/



















































































































































































































































































































































Текст
А.С.ФИДЕЛЕВ , Ю.Ф.ЧУБУК
ДЕТАЛИ МАШИН
ОСНОВНЫЕ СВЕДЕНИЯ О СТРОИТЕЛЬНЫХ МАШИНАХ
ТРАНСПОРТИРУЮЩИЕ
И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫЕ МАШИНЫ
ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
МАШИНЫ ДЛЯ ПРОИЗВОДСТВА ЗЕМЛЯНЫХ РАБОТ
ОБОРУДОВАНИЕ ДЛЯ СВАЙНЫХ РАБОТ
ДРОБИЛЬНО-СОРТИРОВОЧНЫЕ УСТАНОВКИ
МАШИНЫ ДЛЯ ПРИГОТОВЛЕНИЯ, ТРАНСПОРТИРОВАНИЯ И УКЛАДКИ БЕТОННОЙ СМЕСИ И РАСТВОРОВ
МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ.
ОБОРУДОВАНИЕ ДЛЯ ОТДЕЛОЧНЫХ РАБОТ
ОБОРУДОВАНИЕ ДЛЯ ПРОИЗВОДСТВА ЖЕЛЕЗОБЕТОННЫХ ИЗДЕЛИЙ
ЭКСПЛУАТАЦИЯ, РЕМОНТ И ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ СТРОИТЕЛЬНЫХ МАШИН
I.
II.
III.
IV.
V.
VI.
VII.
VIII.
IX.
X.
XI.
СТРОИТЕЛЬНЫЕ
МАШИНЫ
ИЗДАНИЕ ЧЕТВЕРТОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством «лешего и среднего специального образования УССР в качестве учебника для студентов вузов, обучающихся по специальности яП ромышленное и гражданское строительство»
гч
Киев
Головное издательство
издательского объединения «Вища школа» 1979
6С6.08
Ф50
УДК 69.002.5 (075.8)
Фиделев А. С., Чубук Ю. Ф. Строительные машины: Учебник для вузов.— 4-е изд., перераб.и доп.—Киев: Вища школа. Головное изд-во, 1979,— 336 с. — 30207 . 3204010000.
В учебнике описаны прогрессивные конструкции строительных машин, приведены расчеты их производительности, изложены основы их рациональной эксплуатации и рассмотрены условия применения новых строительных машин для современного комплексно-механизированного процесса сборки и монтажа зданий и сооружений.
Для студентов вузов, обучающихся по специальности «Промышленное и гражданское строительство».
Табл. 2. Ил. 278.
Рецензент доктор техн, наук профессор Г. С. Белорусов
Редакция литературы по строительству, архитектуре и коммунальному хозяйству
Зав. редакцией В. В. Гаркуша
„30207-0Р__
М2Н (04)—79 10
3204010000.
СуИздагельское объединение «Вища школа», 1979
ПРЕДИСЛОВИЕ
В Основных направлениях развития народного хозяйства СССР на 1976—1980 годы предусмотрено: «В строительном, дорожном и коммунальном машиностроении обеспечить создание и освоение выпуска систем машин для комплексной механизации работ в промышленном, сельскохозяйственном, мелиоративном, жилищном, дорожном строительстве, машин повышенной единичной мощности с широким применением гидравлики и автоматики»*. Эти системы должны обеспечивать поточный процесс сборки и монтажа зданий и сооружений из унифицированных элементов заводского изготовления. В настоящем, четвертом, издании описаны как принципиально новые виды, так и новые конструктивные решения строительных машин. В книге приведены в основном те типы современных экономичных и надежных машин, которые применяются непосредственно на строительных площадках. Кроме того, учитывая, что современные комбинаты гражданского и промышленного строительства включают заводы по изготовлению железобетонных конструкций — в учебнике описано оборудование этих заводов.
В основу книги положены курсы лекций, читаемые доктором техн, наук профессоров А. С. Фиделевым и кандидатом техн, наук профессором Ю. Ф. Чубуком в Киевском инженерно-строительном институте.
Учебник предназначен для специальности «Промышленное и гражданское строительство» и может быть полезен студентам других специальностей, изучающих курс «Строительные машины».
* Материалы XXV съезда КПСС. М., Политиздат, 1976, с. 191.
5
ВВЕДЕНИЕ
Значение строительной промышленности и роль строительных машин. Дальнейшее улучшение благосостояния советского народа и укрепление мощи СССР неразрывно связано с развитием строительной промышленности.
Еще в 1918 г. в Декрете об упорядочении и усилении государственного руководства строительством, подписанном В. И. Лениным, строительная промышленность ставилась в один ряд с главнейшими отраслями крупной индустрии.
На VIII Всероссийском съезде Советов 22 декабря 1920 г. В. И. Ленин говорил о необходимости больше вводить машин всюду, как можно шире переходить к применению машинной техники.
Партия и правительство уделяли и уделяют большое внимание созданию и применению машин для всего народного хозяйства, и в частности для строительной промышленности и капитального строительства.
Высокими темпами увеличивается парк строительных машин. По сравнению с 1940 г. на начало десятой пятилетки парк экскаваторов увеличился в 70 раз, бульдозеров в 190 раз, скреперов в 40 раз, кранов в 170 раз *.
Особенно велика роль машин, облегчающих труд рабочих в строительном производстве, где преобладают трудоемкие и тяжелые работы (в среднем рабочий за смену перемещает 1—4 т грузов).
Наряду с повышением производительности труда и его облегчением применение машин ускоряет строительство и улучшает качество продукции.
Следствием повышения производительности труда, ускорения строительства и улучшения качества продукции является снижение стоимости строительных работ.
В развитии и совершенствовании строительных машин наблюдаются следующие прогрессивные направления:
повышение качества, надежности и долговечности машин;
* Подробнее см.: Строительные и дорожные машины, 1977, № 10.
6
возрастание единичной мощности;
применение прогрессивного гидравлического привода;
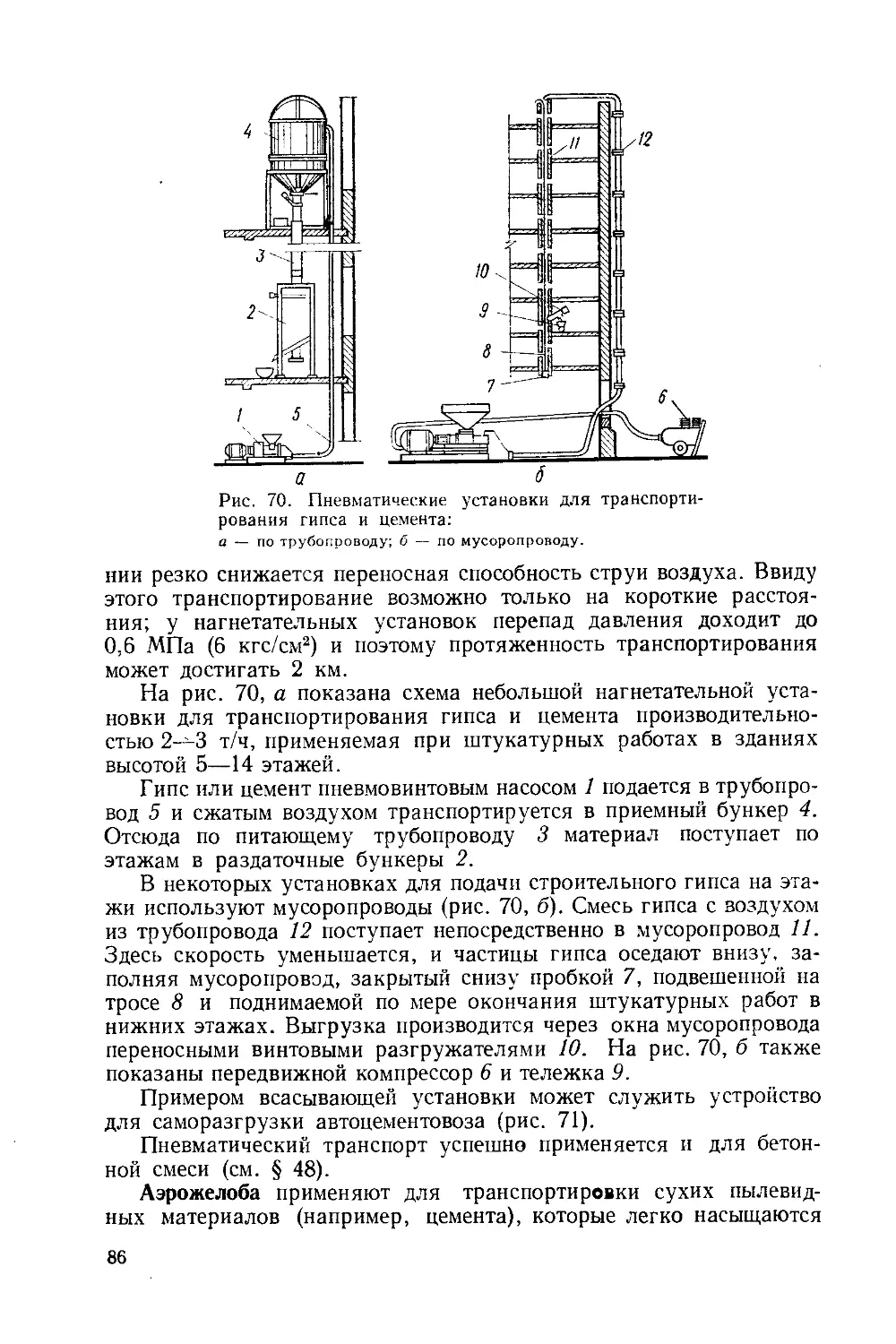
создание универсальных машин со сменным рабочим оборудованием;
применение вспомогательных машин и механизированного инструмента для механизации процессов, выполняемых вручную;
создание базовых машин (тракторов, тягачей, автомобилей) и связанных с ними машин-орудий;
увеличение маневренности машин;
применение автоматических устройств;
внедрение стандартизации (на главные параметры машин установлены ГОСТы), унификации (уменьшение типоразмеров — моделей машин) и нормализации (сокращения разнообразия узлов и деталей машин);
проектирование машин с учетом комфортных условий труда и технической эстетики.
