/





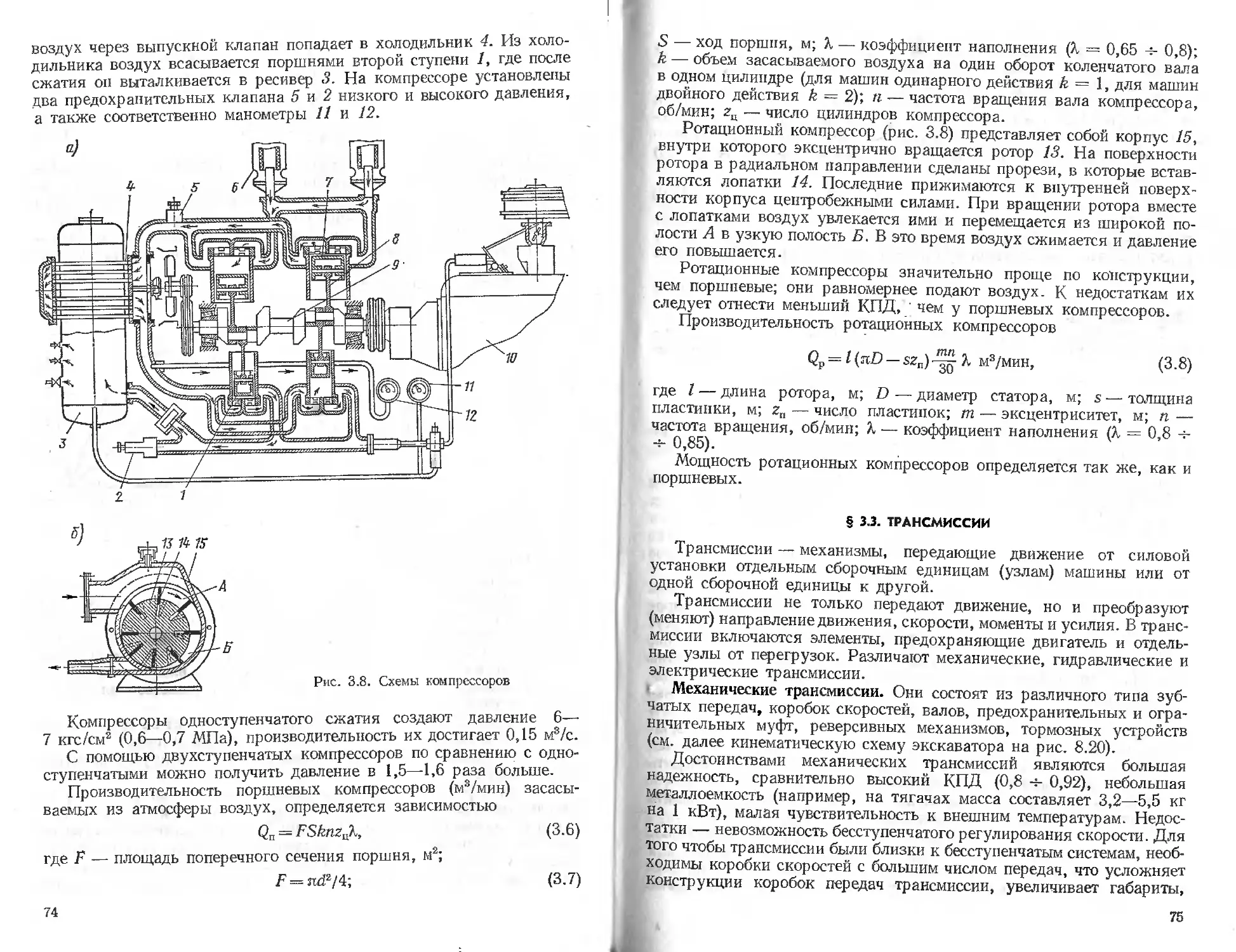
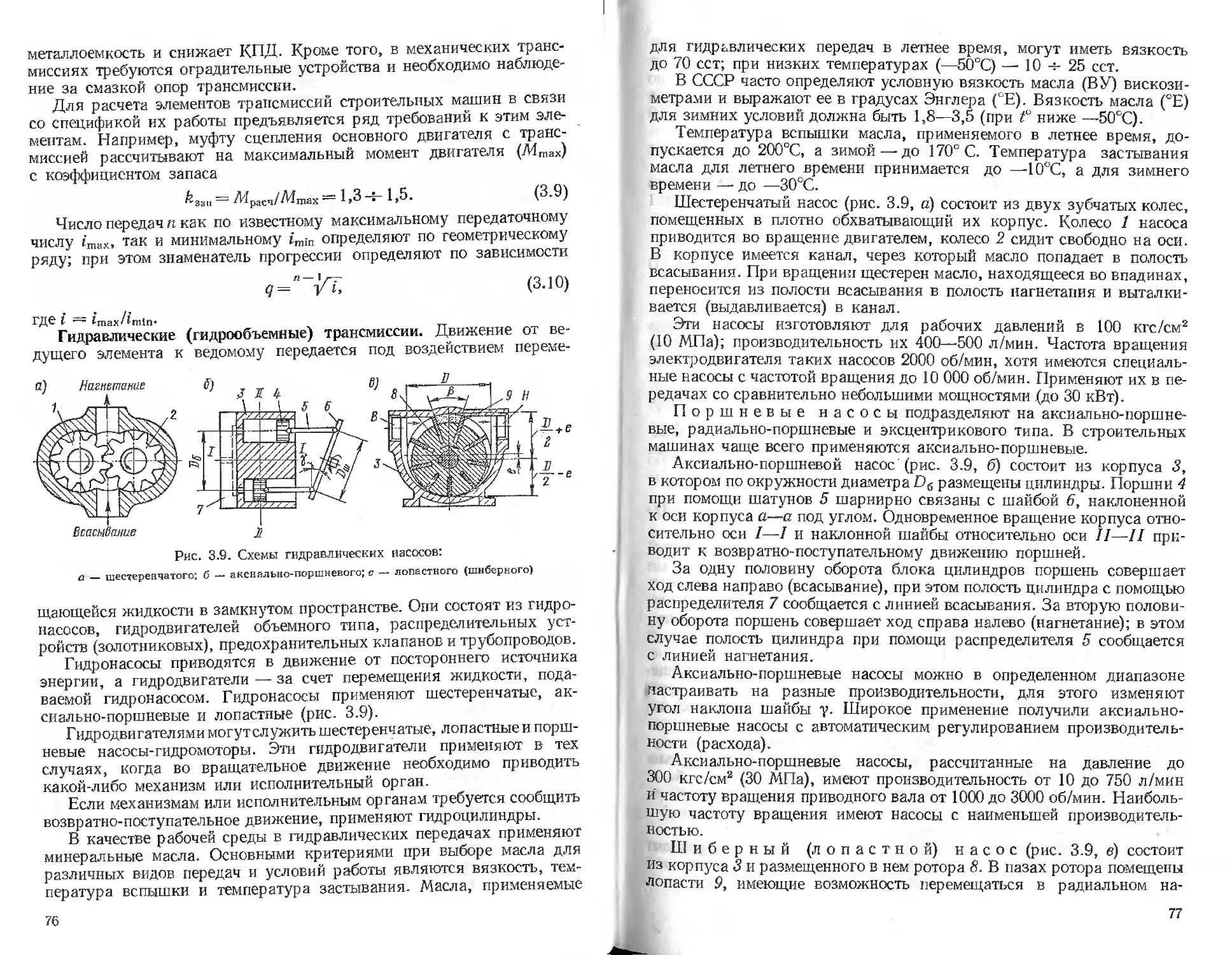
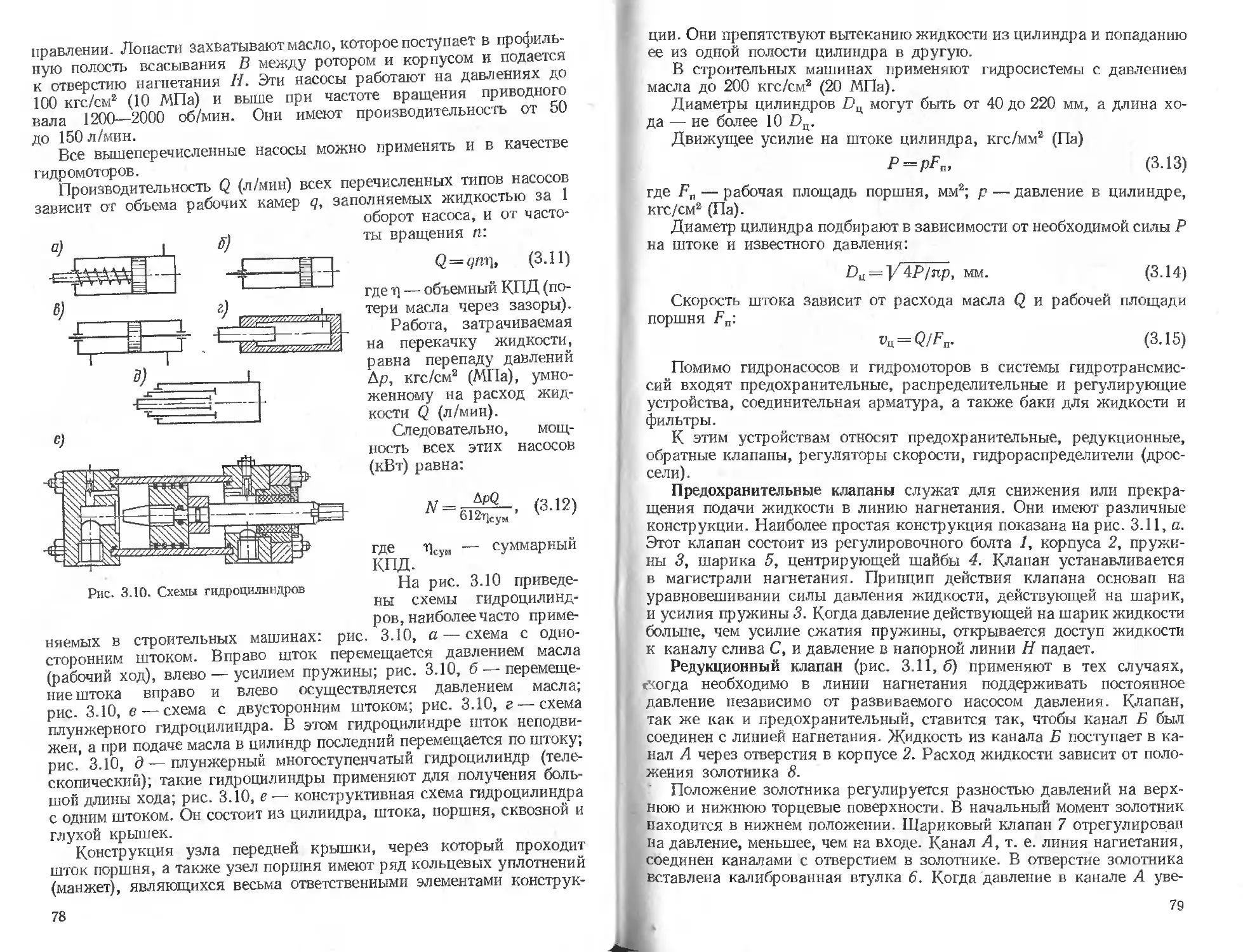
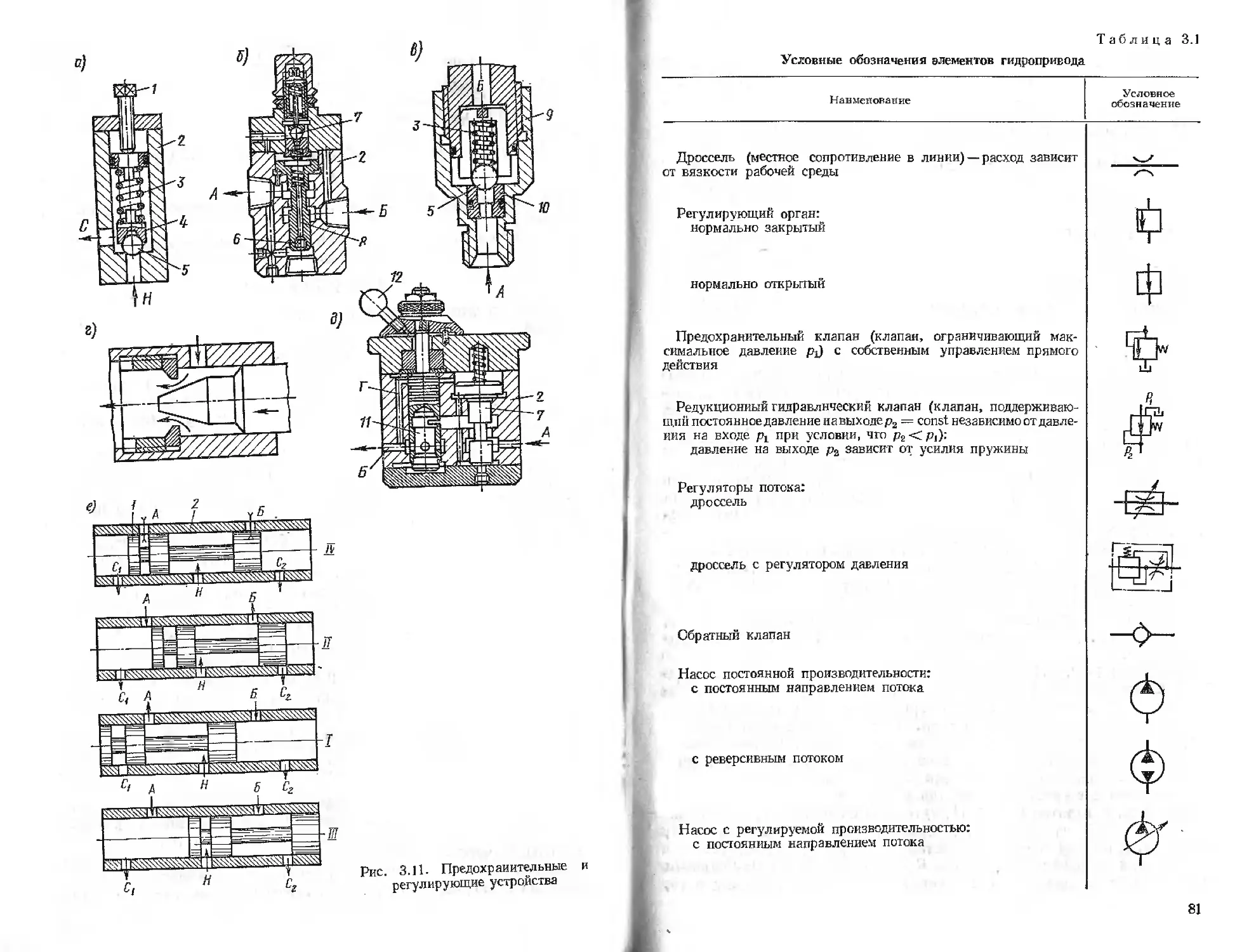



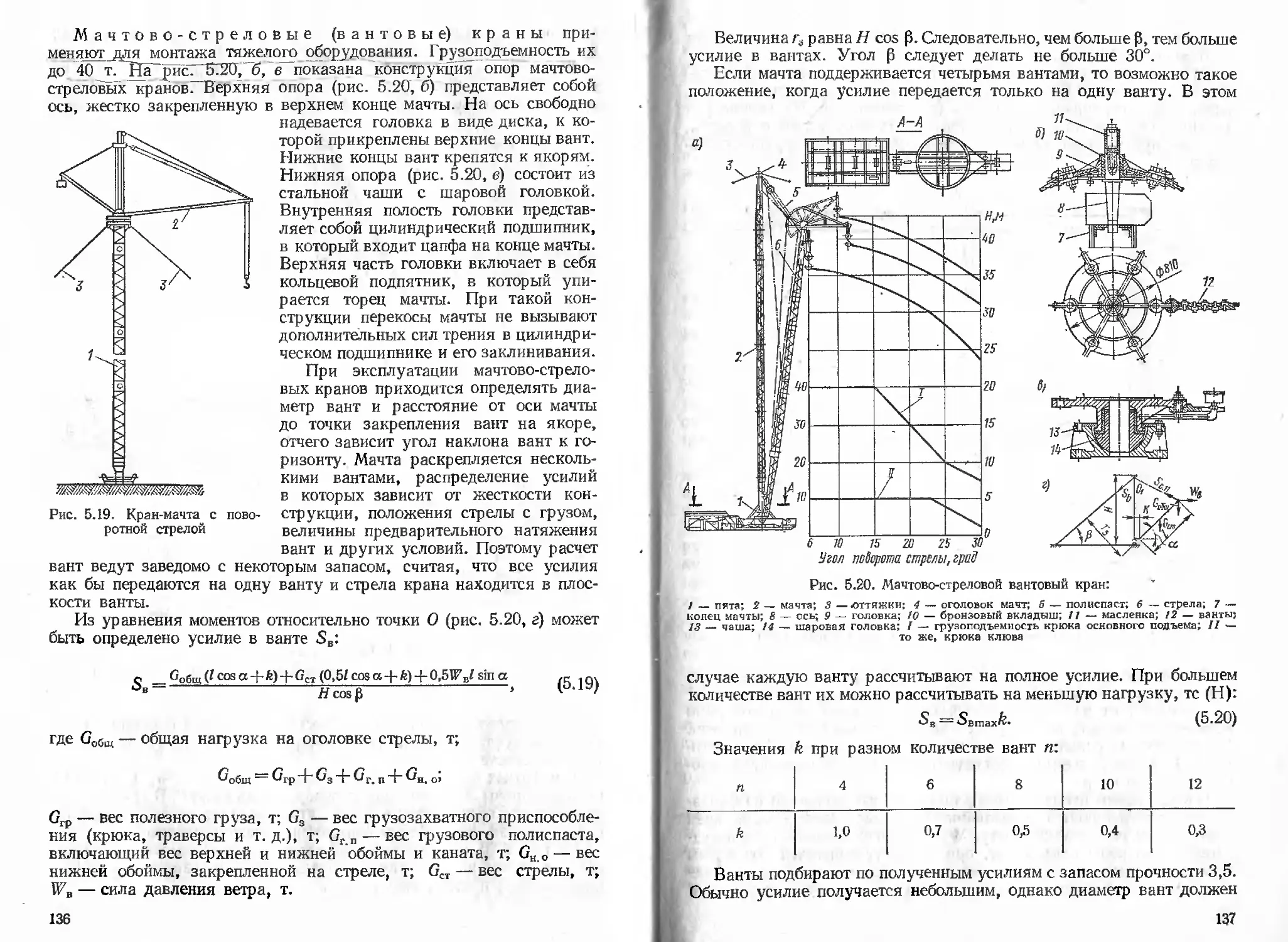
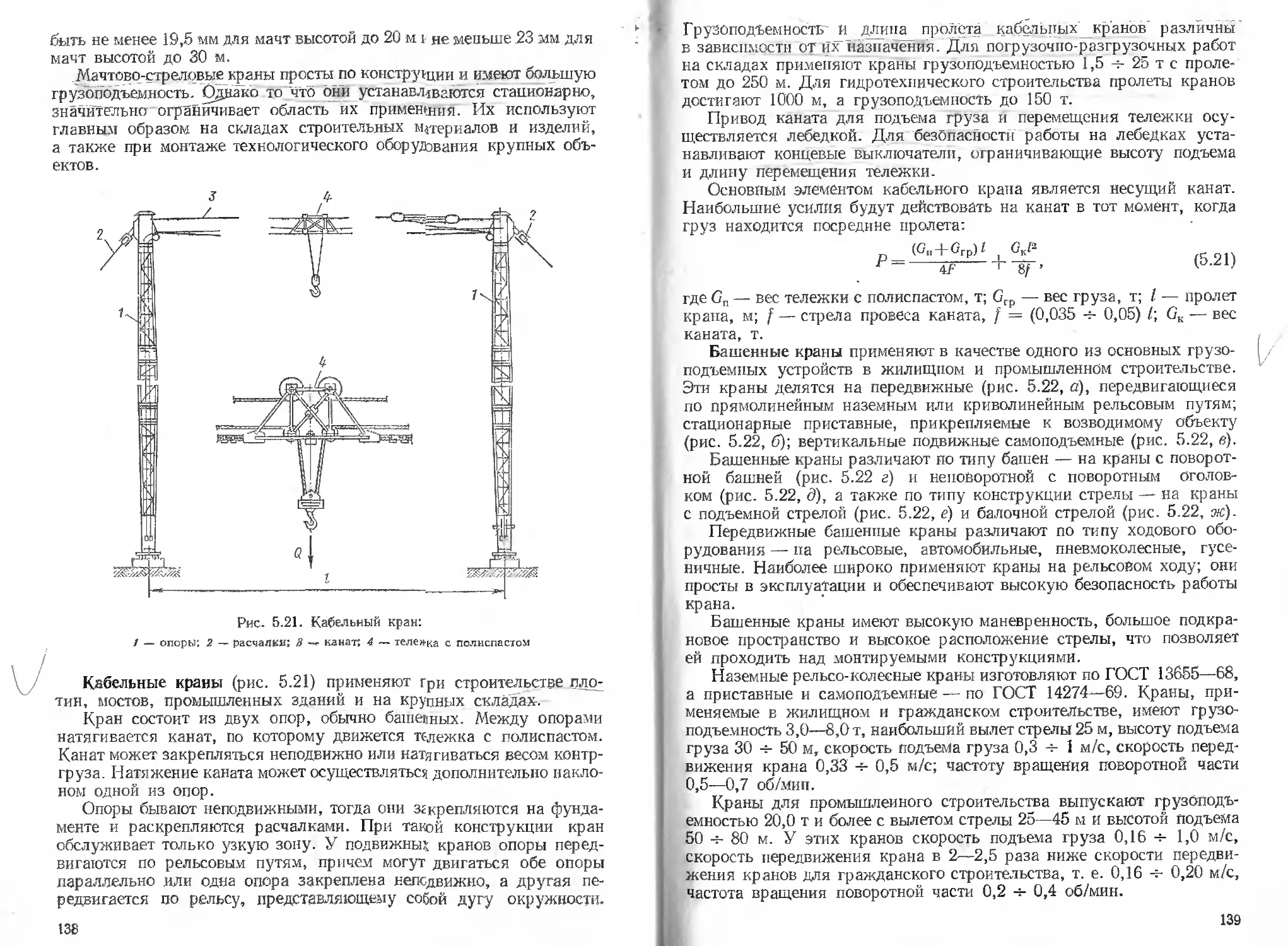
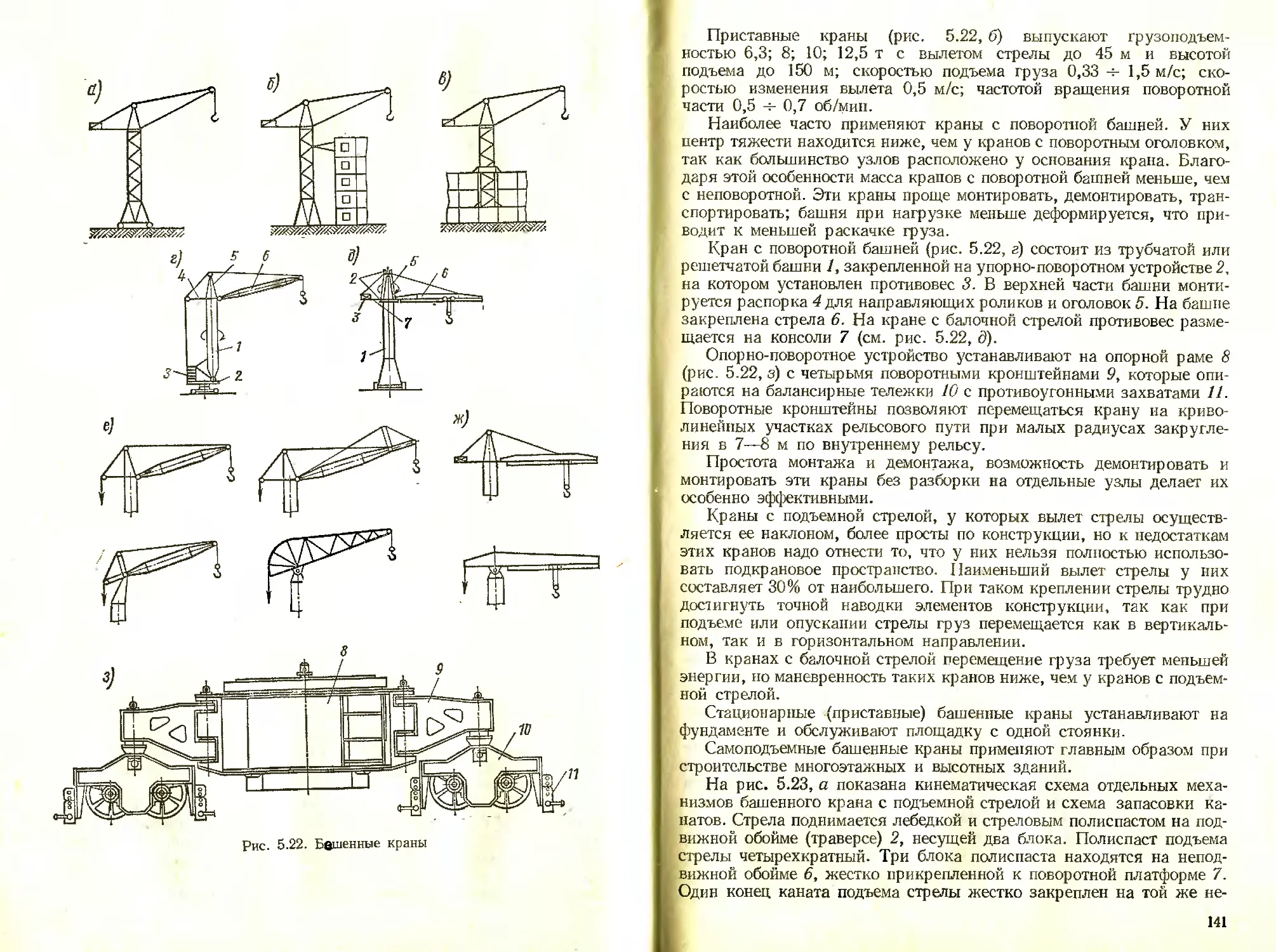
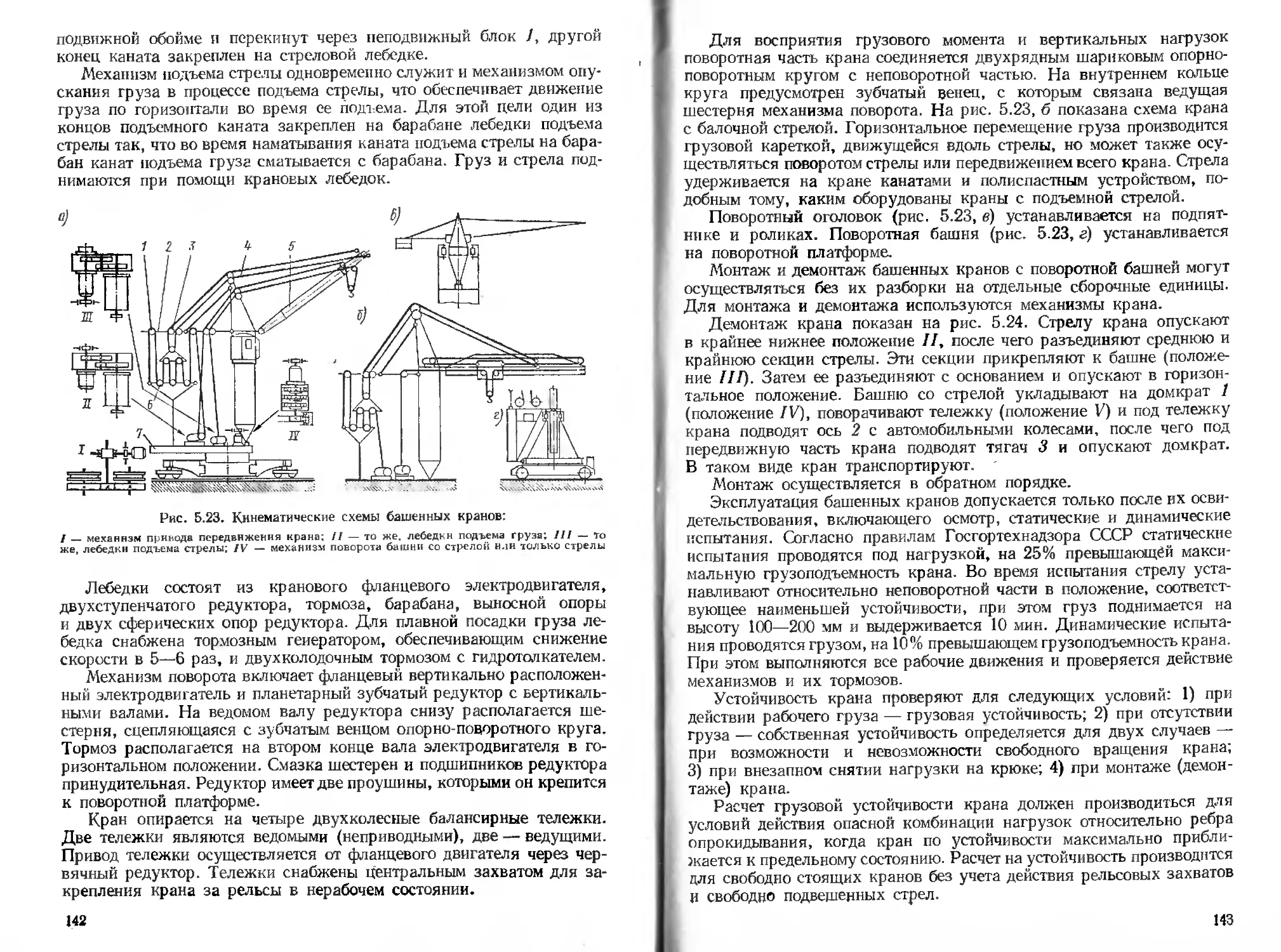

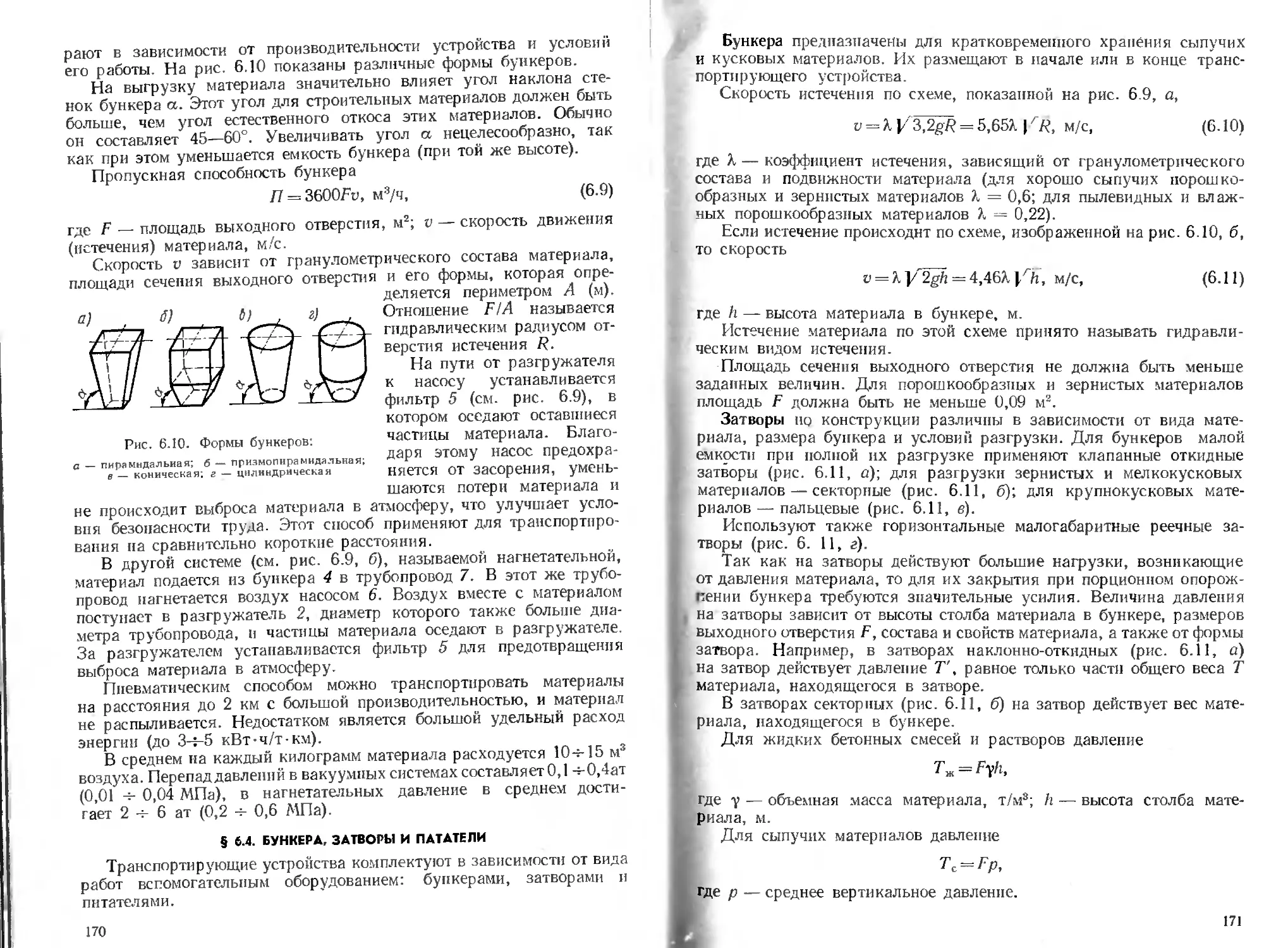
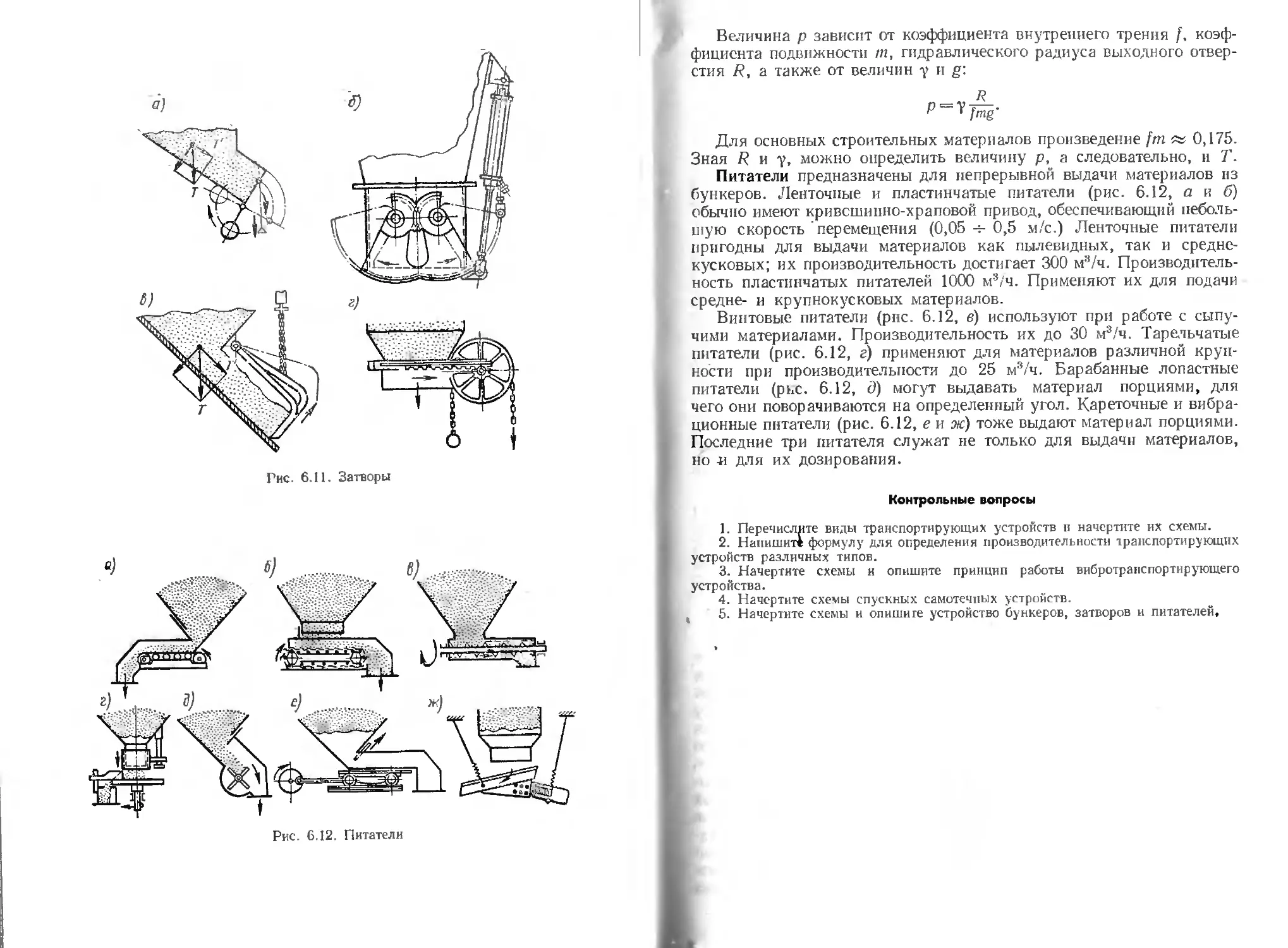
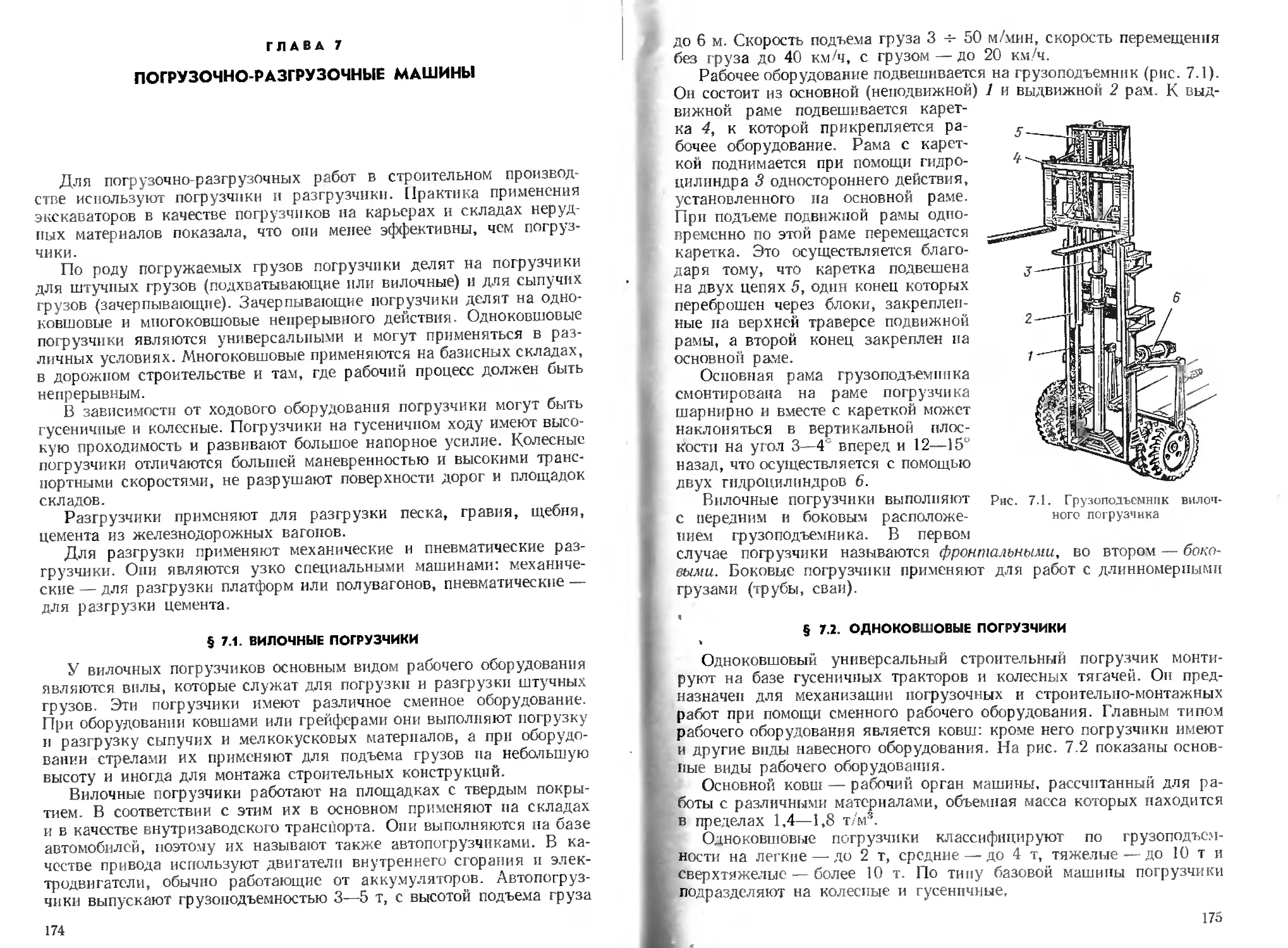
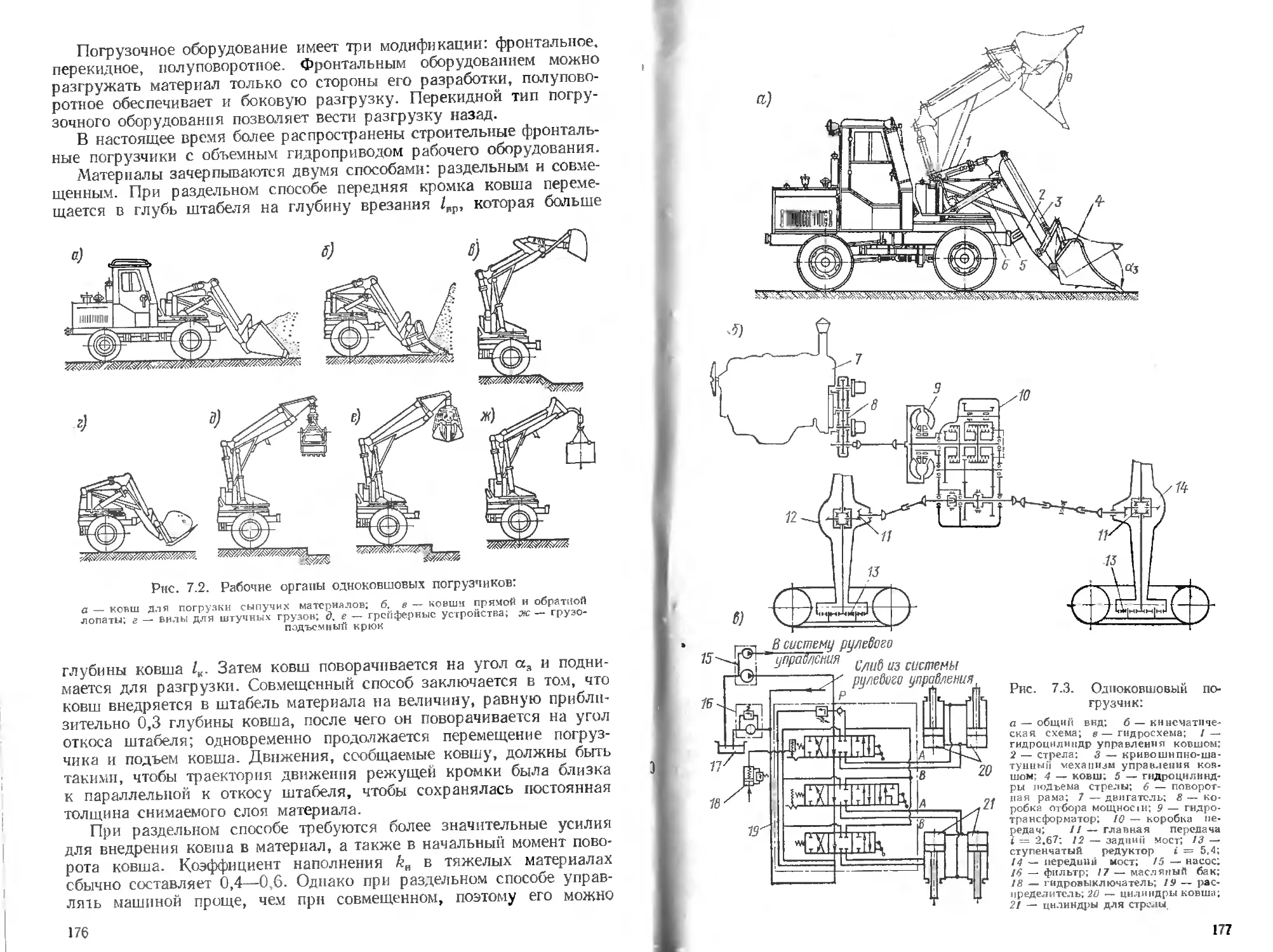


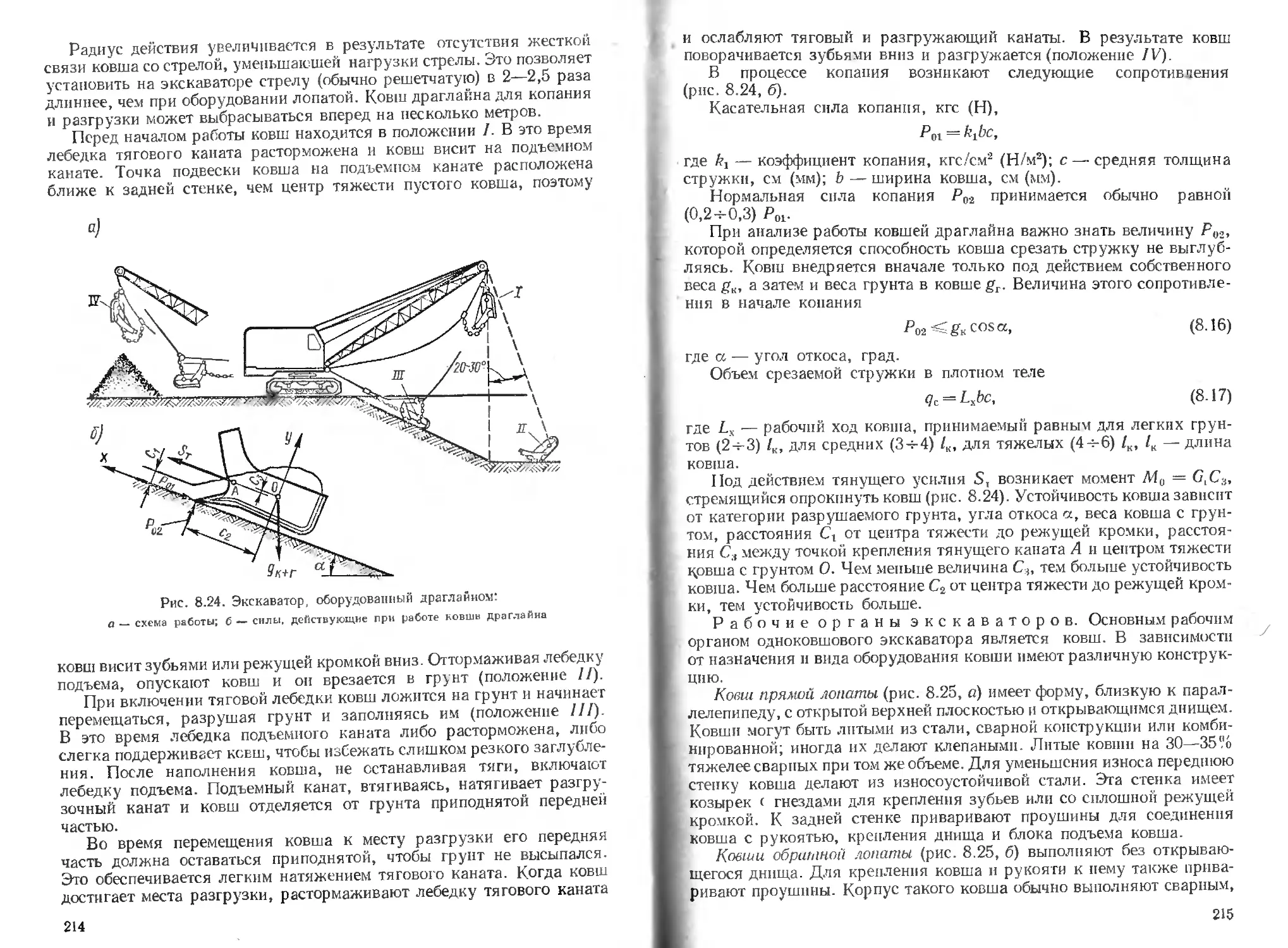
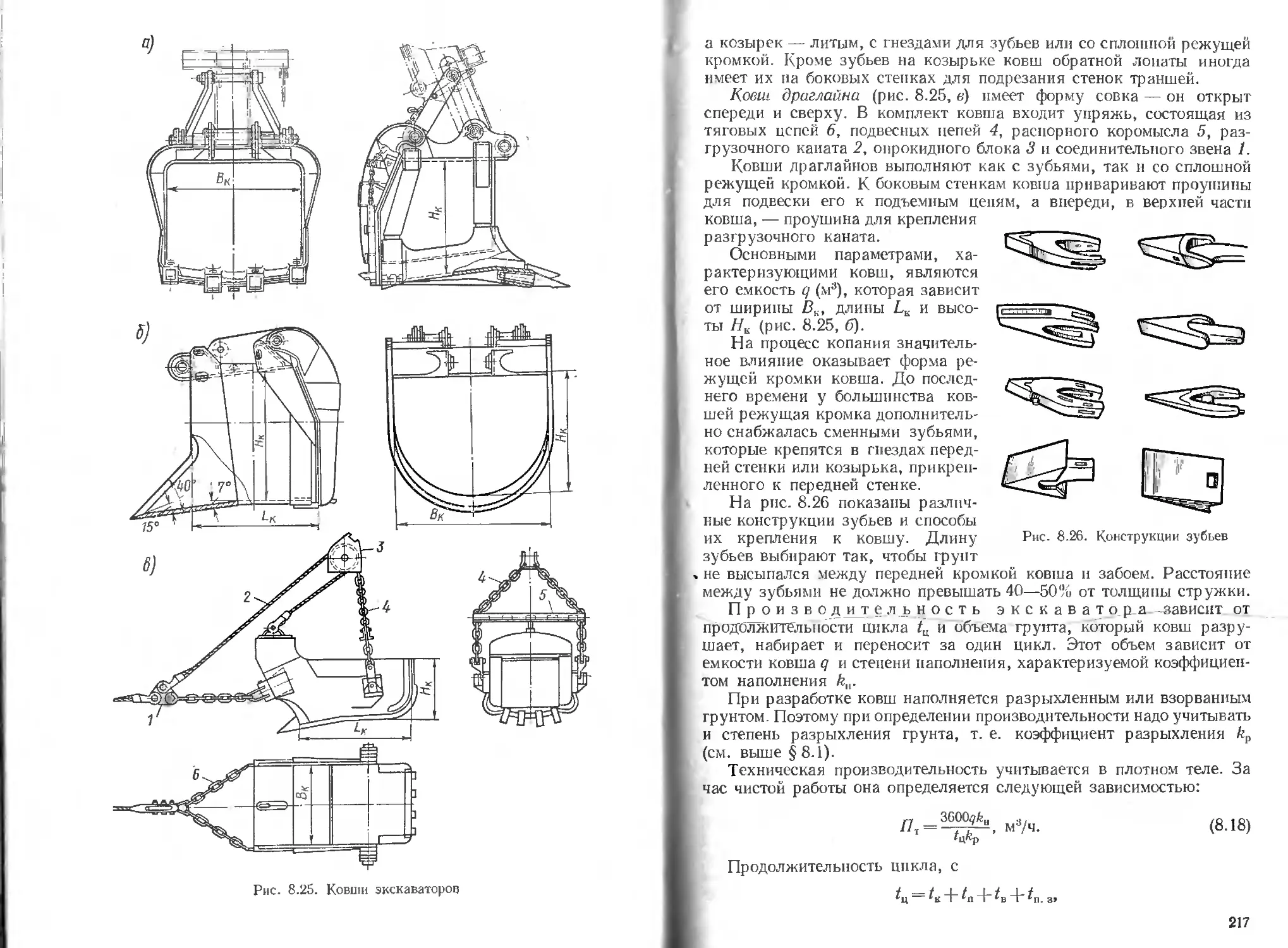
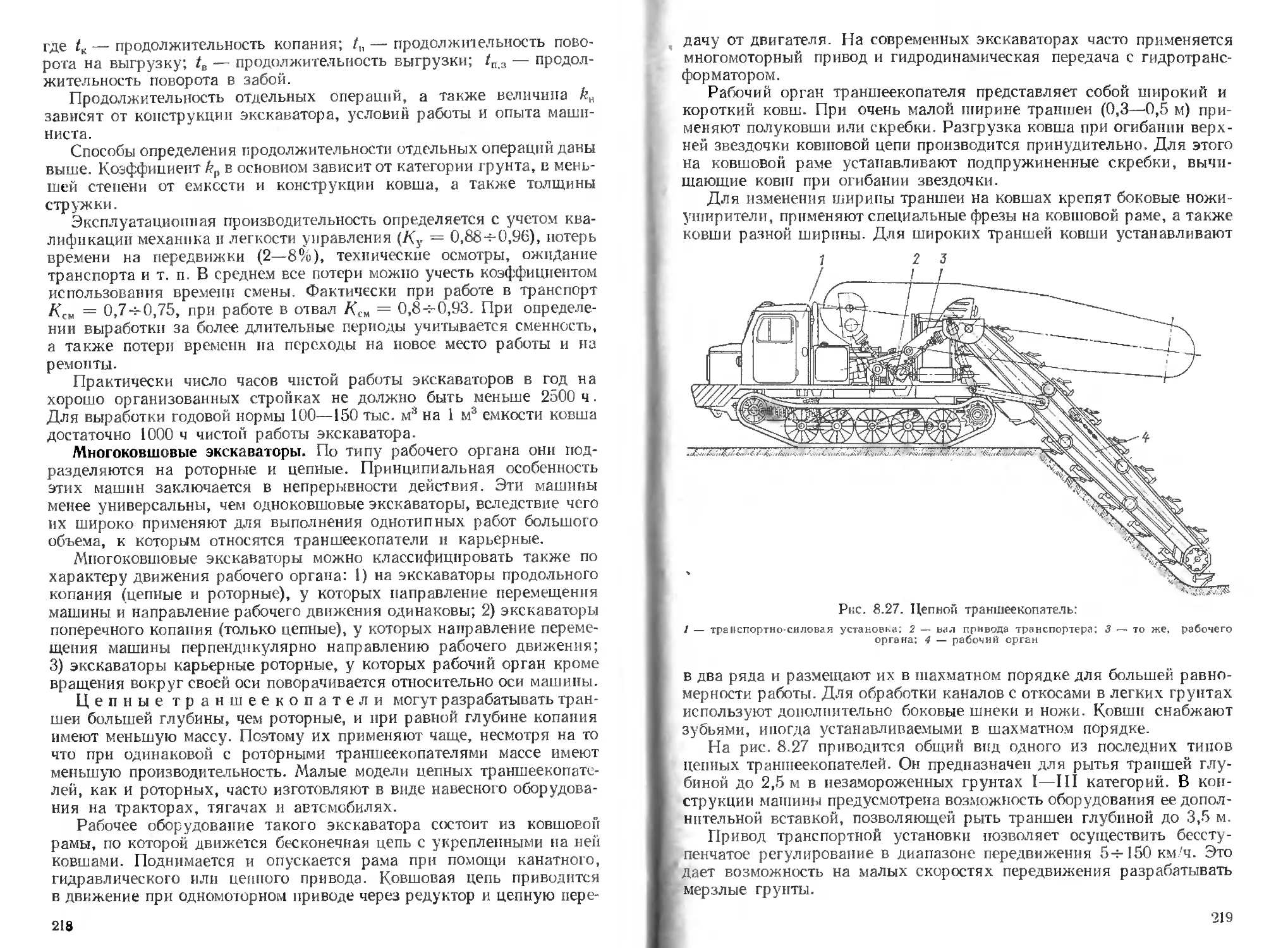
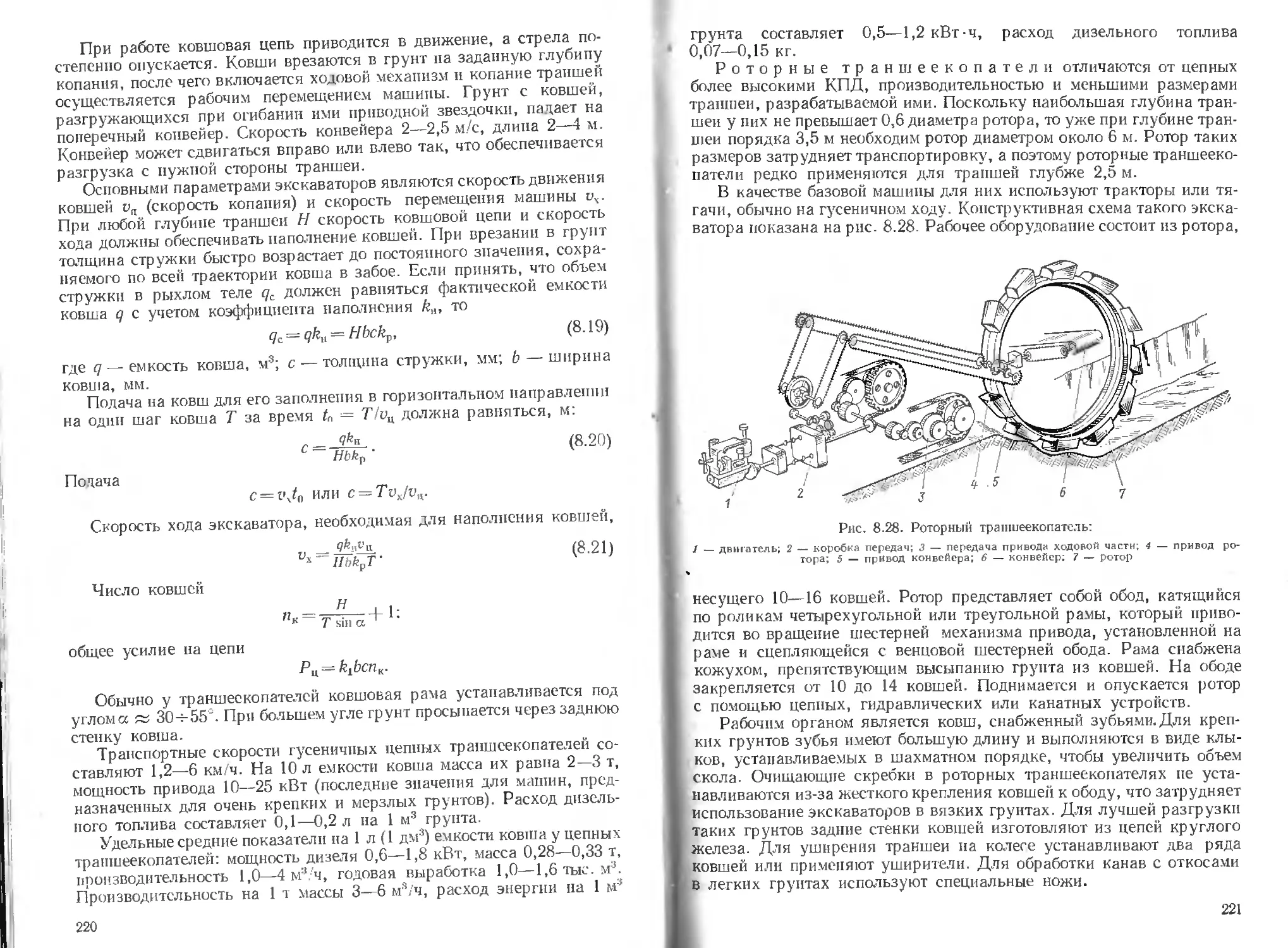


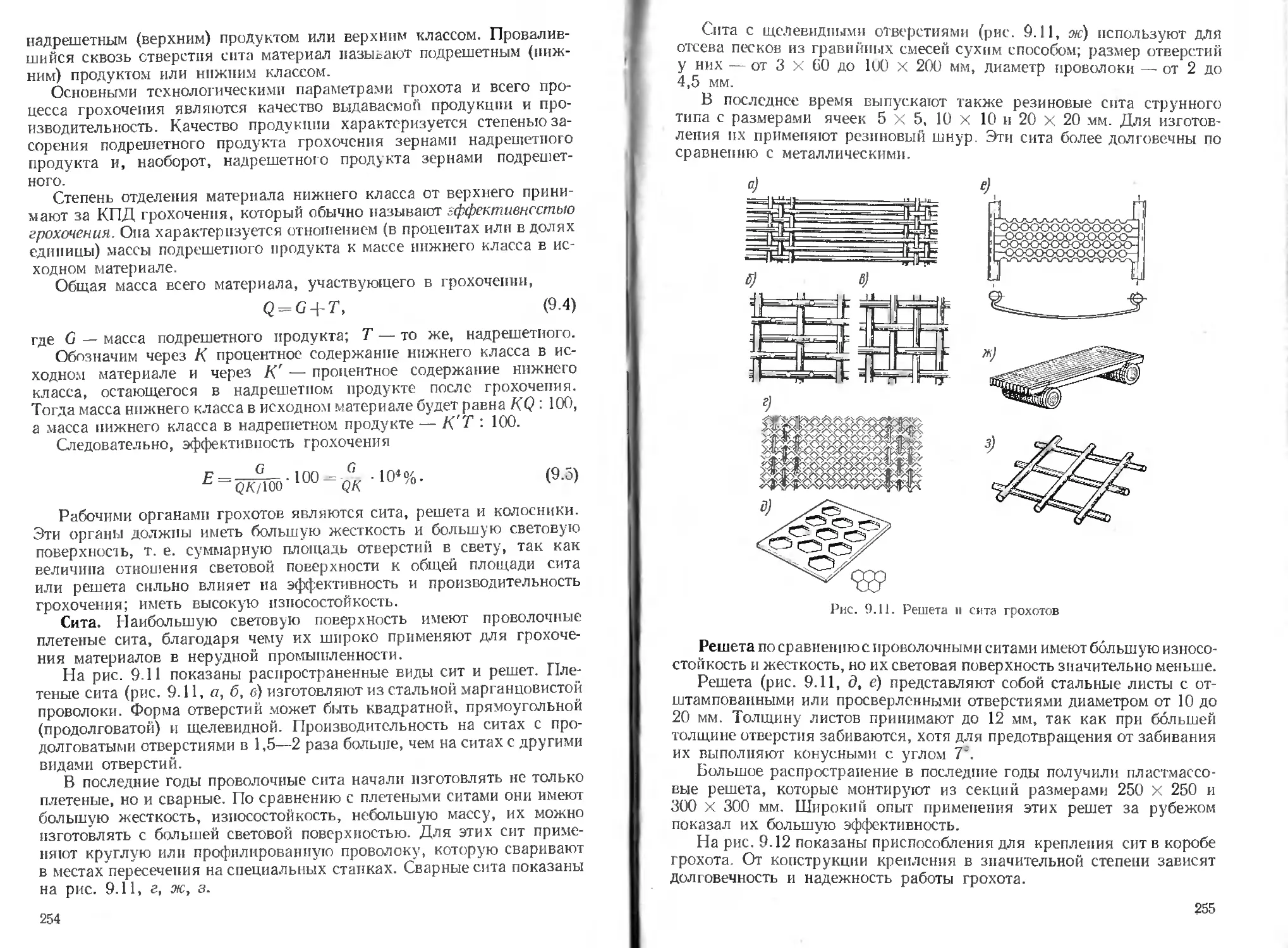
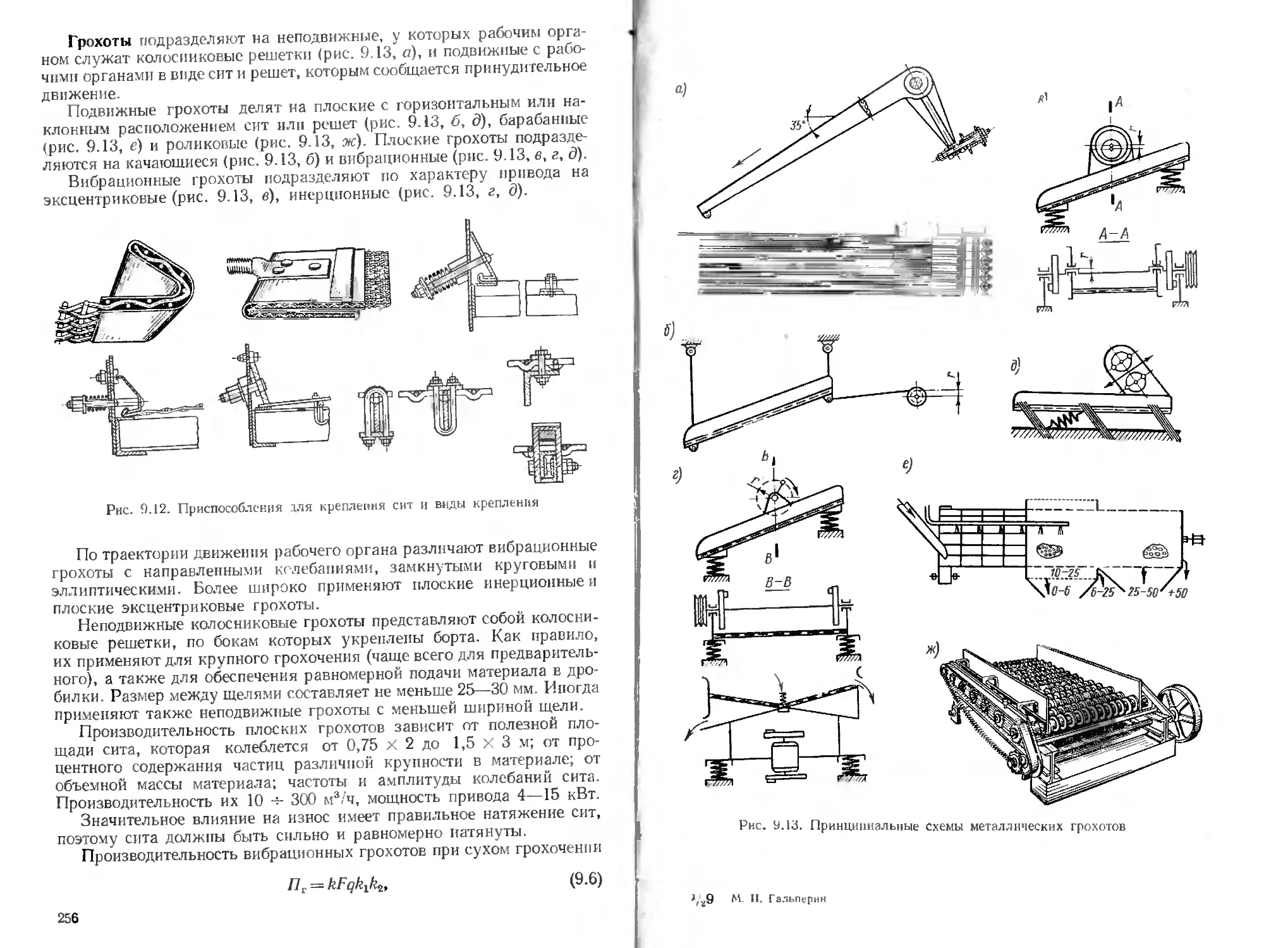
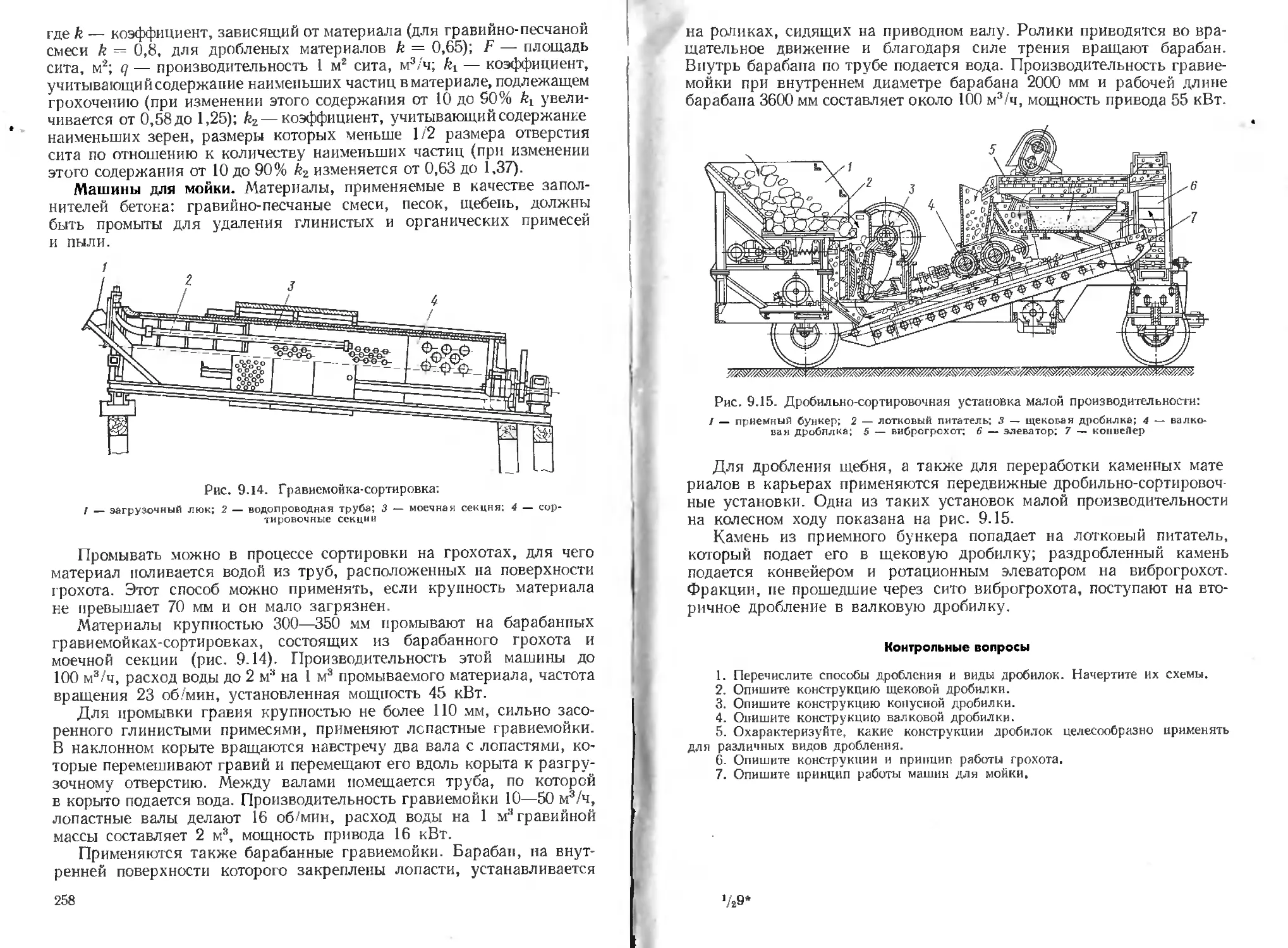
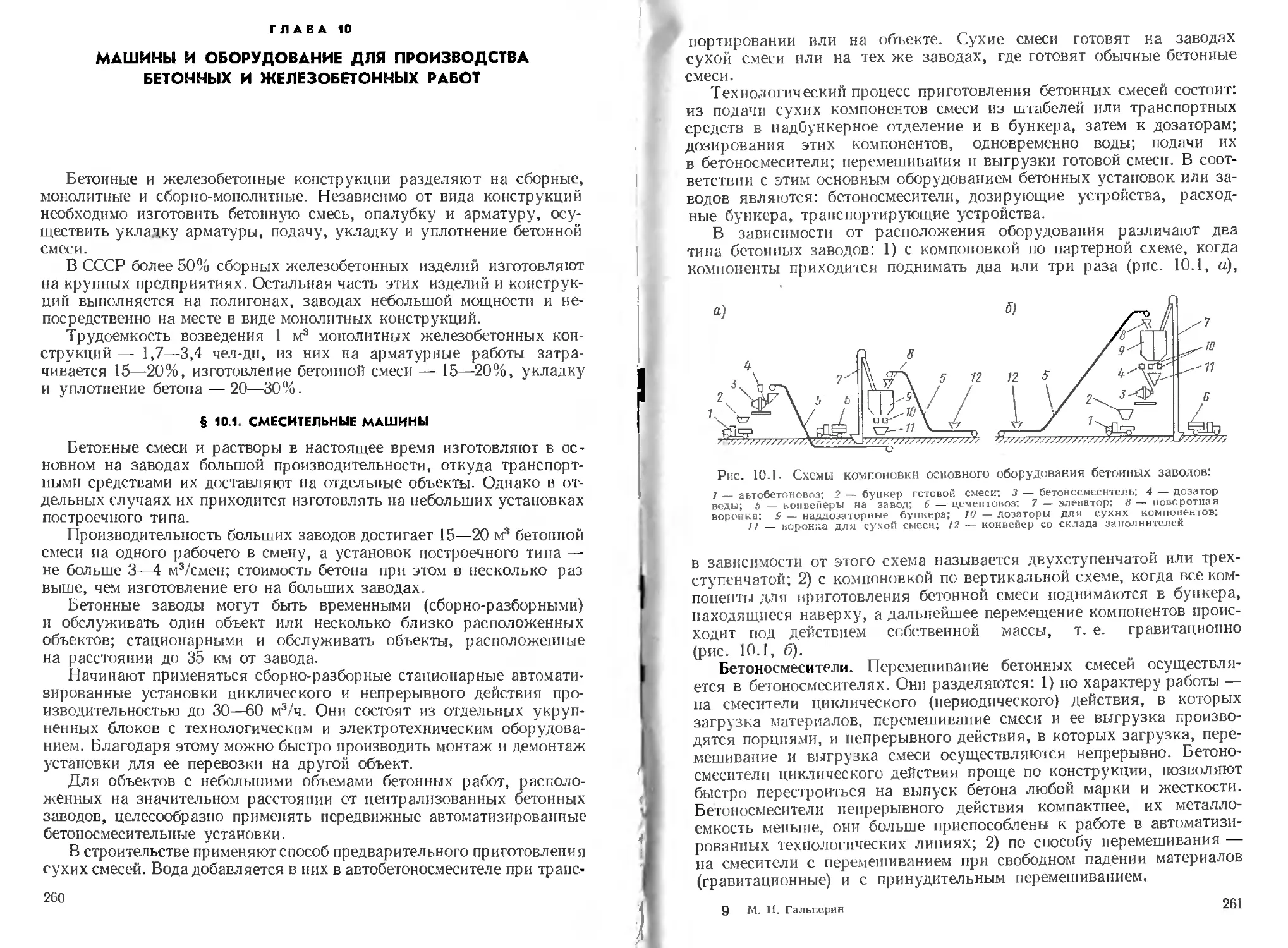

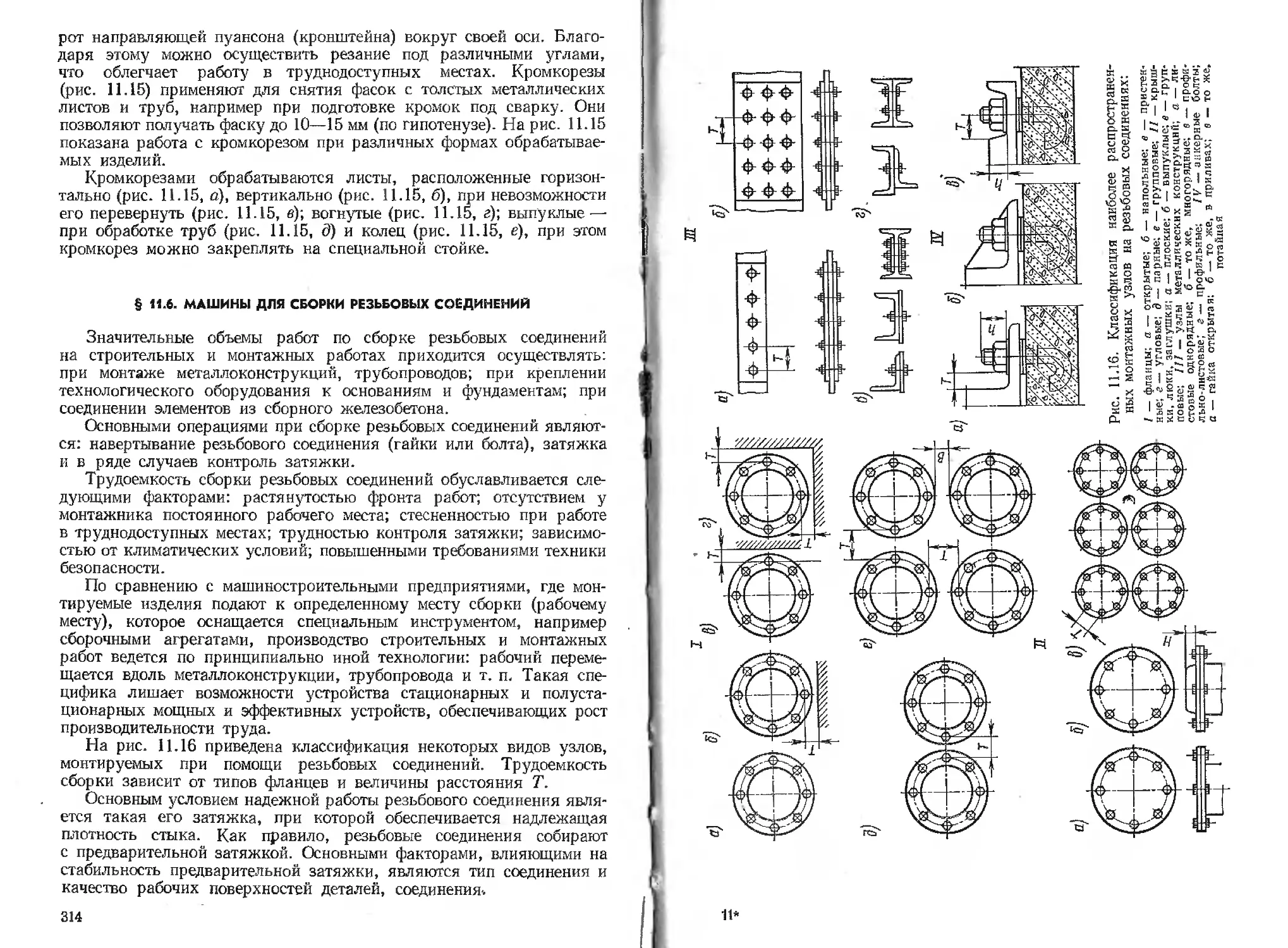
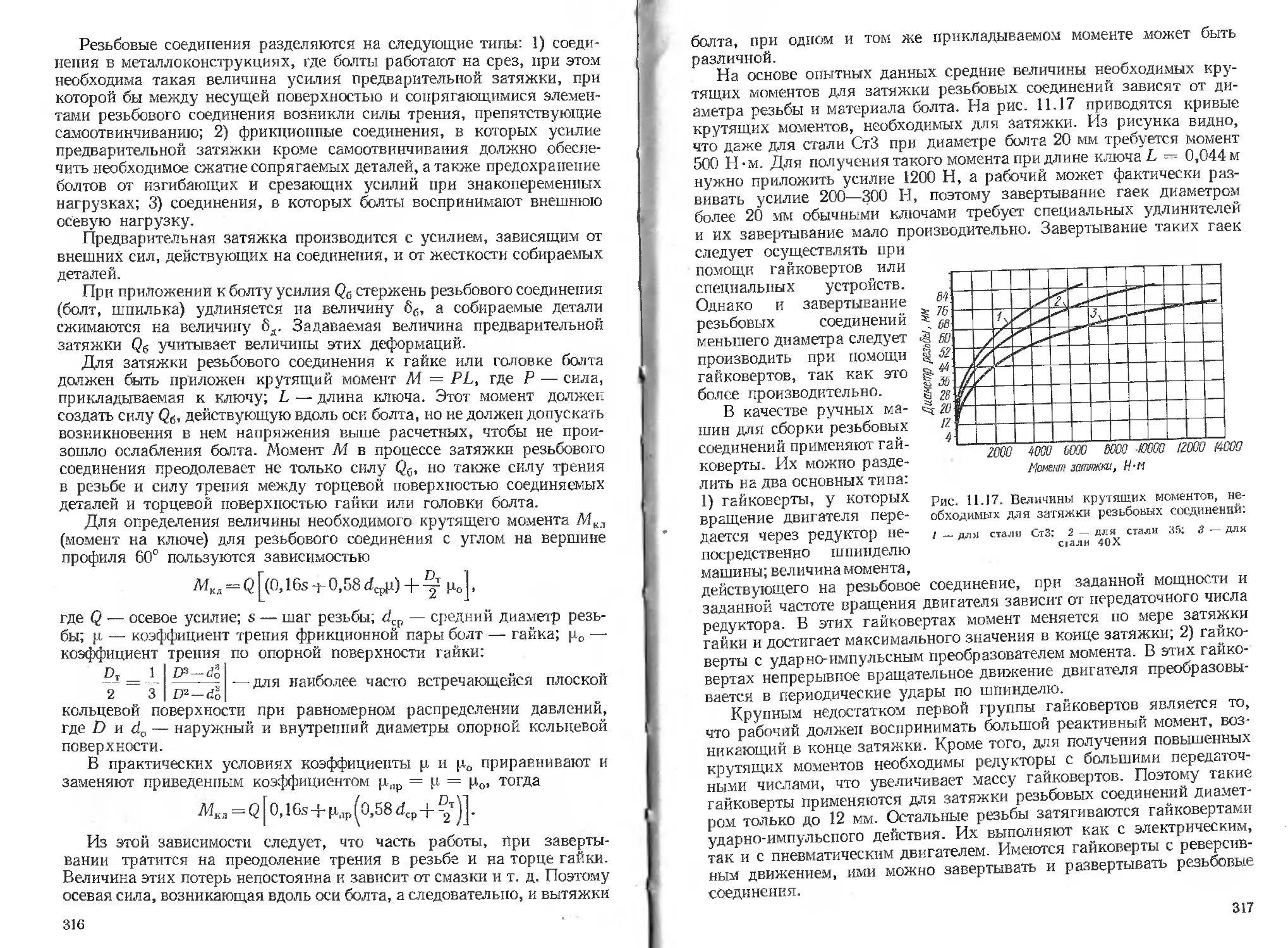
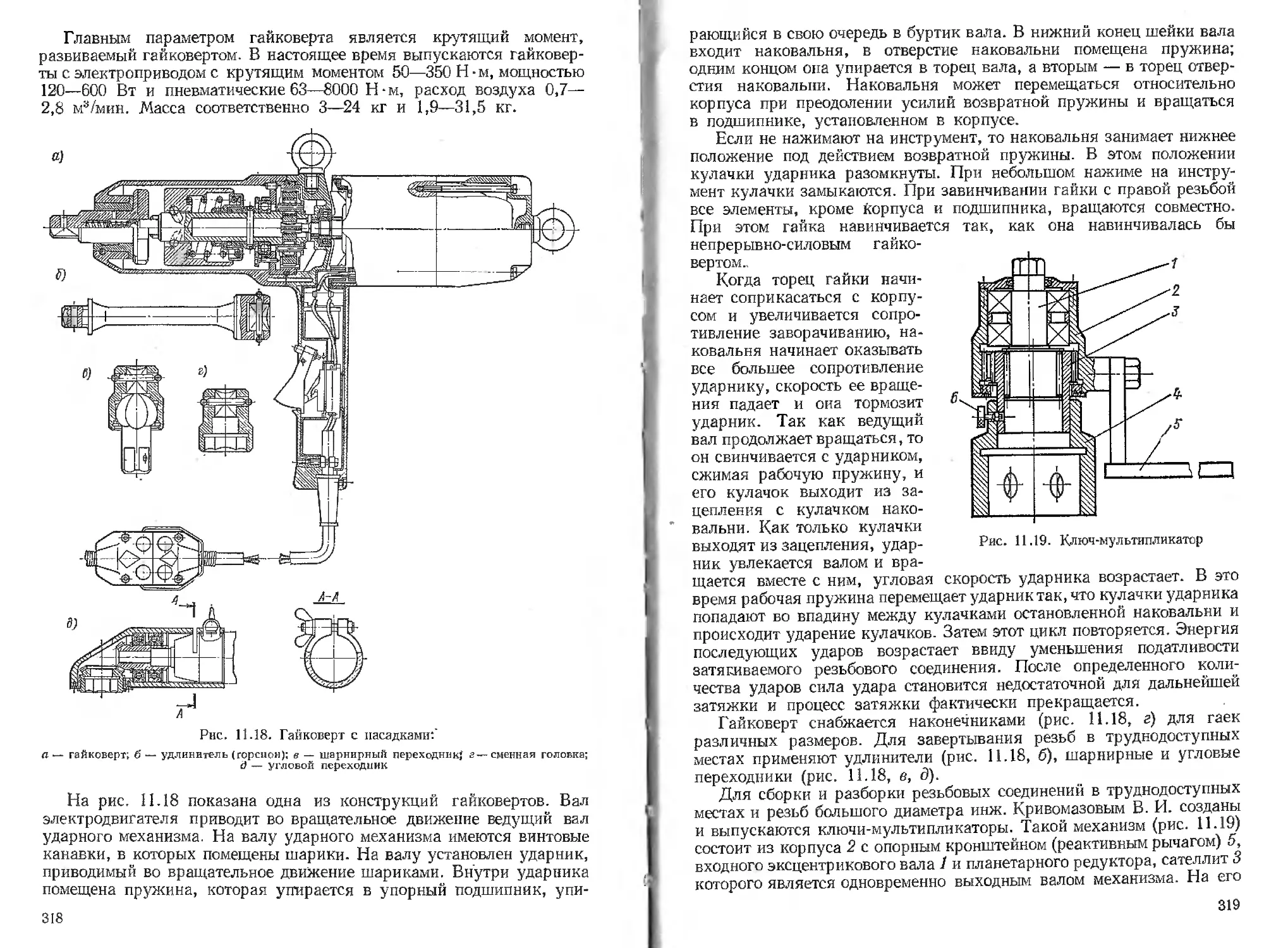
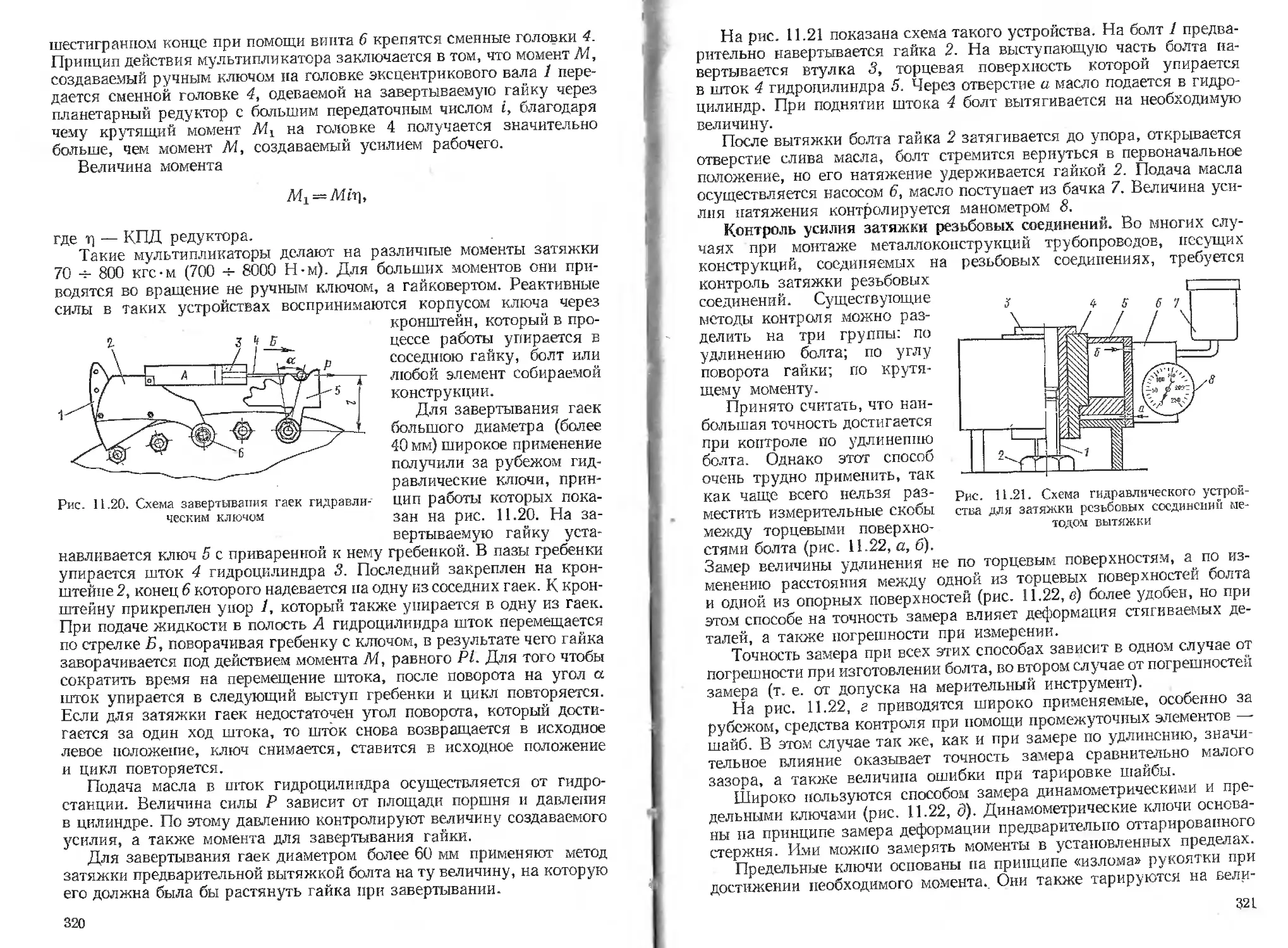




Текст
М. И. ГАЛЬПЕРИН, Н.Г. ДОМБРОВСКИЙ
М. И. ГАЛЬПЕРИН, Н. Г. ДОМБРОВСКИЙ
СТРОИТЕЛЬНЫЕ
МАШИНЫ
ИЗДАНИЕ ТРЕТЬЕ, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ
Допущено
Министерством высшего и среднего
специального образования СССР
в качестве учебника для студентов
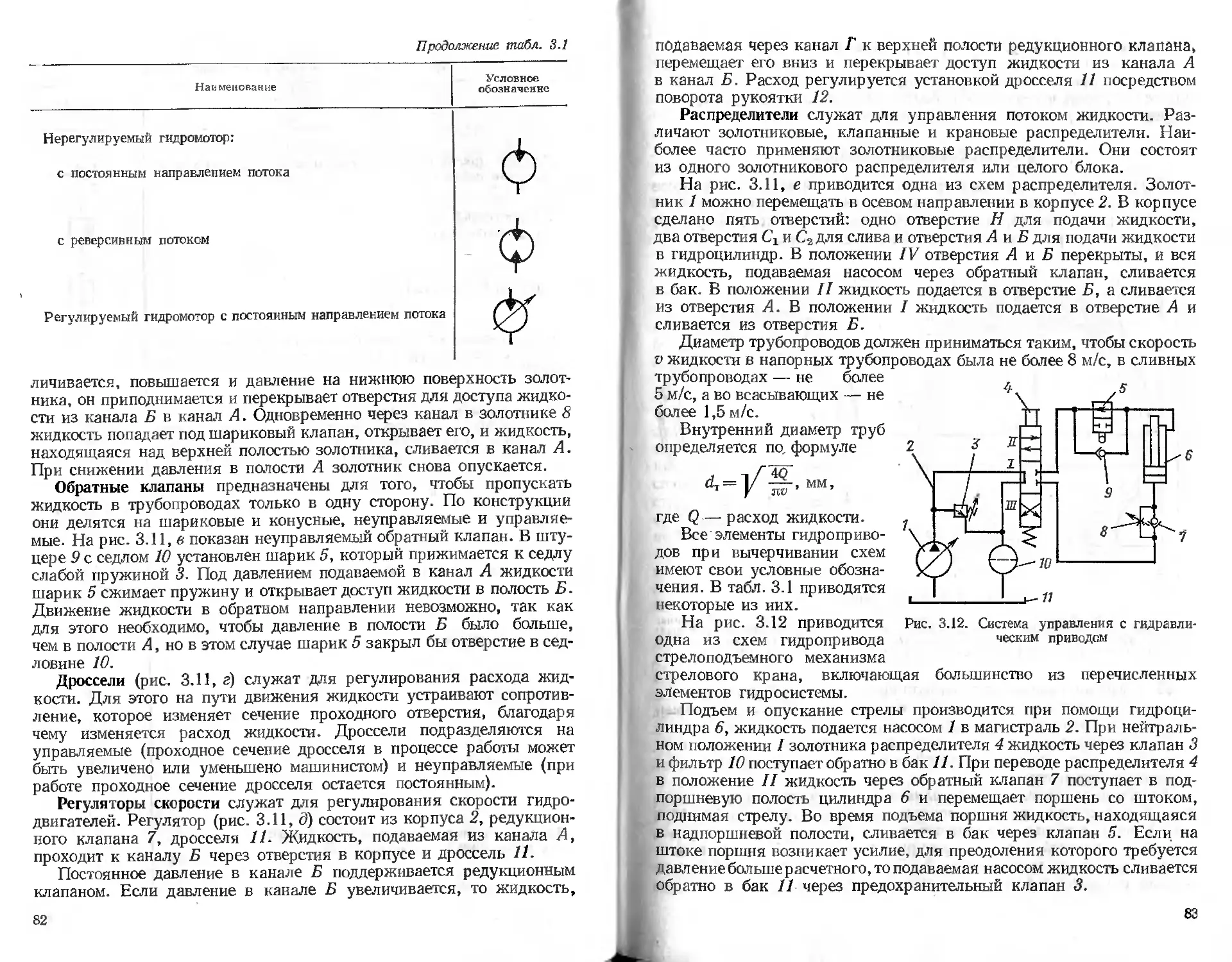
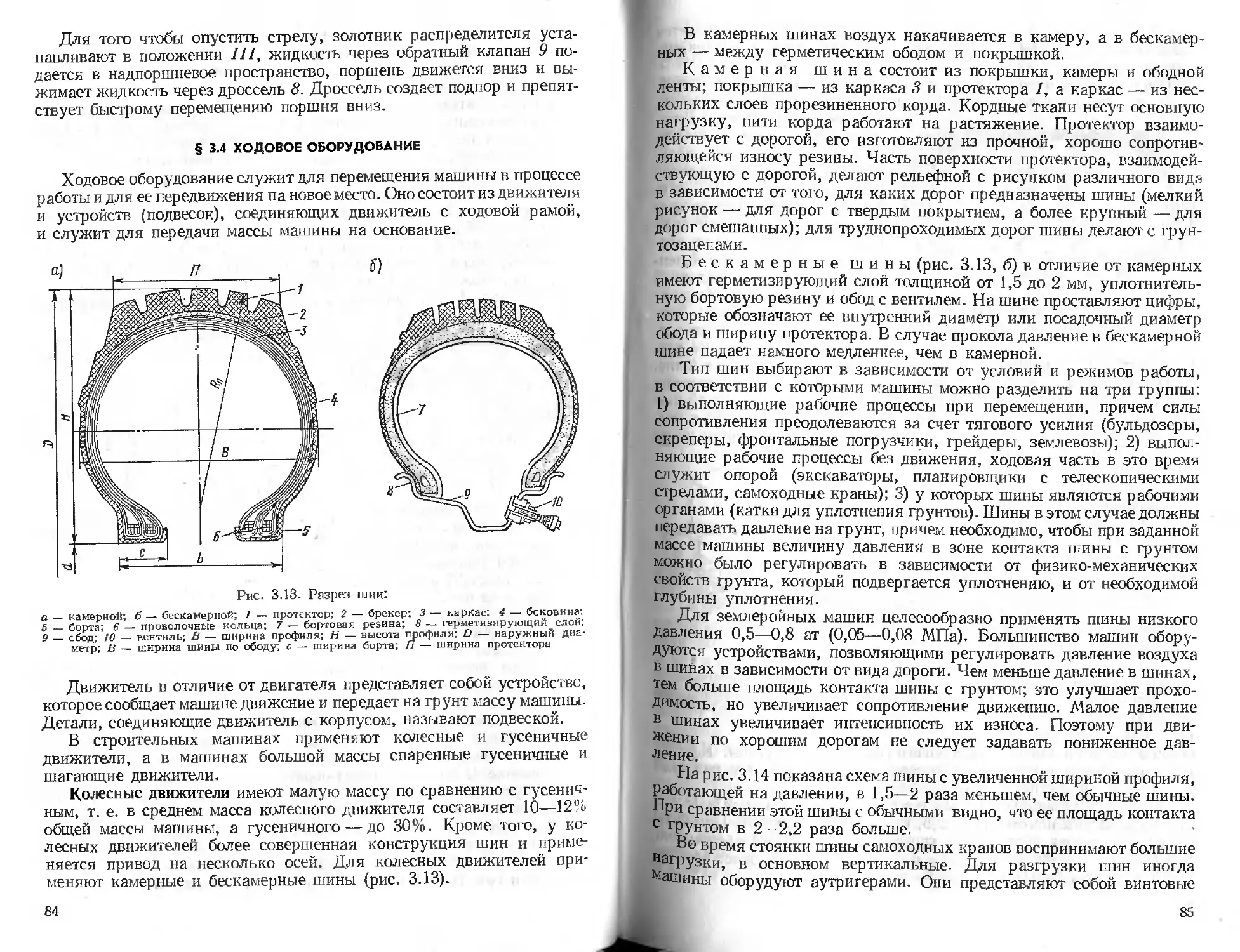
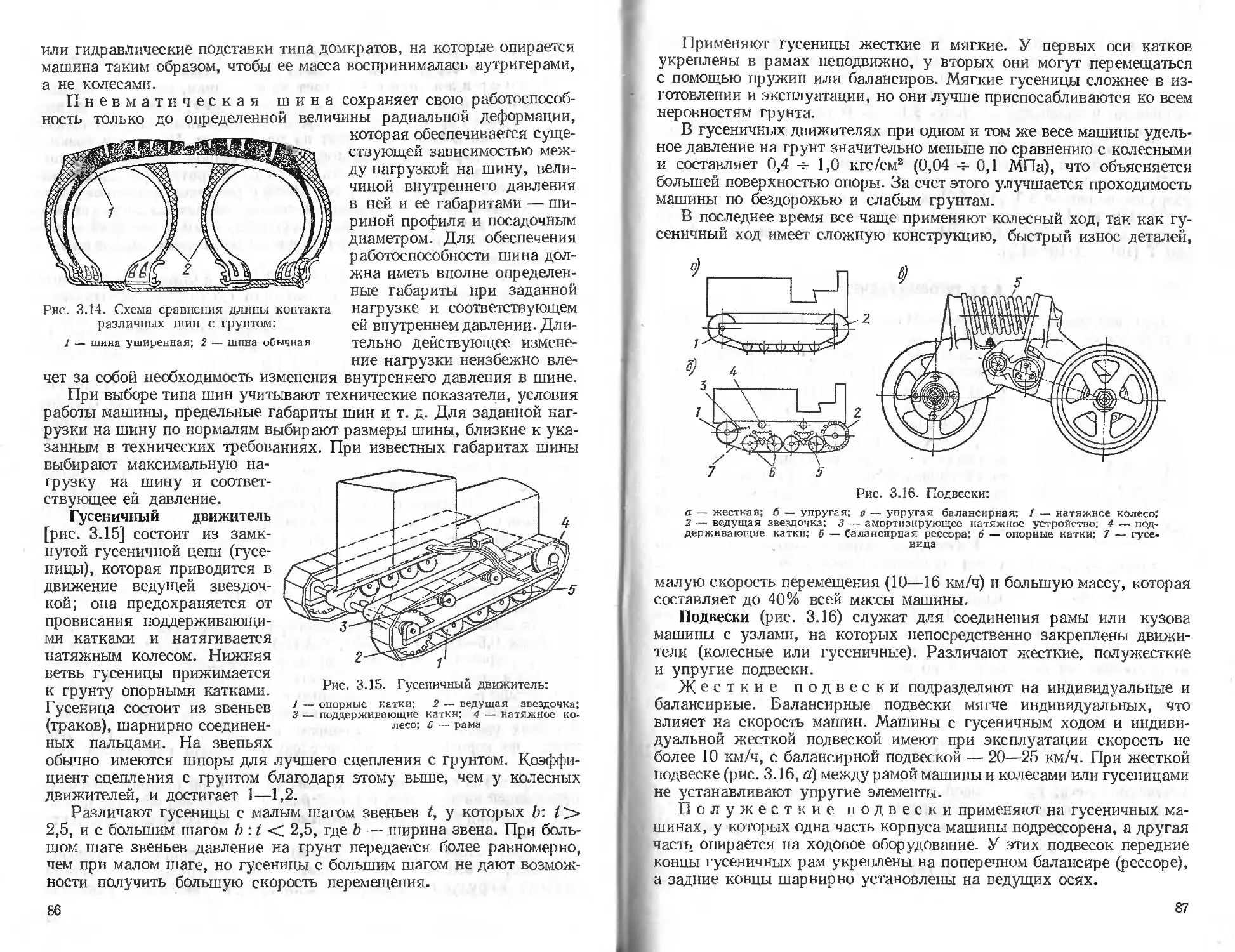
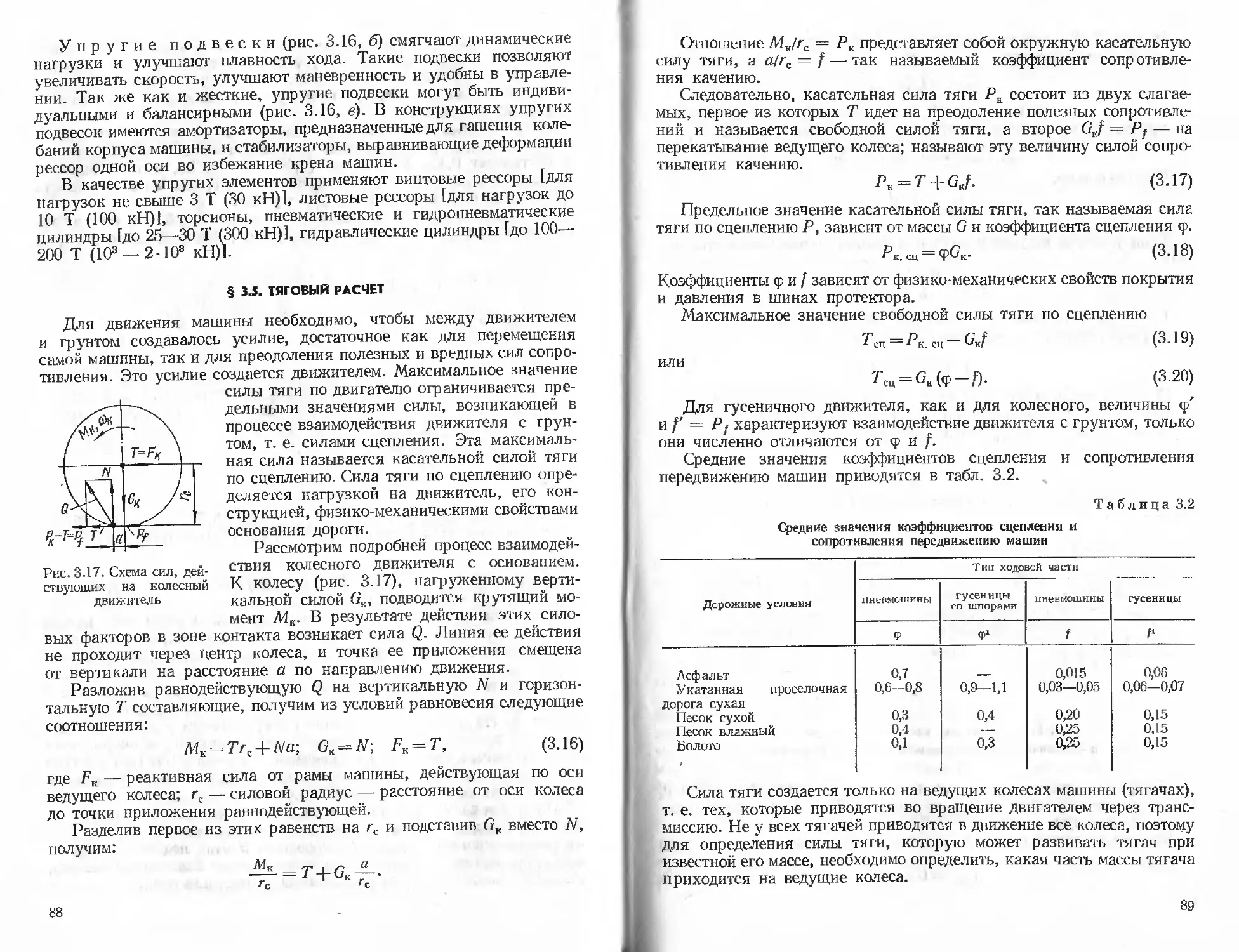
специальности «Промышленное
и гражданское строительство»
высших учебных заведений
МОСКВА «ВЫСШАЯ ШКОЛА» 1980
ББК38.6—44
Г17
УДК 621.8
Рецензент
кафедра эксплуатации и ремонта строительных машин
Киевского инженерно-строительного института
(зав. кафедрой проф. А. Ф. Чубук)
Гальперин М. И., Домбровский Н. Г.
