом повышается надежность измерений, без чего невозможно
38
правильное описание и познание исследуемых процессов.
Теперь уже очевидно, что различия полученных в прошлом
разными странами результатов были связаны главным образом
с различиями в приборах и методах измерений. Опыты по
взаимной калибровке и международной стандартизации,
организуемые и проводимые под эгидой международных организаций,
позволяют добиться единой степени точности и полной
сравнимости измерений.
Как известно, в настоящее время океанологи разных стран
в своих исследованиях широко используют некоторые основные
стандарты, например, стандартные морскую воду и раствор
углерода-14, стандартные планктонные сети, некоторые
постоянные величины и зависимости, в том числе коэффициенты,
входящие в уравнение состояния морской воды, и т. д. Для
международных исследований океана, проводимых в широких
масштабах, стандартизация методов регистрации получаемых
данных приобретает особое значение. Объем научных и
сопутствующих материалов, которыми приходится при этом
обмениваться, исключительно велик, и их эффективной обработки с
помощью современных автоматических систем в рамках одной
страны можно достичь прежде всего путем стандартизации на
международной основе формы представления всех первичных
данных для закладки их в счетно-вычислительные машины.
Совместные экспедиционные исследования Мирового океана,
как указывалось, необходимы в силу природы и масштабов
происходящих в нем процессов. Такие исследования океана на
международной основе позволяют изучить крупномасштабное
взаимодействие океана и атмосферы и разработать научные
основы океанического прогнозирования; создать глобальную сеть
океанических станций, получающих обширную своевременную
и синхронную информацию о состоянии Мирового океана в
целом и протекающих в нем процессах; исследовать количество
и распределение рыбных популяций и их взаимосвязи в целях
повышения и сохранения мирового улова рыбы; изучить
океанское дно с помощью методов современной геофизики и
глубоководного бурения в целях выяснения геологической истории
океанов.
Контроль за состоянием морской среды и ее охрану можно
осуществлять лишь на основе международного сотрудничества.
В настоящее время совместные усилия ученых-океанологов
разных стран направлены на создание научных основ
прогнозирования и предотвращения разрушительных природных
явлений, зарождающихся в океане. К их числу можно отнести
ураганы и тайфуны, штормовые волны и цунами, катастрофическую
гибель коммерческих видов рыб, вызываемую
метеорологическими факторами, извержения подводных вулканов и т. д.
Международная кооперация в изучении этих явлений будет
способствовать быстрейшему познанию природы и^ возникно-
39
вения и разработке защитных мер или мер по уменьшению их
разрушительных последствий.
Не менее важно международное сотрудничество в деле
контроля за загрязнениями вод океана, отсутствие которого может
привести к губительным для человечества последствиям.
Совместное изучение нежелательных последствий деятельности
человека в океане — загрязнения его вод, в особенности
прибрежных, бытовыми и промышленными сточными водами,
нефтепродуктами, радиоактивными отходами и т. д., позволит
создать действенную систему контроля за состоянием морской
среды, разработать эффективные комплексы организационно-
технических мероприятий по борьбе с загрязнением и охране
чистоты океанов и морей, в которой заинтересованы все
живущие на нашей планете.
Использование средств навигации. Хорошо известно, что
результаты многих работ в океане, выполняемых с борта
научно-исследовательского судна, в большой степени зависят от
точности судовождения. В последнее время широкое развитие
получили методы точной навигации, даже на больших
расстояниях от суши, основанные на использовании низкочастотного
радиооборудования или искусственных спутников Земли.
Реализация этих методов возможна лишь на основе международного
сотрудничества в различных формах. К ним относится
предоставление участков в разных странах для размещения наземных
установок, распространение в мировом масштабе необходимого
оборудования или спецификаций для радиоприемников,
использующих сигналы спутников, и т. д.
2. Международные океанологические организации
История создания международных организаций в области
океанологии восходит к 1902 г., когда был создан Международный
совет по исследованию морей — МСИМ (International Council
for the Exploration of the Sea — ICES). Его задачи были
ограничены проблемами рыбопромысловой океанографии районов
Северного моря и северо-восточной части Атлантического
океана. В последующие годы рост международной активности
в области исследования океана привел к созданию целого ряда
специальных международных организаций.
Сегодня в мире существуют более 30 таких организаций. Они
делятся на две основные группы: неправительственные и
межправительственные. Членами первых обычно являются академии
наук, национальные научные советы и т. д.
Межправительственные организации делятся на связанные с системой ООН и не
связанные с ней.
Важной неправительственной организацией является
Международный совет научных союзов МСНС (International Council
40
of Scientific Unions — ICSU) — крупнейшее объединение
национальных научных учреждений и международных союзов,
комитетов и комиссий, созданное в 1931 г. с целью установления
научных связей между странами и координирования
деятельности международных научных союзов во всех областях
естественных наук, в том числе в области океанологии.
В настоящее время членами МСНС являются научные
учреждения 64 стран мира, в Совет входят 16 научных союзов,
из которых вопросами океанологии в той или иной мере
занимаются Международный геодезический и геофизический союзы
(с Международной ассоциацией физических наук об океане и
Международной ассоциацией метеорологии и физики
атмосферы), Международный союз геологических наук (с
Международной ассоциацией седиментологов и Комиссией по морской
геологии), Международный союз биологических наук (с
Международной ассоциацией биологической океанографии).
Для концентрации усилий ученых на наиболее актуальных
проблемах океанологии МСНС создан ряд специальных
комитетов, находящихся в его непосредственном подчинении и
имеющих в своем составе представителей нескольких союзов. Среди
таких комитетов проблемами океанологии непосредственно
занимается Научный комитет по океаническим исследованиям —
СКОР (Scientific Committee on Oceanic Research — SCOR).
Созданный в 1957 г. Научный комитет по океаническим
исследованиям — по существу, главная международная научная
организация в области океанологии. СКОР — основной научно-
консультативный орган Межправительственной
океанографической комиссии ЮНЕСКО, оказывающий ей свою помощь в
решении многих, чисто научных проблем, которые возникают при
организации океанографического сотрудничества на
межправительственном уровне. Основная цель СКОР — способствовать
развитию международной научной деятельности во всех
областях океанологических исследований путем организации
дискуссий по важнейшим проблемам и сотрудничества с другими
заинтересованными международными организациями.
На сегодняшний день членами СКОР являются 34
представителя национальных академий наук или соответствующих им
организаций и 6 представителей различных союзов МСНС.
Большую часть работы СКОР выполняет через свои группы,
созданные для решения отдельных научных проблем
океанологии. В настоящее время действуют 20 рабочих групп,
координирующих исследования внутренней динамики океана, влияния
океана на климат, возможности математического
моделирования океанических процессов, а также биологической
океанографии, биологических эффектов изменчивости океана, процессов
экваториального подъема вод, палеоокеанографии и др. Через
свои рабочие группы СКОР выступает инициатором проведения
и организатором международных научных симпозиумов и кон-
41
ференций с последующей публикацией научных трудов. При
активном участии СКОР океанологи разных стран выполняют
совместные работы в море, в том числе с целью калибровки
приборов и методик.
Непосредственное отношение к океанологии имеет
Международная ассоциация физических наук об океане — МАФНО
(International Association for the Physical Sciences of the
Ocean — IAPSO), одна из семи ассоциаций Международного
геодезического и геофизического союза (МГГС) МСНС,
созданная в 1922 г. и получившая свое теперешнее название в 1967 г.
Однако в отличие от СКОР, круг проблем которого охватывает
все области океанологии, МАФНО, как показывает само
название, занимается проблемами физической океанографии, т. е.
изучением физических процессов в океане и на его границах
с привлечением достижений математики, физики и химии. Эта
ассоциация играет в указанной области роль международного
координирующего органа.
Естественно, между СКОР и МАФНО существует тесная
связь. Большая часть работы проводится этими организациями
через рабочие органы СКОР (рабочие группы) и МАФНО
(рабочие группы, комиссии и комитеты). По многим наиболее
важным проблемам океанологии созданы совместные рабочие
группы, к числу которых относятся, например, РГ № 10
«Океанографические таблицы и стандарты»; РГ № 34 «Внутренняя
динамика океана»; РГ № 42 «Загрязнение Балтийского моря»;
РГ № 46 «Вклад рек в океанические системы»; РГ № 47
«Океанографические программы в период Первого глобального
эксперимента ПИГАП»; РГ № 48 «Влияние океана на климат»; РГ
№ 49 «Математическое моделирование океанических
процессов»; РГ № 55 «Предсказания явления Эль-Ниньо»; РГ № 56
«Процессы экваториального подъема вод».
Деятельность большинства этих совместных групп, в работе
которых принимают участие представители и других
международных органов, оказывается очень плодотворной, например,
в определении наиболее актуальных научных проблем
исследования океана, разработке совместных исследовательских
программ и оказании помощи соответствующим международным
и национальным организациям в их осуществлении.
СКОР и МАФНО — крупные организации
ученых-океанологов, играющие роль международных научно-консультативных
органов. Практическую же организацию исследований в океане
путем координации исследований разных стран призваны
выполнять международные организации, связанные с ООН.
Основной среди них является Межправительственная
океанографическая комиссия — МОК (Intergovernmental Oceanogra-
phic Commission — ЮС), созданная в 1960 г. в рамках ООН
по вопросам образования, науки и культуры (ЮНЕСКО) для
того, чтобы «способствовать развитию научных исследований
42
океанов в целях познания природы и освоения их ресурсов
посредством согласованных действий ее членов». Членами МОК
ЮНЕСКО в настоящее время являются 64 государства.
МОК рассматривает международные программы
океанологических исследований, а также предпринимает необходимые шаги
для их осуществления, анализирует результаты научных
исследований и определяет основные проблемы, требующие
международного сотрудничества, а также дает рекомендации о
характере, формах и методах обмена океанологическими данными
через международные и специальные центры сбора данных.
Для реализации специальных проектов, связанных с
исследованиями океана, МОК ЮНЕСКО создает рабочие группы,
группы экспертов и комитеты из заинтересованных членов. При
Президиуме МОК ЮНЕСКО (председатель и два заместителя)
работает Консультативный совет из представителей государств-
членов Комиссии, помогающий принимать решения по всем
важным вопросам в период между сессиями МОК.
Международные программы океанографических
исследований, рекомендованные МОК ЮНЕСКО ее членам для
конкретного выполнения, проводятся на средства участвующих
государств по согласованию с ними, а также частично на средства
других международных организаций системы ООН (как,
например, Продовольственной и сельскохозяйственной
организации ООН — ФАО), которые не являются членами Комиссии,
но согласны финансировать подобные программы.
МОК ЮНЕСКО занимается и такими проблемами, как
маркировка океанографических буйковых станций, изыскание
радиочастот для использования их океанологами, стандартизация
методов океанологических исследований, создание систем
предупреждения о цунами, разработка средств предотвращения
загрязнения океана и т. д. Комиссия стимулировала подготовку
«Долгосрочной и расширенной программы исследований и
освоения Мирового океана» (1970 г.), в разработке которой
активное участие принимал СКОР. Под руководством МОК ЮНЕСКО
подготовлена и опубликована серия атласов Индийского океана,
готовятся к публикации геолого-геофизические атласы
Атлантического и Тихого океанов.
Занимаясь вопросами международной координации
океанологических исследований, МОК поддерживает контакты с
другими океанологическими организациями. Наиболее тесная связь
существует между МОК ЮНЕСКО и СКОР МСНС.
МОК ЮНЕСКО сотрудничает и с неокеанологическими
организациями, прибегает к их помощи при решении наиболее
важных вопросов, связанных с исследованиями Мирового
океана, например с входящей в систему ООН Всемирной
метеорологической организацией —ВМО (World Meteorological
Organization— WMO), хотя таковая и не призвана участвовать
в рассмотрении большинства океанологических проблем. Так,
43
в тесном сотрудничестве с ВМО и при поддержке других
заинтересованных организаций МОК ЮНЕСКО координирует
работу Объединенной глобальной системы океанических станций,
известной как ОГСОС (Integrated Global Ocean Station
System— IGOSS) и действующей в контакте со Всемирной
службой погоды на условиях, разработанных ВМО и МОК. Цель
ОГСОС — обеспечить наиболее широкой, своевременной и
систематической информацией о состоянии океана, необходимой
для наблюдений за явлениями в глобальном масштабе, что
поможет в конечном итоге выработать надежные методы
прогнозирования состояния океанской среды и погоды.
МОК ЮНЕСКО имеет немалый опыт организации и
проведения крупных международных исследований в различных
частях Мирового океана, основанных на сотрудничестве с
некоторыми региональными организациями, прежде всего с уже
упоминавшимся МСИМ. Ценность совместных региональных
исследований заключается в том, что получаемые результаты
дополняют материалы крупных международных исследовательских
программ, осуществляемых под эгидой МОК ЮНЕСКО.
3. Примеры исследований Мирового океана
на основе международного сотрудничества
Для правильного понимания совокупности физических,
химических и биологических процессов, происходящих в том или
ином районе Мирового океана, их взаимосвязей и
взаимозависимостей необходимы регулярные синоптические съемки,
проводимые несколькими судами на всей площади этого
района.
За последние два десятилетия МОК ЮНЕСКО в
сотрудничестве с другими организациями системы ООН и МСНС,
опираясь на научную консультацию СКОР, организовала и провела
ряд крупных международных экспедиций в Индийском,
Атлантическом и Тихом океанах, а также в антарктических водах,
Средиземном и Карибском морях.
В Международной индоокеанской экспедиции (МИОЭ)
в 1959—1965 гг. участвовали 23 страны (14 из которых
предоставили свои суда), 40 научно-исследовательских судов,
причем было проведено 180 научно-исследовательских рейсов
различной продолжительности и сложности. Полученные
результаты были опубликованы при непосредственном участии МОК
ЮНЕСКО. В частности, получили широкое распространение
Сборники материалов экспедиции (5 томов), а также серия
атласов МИОЭ по различным разделам исследований.
Международные совместные исследования тропического
района Атлантического океана осуществлены в 1963—1964 гг.
в три этапа (ЭКВАЛАНТ I—III) с участием 8 стран. Три-
44
надцать судов совершили 36 научно-исследовательских рейсов.
На основе результатов этих исследований по линии МОК
ЮНЕСКО был издан Атлас тропического района
Атлантического океана.
Исследования течения Куросио и ряда районов Тихого
океана (СИК) выполнены в 1965—1967 гг. представителями
11 стран. Тридцать шесть научно-исследовательских судов
совершили 36 научных экспедиций с целью изучения изменчивости
Куросио, а также выявления геологических и геофизических
особенностей района и установления его биоресурса. Последнее
имеет особое значение для населения этого района, которое
получает белковую пищу в основном из продуктов моря.
С 1970 по 1975 гг. под эгидой МОК ЮНЕСКО была
выполнена широкая программа совместных научных исследований
в Карибско-Мексиканском бассейне, получившая название
СИКАР. Объединенные усилия 20 стран-участниц Программы
были направлены на ускоренное и углубленное познание
природы региона, его физико-химического режима, гидрографии,
геологии, разведку и последующую разработку минеральных,
энергетических и биологических ресурсов, а также оказание
помощи развивающимся странам этого района в освоении
современных методов морских исследований и в подготовке
национальных кадров океанологов.
Советский Союз принимал активное участие во всех этих
исследовательских программах МОК.
Хорошим примером сотрудничества межправительственной
и неправительственной международных организаций на пользу
науки является Программа исследований глобальных
атмосферных процессов — ПИГАП (Global Atmospheric Research
Programme — GARP). Она предпринята совместно МСНС и
ВМО. Цель ее — улучшение понимания общей циркуляции
атмосферы, а следовательно, выработка более точных методов
долгосрочных прогнозов погоды. В реализации этой одной из
важнейших программ принимают участие ученые в области
физики атмосферы, океанологии и смежных дисциплин,
направляющие свои усилия на изучение атмосферных процессов
глобального масштаба. Исследования по этой программе
координирует Объединенный организационный комитет (ООК),
созданный МСНС и ВМО в 1967 г. ООК, в состав которого входят
ученые 12 стран,— научный орган, рассматривающий все
предложения и вырабатывающий рекомендации.
Одна из экспериментальных подпрограмм ПИГАП,
известная под названием Атлантического тропического
эксперимента—АТЭП (GARP Atlantic Tropical Experiment —GATE),
осуществлена в тропической части Атлантического океана в июне—
сентябре 1974 г. В ходе АТЭП-74, в котором приняли участие
25 кораблей и 12 самолетов, получены ценные научные данные
для проверки моделей различных атмосферных процессов
45
с целью включения их в окончательное описание общей
циркуляции атмосферы, а также в схемы прогнозирования,
основанные на этом описании. На основе полученных данных создается
международный океанографический атлас АТЭП.
В настоящее время проводится первый глобальный
эксперимент ПИГАП —ПГЭП (First GARP Global Experiment —
FGGE) по исследованию общей циркуляции атмосферы с
участием большого числа научно-исследовательских судов и
метеорологических спутников Земли многих стран мира.
Эксперимент будет осуществлен в 1979 г.
В процессе ПГЭП будет изучена структура поля течений и
других полей в экваториальных частях океана и реакции этих
полей на переменное во времени воздействие атмосферы.
Важный раздел программы — исследование пространственно-
временного строения экваториальных подповерхностных
противотечений, в частности явления меандрирования
экваториальных противотечений, предсказанного теорией и установленного
экспериментально во время АТЭП.
Советский Союз принимает активное участие в ПГЭП,
подготовка к которому, включающая численные эксперименты по
вопросам общей циркуляции атмосферы и океана, изучение
пограничного слоя океана и атмосферы, океанических течений
и т. д., в течение ряда лет успешно проводилась советскими
учеными.
Опыт показывает, что эффект коллективных усилий
нескольких стран оказывается не только чисто арифметическим, но и
научным, так как позволяет исследовать крупномасштабные
явления.
4. Участие СССР в работе международных
океанологических организаций
В СССР океанологические исследования на национальном
уровне координируют Комиссия АН СССР по проблемам
Мирового океана и Океанографический комитет Советского Союза
при Государственном комитете СССР по науке и технике, а по
некоторым вопросам также Министерство рыбного хозяйства
СССР и Государственный комитет гидрометеорологии и
контроля природной среды СССР. Через эти организации
осуществляется советское представительство в главных
международных океанологических организациях.
Особенно активное участие принимают советские ученые
в деятельности СКОР. Членство СССР в СКОР осуществляет
АН СССР через свою Комиссию по проблемам Мирового
океана, которая играет роль национального комитета
океанологов.
46
Много лет советские исследователи принимают участие
в деятельности рабочей группы СКОР № 10
«Океанографические таблицы и стандарты». Для составления международных
таблиц для расчета солености по измеренной
электропроводности РГ № 10 выполнила анализ нескольких сотен проб морской
воды, собранных во всех частях Мирового океана с судов
разных стран. Итогом работы стало издание «Международных
океанологических таблиц», которыми в настоящее время
широко пользуются океанологи разных стран, в том числе и
Советского Союза. Для составления подобных таблиц силами
одного государства потребовалось бы проведение нескольких
больших океанографических экспедиций и работа ряда
экспертов по меньшей мере в течение двух-трех лет.
Не менее плодотворными следует считать проведение по
линии СКОР международных сравнительных испытаний
измерителей течений, осуществленных с борта
научно-исследовательского судна «Академик Курчатов» в 1970 г. при участии
представителей шести стран. За успешное проведение этих
испытаний АН СССР получила благодарность от руководства СКОР.
В ходе работ была выполнена калибровка измерителей течений,
которая позволила оценить степень реальности данных,
получаемых в течение почти 20 лет измерителем системы Алексеева
типа БПВ. Кроме того, были выявлены достоинства и
недостатки различных приборов, проходивших калибровку, которые
будут учтены при конструировании измерителей течений новых
типов.
Многолетнее участие советских ученых в работе СКОР
убеждает в том, что дальнейшая активизация их деятельности
в рамках этой организации, безусловно, целесообразна.
Как отмечалось выше, ряд научных задач, решаемых
Научным комитетом по океанологическим исследованиям, сходен
с задачами, находящимися в компетенции МАФНО, в
результате чего довольно значительная часть работы проводится
СКОР и МАФНО в тесном сотрудничестве. На национальном
уровне было бы естественным ожидать столь же тесной
координации работы организаций, представляющих СССР в этих
международных органах. Однако приходится с сожалением
констатировать слабую координацию деятельности
Междуведомственного геофизического комитета при Президиуме АН СССР,
курирующего вхождение СССР в МАФНО, и Комиссии
АН СССР по проблемам Мирового океана, через которую
осуществляется представительство нашей страны в СКОР. В
результате этого в последние годы отмечается заметное
ослабление деятельности советских ученых в работе МАФНО.
Вероятно, по этой же причине ученые АН СССР не
участвуют в деятельности одной из важных международных
океанологических организаций — МСИМ, в который входит только
Министерство рыбного хозяйства СССР. Такое положение,
47
видимо, нельзя признать удовлетворительным, так как МСИМ —
организация, занимающаяся не только рыбопромысловыми
вопросами, но и научными. Так, МСИМ участвовал в проведении
Международного геофизического года, а также экспедиции
«Оверфлоу» (1960 г.), в ходе которой исследовался район
Исландско-Фарерского порога.
Таким образом, очевидна необходимость участия в работе
МСИМ советских ученых-океанологов и прежде всего ученых
АН СССР, наряду со специалистами-рыбниками. Целесообразно
привлечение специалистов Министерства рыбного хозяйства
СССР к участию, например, в некоторых рабочих группах
СКОР, занимающихся вопросами биологии океана (РГ № 52
«Оценка количеств микронектона», РГ № 54 «Живые ресурсы
Южного океана», РГ № 55 «Предсказание явления Эль-Ниньо»,
РГ № 56 «Процессы экваториального подъема вод» и др.)- Это
способствовало бы принятию более компетентных решений по
конкретным вопросам морских гидробиологических
исследований.
В настоящее время возникла также необходимость более
тесной связи между советскими организациями, представляющими
СССР в СКОР и ВМО, т. е. Комиссией АН СССР по
проблемам Мирового океана и учреждениями Государственного
комитета гидрометеорологии. Постоянные рабочие контакты
между советскими специалистами, работающими в СКОР и
ВМО, взаимная осведомленность о проводимых или
планируемых этими организациями исследованиях и взаимное
привлечение специалистов к решению отдельных важных вопросов —
все это приобретает особое значение сегодня, в период активной
фазы первого глобального эксперимента ПИГАП.
Как активный участник всех значительных международных
программ по изучению Мирового океана Советский Союз
всегда отдавал должное МОК ЮНЕСКО, решающей на
межправительственном уровне важные научные проблемы, которые не
под силу одному учреждению или одной стране. Большую
помощь оказывает МОК развивающимся странам в разработке
национальных океанологических программ, в создании
национальных океанологических институтов. Почти двумя
десятилетиями своего существования МОК доказала свою полезность
как сильной международной координирующей организации
в области океанологии, которая в своей деятельности опирается
на научные консультации авторитетных международных
организаций и прежде всего Научного комитета по океаническим
исследованиям МСНС — активной организации, в которой
развивается действительно научное международное
сотрудничество.
Тем большее огорчение вызывает то, что в последнее время
наметилась тенденция отхода МОК ЮНЕСКО от решения
проблем научно-организационного характера к решению вопро-
48
сов политического и административного плана. В деятельности
Комиссии наметился переход к разбору претензий отдельных
стран, отражающих их политические интересы, рассмотрение
которых является прерогативой ООН. В этой связи резко
уменьшилось число запросов научных рекомендаций со стороны МОК
к СКОР. Более того, МОК создала свое собственное научно-
консультативное бюро, которое, по сути, дублирует функции
СКОР, в научном же плане не является ни достаточно
представительным, ни достаточно компетентным.
По нашему твердому убеждению, МОК ЮНЕСКО должна
освободиться от бюрократических тенденций, отмечающихся
в последние годы, и подчинить свою работу единой цели —
развитию научных исследований Мирового океана.
Существование большого числа международных
организаций в области океанологии может создать впечатление
«организационной перегруженности». Однако если учесть
многообразие задач исследования и освоения Мирового океана, то число
действующих в настоящее время в мире океанологических
организаций не будет казаться столь уж большим.
Наиболее эффективное решение этих задач может быть
достигнуто в результате совместных усилий стран,
заинтересованных в дальнейшем развитии исследований океана при их
координации авторитетными международными
океанологическими организациями.
Лев Львович Любимов, кандидат
экономических наук, заведующий
отделом международных проблем
Мирового океана Института
мировой экономики и
международных отношений АН СССР.
Специалист в области экономики
капиталистических стран,
экономических проблем освоения
ресурсов Мирового океана.
Л. Л. Любимов
МЕЖДУНАРОДНОЕ
РЕГУЛИРОВАНИЕ
ОСВОЕНИЯ
МИРОВОГО ОКЕАНА
1. Плюрализм и его негативные последствия
Международное регулирование морской деятельности в той или
иной мере осуществлялось с тех пор, как возникли и начали
развиваться нормы и принципы международного морского
права. Однако после второй мировой войны, особенно в
последние годы, этот процесс развивался лавинообразно. За короткий
срок регулированию подверглись все виды деятельности
государств в сфере Мирового океана.
Еще недавно основным регулирующим морскую
деятельность принципом была свобода открытого моря. Она
означала, что океаны и их ресурсы доступны для использования
любыми странами. Сфера действия этого принципа
охватывала весь Мировой океан, за исключением, как правило,
3-мильной полосы прибрежных вод. Сегодня дело обстоит
иначе.
Резкое обострение сырьевой проблемы повысило всеобщий
интерес к морским ресурсам минерального сырья.
Научно-технический прогресс обеспечил возможность их эффективной
промышленной разработки. Однако такие возможности сложились
лишь у весьма ограниченного круга высокоразвитых стран.
Именно они получили бы односторонние преимущества в этой
области. Конечно, возможна какая-то форма международного
урегулирования данной проблемы, но многие прибрежные
государства пошли по иному пути, провозгласив свой суверенитет
на ресурсы континентального шельфа.
Начало этому процессу положила в 1945 г. декларация
президента Г. Трумэна «О политике США в отношении естествен-
51
ных ресурсов морского дна и недр континентального шельфа».
Именно на США лежит ответственность за первые шаги в
ущемлении принципа свободы открытого моря и беспрепятственного
доступа государств к морским ресурсам [4, 5]. США,
по-видимому, считали, что объявление суверенитета на ресурсы
невозможно на большей части континентальных шельфов,
примыкающих к материкам, политические карты которых в 1945 г.
были окрашены преимущественно в цвета метрополий. Тем
самым предполагалось, что доступ развитых капиталистических
стран к шельфам останется открытым. Последующие события
опрокинули подобные расчеты.
Уже в конце 40-х годов ряд стран Латинской Америки
заявил о своих правах не только на ресурсы, но и на сами
прибрежные пространства. Возникло понятие «территориализм»,
означающее присвоение прибрежными государствами
прилегающих к их территории обширных морских пространств,
содержащих эти ресурсы. Это вело к дальнейшему подрыву принципа
свободы открытого моря, к тому, что государства, способные
разрабатывать прибрежные морские ресурсы, лишались этой
возможности. Однако данный процесс не был поддержан
большинством прибрежных государств, и «территориализм» так и
остался относительно локальным явлением.
Вместе с тем принцип суверенитета на ресурсы прибрежных
районов получил дальнейшее развитие и сегодня
поддерживается фактически всеми странами, имеющими выход к морю.
При этом ООН распространился не только на минеральные, но и
на биологические ресурсы. Именно это привело к
формированию сначала рыболовных, а затем экономических зон
различной протяженности (как правило, до 200-мильной полосы от
берега). К концу 1977 г. о введении таких зон объявили более
70 стран. При полном завершении этого процесса ресурсы почти
40% площади Мирового океана подпадут под юрисдикцию
прибрежных государств [6].
Уточнению подверглась и ширина территориальных вод.
В соответствии с многовековой традицией существовал
3-мильный предел для таких пространств (на максимальную
дистанцию полета пушечного ядра). Сегодня, за исключением
приверженцев «территориализма», большинство прибрежных стран
сходится на 12-мильном пределе. Для обеспечения безопасности
этих стран подобный лимит можно считать оптимальным. Тем
не менее в определенных районах Мирового океана он ведет
к перекрытию всей акватории. Речь идет о так называемых уз-
костях (входы и выходы в океаны, международные проливы,
архипелажные воды и т. д.). Перекрытие территориальными
водами таких пространств явилось для некоторых прилегающих
к ним стран поводом для попыток распространения на эти
пространства таких же регулирующих правил, какие
применяются в территориальных водах. Если бы эта тенденция полу-
52
чила всеобщую поддержку и была закреплена, интересам
международного судоходства был бы нанесен значительный
ущерб [1].
Таким образом, в последнее время в политике прибрежных
стран отчетливо проявилась тенденция к более интенсивному
регулированию морской деятельности в прилегающих к ним
акваториях Мирового океана. Это выразилось в расширении сфер
территориального суверенитета, в принятии множества норм и
правил, регулирующих практически все виды морской
деятельности в прибрежных районах. На них стали распространяться
таможенные, санитарные, природоохранные, ресурсные и иные
законоположения прибрежных стран, существенно
отличающиеся друг от друга. Единству Мирового океана как
географической среды был противопоставлен плюрализм форм и видов
регулирования деятельности государства на значительной части
морских пространств.
Все это отрицательно сказывается на морском хозяйстве.
Прежде всего, сильно затруднены поисково-разведывательные
работы, предшествующие добыче минеральных ресурсов на
шельфах. Объявление прибрежными странами суверенных прав
на них сопровождалось во многих случаях введением механизма
разрешений на проведение научных исследований, связанных
с ресурсами. Но так как практически невозможно разграничить
«ресурсные» исследования и «нересурсные», то во многих
прибрежных районах запрету стали подвергаться все исследования
вообще, что чрезвычайно осложнило процедуру согласования
иностранной компанией с прибрежной страной разрешений на
проведение исследовательских работ. Кроме того, поиск и
разведка без предварительного согласия на последующие стадии
(включая добычу) сопряжены с большим риском и могут
обернуться чистым убытком. Поэтому на значительной части
континентальных шельфов поисковые работы, в частности в области
нефти и газа, развиваются низкими темпами, тогда как
развитые страны уделяют им огромное внимание. В результате
возникает серьезная диспропорция в размещении работ по
разведке и добыче природных ископаемых на шельфах,
хотя неравномерность в географическом расположении
морских нефтегазовых ресурсов существенно ниже, чем
сухопутных.
Множественность форм и методов регулирования еще более
негативно отражается на рыболовном промысле. Доступ
иностранных судов к биологическим ресурсам рыболовных и
экономических зон обусловливается значительным числом
обязательств, которые могут быть произвольно изменены на
протяжении года. Между тем относительно инвестиционного процесса
океаническое рыболовство ничем не отличается от любого иного
вида производственной деятельности. Разумеется,
неоправданные колебания сырьевой базы и налоговых ставок сдерживают
53
развитие этой отрасли, приводят к резкому снижению ее
экономической эффективности, оттоку из нее капиталов. В зоны ряда
стран, которые не ведут интенсивного рыболовства,
иностранные рыболовецкие суда вообще не допускаются.
Установление рыболовных и экономических зон уже привело
к снижению роли, а в ряде случаев и фактической ликвидации
региональных международных рыболовных организаций. Между
тем их деятельность имела немалое значение для концентрации
международных усилий в области промысловой разведки,
выявления потенциальных ресурсов, постоянного совершенствования
их исследований, накопления необходимой информации.
Изменения в регулировании условий морской деятельности
в значительной мере затронули и торговое судоходство, которое
зависит и от режима экономических зон, проливов,
используемых для международного судоходства, архипелажных и
территориальных вод и т. д. [2].
В последние годы ряд прибрежных стран пытается
произвольно устанавливать режим захода судов в порты и
использовать его с тем, чтобы не выдавать разрешения судам,
плавающим под определенным флагом. Помимо прямого ущерба,
который наносят эти меры молодым коммерческим флотам, они,
естественно, могут вызвать ответную реакцию, ведущую к
«портовой войне». Некоторые государства ставят также вопрос
о взимании сборов «за право прохода судов» через их воды.
Подобная мера имеет аналог лишь в раннем средневековье и
экономически неоправданна. В случае ее применения серьезный
материальный ущерб будет нанесен прежде всего флотам
развивающихся стран. Впервые в истории мореплавания возник
вопрос о возможности закрытия того или иного района для
судоходства. В частности, Канада уже зарезервировала за собой
исключительное право осуществлять торговое судоходство в
некоторых прилегающих к ней районах.
Неурегулированность на единой основе мер по защите
морской среды способствует расширению дискриминационных
полномочий прибрежного государства. Отдельные прибрежные
страны начали вводить собственные законы по охране морской
среды, содержащие более жесткие нормы и стандарты, чем
принятые в международном порядке.
В ряде случаев прибрежное государство, например,
стремится получить право контроля за конструкцией,
оборудованием и составом экипажей судов, проходящих через его
территориальные воды или экономическую зону. И хотя теоретически
цель этого — защита чистоты морской среды, практически
такие меры часто приводят к дискриминации судов тех или иных
государств. Одновременно режим экономической зоны
необоснованно подменяется режимами территориальных вод,
осуществляется невидимый процесс «ползучей юрисдикции», ведущий
к новым территориальным притязаниям.
54
Огромное число неясностей и двусмысленностей содержат
положения об ответственности за загрязнение морской среды,
в частности в таких вопросах, как установление лица, несущего
подобную ответственность, критериев загрязнения, определение
необходимого объема доказательств, процедура
разбирательства и т. д. Отсутствие единого международного механизма по
урегулированию споров между государствами усугубляет
негативные для торгового судоходства последствия применения
санкций прибрежной страной. До сих пор не существует
единого мнения даже относительно того, на какой основе может
прибрежное государство вырабатывать национальные законы
защиты морской среды в территориальных водах, прилежащих
и экономических зонах, международных проливах и т. д.
Наиболее дифференцированным оказался режим охраны морской
среды от загрязнения с судов. В результате основная тяжесть
природоохранных мер фактически была перенесена в морскую
сферу, хотя 80% вины за ее загрязнение приходится на
сухопутную деятельность, в результате которой загрязняющие
вещества попадают через речные стоки и атмосферные осадки
в океан. Затраты на предотвращение загрязнения с судов
составляют значительную часть общих издержек при их
строительстве и эксплуатации. Естественно, что они ориентированы
на соблюдение международных стандартов относительно
конструкции и оборудования судов; отклонения же национальных
требований от таких стандартов наносят ущерб как
деятельности коммерческого судоходства, так во многих случаях и
самой морской среде.
Разнобой национальных норм, регулирующих мореплавание,
затрагивает также вопросы навигационно-гидрографического
обеспечения, в результате появляются районы с существенно
худшими условиями для безопасного мореплавания.
Коммерческое судоходство ежегодно выполняет объем услуг,
оцениваемых 100 млрд. долл. Если бы процесс беспорядочного
национального «нормотворчества» продолжился и приобрел
характер исключительной регулирующей силы, то это могло бы
привести к вынужденным изменениям обычных маршрутов
перевозок, неоправданным задержкам судов и срыву графиков
грузопотоков, нарушению работы наиболее важного и крупного
мирового транспортного звена, обеспечивающего
международные экономические связи.
Таковы некоторые, пожалуй, наиболее существенные
последствия разнобоя в национальных мероприятиях, регулирующих
морскую деятельность. Они недвусмысленно подводят к выводу
о необходимости принятия регулирующих мер, имеющих
универсальный характер и не допускающих какой-либо
дискриминации любого государства. В мире созданы и 'продолжают
создаваться все более эффективные технико-экономические
предпосылки рационального использования морских ресурсов и
55
пространств. Между тем хаотическое регулирование освоения
Мирового океана грозит подрывом его экономической основы,
разрушением производительных сил морского хозяйства.
2. Основа унификации
регулирующих норм
Унифицировать регулирующие нормы призвана III
Международная конференция ООН по морскому праву, в которой
участвуют почти 150 стран. Она была созвана в 1973 г. и получила
от ООН мандат на подготовку единой универсальной морской
конвенции, обеспечивающей унифицированное и
недискриминационное регулирование всех аспектов морской деятельности
государств с учетом их интересов [3].
К числу элементов такой унификации относятся
оптимальные параметры режима мореплавания, включая
беспрепятственный проход судов через территориальные воды и проливы,
используемые для международного судоходства, свободу
мореплавания в открытом море, в частности в экономических зонах.
Назрела необходимость создания единой системы норм,
регулирующих на взаимоприемлемой основе деятельность торговых
флотов в различных пространствах Мирового океана, с целью
обеспечения равных экономических условий для такой
деятельности, прекращения необоснованных экономических претензий
к коммерческим судам.
При эксплуатации биологических ресурсов Мирового океана
особое значение имеет вопрос о доступе к ним иностранных
рыболовных судов в экономических зонах. В этом вопросе имеются
два главных аспекта: политические гарантии и экономические
условия. Первый аспект составляет сегодня, как отмечено выше,
прерогативу прибрежных государств. Отсутствие
международно-правовых гарантий наносит ущерб мировому рыболовству
в целом. Нужно иметь в виду, что развитие 'современной
рыбной промышленности без устойчивой сырьевой базы
немыслимо.
Все более утверждающаяся практика краткосрочных
соглашений по рыболовству уже оказывает пагубное влияние на
объем строительства новейших рыбопромысловых судов. В то
же время их тоннаж по-прежнему увеличивается за счет мелких
судов, на которые начинает ориентироваться береговая
рыбопромышленная база.
Возникает вопрос, каким образом можно заполнить вакуум,
образовавшийся вследствие ослабления или ликвидации
международных рыболовных организаций. Прежде всего это касается
области рыбопромысловых исследований и разведки.
Определение уровня допустимых, максимально устойчивых уловов
позволит выявить неиспользуемый прибрежным государством изли-
56
шек и распределить его между заинтересованными странами
с учетом их исторических и других прав, а также необходимости
заключения соответствующих соглашений со страной —
собственницей биологических ресурсов.
Концепция максимально допустимых уровней использования
живых ресурсов экономических зон легла в основу переговоров
на III конференции. По существу, она разделяется сегодня
большинством государств и в случае ее принятия может послужить
основой для организации международного сотрудничества в
области рыболовства при неукоснительном соблюдении принципа
недискриминации. В сводном проекте конвенции
подчеркивается, что после определения уровня допустимого улова
прибрежная страна предоставляет другим государствам доступ
к излишкам через соответствующие соглашения и на основе
взаимного признания установленных правил и условий.
Такие правила включают выдачу лицензий на ведение
промысла с использованием определенных судов и оборудования;
получение прибрежной страной необходимой компенсации
в различной форме (финансовые платежи, поставки
оборудования для рыбного промысла и переработки либо другие формы,
согласованные заинтересованными странами); установление
квот вылова на определенные сроки, в том числе на данные
виды запасов; выдача разрешений на проведение необходимого
объема исследований и т. п.* Все эти вопросы составляют в
совокупности экономические условия доступа к биологическим
ресурсам. Их круг четко определен в сводном проекте
конвенции, что чрезвычайно важно, ибо позволяет в какой-то мере
ориентировать «заявителей» и значительно уменьшить
возможность возникновения конфликтных ситуаций.
Иными словами, документ способствует унификации
режимов использования биологических ресурсов экономических зон
в интересах как государств-собственников, так и государств-
заявителей. Одновременно он возлагает на прибрежные
государства определенные обязанности по сохранению живых
ресурсов и предоставлению другим странам необходимой научной
информации, статистических данных об уловах и промысловых
условиях через субрегиональные, региональные и
международные организации. Тем самым создается известная возможность
сохранить, хотя и в измененной форме, роль международных
рыболовных организаций.
Объявление прибрежными государствами прав на живые
ресурсы экономических зон поставило проблему совместного
использования мигрирующих видов рыб, чей жизненный цикл
протекает в водах и экономических зонах нескольких стран.
Такая «мигрирующая собственность», если должным образом не
* Док. ООН A/Conf. 62/WP. 10 и Add. 1, 1978, с. 19.
57
урегулированы вопросы ее эксплуатации, нередко становится
инструментом политического давления. Не исключено, в
частности, что какая-либо страна с целью нанести ущерб соседнему
государству может начать истребление того или иного вида,
мигрирующего через его зону, но не образующего в ней запаса.
Поэтому чрезвычайно важна разработка международных
правил регулирования эксплуатации таких видов биологических
ресурсов, определение особых прав стран, в водах которых
образуются запасы «проходных» видов.
Сложные проблемы возникают и в связи с суверенными
правами прибрежных государств на минеральные ресурсы
континентальных шельфов. III конференция получила в наследство
от первых двух конференций нерешенный вопрос о внешней
границе континентального шельфа. Точнее, он был как бы
решен, однако в более чем неопределенной форме. Конвенция,
подписанная в 1958 г. I конференцией ООН по морскому праву,
устанавливает такую границу «до глубины 200 м или за этим
пределом, до такого места, до которого глубина покрывающих
вод позволяет разработку естественных богатств». Подобная
формула, по существу, ставит определение внешней границы
шельфа в зависимость от технического прогресса в морской
горнодобывающей промышленности. Вряд ли могут возникнуть
сомнения, что в перспективе можно будет разрабатывать
минеральные ресурсы на любых глубинах. Вопрос, какие именно
страны уже достигли или первыми достигнут уровня, дающего
им несомненные преимущества, ни для кого секрета не
составляет.
Сегодня проблема установления внешней границы
континентального шельфа остается достаточно острой, продолжает
вызывать серьезные разногласия между участниками III
конференции. Группа арабских государств отстаивает протяженность
такой границы до 200-мильного расстояния от берега. Страны,
имеющие широкий шельф, стремятся отодвинуть его как можно
дальше. Они настаивают, в частности, на применении такого
критерия, как глубина осадочных пород, которая должна
составлять 1 % общего расстояния внешней границы до берега.
Иными словами, если глубина этих пород составляет 1 км, то
внешняя граница должна находиться в 100 км, а если их
глубина равна 10 км, то — в 1 000 км от берега. Подобный подход
весьма сложен, и это очевидно многим специалистам. Дело
в том, что ныне исследовано, и то в далеко не полной мере,
только 16% Дна океанов. Для выяснения глубины осадочных
пород требуется проведение буровых работ, которые на
больших глубинах практически никем не ведутся, так как нужны
.значительные затраты, непосильные даже для наиболее
богатых стран. Наконец, уже установленная граница может быть
передвинута, если будут найдены более глубокие осадки. Таким
образом, указанный критерий ведет как к распространению су-
.58
веренных прав прибрежного государства на ресурсы огромных
районов морского дна, так и к сохранению неопределенности
границ.
Советский Союз и другие социалистические страны
отстаивали принцип, в соответствии с которым внешняя граница
шельфа должна определяться по 200-мильной отметке, а в
случаях, когда шельф простирается дальше нее,— до 500-метровой
изобаты.* Такой подход основан на общепринятых в мировой
науке представлениях о строении морского дна и соответствует
за весьма редким исключением реальной пространственной
характеристике континентального шельфа. На III конференции
было предложено несколько компромиссных вариантов. Один
из них допускал возможность определения внешней границы
континентального шельфа в соответствии с критерием глубины
осадочных пород, при этом если шельф выходит за
200-мильную экономическую зону, то его внешняя граница не должна
простираться дальше точно установленного количества миль от
этого расстояния. Тем самым как бы вводится четкий
дистанционный критерий. Однако такое решение в наибольшей степени
учитывает интересы лишь относительно немногих государств,
имеющих широкий шельф. И все же именно они не согласились
с таким предложением, конференция оказалась перед
очередным тупиком.
Вопрос о внешней границе шельфа лишь на первый взгляд
не связан с регулированием морской деятельности. На деле от
его решения зависит установление пространственной сферы
различных форм такого регулирования. Если граница находится
в пределах 200-мильной зоны, то общая площадь территории
морского дна, ресурсы которой подпадают под суверенитет
прибрежного государства, оказывается существенно меньшей, чем
при использовании критерия глубины осадочных пород. Это
имеет немаловажное значение, например, для научных
исследований в Мировом океане. К сожалению, некоторые страны, не
ведущие и не собирающиеся вести активную морскую
деятельность, полагают, что отсутствие знаний об океане не принесет
им ущерба. Это может причинить урон всем странам,
человечеству в целом. Поэтому использование критерия глубины
осадочных пород, даже в сочетании с четким дистанционным
критерием, не исключает необходимости учитывать, где находится
шельф: в пределах 200-мильной зоны или за ее пределами.
Внутриконтинентальные и географически неблагоприятно
расположенные страны обеспокоены тем, что ресурсная
«оккупация» шельфов государствами, имеющими выход к морю,
лишит их всяких надежд на использование данных ресурсов.
* Изобата — линия на карте, отображающая линии на дне океана,
каждая точка которых находится на одинаковой глубине.
59
Поэтому они ставят вопрос об обязанности прибрежного
государства отчислять в их пользу часть доходов от разработки
минеральных ресурсов шельфа. Уже сейчас имеются предложения
отчислять этим государствам до 10% и более от стоимости
минерального сырья, добытого на шельфе (за пределами
200-мильного расстояния от берега») *. Одновременно
существуют предложения применять дифференциальную шкалу
отчислений в зависимости от уровня экономического развития
прибрежного государства — владельца шельфовых ресурсов.
Более того, аналогичные требования пытаются
распространить и на ресурсы, добываемые на шельфе в пределах
экономических зон.
Подобный подход является лишь одним из многих
вариантов учета интересов внутриконтинентальных и географически
неблагоприятно расположенных стран, причем вряд ли самым
удачным. По-видимому, при этом исходят из предположения,
что ресурсы шельфа находятся как бы в совместном владении
прибрежных и неприбрежных государств. Во всяком случае,
иначе невозможно понять идею раздела доходов (прибылей)
при условии, что неприбрежное государство не участвует в
расходах по разработке ресурсов. Однако концепция совместного
владения вряд ли когда-нибудь будет принята прибрежными
странами. Поэтому интересы другой группы государств скорее
всего станут приниматься во внимание на основе политического
компромисса в контексте всей проблемы использования
минеральных ресурсов континентального шельфа, включая вопрос
о его внешней границе.
На III конференции 53 государства образовали особую
группу, которые фактически оказались полностью
отчужденными от богатств Мирового океана. Дело в том, что более чем
95% используемых ныне морских биологических ресурсов,
значительная часть морских нефтегазовых и прочих запасов
перешли в собственность прибрежных стран. Дискриминация
целой группы стран, составляющей более трети общего
количества членов ООН, абсолютно неправомерна. III конференция
разрабатывает способы учета их интересов при освоении
морских ресурсов и пространств. Подрыв ее усилий в этом
направлении пагубно отразился бы на возможной морской
деятельности неприбрежных государств.
Внимание многих стран в последнее десятилетие все более
привлекают также перспективы разработки минеральных
ресурсов морского дна за пределами континентального шельфа
(международный район дна). К ним относятся нефть и газ,
глауконитовые пески, глубоководные красные глины,
известковые и креминистые илы, металлоносные илы, железомарганцы,
* Док. ООН A/Conf. 62/65,8. V. 1978, с. И.
60
известковые и кремнистые илы, металлоносные илы, железо-
марганцевые конкреции. Использование большинства из них —
дело весьма отдаленного будущего. Однако разработка
технологии их добычи и металлургического передела продвинулась
уже достаточно далеко.
В ходе переговоров на III конференции было найдено
взаимоприемлемое решение основных принципов режима
глубоководной добычи, таких, как использование международного
района морского дна и его ресурсов исключительно в мирных
целях, неприсвоение ресурсов и территории района,
недопущение монополизации ресурсов каким-либо государством или
группой государств и частными компаниями, защита среды
и т. д.*
Не удавалось достичь компромисса по центральному
вопросу— о доступе к ресурсам дна. Группа развитых
капиталистических стран первоначально настаивала на автоматическом
доступе своих частных компаний к этим ресурсам. Естественно,
что реализация такого требования привела бы к монополии их
хозяйствования в отношении ресурсов международного района
морского дна, учитывая монопольное положение этих стран в
мировом капиталистическом хозяйстве в области технологии
добычи и переработки железомарганцевых конкреций. В свою
очередь, развивающиеся государства («группа 77») настаивали
на том, чтобы разработка ресурсов дна велась исключительно
международным предприятием, которое должно быть создано
в качестве хозяйственной единицы будущего международного
органа. Тем самым «группа 77» стремилась лишить суверенные
государства права разработки ресурсов.
Советский Союз и другие социалистические страны
выдвинули компромиссное предложение, чтобы такая разработка
велась одновременно как международным предприятием, так и
государствами, государственными предприятиями и частными
компаниями по контрактам с международным органом. Это
предложение получило наименование «параллельной системы».
На его основе в ходе VII сессии конференции удалось
выработать подход, разделяемый ныне большинством стран. Он
предусматривает возможность участия государств в разработке
ресурсов морского дна по контрактам с международным органом
и вместе с тем обеспечивает реальную жизнеспособность
будущего международного предприятия, поскольку возлагает на
государства обязанность оказывать ему технологическую и
финансовую помощь на первой, наиболее трудной, стадии его
деятельности.
Конечно, решены еще не все вопросы, относящиеся к
международному режиму морского дна, но разработана хорошая
* Док. ООН A/Conf. 62/WP.10 и Add. 1, 1978, с. 33—37.
61
основа для завершения переговоров. Определены контуры
системы разведки и разработки ресурсов дна, многие
вопросы политической структуры функций международного
органа, методы мобилизации средств для финансирования его
административного бюджета, устав будущего международного
предприятия. Остаются пока неурегулированными некоторые
вопросы, в частности относящиеся к экономическим аспектам
режима деятельности государств по контрактам.
3. Опасности односторонних акций
Наибольшую угрозу для перспектив выработки
взаимоприемлемого режима регулирования глубоководной добычи полезных
ископаемых представляют односторонние акции в отношении
минеральных ресурсов морского дна, которые намереваются
предпринять некоторые страны, не удовлетворенные ходом
переговоров и ведущие на них жесткую линию. Они считают
возможным предоставить частным компаниям нескольких
империалистических государств право начать разработку таких
ресурсов самостоятельно, вопреки разрабатываемой III
конференцией единой универсальной конвенции по морскому праву. По
существу, это был бы односторонний захват ресурсов,
объявленных ООН «общим наследием человечества».
Подобные действия могут не только нанести серьезный
ущерб работе III конференции в целом, но и нарушить весь
процесс выработки единых универсальных норм регулирования
морской деятельности. Естественно, что это еще сильнее
затормозит процесс освоения Мирового океана.
В срыве III конференции, нацеленной на принятие единых
регулирующих норм морской деятельности, заинтересованы
государства, стремящиеся на основе односторонних актов в
отношении ресурсов международного района морского дна получить
для себя выгоды вне рамок взаимоприемлемого механизма-
регулирования. По-видимому, к ним примыкают и те страны,
которые, решив для себя проблему суверенных прав на ресурсы
и пространства своих прибрежных районов, не намерены
развивать собственные отрасли морского хозяйства.
Каковы же последствия замедления регулирования
хозяйственной деятельности по освоению Мирового океана? Прежде
всего оно приведет к снижению ее экономической
эффективности. Особенно сильно этот процесс затронет страны, где
морские отрасли начали развиваться совсем недавно. Рост
расходов на морскую деятельность в этих странах и, в частности,
повышение удельных затрат не только увеличит капиталоемкость
в соответствующих отраслях, но в ряде случаев сделает их
неконкурентоспособными.
62
Другим серьезным последствием может стать ухудшение
условий международного экономического сотрудничества в
морской сфере. Развитие коммерческого судоходства, например,
немыслимо без относительно одновременного распространения
в большинстве прибрежных стран научно-технических
достижений, особенно в области оборудования портовых комплексов,
навигационных и других средств, обеспечивающих безопасную
и ритмичную доставку грузов и т. д. Невозможно достичь
заметного прогресса в изучении Мирового океана без постоянного
наращивания совместных усилий. Между тем, как отмечают
многие специалисты-океанологи, Мировой океан до сих пор
изучен в меньшей степени, чем космос.
Освоение Мирового океана требует применения новейшей
технологии, крупных финансовых средств и
квалифицированных кадров. Вся совокупность мер по регулированию
хозяйственного использования морских ресурсов и пространств
формирует основу международных условий такой деятельности.
В последние годы, однако, уже не наблюдается столь активная,
как прежде, международная миграция основных
производственных фондов морского хозяйства, что свидетельствует о
возникновении тревожной тенденции к морехозяйственной автаркии —
антиподу международного сотрудничества.
Неурегулированность режима деятельности в Мировом
океане приводит к возникновению все новых конфликтных
ситуаций на морях. Например, только по вопросам рыболовства
за период 1949—1972 гг. было зафиксировано свыше 1 100
конфликтов.* Отсутствие единообразия в нормах, помноженное на
бесконечные расхождения национальных интересов, неизбежно
увеличило бы подобные столкновения и споры.
Среди различных международно-правовых механизмов в
области морской деятельности III конференция разрабатывает и
механизм урегулирования споров. Основные черты его уже
согласованы. Альтернативой такому взаимоприемлемому
механизму может быть только применение силы, обеспечение
собственных интересов в возникшем споре через «патронаж»
более мощной страны, участие в блоках, использование
различных, в том числе не в последнюю очередь военных, рычагов
давления на соперника. Совершенно очевидно, что все это способно
нанести существенный урон безопасности морской деятельности,
миру на морях, а в конечном счете миру и безопасности во всем
мире. «Мы исходим из того,— подчеркивал Председатель
Совета Министров СССР А. Н. Косыгин,— что будущий правовой
режим должен способствовать укреплению мира и повышению
благосостояния народов, а практические вопросы
использования Мирового океана должны учитывать разумные интересы
* Е. Mann Borgese. Drama of the oceans.— N. Y., 1975, p. 208.
63
всех государств. Попытки же решать эти вопросы односторонне,
без должного учета потребностей и законных прав других стран
могут превратить моря и океаны еще в один источник
напряженности и конфликтов. Мы же хотим избежать этого» *.
Отсутствие унифицированных норм регулирования
производственной деятельности в Мировом океане отрицательно
сказалось бы, наконец, на решении проблем сохранения морской
среды. Ее загрязнение уже достигло уровня, опасного для
глобальных природных и климатических процессов на Земле.
Площадь биологически мертвых акваторий непрерывно
расширяется. Необходимость проведения эффективных мер по
защите морей совместными усилиями всех государств назрела
давно.
Таким образом, вопросы регулирования морской
деятельности приобрели в современных условиях важнейшее значение.
Плюрализм международных условий морской деятельности
сдерживает процесс освоения человечеством производительных
сил Мирового океана, тормозит развитие морского хозяйства.
Выражая озабоченность по этому поводу, глава советской
делегации на конференции, заместитель министра иностранных дел
СССР С. П. Козырев отметил, что обстановка в Мировом
океане и вокруг его проблем становится все более сложной
в силу известного развития 'событий за последние годы.
Необходимо как можно скорее нормализовать эту обстановку,
создать условия для эффективного, упорядоченного
использования Мирового океана и его ресурсов во имя укрепления мира,
углубления международной разрядки и обеспечения прогресса
и благосостояния народов. Разделу огромных пространств и
богатств Мирового океана выдвинута альтернатива широкого
и равноправного международного сотрудничества на благо
человечества. Ее реализация призвана стать одним из
важнейших факторов укрепления мира и безопасности на морях,
дальнейшей разрядки напряженности, мирного сосуществования и
сотрудничества народов. Она вполне достижима, если в
отношении режима Мирового океана, как и всех других «жизненно
важных проблем, встающих в наше время перед человечеством
в целом», будет найдено «разумное коллективное их решение
на путях планомерного международного сотрудничества» **.
* «Правда», 1977, 22 сентября.
** Брежнев Л. И. Актуальные вопросы идеологической работы КПСС.
Т. 2.— М.; Политиздат, 1978, с. 407.
64
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Бараболя П. Д., Иванащенко Л. А., Колесник Д. Н.
Международно-правовой режим важнейших проливов и каналов.— М., 1965.
2. Левиков Г. А. Международное морское торговое судоходство.— М.,
1978, с. 243—284.
3. Любимов Л., Яковин И. Мировой океан: экономика, политика,
право.— Мировая экономика и международные отношения, 1976, № 9, с. 31.
4. Молодцов С. В. Международно-правовой режим открытого моря
и континентального шельфа. — М., 1960.
5. Писарев В. Д. США и Мировой океан. — М., 1977, с. 44—45.
6. Спивакова Т. И. Право и природные ресурсы прибрежных зон. —
М, 1978. с. 12—23
3 Заказ № 1190
65
Михаил Тимофеевич Мелешкин,
член-корреспондент АН УССР,
доктор экономических наук,
профессор, директор Одесского
отделения Института экономики
АН УССР. Руководитель научной
программы по развитию мари-
культуры в Черноморско-Азов-
ском бассейне. Основные научные
интересы — экономика моря.
М. Т. Мелешкин
экономико-
экологические
проблемы
освоения
мирового океана
Человечество в поисках минеральных и пищевых ресурсов,
необходимых для удовлетворения его жизненных потребностей,
вступило в эру активного освоения океана. В этом процессе есть одна
особенность. Освоение континентальных ресурсов происходило
тысячелетиями по мере роста и совершенствования
производительных сил общества. Столь же медленно, хотя и с
прогрессирующим ускорением, шло накопление отрицательных
последствий этой деятельности и формировался эмпирический опыт по
их устранению. Сейчас человечество уже располагает
необходимой суммой знаний, позволяющей в принципе правильно
планировать свою деятельность, чтобы нейтрализовать ее
отрицательные последствия. Делается это в недостаточном объеме и далеко
не всегда, но положительно само наличие знаний относительно
того, как вести себя на континентальном пространстве, чтобы не
вызвать необратимых экологических изменений.
Таких знаний о Мировом океане пока еще мало, и трудно
надеяться на то, что процесс их накопления будет соответствовать
темпам его экономического освоения, к которому человечество
приступило, вооруженное невиданными техническими
средствами. В результате такого вторжения в океан могут в весьма
короткие сроки радикально измениться протекающие в нем
процессы.
Общепланитарную опасность, которую несет с собой такая
неуправляемая и лишенная необходимого научного базиса
деятельность в океане, трудно переоценить. Так, нарушение
процессов океанического фотосинтеза и испарения вследствие пленоч-
3*
67
ного загрязнения нефтью и повышения мутности океанических
вод может привести к существенным изменениям теплового,
водного и кислородного балансов Земли со всеми вытекающими
отсюда катастрофическими последствиями, включающими
изменение погоды и климата планеты. В результате нерациональной
эксплуатации биологических ресурсов Мирового океана,
представляющих важный источник и резерв пищевого белка, может
значительно снизиться его биологическая продуктивность.
Из сказанного ясно, что при формировании планов
экономического развития приморских регионов и освоения Мирового
океана следует учитывать все аспекты возможных ближайших и
долговременных последствий этой деятельности. Трудности
такого планирования усугубляются рядом объективных
обстоятельств, среди которых наиболее важными представляются
следующие:
значительное отставание темпов исследований океаносферы
от темпов ее антропогенных преобразований. Вследствие
недостаточности и разобщенности работ по изучению основных
физико-химических и биологических процессов в океане мировая
исследовательская практика может в настоящее время предложить
лишь ограниченный набор природоохранных рекомендаций при
экономическом использовании его ресурсов;
отсутствие международных норм регулирования освоения
океана. Сегодня к эксплуатации его ресурсов приступило почти
100 государств, концептуальные основы экологической политики
которых существенно различны. Некоторые из них, и прежде
всего капиталистические страны, стремятся не отягощать свои
национальные бюджеты расходами на природоохранные
мероприятия.
Выработка единой международной стратегии освоения
ресурсов океана затрудняется тем, что его акватория пока еще
является не столько областью сотрудничества, сколько областью
экономического соревнования двух систем, создаются условия
для сохранения современных тенденций к стихийному и
конвенционно ненормируемому транспортному, рыбопромысловому,
промышленному и военному использованию его. ресурсов [18].
Имеются, однако, основания полагать, что разрядка
международной напряженности, равно как и обострение проблемы
охраны океана, будут способствовать усилению международного
сотрудничества в этой области.
1. Некоторые особенности современного этапа
освоения Мирового океана
По данным ООН, вклад морского хозяйства в мировую
экономику за последние два десятилетия возрос в 9 раз и составил
свыше ПО млрд. долл. [26].
68
Одним из серьезнейших стимулов к усилению промышленного
использования минеральных ресурсов океана, в первую очередь
нефти и газа, явилось резкое увеличение доли последних в
топливно-энергетическом балансе большинства стран мира.
Достаточно указать, что для стран Западной Европы она возросла
с 8% в предвоенный период до 70% в начале 70-х годов [30].
Разведка и эксплуатация морских месторождений жидких и
газообразных углеводородов в настоящее время становятся
одним из ведущих направлений освоения океана. Исключительная
активность рассматриваемого процесса поддерживается высокой
эффективностью капитальных вложений в морскую
нефтегазодобычу. По данным А. В. Курова [15], вложенные средству по
чистой прибыли окупаются всего за 2,5—6 месяцев, что связано
как с высоким уровнем мировых цен на нефть, так и со
сравнительно низкой себестоимостью ее добычи в пределах шельфовых
зон океана.
Освоение других минеральных ресурсов осуществляется более
медленными темпами, однако уже сегодня разработка, например,
подводных россыпей дает основную часть мировой добычи
циркония и рутила, ильменита и др. [6, 16,28]. Можно ожидать, что
с завершением составления проектов добычи железомарганцевых
конкреций с глубоководных акваторий океана процесс их добычи
будет значительно интенсифицирован. По оценкам ООН, начало
промышленной разработки конкреций ожидается в конце 70-х
годов, к середине 80-х годов она сможет удовлетворить до 18%
мировой потребности в никеле, до 50% —в кобальте и др. В
целом общая стоимость добытого морского минерального сырья,
включая нефть и газ, а также продукты морской химии в 1976 г.,
составляет 60—70 млрд. долл. [18].
Одной из наиболее актуальных задач освоения Мирового
океана является активное использование его биопродукционных
потенций.
Очевидно, уже на современном этапе необходимо
закладывать научные и практические основы новой стратегии
использования биопродукционных возможностей морской среды. По
нашему мнению, они должны состоять в увеличении относительной
добычи организмов, находящихся на более низких, чем рыба,
уровнях трофической цепи и продуцирующих значительно
большую биомассу, а также во всемерном развитии морского
фермерства (марикультуры) [1]. Последнее направление
использования морской среды для получения белковой пищи представ-
• ляется особенно перспективным.
Весьма важно, что решение основных задач, связанных
с повышением роли биологических ресурсов Мирового океана
в общем пищевом балансе человечества, будет сконцентрировано
в пределах шельфовых зон, в средиземных и окраинйых морях.
В то же время именно эти, наиболее продуктивные области
Мирового океана испытывают максимальное негативное влияние
69
континентальной экономики, проявляющееся главным образом
в химическом загрязнении морской среды и изменении ее
геосубстратных свойств в результате сокращения пресного стока.
Масштабы и тенденции загрязнения морских акваторий
вызывают обоснованное беспокойство, причем не только в
отношении деградации их биологической продуктивности и снижения
пищевых качеств объектов промысла, но также и в отношении
возможного глобального нарушения естественного равновесия
процессов в системе «океан — атмосфера».
В настоящее время насчитывается свыше 600 тысяч
различных химических веществ, находящихся в отходах, сбрасываемых
в окружающую среду, значительная часть которых
аккумулируется в Мировом океане [5, 27].
Все возрастающий приток загрязняющих и эвтрофизирующих
веществ (в океан поступает около 7з удобрений и других
агротехнических веществ, применяемых на континентах [5])
значительно трансформирует естественные процессы и связи в
экологических системах океана и является одной из главных причин
их перехода на более низкий уровень продуктивности, не
отвечающий экономическим устремлениям общества. Только в
Средиземном море в результате загрязнения погибло около
половины его живых ресурсов [12], в Балтийском море участились
случаи придонного дефицита кислорода, вплоть до полного его
исчезновения, гибели донной фауны и формирования так
называемых бентосных пустынь. Только на окисление бытовых
сточных вод здесь ежегодно расходуется более 3,6 млн. т. кислорода
[34]. Массовые заморы рыб в эстуарных участках рек и на
шельфе индустриально высокоразвитых стран стали обычным
явлением, масштабы которого постоянно растут. Так, ущерб
вследствие массовой гибели рыбы у побережья Японии на
начало 60-х годов оценивался в 5 млрд. иен.
По оценкам С. А. Патина и Н. П. Морозова [25],
возможное уменьшение продукции нектона в масштабе Мирового
океана под действием его загрязнения глобальными токсикантами
уже сейчас составляет не менее 20 млн. т в год.
Серьезную опасность представляет аккумуляция токсических
веществ, в первую очередь тяжелых металлов, хлорированных
углеводородов и радионуклиидов, в биологических объектах
океана. Помимо прямого токсического воздействия,
приводящего к снижению продуктивности организмов всех трофических
уровней, инкорпорирование этих загрязняющих веществ делает
также невозможным использование промысловых объектов
океана для пищевых целей. Так, концентрация канцерогенных
многоядерных углеводородов в мидиях у побережья Франции
достигает 3,4 мг/кг сухого вещества, среднее содержание
остаточного ДДТ в морских рыбах составляет 1, в устрицах — 5,4 мг/кг
и т. д. Содержание некоторых канцерогенных металлов в
биологических объектах эстуариев Северного моря таково (по цинку,
70
например, до 5800 мг/кг), что, по мнению зарубежных
специалистов [33], эти акватории представляют собой идеальное место
для экспериментального изучения проблем этиологии рака.
Негативное воздействие на свойства морской среды
оказывает также все возрастающее хозяйственное изъятие речного
стока. На нужды ирригации, промышленности и энергетики
всеми странами мира ежегодно расходуется около 4000 км3
речных вод [17], и, естественно, масштабы возможных
последствий преобразования речного стока представляются довольно
значительными. Для замкнутых и полузамкнутых внутримате-
риковых морей они зачастую имеют характер «экологического
коллапса». Например, в результате безвозвратного изъятия
более 30% пресных вод в бассейне Азовского моря
гидрологические условия, определявшие прежде уникальную биологическую
продуктивность этого водоема, оказались в значительной мере
деформированы, а суммарные уловы ценных пород рыб,
несмотря на интенсивные меры по их промышленному
воспроизводству, сократились более чем в 10 раз [2]. Активное
водохозяйственное строительство в бассейне Каспийского моря,
сопровождающееся ежегодным изъятием до 12% речного стока
(35 км3/год), способствовало понижению биологической
продуктивности Северного Каспия с 30 до 10 ц/км2. Ряд популяций,
в том числе каспийские сельди, потеряли свое промысловое
значение. К концу текущего столетия безвозвратное водопотребле-
ние здесь увеличится до 100—115 км3 [6]. В этих условиях при
отсутствии переброски пресной воды из бассейнов северных рек
уровень Каспийского моря к 2000 г. понизится на 1,5—2,0 м по
сравнению с современным. Только это способно привести к
значительной деградации биологической продуктивности данного
водоема, являющегося в настоящее время крупнейшим
внутренним рыбопромысловым районом страны. Прогнозируемое
сокращение стока Дуная, Днепра и Днестра более чем на 140 км3/год
неблагоприятно скажется на биологической продуктивности
северо-западного шельфа Черного моря, в пределах которого
формируется около 60% всей его биомассы.
Приведенные фрагментарные факты со всей очевидностью
свидетельствуют об исключительной актуальности скорейшего
научно-практического решения сложных и многообразных
проблем, направленных на упорядочение взаимодействий в системе
«экономика — морская среда». В числе одного из узловых
элементов этой работы следует назвать создание методов
объективной экономико-экологической оценки ущербов, наносимых
антропогенными изменениями морской среды. К сожалению, до
настоящего времени подобные исследования затрагивали лишь
континентальные регионы, морские же акваторщ были
полностью исключены из сферы анализа.
В процессе организации аналогичных работ относительно
морской среды, несомненно, окажется полезной ассимиляция
71
ряда идей, оправдавших себя при разработке
«континентальной» методики. В то же время специфика морской среды и
особенности ее взаимодействия с производственной и
непроизводственной деятельностью человека, безусловно, потребует
формирования принципиально новых подходов, часть из которых
может быть сформулирована уже сегодня.
Прежде всего следует отметить недостаточность
современных исследований, направленных на оценку только наиболее
очевидных разновидностей ущерба, которые возникают
вследствие антропогенного сокращения биологических и
рекреационных ресурсов моря. В соответствии с исследованиями,
проводимыми в Одесском отделении Института экономики АН УССР
[3], оценки должны учитывать ущерб, наносимый в
результате:
— невозможности использования той или иной акватории для
целей марикультуры или снижения ее потенциально возможной
продуктивности;
— ухудшения технических качеств машин, механизмов и
сооружений, контактирующих с качественно измененной морской
средой;
— изменения рельефа дна и интенсивности береговых
абразивных процессов под влиянием антропогенных изменений
гидродинамического режима прибрежной зоны моря;
— использования водных масс в бальнеологических и
рекреационных целях, а также в химической и других отраслях
промышленности;
— погодных и климатических изменений, генетически
связанных с нарушением динамического равновесия в системе
«океан — атмосфера»;
— ослабления процессов саморегуляции морских
экологических систем и необходимости компенсации возникающих при
этом неблагоприятных последствий за счет
специализированных техногенных мероприятий.
В сфере экономико-экологического анализа две последние
позиции являются новыми и поэтому нуждаются в некоторых
комментариях.
Уже говорилось о том, что загрязнение океана способно
существенно нарушить его основные общепланетарные функции
и вызвать сопутствующие неблагоприятные изменения балансов
кислорода и углекислоты, глобального влагооборота, теплового
режима и циркуляции атмосферы. По мнению В. X. Буйницкого
[5], гимптомы таких изменений наблюдаются уже сегодня. Они
проявляются, в частности, в увеличении повторяемости
жестоких засух или наводнений, разрушительных ураганов или
заморозков там, где их никогда ранее не наблюдали, что
приносит огромный материальный ущерб и пагубно влияет на
здоровье -и жизнь людей. Оценить размеры этого ущерба и
установить его непосредственную зависимость от загрязнения океана
72
пока не представляется возможным даже в первом приближении,
однако объективные трудности подобного рода вряд ли могут
служить достаточно веским аргументом против необходимости-
целенаправленной разработки этой проблемы в будущем.
В своем естественном состоянии морская и океаническая
среда в наибольшей мере соответствует системе гомеостатиче-
ского типа, сохраняющей постоянные рабочие условия перед
лицом случайных внешних флуктуации [29]. Возвращение такой
системы в состояние равновесия возможно в результате
саморегуляции — действия «сервомеханизма», фиксирующего
изменения во внешней среде и передающего соответствующую
информацию системе, и «регулятора», обеспечивающего
сохранение ее постоянного режима в условиях переменных внешних
воздействий [29]. Эти два механизма — сервомеханизм и
регулятор— во многих отношениях подобны и отождествляются
в единый механизм саморегуляции, действующий по принципу
обратной отрицательной связи.
До недавнего времени механизм саморегуляции морских
экологических систем находился за пределами каких-либо
натуральных или стоимостных оценок. В то же время интегральная
оценка ущерба, наносимого морской среде хозяйственной,
деятельностью человека, должна обязательно включать также и
оценки, связанные с ослаблением саморегулирующих
способностей экологических систем. При этом прежде всего следует
акцентировать внимание на необходимость оценки способности
морской среды к самоочищению от загрязнений и оценки тех
экономических и внеэкономических потерь, которые связаны
с ее деградацией [3]. Согласно формулировке А. И. Симонова,
«под самоочищением необходимо понимать совокупность
физических, химических, биологических и гидробиологических
процессов, обусловливающих разложение, утилизацию
загрязняющих веществ и ведущих к восстановлению естественных
характеристик морских вод» [27, с. 55—56].
Мировой океан и его отдельные акватории обладают
потенциалом самоочищения огромной мощности, значительно
превосходящих суммарную мощность существующих очистных
сооружений. Например, по заниженным оценкам А. М. Бронфмана
[2], потенциал самоочищения Азовского моря только от
.нефтепродуктов и детергентов оказывается эквивалентным работе
очистных сооружений стоимостью более 500 млн. руб.
Система самоочищения, так же как и любая другая, тонко
сбалансированная система саморегуляции морских
биогеоценозов, обладает определенной, но далеко не безграничной
устойчивостью по отношению к внешним воздействиям. Среди
конкретных причин, ослабляющих эффективность самоочищения,
следует назвать чрезмерное загрязнение и осолонение
акваторий, снижение концентрации биогенных элементов и кислорода,
падение биологической, в том числе первичной продуктивности,
73
гидродинамической активности вод и др. Признаки деградации
системы самоочищения моря уже сегодня обнаружены рядом
исследователей [27, 32], и можно предвидеть, что в будущем
это явление проявится в еще большей степени.
Логически понятно, что снижение интенсивности
самоочищения катализирует процессы загрязнения морских акваторий
со всеми вытекающими отсюда отрицательными последствиями
экологического и экономического плана. Устранение этих
последствий возможно лишь при вложении значительных
общественных средств, обеспечивающем либо восстановление
потенциала самоочищения, либо приведение количества токсических
выбросов в соответствии с новой, уменьшенной, способностью
экологической системы моря к их детоксикации.
Как в первом, так и во втором случае размеры
необходимых капиталовложении оказываются весьма существенными.
Так, в Азовском море только в результате антропогенного
повышения солености расчетная годовая величина потенциала
самоочищения от нефтепродуктов и детергентов сократилась
в среднем на 20 и 46 тыс. т. соответственно [2]. Как показывают
расчеты, оптимизация солености моря, которая способствовала
бы восстановлению потенциала самоочищения, возможна лишь
в результате комплексного осуществления крупных
водохозяйственных программ с ориентировочной стоимостью примерно
1 млрд. руб. Другой путь, обеспечивающий элиминацию
указанного количества рассматриваемых полютантов, требует
дополнительного строительства в бассейне очистных сооружений
стоимостью не менее 150 млн. руб. При проведении
аналогичных расчетов и для других загрязняющих веществ последняя
цифра, несомненно, возрастет в несколько раз.
Приведенного примера, по-видимому, достаточно для
иллюстрации высказанного положения о необходимости
объективной экономической оценки ущербов, возникающих в
результате антропогенных нарушений естественных механизмов
саморегуляции морской среды.
Следует также указать и на другое важное обстоятельство,
требующее внимания при формировании научных основ
освоения морской среды. До последнего времени практически любое
изменение ее качества считалось следствием антропогенных
влияний. Такой методологический прием значительно упрощал
расчеты ущерба, однако он вряд ли может быть признан
достаточно корректным.
В действительности любые антропогенные преобразования
параметров морской среды происходят на сложном фоне их
естественных изменений. В этих условиях чрезвычайно важным
становится разделение динамики соответствующих параметров
морской среды на две составляющие — естественную и атропо-
генную. Экономические расчеты ущерба должны базироваться
на последней из них.
74
2. Методология и задачи развития
экономико-экологических исследований океана
Существующий до последнего времени подход к освоению
морской среды не учитывал взаимосвязи между определенными
отраслями хозяйственной деятельности человека и их влиянием
на состояние морской среды в целом. Такой подход в
значительной степени основывался на мнении о неисчерпаемости
естественных ресурсов. Соответствующая ему хозяйственная
практика приводит к интенсивному загрязнению моря, ухудшению
экологических характеристик морской среды, нарушению ее
природных циклов и связей.
В этой связи особенно остро проявляется отставание, а
точнее говоря, полное отсутствие комплексных исследований,
связывающих вопросы развития производства и динамику
состояния морской среды. Именно поэтому возникает потребность
в новом комплексном подходе к разработке проблем освоения
океана, учитывающем взаимодействие всех сфер хозяйственной
деятельности и влияние их на среду. Только в этом случае будет
возможна разработка интегральных схем развития и
размещения производственных комплексов при оптимальном
взаимодействии их с окружающей средой.
Современный период развития человеческого общества
отличается особенно активным расширением «экономического
пространства», так или иначе преобразуемого в результате
деятельности человека. В сферу экономического освоения морей и
океанов включаются не только шельфовые области,, но и
пространства материкового склона, эпипелагиали и дна. Современный
годовой экономический эффект от освоения Мирового океана,
достигающий ПО—120 млрд. долл., складывается из продуктов
и услуг, получаемых при использовании рекреационных,
энергетических и химических ресурсов морской среды.
Несомненно, что развитие фундаментальных и
научно-практических исследований в названных направлениях требует
совместного рассмотрения экологических, технологических и
социально-экономических аспектов проблемы освоения океана.
Однако с сожалением приходится констатировать существенную
междисциплинарную разобщенность этих исследований.
Здесь мы полностью солидарны с мнением академика
И. П. Герасимова, считающего, что объективные трудности
конструктивных разработок в области целенаправленного
преобразования природной среды связаны не только с
недостаточностью современного знания природных процессов и
закономерностей их антропогенных модификаций, но обусловлены также
относительной обособленностью существующих сейчас
экономического, технического и экологического подходов к решению
соответствующих проблем. «Именно поэтому,— пишет И. П.
Герасимов,— комплексная разработка научных основ преобразо-
75
вания природы особенно тесно связывается в настоящее время
с проблемами синтеза научного знания ... с возникновением
и развитием новых «пограничных» наук или научных
направлений, отражающих тенденцию к интеграции научных
знаний» [7, с. 32—33].
Именно ясное осознание недостаточности и несовершенства
традиционно изолированных подходов к изучению и решению
современных проблем Мирового океана, а также стремление
как можно полнее обобщить разнообразные данные,
получаемые в ходе его освоения, явились основными побудительными
причинами развития морских экономико-экологических
исследований [22, 26], ставших приоритетным направлением
деятельности Одесского отделения Института экономики АН УССР.
Это новое направление экономической науки возникло на
стыке двух наук — экономики и экологии. В этом отношении
оно подобно другим пограничным наукам, например, биофизике
или биохимии. Хотя во всех перечисленных случаях имеет
место синтез разных наук, характер синтеза экономики и
экологии существенно отличен от синтеза физики и биологии или
биологии и химии. В последнем случае речь идет, прежде всего,
о синтезе метода одной науки — физики или химии с
предметом другой — биологии. Биофизика — это изучение жизни
физическими методами, биохимия — изучение живого методами
химии. Однако нельзя изучать ни экономику методами экологии,
ни экологию методами экономики. Речь идет не о простом
объединении предметов и методов экономики и экологии, такое
объединение имело бы эклектический характер и не принесло бы
успеха, а о синтезе научных знаний. Он заключается в том, что
одна наука — экология — определяет, как совокупность
ограничений, предельно допустимые нагрузки на Мировой океан, а
другая— экономика — предъявляет определенные требования к его
состоянию. При этом экология, исследуя пластичность
природных экологических систем, раскрывает возможности
варьирования в определенных пределах допустимыми нагрузками.
Экономика же, исходя из тенденций и направлений развития
народного хозяйства, позволяет выявить возможные пути и
средства, необходимые для изменения антропогенных нагрузок на
морскую среду. Вышесказанное позволяет говорить о
существовании единой системы «экономика — Мировой океан», которая
и составляет предмет изучения так называемой эконологии
Мирового океана.
Таким образом, изучение экономико-экологических проблем
Мирового океана можно определить как науку о законах
функционирования, устойчивости и развития системы «экономика —
Мировой океан», включающую в себя подсистемы различного
уровня, масштаба и сложности. Основной задачей этой науки
является управление процессами развития такой системы на
локальном (отдельные предприятия й биоценозы), региональ-
76
ном (приморские регионы и отдельные акватории, моря
Мирового океана) и .глобальном уровнях [21].
Теоретические и методологические ее основы к настоящему
времени только начинают складываться. Последнее
обстоятельство объясняется тем, что управление системой «экономика —
Мировой океан», как всякое управление, включает в себя
следующие три обязательных элемента: объект управления,
средства управления и цель управления [8]. Теоретические же основы
их синтеза — кибернетика и системный анализ — окончательно
оформились сравнительно недавно. Именно в результате
интеграции этих наук, региональной экономики и естественных наук
об океане и формируются в настоящее время теоретические
основы эконологии Мирового океана.
Под объектом управления понимается планетарный
круговорот вещества и энергии в целом и его звенья на локальном
и региональном уровнях в экономическом пространстве Земли,
ведущая роль в котором принадлежит Мировому океану. Часть
звеньев этого круговорота подчиняется в первую очередь
законам развития производительных сил, другая часть — законам
развития неравновесных динамических систем.
Последние звенья круговорота, принадлежащие
окружающей среде, можно утверждать, обладают свойствами
инерционности, запаздывания, демпфирования, адаптации и т. п.,
которые обеспечивают определенный уровень устойчивости их по
отношению к внешним возмущениям, а также:
— возможность существования целого спектра стабильных
неравновесных состояний среды, часть из которых
соответствует потребностям общества на всех этапах его развития;
— наличие «разрешенных» переходов от одного
равновесного состояния к другому, достижение которых связано со
специальной экономической и технологической деятельностью.
При соответствии уровня развития производительных сил
производственным отношениям в обществе средствами управления
системы «экономика — Мировой океан» являются такие
экономические рычаги, как:
— экономическая оценка ресурсов с народнохозяйственных
позиций;
— затраты на ликвидацию последствий (плата)
загрязнения и, вообще, ухудшения состояния среды и отдельных
ресурсов, за превышение норм их потребления и т. д.;
— себестоимость и прибыль от использования ресурсов и
среды в целом.
При рассмотрении экономических рычагов как основных
в управлении всей системой особое значение приобретает
сопоставимость затрат в текущий момент с будущим эффектом
от использования ресурсов океана. Цель такого сопоставления—
не только рационально использовать средства, выделяемые на
охрану и воспроизводство ресурсов, но и поиск путей переустрой-
77
ства производства, при котором экономический эффект от
внедрения новых технологий окупит затраты на охрану природных
ресурсов [10]. Именно поэтому особое значение приобретает
интегрированная экономическая оценка динамических и
самовосстанавливающих свойств среды. Такая оценка позволит
должным образом рассматривать вопросы распределения ресурсов
океана между отраслями и отдельными производствами, а на
стадии перспективного планирования размещения и развития
производств значительно повысит народнохозяйственную
эффективность его освоения. Стоимостная оценка ресурсов
Мирового океана будет способствовать повышению материальной
ответственности, оперативно-хозяйственной самостоятельности
предприятий морского хозяйства в целом, быстрейшей
окупаемости затрат, возмещению всех расходов собственными
доходами. Планируемая рентабельность производства станет
важнейшим средством осуществления режима экономии,
обеспечивающего выполнение планов при минимальных затратах
общественного труда.
В то же время экономическая оценка ресурсов Мирового
океана должна рассматриваться как производная от
экономических оценок продукции, полученной на их основе. Поэтому
необходимо совместное взаимоувязанное рассмотрение всей
системы экономических оценок ресурсов, ущербов и цен готовых
продуктов. При этом в цене каждого вида продукции должны
быть отражены затраты на его производство (с учетом
расширенного воспроизводства), а также уменьшение причиняемых
других отраслям и государству ущербов и выплата за них
соответствующих компенсаций.
При этом экономико-экологическая наука о Мировом океане
исходит из того, что максимальная эффективность
экономических средств управления системой может быть достигнута
только в случае последовательного применения
программно-целевого подхода при реализации экономико-экологических
мероприятий любого масштаба. Это убеждение базируется на том,
что только методы, разработанные на основе системного
анализа и программно-целевого подхода как его неотъемлемой
части, позволяют рационально сочетать централизованное и
децентрализованное управление межотраслевыми
народнохозяйственными комплексами, которые формируются для
достижения генеральных национальных целей экономического развития
[14] и связываются их структурно-функциональными циклами
[11, 13]. Цель же управления системой «экономика—Мировой
океан» — повышение народнохозяйственной эффективности
социалистического способа производства. Оптимальным считается
такой круговорот вещества и энергии между производством и
Мировым океаном, который осуществляется в необходимом для
удовлетворения всех потребностей общества масштабе при
условиях:
78
— минимизации затрат общественного труда;
— рационального распределения и использования
добываемых ресурсов;
— сохранения качества среды на уровне, обеспечивающем
нормальные условия жизнедеятельности и стабильность
природных экологических систем общества в настоящее время и
обозримом будущем.
Для решения поставленных задач используются методы
диалектики, системного анализа, оптимизационные и
имитационные методы кибернетического, экономического и экологического
моделирования и разрабатываются методы собственно
экономико-экологического моделирования, позволяющие на базе
ретроспективного анализа состояния системы определить наиболее
рациональные методы управляющих воздействий.
Системный подход, базирующийся на принципах
марксистско-ленинской диалектики, позволил сформулировать систему
концепций, принципов и категорий, составляющих основу
теоретического фундамента эконологии Мирового океана.
Рассмотрим некоторые из них.
Концепция единства экономики и экологии.
Исходя из существования единого круговорота вещества и
энергии в системе «экономика — Мировой океан», выделим
прямые (возмущающее действие экономики на среду, изъятие
ресурсов, сброс отходов и т. д.) и обратные (изменение
эффективности производства при изменении состояния среды) связи
в ней.
Указанные виды связей опосредствованы реакцией среды на
внешнее возмущение, трансформирующей прямые связи по цепи
естественных взаимосвязанных процессов. Эти процессы
целесообразно дифференцировать по энергетическим уровням.
Наибольшей энергией обладают процессы круговорота тепла и
влаги, на порядок ниже — энергия динамических процессов,
а именно течений и волн, и, наконец, еще на несколько
порядков ниже — энергия биохимических превращений в океане.
Естественно, что взаимодействие в системе «экономика — Мировой
океан», осуществляемое по цепи «возмущение — трансформация
возмущения — изменение эффективности использования
ресурсов», идет только в направлении от процессов с большей
энергией, а не наоборот. Поэтому в результате, например,
изменения стока рек меняются гидрологический и гидрохимический
режимы внутренних морей и прибрежных акваторий океана, их
биологическая продуктивность и т. д. В то же время
воздействие только на биологические процессы, скажем, изъятие
какого-либо вида из пищевой цепи экологической системы,
разрушает ее целостность, но не оказывает влияния на
гидрологический режим акваторий.
В концепции постулируется, что, наряду с управлением
прямыми связями, необходимо управление и обратными посред-
79
ством активного вмешательства в интенсивность и
направленность процессов трансформации возмущений в среде.
Качество морской среды — категория, позволяющая
определить комплексную динамическую (учитывающую
трансформацию возмущения в среде) оценку отличия ее реального
состояния от желаемого или нормативного, которая
характеризует потенциальные возможности и сравнительную
эффективность удовлетворения потребностей общества.
Состояние среды можно определить набором параметров:
физико-химических (соленость, температура, концентрация
различных соединений); динамических (течения, волнения);
геоморфологических (рельеф дна и берегов); биологических
(биомассы организмов различных трофических уровней, скорости их
размножения) и др., изменяющихся в пространстве и времени.
Назовем их параметрами состояния морской среды £i £а ... £п и
определим диапазоны их изменений, тем самым определим
область G /г-мерного эвклидова пространства, называемую
областью состояний. В этой области каждой точке соответствует
набор чисел, определяющих состояние среды. Этот набор можно
интерпретировать как вектор S(£b £2, ..., £п), имеющий п-ком-
понентов, и отождествить его с состоянием среды [19].
Пусть в результате производственной деятельности
изменяются некоторые компоненты состояния, т. е. его параметры.
При этом вектор 5 изменится на некоторую величину AS=S—
—5исх- Вектор AS отражает те изменения (сдвиги), которые
произошли в состоянии среды. Отметим, что поскольку
некоторые £г и £& связаны между собой функциональными
зависимостями, то сдвиг 5 всегда происходит по поверхности некоторых
гиперповерхностей cpj (£ь ..., £*, ..., £г) = 0, описывающих
трансформацию возмущения в морской среде.
Разобьем область состояний G на подобласти G2-,
определяющие поднабор параметров {£}*, связанный с требованиями
к состоянию среды 1-го потребителя. При использовании среды
предприятием этой подобласти ему можно приписывать
экономическую оценку, определяемую как эффективность
деятельности последнего при состоянии среды 5.