Создание принципиально новых строительных машин, очевидно, будет основываться на использовании энергии взрыва, лазерного луча, вибрационного и электрогидравлического эффекта, высоких давлений, ультразвуковых колебаний, термических и химических способов дробления крепких пород.
Существенное значение для повышения производительности труда и более эффективного использования машин имеют автоматизированные системы управления строительством (АСУС), которые решают задачи учета, контроля, планирования и управления производством. Вычислительный центр, оснащенный электронными цифровыми вычислительными машинами (ЭЦВМ), получает в приемник по каналам связи информацию (сигналы) от производственных участков (передатчиков). Эту информацию систематизируют автоматы и дают возможность оценивать обстановку и принимать решения , которые в виде команд (приказов) передаются производственным участкам.
Комплексная механизация и автоматизация строительства. Первичной формой внедрения машин в строительное производство является замена ими ручного труда только в одной или части операций производственного процесса. Например, при возведении кирпичных зданий транспортирование и подача кирпича и раствора к рабочему месту осуществляются машинами, а укладка кирпича в сооружение — вручную. Такая форма организации работ представляет собой частичную механизацию.
Для современного строительного производства, оснащенного передовой техникой, необходима комплексная механизация, т. е. такая форма организации работ, при которой грунт, материал, готовая деталь или конструкция на всем пути следования перерабатывается, перемещается, укладывается в тело сооружения с помощью машин, а труд рабочего в основном заключается в управлении этими машинами.
7
Рис. 1. Схема комплексной механизации и системы машин при строительстве зданий из крупных железобетонных конструкций: отгрузка башенным краном конструкций со склада завода; транспортирование конструкций панелевозом; установка конструкций стреловым краном.
При применении сборных железобетонных конструкций не только их транспортирование и подъем, но и укладка в сооружение производится машинами (рис. 1). При этом все машины взаимоувязаны по своей производительности, рабочим размерам, грузоподъемности и т. п.
Комплексная механизация значительно повышает производительность труда по сравнению с частичной механизацией, а также обеспечивает лучшее использование машин и меньшую стоимость производства работ.
Для оценки комплексной механизации применяется показатель уровня этой механизации, т. е. отношение (в %) объема работ, выполненных комплексно-механизированным процессом, ко всему объему работ данного вида.
Например, уровень комплексной механизации в СССР в 1977 году достиг по земляным работам 99,4%, по монтажным — 98,1%.
Высшей формой механизации является автоматизация, при которой даже управление машинами осуществляется аппаратами, и труд человека ограничивается контролем за работой этой аппаратуры.
При частичной автоматизации строительные машины оборудуются автоматически действующими приборами и устройствами.
Землеройные машины и краны оборудуются аппаратами для автоматизации подачи смазки, учета их работы, защиты от перегрузок машин, программно-дистанционного управления и т. п.
8
При полной автоматизации все операции — как основные, так и вспомогательные — автоматизируются, В нашей стране, например, созданы автоматизированные землесосные снаряды, успешно работают автоматизированные бетоносмесительные и камнедробильные установки.
Характеристика курса «Строительные машины». Важнейшими профилирующими дисциплинами при подготовке инженера-строителя являются «Технология строительного производства» и «Организация, планирование и управление строительством». Эти дисциплины излагаются на основе современной машинной техники, рассматриваемой в курсе «Строительные машины». Студенты, обучающиеся по специальности «Промышленное и гражданское строительство», изучают:
современные типовые конструкции строительных машин;
методы расчета, определяющие производительность машин;
условия рационального применения машин для индустриализации строительства;
основы правильной эксплуатации строительных машин.
Курс «Строительные машины» студенты изучают исходя из знаний основ строительной техники и общетехнических дисциплин: теоретической механики, сопротивления материалов, гидравлики, электро- и теплотехники, технологии материалов.
Курс начинается разделом «Детали машин», цель которого — ознакомить студентов с деталями общего назначения, применяемыми в строительных машинах, и с основными принципами их расчета.
При создании отечественных строительных машин большую работу провели коллективы машиностроительных заводов (Уралмаш, Новокраматорский и др.), научно-исследовательских и учебных институтов (ВНИИстройдормаш, Московский инженерно-строительный институт и др.). Большой вклад в развитие строительных машин внесли советские ученые (академики И. И. Артоболевский» Н. В. Мельников, член-корреспондент АН СССР А. О. Спиваковский, доктора техн, наук Н. Г. Домбровский, С. С. Атаев, В. А. Бауман, Ю. А. Ветров, Д. П. Волков, Н. А. Ульянов, Б. И. Са-товский, Д. И. Федоров, А. М. Холодов и др.) и ряд новаторов производства.
Наряду с изучением отечественных машин важным для использования новой техники является ознакомление с зарубежными конструкциями, но при этом надо иметь в виду, что в ряде источников, опубликованных в капиталистических странах, многие положения излагаются тенденциозно, без указания эксплуатационных недостатков.
Инженеры-строители на производстве обязаны обеспечивать нормальные условия работы, правильное использование и систематический ремонт строительных машин. Они также должны принимать творческое участие как в улучшении конструкций машин (повышение скоростей, уменьшение массы и увеличение прочности), так и в
9
создании новых типов машин, помня, что непрерывное совершенствование социалистического производства на базе новой техники яв ляется первейшей обязанностью советского инженера.
Вопросы для самопроверки
1. Какова роль машин в строительном производстве?
2. Охарактеризуйте частичную и комплексную механизацию, а также частичную и полную автоматизацию процессов строительного производства.
3. Каковы прогрессивные направления совершенствования строительных машин?
4. Охарактеризуйте главные задачи курса строительных машин.
Глава I
ДЕТАЛИ МАШИН
§ 1. ОБЩИЕ ПОЛОЖЕНИЯ
Каждая машина представляет собой механизм или комплекс механизмов, сконструированный для выполнения полезной работы. Механизм — это кинематическая цепь элементов (деталей и узлов), предназначенных для совершения определенных движений. В этой главе рассматриваются детали общего назначения (болты, валы, зубчатые колеса, подшипники, муфты и т. д.), т. е. такие, которые встречаются почти во всех машинах.
В зависимости от выполняемых функций указанные детали можно разделить на основные группы: соединения; передачи; валы, оси, их соединения и опоры.
Для получения надежных, долговечных и в то же время легких и экономичных конструкций необходим правильный выбор материала для изготовления детали. Чаще всего применяются черные металлы (чугуны и стали), а когда надо обеспечить антифрикцион-ность, антикоррозийность и т. п.— цветные металлы (медь, алюминий, олово и др.) и их сплавы (бронзы, баббиты, латуни). Относительно новыми материалами являются пластмассы, применение которых в ряде случаев значительно снижает как массу детали, так и трудоемкость ее изготовления. Например, для изготовления бесшумных зубчатых колес, вкладышей для подшипников применяется, текстолит — пластмасса, представляющая многослойную ткань, пропитанную резольной смолой и спрессованную под большим давлением при высокой температуре.