Г17 Строительные машины: Учебник для вузов. — 3-е изд.,
перераб. и доп. —М.: Высш, школа, 1980. — 344 с., ил.
В nep.-.l р. 10 к.
Учебник составлен в полном соответствии с утвержденной программой. В н<_.„
изложены общие сведения о деталях машин и их расчете, основные принципы рабо-
ты и устройства строительных машин, показана физическая сущность их рабочего
процесса и особенности технологических процессов, для выполнения или уча-
стия в которых они предназначены, приведены технические параметры, технико-эко-
номические показатели работы, основные тенденции развития и области применения
строительных машин.
По сравнению с предыдущими изданиями в учебник внесены следующие изме-
нения: приводятся схемы машин с гидравлическим приводом, расширен раздел о
грузоподъемных устройствах и сокращен объем раздела о машинах для земляных
работ. Введены новые разделы о ручных машинах и машинах для отделочных работ.
Первое издание книги вышло в 1965 г.
Учебник предназначен для студентов инженерно-строительных вузов.
30207—296
001(01)—80
107—80
3204010000
6С6.08
ББК 38.6—44
Марк Исаевич Гальперин, Николай Григорьевич Домбровский
СТРОИТЕЛЬНЫЕ МАШИНЫ
Зав. редакцией В. Г. Акатова. Редактор Л. Б. Лохова. Мл. ре-
дактор Г. К. Ионова. Ху дож. редактор Т. А. Дурасова. Ху-
дожник В. И. Казакова, Техн, редактор Э. М. Чижевский.
Корректор В. А. Орлова.
ИБ № 2130
Изд. № СТР-335. Сдано в набор 15.11.79. Поди, в печать 10.06.80. Т-11733.
Формат 60X90/is- Бум. тип. № 1. Гарнитура литературная. Печать
высокая. Объем 21,5 усл. печ. л. 23,99 уч.-изд. л. Тираж оО 000 экз.
Зак. № 977. Цена 1 р. 10 к.
Издательство «Высшая школа», Москва, К-51, Неглинная ул., д. 29/14
Ордена Октябрьской Революции, ордена Трудового Красного Знамени
Ленинградское производственно-техническое" объединение «Печатный
Двор» имени А. М. Горького «Союзполиграфпрома» при Государст-
венном комитете СССР по делам издательств, полиграфии и книжной
торговли. 197136, Ленинград, П-136, Чкаловский просп., 15.
© Издательство «Высшая школа», 1980
ПРЕДИСЛОВИЕ
Строительству в нашей стране уделяют особое внимание, так как оно в зна-
чительной степени обеспечивает развитие других отраслей народного хозяйства
и повышает уровень благосостояния населения.
Парк строительных машин России в 1917 г. насчитывал 220 единиц. В основном
это были зарубежные экскаваторы, ленточные конвейеры, краны-укосины, при-
митивные кирпичные прессы с конным приводом, ручные бетономешалки и др. Годо-
вой объем земляных работ не превышал 200 млн. м3, а уровень их механиза-
ции — 3%.
Создание отечественных строительных машин было начато в 1921—1927 гг.,
и в настоящее время их выпускается более 700 наименований.
В Основных направлениях развития народного хозяйства СССР на 1976—
1980 гг., принятых на XXV съезде КПСС, предусмотрено значительное увеличение
парка машин, выпуск их повышенной единичной мощности, переход от создания
отдельных агрегатов к разработке и внедрению систем машин, охватывающих весь
технологический процесс, механизацию и автоматизацию трудоемких видов произ-
водства. Осуществление комплексной механизации в строительстве позволяет зна-
чительно увеличить производительность труда и снизить трудоемкость и стоимость
работ. Перечисленные мероприятия требуют от инженеров знания принципов дейст-
вия основных устройств машины; особенностей основных классов, групп и типов
машин и принципов их действия; факторов, влияющих на производительность, и
методов расчета производительности; основ правильной эксплуатации машин.
В СССР создан ряд научных школ, разрабатывающих основы теории рабочих
процессов, осуществляемых строительными машинами, а также особенности расчета
конструкции этих машин. В этой области наиболее существенные результаты достиг-
нуты профессорами Н. Г. Домбровским, Д. П. Волковым, Д. И. Федоровым,
Ю. А. Ветровым, А. Н. Зелениным, М. И. Гальпериным, В. И. Баловневым и др.
Данный учебник написан в соответствии с программой курса для специальности
«Промышленное и гражданское строительство». Первое издание книги вышло в
1965 г., второе — в 1971 г. Третье издание книги значительно переработано и до'
полнено на основе достижений науки и техники последних лет; все физические вели-
чины параллельно с системой единиц МКГСС даны в Международной системе еди-
ниц СИ.
Авторами приведен минимум материала, которого достаточно для того, чтобы
студенты могли изучить принципы устройства и работы машин, физическую сущность
явлений, происходящих при их эксплуатации, технические параметры машин и
технико-экономические показатели их работы, а также на практике правильно
выбрать машину для выполнения заданных технологических операций, оценить
влияние отдельной машины и условий работы на ее производительность и т. д.
Курс «Строительные машины» содержит общие вопросы конструкций строитель-
ных машин, где излагаются основные характеристики отдельных машин — прохо-
димость, маневренность и др., а также системы управления, силовые установки,
ходовая часть машин, методы расчета тяговых усилий, определение сил сопротивле-
ния рабочих органов при разрушении грунтов и пород и т. д.
1*
2
На основе опыта использования этого учебника в различных вузах, а также
требований, которые предъявляют на данном этапе строители, авторы в третьем изда-
нии изменили объемы некоторых разделов: сокращен объем материала по машинам
для земляных работ, увеличен объем материала по ручным машинам, так как они
получают все большее применение (ими пользуются около 60% строителей и мон-
тажников).
Для облегчения изучения курса студентами заочных вузов в учебник включены
контрольные вопросы.
За основу написания гл. «Детали машин» был принят учебник проф. Д. Н. Ре-
шетова «Детали машин».
Главы с 1 по 10 написаны докторами техн, наук профессорами М. И. Гальпери-
ным и Н. Г. Домбровским, гл. 11, 12 — ипж. Л. М. Местечки ным.
Авторы выражают глубокую благодарность руководителю кафедры эксплуата-
ции и ремонта строительных машин Киевского инженерно-строительного института
профессору А. Ф. Чубуку за ценные методические рекомендации и уточнения в ма-
териале, излагаемом в учебнике, и ииж. И. А. Смолиной за оказанную помощь при
переработке учебника.
Авторы
ГЛАВА 1
ДЕТАЛИ МАШИН
§ 1.1 ОБЩИЕ СВЕДЕНИЯ О ДЕТАЛЯХ МАШИН
Машины и механизмы состоят из отдельных.деталей. Деталь пред-
ставляет собой одно целое (вал, винт и др.). Группа деталей, работаю-
щих в комплексе и объединенных общим назначетгемгтгазываётся”
узлом (коробка передач, редуктор и др.). Различают детали простые
(гайка, шпонка, винт и т. д.) и сложные (коленчатый вал, корпус
ковша экскаватора, корпус редуктора).
В курсе деталей машин изучаются детали и узлы общего назначе-
ния, встречающиеся почти во всех машинах: болты, валы, муфты,
механические передачи и др.
Эффективная работа машин, срок их службы определяются проч-
ностью, жесткостью, виброустойчивостью, износостойкостью, тепло-
стойкостью и надежностью деталей этих машин.
V Прочность — свойство детали сопротивляться разрушению под
действием на нее внешних нагрузок. Прочность детали зависит от
характера приложения нагрузки, от формы детали, а также от мате-
риала, из которого она изготовлена.
На детали могут действовать нормальные, случайные и аварийные
нагрузки. Нормальные нагрузки по величине и характеру соответст-
вуют паспортным условиям работы машины. По ним ведется расчет
на долговечность. Случайные нагрузки — наименее выгодные сочета-
ния одновременно действующих на деталь нагрузок, которые воз-
можны во время работы при исправных механизмах, правильном управ-
лении и эксплуатации машины в очень тяжелых условиях; они вызы-
вают максимальные напряжения в детали. Расчет детали на прочность
ведут, исходя из этих нагрузок. Размеры, форма детали, материал
и его обработка должны быть такими, чтобы напряжения, возникаю-
щие при работе детали, от этих нагрузок не превосходили допустимых
величин. Аварийные нагрузки могут возникнуть в случае неисправной
работы механизмов или нарушения правил управления и эксплуата-
ции. По этим нагрузкам рассчитывают предохранительные устройства
с тем, чтобы нагрузка на деталь не превосходила случайной нагрузки.
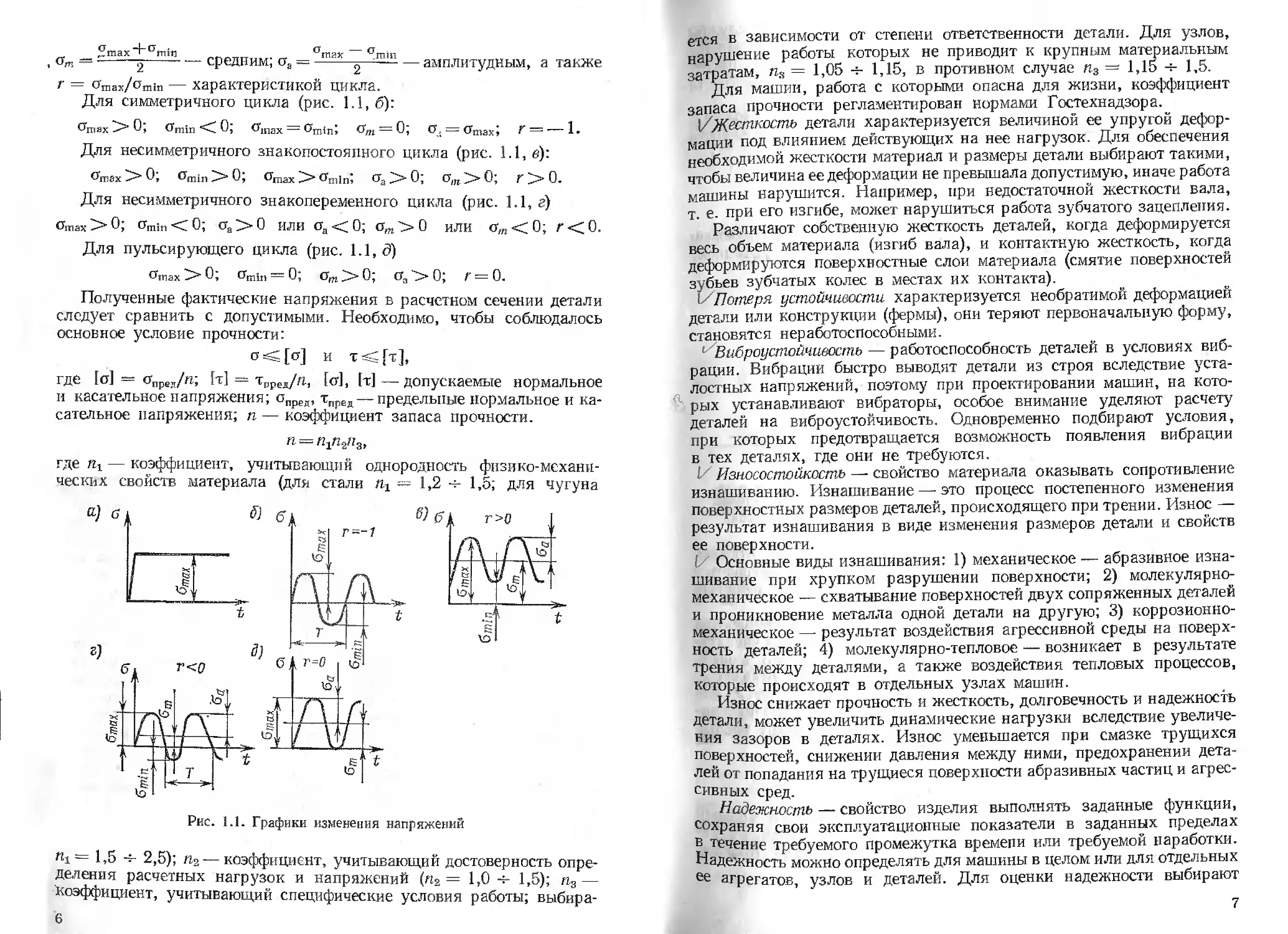
С точки зрения изменения напряжений во времени их можно разде-
лить на постоянные и переменные (рис. 1.1). Переменные напряжения
могут быть симметричными (рис. 1.1,6), асимметричными, знакопосто-
янными (рис. 1.1, в), знакопеременными (рис. 1.1, а) или пульси-
рующими (рис. 1.1, д).
Постоянное по времени напряжение (рис. 1.1 о) характеризуется
максимальным значением о = птах.
Переменное по времени напряжение характеризуется следующими
видами напряжений; отах — максимальным; omin — минимальным;
5
om — rmax~^ ml" — средним; cra = tna* 2 —— амплитудным, а также
r = Cmax/cmin — характеристикой цикла.
Для симметричного цикла (рис. 1.1,6):
(Утах > 0; <jmin < 0; (Утах — (Ут<п> &т — (У, — (Утах > — 1 *
Для несимметричного знакопостоянного цикла (рис. 1.1, в):
Оглах 0» (Ущ!п 0, Оглах (Ут!п» (Уа 0j 0-
Для несимметричного знакопеременного цикла (рис. 1.1, г)
(Утах Qj (Ут!п <0; сга>0 или оа<0; от>0 или <т,„<0; г<0.
Для пульсирующего цикла (рис. 1.1,6)
*Ттах^>0; Рщ1п — 0; ст 0; оа 0; f = 0.
Полученные фактические напряжения в расчетном сечении детали
следует сравнить с допустимыми. Необходимо, чтобы соблюдалось
основное условие прочности:
о^£[о] и т<[т],
где [о] = апрея/п; М = трред/п, [<г], [т]—допускаемые нормальное
и касательное напряжения; опред, тпред— предельные нормальное и ка-
сательное напряжения; п — коэффициент запаса прочности.
П = И1П2«з,
где пх — коэффициент, учитывающий однородность физико-механи-
ческих свойств материала (для стали пх — 1,2 ч- 1,5; для чугуна
«г = 1,5 ч- 2,5); и2— коэффициент, учитывающий достоверность опре-
деления расчетных нагрузок и напряжений (п2 = 1,0 ч- 1,5); ns—
коэффициент, учитывающий специфические условия работы; выбира-
6
ется в зависимости от степени ответственности детали. Для узлов,
нарушение работы которых не приводит к крупным материальным
затратам, пя = 1,05 -ь 1,15, в противном случае п3 = 1,15 -ь 1,5.
Для машин, работа с которыми опасна для жизни, коэффициент
запаса прочности регламентирован нормами Гостехнадзора.
[/Жесткость детали характеризуется величиной ее упругой дефор-
мации под влиянием действующих на нее нагрузок. Для обеспечения
необходимой жесткости материал и размеры детали выбирают такими,
чтобы величина ее деформации не превышала допустимую, иначе работа
машины нарушится. Например, при недостаточной жесткости вала,
т. е. при его изгибе, может нарушиться работа зубчатого зацепления.
Различают собственную жесткость деталей, когда деформируется
весь объем материала (изгиб вала), и контактную жесткость, когда
деформируются поверхностные слои материала (смятие поверхностей
зубьев зубчатых колес в местах их контакта).
У Потеря устойчивости характеризуется необратимой деформацией
детали или конструкции (фермы), они теряют первоначальную форму,
становятся неработоспособными.
^Виброустойчивость — работоспособность деталей в условиях виб-
рации. Вибрации быстро выводят детали из строя вследствие уста-
лостных напряжений, поэтому при проектировании машин, на кото-
рых устанавливают вибраторы, особое внимание уделяют расчету
деталей на виброустойчивость. Одновременно подбирают условия,
при которых предотвращается возможность появления вибрации
в тех деталях, где они не требуются.
V Износостойкость — свойство материала оказывать сопротивление
изнашиванию. Изнашивание — это процесс постепенного изменения
поверхностных размеров деталей, происходящего при трении. Износ —
результат изнашивания в виде изменения размеров детали и свойств
ее поверхности.
Основные виды изнашивания: 1) механическое — абразивное изна-
шивание при хрупком разрушении поверхности; 2) молекулярно-
механическое — схватывание поверхностей двух сопряженных деталей
и проникновение металла одной детали на другую; 3) коррозионно-
механическое — результат воздействия агрессивной среды на поверх-
ность деталей; 4) молекулярно-тепловое — возникает в результате
трения между деталями, а также воздействия тепловых процессов,
которые происходят в отдельных узлах машин.
Износ снижает прочность и жесткость, долговечность и надежность
детали, может увеличить динамические нагрузки вследствие увеличе-
ния зазоров в деталях. Износ уменьшается при смазке трущихся
поверхностей, снижении давления между ними, предохранении дета-
лей от попадания на трущиеся поверхности абразивных частиц и агрес-
сивных сред.
Надежность — свойство изделия выполнять заданные функции,
сохраняя свои эксплуатационные показатели в заданных пределах
н течение требуемого промежутка времени или требуемой наработки.
Надежность можно определять для машины в целом или для отдельных
ее агрегатов, узлов и деталей. Для оценки надежности выбирают
7
различные показатели: число отказов в работе, средний срок службы
в часах, число километров пробега и др. Если, например, для автомо-
билей установлен пробег 100 000 км, а средне-статистический пробег
для этого типа машин равен 95 000 км, то коэффициент надежности
этих автомобилей 7? = 0,95.
Согласно теории вероятности коэффициент надежности сложного
изделия R выражается произведением коэффициентов надежности
отдельных составляющих элементов:
R — Ri, Rz, R3, ..., Ri — J[Rt.
i
Если, например, система включает
коэффициентом надежности каждого
надежности системы R = 0,99100 =
= 0,37. Такая система не является
р аботоспособной.
100 элементов с одинаковым
Rt = 0,99, то коэффициент
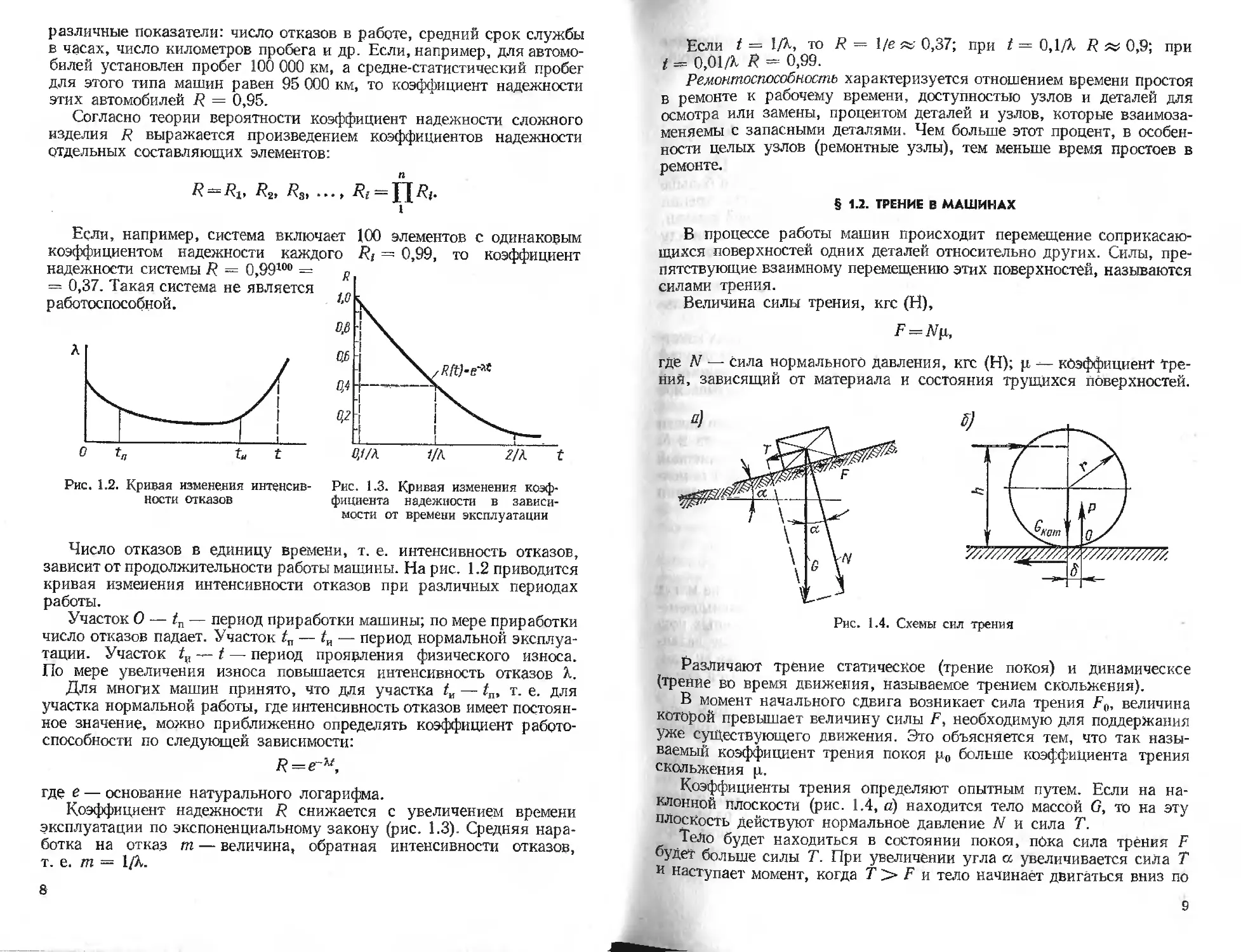
Рис. 1.3. Кривая изменения коэф-
фициента надежности в зависи-
мости от времени эксплуатации
Рис. 1.2. Кривая изменения интенсив-
ности отказов
Число отказов в единицу времени, т. е. интенсивность отказов,
зависит от продолжительности работы машины. На рис. 1.2 приводится
кривая изменения интенсивности отказов при различных периодах
работы.
Участок О — tn — период приработки машины; по мере приработки
число отказов падает. Участок t„ — tn — период нормальной эксплуа-
тации. Участок i,, — / — период проявления физического износа.
По мере увеличения износа повышается интенсивность отказов X.
Для многих машин принято, что для участка tK — tn, т. е. для
участка нормальной работы, где интенсивность отказов имеет постоян-
ное значение, можно приближенно определять коэффициент работо-
способности по следующей зависимости:
где е — основание натурального логарифма.
Коэффициент надежности R снижается с увеличением времени
эксплуатации по экспоненциальному закону (рис. 1.3). Средняя нара-
ботка на отказ т — величина, обратная интенсивности отказов,
т. е. т = 1/Х.
8
Если / — 1А, то R = l/e ж 0,37; при t = 0.1Д R « 0,9; при
t = 0,01Д R = 0,99.
Ремонтоспособность характеризуется отношением времени простоя
в ремонте к рабочему времени, доступностью узлов и деталей для
осмотра или замены, процентом деталей и узлов, которые взаимоза-
меняемы с запасными деталями. Чем больше этот процент, в особен-
ности целых узлов (ремонтные узлы), тем меньше время простоев в
ремонте.
§ 1.2. ТРЕНИЕ В МАШИНАХ
В процессе работы машин происходит перемещение соприкасаю-
щихся поверхностей одних деталей относительно других. Силы, пре-
пятствующие взаимному перемещению этих поверхностей, называются
силами трения.
Величина силы трения, кгс (Н),
F=Np,
где У — сила нормального давления, кгс (Н); р — коэффициент Тре-
ний, зависящий от материала и состояния трущихся поверхностей.
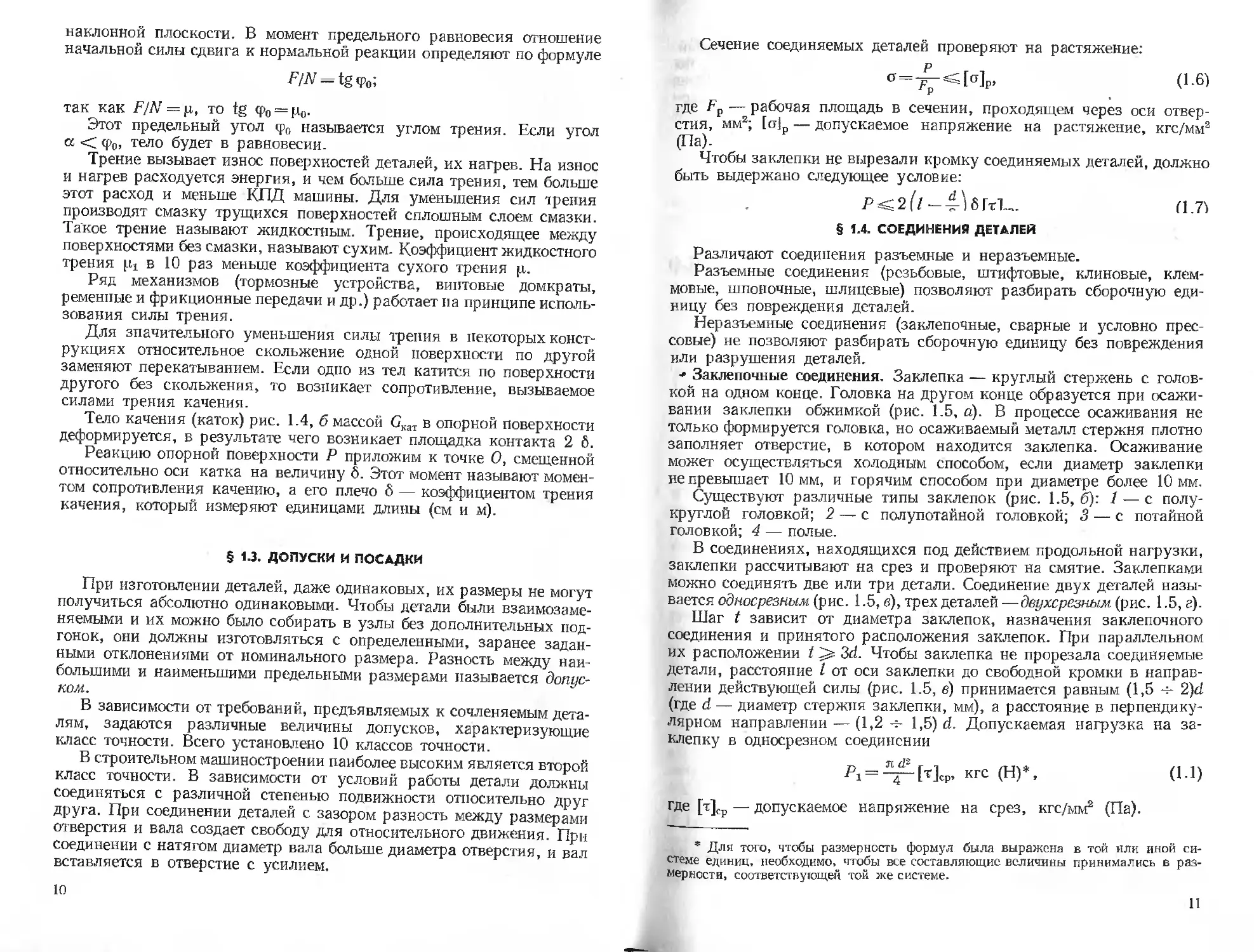
Рис. 1.4. Схемы сил трения
Различают трение статическое (трение покоя) и динамическое
(трение во время движения, называемое трением скольжения).
В момент начального сдвига возникает сила трения Fo, величина
которой превышает величину силы F, необходимую для поддержания
уже существующего движения. Это объясняется тем, что так назы-
ваемый коэффициент трения покоя р0 больше коэффициента трения
скольжения р.
Коэффициенты трения определяют опытным путем. Если на на-
клонной плоскости (рис. 1.4, а) находится тело массой G, то на эту
плоскость действуют нормальное давление N и сила Т.
Тело будет находиться в состоянии покоя, пока сила трения F
будет больше силы Т. При увеличении угла а увеличивается сила Т
и наступает момент, когда Т > F и тело начинает двигаться вниз по
9
наклонной плоскости. В момент предельного равновесия отношение
начальной силы сдвига к нормальной реакции определяют по формуле
F/N = tg <р0;
так как F/N = р, то tg <р0 = Йо-
Этот предельный угол <р0 называется углом трения. Если угол
а < ф0, тело будет в равновесии.
Трение вызывает износ поверхностей деталей, их нагрев. На износ
и нагрев расходуется энергия, и чем больше сила трения, тем больше
этот расход и меньше КПД машины. Для уменьшения сил трения
производят смазку трущихся поверхностей сплошным слоем смазки.
Такое трение называют жидкостным. Трение, происходящее между
поверхностями без смазки, называют сухим. Коэффициент жидкостного
трения pi в 10 раз меньше коэффициента сухого трения р.
Ряд механизмов (тормозные устройства, винтовые домкраты,
ременные и фрикционные передачи и др.) работает на принципе исполь-
зования силы трения.
Для значительного уменьшения силы трения в некоторых конст-
рукциях относительное скольжение одной поверхности по другой
заменяют перекатыванием. Если одно из тел катится по поверхности
другого без скольжения, то возникает сопротивление, вызываемое
силами трения качения.
Тело качения (каток) рис. 1.4, б массой Скат в опорной поверхности
деформируется, в результате чего возникает площадка контакта 2 б.
Реакцию опорной поверхности Р приложим к точке О, смещенной
относительно оси катка на величину 6. Этот момент называют момен-
том сопротивления качению, а его плечо 6 — коэффициентом трения
качения, который измеряют единицами длины (см и м).
§ 1.3. ДОПУСКИ И ПОСАДКИ
При изготовлении деталей, даже одинаковых, их размеры не могут
получиться абсолютно одинаковыми. Чтобы детали были взаимозаме-
няемыми и их можно было собирать в узлы без дополнительных под-
гонок, они должны изготовляться с определенными, заранее задан-
ными отклонениями от номинального размера. Разность между наи-
большими и наименьшими предельными размерами называется допус-
ком.
В зависимости от требований, предъявляемых к сочленяемым дета-
лям, задаются различные величины допусков, характеризующие
класс точности. Всего установлено 10 классов точности.
В строительном машиностроении наиболее высоким является второй
класс точности. В зависимости от условий работы детали должны
соединяться с различной степенью подвижности относительно друг
друга. При соединении деталей с зазором разность между размерами
отверстия и вала создает свободу для относительного движения. При
соединении с натягом диаметр вала больше диаметра отверстия, и вал
вставляется в отверстие с усилием.
Ю
Сечение соединяемых деталей проверяют на растяжение:
о = -Д-^[£т]р, (1.6)
ГР
где Fp — рабочая площадь в сечении, проходящем через оси отвер-
стия, мм8; [сг]р — допускаемое напряжение на растяжение, кгс/мм3
(Па).
Чтобы заклепки не вырезали кромку соединяемых деталей, должно
быть выдержано следующее условие:
Р<2(/-44бГтЛ.. (1.71
§ 1.4. СОЕДИНЕНИЯ ДЕТАЛЕЙ
Различают соединения разъемные и неразъемные.
Разъемные соединения (резьбовые, штифтовые, клиновые, клем-
мовые, шпоночные, шлицевые) позволяют разбирать сборочную еди-
ницу без повреждения деталей.
Неразъемные соединения (заклепочные, сварные и условно прес-
совые) не позволяют разбирать сборочную единицу без повреждения
или разрушения деталей.
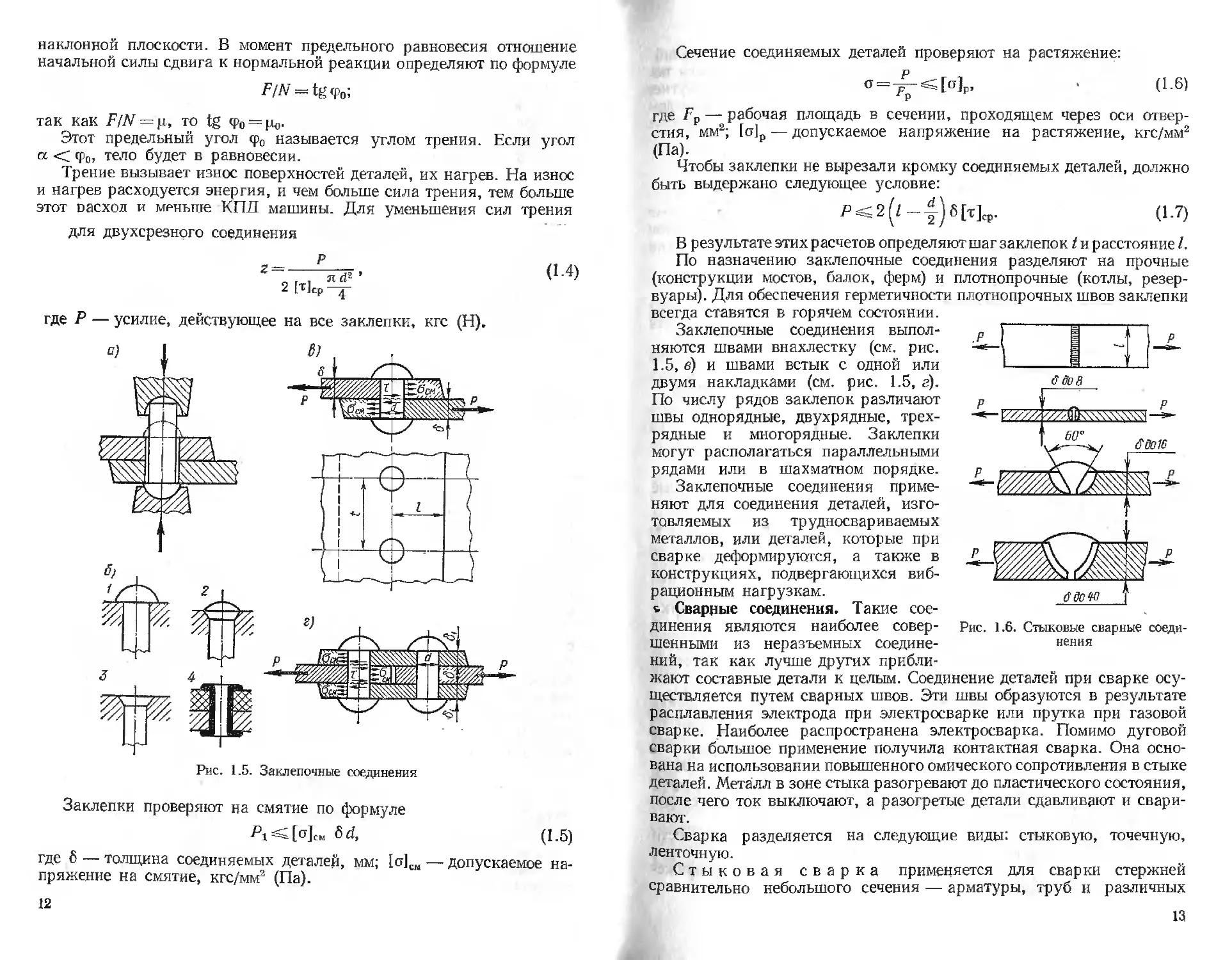
* Заклепочные соединения. Заклепка — круглый стержень с голов-
кой на одном конце. Головка на другом конце образуется при осажи-
вании заклепки обжимкой (рис. 1.5, и). В процессе осаживания не
только формируется головка, но осаживаемый металл стержня плотно
заполняет отверстие, в котором находится заклепка. Осаживание
может осуществляться холодным способом, если диаметр заклепки
не превышает 10 мм, и горячим способом при диаметре более 10 мм.
Существуют различные типы заклепок (рис. 1.5, б): 1 — с полу-
круглой головкой; 2 — с полупотайной головкой; 3 — с потайной
головкой; 4 — полые.
В соединениях, находящихся под действием продольной нагрузки,
заклепки рассчитывают на срез и проверяют на смятие. Заклепками
можно соединять две или три детали. Соединение двух деталей назы-
вается односрезным (рис. 1.5, с), трех деталей —двухсрезным (рис. 1.5, а).
Шаг t зависит от диаметра заклепок, назначения заклепочного
соединения и принятого расположения заклепок. При параллельном
их расположении t 3d. Чтобы заклепка не прорезала соединяемые
детали, расстояние I от оси заклепки до свободной кромки в направ-
лении действующей силы (рис. 1.5, в) принимается равным (1,5 — 2)d
(где d — диаметр стержня заклепки, мм), а расстояние в перпендику-
лярном направлении — (1,2 -ъ 1,5) d. Допускаемая нагрузка на за-
клепку в односрезном соединении
Л = ^Мср, кге (Н)*, (1.1)
где [т]ср — допускаемое напряжение на срез, кгс/мм2 (Па).
* Для того, чтобы размерность формул была выражена в той или иной си-
стеме единиц, необходимо, чтобы все составляющие величины принимались в раз-
мерности, соответствующей той же системе.
И
наклонной плоскости. В момент предельного равновесия отношение
начальной силы сдвига к нормальной реакции определяют по формуле
W = tg<p0;
так как F/N = p., то tg ф0 = [10.
Этот предельный угол ф0 называется углом трения. Если угол
а < Фо, тело будет в равновесии.
Трение вызывает износ поверхностей деталей, их нагрев. На износ
и нагрев расходуется энергия, и чем больше сила трения, тем больше
этот пасхол и меньше КПД машины. Для уменьшения сил трения
для двухсрезного соединения
где Р — усилие, действующее на все заклепки, кгс (Н).
Рис. 1.5. Заклепочные соединения
Заклепки проверяют на смятие по формуле
Sd, (1.5)
где б — толщина соединяемых деталей, мм; [о]сн — допускаемое на-
пряжение на смятие, кгс/мм3 (Па).
12
Рис. 1.6. Стыковые сварные соеди-
нения
Сечение соединяемых деталей проверяют на растяжение:
о = 7г~<;[о]Р. • (1-6)
гр
где Гр — рабочая площадь в сечении, проходящем через оси отвер-
стия, мм2; [trip — допускаемое напряжение на растяжение, кгс/мм2
(Па).
Чтобы заклепки не вырезали кромку соединяемых деталей, должно
быть выдержано следующее условие:
Р 2 (/- 4) 6 [т]ср. (1.7)
В результате этих расчетов определяют шаг заклепок t и расстояние I.
По назначению заклепочные соединения разделяют на прочные
(конструкции мостов, балок, ферм) и плотнопрочные (котлы, резер-
вуары). Для обеспечения герметичности плотнопрочных швов заклепки
всегда ставятся в горячем состоянии.
Заклепочные соединения выпол-
няются швами внахлестку (см. рис.
1.5, в) и швами встык с одной или
двумя накладками (см. рис. 1.5, а).
По числу рядов заклепок различают
швы однорядные, двухрядные, трех-
рядные и многорядные. Заклепки
могут располагаться параллельными
рядами или в шахматном порядке.
Заклепочные соединения приме-
няют для соединения деталей, изго-
товляемых из трудносвариваемых
металлов, или деталей, которые при
сварке деформируются, а также в
конструкциях, подвергающихся виб-
рационным нагрузкам.
« Сварные соединения. Такие сое-
динения являются наиболее совер-
шенными из неразъемных соедине-
ний, так как лучше других прибли-
жают составные детали к целым. Соединение деталей при сварке осу-
ществляется путем сварных швов. Эти швы образуются в результате
расплавления электрода при электросварке или прутка при газовой
сварке. Наиболее распространена электросварка. Помимо дуговой
сварки большое применение получила контактная сварка. Она осно-
вана на использовании повышенного омического сопротивления в стыке
деталей. Металл в зоне стыка разогревают до пластического состояния,
после чего ток выключают, а разогретые детали сдавливают и свари-
вают.
Сварка разделяется на следующие виды: стыковую, точечную,
ленточную.
Стыковая сварка применяется для сварки стержней
сравнительно небольшого сечения — арматуры, труб и различных
13
листовых конструкций (рис. 1.6). При толщинах свариваемых изделий
больше 8 мм делают подготовку кромок, чтобы шов проваривался по
всей толщине деталей. Сварной шов называется стыковым. Другие
виды сварных соединений выполняют угловыми швами, которые де-
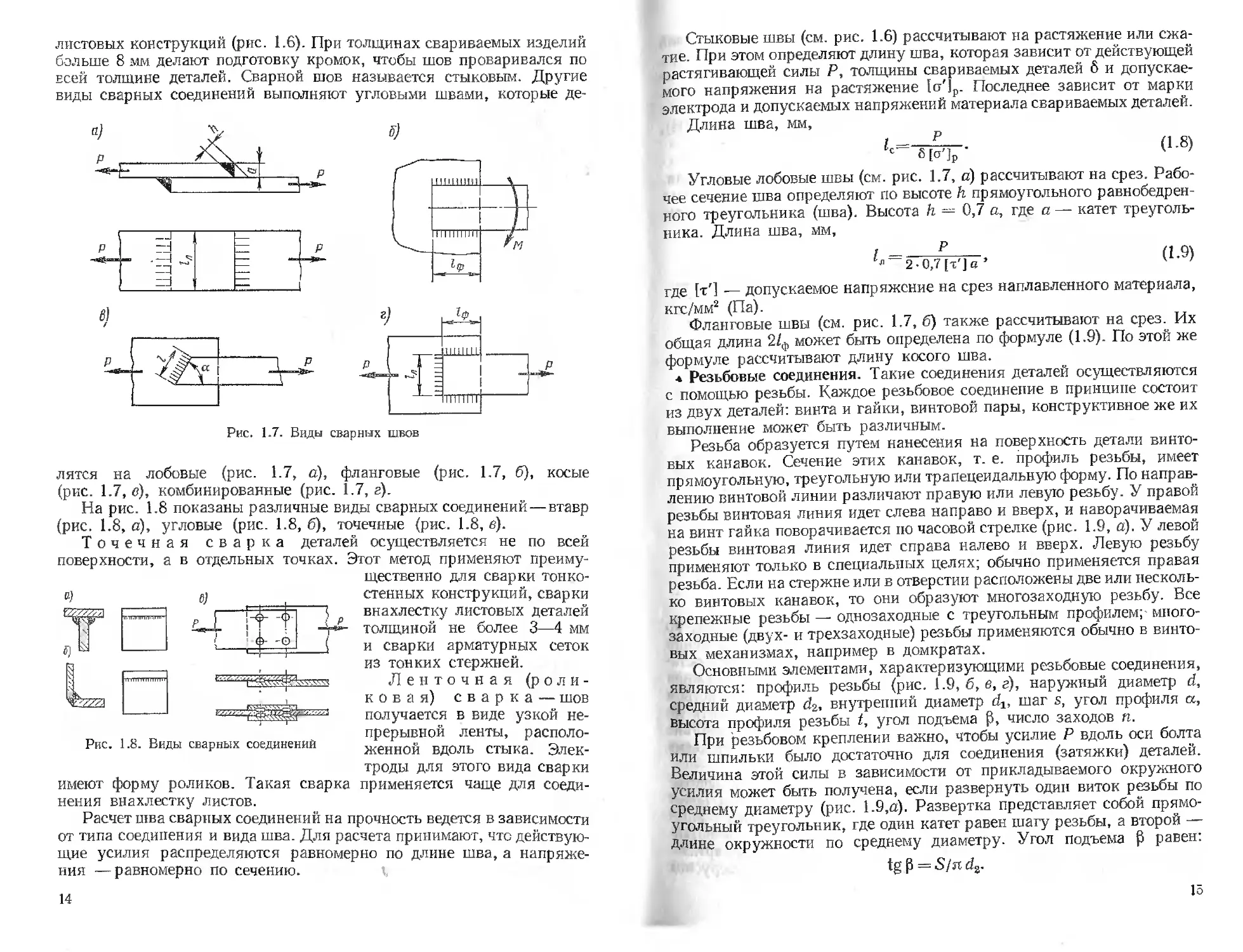
Рис. 1.7. Виды сварных швов
лятся на лобовые (рис. 1.7, а), фланговые (рис. 1.7, б), косые
(рис. 1.7, в), комбинированные (рис. 1.7, г).
На рис. 1.8 показаны различные виды сварных соединений—втавр
(рис. 1.8, а), угловые (рис. 1.8, б), точечные (рис. 1.8, в).
Точечная сварка деталей осуществляется не по всей
поверхности, а в отдельных точках. Этот метод применяют преиму-
щественно для сварки тонко-
стенных конструкций,сварки
внахлестку листовых деталей
толщиной не более 3—4 мм
и сварки арматурных сеток
из тонких стержней.
Ленточная (роли-
ковая) сварка — шов
получается в виде узкой не-
прерывной ленты, располо-
женной вдоль стыка. Элек-
Рис. 1.8. Виды сварных соединений
троды для этого вида сварки
имеют форму роликов. Такая сварка применяется чаще для соеди-
нения внахлестку листов.
Расчет шва сварных соединений на прочность ведется в зависимости
от типа соединения и вида шва. Для расчета принимают, что действую-
щие усилия распределяются равномерно по длине шва, а напряже-
ния — равномерно по сечению.
14
Стыковые швы (см. рис. 1.6) рассчитывают на растяжение или сжа-
тие. При этом определяют длину шва, которая зависит от действующей
растягивающей силы Р, толщины свариваемых деталей 6 и допускае-
мого напряжения на растяжение Последнее зависит от марки
электрода и допускаемых напряжений материала свариваемых деталей.
Длина шва, мм,
Угловые лобовые швы (см. рис. 1.7, а) рассчитывают на срез. Рабо-
чее сечение шва определяют по высоте h прямоугольного равнобедрен-
ного треугольника (шва). Высота h — 0,7 а, где а — катет треуголь-
ника. Длина шва, мм,
Zj,==2-0,7 [т']в ’
где 1т'] — допускаемое напряжение на срез наплавленного материала,
кге/мм2 (Па).
Фланговые швы (см. рис. 1.7, б) также рассчитывают на срез. Их
общая длина 2/ф может быть определена по формуле (1.9). По этой же
формуле рассчитывают длину косого шва.
* Резьбовые соединения. Такие соединения деталей осуществляются
с помощью резьбы. Каждое резьбовое соединение в принципе состоит
из двух деталей: винта и гайки, винтовой пары, конструктивное же их
выполнение может быть различным.
Резьба образуется путем нанесения на поверхность детали винто-
вых канавок. Сечение этих канавок, т. е. профиль резьбы, имеет
прямоугольную, треугольную или трапецеидальную форму. По направ-
лению винтовой линии различают правую или левую резьбу. У правой
резьбы винтовая линия идет слева направо и вверх, и наворачиваемая
на винт гайка поворачивается по часовой стрелке (рис. 1.9, а). У левой
резьбы винтовая линия идет справа налево и вверх. Левую резьбу
применяют только в специальных целях; обычно применяется правая
резьба. Если на стержне или в отверстии расположены две или несколь-
ко винтовых канавок, то они образуют многозаходную резьбу. Все
крепежные резьбы — однозаходные с треугольным профилем;- много-
заходные (двух- и трехзаходные) резьбы применяются обычно в винто-
вых механизмах, например в домкратах.
Основными элементами, характеризующими резьбовые соединения,
являются: профиль резьбы (рис. 1.9, б, в, г), наружный диаметр d,
средний диаметр dz, внутренний диаметр dlt шаг s, угол профиля а,
высота профиля резьбы /, угол подъема р, число заходов п.
При резьбовом креплении важно, чтобы усилие Р вдоль оси болта
или шпильки было достаточно для соединения (затяжки) деталей.
Величина этой силы в зависимости от прикладываемого окружного
усилия может быть получена, если развернуть один виток резьбы по
среднему диаметру (рис. 1.9,а). Развертка представляет собой прямо-
угольный треугольник, где один катет равен шагу резьбы, а второй —
Длине окружности по среднему диаметру. Угол подъема Р равен:
tg ₽ = S/л dz.
15
Чтобы определить взаимодействие между силой Р и окружной силой
Т, прикладываемой для затяжки, заменим гайку ползуном А. При
перемещении ползуна, т. е. при относительном движении, возникает
равнодействующая от нормальной силы и силы трения, которая накло-
нена к нормали под углом трения ср. tg ф — р, где р — коэффициент
трения. Из разложения этой силы следует, что окружная сила, кгс (Н),
7 = Ptg(₽ + <p).
Величина угла <р неодинакова для резьб различного профиля.
У треугольного профиля она больше, чем у прямоугольного, так как
трение в резьбе с прямоугольным профилем меньше, чем с треуголь-
ным.
Рис. 1.9. Элементы резьбовых соединений
а — схема сил; б — треугольный профиль; в — прямоугольный профиль; г — тра-
пецеидальный профиль
Винтовые пары применяют не только для крепежных целей, но
и в механизмах для подъема грузов (домкратах) и для преодоления
усилий. В этом случае очень важно, чтобы поднимаемый груз при оста-
новке механизма, когда перестает действовать движущая окружная
сила Т, не опускался, т. е. чтобы винтовая пара обладала свойством
самоторможения. Это значит, что ползун А не должен сползать по
наклонной плоскости под действием силы Р, если снято действие
силы Т. Самоторможение достигается при условии, когда угол подъема
₽ меньше угла трения ср.
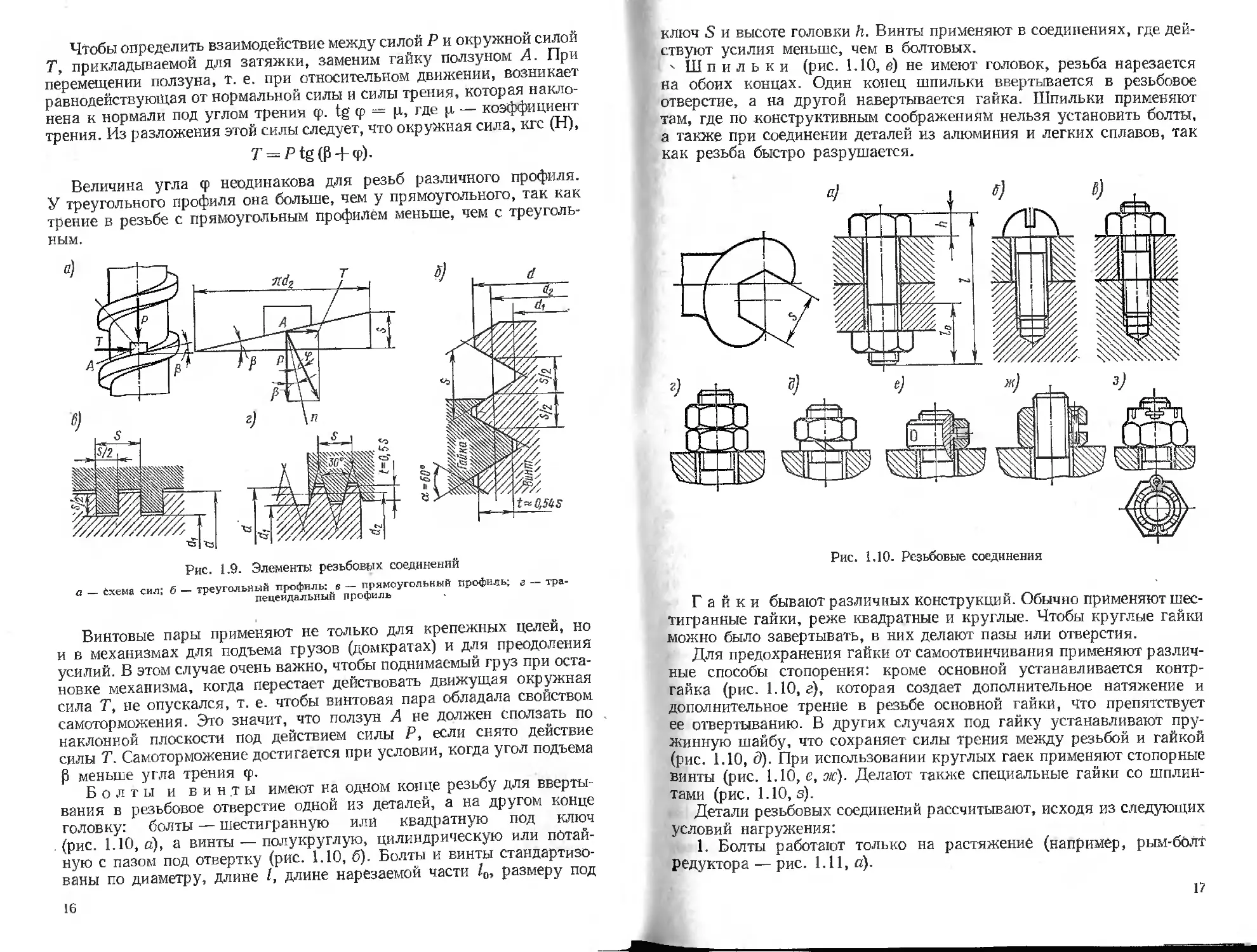
Болты и винты имеют на одном конце резьбу для вверты-
вания в резьбовое отверстие одной из деталей, а на другом конце
головку: болты — шестигранную или квадратную под ключ
(рис. 1.10, а), а винты — полукруглую, цилиндрическую или потай-
ную с пазом под отвертку (рис. 1.10, б). Болты и винты стандартизо-
ваны по диаметру, длине /, длине нарезаемой части /0, размеру под
16
ключ S и высоте головки h. Винты применяют в соединениях, где дей-
ствуют усилия меньше, чем в болтовых.
I 4 Шпильки (рис. 1.10, в) не имеют головок, резьба нарезается
на обоих концах. Один конец шпильки ввертывается в резьбовое
отверстие, а на другой навертывается гайка. Шпильки применяют
там, где по конструктивным соображениям нельзя установить болты,
а также при соединении деталей из алюминия и легких сплавов, так
как резьба быстро разрушается.
Рис. 1.10. Резьбовые соединения
Гайки бывают различных конструкций. Обычно применяют шес-
тигранные гайки, реже квадратные и круглые. Чтобы круглые гайки
можно было завертывать, в них делают пазы или отверстия.
Для предохранения гайки от самоотвинчивания применяют различ-
ные способы стопорения: кроме основной устанавливается контр-
гайка (рис. 1.10, г), которая создает дополнительное натяжение и
дополнительное трение в резьбе основной гайки, что препятствует
ее отвертыванию. В других случаях под гайку устанавливают пру-
жинную шайбу, что сохраняет силы трения между резьбой и гайкой
(рис. 1.10, д). При использовании круглых гаек применяют стопорные
винты (рис. 1.10, е, ж). Делают также специальные гайки со шплин-
тами (рис. 1.10, з).
Детали резьбовых соединений рассчитывают, исходя из следующих
условий нагружения:
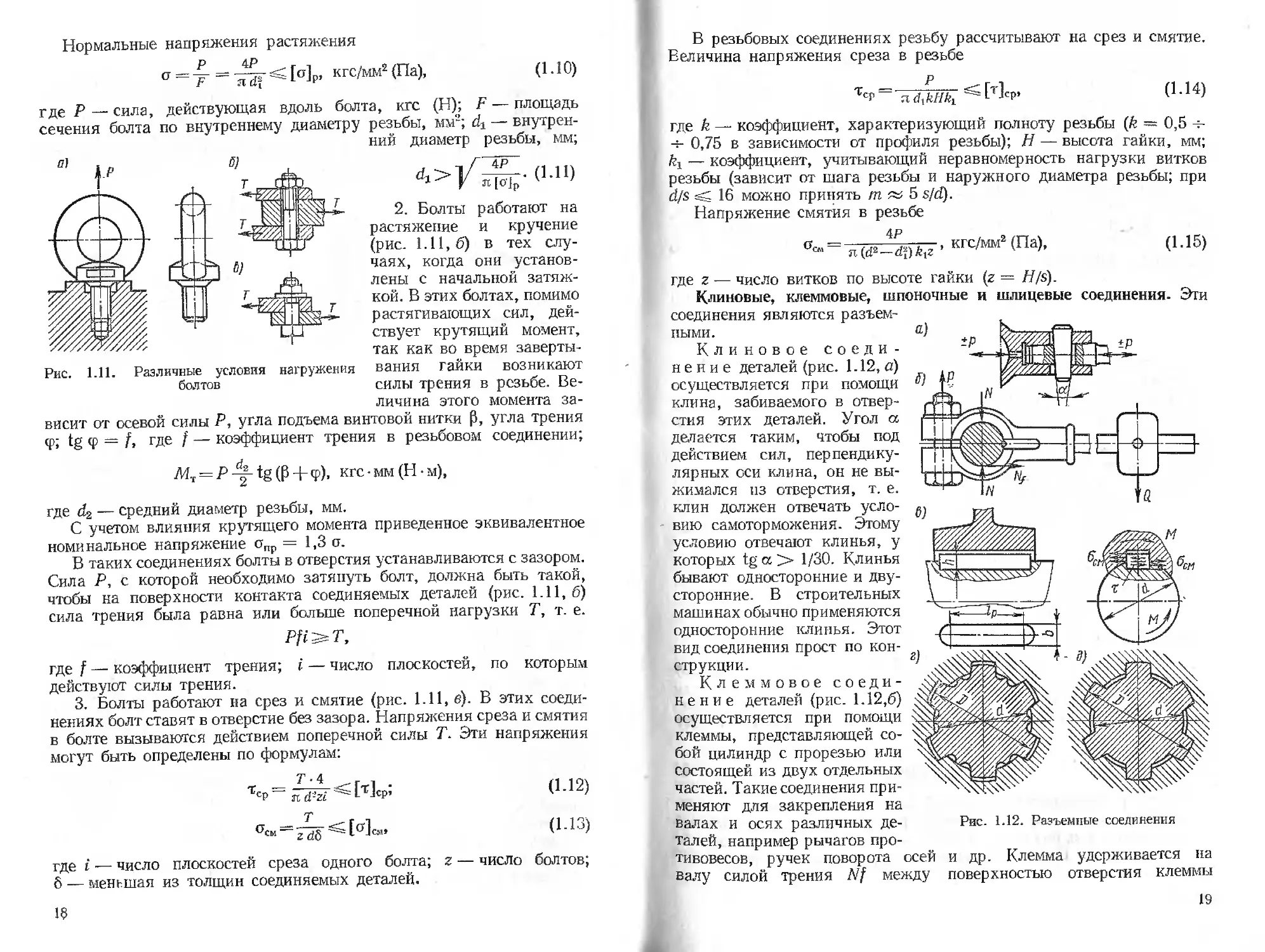
1. Болты работают только на растяжение (например, рым-болт
редуктора — рис. 1.11, а).
17
Нормальные напряжения растяжения
о = jr = < Ир, кгс/мм2 (Па),
(1-10)
где Р — сила,
сечения болта
действующая вдоль болта, кгс (Н); F — площадь
по внутреннему диаметру резьбы, мм2; — внутрен-
ний диаметр резьбы, мм;
Рис. 1.11. Различные условия нагружения
болтов
(1Л1>
2. Болты работают на
растяжение и кручение
(рис. 1.11, б) в тех слу-
чаях, когда они установ-
лены с начальной затяж-
кой. В этих болтах, помимо
растягивающих сил, дей-
ствует крутящий момент,
так как во время заверты-
вания гайки возникают
силы трения в резьбе. Ве-
личина этого момента за-
висит от осевой силы Р, угла подъема винтовой нитки р, угла трения
q>; tg ф = f, где / — коэффициент трения в резьбовом соединении;
Л1Т = Р — tg (Р ф- ф), кгс - мм (Н • м),
где d2 — средний диаметр резьбы, мм.
С учетом влияния крутящего момента приведенное эквивалентное
номинальное напряжение опр = 1,3 о.
В таких соединениях болты в отверстия устанавливаются с зазором.
Сила Р, с которой необходимо затянуть болт, должна быть такой,
чтобы на поверхности контакта соединяемых деталей (рис. 1.11, б)
сила трения была равна или больше поперечной нагрузки Т, т. е.
Pfi^T,
где f — коэффициент трения; i — число плоскостей, по которым
действуют силы трения.
3. Болты работают на срез и смятие (рис. 1.11, в). В этих соеди-
нениях болт ставят в отверстие без зазора. Напряжения среза и смятия
в болте вызываются действием поперечной силы Т. Эти напряжения
могут быть определены по формулам:
Тср “ п d-zi tTbP;
т
С(к = zdd
(1-12)
(1.13)
где i — число плоскостей среза одного болта; z — число болтов;
б — меньшая из толщин соединяемых деталей.
1$
В резьбовых соединениях резьбу рассчитывают на срез и смятие.
Величина напряжения среза в резьбе
ТсР ^Мср.
(1-14)
где k — коэффициент, характеризующий полноту резьбы (k — 0,5 <-
4- 0,75 в зависимости от профиля резьбы); Н — высота гайки, мм;
kx — коэффициент, учитывающий неравномерность нагрузки витков
резьбы (зависит от шага резьбы и наружного диаметра резьбы; при
d/s gg 16 можно принять т яь 5 s/d).
Напряжение смятия в резьбе
4Р
°- = ’ кгс/мм2<Па)-
(1-15)
где г — число витков по высоте гайки (г = Я/s).
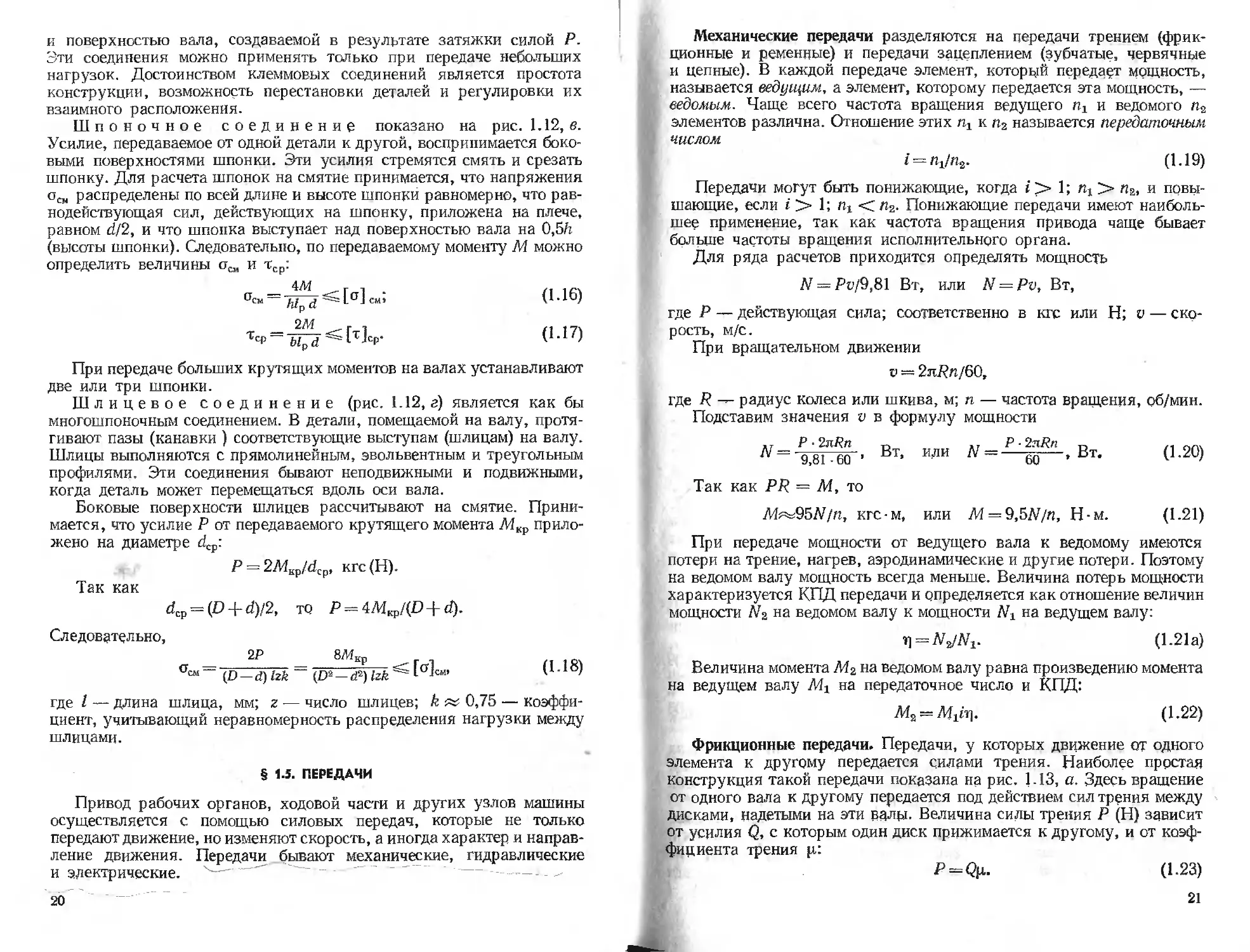
Клиновые, клеммовые, шпоночные и шлицевые соединения. Эти
соединения являются разъем-
ными.
Клиновое соеди-
нение деталей (рис. 1.12, а)
осуществляется при помощи
клина, забиваемого в отвер-
стия этих деталей. Угол а
делается таким, чтобы под
действием сил, перпендику-
лярных оси клина, он не вы-
жимался из отверстия, т. е.
клин должен отвечать усло-
вию самоторможения. Этому
условию отвечают клинья, у
которых tg а > 1/30. Клинья
бывают односторонние и дву-
сторонние. В строительных
машинах обычно применяются
односторонние клинья. Этот
вид соединения прост по кон-
струкции.
Клеммовое соеди-
нение деталей (рис. 1.12,6)
осуществляется при помощи
клеммы, представляющей со-
бой цилиндр с прорезью или
состоящей из двух отдельных
частей. Такие соединения при-
меняют для закрепления на
валах и осях различных де-
талей, например рычагов про-
тивовесов, ручек поворота осей
валу силой трения Nf между
Рис. 1.12. Разъемные соединения
и др. Клемма удерживается на
поверхностью отверстия клеммы
19
и поверхностью вала, создаваемой в результате затяжки силой Р.
Эти соединения можно применять только при передаче небольших
нагрузок. Достоинством клеммовых соединений является простота
конструкции, возможность перестановки деталей и регулировки их
взаимного расположения.
Шпоночное соединение показано на рис. 1.12, в.
Усилие, передаваемое от одной детали к другой, воспринимается боко-
выми поверхностями шпонки. Эти усилия стремятся смять и срезать
шпонку. Для расчета шпонок на смятие принимается, что напряжения
осн распределены по всей длине и высоте шпонки равномерно, что рав-
нодействующая сил, действующих на шпонку, приложена на плече,
равном d/2, и что шпонка выступает над поверхностью вала на 0,5/г
(высоты шпонки). Следовательно, по передаваемому моменту М можно
определить величины ос„ и тср:
а™ = 7г7р^г^[С1] ™: (1-16)
О-^7)
При передаче больших крутящих моментов на валах устанавливают
две или три шпонки.
Шлицевое соединение (рис. 1.12, г) является как бы
многошпоночным соединением. В детали, помещаемой на валу, протя-
гивают пазы (канавки ) соответствующие выступам (шлицам) на валу.
Шлицы выполняются с прямолинейным, эвольвентным и треугольным
профилями. Эти соединения бывают неподвижными и подвижными,
когда деталь может перемещаться вдоль оси вала.
Боковые поверхности шлицев рассчитывают на смятие. Прини-
мается, что усилие Р от передаваемого крутящего момента /Икр прило-
жено на диаметре dcp:
P = 2MKp/dcp, кгс(Н).
Так как
rfcp = (D + d)/2, то P-4MKp/(D + d).
Сл едовательно,
2Р 8Мкр п 1Сч
°™ (D — d)lzk (О2-йЕ)/гЛ:^1а^м’ С1 1
где I — длина шлица, мм; z — число шлицев; k 0,75 — коэффи-
циент, учитывающий неравномерность распределения нагрузки между
шлицами.
§ 1.5. ПЕРЕДАЧИ
Привод рабочих органов, ходовой части и других узлов машины
осуществляется с помощью силовых передач, которые не только
передают движение, но изменяют скорость, а иногда характер и направ-
ление движения. Передачи бывают механические, гидравлические
и электрические.
20
Механические передачи разделяются на передачи трением (фрик*
ционные и ременные) и передачи зацеплением (зубчатые, червячные
и цепные). В каждой передаче элемент, который передает мощность,
называется ведущим, а элемент, которому передается эта мощность, —
ведомым. Чаще всего частота вращения ведущего щ и ведомого п3
элементов различна. Отношение этих щ к п2 называется передаточным
числом
1 = пг!щ. (1.19)
Передачи могут быть понижающие, когда i > 1; пг > па, и повы-
шающие, если i > 1; пг < л2. Понижающие передачи имеют наиболь-
шее применение, так как частота вращения привода чаще бывает
больше частоты вращения исполнительного органа.
Для ряда расчетов приходится определять мощность
N = Pv/9,81 Вт, или N = Pv, Вт,
где Р — действующая сила; соответственно в кгс или Н; о — ско-
рость, м/с.
При вращательном движении
о — 2лДп/60,
где 7? — радиус колеса или шкива, м; п — частота вращения, об/мин.
Подставим значения v в формулу мощности
,Т Р-2лЕп п . . ., P-2nRn р, ,,
9,81-60 ’ Вт* ИЛИ 60 ’ ВТ* (1.20)
Так как PR — М, то
M^Q5N/n, кгс-м, или /И = 9,5Д//п, Н-м. (1-21)
При передаче мощности от ведущего вала к ведомому имеются
потери на трение, нагрев, аэродинамические и другие потери. Поэтому
на ведомом валу мощность всегда меньше. Величина потерь мощности
характеризуется КПД передачи и определяется как отношение величин
мощности на ведомом валу к мощности А\ на ведущем валу:
11 = ад/,. (1.21а)
Величина момента /И2 на ведомом валу равна произведению момента
на ведущем валу Мг на передаточное число и КПД:
М2 — Мрщ (1-22)
Фрикционные передачи. Передачи, у которых движение от одного
элемента к другому передается силами трения. Наиболее простая
конструкция такой передачи показана на рис. 1.13, а. Здесь вращение
от одного вала к другому передается под действием сил трения между
дисками, надетыми на эти валы. Величина силы трения Р (Н) зависит
от усилия Q, с которым один диск прижимается к другому, и от коэф-
фициента трения р:
₽ = <&. (1.23)
21
В рассматриваемых передачах всегда имеет место проскальзывание
дисков, поэтому величина передаточного числа непостоянна. Она
подсчитывается по формуле
Щ_______Р2
п2 ~~ — £) ’
(1-24)
где £ — величина, характеризующая относительное скольжение и
зависящая от материала фрикционных дисков (Е = 0,002—0,03).
Фрикционными передачами можно передавать вращение между
пересекающимися осями (рис. 1.13, б). В этом случае усилие, с кото-
рым конические катки прижимают-
Рис. 1.13. Фрикционные передачи
ся один к другому, создается под
действием усилий, направленных
вдоль осей катков.
Передаточные числа у фрик-
ционных передач не превышают 10;
чаще всего они составляют 5—7.
Фрикционные передачи приме-
няют в случаях, когда передаточ-
ное число должно быть перемен-
ным.
На рис. 1.13, в показан случай,
когда два диска расположены так,
что их оси взаимно перпендику-
лярны. Диск 1 соприкасается по
образующей наружной поверхности
с торцевой поверхностью диска 2
и прижимается к нему силой Q.
При вращении диска 1 сила трения
приводит в движение диск 2. Частота вращения диска 2 зависит от
расстояния диска 1 от оси вращения диска 2. Передаточное число
в такой передаче равно;
t =
Изменением величины регулируется величина I. Такие передачи
просты по конструкции, имеют небольшие динамические нагрузки,
возможность плавного изменения передаточного числа (вариаторы).
К недостаткам следует отнести проскальзывание дисков, в результате
чего не обеспечивается заданное передаточное число.
В строительных машинах фрикционные передачи применяются
редко и то во вспомогательных механизмах.
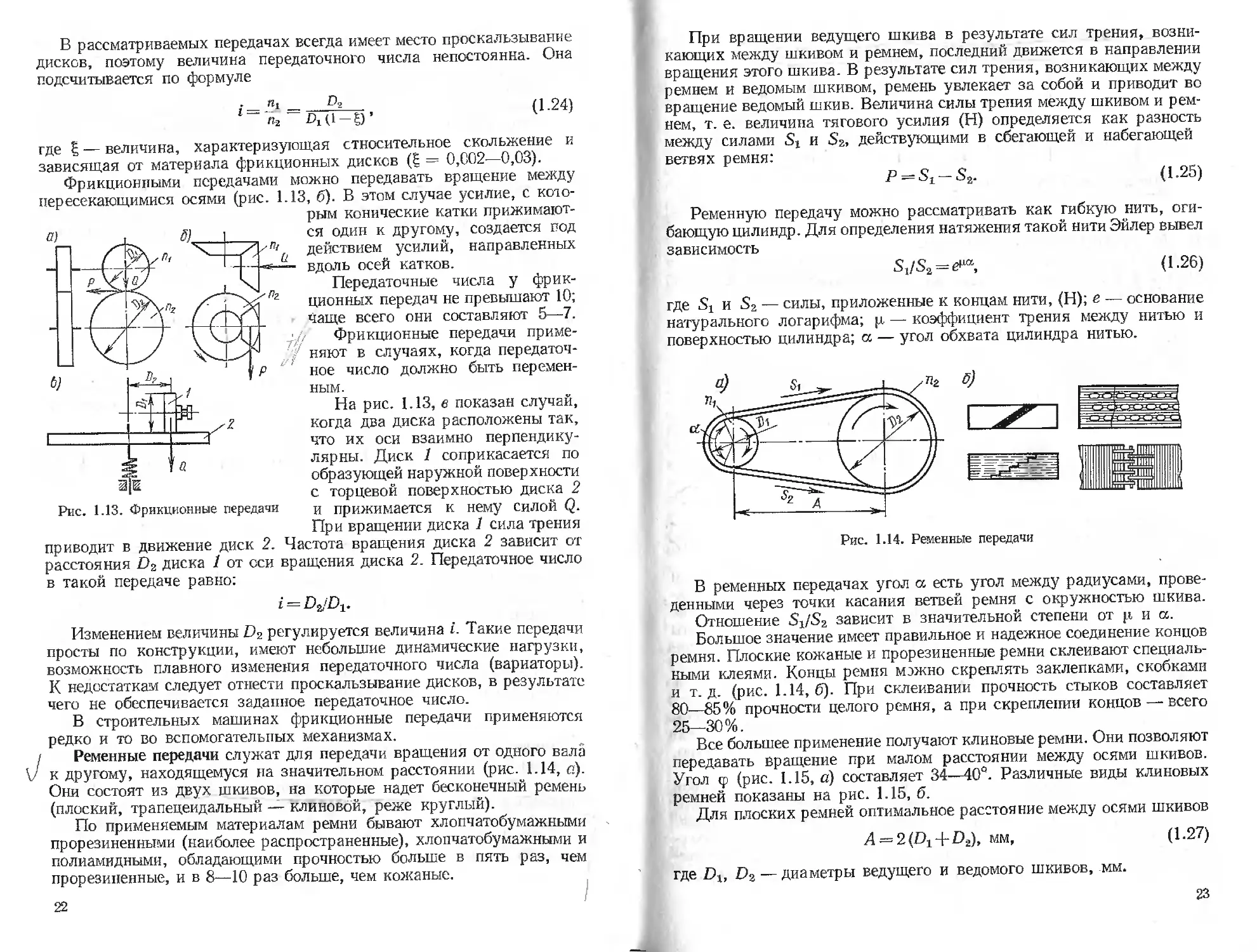
Ременные передачи служат для передачи вращения от одного вала
к другому, находящемуся па значительном расстоянии (рис. 1.14, с).
Они состоят из двух шкивов, на которые надет бесконечный ремень
(плоский, трапецеидальный — клиновой, реже круглый).
По применяемым материалам ремни бывают хлопчатобумажными
прорезиненными (наиболее распространенные), хлопчатобумажными и
полиамидными, обладающими прочностью больше в пять раз, чем
прорезиненные, и в 8—10 раз больше, чем кожаные.
22
При вращении ведущего шкива в результате сил трения, возни-
кающих между шкивом и ремнем, последний движется в направлении
вращения этого шкива. В результате сил трения, возникающих между
ремнем и ведомым шкивом, ремень увлекает за собой и приводит во
вращение ведомый шкив. Величина силы трения между шкивом и рем-
нем, т. е. величина тягового усилия (Н) определяется как разность
между силами и S2, действующими в сбегающей и набегающей
ветвях ремня:
P = St-Sz. (1.25)
Ременную передачу можно рассматривать как гибкую нить, оги-
бающую цилиндр. Для определения натяжения такой нити Эйлер вывел
зависимость
(1.26)
где Sj и S2 — силы, приложенные к концам нити, (Н); е — основание
натурального логарифма; р — коэффициент трения между нитью и
поверхностью цилиндра; а — угол обхвата цилиндра нитью.
Рис. 1.14. Ременные передачи
В ременных передачах угол а есть угол между радиусами, прове-
денными через точки касания ветвей ремня с окружностью шкива.
Отношение SjSz зависит в значительной степени от р и а.
Большое значение имеет правильное и надежное соединение концов
ремня. Плоские кожаные и прорезиненные ремни склеивают специаль-
ными клеями. Концы ремня мэжно скреплять заклепками, скобками
и т. д. (рис. 1.14,6). При склеивании прочность стыков составляет
80—85% прочности целого ремня, а при скреплении концов — всего
25—30%.
Все большее применение получают клиновые ремни. Они позволяют
передавать вращение при малом расстоянии между осями шкивов.
Угол ф (рис. 1.15, а) составляет 34—40°. Различные виды клиновых
ремней показаны на рис. 1.15, б.
Для плоских ремней оптимальное расстояние между осями шкивов
Л = 2(Р1+О2), мм, (1.27)
где Dlt Dz —диаметры ведущего и ведомого шкивов, мм.
23
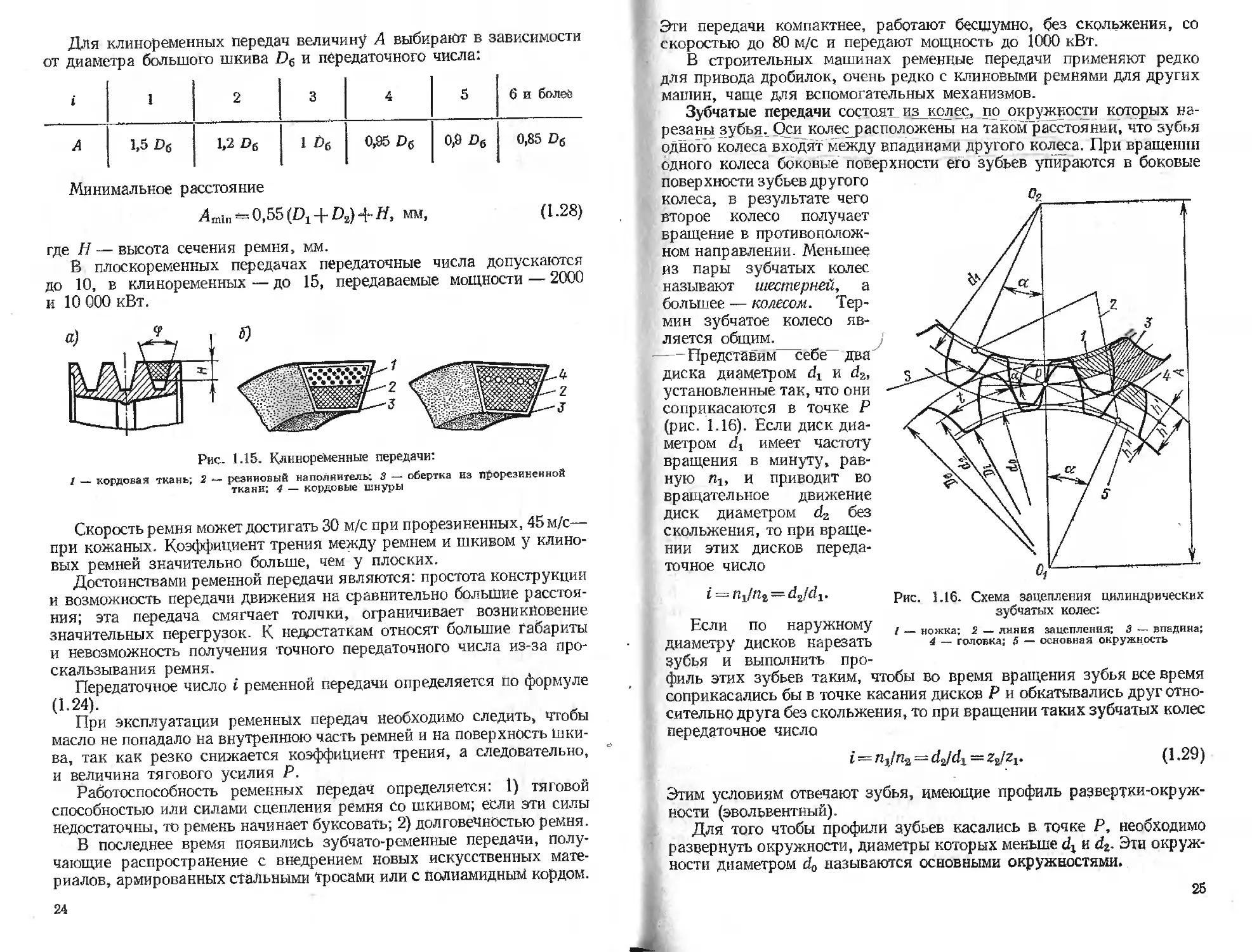
Для клиноременных передач величину А выбирают в зависимости
от диаметра большого шкива £>б и передаточного числа:
i 1 2 3 4 5 6 и болей
А 1,5 D6 1,2 D6 1 Рб 0,95 D6 0,9 D6 0,85 D6
Минимальное расстояние
-;4т1п = 0,55(О1 + О2)4-Я, мм, (1.28)
где Н — высота сечения ремня, мм.
В плоскоременных передачах передаточные числа допускаются
до 10, в клиноремениых—до 15, передаваемые мощности — 2000
и 10 000 кВт.
Рис. 1.15. Клиноременные передачи:
1 — кордовая ткань; 2 — резиновый наполнитель; 3 — обертка из прорезиненной
ткани; 4 — кордовые шнуры
Скорость ремня может достигать 30 м/с при прорезиненных, 45 м/с—
при кожаных. Коэффициент трения между ремнем и шкивом у клино-
вых ремней значительно больше, чем у плоских.
Достоинствами ременной передачи являются: простота конструкции
и возможность передачи движения на сравнительно большие расстоя-
ния; эта передача смягчает толчки, ограничивает возникновение
значительных перегрузок. К недостаткам относят большие габариты
и невозможность получения точного передаточного числа из-за про-
скальзывания ремня.
Передаточное число i ременной передачи определяется по формуле
(1-24).
При эксплуатации ременных передач необходимо следить, чтобы
масло не попадало на внутреннюю часть ремней и на поверхность Шки-
ва, так как резко снижается коэффициент трения, а следовательно,
и величина тягового усилия Р.
Работоспособность ременных передач определяется: 1) тяговой
способностью или силами сцепления ремня со шкивом; если эти силы
недостаточны, то ремень начинает буксовать; 2) долговечностью ремня.
В последнее время появились зубчато-ременные передачи, полу-
чающие распространение с внедрением новых искусственных мате-
риалов, армированных стальными Тросами или с полиамидным кордом.
24
Рис.
1.16.
I — ножка; _ _______ _ __
4 — головка; 5 — основная окружность
Схема зацепления цилиндрических
зубчатых колес:
2 — линия зацепления; 3 — впадина;
Эти передачи компактнее, работают бесшумно, без скольжения, со
скоростью до 80 м/с и передают мощность до 1000 кВт.
В строительных машинах ременные передачи применяют редко
для привода дробилок, очень редко с клиновыми ремнями для других
машин, чаще для вспомогательных механизмов.
Зубчатые передачи состоят, из колес, по окружности которых на-
резаны зубья. Оси колесрасположены на таком'расстоянии, что зубья
одного колеса входят между впадинами другого колеса. При вращении
одного колеса боковые поверхности его зубьев упираются в боковые
поверхности зубьев другого
колеса, в результате чего
второе колесо получает
вращение в противополож-
ном направлении. Меньшее
из пары зубчатых колес
называют шестерней, а
большее — колесом. Тер-
мин зубчатое колесо яв-
ляется общим.
—- Представим себе- два
диска диаметром 4 и 4,
установленные так, что они
соприкасаются в точке Р
(рис. 1.16). Если диск диа-
метром имеет частоту
вращения в минуту, рав-
ную «1, и приводит во
вращательное движение
диск диаметром 4 без
скольжения, то при враще-
нии этих дисков переда-
точное число
i = njn2 — d^/dj.
Если по наружному
диаметру дисков нарезать
зубья и выполнить про-
филь этих зубьев таким, чтобы во время вращения зубья все время
соприкасались бы в точке касания дисков Р и обкатывались друг отно-
сительно друга без скольжения, то при вращении таких зубчатых колес
передаточное число
i — rijjnz = 4/4 = zs/z,.
(1-29)
Этим условиям отвечают зубья, имеющие профиль развертки-окруж-
ности (эвольвентный).
Для того чтобы профили зубьев касались в точке Р, необходимо
развернуть окружности, диаметры которых меньше 4 и 4- Эти окруж-
ности диаметром 4 называются основными окружностями.
25
Касательная к этим окружностям называется линией зацепления
и проходит через точку Р, называемую полюсом зацепления.
Окружности диаметром и d% называются делительными.
Основными элементами, характеризующими зубчатое зацепление,
являются:
' число зубьев шестерни и колеса соответственно zL и z2;
передаточное число I = n1/n2=z2/z1;
шаг зубьев t, равный расстоянию между одноименными профилями
(двумя правыми или двумя левыми) двух смежных зубьев, измеренному
по делительной окружности, мм;
модуль зацепления т — tin принимается в качестве основного
параметра зацепления;
высота головки зуба h' и высота ножки зуба /г"; нормальная высота
головки принята h' = т; высота ножки h" = 1,15 т, мм;
высота зуба для нормального зацепления h = 2,25т, мм;
диаметр делительной окружности d — те, мм;
диаметр окружности выступов £>z (наружный диаметр зубчатого
колеса): De = d + 2h' = mz + 2m — m(z 2), мм;
межцентровое расстояние А, мм;
толщина зуба s, мм;
диаметр окружности впадин D, ~ с/2 — 2h" = mz — 2,5т =
= т (г — 2,5), мм;
ширина рабочей части колеса Ь; для прямозубых колес b = (6-г-10) т;
полюс зацепления Р — постоянная точка, в которой общая нормаль
к соприкасающимся профилям зубьев в точке их касания пересекается
с линией, соединяющей центры зубчатых колес;
линия зацепления — прямая, представляющая собой геометриче-
ское место точек касания профилей двух соприкасающихся зубьев;
она является касательной к основным окружностям;
угол зацепления а — угол между линией зацепления и перпенди-
куляром к линии центров колес.
Величины указанных параметров даны для цилиндрических прямо-
зубых колес с некорригированным зубом. Чем больше ширина зуба b
и число зубьев z, находящихся в зацеплении, тем большую мощность
можно передавать передачей.
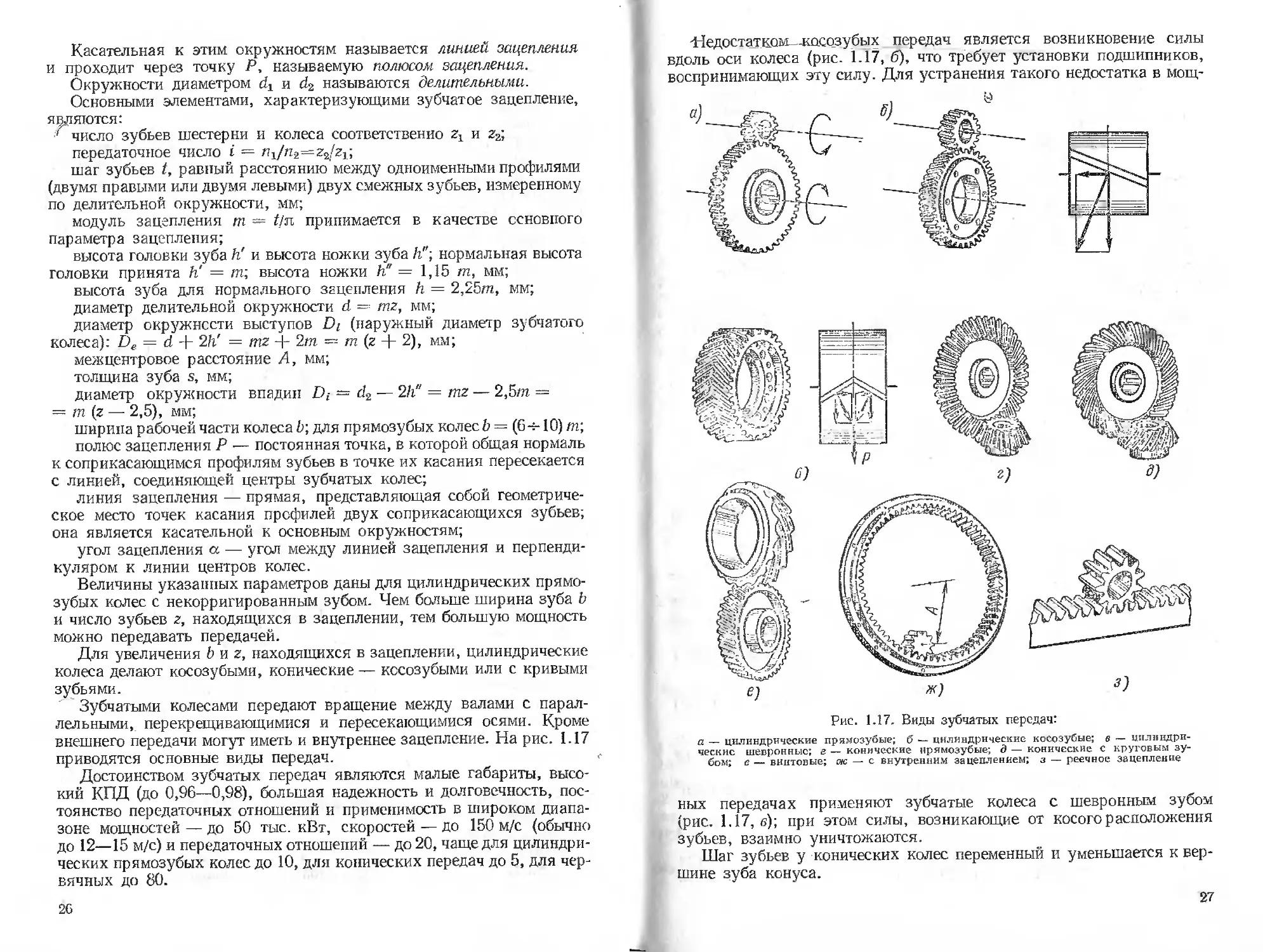
Для увеличения Ь и z, находящихся в зацеплении, цилиндрические
колеса делают косозубыми, конические — кссозубыми или с кривыми
зубьями.
Зубчатыми колесами передают вращение между валами с парал-
лельными, перекрещивающимися и пересекающимися осями. Кроме
внешнего передачи могут иметь и внутреннее зацепление. На рис. 1.17
приводятся основные виды передач.
Достоинством зубчатых передач являются малые габариты, высо-
кий КПД (до 0,96—0,98), большая надежность и долговечность, пос-
тоянство передаточных отношений и применимость в широком диапа-
зоне мощностей — до 50 тыс. кВт, скоростей — до 150 м/с (обычно
до 12—15 м/с) и передаточных отношений — до 20, чаще для цилиндри-
ческих прямозубых колес до 10, для конических передач до 5, для чер-
вячных до 80.
2G
'Недостатком—косозубых передач является возникновение силы
вдоль оси колеса (рис. 1.17, б), что требует установки подшипников,
воспринимающих эту силу. Для устранения такого недостатка в мощ-
Рис. 1.17. Виды зубчатых передач:
а — цилиндрические прямозубые; б — цилиндрические косозубые; в — цилиндри-
ческие шевронные; е — конические прямозубые; д — конические с круговым зу-
бом; е — винтовые; яс — с внутренним зацеплением; з — реечное зацепление
ных передачах применяют зубчатые колеса с шевронным зубом
(рис. 1.17, в); при этом силы, возникающие от косого расположения
зубьев, взаимно уничтожаются.
Шаг зубьев у конических колес переменный и уменьшается к вер-
шине зуба конуса.
27
сил, действующих на зуб
Схема
Трещина.
Рис. 1.18.
Qcostf=P
Опасное
сечение
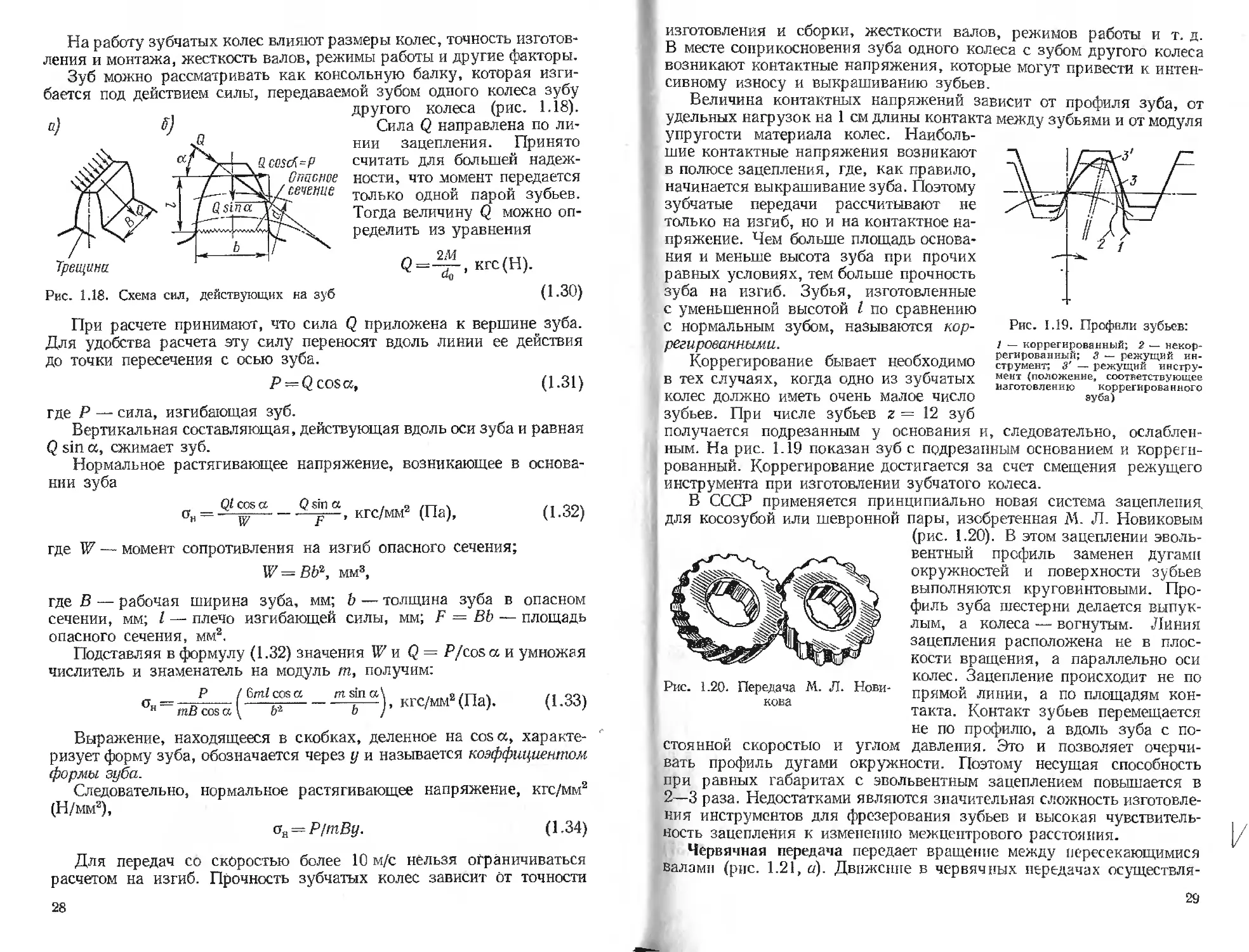
На работу зубчатых колес влияют размеры колес, точность изготов-
ления и монтажа, жесткость валов, режимы работы и другие факторы.