Аналогично можно определить экономическую оценку сдвига
состояния среды AS. Для этого необходимо знать
производственную функцию деятельности отрасли или отдельного
предприятия, в которой в качестве ряда аргументов выступает
подмножество параметров состояния среды {&}<. В случае полной
взаимозаменяемости этих аргументов (аддитивности
производственной функции [4] по {&}<) целесообразно ввести вектор Д
компонентами которого являются коэффициенты предельной
эффективности параметров состояния. Поскольку величины пре-
80
дельных эффективностей показывают прирост эффективности
производства при изменении соответствующих параметров
состояния среды на малую величину [9], то скалярное
произведение вектора D с вектором А5 и даст стоимостную оценку
(сравнительную эффективность) использования среды в различных
состояниях.
Принцип двуединства естественных и антрсг-
погенных воздействий на морскую среду.
Любые антропогенные преобразования морской среды
осуществляются на сложном фоне ее естественных ритмических и
аритмических флуктуации и могут быть адекватно поняты
только с учетом последних. В процессе взаимодействия
природных и антропогенных факторов может происходить как
ослабление последствий хозяйственной деятельности человека, так и
усиление их. Эти эффекты имеют квазипериодический характер,
обусловленный естественным ритмом природных процессов.
В частности, для морских и океанических акваторий наиболее
выражены внутривековые ритмические колебания параметров
состояния среды с периодами 2, 5, 7, 8, 11, 18 лет и более
[24]. Наряду с проблемой разделения естественных и
антропогенных составляющих регистрируемого состояния
морской среды, возникают проблемы объективного выбора времени,
определения значений компонент вектора состояния 5 и
отнесения полученных результатов к определенной фазе
естественного ритмического развития исследуемой акватории.
Принцип стадийности экономического
освоения возобновляемых ресурсов океана. Среди
различных форм траекторий движения вектора 5 по
гиперповерхности (p*(£i ... £г)=0 существует ряд замкнутых,
соответствующих устойчивым состояниям среды, и ряд разомкнутых
траекторий, соответствующих либо переходу среды из одного
устойчивого состояния в другое, либо переходу ее из
устойчивого в неустойчивое состояние.
Поскольку запас устойчивости природных систем конечен,
возможны следующие случаи.
Если воздействие производства на какой-либо параметр
состояния много меньше его естественных изменений, то сила
воздействия по прошествии некоторого времени угасает либо
локализуется.
При соизмеримости антропогенного влияния и естественных
изменений физико-химических, биологических и других
параметров возникают устойчивые циклы, противостоящие
воздействию производства.
И, наконец, если возмущающие воздействия много больше
отдельных статей природного баланса, то восстановление его
гстественным путем оказывается невозможным. Поэтому
рациональное использование морской среды должно осуществляться
81
в несколько стадий в зависимости от характера реакции среды
на воздействие производства [20].
На первой стадии все воздействия производства гасятся
в результате свойства среды самовосстанавливаться, и освоение
ресурсов ведется так, будто они бесконечны. По сути дела, до
настоящего времени именно таким образом осуществлялось
взаимодействие с морем основных отраслей народного
хозяйства.
Вторая стадия наступает тогда, когда некоторый уровень
качества среды поддерживается как в результате
самовосстановления, так и целенаправленной деятельности человека. В этом
случае на восстановление ограниченных ресурсов требуются
определенные затраты.
На третьей стадии природный объект практически не
самовосстанавливается, нужный уровень качества среды полностью
поддерживается с помощью технических средств.
Использование вышеизложенных принципов и концепций
возможно лишь применительно к региону. Основной проблемой,
возникающей при этом, является проблема экономического
районирования Мирового океана. Она еще мало изучена и
одновременно гораздо сложнее, чем проблема экономического
районирования континентальных участков, вследствие неразрывности
водной среды и взаимосвязи происходящих в ней процессов,
а также инерционности океана. Вследствие этого изменения
состояния океана как результат нерациональной деятельности
человека проявляются через длительное время. При решении
этой проблемы нельзя воспользоваться ни административными,
ни естественными, ни физико-географическим делением, ни
делением, проведенным по отраслевому признаку на
рыбопромысловые, транспортные и геологические районы.
Целесообразным представляется территориальное экономическое
районирование.
Выделять такие районы правомерно на основе новой
типологии— типологии систем вида «потребности в природных
ресурсах — источники ресурсов — экономико-экологические
возможности их освоения».
Основная идея заключается в том, что район перспективного
освоения должен быть определен с помощью ряда показателей
качественного состояния ресурсов и среды (устойчивых и
периодически изменяющихся), а также таких, которые
характеризуют потребности экономики и технические возможности их
удовлетворения. Такая система экономического районирования
океана обладает достаточной гибкостью и может быть с
успехом применена при решении проблем перспективного
планирования развития, а также размещения производительных сил
в океане.
Кроме того, такая система позволяет определить участки,
на которых сталкиваются пространственные интересы различ-
82
ных отраслей (добыча нефти и газа, рыбный промысел,
индустрия курортов, морской транспорт), а также дает возможность
определить показатели, которые лежат в основе конфликтов
между этими отраслями, и находить компромиссные решения
путем анализа этих показателей.
Для того чтобы решить исследуемые проблемы
комплексного и отраслевого экономического районирования, как нам
представляется, необходимо:
1) ставить проблему на достаточно длительный промежуток
времени, так как только стабильная долговременная стратегия
развития хозяйственной деятельности способствует повышению
эффективности капитальных вложений и снижению
производственных затрат и, напротив, всякая переориентация в этой
сфере сопряжена с огромными капитальными затратами и
временным снижением производительности труда;
2) функционально определять конфигурацию района,
выделяемого для решения поставленной на рассматриваемый период
цели, с помощью ряда показателей (характеристик), которые
выявлены при анализе поставленной проблемы;
3) определять основные показатели развития
экономических районов [уровень концентрации (мощности) и
специализации (объемы выпуска отдельных видов продукции), темпы
развития, технология производства, схема связей по поставке
сырья, материалов и готовой продукции] совместно и
одновременно, так как все перечисленные параметры формируются
природными, экономическими и социальными условиями, которые
различны в разных районах и, следовательно, не могут быть
установлены, пока не известны границы этих районов. Размеры
осваиваемых акваторий, в свою очередь, зависят как от
производственных мощностей, так и ряда других характеристик
производительных сил и, следовательно, не могут быть найдены,
пока не известны последние;
4) осуществлять районирование осваиваемой территории
таким образом, чтобы существующие и проектируемые районы
образовали единую систему, в пределах которой возможно
решение поставленной проблемы.
Для реализации сформулированных положений в
динамических моделях отраслевого и интегрального экономического
районирования затраты на производство и транспортировку сырья
и готовой продукции, в отличие от существующих моделей
оптимального планирования развития и размещения отраслей
промышленности, рассматриваются как заданные функции от
акватории районов, концентрации и специализации хозяйства в них,
а также от времени.
Это позволяет использовать рассмотренные концепции и
принципы экономико-экологической науки о Мировом океане
для решения главной задачи — программно-целевого
планирования его экономического освоения.
83
3. Программно-целевое планирование
экономического освоения океана
В настоящее время достигнуты определенные успехи в решении
частных экономико-экологических задач. Так, создаются
гидротехнические устройства и сооружения, благоприятно
изменяющие режим и литодинамику прибрежной зоны моря,
регулируется промысел с целью воспроизводства ихтиофауны,
нормируются предельно допустимые выбросы загрязняющих веществ,
обогащаются отдельные акватории, определяется их водообмен
и др. Указанные мероприятия представляют собой виды
управления обратными связями в системе «экономика — Мировой
океан», т. е. управления реакции среды на внешние возмущения.
Принципиально возможно осуществление более крупных и
комплексных мероприятий. В последние годы все чаще
выдвигается идея управления морскими экологическими системами,
в том числе и всей акваторией Мирового океана. По нашему
мнению, такая постановка является преждевременной, и в
современных условиях центр тяжести решения проблем
управления морской средой должен быть смещен в область
региональных преобразований.
Наиболее приемлемым при этом является
программно-целевой подход, обеспечивающий первоочередное решение задач
общественного развития путем планомерного использования
ресурсов и способствующий глубокому разностороннему
обоснованию принимаемых плановых решений на длительную
перспективу.
Программа должна предусматривать увязанный по
ресурсам, исполнителям и срокам завершения комплекс мероприятий
научно-исследовательского, социально-экономического,
производственного, организационно-хозяйственного и другого
характера, осуществление которых способствует реализации
поставленной цели или комплекса взаимосвязанных целей [23].
Эффективная разработка комплекса мероприятий,
включенных в программу (от научно-исследовательских работ до
распределения, обращения и потребления программной
продукции), может быть достигнута только при точной формулировке
ее конечной цели.
Формулирование цели — это первый наиболее важный этап
составления программы, поскольку от формулировки цели
зависит выбор ограничений на средства ее достижения, критериев
отбора альтернатив и т. д.
Принято считать, что главная цель программы,
выражающая определенную общественную потребность, обобщает все
программные неглавные цели и выступает в то же время в виде
задающего звена. Следовательно, эта главная цель может
распадаться на подчиненные ей и взаимосвязанные подцели,
достижение которых обеспечивает реализацию главной исходной
84
цели. Множество таких взаимоупорядоченных и подчиненных
подцелей, образующих иерархическую структуру, обычно
называют вертикальным деревом целей.
Считается, что нижним уровнем вертикального дерева целей
является уровень появления альтернатив. Сами подцели всегда
безальтернативны, а способы достижения их, как правило, мно-
говариантны.
Поэтому большинство авторов предлагает строить не только
вертикальные деревья целей с вершинами типа «и», но также
деревья вариантов их достижения с вершинами типа «или»,
а затем согласовывать их между собой. При этом способы
согласования до настоящего времени считаются
неразработанными, так как оно проводится на разных уровнях, с разной
степенью детализации и во многом определяется субъективными
факторами.
Слабо разработаны и оценки целей по уровням и по
значимости.
Представляется более методологически верным построение
интегрированного дерева целей, уровни которого строго
соответствуют видам и масштабам деятельности, направленной на
реализацию программы. Обычно различают следующие восемь
уровней: научные ресурсы; технологические ресурсы;
элементарная технология; функциональные технологические схемы;
применимость; социальные системы; окружающая среда;
общество в целом [31].
Очевидно, что четыре верхних уровня вариантов
соответствуют уровням разработки данной проблемы, а нижние уровни
целей — уровням воздействия функционирующей системы.
Поскольку цели в зависимости от масштабов располагаются
на различных уровнях, то для эффективности анализа таких
деревьев необходимо ответить на следующие вопросы.
Возможны ли:
— форсирование исследований и разработок по
подпрограммам, требующим особого сосредоточения усилий;
— выявление технологических трудностей, технических
целей и т. д.;
— оценка возможных путей достижения главных целей.
Для получения ответов на эти вопросы необходима четкая
фиксация целевых систем, предназначенных непосредственно
для выполнения цели и располагающихся на водораздельном
пятом уровне. При этом для каждой выделенной целевой
системы ищутся функциональные технологические схемы,
обеспечивающие достижение цели (четвертый уровень) и
описывающие конкретные технико-экономические характеристики
(третий уровень).
Если к моменту рассмотрения проекта программы имеются
технологические схемы, характеристики которых обеспечивают
выполнение поставленной цели при внешних ограничениях,
85
обусловленных уже существующими целевыми системами
(например, прогнозируемый уровень безвозвратного водопотребле-
ния), то построение дерева целей на этом заканчивается. Если
же технико-экономические характеристики существующих
структур не обеспечивают достижения цели, то начинается
построение второго уровня дерева целей—поиск необходимых опытно-
конструкторских работ (ОКР).
Наконец, при отсутствии достаточно достоверного варианта
ОКР, происходит расширение дерева целей до первого
уровня— ведется поиск необходимых научно-исследовательских
работ (НИР), обеспечивающих требуемый вариант ОКР.
Вышеописанных пяти уровней вполне достаточно, если
заданы внешние ограничения выполнения программы, не
допускающие ее дальнейшего пересмотра. Если же в ходе
выполнения программы допускается корректировка внешних
ограничений, то одновременно происходит продвижение вверх от пятого
уровня вплоть до целей, затрагивающих интересы общества
в целом.
При составлении крупных региональных программ
включение в дерево целей шестого и седьмого уровней представляется
насущно необходимым, поскольку именно этим уровням
соответствуют системы поддержания качества среды,
обеспечивающие ее гармоничное развитие.
В результате использования предлагаемого метода в
процессе разработки интегрированного дерева целей происходит
однозначная увязка главной цели и подцелей программы,
расположенных на уровнях, соответствующих масштабам их
деятельности, с многовариантной системой мероприятий,
обеспечивающих достижение поставленной цели и охватывающих весь
жизненный цикл программной продукции.
Благодаря строгой фиксации уровней цели и подцелей
однозначно выделяются мероприятия, направленные на достижение
главной цели. Отбор вариантов их реализации необходимо
выполнять в рамках разрабатываемой программы. Наряду с этим
разработка мероприятий, необходимых для достижения главной
цели, должна быть реализована в рамках программ более
высокого ранга.
Конкретной реализацией изложенных основных положений
программно-целевого планирования экономическим
управлением Мирового океана является разрабатываемая в Одесском
отделении Института экономики АН УССР целевая программа
использования в народном хозяйстве резервов биологических
ресурсов морской среды Черноморско-Азовского бассейна.
В ней показано, что биологическая и рыбохозяйственная
продуктивность Черного и Азовского морей, их лиманов и
приустьевых участков рек могут быть радикально увеличены, однако
для реализаций этого потребуется осуществление мероприятий,
подчиненных следующим основным целям:
86
1. Сохранение и поддержание высокого качества морской
среды.
2. Перемещение центра тяжести от рыболовства,
возможности дальнейшего расширения которого ограничены, на
морское фермерство (марикультуру), обеспечивающего получение
высоких гарантированных объемов рыбо- и морепродуктов при
высокой рентабельности производства.
3. Ориентация значительной части промысла и марикуль-
туры на объекты, располагающиеся на нижних трофических
уровнях биологической цепи (водоросли и моллюски), биомасса
которых значительно больше, чем биомасса растительноядных
и особенно хищных рыб.
Выбор этих целей предопределил рассмотрение следующих
целевых систем:
— обеспечение необходимого качества водной, в том числе и
морской среды, Черноморско-Азовского бассейна;
— обеспечение условий воспроизводства биологических
ресурсов бассейна;
— добыча биологических ресурсов;
— организация морского фермерства;
— переработка биологических ресурсов в пищевые и
кормовые продукты, а также в сырье для технических отраслей
промышленности;
— реализация и сбыт готовой продукции.
Для каждой из вышеперечисленных целевых систем были
определены функциональные технологические структуры,
обеспечивающие достижение поставленных целей.
Анализ современного и желаемого их состояния на
перспективу до 2000 г. позволил наметить комплекс экологических,
социально-экономических, производственных,
опытно-конструкторских, научно-исследовательских и организационных
мероприятий, совокупность которых направлена на достижение
поставленных целей и определяет объемы необходимых ресурсов.
Как известно, заключительным этапом разработки каждой
программы является этап включения ее в
народнохозяйственный план (в его программный и непрограммный разделы).
Вследствие особенностей разработки экономико-экологических
программ освоения Мирового океана требуется создание
системы экономико-экологического планирования и управления.
Принципиальная схема такой системы состоит из четырех
подсистем: наблюдения (мониторинга) /, экологического 2 и
экономического 3 прогнозирования и собственно
экономико-экологического планирования 4 (рис. 1).
Объект управления, рассматриваемый как единая система,
представлен на схеме в виде двух блоков: 5 — «экономика» и
6 — «среда». Учитывая характер связей между ними,
представляется целесообразным мониторинг, включающий три вида
наблюдений, необходимых для целей управления:
87
6. Среда Act, J 1 A65 j '-J 5. Экономика A55 |
I j t I
J I 1. Мони1торинг ^ I
I 1.1 Изменчивость параметров среды \< 1.2. Антропогенные возмущения \< 1.3. Качество среды j
I L I |
j t t r_t
I 2. Экологический прогноз I [ 3. Экономический прогноз I
I j . . I у . ^
I 2.1. Разработка 2.2 Моделирование I I I I 3.4. Прогноз антро- 3.2. Варианты 1
вариантов моделей —Ч проверка на _> и Пр0ГН03 тюведе- L_i I погенных возму- \<-\ хозяйственной —|
I j поведения среды | | адекватность | | ния среды II щений | деятельности |
_ _ { ,
3,3. Прогноз тре- 3.1. Прогноз разви- |
бований к состоя- тия потребностей I'll
I нию среды общества I I I I
L_ L 1 L J
, . ix I I
I 4. Экономико-экологическое планирование ' — 1 1 [ — ■
I i i Г i i i i *
..,_,„ 4.2. Система Крите- ,. . 0 „ 1
I 4.1. Районирование риев и ограничений Удовлетворение 4.3. Прогностиче- i
• акваторий -» экономико-экологи- К качества среды U- екая модель [
I Мирового океана ческого управления критериям качества среды |
i t t . I I
I I : I
Реализация принятого варианта
Рис. 1. Принципиальная схема системы экономико-экологического управления процессом
освоения ресурсов морской среды.
А56 — о характере антропогенных возмущений;
А65 — о значениях параметров состояния среды, входящих
в производственные функции потребителей;
Абб — об изменчивости параметров состояния среды,
входящих в функцию трансформации антропогенных возмущений.
Мониторинг морской среды позволяет определить значения
экологических параметров, необходимых для построения
производственных функций. Однако для построения этих же функций
требуется специальная информация о значениях и динамике
экономических факторов, что влечет за собой дополнение
мониторинга также системой наблюдений А55.
Как видно из представленной схемы,
экономико-экологический мониторинг кроме выше перечисленных четырех основных
видов наблюдений включает в себя следующие
функциональные блоки:
1.1 и 1.2 — обработки информации А56 и А66 с целью
выяснения функциональных связей между параметрами состояния
среды, подвергающимися антропогенным возмущениям;
1.3 — обработки информации А55 и А65 с целью определения
качества среды, т. е. оценки ее состояния, проводимой каждым
потребителем в соответствии с его потребностями.
В подсистеме экологического прогнозирования 2 на
основании информации, выдаваемой блоком 1.1, формируются
различные модели поведения среды (блок 2), проверка которых на
адекватность осуществляется по ретроспективным и
современным данным с использованием информации блоков 1.1 и 1.2.
Конечным итогом функционирования подсистемы 2 является
выработка моделей среды 2.2, позволяющих прогнозировать
динамику основных параметров ее состояния.
В подсистеме экономического прогнозирования 3 на основе
прогноза развития потребностей 3.2 вырабатываются варианты
хозяйственной деятельности.
Взаимодействие блоков 5 и 6 происходит на уровне
отдельных предприятий в конкретных регионах. Следовательно,
работа осуществляется на двух уровнях: микроэкономическом,
представленном производственными функциями предприятий,
и макроэкономическом, учитывающим взаимовлияние этих
предприятий через среду.
На базе производственных функций для каждого из
вариантов хозяйственной деятельности формируются требования к
параметрам состояния среды, перечень которых должен быть
включен в программу мониторинга, относящуюся к системе
наблюдений А65-
Информация о размере и характере антропогенных
возмущений, депонированная в блоке 3.4, определяется технологией
и объемом выпуска продукции, соответствующей вариантам
хозяйственной деятельности. Эта информация используется в
модели среды (блок 2.2). В свою очередь, информация блока 3.3
89
совместно с прогнозом состояния среды (выход блока 2.2)
является основой для моделирования ее качества, (блок 4.3).
В подсистеме 4 осуществляется согласование вариантов
хозяйственной деятельности с прогнозируемым состоянием среды,
т. е. собственно экономико-экологическое планирование. Для
этого предусмотрен блок 4.2, вырабатывающий критерии и
ограничения для акваторий с различным характером
использования. Необходимое для этих целей районирование проводится
в блоке 4.1 на основании информации о текущем состоянии,
качестве морской среды (блок 1.3) и прогнозе потребностей
общества (блок 3.1) в отношении характера предполагаемого
использования акваторий.
В заключение уже сейчас правомерно сделать общий вывод
о том, что дальнейшее развитие экономико-экологических
исследований Мирового океана будет способствовать созданию
комплексных национальных и международных программ
освоения его ресурсов при условии всемерного сохранения
природной среды и общепланетарных функций.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Бардач Д., Ритер Д., Маклерни У. Аквакультура. — М.: Пище-
промиздат, 1978, с. 293.
2. Б р о н ф м а н А. М. Альтернативные решения
экономико-экологических проблем бассейна Азовского моря. — Проблемы экономики моря
(Одесса), 1976, №5, с. 33—45.
3. Бронфман А. М., Харичков С. К-, Рясинцева Н. И. Вопросы
методологии экономической оценки ущерба от загрязнения морской среды.—
Проблемы экономики моря (Киев), 1978, вып. 7, с. 66—79.
4. Будянский Г. Г. О форме регрессионного уравнения старической
производственной функции.— ЭММ, 1972, т. 7, вып. 1, с. 76—85.
5. Буйницкий В. X. Некоторые социально-экономические проблемы
загрязнения окружающей среды в связи с научно-техническим прогрессом. —
Вест. ЛГУ, 1976, № 12, с. 7—12.
6. Воскресенский К. П., Соколов А. А., Шикломанов И. А.
Ресурсы поверхностных вод СССР и их изменения под влиянием
хозяйственной деятельности.— Водные ресурсы, 1973, № 2, с. 33—58.
7. Герасимов И. П., Фрадкин Н. Г. О проблеме «Человек, общество
и окружающая среда».— В кн.: Человек, общество и окружающая среда/Под
ред. И. П. Герасимова и др.—М.: Мысль, 1973, с. 18—33.
8. Г ир у со в Э. В., Лаппо С. С. Пределы возможности биосферы.—
Природа, 1974, № 12, с. 2—7.
9. Г р а н б е р г А. Г. Математические модели социалистической
экономики.— М.: Экономика, 1978.
10. Захариев И. Основные направления решения проблемы охраны
окружающей среды. — В кн.: Рациональное использование природных
ресурсов и охрана окружающей среды.— М.: Прогресс, 1977.
И. Коваленко Ю. Н. Научные основы территориальной организации
промышленных комплексов.— Киев: Буд1вельник, 1977, 176 с.
12. Колодник А., Лазарев М., Имеренов Б. Мальтемирное
море.—Новое время, 1971, № 34,12, с. 12, с. 123—129.
90
13. Комар И. В. Рациональное использование природных ресурсов и
ресурсные циклы.—М.: Наука, 1975, 212 с.
14. Комплексное народнохозяйственное планирование/Под ред. акад.
Н. П. Федоренко.— М : Экономика, 1974, 234 с.
15. Куров А. Б. Капитальные вложения в морские
поисково-разведочные и эксплуатационные работы по добыче нефти и газа и их эффективность
за рубежом.— Тез. докл. Всесоюз конфер. Экономические проблемы Мирового
океана.—Одесса: 1977, с. 75—77.
16. Левченко В. А. Минеральные ресурсы Мирового океана и
проблемы их освоения и использования. — В кн.: Экономические проблемы
Мирового океана. — Одесса: 1977, с. 128—129.
17. Львович М. Н. Мировые водные ресурсы и их будущее. — М.:
Мысль, 1974, 448 с.
18. Любимов Л., Яковин И. Мировой океан: экономика, политика,
право.— Мировая экономика и международные отношения, 1976, № 9,
с. 24—34.
19. Мелешкин М. Т., Суворовский А. Л. Методологические
основы экономики Мирового океана.— Вестн. АН СССР, 1974, № 12, с. 58—66.
20. Мелешкин М. Т. Вопросы методологии комплексного
использования морской среды.— В1сник АН УССР, 1975, № 3, с. 37—46.
21. Мелешкин М. Т. Вопросы теории и методологии развития
экономики Мирового океана. — Проблемы экономики моря./Ин-т экономики АН
УССР, Одесса, 1977, вып. 6, с. 5—28.
22. Мелешкин М. Т. Эконология Мирового океана как новое
направление науки.— Проблемы экономики моря (Киев), 1978, вып. 7, с. 29—43.
23. Методические рекомендации по разработке комплексных
народнохозяйственных программ. (АН СССР, Отделение экономики Центральный эко-
номико-матем. ин-т. ч. 1) — М., 1977, 175 с.
24. М о н и н А. С, К а м е н к о в и ч В. М., К о р т В. Г. Изменчивость
Мирового океана.— Л.: Гидрометеоиздат, 1974, 262 с.
25. Патин С. А., Морозов Н. П. Некоторые аспекты проблемы
загрязнения морской среды тяжелыми металлами. — Труды/ВНИРО.Т. С.
Экономические аспекты химического и радиоактивного загрязнения водной среды,
1974, с. 7—12.
26. Румянцев А. М. Экономическая наука в решении экологических
и социальных проблем освоения Мирового океана.— Проблемы экономики
моря (Киев), 1978, вып. 7, с. 5—18.
27. Симонов А. И. Океанографические аспекты проблемы загрязнения
морей и океанов.— Проблемы экономики моря (Одесса), 1977, вып. 6, с.
56—69.
28. С п р и н г и с К. Я. Морская геология и проблемы минерального
сырья.— М.: Знание, 1971, 47 с.
29. Харвей Д. Научное объяснение в географии.— М.: Прогресс, 1974,
502 с.
30. Шлыков С. Г. Влияние разработки нефтегазовых ресурсов
Северного моря на экономическое положение стран Западной Европы.— Тез. докл.
Всесоюз. конфер. Экономические проблемы Мирового океана.— Одесса: 1977,
с. 39—41.
31. Янч Э. Прогнозирование научно-технического прогресса. М.:
Прогресс, 1974, 586 с.
32 В г о n f m a n A. M. The Arov Sea water economy and ecological
problems: investigation and possible solutioni — In. Enviromental effects
of complex river development.—Colorado: Westview Press, Boulder, 1977,
p. 39—59.
33. Halme E. Zinc and the etiology of cancer.—YCES, Fish.
Improvement Comm. СМ. 1971/Е5, p. 13—17.
34. Oertzen J. A. Von. Die Meeresverschmutzung ein Problem des
Meeresbiologie.—Biol. Rd-sch, 1972, S. 17—29.
91
^0
Ала юлий Ильич Симонов,
доктор географических наук,
профессор. Заведует отделом
Государственного океанологического
института. Специалист в области
химической океанологии, автор
прогнозов загрязнений морей
Советского Союза до 1990 г.,
руководитель ряда международных
научных проектов по проблеме
загрязнения морских вод и их
влияния на экологические
системы. Член редколлегии
журнала «Океанология».
А. И. Симонов
МОНИТОРИНГ
ХИМИЧЕСКОГО
ЗАГРЯЗНЕНИЯ
МОРСКИХ ВОД
1. Характеристика загрязнения морских вод
Первый, рекогносцировочный, этап исследований химического
загрязнения вод, проведенных нашей страной в Атлантическом
океане, был завершен к 1975 г. В результате этих исследований
сделан ряд общих выводов о характере загрязнения морской
среды, которые во многом способствовали определению
мониторинга загрязнения вод.
Было установлено, что загрязнение, особенно нефтяными
углеводородами (НУ), приобретает глобальный характер. В
настоящее время поля загрязнений, как правило, формирующиеся
у берегов, распространяются далеко за пределы прибрежных
районов, охватывают целиком многие моря и районы океанов.
Эти поля устойчивы во времени и пространстве [6].
Данный вывод подтверждают многочисленные- наблюдения,
которые были проведены в последние три года различными
странами в рамках Опытного проекта хМежправительственной
океанографической комиссии (МОК) ЮНЕСКО и Всемирной
метеорологической организацией (ВМО) ООН по мониторингу
нефтяных загрязнений Мирового океана не только в
Атлантическом, но также в Тихом и Индийском -океанах. В осуществлении
этого проекта активное участие принимают
научно-исследовательские суда Советского Союза.
Наблюдения в Северной Атлантике показали, что в
наибольшей степени загрязнены шельфовые воды материковых и
островных районов, где содержание НУ колеблется в пределах
0,05—0,68 мг/л. По мере удаления от шельфа происходит
снижение концентрации. В целом картина распределения углеводо-
93
родов, обусловленного сложной структурой вод и
особенностями процесса растворения их в морской воде, представляется
довольно сложной. В морской воде НУ содержатся в основном
в форме нефтяных комочков и пленок.
Комочки НУ представляют собой образования
разнообразной формы и консистенции от черного до желто-коричневого
цвета размером от 1,0 до 30—45 мм.
В процессе одного отбора, как правило пробоотборником,
собираются комочки различных типов и размеров, что
свидетельствует о неоднородности поля загрязнения и постоянной
трансформации последних под влиянием внешних факторов.
Установлено, что нефтяные комочки в приповерхностном
слое вод Северной Атлантики присутствуют в 89% случаев
отбора проб в количествах от 0,1 до 456,50 мг на 1 м2.
Концентрации нефтяных комочков на 1 м2 морской
поверхности распределяются следующим образом:
Комочки массой <0,1 мг (следы нефти) 10,6%
» » 0,1—1,0 (среднее загрязнение) 45,3%
» » 1,0—5,0 (сильное загрязнение) 36,7%
» » >5,0 (очень сильное загрязнение) . . 7,4%
В 80,7% отобранных проб концентрация комочков достигает
1,0 мг/м2 и больше.
Многие комочки являются носителями нектонного перифи-
тона, основу которого составляют морские уточки, рачки-изо-
поды и другие подвижные формы. Так, комочек массой 6,85 г
с очень развитой поверхностью населяла колония из 21 уточки
с размерами головок 3—4 мм.
Анализ ряда комочков методом газовой хроматографии
показал наличие в них хлорорганических пестицидов, которые
абсорбировались на их поверхности во время миграции в морской
среде. Так, например, агрегат, выловленный в точке с
координатами 36° 0Г с. ш. и 15° 02' з. д., массой 72 мг содержал 2,79 нг
Y-ГХЦГ, 20,42 нг ДДТ и 11,23 нг ДДЕ.
Нефтяными пленками охвачены громадные акватории. Так,
визуальные наблюдения, проводившиеся в рамках проекта
МОК и ВМО [9], свидетельствуют о том, что подобной пленкой
полностью покрыты Южно-Китайское и Желтое моря, зоны
площадью 300 тыс. км2 у Панамского канала (пленки
обнаружены в 40 — 50% случаев всех наблюдений), вся система Куро-
сиво (до 30%), зона к западу от Гавайских островов площадью
до 600 тыс. км2 (до 30%), юго-восточная часть Берингова моря,
почти сплошная зона вдоль берегов Северной Америки
шириною до 500 — 600 км (до 20%).
Эти визуальные наблюдения полностью подтверждаются
инструментальными наблюдениями за распространением
нефтяных комочков в поверхностном десятиметровом слое воды,
которые являются конечным продуктом эволюции тяжелых фрак-
94
ций НУ на различной стадии их минерализации. Нефтяные
комочки обнаружены во всех перечисленных выше районах,
а также на громаднейшей акватории от Гавайских островов
к северу до Аляски и к востоку до берегов Северной Америки.
Наибольшее их содержание (до 100 мг на 1 м2) отмечено в
районах к югу от Японии и между Гавайскими островами и Сан-
Франциско, т. е. в районах самого интенсивного судоходства
в северной части Тихого океана.
Данные о нефтяном загрязнении тихоокеанских вод еще раз
подтверждают вывод о том, что оно приобретает глобальный
характер.
Проведенные исследования позволили сделать другой
важный вывод о значительном влиянии химического загрязнения на
первичную продукцию океанических вод [3]. Оценивая влияние
химических загрязнений на первичную продуктивность
поверхностных вод, следует прежде всего отметить то, что в районах,
где концентрации загрязненных веществ были небольшими,
наблюдались максимальные концентрации хлорофилла (0,1 —
1,0 мкг/л) и совершенно отсутствовал продукт его распада
феофитин, который в вегетационный период, вероятно, может
служить показателем степени воздействия загрязняющих
веществ на первичную продукцию фитопланктона.
Там же, где морские воды оказались наиболее
загрязненными ртутью и нефтепродуктами, содержание хлорофилла
было значительно ниже (в основном до 0,1 мкг/л), а
содержание феофитина увеличено (до 2 — 3 мкг/л). Высокие
концентрации химических загрязнений не столько оказывают
тормозящее, подавляющее влияние на процесс фотосинтеза водорослей,
сколько пагубно воздействуют на живое органическое
вещество, образующееся в ходе этого процесса.
Таким образом, можно считать установленным факт
существенного влияния, загрязнения на первичную продукцию
морских вод.
Кроме того, сделан очень важный вывод о роли основных
циркуляционных систем и относительно застойных зон океанов
и морей в переносе и накоплении загрязняющих веществ
соответственно.
Наибольшие концентрации этих веществ отмечаются в
прибрежных зонах, куда они поступают с берега, и в обширных
относительно малоподвижных районах океана, куда они
приносятся системами течений. Так, струи Гольфстрима, Северо-
Атлантического течения, которые насыщаются загрязняющими
веществами у берегов Северной Америки и Европы,
разгружаются в районе Саргассова, Норвежского и Баренцева моря.
Таким образом, зоны разгрузки, в том числе и Арктический
район, становятся аккумуляторами вредных веществ. В
северозападном районе Тихого океана основной поток Куросиво
делит поле загрязненных вод на две части: одну прижимает к бе-
95
регам Японии, а другую — оттесняет в открытый океан.
Перенос загрязняющих веществ происходит преимущественно
в периферийных зонах циркуляционных систем, где они
концентрируются под действием поперечной составляющей
скорости течения.
Еще один вывод был сделан в последние годы. Обнаружено
значительное концентрирование НУ, синтетических
поверхностно-активных веществ и хлорированных углеводородов в
поверхностном микрослое воды (до 3000 мкм), поступающих
в Мировой океан по различным каналам. Установлено, что
концентрация указанных веществ в поверхностном микрослое на
один-два порядка выше, чем в подповерхностном слое воды и
приводном слое атмосферы. По мере удаления от материков и
шельфовых зон их концентрация в целом уменьшается, но все
же остается сравнительно высокой. Исключением являются
хлорированные углеводороды, концентрации которых
снижаются до «следовых» значений.
Одновременно с удалением от материков меняется
качественный состав загрязняющих веществ: абсолютно и относи1
тельно возрастает взвешенная часть и уменьшается
растворенная часть НУ, повышается также абсолютная и относительная
доля ДДЕ и ДДД (метаболиты ДДТ) и уменьшается доля
ддт.
Таким образом, можно считать характер явления устойчиво
высоких концентраций химических загрязнений в
поверхностном микрослое Мирового океана глобальным, так же как и
характер нарушения естественно сложившихся
физико-химических параметров этого слоя под влиянием загрязнения.
Частью мониторинга является система наблюдений за
загрязнением вод, донных отложений и поверхности Мирового
океана, которые позволят выделять изменения в состоянии
океанской и, в какой-то мере, наземной живой среды, происшедшие
под влиянием антропогенной деятельности. В этом отношении
мониторинг загрязнения вод Мирового океана имеет
подчиненное значение в системе мониторинга окружающей природной
среды.
Решить проблему загрязнения вод Мирового океана —
значит разработать обоснованные предложения по сокращению
сбросов отходов в океанскую среду в такой мере, чтобы
процессы естественной утилизации загрязняющих веществ
постоянно превалировали над процессами загрязнения и приводили
к устранению нарушений или возможностей нарушений в
экологических системах Мирового океана и Земли в целом.
Эта цель может быть достигнута путем решения следующих
задач:
— наблюдение за динамикой уровней загрязнения вод
Мирового океана, их обобщение и определение сложившихся
тенденций в изменении уровней загрязнения;
96
— прогноз динамики уровней загрязнения океанских вод и
тенденций в их изменении;
— разработка предложений по предотвращению сбросов
загрязняющих веществ в океанскую среду с учетом результатов
указанного прогноза.
В настоящее время балансовый метод прогноза уровней
загрязнения и расчета темпов снижения сбросов загрязняющих
веществ разработан и опробован для отдельных морей [1].
Расчет динамики уровней загрязнений учитывает
одновременно поступление загрязняющих веществ в море, их
разложение, уход в донные отложения, атмосферу и при водообмене
в другое море, при этом каждый из этих процессов
характеризуется своим коэффициентом скорости. Суть его сводится к
следующему.
Известно, что расход загрязняющих веществ в единицу
времени пропорционален его массе и коэффициентам скоростей
оттока, при этом каждый принимается постоянным за изучаемый
промежуток времени. При этих предположениях баланс
загрязняющих веществ за время dt описывается уравнением
где Mo и Mt — наличие загрязняющих веществ в море
соответственно к началу расчета и в период dt, тыс. т; qt— скорость
поступления загрязняющих веществ в море; 2/С — сумма
констант скоростей оттока загрязняющих веществ по различным
каналам.
Из уравнения видно, что при постоянных qt и S/C масса
загрязняющих веществ в море Mt при t-^oo асимптотически
стремится к величине qtf^K с некоторым запаздыванием, которое
характеризуется членом (qt/^K— M0)e"~SK/ и определяет
динамические свойства процессов, происходящих в море.
Приведенная формула несколько сложна для расчетов,
поэтому, используя разложение в ряд величины e-SK', приводим
ее к рабочему виду:
Эмпирические коэффициенты, используемые в формулах
расчета констант скоростей оттока загрязняющих веществ,
а также константа скорости биохимической деструкции Ki в
зависимости от температуры, получены на основе
экспериментальных данных и натурных наблюдений [1].
Однако использование этого метода требует наличия
достоверных данных не только о приходе загрязняющих веществ
в море, но и об уровне загрязнения водной толщи, поверхност-
4 Заказ № 1190
97
ного и придонного слоя воды, донных отложений и величинах
водообмена как между отдельными слоями воды, так и с
соседним морем.
2. Каналы поступления загрязняющих веществ
в Мировой океан
Научные основы организации мониторинга загрязнения вод
Мирового океана, учитывающие каналы и скорости
поступления основных загрязняющих веществ (НУ, хлорированные
углеводороды, тяжелые металлы, синтетические
поверхностно-активные вещества), время их нахождения в морской среде,
скорости обмена на границе фаз (вода — донные отложения,
вода — приводный слой атмосферы, вода — живые организмы),
их эволюции в морской воде, способность концентрироваться-
в граничных зонах (поверхность, донные отложения, слой
скачка плотности) в известной мере изложены в «Программе
мониторинга фоновых уровней отдельных загрязняющих
веществ в открытых водах Мирового океана», в составлении
которой по решению ЮНЕП, ВМО и МОК принимал участие автор
этой статьи.
При разработке следует учитывать многие обстоятельства,
и в первую очередь природного характера, которые
обусловливают многие важнейшие черты в эволюции загрязняющих
веществ:
высокую динамичность вод океанов, приводящую к
довольно быстрому распространению загрязняющих веществ на
обширные пространства;
различный временной характер обмена, вентиляции вод,
возраста водных масс над шельфом и в открытой части океана,
в верхнем и нижележащих слоях;
ограниченные потенциальные возможности морских вод
к естественной утилизации химических загрязнений, к
самоочищению, особенно при низких температурах воды.
Кроме того, необходимо учитывать характер источников и
каналов поступления загрязняющих веществ, их
физико-химические свойства.
По-видимому, следует рассматривать проблему загрязнения
морской среды каждым конкретным загрязняющим веществом
отдельно. Насколько это правильно, можно убедиться, кратко
проанализировав процесс загрязнения нефтяными (НУ) и
хлорированными углеводородами.
В настоящее время в морские воды ежегодно поступает от
различных источников и по разным каналам около 6 млн. т
НУ, что составляет примерно 0,23% годовой мировой добычи
нефти. Чтобы реально представить эту величину, достаточно
указать, что в течение всей второй мировой войны в результате
98
потопления и повреждения танкеров в океан поступило всего
около 4 млн. т нефти [8].
Общее представление об источниках и каналах поступления
НУ в морские воды можно получить на основе
нижеприведенных данных [10]:
Объем, %
т, ТТЛГ от общего притока
Источники и каналы поступления НУ загрязняющих
веществ
Сбросы с судов в море, включая сбросы промывочных,
балластных вод 23
Сбросы с судов в портах, в припортовых акваториях, включая
потери при переливе нефти с танкеров и в них, при загрузке
топлива 17
Сбросы с берега, включая промышленные сточные воды . . 11
Поступление с ливневыми стоками из городов 5
Поступление при катастрофах судов 5
Поступление при бурении на шельфе 1
Приток с речными водами 28
Приток из атмосферы 10
Эти данные примечательны в двух отношениях. Во-первых,
они позволяют определить основные каналы поступления НУ
в Мировой океан и оценить величину каждого из них. Так,
поступления непосредственно в море составляют 29%; с речным
стоком — 28; сбросы с берега и с судов в портах и припортовых
акваториях — 33 % •
Во-вторых, они говорят о том, что 43% поступлений НУ
в настоящих условиях не может практически регулироваться,
так как речной сток, атмосфера и городские ливневые стоки
являются их мощными коллекторами. Этот факт значительно
усложняет и отдаляет время решения проблемы в целом.
Постоянное наличие и увеличение содержания НУ в
морских водах свидетельствует о преобладании скорости их
поступления над скоростью естественной утилизации.
Исследования, проведенные в различных странах,
свидетельствуют о влиянии НУ на снижение воспроизводства и
сокращение видового состава живых организмов, а также
возникновение раковых заболеваний [2]. Пороговые концентрации,
вызывающие гибель одноклеточных водорослей или замедление их
деления, лежат в интервале 0,05—1,00 мг/л. В связи с этим
в «черном списке» опасных загрязняющих веществ, сброс
которых полностью запрещен лондонской Конвенцией о
предотвращении загрязнения морской среды 1972 г., значатся нефть и
нефтепродукты.
В Советском Союзе регламентирована предельно
допустимая концентрация НУ в морских водоемах, имеющих рыбохо-
зяйственное-значение — она равна 0,01 мг/л. Следует отметить,
4*
99
что на обширных пространствах морей, в шельфовых зонах
материков реальные концентрации НУ могут быть значительно
выше предельно допустимых.
Загрязнение морской воды влияет не только на живые
организмы. Наличие НУ на поверхности воды в виде пленок и их
высоких концентраций в поверхностном микрослое могут
значительно нарушать энерго-, газо- и влагообмен между океаном и
атмосферой, так как поверхностное натяжение нефтяной пленки
в несколько раз меньше поверхностного натяжения чистой воды,
коэффициент теплопроводности на два порядка выше,
теплоемкость в несколько раз меньше, чем в воде, газопроводность
нормальной пленки мономолекулярного слоя составляет 50% газо-
проводности чистой воды. В итоге, наличие НУ на поверхности
воды может повлиять не только на гидробиологические условия
океана, но также на климат и содержание кислорода в
атмосфере Земли, поскольку океан является важным фактором
формирования их режима.
Сказанное выше позволяет выделить несколько наиболее
важных аспектов мониторинга загрязнения Мирового океана
нефтью и нефтепродуктами.
Первый аспект заключается в прослеживании динамики
уровней нефтяного загрязнения открытых вод Мирового океана
в районах, достаточно удаленных от основных каналов их
поступления.
Второй аспект заключается в оценке накопления НУ в
зонах Мирового океана, в которых степень естественной
утилизации этих веществ из-за низких температур воды небольшая.
К таким зонам можно отнести Балтийское, Берингово,
Норвежское моря, Северный Ледовитый океан, Антарктику.
В основном НУ поступают в Северный Ледовитый океан
с течениями из других океанов и прежде всего с водами Северо-
Атлантического течения [6]. Большему накоплению НУ в
Северном Ледовитом океане по сравнению с другими океанами могут
способствовать некоторые его физико-географические
особенности, а именно: низкие температуры воды и воздуха, которые
тормозят процессы химического и биохимического окисления
НУ, даже в летний период.
Третий аспект состоит в оценке накопления НУ в
поверхностном микрослое океанов и морей, в их влиянии на
загрязнение атмосферы, на изменение тепло-, влаго- и газообмена
океана с атмосферой. В настоящее время, как показывают
наблюдения, по всей акватории Северной Атлантики в
поверхностном микрослое воды средняя концентрация НУ превышает
1 мг/л. Ориентировочный расчет показывает, что общее
содержание НУ в поверхностном микрослое всей акватории
Мирового океана может достигать 1,5—2 млн. т, что составляет
третью часть ежегодных поступлений НУ в океанические воды.
Очевидно, что объем концентрирования НУ- в поверхностном
100
микрослое грандиозен. Это обстоятельство говорит о роли
граничных поверхностей в концентрировании НУ и свидетельствует
о необходимости исследования их содержания на двух других
наибольших граничных поверхностях океана, а именно: в
донных отложениях океанов и в слоях скачка плотности.
Полученные результаты в свою очередь позволят уточнить мониторинг
нефтяных загрязнений морской среды.
Зная массу НУ, удерживаемую в поверхностном микрослое,
и скорость поступления (5,5 млн. т в год), можно рассчитать
ориентировочное время их пребывания НУ в этом слое.
Предположительно оно может составлять от одного до пяти месяцев,
что не только совпадает по порядку, но и близко к значению
периода полураспада растворенной и диспергированной в воде
нефти, которые были найдены экспериментальным путем [7].
Период полураспада нефти в морской воде при температуре
10° С равен примерно 1,5 месяца; с повышением температуры
до 18—20° С он понижается до 20 сут, а при 25—30° С —
до 7 сут.
Исходя из изложенного, можно полагать, что при низких
температурах воды только около половины НУ, находившихся
в поверхностном микрослое, уходит во взвешенной и
растворенной форме в воду, концентрируясь вновь в слоях скачка
плотности или в донных отложениях, а их легколетучие
компоненты — в атмосферу. Другая же половина НУ деградирует
в этом слое. При высоких температурах воды значительная
доля НУ, за исключением легколетучих компонентов, может
деградировать непосредственно в поверхностном микрослое. Это
(вместе с турбулентной диффузией) вполне объясняет
уменьшение концентраций НУ в поверхностном микрослое по мере
удаления от шельфа, а также их повышение в средних и
высоких широтах океанов и, напротив, понижение в экваториальной,
тропической и субтропической зонах.
Сопоставление величин времени пребывания НУ в
поверхностном микрослое и периода их полураспада в воде также
позволяет заключить, что поверхностный микрослой — не только
мощный концентратор, но и фильтр НУ, что в значительной
степени предохраняет толщу вод океана от интенсивного
загрязнения.
Этот вывод чрезвычайно важен для правильного учета
основных составляющих баланса загрязнений морской среды НУ.
До сих пор в расходной части баланса загрязнений не
учитывалось концентрирование значительной части НУ в сравнительно
небольшом по объему микрослое (меньше 1% всего объема вод
Мирового океана) и деградация их в этом слое.
Следует отметить, что с ростом добычи нефти при
отсутствии серьезных водоохранных мероприятий, проведение
которых по ряду причин затруднено, загрязнение Мирового океана
будет возрастать. По данным ООН, мировой объем добычи
101
нефти в 1980 г. превысит 4000 млн. т, в том числе 7з этого
количества — на шельфе. Можно рассчитать, используя
указанный выше коэффициент потерь, что в морскую среду будет
поступать ежегодно выше 9 млн. т НУ. Более того, есть
основание предположить, что темпы загрязнения Мирового океана
будут повышаться и в связи с ростом добычи нефти на
континентальном шельфе.
Обратимся теперь к проблеме загрязнения Мирового океана
хлорированными углеводородами, прежде всего ДДТ и РСВ.
ДДТ (и его метаболиты ДДЕ и ДДД) и РСВ обнаружены
во многих районах Мирового океана. Относительная
химическая устойчивость, а также характер миграции этих веществ
способствовали их поступлению в больших объемах в морскую
среду.
Постоянное накопление в морях и океанах
хлорированных углеводородов представляет серьезную угрозу для живых
организмов, населяющих море, и для человека. Установлено,
что существует определенная зависимость между уровнем
загрязнения воды пестицидами и их накоплением в жировых
тканях рыб и морских млекопитающих.
В связи с этим, по-видимому, предстоит решить еще одну
проблему: достоверно оценить массу пестицидов в атмосфере и
океанах, накопившуюся за последние три десятилетия, а также
период их воздействия на живые организмы, и зоны
наибольшего накопления их в донных отложениях.
К 1968 г. производство ДДТ достигло примерно 100 тыс. т
в год (из них две трети — в США), а в целом за период с 1944
по 1970 гг. составило около 2 млн. т [8].
ДДТ, применяемые в качестве пестицидов, и его продукты
распада поступают в окружающую среду в основном при
испарении.
Таким образом, основным каналом поступления ДДТ и
его метаболитов в морскую среду в фазе паров является
атмосфера.
Именно этим объясняется факт его широкого
распространения в морской среде: наличие ДДТ и его метаболитов
фиксируется в открытых и океанических водах, особенно в
поверхностном микрослое. По наблюдениям, проведенным ГОИН
в 1976 г. в северо-восточной части Северной Атлантики,
суммарное содержание ДДТ, ДДЕ и ДДД в этом микрослое воды
достигало 90 нг/л, а в подповерхностном — 5 нг/л.
Производство полихлорбифенилов (ПХБ) к 1970 г. только
в США и Японии достигло 49,7 тыс. т (в 1961 г. оно составляло
лишь 21,2 тыс. т [8]). Правда, уже в 1971 г. производство ПХБ
резко сократилось в связи с ограничением его потребления
в гидравлических смесях, системах с высокими температурами,
при.котором происходит очень большое, а в ряде случаев и
полное рассеивание в окружающей среде. Кроме того, при исполь-
102
зовании РСВ как пластификаторов, смазочных масел,
материалов для уплотнения и наполнителя смолы в клее, они затем не
извлекаются.
Основным каналом поступления ПХБ в океан, как и ДДТ,
является атмосфера.
По данным американских специалистов, содержание ПХБ
в поверхностных водах восточной части Атлантики в 1971—
1972 гг. достигло в среднем 30 нг/л [8]. В 1973 г. в Северной
Атлантике были проведены замеры (в точке 32°25/ с. ш. и 70°20'
з. д.): на глубине 100 м — концентрация ПХБ составляет
0,8 нг/л, на глубине 600 м — 0,5 нг/л, 900 м — 1,9 нг/л и на
глубине 5100 м — 0,4 нг/л. Американские специалисты определили
также, что содержание ПХБ в среднем в 20-—30 раз выше
содержания ДДТ.
Существует предположение, что ПХБ имеет большую
устойчивость, чем ДДТ.
Остатки ПХБ, как и ДДТ, обнаружены в липидной фракции
морских организмов. Как и в воде, соотношение масс ПХБ и
ДДТ в планктоне можно выразить примерно как 1 : 30, но
затем, по мере продвижения по пищевым цепочкам, оно
уменьшается до 1 : 3 в рыбах.
Краткое рассмотрение характера проблем загрязнения вод
Мирового океана позволяет сделать следующие выводы:
распространение НУ и хлорированных углеводородов имеет
глобальный характер, обусловленный для НУ колоссальным
объемом их притока и переносом циркуляционными системами,
а для хлорированных углеводородов — их незначительной
эволюцией в морской среде при сравнительно меньшем
поступлении; концентрирование НУ в больших количествах в
поверхностном микрослое, обусловленное для НУ их меньшей
плотностью по сравнению с плотностью морской воды, а для
хлорированных углеводородов — их поступлением преимущественно из
атмосферы и способностью растворяться в нефтяных
углеводородах.
Эти общие выводы, несомненно, будут способствовать
построению единой системы мониторинга загрязнения вод
Мирового океана.
Следует отметить, что в последнее время получены
количественные данные, которые говорят о поверхности океана как
источнике загрязнения атмосферы. Так, анализ наблюдений,
которые проводились в 1976—1977 гг. ГОИН в Северной
Атлантике свидетельствуют о том, что между концентрацией
растворенной фракции НУ в поверхностном микрослое и
концентрацией НУ в приводном слое атмосферы существуют вполне
определенные прямые связи. Правда, связи эти не однозначны
для различных районов океана. Характерно, что их
устойчивость уменьшается по мере удаления от шельфа в океан.
Причина этого заключается в том, что в прибрежных районах
103
обычно преобладают свежевыброшенные НУ, в составе
которых, в свою очередь, преобладают летучие фракции.
Разумеется, неоднозначность выявленной связи
определяется и другими факторами: анемобарическими условиями,
влажностью воздуха, сложившимся парциальным давлением
НУ в воздухе, их разностью в поверхностном микрослое и
воздухе, турбулентностью в пограничном слое и др.
Однако все эти факты — значительно меньшее содержание
НУ в воздухе, чем в поверхностном микрослое, уменьшение
растворимой фракции НУ в нем по мере удаления от берега и
наличие связи между содержанием НУ в воздухе и
концентрацией растворимой фракции НУ в поверхностном микрослое —
говорят о существовании процесса перехода части НУ из
океана в приводный слой атмосферы.
В связи с этим необходимо в систему мониторинга
загрязнения вод Мирового океана включить наблюдения за химическим
составом и основными метеорологическими характеристиками
в приводном слое атмосферы, а также за скоростью обмена
загрязняющими веществами через поверхность океана.
3. Принципы организации мониторинга
загрязнений морских вод
Изложенные выше соображения с очевидностью подводят
к следующим основным принципам организации мониторинга
загрязнения вод Мирового океана:
— комплексности химических (в воде, взвесях, грунтах,
приводном слое атмосферы) и сопутствующих гидрологических
и метеорологических наблюдений, которые во многом
определяют эволюцию загрязняющих веществ в морской среде и их
обмен через основные граничные разделы — поверхность
океана, слой скачка плотности, взвеси и дно океана;
— прослеживания динамики уровней загрязнения
океанических вод при проведении долгопериодных систематических
наблюдений за фоновыми концентрациями загрязняющих веществ
в наиболее удаленных от источников загрязнения районах
открытого океана, которые характеризовали бы условия среды
значительных прилегающих акваторий. Такое прослеживание
можно организовать на ограниченном числе базовых
океанографических станций в каждом океане (по шесть — десять
станций);
— прослеживания переноса загрязняющих веществ. Для
этого необходимо организовать наблюдения на
океанографических разрезах в основных циркуляционных системах Мирового
океана. Такие разрезы можно выполнять около базовых
станций и при подходе.к ним или при отходе от них
научно-исследовательского судна;
104
— сопряженности мониторинга химического загрязнения
вод Мирового океана как подсистемы мониторинга окружающей
природной среды с мониторингом влияния загрязнений на
морские живые организмы. Только при соблюдении этого
принципа наблюдения будут логически полноценными и
завершенными.
Осуществление изложенных принципов позволит
одновременно подойти к изучению долгопериодной пространственно-
временной изменчивости условий среды, включая загрязнения.
Именно этими принципами, за исключением последнего, автор
статьи руководствовался при составлении Программы
мониторинга фоновых уровней отдельных загрязняющих веществ в
открытых водах Мирового океана.
По мнению авторов этой программы, в Атлантическом океане
достаточно восьми базовых станций для освещения
долгопериодной изменчивости фоновых уровней основных загрязняющих
веществ. Местоположение этих станций выбрано с учетом
гидродинамических и морфологических условий районов
Атлантического океана, каждая из которых отражает определенные,
а в совокупности основные циркуляционные и термогалинные
особенности водных масс океана (рис. 1).
В программе рекомендуется проводить наблюдения на
базовых станциях в течение десятилетий, не менее чем четыре раза
в год.
Предлагается вести контроль за такими загрязняющими
веществами, как нефть и нефтепродукты, хлорированные
углеводороды (ДДТ, ПХБ), как тяжелые металлы (свинец, ртуть,
кадмий и, возможно, другие), детергенты. Кроме того, в состав
сопутствующих наблюдений рекомендуется ввести определение:
физических параметров (температура и соленость воды для
выделения водных масс и определения вертикальной структуры,
взвеси для определения нерастворимых загрязняющих веществ,
температура и влажность воздуха, скорость и направление
ветра);
химических параметров (растворенный кислород,
щелочность и рН в случае, если появится необходимость
рассчитывать формы угольной кислоты, в том числе и двуокись углерода
для изучения обмена ею с атмосферой).
С учетом изложенных выше обоснований, в настоящее время
проводятся работы на научно-исследовательских судах погоды
Советского Союза в Атлантическом океане в районе станции
погоды «Чарли», расположенной в системе
Северо-Атлантического течения, берущего начало у Флориды и заканчивающегося
в Северном Ледовитом океане.
Незначительные долгопериодные изменения в параметрах
среды, установленные в ходе наблюдений в районе станции
«Чарли», будут, несомненно, характеризовать изменения среды
на значительной акватории Северной Атлантики.
105
Именно поэтому эта станция наряду с другими семью
станциями определена в упомянутой Программе мониторинга
фоновых уровней отдельных загрязняющих веществ в открытых водах
Мирового океана как станция для долгопериодных
систематических наблюдений за фоновыми уровнями загрязнения
среды Атлантического океана.
Организация таких наблюдений в районе станции «Чарли»
может сыграть исключительно важную роль при изучении фо-
С.Ш.70°,
га.шбО0!
здЮ0°
50°
0° 20°в д.
Рис. 1. Местоложение станций
для наблюдений за уровнем
основных загрязняющих
веществ в Атлантическом океане.
1—8 — базовые станции.
новых уровней параметров среды в арктических морях,
которые в отдельности или вместе взятые могут рассматриваться
как биосферные заповедники.
Таким образом, организацию специальных комплексных
наблюдений в районе станции «Чарли» можно в будущем
рассматривать как вклад Советского Союза в систему
международного глобального мониторинга химических загрязнений вод
Мирового океана и как составную часть «системы
национальных наблюдений по программе биосферных заповедников.
В задачи наблюдений на станции погоды входит:
— изучение фоновых уровней основных физических,
химических характеристик и загрязняющих веществ в морской воде;
— исследование фоновых уровней, распространения,
эволюции и тенденции уровней загрязнения вод Гольфстрима НУ,
хлорированными углеводородами, некоторыми тяжелыми
металлами и детергентами, а также перенос их системой
Северо-Атлантического течения;
106
— изучение фоновых уровней основных загрязняющих
веществ в приводном слое атмосферы (НУ, сернистый газ,
тяжелые металлы, хлорированные углеводороды, сульфаты);
— определение потока загрязняющих веществ через
поверхность океана;
— исследование уровней концентрирования загрязняющих
веществ в основных компонентах биологической системы
(фитопланктон, зоопланктон и бентосные организмы);
— исследование первичной продуктивности и влияния на нее
загрязняющих веществ;
— определение численности микроорганизмов (общая и по
группам) и исследование родового состава нефтеокисляющих
микроорганизмов для оценки их роли в разрушении НУ в
морской воде;
— разработка общих оценок реакции биоты на воздействие
отдельных загрязняющих веществ с целью определения
понятий «норма» и «патология» для всей системы Гольфстрима;
изучение возможности использования морских организмов
для индикации загрязняющих веществ.
Наблюдения в районе станции «Чарли» будут
сопровождаться наблюдениями на разрезе, проходящем через эту
станцию и пересекающем Гольфстрим.
Представляется, что подобным образом могут быть
организованы наблюдения на других базовых океанографических
станциях Атлантического океана и других океанов.
Наблюдения в открытых водах Мирового океана должны
подкрепляться систематическими наблюдениями в шельфовых
зонах. Только тогда можно будет составить представление
о пространственно-временной изменчивости загрязнений
океанических вод и решить задачи, изложенные выше.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Метод расчета баланса и динамики уровней загрязнения морских
вод/А. И. Симонов, Н. А. Афанасьева, Т. А. Бакум, Н. С. Езжал-
кина, Н. А. Родионо в.— Труды/ГОИН, 1978, вып. 149.
2. Н е л ь с о н-С м и т А. Загрязнение моря нефтью. — Л.: Гидрометео-
издат, 1973, с. 122.
3. О р а д о в с к и й С. Г., Симонов А. И., Ю щ а к А. А. Исследование
характера распределения химических загрязнений в зоне Гольфстрима и их
влияние на первичную продуктивность океанических вод. — Метеорология и
гидрология, 1975, № 2, с. 48—58.
4. Симонов А. И. Океанографические аспекты проблемы загрязнения
морей и океанов.— В кн.: Мониторинг состояния окружающей природной
среды. — Л: Гидрометеоиздат, 1977, с. 174—192.
5. С и м о н о в А. И., Михайлов В. И. Химическое загрязнение
тонкого поверхностного слоя Мирового океана.— Труды/ГОИН, 1978, вып. 149,-
с. 6—14.
107
6. Симонов А. И., Орадовский С. Г., Ющак А. А. Современное
состояние химического загрязнения вод Северной Атлантики.— Метеорология
и гидрология, 1974, № 3, с. 61—69.
7. Симонов А. И. и др. Процессы самоочищения морских вод от
химических загрязнений.— Труды/ГОИН, 1978, вып. 128, с. 61—63.
8. G о 1 d b е г g E. D. The health of the oceans.— Paris: The Unesco
Press, 1976.
9. Rohnke D. Preliminary analysis of data visual observations and tal-
ball collections.—IOC — WMO/MAP MOPP — 11/6.—Paris, 1978, Janyary.
10. Petroleum in the Marine Environment. National Akademy of sciencis.—
Washington, 1975.
п.
МЕТОДЫ
ИССЛЕДОВАНИЯ
ОКЕАНА
Борис Алексеевич Нелепо,
действительный член АН УССР,
директор Морского
гидрофизического института АН УССР.
Основные научные интересы —
экспериментальная гидрофизика.
В последние годы занимается
разработкой спутниковой
океанографии.
Б. А. Нелепо
КОСМИЧЕСКАЯ
ОКЕАНОГРАФИЯ:
ПРОБЛЕМЫ
И ПЕРСПЕКТИВЫ
Изучение Мирового океана проводится со все более
нарастающей интенсивностью. Измерительные средства, с помощью
которых получают фактические данные, непрерывно
совершенствуются. Однако методика их использования, по существу, не
меняется. Наблюдения выполняют либо с автоматических
буйковых станций, выставляемых в различных районах океана,
либо на стационарных платформах и береговых
океанографических станциях. Создание сети постоянно действующих
океанографических станций связано с серьезными техническими
трудностями, в том числе и эксплуатационными. Поэтому
разработку и применение специализированных океанологических
спутниковых систем следует считать актуальным и
перспективным направлением современной океанологии.
Космическая океанография базируется на развитых в
последнее время дистанционных методах измерения океанологических
параметров. Установлена возможность дистанционного
измерения таких параметров океана, как глобальная топография его
поверхности, состояние водной поверхности, морских течений,
спектр и направление распространения волн, ветра в приводном
слое, радиационный баланс на поверхности океана, температура
поверхности океана. В качестве носителей аппаратуры
дистанционного измерения могут использоваться как суда, так и
самолеты, однако наиболее перспективным является использование
искусственных спутников Земли (ИСЗ), имеющих целый ряд
преимуществ: большую продолжительность работы, быстрый
обзор значительной площади земного шара и др.
Первые результаты использования ИСЗ, полученные как
в Советском Союзе, так и в США, свидетельствуют о возмож-
111
ности удовлетворительной точности измерения океанологических
параметров.
Однако сегодня роль дистанционных методов исследования
океана с использованием ИСЗ не столь велика, как хотелось бы.
Это связано, в первую очередь, с недостаточной
отработанностью методов дистанционных измерений, ограниченными
возможностями измерительной аппаратуры, отсутствием глубоко
разработанных теорий и методов обработки и интерпретации
получаемой информации. Следует отметить и то, что
дистанционные методы позволяют проводить измерения только
поверхностных гидрофизических полей, являющихся лишь отражением
процессов, протекающих в глубинах океана, и едва ли в
обозримом будущем эти методы позволят непосредственно
«заглянуть» в глубь океана, скажем, ниже слоя сезонного термоклина.
Поэтому традиционные методы исследования с использованием
научно-исследовательских судов и буйковых станций различного
назначения будут по-прежнему развиваться и
совершенствоваться.
В то же время появление методов космической океанографии
окажет (и уже оказывает) значительное влияние на весь
характер исследования океана, что заставит океанологов существенно
пересмотреть установившиеся методы исследований и перейти
к выполнению крупных управляемых океанографических
программ.
Методы космической океанографии в своей основе — это
методы крупномасштабных исследований, позволяющие
осуществлять оперативный обзор обширных акваторий, дающий
общее представление о динамике происходящих процессов в
поверхностном слое океана, а также получать количественные
оценки гидрофизических параметров в высокоградиентных зонах.
Фотография, приведенная здесь (рис. 1; фотографирование
выполнено в сентябре 1973 г. с космического корабля «Союз-12»
летчиками-космонавтами В. Г. Лазаревым и О. Н. Макаровым),
дает некоторое представление о характере информации,
получаемой с орбит ИСЗ. Данный снимок, в частности, можно
использовать для изучения водных масс и мелководий.
Трудно на основании первых экспериментов дать
достоверный прогноз дальнейшего развития этого направления
океанографии. Однако можно с уверенностью сказать, что
дальнейшие научные исследования, связанные с разработкой теории,
методов и средств дистанционного зондирования океана с борта
космических аппаратов, дадут в руки океанологов мощный
инструмент.
На основе подобных данных можно планировать экспедиции
научно-исследовательских судов для детальных исследований
с помощью судовых и буйковых средств в характерных районах,
изменчивость протекающих процессов в которых определяет
динамику на значительных акваториях.
112
Рис. 1. Район Каспийского моря (снимок сделан с борта космического
корабля «Союз-12»).
Океанологам еще предстоит создать в океане опорную сеть
измерительных пунктов, к которым будут «привязываться»
результаты дистанционных измерений, аналогично тому, как
в метеорологии данные, получаемые с метеорологических
спутников, «опираются» на наземную сеть метеорологических
станций. Система автоматических буйковых станций, расставленная
определенным способом, позволит получать вертикальную
структуру (начиная с поверхности) не только деятельного, но и
глубинных слоев океана. Это позволит, с одной стороны,
регулярно калибровать датчики дистанционного зондирования,
с другой — решать задачу трансформации поверхностных полей
в глубину, по крайней мере, в пределах деятельного слоя.
Дополнив указанный измерительный комплекс системой
дрейфующих буев (поверхностных и нейтральной плавучести),
океанологи смогут трассировать поверхностные и глубинные
течения, вихри и ринги, а также оценивать их скорости.
Важным элементом, определяющим характер эксплуатации всей
системы буйковых станций, может стать геостационарный
спутник, в поле зрения которого будет находиться исследуемая
акватория океана, и комплекс измерительных средств, в том
числе исследовательские суда, система заякорных и
дрейфующих буев, измерительные океанографические ИСЗ. Такие
спутники помимо других задач смогут собирать информацию с
системы буев (особенно с «ныряющих» буев нейтральной
плавучести) и ретранслировать ее на приемные пункты.
1. Проблемы космической океанографии
Интенсивное развитие методов дистанционного зондирования
в течение последнего десятилетия открыло новый путь к
изучению происходящих в океане явлений, в частности к
исследованию его мезомасштабной, или синоптической, изменчивости.
Разработка новой аппаратуры, развитие новых методик
дистанционного зондирования и способов дешифровки информации,
привлечение теоретических моделей, которые описывают
процессы, происходящие в океане, — вот те задачи, которые
предстоит решить, прежде чем перейти к решению ряда
фундаментальных проблем океанологии и, следовательно, к созданию
замкнутой гидродинамической модели океана, а также
последующему прогнозированию его параметров.
Одной из таких проблем является определение
крупномасштабной изменчивости океана. Синоптическая, или мезомас-
штабная, изменчивость крупномасштабных океанических
течений и в первую очередь изменчивость наиболее интенсивных
из них, проявляется в изменениях положения оси течений,
колебаниях их интенсивности, меандрировании. Указанные факторы,
в свою очередь, приводят к изменениям таких важных
характеристик, как вынос тепла к северу течениями типа Гольфстрим,
114
количество которого определяет климат на значительной
территории Европы и арктических районов.
Меандрирование интенсивных течений и связанные с этим
процессы так называемой баротропной неустойчивости приводят
к возникновению изолированных вихревых образований типа
холодных и теплых рингов. Обладая значительными запасами
кинетической энергии, крупномасштабные океанические
течения и их изменчивость играют важную роль в общем
динамическом балансе океана, в процессах взаимодействия океана и
атмосферы и во многом определяют динамику собственно
атмосферных процессов.
Значительный вклад в процессы перераспределения
количества движения, углового момента, переноса тепла в океане
вносят синоптические вихри. По подсчетам специалистов, учет
переноса тепла синоптическими вихрями может на 30—40%
изменить общий баланс меридионального потока тепла к северу.
Для оценки вклада синоптических вихрей в общий баланс
переноса тепла, импульса и углового момента в океане
необходимо знать районы зарождения вихрей, периодичность их
образования, направления преимущественного распространения.
Имеющийся опыт говорит о том, что дистанционные методы
обнаружения вихревых образований и слежения за ними с
орбитальных научных станций открывают путь к оперативному
прогнозированию «погоды» в океане.
Одними из важнейших факторов, определяющих
крупномасштабную изменчивость гидрофизических полей океана, являются
термические аномалии и фронтальные зоны.
По современным представлениям, достаточно мощные и долго-
живущие температурные аномалии и фронтальные зоны во
многом определяют характер процессов теплообмена между
атмосферой и океаном, влияют на устойчивость глобальных
атмосферных процессов, что, в конечном счете, отражается на
формировании погоды и климата на значительных территориях
земной поверхности. Совершенно ясно, что проблема краткосу-
точного, а затем более долгосрочного прогноза не может быть
решена без учета указанных факторов, оперативное получение
информации о которых возможно только дистанционными
методами.
Связующим звеном в цепи процессов, определяющих
взаимодействие океана и атмосферы, является деятельный слой
океана. Он представляет собой верхний приповерхностный
слой, в котором физические параметры испытывают
значительные сезонные колебания. В нем выделяется
квазиизотермический слой, характеризующийся малым вертикальным градиентом
температуры; слой скачка, в котором параметры среды
претерпевают скачкообразные изменения, и сезонный термоклин,
характеризующийся значительным вертикальным градиентом
температуры.
115
Изменчивость деятельного слоя приводит к формированию
температурных аномалий, которые вследствие большой тепловой
инерции океана оказывают значительное влияние на характер
атмосферных процессов. Кроме того, деятельный слой океана,
являющийся промежуточным звеном в перераспределении
потоков тепла, во многом определяет и характер циркуляции
глубинных вод.
Количественные оценки крупномасштабного
взаимодействия океана и атмосферы, включая обмен
энергией, моментом, теплом и влагой, можно получить также с
помощью дистанционных измерений радиационного бюджета
поверхности океана, осадков и испарений, статистических
характеристик поверхностных волн и ветрового режима в приводном
слое атмосферы.
Разработка перечисленных фундаментальных проблем
физики океана, теории и методов расчета физических полей, а также
переход к экспериментальным исследованиям океана из
космоса позволяет приступить к решению ряда прикладных и
практических задач народного хозяйства. Главнейшими из них
являются:
— оперативное краткосрочное и долгосрочное
прогнозирование погоды;
— обеспечение безопасности мореплавания, выбор
оптимальных маршрутов судов;
— установление контроля над экологией моря, в частности,
при определении степени загрязненности морской поверхности
нефтепродуктами;
— определение динамики образований ледового покрова;
— определение районов повышенной биологической
продуктивности и прогноз рыбных скоплений и т. д.
Обсуждаемые проблемы могут быть решены поэтапно.
Первым этапом является картирование диагностических полей
физических параметров (температуры, волнения и пр.),
получаемых дистанционными методами. Дальнейшее развитие теории
и методов интерпретации данных наблюдений позволит
идентифицировать физические образования и перейти к составлению
карт этих образований, а именно:
— течений, отражающих интенсивность, положение оси,
меандрирование и связанные с этим процессы
гидродинамической неустойчивости, приводящие к образованию рингов
и вихрей, а также взаимодействие вихревых образований с
течениями;
— фронтальных зон с указанием их положения,
интенсивности, мест наибольших градиентов;
— зон апвеллингов с указанием мощности выноса
биогенных элементов;
— термических аномалий деятельного слоя океана с
указанием их положения, размеров и мощности;
116
— загрязнений поверхности моря нефтепродуктами с
указанием положения, размеров и количества нефтепродукта;
— цвета вод с указанием биологически продуктивных
районов;
— ледовых полей с указанием положений и границ полей,
полыней, разводий.
На этой стадии необходимо разработать критерии и методы,
позволяющие выделить и классифицировать физические
явления в океане.
Вторым, более сложным, этапом является разработка
прогностических моделей физических образований в океане,
основанная на материале, полученном за достаточно большой период
наблюдений.
Первоначально такое прогнозирование будет осуществлено
в масштабах синоптической изменчивости, в дальнейшем —
в масштабах сезонной изменчивости. В перспективе можно
ожидать решение долгосрочного прогнозирования, скажем, на
год. На этой стадии требуется осуществить комплекс
организационно-технических мероприятий.
С одной стороны, необходимо создать мощную
вычислительную базу на основе машин третьего поколения; банк хранения
данных; математическое обеспечение для обработки
информации.
С другой стороны, следует организовать целевые рейсы
научно-исследовательских судов для изучения физических
явлений, происходящих в океане, создать
контрольно-калибровочные полигоны, позволяющие отработать методику
дистанционного зондирования и идентификации физических образований
в океане; установить комплекс «долгоживущих» буев и буев
нейтральной плавучести (дрифтеров) для исследования, по
крайней мере, верхнего 200-метрового слоя океана; развернуть
постоянно действующую сеть автономных буйковых станций
(АБС) в виде «кластеров», состоящих из одного-двух базовых
буев, работающих в режиме измерения и накопления
информации, и несколько мини-буев, работающих в режиме измерения
и трансляции информации на базовые буи.
Все это позволит решать задачи гидродинамики океана
сначала в пределах деятельного слоя, а затем и в более
глубоких слоях океана.
2. Информативные гидрофизические параметры
и требования к их определению
Накопленный к настоящему времени опыт дешифрирования
получаемых из космоса изображений в различных диапазонах
электромагнитных волн свидетельствует о перспективности
использования спутниковой информации для изучения Мирового
117
океана [4, 15]. Синтезируя эту информацию с данными
измерений, получаемых традиционными (контактными) методами
с борта научно-исследовательских судов или АБС, можно
перейти к изучению всего многообразия термодинамических и
других процессов, протекающих в океане.
Достигнутый к настоящему времени уровень развития
технических средств и методов наблюдений из космоса позволяет
в большинстве случаев получать качественные характеристики
интересующих нас параметров состояния океана, однако уже
в ближайшем будущем точность измерений будет существенно
повышена, что позволит получать и их количественные оценки
с необходимым уровнем информативности [21].
Попытаемся сформулировать те минимальные требования,
которые предъявляются к точности измерения гидрофизических
параметров, выполняемых дистанционными методами. Точность
определения этих параметров зависит от специфики решения
конкретных океанографических задач. Таким образом, сначала
следует сформировать задачу, а затем на ее основе выработать
требования к аппаратуре и точности измерения.
Требования должны предъявляться к точности измерений,
пространственному разрешению и широте охвата исследуемого
района океана, временному осреднению и частоте отсчета.
Одним из наиболее информативных параметров морской
среды является температура поверхности океана, которая в
настоящее время может быть определена по собственному
излучению океана в ИК- и СВЧ-диапазонах.
Этот параметр является определяющим при решении таких
задач океанографии, как изучение мезомасштабной
изменчивости океана; выделение фронтальных зон и зон интенсивных
течений; прогноз структуры деятельного слоя океана,
взаимодействие океана и атмосферы.
Исходя из этих задач и определим требования к измерению
температуры и другим информативным параметрам.
Мезомасштабная изменчивость океана. Поле
температуры поверхности океана в значительной мере подчинено
характеру вихревого движения в главном океаническом
термоклине. При этом основные особенности в распределении этого
параметра обусловлены прежде всего вихревыми адвективными
течениями, возмущающими зональное распределение
температуры [13].
В отличие от циркуляционного характера вихревого
движения в главном океаническом термоклине модель
распределения температуры поверхности океана характеризуется ин-
трузионным характером смещения изотерм.
Характерные масштабы образований в верхнем слое
океана— 40—400 км. Средняя скорость пространственного
перемещения— 5—8 км/сут. Перепады температур на упомянутых
расстояниях 0,2—2,0° С в зонах влияния глубинных мезомас-
118
штабных вихрей и до 2—3°С в зонах расположения
интенсивных образований типа рингов Гольфстрима.
Выделение (идентификация) синоптических вихревых
образований по их проявлениям в поле температуры поверхности
океана позволит оценить как кинематические характеристики
вихревых образований, так и характер взаимодействия верхнего
пограничного слоя океана со слоем основного океанического
термоклина. В последнее время резко возрос интерес к
исследованиям изменчивости океана в масштабах 15—50 км, что связано
с высокой энергетичностью движений на этих участках.
Перепады температур составляют обычно 0,2—1,0° С. Поэтому
точность измерений этих перепадов — 0,1—0,2° С при
разрешающей способности аппаратуры на местности 3—5 км.
Температурные аномалии прослеживаются на сред-
неклиматическом фоне как образования с характерными
пространственными масштабами от сотен до тысячи километров,
характерным временем жизни от нескольких до десятков
месяцев и мощностью (по глубине) —десятки метров [20].
Экстремальные отклонения от климатической нормы таких
образований составляют не более 2—3° С, однако вследствие большой
тепловой инерции океана по сравнению с атмосферой они
оказывают значительное влияние на погоду планеты в глобальных
масштабах. Поэтому дистанционные зондирующие аппараты
должны обладать достаточной широтой охвата регионов океана
и частотой измерения. Наиболее целесообразно получать карты
поверхностной температуры 1—2 раза в неделю.
Пространственное разрешение при этом должно составлять 30—50 км,
точность определения температуры — не ниже 0,5° С.
Фронтальные зоны и зоны интенсивных
течений. К настоящему времени положение основных фронтальных
зон Мирового океана и зон интенсивных течений определено
достаточно хорошо. Поэтому главной задачей является изучение
изменчивости оси течений и фронтов, меандрирования и т. п.
[19]. В качестве основного признака для распознавания
«образов» океанских фронтов и границ интенсивных течений является
перепад температур на их границах, который может достигать
2—10° С. Это позволяет обнаруживать его аппаратурой ИК-
диапазона. При столь больших перепадах температур
приемлемая точность ее определения составляет 0,5—1,0° С.
Пространственное разрешение должно составлять 1—2 км.
Добавим, что информация о положении границ
фронтальных зон несет в себе данные о цвете вод, характере облачности
над океаном, скорости и направлении течений и другие.
Определение скорости течений принципиально возможно с
помощью высокоточных альтиметров (радиовысотомеров),
позволяющих получать оценки крупномасштабных уклонов
уровня океанской поверхности. Однако использование
динамического метода для определения скорости течений вследствие
119
исключительных сложностей методического и технического плана
остается проблематичным. Например, при скорости течения
10 см/с перепад уровня поперек оси течения в масштабе 10 км
составит 10 см. При этом точность определения разницы высот
при ошибке в 20% требуется ±2 см.
Большие перспективы в этом направлении сулит
использование дрейфующих буев (дрифтеров), положение которых
может быть определено с помощью спутниковых
навигационных систем несколько раз в сутки с точностью порядка 1 км.
Это, в свою очередь, позволяет оценивать скорость с точностью
около 10% даже для самых интенсивных течений, что вполне
удовлетворяет требованиям океанографии.
Прогноз структуры деятельного слоя океана
является важнейшей задачей океанографии, так как он —
главное промежуточное звено в процессах взаимодействия океана
и атмосферы. Этот прогноз включает в себя определение
температуры поверхности океана, положения нижней границы
однородного слоя (слоев), положения (глубины залегания)
скачка плотности. Температура и глубина однородного слоя
определяют мощность температурных аномалий
(теплосодержания) и время жизни, положение слоя скачка определяет
нижнюю границу зоны активного фотосинтеза верхнего слоя
океана.
В настоящее время имеется довольно большое количество
теоретических моделей, позволяющих рассчитывать упомянутые
параметры вертикальной структуры деятельного слоя океана.
Входными параметрами таких моделей служат температура
воздуха, лучистый поток энергии, скорость ветра, влажность,
давление, облачность, которые могут быть измерены
дистанционными методами с ИСЗ. Расчеты по этим моделям позволяют
использовать температуру поверхности океана, измеренную
с точностью 0,1° С, глубину перемешанного слоя и положения
слоя скачка с точностью 1—2 м. При измерениях
дистанционными методами такая точность еще не достигнута.
Когда необходимая точность измерений температуры
поверхности океана и других информативных гидрофизических
параметров будет достигнута, то использование их в теоретических
моделях позволит перейти к расчету потоков тепла на границе
слоя скачка и определять таким образом поступление тепла
в главный океанический термоклин.
На основании сказанного выше представляются разумными
следующие точности измерения температуры поверхности
океана, разрешающей способности на местности и
периодичности обновления информации, позволяющие проводить
достаточно корректно последующую интерпретацию получаемых
данных.
Температура воздуха, наряду с температурой поверхности
океана, является важнейшим информативным параметром, поз-
120
воляющим определять скорость поступления тепла в океан
в результате контактного теплообмена с атмосферой. Расчетной
величиной в теоретических моделях служит не абсолютная
величина температуры, а ее аномалия относительно некоторого
значения. Поэтому при разности температур «воздух-вода»
порядка 10° С 10%-ная точность расчета составляющей
контактного теплообмена может быть достигнута при точности
определения температуры воздуха ~ 1° С.
При разности температур порядка 2—3° С необходимая
точность составляет уже 0,2° С. Однако при таких значениях
разности температур «воздух—вода» вклад контактного
теплообмена в общий баланс (бюджет) тепла на поверхности океана
становится менее 10%. Следовательно, точность измерения
температуры воздуха ~ 1° С является вполне приемлемой
с точки зрения усвоения этого параметра в моделях
деятельного слоя океана.
При расчетах локальной структуры деятельного слоя океана
информативным гидрофизическим параметром является модуль
скорости ветра, входящий в формулы, описывающие баланс
(бюджет) тепла на поверхности океана, скорость поступления
(генерацию) механической энергии перемешивания в
однородном слое и диссипацию механической энергии в этом слое.
При 10%-ной точности расчета этих параметров вполне
приемлемой точностью измерения модуля скорости ветра в
диапазоне скоростей от 1 до 15 м/с является величина ~1 м/с
(заметим, что средняя минимальная скорость ветра над океаном
4—5 м/с). При скоростях ветра, превышающих значение 15 м/с,
необходимая точность может быть снижена до 3—4 м/с,
поскольку становится существенной неопределенность в подт
боре эмпирических коэффициентов.
Развитые в последние годы методы скаттерометрии,
основанные на определении диаграммы обратного рассеяния
радиоволн СВЧ-диапазона, позволяют определять этот параметр
с орбит ИСЗ с приемлемой точностью.
В формулах расчета составляющих теплового баланса
(бюджета) на поверхности океана давление в приземном
(приводном) слое не играет существенного значения. Например, в
диапазонах изменения давления 820—1080 мбар ошибка в
определении давления ±1 мбар вносит примерно 1%-ную погрешность
в определение соответствующего теплового баланса. В то же
время 10%-ная точность определения относительной влажности
вполне приемлема для расчета составляющих теплового
баланса по поверхности океана. С помощью поля ветра можно
оценить атмосферное давление в приводном слое.
Расчетной величиной служит и балл облачности верхнего и
нижнего ярусов, выраженный в числе октантов неба, закрытых
облаками. В настоящее время облачность оценивают визуально,
причем точность определения величины 1/с составляет ±0,1 при
121
диапазоне изменений величины {1ч-10}. Информация,
получаемая аппаратурой дистанционного зондирования в видимом,
ИК- и СВЧ-диапазонах позволяет получить данные как по
облачности, так и влажности воздуха.
Величина влажности воздуха в приводном слое океана
входит в расчетные формулы затрат тепла на испарение и
величины уходящей длинноволновой радиации. Принимая во
внимание, что в диапазоне температур 0—30° С давление
насыщенного пара изменяется в пределах 2—50 мбар, и придерживаясь
10%-ной точности расчета относительной влажности, получим,
что при среднем значении относительной влажности 50%-ная
необходимая точность ее определения составляет ± 1 мбар. В
расчетах теплового баланса (бюджета) на поверхности океана
участвуют два вида потока лучистой энергии: поток падающей
коротковолновой радиации (прямая плюс диффузная
компоненты) и поток отраженной длинноволновой радиации.
Не вдаваясь в тонкости, связанные с конкретным выбором
эмпирических коэффициентов, входящих в приведенные
формулы, остановимся на обсуждении точности параметров,
необходимых для расчета этих потоков радиации. При определении
падающей коротковолновой радиации, поглощаемой верхним
слоем, широко используется методика, позволяющая затабули-
ровать значения потоков лучистой энергии. В этой методике
основным параметром служит поток лучистой энергии на верхней
границе атмосферы Земли Q0. Значения Q0, затабулированные
для каждого из сезонов, широты и долготы места наблюдений,
имеются в соответствующих климатических атласах.
Прямое измерение потока лучистой энергии Qo с ИСЗ
позволяет перейти к использованию его в качестве одного из
информативных параметров, разрабатываемых и имеющихся
теоретических моделей. Считая диапазон изменений величины Q0
{100-г-1000} кал/(см2-сут)
и принимая 10%-ную точность измерений потока, можно
полагать, что ошибка в определении Q0, равная ±50 кал/(см2 • сут)
в нижних широтах, является вполне приемлемой.
3. Влияние «скин-слоя» на развитие методов
дистанционного зондирования океана
Центральное звено в системе взаимодействия атмосферы и
океана — приповерхностный однородный слой океана. Поле
температуры в этом слое формируется под действием различных
динамических и термических факторов: ветра над океаном,
коротковолнового и длинноволнового излучения, осадков,
испарения, волцеция и т. д. Кроме того, как показали исследования
синоптической изменчивости океана, поле температуры одно-
122
родного слоя в значительной мере подвержено влиянию
глубинных синоптических вихрей, формирующих мезомасштабные
структуры с горизонтальными масштабами от десятков до
сотен километров.
В настоящее время задача определения температуры
поверхности океана наиболее эффективно может быть решена с
помощью ИК-радиометрических измерений, выполняемых ИСЗ.
Однако температуру, измеренную таким образом, вообще
говоря, нельзя отождествлять с температурой однородного слоя.
Это объясняется тем, что у поверхности океана почти всегда
расположен так называемый холодный «скин-слой» толщиной
несколько миллиметров, внутри которого термодинамические
свойства среды резко меняются.
Лабораторные и натурные эксперименты по исследованию
термической структуры этого слоя показали, что перепад
температуры 0,4—2,0° С может быть сосредоточен в пределах 1 мм,
а холодная пленка сохраняется при ветре до 10 м/с, т. е. даже
в условиях развитого волнения. При обрушивании волн
генерируется мелкомасштабная турбулентность и холодный «скин-
слой» исчезает. Кроме того, турбулентные вихри могут
проникать в него из однородного слоя и выравнивать профиль
температуры, что также приводит к разрушению «скин-слоя».
Несмотря на многие причины, вызывающие разрушение
«скин-слоя», восстановление его происходит довольно быстро.
По данным авторов работы [7], время восстановления равно
примерно 12 с.
Таким образом, можно полагать, что существование
холодной пленки — явление повсеместное и в среднем устойчивое во
времени.