Расчеты деталей машин базируются на методах, изучаемых в курсе «Сопротивление материалов». Однако часто детали имеют сложную форму, поэтому приходится в теоретические расчеты вводить эмпирические величины. В процессе расчета приходится определять действующие нагрузки, выбирать материал детали и допускаемые напряжения *.
Прочность каждого материала характеризуется предельным напряжением (опред— нормальным и тпред—касательным), при достижении которого нарушается нормальная работа детали —
* Теоретические основы курса «Детали машин» созданы выдающимися учеными: профессорами Н. Е. Жуковским, Н. П. Петровым, А. И. Сидоровым, П. К- Худяковым, С. А. Чаплыгиным и рядом других. Первый курс «Детали машин» был написан в 1881 г. замечательным педагогом и ученым проф. В. Л. Кир-пичевым.
11
Рис. 2. Характер изменения напряжений:
а — нагружения постоянные во времени; б — пульсирующий цикл изменения нагружений; в — знакопеременные нагружения.
появляются трещины, возникают пластические деформации и происходит разрушение детали.
Допускаемое напряжение определяется запасом прочности п, т. е.
[Ст] = и [т] = 3!££Д_.
1 п 1 J п
На величину запаса прочности влияет много факторов — вид нагружения, степень ответственности детали, технология, вид деформации, относительные размеры и ряд других. При предварительных расчетах величина п определяется видом деформации (изгиб, кручение, растяжение, сжатие) и видом нагружения (рис. 2).
При изготовлении деталей машин размер отверстия или вала по чертежу отличается от размера, полученного непосредственным измерением. Разность между наибольшими и наименьшими предельными размерами, которая устанавливается стандартом, называется допуском. При малых допусках применяются тонкие отделочные операции, а при больших допусках можно ограничиться более грубой обработкой. Если вал должен двигаться в отверстии, между его размером и размером отверстия должен быть зазор; он определяется допуском на обработку вала и отверстия. Если же вал должен быть посажен в отверстие, то устанавливается допуск натяга. Величина натяга определяет характер посадки, например горячая, прессовая и т. п. Качество поверхности деталей машин по ее гладкости характеризуется геометрическим критерием. Этот критерий определяется как среднее квадратичное отношение действительной поверхности от ее среднего уровня и называется чистотой поверхности; классы чистоты установлены стандартом.
§ 2. ТРЕНИЕ В МАШИНАХ
Трением называется механическое взаимодействие между твердыми телами, которое возникает в местах их соприкосновения и препятствует относительному перемещению тел в направлении, лежащем в плоскости их соприкосновения. Трение имеет большое значение при работе машин, в которых всегда перемещаются детали. Оно уменьшает КПД машины и вызывает износ ее отдельных частей.
I?
Рис. 3. Схема движения груза по наклонной плоскости.
В ряде случаев трение полезно — его используют для устройства тормозов, муфт сцепления, ременных и фрикционных передач.
Сопротивление от трения может быть значительно уменьшено введением между трущимися поверхностями смазки.
В зависимости от наличия смазки между трущимися поверхностями различают сухое и полусухое трение; жидкостное и полу-жидкостное.
Для сухого трения (при полном отсутствии смазки) и полусухого (при незначительной части поверхности, покрытой смазкой) силы тоения, даН (кгс) *,
F = Nf, (1)
где N — нормальное усилие; f — коэффициент трения, зависящий от материала и состояния поверхности трущихся тел.
Сила жидкостного (при полном разделении поверхностей слоем смазки) трения, даН (кгс),
? = (2)
где S — площадь трущихся поверхностей, м* 1 2; v — скорость относительного движения, м/с; h — толщина смазочного слоя, м; k — коэффициент пропорциональности, даН • с/м2 (кгс-с/м2).
Если разделить и умножить правую часть формулы (2) на N и обозначить через — q давление, получим
Е = W = = = (3)
h м qh 7
~s~h
Величина k = p представляет собой коэффициент жидкостного трения, который значительно меньше коэффициента сухого трения и зависит от вязкости применяемого смазочного масла, толщины смазочного слоя и увеличивается с увеличением скорости движения.
Треиие на наклонной плоскости. При работе винтовых механизмов большое значение имеет равномерный подъем и спуск груза по наклонной плоскости; при этом нас интересует сила Р, направленная параллельно основанию (линии АВ на рис. 3).
* Согласно Международной системе (СИ), 1 кгс = 9,80665 Н (ньютон),
1 даН (деканьютон) = 10 Н ;= 1 кгс. Поэтому читателю легко перейти к едини-
цам СИ, записав 1 кгс как 1 даН.
13
Рис. 4. Схема работы клина.
Рис. 5. Схема работы клинчатого ползуна.
Выбирая оси координат, как показано на рис. 3, и учитывая, что равномерное прямолинейное движение является частным случаем равновесия, записываем:
Sx = Р cos X — G sin X — fN — 0; (4)
Ну = N — G cos X — P sin X = 0. (5)
Из выражений (4) и (5) следует, что
P = G-^nt + ^-. (6)
cosX — /sinX
Поскольку f = tg p (тангенсу угла трения), то . ' sinp
smX-f----cosX
P = G--------£££------=.G = -I-р)- (7)
“ft + W
cos p
КПД наклонной плоскости т) при подъеме груза представляет собой отношение работы сил полезных сопротивлений к работе движущих сил.
Учитывая, что работа силы равна ее произведению на перемещение S и на косинус угла между направлениями силы и перемещения, записываем
GS sin X zq\
Т1=Р^Г- (8)
Из формул (7) и (8) следует, что
„ 6S tg X_________tg X ,q.
1 ~ GS tg (X + p) ~ tg(X-f-p) * W
Если наклонная плоскость самотормозящая, т. е. если груз под действием собственного веса не будет скользить вниз (X < р), то КПД такой плоскости
tg2X ~ 2 — 2 2 <'U,a’ 'IU>
Иными словами, КПД наклонной самотормозящей плоскости всегда меньше 50%.
Трение на клине. Клин употребляется для соединения отдельных частей машин, для регулировки перемещающихся деталей
14
и т. д. Определим силу Р, вдвигающую клин с углом заострения в соответствующее гнездо (рис. 4).
Из условия равновесия
Ху — — Р + 2Nf cos а + + 2Wsina = 0. (II)
Поскольку f — tg р =
Рис. 6. Схема трения при гибком органе.
Р = 2W (/ cos а + sin а) = 2N (sin р- cos а + sin а) = 2W ~1П v ' \ cos р / cos р
(12)
Если клин установлен в гнезде, то реактивные силы N будут стремиться его вытолкнуть. Чтобы они не смогли его вытолкнуть, удерживающая сила Р' < 0, т. е.
р, _ 2N sin (а — р) 0 cos р
(13)
Из уравнения (13) следует, что самотормозящий клин должен иметь а — р < О или 2а <3 2 р, т. е. чтобы клин не мог быть вытолкнут реактивными силами, действующими на его боковые грани, необходимо иметь угол заострения клина, равный или меньший двойного угла трения.
В ряде станков применяется клинчатый ползун, у которого опорная поверхность скользит по направляющей, имеющей желобчатую форму (рис. 5).
Для равномерного движения ползуна ,
Р = 2Nf, (14)
а так как при проектировании сил на ось у — у
G — 2tfsinp = 0, (15)
из формул (14) и (15) получим
P = G-X^=Gf, (16)
sm р ' ’ ' ’
где f' — приведенный коэффициент трения, всегда имеющий большее значение, чем коэффициент трения на плоской подошве.
Треиие при гибком органе. В основе теории трения при гибком органе лежит установленная Л. Эйлером (в 1775 г.) аналитическая зависимость между натяжениями ветвей гибкой нерастяжимой и невесомой нити, огибающей цилиндр. К концам нити, перекинутой через цилиндр с углом обхвата а (рис. 6), приложены силы 5Н (набегающая) и Sc (сбегающая). Нить равномерно скользит в направлении силы SH, превышающей силу 5С на величину Р, необходимую для преодоления сил трения между поверхностью цилиндра и
15
нитью:
SH-SC = P. (17)
Выделим на цилиндре элемент нити, охватываемый углом da, и рассмотрим условие его равновесия.
Проектируя все действующие силы на оси у и х, получаем:
2У = dN — 2S sin -J- — dS sin = 0;
(18)
Sx = — dP + dScos ~ = 0.
Принимая sin ~ ~ и cos da = 1 и отбрасывая dS sin ~
как бесконечно малую величину высшего порядка, получаем
dN = Sda\ dP = dS. (19)
Далее, приняв соотношение между нормальной силой dN и силой трения dP в виде dP = [dN, получим из формул (19) уравнение
fSda — dS, (20)
или
fda = ^-. (21)
Интегрируя это выражение в пределах угла обхвата а, получаем соотношения между усилиями $„ и Sc:
S а н
(22) о sc
Отсюда
fa = In SH — In Sc = In ф-. (23)
Условие непроскальзывания нити
< е'“ (24)
Выражение (24) называется формулой Эйлера.