Зуб можно рассматривать как консольную балку, которая изги-
бается под действием силы, передаваемой зубом одного колеса зубу
другого колеса (рис. 1.18).
Сила Q направлена по ли-
нии зацепления. Принято
считать для большей надеж-
ности, что момент передается
только одной парой зубьев.
Тогда величину Q можно оп-
ределить из уравнения
Q=-z-, кгс(Н).
а0
(1.30)
При расчете принимают, что сила Q приложена к вершине зуба.
Для удобства расчета эту силу переносят вдоль линии ее действия
до точки пересечения с осью зуба.
Р — Qcosa, (1.31)
где Р — сила, изгибающая зуб.
Вертикальная составляющая, действующая вдоль оси зуба и равная
Q sin а, сжимает зуб.
Нормальное растягивающее напряжение, возникающее в основа-
нии зуба
QI cos ct Q sin ct / ? /п \ zi
..— - -p—, кгс/мм2 (Па), (1.32)
где W — момент сопротивления на изгиб опасного сечения;
W'=Bb2, мм3,
где В — рабочая ширина зуба, мм; b — толщина зуба в опасном
сечении, мм; I — плечо изгибающей силы, мм; F = ВЬ — площадь
опасного сечения, мм2.
Подставляя в формулу (1.32) значения W и Q = P/cos а и умножая
числитель и знаменатель на модуль т, получим:
Р /Grnlcosa msincc\ , e zn х oox
= P---------Г-)’ кгс/мм2(Па). (1.33)
Выражение, находящееся в скобках, деленное на cos а, характе- '
ризует форму зуба, обозначается через у и называется коэффициентом
формы зуба.
Следовательно, нормальное растягивающее напряжение, кгс/мм2
(Н/мм3),
о^ — Р/тВу. (1-34)
Для передач со скоростью более 10 м/с нельзя ограничиваться
расчетом на изгиб. Прочность зубчатых колес зависит от точности
28
изготовления и сборки, жесткости валов, режимов работы и т. д.
В месте соприкосновения зуба одного колеса с зубом другого колеса
возникают контактные напряжения, которые могут привести к интен-
сивному износу и выкрашиванию зубьев.
Величина контактных напряжений зависит от профиля зуба, от
удельных нагрузок на 1 см длины контакта между зубьями и от модуля
упругости материала колес. Наиболь-
шие контактные напряжения возникают
в полюсе зацепления, где, как правило,
начинается выкрашивание зуба. Поэтому
зубчатые передачи рассчитывают не
только на изгиб, но и на контактное на-
пряжение. Чем больше площадь основа-
ния и меньше высота зуба при прочих
равных условиях, тем больше прочность
зуба на изгиб. Зубья, изготовленные
с уменьшенной высотой I по сравнению
с нормальным зубом, называются кор-
Рис. 1.19. Профили зубьев:
; — коррегированный; 2 — некор-
регированиый; 3 — режущий ин-
струмент; 3' — режущий инстру-
мент (положение, соответствующее
изготовлению кор регирова иного
зуба)
регированншш.
Коррегирование бывает необходимо
в тех случаях, когда одно из зубчатых
колес должно иметь очень малое число
зубьев. При числе зубьев z = 12 зуб
получается подрезанным у основания и, следовательно, ослаблен-
ным. На рис. 1.19 показан зуб с подрезанным основанием и корреги-
рованный. Коррегирование достигается за счет смещения режущего
инструмента при изготовлении зубчатого колеса.
В СССР применяется принципиально новая система зацепления,
для косозубой или шевронной пары, изобретенная М. Л. Новиковым
(рис. 1.20). В этом зацеплении эволь-
вентный профиль заменен дугами
окружностей и поверхности зубьев
выполняются круговинтовыми. Про-
филь зуба шестерни делается выпук-
лым, а колеса — вогнутым. Линия
зацепления расположена не в плос-
кости вращения, а параллельно оси
колес. Зацепление происходит не по
прямой линии, а по площадям кон-
такта. Контакт зубьев перемещается
не по профилю, а вдоль зуба с по-
Рис. 1.20. Передача М. Л. Нови-
кова
стоянной скоростью и углом давления. Это и позволяет очерчи-
вать профиль дугами окружности. Поэтому несущая способность
при равных габаритах с эвольвентным зацеплением повышается в
2—3 раза. Недостатками являются значительная сложность изготовле-
ния инструментов для фрезерования зубьев и высокая чувствитель-
ность зацепления к изменению межцентрового расстояния.
Червячная передача передает вращение между пересекающимися
валами (рис. 1.21, о). Движение в червячных передачах осуществля-
29
ется по принципу винтовой пары. Вцнтом является червяк, который
представляет собой винт, обычно с резьбой трапециевидной формы.
Червячное колесо является как бы гайкой, в зацеплении с которой
находится червяк. Червяк может быть одпозаходным или иметь не-
сколько заходов. За каждый оборот червяка колесо поворачивается
на один зуб при однозаходном червяке или на количество зубьев,
Рис. 1.21. Червячные передачи:
а — схема обычного червячного зацепления;
б — схема глобоидной передачи
равное количеству заходов
червяка. Такие передачи вы-
полняют с передаточным чис-
лом 50—60, но в отдельных
случаях можно получить пе-
редаточное число больше 200.
Передаточное число пере-
дачи
г = 2к/гч = нч/нк, (1.35)
диаметр делительной окружности
где z4 — число заходов чер-
вяка; zK — число зубьев ко-
леса; нч, пк — частота враще-
ния червяка и колеса.
Червячными передачами
можно передавать мощность
до 750 кВт. Окружные ско-
рости могут достигать 15 м/с;
КПД — 0,7—0,9.
Г Основными параметрами,
^характеризующими червя ч-
Jiyio передачу, являются:
Л шаг t, мм;
/ модуль'т, мм;
диаметр делительной ок-
' ружности колеса d№=zKm, мм;
червяка d04 = mzjlg р, мм,
где Zq — число заходов червяка; р — угол подъема винта;
расстояние между осью колеса и осью червяка
л tn / гч I \
Л=~2 (й+24мм;
(1.36)
диаметр окружности выступов колеса Dei( == d,K + 2m, мм;
диаметр окружности выступов червяка Печ = dC4 + 2/п, мм;
диаметр окружности впадин колеса Z)fl! — dKK — 2,4m, мм;
диаметр окружности впадин червяка Di4 = dn4 — 2,4т, мм.
На рис. 1.21, а показаны силы, действующие в червячном зацепле-
нии. Окружное усилие на колесе Рк — 2Л4к/йдк; оно равно осевому
усилию на червяке. Окружное усилие на червяке Рч равно осевому
усилию на колесе 2Л1ч/с1дч.
Радиальное усилие, раздвигающее червяк и колесо, кгс(Н),
tf = PKtga, (1.37)
где а — угол зацепления.
30
В червячных передачах рассчитывают зуб колеса на изгиб и на
контактную прочность, так как он слабее зуба червяка. Расчет чер-
вячных колес ведут аналогично расчету зубчатых колес.
Передаваемая червячной передачей мощность может быть повышена
в 1,5—3 раза при тех же габаритах, если витки червяка нарезаны не на
цилиндрической, а на глобоидной поверхности (рис. 1.21, б).
В строительных машинах червячные передачи применяют в тех
случаях, когда требуется большое передаточное число. Так как чер-
вячные передачи обычно обладают свойством самоторможения, то их
используют в грузоподъемных устройствах; при этом не требуются
тормозные устройства.
Редукторы — механизмы в виде отдельных агрегатов, которые слу-
жат для понижения частоты вращения и увеличения крутящих мо-
ментов. Они состоят из одной или чаще нескольких пар зубчатых
колес или червячных передач, помещенных в специальном корпусе.
Рис. 1.22. Редукторы
Для передаточных чисел до 10 редукторы выполняют одноступен-
чатыми (рис. 1.22, с), до 15—30 — двухступенчатыми (рис. 1.22, б).
Для больших передаточных чисел — трехступенчатыми (рис. 1.22, в).
Редукторы с коническими колесами выполняют одноступенчатыми
(рис. 1.22, а) или, в сочетании с цилиндрическими,—двухступен-
чатыми (рис. 1.22, д). Червячные редукторы обычно выполняют одно-
ступенчатыми (рис. 1.22, е). Передаточное число двухступенчатых
или трехступенчатых редукторов равно произведению передаточных
чисел каждой пары.
Цепные передачи. Для передачи вращения между двумя парал-
лельными валами при большом расстоянии между ними (до 8 м) при-
меняют передачи, состоящие из двух цепных звездочек и бесконечной
цепи (рис. 1.23). В таких передачах применяют так называемые при-
водные в основном втулочно-роликовые однорядные и многорядные цепи.
Шаг цепей колеблется от 8 до 120 мм. Каждое звено имеет ось 1
(рис. 1.24), на которую напрессовываются пластины 2, образуя наруж-
ное звено. На ту же ось надевается втулка 3, на которую напрессовы-
31
вается пластина 4, образуя внутреннее звено. На втулках насажены
ролики 5, входящие в зацепление со звездочками.
Существуют и другие конструкции цепей: втулочные, пластинчато-
зубчатые, втулочно-роликовые с изогнутыми пластинками, фасонно-
звеньевые крючковые, фасонно-звеньевые втулочно-штырьевые.
Конструкция звездочек цеппых передач во многом подобна конструк-
ции зубчатых колес.
Рис. 1.23. Цепная передача:
I — ведомая звездочка; II — ведущая звездочка
Рис. 1.24. Втулочно-роликовая
цепь
Делительная окружность звездочки проходит через центры шарни-
ров цепей (рис. 1.25). Диаметр этой окружности
(1.38)
где t — шаг зуба, мм.
Профили зубьев звездочек роликовых и втулочных цепей могут
быть выпуклыми, прямолинейными и вогнутыми. Зуб любого профиля
должен обеспечивать свободный вход и выход
-с—шарниров из зацепления.
Яд В зависимости от передаточного числа число
зубьев малой звездочки назначается равным
32—12.
/ Ух\ Передаточное число
\ i — ^1/^2 ^2/^1 = ^г/^1-
' Обычно i 8, а в тихоходных передачах может
Рис. 1.25. Профиль достигать 15.
зубьев звездочки Скорость цепи выбирают до 15 м/с, а в
быстроходных передачах — до 25—30 м/с. Пе-
редаваемые мощности достигают 800 кВт, наиболее эффективны они
до 120 кВт.
Под действием собственного веса цепь провисает (см. рис. 1.23).
Для нормальной работы необходимо, чтобы величина провисания была
не больше определенного значения, для этого цепь натягивается пере-
мещением оси одной из звездочек. Для горизонтальных передач и
передач под углом наклона до 45° допускаемый прогиб к горизонту
f = 0,02Л, для передач, близких к вертикальным, / = (0,01 -н0,015) А.
32
Величина натяжения SH (кН) зависит от массы 1 м цепи д, расстояния
А между осями, допускаемого прогиба
Хн = 7Л2/8/.
Допускаемая полезная сила Р, которая может передаваться цепью,
зависит от допускаемых удельных давлений в шарнирах цепи 1р]0,
кгс/мм2 (МПа). Удельное давление выбирают таким, чтобы контактные
напряжения не превышали допускаемых. Допускаемая величина
удельного давления [р!0 зависит от скорости шага и типа цепи. Для
втулочно-роликовых цепей принимается |р]0 — 3,5-=-1,4 кгс/мм2 (35—
—14 МПа); для зубчатых цепей — 2-5-0,7 кгс/мм2 (20—7 МПа).
Величина допускаемой полезной нагрузки, кгс (Н),
(1.39)
где — проекция опорной поверхности шарнира, мм2; k3 — коэф-
фициент, характеризующий условия эксплуатации передачи; зависит
от характера динамических нагрузок, длины цепи, наклона передачи,
характера смазки, режима работы; изменяется от 1,2 до 3,0.
Общее натяжение ведущей цепи
S^Sh-1-Л (1.40)
Передаваемая мощность для однорядной цепи
М = РоВт, (1-41)
где v — скорость цепи, м/с; Р — сила, Н.
При работе цепной передачи цепь вытягивается, изнашиваются
шарниры и зубья звездочек. Если цепь удлиняется больше чем на 3%,
то она начипает соскакивать со звездочки. При скоростях цепи более
6 м/с допускается удлинение цепи меньше чем на 3%.
При эксплуатации цепей необходимо смазывать шарниры и зубья
звездочек.
Достоинствами цепных передач является: возможность приме-
нения в широком диапазоне межцентровых расстояний, малые габариты
и масса, простота замены и высокий КПД. Недостатки — возможность
внезапного обрыва, удлинение вследствие износа и необходимость
натяжных устройств, неравномерность скорости, особенно при малом
числе зубьев звездочки.
В строительных машинах цепи широко применяют для привода
от двигателя (обычно многорядные) и приводов отдельных механизмов
(однорядные).
§ 1.6. ВАЛЫ И ОСИ. ИХ СОЕДИНЕНИЯ И ОПОРЫ
Вращающиесядеталщмашни устанавливают на осях или валах.
Валы всегда* вращаются вместе с деталями и передают крутящий
момент; оси же, вращаются ли они вместе с деталями или остаются
неподвижными, момента не передают и только поддерживают детали.
Поэтому оси нагружены только изгибающими усилиями, а валы еще
и крутящими моментами.
2 М. И. Гальперин
33
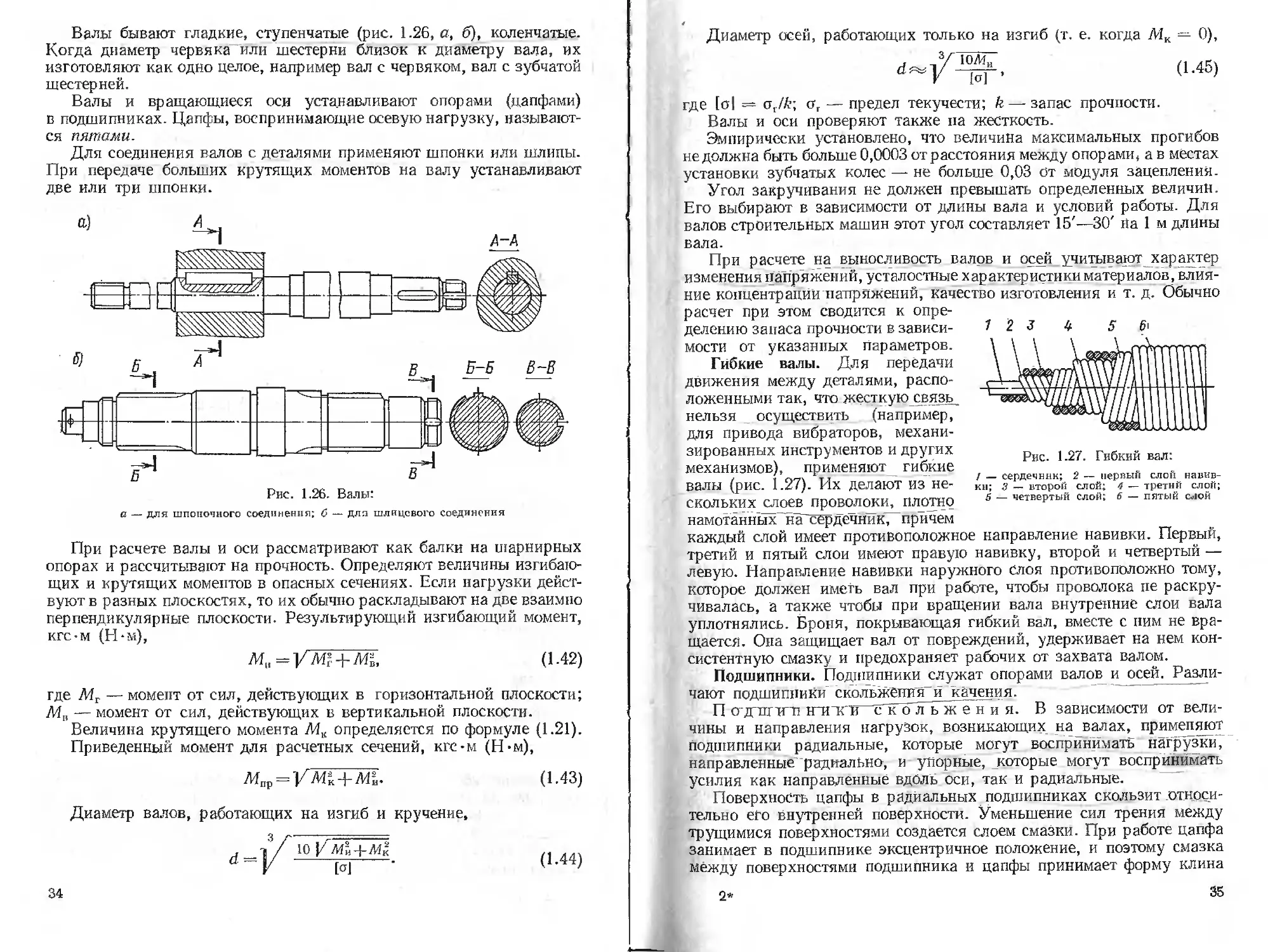
Валы бывают гладкие, ступенчатые (рис. 1.26, а, б), коленчатые.
Когда диаметр червяка или шестерни близок к диаметру вала, их
изготовляют как одно целое, например вал с червяком, вал с зубчатой
шестерней.
Валы и вращающиеся оси устанавливают опорами (цапфами)
в подшипниках Цапфы, воспринимающие осевую нагрузку, называют-
ся пятами.
Для соединения валов с деталями применяют шпонки или шлицы.
При передаче больших крутящих моментов на валу устанавливают
две или три шпонки.
Рис. 1.26. Валы:
а — шпоночного соединения; б — шлицевого соединения
При расчете валы и оси рассматривают как балки на шарнирных
опорах и рассчитывают на прочность. Определяют величины изгибаю-
щих и крутящих моментов в опасных сечениях. Если нагрузки дейст-
вуют в разных плоскостях, то их обычно раскладывают на две взаимно
перпендикулярные плоскости. Результирующий изгибающий момент,
кге-м (Н-м),
Ми = \/Ml + Ml, (1.42)
где Мг — момент от сил, действующих в горизонтальной плоскости;
Мп — момент от сил, действующих в вертикальной плоскости.
Величина крутящего момента Л4Х определяется по формуле (1.21).
Приведенный момент для расчетных сечений, кге-м (Н>м),
Л1пр = ]/Ж + Л1ь. (1.43)
Диаметр валов, работающих на изгиб и кручение,
я-?/ 10
' [5] •
(1-44)
34
Диаметр осей, работающих только на изгиб (т, е. когда Мк — 0),
(1.45)
где [о| == аг//г; ст, — предел текучести; /г —запас прочности.
Валы и оси проверяют также па жесткость.
Эмпирически установлено, что величина максимальных прогибов
не должна быть больше 0,0003 от расстояния между опорами, а в местах
установки зубчатых колес — не больше 0,03 от модуля зацепления.
Угол закручивания не должен превышать определенных величин.
Его выбирают в зависимости от длины вала и условий работы. Для
валов строительных машин этот угол составляет 15'-—30' на 1 м длины
вала.
При расчете на выносливость валов и осей учитывают характер
изменения напряжений, усталостные характеристики материалов, влия-
ние концентрации напряжений, качество изготовления и т. д. Обычно
расчет при этом сводится к опре-
делению запаса прочности в зависи-
мости от указанных параметров.
Гибкие валы. Для передачи
движения между деталями, распо-
ложенными так, что жесткую связь
нельзя осуществить (например,
для привода вибраторов, механи-
Рис. 1.27. Гибкий вал:
/ _ сердечник; 2 — первый слой навив-
ки; 3 — второй слой; 4 — третий слой;
5 — четвертый слой; 6 — пятый слой
зированных инструментов и других
механизмов), применяют гибкие
валы (рис. 1.27). Их делают из не-
скольких слоев проволоки, плотно
намотанных нгГсОрдечнйк, причем
каждый слой имеет противоположное направление навивки. Первый,
третий и пятый слои имеют правую навивку, второй и четвертый —
левую. Направление навивки наружного слоя противоположно тому,
которое должен иметь вал при работе, чтобы проволока не раскру-
чивалась, а также чтобы при вращении вала внутренние слои вала
уплотнялись. Броня, покрывающая гибкий вал, вместе с ним не вра-
щается. Она защищает вал от повреждений, удерживает на нем кон-
систентную смазку и предохраняет рабочих от захвата валом.
Подшипники. Подшипники служат опорами валов и осей. Разли-
чают подшипники' скольжения-й качения.
П о дтнтгт! нш к в с к о л ь ж е н и я. В зависимости от вели-
чины и направления нагрузок, возникающих на валах, применяют
подшипники радиальные, которые могут воспринимать нагрузки,
направленные радиально, и упорные, которые могут воспринимать
усилия как направленные вдоль оси, так и радиальные.
Поверхность цапфы в радиальных подшипниках скользит .относи-
тельно его внутренней поверхности. Уменьшение сил трения между
трущимися поверхностями создается слоем смазки. При работе цапфа
занимает в подшипнике эксцентричное положение, и поэтому смазка
между поверхностями подшипника и цапфы принимает форму клина
2*
35
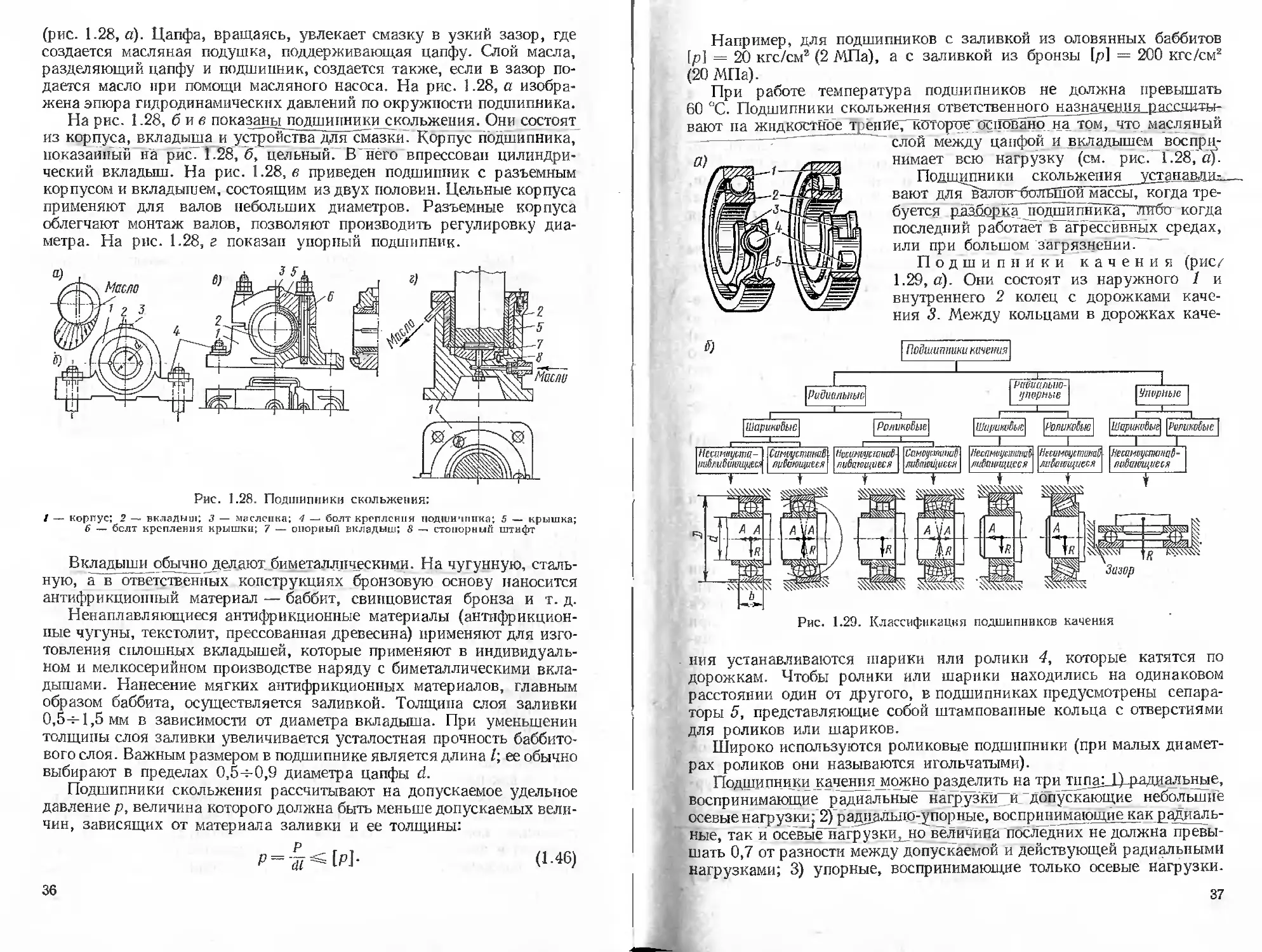
(рис. 1.28, а). Цапфа, вращаясь, увлекает смазку в узкий зазор, где
создается масляная подушка, поддерживающая цапфу. Слой масла,
разделяющий цапфу и подшипник, создается также, если в зазор по-
дается масло при помощи масляного насоса. На рис. 1.28, а изобра-
жена эпюра гидродинамических давлений по окружности подшипника.
На рис. 1.28, бив показаны подшипники скольжения. Они состоят
из корпуса, вкладыша и устройства для смазки. Корпус подшипника,
показанный на рис. 1.28, б, цельный. В’йёго впрессован цилиндри-
ческий вкладыш. На рис. 1.28, в приведен подшипник с разъемным
корпусом и вкладышем, состоящим из двух половин. Цельные корпуса
применяют для валов небольших диаметров. Разъемные корпуса
облегчают монтаж валов, позволяют производить регулировку диа-
метра. На рис. 1.28, г показан упорный подшипник.
Рис. 1.28. Подшипники скольжения;
/ — корпус; 2 — вкладыш; 3 — масленка; 4 — болт крепления подшипника; 5 — крышка;
6 — болт крепления крышки; 7 — опорный вкладыш; 6‘ — стопорный штифт
Вкладыши обычно делают би еталлнческими. На чугунную, сталь-
ную, а в ответственных конструкциях бронзовую основу наносится
антифрикционный материал — баббит, свинцовистая бронза и т. д.
Ненаплавляющиеся антифрикционные материалы (антифрикцион-
ные чугуны, текстолит, прессованная древесина) применяют для изго-
товления сплошных вкладышей, которые применяют в индивидуаль-
ном и мелкосерийном производстве наряду с биметаллическими вкла-
дышами. Нанесение мягких антифрикционных материалов, главным
образом баббита, осуществляется заливкой. Толщина слоя заливки
0,5-н1,5мм в зависимости от диаметра вкладыша. При уменьшении
толщины слоя заливки увеличивается усталостная прочность баббито-
вого слоя. Важным размером в подшипнике является длина I; ее обычно
выбирают в пределах 0,5-н0,9 диаметра цапфы d.
Подшипники скольжения рассчитывают на допускаемое удельное
давление р, величина которого должна быть меньше допускаемых вели-
чин, зависящих от материала заливки и ее толщины:
U-46)
36
Например, для подшипников с заливкой из оловянных баббитов
[р] = 20 кгс/смг (2 МПа), а с заливкой из бронзы [р] = 200 кгс/см2
(20 МПа).
При работе температура подшипников не должна превышать
60 °C. Подшипники скольжения ответственного назначения рассниты-
вают па жидкостное треиие/которте (Тшювано на том, что масляный
слой между цапфой и вкладышем воспри-
нимает всю нагрузку (см. рис. 1.28, а)1.
Подшипники скольжения устанавдщ-.______
вают длявалив~бсотБшби массы, когда тре-
буется разборка подшипника, лтгби когда
последний работает в агрессивных средах,
или при большом загрязнении.
Подшипники качения (рис/
1.29, а) Они состоят из наружного 1 и
внутреннего 2 колец с дорожками каче-
ния 3. Между кольцами в дорожках каче-
| Подшипники кичения\
[ШдриЫые] | РоликоВыё\
Gtouiim>no-\ .....1----1
•пирные I у/пирмые
[Несаииуипа-\ \CUMtycmarmBl [Неишиустаб- I
|иЛибшещиес^ | ад&этщием | | либающиеся | | |жЛ««вдгся | | | лабающиеся |
f Г Г f
J
Т
дуд
[7
Рис. 1.29. Классификация подшипников качения
ния устанавливаются шарики или ролики 4, которые катятся по
дорожкам. Чтобы ролики или шарики находились на одинаковом
расстоянии один от другого, в подшипниках предусмотрены сепара-
торы 5, представляющие собой штампованные кольца с отверстиями
для роликов или шариков.
Широко используются роликовые подшипники (при малых диамет-
рах роликов они называются игольчатыми).
Подшипники качения можно разделить на тритпщрЧХрадиальные,
воспринимающие радиальныММафузки и допускающие небольшие
осевые нагрузки 2) радиалыю-упорные, воспринимающие как радиаль-
ные, так й осевыёПйагрузкщдно величина последних не должна превы-
шать 0,7 от разности между допускаемой и действующей радиальными
нагрузками; 3) упорные, воспринимающие только осевые нагрузки.
37
На рис. 1.29, Сдана классификация подшипников качения.
Шариковые подшипники применяют в передачах с малыми и сред-
ними нагрузками. Роликовые подшипники устанавливают в передачах
с большими нагрузками, так как их грузоподъемность почти в два
раза больше, чем у шариковых. Однако они хуже работают при боль-
ших числах оборотов. Максимально допускаемая частота вращения
для них почти в два раза меньше, чем для шариковых подшипников.
Подшипники выбирают по нагрузкам, действующим на них. Наг-
рузки могут быть постоянными, переменными, с ударами, толчками,
с разным соотношением величин осевых и радиальных нагрузок и т. д.
Условия нагружения могут быть также различными: может вращаться
внутреннее или наружное кольцо.
Расчет подшипников ведут па их долговечность. Срок службы
определяют в зависимости от так называемой динамической грузо-
подъемности G и эквивалентной динамической пагрузки Р.
Динамическая грузоподъемность для радиального или радиально-
упорного подшипника есть постоянная радиальная нагрузка, которую
группа подобных подшипников (с неподвижным наружным кольцом)
может выдержать в течение расчетного срока службы, исчисляемого
в 1 млн. оборотов внутреннего кольца. Величина G зависит от среднего
диаметра ролика или шарика DT, числа роликов или шариков г в одном
ряду, i — числа рядов тел качения в подшипнике и от среднего диамет-
ра йо-
Для радиальных и радиально-упорных подшипников (шариковых)
G = fa (i cos a)°-7z2/3Z)*-8j
где fc — коэффициент динамической грузоподъемности, зависящий
от геометрии деталей подшипника, точности изготовления и материала;
а — угол между линией действия нагрузки па шарик или ролик и
плоскостью, перпендикулярной оси подшипника.
Эквивалентная нагрузка Р, воспринимаемая радиальным или
радиально-упорным подшипником, — это постоянная радиальная па-
грузка, при которой долговечность подшипника с вращающимся
внутренним и неподвижным внешним кольцами такая же, что и при
фактических условиях нагружения и вращения. Эквивалентную дина-
мическую нагрузку определяют по формуле
Р = (VxFr-\-yF0)krk„
где Fr, Fo — соответственно радиальная и осевая нагрузки; V — коэф-
фициент, учитывающий, какое из колец (внутреннее или наружное)
вращается; х, у — коэффициенты, учитывающие влияние радиальной
и осевой нагрузок и зависящие от типа подшипника; fer, — коэффи-
циенты, учитывающие влияние динамических нагрузок и температур-
ного режима.
Расчет поминальной долговечности подшипников (млн. об/мин)
производится по следующим формулам:
для шариковых подшипников
L = (G/P)«; (1-47)
38
для роликовых подшипников
£ = (С/Р)Юуз. (1.48)
Долговечность подшипников
(!«)
где п — частота вращения подшипника, об/мин.
Для эксплуатации подшипников важно установить их без пере-
косов, чтобы температурные деформации валов не вызывали допол-
нительных нагрузок. Кроме того, их необходимо смазывать и пре-
дохранять от загрязнения.
Радиально-упорные подшипники устанавливают так, чтобы можно
было производить осевую регулировку, что осуществляется обычно
перемещением одного кольца относительно другого.
Смазка подшипников может быть консистентной или жидкой.
При работе па консистентной смазке температура не должна пре-
вышать 100° С. Жидкую смазку используют там, где КПД должен
быть значительным. Допускаемая температура в этом случае может
достигать 120 и даже 150° С. Чтобы подшипники не загрязнялись
и масло не вытекало из корпусов, устанавливают манжеты.
В подшипниках качения по сравнению с подшипниками скольже-
ния сила трения в 5—10 раз меньше.
Муфты. Для соединения валов, являющихся продолжением один
другого или расположенных под углом, а также для передачи кру-
тящего момента между валом и сидящими на нем деталями применяют
муфты. —
По назначению они разделяются па муфты постоянного действия
(неуправляемые) _и сцепные (управляемые). По-типу соединения
валов муфты делятся на жесткие и компенсирующие (рис. 1.30).
Жесткие муфты различают двух видов — втулочные и фланцевые.
Втулочные муфты (рис. 1.30, а) просты по конструкции,
малы по габариту; применяются для диаметров валов 120 мм. Не-
достатком их является то, что для соединения валов последние
необходимо раздвигать.
Фланцевые муфты обычно состоят из двух полумуфт и бывают
двух типов. В одном типе муфт болты устанавливают без зазора
(рис. 130, б), при этом болты работают на срез и на каждый из них
действует сила
Р=^,кгс(Н), (1.50)
где г — число болтов; d — диаметр окружности, по которой рас-
положены болты, мм.
По величине Р болты рассчитывают на срез.
В другом типе муфт болты устанавливают с зазором (рис. 1.30, в).
В этом-случае крутящий момент М,. передается под действием момента
трения Л1.,, кге-м (Н-м), создаваемого затяжкой болтов:
гРзят/ drn
Р^ЛК. (1.51)
39
откуда
(1 52)
“ср*/
где Рзат — усилие, с которым затягивается каждый болт; dcp — сред-
ний диаметр фланцев муфты; f — коэффициент трения (f = 0,15-1-0,2).
Компенсирующие муфты соединяют валы при неко-
тором их взаимном смещении или перекосе в результате неточности
изготовления, монтажа или деформации во время работы. Имеется
несколько типов компенсирующих муфт. Наиболее простая муфта
Рис. 1.30. Жесткие и
компенсирующие муфты
(рис. 1.30, г) представляет собой две полумуфты, такие же, как у жест-
ких муфт, только болт в одной из полумуфт упирается в резиновые
прокладки, что позволяет компенсировать неточности в положении
валов.
Цепная муфта показана на рис. 1.30, д. Она состоит из двух полу-
муфт-звездочек, на которые надета цепь. Такие муфты допускают
перекос валов до 1,5° и радиальное смещение до 2 мм при средних
размерах и до 5 мм при больших размерах муфт.
<'--._Крестовь1е муфть121р11М£ня.ют л../1Я соединения валов, когда могут
бытьЗольшие смещения осей (рисГТТЗОГ^ЦОни состоят из двух полу-
муфт с пазами на торцах. Между полумуфтами помещается диск,
на торцах которого предусмотрены выступы, перпендикулярно рас-
положенные по отношению один к другому. Между диском и полу-
40
муфтами возникают силы трения, вызывающие радиальные усилия,
которые передаются на вал. Величина их достигает 0,1—0,4 окруж-
ного усилия в зависимости от материала полумуфты. Недостатком
этих муфт является большой износ пазов, так как во время работы
средний диск движется относительно полумуфт.
— Шарнирные муфты применяют для передачи движения между
валами, расположенными- под углом (рис. 1.30, ж). Возможность
передачи вращения под углом до 45с обеспечивается тем, что муфта
имеет два шарнира, расположенные взаимно перпендикулярно.
Рис. 1.31. Муфты сцепления:
а — кулачковая муфта; б — дисковая фрикционная муфта; в — двухконусная фрик-
ционная муфта; г — шювмокамерная фрикционная муфта; / — ведомый диск;
2 — ступица ведомого диска; 3 — вал муфты; 4 — ведущий диск; 5 — нажимные
рычажки; 6 — пальцы; 7 — серьги; 8 — втулка; 9 — тягн; 10 — рычаг управления;
// — втулка-крестовина; 12 — нажимной диск; 13 — вал; 14 — ведомый конус;
15 — ведущий конус; 16 — шкив; 17 — колодки с фрикционными накладками;
18 — пружина; 19 — пневмокамера; 20 — трубка для подачи сжатого воздуха
Сцепные муфты. Такие муфты применяют в приводах,
когда необходимо при работе часто соединять или разъединять валы.
Сцепные муфты бывают кулачковые (зубчатые) и фрикционные.
Первые применяют для механизмов, включаемых при их остановке
или очень медленном вращении, причем включать их необходимо
не чаще, чем один раз в 5—15 мин. Вторые — при включениях, про-
изводимых на ходу с периодом действия в течение иногда нескольких
секунд.
Кулачковая муфта (рис. 1.31, а) состоит из двух полумуфт, на
торцевых поверхностях которых имеются кулачки (зубья) треуголь-
ного, трапецеидального или прямоугольного профиля. Зубья тре-
угольного профиля могут быть симметричными и несимметричными.
Включаются и выключаются такие муфты при осевом перемещении
одной из полумуфт.
41
Кулачковые муфты применяют главным образом в приводах и
передачах, когда включение происходит при неподвижных или очень
медленно вращающихся деталях, а также когда не допускается про-
скальзывание одного вала относительно другого.
Такие муфты изготовляют обычно из легированных сталей и тер-
мически обрабатывают до твердости НВ 50—70. Устанавливают их
с высокой степенью соосности.
Фрикционные муфты позволяют осуществлять плавное включение.
Они бывают ленточные, дисковые, конусные, а также ппевмокамер-
ные.
Ленточные муфты работают по принципу обычного ленточного
тормоза, устанавливаемого на ведущем ободе муфты и охватываю-
щего ведомый шкив. Их преимущество в том, что они пе передают
на вал осевых усилий и требуют ничтожных усилий для включения.
Применяются для мощностей до 750 кВт.
Дисковая муфта (рис. 1.31, б) состоит из полумуфт, соединяю-
щихся под действием сил трения, возникающих между торцевыми
поверхностями в виде гладких дисков. Величина создаваемого мо-
мента трения зависит от силы Q, с которой диски прижимаются один
к другому, а также от коэффициента трения между дисками р, от сред-
него диаметра дисков Рср и от коэффициента запаса сцепления р,
который принимается равным 1,25—1,5. В многодисковых муфтах
момент трения зависит также и от числа дисков, т. е. от количества
поверхностей трения г, которое равно числу дисков минус один.
Величина крутящего момента, передаваемого муфтой,
^кр< ^2рСР (z-О. кгс-м(Н-м). (1.53)
Недостатком дисковых фрикционных муфт является необходи-
мость создания довольно большой силы Q, вследствие чего они обычно
применяются для небольших мощностей.
Конусные муфты (рис. 1.31, в) представляют собой две полумуфты
с коническими рабочими поверхностями, одна из которых имеет
внутренний конус, а другая — наружный. Перемещением одной
из полумуфт вдоль осн достигается включение муфты.
Принцип работы муфты заключается в том, что благодаря конус-
ной поверхности в результате действия силы Q возникает нормаль-
ная сила ТУ, значительно большая, чем сила Q. Величина крутя-
щего момента, передаваемая муфтой, составляет
Мк , кгс • м (Н • м). (1.54)
к 2 р sin а ' ' ' '
Применяются для передачи мощности до 150 кВт.
Пневмокамерные муфты широко применяют в строительных маши-
нах, особенно в землеройных (рис. 1.31, г). В таких муфтах трение
создается между колодками резиновой камеры, связанной с одной
полумуфтой и наружной поверхностью обода другой полумуфты.
Колодки прикреплены к внутренней поверхности камеры шпильками
и в местах трения покрыты антифрикционным материалом. При подаче
42
воздуха в баллон создается давление на колодки, в результате кото-
рого последние прижимаются к ободу второй полумуфты..
Момент, передаваемый такой муфтой,
М sg р ztR2b [pl ц, кгс м (Н м), (1.55)
где Р.— радиус поверхности трения; b — ширина колодок; [Р]—
допускаемое давление.
Недостаток пневмокамерных муфт заключается в старении резины.
§ 1.7. КАНАТЫ, БЛОКИ, ПОЛИСПАСТЫ
Канаты. Различают стальные проволочные и пеньковые канатьь
Стальные про в о л о ч Н“ьге- к а и а т ы “(тросы) широко
применяют в строительных машинах. Их используют для подъема
или горизонтального перемещения грузов (грузовые канаты), для
оттяжек, торможения поднимаемых грузов (поддерживающие канаты).
При специальной конструкции их применяют в качестве рельсов
для кабельных кранов (несущие канаты), для строповки перемещае-
мых грузов.
7 Канаты делают из отдельных проволок диаметром от 0,5 до 3,5 мм.
Проволоки свивают в пряди, а пряди навивают па органический
или металлический сердечник. Различают канаты с точечным каса-
нием проволок между слоями прядей (ТК) и с линейным касанием (ЛК).
Проволоки, из которых свивается канат, могут быть одинакового
или различного диаметра. При разном диаметре проволок в обозна-
чении каната добавляется буква «Р», при одинаковом — «О».
В зависимости от направления свивки верхнего слоя проволок
(рис. 1.32) различают канаты правой (П) и левой (Л) свивки. По
виду свивки различают канаты крестовой^свивкиГФЕогда направление
свивки проволок в прядях противоположно направлению свивки
прядей в канате, параллельной (односторонней) свивки, когда в пря-
дях и проволоках направление свивки одинаковое, и комбинирован-
ной свивки, когда проволоки в двух соседних прядях имеют противо-
положное направление.
Маркировка канатов включает, кроме указанных буквенных
обозначений, также диаметр каната, расчетный предел прочности
проволок, номер ГОСТа и обозначение марки проволоки в зависимости
от ее механических свойств: В — высшая марка, I — первая, II —
вторая. Например, условное обозначение каната с точечным каса-
нием проволоки в прядях диаметром 11 мм, обыкновенного, из про-
волоки с расчетным пределом прочности 180 кге/см2 марки I, свет-
лого, левой односторонней свивки: капат 11-180-1-Л-О.
Пеньковые канаты применяют главным образом в ка-
честве чалочных приспособлений для подвязывания грузов к крюкам
и другим захватным устройствам или в канатных полиспастах подъ-
емных устройств скучным приводом. Такие канаты обычно состоят
из трех пеньковых прядей. Нити в прядях и сами пряди закручива-
ются в противоположных направлениях.
43
Для защиты от сырости канаты пропитывают смолой.
Капат выбирают по разрывному усилию Р, по наибольшему натя-
!. жению (нагрузке на капат) S без учета динамических усилий и по
коэффициенту запаса прочности k, который регламентирован .Гос-
'/ ' гортехнадзором.
Допускаемая нагрузка на капат, кгс (Н),
S = P/k.
Коэффициент k выбирают в зависимости от режимов работы и
назначения каната. Например, для стреловых растяжек канаты лебе-
док, предназначенных для подъема людей, k = 9. В грузоподъемных
Рис. 1.32. Свивка канатов:
а — параллельная; 6 — крестовая; й — комбинированная; I — шаг свивки
машинах при ручном подъеме & должно быть не менее 4,5. При машин-
ном подъеме: при легком режиме k принимают не меньше 5; при сред-
нем — 5,5; при тяжелом режиме -— не меньше 6; в экскаваторах
k = 4-5-5.
Кроме расчета на прочность производится расчет канатов на дол-
говечность, которая зависит от условий эксплуатации, количества
перегибов (числа циклов), отношения диаметра каната к диаметру
барабана, конструкции каната и его диаметра.
Пеньковые канаты рассчитывают на растяжение:
S = ^-[o]p, кгс(Н), (1.56)
где S — нагрузка на канат, кгс (Н); d — диаметр круга, описанного
вокруг прядей каната, см; [о]р — допускаемое условное напряжение
44
на разрыв; для несмоленого каната [о]р = 100 кгс/см2 (10 МПа),
для просмоленного — до 90 кгс/см2 (9 МПа).
Способы крепления канатов разнообразны. Широко используют
различные зажимы, которые подбирают по диаметру канатов.
Рис. 1.33. Крепление каната с по-
мощью зажима «коренной зуб»
Рис. 1.34. Клиповое
крепление канатов
Для подвески крюков на конце каната делают петлю. Чтобы
канат не перетирался, внутри нее помещают коуш (рис. 1.33, а).
На рис. 1.33, б показан наиболее распространенный зажим «корен-
ной зуб», на рис. 1.33, в —
крепление каната с помощью
трех таких зубьев.
Часто используют клино-
вые захваты (рис. 1.34). В
такой захват заводится петля
каната, которая заклинивает-
ся при его натяжении.
Применяют также кониче-
ские захваты (рис. 1.35).
Внутрь такого захвата вво-
дится конец каната, обмотан-
ный проволокой. Затем конец Рис. 1.35. Крепление канатов коническими
каната выше этой обмотки захватами
распускают и концы прово-
лок, из которых состоит канат, загибают, а внутрь захвата заливают
расплавленный свинец.
На рис. 1.36, а показаны способы крепления канатов к подъемным
механизмам, а на рис. 1.36, б— к барабанам. Жесткие канаты кре-
пят зажимпыми винтами и планками, гибкие канаты — клиновыми
креплениями. Для уменьшения усилий, действующих на узлы креп-
45
ления, рекомендуется, чтобы при разматывании каната на баоабанё
оставалось 1,5-—2 витка.
Канаты необходимо периодически осматривать. По нормам Гос-
гортехнадзора допускается иметь строго определенное количество
оборванных проволок на длине одного шага свивки.
Рис. 1.36. Виды крепления канатов к подъемным механизмам и барабанам:
/ — соединительной муфтой; 2 — соединительной муфтой с цепным звеном; «3 — за-
жимными винтами; 4, 5 — зажимными планками; 6 — с помощью клиньев
Шаг свивки каната определяют следующим образом. На поверх-
ности какой-либо пряди (см. рис. 1.32) наносят метку (точка 7), от ко-
торой отсчитывают вдоль центральной оси каната столько прядей,
сколько их имеется в его сечении, и на следующей после отсчета
пряди наносят другую метку (точку II). Расстояние I между метками
есть шаг свивки.
46
§ 1.8. ОСТАНОВОЧНЫЕ И ТОРМОЗНЫЕ УСТРОЙСТВА
Остановочные устройства применяют для того, чтобы удержать
груз, поднимаемый лебедками, от падения. Одно из них, показанное
на рис. 1.38, а, представляет собой храповое колесо 1 и защелку 2.
Колесо может вращаться только в одну сторону, так как вращению
в другую сторону препятствует защелка. Один копен защелки сво-
бодно сидит на оси, а другой находится в контакте с колесом.
Значительно реже применяют фрикционные и роликовые оста-
новы.
Рис. 1.38. Остановочные и тормозные устройства
Тормозные устройства бывают колодочные, ленточные, кониче-
ские, пластинчатые, центробежные. Их применяют для регулирова-
ния скорости опускания груза или удержания груза на весу, для
поглощения инерции движущихся масс (тележек, кранов, грузов),
для изменения скорости отдельных узлов машин.
Колодочный тормоз показан на рис. 1.38, б. Торможе-
ние осуществляется нажатием колодок 3 на тормозной шкив 5, наде-
тый на вал, который необходимо затормаживать. Величина силы
трения, создаваемая каждой колодкой, равна произведению нормаль-
ной силы N на коэффициент трения р между колодками и тормозным
шкивом. Величина момента трения
Мг = 2Мр ~, кгс м (Н • м). (1.61)
Чтобы затормозить шкив, момент трения должен быть больше
момента, действующего на шкиве. Нажатие колодок достигается
грузом 8 и системой рычагов так, что тормоз всегда находится в за-
торможенном состоянии. Для растормаживания чаще применяют
электромагнитное устройство 7, при включении которого груз при-
поднимается и колодки отходят от диска. В данной схеме при опуска-
нии груза тяга 9 опускается. Точка В тяги движется вниз и одновре-
49
мепно влево,, а точка Б — вправо. В это же время рычаг 6 с при-
крепленной к нему колодкой движется влево, а рычаг 4 с другой
колодкой — вправо, в результате чего тормозные колодки зажи-
маются.
Ленточный тормоз (закрытого типа) показал на
рис. 1.38, в. Торможение достигается при обхвате тормозного шкива 5
стальной лентой 10, трущаяся поверхность которой покрывается
обкладками из фрикционных материалов. Один конец ленты закреп-
лен неподвижно, другой натягивается грузом 11 через систему рыча-
гов. Растормаживается тормоз электромагнитом.
Применяются также тормоза с ручным управлением.
§ 1.9. ПРУЖИНЫ И РЕССОРЫ
Пружины бывают конические, винтовые, спиральные, плоские и
тарельчатые. Их используют в качестве амортизаторов, а также для
измерения сил и создания постоянных усилий
в механизмах.
Цилиндрические винтовые
пружины являются наиболее распростра-
ненными. Они работают на растяжение или
сжатие. Их делают из проволоки различной
формы (чаще круглой). Материалами для пру-
жин служат высокоуглеродистые и легирован-
ные стали. Пружина характеризуется диамет-
ром проволоки d, средним диаметром D, на-
ружным диаметром (D -J- d), внутренним диа-
метром (D — d), шагом витков h, углом подъема
Рис. 1.39. Цилиндри-
ческие пружины, рабо-
тающие:
а — на сжатие; б — на
растяжение
витков а, определяемым зависимостью tga =
= h/jiD, длиной рабочей части /7р, числом
рабочих витков i = Hp!h. Угол подъема а обычно
принимается 10—12°.
Нагрузки, действующие на пружину (рас-
тяжение или сжатие), сводятся в основном
к действию момента, вызывающего кручение. Величина допускаемых
нагрузок Р зависит от диаметра проволоки d, допускаемого напряже-
ния 1т], среднего диаметра пружины О:
„ л d3 [т] ,т1.
p-=~8D> кгс(Н).
(1.62)
Фактором, определяющим работу пружины, является величина
ее суммарного сжатия или растяжения под действием нагрузки.
Величина сжатия
, _ 8PD3i
РЕ ’
(1.63)
где Е — модуль упругости второго рода.
Отношение D/d обычно выбирается в пределах 4—8.
Шаг пружины в свободном состоянии й=С (D/3).
50
Рессоры бывают листовые, винтовые и торсионные. Они служат
для амортизации и применяются в строительных и транспортных
машинах.
Листовые рессоры состоят из стальных полос, скрепляемых в пакет
(рис. 1.40). Для большей гибкости длину этих полос делают неодина-
ковой. Достоинством такой конструкции является то, что колебания,
возникающие при нагрузке на рессору, гасятся не только благодаря
упругости листов, но и в результате сил трения между ними.
Рис. 1.40. Типы листовых рессор
Для уменьшения напряжений листам придают изогнутую форму.
В собранном виде рессора предварительно деформируется в направ-
лении, противоположном тому, в котором будут действовать нагрузки
на рессору во время работы.
В зависимости от вида крепления рессоры, точка приложения
нагрузки Р различна.
Контрольные вопросы
1. От чего зависит работоспособность деталей машин? Что такое прочность,
износостойкость деталей?
2. Какие материалы применяют для изготовления деталей машин?
3. Что такое допуски и посадки?
4. Перечислите виды соединений. В чем разница между разъемными и неразъ-
емными соединениями?
5. Перечислите виды заклепочных соединений.
6. В чем основные преимущества и недостатки заклепочных соединений?
7. Напишите и объясните формулу для расчета заклепочных соединений.
8. Как происходит сварка? Что называется сваркой?
9. Перечислите способы сварки.
10. Перечислите виды сварных соединений.
IК Начертите развертку резьбы; покажите, что такое шаг и угол подъема.
12. Начертите резьбу треугольного профиля; укажите средний, наружный и
внутренний диаметры, шаг и угол профиля.
13. Напишите и объясните формулу для расчета болтовых соединений без пред-
варительной затяжки.
14. Напишите и объясните формулу для расчета болтовых соединений с пред-
варительной затяжкой.
15. Какая разница в работе болтовых соединений, устанавливаемых с зазором
и без зазора?
16. Вычертите несколько типов гаечных замков.
17. Перечислите виды передач.
18. Что называется передаточным числом?
19. Напишите формулы для определения передаточного числа ременной пере-
дачи. Какая величина передаточного отношения допускается в ременных передачах?
20. Что такое клиноременная передача?
21. Какие основные параметры характеризуют клиноременную передачу?
51
22. Вычертите схемы фрикционных передач.
23. Как можно получить переменное передаточное число во фрикционных пере-
дачах?
24. Перечислите виды зубчатых передач.
25. Начертите схему зацепления и напишите основные элементы, характеризую-
щие зубчатые зацепления.
26. Напишите формулу для определения величины передаточного числа в зуб-
чатых передачах.
27. Начертите схему расчета зуба зубчатого зацепления.
28. Что такое коррегирование и для чего оно применяется?
29. Как маркируют и подбирают канаты?
30. Перечислите схемы блоков.
31. Опишите схемы полиспастов.
32. Чему равно КПД полиспаста?
33. Какие имеются схемы тормозных устройств?
34. Формула для расчета пружин.
ГЛАВА 2
ОБЩИЕ СВЕДЕНИЯ О СТРОИТЕЛЬНЫХ МАШИНАХ
§ 2.1 КЛАССИФИКАЦИЯ МАШИН
Применяемые в строительстве машины и механизмы можно клас-
сифицировать: по виду выполняемой работы;?по характеру и техно-
логии рабочего процесса^/по режиму работы;^по виду привода;?; по
мощности 7прог1зводг1тельгк)сти)^)по_х.одовому оборудованию;.^ уни-
версалыюсти;^по виду управления.
По технологическому признаку строительные машины можно раз-
делить на следующие классы: горизонтального безрельсового транс-
порта; грузоподъемных монтажных работ; непрерывного транспорта;
погрузочно-разгрузочных работ; земляных и подготовительных ра-
бот; буровых работ; свайных работ; механической обработки (дроб-
ления, сортировки, мойки) каменных материалов; приготовления,
транспортирования и укладки бетонных смесей и растворов; отделоч-
ных работ; производства железобетонных изделий, производства
различного вида работ механизированным инструментом.
Класс делится на группы машин, различающиеся по характеру
рабочего процесса. Например, машины для земляных работ делятся
на землеройные (экскаваторы); землеройно-транспортные; для ги-
дравлической разработки грунта и др.
Машины разных групп по режиму работы могут быть как прерыв-
ного (циклического)дциствия (например/одноковшовые экскава-
торы), так и непрерывного действия (многоковшовые экскаваторы,
машины для гидравлической разработки грунта).
Каждая группа машин может выполнять различные технологиче*
ские процессы и отличаться рядом конструктивных особенностей.
Так, экскаваторы применяют для работы в транспорт (например,
карьерные машины) и в отвал (вскрышные машины). При этом группа
разделяется на типы, отличающиеся конструкцией отдельных узлов,
агрегатов, а иногда и машин.
Все типы машины должны иметь ряд типоразмеров, различаю-
щихся между собой мощностью привода, массой, размерами рабочего
органа, габаритами, но имеющих в основном близкую конструкцию.
По виду основного привода различают машины, в которых исполь-
зуются двигатели: электрические, внутреннего сгорания, пневмати-
ческие и гидравлические или комбинация двух из них (например,
дизель-электрические).
ч По степени подвижности (универсальности) машины делят на
стациопарные~и^подвижные; последние в зависимости от способа
агрегатирования могут быть самоходными, полуприцепнымн и при-
цепными. В зависимости от типа ходового оборудования машины
могут быть гусеничными, на пневматических шинах, на рельсовом
53
И на шагающем ходу. Различают машины универсальные (при большом
числе сменного рабочего оборудования и нескольких типах сменного
ходового и силового оборудования) и машины специализированные.
cj $
Рис. 2.1. Базовая машина с различным рабочем оборудованием:
я — одноосные тягачи; б — двухосные тягачи; I — скрепе; 2 — грейдер-элеватор;
3 — кран стреловой поворотный; 4 — цементовоз; 5 — бгльдозер; 6 — погрузчик
с задней разгрузкой; 7 — корчеватель; 8 — роторшй снегоочиститель
По системам управления различают машиня с ручным и автома-
тическим управлением, а по средствам украшения — с механиче-
ским, гидравлическим, пневматическим и электрическим управле-
нием. Применяются машины со смешанным убавлением (например,
гидромеханические).
54
Расширяется область применения универсальных самоходных
машин. Все чаще такие машины состоят из базовой машины и обычно
сменного навесного или полуприцеппого, реже прицепного рабо-
чего оборудования. В качестве базовой машины используют трак-
торы, автомобили, гусеничные, а также колесные тягачи (рис. 2.1)
и самоходные шасси. Наилучшие решения получаются агрегатиро-
ванием базовых машин или машин целиком из унифицированных
узлов (сборочных единиц).
Конструктивные и эксплуатационные особенности машин оцени-
вают по основныг их параметрам. К ним относятся: мощность, сила
тяги, .емкость ковша экскаватора или скрепера, размеры отвала
бульдозера, максимальный диаметр бурения при различных катего-
риях грунта и породы, габариты и масса машины, энергоемкость,
удельные нагрузки на грунт движителей и др.
Для каждой группы машин выделяют главный параметр, который
определяет эксплуатационную характеристику машин этой группы. На-
пример, у бульдозеров главным параметром считают номинальную силу
тяги, у одноковшовых экскаваторов геометрический объем ковша.
В одной и той же группе машин обычно имеется~большое коли-
чество моделей, основные параметры или отдельные узлы и агрегаты
которых отличакугся друг от друга незначительно. В связи с труд-
ностью организовать серийное-производство машин и сложностью
эксплуатации их делят на типоразмерные ряды, в каждом из которых
количество моделей минимально. В ряду^можно выбрать машину
необходимой производительности, мощности и т. д., соответствую-
щие наиболее рациональным условиям работы, а некоторые машины
позволяют выполнять работы всего диапазона данного вида работ.
Для этого параметры отдельных моделей связаны определенной мате-
матической зависимостью. Для строительных машин принято опре-
делять ряд по главному параметру машин. Ряд строят таким образом,
чтобы отношение этого параметра между моделями изменялось по гео-
метрической прогрессии с показателем 1,6 или 1,25.
При разработке типоразмерного ряда машин проводится также
анализ основных параметров, конструктивных, эксплуатационных
и экономических показателей существующих отечественных и зару-
бежных машин.
На основе типоразмерпого ряда можно создать «семейство» ма-
шин. Для обеспечения их поточного изготовления проводят широкую
унификацию и стандартизацию узлов и создают машины методом
агрегатирования.
Разработка теоретических основ унификации и создание типажа
строительных машин в пашей стране были начаты докт. техн, наук,
проф. Н. Г. Домбровским.
§ 2.2. ОБЩИЕ ТРЕБОВАНИЯ К МАШИНАМ
Требования, предъявляемые к машинам, можно подразделить
на социальные, конструктивные, эксплуатационные, экономические.
Социальные требования состоят в обеспечении удобства работы
в машинах, для чего предусматривают защиту рабочих от вибра-
55
ционных и атмосферных воздействий, удобное размещение приборов
и аппаратуры, безопасные условия труда и др.
Конструктивные требования заключаются в том, что узлы машины,
их компоновка, система управления должны отвечать современному
уровню науки и техники. Машины должны иметь высокую надеж-
ность, долговечность, допускать удобную замену деталей и узлов,
а также быть хорошо приспособленными к техническому обслужи-
ванию.
Приспособленностью к техническому обслуживанию называется
возможность проведения операций осмотра, смазки, регулировки,
заправки, запуска в течение времени, не превышающего 0,03—0,05
от рабочего времени.
Утомляемость машиниста вызывается неудачным расположением
рычагов и педалей, большими усилиями для управления ими, несо-
Рис. 2.2. Чувствительность человека к
вертикальным ускорениям:
I — явно ощутимы; 2 — беспокоят; 3 — очень
беспокоят; 4 — опасны для здоровья
вершенной конструкцией крес-
ла, плохой обзорностью, а также
чрезмерной вибрацией и тряской
на педалях, рычагах и сиденье
машиниста, превышающими са-
нитарные нормы шумами и др.
Чувствительность человека к
вертикальным ускорениям по-
казана на рис. 2.2 (по горизон-
тали отложены частоты колеба-
ний, а по вертикали — уско-
рения).
Большинство явлений, про-
исходящих в машине при ра-
боте, и некоторые параметры
ее характеристики зависят от
управления машиниста. Машину
следует рассматривать не как самостоятельную, а как комплексную
систему: параметры рабочих условий — рабочий орган — металло-
конструкции — привод — человек.
Эксплуатационные требования объединяют все требования к ма-
шинам, так как только в процессе эксплуатации выявляются кон-
структивные, технологические и другие особенности машин.
Экономические требования заключаются в том, что стоимость еди-
ницы получаемой продукции должна быть минимальной. Это дости-
гается при наименьшей стоимости машины и малых эксплуатацион-
ных расходах, но при наибольшей ее производительности. Всегда
имеется такое соотношение стоимости машины, затрат на ее эксплуа-
тацию и других капиталовложений и производительности машины,
при котором достигается наименьшая стоимость единицы продук-
ции.
Минимальная стоимость единицы продукции является одним
из основных экономических показателей. Однако во многих случаях
следует отдавать предпочтение получению максимальной производи-
тельности даже при некотором повышении стоимости.
56
Одним из важных экономических требований является также
наименьший расход энергии на единицу получаемой продукции.
Удельная энергоемкость машины Луд — показатель, означающий
отношение мощности двигателей машины А к емкости рабочего органа q,
производительности П или силе тяги Tcii:
Аул = А/д, или Луд = Л/П, или Луд = Д/Тсц.
Удельная металлоемкость машины — показатель, выражающий
отношение массы машины к величине главного или одного из основ-
ных параметров (например, к емкости рабочего органа, к мощности
двигателя, к производительности и силе тяги).
§ 2.3. КОНСТРУКТИВНО-ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ МАШИН
Основными конструктивно-эксплуатационными характеристиками
машин являются производительность, маневренность, подвижность,
устойчивость.
Производительность машины характеризуется тем количеством
продукции q, которое она может выработать в единицу времени Т:
минуту, час, смену, месяц, квартал, год. Количество продукции
для землеройных машин выражают в м3, дробильных и сортировоч-
ных машин — в т и м3.
Проектируя машину, подбирают ее главный и основные пара-
метры таким образом, чтобы можно было получить намечаемую для
нее производительность и обеспечить максимальную эффективность
ее использования. Производительность определяют расчетом для
наиболее характерных условий работы данной машины, расчетных
режимов (скорости подъема ковша, скорости напора и др.) и нагру-
зок на рабочем органе. Рассчитывают производительность на 1 ч
чистой работы при максимальном использовании мощности силовой
установки. Найденную производительность Пк называют теорети-
ческой или конструктивной; она является своего рода исходной услов-
ной величиной для расчета производительности в реальных условиях
эксплуатации.
Для машин цикличного действия Пк пропорциональна коли-
честву циклов п в 1 мин и количеству продукции q, вырабатываемой
за один цикл. Количество циклов, выполняемых машиной в 1 мин,
при продолжительности цикла 7Ц.
п = 60/Тц. (2.1)
Следовательно, для машин цикличного действия
Пк = 60(/п, м3/ч; (2.2)
Пк = 60^ну, т/ч, (2-3)
где у — объемная масса разрабатываемого материала.
При расчетах принимают условия работы, более характерные
Для данной машины, т. е. условия, на которые она рассчитана. На-
пример, для экскаваторов — это средний угол поворота, средняя
высота нагрузки, нормальная высота или глубина забоя, а также
57
условие, что за каждый цикл разрабатывается объем плотного грунта,
равный геометрической емкости ковша q.
Для машин непрерывного действия при перемещении насыпных
материалов сплошным непрерывным потоком величина Пк пропорцио-
нальна площади поперечного сечения потока материала F (м2) и ско-
рости v (м/с), причем эту расчетную площадь принимают неизменной
на всем пути перемещения.
Производительность машин в этом случае можно подсчитать по
следующим зависимостям:
Пк = 3600/ч>, м8/ч; (2.4)
Пк = 3600Л>у, т/ч. (2.5)
Для тех же машин при перемещении штучных и сыпучих мате-
риалов отдельными порциями производительность обратно пропор-
циональна расстоянию I между отдельными порциями:
Пк == ЗбОО^о//, м3/ч; (2.6)
Пк = ЗбООдоу//, т/ч, (2.7)
где q — объем каждой порции материала, м3.
Реальные условия работы машины отличаются от расчетных
вследствие различных сочетаний рабочих условий (различная кате-
гория грунтов, глубина котлована, траншей, возможный угол пово-
рота рабочего оборудования, условия разгрузки и т. д.). Это приво-
дит к тому, что производительность в реальных условиях несколько
отличается от Пк.
Максимально возможную для данной машины и в данных усло-
виях производительность, которой можно достичь за 1 ч чистой ра-
боты при современной организации процесса передовыми методами
управления машиной на основе научной организации труда, назы-
вают технической производительностью машины Пт.
По известным величинам Пк, которые приводятся в паспортах
машин, и корректирующему коэффициенту К„ учитывающему кон-
кретные условия работы, можно определить техническую произво-
дительность:
Пт = ПкКт. (2.8)
В связи с тем что в процессе эксплуатации машины работают
не непрерывно, действительная производительность оказывается мень-
ше теоретической и технической.
Производительность, учитывающую все перерывы в работе ма-
шины, называют эксплуатационной (Пэ).
Перерывы в работе можно разделить на следующие пять групп:
1) по конструктивно-техническим причинам. Они зависят от надеж-
ности конструкции, от времени, необходимого для подготовки ма-
шины к эксплуатации, проведения технического обслуживания, пере-
наладки машины, замены рабочего органа; 2) связанные с организа-
цией труда и отдыха машинистов; 3) зависящие от технологии выпол-
нения работ (необходимость перемещения машины, изменение поло-
58
жепия рабочего оборудования и т. д.); 4) по метеорологическим при-
чинам (работы прекращаются из-за сильного дождя, ветра, тумана,
морозов); 5) из-за общих организационных причин (например, прекра-
щение подачи воды, питания электроэнергией), зависящих от нечет-
кой организации работ.
Кроме перерывов на эксплуатационную производительность ока-
зывает влияние качество управления, т. е. квалификация механика.
В зависимости от того периода времени, для которого опреде-
ляется производительность, ее подразделяют на эксплуатационную
часовую, среднечасовую и годовую.
Эксплуатационную часовую производитель-
ность рассчитывают на 1 ч полезного рабочего времени машины.
При этом не учитывают внутрисменные и организационные перерывы,
а также вызванные метеорологическими условиями. Она является
фактически производственной нормой выработки. Последнюю при-
нимают в расчет для определения заданий рабочим при сдельной
оплате труда. Эти нормы включают в состав единых норм и расценок
на строительные и монтажные работы. Нормы выработки машин
устанавливают методами технического нормирования.
Эксплуатационную среднечасовую произ-
водительность рассчитывают на I ч работы с учетом органи-
зационных и метеорологических перерывов в течение данного часа.
Эксплуатационная среднесменная произ-
водительность равна произведению среднечасовой произ-
водительности на продолжительность смены в часах. Эту производи-
тельность используют для расчета плановых технико-экономических
показателей машины на длительное время, для определения показа-
телей годовой выработки, а также сметной стоимости работ.
Среднечасовая эксплуатационная произво-
дительность машин (т/год)
П9.ср_ч = Пэ.чКи, (2.9)
Кв = КвКк,
где Кв — коэффициент использования рабочего времени (Кв =0,75-н0,8);
См (С1СТ-ЬСрг)
где 4юл — полезное рабочее время внутри смены; tc„ — продолжи-
тельность смены; /ыст — метеорологические потери; /ор1. — организа-
ционные потери; Кк — коэффициент, учитывающий квалификацию
механика и качество управления (Кк = 0,9-^-0,95).
Эксплуатационную годовую производитель-
ность рассчитывают па 1 год работы списочной машины в составе
парка, учитывая при этом внутрисменные перерывы для условий
правильно организованного производства.
Для конкретных условий эксплуатационная годовая выработка
машины, м3/год (т/год)
Пэ.Го4 = Пэ.ср_чТч. Дод, (2. ГО)
59
где Тч г — число часов работы машины в году, определяемое по годо-
вому режиму без учета внутрисменных простоев; &гол — степень
увеличения годовой производительности за счет лучшего использо-
вания машины (уменьшение простоев и повышение эксплуатацион-
ной часовой производительности).
Маневренность машины — это способность работать и передви-
гаться в стесненных условиях, разворачиваться на месте. Иногда
маневренности придают более широкое значение, отвечающее скорее
свойству, называемому подвижностью.
Подвижность машины — способность передвигаться
как по строительному участку, так и вне него. Подвижность опреде-
ляется скоростью движе-
ния, рабочей и транспорт-
ной проходимостью, устой-
чивостью при движении и
работе, габаритом машины
и другими параметрами.
Проходимость
машины — способность
преодолевать различные
неровности местности, со-
Рис. 2.3. Дорожный просвет, продольный и
поперечный радиусы проходимости колесных
машин
измеримые с размерами хо-
довой части, проходить по
влакным и рыхлым грун-
там. преодолевать неглу-
бокие водные преграды. Она определяется силой тяги, средним удель-
ным давлением по грунту, величиной дорожного просвет'а С и углами
переднего и заднего свеса и 02 (рис. 2.3) илт, как их обычно назы-
вают, углами въезда и съезда, а у машины с телесным 'ходом, кроме
того, — количеством ведущих осей, диаметром, числом и располо-
жением колес, давлением на грунт, формой протектора шин, про-
дольными и поперечными радиусами проходимости pj и р2, мини-
мальным радиусом поворота и т. д.
Для машин с гусеничным ходом среднее удельное давление на
грунт, кгс/см2 (МПа)
Р, р - naL ’
где G — масса машины, кгс (Н); п — количество гусениц; а — ши-
рина гусеницы, см (м); L—длина опорной поверхности гусеницы,
см (м).
Среднее удельное давление отвечает условиям, когда центр тяже-
сти машины и результирующая от внешних сил расположены сим-
метрично относительно гусениц. Однако фаьтически эти силы рас-
положены несимметрично, что приводит к повышению удельных
давлений по сравнению со средними значеньями в 1,2—2 раза.
У некоторых машин (экскаваторов, кранов, бульдозеров, корче-
вателей и др.) при работе смещение вертькальной составляющей,
веса и внешних нагрузок приводит к выходу равнодействующей
60
из ядра сечения опорной поверхности гусениц. В этом случае наи-
большие удельные давления на грунт у двугусеничных машин могут
превышать средние в 4—6 раз, у многогусеничных в 2—3 раза, у ма-
шин на шагающем ходу в 2 раза.
Во многих случаях действительная поверхность контакта меньше
площади гусениц, что также повышает удельное давление но срав-
нению со средним значением рср. Например, если величина смещения
равна 1/,1 длины опорной поверхности гусениц, то длина поверхности
контакта гусениц с грунтом уменьшается на 25%.
У колесных машин с пневматическими шинами величина удель-
ного давления зависит от жесткости покрышки пневматической
шины, давления внутри шины и физико-механических свойств грунта,
кгс/см2 (МПа):
Pcp = ^fB. (2.11)
где /7В — давление воздуха в шипе, кгс/см2 (МПа); k — коэффициент,
учитывающий влияние жесткости покрышки пневматической шины
(Ал 1,2-5-1,25).
Чтобы обеспечить проходимость машин по бездорожью, удель-
ное давление должно быть не больше 1 кгс/см2 (0,1 МПа).
Дорожный просвет (клиренс) представляет собой расстояние
от нижней точки машины до поверхности дороги. В зависимости
от размеров продольной и поперечной базы машины (L и В) и назна-
чения для движения по дорогам с покрытиями, грунтовым или без-
дорожью эта величина равна 280—600 мм. Клиренс связан с диа-
метром колеса и составляет в среднем 0,34-0,4 диаметра. Если на пути
имеются значительные неровности, то проходимость оценивают допол-
нительно продольным радиусом проходимости pi и поперечным радиу-
сом проходимости р2 (рис. 2.3).
Величина р± есть радиус окружности, которая проходит через
самую низкую точку шасси и касается переднего и заднего колес.
Величина р2 есть радиус окружности, также проходящей через низ-
кую точку шасси, но касающейся колес, находящихся на одной оси.
Для большинства современных машин р! = 8-5-Юм, р2 — 1,254-1,35м.
Возможность машины преодолевать канавы и неровности опре-
деляется помимо силы тяги еще положением ее центра тяжести, кон-
струкцией и размерами ходовой части, а также углами въезда и съезда.
Для колесных машин наибольшая ширина преодолеваемой канавы
составляет около половины диаметра колеса; для гусеничных машин
она зависит от длины гусеничного хода и равна приблизительно
0,4 длины опорной поверхности гусеницы.
Схема действия сил на колесо при преодолении подобных препят-
ствий колесной машины показана на рис. 2.4. В процессе преодоле-
ния препятствия в точке контакта А возникает суммарная реакция N\
кроме того, на колесо действуют вертикальная нагрузка GK и тяга Т,
приложенная к оси колеса О.
Уравнения равновесия имеют вид:
Т — N since = 0; GK — /Vcosa = 0.
61
Из геометрических соотношений следует, что
tga =—т
” г — п
-и Г 2rh—h~
V r—h
Отсюда можно найти связь между усилием Т, необходимым для
переезда через препятствие, и его высотой
(2.12)
Маневренность машины зависит от ширины дороги и радиусов
поворота. Эти величины характеризуют так называемую ширину
габаритного коридора. Последняя имеет большое значение при пере-
возке с прицепами длинномерных конструкций. Ширину габарит-
ного коридора можно определить графически (рис. 2.5).
Рис. 2.4, Схема сил, дей-
ствующих на колесо при
преодолении препятствий
Рис. 2.5. Определение ширины габаритного
коридора
По известному предельному углу поворота управляемого колеса
машины оц находят центр поворота О. На прямой, соединяющей
точку О с центром шарнира прицепа Д, как на диаметре строят полу-
окружность радиусом, равным ОД/2. От центра шарнира прицепа
делают на проведенной окружности засечку радиусом, равным рас-
стоянию от центра шарнира до оси колес прицепа, т. е. Д7И — ДЛ4г.
Соединив точки /( и A4t, вычерчивают контур прицепа. После этого
строят окружность радиусом касательную к колесу прицепа,
и окружность радиусом Д2, касательную к колесу машины. Ши-
рина А габаритного колеса должна быть всегда меньше ширины
дороги как ла прямых участках, так и на уширениях дороги, которые
делаются на кривых участках.
Устойчивость машины — ее способность сохранять свое положе-
ние в пространстве относительно опор независимо от различных со-
четаний действующих нагрузок. Поэтому на устойчивость влияют
расположение опор и различные сочетания силовых факторов, дей-
ствующих на машину в том или ином ее положении относительно
горизонтальной плоскости.
62
Некоторые схемы расположения опор показаны на рис. 2.6. Пря-
мые, соединяющие точки приложения реакций на опорах, называ-
ются ребрами опрокидывания, а плоскость, ограниченная этими реб-
рами, называется опорным
контуром.
При опирании основы
машины на точки 1, 2, 3, 4
(четыре колеса) или на две
гусеницы опорный контур
представляет собой четы-
рехугольник (рис. 2.6, а, б).
Если основание машины
имеет трехточечное опира-
ние (два задних колеса и
шарнир на передней оси),
то контур — треугольник
(рис. 2.6, е), причем точка 1
приподнята по отношению
Рис. 2.6. Схема к расчету устойчивости машины
к точкам 2 и 3.
Сама опорная поверхность (поверхность расположения опор),
как правило, принимается наклонной к горизонту на расчетный
угол а, который зависит от типа машины и характера ее эксплуа-
тации.
Рис. 2.7. Схема к расчету устойчивости крана
Силовые факторы при расчете на устойчивость разделяются на
факторы, способствующие опрокидыванию и удерживающие машину
от опрокидывания. Численные значения этих факторов определяются
как удерживающие или опрокидывающие моменты относительно
расчетного ребра опрокидывания.
За расчетное ребро опрокидывания принимается такое, для кото-
рого отношение удерживающего момента к опрокидывающему —-
минимальное. Сами силовые факторы могут быть как статические
63
(не меняющиеся во времени), так и динамические — изменяющиеся
во времени. Поэтому и расчеты на устойчивость разделяются на ста-
тические и динамические. Кроме того, устойчивость рассчитывают
для различных сочетаний силовых факторов (рабочее состояние —
при наличии рабочих нагрузок — при отсутствии рабочих нагрузок).
В первом случае говорят о грузовой устойчивости, во втором —
о собственной устойчивости.
Во всех случаях количественная сумма устойчивости дается с по-
мощью коэффициента устойчивости
Л = Л1уд/Л4опр,
где Л4уд — суммарный удерживающий момещ кгс-м (Н-м); Л1опр —
суммарный опрокидывающий момент, кгс-м Н-м).
Величина k зависит от типа машины, ви.а устойчивости (стати-
ческая, динамическая, грузовая, собственная)и задается различными
нормативными документами (ГОСТами, ОСТаш). Минимальное зна-
чение k = 1,15-ь 1,25.
В качестве примера даны схемы стрелоюго крана для расчета
на грузовую устойчивость (рис. 2.7, а) и hi собственную устойчи-
вость (рис. 2.7, б), а также силы, действуюцие на кран: Q — масса
поднимаемого груза; и 1К2 — ветровые тагрузки; a, b, h, hr, с,
Н, Pi и р2 — размеры для определения п.еч относительно ребра
опрокидывания.
Контрольные вопросы
1. Какие имеются категории производительности?
2. Чем характеризуется маневренность машины?
3. Как определить собственную и грузовую усточивость?
4. Чем характеризуется проходимость машины?
ГЛАВА 3
УСТРОЙСТВО МАШИН
Основными узлами (агрегатами) строительных машин являются
рабочее оборудование, силовое оборудование, трансмиссия, ходовое
оборудование, платформа или рама (металлоконструкция) и система
управления. Силовое оборудование, трансмиссия и управление состав-
ляют привод.
Машины, приводимые в действие от посторонних источников
энергии, не имеют своего силового оборудования. Стационарные
машины не имеют ходового оборудования.
Рабочее оборудование на многих машинах применяется сменное,
благодаря чему машина становится универсальной, что позволяет
ее использовать для выполнения различных технологических про-
цессов.
Рабочее оборудование состоит из рабочего органа (ковша, отвала,
дробильных щек и др.), узлов и деталей, к которым прикрепляют
рабочий орган (стрелу и рукоять экскаватора, раму отвала бульдо-
зера), сборочных единиц (узлов), с помощью которых приводится
в движение рабочий орган (лебедки подъема ковша и стрелы экска-
ватора, гидравлические устройства для подъема и опускания отвала
бульдозера).
§ 3.1. РАБОЧИЕ ОРГАНЫ МАШИН
Рабочий орган — та часть машины, при помощи которой выпол-
няются рабочие операции. Основные параметры рабочего органа
зависят от вида выполняемой операции и главного параметра машины.
У некоторых рабочих органов за главный параметр машины прини-
мают один из его параметров. Так, геометрическая емкость ковша
одноковшового экскаватора является его главным параметром.
От выбранных параметров рабочего органа зависят производи-
тельность, энергоемкость процесса, износ его рабочих элементов,
возможность работать в различных условиях.
Некоторые детали рабочего органа быстро изнашиваются: у одних
машин — в течение нескольких смен работы, а у других, например
у буровой машины для разработки мерзлых грунтов, резцы необхо-
димо менять через 5—6 ч работы. Поэтому конструкция рабочего
органа должна быть такой, чтобы было удобно заменять изношенные
детали, а также вести монтаж и демонтаж всего рабочего органа.
Рабочие органы землеройных, землеройно-транспортных, буриль-
ных машин принято разделять на следующие группы: 1) которые
только отделяют грунт от массива или разрезают породу (зуб рыхли-
теля); 2) которые отделяют и перемещают грунт по мере его отделе-
3 М. И, Гальперин
65
ния или перемещают породу после рыхления (отвал бульдозера);
3) у которых после отделения грунта от массива он накапливается
в емкостях и переносится в этих емкостях (ковш экскаватора, скре-
пера).
§ 3.2. СИЛОВЫЕ УСТАНОВКИ {ПРИВОДЫ]
Силовая установка — та часть машины, которая приводит в дви-
жение механизмы машины. Она представляет собой агрегат, состоя-
щий из двигателя и вспомогательных систем: питания (топливный
бак, фильтры, трубопроводы), охлаждения (водяной насос, радиатор
трубопроводов), управления (рычаги управления режимом двига-
теля, охлаждения), смазки. К сборочным единицам силовой установки
относят также подмоторную раму.
Силовые установки с одним двигателем и комбинированные. На уста-
новках с одним двигателем применяют следующие двигатели: внут-
реннего сгорания, дизельные или карбюраторные, электрические по-
стоянного и переменного тока, пневматические. Установки с комби-
нированным приводом бывают электрические по системе генератор —
электродвигатель, дизель-электрические, дизель-гидравлические, ди-
зель- пневматические.
Приводы одно- и многомоторные. В одномоторном приводе одна
силовая установка приводит в движение все механизмы. При таком
приводе включают и выключают отдельные механизмы машины при
помощи различных конструкций муфт, чаще всего фрикционных.
При многомоторном приводе каждый механизм или группа их приво-
дятся в движение отдельными двигателями. Чаще всего на машинах
с многомоторным приводом двигатель внутреннего сгорания приводит
в движение электрогенератор, который питает электроэнергией элек-
троприводы отдельных механизмов. Двигатель внутреннего сгорания
может приводить в движение гидронасос, который подает жидкость
к гидродвигателям отдельных механизмов.
Достоинством одномоторного привода является то, что масса
этого привода меньше, чем суммарная масса приводов многомотор-
ного привода, а изготовить его проще и дешевле.
В многомоторном приводе можно регулировать работу отдельных
механизмов независимо друг от друга, значительно сократить коли-
чество трансмиссий, легче осуществить автоматизацию. Эти пре-
имущества позволяют все более широко применять машины с много-
моторным приводом, особенно в связи с усовершенствованием кон-
струкции гидропривода, при котором масса многомоторных приво-
дов приближается к массе одномоторного привода вместе с трансмис-
сиями.
Недостаток одномоторного привода состоит в том, что при нем
требуется большое количество трансмиссий, чтобы осуществить пере-
дачу движения отдельным механизмам. Кроме того, при одномотор-
ном приводе нельзя получить независимое распределение мощности
между приводимыми в движение механизмами.
Привод, а следовательно, и двигатель выбирают с учетом харак-
тера изменения рабочих нагрузок. Режим машины зависит от вели-
66
чины амплитуды и частоты ^колебаний- нагрузки, количества включе-
ний в единицу времени, реверсивности и продбЛЖИтельноСтйПГепре-
рывной работы.
Различают четыре режима работы: _1) легкий режим работв!
(рис. 3.1, а) - -отненгепиё'макси?,1альной нагрузки к средней состав-
ляет у :Г,3;.скорость рабочих движений постоянна, нет реверсив-
ности рабочих движений; число включений в 1 ч составляет 20—-30,
редко 50. С такими режимами работают машины для уплотнения
грунтов (кроме вибрацион-
ных): бетоносмесители, ра- а) цквт
створосмесители, цилин-
дрические грохоты, транс-
портеры. Для привода этих
машин можно применять
любые двигатели;
2) средний режим ра-
боты (рис. 3.1, б)— отно-
шение максимальной на-
грузки к средней состав-
ляет 1,5 : 2,5; скорость ра-
бочих движений переменна,
движения редко реверсив-
ны; число включений в 1 ч
достигает 200. На таких
режимах работают скрепе-
ры, тягачи, грейдер-элева-
торы, дробилки, краны,
многоковшовые экскавато-
ры и погрузчики;
3) тяжелый режим ра-
боты (рис. 3.1, б) — отно-
шение максимальной на-
грузки к средней состав-
ляет 2 : 3, нагрузка имеет
частые и резкие пики; ско-
рости рабочих движений
Рис. 3.1. Нагрузочные диаграммы при различ-
ных режимах работы машины:
а — легкий режим работы; б — средний; в — тяже-
лый; г — очень тяжелый; / — частота колебаний
машины; 2 — изменение мощности
меняются прерывно, дви-
жения часто реверсивны; число включений в 1 ч до 1000 и более.
На таких режимах работают одноковшовые экскаваторы, бульдозе-
ры, толкачи и др.;
4) очень тяжелый режим работы — носит ударный или вибрацион-
ный характер (рис. 3-1, г)-
Целесообразность применения того или иного двигателя для ра-
боты при различных режимах нагружения определяют с помощью
механической внешней характеристики. Кривую, построенную в коор-
динатах М и п, где М — крутящий момент; п — частота вращения;
М — f (п) называют механической внешней характеристикой. По этой
зависимости каждому значению частоты вращения в минуту соот-
ветствует одно значение крутящего момента.
3*
67
Как известно, произведение Мп пропорционально мощности,
развиваемой двигателем. Поэтому наилучшей характеристикой явля-
лась бы такая, при которой для всех значений частоты вращения
мощность оставалась постоянной, т. е.
N = А Мп — Af (и) = const,
Рис. 3.2. Внешние характеристики
где А — коэффициент пропорциональности.
Кривая внешней характеристики, отвечающая этому требованию,
представляет собой гиперболу (кривая 1 на рис. 3.2).
Реальные внешние характеристики обычно существенно отли-
чаются от формы гиперболы и представляют собой ломаные или плав-
ные кривые, имеющие характерные точки номинального режима,
у которых с увеличением частоты
вращения п момент М обычно
уменьшается (падающие кри-
вые).
Если сравнивать различные
характеристики, имеющие одну
и ту же точку номинального ре-
жима (точка О на рис. 3.2), то
их можно условно разбить на
следующие категории: проходя-
щие в зонах А и С — жесткие,
в зонах В и D — так называе-
мые мягкие.
Мягкие характеристики на-
ходятся в пределах, ограничен-
ных горизонталью и прямой, про-
ходящей через точку О под уг-
лом 45° к горизонту, жесткие характеристики — между вертика-
лью и той же прямой. Например, оптимальная характеристика
(кривая 7) в верхней части является жесткой, а в нижней — мяг-
кой; характеристика по кривой 2 полностью мягкая, а характери-
стика в соответствии с кривой 3 — жесткая.
При большом изменении частоты вращения момент у мягких харак-
теристик меняется незначительно; у жестких картина обратная:
малому изменению частоты вращения соответствует существенное
изменение крутящего момента.
Жесткость характеристики определяется по формуле
j р | = dM/dn — АМ/А.П.
(3-1)
Характеристики, для которых р -> со, называют абсолютно жест-
кими (вертикальная прямая на рис. 3.2); при р = 40э- 10 — жест-
кими (прямая 3); при р < 10 — мягкими (прямая 2 на рис. 3.2).
Механическая характеристика позволяет определить не только
изменение момента от частоты вращения, но и такие качества двига-
телей, как запас крутящего момента, определяемого коэффициен-
68
Рис. 3.3. Зависимости мощности,
крутящего момента, расхода горю-
чего и КПД двигателя внутреннего
сгорания от частоты вращения:
1, 2, 6 и 3, 4, 6 — участки кривых,
показанные сплошными линиями, со-
ответствуют регуляторной характери-
стике двигателя
том Лзап, который находят по коэффициенту запаса крутящего момента:
м ~м
Ь — ™ах н 1 ООо/
“-зап — М~ 1
шах
По этой характеристике можно судить о приспособляемости дви-
гателя, которую определяют по коэффициенту приспособляемости
^-п “
Чем мягче характеристика, тем шире пределы изменения ча-
стоты вращения двигателя при изменении нагрузки, т. е. способность
автоматически снижать частоту вра-
щения при перегрузке с плавным
увеличением крутящего момента.
Двигатели внутреннего сгорания
являются основным приводом всех
транспортных землеройных и земле-
ройно-транспортных машин. Эти дви-
гатели разделяют на два типа: дизе-
ли, работающие на тяжелом дизель-
ном топливе, и карбюраторные, ра-
ботающие на бензине. Основное пре-
имущество этих двигателей состоит
в том, что для них не требуется
внешних источников питания.
На рис. 3.3 показана механиче-
ская характеристика двигателя внут-
реннего сгорания.
Дизели имеют регуляторы, кото-
рые регулируют количество подавае-
мого топлива, поддерживая постоян-
ную частоту вращения. Настраивают
регуляторы таким образом, чтобы
двигатель развивал максимальную
минимальном расходе топлива (точка 5). В этом случае Nmax назы-
вают номинальной мощностью АД, а частоту вращения и крутящий
момент, соответствующие этой мощности, считают номинальной часто-
той вращения пн и номинальным крутящим моментом ЛД.
Недостатком этих двигателей является большая чувствитель-
ность к перегрузкам. Для карбюраторных двигателей — 1,15-^ 1,95,
а для дизелей kn = 1,01 ч- 1,1. Частота вращения холостого хода
составляет примерно 1,1 Д 1,15 от частоты вращения, соответствую-
щей частоте вращения при номинальной мощности. Частота враще-
ния, соответствующая максимальному крутящему моменту,
«л1тах=0,6пн.
мощность Nmax (точка 4) при
Минимальная частота вращения холостого хода
nxmin = (0,3 ч-0,5) пн.
69
К недостаткам двигателей внутреннего сгорания надо также
отнести высокую стоимость эксплуатации и сравнительно малую
долговечность — до 4000 ч работы.
Двигатели внутреннего сгорания применяют как с непосредствен-
ной механической передачей, так и с гидромуфтами и гидротрансфор-
маторами, обеспечивающими защиту двигателя и всей конструкции
от внешних перегрузок и сглаживающими расхождения между выход-
ной характеристикой двигателя и требованиями, вытекающими из ре-
жима работы рабочего органа.
Электродвигатели переменного тока. Такие двигатели особенно
широко применяют в качестве привода стационарных строительных
машин (бетоносмесителей, дробилок и др.). Этот вид силового обору-
дования отличает простота управления и обслуживания, малая стои-
мость, надежность в эксплуатации, способность выдерживать боль-
шие кратковременные перегрузки и возможность питания от обычной
электросети. Для машин, имеющих повторно-кратковременпый режим
работы (например, дробилок), применяют электродвигатели с коэф-
фициентом приспособляемости kn — 3.
Применить эти двигатели для непосредственного ' привода земле-
ройных, землеройно-транспортных и других машин, требующих регу-
лирования частоты вращения в зависимости от нагрузки, не удается,
так как внешняя характеристика их является весьма жесткой.
Электродвигатели постоянного тока. Они имеют мягкую внешнюю
характеристику и являются наиболее пригодными для привода мно-
гих карьерных машин. Недостаток их заключается в том, что такие
двигатели не могут питаться от общей сети переменного тока.
Для получения источника постоянного тока требуются комбини-
рованные установки, в которых генераторы постоянного тока приво-
дятся в движение двигателем внутреннего сгорания или электродви-
гателем переменного тока. Поэтому габариты и масса такого комбини-
рованного привода в 1,5—2,5 раза больше, чем у любого другого
привода. Несмотря на этот крупный недостаток, такие комбиниро-
ванные установки широко применяют как в одномоторном, так и
многомоторном приводе.
Комбинированные дизель-гидравлические приводы. Они состоят
из дизеля и гидродинамической передачи в виде гидромуфты или
гидротрансформатора.
Г идромуфта (рис. 3.4) состоит из колеса 1 центробежного
насоса, соединенного с ведущим валом 2, и колеса 5 центростреми-
тельной турбины, соединенного с ведомым валом 3. Колеса 1 и 5
размещены в общем корпусе 4, замкнутом уплотнением. Между ва-
лами насоса и турбины имеется зазор. Корпус гидромуфты заполнен
жидкостью. Передача момента развиваемого двигателем, на ведо-
мый вал в гидромуфтах осуществляется потоком жидкости. При
вращении насосного колеса лопатки насоса увлекают жидкость и пере-
мещают ее к периферии рабочей полости. Из насосного колеса поток
поступает на лопатки турбинного колеса. Силы, возникающие при
обтекании лопаток турбинного колеса, образуют момент М2, направ-
ленный в ту же сторону, что и вращение двигателя.
70
Рис. 3.4. Схема гидромуфты
В гидромуфте между насосным и турбинным колесами отсутствуют
какие-либо элементы, способные изменить момент количества дви-
жения потока. Поэтому, если не учитывать момент, передаваемый
посредством трения, приближенно принимают ЛД = М 2 = М.
Поскольку рассчитывать характеристику гидромуфты можно только
приближенно, ее получают опытным путем. Для этого насосное колесо
приводят в движение с постоянной частотой вращения nlf нагружая
одновременно вал турбинного колеса различными величинами крутя-
щего момента. При этом между насосным и турбинным колесами
возникает скольжение. С увеличением момента на валу турбинного
колеса увеличивается также момент на валу насосного колеса АД —
= ЛД = Л4, но при этом частота
вращения п2 на валу турбинного
колеса уменьшается. Отноше-
ние = i называют переда-
точным отношением гидромуфты.
КПД гидромуфты равен отно-
шению мощности на ведомом
колесе, т. е. на турбинном, к
мощности на ведущем колесе
(насосном). Так как моменты на
этих колесах одинаковы, то
л,_ __ М2(Л>2 _ Ч2 _ . .л
4 ~ Nj. ~ ~ щ
где П1, п2 — частота вращения
ведомого и ведущего колес.
Следует выбирать гидромуф-
ту и работать на таких режимах,
чтобы КПД был максимально возможным. Скольжение между коле-
сом насоса пг и турбиной п2 характеризуется относительной разностью
этих частот вращения:
S = (rt1 —«2)/^.
(3.3)
Величина S характеризует долю потерь в балансе энергии гидро-
муфты:
О Щ —«2 _ N 1—1^2 _ 1 _ /ОМ
д—— - Ni -1 П-
На рис. 3.5 показана характеристика гидромуфты (кривая 1).
Она строится в безразмерных величинах. По вертикали отложен
момент в долях единиц величины крутящего момента, а по горизон-
тали — передаточное отношение i. Из этой характеристики видно,
что с увеличением момента передаточное отношение уменьшается,
т. е. частота вращения п2 падает.
На этом же рисунке приводится кривая 2, которая показывает,
что КПД с увеличением момента также падает, так как увеличивается
скольжение.
Гидромуфты подбирают таким образом, чтобы при номинальном
моменте КПД было не меньше 0,85 + 0,9.
71
Приводы с гидромуфтами обеспечивают запуск двигателя при
включенной передаче, снижают динамическую нагрузку в системе,
защищают двигатель от перегрузок, обеспечивают плавность разгона
машины при запуске и при уменьшении нагрузки, а также плавное
стопорение при возрастании нагрузки. Недостатки гидромуфты состоят
в сильном снижении КПД при увеличении скольжения, а также
в невозможности изменения величины передаваемого крутящего мо-
мента двигателя в зависимости от нагрузки.
Гидромуфты целесообразно применять для машин и механизмов,
у которых колебания нагрузки значительны, но перегрузки бывают
редко.
Рис. 3.5. Внешняя характери-
стика гидромуфты
Рис. 3.6. Схема гидротрансформатора
Гидротрансформаторы также применяют для авто-
матического регулирования крутящего момента и частоты вращения
ведомого вала в зависимости от нагрузки. Они отличаются от гидро-
муфт тем, что кроме насосного колеса 2 (рис. 3.6) и турбинного колеса 1
между ними в рабочей полости устанавливают лопастные колеса
реактора — так называемый направляющий аппарат 3.
Жидкость из турбинного колеса попадает на лопатки реактора.
Реактор, отклоняя жидкость своими лопатками, изменяет момент
количества движения потока. Поэтому в гидротрансформаторе мо-
менты количества движения за турбинным колесом и перед входом
в насосное колесо не равны друг другу, как в гидромуфте. Вследствие
этого момента М2, развиваемый турбинным колесом, превосходит
момент Mlt сообщаемый двигателем насосному колесу, т. е. М2 > Мг;
значит, гидротрансформатор работает как редуктор.
Если валы вращаются в одну сторону, то согласно закону сохра-
нения энергии п2<П1, а передаточное отношение i — (п2 : щ) < 1.
На рис. 3.7 приведены характеристики гидротрансформатора
и М2 в зависимости от частоты вращения п2 или передаточного отно-
шения г. Характеристику гидротрансформатора получают также
72
опытным путем. Из рассмотрения характеристик гидротрансформатора
следует, что чем больше момент М2 на валу турбинного колеса, т. е.
чем больше сопротивление, тем меньше частота вращения п2, а сле-
довательно, и i. Величина КПД
____
71 “ ‘
(3.5)
передач или упростить их кон
Рис. 3.7. Внешняя характеристика
гидротрансформатора
Для построения тяговой характеристики трансформатора необ-
ходимо совместить характеристику двигателя и трансформатора.
Это совмещение можно построить, имея внешнюю характеристику
двигателя и безразмерную характеристику гидротрансформатора.
Применение гидротрансформаторов позволяет отказаться от много-
ступенчатых механических коробщ
струкцию. С уменьшением коэффи-
циента трансформации k КПД
гидротрансформатора существенно
понижается. Поэтому имеются уни-
версальные гидропередачи, кото-
рые при k = 1 работают как
муфты, а при k >• 1 — как гидро-
трансформаторы.
Недостатками гидротрансфор-
маторов являются сравнительно
низкий КПД (r]max = 0,90 ч- 0,92);
необходимость применять устрой-
ства для охлаждения масла, ус-
ложняющие конструкцию; слож-
ность или невозможность изменять
направление движения, для чего
требуются дополнительные меха-
нические устройства.
Пневматические установки. Их применяют для подачи сжатого
воздуха, приводящего в движение механизированный строительный
инструмент. Энергия сжатого воздуха используется также для тран-
спортирования строительных материалов, в механизмах для нанесения
покрытий, в пескоструйных аппаратах и др. Обычно такие установ-
ки состоят из двигателя внутреннего сгорания или электродвига-
теля, приводящего в движение компрессоры поршневого или рота-
ционного типа.
Строительные компрессоры чаще всего монтируют на специальной
раме и перемещают с помощью автомобиля или трактора.
В строительстве применяют одноступенчатые и двухступенчатые
компрессоры.
Компрессор двухступенчатого сжатия показан па рис. 3.8, а.
Коленчатый вал 9, вращающийся от двигателя 10, посредством ша-
тунов 8 приводит в движение поршни 7 цилиндров первой ступени.
При движении поршней вниз воздух засасывается всасывающими
клапанами, как это показано стрелками, и проходит через фильтр 6.
При движении поршня вверх по достижении определенного давления
73
воздух через выпускной клапан попадает в холодильник 4. Из холо-
дильника воздух всасывается поршнями второй ступени 1, где после
сжатия он выталкивается в ресивер 3. На компрессоре установлены
два предохранительных клапана 5 и 2 низкого и высокого давления,
а также соответственно манометры 11 и 12.
Рис. 3.8. Схемы компрессоров
Компрессоры одноступенчатого сжатия создают давление 6—
7 кгс/смг (0,6—0,7 МПа), производительность их достигает 0,15 м3/с.
С помощью двухступенчатых компрессоров по сравнению с одно-
ступенчатыми можно получить давление в 1,5—1,6 раза больше.
Производительность поршневых компрессоров (м3/мин) засасы-
ваемых из атмосферы воздух, определяется зависимостью
Qn = FSknz^, (3.6)
где F — площадь поперечного сечения поршня, м2;
F = nd2/4; (3.7)
74
S — ход поршня, м; X — коэффициент наполнения (X = 0,65 ч- 0,8);
k — объем засасываемого воздуха на один оборот коленчатого вала
в одном цилиндре (для машин одинарного действия k = 1, для машин
двойного действия k — 2); п — частота вращения вала компрессора,
об/мин; ?ц — число цилиндров компрессора.
Ротационный компрессор (рис. 3.8) представляет собой корпус 15,
внутри которого эксцентрично вращается ротор 13. На поверхности
ротора в радиальном направлении сделаны прорези, в которые встав-
ляются лопатки 14. Последние прижимаются к внутренней поверх-
ности корпуса центробежными силами. При вращении ротора вместе
с лопатками воздух увлекается ими и перемещается из широкой по-
лости А в узкую полость Б. В это время воздух сжимается и давление
его повышается.
Ротационные компрессоры значительно проще по конструкции,
чем поршневые; они равномернее подают воздух. К недостаткам их
следует отнести меньший КПД, чем у поршневых компрессоров.