ИК-радиометры измеряют радиационную температуру
тончайшей пленки воды, а практический интерес для
исследователей представляет температура подстилающего однородного
слоя, поэтому вопрос о правомерности отождествления
температур квазиоднородного слоя и поверхностной пленки или о
способах корректировки измеренной яркостной температуры имеет
большое значение. До тех пор, пока мы не установим истинное
распределение температуры в «скин-слое», а также
закономерности горизонтального распределения его характеристик,
неточность в определении однородного слоя будет существенно
снижать информативность получаемых данных. Это снижение
информативности заключается в следующем. Во-первых,
поскольку характерное время проведения ИК-съемок со спутника
оказывается сравнимым с характерным временем
существования «скин-слоя», неопределенность в определении температуры
однородного слоя может достигать величины перепада
температуры в «скин-слое». Во-вторых, температура «скин-слоя»
существенно влияет на энергетические характеристики процессов
взаимодействия океана и атмосферы. При этом вследствие
123
малой толщины его прямая роль в энергетическом бюджете
верхнего слоя океана оказывается незначительной. Например, «скин-
слой» в известном смысле оптически прозрачен для падающей
солнечной радиации. Другие же составляющие теплового
баланса, такие как затраты тепла на испарение, контактный
теплообмен, уходящее длинноволновое излучение, «скин-слой»
может изменять на 10—15%. Поэтому необходимо исследовать
одновременное влияние процессов, протекающих в атмосфере
и в однородном слое, на динамику поверхностной холодной
пленки.
Цель этих исследований — установление механизмов
локального формирования и разрушения «скин-слоя»; определение
характерных горизонтальных масштабов и времени «жизни» этого
слоя, а также границ метеорологических параметров, в
пределах которых он существует; оценка характера и степени
волнения отдельных метеорологических параметров и характеристик
однородного слоя на структуру «скин-слоя».
Решение перечисленных задач позволит связать температуру
поверхности океана с температурой однородного слоя и перейти
к построению гидродинамической модели верхнего однородного
слоя океана с включением в нее холодного «скин-слоя» с
помощью такой модели. Благодаря спутниковым ИК-снимкам,
можно будет всесторонне изучить процессы, протекающие
в однородном слое, что, в свою очередь, позволит составить
представление о процессах, протекающих в глубинных слоях
океана.
4. Передаточная функция атмосферы
и учет ее влияния
Исследование характеристик поверхности океана пассивными
методами в видимом ИК- и СВЧ-диапазонах связано с
измерениями отраженной солнечной радиации и собственного
излучения океана. Поскольку солнечная радиация и собственное
излучение трансформируются при прохождении атмосферы, то в
решениях задач дистанционного зондирования океана необходим
учет передаточной функции атмосферы.
Передаточная функция атмосферы определяется как
отношение интенсивности радиации /v с частотой v на верхней
границе атмосферы к интенсивности радиации той же частоты
/v на уровне подстилающей поверхности [7].
Эта функция, введенная [6] для определения температуры
подстилающей поверхности по измерениям излучения со спутников,
определяется вертикальными профилями температуры и
влажности, от которых главным образом зависит интенсивность
радиации в данной полосе частот, а также характер аэрозольного
ослабления излучения в атмосфере.
124
Для определения температуры подстилающей поверхности
измерения проводятся в ИК-Диапазоне в окне прозрачности
10—12 мкм и в сантиметровом диапазоне на длинах волн 3
и 8 см.
В ИК-Диапазоне при измерении излучения океана Sav~1
излучательная способность поверхности в интервале частот Av
и передаточная функция P(Av) сильно зависят от профилей
температуры, влажности и аэрозольного ослабления.
В радиодиапазоне PAv практически не зависит от профилей
температуры и влажности атмосферы, в то же время величина
SAv имеет сильную зависимость от степени волнения морской
поверхности. Одно из основных достоинств микроволнового
диапазона заключается в том, что помехи, создаваемые
атмосферой при дистанционном зондировании океана, сравнительно
невелики, даже в присутствии облачности. Это обстоятельство
привлекает большое внимание к разработке и использованию
всепогодных методик микроволнового дистанционного
зондирования.
Физические принципы распространения радиотеплового
излучения в атмосфере хорошо изучены. Детальное их изложение
и соответствующие ссылки можно найти, например, в [1, 10, 12,
16,22,23].
Основными поглощающими компонентами безоблачной
атмосферы являются водяной пар и кислород. Кислород имеет
систему линий поглощения вблизи длины волны 0,5 см и
изолированную линию 0,25 см, водяной пар — линии поглощения на
1,348 и 0,164 см. Вариации радиояркостной температуры
системы атмосфера — океан, связанные с этими факторами, могут
вызываться изменениями влажности, температуры и давления
атмосферы/ В области длины волн более 3—4 см они
пренебрежимо малы. Для пассивного микроволнового зондирования
океана длины волн короче 0,6—0,8 см непригодны. Вариации
радиояркостной температуры, вызываемые облачностью,
наиболее значительны на длинах волн менее 1 см, но и на более
длинных волнах они оказываются заметными и должны
учитываться при стремлении получать надежную информацию о
поверхности океана на длинах волн 8—10 см.
С учетом сказанного выше выбирают длины волн СВЧ-ра-
диометрической аппаратуры, позволяющей совместно с ИК-ап-
паратурой определять профиль температуры и влажности
атмосферы, а также параметры подстилающей поверхности.
Зависимость радиотеплового излучения океана от основных
параметров его поверхности — состояния и температуры —
проявляется практически во всем микроволновом диапазоне,
причем в области коротких длин волн влияние таких
эффектов, как вспененность, сравнимо по величине с влиянием
облачности. Необходимо также иметь в виду тот факт, что
температура морской поверхности оказывается самым слабым из пере-
125
численных факторов, вместе с тем требуется высокая точность
ее определения. Из этого ясно, что задача интерпретации
результатов пассивного микроволнового зондирования должна
решаться комплексно с одновременным учетом всех определяющих
параметров, включая параметры атмосферы. Но при полной
постановке задачи дистанционного зондирования системы
атмосфера—океан количество атмосферных параметров слишком
велико. Если задача состоит в получении информации только
о поверхности океана, то достаточно лишь учитывать эффект
изменчивости параметров, не находя точных значений самих
параметров.
Изменчивость трех основных параметров облачного слоя —
высоты, мощности и водности — приводит к неотличимым по
спектру вариациям радиояркостной температуры, поэтому для
учета облачности при' дистанционном зондировании океана
достаточно одного общего параметра.
Аналогично для учета изменений влажности атмосферы
достаточно также одного параметра — интегрального количества
осажденной воды (если только не используется специальная
совокупность близких длин волн в окрестности резонанса
1,35 см). Более того, если основную информацию об океане
предполагается получать по каналам с достаточно большими
длинами волн (более 2—3 см), то для формального учета
вариаций радиояркостной температуры на этих длинах волн,
вызываемых любыми изменениями состояния атмосферы,
достаточно использования одного обобщенного параметра и
вспомогательных измерений на одной длине волны около 0,8—
1,0 см. Из результатов работ следует также, что эти вариации
могут быть учтены аддитивными поправками, линейно
зависящими от указанного формального параметра. При более
детальном учете влияния атмосферы аналогичные поправки
могут быть использованы для раздельного выражения зависимости
радиояркостной температуры от облачности и водяного пара.
Такой подход представляет собой линейную аппроксимацию
функционалов, выражающих зависимости измеряемых величин
от распределенных параметров среды через некоторые
формальные коэффициенты, получаемые численными расчетами.
Так, например, зависимость радиояркостной температуры от
параметров океана несколько меняется в коротковолновой
части при вариациях параметров атмосферы, но эти изменения
невелики и могут быть скорректированы после предварительной
оценки состояния атмосферы.
Для дальнейшего повышения надежности комплексного
использования микроволнового диапазона необходимо проведение
исследований зависимости излучательных свойств реальной
морской поверхности от длины волны излучения, угла наблюдения,
поляризации и т. д. Важной задачей, которая пока далека от
решения, является разработка методики интерпретации микро-
126
волновых измерений с целью определения параметров
поверхности океана в зонах с учетом возможных дождевых осадков.
Таким образом, учет влияния атмосферы при
дистанционном зондировании океана приобретает особое значение,
поскольку она является слабо отражающей поверхностью и даже
в условиях прозрачности атмосферы уходящая отраженная
радиация определяется в основном атмосферой.
5. Исследования в видимом диапазоне спектра
Одним из наиболее информативных дистанционных источников
информации о Мировом океане являются измерения в видимом
диапазоне спектра. Это объясняется тем, что в этом диапазоне
прозрачность безоблачной атмосферы достигает максимальных
значений, а поглощение света водами океана минимально.
В этом же диапазоне находится максимум излучения
солнечной радиации.
К недостаткам измерений в видимом диапазоне можно
отнести существенную зависимость результатов измерений от
времени суток и атмосферных условий. При наличии сплошной
облачности наблюдение невозможно.
Наиболее информативной характеристикой в видимом
диапазоне является спектральный состав восходящего светового
потока. В открытых частях океана он несет информацию о
гидрооптических характеристиках вод океана. Это позволяет
выделять различные водные массы, определять их границы,
обнаруживать вихри, зоны подъема вод и другие динамические
образования, а также биологическую продуктивность. В
прибрежных районах по цвету воды хорошо различаются воды
материкового стока, их распределения и взаимодействие с
водами открытого моря. Поскольку анализ спектральной
структуры восходящего потока позволяет выявить наиболее важные
характеристики поверхностных слоев океана, рассмотрим
подробнее процесс формирования спектра восходящего над
океаном излучения.
Солнечные лучи, проходя через атмосферу, ослабляются за
счет поглощения и рассеяния молекулами газов и паров и
частицами аэрозолей, постоянно в ней присутствующих.
Свет, достигающий поверхности океана, состоит из
направленной компоненты — прямых солнечных лучей — и
диффузной— солнечного излучения, рассеянного атмосферой.
Падающий на поверхность воды свет частично отражается от
поверхности раздела воздух—вода, но большая его часть проникает
в толщу воды. Величина отраженного светового потока зависит
от условий освещения, направления наблюдения и от состояния
поверхности моря. Прямые солнечные лучи, зеркально
отраженные от поверхности воды, образуют блики, яркость которых
127
чрезвычайно велика. Вне зоны блика яркость поверхности
определяется отражением света небосвода, т. е, света, рассеянного
атмосферой и облаками, а также светом, рассеянным в
морской воде. Отражение света практически неселективно по его
спектру и зависит лишь от распределения яркости по небосводу,
главным образом от высоты и направления наблюдения. При
наблюдении, близком к надиру, оно составляет приблизительно
2% от яркости неба в зените.
При рассеянии света на крупных частицах взвеси показатель
рассеяния можно положить не зависящим от длины волны. Если
пренебречь также поглощением света частицами, что
практически выполняется, если частицы минерального происхождения,
то при увеличении концентрации терригенной взвеси получим
увеличение общего уровня интенсивности восходящего из воды
света при практически неизменном характере спектрального
распределения.
Присутствие в воде поглощающих примесей дает
совершенно иную картину. Спектр поглощения «желтого вещества»
увеличивается экспоненциально с уменьшением длины волны.
В результате под влиянием «желтого вещества» энергия
спектра выходящего из воды света значительно уменьшается в
коротковолновой части, тогда как в длинноволновой (при длинах
волн больше 530 нм) изменений практически нет. Аналогичная
картина наблюдается и при наличии в воде поглощенных
частиц, к которым в первую очередь относятся клетки
фитопланктона, содержащие пигменты хлорофилла и др., поглощение
которых возрастает в области 420—460 и 660—680 нм.
В открытых частях океана гидрооптические характеристики
зависят в основном от биологической продуктивности: чем выше
содержание биогенов, тем больше ослабление света в
коротковолновой части спектра, т. е. цвет моря более зеленый.
При наблюдениях со спутника искажения в спектр вносит
атмосферная дымка. Особенно велико ее влияние на
коротковолновую часть спектра, что требует ввода поправок.
Исследования последних лет показали, что изучение
облачного покрова и его пространственной структуры полезно при
решении таких океанологических задач, как определение
рационального режима океана, распознавание положения
океанологических фронтов, выделение штормовых зон и т. п. Для таких
исследований необходимо учитывать различные характеристики
облачности: тип облаков, их форму, ярусность и текстуру.
Эти характеристики могут быть определены по изображениям
облаков в различных участках спектра. Например, над
относительно тепловыми водными массами с повышенным
испарением влаги образуется низкая сплошная слоисто-кучевая
облачность, а над более холодными водами облачность разрежена
или вообще отсутствует. Над линией таких водных масс
облачность имеет резкую границу, которая может служить индика-
128
тором океанологического фронта. Ячеистая структура облаков
характерна для районов с упорядоченной конвекцией над
теплой поверхностью океана. Спиралевидная облачность обычно
образуется в зонах зарождения штормов, эволюция которых
может быть прослежена по изменениям во времени
пространственной структуры облачности и ее текстуры.
Методы изучения океанологических явлений по
характеристикам облачности имеют ряд ограничений. Формирование
облачности происходит с определенной инерционностью, и
существующие в районе наблюдений местные ветры смещают
облачные образования в неконтролируемых направлениях.
Активная циклоническая деятельность также маскирует различия
водных масс. Однако при устойчивых состояниях
метеорологических полей в районах протекания океанологических
процессов создаются условия для формирования вызванных этими
процессами облачных структур, что позволяет в практике
океанологических исследований использовать методы облачных
индикаторов.
Картографирование и изучение морских льдов возможно во
всем видимом диапазоне спектра. Слабая зависимость
отраженного этими объектами излучения от длины волны позволяет
использовать для их исследования технические средства
невысокого спектрального разрешения, хотя учет спектральных
различий этих природных образований позволяет анализировать
их структуру.
При спутниковых оптических наблюдениях воспринимаемое
приборами излучение в значительной степени искажено трудно-
контролируемым влиянием атмосферы. Поэтому важно
проведение, особенно на начальных этапах развития спутниковой
океанографии, синхронных контактных и дистанционных
«подспутниковых» измерений различных характеристик океанских
вод.
6. Использование радиолокационных систем
при океанографических исследованиях
Основой для развития методов активной космической
радиоокеанографии являются достижения радиофизики в области
изучения закономерностей рассеяния радиоволн различных
диапазонов взволнованной морской поверхностью.
В настоящее время установлена физическая природа
рассеяния радиоволн взволнованной морской поверхностью, изучены
его основные закономерности, что позволило разработать
методики определения основных параметров морского волнения
и ветра в приводном слое атмосферы с помощью
радиолокационной аппаратуры различных диапазонов радиоволн как под
малыми (г|)<10°), так и под большими (\f>^85-^-90°) углами
скольжения [2, 3, 9, 14, 18].
5 Заказ № 1190
129
Специфика работы аппаратуры в космическом пространстве,
особенности распространения радиоволн в атмосфере Земли
накладывают существенные ограничения на возможности
применения тех или иных методик радиолокационного
определения параметров морского волнения. Так, оказались
неприменимыми достаточно хорошо зарекомендовавшие себя в
«наземной» радиоокеанографии радиолокационные системы метрового
и декаметрового диапазонов радиоволн [14].
Поэтому в космической радиоокеанографии в основном
применяют радиолокационные системы сантиметрового диапазона
(1 —10 ГГц); радиолокационные высотометры (альтиметры),
скаттерометры (измерители мощности рассеянного сигнала),
радиолокационные системы бокового обзора.
Радиолокационные высотометры
(альтиметры) позволяют измерять с высокой точностью расстояния
между космическим аппаратом (КА) и уровнем спокойной
поверхности океана, а также оценивать степень шероховатости
рассеивающей поверхности (высот морских волн).
Оптимальное построение радиовысотометра и оптимальная
обработка радиолокационного сигнала позволяют довести
потенциальную точность измерения высоты полета до 6Н~ 10-г-
-f-15 см.
Становится возможным решение большого круга задач
изучения топографии и динамики поверхности океана. Однако
полностью реализовать высокие потенциальные возможности
методов альтиметрии не удается вследствие сложности учета
нутаций орбиты КА и связанных с этим ошибок в определении
абсолютных высот; определения отсчетного уровня в
отраженном сигнале при взволнованной поверхности океана.
Поэтому в настоящее время лишь в прибрежных районах
возможно количественное решение задачи определения
динамики поверхности океана путем «привязки» результатов
измерений к особенностям береговой черты или с помощью точного
определения элементов орбиты КА; в открытых районах океана
удается дать только качественную оценку этого явления.
Спутниковые измерители рассеяния
(скаттерометры) измеряют диаграммы рассеяния в интервале
углов падения, определяемом электрическим потенциалом
системы, что позволяет получать оценки характеристик поля
ветра в приводном слое атмосферы.
Физической основой действия скаттерометрических систем
является зависимость параметров рассеянного сигнала от
характеристик рассеивающей поверхности.
Как известно, рассеяние радиоволн под малыми углами
падения (0—5°) подчинено законам физической оптики и
определяющую роль в формировании рассеянного сигнала играют
дисперсия и корреляционная функция углов наклона морской
поверхности, чувствительных к скорости ветра W.
130
Рассеяние на углах падения более 5—10° является
избирательным, интенсивность рассеянного сигнала определяется
спектральной плотностью соответствующих длин волн, причем
в СВЧ-диапазоне рассеивателями являются волны ряби.
Спутниковые скаттерометры, как правило, должны иметь
высокое разрешение по угловым координатам (^1°),
поскольку при ухудшении разрешения чувствительность системы
к изменению характера диаграммы рассеяния резко снижается
вследствие ее интегрирования элементом разрешения.
Как показывают результаты лабораторных и натурных
экспериментов [8, 11, 18], скаттерометрические системы
принципиально позволяют с достаточной точностью определять
характеристики поля ветра над поверхностью.
Полученные результаты показывают, что в определении
скорости ветра над океанской поверхностью имеются некоторые
сложности, обусловленные наличием зависимости эффективной
площади рассеяния не только от скорости ветра, но и от
азимутального угла между направлением ветра и направлением
плоскости орбиты КА, а также несовершенством методики.
Совершенствование методик измерений, калибровки
обработки сигнала позволяет в полной мере реализовать
потенциальные возможности скаттерометра как всепогодного
измерителя характеристик полей ветра и волнения.
Радиолокационные системы бокового обзора
(РЛС БО) позволяют регистрировать радиолокационные
изображения поверхности суши и океана в полосе обзора РЛС,
обеспечивая при высотах орбиты 600—800 км разрешение на
местности порядка 1—2 км. Это позволяет, с учетом
особенностей интерпретации результатов дистанционных измерений,
изучать пространственное распределение полей ветра,
характеристик ледовых полей и т. д.
Для повышения разрешения по азимуту в РЛС БО
применяют методы синтезирования диаграммы направленности
РЛС. Высокая разрешающая способность вдоль луча РЛС
обеспечивается за счет сжатия радиоимпульса. При этом по
потенциальным характеристикам разрешения РЛС БО
приближаются к оптическим средствам наблюдения. Дальнейшему
повышению разрешающей способности РЛС БО препятствуют
флуктуации диэлектрических характеристик атмосферы,
приводящие к «развалу» как диаграммы направления, так и
импульса РЛС.
Недостаточно разработанными в настоящее время являются
и методы синтезирования при неравномерном и криволинейном
перемещении носителя РЛС в пространстве.
Однако и при существующем в настоящее время уровне их
развития РЛС БО позволяют получать изображения земной и
водной поверхности на значительных расстояниях независимо
от метеорологических условий в любое время суток с высокой
5*
13!
детальностью воспроизведения различных участков
поверхности. Получаемые изображения могут быть использованы для
определения состояния поверхности морей и океанов, изучения
динамики и определения характеристик ледовых полей и т. д.
Несмотря на ряд существующих технических и методических
сложностей в создании спутниковых РЛС БО, они, несомненно,
станут одной из основных систем дистанционного
зондирования, особенно при решении задач ледовой разведки.
Космические радиоокеанографические
системы, являясь новым инструментом в руках исследователя,
принципиально отличаются от традиционных средств
океанографических измерений пространственным осреднением
исследуемых характеристик, что предъявляет соответствующие
требования к организации сопутствующих измерений.
Прежде всего необходимо создать сеть специализированных
контрольно-калибровочных морских полигонов с размерами,
сравнимыми с элементом разрешения космической
радиоокеанографической системы.
Наряду с традиционными методами для измерений на
полигонах должны быть широко использованы радиофизические
методы дистанционного определения параметров волнения с
помощью береговых (судовых) и авиационных радиолокационных
систем, реализующие различные методики получения
океанографической информации.
Их применение для интерпретации результатов
океанографических спутниковых измерений принципиально необходимо,
поскольку работа этих систем основана на использовании одних
и тех же закономерностей рассеяния радиоволн морской
поверхностью при определении исследуемых характеристик
пространственных полей ветра и волнения, сопоставимых с
элементом разрешения радиоокеанографической системы.
В заключение можно смело утверждать, что методы
космической океанографии, благодаря совершенствованию теории и
средств дистанционного зондирования поверхности станут
в ближайшие годы эффективным инструментом в
осуществлении крупных океанографических проектов. Это позволит
поставить проблему изучения Мирового океана на новый
значительно более высокий уровень.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Башаринов А. Е., Гурвич А. С, Егоров С. Т. Радиоизученне
Земли как планеты. — М.: Наука, 1974.
2. Гарнакерьян А. С., Афанасьев К. Л. Измерение параметров
морского волнения радиотехническим методом с летательного аппарата. —
Метеорология и гидрология, 1973, № 12, с. 102—108.
3. Загородников А. А. Использование доплеровского спектра
радиолокационного сигнала для измерения некоторых параметров морского
волнения.— Метеорология и гидрология, 1971, № 1, с. 65—72.
132
4. Кондратьев К- Я. Новые зарубежные метеорологические
спутники.— Л.: Гидрометеоиздат, 1975.
5. К у ф т а р к о в Ю. М., Нелепо Б. А., Федоровский А. Д. О
холодном температурном скин-слое океана.— Изв. АН СССР: Сер. ФАО, 1978,
т. 14. с. 88—93.
6. М а л к е в и ч М. С. Оптические исследования атмосферы со
спутников. М.: Наука, 1973.
7. М а л к е в и ч М. С. Учет атмосферы в задачах изучения
природных ресурсов земли из космоса.— В кн.. Космические исследования земных
ресурсов.—М: Наука, 1976, с. 110—130
8. Мандуровский И. А., Семенов Р. И., Узлянер-Нел-
л о И. Р. Экспериментальные исследования характеристик радиолокационных
сигналов, отраженных от морской поверхности.— Вопросы радиоэлектроники:
Сер. Общетехническая, 1974, № 2, с. 17—28.
9. Методы определения характеристик волнения радиолокационным
способом.— В кн.: Неконтактные методы измерения океанографических
параметров/Б. Д. Замараев, А. И. Калмыков, И. В. К и р е е в, А. С. Ку-
рекин, В. Ю. Левантовский, В. В. Пустовойтенко, А. В.
Свечников. — М.: Гидрометеоиздат, 1975, с. 7—16.
10. Микроволновое дистанционное зондирование окружающей среды/
К. Я Кондратьев, Ю. И. Рабинович, Ю. М. Тимофеев,
Е. М. Ш у л ь г и н а. —Обнинск: ВНИИГМИ МЦД, 1975.
11. Некоторые характеристики радиолокационных отражений
поверхностного моря при углах падения, близких к вертикальным/Ю. С. Г а л а е в,
А. Н. Большаков, В. Б. Ефимов, А. И. Калмыков, А. С. Куре-
к и н, Ю. А. Л е м е н т а, Б. А. Нелепо, И. Е. Островский, А. П.
Пичуг и н, В. В. Пустовойтенко, Ю. В. Терехин.— Севастополь:
Препр. МГИ АН СССР, 1978, № 1.
12. Нелепо Б. А., Суетин В. С. Исследование функции радиоярко-
стной температуры и общей обратной задачи зондирования с ИСЗ над
океаном.— Морские гидрофизические исследования, 1976, №2, с. 140—147.
13. Нелепо Б. А., Куфтарков Ю. М, Косны рев В. К. О
влиянии мезомасштабных вихрей на температуру поверхности океана.— Изв
АН СССР: Сер. ФАО, 1978, т. 14, № 7, с. 768—777.
14. Радиоокеанографические исследования морского волнения/Под ред.
С. Я. Брауде.—Киев: Изд-во, АН УССР, 1962.
15. Спутниковая океанология.— Л.: Изд-во ЛГУ, 1975.
16. Шифр ин К. С, Гашко В. А., Ламден К. С. Влияние
вариаций характеристик атмосферы на радиотепловое излучение.— В кн.: Оптика
океана и атмосферы.— Л.: Наука, 1972, с. 82—97.
17. Е wing G. С, Мс A lister E. D. On the thermal boundary layer
of the ocean.—"Science, 1960, vol. 131, p. 1374—1376.
18. Krishen K. Correlation of radar Backscattering cross cestion with
ocean wave height and wind velocity.— J. of Geophys. Res., 1971, vol. 76,
p. 27.
19. Le geek is R. V. Application of synchronous meterological sattelite
data to the study of time dependent sea — surface temperature changer along
the boundary of the Gulf Stream.—Geophys. Res. Letters. 1975, vol. 2,
p. 435—438
20. Stumpf H. G., Legeckis R. V. Satellite observations of meso-
scale eddy dynamics in the Eastern tropical Pacific Ocean.— J. Phys. Oceanogr.,
1977, vol. 6, p. 648—658.
21. Ocean Research in the 1980's Center for Ocean Managment studies —
Kingston: University of Rhode Island, 1977.
22. T h r a n e L. Evaluation of Multy — Freqyency — Microwave — Radio-
metr — System Performance for Oceanography — Boundary.— Layer
Meteorology, 1978, vol. 13, N 1—4, p. 373—392.
23. Wilheit Т. Т., Fowler M. G. Microwave Radiometric
determination of wind speed at the surface of the ocean during BESEX-IEEE.— Trans,
1977, vol. AP-25, N 1, p. 111 — 120.
133
Виталий Васильевич Шарков,
доктор геолого-минералогических
наук. Занимается разработкой
аэрокосмических методов
изучения дна морских мелководий.
Основные работы посвящены
геолого-геоморфологическому
строению некоторых участков
акваторий Каспийского, Черного,
Японского и Охотского морей.
В. В. Шарков
АЭРОМЕТОДЫ
ИЗУЧЕНИЯ ОКЕАНА
И ЕГО ДНА
При изучении поверхности Земли, акваторий океанов и их недр
широко используются материалы съемок, получаемые с
помощью различной аппаратуры (приемников), которую
устанавливают на самолетах, вертолетах и других воздушных или
космических носителях. Эти методы получили название
дистанционных аэрометодов.
Аэрометоды в отличие от других методов океанологии,
наблюдения с помощью которых выполняются на отдельных
станциях в различное время, позволяют получать информацию об
объектах и явлениях на обширных акваториях океана
практически одновременно или за сравнительно короткий
промежуток времени.
Подобные явления и объекты с помощью других методов
приходится изучать лишь по частям и длительное время.
Предварительно дешифрируя материалы аэросъемок, можно
планировать применение других методов океанологии.
Возможности различных аэрометодов при изучении и
специальном картировании океанов далеко еще не выяснены.
Несомненно, что совершенствование существующих аэрометодов,
а также разработка новых (лазерной, люминесцентной,
ультрафиолетовой, геохимической съемок и т. д.) значительно повысят
эффективность изучения океана и позволят решать многие
научные и практические проблемы океанологии.
135
1. Классификация
аэрометодов *
Современные высокочувствительные приемники,
устанавливаемые на летательных аппаратах, в состоянии регистрировать
излучение земной и водной поверхностей в узких зонах почти
всего спектра электромагнитных волн.
Получаемая информация может быть представлена в виде
двумерных изображений (снимков) или одномерных
профилей, графиков [4].
В зависимости от используемых диапазона
электромагнитных волн и регистрирующей аппаратуры выделяют различные
виды аэросъемок, сравнительная характеристика которых
приведена в табл. 1**.
Кроме того, съемки подразделяются на пассивные,
фиксирующие собственное излучение объектов или отраженное
солнечное излучение, и активные, при которых облучается
поверхность Земли, с последующим приемом отраженного излучения.
Большинство активных методов можно выполнять в любое
время суток, а радиолокационную съемку практически в любую
погоду.
Пассивные съемки, за исключением инфракрасной, можно
выполнять лишь в дневное время.
Чаще всего при изучении природных объектов применяют
фотографические, телевизионные, многозональные,
спектрометрические (сканерные, инфракрасные, а также аэрорадарные и
аэромагнитометрические, аэрокосмические съемки). Лазерная
съемка уже используется для измерения расстояний и глубин
моря в пределах морских мелководий.
Материалы аэросъемок, а следовательно, и информация,
снимаемая с них, привязываются к географическим
координатам с помощью радиогеодезических средств. Имеются
угломерные, дальномерные и смешанные системы. Наибольшая
точность определения (до ±20 м) достигается дальномерной
системой.
В тех случаях, когда радиогеодезическая аппаратура не
может быть использована, привязка объектов осуществляется
с помощью навигационных способов, при которых учитывается
курс самолета и время, затраченное на достижение
определенного пункта. При работе вблизи береговой линии
аэросъемочные маршруты рассчитывают непосредственно по береговым
ориентирам.
* Большинство этих методов применяется и при съемках с космических
носителей.
** В табл. 1 использованы данные работ [1] и [9].
136
137
Таблица 1
Сравнительная характеристика видов дистанционных съемок
I I Виды съемок I
I ультрафиолетовая III
Параметры i люминесцент- спектро- телеви- фотогра-
гамма-съемка ная метрическая зионная фическая лазерная
дальняя средняя
Длина волн 0,03А 100—300А 3000—4000А 0,3—1,2 мкм | 0,4—0,76 мкм 0,3— П.Омкм
Частота, 1014 ЗХ1010 8Х 108 5Х108
МГц 3X10° _ I I | |
Характер ме- Пассивный Пассивный и активный Пассивный и Пассивный Активный
года съемки I активный III
Поглоще- Очень сильное Почти Сильное Слабое
ние агмос- полное III
ферой I I ' ' '
Носители Воздушные Воздушные Воздушные и космические
аппара- с высоты I I III
туры менее 200 м | I I
Время В любую Днем и ночью Днем и ночью Днем В любую
съемки погоду I I'll П0Г°ДУ
Глубина До 50 см Микрометры
в твердых III
породах I I I I J
Глубина Несколько Поверхность воды До 100 м
в воде больше 1м | I I I I
Форма График Сигнал, график, телеви- Снимок, сиг- График, Телеви- Снимок График,
получения зионное изображение нал, график спектро- зионное в перспек-
информа- | метричес- изобра- тиве сни-
ции кая харак- жение мск
| теристика I | |
Назна- Поиски радио- Изучение объектов Поиски люми- Изучение геолого-геоморфологических
чение активных руд, со специфическим несцирующих и географических объектов
расчленение ультрафиолетовым излу- объектов I I I
горных пород чением
138
Продолжение табл. 1
I Виды съемок
инфракрасная I радарная II
Параметры j i j рораз- магнитомет- геохи- грави-
. РГ„^" радиоло- ведоч- рическая мичес- тационная
ближняя средняя дальняя тепло- кационная ная кая
Длина 0,74—1,35 мкм 1,35—5,5 мкм 5,5—1000 0,3 —1000 см Сотни и I
волн мкм тысячи
км
Частота, 10» 107 106 2Х104 ЗХ103 10—ЮМ — —
МГц
Характер Пассивный Актив- Пассив- Пассивный
метода I I [ ный ный и I I
съемки актив- III
ный
Поглоще- Отдельные атмосферные «окна»; основные: Слабое Очень Нет Нет — Нет
ние атмос- 0,74—1,35; 3,5—5,5; 7,5—14,0; слабое
ферой 20,0—1000,0 мкм
Носители Воздушные и космические Воздушные Воздуш- Воздуш- Воздуш- Воздуш-
аппара- I I III пые ные и кос' ные ные и
туры мические космиче-
I | ские
Время Днем и ночью В любую погоду Д н е м и
съемки I I I I I ночью
11 I 1 I I I 1 I I I
139
Про до л жен ие т а б л. 1
Виды съемок I
инфракрасная I радарная I
Параметры j j j рораз- магнитомет- геохи- грави-
- JLr?™~ радиоло- ведоч- рическая мичес- тационная
ближняя средняя дальняя тепло- кационная ная кая
I'll '
Глубина Сантиметры До Километры Поверх- Кило- I
в твердых III 300 м ность метры
породах
Глубина Поверхность воды До То же Поверх- I
в воде I I III Ю— ность
15 м воды
Форма Инфракрасные Тепловые Снимки, графики, Сигнал, график График
получения снимки снимки телевизионное изображение I I
информа- до 1 мкм, II
ции изображение
более 1 мкм
Назна- Изучение геолого-геоморфологических и географических Обнару- Обнаруже- Поиск Определе-
чение объектов жение ние маг- некото- ние гра-
I I III электро- нитных рых эле- витацион-
прово- комплек- ментов ного поли
дящих сов горных крупных
тел пород, геологи-
геологи- ческих
ческое кар- объектов
тирование
2. Материалы фотографических, телевизионных
и сканерных аэросъемок
В процессе вышеотмеченных съемок фиксируется отраженное
солнечное излучение главным образом в видимой зоне спектра
(0,4—0,74 мкм) в виде двумерных изображений — аэроснимков.
Принципы аэрофотосъемки широко известны.
Аэротелевизионная съемка (несканирующей аппаратурой)
отличается от аэрофотосъемки тем, что изображение строится
на электропроводящей мишени — видиконе, а не на фотопленке.
Изображения с видикона передаются на приемные устройства
(наземные) в режиме фототелеграфной передачи или
записываются на борту самолета на магнитную пленку.
Аэрофото-, аэротелевизионные изображения строятся по
принципу центральной проекции.
Сканерное изображение получается в результате
сканирования местности перпендикулярно направлению полета
качающимся зеркалом или вращающимся барабаном, на боковых
стенках которого укреплены зеркала, изображающие узкую
полосу местности в виде строки. При движении самолета и
синхронном перемещении фотопленки, на которой фиксируется
строка, отдельные строки складываются, в результате чего
формируется двумерное изображение местности в равноугольной
проекции [4].
Материалы этих съемок широко используются для изучения
как поверхности океана и приповерхностной толщи воды, так и
для изучения строения дна морских мелководий.
Для получения аэрофотографических изображений
поверхности воды используются панхроматические, изопанхроматиче-
ские или инфрахроматические пленки. Для получения
изображений морского дна, учитывая сильное поглощение водной
толщей длинноволновой и рассеяние коротковолновой частей
спектра, применяют пленки, сенсибилизированные (очувствлен-
ные) к желто-зеленому (при мутных прибрежных водах) и
сине-зеленому (при прозрачных водах открытого моря)
диапазонам электромагнитного спектра. В связи с этим для
съемки морского дна прибрежных мелководий рекомендуется
применять изохроматические или изоортохроматические
пленки.
Практикуется использование многозональной
(фотографической, телевизионной) и многоканальной (спектрометрической,
или сканерной) съемок. Многозональная выполняется
несколькими синхронно работающими или многообъективными
аппаратами на пленки разных типов или на одну пленку с разными
светофильтрами. При этом изображения получаются в
относительно широких диапазонах спектра. Многоканальная съемка
позволяет получать изображения как в широких, так и в узких
диапазонах спектра.
НО
Таким образом, съемки акватории и морского дна могут
быть осуществлены в оптимальных спектральных диапазонах.
При наличии комплекта многозональных и многоканальных
снимков удается в ходе их дешифрирования более уверенно
отделить изображения морского дна или объектов в толще воды
от объектов на поверхности моря, поскольку первые лучше
фиксируются в сине-зеленых и зеленых, а вторые — в красных
диапазонах спектра. Снимки, снятые в различных диапазонах
электромагнитного спектра, при наличии соответствующей
аппаратуры могут быть с высокой точностью совмещены на одном
экране.
Используя различные светофильтры, можно из
черно-белых изображений получить цветные, отражающие естественную
окраску объектов или условную.
Такие изображения отличаются большей информативностью,
что значительно упрощает, ускоряет дешифрирование и
увеличивает его достоверность.
Существенное значение для дешифрирования
аэрофотоизображений имеет масштаб снимков 1/т, зависящий от
соотношения фокусного расстояния фотоаппарата / и высоты съемки Я,
а именно: I/m = f/H.
Материалы аэросъемок по масштабам условно
подразделяются на крупномасштабные (крупнее 1:15 000), среднемас-
штабные (1 : 15000—1 : 70000), мелкомасштабные (1 : 70 000—
1 : 1 250 000) и сверхмелкомасштабные (мельче 1 : 250 000).
Масштаб съемок выбирается в зависимости от поставленных
проблем.
В последнее время наметилась тенденция выполнять
аэросъемку в более мелких масштабах, в частности из космического
пространства. Объясняется это несколькими причинами.
Во-первых, снимки, снятые с больших высот, а тем более из
космического пространства, лучше по качеству, поскольку на
фокальную плоскость аппаратуры не попадает рассеянный свет
атмосферы, которая может рассматриваться в данном случае
как природный светофильтр. В процессе съемки морского дна
с больших высот на значительной площади световые лучи
проходят через толщу атмосферы и воды под более вертикальными
углами, чем при съемке с малых высот. Это предопределяет
меньшее поглощение и рассеяние света водой.
Во-вторых, такие аэроснимки с высокой разрешающей
способностью можно многократно увеличивать до необходимого
масштаба без существенной потери их качества.
В-третьих, при мелкомасштабной съемке можно охватить
большую площадь одновременно, что сокращает время,
затрачиваемое на обработку материалов и их дешифрирование.
Специальное дешифрирование аэрофото-,
аэротелевизионных и сканерных снимков в принципе не отличается друг от
Друга.
141
2.1. Дешифрирование аэроизображений поверхности воды,
объектов и явлений в ее толще
На аэроснимках поверхности воды уже в настоящее время
может быть опознан ряд объектов и явлений, а именно волны,
течения, окраска и прозрачность воды, Ленгмюровы циркуляции,
определен цвет и прозрачность воды и т. д.
Морские волны хорошо отображаются на аэроснимках.
При дешифрировании их можно выявить все системы волн и
определить их характеристики [10].
Стереоскопические измерения по перекрывающимся
аэроснимкам, полученным с двух самолетов синхронно работающими
аппаратами, позволяют составить карты в изогипсах
взволнованной поверхности акваторий. С таких карт могут быть сняты
все параметры волн.
По одиночным снимкам (полученным одним аппаратом)
легко измерить длину волн зыби. Применение цилиндрических
линз или вращающихся растров облегчает изучение различных
систем волн. Это же достигается дифракционным методом, при
котором аэроснимок с изображениями волн рассматривается
как несовершенная дифракционная решетка. Системы волн
определяются по положению максимумов на дифракционной
картине, получаемой с помощью специальной аппаратуры.
На мелкомасштабных аэрофотоснимках с изображениями
взволнованной поверхности моря с трехмерными волнами
удается подметить упорядоченное волнение, не наблюдаемое
с судов или на крупномасштабных снимках.
По материалам аэрофотосъемки можно в деталях изучать
рефракцию и дифракцию волн (рис. 1) и использовать эти
данные для выявления особенностей рельефа дна, а иногда (по
рефракции волн) и для определения косвенным методом глубины
моря [12].
Морские течения нередко легко опознаются на
обычных аэрофотоснимках по тону изображения. Это возможно, если
перемещаемые течениями толщи воды, в зависимости от своих
свойств, отличаются от окружающих водных пространств,
а также от вод, переносимых другими течениями. Например,
к востоку от Японских островов встречаются холодное (Оясио)
и теплое (Куросио) течения. Первое обогащено питательными
веществами и, следовательно, насыщено планктоном,
придающим водам желтовато-коричневатую окраску. Теплое течение
Куросио отличается прозрачностью воды цвета темного
аквамарина. Соответственно на аэрофотоснимках эти течения
отразятся разными тонами.
Более совершенная методика изучения поверхностных
течений с самолета для прибрежных частей акваторий разработана
в Лаборатории аэрометодов (ЛАЭМ) Министерства геологии
СССР [8]. В соответствии с одним из вариантов методики
142
„>J№^w;"-%.. s.
.: ,;;;:ч:,..,..., .^:«>
Шшш -
щ
^^fefc
Щт,
.,.
■и
;
г
":1;1
Рис. 1. Рефракция (а) и дифракция (б) морских волн.
143
поверхность воды маркируется с помощью сбрасываемых с
самолета поплавков, пропитанных солями флуоресцена,
образующего яркие пятна. Затем дважды через определенные
промежутки времени выполняется аэрофотосъемка замаркированной
акватории. После ориентировки аэрофотоснимков измеряют
направление и величину смещения пятен относительно
неподвижных ориентиров (объектов на берегу, надводных сооружений
или фотоизображений контуров дна). Таким образом, можно
изучать структуру течений в деталях.
В соответствии с другим вариантом методики для
маркировки поверхности воды с самолета сбрасывается донный
индикатор, от которого последовательно с помощью специальных
устройств через строго определенный интервал времени
отделяются и всплывают на поверхность моря два поплавка с
красителями. После всплытия второго поплавка проводится
аэрофотографирование так, что на одном снимке сразу получается
изображение пятен красителя обоих поплавков. На аэроснимках
определяется направление перемещения пятен красителя и
расстояние между ними с учетом масштаба съемки. Зная интервал
времени между всплытием на поверхность обоих поплавков и
расстояние между ними, можно рассчитать и скорость их
перемещения, т. е. скорость дрейфа под воздействием течений.
Положение поплавков можно фиксировать в ходе радиогеодезических
измерений.
Цвет воды опознают на черно-белых аэрофотоснимках
по тону, а на синтезированных цветных — по определенным
цветам. На черно-белых аэроснимках мутные воды, имеющие
желтоватые или серо-коричневатые оттенки, получаются
относительно светлыми, а прозрачные — темными. Используя эти
признаки, представляется возможным устанавливать и картировать
по относительно светлому тону аэрофотоизображения площади
распространения вод речного стока; мутные воды, образующиеся
после штормов в пределах прибрежных мелководий или над
песчаными банками; воды, обогащенные взвешенным
материалом при извержениях подводных лавовых и грязевых вулканов;
участки подъема донных вод к поверхности (апвеллинги),
имеющие обычно коричневую окраску вследствие их обогащения
фитопланктоном, и т. д. Разгрузка подземных или ювенильных вод
на морском дне иногда проявляется на поверхности моря в виде
пятен прозрачной воды, соответствующих более темным
участкам на аэроснимках. По изменению тона или цвета
изображения толщи воды в пределах прибрежных мелководий (при
наличии однородных грунтов) можно определять фотометрическим
методом глубины моря, поскольку от последних при этих
условиях зависит тон изображения на черно-белых и цвет на
цветных аэроснимках [11].
Спиралеобразные циркуляции (вихри) Ленг-
мюра, как известно, предопределяют на поверхности воды
144
Рис. 2. Аэрофотоизображение полос поверхностно-активного вещества (а)
и пены (б), возникших под действием вихрей Ленгмюра.
145
скопление плавающих объектов (поверхностно-активных
веществ, пены, растительности и т. д.) в виде длинных и
относительно узких полос. Эти полосы, образованные поверхностно-
активным веществом (рис. 2, а) и пеной (рис. 2, б) хорошо
отображаются на фоне взволнованной поверхности моря.
Анализ фотоснимков в сочетании с анализом
гидрометеорологических данных в момент аэрофотосъемки может оказать
существенную помощь при исследовании пока еще недостаточно
изученного явления — циркуляции Ленгмюра, позволит установить
взаимоотношение распределения полос с направлениями ветра
и основных систем волн, глубинами моря, выявить зависимость
расстояния полос и их структуры от вышеотмеченных
факторов, а также внутренних волн.
Внутренние волны образуются в толще воды на
границе слоев с разной плотностью. На гребнях этих волн мутная
поверхностная вода меньше по толщине, чем в ложбинах,
поэтому последние получаются на снимках более светлых тонов,,
чем первые [13].
Кроме того, можно ожидать, что на границе слоев воды
с разной плотностью задерживаются отмирающие створки
планктона и другие мелкие частицы, а это при высокой
прозрачности верхнего слоя воды помогает выделить на снимках
внутренние волны [14].
Анализ изображений внутренних волн позволяет оценить их
параметры: период, фазовую скорость, направление
распространения.
Разрывные течения нарушают систему прибрежных
ветровых волн и зоны прибоя, что проявляется на аэроснимках.
Кроме того, масса воды разрывных течений обычно отличается
по окраске вследствие большого количества взвешенного
материала. Это хорошо видно на фотоснимках. Анализ их позволяет
детально изучать это явление.
Планктон окрашивает воду в желтовато-коричневатые
или зеленоватые тона. Такие участки четко выделяются на
снимках (тон их отличается от тона остальной поверхности
моря).
Высокая продуктивность планктоновых организмов часто
связана, как уже сказано, с апвеллингами или же наличием
холодных течений.
Мутная вода, как уже отмечалось, на аэроснимках
получается более светлой по тону, чем чистая морская вода.
Картирование распространения мутной воды имеет существенное
значение для выявления условий современного осадконакопления
в пределах шельфа.
При этом особое значение приобретает метод измерения
коэффициентов спектральной яркости мутных вод,
позволяющий оценивать количество взвешенного материала в ее
приповерхностном слое [10].
J 46
2.2. Косвенный индикатор локального изменения
температуры воды
Американские астронавты [19] обнаружили облака особой
формы, образование которых связано с наличием вихреобраз-
ных водоворотов холодной воды, например среди теплого
Юкатанского течения. Над холодными вихрями воды они наблюдали
ясное небо, в то время как по краям вихрей, т. е. на границе
холодных и теплых вод, имел место мощный серповидной
формы облачный покров. Таким образом, по форме облачного
покрова удается косвенно устанавливать локальные площади
распространения холодной воды (например, апвеллинги) среди
относительно более теплых поверхностных вод океана. Анализ
особенностей строения облачного покрова при относительно
спокойной синоптической ситуации может помочь в изучении
температурных аномалий поверхностных вод океана, морских
течений и т. д. Наибольший эффект для изучения облачного
покрова над океаном дают материалы аэро- и космических
съемок.
2.3. Дешифрирование объектов морского дна
Современные технические средства позволяют получать
аэрофотоизображение морского дна на глубинах от нескольких
метров до нескольких десятков метров в зависимости от
прозрачности воды. Вследствие этого ширина полосы подводного
берегового склона, в пределах которой удается снять морское дно,
колеблется от нескольких сотен метров до десятков километров.
Кроме того, морское дно отображается на аэроснимках в
пределах изолированных банок как в открытом море, так и на
шельфе.
На таких аэроснимках могут быть опознаны многие
подводные объекты, камеральное и полевое дешифрирование которых
способствует их детальному изучению и картированию [2, 3].
В настоящее время материалы аэросъемок морского дна уже
используются для геолого-геоморфологического исследования и
картирования, инженерно-геологических изысканий, поисков
полезных ископаемых, изучения и картирования подводной
растительности, составления морских и ландшафтных карт
прибрежных мелководий и т. д.
Геолого-геоморфологическое изучение и
картирование. На аэроснимках морского дна прибрежных
мелководий нередко хорошо отображаются горные породы и
рыхлые морские грунты, фоторисунки которых часто резко
различаются в зависимости от их вещественного состава,
текстурных и структурных особенностей [2, 3]. Это хорошо видно на
приведенном аэрофотоснимке морского дна (рис. 3). На этом же
снимке четко получились дизъюнктивные (разрывные) наруше-
147
Рис. 3. Аэрофотоизображение горных пород разного
вещественного состава, слагающих разновозрастные свиты.
СО, НКП, ПК — породы преимущественного песчаного состава; НКГ, КС—
глинистого состава. Часть этих свит относится к нефтесодержащим, что
может свидетельствовать о потенциальной нефтеносности данной
акватории. Пунктиром показаны разрывные нарушения.
148
ния в виде прямых или изогнутых линий, ограничивающих
отдельные тектонические блоки.
Дешифрирование таких аэрофотоснимков позволяет
получить обширную геологическую информацию: установить
распространение на дне различных комплексов горных пород, в том
числе таких, к которым могут быть приурочены те или иные
полезные ископаемые; измерить горизонтальные мощности (т. е.
ширину выхода на дне) отдельных пластов, пачек, свит и т. д.;
определить элементы залегания пластов (азимуты и углы
падения); выявить стратиграфические и угловые несогласия;
опознать различные аккумулятивные и абразионные формы
рельефа и т. д., а также геологические структуры и их элементы
(рис. 4), выявление которых имеет существенное значение при
поисках морских нефтегазоносных месторождений.
Благодаря этому, а также четкому изображению границ
между объектами можно составлять геологические,
геоморфологические, грунтовые и другие специальные карты морского дна,
по достоверности и детальности не уступающие картам суши.
Инженерно-геологические изыскания.
Материалы аэрофотосъемок могут быть использованы для изучения
инженерно-геологических особенностей и составления
инженерно-геологических карт подводного берегового склона и
прибрежных частей суши, которые нужны для проектирования
гидротехнических сооружений. Большое значение эти материалы
имеют для выявления и прогнозирования динамики береговых
процессов. В частности, по характеру изображения береговых
и донных аккумулятивных и абразионных форм рельефа можно
устанавливать направление перемещения вдоль берега
потоков наносов и их относительную мощность, участки абразии или
аккумуляции рыхлых отложений и т. д. Учет динамики этих
процессов важен при прогнозировании возможных размывов
берега или, наоборот, заносимости гидротехнических
сооружений в период их эксплуатации.
Поиски полезных ископаемых. На
аэрофотоснимках акваторий отображается ряд объектов, явлений или
процессов, которые могут быть использованы как критерии при поиске
некоторых полезных ископаемых. Это позволяет локализовать
участки акваторий, перспективные для постановки более
детальных поисково-разведочных работ. Так, участки акваторий,
недра которых, возможно, содержат нефть и газ, могут быть
обнаружены по аэрофотоизображениям нефтесодержащих
горных пород (рис. 3); антиклинальных складок (см. рис. 4, а);
постоянно возобновляемых пленок плавающей на поверхности
моря нефти, на аэрофотоснимках их опознают по
специфическому аэрофоторисунку светлого тона, под которым
просматривается изображение морского дна (рис. 5); подводных грязевых
вулканов, опознаваемых по характерной форме (рис. 4, б)\
извержений газа (рис. 6) и пр.
149
-
1
150
Рис. 4. Аэрофотоизображение сложно построенной подводной антиклинальной складки. В сводовой части складки
изобразились: диапировая структура (а), подводные грязевые вулканы (б) и грязевулканический остров (в).
Антиклинальные структуры являются одним из поисковых критериев нефтегазоносных залежей.
Участки, перспективные на залежи каменного угля,
железных руд осадочного происхождения и т. д., могут быть
выделены по характерным изображениям подводных выходов
угленосных, железорудных и других свит и толщ. На рис. 7 (в левой
части) видна угленосная свита, представленная породами
глинисто-алевритового состава с пластами песчаников, каменного
Рис. 5. Аэрофотоизображение нефтяной пленки на поверхности моря.
угля и углистых сланцев. Она характеризуется четко
выраженной слоистостью и сильной перемятостью пород,
отображающихся на снимке. Эти признаки позволяют установить
присутствие и распространение подобных свит на дне моря.
Прибрежно-морские россыпи полезных минералов
обнаруживаются по изменению фотографической плотности (тона
изображения), отражающей окраску пляжевых песков, обогащенных
полезными минералами; по изображениям элементов надводных
и подводных аккумулятивных форм рельефа представляется
возможным локализовать участки, в пределах которых происходит
селарация минералов тяжелой фракции.
Строительные материалы в пределах морского дна и
прибрежной части суши представлены главным образом рыхлыми
151
осадками, слагающими различные аккумулятивные формы
рельефа или заполняющими переуглубленные долины. Эти
формы, как и сами рыхлые отложения, хорошо отображаются
на аэроснимках. Таким образом, последние дают
исчерпывающую информацию об их распространении на дне и о возможных
условиях их эксплуатации без ущерба для динамики береговых
процессов *, т. е. без нарушения динамического равновесия
побережья.
Рис. 6. Аэрофотоизображение извержения газов из недр морского
дна, вспенившего воду на поверхности моря.
Подводная растительность легко опознается на
аэрофотоснимках. При этом иногда можно не только опознать
различные водоросли, в том числе и полезные (морскую траву,
морскую капусту и т. д.), но и определить границы их
распространения, подсчитать запасы (рис. 8).
Составление морских карт. Для составления
морских карт при наличии на снимках контуров дна выполняются
стереоизмерения относительных превышений рельефа дна. При
отсутствии контуров используется уже рассмотренный (2.1)
фотометрический метод, позволяющий по тону или цвету изобра-
* Следует иметь в виду, что добыча строительных материалов на
побережьях часто ведет к нарушению динамики берегов и их разрушению.
Безболезненно для динамики берегов забор рыхлого материала может
осуществляться в верхних частях подводных каньонов.
152
Рис. 7, Аэрофотоизображение угленосной свиты,
обнажающейся на морском дне.
153^
жения толщи воды (при однородных грунтах) определять
глубины моря. Иногда комбинируют стереоскопические измерения
с данными эхолотных промеров, измерений глубин с помощью
лазеров и фотометрического метода. Материалы
аэрофотосъемки значительно облегчают выполнение гидрографических
работ и составление морских карт, особенно в районе
мелководий, поскольку дают относительно точное и объективное
представление о подводном рельефе.
Рис. 8. Аэрофотоизображение зарослей морской травы (Zostera nana) на
подводном береговом склоне.
Составление ландшафтных карт. Детальное и
объективное отображение на аэрофотоснимках подводных
объектов делает их незаменимыми для ландшафтного изучения и
картирования морского дна. При дешифрировании
аэрофотоизображений не только опознаются различные компоненты и
элементы ландшафта, но нередко устанавливаются их
взаимосвязи и взаимозависимости.
Изучение динамики процессов, протекающих
на дне морских мелководий. При наличии повторных
аэросъемок в пределах одной и той же акватории можно судить
об изменениях ландшафтов морского дна, происшедших за
строго определенный период времени. Таким способом
устанавливают изменения форм рельефа дна, скорость образования
новых или разрушения уже существующих форм рельефа побе-
154
режья, зарастание дна подводной растительностью и т. д.
Сравнение материалов повторных аэросъемок — один из наиболее
совершенных и достоверных методов изучения динамики
процессов, протекающих в пределах дна прибрежных морских
акваторий, позволяющих получить не только качественную, но и
количественную характеристику этих процессов.
2.4. Получение информации об объектах морского дна
по косвенным признакам
Материалы аэрофотосъемок морского дна можно применять для
решения многих научных и практических задач. Однако их
использование в значительной степени ограничено относительно-
узкой полосой прибрежной части акваторий и отдельными
мелководными банками. На аэрокосмических снимках
обширнейших площадей открытого моря и океанов получается лишь
изображение поверхности воды.
Предположение некоторых исследователей [5, 6, 18], согласна
которому при съемке с больших высот и из космического
пространства можно наблюдать и фотографировать морское дно при
глубинах в несколько сотен или даже тысяч метров, является
маловероятным. Ослабление света водной толщей настолько-
значительно, что практически, как показывают
экспериментальные работы, исключена возможность при современных
технических средствах получать фотоснимки морского дна на глубинах
свыше 100 м. Это подтверждается и многочисленными
визуальными наблюдениями аквалангистов, отмечающих быстрое
ослабление света с глубиной, и измерениями светового потока на
разных глубинах моря при различной прозрачности воды.
Максимальная глубина моря, при которой получено
фотоизображение морского дна, составляет 70 м.
В связи с вышеизложенным можно сделать заключение, что
фотографирование морского дна вне пределов подводного
берегового склона и отдельных мелководных банок на акваториях
морей и океанов исключается.
Тем не менее материалы аэрофотосъемок и космических
фотографий поверхности морей и океанов могут быть
использованы для получения информации о некоторых особенностях
строения морского дна. Это становится возможным вследствие
того, что определенные объекты^ и явления, находящиеся или
возникающие на поверхности воды и в ее толще, взаимосвязаны
со строением морского дна, а также с процессами,
протекающими в его недрах. Такие взаимосвязи могут быть использованы
в качестве индикаторов некоторых особенностей его строения.
Первая попытка изучения морского дна с использованием
таких индикаторов была предпринята в ЛАЭМ [14].
Индикаторы подводных вулканических
извержений. Вулканические извержения могут проявиться
155
в виде изменения оптических свойств воды за счет выбросор
пеплового материала; наличия локальных участков бурлящей
воды или сильного и неправильного волнения среди спокойной
поверхности моря; выбросов пепла, дыма и выделения паров
над поверхностью воды; скопления плавающих обломков пемзы,
а иногда и образования временных или постоянных
вулканических островов.
Индикаторы подводных грязевулканических
извержений. Эти извержения проявляются в виде
небольших фонтанов, грифонов, выделения газов (см. рис. 6),
вспенивающих воду, помутнений воды за счет выброса пелитового
материала, а иногда в виде горящих факелов углеводородных
газов. Нередко образуются также временные или постоянно
существующие острова.
Индикаторы разгрузки подземных пресных,
термальных и ювенильных вод. Разгрузка на дне этих
вод при спокойной поверхности моря проявляется в виде
участков бурлящей воды, а при волнении — в виде участков
относительно гладкой воды; иногда мощные подводные источники
воды на поверхности моря образуют участки более прозрачной
воды.
Индикаторы возможных залежей нефти и
газа. Нефтеносность недр морского дна на поверхности моря
иногда проявляется в виде пятен нефти, постоянно
возобновляющихся в одних и тех же пунктах, и извержений газа, обычно
вспенивающих воду.
Для выявления форм рельефа дна могут быть использованы
следующие индикаторы:
Волны. Они чутко реагируют на положительные формы
рельефа дна, находящиеся на глубинах моря, меньших 7г их
длины. Начиная с этой глубины, волны испытывают
деформацию, а именно, уменьшается длина и увеличиваются высота
и скорость. Такая деформация волн может отразиться на
аэрофотоснимках и по изменению характера фотоизображения
взволнованной поверхности моря можно устанавливать
положительные формы рельефа дна, иногда при значительных
глубинах моря. Например, Ю. М. Шокальский отмечает, что «.. .даже
на таких больших глубинах, какие имеются на подводном
пороге Уайвилла—Томсона, между Фарерскими островами и
Шотландией, т. е. при глубинах 400—500 м, замечалось
укорачивание волн» [16, с. 277].
В прибрежных частях моря по изменению характера
взволнованной поверхности можно выявить подводные долины, в
пределах которых во время шторма из-за значительных глубин
волны испытывают меньшую деформацию по сравнению с
мелководными участками, разделяющими подводные долины.
Разрушение волн. На мелководье оно наблюдается при
уменьшении глубины моря примерно (в среднем) до 3Д высоты
156
волны. При разрушении волн возникают буруны и образуется
аэрированная (пенистая) зона, хорошо отображающаяся на
аэроснимках. Особенно энергичное разрушение волн происходит
над препятствиями. Именно по фотоснимкам бурунов можно
устанавливать наличие и количество подводных валов,
подводных гряд, камней и скал, мелей и т. д. Так, например, буруны
наблюдались у берегов Сирии над подводными скалами при
глубинах моря до 84 м [16].
Рефракция морских волн. Она хорошо
отображается на аэрофотоснимках. По ним можно выявлять углы
подхода волн к берегу, измерять длину волн, а при известных
условиях устанавливать крутизну их склонов и даже скорость
распространения. Последняя определяется как отношение
смещения характерных точек волн на смежных снимках,
определяемого относительно соответствующих неподвижных ориентиров
на берегу или в море, к промежуткам времени между
смежными экспозициями.
Зная длину А, и скорость v волн в определенной точке, можно
определить и глубину моря [12]. Для этого используется
формула Стокса, устанавливающая связь между Я, у и Я,
а именно:
хг = -— th ,
2 я А,
где g — ускорение силы тяжести; Я — глубина моря в данной
точке.
Кроме того, по изгибам рефракционных волн выявляются
элементы рельефа подводного берегового склона — ложбины,
повышения и т. д.
Апвеллинги, т. е. подъем глубинных вод к поверхности
моря, в открытых частях морей и океанов нередко проявляются
над банками, подводными горами и хребтами *. Как уже
отмечалось выше, поднимающиеся со дна воды предопределяют
пышное развитие планктона и изменение оптических свойств
воды. Внимательный анализ аэрофотографических и
космических снимков позволяет выявить локальные изменения тона
изображений, по которым можно судить о рельефе дна, а если
подводные хребты генетически связаны с разломами, то и
определять их расположение.
Мутные воды. Они возникают после штормового
волнения на мелководье и хорошо отображаются на аэрофотосним-
* Апвеллинги могут вызываться и ветровым сгоном вод от берега и
расходящимися течениями, возникать у подветренных сторон островов и т. д.
Однако в открытом море, если нет днвергирующих течений, они, как правило,
связаны с формами рельефа дна
157
ках. Систематическое возобновление мутной воды в виде
изолированных площадей, иногда наблюдающееся далеко от берега,
может свидетельствовать о наличии подводных песчаных банок.
Таким образом, взмученная вода маркирует мелководную зону
у песчаных и илистых берегов, а также песчано-илистые банки,
значительно удаленные от берега.
Выносы мутной воды реками. Они иногда
происходят вдоль подводных долин и тем самым фиксируют
продолжение последних в море.
3. Инфракрасная (ИК) аэросъемка
ИК-аэросъемка основана на регистрации отраженного
солнечного и собственного теплового излучения объектов земной
поверхности в виде электромагнитных волн в диапазоне от 0,74 до
1000 мкм. Опытным путем установлено, что для ИК-излучения
в атмосфере существуют три основных атмосферных окна
прозрачности, определяющих аэросъемку в трех диапазонах:
0,74—1,35; 3,5—5,5; 7,5—14,0 мкм.
В первом атмосферном окне (0,74—1,35 мкм) используется
отраженное солнечное излучение, поэтому применяются
обычные методы аэрофотосъемки на фотопленки,
сенсибилизированные (очувствленные) к этому диапазону волн (точнее
к 0,74—1,2 мкм). Такая аэросъемка может быть названа инфра-
фотографической.
ИК-аэросъемка во втором и третьем атмосферных окнах
3,5—5,5 и 7,5—14,0 мкм позволяет фиксировать собственное
тепловое излучение Земли и тепловые аномалии объектов,
возникшие в результате нагревания солнечным излучением
(наведенные тепловые аномалии). Она выполняется сканирующей
аппаратурой — тепловизорами, позволяющими получать двумерные
изображения (тепловые аэроснимки), или ИК-радиометрами,
регистрирующими изменения температуры земной поверхности
по оси полета самолета. Разработана также аппаратура,
работающая в узких спектральных ИК-зонах. Синтез снимков,
полученных этой аппаратурой, дает возможность воспроизводить
-цветные ИК-изображения. Подобная аэросъемка называется
тепловой.
3.1. Инфрафотографическая аэросъемка
Ближняя инфракрасная зона спектра по сравнению с видимой
зоной характеризуется меньшим рассеянием лучей при
прохождении через атмосферу, что увеличивает дальность съемки,
а отличия в коэффициентах отражения и пропускания
способствуют увеличению контрастности отдельных объектов и их
деталей.
158
Для получения изображения морского дна ИК-аэрофото-
съемку не применяют, поскольку уже первые метры водной
толщи полностью поглощают всю длинноволновую часть
спектра. Однако вследствие разницы коэффициентов отражения этой
части спектра и видимой части на ИК-снимках четко
отображается граница между водной поверхностью и сушей. Это
определяется свойством воды поглощать ИК-красное излучение,
в связи с чем наблюдается резкое отличие в отражении лучей
инфракрасного диапазона от суши и поверхности воды. Поэтому
ИК-аэрофотосъемка может быть использована для изучения и
картирования береговых линий, максимальных и минимальных
положений уровня моря при приливах и отливах, сгонно-нагон-
ных явлений и т. д.
3.2. Тепловая съемка
Тепловая съемка, выполняемая с помощью ИК-радиометров,
позволяет фиксировать температуру поверхности воды по
профилю полета. В океанологии ее применяют для определения
одной из наиболее существенных и изменчивых в пространстве
и во времени характеристик океана — температуры воды на его
поверхности.
Тепловая съемка, выполняемая с помощью тепловизоров,
позволяет регистрировать тепловые контрасты (аномалии).
Ее используют для выявления гидродинамических процессов,
подводных вулканических и грязевулканических извержений,
загрязнения поверхности моря и т. д.
Гидродинамические процессы вызывают
неравномерное распределение температуры на поверхности моря,
поэтому на тепловых аэроснимках четко отображаются теплые и
холодные течения, их структурные особенности, зоны
конвергенции и дивергенции течений, а также холодные воды апвел-
лингов, мощные разгрузки подземных или ювенильных вод,
фронты холодных и тепловых вод, конвективные ячейки,
циркуляции Ленгмюра и т. п.
Подводные извержения вулканов могут
повышать температуру воды над ними либо за счет
непосредственного нагревания при близком положении жерл вулканов к
поверхности моря, либо за счет подъема к поверхности донной
нагретой воды и твердых продуктов вулканических выбросов
при извержении, происходящем на больших глубинах моря.
Эти «следы» и могут быть зафиксированы на снимках.
Разгрузка подземных вод на дне акваторий
обычно вызывает локальные тепловые аномалии на поверхности
моря. При разгрузке пресных подземных вод последние
поднимаются к поверхности и понижают температуру воды. Наоборот,
при разгрузке термальных вод температура воды на
поверхности моря над этими участками повышается. Таким образом,
159
тепловая аэросъемка может быть использована для поисков
пресных и термальных вод. Учитывая, что выходы последних
часто приурочены к разломам, картирование термальных вод
может оказать помощь при трассировании в пределах
акваторий крупных дизъюнктивных нарушений.
Загрязнение поверхности моря
нефтепродуктами хорошо фиксируется на тепловых снимках.
Нефтепродукты уменьшают испарение воды, в результате чего на таких
участках поверхности моря отсутствует холодный слой, в
значительной степени возникающий за счет испарения. Это
положение, по-видимому, может быть распространено и на участки
моря, загрязненные другими отходами антропогенного
происхождения.
В пределах прибрежных мелководий с помощью тепловой
съемки удается зафиксировать также волновые и разрывные
течения, речной сток, песчаные и каменистые осушки,
растительность и т. д. Благодаря разному прогреванию воды над более
мелкими и глубокими участками отображаются подводные
долины, мели, подводные валы и другие объекты мелководных
участков подводного берегового склона.
4, Радиолокационная (РЛ) аэросъемка
РЛ-съемка является активным методом изучения [7].
Поверхность местности облучается с самолета радиоволнами,
отраженные сигналы которых фиксируются приемной аппаратурой.
Съемка может проводиться практически в любую погоду как
в дневное, так и в ночное время.
На РЛ-снимках изображается только поверхность
акваторий. Если поверхность воды гладкая, то происходит зеркальное
отражение радиолучей в сторону от антенны (приемника),
вследствие чего на снимке поверхность воды отображается
однородной темной по цвету. В связи с этим РЛ-съемку следует
выполнять при взволнованной поверхности, когда отраженные
от склонов волн, а также и рассеянные от вспененной воды
радиолучи попадают в приемную аппаратуру. В этом случае
РЛ-снимки позволяют получать информацию о морских волнах,
различных водоворотах и других явлениях на поверхности
акваторий.
На РЛ-снимках четко отображаются пленки нефти,
поскольку последние «тушат» капиллярные волны.
Образовавшиеся здесь участки сглаженной поверхности моря, от которой
РЛ-лучи отражаются зеркально в стороны от приемной
аппаратуры, на снимках получаются темными.
По изображению разрушающихся волн (полос вспененной
воды) в прибрежных мелководных частях на РЛ-снимках
опознаются некоторые формы рельефа дна (подводные валы, мели,
160
отдельные гряды или подводные камни). РЛ-снимки успешно
используются и для оценки ледовой обстановки в полярных
акваториях, поскольку позволяют выявлять среди паковых
льдов разводья и трещины, иногда даже удается оценить
относительную толщину плавающих льдов.
5. Лазерная, люминесцентная,
ультрафиолетовая съемки
Лазерная, люминесцентная и ультрафиолетовая съемки
находятся, как уже было сказано, в стадии апробации или
разработки.
5.1. Лазерная съемка
Экспериментальные исследования свидетельствуют, что в
прозрачных водах с помощью лазера, работающего на длине волны
0,55 мкм при ширине зоны 0,003 мкм, можно измерять глубины
моря в несколько десятков метров. Комбинируя
дешифрирование аэрофотоснимков морского дна и измерение глубин моря
с помощью лазера, можно проводить гидрографическую съемку
мелководий [17].
5.2. Люминесцентная съемка*
Люминесцентная съемка основана на том, что при
облучении атомы некоторых веществ приходят в возбужденное
состояние, которое является неустойчивым. Возвращение электронов
на прежний уровень сопровождается испусканием кванта
энергии в виде лучей большей длины, чем облучающего излучения.
Это — нетемпературное свечение. Сильная люминесценция
свойственна нефти и газам, хлорофиллу. По-видимому, эта съемка
может быть использована не только для фиксирования пленок
нефти на поверхности воды, но и планктона.
При активном методе предполагается облучение поверхности
земли искусственными ультрафиолетовыми лучами, которые при
наличии люминесцирующих веществ вызывают нетемпературное
свечение. Оно фиксируется на пленку в видимом диапазоне.
Эту съемку можно выполнять только в ночное время и с малых
высот.
При пассивной люминесцентной съемке используется
специальная аппаратура, позволяющая фиксировать отклонения кон-
* Параграфы 5.2; 5.3, а также раздел 6 составлены по материалам
А. В. Доливо-Добровольского.
6 Заказ № 1190
161
станты соотношения между интенсивностью солнечного
излучения вблизи от фраунгоферовой линии и непосредственно в ее
центре, вызываемые люминесцирующими объектами. На основе
этого метода, предложенного в Советском Союзе А. Н.
Козыревым, в США Хомпфиллом, создан специальный прибор типа
радиометра.
5.3. Ультрафиолетовая съемка
В настоящее время ведется разработка эффективной
аппаратуры для выполнения ультрафиолетовой съемки. При этой
съемке должны использоваться специальные виды аэропленок,
в светочувствительный слой которых вводят люминофоры,
дающие при прохождении ультрафиолетовых лучей вспышку света,
фиксируемого светочувствительным слоем. Съемка может
оказаться полезной при изучении загрязнения поверхности моря
нефтью, обнаружении углеводородов, поступающих из недр дна
на поверхность воды.
Измерение спектра отраженного солнечного света,
выходящего из моря, делает возможным также изучение
фитопланктона и оценку концентрации хлорофилла. Последний поглощает
в видимой части спектра фиолетово-синюю (0,42—0,46 мкм) и
красную (0,66—0,70 мкм) области. Однако эти работы,
выполняемые с самолета, осложняются влиянием передаточной
функции атмосферы, учет которой сделает возможным применение
аэроспектрометрических измерений для изучения хлорофилла,
определяющего фотосинтез.
6. Аэрогеохимическая съемка
Аэрогеохимическая съемка позволяет фиксировать ареалы
рассеяния в воздухе газов или мелковзвешенных частиц.
Практически она осуществляется при всасывании с помощью насоса
забортного воздуха в самолет.
Забортный воздух пропускается через систему
поглотителей, избирательно поглощающих искомые компоненты, и
анализируется с помощью счетчика, измеряющего радиоактивность
воздуха. Взвешенные частицы могут собираться с помощью
сеток из искусственных полимеров и т. д. Разработаны также
приемы, основанные на спектрометрическом изучении состава
атмосферы под самолетом и над ним с помощью метода фра-
унгоферовых линий.
Появление новых линий в приземном разрезе атмосферного
столба воздуха свидетельствует о наличии ореолов каких-то
веществ.
Для исследования акваторий аэрогеохимическая съемка
практически пока не применялась. По-видимому, она может
быть использована для выявления углеводородных газов, по-
162
ступающих на поверхность моря из недр морского дна и
свидетельствующих о наличии нефтегазовых залежей.
Практическое использование аэрогеохимических методов
затруднено из-за отсутствия методики привязки наблюдений
к объектам, вызывающим наличие ареалов рассеяния тех или
иных газов, поскольку трудно учитывать движение воздушных
масс.
7. Аэрогеофизическая съемка
Из аэрогеофизических методов при изучении геологического
строения дна морских акваторий применяют аэромагнитную
съемку, в стадии разработки находится аэрогравитационная
съемка.
7.1. Аэромагнитная съемка
Аэромагнитная съемка предназначена для изучения
особенностей магнитного поля морей и океанов, которые
предопределяются горными породами, слагающими недра дна морей и'
океанов. Съемку проводят с помощью аэромагнитометров,
устанавливаемых на воздушных летательных аппаратах.
Магнитометрические исследования океанов позволили возродить моби-
листскую теорию развития Земли, послужили основой для
создания теории новой глобальной тектоники; с помощью этих
исследований установлены глубинные и трансформные разломы
на дне океанов, прослеживающиеся на протяжении многих сотен
и даже тысяч километров. Благодаря магнитной
восприимчивости разных горных пород можно применять аэромагнитные
измерения при геологическом картировании для трассирования
отдельных геологических свит (толщ, тел и т. п.). По выярлен-
ным магнитным аномалиям можно говорить о глубинном
геологическом строении недр морского дна, в частности, о наличии
интрузий основных и ультраосновных пород и даже о
геологических структурах, перспективных на нефть и газ.
7.2. Аэрогравитационная съемка
Аэрогравитационная съемка, наряду с гравитационными
исследованиями, выполняемыми с морских судов, способствуют
выявлению аномалии силы тяжести. Этот вид съемки имеет пока
опытный характер. Анализ гравиметрических карт дает
возможность устанавливать глубинное строение недр морского дна,
наличие интрузий, а иногда аномалий, указывающих на наличие
антиклинальных структур. Это позволяет использовать
материалы гравитационных съемок для определения перспективных
нефтегазоносных акваторий.
6*
163
Использование материалов аэросъемок при изучении океана
практически только начато, но уже на данном этапе очевидно —
оно необходимо для решения как научных проблем, так и
некоторых практических вопросов освоения океана.
Исходя из этого, можно ожидать, что дешифрирование
материалов аэросъемок акваторий позволит получить обширную
информацию о физических явлениях, происходящих в океане, о
некоторых его биологических особенностях и геологическом
строении дна. Комплексное использование различных видов
аэрометодов совместно с другими методами океанографии может
существенно уточнить наши представления о законах природы
океанов и морей, что необходимо для более эффективного
использования его ресурсов.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Аэрометоды геологических исследований/Под ред. В. К* Еремина.—
М.: Недра, 1971, 703 с.
2. Геолого-геоморфологическое изучение морских мелководий и берегов
по материалам аэрофотосъемки: Методическое руководство/3. И. Гурьева,
К. М. Петров, Н. С. Ра мм, В. В. Шар ко в.—Л.: Наука, 1968,
365 с.
3. Гурьева 3. И., Петров К. М., Шар ков В. В. Аэрофотоме-
тоды геолого-геоморфологического исследования внутреннего шельфа и
берегов морей: Атлас аннотированных аэрофотоснимков.— Л.: Недра, 1976,
277 с.
4. Доливо-Добровольский А. В. Геометрия радиолокационных,
инфракрасных и других новых видов аэроснимков.— М.: Недра, 1976, 50 с.
5. Исследование природной среды с пилотируемых орбитальных
станций.— Л.: Гидрометеоиздат, 1972.
6. Кобец Н. В. Геологическое и геоморфологическое дешифрирование
морского дна по космическим фото- и телевизионным снимкам.— В кн :
Применение новых видов аэросъемок при геологических исследованиях —
Л.: Изд-во ВСЕГЕИ, 1976, с. 21—35.
7. Комаров В. Б., Старостин В. А., Нявро Б. П. Развитие
исследований в СССР по использованию радиолокационных изображений для
геологических целей.— В кн.: Использование природной среды космическими
средствами. Геология и геоморфология. Т. 2.— М.: ВИНИТИ, 1974,
с. 103—107.
8. Методы изучения морских течений с самолета.— Л.: Наука, 1964,
227 с.
Э.Михайлов А. Е., Р а м м Н. С. Аэрометоды при геологических
исследованиях.— М.: Недра, 1975, 196 с.
10. Применение аэрометодов для исследования моря/Под общей ред.
В. Г. Здановича.— М — Л.: Наука, 1963, 546 с.
11. Семенченко И. В., Бахарева Л. В., Калько А. Г.
Дистанционный метод определения мутности воды водохранилищ на основе
измерения коэффициентов спектральной яркости.— Труды/ГГИ, 1976, вып. 237,
с. 65—70.
12. Углев Ю. В. Косвенные способы оценки глубин морских
мелководий по аэроснимкам.— В кн.: Применение с ->рометодов для исследования
моря.—М.—Л.: Наука, 1963, с. 407—430.
13. Федоров К. Н. Дистанционные методы исследования океана.—
В кн.: Итоги науки и техники. Сер. Океаноло1ия. Т. 4.— М.: ВИНИТИ, 1977,
с. 132—161.
164
14 Шар ков В. В., Гурьева 3. И. К вопросу геологического
дешифрирования космических снимков морских акваторий.— В кн.:
Применение новых видов аэросъемок при геологических исследованиях.— Л.: Изд-во
ВСЕГЕИ, 1976, с. 11—21.
15. ШилинБ. В., Кариженский Е. Я. Инфракрасная
аэросъемка — новый метод изучения водных ресурсов.— В кн.: Аэрофотосъемка —
метод изучения природной среды.— Л.: Наука, 1973, с. 64—69.
16. Шокальский Ю. М. Океанография.— Л.: Гидрометеоиздат, 1959,
537 с.
17. Bright D. Coastal aereal photo-laser survey (CAPS).— In:
Proceedings of the American Congress on surveying and mapping, 35th annual
meeting.—Washington, 1975, March 9—14, p. 249—259.
18. Haase E., Kaminski H., Pfannenstiel M. Versuch einer
meersmorphologischen Deutung von Satelliten —Luftbildern.— Deutsche Hyd-
rographische Zeitschrift, 1969, Heft 5, S. 193—204.
19. Stevenson Robert E. Observation from Skylab mesoscale terbu-
lence in ocean currents.—Nature, 1974, N 5468, p. 638—640.
165
Владимир Григорьевич Корт,
член-корреспондент АН СССР,
заслуженный деятель науки
РСФСР. Работает в области
океанографических исследований.
Под его руководством проведено
23 экспедиции в различные
районы Атлантического, Тихого и
Индийского океанов и первые
советские морские антарктические
экспедиции на д/э «Обь» в 1956—
1958 гг. Он является соавтором
открытия в 1970 г. мезомасштаб-
ных океанских вихрей. Под
руководством В. Г. Корта
коллективом сотрудников Института
океанологии АН СССР им. П. П.
Ширшова создана десятитомная
монография «Тихий океан»,
удостоенная в 1977 г.
Государственной премии СССР.
В. Г. Корт
ОКЕАНСКИЕ
ВИХРИ
1. Результаты океанологических экспедиций
Во время работы американской экспедиции «Гольфстрим-60»
в 1960 г. и советской экспедиции в 1963 г. были выполнены
гидрологические съемки в районе Гольфстрима [2]. Они показали
чрезвычайно сложную пространственную структуру поля
течения и других гидрофизических характеристик (температуры,
солености) в этом районе. Из полученных данных следовало, что
положение основного потока Гольфстрима существенно
изменяется от съемки к съемке за счет интенсивного меандрирова-
ния стержня течения. Тогда же было отмечено, что сильно
развитые меандры могут отшнуровываться от основного течения,
превращаясь в мощные вихри, получившие в американской
океанографической литературе название рингов.
Крупномасштабные ринги (протяженностью около 200—300 км) вовлекают
во вращательное движение огромные массы воды (до 30
106 м3/с) и проникают до больших глубин океана (3000—4000 м).
Помимо рингов вдоль внешних границ основного потока
Гольфстрима наблюдались многочисленные вихри существенно
меньшего масштаба (протяженностью 50—100 км). Такие вихри
являются следствием сдвигового напряжения в пограничных
зонах Гольфстрима (вихри Кармана). Была построена типичная
картина пространственной динамической структуры в зоне
Гольфстрима (рис. 1). В районе между 60 и 65° з. д. виден
хорошо выраженный антициклональный (движение по часовой
стрелке) меандр с тремя вихрями к югу и юго-западу от него.
Квазисинхронные площадные гидрологические съемки в
районе течения Куросио показали такую же сложную
динамическую структуру в поле течения.
167
Таким образом, первые подробные гидрологические съемки
районов мощных струйных течений, таких как Гольфстрим и Ку-
росио, позволили установить существование в океане крупно-
и мелкомасштабных вихрей, связанных с гидродинамической
неустойчивостью струйных течений и влиянием на них рельефа
дна океана.
В 1967 г. по инициативе известного советского океанолога
профессора В. Б. Штокмана были организованы
инструментальные наблюдения над течениями на полигоне, оборудованном
Рис. 1. Карта динамической топографии (0—4000 дбар) в районе
Гольфстрима, июнь 1960 г.
Штриховая линия — изобата 300 м. Цифры у сплошных изолиний — динамическая
высота, дин. мм.
семью автономными буйковыми станциями, снаряженными
самописцами течений [6]. Полигон размером 300X240 миль
располагался в южной части Аравийского залива между 63°—66°30'
в. д. и 10—15° с. ш. На полигоне были выполнены две
квазисинхронные гидрологические съемки по равномерной сетке станций
с шагом 30 миль. В ходе наблюдений были обнаружены в
открытом океане, вне зоны влияния сильных океанских течений,
вихри масштабами 200—250 км. Такие вихри теперь принято
называть мезомасштабными. Сразу же возник вопрос об их
генезисе. В 1970 г. под руководством Института океанологии
АН СССР им. П. П. Ширшова [3] была проведена
межведомственная экспедиция в центральную часть Атлантического
океана «Полигон-70». В течение шести месяцев с экспедиционных
168
судов и 17 автономных буйковых океанографических станций,
размещенных крестообразно, проводились непрерывные
наблюдения над изменчивостью основных гидрофизических
характеристик (скорость течения, температура, соленость и др.) на
полигоне размерами 120x120 миль. Результаты этих уникальных
исследований динамики океана оказались весьма интересными.
В открытой части океана, в зоне квазистационарных течений
(Северное пассатное течение), были выявлены крупные вихре-
образные возмущения, напоминающие атмосферные циклоны и
антициклоны. Характерный масштаб этих вихрей— 100—200 км
по протяженности и 40—70 сут по времени. Вихри
прослеживались в глубину до 1000—1500 м от поверхности. Через район
полигона вихри перемещались в западном направлении со
средней скоростью до 5 см/с при средней орбитальной скорости на
глубинах 200—300 м в 20—25 см/с.
Была построена векторная диаграмма изменения поля
скорости течения (горизонт 300 м) на «Полигоне-70» за период
с 13 марта по 12 августа 1970 г. (рис. 2).
Из рисунка отчетливо видно, как с 13 марта и по 22 апреля
на полигоне резко изменился характер поля течения. В начале
наблюдений на акватории полигона располагалась тыловая
часть вихревого возмущения, а к концу апреля на полигон
надвинулся новый антициклональный вихрь. Через месяц (24 мая)
центр этого антициклона продвинулся к середине полигона.
Этот период наблюдений особенно удачный, так как
показывает полный ареал вихревого возмущения. Контур
обнаруженного вихря хорошо аппроксимируется эллипсом с длинами осей
90—100 км и около 200 км. Сравнение параметров этого эллипса
и теоретической модели свободных планетарных волн в
двухслойном океане на бета-плоскости, дало основание М. Н. Кош-
лякову и Ю. М. Грачеву считать, что динамика наблюденного
на полигоне вихревого возмущения скорости течения близка
к динамике бароклинных волн Россби [5].
Таким образом, обнаруженное на «Полигоне-70» вихревое
возмущение оказалось новым классом океанских вихрей,
развивающихся в открытом океане под воздействием
метеорологических возмущений и гидродинамической неустойчивости. На
этом основании, обнаруженный антициклональный вихрь был
назван синоптическим мезомасштабным вихрем. Характерной
чертой этого вихря является хорошо выраженная динамическая
структура в глубинных слоях океана (200—1500 м). В верхнем
слое океана, в отличие от рингов и вихрей Кармана,
синоптический мезомасштабный вихрь проявляется менее четко. Данное
обстоятельство связано с тем, что под воздействием штормов
динамическая структура верхнего слоя океана сильно усложнена
возмущениями более мелкого масштаба. Попытка выделить [4]
на «Полигоне-70» такие более мелкие возмущения увенчалась
успехом: на верхних горизонтах (25—200 м) были обнаружены
169
,3/«" ,3^200-БОо] 22/'V
|П ,, 200-500
II
9 8 7 5 J 4
15*^-
16*
\lj 200-400
/\ 200-400
24/V
з/vn
9/VI
100-400
100-400 200-AOOv
100-600
19/VII^ \ 200-500
12/VlllX .
Vioo-
-40 d*у
•*» V4fc
\^4\V;
О Юмиль О 4см/с
/
Рис. 2. Эволюция поля течений на горизонте 300 м
(«Полигон-70»).
Масштабы для расстояний между станциями и для модулей векторов
скорости (сплошные линии со стрелками) показаны внизу рисунка.
Штриховыми линиями со стрелками показаны векторы скорости,
полученные путем интерполирования по глубине, указанной около стрелки.
170
мелкомасштабные синоптические вихри с горизонтальными
размерами 50—80 км и периодом 3—9 сут, близким к
«естественному синоптическому периоду». Фазовая скорость таких вихрей
достигает 10—15 см/с и прослеживаются они до глубины
200—300 м.
Можно полагать, что мелкомасштабные синоптические вихри
развиваются в любых районах Мирового океана, как реакция
океана на штормовые возмущения.
Полученные советскими учеными результаты стимулировали
развитие подобных исследований в других странах. Так, в США
начиная с 1973 и по 1976 гг. выполнялись обширные
исследования вихревых возмущений в юго-западной части Северной
Атлантики по программе срединно-океанического динамического
эксперимента (МОДЕ). Результаты, полученные американскими
исследователями, подтвердили существование и довольно
большое разнообразие по масштабам и генезису вихреобразных
движений в океане.
Открытие синоптических вихрей в океане имеет большое
научное значение. Оно вносит коренные изменения в наши
представления о внутренней динамике океана, и уже сегодня
перед теоретической и экспериментальной динамической
океанологией встала проблема изучения процессов синоптического
вихреобразования и взаимодействия вихрей с другими
крупномасштабными процессами. При выполнении исследований по
многим разделам океанологии, таким как акустика океана,
гидрохимическая структура вод, биологическая продуктивность,
загрязнение и распространение пассивной примеси и др.
представляется необходимым увязывать результаты с
гидрологической и кинематической структурой океана, формируемой
процессами синоптического вихреобразования.
2. Эксперимент ПОЛИМОДЕ
Учитывая важную роль вихревых возмущений в динамике вод
океана, а также большую сложность и трудоемкость их
изучения, в 1974 г. при разработке плана научного
советско-американского сотрудничества была принята программа более
обширных исследований динамики вод океана, получившая название
Международный крупномасштабный океанический
динамический эксперимент ПОЛИМОДЕ. Она является логическим
развитием исследований по программам «Полигон-70» и МОДЕ и
рассчитана на несколько лет.
Основная задача программы ПОЛИМОДЕ состоит в
исследовании океанских вихрей для правильного понимания
динамики низкочастотной и мезочастотной (синоптической)
изменчивости океанских течений и определения ее роли в общей
крупномасштабной динамике океана. В ходе экспедиции предусмот-
17J
рено тщательное картирование трехмерной структуры и
временной изменчивости основных гидрофизических полей (скорость
течения, температура, плотность) в масштабах, существенно
больших, чем ранее; измерение локального динамического
баланса в характерных районах океана; изучение роли вихревого
переноса количества движения, тепла и массы и изменчивости
этого переноса в пространстве и времени; исследование меха-
Рис. 3. Схема работ по советско-американской программе ПОЛИМОДЕ.
1 — район работ по программе МОДЕ с помощью системы автономных буйковых
станций 1; 2 — район работ по программе МОДЕ-1 с помощью системы автономных
буйковых станций 2; 3 — полигон ПОЛИМОДЕ; 4 — район работ СССР по программе «Поли-
гон-70»; 5 —район работ США с помощью системы автономных буйковых станций 3.