§ 3. СОЕДИНЕНИЯ
Различают два вида соединений — неразъемные, при которых разъем деталей возможен только разрушением, и разъемные. Первый вид соединений осуществляется заклепочными и сварными швами. Разъемные соединения часто бывают резьбовыми.
Заклепочные соединения применяются в виде механически прочных швов, в основном при воздействии на детали вибрационной и ударной нагрузки, например в мостостроении.
В металлоконструкциях машин и в строительных конструкциях чаще всего применяются заклепки (рис. 7) с полукруглой 5 и погай-
16
Рис. 7. Основные типы заклепочных швов.
ной 4 головкой. В зависимости от типа стыка швы выполняются внахлестку 1, 2 и в стык с двумя накладками 3, 6 или одной.
В зависимости от числа рядов заклепок швы делятся на однорядные 1, 3, двухрядные 2, 6, трехрядные и многорядные. По расположению заклепок в рядах швы делятся на параллельные 6 и шахматные 2.
Прочность заклепочного шва характеризуется коэффициентом прочности шва
Ф = ^-, (25)
где t — расстояние между заклепками; d — диаметр заклепки.
Естественно, что у двухрядных швов коэффициент прочности шва (<р 0,66 -т- 0,75) выше, чем у однорядного (<р « 0,58 4- 0,67).
Расчет заклепочного односрезного соединения /, 2 (рис. 7) при числе заклепок в ряду г производится на срез и на смятие:
[т]ср ; (26)
nd2 г-----
4
(27)
17
Рис. 8. Схема электродуговой сварки.
Рис. 9. Схема автоматической сварки под флюсом.
где Р — приложенное усилие; z — число заклепок в ряду; 6 — толщина соединяемого листа.
При двухсрезном соединении 3,6 (рис. 7) в формуле (26) величина Р уменьшается в 2 раза.
Сварные соединения по сравнению с заклепочными обладают рядом существенных преимуществ: простота соединения, экономия металла, отсутствие ослабления деталей отверстиями, быстрота соединения и возможность автоматизации процесса сварки. Поэтому сварные соединения почти всюду вытеснили заклепочные. Основным видом сварки является электрическая дуговая,при которой местный нагрев до расплавления соединяемых деталей осуществляется электрической дугой. Этот метод сварки был предложен еще в 1882 г. русским изобретателем Н. Н. Бенардосом и усовершенствован в 1888 г. Н. Г. Славяновым (рис. 8). Источник тока 5 через кабель 4, зажим 3 и электрод 2 создает электрическую дугу 1, расплавляющую кромки соединяемых деталей.
Особо высокое качество шва достигается при автоматической сварке под слоем флюса (рис. 9), разработанной акад. Е. О. Патоном. Автоматическая головка 7 подает с заданной скоростью голую электродную проволоку с катушки 4. Из бункера 3, расположенного впереди сварочной головки, флюс 1 через трубку 2 поступает к месту сварки, покрывая сварной шов в виде застывшей корки 6, которую после остывания удаляют. Остаток флюса засасывается через трубку 5 обратно в бункер 3.
Виды сварных швов, применяемых в машиностроении и строительных конструкциях, отличаются большим разнообразием в зависимости от разделки кромок и расположения соединяемых дета*-лей. По форме сечения наплавляемого металла сварные швы разделяются на стыковые и угловые (валиковые).
Стыковой шов (рис. 10) рассчитывают на растяжение
Ир>4- <2*)
18
р
р
Рис. 11. Угловой шов.
^77^77^777777777/^7777777777///77/
где Р — приложенное усилие; I — расчетная длина шва; 6 — толщина листа.
Угловые сварные швы рассчитывают на сдвиг или срез.
Так как разрушение шва происходит по плоскости, проходящей через биссектрису прямого угла (рис. 11), то
Рис. 10. Стыковой шов. .
&cos45°Z '
Резьбовые соединения, относящиеся к разъемным соединениям, имеют винтовую резьбу. Образование винтовой резьбы А"— С" (рис. 12) удобнее всего представить в виде мой круговой цилиндр с диаметром d. Угол X называется углом подъема винта. Высота треугольника S, т. е. расстояние между одинаковыми точками винтовой линии А — С' (или А" — С"), называется ходом винта.
//7//////77777к
----Рис. 12. Схема развертки винтовой нарезки.
треугольника АСА0, охватывающего пря-
Очевидно, что
<3°)
На цилиндр может навиваться одновременно одна (рис. 12) или несколько винтовых линий. В зависимости от этого образуется однозаходная (рис. 13, а), двухзаходная (13, б), трехзаходная (13, в) и многозаходная резьба. Следует отличать понятие хода винта от шага резьбы t, т. е. расстояния между двумя одинаковыми точками двух соседних винтовых линий. Например, на рис. 13, а при однозаходном винте S ~ t, на рис. 13, б при двухзаходном S = = 2/, на рис. 13, в при трехзаходном винте S = 3 t, т. е.
S = zt, (31)
где г — число заходов винта.
Две детали, из которых одна имеет наружную резьбу (винт), а другая внутреннюю (гайка), образуют винтовую пару. Винтовые пары могут образовываться только при одинаковых параметрах
19
Рис. 13. Винт с прямоугольной резьбой:
а — однозаходнын; б — двухзаходный; в — трехзаходный.
резьбы (ходе винта; шаге резьбы; направлении резьбы — правой или, реже, левой; типе и диаметре резьбы). Типы резьб показаны на рис. 14.
Гайка, движущаяся по винту, т. е. по наклонной плоскости, приводится в движение горизонтальной силой Р (см. рис. 3), и формулы (7) и (10) применимы к винтовой паре с ленточной резьбой при условии, что Р — сила, вращающая гайку; G — осевая нагрузка на гайку; X — угол подъема винтовой линии; р — угол трения в резьбе.
При винте с треугольной резьбой (рис. 15), исходя из аналогии с клиновым ползуном, следует принимать приведенный угол трения рг:
tgp' = JS£_. (32)
ь 1 cos а
Так как р' > р, то при треугольной нарезке усилие для движения гайки должно быть больше, чем при прямоугольной резьбе. Поэтому треугольную резьбу применяют в крепежных деталях (рис. 16), где большое трение предотвращает самоотвинчивание. Кроме того, треугольные резьбы прочнее других при работе витков на срез, что способствует уменьшению высоты гайки.
В ходовых и грузовых винтах, служащих для подъема груза (подробнее см. описание винтового домкрата в § 19), применяют прямоугольные резьбы, чтобы уменьшить потери на трение. Ленточная резьба (см. рис. 14, а) имеет наиболее высокий КПД, но прочность ее меньше, чем у трапецеидальной, а в изготовлении она нетехнологична. При односторонней нагрузке применяют упорную резьбу, по КПД близкую к ленточной, а по прочности — к трапецеидальной.
К числу элементов, при помощи которых осуществляются резьбовые соединения, относятся болты, шпильки, винты, гайки и детали, предупреждающие самоотвинчивание резьбовых соединений. Эти детали, показанные на рис. 16, называют крепежными.
Болт 1 представляет собой стержень, имеющий резьбу для гайки 2 на одном конце и головку для захвата гаечным ключом 3 на другом. Головки могут быть круглыми, квадратными, но чаще
20
Рис. 15. Усилия в треугольной резьбе.
Рис. 14. Типы резьб:
а — ленточная; б — трапецоидальная; в — упорная;г — треугольная.
Рис. 16 Крепежные детали.
всего выполняются шестигранными. Стандартами на болты предусматривается большое количество типоразмеров, отличающихся формой головки и методом изготовления. Основными размерами болта являются: диаметр d, соответствующий наружному диаметру резьбы, размер под ключ S, длина /, длина резьбовой части /0 и высота головки h
Шпилька 4 представляет собой стержень, имеющий резьбу на обоих концах. Одним концом шпилька ввертывается до упора в отверстие, нарезанное в детали, наружная часть используется как болт для навертывания гайки. Соединение шпильками применяется в тех случаях, когда нет возможности установить болт.
Винты 5 отличаются от болтов тем, что их резьбовая часть ввинчивается в одну из соединяемых деталей, а головка имеет паз под отвертку или (реже) квадратную или шестигранную форму для захвата ключом.
Имеется разновидность винтов, так называемые установочные винты, которые ввертываются в одну деталь и своим концом
21
нажимают на другую деталь, удерживая ее в заданном положении. Такие винты снабжают шестигранными головками.
Гайки имеют форму, удобную для захвата ключом, и отверстие с резьбой для навинчивания на резьбовой конец болта или шпильки. Форма и размеры гаек стандартизированы.
В резьбовых соединениях, работающих при динамических нагрузках и вибрациях, применяют устройства против самоотвинчи-вания — контргайки 6, пружинные шайбы — 9 и особенно надежные замковые шайбы 8 и шплинты 7.
§ 4. ПЕРЕДАЧИ
Для передачи мощности от двигателя к исполнительным органам машины применяются механизмы, называемые передачами. В большинстве передач обеспечивается увеличение крутящего момента и уменьшение скорости движения. Элемент, передающий мощность, называется ведущим, а воспринимающий — ведомым.