Производительность ротационных компрессоров
Qp = I (пП — szn) — X м3/мин, (3.8)
где I — длина ротора, м; D — диаметр статора, м; s — толщина
пластинки, м; 2„ — число пластинок; т — эксцентриситет, м; п —
частота вращения, об/мин; X — коэффициент наполнения (X = 0,8 ч-
ч- 0,85).
Мощность ротационных компрессоров определяется так же, как и
поршневых.
§ 3.3. ТРАНСМИССИИ
Трансмиссии — механизмы, передающие движение от силовой
установки отдельным сборочным единицам (узлам) машины или от
одной сборочной единицы к другой.
Трансмиссии не только передают движение, но и преобразуют
(меняют) направление движения, скорости, моменты и усилия. В транс-
миссии включаются элементы, предохраняющие двигатель и отдель-
ные узлы от перегрузок. Различают механические, гидравлические и
электрические трансмиссии.
Механические трансмиссии. Они состоят из различного типа зуб-
чатых передач, коробок скоростей, валов, предохранительных и огра-
ничительных муфт, реверсивных механизмов, тормозных устройств
(см. далее кинематическую схему экскаватора на рис. 8.20).
Достоинствами механических трансмиссий являются большая
надежность, сравнительно высокий КПД (0,8 ч- 0,92), небольшая
металлоемкость (например, на тягачах масса составляет 3,2—5,5 кг
на 1 кВт), малая чувствительность к внешним температурам. Недос-
татки — невозможность бесступенчатого регулирования скорости. Для
того чтобы трансмиссии были близки к бесступенчатым системам, необ-
ходимы коробки скоростей с большим числом передач, что усложняет
конструкции коробок передач трансмиссии, увеличивает габариты,
75
металлоемкость и снижает КПД. Кроме того, в механических транс-
миссиях требуются оградительные устройства и необходимо наблюде-
ние за смазкой опор трансмиссии.
Для расчета элементов трансмиссий строительных машин в связи
со спецификой их работы предъявляется ряд требований к этим эле-
ментам. Например, муфту сцепления основного двигателя с транс-
миссией рассчитывают на максимальный момент двигателя (Мтах)
с коэффициентом запаса
^зап = ^pacn/Afmax—1,5. (3.9)
Число передач п как по известному максимальному передаточному
числу tmax, так и минимальному im;n определяют по геометрическому
ряду; при этом знаменатель прогрессии определяют по зависимости
q = n j/T, (3.10)
ГДе i — imaxA'tnln*
Гидравлические (гидрообъемные) трансмиссии. Движение от ве-
дущего элемента к ведомому передается под воздействием переме-
Рис. 3.9. Схемы гидравлических насосов:
а — шестеренчатого: б — акснально-поршневого; с — лопастного (шиберного)
щающейся жидкости в замкнутом пространстве. Они состоят из гидро-
насосов, гидродвигателей объемного типа, распределительных уст-
ройств (золотниковых), предохранительных клапанов и трубопроводов.
Гидронасосы приводятся в движение от постороннего источника
энергии, а гидродвигатели — за счет перемещения жидкости, пода-
ваемой гидронасосом. Гидронасосы применяют шестеренчатые, ак-
сиально-поршневые и лопастные (рис. 3.9).
Гидродвигателями могутслужить шестеренчатые, лопастные и порш-
невые насосы-гидромоторы. Эти гидродвигатели применяют в тех
случаях, когда во вращательное движение необходимо приводить
какой-либо механизм или исполнительный орган.
Если механизмам или исполнительным органам требуется сообщить
возвратно-поступательное движение, применяют гидроцилиндры.
В качестве рабочей среды в гидравлических передачах применяют
минеральные масла. Основными критериями при выборе масла для
различных видов передач и условий работы являются вязкость, тем-
пература вспышки и температура застывания. Масла, применяемые
76
для гидравлических передач в летнее время, могут иметь вязкость
до 70 сст; при низких температурах (—50°С) — 10 -г- 25 ест.
В СССР часто определяют условную вязкость масла (ВУ) вискози-
метрами и выражают ее в градусах Энглера (°Е). Вязкость масла (°Е)
для зимних условий должна быть 1,8—3,5 (при ниже — 50°С).
Температура вспышки масла, применяемого в летнее время, до-
пускается до 200°С, а зимой—до 170° С. Температура застывания
масла для летнего времени принимается до — 10°С, а для зимнего
времени — до —30°С.
Шестеренчатый насос (рис. 3.9, а) состоит из двух зубчатых колес,
помещенных в плотно обхватывающий их корпус. Колесо 1 насоса
приводится во вращение двигателем, колесо 2 сидит свободно на оси.
В корпусе имеется канал, через который масло попадает в полость
всасывания. При вращении щестерен масло, находящееся во впадинах,
переносится из полости всасывания в полость нагнетания и выталки-
вается (выдавливается) в канал.
Эти насосы изготовляют для рабочих давлений в 100 кгс/см2
(10 МПа); производительность их 400—500 л/мин. Частота вращения
электродвигателя таких насосов 2000 об/мин, хотя имеются специаль-
ные насосы с частотой вращения до 10 000 об/мин. Применяют их в пе-
редачах со сравнительно небольшими мощностями (до 30 кВт).
Поршневые насосы подразделяют на аксиально-поршне-
вые, радиально-поршневые и эксцентрикового типа. В строительных
машинах чаще всего применяются аксиально-поршневые.
Аксиально-поршневой насос (рис. 3.9, б) состоит из корпуса 3,
в котором по окружности диаметра D6 размещены цилиндры. Поршни 4
при помощи шатунов 5 шарнирно связаны с шайбой 6, наклоненной
к оси корпуса а—а под углом. Одновременное вращение корпуса отно-
сительно оси I—I и наклонной шайбы относительно оси II—II при-
водит к возвратно-поступательному движению поршней.
За одну половину оборота блока цилиндров поршень совершает
ход слева направо (всасывание), при этом полость цилиндра с помощью
распределителя 7 сообщается с линией всасывания. За вторую полови-
ну оборота поршень совершает ход справа налево (нагнетание); в этом
случае полость цилиндра при помощи распределителя 5 сообщается
с линией нагнетания.
Аксиально-поршневые насосы можно в определенном диапазоне
настраивать на разные производительности, для этого изменяют
угол наклона шайбы у. Широкое применение получили аксиально-
поршневые насосы с автоматическим регулированием производитель-
ности (расхода).
Аксиально-поршневые насосы, рассчитанные на давление до
300 кгс/см2 (30 МПа), имеют производительность от 10 до 750 л/мин
и частоту вращения приводного вала от 1000 до 3000 об/мин. Наиболь-
шую частоту вращения имеют насосы с наименьшей производитель-
ностью.
Шиберный (лопастной) насос (рис. 3.9, в) состоит
из корпуса 3 и размещенного в нем ротора 8. В пазах ротора помещены
лопасти 9, имеющие возможность перемещаться в радиальном на-
77
правлении. Лопасти захватывают масло, которое поступает в профиль-
ную полость всасывания В между ротором и корпусом и подается
к отверстию нагнетания Н. Эти насосы работают на давлениях до
100 кгс/см2 (10 МПа) и выше при частоте вращения приводного
вала 1200—2000 об/мин. Они имеют производительность от 50
до 150 л/мин.
Все вышеперечисленные насосы можно применять и в качестве
гидромоторов.
Производительность Q (л/мин) всех перечисленных типов насосов
рабочих камер <?, заполняемых жидкостью за 1
оборот насоса, и от часто-
ты вращения п:
Q = (З.И)
где т] — объемный КПД (по-
тери масла через зазоры).
Работа, затрачиваемая
на перекачку жидкости,
равна перепаду давлений
Ар, кгс/см2 (МПа), умно-
женному на расход жид-
кости Q (л/мин).
Следовательно, мощ-
ность всех этих насосов
(кВт) равна:
зависит от объема
Рис. 3.10. Схемы гидроцилнндров
= (3-12)
612дсум ' >
Псум — Суммарный
где
КПД.
На рис. 3.10 приведе-
ны схемы гидроцилинд-
ров,наиболее часто приме-
рис. 3.10, а — схема с одно-
перемещается давлением масла
няемых в строительных машинах:
сторонним штоком. Вправо шток
(рабочий ход), влево — усилием пружины; рис. 3.10, б — перемеще-
ние штока вправо и влево осуществляется давлением масла;
рис. 3.10, в — схема с двусторонним штоком; рис. 3.10, г — схема
плунжерного гидроцилиндра. В этом гидроцилиндре шток неподви-
жен, а при подаче масла в цилиндр последний перемещается по штоку;
рис. 3.10, д — плунжерный многоступенчатый гидроцилиндр (теле-
скопический); такие гидроцилиндры применяют для получения боль-
шой длины хода; рис. 3.10, е — конструктивная схема гидроцилиндра
с одним штоком. Он состоит из цилиндра, штока, поршня, сквозной и
глухой крышек.
Конструкция узла передней крышки, через который проходит
шток поршня, а также узел поршня имеют ряд кольцевых уплотнений
(манжет), являющихся весьма ответственными элементами конструк-
78
л
ции. Они препятствуют вытеканию жидкости из цилиндра и попаданию
ее из одной полости цилиндра в другую.
В строительных машинах применяют гидросистемы с давлением
масла до 200 кгс/см2 (20 МПа).
Диаметры цилиндров Пц могут быть от 40 до 220 мм, а длина хо-
да — не более 10 Дц.
Движущее усилие на штоке цилиндра, кгс/мм2 (Па)
P=pFn, (3.13)
где Fn — рабочая площадь поршня, мм2; р — давление в цилиндре,
кгс/см2 (Па).
Диаметр цилиндра подбирают в зависимости от необходимой силы Р
на штоке и известного давления:
Оц = ]/4Р/пр, мм. (3-14)
Скорость штока зависит от расхода масла Q и рабочей площади
поршня Fn:
va = Q/Fn. (3.15)
Помимо гидронасосов и гидромоторов в системы гидротрансмис-
сий входят предохранительные, распределительные и регулирующие
устройства, соединительная арматура, а также баки для жидкости и
фильтры.
К этим устройствам относят предохранительные, редукционные,
обратные клапаны, регуляторы скорости, гидрораспределители (дрос-
сели).
Предохранительные клапаны служат для снижения или прекра-
щения подачи жидкости в линию нагнетания. Они имеют различные
конструкции. Наиболее простая конструкция показана на рис. 3.11, а.
Этот клапан состоит из регулировочного болта 1, корпуса 2, пружи-
ны 3, шарика 5, центрирующей шайбы 4. Клапан устанавливается
в магистрали нагнетания. Принцип действия клапана основан на
уравновешивании силы давления жидкости, действующей на шарик,
и усилия пружины 3. Когда давление действующей на шарик жидкости
больше, чем усилие сжатия пружины, открывается доступ жидкости
к каналу слива С, и давление в напорной линии Н падает.
Редукционный клапан (рис. 3.11, б) применяют в тех случаях,
скогда необходимо в линии нагнетания поддерживать постоянное
давление независимо от развиваемого насосом давления. Клапан,
так же как и предохранительный, ставится так, чтобы канал Б был
соединен с линией нагнетания. Жидкость из канала Б поступает в ка-
нал А через отверстия в корпусе 2. Расход жидкости зависит от поло-
жения золотника 8.
Положение золотника регулируется разностью давлений на верх-
нюю и нижнюю торцевые поверхности. В начальный момент золотник
находится в нижнем положении. Шариковый клапан 7 отрегулирован
на давление, меньшее, чем на входе. Канал А, т. е. линия нагнетания,
соединен каналами с отверстием в золотнике. В отверстие золотника
вставлена калиброванная втулка 6. Когда давление в канале А уве-
79
Таблица 3.1
Условные обозначения элементов гидропривода
Наименование
Дроссель (местное сопротивление в линии) —расход зависит
от вязкости рабочей среды
Регулирующий орган:
нормально закрытый
нормально открытый
ф
Предохранительный клапан (клапан, ограничивающий мак-
симальное давление р1) с собственным управлением прямого
действия
Редукционный гидравлический клапан (клапан, поддерживаю-
щий постоянное давление иавыходер2 = const независимо от давле-
ния на входе pt при условии, что р2 <z р,):
давление на выходе р2 зависит от усилия пружины
Регуляторы потока:
дроссель
дроссель с регулятором давления
Обратный клапан
Насос постоянной производительности:
с постоянным направлением потока
с реверсивным потоком
Насос с регулируемой производительностью:
с постоянным направлением потока
Условное
обозначение
ф
81
Продолжение табл. 3.1
Наименование
Условное
обозначение
Нерегулируемый гидромотор:
с постоянным направлением потока
с реверсивным потоком
Регулируемый гидромотор с постоянным направлением потока
личивается, повышается и давление на нижнюю поверхность золот-
ника, он приподнимается и перекрывает отверстия для доступа жидко-
сти из канала Б в канал А. Одновременно через канал в золотнике 8
жидкость попадает под шариковый клапан, открывает его, и жидкость,
находящаяся над верхней полостью золотника, сливается в канал А.
При снижении давления в полости А золотник снова опускается.
Обратные клапаны предназначены для того, чтобы пропускать
жидкость в трубопроводах только в одну сторону. По конструкции
они делятся на шариковые и конусные, неуправляемые и управляе-
мые. На рис. 3.11, в показан неуправляемый обратный клапан. В шту-
цере 9 с седлом 10 установлен шарик 5, который прижимается к седлу
слабой пружиной 3. Под давлением подаваемой в канал А жидкости
шарик 5 сжимает пружину и открывает доступ жидкости в полость Б.
Движение жидкости в обратном направлении невозможно, так как
для этого необходимо, чтобы давление в полости Б было больше,
чем в полости А, но в этом случае шарик 5 закрыл бы отверстие в сед-
ловине 10.
Дроссели (рис. 3.11, г) служат для регулирования расхода жид-
кости. Для этого на пути движения жидкости устраивают сопротив-
ление, которое изменяет сечение проходного отверстия, благодаря
чему изменяется расход жидкости. Дроссели подразделяются на
управляемые (проходное сечение дросселя в процессе работы может
быть увеличено или уменьшено машинистом) и неуправляемые (при
работе проходное сечение дросселя остается постоянным).
Регуляторы скорости служат для регулирования скорости гидро-
двигателей. Регулятор (рис. 3.11, д) состоит из корпуса 2, редукцион-
ного клапана 7, дросселя 11. Жидкость, подаваемая из канала А,
проходит к каналу Б через отверстия в корпусе и дроссель 11.
Постоянное давление в канале Б поддерживается редукционным
клапаном. Если давление в канале Б увеличивается, то жидкость,
82
подаваемая через канал Г к верхней полости редукционного клапана,
перемещает его вниз и перекрывает доступ жидкости из канала А
в канал Б. Расход регулируется установкой дросселя 11 посредством
поворота рукоятки 12.
Распределители служат для управления потоком жидкости. Раз-
личают золотниковые, клапанные и крановые распределители. Наи-
более часто применяют золотниковые распределители. Они состоят
из одного золотникового распределителя или целого блока.
На рис. 3.11, е приводится одна из схем распределителя. Золот-
ник 1 можно перемещать в осевом направлении в корпусе 2. В корпусе
сделано пять отверстий: одно отверстие Н для подачи жидкости,
два отверстия и С2 для слива и отверстия А и Б для подачи жидкости
в гидроцилиндр. В положении IV отверстия А и Б перекрыты, и вся
жидкость, подаваемая насосом через обратный клапан, сливается
в бак. В положении II жидкость подается в отверстие Б, а сливается
из отверстия А. В положении I жидкость подается в отверстие А и
сливается из отверстия Б.
Диаметр трубопроводов должен приниматься таким, чтобы скорость
v жидкости в напорных трубопроводах была не более 8 м/с, в сливных
Рис. 3.12. Система управления с гидравли-
ческим приводом
5 м/с, а во всасывающих — не
более 1,5 м/с.
Внутренний диаметр труб
определяется по, формуле
cL — I/ —мм,
1 у JW
где Q — расход жидкости.
Все элементы гидроприво-
дов при вычерчивании схем
имеют свои условные обозна-
чения. В табл. 3.1 приводятся
некоторые из иих.
На рис. 3.12 приводится
одна из схем гидропривода
стрелоподъемного механизма
стрелового крана, включающая большинство из перечисленных
элементов гидросистемы.
Подъем и опускание стрелы производится при помощи гидроци-
линдра 6, жидкость подается насосом 1 в магистраль 2. При нейтраль-
ном положении I золотника распределителя 4 жидкость через клапан 3
и фильтр 10 поступает обратно в бак 11. При переводе распределителя 4
в положение II жидкость через обратный клапан 7 поступает в под-
поршневую полость цилиндра 6 и перемещает поршень со штоком,
поднимая стрелу. Во время подъема поршня жидкость, находящаяся
в надпоршневой полости, сливается в бак через клапан 5. Если на
штоке поршня возникает усилие, для преодоления которого требуется
давление больше расчетного, то подаваемая насосом жидкость сливается
обратно в бак 11 через предохранительный клапан 3.
83
Для того чтобы опустить стрелу, золотник распределителя уста-
навливают в положении III, жидкость через обратный клапан 9 по-
дается в надпоршневое пространство, поршень движется вниз и вы-
жимает жидкость через дроссель 8. Дроссель создает подпор и препят-
ствует быстрому перемещению поршня вниз.
§ 3.4 ХОДОВОЕ ОБОРУДОВАНИЕ
Ходовое оборудование служит для перемещения машины в процессе
работы и для ее передвижения на новое место. Оно состоит из движителя
и устройств (подвесок), соединяющих движитель с ходовой рамой,
и служит для передачи массы машины на основание.
Рис. 3.13. Разрез шии:
а — камерной; б — бескамерной; / — протектор; 2 — брекер; 3 — каркас: 4 — боковина:
5 — борта; 6 — проволочные кольца; 7 — бортовая резина; S — герметизирующий слой;
9 — обод; Ю — вентиль; В — ширина профиля; Н — высота профиля; D — наружный диа-
метр; В — ширина шины по ободу; с — ширина борта; П — ширина протектора
Движитель в отличие от двигателя представляет собой устройство,
которое сообщает машине движение и передает на грунт массу машины.
Детали, соединяющие движитель с корпусом, называют подвеской.
В строительных машинах применяют колесные и гусеничные
движители, а в машинах большой массы спаренные гусеничные и
шагающие движители.
Колесные движители имеют малую массу по сравнению с гусенич-
ным, т. е. в среднем масса колесного движителя составляет 10—12%
общей массы машины, а гусеничного — до 30%. Кроме того, у ко-
лесных движителей более совершенная конструкция шин и приме-
няется привод на несколько осей. Для колесных движителей при-
меняют камерные и бескамерные шины (рис. 3.13).
84
В камерных шинах воздух накачивается в камеру, а в бескамер-
ных — между герметическим ободом и покрышкой.
Камерная шина состоит из покрышки, камеры и ободной
ленты; покрышка — из каркаса 3 и протектора 1, а каркас — из нес-
кольких слоев прорезиненного корда. Кордные ткани несут основную
нагрузку, нити корда работают на растяжение. Протектор взаимо-
действует с дорогой, его изготовляют из прочной, хорошо сопротив-
ляющейся износу резины. Часть поверхности протектора, взаимодей-
ствующую с дорогой, делают рельефной с рисунком различного вида
в зависимости от того, для каких дорог предназначены шины (мелкий
рисунок — для дорог с твердым покрытием, а более крупный — для
дорог смешанных); для труднопроходимых дорог шины делают с грун-
тозацепами.
Бескамерные шины (рис. 3.13, б) в отличие от камерных
имеют герметизирующий слой толщиной от 1,5 до 2 мм, уплотнитель-
ную бортовую резину и обод с вентилем. На шине проставляют цифры,
которые обозначают ее внутренний диаметр или посадочный диаметр
обода и ширину протектора. В случае прокола давление в бескамерной
шине падает намного медленнее, чем в камерной.
Тип шин выбирают в зависимости от условий и режимов работы,
в соответствии с которыми машины можно разделить на три группы:
1) выполняющие рабочие процессы при перемещении, причем силы
сопротивления преодолеваются за счет тягового усилия (бульдозеры,
скреперы, фронтальные погрузчики, грейдеры, землевозы); 2) выпол-
няющие рабочие процессы без движения, ходовая часть в это время
служит опорой (экскаваторы, планировщики с телескопическими
стрелами, самоходные краны); 3) у которых шины являются рабочими
органами (катки для уплотнения грунтов). Шины в этом случае должны
передавать давление на грунт, причем необходимо, чтобы при заданной
массе машины величину давления в зоне контакта шины с грунтом
можно было регулировать в зависимости от физико-механических
свойств грунта, который подвергается уплотнению, и от необходимой
глубины уплотнения.
Для землеройных машин целесообразно применять шины низкого
Давления 0,5—0,8 ат (0,05—0,08 МПа). Большинство машин обору-
дуются устройствами, позволяющими регулировать давление воздуха
в шинах в зависимости от вида дороги. Чем меньше давление в шинах,
тем больше площадь контакта шины с грунтом; это улучшает прохо-
димость, но увеличивает сопротивление движению. Малое давление
в шинах увеличивает интенсивность их износа. Поэтому при дви-
жении по хорошим дорогам не следует задавать пониженное дав-
ление.
На рис. 3.14 показана схема шины с увеличенной шириной профиля,
Работающей на давлении, в 1,5—2 раза меньшем, чем обычные шины.
При сравнении этой шины с обычными видно, что ее площадь контакта
с грунтом в 2—2,2 раза больше.
Во время стоянки шины самоходных крапов воспринимают большие
нагрузки, в основном вертикальные. Для разгрузки шин иногда
Машины оборудуют аутригерами. Они представляют собой винтовые
85
или гидравлические подставки типа домкратов, на которые опирается
машина таким образом, чтобы ее масса воспринималась аутригерами,
а не колесами.
Пневматическая шина сохраняет свою работоспособ-
ность только до определенной величины радиальной деформации,
которая обеспечивается суще-
ствующей зависимостью меж-
ду нагрузкой на шину, вели-
чиной внутреннего давления
в ней и ее габаритами — ши-
риной профиля и посадочным
диаметром. Для обеспечения
работоспособности шина дол-
жна иметь вполне определен-
ные габариты при заданной
нагрузке и соответствующем
ей внутреннем давлении. Дли-
тельно действующее измене-
ние нагрузки неизбежно вле-
внутреннего давления в шине.
При выборе типа шин учитывают технические показатели, условия
работы машины, предельные габариты шин и т. д. Для заданной наг-
рузки на шину по нормалям выбирают размеры шины, близкие к ука-
занным в технических требованиях. При известных габаритах шины
выбирают максимальную на-
грузку на шину и соответ-
ствующее ей давление.
Гусеничный движитель
[рис. 3.15] состоит из замк-
нутой гусеничной цепи (гусе-
ницы), которая приводится в
движение ведущей звездоч-
кой; она предохраняется от
провисания поддерживающи-
ми катками и натягивается
натяжным колесом. Нижняя
ветвь гусеницы прижимается
к грунту опорными катками.
Гусеница состоит из звеньев
(траков), шарнирно соединен-
ных пальцами. На звеньях
обычно имеются шпоры для лучшего сцепления с грунтом. Коэффи-
циент сцепления с грунтом благодаря этому выше, чем у колесных
движителей, и достигает 1-—1,2.
Различают гусеницы с малым шагом звеньев t, у которых b: t>
2,5, и с большим шагом b : t < 2,5, где b — ширина звена. При боль-
шом шаге звеньев давление на грунт передается более равномерно,
чем при малом шаге, но гусеницы с большим шагом не дают возмож-
ности получить большую скорость перемещения.
86
Применяют гусеницы жесткие и мягкие. У первых оси катков
укреплены в рамах неподвижно, у вторых они могут перемещаться
с помощью пружин или балансиров. Мягкие гусеницы сложнее в из-
готовлении и эксплуатации, но они лучше приспосабливаются ко всем
неровностям грунта.
В гусеничных движителях при одном и том же весе машины удель-
ное давление на грунт значительно меньше по сравнению с колесными
и составляет 0,4 -ъ 1,0 кгс/см2 (0,04 4-0,1 МПа), что объясняется
большей поверхностью опоры. За счет этого улучшается проходимость
машины по бездорожью и слабым грунтам.
В последнее время все чаще применяют колесный ход, так как гу-
сеничный ход имеет сложную конструкцию, быстрый износ деталей,
Рис. 3.16. Подвески:
а — жесткая: б — упругая; в — упругая балансирная; 1 — натяжное колесо;
2 — ведущая звездочка; 3 — амортизирующее натяжное устройство; 4 —- под-
держивающие катки; 5 — балансирная рессора; 6 — опорные катки; 7 ~ гусе-
ница
малую скорость перемещения (10-—16 км/ч) и большую массу, которая
составляет до 40% всей массы машины.
Подвески (рис. 3.16) служат для соединения рамы или кузова
машины с узлами, на которых непосредственно закреплены движи-
тели (колесные или гусеничные). Различают жесткие, полужесткие
и упругие подвески.
Жесткие подвески подразделяют на индивидуальные и
балансирные. Балансирные подвески мягче индивидуальных, что
влияет на скорость машин. Машины с гусеничным ходом и индиви-
дуальной жесткой подвеской имеют при эксплуатации скорость не
более 10 км/ч, с балансирной подвеской — 20—25 км/ч. При жесткой
подвеске (рис. 3.16, а) между рамой машины и колесами или гусеницами
не устанавливают упругие элементы.
Полужесткие подвески применяют на гусеничных ма-
шинах, у которых одна часть корпуса машины подрессорена, а другая
часть опирается на ходовое оборудование. У этих подвесок передние
концы гусеничных рам укреплены на поперечном балансире (рессоре),
а задние концы шарнирно установлены на ведущих осях.
87
Упругие подвески (рис. 3.16, б) смягчают динамические
нагрузки и улучшают плавность хода. Такие подвески позволяют
увеличивать скорость, улучшают маневренность и удобны в управле-
нии. Так же как и жесткие, упругие подвески могут быть индиви-
дуальными и балансирными (рис. 3.16, в). В конструкциях упругих
подвесок имеются амортизаторы, предназначенные для гашения коле-
баний корпуса машины, и стабилизаторы, выравнивающие деформации
рессор одной оси во избежание крена машин.
В качестве упругих элементов применяют винтовые рессоры [для
нагрузок не свыше 3 Т (30 кН)], листовые рессоры [для нагрузок до
10 Т (100 кН)], торсионы, пневматические и гидропневматические
цилиндры [до 25—30 Т (300 кН)], гидравлические цилиндры [до 100—
200 Т (103 — 2-Ю3 кН)].
§ 3.5. ТЯГОВЫЙ РАСЧЕТ
Для движения машины необходимо, чтобы между движителем
и грунтом создавалось усилие, достаточное как для перемещения
самой машины, так и для преодоления полезных и вредных сил сопро-
тивления. Это усилие создается движителем. Максимальное значение
Рис. 3.17. Схема сил, дей-
ствующих на колесный
движитель
силы тяги по двигателю ограничивается пре-
дельными значениями силы, возникающей в
процессе взаимодействия движителя с грун-
том, т. е. силами сцепления. Эта максималь-
ная сила называется касательной силой тяги
по сцеплению. Сила тяги по сцеплению опре-
деляется нагрузкой на движитель, его кон-
струкцией, физико-механическими свойствами
основания дороги.
Рассмотрим подробней процесс взаимодей-
ствия колесного движителя с основанием.
К колесу (рис. 3.17), нагруженному верти-
кальной силой GK, подводится крутящий мо-
мент Мк. В результате действия этих сило-
вых факторов в зоне контакта возникает сила Q. Линия ее действия
не проходит через центр колеса, и точка ее приложения смещена
от вертикали на расстояние а по направлению движения.
Разложив равнодействующую Q на вертикальную N и горизон-
тальную Т составляющие, получим из условий равновесия следующие
соотношения:
MK = 7VC + Mz; С1£ = У; FK = T, (3.16)
где FK — реактивная сила от рамы машины, действующая по оси
ведущего колеса; гс — силовой радиус — расстояние от оси колеса
до точки приложения равнодействующей.
Разделив первое из этих равенств на гс и подставив GK вместо Л',
получим:
2!k = r + GK—.
гс гс
88
Отношение Mjrz = Рк представляет собой окружную касательную
силу тяги, a a/rc = f — так называемый коэффициент сопротивле-
ния качению.
Следовательно, касательная сила тяги состоит из двух слагае-
мых, первое из которых Т идет на преодоление полезных сопротивле-
ний и называется свободной силой тяги, а второе GJ = Pf — на
перекатывание ведущего колеса; называют эту величину силой сопро-
тивления качению.
P, = T + GKf. (3.17)
Предельное значение касательной силы тяги, так называемая сила
тяги по сцеплению Р, зависит от массы G и коэффициента сцепления <р.
^к.сц = фСк- (3.18)
Коэффициенты ф и f зависят от физико-механических свойств покрытия
и давления в шинах протектора.
Максимальное значение свободной силы тяги по сцеплению
T^P^-GJ (3.19)
или
^ц = Ск(ф-/). (3.20)
Для гусеничного движителя, как и для колесного, величины <р'
и f = Рf характеризуют взаимодействие движителя с грунтом, только
они численно отличаются от <р и f.
Средние значения коэффициентов сцепления и сопротивления
передвижению машин приводятся в табл. 3.2.
Таблица 3.2
Средние значения коэффициентов сцепления и
сопротивления передвижению машин
Дорожные условия Тип ходовой части
пневмошины гусеницы со шпорами пневмошииы гусеницы
Ф ч>* f
Асфальт 0,7 0,015 0,06
Укатанная проселочная 0,6—0,8 0,9—1,1 0,03—0,05 0,06—0,07
дорога сухая Песок сухой 0,3 0,4 0,20 0,15
Песок влажный 0,4 — 0,25 0,15
Болото 0,1 0,3 0,25 0,15
Сила тяги создается только на ведущих колесах машины (тягачах),
т. е. тех, которые приводятся во вращение двигателем через транс-
миссию. Не у всех тягачей приводятся в движение все колеса, поэтому
для определения силы тяги, которую может развивать тягач при
известной его массе, необходимо определить, какая часть массы тягача
приходится на ведущие колеса.
89
На рис. 3.18 показана схема тягача. При движении тягача по на-
клонной поверхности нормальная сила
GH. т — С cos а.
Реакцию на передние колеса Рп и на задние /?8 можно определить
из уравнения равновесия системы относительно точек О или Ог
%M0t = R3L-Gu^l = b.
Следовательно,
Если у тягача ведущими являются только задние колеса, то сила
тяги
7сц = -^(<р-7).
При перемещении машины возникают следующие силы:
1) сопротивления передвижению ходовой части
Pf=fGcosa; (3.21)
2) сопротивления инерции Рин; они пропорциональны массе ма-
шины G/g и ее ускорению при трогании с места или изменении скорости
машины. Приближенно Рин можно определить по зависимости
PUH = (3-22)
где /р — время разгона (для колесных машин /р=5—10 с, для гусенич-
ных — 3—6 с).
Рис. 3.18. Схемы для расчета тяговых усилий:
а — машины с колесным движителем; б — с гусеничным
Трогание с места происходит на первой передаче. При этом vx
можно принимать для гусеничных машин 0,25—0,3 м/с, для колес-
ных — 1—1,5 м/с;
3) сопротивления подъему на уклонах Pnw зависящие от угла
уклона а:
PB0A = Gsina. (3.23)
90
Гусеничные машины могут преодолевать уклоны 20—25°, колес-
ные — 15—20° (наименьшие значения для тракторов и машин на их
базе). Возможность преодоления различных уклонов, развиваемая
силой тяги, зависит также от устойчивости машины.
Таким образом, для движения машины необходимо, чтобы сила
тяги на движителе преодолевала все указанные выше сопротивления,
а также полезные сопротивления Р* сум, т.е. сопротивления, возникаю-
щие на рабочих органах, и т. д. Следовательно,
/^Р/Ч-Лш + Люд + ^хсум. (3.24)
Необходимо, чтобы мощность двигателя обеспечивала получение
этого окружного усилия.
При определении Рк учтены только те силы, которые проявляются
в процессе выполнения машиной технологических операций.
Для привода трансмиссии используется только часть мощности
силовой установки Ns, которая равна разности между номинальгой
мощностью AZHOM и мощностью /Ув, идущей на преодоление потерь
в силовой установке. Мощность называют свободной мощностью
двигателя;
Na = N„0„~NK. (3.25)
Момент, передаваемый двигателем трансмиссии, Н-м,
А4д^9550Мд/п,
гден — частота вращения вала двигателя, об/мин; N — мощность, кВт.
Силу тяги, которую может развивать машина при данной мощности
двигателя, называют силой тяги по двигателю Тл:
МдЧУтр
Л =—(3-26)
где Л1д — крутящий момент, развиваемый двигателем, кгс-м (Н-м);
1тр — общее передаточное число трансмиссии от двигателя к ведущему
колесу; т]ы — общий КПД трансмиссии и ходовой части; гк — радиус
ведущего колеса машины, м.
Величина т)м, не являющаяся постоянной, зависит от скорости
перемещения машины;
"Пм 'Птр'Пх»
где т|тр — КПД трансмиссии; тр — КПД ходовой части.
Если известны параметры машины — масса G, диапазон возмож-
ных скоростей v, мощность Мт) угол подъема а, то, пользуясь уравне-
нием (3.24), можно определить режимы, на которых следует работать,
чтобы полностью использовать мощность двигателя, и какие макси-
мальные рабочие сопротивления можно преодолеть для работы на
заданных режимах.
§ 3.6. СИСТЕМЫ УПРАВЛЕНИЯ
Системы управления современных строительных машин должны
позволять эксплуатировать силовую установку на оптимальных
режимах.
91
Управление силовой установкой и машиной в целом требует регу-
лирования нескольких параметров. При большом числе рукоятей
иногда, чтобы уменьшить их число, органы управления механизмов
объединяют. Такие агрегаты представляют собой центральные посты
управления, механизмы которых кинематически связаны между
собой.
К стенду управления, и к кабине машиниста предъявляют особые
требования. Большое значение имеет посадка машиниста, возможность
регулировать положение сиденья относительно рукоятей рычагов и
педалей, взаимное расположение рычагов, комфортабельность кабины,
величина углов обозрения. Существенное значение имеет очистка
стекол кабины от пыли, снега и льда, обогрев кабины, вентиляция,
охлаждение и герметизация.
Наиболее часто включаемые рукояти рычагов управления распо-
лагают ближе к правой руке машиниста; рукояти вспомогательных
рычагов размещают так, чтобы не мешать переносу руки от одной
рукояти к другой. По условиям техники безопасности кабина должна
иметь удобный вход и выход при любом положении машины. Чтобы
не держать локти на весу, рекомендуется кресло машиниста снабжать
подлокотниками.
Направление движения рукоятей но возможности должно совпа-
дать с управляемым ими движением механизма машины. Если ход
рукояти перпендикулярен движению исполнительного механизма,
то обычно движение «на себя» соответствует подъему или повороту
вправо исполнительного органа, и наоборот.
Чаще всего движение рычагов и педалей производится в продоль-
ной вертикальной плоскости (бойевые движения больше утомляют
машиниста). Чтобы сократить число рычагов, применяют рычаги,
управляющие двумя движениями. Движения, не требующие плав-
ности включения, управляются кнопками.
На рис. 3.19 показаны наиболее эффективные зоны расположения
рычагов и педалей (эти зоны заштрихованы), а также зоны пределов
их досягаемости (ограничены линией).
Почти все самоходные машины имеют приводы управления ходовой
частью, узлами трансмиссии, рабочим оборудованием и другими
элементами машины.
Различают системы управления непосредственного действия и
системы управления с усилителями (сервоприводы).
Системы управления непосредственного действия. В них управ-
ление производится под действием усилия, прилагаемого машинистом
к рычагам или педалям, включающим тот или иной механизм. Усилие
на рычагах не должно превышать 7 кгс (70 Н) при ходе не более
250 мм, угол поворота педалей не более 60°, а поворот рукоятей 35°.
Если усилие на рычагах меньше 0,15 кгс (1,5 Н) и ход менее 120 мм,
машинист не может обеспечить плавное включение. При незначитель-
ных усилиях устанавливают кнопочное управление автоматическим
регулированием включения и выключения или автоматическое прог-
раммное управление также с автоматическим изменением силы вклю-
чения.
92
В отличие от систем непосредственного действия в сервоприводах
для управления используется посторонний источник энергии. В этом
случае машинист только включает систему управления. Посторонним
источником энергии служат электрический, гидравлический, пневма-
тический или механический приводы.
Как правило, механическую систему непосредственного действия
(рычажную) применяют только для выигрыша в силе. Рычажную
(рис. 3.20, а) систему используют в машинах небольшой мощности
Рис. 3.19. Зоны перемещения рук и ног оператора при работе
В механических передачах передаточное число iK зависит от отно-
шения длин рычагов, соединяющих педаль А с рычагом Б, непосред-
ственно включающим механизм, например тормоз, т. е.
где Sn — ход педали А, мм; h — ход рычага Б, мм. Сила Рх, действую-
щая на рычаг Б, равна:
где Р — сила, действующая на педаль А или рычаг выключателя,
кгс (Н).
В существующих конструкциях рычажных передач i„ = 25 — 40.
Нельзя допускать, чтобы величины t„ превышали указанные, так как
при этом получатся значительные величины отношений плеч и большое
количество рычагов, что снижает жесткость передачи и создает холо-
стой ход.
В рычажных гидравлических передачах для изменения усилия или'
величины хода используют два цилиндра разного диаметра. При
нажиме на педаль (рис. 3.20, б) из цилиндра 4 диаметром d выжимается
93
масло в цилиндр 1 диаметром dx. Если d < то ход поршня с диамет-
ром d2 будет меньшим, а усилие на штоке цилиндра 1 — большим,
чем усилие, прилагаемое для выжимания масла из цилиндра диамет-
ром d. Передаточное число такого механизма
ir = dl/d2. (3.28)
Такие системы не являются чисто гидравлическими, так как они
кроме цилиндров имеют еще систему рычагов. Общее передаточное
число
>«>«=(.<•.= (3.29)
Гидравлическая система является замкнутой и может работать
только при отсутствии потерь масла, так как при потерях его полу-
чается значительный мерт-
вый ход. Для того чтобы
восполнить эти потери (из-
за износа манжет и других
причин), в системе устанав-
ливают бачок 2, из кото-
рого все время пополняется
масло. Чтобы масло не вы-
жималось в бачок, устанав-
ливают обратный клапан 3
(рис. 3.20, б).
Эти системы управления
обладают тем недостатком,
что рабочий должен все
время держать руку на
рычагах управления или в
конструкции должны быть
специальные фиксаторы.
Приводы с усилителями.
Для уменьшения усилий на
рычагах и педалях управ-
ления применяют посто-
ронние источники энергии
в виде электрического, ги-
дравлического или пневма-
Рис. 3.20. Схемы управления непосредственного тического приводов
действия: „ j-д-
а — рычажного с ленточным тормозом; б — рычажно- ® ГИДрЭВЛИЧеСКИХ И
гидравлического пневматических приводах
управление сервомоторами
(гидроцилиндрами) осуществляется при помощи золотниковых уст-
ройств (см. рис. 3.11, е). Во многих случаях необходимо, чтобы
исполнительный орган как бы следил за управлением рукояток педа-
лей или штурвалов, т. е. чтобы он перемещался одновременно с пере-
мещением рукояти или штурвала. Например, при повороте штурвала
управления колесами трактора, автомобиля или другой колесной
машины колеса должны поворачиваться синхронно с поворотом
штурвала.
Если в системе управления установить обычный гидроусилитель
(например, сервомотор), то при повороте штурвала и перемещении
золотника сервопривод задаст угол поворота машины больший, чем
требуется, т. е. повернет колеса до упора.
Чтобы исполнительный орган следил за движением рычагов, при-
водимых в движение машинистом, применяют так называемые следя-
щие системы (рис. 3.21, а). Поворот рукояти управления относительно
неподвижной точки Ох приводит в первый момент к перемещению
штока золотника. Рычаг АВ занимает положение Л1В1, и золотник
открывает доступ масла в полость D цилиндра сервомотора. Поршень
сервомотора, преодолевая рабочее сопротивление, перемещает точку С
так, что рычаг АВ занимает прежнее положение, т. е. золотник воз-
вращается в исходное положение, перекрывая отверстие подачи масла
Рис. 3.21. Схемы управления со следящей системой
в цилиндр гидромоторов, и движение поршня со штоком прекращается.
Следовательно, золотник все время «следит» за движением сервопоршня.
Систему рычагов, связывающих шток сервопоршня с осью золот-
ника, называют обратной связью. Пример конструктивного оформления
следящей системы для управления рулевым механизмом показан на
рис. 3.21, б. При повороте руля по часовой стрелке поворачивается
червячный винт 6, сидящий на оси руля 9; одновременно он переме-
щается вдоль оси, на конце которой закреплен золотник 4 распре-
делительного устройства. При перемещении золотника влево откры-
вается отверстие, через которое масло из одной полости цилиндра 8
сливается, а в другую подается. При этом поворотная цапфа повора-
чивается, вместе с ней перемещается система рычагов обратной связи 2,
которые поворачивают зубчатый сектор 7. Последний перемещает
червяк, й вместе с ним и ось рулевого управления вправо. Вместе
с осью перемещается вправо золотник, прикрывая отверстие подвода
масла, которое было открыто поворотом руля. Таким образом, управ-
ление поворотом осуществляется по следящей схеме.
Пневматические системы управления включаются более плавно,
так как в них нет рабочей жидкости, а следовательно, и ее утечек.
Утечки воздуха не отражаются на качестве работы систем. Обычно эти
системы работают на давлениях 6—7 кгс/сма (0,6—0,7 МПа), в то время
95
как в гидравлических системах рабочее давление достигает иногда
300 кгс/см2 (30 МПа). Поэтому исполнительные органы в пневмати-
ческих системах имеют значительные размеры, что является их не-
достатком.
На рис. 3.22, а приведена одна из схем системы пневматического
управления тормозным и фрикционными устройствами экскаватора.
Система состоит из компрессора 1, который приводится в движение
обычно от коробки отбора мощности и снабжен предохранительным
Рис. 3.22. Схемы пневматического управления колесами:
] — компрессор; 2 — предохранительный клапан; 3 — масловлагоотдели-*
тель; 4 — ресивер; 5 — манометр; 6 — распределительное устройство (кра-
ны управления); 7, 8 — камеры; 9 — пневмокамера
клапаном 2, и ресивера 4, в котором накапливается запас воздуха для
обеспечения плавной работы системы. Между компрессором и реси-
вером установлен масловлагоотделитель 3 для очистки воздуха.
Широко распространены такие системы пневматического управле-
ния, в которых в качестве рабочих цилиндров (камер) применены
пневмокамерные муфты (рис. 3.22, б).
Средний расход воздуха пневмосистемы, (м3/ч)
Q4 = ntnq,
где т — среднее количество включений одного механизма в 1 ч;
п — количество включаемых механизмов; q — расход воздуха на
одно включение.
§ 3.7. ВИБРАЦИОННЫЕ УСТРОЙСТВА
В различных областях строительного производства используется
вибрация, которая создается с помощью вибрационных механизмов,
называемых вибровозбудителями.
Под воздействием вибрации значительно изменяются физико-
механические свойства некоторых материалов, так как вибрация
резко уменьшает внутренние силы трения. Так, песок, бетонные
смеси, грунты и другие материалы приобретают некоторые свойства
жидкости, что позволяет использовать вибрацию для уплотнения этих
материалов. Вибрацию применяют для грохочения материалов, для
96
транспортировки сыпучих материалов. В СССР созданы вибромолоты
для забивки свай и шпунта.
Как правило, в строительных механизмах вибровозбудители соз-
дают гармонические колебания, т. е. вибрируемое тело отклоняется
по времени от среднего положения по синусоидальному закону.
Основными параметрами, характеризующими процесс вибрации,
являются: амплитуда колебаний (а) — наибольшее абсолютное откло-
нение вибрируемого тела от среднего положения. Величина удвоенной
амплитуды «2й» называется размахом колебаний-, период колебаний
(Т) — время, в течение которого тело проходит полный цикл колеба-
ний^. е. полный размах); частота колебаний ([) — величина, обратная
периоду Т,
f=MT.
В качестве единицы измерения частоты принимается герц (Гц),
т. е. величина, равная одному колебанию в секунду. Дебалансные
вибровозбудители, выпускаемые серийно, имеют частоту (номиналь-
ную) 2800 кол/мин. Однако во многих случаях в зависимости от тех-
нологических требований вибровозбудители могут иметь большую
или меньшую частоту колебаний.
При работе вибровозбудителя возникает сила, которая вызывает
вынужденные колебания вибровозбудителя и поэтому она называется
вынуждающей силой (ранее эта сила называлась возбуждающей).
Величина амплитуды колебаний, а также вынуждающая сила
зависят от величины статического момента массы дебаланса Мс.
Этот момент равен произведению массы дебаланса т на эксцентри-
ситет г, равный расстоянию от центра массы О до оси вращения:
Мс=тг.
Величина вынуждающей силы
R = гпшР,
где <» — угловая скорость, рад/с.
Наиболее распространенным типом вибровозбудителей являются
центробежные вибровозбудители. Они разделяются на дебалансные
(центробежные) и планетарные. Применяют также электромагнитные
вибровозбудители.
Центробежные вибровозбудители. Вынуждающая сила создается
при вращении несбалансированного ротора (дебаланса), вращающе-
гося в подшипниках, закрепленных в корпусе. Дебалансные вибро-
возбудители в строительных механизмах выполняются одно- и двух-
вальными.
Одновальный вибровозбудитель показан на рис. 3.23, а. Электро-
двигатель 1 приводит во вращение вал 2 с закрепленным на нем де-
балансом 3. В таком вибровозбудителе вынуждающая сила имеет
круговое направление, поэтому его называют вибровозбудителем
с круговыми колебаниями.
На рис. 3.23, б показана схема двухвального вибровозбудителя,
у которого имеются два вала с дебалансами. Валы вращаются синхрон-
но в противоположных направлениях. Сумма вынуждающих сил
4 М. И* Гальперин
97
каждого из дебалапсов дает одну равнодействующую R', всегда имею-
щую одно направление. Такие вибровозбудители называются вибро-
возбудителями с направленными колебаниями.
Направленное действие вынуждающей силы можно также получить
на одновальных вибровозбудителях, но для этого корпус устанавли-
вается на шарнире (оси), как показано па рис. 3.24, а. В этом вибро-
возбудителе вертикальная составляющая создает направленные коле-
бания, а под действием горизонтальных составляющих корпус 2 стре-
мится совершать колебания подобно маятнику. Опрокидывание кор-
пуса вокруг оси шарнира 3 предотвращается введением в корпус
резиновых амортизаторов. Такие вибровозбудители называются маят-
никовыми (рис. 3.24, б).
Электродвигатель 5 приводит во вращение вал 6 с закрепленными
на нем дебалансами 1. Корпус электродвигателя установлен на оси 3
и может поворачиваться вокруг нее. Ось установлена на опорной
плите 4, на ось установлены резиновые амортизаторы 7.
Планетарные вибровозбудители. Для выполнения ряда технологи-
ческих процессов требуются вибровозбудители, имеющие значитель-
ную частоту колебаний. Получение высоких частот колебаний без
дополнительных устройств, увеличивающих частоту вращения при-
водного двигателя, можно получить в планетарных вибровозбудите-
лях (рис. 3.25).
Бегунок /, приводимый в движение валом 2, обкатываясь по беговой
дорожке, передает на нее вынуждающую центробежную силу. Разли-
чают вибровозбудители с наружной обкаткой бегунка (рис. 3.25, а),
где бегунок обкатывается по внутренней поверхности корпуса 3, и
с внутренней обкаткой (рис. 3.25, б), где бегунок обкатывается
внутренней поверхностью по сердечнику 4. Число колебаний зависит
98
от диаметра d бегунка или сердечника и диаметра D, по которому
обкатывается бегунок или который обкатывается по сердечнику:
для наружного обкатывания
п =____41__.
для внутреннего обкатывания
- — П1
П~
(3.30)
(3.31)
Рис. 3.24. Маятниковый вибровозбудитель с направленными колебаниями:
а — схема; б — конструкция
Частота колебаний этих вибровозбудителей 10 000 — 20 000 кол/мин.
В качестве привода инерционных вибровозбудителей могут быть
электрические, пневматические и гидравлические двигатели, в которых
вынуждающая сила создается не дебалансом, а давлением воздуха
или жидкости, поэтому пневматические и гидравлические вибровоз-
будители широкого распространения пока не получили.
Электромагнитные вибровозбудители с направленными колеба-
ниями (рис. 3.26) имеют наибольшее применение. Вибровозбудитель
состоит из катушки 1 с железным сердечником 2 и якоря 3, который
подвешен между четырьмя спиральными пружинами 4, сопротивляю-
щимися его перемещению вверх и вниз. Через выпрямитель к катушке
подводится электрический ток от сети переменного напряжения.
Вследствие этого якорь вибратора то притягивается к катушке, то
<4*
99
отталкивается от нее пружинами с частотой, соответствующей частоте,
с которой ток в электрической сети изменяет свое направление.
В качестве вынуждающей силы в электромагнитном вибровозбуди-
теле используются силы притяжения электромагнита.
Рис. 3.25. Схема планетарного
вибратора с внутренним обкаты-
ванием
Рис. 3.26. Электромагнитный
вибровозбудитель
Вынуждающая сила в этих вибровозбудителях
<м2>
где Ip — индуктивность обмотки якоря вибровозбудителя; i — сила
тока; — максимальный зазор между якорем и катушкой; х — теку-
щий зазор между якорем и катушкой.
Рис. 3.27. Схема вибромолота:
а — схема взаимодействия вмбровозбудитсля с бойком; б — то же, наголовника с на-
ковальней; 1 — вмбровозбуднтель с бойком; 2 — пружины; 3 — наголовник с нако-
вальней; 4, 5 — шары
Вибромолоты. Кроме механических чисто инерционных вибро-
возбудителей применяют механические инерционно-ударного дей-
ствия, так называемые вибромолоты (рис. 3.27,а).
При вращении дебалансов вибровозбудителя корпус его будет
колебаться. Колебания корпуса при движении вниз ограничены
расстоянием а между бойком и наковальней наголовника. В точке их
встречи А скорость движения корпуса вниз максимальная, и корпус
в момент встречи обладает определенной долей энергии, которая
передается наковальне с наголовником. Под действием этой энергии
100
наголовник будет стремиться сдвинуться вниз. После изменения
направления действия вынуждающей силы корпус начнет двигаться
вверх (точки В). В промежуток времени между точками А и В корпус
вибровозбудителя, находясь в соприкосновении с наголовником,
движется вместе с ним как одно целое.
Чтобы выяснить, как передается энергия от вибровозбудителя
к наголовнику, рассмотрим принцип его работы на следующем при-
мере. Тяжелый шар 4 движется с некоторой скоростью (рис. 3.27,6)
в направлении шара 5, упирающегося в пружину 2. Шар 5 имеет кине-
тическую энергию, величина которой тем значительнее, чем больше
масса шара и скорость его движения. Если на пути движущегося шара
встретится сопротивление, то для его преодоления шар 4 должен
затратить часть кинетической энергии. Работа, произведенная шаром 4,
тем больше, чем значительнее сопротивление; при этом скорость его
соответственно уменьшится. Если на преодоление сопротивления
движению шара потребуется затратить всю кинетическую энергию,
то он остановится.
Итак, шар 4, встретив на пути шар 5, удерживаемый пружиной,
замедляет свое движение. Замедление будет тем резче, чем больше
жесткость пружины, т. е. чем большее усилие необходимо для ее сжа-
тия. В момент встречи часть кинетической энергии шара 4 переходит
в работу сжатия пружины и трогания с места шара 5. Чем больше
масса шара 5 и жесткость пружины, тем значительнее сопротивление
движению шара 4 и тем большая часть энергии шара 4 перейдет в рабо-
ту сжатия пружины.
После встречи шары будут продолжать двигаться вместе, пока вся
кинетическая энергия шара 4 не перейдет в работу. Аналогично
в вибромолоте: кинетическая энергия вибровозбудителя переходит
в работу не только в момент удара бойка корпуса о наковальню наго-
ловника, но и при дальнейшем движении обеих частей вибромолота,
пока не затратится вся кинетическая энергия вибровозбудителя или
пока в результате изменения направления движению дебалансов
корпус вибровозбудителя не начнет перемещаться вверх и не оторвется
от наголовника.
Расстояние а (рис. 3.27, а) выбирают таким, чтобы в момент встречи
скорость движения корпуса вибровозбудителя была наивысшей. В этом
случае он будет иметь наибольшую кинетическую энергию и сможет
произвести при ударе максимальную работу.
ГЛАВА 4
ТРАНСПОРТНЫЕ СРЕДСПА
Ежегодно в нашей стране перевозится более 3 млрд, т грузов для
строительства. При этом используются железнодорожный и водный
транспорт, автомобили, автомобильные поезда, состоящие из тягачей
различных видов, прицепов и полуприцепов, специализированные
транспортные машины для перевозки строительных материалов и
изделий.
Рис. 4.1. Основные транспортные средства, применяемые в строительстве
Расходы только на автомобильный транспорт в строительстве
достигают 10—12% стоимости строительно-монтажных работ. На авто-
транспорте и связанных с ним погрузочных работах занято до 25%
всех рабочих в строительстве.
На рис. 4.1 приводится схема основных транспортных грузов и
средств для их перевозок.
§ 4.1. ТРАКТОРЫ
Гусеничные и колесные тракторы агрегатируют с землевозами,
трайлерами и различными видами тележек, кроме того, их исполь-
зуют в качестве буксирных средств.
Колесные тракторы более мобильны, чем гусеничные, могут раз-
вивать большую скорость — до 40 км/ч. Они наиболее эффективны
на дорогах с твердым покрытием. При перевозке по неподготовленным,
временным дорогам выгоднее использовать гусеничные тракторы,
102
Рис. 4.2. Гусеничный трактор:
а — общий вид трактора; б — кинематическая схема; / — силовая установка;
2 — капот; 8 — муфта сцепления; 4 — карданный вал; 5 — кабина; 6 — топливные
бакн; у — коробка передач; 8 — бортовая передача; Р — ведущая звездочка;
iO — гусеничная цепь; 11 — опорные каткн; 12 — рама; 13 — направляющее ко-
лесо; 14 — центральная передача; 15 — бортовой фрикцион; 16 — тормоз
которые имеют лучшую проходимость. Их скорость не превышает
12 км/ч. Удельное давление на грунт гусеничных тракторов 1 кгс/см2
(0,1 МПа), у колесных тракторов — около 2,5—3,5 кгс/см2 (0,25—-
0,35 МПа). Сила тяги гусеничных тракторов примерно равна их массе,
а колесных — только половине массы.
Различают тракторы общего назначения, мелиоративные, карьер-
ные, малогабаритные и специальные — для работы с отдельными
типами машин.
Главным параметром тракторов является номинальное тяговое
усилие.
Гусеничные тракторы выпускают следующих тяговых классов:
30; 40; 60; 250; 350 кН, колесные тракторы: 9; 14; 35; 100 кН. Основные
параметры тракторов приведены в табл. 4.1.
Таблица 4.1
Основные параметры тракторов
Параметры Виды тракторов
гусеничные колесные колесные
Мощность двигателя, л. с. 75—500 40—200 75—240
(кВт) (~65—420) (—35—160) (~65—200)
Количество передач;
вперед 3—9 4—18 3—5
назад 1—4 2—8 1—2
Скорость движения, км/ч: 2.4—17,6 4,0—55
вперед 1,6—39,8
назад 2,0—14,6 1,6—40,8 4,5—21,2
Удельное давление, кгс/см2 (МПа): 0,3—0,57
гусениц — —
(0,03—0,057)
в шинах — 0,8—3,0 2,5—3,5
(0,08—ОД) (0,25—0,35)
Дорожный просвет (клиренс), 280—570 0,8—5,0 2,5—3,5
ММ
Масса, кг 6350—35 000 2600—12 000 7500—12500
Общий вид и схема гусеничного трактора показаны на рис. 4.2.
Кроме этих параметров тракторы и тягачи характеризуются видом
трансмиссии — механическая, электромеханическая и гидромехани-
ческая; конструкцией подвески — балансирная с каретками, полу-
жесткая, эластичная и др. Все рассматриваемые транспортные машины
могут иметь различное расположение кабины — заднее, переднее и
среднее.
§ 4.2. АВТОМОБИЛИ
Автомобили являются не только транспортными средствами, но
и базовыми машинами, на которых монтируют краны, буровые уста-
новки, монтажные вышки, ремонтные мастерские и другое оборудо-
вание. Средняя грузоподъемность парка автомобилей в строительстве
составляет примерно 4,6 т. Увеличение этой грузоподъемности до
10—11 т за счет увеличения удельного веса большегрузных автомо-
104
билей в ближайшие годы позволит снизить стоимость перевозок в два
раза.
В зависимости от типа двигателя различают автомобили карбюра-
торные, дизельные, газогенераторные и газобаллонные. Современные
грузовые автомобили, начиная с грузоподъемности 5 т, выпускаются
почти исключительно с дизелями.
По назначению автомобили делятся на бортовые, автосамосвалы,
специализированные (автоцементовозы, автоцистерны, панелевозы и др.).,
Главным параметром автомобиля, определяющим конструкцию
его основных узлов, является нагрузка на ведущий мост. Грузоподъем-
ность при нормальной эксплуатации меняется в зависимости от числа
осей. Для дорог с обычным и усовершенствованным покрытием допус-
каемая нагрузка на ось соответственно 6 и 10 т (60 и 100 кН). Для обоз-
начения грузовых автомобилей принята формула, соединяющая зна-
ком умножения две цифры: первая — количество колес, вторая —
количество ведущих колес (двойные скаты считаются за одно колесо).
Обычный грузовой автомобиль имеет формулу 4x2, трехосный
с двумя ведущими осями — 6x4 и т. д.
На рис. 4.3, а приведена схема расположения узлов автомобиля
малой грузоподъемности. Двигатель 1 через муфту сцепления передает
крутящий момент коробке передач 3. Муфта сцепления представляет
собой дисковую фрикционную муфту, что позволяет кратковременно
отсоединить двигатель от трансмиссии и вновь их соединить при пере-
ключении передачи и трогании автомобиля с места.
Коробка передач 3 служит для изменения крутящего момента,
передаваемого от коленчатого вала двигателя к карданному валу.
Это необходимо, так как при трогании автомобиля с места, при дви-
жении на подъем с грузом крутящий момент должен быть большим,
чем при движении по горизонтальным участкам. Коробка передач
также позволяет переключать движение машины с переднего на задний
ход. Изменение передаваемого крутящего момента достигается вклю-
чением различных пар зубчатых передач с разными передаточными
числами.
Коробка передач 3 приводит во вращение главную передачу 6
через промежуточный карданный вал 4 и главный карданный вал 5.
Карданные валы между собой и валами коробки передач и главной
передачей соединяются при помощи шарниров, благодаря чему не
сказывается смещение оси коробки передач относительно оси главной
передачи.
Главная передача (рис. 4.3, б) служит для передачи движения
под прямым углом к полуосям 7, а также для увеличения крутящего
момента. Главная передача состоит из конической передачи 11 и
дифференциала 8, который распределяет подводимый к нему крутящий
момент между полуосями 7 и позволяет им вращаться с неодинаковой
скоростью. Такая необходимость объясняется тем, что когда автомо-
биль движется по прямой и ровной дороге, оба ведущих колеса встре-
чают разное сопротивление качению, при этом ведомая шестерня 11
главной передачи вращает коробку дифференциала 10 с сателли-
тами 9.
105
Рис. 4.3, Схема расположения узлор автомобиля
Сателлиты, находясь в-зацеплений с правой й левой пблуосеВЫМй
шестернями 12, приводят их во вращение с одинаковой частотой,
сами при этом не вращаясь.
На поворотах внутреннее колесо при одном и том же угле поворота а
(рис. 4.3, е) должно пройти путь а—а, который меньше пути внешнего
колеса б—б, т. е. оно должно делать меньшее число оборотов, чем
внешнее: пвнеш > пвнут. При повороте внутреннее колесо встречает
большее сопротивление, происходит изменение действующих усилий
в дифференциале, сателлиты начинают вращаться, благодаря чему
уменьшается частота вращения внутреннего колеса.
Различают автомобили нормальной проходимости, способные ра-
ботать на шоссейных и других дорогах с твердым покрытием, и повы-
шенной проходимости, предназначенные для передвижения по про-
селочным дорогам и бездорожью. Последние бывают с двумя и более
ведущими мостами.
На рис. 4,3, г показана схема трансмиссии автомобиля с передним
и задним ведущими мостами. В трансмиссии такого автомобиля помимо
перечисленных механизмов имеются: раздаточная коробка 13, допол-
нительный карданный вал 14 и передний ведущий мост 15 с главной
передачей и дифференциалом.
Для специальных работ применяют плавающие автомобили, прис-
пособленные для преодоления водных преград.
Автомобили общего назначения выполняют двухосными с задней
ведущей осью, снабженной двускатными колесами. Они оборудуются
кузовами общего назначения (бортовые автомобили) или самор аз -
гружающиеся (самосвалы), а также другим специальным оборудо-
ванием. На их базе заводы выпускают специальные модификации авто-
мобилей соответствующей грузоподъемности, в том числе седельные
тягачи для работы с полуприцепами, многоосные автомобили и др.
Для строительства нерационально применять автомобили грузоподъем-
ностью менее 5 т. Для перевозки массовых грузов целесообразны авто-
мобили средней и большой грузоподъемности.
Повышение грузоподъемности благодаря дополнительным осям,
прицепам и полуприцепам увеличивает длину и значительно ухудшает
маневренность автомобиля. Но при хороших дорожных условиях
и особенно при перевозке на большие расстояния использовать полу-
прицепы и прицепы очень выгодно. Однако увеличение грузоподъем-
ности таким способом требует применения двигателей повышенной
мощности.
Увеличение числа ведущих осей несколько усложняет конструкцию
и повышает вес и стоимость автомобиля. Для обеспечения хороших
транспортных качеств при работе с полуприцепами и прицепами сред-
няя мощность автомобилей при нагрузке на ось 18—6 тс (180—60 кН),
отнесенная к 1 тс общего веса с грузом, должна составлять соответ-
ственно 7—16 л. с. (?а6—13 кВт), т. е. больше для машин меньшей
грузоподъемности.
В последнее время в строительстве вместо транспортных автомо-
билей применяют специальные большегрузные автомобили. Они более
приспособлены к тяжелым условиям строек, а унифицированные узлы,
107
входящие в состав различных строительных машин, облегчают экс-
плуатацию и ремонт строительного и транспортного оборудования.
Большое применение в строительстве имеют самосвалы и земле-
возные тележки, применяемые для всех видов сыпучих грузов. Коли-
чество самосвалов в автопарке строительства достигает 60%.
Различают следующие типы самосвалов и тележек: 1) донные
(рис. 4.4, а), разгрузка которых осуществляется раскрытием створок
днища; их применяют для разгрузки в бункера и с эстакад; 2) с зад-
ней (рис. 4.4, б) или передней (рис. 4.4, в) разгрузкой; передняя раз-
грузка осуществляется на машинах, у которых кузов находится впе-
реди кабины водителя; 3) с боковой разгрузкой (рис. 4.4, г), применяе-
мые при массовых работах по разгрузке и поточном движении авто-
мобилей. Реже используют трехстороннюю разгрузку, а также боко-
вую одностороннюю.
Рис. 4.4. Схема разгрузки самосвалов и землевозных тележек
Опрокидывается кузов самосвала обычно с помощью гидравли-
ческих цилиндров, простых или телескопических. Масло подается
в гидроцилиндр масляным насосом, приводимым в действие от коробки
отбора мощности. Шток цилиндра поднимает кузов автомобиля, шар-
нирно закрепленный на раме. Опускается кузов под действием соб-
ственного веса, для чего открываются отверстия выпуска масла из
цилиндра. Общий вид подъемника и гидравлическая схема его показаны
на рис. 4.5.
Для перевозки деталей перекрытий, стеновых панелей и других
подобных грузов применяют автосамосвалы со скользящим кузовом,
который для разгрузки сначала выдвигается назад на половину
своей длины, а затем поворачивается на угол до 42°. При этом одно-
временно машина движется вперед. В результате наклона детали спол-
зают, а так как при выдвинутом и наклонном кузове нижний край
кузова почти касается земли, то разгружаемые детали не ударяются
о землю и не ломаются.
$ 4.3. ТЯГАЧИ И ПРИЦЕПЫ
Тягачи представляют собой машины, специально приспособлен ше
для работы с навесным и полуприцепным оборудованием. Их приме-
няют также для подталкивания грузов или страховки тяжелых авто-
поездов на подъемах, спусках и уклонах. Тягач может быть гусеничным
и колесным.
108
Рис. 4.5. Общий вид (а) и схема работы гидравлического подъемника само-
свала (б):
1 — коробка отбора мощности; 2 — насос; 3 — ось поворота цилиндра: 4 — цилиндр;
5 — шток; 6 — устройство поворота тяг; 7 — тяги; 8 — нарамник; 9 — платформа;
Z — выдвижение штока и начало подъема платформы; II —* конец подъема платформы;
111 — опускание платформы
Рис. 4.6. Опорно-сцепные (седельные) и сцепные устройства:
1 опорная плита; 2 — балансир; 3 — ось балансира; 4 — плита; 5 — замок;
6 — запорный кулак; 7 — рукоять; 8 — кронштейн; 9 — шкворень; 10 — гидро-
цилнндр поворота тягача; И —* ось
Если тягач предназначен для транспортных работ, то для этой
цели используют автомобиль (обычно с укороченной базой) с опор-
посцепным (седельным) устройством, установленным вместо снятого
кузова. В этом случае чаще применяют опорно-сцепное устрой-
ство, установленное на тягаче с направляющими полозьями
(рис. 4.6, а).
Седелыю-сцепное устройство состоит из опорной плиты 1, балан-
сира с осями 2, оси балансира 3, плиты 4 замка, выполненного в виде
двух захватов 5, установленных на осях на плите. Захваты фикси-
руются запорным кулаком 6, который перемещается с помощью
рукояти 7.
Седельное устройство может качаться вокруг продольной гори-
зонтальной оси 3, что позволяет полуприцепу перекашиваться отно-
сительно тягача в вертикальной плоскости. Недостатки такого устрой-
ства заключаются в необходимости точно ориентировать полуприцеп
относительно тягача при сцепке, больших силах трения в седле, что
затрудняет сцепку на скользкой дороге, и применении значительного
ручного труда при сцепке и расцепке.
Соединяется полуприцеп с тягачом вертикальным шкворнем
(рис. 4.6, б).
Чтобы избежать заноса полуприцепа при торможении, особенно
опасного при повороте, между тягачом и полуприцепом устанавли-
вают стабилизаторы в виде горизонтальных гидроцилиндров, которые
при торможении автоматически фиксируют положение полуприцепа.
В горизонтальном положении полуприцеп после отцепки удерживается
опорными катками, выдвигаемыми специальным устройством.
Для транспортирования агрегатов и аппаратов технологического
и другого оборудования, собранного из крупных блоков массой до
500 т и более, применяют специальные прицепы (полуприцепы) —
тяжеловозы, на которые устанавливаются лебедки и трапы для под-
таскивания грузов.
В зависимости от грузоподъемности такие прицепы снабжаются
двумя, четырьмя или шестью осями. Колеса их устанавливаются не
на сплошные оси, а на короткие балансирные подвески, соединенные
в систему, которая позволяет им «приспосабливаться» к неровностям
дороги. Платформы прицепов-тяжеловозов могут опускаться с по-
мощью гидравлических устройств, чтобы облегчить погрузку тяже-
лого оборудования так, что пол платформы отстоит от дороги на вы-
соту ее балок 350—400 мм. Это особенно необходимо для погрузки
своим ходом тяжелых строительных машин. Грузоподъемность прице-
пов-тяжеловозов доходит до 550 т.
При массовых перевозках грузов по хорошей дороге применяют
поезда из автомобилей с полуприцепами и прицепами. Сцепные устрой-
ства автомобилей и тягачей для полуприцепов обычно бывают выпол-
нены в виде крюка. Их недостатком является быстрый износ (после
10—15 тыс. км пробега), динамические нагрузки и неспокойный ход
поезда вследствие зазоров, трудоемкость и опасность операций по
сцепке — расцепке. Более совершенным приспособлением является
тяговая вилка с поворотно-выдвижным устройством (рис. 4.6, в).
ПО
Имеются сцепные устройства, обеспечивающие следование колес
прицепа по колее задних колес автомобиля, что значительно упрощает
управление поездом и увеличивает безопасность движения.
Большое применение в строительстве имеют специальные колесные
тягачи. Их применяют в сочетании с полуприцепным, навесным или
прицепным оборудованием. Они являются базовыми машинами для
самых разнообразных колесных машин-орудий и очень большой но-
менклатуры машин специального агрегатирования. Такие тягачи
можно собирать в различной компоновке из унифицированных сбороч-
ных единиц (рис. 4.7, а, в, г, д). Их можно приспособить для разно-
образных работ, так как они воспринимают значительные вертикаль-
Рис. 4.7. Схемы агрегатирования тягачей для унифицированных узлов:
а — одноосный; б — сдвоенный по системе тандем из шарнирно-соединенных одноосных тяга-
чей; в — двухосный короткобазовый; г — двухосный длиннобазовый седельный; д — двухос-
ный с шарнирной рамой; е — то же, с двумя двигателями
ные и боковые нагрузки всеми осями и коробкой передач, часто имею-
щей одинаковые передачи переднего и заднего хода, а управление
спроектировано так, что водитель с пультом может поворачиваться
на 180°.
Существует несколько видов колесных тягачей. Одноосный тягач
(рис. 4.7, а) может самостоятельно передвигаться и выполнять какие-
либо рабочие операции только с полуприцепами различного назначе-
ния, так как может поворачиваться под углом в 90Q к продольной оси
полуприцепа под действием двух горизонтальных гидроцилиндров 4
(рис. 4.8). Отличается высокой маневренностью, пригоден для агре-
гатирования с полуприцепами почти любого назначения, однако он
не пригоден (без полуприцепа) для навесного оборудования и для
скоростей более 60 км/ч вследствие значительных вредных для води-
теля колебаний, основным источником которых являются изменяю-
щиеся нагрузки, передаваемые полуприцепом на тягач через сцепное
устройство тягача 3. Эти колебания только частично гасятся демпфи-
рованием сиденья.
Ill
Рис. 4.8. Одноосный тягач:
а — общий вид; б — кинематическая схема; / — распределитель;
2 — кронштейн: 3 — сцепное устройство; 4 — гидроцилиндр; 5 — на-
сос; 6 — Двигатель: 7 — раздаточная коробка; 8 — турботрансфор-
матор; 9 — коробка передач; 10 — карданный вал; 11 — главная пе-
редача с дифференциалом; /2 — карданный вал; 13 — полуось;
14 — конечная планетарная Передача
В последнее время создан специальный демпфер в седловом устрой-
стве, позволивший увеличить скорость хода одноосных тягачей до
65—75 км/ч. Это резко снизило эффективность применения скорост-
ных двухосных тягачей, которые дороже и тяжелее одноосных. Осу-
ществление привода осей полуприцепа позволяет увеличить сцепной
вес машины, который без этого не превышает 55% общего веса агре-
гата. Нагрузка на седло тягача может превышать вес тягача в 1,5 раза.
Одноосные тягачи могут агрегатироваться попарно по системе тандем,
образуя модификации двухосного тягача с шарнирно-сочлененной
рамой.
В отличие от одноосного двухосный тягач может передвигаться
самостоятельно и агрегатироваться с навесным оборудованием и по-
луприцепами. Двухосные тягачи выполняются следующих типов.
3 5 5 6
Рис. 4.9. Цементовоз:
/ — компрессор; 2 — шланг подачи воздуха; 3 — цистерна; 4 — аэролоток;
5 — пористая перегородка аэролотка; 6 — загрузочный патрубок; 7 — раз-
грузочным патрубок
1. Двухосные короткобазные тягачи (см. рис, 4.7, е) с приводом
на обе оси; они имеют передние или задние колеса поворотными при
одной управляемой оси или очень редко все колеса поворотными;
обладают меньшей маневренностью, однако 85% их сборочных единиц
унифицированы с одноосным тягачом; допускают вертикальные на-
грузки, равные массе тягача. Поскольку рабочие скорости машин,
агрегатируемых с этими тягачами, не превышают 25 км/ч, а для тран-
спортных работ с прицепами такие тягачи малопригодны вследствие
небольшой массы, то наибольшие скорости их не превышают 40 км/ч —
предела, после которого машину необходимо подрессоривать.
2. Двухосные и реже трехосные тягачи с седельным устройством
с одним ведущим мостом и подрессоренной передней осью (см.
рис. 4.7, г). Обычно, так же как и одноосные тягачи, их можно агре-
гатировать почти с любыми полуприцепами. Однако в большинстве
случаев они менее эффективны, чем одноосные тягачи, вследствие
большей массы при том же сцепном весе. Раньше, имея максималь-
ную скорость до 80 км/ч, они были наиболее целесообразны для тран-
спортных работ и эффективны для скреперных работ при дальности
возки 3—6 км и более. Это их преимущество в значительной мере
ослаблено после демпфирования седельного устройства одноосных
тягачей.
113
3. Двухосные тягачи с шарнирно-сочлененной рамой (см.
рис. 4.7, д, е); применяются только для установки навесного оборудо-
вания (погрузчик, бульдозер, толкач), требующего особой маневрен-
ности. Тягачи с шарнирно-сочлененной рамой имеют несколько мень-
шую устойчивость, однако их высокая маневренность повышает про-
изводительность, снижая цикл погрузчика до 22—24 с, что позволяет
погрузчикам на их базе конкурировать с экскаватором весом в пять
раз больше, чем вес погрузчика.
На рис. 4.9 в качестве одного из примеров агрегатирования показан
цементовоз на базе двухосного тягача с полуприцепом. Для разгрузки
цемента применяется аэрационный способ. В цистерну с цементом
подается от компрессора сжатый воздух. Он поступает под аэролоток,
дно которого выполнено из мягкого пористого материала. Воздух,
проходя через эту перегородку, разжижает цемент и создает в ци-
стерне некоторое давление, что облегчает выход цемента через раз-
грузочный патрубок.
Контрольные вопросы
1. Что вы знаете о перспективах развития автопарка строительства?
2. Какие вы знаете специальные автомобили?
3. Вычертите кинематические схемы гусеничного и колесного тягачей.
4. Вычертите принципиальную схему цементовоза.
5. Укажите основные методы агрегатирования, принятые прогрессивными авто-
заводами, и расскажите об изготовляемых ими моделях и принципах унификации.
6. Какова удельная мощность на 1 тс веса у одно- и двухосных тягачей?
7. Чем отличаются двухосные тягачи от одноосных?
ГЛАВА 5
ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
Грузоподъемными машинами поднимают и перемещают различные
строительные материалы по вертикали или по пространственной трассе,
изменяющейся в горизонтальном и вертикальном направлениях.
С помощью этих машин монтируют основные строительные конструк-
ции во всех видах строительства, а в промышленном строительстве —
технологическое оборудование. Многие из этих работ сочетаются со
строповкой и пакетированием грузов, подтаскиванием грузов к гру-
зоподъемному устройству и другими такелажными работами. Работают
грузоподъемные машины чаще всего циклично.
Грузоподъемные машины можно разделить на следующие группы:
1. Вспомогательные (простые) машины и механизмы — домкраты,
лебедки и тали.
2. Подъемники — машины, перемещающие грузы в ковшах, клетях,
кабинах или на площадках, движущихся в жестких направляющих.
3. Краны — наиболее сложные и универсальные грузоподъемные
машины для подъема, перемещения по пространственной трассе и
подачи грузов и монтажа конструкций.
§ 5.1. ДОМКРАТЫ, ЛЕБЕДКИ, ТАЛИ
Эти устройства могут иметь ручной, электрический, гидравличе-
ский или пневматический привод.
Устройства с ручным приводом основаны на том, что человек,
прикладывая сравнительно малое усилие — в среднем 16 кгс (160 Н),
может поднимать значительный груз.
Домкраты обычно используют для подъема груза на небольшую
высоту, причем воздействуют на груз снизу; их делят на реечные
(грузоподъемность до 6 т, высота подъема до 0,3 м), винтовые (грузо-
подъемность до 50 т, высота подъема до 0,35 м) и гидравлические
(грузоподъемность 50-4-500 т, высота подъема 0,15—0,2 м).
Домкраты с ручным приводом показаны на рис. 5.1. Грузоподъем-
ность устройств с ручным приводом определяется передаточным от-
ношением от механизма привода к исполнительному органу (штоку
домкрата и т. д.) и КПД механизма. Величину веса груза при задан-
ном усилии на рукояти домкрата можно найти, приравняв работу,
совершаемую рабочим за один оборот рукояти домкрата или за один
ход поршня, к работе, которая затрачивается на подъем груза. Тогда:
1) для винтового домкрата (рис. 5.1, а)
I
P-2nR = Qs^, (5.1)
115
где Р — усилие, прилагаемое рабочим, кгс (Н); Р — длина (радиус)
рукояти, мм; Q —- грузоподъемность домкрата или величина преодо-
леваемого сопротивления, кгс (Н); s— величина перемещения груза
на один оборот рукоят-
ки (соответствует шагу
винта домкрата), мм;
— КПД устройства.
Из формулы (5.1)
Q = (5.2)
леваемого сопротивления, кгс (Н); s
а)
Подвод маш
Рис. 5.1. Домкраты:
а — пинтовой; б — реечный; в — гидравлический:
е ’— беспоршневой; 1 — рукоять; 2 — винт: 8 — гайка;
4 — храповое колесо; 5 — защелка; б — зубчатое ко-
лесо; 7 — шток с рейкой и лапой; 8 — основной пор-
тень; У — клапан; 10 — цилиндр ручного насоса;
11 — шток ручного насоса; 12 — маслобак; 18 — всасы-
вающий клапан
2) для реечного дом-
крата (рис. 5.1,6) вели-
чина Q определяется
той же зависимостью,
что и для винтового
домкрата, но величина
перемещения s груза за
один оборот рукояти за-
висит от передаточного
числа I между шестер-
ней, закрепленной на
оси рукояти домкрата,
и зубчатым колесом,
приводящим в движение
рейку домкрата и диа-
метра делительной ок-
ружности этого зубча-
того колеса:
s = nd/i,
где d = тг (т — модуль
зуба, z — число зубьев).
Следовательно,
3) в гидравлическом
домкрате (рис. 5.1, в)
жидкость (обычно масло)
подается ручным насо-
сом с диаметром штока d в основной цилиндр с диаметром порш-
ня D. Грузоподъемность домкрата
_ г „ яД2
Q —- Q — Я ~4~»
где q — давление масла в цилиндре, равное давлению масла, созда-
ваемому ручным насосом, кгс/см2 (МПа); Fa — площадь сечения основ-
ного цилиндра.
(5.4)
116
Усилие Р, прилагаемое рабочим, диаметр d и давление q связаны
зависимостью
P = р=9?т- М
Разделив уравнение (5.4) на уравнение (5.5), получим:
<2 = р^4= <5-6)
4) в беспоршневых домкратах в замкнутый объем, который может
деформироваться (рис. 5.1, г), накачивается масло под высоким дав-
лением. Под действием этого давления стенки домкрата перемещаются;
величина перемещения а (ход домкрата) достигает 20 мм. Их грузо-
подъемность достигает 200 т. В этих домкратах
Q = Fq, (5.7)
где F — площадь поперечного сечения домкрата, м2.
Лебедки делятся на однобарабанные и многобарабанные, по виду
установки — на настенные, подвесные и наземные. Главным парамет-
ром лебедок является тяговое усилие S. Кроме того, лебедки характе-
ризуются канатоемкостью барабана L и скоростью каната V.
В зависимости от назначения лебедки эти параметры различны.
Лебедки делят на подъемные — общего назначения и монтажные;
тяговые — для перемещения грузов по горизонтали; скреперные
(обычно двухбарабанные) — для. транспортирования ковшей-волокуш
с заполнителями.
Лебедки общего назначения имеют тяговое усилие 0,5—7,5 тс
(5—75 кН), скорость каната до 30 м/мин, канатоемкость 80—100 м.
Тяговое усилие монтажных лебедок 1—2,5 тс (10—25 кН), скорость
каната 10—15 м/мин, канатоемкость 30—40 м.
Схема барабанной лебедки с ручным приводом дана на рис. 5.2, а.
Тяговое усилие
5 = 2Р-^4т1кгс(Н), (5.8)
где Р — усилие, -прилагаемое к рукояти одним или несколькими
рабочими, кгс (Н); R — длина рукояти, мм; D — диаметр барабана
лебедки, мм; i — передаточное число от вала, на который насажена
рукоять, к валу барабана; t] — КПД лебедки.
Схемы барабанных лебедок с электрическим приводом даны на
рис. 5.2, б, в.
На рис. 5.2, б дана схема электрореверсивной лебедки. Она при-
водится в движение реверсивным электродвигателем, вал которого
жестко связан с барабаном с помощью редуктора. Опускание груза
производится при обратном ходе двигателя на режиме его работы.
Между двигателем и редуктором устанавливается тормоз для удер-
жания груза. Обычно' применяют тормоза двухколодочные электро-
магнитные, которые автоматически включаются при отключении элект-
родвигателя.
117
На рис. 5.2, в показана схема фрикционной лебедки. Привод осу-
ществляется от электродвигателя, связанного с барабаном не жестко,
а с помощью фрикционной муфты. Включение барабана произво-
дится включением и выключением фрикциона при помощи рукояти,
р н
Рис. 5.2. Схемы лебедок:
а _ барабанная с ручным приводом: 6 — электрореверсивная; в — фрикционная; 1 — ру-
коять; 2, 4 — зубчатые передачи; 3 — храповик; 5 — барабан; 6 — редуктор; 7 — тормоз;
S — электродвигатель; 9 — фрикционная муфта; 10 — тормоз ленточный; И — гайка
вращающей гайку с прямоугольной нарезкой, которая сидит на оси
барабана таким образом, что при вращении гайки барабан отжимается
или прижимается к конусным фрикционным колодкам. Для удержа-
ния груза на весу в этих лебедках имеется храповое устройство.
Тормоз (обычно ленточный) устанавливается на шкиве фрикционной
муфты и управляется вручную.
Рис. 5.3. Ручная рычажная лебедка
Фрикционные лебедки дают возможность осуществлять более плав-
ное трогание груза с места, поэтому их применяют в кранах, в част-
ности вантовых, жестконогих и кабельных.
Во всех механических лебедках скорость подъема груза или ско-
рость его подтягивания постоянна, если в редукторе нет коробки
передач.
118
Рис. 5.4. Ручная таль:
/ — цепь подъема груза; 2 — тормоз-
ное устройство; 3 — звездочка; 4 —
червячное колесо; 5 —• крюк для под-
вешивания тали; 6 — приводное коле-
со; 7 — цепь привода тали) 8 — крюк
для подвешивания груза
Мощность для подъема груза G (кгс) со скоростью v равна:
M = Gv/l02i], кВт. (5.9)
Канатоемкость барабана L, т. е. длина каната, который может
быть уложен на барабане, зависит от длины рабочей части барабана I
(мм), диаметра барабана D (мм), числа
слоев каната на барабане т и диа-
метра каната d (мм):
, 1тл (D + ind)
L = ЛООСИ ’м- <5Л0)
Рычажные ручные лебедки (рис. 5.3)
широко применяются при монтажных
работах. Они предназначены для под-
тягивания и подъема грузов. Основ-
ное преимущество этой лебедки —
очень малый вес. Лебедка с тяговым
усилием в 3 тс весит 55 кг (из них
25 кг весит трос).
Работа лебедки основана на про-
тягивании каната через тяговый ме-
ханизм. Поворотом рукояти 1 перед-
него хода перемещается тяга 2 и по-
ворачивается поводок 3. Поводок
связан тягой 10 с корпусами перед-
него 9 и заднего 8 захватов. В кор-
пусах захватов установлены серьги 5
и 6, в которых размещены сухари 7,
охватывающие канат. При повороте
рукояти 1 по часовой стрелке сухари
захвата 9 освобождают канат и пере-
мещаются вместе с серьгами по ка-
нату вправо. В это время сухари
захвата 8 держат зажатым канат. При
повороте рукояти 1 против часовой
стрелки сухари захвата 9 зажимают
канат и протаскивают его влево, в
это время сухари захвата 8 освобож-
дают канат. Рукоять 4 служит для
осуществления заднего хода.
Тали применяют только для подъема и опускания или подтягива-
ния небольших грузов, стягивания между собой отдельных элементов
при монтажных работах, натягивании канатов и проводов при
усилиях 0,1—5 тс (1—5 кН). Тали делят на ручные и электри-
ческие.
На рис. 5.4 приведена ручная таль. Выигрыш в силе достигается
применением полиспаста. Для уменьшения габаритов вместо канат-
ных полиспастов применяют системы из звездочек и пластинчатых,
шарнирных или сварных калиброванных цепей.
119
или леса здании, для подачи сыпучих
Рис. 5.5. Свободностоящий мачтовый подъем-
ник:
а — общий вид; б — схема запасовки канатов при
работе; в — то же, при монтаже; f — колеса на
пневматических щицах; 2 — опорная рама; 3 — щит
электрооборудования; 4 — мачта; 5 — блок грузо-
вого каната; 6 — грузовая платформа; 7 — лебедка;
5 — грузовой канат; F — верхний блок мачты;
10 — зажим
Так как звездочка тали приводится в движение обычно червяч-
ным редуктором, то величина грузоподъемности тали
Q^PimR—^ * (5.11)
где Р — усилие, прикладываемое рабочим к хепи привода тали,
кгс (Н); i — передаточное число червячного редуктора; т — крат-
ность полиспастной подвески, обычно равная 2; р — радиус привод-
ного колеса, мм; г — радиус ведущей звездочки, мм; ц — КПД тали.
Эти тали имеют грузоподъемность 1—10 т, применяются при мон-
таже конструкций, а также при ремонте и монтаже оборудования.
В рассмотренных механизмах, за исключением винтовых домкра-
тов, применяют устройства, препятствующие Обратному движению
груза. В реечном домкрате и в некоторых коктрукциях лебедок,
а также в талях таким устройством является храповик, в гидравли-
ческом домкрате — обратный клапан.
§ 5.2. СТРОИТЕЛЬНЫЕ ПОДЪЕМНИКИ
Для подъема строительных материалов и деталей на перекрытия
материалов в смесительные
машшы и грохоты, а также
для монтажных работ ши-
роко применяют подъем-
ники.
Строительные подъем-
ники разделяются на сле-
дующее группы: по способу
их установки — на свобод-
ностоящие и приставные;
по назначению — на гру-
зовые и грузопассажирс-
кие; цо конструкции на-
правляющих — на мачто-
вые (стоечные), шахтные,
струнные; по типу приво-
да — йа реечные и канат-
ные.
Свободностоящий мач-
товый подъемник показан
на рис. 5.5. Грузоподъем-
ность подъемника 300 кг,
высота подъема до 10 м.
Монтаж и демонтаж такого
подъемника занимает не
более !>—10 мин. На подъ-
емнике установлен конеч-
ный выключатель, ограни-
чивающий высоту подъема, а также автоматический аварийный лови-
тель клинового типа для остановки платформы при обрыве каната.
120
Грузопассажирские подъемники (рис. 5.6) поднимают не только
строительные материалы, сантехническое оборудование и другие гру-
зы, но и рабочих. Применение таких подъемников значительно сокра-
щает потери рабочего времени на подъем и спуск рабочих с этажей.
Кинематическая схема этого
подъемника не отличается от
схемы двухстоечного подъемни-
ка; мачта его более мощная,
представляет собой сварную
пространственную форму из
швеллеров и труб и состоит из
отдельных секций по 3 м каж-
дая. Вместо площадки такие
подъемники имеют кабину, в ко-
торой помещаются подъемная
лебедка и механизмы управле-
ния. Грузоподъемность их до
800 кг груза или до 10 чел,
скорость подъема 35 м/мин.
Подъем кабины осуществля-
ется при помощи лебедки,
оборудованной двумя коло-
дочными электромагнитными
тормозами, показан на рис.
5.6, б.
На рис. 5.6, в приведена
схема запасовки канатов огра-
ничителя скорости. Если ско-
рость каната увеличивается бо-
лее чем на 15% от номинала,
центробежный регулятор вклю-
чает систему ловителей, которые
останавливают кабину.
f ' Для перемещения поднимае-
мых грузов на этажи строящих-
ся зданий применяют различные
способы и устройства. На рис.
5.7, а показано перемещение
груза на шарнирно-сочлененной
стреле с гуськом; на рис.
5.7, б — при помощи выдвижной
площадки грузового подъемни-
ка; на рис. 5.7, в — при помощи
выдвижной площадки грузопас-
сажирского подъемника; на
рис. 5.7, а — при помощи вы-
Цвижного монорельса.
Ковшовые (скиповые) подъ-
емники (рис. 5.8) применяют для
Рис. 5.6. Грузопассажирский мачтовый
подъемник:
а — общий вид; б — схема крепления к
зданию; в — схема за па совки каната ог-
раничителя скорости; / — опорный блок;
2 — противовес: 3 — стойка; 4 — головка:
5 — стрела; £ — подвесная площадка; 7 —
кабина; 8 — мачта; 9 — кронштейн крепле-
ния мачты: 10 — центробежный регулятор
121
подачи сыпучих материалов и растворов в бункера, смесительные
машины и грохоты. Объем ковша обычно составляет 1 м3, скорость
подъема 60 м/мин. Подъемник устанавливают в углубление, в которое
опускается ковш 1, что значительно облегчает разгрузку автомобиля
и наполнение ковша. Ковш поднимается при помощи каната 2 по напра-
Рис. 5.7. Схемы устройств для выдвижения грузонесущих органов внутрь здания:
1 _откидная решетка; 2 — выдвижная площадка; 3 — барабан привода выдвижения;
4 — монорельс
вляющим 3. Для выгрузки ковша направляющие 3 на определенной
высоте имеют изогнутую форму, благодаря чему ковш опрокидывается
по достижении этой высоты.
Шахтные подъемники применяют для подъема сыпучих материа-
лов, раствора, бетонной смеси на высоту 100 м и выше. Масса подни-
маемого груза достигает 3 т, скорость подъема 30 м/мин. Ковш с гру-
зом помещается на площадке или в клети, которая движется внутри
металлической шахты, внизу заглубленной в грунт. К шахте прикреп-
122
лено приемное устройство для разгрузки материалов из транспортных
средств прямо в приемное устройство.
Выгрузка осуществляется через проемы в шахте, в которые опро-
кидывается ковш, шарнирно подвешенный к площадке так, что в за-
груженном состоянии он стремится опрокинуться вперед. Ковш от
Рис. 5.8. Ковшовый скиповый подъемник
Рис. 5.9. Шахтный подъемник с опрокидывающимся ковшом:
1 — шахта; 2 — клеть; 3 — опрокидывающийся ковш; 4 — разгрузочный
лоток; 5 — приемный лоток
опрокидывания предохраняют стойки, по которым он скользит с по-
мощью роликов, прикрепленных по бокам ковша и спереди его. В ме-
стах выгрузки эти стойки прерываются и ковш опрокидывается в проем,
при этом ролики выходят за пределы шахты по специальным напра-
вляющим. Материал из ковша высыпается в разгрузочный лоток.
При опускании клети ковш возвращается в прежнее положение, так
как ролики снова начинают опираться на стойки.
Шахтные подъемники устанавливают как внутри, так и снаружи
здания. Одна из конструкций шахтного подъемника дана на рис. 5.9.
123
Монтажные вышки и гидроподъемники (специальные подъемные
устройства также относятся к подъемникам). Они предназначены
для подъема одного или двух рабочих при выполнении строительно-
монтажных работ. Монтажные вышки устанавливают на автомобилях
или тракторах.
На рис. 5.10, а показана кинематическая схема вышки, смонтиро-
ванной на автомобиле. На люльке помещаются два рабочих с инстру-
ментом и необходимыми материалами. Кроме того, вышка может под-
нимать груз до 0,5 т (5 кН) или натягивать кабель. В транспортном
положении вышка укладывается горизонтально.
Вышка представляет собой телескопическое устройство из пяти
труб. Люлька закреплена на центральной трубе. Трубы выдвигают
по вертикали при помощи канатов и лебедки, причем все трубы под-
нимают одновременно с одинаковой скоростью. Привод лебедки выдви-
жения труб осуществляется от двигателя автомобиля через коробку
отбора мощности. Груз поднимается отдельной лебедкой, которая
также приводится в движение от коробки отбора мощности. Для
укладки вышки в горизонтальное положение имеется канат, который
наматывается на барабан лебедки выдвижения труб.
Для ограничения подъема люльки применяют конечный выключа-
тель, который автоматически выключает систему зажигания автомо-
биля. В целях безопасности работы между трубами расположены
сальники, которые не дают воздуху выходить из пространства между
трубами. При обрыве троса или отказе тормозного устройства лебедки
воздушная подушка, образующаяся в нижнем закрытом конце каждой
трубы, не дает опуститься внутренней трубе. На этом принципе пост-
роен ряд вышек, монтируемых не только на автомашинах или тракто-
рах, но и стационарных.
Более широкое применение имеют гидроподъемники, позволяющие
перемещать люльку не только вертикально, но и в различных направ-
лениях. Они успешно заменяют стремянки, леса, подвесные люльки
и другие приспособления для монтажа, ремонта и обслуживания ли-
ний электропередачи и связи, ремонта, окраски и очистки зданий и
сооружений, а также для других работ.
На рис. 5.10, б показан общий вид рычажно-шарнирного гидро-
подъемника, смонтированного на автомашине.
Основной несущей конструкцией гидроподъемника является скла-
дывающаяся шарнирная мачта с двумя люльками. Мачта может пово-
рачиваться на 360° в горизонтальной плоскости и на 270° в вертикаль-
ной. Это позволяет перемещать люльки в различных направлениях
и на разную высоту. Независимо от положения мачты, люлька всегда
удерживается в вертикальном положении с помощью специального
механизма. Грузоподъемники этого типа позволяют поднимать люльку
на высоту до 12 м при радиусе действия люлек от оси вращения до
9 м; грузоподъемность их до 0,5 т.
Управление мачтой осуществляется при помощи гидроцилиндров
и канатно-блочных устройств. Питание гидроцилиндров осуществляется
масляным насосом, приводимым в движение от двигателя автомобиля
через коробку отбора мощ! ости.
124
125
Производительность подъемников определяется по формуле для
цикличных машин. Коэффициент использования производительности
(грузоподъемности) Кп и рабочего времени — Л'в зависят от вида
поднимаемых грузов (штучные грузы, бетон и т. д.) и составляют:
Кп = 0,6 ч- 0,9; Кв = 0,3 ч- 0,75. Даже при небольших значениях Кв
и Кп экономически выгодно применять подъемники в связи с их незна-
чительной стоимостью, высокой мобильностью и малыми сроками
монтажа и демонтажа (несколько часов).
Мощность электродвигателя привода лебедки подъемников
М = кВт, (5.12)
где G — масса груза с площадкой, кгс; v — скорость подъема; т] — КПД
системы блоков; г]л — КПД лебедки.
I
§ 5.3. КЛАССИФИКАЦИЯ СТРОИТЕЛЬНЫХ КРАНОВ,
ИХ РАБОЧИЕ ОРГАНЫ И ХАРАКТЕРИСТИКИ
Краны предназначены для подъема грузов и подачи их к месту
разгрузки, а при монтаже — для подачи деталей к месту установки
их в проектное положение в вертикальном и горизонтальном направ-
лениях.
Типаж кранов, применяемых в народном хозяйстве, многообразен.
Для целей строительства используют следующие виды кранов: 1) лег-
кие переносные краны — подъемники, используемые в основном для
подъема груза по вертикали и в отдельных случаях на небольшое
расстояние по горизонтали; 2) стационарные краны для подъема и
перемещения грузов по вертикали и по горизонтали в пределах ра-
диуса окружности, описываемой стрелой; 3) башенные краны (перед-
вижные стационарные и приставные и самоподъемные) служат для
подъема грузов и перемещения их по горизонтали; 4) самоходные
стреловые краны применяют для монтажных и погрузочно-разгрузоч-
ных работ; обладают высокой мобильностью и практически не огра-
ниченной зоной обслуживания; 5) козловыми кранами осуществляют
подъем, перемещение и монтаж конструкций. Пределы зоны ограни-
чены пролетом крана и длиной его перемещения; 6) кабельные краны
применяют на таких строительных объектах, где приходится переме-
щать грузы на значительное расстояние.
Кроме того, используют специальные краны — плавучие, летаю-
щие (вертолеты), трубоукладчики.
._„-Все__крань^ обозначают индексами, состоящими из буквенной и
цифровой частщ_.Буквенная часть обозначает группу кранов~или
особенностшего конструкции, например: КБ — кран башенный; АК —
"автомобильный кран; МКГ, МКП или МКА — монтажный кран гусе-
ничный, пневмоколесный или автомобильный; СКГ — специальный
кран гусеничный; СМК —- специальный монтажный кран. В цифровых
обозначениях указывается грузоподъемность, например: МКГ-20—
кран монтажный гусеничный, грузоподъемность 20 т. Однако для более
126
полной характеристики стреловых самоходных кранов введена сле-
дующая .индексация кранов по схеме (рис. 5.11). Эта индексация
состоит из двух букв КС (кран самоходный) и четырех цифрТЦифро-
вая часть после букв обозначает основные данные о кране в сле-
дующем порядке: первая цифра — размерная группа, характеризую-
щая грузоподъемность крана в т (составлена в соответствии с типо-
размерными рядами); вторая — тип ходового устройства: 1 — гусе-
ничное, 2 — гусеничное уширенное, 3 — пневмоколесное; 4 — на спе-
циальном шасси; 5 — автомобильном шасси; 6 — тракторе; 7 —- при-
цепе; третья — характер подвески: канатная, жесткая и др.; четвер-
тая — порядковый номер модели крана. Так как конструкции кранов
7odobot устроштпЬо
I /~У I /7 | № IЛ 17/71 /7/7 [резеда
Рис. 5.11. Индексация стреловых кранов
все время совершенствуются, производится их модернизация, то кроме
указанных после перечисленной индексации может указываться оче-
редная модернизация (А, Б, В), а также указывают специфические
данные крана, например климатическое исполнение (северное ХЛ,
тропическое Т или для работы во влажных тропиках ТВ).
Башенные-краны, выпускаемые различными ведомствами, имели
различную индексацию, не всегда характеризующую основные пара-
метры. В 1971 г. для башенных кранов быда^НриггятаТ'индексация.
Она состоит из двух букв КБ и трех~цифр. Первая цифра обозначает
размерную группу по грузовому моменту, так как для башенных кра-
нов размерная группа строится по грузовому моменту, а не по грузо-
подъемности, как у стреловых кранов. Две следующие цифры являются
номерами по регистрации.
Номера от 00 до 69 дают краном с поворотной башней, а с 70 до
99 — с неповоротной башней. Например, кран КБ-674.5 относится
к шестому типоразмеру (т. е. имеет грузовой момент 40 тс - м), выполнен
с неповоротной башней и является пятым по регистрации.
127
Краны состоят из рабочих органов остова, ходовой рамы, поворот-
ной части, башни, стрелы, механизма подъема и опускания груза,
механизма подъема и поворота стрелы, механизма перемещения крана,
рабочих органов, аппаратуры управления и контроля грузоподъем-
ности и высоты подъема,
В зависимости от типа и значения кран может иметь все пере-
численные составные части или только некоторые из них. Основными
параметрами кранов являются: грузоподъемность G, т; грузовой мо-
мент Мг, тс-м (кН-м), равный произведению массы поднимаемого
груза G на плечо L от центра тяжести поднимаемого груза до оси
крана; вылет стрелы £с, м; высота подъема груза Н, м; скорость подъ-
ема и опускания груза и vo, м/с; скорость передвижения крана ок,
м/мин; для стреловых кранов кроме этих параметров также вылет
стрелы, а следовательно, радиус действия R, м, для кабельных и коз-
ловых кранов длина пролета £п, м.
Диапазон изменения скоростей о„, п0 и пк также является пара-
метром, характеризующим краны. Величины Л1Г и G задаются мини-
мальными и максимальными в зависимости от величины вылета стрелы.
Рабочие органы кранов представляют собой грузозахватные устрой-
ства для единичных штучных грузов или группы грузов (крюки,
траверсы, захваты и т. д_), либо емкости, в которых размещают грузы
(ковши, бадьи, грейферы).
Следует различать два вида рабочих органов: 1) представляющие
собой грузозахватные устройства и, как правило, являющиеся по-
стоянной составной частью машин. Крюк является основным рабочим
органом крана. Груз подвешивается к крюку непосредственно или
при помощи стропов. Крюки стандартизованы. Они бывают одноро-
гие и двурогие. Размеры крюков подбирают соответственно максималь-
ной грузоподъемности крана; 2) дополнительно подвешивающиеся
к грузозахватным устройствам машины (оснастка). Грузы и емкости
с грузами подвешивают к крюкам или скобам при помощи цепных
или канатных стропов или траверс.