низмов возникновения, передачи и диссипации энергии в вихрях
и их взаимодействия между собою и со средним течением;
изучение распределения размеров, интенсивности и изменчивости
вихревого поля по акватории океана.
Успешное выполнение этих задач позволит создать научную
основу для кратко- и долгосрочных океанографических
прогнозов и позволит построить объединенную динамическую модель
системы атмосфера—океан, необходимую для дальнейшего
совершенствования методов прогноза погоды.
В соответствии с программой ПОЛИМОДЕ советская
сторона провела исследования в течение года (с июля 1977 г. по
сентябрь 1978 г.) на гидрофизическом полигоне, расположенном
в юго-западной части Северной Атлантики. Центр полигона
размером 300x300 миль был выбран ориентировочно в точке
с координатами 29° с. ш. и 70° з. д. Ветровой режим в этом
172
районе сравнительно благоприятный для долговременной
работы буйковых океанографических станций. Американская
сторона должна была продолжиib начатые в 1976 г. исследования
с помощью системы буйковых океанографических станций к
северу, северо-востоку и юго-востоку от советского полигона,
310 миль
32°с.ш.
71° 70°
£*\ о 2 © 3 <§) 4
67°З.Д.
Рис. 4. Схема советского гидрофизического полигона
ПОЛИМОДЕ.
1 — буйковая станция; 2 — XBT-зондирование; З — СТД-зондкрование; 4 —
серия гидрологических станций.
а также выполнить локальный синоптический эксперимент
вблизи основного полигона (рис. 3).
Советские исследования мезомасштабных вихрей на
полигоне ПОЛИМОДЕ проводились по схеме, приведенной на рис. 4.
Глубина акватории полигона изменялась от 5100 до 5400 м.
В работе приняли участие научно-исследовательские суда
«Академик Курчатов» и «Витязь» (ИОАН СССР), «Академик
Вернадский» и «Михаил Ломоносов» (МГИ АН УССР),
«Академик Крылов» и «Молдавия» (Гидрографическая служба),
«Петр Лебедев» и «Сергей Вавилов» (АКИН АН СССР) и
173
«Виктор Бугаев» (Государственный комитет гидрометеорологии
и контроля природной среды СССР).
За период с 11 июля 1977 г. по сентябрь 1978 г. девятью
судами экспедиции были выполнены 17 крупномасштабных (по
всему полигону) гидрологических съемок, 14 среднемасштабных
(по акватории полигона 1 и 2 на рис. 3) и наблюдения на
нескольких микрополигонах. Все автономные буйковые
океанографические станции почти непрерывно проработали по 12—13
месяцев. Зарегистрировано около трех миллионов компонент
вектора скорости течения и получено около двух миллионов
значений температуры воды. Проведены наблюдения на нескольких
тысячах гидрологических станций и станциях температурного
зондирования. Предварительный анализ материалов,
полученных на первом этапе экспедиции, показал, что район полигона
ПОЛИМОДЕ весьма динамичен (табл. 1, рис. 5).
3. Анализ полученных данных
Анализ скорости перемещений вихрей (табл. 1) и характера
их траекторий (рис. 5 и 6) показывает весьма интенсивную
динамику вихрей на полигоне ПОЛИМОДЕ. Их фазовая скорость
изменяется от 3 до 17 см/с. Движение вихрей происходит крайне
неравномерно, создается впечатление, что оно сравнительно
Таблица 1
Скорость перемещения вихревых образований на полигоне
Вихревое
образование
Ц1
ш
ш
ш
ш
Ц2
Ц2
Ц2
А1
А1
А1
1 А1
А1
А2
А2
- А2
При
№
съемок
1а—2
2—2а
2а—3
3—За
4—5
1—1а
1а—3
3—4
1а—2
2—2а
2а—3
3—4
4—5
1а—2
2—2а
3—4
м е ч а н и
Даты середины
съемок
16/VII—27/VII
27/VII—05/VIII
05/VIII—16/VIII
16/VIII—22/VIII
01/IX—28/IX
13/VII—17/VII
17/VII—16/VIII
16/VIII—01/IX
16/VII—27/VII
27/VII—05/VIII
05/VIII— 16/VIII
16/VIII—01/IX
01/1X—28/1X
16/VII—27/VII
27/VII—05/VIII
16/VIII—01/IX
е- Ц — циклоны; А —
Пройденное
расстояние,
мили
10
20
60
15
45
20
50
30
15
40
30
40
40
10
25
75
антициклон]
Сутки
11
9
11
6
27
3—4
29
15
И
9
И
15
27
И
9
15
ы.
Скорость
перемещения,
мили/сут
1,0
2,2
5,5
2,5
1,7
5,0
1,7
2,0
1,4
4,4
2,9
2,7
1,5
1,0
2,8
5,0
Направление
перемещения
сз
сз
зюз
ю
зсз
сз
сз
с
3
3
3
сз
3
ев
в
зюз
174
Рис, 5. Топография изотермы 17°С по данным первой гидрологический съемки (а) и пятой съемки (б).
Изолинии отображают структуру вихревого поля. Цифры у изолиний — iлубчна изотермы, м.
хаотично. Основной причиной такого характера движения
вихрей, вероятно, является их взаимодействие. Они сталкиваются
друг с другом, одни преграждают путь другим. Очевидно,
дальнейший анализ наблюдений на полигоне ПОЛИМОДЕ
позволит понять и объяснить эти сложные процессы.
ОБ
lao^Ja
73°
4
1
5
ОБ
I 41
2а
<
AI 2
X
-7*
РЗ
32°с.ш.
ЦЗ
—оН
5
• и,1,и,2
OAI.A2
31°
30°
72° 71°
70° 69°
68°
29°
28°
27°
26°
67°э.д.
Рис. 6. Расположение центров вихревых образований и
траектории их движения (схематические) на глубине изотермы
17° С по данным восьми гидрологических съемок.
Съемки выполнялись: № 1 — 11/VII—18/VII; № la — 13/VII—21/VII;
№ 2 — 24/VII—1/VIII; № 2а — 1/VIII—10/VIII; № 3 — 10/VIII—21/VIII;
№ За—18/VIII—27/VHI; № 4 — 23/VIII—11/IX; № 5 — 22/IX—4/Х.
Сравнение карт вихревых полей, построенных по данным
гидрологических съемок, с картами течений, основанных на
измерениях буйковых океанографических станций, показало их
удовлетворительное сходство. Еще более близкая аналогия
имеет место между полем течения и динамической топографией,
учитывающей распределение не только температуры воды, но
и ее солености.
Указанное обстоятельство позволяет считать, что вихревые
образования на полигоне ПОЛИМОДЕ с большой вероятностью
функционируют в квазигеострофическом режиме, т. е. градиенты
176
давления, возникающие в циклонических (Ц1, Ц2) и
антициклонических (Al, A2) вихрях, уравновешиваются силой
ускорения, связанного с вращением Земли (силой Кориолиса).
Таким образом, океанские вихри на определенном этапе своего
развития могут быть сравнительно устойчивыми образованиями.
Форма глубинной структуры вихревых образований
приближена к несколько скрученному по часовой стрелке (для
северного полушария) усеченному конусу с вершиной,
обращенной кверху для циклонических вихрей и вниз для антициклонов.
Форма оснований конуса, образованная замкнутыми изопикна-
ми, как правило, довольно сложная, но в большинстве случаев
может быть аппроксимирована окружностью или эллипсом.
Пространственный масштаб синоптических вихрей на полигоне
ПОЛИМОДЕ характеризуется 150—200 км, а их период
составляет 60—80 сут. В циклонических вихрях в северном полушарии
отмечается подъем изопикн в центральной части, а в
антициклонических — опускание. В связи с этим циклонические вихри
имеют отрицательную аномалию температуры в центре из-за
подъема вод и могут быть названы «холодными»,
антициклонические же вихри имеют положительную аномалию температуры,
связанную с опусканием поверхностных вод, и называются
«теплыми». Нижняя граница проникновения вихрей составляет
3000—4000 м, что в общем соответствует американским
определениям, полученным на полигоне МОДЕ, который располагался
несколько южнее полигона ПОЛИМОДЕ.
Существование в океане теплых и холодных вихрей создает
специфические условия для тепло- и влагообмена с атмосферой,
что оказывает влияние на погоду.
Интересной особенностью динамики вихрей является наличие
в их фронтальных областях более высоких орбитальных
скоростей по сравнению с тыловыми областями (относительно
генерального направления движения вихря). Вследствие этого на
границе между вихрями наблюдаются гидрологические фронты,
подтверждаемые данными гидрологических наблюдений.
Открытие океанских вихрей синоптического масштаба
позволяет говорить о существовании в океанской толще своеобразной
«погоды», учет и прогнозирование которой имеет важное
практическое значение для мореплавания и морского промысла.
Холодные циклонические вихри отличаются не только своей
термической структурой. Подъему глубинных вод к поверхности
в этих вихрях сопутствует вынос водных масс, богатых
биогенными элементами. Попадая в зону фотосинтеза, эти элементы
способствуют увеличению биологической продуктивности в
поверхностных слоях центральной части циклонического вихря.
Другими словами, районы холодных океанских циклонов
перспективны для рыбного промысла в открытых частях океана.
Классическим примером таких продуктивных районов являются
районы квазистационарных крупномасштабных вихрей в водах
177
Антарктики. Здесь, в зонах поднятия глубинных вод, в центре
вихрей биомасса планктона достигает рекордной величины —
1000мг/м3[1].
Американские океанографы большое внимание уделили
изучению крупномасштабных вихрей — рингов, зарождающихся из
меандров Гольфстрима, имеющих значение для навигации.
Рис. 7. Схема формирования рингов в Гольфстриме (по Пар-
* керу): а—г — этапы формирования.
Используя радиационные термометры для измерения
температуры поверхности океана с самолетов и искусственных
спутников Земли, а также судовые и самолетные сбрасываемые
зонды температуры, акустические буи с нулевой плавучестью,
американские исследователи получили уже довольно полную
информацию о структуре и режиме этих рингов (рис. 7).
Статистическая обработка материалов наблюдений показала, что на
южной периферии Гольфстрима, в районе между 65 и 55° з. д.,
ежегодно продуцируется от пяти до восьми циклонических
рингов [7]. Пространственный масштаб их, определенный по
изотерме 15° С достигает 150—200 км, и все они дрейфуют в
генеральном направлении на юго-запад со средней скоростью до
10 м/с. При этом орбитальная скорость поверхностного течения
178
в рингах достигает 150 см/с и остается почти неизменной в
течение первых шести месяцев своей «жизни». Общая
продолжительность существования ринга достигает двух-трех лет.
Центральное ядро циклонических «холодных» рингов до
глубины 2000 м содержит воды склона с береговой стороны
Гольфстрима, и тем самым охлаждает и опресняет окружающие
воды Саргассова моря (см. рис. 7 и 8) [9].
оп ■ ■
№ ■ #
ои о°а ш и пП
'бермудские
u о-ва
о i
D 2
о з
:ь
60"
40° С.Ш
30°
20°
50"З.Д.
Рис. 8. Схема распространения рингов Гольфстрима за период 1970—1976 гг.
(по Лаю и Ричардсону).
1 — по материалам температурных зондирований; 2 —по данным спутниковых
наблюдений; 3, 4 — единичные наблюдения с экспедиционных судов.
Анализ всех гидрологических наблюдений (более 50 тыс.)
в районе западной части Саргассова моря за 1970—1976 гг.
позволил выделить 163 ринга (рис. 8).
Идентификация их по гидрологической структуре дала
возможность проследить перемещение большой серии теплых и
холодных рингов. На рис. 9 показан пример движения
идентифицированного ринга за период 1971—1973 гг., в течение которого
он прошел путь от места зарождения до района Флориды, где
он, по мнению авторов работы [8], снова объединился с
Гольфстримом. Перемещение рингов в юго-западном направлении
связывается с существованием в южной пограничной зоне
Гольфстрима слабого квазистационарного противотечения, в котором
ринги и дрейфуют на юго-запад со средней скоростью 3 км/сут
(рис. 9).
179
По данным ряда авторов [7, 8], в зоне Гольфстрима между
65 и 55° з. д. зарождается шесть-восемь холодных и пять-семь
теплых рингов в год.
Как крупномасштабные ринги, так и мезомасштабные вихри
обладают большой кинетической энергией. Выше уже
отмечалось, что орбитальные скорости течения в рингах могут
достигать больших значений. Вследствие этого вихревая кинетиче-
40°С.Ш.
Рис. 9. Схема движения ринга за период с мая 1971 г. по февраль 1973 г.
(по Лаю и Ричардсону).
/ — положение ринга, определенное по аномалиям температуры воды на трех глубинных
горизонтах; 2 — по аномалии температуры воды на одном-двух горизонтах.
екая энергия в рингах, рассчитанная на единицу массы
поверхностных течений, может достигать до 1000 см2/с2, т. е.
превышает^ в 30—40 раз величину средней кинетической энергии
в районах со слабыми течениями. Согласно измерениям на
полигоне ПОЛИМОДЕ, средняя кинетическая энергия мезомас-
штабных (синоптических) вихрей превышает в три — пять раз
кинетическую энергию среднего течения. Таким образом, при
своем распространении крупномасштабные и мезомасштабные
вихревые возмущения коренным образом изменяют структуру
поля квазистационарных океанических течений и тем самым
затрудняют их учет при навигационном счислении. Приведенные
примеры достаточно ярко свидетельствуют не только о большом
научном, но и о прикладном значении изучения океанских
вихрей.
180
Океанографические исследования последнего времени
свидетельствуют о почти повсеместном распространении в океанах
вихревых возмущений разных масштабов. Однако природа их
еще далеко не изучена. На современной стадии исследований
океанографы имеют только самые общие представления о том,
что крупномасштабные вихри (ринги) зарождаются в районах
меандрирующих сильных океанических течений. Синоптические
мезо- и мелкомасштабные вихри — результат баротропной и ба-
роклинной гидродинамической неустойчивости средних течений
и фронтальных зон в океане, обусловленной действием сильных
метеорологических возмущений (штормов) и влиянием рельефа
дна океанов на движение водных масс.
С открытием вихревого поля в Мировом океане возникло
много новых сложных вопросов, в частности о происхождении
мезомасштабных вихрей, их эволюции, внутренней динамике,
взаимодействии с окружающими водами и т. д., решение
которых является актуальной задачей современных
океанографических исследований.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Виноградов М. Е., Наумов А. Г. Количественное
распределение планктона в антарктических водах Индийского и Тихого океанов.—
Океанологические исследования, 1961, № 3, с. 172—176.
2. Исследование циркуляции и переноса вод Атлантического океана/
Е. И. Баранов, В. А. Бубнов, Р. П. Булатов, И. В.
Привалова.— Океанологические исследования, 1971, №22, с. 94—153.
3. Корт В. Г, Нейман В Г. Атлантический гидрофизический
полигон 1970 г.—М.: Наука, 1974.
4. Корт В. Г., Бышев В. И., Т а р а сен к о В. М. Синоптическая
изменчивость течений на Атлантическом полигоне.— В кн.: Атлантический
гидрофизический «ПОЛИГОН-70».—М.: Наука, 1974, с. 181 — 188
5. К о ш л я к о в М. Н., Грачев Ю. М. Среднемасштабные течения на
гидрофизическом полигоне в тропической Атлантике.— В кн.: Атлантический
гидрофизический «ПОЛИГОН-70».—М.: Наука, 1974, с. 163—180.
6. Кошляков М. Н., Галеркин Л. И., Чыонг Динь-Хиен.
О мезоструктуре геострофических течений открытого океана.— Океанология,
1970, т. X, вып. 5, с. 805—814.
7. Fu glister F. С. Cyclonic rings formed by the gulf stream 1965—
1966. Atribute to Georg Wtiston his 80th birthday.—Cordon and Breach, 1971.
8. Lai D. Y., Richardson P. J. Distribution and Movement of gulf
stream rings.— J. of Phys. Ocean., 1977, vol. 7, N 5, p. 670—683.
9. Parker Ch. E. Gulf stream rings in the Sargasso sea.—Deep-sea Res,
1971, vol. 18, N 10, p. 981—995.
181
Борис Васильевич Шехватов,
кандидат технических наук, старший
научный сотрудник Института
океанологии АН СССР им. П. П.
Ширшова. Занимается
разработкой зондирующих и автономных
приборов, гидроакустической
аппаратуры, автономных буйковых
станций и другой
океанологической техники.
Б. В. Шехватов
ОКЕАНОГРАФИЧЕСКИЕ БУИ
И БУЙКОВЫЕ
ЛАБОРАТОРИИ
Фундаментальное изучение физико-химических и биологических
процессов, происходящих в толще водных масс и на границе
раздела вода — атмосфера, а также проведение постоянных
наблюдений за гидрометеорологической обстановкой в океане
осуществляются разными способами. Это и обширная сеть
гидрометеорологических станций, расположенных вдоль побережья
материков и на островах, и суда погоды, оборудованные
гидрометеорологической и аэрологической аппаратурой. Число судов
погоды сравнительно невелико, а стоимость их эксплуатации
высока. Важным источником информации о состоянии погоды
в открытом океане являются метеосводки с плавающих там
судов, но их распределение по площади очень неравномерно,
большие районы Мирового океана, удаленные от суши,
находятся вне зоны наблюдений.
Информация, поступающая от метеорологических спутников
Земли, позволяет судить о крупномасштабных процессах,
происходящих в атмосфере и на поверхности океана. Однако
измерения гидрометеорологических параметров с ИСЗ не могут
обеспечить в настоящее время требуемой точности и полноты
данных.
Один из наиболее перспективных методов получения
гидрометеорологических данных, а также проведения длительных
научно-исследовательских наблюдений в океане при любых
погодных условиях, основан на применении автономных буйковых
станций (АБС). Первые буйковые станции использовались
главным образом для навигационных целей и устанавливались
в прибрежной полосе на малых глубинах.
183
В середине 50-х годов были осуществлены первые
экспериментальные постановки АБС в открытом океане, которые сразу
привлекли внимание ученых. В 1967 г. на специальной
Международной конференции в Вашингтоне сообщалось, что
только в США сконструировано и испытано около 85 различных
систем АБС, из числа которых были выбраны более
совершенные конструкции [1].
Использование для ретрансляции данных ИСЗ позволило
значительно повысить надежность передачи информации и
одновременно упростить аппаратуру, снизить энергопотребление
радиопередающих устройств АБС. Применение их позволило
сократить число экспедиционных судов.
За прошедшие два десятилетия АБС прочно вошли в состав
технических средств, используемых для различных наблюдений
в морях и океанах. Так, например, при изучении
крупномасштабных синоптических вихрей в Атлантическом океане по
международной программе ПОЛИМОДЕ в 1977—1978 гг.
только советскими океанологами были установлены 19 АБС.
Сотни дрейфующих станций используются для изучения
поверхностных течений. В связи с интенсификацией добычи нефти,
газа и других природных ископаемых значительно увеличилось
число АБС, устанавливаемых на континентальном шельфе и
во внутренних морях. Планируется создание региональных и
международных сетей гидрометеорологических станций,
охватывающих важнейшие районы Мирового океана. В рамках
Европейского сообщества к 1980 г. предполагается установить
сеть гидрометеорологических АБС в Северном, Балтийском
морях и Бискайском заливе. США планируют создать в
Атлантическом, Индийском и Тихом океанах сеть из 500 АБС.
Обсуждаются проекты создания Международной глобальной
сети АБС.
В то же время проблему создания АБС для проведения
длительных наблюдений на больших глубинах океана нельзя
считать решенной. Из большого числа разработанных станций
в 1978 г. насчитывалось немногим более 20 АБС,
эксплуатировавшихся в открытом океане. Интенсивные работы по
совершенствованию конструкций АБС и поиску новых решений ведутся
в различных странах мира.
1. Типы и состав АБС
В зависимости от назначения и способа постановки можно
выделить четыре основных типа АБС (рис. 1):
с поверхностным, поставленным на якорь, буем;
с притапливаемым буем;
комбинированные с притапливаемым и поверхностным буем;
дрейфующие.
184
Области их применения, достоинства и недостатки
рассмотрены ниже. В самостоятельную группу выделяются обитаемые
и необитаемые буи-лаборатории.
АБС включает комплекс постановочного оборудования:
несущий буй, якорный трос, размыкатель троса и донный якорь;
измерительный комплекс: гидрологические, метеорологические
и другие измерительные приборы; системы преобразования,
Рис. 1. Схемы постановок буйковых станций: а — с поверхностным буем ЕЕР;
б — с притапливаемым буем; в — комбинированная АБС; г — с дрейфующим
буем; д — обитаемый буй-лаборатория.
1 — гидрологические приборы; 2 — размыкатель троса.
обработки и регистрации полученных данных; программное
устройство, управляющее работой измерительных и
вспомогательных систем АБС; системы телеметрии — приемно-передающие
радиостанции, линии связи с первичными преобразователями,
включая гидроакустический канал; вспомогательное
оборудование — аккумуляторные батареи, энергетические установки
для их подзарядки, системы вентиляции, терморегулирования,
навигационное оборудование и т. д.
Несущие буи. Несущий буй сдерживает якорный трос
с подвешенными к нему приборами, в нем размещается
аппаратурный комплекс, измерительные датчики, радиопередающие
устройства, источники питания и вспомогательные системы.
185
Форма конструкции буя и требования к его гидродинамическим
характеристикам определяются в значительной мере системой
постановки АБС. В наиболее неблагоприятных условиях
находятся АБС с поверхностным заякоренным буем. Эти буи
подвергаются воздействию волн, течения и ветра. Поэтому от их
гидродинамических характеристик будут зависеть динамические
нагрузки, возникающие на якорном тросе. Даже
незначительное улучшение этих характеристик повышает надежность
постановки АБС и позволяет упростить ее якорную систему. Следует
учитывать, что коэффициент лобового сопротивления буев
может существенно изменяться при воздействии нерегулярного
волнения. Величина и знак этих изменений зависят от формы
буя.
В более благоприятных условиях находятся притапливаемые
АБС, несущие буи которых подвергаются в основном
воздействию течений. * Буи этих АБС должны иметь минимальный
коэффициент лобового сопротивления и достаточную
плавучесть, чтобы удерживаться на заданной глубине при
максимальной скорости течения, ожидаемой в районе постановки
станции.
Поверхностные заякоренные буи часто имеют форму диска,
тороида, вертикально-ориентированного цилиндра, вехи или
судна.
В притапливаемых АБС применяются буи в виде сфер,
горизонтально ориентированных цилиндров.
Корпуса крупнотоннажных буев изготовляют из стали, буи
водоизмещением несколько тонн — из сплавов алюминия,
которые благодаря небольшому удельному весу, хорошим
антикоррозийным свойствам получили широкое применение.
Синтетические материалы, в том числе в комбинации с
металлом, применяют при изготовлении буев, имеющих
небольшую плавучесть. Ряд фирм США выпускает серии
унифицированных буев с плавучестью от десятков килограмм до
нескольких тонн из алюминиевых сплавов. Для увеличения плавучести
устанавливают несколько таких буев.
Одной из важных задач, возникающих при разработке
морских буев, является защита их корпусов от коррозии и
обрастания. Как правило, корпус буя покрывают специальными анти-
обрастающими красителями, при этом срок эксплуатации буя
составляет 1—2 года в зависимости от района постановки (в
тропических районах не более 6—8 месяцев). Однако антиобраста-
ющие красители кроме ограниченного срока службы обладают
другими недостатками: в них содержится до 90—95%
токсических веществ и только 5—10% пленочного материала.
Токсические вещества содержат ионные частицы, которые способствуют
электролитической коррозии, вследствие чего между антиобра-
стающим красителем и металлом необходимо наносить
дополнительный слой антикоррозионного покрытия.
186
Американской компанией В. Ф. Гудхарда предложен метод
защиты металлических корпусов буев от обрастания и
коррозии при помощи резиновых пластин специального состава,
которые наклеиваются на металлические конструкции,
работающие в погруженном состоянии. Путем специальной
технологической обработки в резину вводятся токсические вещества,
которые сохраняются в ней в течение длительного времени. Такие
покрытия имеют целый ряд преимуществ по сравнению
с красителями. Срок их службы увеличивается до 5—7 лет
и может регулироваться толщиной резиновых пластин и
количеством введенных в нее токсических веществ. Покрытия инертны
к материалу корпуса и одновременно служат дополнительной
защитой буя. Стоимость их в 1,5—2 раза больше стоимости
обычных красителей.
Эффективное защитное покрытие для буев применяет фирма
«Хагенук» (ФРГ). На корпуса буев из алюминия и других
металлов путем горячего напыления наносится слой цинка. Такое
покрытие является надежной защитой корпуса буя от коррозии
и одновременно, как показала их эксплуатация, от
биологического обрастания. Оказалось, что отдельные организмы,
прикрепившиеся к подобным корпусам, вскоре смываются водой.
Продолжительность действия таких покрытий оценивают в один
год, после чего оно может быть обновлено.
В последние годы разработан ряд покрытий на основе
эпоксидных смол, показавших хорошие эксплуатационные качества.
Якорный трос. Одним из наиболее ответственных
элементов станции, особенно с поверхностным заякоренным буем,
от которого в значительной мере зависит ее «живучесть»,
является якорный трос.
В настоящее время используют как стальные проволочные
тросы, так и тросы из синтетических волокон. Достоинствами
первых следует считать большую прочность при сравнительно
небольшом диаметре, что весьма важно для его
гидродинамического сопротивления горизонтальной составляющей течения, и
небольшое удлинение под нагрузкой.
Их недостатком является подверженность коррозии. Дело
в том, что океанологи применяют обычные тросы,
предназначенные для промышленности. Морская вода быстро вымывает
смазку и разрушает цинковое покрытие. Как показала
практика, срок службы стальных оцинкованных тросов в
экваториальных районах не превышает 1 —1,5 месяца. Повреждается
под действием коррозии прежде всего верхняя часть троса.
Ряд зарубежных фирм выпускает секции стального троса
с нейлоновым или уретановым покрытиями, что значительно
повышает срок службы. Эти секции имеют наконечники,
позволяющие соединять их между собой. Такой трос можно
использовать также в качестве кабеля для передачи данных от
гидрологических приборов.
187
К недостаткам стальных тросов нужно отнести их большую
массу и, следовательно, инерционность, вследствие чего они
испытывают большие динамические нагрузки при волнении. Это
часто является причиной разрыва прядей троса вблизи его
крепления к бую. В результате раскручивания троса происходит
перераспределение нагрузки на отдельных прядях и
существенное снижение прочности.
При постановках АБС на больших глубинах для снижения
массы применяют тросы переменного сечения с меньшим
диаметром внизу. Это позволяет более равномерно распределять
нагрузку по длине троса и улучшать условия его работы.
Благодаря небольшому растяжению, металлические тросы особенно
удобны при постановках притапливаемых АБС.
С появлением тросов из синтетических материалов
существенно улучшились качества якорных систем. Одним из
основных достоинств синтетических тросов является их небольшой
удельный вес, близкий к 1. Благодаря этому уменьшается
грузоподъемность несущего буя, что позволяет использовать для
постановки трос одного диаметра. Малая масса и,
соответственно, инерционность снижают динамические нагрузки,
возникающие на тросе при волнении. Тросы из синтетических материалов
не подвержены коррозии. Их эластичность позволяет ставить
АБС без «притравки» троса. Так, при поисках подводной лодки
«Трешер» на глубине 2,5 км было поставлено шесть АБС. В
качестве якорного троса использовался 14-миллиметровый
нейлоновый канат, длина которого с учетом растяжения на 15%
меньше глубины.
До последнего времени были наиболее распространены
нейлоновые и дакроновые тросы. Полипропиленовые тросы,
имеющие небольшое удлинение и положительную плавучесть,
применяют редко, так как при низких температурах они снижают
свою прочность. Тросы из стекловолокна, несмотря на высокую
прочность (до 35 т/см2), легко повреждаются при механическом
воздействии. Рекомендуемая нагрузка на дакроновые и
нейлоновые тросы — 20% их разрывной прочности, при этом
растяжение для дакрона составляет около 6% и для нейлона — 20%.
При оптимальных нагрузках, соответствующих 20%-ной
разрывной прочности, срок службы якорного троса из синтетических
материалов оценивают в один год. В случае увеличения
нагрузки до 85% этот срок сокращается до недели. Однако во
время эксплуатации АБС тросы нередко повреждают морские
животные, особенно на глубинах до 1000 м. Поэтому здесь
рекомендуется устанавливать стальной трос.
Синтетической трос из арамидного волокна «Кевлар»,
разработанного в США, обладает прочностью стального и
легкостью нейлонового. Результаты эксплуатационных испытаний
тросов и кабелей-тросов из этого волокна показали
перспективность их применения в качестве якорных для АБС [1].
)88
При постановках АБС с поверхностным буем в целях
уменьшения динамических нагрузок на якорный трос дается «при-
травка». При отсутствии течений часть троса ложится на дно
и на ней образуются петли. При последующем натяжении троса
происходит обрыв его прядей. В случае постановки АБС на
стальном тросе, для повышения надежности в нижней части
ставят секцию из цепей. При использовании тросов из
синтетических материалов ставят секцию, обладающую
положительной плавучестью.
Несмотря на интенсивные поиски и усилия, прилагаемые
разработчиками к созданию надежных якорных тросов, они
по-прежнему остаются наиболее уязвимой частью буйковых
станций.
Практически срок постановки АБС определяется
надежностью троса.
Донные якоря. В качестве донных якорей АБС
используют чугунные литые сегменты, цепи, якоря Стимсона и Дан-
форта, а также якоря, заглубляющиеся в грунт при помощи
взрывных устройств. В отличие от обычной постановки
станции на якорь на мелководье при постановке АБС на большой
глубине образуется небольшой угол наклона якорного троса,
который ухудшает сцепление якоря с грунтом. Под действием
волнения возможен отрыв якоря от грунта и дрейф станции.
Во избежание этого применяют якоря в виде якорных цепей
или секционные с распределенным грузом. Они состоят из
нескольких чугунных сегментов, соединенных последовательно
отрезками цепи или троса, вследствие чего снижается вероятность
полного отрыва якоря от грунта, а также обрыва троса.
Размыкатели троса. Надежное сцепление якоря
с грунтом, которого стремятся достичь при постановках АБС,
осложняет подъем станции. В большинстве случаев якоря
станции заглубляются в грунт, и при их «вырыве» на тросе
возникают большие динамические нагрузки, приводящие к его
обрыву. Поэтому раньше в нижней части троса у якоря обычно
ставили ослабленное звено. В случае перегрузки это звено
обрывалось, а трос с приборами поднимался на борт. В настоящее
время вместо ослабленного звена используют размыкатели
троса, среди которых наибольшее распространение получили
гидроакустические. Такие размыкатели включают в себя
механический замок с исполнительным механизмом,
гидроакустический приемник, дешифратор кодовых команд и батареи
питания, помещенные в прочный корпус. Размыкатель
устанавливают обычно в нижней части троса. Управляют
гидроакустическими размыкателями с помощью кодовых сигналов,
посылаемых судовым передатчиком. Принятые сигналы поступают
на дешифратор, после чего включается привод механического
замка, который отсоединяет нижнюю секцию троса,
прикрепленную к якорю. Наибольшее распространение получила
189
цифровая система кодирования с использованием двух несущих
частот. Она обладает высокой помехоустойчивостью и позволяет
принимать значительное число различных команд.
Для повышения надежности срабатывания в ряде
размыкателей гидроакустические системы дублируются программно-
временными устройствами, которые включают привод
размыкателя через заданный интервал времени. Аналогичные
программно-временные устройства применяются в притапливаемых АБС,
которые должны быть подняты после заданного срока,
например, при постановке станции на зимний период подо льдом.
В этом случае электронные схемы размыкателя включаются
к моменту подъема станции. Такая блокировка исключает
возможность срабатывания от помех, позволяет значительно
уменьшить расход энергии и емкость батарей питания. В качестве
программно-временных устройств используют электронные часы
со счетными схемами.
Применяют также упрощенные конструкции программно-
временных размыкателей, которые срабатывают при
электрохимическом разрушении стопорной тяги, изготовленной из
сплава магния и алюминия. Скорость электрохимической
реакции задается электрической схемой, а в случае ее отказа
изменяется только время срабатывания спускового механизма.
Такие размыкатели служат для дублирования гидроакустических
на притапливаемых станциях.
Системы сбора, накопления и передачи
информации АБС. Эти системы обеспечивают вызов
измерительных блоков по заданной программе, фиксированной или
гибкой; прием информации от измерительных блоков и
отдельных датчиков и ее преобразование в цифровой код; накопление
полученных данных на носителях и их передачу по радиоканалу.
В основе управления системой лежит принцип временного
программирования циклов измерения, включения отдельных узлов
и блоков, систем регистрации, радиопередающих и приемных
устройств и вспомогательной аппаратуры. Программное
устройство вырабатывает через заданные интервалы времени
командные сигналы, с помощью которых выполняется
последовательный, иногда последовательно-параллельный опрос всех
измерительных систем, включая контрольную аппаратуру (рис. 2).
Циклы измерения, их последовательность и приоритет
опроса определяются по фиксированной программе или по
команде из приемного центра. Предусмотрено также
автоматическое изменение режима измерения и передачи данных. Так,
во время штормовой погоды АБС переходит на непрерывный
режим измерения и передачи данных. Команды на измерительные
блоки, а также результаты измерений в системы преобразования
данных и в блоки памяти передаются по внутренним кабельным
линиям связи. В ряде случаев для передачи данных от
гидрологических приборов на буи используется гидроакустический
190
Комплекс
гидрологических
датчиков
Комплекс
метеорологических
датчиков
ф
i
Коммутатор каналов
1
Преобразователь сигналов
1 в цифровой код
Оперативный магнитный
накопитель
Магнитный
накопитель
Приемно-передающий
радиокомплекс
К антенне
Навигационная
аппаратура
Програмное
устройство
Блок
питания
Рис. 2. Структурная схема автоматической буйковой станции.
191
канал. Результаты измерения записывают на магнитные
носители и затем передают в сеансы связи или по запросу по
радиоканалу в береговые центры сбора данных.
Информация передается в большинстве случаев на KB- и
УКВ-диапазонах на частотах от 2 до 40 МГц. В целях
повышения надежности связи крупнотоннажные АБС оборудуют
многоканальными приемно-передающими системами, позволяющими
выбрать оптимальный частотный диапазон, для прохождения
сигналов с минимальным числом ошибок. Принятая такой
системой с береговой станции команда, содержащая кодовый
сигнал, ретранслируется на берег, где она проверяется при помощи
ЭВМ. При отсутствии ошибок команда вновь посылается на буй
уже в качестве исполнительной. После ее получения
программное устройство АБС выдает разрешение на передачу данных,
записанных в блоке оперативной памяти. При наличии ошибок
из-за плохой связи береговой центр повторяет команду в других
частотных диапазонах. Данные передаются также через
спутники связи.
Источники питания. Вспомогательная
аппаратура. От энергоресурса АБС в значительной мере зависят
сроки ее автономной работы. Непосредственное питание
аппаратуры АБС осуществляется от аккумуляторов, которые
должны периодически подзаряжаться при длительных постановках
станции от различных генераторов. В качестве источников
питания обычно применяют на больших буях дизель-генераторы,
термоэлектрические генераторы, работающие на сжиженном
газе. Последние, благодаря небольшим габаритам, используют
также на малых буях. Разработан ряд радиоизотопных
установок, которые целесообразно размещать на притапливаемых
станциях, где затруднена подача свежего воздуха, необходимого
для работы вышеуказанных генераторов.
В число вспомогательной аппаратуры входит навигационный
комплекс, включающий осветительные огни, активный
радиоответчик, сирену, включаемую при тумане, а также системы
контроля за работой агрегатов, вырабатывающих электроэнергию,
и состоянием аккумуляторных батарей и др.
2. АБС с поверхностным заякоренным буем
Такие АБС используют для проведения стандартных
гидрометеорологических наблюдений, а также для навигационных
целей. Одной из первых гидрометеорологических станций,
получивших довольно широкое распространение, является станция
(Navy Oceanographic Meteorological Automatic Device) NOMAD
(США). В течение 25 лет станции этой конструкции успешно
эксплуатируются в различных районах Мирового океана.
Несущий буй станции выполнен из алюминия в форме лодки длиной
192
6 м и шириной 3 м. Масса буя — 20 т. Внутри корпуса,
разделенного на 12 отсеков, размещены измерительная аппаратура,
радиостанция и источники питания. На мачтах буя установлены
комплекс метеорологических датчиков и антенна.
За время эксплуатации станция была существенно
модернизирована. Вначале она измеряла атмосферное давление,
скорость и направление ветра, температуру воздуха и
поверхностного слоя воды. Впоследствии в состав измерительной
аппаратуры была включена гирлянда термодатчиков для измерения
вертикального распределения температуры поверхностного слоя
воды. Установлена система для передачи данных через ИСЗ,
а также система ракетного зондирования тропосферы до высоты
7 км. Запущенная со станции ракета в процессе снижения на
парашюте измеряет и передает данные о вертикальном профиле
температуры, давления и относительной влажности воздуха,
которые регистрируются и затем передаются совместно с
гидрометеорологической информацией на береговой пункт. Сеансы
связи проводятся 4 раза в сутки, а при ухудшении логоды через
час [1, 3]. Повышена мощность радиостанции с 1 до 4 кВт.
АБС NOMAD предназначена для работы в шельфовой зоне.
Однако станции ставили и на глубинах до 4—5 км. Срок
действия их без ремонта составляет 8 месяцев. Для постановки
АБС в глубоком океане используют буи «Монстр», ХЕРВ-1,
ЕЕР, РЕВ, разработанные фирмой «Дженерал дайнамикс»
(США). Буи типа «Монстр» прошли успешные испытания при
неблагоприятных погодных условиях в открытом океане
в 1964—1966 гг. Наиболее уязвимым элементом оказалась
якорная система. И хотя станция выдерживала ураганы, при
которых скорость ветра достигала 100 миль/ч, а высота волн 15 м,
срок действия якорного троса оказался менее запланированного
(менее одного года).
Постановка станции на стальном тросе оказалась
ненадежной, и трос был заменен на комбинированный — дакроново-по-
липропиленовый.
Буй типа «Монстр» послужил основой для разработки АБС
ХЕРВ-1. Корпус этого буя сварен из десятимиллиметровой
листовой стали и имеет форму диска диаметром 12 м с усечением
в нижней части. Водоизмещение—100 т. На буе установлена
12-метровая мачта, которая является опорой антенны и
одновременно вентиляционной и выхлопной трубой двигателя
внутреннего сгорания. На мачте укреплены метеорологические
датчики и мощная навигационная ксеноновая лампа. Буй разделен
на 16 водонепроницаемых отсеков. В четырех расположены
генераторы и электронное оборудование, восемь заполнено
пенопластом, в четырех находятся балластные цистерны с
морской водой.
АБС рассчитана на автономную работу в течение года и
может устанавливаться практически на любых глубинах. Аппара-
Заказ № 1190
193
тура станции позволяет подключать до 100 океанологических
и 10 метеорологических датчиков. В подводный измерительный
комплекс входят датчики глубины, температуры, солености.
Контейнеры с измерительными датчиками могут
устанавливаться на якорном тросе на глубине до 3000 м. В каждом
контейнере имеются три датчика, преобразователь аналоговых
сигналов в частотный и батарейное питание. Опрос и включение
отдельных датчиков проводится по команде с буя, в качестве
линии связи служит якорный кабель-трос. Ввод данных в
линию связи от подводных датчиков и сигналов команды от
поверхностного буя осуществляется методом индуктивной связи
при помощи специальных трансформаторов с разъемным
сердечником. Принятые на буе сигналы отфильтровываются,
преобразуются в цифровой код и регистрируются.
Датчики, устанавливаемые на мачте буя, измеряют
направление и скорость ветра на высоте 5, 10 и 15 м от водной
поверхности, магнитный курс, атмосферное давление, солнечную
радиацию, температуру морской воды на поверхности,
температуру точки росы и сухого воздуха. Кроме того, определяется
ускорение буя по вертикали, фиксируются углы наклона и
угловая скорость. Эти данные используются для определения
характеристик волнения. Также регистрируются скорости и
направления течения в поверхностном слое океана. Датчики
течения крепятся к днищу корпуса буя приблизительно на 1 м
ниже поверхности (рис. 3).
Показания метеорологических датчиков представляют как
аналоговое напряжение, которое преобразуется в ЧМ-сигнал,
а затем в 12-разрядный двоичный код. В связи с ограниченной
емкостью источников питания станция передает только часть
собранной информации, которая необходима главным
образом для составления метеорологических прогнозов. На станции
предусмотрены блоки долговременной оперативной магнитной
памяти. Емкость ее рассчитана на хранение информации,
собранной станцией за весь период работы. Оперативная память
хранит данные, собранные за последние 24 часа. Аппаратура,
установленная для сбора данных от датчиков, может выполнять
до 20 различных команд: изменять скорость опроса датчиков,
проводить выборочный опрос и т. п. Выход буя в эфир
осуществляется по команде с береговой станции. Для большей гибкости
предусмотрена возможность связи на шести диапазонах в
полосе частот от 3 до 30 МГц. Мощность передатчика — 1 кВт.
Телеметрическая система обеспечивает надежную связь в
радиусе до 4500 км, используя высокие частоты и ионосферное
отражение.
Питание станции обеспечивается никелево-кадмиевыми
аккумуляторами, которые периодически подзаряжаются двумя
генераторами с приводом от двигателей внутреннего сгорания,
работающих на пропане.
194
Рис. 3. Схема размещения измерительных датчиков на буйковой станции
«Альфа».
/ — датчик солнечной радиации; 2, 5, 7 — датчик скорости и направления ветра- 3 —
навигационная лампа; 4 — сирена, работающая во время тумана; 6 — барометр-' 8 —
измеритель осадков; 9 — измеритель скорости и направления течения; 10 — датчик
температуры воды; 11 — термисторная цепь для измерения температуры воды до глубины
45 м; 12 — радиолокационный отражатель; 13, 16, 18— измеритель температуры точки
росы; 14, 17, 20— датчик температуры воздуха; 15 — измеритель дождевых осадков; 19 —
компас; 21 —датчик температуры поверхности воды; 22 — гироскопический датчик
ускорения; 23 — динамометр; 24 — измерители солености, температуры, давления (10
приборов устанавливаются на глубине от 50 до 500 м).
7*
195
Дальнейшими модификациями ХЕРВ-1 являются буи ЕЕР
(Engineering Experimental Phase) и РЕВ (Prototype
Environmental Buoy) [1]. На буе ЕЕР установлена усиленная мачта без
оттяжек с антенной высотой 7,5 м. Общая высота буя с
оборудованием на мачте равна 11 м. На уровнях 5 и 10 м от
поверхности воды размещены датчики общей радиации, температуры,
осадков, атмосферного давления, температуры точки росы,
скорости и направления ветра.
На буях РЕВ комплекс метеорологических датчиков
установлен только на уровне 10 м.
Особое внимание при разработке станции ЕЕР было уделено
надежности и стабильности показаний метеорологических
датчиков, которые, как показал опыт эксплуатации, быстро
выходят из строя и являются одной из наиболее частых причин
прекращения работы станций.
Гидрологические измерители скорости и направления
течения, температуры и солености морской воды, гидростатического
давления и скорости звука размещают в титановых корпусах,
которые закрепляют на двенадцати уровнях до глубины 500 м.
Для передачи данных от измерительных блоков в кабель-
трос используется индуктивный метод связи. Аналогичным
образом через линию связи подается питание измерительных схем
от источников, расположенных в буе. Сеансы передачи данных
с АБС проводятся через 1, 3, 6 часов, а также по запросу. Буй
на якорь ставится на синтетическом тросе. В верхней части,
длиной 500 м, устанавливают восьмижильный дакроновый
кабель-трос, в нижней — нейлоновый канат. Размыкатель троса
соединяется с якорем при помощи цепи. Энергия для питания
аппаратуры буя вырабатывается дизель-генератором, который
периодически подзаряжает буферную аккумуляторную батарею.
Буй рассчитан для работы в любых погодных условиях.
Автономность буя — 1 год. Предполагаемый срок эксплуатации —
10 лет. Стоимость станции составляет 500 тыс. долл.
В Англии изготовлена и прошла успешные
эксплуатационные испытания буйковая станция ДБ-1 аналогичной
конструкции, предназначенная для постановки в районах
континентального шельфа. Чтобы устранить вращение буя, применяют три
якоря. Испытания показали, что якорная система может
обеспечить срок постановки до 1 года. Термомеханический
генератор, работающий на жидком пропане, рассчитан на 2 года. Для
повышения надежности измерения гидрометеорологических
параметров датчики дублируются.
Для национальной сети Норвегии разработана АБС с
цилиндрическим буем, предназначенная для сбора и передачи
гидрометеорологических данных. Корпус его длиной 6,8 м и
диаметром 0,8 м изготовлен из металла и стеклопластика.
Положительная плавучесть буя — 2 т. Масса оборудования — 0,7 т.
В корпусе буя размещены электронная аппаратура, приемно
196
передающая радиостанция и гидроакустическая станция.
Питание станции осуществляется от сухих батарей, рассчитанных на
работу в течение восьми месяцев. Гидрологические датчики
заключены в автономные контейнеры, имеющие собственные
источники питания. Информация, получаемая от этих датчиков,
передается по гидроакустическому каналу в цифровом коде на
несущий буй и ретранслируется затем по радио.
3. АБС с притапливаемым буем
На АБС с поверхностным буем при измерениях в штормовую
погоду вследствие вертикального перемещения троса
происходит сильное искажение показаний навешенных на него
приборов. Заглубление несущего буя позволяет избежать этого. Кроме
того, АБС с притапливаемым буем можно устанавливать в
районах, покрываемых в зимний период льдом, и снимать после
его таяния. Отсутствие динамических нагрузок на тросе,
вызываемых поверхностным волнением, позволяет значительно
уменьшить положительную плавучесть несущего буя и
использовать более легкие якорные системы.
К недостатку АБС этого типа следует отнести невозможность
измерения гидрометеорологических и гидрологических
параметров в верхнем, наиболее активном, слое воды над буем, а также
отсутствие радиосвязи. Вся информация, собранная станцией,
накапливается на регистраторах и доступна только после ее
подъема.
Наибольшее распространение эти станции получили при
проведении научно-исследовательских работ, а также измерении
гидрологических параметров в ледовых районах.
Система постановки аналогична применяемой в
поверхностных АБС. Особое внимание уделяется якорным тросам, которые
не должны изменять свою длину в процессе эксплуатации.
Размыкатели троса для отсоединения донного якоря должны иметь
повышенную надежность. В ряде случаев они дублируются. Для
обнаружения станций на них устанавливают
гидроакустические ответчики, которые часто совмещают с размыкателями
троса.
4. Комбинированные АБС
Довольно часто в последнее время применяют комбинированные
АБС с притапливаемым и поверхностным буем. Вывод несущего
буя из зоны поверхностного волнения позволяет существенно
упростить его конструкцию и систему якорной постановки.
В несущем буе сосредоточены основная измерительная
аппаратура, источники питания и система сбора и регистрации
197
данных. В результате поверхностный буй, освобожденный от
большей части нагрузки, может быть значительно уменьшен
в размерах, вследствие чего уменьшается его гидродинамическое
сопротивление. На поверхностном буе устанавливают комплекс
гидрометеорологических датчиков и радиопередающую станцию
с антенной. Связь притапливаемого буя с поверхностным
осуществляется при помощи кабеля-троса.
К одной из наиболее удачных систем такого типа следует
отнести комбинированную АБС, созданную во Франции. В
качестве поверхностного буя служит буй-веха L-55, изготовленный
из пенопласта и стеклопластика. Его длина—10 м и диаметр
в центральной части — 0,3 м, масса вместе с оборудованием —
100 кг. В верхней части буя расположен съемный блок с
комплексом метеорологических датчиков, антенной, проблесковым
огнем и радиолокационным отражателем. В качестве балласта
к нижней части подвешен контейнер с электронной аппаратурой,
радиопередатчиком и батареями питания. Масса контейнера —
275 кг. Основной якорный трос удерживается дополнительным
сферическим буем, находящимся на глубине 15—20 м, с
которым поверхностный буй соединен полипропиленовым кабелем.
Такая система сводит к минимуму вероятность запутывания
троса и кабеля.
Буй был многократно испытан в неблагоприятных условиях,
при скорости ветра 100—130 км/ч и скорости течения до 4 уз
(при этом наклон его корпуса не превышал 15—20°).
Установленный в 1000 км от побережья Франции, буй в течение месяца
передавал данные через ИСЗ. Радиопередатчик мощностью
5 Вт, работающий на частоте 40 МГц, обеспечивал связь в
радиусе 100 км. За один сеанс связи передаются 12 параметров,
в том числе значения направления и скорости ветра,
атмосферного давления, температуры воды и воздуха. V Международная
океанографическая комиссия МОК приняла решение
использовать буй L-55 в глобальной системе АБС.
5. Дрейфующие АБС
Для изучения поверхностных течений, а также
гидрометеорологических измерений в районах, покрытых льдом, где
невозможна постановка заякоренных АБС, широко используют
дрейфующие АБС.
В качестве примера такой АБС может быть рассмотрен
дрейфующий буй «Sea Robin», разработанный фирмой
«Дженерал Электрик». Подводная часть буя имеет форму цилиндра
диаметром 0,6 м, который в верхней части имеет коническое
расширение диаметром 1,2 м. В нижней части установлен
динамический демпфер в виде решетчатого цилиндра.
Общая длина буя — 4,3 м, масса с полным оснащением — 0,7 т.
198
На верхнем основании крепится
трехметровая стойка с антеннами и
гидрометеорологическими
датчиками. В корпусе буя размещены
приемно-передающие радиостанции,
измерительная аппаратура,
аккумуляторы и термоэлектрический
генератор с запасом пропана. На буе
установлено 19 различных
океанологических, метеорологических и
контрольно-измерительных
датчиков (рис. 4).
В Канаде было создано
несколько дрейфующих АБС с
корпусами из пластиковых материалов
и из алюминия. Последний
оказался более прочным, легко
поддающимся обработке и дешевым.
Буй длиной 2 м, массой 90 кг
рассчитан на работу в течение 6—12
месяцев.
На буе установлены датчики ат- 2
мосферного давления и
температуры воды, измерительный
преобразователь, радиопередатчик с
антенной и батареи питания. В
течение двух лет было изготовлено и
запущено около 100 дрейфующих
АБС.
Для определения
местоположения дрейфующих буев исполь- j
Рис. 4. Устройство дрейфующего буя
«Sea Robin».
/ — панель «Земля» УКВ-передатчика; 2 —
антенна СВ-передатчика; 3 — радиоответчик
УКВ-передатчика; 4 — блок коммуникационного
оборудования; 5 —система охлаждения
термоэлектрического генератора; 6 — блок электроники; 7 — блок
терморегулирования; 8 — емкость для хранения
жидкого пропана; 9—10 — УКВ-антенны для
передачи информации и связи со спутником; 11 — ан- Q
тенна передатчика дециметрового диапазона для
связи со спутником; 12 — панель «Земля»
дециметрового передатчика; 13 — стойки антенны
коротковолнового передатчика; 14 —
термоэлектрический генератор; 15 — крышка съемного блока
с электронным оборудованием; 16 — наполнитель,
имеющий положительную плавучесть; 17 —
дистанционный коррелятор; 18— КВ-передатчик
19 — дециметровый радиоответчик; 20 —
измерительные преобразователи; 21 — система
регулировки работы термогенератора; 22 —
аккумуляторные батареи; 23 — динамический демпфер.
зуют радионавигационную систему «Омега» и
навигационные системы, связанные с ИСЗ. При работе с системой «Омега»
принятый на АБС сигнал регистрируется и затем
ретранслируется вместе с накопленной гидрометеорологической
информацией в береговой центр, где затем вычисляются координаты
буя. Точность определения автоматической системой места —
около 4—5 км.
Системы, основанные на использовании ИСЗ, наиболее
перспективны. Они имеют небольшие габариты, массу и стоимость.
Точность определения координат буев (около 3 км) вполне
достаточна для проводимых исследований. ИСЗ обеспечивают
надежную связь с дрейфующими АБС в любых районах океана
при самых неблагоприятных погодных условиях.
6. Буи-лаборатории
Для проведения испытаний акустической аппаратуры, а также
поисковых и научно-исследовательских работ, которые
необходимо выполнять с бесшумных и малоподвижных платформ,
создан ряд обитаемых и автономных буев-лабораторий. Такие буи
имеют ряд преимуществ перед экспедиционными судами,
благодаря минимальному искажению, вносимому ими в
физические поля, и возможности хорошей пространственной
стабилизации.
Обитаемый буй-лаборатория BORNA-1 разработанный
французской Службой подводных исследований OERS выполнен
в виде 60-метровой трубы переменного сечения (1, 2, 3 м).
Общая масса буя — около 250 т. Подводная часть буя погружается
на глубину 50 м. Эта глубина может регулироваться при
помощи воздушного колокола, расположенного в нижней части
буя. На верхней части буя на расстоянии 15 м от поверхности
моря установлена надстройка, в которой размещены
лаборатория, каюта для экипажа из 4 или 9 человек,
вспомогательные помещения, радиотелефонная аппаратура и
дизель-генераторы.
Плоская крыша служит в качестве вертолетной площадки.
На сигнальной мачте размещены датчики для градиентных
наблюдений.
Подводные лаборатории находятся в средней части буя.
В лабораториях имеются иллюминаторы для наблюдений и
устройства для взятия проб. В трубе, кроме лабораторий,
размещаются мастерские и складские помещения, в ее нижней
части — резервуары пресной воды, горючего и баллоны с
сжатым воздухом. Связь между лабораториями осуществляется
при помощи лифта.
Опыт эксплуатации показал, что колебания буя даже при
сильных штормах не превышают 3°, период качки равен 22 с.
200
В США в институте Скриппса разработан и находится в
эксплуатации с 1962 г. обитаемый буй-лабораторйя FLIP (Floating
Instrument Platform). Носовая часть буя выполнена, как у судна,
для удобства буксировки в горизонтальном положении в место
постановки. После заполнения балластных цистерн водой буй,
переводится в вертикальное положение.
Диаметр нижней части корпуса 6 м, верхней части длиной
27 м — 3,8 м. Буй разделен на четыре вертикальных отсека:
машинное отделение, жилое помещение, электронная
лаборатория и компрессорная. Имеется также отсек-лаборатория,
заполненная водой. Общая масса буя с оборудованием — 590 т.
Водоизмещение в горизонтальном положении—1500 т, в
вертикальном— 2000 т. На буе установлены три дизель-генератора
(2X60 кВт и 1x20 кВт). На надводной платформе имеются
выдвижные стрелы, шпили, лебедки и другое оборудование. Буй
снабжен системой ориентации, радиолокатором,
радионавигационной станцией «Лоран» и специальной радиоаппаратурой.
Установленная аппаратура предназначена для измерения
акустических сигналов, сейсмических и внутренних волн,
микротермической структуры моря, течения и других параметров водной
среды и приводного слоя атмосферы. Колебания буя при
воздействии волн высотой 1,5 м с периодом 11 с не превышают
0,2°, при этом амплитуда вертикальных перемещений буя равна
4 см.
Буй имеет высокую чувствительность к вертикальным
нагрузкам. Поэтому попытки использовать его для разработки
нефтяных месторождений в открытом море окончились
неудачно.
На основе опыта эксплуатации буя-лаборатории FLIP
сконструирован буй-лаборатория POP меньших размеров. Общая
длина равна 70 м, а погружаемой части — 55 м. Масса
буя—150 т. Период колебаний буя на резонансной частоте —
21 с.
В том же институте Скриппса для проведения акустических
исследований сконструирован необитаемый буй-лаборатория
SPAR (Seagoing Platform Acustic Research). Он имеет
сигарообразную форму. Его длина —118 м и диаметр—4,8 м.
Масса — 587 т. Водоизмещение в вертикальном положении при
заполненных балластных цистернах на глубине 92 м равно
1720 т.
Буй может поворачиваться вокруг вертикальной оси при
помощи гребных винтов для ориентировки гидрофонов при
испытаниях гидролокаторов. В его верхней части находятся
антенны радиопеленгатора. Вдоль корпуса размещены гидрофоны
и другие приборы, внутри него — электронное оборудование,
насосы, компрессоры, топливо, дизель-генератор на 10 кВт и
аккумуляторные батареи. SPAR работает совместно с двумя
вспомогательными судами: одно используется для буксировки и
201
снабжения буя электроэнергией при помощи километрового
кабеля во время проведения измерений, другое — для передачи
электромагнитных и акустических сигналов в радиусе до
100 миль.
Сигналы, принятые на буе, передаются для анализа по
кабелю на судно. Период вертикальных колебаний буя на
резонансной частоте равен 19 с. При поверхностных волнах с
периодом менее 10 с вертикальные перемещения буя
незначительны.
Следует отметить, что стоимость конструкции
автономного буя-лаборатории типа SPAR с дистанционным
управлением почти вдвое больше стоимости обитаемого
буя-лаборатории типа FLIP.
Большое внимание при планировании
гидрометеорологических сетей АБС уделя-ется вопросам их постановки, съема,
эксплуатации и периодического контроля специальными судами.
Расходы на эксплуатацию судов обеспечения имеют большой
удельный вес в общих затратах и в значительной мере зависят
от технических характеристик станций, длительности их
автономной постановки. При планировании в США национальной
сети АБС, состоящей из 300 буев, была дана следующая
оценка предполагаемых затрат на ее эксплуатацию в течение
десяти лет.
При проведении ревизии буев каждые два месяца для
обслуживания сети необходимо 28 судов. Стоимость их
эксплуатации составит 3,4 млрд. долл. При интервале осмотра
раз в шесть месяцев количество судов уменьшается до девяти,
а затраты — до 1,8 млрд. долл. При годичной бесконтрольной
работе АБС потребуется пять судов, а затраты снизятся до
0,8 млрд. долл. [2].
Несмотря на столь значительные затраты, буйковые
станции и лаборатории будут в дальнейшем совершенствоваться,
появятся новые конструкции, так как они являются
неотъемлемой частью глобальной системы изучения Мирового
океана.
Повышение эксплуатационной надежности АБС требует
решения целого ряда задач. Одной из главных является
совершенствование постановочных комплексов «буй — якорная
система». Создание специальных тросов и кабель-тросов и
способов крепления на них измерительной аппаратуры, улучшение
гидродинамических характеристик буев за счет применения
новых конструктивных материалов и снижения массы якорных
тросов позволят повысить «живучесть» АБС.
Применение новой электронной техники даст возможность
резко уменьшить габариты, массу и потребление энергии
измерительными устройствами, что позволит устанавливать на АБС
дублирующие системы и тем самым повысить надежность
работы станции.
202
Совершенствование систем ретрансляции данных через ИСЗ
существенно упростит решение проблем энергопитания АБС
и увеличения их автономной работы.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Remote ocean engineering environmental date acqusition/G. Haas,
T. L. Livingston, R. P. M u e 1 e e, R. Y. P о t e п.— Oceans 77. Conf. Rec,
Los Angeles, 1977.—N. Y., 1978.
2. Status of data buoy development in the United States Technical.—
Conf. of Acqusition and Communication of Ocean Data world meteorological
organization.— Tokyo, 1972.
3. Transactions 2nd International Buoy Technology Symposium.—Marine
Technology Society, 1967.
Геннадий Константинович Круп-
нов, начальник отдела ЦНИИ им.
акад. А. Н. Крылова. Занимается
прогнозом развития
перспективных технических средств для
изучения и освоения Мирового
океана — научно - исследовательских
судов, плавучих буровых
установок, обеспечивающих судов и т. д.
Г. К. Крупнов
НАУЧНО-
ИССЛЕДОВАТЕЛЬСКИЕ СУДА
Вот уже на протяжении столетия научно-исследовательские
суда (НИС) остаются основным средством изучения Мирового
океана. Отмеченное обстоятельство косвенно подтверждается
распределением количества параметров, измеряемых
различными техническими средствами, привлекаемыми к
исследованию океанов и морей (рис. 1).
Предлагаемая диаграмма, заимствованная из книги
Н. Ф. Медведева *, характеризует не конкурентоспособность
отдельных типов технических средств (раз мало измеряемых
параметров — значит не конкурент!), а всего лишь возможности
того или иного средства, зависящие в первую очередь от
возлагаемых на него задач, состава измерительной аппаратуры,
скорости и других тактико-технических данных. Поэтому, нап-
пример, подводный аппарат никогда не будет, да и не должен
быть, конкурентом судна или спутника. Все указанные
средства представляют хорошо сбалансированную систему,
предназначенную для всестороннего изучения Мирового океана, и
каждое из них должно иметь четкую область применения.
Итак, НИС следует рассматривать как часть системы
технических средств, предназначенных для комплексного изучения
океанов и морей.
Основной функцией НИС является сбор и первичная
обработка информации о Мировом океане, атмосфере над ним, строе-
* Медведев Н. Ф. Суда для исследования Мирового океана.— Л.,
Судостроение, 1971.
205
нии его дна, а также о флоре и фауне. В соответствии с этим
НИС выполняют следующие основные исследования:
— гидрологические (определение температуры на
различных горизонтах, скорости и направления течений, прозрачности,
турбулентности, наблюдения за волнением);
— гидрохимические (взятие проб воды и дальнейший их
анализ на содержание различных компонентов, определение
солености и т. д.);
— геофизические (измерение магнитных, гравитационных и
100°L
90
80
70
60
JO
40
30
20
10
О
^J
IS*
03
1
*
1
1 1
S
1 1
3
<5
О:
_ <b ^
41 -R
DC
1
^<
*4i
100%
90
80
70
60
50
40
30
\20
10
0
Рис. 1. Объем исследований Мирового океана (%),
выполняемых с помощью различных видов технических
средств.
электрических полей, проведение сейсморазведки и
радиометрии);
— геологические ( взятие проб грунта и последующий их
анализ);
— гидроакустические (изучение законов распространения
звука в морской воде);
— гидрографические (выполнение морского и прибрежного
промера, составление карт и лоций, обслуживание системы
навигационного ограждения);
— метеорологические (определение температуры и давления
воздуха, скорости и направления ветра, влажности, солнечной
радиации, наблюдения за облачностью);
— биологические (наблюдение за флорой и фауной океана).
Строительство НИС развивалось по двум направлениям.
Примерно до 60-х годов нашего столетия НИС рассматривались
только как средства для размещения необходимого
оборудования, аппаратуры и научного персонала. И для
исследовательских целей использовали транспортные, рыболовные, вспомога-
206
тельные суда. В этот период проектирования НИС вообще не
велось, поскольку предлагаемые суда требовалось только
дооборудовать.
Такое положение в какой-то мере всех устраивало, поскольку
применявшаяся в то время аппаратура была довольно
примитивна, не комплексировалась в измерительные системы, а
требования к точности измерений оставались невысокими.
Повышение требований, предъявляемых к информации о процессах,
протекающих в океанах и атмосфере над ними, вследствие
развития науки, промышленности и даже сельского
хозяйства (на урожай в конечном счете влияет и количество
НИС, участвующих в сборе информации для составления
прогнозов погоды), повлекло за собой усложнение
научно-исследовательской аппаратуры, появление принципиально новых ее
образцов и совершенствование методов проведения
исследований.
В связи с этим пришлось пересмотреть требования,
предъявляемые к НИС.
Начиная с 60-х годов все ведущие морские страны стали
создавать НИС по специально разработанным проектам, и
сегодня переоборудование судов других назначений в научно-
исследовательские— не правило, а редкое исключение. С этого
периода можно говорить о появлении нового класса судов —
научно-исследовательских, непохожих ни на какой другой тип
судов.
Поскольку наибольший интерес представляют специально
спроектированные НИС, ниже речь пойдет исключительно о них,
а статистические данные будут приводиться в основном по
судам, построенным после 1960 г.
До настоящего времени нет общепринятой классификации
НИС, что обусловлено значительным количеством задач,
решаемых с их помощью. Однако в зависимости от состава
основного оборудования и, в какой-то мере, ведомственной
принадлежности судов их условно можно подразделить на следующие:
океанографические; гидрометеорологические;
геолого-геофизические; гидрографические; гидроакустические; биологические;
научно-промысловые.
При рассмотрении предложенной классификации может
возникнуть правомерный вопрос: а где же суда-носители
подводных аппаратов? Современные подводные аппараты можно
рассматривать как дорогое и весьма сложное
научно-исследовательское оборудование, поскольку они практически не могут
нормально эксплуатироваться без судна-носителя. Комплекс
лабораторий, имеющихся на таком судне, предназначен для
работ, тематически связанных с задачами, решаемыми
аппаратами. Поэтому достаточно к определению судна по назначению
прибавлять слова «носитель подводных аппаратов», чтобы тем
самым выделить конструктивные особенности данного судна.
207
Основные характеристики научно-исследовательских
Характеристика
Страна-владелец
Год постройки
Назначение
Водоизмещение, т
Длина, м
Ширина, м
Высота борта, м
Площадь лабораторий и
специальных помещений, м2
Тип энергетической установки
ЭУ)
Мощность ЭУ, л. с.
Скорость, уз
Дальность плавания, мили
Автономность, сут.
Количество и мощность
подруливающих устройств,
Тип успокоителей качки
* Указан дедвейт.
** Судно ,,Хейз44 — катамаран, ^
,,Холлис
Хедберг"
Канада
1974
Геофизические
исследования
1700
61,6
12,8
5,6
130
Дизельная
2X1950
14,0
9000
60
—
/казана наибол
„Ля Сурой44
Франция
1975
Комплексные
океанологические
исследования
1090
56,3
11,0
6,3
65
Дизельная
2X825
14,3
8500
—
1X200;
1X150
„Шойе44
Япония
1972
Гидрографические и
океанографические
исследования
1960
80,0
12,3
6,5
—
Дизельная
2X2400
17,4
12 000
40
1X310
Пассивные цистерны
ьшая ширина.
В отличие от классификации судов транспортного или
рыболовного флотов, где при определении типа судна учитывают
не только его назначение, но еще и
архитектурно-конструктивный тип, НИС подразделяют только по назначению, поскольку
архитектура НИС различных типов может быть весьма близкой.
В табл. 1 приведены сведения о некоторых НИС постройки
70-х годов.
Прежде чем рассмотреть особенности НИС, попытаемся
сформулировать основные общие требования, которым они
должны удовлетворять.
НИС должны прежде всего обладать хорошей
мореходностью, особенно когда судно движется малым ходом или
находится в дрейфе. Дело в том, что 50—80% времени рейса такое
судно либо эксплуатируется на малых ходах (с буксируемыми
системами), либо выполняет так называемые станции, т. е.
с него проводят работы с опускной аппаратурой. Кроме того,
судно должно быть приспособлено для выполнения научных
исследований при состоянии моря 5 баллов, желательно даже при
6 баллах. Данное требование вытекает из анализа
распределения вероятности встречи в океане с волнением различной ин-
208
судов постройки 70-х годов
Таблица 1
..Тудеман"
Голландия
1976
Гидрометеорологические
исследования
2980
90,2
14,4
7,3
—
Дизель-
электрическая
3X1230
15,0
15 700
63
1X450;
1 1 X 300
„Поларбъерн"
Норвегия
1975
Океанографические
исследования
600 *
42,4
11,5
6,1
—
Дизельная
1X 2495
13,0
—
1X300
„Профессор
Сидлецкий44
ПНР
1972
Рыбопромысловые
исследования
1100 *
89,3
15,0
6,6
—
Дизель-электрическая
3X1150;
3X700
14,0
80
2X300
„Эксплора"
ФРГ
1973
Гео л о
го-геофизические
исследования
1900
72,6
11,8
6,5
—
Дизельная
2X1760
17,0
12 000
90
Есть
„Хейз»
США
1971
Гидроакустические и
океанографические
исследования
3270
75,2
22,9 **
350
Дизельная
2X2700
15,0
6000
30
Нет
Нет
тенсивности. Если судно пригодно для выполнения научных
работ на волнении до 4 баллов, то почти половину времени,
отводимого на исследования, оно будет простаивать в ожидании
улучшения гидрометеорологических условий. Возможность
проведения работ на волнении 5 баллов сокращает время простоев
почти в 3 раза, а на волнении 6 баллов это время практически
близко к нулю. Дальнейшее улучшение мореходных качеств
судна нецелесообразно, так как вероятность встречи в океане
с волнением интенсивностью 7 баллов и выше мала, а
трудности обеспечения работ в таких условиях очевидны. Это
требование выполняют, применяя различные успокоители качки.
Эти суда должны иметь хорошие маневренные качества для
обеспечения работы с опускной аппаратурой, а также при
плавании вблизи подводных препятствий или в узкостях
(гидрографические суда). С этой целью на НИС обычно применяют двух-
вальные установки, электродвижение, активные рули,
подруливающие устройства и выдвижные поворотные колонки.
НИС, особенно океанографические, должны быть
универсальными. Под этим понимают их приспособленность для
выполнения различных исследований без существенного переоборудо-
209
вания в период между рейсами. Для выполнения этого
требования на судах резервируются необходимые площади, объемы,
а также предусматриваются «стандартные» лаборатории, к
которым подводится энергопитание различного вида. В них
в зависимости от конкретных задач того или иного рейса
устанавливают сменную аппаратуру. В последнее время на
некоторых судах применяют «съемные» лаборатории, в которых
оборудование загружается на берегу, и затем они монтируются на
судне. К местам установки этих лабораторий на НИС лишь
заранее прокладывают различные кабели и трубопроводы для
подачи электроэнергии, воды, воздуха и других
энергокомпонентов, необходимых для обеспечения нормальной работы
съемных лабораторий. Использование таких лабораторий позволяет
также сократить время подготовки судна к рейсу.
Все НИС должны быть оборудованы совершенными
радионавигационными системами, а на некоторых из них
целесообразно устанавливать системы навигации с использованием
искусственных спутников Земли, поскольку от точности
определения местоположения судна в море, особенно при выполнении
исследований, в большой степени зависит достоверность и
ценность получаемой информации.
Не менее важно предусмотреть на НИС достаточно
просторные открытые части верхней палубы для размещения
необходимого количества лебедок и работы с кабельными и тросовыми
системами относительно большой протяженности.
Все особенности НИС вытекают из тех требований, которые
предъявляются к ним, и специфических условий их
эксплуатации.
В чем же заключаются особенности НИС?
Форма корпуса и главные размерения.
Особенностями формы корпуса НИС, обеспечивающими хорошие
мореходные качества, являются:
— высокий надводный борт в сочетании со значительным
развалом бортов в носовой оконечности и достаточно наклонным
форштевнем для уменьшения заливаемости, а также смягчения
килевой качки и улучшения всхожести судна на волну;
— V-образные шпангоуты, по возможности, в сочетании
с бульбовым носом для уменьшения амплитуды килевой качки;
— малый коэффициент общей полноты для уменьшения
потери скорости на волнении и для обеспечения требуемой осадки
при условии оптимального размещения гребных винтов;
■—малое отношение длины к ширине, необходимое для
улучшения маневренных качеств.
Опыт проектирования и анализ элементов существующих
НИС показывает, что отношение их длины к ширине
составляет обычно 4,4—5,5, ширины к осадке — 2,5—3,0, длины к
высоте борта 9,0—12,0, а коэффициент общей полноты изменяется
в пределах 0,50—0,63.
210
Архитектурный тип. По
архитектурно-конструктивному типу НИС можно подразделить на следующие:
— с баком и кормовой удлиненной надстройкой, по типу
близкому к принятому на рыболовных траулерах с бортовым
тралением;
— с носовой и средней надстройкой;
— со средней надстройкой;
— с удлиненным баком, переходящим в среднюю
надстройку;
— катамараны.
Суда первых двух типов имеют сравнительно небольшую
открытую площадь верхней палубы, поэтому часть аппаратуры
опускается в море с палуб надстроек, что увеличивает опасность
удара приборов о борт судна во время качки, а следовательно,
повреждения или их утери.
На судах третьего типа для проведения исследований могут
быть использованы носовая и кормовая части верхней палубы,
однако при сильном волнении одна из открытых частей верхней
палубы, а при положении судна лагом к волне и обе ее части,
могут заливаться водой, что ограничивает возможность работы
судов в открытом океане.
Суда четвертого типа лишены указанных выше недостатков.
На некоторых судах постройки последних лет средняя
надстройка сдвинута к одному, как правило левому, борту. Такое
нетрадиционное решение, возможно и вызвало нарекания со
стороны некоторых проектировщиков, но оно оказалось очень
удачным и большинство современных НИС выполнены
«кособокими». На этих судах для проведения исследований
используется кормовая часть верхней палубы и проход вдоль
средней надстройки. Несимметричное расположение средней
надстройки дает следующие преимущества:
— рабочие места на верхней палубе хорошо защищены от
ветра и заливания с носа и с одного борта;
— ширина рабочей площадки по правому борту
увеличивается за счет ликвидации прохода и рабочих площадок по
левому борту;
— работы с опускной аппаратурой ведутся в «чистой воде»,
так как все отверстия забортных систем можно вывести на
нерабочий борт;
— при дрейфе судна можно работать несколькими лебедками
(при их симметричном расположении относительно средней
надстройки— по бортам — совместная работа практически
исключена, поскольку перепутывание тросов или кабелей под килем
судна неизбежно приводит к потере научного оборудования);
— коммуникации между рабочими местами на палубе и
общая организация проведения работ упрощаются;
— наблюдение с командных постов за работами с
забортной аппаратурой улучшается.
211
В начале 60-х годов, когда, как уже отмечалось, произошел
переход к проектированию специальных НИС, большой интерес
вызвала возможность использования для изучения Мирового
океана судов типа катамаранов, имеющих значительную
площадь верхней палубы. Подсчитано, что при одной и юй же
площади верхней палубы катамаран имеет примерно на 50%
меньшее водоизмещение и на 30% меньшую мощность
энергетической установки (при равной скорости), чем однокорпусное
судно. Внимание проектировщиков привлекали также такие
качества двухкорпусного судна, как хорошая остойчивость и
маневренность.
Но прошло уже почти 20 лет, а количество
научно-исследовательских катамаранов исчисляется единицами (в основном
это малые суда длиной менее 25 м). В чем же дело?
По-видимому, недостатки катамаранов, в основном воздействие ударов
волн (слемминг) в районе носовой части соединительного моста
и большая строительная стоимость за счет увеличения массы
и усложнения корпусных конструкций, а также
необходимость дублирования ряда механизмов, сводят на нет их
преимущества. Тем не менее, можно считать, что судостроители
найдут приемлемые способы уменьшения слемминга, и поэтому
следует признать этот архитектурный тип перспективным для
НИС.
Остойчивость и непотопляемость. НИС должны
иметь, как правило, повышенную остойчивость, что
объясняется рядом обстоятельств. В частности, дальность плавания
современных судов рассматриваемого типа достигает 15—20 тыс.
миль, а автономность—150 сут. Вследствие этого необходимо
иметь на судах значительные запасы жидких грузов — топлива,
воды и масла, общая масса которых достигает 30% полного
водоизмещения.
Напомним, что на транспортных судах эта цифра составляет
всего 4—8%. Разместить такое количество жидких грузов
в двойном дне, как правило, невозможно, поэтому на судах
предусматривают топливные диптанки или бортовые топливные
цистерны. Наличие таких цистерн, или диптанков, разделенных
продольными переборками, может привести при аварии к
тяжелым последствиям, поскольку возможно несимметричное
затопление или симметричное, но с высоким центром тяжести
влившейся воды. Остойчивость же в значительной степени
понижается при наличии свободных уровней, в том числе и воды
в успокоительных цистернах. Например, наличие пассивных
успокоительных цистерн на канадском гидрометеорологическом
судне «Ванкувер» привело к снижению начальной метацентри-
ческой высоты на 0,3 м (примерно на 33%). Вследствие этого
надстройку судна пришлось облегчить — выполнить из
алюминиевых сплавов — и увеличить толщину обшивки днища до
скулового стрингера. При расчете остойчивости НИС следует
212
учитывать, что при его модернизации обычно устанавливают
значительное количество дополнительной аппаратуры выше
верхней палубы.
Поэтому НИС обычно имеют повышенную начальную
поперечную метацентрическую высоту. Ее отношение к ширине
достигает 0,08, а для грузовых и пассажирских судов при полном
водоизмещении — около 0,05.
Непотопляемость НИС желательно обеспечивать при
затоплении двух смежных отсеков, по крайней мере в носовой
оконечности, так как эти суда зачастую работают в
малоизученных районах и существует опасность их посадки на мель. На
судах длиной 75 м и более с палубой переборок, доведенной
в носовой части до палубы бака, простирающейся на 40% длины
судна, обеспечение двухотсечного стандарта непотопляемости
не представляет особых трудностей. Непотопляемость при
затоплении двух смежных отсеков обеспечена, например, на
английских гидрографических судах типа «Хекла», имеющих
длину 75 м, шесть водонепроницаемых переборок и высоту
подводного борта 3,3 м, а также на судне «Метеор» (ФРГ),
которое имеет длину 77,3 м, семь водонепроницаемых переборок и
высоту надводного борта 2,2 м.
На судах меньшей длины это сделать по всему судну
труднее: приходится разделять его на отсеки сравнительно
небольших размеров, в которых бывает сложно разместить
энергетическую установку.
Средства умерения качки. НИС при повышенной
остойчивости должны иметь плавную качку, поскольку резкая
качка отрицательно сказывается на состоянии людей,
вынужденных длительное время (рейсы могут длиться до шести
месяцев) работать в открытом море. Кроме того, при порывистой
качке увеличивается вероятность повреждения аппаратуры,
уменьшается точность измерений, а в отдельных случаях
проведение некоторых исследований становится вообще
невозможным (например, при изучении силы тяжести Земли). Известно,
что требования повышенной остойчивости и плавности качки
противоречивы, так как увеличение остойчивости приводит к
более резкой качке.
НИС должно быть спроектировано таким образом, чтобы
при достаточной остойчивости иметь благоприятный характер
качки. Это достигается соответсвтующим выбором формы
корпуса, рациональным распределением нагрузки масс и
применением различного рода успокоителей качки. Как уже
упоминалось, особенно важно уменьшить бортовую качку судна
в дрейфе, во время выполнения станций.
Анализ средств умерения качки, применяемых на судах
в настоящее время, позволяет установить следующее.
Гироскопические успокоители одинаково эффективно умеряют качку
как на ходу судна, так и в дрейфе. Однако вследствие большой
213
массы, значительной потребляемой мощности и относительно
высокой стоимости этот тип успокоителей качки не нашел при
менения на НИС.
Бортовые управляемые рули эффективно действуют лишь
на высоких скоростях, но они довольно сложны в эксплуатации
и имеют относительно большую стоимость. Но, как уже
отмечалось, НИС значительное время эксплуатируются либо на малых
ходах, либо в дрейфе, поэтому такой вид успокоителей качки
также не получил широкого распространения.
Активные успокоительные цистерны эффективно умеряют
качку как на ходу судна, так и в дрейфе, но требуют довольно
сложного оборудования и дополнительных затрат энергии. Так,
мощность привода насоса активных цистерн, установленных на
судне «Метеор», равна 150 л. с.
Наибольшее распространение в качестве средств умерения
качки на НИС получили в настоящее время пассивные
успокоительные цистерны.
Довольно часто применяют и скуловые кили благодаря их
исключительной простоте. Но так как эффект умерения качки
незначительный (до 25%), их устанавливают на судах
совместно с другими типами успокоителей.
Энергетическая установка. К главной
механической установке НИС предъявляются высокие требования: она
должна обеспечивать маневренность судна как при изменении
скорости, так и при реверсе, длительный устойчивый малый ход
(со скоростью 2—6 уз), быть надежной, экономичной и простой
в обслуживании.
Эти требования обусловлены условиями и характером
эксплуатации НИС. Рассмотрим некоторые типы механических
установок с точки зрения целесообразности их применения.
Паровые машины, также как паровые и газовые турбины,
практически не применяют на НИС, в основном вследствие
повышенного расхода топлива.
В составе мирового научно-исследовательского флота
имеются только два американских судна специальной постройки,
оборудованных паровой машиной («Атлантис-П») и паровой
турбиной («Сервейер»).
Дизельная установка, наиболее распространенная на судах
транспортного и рыболовного флотов, оказалась
предпочтительней и для НИС, правда относительно малого (до 1000 т)
водоизмещения, вследствие небольшого расхода топлива и
сравнительно малого машинного отделения. У этой установки есть
серьезный недостаток: работа дизеля при пониженных оборотах
неустойчива. Этот недостаток может быть ликвидирован
применением либо ВРШ (тогда, естественно, на малых ходах будет
повышенный расход топлива), либо специального двигателя
малого хода (что приводит к усложнению и удорожанию
установки) .
214
Наиболее подходящей установкой для НИС достаточно
большого водоизмещения является установка с электродвижением,
которая имеет следующие преимущества:
— постоянство частоты вращения приводного двигателя при
изменении частоты вращения гребного винта, при этом
двигатель работает в наиболее экономичном режиме относительно
расхода топлива;
— способность поддержания постоянной мощности при
любых режимах: от свободного хода до буксировки, что может
осуществляться как ручным, так и автоматическим
регулированием;
— возможность в установках, состоящих из нескольких
дизельных генераторов, выключать один или несколько из них и
обеспечивать больший коэффициент загрузки
дизель-генераторов, увеличивая тем самым эффективность работы всей
установки в целом.
Первыми двумя преимуществами обладают установки на
постоянном токе. В установках на переменном токе регулирование
частоты вращения гребных электродвигателей при изменении
частоты вращения винта осуществляется только путем
изменения частоты вырабатываемого дизель-генераторами тока. Это
обстоятельство влечет за собой изменение частоты вращения
приводного двигателя, что связано с известными трудностями.
Поэтому для НИС предпочтительнее дизель-электрическая
установка на постоянном токе.
Кратко скажем еще о двух типах установки, атомной и ...
парусной.
Представляется весьма заманчивым применение атомной
установки, как требующей небольшого количества топлива для
достижения значительной дальности плавания и
автономности. Поэтому в различных странах мира в 60-х годах
разрабатывались проекты НИС с атомной энергетической
установкой.
В 1962 г. международной организацией ENEA,
финансирующей работы по гражданским атомным судам в Западной
Европе, был разработан проект атомного океанографического
судна, имеющего реактор с тепловой мощностью 26 МВт [2].
На этом судне водоизмещением около 6000 т предполагалось
разместить две паровые турбины мощностью по 3500 л. с.
каждая, обеспечивающие скорость 17 уз. Предусматривалась
резервная турбина мощностью 1000 л. с, работающая от
дополнительного котла на нефтяном топливе.
Проекты атомных НИС разрабатывались также в ФРГ и
Японии, однако ни одно из них до настоящего времени не
построено. Это объясняется тем, что атомная установка весьма
сложна и дорога, а также требует увеличения примерно на 20%
численности экипажа для ее обслуживания. Кроме того, может
быть экономически оправдана лишь установка большой мощ-
215
ности, а потребная мощность даже для самых крупных НИС
не превышает 9000 л. с.
Интерес представляют и высказывания французских
специалистов, сделанные опять-таки в 60-х годах, об использовании
для океанографических исследований парусных судов [1]. По их
мнению, преимуществом таких судов является экономия топлива
(особенно в условиях энергетического кризиса), меньшая
стоимость постройки и эксплуатации, а также малочисленность
экипажа по сравнению с судами, оборудованными механическими
установками. Это предложение является безусловно
интересным, но выходит за рамки настоящей статьи.
При проектировании и строительстве НИС по
разработанному тактико-техническому заданию, как правило, не
возникает каких-либо специфических проблем, за исключением,
пожалуй, вопросов улучшения мореходных качеств двухкорпус-
ных судов.
Основная проблема при создании НИС заключается в
разработке высокоточных автоматизированных измерительных
комплексов.
Высокая стоимость создания и эксплуатации НИС,
превосходящая в 1,5—2 раза стоимость транспортных или
рыболовных судов аналогичных размеров, предопределяет
необходимость проведения технико-экономического анализа при их
проектировании. Такой анализ позволяет из числа рассматриваемых
вариантов выбрать оптимальный. Его выполняют, как правило
на начальных стадиях проектирования, при формировании
технического задания, с помощью метода исследования
операций, в основе которого лежит категория эффективности, под
которой понимают соотношение между полезным эффектом от
того или иного решения и затратами, связанными с
достижением этого эффекта. Известно, что критерии эффективности
любых технических решений сводятся к двум, а именно:
максимизации полезного эффекта при ограниченных затратах на его
реализацию или минимизации затрат для достижения заданного
эффекта.
Эти критерии эквивалентны друг другу, и результаты
расчетов по ним должны быть одними и теми же. Основная
трудность заключается в подсчете эффекта, получаемого от
использования НИС.
Правильнее рассчитывать эффект в денежном выражении,
тогда его легко сравнивать с затратами, необходимыми для
достижения этого эффекта, и оценивать целесообразность не
только принятых технических решений, но и создания того или
иного средства. Однако отыскание эффекта в денежном
выражении связано со значительными трудностями, что может быть
проиллюстрировано следующим примером.
Пусть в результате составления прогноза погоды были
рекомендованы курсы для судов транспортного флота, отличные
216
от традиционных для данного района. Предположим также, что
удалось подсчитать предотвращенный ущерб, учитывая
экономию топлива, своевременную доставку груза получателю и т.д.
Однако определить разработку таких рекомендаций практически
не представляется возможным, поскольку при составлении
прогнозов используются данные, получаемые также от
береговых метеостанций, авиации и искусственных спутников
Земли.
Если попытаться выполнить подобный расчет, то придется
сделать такое количество предпосылок и допущений, что
могут возникнуть серьезные сомнения в достоверности
полученных результатов. Еще большие трудности возникают при
подсчете в денежном выражении эффекта от использования НИС
для АН СССР.
Интересное высказывание по этому вопросу приводит
А. А. Нарусбаев, который классифицирует суда в зависимости
от способа оценки их полезного эффекта: «Вторую группу
составляют суда, полезный эффект которых в принципе не может
быть сведен к экономическим показателям, хотя необходимость
оказываемых ими услуг несомненна и вызвана актуальными
общественными потребностями, а сами услуги проявляются
в явном виде. Характерные представители этой группы —
научно-исследовательские суда, осуществляющие изучение
Мирового океана, космического пространства и т. д.
Очевидно, что работу этих судов, заключающуюся в
получении новой научной информации, новых знаний об окружающем
нас материальном мире, нельзя свести только к экономическому
эффекту, так как научный прогресс, собенно в области
фундаментальных исследований, всегда предусматривал и будет
предусматривать достижение более глобальных целей, чем
повышение производительности общественного труда в данный
исторический период.
Можно утверждать, что, развивая науку, человечество
производит «задел» на будущее, который не может быть в полной
мере оценен настоящим поколением»*.
Приведенные выше соображения представляются
справедливыми, однако они больше подходят для НИС, используемых
для так называемых фундаментальных исследований Мирового
океана, ожидать от которых «сиюминутного» эффекта было бы
неправильным. Для НИС, выполняющих прикладные работы
(составление прогнозов погоды, поиск и разведка
месторождений полезных ископаемых), вероятно, следует все же оценивать
эффект в стоимостном выражении, несмотря на возникающие
трудности.
* Нарусбаев А. А. Введение в теорию обоснования проектных
решений.— Л., Судостроение, 1976.
217
Весьма заманчиво выражать эффект от использования
НИС, памятуя об их основном назначении — сборе информации
о Мировом океане, в количестве этой информации.
Информацию, учитывая ее «безразмерность», можно суммировать по
отдельным видам наблюдений (гидрологическим,
метеорологическим и т. д.). Однако расчеты с использованием этого
критерия могут быть также затруднены. Во-первых, не всегда
имеются исходные данные для расчета (может быть неизвестен
закон распределения значений измеряемой величины или
характеристики аппаратуры), во-вторых, количество информации,
выраженное, допустим, в битах, является непривычным.