Величина потери мощности на преодоление вредных сопротивлений от ведущего элемента к ведомому определяется КПД передачи,
= (33)
где Nt — мощность на ведомом элементе; — то же, на ведущем элементе.
Отношение частоты вращения пг ведущего элемента передачи к частоте вращения п2 ведомого элемента называется передаточным числом i:
f = (34)
Из теоретической механики известно, что крутящий момент, даН • см (кгс • см), при N, кВт, и п, мин-1, определяется по фор-
муле Л4 = 97 400-^~. (35)
Следовательно, <36>
или М2 = Л^гг). (37)
Механические передачи осуществляются использованием сил трения (фрикционные, ременные) или зацеплением зубьев (зубчатые, червячные, цепные).
Окружные скорости ведущего и ведомого элементов в случае иепроскальзывания должны быть равны.
(Так как
то D лп D ,оо, U w ~2~ = "30-' ~2~ * <38> nJ)! = пгйг, (39)
22
a — цилиндрическая; б — коническая; в — фрикционный вариатор; / — ведущий элемент; 2 — ведомый элемент.
(40)
где D — диаметр передаточного элемента, ап — его угловая скорость.
Из выражений (34) и (39) следует, что
i == П1 = ”2 Di
Если в машине несколько пар последовательных передач, то общее передаточное число, даже если передачи будут разных видов, равно произведению передаточных чисел всех пар
1общ = • • (41)
Фрикционные передачи (рис. 17) просты, работают плавно и бесшумно, но не обеспечивают точного передаточного числа вследствие проскальзывания:
; _ ”1 _ Р2
пг (1-6)0! '
где е — коэффициент проскальзывания, равный 0,005—0,03.
Проскальзывание также не дает возможности передавать большие нагрузки.
Так как условие работы фрикционной передачи (рис. 17, а)
P<fQ, (43)
то увеличение силы нажатия Q (обычно от пружины) с целью увеличения сцепления приводит к возрастанию напряжения вала от изгиба. Уменьшение Q достигается увеличением коэффициентов трения между колесами, рабочие поверхности которых покрываются кожей, деревом, фиброй, резиной, текстолитом, асбобакелитом и другими материалами, а также клиновыми выступами и канавками.
Фрикционные передачи могут иметь переменные передаточные числа; в этом случае они называются фрикционными вариаторами.
23
Рис. 18. Условные обозначения фрикционных передач:
а — с цилиндрическими роликами; б — с коническими роликами; в — фрикционный вариатор.
Рис. 19. Плоскоременная передача.
откуда
Схема лобового вариатора показана на рис. 17, в. На ведущем валу Oj, вращающемся с частотой «!, мин-1, посажен горизонтальный диск; по оси ведомого вала 02 может перемещаться диск радиуса г. При соответствующем нажатии между дисками ведомый диск приходит во вращательное движение с угловой скоростью, зависящей от расстояния оси диска до оси ведущего вала. Действительно, при положении диска, показанном на рис. 17, в, имеем равные линейные скорости:
п^х — гп2,
(44)
(45)
При увеличении х увеличивается и п2, т. е. передаточное число i = -^--переменно.
Условные обозначения фрикционных передач на кинематических схемах машин показаны на рис. 18 *.
Ременные передачи разделяются на плоскоременные, которые применяются при значительном (12—15 м) расстоянии между валами, и клиноременные, которые особенно удобны для получения минимальных размеров передачи.
Плоскоременная передача (рис. 19) состоит из ведущего шкива 1, ведомого шкива 3 и ремня 2, надетого с некоторым натягом.
При вращении ведущего шкива ремень передает движение ведомому благодаря силам трения, возникающим между ремнем и шкивами.
Передаточное число ременной передачи приближенно определяется по формуле (40). Если ремень проскальзывает (обычно при i > 5), для увеличения угла обхвата шкива / [см. формулу (24)1 применяют передачу с натяжным роликом (см. рис. 21, б).
В ременных передачах так же, как и во фрикционных, всегда происходит некоторое проскальзывание, влияющее на точность и постоянство передаточного числа. Величина проскальзывания зависит от свойств ремня (упругости, коэффициента трения), угла
* Здесь и ниже условные обозначения приводятся выборочно. Подробнее см.: Государственные стандарты Союза ССР. Единая система конструкторской документации. Обозначения условные графические в схемах. М., 1969.
24
обхвата шкива и предварительного натяжения ремня (обычно е = === 0,01 ~ 0,02). Благодаря гибкости ремня, ременная передача может применяться при самом разнообразном расположении осей ведущего и ведомого шкивов. Скорость движения ремней достигает 30 м/с и более, а передаваемая мощность — нескольких сот киловатт.
П лоско ременная открытая передача применяется при параллельном расположении
валов и одинаковом направлении вращения ведущего и ведомого шкивов. Перекрестная передача применяется при необходимости
противоположного вращения шкивов.
Расстояние между центрами шкивов, по данным из практики, рекомендуется
X = 2(D3 + D2). (46)
Поперечное сечение плоского ремня F, см2, определяется из равенства
Р = kcnc?,cvcvF, (47)
где Р — окружное усилие; k — полезное напряжение ремня; с0, ср, ct„ ср — эмпирические коэффициенты, учитывающие расположение передачи (открытая, перекрестная, с натяжным роликом), угол обхвата на малом шкиве, скорость и режим работы (колебания нагрузки, пыль, влага, грязь, продолжительность работы).
В свою очередь, окружное усилие, даН (кгс),
D v ' ' '
где Л!кр — крутящий момент на ведущем шкиве, даН • м (кгс • м); W — передаваемая мощность, кВт; и — скорость движения ремня, м/с.
Определив сечение ремня из формул (47) и (48), находят его толщину и ширину в соответствии с диаметром шкива и стандартами.
Достоинствами плоскоременных передач являются: универсальность, позволяющая использовать эти передачи при сложных схемах; плавность и безударность работы; сравнительная бесшумность хода; возможность применения при значительном расстоянии между валами и др. К недостаткам относятся непостоянство передаточного
25
г
Рис. 21. Условные обозначения ременных передач:
а — плоскоременная открытая; б — плоскоременная с натяжным роликом; в — перекрестная; а — клнноременная.
числа, которое зависит от нагрузки и упругих свойств рем-ия; вытягивание гибкого органа; относительно большие размеры передачи.
Клиноремен н ы е передачи (рис. 20) широко используют в индивидуальных приводах к рабочим машинам. Роль гибкого звена выполняется ремнем или группой прорезиненных ремней с кордтканью. Достоинства их заключаются в следующем: передача больших окружных усилий при малом предварительном натяжении ремней; сравнительно большие передаточные числа и малое расстояние между валами; плав
ность и бесшумность хода; обрыв одного ремня в комплекте ремней не сопровождается остановкой передачи.
К недостаткам относятся меньшая долговечность по сравнению с плоским ремнем при равных условиях; более сложная форма обода шкива, чем в плоскоременной передаче.
Как указывалось выше, для клиноременных передач межцентровое расстояние может быть очень малым:
Ямин = 0,55(£>з+ 02) Л, (49)
где h — высота сечения ремня.
Шкив клиноременной передачи (рис. 20, б) состоит из обода 3, ступицы 1 и диска или спиц 2.
Шкивы плоскоременных передач также изготовляются в виде сплошных цилиндров (малый диаметр), обода, соединенного со ступицей посредством диска (средний диаметр), и со спицами (большой диаметр). Шкивы клиноременных передач от плоскоременных отличаются в основном конструкцией обода, имеющего число и профиль канавок, соответствующие числу и профилю ремней.
Клиновые ремни 4 в СССР изготовляются из кордшнура или корд-ткани, залитых вулканизированной резиной и обвернутых сверху прорезиненной тонкой тканью.
Сечение каждого ремня рассчитано по стандарту на определенную передаваемую мощность No. Поэтому необходимое число ремней
N z = ’ (50)
где N — необходимая мощность.
Условные обозначения ременных передач показаны на рис. 21.
26
Рис. 22. Зубчатые передачи:
а — цилиндрическая прямозубая; б — цилиндрическая косозубая; в — цилиндрическая шевронная; г — коническая прямозубая; д — коническая с криволинейными зубьями.
_. Зубчатые передачи широко применяются в машинах, так как обеспечивают практически неограниченную передаваемую мощность, постоянство передаточного числа, малые габариты и долговечность.
В зависимости от расположения валов зубчатые передачи (рис. 22) разделяются на цилиндрические с параллельными валами, конические с пересекающимися и винтовые с перекрестными валами.
Кроме того, зубчатые передачи могут иметь внешнее и внутреннее зацепление.
Профиль боковой поверхности зубьев может быть различным, однако в подавляющем большинстве случаев он образуется кривой, получившей название эвольвенты *.