Канатные стропы представляют собой отрезки стального
каната, которые вверху присоединены к кольцу, надеваемому на крюк
крана. Внизу каждый отрезок каната имеет крюк или коуш для при-
крепления к поднимаемому грузу. Таких отрезков ветвей может быть
два, три и больше в зависимости от массы и конфигурации груза
(рис. 5.12, а, б).
Стропы могут также выполняться из пеньковых и капроновых
канатов в виде петли или нескольких петель (рис. 5.12, а). При сим-
метричной подвеске груза усилие в каждой ветви стропы (рис. 5.12, в)
S = —= (5.13)
т cos а т '
где К — коэффициент, характеризующий угол наклона стропа к вер-
тикали (К = 1/cosa); G — масса груза, т; т — количество ветвей;
а — угол между ветвью стропы и вертикалью. Если а = 0, 30, 45, 60°,
то соответственно К = 1; 1,15; 1,42; 2,0. Если позволяет высота подъ-
ема, желательно, чтобы угол был минимальным.
128
Цепные стропы (рис. 5.12, д) выполняют из стальных
некалиброванных цепей. Натяжение в цепных стропах подсчитывается
по формуле (5.13).
Рис. 5.12. Виды строп:
а — конструкции канатных строп; б — примеры захвата деталей стропами; в — силы, дей-
ствующие на стропы; г — способы крепления пеньковых строп; д — цепные стропы
Траверсы различных конструкций показаны на рис. 5.13.
Напряжения, возникающие в траверсе, зависят от способа подвески
ее к крюку. Если траверса подвешена на канатах, направленных
вертикально (рис. 5.13, а), то ее рассчитывают на изгиб.
Напряжение от изгиба в траверсе
c=M/W; M = Ga/4, (5.14)
Б М. И. Гальперин
129
где М — максимальный изгибающий момент, кгс-м (Н-м); G — масса
поднимаемого груза, т; а — расстояние между стропами, м; W —
момент сопротивления балки траверсы.
Если траверса подвешена на канатах, направленных под углом
к вертикали (рис. 5.13, б), то возникают усилия, действующие вдоль
нее, что вызывает дополнительно продольный изгиб траверсы. Напря-
жения от продольного изгиба, возникающие в траверсе,
u — T/Fcp, (5.15)
где Т — усилие, действующее вдоль траверсы, кгс (Н); F — пло-
щадь сечения траверсы, м2; <р — коэффициент устойчивости при
изгибе.
Рис. 5.13. Траверсы
Траверсы выполняют различными для подъема грузе® разной массы
и конфигурации. На рис. 5.13, в показана траверса для подъема
стропильных балок пролетом до 18 м, массой до 10 т. Такая траверса
представляет собой металлическую ферму и весит около 1 т.
Для подъема грузов сложной конфигурации и массой более 20 т
применяют трехрогие траверсы (рис. 5.13, а). Такая траверса пред-
назначена для подъема царг диаметром 9—II м при монтаже домен-
ных печей.
Захваты также используют для поднятия грузов. Например,
колонны поднимают захватами, показанными на рис. 5.14, а. Для
подъема массовых однотипных грузов применяют захваты в виде
клещей (рис. 5.14, б). При подъеме груз удерживается в клещах силой
130
Рис. 5.14.
Захваты
Рис. 5.15. Бадья с
/ — створки днища; 2, 5 — запорные рычаги; 3 —
рычаг для открывания я закрывания створок;
4 — ось '
В трения, поэтому необходимо, чтобы усилие
(5.16)
где G — масса поднимаемого груза, т; р — коэффициент трения.
Усилие можно определить из уравнения равновесия системы
— Та+РЬ~Р{1~=0, (5.17)
где с/2 — расстояние от линии действия силы Рр до оси захвата.
Так как Т — —• то можно написать, что
, 2 сое а *
-2^+-£-т=°- (518>
Исходя из этих зависимостей, подбирают плечи рычагов клещей.
Бадьи используют для перемещения сыпучих, кусковых и пла-
стичных материалов (песка,
щебня, бетонных смесей и
др.). По конструкции бадьи
бывают опрокидными и с
раскрывающимся днищем
(рис. 5.15).
Грейферы (двух-
канатные, крюковые одно-
канатные и моторные). Для
массового перемещения сы-
пучих материалов более
пригодны грейферы, кото-
рые загружаются и разгру-
жаются автоматически.
Двухканатный грейфер
(рис. 5.16) подвешивается
к двухбарабанной или к
двум однобарабанным ле-
бедкам 1 на поддерживаю-
щем 2 и замыкающем 3
канатах.
Поддерживающий ка-
нат 2 закреплен на верхней
головке грейфера. Замы-
кающий канат 3 прикреп-
лен к нижней головке грей-
фера 4, на которой одновре-
менно закреплены тяги 5,
связанные с челюстями
грейфера. Для создания
большего усилия замыка-
ния грейфера в верхней
и нижней головке имеются
ходит замыкающий канат. Когда грейфер висит на поддерживающем
раскрывающимся днищем:
блоки полиспаста, через которые про-
131
канате, а замыкающий канат освобожден, челюсти грейфера под дей-
ствием их веса, веса нижней головки и грунта раскрываются (поло-
жение I) и материал высыпается.
При одновременном опускании обоих канатов грейфер, независимо
от положения челюстей, опускается и ложится на материал (положе-
ние II). При выбирании замыкающего каната нижняя головка под-
нимается, челюсти грейфера смыкаются, захватывая материал (положе-
ние III). Выбирание замыкающего каната после полного замыкания
челюстей приводит к подъему грейфера. При этом включается на
подъем (во избежание провисания) также и поддерживающий канат,
который при достаточной опытности крановщика может принять на
себя часть общей нагрузки.
Рис. 5.16. Схема работы двухканатного симметричного грейфера
Для опорожнения грейфера барабан поддерживающего каната
затормаживается, а барабан замыкающего каната вращают в сторону
опускания этого каната. Под действием веса материала и челюстей
грейфера они раскрываются (положение IV). Направление движения
канатов для каждого из положений показано стрелками.
Крановые механизмы могут приводиться в движение каждый от-
дельным двигателем (многомоторный или индивидуальный привод)
или один привод сообщает движение всем механизмам или группе
механизмов (одномоторный или групповой привод).
На рис. 5.17 приводятся схемы основных механизмов кранов с
многомоторным приводом. Все они построены на одном принципе:
электродвигатель через зубчатую передачу (редуктор) сообщает вра-
щение исполнительным элементам.
Механизм подъема (рис. 5.17, а). Электродвигатель 1
через несколько зубчатых передач 3 приводит во вращательное дви-
жение барабан 4, на который наматывается канат 5, идущий от не-
подвижной обоймы 6 полиспаста. Груз подвешен на крюке 7. На валу,
соединенном с валом электродвигателя, установлен тормоз 2, при-
меняемый для удержания поднятого груза.
Механизм передвижения рельсо-колесного
крана (рис. 5.17, б). Электродвигатель 1 через несколько зубчатых
132
передач 3 приводит во вращение колесо 4. Так же, как и в механизме
подъема, установлен тормоз 2, предназначенный для удержания крана
на месте при нахождении его на уклоне и при действии иа него ветро-
вого давления.
Механизм вращения поворотной части крана
(рис. 5.17, г). Электродвигатель 1, установленный на поворотной части
крана, через несколько зубчатых передач 3 и конической передачи 8
Рис. 5.17. Схемы крановых механизмов
приводит во вращательное движение шестерню 9, которая обкаты-
вается по неподвижному зубчатому ободу 10, укрепленному на непо-
воротной части крана. Таким образом, вся поворотная часть крана
обкатывается вокруг обода. На валу электродвигателя 1 помещен
тормоз 2.
Групповой привод (рис. 5.17, в). Двигатель 1 через ре-
менную или цепную передачу 11 приводит во вращательное движение
шестерню 12. Последняя приводит во вращение вал со стрелоподъем-
ным барабаном 13 и грейферными барабанами 14 и 15. На всех валах
с барабанами установлены муфты 16, которыми барабаны могут
независимо включаться.
133
Механизм изменения вылета крюка в одних
кранах изменяет наклон стрелы, а в других передвигает каретку с не-
сущими блоками. На рис. 5.17, д показана схема механизма передви-
жения каретки с крюком. К каретке 17, установленной на рельсах,
прикреплены концы тягового каната 5,,огибающего барабан 4 лебедки.
При вращении барабана по часовой стрелке канат наматывается с ниж-
ней ветви А барабана и сматывается с верхней ветви Б. Каретка дви-
жется вправо, при вращении против часовой стрелки — влево.
В каждом из этих механизмов имеется тормозной шкив (тормоз),
который устанавливают обычно на валу, находящемся на одной оси
с валом электродвигателя.
В зависимости от типа и назначения кранов они могут иметь раз-
личные механизмы. Например, неподвижные краны имеют механизмы
подъема и опускания груза, поворота мачты, поворота стрелы, наклона
стрелы. В таких крапах пет механизма передвижения крана, который
имеется в передвижных кранах.
§ 5.4 СТРОИТЕЛЬНЫЕ КРАНЫ
Легкие переносные краны применяют при выполнении сравни-
тельно малых объемов работ и при необходимости поднимать и переме-
щать грузы массой до 1 т на расстояние до 4 м. Большим преимущест-
вом этих кранов является возможность их установки не только на
земле, но и на зданиях. Один из таких кранов КЛ-1а показан на
рис. 5.18, а. Он состоит из основания 1 и поворотной платформы 2,
на которой смонтированы лебедка 5, стрела 7 и плиты противовеса 3.
Масса этого крана без противовеса составляет 0,9 т, а с противове-
сом— 1,65 т. Мощность двигателей 3 кВт. Поворот крана осущест-
вляется вручную рычагом 8 усилием не более 12 кгс (120 Н). Для
стопорения на крапе установлено тормозное устройство, управляемое
ручкой 4. Изменение вылета стрелы осуществляется стреловым кана-
том 6. Скорость подъема груза 0,2 м/с.
Консольно-балочные краны (рис. 5.18, б) применяют для подачи
материалов внутрь здания через оконные проемы при отделочных,
ремонтных и сантехнических работах. Грузоподъемность их до 100 кг,
вылет стрелы до 3 м, высота подъема 60—70 м, средняя скорость
подъема грузов 0,25 м/с. Такой крап состоит из вертикальной стойки 2,
устанавливающейся внутри помещения, и стрелы, по которой дви-
жется тележка 4 с крюком. Груз поднимается электрической лебедкой.
Грузовая тележка перемешается вдоль стрелы при помощи ручной
лебедки.
Стационарные краны. Мачтовые краны наиболее просты
по конструкции. Их особенностью является независимое выполнение
металлоконструкций и механизмов. Эти краны в строительстве при-
меняют редко. Одним из видов мачтовых кранов являются кран-
мачты. Они состоят из мачты 1 и стрелы 2, прикрепленной к мачте
в верхней или средней ее части (рис. 5.19). Стрела может выполняться
поворотной и неповоротной. В обоих случаях мачта раскрепляется
134
вантами 3, которые удерживаются якорями. Грузоподъемность таких
кранов до 100 т, высота подъема грузов — до 60 м.
Мачтово-стреловой вантовый кран показан на
рис. 5.20, а. На пяте 1 установлена мачта 2 с вантами 3, которые
крепятся к оголовку 4 мачты. Установка крана на пяте и оголовок
Рис. 5.18. Легкие переносные краны:
1 — электродвигатель привода; 2 — раздвижная трубчатая стойка; 3 — стрела; 4 — те-
лежка
позволяют поворачивать мачту. К основанию мачты шарнирно при-
креплена стрела 6, верхний конец которой подвешен на стрелоподъем-
ном полиспасте 5.
В вантовых кранах стрела короче мачты на 20—40%, и при угле
наклона стрелы 30е стрелу можно поворачивать на 360°. В этих кранах
стрела часто оборудуется гуськом, что позволяет увеличить высоту
подъема груза, но при этом снижается грузоподъемность.
На рис. 5.20, а, кроме того, приводятся кривые изменения высоты
подъема крюка и изменения грузоподъемности в зависимости от на-
клона стрелы и положения гуська.
135
Рис. 5.19. Кран-мачта с пово-
ротной стрелой
Мачтово-стреловые (вантовые) краны при-
меняют для монтажа тяжелого оборудования. Грузоподъемность их
до 40 тГна^рйёГК^и/^, в показана конструкция опор мачтово-
стреловьГх^рановГВерхняя опора (рис. 5.20, б) представляет собой
ось, жестко закрепленную в верхнем конце мачты. На ось свободно
надевается головка в виде диска, к ко-
торой прикреплены верхние концы вант.
Нижние концы вант крепятся к якорям.
Нижняя опора (рис. 5.20, в) состоит из
стальной чаши с шаровой головкой.
Внутренняя полость головки представ-
ляет собой цилиндрический подшипник,
в который входит цапфа на конце мачты.
Верхняя часть головки включает в себя
кольцевой подпятник, в который упи-
рается торец мачты. При такой кон-
струкции перекосы мачты не вызывают
дополнительных сил трения в цилиндри-
ческом подшипнике и его заклинивания.
При эксплуатации мачтово-стрело-
вых кранов приходится определять диа-
метр вант и расстояние от оси мачты
до точки закрепления вант на якоре,
отчего зависит угол наклона вант к го-
ризонту. Мачта раскрепляется несколь-
кими вантами, распределение усилий
в которых зависит от жесткости кон-
струкции, положения стрелы с грузом,
величины предварительного натяжения
вант и других условий. Поэтому расчет
вант ведут заведомо с некоторым запасом, считая, что все усилия
как бы передаются на одну ванту и стрела крана находится в плос-
кости ванты.
Из уравнения моментов относительно точки О (рис. 5.20, г) может
быть определено усилие в ванте SB:
Добщ (Z cos a-pfe)4- GCT (0,5/ cos <x fe) + 0,51FBZ sin a
77 cos 0
(5.19)
где Go6iu — общая нагрузка на оголовке стрелы, т;
^общ == Grp Ч- G3 Ч- Grn Ч- G„ о,
Grp — вес полезного груза, т; G3 — вес грузозахватного приспособле-
ния (крюка, траверсы и т. д.), т; Gr п — вес грузового полиспаста,
включающий вес верхней и нижней обоймы и каната, т; GH о — вес
нижней обоймы, закрепленной на стреле, т; GCT — вес стрелы, т;
WB — сила давления ветра, т.
136
Величина rs равна Н cos р. Следовательно, чем больше р, тем больше
усилие в вантах. Угол р следует делать не больше 30°.
Если мачта поддерживается четырьмя вантами, то возможно такое
положение, когда усилие передается только на одну ванту. В этом
Рис. 5.20. Мачтово-стреловой вантовый кран:
/ — пята; 2 — мачта; 3 —-оттяжки; 4 — оголовок мачт; 5 — полиспаст; 6 — стрела; 7 —
конец мачты; 8 — ось; 9 — головка; 10 — бронзовый вкладыш; 11 — масленка; 12 — ванты;
13 — чаша; 14 — шаровая головка; I — грузоподъемность крюка основного подъема; II —
то же, крюка клюва
случае каждую ванту рассчитывают на полное усилие. При большем
количестве вант их можно рассчитывать на меньшую нагрузку, тс (Н):
SB = SBmaxfe. (5.20)
Значения k при разном количестве вант п:
п 4 6 8 10 12
k 1,0 0,7 0,5 0,4 0,3
Ванты подбирают по полученным усилиям с запасом прочности 3,5.
Обычно усилие получается небольшим, однако диаметр вант должен
137
быть не менее 19,5 мм для мачт высотой до 20 м i не меньше 23 мм для
мачт высотой до 30 м.
Мачтово-стреловые краны просты по конструкции и имеют большую
грузоподъемность. Однако то что они устанавливаются стационарно,
значительно ограничивает область их применения. Их используют
главным образом на складах строительных материалов и изделий,
а также при монтаже технологического оборудования крупных объ-
ектов.
J 4
Рис. 5.21. Кабельный кран:
/ — опоры, 2 — расчалки; 3 —«• канат; 4 — теле»ка с полиспастом
Кабельные краны (рис. 5.21) применяют гри строительстве пло-
тин, мостов, промышленных зданий и на крупных складах.
Кран состоит из двух опор, обычно башенных. Между опорами
натягивается канат, по которому движется тс-лежка с полиспастом.
Канат может закрепляться неподвижно или натягиваться весом контр-
груза. Натяжение каната может осуществляться дополнительно накло-
ном одной из опор.
Опоры бывают неподвижными, тогда они закрепляются на фунда-
менте и раскрепляются расчалками. При такой конструкции кран
обслуживает только узкую зону. У подвижные кранов опоры перед-
вигаются по рельсовым путям, причем могут двигаться обе опоры
параллельно или одна опора закреплена неподвижно, а другая пе-
редвигается по рельсу, представляющему собой дугу окружности.
138
Грузоподъемность и длина пролета кабельных кранов различны
в зависимости от их"назначения. Для погрузочно-разгрузочных работ
на складах применяют краны грузоподъемностью 1,5 ч- 25 т с проле-
том до 250 м. Для гидротехнического строительства пролеты кранов
достигают 1000 м, а грузоподъемность до 150 т.
Привод каната для подъема груза и перемещения тележки осу-
ществляется лебедкой. Для безопасности работы на лебедках уста-
навливают концевые выключатели, ограничивающие высоту подъема
и длину перемещения тележки.
Основным элементом кабельного крана является несущий канат.
Наибольшие усилия будут действовать на канат в тот момент, когда
груз находится посредине пролета:
(G.,+Grp)Z i GKP
47’ "г 8/ ’
(5.21)
где Gn — вес тележки с полиспастом, т; Grp — вес груза, т; I — пролет
крана, м; f — стрела провеса каната, f = (0,035 ч- 0,05) /; GK — вес
каната, т.
Башенные краны применяют в качестве одного из основных грузо-
подъемных устройств в жилищном и промышленном строительстве.
Эти краны делятся на передвижные (рис. 5.22, а), передвигающиеся
по прямолинейным наземным или криволинейным рельсовым путям;
стационарные приставные, прикрепляемые к возводимому объекту
(рис. 5.22, б); вертикальные подвижные самоподъемные (рис. 5.22, в).
Башенные краны различают по типу башен — на краны с поворот-
ной башней (рис. 5.22 г) и неповоротной с поворотным оголов-
ком (рис. 5.22, д), а также по типу конструкции стрелы — на краны
с подъемной стрелой (рис. 5.22, ё) и балочной стрелой (рис. 5.22, ж).
Передвижные башенные краны различают по типу ходового обо-
рудования — па рельсовые, автомобильные, пневмоколесные, гусе-
ничные. Наиболее широко применяют краны на рельсовом ходу; они
просты в эксплуатации и обеспечивают высокую безопасность работы
крана.
Башенные краны имеют высокую маневренность, большое подкра-
новое пространство и высокое расположение стрелы, что позволяет
ей проходить над монтируемыми конструкциями.
Наземные рельсо-колесные краны изготовляют по ГОСТ 13655—68,
а приставные и самоподъемные — по ГОСТ 14274—69. Краны, при-
меняемые в жилищном и гражданском строительстве, имеют грузо-
подъемность 3,0—8,0 т, наибольший вылет стрелы 25 м, высоту подъема
груза 30 ч- 50 м, скорость подъема груза 0,3 ч- 1 м/с, скорость перед-
вижения крана 0,33 ч- 0,5 м/с; частоту вращения поворотной части
0,5—0,7 об/мин.
Краны для промышленного строительства выпускают грузоподъ-
емностью 20,0 т и более с вылетом стрелы 25—45 м и высотой подъема
50 ч- 80 м. У этих кранов скорость подъема груза 0,16 ч- 1,0 м/с,
скорость передвижения крана в 2—2,5 раза ниже скорости передви-
жения кранов для гражданского строительства, т. е. 0,16 ч- 0,20 м/с,
частота вращения поворотной части 0,2 ч- 0,4 об/мин.
139
Рис. 5.22. Бешенные краны
Приставные краны (рис. 5.22, 6) выпускают грузоподъем-
ностью 6,3; 8; 10; 12,5 т с вылетом стрелы до 45 м и высотой
подъема до 150 м; скоростью подъема груза 0,33 ч- 1,5 м/с; ско-
ростью изменения вылета 0,5 м/с; частотой вращения поворотной
части 0,5 ч- 0,7 об/мин.
Наиболее часто применяют краны с поворотной башней. У них
центр тяжести находится ниже, чем у кранов с поворотным оголовком,
так как большинство узлов расположено у основания крана. Благо-
даря этой особенности масса крапов с поворотной башней меньше, чем
с неповоротной. Эти краны проще монтировать, демонтировать, тран-
спортировать; башня при нагрузке меньше деформируется, что при-
водит к меньшей раскачке груза.
Кран с поворотной башней (рис. 5.22, а) состоит из трубчатой или
решетчатой башни 1, закрепленной на упорно-поворотном устройстве 2,
на котором установлен противовес 3. В верхней части банши монти-
руется распорка 4 для направляющих роликов и оголовок 5. На башне
закреплена стрела 6. На кране с балочной стрелой противовес разме-
щается на консоли 7 (см. рис. 5.22, д).
Опорно-поворотное устройство устанавливают на опорной раме 8
(рис. 5.22, з) с четырьмя поворотными кронштейнами 9, которые опи-
раются на балансирные тележки 10 с противоугонными захватами И.
Поворотные кронштейны позволяют перемещаться крану на криво-
линейных участках рельсового пути при малых радиусах закругле-
ния в 7—8 м по внутреннему рельсу.
Простота монтажа и демонтажа, возможность демонтировать и
монтировать эти краны без разборки на отдельные узлы делает их
особенно эффективными.
Краны с подъемной стрелой, у которых вылет стрелы осуществ-
ляется ее наклоном, более просты по конструкции, но к недостаткам
этих кранов надо отнести то, что у них нельзя полностью использо-
вать подкрановое пространство. Наименьший вылет стрелы у них
составляет 30% от наибольшего. При таком креплении стрелы трудно
достигнуть точной наводки элементов конструкции, так как при
подъеме или опускании стрелы груз перемещается как в вертикаль-
ном, так и в горизонтальном направлении.
В кранах с балочной стрелой перемещение груза требует меньшей
энергии, но маневренность таких кранов ниже, чем у кранов с подъем-
ной стрелой.
Стационарные (приставные) башенные краны устанавливают на
фундаменте и обслуживают площадку с одной стоянки.
Самоподъемные башенные краны применяют главным образом при
строительстве многоэтажных и высотных зданий.
На рис. 5.23, а показана кинематическая схема отдельных меха-
низмов башенного крана с подъемной стрелой и схема запасовки ка-
натов. Стрела поднимается лебедкой и стреловым полиспастом на под-
вижной обойме (траверсе) 2, несущей два блока. Полиспаст подъема
стрелы четырехкратный. Три блока полиспаста находятся на непод-
вижной обойме 6, жестко прикрепленной к поворотной платформе 7.
Один конец каната подъема стрелы жестко закреплен на той же не-
141
подвижной обойме и перекинут через неподвижный блок 1, другой
конец каната закреплен на стреловой лебедке.
Механизм подъема стрелы одновременно служит и механизмом опу-
скания груза в процессе подъема стрелы, что обеспечивает движение
груза по горизонтали во время ее подзема. Для этой цели один из
концов подъемного каната закреплен на барабане лебедки подъема
стрелы так, что во время наматывания каната подъема стрелы на бара-
бан канат подъема груза сматывается с барабана. Груз и стрела под-
нимаются при помощи крановых лебедок.
Рис. 5.23. Кинематические схемы башенных кранов:
/ — механизм привода передвижения крана; II — то же, лебедки подъема груза; III — то
же, лебедки подъема стрелы; IV — механизм поворота башни со стрелой или только стрелы
Лебедки состоят из кранового фланцевого электродвигателя,
двухступенчатого редуктора, тормоза, барабана, выносной опоры
и двух сферических опор редуктора. Для плавной посадки груза ле-
бедка снабжена тормозным генератором, обеспечивающим снижение
скорости в 5—6 раз, и двух колодочным тормозом с гидротолкателем.
Механизм поворота включает фланцевый вертикально расположен-
ный электродвигатель и планетарный зубчатый редуктор с вертикаль-
ными валами. На ведомом валу редуктора снизу располагается ше-
стерня, сцепляющаяся с зубчатым венцом опорно-поворотного круга.
Тормоз располагается на втором конце вала электродвигателя в го-
ризонтальном положении. Смазка шестерен и подшипников редуктора
принудительная. Редуктор имеет две проушины, которыми он крепится
к поворотной платформе.
Кран опирается на четыре двухколесные балансирные тележки.
Две тележки являются ведомыми (неприводными), две — ведущими.
Привод тележки осуществляется от фланцевого двигателя через чер-
вячный редуктор. Тележки снабжены центральным захватом для за-
крепления крана за рельсы в нерабочем состоянии.
142
Для восприятия грузового момента и вертикальных нагрузок
поворотная часть крана соединяется двухрядным шариковым опорно-
поворотным кругом с неповоротной частью На внутреннем кольце
круга предусмотрен зубчатый венец, с которым связана ведущая
шестерня механизма поворота. На рис. 5.23, б показана схема крана
с балочной стрелой. Горизонтальное перемещение груза производится
грузовой кареткой, движущейся вдоль стрелы, но может также осу-
ществляться поворотом стрелы или передвижением всего крана. Стрела
удерживается на кране канатами и полиспастным устройством, по-
добным тому, каким оборудованы краны с подъемной стрелой.
Поворотный оголовок (рис. 5.23, в) устанавливается на подпят-
нике и роликах. Поворотная башня (рис. 5.23, г) устанавливается
на поворотной платформе.
Монтаж и демонтаж башенных кранов с поворотной башней могут
осуществляться без их разборки на отдельные сборочные единицы.
Для монтажа и демонтажа используются механизмы крана.
Демонтаж крана показан на рис. 5.24. Стрелу крана опускают
в крайнее нижнее положение //, после чего разъединяют среднюю и
крайнюю секции стрелы. Эти секции прикрепляют к башне (положе-
ние III). Затем ее разъединяют с основанием и опускают в горизон-
тальное положение. Башню со стрелой укладывают на домкрат 1
(положение IV), поворачивают тележку (положение V) и под тележку
крана подводят ось 2 с автомобильными колесами, после чего под
передвижную часть крана подводят тягач 3 и опускают домкрат.
В таком виде кран транспортируют. '
Монтаж осуществляется в обратном порядке.
Эксплуатация башенных кранов допускается только после их осви-
детельствования, включающего осмотр, статические и динамические
испытания. Согласно правилам Госгортехнадзора СССР статические
испытания проводятся под нагрузкой, на 25% превышающей макси-
мальную грузоподъемность крана. Во время испытания стрелу уста-
навливают относительно неповоротной части в положение, соответст-
вующее наименьшей устойчивости, при этом груз поднимается на
высоту 100—200 мм и выдерживается 10 мин. Динамические испыта-
ния проводятся грузом, на 10% превышающем грузоподъемность крана.
При этом выполняются все рабочие движения и проверяется действие
механизмов и их тормозов.
Устойчивость крана проверяют для следующих условий: 1) при
действии рабочего груза — грузовая устойчивость; 2) при отсутствии
груза — собственная устойчивость определяется для двух случаев —
при возможности и невозможности свободного вращения крана;
3) при внезапном снятии нагрузки на крюке; 4) при монтаже (демон-
таже) крана.
Расчет грузовой устойчивости крана должен производиться для
условий действия опасной комбинации нагрузок относительно ребра
опрокидывания, когда кран по устойчивости максимально прибли-
жается к предельному состоянию. Расчет на устойчивость производится
для свободно стоящих кранов без учета действия рельсовых захватов
и свободно подвешенных стрел.
143
T897S
Рис. 5.24. Демонтаж башенного крана с поворотной башней
144
На рис. 5.25, а приводится схема для расчета крана па грузовую
устойчивость. Для этого должно выполняться следующее неравен-
ство:
^o~i~ Л1си-|- Л1Д 0,95Qk£>k, (5.22)
где ke — коэффициент перегрузки, зависит от режима работы, класса
ответственности и массы поднимаемого груза; QH — нормативная
нагрузка от веса груза, тс; /VI" — момент относительно ребра опро-
кидывания от нормативной ветровой нагрузки (действующей на кран
Рис. 5.25. Схемы для расчета устойчивости:
1 — направление ветра; 2 — центр тяжести; 3 — ребро опрокидывания
и на груз), тс-м (кН-м); Л!д — момент относительно ребра опрокиды-
вания от динамических нагрузок и дополнительного наклона вслед-
ствие деформации крана и его основания, тс-м (кН-м). Этот момент
принимается наибольшим из двух: от пульсации ветра или от одно-
временного разгона (торможения механизмов подъема и передвижения
крана); Q" — нормативная нагрузка от веса груза, тс; bQ, Ьк — рас-
стояния от точки подвеса грузового полиспаста и от центра тяжести
крана до вертикальной плоскости, проходящей через ребро опрокиды-
вания, определенное с учетом наклона крана в сторону опрокидыва-
ния, м.
145
В зависимости (5.22) величины Qb6q + М” + Мл представляют
собой опрокидывающий момент Л!ОпР> а величины Q*bK — удерживаю-
щий момент Л1уд.
Крапы могут работать в легком, среднем и тяжелом режимах в за-
висимости от степени использования машины в течение года и суток,
использования по грузоподъемности, числа включений и др. Норма-
тивы на режим работы установлены Гостехнадзором. Класс ответст-
венности крана зависит от области применения. Например, подача
бетона на гидротехническом строительстве относится к I классу, а ма-
лоэтажное сельское строительство — к III классу.
Расчет собственной устойчивости производят для рабочего и нера-
бочего состояний крана без учета действия рельсового захвата. Схема
для расчета приведена на рис. 5.25, б. Для обеспечения собственной
устойчивости должно выполняться условие
Л€к4-Ми,д^Д95(2Х.
где — момент относительно ребра опрокидывания от норматив-
ной ветровой нагрузки, действующей на кран, тс-м (кН-м); Л1С,Д—
момент от пульсации ветра.
Для крана, у которого в нерабочем состоянии разрешается свобод-
ное вращение, расчет собственной устойчивости должен производиться
при ветре, направленном со стороны противовеса (рис. 5.25, в). При
расчете собственной устойчивости при внезапном снятии нагрузки на
крюке принимается, что на конец стрелы (рис. 5.25, а) действует сила,
равная 0,3 Q". Для устойчивости должно выполняться неравенство
0,3Q''feo + ACK<0,95QK/v
Расчет устойчивости необходимо также производить при демонтаже
и монтаже крана.
При начале подъема или в конце опускания башни расчет ведут
в соответствии с рис. 5.25, д. Условия устойчивости выполняются
при соблюдении неравенства
KrQGA<0,95QO2k,
где Qc,i — масса поднимаемых частей крапа, т; QG2 — масса непод-
вижных частей крана, т; — коэффициент перегрузки; blt b2 —
расстояние от центров тяжести поднимаемых частей и необходимых
частей крана до плоскости, проходящей через ребро опрокидывания
и нормальной к плоскости опорного контура, м.
После подъема башни производят расчет устойчивости в соответ-
ствии со схемой рис. 5.25, е. Устойчивость обеспечивается, если вы-
полняется неравенство
Л1£[ + < 0,95<2о36й,
где Л4“1 — момент от нормативной ветровой нагрузки рабочего со-
стояния, действующей на смонтированные части крана, относительно
ребра опрокидывания, тс-м (кН-м); Л4^.л — момент от динамических
нагрузок, вызванных пульсацией ветра, относительно ребра опрокц-
146
дывания, тс-м (кН-м); QG3 — масса смонтированных частей крана, т;
Ьэ — расстояние от центра тяжести смонтированных частей крана до
плоскости, проходящей через ребро опрокидывания и нормальной
к плоскости опорного круга, м.
Тормоза механизмов подъема груза и стрелы регулируют так,
чтобы запас торможения был равен не менее 1,5 при легком и 1,75
при среднем режиме работы. Тормоза механизмов передвижения кра-
нов должны плавно останавливать их и удерживать при действии
максимально допустимого ветра.
На правильную эксплуатацию крапов влияет состояние крановых
путей. Устройство путей под башенные краны зависит от нагрузки
/?0 на опоры крана, которые определяют для наиболее неблагоприят-
ных условий опирания крана (па две или три точки). Максимальная
нагрузка на опору Ro, зависит от параметров и конструкции крана
и составляет:
Rll ~ (0>5 -г- 0,7) (GKp + Gmax),
где GKp — масса крана, т: Gmax — максимальная масса груза, т.
Обычно расчетную нагрузку R принимают равной 0,75 RQ.
При эксплуатации кранов необходимо всегда вести контроль за
состоянием канатов и блоков. Во время ежемесячного обслуживания
и особенно во время монтажа и демонтажа крана подлежат осмотру
канатно-блочные системы. Если на одном шаге число обрывов превы-
шает нормы браковки, предусмотренные правилами Гостехнадзора,
канат подлежит замене.
Большинство современных башенных крапов выполняют мобиль-
ными, их вместе с электрооборудованием можно перевозить с одной
строжи на другую практически без разборки и демонтажа. Поэтому-
важно перед транспортировкой выбрать трассу, обеспечивающую необ-
ходимую ширину? габаритного коридора, а также возникающие удель-
ные давления па движителях.
Козловые краны широко применяются для монтажа тяжеловес-
ного оборудования, для подачи строительных материалов и строи-
тельных конструкций при возведении монолитных сооружений. Эти
краны делают грузоподъемностью 1 -5- 500 т.
Кран (рис. 5.26) состоит из мостовой балки (фермы), которая опи-
рается на две опоры, установленные на ходовые рельсовые тележки.
По мостовой балке передвигается тележка с подъемным механизмом
или электроталь. Краном обычно управляют из кабины. Эти краны
просты по конструкции, устойчивы, имеют постоянную грузоподъем-
ность и высоту подъема по всей рабочей зоне.
Величина пролета между опорами 10 <- 50 м. У некоторых кранов
мостовая балка имеет две консоли по концам, что увеличивает рабо-
чую зону. Длина консолей делается 4 -г- 10 м. На некоторых моделях
козловых крапов можно увеличивать пролет с помощью вставок в мо-
стовую балку, но при этом снижается грузоподъемность. Высота коз-
ловых кранов достигает 30 м.
Стреловые самоходные краны. Краны с собственным приводом для
свободного перемещения по местности называются самоходными.
147
На этих крапах устанавливают стреловое или башенно-стрсловое
оборудование. Они предназначены для выполнения строительно-мон-
тажных и перегрузочных работ.
Самоходные крапы разделяют по грузоподъемности на легкие
грузоподъемностью до 10 т, средние — грузоподъемностью 10 4- 25 т
и тяжелые от 25 т и более. На специальных монтажных работах в СССР
уже сейчас работают краны грузоподъемностью 250 т.
Рис. 5.26. Козловый крап:
а — внешний вид; б — схема запасовки канатов для перемещения тележки: / — барабан
подъемной лебедки; 2 — грузовая тележка; 3 — барабан тяговой лебедки
По конструкции ходового устройства краны делят на гусеничные
и пневмоколесные. Последние разделяются на краны автомобильные,
ходовым устройством которых служит шасси автомобиля, и краны
на специальном ходовом устройстве в виде специального шасси авто-
мобильного типа.
По типу привода механизмов различают краны с одномоторным
и многомоторным приводом. В последнее время все большее примене-
ние получают краны с гидравлическим приводом.
Автомобильные краны предназначены для монтажа строительных
конструкций, ремонтных работ, погрузки и разгрузки штучных
грузов, при оборудовании грейфером — сыпучих и мелкокусковых
материалов. Привод механизмов крана осуществляется от двигателя
автомобиля. Это может достигаться двумя способами. При групповом
приводе механизмы управления грузовым и стреловым барабанами
148
и поворотом платформы вместе со стрелой приводятся в движение от
вмонтированной в трансмиссию автомобиля коробки отбора мощности
разветвленными механическими трансмиссиями. При индивидуальном
приводе на шасси устанавливают генератор, который приводится в
движение от трансмиссии автомобиля. Электроэнергия, вырабатываемая
генератором, питает электродвигатели отдельных механизмов крана.
Выпускаемые в СССР автомобильные краны можно разделить на
две большие группы: грузоподъемностью 2,5 -э- 5 т с грузовым мо-
ментом 7,5 19 тс-м (75—190 кН-м) и грузоподъемностью 6 -н 16 т
с грузовым моментом- 21 -к 62 тс-м (210—620 кН-м). Некоторые из
крапов оборудуют сменными стрелами различной длины.
Автомобильные краны отличаются высокой маневренностью и боль-
шой скоростью передвижения (до 60 км/ч без груза), что позволяет
применять их для выполнения рассредоточенных работ. Скорость
передвижения крана с грузом не превышает 5 км/ч.
Различают автомобильные краны с канатной подвеской стрелового
оборудования и механическим, электрическим или гидравлическим
приводом, а также гидравлические краны с жесткой подвеской гид-
равлического оборудования.
На рис. 5.27, а показан автомобильный кран, а на рис. 5.27, б —
кинематическая схема. На шасси грузового автомобиля 1 вместо
кузова устанавливается ходовая рама 3, а на ней — поворотная рама 5.
Эти рамы соединяются поворотным устройством 4. На раме 5 уста-
новлен механизм 6 подъема и опускания груза и стрелы, механизм 7
поворота рамы с механизмами и стрелы 10, реверсивного распредели-
тельного механизма 8, противовеса, кабина. Автомобильные краны,
как правило, снабжены выносными опорами 2, которые крепятся
к раме 3. Благодаря опорам увеличивается устойчивость крана. Гру-
зоподъемность кранов при работе с выносными опорами увеличивается
на 75—80%.
Механизмы крана рассчитаны на грузоподъемность при работе с
опорами. При работе краны на выносных опорах упругие подвески
шасси прогибаются. При работе без выносных опор правая и левая
подвески моста деформируются неравномерно, что приводит к наклону
поворотной рамы.
Для повышения устойчивости автомобильных кранов они снаб-
жены выключателями подвесок, жестко соединяющими шасси с его
рамой, или стабилизаторами 9, соединяющими шасси с рамой, урав-
нивающими деформацию подвесок.
Для безопасной работы крана на стреле установлен автоматиче-
ский сигнализатор опасных напряжений 11, предупреждающий маши-
ниста о приближении стрелы крана на опасное расстояние (не ме-
нее 1 м) к одно- или многофазной линии электропередачи. На ра-
стяжке 9 между полиспастом и головкой стрелы имеется автомати-
ческий ограничитель грузоподъемности. Кроме того, краны обору-
дуются ограничителями подъема крюка и вылета, а также устрой-
ствами, сигнализирующими о предельных значениях крена.
Привод механизмов крана осуществляется от основного двига-
теля через коробку отбора мощности / (рис. 5.27, б), конический
149
редуктор II и реверсивный механизм III. Последний приводит в дви-
жение шестерню 12 распределительного механизма IV, которая при-
водит в движение зубчатые колеса 13 и 16, приводящие в движение
червячный привод грузовой V и стреловой лебедки VI. Зубчатые
колеса 13 и 16 сидят свободно на валах и приведение вала в дви-
жение возможно только после включения кулачков 14 и 15. Зубчатое
Рис. 5.27. Автомобильный кран
колесо 16 приводит в движение механизм поворота, для этого надо
включить кулачок 17.
Эта схема имеет тот недостаток, что при включении реверса про-
исходит реверсирование движения у всех механизмов. Поэтому на
ряде кранов устанавливаются распределительные коробки с ревер-
сивными механизмами, позволяющими реверсировать каждый из при-
водимых в движение механизмов независимо.
В последнее время все большее применение получают автомо-
бильные краны с гидравлическим управлением.
150
Недостатком конструкции автомобильных кранов является срав-
нительно малая устойчивость. Для повышения устойчивости при
работе под крап подводят механические, гидравлические или пнев-
матические выносные опоры (аутригеры). При подъеме груза, масса
которого значительно меньше номинальной грузоподъемности, опоры
не устанавливают и кран .может передвигаться вместе с грузом.
Рис. 5.28. Кран пневмоколеснын на специальном шасси:
а — общий вид; б — кинематическая схема дизель-электрической установки;
в — го же, грузовой лебедки (главной); г — то же, грузовой лебедки (вспомога-
тельной); д — то же, стрслоподъемной лебедки; е — то же, механизма вращения
платформы; ж — то же, механизма передвижения крана; /, 2» 3 — генераторы по-
стоянного тока; 4 — дизель; 5, 6, 7 — электродвигатели
Основные показатели этих кранов зависят от того, работает кран
с выносными опорами или без них. Например, автомобильный кран
К-52 при длине стрелы 12 м имеет максимальную грузоподъемность 3 т
при работе на выносных опорах и не больше 1 т при работе без опор.
В автомобильных кранах, оборудованных дизель-электрическим при-
водом, двигатель внутреннего сгорания через карданный вал при-
водит в движение электрогенератор.
Привод грузоподъемной лебедки, грейферной лебедки, стрело-
подъемной лебедки, а также механизма вращения платформы осуще-
ствляется от отдельных электродвигателей, которые питаются элек-
троэнергией, вырабатываемой генератором.
151
Специальные (колесные и гусеничные) краны устанавливают на
шасси, имеющем более широкую базу. В пневмоколеспых кранах
число осей доходит до шести. Эти краны оборудуют короткими стре-
лами, если они предназначены для погрузочно-разгрузочных работ,
или длинными стрелами —
для монтажных работ.
Последнее время для
грузоподъемности до 30—
40 т получают распростра-
нение краны с телескопи-
чески выдвигающимися
стрелами. Это позволяет
при работе с длинными
стрелами сократить срок
подготовки их к работе и
переброске до 20—30 мин.
Грузоподъемпость ппев-
моколесных кранов дохо-
дит до 250 т, длина стрелы
до 120—130 мм (с наголов-
ником). Как правило, пнев-
моколесные краны стрело-
Рис. 5.29. Тракторные краны:
а — общий вид; 6 — кинематическая схема; / — чер-
вячный редуктор грузовой лебедки; 2 — трехсту-
пенчатый цилиндрический редуктор; 3 — распреде-
лительная коробка с реверсом; 4 — муфта включе-
ния; 5 — механизм вращения; 6 — распределитель-
ная коробка; 7 — червячный редуктор стреловой
лебедки
вые, хотя имеются и краны
башенные.
Краны на специальном
шасси, как правило, выпус-
кают с многомоторным при-
водом. На рис. 5.28 пока-
зан общий вид и кинемати-
ческие схемы механизмов
полноповоротного крапа с
дизель-электрическим при-
водом грузоподъемностью
25 т на колесном ходу.
Дизель приводит в движе-
ние три генератора посто-
янного тока. Вырабаты-
ваемый ими ток приводит
в движение электроприво-
ды отдельных механизмов.
Специальные шасси вы-
полняются не только колес-
ными, но и гусеничными.
Кроме того, краны на гусеничном ходу изготовляют на базе трак-
торов промышленного применения. Их максимальная грузоподъем-
ность 5—6 т/ длина стрел 12 м.
У таких кранов на тракторе жестко закреплена рама, на которой
монтируют поворотный круг в виде двойного упорного шарикового
подшипника. На платформе размещены стрела, стойки для блоков,
152
Рис. 5.30. Кран-трубоукладчик:
/ — стрела; 2 — лебедка; 3 — контргруз;
4 — рама контргруза
лебедки, редукторы приводного и поворотного механизмов. У неко-
торых кранов на поворотном круге помещена и кабина крановщика.
Привод механизмов подъема стрелы, подъема груза, поворота
в этих кранах бывает одномоторным — в этом случае движение меха-
низму крана передается от вала отбора мощности двигателя трак-
тора через распределительную коробку и муфту включения или инди-
видуальным, когда генератор приводится во вращение от переднего
вала двигателя, что позволяет ра-
ботать при отключенной ходовой
части трактора.
Общий вид тракторного крана
и кинематическая схема его пока-
заны на рис. 5.29, а, б.
Чтобы повысить устойчивость,
краны большой грузоподъемности
оборудуют двумя выдвижными опо-
рами (домкратами). Для предотвра-
щения раскачивания поднятого
груза при деформации тракторных
рессор последние во время работы
выключают. Это обеспечивает жест-
кую связь гусеничного хода трак-
тора со всей конструкцией крана.
На базе трактора выпускают
краны-трубоукладчики (рис. 5.30)
различных конструкций грузо-
подъемностью 3 ч- 90 т. У таких
кранов на тракторе устанавливается дополнительная рама, на которой
размещают лебедки для подъема груза и стрелы. Привод лебедок
осуществляется от коробки отбора мощности через систему зубчатых
передач. В тяжелых кранах гусеницы трактора раздвигаются для
улучшения устойчивости.
Специальные крапы на гусеничном ходу выполняют или на базе
экскаватора, или на специальном шасси. Основным преимуществом
гусеничных крапов по сравнению с пневмоколесными является их
высокая проходимость. Удельное давление на грунт у них не пре-
вышает 1,5 кгс/см2 (0,15 МПа).
Гусеничные краны делят на четыре группы: грузоподъемностью
5—10 т с грузовым моментом 12 ч- 50 тс-м; грузоподъемностью
15 ч- 25 т с грузовым моментом 54 ч- 137 тс-м (540—1370 кН-м);
грузоподъемностью 30 ч- 100 т с грузовым моментом 150 ч- 600 тс-м
(1,5 — 6 МН-м). Имеются краны на гусеничном ходу грузо-
подъемностью до 250 т. Гусеничные краны на дальние расстояния
перевозят железнодорожным транспортом или тяжеловозами.
§ 5.S. КОНТРОЛЬНО-ПРЕДОХРАНИТЕЛЬНЫЕ УСТРОЙСТВА
Для безопасной работы, а также для лучшего использования
кранов их оборудуют предохранительными и контрольными устрой-
ствами и приборами.
153
Анемометры. При работе башенных кранов, у которых обычно
центр тяжести расположен высоко, большое значение имеет ветровое
давление, под действием которого кран может сойти с путей или
опрокинуться. Для определения ветрового давления применяют
анемометры (рис. 5.31, о). Лопасть 1 под действием ветра приводит
в движение генератор 2, ток которого пропорционален скорости
ветра. В цепь генератора включен миллиамперметр 3, оттарированный
по скорости ветра. Крановщик, наблюдая за миллиамперметром,
по его показаниям определяет скорость ветра.
Противоугонные захваты. На рис. 5.31, б приведена схема про-
тивоугонного захвата. Два рычага 4 (клещи) закреплены на шарни-
рах в точке О. Ручка 2 через цепную передачу 3 приводит во вра-
щение винт 4, на одном конце которого нарезана правая резьба,
а на другом левая. На винт надеты гайки 5, закрепленные на рыча-
гах. При повороте винта в обоих направлениях рычаги 6 поворачи-
вают рычаги 1 и зажимают или разжимают рельсы.
Ограничители. Применяют устройства для ограничения хода вы-
соты каната, так как подъем крюка выше определенного положения
приводит к разрыву каната. Для ограничения высоты подъема обычно
применяют конечные выключатели, которые включаются рычажным
устройством. Один из таких ограничителей показан на рис. 5.31, в.
Когда крюковая обойма 1 достигает предельной высоты, она опира-
ется в рычаг 2 и поворачивает его вокруг оси О. Конец этого ры-
чага 3 упирается в кнопку конечного выключателя 4, который вклю-
чает питание двигателя барабана подъема каната.
Упоры применяют для ограничения длины перемещения кранов
(рис. 5.31, а). На местах ограничения хода устанавливают упоры 1.
На, кране устанавливают конечный выключатель 2. При достижении
краном предельного положения перемещения рычаг 3 конечного
выключателя упирается в упор 1. Рычаг 3, поворачиваясь, выключает
питание двигателя привода перемещения крана. Для безопасности
работы необходимо, чтобы крановщик знал, каков вылет стрелы
и какой груз можно поднимать на этом вылете.
Устройство для определения вылета стрелы показано на рис. 5.31, д.
На стреле закрепляют сектор / и свободно подвешенную стрелку,
показывающую угол наклона стрелы к вертикали. Диск сектора 1
можно градуировать не только для показаний вылета стрелы, но
и допустимой грузоподъемности. На многих кранах этот указатель
монтируют в кабине. Для этого стрелу связывают с указателем,
находящимся в кабине, рычагом 2. Необходимо, чтобы величины С
были равны друг другу.
Некоторые типы стреловых кранов могут работать на местностях
с поперечным уклоном (боковыми кренами). По требованиям устой-
чивости кранов допускается крен не более 3°.
Указатели крена применяют (рис. 5.31, в) для контроля величины
крена. Такой указатель состоит из корпуса /, у которого на оси 2
установлен маятник 3, а на оси 4 — стрелки 5. Указатель крена
крепят перед крановщиком в плоскости, нормальной к плоскости
изменения вылета.
154
Ограничитель грузоподъемности электромеханического действия
показан на рис. 5.32, а. Он работает на принципе сравнения вели-
чины фактически поднимаемого груза с допускаемой величиной при
Рис. 5.31. Контрольно-предохранительные устройства
разных вылетах стрелы. Фактическая нагрузка изменяется датчи-
ком 3, встроенным в канатные оттяжки 1 стрелового полиспаста,
стягивая их в пределе распорок 2. Датчик (рис. 5.32, б) представляет
собой электрический динамометр, состоящий из упорного кольца 5.
Под действием нагрузок кольцо деформируется (растягивается) про-
155
порционально усилию в стреловых канатах и силе тяжести груза.
Деформация кольца передается на рычажный потенциометр. Второй
датчик, оттарированный на предельные величины поднимаемых гру-
зов в зависимости от вылета стрелы, устанавливают на стреле (рис.
5.32, в). Одновременно, поворотом стрелы 8 вокруг точки О, повора-
чиваются стержень 9, поводок 10 и кулачок 6. Кулачок через рычаг 7
перемещает рычажок 12 потенциометра 11,
Рис. 5.32. Ограничитель грузоподъемности и работомер
Совместная электрическая схема этих датчиков приводится на
рис. 5.32, г. Если сигналы потенциометров становятся равными между
собой, т. е. величина поднимаемого груза равна предельно допу-
стимому значению, то ток, проходящий через реле 13, меняет направ-
ление, что приводит к размыканию контактов реле и отключению
питания крана электроэнергией.
Для оценки степени использования кранов и учета их работы
разрабатываются и на отдельных кранах находят применение рабо-
томеры.
Универсальный работомер, показанный на рис. 5.33, разработан
ВНИИСтройдормашем. Он регистрирует суммарную массу перегру-
женных грузов, время работы крана, число подъемов груза, число
рабочих циклов с подъемом и поворотом груза и время нахождения
его па крюке.
156
Прибор состоит из датчика усилия 3, который используется как
для ограничения грузоподъемности, так и для определения массы
груза; датчика 2, состоящего из трех потенциометров, один из кото-
рых служит для ограниче-
ния грузоподъемности, а
два других для подачи
сигнала о величине подни-
маемого груза и времени
нахождения его на крюке.
Эти сигналы подаются че-
рез блок-реле 1 и блок
сравнения 5 в блок счет-
чиков 4.
Рис. 5.33. Универсальный работомер
§ 5.6. ПРОИЗВОДИТЕЛЬНОСТЬ
КРАНОВ
Эксплуатационную про-
изводительность кранов
подсчитывают так же, как
для машин цикличного дей-
ствия. Продолжительность
цикла крана tn склады-
вается из машинного времени /ч (мин) и времени tn (мин), затрачи-
ваемого-на выполнение операций, выполняемых вручную.
Машинное время — это время, затрачиваемое на вертикальное
и горизонтальное перемещение крюка. Оно зависит от длины пути,
проходимого крюком с момента прицепки груза до момента уста-
новки груза в рабочее положение, и от длины пути после отцепки
груза до приемки его такелажниками, а также от рабочих скоростей
крана. При работе на кранах следует совмещать подъем груза с пере-
мещением крана и поворотом стрелы, так как это сокращает про-
должительность цикла:
ip — Аф + iycj + ^отц» (5.23)
где /пр — продолжительность прицепки груза, мин; /угт — продол-
жительность установки (монтажа) груза, мин; /отп — продолжитель-
ность отцепки груза, мин.
Время /уст составляет значительную долю от общего времени
цикла, в частности когда краном производят монтажные работы.
Например, при монтаже крупнопанельных бескаркасных зданий
башенными кранами время, затраченное на установку вручную одной
наружной стеновой панели, составляет 20,7 мин, на установку одного
лестничного марша — 23,6 мин, в то время как машинное время
составляет всего лишь 2—3 мин.
Время, затраченное на выполнение операций вручную, можно
уменьшить, если сократить продолжительность наводки деталей
на место посадки и крепления их. Для этого следует применять спе-
циальные кондукторы, фиксаторы и другие приспособления.
157
Большое влияние на время установки оказывают посадочные
скорости крана, т. е. скорости, при которых груз подводится к месту
посадки. В монтажных кранах предусматривается возможность по-
садки деталей с уменьшенными скоростями, при которых детали
устанавливать легче и проще.
Существенно влияет на производительность крана использование
грузоподъемности. При расчетах это учитывается коэффициентом
использования кранов по грузоподъемности /<г, представляющим
собой отношение полезной массы (без тары) поднимаемого груза
к грузоподъемности крана на данном рабочем вылете стрелы. Чем
больше грузоподъемность, тем меньше коэффициент /<г. Если масса
поднимаемых грузов неизвестна, то для кранов грузоподъемностью
0,5—1 тс можно принимать Л'г = 0,85 4- 0,8, для кранов грузо-
подъемностью 3—5 т Кг = 0,65 4- 0,5. Для кранов большей грузо-
подъемности значение коэффициента Кг еше меньше.
Использование крана по времени в течение смены учитывается
коэффициентами К,л и Ке2:
480—/П(?р
Лв1 — 480 ’
(5.24)
где infp — продолжительность технологических перерывов в работе
крана за смену, мин.
Коэффициент КЪ2 учитывает организационные перерывы в работе
(на текущий уход, передвижение крана, на прием и сдачу крана
в начале и конце смены, обеденный перерыв). Величина этого коэф-
фициента 0,75 4- 0,9.
Контрольные вопросы
1. Начертите схемы домкратов, лебедок и талей. Приведите основные зависи-
мости для их расчета.
2. Перечислите типы подъемников, начертите их схемы и опишите области их
применения.
3. Перечислите типы кранов и начертите их принципиальные схемы.
4. Начертите кинематическую схему автомобильного крана и приведите его
основные характеристики.
5. Начертите кинематическую схему башенного крана и приведите его основные
характеристики.
6. Напишите формулу для определения мощности привода лебедки подъема
груза.
7. Напишите формулу для определения мощности привода механизма переме-
щения башенного крана.
8. Вычертите кривую грузоподъемности в зависимости от вылета стрелы крана.
9. Напишите формулы для определения продолжительности цикла и произ-
водительности башенного крана.
10. Перечислите и начертите схемы ограничителен грузоподъемности.
11. Вычертите схему устройства для определения величины вылета стрелы.
ГЛАВА 6
ТРАНСПОРТИРУЮЩИЕ МАШИНЫ
§ 6.1. КОНВЕЙЕРЫ
Конвейеры применяют для транспортирования гравия, щебня,
цемента, грунта, бетонных смесей, кирпича, дробленого камня в пре-
делах строительной площадки, завода строительных деталей и карьера.
Машины этого типа можно разделить на следующие группы: а) кон-
вейеры или транспортеры (ленточные, цепные, винтовые, роликовые,
вибрационные, а также элеваторы); б) подвесные канатные дороги;
в) пневматические транспортные устройства; г) самотечные гравита-
ционные устройства.
Ленточные конвейеры. Они делятся на передвижные (длиной
5 -ь 20 м) и стационарные (до нескольких сотен метров). Они просты
по конструкции, имеют сравнительно небольшую металлоемкость,
позволяют транспортировать грузы на расстояния до нескольких
километров. Производительность их 10 -5- 20 тыс. т.ч.
Ленточный конвейер (рис. 6.1, а) представляет собой бесконеч-
ную ленту, огибающую два барабана, один из которых является
ведущим, а другой —- ведомым. При вращении ведущего барабана
лента цод действием сил трения приводится в движение. Между веду-
щим и ведомым барабанами устанавливают роликовые опоры, под-
держивающие верхнюю и нижнюю ветви ленты, не давая ей провисать.
Грузы укладывают на ленту.
Способность материала перемещаться вместе с лентой зависит
от его гранулометрического состава, определяемого размерами ча-
стиц; объемной (насыпной) массы у, т. е. веса единицы объема мате-
риала без его уплотнения при насыпке или укладке с малой ско-
ростью и при малой высоте падения частиц; влажности; подвижности,
‘зависящей от внутренних сил трения, а также от абразивности, лип-
кости, хрупкости и острокромчатости.
Лента конвейера должна быть достаточно прочной, так как она
является не только органом, несущим груз, но и тяговым элемен-
том; кроме того, она должна обладать такими свойствами, чтобы
сцепляемость (коэффициенттрения между лентой и барабаном, а также
между лентой и транспортируемым материалом) была наибольшей.
Этим требованиям отвечают ленты, выполненные из нескольких
слоев прокладок из хлопчатобумажной ткани, которые связаны между
собой слоями резины и покрыты резиной. Такие ленты применяют
для транспортирования материалов при температуре от +50 до —15° С.
При температуре выше +50 и ниже —15" С используют теплостойкие
и морозостойкие ленты.
Более прочными являются ленты с прокладками из нейлона и
других искусственных волокон. Особо прочные ленты выполняют
159
с каркасом из стальных тросиков, что позволяет увеличивать длину
одного конвейера примерно в 10 раз.
а — общий вид: б — силы, действующие на барабан; е, г» д — схемы загрузочных и разгру-
зочных устройств; е, ж. з — формы конвейерных лент; / — электродвигатель; 2 — редуктор:
3 — ведущий барабан; 4 — лента; 5 — натяжное устройство; 6 — ведомый барабан
Количество прокладок i в зависимости от ленты В (м) следующее:
В 0,3 0,4 0,5 0,6 0,8 1,0 1,2 1,4
i 3—4 3—5 3—6 3—7 4—8 5—10 6—10 7—10
Надежность работы конвейера зависит от соединения концов
ленты. Наиболее прочным является соединение склейкой с после-
дующей вулканизацией. Для этого на концах ленты расщепляют слои
и затем отрезают их уступами. После зачистки уступов их покры-
160
вают резиновым клеем, соединяют и зажимают между металличе-
скими пластинами. Затем стык нагревают до 160° С, в результате
чего происходит вулканизация резины.
Применяют соединения скрепками или шарнирными петлями.
Прочность таких соединений на 30—40% меньше, чем при вулкани-
зации.
По известной величине натяжения 5тях выбирают ширину лен-
ты В (м) с необходимым количеством прокладок i:
1 — (6.1)
где Р — допускаемая нагрузка на 1 м ширины одной прокладки
ленты [при обычных хлопчатобумажных прокладках Р = 550 кгс
(5,5 кН)].
Привод ведущего барабана осуществляется от электродвигателя
через редуктор, установленный на раме.
Многие ленточные конвейеры для большей компактности выпол-
няют с барабанами, в которые встроен электродвигатель.
Загрузка и разгрузка конвейера выполняются загрузочными и
разгрузочными устройствами, конструкция которых зависит от вида
транспортируемых материалов.
Сыпучие, мелкокусковые и среднекусковые материалы загружа-
ются на конвейер при помощи воронок и направляющих лотков
(рис. 6.1, в, г), а штучные грузы — при помощи направляющих. Для
сбрасывания материалов с конвейера служат скребковые сбрасыва-
тели (рис. 6.1, д)
В зависимости от вида груза ленте задается различная скорость.
Для транспортирования строительных материалов при прорезиненной
ленте скорость должна быть 1,0—2,0 м/с, для транспортирования
штучных грузов 0,5—0,8 м/с.
Ленточные конвейеры позволяют перемещать грузы (при проре-
зиненной ленте) под углом до 20°.
Для работы конвейера необходимо, чтобы сила трения между
барабаном и лентой была достаточной для перемещения нагруженной
ленты. Величина этой силы трения (рис. 6.1, б) зависит от коэффи-
циента трения р между лентой и барабаном и угла обхвата барабана
лентой а. Чтобы лента не проскальзывала, должно быть соблюдено
неравенство Эйлера:
($наб/$сб)<^“, (6.2)
где Slla6 — натяжение в набегающей ветви лепты, кгс (Н); Sc6 —
натяжение в сбегающей ветви ленты, кгс (II); е — основание нату-
рального логарифма.
Для устойчивости ленты в работе ее предварительно натягивают
винтами, перемещающими ось ведомого барабана вместе с барабаном.
Величина тягового усилия Р,„ кгс (Н), необходимая для опреде-
ления мощности привода (рис. 6.1, б):
Ро ~ *^ваб — ^сб•
6 М. И. Гальперин
161
Натяжение в сбегающей ветви Sc6 обычно равно предваритель-
ному натяжению So, следовательно,
/’о = ^наб $0-
(6.3)
Величина натяжения должна обеспечивать необходимую силу
трения между лентой н приводным барабаном; при этом стрела про-
веса нагруженной ленты между отдельными опорными роликами
не должна превышать заданной величины, которая зависит от расстоя-
ния между роликами.
Для получения нужных сил трения и надежной работы величина
минимального натяжного усилия
Smin = 2 • 5,5 (т + mJ = 11 (т + mJ,
(6-4)
где т — масса 1 м транспортируемого материала, кг; mY — масса
1 м ленты, кг.
Производительность ленточного конвейера
П = ЗбООГуо, м3/ч, (6.5)
Рис. 6.2. Пластинчатый конвейер:
1 — пластина; 2 — воронка; 3 — натяжная звездоч-
ка; 4 — катки; 5 — неподвижные направляющие;
6 _ тяговая цепь; 1 — приводная звездочка; 8 — ло-
ток
где F — площадь сечения материала, расположенного на ленте, м2;
у — насыпная масса материала, т/м3; V — скорость движения лепты, м/с.
Площадь F зависит от угла естественного откоса (который в свою
очередь зависит от физических свойств материала), от формы ленты
и угла наклона ее. Различ-
ные формы лент показаны
на рис. 6.1. Величина пло-
щади сечения F при углах
подъема конвейера до 10*
может быть приближенно
принята следующей: для
плоской ленты (рис. 6.1,е)
F = 0,05В2; для плоской
ленты с бортами (рис. 6.1 ,ж)
F = 0,05В 2 + /гВ0; для
желобчатой ленты (рис.
6.1, з) F = 0,11В.
При транспортировании
кусковых материалов или
штучных грузов, макси-
мальный размер которых
равен птах, ширина ленты
должна быть: для рядового материала В^2птах + 0,2м; сортированного
материала В > 3,3nmax + 0,2 м; штучных грузов В «тах + 0,1 м.
Цепные конвейеры. К цепным относят пластинчатые, скребковые
и ковшовые конвейеры.
Пластинчатые конвейеры (рис. 6.2) применяют
для транспортирования горячих, острокромчатых, кусковых и штуч-
пых материалов. Тяговым органом пластинчатых конвейеров явля-
ются две бесконечные цепи, которые устанавливаются на ведущей
и ведомой звездочках. К цепям крепят настилы из гладких или фигур-
162
ных металлических пластин. Скорость перемещения пластин, а сле-
довательно, и грузов на пластинчатом конвейере меньше, чем у лен-
точных, и составляет 0,05—0,5 м/с. Пластинчатые конвейеры поз-
воляют перемещать грузы под углом до 30°.
На основании опытных данных установлено, что величина натя-
жения цепи
5иат = 600В + 40L, кгс,
где В — ширина настила, м; L — длина конвейера, м.
Величина тягового усилия ограничивается прочностью цепей.
Обычно в конвейерах применяют длнннозвениые цепи, главным обра-
зом пластинчатые втулочные и втулочно-роликовые с шагом 100 ч-
ч- 630 мм. Тяговый орган предварительно натягивается, но это на-
тяжение значительно меньше, чем в ленточных конвейерах. Оно дела-
ется для того, чтобы цепь не провисала, а также для обеспечения
нормального зацепления между цепью и звездочкой.
Рис. 6.3. Скребковый конвейер:
/ — цепь, 2 — скребки; 3 — натяжная звездочка; 4 — желоб; 5 — приводная звез-
дочка
Производительность пластинчатых конвейеров подсчитывается так
же, как и ленточных, по формуле (6.5).
Скребковые конвейеры (рис. 6.3) отличаются от пла-
стинчатых тем, что тяговые цепи помещены в открытом желобе и на
них вместо пластин закреплены скребки. Скорость скребковых кон-
вейеров 0,1 ч- 0,5 м/с, длина не более 50—60 м. Недостатком этих
конвейеров является быстрый износ тяговых цепей, так как они
чаще всего применяются для транспортирования сыпучих материалов,
оказывающих абразивное воздействие па цепи.
Ковшовые конвейеры (нории) применяют для подъема
материалов по вертикали или в круто наклонном направлении на
высоту до 50 м. На бесконечной цепи (рис. 6.4), установленной на двух
звездочках, ведущей и ведомой, или бесконечной ленте, установлен-
ной на двух барабанах, закрепляют рабочие органы—ковши. На
таких элеваторах можно транспортировать как сыпучие, так и куско-
вые материалы. Сыпучие и мелкокусковые материалы загружают
к предварительно в загрузочный башмак, из которого его забирают
ковши. Крупнокусковые материалы необходимо подавать непосред-
ственно в ковши.
Элеваторы бывают быстроходные (со скоростью тягового органа
1,25—2,0 м/с) и тихоходные (со скоростью 0,4—1,0 м/с).
В этих элеваторах используют ковши с цилиндрическими дни-
щами (рис. 6.4, б) и остроугольные с бортовыми направляющими.
Ковши с цилиндрическими днищами делают глубокими для транс-
портирования сухих материалов (земли, песка, мелкого каменного
угля) и мелкими для транспортирования плохо высыпающихся мате-
риалов (влажного песка, молотого гипса, извести, цемента).
164
Остроугольные ковши с бортовыми
направляющими применяют для тран-
спортирования абразивных и кусковых
насыпных материалов.
Производительность элеваторов 5—
360 м3/ч. Она зависит от емкости ков-
шей q, шага размещения ковшей t,
коэффициента заполнения в, скорости
их перемещения v и объемной массы у:
Л = 3600’Руи. (6.6)
Отношение нормального объема мате-
риала к полному геометрическому объе-
му желоба называется коэффициентом
заполнения е.
Винтовые конвейеры. Эти конвейеры
иначе называют шнеками. Применяют
их для транспортирования цемента, гра-
вия, песка, шлака, мокрой глины, бе-
тонной смеси на расстояние 30—40 м
под углом до 20°. В отдельных случаях
их используют и для вертикального
транспортирования. Винтовой конвейер
(рис. 6.5) представляет собой винт, за-
ключенный в кожух (желоб). При вра-
щении винта материал перемещается
вдоль его оси. Работают такие конвейеры
при определенной окружной скорости
винтов, которая выбирается в зависи-
мости от коэффициента трения между
материалом и винтом. Качество работы
конвейера зависит от заполнения жело-
ба: при слишком большом заполнении
трение между материалом и винтом будет
очень велико и может произойти заку-
порка желоба, при недостаточном за-
полнении не достигается возможная
производительность.
Производительность винтовых кон-
вейеров зависит от средней площади се-
чения потока материала в желобе и ско-
рости его перемещения вдоль оси. Эти
величины зависят от диаметра желоба,
шага и частоты вращения винта, его
Конструкции и свойств материала.
Величина средней площади сечения
Потока
Рис. 6.5. Винтовой конвейер:
F=~^tC, ма,
4
165
где С — коэффициент, учитывающий изменение средней площади
сечения потока при работе с уклоном (при горизонтальном располо-
жении конвейера величина С — 1, при уклоне 20е С — 0,65); е —
коэффициент заполнения (е — 0,8 ч- 0,85).
Скорость перемещения материала вдоль оси
u = SEz?/60, м/с,
где SB — шаг винта; п — частота вращения винта, об/мин.
Следовательно, производительность
/7 = 3600еС^^т, т/ч. (6.7)
Шаг винта равен диаметру или 0,8 диаметра винта. Диаметры
винтов стандартизованы 0,15 4- 0,6 м. При выборе конвейеров необ-
ходимо, чтобы шаг винта был в 12 раз больше среднего размера кусков
сортированного материала и в 4 раза больше максимального размера
кусков рядового материала.
Рис. 6.6. Виброжелоб:
/ — вибраторы; 2 — внброжелоб; 3 — внбропнтатсль
Мощность этих конвейеров зависит от массы транспортируемого
груза GM, скорости движения конвейера или элеватора v, высоты
подъема груза Н, длины транспортирования груза, массы транс-
портирующего устройства, вида разгрузки. При свободном сбрасы-
вании не тратится мощность на сбрасывание, а при принудительном,
например с помощью плужкового сбрасывателя, требуется дополни-
тельная мощность.
Вибрационные конвейеры. Для транспортирования сыпучих ма-
териалов, бетонных смесей, растворов применяют вибрационные
устройства. При вибрации значительно уменьшается трение между
частицами сыпучих материалов и вязких смесей. Цемент и другие
сыпучие материалы при вибрации частично приобретают свойства
жидких тел, а растворы и бетонные смеси — более жидкую консистен-
цию. Достаточно желобу или трубе придать небольшой уклон и со-
166
Рис. 6.7. Виброконвейер
общнть им колебания, чтобы находящийся в них материал начал
перемещаться по уклону.
На рис. 6.6 показан внброжелоб для подачи бетонной смеси или
раствора, выгружаемых из автомобиля к месту укладки. В зависи-
мости от жесткости смеси угол наклона такого желоба делается 54-15°.
Обычно на таких устройствах устанавливают вибровозбудители
с ненаправленными колебаниями. Производительность такой уста-
новки может достигав 100 м3 в смену.
Виброконвейеры применяют также
для перемещения материалов на заво-
дах строительных деталей, на складах
инертных материалов. Материалы
могут транспортироваться под углом
не только вниз, но и вверх. Общий
вид виброконвейера показан на рис.
6.7, а, принцип работы — на рис.
6.7, б.
Предположим, что наклонный же-
лоб или труба занимают положение /.
При вибрировании желоб при каждом
колебании переходит из положения I
в положение //, и частица, находя-
щаяся на желобе в положении А,
переместится в положение Б. При
резком возвращении желоба в поло-
жение / частица переместится допол-
нительно относительно желоба и при
окончании одного колебания будет
находиться в точке В, расположенной
выше точки А.
Во время движения желоба вверх
находящаяся на нем масса М пере-
местится вместе с желобом под действием сил трения. Если дви-
жение желоба вверх будет слишком резким, то силы инерции плюс
сила тяжести, действующие на массу, окажутся больше сил трения,
и масса начнет скользить по желобу вверх. Если же движение желоба
вниз будет недостаточно резким, то масса останется на желобе.
Направление движения материала по желобу определяется углом
наклона желоба, характером и направлением колебаний вибровоз-
будителя, а также сообщением желобу несимметричных колебаний,
во время которых движение желоба вверх будет происходить плавно,
а вниз резко. Недостатком вибрационных конвейеров является срав-
нительно малый моторесурс вибровозбудителей, сложность наладки,
неизбежность резонансного режима при остановках.
§ 6.2. СПУСКНЫЕ САМОТЕЧНЫЕ УСТРОЙСТВА
Большое применение в строительстве имеют самотечные устрой-
ства, но которым материалы перемещаются под действием силы тя-
жести. Такне устройства используют для спуска мусора из строя-
167
щихся или ремонтируемых здании, укладки материалов, подачи
их в бункера или на конвейеры.
Обычно материалы в рассматриваемых устройствах перемещаются
по наклонной плоскости. Угол наклона подбирают так, чтобы мате-
риал двигался со скоростью, обеспечивающей безопасные условия
работы. Чаще всего спускные устройства выполняют в виде лотков
иЛи труб
Рис. 6.8. Самотечные устройства
На рис. 6.8, а показан спускной корытообразный лоток. Он под-
вешивается на шарнире и поддерживается двумя тягами. В зависи-
мости от транспортируемого материала лотку задается определенный
угол наклона изменением длины тяг. Ширина лотка обычно состав-
ляет не менее трехкратного максимального размера кусков мате-
риала или штучных грузов. Высота бортов принимается равной 0,4
ширины лотка. Лотки делают из металла толщиной 3 ч- 8 мм.
Для перемещения сыпучих и пылящих материалов применяют
спускные трубы (рис. 6.8, б). Такие спуски состоят из загрузочного
бункера, трубы и в некоторых случаях затвора. От одного бункера
могут отходить две и более трубы. Диаметр груб составляет не менее
300 мм.
Для спускания штучных грузов применяют винтовые спуски,
представляющие собой трубу, внутри которой помещается непод-
вижная спираль (рис. 6.8, в). Шаг и угол наклона спирали подбирают
168
так, чтобы грузы перемешались под действием собственного веса
с заданной скоростью.
Если для спуска сыпучих материалов требуется ограниченная
скорость падения, можно использовать каскадные спуски (рис. 6.8, г).
Они состоят из вертикальной шахты, внутри которой размещены
по винтовой линии наклонные лотки.
Производительш'сть спускных устройств зависит от коэффи-
циента заполнения е, величина которого колеблется в пределах
0,4 ч- 0,8, и от скорости движения материала по желобу v, которая
в свою очередь зависит от угла наклона и сил трения материала
о желоб.
Скорость v можно приближенно подсчитать по формуле
v = k'\/r2gH, м/с,
где k — коэффициент, зависящий от угла наклона и коэффициента
трения.
Производительность спускного устройства
П = ЗбООЛуие, т/ч, (6.8)
где F — площадь сечения самотечного устройства, м2; у — насып-
ная масса материала, т/м8.
Рис. 6.9. Схемы пневматического транспор-
тирования
§ 6.3. ОБОРУДОВАНИЕ ДЛЯ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТИРОВАНИЯ
При помощи пневматических устройств перемещают сыпучие мате-
риалы (цемент, песок, шлак, древесные опилки и т. д.), а также раст-
воры. Принцип работы пневматических устройств заключается в том,
что в трубопровод, по кото-
рому транспортируется мате-
риал, подается такое количе-
ство воздуха и с такой ско-
ростью, при которых частицы
Материала удерживаются во
взвешенном состоянии н в
этом состоянии перемещаются
по трубопроводу. Чтобы час-
тицам сообщить взвешенное
состояние, необходим опреде-
ленный расход воздуха.
Применяются две системы
транспортирования. В одной
системе (рис. 6.9, а), называемой вакуумной, транспортируемый мате-
риал засасывается вместе с потоком воздуха соплами /, прикреплен-
ными к трубопроводу. Насос 6 всасывает воздух, который увлекает за
собой частицы материала. Между насосом и соплом установлен раз-
гружатель 2, диаметр которого значительно больше диаметра трубо-
провода. Смесь воздуха с материалом, попадая в разгружатель, резко
уменьшает скорость, и частицы материала падают на дно. Внизу
разгружателя имеется герметический затвор 3, при открывании
Которого материал высыпается в бункер 4. Емкость бункеров выби-
169
рают в зависимости от производительности устройства и условий
его работы. На рис. 6.10 показаны различные формы бункеров.
На выгрузку материала значительно влияет угол наклона сте-
нок бункера а. Этот угол для строительных материалов должен быть
больше, чем угол естественного откоса этих материалов. Обычно
он составляет 45—60°. Увеличивать угол а нецелесообразно, так
как при этом уменьшается емкость бункера (при той же высоте).
Пропускная способность бункера
77 = 360074 м3/ч, (6.9)
где F — площадь выходного отверстия, м2; v — скорость движения
(истечения) материала, м/с.
Скорость v зависит от гранулометрического состава материала,
площади сечения выходного отверстия и его формы, которая опре-
деляется периметром А (м).
Отношение F/А называется
гидравлическим радиусом от-
верстия истечения 7?.
На пути от разгружателя
к насосу устанавливается
фильтр 5 (см. рис. 6.9), в
а)
б)
б)
г)
Ъ,
котором оседают оставшиеся
Рис. 6.10. Формы бункеров: частицы материала. Благо-
а _ пирамидальная; б — призмопираыидальная; Даря ЭТОМу НЭСОС ПрбДОХра-
е — коническая; г — цилиндрическая НЯСТСЯ ОТ ЗЭСОреНИЯ, уМРНЬ-
шаются потери материала и
не происходит выброса материала в атмосферу, что улучшает усло-
вия безопасности труда. Этот способ применяют для транспортиро-
вания па сравнительно короткие расстояния.
В другой системе (см. рис. 6.9, б), называемой нагнетательной,
материал подается из бункера 4 в трубопровод 7. В этот же трубо-
провод нагнетается воздух насосом 6. Воздух вместе с материалом
поступает в разгружатель 2, диаметр которого также больше диа-
метра трубопровода, н частицы материала оседают в разгружателе.
За разгружателсм устанавливается фильтр 5 для предотвращения
выброса материала в атмосферу.
Пневматическим способом можно транспортировать материалы
на расстояния до 2 км с большой производительностью, и материал
не распыливается. Недостатком является большой удельный расход
энергии (до З-т-5 кВт-ч/т-км).
В среднем на каждый килограмм материала расходуется Ю-т-15 м3
воздуха. Перепаддавлепнй в вакуумных системах составляет0,1 -г-0,4ат
(0,01 -т- 0,04 МПа), в нагнетательных давление в среднем дости-
гает 2 4- 6 ат (0,2 0,6 МПа).
§ 6.4. БУНКЕРА, ЗАТВОРЫ И ПАТАТЕЛИ
Транспортирующие устройства комплектуют в зависимости от вида
работ вспомогательным оборудованием: бункерами, затворами и
питателями.
170
Бункера предназначены для кратковременного хранения сыпучих
и кусковых материалов. Их размещают в начале или в конце транс-
портирующего устройства.
Скорость истечения по схеме, показанной на рис. 6.9, а,
u = XJ/3^ = 5,65X м/с, (6.10)
где X — коэффициент истечения, зависящий от гранулометрического
состава и подвижности материала (для хорошо сыпучих порошко-
образных и зернистых материалов X = 0,6; для пылевидных и влаж-
ных порошкообразных материалов X — 0,22).
Если истечение происходит по схеме, изображенной на рис. 6.10, б,
то скорость
v = X у"2g/< = 4,46Х l^h, м/с, (6.11)
где h — высота материала в бункере, м.
Истечение материала по этой схеме принято называть гидравли-
ческим видом истечения.
Площадь сечения выходного отверстия не должна быть меньше
заданных величин. Для порошкообразных и зернистых материалов
площадь F должна быть не меньше 0,09 м2.
Затворы по конструкции различны в зависимости от вида мате-
риала, размера бункера и условий разгрузки. Для бункеров малой
емкости при полной их разгрузке применяют клапанные откидные
затворы (рис. 6.11, а); для разгрузки зернистых и мелкокусковых
материалов — секторные (рис. 6.11, б); для крупнокусковых мате-
риалов— пальцевые (рис. 6.11, в).
Используют также горизонтальные малогабаритные реечные за-
творы (рис. 6. 11, г).
Так как на затворы действуют большие нагрузки, возникающие
от давления материала, то для их закрытия при порционном опорож-
нении бункера требуются значительные усилия. Величина давления
на затворы зависит от высоты столба материала в бункере, размеров
выходного отверстия F, состава и свойств материала, а также от формы
затвора. Например, в затворах наклонно-откидных (рис. 6.11, а)
на затвор действует давление Т', равное только части общего веса Т
материала, находящегося в затворе.
В затворах секторных (рис. 6.11, б) на затвор действует вес мате-
риала, находящегося в бункере.
Для жидких бетонных смесей и растворов давление
Tx = Fyh,
где -у — объемная масса материала, т/м3; h — высота столба мате-
риала, м.
Для сыпучих материалов давление
Tc — Fp,
где р — среднее вертикальное давление.
1
171
Гис. 6.11. Затворы
Рис. 6.12 Питатели
Величина р зависит от коэффициента внутреннего трения f, коэф-
фициента подвижности т, гидравлического радиуса выходного отвер-
стия R, а также от величин у и g:
Р fmg'
Для основных строительных материалов произведение fm « 0,175.
Зная R и у, можно определить величину р, а следовательно, и Т.
Питатели предназначены для непрерывной выдачи материалов из
бункеров. Ленточные и пластинчатые питатели (рис. 6.12, а и б)
обычно имеют кривсшинио-храповой привод, обеспечивающий неболь-
шую скорость ' перемещения (0,05-н 0,5 м/с.) Ленточные питатели
пригодны для выдачи материалов как пылевидных, так и средне-
кусковых; их производительность достигает 300 м3/ч. Производитель-
ность пластинчатых питателей 1000 м3/ч. Применяют их для подачи
средне- и крупнокусковых материалов.
Винтовые питатели (рнс. 6.12, в) используют при работе с сыпу-
чими материалами. Производительность их до 30 м3/ч. Тарельчатые
питатели (рис. 6.12, е) применяют для материалов различной круп-
ности при производительности до 25 м®/ч. Барабанные лопастные
питатели (рьс. 6.12, 0) могут выдавать материал порциями, для
чего они поворачиваются на определенный угол. Кареточные и вибра-
ционные питатели (рис. 6.12, е и ж) тоже выдают материал порциями.
Последние три питателя служат не только для выдачи материалов,
но « для их дозирования.
Контрольные вопросы
I. Перечислите виды транспортирующих устройств и начертите их схемы.
2. Напишите формулу для определения производительности транспортирующих
устройств различных типов.
3. Начертите схемы и опишите принцип работы вибротранспортирующего
устройства.
4. Начертите схемы спускных самотечных устройств.
5. Начертите схемы и опишите устройство бункеров, затворов и питателей.
ГЛАВА 7
ПОГРУЗОЧНО-РАЗГРУЗОЧНЫЕ МАШИНЫ
Для погрузочно-разгрузочных работ в строительном производ-
стве используют погрузчики и разгрузчики. Практика применения
экскаваторов в качестве погрузчиков на карьерах и складах неруд-
ных материалов показала, что они менее эффективны, чем погруз-
чики.
По роду погружаемых грузов погрузчики делят на погрузчики
для штучных грузов (подхватывающие или вилочные) и для сыпучих
грузов (зачерпывающие). Зачерпывающие погрузчики делят на одно-
ковшовые и многоковшовые непрерывного действия. Одноковшовые
погрузчики являются универсальными и могут применяться в раз-
личных условиях. Многоковшовые применяются на базисных складах,
в дорожном строительстве и там, где рабочий процесс должен быть
непрерывным.
В зависимости от ходового оборудования погрузчики могут быть
гусеничные и колесные. Погрузчики на гусеничном ходу имеют высо-
кую проходимость и развивают большое напорное усилие. Колесные
погрузчики отличаются большей маневренностью и высокими транс-
портными скоростями, не разрушают поверхности дорог и площадок
складов.
Разгрузчики применяют для разгрузки песка, гравия, щебня,
цемента из железнодорожных вагонов.
Для разгрузки применяют механические и пневматические раз-
грузчики. Они являются узко специальными машинами: механиче-
ские — для разгрузки платформ или полувагонов, пневматические —
для разгрузки цемента.
§ 7.1. ВИЛОЧНЫЕ ПОГРУЗЧИКИ
У вилочных погрузчиков основным видом рабочего оборудования
являются вилы, которые служат для погрузки и разгрузки штучных
грузов. Эти погрузчики имеют различное сменное оборудование.
При оборудовании ковшами или грейферами они выполняют погрузку
и разгрузку сыпучих и мелкокусковых материалов, а при оборудо-
вании стрелами их применяют для подъема грузов па небольшую
высоту и иногда для монтажа строительных конструкций.
Вилочные погрузчики работают на площадках с твердым покры-
тием. В соответствии с этим их в основном применяют па складах
и в качестве внутризаводского транспорта. Они выполняются на базе
автомобилей, поэтому их называют также автопогрузчиками. В ка-
честве привода используют двигатели внутреннего сгорания и элек-
тродвигатели, обычно работающие от аккумуляторов. Автопогруз-
чики выпускают грузоподъемностью 3—5 т, с высотой подъема груза
174
до 6 м. Скорость подъема груза 3 4- 50 м/мин, скорость перемещения
без груза до 40 км/ч, с грузом—до 20 км/ч.
Рабочее оборудование подвешивается на грузоподъемник (рис. 7.1).
Он состоит из основной (неподвижной) 1 и выдвижной 2 рам. К выд-
вижной раме подвешивается карет-
ка 4, к которой прикрепляется ра
бочее оборудование. Рама с карет-
кой поднимается при помощи гидро-
цилиндра 3 одностороннего действия,
установленного на основной раме.
При подъеме подвижной рамы одно-
временно по этой раме перемещается
каретка. Это осуществляется благо-
даря тому, что каретка подвешена
на двух цепях 5, один конец которых
переброшен через блоки, закреплен-
ные на верхней траверсе подвижной
рамы, а второй конец закреплен на
основной раме.
Основная рама грузоподъемника
смонтирована на раме погрузчика
шарнирно и вместе с кареткой может
наклоняться в вертикальной плос-
кости на угол 3—4° вперед и 12—15°
назад, что осуществляется с помощью
двух гидроцилиндров 6.
Вилочные погрузчики выполняют
с передним и боковым расположе-
нием грузоподъемника. В первом
Рис. 7.1. Грузоподъемник вилоч-
ного погрузчика
случае погрузчики называются фронтальными, во втором — боко-
выми. Боковые погрузчики применяют для работ с длинномерными
грузами (трубы, сваи).
5 7.2. ОДНОКОВШОВЫЕ ПОГРУЗЧИКИ
Одноковшовый универсальный строительный погрузчик монти-
руют на базе гусеничных тракторов и колесных тягачей. Он пред-
назначен для механизации погрузочных и строительно-монтажных
работ при помощи сменного рабочего оборудования. Главным типом
рабочего оборудования является ковш: кроме него погрузчики имеют
и другие виды навесного оборудования. На рис. 7.2 показаны основ-
ные виды рабочего оборудования.
Основной ковш — рабочий орган машины, рассчитанный для ра-
боты с различными материалами, объемная масса которых находится
в пределах 1,4—1,8 т/м3.
Одноковшовые погрузчики классифицируют по грузоподъем-
ности на легкие — до 2 т, средние — до 4 т, тяжелые — до Юти
сверхтяжелыс — более Ют. По типу базовой машины погрузчики
подразделяют на колесные и гусеничные.
175
Погрузочное оборудование имеет три модификации: фронтальное,
перекидное, полуповоротное. Фронтальным оборудованием можно
разгружать материал только со стороны его разработки, полупово-
ротное обеспечивает и боковую разгрузку. Перекидной тип погру-
зочного оборудования позволяет вести разгрузку назад.
В настоящее время более распространены строительные фронталь-
ные погрузчики с объемным гидроприводом рабочего оборудования.
Материалы зачерпываются двумя способами: раздельным и совме-
щенным. При раздельном способе передняя кромка ковша переме-
щается в глубь штабеля на глубину врезания 1„р, которая больше
Рис. 7.2. Рабочие органы одноковшовых погрузчиков:
а — ковш для погрузки сыпучих материалов; б. в — ковши прямой и обратной
лопаты; г — вилы для штучных грузов; д, е — грейферные устройства; ж — грузо-
подъемный крюк
глубины ковша /к. Затем ковш поворачивается на угол а3 и подни-
мается для разгрузки. Совмещенный способ заключается в том, что
ковш внедряется в штабель материала на величину, равную прибли-
зительно 0,3 глубины ковша, после чего он поворачивается на угол
откоса штабеля; одновременно продолжается перемещение погруз-
чика и подъем ковша. Движения, сообщаемые ковшу, должны быть
такими, чтобы траектория движения режущей кромки была близка 3
к параллельной к откосу штабеля, чтобы сохранялась постоянная
толщина снимаемого слоя материала.
При раздельном способе требуются более значительные усилия
для внедрения ковша в материал, а также в начальный момент пово-
рота ковша. Коэффициент наполнения kH в тяжелых материалах
обычно составляет 0,4—0,6. Одпако при раздельном способе управ-
лять машиной проще, чем при совмещенном, поэтому его можно
176
Рис. 7.3. Одноковшовый по-
грузчик:
а — общий вид; б — кинематиче-
ская схема; в—гндросхема; / —
гидроцилиндр управления ковшом;
2 — стрела; 3 — криво шнпно-ша-
тунный механизм управления ков-
шом: 4 — ковш; 5 — гидро цилинд-
ры подъема стрелы; 6 — поворот-
ная рама; 7 — двигатель; 8 — ко-
робка отбора мощное।и; 9 — гидро-
трансформатор; 10 — коробка пе-
редач; 11 — главная передача
i — 2.67; 12 — задний мост; 13 —
ступенчатый редуктор i = 5,4;
14 — передний мост; /5 — насос:
16 — фильтр; 17 — масляный бак;
18 — гидровыключатель; 19 — рас-
пределитель; 20 — цилиндры ковша;
21 — цилиндры для стрелы.
177
рекомендовать для погрузки легких сыпучих материалов, в которых
можно обеспечить при этом способе k.a = 1,0 -е 1,2.
Рис. 7.4. Способы зачерпывания материала
Сопротивление повороту ковша (в кгс или Н) в зависимости от раз-
мерности /?г имеет наибольшее значение при начале поворота. Можно
КI,кгс./СМ
Рис. 7.5. Кривые удельного сопротивле-
ния при врезании ковша в различные
материалы:
1 — для щебня мелкокускового; 2 — для гра-
вия; 3 — для грунта рыхлого и песка естест-
венной влажности; 4 — для шлака котель-
ного; 5 — для каменного угля
считать, что при раздельном
способе
Р'п = 0,54ZK&/?1, (7.1)
где — удельное сопротнвте-
ине материала копанию; b —
ширина ковша.
11ри совмещенном и экскава-
торном способах
P'n = Q,6k1bc, (7.2)
где с—толщина срезаемого слоя.
Па участке срезания струж-
ки сопротивление движению
ковша определяется как для
экскаватора с оборудованием
лопаты.
Сопротивление внедрению Рв„
ковша в материал зависит от
глубины внедрения и от вида материала (рис. 7.5). По вертикали
отложено удельное сопротивление kL па единицу длины кромки
ковша, ио горизонтали — глубина внедрения.
где Кк — коэффициент, учитывающий крупность зерен.
В гидравлическую схему фронтального погрузчика входит шесте-
ренчатый насос, который подает масло через распределитель к гид-
роцилиндрам. Обычно погрузчик оборудуют гндроцилиндрамп опу-
скания и подъема стрелы и управления рабочим органом.
178
В современных конструкциях погрузчиков имеются приводы как
на передние, так и па задние оси.
Ковш погрузчика подвешивают на специальной рычажной системе,
управление которой осуществляется через гидроцилиндры. Одна
из конструкций рычажной системы показана на рис. 7.3, а.
Механизм подъема ковша состоит из стрелы, которая при помощи
гидроцилиндра подъема поворачивается вокруг неподвижного центра.
На конце стрелы шарнирно закреплен ковш, который с помощью
гидроцилиндра поворота и системы рычагов поворачивается вокруг
стрелы.
При погрузке крупных кусков сопротивление внедрению увеличи-
вается в 1,1—1,3 раза, что учитывается введением в формулу коэф-
фициента /<к. Для зернистых и мелкокусковых материалов Л’к = 1.
При совмещенном способе усилие внедрения ковша в 2—3 раза меньше,
чем при раздельном. Это объясняется значительным снижением сил
трения о нижнюю поверхность днища ковша и подвижностью сыпучей
массы. При этом способе сила Р'п (см. рис. 7.4) также значительно
меньше, чем при раздельном. При работе по совмещенному способу
усилие подъема, возникающее в процессе подъема ковша, действует
на ведущие колеса погрузчика, что увеличивает их сцепной вес и
напорное усилие.
Для работы погрузчиков необходимо, чтобы соблюдалось нера-
венство
Рвн max ==== 7\ц = G<p, (7.3)
где G — сцепная масса погрузчика, т; Тсц — максимальное тяговое
усилие по сцеплению; тс (кН); <р — коэффициент сцепления колес
или гусениц с грунтом.
Производительность погрузчиков (техническая) для цикличных
машин при работе с ковшом
/7Т = 3600 , м7ч, или /7Г = 3600 , тс/ч, (7.4)
‘Ц Гц
где k„ — коэффициент наполнения ковша: k„ — 0,8 -ь 0,9 для рых-
лого грунта крупностью до 50 мм; kn = 0,9-г-1,0 для влажного песка
й гравия крупностью до 50 мм; /гн = 0,60-н0,75 для щебня и хорошо
дробленной скалы; = 0,4ч-0,5 для плохо дробленной скалы и ко-
тельного шлака; q — емкость ковша, м3; tn — продолжительность
рабочего цикла; у — объемная масса материала, т/м3.
Продолжительность рабочего цикла /ц в значительной степени
зависит от расстояния, на которое должен передвигаться погрузчик
для разгрузки. Погрузчик обычно передвигается на первой или на вто-
рой передаче (диапазоне иг = 2-е-4 м/с с грузом и и„ = 3-5-6 м/с без
груза).
Продолжительность цикла
^ц = ^к + ^0~Мп + ^р + ^з» (7-5)
где tK — время на наполнение ковша (4—6 с); t0 — время па отьезд
от забоя (4—5 с): ta — время на подъезд к транспорту (4—5 с); /р —
время разгрузки (2—3 с); /3 — время на подъезд к забою (8—10 с).
179
Время указано для наиболее рациональной установки транспорта,
под утлом в 45 к подошве забоя и возможно ближе к ней. В этом
случае путь отъезда от забоя составляет 6—8 м, а путь подъезда к транс-
порту 4—5 м. При больших расстояниях
f„ = //vr и /0 = //v„,
где I — длина пути от места загрузки до места разгрузки, м; ог и оп —
скорости движения погрузчика соответствен ио с грузом в ковше
и порожняком, м/с.
§ 7.3. ПОГРУЗЧИКИ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Производительность многоковшовых погрузчиков при одной и
той же установленной мощности на 40—60% выше, чем одноковшовых.
Их целесообразно применять на
кирпичных заводах, заводах
строительных деталей, железно-
дорожных станциях с большими
объемами разгрузки и погрузки
сыпучих материалов. Кроме
того, их используют для разде-
ления сыпучих материалов на
фракции, для чего на них
монтируют специальные вибро-
грохоты.
Рис. 7.6. Погрузчик непрерывного действия:
а — общий вид; б — кинематическая схема
Многоковшовые погрузчики можно эффективно использовать для
разгрузки железнодорожных платформ, при этом погрузчик, дви-
гаясь на самой платформе, сбрасывает материал на сторону. Эти
180
Погрузчики можно применять в технологических линиях (на заводах
строительных деталей) или при строительстве дорог. В последнем
случае погрузчики загружают песок и гравий в сушильные барабаны
и в смесители.
Общий вид многоковшового погрузчика показан на рис. 7.6, а.
Рабочим органом является шнековый питатель, который состоит
из двух шнеков с правым и левым направлением спирали. Шнеки
расположены по обеим сторонам ковшового элеватора. При вращении
питателя погружаемый материал подается к ковшам, что способствует
лучшему загребанию материала ковшами. Внизу под шнековым пита-
телем прикреплен скребок. Обычно материалы с элеватора разгру-
жаются на ленточные конвейеры, которые подают его в транспортные
средства.
У некоторых погрузчиков материал разгружается в транспортные
средства через бункера или лотки.
На рис. 7.6, б показана кинематическая схема погрузчика. Дви-
гатель 1 через зубчатые колеса 2 приводит в движение конические
передачи 4. Одна из них сообщает движение через цепную передачу
ковшовому элеватору 7 и шнековому питателю 8, а другая кониче-
ская пара через цепную передачу приводит во вращение барабан <3
ленточного конвейера. Двигатель 1 через коробку передач 9 и кар-
данные валы 6 передает вращение заднему и переднему мостам 5 и 10.
В строительстве помимо многоковшовых применяют роторные
погрузчики. Их изготовляют с обычным ротором и с ротором в виде
шаровой головки.
Производительность многоковшовых погрузчиков (техническая)
зависит от производительности шнекового питателя и производи-
тельности ковшового элеватора, которые определяются как для ма-
шин непрерывного действия.
Производи гельность шнекового питателя
77т = 60 tn <р, м3/ч, (7.6)
где D—диаметр шнека, м; t — шаг винта, м; п — частота враще-
ния*, об/мин; ф — коэффициент заполнения, равный 0,6—0,9.
Производительность ковшового элеватора
77т = 3,6уф1, м3/ч, (7.7)
где q — емкость ковша элеватора, л; v — скорость ковшовой цепи, м/с;
7 — шаг расположения ковшей, м; ф, — коэффициент заполнения
ковшей, равный 0,7—1,1 Последнее значение принимается для рых-
лых сыпучих материалов без крупных кусков, заполняющих ковши
«с шапкой».
§ 7.4. РАЗГРУЗЧИКИ
Разгрузчики, применяемые в строительстве, можно разделить
на механические и пневматические.
Механические разгрузчики применяют для разгрузки песка, гра-
вия, щебня.
181
На рис. 7.7 показан один из распространенных механических
разгрузчиков для полувагонов. Он представляет собой самоходный
портал 1, на котором подвешена передвижная рама с двумя ковшо-
выми элеваторами 2. К этой же раме присоединен ленточный конвейер 3
Рис. 7.7. Механический разгрузчик для полувагонов
для подачи материала от ковшей элеваторов па отвальный ленточный
конвейер 4.
Работает машина следующим образом. При верхнем положении
рамы вместе с элеваторами под раму подается разгружаемый полу-
вагон, элеваторы приводятся в действие и начинают опускаться внутрь
вагона. Ширина элеваторов несколько меньше внутренней ширины
Рис. 7.8. Пневматический разгрузчик:
1 — подгребающий диск; 2 — электродвигатель подгребающею диска: 3 — быстроход-
ный шнек; 4 — цилиндр насоса; 5 — воздушная кольцевая форсунка; 6 — электродви-
гатель колеса; 7 — воздушный край
вагона. После того как элеватор опустился до дниша вагона, вклю-
чается привод перемещения машины вдоль рельсового пути и ковши
элеваторов начинают захватывать материал с торцевой стороны слоя
материала. Машина перемещается, пока ковши не дойдут до другой
торцевой стенки вагона. Затем рама вместе с элеваторами подни-
мается и под разгрузку подается следующий вагон или машина сама
перемещается к другому вагону.
182
Длина отвального конвейера такова, что материал может ссы-
паться на расстояние 20 25 м от разгружаемого вагона. Отвальный
конвейер может поворачиваться на угол до 20°, что позволяет насы-
пать штабель высотой 8—9 м. Производительность машины 300—
450 т/ч.
Пневматические разгрузчики выпускаются производительностью
от 20 до 50 т/ч. Наибольшая дальность подачи 12-ь40 м, наиболь-
шая высота подачи — 35 м. Выпускают пневматические разгрузчики
всасывающего действия (рис. 7.8). Такой разгрузчик работает сле-
дующим образом. Заборное устройство 1 в виде подгребающего диска
подает цемент или другой! порошкообразный материал в трубопро-
вод 2. В трубопроводах 2 и 6 создается вакуум насосом 7. Цемент
осаживается при помощи отбойника 3 в шнековую разгрузочную
камеру..Для того чтобы цемент не попадал в насос, между насосом
и трубой 2 установлена осадительная камера 4. Она состоит из бун-
кера, в котором размещены фильтры, и разгрузочной камеры со шне-
ковым устройством. В верхней части осадительной камеры размещен
электромагнит 5. Такое устройство обеспечивает подачу в резиновый
рукав 6 чистого воздуха.
Контрольные вопросы
1. Что является главным параметром одноковшового погрузчика и почему?
2. Что вы знаете о технико-экономических показателях одноковшовых погруз-
чиков и их конструкции?
3. Как измеряется емкость ковша погрузчика?
4. Начертите общие схемы одноковшовых погрузчиков и кинематическую схему
одного из них; опишите принцип их работы.
5. Начертите общую п кинематическую схему погрузчика непрерывного дей-
ствия.
6. Начертите схему разгрузчика полувагонов и опишите принцип его работы.
7. Начертите схему пневматического разгрузчика для цемента и опишите прин-
цип его работы.
ГЛАВА 8
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Машины для земляных работ используют при разработке выемок —
котлованов и траншей; для образования насыпей, плотин, дорожного
полотна; при буровых и планировочных работах.
На 1 м3 объема промышленного сооружения выполняется в сред-
нем 1,54-2 м3 земляных работ, а на 1 м3 объема гражданского соору-
жения — до 0,5 м3.