Многими авторами предпринимаются попытки определить
эффект от применения НИС в натуральных единицах. Иногда в
качестве продукции НИС принимают количество миль промера,
отработанных геофизических профилей и т. д. и соотносят ее
с соответствующими затратами. Такой критерий напоминает
знакомую и понятную всем стоимость, например, одной тонны
перевозимого груза или выловленной рыбы. Преимущества
такого критерия очевидны, поскольку нет необходимости априорно
устанавливать значения полезного эффекта, однако многие
специалисты относят его к числу составных, считая главным
пороком возможность необъективной компенсации недостатков
решения (например, малое количество измерений) его
преимуществами (низкими затратами).
Таким образом, основной проблемой, которая возникает при
проектировании НИС и прежде всего при формировании
тактико-технического задания, является разработка методов оценки
их эффективности, в том числе обоснованный выбор критериев,
построение математических моделей функционирования и т. д.
Причем только после расчета эффективности можно решать
вопросы об оптимальной скорости НИС, целесообразном сочетании
проводимых с его помощью исследований и других параметров,
во многом определяющих тип, размеры, а значит стоимость
строительства и эксплуатации судна.
В заключение следует сказать несколько слов относительно
тенденций развития рассматриваемых судов или, иными
словами, какими они будут в 2000 г.
По мнению автора, тип научно-исследовательского судна,
который сложился к настоящему времени, существенных
изменений не претерпит. Суда будут по-прежнему однокорпусными,
относительно небольшого водоизмещения (2000—4000 т), с
ограниченным количеством лабораторий (не более 10), имеющих
дизельную установку с ВРШ или электродвижение,
снабженные средствами умерения качки и различными подруливающими
устройствами. При создании более экономичных двигателей
можно ожидать увеличения скорости НИС, а при появлении
экономичных атомных установок малой мощности — НИС с АЭУ,
хотя это и маловероятно. Безусловно, будут совершенствоваться
218
измерительные системы в части повышения быстродействия и
точности, появится аппаратура, позволяющая проводить замеры
на больших скоростях. Последнее будет также способствовать
повышению скорости судов. Найдут широкое применение
«стандартные» и «съемные» лаборатории.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Море: Пер. с франц.— М.: Изд-во иностр. литерат., 1960.
2. I progetti i de i navi a propulsione nuc pleare della ENEA.— Resifa
maristimma, 1964, N 4, p. 51—70.
Виктор Иванович Винокуров,
доктор технических наук,
профессор, специалист в области
радиоэлектроники, электронного
оборудования морских судов и
аппаратов. Научные интересы —
системотехника и статистическая
радиофизика.
В. И. Винокуров
ПРОБЛЕМЫ
ИСПОЛЬЗОВАНИЯ
РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ
ПРИ ОСВОЕНИИ
И ИССЛЕДОВАНИИ
ОКЕАНА
Радиоэлектронные средства (РЭС) играют
существенную роль при решении множества задач, связанных как с
освоением и использованием океана, так и с его исследованием.
Число таких задач непрерывно растет, и это приводит к
повышению концентрации РЭС на судах и морских объектах,
возрастанию потребляемой ими мощности, а также к усложнению
условий совместной работы. В связи с этим, а также с
необходимостью повышения надежности работы РЭС, снижения их
массы и габаритов возник целый ряд новых проблем, которые
предстоит решить в ближайшее время.
Прежде чем проанализировать эти проблемы, рассмотрим
задачи, при решении которых используют РЭС. В первом
приближении можно выделить несколько видов таких задач. К
задачам первого вида можно отнести поиск, обнаружение и
измерение координат различных объектов, например судов и других
объектов (плавающих и затонувших), косяков рыб,
залежей полезных ископаемых и т. п. Для их обнаружения
используют и создают поля различных типов. При этом свойства
объекта в одном поле или в нескольких должны существенно
отличаться от свойств окружающей среды. Для обнаружения
объекта в воздушной среде применяют электромагнитные поля,
включая диапазон световых волн; в воде— акустическое,
магнитное, электрическое и электромагнитное поля.
Для измерения координат объектов один или несколько
параметров создаваемого поля (интенсивность, амплитуду,
частоту или фазу колебаний) изменяют во времени, Сравнивая
221
параметры отраженных и излучаемых колебаний, определяют
расстояние до объекта. Для измерения угловых координат
необходимо обеспечить излучение энергии в пределах малого
пространственного угла.
Решение задач первого вида затрудняет наличие помех,
вызванных отражением волн (полей) от водной поверхности и дна,
а также зависимость распространения соответствующих
колебаний от состояния окружающей среды (океана и
прилегающих слоев атмосферы).
Задачи второго вида связаны с измерениями различных пара*
метров и характеристик Мирового океана, а также
характеристик объектов, работающих в океане. При их решении особую
сложность вызывает выявление характеристик, несущих
наибольшую информацию об исследуемом явлении или
контролируемом объекте, и нахождение способов уменьшения
погрешностей измерений, обусловленных многими факторами. Повышение
точности измерений связано обычно с усложнением
измерительных средств.
К задачам третьего вида можно отнести осуществление связи
между объектами и группы объектов с центром управления.
Задачи этого вида реализуются с помощью электромагнитных,
акустических и световых волн, а для ряда объектов — по
кабельным линиям. Их решение осложняет наличие множества
факторов, существенно влияющих на качество связи, а также
помех.
Задачи четвертого вида связаны с ориентированием
объектов в океане. РЭС играют важную роль в обеспечении
безопасности мореплавания, особенно в районах интенсивного
движения судов, узкостях и т. п. Для определения местоположения
в различных частях океана широко применяют средства радио-
и инерциальной навигации. При исследовании и освоении
шельфа требуется определение с большой точностью координат
объектов (суда, буи, вышки) в прибрежной зоне. При решении
этих задач возникают те же трудности, что и при решении
задач первого вида, а также трудности, связанные с
необходимостью учета специфики движения судов и аппаратов,
обусловленной наличием течений, волнения и других факторов.
Методы решения задач каждого вида многообразны и
зависят от типа объекта, на котором установлено РЭС. Так,
задачи обнаружения объектов на дистанции в десятки и сотни
километров с борта подводного аппарата будут решаться разными
методами, также по-разному будет осуществляться связь на
дистанциях в сотни и тысячи километров между судами, судном
и базой, подводным аппаратом и судном обеспечения. Примеров
можно привести множество. В качестве измерительной
аппаратуры может быть использован отдельный датчик (температуры,
скорости течения и т. п.) или преобразователь с
дополнительными устройствами, или целая измерительная система, напри-
222
мер, типа специализированной радиолокационной станции для
дистанционного измерения параметров и характеристик
волнения. Структура ее зависит от вида измеряемых
параметров.
Несмотря на многообразие РЭС, решающих перечисленные
выше задачи, им присущи и общие черты. Работа большинства
из них связана с излучением энергии и созданием поля в зоне
расположения объекта. Структурные схемы РЭС разного
назначения содержат устройства, выполняющие одинаковые функции,
например, усиление сигналов, излучение, преобразование
колебаний, логические операции, связанные с работой цифровых
устройств, и т. п.
Совокупность РЭС на объекте-носителе составляет его р а -
диоэлектронное оборудование.
В составе радиоэлектронного оборудования взаимодействие
РЭС друг с другом (т. е. взаимосвязь при функционировании)
может быть различным. Приближенно можно выделить три вида
взаимодействия.
1. Если все РЭС предназначены для выполнения одной или
нескольких операций, то работа их взаимосвязана и
осуществляется по единой программе. Такую совокупность РЭС
называют также радиоэлектронным комплексом. При
использовании такого комплекса необходимо учитывать взаимное
влияние РЭС, которое выражается главным образом в появлении
взаимных помех. Эти помехи нарушают работу отдельных РЭС,
а также их взаимодействие.
2. Если РЭС предназначены для решения различных, не
взаимосвязанных задач, то они функционируют независимо
друг от друга. Однако это не означает отсутствия взаимного
влияния, т. е. взаимных помех.
3. Если взаимосвязь между функционированием РЭС слабая
или если часть РЭС составляет комплекс, который работает
по единой программе, а остальные функционируют независимо,
то и в этом случае так же отмечается появление взаимных
помех. Этот вид взаимодействия занимает промежуточное
положение между двумя первыми.
Характерной особенностью современного радиоэлектронного
оборудования является широкое применение в его составе
средств вычислительной и информационной техники.
По мере расширения и углубления задач, решаемых при
освоении и исследовании океана, усложняется радиоэлектронное
оборудование объектов, судов и аппаратов различного
назначения, возрастают требования к ним [5, 6].
В настоящее время РЭС, предназначенные для работы в
условиях моря, должны: функционировать с требуемой точностью
и эффективностью в течение заданного интервала времени; быть
устойчивыми по отношению к внешним воздействиям и иметь
минимальные габариты и массу.
223
РЭС на подводных аппаратах и автономных носителях
должны также потреблять минимум энергии.
Сегодня возникают такие проблемы, как рациональное
(оптимальное— в пределах установленного критерия) построение
радиоэлектронного оборудования, обеспечение совместной
работы радиоэлектронных средств (электромагнитная
совместимость — ЭМС), комплексирование их.
Рассмотрим кратко перечисленные проблемы.
Обеспечить выполнение морским объектом определенных
операций можно различными способами, привлекая для этой
цели различные по своему назначению, составу и выходным
параметрам РЭС. Следовательно, может быть несколько
вариантов построения радиоэлектронного оборудования.
Например, предотвращение столкновений нескольких
морских объектов, маневрирующих в ограниченном районе, можно
осуществить с помощью станций обнаружения, установленных
на каждом из них и работающих независимо друг от друга, или
с помощью станции обнаружения, установленной на одном из
объектов (или даже на берегу) и передающей информацию
о навигационной обстановке по каналам связи. Состав
радиоэлектронного оборудования и характеристики РЭС в каждом
случае будут иными. Необходимо определить рациональное
(наилучшее — в рамках установленного критерия)
построение радиоэлектронного оборудования, обеспечивающего
выполнение морским объектом определенных операций с заданным
качеством. Критериями могут быть, например, наименьшая
стоимость РЭС, входящих в оборудование; минимальная мощность,
потребляемая одновременно работающими РЭС; наименьшая
полоса частот, занимаемая спектрами сигналов, излучаемых
РЭС, и т. п.
Решение этой проблемы связано с большими трудностями,
в частности со сложностью установления обобщенной
функциональной и даже статистической связи между
функциональными характеристиками РЭС и массой, габаритами,
потребляемой мощностью и т. п.; сложностью сравнения вариантов
построения радиоэлектронного оборудования друг с другом по
обобщенным характеристикам и другие.
Вторая проблема — обеспечение совместной работы РЭС
различного назначения (радиотехнических акустических) —
получила название проблемы ЭМС. Увеличение числа средств
на судах и морских объектах привело к необходимости учета их
взаимного влияния, т. е. взаимных (непреднамеренных) помех,
которые эти средства создают друг другу в работе [3]. При
этом возможно влияние как на РЭС, передающие информацию
(излучающие), так на средства приема и обработки
информации, а в ряде случаев и на каналы проникновения взаимных
помех (воздушная или водная среда, источники и цепи
питания и др.).
224
При анализе ЭМС удобно рассматривать группы РЭС двух
типов. Группы первого типа, состоящие из функционально
связанных между собой РЭС, и второго типа, в которых РЭС
функционально не связаны друг с другом и выполняют разные
задачи, находятся в зоне взаимного влияния. При анализе
групп третьего типа их можно свести ко второму.
В группах как первого, так и второго типа взаимное влияние
РЭС зависит от параметров, присущих каждому средству
(излучаемая мощность, рабочая частота, полоса частот спектра
излучаемого сигнала, уровень побочных излучений и т. п.)
и называемых параметрами ЭМС. Множество параметров ЭМС
можно разбить на два подмножества (в общем случае
пересекающихся) по признаку их влияния на показатели качества
функционирования отдельных РЭС. К первому подмножеству
относят параметры, изменение которых может повлечь за
собой изменение качества функционирования как данного
средства, так и качества работы других РЭС в группе. Параметры
данного подмножества условно называют организационными.
Ко второму подмножеству относят параметры, изменение
которых улучшает качество работы одних РЭС и не приводит
в принципе к ухудшению качества работы других. Их условно
называют техническими,
В соответствии с этим делением параметров условно
различают организационные и технические методы обеспечения
ЭМС. Организационные методы делят на централизованные,
децентрализованные и комбинированные. Централизованные
методы предполагают наличие функций управления в едином
центре, который предписывает каждому РЭС численные
значения организационных параметров. Децентрализованные методы
основаны на наличии функций управления у каждого
отдельного средства. Комбинированные методы предусматривают
сочетание и тех и других методов управления.
Перечисленные методы обеспечения ЭМС основаны на
детерминированных или стохастических моделях работы групп РЭС,
которые не всегда дают оптимальные решения в условиях
сложной и нестационарной электромагнитной обстановки.
Необходимы другие подходы, одним из которых является адаптация
(например, по частоте, мощности, поляризации и т. п.) каждого
РЭС.
Для обеспечения ЭМС необходимо определить критерии
(показатели), которые были бы числовыми характеристиками
взаимного влияния РЭС. Единый критерий ЭМС,
определяющий работу всех РЭС в группе, редко удается ввести. Поэтому
вводят частные критерии, характеризующие совместимость
отдельного РЭС в группе. Число таких критериев равно числу
средств.
Каждый частный критерий зависит от параметров ЭМС:
рабочих частот РЭС, излучаемых ими мощностей, коэффициентов
S Заказ № 1190
225
усиления антенн передатчиков и приемников и т. п., а также
от внешних параметров: условий распространения колебаний,
наличия сторонних отражателей и т. п.
Задачу обеспечения ЭМС можно сформулировать как
отыскание таких параметров совместимости, которые обращают
показатель в максимум (минимум) при заданных внешних
параметрах, или обеспечивают значение этого показателя не ниже
(выше) заданного. Показатель совместимости — сложная
функция параметров ЭМС, имеющая в общем случае много
максимумов (минимумов), из которых один — глобальный.
Рассмотрим случай обеспечения совместимости, когда
рабочая частота каждого РЭС в группе может изменяться в
зависимости от уровня взаимных помех. Пусть имеются множество
частот, на которых возможна работа, а также показатель
совместимости, характеризующий функционирование данного РЭС
в группе. Целью адаптации является отыскание в процессе
функционирования РЭС такого значения рабочей частоты, для
которого показатель совместимости максимален (минимален).
Для отыскания экстремума можно предложить множество
алгоритмов адаптации, реализуемых автоматами разных типов.
При задании дискретных значений возможных рабочих частот
удобной моделью адаптирующего (обучающегося) устройства
является конечный автомат. Остановимся на простейшем
варианте конечных автоматов (КА) с бинарным входным
алфавитом [4].
Принцип работы автомата состоит в том, что, осуществляя
случайное блуждание по множеству значений частот, он
устанавливает такую, при которой вероятность выигрыша наибольшая
(рис. 1). Вся система (РЭС и блок адаптации БА) будет
обладать целенаправленным поведением, если вероятность
«выигрыша», получаемого автоматом за выполненное действие
(работа на конкретной частоте), монотонно связана с показателем
качества. Чтобы успешно использовать конечный автомат в
процессе адаптации, необходимо согласовать его входной
алфавит (множество возможных сигналов на входе) с выходным
алфавитом измерителя показателя качества (ИПК). Это можно
осуществить следующим образом. Отобразим (монотонно) с
помощью функционального преобразователя (ФП) множество
допустимых значений показателя качества на интервал 0,1. Если
поставить в однозначное соответствие каждому значению этого
интервала случайную величину («выигрыш») с вероятностью
появления, равной выходному значению функционального
преобразователя, то задачу согласования выходного алфавита ИПК
со входным алфавитом КА можно решить. Это согласование
осуществляют с помощью управляемого датчика случайных чисел
(УДСЧ), который формирует «выигрыши» с вероятностями,
равными значениям выходного сигнала функционального
преобразователя, и «проигрыши» с дополнительной вероятностью.
226
Таким образом, при соответствующем выборе показателя
качества функционального преобразователя и автомата, РЭС,
снабженное блоком адаптации, будет работать
преимущественно на той частоте, для которой показатель качества минимален
(максимален). Выигрыш, получаемый в результате адаптации,
зависит он конкретной ситуации и может колебаться от нуля де-
цибелл (все рабочие частоты равноценны по показателю
качества) до предельного, что соответствует работе на оптимальной
частоте.
Для решения задач совместимости представляет интерес
адаптация мощности, излучаемой каждым РЭС, т. е. обеспече-
^~~~ *■
Сигнал у/
/
Помеха
^W
г 9
Г
1
1
1
i
1
L
РЭС
к
КЯ
i
{
УДСЧ
—\
h —
МП К
V
ФП
1
6Й 1
J
Рис. 1. Структурная схема РЭС с конечным автоматом.
ние работы данного РЭС с заданным качеством при
наименьшей величине излучаемой мощности. Анализ показывает, что
и в этом случае удается расширить возможности совместной
работы РЭС. Одним из способов оценки эффективности
адаптации может быть сравнение количества ситуаций, в которых
обеспечивается совместная работа при наличии адаптации мощности,
с количеством ситуаций при ее отсутствии. Анализ выигрыша
удобно проводить на основе критерия совместимости,
используя рассмотренные выше модели ЭМС. Возможные условия
совместной работы РЭС можно задать набором коэффициентов
С12, a2u входящих в критерий совместимости (рис. 2). Каждой
ситуации соответствуют определенные значения коэффициентов
С и а. Прямоугольная область, ограниченная осями координат
и прямыми 1, 2, соответствует ситуациям, в которых системы
совместимы как при отсутствии, так и при введении адаптации.
Область, ограниченная осями координат и кривыми 3, 4,
соответствует ситуациям, в которых системы совместимы лишь
при наличии адаптации. Количество ситуаций во втором
случае увеличивается более чем на треть.
Адаптация мощности РЭС, входящих в оборудование
отдельного объекта, способствует снижению уровня взаимных помех,
8*
227
проникающих через цепи и источники питания. Взаимные
помехи данного вида могут быть значительными для морских
аппаратов, снабженных маломощными источниками энергии.
Эффективность методов ЭМС определяется в конечном счете
соотношением выигрыша в функционировании и затрат на
реализацию метода. Критерии эффективности могут быть
различными.
Третья проблема — комплексирование РЭС— связана с
улучшением качества работы отдельных РЭС, входящих в
радиоэлектронное оборудование. Под комплексированием будем понимать
такое построение радиоэлектронного оборудования, при котором
0,1 0,2 0,3 0,4 а 27
Рис. 2. Результаты
оценки совместной
работы группы РЭС,
состоящей из двух систем
обнаружения.
РЭС (или отдельные их устройства) могут комбинироваться
в различных сочетаниях, обеспечивающих наилучшее
выполнение задачи (по установленному критерию). Целью комплекси-
рования могут быть, например:
— повышение достоверности обнаружения или точности
измерений;
— повышение надежности работы;
— решение новых задач, которые не могут быть обеспечены
имеющимися отдельными радиоэлектронными средствами;
— уменьшение объема, массы и габаритов оборудования при
сохранении тактико-технических характеристик.
Первый метод комплексирования основан на применении
электронно-вычислительных машин (ЭВМ), которые на
основе анализа информации, содержащейся в сигналах,
поступающих от РЭС, управляют их работой, т. е. изменяют рабочие
характеристики этих средств с целью повышения их
эффективности (комплексирование с управлением). Под управлением
можно понимать:
а) изменение времени анализа сигнала в зависимости от
объема полученной информации, требуемой точности измерений
или помех;
б) изменение параметров сигнала РЭС, поиск и выбор опта*
228
мального для имеющейся помеховой обстановки или других
факторов;
в) применение для измерения заданного параметра
нескольких систем, обладающих различными характеристиками:
разной точностью измерения (грубое определение области
значений фиксируемого параметра с помощью одного средства и
точное— с помощью второго), имеющих различный закон
накопления ошибок или распределения случайных погрешностей
(в том числе за счет воздействия помех). Обычно эти
измерители основаны на различных физических принципах: например,
радиотехнический и инерциальный, радиотехнический и
акустический; радиотехнический и тепловой и т. п., или на одном
принципе, но использующие сигналы разных типов. В общем случае
для комплексирования измерителей необходимо наличие
статистической связи между измеряемыми величинами (процессами).
Частным случаем такой связи является детерминированная.
Выбор способа комплексирования измерителей зависит от
особенностей исследуемого процесса, а также получаемого
выигрыша в точности или помехоустойчивости. Важно, чтобы
технические трудности при его реализации существенно не
уменьшили выигрыш, получаемый за счет комплексирования;
г) выбор наилучшего сочетания измерителей (пункт «в») и
закона совместной обработки поступающих от них сигналов.
Анализ информации, содержащейся в сигналах, и
управление с помощью ЭВМ необходимы в том случае, когда
априорная информация об исследуемых процессах недостаточна или
процессы нестационарны. Часто, однако, анализируемые
процессы— стационарные и об их особенностях имеется достаточно
априорных данных. Поэтому можно заранее выбрать наилучшее
сочетание комплексируемых средств и установить оптимальный
закон обработки поступающей от них информации. Функции
ЭВМ в этом случае существенно упрощаются.
Второй метод комплексирования состоит в совмещении
функций, выполняемых отдельными устройствами различных РЭС
(функциональное комплексирование). Основой его является
различие характеристик сигналов, а также функциональная
избыточность отдельных устройств РЭС. Приведем несколько
примеров.
Получило распространение такое построение средств
обнаружения, при котором несколько радиолокационных станций
работают на одну антенну, выполненную в виде фазированной
антенной решетки (ФАР). В этом случае одна ФАР выполняет
(совмещает) функции, выполняемые при обычном построении
разными антеннами, входящими в состав соответствующих РЛС.
Сигналы разных РЛС, поступающие на ФАР, смещены во
времени. Сигналы управления диаграммой направленности
ФАР имеют структуру, обеспечивающую поочередную работу
229
Аналогичным образом осуществляют комплексирование
радиотехнических систем различного назначения водной
радиолинии на основе временного или частотного разделения сигналов.
Указанные методы позволяют комплексировать
радиоэлектронные средства и устройства, обрабатывающие как близкие, так
и далекие по структуре и информативности сигналы.
Для комплексирования можно использовать различие
структур сигналов, принадлежащих разным РЭС, например,
обеспечить с помощью одного устройства усиление нескольких
сигналов (с последующим разделением), спектры которых
перекрываются. Основные этапы комплексирования в этом случае
следующие: аддитивное суммирование сигналов различных
источников — образование группового сигнала; обработка
группового сигнала в канале, едином для различных РЭС;
разделение группового сигнала на составляющие, осуществляемое с
использованием фильтра Калмана, реализуемого в схемном
исполнении (рис. 3).
Третий метод — структурное комплексирование — основан на
возможности объединения структур нескольких отдельных
систем или устройств в новую систему. Такая система может
выполнять новые функции, несвойственные составляющим ее
системам, или те же функции, но с повышенным качеством.
Образуемая система строится по структурной схеме,
отличной от структурных схем комплексируемых средств. При этом
устройства комплексируемых систем (полностью или частично)
входят в новую схему вместе с дополнительными устройствами.
При отсутствии комплексирования отдельные системы могут
работать независимо друг от друга. Переключение с режима
независимой работы на режим комплексной работы может
проводить оператор.
Комплексируемые РЭС могут быть однотипными или
разнотипными, базироваться на одинаковых или различных
физических принципах.
Рассмотрим для примера комплексирование систем
обнаружения (радио- или акустических) для получения высокого
разрешения по углу при разнесенном приеме. Это необходимо,
например, при определении с повышенной точностью координат
точечных целей в открытом море на дистанциях до
радиогоризонта при помощи береговых станций.
Высокое угловое разрешение при комплексировании
определяется шириной функции пространственной когерентности
(ФПК) при использовании сложных сигналов, подобно тому,
как разрешение по дальности определяется
автокорреляционной функцией (АКФ) сигналов. ФПК характеризует степень
когерентности сигналов, отраженных от целей, находящихся на
разных угловых направлениях относительно точки измерения
[1]. Ширина ФПК связана с шириной спектра пространственных
частот такой же зависимостью, как и ширина АКФ с шириной"
230
спектра временных частот. ФПК можно измерить различными
способами. Для монохроматических сигналов это можно
сделать, измеряя взаимную корреляцию сигналов, принятых в
различных точках пространства, путем изменения расстояния
между ними.
При использовании многочастотных или многополосных
сигналов измерение ФПК на разных частотах — составляющих
сигналов эквивалентно ее измерению в различных точках про-
а)
\\\\\\\\\\\\\\\\\\\\\\\\\
niiiiiiiiiiinninnniiii
imwwmiff
б)
WWtw'yWWMwWTv^W'TJXi шщт
ш^шми^^й^шь^н^шмплв^Ънлн
Рис. 3. Виды записей,
характеризующие
работу общего канала
для усиления
речевого сообщения и
гармонического сигнала
синхронизации: а —
сообщение и
гармоническое колебание;
б — выделенный
речевой сигнал; в —
выделенное гармоническое
колебание; г —
исходное гармоническое
колебание.
странства. Это так называемый принцип
пространственно-частотной эквивалентности. Таким образом, при многочастотном
сигнале и фиксированных точках в пространстве можно
измерить весь спектр пространственных частот и получить в
результате измерений ФПК, которая определяет степень угловой
близости точечных целей. Для реализации высокого разрешения по
углу необходимы две радиолокационные или гидролокационные
станции или, точнее, два приемника и один передатчик. Оба
приемника содержат устройства обработки, согласованные с
сигналом, излучаемым передатчиком.
До комплексирования станции выполняют свои задачи
независимо. При необходимости обеспечить высокое угловое
разрешение они вступают в согласованное функциональное
взаимодействие, т. е. одновременно принимают сложный
многочастотный сигнал, отраженный от пространства целей. Этот сигнал
231
после предварительной обработки в устройствах каждой РЛС
поступает в дополнительное устройство совместной обработки
(например, сумматоры), которые формируют ФПК.
Амплитуда напряжения на выходе сумматоров,
производящих сложение колебаний на выходе каналов одной частоты
зависит от направления приходящих волн.
Дальнейшее
F(Q)
суммирование
напряжений с выходов
сумматоров, соответствующих разным
частотным каналам, приводит
к образованию диаграмм
направленности комплексирован-
ной системы в режиме приема
многочастотного сигнала (рис.
4). При использовании в РЛС
фазовой манипуляции по закону
кодовых последовательностей
целесообразно выполнять вза-
имнокорреляционную обработку
каждой компоненты сигнала с
помощью корреляторов
разностной частоты [2] и последующее
суммирование выходных
напряжений. Корреляционная
обработка сигналов способствует устранению неоднозначности
углового отсчета, а также дополнительному подавлению боковых
лепестков.
Следует заметить, что характеристики направленности в
режиме приема при комплексировании можно менять путем
изменения параметров сигнала.
Приведенные выше примеры далеко не исчерпывают всего
многообразия проблем, связанных с использованием
радиоэлектронного оборудования в освоении и исследовании Мирового
океана. Нет сомнений, что интенсивные поиски в этой весьма
перспективной и интересной области позволят найти
интересные решения, но одновременно они выдвинут еще новые
нерешенные проблемы и вопросы.
Рис. 4. Диаграммы
направленности.
1 — в режиме комплексирования при
приеме многочастотного сигнала; 2 —
главный лепесток диаграммы
направленности одной из станций в режиме
независимой работы.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Борн М., Вольф Э. Основы оптики.— М.: Наука, 1976.
2. Винокуров В. И., Ваккер Р. А. Вопросы обработки сложных
сигналов в корреляционных системах.— М.: Сов. радио, 1972.
3. Винокуров В. И., Пащенко Е. Г., ХарченкоИ. П.
Электромагнитная совместимость судового радиооборудования.— Л.:
Судостроение, 1977.
4. Срагович В. Г. Теория адаптивных систем.— М.: Наука, 1976.
5. «Судостроение», 1975, № 10.
6. Электронная аппаратура в океанологических исследованиях.— Тез.
докл. I Всесоюз. конфер. по исследованию и освоению Мирового океана.—
Владивосток: Изд. ДВПИ, 1976.
232
HI.
ДОБЫЧА
МИНЕРАЛЬНЫХ
И БИОЛОГИЧЕСКИ
РЕСУРСОВ
ОКЕАНА
Сергей Сергеевич Сальников,
зам. председателя Рабочей труп-1
пы «География океана» Комиссии
по проблемам Мирового океана
АН СССР, заместитель главного
редактора издаваемой АН СССР
серии книг «География Мирового
океана», участник морских
экспедиций. Область научных
интересов — география океана и
экономическая география зарубежных
стран Европы.
Соломон Борисович Слевич,
доктор географических наук,
участник второй Советской
антарктической экспедиции, специалист
в области экономической
географии Мирового океана. Научные
интересы — политическая и
экономическая география.
С. С. Сальников,
С. Б. Слевич
ХОЗЯЙСТВЕННОЕ
ОСВОЕНИЕ
РЕСУРСОВ
ОКЕАНА*
1. Освоение минеральных ресурсов
Порядок вовлечения ресурсов океана в хозяйственную
деятельность человеческого общества определяется уровнем развития
производительных сил, а характер их использования во
многом зависит от социально-экономических факторов. В настоящее
время морское хозяйство представляет совокупность
разнообразных, слабо связанных между собой отраслей. Основную
долю дохода приносят добыча минерального сырья и топлива
(по ориентировочным подсчетам до 40%), торговое
судоходство (30—35%) и рыбный промысел (до 10%), остальную
часть — использование гидрохимических, гидроэнергетических
ресурсов и морской туризм [7].
Современный этап освоения океана в большой степени
связан с разработкой морских месторождений нефти и газа..
Морская добыча нефти имеет давнюю историю. Еще
в 1824 г. в районе Баку в 20—30 м от берега сооружали
колодцы, изолированные от воды, и черпали нефть из неглубоко
залегающих горизонтов. В 1870 г. близ города Идзаумосаки
(Япония) был намыт остров для нефтяных вышек. В 1891 г.
на калифорнийском побережье началось бурение наклонных
скважин, уходящих на расстояние до 200 м от берега.
Освоение морских нефтяных месторождений в первой
половине XX в. происходило сравнительно медленно, и лишь в 60-е
годы положение изменилось — резко возросло число стран,
* Биологические ресурсы Мирового океана здесь не рассматриваются —
им посвящена специальная статья П. А. Моисеева в наст, сборнике.— Прим.
сост.
235
ведущих работы на шельфе. На долю последнего приходится до
24% общей добычи нефти и более 10% добычи природного газа.
В стоимостном выражении с конца 60-х до середины 70-х годов
добыча нефти и газа из морских месторождений увеличилась
в 10 раз.
По объему добываемой морской нефти на первом месте стоит
район Персидского залива, далее идут акватория озера Мара-
каибо и Венесуэльский залив, Мексиканский и Гвинейский
заливы, северный шельф Аляски, а также акватории
Калифорнийского залива и залива Кука (Южная Аляска) и др. Особое
значение приобрело Северное море — здесь добывается более
53 млн. т нефти и 42 млрд. м3 газа в год. В результате
разработок морских месторождений становятся крупными
нефтедобывающими странами Великобритания и Норвегия, а также
Малайзия, Индонезия, Австралия.
В конце 70-х годов потенциальные запасы нефти и газа на
земном шаре составляли 325 млрд. т, из них более половины
приходится на морские месторождения [3].
В последние годы площадь потенциально нефтегазоносной
осадочной толщи океана, перспективной для поиска,
оценивается 50—80 млн. км2, в том числе в пределах шельфа —
20 млн. км2. С развитием разведочных работ глубоким
бурением прогнозы будут уточнены и расширятся достоверные
данные о наличии промышленных скоплений нефти и газа не
только на шельфе, но и в глубоководных районах океана.
По современным данным, в осадочной толще дна Мирового
океана уже открыто около 1000 нефтяных месторождений,
в том числе 10 супергигантских с запасами более 1 млрд. т,
семь из них сосредоточены в зоне Персидского залива.
Существенны прогнозируемые запасы морских
месторождений Советского Союза. Около 70% площади континентального
шельфа нашей страны перспективны для поисков нефти и газа.
Речь, в частности, идет об акваториях Каспийского, Охотского,
Японского морей [14].
Темпы освоения морских месторождений нефти и газа
зависят не только от разведанных ресурсов и возможностей
техники, но и от экономических факторов.
Как правило, разведка подводных нефтегазоносных
структур дешевле, чем на суше, однако расходы на строительство
морских буровых вышек нефтепроводов значительно
превосходят соответствующие расходы на суше. С увеличением глубины
моря и отдаленности от берега расходы растут в
геометрической прогрессии, и все же на Каспии каждая тонна добытой
нефти обходится на десять с лишним рублей дешевле по
сравнению с «сухопутной», а вложения в эксплуатационное бурение
оправдываются за 6 лет [14].
Решающую роль в освоении нефтегазовых ресурсов океана
играет и будет играть соотношение между минимально рыноч-
236
ной ценой нефти, обеспечивающей ее рентабельную добычу, и
издержками производства. Чем выше будет уровень цен, тем
все большее количество нефтяных запасов, залегающих на
больших глубинах в труднодоступных районах, будет
вовлекаться в хозяйственный оборот. При современном уровне цен на
нефть целесообразно освоение ее ресурсов на глубинах не
более 200 м.
Пятикратное увеличение цен на нефть приведет к
необходимости освоения около 120 млрд. т, т. е. практически всех
ресурсов на шельфе и значительной части в глубоководных
районах.
Специалисты предполагают, что добыча нефти в океане
будет увеличиваться, и уже к 80-м годам она составит 30—40%
всей добываемой в мире.
Некоторые развитые капиталистические государства
рассчитывают, расширив добычу морской нефти, укрепить свои
энергетические ресурсы и ослабить зависимость от импорта. Это
прежде всего относится к Японии, которая ввозит 99%
потребляемой нефти и 74%—природного газа. По мнению
американских специалистов, освоение морских месторождений нефти и
газа может иметь решающее значение в выполнении программы
самообеспечения страны в 80-е годы.
Твердые полезные ископаемые океана стали
разрабатывать раньше нефти, однако темпы роста разработок
невелики вследствие малой изученности океана, наличия более
рентабельных месторождений на суше и отсутствия
совершенных технических средств. В 1966 г. стоимость добытого
минерального сырья (без нефти и газа) составляла всего 25 млрд.
долл., однако в последнее время и здесь наметились изменения:
к началу 70-х годов стоимость добытых минеральных ресурсов
возросла более чем в 2 раза.
Твердые поверхностные полезные ископаемые добывают
в основном на мелководных прибрежных участках (пляжи,
лагуны, бары), а твердые погребенные — в непосредственной
близости от берега с помощью шахт и рудников, заложенных на
берегу или на естественных и искусственных островах.
Некоторые рудники и шахты достигают 2400 м ниже уровня моря и
удалены от берега на 8 км до глубин 120 м и более.
Проектируется разработка залежей железа, меди, цинка, свинца и
других металлов путем сооружения бетонных шахт на глубину
140—150 м под дном моря.
Значительное место занимает добыча каменного угля. В
Японии из недр морского дна извлекается 30% всего добываемого
угля, в Великобритании—10%. К началу 70-х годов в мире
действовало 57 подводных угольных шахт.
В Японии, Канаде, Финляндии функционируют подводные
шахты по добыче железной руды общей стоимостью 17 млн.
долл.
237
Медь и никель в небольших количествах добывают из
подводных шахт в Гудзоновом заливе (Канада) и у полуострова
Корнуолл (Великобритания).
Известны многочисленные осадочные бассейны, содержащие
натриевые, калийные и магнезитовые соли. Запасы их огромны,
но в ближайшие десятилетия вряд ли начнется их широкое
освоение, так как потребности промышленности
удовлетворяются за счет месторождений на суше и извлечений из морской
воды. Известно, что США разрабатывают два соляных купола
в Мексиканском заливе, там же методом бурения добывается
сера (15% добываемой в США).
Из подводных россыпей в настоящее время извлекают 7%
руд, добываемых за рубежом на рассыпных месторождениях,
в том числе около 100% всего циркония и рутила, около 80%
ильменита, более 50% касситерита [5]. Ильменито-циркониевые,
ильменито-монацитовые россыпи разрабатываются в
значительных масштабах в Индии, США, Шри Ланка, в Бразилии,
Австралии, Новой Зеландии, оловоносные — в странах
Юго-Восточной Азии. Титаномагнетитовые и магнетитовые россыпи,
железистые пески — в Японии, Новой Зеландии. Перспективные
залежи оловоносного песка обнаружены в море Лаптевых.
На юго-западном побережье Африки более полувека ведется
промышленное освоение алмазных песков, а с 1962 г. начата
добыча алмазов на шельфе. Перспективными можно считать
разработку золотоносных, платиновых песков.
Большой интерес представляет добыча со дна моря
строительных материалов: песка, гравия, ракушечника, однако при
этом важно следить за динамикой береговых наносов, чтобы
избежать исчезновения пляжей, усиления абразии морских
берегов.
Значительны запасы фосфатного сырья в море — они
оцениваются миллиардами тонн. И хотя потребность в них
удовлетворяется за счет месторождений на суше, но такие страны, как
Австралия, Перу, Чили, Япония и др., в которых подобные
месторождения отсутствуют, планируют начать их морскую
разработку.
Особое значение ряд развитых капиталистических стран
придает разработке железомарганцевых (полиметаллических)
конкреций, распространенных по всему дну океана. Наиболее
богатые запасы сосредоточены в Тихом океане между 6 и 20° с. ш.
и 110—180° з. д. на глубинах более 4000 м, а также в
Индийском и Атлантическом океанах. Высокосортные концентрации
содержат 27—30% марганца, 1,1—1,4% никеля, 1—1,3% меди
и 0,2—0,4% кобальта. По подсчетам Дж. Меро, запасы
конкреций, доступных для промышленного освоения, составляют от 10
до 500 млрд. т [19].
Если учесть, что наземные ресурсы содержащихся в
конкрециях металлов ограниченны, а потребность в них растет, то ста-
238
новится очевидным актуальность их разработки. По расчетам
американских экономистов, предприятие, добывающее 3 млн. т
конкреций в год, получит 150—260 млн. долл. дохода (без
учета выплат налогов и отчислений). И даже, если оно будет
отдавать будущему международному органу по эксплуатации
ресурсов морского дна половину доходов, то и тогда получит
примерно 36% прибыли, т. е. в 3 раза больше, чем обычно.
Интенсивное освоение других минеральных ресурсов,
содержащихся в глубоководных районах океанического дна,
например металлоносных, известковых и кремнистых илов, красных
глин, глауконитовых песков, вряд ли начнется в ближайшие
десятилетия.
2. Морское судоходство
Одним из древнейших направлений хозяйственного освоения
океана является использование его как «общей просторной
дороги всех наций»*. Мировой океан был и остается основной
транспортной магистралью, обеспечивающей
развитие международных и частично внутренних (каботажных)
перевозок. На долю морского транспорта приходится свыше 70%
грузооборота всех видов транспорта, что определяется
значительными расстояниями, на которые перевозятся грузы (среднее
расстояние составляет 8—9 тыс. км, среднее расстояние
перевозок грузов по железной дороге — 649 км) [11]. Необходимость
таких морских перевозок вызвана несоответствием между
размещением производства и природных ресурсов,
неравномерностью экономического развития государств, все
углубляющимся международным разделением труда. Для многих,
особенно островных, государств бесперебойное действие морских
коммуникаций стало жизненно важным, например, для Японии,
которая ежегодно импортирует около 600 млн. т
преимущественно сырьевых грузов.
Основная доля морских перевозок (83%) осуществляется
на международных линиях. На долю Атлантического океана
приходится около 60% объема перевозок, на долю Тихого
океана— лишь 25%, а на Индийский — около 15%.
Объем международных грузовых перевозок мирового
морского флота только за 60—70-е годы увеличился более чем
в 3 раза и достиг в 1977 г. 3400 млн. т.
Морем перевозят прежде всего наливные грузы — нефть и
нефтепродукты (50%), затем штучные (генеральные) грузы
(20%) и навалочные (железная руда, зерно, уголь и др.) (16%).
Остальную долю составляют сухогрузы (за исключением
генеральных).
* Маркс К-, Энгельс Ф. Соч., т. 15, с. 439,
239
В перевозках нефтегрузов неуклонно увеличивается доля
сырой нефти, достигающая в настоящее время 86%. Ее
основными импортерами являются страны Западной Европы, США
и Япония.
Перевозка генеральных грузов наиболее развита на
магистралях, связывающих США с Южной Америкой и Японией,
Западную Европу с Южной Америкой и западноевропейские порты
между собой. В последние годы резко возросли контейнерные
перевозки, что способствует повышению эффективности погру-
зоразгрузочных работ.
Увеличились перевозки навалочных грузов, в первую
очередь руды. Так, в 1977 г. перевезено морем 283 млн. т. В страны
Западной Европы, США и Японию значительную часть руды
поставляют страны Южной Америки и Юго-Восточной Азии,
Австралия, Канада, Индия. Высококачественная руда поступает
в Западную Европу из Швеции и Либерии.
Заметно возросли морские перевозки зерна (в 1977 г. они
составили 143 млн. т), крупными экспортерами которого
являются США и Канада (67% мирового экспорта зерна по морю),
а также Австралия и Аргентина. Среди экспортеров риса кроме
США выделяются Бирма, Таиланд, Италия. Главными
импортерами зерна являются страны Западной Европы (35%),
Япония (17%), некоторые социалистические страны и страны
Южной Азии.
Почти 25% перевозимых морем навалочных грузов
составляет уголь в (1977 г.— 125 млн. т), который транспортируется
из США и Канады в Японию, Западную Европу, Южную
Америку, а также из Австралии в Японию [2].
В связи с увеличением объема перевозок и ростом
фрахтовых цен доход от мирового судоходства значительно вырос —
к середине 70-х годов он достиг 42—45 млрд. долл.
Транспортные издержки составляют существенную часть экспортной цены
многих товаров (для сырьевых товаров — 20—30%). Вместе
с тем себестоимость морских перевозок значительно ниже
железнодорожных. Именно поэтому тоннаж морского флота ряда
стран быстро растет. В развитых капиталистических странах он
значительно превышает потребности в собственных перевозках
и используется для обслуживания иностранных фрахтователей.
Так, нефтедобывающие страны — члены ОПЕК,
обеспечивающие более 90% экспортных поставок нефти в
капиталистическом мире, на своих судах перевозят менее 1 % экспортируемой
ими нефти.
На начало 1978 г. в мире насчитывалось более 32 тыс.
морских судов, суммарная вместимость которых составила почти
365 млн. бр.-рег. т (вместимостью не менее 300 бр.-рег. т
каждое) [18]. Большая часть всего тоннажа мирового флота
приходится на наливные суда, затем идут суда для перевозки
генеральных грузов и суда для навалочных грузов, растет число
240
специализированных судов: контейнеровозов,
комбинированных, для перевозки массовых грузов.
В современном судостроении наблюдается тенденция
увеличения грузоподъемности судов, особенно танкеров. В 1976 г.
в мире насчитывалось около 700 супертанкеров (из них 48
грузоподъемностью более 300 тыс. т), вступили в строй танкеры
грузоподъемностью 540 тыс. т, построенные во Франции.
Во многих развивающихся странах строится собственный
флот, например, Индия и Бразилия имеют флоты вместимостью
соответственно более 5 и 3 млн. бр.-рег. т, соответственно,
создаются танкерные флоты в Мексике, Венесуэле, Алжире,
Египте. Вследствие этого монопольное положение развитых
капиталистических стран на мировом фрахтовом рынке
утрачено. Этому способствует и растущая роль социалистических
стран в транспортном обеспечении внешних экономических
связей развивающихся стран.
Советский морской торговый флот, насчитывающий около
3 тыс. судов вместимостью свыше 14 млн. бр.-рег. т [13]
занимает шестое место в мире по суммарному тоннажу. Советские
суда посещают 1400 портов 120 зарубежных стран, работают
на 70 морских и океанических линиях. В десятой пятилетке
морской флот СССР пополнится преимущественно
высокопроизводительными специализированными судами: лихтеровозами,
контейнеровозами, балккэриерами.
Рост морского флота страны, его специализация и
модернизация судов — все это способствует повышению
эффективности морских перевозок.
Мощным является морской транспорт стран
социалистического содружества, осуществляющий международные морские
перевозки грузов объемом свыше 350 млн. т.
Существенную роль в концентрации внешней торговли в
определенных пунктах побережья играют порты, которые
представляют собой не только сложные транспортные узлы, но и
крупные промышленные центры.
В мире насчитывается около 2000 портов, однако только
несколько сот из них перерабатывают ежегодно более 1 млн. т
грузов каждый и всего 150 портов — более 10 млн. т.
Концентрация перевалочных работ в портах-гигантах—характерная
особенность современного транспортного процесса. Интересно,
что грузооборот некоторых портов достигает «астрономических»
величин: в 1976 г. порт Рас-Таннура в Персидском заливе
переработал 390 млн. т грузов, Роттердам—288, Кобе—138, Тиба—
139, Америпорт (порты устья р. Делавэр) —126, Новый
Орлеан—124, Нью-Йорк—119, Иокагама—114, Марсель-Фос —
104, Нагоя —99, Кавасаки —96, Хьюстон —90, Гавр —80, Ме-
на-эль-Ахмади (Персидский залив) —70 [2].
Важным направлением развития современных портов
является их специализация. Так, крупнейшие нефтяные находятся
241
в развивающихся странах (Иран, Кувейт, Оман, Абу-Даби,
Саудовская Аравия, Ливия и др.)-
Среди крупнейших портов, специализирующихся на отправке
навалочных грузов, следует отметить железорудные порты
Бразилии (Витория), Венесуэлы (Пуэрто-Ордас), Норвегии
(Нарвик) $ угольный портовый комплекс Хемптон-Родс (США),
зерновые порты Новый Орлеан (США) и Ванкувер (Канада) и др.
В последние годы особый размах приобрело строительство и
оборудование портов для контейнерных перевозок.
Крупнейшими из них являются Ньюарк и Окленд (США), Роттердам,
Антверпен, Лондон, Бремен, Гамбург, Сидней, Токио, Иокагама,
Кобе. В настоящее время такие грузы обрабатываются более
чем в 150 портах мира.
Однако малые глубины и ограниченные акватории многих
портов не позволяют принимать крупнотоннажные суда, прежде
всего танкеры, поэтому приходится строить аванпорты и
оборудовать рейдовые причалы на подходах к ним.
Углубление международного разделения труда, развитие
освободившихся стран, рост экономики социалистических стран,
интенсивное хозяйственное освоение ресурсов Мирового океана
и ряд других факторов будут способствовать дальнейшему
развитию мирового судоходства и росту морской торговли. Будет
совершенствоваться и техническая база морского транспорта,
появятся новые виды судов, увеличатся их скорости и т. д.
Океан как транспортная артерия приобретает еще большее
значение.
3. Освоение гидрохимических ресурсов
Гидрохимические ресурсы океана — это в первую
очередь поваренная соль, которую получают путем ее
выпаривания из морской воды. Сегодня примерно 30—35% соли в мире
производится таким способом. Запасы ее в Мировом океане
практически неисчерпаемы.
Морскую воду называют «тощей рудой»— из нее добывают
магний (США, Англия, Франция, Италия, Тунис, СССР); она
является единственным источником получения брома; во
многих странах из воды получают калий и йод путем переработки
морских водорослей.
Ведутся поиски «дешевых» способов извлечения из морской
воды золота и урана. Япония, например, к 1990 г. рассчитывает
получить этим методом 3400 т урана.
В целом сырье, добытое из морской воды (без учета
стоимости опресненной воды) в начале 70-х годов оценивалось
в 500 млн. долл [10].
Особо следует сказать о Мировом океане как источнике
пресной воды. Вследствие неравномерности распределения прес-
242
ной воды на суше, быстрого роста потребления и еще более
быстрого роста загрязнения во многих районах мира
ощущается ее острый дефицит. Для его покрытия необходимы строгие
и срочные природоохранные меры.
Одним из дополнительных источников пресной воды может
стать и уже становится морская вода. Способ фильтрации ее
через песок, а затем перегонный куб известен людям с
глубокой древности. И сейчас мореплаватели являются основными
производителями и потребителями опресненной морской воды.
На суше промышленные опреснители появились только в конце
XIX — начале XX вв.
В 1970 г. во всем мире только крупных опреснительных
установок насчитывалось около 800 с суммарной
производительностью 1,25 млн. м3 в сутки. Предполагают, что к 1985 г. общая
производительность опреснителей в мире составит 40 млн. м3
в сутки, а к концу века— 1290 млн. м3, или 472 км3 в год, что
сыграет заметную роль в покрытии «водного» дефицита [4].
В 1973 г. в Советском Союзе вступила в строй первая в мире
атомная водоэлектростанция (АВЭС) с реактором на быстрых
нейтронах. Реактор обеспечивает тепловой энергией
электростанцию мощностью 150 тыс. кВт и опреснитель
производительностью 100 тыс. м3 в сутки. Разрабатываются проекты и
ведется строительство АВЭС в целях получения дешевой
электроэнергии и пресной воды во многих других странах.
Реализуются методы получения пресной воды, основанные
на естественном и искусственном вымораживании, процессах
ионного обмена, гиперфильтрации, электродиализа и др.
Успешно проводятся опыты по использованию
маломинерализованной воды, например воды Балтийского моря, для
сельскохозяйственных нужд. Современная техника и технология
позволяет расширить также сферу использования непереработан-
ной морской воды в промышленности, городском хозяйстве.
Величайшим резервом пресной воды являются ледники
Земли, содержащие 24,3 млн. км3 воды, т. е. 69,5% всех
пресных вод. Основная часть пресноводных льдов сосредоточена
на куполе Антарктиды (они сползают в океан в виде
глетчерных рек, которые обламываются — образуются пирамидальные
айсберги), а также в шельфовых ледниках материка.
Количество пресной воды, содержащейся в последних, почти в 300 раз
превышает ее содержание во всех реках мира. Не следует
забывать и о плавучем ледниковом покрове Мирового океана,
площадь которого— 1,5 млн. км2.
От шельфовых ледников откалываются огромные столовые
айсберги, каждый из которых содержит больше воды, чем
годовой сток значительной по величине реки. Не случайно давно
появились проекты буксировки айсбергов к засушливым
континентам. Рассчитано, что для буксировки ледяной горы массой
10 млрд. т со скоростью 2 км/ч нужен отряд крупных морских
243
буксиров мощностью по 225 тыс. л. с. [9]. Однако стоимость
содержащейся в айсберге воды окупит весь расход на его
транспортировку. И хотя для реализации подобных проектов
необходимо решить ряд проблем, можно считать вполне реальной в
недалеком будущем транспортировку айсбергов, например, к
засушливым берегам Саудовской Аравии или Австралии.
4. Освоение рекреационных ресурсов
В последнее время быстро развивается процесс использования
морских рекреационных ресурсов.
Под рекреационными ресурсами понимают места отдыха,
лечения и туризма с определенными климатическими
условиями в совокупности с техническими базами и
инфраструктурой, необходимыми для восстановления трудового потенциала
населения. Объем рекреационных ресурсов океана непрерывно
растет вследствие усиления подвижности населения, развития
транспорта, связи и т. д. Меняется и география использования
ресурсов.
Туризм, в том числе и морской, как отрасль экономики,
быстро развивается. Число туристов растет не только в
странах Европы и Северной Америки, дающих 90% всех
поступлений от международного туризма [12], но и в странах Азии,
Австралии и Океании. Число туристов увеличивается ежегодно на
2—8%. Только основные транспортные расходы международных
туристов оцениваются в 11 млрд. долл. [17]. Например, в США
затраты населения на организацию отдыха возле моря к 1970 г.
достигли 14 млрд. долл.
Туризм становится существенным хозяйственным фактором
и для развивающихся стран, так как позволяет им получить
валюту в более короткие сроки, чем при налаживании
производства экспортных товаров. Однако валютная эффективность
заметно снижается вследствие увеличения импорта товаров,
предназначенных для туристов.
Морской туризм развивается по двум направлениям:
использование прибрежных районов (хождение под парусами и
на прогулочных судах, плаванье, водные лыжи, спортивное
рыболовство) и расширение морских круизных перевозок. Для
дальнейшего развития туризма требуется увеличение числа
предприятий бытового обслуживания и питания, создание
специальных судов и автосредств, а также береговых сооружений,
необходимых для обслуживания флота (пассажирских
причалов, портов, бункерных баз, вокзалов, складских помещений).
В результате роста круизных перевозок происходит
переориентация пассажирского флота, переоборудование судов и
повышение их комфортабельности, создаются специальные
маршруты и линии, возникают комбинированные воздушно-морские
244
круизы, когда туристов на самолетах доставляют к начальному
пункту или, наоборот, от конечного пункта («флай-круизы»).
Морские круизные перевозки осуществляются в основном
в Карибском и Средиземном морях, а также по следующим
направлениям: США — Бермудские острова, США — Европа,
кругосветные круизы из США и др. В настоящее время
функционирует Тихоокеанская секция круизного судоходства, создана
Цндоокеанская секция. Только в перечисленных районах кру-
изных перевозок, в том числе в тихоокеанском, работает
более 150 судов вместимостью почти 3 млн. бр.-рег. т,
рассчитанных на 100 тыс, мест.
Очевидно, что морской туризм повсеместно становится
одним из важных направлений хозяйственного освоения океана.
5. Освоение энергетических ресурсов
Энергетические ресурсы Мирового океана стали
привлекать внимание ученых сравнительно недавно, особенно
в связи с энергетическим кризисом капиталистических
государств середины 70-х годов.
Минеральные топливно-энергетические ресурсы океана
вовлекаются в хозяйственную деятельность (об этом сказано
выше). Речь идет о возможных направлениях использования
собственно энергетики океана.
Технически разработано и практически осуществлено
применение энергии приливов. Потенциальные запасы энергии
приливов и отливов, пригодные для разработки оценивают
в 10 млн. МВт [21]. Распределяются они в пространстве и
времени неравномерно, что создает трудности при их
использовании. В связи с этим целесообразно строительство приливных
электростанций (ПЭС) в сочетании с другими видами
электростанций. Тогда ПЭС смогут ликвидировать дефицит в энергии
в периоды «пиковых» ситуаций.
Во Франции с 1967 г. успешно работает ПЭС «Ране»
мощностью 240 тыс. кВт, вырабатывающая ежегодно 560 млн.
кВт-ч. Созданы проекты более мощных ПЭС: во Франции —
на 12 млн. кВт, в Англии — на 4—7 млн. кВт, в США — на
6 млн. кВт и др. [21].
В нашей стране с 1968 г. работает опытная Кислогубская
ПЭС (400 кВт), возведенная наплавным методом.
Проектируется строительство Лумбовской ПЭС на
Кольском полуострове мощностью 360 тыс. кВт, Мезенской ПЭС
в Архангельской области мощностью 10 млн. кВт, а также
Пенжинской и Тугурской ПЭС на побережье Охотского моря.
Одним из источников энергоснабжения может стать
использование только механической энергии течений, мощность
которых, по некоторым оценкам, в 50 раз превышает мощность
245
всех современных энергетических установок. Существуют
проекты использования энергетического потенциала Гольфстрима,
Флоридского течения, проектируется установка огромного
подводного вращающегося диска с лопастями у южного побережья
Сицилии для использования местного течения для
производства дешевой электроэнергии [10].
Вполне реальным следует считать создание моретермальных
установок, использующих разницу температур верхних и
нижних слоев морской воды. Первая моретермальная установка
на берегу была создана в 1927 г. во Франции на р. Маас. После
второй мировой войны на Атлантическом побережье Африки
около Абиджана была сооружена моретермальная станция
мощностью 14 тыс. кВт. Теплая вода для станции поступает
из мелководной лагуны, а холодная —с глубин 500 м.
Проектируются мор-етермальные станции в районах с
благоприятными условиями, где на поверхности температура воды
достигает 28—30° С, а на глубине 400—500 м — 8—10° С, в
умеренных широтах при небольшой разнице температур.
Предусматривается создание многоцелевых
гидротермальных установок для выработки электроэнергии и одновременно
получения пресной воды, утилизации образуемого в
испарителях концентрированного рассола, что, несомненно, повысит
эффективность всего производства.
Планируется использование водорода морской воды как
источника энергии, призванного заменить дефицитное
углеводородное топливо. Пока что получение водорода обходится
дорого, внедрение термохимических способов с применением
низкотемпературного тепла позволит снизить затраты.
Проектируются установки по производству водорода из
морской воды, работающие на солнечной энергии, на энергии волн.
Все чаще можно услышать о целесообразности частичного
возврата к использованию парусов, использующих даровую
энергию ветра для движения [8].
Разрабатываются проекты ветровых энергетических
установок на морских нефтяных промыслах, в прибрежных
густонаселенных районах. Цепочка из многих тысяч ветряных вышек,
установленная вдоль берегов Новой Англии (США) может
дать в 2,5 раза больше энергии, чем потребляют штаты Новой
Англии, а стоимость системы будет на 45% ниже стоимости
строительства атомных электростанций такой же мощности.
Выше были рассмотрены наиболее важные сферы
хозяйственной деятельности человека в океане. К ним следовало бы
причислить и развитие самой науки об океане, так как
сегодня, в век научно-технической революции, она становится
непосредственной производительной силой, хотя подсчитать
доходы на каждый рубль вложения в исследования довольно
сложно. Они выражаются в повышении качества
долгосрочных прогнозов погоды, приросте биологической продукции, ми-
246
нерального сырья, повышении рентабельности работы морского
транспорта и т. д.
Для успешного хозяйственного освоения океана
потребуется научная кооперация всех «природопользователей»,
координация их действий. Частный подход, определяемый
сиюминутной выгодой, может иметь катастрофические последствия
Необходима единая программа широких экономических
исследований и освоения ресурсов океана, выработка оптимальных
критериев их эффективности, которые должны учитывать
ближние и дальние последствия, в том числе и возможное
ослабление саморегулирующих экологических систем в результате
хозяйственной деятельности. Комплексное освоение богатств
океана нуждается в разработке научных основ, в этом состоит
одна из задач советских ученых.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Бунич П. Г. Экономика Мирового океана. Ресурсы, их освоение,
право.— М.: Наука, 1977.
2. География морского транспорта/Л. И. Василевский,
СБ. Шлихт ер, О. М. Колесников, С. С. Сальников.— В кн.:
Экономическая география Мирового океана.— Л.: Наука, 1979.
3. Г е о д е к я н А. А. Нефтегазоносность Мирового океана.— Вестн.
АН СССР, 1978, № 7.
4. Кол один М. В. Проблемы опреснения воды на Земле.— М.:
Знание, 1975.
5. Минеральные ресурсы Мирового океана и некоторые закономерности
их распространения.— Л.: Недра, 1974.
6. Михайлов С. В. Мировой океан и человечество.— М.:
Экономика, 1969.
7. П а в л о в В. Г. Мировой океан и всемирное хозяйство.
Международное экономическое сотрудничество на морях и океанах. — В кн.:
Экономическая география Мирового океана.— Л.: Наука, 1979.
8. Перестюк И. Возвращение паруса? — Морской флот, 1978, № 9.
9. С л е в и ч С. Ледяной материк сегодня и завтра.— Л.: Гидрометео-
издат, 1968.
10. С лев ич СБ. Шельф: освоение, использование. — Л.: Гидрометео-
издат, 1977.
11. Современная география мирового хозяйства. Пособие для учителей/
Под ред. М. С. Розина.— М.: Просвещение, 1977.
12. Соломин Е. В. Массовый туризм — важный фактор
регионального развития.— В кн.: Новые формы территориальной организации
производства за рубежом.— М.: 1977.
13. СССР в цифрах в 1977.—М..: Статистика, 1978.
14. Хведчук И. Путь к морским кладовым.— «Правда», 1979,
3 апреля.
15. Экономическая география Мирового океана.— Л.: Наука, 1979.
16. Action in the Atlantic—Amer. Gras. Assoc. Mon., 1973, N 10, p.
17. Chil S. N. Measurement of Tourism.—J. Trans. Res., 1977, 16, N 62.
18. Lloyd's Register of Shipping. Statistical Tables, 1978.
19. Mero J. L. Potential Economic Value of Ocean.—N. Y., Floor
Manganese Nodule Deposits., 1972.
20. Statistik der Schiffahrt — Bremen, 1978.
21. The case for tsing tidal energy.—Ocean Energy, 1978, N 11.
247
Георгий Михайлович Лезгинцев,
директор Всесоюзного
научно-исследовательского и проектного
института золотодобывающей
промышленности. Руководит
разработкой технических средств
добычи твердых полезных
ископаемых на шельфе и в Мировом
океане. Автор многих
изобретений, член Союза писателей СССР.
Г. М. Лезгинцев
ЗАДАЧИ СОЗДАНИЯ
ТЕХНИКИ
И ТЕХНОЛОГИИ
ДЛЯ РАЗРАБОТКИ
ПОДВОДНЫХ
МЕСТОРОЖДЕНИЙ
ТВЕРДЫХ ПОЛЕЗНЫХ
ИСКОПАЕМЫХ
Для практического осуществления грандиозной программы
развития народного хозяйства страны необходимы научно
обоснованные поиски новых способов добычи полезных ископаемых,
которые позволят увеличить ее, не нарушив при этом
окружающей среды, и одновременно снизить себестоимость, повысить
производительность труда, исключить работы людей под
землей. Объем добычи полезных ископаемых в настоящее время
достиг колоссальных размеров, тем не менее потребность в
минеральном сырье с каждым годом возрастает, что вызывает
необходимость ввода в эксплуатацию более бедных и залегающих
в сложных горно-геологических условиях месторождений.
Поэтому становится очевидным, что решение названных задач
представляет собой важную и довольно сложную
комплексную проблему. Одним из возможных путей ее решения
является освоение месторождений минерального сырья Мирового
океана.
Рентабельная промышленная добыча полезных ископаемых
со дна морей и океанов становится все более реальной. Про-
мышленно развитые страны интенсивно расширяют
научно-исследовательские и опытно-конструкторские работы,
направленные на скорейшее создание технологии и специальных
технических средств для освоения подводных месторождений (4, 5].
Для решения технических вопросов, возникающих при создании
эффективного горно-морского оборудования, требуются в
первую очередь мощные экспериментальные базы с
испытательными стендами, а также специализированные научно-исследова-
249
тельскйе суда. Поэтому одним из первых этапов выполнения
экспериментально-исследовательских работ в Советском Союзе
по созданию нового горно-морского оборудования и его
всестороннего испытания явились организация и строительство вЛатв.
ССР Балтийской морской экспериментальной базы ВНИИпро-
золото и создание специализированного
научно-исследовательского судна «Шельф-1» (рис. 1), которое используется для
Рис. 1. Научно-исследовательское судно «Шельф-1» водоизмещением 590 т
имеет два главных двигателя по 110 л. с, дизель-генераторную
электростанцию мощностью 500 кВт, компрессорное и насосное хозяйство,
механическую мастерскую и мощные спуско-подъемные устройства с выносной
площадкой и П-образной стрелой. На верхней технологической палубе
смонтирована обогатительная установка. Кроме помещений для размещения
команды и научных сотрудников на судне имеются лаборатории.
испытания нового морского горного и обогатительного
оборудования, а также для опытной разработки подводных россыпей
и осадочных месторождений в шельфовой зоне Балтийского
моря [6].
1. Основные направления исследований
Сегодня наметились три основных способа морской
подводной добычи твердых полезных ископаемых: с
плавсредств; с использованием подводных или придонных устано-
250
вок и аппаратов; с использованием методов геотехнологии,
в частности метода подводной скважинной гидродобычи.
Лучше всего освоен первый способ. Этому способствует
имеющийся отечественный и зарубежный опыт подводной
добычи со специализированных и приспособленных для этой цели
плавучих средств (земснаряды, драги). Следует отметить, что
работа существующих земснарядов и драг ограничивается
сравнительно небольшими глубинами, большинство их не
приспособлено к работе при волнении моря более 3 баллов и во льдах
[2]. Для дальнейшего развития этого способа необходимо
проведение соответствующих исследовательских работ по
созданию систем добычных органов со специальными
разрыхлителями и интенсификаторами подводной разработки, которые не
требуют жесткой связи с плавучим средством [3].
Перспективно создание морских земснарядов и драг с
безъякорной системой перемещения, оснащенных
усовершенствованными успокоителями качки.
Основным. достоинством второго способа добычи является
возможность ее проведения независимо от климатических и
ледовых условий. Можно полагать, что этот способ будет
главенствующим в шельфовой добыче для нашей страны, так как
более 80% площади шельфа СССР приходится на арктические
моря, сезон работы в которых чрезвычайно ограничен. Так,
в заливе Ванькина Губа моря Лаптевых он составляет в
среднем менее 50 дней в год. Вероятно, в этом направлении должны
совершенствоваться подводные необитаемые аппараты-роботы,
которые целесообразно использовать для морской добычи же-
лезомарганцевых конкреций.
Существуют схемы, по которым ведется морская добыча
минерального сырья с глубин 60 и 200 м (рис. 2). К
преимуществам второго способа добычи следует отнести и возможность
организации полного или частичного придонного обогащения и
укладки «хвостов» в выработанных пространствах. В целях
совершенствования этого направления ведется конструирование
необитаемых, дистанционно управляемых транспортно-добыч-
ных агрегатов и всего комплекса устройств.
Третий способ подводной разработки месторождений,
а именно с использованием методов геотехнологии, в первую
очередь способа скважинной гидродобычи, находится в стадии
теоретического и экспериментального изучения. Первые
положительные результаты применения этой технологии получены
при разработке континентальных осадочных и россыпных
месторождений, а-также при добыче серы из морского дна [6]. Это
говорит о несомненной перспективности данного способа прежде
всего при разработке погребенных морских россыпей, а также
подводных месторождений, скрытых под толщей льда,
например на шельфе Арктики,
251
252
253
Рис. 2. Система придонной морской добычи твердых полезных ископаемых: а — на глубинах до 60 м,
расстояние от берега до 2 км; б — на глубинах более 60 м, расстояние от берега до 3 км.
/ — грунтозаборное устройство; 2 — электротанк подводный (необитаемый, самоходный, дистанционно-управляемый);
3 — гибкие коммуникации (пульпопровод, вода высокого давления, электрокабель, провода сигнализации и
управления); 4—база с насосами и электрооборудованием; 5—трубопроводы и кабели от береговых установок до базы 1,
6 — обогатительная фабрика (сборно-разборная); 7 — энергоблок и пульт управления
2. Новые добычные устройства
и выбор технологической схемы
для разработки месторождений с плавучих средств
Во время экспериментальных работ, проведенных с научно-
исследовательского судна «Шельф-1» при использовании
базовой эрлифтной установки с гибкими подъемными
коммуникациями диаметром 150/250 мм (табл. 1), был испытан ряд
добычных устройств механического, вибрационного,
гидравлического и пневмогидравлического типов, а именно
гидрогрейфер, виброрыхлитель, пневмогидравлическое грунтозаборное
устройство, механогидравлическая скреперная установка и др.
При работе гидрогрейфера (рис. 3) происходит
активное механическое отделение и рыхление разрабатываемой
породы подводного забоя и одновременно постоянное
всасывание и гидротранспортирование образующейся пульпы.
Это значительно повышает эффективность разработки связных
осадков по сравнению, например, с гидрорыхлением (рис. 4).
Привод створок грейферного ковша осуществляется с помощью
поочередной подачи в верхнюю и нижнюю полости силового
гидроцилиндра рабочей жидкости от судовой маслостанции.
В полости ковша имеются гидромониторные насадки, которые
способствуют дополнительной дезынтеграции разрабатываемой
грейфером породы непосредственно перед «всасом», что
улучшает подготовку пульпы и обеспечивает относительную
однородность консистенции поднимаемой эрлифтом гидросмеси. В
результате испытаний установлено, что благодаря выполнению
привода челюстей гидрогрейфера в виде силового
гидроцилиндра, штоком которого является всасывающая труба,
обеспечивается равное усилие резания обеими челюстями и
повышается надежность контроля за разработкой подводного забоя.
При действии виброрыхлителя благодаря его
конструкции можно использовать эффект направленной вибрации для
успешного подводного разрушения слежавшихся и
уплотненных песчано-гравийных пород. При этом вследствие наличия
механизма поворота вибрирующей массы виброрыхлитель,
соединенный с гибкими коммуникациями эрлифтной установки,
автоматически осуществляет возвратно-поступательные
перемещения в подводном забое в соответствии с заданной
программой. Горизонтальная составляющая сила вибраторов равна
1000 кгм/с2 при суммарной возмущающей силе 3000 кгм/с2.
Крутящий момент равен 170 кг/с2 при расстоянии от оси
всасывающей трубы до продольной оси вибратора 340 мм. В целом
испытания виброрыхлителя показали хорошие результаты.
Для подводной разработки осадков средней консолидации,
а также уплотненных осадочных пород без предварительного
механического рыхления создано пневмогидравличе-
264
Таблица 1
Основные параметры базовой эрлифтной установки, смонтированной
на НИС «Шельф-1»
Коэффициент
относительного
погружения
эрлифта
0,74
0,85
0,89
0,92
Производительность
по воде, м3/ч
Dn= 150
85,5
104,0
109,5
114,0
Dn = 250
245,0
290,0
306,0
316,0
Расход воздуха, м3/ч
Dn = 150
310
228
212
208
Dn = 250
834
632
588
563
Продолжение табл. 1
Коэффициент
относительного
погружения
эрлифта
0,74
0,85
0,89
0,92
Производительность по пескам, т/ч
V = Ы т/м3
Dn= 150
12,2
13,8
15,1
15,8
Dn = 250
34,2
38,2
41,2
43,2
V= 1,2 т/м3
Dn= 150
19,6
23,4
24,4
26,2
Dn=2H
57,0
64,3
68,6
70,5
Продолжение табл. 1
Коэффициент
относительного
погружения
f эрлифта
0,74
0,85
0,89
0,92
П р и м е ч а
ность гидросмеси
Производительность по пескам, т/ч
7 =
Dn= 150
25,6
30,1
31,6
33,4
н и я: Dn — д*
, т/м3.
1,3 т/м3
Dn = 250
71,6
82,4
88,4
91,2
V = Ь4 т/м3
Dn = 150
28,1
32,7
34,1
36,8
Dn = 250
77,0
90,2
95,1
99,5
[аметр гибких коммуникаций эрлифта, мм; у — плот-
ское грунтозаборное устройство (рис. 5).
Отличительная особенность его заключается в наличии пневмогидравличе-
ских насадок, которые позволяют в значительной степени
увеличить действие гидромониторных струй, так как в зоне выхода
сжатого воздуха происходит вытеснение окружающей воды, и
струи работают фактически в осушенном забое.
255
Пневмогидравлическое грунтозаборное устройство состоит из
всасывающей трубы, на которой закреплен конический экран,
диаметр которого в 10 раз превышает внутренний диаметр
всасывающей трубы. Непосредственно на экране смонтированы
водяной и воздушный коллекторы с подводящими патрубками. Во
внутренней полости экрана по окружности установлены шесть
сменных пневмогидравлических насадок с регулируемым за-
Рис. 3. Гидрогрейфер с ковшом
емкостью 0,25 м3 совместно с эр-
лифтной установкой обеспечивает
эффективную подводную
разработку плотных осадочных пород.
Масса устройства — 2,5 т,
производительность добычи — 20 м3/ч.
I
1
I
во,
50\
^ 20
i
10
/•
л
Astf
*
\
1,0 1,1 1,2 1,3 /,4 1,5
Удельная масса гидросмеси, т/м3
Рис. 4. Сравнительная
характеристика рабочих параметров
гидрогрейфера.
/ — зона теоретической
производительности эрлифтной установки; 2 — зона
фактической производительности
грейфера. Верхняя граница зон при
коэффициенте относительного погружения
эрлифтной магистрали 0,76, нижняя —
при коэффициенте 0,71.
зором между водяным и воздушным соплами. Такое
конструктивное выполнение устройства позволяет расход сжатого
воздуха использовать для выполнения двойной полезной работы:
усиления действия гидромониторых струй и подъема гидросмеси
в эрлифте.
С борта судна «Шельф-1» испытано несколько модификаций
механогидравлических скреперных установок,
имеющих скреперный ковш с гидроотсасывающей магистралью.
Установки выполняли драгирование подводной залежи при
перемещении судна и, следовательно, перемещении скреперного
ковша относительно подводного забоя. При действии механо-
гидравлической скреперной установки происходит механическое
отделение породы от забоя с помощью режущей кромки ковша
256
и одновременно дополнительная гидромониторная
дезинтеграция горной массы с образованием пульпы непосредственно в
полости ковша, а также эрлифтный подъем гидросмеси на судно.
В результате испытаний установлено, что для эффективной
работы подобного оборудования необходима гибкая система
папильонирования, которая обеспечивает срез породы
постоянной толщины. Этому требованию удовлетворяет система
подводной разработки, применявшаяся при проведении опытных
Рис. 5. Пневмогидравлическое грунтозаборное устройство.
Дополнительный расход сжатого воздуха на пневмогидравлическое рыхление
не превышает 5% суммарного расхода воздуха в эрлифте.
работ с борта судна «Шельф-1», которая заключалась в
перемещении скреперного ковша относительно подводного забоя
подтягиванием судна на кормовом якоре.
Исследования 'развития технологии подводной добычи
показали, что эффективная разработка морских россыпей с плавучих
средств с помощью нового горно-морского оборудования и
гибких коммуникаций может осуществляться различными
способами подводной выемки.
Разработку подводных месторождений малой мощности
целесообразно вести способом послойной выемки с применением
механогидравлических скреперных установок (рис. 6).
В процессе работы судно закрепляется на носовых и
кормовых якорях. С борта опускается скреперный ковш механо-
гидравлической установки, соединенный с магистралью эрлифта
выдачи породы.
9 Заказ № 1190
257
При перемещении судна за счет подтягивания на якорях
скреперный ковш папильонированием выбирает породу одной
заходки по ширине, равной геометрическим размерам режущей
кромки ковша. Для отработки следующей заходки судно должно
переместиться в противоположном направлении на длину
заходки.
Подводные месторождения средней и большой мощности
целесообразно разрабатывать способом выемки воронками,
наиболее простым и не требующим постоянного (или частого)
перемещения добывающего судна относительно подводного забоя.
Якорные лебедки
Грунтозаборное
устройство
Гибкие
\ коммуникации
Россыпи песка
^7777^7777777777,
Рис. 6. Технологическая схема подводной разработки с использованием
способа послойной выемки.
Такую разработку можно вести несколькими уступами или
одним (при разработке несвязных зернистых осадочных пород)
с последующей зачисткой плотика россыпи интенсификато-
рами грунтозабора по площади, а также скребателями
различных конструкций или способом послойной выемки.
При разработке морской россыпи способом выемки
воронками специализированное судно типа «Шельф-1» перемещается
над площадью участка месторождения с помощью мощного
кормового якоря. Носовой якорь служит для поддержания
необходимого направления перемещения при меняющихся
направлениях ветра. После отработки очередной воронки
грунтозаборное устройство приподнимается над забоем и судно
передвигается с помощью кормового якоря на расстояние, равное
диаметру воронки. Два якоря позволяют занимать
фиксированное положение над россыпью.
В зависимости от конкретных горно-геологических условий
и гидродинамических характеристик донных отложений в
данном районе подводного месторождения, а также соотношения
258
геометрических размеров и формы россыпи в плане горные ра*
боты могут выполняться с продольным и фронтальным
(поперечным) расположением забоев.
Использование схемы с продольным расположением забоев
наиболее целесообразно при разработках узкой россыпи,
совпадающей по ширине с целым числом заходок, что позволяет
уменьшить потери продуктивных песков. Расстояние
перемещения судна вдоль россыпи определяется длиной якорных цепей
и мощностью лебедок.
При применении этой схемы размещения забоев упрощается
маневрирование,* однако осложняются выявление и отработка
промышленных площадей за границами россыпи. При такой
схеме россыпь должна быть четко оконтурена в процессе
разведочных работ.
Схема разработки фронтальными забоями позволяет
разрабатывать залежи за контуром россыпи до тех пор, пока
содержание полезного компонента не снизится до допустимого сред-
непромышленного уровня. При такой схеме значительно ослож-
Таблица 2
Наиболее эффективные технологические схемы подводной разработки
месторождений с плавучих средств
Разрабатываемая порода
Мощность
залежи, м
Технологическая
схема
Добычное
устройство
Пески рыхлые зернистые несле-
жавшиеся
Пески слежавшиеся, гравелистые,
супеси, илистые пески, лёсс
Илы слежавшиеся
Глины легкие нежирные
Глины плотные
Скала легкая, разборная
>1
1-5
<1
>1
1—5
<1
>1 "
1—5
<1
>1
1—5
<1
>1
1—5
<1
>1
1—5
<1
Па
Па
I
Па
Пб
I
Па
Пб
I, На
Пб
Пб
I, Па
I, Пб
I, Пб
Па
Пб
Пб
4
3
4
1, 2, 3
1,2
1, 3, 4
1,3
1,3
1, 3, 4
1,4
1,4
1,4
I
I
I
Примечания. Римскими цифрами обозначены технологические схемы: I—
с послойной выемкой: Па — с выемкой способом воронок несколькими уступами;
Пб —одним уступом; арабскими цифрами — добычные устройства: / — гидрогрейфер;
2— виброрыхлитель; 3 — пневмогидравлическое устройство; 4 — механогидравличес-
кая скреперная установка.
9*
259
няется маневрирование судна, особенно при уменьшении
ширины россыпи, и увеличиваются потери рабочего времени на
переходы с заходки на заходку. Эта схема предпочтительнее в тех
случаях, когда границы россыпи установлены приблизительно.
Выбор добычных устройств делают в зависимости от физико-
механических свойств разрабатываемых пород, мощности
продуктивной залежи и способа выемки. Рекомендации для такого
выбора приведены в табл. 2.
3. Подводные и придонные установки
На Балтийской морской экспериментальной базе ВНИИпрозо-
лото успешно проведены испытания нескольких установок
тралового и самоходного типов, предназначенных для подводной
& *®щ
Рис. 7. Опытная самоходная дистанционно-управляемая добычная
установка перед спуском в подводной забой. Производительность
землесосов установки, оснащенного виброрыхлителем,— 44 м3/ч. Установка
преодолевает уклон дна до 15°. Толщина снимаемого слоя за один
проход — 0,2 м.
разработки и придонного обогащения россыпей шельфа.
Примерами такого оборудования является специализированная
подводная добычная установка на гусеничном
ходу, оснащенная землесосом с вибрационным грунторазра-
батывающим органом (рис. 7), а также придонный
виброскреперный агрегат, рабочие перемещения которого
осуществляются мощным подводным гусеничным тягачом. Созданы
260
и испытаны новые перспективные механизмы типа
шагающих мостов (рис. 8) для перемещения придонных
добычных и обогатительных агрегатов в подводных забоях.
Конструктивно такие механизмы включают удлиненный мостообраз-
ный корпус с опорами и балластными емкостями на его концах.
Опоры имеют устройства для разворота корпуса вокруг них.
Механизм по морскому дну движется методом зашагивания
в результате поочередной продувки сжатым воздухом
балластных емкостей и частичных разворотов корпуса вокруг опор.
Ife
-
яя^^д
ШщШ
::Х:-:;■•:--.:■; '
:
\
4§&
Рис. 8. Подводный шагающий мост — перспективный механизм для
перемещения по морскому дну добычного и обогатительного оборудования. Длина
фермы— 14 м. Опоры имеют шарнирную связь с фермой, что повышает
устойчивость моста на неровном дне.
Применительно к созданным придонным установкам и
агрегатам ведутся разработка и стендовые исследования
подводного обогатительного оборудования, предназначенного для
получения концентрата из разрабатываемых песков
непосредственно в подводном забое.
4. Перспективы подводной скважинной гидродобычи
Сущность способа подводной скважинной гидродобычи довольно
проста, однако конструктивное выполнение соответствующего
промышленного оборудования, определение оптимальных
параметров и технологических приемов его применения — задачи
весьма сложные.
Необходимо через пробуренную с поверхности
месторождения скважину проникнуть сквозь перекрывающие пустые
породы к продуктивной залежи, и специальным добычным
снарядом, оборудованным гидромонитором и эрлифтом, разрушить
пласт полезного ископаемого под действием струи воды и вы-
261
дать образующуюся в камере пульпу на поверхность для
извлечения из нее полезного компонента.
Проведенные с борта судна «Шельф-1» испытания буровой
установки и гидропневматического скважинного снаряда с
гибким гидромонитором при опытной обработке подводных камер
подтвердили принципиальную осуществимость способа
подводной скважинной гидродобычи. Однако для того чтобы создать
и внедрить технику и технологию такой подводной добычи,
необходимо провести комплекс дополнительных поисковых и
экспериментальных исследований, и в первую очередь:
— определить возможность применения существующих
плавучих средств (баржи, понтоны и платформы различного типа)
или реконструировать их для установки и монтажа
оборудования подводной скважинной гидродобычи;
— довести конструкторские проработки морского
скважинного снаряда до опытно-промышленных образцов.
Целесообразно конструктивно совместить буровой и добычный рабочие
органы снаряда;
— провести полупромышленные исследования и подготовить
технику и технологию подводной скважинной гидродобычи
к внедрению в горной промышленности.
Такой способ добычи может быть реализован при
промышленной разработке месторождений арктического шельфа на
участках с ограниченными подвижками льда.
5. Оборудование для взятия проб осадков
со дна океана
Для оценки глубоководных месторождений минерального сырья
и получения технологических проб создана конструкция
грейферного автономного пробоотборника
АП-6000 (рис. 9). Групповое применение новых
пробоотборников, например при поисково-разведочных работах на конкреции,
позволяет существенно повысить производительность пробоот-
бора и снизить себестоимость единичной пробы.
Принцип работы АП-6000 заключается в его погружении и
достижении дна океана под действием силы тяжести
оставляемого на дне балласта. После удара о дно и сброса балласта
створки грейферного ковша отбирают пробу донных отложений,
которая поднимается на поверхность океана с помощью
поплавка пробоотборника.
Промышленные испытания и внедрение пробоотборников
новой конструкции были выполнены во время экспедиций
Министерства геологии СССР в Атлантическом и Тихом океанах.
Создание и совершенствование техники и технологии для
разработки подводных месторождений твердых полезных
ископаемых невозможно без глубоких научных исследований и опыт-
262,
но-конструкторских работ в широких масштабах, без
интенсивного развития горной науки, охватывающей все новые и новые
области. Привлечение к вопросам морского горного дела
внимания многих инженеров и ученых, безусловно, будет
способствовать успешному решению целого ряда проблем. С
расширением морских
горно-эксплуатационных рабог
увеличится объем добычи
полезных ископаемых, доля
которых будет все больше
увеличиваться по мере
истощения месторождений на
суше.
Рис. 9. Автономный
пробоотборник АП-6000 в снаряженном
состоянии перед спуском за борт.
Грейферный рабочий орган
снабжен четырьмя балластными
грузами общей массой 120 кг.
Поплавок, изготовленный из синтак-
тика, имеет плавучесть 130 кгс,
что обеспечивает вертикальное
перемещение пробоотборника со
скоростью до 1,5 м/с. Рабочая
глубина погружения — 6 км.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Арене В. Ж. Геотехнологические методы добычи полезных
ископаемых.—М.: Недра, 1975, с. 220—224.
2. Е л а н с к и й А. Н., Л е з г и н ц е в Г. М., Мазуров А. А.
Месторождения цветных металлов континентального шельфа. Ч. 2. Средства и
способы разработки.—М.: Цветметинформация, 1974, 59 с.
3. Лезгинцев Г. М., Истошин С. Ю., Контарь Е. А.
Применение эрлифтного оборудования для разработки морских россыпей.—М.:
Цветметинформация, 1973, 74 с.
4.^ Лезгинцев Г. М., Попов В. И., Чертов П. Н. Состояние
подводной добычи твердых полезных ископаемых за рубежом (по материалам
выставки «Интерокеан-73».—Цветная металлургия, 1974, № 18, с. 18—20.
5. Лезгинцев Г. М., Контарь Е. А., Кузнецов Г. И.
Разработка глубоководных месторождений твердых полезных ископаемых
Мирового океана.—В кн.: Итоги науки и техники. Т. 14.—М.: ВИНИТИ, 1976,
с. 365—436.
6. Научно-исследовательское судно «Шельф-1»/Г. М. Лезгинцев,
В. И. Попов, СЮ. Истошин, В. М. Г л v ш а н о в с к и й.— Труды/
ВНИИпрозолото, 1974, вып. 2, с. 22—27.
ШМь.
Рх |~~
,'**.-,-« *""
Г.11,
1
263
Виктор Николаевич Самарский,
заместитель начальника «Глав-
морнефтегаза». Занимался
разработкой конструкций плавучих
буровых установок, стационарных
платформ и намывных
сооружений.
Константин Геннадьевич Суворов,
начальник отдела ЦНИИ им.
акад. А. Н. Крылова. Работает
в области перспективного
планирования строительства буровых
платформ, судов снабжения и
других средств освоения
континентального шельфа, а также
определения их основных технико-
эксплуатационных характеристик.
В. Н. Самарский,
К. Г. Суворов
ПУТИ СОЗДАНИЯ
ТЕХНИЧЕСКИХ
СРЕДСТВ
МОРСКОЙ ДОБЫЧИ
НЕФТИ И ГАЗА
Строительство плавучих технических средств для освоения
морских месторождений нефти и газа началось в основном в
50-х годах с создания буровых платформ. Интенсификация
изучения нефтяных и газовых месторождений в море относится
к концу 60-х годов, когда были открыты большие запасы нефти
и газа в Северном море. В 70-х годах резкое увеличение
мировых цен на нефть и газ позволило говорить о
конкурентоспособности морских нефтегазовых месторождений, для освоения
которых требуются большие капитальные затраты и
значительно более дорогая техника, чем при разработке сухопутных
месторождений. Затраты на бурение на глубинах моря
20—30 м примерно в 2 раза превышают аналогичные затраты
на суше, на глубине 50 м стоимость бурения возрастает
в 3—4 раза, а на глубине 200 м—уже в 6 раз. Существенно
выше и затраты на прокладку подводных трубопроводов
(в 1,5—3 раза) для транспортировки нефти на берег, а также
стоимость постройки нефтехранилищ на морских
месторождениях (в 4—8 раз).
Однако несмотря на столь высокие затраты объем добычи
нефти и газа в море постоянно увеличивается, что можно
объяснить истощением старых сухопутных месторождений,
необходимостью осваивать новые в труднодоступных и малоосвоенных
районах.
Имеющиеся данные показывают, что мировые разведанные
запасы нефти составляют 85—90 млрд. т., в том числе морские
19—20 млрд. т. К настоящему времени в море добыто около
265
3,5 млрд. т. нефти, что составляет менее 10% от общего
количества добытой нефти (46 млрд. т.), при этом необходимо
учитывать, что нефтедобыча в море проводится примерно 25—30 лет,
а на суше— 100 лет. Ежегодная доля морской добычи нефти
постоянно увеличивается и составляет около 20%, а к 1985 г. она
достигнет 30—50% от общего количества нефти, потребляемого
всеми странами (рис. 1).
Развертывание работ по добыче нефти в море потребовало
постройки большого количества технических средств,
принципиально отличающихся от традиционных. В состав комплекса
&40
си
5:
|30
о
*:
^°1950 1955 1960 1965 1970 1915 1980 19В5
Годы
Рис. I. Темпы роста общемировой добычи нефти в море.
средств, которые необходимы для освоения морских
месторождений нефти и газа, в основном входят:
буровые платформы и суда для поисково-разведочного б\*
рения;
станционарные платформы для бурения эксплуатационных
скважин;
средства для прокладки подводных нефтепроводов;
специализированные баржи для доставки секций
стационарных платформ к месту монтажа;
краново-монтажные суда;
суда снабжения буровых платформ;
специальные хранилища добытой нефти.