Центры пары эвольвентных зубчатых колес, на'одящихся в зацеплении, лежат на линии центров ОуО2 (рис. 23, а). Если из центров Оу и 02 провести две касающиеся друг друга окружности, отношение диаметров которых дк/дш будет обратно пропорционально отношению чисел оборотов, то при соответствующем построении профиля зуба эти окружности будут катиться одна по другой без скольжения. Указанные окружности называются начальными (d[U — диаметр начальной окружности шестерни, dK — диаметр начальной окружности колеса). Шестерней называют меньшее зубчатое колесо, а колесом — большее. Расстояние t между одноименными точками соседних зубьев по начальной окружности называется шагом. Для двух находящихся в зацеплении колес шаг должен быть одинаковым.
* Вопросы геометрии зубчатых зацеплений излагаются в курсе «Теория машин и механизмов».
27
Очевидно, что при числе зубьев z
= Zalt, (51]
щийся основной характеристикой размеров зубьев. Величины модулей определяются ГОСТом и находятся в пределах 0,05—100 мм; чаще всего применяют модули 4; 5; 6; 8; 10; 12; 16 мм.
Рис. 23. Схемы зубчатых передач:
а — эвольвентное зацепление; б — двухступенчатая передача; в — коническая передача.
]£ зубчатой передачи, являю-
Окружности, ограничивающие выступающие части зубьев (£>еш и 0^), называются окружностями выступов. Окружности, ограничивающие основания зубьев (£)(Ш и DiK), называются окружностями впадин.
Начальная окружность делит высоту зуба h на две части: hr — высота головки зуба и /г2 — высота ножки зуба. Обычно принимают hx = т и h2 = 1,25 т.
Тогда
Dt = d 4- 2/ij = mz + 2m = m (z 4- 2);
Dt = d — 2h2 = mz — 2,5m = m(z — 2,5).
(53)
(54)
Длина дуги начальной окружности называется толщиной зуба, а дуги S2 — шириной впадины: t = St + S2 и Sj «= 0,5 t.
Размер зуба, перпендикулярный к торцу колеса, называется длиной зуба. Все приведенные сведения относятся к нормальному эвольвентному зубчатому зацеплению.
Принципиально новый вид зацеплений с круговым профилем зубьев и точечным начальным контактом предложен в 1954 г. М. Л. Новиковым. При равных условиях эти зацепления обладают большей нагрузочной способностью, чем передачи с эвольвентным профилем зубьев, и поэтому они успешно и в возрастающих масштабах внедряются в машиностроении *.
Передаточное число зубчатой передачи i постоянно, так как начальные окружности перекатываются друг по другу без проскальзывания, т. е.
* Подробнее см.: Кудрявцев В. Н. Упрощенные расчеты зубчатых передач. М.— Л., Машиностроение, 1S67.
Рис. 24. Редуктор.
Следовательно, с увеличением передаточного числа число зубьев ведомого колеса должно увеличиваться. Это ограничивает обычно применяемые передаточные числа величиной i = 8.
При необходимости получить передачу с большим передаточным числом применяют двухступенчатую (рис. 23, 6) или многоступенчатую передачу.
Общее передаточное число двухступенчатых передач определяется по формуле (41):
i = = (56)
Z1 Z3
29
Зубчатые передачи могут быть: открытые со смазкой подшипников консистентными маслами, не защищенные от пыли, осадков, газа и т. п.; закрытые (редукторы, коробки передач), имеющие корпус с крышкой, полностью защищенные от засорения смазки, которая создается разбрызгиванием масла. На рис. 24 показан одноступенчатый цилиндрический редуктор с веду-
Трещина
Рис. 25. Усилия, действующие на зуб.
щей шестерней 3 и ведомым колесом 4; валы этих колес поддерживаются подшипниками 5; передача заключена в корпус 1 с крышкой 2 и масломерным стеклом 6.
Редукторы, как правило, подбираются типовые по передаточному числу и необходимой мощности на ведущем валу.
В открытых передачах чаще всего происходит излом зубьев у их основания, поэтому такие зубья рассчитывают на изгиб. Наиболее опасное положение, когда усилие Q приложено к вершине зуба (рис. 25). Проведем ось симметрии зуба и перенесем вектор Q в точку О пересечения с плоскостью симметрии. Силу Q разложим на изгибающее усилие Ру и сжимающее Т, которое будет передаваться на вал колеса.
Зуб будем рассматривать как брус, защемленный одним концом и нагруженный на свободном конце силой Ру.
Следовательно, согласно расчетному уравнению, известному из сопротивления материалов,
Выразим hy и ау через модуль tn hy = и = ym. Тогда
Отсюда
Р$т
, у2т2
О —!--
6
(58)
Pi < [а]из bm.
Величину -gg-, которая характеризует форму зуба, т. высоту и ширину, обозначим через у и заменим усилие Ру ным усилием
(59)
е. его окруж-
р_ 2At d
(60)
где М — вращающий момент; d — диаметр начальной окружности колеса.
30
Изгибающее усилие Pi ие равно окружному Р, но так как Р > Pj эта замена увеличивает запас прочности.
Из выражений (59) и (60) следует, что
2 < У [о]из Ьт. (61)
Формула (61) удобна для проверочного расчета работающей передачи.
Для определения модуля, учитывая, чтоб/ = mz и выражая ширину зуба как b = Wm, выражение (61) запишем в виде
2М < у [о]изЧг2/п3. (62)
Коэффициент Y характеризует качество изготовляемых передач; он ниже для литых и выше для фрезерованных колес. Решая уравнение (62) относительно т, получим значение модуля.
Здесь рассматривались зубчатые колеса с прямыми зубья-
Рис. 26. Условные обозначения зубчатых передач:
а — цилиндрическая передача внешняя (без уточнения типа зубьев); б — то же, с прямыми и косыми зубьями; в — то же, с шевронными зубьями; г — внутреннее зацепление; д — коническая передача без уточнения типа зубьев; е — то же, с прямыми и криволинейными зубьями.
ми, т. е. с такими, которые входят в зацепление одновременно по всей длине. Если зуб наклонить под углом к оси вращения, то получится косозубое колесо (см. рис. 22, б). В этом колесе в зацеплении одновременно находится большее число зубьев, чем у колеса с прямыми зубьями, что обеспечивает более плавную работу. Однако недостатком косозубых колес является возникновение осевого усилия А,
из-за которого приходится принимать дополнительные меры для закрепления колеса на валу. Колеса, имеющие шевронный (елочный) зуб, обладают всеми преимуществами косозубых, но осевые усилия у, возникающие на правой и левой частях зуба, взаимно уничтожаются. Так как шевронные передачи сложны в изготовлении, их применяют в наиболее ответственных узлах машин. Конические передачи (рис. 22, г, ди 23, в) обычно применяются, когда валы пересекаются под углом 90°. Передаточное число этих колес определяется так же, как и для цилиндрических:
_ г2 _ d2cp
п-2 z, dlcp ’
(63)
где б2сР и dic.p средние диаметры колес.
31
Средний модуль открытых конических колес также определяется по формуле (62), но [о]из уменьшается на 15%.
На рис. 26 показаны условные обозначения зубчатых передач.
Червячные передачи применяют при передаче вращения между перекрещивающимися валами обычно под углом 90°. Червячная передача состоит из червяка и червячного колеса (рис. 27). Червяк 1 представляет собой одно-, двух-, трех- или четырехзаходный винт с трапециевидной нарезкой. Червячное колесо 2 — это косозубое колесо с зубьямй дуговой формы. Угол наклона зуба и шаг червячного колеса соответствуют углу наклона и шагу зубьев червяка. На рис. 27, в показана схема усилий в червячной передаче. Достоинствами червячной передачи являются:
возможность получения большого передаточного числа (80— 100) при малых габаритных размерах:
32
о о -
где Zi — число заходов червяка; г2 — число зубьев колеса; например, если следует обеспечить i = 60, то можно принять 60 зубьев на колесе и сделать однозаходный червяк (в случае зубчатой передачи пришлось бы практически принять три пары передач);
плавность хода и бесшумность работы;
возможность выполнения передачи самотормозящей.
Недостатки червячной передачи: относительно невысокий КПД, особенно при самотормозящем червяке [см. формулу (10)]; нагрев при непрерывной работе; необходимость применения бронзовых зубьев, чтобы уменьшить в них трение и предотвратить их схватывание.
Цепные передачи (рис. 28) применяют для передачи вращения между параллельными валами, расположенными на сравнительно большом (до 8 м) расстоянии, но при необходимости обеспечить постоянное передаточное число. Простейшая цепная передача состоит из цепи 1 и двух звездочек 2 м3. Применяются три типа цепей; тяговые — для перемещения грузов в транспортирующих машинах, грузовые — для подъема грузов и приводные. Роликовая приводная цепь состоит из валика, втулки 5, ролика 6 и пластины 4. Из приводных цепей самыми сложными являются зубчатые, у которых на валике собираются пластины с двумя зубьями. Однако они обеспечивают плавность и бесшумность работы и применяются при высоких скоростях (до 25 м/с).
Основным размером цепи является ее шаг t (расстояние между осями соседних роликов или втулок).