Одной из основных операций при земляных работах является раз-
рушение грунта. Грунты и породы разрушаются: 1) механическим
способом, когда рабочие органы непосредственно отделяют грунт
от массива. Энергоемкость его составляет 0,054-0,3 кВт-ч'м3; 2) гид-
ромеханическим способом; при этом способе грунт разрушается,
т. е. отделяется от массива механическим рабочим органом (фрезой),
а затем транспортируется при помощи воды или грунт сразу раз-
рушается струей воды высокого давления. В нервом случае энерго-
емкость составляет 0,24-2 кВт-ч,м3, во втором — в 1,5 раза меньше;
3) взрывным способом, когда в породе предварительно пробури-
вают шпуры, в которые помещают взрывчатые вещества. Газы, выде-
ляющиеся при воспламенении взрывчатых веществ, разрушают породу.
Энергоемкость такого бурения составляет 0,84-1,1 кВт-ч м3.
Применяются также комбинированные способы, когда предвари-
тельно разрушение (рыхление) грунта производится рыхлителем,
а транспортировка другими машинами. Помимо механических и гид-
равлкче.’ких способов разрушения ведутся исследования по термиче-
скому и химическим способам.
Машины, выполняющие земляные работы, можно разделить на сле-
дующие классы: 1) машины для подготовительных работ; 2) земле-
ройно-транспортные машины; 3) экскаваторы; 4) машины для гидрав-
лической разработки грунта; 5) для бурения скважин диаметром
0,54-3 м; 6) для разработки мерзлого грунта; 7) для уплотнения грунта;
8) для свайных работ.
§ 8.1. ОСНОВНЫЕ ФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА ГРУНТОВ
На работу землеройных машин влияют следующие физико-меха-
нические свойства грунта:
1. Гранулометрический состав, т. е. процентное содержание по
весу частиц различной крупности.
2. Объемная масса у — масса 1 м3 грунта, взятого в естествен-
ном состоянии, вместе с норами (в плотном теле). Для грунтов у —
— 1,5—2 т м3.
3. Пористость — объем пор, заполненных водой и воздухом в про-
центах от общего объема грунта.
184
кгс/см2 (0,54-
Рис. 8.1. Удар-
пик конструк-
ции ДорНИИ
измеряемый отно-
Дис к объемному
о грунт р и грунта
4. Влажность — объем воды в грунте, в %.
5. Связность — характеризуется усилием, необходимым для прео-
доления сцепления одних частиц с другими и их относительного сме-
щения.
6. Пластичность — свойство грунта изменять форму под действием
внешних сил и сохранять эту форму после их удаления.
7. Прочность — свойство грунта сопротивляться разрушению под
влиянием внешних нагрузок.
8. Сопротивление грунта вдавливанию. При движении машин
движители вдавливаются в грунт. Вдавливание на небольшую глу-
бину называют смятием. Величина силы, необходимой для вдавлива-
ния на глубину в 1 см штампа площадью в 1 см2, т. е. удельное сопро-
тивление вдавливанию, называется коэффициентом сопротивления
смятию Рп. Для различных грунтов Ро — 0,054-1,3 ' “ '
4- 130 кПа). Величина допускаемых давлений Р(> на
движители составляет 0,44-1,5 кгс/см2 (40-=-150 кПа).
9. Абразивность — способность материала оказы-
вать истирающее действие. За меру абразивности
принят относительный износ (0о,
шением объемного износа стали
износу грунта или породы Доп:
(£>о = Дцс/Дп„.
10. Коэффициент трения стали
о грунт pi для грунтов, находящихся в естественном
состоянии, колеблется в пределах соответственно
0,3 4- 0,7 и 0,3 4- 0,9.
11. Разрыхляемость — способность грунта уве-
личивать объемы при разрушении. Разрыхляемость
измеряется коэффициентом разрыхления /?р, равным
отношению объема разрыхляемого грунта к объему,
• который он занимал в естественном состоянии. В
категории грунта kp изменяется от 1,2 до 1,5.
12. Угол естественного откоса <р — угол у основания конуса,
который образуется при осыпании разрыхленного грунта с некоторой
высоты. Величина <р зависит от коэффициента внутреннего трения
и от связности. Для несвязных грунтов угол естественного откоса
равен углу внутреннего трения. Величины углов естественного откоса
зависят от категории грунта и его состояния и составляют 15—40°.
Оценить трудность разработки грунтов по вышеперечисленным
параметрам в производственных условиях сложно, поэтому Госстрой
СССР на основные типы грунтов разработал производственную клас-
сификацию грунтов по трудности их разработки: I — мелкий грунт
(песок); II—III — средний (супесь); IV — тяжелый (глина). Однако
эта классификация основана только на качественной оценке и не учи-
тывает некоторых важных свойств, например влажности. Это при-
водит иногда к несоответствию фактической трудоемкости разработки
с расчетной. Поэтому был предложен способ оценки разрабатывае-
мое™ грунтов с помощью ударника (плотномера) ДорНИИ (рис. 8.1)
зависимости от
185
Он представляет собой стержень, по которому между двумя при-
варенными на расстоянии 40 мм шайбами сбрасывается груз массой
2,5 кг. Стержень устанавливают одним концом на поверхность грунта,
поднимают груз в верхнее положение и опускают его. Падая, груз
ударяет но нижней шайбе, при этом работа одного удара состав-
ляет 1 кге-м (10 Н-м). Под действием силы удара стержень внедря-
ется в грунт. В зависимости от свойств грунта для внедрения стержня
на глубину 100 мм требуется различное число ударов: например,
в просеянный песок влажностью 9,2% требуется всего один удар,
а в легкий суглинок влажностью 10,6% — 12 ударов. Между числом
ударов и сопротивлением грунтов резанию имеется следующая зави-
симость:
Категория грунта I II III IV
Число ударов С 1—4 5-8 9—16 16—34
§ 8.2. РЕЗАНИЕ И КОПАНИЕ ГРУНТОВ
Отделение грунта от массива осуществляется режущей частью
рабочего органа, имеющего форму клина (рис. 8.2). Рабочему органу
сообщается два движения: одно для внедрения рабочего органа в грунт,
Рис, 8,2. Геометрия рабочего органа
характеризуемое скоростью
подачи v„, и второе, при ко-
тором отделяется грунт от
массива, характеризуемое
скоростью резания ор. Вели-
чина Ор на современных ма-
шинах для земляных работ
колеблется от 0,8 до 2 м/с,
а величина v„ « 0,1ор.
Рабочие органы отделяют
грунт от массива и переме-
щают его. Процесс только
отделения грунта от массива
(разрушение грунта) назы-
вается процессом резания. Весь процесс отделения грунта от массива
и заполнения им рабочего органа (ковша экскаватора, скрепера)
или перемещения его рабочим органом (отвалом бульдозера, грей-
дера) называется процессом копания.
Для проектирования и рациональной эксплуатации машин необ-
ходимо знать, какие силы сопротивления возникают при резании
и копании. Эти силы зависят от ширины b и толщины с срезаемой
стружки, т. е. от срезаемой площади F = Ьс, от физико-механи-
ческих свойств грунта и от геометрии режущей части рабочего
органа.
186
Режущая часть рабочего органа характеризуется углом заостре-
ния Р, задним углом а, углом резания 6 = а + Р и передним
углом у.
При резании, т. е. только при отделении грунта от массива, воз-
никает сила Р, нормальная к передней грани режущего органа. Опре-
делить точку приложения этой силы, а также ее величину очень
трудно. Для простоты принято считать, что эта сила приложена
к режущей кромке. Ее раскладывают на две силы: касательную силу
сопротивления резанию Рр и нормальную силу резания (силу по-
дачи) Рп. В результате действия Р„ возникает сила трения рабочего
органа о грунт Prpi.
При копании помимо этих сил возникают дополнительные силы
сопротивления перемещению грунта при заполнении рабочего органа
(ковша) или перемещению грунта впереди рабочего органа (отвал
бульдозера). Определение каждой из этих сил весьма сложно, поэтому
принято, что при копании возникает сила сопротивления Ро (рис. 8.2,6),
которая раскладывается на две силы: касатель-
ную силу копания Р(Л, направленную по каса-
тельной к траектории движения, и нормальную
силу копания Ро2, направленную по нормам
к траектории движения.
Величины сил Рм и Рт, Рр и Рп опреде-
ляют по коэффициентам удельного сопротивле-
ния резанию kp и копанию й(. Эти коэффи-
циенты определены экспериментально для раз-
личных грунтов.
Величина силы, кгс (Н),
^01 —
где F — сечение снимаемой стружки, см2.
. Величина Рп2 зависит от затупления рабочего органа и прини-
мается как часть Ро1:
Рт = (0,2 ч- 0,4) Р01
(большее значение при большем затуплении).
Откол грунта заключается в том, что в грунт на некотором рас-
стоянии от бровки забоя внедряется (забивается) клин (рис. 8.3).
Процесс откола зависит от угла клина а, ширины клина Ь, расстоя-
ния между бровкой забоя и местом забивки клина В, работы еди-
ничного удара А = 6уН, где GL — вес падающего груза, Н — высота
падения груза. Чтобы внедрить клин в грунт, работа единичного
удара А должна быть не меньше определенной величины, которая
зависит от физико-механических свойств грунта, степени промерза-
ния, угла клипа а, расстояния от бровки забоя В. Экспериментально
установлено, что при угле клина а = 30° и забивке в мерзлый грунт
IV категории на каждый сантиметр ширины клина требуется работа
не меньше 200 кгс-м (2-Ю3 Н-м). При этом клин за каждый удар
внедряется в среднем на глубину й = 120—150 м. Очевидно, что чем
больше работа удара, тем больше /г.
Рис. 8.3. Схема откола
крупных глыб с по-
мощью клиньев
187
§ 8.3. МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
К подготовительным работам относятся удаление кустарников,
деревьев, пней на строительных площадках, а также рыхление грун-
тов и пород II и III категории и мерзлых грунтов. Эти работы выпол-
няются рыхлителями, кусторезами и корчевателями. Для эффектив-
ности их работы необходимо, чтобы машины могли развивать боль-
шие тяговые усилия не менее
25—35 тс (250—350 кН) и
мощности были бы не менее
250—350 кВт.
Рыхлитель (рис. 8.4) пред-
ставляет собой навесное обо-
рудование к гусеничному
трактору или базовому тя-
гачу. Навесное оборудование
состоит из рабочего органа
(зубьев), подвески, системы
Рис. 8.4. Общий вид рыхлителя:
I — тяга: 2, 3 — балки: 4 — флюгерное устрой- управления.
ство; 6 — зуб с наконечником; 6 — рама Как пОКЭЗаЛН прЭКТИКЭ И
экономический анализ, стои-
мость разработки грунта с применением рыхлителей по сравнению
с работой буровзрывным способом в 2—3 раза ниже. Рыхлители
целесообразно использовать также для расчистки лесных просек от
пней, разламывания дорожных покрытий.
Тяговое усилие является главным параметром рыхлителя. Разли-
чают легкие рыхлители с тяговым усилием Тсп = 3—6 тс (30—60 кН)
и мощностью до 55 кВт; средние с = 10—15 тс (100—150 кН)
и мощностью 50—120 кВт; тяжелые с Тса = 25 тс и мощностью 120—
250 кВт и сверхтяжелые с Тсц = 50 тс и мощностью более 250 кВт.
Ниже приводятся данные о заглублении И зуба и количестве
зубьев z рыхлителей в зависимости от силы тяги Тск:
Гец. кН 30 40 100 150 250 350
II, им 300 300 400 500 700 900
2 3—5 3—5 1—2 1—3 1—3 1-3
Сцепной вес рыхлителя Ссц равен сумме весов базовой машины G6.M
и навесного оборудования Gp:
Gc„=G6.M + Gp^(l,18-5-l,23)G6.„. (8.1)
Если на базовую машину кроме рыхлителя навешивают отвал
бульдозера, то
ССц - G6. м + Gp + G6. о № (1,35 ч-1,4) Gc. „, (8.2)
где G6jO — эксплуатационный вес бульдозерного оборудования.
188
соче-
быть
кото-
В начале рабочего процесса одновременно с перемещением машины
зубья заглубляются в грунт. После заглубления их на заданную
глубину машина продолжает перемещаться с сохранением этой глу-
бины, затем зубья выглубляются до выхода из грунта.
Если необходимо разрыхлить грунт на какой-то площади, рыхли-
тель после проходки определенной длины поворачивает обратно
и повторяет процесс в обратном направлении. Длину каждой про-
ходки выбирают в зависимости от условий работы и от того, в
танин с какими машинами работает рыхлитель.
Минимальная глубина рыхления за один проход должна
на 20—30% больше, чем глубина слоя, снимаемого машиной, с
рой должен работать рыхлитель (бульдозер или скрепер).
В одних грунтах наиболее эффективно работать на большой глу-
бине с меньшим количеством зубьев, а в других — с большим коли-
чеством зубьев и меньшей глубиной. Это объясняется тем, что зуб
рыхлителя разрушает грунт или породу не только впереди себя,
но и по бокам. Разрушаемая по бокам площадь зависит от физико-
механических свойств грунта и глубины.
Количество зубьев и расстояние между ними выбирают из усло-
вий полного использования тяговых усилий тягача и чтобы получае-
мые при разрушении глыбы можно было убирать экскаватором. Из
опыта применения рыхлителей следует, что для легких рыхлителей
расстояние между зубьями принимается 0,3—0,5 м, при пяти зубьях —
0,8—1 м, при трех зубьях у средних и тяжелых рыхлителей расстоя-
ние между зубьями достигает 0,9—1,3 м, а в очень крепких грунтах
рыхление даже мощными рыхлителями производится одним зубом.
Производительность рыхлителя /7эзависит от ширины захвата В (м),
средней глубины рыхления h, средней длины рабочего хода в одну
сторону Lp.x, от средней скорости рабочего хода ор>х — 1,7—2,2 км/ч:
ЗС00ВДбп ХМВ
Лэ = , , ч Р , (8.3)
Ь3-|-3,Ь/рСр. х ' '
где#!— коэффициент, учитывающий работу с толкачом, kt = 0,8 -ь1,2;
kB — коэффициент использования времени, принимается равным 0,85;
L3 — радиус закругления, м.
Ширина захвата при рыхлении
В = [Zw-f-2/t tg р, ф-/ (/г — 1)], м, (8.4)
где k„ — коэффициент перекрытия (А’„ = 0,75); b — ширина зуба;
п — количество зубьев; р — угол скола от вертикали, равный 15—45°;
t — шаг зубьев.
Кусторезы. Кусторезом можно срезать кустарники и деревья.
За один проход можно очищать от кустарника и мелколесья полосу
шириной 3,5—5 м.
Рабочий орган кустореза состоит из двух отвалов, соединенных
вместе в плане под углом 40—60° и шарнирно укрепленных к гусе-
ничным рамам трактора. По нижним кромкам отвала крепят ножи.
Режущие кромки их выполняют гладкими или в виде пилы. Так как
ножи и отвал в плане имеют треугольную ферму, то при движении
кустореза вперед создается подача, необходимая для срезания дерева.
189
Для защиты тракториста от падающих деревьев над капотом
и кабиной трактора устанавливают мощную ограждающую металло-
конструкцию из труб или уголков. Оборудование кустореза сменное,
и его отвал может быть заменен на той же раме мощным толкающим
приспособлением древовала. Для валки деревьев толкающее устрой-
ство поднимают на высоту 3—5 м над землей. Тяговое усилие в 25 тс
(250 Н) достаточно, чтобы повалить дерево диаметром 2 м. Обору-
дование древовала должно выступать вперед на 4—6 м от трактора,
чтобы корни дерева не опрокинули трактор.
При работе кусторезу приходится преодолевать силы сопротивле-
ния (рис. 8.5), направленные вдоль режущего лезвия, — главное
движение резания Рр, и силу, направ-
Рис. 8.5. Схема сил, действую-
щих на отвал кустореза без
зубьев
ленную но нормали к режущему лезвию,
Рц — усилие подачи. Эти силы стремят-
ся сдвинуть и повернуть кусторез.
При расчетах принимают, что эти силы
поворачивают кусторез вокруг его центра
тяжести:
Л4СП = -g GKpcz,
где GK — масса кустореза с трактором:
р — коэффициент сцепления гусениц
повороту Л4ГП был больше,
нуть кусторез:
^иов = Рп/1-^Р + ЛР)/2,
трактора с грунтом; а — ширина колеи
гусеничного хода.
Для предотвращения поворота не-
обходимо, чтобы момент сопротивления
чем момент Л1|1ОВ, стремящийся повер-
(8.5)
где /1 и /2 — плечи действия сил.
Корчеватели-собиратели применяют для извлечения из почвы
крупных камней и пней, корчевания кустарников и уборки деревьев,
срезанных кусторезами или поваленных древовалами.
Рабочим органом служит решетчатый отвал с зубьями, располо-
женными в нижней части. Отвал сваривают из вертикальных ребер
и поперечных балок коробчатого сечения: спереди к ребрам прива-
ривают лобовой лист, защищающий радиатор трактора. Отвал кренится
к толкающей раме трактора, аналогичной раме кустореза.
Извлекать камень можно толкающим усилием или подклинить его
и затем поднять. Вторым способом можно извлекать камни большого
веса, находящиеся на значительной глубине. Для извлечения этим
способом требуется больше времени.
Производительность корчевателя-собирателя на тракторе 100 кВт
на тяжелом суглинке с тяговым усилием 10 тс (100 кН) составляет
80—90 пней диаметром 0,35—0,75 м или 18 м3 камней объемом по
0,75—2 м3. Увеличение мощности в п раз даст увеличение производи-
тельности в п1-6 раз.
190
§ 8.4. ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫЕ МАШИНЫ
Машины, отделяющие грунт от массива н перемещающие его на
сравнительно небольшие расстояния, называются землеройно-транс-
портными. К этому классу машин относятся бульдозеры, скреперы,
грейдеры и грейдер-элеваторы. Землеройно-транспортные машины
просты по конструкции и высокопроизводительны. Для управления
транспортные средства
на водителя достигает
требуется один водитель, дополнительные
не нужны. Удельная производительность
1000 м3/ч. Стоимость работ в 3—
4 раза меньше стоимости работ,
выполняемых экскаваторами с авто-
самосвалами.
Бульдозер (рис. 8.6) представ-
ляет собой гусеничный или колес-
ный тягач (базовая машина) с на-
весным оборудованием, имеющим
рабочий орган в виде отвала 1,
соединенного с толкающими брусья-
ми 2. Для подъема и опускания
отвала служит гпдроцилиндр 3.
Различают бульдозеры: 1) с пе-
поворотпым отвалом; последний
закрепляется жестко перпендику-
лярно продольной оси машины.
Такне бульдозеры применяют для
устройства выемок, возведения на-
сыпей, планировки площадок, раз-
работки и засыпки траншей; 2) с
поворотным отвалом; отвал может
поворачиваться на угол <( ' в гори-
зонтальной плоскости и па угол а
в вертикальной плоскости, что гю-
Рис. 8.6. Схемы бульдозера
зволяет перемещать грунт не толь-
ко вперед, но и в сторону. Этими бульдозерами можно нарезать тер-
расы на косогорах, засыпать траншеи, расчищать дороги от снега.
Помимо основного рабочего органа — отвала на раму бульдозера
могут быть навешены устройства для толкания скреперов, рыхлители,
кусторезы, канавокопатели, корчеватели и другое сменное оборудо-
вание, что значительно расширяет область применения бульдозеров.
ОШ Л},VJjicnnc It | *»»•»*
При работе бульдозера возникают следующие силы (рис. 8.10):
сила сопротивления резанию грунта Рр, сила сопротивления внед-
рению рабочего органа в грунт Рп, ейла трения грунта призмы волоче-
ния о грунт Рпр, сила трения режущей кромки отвала по грунту
Р|р1, а также сила трения грунта при его перемещении по отвалу
Р1р2. Сумма всех составляющих этих сил, направленная по оси дви-
жения бульдозера, должна быть меньше силы тяги по сцеплению Тсц.
7 М. И. Гальперин
193
пределить по поверхности, то отвал при движении бульдозера под-
нимают.
/ Главным параметром бульдозера считается номинальное тяговое
усилие, основными параметрами — масса и мощность.
Бульдозеры классифицируются по тяговому усилию и по мощности
базовой машины: легкие 204-80, средние 804-150, тяжелые 1504-300,
сверхтяжелые более 300 кВт.
Отвалу бульдозера необходимо задавать четыре положения. Схема
управления отвалом для этих положений показана па рис. 8.7, где
она дается в принятых условных обозначениях, и для лучшего пред-
ставления она показана в виде конструктивных схем на рис. 3.11, е.
Рис. 8.7. Гидравлическое управление бульдозера
Положение I — опускание отвала. Для этого золотник распреде-
лителя устанавливается в положение /, масло через отверстие подачи
И и отверстие А в распределительном устройстве подается в полость
Tli цилиндра и через отверстие Б и С2 сливается в бак.
Положение 11 — подъем отвала. Золотник занимает положение II,
масло из отверстия Н и отверстия Б подается в полость Бх цилиндра
и сливается через отверстие А и Сг.
Положение III — плавающее положение отвала. Золотник закры-
вает отверстие подачи масла И и масло из полостей Ai и Бг цилиндра
сливается через отверстия А, Б, и С2. В этом положении отвал
извлекать камень можно толкающим усилием ил_и подклинить его
и затем поднять. Вторым способом можно извлекать камни большого
веса, находящиеся на значительной глубине. Для извлечения этим
способом требуется больше времени.
Производительность корчевателя-собирателя на тракторе 100 кВт
на тяжелом суглинке с тяговым усилием 10 тс (100 кН) составляет
80—90 пней диаметром 0,35—0,75 м или 18 м3 камней объемом по
0,75—2 м8. Увеличение мощности в п раз даст увеличение производи-
тельности в п1-6 раз.
190
отвала к толкающим балкам. Энергоемкость и производительность
бульдозера в значительной степени зависят от рациональной формы
отвала.
Отвал срезает грунт, накапливает его впереди себя и перемещает
его. Профиль отвала подбирают таким образом, чтобы срезаемый
грунт от массива двигался по отвалу и обрушивался по направлению
движения бульдозера (рис. 8.8, а). При этом менее всего тратится
работы на трение грунта о грунт. Если профиль подобран неправильно,
Рис. 8.8. Характер перемещения грунта и формирование призмы во-
лочения
то срезаемый грунт в процессе формирования призмы двигается вверх
не по поверхности отвала, а выпучивает массу грунта, образующую
призму (рис. 8.8, б). Это приводит к интенсивному трению между
частицами грунта.
На рис. 8.9 приводится геометрия отвала, а в табл. 8.1 его основные
параметры.
Таблица 8.1
Основные параметры отвала
Параметры Отвал
неповоротный поворотный
Высота отвала без козырька II 500—1600 мм '100—1 100 мм
Угол резания 6 55° 50—55°
Угол наклона отвала е 75° 75-
Задний угол а зо—35° 30—35°
Угол установки козырька рк 90—100° 90—100’
Заглубление Л (см. рис. 8.6) До 300 мм
При работе бульдозера возникают следующие силы (рис. 8.10):
сила сопротивления резанию грунта Рр, сила сопротивления внед-
рению рабочего органа в грунт Рп, сила трения грунта призмы волоче-
ния о грунт Рпр, сила трения режущей кромки отвала по грунту
Ptpl, а также сила трения грунта при его перемещении ио отвалу
Р,Р9. Сумма всех составляющих этих сил, направленная по оси дви-
жения бульдозера, должна быть меньше силы тяги по сцеплению Тсц.
7 М. И. Гальперин
193
Производительность бульдозера зависит от формы отвала, длины
транспортирования, свойств грунта (песок или глина), работы под
уклон или на подъем. При работе под уклон уменьшается сопротивле-
ние перемещению призмы волочения и одновременно увеличивается
сила тяги. Это позволяет повысить толщину срезаемого слоя и объем
перемещаемого грунта, и наоборот, при работе на подъем производи-
тельность резко падает. Сопротивление перемещению бульдозера
возрастает с увеличенном призмы волочення. Поэтому целесообразно
срезать слой переменного сечения в начале глубиной на 25—30%
больше, чем в конце.
Формирование призмы волочения происходит на 5—7 м пути. Сре-
зание грунта обычно производят на первой и второй передачах, а пере-
мещение на первой и третьей. В процессе перемещения часть грунта
Рис. 8.9. Геометрия отвала
Рис. 8.10. Силы, действующие на
отвал бульдозера
призмы волочення высыпается за пределы отвала. Эти потерн грунта
значительно влияют на производительность. Для несвязных грунтов
они составляют 6—7% на каждый 1 м перемещения бульдозера, а для
связных грунтов — 2,5—3,2%. Потери уменьшаются почти в два раза,
если одновременно работают два бульдозера, устанавливаемые один
от другого на расстоянии 0,25—0,3 м для грунтов I и II категории
и до 0,5 м для грунтов III категории. При такой работе производи-
тельность увеличивается на 10—15%.
Перемещение грунта в два или три этапа повышает производитель-
ность, если перемещение ведут в два или три этана, но сначала грунт
перемещают на половину или одну треть пути. На этом промежуточном
этапе накапливают 100—200 м:‘ грунта, а затем перемещают его
дальше. При таком способе грунт меньше теряется и производитель-
ность возрастает на 5—10%.
Для сокращения времени холостого хода при расстояниях за 30—
50 м холостой ход целесообразно производить на максимальной ско-
рости обратного хода, при этом выигрывается время, которое шло бы
на разворот бульдозера. При больших расстояниях холостой ход
производят движением вперед.
194
(8-6)
Техническая производительность бульдозера в общем случае
3600(7, |Лт
Пл = - , м3/ч, (
1 и
где t/ф — объем призмы волочения, м3/ч; Тп — время никла, с; fer —
коэффициент, учитывающий конкретные условия работы.
Время цикла Тц оказывает существенное влияние на величину
производительности. 7\ подразделяют на следующие составляющие, с:
Тц = 1р + tp ф- t0 х -|- to о. , + /с. р. X + tw
где tp — время накопления призмы волочения; /р — время транспор-
тировки призмы; /о р х— время остановки после рабочего хода;
to х — время обратного хода; /оох — время остановки после обрат-
ного хода; tM — время маневрирования.
Время накопления призмы волочения t'p и время ее транспорти-
ровки /р в сумме составляют время рабочего хода: -
-Мр “ ^Р.
Время остановки после рабочего хода и время остановки после
обратного хода считают временем вспомогательных операций:
^в. О = ^О. р. X + ^О. О. X'
Эксплуатационная производительность бульдозера
ЗСОО<7ф^,Лу
/7Э =------т-----, м3/ч,
где kti — коэффициент использования рабочего времени, принимаемый
по СНиП; — коэффициент, учитывающий влияние уклона мест-
ности на производительность, равный:
При работе на подьемах:
0 4-5%
5 4-10%
10 4- 15%
При работе на уклонах:
0 4- 5%
5-4-10%
10 4-15%
1.5 4- 20%
fev = 1,0 4-0,67 k~ = 0,67 4- 0.5
s- = 0,5 4- 0,4
k.. = 1,0 4- 1.33
k* — 1,33 4- 1.94
k„ = 1,94 —— Z
fey = 2,25 4- 2,68
Автогрейдер является одной из основных машин, предназначенных
для строительства дорог и их содержания. С помощькцеещ профили-
руют земляное полотно, возводят насыпи высотой до 0,6 м, переме-
щают и разравнивают грунт по дорожному полотну, планируют пло-
щадки и т. д. Прицепные грейдеры постепенно выходят из примене-
ния. В последнее время получают развитие только автогрейдеры
(рис. 8.11), которые выпускаются мощностью 250 кВт.
Рабочий орган автогрейдера — отвал устанавливается под углом
в плане к оси машины и с подъемом к оси дороги. При движении
автогрейдера он срезает грунт и перемещает его к середине дороги.
7*
195
После определенной длины прохода, которая выбирается в пределах
200—1500 м в зависимости от профиля дороги и условий работы,
автогрейдер перемещается на другую сторону дороги и разрабатывает
грунт в обратном направлении.
Автогрейдеры подразделяются на легкие (для ремонта грунтовых
дорог) мощностью до 100 кВт, средние — от 100 до 150 кВт и тяже-
лые — свыше 160 кВт. Почти все автогрейдеры выполняются трех-
осными с двумя задними ведущими осями. Автогрейдеры часто
снабжают кирковщиками для разрушения дорожной одежды, а в зим-
нее время на них устанавливаются плужные снегоочистители. Иногда
на базе автогрейдера собирают грейдер-элеватор (см. ниже).
Рис. 8.11. Автогрейдер:
/ — рыхлитель: 5, 5 — гмдроцилипдры; 3, /2 — карданные валы; 4 — основная
рама; 6 — вал рулевого колеса; 7 — кабина; 8 — двигатель; 9 — радиатор; IO —
задний мост; fl — сцепление; 13 — коробка перемены передач; 14 — отвал; 15 — по-
воротный круг; 16 — рама поворотного круга; 17 — цапфа переднего моста; 18 —
передний мост
Рабочие скорости автогрейдеров колеблются в пределах 1ч-2 м /с.
В зависимости от веса отечественные автогрейдеры разделяют на пять
типов:
Легкий Средний Тяжелый
Тип автогрейдера I 11 III IV V
Масса, т 7—9 10—12 13—15 17—19 21—23
Для среднего ремонта дорог и строительства дорог в грунтах до
IV категории используются чаще средние автогрейдеры. Для значи-
тельных объемов дорожных работ, строительства аэродромов, плани-
рования больших площадей, а также при работе в тяжелых грунтах
выгоднее применять тяжелые автогрейдеры.
Автогрейдер (рис. 8.11) состоит из силовой установки, рамы,
трансмиссии, рабочего органа, ходовой части и механизмов управле-
ния.
19G
Основными рабочими органами автогрейдера являются отвал и
кирковщик. В качестве дополнительных применяются откосники и
снегоочистители.
Конструкция автогрейдера характеризуется схемой ходовой части,
так как от нее зависят тяговое усилие автогрейдера, его планирую-
щие свойства, устойчивость, а также маневренность. Чтобы обеспечить
эти условия, ходовую часть делают с различным количеством колес
и ведущих осей, с возможностью управления осями и наклоном колес.
Число осей А с управляемыми колесами, число ведущих осей Б
и общее число осей В характеризуют колесную схему автогрейдера,
которая обозначается формулой А X Б х В. Например, колесная
формула автогрейдера, имеющего одну ось с управляемыми колесами
и одну ведущую ось, следующая: 1X1; 2. Наибольшее распростране-
ние имеют автогрейдеры, схема которых обозначается 1x2x3. Такие
автогрейдеры отличаются большим сцепным весом, достигающим 75%
от общего веса машины, и хорошей планирующей способностью.
В зависимости от выполняемой операции и положения рабочего
органа при работе автогрейдера возникают силы сопротивления,
аналогичные силам сопротивления при работе бульдозера.
Производительность автогрейдеров Псм при профилировании, на-
резке канав и других работах определяется по объему срезаемого
и перемещаемого грунта в смену, м3, смену:
/7СМ = ^, (8.8)
где Т — продолжительность смены, ч; k„ — коэффициент использо-
вания времени в смену (k„ = 0,8-х0,95); V — геометрический объем
призмы грунта, перемещаемый за один рабочий ход, м®; kp — коэф-
фициент разрыхления; t — время рабочего цикла автогрейдера, ч.
Время рабочего цикла t складывается из времени 4 — на переме-
щение грунта отвалом, t2 — на подъем отвала в транспортное положе-
'ние, 4 — на переключение передач и повороты в конце рабочего хода,
4 — на обратный (порожний) ход, 4 — на переключение передач
и поворот в конце обратного (порожнего) хода, 4 — на опускание
отвала в рабочее положение.
Производительность в смену автогрейдеров при производстве
планировочных работ
*4м > м) ч,
где В — ширина захвата (полосы планирования) отвалом, установ-
ленным перпендикулярно или под углом в плане к оси движения, м;
4 — ширина перекрытия смежных полос планирования, м; v — сред-
няя скорость движения при планировании, км/ч; ш — необходимое
число проходов по одному месту.
Грейдер-элеватор (рис. 8.12) разрабатывает (срезает) грунт по-
слойно и отсыпает его в отвал или в транспортные средства.
Принципиальной особенностью этой машины является то, что грунт,
отделяемый от массива, попадает на транспортирующее устройство —
197
конвейер, при помощи которого он подается в транспортные средства
или в отвал. Это выгодно отличает грейдср-элеваторы от других земле-
ройно-транспортных машин, так как расход энергии на транспорти-
рование грунта конвейером значительно меньше, чем на заполнение
грунтом скрепера и бульдозера, где в процессе перемещения грунта
значительное количество энергии расходуется на трение грунта о грунт.
По типу рабочего органа грейдер-элеваторы разделяют на машины
с дисковыми ножами, которые могут быть поворотными или неповорот-
ными, с прямыми ножами и с криволинейными (струги).
По расположению конвейера грейдер-элеваторы разделяют на ма-
шины с поперечным или диагональным расположением конвейера,
с одним или двумя поворотными конвейерами и машины с грунто-
метателем.
Рис. 8.12. Грейдер-элеватор:
f — трактор-тягач; 2 — генератор; 3 — траверса; 4 — рама; 5 — планиров-
щик; 0 — плужная балка; 7 — транспортер; 3 — дисковый нож; 9 — гидро-
цилиндр управления дисковым ножом; 10 — гидроцилиндр управления пла-
нировщиком
В зависимости от ходового оборудования и тягового средства грей-
дер-элеваторы могут быть прицепные (на пневматическом ходу),
полупрпценные к гусеничным тракторам, навесные в виде сменного
оборудования к автогрейдерам и самоходные (с собственной ходовой
частью с использованием одноосных тягачей).
Грейдер-элеваторы применяют при строительстве дорог, постройке
оросительных каналов, возведении дамб, валов, земляных плотин,
разработке карьеров в равнинной местности и грунтов без значитель-
ных включений. При использовании транспорта с помощью таких
машин устраивают высокие насыпи с выемкой грунта из боковых резер-
вов или карьеров, разрабатывают глубокие и широкие выемки.
Наиболее эффективно используют грейдер-элеваторы ври разработ-
ке связных грунтов. На сыпучих и сырых (с влажностью более 25%)
грунтах производительность их невысокая.
Грунты I—П1 категорий грейдер-элеватор разрабатывает без пред-
варительного рыхления, грунты IV категории должны предварительно
разрыхляться. Мерзлые грунты, глубина промерзания которых больше
0,15 м, должны предварительно разрыхляться на всю глубину.
198
Скрепер состоит из следующих основных частей: ходового обору-
дования (одноосного или двухосного), рабочего оборудования (ковша),
механизмов управления ковшом и заслонкой. Приводят в движение
скреперы одноосным или двухосным тягачом или собственными дви-
гателями.
Скреперы подразделяют на принепные, пол упри цепные н самоход-
ные. В соответствии с этим у прицепных и полуприцепных скреперов
кроме перечисленных выше основных узлов имеется сцепное устрой-
ство, а у самоходных — и силовое оборудование (рис. 8.13).
Главным параметром скрепера является геометрическая емкость
ковша с], м3; основными — грузоподъемность, ширина резания, глубина
заглубления и удельная металлоемкость.
Рис. 8.13. Схемы скреперов (цифры показывают примерное рас-
пределение веса скрепера по осям):
а — двухосный прицепной к гусеничному тя!ачу; б, е — полупри-
ценные к одноосному и двухосному тягачу; г — самоходный; / — тя-
гач; 2 — ковш; 3 — буферное устройство; 4 — заслонка
По емкости ковша скреперы условно подразделяют на скреперы
малой емкости с. объемом ковша до 4 м3, средней — 5ч-12 м3, большой —
8ч-15 м3. В последние годы начали применять скреперы с емкостью
ковша до 60 м3.
Грузоподъемность скрепера определяют по емкости ковша с «шап-
кой» <уш при объемной массе разрыхленного грунта 1,5 т/м3. Ширина
резания В для скреперов емкостью 4-е-25 м3 колеблется в пределах
от 2200 до 2800 мм.
Максимальная глубина заглубления С для этих же скреперов со-
ставляет 2504-400 мм, удельная металлоемкость 1ч-1,2 т/м3. Чем боль-
ше емкость ковша, тем меньше металлоемкость скрепера.
На рис. 8.14 показана схема самоходного двухмоторного скрепера.
Работает скрепер следующим образом. Подъехав к месту набора
грунта, скреперист переключает тягач на первую передачу и одно-
временно опускает ковш, приподнимая заслонку. Ковш врезается
в грунт под действием собственного веса, усилий гидроцилиндра (при
гидравлическом управлении) и силы тяги трактора (прицепной скре-
199
пер) или силы тяги одного-трех толкачей (самоходный). Во время
заполнения скреперист следит за наполнением ковша, регулируя
толщину стружки в зависимости от загрузки двигателя. Обычно ковш
быстро заглубляется на максимальную глубину, а затем постепенно
поднимается, чтобы поддержать силу тяги на более пли менее постоян-
ном наиболее эффективном уровне. Путь заполнения в зависимости
от емкости скрепера и крепости грунта при обеспечении необходимого
тягового усилия колеблется в пределах от 8 до 35 м. Когда грунт
перестает поступать в ковш вследствие того, что уменьшенная толщина
стружки уже не в состоянии пробить массу грунта в ковше, скреперист
начинает подъем ковша, закрывая заслонку, переводит управление
на второй или третий диапазон скорости и направляется к месту
разгрузки. У большинства скреперов разгрузка производится на ходу
вперед. В зависимости от емкости скрепера толщина разгружаемого
Рис. 8.14. Самоходный двухмоторный скрепер:
/ — тягач; 2 — конш; 3 — двигатель
слоя составляет 0,20-5-0,60 м. Она регулируется опусканием пли подъе-
мом заслонки. Путь разгрузки достигает 15-5-40 м.
Процесс работы скрепера происходит непрерывно. Только скреперы
с задней разгрузкой останавливаются для разгрузки, если она произво-
дится под откос с насыпи.
При больших объемах работ скреперы работают группами по
10—30 машин, которые движутся по замкнутой линии, имеющей обычно
в плане вид прямоугольника с закругленными углами.
Нижний предел целесообразной дальности возки для колесных
тягачей составляет 150-5-200 м. Так как на коротких расстояниях они
не могут полностью использовать свою скорость, их следует исполь-
зовать на работах небольшого объема при наличии прицепных скре-
перов и двухосных тягачей, не занятых па других работах.
Полуприцепные (самоходные) скреперы изготовляют емкостью
6-5-45 м3. При емкости 6-5-Юм3 их чаще применяют с одноосными
тягачами мощностью 150—270 кВт и используют для работ небольших
объемов, при расстояниях возки 1504-2500 м в условиях, требующих
высокой маневренности (например, засыпка назух шлюзов, небольших
котлованов, отсыпка с головы невысоких насыпей и в сложных рельеф-
ных условиях).
200
При емкости 12-е-45 м3 при хороших дорогах полуприцепные скре-
перы применяют с одноосными колесными тягачами мощностью
3004-1600 кВт. Реже, при дальности возки более 2,0 км, они исполь-
зуются с двухосными тягачами такой же мощности.
Максимальный подъем, преодолеваемый груженым полуприцепным
скрепером на первой передаче колесного тягача, составляет 30—35%.
Наиболее маневренными и быстроходными землеройно-транспортными
машинами являются полуприцепные скреперы с одноосными тягачами.
Однако их недостатком является то, что на ведущую ось тягача пере-
дается только 524-55% веса груженой машины. Это значительно сни-
жает их тяговые возможности и заставляет обычно прибегать при запол-
нении их к помощи 2— 3 толкачей, которыми могут служить либо
Рис. 8.15. Схемы заполнения ковша грунтом
двухосные тягачи, либо гусеничные тракторы со специальным буфером,
снабженным демпферным устройством или в крайнем случае обычным
отвалом бульдозера, упирающимся в буферное устройство скрепера.
Еще меньше используется тяговое усилие у двухосных колесных
тягачей. У них на ведущую ось передается 37—38% веса груженой
машины.
Заполнение ковша за счет тягового усилия зависит от физико-
механических свойств грунта. В правильно сконструированном ковше
заполнение его грунтом может быть разделено на три фазы (рис. 8.15).
Во всех грунтах в начальный период заполнения (1 фаза, заслонка
поднята на 0,5—0,7 м в зависимости от емкости ковша) ковш быстро
заглубляется, а грунт движется к задней стенке ковша. После того
как грунт дойдет до нее и начнет заполнять ковш, заслонка опускается
почти до поверхности грунта, поступающего в ковш. В это время ковш
заглубился па максимальную глубину и скреперист начинает мед-
ленно уменьшать толщину стружки, стараясь сохранить режим на
201
пределе, за которым движение скрепера замедляется. В связных грун-
тах тем временем угол а (рис. 8.15, п) достигает 70—75°, и грунт начи-
нает перемещаться вперед, заполняя заслонку и переднюю часть ковша
(II фаза). После заполнения части заслонки грунт начинает проби-
ваться наверх (III фаза). Происходит как бы кипение, вспучивание
грунта, заполняющего ковш. Призма волочения перед заслонкой
в связных грунтах или почти вовсе отсутствует или очень невелика.
Постепенно подъем грунта замедляется, а затем и вовсе прекра-
щается. Это происходит потому, что уменьшившаяся толщина стружки
уже не обладает силой, необходимой для преодоления возрастающей
силы трения о грунт, заполнивший ковш. В этот момент скреперист
начинает быстрый подъем ковша
с одновременным закрытием за-
слонки и переводит скорость на
транспортный режим.
При малосвязпыхсыпучих грун-
тах (рис. 8.15, б) процесс происхо
дит почти так же, как в предыду-
щем случае, но угол а имеет зна-
чительно меньшую величину, по-
рядка 35—40°. Вследствие мень-
шего удельного сопротивления ко-
панию в этих грунтах толщина
стружки может быть значительно
больше, иначе сила, проталкиваю-
щая грунт в ковш, будет недоста-
точна, весь грунт уйдет в призму
волочения и валики по бокам ков-
ша. Призма волочения перед за-
слонкой значительно больше, чем
в связных грунтах.
Для уменьшения сил сопротив-
Рис. 8.16. Формы ножей
ления загрузке заполнение ковша
грунтом в некоторых конструкциях осуществляется элеваторным ус-
тройством (рис. 8.15, в).
Чтобы во время выглублення ковша стружка возможно дольше
сохраняла толщину, необходимую для проталкивания грунта в ковш,
и быстрее увеличивалась при заглублении, нож делают ступенчатым
с выступающей вперед средней частью (рис. 8.16, о). Помимо прямой
(редко применяемой) и ступенчатой формы ножи бывают полукруглой
формы (рис. 8.16, б).
Кроме основного ножа устанавливают съемные ножи, которые кре-
пят к нижней части боковых стенок ковша. Они способствуют лучшему
наполнению ковша в малосвязных грунтах.
Разгрузка ковша осуществляется тремя способами: свободным
(рис. 8.17, а, б), полупринудительным (рис. 8.17, в) и принудительным
(рис. 8.17, г).
При свободном способе разгрузки грунт может выгружаться вперед
или назад. Для этого ковш поворачивается вокруг точки, лежащей
202
вблизи центра тяжести ковша с грунтом. Этот способ пригоден для
работы в сыпучих грунтах. Он обеспечивает достаточно точную регу-
лировку толщины разгружаемого слоя. Таким способом можно осу-
ществлять разгрузку под откос (при одноосном выполнении скрепера).
Ковшн со свободной разгрузкой применяются у скреперов очень малой
емкости для вспомогательных работ.
При полупринудительном способе грунт выгружается поворотом
днища или задней стенки вместе с днищем относительно боковых сте-
нок ковша и при этом частично выталкивается. Недостатком является
хотя и лучшее, чем при свободной разгрузке, по все же неполное
опорожнение ковша, особенно при липких и увлажненных грунтах.
Рис. 8.17. Схемы разгрузки ковша:
а — опрокидыванием ковша вперед; б — то же, назад; в — движением задней
стенки ковша вперед; <? — опрокидыванием вперед блока днища; д — поворотом
днища и задней стенки ковша (щелевая): / — заслонка; 2 — ковш: 3 — нож;
4 — задняя стенка; 5 — подвижная задняя стенка; 6 — поворотные днища
При принудительном способе грунт выталкивается выдвижной стен-
кой, горизонтально перемещающейся на роликах в направляющих.
Этот способ обеспечивает полную разгрузку любых грунтов. Недостат-
ком являются большие усилия и мощности, необходимые для переме-
щения задней стенки.
В зависимости от выполняемой операции и положения скрепера
на рабочий орган действуют следующие силы сопротивления: 1) сила
сопротивления резанию грунта Рр (см. рис. 8.15, б); 2) сила трения
ножа о грунт Р1р1; 3) сила сопротивления перемещению призмы воло-
чения Рпр; 4) сила сопротивления заполнению ковша Рзап. Она склады-
вается из: силы сопротивления грунта подъему в ковше Р|Ю1 и силы
сопротивления трению между движущимся вверх столбом грунта и
грунтом, находящимся в ковше, Р
Суммарная сила сопротивления перемещению скрепера, кгс (Н)
Луя = ^Р + Лр1 + ^Пр + Взап. (8-9)
203
Производительность скрепера в обычных условиях (легких и сред-
них грунтах) можно определить по зависимости
л = 3бумв> mS/4> (8,10)
fyv ц
где q — геометрическая емкость ковша скрепера, мя; k„ — коэффи-
циент наполнения ковша скрепера, зависящий от физико-механических
свойств и состояния грунта, а также квалификации водителя; kB —
коэффициент использования рабочего времени; kp — коэффициент
разрыхления грунта, равный 1,1-ь 1,4; —продолжительность цик-
ла, с;
где /2. ^з. ^4 — длина пути соответственно заполнения, транспорти-
рования грунта, разгрузки и порожнего скрепера, м; vlt v2, v3, щ —
скорости движения при заполнении груженого скрепера, его раз-
грузке и порожнего, м/сек; tn — время на переключение передач;
/пов — время па повороты скрепера, с.
Для повышения производительности скрепера нужно добиваться
максимальных значений коэффициента наполнения и уменьшать время
рабочего цикла.
§ 8.5. ЭКСКАВАТОРЫ ,
Экскаваторы предназначены для разработки горных пород и грун-
тов. Различают экскаваторы: одноковшовые, которые после отделения
грунта от массива рабочим органом (ковшом) подают его на сравни-
тельно небольшие расстояния в отвалы или в транспортные средства;
многоковшовые роторные и цепные экскаваторы, у которых во взаимо-
действии с грунтом находятся всегда несколько ковшей. По характеру
привода различают экскаваторы с механическим и гидравлическим
приводом.
Одноковшовые экскаваторы с механическим (гибким) приводом.
В соответствии с назначением одноковшовые экскаваторы разделяются
на следующие группы:
1) экскаваторы-краны для строительных и строительно-карьерных
работ малой мощности с емкостью ковша 0,1—1,75 м3; средней мощ-
ности с емкостью ковша 2—4 м3; большой мощности с емкостью ковша
4,5—6 м3;
2) экскаваторы карьерные средней и большой мощности с емкостью
ковша 2—20 м3, применяемые для разработки крепких пород с погруз-
кой в транспорт;
3) вскрышные экскаваторы-лопаты большой мощности с емкостью
ковша 6—15 м3, предназначенные для разработки крепких пород с по-
грузкой в отвал;
4) шагающие драглайны средней и большой мощности с емкостью
ковша 4—100 м3, которые используют для открытых горных работ и
крупных гидротехнических сооружений, с погрузкой в отвал;
204
5) туннельные и шахтные лопаты и погрузчики с укороченным
оборудованием с емкостью ковша 0,5—1 м3;
6) башенные экскаваторы с емкостью ковша 0,5—10 м3 для разра-
ботки выемок и карьеров;
7) плавучие неполноповоротные лопаты с емкостью ковша 0,25—
20 м3 и грейферные экскаваторы на понтонах для дноуглубительных
работ и сооружения каналов в тяжелых каменистых грунтах.
Строительные экскаваторы малой мощности наиболее универсальны.
В зависимости от вида выполняемых работ они могут иметь следующее
Рис. 8.18. Вилы сменного рабочего оборудования одноковшовых экскаваторов:
а — прямая лопата; 6 — обратная лопата; в — дратайп; г — кран; d — грейфер; е — струг;
ж — корчеватель; з — копер
оборудование (рис. 8.18): ковш — прямую лопату (обычно основную)
для копания грунта выше уровня стоянки экскаватора; ковш — обрат-
ную лопату для копания грунта ниже уровня стоянки экскаватора,
ковш драглайна для разработки выемок и сооружения насыпей, грей-
фер для рытья небольших котлованов и погрузочных работ; крановое
оборудование; копер для забивки свай.
Для этих экскаваторов применяют и другие виды оборудования:
трамбовки, ломы для разрушения покрытий и мерзлых грунтов, обо-
рудование для бурения и т. д.
Экскаваторы со стандартным оборудованием прямой или обратной
лопатой целесообразны при разработке (с погрузкой в транспорт)
205
выемок и котлованов в тяжелых и скальных грунтах при возможности
удобного отвода или отсутствия грунтовых вод. Очень тяжелые, мерз-
лые и скальные грунты нужно дробить взрывами так, чтобы средние
размеры кусков не превышали 0,3—0,4 ширины ковша. Использовать
одноковшовые экскаваторы в легких и средних грунтах целесообразно
только тогда, когда нельзя применить скреперы и многоковшовые
экскаваторы.
Экскаваторы с оборудованием драглайна применяют в основном
для сооружения насыпей и выемок по бестранспортной схеме работы
в отвал во всех грунтах, особенно при наличии грунтовых вод, кроме
скальных. Машины с ковшом емкостью более 3 м3 применяют в скаль-
ных грунтах.
Экскаваторы с оборудованием грейфера используют для разра-
ботки глубоких котлованов с отвесными стенками, особенно при
наличии грунтовых вод,
при работе под водой в лю-
бых грунтах, в том числе
взорванных, и при пере-
грузочных работах.
Экскаваторы, имеющие
два-три вида сменного обо-
рудования (чаще всего пря-
мая лопата, драглайн и
крап), называются полу-
универсальными.
Рис. 8.19. Схема одноковшового экскаватора / Процесс работы экекя-
с прямой лопатой: \/ватора, оборудованного
прямой лопатой, показан
стрела; б - рукоять; 7 - ковш на рис 8.19. РуКОЯТЬ С
ковшом 7 опускается к по-
дешве забоя (положение /), затем перемещением рукояти вдоль осн
осуществляют внедрение ковша в грунт, одновременно ковш подни-
мают подъемным канатом 4. При этом рукоять поворачивается вокруг
оси напорного вала (точка О). Толщину стружки С выбирают таким
образом, чтсбы при выходе ковша из забоя он был наполнен ес шапкой»
(положение III). После наполнения ковша производят втягивание
рукояти с ковшом, одновременно поворачивают платформу и выдви-
гают рукоять для установки над местом разгрузки.
Стрела шарнирно соединена с поворотной платформой. Во время
работы положение стрелы пе изменяется. Поднимают и опускают стрелу
перед началом работы с помощью стрелоподъемного механизма и поли-
спастного устройства. Канат полиспастного устройства стрелового
каната проходит через блоки, закрепленные на конце стрелы и на дву-
ногой стойке. Когш вместе с рукоятью независимо от подъема стрелы
поднимается с помощью главной лебедки, от барабана которой канат
проходит через блоки, закрепленные на конце стрелы и на ковше.
Этот канат называют подъемным.
Ковши могут быть глухими и с открывающимся днищем. В послед-
нем случае экскаваторы имеют механизм, который позволяет открывать
206
днище ковша при его разгрузке. Этот механизм состоит из лебедки,
каната и рычажпой системы на рукояти ковша.
Таким образом, цикл работы экскаватора с любым оборудованием
состоит из следующих операций: 1) рабочего хода — наполнения
ковша грунтом с помощью подъемного и напорного или тягового меха-
низма, перемещения ковша к месту выгрузки и выгрузки грунта;
2) холостого хода — перемещения пустого ковша от места выгрузки
Г-руита обратно к месту копания; 3) перемещения экскаватора на новую
позицию.
Элементы цикла работы экскаватора рассмотрим более подробно
на примере работы прямой лопаты.
Наполнение ковша является основной операцией, определяющей
производительность экскаватора. При подъеме под напором ковш
внедряется в грунт, срезая слой грунта (стружку). В малосвязных,
сыпучих и разрыхленных грунтах ковш захватывает грунт не стружкой,
а порциями и кусками.
Объем грунта в заполненном ковше зависит от сечения срезаемой
стружки и длины, па которой она срезается. Проекция этой длины
на вертикаль называется высотой копания Нк. Так как форма траекто-
рии в процессе последовательных резов не меняется, то длину горизон-
тального сечения стружки можно приближенно принять постоянной
по всей высоте копания. Толщина снимаемой стружки в направлении
напора переменна и достигает максимального значения С,пах на высоте
напорного вала.
Приближенно объем грунта в ковше (м3)
(]г ~ ^Стах^ЛЛ|Лц, (8.11)
где b — ширина срезаемой стружки (обычно ширина ковша), м;
k?i — коэффициент разрыхления (kp як 1,1 4-1,3); ^„ — коэффициент
наполнения ковша; для экскаваторов величина его может достигать
14-1,2.
Следовательно, максимальное сечение стружки (м), необходимое
для заполнения ковша при k„ — 1, составит:
C,,,ax = W%%‘ (8”12)
Продолжительность копания составляет примерно 30—35% от
общего времени цикла. Чтобы не увеличивать продолжительность
цикла, ковш перемещают на выгрузку при повороте. Для этого тре-
буется согласовать скорости и ускорения всех движений ковша при
минимальных углах поворота (порядка 40 ). Продолжительность вы-
грузки в зависимости от вязкости грунта, емкости ковша, а также места
выгрузки грунта составляет 1—8 с. Открывание ковша для выгрузки
должно совмещаться по времени с поворотом ковша. Емкость кузова
должна быть не менее 4—5 емкостей ковша при автотракторном транс-
порте и 8—10 емкостей ковша при железнодорожном.
После выработки участка забоя экскаватор перемещается для
разработки нового. Поскольку выдвижение рукояти на полный вылет
уменьшает возможное усилие копания, разработку каждого участка
207
забоя ведут таким образом, чтобы последняя стружка срезалась при
рукояти, выдвинутой не больше чем на 60—80% от ее общего хода
(меньше в более тяжелых грунтах), который у строительных экскава-
торов колеблется от 2 до 5 м. Величина передвижки экскаватора
для разработки каждого элемента забоя 1,2д-4 м. Продолжительность
передвижки составляет J5-K40 с. Ее приходится увеличивать на слабых
грунтах, а также при плохой планировке пути перед экскаватором.
Поэтому необходимо обеспечивать хорошую планировку пути, для чего
нужна правильная разработка забоя самим экскаватором.
Кинематическая схема экскаватора следующая: цепь управления
рабочим оборудованием, в которую входят механизм подъема ковша
или тяговый механизм (для драглайна), механизм внедрения ковша
в грунт (напорный механизм), механизмы перемещения ковша к месту
выгрузки и обратно в забой, механизм, способствующий выгрузке
(открывание днища ковша); цепи управления перемещением машины.
В зависимости от вида привода экскаваторы делятся па два типа:
одномоторные (дизельные, электрические или дизель-электр ические)
и многомоторные (дизель-электрические, дизель-гидравлические).
На рис. 8.20, а изображена одна из простых схем — кинематичес-
кая схема экскаватора с прямой лопатой и одномоторным приводом.
Кинематическая цепь привода главной лебедки подъема ковша состоит
из зубчатого редуктора 2, приводимого в движение двигателем /,
и зубчатой передачи 3. Барабан 4 лебедки, свободно посаженный
на валу, приводится во вращение фрикционной муфтой 5. На барабане
установлен тормоз 6. На этом же валу размещен свободно возвратный
барабан 7, на который наматывается канат от барабана механизма
напора. Барабан 7 приводится во вращение фрикционной муфтой 5
и затормаживается тормозом 6, так же как барабан 4. На том же валу
закреплена коническая муфта 8 привода механизма открывания днища
ковша.
Кинематическая цепь механизма поворота платформы состоит из
редуктора 2, конической передачи 9, зубчатой передачи 10 и зубчатого
колеса 11 (последнее приводит в движение зубчатый венец 12 поворот-
ной платформы) Реверсирование поворота осуществляют при помощи
двух ленточных фрикционов /<?; включением одной из лент платформа
поворачивается вправо или влево.
Кинематическая цепь механизма передвижения машины состоит из
редуктора 2, конических передач 9 и 15, зубчатых передач 10 и 14
Одна из шестерен конической передачи 15 приводит во вращение вал
со звездочками 16. Каждая из них передает движение звездочкам 17,
которые в свою очередь приводят в движение одну из ведущих звездо-
чек привода гусеницы. Поворачивают машину включением одной из
звездочек 16 при помощи кулачков 18. Реверсирование хода дости-
гается включением одного из двух ленточных фрикционов 13.
Кинематическая цепь механизма подъема и опускания стрелы со-
стоит из редуктора 2, конической передачи 9, зубчатой передачи
19, червячной передачи 20 и ленточного тормоза 21.
Напорные механизмы в экскаваторах выполняются по различным
схемам зависимого, независимого и комбинированного напора.
208
При зависимом напоре (рис. 8.20, б) напорное движение осущест-
вляется в результате натяжения подъемного каната лебедкой 4 при
оттормаживаиии возвратного барабана 7. Подъемный канат, закреплеи-
Рис. 8.20. Кинематическая схема одноковшового экскаватора с одномотор-
ным приводом
ный одним концом на барабане механизма напора 22, сматывается
с барабана и поэтому скорость подъема ковша несколько уменьшается.
Исходя из этого, скорость подъемного каната при зависимом напоре
принимают па 10—15% выше необходимой.
209
Для возврата рукояти включают муфту возвратного барабана.
При копании иа ковш действует суммарная сила копания Ро
(рис. 8.21, а). Она является результирующей касательной силы копа-
ния Р01 = krF (где F — площадь сечения срезаемого грунта, F = СВ,
где С — толщина снимаемого слоя; В — ширина ковша) и нормаль-
ной силы копания Р02. Величина Р02 в значительной степени зависит
от площади затупления зубьев и режущей кромки и обычно принима-
ется равной (02-5-0,4) Ро1.
В системе силового оборудования действуют подъемная сила ковша
S„, сила подъема стрелы Q и сила напора на рукояти Pti.
Рис. 8.21. Схема для определения сил в рабочем оборудовании:
а _ схема для определения подъемной силы ковша: б — многоугольник для определения
напорного усилия
Величину силы Sn можно определить из уравнения моментов отно-
сительно оси напорного вала (рис. 8.21), принимая, что линия дей-
ствия Р02 проходит через его ось:
S„= (Poiro + GKi.rrKir-|-Gp/'p), (8.13)
1 п
где Gp — вес рукояти; GK+r — вес ковша с грунтом.
Таким образом, по известным параметрам ковша и рабочего обору-
дования, толщине стружки С и категории грунта можно определить
величину Sn- Задаваясь скоростью подъема о„, определяют мощность
подъемного механизма:
*.~Я& <814>
где т)п — КПД механизма подъема.
Наоборот, по известной мощности, задаваясь о, определяют возмож-
ную величину S„.
Усилие напора зависит от нормальной силы Ро1, а также усилия
подъема ковша Sn, веса ковша с грунтом GK+r и веса рукояти G„.
Это усилие проще всего определить графическим методом (рис. 8.21, б).
По суммарному усилию F определяем напорное усилие и нормальную
210
силу /?„, а по напорному усилию и известной скорости напора v„ опре-
деляют мощность напора:
(8.15)
где г]н — КПД напорного механизма.
Экскаваторы с гидравлическим приводом. Схема одноковшового
экскаватора, оборудованного прямой лопатой с гидроприводом, пока-
зана на рис. 8.22. На конце стрелы 1 имеется ось 2, на которую наве-
шена рукоять 3. К рукояти жестко прикреплен ковш 4. Подъем и
опускание стрелы осуществляются гидроцилиндром 5, а поворот руко-
яти вокруг оси — гидроцилипдром 6. Днище ковша открывается и
закрывается гпдроцилиндром 7.
- Рис. 8.22. Экскаватор, оборудованный прямой лопатой с гидравлическим
приводом
Процесс работы осуществляется следующим образом. Втягивая
шток гидроцилиндра 5 (рис. 8.22, а), поворачивают стрелу по часовой
стрелке. Одновременно, втягивая шток гидроцилиндра 6, опускают
рукоять так, чтобы ковш занял положение / для копания. Заглубление
ковша и регулирование толщины стружки производят подъемом или
опусканием стрелы с помощью гидроцилиндра 5. Выдвижением штока
гидроцилиндра 6 поворачивают рукоять и наполняют ковш (положе-
ние II). После наполнения ковша поднимают стрелу и выводят его из
забоя. Для подъема ковша на большую высоту, кроме подъема страты,
поворачивают еще и рукоять. Для разгрузки ковша открывают гидро-
цилиндром 7 его днище.
Ряд экскаваторов с гидроприводом выпускается с ковшами, кото-
рые закреплены на рукояти таким образом, что ковши могут повора-
чиваться (рис. 8.22, б). Поворот ковша осуществляется гидроцнлинд-
ром 8.
211
Поворот ковша прямой лопаты позволяет выполнять пе только
разработку и погрузку, а также вести планировку забоя.
Одноковшовые экскаваторы с оборудованием обратной лопаты.
Экскаваторы с обратной лопатой преимущественно оборудуются гидра-
влическим приводом. По-
этому ниже приводится
оборудование обратной ло-
паты только с гидравличе-
ским приводом.
Во время работы экска-
ватора, оборудованного об-
ратной лопатой, ковш дви-
жется снизу вверх не «от
себя», как в прямой лопате,
а к себе. Ковш устанавли-
вается в положение I (рис.
8.23, а). Гидроцилиндр по-
ворота ковша находится в
крайнем положении, шток
до упора втянут в ци-
линдр, положение гидро-
цилиндров стрелы и ру-
кояти таково, что позволя-
ет режущей кромке ковша
Рис. 8.23. Экскаватор, оборудованный обратной лопатой с гид-
равлическим приводом
212
занять требуемое исходное положение. При этом относительное поло-
жение штоков и цилиндров рукояти и стрелы должно обеспечивать
дальнейшее рабочее движение ковша при наборе грунта.
» Далее ковш с помощью гидроцилиндра рукояти внедряется в грунт,
а затем через некоторое время включается гидроцилиндр поворота
ковша. При этом продолжается внедрение ковша за счет движения
цилиндра стрелы. По достижении максимального сечения стружки
движение штока рукояти прекращается, а ковш продолжает повора-
чиваться до полного его заполнения (положение II). Цилиндр пово-
рота стрелы начинает работать после того, как ковш заполнится
на 50%.
После окончания поворота ковша и его выглубления из забоя
включается механизм поворота платформы. При этом подъем стрелы
и ковша продолжается. После поворота платформы для установки
ковша над местом разгрузки или транспортным средством ковш по-
ворачивается для разгрузки, принимая в конце исходное положение
(III). Платформа возвращается в исходное положение. Стрела и рукоять
также устанавливаются в исходное положение, и цикл повторяется.
Значительным достоинством гидравлического привода является
возможность независимо управлять работой отдельных узлов силового
оборудования.
Пример схемы привода стрелы (подъема и опускания) показан на
рис. 8.23, 6. Масло из бака 1, в котором помещен фильтр 2, подается
насосом 3 в трубопровод 4 и к распределительному устройству 5.
Перемещением золотника вверх рукояткой 6 устанавливают золотник
так, как показано на рис. 8.23, е. Масло при этом положении золотника
поступает через отверстия Н и А и трубопровод 7 в нижние полости
гидроцилиндров 8.
Штоки гидроцилиндров при этом перемещаются по стрелке В, под-
нимая стрелу. Масло из верхней полости через трубопроводы 9 и отвер-
стия в распределительном устройстве CL и Б и трубопровод 10 сли-
вается в бак I. Для опускания стрелы рычагом 6 перемещают золотник
вниз и устанавливают его так, как это показано на рис. 8.23, г. При
этом масло через отверстия Н и А и трубопровод 11 подается в верхние
полости цилиндров 9, а из нижних полостей этих цилиндров масло
сливается в бак 1 через трубопровод 7, отверстия в золотниковом
распределителе и трубопровод 11. В гидросистеме установлен предо-
хранительный клапан 12. Если золотник находится в нейтральном
положении (рис. 8.23, а) и перекрывает доступ масла в гидроцилиндр
или если в системе нагнетания давление повышается выше расчетного,
то масло, подаваемое насосом, пропускается через этот клапан обратно
в бак 1.
Экскаваторы, оборудованные драглайном. Для разработки грунта
на больших глубинах и при большом радиусе действия применяют
экскаваторы, оборудованные драглайном. В отличие от прямой и
обратной лопат ковш драглайна не укрепляется жестко на рабочем
оборудовании, а подвешивается на двух канатах: подъемном и тяговом
(рис. 8.24, а) при помощи блоков, цепей подвески и разгружающего
каната.
213
Радиус действия увеличивается в результате отсутствия жесткой
связи ковша со стрелой, уменьшающей нагрузки стрелы. Это позволяет
установить на экскаваторе стрелу (обычно решетчатую) в 2—2,5 раза
длиннее, чем при оборудовании лопатой. Ковш драглайна для копания
и разгрузки может выбрасываться вперед на несколько метров.
Перед началом работы ковш находится в положении I. В это время
лебедка тягового каната расторможена и ковш висит на подъемном
канате. Точка подвески ковша на подъемном канате расположена
ближе к задней стенке, чем центр тяжести пустого ковша, поэтому
а)
Рис. 8.24. Экскаватор, оборудованный драглайном:
а — схема работы; б — силы, действующие при работе ковш» драглайна
ковш висит зубьями или режущей кромкой вниз. Оттормаживая лебедку
подъема, опускают ковш и он врезается в грунт (положение //).
При включении тяговой лебедки ковш ложится на грунт и начинает
перемещаться, разрушая грунт и заполняясь им (положение ///).
В это время лебедка подъемного каната либо расторможена, либо
слегка поддерживает ковш, чтобы избежать слишком резкого заглубле-
ния. После наполнения ковша, не останавливая тяги, включают
лебедку подъема. Подъемный канат, втягиваясь, натягивает разгру-
зочный канат и ковш отделяется от грунта приподнятой передней
частью.
Во время перемещения ковша к месту разгрузки его передняя
часть должна оставаться приподнятой, чтобы грунт не высыпался.
Это обеспечивается легким натяжением тягового каната. Когда ковш
достигает места разгрузки, растормаживают лебедку тягового каната
214
и ослабляют тяговый и разгружающий канаты. В результате ковш
поворачивается зубьями вниз и разгружается (положение IV).
В процессе копания возникают следующие сопротивления
(рис. 8.24, б).
Касательная сила копания, кгс (Н),
Д of — ktbc,
где — коэффициент копания, кгс/см2 (Н/м2); с—-средняя толщина
стружки, см (мм); b — ширина ковша, см (мм).
Нормальная сила копания Р02 принимается обычно равной
(0,24-0,3) Р01.
При анализе работы ковшей драглайна важно знать величину Р,)г,
которой определяется способность ковша срезать стружку не выглуб-
ляясь. Ковш внедряется вначале только под действием собственного
веса Як, а затем и веса грунта в ковше gr. Величина этого сопротивле-
ния в начале копания
Рог Як COS а,
(8.16)
где а — угол откоса, град.
Объем срезаемой стружки в плотном теле
qc = Lxbc, (8-17)
где £х — рабочий ход ковша, принимаемый равным для легких грун-
тов (2-еЗ) /к, для средних (3-5-4) /к, для тяжелых (4-4-6) /к, /к —длина
ковша.
Под действием тянущего усилия S, возникает момент 7И0 = G,C3,
стремящийся опрокинуть ковш (рис. 8.24). Устойчивость ковша зависит
от категории разрушаемого грунта, угла откоса а, веса ковша с грун-
том, расстояния Ct от центра тяжести до режущей кромки, расстоя-
ния Сл между точкой крепления тянущего каната А и центром тяжести
цовша с грунтом О. Чем меньше величина С3, тем больше устойчивость
ковша. Чем больше расстояние С2 от центра тяжести до режущей кром-
ки, тем устойчивость больше.
Рабочие органы экскаваторов. Основным рабочим
органом одноковшового экскаватора является ковш. В зависимости
от назначения и вида оборудования ковши имеют различную конструк-
цию.
Ковш прямой лопаты (рис. 8.25, а) имеет форму, близкую к парал-
лелепипеду, с открытой верхней плоскостью и открывающимся днищем.
Ковши могут быть литыми из стали, сварной конструкции или комби-
нированной; иногда их делают клепаными. Литые ковши на 30—35%
тяжелее сварных при том же объеме. Для уменьшения износа переднюю
стенку ковша делают из износоустойчивой стали. Эта стенка имеет
козырек с гнездами для крепления зубьев или со сплошной режущей
кромкой. К задней стенке приваривают проушины для соединения
ковша с рукоятью, крепления днища и блока подъема ковша.
Ковши обратной лопаты (рис. 8.25, б) выполняют без открываю-
щегося днища. Для крепления ковша и рукояти к нему также прива-
ривают проушины. Корпус такого ковша обычно выполняют сварным,
215
Рис. 8.25. Ковши экскаваторов
а козырек — литым, с гнездами для зубьев млн со сплошной режущей
кромкой. Кроме зубьев на козырьке ковш обратной лопаты иногда
имеет их па боковых стенках для подрезания стенок траншей.
Ковш драглайна (рис. 8.25, в) имеет форму совка — он открыт
спереди и сверху. В комплект ковша входит упряжь, состоящая из
тяговых цепей 6, подвесных цепей 4, распорного коромысла 5, раз-
грузочного каната 2, опрокидного блока 3 и соединительного звена 1.
Ковши драглайнов выполняют как с зубьями, так и со сплошной
режущей кромкой. К боковым стенкам ковша приваривают проушины
для подвески его к подъемным цепям, а впереди, в верхней части
ковша, — проушина для крепления
разгрузочного каната.
Основными параметрами, ха-
рактеризующими ковш, являются
его емкость q (му), которая зависит
от ширины Вк, длины £к и высо-
ты Нк (рис. 8.25, б).
На процесс копания значитель-
ное влияние оказывает форма ре-
жущей кромки ковша. До послед-
него времени у большинства ков-
шей режущая кромка дополнитель-
но снабжалась сменными зубьями,
которые крепятся в гнездах перед-
ней стенки или козырька, прикреп-
ленного к передней стенке.
На рис. 8.26 показаны различ-
ные конструкции зубьев и способы
их крепления к ковшу. Длину
зубьев выбирают так, чтобы грунт
не высыпался между передней кромкой ковша и забоем. Расстояние
между зубьями не должно превышать 40—50% от толщины стружки.
П р о и з в о д и т е ль ность экскавато р_а зависит от
продолжительности цикла /ц и объема грунта, который ковш разру-
шает, набирает и переносит за один цикл. Этот объем зависит от
емкости ковша q и степени наполнения, характеризуемой коэффициен-
том наполнения kH.
При разработке ковш наполняется разрыхленным или взорванным
грунтом. Поэтому при определении производительности надо учитывать
и степень разрыхления грунта, т. е. коэффициент разрыхления kp
(см. выше § 8.1).
Техническая производительность учитывается в плотном теле. За
час чистой работы она определяется следующей зависимостью:
Рис. 8.26. Конструкции зубьев
и ЗбОО^^и
* Д Т~ь
‘Ц^р
м3/ч.
(8.18)
Продолжительность цикла, с
Д + “Ь Д Ч" Д. 3>
217
где /к — продолжительность копания; /„ — продолжительность пово-
рота на выгрузку; te — продолжительность выгрузки; /п 3 — продол-
жительность поворота в забой.
Продолжительность отдельных операций, а также величина
зависят от конструкции экскаватора, условий работы и опыта маши-
ниста.
Способы определения продолжительности отдельных операций даны
выше. Коэффициент kp в основном зависит от категории грунта, в мень-
шей степени от емкости и конструкции ковша, а также толщины
стружки.
Эксплуатационная производительность определяется с учетом ква-
лификации механика и легкости управления (Му = 0,884-0,96), потерь
времени на передвижки (2—8%), технические осмотры, ожидание
транспорта и т. п. В среднем все потери можно учесть коэффициентом
использования времени смены. Фактически при работе в транспорт
К™ = 0,74-0,75, при работе в отвал /<см = 0,84-0,93. При определе-
нии выработки за более длительные периоды учитывается сменность,
а также потери времени на переходы на новое место работы и на
ремонты.
Практически число часов чистой работы экскаваторов в год на
хорошо организованных стройках не должно быть меньше 2500 ч.
Для выработки годовой нормы 100—150 тыс. м3 на 1 м3 емкости ковша
достаточно 1000 ч чистой работы экскаватора.
Многоковшовые экскаваторы. По типу рабочего органа они под-
разделяются на роторные и цепные. Принципиальная особенность
этих машин заключается в непрерывности действия. Эти машины
менее универсальны, чем одноковшовые экскаваторы, вследствие чего
их широко применяют для выполнения однотипных работ большого
объема, к которым относятся траншеекопатели и карьерные.
Многоковшовые экскаваторы можно классифицировать также по
характеру движения рабочего органа: 1) на экскаваторы продольного
копания (цепные и роторные), у которых направление перемещения
машины и направление рабочего движения одинаковы; 2) экскаваторы
поперечного копания (только цепные), у которых направление переме-
щения машины перпендикулярно направлению рабочего движения;
3) экскаваторы карьерные роторные, у которых рабочий орган кроме
вращения вокруг своей оси поворачивается относительно оси машины.
Цепные траншеекопатели могут разрабатывать тран-
шеи большей глубины, чем роторные, и при равной глубине копания
имеют меньшую массу. Поэтому их применяют чаще, несмотря на то
что при одинаковой с роторными траншеекопателями массе имеют
меньшую производительность. Малые модели цепных траншеекопате-
лей, как и роторных, часто изготовляют в виде навесного оборудова-
ния на тракторах, тягачах и автомобилях.
Рабочее оборудование такого экскаватора состоит из ковшовой
рамы, по которой движется бесконечная цепь с укрепленными на ней
ковшами. Поднимается и опускается рама при помощи канатного,
гидравлического или цепного привода. Ковшовая цепь приводится
в движение при одномоторном приводе через редуктор и цепную пере-
218
дачу от двигателя. На современных экскаваторах часто применяется
многомоторный привод и гидродинамическая передача с гидротранс-
форматором.
Рабочий орган траншеекопателя представляет собой широкий и
короткий ковш. При очень малой ширине траншеи (0,3—0,5 м) при-
меняют полуковши или скребки. Разгрузка ковша при огибании верх-
ней звездочки ковшовой цепи производится принудительно. Для этого
на ковшовой раме устанавливают подпружиненные скребки, вычи-
щающие ковш при огибании звездочки.
Для изменения ширины траншеи на ковшах крепят боковые ножи-
уширители, применяют специальные фрезы на ковшовой раме, а также
ковши разной ширины. Для широких траншей ковши устанавливают
Рис. 8.27. Цепной траншеекопатель:
1 — транспортно-силовая установка; 2 — вал привода транспортера; 3 — то же, рабочего
органа; 4 — рабочий орган
в два ряда и размещают их в шахматном порядке для большей равно-
мерности работы. Для обработки каналов с откосами в легких грунтах
используют дополнительно боковые шнеки и ножи. Ковши снабжают
зубьями, иногда устанавливаемыми в шахматном порядке.
На рис. 8.27 приводится общий вид одного из последних типов
цепных траншеекопателей. Он предназначен для рытья траншей глу-
биной до 2,5 м в незамороженных грунтах I—III категорий. В кон-
струкции машины предусмотрена возможность оборудования ее допол-
нительной вставкой, позволяющей рыть траншеи глубиной до 3,5 м.
Привод транспортной установки позволяет осуществить бессту-
пенчатое регулирование в диапазоне передвижения 54-150 км/ч. Это
дает возможность на малых скоростях передвижения разрабатывать
мерзлые грунты.
219
При работе ковшовая цепь приводится в движение, а стрела по-
степенно опускается. Ковши врезаются в грунт па заданную глубину
копания, после чего включается ходовой механизм и копание траншей
осуществляется рабочим перемещением машины. Грунт с ковшей,
разгружающихся при огибании ими приводной звездочки, падает на
поперечный конвейер. Скорость конвейера 2—2,5 м/с, длина 2—4 м.
Конвейер может сдвигаться вправо или влево так, что обеспечивается
разгрузка с нужной стороны траншеи.
Основными параметрами экскаваторов являются скорость движения
ковшей ц, (скорость копания) и скорость перемещения машины г\.
При любой глубине траншеи Н скорость ковшовой цепи и скорость
хода должны обеспечиватьпаполненне ковшей. При врезании в грунт
толщина стружки быстро возрастает до постоянного значения, сохра-
няемого по всей траектории ковша в забое. Если принять, что объем
стружки в рыхлом теле qc должен равняться фактической емкости
ковша q с учетом коэффициента наполнения /гн, то
qz=qkn = Hbckv, (8.19)
где q — емкость ковша, м3; с — толщина стружки, мм; b — ширина
ковша, мм.
Подача на ковш для его заполнения в горизонтальном направлении
на один шаг ковша Т за время /п = T/vu должна равняться, м:
<8-2о>
Подача
c = t\/n или c = Tvx/v,v
Скорость хода экскаватора, необходимая для наполнения ковшей,
Qk„V„ ,оп<.
Число ковшей
Р.. = k,bcn...
общее усилие на цепи
Обычно у траншеекопателей ковшовая рама устанавливается под
углом а гы 30-5-55°. При большем угле грунт просыпается через заднюю
стенку ковша.
Транспортные скорости гусеничных цепных траншеекопателей со-
ставляют 1,2—6 км/ч. На 10 л емкости ковша масса их равна 2—3 т,
мощность привода 10—25 кВт (последние значения для машин, пред-
назначенных для очень крепких и мерзлых грунтов). Расход дизель-
ного топлива составляет 0,1—0,2 л на 1 м3 грунта.
Удельные средние показатели на 1 л (1 дм3) емкости ковша у цепных
траншеекопателей: мощность дизеля 0,0—1,8 кВт, масса 0,28—0,33 т,
производительность 1,0—4 м’.'ч, годовая выработка 1,0—1,6 тыс. м3.
Производительность на 1 т массы 3—6 м3/ч, расход энергии на 1 и3
220
грунта составляет 0,5—1,2 кВт-ч, расход дизельного топлива
0,07—0,15 кг.
Роторные траншеекопатели отличаются от цепных
более высокими КПД, производительностью и меньшими размерами
траншеи, разрабатываемой ими. Поскольку наибольшая глубина тран-
шеи у них не превышает 0,6 диаметра ротора, то уже при глубине тран-
шеи порядка 3,5 м необходим ротор диаметром около 6 м. Ротор таких
размеров затрудняет транспортировку, а поэтому роторные траншееко-
патели редко применяются для траншей глубже 2,5 м.
В качестве базовой машины для них используют тракторы или тя-
гачи, обычно на гусеничном ходу. Конструктивная схема такого экска-
ватора показана на рис. 8.28. Рабочее оборудование состоит из ротора,
Рис. 8.28. Роторный траншеекопатель:
1 — двигатель; 2 — коробка передач; 3 — передача привода ходовой части; 4 — привод ро-
тора; 5 — привод конвейера; 6 — конвейер; 7 — ротор
несущего 10—16 ковшей. Ротор представляет собой обод, катящийся
по роликам четырехугольной или треугольной рамы, который приво-
дится во вращение шестерней механизма привода, установленной на
раме и сцепляющейся с венповой шестерней обода. Рама снабжена
кожухом, препятствующим высыпанию грунта из ковшей. На ободе
закрепляется от 10 до 14 ковшей. Поднимается и опускается ротор
с помощью цепных, гидравлических или канатных устройств.
Рабочим органом является ковш, снабженный зубьями. Для креп-
ких грунтов зубья имеют большую длину и выполняются в виде клы-
ков, устанавливаемых в шахматном порядке, чтобы увеличить объем
скола. Очищающие скребки в роторных траншеекопателях пе уста-
навливаются из-за жесткого крепления ковшей к ободу, что затрудняет
использование экскаваторов в вязких грунтах. Для лучшей разгрузки
таких грунтов задние стенки ковшей изготовляют из цепей круглого
железа. Для уширения траншеи на колесе устанавливают два ряда
ковшей или применяют уширители. Для обработки канав с откосами
в легких грунтах используют специальные ножи.
221
Эти экскаваторы выпускаются с одномоторным дизельным и с мно-
гомоторным дизель-электрическпм приводом. В дизель-электрическом
приводе (рис. 8.29) дизель приводит в движение генератор, ток от
которого передается к электродвигателям приводов ротора, ходовой
части и гидронасоса.
Процесс работы проходит следующим образом. Ротор приводится
в движение и постепенно опускается до заглубления на заданную
глубину копания. После этого включается ходовой механизм и машина
перемещается вдоль разрабатываемой траншеи. Грунт из ковшей
высыпается на ленточный конвейер и подается на бровку забоя.
Скорость ковшей колеблется от 1,5 до 2,5 м/с. Скорость перемеще-
ния машины (рабочий ход) составляет 20—600 м/ч. Каждый ковш
Рис. 8.29. Кинематическая схема днзель-элсктричсского роторного экскаватора:
/ __ дизель; 2 — электрогенератор; 3 — э 1ектродвнгатель; 4 — коробка передач; 5 — эле-
ктродвигатель привода насоса; 6 — редуктор привода ротора; 7 — приводные барабаны лен-
точного тормоза со встроенными электродвигателями; 8 — электродвигатель привода ротора;
9 — ведущая звездочка гусеницы; W — зубчатые передачи к гусеничному ходу
движется вокруг оси колеса и одновременно поступательно, поэтому
сечение стружки изменяется и достигает максимального значения
на высоте копания, равной радиусу колеса.
Цепные экскаваторы поперечного копания
широко применяют на карьерах нерудных материалов как для вскрыш-
ных работ, так и для добычи глины, гравия, песка. Эти машины делят
на экскаваторы нижнего и верхнего копания. Экскаваторы нижнего
копания разрабатывают забой, расположенный ниже уровня установки
машины (рис. 8.30, б, г), а экскаваторы верхнего копания — выше
уровня установки машины (рис. 8.30, а, в).
При втором способе разработки энергоемкость процесса меньшая,
чем при первом, так как грунт не приходится поднимать вверх.
Современные экскаваторы можно переоборудовать для верхнего
или нижнего копания.
На карьерах для добычи нерудных материалов применяют экскава-
торы сравнительно малой мощности, до 50 кВт. Емкость ковшей этих
222
машин составляет 20-4-50 л (дм3), глубина или высота копания —
6^-9 м, скорость передвижения экскаватора — 44-12 м.'мин на желез-
нодорожном ходу и 44-6 м/мпи на гусеничном.
Различают два вида копания при работе этими экскаваторами:
параллельное и радиальное (веерное). При параллельном копании
по всей длине забоя снимается стружка одинаковой толщины. В этом
случае ковшовая рама расположена параллельно поверхности забоя
и каждый ковш снимает стружку одинаковой толщины.
При радиальном резании рама находится под углом к поверхности
забоя. Толщина снимаемой стружки в этом случае различна: у конца
Рис. 8.30. Схемы работы экскаватора при поперечном копании:
а — верхнее копание при параллельном реяанни; б —• нижнее копание при параллель-
ном резании; в — верхнее копание прн радиальном (веерном) резании; г — нижнее
копание прн радиальном (веерном) резании
ковшовой рамы она имеет максимальное значение, у выхода ковшей
из забоя — минимальное. Когда ковшовая цепь приводится в движе-
ние, рама постепенно опускается в забой до тех пор, пока ковш не
заглубится в грунт на заданную глубину копания. После этого вклю-
чают ходовой механизм и экскаватор начинает перемещаться вдоль
забоя.
Для того чтобы при радиальном копании на поверхности забоя
не оставалось несрезанных полос, каждый последующий ковш должен
срезагь полосу, примыкающую или немного перекрывающую полосу,
срезанную предыдущим ковшом. Для этого скорость перемещения и
скорость цепи при заданном шаге ковшей должны быть увязаны с ши-
риной ковша.
Роторные карьерные экскаваторы (рис. 8.31)
устанавливают на гусеничном ходу. Роторные экскаваторы, выпускае-
мые в настоящее время, имеют диаметр роторного колеса 1,6—16,5 м
223
И емкость ковшей 16-е4000 л. Теоретическая или конструктивная
производительность их 80—8000 м3<ч, высота разрабатываемого забоя
5—70 м, мощность привода 30—1500 кВт. На предприятиях неруд-
ных материалов применяют роторные экскаваторы малой мощности
с емкостью ковша 25—150 л, а на крупных карьерах — модели средней
мощности с емкостью ковша 200—500 л. Установленная мощность на
каждый литр емкости ковша при разработке тяжелых грунтов состав-
ляет 1,5—2 кВт, средняя производительность на I л емкости ковша
1,5—2,5 м3/ч.
Энергоемкость разработки грунта колеблется от 0,3 кВт-ч/м3 в
легких грунтах до 0,5 — в средних и до 0,75 — в тяжелых грунтах.
Рис. 8.31. Конструктивная схема роторного экскаватора:
/ — ротор с ковшами; 2 — стрела; 3 — приемный ленточным транспортер; 4 — поворотная
платформа; 5 — канаты подъема роторной стрелы; 6 — ленточный транспортер; 7 — реснич-
ный ход
Роторные экскаваторы выпускают с выдвигаемой и левы двигаемой
телескопической стрелой.
Рабочими органами роторных экскаваторов служат ковши с раз-
личными формами режущих кромок. Ковши расположены равномерно
по окружности ротора. Ковши роторных экскаваторов могут быть
с зубьями и без них.
Для разработки липких материалов днища ковшей делают не сплош-
ными, а состоящими из цепей. В процессе работы экскаватор подводят
к забою при вращающемся роторе. Ковш ротора врезается в породу-
па глубину, соответствующую толщине снимаемой стружки в положе-
нии, когда режущая кромка ковша находится в плоскости, проходящей
через ось ротора. Затем поворотная рама вместе с вращающимся рото-
ром поворачивается на угол 90—120°. После снятия стружки по всей
дуге экскаватор снова перемещают на величину, необходимую для
получения заданной толщины стружки. Цикл работы повторяется
до тех пор, пока не будет разработана ступень на глубину А, равную
0,5—0,7 длины роторной стрелы.
224
При достижении очередным ковшом верхнего положения грунт из
него высыпается на приемный транспортер. С этого транспортера
грунт перегружается на другой ленточный транспортер, который подает
его в отвал или транспортные средства.
Производительность роторных экскаваторов зависит, как и у одно-
ковшовых, от числа раз!рузок (ссыпок) лр в 1 мин. При заданной ско-
рости ковшей и шаге их Тк число разгрузок будет равно:
пр = 60vK/TK.
Отсюда производительность многоковшового экскаватора при
заданной емкости
60-60n„gA = 3.6п,^..
11 1000Ар kp 1 --'
§ 8.6. МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ГИДРОМЕХАНИЗАЦИИ
Для целей строительства часто применяется способ разрушения
и транспортирования грунтов при помощи струи воды, подаваемой под
давлением. Этот способ называется гидромеханизацией. Гидромехани-
зация осуществляется обычно двумя видами устройств: 1) гидромони-
торами, выбрасывающими струю воды под высоким давлением и ско-
ростью, которая разрушает грунт; 2) землесосами или земснарядами,
которые разрушают грунт под водой механическими средствами,
а затем всасывают смесь размельченного грунта с водой (пульпу)
и транспортируют ее в отвал или к месту укладки.
Примерные технико-экономические показатели при применении
гидромониторов и плавучих земснарядов составляют соответственно:
годовая выработка установки 0,1—1 млн. м3 и 0,8—3,0 млн. м3, годовая
выработка на одного рабочего 3,5—15 и 15—50 тыс. м3, расход энергии
3,5—6 и 1,9—2,2 кВт-ч/м3, металлоемкость (с трубопроводами) на
1 млн. годовой программы 70—250 и 270—500 т.
' При комбинированной разработке с механическим рыхлением грунта
вместо гидромониторов с гидротранспортом расход энергии меньше
в 1,5—2 раза, производительность труда выше на 25—50%.
Гидромонитор (рис. 8.32) состоит из гидравлического насоса,
трубопроводов, подающих воду к насосу, и собственно гидромонитора.
Установка выполнена из нескольких колен, на одном из которых
установлена труба и коническая насадка.
Производительность гидромонитора
/7 = 36ООпо-^<₽, м3/ч, (8.23)
где v0 — скорость струи, м/с; dn — диаметр выходного отверстия;
<р — коэффициент, равный « 0,9.
Насосы подбирают по заданной производительности. Если нет
насосов нужной производительности, то устанавливают несколько
насосов. Мощность, необходимая для привода насосов,
Л'.-да-;. <8.24)
8 М. И. Гальперин
225
где Нк — напор, развиваемый насосом, м вод. ст.; ц — КПД насоса,
равный 0,7—0,75.
Размытый гидромониторами грунт может транспортироваться к
месту укладки но канавам или лоткам с определенным уклоном
(табл. 8.2).
Рис. 8.32. Гидромонитор:
/ — пульт управления; 2 — салазки; 3 — гидроцнлиидры; 4 — нижнее колено; 5 — шарнир
для поворота гидромонитора в i ори зонта льном плоскости; 6 — верхнее колено; 7 — рычаг
для ручного управления гидромонитора; 8 — противовес; 9 — шарнир для вращения ствола
в вертикальной плоскости; 10 — сгвол; 11 — насадка
Применяется также напорный гидротранспорт, требующий расхода
энергии на перекачивание 1 м3 грунта на 100 м <-->0,4 кВт ч.'м3.
Таблица 8.2
Величины уклонов канав и лотков для транспортирования
размытою грунта
Грунт Уклоны
В забой по грунту в земляной канаве
Глинистый и суглинистый 0,02—0,025 0,02—0,03
Мелкий песок, супесь 0,025—0,035 0,03—0,05
Крупно- и средпезернистый песок 0,3—0,050 0,03—0,07
Гравий 0,4—0,080 0,01—0,12
Землесосная установка (земснаряд) представляет собой плавучее
устройство, к которому подвешен грунтоприемник, всасывающий грунт
при помощи землесоса (рис. 8.33, а). Грунтоприемник (рис. 8.33, б)
и землесос соединены всасывающим грунтопроводом. Для облегчения
всасывания грунт разрушается дополнительно гидромонитором
(рис. 8.33, в), специальной фрезой (рис. 8.33, г) или гидроэжектор ным
устройством (рис. 8.33, д).
Землесос всасывает смесь разрушенного грунта с водой и подает
ее в трубопроводы, через которые она транспортируется к месту уклад-
ки. По мере выработки грунта у одной стоянки земснаряд перемещается
па другое место. Чтобы частицы пульпы, всасываемой земснарядом,
находились во взвешенном состоянии (иначе трубопровод будет забп-
226
ваться оседающими частицами грунта), скорость потока должна быть
не меньше определенных заданных величин. Эта скорость (м/с) должна
быть для песков 10—12; легких суглинков и супесей средней плот-
ности 18—25; суглинков средней плотности и тяжелых супесей 20—26;
тяжелых глин 30—35. Производительность земснаряда зависит от
консистенции пульпы, т. е. от отношения объема грунта к объему
воды. Производительность прн разработке полезных ископаемых
зависит от того, какая часть добываемого материала в виде частиц,
загрязняющих материал или негодных для укладки в сооружение,
сбрасывается вместе с водой.
Рис. 8.33. Схема работы земснаряда:
1 — грунтоприемник; 2 — всасывающий грунтопровод; 3 — землесос;
4 — двигатель землесоса; 5 — нагнетательный грунтопровод; 6 — понтон
При известном объеме грунта V (м3), подлежащего разработке,
производительность земснаряда, м3/ч
n = Kv,
(8.25)
где К — коэффициент, зависящий от продолжительности работы уста-
новки (дн.), числа часов работы установки (сут.), использования
земснаряда по времени, длины транспортирования грунта, объема
воды, необходимого для разработки грунта.
Для транспортирования пульпы требуется, чтобы диаметр пульпо-
вода D был не меньше определенной величины, т. е. необходимо,
чтобы площадь сечения трубопровода обеспечивала бы истечение за-
данного объема пульпы при необходимой скорости цп, т. е.
(8.26)
этР3 _ П
4 ~ 3600г1 л ’
По заданной производительности, категории разрабатываемого
грунта, дальности транспортирования пульпы определяют требуемую
мощность установки.
8*
227
§ 8.7. МАШИНЫ ДЛЯ БУРЕНИЯ
Буровые работы в строительстве осуществляются при помощи
буровых машин (станков) и ручных машин. Буровыми машинами
производят бурение котлованов диаметром до 3 м для установки мачт
линий электропередачи и набивных свай, котлованов диаметром до
0,75 .м для опускания свай в мерзлый грунт, шпуров в мерзлом грунте
и горных породах для взрывных работ, а также при геологоразведоч-
ных работах.
В зависимости от условий бурения рабочему органу сообщаются
л различные движения.
) /Вращательное бурение, когда рабочий орган только вращается.
Вращательное бурение можно вести двумя способами: разрушать всю
породу в пробуриваемом отверстии или высверливать кольцевую щель,
внутри которой остается столбик породы (керн), как показано па
Рис. 8.34. Схемы способов бурения
рис. 8.34, а, б. Второй способ менее энергоемок, поскольку не тра-
тится энергия па разрушение остающейся внутри инструмента породы.
При вращательном бурении требуется большое усилие подачи для
внедрения инструмента. Эю усилие в значительной степени опреде-
ляет глубину внедрения инструмента за один оборот, а следовательно,
и производительность.
С увеличением прочности горной породы значительно возрастает
усилие, необходимое для внедрения инструмента, что является одной
из основных причин, ограничивающих возможность применения спо-
соба вращательного бурения горных пород.
Ударное бурение (рис. 8.34, в). При этом способе инструмент
внедряется в горную породу в результате сбрасывания его с опре-
деленной высоты или в результате ударов по его хвостовой части.
После каждого сбрасывания или удара инструмент приподнимают,
поворачивают на некоторый угол и таким образом обрабатывают всю
торцевую поверхность забоя. Рабочий инструмент находится в кон-
такте с породой только часть времени. Вовремя опускания инструмента
до контакта с породой разрушения ее не происходит. Время на подъем
инструмента, его поворот и опускание составляет более 40% от общего
228
времени работы, поэтому производительность ударного бурения
относительно невысока.
Преимуществом ударного бурения является то, что создаются
большие силы удара, а следовательно, и большие удельные нагрузки
на лезвие коронки. Хрупкие породы разрушаются легче под действием
удара, чем под действием статических нагрузок, поэтому ударное
бурение рекомендуется применять для бурения пород выше средней
прочности.
Ударно-поворотное бурение (рис. 8.34, г). При этом способе одно-
временно с внедрением лезвия под действием удара оно поворачивается
на некоторый угол, обычно на 10—15°, благодаря чему увеличивается
» Рис. 8.35. Машина для бурения котлованов под опоры мачт линий электро-
передачи:
/ коробка отбора мощности для привода бура и гидронасоса: 2 — гидронасос;
3 — карданный вал привода бура; 4 — гпдроцнлнидр подъема буровой штанги;
5 — гндроцилиндр подьема и поворота рамы совместно со штангой; 6 — гидроцн-
линдр подачи штанги в направлении бурения, 7 — буровая штанга
разрушаемая поверхность забоя. После удара и поворота инструмента
на некоторый угол он приподнимается и цикл повторяется. Хотя при
этом способе бурения инструмент находится в контакте с породой
только часть времени, однако производительность его на 50—60%
выше, чем при ударном бурении.
Ударно-вращательное бурение (рис. 8.34, д, е) осуществляется
посредством непрерывного вращения инструмента и периодических
ударов по нему. При этом способе используются одновременно поло-
жительные особенности ударного бурения, т. е. возможность создания
большого осевого ударного усилия на режущем лезвии, и вращатель-
ного бурения, т. с. непрерывное отделение породы от массива. Произ-
водительность при этом способе в 2—3 раза выше, чем при ударном
бурении, и в 1,4—1,8 раз выше, чем при вращательном.
229
Термическое бурение (рис, 8.34, ж) заключается в том, что порода
разрушается под действием высокой температуры и давления газовой
струи. К породе подводят газы при температуре 2500—3000СС со
скоростью до 2000 м/с. Этот способ можно применять для бурения
пород, которые растрескиваются, а не плавятся.
Для бурения ям под столбовые фундаменты, опоры линий электро-
передачи в талом и мерзлом грунтах используют мощные бурильные
установки на тракторах или автомобилях (рис. 8.35). Бур приводится
во вращение двигателем автомобиля через коробку отбора мощности
и карданные валы. Внедряется бур в грунт при помощи гидроцилиндра
и канатной передачи. Благодаря этому при сравнительно малом ходе
цилиндра (800—1000 мм) рабочий орган внедряется па глубину до 4 м.
Такой установкой можно бурить как вертикальные скважины, так и
под углом. Для этого раму устанавливают в нужное положение при
помощи гидродомкрата.
При транспортировании установка укладывается на машину
с помощью таких же домкратов. Осевое усилие, которое можно раз-
вивать на этой установке, ограничивается весом автомобиля и трактора.
§ 8.8. МАШИНЫ ДЛЯ БЕСТРАНШЕЙНОЙ РАЗРАБОТКИ ГРУНТА
Такие машины применяют при прокладке трубопроводов, проходя-
щих под магистралями автомобильных и железных дорог.
Способы проходки могут быть следующими:
1. Отверстие образуется без удаления грунта, т. е. происходит
уплотнение всего грунта вокруг отверстия (прокол, или прокалывание
грунта). На конец трубы надевается наконечник, и трубе вместе с на-
конечником сообщается движение при помощи гидравлических дом-
кратов, электрических лебедок, тракторов или вибрационных устройств
(рве. 8.36, а). Труба может быть и без наконечника, т. е. открытая.
В этом случае часть трубы на длину 1,5—2 м забивается грунтом,
впереди трубы образуется ядро уплотнения, которое и служит как бы
наконечником при дальнейшем движении трубы.
2. При прокалывании часть грунта попадает в трубу, а остальная
часть грунта уплотняется. В этом случае конец трубы открыт или
на него надевается наконечник с отверстием (рис. 8.36, в). В про-
цессе продвижения трубы грунт удаляется из нее с помощью специ-
альных желонок и других устройств. Этот способ называется продав-
ливанием.
3. Перед проталкиванием трубы грунт разрабатывается методом
гидромеханизации или горизонтальным бурением (рис. 8.36, в). В по-
следнем случае труба может следовать непосредственно за буром,
если проходка осуществляется в слабых грунтах. При проходке
в прочных грунтах можно пробурить все отверстия, а затем протащить
трубу (рис. 8.36, г). Бурение осуществляется при помощи буровых
головок, а протаскивание труб — теми же механизмами, что и в пре-
дыдущих способах.
Тот или иной способ рекомендуется в зависимости от того, в каких
грунтах осуществляют проходку отверстий.
230
При проходке отверстий в грунте различными способами действуют
различные силы. При прокалывании преодолевается усилие, необ-
ходимое для вдавливания наконечника в грунт, кгс (Н),
= (8.27)
где р — удельное усилие, необходимое для вдавливания наконечника
в грунт, кгс см2 (I la); F — наибольшая площадь сечений наконеч-
ника, см2 (м2).
Рис. 8.36. Способы бестраншейной разработки грунта
При продавливании нужно преодолеть сопротивление внедрению
сечения трубы:
Рт = рпГ>б; D = (8.28)
где £>н и Овн — наружный и внутренний диаметры трубы; б — толщина
стенки.
Для уменьшения сил трения по наружной поверхности трубы при
прокалывании и продавливании наконечник делают больше диаметра
трубы, а при прокалывании открытой трубой на конец трубы нава-
ривают кольцо с толщиной степок до 10 мм.
Сопротивление прочных грунтов прокалыванию или продав-
ливанию очень велико. Здесь требуются механизмы, развивающие
большие осевые усилия; однако при этом прочность труб может ока-
заться недостаточной и они могут изогнуться, поэтому для таких
грунтов следует применять метод бурения.
В слабых грунтах можно осуществлять проходку методом прокола
или продавливания.
231
§ 8.9. МАШИНЫ ДЛЯ РАЗРАБОТКИ МЕРЗЛЫХ ГРУНТОВ
Мерзлые грунты разрабатывают как специальными, так и обычными
землеройными машинами, для чего грунт предварительно разрушают.
Для разработки мерзлых грунтов можно использовать и землеройные
машины, рабочие органы которых будут соответственно приспособле-
ны. Однако производительность таких машин значи-
тельно ниже, чем при разработке талых грунтов.
Лучшие результаты по производительности труда,
стоимости и металлоемкости дает рыхление мерзлых грун-
тов рыхлителями на тракторах мощностью 300—750 кВт,
с отвозкой разрыхленного грунта самоходными скрепе-
рами усиленной конструкции емкостью 30 м8 и выше.