Эти средства в связи с постоянным расширением районов
континентального шельфа, где ведется бурение, совершенствуются и
видоизменяются, улучшаются их технико-эксплуатационные
характеристики. Рост объемов добычи нефти и газа в море, а
следовательно, и буровых работ приводит в первую очередь к
увеличению числа буровых платформ и судов. По оценке зарубеж-
266
S3 >
/
/
fryS
/
/
/
/\
/
/
/1
<
ных специалистов, чтобы обеспечить ожидаемый темп роста
морской добычи нефти к 1985 г. потребуется ежегодно строить до 40
буровых платформ и судов, что приведет к загрузке 50%
производственной мощности судостроительных предприятий. Уже в
настоящее время строительством подобных технических средств
занимаются 55 фирм из 15 зарубежных стран, в том числе
в США — 18, Японии — 7, ФРГ и Сингапуре — по 4,
Великобритании, Норвегии, Канаде, Австралии — по 3, в Финляндии — 2.
Сегодня общей тенденцией можно считать создание буровых
платформ и судов, приспособленных для работы в
глубоководных районах, а также в сложных гидрометеорологических
условиях. Вследствие этого происходит усложнение конструкции и
рост стоимости сооружений (рис. 2 и 3).
Технические средства, с которых выполняется бурение в море,
имеют одну особенность — они отличаются высокой степенью
стабилизации над устьем скважины при воздействии волнения,
ветра и течений. Такая стабилизация может быть достигнута при
жестком сцеплении конструкции с грунтом. Первоначально
бурение проводили на глубинах до 30—40 м, поэтому использовались
буровые платформы погружного типа, имеющие
вертикальные цилиндрические колонны, в нижней части которых
размещены балластные цистерны. После заполнения балластных
цистерн платформа становилась на грунт, причем высота колонн
позволяла располагать верхнюю площадку над поверхностью
воды на высоте, предотвращающей удары волн о площадку.
Остойчивость буровой платформы в процессе погружения
создавалась за счет площади ватерлинии цилиндрических колонн.
После окончания работ балластные цистерны осушались,
погружная платформа всплывала и транспортировалась в новую точку.
Погружные платформы просты в эксплуатации, однако их
применение возможно только при ограниченных глубинах, так
как увеличение их высоты приводит к усложнению технологии
постройки и вызывает трудности при обеспечении
остойчивости во время транспортировки и погружения в точке работ.
Кроме того, для их успешной эксплуатации необходима точная
информация о характере грунта и глубине моря. При
длительной стоянке на грунте возможно засасывание нижних концов
опор, а также вымывание грунта под действием течений, что
может привести к аварии.
Погружные платформы строились в основном до 1960 г., и
в настоящее время и эксплуатации находится всего 22 единицы.
Самой большой из всех погружных платформ является
платформа «Кермак-54» американской компании «Трансуорд Дрил-
линг». Она может работать на глубинах до 53 м, имеет высоту
63 м при диаметре колонн 9,1 м и площади палубы 2800 м2.
В последние годы строились погружные платформы для
работы вблизи побережья в Мексиканском заливе и у
Африканского побережья на глубинах не более 10 м.
267
Стабилизация за счет установки на грунт достигается также
и на самоподъемных буровых платформах. Их
отличительной конструктивной особенностью является
перемещение опорных колонн относительно понтона. Остойчивость
самоподъемной платформы обеспечивается в процессе
транспортировки и при погружении опор с помощью понтона. После задав-
ливания опор в грунт понтон поднимается над поверхностью
воды до высоты, позволяющей избегать ударов волн о его днище.
Размеры и конструкцию самоподъемных платформ выбирают,
исходя из следующих условий:
1000
800
| 600
400
■!> 200
А
^yv
2ч
л
\-*-£
L
Ь
/
/
Ч7
/
/
/
**
1955
1965 1975
Годы
1985
Рис. 2. Изменение глубины моря
в месте работ платформ (/) и
буровых судов (2).
60
|
с§ 50
§ 40
5 30
о>
I20
§
а70
1
&0
7
/
rJ-*
F
Ь^
г
/i/jt
j
i
1/
/
f
/1
/
/
НУ
1 /
-3
1955
1965
Годы
1975
1985
Рис. 3. Повышение средней
стоимости постройки буровых платформ и
судов.
1 — полупогружные платформы; 2 —
буровые суда; 3 — самоподъемные платформы.
— необходимости размещения бурового оборудования,
технологических запасов и жилых помещений;
^— создания достаточной устойчивости на грунте при
воздействии расчетного ветра, волнения и течения;
— обеспечения остойчивости непотопляемости при
транспортировке с максимально поднятыми опорами;
— создания необходимой дополнительной плавучести при
притапливании понтона для облегчения освобождения опор из
грунта.
Самоподъемные платформы — наиболее многочисленная
группа технических средств, предназначенных для разведочно-по-
искового бурения. Интенсивное строительство самоподъемных
платформ проводилось начиная с 1972 г., причем их
максимальный ежегодный выпуск составлял 20 единиц (рис. 4). Построено
108 самоподъемных платформ (21%—для глубин моря до
63 м, 63%—для глубин 75—90 м, 16%—для глубин
96—107 м).
Вначале строили в основном самоподъемные буровые
платформы с прямоугольным понтоном и четырьмя опорами (рис. 5).
268
Такая конструкция позволяла обеспечить устойчивое положение
платформы в случае выхода из строя одной из опор. По мере
совершенствования конструкции механизмов и повышения их
надежности, а также накопления опыта эксплуатации, выяснилось,
что можно перейти к строительству самоподъемных платформ
с треугольным в плане понтоном и тремя опорами. Такие
конструкции имеют меньшую металлоемкость и требуют меньших
затрат на изготовление. В настоящее время подавляющее
большинство самоподъемных платформ строится с тремя опорами,
^ 1970 1972 7974 1916 1978
41 Годы
Рис. 4. Темпы постройки буровых платформ и судов.
/ — самоподъемные платформы; 2 — полупогружные платформы; 3 —
буровые суда.
имеющими ферменную конструкцию. Они испытывают меньшие
волновые нагрузки по сравнению с цилиндрическими.
Подъемные устройства на самоподъемных
платформах устанавливают электромеханические и гидравлические.
Электромеханические включают зубчатую рейку, закрепленную
на опоре, и шестерни с электроприводом через редуктор,
размещенные на понтоне. Гидравлическая система имеет несколько
цилиндров с поперечными траверзами, входящими в пазы
зубчатой рейки, закрепленными на опоре. Скорость подъема
понтона составляет 0,3—0,4 м/с. Операции по установке
самоподъемной платформы на грунт или ее снятию с точки работ
являются наиболее опасными и ответственными (именно в этот
период произошло 30% аварий этого типа платформ).
Значительные трудности при перестановке самоподъемных платформ
могут возникать при сильном задавливании опор в грунт и их
защемлении. Для предотвращения этого стали применять
площадки, связывающие нижние концы опор (так называемые
маты). Особенно часто маты используют в конструкциях с тремя
269
опорами, когда нельзя поочередно выдергивать их из грунта,
как это обычно делают на платформе с четырьмя опорами.
Большие конструктивные сложности возникают из-за
увеличения длины опор, особенно при обеспечении их надежности и
прочности во время транспортировки, поскольку опоры
возвышаются над понтоном на 100 м и более, а в транспортном
положении самоподъемная платформа испытывает резкую порыви-
Рис. 5. Самоподъемная платформа «Бакы» (СССР), работающая в
Каспийском море.
стую качку. Чтобы избежать этих недостатков на некоторых
самоподъемных платформах верхние секции опор делают
съемными. Для их монтажа на палубе платформы имеются
специальные крановые устройства. Подобное конструктивное решение
позволяет снизить высоту поднятых опор и уменьшить
динамические нагрузки, а также повысить остойчивость, не увеличивая
размеры понтона.
Другим конструктивным решением, позволяющим также
решить эту проблему, является использование телескопических
цилиндрических опор. Самоподъемная платформа такой
конструкции «Сторм-Y», построенная в США, имеет рекордную
глубину постановки для платформ рассматриваемого типа —
115 м. Длина цилиндрических опор составляет 123 м.
Наружная телескопическая опора имеет длину 77 м и диаметр 4,6 м,
а внутренняя — соответственно 71 м и 4,3 м. Однако подобные
конструкции для обеспечения жесткости должны иметь
поперечное крепление в месте телескопического соединения, вслед-
270
ствие этого не удается полностью поднимать опоры, и при
транспортировке платформа имеет обычно большую осадку.
Интересными следует признать и предложения о
самоподъемной платформе с опорным блоком, который устанавливается
отдельно на грунт и имеет балластные цистерны, обеспечивающие
его погружение и всплытие. На опорный блок наводится и
крепится самоподъемная платформа. С помощью таких конструкций
самоподъемную платформу, рассчитанную на глубину 60 м,
можно использовать для бурения на 160 м.
Буровая вышка на самоподъемных платформах
устанавливается над специальным вырезом в понтоне или на выносных
кронштейнах.
При проектировании самоподъемных буровых платформ
приходится решать сложную задачу — удовлетворить несколько
противоречивых требований. Так, желательно увеличить
расстояние между опорами для повышения устойчивости на грунте,
однако это приведет к увеличению массы понтона, механизмов
подъема и, следовательно, габаритов, что, в свою очередь,
вызовет увеличение ветровых нагрузок и опрокидывающего момента.
Интересно, что в 1967 г. была построена самоподъемная
платформа «Оушен Мастер» с наклонными опорами под углом
7—12° для увеличения устойчивости на грунте. Такая
конструкция способна выдержать в 1,5 раза больше по сравнению
с платформой, имеющей вертикальные опоры, ветровые и
волновые нагрузки. Однако самоподъемные платформы с наклонными
опорами не нашли распространения из-за сложного подъемного
устройства, которое должно работать на разных углах наклона
в процессе спуска опор.
Таким образом, самоподъемные платформы наиболее
приспособлены для буровых работ на шельфе, поскольку в меньшей
степени зависят от погоды, и, будучи жестко связанными с
грунтом не требуют применения специальных компенсаторов качки
и систем удержания в точке бурения, что упрощает применяемое
технологическое оборудование.
Конструкции самоподъемных платформ развиваются по пути
их упрощения, снижения числа опор, изыскания возможности
увеличения глубин моря в точке работ.
В то же время самоподъемные платформы имеют и
недостатки, основными из которых являются:
— зависимость транспортировки и установки в точке работ
от погодных условий;
— ограниченная рабочая глубина;
— снижение мобильности из-за трудностей их провода через
узкости и каналы.
Полупогружные платформы используют в
районах с глубинами, на которых невозможна стабилизация
постановкой на грунт. Их интенсивное строительство ведется начиная
с 1972 г. Всего построено 99 полупогружных платформ (43% —
271
для глубин до 240 м, 47%—для 300—450 и 10%—для
500—1830 м) (см. рис. 4). Стабилизация их на волнении
достигается путем заглубления создающих плавучесть понтонов ниже
поверхности моря до уровня, где волнение сказывается в
меньшей степени, а также за счет использования разнесенных
вертикальных стабилизирующих колонн, обеспечивающих
минимальную площадь ватерлинии. Это, с одной стороны, способствует
уменьшению возмущающих сил, а с другой,— созданию необ-
Рис. 6. Полупогружная платформа типа «Акер» (Норвегия).
ходимой остойчивости. Технологическое оборудование,
энергетическая установка и жилые помещения располагаются на
площадке, находящейся над поверхностью воды на уровне,
достаточном для предотвращения ударов волн расчетной высоты.
Удержание полупогружных платформ в точке работ
обеспечивается, как правило, с помощью якорей, число которых достигает
восьми (масса каждого — до 13 т).
В 1976 г. была построена первая полупогружная платформа
«Седко-709» (США) с системой динамического удержания за счет
работы подруливающих устройств. Эта платформа может
работать на глубинах до 1830 м, причем необходимая точность
удержания обеспечивается при волнении высотой 12,2 м за счет
работы двигателей суммарной мощностью 25 000 л. с.
Имеются полупогружные платформы трех типов:
с двумя продольными заглубленными понтонами и шестью —
восьмью стабилизирующими колоннами (рис. 6);
272
с четырьмя продольными цилиндрическими плавучестями и
большим числом стабилизирующих колонн;
с пятью вертикальными колоннами, имеющими раздельные
цилиндрические понтоны (рис. 7).
До последнего времени полупогружные платформы строили
несамоходными, их доставляли в район работ специальные бук-
Рис 7. Полупогружная платформа типа «Пентагон» (Франция).
сиры. Для упрощения транспортировки платформы стали
проектировать самоходными. Это не вызвало существенного изменения
энергетической установки, состав и мощность которой
определяют из условия обеспечения работы буровых и якорных
лебедок, насосов и другого технологического оборудования.
Размеры полупогружных платформ зависят от ограничений
по качке. В 1977 г. в Японии построена самая большая
полупогружная платформа «Хакурио-IV», имеющая длину 104,5 м,
ширину 67 м и габаритную высоту 104 м (рис. 8). Для этой
платформы расчетными являются волны высотой до 27 м, ветер
скоростью 60 м/с и течение скоростью 3 уз. Выбор размерений
полупогружных платформ определяется также требованиями
273
к их остойчивости и непотопляемости. Для полупогружных
платформ необходимо рассчитывать остойчивость по диагоналям,
а не только в поперечном и продольном направлении, поскольку
площадь ватерлинии слагается из сечений вертикальных ста-
Рис. 8. Японская самоподъемная платформа «Хакурио-IV».
билизирующих колонн. Излишнее повышение остойчивости
полупогружных платформ приводит к ухудшению экономических
показателей, поскольку при этом возрастают габариты из-за
разноса стабилизирующих колонн или их диаметр, вследствие чего
увеличивается качка. Это, в свою очередь, приводит к
увеличению простоев в ожидании благоприятных
гидрометеорологических условий.
274
К недостаткам полупогружных платформ следует отнести их
большие габариты, сложность проведения монтажных и
строительных работ, а также докования. Кроме того, вследствие
малой площади ватерлинии полупогружные платформы очень
чувствительны к изменению нагрузки, что ограничивает объем
технологических запасов. Их приходится постоянно пополнять,
так как платформа находится в точке работ в течение
нескольких месяцев. Значительные размеры полупогружных платформ,
особенно высоты, повышают трудоемкость строительных работ,
для проведения которых приходится использовать тяжелые
плавучие краны с большим вылетом стрелы.
В последнее время благодаря применению систем
динамического удержания увеличиваются глубины моря, на которых
используются полупогружные платформы. Это приводит к
изменению конструктивного типа платформ, так как наиболее
распространенный в настоящее время тип платформы с двумя
продольными понтонами не обеспечивает постоянства возмущающих сил
в зависимости от направления. Полупогружные платформы с
динамическим удержанием будут иметь симметричную
конструкцию, ведутся исследования по гидродинамике платформы с
кольцевым понтоном и дискообразной верхней площадкой
(рис. 9).
Перспективным направлением в создании буровых платформ
можно считать конструирование полупогружных платформ,
удерживаемых в точке работ за счет вертикально напряженных
тросов, закрепленных за уложенные на грунт грузы (рис. 10).
Платформа имеет избыточную плавучесть, за счет вертикальной
дополнительной силы она лучше стабилизируется на волнении.
Особо эффективны подобные конструкции во время работы на
больших глубинах, где масса опор резко увеличивается в связи
с увеличением размеров платформ.
В настоящее время разработаны проекты подобных
конструкций, в натурных условиях в США осуществлена проверка
крупномасштабной модели.
Буровые суда привлекаются для разведочно-поискового
бурения в отдаленных от береговых баз районах и в местах, где
могут встречаться плавучие льды. Они обладают хорошей
мореходностью, большой грузоподъемностью и автономностью.
В отличие от полупогружных платформ буровые суда могут
строиться на любой судостроительной верфи. Создание
специальных буровых судов было начато в 1962—1968 гг. в США
компанией «Глобал Мэрии». В 1968 г. она построила буровое судно
«Гломар Челленджер», предназначенное для работ на глубинах
моря до 6000 м с повторным вводом бурового инструмента
в скважину.
Наиболее совершенными можно считать буровые суда типа
«Пеликан», строящиеся в Голландии с 1972 г. Первые суда этой
серии были приспособлены для бурения на глубине 600 м,
275
последние — на глубине 1500 м. Буровые суда имеют обычные
судовые обводы, а также следующие конструкции и системы:
в центральной части судна — вырез и буровую вышку для
спуска инструмента и колонны труб;
системы динамического удержания в точке работ за счет
развитых подруливающих устройств;
Рис. 9. Полупогружная платформа перспективного типа
с кольцевым понтоном.
специальные компенсаторы качки, уменьшающие влияние
вертикальных перемещений судна на колонну буровых труб.
Точность удержания бурового судна в точке работ
определяется величиной допустимого изгиба колонны буровых труб и
составляет 4—6% глубины моря. Системой динамического
276
Рис. 10. Платформа, удерживаемая вертикально напряженными тросами.
277
удержания оборудовано 30 буровых судов из 52 построенных.
Опыт эксплуатации бурового судна «Пеликан» в 1973/74 г.
показал, что простои из-за плохой погоды составили 6,5%. Как
правило, бурение с судна осуществлялось при вертикальных
перемещениях 1,2—1,5 м.
Для ускорения работы буровые трубы располагают в
стеллажах непосредственно на палубе судна в нос и в корму от
буровой вышки.
Технологические запасы и другие грузы (цемент, глина,
трубы, агрегаты, крупногабаритное оборудование и т. д.)
доставляют на буровые платформы суда снабжения, число
которых в мире превысило 2000. В соответствии со спецификой
эксплуатации суда этого типа имеют
архитектурно-конструктивные отличия. Они имеют носовую надстройку и свободную
кормовую палубу для размещения палубного груза,
составляющего до 70% дедвейта судна. Суда однопалубные,
низкобортные с высоким баком, на котором расположена двух-,
трехъярусная рубка. Высота надводного борта судов, даже
предназначенных для Северного моря, составляет всего 1,0—1,2 м, а высота
борта судов, работающих в Мексиканском заливе,— всего 0,6 м.
Вследствие этого уменьшается масса корпусных конструкций,
что позволяет увеличить грузоподъемность, но затрудняет
работу команды в тяжелых гидрометеорологических условиях.
Суда снабжения обычно высокоманевренные, поскольку им
часто приходится работать в непосредственной близости от
буровой платформы в условиях развитого волнения. Это качество
обеспечивается двухвальной энергетической установкой и
носовым подруливающим устройством.
Для перевозки сыпучих грузов имеется до восьми
цилиндрических бункеров с пневматической разгрузкой.
В последнее время наряду со специализированными судами
снабжения строят универсальные суда, которые
обеспечивают буксировку платформ, укладку и подъем их якорей,
а также, при необходимости, и тушение пожаров. Для этих
целей на судах в носовой части палубы размещается
специальная лебедка, а в корме — горизонтальный ролл для проводки
якорной цепи.
Мощность энергетической установки универсального судна
снабжения может достигать 8000 л. с, а судов, занимающихся
только доставкой грузов,— 3000 л. с.
Нормальное функционирование морских нефтепромыслов
невозможно без проведения ряда вспомогательных работ, в том
числе водолазных. Для их проведения на палубе судов
снабжения устанавливается комплекс декомпрессионных
камер с необходимым оборудованием. Однако эти работы
зависят от условий перемещений судна, поэтому в последнее
время стали строить вспомогательные суда полупогружной
конструкции с меньшими параметрами качки.
278
После определения размеров и запасов месторождений нефти
и газа на континентальном шельфе осуществляется проходка
эксплуатационных скважин. Эта операция проводится со
стационарных буровых платформ, причем с каждой может быть
пробурено до 30—40 скважин. Можно выделить платформы
двух типов: ферменные конструкции, монтируемые в точке работ
из отдельных блоков, и железобетонные, полностью
изготовляемые на судостроительной верфи и доставляемые к месту
установки на плаву.
Стационарная буровая платформа
ферменной конструкции закрепляется с помощью свай на грунте.
На этой конструкции выше поверхности моря монтируются блоки-
модули с энергетической установкой, технологическим
оборудованием для бурения и очистки поступающей из скважины нефти,
жилыми и другими помещениями. Масса отдельных модулей
достигает 1600 т, на каждую стационарную буровую платформу
устанавливается до восьми блоков-модулей. Платформа
находится в точке работ в течение всего процесса добычи нефти,
а блоки-модули могут заменяться в зависимости от вида
операций (бурение, а затем очистка нефти от примесей и т. д.).
Монтаж крупнейшей в мире ферменной платформы (США)
был закончен в 1978 г. в Мексиканском заливе в 15 милях
от побережья на глубине 310 м. Установленное на ней
технологическое оборудование рассчитано для бурения 62 скважин,
проходка которых будет закончена к 1982 г. Полная высота этой
стационарной платформы составляет 385 м, а масса — 46 000 т.
Для выполнения монтажных работ платформа разбита на три
блока. Нижнее основание, установленное на грунт, имеет массу
14 000 т, высоту 53,4 м и размеры в плане ПбХ 122 м.
Доставлялось нижнее основание платформы в точку работ на
специальной барже, а закреплялось на грунте с помощью 24 свай, причем
максимальное время их забивки составило трое суток.
Каждая свая массой 450 т, представляющая собой цилиндр
диаметром 2,12 м и длиной 188 м, буксировалась в горизонтальном
положении двумя буксирами, а затем путем заполнения
балластных отсеков переводилась в вертикальное положение и
наводилась на точку установки. После закрепления нижнего
основания последовательно устанавливалась средняя секция массой
8000 т и высотой 96 м, а затем верхняя — массой 11 000 т и
высотой 1600 м. Монтаж надводной площадки, где размещены две
буровые вышки, технологическое и другое оборудование,
проводился из блоков массой 500 т.
Ферменные конструкции могут транспортироваться от
береговой площадки в точку монтажа на специальных баржах или
с помощью цилиндрических металлических понтонов, или за
счет собственной плавучести.
Практика показала, что с помощью барж целесообразно
транспортировать платформы небольшой массы, устанавливае-
279
мые на малой глубине. При перевозке платформ значительной
массы сложнее обеспечить устойчвость, особенно с тяжелым
грузом при высоко размещенном центре тяжести. Для
транспортировки ферменных конструкций эффективнее использовать
цилиндрические понтоны. В этом случае ферменная конструкция
собирается в горизонтальном положении в сухом доке
непосредственно на соединенных вместе цилиндрических понтонах,
имеющих достаточную плавучесть. После всплытия и буксировки
к месту работ часть понтонов заполняется водой для
переворота конструкции в вертикальное положение и посадки на
грунт, затем понтоны отсоединяют и обычно используют
повторно.
Технологию постройки стационарных платформ выбирают,
исходя из массогабаритных характеристик и принятого
конструктивного типа. Как правило, конструкции собирают на открытых
площадках из отдельных секций, которые формируют из
унифицированных прямолинейных элементов и узлов. Сборку и
насыщение блоков-модулей для верхней площадки, имеющих
прямолинейные образования, выполняют также на
специализированных площадках.
Железобетонные платформы для бурения и
последующей добычи нефти и газа на глубинах до 160 м
применяют на нефтепромыслах Северного моря. Они отличаются
большой долговечностью и экономичностью в эксплуатации. При их
постройке можно использовать рабочих невысокой
квалификации. Значительно сокращается продолжительность монтажа
работ в открытом море. Широкое распространение
железобетонных платформ сдерживается из-за их значительной осадки при
буксировке (около 30 м), т. е. из-за отсутствия глубоководных
фарватеров. Не следует забывать и о возможности аварий
вследствие размыва грунта под тяжестью платформ.
В настоящее время можно выделить два типа
железобетонных платформ. К первому относятся конструкции с волногася-
щей стенкой, имеющей большое количество отверстий для
поглощения энергии волн. В Северном море установлено четыре
платформы такого типа, причем первая из них — «Экофиск»
(Норвегия) — была построена в 1973 г. Ко второму относятся
платформы с цилиндрическими опорами, связывающими
верхнюю площадку и установленный на грунте нижний корпус с
цистернами для обеспечения плавучести при транспортировке.
В этих цистернах хранится нефть, поступающая из скважины;
их объем достигает 160—200 тыс. м3.
Железобетонные платформы — грандиозные сооружения.
Приведем пример: на изготовление только нижнего корпуса
одной из построенных платформ «Корморант-А» высотой 58 м
израсходовано 120 тыс. м3 бетона. Постройка таких платформ
ведется вначале в специальном котловане, где формируется
нижний корпус до высоты, обеспечивающей возможность получе-
280
ния достаточной для всплытия плавучести и осадки, при
которой его можно вывести из котлована. Затем котлован
затапливается, перемычка разрушается и на плаву ведется достройка
нижнего корпуса, а также начинается формирование колонн.
После этого сооружение притапливается на более
глубоком месте и монтируется оборудование верхней площадки.
Перспективным можно считать использование подводных
камер, устанавливаемых непосредственно на устье нефтяной
скважины и оснащенных необходимым оборудованием для
передачи нефти на сборные хранилища. Это позволяет исключить
большие расходы металла, идущего на изготовление
стационарных платформ, а также осложнения при мореплавании.
Добытая нефть транспортируется на берег с помощью
подводных трубопроводов, прокладка которых в открытом море
возможна с помощью специализированных
судов-трубоукладчиков. Отличительной их особенностью является
наличие в кормовой части ферменной рамы — стингера — для
обеспечения спуска трубопровода без изгибов по плавной
кривой. Длина стингера должна равняться двойной-тройной
глубине моря (рис. 11).
Необходимая точность удержания трубоукладчика по курсу
составляет 30—100 м, а точность поступательного перемещения,
определяемая необходимостью размещения очередного стыка
трубопровода в пределах сварочного поста, ±0,5 м. Такое
перемещение обеспечивается системой якорных лебедок; якоря
укладываются специальными судами.
Высокие требования предъявляются к стабилизации
трубоукладчика, поскольку сварка трубопровода ведется из
отдельных секций длиной по 24 м; крен не должен превышать ±3%,
дифферент ±2°.
Для уменьшения влияния качки трубоукладчики строят
полупогружной конструкции, а для обеспечения постоянной
осадки, которая влияет на изгиб и напряжения в трубопроводе,
применяют специальную балластную систему с автоматическим
управлением.
Сборка трубопровода осуществляется с остановками для
контроля и изоляции стыков. Во время работы судно должно
совершать циклические перемещения с высокой точностью и,
кроме того, удерживаться в одной точке.
В связи с расширением морских нефтегазовых разработок
эффективность укладки трубопроводов должна быть повышена,
однако это будет возможно только при изменении технологии
этих работ. Начиная с 1970 г. в США ведется разработка
трубоукладчиков, у которых предварительно сваренный
трубопровод наматывается на вьюшку. Ее диаметр обеспечивает упругий
изгиб без пластических деформаций. В 1978 г. закончена
постройка судна-трубоукладчика, работающего по такой
технологии. На нем установлена вьюшка диаметром 16,4 м и шириной
281
6,7 м, с ребордой высотой 25,2 м, на которую может быть
намотан трубопровод диаметром от 102 до 405. мм при длине 50
или 5 миль соответственно. Скорость судна, при которой
выполняется укладка, равняется 1,5—2 уз.
При укладке трубопровода с такого судна угол входа
трубопровода в воду может достигать 50° (вместо 15° на обычных
судах-трубоукладчиках), что позволяет выполнять работы
без стингера на глубинах до 400—900 м и при высоте волн до
4,6 м.
Рис. И. Трубоукладчик с кормовым стингером.
Технологический процесс монтажа и укладки труб с
помощью судна, оборудованного барабаном, заключается в
следующем. На бортовой базе сваривают плети труб длиной до
1,5 км, которые укладывают на вьюшку, позволяющую
изгибать трубопровод в пределах радиуса его упругого изгиба.
Готовый трубопровод перематывают на барабан на судне,
которое выходит в море, а на базе монтируют следующий отрезок
трубопровода.
В связи с разработкой все более глубоководных
месторождений нефти и газа приходится по-новому решать проблему их
282
Рис. 12. Японская буровая платформа
283
транспортировки. Прокладка подводных нефтепроводов на
десятки и сотни километров связана с необходимостью:
— регулировать напряжения, возникающие в
трубопроводах на больших глубинах;
— преодолевать естественные преграды на глубоководной
трассе.
При этом резко повышается стоимость подводных
трубопроводов, что значительно снижает рентабельность промысла.
Поэтому становится целесообразным устанавливать на дне моря
емкости для хранения нефти.
Такие подводные хранилища соединяют трубопроводом
с пунктом первичной подготовки нефти, расположенным на
стационарной платформе, и со специальными загрузочными
установками. Емкости могут быть стальными и
железобетонными.
Не менее эффективна и загрузка танкеров непосредственно
на месте добычи нефти. Для этой цели применяют
специальные погрузочные устройства либо в виде башни, шарнирно
закрепленной к подводному хранилищу или ко дну, либо в виде
плавучего буя.
Последний также соединяется гибким трубопроводом с
хранилищем нефти. К этим погрузочным устройствам и
швартуются танкеры.
В связи с освоением минеральных ресурсов
континентального шельфа в арктических районах предстоит создать технику
для бурения в ледовых условиях. При этом необходимо
учитывать характер воздействия перемещающегося льда на стоящее
в точке бурения сооружение. Оно идентично действию льда на
корпус движущегося судна, поэтому при проектировании
буровых платформ можно использовать опыт создания ледоколов.
Лед вокруг платформы можно разрушать либо под действием
тяжести конструкции и специфических образований корпуса,
либо с помощью взрыва, либо распиливать его специальными
механизмами, либо расплавлять. Наиболее надежным и
проверенным методом является первый.
При проектировании ледовых буровых платформ
следует учитывать и возможность их обледенения. Важно,
чтобы намерзающий лед обрушивался под собственной
тяжестью раньше, чем он окажет влияние на прочность и
остойчивость платформы.
В районах, где отсутствует дрейф льда, возможно
намораживание искусственных ледовых островов путем распыления
воды для установки на них бурового оборудования. У
побережья Канады с подобного ледового острова была пробурена
скважина глубиной 924 м, причем максимальная толщина
льда составляла 5,5 м, а распыление воды проводилось в
течение двух месяцев при первоначальной толщине льда
1,5 м.
284
В последнее время появились проекты ледовых буровых
платформ с небольшим числом стабилизирующих колонн в
отличие от ранее построенных (рис. 12). Корпус такой буровой
платформы предлагается выполнять в виде двух усеченных
конусов, соединенных друг с другом основаниями меньшего
диаметра. Корпус подобной формы лучше разламывает
дрейфующие ледовые поля при вертикальных
перемещениях платформы за счет приема или откачки водяного
балласта.
Таким образом, для освоения месторождений нефти и газа
на континентальном шельфе создан комплекс разнообразных
технических средств, которые отличаются по своей
конструкции, габаритам, комплектующему оборудованию и условиям
эксплуатации от традиционных типов.
Петр Алексеевич Моисеев,
заместитель директора Всесоюзного
научно-исследовательского
института морского рыбного хозяйства
и океанологии, доктор
биологических наук, профессор, широко
известен в СССР и за рубежом
своими трудами в области
биологической продуктивности океана.
П. А. Моисеев
БИОЛОГИЧЕСКИЕ
РЕСУРСЫ
МИРОВОГО ОКЕАНА
И ПЕРСПЕКТИВЫ
ИХ ИСПОЛЬЗОВАНИЯ
1. Характеристика биологических ресурсов
Быстрый рост населения нашей планеты, численность которого
в 1975 г. уже составила 4 млрд., а к 2000 г., по оценочным
данным ООН, превысит 6 млрд. человек, все возрастающий
мировой дефицит пищевых продуктов, а также значительные
потребности животноводства в калорийных кормах
относительно низкой стоимости — все это заставляет государства
обратить свое внимание на биологические ресурсы Мирового
океана.
За последние десятилетия успехи сельского хозяйства стали
значительны, особенно в густонаселенных странах, таких как
Индия, Паскистан и др., где этот процесс получил название
«зеленой революции». Однако удовлетворение потребностей
населения животными белками неуклонно снижается. Так, в 1938 г.
в рацион почти 59% всех жителей земли входило менее 15 г
животных белков, что считается недопустимым для
нормального питания, а в 1970 г. — уже в рацион 62% жителей. Таким
образом, около 2 млрд. человек систематически недоедает или,
попросту говоря, голодает.
Между тем Мировой океан является важнейшим
источником разнообразных и в высшей степени ценных пищевых
продуктов. Вылавливая в настоящее время в общей сложности
более 60 млн. т морских рыб, моллюсков, млекопитающих и
других объектов в год, человечество обеспечивает за их счет
около 20% своей потребности в белках животного
происхождения, что позволяет значительно повышать качество питания,
включать в него многие микроэлементы, различные витамин-
287
ные компоненты и хорошо усвояемые белки своеобразного
аминокислотного состава.
Следует заметить, что ряд стран удовлетворяет свои
потребности в животных белках почти полностью за счет продуктов
водного происхождения.
Не меньшее значение имеют морские объекты как сырье
для получения высококалорийной кормовой муки, объем
выработки которой достигает 4,5 млн. т, а также как сырье для
медицинской и ряда технических отраслей промышленности.
Поэтому, естественно, мировой вылов водных объектов с каждым
годом растет, увеличивается его ассортимент, и сегодня на
каждого жителя нашей планеты приходится в 3 раза больше
морепродуктов, чем в 1948 г.
Сегодня 210 стран и территорий ведут морское и
океаническое рыболовство, сотни тысяч промысловых судов
забрасывают свои сети в различных районах океана, десятки
миллионов людей трудятся на просторах «голубой нивы».
За короткий срок рыбная промышленность многих стран
превратилась в высокоразвитую индустриальную отрасль
хозяйства.
В Советском Союзе в 1976 г. потребление рыбных продуктов
на душу населения достигло 18 кг (вместо 5 кг в 1950 г.), и
в ближайшей перспективе планируется довести их объем до
20—22 кг. Эта большая народнохозяйственная задача должна
быть решена за счет дальнейшего освоения разнообразных
биологических ресурсов различных районов Мирового океана
и прежде всего за счет морского и океанического рыболовства
(наша страна за счет этого промысла уже теперь получает
90% рыбной продукции).
Имеющиеся представления о биологических ресурсах
Мирового океана и их потенциальных возможностях сложились в
результате всестороннего изучения, проведенного
научно-исследовательскими институтами многих стран, экипажами
исследовательских, поисковых и промысловых судов, сотрудниками
экспериментальных станций, космических лабораторий и
подводных аппаратов.
Это позволило установить основные закономерности
океанических биопродукционных процессов и с достаточной
степенью достоверности определить возможный объем вылова
водных объектов.
Особое внимание исследователей было привлечено к
выявлению роли процессов вертикального перемешивания вод, в том
числе влияния крупномасштабных вихрей, меандров и рингов
в создании зон повышенной рыбопродуктивности, определению
значения склона континентального шельфа и особенностей
подводного рельефа, в том числе рельефа океанического ложа,
для образования рыбопродуктивных районов, а также к
установлению закономерностей биологического воспроизводства и
288
разработке методов оценки потенциальных биологических
ресурсов океана.
Большой вклад в разработку этих проблем внесли
советские ученые.
Несомненно, что результаты советских рыбохозяйственных
исследований и само развитие океанического рыболовства
в нашей стране в значительной степени способствовали
созданию современного представления о биологических ресурсах
океана.
2. Способы рационального использования
биологических ресурсов
Совершенно очевидно, что в современных условиях морской
промысел, масштабы которого с каждым годом растут,
особенно в традиционных районах рыболовства, превратился
в мощный фактор воздействия на биологические ресурсы, и без
должного управления он может привести к губительным
последствиям, тем более что в ряде зон запасы промысловых
объектов в результате целого ряда естественных
факторов оказались на предельно низком уровне. В соответствии
с оценкой потенциальных возможностей океана объем вылова
рыбы, крупных беспозвоночных и морских млекопитающих
может увеличиться примерно на 30 млн. т по сравнению с
существующим. В то же время минимальная потребность
человечества в рыбе и других водных объектах в 2000 г. будет
определяться 150—160 млн. т. За счет пресноводных обитателей, как
естественных, так и искусственно разводимых, в предстоящие
20—25 лет может быть получено не более 15—20 млн. т (в
настоящее время около 10 млн. т). Таким образом, единственная
возможность удовлетворить быстро растущие потребности
человечества в морепродуктах — более эффективное и в то же
время рациональное использование потенциальных
возможностей биологических ресурсов Мирового океана, которое станет
реальным только при коренном изменении отношения ко всей
проблеме океанического рыболовства и морского рыбного
хозяйства.
Большое внимание должно быть уделено разработке
научных методов ведения промысла. Хорошо известно, что
современные орудия и методы лова могут нанести весьма
существенный ущерб облавливаемым популяциям, если их применять без
учета особенностей биологии, характера распределения,
возрастного состава и численности стад. Чрезмерно интенсивный
промысел приводит к значительному снижению общей массы
популяции и ее омоложению, сокращению ареала обитания и
уменьшению протяженности нагульных миграций, понижению
уровня воспроизводства и в результате к меньшей биологиче-
Ю Заказ № 1190
289
ской стойкости вида. Численность популяции, состоящей из
младших возрастных групп, оказывается под определяющим
воздействием колебаний степени «урожайности» отдельных
поколений, пополняющих промысловую часть стада, а
вероятность повторения «неурожайных» поколений становится больше
и результативность промысла понижается.
Примеров такого рода можно привести множество,
достаточно вспомнить популяции таких рыб, как атлантические
треска и сельдь, морской окунь, камбала и др. Следует заметить,
что необдуманное ведение промысла, а также неравномерное
изъятие из популяции особей различных полов, генераций и
генетических групп приводит к весьма неблагоприятным для
стойкости и продуктивности вида последствиям.
Следовательно, не только желательно, но жизненно
необходимо ведение промысла на основе научно разработанных
рекомендаций. Требуется создание селективных орудий лова,
совершенствование разноглубинных тралов, применение
методов лова, способствующих отчленению мелкой неполовозрелой
рыбы, и т. д.
Другим способом повышения эффективности современного
рыболовства является существенное улучшение методов
использования традиционных объектов промысла. Сегодня около
10 млн. т потенциально возможного улова облавливаемых
популяций теряется в результате нерационального ведения
промысла.
Особое значение приобретает развитие промысла некоторых
новых объектов промысла, прежде всего обитателей
океанической эпипелагиали и глубоководных зон (до 2000 м).
До последнего времени к биологическим ресурсам
громадной акватории океанической эпипелагиали, составляющей
около 100 млн. км2, было привлечено ничтожно малое
внимание ученых; исследований, таких как в прибрежных районах,
в них проведено не было. Однако осуществленные здесь
рекогносцировочные рыбохозяйственные работы, а также достаточно
обстоятельные океанографические съемки свидетельствуют
о реальности обитания достаточно объемных популяций таких
пелагических объектов, как макрелещуки, летучие рыбы,
мелкие тунцы, корифены, кальмары и др. Более того, оказалось,
что во многих регионах Мирового океана в пределах
океанической пелагиали могут обитать и образовывать весьма
плотные скопления обитатели неритических и дальненеритических
зон (скумбрия, ставрида, путассу, анчоус, сардина и др.).
По некоторым оценкам, объем потенциально возможного
вылова различных водных объектов в пределах океанической
эпипелагиали может превышать 10 млн. т. Для успешного
промысла особое значение приобретает создание искусственных
скоплений относительно диффузно рассредоточенных в
эпипелагиали объектов: макрелещук, летучих рыб и кальмаров.
290
Достаточно объемный вылов можно ожидать в результате
осуществления соответствующих исследований и организации
промысла в пределах поднятий океанического ложа на
относительно больших глубинах (800—2000 м) Мирового океана.
Напомним, что акватория Мирового океана с глубинами
2000 м и более составляет 84,1%, а с глубинами до 200 м —
всего 7,4% океанической поверхности. Однако именно в пределах
шельфовой зоны и прилегающих к ней районах, составляющих
примерно 20% всей площади океана, ныне вылавливается
более 90% всей мировой добычи водных объектов.
Объясняется это прежде всего общими закономерностями
океанологических и биологических процессов, определяющих в
конечном счете рыбопродуктивность океана и его отдельных
районов.
В 1975 г. из 49,3 млн. т рыб, добытых в Мировом океане,
43,2 млн. т составили обитатели шельфовых вод, 3,0 млн. т
было добыто в верхней части склона (до 500—800 м) и столько
же в эпипелагиали. Если за последние 30 лет вылов в
шельфовых районах увеличился на 30 млн. т, то в пределах верхней
части склона — всего на 1,8 млн. т, а в эпипелагиали — на
1,3 млн. т.
Объясняется чрезвычайно медленное увеличение объема
вылова в пределах относительно больших глубин
особенностями распределения здесь промысловых скоплений, слабой их
изученностью, сложностью поисковой работы, недостаточной
технической вооруженностью промыслового флота.
Работы последних лет показали определенную
перспективность выявления и использования биологических ресурсов на
некоторых участках Мирового океана до глубин 1900—2000 м.
Положительные результаты были получены при облове
скоплений палтуса, макрурусов, гладкоголовых, акул, морского
налима и других видов в Северной Атлантике.
В Центральной Атлантике на глубинах до 1900 м были
выявлены плотные скопления гладкоголовых, солнечника и др.
Скопления рыб обнаружены на глубинах свыше 1000 м и
в районах поднятий дна в Индийском океане и в южной части
Тихого океана *.
По предварительной оценке, площадь океанического дна до
глубины 2000 м за пределом 200-мильных зон составляет
2,7 млн. км2, в диапазоне глубин 1000—2000 м —2,3 млн. км2,
а в районе глубин до 500 м — всего 0,06 млн. км2.
Имеющиеся данные свидетельствуют, что подавляющее
большинство скоплений относительно глубоководных рыб
приурочено к горизонтам от 800 до 1600 м (табл. 1).
* Подробнее проблемы глубоководного промысла рассмотрены в статье
А. Д. Дружинина, Б. П. Пшеничного в наст, сборнике.— Прим. сост.
10*
291
Таблица 1
Распределение скоплений макруруса по глубине (по Низовцеву)
Глубина, м
600—800
800—1000
1000—1200
1200—1600
| 1600—2000
2000—2400
Всего
Объем скоплений
Ы06м3
50,43
193,92
179,45
74,40
13,18
26,05
537,43
%
9,4
36,0 )
33,4 83,3
13,9 J
2,4
4,9
100,0
Количество
скоплений
И
44
44
25
5
4
133
Средняя высота
скоплений, м
60
75
70
70
70
100
70
Площадь наиболее перспективных для промысла
океанических подводных возвышенностей составляет 1,0—1,5 млн. км2.
В пределах упомянутых поднятий дна можно ожидать
обнаружения скоплений промысловых водных объектов с общим
выловом до 2 млн. т.
Определяющее значение в увеличении объемов изъятия
биологических ресурсов Мирового океана в ближайшие
десятилетия будут иметь объекты низкого трофического уровня, прежде
всего антарктический криль, объем возможного вылова
которого многими специалистами оценивается десятками
миллионов тонн (мы условно оцениваем его 30 млн. т).
Кроме того, настало время перехода от неуправляемого
рыболовства к выращиванию промысловых объектов,
численность которых будет определяться и увеличиваться в
результате активного воздействия на биологические процессы. Речь
идет о создании крупномасштабных прибрежных морских
подводных хозяйств по выращиванию водорослей, моллюсков,
ракообразных и рыб, об осуществлении комплекса также весьма
объемных мероприятий по биомелиорации морских
рыбопромысловых районов и трансплантации водных объектов в новые
регионы их обитания. Эти усилия могли бы дать прирост более
40 млн. т*.
На основе вышеизложенного можно составить
представление о составе и объеме океанических водных объектов, которые
могут быть получены в результате реализации громадного
комплекса мероприятий, осуществляемых заинтересованными
странами как в прибрежных, так и открытых водах Мирового
*и Подробнее методы развития марикультуры рассмотрены в статье
В. П. Зайцева, А. Н. Дмитриева в наст, сборнике.— Прим. сост.
292
океана. Они позволили бы в ближайшие 25—30 лет по
меньшей мере удвоить общий вылов, который, по нашему
представлению, мог бы складываться следующим образом:
Современное и перспективное использование морских и пресноводных
биоресурсов
1975 г. 2000 г. Изменение
Вылов, млн. т 70 160 +90
В том числе:
пресноводных и проходных объектов (в том числе
рыбоводство) 10 20 +10
морских объектов, 60 160 +100
в том числе за счет
рыболовства 52 80 +28
рационализации рыболовства — 10 +10
марикультуры, биомелиорации, трансплантации . 8 40 +32
объектов низкого трофического уровня (криль) . . — 30 +30
Итак, биологические ресурсы Мирового океана являются и
будут оставаться основным источником пополнения все
возрастающей потребности человечества в пищевых ресурсах. Как
было уже подчеркнуто, это может быть достигнуто только при
условии бережного отношения к его богатствам, а также
рационального ведения промысла.
3. Перспективы использования
биологических ресурсов в СССР
В Советском Союзе наряду с совершенствованием методов
использования биологических ресурсов прибрежных вод
громадное внимание должно быть уделено рыбоводству во
внутренних водоемах, марикультуре и биомелиорации.
В свете изложенного представляется, что вероятный улов
в нашей стране в будущем может складываться примерно
таким образом:
Современный и вероятный состав уловов в СССР
1975 г. 2000 г. Изменение
Общий вылов, млн. т 10,3 15,0 + 4,7
В том числе:
во внутренних водоемах, 1,2 2,0 +0,8
из них:
в озерах, реках и внутренних морях 1,0 1,0 0
рыбоводство в пресных водах и акклиматизация . 0,2 1,0 +0,8
в морях и океанах,
а именно:
в ближних прибрежных водах 3,5 4,0 +0,5
» дальних » » 5,6 2,0 —3,6
в эпипелагиали 0,1 1,0 +0,9
на больших глубинах 0,1 1,0 +0,9
марикультура и биомелиорация — 0,5 +0,5
объекты низкого трофического уровня 0,1 3,0 +2,9
293
Таблица 2
Вероятный объем уловов СССР различных океанических объектов в перспективе
Объект
Объем улова,
млн. т
Ближние прибрежные зоны
Треска, пикша
Полярная тресочка
Сельдь
Минтай
Мойва
Камбала
Лемонема и др. бати-
пелагические
Лосось
Кальмары
| Прочие
Всего
Большие гл\
Макрурус
Престипома
Морской окунь,
палтус и др.
Всего
0,5—0,7
0,2
0,5—0,8
2—3
0,5 1,0
0,2
0,1
0,1
0,3
0,3—0,5
4—6
)бины
0,8
0,2
0,5
1,5
Объект
Объем улова,
млн. т
Эпипелагиаль
Мелкий тунец
Крупный тунец
Макрелещуки
Путассу
Скумбрия, ставрида
Всего
0,5
0,2
0,3
0,2
1,0
2,2
Дальние прибрежные зоны
Мерлуза
Скумбрия
Ставрида
Сардина
Прочие
Всего
0,3—0,6
1,0—2,0
1,0—2,0
0,7—1,0
0,4
2,0—4,0
Таблица 3
Основные типы орудий лова и вероятные объемы вылова СССР
в Мировом океане
Тип орудий лова
Тралы:
для глубоководного
траления (800—2000 м)
для разноглубинного
траления (до 600 м)
для придонного
траления (до 500 м)
Кошельковые неводы
Крючковые орудия лова:
ярусы горизонтальные
ярусы вертикальные
Подъемные сети
Объект лова
Макрурус, лемонема,
престипома, палтус и др.
Скумбрия, сельдь, сардина,
ставрида, минтаи, мерлуза,
мойва, путассу, треска,
кальмары, криль и др.
Треска, камбала, окунь и др.
Сельдь, скумбрия, анчоус,
мелкий тунец и др.
Крупный тунец,
дальневосточная треска, угольная рыба и
др.
Кальмары
Макрелещуки
Объем |
возможного
вылова, млн. т
1,5
6—8
1,0
1,0
0,4
1,0
0,3
294
Можно также в высшей степени ориентировочно подойти
к оценке возможных объемов вылова основных объектов
промысла в Мировом океане (табл. 2).
Как видно, повышенное значение приобретает
национальная прибрежная 200-мильная зона (особенно прилегающая
к Дальневосточному побережью СССР), в пределах которой
может добываться более 4 млн. т различных видов рыб и
ценных беспозвоночных животных. Естественно, столь
существенный объем вылова может быть достигнут только при условии
восстановления запасов ряда видов рыб и прежде всего сельди
и трески, запасы которых находятся в депрессивном состоянии.
Представляется, что приведенные данные свидетельствуют
не только об определяющем значении для дальнейшего
развития океанического рыболовства, освоения биологических
ресурсов дальненеретических зон, батипелагиали и эпипелагиалы
(макрелещуки, мелкие тунцы, светящийся анчоус, кальмары
и др.), а также относительно больших глубин (макрурусы,
кальмары и др.), но и о необходимости проведения
крупномасштабных исследований и поисковых работ в этих обширных и
новых для рыболовства районах' Мирового океана, а также
создания специализированного рыболовного флота с учетом
потенциальных возможностей Мирового океана (табл. 3).
Как и ранее, наиболее целесообразно использовать для
облова вышеперечисленных объектов распорные тралы, с их
помощью будет получена основная (до 80%) часть вылова
(см. табл. 3). Однако резко преобладать будут по-прежнему
разноглубинные тралы, способные работать в пределах
относительно небольших глубин (до 500—800 м) и только
определенная часть траулеров и имеющегося на них промыслового
вооружения должна быть рассчитана на траление в пределах до
2000 м.
При организации промысла особое внимание следует
обращать на предотвращение негативных для состояния запасоз
влияний орудий и методов лова. Так, подавляющее
большинство тралений должно проводиться без посадки трала на грунт,
чтобы не разрушать донные экологические системы. При
подборе размеров ячеи и конструкции орудия лова необходимо
обеспечить сохранение молоди и т. д.
Таковы некоторые соображения относительно
биологических ресурсов Мирового океана и перспектив их дальнейшего
использования.
Викентий Петрович Зайцев,
профессор, лауреат Государственной
премии СССР, член Коллегии и
заместитель председателя
Научно-технического совета
Министерства рыбного хозяйства СССР,
вице-президент Комиссии по
морскому рефрижераторному
транспорту Международного института
холода.
Занимается разработкой и
эксплуатацией холодильной техники
рыбообрабатывающего
оборудования, подводной техники, а
также исследованиями и использо-
нием природных ресурсов
Мирового океана. В последние годы
уделяет большое внимание
развитию в стране марикультуры.
Александр Николаевич Дмитриев,
кандидат технических наук, один
из создателей подводных
аппаратов «Север-2», ТИНРО-2, «Ат-
лант-2» и др., председатель
секции подводной техники НТО суд-
прома им. акад. А. Н. Крылова.
В. П. Зайцев,
А. Н. Дмитриев
ТЕХНИЧЕСКИЙ
АСПЕКТ
РАЗВИТИЯ
МАРИКУЛЬТУРЫ
Под термином «марикультура» понимают водоросли,
моллюски, ракообразные, рыбы, выращиваемые в морской воде,
идущие в пищу человеку, на корм домашним животным,
а также используемые в качестве сырья для различных
отраслей промышленности.
Разведение растений и животных в водной среде имеет
многовековую историю. Например, первый известный трактат
о разведении рыб был написан китайцем Фан Ли в 475 г.
до н. э. В Японии, Древней Греции, Риме разводили устриц
две тысячи лет назад, столь же древним является прудовое
рыболовство.
Однако лишь сравнительно недавно выращивание морских
животных и разведение водорослей было поставлено на
промышленную основу.
В 1969 г. во всем мире было выращено 4 млн. т
морепродуктов, общая мировая добыча последних в том же году
составила 63 млн. т. В настоящее время производство мари-
культуры достигает приблизительно 10 млн. т в год. По
мнению специалистов, в 1985 г. продукция морских хозяйств
возрастет до 20 млн. т, а к 2000 г.— до 40 млн. т. Однако
для того чтобы реализовать эти прогнозы, предстоит
решить ряд научно-исследовательских и опытно-конструкторских
проблем.
Ответы на многие вопросы технологии марикультуры
морские биологи получают путем длительных наблюдений за
жизнью морских животных в искусственной и естественной
средах обитания. Для этого используют аквариумы, морские
297
суда и подводные аппараты, позволяющие исследователю
длительное время работать под водой.
Многие научно-исследовательские работы выполняются
в лабораториях или в береговых научных комплексах,
имитирующих реальные морские условия. Такие комплексы
оборудованы системой подготовки морской воды. Разнообразные
фильтрующие устройства и дозаторы очищают отработанную
воду, вносят в нее необходимые элементы, подогревают или
охлаждают, поддерживают постоянный состав. Контрольно-
измерительные приборы постоянно информируют о состоянии
водной среды и при необходимости автоматически
поддерживают заданный режим.
Основными проблемами, стоящими перед исследователями,
являются определение наиболее благоприятных условий для
размножения и развития в промышленных условиях культуры,
селекция и отбор наиболее жизнеспособных организмов,
изучение их взаимосвязи с окружающей средой.
В программу работ входит также культивирование ценных
морских водорослей и организмов, определение экологических
систем. Не менее важно разработать совершенные технические
средства, необходимые для успешного развития марикультуры.
На современном этапе морские хозяйства специализируются
в основном на разведении водорослей, моллюсков,
ракообразных и рыб.
1. Разведение водорослей
Флора морей и океанов представлена более 10 тыс. видами
растений, называемых морскими травами и водорослями. К ним
относятся микроскопические одноклеточные водоросли —
фитопланктон и крупные водоросли — фитобентос, или макрофиты.
Некоторые из них, например макроцистис, достигают 60 м
в длину и более и весят свыше 300 кг.
Биомассу водорослей в Мировом океане, включая
фитопланктон, оценивают в 1,7 млрд. т, а мировая добыча их составляет
всего 600 тыс. т в год, т. е. меньше 1% запасов. Запасы
водорослей в морях, омывающих нашу страну, исчисляются сотнями
миллионов тонн, добывается же всего около 2 тыс. т, что
составляет 0,5% разведанных запасов.
Такое положение объясняется отсутствием специальной
уборочной техники, конструкция которой далеко не совершенна, и
малочисленностью перерабатывающих заводов. Нередко
водоросли добывают еще примитивными способами: с лодок,
драгами, граблями, кое-где тралами, с помощью водолазов.
Из ста видов промысловых водорослей, произрастающих
в наших морях, добывают красные водоросли (анфельция,
филлофора и фурцилярия) и бурые (ламинариевые фукусы и ци-
298
стозира). Основные запасы их находятся в морях Дальнего
Востока, Белом, Черном и Балтийском.
Водоросли служат прекрасным сырьем для получения ценных
лекарственных веществ, производства продуктов питания, корма
домашним животным, удобрений и т. д. Сейчас потребности
промышленности удовлетворяются в основном за счет сбора
дикорастущих водорослей. Лишь в странах Юго-Восточной Азии
и Японии существуют специализированные хозяйства по
разведению морской капусты, красной порфиры, анфельции,
ламинарии и других водорослей. В этих странах под водорослевые
плантации отведены обширные лагуны и заливы,
прибрежные воды с твердым ракушечным или каменистым дном. При
благоприятных условиях урожай составляет до 150 т зеленой
массы с гектара, хозяйства приносят большую прибыль.
В некоторых странах водоросли выращивают не на
грунте дна, а в толще воды, применяя штормоустойчивые
сооружения в виде свай, забитых в грунт, или заякоренных
плавучих буев, на которых укрепляются канаты для закрепления
водорослей. Последний способ при обилии биогенной
проточной воды и солнца позволяет получать высокие урожаи.
Именно этот способ приобретает все большее
распространение, поскольку он позволяет механизировать процессы посева,
сбора и обработки водорослей. Под такие плантации
целесообразно отводить акватории Мирового океана, которые
отличаются изобилием биогенных солей и солнечного света.
Заслуживают внимания предложения выращивать водоросли
на плавучих сооружениях, удерживаемых заякоренными буями и
поплавками в верхнем фотическом слое. Эти океанские
плантации будут занимать большие акватории, ограждаться
сигнальными огнями, опознавательными буями и звуковыми сигналами,
действующими во время тумана.
Такие морские хозяйства станут обслуживать специальные
суда: суда-базы, оснащенные подводными аппаратами для
монтажа подводных сооружений, постановки якорей, якорных
тросов, плавучих буев, опознавательных знаков и т. п., суда, с
которых будет выполняться посев спор. Кроме того, нужны суда
для охраны морского поля, наблюдения за ростом водорослей
и сохранностью инженерных сооружений. Должны быть созданы
специальные суда для сбора и переработки урожая, они будут
поднимать из воды сеть и, вероятно, перерабатывать водоросли.
При наличии таких судов возможно круглогодичное
выращивание водорослей летом в северных, а зимой в южных морях.
На создание специальной техники и судов потребуются
значительные средства, однако затраты, по подсчетам специалистов,
быстро оправдаются.
Таким образом, создание механизированных
полноцикличных водорослевых плантаций — дело перспективное и
экономически выгодное.
299
Не менее важной проблемой является выращивание
микроскопических водорослей, являющихся пищей
для мелких морских животных,— зоопланктона, а также личинок
рыб, моллюсков, ракообразных, развивающихся в поверхностном
слое моря.
Их промышленное разведение связано с определенными
трудностями, однако в последние годы конструкторы в содружестве
с морскими биологами разработали оригинальные выростные
системы. Существуют два способа выращивания одноклеточных
водорослей: под открытым небом и в закрытых установках,
в строго контролируемой среде.
Системы состоят из бассейнов, фильтров, подогревателей
воды, трубопроводов, насосов, приборов, осветительной и
другой аппаратуры, служащей для непрерывного контроля и
дозировки питательных солей, газового состава морской воды,
поддержания заданной температуры и стерильности, а также
непрерывного контроля за важнейшими параметрами.
В таких системах постоянно существует опасность заражения
организмов и появления вселенцев, пожирающих полезных
животных и замедляющих их рост. Это одна из проблем, которая
требует быстрейшего разрешения. Не менее сложно
консервировать и хранить полученную продукцию.
В последнее время разработаны установки для выращивания
смеси различных водорослей: диатомовых, динофлагелят,
жгутиковых, являющихся прекрасным кормом для копепод,
коловраток, артемий и других кормовых зоопланктонных организмов,
необходимых для откорма молоди рыб и других животных.
Наибольшее распространение получили установки в виде
вертикальных цилиндрических емкостей-культиваторов. Культиваторы
малой производительности выполняют из стекла или пластика.
Высокопроизводительные установки изготовляют в виде
больших цилиндрических баков, оборудованных осветительными
устройствами, часто автоматическими, системой труб для подачи
газа, свежей воды, циркуляции, очистки и отбора готовой
водорослевой суспензии.
Получаемая суспензия насосом откачивается в выростные
садки для корма животных. Производительность простейших
установок составляет от 2,2 • 106 до 6 • 106 клеток различных
видов водорослей в 1 см3 за 17—30 дней. Первый «урожай»
можно снимать уже через 10 дней. При более благоприятном
освещении и температуре 20° С урожайность повышается в 2 раза.
2. Выращивание молоди
Первыми этапами разведения морских животных, будь это
моллюски, ракообразные или рыбы, является получение
оплодотворенной икры и ее инкубация. Часто икру берут от произ-
300
водителей, отлавливаемых в море незадолго до нереста или от
выращиваемых в искусственных условиях. В этих случаях
разведение начинается с оплодотворения и инкубации икры. Иногда
оплодотворенную икру отлавливают в местах нереста, а затем
ее инкубируют и выращивают личинки и молодь в
искусственных условиях.
Икра созревает в специальных инкубаторах различной
конструкции с постоянно циркулирующей водой. Имеются
инкубаторы прямоугольной формы с большой поверхностью воды, что
вызывает повышенный расход воздуха для аэрации. Более
эффективными считаются цилиндрические инкубаторы с
воронкообразным дном, выполненные из стекла или пластмассовых
материалов.
Для аэрации и поддержания икринок в суспензированном
состоянии в нижнюю часть инкубатора от компрессора подается
воздух. При непрерывной аэрации в 1 л воды инкубируется
около 10 г икры. Специальный сепаратор отделяет личинки от
скорлупы и икринок и транспортирует их в выростные бассейны.
Некоторые инкубаторы оборудованы специальной системой,
поддерживающей оптимальные параметры воды: ее
температуру, газовый и солевой состав, стерильность, чистоту и др.
В последние годы разработаны автоматические устройства
для выращивания кормовых личинок. В них по программе
регулируются параметры воды, аэрация, подача питательных
веществ, отбор личинок и удаление отходов производства.
С появлением таких автоматов пришлось коренным образом
реконструировать инкубационные цехи. Вместо громоздких,
занимающих большую площадь лотковых инкубаторов, появились
вертикальные стеллажные, в которых ярусами устанавливают
одна над другой свыше 10 пластмассовых инкубационных
емкостей. Благодаря этому удалось не только уменьшить площадь
цехов и расход воды, но и повысить в десятки раз выход
личинок с единицы площади.
При искусственной инкубации выжимаемость личинок
составляет до 95%, тогда как в естественных условиях она не
превышает 5%.
Эти личинки используют как корм для личинок рыб. После
многолетних экспериментов ученые установили, что наилучшим
кормом являются науплии артемии-салины.
Артемия-салина — своеобразный веслоногий рачок,
живущий в морских водоемах. Он очень быстро размножается,
через пять дней рождается по 10—15 маленьких науплий, поэтому
поколение одной самки может за месяц достичь сотни
экземпляров. Питается артемия одноклеточными водорослями ярко-
красного цвета — дуналиеллой.
Она очень неприхотлива, прекрасно живет при малом
количестве кислорода, большой плотности, при высыхании или
замерзании водоема артемия образует яйца, способные в течение
301
10 лет сохранять жизнеспособность, хорошо переносит жаркое
солнце.
Размеры артемии колеблются в широких пределах: от 0,3—
0,4 мм до 10—15 мм. Наибольшую ценность как корм имеют
науплии в возрасте двух суток после выклева из яйца, так как
у них в это время отсутствует твердый хитиновый покров.
Выращивают артемии и других крупных веслоногих рачков-
коловраток, копепод и т. п. размером до 1 мм в
высокопроизводительных установках с рециркуляцией воды и системами,
снижающими в воде растворенные органические вещества,
удаляющие отходы и твердые частицы размерами 5—100 мкм.
Туда же дополнительно вселяют копепод-санитаров,
которые очищают стенки бассейнов от налипающих водорослей и
поедают мертвых личинок. Плотность заселения коловраток
составляет 100—200 экз./см3, а копепод — 5—20 экз./см3.
Сегодня процесс их выращивания механизирован и
автоматизирован; резервуары имеют наклонное дно, обеспечивающее
сбор отходов.
3. Выращивание моллюсков
Моллюски, или мягкотелые, включают три класса:
пластинчатожаберных (устрица, гребешок, мидия); брюхоногих (мактра,
трубач, рапана); головоногих (осьминог, кальмар и
каракатица). Их в той или иной степени используют как сырье для
пищевой, фармацевтической промышленности, иногда как корм.
Моллюски обладают высокой питательной ценностью, что
объясняется большим содержанием в них белка, ценных
микроэлементов и витаминов, имеют хорошие вкусовые качества.
Наибольшим спросом пользуются устрицы. Дикие устрицы
крепко прирастают створкой к твердой поверхности подводного
предмета и неподвижно проживают так всю свою жизнь. В
возрасте трех-четырех лет они дают миллионы икринок, из
которых появляются свободные плавающие личинки. Проходит
время, личинки опускаются на дно и также переходят на
«оседлый» образ жизни. Диких устриц добывают специальными
деревянными щипцами или драгами, отрывая их от дна или
остальной массы сросшихся раковин.
Большую же часть устриц выращивают в специальных
хозяйствах.
Основные принципы выращивания моллюсков и других
видов морских животных и растений являются одинаковыми для
всех районов Мирового океана, но методы выращивания
различаются в зависимости от конкретных условий.
Устрицы. Культивируемых устриц условно разделяют по
форме раковины на плоских и чашевидных. Плоскую, или
европейскую, устрицу выращивают в Англии, Франции, Испании и
302
Норвегии, чашевидную, или португальскую, устрицу
культивируют в Европе и в южных морях Советского Союза. Мировое
производство устриц составляет около 800 тыс. т.
Первое место в мире по выращиванию устриц занимает
Япония — в год она производит около 40 тыс. т устричного мяса.
700 устричных хозяйств культивируют так называемую
гигантскую японскую устрицу.
Существуют три метода выращивания устриц: на дне, на
плотах и в питомниках.
Выращивание устриц на дне, на природных
банках — наиболее старый способ и дает высокие урожаи,
если они не загрязнены и не заилены. Такие хозяйства
получили широкое распространение в южных приморских странах,
на побережьях, где много солнца и тепла. Разводят устриц
в эстуариях малых рек, в полузакрытых заливах и в других
прибрежных зонах моря с благоприятными условиями, при этом
умело используют приливо-отливные течения и морской
прибой, обогащающие воду у берегов новыми питательными
веществами и кислородом, необходимым для развития устриц.
Наиболее благоприятна вода соленостью 19—33%о и
температурой 10—30°С. При выращивании устриц на грунте
используют механизмы для посева, а также для сбора урожая,
очистки дна от ила.
Так, в морском устричном хозяйстве на о. Лонг-Айленд
(США) для этого используют землесосные снаряды и
устройства. С их помощью регулярно смывают ил с устриц струями
воды из насоса со шлангом, установленного на катере. В
период выращивания периодически перемещают устриц на другие,
очищенные от ила участки, ранее выбранные водолазами.
Для сбора личинок и выращивания молоди в толще воды
подвешивают специальные коллекторы. Субстратом для
личинок служат пустые раковины, черепичные или пластмассовые
плитки, нанизываемые на гальванизированную проволоку.
Для закрепления личинок эти плитки покрывают известью.
Коллекторы подвешивают к плотам, поплавкам, донным или
плавающим устройствам, каркасам ставных неводов, сваям и
другим опорам. Длина гирлянды коллектора может составлять
от 1 до 20 м и зависит от глубины района, вида моллюсков,
условий обитания и других факторов.
В середине лета моллюски начинают метать икру. Икринки
прикрепляются к пластинкам, покрытым известью, а через три
месяца на них можно разглядеть маленьких ракушек.
Спустя девять месяцев личинки превращаются в маленьких
устриц длиной 1—2 см. После этого их, не снимая с
коллекторов, перевозят на берег и вручную снимают с плиток. Этот
первичный устричный продукт, своеобразную рассаду, называют
шпатом. Слой извести помогает отделять ракушки от плиток,
особенно с тонких пластмассовых пластин — при изгибе их шпат
зоз
легко соскакивает вместе с известью. Один килограмм шпата
содержит примерно 800—1200 устриц массой 0,7—2,0 г.
Второй этап выращивания проходит на огороженных банках
с чистым песчано-галечниковым дном или в подвесных
корзинах. Полный цикл выращивания устриц до товарного размера
составляет 1—3 года. За это время их несколько раз извлекают
из воды. Трехлетняя устрица длиной до 5 см весит 60—100 г
(в ней 30 г мяса).
Устричные хозяйства обычно делят на два типа:
полноцикличные и полуцикличные.
В первых разведение и выращивание происходит по
полному циклу: в них содержат и культивируют производителей,
получают от них икру, затем ее инкубируют, из личинок
разводят шпат и затем выращивают взрослых особей.
В некоторых хозяйствах личинок такого типа получают
в любое время года в танках и бассейнах от небольшого числа
производителей, что исключает зависимость от природных
условий. Для этого наиболее крупных половозрелых устриц
отбирают из выростных бассейнов, пересаживают их в нерестовые
и стимулируют размножение температурным, механическим,
химическим воздействием. Оплодотворенную икру помещают
в инкубационные танки с хорошим водообменом, выведенные
здесь личинки сортируют и переводят в выростные баки. Через
две недели личинок пересаживают в большие бассейны, дно
которых покрыто устричными створками. За двое суток на эти
створки оседают личинки, которые затем помещают в
выростные бассейны. Такой способ получения шпата эффективнее
сбора в море.
Ва вторых, полуцикличных, хозяйствах выращивают
взрослых особей только из получаемой молоди, как из «рассады».
Такие хозяйства значительно проще и рентабельнее, поэтому
имеют более широкое распространение.
Довольно широкое распространение получили хозяйства,
в которых устриц выращивают в толще воды на
плотах, канатах (ярусах), стеллажах и других
подобных сооружениях. Такой метод имеет ряд
преимуществ по сравнению с выращиванием на грунте: устрицы
защищены от донных хищников, вследствие улучшения
условий (плоты буксируют в более теплые и чистые воды)
сокращается время выращивания до одного года, более чем в 3 раза
повышается урожай.
Из-за необходимости многократно вынимать и очищать
коллекторы с моллюсками процесс их выращивания до сих пор не
удается полностью механизировать.
В странах с умеренным климатом, где отсутствуют морские
акватории, удобные для разведения, строят береговые фабрики.
Так, несколько береговых хозяйств действует на Атлантическом
побережье США. Они состоят из бассейнов для размещения
304
производителей, инкубационных емкостей для содержания
икры до выклева личинок, осадительных бассейнов с
коллекторами и бассейнов для выращивания кормовых водорослей.
И хотя расходы на создание и эксплуатацию таких хозяйств
значительные (300 и 50 тыс. долл. соответственно) чистая
прибыль, не считая амортизационных расходов, достигает 220 тыс.
долл. в год. Годовой прирост молоди равен примерно 20 млн.
единиц.
Имеются береговые хозяйства с полным циклом
выращивания устриц. В таких хозяйствах, кроме питомников молоди,
имеются большие бассейны для выращивания товарных устриц,
разведения кормовых водорослей и личинок, а также бассейны
для выдерживания устриц перед продажей. Последние
обслуживаются системами для регенерации, стерилизации и
подогрева воды. С целью экономии энергии в таких хозяйствах
часто используют сбросовые теплые воды от агрегатов
электростанций.
Мидии — менее ценный пищевой продукт, чем устрицы, но
их мясо по вкусу не уступает устричному. В некоторых странах
мясные продукты из этих моллюсков пользуются большим
спросом у населения.
С 1 га морского дна, удобного для выращивания мидий,
можно ежегодно получать 56 т чистого мяса этого моллюска.
Мидий выращивают, аналогично устрицам, на коллекторах,
рамах, сваях, забитых в грунт, и на дне. Мидиевое хозяйство
должно располагаться в районе с высоким приливо-отливным
течением, хорошим прогревом воды до 12—18° С,
защищенном от хищников и загрязнений сточными водами или
нефтью.
В Европе такие хозяйства имеются в Испании, Франции,
Голландии, Италии, Норвегии, Ирландии, Шотландии и
других странах (рис. 1).
Во Франции разведением мидий по системе «бушо» фермеры
занимаются много столетий. По этой системе дубовые жерди
диаметром 15—20 см и длиной примерно 3 м забивают в грунт
в приливной зоне. Основание каждой из них на высоте до 25 см
от дна покрывают сеткой или пластмассовой пленкой,
предохраняющей мидий от крабов и других хищников. Колья ставят
на такой глубине, что при отливе они полностью обнажаются.
В это время моллюсков осматривают. Колья забивают рядами
на расстоянии 35 см друг от друга перпендикулярно к берегу.
Между рядами оставляют пространство для прохода лодок.
Молодь собирают на канаты свободной свивки диаметром 125 мм
и длиной 3 м. Иногда канаты обматывают по спирали вокруг
забитых в грунт кольев.
Во время нереста личинки прикрепляются к канатам. Когда
они подрастут до стадии шпата, канаты переносят на другие
участки и укрепляют на вбитых в дно дубовых жердях. Во
305
избежание потерь мидий колья с канатами и молодью
закрывают синтетическими сетями. По мере роста мидии отпадают
под собственной тяжестью, поэтому внешний слой снимают и
в специальных мешках переносят на новое место. Эту
операцию повторяют 2—3 раза в год, пока мидии не достигнут
Рис. 1. Ряды буев, поддерживающих коллекторы для
выращивания мидий (Шотландия).
в длину 5 см. Мидии требуют меньшего ухода, чем устрицы,
поэтому хозяйства по их выращиванию рентабельнее.
В Японии в последнее время применяют новый способ
выращивания мидий со специальных плотов размером 20X20 м из
стеклопластиковых поплавков. С одного плота, на котором
подвешено 500 коллекторов, ежегодно получают 60 т мидий, а
годовой урожай с 1 га (примерно 10 плотов) составляет около
600 т.
306
Морские гребешки — это моллюски с очень вкусным и
питательным мясом. Товарного размера они достигают за два
года. Гребешок в отличие от устриц ведет подвижный образ
жизни, поэтому его выращивают в закрытых садках. Масса
крупного гребешка достигает 350 г. Гребешковые хозяйства
располагаются в районах с песчано-галечниковым дном глубиной
50—60 м, скоростью течения 5—15 см/с, температурой воды 8—
10° С, соленостью 37%о, насыщением кислородом 90—100%.
Кормом для гребешка служат диатомовые водоросли.
Для выращивания гребешка в толще воды на ярусных
линиях акватория хозяйства должна быть защищена от сильного
волнения, поступления речных или ливневых вод.
Промышленное производство морских гребешков налажено в Японии, США
и ряде других стран. В Советском Союзе такие хозяйства есть
на Дальнем Востоке.
Современные устричные и мидиевые хозяйства требуют
применения ручного труда. Перед учеными и инженерами стоит
проблема разработать новую технологию выращивания
моллюсков, позволяющую механизировать и автоматизировать ряд
процессов. Этому должны предшествовать
научно-исследовательские работы.
Ракообразные, и прежде всего креветки, пользуются
наибольшим спросом у населения. Их промышленное выращивание
хорошо развито в Японии, Индонезии, на Филиппинах, в
Великобритании и США.
В странах с теплым климатом креветок обычно
выращивают в приливных зонах, прилегающих к рекам и эстуариям.
Площадь таких участков может составлять от нескольких
гектаров до 100 га и более. Для смены воды используют приливы
и отливы. При высокой воде фермеры ежедневно открывают
верхние шлюзы, и вода из моря вместе с креветками и пищей
поступает в пруды. Во время отлива открывают нижние шлюзы
и вода через сетчатые фильтры уходит в море.
Строительство креветочного хозяйства начинается с очистки
выбранного затопляемого приливом участка, его выравнивания,
сооружения дамбы и шлюзов, размер и количество которых
должны обеспечивать спокойный вход воды и полное
заполнение пруда или спуск из него за один цикл прилива или
отлива. На дне делают каналы, идущие от шлюза к самым
дальним углам участка. Креветок отлавливают ночью. После
достижения уровня полной воды проволочную сетку в нижнем шлюзе
заменяют рыболовной сетью с ячеей 21 мм в устье и 9,5 мм
в кутке. При уходе воды через сеть в кутке задерживаются
креветки, которых выбирают для продажи (рис. 2).
В странах с умеренным климатом, где нет благоприятных
гидрологических условий для выращивания креветок, строят
специальные пруды и бассейны с принудительной циркуляцией,
аэрацией и подогревом воды. Молодь креветок отлавливают
307
в море или выращивают в искусственных условиях. Для молоди
в качестве корма применяют одноклеточные водоросли, а для
выращивания креветок — измельченное мясо мидий,
малоценных рыб и т. п. Например, в Японии креветок выращивают
в бетонных танках размерами 10X10X2 м или 100X10X0,6 м
с песчаным дном. В танки из
моря закачивают воду до
высоты 15—30 см. При
благоприятных условиях креветки
достигают товарного размера за 6—7
месяцев.
В зависимости от условий
выращивания урожай креветок
составляет от 2 до 6 т с 1 га.
Выращивание морских
раков — омаров и лангустов —
менее выгодно, чем креветок,
однако они пользуются большим
спросом, что способствует
развитию специализированных
хозяйств по их разведению. По
мнению специалистов, омара
товарной массой 450 г можно
вырастить за два года, используя
сбросовые теплые воды электростанций и хороший корм. При
таких темпах роста затраты на создание хозяйств должны
окупиться в короткие сроки.
4. Разведение морских рыб
В последнее время все больше появляется хозяйств по
выращиванию рыбы в морской воде. Основой для этого вида мари-
культуры послужили опыт прудового рыбоводства и результаты
научно-исследовательских работ по инкубации, выведению
личинок, молоди и созданию живых кормов для морских рыб.
Сейчас искусственно разводят таких рыб, как кефаль, желто-
хвост, радужная форель, лосось, камбала, тунец, морской лещ,
телапия и др. Сегодня уже детально отработаны методы
рационального кормления, массового производства гранулированных
кормов, механизации производственных процессов и
применения новых синтетических материалов в морской воде.
Разработка и промышленное производство микрокапсули-
рованных кормов позволили выращивать некоторые виды рыб
без живых кормов. В развитии промышленного разведения
рыб большую роль сыграло создание систем, автоматически
поддерживающих оптимальные физико-химические параметры
воды в выростных бассейнах.
Рис. 2. Схема пруда площадью
10 га для выращивания креветок
(Филиппины):
/ — выростной пруд; 2 — мальковый
пруд; 3 — сбросные каналы; 4 —
головной пруд; 5 — основные шлюзы; 6 —
дополнительные шлюзы; 7 — основная
дамба.
308
На современном этапе морское рыбоводство развивается
по четырем основным направлениям: прудовое рыбоводство,
рыбоводство в отгороженных морских участках и садках,
пастбищное рыбоводство в открытом море и промышленное
рыбоводство на специальных фабриках. Выбор того или иного
направления определяется географическими, климатическими и
гидрологическими условиями.
Прудовое рыбоводство с использованием морской
воды применяется в странах, не имеющих удобных акваторий.
К достоинствам прудовых хозяйств относятся независимость
от погодных условий и вовлечение в экономику акваторий,
малопригодных для других целей. Недостатками являются
трудность создания интенсивной циркуляции и поддержания
оптимальных параметров водной среды.
Обычно площадь прудов составляет около гектара. Их
продуктивность повышается за счет применения удобрений,
искусственных кормов и подогрева воды.
В северных странах в таких прудах разводят лососей,
радужную форель, камбалу, а в тропических—теплолюбивых рыб:
телапию, угря, красного и черного тая, помпано. Урожай
форели достигает 6—10 кг с 1 м2, угря — 4,5 кг, телапии — 0,3 кг.
Более эффективны береговые хозяйства, использующие
естественный водообмен, а именно отгороженные участки
и садки (рис. 3). В последнее время прирост продукции
садкового рыбоводства во всех странах мира составляет от 20 до
30% в год.
Например, норвежские рыбоводы получают в год 35 тыс. т
форели и лосося и планируют выращивать в 1990 г. до 20 тыс. т
этих ценных рыб.
Широкое распространение находит такой способ разведения
лосося и форели в Англии, ФРГ, Франции, США и других
странах. Достоинством этого метода является свободное
содержание рыб и частичное удовлетворение их потребности в пище за
счет живых организмов, произрастающих в вольере или
приносимых течением из моря.
К недостаткам относится плохая циркуляция воды, которая
ухудшается при обрастании сетки водорослями и ракушками.
Кроме того, загородки часто повреждаются волнами, дно быстро
загрязняется, из моря в вольер проникают хищники. В
загородках трудно осуществлять контроль за состоянием рыб и их
отлов. При всех положительных качествах загородки
эффективны лишь в районах с особо благоприятными климатическими
и гидрологическими условиями.
Конструкция заграждений и садков, методы строительства и
эксплуатации подобных хозяйств весьма разнообразны и
зависят от местных условий.
Ограждение, отделяющее часть залива, пролива или часть
прибрежной акватории от открытого моря, с одной стороны,
309
должно свободно пропускать воду и планктонные организмы
из моря, быть штормоустойчивой, с другой стороны, не
выпускать в море выращиваемую рыбу. Сейчас ограждения
выполняют из сетного полотна, применяемого обычно для
изготовления рыболовных сетей и тралов, чаще всего из нейлонового или
оцинкованного стального, состоящего из отдельных звеньев^.
Ячея такой сети должна иметь размер, не позволяющий самой
маленькой рыбке уйти из садка.
Сетные полотна укрепляют на деревянных или
железобетонных сваях, вбиваемых в дно. Нижняя кромка полотен
прижимается ко дну грузами,
а верхняя возвышается над
средним уровнем воды примерно на
1 м.
В морских рыбоводческих
хозяйствах используют и ставные
или плавающие садки объемом
от 50 до 500 м3, а также
изготовляемые из нейлоновых или
стальных оцинкованных сетей. Садки
устанавливают в защищенных
бухтах, фиордах и морских
прудах. Полотно сетей иногда
крепят на свайные сооружения,
похожие на строительные леса
с мостками. Сваями служат
стальные трубы.
В некоторых странах широко
применяют плавающие садки,
верхние подборы которых
держатся на плаву с помощью
бочкообразных буев из пластмассы
или пенопласта, заключаемого
в тканый или резиновый мешок. Буи также закрывают тонкой
пластиковой оболочкой, которую заменяют после обрастания
новой. Садки делают из нейлоновой дели или гибких
оцинкованных стальных сетей «кольчужного» типа. Стальная сетка
меньше обрастает, но из-за быстрого износа ее каждый год
заменяют новой во избежание разрывов и ухода рыбы.
Форма жесткой рамы и буев может быть самой
разнообразной, размеры садков зависят от места расположения и вида
выращиваемой рыбы. Диаметр круглых садков достигает 60 м,
а глубина—10 м и более. Все они имеют общие недостатки:
необходимость частой замены сетных полотен, дороговизну
постройки и трудность в обслуживании.
В Японии наиболее распространен садок, состоящий из
жесткой квадратной рамы размером 10X10 м, поддерживаемой на
поверхности воды пластмассовыми поплавками. К раме подве-
Рис. 3. Схема кефалевых прудов
с отводным каналом во Франции:
/ — морская дамба; 2 — внутренние
каналы; 3 — шлюзы.
310
шивают сетный мешок глубиной 3—5 м. На акваториях,
защищенных от волн, обычно ставят однослойные сети, а в
открытом море их делают более прочными, двухслойными. К нижним
углам сетного мешка привязывают грузы, чтобы придать садку
необходимую форму.
Десяток плавающих садков квадратной формы, связанных
вместе, образует большой плот, удерживаемый якорями с
каждого угла.
Поплавки поддерживают в толще воды весь садок, поэтому
их объем определяется массой грузов, рамы и сетного полотна.
Для поддержания больших садков требуется большое число
поплавков, поэтому их сложнее обслуживать, буксировать и
удерживать на течении и волне.
В открытых районах, подверженных воздействию волн,
применяют плавучие волнорезы.
В зимний период плавучие садки часто буксируют поближе
к прибрежным электростанциям, сбрасывающим теплые воды
в море.
Более совершенными и рентабельными считают садки,
которые укрепляют на понтонах, соединенных мостками,
необходимыми для обслуживающего персонала. Такие садки имеют
квадратную или восьмиугольную форму, за их жесткий каркас
закрепляется нейлоновая или металлическая сеть. Садки обычно
связывают между собой, крепят к общим плавающим понтонам,
с которых осуществляется уход за рыбами. Один из концов
протяженного садкового комплекса имеет выход на берег.
Полезный объем прямоугольных и многоугольных садков может
достигать 500 м3 и более. Садки такого типа отличаются
дешевизной, прочностью, мобильностью, простотой в обслуживании
(рис. 4).
В Норвегии эксплуатируется более 10 тыс. больших
восьмиугольных садков (12 м в поперечнике и 4 м глубиной), в
которых выращивают радужную форель, атлантического и
тихоокеанского лосося. Плотность посадки рыбы в садках
достигает 30 кг на 1 м3, а готовая продукция иногда превышает
100 кг с 1 м3.
В последнее время появились подводные садки,
устанавливаемые на глубине 10—12 м, с жесткой кольцевой рамой.
В Центральной части садка смонтирован стальной цилиндр, в
котором располагается система регулирования плавучести для
автоматического затопления садка или его всплытия на
поверхность при кормлении и уходе за рыбами.
Пастбищное рыбоводство в открытом море имеет
давнюю историю. Еще в прошлом веке ихтиологи начали
выпускать в море личинок рыб. В начале нашего века появились
специальные рыбоводные станции и предприятия, которые
разводят десятки видов промысловых рыб: белугу, осетра, семгу,
лосося, горбушу, камбалу, треску и др.
311
Технология такого рыбоводства обычно состоит из отлова
производителей в море, выдерживания их в специальных
садках, получения оплодотворенной икры, ее инкубации в
аппаратах различного типа, выращивания личинок и молоди.
Пастбищное рыбоводство оправдало себя при откорме
оседлых популяций рыб во внутренних и полузакрытых морях, но
в ряде случаев молодь, выпускаемая в открытые моря,
становится добычей рыбаков других стран. В связи с этим ихтиологи
начали разрабатывать методику удержания в своих водах
выращиваемой рыбы. Известно, что некоторые виды рыб
предпочитают оседлый образ жизни, если этому способствуют условия
для нереста, вызревания личинок, развития мальков. Кроме
Рис. 4. Многогранные садки для выращивания лосося (Шотландия).
того, подводные наблюдатели установили, что рыба в больших
количествах скапливается возле рифов, скал, зарослей
водорослей, кораллов, где она находит приют и убежище от хищников,
а также вблизи различных затопленных предметов, например
затонувших судов, барж, бетонных плит и т. п. В море они
довольно быстро обрастают колониями моллюсков или
водорослей, представляющих надежные убежища для мальков.
Так, советские исследователи, работая в подводном
аппарате ТИНРО-2 на банке Йер в Атлантическом океане,
установили, что на скалистом сильно пересеченном рельефе
концентрация рыб увеличивается в 500 раз по сравнению с
равнинными участками дна, покрытыми рыхлыми грунтами.
Выводы о закономерностях концентрации рыб навели на
мысль о создании искусственных рифов в районах, отведенных
под пастбищное рыбоводство, которые будут способствовать
удержанию рыбы.
Конструкции искусственных рифов многообразны и
определяются гидрологическими условиями, а также видом
выращиваемой рыбы. Применяют металлические и капроновые сети,
укрепляемые на сваях или специальных каркасах.
Ихтиологи Магаданского отделения ТИНРО предложили
создать в прибрежной зоне Охотского моря искусственное нере-
312
стелище для сельди на участках моря, бедных растительностью.
В море были установлены сетные полотна, на нитях которых
сельдь начала откладывать икру, столь же обильно, как на
водорослях. Эксперимент оказался успешным.
По подсчетам специалистов, с 500 тыс. га моря с глубинами
до 100 м, огражденных искусственными рифами общим
объемом 30 тыс. м3, можно ежегодно получать 3 тыс. т рыбы.
Современные рыбоводческие хозяйства, несмотря на
невысокий уровень технической оснащенности, достаточно
прибыльны. Дальнейшее повышение экономической эффективности
зависит от решения целого ряда проблем, а именно
совершенствования технологии, механизации и автоматизации процессов
разведения рыбы, отлова и т. д. Только в этом случае мари-
культура станет крупнейшим источником белковой пищи для
растущего населения земного шара. Однако и Мировой океан
как колоссальная природная фабрика пищевого белка никогда
не утратит своего значения.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Бардах Д., Райтер Д., Маклони В. Аквакультура, разведение
и выращивание пресноводных морских организмов: Пер. с англ.— М.:
Пищевая промышленность, 1978.
2. М и л н П. X. Разведение рыбы, моллюсков и ракообразных в
прибрежных водах: Пер. с англ.— М.: Пищевая промышленность, 1978.
3. Современное состояние и зарубежный опыт в области марикуль-
туры.—М.: ЦНИИТЭИРХ, 1976.
4. Ц а п к о А. С. Механизация добычи и первичная обработка морских
водорослей.— М.: Пищевая промышленность, 1968.
Анатолий Дмитриевич
Дружинин, кандидат биологических
наук, заведующий лабораторией
Всесоюзного
научно-исследовательского института морского
рыбного хозяйства и
океанографии. Занимается изучением
рыбных ресурсов океанических и
шельфовых вод Мирового океана.
Борис Павлович Пшеничный,
кандидат биологических наук,
старший научный сотрудник
Всесоюзного
научно-исследовательского института морского
рыбного хозяйства и океанографии.
Занимается изучением
биологических ресурсов Мирового
океана.