Передаточное число цепной передачи
Z = -И- = — пз г,
(65)
2 642
33
Рис. 29. Расчетная схема к определению диаметра звездочки.
где 2\ и 2г — соответственно число зубьев ведущей и ведомой звездочек.
Диаметр звездочки D определяется из треугольника АВС (рис. 29):
„ 360°
Так кака = —-—, то
Рис. 30. Условное обозначение передачи (без уточнения типа цепи).
D =-----L_
. 180° sm-----
2
(66)
Основными недостатками цепных передач являются: вытягивание цепи, влияющее на равномерность хода, чувствительность к динамическим нагрузкам и необходимость тщательного ухода.
Грузовые цепи подбирают, исходя из разрывного усилия с учетом необходимого запаса прочности.
Условные обозначения цепных передач показаны на рис. 30.
§ 5. ОСИ И ВАЛЫ, ИХ СОЕДИНЕНИЯ И ОПОРЫ
Ось представляет собой стержень, как правило, круглого сечения, предназначенный только для поддержания вращающихся деталей. Ось рассчитывают на изгиб (рис. 31):
Миэ < F [<т]из. (67)
Так как Л4ИЗ = 7?ад, а 7?а/ = РЬ, то
МИ5 = Р^-, (68)
где Мю изгибающий момент в опасном сечении; W — момент сопротивления сплошного сечения круглой формы; [о]Из — допускаемое напряжение.
Оси бывают: невращающиеся — в этом случае они нагружаются по пульсирующему циклу (см. рис. 2, б) и вращающиеся, подвергающиеся знакопеременным нагрузкам (см. рис. 2, в).
Вал также представляет собой стержень, обычно круглого сечения, предназначенный для поддержания закрепленных на нем деталей и передачи им крутящего момента. Наиболее распространены прямые валы. Они могут иметь постоянный диаметр по всей длине или ступенчатое (реже плавное) изменение диаметра; при-
34
Рис. 31. Схема к расчету оси.
Рис. 32. Схема частей вала.
меняются валы сплошного поперечного сечения или кольцевые (полые). Кроме того, имеются валы специального назначения, например коленчатые, кривошипные и т. п.
Условие прочности вала при расчете на кручение
Мкр < Wo |т]кр, (69)
где Л4кр — крутящий момент, передаваемый валом; 1ЕР — полярный момент сопротивления сплошного сечения круглого вала; 1т]кр — допускаемое напряжение.
Если на валу находится звездочка, зубчатое колесо или шкив, то вал рассчитывают по формуле (67) на приведенный момент:
Мпр = У Миэ + (0,75Мкр/. (70)
Та часть вала или оси, которая лежит непосредственно на опоре, называется цапфой, причем концевые цапфы принято называть шипами, а промежуточные — шейками. На рис. 32 схематически изображен вал Л В, лежащий на трех опорах Л, С и В и несущий шкивы 1, 2 и 3, причем, согласно сказанному ранее, части вала, лежащие на опорах А, С и В, являются цапфами (цапфы А и В — шипы и цапфа С — шейка). Если цапфа передает опоре осевую нагрузку вала или оси, то такая цапфа называется пятой.
Неподвижные опорные части, на которые опираются шипы и шейки и которые образуют с цапфами вращательные кинематические пары, называются подшипниками, а опоры для пят — подпятниками.
Для соединения валов различных механизмов, а также отдельных валов одного и того же механизма между собой служат муфты.
На рис. 33 показаны условные обозначения соединения деталей с валом.
Шпоночные и шлицевые соединения применяются для закрепления на валах вращающихся вместе с ними деталей. Ш п о н о ч -ные соединения выполняются следующим образом: на валу 2 и в ступице 1 детали (рис. 34, а) вырезают паз (канавку), в который вводят клиновидную соединительную деталь — шпонку.
Обычно применяются призматические шпонки, которые проверяются на срез и смятие:
Рш < Ы [т]ср; (71)
Рш < ®,5hl |о]см, (72)
где Рш — окружное усилие, даН (кгс).
2*
35
-ЕЕЗ— в
Рис. 33. Условные обозначения соединения деталей с валом:
а — свободное для вращения: б — подвижное без вращения; в — глухое.
Рис. 34. Соединения: а — шпоночное; б — шлицевое.
Для осевого перемещения детали шпонку прикрепляют к валу винтами. Такая шпонка называется направляющей.
Широко распространены также шлицевые соединения (рис. 34, б), которые образуются выступами вала 3, входящими в пазы ступицы 4, насаживаемой детали. Эти соединения по сравнению со шпоночными хорошо центрируют детали, позволяют перемещать их вдоль оси вала и очень надежны в эксплуатации. Их проверяют на смятие боковых граней:
Рш < 1^1 , (73)
где z — количество шлицов.
Муфты служат для осевого соединения валов или для передачи крутящего момента детали, свободно сидящей на валу.
По выполняемым функциям муфты можно разделить на следующие группы:
постоянные, применяемые для постоянного соединения валов;
сцепные, дающие возможность соединять и разъединять вращающиеся валы на ходу;
предохранительные, обеспечивающие разъединение вращающихся валов при увеличении нагрузки или скорости сверх расчетной, чем предотвращается поломка машины;
обгонные, передающие крутящий момент только в одном направлении и автоматически разъединяющие ведущий и ведомый валы в том случае, когда ведомый вал начинает вращаться быстрее ведущего.
Постоянные муфты делятся на глухие и подвижные.
Глухие муфты (продольно-разъемная и поперечно-разъемная фланцевая — рис. 35, а, б) служат для жесткого соединения валов, оси которых точно совпадают и во время работы не смещаются.
Подвижные муфты (например, упругая, шарнирная — рис. 35, в, г) допускают относительные смещения соединяемых валов, которые компенсируются подвижностью элементов муфты. У элас-
36
ж
Рис. 35. Муфты:
Глухие; а — продольно-разъемная, б — поперечно-разъемная; подвижные: в — упругая, а — шарнирная; сцепные: д — кулачковая, е — фрикционная конусная. ж — однодисковая.
точной муфты компенсация происходит за счет резиновых втулок на соединительных пальцах или колец. У шарнирной муфты шарниры дают возможность соединять валы под углом, причем этот угол во время работы может изменяться.
Сцепные муфты различаются в зависимости от характера сил, вызывающих сцепление между ведущими и ведомыми элементами. Наиболее распространены кулачковые и фрикционные муфты.
Кулачковая муфта (рис. 35, д) состоит из полумуфт, имеющих на торцах кулачки (выступы). Эта муфта используется для включения и выключения тихоходных валов, так как включать ее можно только при остановке вала или при очень малой скорости вращения.
Фрикционные муфты обеспечивают возможность плавного соединения ведущего вала с ведомым; при резких перегрузках эти муфты пробуксовывают, предохраняя от поломки нагруженные детали. Чаще всего применяются дисковые муфты, реже—конусные
37
a
Рис. 36. Предохранительные муфты:
а — со срезными штифтами; б — фрикционная.
(рис. 35, е), так как они более чувствительны к перекосам и резкости включения.
У дисковых муфт, например однодисковых (рис. 35, ж), при нажатии ведомого диска 2 на ведущий диск 1 с некоторой осевой силой Q между дисками создается момент трения.
Применяются также фрикционные муфты с
внутренней разжимной лентой и с внешними нажимными колодками.
Предохранительные муфты могут быть дисковыми со срезными штифтами 1 (рис. 36, а) и фрикционными. В рабочем положении муфта (рис. 36, б) замкнута благодаря тре-
нию на поверхности двухстороннего конического диска, сидящего на призматической шпонке ведомого вала. Если момент сопротив
ления на ведомом валу превышает сумму моментов трения на коническом диске, муфта размыкается, допуская таким образом передачу ограниченного по величине момента. Величина этого момента регулируется затягиванием болтов, сжимающих пружины 2.
Обгонной муфтой обычно служит центробежная муфта, автоматически включающая и выключающая привод по достижении ведущей частью муфты определенного числа оборотов.
На рис. 37 изображена центробежная фрикционная муфта с двумя поворотными корытообразными колодками 1. Осями поворота колодок служат пальцы 3, установленные в бобышках диска 5, насаженного своей ступицей на ведущий вал на шпонке. Пружины 2, закрепленные внутри колодок, прижимают свободный конец одной колодки к втулке другой. На ступицу диска 5 свободно насажен диск, удерживаемый от осевого смещения шайбой. Внутренняя поверхность обода шкива используется как рабочая поверхность муфты. По мере увеличения числа оборотов вала колодки под действием центробежной силы, преодолев натяжение пружин, прижимаются к ободу шкива с давлением, достаточным для передачи крутящего момента. Смазка на трущиеся при невключенной муфте поверхности подается посредством колпачковой масленки.
Резиновые амортизаторы 4, привинченные к свободным концам колодок, предохраняют колодки от удара о втулки.
Условные обозначения рассмотренных муфт приведены на рис. 38.