Существуют различные механические способы разру-
шения мерзлых грунтов.
Разрушение грунта при помощи клиньев или шаров
большого веса (500 кгс и более), которые подвешиваются
на подъемных канатах экскаваторов или гусеничных
кранов и сбрасываются с высоты 5—8 м. Шары рекомен-
дуется применять при разра-
ботке песчаных и супесчаных
грунтов, клинья — при раз-
работке глинистых грунтов.
Эти способы применяют толь-
ко при отсутствии современ-
ного оборудования, так как
они малопроизводительны.
В зависимости от веса
сбрасываемого шара или кли-
на производительность состав-
ляет 25—30 м3/смеп. При этом
способе разрушения увеличи-
вается износ экскаваторов и
особенно износ канатов лебе-
док из-за больших динамиче-
ских нагрузок.
Откол крупных глыб с по-
мощью рабочего оборудова-
ния, навешенного на трактор или экскаватор. Оборудование представ-
ляет собой клин, внедряемый в грунт под действием собственного веса.
Одна из таких установок показана на рис. 8.37, где клип поднимается
па 4 м при помощи лебедки, приводимой в движение от коробки от-
бора мощности трактора. Вес груза составляет 1,5 т. Несмотря на
малое количество ударов (8—10 ударов в минуту), производитель-
ность этой установки значительно выше, чем при сбрасывании клиньев
или шаров без направляющих.
Аналогичные опытные установки изготовляются с 1948 г. Произ-
водительность труда (с транспортом) составляет от 12 до 20 м3 на 1 чел/ч,
а производительность в смену 100—200 м3.
Рис. 8.37. Установка для рыхления мерзлых
грунтов:
/ — оголовок; 2 — автоматический сцеп; 3 — ра-
бочий орган (клин); 4 — канат; 5 — направляю-
щая; 6 — лебедка; 7 — узел амортизации
232
Резание грунта с помощью дисковых пил, цепных баров и приспо-
собленных для разработки мерзлых грунтов роторных экскаваторов.
Навесное оборудование в виде дисковых пил применяют для нарезки
щелей шириной 30—35 мм на всю глубину промерзания или па 0,7
этой глубины. Щели нарезаются так, чтобы расстояние между ними
составляло 0,8—1,0 м. Это дает возможность разрабатывать грунт
между щелями (отрывать глыбы) экскаватором. Расстояние между
щелями выбирают в зависимости от типа, которым будет разрабаты-
ваться грунт и от ширины зева его ковша. Недостатком применения
дисковых пил является то, что они могут углубляться в грунт не
больше чем па 0,4 диаметра.
Навесное оборудование в виде режущих цепей (цепных баров)
получило наиболее широкое распространение. На рис. 8.38 показана
одна из таких установок.
В качестве рабочего органа
служит цепь, на которой за-
креплены резцы. Цепи приво-
дятся в движение от вала от-
бора мощности нрп помощи ре-
дуктора, устанавливаемого на
тракторе. Преимущество таких
установок по сравнению с диско-
выми пилами в том, что цепями
можно нарезать щели большой
глубины (до 2 м и более). Ско-
рость резания равна 2—2,5 м/с.
Рабочая скорость движения
машины 30—70 м/ч. Чтобы трак-
тор двигался с этой скоростью,
устанавливают уменыпитель ско-
рости. Сменная производительность установок 50 м3/смен. Толщина
срезаемой стружки 2— 3 см.
Недостаток этих установок — значительные потери па трение
в цепях, достигающие 60% общей потребляемой мощности, быстрый
износ цепей и необходимость извлечения глыб другой машиной.
Для заглубления режущих цепей в грунт и фиксирования их в оп-
ределенном положении применяют напорный механизм, представ-
ляющий собой гпдроцилиндр, закрепляемый па кронштейне при
помощи цапф. Ьлагодаря такому креплению гидроцилиндр может
поворачиваться по мере поворота режущей цепи (бара), его опускания
или подъема. В транспортном положении машины бары поднимаются
гндроцилиндром в горизонтальное положение и закрепляются защел-
кой.
Для разработки мерзлых грунтов на глубину до 0,5—0,6 м при-
меняют землеройно-фрезерные машины (рис. 8.39). Она состоит из
тягача 1 и навесного оборудования. Фреза 6 приводится во вращение
от коробки отбора мощности 2. Вращение передается через карданный
вал 4 и редуктор 5. Подъем и опускание фрезы, а также создание
напорного усилия осуществляются гидроцилиндром 3.
233
Из обычных землеройных машин для разработки мерзлого грунта
применяют:
1. Многоковшовый траншейный экскаватор продольного копания.
Клыки ковшей экскаватора устанавливаются так, что часть грунта
разрушается в условиях полублокироваппого резания; это снижает
энергоемкость процесса. Значительно усилена конструкция привод-
ных цепей и рамы, на которой установлены цепи.
Рис. 8.39. Землеройно-фрезерная машина
2. Роторный траншейный экскаватор. Так как ротор имеет жесткую
конструкцию, то роторные экскаваторы, у которых клыки ковшей
установлены так же, как и в предыдущем случае, позволяют разраба-
тывать мерзлый грунт. Для эффективной работы мощность траншей-
ного экскаватора должна быть не меньше 300 кВт и поэтому создаются
роторные экскаваторы мощностью 500 кВт и более, которые более
эффективны, чем цепные.
Производительность обычных экскаваторов при разработке мерз-
лых грунтов составляет 0,1—0,2 их нормальной производительности,
и поэтому их рекомендуется применять только при случайных работах
на небольших объектах.
§ 8.10. МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТА
Большинство земляных сооружений уплотняется искусственно,
так как насыпные грунты не имеют требуемой плотности и равномер-
ности последующей осадки.
Различают следующие способы уплотнения грунтов: укатывание,
трамбование, вибрация.
Для уплотнения связных и малосвязных грунтов — суглинков и
супесей — может быть рекомендован способ укатки.
Уплотнять несвязные грунты — песчаные, гравелистые и галеч-
ные — лучше всего трамбованием и вибрацией.
Машины для уплотнения грунтов классифицируются на следующие
группы: катки статического действия (с гладкими вальцами, с кулач-
234
новыми вальцами, с пневматическими шинами, с вибровальцами);
трамбующие машины — с вальцами, с падающим грузом, с трамбу-
ющими плитами, с виброплитами.
Основные из этих машин показаны на рис. 8.40.
По способу передвижения катки разделяют па прицепные, само-
ходные и пслуприцепные. Самоходные катки с гладкими вальцами де-
лят на легкие (массой 2—5 т), средние (6—9 т) и тяжелые (10—15 т).
Прицепные и полуприцеппые катки на пневматических шинах выпуска-
Рис. 8.40. Схемы грунтоуплотняющих машин:
а — каток с гладкими вальцами; б — кулачковый каток прицепной; в — ппевмоколссный
прицепной каток; г — трамбовочная плита на тракторе; д — самоходная внброплнта; 1 —
пневматические шины; 2 — балластные ящики; 3 — механизм подъема и сбрасывания плиты;
4 — плита; 5 — направляющие; 6 — вибровозбуднтсль; 7 — двигатель
ются массой вместе с балластом от 10 до 100 т. Вибрационные самоход-
ные катки имеют массу от 1,4 до 6 т без балласта и до8тс балластом.
В последнее время выпускают катки с гладкими вальцами с объем-
ным гидроприводом. Схема такого катка показана на рис. 8.41. Дви-
гатель 1 приводит в действие насос 2. Через распределители 3 жид-
кость подается к гидромоторам 4 привода вальцов 5. Поворот катка
осуществляется поворотом одного из вальцов при помощи гидроци-
линдров 6.
Для уплотнения грунта необходимо на поверхности создать такие
удельные давления (напряжения), чтобы после снятия нагрузки
235
грунт остался деформированным. Необходимо, чтобы напряжения,
которые развиваются па поверхности контакта рабочих органов машин
с уплотняемым грунтом, не превышали предела прочности грунта.
Для эффективного уплотнения величина удельного давления долж-
на быть близка к пределу прочности. Лучше, если оно составляет
0,9—1 предела прочности ов.
По мере уплотнения грунта увеличиваются его прочность и плот-
ность. Следовательно, чтобы повысить эффективность уплотнения,
необходимо увеличивать удельные давления. Однократное наложение
напряжения не обеспечивает необходимого уплотнения, поэтому при-
ходится прилагать нагрузки на грунт несколько раз.
Для катков с гладкими вальцами и на пневмоколесном ходу удель-
ное давление принято оценивать в кгс/см, т. е. удельное давление
Рис. 8.41. Каток с гладкими вальцами и i идропрпводом
па 1 пог. см ширины вальца. В действительности под катком образуются
площадки, ширина которых при одинаковом весе катка зависит от
диаметра катка и от физико-механических свойств уплотняемого
грунта.
Величина максимального напряжения, возникающего в грунте,
•Тщах = рЕц/R,
где р — уделыюе линейное давление, кгс/см; R — радиус колеса, см;
Ео — модуль деформации грунта, кгс/см.
Величина Ео в конце уплотнения может быть принята равной
200 кгс/см (200 Н.'мм).
Чтобы повысить эффективность уплотнения, его следует вести
группой катков, причем вначале уплотнять легкими катками, а затем
тяжелыми. Легкими катками рекомендуется делать 30—40% общего
количества проходов. Если грунт имеет плотность 0,9 отах, его уплот-
няют одними тяжелыми катками.
Катками с гладкими вальцами и пневмоколесными катками можно
уплотнять грунты слоями около 0,15 м. Количество проходов для
связных грунтов колеблется от 8 до 12.
Кулачковыми катками можно уплотнять грунт слоями 0,2—0,25 м.
Остаточные деформации в грунте при одних и тех же удельных
давлениях зависят от скорости перемещения катков. Опытами уста-
236
новлено, что скорость перемещения должна быть различна на первой
и второй стадиях уплотнения. Первые и последние проходы следует
выполнять на скоростях, меньших, чем промежуточные проходы.
При работе катков приходится преодолевать различные силы
сопротивления.
Сила сопротивления перемещению катка
lV'1==Gco, (8.29)
где G — вес катка; © — коэффициент сопротивления катка передви-
жению, в большой степени зависящий ст состояния уплотняемого слоя
(для разрыхленного грунта со — 0,18).
Сила сопротивления, связанная с преодолением подъема, кгс (Н),
F2 = Gz, (8.30)
где i — уклон местности (обычно i < 0,1).
Сила сопротивления от преодоления сил инерции, кгс (Н),
(8.31)
где v — скорость катка, м/с; g — ускорение свободного падения, м/с2;
t — время разгона катка (I = 3—4 с), с.
Сила сопротивления катка передвижению по кривой при движении
на рыхлом щебне
U7j = 0,3G„, кгс (Н), (8.32)
где G — доля веса катка, передаваемая на поворачиваемый (ведомый)
валец.
При уплотнении грунта пневмоколесными катками на процесс
уплотнения влияют: давление в шинах; зазоры между шинами; вес
катка; скорость его перемещения.
, Расстояние между торцевыми поверхностями шин должно быть не
больше 0,4 ширины шины. Удельное давление на грунт зависит от
веса катка (при заданном количестве шин), который должен быть
таким, чтобы удельное давление было не более 1,0. Вес подбирают
также и в зависимости от допускаемых конструкций шины нагрузок
на шину.
Число проходов пневмокатков при уплотнении песчаных грунтов
составляет 2—3, супесчаных 3- 4, суглинистых и тяжелосуглинистых
5—6 проходов.
При уплотнении трамбованием в грунте напряжения возникают
в результате действия веса рабочего органа, которым может являться
свободно падающий груз или плита (трамбовка).
Проф. Н Я- Харахута предложил определять величину напряже-
ния в зависимости от удельного импульса силы:
/ = 4 = (8.33)
где J = Qv/g—полный импульс, кгс-с (II-с); Q — вес рабочего
органа, кг; v —- скорость в момент соударения рабочего органа с грун-
том, м/с; F — площадь трамбующего рабочего органа, м.
237
При свободном падении
QYW
gF
(8-34)
где Q — вес падающего груза, т; И — высота падения, и.
Величины удельных импульсов не должны быть больше определен-
ных значений, так как с их увеличением ухудшается уплотнение и
грунт разрушается. Предельные значения этих импульсов для мало-
стязвых грунтов составляют 0,040—0,060 кгс-с/см2, а для весьма
связных грунтов 0,175—0,225 кгс-с/см2.
Если уплотняются насыпные грунты, то величину допускаемых
импульсов принимают равной 0,8—0,9 от предельных значений. Прн
уплотнении грунтов с ненарушеннсйструктурой они могут быть уве-
личены в 1,5—2 раза.
§ 811. ОБОРУДОВАНИЕ ДЛЯ СВАЙНЫХ РАБОТ
Для устройства искусственных оснований и при возведении вре-
менных перемычек в грунт погружают сваи или металлический шпунт.
Сваи (шпунт) погружаются
Рис. 8.42. Штанговый дизель-молот
следующими способами: за-
бивкой, вибрацией, вдав-
ливанием, ввинчиванием,
забивкой с подмывом грун-
та водой Наиболее распро-
страненными являются за-
бивка и вибрационное по-
гружение.
При забивке преодоле-
вается сопротивление по-
гружению в грунт, а так-
же сопротивление трению
сваи о грунт. Для внедре-
ния сваи необходимо, чтобы
работа каждого удара была
не меньше определенной
величины, иначе при уда-
рах будут происходить
только упругие деформа-
ции и сваи не внедрятся в
грунт. Величина необходи-
мой работы каждого удара,
при котором будет проис-
ходить забивка сваи, зави-
сит от ее сечения и свойств
грунта. Чем больше сече-
ние сваи, тем значительнее
величина этой работы. Для забивки свай сечением 0,25 х 0,25 м
даже в слабые грунты требуется, чтобы работа единичного удара
была не меньше 10 тс-м.
238
21. Начертите кинематическую схему роторного экскаватора и опишите его
работу.
22. Начертите схемы гидромонитора и земснаряда и напишите формулу для
определения производительности земснаряда.
23. Начертите схемы рабочих инструментов для бурения.
24. Начертите схему станка для вращательного бурения.
25. Начертите схемы установок для бестраншейной прокладки трубопроводов и
опишите принципы бестраншейной прокладки труб.
26. Начертите график прочности мерзлых грунтов в зависимости от влажности
и опишите способы разработки мерзлых грунтов.
27. Перечислите способы уплотнения грунтов и вычертите принципиальные схемы
механизмов для уплотнения грунтов.
28. Напишите формулу для определения сопротивления перемещению катка.
29. Перечислите виды оборудования для забивки свай и вычертите схемы этого
оборудования.
ГЛАВА 9
МАШИНЫ ДЛЯ ДРОБЛЕНИЯ, СОРТИРОВКИ
И МОЙКИ КАМЕННЫХ МАТЕРИАЛОВ
Источником получения нерудных строительных материалов служат
каменные, гравийные, песчаные и гравийно-песчаные месторождения.
Для применения в строительстве щебня, гравия и песка их требуется
предварительно обработать — подвергнуть дроблению, сортировке и
промыть.
Щебень изготовляют из крупных кусков горных пород путем дроб-
ления и сортировки, а иногда и промывки. Гравий сортируют и про-
мывают, в некоторых случаях (при использовании гравийно-валуипых
пород) гравий приходится дробить. Дробят его и для получения кусков
с шероховатой поверхностью, которые обеспечивают лучшее сцепление
с бетоном. Песок, как правило, моют, а в некоторых технологических
процессах сортируют на две фракции или размалывают.
Частицы дробимого продукта обычно имеют неправильную форму.
Их размеры определяют размерами минимального параллелепипеда,
описываемого вокруг измеряемого куска. Наибольший размер назы-
вают длиной куска L, средний — шириной В и меньший — толщиной И.
Эти размеры кусков колеблются в значительном диапазоне.
Формы кусков сопоставляют но относительным величинам, где за
единицу измерения принята ширина В. Величина относительной длины
L' - L : В, относительной толщины И' = Н : В. Следовательно,
форма куска характеризуется отношением L' : 1 : Д'. По данным
исследований для горной массы, получаемой после взрыва массива,
это отношение составляет 1,5 : 1 : 0,65.
Размеры кусков для практических расчетов определяют по диаметру
отверстия, через который проходит кусок. Для продукта дробления
этот размер обозначают через d, а для исходного — через D. В среднем
его принимают равным В. Объем куска q определяют по его весу G
и объемной массе у:
q = G-y.
Объем определяют на основе размера d, причем q можно прибли-
женно принять равным 0,5 d 3 или объему куба с ребром, равным
0,8 d, а также приравнять объему шара диаметром d.
Для анализа качества исходного материала и продуктов дробления
кроме размеров отдельных частиц необходимо знать характеристику
смеси. Показателем, характеризующим данную смесь, является сред-
невзвешенный размер. Для получения этого размера смесь рассеивают
на фракции, характеризуемые величиной наибольших и наименьших
размеров. Если, например, измельченный материал прошел через
сито с отверстием в 30 мм (рис. 9.1) и задержался на сите 15 мм, то его
считают фракцией 30—15.
244
Материал, задержавшийся на сите, называют материалом верхнего
класса. Полученная фракция материала по отношению к ситу с отвер-
стием в 30 мм будет нижним классом (—30 мм), а по отношению к ситу
15 мм — верхним (+15 мм).
Средневзвешенный размер
п
dcB= 100 ’ ММ’
(9.1)
где^,- — среднеарифметический размер так называемой узкой фракции;
у, — выход такой фракции, %.
Одним из основных показателей разрушения является степень
дробления I, равная отношению средневзвешенных размеров исходного
Рис. 0.1. Схемы грохочения и расположения ент на грохоте:
а — от мелкою к крупному; б — от крупного к мелкому; в — комбинированное
грохочение
материала £>св и продукта дробления JCB. В некоторых случаях удобнее
характеризовать продукт наибольшим размером кусков. Тогда сте-
пень дробления определяют по зависимости i = Dmail :
ГОСТы подразделяют щебень и гравий на три основные фракции:
мелкий (5—10 и 10—20 мм), средний (20—40 мм) и крупный (40—70 мм).
Некоторые стандарты допускают выпуск широких фракций щебня,
т. е. смеси двух или более смежных фракций (например, 5—20 или
5—40 мм).
Действующие ГОСТы не допускают содержания в щебне и гравии
зерен лещадной формы более 15%. К таким зернам относятся те, у ко-
торых ширина меньше длины в три раза и более. Однако получить
материал с содержанием кубообразных зерен не менее 85% относи-
тельно трудно.
Для строительных целей используют также песок крупностью до
5 мм. Для изготовления высокомарочных бетонов в ряде случаев тре-
буется сортировка песка.
Горные породы, из которых получают щебень, по прочностным
показателям разделяют на три основные группы: породы малой проч-
ности оС1К = 300—800 кгс/см2 (30—80 МПа); средней ос>к = 800—
1500 кгс/см2 (80—150 МПа); высокой осж > 1500 кгс/см2 (150 МПа).
245
Последовательность обработки горной породы и применяемые
для этой цели машины зависят от группы разрабатываемой горной
породы и требований крупности получаемой продукции.
Дробить материалы можно приложением статических и динамичес-
ких нагрузок.
Различают следующие способы дробления и измельчения: раздав-
ливание (рис. 9.2, а), разрушение ударом (рис. 9.2, б), истирание
Рис. 9.2. Схемы способов дробления и измельчения
(рис. 9.2, е), раскалывание (рис. 9.2, г). Во многих случаях дробление
происходит при одновременном действии раздавливания и истирания
(рис. 9.2, д).
Дробление разделяют на крупное, среднее, мелкое и тонкое (помол).
В табл. 9.1 приведена характеристика различных стадий дробления
каменных материалов.
Характеристика различных стадий дробления
Таблица 9.1
Стадия дроб- ления Максимальная крупность, мм Стадия дробления Максимальная крупность, мм
исходного материала продукта дробления ИСходного материала продукта дробле- ния
Крупное Среднее 1200—1000 300—100 300-100 70—30 Мелкое Тонкое (помол) 50—30 10-1 30—10 Менее 0,1
В зависимости от требуемой степени измельчения материалов
машины подразделяют на дробилки и мельницы. Некоторые машины
(например, валковые дробилки) в зависимости от режимов и условий
могут работать как дробилки или как мельницы.
246
§ 9.1. ДРОБИЛКИ
На рис. 9.3 показаны схемы дробилок и мельниц. Основными пока-
зателями работы дробилок являются максимальная крупность продукта
дробления в мм, степень измельчения, удельный расход энергии в
кВт-ч/м3 или кВт-ч/т и производительность в м3/ч или т/ч.
Продукт дробления любой машины содержит зерна определенного
размера (крупность их зависит в основном от ширины выходной щели
Рис. 9.3. Схемы дробилок и мельниц:
а — щековая; б — конусная; в — валковая; г — роторная; д — молотковая; е — шаровая
мельница; ж, з — валковые; и — вибромельница
и вида горной породы), а также переизмельченный материал круп-
ностью 0—10 мм или 0—5 мм, который как отход на большинстве
предприятий не используют.
Зерна крупнее ширины разгрузочной щели дробилки называют
сверхмерным материалом. Его процентное содержание и максимальный
размер зависят от конфигурации рабочих органов и ширины разгру-
зочной щели дробилки. Наиболее крупные куски сверхмерного мате-
риала обычно имеют лещадную форму. Характер прохождения сверх-
мерных зерен приведен на рис. 9.4.
Тип дробильного оборудования выбирают с учетом крупности
исходного материала, его прочности и абразивности, а также требова-
ний к зерновому составу продукта дробления и производительности.
Конструкция различных дробилок позволяет получить определен-
ную, присущую данной конструкции степень дробления: для щековых
247
i = 2 -z- 8, для валковых— 1,5 4- 10; для конусных при крупном
дроблении с крутым конусом — 3 -г- 8 (они обычно работают при
i = 3 -i- 4), для среднего и мелкого дробления с пологим конусом
i — 2,5 -е- 6,0, для молотковых дробилок i = 5 ч- 30. На мельницах
получают степень измельче-
ния i = 10 -г 20.
Если требуется высокая
степень дробления, а куски
исходного материала имеют
большие поперечные размеры,
приходится дробить этот ма-
териал в 2—3 стадии. Такое
дробление ведут последова-
тельно на дробилках разных
типов. При каждой стадии
дробления получается только
часть материала с требуемыми
размерами. На следующей же
стадии эти куски материала могут раздробиться настолько мелко, что
не будут соответствовать техническим требованиям.
Для того чтобы в дробилку не попадали куски материала, размеры
которых меньше или равны тем, которые получаются на выходе из
этой дробилки, такие куски предварительно отсеивают из исходного
материала на грохотах, установленных перед дробилками.
Рис. 9.5. Одностадийная схема
дробления в открытом цикле:
/ — питатель; 2 — щековая дро-
билка; 3 — грохот; 4 — бункер
Рис. 9.6. Схема стадийного дробле-
ния в замкнутом цикле:
/ _ питатель; 2 — щековая дробила;
3 — грохот; 4 — конусная дробилка;
5 — бункер
Дробилки последних стадии работают, как правило, в замкнутом
цикле с грохотами. При этом материал крупнее заданного размера
с верхнего яруса сит возвращается в ту же дробилку для повторного
дробления. Схемы движения материала показаны на рис. 9.5 н рис. 9.6.
Щековые дробилки среди различных типов дробильного оборудо-
вания имеют наибольшее применение. В зависимости от типоразмера
эти машины используют для крупного, среднего и мелкого дробления
248
материала. Распространению щековых дробилок способствует про-
стота конструкции, обслуживания и ремонта, а также возможность
использования некоторых типов машин как для среднего, так и для
мелкого дробления путем замены дробящих плит.
Щековая дробилка работает на принципе сжатия камня между
двумя плитами. В камеру дробления, т. е. в промежуток между двумя
щеками, на которых закреплены сменные дробящие плиты, подается
материал, который должен быть раздроблен. Одна щека неподвижна,
другая шарнирно подвешена одним концом на оси. Подвижная щека
приводится в качательное движение. Материал, заполняющий камеру
дробления, при каждом сближении щек дробится, а при отходе под-
вижной щеки раздробленный материал выпадает через нижнюю щель
между щеками, которая называется выходной щелью.
Рис. 9.7. Схема действия щековой дробилки:
а — с простым движением щек»; 6 — со сложным движением щеки
Ширину выходной щели щековой дробилки замеряют между вер-
шиной рифления плит и противолежащей впадиной в момент наиболь-
шего удаления подвижной щеки и регулируется при помощи специаль-
ных устройств. От ширины выходной щели при прочих равных усло-
виях зависит крупность продукта дробления и производительность
дробилки. Ширина выходной щели составляет20—80 мм для дробилок
мелкого дробления, 40—120 мм — для среднего и 100—250 мм — на
машинах крупного дробления.
Современные щековые дробилки по характеру движения подвижной
щеки подразделяют на дробилки с простым и сложным движением
щек. Схема дробилки с простым движением
щеки показана на рис. 9.7, а. Электродвигатель вращает шкив-
маховик и связанный с ним эксцентриковый вал 3, па котором насажен
шатун 4. Конец шатуна имеет специальные гнезда, в которые свободно
вставлены концы распорных плит 11 и 9. Второй конец плиты 11 шар-
нирно соединен с подвижной щекой 12, подвешенной на оси 1. Конец
плиты 9 упирается в клиновой упор регулировочного устройства.
249
Когда шатун движется вверх, он тянет за собой концы распорных плит,
вследствие чего подвижная щека приближается к неподвижной щеке 13.
При движении шатуна вниз концы распорных плит опускаются, и
подвижная щека отходит от другой под действием собственной массы,
а также в результате действия тяги 10 замыкающего устройства с пру-
жиной 8. Тяга и пружина не только обеспечивают обратное движение
подвижной щеки, но и удерживают распорные плиты от выпадения
из своих гнезд.
Ширину выходной щели изменяют регулировочным устройством,
которое состоит из клиньев 6 и 7 и винта 5. Для изменения ширины
разгрузочной щели на крупных дробилках (900 X 1200 мм и выше)
Рис. 9.8. Схема для опреде-
ления производительности
щековой дробилки
используют прокладки, комплект которых
поставляется вместе с дробилкой.
Сопротивление движению подвижной
щеки, непостоянное за время рабочего
хода, при холостом ходе резко падает.
Поэтому для более равномерной работы
дробилки па эксцентриковом валу уста-
навливают два маховика 2, один из кото-
рых выполняет функции шкива.
Преимущество дробилок с простым
движением щеки — возможность перера-
ботки высокопрочного и абразивного ма-
териала 1сгв до 3500 кгс/см2 (350 МПа)], а
также довольно малая вертикальная
составляющая хода, вследствие чего истирание камня, а следовательно,
и износ дробящих плит незначительны.
Схема машины со сложным движением щеки
(рис. 9.7, 6) отличается от схемы машины с простым движением щеки
тем, что подвижная щека 12 надета непосредственно на эксцентриковый
вал 3, при вращении которого она не только приближается к непод-
вижной щеке, но и движется вверх и вниз, т. е. осуществляет сложное
движение. Нижний конец подвижной щеки имеет гнездо, в которое
свободно вставлен конец распорной плиты 11. Второй конец этой
плиты упирается в клин 6 регулировочного устройства. В остальном
конструкция этой дробилки аналогична схеме дробилки с простым
движением. Однако конструкция дробилок со сложным движением
щеки проще, чем у машин с простым движением, а габаритные размеры
и масса ниже.
Основными параметрами, характеризующими щековую дробилку,
являются (рис. 9.8); размер приемного отверстия В; размер выходной
щели Ь; длина зева L; ход сжатия в нижней точке SH.
Величина кусков Омакс, загружаемых в дробилку, должна быть
меньше 0,85 В, а при работе дробилок в автоматических линиях —
меньше 0,5 В.
В щековых дробилках крупность дробления, а также производи-
тельность зависят от размера выходной щели Ь, которая замеряется
между вершинами рифлений плит и противолежащей впадиной в мо-
мент наибольшего удаления подвижной щеки. Размер S„ регулируется
250
специальными устройствами. Для работы дробилки необходимо, чтобы
угол а (рис. 9.8) между щеками был не больше определенной величины,
так как иначе материал будет выталкиваться из дробилки. Этот угол
зависит от коэффициента трения материала и щеки и составляет при-
мерно 19—23°.
Размер выходной щели составляет 20—80 мм для дробилок мелкого
дробления, 40—120 мм-—для среднего дробления и 100—250 мм —
для крупного дробления.
Угол а и число качаний щек в минуту п также влияют на произво-
дительность. Обычно за один оборот приводного вала совершаются
два качания: рабочий ход и холостой ход, в течение которого дробилка
разгружается. Частота вращения в минуту подбирается так, чтобы
раздробленный до нужной степени материал за один двойной ход
дробилки успел высыпаться из выходной щели. Частоту вращения
можно определить по схеме, показанной на рис. 9.8.
Высота трапеции
/i = SH/tga.
Время опускания призмы на высоту h будет равно (по уравнению
свободного падения):
М'Ж
где £ — ускорение силы тяжести, см/с2.
Так как время отхода щеки должно соответствовать времени опус-
кания призмы, то можно написать
“ =]Л2^; п =
?п V2h;g
После подстановки в эту зависимость значений h и численного
значения g = 981 см/с- получим:
В действительности свободного падения материала нет, так как
преодолеваются силы трения, что увеличивает продолжительность па-
дения, поэтому частоту вращения уменьшают на 5—10%.
Приближенно можно считать, что
п № (600 -- 630) |/ . (9.2)
Производительность зависит от объема материала q, выдаваемого
за каждое двойное качание щеки, помноженному на частоту вращения
(об 'мин):
9 3
2 tg a fl * ' '
где L — длина зева; Кр — коэффициент разрыхления материала,
равный 0,4—0,45.
251
Конусные дробилки применяют для дробления очень прочных
материалов, оСж до 3000 кгс/см2 (300 МПа) с высокой степенью абра-
зивности. По своему назначению конусные дробилки разделяются
па дробилки для крупного (ККД), среднего (КСД) и мелкого (КМД)
дробления.
Принцип работы дробилок заключается в том, что дробление про-
исходит раздавливанием материала между двумя конусами, из кото-
рых один неподвижен, а другой совершает круговые качания (тирании)
внутри первого таким образом, что его геометрическая ось также опи-
сывает коническую поверхность (рис. 9.9). Такое движение достигается
благодаря тому, что ось подвижного конуса нижним концом закреплена
Рис. 9.9. Схема дробилки с кру-
тым конусом:
/, 4 — неподвижный и подвижный
конусы: 2 — шаровая пята: 3 —
траверса; 5 — приводной Шлнв;
6 — коническая передача; 7 — cia-
кан; И — лоток; 9 — вал
Рис. 9.10. Схема дробилки
с пологим конусом:
1 — вал; 2 — подвижный ко-
нус; 3 — питатель; 4 — корпус;
5 —- коническая передача; 6 —
приводной шкив; 7 — стакан
эксцентрично и под углом к вертикали в эксцентриковом стакане.
Верхний конец в дробилках крупного дробления подвешивается на
верхней траверсе, а в дробилках среднего и мелкого дробления — па
сферическом подпятнике вместе с дробящим конусом. При таком дви-
жении внутреннего конуса одна часть его поверхности сближается
с поверхностью неподвижного конуса, а другая часть удаляется от нее.
При сближении поверхностей неподвижного и дробящего конусов
материал, находящийся между ними, раздавливается. В отличие
от щековых дробилок дробление материала в конусных дробилках
происходит непрерывно.
Конусные дробилки делают с различными углами конусов, т. с.
конусы могут быть крутыми или пологими (рис. 9.10). Дробилки,
предназначенные для крупного дробления, делают с крутым конусом.
Вершины внутреннего и внешнего конусов обращены в противополож-
ные стороны. При таком расположении конусов ширина зева имеет .мак-
симальную величину, что дает возможность захвата крупных кусков.
252
Дробилки для вторичного (среднего и мелкого) дробления делают
с пологим конусом. Вершины обоих конусов у этих дробилок обращены
в одну сторону. При таком расположении конусов увеличивается
периметр выходной щели.
Производительность конусных дробилок с крутым конусом опре-
деляют так же, как и для щековых дробилок.
§ 9.2. ОБЩИЕ СВЕДЕНИЯ О ГРОХОЧЕНИИ
Нерудные строительные материалы, измельченные дроблением или
природные (песок, гравий), сортируют по крупности на различные
фракции (классы). Кроме того, часто требуется очищать материалы
от примесей глины и пыли с помощью продувки воздухом (сепарации)
или промывать водой.
В производстве нерудных полезных ископаемых применяют в ос-
новном механический и частично гидравлический способы их сорти-
ровки.
При механическом способе разделяют материал путем просеивания
материала на грохотах, рабочие органы которых, т. е. просеивающие
поверхности, представляют собой сита, решета или колосниковые
решетки. Процесс этого разделения называют грохочением, или сито-
вой классификацией.
Гидравлическую сортировку материалов ведут с помощью класси-
фикаторов и гидроциклонов.
Различают три вида грохочения нерудных материалов: I) предва-
рительное, выполняемое перед дроблением горной массы для отделе-
ния из нее слишком крупных кусков или мелочи; 2) промежуточное,
с помощью которого из дробленого материала отделяют более крупные
куски для направления в дробилки последующих ступеней измель-
чения; 3) товарное, или окончательное, при котором кусковые или
сыпучие материалы разделяют на требуемые фракции (классы).
В каждой фракции материала кроме частиц определенной крупности
допускается содержание более крупных или более мелких частиц
(засорение) в следующих количествах: для щебня и гравия — не более
5%, для песка — не более 15%.
Различают две принципиальные схемы разделения материала на
фракции. На рис. 9.1, а приведена схема разделения материала от
мелкого к крупному, причем исходный материал подается последо-
вательно на сита с отверстиями от самых маленьких до самых больших.
Этот способ прост и обеспечивает лучшее распределение рассортиро-
ванного материала по бункерам.
На рис. 9.1,6 изображена другая схема — разделение от крупного
материала к мелкому. В этом случае материал сначала поступает на
сито с крупными отверстиями, а затем с меньшими. Такая схема полу-
чила наибольшее распространение, так как производительность на
единицу поверхности сита получается более высокая, качество сорти-
ровки выше, а износ сит меньший.
Поступающий на сито для грохочения материал называют исход-
ным. Материал, остающийся на сите после грохочения, называется
253
надрешетным (верхним) продуктом или верхним классом. Провалив-
шийся сквозь отверстия сита материал называют подрешетным (ниж-
ним) продуктом или нижним классом.
Основными технологическими параметрами грохота и всего про-
цесса грохочения являются качество выдаваемой продукции и про-
изводительность. Качество продукции характеризуется степенью за-
сорения подрешетного продукта грохочения зернами надрешетного
продукта и, наоборот, надрешетного продукта зернами подрешет-
ного.
Степень отделения материала нижнего класса от верхнего прини-
мают за КПД грохочения, который обычно называют гффективнсстыо
грохочения. Опа характеризуется отношением (в процентах или в долях
единицы) массы подрешетпого продукта к массе нижнего класса в ис-
ходном материале.
Общая масса всего материала, участвующего в грохочении,
Q = G + T, (9.4)
где G — масса подрешетного продукта; Т — то же, надрешетиого.
Обозначим через Л' процентное содержание нижнего класса в ис-
ходном материале и через К' — процентное содержание нижнего
класса, остающегося в надрешетпом продукте после грохочения.
Тогда масса нижнего класса в исходном материале будет равна KQ 100,
а масса нижнего класса в надрешетном продукте — К'Т : 100.
Следовательно, эффективность грохочения
£=да®-|(к)-«< <9-5>
Рабочими органами грохотов являются сита, решета и колосники.
Эти органы должны иметь большую жесткость и большую световую
поверхность, т. е. суммарную площадь отверстий в свету, так как
величина отношения световой поверхности к общей площади сита
или решета сильно влияет на эффективность и производительность
грохочения; иметь высокую износостойкость.
Сита. Наибольшую световую поверхность имеют проволочные
плетеные сита, благодаря чему их широко применяют для грохоче-
ния материалов в нерудной промышленности.
На рис. 9.11 показаны распространенные виды сит и решет. Пле-
теные сита (рис. 9.11, а, б, в) изготовляют из стальной марганцовистой
проволоки. Форма отверстий может быть квадратной, прямоугольной
(продолговатой) и щелевидной. Производительность на ситах с про-
долговатыми отверстиями в 1,5—2 раза больше, чем на ситах с другими
видами отверстий.
В последние годы проволочные сита начали изготовлять не только
плетеные, но и сварные. По сравнению с плетеными ситами они имеют
большую жесткость, износостойкость, небольшую массу, их можно
изготовлять с большей световой поверхностью. Для этих сит приме-
няют круглую или профилированную проволоку, которую сваривают
в местах пересечения на специальных станках. Сварные сита показаны
на рис. 9.11, г, ж, з.
254
Сита с щслевидпыми отверстиями (рис. 9.11, ж) используют для
отсева песков из гравийных смесей сухим способом; размер отверстий
у них — от 3 X 60 до 100 X 200 мм, диаметр проволоки — от 2 до
4,5 мм.
В последнее время выпускают также резиновые сита струнного
типа с размерами ячеек 5x5. 10 X 10 и 20 X 20 мм. Для изготов-
ления их применяют резиновый шнур. Эти сита более долговечны по
сравнению с металлическими.
°)
Рис. 9.11. Решета и сита грохотов
Решета по сравнениюс проволочными ситами имеют большую износо-
стойкость и жесткость, но их световая поверхность значительно меньше.
Решета (рис. 9.11, д, е) представляют собой стальные листы с от-
штампованными или просверленными отверстиями диаметром от 10 до
20 мм. Толщину листов принимают до 12 мм, так как при большей
толщине отверстия забиваются, хотя для предотвращения от забивания
их выполняют конусными с углом 1~.
Большое распространение в последние годы получили пластмассо-
вые решета, которые монтируют из секций размерами 250 X 250 и
300 X 300 мм. Широкий опыт применения этих решет за рубежом
показал их большую эффективность.
На рис. 9.12 показаны приспособления для крепления сит в коробе
грохота. От конструкции крепления в значительной степени зависят
долговечность и надежность работы грохота.
255
Грохоты подразделяют на неподвижные, у которых рабочим орга-
ном служат колосниковые решетки (рис. 9.13, а), и подвижные с рабо-
чими органами в виде сит и решет, которым сообщается принудительное
движение.
Подвижные грохоты делят на плоские с горизонтальным или на-
клонным расположением сит или решет (рис. 9.13, б, д'), барабанные
(рис. 9.13, е) и роликовые (рис. 9.13, ж). Плоские грохоты подразде-
ляются на качающиеся (рис. 9.13, б) и вибрационные (рис. 9.13, в, г, д).
Вибрационные грохоты подразделяют по характеру привода на
эксцентриковые (рис. 9.13, в), инерционные (рис. 9.13, г, д).
Рис. 9.12. Приспособления для крепления сит и виды крепления
По траектории движения рабочего органа различают вибрационные
грохоты с направленными колебаниями, замкнутыми круговыми и
эллиптическими. Более широко применяют плоские инерционные и
плоские эксцентриковые грохоты.
Неподвижные колосниковые грохоты представляют собой колосни-
ковые решетки, по бокам которых укреплены борта. Как правило,
их применяют для крупного грохочения (чаще всего для предваритель-
ного), а также для обеспечения равномерной подачи материала в дро-
билки. Размер между щелями составляет не меньше 25—30 мм. Иногда
применяют также неподвижные грохоты с меньшей шириной щели.
Производительность плоских грохотов зависит от полезной пло-
щади сита, которая колеблется от 0,75 X 2 до 1,5 X 3 м; от про-
центного содержания частиц различной крупности в материале; от
объемной массы материала; частоты и амплитуды колебаний сита.
Производительность их 10 -г- 300 м3/ч, мощность привода 4—15 кВт.
Значительное влияние на износ имеет правильное натяжение сит,
поэтому сита должны быть сильно и равномерно натянуты.
Производительность вибрационных грохотов при сухом грохочении
n^kFqk^, (9.6)
256
Рис. 9.13. Принципиальные схемы металлических грохотов
М. И. Гальперин
где k — коэффициент, зависящий от материала (для гравийно-песчаной
смеси k = 0,8, для дробленых материалов k = 0,65); F — площадь
сита, м2; q — производительность 1 м2 сита, м3/ч; ki — коэффициент,
учитывающийсодержание наименьших частиц в материале, подлежащем
грохочению (при изменении этого содержания от 10 до S0% увели-
чивается от 0,58 до 1,25); — коэффициент, учитывающий содержание
наименьших зерен, размеры которых меньше 1/2 размера отверстия
сита по отношению к количеству наименьших частиц (при изменении
этого содержания от 10 до 90% k2 изменяется от 0,63 до 1,37).
Машины для мойки. Материалы, применяемые в качестве запол-
нителей бетона: гравийно-песчаные смеси, песок, щебень, должны
быть промыты для удаления глинистых и органических примесей
и пыли.
Промывать можно в процессе сортировки на грохотах, для чего
материал поливается водой из труб, расположенных на поверхности
грохота. Этот способ можно применять, если крупность материала
не превышает 70 мм и он мало загрязнен.
Материалы крупностью 300—350 мм промывают на барабанных
гравиемойках-сортировках, состоящих из барабанного грохота и
моечной секции (рис. 9.14). Производительность этой машины до
100 м3/ч, расход воды до 2 м3 на 1 м3 промываемого материала, частота
вращения 23 об/мин, установленная мощность 45 кВт.
Для промывки гравия крупностью не более ПО мм, сильно засо-
ренного глинистыми примесями, применяют лопастные гравиемойки.
В наклонном корыте вращаются навстречу два вала с лопастями, ко-
торые перемешивают гравий и перемещают его вдоль корыта к разгру-
зочному отверстию. Между валами помещается труба, по которой
в корыто подается вода. Производительность гравиемойки 10—50 м3/ч,
лопастные валы делают 16 об/мин, расход воды на 1 м3 гравийной
массы составляет 2 м3, мощность привода 16 кВт.
Применяются также барабанные гравиемойки. Барабан, на внут-
ренней поверхности которого закреплены лопасти, устанавливается
258
на роликах, сидящих на приводном валу. Ролики приводятся во вра-
щательное движение и благодаря силе трения вращают барабан.
Внутрь барабана по трубе подается вода. Производительность гравие-
мойки при внутреннем диаметре барабана 2000 мм и рабочей длине
барабана 3600 мм составляет около 100 м3/ч, мощность привода 55 кВт.
Рис. 9.15. Дробильно-сортировочная установка малой производительности:
1 — приемный бункер; 2 — лотковый питатель: 3 — щековая дробилка; 4 — валко*
вам дробилка; 5 — виброгрохот; 6 — элеватор; 7 — конвейер
Для дробления щебня, а также для переработки каменных мате
риалов в карьерах применяются передвижные дробильно-сортировоч-
ные установки. Одна из таких установок малой производительности
на колесном ходу показана на рис. 9.15.
Камень из приемного бункера попадает на лотковый питатель,
который подает его в щековую дробилку; раздробленный камень
подается конвейером и ротационным элеватором на виброгрохот.
Фракции, не прошедшие через сито виброгрохота, поступают на вто-
ричное дробление в валковую дробилку.
Контрольные вопросы
1. Перечислите способы дробления и виды дробилок. Начертите их схемы.
2. Опишите конструкцию щековой дробилки.
3. Опишите конструкцию конусной дробилки.
4. Опишите конструкцию валковой дробилки.
5. Охарактеризуйте какие конструкции дробилок целесообразно применять
для различных видов дробления.
6. Опишите конструкции и принцип работы грохота.
7. Опишите принцип работы машин для мойки.
ГЛАВА 10
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПРОИЗВОДСТВА
БЕТОННЫХ И ЖЕЛЕЗОБЕТОННЫХ РАБОТ
Бетонные и железобетонные конструкции разделяют на сборные,
монолитные и сборно-монолитные. Независимо от вида конструкций
необходимо изготовить бетонную смесь, опалубку и арматуру, осу-
ществить укладку арматуры, подачу, укладку и уплотнение бетонной
смеси.
В СССР более 50% сборных железобетонных изделий изготовляют
на крупных предприятиях. Остальная часть этих изделий и конструк-
ций выполняется на полигонах, заводах небольшой мощности и не-
посредственно на месте в виде монолитных конструкций.
Трудоемкость возведения 1 м3 монолитных железобетонных кон-
струкций — 1,7—3,4 чел-дн, из них на арматурные работы затра-
чивается 15—20%, изготовление бетонной смеси — 15—20%, укладку
и уплотнение бетона — 20—30%.
§ 10.1. СМЕСИТЕЛЬНЫЕ МАШИНЫ
Бетонные смеси и растворы в настоящее время изготовляют в ос-
новном на заводах большой производительности, откуда транспорт-
ными средствами их доставляют на отдельные объекты. Однако в от-
дельных случаях их приходится изготовлять на небольших установках
построечного типа.
Производительность больших заводов достигает 15—20 м3 бетонной
смеси на одного рабочего в смену, а установок построечного типа —
не больше 3—4 м3/смен; стоимость бетона при этом в несколько раз
выше, чем изготовление его на больших заводах.
Бетонные заводы могут быть временными (сборно-разборными)
и обслуживать один объект или несколько близко расположенных
объектов; стационарными и обслуживать объекты, расположенные
на расстоянии до 35 км от завода.
Начинают применяться сборно-разборные стационарные автомати-
зированные установки циклического и непрерывного действия про-
изводительностью до 30—60 м3/ч. Они состоят из отдельных укруп-
ненных блоков с технологическим и электротехническим оборудова-
нием. Благодаря этому можно быстро производить монтаж и демонтаж
установки для ее перевозки на другой объект.
Для объектов с небольшими объемами бетонных работ, располо-
женных на значительном расстоянии от централизованных бетонных
заводов, целесообразно применять передвижные автоматизированные
бетопосмесительные установки.
В строительстве применяют способ предварительного приготовления
сухих смесей. Вода добавляется в них в автобетоносмесителе при транс-
260
портировании или на объекте. Сухие смеси готовят на заводах
сухой смеси пли на тех же заводах, где готовят обычные бетонные
смеси.
Технологический процесс приготовления бетонных смесей состоит:
из подачи сухих компонентов смеси из штабелей или транспортных
средств в надбункерное отделение и в бункера, затем к дозаторам;
дозирования этих компонентов, одновременно воды; подачи их
в бетоносмесители; перемешивания и выгрузки готовой смеси. В соот-
ветствии с этим основным оборудованием бетонных установок или за-
водов являются: бетоносмесители, дозирующие устройства, расход-
ные бункера, транспортирующие устройства.
В зависимости от расположения оборудования различают два
типа бетонных заводов: 1) с компоновкой по партерной схеме, когда
компоненты приходится поднимать два или три раза (рис. 10.1, а),
Рис. 10.1. Схемы компоновки основного оборудования бетонных заводов:
1 — автобетоновоз; 2 — бункер готовой смеси; 3 — бетоносмеситель; 4 — дозатор
веды; 5 — конвейеры на завод; 6 — цементовоз; 7 — элеватор; 8 — поворотная
воронка; 5 — наддозаторные бункера; 10 — дозаторы для сухнх компонентов;
11 — воронка для сухой смеси; 12 — конвейер со склада заполнителей
в зависимости от этого схема называется двухступенчатой или трех-
ступенчатой; 2) с компоновкой по вертикальной схеме, когда все ком-
поненты для приготовления бетонной смеси поднимаются в бункера,
находящиеся наверху, а дальнейшее перемещение компонентов проис-
ходит под действием собственной массы, т. е. гравитационно
(рис. 10.1, б).
Бетоносмесители. Перемешивание бетонных смесей осуществля-
ется в бетоносмесителях. Они разделяются: 1) но характеру работы —
на смесители циклического (периодического) действия, в которых
загрузка материалов, перемешивание смеси и ее выгрузка произво-
дятся порциями, и непрерывного действия, в которых загрузка, пере-
мешивание и выгрузка смеси осуществляются непрерывно. Бетоно-
смесители циклического действия проще по конструкции, позволяют
быстро перестроиться на выпуск бетона любой марки и жесткости.
Бетоносмесители непрерывного действия компактнее, их металло-
емкость меньше, они больше приспособлены к работе в автоматизи-
рованных технологических линиях; 2) по способу перемешивания —
на смесители с перемешиванием при свободном падении материалов
(гравитационные) и с принудительным перемешиванием.
9 М. И. Гальперин
261
В первом случае смешиваемые материалы поднимаются с помощью
лопастей, закрепленных на внутренней поверхности барабана, и затем
падают под действием собственной массы. Во втором случае переме-
шивание осуществляется с помощью лопастных валов, перелопачи-
вающих смесь. На рис. 10.2 приводятся принципиальные схемы спо-
собов перемешивания.
Гравитационные бетоносмесители (рис. 10.2, а)
применяются для приготовления подвижных (пластичных) бетонных
смесей с осадкой конуса до 8 см. ГОСТ 16349—70 предусматривает
девять типоразмеров гравитационных бетоносмесителей с объемом
готового замеса бетонной смеси 65, 165, 330, 500, 800, 1000, 1600, 2000,
3000 л (дм3).
Рис. 10.2. Принципиальные схемы способов перемешивания:
а — гравитационные бетоносмесители; б — корытообразные бетоносмесители
принудительного действия; в — протиноточныс бетоносмесители; г — роторные.
бетоносмесители
Бетоносмесители принудительного (рис. 10.2, б, в, г) действия
применяются для приготовления малоподвижных и жестких бетонных
смесей с крупностью заполнителей до 80 мм. Их производительность
больше, чем у гравитационных бетоносмесителей. ГОСТ 16349—70
предусматривает восемь типоразмеров бетоносмесителей принуди-
тельного действия с объемом готового замеса бетонной смеси 65, 165,
330, 500, 800, 1000, 2000 и 3000 л (дм3).
Одним из основных параметров смесителей является частота
вращения барабана. От частоты вращения барабана, а следовательно,
и от окружной скорости зависит качество перемешивания и произ-
водительность. Частота вращения не должна превышать определенных
значений, так как с увеличением скорости ухудшается качество пере-
мешивания вследствие того, что материал прижимается центробежной
силой к внутренней поверхности.
Частота вращения задается в зависимости от емкости смесительного
барабана и составляет 12 об/мин для емкости 2400 л (дм3) и 24 об/мин
262
для емкости 100 л (дм3). Еще большее значение имеет правильный выбор
окружной скорости для бетоносмесителей непрерывного действия со
свободным падением материала. При высокой частоте вращения мате-
риал будет проходить через барабан, не перемешиваясь. То же самое
относится к бетоносмесителям с лопастями.
Выбор бетоносмесителя зависит от того, какой бетон и в каком
количестве нужно приготовить. Жесткие бетоннпые смеси должны
перемешиваться в смесителях
Для перемешивания таких
материалов стали приме-
нять вибросмесители.
Передвижные гравита-
ционные бетоносмесители
имеют полезный объем ба-
рабанов 65,165 и 330 л н
применяются на небольших
строительствах.
Один из типов таких
смесителей с объемом бара-
бана 165 л показан на рис.
10.3. На раме / смон-
тирован грушевидный сме-
си гельный барабан 7 с элек-
трическим приводом 9, со-
стоящим из электродвига-
теля и редуктора. На раме
установлен гидравлический
насос 2 для подачи воды.
Для загрузки барабана
применен скиповый подъ-
емник. На ковше 4 этого
с принудительным перемешиванием.
подъемника установлен рис. щ 3 схема гравитационного передвижного
вибровозбудитель для луч- бетоносмесителя
того опорожнения бара-
бана. Ковш движется по направляющим 3 подъемника. Ковш 4
поднимается и опускается с помощью канатов, наматываемых на ба-
рабаны 5, которые приводятся в движение отдельным реверсивным
электродвигателем 6 через червячный редуктор. Червячная пере-
дача оборудована концевыми выключателями, ограничивающими
ход ковша. Наклон барабана для выгрузки смеси производится ручным
механизмом, состоящим из штурвала 8, редуктора и фиксатора.
Стационарные гравитационные бетоносмесители имеют полезный
объем 330—3000 л и применяются на заводах.
На рис. 10.4, а показана кинематическая схема, а на рис. 10.4, б
барабан одного из таких бетоносмесителей.
Барабан состоит из двух усеченных конусов 5, соединенных у ос-
нования цилиндрической обечайкой 6. Внутри барабана установлены
фасонные смесительные лопасти 11. Обечайку охватывает зубчатый
венец 7, при помощи которого барабан приводится во вращение от
9*
263
Рис. 10.4. Кинематическая схема гравитационного стационарного бетоно-
смесителя (а) и барабан (б)
264
электродвигателя 9 через редуктор 8. Опрокидывание барабана для
выгрузки готовой смеси осуществляется пневматическим цилиндром 10.
Управление смесителем можно производить вручную при помощи
рукояти 4, которая открывает клапан 2 подачи воздуха, подава-
емого через регулировочные вентили 1. Может также осуществля-
ться дистанционное управление при помощи магнитов 3.
Загрузка компонентов смеси в барабан производится через воронку
на одном из торцов барабана, а разгрузка осуществляется наклоном
барабана до 45'. Для подачи воды служит гидронасос с отдельным
приводом.
В последнее время промышленностью освоены и выпускаются ста-
ционарные бетоносмесители объемом 330 и 880 л более совершенной
конструкции с центральным приводом.
Рис. 10.5. Гравитационный бетоносмеситель с центральным приводом ба-
рабана
Схема такого смесителя показана на рис 10.5. Барабан / с лопас-
тями 2 установлен на оси траверсы 8 и соединен с вало.м редуктора 3,
который приводится в движение электродвигателем 4. Наклон барабана
для выгрузки осуществляется гидроцилнпдром 5. Подача воды произ-
водится гидронасосом 6, приводимым в действие отдельным электро-
двигателем 7.
Бетоносмесители с принудительным смешиванием разделяют па
циклические и непрерывного действия
Бетоносмесители циклического действия
используют для приготовления бетонных смесей с крупностью запол-
нителя не более 70 м. Наиболее эффективными являются смесители,
у которых в неподвижной чаше вращается ротор с лопастями. Ротор
вращается вокруг своей оси, а лопасти дополнительно вращаются
вокруг собственной оси или, как в планетарных редукторах, вокруг
оси, приводящей в движение два лопастных вала.
Один из таких бетоносмесителей показан на рис. 10.6. Электро-
двигатель 2 приводит во вращательное движение траверсу 3, в которой
размещены шестерни планетарной передачи. Одновременно с траверсой
265
3 вращаются оси 4 с установленными на них шестернями 5. Шестерни 5
вращаются вокруг оси двигателя и вокруг собственной оси.
На оси 4 закреплена траверса 7, на которой имеются два стержня 8
с лопастями 9. Стержни вращаются вокруг осп смесителя, а также
вокруг оси 4. Такое перемещение лопастей создает интенсивное пере-
мещение бетонной смеси. Загрузка составляющих производится через
загрузочною воронку 1, а выгрузка через отверстие в днище, закры-
ваемое затвором 10. Вода в смеситель подается по кольцевому трубо-
проводу 6, благодаря чему' достигается равномерное орошение водой.
Рис. 10.6. Бетоносмеситель с принудительным перемешиванием
Бетоносмесители непрерывного действия,
гравитационные (рис. 10.7, а, б). В смесителях этого типа перемеши-
вание происходит так же, как и в смесителях циклического действия,
со свободным падением, но лопасти внутри барабана расположены так,
что при вращении барабана бетон перемещается от одного места за-
грузки к другому копну, где вьпружается смесь. Длина барабана
подбирается такой, чтобы перемешивание смеси происходило в соответ-
ствии с техническими требованиями.
Такой бетоносмеситель состоит из барабана 1 с лопастями, установ-
ленного на роликах 5. Барабан получает вращение от электродвига-
теля 2 через редуктор 3 и зубчатое колесо 4. Загружаются материалы
через лоток. При диаметре барабана 1600 мм и длине 4 м производи-
266
тельность составляет 130 м3/ч, что равняется производительности
четырех бетоносмесителей емкостью 2400 л. Мощность смесителя
40 кВт, энергоемкость 0,3 кВт-ч/м3. Смеситель целесообразно приме-
нять на крупных гидростроительствах.
Бетоносмесители непрерывного действия
с принудительным перемешиванием. В корпусе 3
смесителя (рис. 10.8) помещены два вала 4 с лопастями 5, вращаю-
Рис. 10.7. Гравитационный бетоносмеситель непрерывного действия:
а — общий вид; 6 — кинема! и ческа я схема
щимися в противоположных направлениях. Валы приводятся во вра-
щение от электродвигателя 1 через редуктор 2. Материалы загружа-
ются через бункер в одном конце барабана и по мере перемешивания
перемещаются к другому концу, откуда выгружаются. Длина валов
с лопастями и корпуса барабана делается такой, чтобы качество пере-
мешивания смеси соответствовало техническим требованиям. Бетоно-
смесители выпускаются производительностью 5—60 м3/ч, мощностью
соответственно 4,5 40 кВт и энергоемкостью от 0,75 кВг-ч/м3 для
смесителей большой производительности и до 1 кВт-ч/м3 для смесите-
лей малой производительности.
Энергоемкость этих смесителей больше, чем смесителей свободного
перемешивания и принудительного перемешивания циклического
действия. По конструкции эти бетоносмесители сложнее, чем смесители
со свободным падением.
Приготовление растворов. Строительные растворы для кладочных
и штукатурных работ приготовляют на передвижных или стационар-
ных растворос.месительных установках. Стационарные установки на-
зываются растворными узлами.
Различают установки циклического и непрерывного действия.
Имеются стационарные крупные автоматизированные узлы с произ-
водительностью до 90 тыс. м3 раствора в год и передвижные установки
производительностью до 15 тыс. м3 в год. Созданы также заводы с про-
изводительностью до 200 тыс. м3 в год.
Рис. 10.8. Бетоносмеситель (растворосмеситель) непрерывного действия с прину-
дительным перемешиванием и корытообразным барабаном:
а — общий вид; б — кинематическая схема привода
Технологический процесс приготовления растворов состоит из
подачи сухих компонентов из штабелей или транспортных средств
в бункера; подачи их к дозаторам; дозирования компонентов и одно-
временно воды; подачи в смесительные устройства; перемешивания;
выгрузки готового раствора.
Основным оборудованием растворосмесительных установок явля-
ются растворосмесители, дозирующие устройства, расходные бункера,
транспортирующие устройства, узлы системы управления.
Растворы перемешиваются в растворосмесителях. Они бывают
циклического и непрерывного действия. На рис. 10.9 показана схема
передвижной растворосмесительной установки. Главным параметром
растворосмесителей является объем готового замеса в литрах.
Принятый типаж включает следующий ряд растворосмесителей:
30, 65, 125, 250, 750 и 1200 л готового замеса, что соответствует емкости
по выгрузке 40, 80, 150, 325, 1000 и 1500 л.
Растворосмесители с емкостью загрузки до 325 л делают передвиж-
ными, а остальные — стационарными. Кинематическая схема одного
из растворосмесителей циклического действия показана на рис. 10.10.
268
Рис. 10.9. Передвижная автоматизированная растворосмесительная установка:
1 — скребковый пшатель; 2 — ковшовый элеватор для подачи песка; 3 — грохот для про-
сеивания песка; 4 — растворосмеситсль непрерывного действия
Рис. 10.10. Кинематическая схема растворосмсситсля:
/ — ковш; 2 — барабан; 3 — тормоз ленточный; 4 — рычаг
управления; 5 — бак вододозировочный; 6 — кран трехходовой;
7 — рукоятка крана; 8 — лопастной вал; 9 — редуктор;
10 — звездочка; // — клнноременная передача; 12 — электро-
ДВИ1атель; 13 — конус фрикционный; 14 — кулачок включе-
ния фрикциона
269
Рис. 10.11. Турбулентный смеситель
Привод лопастного вала осуществляется от электродвигателя через
редуктор. От этого же электродвигателя через цепную передачу при-
водятся в движение барабаны лебедки подъема ковша. Растворосме-
сители выпускаются с емкостью барабана 150 4- 325 м и мощностью
3 4-4 кВт.'
Высокое качество раствора обеспечивается при перемешивании
в так называемых турбулентных растворосмесителях. Эти растворо-
смесители выпускаются передвижные с емкостью замеса 65 л и ста-
ционарные с объемом замеса 900 и 1800 л.
Передвижные растворосмесители применяют при небольшой пот-
ребности раствора для отделочных и ремонтных работ. Схема турбу-
лентного смесителя показана на
рис. 10.11. Он состоит из электро-
двигателя /, клиноременной пере-
дачи 2, приводящей в движение
ротор 8. Ротор 8 размещен в ниж-
ней части бака 7. Перемешивание
приготовляемых растворов проис-
ходит за счет интенсивного движе-
ния, возникающего под действием
центробежных сил. Это движение
создается за счет сравнительно
большой частоты вращения —
550 об/мин, с которым вращается
ротор 8. Загрузка этих смесителей
производится вручную. При пере-
мешивании бак закрывается крышкой 6. Выгрузка происходит через
лоток 4. Затвор лотка открывается и закрывается механизмом 5.
Для передвижения смесителя служит рама 3.
Помимо перечисленных смесителей применяется вибросмсситель.
Производительность смесительных машин. Производительность
смесительных машин циклического действия зависит от емкости бара-
бана по загрузке, которая определяется суммой объемов сухих мате-
риалов, загружаемых в барабан для одного замеса. При перемеши-
вании мелкие частицы материалов попадают в пустоты между круп-
ными частицами, поэтому смесь уплотняется и объем готовой смеси
получается меньше, чем общий объем исходных материалов. Отноше-
ние этих объемов характеризуется коэффициентом выхода f. Экспери-
ментально установлено, что для бетонных смесей / = 0,65 4- 0,7, а для
растворов I — 0,75 4- 0,85.
Число замесов в час
п = 3600/Т, (10.1)
где Т — время, затрачиваемое на загрузку, перемешивание и вы-
грузку, с.
Время перемешивания бетонных смесей и растворов зависит от их
состава, жесткости, а также размеров и конструкции смесительных
машин. Время на загрузку и выгрузку при механизированном способе
составляет 30—45 с, а при загрузке и выгрузке вручную — 2—2,5 мин.
270
Часовая производительность
1000’
(Ю.2)
где Q6 — емкость смесительного барабана по загрузке, л.
Производительность смесительных машин непрерывного действия
с принудительным перемешиванием зависит от площади сечения по-
тока смеси в корпусе бетоносмесителя F и скорости v движения смеси
в направлении продольной оси корпуса бетоносмесителя. Скорость
движения смеси
v = 5п,.р,
где S — шаг лопастей или шнека, мм; nR — скорость вращения ло-
пастного вала, об мин; р — коэффициент трения между смесью, ло-
пастями и стенками барабана.
nB = 60Fu (10.3)
§ 10.2. ДОЗАТОРЫ
Качество приготовления бетонных смесей и растворов зависит не
только от качества перемешивания, но и от правильного дозирования
компонентов смеси: воды, вяжущего (цемента, извести) и заполнителей
(песка, щебня). Точность дозирования должна быть для воды и це-
мента не ниже _| 1%, для остальных заполнителей ±2—3%. Дози-
ровать можно по объему и ио массе. Наиболее правильным является
дозирование по массе, так как песок и другие материалы из-за различ-
ной влажности и разрыхлеиности будут иметь различную массу в од-
ном и том же объеме.
Дозаторы могут быть с ручным управлением, полуавтоматического
и автоматического действия. Последние позволяют создать смеситель-
ные установки с центральными постами управления. В полуавтомати-
ческих дозаторах впуск взвешиваемого материала и отмеривание не-
обходимой порции производятся автоматически, а выпуск — вручную.
В автоматических дозаторах все операции выполняют автоматически
с помощью электрической или механической энергии.
Дозирование может быть порционным (цикличным) и непрерыв-
ным. Весовые дозаторы циклического действия различны по кон-
струкции, по они имеют емкость для загрузки и дозирования
материала, загрузочное и разгрузочное устройства, весовой меха-
низм и механизм управления.
В дозаторах непрерывного действия емкость заменяется транспор-
тирующим устройством, па котором взвешивание производится так, что
конвейер все время подает постоянное весовое количество материала.
В объемных дозаторах емкость тарируется так, что объем ее соот-
ветствует определенной массе материала. Типичным объемным доза-
тором является водомерный бачок (рис. 10.12). При подаче воды
в бачок по мере его заполнения всплывает поплавок, который упра-
вляет клапаном, закрывающим поступление воды. Управление клапа-
ном может быть отрегулировано на различные объемы воды в данном
бачке.
271
Рис. 10.12. Водомерный бачок до-
затора:
/ — труба; 2 — клапан; 3 — стержень
клапана: 4 — поплавок
На рис. 10.13, а показана схема весового дозатора для сыпучих
материалов. Емкость А подвешена на кронштейнах к рычагам 1 и 2.
Рычаги под действием массы емкости
с материалом приводят в движение
систему рычагов, поворачивающихся
вокруг шарниров и перемещающихся
в направлениях, показанных стрел-
ками. Перемещение рычага 3 и ры-
чага 4, соединенного с указателем
циферблата, уравновешивается гру-
зами, установленными на коромыслах
весов 5, 6 и 7.
Во многих строительных машинах,
где процесс идет непрерывно, напри-
мер в бетоносмесителях непрерывного
действия, дозирование материалов
должно происходить непрерывно. Для
этой пели используют дозаторы непрерывного действия. Один из
таких дозаторов показан на рис. 10.13, б. Из бункера дозируемый
Рис. 10.13. Схемы автоматических дозаторов:
а —- циклического действия; б — непрерывного действия: / — электромагнитный
вибратэр; 2 — бункер; 3 — лоток; 4 — весовой конвейер; 5 — рычаг весового уст-
ройства; 6 — рычаг управления индуктивным датчиком; 7 — уравновешивающий
груз; 8 — блок приборов регулирования напряжения
материал поступает на электромагнитный вибропитатель, состоящий
из лотка, которому электромагнитным вибратором сообщаются коле-
бательные движения. От питателя материал попадает на весовой
272
конвейер. Количество материала, подаваемого питателем, зависит от
величины амплитуды его колебаний; последняя в свою очередь за-
висит от величины напряжения, которое подается на электромагнит-
ный вибратор. Один конец конвейера подвешен к рычагу весового
устройства.
Производительность конвейера зависит от того, сколько па него
подается материала от вибропитателя. Если вибропитатель подает
больше или меньше материала, чем нужно, го выходит из состояния
равновесия весовое устройство, на котором подвешен конвейер, и
рычаг весов воздействует на специальное автоматическое устройство,
изменяющее напряжение.
Рис. 10.14. Схема бетонного завода
Значительно эффективнее изготавливать бетон на бетонных заво-
дах. Наиболее рациональная схема бетонного завода и компоновка
оборудования на таких заводах показаны на рис. 10.14. На таком
заводе установлены два смесителя с объемом 880 л (по загрузке).
Ленточный транспортер 16 перемещает заполнители на поворот-
ный транспортер 15, который подает их в различные отсеки бункера 5.
Из бункера заполнители поступают в дозатор 3. На этих установках
устанавливаются дозаторы, позволяющие взвешивать 5—6 компонен-
тов. Цемент по трубе 8 перемещается в циклон 7 с патрубком 6. Циклон
оборудован сводообрушителем 9. Из силоса цемент подается на доза-
тор 10 винтовым питателем 11, из которого по ленточному питателю 12
он подается в смеситель 1 через воронку 14. Готовая смесь выгружается
в бункер 13.
На этих установках вода из водопроводов поступает в бачок 4,
а из бачка в дозатор воды 2. Установки оборудуются компрессором 17,
воздух от компрессора подается в системы управления.
273
Рис. 10.15. Схема автоматизированного бетонорастворного узла (завода)
Структурная схема автоматизации бетонного завита показана на
рис. 10 15.
Бункера для цемента, песка и щебня оборудуются датчиками,
показывающими предельные уровни заполнения материала. Датчик 1
показывает, что бункера заполнены, а датчик 4 — что материал из
бункера израсходован. На транспортере, подающем щебень, уста-
новлен датчик 3 толщины слоя на транспортере и датчик 2 скорости
ленты. Они позволяют регулировать равномерную подачу. Если дат-
чики в бункерах показывают, что песок или щебень заполнил бункера,
то прекращается подача материала и выключаются транспортеры.
Затворы бункеров и кран подачи воды открываются и закрываются
гидроцилиндрами 5.
На всех дозаторах установлены датчики: сигнализирующий ава-
рийную перегрузку дозатора датчик 6, датчик контроля разгрузки
дозатора 7 и датчик, показывающий величину заданной порции 8.
Открываются и закрываются затворы дозаторов гидроцилиндрами 9.
Из дозаторов составляющие поступают в бункер, из бункера
в смеситель 10 и из смесителя в бункер готовой продукции 15. Затвор
бункера 15 управляется гидроцилиндром 16. Для управления опе-
рациями дозирования, перемешивания и выдачи готовой смеси служит
«Униблок» 12. На нем установлены дистанционные указатели 13 ра-
боты отдельных систем. Для управления операциями подачи материа-
лов в расходные бункера служит блок «Кактус» 11.
Если автоматика должна обеспечить дистанционное изменение ма-
рок раствора и бетона, т. е. дистанционно перестраиваются дозаторы
или автоматически производится корректировка марки, то система
управления дополняется системами «СУЗИ» 14.
§ 10.3. МАШИНЫ ДЛЯ ТРАНСПОРТИРОВАНИЯ БЕТОННЫХ
СМЕСЕЙ И РАСТВОРОВ
Для доставки бетонных смесей и растворов к месту укладки при-
меняют бетоновозы, автобетоносмесители, конвейеры, бетононасосы
и растворонасосы. Выбор транспортного средства зависит от вида
сооружения, расстояния от смесительной установки, объемов и сро-
ков выполнения работ. Основным требованием, предъявляемым
к транспортным средствам, является предохранение смеси от рас-
слаивания при перевозке.
Автобетоносмесители (рис. 10.16) служат для приготовления бе-
тона в процессе транспортирования. В смеситель обычно загружают
сухие составляющие. При движении машины они перемешиваются;
одновременно к ним подается вода из бачка. Перемешивание состав-
ляющих и подача воды начинаются за 10—15 мин до выгрузки смеси.
Если транспортируют на расстояние не более 10 км, то автобетопо-
смесптель можно загружать готовой смесью на бетонных заводах.
Смесительный барабан устанавливается на подрамнике, закреп-
ленном на раме автоприцепа, и приводится во вращение гидродвига-
телем через редуктор. Питается гидродвигатель от насоса, приводи-
мого в движение от коробки отбора мощности автомобиля. Для за-
275
274
грузки имеется загрузочная воронка, а для раздачи бетонной смеси —
разгрузочный лоток.
При разгрузке смесительный барабан наклоняется, для этого под-
рамник вместе с барабаном поднимается с помощью гидроцилиндра.
Масло в гидроцилиидр подается тем же насосом, который направляет
масло к гидро^вигателю.
Бетононасосы подают бетон на расстояние до 350 м по горизонтали
и на высоту до 40 м. Можно подавать бетон и на большие расстояния,
но для этого нужно устанавливать несколько бетононасосов, рабо-
тающих последовательно.
Бетононасосы рекомендуется применять при выполнении сосредо-
точенных объемов бетонных работ. Главным параметром этих насосов
Рис. 10.16. Автобетоносмеситель:
1 — водяной бак; 2 — гидродвнгатель привода смесителя; 3 — редуктор;
4 — смесительный барабан; 5 — загрузочная воронка; 6 — раздаточный лоток;
7 — подрамник; 8 — гидроцилиидр
является призводительность. Выпускаются бетононасосы производи-
тельностью 10, 20 и 40 м3/ч. Соответственно этой производительности
бетононасосы целесообразно применять при минимальном объеме бе-
тонных работ 500, 2000 и 5000 м3. Бетононасосы имеют сравнительно
небольшие габариты и массу (3 -н 12 т). Недостатком их является то,
что размеры заполнителей должны быть не крупнее 70 мм, причем
количество заполнителей такого размера должно быть не больше 15%
от общего объема заполнителей.
Схема работы бетононасоса показана на рис. 10.17. Бетонная
смесь подается лопастным устройством из приемного бункера, в ко-
тором она непрерывно перемешивается, к всасывающему клапану
цилиндра насоса. После заполнения цилиндра всасывающий клапан
закрывается и открывается клапан нагнетания. Бетонная смесь выжи-
мается в бетоновод под давлением поршня, который приводится в дви-
жение от электродвигателя кривошипно-шатунным механизмом. При
обратном движении поршня закрывается клапан нагнетания, откры-
вается всасывающий клапан и цикл повторяется.
Основным сопротивлением перемещению бетона по бетоноводу
является трение бетона о внутренние стенки трубы. Поэтому перед
276
Энергоемкость растворонасосов составляет 1,25—1,5 кВт ч на 1 м3
раствора.
Рис. 10.19. Схема диафрагмового растворопасоса с шаровыми клапанами:
/ — бункер: 2 — шаровые клапаны; 3 — резиновая диафрагма; 4 — воздушный
колпак; 5 — трубопровод; 6 — предохранительный клапан: 7 — кривошнпно-
шатунный механизм; 8 — зубчатая передача; 9 — электродвигатель; 10 — плун-
жер; // — корпус
Производительность растворонасосов
П = 60 ~Sm], (10.4)
где и — число двойных ходов штока; т] — коэффициент использова-
ния рабочего объема, ц = 0,5 ч- 0,75; D и S см. на рис. 10.19.
§ 10.4. ОБОРУДОВАНИЕ ДЛЯ ИЗГОТОВЛЕНИЯ АРМАТУРЫ
На заводы железобетонных изделий и на полигоны арматурная
сталь диаметром 2 <- 14 мм поступает в виде мотков массой 50 -ь 200 кг,
а диаметром свыше 14 мм —- в прутках длиной 6 ч- 12 м. Для изго-
товления арматуры сталь, поступающую в мотках, подвергают раз-
мотке, очистке, правке, упрочнению (в отдельных случаях), резке
и иногда гибке. Сталь, поступающую в прутках, очищают, в некоторых
случаях упрочняют и подвергают гибке.
Схема технологического процесса заготовки арматурных стержней
из мотков приведена на рис. 10.20.
Станки для правки и резки. Проволоку 1 пропускают через вра-
щающийся барабан 2 с радиально расположенными плашками 3,
смещенными относительно оси барабана. При вращении барабана
проволока протягивается через плашки 3, изгибается поочередно в раз-
личных плоскостях, благодаря чему выпрямляется и дополнительно
очищается от окалины и грязи. За барабаном установлены несколько
пар роликов 4, между которыми проходит выпрямленная проволока.
При вращении этих роликов зажатая между ними проволока вытя-
гивается из барабана и подается к двум роликам 5, на которых за-
креплены ножи, отрезающие проволоку. Вращение этих роликов с но-
жами включается периодически после того, как проволока прошла
279
между роликами расстояние, соответствующее заданной длине прут-
ка I. Когда копен проволоки достигает упора 6 и нажимает на него,
ролики с ножами начинают вращаться. Скорость протягивания про-
волоки в этих станках достигает 1,5 м/с, частота вращения барабана
1800—2000 об/мин, мощность привода составляет 4—7 кВт.
Рис. 10.20. Схема заготовки арматуры:
I — бухта проволоки; 2 — правйльный барабан; 3 — плашки; 4 — ролики, протягиваю*
<цие проволоку; 5 — ролики с ножами для отрезания проволоки; 6 — упор с выключателем
ножей
Производительность станка
Q = SQjiDnq,
(10.5)
Рис. 10.21. Принципиаль-
ная схема станка для
гибки арматуры
где D—диаметр тянущих роликов; /г — частота вращения, об/мин;
q — масса 1 м длины арматурной стали, т.
Диаметр проволоки, которая может правиться на станках, рабо-
тающих по этому принципу, составляет 7-4-14 мм. Расстояние между
роликами, соответствующее диаметру прово-
локи, регулируется в радиальном направле-
нии винтовым устройством.
Станки для гибки арматуры. Гибка стерж-
ней арматуры производится на станках раз-
личной конструкции, но по одной принци-
пиальной схеме (рис. 10.21). zja вращающемся
диске 2 вертикально закреплены централь-
ный палец 3, вокруг которого загибается
пруток и диаметр которого равен радиусу
изгиба, и гибочный ролик 4, расположенный
на некотором расстоянии от центра. Вне диска закреплен упор-
ный ролик 1. Проволока пропускается между центральным паль-
цем, гибочным роликом и упорным роликом. При вращении диска
пруток упирается в упорный ролик, а гибочный ролик загибает его
280
вокруг центрального пальца. Для гибки арматуры больших диамет-
ров одного гибочного ролика недостаточно, в этих случаях устанавли-
вают большее количество роликов. Станки выпускают с комплектами
сменных частей, в которые входят диски с пальцами и роликами для
гнутья стержней диаметром до 20 мм.
В станках для гнутья стержней диаметром до 90 мм имеется диск
для гнутья арматуры диаметром до 40 мм и диск для гнутья арматуры
диаметром до 90 мм. Привод второго диска осуществляется при помощи
дополнительной зубчатой передачи, благодаря которой частота вра-
щения этого диска значительно меньше, чем первого диска. Поэтому
окружное усилие на изгибающих роликах значительно больше, что
и необходимо для гнутья стержней больших диаметров. Мощность
этих станков достигает 10 кВт.
Производительность станков для гибки зависит от частоты враще-
ния рабочего вала, которая для гнутья арматуры диаметром до 10 мм
составляет 14 об/мин, диаметром 12 ч- 14 мм — 7—7,5 об/мин, диа-
метром 19 ч- 40 мм — 3,5 об/мин, диаметром 40 ч- 90 мм — 0,5—
0,6 об/мин. Для гнутья арматурных каркасов, сварных сеток при-
меняют специальные станки. Сетку укладывают на стол станка так,
чтобы со стола свешивалась та часть, которая должна быть отогнута.
Изгибается сетка при помощи прижимной траверсы и гибочной балки.
Чтобы загнуть второй край, сетку вынимают и укладывают на стол
другой стороной. На таких станках можно гнуть сетки длиной до
3,5 м. Наибольший угол отгиба 105°, число отгибов в 1 ч до 100. Имеются
станки, позволяющие одновременно отгибать оба края сетки; они
работают по тому же принципу.
§ 10.5. ОБОРУДОВАНИЕ ДЛЯ ПРЕДВАРИТЕЛЬНОГО
НАТЯЖЕНИЯ АРМАТУРЫ
Армирование при изготовлении предварительно напряженных же-
лезобетонных изделий производится двумя способами: с помощью
отдельных стержней, проволок или пучков, которые натягиваются
на упоры форм или стендов; или с помощью непрерывной нити про-
волоки, которая в напряженном состоянии наматывается па упоры
форм или стендов (по этому способу армируются трубы, стойки и им
подобные детали).
Существует два способа передачи натяжения арматуры на бетон.
По одному способу арматура натягивается до затвердения бетона,
и усилие натяжения воспринимается поддоном, формой или упорами
стенда. После затвердения бетона усилие натяжения передается
с инвентарных конструкций на бетон. По другому способу вначале
изготовляется изделие, которое затем обжимается напряженной арма-
турой.
Установка для натяжения арматуры в формах показана на рис. 10.22.
В форму перед укладкой бетона закладывают арматуру. На одном
конце формы ее закрепляют зажимами, упирающимися в борт формы.
Другой конец арматуры, зажатый в захвате, прикрепляют к штоку
гидродомкрата. Домкрат закрепляют в стойке, служащей упором.
10 М. И. Гальперин
281
Питание гидродомкрата осуществляется гидронасосом, установлен-
ным на тележке. При подаче масла в цилиндр шток перемещается
вместе с захватом и производит натяжение арматуры. После натя-
жения арматуру закрепляют зажимами со стороны домкрата так,
что усилия от натяжения передаются на борт формы. Затем гидро-
домкрат освобождают и переносят на следующий стержень арматуры
или на другую форму.
Усилие, развиваемое гидродомкратом,
Р = 0,65овЕт], (10.6)
где ив — предел прочности стали при растяжении, кгс/см2 (Па);
F — площадь сечения проволоки, см2 (мм2); п — количество проволок
в пакете; ц — КПД гидродомкрата, равный 0,95—0,98.
Рис. 10.22. Установка для натяжения арматуры в формах:
1 — натяжное устройство; 2 — форма; 3 — упор; 4 — упорная траверса; 5 — Дом-
крат; 6 — подвижная траверса; 7 — винты-фиксаторы
Если изделие изготовляют стендовым способом и одновременно
формуют большое количество изделий, то принцип натяжения арма-
туры остается тот же. Ввиду того что стенды могут иметь длину до
250 м, проволока, как правило, укладывается при помощи специаль-
ных тележек. Натягивается арматура при помощи мощных гидродомк-
ратов.
После твердения бетона арматуру натягивают переносными гид-
равлическими домкратами. Домкраты для натяжения стержневой ар-
матуры отличаются по конструкции от домкратов для натяжения пуч-
ковой арматуры.
Гидродомкрат для натяжения стержней показан на рис. 10.23.
На конце арматурного стержня нарезается резьба, на которую навин-
чивается гайка 3 домкрата. Она соединена со штоком 4. Впереди ци-
линдра 5 домкрата помещается упорная стойка 2 и опорная плита 1.
Перед натяжением гайка вместе со штоком находится справа. При
282
подаче масла в цилиндр 5 поршень 6 и шток 4 перемещаются влево и
натягивают арматуру. Домкрат через стойку и рамы упирается в же-
лезобетонную конструкцию. Масло подается через штуцер 7.
Наиболее характерным примером непрерывного армирования яв-
ляется навивка арматурной проволоки на трубы с предварительным
напряжением.
Рис. 10.23. Схема гидродомкрата для натяжения стержней арматуры
Рис. 10.24. Глубинный вибровозбудитель с гиб-
ким валом
Для уплотнения бетона в монолитных конструкциях, а также при
изготовлении некоторых видов бетонных и железобетонных изделий
в формах широко применяют погружаемые в бетон вибровозбудители,
называемые глубинными. Их делают в основном планетарными. Глав-
ным достоинством этих вибровозбудителей является то, что дебаланс-
ный вал не вращается в подшипниках, что значительно повышает КПД
вибровозбудителей и уве-
личивает их ресурс работы,
так как их подшипники
быстро выходят из строя.
Глубинные электровиб-
ровозбудители выпускают-
ся с гибким валом, со
встроенным высокочастот-
ным электродвигателем и
пневматические.
Глубинный вибровозбу-
дитель с гибким валом
(рис. 10.24) состоит из при-
водного электродвигателя
/, гибкого вала 2 и вибронаконечника 3. Вибронаконечники выпол-
няют двух типов: с обкаткой бегунка-дебаланса по коническому
сердечнику (рис. 10.25, а), неподвижно закрепленному в корпусе
(вибровозбудители с внутренней обкаткой); с обкаткой бегунка-де-
баланса по беговой дорожке на конической втулке (рис. 10.25, б),
неподвижно закрепленной в корпусе (вибровозбудители с наружной
обкаткой).
Вибронаконечник с обкаткой бегунка-дебаланса по коническому
сердечнику состоит из корпуса с массивным дном. В дно корпуса
запрессован конический сердечник, по которому при работе вибро-
10*
283
возбудителя обкатывается бегунок-дебаланс. Последний соединяется
со шпинделем упругой муфтой. На конце шпинделя имеется хвосто-
вик, который соединяется с гибким валом.
Рис. 10.25. Вибронаконечники:
/ ~~ конусная втулка; 2 — бегунок; 3 — корпус; 4 — резинометалличеекяя муфта; 5 —
шпиндель; 6 — сердечник
Ручные глубинные вибровозбудители со встроенным высокочастот-
ным электродвигателем выполняются диаметром 50, 75, 100 мм с ча-
стотой колебаний 11000 в минуту. Возмущающая сила соответственно
равна 2500, 5500 и 12000 Н, а мощность 0,27; 0,8; 1,5 кВт. Эти вибро-
возбудители работают при напряжении 36 В, следовательно, для их
Рис. 10.26. Поверхностный площа-
дочный вибровозбудитель
Рис. 10.27. Схема работы виброрейки
эксплуатации необходимы понижающие трансформаторные преобра-
зователи частоты тока. Это значительно усложняет их эксплуатацию.
Пневматические глубинные ручные вибровозбудители выполняют
с наружным диаметром 34, 50, 75 и 110 мм. Работают они при давле-
нии воздуха 4—6 кгс/см2 (0,4—0,6 ЛШа) с частотой колебаний 8—18 тыс.
в минуту, возмущающая сила соответственно равна 1,3, 5, 7 и 20 кН,
284
а расход воздуха 0,5 -s- 1,5 м3/мин. Масса этих вибровозбудителей
колеблется от 35 до 200 кг. Металлоемкость этих вибровозбудителей
в 1,5 раза меньше, чем электрических. Достоинства и недостатки этих
машин те же, что и всех машин с электрическим приводом.
Поверхностные вибровозбудители применяют при бетонировании
полов, плит перекрытий, дорожных покрытий.
На рис. 10.26 показан площадочный вибровозбудитель. На метал-
лической площадке 2 закреплен вибровозбудитель 1. Передвижение
производится вручную с помощью двух рукояток 3.
Для бетонирования широких полос до 4 м применяют виброрейки
(рис. 10.27). На рейке 2 устанавливается один или несколько вибро-
возбудителей 1. Рейка перемещается по двум бортовым доскам 4
двумя рабочими за гибкие петли 3.
§ 10.6. ОБОРУДОВАНИЕ ДЛЯ УПЛОТНЕНИЯ БЕТОННОЙ
СМЕСИ И ФОРМОВАНИЯ ИЗДЕЛИЙ
Бетонную смесь уплотняют вибрированием, вибропрокатом, виб-
роштампованием, прессованием, центрифугированием. При уплотне-
нии вибрированием бетонной смеси сообщается вибрация от вибровоз-
будителей, погружаемых в бетон, или вибрация, передаваемая через
форму от вибростола или виброплощадки. Степень уплотнения зави-
сит от физико-механических свойств бетона, формы вибрируемого
изделия, амплитуды и частоты колебаний.
Экспериментально установлено, что для уплотнения необходимы
определенные величины амплитуд и частот колебаний, ниже которых
уплотнение не происходит. С увеличением амплитуд и частот степень
уплотнения повышается. Значительно влияет на уплотнение характер
колебаний (направленные или ненаправленные колебания).
Кроме того, если одновременно с вибрированием изделие подвер-
гать давлению, то степень уплотнения также возрастает. Если уплот-
няют только давлением без вибрирования, то для получения того же
эффекта удельное давление на бетон должно быть порядка 50—70 кгс/см2
(5—7 МПа).
Для прессования изделий с большой поверхностью требуются
мощные прессы. Виброштампование представляет собой сочетание
вибрирования с прессованием. Вибропрокат также сочетает в себе
метод прессования и вибрирования, но этот процесс является непре-
рывным и, следовательно, более производительным.
Центрифугирование также можно отнести к прессованию, но здесь
уплотнение происходит под действием центробежных сил.
Виброплощадки. Это один из основных видов оборудования для
уплотнения бетона при изготовлении бетонных и железобетонных
деталей.
На рис. 10.28 приводятся схемы основных типов виброплощадок.
Выбор виброплощадки зависит от формы и размеров изделий, а также
от жесткости бетонной смеси.
Различают виброплощадки малой грузоподъемности (до 1 т), сред-
ней (1 4- 5 т) и большой (5 -т- 20 т). На виброплощадках устанавли-
285
вают механические (дебалансные) и электромагнитные вибровозбуди-
тели, делаются попытки применить вибровозбудители пневматические
и гидравлические. Для крепления форм к виброплощадке применяют
механические, электромаг-
нитные, гидравлические и
пневматические приспособ-
ления.
Пружины виброплоща-
док подбирают так, чтобы
их осадка под действием
статической нагрузки была
в 20—30 раз больше, чем
расчетная амплитуда коле-
баний, а суммарный зазор
между витками при запол-
ненной бетонной смесью
форме был больше, чем ам-
плитуда колебаний площад-
ки. Пружины должны быть
отрегулированы так, чтобы
Рис. 10.28. Схемы виброплощадок в процессе работы осадка
была равномерной, иначе
в различных участках площадки колебания будут неравномерными
и, следовательно, уплотнение бетонной смеси в форме получится
также неравномерное.
Рис. 10.29. Схема стенда для изготовления пустотелых панелей
Для вибрирования изделий значительной массы и габарита сое-
диняют несколько виброплощадок. Такие устройства называют виб-
ростолами.
Широкое применение имеют пустотелые железобетонные конструк-
ции. На рис. 10.29 показан стенд для изготовления пустотелых пане-
лей. В форму 5, которая установлена на вибростоле, вводятся вибро-
286
вкладыши 4, прикрепленные к траверсе 3 при помощи лебедки 2,
которая приводится в движение электродвигателем 1 через редуктор.
Вибровкладыши входят в отверстия в поперечных бортах формы.
После укладки и уплотнения бетонной смеси вкладыши извлекаются
с помощью той же лебедки. Вибровкладыши представляют собой трубу
круглого или овального сечения, внутри которой помещены вибро-
возбудители. Электродвигатель помещается снаружи или внутри
трубы. На конце трубы имеется конусный наконечник.
Виброштампующие машины. Такие машины применяют для изго-
товления панелей покрытий, часторебристых панелей, лестничных
маршей, балок и др. Основной частью машины является виброштамп,
состоящий из рамы, на которой сверху прикреплены вибровозбуди-
тели, а снизу штамп (пуансон), образующий конфигурацию штампуе-
мого изделия. Виброштамп может быть переносным. В этом случае
он подвешивается на крюке электротали или крана и подается к форме
с уложенной в нее бетонной смесью. Виброштамп с включенными
вибровозбудителями опускают на форму до соприкосновения его
рамы с краями формы. После отключения вибровозбудителей вибро-
штамп поднимают и переносят на следующую форму. На вибро-
штампах обычно устанавливаются вибровозбудители с направлен-
ными колебаниями. Мощность вибровозбудителей, их кинетический
момент зависят от размеров и конструкции штампуемых изделий.
Контрольные вопросы
1. Вычертите и опишите принципиальные схемы бетоносмесительных и раст-
воросмесительных установок.
2. Изложите основные требования к смесительным установкам.
3. Опишите принципы работы дозаторов.
4. Опишите схему автоматизированного бетонного завода.
5. Начертите схемы станков для правки и резки арматуры и для гибки.
6. Начертите схемы оборудования для предварительного натяжения арматуры.
7. Начертите схему виброплощадки и опишите принцип ее работы.
ГЛАВА 14
РУЧНЫЕ МАШИНЫ
Многие вспомогательные операции на строительных и монтаж-
ных работах выполняют вручную или с помощью ручных машин (ме-
ханизированных инструментов).
Для снижения трудоемкости операций, повышения производитель-
ности и качества работ применяют ручные машины на тех операциях,
которые еще выполняются с помощью ручных инструментов, например
гаечных ключей при завертывании гаек, зубил при зачистке сварных
швов и т. д.
Существующие ручные машины надо использовать более эффективно
и значительно расширять область их применения. Как показали на-
блюдения за выполнением ручных операций, внедрение каждых
десяти ручных машин освобождает от ручного труда одного рабочего.
Затраты на приобретение ручных машин окупаются за 4—10 недель.
Многие ручные машины работают в комплексе с другими агрега-
тами, чаще всего в штукатурных и малярных работах. Поэтому в дан-
ной главе в отдельных случаях кроме описания ручных машин дано
описание этих агрегатов.
§ 11.1. КЛАССИФИКАЦИЯ РУЧНЫХ МАШИН
Ручной машиной (механизированным инструментом) называется
машина с двигателем, масса которой при работе полностью или ча-
стично воспринимается руками оператора. Главное рабочее движение
(рабочего органа) осуществляется соответствующим двигателем, а вспо-
могательное движение (подача) и управление — вручную. Ручные
машины должны иметь минимально возможную массу и габариты.
От этих показателей в значительной степени зависит утомляемость
оператора (рабочего), удобство подхода к месту выполнения опера-
ции, а следовательно, и производительность.
Компоновка машины, форма и расположение рабочих рукоятей,
уравновешивание машины должны быть такими, чтобы достигалось
наибольшее удобство работы.
Ручные машины, работающие на строительных и монтажных ра-
ботах, должны обладать высокой долговечностью и надежностью,
так как в условиях строительства трудно организовать ремонт машин,
а эксплуатация их происходит часто в сложных условиях. К ручным
машинам предъявляются также особые требования безопасности ра-
боты. Внешние очертания машин должны быть такими, чтобы исклю-
чалась возможность механических травм, следует предусматривать
предохранительные устройства, исключающие возможность поражения
оператора электрическим током. Необходимо обеспечивать шумо- и
вибробезопасность, соответствующие санитарным нормам.
288
Наиболее эффективно применение ручных машин на строительно-
монтажных работах, если машины универсальны и способны удовлет-
ворять различным условиям эксплуатации.
Ручные машины классифицируют по назначению и области приме-
нения, виду потребляемой энергии и привода, принципу действия, кон-
структивному исполнению и
режиму работы.
По назначению и области
применения ручные машины
подразделяют на машины:
1) общего применения (свер-
лильные, шлифовальные,
фрезерные); их используют
для выполнения наиболее
массовых операций и для
работы по различным мате-
риалам; 2) для обработки
металла (развальцовочные,
развертывающие, зенковаль-
ные, ножницы, опиловочные,
шаберы, рубильные молотки,
пучковые молотки); 3) для
обработки дерева (рубанки,
пилы, долбежники); 4) для
обработки каменных материа-
лов и грунта (молотки, пер-
фораторы, ломы, трамбовки);
5) для сборочных работ (резь-
бонарезные, резьбозаверты-
вающие, клепальные молотки,
скобозабивные, гвоздезабив-
ные). Из них резьбозаверты-
вающие делятся на гайковер-
ты, шуруповерты, шпилько-
верты, муфтоверты; 6) для
бетонных работ (бучарды);
7) для отделочных работ (за-
тирочные, краскопульты).
По виду потребляемой
энергии и приводу ручные
машины могут быть электрические, пневматические, гидравлические,
с двигателями внутреннего сгорания, пиротехнические.
По принципу действия различают машины, передающие крутящий
момент рабочему органу непрерывно (непрерывпо-силовые, рис. 11.1,а),
и машины, в которых передача энергии привода на обрабатываемый
объект осуществляется в прерывисто-импульсном режиме — ударном
(импульсно-силовые). Машины импульсно-силовые подразделяют на
ударные (рис. 11.1,6), ударно-поворотные (рис. 11.1, о) и ударно-
вращательные (рис. 11.1 г, д).
289
Классификация ручных машин и
виды выполняемых ими операций
Сверлильные
машины
Бурение отвер-
стий (шпуров): в
скальных грунтах;
в кирпиче; бетоне
и железобетоне
Сверление отвер-
стий: в деревянных
конструкциях и де-
талях; в металле
Режущие
машины
Резание: про-
фильного проката;
полимерных мате-
риалов; стеклопла-
стика; листового
металла
Обработка кро-
мок под сварку
Шлифовальные
машины
Резание: армату-
ры н профильного
металла; мелкого
проката
Зачистка: голов
железобетонных
свай; металла; свар-
ных швов
Шлифование:
шпаклеванных по-
верхностей; доща-
тых и паркетных
полов; мозаичных и
бетонных полов
Подгонка отдель-
ных деталей
Шлифование и
полирование по-
верхностей
Вышлифовка кор-
ня сварного шва
Подготовка кро-
мок под сварку
Резьбозавертывающие
и резьбонарезные
машины
Завертывание:
шурупов, болтов,
гаек, винтов, шпи-
лек
Нарезание резь-
бы в различных ма-
териалах
Машины ударного
действия
Разрыхление твер-
дых слежавшихся
и мерзлых грунтов
Разрушение бе-
тона, асфальтобето-
на и железобетона
Рубка металла и
арматуры
Бурение отвер-
стий в твердых
скальных грунтах
и железобетоне
Обработка рабо-
чих швов ранее
уложенного бетона
Пробивка: отвер-
стий в бетоне и
кирпичной кладке;
ниш, гнезд, борозд
Скалывание же-
лезобетонных свай
Забивка шпилек
при закреплении
стекол в рамах
Насечка твердого
бетонного основа-
ния
Снятие грата по-
сле огневой резки
Отбивка шлака
после сварки
Чеканка сварных
швов
Клепка конструк-
ций^
Обрубка металла
и буртовка труб
Вырубка дефект-
ных сварочных
швов, заклепок,
болтов, пайки
У пл отня ющие
машины
Уплотнение: бе-
тонной смеси при
формовании мо-
нолитных бетонных
и железобетонных
конструкций; буто-
бетона при устрой-
стве фундаментов;
несвязного грунта
Уплотнение и
разравнивание бе-
тона при устрой-
стве оснований и
покрытий
Трамбование по-
верхностей основа-
ний
Краскораспылители
Увлажнение и
обеспыливание
грунта
Смазка: щитов
опалубки перед
установкой; метал-
лических форм,
кассет
Нанесение на по-
верхность: лако-
красочных покры-
тий; шпаклевочных
масс; грунта
Огрунтовка по-
верхности жидким
стеклом
Лакирование по-
верхностей
Деревообрабаты-
вающие машины
Строгание и фу-
гование древесины
Обрезка паркет-
ной клепки, фуго-
вание кромок, фре-
зерование пазов
Распиловка лесо-
материалов
Выборка отвер-
стий и гнезд пря-
моугольной формы
и шпунтовых пазов
Выпиливание де-
талей из дерева
Прочие машины
Затирка и загла-
живание поверхно-
стей бетонных кон-
струкций и изделий
Очистка армату-
ры и металлокон-
струкций от ржав-
чины и старой кра-
ски, окалины, гря-
зи и т. п.
Забивка крепеж-
ных деталей дюбе-
лей в бетон и
кирпичные кон-
струкции
Заточка инстру-
ментов
Затирка накры-
вочного слоя
Развальцовка от-
верстий
290
К непрерывно-силовым машинам относятся сверлильные, шлифо-
вальные, фрезерные машины, дисковые пилы; к импульсно-силовым —
молотки, перфораторы, гайковерты, вырубные ножницы. Все импульс-
но-силовые машины делятся по принципу воздействия на рабочий орган
на механические (компрессионно-вакуумные, пружинно-воздушные,
пружинные) и фугальные (электромагнитные, электродинамические и
пневматические).
По режиму работы ручные машины делят па легкие массой до
1,5 кг, средние — до 8 кг и тяжелые — свыше 8 кг; часто для работы
с машинами средней и большой массы применяют подвески, которые
частично или полностью воспринимают на себя массу ручной машины;
по мощности ручные машины делят на машины малой мощности до
0,2 кВт, средней — до 1,5 кВт и большой — свыше 1,5 кВт.
Так же как и в строительных машинах, при проектировании руч-
ных машин необходимо разрабатывать их в соответствии с типораз-
мерными рядами. Однако в этом случае при составлении ряда по глав-
ному параметру машины необходимо учитывать массу получаемых
машин.
Типоразмерный ряд каждой из ручных машин выбирают в зави-
симости от основной характеристики выполняемого процесса, напри-
мер ряд машин для сверления должен выбираться таким образом,
чтобы можно было сверлить отверстия во всем диапазоне необходи-
мых диаметров, причем количество машин было бы минимальным.
Типоразмерные ряды, шаг ряда, определение главного параметра
находятся в стадии разработки.
Ниже приводится классификация основных ручных машин, при-
меняемых на строительных и монтажных работах, и виды операций,
которые этими машинами могут выполняться.
§ 11.2. УСТРОЙСТВО РУЧНЫХ МАШИН
Все ручные машины состоят из привода, механизма передачи,
механизма включения и рабочего органа.
Приводы. В качестве привода ручных машин применяют: электро-,
пневмо-, гидродвигатели, двигатели внутреннего сгорания, пороховые
двигатели.
Основными требованиями, предъявляемыми к приводам ручных
машин, являются: удельный вес, малая металлоемкость, т. е. масса,
приходящаяся на единицу мощности; бесшумность в работе; возмож-
ность использования общих источников питания; безопасность. Са-
мыми распространенными приводами в ручных машинах являются
электро- и пневмодвигатели. В современных приводах металлоемкость
для машин малой и средней мощности составляет: для электродвига-
телей 0,5—0,6 кг на 100 Вт, для пневмодвигателей 0,2—0,25 кг на
100 Вт.
Электродвигатели, применяемые в качестве привода ручных ма-
шин, по конструкции, роду и частоте тока можно подразделить на
три группы: 1) коллекторные однофазные с частотой тока 50 Гц,
типа КН; 2) трехфазные асинхронные с короткозамкнутым ротором,
291
частотой тока 50 Гц, типа АН; 3) трехфазпые асинхронные с коротко-
замкнутым ротором, частотой тока 200 Гц, типа АП.