А. Д. Дружинин,
Б. П. Пшеничный
НЕКОТОРЫЕ
ПРОБЛЕМЫ
ГЛУБОКОВОДНОГО
РЫБНОГО ПРОМЫСЛА
Как известно, рыболовство в морских водах получило
наибольшее развитие в послевоенные годы. Так, начиная с 1955 г.
ежегодный прирост мировых уловов стал увеличиваться и достиг
в среднем 2,5 млн. т за счет ведения интенсивного промысла
в высокопродуктивных районах Мирового океана, главным
образом на материковом шельфе, т. е. в районах, находящихся
в непосредственной близости от континентов.
Такой прирост уловов способствовал распространению
мнения о неистощимости биологических ресурсов Мирового океана.
Однако рыбопромысловые исследования последних лет
опровергли подобное представление и показали четкую связь
уменьшения уловов в некоторых традиционных промысловых
районах с возросшей интенсивностью промысла. Снижение запасов
некоторых промысловых видов рыб свидетельствует о том, что
в ряде случаев промышленная эксплуатация их запасов
превысила допустимый уровень. (Существуют и другие причины
снижения мирового улова — экономические, загрязнение,
обмеление и т. д.).
Все это, вместе взятое, и вынудило многие, в первую очередь
технически развитые, государства обратить внимание на
освоение биологических ресурсов в открытых частях океанов за
пределами 200-мильных экономических зон. Оно осуществляется
в настоящее время по двум направлениям: освоение промысла
в пелагиали и на больших глубинах.
Под большими глубинами принято считать участки
материкового склона с глубинами свыше 600—700 м и области
поднятий морскогр дна.
315
В данной статье рассматриваются некоторые проблемы
глубоководного рыбного промысла, приобретающие особую
актуальность.
Вплоть до 50-х годов большинство глубоководных
экспедиций носило фаунистический характер. Благодаря проведенным
исследованиям было выяснено, что жизнь в океане существует
и на самых больших глубинах, вплоть до максимально
известных. Наибольшая глубина, на которой была поймана рыба во
время экспедиции советского судна «Витязь», равнялась
7,5 тыс. м. С помощью батискафов рыба обнаружена на
глубинах 9—10 тыс. м.
Изучение больших глубин в рыбопромысловом отношении
началось совсем недавно, однако уже имеется положительный
опыт лова некоторых рыб в Северной Атлантике и в северной
части Тихого океана, свидетельствующий о наличии довольно
больших запасов глубоководных рыб.
Это позволяет надеяться на возможность получения
значительной части необходимого человечеству белкового продукта
по мере решения некоторых технических задач, связанных с
промысловым освоением больших глубин.
По сравнению с поверхностными водами и водами шельфа
условия обитания глубоководных рыб довольно стабильны.
В глубинных водах практически не проявляются сезонные
явления. Эти воды вполне насыщены кислородом, лишены
солнечного света и характеризуются пониженным теплосодержанием.
Явления перемешивания вод на глубинах выражены очень слабо.
Ихтиофауна глубинных вод Мирового океана состоит из
двух компонентов: океаническо-глубоководного (древние или
собственно глубоководные рыбы) и шельфово-глубоководного
(материково- или вторичноглубоководные рыбы) [1, 3].
Океаническо-глубоководный компонент представлен рыбами,
приспособившимися к условиям жизни на глубине. Они имеют
обычно ряд специальных органов и приспособлений (органы
свечения, осязания, зрения). Тело этих рыб голое или со
слабой чешуей. Эти виды рыб редко встречаются в районе шельфа
и в верхних слоях воды.
Шельфово-глубоководные виды рыб большей частью не
имеют изменений в строении тела и принадлежат к группам,
распространенным преимущественно в районе шельфа. Они
лишь слегка изменились (исчезла яркая окраска, стали
красными или черными), часто имеют недоразвитую чешую. Их
ареалы меньше, чем ареалы океаническо-глубоководных рыб.
Существуют семейства рыб, обладающие как бы
переходными между этими двумя группами чертами.
В процессе эволюции глубоководные рыбы приспособились
к новым условиям: увеличились объем и поверхность тела,
а также уменьшилась его плотность, что способствует
повышению эффекта «парения» в воде, Это происходит за счет умень-
316
шения обызвествленности скелета, отложения жира в тканях,
обводненности тела, наличия различных выростов и т. д.
Низкие температуры воды на больших глубинах сказались и на
обмене веществ глубоководных рыб. Очевидно, у них меньше
потребности в корме, чем у рыб верхних слоев
(мелководных).
Некоторые глубоководные рыбы могут приспосабливаться
к изменению условий обитания. Они совершают суточные и
сезонные вертикальные миграции вплоть до верхних слоев. Икра
и личинки многих глубоководных рыб, нерестящихся у дна,
благодаря наличию определенных приспособлений всплывают
в верхние слои воды, а подрастающие особи возвращаются
в придонные слои. Некоторые глубоководные рыбы нерестятся
в верхних слоях воды.
В настоящее время ведется глубоководный промысел
представителей семи-восьми семейств рыб. Между тем объектами
лова (на глубинах свыше 600—700 м) в принципе могут стать
еще 35—40 семейств рыб, причем из них около 20 семейств
ведут стайный образ жизни. Вообще из известных к настоящему
времени 1500 видов океаническо-глубоководных рыб около 900
видов (61 семейство) пелагических и около 600 видов рыб (19
семейств) живут у дна [4].
Наибольшее значение для промысла в открытых водах
океанов имеют представители долгохвостовых, моровых,
катрановых, солнечникообразных, гладкоголовых, камбаловых, броту-
ловых и т. д. Назовем некоторых из них, главным образом тех,
которые в настоящее время уже в какой-то мере используются
человеком в качестве белковой пищи.
Одной из самых важных в промысловом отношении групп
глубоководных рыб являются макрурусы, или долгохвосты
(сем. Macrouridae). Многочисленные представители этого
семейства, насчитывающего около 300 видов, широко
распространены в водах Тихого, Атлантического и Индийского океанов. Эти
крупные стайные рыбы населяют практически все зоны
Мирового океана от глубин 150—200 м до 2500—3000 м.
Довольно большие промысловые скопления представителей
этой группы — тупорылого макруруса (М.
rupestris)—обнаружены в Северной Атлантике и малоглазого макруруса (Nema-
tonurus pectordlis)—в северной части Тихого океана. Мясо
большинства видов макрурусов обладает хорошими вкусовыми
качествами и является ценным пищевым продуктом.
Так же как макрурусы, многочисленны представители
моровых рыб (сем. Moridae). Они также представляют большой
интерес в качестве объектов глубоководного промысла. Среди рыб
этого семейства встречаются довольно крупные рыбы. Так,
антимора рострата (Antimora rosirata) достигает длины 70 см.
Представитель семейства Eretmophoridae — лемонема {Lae-
топета longipes), промысловые скопления которой обнаружены
317
в северной части Тихого океана, достигает длины свыше 70 см.
Мясо ее по вкусу напоминает мясо тресковых.
Солнечникообразные (отр. Zeiformes) обитают в
основном в верхней части материкового склона. Представители
семейства ореосомовых (сем. Oreosomatidae) — глубоководные
солнечники, «лунники» (Allocyttus verrucosus и Neocytius
rhomboidalis)—обнаружены на глубине свыше 1000 м. Эти
рыбы обладают довольно вкусным мясом и могут быть
использованы для приготовления, например, консервов, копченой и
вяленой продукции.
Гладкоголовые (сем. Alepocephalidae) образуют большие
скопления на глубинах до 2000 м. Мясо их нуждается в
специальной кулинарной обработке из-за большой обводненности.
Представители камбаловых (сем. Pleuronectidae), хотя и не
являются типичными океаническо-глубоководными (нижняя
граница их обитания не выходит за пределы 1000—1500 м),
могут стать объектами глубоководного лова. Вкусовые качества
их мяса высокие.
Не вызывает сомнения, что список рыб, которые должны
стать объектами глубоководного промысла, может быть
продолжен.
Для того чтобы осуществить эту задачу, необходимо решить
многие проблемы, связанные с обнаружением и добычей
глубоководных рыб и с приготовлением из них качественного
пищевого продукта и др. Рассмотрим некоторые из них.
Одной из основных проблем при организации промысла
глубоководных рыб является обнаружение их скоплений. Обычно
с этой целью используется гидроакустическая аппаратура,
которая позволяет быстро обследовать большие акватории моря,
установить наличие рыбы, а также прицельно обловить ее. Так,
рыбопоисковые приборы типа «Палтус» или «Кальмар» в
состоянии обнаружить плотные скопления рыбы на глубинах до
800—900 м. Однако глубоководные рыбы часто держатся
разреженно; при этом в зону действия гидролокатора, естественно,
попадают отдельные рыбы. Следовательно, для успешного
обнаружения глубоководных скоплений рыб гидроакустические
приборы должны «чувствовать» на больших глубинах и
отдельных рыб.
При создании такой техники конструкторы сталкиваются
с большими техническими трудностями; аппаратура пока
получается громоздкой и сложной и имеет ограниченные
возможности.
Дальнейшее увеличение глубины обнаружения рыбы реально
при существенном сужении звукового луча и повышении
мощности излучаемых сигналов, а это приводит к еще большему
усложнению рыбопоисковой техники.
Значительно проще решается проблема увеличения глубины
обнаружения рыбы "при приближении акустической системы по-
318
искового прибора к объекту поиска, т. е. при использовании
буксируемой опускной антенны. На этом принципе работает
отечественный рыбопоисковый комплекс «Игла». Этот комплекс
имеет буксируемую акустическую систему, которая связана
с бортовой аппаратурой с помощью кабеля-троса. Комплекс
может работать в режиме поиска или в режиме тралового зонда.
В первом случае буксируемая акустическая система может
заглубляться до 1100 м, и поисковый прибор в состоянии
обнаруживать разреженные придонные и пелагические скопления
до глубины 1800 м. Во втором случае комплекс позволяет
определить вертикальное раскрытие глубоководного трала,
отстояние его от дна или поверхности воды и наличие рыбы в районе
устья трала. Эти параметры прибор фиксирует при глубине
хода трала до 1500 м.
В настоящее время разработан и проходит испытания более
совершенный рыбопоисковый прибор, буксируемая
акустическая система которого может заглубляться до 2000 м. Такой
прибор будет фиксировать разреженные рыбные скопления до
3000 м и глубже.
Большое значение при промысле глубоководных рыб имеет
оснащение промысловых судов современным навигационным
оборудованием, позволяющим определять точное
местоположение. С увеличением глубины лова возрастают трудовые и
энергетические затраты, увеличивается непроизводительное время
на спуск и подъем трала. Возникает проблема увеличения
мощности судов, тяговых характеристик траловых лебедок,
прочности ваеров и т. д.
Далеко не полностью решена проблема организации
глубоководного промысла, не отработана тактика лова.
Так, траулеры должны развивать тягу 25—40 тс и скорость
траления 4,5—5,0 уз.
Установлено, что с глубиной уменьшается плотность
скоплений рыбы. В связи с этим необходимо увеличивать размеры и
раскрытие трала. Глубоководные тралы, кроме того, должны
быть оборудованы приборами, обеспечивающими контроль
вертикального и горизонтального раскрытия тралов, расстояние от
грунта, длину вытравленных ваеров.
Комплекс современных рыбопоисковых, навигационных и
траловых приборов должен обеспечивать прицельное траление
рыбы на больших глубинах. В связи с обнаружением больших
скоплений рыбы на глубинах 2000 м предстоит разработать
принципиально новые методы и создать орудия лова с
искусственной концентрацией и селективным выловом рыбы. Для
освоения глубоководного рыбного промысла потребуется
переоборудование промысловых судов и расширение
научно-исследовательских и опытно-конструкторских работ.
Не менее важно решить и проблемы обработки
глубоководных рыб, так как мясо некоторых из них имеет пониженную
319
пищевую ценность, а иногда «нетоварный» вид вследствие
увеличенной обводненности и ослабления скелетных образований.
При организации промышленного лова глубоководных рыб
в крупных масштабах следует проявлять определенную
осторожность, так как для большинства (например, макрурусов)
характерны большая продолжительность жизни, позднее достижение
половой зрелости и относительно низкая воспроизводительная
способность. На запасы таких рыб в большой степени влияет
промысел, который должен вестись рационально, на научной
основе, так как потери в этом случае будут трудновосполни-
мыми.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Андрияшев А. П. Древнеглубоководная и вторичноглубоководная
формы рыб и их значение для зоогеографического анализа.— В кн.: Очерки
по общим вопросам ихтиологии.— М.— Л.: Изд-во АН СССР, 1953.
2. Леонтьев О. К., Лукьянова С. А., Калинина Л. И. Бати-
графическая кривая и размеры планетарных морфоструктур Мирового
океана.— Геоморфология, 1974, № 4.
3. Р а с с Т. С. Глубоководные рыбы.— Итоги науки. Достижения
океанологии. — М.—Л.: Изд-во АН СССР, 1959.
4. Р а с с Т. С. Некоторые закономерности распространения
глубоководных рыб. — В сб.: Биология Тихого океана. Кн. 3. Рыбы открытых вод. —
М.—Л.: Изд-во АН СССР, 1967.
IV.
ОСВОЕНИЕ
ГЛУБИН
ОКЕАНА
И Заказ № 1190
Вячеслав Семенович Ястребов,
доктор технических наук,
профессор, заместитель директора
Института океанологии АН СССР
им. П. П. Ширшова, заведующий
техническим сектором института,
возглавляет отдел техники
подводных исследований. Основные
научные интересы — подводные
телеуправляемые аппараты и
подводные робототехнические
системы.
В. С. Ястребов
НЕОБИТАЕМЫЕ
ПОДВОДНЫЕ
АППАРАТЫ:
СОСТОЯНИЕ
И ПЕРСПЕКТИВЫ
РАЗВИТИЯ
Необитаемые подводные аппараты (НПА) составляют
большую самостоятельную группу подводно-технических средств
для исследования океана и выполнения сравнительно
несложных работ в его глубинах.
Как показывает опыт исследования НПА, ряд научных
задач, например подавляющее большинство гидрофизических и
геофизических исследований у дна, практически можно
качественно решить лишь с их помощью.
НПА получили также признание как мобильное и
достаточно эффективное средство оказания помощи обитаемым
подводным аппаратам, потерпевшим аварию. Очевидно, весьма
эффективным будет применение НПА и для выполнения ряда
подводно-технических работ на больших глубинах.
Существующие и создаваемые образцы различаются
прежде всего по глубине погружения, которая существенно
определяет их конструктивное выполнение, степень сложности
системы управления, а также функциональные возможности.
В зависимости от глубины погружения можно выделить три
группы аппаратов: малых глубин (до 600 м), средних глубин
(до 2000 м) и больших глубин (свыше 2000 м).
Наибольшее число НПА принадлежит к первой группе.
Это — необитаемые аппараты КЭРВ-I и КЭРВ-И (США), Те-
ленот-I (Франция), «Скат» (СССР), БАТФИШ (США),
«Глория» (Англия), «Пингвин» (ФРГ), УАРС (США), РУФАС
(США) и т. д. Все они представляют собой простые системы,
способные выполнять столь же простые, ограниченные функции
и являются аппаратами первого поколения.
11*
323
Ко второй группе аппаратов средних глубин относятся «Те-
ленот-Н» (Франция), «Эрик-I» (Франция), «Аида» (США),
«Тройка» (Франция), «Манта-1,5» (СССР), «Краб» (СССР).
С ростом глубины возникают прежде всего проблемы
информационного обмена между аппаратом и обеспечивающим
судном. Эта меньшая по составу группа включает в себя
аппараты более совершенные, с большими функциональными
возможностями, среди которых находим системы второго
поколения.
Третья группа аппаратов больших глубин, или
глубоководных,— самая малочисленная. В настоящее время созданы
НПА, эффективно действующие на глубинах до 6000 м. К ним
относятся аппараты РУВС, МПЛ, СПУРВ, «Си дроун», «Си
проуб», НРЛ (США), «Эрик-П» (Франция).
НПА могут быть разделены также по функциональному
признаку на автономные и привязные. Привязные в свою
очередь подразделяются на буксируемые и зондирующие.
Автономные необитаемые аппараты предназначены для
выполнения исследовательских задач по заранее определенной
программе. Их в настоящее время относят к роботам первого
поколения. Такие аппараты могут работать либо в толще воды,
либо непосредственно у дна. Необитаемые аппараты могут
работать как в строго зондирующем режиме по вертикали, так
и в режиме пространственного зондирования, когда спуск и
подъем происходят, например, по спирали.
У дна они работают, перемещаясь по заранее заданной
траектории либо по прямой, либо параллельными галсами, либо по
раскручивающейся спирали. В ходе движения осуществляются,
также по программе, измерение и запись параметров среды,
фотографирование дна. В отдельных случаях можно
запрограммировать отбор проб воды либо покладку на грунт на
достаточно длительное время, в период которого также происходит
измерение и запись параметров среды.
Обмен информацией между автономными аппаратами и
обеспечивающим судном осуществляется, как правило, по
гидроакустическому каналу в ограниченном объеме.
Большую группу составляют привязные аппараты. Высокой
эффективностью отличаются буксируемые системы, с помощью
которых удается выполнять длительные измерения параметров
среды на заданных горизонтах, картографирование дна и поиск
затонувших объектов. Такие системы обычно буксируются
обеспечивающим судном на прочном тросе-кабеле (рис. 1).
Информационный обмен между аппаратом и обеспечивающим
судном осуществляется по тросу-кабелю, от характеристик
которого, а также от глубины погружения зависит объем
передаваемой информации.
Привязные зондирующие НПА обычно спускают с
неподвижного обеспечивающего судна. Эффективность их зависит от
324
325
Рис. 1. Схема буксируемого необитаемого подводного аппарата.
способности судна длительно сохранять неизменным свое
положение. Обычно привязные зондирующие аппараты оборудованы
двигателями, которые позволяют им маневрировать в толще
воды над дном и объектом работ. Информационный обмен
между аппаратом и обеспечивающим судном осуществляется
также по кабельной линии, которая определяет маневренность
аппарата.
В последнее время появилась идея создания НПА
комбинированного типа. Зондирующий привязной аппарат оборудуют
устройством изменения положения точки крепления к аппарату
кабельной линии. Это позволяет использовать такой аппарат
как в режиме буксировки, так и при неподвижно стоящем
обеспечивающем судне. Несмотря на функциональные различия
НПА, в их структуре обнаруживается весьма много общего, что
позволяет дать обобщенную характеристику.
НПА содержит следующие узлы и системы: прочный
корпус ; движительную систему; систему управления; систему
связи и информации; систему наблюдения; систему навигации;
энергетическую систему; исследовательскую аппаратуру.
Прочный корпус НПА служит для придания ему
некоторой положительной плавучести. В корпусе размещены
системы управления, наблюдения, связи и навигации. Обычно
аппарат имеет один или несколько прочных корпусов
цилиндрической или сферической формы.
Для придания аппарату нулевой или небольшой
положительной плавучести на глубинах 1000—1500 м дополнительно
используют плавучие блоки из синтетических материалов,
удельный вес которых составляет 0,5—0,7 т/м3. Они
выдерживают высокое внешнее гидростатическое давление.
Движительная система аппаратов
совершенствовалась по мере их развития. Первые образцы имели от двух до
трех движителей, которые обеспечивали их движение в
главных направлениях. По мере усложнения операций,
выполняемых аппаратами, возрастали требования к их управляемости.
Появилась необходимость применения развитой движительной
системы, способной контролировать и изменять все шесть
обобщенных координат аппарата в пространстве.
Движительная система должна удерживать аппарат на
заданном горизонте или в заданном режиме движения.
Энергетически оказывается часто более выгодным статическое
регулирование нулевой плавучести аппарата, при котором
дальнейшие затраты на динамическое управление оказываются
значительно меньше. Такое регулирование осуществляется с
помощью специальной уравнительной системы, имеющейся,
например, на аппарате ТРОВ (Канада). Энергия, необходимая для
движения, передается на буксируемый аппарат по
тросу-кабелю. Маневрирование буксируемого аппарата в пространстве
осуществляется либо за счет изменения скорости судна и изме-
326
нения длины троса-кабеля, либо за счет управляемых
гидродинамических плоскостей. Следует отметить, что последние
оказываются эффективными только при скоростях буксировки свыше
3 уз. При малых скоростях буксировки достаточно
эффективным средством измерения траектории могут служить также про-
пульсивные движители, которые совместно с системой
стабилизации способны поддерживать необходимые параметры
движения. Очевидно, энергетически такое решение невыгодно, хотя и
довольно эффективно.
Система управления предназначена для обеспечения
заданных параметров движения или положения НПА в
пространстве. При этом перед всеми необитаемыми аппаратами
стоит задача управления выдерживанием заданной траектории
движения. Для привязных зондирующих аппаратов наряду
с этой задачей существует задача длительного сохранения
неизменным положения над объектом работ — задача
динамического позиционирования. В режиме движения по заданной
траектории обычно контролируются следующие параметры:
глубина или отстояние от грунта, курс, крен и дифферент. Значения
всех этих параметров фиксируются соответствующими
датчиками: глубины, эхолотом, угловых скоростей гироскопической
системы аппарата. Линейные координаты положения аппарата
в инерциальной системе, правда, с небольшой точностью, могут
быть получены, например, путем применения доплеровской
системы.
По мере развития НПА совершенствовались принципы
управления ими. В аппаратах первого поколения параметры движения
задавались раздельными органами управления. По мере
увеличения числа движителей и, следовательно, усложнения
траектории движения аппарата возникла необходимость в применении
комплексных органов управления. Так появились комплексные
мнемонические рукоятки, с помощью которых управление
осуществляется в коде движения руки оператора. Позднее были
созданы системы супервизорного управления. В простейшем
варианте такой системы оператор задает координаты точки
района, в которую необходимо вывести аппарат, на экране
телевизионного или гидролокационного дисплея. Специальный
вычислительный блок принимает это задание и формирует
необходимые сигналы управления на каждый из движителей аппарата.
Оператор определяет лишь точку, в которую следует выйти
аппарату, и задает ее координаты.
Система связи и информации фактически
определяет выбор принципов управления НПА. Аппараты малых
глубин обычно связаны с обеспечивающим судном с помощью
многожильного кабеля. В ряде случаев для разных видов
команд предназначены отдельные жилы (линии) кабеля. Однако
такое использование канала связи нерационально.
Целесообразнее его временное либо частотно-временное уплотнение. Обычно
327
на аппарат передается информация управления, а на
обеспечивающее судно — информация о параметрах состояния аппарата,
а также видеоинформация от телевизионной и
гидроакустической системы. На аппараты малых и средних глубин
видеоинформация передается обычно по отдельным коаксиальным
линиям. С увеличением рабочей глубины аппарата и длины кабеля
такая схема передачи информации становится невозможной.
Многожильные кабели заменяют, начиная с глубины 2000 м, на
трос-кабель, состоящий из одной коаксиальной пары. Обмен
информацией между автономными аппаратами и
обеспечивающим судном происходит по гидроакустическому каналу связи.
Вследствие нестабильности его параметров, а также
частотной ограниченности возможен обмен на уровне простейших
команд.
Возможности кабельного канала связи ограничены, что
существенно сказывается на эффективности НПА. Кроме того,
информацию, поступающую на обеспечивающее судно, оператор
воспринимает чаще всего с трудом: данные о глубине, курсе,
крене и дифференте аппарата выводятся на отдельные приборы,
что затрудняет оценку его положения в пространстве. Очевидно,
необходимо интегральное представление информации. Подобная
система — КОНАЛОГ— была создана в США и использована
для управления подводной лодкой. Информация о параметрах
движения представляется на дисплее в виде «бегущей
дорожки», соответствующие наклоны которой определяют крен и
дифферент. Испытания системы показали ее высокую
эффективность.
Очень интересно решение специалистов США, которые для
создания у оператора «эффекта присутствия» предложили
использовать специальный шлем со встроенным в него
миниатюрным видеоконтрольным устройством. Шлем оператора
кинематически связан с креслом. Отклонения головы оператора в
пространстве фиксировались датчиками положения, по сигналам
которых синхронно отклонялся подводный аппарат. Такой
способ управления движением телеуправляемого аппарата
обеспечивает быструю адаптацию оператора к системе, высокое
быстродействие и эффективность.
Очевидно, что дальнейшее совершенствование принципов
представления информации будет развиваться по пути все
большего использования разнообразных рецепторов человека при
обязательном интегральном способе представления
информации.
Система наблюдения НПА обычно содержит две
подсистемы: телевизионную и гидролокационную. В качестве
первых применяют преимущественно малогабаритные с-
передающим^ трубками типа видикон. Качество изображения,
наблюдаемого оператором, зависит прежде всего от прозрачности
воды, характеристик светильников, дальности наблюдения и па-
328
раметров передающего устройства. Чрезвычайно важную роль
играют длина и частотные характеристики кабельного канала
связи. Высокого качества телевизионного изображения на НПА
малых глубин добиться несложно. С ростом длины кабеля
существенно ухудшаются его свойства, растет затухание и
увеличиваются искажения телевизионного сигнала. На глубоководные
аппараты по одной коаксиальной паре приходится одновременно
передавать весь массив информации и электроэнергии. Все это,
безусловно, заметно снижает качество телевизионного
изображения и, как следствие, затрудняет работу аппарата.
Дополнительную информацию об окружающей обстановке
получают с помощью гидролокатора бокового обзора. При этой
можно получить картину дна с достаточно больших расстояний
(в несколько сот метров) в наиболее общем виде, без
детализации и с малым разрешением. Однако эта предварительная
информация чрезвычайно важна. Она позволяет, во-первых,
ориентироваться в подводной обстановке до тех пор, пока
не будет установлен визуальный контакт с помощью
телевизионной системы, и, во-вторых, дает общее представление об
исследуемом районе, хорошо дополняющее информацию о
локальном пространстве, наблюдаемом телевизионной
системой.
Навигационная система НПА функционирует на
основе данных гидроакустических маяков. Различают системы
с длинной и короткой базой.
Система с длинной базой предусматривает установку
нескольких донных маяков-ответчиков с расстоянием между ними
в несколько миль, а также одного гидрофона на
обеспечивающем судне и одного маяка-ответчика на подводном
аппарате.
В систему с короткой базой на дне входят один маяк-ответчик
и два гидрофона на судне, на корме и носу. Кроме того, на
подводном аппарате устанавливают маяк-ответчик. Донные маяки-
ответчики и маяк-ответчик НПА дают ответ по запросу судна.
Направление на каждый маяк и на подводный аппарат
определяют по разности времени поступления сигналов на судовые
гидрофоны. Наклонную дальность до маяков определяют по
времени прохождения ответного сигнала. Для расчета
горизонтальной дальности измеряют глубину. Все вычисления обычно ведут
на ЭВМ.
Энергетические системы НПА различаются по
конструкции в зависимости от их типов. Так, на автономных
необитаемых аппаратах обычно имеются бортовые аккумуляторные
батареи.
Привязные аппараты малых глубин получают энергию, как
правило, по тросу-кабелю. При наличии троса-кабеля с одной
коаксиальной парой передача электроэнергии на НПА вырас-
стает в техническую проблему.
329
В качестве одного из вариантов энергообеспечения
глубоководных необитаемых аппаратов энергией может быть
использована система с промежуточным энергоякорем, энергозаглу-
бителем (для буксируемых) или носителем более крупного
водоизмещения, чем НПА. В этом случае НПА имеет на борту
необходимое количество аппаратуры управления и наблюдения,
а энергозапас и часть вспомогательной аппаратуры размещаются
на энергоякоре, заглубителе или промежуточном носителе.
Энергоноситель с обеспечивающим судном связан
тросом-кабелем. С подводным аппаратом он может быть связан
многожильным кабелем, по которому передается электроэнергия. В
процессе работы аккумуляторная батарея подзаряжается
электроэнергией, которая подается по однокоаксиальному
тросу-кабелю с обеспечивающего судна.
Энергоякорь может также служить одновременно
своеобразным носителем-ангаром для НПА, в котором он доставляется до
дна и поднимается на поверхность. У дна НПА выпускается из
ангара-носителя для выполнения работ. Подобная схема
реализована на аппарате «Эрик-П» (Франция).
Исследовательская аппаратура НПА обычно
включает измерительную аппаратуру, манипуляторы и
различные пробоотборники.
Специальные датчики регистрируют направление и скорость
течения, температуру, давление, электропроводность, скорость
звука, реже — концентрацию растворенного кислорода и другие
параметры. Магнитометры измеряют направленность магнитного
поля Земли. На НПА часто устанавливают локаторы бокового
обзора и профилографы.
Манипуляторы служат для выполнения работ на дне.
Конструкция и способы управления манипуляторами столь же
разнообразны, как и сами НПА. В настоящее время разработаны
манипуляторы, предназначенные для выполнения достаточно
сложных и трудоемких операций. Они имеют до семи степеней
свободы, поэтому системы управления ими должны быть самыми
современными. Кинематическая структура манипулятора
зависит в первую очередь от поставленных перед ним задач. Как
правило, для выполнения несложных операций предназначены
простейшие конструкции с минимально необходимым числом
степеней свободы. Примером могут служить манипуляторы
необитаемых аппаратов КЭРВ, которые служат только для
захвата на дне предметов определенной формы.
В качестве пробоотборников на НПА используются
миниатюрные грунтовые трубки и дночерпатели. Иногда захват
манипулятора изготовляют в виде дночерпателя. Тогда пробы
грунта отбирает сам манипулятор. В остальных случаях
манипулятор используют в качестве вспомогательного
транспортного средства. Для взятия проб воды применяют специальные
батометры.
330
Как показывает анализ структуры НПЛ, это довольно
сложные комплексные системы, далеко не совершенные.
Существуют и проблемы, присущие только одной группе
аппаратов. Одной из главных является проблема повышения
эффективности работы привязных зондирующих аппаратов,
являющихся основным средством активного выполнения маневров
на дне с помощью манипуляторов, которая остается еще весьма
низкой. Причин этому несколько. Выполнение операций
затруднено прежде всего из-за подвижности НПА над объектом. По-
кладка на грунт аппарата — по-видимому, наиболее простой
способ стабилизации положения. Однако при этом интенсивно
взмучиваются придонные слои воды, что ухудшает видимость
и затрудняет контроль за действием манипулятора.
Эффективность функционирования НПА в непосредственной
близости от объекта зависит от его маневренности и точности
стабилизации в любой точке пространства. В результате
маневрирования рабочие органы манипулятора выставляются в
позицию, удобную для выполнения операций, а стабилизация
аппарата позволяет сохранить неизменным принятое
положение.
Поэтому центральным в этой проблеме становится
взаимодействие манипулятора с подводным аппаратом. Следовательно,
задача создания работоспособного образца манипулятора
должна решаться комплексно, с учетом назначения аппарата и
взаимодействия всех его систем.
Анализ экспериментально полученных материалов
показывает, что локальное маневрирование НПА и их зависание над
объектом работ обычно выполняются с чрезвычайно малой
точностью и требуют значительного времени.
Основная причина этого состоит в несовершенстве способов
управления. Управление перемещением аппарата
осуществляется путем изменения скорости движения и, таким образом,
полностью зависит от искусства оператора.
Надежную стабилизацию самого аппарата как по угловым,
так и по линейным координатам может осуществить замкнутая
система управления с позиционными обратными связями.
Анализ процессов перемещения манипулятора и аппарата как
многомерных управляемых объектов позволяет сделать вывод
о необходимости и достаточности контролируемого изменения
только одного параметра — расстояния объекта до цели. Этого
можно достичь, использовав один комплексный управляющий
орган, действующий по принципу копирования движений, либо
систему с управлением по вектору скорости или моменту.
Такая мнемоническая многостепенная рукоятка управления
задает команды на перемещения аппарата по всем шести
обобщенным координатам. Для удержания его над объектом
работ необходимо непрерывное поступление информации об
изменении всех этих шести координат. Наиболее сложно вы-
331
полнить последнее требование. Данные об изменении угловых
координат легко получить с помощью гироскопической системы,
установленной на аппарате, сложнее определить значения
линейных координат аппарата относительно объекта работ,
находящегося на грунте. Одно из возможных технических решений
этой задачи предложено Институтом океанологии АН СССР
им. П. П. Ширшова.
Подобно системе динамического позиционирования
исследовательского судна «Тритон» (Франция) t координатно-изме-
рительное устройство представляет собой систему, которая
состоит из легкого груза, связанного гибким тросом с барабаном.
Последний укреплен в нижней части аппарата и имеет привод,
который в одном режиме постоянно натягивает трос, не
поднимая груз со дна, а в другом — по команде оператора полностью
выбирает груз. Углы наклона троса измеряются индукционными
датчиками. Длина выпущенного с барабана троса определяется
по числу оборотов барабана. Такое устройство позволяет
получить достаточно точную информацию о всех трех линейных
координатах аппарата (±10 мм) относительно точки на грунте,
где лежит груз.
Далее информация о всех шести обобщенных координатах
вводится в систему управления движением аппарата. Таким
способом обеспечивается динамическое позиционирование НПА
над объектом работ.
В процессе работы манипулятора в результате его
взаимодействия с объектом на НПА действуют возмущения. Они
неизбежно приводят к возмущенным движениям НПА, которые
затрудняют проведение операций. Об этих и управляемых
движениях аппарата оператор объективно может судить лишь по
динамике телевизионного изображения. Но этого недостаточно
как для управления действиями манипулятора, так и для
точного управления локальным маневрированием аппарата над
объектом. Очевидно, что необходимо существенно увеличить
объем осведомительной информации, которая должна
поступать к оператору в удобной для восприятия и анализа форме.
Этого можно достичь путем максимального вовлечения нерво-
моторного аппарата человека-оператора в процесс
управления подводным аппаратом и манипулятором, а также
активного динамического отражения на пульте управления данных,
характеризующих их состояние. Только при подобном
информационном обеспечении у оператора возникает «эффект
присутствия», который чрезвычайно необходим для эффективности
действий при управлении (рис. 2).
Система управления аппаратом в этом случае становится
информационно-управляющей. Почти автоматически будет
восприниматься информация о движении и маневрах подводного
аппарата, а также о малейших изменениях угловой скорости.
Эти данные дополняются зрительной информацией, представ-
332
ОПЕРАТОР
zz.
СИСТЕМА
АВТОМАТИЧЕСКОЙ
СТАБИЛИЗАЦИИ
ИДМ
s^
СИСТЕМА
АВТОМАТИЧЕСКОЙ
СТАБИЛИЗАЦИИ
ПТА
Рис. 2. Схема системы управления ПТА, формирующая «эффект
присутствия».
333
ляемой на экране. Изменение шума работающих движителей
также дает некоторое представление об изменении скорости
движения аппарата.
Управляющий сигнал оператор формирует на основе
обработки получаемой информации. В выше рассмотренном случае
осмысливание информации и ее поиск практически отсутствуют.
Управление аппаратом может быть при этом сосредоточено
на одной командной рукоятке, что приводит к определенному
упрощению процесса выдачи команд. В этом случае процесс
переработки оператором информации будет состоять из этапов
обнаружения (определение положения аппарата
анализаторами зрительного и вестибулярного аппаратов), принятия
решений (синтез алгоритма действия в соответствии с общей
стратегией) и самого решения (перемещение командной
рукоятки в положение, соответствующее выбранному направлению
и скорости движения аппарата).
Довольно часто в процессе дистанционного управления
движущимся объектом оператору приходится решать задачи,
требующие почти мгновенной предварительной переработки
информации. Основной оценкой управляющего воздействия
служит быстрота реакции оператора.
Рассмотрим способ дистанционного управления подводным
аппаратом в режиме поиска. В этом случае реакцию оператора
в первом приближении можно определить как простую сенсо-
моторную реакцию, время задержки которой складывается из
латентного периода и периода моторного действия [2]. Период
осмысливания информации и информационный поиск
практически отсутствуют, что позволяет существенно упростить алгоритм
его действий и определить конкретные меры увеличения их
эффективности и надежности. Этого можно достичь, уменьшив
объем предъявляемой оператору осведомительной информации,
для чего нужно выбрать наиболее полно характеризующую
состояние объекта управления.
В настоящее время оператор эту информацию получает по
телевизионному каналу. Однако из-за отсутствия привычных
для глаза человека ориентиров, а также оптических свойств
водной среды пространственное положение аппарата
воспринимается в несколько искаженном виде.
Разработанный в Институе океанологии АН СССР способ
построения схемы управления НПА на основе использования
его информационно-динамической модели (ИДМ) позволил
значительно повысить эффективность процесса управления [3].
Благодаря подвижному пульту управления (см. рис. 2),
занимающему положение в пространстве, соответствующее
положению аппарата, значительно увеличился объем информации,
поступающей к оператору.
При использовании ИДМ в построении алгоритма
управляющего воздействия активное участие принимают два анали-
334
затора оператора — зрительный и вестибулярный.
Вестибулярный аппарат является основным анализатором, определяющим
положение тела и его перемещение в окружающем
пространстве. Как уже было сказано, время латентного периода
реакции оператора в основном будет зависеть от эффективности
участия указанных анализаторов в построении сигнала
управления.
Повышения эффективности можно добиться, проводя
специальные тренировочные циклы, повышающие устойчивость
вестибулярного аппарата. Важнейшим моментом такой
подготовки является формирование функциональных связей
вестибулярного анализатора с другими, особенно со
зрительным.
При выполнении программы работ НПА действует либо
в динамическом, либо в статическом режиме. При небольших
скоростях и ускорениях аппарата оператор не испытывает
перегрузок, порождающих изменение чувствительности и
привычной настройки его вестибулярного аппарата. Последний играет
в основном роль корректора в формировании сигнала
управления, а главным анализатором, участвующим в приеме и
переработке осведомительной информации, является зрительный.
Однако в отдельных случаях (при ухудшении видимости)
вестибулярный анализатор может выступать в качестве
доминирующего в осознании информации о пространственном
положении аппарата.
Был проведен ряд экспериментов, в ходе которых
исследовалось качество управления оператором НПА при участии
в формировании сигнала управления одновременно двух
анализаторов— зрительного и вестибулярного.
Использовался специальный стенд, представляющий собой
шарнирно подвешенную платформу с расположенными на ней
пультом контроля и креслом, снабженным рукоятками
управления. Платформа имела две степени свобды: вращение вокруг
осей х и г, соответствующих осям действия векторов угловых
скоростей дифферента и крена аппарата. Вращение платформы
обеспечивалось силовыми приводами, состоящими из насосной
станции, силовых цилиндров и распределителей золотникового
типа с электромагнитным регулятором.
Особое внимание было уделено контролю динамических
режимов работы стенда. Требовалось обеспечить соответствие
угловых скоростей платформы стенда угловым скоростям
аппарата.
Эксперименты Института океанологии показали, что
именно совместное участие зрительного и вестибулярного
анализаторов значительно повышает реакцию нервной системы на
сигнал раздражителя. Это объясняется тем, что изменение
чувствительности зависит от силы побочного раздражителя. При
низком уровне чувствительности побочные раздражители по-
335
Оператор fl
X
4.0
3,0
2,0
1,0
к 1
\/
4^.
2 3
/ /
/
*^^
""Н
4,0
3,0
2,0
го
60 120 180 240
а), град/мин
40 80 120140
а), град/мин
Оператор Б
4,0
3,0
2,0
1,0
\
1
4/
1\ У
\ \ у
■^^
1 2
/
3
/
60 120 180 240
о), град/мин
X
4,0
3,0
2,0
1,0
п
1
\
4^
/
2
1
' 3
/
/
40
80 120140
а), град/мин
Рис. 3. Зависимость времени латентного периода т реакции
операторов А и Б от интенсивности раздражителя.
/ — зрительный анализатор; 2 — вестибулярный; 3 — зрительный и
вестибулярный анализаторы вместе, 4 — контроль- последних по навигационным
приборам.
336
вышают ее, при высоком — несколько понижают (кривые У, 2
и 3 на рис. 3).
Видимо, при исследовании каждого из анализаторов в
отдельности интенсивность раздражителя (в данном случае
угловая скорость крена платформы со) не обеспечивает
определенного уровня активности анализаторов. Повышенную
чувствительность при совместном действии двух анализаторов
(кривая 3 на рис. 3) можно объяснить, если предположить, что
один из анализаторов является по отношению к другому
побочным раздражителем, который тем самым стимулирует рост его
активности.
В процессе изучения совместного действия анализаторов
были приняты тесты, исключающие из участия в управлении
один из анализаторов. В частности, оператору предлагалось
переключить свое внимание с телевизионного экрана на
другие приборы пульта. В этом случае прием и переработка
информации о пространственном положении аппарата целиком
осуществлялись его вестибулярным аппаратом. При этом
характер процесса не изменился. Независимо от структуры
действия и механизмов психической регуляции каждого оператора
в отдельности в конечном итоге происходит перенастройка их
нервной системы, динамическая перегруппировка временных
нервных связей [1]. Это наглядно иллюстрирует рис. 3.
После перенастройки системы регуляции время латентного
периода для всех трех операторов не превышает 0,25 с.
Дистанционное управление манипулятором в коде
раздельных команд или же в коде движений приводит к увеличению
времени выполнения задач приблизительно на порядок по
сравнению со временем, необходимым для непосредственного
выполнения тех же задач оператором без помощи
манипулятора.
Увеличение времени выполнения задачи является
существенным недостатком автономных глубоководных аппаратов
с ограниченным энергоресурсом и, следовательно, временем
пребывания под водой. Кроме того, такое управление
манипулятором при существующих возможностях кабельных каналов
связи является весьма трудной операцией как технически, так
и функционально.
Существенную помощь в подобной ситуации может оказать
автоматизация процесса выполнения операций, не требующая
тщательного и непрерывного визуального контроля со стороны
оператора и повышающая эффективность использования
манипуляторов в условиях плохой видимости или низкого
качества телевизионного изображения.
Институтом океанологии АН СССР им. П. П. Ширшова
были проведены экспериментальные исследования по созданию
автоматического подводного манипулятора со сравнительно
простым алгоритмом функционирования.
337
В задачу автоматической системы управления входил поиск
геологических образцов произвольной формы в зоне действия
манипулятора, определение их размеров, взятие
захватывающим органом и перенесение в бункер. Управление
манипулятором с пятью степенями свободы осуществлялось от бортового
вычислительно-управляющего блока.
На захватывающем органе устанавливали пять тактильных
датчиков (рис. 4): два датчика в нижней части схвата (они
Рис. 4. Тактильные датчики захвата манипулятора
предназначались для ощупывания поверхности поиска), два —
на боковых поверхностях схвата (они служили индикаторами
касания манипулятором препятствий). Внутри схвата
располагали пятый текстильный датчик, информировавший о наличии
предмета внутри схвата.
Процесс сбора геологических образцов разбивался на два
этапа: поиск и обследование найденного предмета. Поиск
выполнялся по программе методом сканирования схвата по
обследуемой площади. Последний при этом тактильными
датчиками касался поверхности, после чего приподнимался над ней
и перемещался на следующий шаг сканирования. При встрече
с препятствием боковой тактильный датчик информировал об
этом. Для того чтобы убедиться в подвижности предмета,
выполнялось пробное движение схвата на один шаг. После
установления факта подвижности препятствия схват нижними
тактильными датчиками ощупывал предмет для определения его
размеров. Затем схват, если размеры были меньше его
раскрытия, захватывал предмет и переносил в бункер. Дальнейший
338
поиск продолжался, начиная с того места, где был взят
предмет.
Применение тактильных датчиков и использование
инерционных звеньев в цепи управления приводами позволило
добиться мягкости движений манипулятора, несмотря на его
существенную мощность. Усилие касания манипулятором
ощупываемой поверхности оказывается ничтожно малым.
Проведенный анализ существующих НПА с манипуляторами
показал, что дальнейшее расширение их функциональных
возможностей и повышение уровня автоматизации работы
оператора при управлении ими возможно только в случае
качественного изменения системы сбора и переработки информации об
окружающей среде. Включение бортового управляющего
вычислительного комплекса в систему НПА позволяет качественно
изменить структуру подводного аппарата и прежде всего
создать систему, в которой комплексное управление им
осуществляется по замкнутому контуру, без непосредственного
участия оператора. НПА становится подводным
аппаратом-роботом.
В таком роботе должны быть предусмотрены
многоуровневое построение, управляюще-вычислительный комплекс, блок
памяти, возможность устройства постоянной корректировки
модели внешнего мира и внутреннего состояния, обучения его
элементарным навыкам.
На высших стратегическом и тактическом уровнях следует
предусмотреть возможность вмешательства оператора.
При этом структурно робот представляет собой комплекс
систем, объединенных одной целью поведения. Ни одна из. систем
робота не действует самостоятельно и бесконтрольно, а
подчинена общей стратегии, заданной оператором, или частной,
выработанной в результате общения с внешним миром.
Робот должен состоять из носителя, обеспечивающего его
точное перемещение в пространстве, и следующих систем: эф-
фекторной (системы общения с внешней средой);
вычислительно-управляющей; общения с оператором.
Одной из главных оказывается
вычислительно-управляющая система, в функции которой входит:
— хранение в памяти и регулярная корректировка модели
внешней среды и внутреннего состояния робота;
— обработка поступающей из рецепторной системы
информации в соответствии с заданной оператором подцели;
— использование результатов анализа информации об
окружающей среде для формирования управляющих сигналов в эф-
фекторную систему на основании модели внешней среды,
внутреннего состояния робота и заданной подцели;
— рациональное кодирование информации для ее передачи
по каналу связи;
— управление работой канала связи.
339
В управляющем информационном комплексе существуют два
уровня обработки информации: на верхнем обработка ведется
центральным вычислительным устройством; на нижнем — с
помощью специализированных устройств обработки и
промежуточного хранения данных. Эти устройства являются
промежуточными между рецепторной системой и центральным
вычислительным устройством (препроцессорами) и одновременно
промежуточными между центральным вычислительным
устройством и эффекторной системой (постпроцессорами).
В функции центрального вычислительного устройства
входит:
— анализ непротиворечивости и возможности исполнения
команд, поступающих от оператора;
— анализ команд на стратегическом и тактическом
уровнях;
— выдача команд тактического уровня управления на
постпроцессоры;
— периодический опрос буферной памяти каждого
препроцессора и постпроцессора;
— обработка на высшем уровне информации от
рецепторной системы;
— хранение и коррекция математической модели внешней
среды.
Функции препроцессора заключаются:
— в предварительной обработке данных, поступивших от
рецепторной системы;
— в управлении постпроцессорами исполнительных органов;
— в хранении в буферной памяти полученной в результате
предварительной обработки информации.
Наконец, функции постпроцессора состоят в следующем:
— в расшифровке поступающих из центрального
вычислительного устройства команд тактического уровня;
— в непосредственном управлении исполнительными
приводами;
— в контроле за отработкой команд по сигналам от
датчиков внутренних обратных связей;
— в хранении в буферной памяти информации, полученной
в результате контроля обработки команд.
В настоящее время большинство исследований
сосредоточено на создании систем супервизорного управления. При
таком управлении оператор, работающий в режиме супервизора,
находясь на судне обеспечения, предварительно расчленяет
исходную задачу на последовательные элементарные операции.
Каждой операции присваивается типовая команда. Набор
типовых команд определяется характером выполняемых работ и
фактически является своеобразным языком общения с роботом.
Помимо типовых команд, в этот язык входят и
вспомогательные команды, которые, в частности, используются для более
340
компактной записи командных фраз. Такой метод управления
обеспечивает аппарату-роботу самостоятельность действий
в пределах выполнения типовой команды.
Очевидно, что применение систем супервизорного
управления на необитаемых подводных аппаратах-роботах позволит
существенно повысить эффективность их использования при
проведении исследований и подводно-технических работ на
больших глубинах.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Бойко Е. И. Время реакции и физиологический закон силы.— В кн.:
Пограничные законы психологии и физиологии.— М.: Изд-во Акад. мед. наук
РСФСР, 1961.
2. Ломов Б. Ф. Человек и техника.— М.: Советское радио, 1966,
с. 31—32.
3. Ястребов В. С. Об одном способе управления подводным
телеуправляемым аппаратом. —М.: ВИНИТИ, 4016—72 Деп., 1971, с. 3—5.
Евгений Павлович Попов, доктор
технических наук,
член-корреспондент АН СССР, лауреат
Государственных премий,
заведующий кафедрой автоматических
систем МВТУ им. Н. Э. Баумана.
Председатель
Научно-координационного совета Министерства
высшего образования по
проблеме «Роботы и робототехниче-
ские системы». Основные
научные интересы — механика,
автоматическое управление и
робототехника.
К. П. Попов
СИСТЕМЫ
УПРАВЛЕНИЯ
РОБОТОТЕХНИЧЕСКИХ
КОМПЛЕКСОВ
Во многих отраслях народного хозяйства и областях науки
широкое практическое применение находят программные
автоматические манипуляторы (промышленные роботы), а также
командные и копирующие манипуляторы, дистанционно
управляемые человеком-оператором. В частности, командные и
копирующие манипуляторы используются на обитаемых и
необитаемых подводных аппаратах.
Однако обширные задачи освоения Мирового океана не
могут быть решены с помощью существующих простых
манипуляторов. Требуются более универсальные многоцелевые мани-
пуляционные робототехнические комплексы с необитаемыми
рабочими аппаратами, управляемые комбинированной
человеко-машинной системой.
Необходимость в них диктуется целым рядом соображений.
Во-первых, необитаемый аппарат при выполнении большого
объема работ на глубине может непрерывно в течение
продолжительного периода находиться у объекта, а обитаемый
аппарат или водолазный комплекс из-за ограниченного времени
действия системы жизнеобеспечения вынужден совершать
несколько циклов погружения и всплытия. Это существенно
затягивает и удорожает всю операцию.
Во-вторых, масса обитаемого аппарата всегда будет много
больше, чем необитаемого, предназначенного для тех же
операций. Это влечет за собой значительное утяжеление спуско-
подъемного устройства на надводном судне-носителе, а значит
и увеличение минимально допустимого тоннажа последнего,
343
что снижает оперативность системы и тоже удорожает
операцию.
В-третьих, для выполнения целого ряда работ на глубине
нужны универсальные манипуляторы с числом степеней
свободы не менее шести (подобные человеческим рукам, не считая
кисти). Они могут быть многоцелевыми с простой
перенастройкой на различные циклы операций. В этом состоит одно из
преимуществ манипуляционных роботов перед традиционными
автоматическими устройствами. Они во многих случаях вполне
могут заменить тяжелый и опасный труд водолазов.
В-четвертых, манипуляционная система должна обладать
достаточно «умной» системой управления, адаптирующейся
к фактической обстановке на месте действия манипуляторов,
аналогичной мозгу человека, управляющему целенаправленным
движением рук в процессе работы. Для этого необходимо
«очувствление» манипуляторов и включение ЦВМ или
спецвычислителя в контур управления. Вследствие сложности
операции и «непредсказуемости» подводной обстановки для полной
автоматичности действия манипуляционного робота
потребуется создать элементы искусственного интеллекта. Однако
о решении последней задачи на современном уровне развития
науки и техники пока говорить преждевременно. Поэтому
неизбежно включение человека-оператора, находящегося на борту
надводного судна-носителя, в процесс управления подводными
манипуляторами. При этом дистанционно по кабелю-тросу
необходимо передавать с судна на подводный аппарат
сигналы управления, а обратно, с аппарата на судно,
телевизионную и другую информацию для отображения подводной
обстановки на телевизионном экране (приемном пульте).
Таким образом, в распознавании неопределенной и
меняющейся подводной обстановки и в управлении движением
манипуляторов используется интеллект человека-оператора.
Возможны различные пути построения такой системы управления.
Система в простейшем варианте построена так, что
оператор все время управляет каждым движением манипуляторов,
воздействуя руками на задающее устройство и наблюдая на
экране подводную обстановку у подводного объекта (рис. 1).
Такие системы называются биотехническими. Эти
биотехнические системы делятся на три основных вида: командные,
копирующие и полуавтоматические.
В командных системах управления оператор при
помощи кнопок, тумблеров или рукоятки с кнопками вызывает
движения манипуляторов, соответствующие разным степеням
свободы, по отдельности. В данном случае имеет место просто
дистанционное включение отдельных приводов на
манипуляторе (рис. 2).
В копирующих системах управления на посту
у оператора имеется задающий механизм, кинематически пол-
344
ностью подобный подводному манипулятору. Оператор
присоединяет этот задающий механизм к своей руке или просто
перемещает рукой только конец задающего механизма. При
этом манипулятор будет в точности повторять движение зада-
Рис. 1. Биотехническая система
управления манипуляторами с
судном-носителем.
СН — судно-носитель; РА — рабочий аппарат.
штмш
***4aS^^^
Рис. 2. Схема действия командной системы управления.
ющего механизма по всем степеням свободы. Это происходит
за счет того, что каждой степени свободы манипулятора
соответствует степень свободы задающего механизма по принципу
следящей системы (рис. 3). При этом на манипуляторе
находится исполнительная часть следящей системы, а на посту
345
оператора — задающая. Таким образом, общее число следящих
систем равно числу степеней свободы манипулятора. Следящие
системы замкнуты. Следовательно, по каждой из них через
канал связи судно — аппарат идет по два сигнала: прямой и
обратный.
Применяют, как известно, еще копирующие системы
двустороннего действия. В них на задающем механизме, как и на
манипуляторе, устанавливают двигатели для передачи на руки
человека-оператора в некотором масштабе усилия,
возникающего во время работы манипулятора. Тогда человек как звено
системы управления получает два сигнала обратной связи:
зрительный по телевизионному каналу (на экране) и тактильный
Рис. 3. Схема действия копирующей системы управлении.
(отражение рабочих усилий), что существенно повышает
эффективность его действий.
В полуавтоматических системах на посту
управления оператора имеется управляющая рукоятка, которая
обладает несколькими степенями свободы (в общем случае —
шестью). По каждой степени свободы возможны небольшие
перемещения. При этом сила нажатия человеком на рукоятку по
каждой степени свободы создает пропорциональную ей
величину перемещения, которая преобразуется в электрический
сигнал.
Итак, оператор, нажимая на управляющую рукоятку и
поворачивая ее, задает тем самым желательное движение концу
подводного манипулятора (схвата или инструмента) по шести
пространственным координатам (линейные перемещения и
угловая ориентация) одновременно. Для осуществления этого
сигналы, снимаемые с управляющей рукоятки по всем степеням
свободы, поступают в спецвычислитель СВ (рис. 4 и рис. 5).
Последний пересчитывает их таким образом, чтобы
сформированные в результате команды управления для всех приводов
реализовали совокупное движение приводов, под действием
которых выполнялись бы желаемое линейное смещение и угловая
ориентация на конце манипулятора.
346
Полуавтоматические системы имеют ряд преимуществ: во-
первых, управляющие устройства их компактнее и, во-вторых,
удобна для работы рукоятка, при проектировании кинематики
которой независимо от кинематики манипулятора, можно
исходить из удобства работы с ней.
Существуют три основных способа управления такими
полуавтоматическими системами: скоростной, силовой и
позиционный, а также их комбинации.
Скоростной способ полуавтоматического управления состоит
в том, что при нажатии оператором на управляющую рукоятку
спецвычислитель формирует такие команды управления на
приводы, при которых скорость движения (линейного или угло-
Рис. 4. Схема действия полуавтоматической системы управления,
СВ — спецвычислитель.
вого) на конце манипулятора будет пропорциональна величине
смещения или силе нажатия на управляющей рукоятке.
Силовой способ полуавтоматического управления
заключается в формировании усилия (сил и моментов) на конце
манипулятора, пропорционального силе нажатия на рукоятке. Его
целесообразно применять в том случае, когда схват или
инструмент на конце манипулятора находится в соприкосновении
с предметом на объекте работ. Свободное движение
манипулятора по силовому способу при помощи спецвычислителя
формируется так, как будто за концевую его точку потянули с силой,
пропорциональной силе нажатия оператором на управляющую
рукоятку. Однако силовой способ управления свободным
движением схвата нецелесообразен, так как величина приложенной
силы не определяет непосредственно направление движения.
Наконец, позиционный способ полуавтоматического
управления отличается тем, что в нем человек-оператор при помощи
управляющей рукоятки задает текущие координаты концевой
точки манипулятора и текущее угловое положение схвата, т. е.
траекторию движения и угловую ориентацию схвата или
инструмента на конце манипулятора. Спецвычислитель при этом
формирует сигналы управления на приводы всех степеней
свободы манипулятора так, чтобы реализовалось указанное выше
движение.
347
Целесообразно строить комбинированную
полуавтоматическую систему управления, в которой для
переносов (транспортных перемещений) конца манипулятора
применялся скоростной способ управления, для местных малых
перемещений с точным позиционированием схвата или
инструмента — позиционный способ, а для проведения рабочих
операций в контакте с предметами — силовой способ
полуавтоматического управления. Подобная комбинированная система мо-
Рис. 5. Автоматизированная систе- Рис. 6. Автоматизированная си-
ма со спецвычислителем на борту стема с ЦВМ на судне-носителе,
рабочего аппарата.
жет быть выполнена с единой управляющей рукояткой и
единым спецвычислителем при добавлении лишь несложного
переключающего устройства, сопряженного с этой рукояткой.
Эффективность действия всей системы повышается, если «очув-
ствить» управляющую рукоятку по сигналам от датчиков,
расположенных на подводном манипуляторе.
Итак, три основных вида систем дистанционного
управления (командный, копирующий и полуавтоматический)
являются биотехническими, так как в них оператор, следя по
экрану и приборам за движением манипулятора и за
обстановкой, непрерывно руками подает управляющие сигналы.
Руки человека все время направляют действия манипулятора.
При такой непрерывной загрузке, создающей напряженный
режим работы, оператор не может длительно действовать. Для
увеличения эффективности проведения операции необходимо
348
существенно разгрузить оператора, увеличить длительность
его работы путем снижения утомляемости. Этого частично,
правда в недостаточной степени, можно достичь, перейдя от
копирующего управления к полуавтоматическому.
Эффективность действий подводного манипуляционного
робота возрастает, если часть операции, поддающуюся жесткому
программированию или гибкому — с простейшей адаптацией,
выполнять в автоматическом режиме. Система управления
этой частью операции может быть полностью размещена на
самом рабочем аппарате (РА), при этом можно использовать
либо бортовой спецвычислитель на РА (рис. 5), т. е. без
загрузки информационного канала кабеля-троса, либо судовую
ЦВМ (рис. 6).
Человек-оператор наблюдает по экрану и приборам на
своем посту за обстановкой и действиями подводных
манипуляторов в автоматическом режиме и в зависимости от нее
включает и выключает те или иные автоматические режимы,
а при необходимости может брать управление в свои руки
(переходить на один из биотехнических режимов, описанных
выше) (рис. 7).
Такая комбинированная система, которую можно назвать
автоматизированной, весьма перспективна. Она позволяет
значительно увеличить производительность работ (за счет
автоматических режимов), облегчить труд оператора (избавляет его
от непрерывных манипуляций руками) и тем самым
увеличить продолжительность его эффективных действий.
Автономность работы НПА без его утяжеления можно
повысить, если ввести дополнительно аппарат-матку (AM)
с установленной на ней бортовой ЦВМ (рис. 8). Тогда
исполнительный уровень управления приводами с простейшим
вычислителем разместится на аппарате, а ЦВМ для следующего
иерархического уровня системы управления — адаптивного —
будет находиться на аппарате-матке. Заметим, что с
аппаратом-маткой могут работать одновременно два или несколько
рабочих НПА (рис. 9).
Этот аппарат-матку целесообразно использовать при
работах на больших глубинах. Во-первых, легкий рабочий аппарат
не может бороться с помощью своих собственных движителей
с колебаниями длинного кабеля-троса (см. рис. 6), если он не
закреплен. Аппарат-матка в данном случае (см. рис. 8)
послужит якорем, от которого будет идти сравнительно короткий
кабель-трос к рабочему аппарату.
Во-вторых, такой аппарат-матка будет служить как
промежуточный энергетический узел. По длинному кабелю-тросу
с судна-носителя на аппарат-матку передается энергия в виде,
наиболее выгодном для передачи. На аппарате-матке
устанавливаются преобразователи тока в разные его виды. Ток
подается затем к потребителям на рабочем аппарате по корот-
349
кому кабелю. Кроме того, на аппарате-матке могут быть
установлены аккумуляторные батареи в качестве запасных
источников энергии.
В-третьих, аппарат-матка может быть снабжен
измерительной и записывающей аппаратурой для регистрации различных
свойств среды по всей линии спуска с судна-носителя и на
океанском дне.
Человек-
оператор
i
Управляющий
механизм
1
\
Отобр<
ажение
обстановки
\
t
1
1
l
ЦВМ
1
1
1
Спецвычислитель
1
1 Манипулятор
1 f
1 1
Среда
-
-
<
Датчики
обратной связи
Датчики '
информации
Рис. 7. Функциональная схема автоматизированной системы управления.
Спуск рабочего аппарата с судна проводится поэтапно:
сперва он опускается вместе с аппаратом-маткой на
необходимую глубину, а затем уходит с него к заданному объекту
работ.
Описанная выше автоматизированная система управления,
включающая автоматические и биотехнические режимы (см.
рис. 7), является простейшим видом систем с интерактивным
управлением. Последнее предполагает активное взаимодейст-
350
вие человека и машины. К интерактивному управлению
относятся управления в супервизорном, а также наиболее
совершенном диалоговом режиме.
При супервизорном режиме управления все отдельные
элементы операции запрограммированы. Они выполняются
манипуляторами каждая в отдельности автоматически под
управлением ЦВМ или спецвычислителя. Человек-оператор
путем подачи целеуказательной команды (световым пером на
Рис. 8. Робототехническая си- Рис. 9. Робототехническая система
стема с промежуточным аппара- с несколькими рабочими аппа-
том-маткой. ратами.
экране, с помощью рукоятки или иным способом) дает машине
приказание выполнить определенный элемент операции
(рис. 10). Таким образом, распознавание обстановки и
стратегия действий манипуляционного робота вырабатывается
оператором. Наблюдая обстановку по экрану и приборам, он
определяет последовательность включения тех или иных
элементов операций и их направленность в сложившейся
обстановке. Внутри элементарных операций возможны не только
жесткие программы, но и простейшая адаптация, например,
самонаведение, поисковые режимы.
При диалоговом режиме управления в наиболее полной
форме происходит активное взаимодействие ЦВМ и человека-
оператора. ЦВМ участвует совместно с человеком в
распознавании обстановки и выработке решения о дальнейших действиях
манипуляционного робота (рис. 11). В данном случае ЦВМ —
351
«творческий» партнер оператора в процессах наблюдения и
управления. Для этого манипуляционный робот должен быть
снабжен соответствующим очувствлением (зрительным,
тактильным, звуковым и др.), т. е. определенным набором
датчиков различной информации и аппаратурой восприятия, а также
Человек-
оператор
Отображение
обстановки
I
Средства
супервизорного
управления
Спецвычислитель
Манипулятор
Датчики
обработки
сведений
Датчики
информации
Рис. 10. Функциональная схема системы супервизорного управления.
первичной обработки этой информации. Управляющая ЦВМ
должна быть снабжена соответствующими устройствами ввода
таких исходных данных, а также аппаратурой наглядного
представления человеку-оператору результатов своего
восприятия и рекомендаций о дальнейших действиях. Необходимо
иметь также средства диалогового общения, ввода цели
управления и подачи управляющих команд человеком.
В целом система будет иметь иерархическую структуру
с тремя уровнями, разделенными по задачам и
территориально:
352
а) исполнительная система управления приводами со
спецвычислителем на борту рабочего аппарата (см. рис. 8);
б) ЦВМ на аппарате-матке для первичной обработки
информации и адаптивного управления манипуляторами;
в) ЦВМ и пост оператора на судне-носителе для
интерактивного распознавания обстановки, принятия решения и
диалогового управления.
Человек-оператор
Средства диалога
•
■
ЦВМ управления
1
Манипулптор
1 f
Соела
Отображение
обстановки <
t
i
ЦВМ вы
реше
эаоотки L_
ни я
ЦВМ расп(
обстав
i
i
эзнавания L
[ОВКИ I
Датчики
свя
обратной
зи
ДаТЧИКИ инЖппмяпии 1
Рис. 11. Функциональная схема системы диалогового управления.
Очень важно решить вопрос о целесообразном разделении
функций между этими тремя уровнями с учетом загрузки
информационных каналов кабеля-троса на обоих участках (РА —
AM и AM — СН). Аппаратура наблюдения и управления
должна быть отработана с учетом дискретности передачи
информации по кабелю-тросу в довольно узкой полосе частот.
Далее предстоит разрешить проблему визуализации места
работы подводного робота на посту оператора. Дело в том,
что при подводных работах водная среда замутнена.
Телевизионная информация оказывается неполноценной, ее следует
дополнять ультразвуковой, лазерной и тактильной. При этом
1V2 I2 Заказ № 1190
353
все четыре вида информации в совокупности должны давать
объемное представление. Лишь комплексное представление
этих видов информации с выводом на общий дисплей позволит
в различных условиях более удовлетворительно отобразить
подводную обстановку, чем при использовании каждого из них
в отдельности. Но эта проблема остается еще нерешенной.
Выше были рассмотрены подводные телеуправляемые ма-
нипуляционные роботы с комбинированной человеко-машинной
системой управления. Сейчас уже можно говорить о создании
автономных НПА с системой управления, базирующейся
исключительно на бортовую ЦВМ, без кабельной связи с судном-
носителем. Их можно использовать для выполнения
несложных манипуляционных операций и сбора информации.
В этом случае робототехнический комплекс (рис. 12)
состоит из аппарата-матки и рабочего аппарата, соединенных
коротким кабелем. Основная управляющая и обрабатывающая
информацию ЦВМ помещается на аппарате-матке, а более
простой спецвычислитель — на рабочем аппарате. Сохраняется
иерархический принцип построения системы управления
манипулятора, но с чисто автоматическими режимами,
программными и адаптивными, а в перспективе — с элементами
искусственного интеллекта, как описывалось выше.
Рассмотрим узловые задачи проектирования дистанционных
человеко-машинных систем управления необитаемых
подводных манипуляционных роботов.
Как видим, в систему входит большой комплекс
технических средств, разнообразных по содержанию и
разбросанных территориально, но тем не менее составляющих единое
целое. Все звенья этой системы взаимосвязаны в процессе
работы. Поэтому необходимо не только детальное
проектирование их как отдельных технических устройств, но и системное
проектирование с увязкой между собой основных параметров
этих звеньев на базе общих требований, предъявляемых к
эффективности, качеству, точности и динамическим свойствам
всей системы.
Первым этапом такого проектирования является
определение исполнительного уровня системы управления
манипуляторами внутри рабочего подводного аппарата. Исходя из
анализа операций, которые надо совершать, выявляют основные
требования к зоне обслуживания, кинематике манипуляторов,
энергетике и динамическим качествам приводов, алгоритмам
работы спецвычислителя. Определяют необходимый набор
датчиков очувствления манипулятора и датчиков информации
о свойствах среды.
Динамика манипулятора в целом описывается сложной
системой дифференциальных уравнений, исследование которой для
синтеза системы управления возможно только с помощью
универсальных ЦВМ. Это исследование усложняется в том случае,
354
если предусмотрена работа манипуляторами при плавающем
аппарате (в режиме зависания без закрепления). При этом
все движения и рабочие усилия манипулятора играют роль
возмущающих воздействий на систему управления самого аппарата,
что затрудняет его стабилизацию в процессе функционирования
манипуляционной системы. Для решения задачи требуются
исследование динамики аппарата совместно с
манипуляторами и иногда постановка дополнительной механической
руки для закрепления аппарата за корпус объекта. Возможно,
Рис. 12. Схема робототехнического комплекса.
при этом система управления движением рабочего аппарата
должна быть взаимосвязана с системой управления движением
звеньев манипулятора, чтобы в результате их совместных
действий была выполнена необходимая манипуляционная
операция. Это вносит определенную специфику и в алгоритмы работы
бортового спецвычислителя в зависимости от сигналов
датчиков очувствления манипулятора.
Таковы основные проблемы проектирования
исполнительного уровня управления на борту рабочего подводного
аппарата.
Далее в качестве звена системы управления вступает в
работу линия связи между подводным рабочим аппаратом,
аппаратом-маткой и надводным судном-носителем. Линия связи
вынужденно малоканальная и имеет ограниченную полосу
частот. Передача значительного числа информационных сигналов
(в том числе и телевизионных) в одном направлении, а также
1V.12*
355
командных и контрольных в другом приводит к существенной
дискретности передачи сигналов, вследствие чего возможно их
временное запаздывание. Это существенно влияет, во-первых,
на эффективность и динамические качества адаптивной
автоматической части системы управления манипуляторами,
включающей ЦВМ аппарата-матки, во-вторых, на качество работы
контура наблюдения и управления, проходящего от рабочего
подводного аппарата через пульт оператора на надводном судне.
Поэтому на втором этапе системного проектирования
необходимо, с одной стороны, учитывать характеристики линии связи
при определении эффективности и динамических качеств
общего контура управления, а с другой — предъявлять требования
к линии связи (в пределах возможного), исходя из
необходимой эффективности действия общего контура управления. При
этом предстоит учитывать помехи и искажения информационных
и командных сигналов, для чего потребуются соответствующие
статистические расчеты системы управления как по блокам,
непосредственно связанным с линией связи, так и по общей
эффективности и динамике всей системы управления в целом.
Для включения такой линии связи в контур управления
придется также заняться серьезной разработкой устройств
сопряжения выходов этой линии с основными блоками системы
управления. Все эти устройства следует минимизировать в
совокупности по массогабаритным характеристикам и по
потреблению энергии и одновременно стремиться к достижению
максимальной надежности.
На третьем этапе системного проектирования предстоит
построить'верхние уровни человеко-машинной интерактивной
системы управления с использованием ЦВМ, спецвычислителя и
с учетом всех особенностей рассмотренного выше
исполнительного уровня, линии связи и системы очувствления.
На четвертом этапе необходимо представить информацию
о подводной обстановке в удобной для человека форме, а на
последнем, пятом, этапе проектирования выполнить
биотехническую проработку технических средств наблюдения и
управления, т. е. согласовать их с физиологическими особенностями
человека. При этом система управления в целом как
интерактивная должна совершать автоматически максимально возможное
количество элементов манипуляционных операций
с'минимальным применением ручного труда человека-оператора на пульте.
Для этого необходимо использовать все современные технические
средства и привлекать человека к процессу управления только
тогда, когда действительно необходимо его активное участие.
Однако в период всей работы подводного манипуляционного
робота, в том числе и в автоматических режимах,
человек-оператор осуществляет непрерывное наблюдение по экрану и
приборам за его действиями и, если понадобится, в любой момент
может взять управление в свои руки.
356
Таким образом, наиболее перспективными следует считать
описанные выше автоматизированные, супервизорные и
диалоговые интерактивные системы управления, дополняемые
полуавтоматическими биотехническими системами с управляющей
рукояткой и спецвычислителем.
ПРИВОДЫ
УГЛОВЫХ
ПЕРЕМЕЩЕНИЙ
ТЕ
ПРИВОДЫ
ЛИНЕЙНЫХ
ПЕРЕМЕЩЕНИЙ
АВМ
ПОСТ ОПЕРАТОРА
АНАЛОГО-ЦИФРОВОЙ КОМПЛЕКС
Рис. 13. Схема комплексного лабораторного стенда
полунатурного моделирования.
Заметим, что все рассмотренные выше задачи системного
проектирования тесно связаны между собой и решаются
в конце концов совместно.
Для успешного осуществления системного проектирования
дистанционного управления подводными манипул яционными
357
роботами требуется создание специальных комплексных
лабораторных стендов полунатурного моделирования, включающих
в себя аналого-цифровой машинный комплекс, качающийся
макет рабочего аппарата с реальными манипуляторами, модели
объектов работы, действующий макет поста оператора с
аппаратурой отображения обстановки и управляющими
устройствами (рис. 13). Макет поста должен находиться в соседнем
помещении вне прямой видимости места действий
манипуляторов.
В аналого-цифровом комплексе моделируются уравнения
движения аппарата с учетом гидродинамики, свойств
измерителей и движительно-рулевого комплекса, воздействия кабеля-
троса и т. п., а также алгоритмы управления движением аппа-
рата и манипуляционной системы с учетом свойств линии связи
и помех.
Такой стенд позволит в лабораторных условиях, во-первых,
проверить, насколько правильно проведены предыдущие
расчеты системы управления по всем задачам системного
проектирования, в том числе и результаты машинного
проектирования с предварительным чисто математическим моделированием.
Во-вторых, он позволит отработать алгоритмы управления
с учетом натурного представления в стенде манипуляторов и
поста человека-оператора, в-третьих, внести необходимые
изменения в эти натурные части системы для повышения
эффективности действия всей системы в целом; в-четвертых, отработать
эргономические и биотехнические характеристики системы.
Кроме того, такой стенд может служить для лабораторных
испытаний различных дистанционных систем'управления мани-
пуляционными роботами, а также стать основой тренажерного
комплекса для обучения, отбора и тренировки операторов.
Подобный стенд полунатурного моделирования — мощное
универсальное средство проектирования и лабораторной
отработки системы, позволяющее в хорошо подготовленном
состоянии выйти на натурные морские испытания.
Надо сказать, что его можно использовать для отработки
и испытания в лаборатории любых других дистанционно
управляемых робототехнических комплексов, предназначенных,
например, для безлюдной работы в шахтах или в других
экстремальных условиях, в том числе в космическом
пространстве.
В заключение скажем, что аналогичным путем можно
проводить проектирование и лабораторную отработку систем
дистанционного управления манипуляторами для обитаемых
подводных и космических аппаратов. В этом случае
человек-оператор может быть помещен внутрь качающегося аппарата на
описанном выше стенде с целью приближения условий его
деятельности к реальным, в частности, для ввода в действие его
вестибулярного аппарата.
358
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Бе л я нин Н. П. Промышленные роботы.— М.: Машиностроение,
1975.
2. Дистанционно управляемые роботы-манипуляторы: Сб. статей: Пер.
с англ. и япон.— М.: Мир, 1976.
3. Игнатьев М. Б., Кулаков Ф. М., Покровский А. М.
Алгоритмы управления роботами-манипуляторами. — М.: Машиностроение,
1977.
4. Кулешов В. С, Л а кот а Н. А. Динамика систем управления
манипуляторами. — Л.: Энергия, 1971.
5. Медведев В. С, Лесков А. Г., Ющенко А. С. Системы
управления манипуляционных роботов. — М.: Наука, 1978.
6. Подводные роботы. — Л.: Судостроение, 1977.
7. Попов Е. П., Верещагин А. Ф., Зенкевич С. Л. Манипу-
ляционные роботы. Динамика и алгоритмы.—М.: Наука, 1978.
8. Ястребов В. С. Телеуправляемые подводные аппараты с
манипуляторами.— Л.: Судостроение, 1973.
Александр Николаевич Дмитриев,
кандидат технических наук, один
из создателей подводных
аппаратов «Север-2», ТИНРО-2, «Ат-
лант-2» и др., председатель
секции подводной техники НТО суд-
прома им. акад. А. Н. Крылова.
А. Н. Дмитриев
ОБИТАЕМЫЕ
ПОДВОДНЫЕ
АППАРАТЫ:
СОСТОЯНИЕ
И ПЕРСПЕКТИВЫ
РАЗВИТИЯ
В хозяйственном освоении Мирового океана особое место
среди разнообразной морской техники занимают обитаемые
подводные аппараты (ОПА), позволяющие человеку выполнять
под водой различные исследования и работы.
ОПА с прочным корпусом предохраняют человека от
внешнего давления, поэтому в них, в отличие от водолазного
снаряжения, любой человек, даже не обладающий крепким здоровьем
и навыками водолаза, может погружаться на значительные
глубины, вплоть до предельных. Считается, что работа водолазов
эффективна на глубинах до 150 м, глубже выгоднее
применять ОПА.
Первые обитаемые самоходные аппараты имеют довольно
много общего с первыми экспериментальными подводными
лодками, строившимися еще в прошлом веке по проектам
К. А. Шильдера, И. Ф. Александровского, С. К. Джевец-
кого и др. Они также имеют прочный корпус, источники
энергии, движительный комплекс, системы управления, навигации,
жизнеобеспечения. Их главное отличие — хозяйственное
назначение, что определяет основные характеристики и
конструктивную схему: например, они могут погружаться на большую
глубину, обладают малой скоростью, но высокой маневренностью,
на них имеются иллюминаторы, манипуляторы.
Классифицируют ОПА по назначению и важнейшим
техническим характеристикам.
По назначению различают аппараты:
исследовательские, как правило, многоцелевые;
361
производственные, предназначенные для подводных работ,
в основном специализированные;
грузопассажирские, предназначенные для транспортировки
грузов, гидронавтов, легководолазов, спасательных работ и
подводных прогулок;
экспериментальные для отработки отдельных видов систем
и оборудования.
По способу доставки к месту погружения различают
аппараты:
буксируемые;
транспортируемые на борту судна-носителя;
автономные, базирующиеся на берег.
По способу удержания на глубине различают аппараты:
привязные, поддерживаемые на кабеле-тросе;
поплавковые, имеющие легковесный поплавок (батискафы);
беспоплавковые, поддерживаемые плавучестью прочного
корпуса;
донные, передвигающиеся по дну с помощью механических
органов.
По глубине погружения различают аппараты:
для малых глубин — до 600 м;
для средних — до 2000 м;
для больших — до 6000 м;
для предельных глубин — до 12 000 м.
Однотипные самоходные аппараты, транспортируемые на
борту судна-носителя, классифицируют обычно в зависимости
от их технических характеристик.
В зависимости от водоизмещения различают аппараты:
малого водоизмещения — до 20 т;
среднего — от 20 до 60 т;
большого — более 60 т.
В зависимости от автономности выделяют три группы:
малой автономности, работающие 3—5 ч;
средней — в пределах суток;
большой автономности, работающие несколько суток.
В зависимости от скорости движения различают аппараты:
малой скорости — до 1,5 м/с;
средней скорости — от 1,5 до 3 м/с;
большой скорости — свыше 3 м/с.
По числу членов экипажа аппараты указанного типа можно
разделить на одно-, двух-, трех- и многоместные.
Наиболее многочисленную группу составляют самоходные
научно-исследовательские ОПА с глубиной погружения до
600 м, водоизмещением до 15 т, скоростью 1,0—2 м/с,
экипажем 2—3 человека.
Несмотря на разнообразие конструктивных форм, эти
аппараты имеют общие элементы, главными из которых являются
прочный корпус (в нем размещается экипаж), системы жизне-
362
обеспечения, управления, навигации и связи; легкий корпус
(в нем размещается забортное оборудование для достижения
наилучших гидродинамических качеств подводного аппарата);
энергетическая установка, мощность и энергоемкость которой
достаточны для обеспечения заданной скорости, автономности
плавания и работы всех систем и оборудования.
К главным элементам также относится движительно-руле-
вой комплекс, обеспечивающий аппарату ход и
маневрирование, судовые системы и устройства, обычно располагающиеся
за пределами прочного корпуса, система жизнеобеспечения
экипажа, которая располагается внутри прочного корпуса и
состоит из систем регенерации и кондиционирования воздуха,
пищевых и санитарно-гигиенических блоков и других
устройств.
Обязательным элементом каждого подводного аппарата
является балласт — жидкий и твердый, который служит для
компенсации изменения массы и плавучести аппарата в процессе
работы, уравновешивания плавучести перед погружением, для
сброса при всплытии в аварийной ситуации и создания запаса
водоизмещения.
У аппаратов средних и больших глубин плавучесть прочного
корпуса часто оказывается недостаточной для
уравновешивания его массы. В этом случае недостаток плавучести
компенсируют легковесными поплавками, выполненными из легких
твердых материалов или пустотелых емкостей, заполненных
жидкостью или газом.
Основные характеристики ОПА, определяющие его
технические и эксплуатационные свойства,— это рабочая глубина
погружения, масса, водоизмещение, скорость, автономность по
запасам энергии и обитаемости, масса полезного груза, число
членов экипажа, главные размерения, диаметр прочного
корпуса.
Прочный корпус ОПА обеспечивает безопасность
погружения. Чаще всего его форма сферическая. Корпус состоит
либо из одной сферы, либо из двух-трех. Меньше
распространены аппараты с цилиндрическим корпусом и
полусферическими концевыми переборками. Изготовляют корпус в
основном из высокопрочной стали, реже из титана. В последние годы
прочные корпуса аппаратов малых глубин изготовляют из
стеклопластика, акрилового и силикатного стекла.
Легкий корпус выполняют из мягкой стали,
алюминиевых и титановых сплавов, стеклопластика. В качестве
источников энергии применяют свинцово-кислотные аккумуляторные
батареи, надежные в работе, простые в обслуживании и
недорогие.
В различных странах ведутся поиски новых, более
эффективных, небольших по массе, но мощных источников энергии
для подводных аппаратов.
363
Прочный корпус вместе с аккумуляторной батареей, как
правило, составляет от 30 до 70% массы всего подводного
аппарата.
Вне прочного корпуса расположены движительно-рулевой
комплекс, якорно-гайдропное устройство, позволяющее под
водой удерживаться в одной точке или дрейфовать у дна; система
гидравлики, обеспечивающая работу ходовых, маневровых и
вспомогательных гидродвигателей; манипуляторные устройства
для взятия проб грунта и воды и т. д.; устройство для сброса
балласта; буксирное и швартовное устройство.
За пределами прочного корпуса находятся, как правило, и
общесудовые системы:
балластная, обеспечивающая прием воды в балластные
цистерны перед погружением и продувку балласта при
всплытии в надводное положение; система состоит из балластных
цистерн с кингстонами и клапанами продувания, глубоководные
аппараты (батискафы) имеют также систему твердого
балласта, в качестве которого используется железная дробь;
система воздуха высокого давления, используемая
в основном для продувания балластных цистерн, сжатый воздух
также применяется для гидравлической системы, герметизации
забортных двигателей и других вспомогательных целей;
система регулирования плавучести, служащая
для компенсации положительной или отрицательной плавучести,
возникающей во время погружения при изменении плотности
воды и объемного водоизмещения, при сжатии элементов
аппарата под действием внешнего давления или изменения
температуры; система состоит из прочных или эластичных цистерн,
насосов, арматуры;
дифферентная система, предназначенная для
компенсации дифферентующих моментов и создания дифферента; в
качестве рабочего тела применяют воду, ртуть, шарожидкость
(стальные шарики со смазочным маслом), на простых
аппаратах малых глубин удифферентовка часто осуществляется
перемещением груза.
Все элементы забортных устройств и систем должны
надежно работать в морской воде при высоком внешнем давлении,
иметь малые объемы, массу и энергопотребление, быть
приспособленными для дистанционного управления и контроля.
Аналогичные требования предъявляются к системам,
оборудованию и приборам, расположенным внутри прочного корпуса.
Первыми ОПА обычно считают батисферы и гидростаты.
В 1953 г. были созданы швейцарский батискаф «Триест» и
французский ФНРС-3. В 1959 г. Жак-Ив Кусто начинает
испытывать аппарат «Дениза», глубина погружения которого
достигла 300 м.
В Советском Союзе в это время использовались для рыбо-
хозяйственных исследований гидростат ГКС-6 и подводная
364
лодка «Северянка». В 1961 г. вступил в строй гидростат
«Север-1». Все они сыграли большую роль в исследовании океана
и послужили основой для создания более совершенных
подводных аппаратов.
В 1961 г. во Франции был построен батискаф «Архимед»,
а в США — «Триест-2». Аппарат Жак-Ива Кусто «Дениза»
становится прототипом для проектирования серийных аппаратов
типа «Дип Стар», погружающихся на глубины 600, 1200, 3600
и 6000 м
Проектирование и строительство ОПА и лабораторий ведется
в Советском Союзе, Японии, Канаде, Англии, ФРГ и других
странах. Началась интенсивная подготовка к штурму
океанских глубин. Конструкторам предстояло создать подводные
манипуляторы, более точные навигационные системы, мощные
источники энергии, начались поиски сверхпрочных материалов.
В настоящее время во всем мире существует более 200
разнообразных по типу ОПА. Они используются в основном для
научных исследований в области океанографии, геологии,
биологии, рыболовства, а также для обслуживания подводных
нефтепромыслов.
В 1966 г. с помощью ОПА «Алвин» (США) была найдена
у берегов Испании водородная бомба, потерянная
американским самолетом. В 1968 г. «Алвин» во время спуска сорвался
с палубы и затонул на глубине 1540 м. Через год его подняли
с помощью другого ОПА «Алюминаут» (США) и других
спасательных средств. «Алвин» реконструировали: стальной корпус
заменили титановым; на аппарате установили более
совершенное оборудование и приборы. Рабочая глубина погружения была
увеличена почти вдвое — она достигает теперь 3600 м.
В 1974—1976 гг. с помощью этого реконструированного
аппарата выполнены исследования в рифтовой долине Срединно-
Атлантического хребта на глубинах до 3650 м. Аппарат и
сегодня продолжает успешно работать в океанских глубинах.
В настоящее время для подводных исследований и работ
американские фирмы используют другие подводные средства:
ОПА типа «Стар», «Дип Стар», ДСРВ, ТАРТЛ, «Дип Квест» и
серийные аппараты фирмы «Перри Кабмарин», подводные
лодки и дистанционно управляемые аппараты. Аппараты типа
ДСРВ, построенные в 1970 г., кроме спасательных работ
выполняют также различные исследования по заказам военно-
морского флота.
Основным поставщиком рабочих аппаратов на мировом
рынке стала американская компания «Перри Океанографик».
Она начала со строительства прогулочных и спортивных ОПА
серии «Перри Кабмарин» (ПК) в 1956 г., а затем перешла
к созданию рабочих ОПА с глубиной погружения до 900 м. У
последних прозрачная носовая полусфера, модульное исполнение
прочного корпуса, что позволяет видоизменять корпус в зави-
365
симости от назначения; имеется водолазный отсек с комингсом
для стыковки с палубными декомпрессионными камерами,
а также манипуляторы и инструменты.
Один из последних аппаратов фирмы «Перри» — ПК-16 —
может погружаться на глубину 915 м. Его прочный корпус
сочленен из трех стальных сфер. Аппарат предназначен для
транспортировки обслуживающего персонала в район
глубоководных работ на дне моря.
В 1969 г. в США был построен рабочий аппарат «Бивер-4»,
оснащенный системой манипуляторов, сменными инструментами
и камерой для доставки водолазов к месту подводных работ.
Последняя модификация этого аппарата была принята к
серийной постройке.
Большая роль в развитии подводных технических средств
в США принадлежит военно-морскому подводному центру с
базой в Сан-Диего (штат Калифорния), где созданы
оригинальные аппараты.
Кроме транспортируемых ОПА, в США для военно-морского
флота построены подводные лодки, например, известная «Дол-
фин» водоизмещением 930 т с глубиной погружения 660 м;
исследовательская лодка НР-1 водоизмещением 400 т с глубиной
погружения 1000 м и компактной атомной энергетической
установкой, успешно проработавшей восемь лет. Планируется
строительство второй такой лодки НР-2 с повышенной глубиной
погружения.
Во Франции изучение и освоение ресурсов морей и океанов
выполняется в соответствии с большой программой, создан
центр по освоению океана (CNEXO). В настоящее время
французские фирмы эксплуатируют батискаф «Архимед», аппарат
«Дениза», глубоководный аппарат «Сиана», аппарат «Шелф
Дайвер» и недавно построенные аппараты «Гриффон», «Марко»,
«Глобюль», МОАНА и «Нерей».
Трехместный аппарат «Сиана» водоизмещением 8,5 т
предназначен для исследований и работ на глубинах до 3000 м. Он
оборудован необходимыми системами управления, навигации
и связи. С помощью манипулятора, имеющего пять степеней
свободы, можно брать пробы грунта, работать гаечным ключом,
резаком и другими инструментами. Благодаря применению
высокопрочных материалов, малогабаритного оборудования и
рациональных проектных решений удалось повысить полезную
нагрузку и увеличить глубину Погружения при относительно
малом водоизмещении.
Двухместный аппарат «Глобюль» с глубиной погружения
до 200 м предназначен для осмотра подводных объектов, может
служить также для управления подводным кабелезаглубите-
лем. В этом случае он садится на специальную площадку заглу-
бнтеля и соединяется с ним при помощи четырех магнитных
фиксаторов.