Однофазные коллекторные двигатели КП
универсальны, так как могут работать от трехфазной промышленной
или однофазной осветительной сети как переменного, так и постоян-
ного тока. Их металлоемкость в 1,5 раза меньше, чем у трехфазных
асинхронных двигателей переменного тока с короткозамкнутым ро-
тором.
Эти двигатели применяют для сверлильных, шлифовальных машин
и гайковертов малой и средней мощности. В последнее время эти
двигатели начали выпускать с двойной изоляцией, что
значительно улучшает безопасность их применения.
Трехфазпые асинхронные элек-
тродвигатели АН с короткозамкнутым ротором,
с частотой тока 50 Гц надежны в работе, просты в из-
готовлении, могут включаться в промышленные трех-
фазные сети. Недостатками этих двигателей является
большая металлоемкость и электроопасность в работе.
Они применяются для машин средней и большой мощ-
ности.
Трехфазные асинхронные элек-
тродвигатели АП с короткозамкнутым ротором,
с частотой тока 200 Гц принято называть электродви-
гателями повышенной частоты. Они надежны в работе,
просты в изготовлении, имеют меньшую металлоемкость,
чем двигатели АН, но для них требуются специальные
преобразователи частоты тока; последние же, как
Рис. 11.2. Схема двигателя со свободным перемещением поршня
правило, имеют в 4—5 раз большую массу, чем у самой машины,
громоздки и неудобны в эксплуатации, их применяют для машин
большой мощности (свыше 2 кВт).
Все электрические машины делят на три класса защиты от пора-
жения током: 1) машины на номинальное напряжение свыше 42 В,
у которых хотя бы одна металлическая деталь, доступная для прикос-
новения, отделена от частей, находящихся под напряжением, только
рабочей изоляцией; 2) машины на номинальное напряжение свыше
32 В, у которых все металлические детали, доступные для прикосно-
вения, отделены от частей, находящихся под напряжением, двойной
или усиленной изоляцией; 3) машины на номинальное напряжение до
42 В, питающиеся от автономных источников либо от трансформатора
(преобразователя) с раздельными обмотками.
Пневматические двигатели, применяемые в качестве привода руч-
ных машин, подразделяют па пять основных групп: 1) со свободным
поршнем (рис. 11.2); 2) поршневые (рис. 11.3, о); 3) ротационные
(рис. 11.3, б); 4) шестеренчатые (рис. 11.3, е); 5) турбинные двигатели
(рис. 11.3, г).
262
Рис. 11,3. Схемы пневматических двигателей
и механические потери при оптималь-
В двигателях со свободным перемещением
поршня энергия сжатого воздуха преобразуется в кинетическую
энергию бойка, который играет роль поршня, свободно перемещающе-
гося внутри цилиндра. Рабочее движение совершается бойком в одну
сторону, при этом наносится удар по хвостовику инструмента. Холо-
стой ход осуществляется при обратном направлении и обеспечивается
золотником. Такие двигатели применяют преимущественно в клепаль-
ных, рубильных, отбойных
и пучковых молотках.
Основными параметра-
ми, характеризующими ма-
шины ударного действия,
являются работа одного
удара и количество ударов
в минуту. Работа одного
удара Л (кге-м или кН-м)
зависит: от давления воз-
духа в сети р, кгс/см'2 (МПа);
конструктивного хода
поршня (ударника) 5КОИ, м,
представляющего собой
разность между длиной по-
лости за вычетом длины
хвостовика рабочего органа
и длиной поршня; площа-
ди F поперечного сечения
ствола, по которому дви-
жется поршень.
A^k^FS^, (11.1)
где fei — коэффициент пс‘
терь энергии, учитываю-
щий степень наполнения
цилиндра сжатым воздухе
ных режимах работы молотков. Этот коэффициент для клепальных
молотков равен 0,5 -ь 0,55.
Количество ударов в минуту зависит от продолжительности ка-
ждого удара, которая в свою очередь определяется скоростью пере-
мещения поршня при рабочем ходе и длиной его пути.
Средняя скорость перемещения может быть определена по зави-
симости ,
v=pF!mn,
где тп — масса поршня.
Время рабочего хода
/ = У'25^д5.
(Н.2)
(П-3)
Скорость холостого хода поршня меньше скорости рабочего хода,
следовательно, время холостого хода больше. Обычно время холостого
293
хода составляет 1,2 1,6 времени рабочего хода. Таким образом,
общее время одного удара
Т = (2,2 2,6)(11.4)
Число ударов молотка в минуту
п=1/Т. (11.5)
Подставив значение и в формулу (11.3) и значение / вформулу (11.4),
получим:
Т = (2,2-ь2,6)]Л
Подставив значение Т в формулу (11.5), получим:
П = 2.2 <-2,6 V 2SKfHQ’ 1,6)
где k2 — коэффициент, учитывающий снижение частоты ударов за
счет механических потерь и степень пополнения цилиндра сжатым воз-
духом. Обычно он принимается равным 0,6 <- 0,8.
Расход воздуха в молотках такого типа определяется приближенно
по следующей зависимости:
Q=l,2FSpn- IO-6.
Для сравнительных оценок ударных машин принято также поль-
зоваться таким параметром, как мощность молотка в л. с. Это сугубо
относительная величина. Она определяется по зависимости
N ~ А п/(60 • 75).
Пневматические поршневые двигатели имеют
высокий КПД при сравнительно малых оборотах. В этих двигателях
возможна плавная регулировка числа оборотов; они имеют относи-
тельно небольшую утечку сжатого воздуха. Преобразование движения
осуществляют кривошипно-шатунным механизмом, кулисными и ку-
лачковыми механизмами различных типов.
Схема пневматического поршневого двигателя показана на
рис. 11.3, а. Он состоит из цилиндра 3, в котором перемещается пор-
шень 2, связанный с кривошипно-шатунным механизмом 1. В корпусе
цилиндра имеется золотниковый распределитель 4. Мощность поршне-
вых двигателей, применяемых в ручных машинах, составляет 0,5—
5 л. с., частота вращения 400—2000 об/мин. Наиболее широкое при-
менение поршневые двигатели получили в клепальных скобах безу-
дарного действия.
Шестеренчатые двигатели (см. рис. 11.3, в) просты
по конструкции, легко переносят перегрузки, имеют меньшие по срав-
нению с поршневыми габариты, а также большой срок службы. Суще-
ственными недостатками их являются: повышенный расход воздуха на
единицу мощности, значительный шум при работе и большая масса
(на 1 л. с. мощности двигателя приходится до 14 кг массы).
294
В ручных машинах шестеренчатые двигатели практически не при-
меняют, так как они уступают по своим показателям ротационным
пневматическим двигателям.
Ротационные двигатели являются основным типом
привода большинства ручных машин пневматического действия. Они
имеют сравнительно простое устройство и работают очень плавно.
Как правило, ротационные двигатели в ручных машинах имеют ча-
стоту вращения 10—15 тыс. об/мин.
Такой двигатель (см. 11.3, б) состоит из ротора 1, в котором ра-
диально нарезаны пазы 2. В эти пазы вставляются плоские лопатки 3,
которые могут перемещаться в радиальном направлении. Ротор с ло-
патками устанавливается в статоре 4 в виде пустотелого цилиндра.
Ось ротора эксцентрично смещена относительно оси статора. Для
привода ротора в движение воздух через отверстие в статоре подается
в ту часть ротора, где зазор между статором и ротором наименьший.
Воздух давит на лопатку и приводит во вращение ротор.
Мощность, развиваемая пневматическим ротационным двигателем,
зависит: от работы, совершаемой одной лопаткой за один оборот ротора,
количества лопаток, числа оборотов ротора, КПД, а также от коэф-
фициента, учитывающего влияние толщины лопатки.
Турбинные двигатели применяют в основном в высо-
кооборотных шлифовальных машинах небольших мощностей. Они
обладают высоким КПД. У таких двигателей частота вращения дости-
гает 60—100 тыс. об/мин; мощность составляет 0,01 -и 0,4 л. с.
Схема работы такого двигателя показана на рис. 11.3, г. Ротор
двигателя выполнен в виде диска с прорезными по наружной поверх-
ности каналами, образующими лопасти. Под углом к плоскости ротора
через два диаметрально расположенных сопла поступает сжатый воз-
дух, который, действуя на лопатки ротора, сообщает ему вращатель-
ное движение. Из-за отсутствия износа рабочего колеса 2 соплового
аппарата 1 срок службы этих двигателей значительно выше, чем у дру-
гих пневматических двигателей.
Расход воздуха в турбинках по сравнению с ротационными дви-
гателями в три раза меньше. Например, у ротационного двигателя
1Мощностью 0,25 л. с. расход воздуха составляет 0,75 м3/мин, а у тур-
бинки той же мощности — 0,25 м®/мин. Однако изготовление турбин-
ных двигателей значительно сложней, чем ротационных. Кроме того,
в них имеется трудность реверсирования.
В последнее время для привода отдельных ручных машин приме-
няют газовые турбинки, в которых к лопастям ротора подводится не.
воздух, а газ от сгорания топлива, подаваемого в отдельную камеру
сгорания. Такие турбинки могут развивать мощность во много раз
больше, чем воздушные, при одинаковых габаритах и массе. Эти тур-
бинки делаются тоже высокооборотными.
Несмотря на большие достоинства газовых и воздушных турбинок,
их применение пока ограничено, так как вращающиеся рабочие ор-
ганы ручных машин должны делать, как правило, от 10 до несколько
сотен оборотов в минуту (за исключением шлифовальных машин).
Для того чтобы напучить такую частоту вращения при наличии га-
295
зовой или воздушной турбинки, необходимы редукторы с большими
передаточными числами. Такие редукторы получаются очень слож-
ными и тяжелыми.
Достоинством пневмодвигателей является их устойчивая работа
в ручных машинах не только в непрерывно-силовых, но и в импульсно-
силовых, а также значительно меньшая масса по сравнению с электри-
ческими. Однако пневмодвигатели имеют и крупные недостатки. Их
КПД сравнительно мал — в 5—6 раз ниже, чем у электродвигателей.
Рис. 11.4. Расход воздуха при работе двигателей
Для приведения в действие ручных машин с пневмодвигателями
необходимо наличие компрессора, специальной воздушной сети, спе-
циальной аппаратуры для очистки сжатого воздуха от влаги и меха-
нических включений. Вследствие всего этого увеличивается количе-
ство обслуживающего персонала. Стоимость работы ручных машин
с пневмоприводом в 6—7 раз выше, чем стоимость машин с электро-
приводом. Пневматические двигатели являются объемными машинами
и поэтому они очень чувствительны к расходу воздуха. Удельный
расход воздуха на каждый киловаттмощности придавленииб—7 кгс/см2
(0,6—0,7 МПа) составляет 1,5—2 м3/ч.
296
Значительное влияние на работу пневмодвигателя оказывает про-
тиводавление на выходе воздуха из двигателя. Оно возникает оттого,
что пневмодвигатель, как правило, встраивается в специальный кор-
пус, откуда через специальные каналы необходимо отводить воздух.
Чем больше противодавление, тем меньше становится расход воздуха
при постоянном давлении на входе, при этом снижается также частота
вращения двигателя и развиваемая им мощность.
На рис. 11.4 приводятся кривые изменения расхода воздуха, ча-
стоты вращения двигателя и мощности в зависимости от давления
воздуха на входе и на выходе. При падении давления на входе частота
вращения и мощность двигателя уменьшаются. Это ясно из графиков,
если принять противодавление постоянным. Частота вращения резко
Рис. 11.5. Зависимость массы и металлоемкости двигателей от мощности:
а — электрических; б — пневматических
падает также при увеличении нагрузки. Недостатком пневмодвига-
телей является и большой шум при работе. Несмотря на все эти недо-
статки, ручные машины с пневмодвигателями имеют широкое при-
менение, так как они просты по конструкции, надежны и безопасны
в работе и имеют по сравнению с электрическими малую массу.
На рис. 11.5 приводится кривая изменения массы и металлоемко-
сти двигателей от их мощности, из которой видно, что с увеличением
мощности двигателя металлоемкость падает. Средняя металлоемкость
пневматических двигателей по сравнению с наиболее легкими электро-
двигателями типа КН в 2—2,5 раза меньше.
Как электрические, так и пневматические приводы имеют тот не-
достаток, что при их применении необходима укладка коммуникаций
большой длины для подвода электроэнергии или воздуха от источни-
ков питания. Это приводит к большим трудозатратам и увеличивает
стоимость применения .ручных машин.
В последнее время за рубежом созданы и создаются также у нас
ручные машины со специальными высокоемкостными аккумуляторами
очень малых габаритов и массы. Такие аккумуляторы встраиваются
в корпус или рукоятку ручных машин. Их емкость достаточна для
297
того, чтобы приводить в действие ручную машину в течение всей смены,
после чего они становятся на подзарядку.
Для более мощных машин в качестве индивидуального привода
наиболее перспективными являются газовые турбинки, у которых
топливная система представляет собой отдельный агрегат небольшой
массы.
Механизмы передач. В ручных машинах применяют следующие
передачи: редукторы с цилиндрическими и коническими зубчатыми
колесами, в том числе с планетарными передачами, которые имеют
большое применение; кривошипно-шатунные механизмы; гибкие валы.
Рис. 11.6. Схемы приводов ручных машин
Редукторы. К редукторам ручных машин предъявляют сле-
дующие требования: большие передаточные числа — 20 ч- 300; малые
габариты; модуль зубчатых колес этих редукторов обычно равен 0,5;
0,8; 1,0; 1,5; как правило, применяется коррегирование зуба; повы-
шенные требования к шуму. Редукторы в этих машинах представляют
собой самостоятельный узел, собираемый с двигателем и приводом
рабочего органа. Основные схемы применяемых редукторов показаны
на рис. 11.6.
На рис. 11.6, а показана схема привода электроножниц, состоя-
щего из двух цилиндрических зубчатых пар. Такая же схема передачи
применяется в электрогайковертах и электросверлилках, (рис. 11.6, б).
В этой схеме имеются две .муфты предельного момента и муфта, вклю-
чаемая при нажатии инструмента на рабочую поверхность.
296
Рис. 11.7. Гибкий вал
На рис. 11.6, в показана схема привода с одной парой конических
колес, их используют в шлифовальных машинах.
Планетарный однорядный механизм (рис. 11.6, г) широко приме-
няется в приводах гайковертов, а для привода пневматических свер-
лилок планетарный механизм соединен с цилиндрической зубчатой
парой (рис. 11.6,6). В этой сверлилке установлен центробежный
регулятор и ручной дублирующий привод, соединенный с ведомым
звеном через храповой механизм хода. Аналогичную схему имеет
привод пневматической угловой сверлилки (рис. 11.6, е), но в нем
используется коническая зубчатая пара. Наличие регуляторов в этих
машинах позволяет поддерживать необходимую постоянную частоту
вращения, что для шлифовальных машин, работающих с абразив-
ными кругами, очень важно, так как с изменением скорости по срав-
нению с расчетной увеличивается износ абразивных дисков. В свер-
лилках, где требуется более
передаточное отношение, на-
пример для сверления от-
верстий большого диаметра,
имеются два планетарных
однородных механизма, сое-
диненных последовательно
(рис. 11.6, ж), а в затироч-
ной машине (рис. 11.6, з) —
два последовательно соеди-
ненных планетарных механиз-
ма и червячная передача.
В ручных машинах при-
меняют также приводы с ре-
дуктором, составленным из
трех и более планетарных
механизмов.
Кривошипно-шатунный механизм. В ручных
машинах наличие кривошипно-шатунного механизма вызывает повы-
шенную вибрацию, что является серьезным препятствием для его
применения. Для снижения вибрации следует уравновешивать криво-
шипно-шатунный механизм самонастраивающимся динамическим ком-
пенсатором, что снижает вибрации в широком диапазоне рабочих
скоростей в 2—3 раза.
Многие ручные машины не имеют встроенного двигателя и приво-
дятся в движение от двигателя, находящегося на расстоянии от этой
машины. В основном передача движения в этих случаях осуществ-
ляется при помощи гибких валов. Конструкция гибкого вала показана
на рис. 11.7, а. Он состоит из стального проволочного сердечника 1,
на который навито несколько слоев стальной проволоки 2, причем
направление витков в каждом слое противоположно предыдущему.
Навивка верхнего слоя обычно имеет направление, обратное
направлению вращения вала, чтобы вал не раскручивался во время
вращения. Гибкие валы выпускают для правого и левого враще-
ния.
299
В качестве опоры гибкого вала служит гибкий рукав (рис. 11.7, б).
Он имеет внутри спираль 1 из стальной лепты или стальной сплющен-
ной проволоки. Направление витков этой спирали противоположно
направлению вращения вала. Эта спираль называется предохранитель-
ной броней. Чтобы спираль не растягивалась, ее вставляют в гибкий
металлический рукав 2, который снаружи оплетается тонкой стальной
оцинкованной проволокой (оплеткой) 3, а затем резиновой оболочкой 4
с хлопчатобумажными прокладками. Между валом и внутренней спи-
ралью брони делается зазор, заполняемый маслом.
Присоединение валов к двигателям и к ручным машинам осущест-
вляется при помощи концевой арматуры. Гибкий вал припаивают
к наконечнику шпинделя привода, а броню — к втулке.
Пока еще нет методов, по которым можно было бы рассчитать гиб-
кий вал, поэтому для выбора таких валов в зависимости от передавае-
мых крутящих моментов пользуются экспериментальными данными
(табл. 11.1).
Таблица 11.1
Основные параметры гибких валов
Параметры
Допустимый крутящий момент, Н м
Наименьший радиус изгиба, мм
Число слоев вала
Масса 1 м вала, кг
Как видно из таблицы, диаметр вала следует выбирать ие только
в зависимости от передаваемого крутящего момента, но также и от
Рис. 11.8. Механизмы включения и выключения ручных машин
радиуса изгиба вала. Чем меньше радиус изгиба, тем меньше должен
быть диаметр вала. Потери момента в значительной степени зависят
от радиусов изгиба. При отношении радиуса изгиба к диаметру вала,
равном 10, потери момента составляют 15—20%, при отношении, рав-
300
ном 7, — 70—80%. Малые- радиусы изгиба не только приводят к боль-
шим потерям, но также и к быстрому износу вала. Это усложняет ме-
тоды расчета валов.
Рис. 11.9. Сверлильная машина с комплектом насадок:
а — электросверл и льна я машина; б — насадка-щетка; в — насадка-гайковерт;
г — ножницы ножевые; д — ножницы вырубные
Существующие гибкие валы наиболее эффективно работают при
частоте вращения 1500—3000 об/мин, при этом КПД составляет 0,9,
если вал работает без изгибов. При меньшей частоте вращения КПД
падает. Валы не могут работать при частоте вращения выше 6000 об/мин.
301
Длина гибких валов может достигать 30 м, но рекомендуется ра-
ботать при длинах не более 6 м.
Механизм включения и выключения. Различают два типа таких
механизмов: перекидные выключатели (рис. 11.8, а), которые для
включения и выключения машины надо перекидывать из одного по-
ложения в другое, и нажимные (рис. 11.8, б), при которых машина
включается только при нажатии на них; при прекращении нажима
машина автоматически выключается. В последнее время применяются
нажимные механизмы с фиксатором.
Выбор того или иного выключателя осуществляется из следую-
щих соображений. Нажимными выключателями оборудуют те ручные
машины, во время работы которых движение рабочего органа может
оказаться опасным для рабочего и для выполняемой операции или
может привести к поломке самого рабочего органа (например, шли-
фовальные машины, гайковерты, молотки и др.). Остальные машины,
при действии которых не нарушаются условия техники безопасности,
снабжают перекидными выключателями (например, вибраторы, пар-
кетно-циклевочные машины). 1
Рабочие органы ручных машин различны в зависимости от вида
выполняемых операций. Некоторые машины предназначены для вы-
полнения одного вида операций (узкоспециализированные), снаб-
жаются рабочим органом только одного типа (например, ручная цеп-
ная пила). Отдельные машины используются так, что на них при-
меняется один тип рабочего органа, но разных размеров (например,
сверлильные и шлифовальные машины).
Для повышения коэффициента использования ручных машин на
строительных и монтажных работах и для снижения количества не-
обходимых машин за рубежом и у нас в стране многие машины снаб-
жают различными видами сменного рабочего оборудования, например
сверлильная машина ИЭ-6002 с комплектом насадок (рис. 11.9). Основ-
ной ручной машиной в этом наборе является электросверлильная ма-
шина ИЭ-1021, а к ней прилагаются: насадка-гайковерт, насадка-
ножницы ножевые и насадка-ножницы вырубные. В этом случае ма-
шины становятся универсальными.
В ряде случаев для применения инструментов, работа которых
осуществляется при разных режимах и в различных условиях, вместе
с рабочими органами машины снабжаются дополнительными механиз-
мами *.
§ 113. СВЕРЛИЛЬНЫЕ МАШИНЫ
Сверлильные машины являются одним из наиболее распростра-
ненных видов ручных машин. Они предназначены для сверления от-
верстий в различных материалах: металлах, дереве, бетоне, кирпиче,
пластических массах, горных породах и т. д.
* Рабочие органы и режимы работы будут рассмотрены далее совместно с кон-
струкцией машин.
302
Сверлильные машины можно классифицировать: по типу потреб-
ляемой энергии — электрические, пневматические и др.; по типу
двигателя — высокочастотные, коллекторные и др.; по взаимному
расположению осей двигателя и рабочего органа — прямые, угловые;
по типу подачи — с ручной, механической, автоматической; по ре-
жиму работы — легкие, средние, тяжелые; по направлению враще-
ния — реверсивные, нереверсивные; по регулированию скорости —
односкоростНые, многоскоростные; по воздействию на обрабатывае-
мый материал — вращательные, ударно-вращательные.
Сверлильная машина (рис. 11.9, а) имеет электродвигатель 5;
на валу ротора 6 насажен вентилятор 7 для охлаждения двигателя.
Вращение от вала ротора передается шпинделю 1 через редуктор 4
с цилиндрическими зубчатыми колесами. Шпиндель вращается в ша-
рикоподшипниках 2, установленных в корпусе 3 редуктора. Задняя
крышка электродвигателя снабжена рабочей рукояткой 9, в которой
расположен курковый выключатель 8.
Сверлильные машины делятся на легкие (диаметр сверления до
7 мм), средние (диаметр сверления до 16 мм) и тяжелые (диаметр
сверления свыше 16 мм). Мощность этих машин 0,12—0,8 кВт, масса
1,2—17 кг.
Легкие сверлильные машины имеют корпус с рукояткой пистолет-
ного типа; средние имеют основную закрытую центральную рукоятку
и съемную вспомогательную боковую; тяжелые снабжены двумя боко-
выми ручками, грудным или плечевым, либо винтовыми упорами.
Большинство сверлильных машин по своей конструкции выпу-
скаются прямые, у них оси шпинделя и вала совпадают или располо-
жены параллельно. Однако для удобства работ в стесненных условиях
выпускают машины угловые, у которых шпиндель относительно вала
расположен под углом.
Рабочими органами сверлильных машин служат чаще всего обыч-
ные стандартные быстрорежущие сверла. При необходимости приме-
няют зенкеры и развертки. Для более производительного сверления
чугуна, высокопрочных сталей, сплавов и цветных металлов применяют
сверла, оснащенные твердым сплавом.
Основными факторами, влияющими на производительность свер-
ления и качество получаемых отверстий, являются геометрические
параметры режущей части сверла (рис. 11.10, а). К ним относятся:
задний угол а, передний угол у, углы при вершине 2<р и 2«р0 и угол на-
клона поперечной кромки сверла ф.
Форма заточки сверла зависит от его диаметра и свойств обрабаты-
ваемого материала. Задний угол а имеет переменную величину и
возрастает по мере приближения к центру от 8 до 35°. Чем больше
диаметр сверла, тем меньше угол а, и наоборот. Передний угол у
имеет также переменную величину и уменьшается от периферии, где
он изменяется от 8 до 33°, к перемычке, где доходит до 0°, а иногда до
отрицательного значения. Угол при вершине 2ср зависит от свойств
обрабатываемого материала и выбирается в пределах 116 118°.
Угол наклона поперечной кромки равен 50° для сверл диаметром до
12 мм и 55° — для сверл больших диаметров.
303
Зенкеры делятся на насадные и цельные.
Насадные зенкеры изготовляют: цельными из быстрорежущих
сталей; оснащенными пластинками из твердого сплава; сборными со
вставными ножами из быстрорежущего сплава; сборными со встав-
ными ножами, оснащенными пластинками из твердого сплава.
Рис. 11.10. Рабочие органы сверлильных машин:
а, б — геометрические параметры режущей части сверла; / — поперечная кромка;
2 — ленточка; 3 — передняя поверхность; 4 — канавка; 5 — кромка ленточки;
6 — задняя поверхность; 7 — спинка зуба; 8 — зуб; Р — режущие кромки;
10 — сердцевина; II — режущая часть; 12 — шейка; 13 — лапка; 14 — хвостовик;
15 — рабочая часть; в —< резцы типа РД и кольцевые резцы типа РК; г —- ал^
мазное кольцевое сверло
Развертки делятся на машинные и ручные.
Машинные развертки бывают: с монолитной твердосплавной го-
ловкой и цилиндрическим и коническим хвостовиком; насадные, осна-
щенные пластинками из твердого сплава.
Ручные развертки делятся на цилиндрические постоянные, котель-
ные, цилиндрические раздвижные (установочные), цилиндрические
однозубые и конические для получения различных конусных отвер-
стий.
Часто в строительной и монтажной практике приходится сверлить
отверстия в строительных материалах и конструкциях, кирпиче
(стены), бетоне и железобетоне (фундамент и перекрытия). Для этих
304
целей служат как ручные машины, так и переносные станки. Рабочим
органом таких машин и стапков служат перовые сверла, алмазные
кольцевые сверла, кольцевые резцы, буровые коронки и т. д.
Инструмент выбирают в зависимости от обрабатываемого материала
и диаметра сверления.
При сверлении кирпича и бетона с малоабразивными заполнителями
применяют сверла, оснащенные твердосплавными пластинками из
металлокерамических сплавов ВК2, В КЗ, В Кб. Эти сплавы обладают
наибольшей износостойкостью при истирании. В качестве привода для
таких сверл применяют сверлильные ручные машины вращательного
действия.
Сверление отверстий в бетонах повышенной и высокой прочности
(М400—600) осуществляют сверлами, оснащенными твердосплавными
пластинками из металлокерамических сплавов ВКП и ВК15, обла-
дающих высокой вязкостью и эксплуатационной прочностью. С этими
сверлами. могут работать сверлильные машины ударно-вращательного
принципа действия. Такими сверлами сверлят отверстия диаметром
8—24 мм и глубиной сверления до 100—150 мм.
Для сверления отверстий под трубы и крепления аппаратов в кир-
пиче, керамзитобетонс, шлакобетоне диаметром 18—55 мм на глу-
бину 600—800 мм применяют двухлезвийные резцы с витой штангой
типа РД (рис. 11.10, б). Резцы 1 оснащены пластинками 2 из твердого
сплава В Кб. Эти резцы выпускаются в комплекте со штангами 3 и
соединяются с ними при помощи резьбы. Применение витых штанг
при сверлении позволяет интенсивно удалять буровую мелочь. Хво-
стовик штанги 4 имеет конус Морзе и для крепления в сверлильных
машинах.
Для тех же целей, но при сверлении отверстий в бетоне и железо-
бетоне с арматурой диаметром до 8 мм применяют кольцевые резцы
типа РК (рис. 11.10, в), оснащенные чечевицеобразными вставками 6
из твердого сплава В Кб. Резцы комплектуются штангами 5, переход-
никами 4 и промывочными муфтами 3. Кольцевой резец соединяется
со штангой при помощи двух цилиндрических шипов, которые входят
в пазы штанги. Буровая мелочь удаляется водой, которую подводят
шлангом к ниппелю 2 муфты 3, находящейся на цилиндрической части
хвостовика. На конце переходника 3 имеется конус Морзе 1.
При сверлении бетона и железобетона в конструкциях перекры-
тий и фундаментах под анкерные болты и дюбеля целесообразно при-
менять алмазные кольцевые сверла (рис. 11.10, г). Они выпускаются
диаметрами 12 -е 125 мм длиной до 450 мм. Сверла состоят из алмаз-
ной коронки 1 и трубчатого удлинителя 2, являющегося неотделимой
частью сверла. Коронка состоит из стального кольца и алмазного
твердосплавного слоя. Для крепления алмазных кольцевых сверл на
шпинделе ручных сверлильных машин, как и для крепления кольце-
вых резцов, служат специальные конусы. На передвижных станках
имеется специальный патрон с промывочной муфтой.
Выбор мощности и частоты вращения сверлильных машин произ-
водится в зависимости от диаметра и глубины просверливаемого от-
верстия, а также от материала, в котором сверлят отверстия.
305
Скорости резания при сверлении для различных материалов следует
выбирать по табл. 11.2.
Таблица 11.2
Рекомендуемые скорости резания при сверления
Обрабатываемый материал Материал инструмента Твердый сплав
инструмента ЛЬ’ ная сталь быстрорежу- щая сталь
V, м 'мин
Стальной прокат 10—15 18—30 30—120
Алюминий До 100 До 200 До 400
Мягкий камень и гипс До 80 До 150 До 400
Камень средней твердости До 10 До 20 До 50
Бетой, гранит, твердые породы Низкая стойкость до 10
§ 11.4. ШЛИФОВАЛЬНЫЕ МАШИНЫ
Шлифовальные машины применяют в строительстве для очистки
ржавчины, удаления наплывов металла, зачистки швов, полировки
естественного камня, для резания металлов мелкого проката, огне-
упоров.
Для шлифовки и зачистки обычно применяют абразивные крути
и проволочные щетки; для полировки — фетровые и войлочные круги;
для резания — абразивные и алмазные крути.
Рабочие органы шлифовальных машин — абразивные круги изго-
товляют из абразивного материала — карбида кремния зернистостью
125, 80, 50, составляющего до 50% от общей массы круга; увлажни-
теля — жидкого бакелита вязкостью 8—15 с (10% от общей массы);
наполнителя — креолита (13—15% от общей массы); связующего
материала пульвербакелита (13—15% от общей массы). Все эти мате-
риалы после тщательного перемешивания, т. е. после того, что каждая
частица абразива обволакивается связующим материалом, формуются
в виде дисков в пресс-формах. После формовки они подвергаются
термической обработке.
Эффективность работы кругов зависит от их прочности и износо-
стойкости. Эксперименты показали, что чем больше окружная ско-
рость круга, тем меньше его износ при прочих равных условиях.
Абразивные круги, применяемые до последнего времени, имели
очень малую прочность, что не позволяло задавать им окружные
скорости свыше 40—50 м/с. Кроме того, они были очень чувствитель-
ные к перекосам в связи с большой хрупкостью. Поэтому в последнее
время применяются так называемые армированные крути, которые имеют
в качестве арматуры стекловолокно или полимерные материалы.
Такие круги допускают окружные скорости до 100 м/с, при которых
происходит более эффективное резание всех материалов.
В настоящее время за рубежом и в СССР созданы опытные образцы
абразивных кругов, скорость которых превышает 150—200 м/с.
306
Круги для резки металла с помощью шлифовальных машин вы-
полняют диаметром 180 -н 300 мм и толщиной 3 мм. Для зачистных
операций применяют круги до 230 мм, толщиной 6—8 мм.
Различают следующие шлифовальные машины: 1) прямые, у кото-
рых шлифовальный круг или щетка работает наружным диаметром;
их применяют для снятия заусенцев, зачистки сварных швов, резки
и шлифовки небольших поверхностей; 2) угловые, у которых инстру-
мент работает тоже наружным диаметром; их также применяют для
резки и шлифовки; 3) торцевые, у которых инструмент работает тор-
цевой поверхностью; их используют только для шлифовки.
Шлифовальная угловая машина, показанная на рис. 11.11, при-
водится в действие ротационным двигателем 3. Передача вращения
Рис. 11.11. Угловая шлифовальная машина
от двигателя к шпинделю осуществляется через пару конических
зубчатых колес 2, из которых одно установлено непосредственно на
валу ротора двигателя, а другое — на шпинделе. На шпинделе ма-
шины закрепляется абразивный круг 1 или резиновый подкладной диск 5
с эластичными кругами 6, на которые наносится абразив или наклады-
вается шлифовальная шкурка. На данной машине установлен центро-
бежный регулятор 4, предохраняющий машину от разноса при холо-
стом ходе и поддерживающий заданную частоту вращения.
Шлифовальные ручные машины выпускают с пневматическими
турбинными и ротационными двигателями и с электрическими двига-
телями.
Основные характеристики шлифовальных машин приводятся в
табл. 11.3 и 11.4.
Процесс резки. При работе ручными шлифовальными машинами
в процессе резки (рис. 11.12) разрезаемую деталь неподвижно закреп-
ляют, так как в противном случае возможность перемещения разре-
заемой детали может привести к поломке круга и травме.
При выполнении операции резки машину следует держать как
показано на рис. 11.12, а, при этом оператор должен занимать устой-
307
чивое положение, тем самым обеспечивая фиксированную подачу
круга на разрезаемую деталь. Шлифовальную машину наводят на
деталь так, чтобы плоскость абразивного крута была перпендикулярна
разрезаемой поверхности.
Характеристики пневматических машин
Таблица 11.3
Параметры Диаметр шлифовального круга
с турбинным двигателем с ротационным двигателем
6 10 30 прямых угло- вых
60 80 200
Скорость вращения, об/мин холостой ход 80 000 65 000 25 000 12 000 10 000 5800
под нагрузкой 60 000 60 000 20 000 10000 8 000 4600
Мощность, л. с. 0,04 0,1 0,4 0.7 0,8 2
Расход воздуха, м’/мип 0,09 0,14 0,47 0,0 0,9 1,8
Масса, кг 0,2 0,3 0,5 1,4 2,6 5,5
Трубы и круглый прокат можно резать двумя методами: врезанием
и обкаткой. Первый метод заключается в линейном перемещении круга
в плоскости, перпендикулярной оси трубы, с перерезанием сразу
всего поперечного сечения. Этот метод применяется редко из-за малого
диаметра отрезного круга, которым обуславливается диаметр отрезае-
мой трубы. Например, кругом диаметром 180 мм можно резать трубу
диаметром до 57 мм, а кругом 230 мм — до 70 мм. При этом методе
резки машину наводят на металл в направлении сверху вниз
(рис. 11.12, б), чтобы избежать «сбрасывания» машины с разрезаемого
изделия.
Характеристики электрических машин
Таблица 11.4
Параметры Диаметр шлифовального круга
прямых угловых
100 125 150 200 180 2-30
Скорость вращения шпинделя, об/мин 5450 6400 3800 2750 8700 6800
Электродвигатель, тип КН АН АН АП АН АН
Мощность, Вт 400 800 800 400 1600 1600
Напряжение, В 220 36 36 220 36 36
Частота тока, Гц 50 200 200 50 200 200
Масса, кг V 7 9,5 8 8
Второй метод заключается в перемещении шлифовальной машины
вокруг разрезаемой трубы таким образом, чтобы круг находился
все время в плоскости, перпендикулярной оси трубы, или при непод-
308
вижной шлифовальной машине — путем поворота трубы вокруг
своей оси в специальном приспособлении. Резку труб методом обкатки
в зависимости от толщины стенки производят в один или несколько
проходов. Этим методом пользуются в тех случаях, когда нельзя
перерезать трубу методом врезания.
Резку профильного металла осуществляют таким образом, чтобы
длина дуги соприкосновения круга с изделием в процессе резания
была возможно меньшей. На схеме (рис. 11.12, в) показана траектория
движения круга и его положение при резке уголка.
При большом объеме работ по резке мелкого проката для удобства
работы в условиях монтажной площадки существуют специальные
приспособления, в которых закрепляют шлифовальные машины,
образуя полустациопарный станок (рис. 11.12, г).
Рис. 11.12. Способы резки металлов абразивными кругами
Для обрезки труб с одновременным снятием фаски под сверку
выпускается серия труборезов типа ПТВ, которая охватывает диапа-
зон труб диаметром 16 -ь 108 мм с толщиной стенки до 10 мм. Эти
труборезы имеют механизм крепления на трубе, планшайбу с резцами
и механизмами их автоматической подачи и вращения планшайбы
и электродвигатель.
Для резки труб больших диаметров (свыше 108 мм) следует приме-
нять электротруборез ИЭ-6302, производящий разделительную резку
методом обкатывания вокруг трубы, а при необходимости снятия фаски
применяют кромкорезы.
Процесс зачистки. Производительность выполнения той или иной
зачистной операции зависит от двух основных факторов: 1) правиль-
ного выбора ручной машины и инструмента к ней; 2) правильных
приемов работы ручной машины.
При зачистке металлической поверхности плоскость абразивного
круга должна находиться под углом 15—40° к ней. От угла наклона
круга зависит чистота обработки: чем больше угол, тем выше произ-
водительность и меньше износ круга, но ниже чистота обработки.
Исходя из этого, следует начинать работу с углом наклона 30—40°,
а окончательную доводку поверхности производить при угле 15—20 .
В процессе работы оператор должен совершать сложное движение:
наряду с перемещением машины вдоль обрабатываемой поверхности
осуществлять вспомогательные круговые движения.
309
Для зачистных операций надо выбирать круги возможно большего
диаметра, допустимого для данной машины, так как они способствуют
меньшим физическим затратам оператора на направление и удержи-
вание шлифовальной машины на обрабатываемой поверхности. Поло-
жение оператора в процессе работы обуславливается степенью доступа
к обрабатываемым поверхностям и их расположению.
Зачистку корня сварного шва можно производить прямой и угло-
вой шлифовальными машинами, при этом толщина круга должна быть
на 1 —1,5 мм меньше, чем зазор между свариваемыми деталями. Крут
устанавливают под углом 90е к обрабатываемому шву. Зачистку
производят периферией круга. Обработку корня также, как и за-
чистку сварных швов, ведут участками 200—300 мм послойно.
При правильной работе шлифовальными машинами можно достиг-
нуть следующих показателей: 1) производительность — время
шлифования 1 м шва — в нижнем положении 6—8, в горизонталь-
ном — 10 и потолочном — 15 мин; 2) износ абразивного круга диа-
метром 230 мм, толщиной 3,8 мм — послешлифования 30м шва, а круга
диаметром 180 мм, толщиной 6,5 мм — 18 м шва; 3) рост производи-
тельности при шлифовании абразивными армированными кругами
по сравнению с вырубкой корня шва зубилом — в 2—3 раза.
На производительность и износ кругов значительно влияет тип
привода. При одной и той же мощности двигателя и угловой скорости
производительность машин с электрическим приводом в 1,5—2 раза
выше, чем у машин с пневматическим приводом, но при этом износ
(удельный) кругов у машин, работающих с электрическим приводом,
в 2—2,5 раза выше, чем пневматических. Это объясняется особеннос-
тями механических характеристик двигателей привода. Электрические
машины, имея жесткую характеристику при увеличении нагрузки на
двигатель, почти не меняют частоты вращения; при работе с пневмати-
ческим двигателем, у которых полумягкая характеристика, частота
вращения с нагрузкой падает, что приводит к снижению производи-
тельности и резкому увеличению износа. Эта особенность имеет боль-
шое значение, так как 80% стоимости работ этими машинами прихо-
дится на затраты абразивного материала.
Потребляемую мощность (кВт) двигателя при шлифовании пери-
ферией круга можно приближенно определить по следующим зависи-
мостям (при Q в кгс или Н)
^ = ^02^ ИЛИ N~ 10^1021)’
где Q — усилие прижима круга к материалу, Н; v — окружная ско-
рость, м/с; f — коэффициент трения (при обдирке стали его прини-
мают равным 0,4—0,6); ц — КПД механизма.
При шлифовании торцом круга
N — —— Оf pi~-
2925ц**' D--#’
где п частота вращения, об/мин; D и d — соответственно наружный
и внутренний диаметры круга, мм.
ЗЮ
Производительность шлифовальных машин при зачистных работах
зависит от количества проходов k, необходимых для зачистки, от
скорости перемещения машины &п и от ширины площадки зачистки Ъ:
П- = vrb!(k 60), м2/мин.
При зачистке сварного шва, снятии фаски или резании
77 г = v/(k 60), м/мин.
При определении потребности в абразивных армированных кругах
для выполнения операций определенного объема необходимо знать
коэффициент абразивной способности (7Q применяемых кругов, он
равен отношению объема изношенной части абразивного круга к объе-
му снятого материала с обработанной поверхности. Для выпускаемых
в настоящее время кругов К — 0,67.
Количество зачистных кругов, необходимое для выполнения дан-
ного объема работ,
«з = КмК/Укр,
где Км — объем металла, подлежащего снятию в результате обработки;
Ккр— рабочий объем круга.
Для определения потребности в отрезных кругах в качестве ис-
ходных данных можно использовать площадь поверхности металла SM,
подлежащую обработке, и площадь рабочей части круга SKp. Тогда
количество отрезных кругов, необходимое для выполнения данного
объема работ,
По = 5,Л/5кр.
Производительность при резании шлифовальными машинами стали
СтЗ толщиной 10 мм составляет в среднем до 14 пог. м/мин. Один
круг, армированный стеклосеткой, диаметром в 230 мм может разре-
зать такого металла 100 пог. м/мин.
§ 11.5. МАШИНЫ ДЛЯ РЕЗКИ МЕТАЛЛА
При выполнении кровельных, медницких, жестяницких, сантех-
нических и других работ в строительстве и на монтаже прямолинейную
и фасонную резку листового металла толщиной до 4 мм осуществляют
электро- и пневмоножницами.
Ножницы бывают: ножевые, вырубные, кромкорезы, прорезные
п дисковые. Наиболее часто в практике монтажных работ применяют
первые три типа.
Ножевые ножницы. Режущие механизмы ножевых ножниц выпол-
няются по аналогичным схемам (рис. 11.13 и 11.14). Различие состоит
в конструктивном исполнении отдельных деталей и их взаимном рас-
положении. Режущим инструментом в ножницах являются вставные
ножи, изготовляемые из термообработанной стали марок У8А,
Х12Ф1, Р18. В работе принимают участие два ножа: нижний /, уста-
111
новленный неподвижно на улитке 2, и верхний 3 — подвижный, закреп-
ленный в ползуне 4, совершающем возвратно-поступательное движе-
ние относительно направляющей втулки 5 (рис. 11.14).
Зазор между ножами определяется в зависимости от толщины
разрезаемого металла:
Толщина разрезаемого металла, мм
0,4
0.5—0,8
1,0—1,3
1,6-2,0
2,0—3,0
Зазор между ножами, мм
0,024—0,076
0,076—0,127
0,06—0,08
0,1—0,13
0,12—0,18
Наибольшее значение для работы ножевых ножниц имеет угол
между поверхностью (передней гранью) неподвижного ножа и линией
движения ползуна с подвижным ножом. Наиболее распространенное
Рис. 11.13. Режущая часть ножниц
без улитки
Рис. 11.14. Режущая часть ножниц
с улиткой
к линии подвижного показано на
положение неподвижного ножа
рис. 11.13. Здесь угол р — 10°. Однако эти ножницы имеют неко-
торые недостатки. Так как линия движения подвижного ножа пер-
пендикулярна к оси двигателя (т. е. к продольной оси машины),
а разрезаемый материал должен находиться в плоскости передней
грани неподвижного ножа, то в процессе работы ножницами их
необходимо вести по разрезаемому материалу с наклоном назад. При
работе ножницами без рукоятки может возникнуть опасность трав-
мирования рук оператора о разрезаемый материал. Другим не-
достатком является наклонное положение неподвижного ножа, благо-
даря чему появляется составляющая усилия резания, которая
стремится вытолкнуть разрезаемый материал из-под ножей, поэтому
оператору приходится увеличивать усилие подачи.
Схема ножниц, изображенная на рис. 11.14, не имеет таких не-
достатков, так как передняя грань нижнего неподвижного ножа
установлена на улитке под углом 90° относительно линии движения
подвижного ножа.
Наибольшая производительность ножевых ножниц
j-. K(2e—f)n ,
П ~~ loco tg р ’ м/мин>
312
где е — эксцентриситет эксцентрикового вала, мм; f — общая дефор-
мация деталей механизма головки, мм (принимается f яз 1,1 деформа-
ции улитки); р — угол между режущими кромками ножей в вертикаль-
ной плоскости; К — коэффициент, учитывающий невозможность ис-
пользования оператором усилия подачи вследствие физиологических
факторов и упругой деформации отрезаемой полосы {К = 0,7 ч- 0,9).
Затруднение усилия подачи вследствие упругих деформаций раз-
резаемого листа происходит по следующим причинам.
Рис. 11.15. Работа кромкорсзом при различных формах обрабатываемых изделий
В процессе наладки ножевых ножниц ножи устанавливают так,
что при крайнем верхнем положении пуансона кромка подвижного
ножа находится на 0,5—1 мм ниже поверхности неподвижного, т. е.
ножи частично перекрываются. Если этого не сделать, то в процессе
работы могут происходить удары верхнего ножа о нижний. Так как
разрезаемый материал имеет какую-то толщину, то его поверхность
находится выше середины подвижного ножа, который при резке сги-
бает отрезаемую полосу. Вследствие этого полоса получает упругую
деформацию. При движении ножа после рабочего хода вверх полоса
пружинит и следует за ним, поэтому ножницы можно подать вперед
по направлению реза на значительно меньшую величину хода, чем
расчетная, при этом снижается производительность работы.
Вырубные ножницы имеют пуансон и матрицу специальной формы.
При резке вырубными ножницами достигают наименьшего радиуса
(50 мм) вырезаемого контура. Они выполняются различных кон-
струкций и отличаются от ножевых ножниц тем, что допускают пово-
11 М. II. Гальперин 313
рот направляющей пуансона (кронштейна) вокруг своей оси. Благо-
даря этому можно осуществить резание под различными углами,
что облегчает работу в труднодоступных местах. Кромкорезы
(рис. 11.15) применяют для снятия фасок с толстых металлических
листов и труб, например при подготовке кромок под сварку. Они
позволяют получать фаску до 10—15 мм (по гипотенузе). На рис. 11.15
показана работа с кромкорезом при различных формах обрабатывае-
мых изделий.
Кромкорезами обрабатываются листы, расположенные горизон-
тально (рис. 11.15, а), вертикально (рис. 11.15, б), при невозможности
его перевернуть (рис. 11.15, а); вогнутые (рис. 11.15, а); выпуклые —
при обработке труб (рис. 11.15, б) и колец (рис. 11.15, е), при этом
кромкорез можно закреплять на специальной стойке.
§ 11.6. МАШИНЫ ДЛЯ СБОРКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ
Значительные объемы работ по сборке резьбовых соединений
на строительных и монтажных работах приходится осуществлять:
при монтаже металлоконструкций, трубопроводов; при креплении
технологического оборудования к основаниям и фундаментам; при
соединении элементов из сборного железобетона.
Основными операциями при сборке резьбовых соединений являют-
ся: навертывание резьбового соединения (гайки или болта), затяжка
и в ряде случаев контроль затяжки.
Трудоемкость сборки резьбовых соединений обуславливается сле-
дующими факторами: растянутостью фронта работ; отсутствием у
монтажника постоянного рабочего места; стесненностью при работе
в труднодоступных местах; трудностью контроля затяжки; зависимо-
стью от климатических условий; повышенными требованиями техники
безопасности.
По сравнению с машиностроительными предприятиями, где мон-
тируемые изделия подают к определенному месту сборки (рабочему
месту), которое оснащается специальным инструментом, например
сборочными агрегатами, производство строительных и монтажных
работ ведется по принципиально иной технологии: рабочий переме-
щается вдоль металлоконструкции, трубопровода и т. п. Такая спе-
цифика лишает возможности устройства стационарных и полуста-
ционарных мощных и эффективных устройств, обеспечивающих рост
производительности труда.
На рис. 11.16 приведена классификация некоторых видов узлов,
монтируемых при помощи резьбовых соединений. Трудоемкость
сборки зависит от типов фланцев и величины расстояния Т.
Основным условием надежной работы резьбового соединения явля-
ется такая его затяжка, при которой обеспечивается надлежащая
плотность стыка. Как правило, резьбовые соединения собирают
с предварительной затяжкой. Основными факторами, влияющими на
стабильность предварительной затяжки, являются тип соединения и
качество рабочих поверхностей деталей, соединения-.
314
11*
Резьбовые соединения разделяются на следующие типы: 1) соеди-
нения в металлоконструкциях, где болты работают на срез, при этом
необходима такая величина усилия предварительной затяжки, при
которой бы между несущей поверхностью и сопрягающимися элемен-
тами резьбового соединения возникли силы трения, препятствующие
самоотвинчиванию; 2) фрикционные соединения, в которых усилие
предварительной затяжки кроме самоотвинчивания должно обеспе-
чить необходимое сжатие сопрягаемых деталей, а также предохранение
болтов от изгибающих и срезающих усилий при знакопеременных
нагрузках; 3) соединения, в которых болты воспринимают внешнюю
осевую нагрузку.
Предварительная затяжка производится с усилием, зависящим от
внешних сил, действующих на соединения, и от жесткости собираемых
деталей.
При приложении к болту усилия Qc стержень резьбового соединения
(болт, шпилька) удлиняется на величину бб, а собираемые детали
сжимаются на величину бд. Задаваемая величина предварительной
затяжки Q6 учитывает величины этих деформаций.
Для затяжки резьбового соединения к гайке или головке болта
должен быть приложен крутящий момент М = PL, где Р — сила,
прикладываемая к ключу; L — длина ключа. Этот момент должен
создать силу Q6, действующую вдоль оси болта, но не должен допускать
возникновения в нем напряжения выше расчетных, чтобы не прои-
зошло ослабления болта. Момент М в процессе затяжки резьбового
соединения преодолевает не только силу Qc, но также силу трения
в резьбе и силу трения между торцевой поверхностью соединяемых
деталей и торцевой поверхностью гайки или головки болта.
Для определения величины необходимого крутящего момента Л1кл
(момент на ключе) для резьбового соединения с углом на вершине
профиля 60° пользуются зависимостью
Л1КЛ = Q [(0,16s -1- 0,58 dcpp) + ро],
где Q — осевое усилие; s — шаг резьбы; dcp — средний диаметр резь-
бы; р — коэффициент трения фрикционной пары болт — гайка; ро —
коэффициент трения по опорной поверхности гайки;
DT 1|d3—dol й
-- = — ——у —для наиболее часто встречающейся плоской
кольцевой поверхности при равномерном распределении давлений,
где D и do — наружный и внутренний диаметры опорной кольцевой
поверхности.
В практических условиях коэффициенты р и ро приравнивают и
заменяют приведенным коэффициентом р„р = р = р0, тогда
Л1КЯ = Q [0,16s + рпр (0,58 ?2Т)].
Из этой зависимости следует, что часть работы, при заверты-
вании тратится на преодоление трения в резьбе и на торце гайки.
Величина этих потерь непостоянна и зависит от смазки и т. д. Поэтому
осевая сила, возникающая вдоль оси болта, а следовательно, и вытяжки
316
болта, при одном и том же прикладываемом моменте может быть
различной.
На основе опытных данных средние величины необходимых кру-
тящих моментов для затяжки резьбовых соединений зависят от ди-
аметра резьбы и материала болта. На рис. 11.17 приводятся кривые
крутящих моментов, необходимых для затяжки. Из рисунка видно,
что даже для стали СтЗ при диаметре болта 20 мм требуется момент
500 Н-м. Для получения такого момента при длине ключа L — 0,044 м
нужно приложить усилие 1200 Н, а рабочий может фактически раз-
вивать усилие 200—300 Н, поэтому завертывание гаек диаметром
более 20 мм обычными ключами требует специальных удлинителей
и их завертывание мало производительно. Завертывание таких гаек
следует осуществлять при
помощи гайковертов или
специальных устройств.
Однако и завертывание
резьбовых соединений
меньшего диаметра следует
производить при помощи
гайковертов, так как это
более производительно.
В качестве ручных ма-
шин для сборки резьбовых
соединений применяют гай-
коверты. Их можно разде-
лить на два основных типа:
1) гайковерты, у которых
вращение двигателя пере-
Рис. 11.17. Величины крутящих моментов, не-
обходимых для затяжки резьбовых соединений:
ДаеТСЯ Через редуктор Не- / _ дЛИ стали СтЗ: 2 — для стали 35; 3 — для
посредственно шпинделю с,али 40Х
машины; величина момента,
действующего на резьбовое соединение, при заданной мощности и
заданной частоте вращения двигателя зависит от передаточного числа
редуктора. В этих гайковертах момент меняется по мере затяжки
гайки и достигает максимального значения в конце затяжки; 2) гайко-
верты с удар но-импульсным преобразователем момента. В этих гайко-
вертах непрерывное вращательное движение двигателя преобразовы-
вается в периодические удары по шпинделю.
Крупным недостатком первой группы гайковертов является то,
что рабочий должен воспринимать большой реактивный момент, воз-
никающий в конце затяжки. Кроме того, для получения повышенных
крутящих моментов необходимы редукторы с большими передаточ-
ными числами, что увеличивает массу гайковертов. Поэтому такие
гайковерты применяются для затяжки резьбовых соединений диамет-
ром только до 12 мм. Остальные резьбы затягиваются гайковертами
ударно-импульсного действия. Их выполняют как с электрическим,
так и с пневматическим двигателем. Имеются гайковерты с реверсив-
ным движением, ими можно завертывать и развертывать резьбовые
соединения.
317
Главным параметром гайковерта является крутящий момент,
развиваемый гайковертом. В настоящее время выпускаются гайковер-
ты с электроприводом с крутящим моментом 50—350 Н-м, мощностью
120—600 Вт и пневматические 63—8000 Н-м, расход воздуха 0,7—
2,8 м3/мин. Масса соответственно 3—24 кг и 1,9—31,5 кг.
Рис. 11.18. Гайковерт с насадками:'
а — гайковерт; б — удлинитель (горсион); в — шарнирный переходник* г—сменная головка;
д — угловой переходник
На рис. 11.18 показана одна из конструкций гайковертов. Вал
электродвигателя приводит во вращательное движение ведущий вал
ударного механизма. На валу ударного механизма имеются винтовые
канавки, в которых помещены шарики. На валу установлен ударник,
приводимый во вращательное движение шариками. Внутри ударника
помещена пружина, которая упирается в упорный подшипник, упи-
318
рающийся в свою очередь в буртик вала. В нижний конец шейки вала
входит наковальня, в отверстие наковальни помещена пружина;
одним концом опа упирается в торец вала, а вторым — в торец отвер-
стия наковальни. Наковальня может перемещаться относительно
корпуса при преодолении усилий возвратной пружины и вращаться
в подшипнике, установленном в корпусе.
Если не нажимают на инструмент, то наковальня занимает нижнее
положение под действием возвратной пружины. В этом положении
кулачки ударника разомкнуты. При небольшом нажиме на инстру-
мент кулачки замыкаются. При завинчивании гайки с правой резьбой
все элементы, кроме корпуса и подшипника, вращаются совместно.
При этом гайка навинчивается так, как она навинчивалась бы
непрерывно-силовым гайко-
вертом..
Когда торец гайки начи-
нает соприкасаться с корпу-
сом и увеличивается сопро-
тивление заворачиванию, на-
ковальня начинает оказывать
все большее сопротивление
ударнику, скорость ее враще-
ния падает и оиа тормозит
ударник. Так как ведущий
вал продолжает вращаться, то
он свинчивается с ударником,
сжимая рабочую пружину, и
его кулачок выходит из за-
цепления с кулачком нако-
вальни. Как только кулачки
выходят из зацепления, удар-
ник увлекается валом и вра-
щается вместе с ним, угловая
Рис. 11.19. Ключ-мультипликатор
скорость ударника возрастает. В это
время рабочая пружина перемещает ударник так, что кулачки ударника
попадают во впадину между кулачками остановленной наковальни и
происходит ударение кулачков. Затем этот цикл повторяется. Энергия
последующих ударов возрастает ввиду уменьшения податливости
затягиваемого резьбового соединения. После определенного коли-
чества ударов сила удара становится недостаточной для дальнейшей
затяжки и процесс затяжки фактически прекращается.
Гайковерт снабжается наконечниками (рис. 11.18, а) для гаек
различных размеров. Для завертывания резьб в труднодоступных
местах применяют удлинители (рис. 11.18, б), шарнирные и угловые
переходники (рис. 11.18, в, д).
Для сборки и разборки резьбовых соединений в труднодоступных
местах и резьб большого диаметра инж. Кривомазовым В. И. созданы
и выпускаются ключи-мультипликаторы. Такой механизм (рис. 11.19)
состоит из корпуса 2 с опорным кронштейном (реактивным рычагом) 5,
входного эксцентрикового вала 1 и планетарного редуктора, сателлит 3
которого является одновременно выходным валом механизма. На его
319
шестигранном конце при помощи винта 6 крепятся сменные головки 4.
Принцип действия мультипликатора заключается в том, что момент М,
создаваемый ручным ключом на головке эксцентрикового вала 1 пере-
дается сменной головке 4, одеваемой на завертываемую гайку через
планетарный редуктор с большим передаточным числом I, благодаря
чему крутящий момент Мх на головке 4 получается значительно
больше, чем момент М, создаваемый усилием рабочего.
Величина момента
Mi —Mit],
Рис. 11.20. Схема завертывания гаек гидравли-
ческим ключом
где т] — КПД редуктора.
Такие мультипликаторы делают на различные моменты затяжки
70 -=- 800 кгс-м (700 ч- 8000 Н-м). Для больших моментов они при-
водятся во вращение не ручным ключом, а гайковертом. Реактивные
силы в таких устройствах воспринимаются корпусом ключа через
кронштейн, который в про-
цессе работы упирается в
соседнюю гайку, болт или
любой элемент собираемой
конструкции.
Для завертывания гаек
большого диаметра (более
40 мм) широкое применение
получили за рубежом гид-
равлические ключи, прин-
цип работы которых пока-
зан на рис. 11.20. На за-
вертываемую гайку уста-
навливается ключ 5 с приваренной к нему гребенкой. В пазы гребенки
упирается шток 4 гидроцилиндра 3. Последний закреплен на крон-
штейне 2, конец 6 которого надевается па одну из соседних гаек. К крон-
штейну прикреплен упор 1, который также упирается в одну из гаек.
При подаче жидкости в полость А гидроцилиидра шток перемещается
по стрелке Б, поворачивая гребенку с ключом, в результате чего гайка
заворачивается под действием момента М, равного Р1. Для того чтобы
сократить время на перемещение штока, после поворота на угол а.
шток упирается в следующий выступ гребенки и цикл повторяется.
Если для затяжки гаек недостаточен угол поворота, который дости-
гается за один ход штока, то шток снова возвращается в исходное
левое положение, ключ снимается, ставится в исходное положение
и цикл повторяется.
Подача масла в шток гидроцилиидра осуществляется от гидро-
станции. Величина силы Р зависит от площади поршня и давления
в цилиндре. По этому давлению контролируют величину создаваемого
усилия, а также момента для завертывания гайки.
Для завертывания гаек диаметром более 60 мм применяют метод
затяжки предварительной вытяжкой болта на ту величину, на которую
его должна была бы растянуть гайка при завертывании.
320
резьбовых соединениях,
несущих
требуется
Рис. 11.21. Схема гидравлического устрой-
ства для затяжки резьбовых соединений ме-
тодом вытяжки
На рис. 11.21 показана схема такого устройства. На болт 1 предва-
рительно навертывается гайка 2. На выступающую часть болта на-
вертывается втулка 3, торцевая поверхность которой упирается
в шток 4 гидроцилиидра 5. Через отверстие а масло подается в гидро-
цилиндр. При поднятии штока 4 болт вытягивается на необходимую
величину.
После вытяжки болта гайка 2 затягивается до упора, открывается
отверстие слива масла, болт стремится вернуться в первоначальное
положение, но его натяжение удерживается гайкой 2. Подача масла
осуществляется насосом 6, масло поступает из бачка 7. Величина уси-
лия натяжения контролируется манометром 8.
Контроль усилия затяжки резьбовых соединений. Во многих слу-
чаях при монтаже металлоконструкций трубопроводов,
конструкций, соединяемых на
контроль затяжки резьбовых
соединений. Существующие
методы контроля можно раз-
делить на три группы: по
удлинению болта; по углу
поворота гайки; по крутя-
щему моменту.
Принято считать, что наи-
большая точность достигается
при контроле по удлинению
болта. Однако этот способ
очень трудно применить, так
как чаще всего нельзя раз-
местить измерительные скобы
между торцевыми поверхно-
стями болта (рис. 11.22, а, б).
Замер величины удлинения не по торцевым поверхностям, а по из-
менению расстояния между одной из торцевых поверхностей болта
и одной из опорных поверхностей (рис. 11.22, в) более удобен, но при
этом способе на точность замера влияет деформация стягиваемых де-
талей, а также погрешности при измерении.
Точность замера при всех этих способах зависит в одном случае от
погрешности при изготовлении болта, во втором случае от погрешностей
замера (т. е. от допуска на мерительный инструмент).
На рис. 11.22, а приводятся широко применяемые, особенно за
рубежом, средства контроля при помощи промежуточных элементов —
шайб. В этом случае так же, как и при замере по удлинению, значи-
тельное влияние оказывает точность замера сравнительно малого
зазора, а также величина ошибки при тарировке шайбы.
Широко пользуются способом замера динамометрическими и пре-
дельными ключами (рис. 11.22, 5). Динамометрические ключи основа-
ны па принципе замера деформации предварительно оттарировапного
стержня. Ими можно замерять моменты в установленных пределах.
Предельные ключи основаны па принципе «излома» рукоятки при
достижении необходимого момента. Они также тарируются на вели-
321
чину определенного момента. Применяют также способы проверки
величины затяжки по углу поворота гайки. Для этого производится
Рис. 11.22, Методы и средства контроля затяжки резьбовых соединений
предварительная тарировка измерительного диска по углу поворота
гайки (рис. 11.22, ё).
Оправка пиротехническая применяется для закрепления при по-
мощи дюбелей крепежных деталей в бетоне, кирпиче, шлакобетонных
основаниях и металлических конструкциях для последующего мон-
тажа на этих крепежных деталях элементов электрических проводок,
322
трубопроводов, кронштейнов и т. д, Оправки работают на принципе
использования энергии пороховых газов, которые с большой силой
выталкивают дюбель из ствола, забивая его в материал основания.
Большим достоинством такой оправки является то, что для ее работы
не нужно подводить электроэнергию или сжатый воздух.
Конструкция пиротехнической оправки (рис, 11.23) состоит из
корпуса, в котором движется зарядный шток 1. В торце корпуса
размещен ударник 3. Патрон 2 установлен в зарядном штоке. Рабо-
тает оправка следующим образом: при ударе молотком по зарядному
штоку ударник ударяет по капсулю патрона, воспламеняя порох.
Пороховые газы давят на поршень 4, последний перемещается вместе
с ударником 3 и выталкивает дюбель. Для таких оправок выпускаются
патроны различной мощности. Работа, развиваемая при сгорании
пороха, зависит от калибра патрона и колеблется от 400 до 3000 кгс • м
(40 -г- 300 Н-м).
§ 11.7. МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВА
При обработке дерева ручные машины применяют для выполнения
следующих операций: распиливания, долбления отверстий, строжки,
шлифовки, сверления. Как правило, все эти механизмы приводятся
в движение электрическим приводом.
Рис. 11.24. Дисковая электропила по дереву:
1 — электродвигатель; 2 — редуктор; 3 — пила; 4 — кожух; 5 — основание
Для сверления дерева применяются те же машины, что и для
сверления металла.
Для распиливания пиломатериалов толщиной до 60 мм применяют
дисковые электропилы (рис. 11.24). Электродвигатель смонтирован
на специальном основании, которое может легко перемещаться по
обрабатываемому материалу. Глубина пропила зависит от диаметра
пильного диска и регулируется подъемом или опусканием двигателя
относительно поверхности основания. Основание электропилы может
устанавливаться под углом к оси двигателя, при этом производится
распиловка древесины под углом.
323
Пилы оборудуют подвижными подпружиненными предохранитель-
ными кожухами. В зависимости от конструкций эти пилы бывают
с редуктором или без редуктора. Диаметр
пил колеблется от 160 до 200 мм, при этом
скорость резания составляет 25—30 м/с,
а мощность — 0,5—0,8 кВт.
Основным недостатком дисковых пил
является то, что диаметр пилы должен
в три раза превышать глубину прореза-
ния, поэтому для большой глубины тре-
буются очень большие диаметры пильных
дисков, которые должны устанавливаться
па стационарных станках, что не всегда
удобно в условиях строительной площадки.
Для поперечной распиловки лесомате-
риалов применяют цепные пилы (рис. 11.25).
Рис. 11.25. Цепная электропила:
I — выключатель; 2 — вертикальная трубка; 3 — ведомая звездочка; 4 — пильная цепь;
5 — ведущая звездочка; б — электродвигатель; 7 — рукоятка
Эти пилы выполняют с электродвигателем или с двигателем внут-
реннего сгорания. Рабочим органом служит непрерывная цепь, на
которой закреплены резцы. Цепь, установленная на направляющей
7
Рис. 11.26. Электрорубанок:
/ — электродвигатель; 2 — кожух; 3 — рукоятка; 4 — выключатель; 5 — плита; б — на-
правляющие; 7 — Ножевой барабан; 8 — ротор
шине, приводится в движение звездочкой, закрепленной на редук-
торе. Скорость резания равна 5—6 м/с, масс,а 9—19 кг, мощность
привода 1—1,5 кВт.
324
Для строжки древесины применяют элсктрорубанки (рис. 11.26),
в которых приводом служат электродвигатели однофазные с двойной
изоляцией и трехфазные асинхронные с короткозамкнутым ротором.
Ротор выполнен в виде барабана с ножами.
Электрорубанок можно устанавливать па верстаке в перевернутом
положении, что позволяет использовать его как настольный строгаль-
ный станок. Скорость резания составляет 18—35 м/с, мощность 0,3—
0,6 кВт.
Рис. 11.27. Электродолбежиик
При выполнении столярных работ в строительстве часто приходится
делать в дереве выемки и пазы. Для этой цели служат электродолбеж-
пики (рис. 11.27). Рабочим органом является бесконечная цепь с рез-
цами 5, приводимая в движение от электродвигателя 2 через ведущую
звездочку /. Электродвигатель вместе с цепью установлен на двух
вертикальных направляющих 6, что дает возможность заглублять
рабочий орган в материал. Подъем и опускание производятся рычаж-
ной системой 3. Для включения и выключения служит выключатель 4.
Наибольшая глубина долбления составляет 160 мм, сечение вырубае-
мого паза 20 х 60 мм, мощность 0,8 кВт, масса 10—21 кг.
Контрольные вопросы
1. Что такое ручная машина?
2. Какие приводы бывают в ручных машинах? Достоинства и недостатки этих
приводов.
3- Опишите механизмы включения и выключения ручных машин.
4. Что такое ударно-импульсный механизм?
5. Приведите классификацию ручных машин по конструктивным схемам.
6. Опишите схемы машин для резки металла и зачистки сварных швов.
7. Опишите принцип работы гайковертов.
Пилы оборудуют подвижными подпружиненными предохранитель-
ными кожухами. В зависимости от конструкций эти пилы бывают
с редуктором или без редуктора. Диаметр
пил колеблется от 160 до 200 мм, при этом
скорость резания составляет 25—30 м/с,
а мощность — 0,5—0,8 кВт.
Основным недостатком дисковых пил
является то, что диаметр пилы должен
в три раза превышать глубину прореза-
ния, поэтому для большой глубины тре-
буются очень большие диаметры пильных
дисков, которые должны устанавливаться
па стационарных станках, что не всегда
удобно в условиях строительной площадки.
Для поперечной распиловки лесомате-
риалов применяют цепные пилы (рис. 11.25).
Рис. 11.25. Цепная электропила:
— выключатель; 2 — вертикальная трубка; 3 — ведомая звездочка; 4 — пильная цепь;
5 — ведущая звездочка; б -* алектродингатель; 7 — рукоятка
Эти пилы выполняют с электродвигателем или с двигателем внут-
реннего сгорания. Рабочим органом служит непрерывная цепь, иа
которой закреплены резцы. Цепь, установленная на направляющей
Рис. 11.26. Электрорубанок:
/ — электрод питатель; 2 — кожух; 3 — рукоятка; 4 — выключатель; 5 — плита; б —- на-
правляющие; 7 — ножевой барабан; .Я — ротор
шине, приводится в движение звездочкой, закрепленной на редук-
торе. Скорость резания равна 5—6 м/с, масса 9—19 кг, мощность
привода 1—1,5 кВт.
324
Для строжки древесины применяют электрорубапки (рис. 11.26),
в которых приводом служат электродвигатели однофазные с двойной
изоляцией и трехфазные асинхронные с короткозамкнутым ротором.
Ротор выполнен в виде барабана с ножами.
Электрорубанок можно устанавливать на верстаке в перевернутом
положении, что позволяет использовать его как настольный строгаль-
ный станок. Скорость резания составляет 18—35 м/с, мощность 0,3—
0,6 кВт.
Рис. 11.27. Электродолбежиик
При выполнении столярных работ в строительстве часто приходится
делать в дереве выемки и пазы. Для этой цели служат электродолбеж-
иики (рис. 11.27). Рабочим органом является бесконечная цепь с рез-
цами 5, приводимая в движение от электродвигателя 2 через ведущую
звездочку 1. Электродвигатель вместе с цепью установлен на двух
вертикальных направляющих 6, что дает возможность заглублять
рабочий орган в материал. Подъем и опускание производятся рычаж-
ной системой 3. Для включения и выключения служит выключатель 4.
Наибольшая глубина долбления составляет 160 мм, сечение вырубае-
мого паза 20 X 60 мм, мощность 0,8 кВт, масса 10—21 кг.
Контрольные вопросы
I. Что такое ручная машина?
2. Какие приводы бывают в ручных машинах? Достоинства и недостатки этих
приводов.
3. Опишите механизмы включения и выключения ручных машин.
4. Что такое ударно-импульсный механизм?
5. Приведите классификацию ручных машин по конструктивным схемам.
б. Опишите схемы машин для резки металла и зачистки сварных швов.
7. Опишите принцип работы гайковертов.
ГЛАВА 12
МАШИНЫ ДЛЯ ОТДЕЛОЧНЫХ РАБОТ
Основными операциями при штукатурных работах являются:
1) приготовление раствора. Чаще раствор приготовляется на заводах
и в готовом виде доставляется на стройку. При небольших объемах
работ или большом расстоянии от растворного завода раствор готовят
непосредственно на строительных участках. Для приготовления
раствора служат растворосмесители (см. гл. X); кроме того, раствор
приготовляют непосредственно в сопле — устройстве для нанесения
его на поверхность; 2) подача раствора к месту его нанесения с помощью
растворонасосов (см. гл. X); 3) нанесение раствора на стены и потолки
с помощью различных сопловых устройств; 4) затирка поверхностного
слоя, которая производится с помощью затирочных ручных машин.
Для штукатурных работ применяют обычно известково-песчаные
растворы и сложные растворы с добавками глины, цемента или деко-
ративных примесей. На транспортирование, нанесение и затирку
раствора значительное влияние оказывает его жесткость. Лучшее
транспортирование достигается при меньшей жесткости раствора,
однако для нанесения и затирки требуется такая жесткость, при
которой раствор не оползал бы со стен. На основе опытных данных
найдено, что при трехслойной штукатурке для первого слоя применяют
раствор по конусу СтройЦНИла 9—12, а для последующих — 7—9.
§ 12.1. СОПЛОВЫЕ УСТРОЙСТВА
При нанесении раствора соплом необходимо, чтобы при соударении
раствора со стеной сила удара обеспечивала надежное сцепление
с поверхностью. Для этого скорость струи на выходе из сопла должна
быть больше скорости в трубопроводах, подающих раствор.
Размер выходного отверстия сопла подбирают так, чтобы при
известной производительности растворонасоса можно было получить
необходимую скорость раствора на выходе из сопла. Так как раство-
ронасос подает раствор на разные этажи, то скорость в трубопроводах
различна. Иногда приходится одно и то же сопло применять с растворо-
насосами разной производительности. Поэтому сопло должно иметь
устройство, позволяющее регулировать выходное отверстие сопла,
а следовательно, и скорость истечения раствора.
Сопловые устройства для нанесения штукатурных растворов
разделяются на две основные группы: воздушные и безвоздушные.
В воздушные сопловые устройства подается раствор и сжатый
воздух, который при выходе из сопла распыляет раствор, а в безвоз-
душные подается только раствор под давлением.
Безвоздушные сопла просты по конструкции и для работы не тре-
буют компрессора. Однако при этом способе не достигается распыление
326
струи раствора, вследствие чего раствор наносится неравномерно;
это усложняет затирку и не всегда обеспечивает высокое качество
поверхности, больше вероятность забивки (засорения) сопла.
Имеется несколько различных конструкций безвоздушных сопл.
На рис. 12.1, а показано одно из самых простых сопл. Здесь необ-
ходимая скорость истечения раствора достигается за счет формы сопла
(радиуса кривизны). Сопло не имеет регулятора размера выходного
отверстия, что является его недостатком.
На рис. 12.1, б показано прямоточное сопло, дающее плоский фа-
кел. Оно состоит из корпуса 3, выполняемого из капрона, головки 2
из волокнита, резиновой диафрагмы 1 (рис. 12.1, в) гребенчатого хвос-
товика 4.
Рис. 12.1. Сопла для нанесения растворов
В резиновой диафрагме имеются два отверстия, соединенные
прорезью. Такое сопло работает лучше, чем предыдущее, однако оно
сложнее по конструкции. Кроме того, резиновая диафрагма не обла-
дает достаточной надежностью и часто засоряется. Сопла с воздушным
распылением выполняют двух типов: с центральной подачей воздуха
и с кольцевой подачей воздуха. Сопла второго типа сложнее по кон-
струкции, но дают лучшее распыление раствора. В обоих видах сопл
регулирование скорости выхода раствора при постоянных размерах
выходного отверстия форсунок осуществляется изменением расхода
воздуха при помощи крана.
На рис. 12.1, г показано сопло с центральной подачей воздуха.
Оно состоит из форсунки 1, корпуса 2, трубки для подвода воздуха 3,
крана для регулирования подвода воздуха 4.
327
В корпусе имеется штуцер 5 для надевания шланга подвода раст-
вора.
На рис. 12.1, д приводится сопло с кольцевой подачей воздуха.
Оно состоит из форсунки 1, корпуса 2, штуцера 3 для надевания
шланга подачи раствора, колена 4, крана 5 и штуцера 6 для надевания
шланга подачи воздуха. Штуцер 3 ввернут в корпус так, что между ним
и корпусом остается кольцевое пространство, куда воздух попадает
из колена 4 и подается в форсунку через кольцевой зазор между кони-
ческим кольцом 7 и штуцером 3.
На рис. 12.1, е приводится сопло для папесепия торкрет-штукатур-
ки. В сопло подается не раствор, а сухая смесь с воздухом и через
другое отверстие подводится вода. В этой конструкции регулируется
только расход воздуха при помощи крана.
Качество нанесения раствора, а также его потери зависят от объем-
ного соотношения раствора и воздуха. Это соотношение зависит от
размера выходного отверстия. Практикой установлено, что на каж-
дый 1 м3 раствора должно подаваться не менее 4—5 м3 воздуха, при
этом давление должно быть не менее 5 кгс/см2 (0,5 МПа).
Распыление смеси в значительной степени зависит от размера
отверстия, которое обычно делается для давления воздуха 5 кгс/см2
(0,5 МПа) не более 5—6 мм.
Хорошее качество наносимого слоя зависит от расстояния между
выходным отверстием и поверхностью, на которую наносится раствор;
оно должно быть 40—60 мм, а также от угла наклона сопла, который
обычно составляет 60—90°. Кроме того, необходимо поддерживать
постоянное давление воздуха, так как при пониженном давлении
увеличиваются потери раствора.
§ 12.2. ЗАТИРОЧНЫЕ МАШИНЫ
Эти машины выполняют с электрическим и пневматическим приво-
дом. Помимо привода и рабочего органа в затирочных машинах имеется
редуктор, при помощи которого снижается частота вращения затироч-
ного диска. Кроме того, так как процесс затирки происходит при сма-
чивании поверхности, то к машинам подается вода.
С помощью затирочных машин можно выполнять механизированную
затирку штукатурного накрывочного слоя, затирку цементно-пес-
чаного раствора па поверхностях железобетонных панелей, шлифовку
прошпаклеванных поверхностей. Обрабатывают как горизонтальные,
так и вертикальные поверхности.
Одна из конструкций затирочных машин приводится на рис. 12.2, а.
Рабочий орган машины состоит из двух дюралевых дисков, помещен-
ных один внутри другого, которые вращаются с разной скоростью,
благодаря чему достигается почти одинаковая окружная скорость.
На поверхности дисков имеются накладки из войлока или другого
материала.
У конструкции, показанной на рис. 12.2, б, рабочим органом
является лопастной диск, обычно изготовляемый из алюминия, а на
поверхности лопастей также имеются войлочные накладки.
328
Рис. 12.2. Затирочные машины:
а — затирочная машина с электроприводом; / — большой диск; 2 — малый
диск; 3 — корпус; 4, 6 — зубчатые колеса; 5 — штуцер подачи воды; 7 — ру-
коятка; 8 — корпус электродвигателя; 9 — Электродвигатель; 10 — вентиля-
тор; б — затирочная машина с пневматическим приводом; 1 — рабочий
орган (диск); 2 — пневмопривод; 3 — лопасти; 4 — шланг подачи воды;
5 — рукоятка
Качество затирки зависит от скорости вращения диска и от
удельного давления на затираемую поверхность. Так как скорости
различны на разных расстояниях от центра диска, то скорость обычно..
329
подбирают по среднему значению, которое обычно принимают равным
6 -т- 10 м/с. Удельное давление, которое необходимо создать в про-
цессе затирки, зависит от состава раствора и от времени между нане-
сением раствора и его затиркой и выбирается в пределах 0,08 4-
— 0,12 кгс/см2 (0,012 МПа).
Производительность таких машин 30—50 м2/ч, мощность привода
0,1—0,12 кВт, частота вращения дисков 200—700 об/мин, масса 2,5—
4,0 кг.
§ 12.3. ОБОРУДОВАНИЕ И РУЧНЫЕ МАШИНЫ
ДЛЯ МАЛЯРНЫХ РАБОТ
Малярные работы являются трудоемкой операцией. В среднем
производительность даже при применении ручных машип не превы-
шает 15—20 м2/смен.
Малярные работы включают: подготовительные работы; покраску.
К подготовительным работам относятся: приготовление материа-
лов; нанесение шпаклевочного слоя и его зачистка; нанесение грунто-
вочного слоя.
Заготовка материалов для подготовительных и окрасочных работ
производится чаще всего в заготовительных цехах или колерных
Рис. 12.3. Установка для централизованного приготовления шпаклевок,
меловой пасты и замазок
мастерских. Приготовленная в колерных мастерских продукция до-
ставляется на стройку в бидонах. Часто такая продукция является
полуфабрикатом и дополнительно дорабатывается в малярных стан-
циях, которые делают инвентарными и передвижными.
На рис. 12.3 показана схема установки для централизованного
приготовления шпаклевок, меловой пасты и замазок. Мел загружается
в виде кучи 6 на паровые подогреватели 7. Частично подсушенный
мел, идущий на приготовление шпаклевок и меловой пасты, подается
ковшовым конвейером 5 и винтовым конвейером 3 в вертикальные
смесители 4, а затем в жерновые краскотерки 2. Готовая продукция
хранится в бункерах 1.
Для приготовления замазки мел с подогревателей перемещается
в сушилку 8, оттуда на барабан мелосеялки 9. Просеянный мел по-
дается ковшовым конвейером 10 в бункер 11, затем винтовой смеси-
330
Рис. 12.4. Инвентарная малярная станция
Рис. 12.5. Жерновая краскотерка:
1 — вал: 2, 3 — жернова; 4 — бункер; 5 — побудитель; б — электродвига-
тель; 7 — редуктор
331
Рис. 12.6. Роторная мелотерка
Рис. 12.7. Смесители:
а — двухвальный; 1 — рукоятка механизма выгрузки смеси; 2 — смесительные
валы; J — корыто; 4 — редуктор; 5 — электродвигатель; 6 — станина; б — пневмо-
эмульсатор; в — лопастной
332
тель 13, в который из бака 12 поступают жидкие добавки. Для хранения
готовой замазки служит бункер 14.
На рис. 12.4 приводится схема инвентарной малярной станции.
Она работает па полуфабрикатах, получаемых из централизованного
цеха, и предназначена для окончательного приготовления грунто-
вочных, шпаклевочных и красочных клеевых составов и нанесения их
на поверхности. Оборудование станции состоит из бака 1 для муки,
бачков 2 для полуфабрикатов, дозаторов воды 3, электроклееварки 4,
растворонасоса 5, бака готовой продукции 6, смесителя 7 и компрес-
сора 8.
Рис. 12.8. Аппарат для нанесения шпаклевочных составов:
а — бак: б — удочка
Широкое распространение получили передвижные малярные стан-
ции, представляющие собой фургон-прицеп к автомашине.
В тех и других станциях помимо устройств общего назначения
(компрессоры, растворопасо-
сы и др.) для приготовле-
ния малярных смесей нахо-
дят применение специальные
машины и механизмы: крас-
котерки, мелотерки, мешал-
ки.
На рис. 12.5 показана
жерновая краскотерка. Она
обеспечивает тонкость помола
0,02—0,035 мм. Такие крас-
котерки выпускаются двух
типоразмеров. Одна имеет
мощность 1,7 кВт. Произво-
дительность ее при изготов-
лении масляной и красочной
пасты достигает 60 кг/ч, а
при изготовлении клеевых
колеров — 100 кг/ч. Вторая
Рис. 12.9. Удочка безвоздушного распыления
333
имеет мощность 7 кВт и производительность соответственно 250 и
400 кг/ч.
Для помола мела при приготовлении колеров, шпаклевок и
замазок чаще применяют роторные мелотерки (рис. 12.6). Ими можно
перерабатывать как сухой, так и влажный мел. Куски мела загру-
жаются в воронку 1, откуда они попадают в корпус 3, внутри
которого вращается ротор 2. Мелу, попадающему на ротор, сооб-
щается большая окружная скорость, он попадает на отбойную
плиту 5 и измельчается. Кроме того, дополнительное измельчение
происходит в результате трения частиц мела о стенки ротора и друг
с другом. Измельченный мел под действием центробежных сил выпа-
дает через разгрузочный люк 6. Для очистки щелей ротора служит
скребок 7 с рукояткой 4.
Для перемешивания материалов применяются смесители разных
конструкций и пневмоэмульсаторы. На рис. 12.7, а показан двух-
вальный смеситель для приготовления замазки и шпаклевки. В нем
перемешивание происходит
при помощи двух валов,
вращающихся навстречу
друг другу с различными
скоростями. Производи-
тельность таких смесите-
лей 200—300 кг/ч.
Для приготовления вод-
ных и масляных красоч-
ных составов применяют
лопастные смесители (рис.
12.7, в). Перемешивание
происходит при помощи
диска с тремя лопастями 3,
приводимого в движение
электродвигателем 1. Для
снижения частоты враще-
ния между двигателем и
валом диска установлен
двухступенчатый редук-
тор 2. Бак 4 смесителя
снабжен краном 5 для сли-
ва получаемой смеси.
С помощью пневмо-
эмульсатора (рис. 12.7, б)
Рис. 12.10. Шпатель с принудительной подачей
шпаклевки
можно осуществлять раз-
жижение паст и разбавление олифой и растворителями густотертых
масляных составов и водомасляных эмульсий, а также перемешивание
составов и их перекачивание. Пневмоэмульсатор состоит из бака 1,
закрытого крышкой 3, на которой закреплены воронка 6 с краном 7
для подачи составляющих, крана 4 для подачи сжатого воздуха,
крана 5для соединения бачка с атмосферой и манометра 5. Составляю-
щие заливаются через воронку и перемешиваются сжатым воздухом,
334
который поступает через кран 2, в это время кран 8 открыт, а кран 9
закрыт. Затем закрываются краны 7 и 8 и готовая эмульсия выпус-
кается через кран 9.
Аппараты и инструменты для нанесения шпаклевочных, грунто-
вочных и красочных составов делятся на пневматические, у которых
состав распыливается сжатым воздухом, и механические, в которых
распыление струи состава происходит в результате его завихрения
в канале форсунки.
Рис. 12.11. Пневматический пистолет-краскораспылитель
При втором способе получается меньшее туманообразование и,
следовательно, меньшие потери состава.
На рис. 12.8 показан аппарат для нанесения шпаклевки. Он сос-
тоит из бака 2 на двух колесах с герметической крышкой 1 и поручнем 3.
На крышке установлены предохранительный клапан и манометр.
Состав заливается в бак сверху через горловину, туда же подается
сжатый воздух от компрессора через трехходовой кран. В нижней
части бака имеется штуцер, к которому присоединяется шланг для
335
подачи состава к удочке. Удочка (рис. 12.8, б) состоит из двух трубок
4 и 6, через одну из них подается состав, а через другую сжатый
воздух. Количество того и другого регулируется кранами 7, а ско-
рость истечения, т. е. факел, насадкой 5.
На рис. 12.9, а приводится конструкция удочки безвоздушного
распыления. Она применяется для нанесения шпаклевочных составов
Рис. 12.12. Красконагпетательный бак
и побелки потолков и работает по принципу механического безвоз-
душного распыления. Удочка состоит из головки (форсунки) 1, по-
дающей трубки 2, клапана 3. Форсунка (рис. 12.9, 6) включает в себя
корпус 4, в который ввернут направляющий конус 5 и сопло 7.
Состав подается в корпус форсунки через трубку 6, расположенную
эксцентрично оси форсунки.
Составы подаются к удочке от нестандартных баков, давление
в которых должно быть не менее 7 кгс/см2 (0,7 МПа), что является
некоторым недостатком. Как правило, в стандартных баках давление
336
не превышает 4—5 кгс/см2 (0,4—0,5 МПа). Достоинством этой удочки
является малое туманообразование.
Нанесение шпаклевочных составов может также осуществляться
шпателем с принудительной подачей шпаклевки.
Шпатель (рис. 12.10) представляет собой трубку, на нижнем конце
которой имеется пробковый кран и штуцер, через который на поверх-
ность подается под давлением шпаклевка; на верхнем конце закреп-
лена полоса резины для раз-
равнивания слоя шпаклевки
но поверхности.
Для выполнения различ-
ных видов окрасочных работ
в строительстве и на монтаже
при нанесении масляных кра-
сок, лаков, эмалей, грунта
широко применяют краско-
распылители. Наиболее часто
используют: пистолеты-крас-
кораспылители, которые рас-
пыляют красочные составы
Рис. 12.13. Ручной краскопульт
под действием сжатого воз-
духа в головках; электро-
краскопульты, служащие для
напесения на поверхности маловязких красочных составов (извест-
ковых, водоклеевых и др.) механическим способом.
Для нанесения особо вязких смоляных, перхлорвиниловых и битум-
ных красочных составов применяется бескомпрессорный распылитель
высокого давления.
Пистолет-краскораспылитель показан на рис. 12.11. Он состоит
из корпуса 5, распылительной головки 3, запорной иглы 10, нажим-
ной скобы 9, рукоятки 7. К штуцеру 8 присоединяется шланг для подачи
сжатого воздуха, к штуцеру 11 — шланг для подачи состава. Распы-
лительная головка имеет одно центральное отверстие 1 и несколько
боковых отверстий 2, в зависимости от числа которых получается
различная форма факела. Запорная игла 10 под действием пружины 6
перекрывает форсунку 4 и воздушный канал 1.
Окрасочные составы подаются к пистолетам-распылителям из
съемных бачков или из красконагнетательных баков.
Красконагнетательный бак (рис. 12.12) состоит из корпуса с гер-
метической крышкой и помещенного внутри него ведра, в котором
находится мешалка и трубка с фильтром. Сжатый воздух поступает
через кран 1. Часть воздуха, не проходя через редуктор, поступает
через кран 3 к пистолету-краскораспылителю. Другая часть сжатого
воздуха проходит через редуктор 2 и после снижения давления до
нужной величины поступает в бак, вытесняя налитый в ведро состав,
который через фильтр с трубкой 5 и кран 4 поступает к пистолету-
краскораспылителю.
Краскопульты выполняют с ручным или электрическим приводом.
На рис. 12.13 показан ручной краскопульт. Он состоит из резервуара 1,
337
Рис. 12.14. Электрокраскопульт
Рис. 12.15, Л1ашина для строгания паркетных полов
338
насоса 2, всасывающего клапана 3, фильтра 4, клапанной системы
из всасывающего, нагнетательного и предохранительного клапанов.
Производительность таких краскопультов составляет до 200 м2/ч.
Рабочее давление равно 4 кгс/см2 (0,4 МПа), масса 7,5 кг.
Электрокраскопульт (рис. 12.14) служит для нанесения на поверх-
ности маловязких красочных составов (известковых, водоклеевых
Рис. 12.16. Паркетошлифовальная машина
и др.) механическим способом. Состав подается при помощи диафраг-
мового насоса. Качание диафрагмы 10 осуществляется от электро-
двигателя 1 через зубчатый редуктор 2 и кривошипный механизм 3.
Прн движении диафрагмы вверх в камер)' всасывается состав из тру-
бопровода 8. В это время шариковый клапан 9 открывается. При
обратном ходе диафрагмы шариковый клапан 9 закрывается, откры-
вается шариковый клапан 7 и состав попадает в ресивер 4, а оттуда
по шлангу 6 к удочке 5.
339
§ 12.4. МАШИНЫ ДЛЯ ОТДЕЛКИ ПОЛОВ
Деревянные, мозаичные, а также полы из полимерных материалов
после укладки обрабатывают для придания им гладкости. Отделка
паркетных и других деревянных полов состоит из строгания, шлифо-
вания и полирования.
Машина для строгания паркетных полов показана на рис. 12.15.
Рабочим органом служит ножевой барабан 3, на котором закреплены
ножи 2 (обычно два). Барабан является одновременно обращенным
ротором электродвигателя. Статор электродвигателя установлен на
валу, закрепленном в боковых крышках корпуса. Кроме ножей на
барабане закреплена крыльчатка — вентилятор для отбрасывания
стружки в сторону. Ходовая часть машины состоит из одного перед-
него 1 и двух задних роликов 4. Регулирование толщины снимаемой
стружки осуществляется поднятием или опусканием оси ротора при
помощи тяги 5, перемещаемой гайкой 7. На рукоятке 6 установлен
выключатель 8.
Мощность привода таких машин 1,5—2 кВт, производительность
составляет 15—20 м2/ч, масса 45—60 кг.
Паркетошлифовальная машина (рис. 12.16) имеет рабочий орган
в виде фибрового шлифовального диска 1 диаметром 200—250 мм,
установленного под углом 3° к обрабатываемой поверхности. Такое
положение диска предохраняет его от перегрева и обеспечивает луч-
ший отсос пыли вентилятором 5. Диск приводится во вращение элект-
родвигателем 3. Ходовая часть состоит из одного переднего ролика 7,
который может свободно поворачиваться, и двух задних роликов 4.
На рукоятке 2 установлен выключатель 1.
Мощность таких машин составляет 1,5—2,0 кВт, производитель-
ность 40—60 м2/ч, масса 35—45 кг.
Контрольные вопросы
1. Опишите основные операции отделочных работ.
2. Какие инструменты применяются для отделочных работ?
3. Вычертите схему малярной станции.
4. Вычертите схемы сопловых устройств.
ЛИТЕРАТУРА
Абезгауз В. Д., Рубин И. Л. и др. Новые абразивные инструменты для строи-
тельно-монтажных работ. М., 1972.
Абрашкееия Ю. Д., Сотников Г. А., Гальперин М. И. Абразивные инструменты
для строительно-монтажных работ. М., 1979.
Дроздов Н. Е., Гальперин М. И. Механическое оборудование предприятий не-
рудной промышленности. М., 1975.
Машины для земляных работ / Под ред. Ю. А. Ветрова. Киев, 1976.
Кишок Н. С., Редуник А. В., Новации й А. А. Комплексная механизация трудо
емких работ в строительстве. Киев, 1977.
Домбровский Н. Г., Картвелишвили Ю. А., Гальперин М. И. Строительные ма-
шины. М., 1976.
Фиделев А. С., Чубук Ю. Ф. Строительные машины. Киев, 1979.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автобетоносмесители — 275» 276
Автогрейдеры — 195—197
Автомобили — 104 — 108
Агрегатирование тягачей — 111
Беек а мерные шины — 85
Бестраншейная разработка грунта — 230,
231
Бе тонные заводы — 273 — 275
Бетононасосы — 276, 277 —--
Бетоносмесителя •— 261» 262
— гравитационные — 262— 266
— непрерывного действия — 268, 269
— циклического действия — 265, 266
Блоки — 47, 48
Бульдозеры — 191 —195 -—
Бункера — 170, 171
Валы и оси — 33—35 ~~
Ведущий мост — 105 —107
Виброуетойчивость деталей — 7
Вибровозбудители — 97—100, 283, 285
Вибромолоты — 100» 101
Вибронаконечники — 284
Виброплощадки — 285, 2S6
Виброштампующие машины — 287
Гибкие палы — 35, 300, 301
Гидродомкраты для натяжения стержней
арматуры — 282
Гидромониторы — 225, 226
Гравиемойки — 2S5
Грейдер-элеваторы — 197, 198
Грохоты — 245, 255
Грохочение — 253
Грузоподъемные машины— 115 —158
Детали машин — 5—50
Дозаторы — 27], 272
Домкраты 115, 116
Допуски и посадки — 10. И
Дробилки — 245
Дробильно-сортировочные установки — 259
Дроссели — 82
Жесткость деталей — 7
Забой — 207
Заслонки скреперов — 203
Землеройно-транспортные машины — 191 —
202
Землеройно-фрезерная машина — 234
Землесосные установки (земснаряды) —
226, 227
Износостойкость деталей — 7
Канаты — 43—47 —
Катки — 235
Классификация ручных машин — 28S—290
Ковш скреперный с элеваторной загруз-
кой — 202
Ковши скреперов — 203
Конвейеры вибрационные 166, 167
— винтовые — 165
— ковшовые — 165—169
— ленточные — 159—162
— скребковые — 163
— цепные — 162, 163
Контрольно-предох р анительные устрой-
ства
— анемометры — 154
Коитролыю-предохранитсльп ыс о грани чи те-
ля подъема — 154
— ограничители грузоподъемности — 154
— противоугонные захваты — 154
— устройство для определения вылета
стрелы — 154
— указатели крена — 154
— универсальный работомер — 156» 157
Коробка передач — 105
Корчеватели-собиратели — 190
Крановые механизмы — 134
— групповой привод подъема — 132
— передвижения — 132, 133
— вращения — 133
— изменения вылета крюка — 134
Краны строительные автомобильные —
148—150
— башенные — 139—147
— кабельные — 138, 139
— козловые — 147
— консольно-балочные — J34
— легкие переносные — 134
— писвмоколесныс на специальном шас-
си — 151
— стационарные мачтовые — 136
— стационарные винтовые — 135 —138
— стреловые самоходные — 147—148
— тракторные — 152
— трубоукладчики — 152, 153
Кусторезы — 189
Лебедки — 118
Машины для подготовительных работ —
188
Машины и оборудование для гидромехани-
зации — 225—227
Машины для бурения — 228—231 —
Машины для разработки мерзлых грун-
тов — 232—234
Машины для уплотнения грунта — 234 —
237
Машины для дробления, сортировки и
мойки каменных материалов — 244 —
259
Машины и оборудование для производства
бетонных и железобетонных работ —
260—275
Машины для транспортирования бетонных
смесей и растворов —-275
Машины для сборки резьбовых соедине-
ний — 318—322
Машины для обработки дерева — 323,- 324
Машины для отделочных работ — 328
— аппарат для нанесения шпаклевочных
составов — 333
— жерновая краскотерка — 331
— затирочные машины — 328—330
— инвентарная малярная станция — 331
— красконагпетатсльный бак — 337
— машина для строгания паркетных по-
лол — 338
— паркетошлифовальная машина — 340
— пневматический пистолет-краскораспы-
литель — 335—337
— роторная мелотерка — 332
— ручной краскопульт — 337
— сопловые устройства — 327
— смесители красок — 332
Механизмы передач ручных машин — 298
Механизмы включения и выключения руч-
ных машин — 302
Муфты — 39—40'^*^
Надежность деталей — 7—8
Насосы — 77
Ножи скреперов — 202
341
Оборудование /?ля свайных работ — 238—
240
Оборудование для изготовления армату*
ры — 279
Параметры машин — 55
Передачи зубчатые — 25—31
Пиротехническая оправка — 322
Пневматические устройства для транспор-
тирования — 169, 170
Питатели — 172
Погрузо-разгрузочные машины — 174 — 181
Подвески жесткие — 87
— полужесткне — 87
— упругие — 88
Подвижность машин — 60
Подшипники — 35—38'.*^
Подъемник строительный грузопассажир-
ский — 121
— свободностоящий мачтовый — 120
— ковшевой скиповый — 121, 122
Полиспасты — 48
Приводы ручных машин электрические —
292
— однофазные коллекторные КН — 292
трехфазные асинхронные — 292
Приводы ручных машин пневматические
со свободным перемещением поршня —
294, 295
Прицепы — 108—ПО
Производительность теоретическая — 57
— техническая — 58
— эксплуатационная — 58, 59
Прочность деталей — 5
Проходимость машин — 60
Процесс резки ручными шлифовальными
машинами — 307—309
Процесс зачистки ручными шлифоваль-
ными машинами — 309, 310
Рабочие органы кранов — 129 — 131
Рабочие органы ручных машин — 302
Рабочие органы экскаваторов — 215—216
Разрушение грунта клцньями — 232
Распределители — 83
Растворосмесителм — 268, 269
Растворосмсситель турбулентный — 270
Раствор о и асосы — 278, 279
Регуляторы скорости — 82
Редукторы ручных машин — 298
Резание и копание грунтов — 186—187
Резание грунта дисковыми пилами — 233
Резание грунта цепными борами — 233
Рессоры — 51
Решета — 254
Ручные машины гайковерты 318 — 319
— сверлильные — 302—306
— шлифовальные — 307—309
— ножевые ножницы — 312, 313
— кромкорезы — 313, 314
Самосвалы — 108
Самотечные устройства — 167—169
Сателлиты — 107
Седельно-сцепное устройство — 108
Скреперы — 191—204 —
Сила сцепления — 88
— тяги касательная — 89
— тяги окружная — 89
— тяги свободная — 89
Силовые установки (приводы) — 66
— гидромуфты — 70—72
— гидротрансформаторы — 72, 73
— комбинированные днзель-электричес-
ки с — 70
— механические внешние характеристи-
— пневматические установки — 73, 74
— одномоторные —~66
Силовые многомоторные — 66
— режимы работы — 67
— характеристика двигателя внутреннего
сгорания — 69
* — электродвигатели переменного тока —
70
— электродвигатели постоянного тока —
70
Системы управления — 92—95
— гидромеханическая — 93, 94
— непосредственного действия (следящая
система) — 92
— передаточное число механической систе-
мы управления — 93
— пневматическая — 96
— пневмокамерная муфта — 96
— приводы с усилителями — 94, 95
Сита — 254
Сопротивление передвижению — 90
— инерции — 90
— подъему — 90
— полезное — 91
Станки для правки и резки арматуры —
279, 280
— для гибки арматуры — 280, 281
Таль ручная — 119, 120
Тележки землевозные — 108
Типоразмерный ряд — 54, 55
Тормоз колодочные — 49
— ленточные — 50
Тракторы гусеничные — 102—104
— • колесные — 102—104
Трамбование грунта — 237
Трансмиссии гидродинамические — 71
— гидрообъемные — 75
— механические — 75
Устойчивость детален — 7
Устойчивость машин — 62—64 —"
Установка для натяжения арматуры —
281, 282
Фи зико-мех а ни чески с свойства грунтов
— абразивность — 185
— влажность — 185
— гранулометрический состав — 184
— объемная Масса — 184
— пористость — 184
— пластичность — 185
— прочность — 1 85
— разрыхляемость — 185
— связность — 185
— сопротивление грунта вдавливанию —
185
— угол естественного откоса — 185
Шины беек а мерные — 85
— камерные — 85
— пневматические — 85
Экскаваторы башенные — 205
— вскрышные экскаваторы-лопаты — 204
— карьерные — 204
— краны-экскаваторы — 204
— плавучие неполноповоротныс лопаты —
— - с гидравлическим приводом — 211, 212
— тоннельные и шахтные лопаты — 205
— - шагающие драглайны — 204
— многоковшовые — 218
— цепные т'раншеекспатслн — 218—221
— роторные траншеекопатели — 221—222
— цепные экскаваторы поперечного копа-
ния — 222, 223
— роторные карьерные экскаваторы —
223, 224