366
После присоединения экипаж может управлять этим
«подводным плугом», способным зарывать при помощи
гидромонитора кабель на глубину до 1 м.
Аппараты типа МОАНА водоизмещением 9 т могут
погружаться на 450 м (рис. 1). В двухсферном прочном корпусе
имеется 16 больших иллюминаторов, обеспечивающих круговой
обзор. Прочный корпус заключен в раму, на которой укреплены
все забортные устройства, системы и рабочие органы. Для
выполнения подводных работ ОПА оснащен манипуляторами,
имеющими пять степеней свободы, и сменными инструментами:
пробоотборниками грунта, захватами, резаками, насадками для
завертки гаек и др.
Предназначены для
обслуживания подводных
нефтепромыслов, но
могут использоваться
и для других целей.
Французская
компания морской
экспертизы (КОМЭКС)
строит подводную
научно - исследовательскую
лодку «Аржиронет»
с глубиной погружения
до 600 м. Она
рассчитана на экипаж из 10
человек. В ней
предусмотрен водолазный
отсек для выхода
исследователей в океан на глубинах до 300 м. «Аржиронет» будет
обладать свойствами подводного аппарата и лаборатории
большой автономности, благодаря чему ее экономическая
эффективность повысится.
В Канаде разработана большая программа исследования и
освоения ресурсов Мирового океана, в том числе в арктических
районах. Хорошо известна канадская фирма «Интернейшнл
Хайдродайнемикс», строящая аппараты «Пайсис»
водоизмещением от 7 до 11 тс глубиной погружения от 1000 до 2000 м и
поставляющая их на мировой рынок. Аппараты имеют
сферический стальной корпус, легкий корпус из стеклопластика.
Источником энергии служат свинцово-кислотные
аккумуляторные батареи, движение и маневрирование аппарата
осуществляется с помощью гребных винтов. Оборудуют аппараты
комплексом научно-исследовательских приборов и манипуляторами
в соответствии с требованиями заказчика. Аппараты «Пайсис»
обладают высокими технико-эксплуатационными
характеристиками и могут быть использованы для научных исследований,
спасательных операций и подводных работ по укладке кабелей
Рис. 1. Аппарат МОАНА.
367
и трубопроводов на морском дне, а также для обслуживания
морских нефтегазопромыслов.
Два аппарата типа «Пайсис» приобретены Институтом
океанологии АН СССР и> успешно эксплуатируются при изучении
глубин озера Байкал и океанов.
Эта же фирма строит суда-базы для транспортировки и
обслуживания аппаратов типа «Пайсис». Их длина 27 м, ширина
12 м, осадка 2 м, водоизмещение "343 т, экипаж 10 чел. и
автономность 30 сут; суда оборудованы спуско-подъемным
устройством.
Кроме этой фирмы, строительством и эксплуатацией
обитаемых аппаратов в Канаде занимается министерство природных
ресурсов, а также фирмы «АРЧ Марин Лтд.» и «Нортон Мари-
тим Эксплорэйшнс Лтд.». Последняя приобрела мезоскаф
«Огюст Пикар», построенный в 1964 г. для прогулочных
экскурсий и погружений на Женевском озере, и подводную
лабораторию «Бен Франклин». Теперь модернизированный мезоскаф
используется для геологических исследований на глубинах до
700 м, а лаборатория «Бен Франклин» — для исследований на
глубине до 600 м.
В Англии в связи с освоением богатейших месторождений
нефти и газа в недрах Северного моря, разработкой твердых
полезных ископаемых и развитием марикультуры создается
разнообразная подводная техника: подводные аппараты,
водолазные комплексы и устройства для добычи твердых полезных
ископаемых. Нефтепромыслы в Северном море в 1977 г.
обслуживали одиннадцать ОПА и несколько аппаратов для
транспортировки водолазов.
Фирма «Интерсаб Лтд.», созданная в 1973 г., уже в 1976 г.
имела пять ОПА типа ПК, построенных американской фирмой
«Перри». Для транспортировки и обслуживания ОПА построены
специальные суда-базы. В 1977 г. фирма приобрела два
новейших аппарата типа ПК-18 для работ на глубинах до 300 м.
Они имеют прозрачную носовую переборку, трехместную
водолазную камеру с комингсом для стыковки с декомпрессионным
комплексом на борту судна и движительный комплекс,
обеспечивающий высокую маневренность. На съемной раме
установлены два манипулятора с набором сменных инструментов: дрели,
гайковерты, шлифовальные круги и др. Один манипулятор
служит для закрепления аппарата на каком-либо подводном
неподвижном сооружении, а второй — для'выполнения рабочих
операций.
Для проведения научных исследований на внешней раме
могут крепиться фото- и кинокамеры, измерительные приборы,
пробоотборники и другое оборудование.
Широкую программу развития океанской промышленности
в 1972 г. приняла ФРГ. К основным фирмам ФРГ,
поставляющим ОПА, относятся «Брукер физик АГ» и «Инженер Контор
368
Любек». Первая из них строит широко известные аппараты
типа «Мермейд», а вторая —типа «Тоурс».
Аппараты «Мермейд» (рис. 2) новейшей постройки
аналогичны аппаратам типа ПК-18. Последние модели
водоизмещением 830 т могут опускаться на глубину 500 м, имеют
водолазный отсек на четыре человека; оборудованы буровыми уста-
Рис. 2. Аппарат «Мермейд-3».
новками для бурения скважин глубиной 200 м. Этой же
фирмой разработан автономный подводный аппарат «Тоурс
200/500», базирующийся на берег и предназначенный для работ
в прибрежных районах Северного моря. Он представляет собой
дизель-электрическую подводную лодку с глубиной погружения
до 500 м, скоростью надводного хода 8 уз, подводного—11 уз,
автономностью 14 сут. Экипаж — семь человек. Емкость
аккумуляторных батарей обеспечивает плавание под водой со
369
скоростью 3 уз в течение 32 ч. Запаса топлива хватает для
2000-мильного плавания.
Этот ОПА не нуждается в судне-базе и не зависит от
погодных условий. На нем предусмотрены девять спальных мест,
общий кубрик, камбуз, санитарные и рабочие помещения.
В Японии первый гидростат «Куросио» был построен
в 1951 г. Через девять лет вступила в строй четырехместная
научно-исследовательская подводная лодка «Куросио-2» для
изучения ресурсов шельфа на глубинах до 200 м. В
последующем японские исследователи получили подводные аппараты
«Иомиури» водоизмещением 35 т, рассчитанный на шесть
человек с глубиной погружения до 305 м; «Синкай» водоизмещением
85 т и глубиной погружения 600 м; «Хакио» водоизмещением
около 7 т с глубиной погружения 300 м.
В 1973 г. в Японии построен двухместный ОПА «Удзусио»
с прозрачным прочным корпусом для работ на глубинах до
200 м. Для изучения океанских впадин Япония арендует
французский батискаф «Архимед».
Швеция, как и ряд других стран, участвует в создании
подводных судов, лодок и аппаратов, а также другой подводной
техники. Так, шведская фирма «Кокумс» по заказу военно-
морского флота строит спасательный аппарат УРФ
водоизмещением 80 т с глубиной погружения 450 м, экипажем из пяти
человек, два из которых — водолазы. Общая масса комплекса
инструментов на нем — 2 т. Для доставки аппарата к месту
работ на глубину 120 м создается подводный носитель ССВ
водоизмещением 1600 т и длиной 65 м. Он может, не всплывая на
поверхность, выходить в море и принимать на борт аппарат
УРФ.
Фирма заканчивает строительство также ОПА
водоизмещением 170 т для осмотра подводных объектов и рабочего
аппарата с водолазным отсеком.
В Советском Союзе до 60-х годов подводные исследования
выполнялись, как уже было сказано, с помощью подводной
лодки «Северянка» и гидростата ГКС-6.
В 1961 г. были начаты работы по проектированию
буксируемого ОПА «Атлант-1», глубоководного ОПА «Север-2» (рис. 3)
и других аппаратов и лабораторий для океанографических и ры-
бохозяйственных исследований.
В начале 70-х годов были построены и сданы в
эксплуатацию ОПА: четырехместный «Север-2» с глубиной погружения
2000 м; двухместный ТИНРО-2 с глубиной погружения 400 м
(рис. 4); двухместный буксируемый «Атлант-2» (рис. 5).
В 1976 г. создана многоместная подводная лаборатория
«Бентос» с глубиной погружения 300 м (рис. 6). С помощью этих
аппаратов получена обширная информация, имеющая
чрезвычайную ценность для рыбного хозяйства. В эти же годы
Институт океанологии АН СССР построил аппарат «Аргус». Дальне-
370
восточный университет строит двухместный аппарат «Шельф»
с глубиной погружения 300 м.
Буксируемые аппараты «Атлант» и аппарат «Север-2»
эксплуатировались по международным программам.
Характеристики некоторых ОПА приведены в табл. 1.
К 1977 г. количество ОПА в мире возросло примерно на
32% по сравнению с 1976 г. Судя по увеличению объема
подводных работ примерно на 30% в год, в 1979—1980 гг. темпы
строительства ОПА будут повышаться.
■■шт ИЩИ»
Рис. 3. «Север-2» в надводном положении.
Сегодня 50% всего эксплуатационного времени аппаратов
затрачивается на обслуживание морских нефтепромыслов,
осмотр подводных трубопроводов и кабелей; около 20%—на
укладку в грунт труб и кабелей; 12% —на подводные и
аварийно-спасательные работы; остальное время — на биологические
и геологические исследования, сбор кораллов и контроль за
загрязнением океанов.
Заметна тенденция к увеличению глубины погружения и
водоизмещения строящихся аппаратов. Улучшаются их
мореходные качества. Так, ОПА «Пайсис» может эксплуатироваться
при волнении до 6 баллов. Повышается эффективность
эксплуатации аппаратов за счет одновременного использования на
одном обеспечивающем судне нескольких обитаемых и
дистанционно управляемых подводных аппаратов. Так, например,
в США на судне-носителе «Пойнт Лома» транспортируются
батискаф «Триест» и необитаемый буксируемый аппарат.
Наибольшую сложность представляют спуско-подъемные
операции в штормовых условиях. Часто погодные условия
вынуждают прекращать работы. В связи с этим в последние годы
371
Рис 4. ТИНРО-2 перед погружением
1
Рис 5. «Атлант-2» на гаке спуско-подъемного устройства.
372
подводные аппараты проектируются одновременно с судном-
базой, которые рассматривают как единый комплекс,
предназначенный для выполнения конкретных подводных работ
в заданном районе Мирового океана. Обычно прорабатывают
несколько вариантов, предпочтение отдается тому из них, у
которого наиболее высокий экономический показатель.
С целью повышения эффективности подводных работ при
любых погодных условиях начинают создавать подводные суда-
базы в комплексе с ОПА. При наличии атомных энергетических
Рис. 6. Подводная лаборатория «Бентос-300».
установок такие базы смогут выполнять работы на больших
глубинах без всплытия на поверхность.
Одной из важнейших проблем при дальнейшем
совершенствовании самоходных ОПА является создание принципиально
новых источников энергии, способных работать без кислорода
воздуха.
Несмотря на дальнейшее совершенствование аккумуляторов,
нет основания считать их перспективным источником энергии
для подводных аппаратов. К наиболее перспективным относят
энергетические установки с поршневыми и роторными
двигателями различных типов, например двигателем типа Рикардо
замкнутого цикла с рециркуляцией выхлопных газов и
двигателем типа Стирлинга. В качестве топлива в них может
использоваться пропан или водород.
Источником энергии на подводных аппаратах могут также
служить водородно-кислородные и гидролизно-кислородные
топливные элементы, однако вследствие их несовершенства и
373
Таблица 1
Характеристики некоторых ОПА
Наименование
аппарата
«Мермейд-3»
(ФРГ)
«Атлант-2»
(СССР)
«Бентос-300»
(СССР)
ПК-8Б (США)
ТИНРО-2
(СССР)
«Дип Вью»
(США)
«Синкай»
(Япония)
«Старт-З»
(США)
«Бивер-4»
(США)
«Тоурс» (ФРГ)
«Аргус» (СССР)
«Аржиронет»
(Франция)
НР-1 (США)
«Дип Стар-4000»
(США)
ДСРВ (США)
«Пайсис-5»
(Канада)
«ТАРТЛ» (США)
«Север-2»
(СССР)
«Дип Квест»
(США)
«Алвин» (США)
«Алюминаут»
(США)
«Архимед»
(Франция) |
рабе
се
к S
ю -
300
300
300
250
400
460
600
600
600
600
600
600
1 000
1 220
1 520
1 980
1 980
2 000
2 440
3 500
4 570
11 000
о
<-<
as
со
СО
1 S
10,5
3,0
510
5,5
10,5
6,0
85,0
8,30
14,5
14,0
9,0
300
400
8,62
33,0
11,0
20,0
38,6
52,0
13,5
81,0
196
со
**>
Р.
и
3
X
СОп
0)0
С as
0,50
0,24
2,5
' 0,45
0,25
0,36
1,96
0,68
1,30
0,38
0,60
3,00
—
0,50
1,90
0,86 |
1,60
0,8
4,7
0,70
2,5
1,8
Э, М/С
о
о,
о
1 и
2,31
3,0
0,75
1 2,06
1,2
2,5
1,54
2,06
1,54
2,57
2,0
3,5
10,3
1,54
2,06
2,06
2,06
0,75
2,57
2,06
2,06
1,54
н
° § з*
5S О -
о25
к S 5
— СО U
g со а
4
—
240
2
8
4
4
3
4
3
7
10
—
4
8,5
3
4
8
10
4,5
18
6
чел.
£
со
S
as
CD
4
2
12
4
2
2
4
2
2+3
2
3
10
7
3
26
3
3
4
4
2
6
2
Главные
размерения
L
6,2
4,3
30,4
6,0
7,12
5,1
16,0
7,5
7,6
7,0
6,0
28
42,6
5,65
15,2
6,1
9,9
12,0
12,0
6,7
15,5
21,3
в
1,80
3,2
6,6
3,0
2,5
1,8
5,5
1,8
3,5
3,6
2,6
6,8
3,66
3,0
3,6
3,1
3,4
26
5,8
2,4
3,0
4,0
, м
Н
2,7
1,8
11,3
3,2
2,7
—
5,0
2
3,2
3.0
3,6
8,5
3,0
2,1
3,6
3,7
3,7
4,0
4,1
2,7
4,4
7,8
высокой стоимости энергии они пока не нашли широкого
применения.
За рубежом ведутся разработки атомных газотурбинных
установок с радиоизотопным источником тепла и реакторами
с жидкометаллическим теплоносителем, а также установок
с прямым преобразованием тепловой энергии в электрическую.
374
Наиболее известны магнитогидродинамическая,
термоэмиссионная и термоэлектрическая.
Таким образом, развитие энергетических систем подводных
аппаратов будет во многом зависеть от разработки надежных
и экономичных энергетических установок на базе достижений
космической техники.
Еще далеки от совершенства современные электро- и
гидромоторы погружного типа, работающие в морской воде при
большом внешнем давлении, поэтому предстоит разработать
малогабаритные эффективные электромоторы мощностью от 5
до 50 кВт для привода ходовых маневровых движителей,
а также более совершенные гидромоторы малой мощности для
привода забортных вспомогательных механизмов и устройств.
Другой, не менее важной проблемой следует считать
проблему снижения массы прочного корпуса, а следовательно и
повышения общей эффективности, глубины погружения и
грузоподъемности аппарата. Для решения этих задач необходимы
материалы с более высокой удельной прочностью и
антикоррозийными свойствами. К таким перспективным материалам
относятся высокопрочные стали, специальные титановые сплавы,
керамические материалы и пластики.
На пути совершенствования ОПА также предстоит:
— разработать точные системы навигации, автоматического
управления, средства связи, гидролокаторы и телевизионные
установки для обзора подводного пространства;
— повысить мореходные качества аппаратов, создать
универсальные спуско-подъемные устройства;
— создать принципиально новые манипуляторные
устройства, способные выполнять любые монтажные и ремонтные
работы на больших глубинах;
— разработать более совершенные приборы для изучения
физических, химических и биологических полей океана.
Не следует забывать и о том, что сегодня изучение и
освоение океанских глубин носит международный характер, поэтому
целесообразно унифицировать некоторые характеристики и
элементы ОПА. Это будет способствовать созданию
международной системы спасения аварийных аппаратов и их экипажей. При
этом должны быть унифицированы: автономность систем
жизнеобеспечения (она должна составлять не менее 70 ч на
человека), рабочие частоты звукоподводной связи и аварийных
маяков. Целесообразна также унификация размеров люков и
подъемных устройств.
Вследствие расширения морских нефтепромыслов и
увеличения их глубины в ближайшем будущем можно ожидать
увеличения числа ОПА.
С развитием марикультуры понадобятся и специальные
ОПА, а также лаборатории для биологических исследований
и обслуживания подводных хозяйств.
375
Проанализировав современные тенденции в освоении
ресурсов Мирового океана, можно сделать следующие выводы:
— ОПА являются эффективным средством выполнения
исследований, экспериментов и работ на любых глубинах
Мирового океана, поэтому темпы их строительства с каждым годом
будут увеличиваться;
— непрерывное совершенствование отдельных элементов и
общей компоновки аппаратов, а также унификация их узлов
будут способствовать снижению стоимости их постройки.
Наибольшим спросом, вероятно, будут пользоваться рабочие
аппараты, используемые для подводно-технических работ и для
исследований. Для выполнения долговременных и
крупномасштабных работ все большее признание получат аппараты
(подводные суда), базирующиеся на берег, а для транспортировки
и обслуживания глубоководных аппаратов будут использоваться
подводные суда-базы.
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Гуо Ж. 20 лет в батискафе. — Л.: Гидрометеоиздат, 1976.
2. Д и о м и д о в М. Н., Дмитриев А. Н. Подводные аппараты. —
Л.: Судостроение, 1966.
3. Диомидов М. Н, Дмитриев А. Н. Покорение глубин: Изд.
4-е, перераб. и доп. — Л : Судостроение, 1974.
4. Д м и т р и е в А. Н. Подводная лаборатория «Бентос-300».—
Судостроение, 1967, № 2, с. 15.
5. Дмитриев А. Н. Подводная лаборатория «Бентос-300». — Человек
и стихия, 1978, с. 116.
6. Дмитриев А. Н. Проектирование подводных аппаратов. — Л.:
Судостроение, 1978.
7. Д м и т р и е в А. Н. Работы на морском дне. — Спортсмен-подводник,
1978, № 51, с. 54.
8. Р и ф ф о К- Будущее океана: Пер. с франц.— Л.:
Гидрометеоиздат, 1978.
9. Behrman D. The World of the Oceans. Boston — Toronto, 1969.
10. Busby Fr. Manned Submersibles.— Office of the Oceanographer of
the Navy, 1976.
11. Janes Ocean Technology 1976/77.—London, 1976.
12. Limburg P., Sweeney J. Vessels for underwater exploration —
N. Y., 1973.
13. Oceans 76.— Proceedings of the Joint Conference of the MTS and
IEEE, 13—15/IX-76.—Washington, 1976.
14. Penzias W., Goodman M. Man beneath the sea.— Rev. of
underwater Ocean Engineering.— N. Y., 1973.
15. Register of Offshore Units, Submersibles and Diving Systems 1977/78.—
(Lloyds Register of Shipping, London).
16. System Certification Procedures and Criteria Manual for Deep
Submersible Systems.—Washington, Dc, 1973, Guly.
Павел Андреевич Боровиков,
кандидат технических наук,
старший научный сотрудник
Института океанологии АН СССР им.
П. П. Ширшова. В течение
последних десяти лет работает
в области создания техники для
обеспечения жизни человека под
повышенным давлением
искусственных газовых сред как в
береговых условиях, так и под водой.
Михаил Игоревич Гире, первый
испытатель и капитан подводного
аппарата ТИНРО-2. Основные
научные интересы —
проектирование и эксплуатация подводной
техники.
13 Заказ № 1190
Анатолий Ефимович Коваленко
является одним из
руководителей подготовки гидронавтов и
водолазов-совместителей.
Основные научные интересы —
эксплуатация подводной техники.
Александр Моисеевич Подражан-
ский, кандидат технических наук.
Принимает активное участие
в разработке, создании и
эксплуатации подводных обитаемых
и телеуправляемых аппаратов.
В настоящее время является
руководителем группы обитаемых
подводных аппаратов Института
океанологии АН СССР им. П. П.
Ширшова. Под его руководством
проведены работы с подводными
аппаратами на Черном море,
озере Байкал и в Тихом океане.
П. А. Боровиков,
М. И. Гире,
А. Е. Коваленко,
А. М. Подражанский
ПРОБЛЕМЫ
подготовки
ПОДВОДНЫХ
СПЕЦИАЛИСТОВ
1. Подготовка подводных специалистов
В настоящее время в связи с бурным развитием подводной
техники и быстрым расширением фронта
научно-исследовательских и промышленно-поисковых работ на континентальном
шельфе и в открытом океане возникла серьезная проблема
подготовки нового вида специалистов — подводников.
Освоение океана происходит в исследовательском,
экспериментальном и промышленном направлениях, которые и
определяют основные принципы подготовки специалистов,
работающих в условиях гидросферы. В зависимости от особенностей
подводных работ, не раскрывая подробно их сущности, можно
выделить группы специалистов:
1. Гидронавты — капитаны (пилоты) и члены экипажей
подвижных обитаемых подводных аппаратов (ОПА). Главное их
качество — способность обеспечить безаварийную эксплуатацию
подводных аппаратов в исследовательских и промышленных
целях.
2. Подводные исследователи — научные сотрудники или
технические специалисты, непосредственно ведущие подводные
наблюдения, эксперименты и работы с использованием
подводной техники.
В зависимости от условий проведения работ и специфики
использования подводной техники подводных исследователей
можно разделить на две подгруппы:
гидронавты-исследователи — специалисты, работающие
непосредственно на подводных аппаратах и в подводных
лабораториях (ПЛБ) с использованием научно-исследовательского
13*
379
оборудования на всех доступных подводным аппаратам
глубинах;
акванавты — специалисты-подводники, работающие
непосредственно в водной среде с использованием подводных аппаратов
«мокрого» типа, водолазного снаряжения и водолазных
комплексов подводных аппаратов.
3. Водолазы-глубоководники, выполняющие подводно-техни-
ческие работы на глубинах свыше 100 м.
Так как основной ближайшей задачей будет проведение
поисковых исследовательских и экспериментальных работ под
водой, большое внимание должно уделяться подготовке
гидронавтов, подводных исследователей и водолазов. Массовую же
подготовку технических специалистов можно отнести на более
позднее время и осуществлять по мере расширения
производства подводной техники.
Рассмотрим поэтапно особенности подготовки
перечисленных выше групп подводных специалистов.
Как свидетельствует накопленный опыт эксплуатации
подводных аппаратов и подводных лабораторий, а также опыт
подготовки их экипажей, в ходе обучения гидронавты и подводные
исследователи должны приобрести знания, практические
навыки, необходимые для эффективной работы под водой с
использованием особо сложной и пока еще не всегда
безотказной техники.
Не менее важна для гидронавтов физическая и
психологическая подготовка. Они должны обладать высокими
моральными качествами, быстрой реакцией, быть смелыми и твердыми
в принятии решений и их проведении.
Гидронавт (капитан или член экипажа ОПА, ПЛБ)
должен знать устройство и правила эксплуатации подводного
аппарата, всех его технических средств; основы судовождения и
безопасности мореплавания; правила техники безопасности и
борьбы за живучесть подводного аппарата и судна-носителя;
водолазное дело в объеме программы подготовки водолаза-
совместителя; основы океанологии, гидробиологии,
промысловой ихтиологии, гидрогеологии; морского дела, морского права
и организации службы на судах-носителях подводных
аппаратов.
Он должен уметь управлять подводным аппаратом или
механизмами (в соответствии с занимаемой должностью) в
любых окружающих условиях; при необходимости заменять любого
члена экипажа подводного аппарата; выполнять регламентные
и подготовительные работы, а также ремонт и устранение
неисправностей механизмов, систем и приборов ПА; бороться за
живучесть подводного аппарата.
Вот как охарактеризовал гидронавтов видный
американский специалист в области проектирования и эксплуатации
подводных аппаратов Р. Ф. Басби: «Капитаны современных под-
380
водных аппаратов представляют собой группу исключительно
умелых, движимых высокими побуждениями энтузиастов,
исполненных желания помочь ученому или инженеру.
Ответственность, возложенная на капитана подводного аппарата,
измеряется, с одной стороны, такими ценностями, как человеческие
жизни, и, с другой стороны, капитальными вложениями,
исчисляемыми миллионами долларов».
Гидронавт-исследователь должен знать
научно-исследовательское оборудование ПА и подводные технические
средства наблюдения; методику и способы подводных
исследований; основы устройства и управления подводным аппаратом;
правила техники безопасности и борьбы за живучесть
подводного аппарата и судна-носителя; устройство и правила
использования индивидуальных спасательных средств; основы
океанологии, гидробиологии, промысловой ихтиологии, гидрогеологии
(дополнительно к своей основной специальности).
Он должен уметь безукоризненно выполнять заданную
программу подводных исследований с использованием всех
технических средств подводного аппарата, снаряжения и
специальной техники; совершать маневры подводным аппаратом в
простых условиях для наиболее полного использования средств
наблюдения; пользоваться индивидуальными спасательными
средствами и бороться за живучесть подводного аппарата.
Акванавт должен обладать теми же
психофизиологическими качествами, что и гидронавт, иметь такую же
подготовку, как гидронавт-исследователь, и квалификацию водолаза
не ниже 3-го класса 2-й группы специализации.
Кроме вышеуказанных требований, он также должен уметь
использовать водолазный комплекс и снаряжение подводной
лаборатории (аппарата); выполнять подводные работы
непосредственно под водой в различных типах водолазного снаряжения.
Остановимся подробнее на методике подготовки
перечисленных выше групп подводных специалистов, за исключением
водолазов-глубоководников, так как их работа имеет много
специфических особенностей.
Как показала практика, подводные специалисты,
работающие с ОПА или ПЛБ, должны обладать знаниями в различных
областях науки и техники. Так, для того чтобы ориентироваться
в условиях гидросферы, они должны уметь, хотя бы в общем
виде, классифицировать неизвестные подводные объекты,
выявлять их особенности.
Поэтому подводные специалисты, как правило, уже имеющие
высшее или среднее техническое образование, в ходе обучения
должны получить специальную техническую подготовку:
познакомиться с устройством и правилами эксплуатации подводных
аппаратов, подводной техники, научно-исследовательского и
промышленного оборудования. Им предстоит овладеть основами
судовождения и безопасности мореплавания (только гидронавты),
381
морского дела, а именно с теорией и устройством судов и
подводных аппаратов; системой связи НПС и ОПА; техникой
безопасности работы на НПС и ОПА; организацией службы на
судах и ОПА, а также с морским правом.
В программу обучения должны быть включены
океанология, гидрогеология, гидробиология, промысловая ихтиология.
Кроме того, как уже было сказано, специалисты-подводники
должны овладеть водолазным делом и получить квалификацию
водолаза-совместителя или водолаза 3-го класса.
Особое внимание должно быть уделено изучению методики
подводных исследований (только для подводных
исследователей) .
Не менее важна психофизиологическая, физическая и
специальная медицинская подготовка.
Объем и содержание программы обучения разрабатывают,
исходя из требований конкретной квалификации подводного
специалиста.
Для того чтобы поставить подготовку подводных
специалистов на научную основу и создать четкую систему обучения
гидронавтов, подводных исследователей и технических
специалистов, вероятно, целесообразно организовать специальный
центр подготовки с учебными классами, полигонами,
тренажерами. Подобный центр должен быть оснащен подводной
техникой. В нем должны предусматриваться медицинский
профилакторий для психофизиологической и физической подготовки и
восстановления здоровья специалистов, а также водолазный
комплекс.
Основными этапами подготовки гидронавтов и подводных
исследователей являются:
1) отбор кандидатов для обучения на специальных курсах;
2) практическая морская подготовка кандидатов, не
имеющих плавценза на НПС, ПА и ПЛБ в составе научных групп
или групп технического обслуживания;
3) подготовка кандидатов в специальном центре или на
курсах;
4) стажировка кандидатов, прошедших теоретический курс
обучения, на подводных аппаратах и ПЛБ. По окончании ее
кандидатам присваивается начальная квалификационная
категория;
5) формирование и подготовка рабочих экипажей ОПА,
ПЛБ.
Подготовку подводных специалистов необходимо проводить
с отрывом от производства. Курс обучения гидронатов
рассчитан обычно на 10—12 месяцев; гидронавтов-исследователей —
на 3—4 месяца; акванавтов — на 5—6 месяцев.
Повышение квалификации этих специалистов возможно
после набора ими установленного плавценза в подводном
положении, проверки практических навыков в эксплуатации ОПА
382
в соответствии с занимаемой должностью, сдачи экзаменов по
основным дисциплинам: устройству и управлению ОПА,
основам судовождения и безопасности мореплавания, водолазному
делу, техники безопасности подводных работ.
Совершенствование подготовки по основной специальности подводных
исследователей и гидронавтов может осуществляться на курсах
повышения квалификации при высших учебных заведениях, научно-
исследовательских институтах и промышленных предприятиях
в установленном порядке под руководством
капитанов-наставников и руководителей научных групп, а также на учебных
сборах при курсах подготовки.
Рассмотрим содержание основных этапов подготовки.
Необходимое количество кандидатов в гидронавты и
подводные исследователи, организацию и сроки обучения на очередной
год определяют, исходя из перспективных планов и
потребностей организации.
Контингентом для отбора кандидатов может быть
командный состав судов флота (судоводители, механики)
Министерства рыбного хозяйства и других министерств,
заинтересованных в подводных исследованиях, поиске, промысле и добыче
морепродуктов и полезных ископаемых; сотрудники
научно-исследовательских учреждений, конструкторских бюро, проектных
и промышленных организаций; научные сотрудники, аспиранты,
выпускники высших учебных заведений, связанных с решением
проблем освоения океана и охраной окружающей среды.
Кандидатами в гидронавты и акванавты могут стать лица
мужского пола в возрасте до 35 лет, имеющие, как правило,
высшее техническое или среднее специальное образование, стаж
работы по специальности (диплому) не менее двух лет и опыт
плавания на морских судах не менее года. По состоянию
здоровья они должны отвечать требованиям, предъявляемым к во^
долазам.
Кандидатами в гидронавты-исследователи могут быть
специалисты любого профиля, которые по роду работы выполняют
подводные исследования, эксперименты или испытания
подводной техники на ОПА. Их возраст и состояние здоровья должны
отвечать требованиям, предъявляемым к морякам морского
флота.
При отсутствии плавценза кандидатам в гидронавты,
гидронавтам-исследователям и акванавтам предоставляется
возможность работы на судах флота в течение не более двух лет. После
этого они допускаются к учебе на курсах. Набор плавценза
должен проводиться в течение одного-двух рейсов на научно-
поисковых (исследовательских) судах, имеющих подводные
аппараты или технику, соответствующие будущей квалификации
кандидата. Во время плавания кандидатов зачисляют в штат
экипажа или включают в группу технического обслуживания
подводного аппарата.
383
Обучение кандидатов — сложный процесс, который четко
разделяется на четыре этапа:
1) теоретические занятия по предметам программы в
течение всего курса обучения;
2) практические занятия по предметам программы по мере
теоретического изучения ее отдельных разделов, включая
отработку операций по управлению аппаратом на берегу и
в море;
3) экзамены и зачеты по всем предметам программы — по
завершению курса обучения;
4) стажировка слушателей, успешно сдавших экзамены и
зачеты, на подводных аппаратах.
На первом этапе читаются лекции по предметам
программы. Особое внимание уделяется тщательному изучению
устройства ОПА, всех его систем, агрегатов, которые можно
разделить на три группы: механические и гидравлические
системы, электроэнергетические системы, электронные системы.
В соответствии с этим делением изучается техническая
документация на аппарат.
Знание эксплуатационных характеристик аппарата и всех
его систем необходимо для всех гидронавтов, так как при
погружениях, а также во время предспусковых и послеспусковых
проверок, проведении профилактических и регламентных работ
необходима взаимозаменяемость членов экипажа.
Изучив теоретически конструкцию ОПА, всех его систем,
правила их эксплуатации, кандидаты должны овладеть
практическими навыками вождения аппарата, научиться устранять
неполадки. Последнее обычно выполняет группа
обслуживания, но кандидаты должны уметь проводить ремонтные
операции, так как каждый из них может оказаться в такой
ситуации в ходе эксплуатации, когда помочь будет некому.
Заранее составляют специальные перечни операций,
выполняемых в процессе предспусковой и послеспусковой проверок.
Такие перечни целесообразно использовать в качестве основы
для практического обучения кандидатов. Многократно
повторяя эти операции, кандидаты смогут выработать необходимые
для эксплуатации ПА навыки.
Отработать все ремонтные операции сложнее. Естественно,
невозможно разбирать в процессе обучения все узлы и
агрегаты аппарата. Достичь необходимого уровня знаний можно
только в процессе эксплуатации, во время плановых и
профилактических работ, а также в процессе ремонта после отказов
или поломок.
После изучения устройства подводного аппарата можно
перейти ко второму этапу — отработке операций управления им
на берегу. Конечно, быстрее всего приобрести навыки в
управлении, используя тренажеры, однако если в распоряжении
учебного центра их нет, то обучение проводится на «живом»
384
аппарате. Те многочисленные операции, которые придется
выполнять гидронавту при погружении, необходимо
первоначально отработать на берегу. На этом этапе под руководством
капитана-наставника ОПА многократно, до появления
автоматизма, должны быть «проиграны» все действия от закрытия
входного люка до его открытия. Такой автоматизм необходим
для преодоления напряженности, которая неизбежно возникает
в первых погружениях гидронавта.
Особое внимание следует уделять отработке действий
экипажа во время аварийных ситуаций, для чего необходимо
имитировать такие ситуации в процессе обучения.
После закрепления навыков и отработки приемов
управления аппаратом на берегу можно перейти к практическому
обучению в море.
Как уже указывалось, напряженность, скованность,
испытываемые гидронавтом при первом погружении, исчезают после
25 — 30-часовой работы в аппарате, так как полностью
снимается нагрузка, вызванная «эффектом новизны», и закрепляются
все навыки, приобретенные им в ходе предварительной
подготовки.
В этот период кандидат начинает привыкать к шумам,
сопровождающим работу аппарата, понимать происхождение и
характер каждого звука, воспринимать сообщения службы
обеспечения с судна-носителя, учится лаконично и точно
передавать свои сообщения, привыкает к динамическим свойствам
аппарата, правильно оценивать скорости погружения, всплытия
и движения, понимать особенности вывески аппарата и многое
Другое.
Важность этого этапа подготовки очевидна. Естественно, не
все 30 часов гидронавт должен проводить за «ручками
управления», не менее важным является и участие в погружениях
в качестве наблюдателя.
В связи с этим может быть рекомендовано следующее
примерное распределение времени подготовительного этапа:
участие в погружении в качестве наблюдателя — 5—10 часов;
гидронавта—15 часов; командира экипажа — 5 часов.
Эти занятия проходят под наблюдением
капитана-наставника, имеющего большой стаж работы на аппарате.
В течение последних пяти часов погружения
капитан-наставник присутствует в ОПА в качестве наблюдателя,
фиксируя ошибки. Этот заключительный период, называемый
«сольным погружением», следует считать экзаменационным. При
отсутствии в действиях кандидата ошибок, каким-то образом
влияющих на безопасность автономного плавания аппарата, он
считается прошедшим курс подготовки и в качестве гидронавта-
стажера допускается к участию в рабочих погружениях. После
приобретения достаточного опыта он может быть допущен к
погружению в качестве помощника командира экипажа или ко-
385
мандира экипажа. Этот вопрос решается
капитаном-наставником в процессе работы.
На третьем этапе осуществляется прием экзаменов и
зачетов по всем предметам программы. Принимает экзамены
комиссия, назначаемая владельцем ОПА. В нее обязательно
должны входить капитан-наставник и опытные гидронавты,
проработавшие под водой более 300 часов.
После успешной сдачи экзаменов кандидаты в гидронавты
направляются на стажировку на ОПА или ПЛБ.
Четвертый этап — стажировка — преследует следующие
цели:
— закрепление теоретических знаний в вопросах
устройства и эксплуатации подводного аппарата и техники;
— получение практических навыков в обслуживании ПА и
механизмов при работе под водой в обычных условиях;
— проверка личных качеств кандидата и допуск к
самостоятельной работе на подводной технике.
В процессе стажировки гидронавты и
гидронавты-исследователи должны проработать под водой не менее 15 часов,
акванавты—15 часов и совершить 10 водолазных спусков
с ОПА и ПЛБ.
После стажировки и получения положительной
характеристики капитана-наставника ОПА (руководителя научной
группы) кандидатам присваивают соответствующую
начальную квалификационную категорию: гидронавт 3-го класса,
гидронавт-исследователь 3-го класса и т. п.
К самостоятельной работе гидронавтов и акванавтов
допускают после того, как они поработают в качестве дублеров.
Экипажи ОПА или ПЛБ формирует капитан-наставник только
из числа специалистов, имеющих соответствующие для данного
типа (категории сложности) аппарата квалификационные
категории.
Многолетний опыт показал, что для подготовки
высококвалифицированного капитана (гидронавта 1-го класса)
необходимо 3 — 5 лет.
За рубежом подготовкой гидронавтов для управления и
обслуживания аппаратов занимаются обычно
фирмы-изготовители ПА. Так, например, курс обучения для работы на
аппаратах «Пайсис» разработан фирмой «Интернейшнл Хайдродайне-
микс». Он состоит из двух основных разделов: теоретического и
практического. Обязанностью гидронавтов является частичное
обслуживание аппарата (только в предспусковой и после-
спусковой периоды и работа в аппарате при погружениях).
Текущий ремонт, необходимый при эксплуатации, выполняют
члены специальной группы.
Кроме того, ремонт устройств и блоков после отказа или
поломки в ходе эксплуатации осуществляют либо
фирма-изготовитель, либо при большой удаленности работ представители
386
фирмы. Как правило, на месте заменяют отказавшее
устройство (с неисправностью) и впоследствии на заводе
ремонтируют его.
Интересно, что каждому гидронавту на период подготовки
выдается журнал с описанием устройств различных систем
аппарата, аварийных ситуаций, навигационных условий, способов
обслуживания и т. д., а также с вопросами, ответы на которые
должны вписать курсанты самостоятельно.
Практическая часть курса также состоит из погружений на
борту аппарата. В соответствии с правилами фирмы гидронавт
должен отработать 30 часов погружений, причем два-три
последних он выполняет самостоятельно, без всякого
вмешательства инструктора, но под его наблюдением. В этот же период
гидронавт последовательно выполняет обязанности
руководителя погружения и связиста.
2. Подготовка водолазов-глубоководников
Особо остановимся на проблеме подготовки
водолазов-глубоководников, хотя в целом она не нова. Однако в настоящее время
в связи с расширением подводных работ, увеличением глубин
их проведения и, следовательно, усложнением поставленных
задач требования к подготовке водолазов изменились. В связи
с промышленным освоением океана предстоит подготовить
водолазов, владеющих различными специальностями в
соответствии с требованиями народного хозяйства. Практически
предстоит подготовить тысячи слесарей-монтажников, ремонтников,
сварщиков, дефектоскопистов для работы под водой, в
необычных экстремальных условиях.
При этом, конечно, основное внимание следует уделять
водолазной подготовке, так как недостаточный уровень
подготовки по специальности может привести только к срыву сроков
задания, зато незнание правил проведения подводных работ —
к несчастному случаю. Статистика показывает, что гибель
водолазов, работающих на морских нефтепромыслах, колеблется
от 0,7% (в Мексиканском заливе) до 1,0% (в Северном море)
от общего числа работающих в год. Столь высокая
аварийность, как свидетельствует анализ, объясняется одновременным
воздействием нескольких факторов: недостаточной подготовкой
самого водолаза и обслуживающего персонала, неисправностью
оборудования, несоответствием оборудования условиям эксплу-
атции, ошибками декомпрессионного режима, сложными
гидрометеорологическими условиями.
Сегодня в подводно-технических работах заняты тысячи
водолазов. Лишь в Северном море на морской добыче нефти и
газа занято около 2 тыс. водолазов, причем более половины из
них регулярно опускаются на глубины 120 м и более. Основные
387
зарубежные водолазные фирмы типа КОМЭКС (Франция),
«Тейлор Дайвинг энд Селведж К» (США), «Ошеанеринг Инт.»
(США) и др. насчитывают в своем постоянном штате по
нескольку сот водолазов, примерно по сто водолазов в год
принимают на временную, сезонную работу. Все эти водолазы
проходят предварительную подготовку и повышают свою
квалификацию до необходимого уровня в учебных центрах, имеющихся
во всех зарубежных водолазных фирмах.
Процесс обучения в этих фирмах, несмотря на
индивидуальные особенности и традиции, имеет много общего.
Как правило, предусмотрена подготовка водолазов
нескольких квалификационных уровней.
Самая низкая квалификация — водолаз, работающий на
сжатом воздухе. Диапазон его рабочих глубин — до 50 м.
Водолаз этой квалификации должен знать правила водолазных
работ той страны, в водах которой он работает, основы
физиологии и медицины, владеть индивидуальным водолазным
снаряжением и оборудованием (декомпрессионные камеры,
компрессоры и пр.). Он должен уметь работать под водой и грамотно
эксплуатировать шланговое и автономное воздушное
индивидуальное снаряжение, водолазные беседки, ручной
механизированный инструмент и подводные энергоблоки к нему, грунто-
размывочные средства, устройства для рубки, резки, сварки и
бетонирования под водой, малые плавсредства, используемые
для обеспечения погружений (катера, мотолодки и пр.).
Следующая квалификационная ступень — водолаз,
имеющий допуск к работе с использованием искусственных дыха-
тельных смесей (водолаз-глубоководник). Водолаз этой
квалификации должен знать и уметь делать все то, что знает и умеет
делать водолаз, работающий на сжатом воздухе. Помимо
этого, он обязан знать правила оказания первой медицинской
помощи на рабочем месте, теорию смешения газов,
газоаналитическую аппаратуру, газовые смесители, таблицы
непрерывной и ступенчатой декомпрессии, владеть индивидуальным
водолазным снаряжением с воздухом и искусственными
дыхательными смесями, изучить в совершенстве устройство
палубных водолазных комплектов (постов управления, систем
жизнеобеспечения, водолазных колоколов) и уметь управлять
ими. Он должен также грамотно и, соблюдая правила
безопасности, погружаться под воду с поверхности в водолазной
беседке или водолазном колоколе на глубины вплоть до 180 м,
уметь из них выходить в воду, проводить взрывные работы,
вести фото- и телесъемку, а также магнитную дефектоскопию.
Высшая водолазная квалификация —
водолаз-глубоководник, допущенный к многосуточному пребыванию под
давлением. Кроме всего перечисленного выше он должен знать
правила работы в режиме многосуточного пребывания под
давлением, специальные декомпрессионные таблицы, уметь грамотно
388
и безопасно погружаться на глубины свыше 180 м, руководить
погружениями других водолазов.
Помимо специальной подготовки все водолазы должны
иметь общепромышленную подготовку на уровне техника или
инженера по одной из необходимых специальностей.
Водолазы всех квалификационных уровней проходят
периодическую переподготовку для знакомства с новой техникой и
новыми методами работы под водой.
Комплектование штата водолазов крупные подводно-техни-
ческие фирмы начинают с предварительного отбора
кандидатов. Претендентами могут быть лица в возрасте 20 — 22 лет,
обладающие хорошим здоровьем, имеющие среднее
техническое образование по одной из общепромышленных
специальностей и диплом об окончании одной из авторитетных водолазных
школ, дающих начальную водолазную подготовку. Кандидаты
подвергаются письменному экзамену, охватывающему широкий
круг вопросов.
Принятые в водолазную школу курсанты изучают теорию и
практику водолазных работ, в том числе глубоководных,
устройство индивидуального водолазного снаряжения, в том
числе водообогреваемого, сборку и обслуживание
кабелей-шлангов, компрессоров и насосных станций, приобретают навыки
в проведении подводных монтажных работ, установке захватов
и подъемников, в выполнении подводной резки, сварки и
взрывных работ, эксплуатации подводных сварочных камер и
комплексов для ремонта трубопроводов; они изучают устройство
драг, барж-трубоукладчиков и пр. На этом же, начальном, этапе
обучения курсанты совершают тренировочные погружения
в глубоководном имитаторе учебного центра и практические
спуски в море.
По завершении обучения курсанты стажируются на подвод-
но-технических работах в качестве обеспечивающих водолазов.
Затем наиболее перспективные водолазы проходят
дополнительное обучение и допускаются к несложным
самостоятельным работам.
В целом курс подготовки водолаза в зависимости от его
квалификационного уровня составляет 10 — 24 месяца.
Самостоятельную деятельность «новобранец» начинает лишь после
нескольких лет работы в море на несложных погружениях и
вспомогательных операциях.
По данным зарубежных фирм, водолаз, получивший
начальную подготовку в возрасте 20 — 22 лет, после обучения
в учебном центре может начать работать самостоятельно лишь
через 3—5 лет (т. е. в 25—27-летнем возрасте), а в возрасте
около 35 лет он уже будет отстранен от погружений по
состоянию здоровья. Считается, что после 7—10 лет активной работы
в море организм водолаза перестает отвечать предъявляемым
требованиям.
389
Учебные центры, которые готовят водолазов высшей
квалификации, имеют в своем распоряжении береговые имитаторы
глубоководных погружений и суда с глубоководным
водолазным комплексом на борту. Курсанты выполняют в них
погружения на глубины 100 м и более, отрабатывают как сам
процесс погружения и работы под водой (в гидротанке
имитатора), так и отдельные подводно-технические операции,
например, подводную сварку, дефектоскопию и пр.
Учебные группы школ высшей квалификации насчитывают
обычно около 10 человек, в год школу заканчивает около 25
человек. Этого количества водолазов вполне достаточно для
пополнения штата фирмы.
Следует отметить, что водолазы, которые отработали
в гидротанке имитатора будущие операции, в море на
реальном объекте выполняют их с максимально возможной
скоростью и хорошим качеством. Поэтому сложные работы
экспериментального характера целесообразно во всех тонкостях
заранее отработать.
Несомненно, в связи с увеличением потребностей народного
хозяйства в подводных специалистах потребуется составить
правила профессионального отбора, создать единые учебные
методики и учебные центры.
В данной статье изложены основные проблемы
профессиональной подготовки подводных специалистов различного
профиля и в общих чертах охарактеризованы пути их решения.
Очевидно, что эти предложения нельзя считать единственно
возможными, во многом они могут показаться спорными.
П. А. Боровиков
ОБЖИВАНИЕ
ЧЕЛОВЕКОМ
МОРСКИХ ГЛУБИН.
СИСТЕМЫ
ЖИЗНЕОБЕСПЕЧЕНИЯ
Обживание человеком морских глубин может быть вызвано
как экономическими, так и социальными причинами. Первые
связаны главным образом с поиском новых пищевых,
минеральных и энергетических ресурсов, вторые — с поиском
жизненного пространства вследствие перенаселения суши.
Сегодня можно говорить с учетом обозримой перспективы
лишь об экономическом освоении океана, о превращении в
повседневную среду обитания, т. е. о социальной экспансии пока
говорить не приходится, поскольку реальных корней под собой
эта проблема не имеет. Поэтому в дальнейшем морские
глубины будем рассматривать как арену производственной
деятельности человека. Таким образом, пребывание человека под
водой ограничено сегодня неделями, может быть месяцами,
но не более.
Инженеры и врачи, занимающиеся проблемой обживания
морских глубин, должны решить последовательно три
взаимосвязанные задачи: сохранение человеку под водой жизни,
здоровья и работоспособности. Для того чтобы более четко понять
сущность решаемых проблем, их характер и объем,
остановимся на специфике подводной среды.
Во-первых, вода не поддерживает дыхания человека,
сформировавшегося как биологический вид в условиях воздушной,
газовой среды. Поэтому, независимо от всех прочих условий,
для дыхания под водой необходимо использовать газовую
смесь, обеспечивающую нормальную жизнедеятельность
организма человека, т. е. имеющую в зависимости от условий
391
погружения вполне определенный состав и параметры. При
работе под водой следует применять средства индивидуальной
или коллективной защиты человека в целом или, по крайней
мере, его дыхательных путей, от воздействия на них воды.
Во-вторых, толща воды на организм оказывает давление,
намного превышающее атмосферное. В этом случае все
условия существования человека резко изменяются. Правда,
экспериментально показано, что жизнедеятельность человека,
равномерно подвергнутого воздействию повышенного давления
(от 0,3 до 60 атм и более), не нарушается при соответствующем
составе дыхательной смеси. Такое давление он испытывает при
погружении под воду на глубину 600 м и более. Однако в
целом проблема жизнеобеспечения человека в гипербарических
условиях, зачастую в течение многих суток и даже недель,—
новая и далеко не решенная.
В настоящее время существуют два метода проведения
подводных работ:
Метод полной изоляции от окружающей воды. Люди
находятся в подводных лодках, рабочих подводных аппаратах,
рабочих камерах и пр., т. е. в сооружениях, прочный корпус
которых воспринимает на себя возрастающее давление воды.
В подобных сооружениях условия в наибольшей степени близки
к привычным наземным. Давление, действующее на организм,
сохраняется равным или весьма близким к атмосферному,
дыхательная смесь — воздух, комфортные зоны не
деформируются.
Метод длительного, многосуточного пребывания человека
под давлением. Последний получает все большее признание,
поскольку водолазная подготовка в наше время приобретает
вспомогательное значение, она становится лишь средством
приспособления к водной среде, в которой проводятся
определенные работы. Основной задачей погружающегося под воду
человека является выполнение различных операций по монтажу
оборудования, его ремонту, подводной сварке, а также
осмотров, экспертиз и пр. Современные объекты подводных работ
находятся на глубинах 200—300 м и более, объемы работ
достигают десятков и сотен человеко-часов подводного времени,
при этом необходимо заботиться не только о безопасности
людей, но и об эффективности их работы под водой.
Для того чтобы доставить человека под воду, дать ему
возможность поработать под водой на объекте и вернуть его
на поверхность живым и здоровым, следует выполнить ряд
требований. Так, строго в соответствии с глубиной погружения
и ритмом спуска следует изменять давление дыхательной смеси,
а в соответствии с давлением — состав дыхательной смеси, ее
температуру и влажность. Кроме того, эти характеристики
зависят и от времени пребывания под давлением в конкретных
условиях, а также от класса используемых технических средств.
392
В современной водолазной технике существуют три класса
оборудования, предназначенного для создания условий,
необходимых для пребывания человека под давлением: судовые
барокамеры, водолазные колокола и индивидуальные
водолазные аппараты. Они различаются по уровню предоставляемого
комфорта, по срокам пребывания в них людей.
В установленных на надводных или подводных судах
барокамерах водолазы живут сутками и неделями. Столь
длительное пребывание людей в замкнутом объеме под давлением
в десятки атмосфер требует поддержания необходимых
бытовых условий экипажа на высоком уровне и в наиболее полном
объеме.
Водолазные колокола используют при практических
работах в течение нескольких часов в день, а затем колокол
или бездействует, или в нем погружается второй, сменный
экипаж. Естественно, в них значительно проще система
жизнеобеспечения и менее комфортны условия обитаемости.
Индивидуальное водолазное снаряжение
применяют непрерывно лишь в течение двух-трех часов, поэтому
с его помощью удается создать минимально необходимые
условия для пребывания человека под водой.
В целом система жизнеобеспечения должна удовлетворять
следующим требованиям.
Во-первых, она должна поддерживать рабочее давление
дыхательной смеси с точностью ±0,25 м вод. ст.
Во-вторых, изменять состав дыхательной смеси при
увеличении рабочих глубин и, стало быть, давления. Так, при
погружениях до 60 м и более инертная компонента воздуха —
азот — должна заменяться на гелий. Наличие гелия в
дыхательной смеси резко меняет все ее свойства и соответственно
изменяются требования к условиям обитаемости.
В-третьих, необходимо точное регулирование содержания
кислорода и углекислого газа, присутствие которых в
дыхательной смеси важно для нормальной жизнедеятельности организма
человека.
В настоящее время исследователи считают, что
биологическое воздействие на организм человека оказывает не
относительное процентное содержание биологически активной
компоненты, а ее абсолютное массовое содержание в единице
геометрического объема отсека. Кроме того, независимо от давления
дыхательной смеси массовое содержание кислорода и
углекислого газа в единице геометрического объема может оставаться
примерно на «наземном» уровне. Исходя из этих двух
положений и проектируются системы жизнеобеспечения.
В процессе жизнедеятельности организм человека в
окружающую среду выделяет целый ряд газообразных
продуктов, так называемых антропотоксинов. Присутствие этих газов
в дыхательной среде в больших количествах может привести
393
к отравлению организма. У физиологов до сих пор нет четкого
представления о характере длительного, многосуточного,
воздействия антропотоксинов на организм человека в условиях
повышенного давления.
Принято считать, что массовое содержание их в единице
геометрического объема отсека будет приемлемым и для
гипербарических комплексов.
В-четвертых, следует поддерживать в требуемых пределах
тепловлажностную характеристику дыхательной смеси. Ее
поддерживают с помощью специального оборудования, внешне не
связанного с системами регулирования состава дыхательной
смеси. Многократными опытами показано, что с повышением
давления дыхательной смеси, особенно с заменой азота в смеси
на гелий, зоны тепловлажностного комфорта деформируются.
Так, на глубине 200—300 м комфортными считаются
температура 30—32° (±1°) и влажность 40—50%. Однако, строго
говоря, для каждой дыхательной смеси, для каждого давления и,
более того, для каждой системы жизнеобеспечения комфортная
зона будет иной. Это вызвано тем, что понятие комфорта
основано на процессах теплообмена и влагообмена организма
с внешней средой. Естественно, что на данные процессы влияют
и теплофизические характеристики дыхательной смеси, и влаго-
содержание, и организация ее потоков по камере, и скорость
этих потоков. Проблема теплового и влажностного баланса
организма человека в гипербарических условиях все еще
нуждается в тщательном исследовании, особенно при внедрении
в практику водолазных работ нового оборудования и
снаряжения.
Существующие системы жизнеобеспечения ведут
обычно комплексную обработку дыхательной смеси, удаляя из
нее углекислый газ и антропотоксины, добавляя кислород,
поддерживая в необходимых пределах температуру и влажность
этой смеси.
Однако на этом задачи, стоящие перед системой
жизнеобеспечения, не исчерпываются. Она должна очищать дыхательную
смесь от непрерывно выделяемой членами экипажа
микрофлоры, которая в условиях замкнутого объема накапливается
с весьма значительной скоростью. Присутствие же микрофлоры
в обитаемом отсеке особенно опасно, так как сопротивляемость
организма человека в гипербарических условиях резко снижена.
Обычно перед началом работ тщательно дезинфицируют
барокамеры, оборудование, проходят дезинфекцию и члены экипажа.
Дезинфекцию периодически повторяют. Кроме того, в системе,
по которой циркулирует дыхательная смесь, устанавливают
специальные фильтры, задерживающие не только микрофлору,
но и обычную пыль.
Наконец, в системе жизнеобеспечения должны быть
предусмотрены пути подачи пищи людям, находящимся под
394
водой или под давлением. В условиях нормального давления —
в прочных корпусах — проблема питания особых трудностей не
вызывает. При решении этой проблемы для водолазов,
находящихся многие сутки под давлением, следует помнить, что их
вкусовые ощущения отличны от ощущений, возникающих
в обычных, наземных условиях. Исследователям предстоит
выяснить, как усваивается пища в гипербарических средах, для
выработки рациона.
Итак, на современном этапе знания об особенностях
жизнедеятельности организма человека в подводных
гипербарических условиях носят полуэмпирический характер и объем их
явно недостаточен. По-видимому, первоочередной задачей
является максимальное расширение объема фундаментальных
исследований по водолазной и подводной физиологии. Только
тогда практические рекомендации будут основаны на
результатах научных работ, а не на методе проб и ошибок.
Сегодня обживание человеком морских глубин связано с
использованием судовых водолазных комплексов: передвижных
блочных и стационарных. Глубоководные варианты и тех и
других комплексов рассчитаны на обеспечение многосуточной
работы под давлением и отличаются друг от друга по
количеству принимаемых в отсеки водолазов и соответственно
объему работ. Передвижные комплексы принимают двух-трех
водолазов и применяются при выполнении случайных работ
небольшого объема, например контроля за состоянием донного
оборудования или мелкого ремонта. Стационарные комплексы
могут принять одновременно 8—12 водолазов, которые
проводят работы, значительные по объему, например монтаж
подводных устройств, трубопроводов и пр.
Требования к условиям обитаемости в барокамерах
водолазных комплексов обоих классов в общем подобны,
одинаковы и их технические решения.
Давление дыхательной смеси в необходимых
пределах практически поддерживается за счет подачи в
барокамеру по трубопроводам запасенного в баллонах в сжатом виде
газа или за счет отвода из барокамеры излишков дыхательной
смеси. Обычно в контур регулирования давления включены
устройства сбора выпускаемой из отсеков смеси, выделения из
нее гелия (если смесь содержит его) в чистом виде и закачки
очищенного гелия снова в баллоны для повторного
использования. Контурами регулирования давления управляют, как
правило, вручную, особенно на этапе снижения давления —
декомпрессии. Рассматриваются варианты автоматизированных
контуров компрессии, стабилизации давления и декомпрессии,
однако они находятся пока на стадии экспериментальной
проверки.
Контроль за составом дыхательной смеси и
поддержание его в заданных пределах осущест-
395
вляются с помощью контуров, регулирующих параметр
дыхательной среды или нескольких сред сразу. Каждый контур
состоит из измерителя величин регулируемого параметра
(температуры, влажности или содержания кислорода) —блока
формирования управляющего сигнала и исполнительного механизма,
который и регулирует величину заданного параметра.
Очень важно, чтобы измерения состава дыхательной смеси
и ее параметров — температуры и влажности — были
высокоточными во всем диапазоне давлений. Мы уже говорили, что
с изменением давления состав дыхательной смеси изменяется:
относительное, процентное, содержание компонент (кроме
инертной) падает пропорционально росту давления. Так, если
в воздухе нормальное содержание кислорода — 20%, то на
глубине 100 м нормальным будет уже содержание 1,8%, на
глубине 300 м —0,65%, а на глубине 500 м —0,39%.
Следовательно, любой газоанализатор, измеряющий
относительное, объемное содержание компонент дыхательной смеси,
должен обладать фантастической точностью, особенно для
больших глубин, недостижимой на сегодняшний день. Поэтому,
как уже было сказано выше, достаточно точно анализировать
состав дыхательной смеси удается лишь методом измерения
абсолютного содержания компоненты в единице
геометрического объема отсека (измерение должно выполняться
непосредственно в отсеке, под рабочим давлением анализируемой
среды). В этом случае точность измерений может быть
сравнительно невысокой, но, главное, она не должна изменяться по
мере увеличения глубины погружения, так как не должно
меняться массовое содержание компонент дыхательной смеси
(кроме инертной). Таким образом, проблема повышения
точности газового анализа в судовых барокамерах, и особенно в
водолазных колоколах, а также дыхательных аппаратах, еще не
решена.
Измерение температуры и влажности
дыхательной смеси — несколько более простая задача, чем
анализ состава смеси, но и здесь используемый для измерения
метод должен быть нечувствительным к изменению и давления, и
состава дыхательной смеси.
Блок формирования управляющего сигнала, сравнивая
показания измерительного прибора — датчика, определяет,
насколько величина контролируемого параметра отклонилась от
заданной, и включает (или выключает) соответствующий
исполнительный элемент. В системах автоматического
регулирования этот блок выполнен в виде специального прибора.
Следует отметить, что увеличение глубины погружения
водолаза влечет за собой усиление внутриконтурных,
перекрестных связей между отдельными, казалось бы не связанными
между собой, параметрами, Учитывать все эти связи при
переводе системы жизнеобеспечения с одного режима на другой
396
человеку-оператору сложно, и в последние годы начаты работы
по комплексной автоматизации водолазного спуска и
включению в систему в качестве блока формирования управляющего
сигнала специализированной вычислительной управляющей
машины.
Собственно исполнительные звенья, регулирующие
содержание той или иной компоненты смеси или ее параметра,
работают по командам блока формирования управляющего сигнала.
Кислород для компенсации расходуемого экипажем при
дыхании подается в дыхательную смесь обычно от внешнего
источника по трубопроводам через дозирующее устройство.
Последнее — основной элемент контура подачи кислорода, так
как от качества его работы в значительной степени зависят
качество и надежность работы всего контура. Существуют два
варианта дозирующих устройств. В одном кислород подается
в отсек с постоянной скоростью (например, через дозу), а
количество подаваемого кислорода регулируется временем
подачи; во втором кислород подается в отсек заранее
подготовленными дозами. Оба эти варианта имеют свои достоинства и
недостатки и в водолазных системах используются в равной
мере.
При создании контура подачи в отсек кислорода
приходится бороться с кислородными «факелами» — струями чистого
кислорода, истекающего из дозирующего устройства. Скорость
истекающего кислорода, его количество, точка подачи и
параметры смесителя на выходе из дозатора должны быть выбраны
таким образом, чтобы попадающий в отсек кислород был уже
перемешан с дыхательной смесью и чтобы его концентрация
в дыхательной смеси не была пожароопасной.
На практике используется обычно несколько типов
источников кислорода: баллоны со сжатым газообразным
кислородом, сосуды с жидким кислородом, электролизеры, добывающие
кислород путем разложения воды на кислород и водород, и,
наконец, твердые химические соединения, выделяющие
избыточный кислород в процессе протекания той или иной реакции.
Все устройства очистки дыхательной смеси
от выделяющихся при дыхании экипажа углекислого газа и
антропотоксинов обычно объединяются в один контур,
включающий в себя блоки поглощения примесей и устройство,
прокачивающее через эти блоки дыхательную смесь — так
называемый побудитель расхода смеси.
Очищают дыхательную смесь от углекислого газа обычно
либо химическим связыванием его тем или иным веществом —
поглотителем, либо физической адсорбцией веществами типа
цеолитов, либо вымораживанием его с помощью установок
глубокого холода. Чаще всего применяют достаточно простые,
надежные и дешевые химические поглотители углекислого газа.
Основным недостатком химической очистки дыхательной смеси
397
от углекислого газа является очень большой расход
поглотителя, достигающий 10—30 кг я более на человека в сутки в
зависимости от условий работы. При многосуточных, и даже
многонедельных, экспозициях экипажей из четырех, шести
человек и более расход поглотителей достигает многих тонн. Это
количество должно поставляться к месту работ,
складироваться, заряжаться в кассеты, что представляет определенные
сложности. Именно поэтому ведется интенсивный поиск
регенерируемых поглотителей углекислого газа адсорбционного
типа либо безрасходных средств очистки типа криогенных
устройств или молекулярных сит.
От газообразных антропотоксинов дыхательная смесь
очищается также специальными поглотителями в процессе
прокачки через них дыхательной смеси. Фильтры-поглотители
вредных примесей, как правило, представляют собой адсорбенты
типа активированного угля или подобных ему соединений,
включенные в один контур циркуляции с катализаторами,
обеспечивающими окисление продуктов типа окиси углерода до
углекислого газа и последующее удаление продуктов окисления
на соответствующих фильтрах-поглотителях. Фильтры
достаточно емки по поглотительной способности, имеют сравнительно
небольшие габариты и, можно сказать, удовлетворяют
практическим целям.
Для создания необходимого теплового потока,
подогревающего дыхательную смесь, в контур циркуляции смеси включены
электрические, паровые или водяные грелки. При этом следует
поддерживать температуру смеси в заданных, зачастую весьма
узких пределах. Практика показывает, что в гелиево-кислород-
ных гипербарических средах колебания температуры не должны
превышать долей градуса, и выдерживание этой величины
колебаний, особенно в автоматическом режиме,— сложная
техническая задача.
Регулирование влажности дыхательной с м е -
с и заключается в удалении из смеси паров воды, поступающих
в нее с дыханием, пищей, из душевых и санузлов. Поглощаться
влага из дыхательной смеси может разными способами. Один из
основных — конденсирование паров воды путем охлаждения
дыхательной смеси до точки росы, соответствующей заданному
режиму, и отведение конденсата за пределы камеры. Для этой
цели в контур циркуляции дыхательной смеси включается
теплообменник, в который подается хладагент с температурой,
обеспечивающей необходимое охлаждение. Далее за
теплообменником и каплеуловителем ставится блок подогрева
охлажденной в теплообменнике дыхательной смеси до исходной
температуры. Конденсационный способ поглощения влаги
наиболее распространен, так как он достаточно надежен и прост
в эксплуатации. Однако для его реализации нужны
холодильные машины, теплообменники, насосы для прокачки через теп-
398
лообменники хладагента и пр. Кроме того, этот способ
чрезвычайно энергоемок — проводится двойная тепловая обработка
дыхательной смеси: сначала ее охлаждение, а затем подогрев.
Следует отметить, что энергозатраты на конденсационное
поглощение с повышением давления дыхательной смеси
увеличиваются.
Вторым способом поглощения влаги, применяемым в
водолазной практике, является адсорбционная осушка. Водяные
пары из дыхательной смеси удаляются адсорбентами типа си-
ликагеля, цеолита и пр. Этот способ энергетически более
выгоден, поскольку для его реализации не требуется тепловой
обработки смеси, и технически более прост. Недостатком его
является необходимость периодической регенерации адсорбента,
что усложняет эксплуатацию системы и увеличивает
эксплуатационную потерю дыхательной смеси, а это, учитывая цену
гелия, также немаловажно. Адсорбционная осушка
нечувствительна к повышению давления, поэтому в настоящее время она
рассматривается как наиболее перспективная, особенно для
осушения дыхательных смесей при давлениях в несколько
десятков атмосфер.
Наконец, следует сказать о необходимости тщательной
организации потоков дыхательной смеси в камере. Обычно
дыхательная смесь забирается на регенерацию в одной из
оконечностей отсека и, обработанная, возвращается в другую
оконечность. Таким образом осуществляется постоянное
движение дыхательной смеси от «чистого» конца к «грязному», т. е.
необходимое перемешивание в самом отсеке. Однако при этом,
с одной стороны, в отсеке не должно образовываться
застойных зон, в которых постоянный обмен дыхательной смеси
отсутствует, и, с другой стороны, скорости движения потока,
градиенты скоростей и перепады температуры и влажности по
струе должны быть ограничены и не могут превышать
комфортных значений.
Все жилые барокамеры водолазных комплексов имеют
в своем составе санитарно-фановые узлы. К санузлам
обычно подводится холодная и горячая вода и отводятся за
борт камеры фекально-фановые воды. Естественно, в камеру,
испытывающую, например, давление 30 атм, необходимо
подавать воду под давлением, на несколько атмосфер
превосходящим давление в камере. Обычно это делается с помощью
промежуточного напорного бака, который заполняется водой под
нормальным давлением, а затем в этом баке создается
противодавление определенной величины, обеспечивающее
поступление воды в камеру. Система эта проста конструктивно, но
создает некоторые дополнительные эксплуатационные трудности —
приходится следить за уровнем воды в баке, противодавлением
в нем, регулировать давление при заправке бака и пр. Кроме
того, запас воды в напорном баке ограничен, и она кончается,
399
как правило, в самый неподходящий момент. В последнее
время в состав линий подачи воды начали включать водяные
насосы высокого давления, с помощью которых можно
пополнять напорный бак водой и создавать таким образом
неограниченный запас ее.
Фекально-фановые воды собираются специальными
установками (поддон душевой, раковины умывальников, унитаз),
через трубопровод собранные воды отводятся из камеры в
прочную накопительную цистерну, а из нее—в общесудовую
систему. Запорные клапаны, установленные по линии отвода,
должны надежно запирать линию даже при прохождении по
ней инородных предметов.
Рассматривая обитаемость гипербарических отсеков, нельзя
не упомянуть и об акустической связи. Большая
скорость звука в гелии, иная плотность дыхательной смеси
приводят к сдвигу резонансных частот голосовых связок человека
в область более высоких частот. Этот сдвиг увеличивается
с увеличением давления, и на глубинах в 200—300 м и более
речь человека делается доступной пониманию лишь после
обработки ее в специальных электронных
приборах—корректорах речи. Создание их — еще не решенная проблема.
До сих пор мы рассматривали проблемы, возникающие при
обеспечении нормальной жизнедеятельности экипажа,
находящегося в жилой барокамере водолазного комплекса на
надводном или подводном судне. Примерно те же проблемы
приходится решать и при обеспечении выхода водолаза в
индивидуальном снаряжении в воду. Вследствие кратковременного
пребывания водолаза в воде (до нескольких часов) снимается
ряд вопросов, таких, как соблюдение комфортной зоны по
влажности, прием пищи и отправление естественных надобностей,
контроль микрофлоры. Зато остальные проблемы становятся
еще более острыми. Во-первых, прямой контакт человека с
водой создает дополнительную нагрузку на физиологические
системы организма. Во-вторых, индивидуальное снаряжение
водолаза— объект гораздо более динамичный, чем жилая
барокамера.
В случае отказа устройств очистки дыхательной смеси,
подачи кислорода, подогрева на устранение неисправности
водолазу отводятся минуты. Практически любая неисправность
может быть устранена лишь в водолазном колоколе или даже
на поверхности. Все это накладывает очень жесткие требования
к надежности индивидуального водолазного снаряжения.
Так, дыхательный аппарат должен подавать водолазу для
дыхания смесь в точном соответствии с давлением
окружающей среды.
Равенство давлений дыхательной смеси и окружающей
водолаза среды достигается путем включения в дыхательный
тракт снаряжения высокочувствительного элемента в виде рези-
400
нового мешка, из которого дышит водолаз, или тонкой
резиновой мембраны, приводящей в действие газоподающий
механизм.
Регулирование состава дыхательной смеси в
индивидуальном снаряжении обеспечивается двумя способами. При первом
водолаз получает по шлангу с поверхности или из водолазного
колокола свежую дыхательную смесь, а выдохнутая им смесь
по другому шлангу возвращается на поверхность или в
колокол для регенерации и повторного использования. При втором
водолаз использует автономный, т. е. не связанный с
поверхностью или колоколом, дыхательный аппарат. Такой аппарат
автоматически пополняет расходуемый водолазом при дыхании
кислород и удаляет из смеси углекислый газ.
В водолазной практике чаще всего используются
шланговые дыхательные аппараты как более надежные в работе,
легкие и менее громоздкие, чем автономные. Основную трудность
представляет определение состава дыхательной смеси в
аппарате. До сих пор не создан промышленный образец датчиков
содержания кислорода и углекислого газа в дыхательной смеси
автономного аппарата, хотя отдельные подобные разработки
уже появились.
Более острой следует считать проблему обогрева
водолаза под водой. В барокамере водолаз находится в газовой
среде с комфортной температурой и дышит ею же, в воде он
окружен водной средой с температурой, доходящей до —2°, и
вдыхает газовую смесь из аппарата, имеющего температуру,
близкую к температуре воды. Таким образом, нормальное
самочувствие водолаза можно обеспечить, если обогревать его
тело до комфортной температуры и одновременно подогревать
вдыхаемую им газовую смесь, чтобы избежать респираторных
теплопотерь. Технически проблема сохранения теплового
комфорта водолаза удовлетворительно пока не решена, так как
имеющееся снаряжение или не обеспечивает необходимого
подвода тепла, или громоздко и стесняет действия водолаза.
Наиболее распространено в настоящее время снаряжение с
обогревом горячей водой, подаваемой по шлангу с поверхности
или из водолазного колокола, однако и оно далеко от
совершенства.
Отдельная, но важная проблема обеспечения нормальной
жизнедеятельности водолаза в воде на глубинах в сотни
метров— контроль за его самочувствием. Практика показала, что
самоконтроля водолаза недостаточно, так как не все симптомы
нарастающих нарушений он может почувствовать и тем более
не может оценить должным образом степень их опасности.
Создано несколько образцов систем контроля за состоянием
основных показателей самочувствия водолаза, таких как
частота дыхания, частота сердечных сокращений, температура
тела, однако они находятся еще на стадии опытной проверки.
401
Рассматривая проблему обживания человеком морских
глубин, следует особо остановиться на вопросах оказания
пострадавшему (заболевшему или получившему травму)
водолазу необходимой медицинской помощи.
Во-первых, возможны «чисто» водолазные заболевания:
всякого рода компрессионные и декомпрессионные
расстройства, последствия отклонений в составе дыхательных смесей
и пр. Эти заболевания в общем достаточно хорошо изучены,
разработана методика их профилактики и лечения.
Во-вторых, при выполнении работы под водой на объекте
не исключены травмы. А даже небольшая травма, абсолютно
безопасная для жизни человека на суше, под водой может
привести к смертельному исходу. Так, если потерявший сознание
на суше человек имеет сто шансов против одного, что его
спасут, то для водолаза это соотношение уменьшается до четырех
против одного.
В-третьих, при длительной работе под водой и под
давлением (до нескольких недель и более) любой водолаз может
заболеть обычными, «бытовыми», болезнями, простудиться,
возможны аппендицит, обострение язвенной болезни и пр. Сразу
вывести заболевшего из-под давления невозможно — он должен
пройти декомпрессию со средней скоростью снижения давления
1 м/ч, т. е. с глубины 300 м человека, независимо от тяжести
его состояния, можно вывести только через 300 часов, или
через 12,5 суток.
Лечение больного, находящегося под давлением,
осложняется еще и тем, что диагноз приходится ставить на
расстоянии— врача в камеру на большие глубины не доставить, пока
неясны характер воздействия на находящийся под давлением
организм медикаментов и последствия хирургического
вмешательства. До сих пор неизвестно даже, как декомпрессировать
человека, перенесшего хирургическую операцию.
Пока объем водолазных работ в данном регионе невелик,
соответственно невелико и число заболеваний или
травмированных водолазов, и проблема оказания им медицинской
специализированной помощи не столь остра, как при проведении
массовых водолазных работ в ограниченном регионе.
Моделью подобного обострения ситуации могут быть нефтегазо-
промыслы Северного моря, на которых в настоящее время
работает около 2 тыс. водолазов, смертность среди которых
достигает 1 % в год *.
В бассейне Северного моря в настоящее время создается
специализированный госпиталь с барооперационной (давление
30 атм), предназначенный для терапевтического или
хирургического лечения заболевших водолазов. В данном регионе на
* Warner S. A. Diving fataliges ledd to correck ve achion.— Ocean In-
dystry, 1977, vol. 12, N 4, p. 124—126.
402
подводных работах занято около 2 тыс. человек. С места работы
в госпиталь заболевшие будут доставляться вертолетами в
одноместных передвижных транспортировочных барокамерах, т. е.
иод тем же давлением, под которым они находились в момент
травмы или заболевания.
Все значительнее становится глубина погружения. В
лабораторных условиях были достигнуты глубины 610 м, в
реальных погружениях в море люди побывали на глубине 501 м.
Практические работы по обслуживанию морского
нефтепромысла проводятся на глубинах около 300 м, а средняя рабочая
глубина на сегодняшний день для водолазов—100 м.
Исследователи ожидают, что вскоре реальными рабочими станут
глубины 600—800 м, может быть и 1000 м. Увеличивается
длительность пребывания под давлением экипажа водолазов.
Максимальная наработка водолазов в режиме длительного
пребывания под давлением составляет, по данным зарубежных
водолазных фирм, 100 суток в год и более.
Увеличение глубины и времени работы человека под водой
будет зависеть от качества систем жизнеобеспечения,
создающих ему комфортные и безопасные условия существования.
Как видим, неотложной задачей является фундаментальное
медико-физиологическое исследование поведения организма
в экстремальных условиях гидросферы, получение сведений об
отдаленных последствиях действия повышенного давления, ибо
процесс обживания человеком Мирового океана с каждым
днем становится все интенсивнее.
РЕФЕРАТЫ СТАТЕЙ
УДК 551.46.01
Современная стратегия в исследованиях и освоении Мирового океана. Б р е -
ховских Л. М. — Проблемы исследования и освоения Мирового
океана.— Л.: Судостроение, 1979.— (Техника освоения океана)—с. 11—35.
Рассмотрены основные пути изучения и освоения Мирового океана на
основе анализа процессов, происходящих в нем, и оценки его энергетических,
минеральных и биологических ресурсов.
УДК 551.46.01:339.96
Международное сотрудничество в изучении Мирового океана. М о н и н А. С,
Цветкова Е. А.— Проблемы исследования и освоения Мирового океана.—
Л.: Судостроение, 1979.— (Техника освоения океана) —с. 37—49.
Рассмотрены преимущества международного сотрудничества в изучении
океана. Обоснована необходимость взаимной стандартизации и калибровки
приборов и методов измерений. Приведены сведения об основных
международных океанологических организациях и примеры сотрудничества.
УДК 551.46.01:339.96
Международное регулирование освоения Мирового океана.
Любимов Л. Л.— Проблемы исследования и освоения Мирового океана.— Л.:
Судостроение, 1979.— (Техника освоения океана) —с. 51—65.
Охарактеризовано современное состояние правовых международных
норм в отношении регламентирования хозяйственной и исследовательской
деятельности государств в шельфовых и открытых районах Мирового
океана.
Библ. 6 назв.
УДК 551.46.01.003
Экономико-экологические проблемы освоения Мирового океана. Мелеш-
к и н М. Т.— Проблемы исследования и освоения Мирового океана.— Л."
Судостроение, 1979.— (Техника освоения океана) —с. 67—91.
Рассмотрены методология и задачи развития экономико-экологических
исследований Мирового океана, а также принципы программно-целевого
планирования его экономического освоения.
Ил. 1. Библ. 34 назв.
УДК 628.515.001.5:551.46.01
Мониторинг химического загрязнения морских вод. Симонов А. И.—
Проблемы исследования и освоения Мирового океана.— Л.: Судостроение,
1979.— (Техника освоения океана) —с. 93—108.
Дана характеристика загрязнения морских вод. Приведена оценка
влияния химических загрязнений на первичную продуктивность поверхностных
вод океана и взаимодействие океана с атмосферой. Сформулированы
основные принципы мониторинга загрязнения вод Мирового океана.
Ил. 1. Библ. 10 назв.
УДК 551.46.01:629.78
Космическая океанография: проблемы и перспективы. Нелепо Б. А.—
Проблемы исследования и освоения Мирового океана.— Л.: Судостроение,
1979.— (Техника освоения океана) —с. 111—133.
Охарактеризованы задачи космической океанографии, рассмотрены
информативные гидрофизические параметры и определены требования к их
точности Исследованы влияние «скин-слоя» и передаточной функции
атмосферы на развитие методов дистанционного зондирования, а также
возможности исследований океана в видимом диапазоне спектра и с помощью
радиолокационных систем.
Ил. 1. Библ. 23 назв.
404
УДК 551.46.01:528
Аэрометоды изучения океана и его дна. Ш а р к о в В. В.— Проблемы
исследования и освоения Мирового океана.—Л.: Судостроение, 1979. — (Техника
освоения океана) —с. 135—165.
Рассмотрены преимущества применения аэрометодов в океанологии.
Дана классификация методов аэросъемок и проанализированы возможности
их использования для различных задач.
Табл. 1. Ил. 8. Библ. 19 назв.
УДК 551.466.3.01
Океанские вихри. Корт В. Г.— Проблемы исследования и освоения
Мирового океана.— Л.: Судостроение, 1979.— (Техника освоения океана) —
с. 167—181.
Проанализированы причины образования океанских вихрей. Приведены
результаты экспериментов «Полигон-70», ПОЛИМОДЕ, рассмотрены
процессы синоптического вихреобразования и сделаны выводы о практическом
применении их прогнозирования для мореплавания и морского промысла.
Табл. 1. Ил. 9. Библ. 9 назв.
УДК 551.46.073-52
Океанографические буи и буйковые лаборатории. Шехватов Б. В.—
Проблемы исследования и освоения Мирового океана.— Л.: Судостроение,
1979.— (Техника освоения океана) ■—с. 183—203.
Охарактеризованы современные автономные буйковые станции и
буи-лаборатории, их типы и состав. Поставлены задачи, решаемые с их помощью.
Ил. 4. Библ. 3 назв.
УДК 629.124.68:551.46
Научно-исследовательские суда. Крупное Г. К.— Проблемы
исследования и освоения Мирового океана.— Л.: Судостроение, 1979.— (Техника
освоения океана) —с. 205—219.
Приведена классификация научно-исследовательских судов, рассмотрены
конструктивные особенности, проанализированы методы оценки их
эффективности, тенденции развития.
Табл. 1. Ил. 1. Библ. 2 назв.
УДК 621.37/39:551.46.01
Проблемы использования радиоэлектронного оборудования при освоении и
исследовании океана. Винокуров В. И.— Проблемы исследования и
освоения Мирового океана.— Л.: Судостроение, 1979.— (Техника освоения
океана) — с. 221—232.
Рассмотрены направления применения радиоэлектронных средств при
освоении океана, особенности их функционирования. Обсуждаются проблемы
повышения их эффективности, оптимального построения, электромагнитной
совместимости, комплексирования. Приведены примеры.
Ил. 4. Библ. 6 назв.
УДК 551.46.01
Хозяйственное освоение ресурсов океана. Сальников С. С, С л е -
вич С. Б.— Проблемы исследования и освоения Мирового океана.— Л.:
Судостроение, 1979.— (Техника освоения океана)—с. 235—247.
Охарактеризовано современное состояние и перспективы освоения
минеральных, энергетических ресурсов океана, развитие и значение морских
международных транспортных перевозок, морского туризма. Анализируются
возможности получения пресной воды.
Библ. 21 назв.
405
УДК 551.462
Задачи создания техники и технологии для разработки подводных
месторождений твердых полезных ископаемых. Лезгинцев Г. М.— Проблемы
исследования и освоения Мирового океана.— Л.: Судостроение, 1979.— (Техника
освоения океана) — с. 249—263.
Рассмотрены основные направления создания горно-морской техники для
освоения подводных месторождений твердых полезных ископаемых.
Табл. 2. Ил. 9. Библ. 6 назв.
УДК 629.124.74:622.242
Пути создания технических средств морской добычи нефти и газа.
Самарский В. Н., Суворов К. Г.— Проблемы исследования и освоения
Мирового океана.—Л.: Судостроение, 1979.—(Техника освоения
океана) — с. 265—285.
Рассмотрены буровые платформы и суда для разведочного бурения,
стационарные платформы, средства для прокладки подводных
нефтепроводов, специализированные баржи для доставки секций стационарных
платформ, краново-монтажные суда, суда снабжения и хранилища добытой
нефти.
Ил. 12.
УДК 551.46.01:57
Биологические ресурсы Мирового океана и перспективы их использования.
Моисеев П. А.— Проблемы исследования и освоения Мирового океана.—
Л.: Судостроение, 1979.— (Техника освоения океана)—с. 287—295.
Рассмотрено состояние биологических ресурсов Мирового океана.
Намечены пути рационального использования биологических ресурсов океана,
в том числе и в СССР.
Табл. 3.
УДК 551.46.01
Технический аспект развития марикультуры. Зайцев В. П*,
Дмитриев А. Я.— Проблемы исследования и освоения Мирового океана.— Л.:
Судостроение, 1979.— (Техника освоения океана) —с. 297—313.
Рассмотрены методы развития марикультуры — выращивания в море
водорослей, моллюсков, ракообразных, разведения рыб. Дан анализ
технических средств современных морских хозяйств, уровня механизации и
автоматизации.
Ил. 4. Библ. 4 назв.
УДК 639.22:551.46
Некоторые проблемы глубоководного рыбного промысла. Дружинин А. Д.,
Пшеничный Б. П.— Проблемы исследования и освоения Мирового
океана.— Л.: Судостроение, 1979.— (Техника освоения океана)—с. 315—320.
Охарактеризованы важные в промысловом отношении виды
глубоководных рыб. Рассмотрены требования к рыбопоисковой аппаратуре,
навигационному оборудованию, тактико-техническим элементам рыбопромысловых
судов.
Библ. 4 назв.
УДК 629.127.4.001.33
Необитаемые подводные аппараты: состояние и перспективы развития. Я с -
т р е б о в В. С.— Проблемы исследования и освоения Мирового океана.—
Л.: Судостроение, 1979.— (Техника освоения океана)—с. 323—341.
- -Дана классификация необитаемых подводных аппаратов (НПА),
рассмотрены конструктивные особенности, отдельные узлы и системы.
Проанализированы состав и способы построения систем управления и представления
информации. Рассмотрены пути совершенствования и развития НПА.
Ил. 4. Библ. 3 назв.
406
УДК 629.127.4-229.72:62-52
Системы управления робототехнических комплексов. Попов Е. П.—
Проблемы исследования и освоения Мирового океана.— Л.: Судостроение,
1979.— (Техника освоения океана) —с. 343—359.
Рассмотрены различные варианты построения систем управления
манипуляторами необитаемых подводных аппаратов и основные задачи
проектирования дистанционных человеко-машинных систем управления.
Ил. 13. Библ. 8 назв.
УДК 629.127.4
Обитаемые подводные аппараты: состояние и перспективы развития.
Дмитриев А. Н.— Проблемы исследования и освоения Мирового океана.— Л.:
Судостроение, 1979.— (Техника освоения океана)—с. 361—376.
Содержатся сведения о назначении, классификации и конструктивных
особенностях современных обитаемых подводных аппаратов (ОПА).
Рассмотрены перспективы развития и проблемы их совершенствования и
использования.
Табл. 1. Ил. 6. Библ. 16 назв.
УДК 378:551.46.01
Проблемы подготовки подводных специалистов. Боровиков П. А., Гире
М. Pi, Коваленко А. Е., Подражанский А. М.— Проблемы
исследования и освоения Мирового океана — Л.: Судостроение, 1979.— (Техника
освоения океана) — с. 379—390.
Даны рекомендации по подготовке экипажей подводных аппаратов,
лабораторий, а также водолазов-глубоководников. Приведены примеры
подготовки подводных специалистов за рубежом.
УДК 629.127.4.073/.074:551.46.01
Обживание человеком морских глубин. Системы жизнеобеспечения.
Боровиков П. А.— Проблемы исследования и освоения Мирового океана.— Л.:
Судостроение, 1979.— (Техника освоения океана) —с. 391—403.
Рассмотрены методы проведения подводных работ. Проанализированы
факторы внешней среды, оказывающие действие на организм водолаза, и
даны рекомендации по составу систем жизнеобеспечения глубоководных
водолазных комплексов и автономного снаряжения.
СЕРИЯ
«ТЕХНИКА ОСВОЕНИЯ ОКЕАНА»
ПРОБЛЕМЫ
ИССЛЕДОВАНИЯ
И ОСВОЕНИЯ
МИРОВОГО
ОКЕАНА
Редакторы Г. Ф. Мощенко, Т. И. Ильичева
Технические редакторы А. И. Казаков и Л. П. Ширяева
Корректоры В. М. Альфимова, Н. 3. Быковская,
И. П. Острогорова
Художественные редакторы О. П. Андреев
и В. А. Пурицкий
Художник Б. Н. Осенчаков
ИБ № 607
Сдано в набор 29.05 79 Подписано в печать 30 10.79
М-28245 Формат 60X90'/i6. Бумага типографская № 1.
Гарнитура шрифта литературная. Печать высокая. Усл. печ.
л. 25,5. Уч.-изд. л. 25,0. Тираж 4500 экз Изд. № 3473—78.
Заказ № 1190. Цена 3 р. 90 к.
Издательство «Судостроение», 191065,
Ленинград, ул. Гоголя, 8
Ленинградская типография № 4 Ленинградского
производственного объединения «Техническая книга» Союзполи-
графпрома при Государственном комитете СССР по
делам издательств, полиграфии и книжной торговли.
Ленинград, Д-126, Социалистическая. 14.
' -,<■ •• * Щ Ш ^■■•••:"' Ш&&