Опорами для валов и осей служат подшипники. Они воспринимают радиальные и осевые нагрузки и передают их на раму машины. По роду трения подшипники разделяются на подшипники качения и подшипники скольжения. Преимущества подшипников качения
38
заключаются в более высоком КПД, меньших усилиях, требующихся на начальный разгон, простоте монтажа, отсутствии явлений заедания и т. д. Но они чувствительны к ударным нагрузкам и к высокой температуре. Подшипники скольжения способны воспринимать большие нагрузки при относительно небольших скоростях и поэтому применяются в тяжелых машинах.
Подшипники качения (рис. 39) изготовляются на специализированных заводах только стандартных размеров.
В подшипниках качения применяют тела качения — шарики, ролики (цилиндрические, конические и сферические) и иглы (длинные ролики малого диаметра). Тела качения помещаются
между наружным и внутренним кольцами и могут располагаться в один и два ряда. Внутреннее кольцо подшипника напрессовывается на вал, а наружное устанавливается в корпус. Тела качения отделяются друг от друга сепараторами и специальными кольцами. Конструкция подшипника качения определяется не только формой тел качения, но и способностью подшипника воспринимать осевую
Рис. 38. Условные обозначения муфт:
а — глухое соединение валов (см. рис. 35, а, б); б — тоже, с предохранением от перегрузки (рмс. 36, а}; в — эластичное соединение валов (рис. 35, в); г — шарнирное соединение валов (рис. 35, г); д — предохранительная муфта (рис. 36, 6): е — сцепная кулачковая муфта (рис. 35, д); ж — то же, двухсторонняя; з — сцепная конусная муфта (рис. 35, е); и — то же, двухсторонняя; к — сцепная дисковая муфта (рис. 35, ж)\ л — то же, двухсторонняя; м — тоже, с колодками; н — то же, с разжимным кольцом; о — центробежная муфта (см. рис. 37).
нагрузку. С этой точки зрения подшипники подразделяются на ра-
диальные, радиально-упорные и упорные (подпятники).
Роликовые радиальные подшипники могут нести значительно большую нагрузку, чем шариковые, но не допускают перекоса вала. Радиальные шариковые подшипники более просты и дешевы в
изготовлении и могут воспринимать осевую нагрузку. Сферические
39
Рис. 39. Подшипники качения:
а — шариковый радиальный, однорядный; б — шариковый радиальный двухрядный: в — роликовый радиальный (с короткими цилиндрическими роликами); г — роликовый радиальный сферический; д — шариковый радиально-упорный; е — роликовый конический радиально-упорный; ж — игольчатый; з — упорный шариковый однорядный.
самоустанавливающиеся подшипники применяют в опорах длинных гибких валов, в которых возможно биение вследствие провисания от веса находящихся на них деталей.
Подшипники подбирают по таблицам ГОСТа, исходя из диаметра цапфы и эмпирического коэффициента работоспособности
С = Qyui (пН)0’3, (74)
где Русл — условная нагрузка на подшипник, зависящая от величины радиальной и осевой нагрузки, ее ударности, рабочей температуры узла и т.п.; п — частота вращения вала, мин-1; Н — предполагаемая долговечность в часах работы; в зависимости от сложности оборудования и сроков ремонта Н принимают от 500 до 10 000 ч.
Для повышения долговечности подшипники качения защищены от попадания минеральных частиц на рабочие поверхности уплотнителями и смазкой. При скоростях до 3—4 м/с применяют контактные (войлок, фетр) уплотнители, при скоростях до 7—10 м/с — манжетные (из кожи или севанита) и при любых скоростях — лабиринтные.
40
Рис. 40. Разъемный подшипник скольжения.
Рис. 41. Условные обозначения
подшипников качения:
Подшипники скольжения бывают неразъемные и разъемные. Наиболее распространены в машиностроении разъемные подшипники (рис. 40). Корпус подшипника 1 явля-
а — радиальный (общее обозначение); б — радиальный роликовый; в — радиальный самоустанавлнваю-щнйся; г — радиально-упорные (общее обозначение) однорядный и двойной; д — радиально-упорный роликовый однорядный н двойной; е — упорные одинарные и двойные
ется основанием, воспринимающим давление цапфы. Крышка 3 закрывает подшипник сверху и стягивает разъемный вкладыш 2. Болты с гайками 4 скрепляют корпус и крышку, а болты, или шпильки, с гайками 5 крепят корпус подшипника к фундаменту или опорной площадке.
Движение цапфы относительно вкладыша подшипника при нагрузке создает работу сил грения, которая приводит к износу цапфы и вкладыша.
Поскольку валы являются дороги-
Рис. 42. Условные обозначения подшипников скольжения: а — радиальный; б — радиальный самоустанавливающнйся; в — радиально-упорные; г — упорные.
ми ответственными деталями, мате-
риал вкладышей выбирают менее износоустойчивым, а в кон-
струкции подшипника предусматривают возможность смены изношенных вкладышей или втулок. Вкладыши изготовляют из антифрикционного чугуна, а в ответственных случаях — из бронзы и заливают баббитом. В настоящее время широко применяют металлокерамические вкладыши, а также вкладыши, изготовленные из пластмасс (текстолита, капрона, лигнофоля и др.).
В подшипниках скольжения непрерывная подача смазки имеет особое значение, так как необходимо обеспечить постоянное жидкостное трение; применяются пресс-масленки, фитильная смазка, кольцевая смазка и маслонасосы. Расчет подшипника скольжения
сводится к проверке на невыдавливание смазки, т. е. по давлению
[7] >
R
Id
(75)
41
где d — диаметр вкладыша; R — радиальная нагрузка на подшипник; I — длина подшипника; [9] зависит от материала вкладышей (наибольшее значение 1с/] для вкладышей, залитых баббитом).
Условные обозначения подшипников показаны на рис. 41 и 42.
Вопросы для самопроверки
1. Чем определяется запас прочности при расчетах деталей машин?
2. От какях величин зависит коэффициент жидкостного трения?
3. Как определить КПД самотормозящей наклонной плоскости?
4. Как обеспечить самоторможение на клине?
5. Выведите формулу Эйлера.
6. Что такое приведенный коэффициент трения?
7. Сравните заклепочные и сварные соединения по назначению и расчету.
8. Объясните, какой вид нарезки применяют в резьбовых соединениях.
9. Охарактеризуйте зависимость передаточного числа от крутящего момента.
10. Каковы условия работы фрикционной передачи и как устроены вариаторы?
II. Сравните плоскоремениую и клиноременную передачи.
12. Что такое модуль зубчатой передачи и как его рассчитать для открытых цилиндрических и конических колес?
13. Каковы достоинства и недостатки червячной передачи?
14. Каковы условия применения цепной передачи и как определить диаметр звездочки?
15. Сравните валы и оси по назначению и расчету.
16. Дайте характеристику различных групп муфт, приведите примеры этих муфт и нарисуйте их условные обозначения на кинематических схемах.
17. Какие подшипники — радиальные, радиально-упорные или упорные — надо поставить на валах червяка и колеса, показанного на рис. 27, в, и почему?
18. Перечислите детали общего назначения, которые применены в таких строительных машинах: лебедке (см. рис. 98), башенном кране (см. рис. 106), гусеничном кране (см. рис. 126) и экскаваторе (см. рис. 158).
Глава II
ОСНОВНЫЕ СВЕДЕНИЯ О СТРОИТЕЛЬНЫХ МАШИНАХ
О
§ 6. ОБЩАЯ КЛАССИФИКАЦИЯ СТРОИТЕЛЬНЫХ МАШИН
Различают машины-двигатели, преобразующие энергию в механическую работу, и рабочие машины, преобразующие механическую работу, получаемую от двигателя, в работу по выполнению технологических операций.
Строительные машины являются рабочими машинами. Поэтому при их изучении целесообразна классификация по технологии рабочего процесса, для выполнения которого машина предназначена.
Строительные машины, непосредственно работающие на строительстве (на строительной площадке), подразделяются на следующие классы: транспортирующие машины; погрузочно-разгрузочные машины; грузоподъемные машины; машины для производства земляных работ; оборудование для свайных работ; дробильно-сортировочные установки; машины для приготовления, транспорта и укладки бетонной смеси и растворов; механизированный инструмент для строительства; оборудование для отделочных работ *.
Современные строительные машины состоят из шести основных частей: рабочего оборудования, непосредственно осуществляющего технологическую операцию, например, перемещение материала, разработку грунта, перемешивание бетонной смеси и т. п.; ходового оборудования, служащего для передвижения машины; силового оборудования, т. е. двигателя, являющегося источником энергии для осуществления движения элементов машины; передаточных механизмов, связывающих силовое оборудование с рабочим и ходовым оборудованием; механизмов управления, служащих для включения или выключения отдельных механизмов машины; рамы (станины, платформы), на которой устанавливается оборудование, механизмы управления и другие части машины.
У некоторых машин отдельные части могут отсутствовать, например силовое оборудование у прицепных машин, ходовое — у стационарных.
§ 7. КАТЕГОРИИ ПРОИЗВОДИТЕЛЬНОСТИ МАШИН
Производительность машины, определяемая количеством продукции, произведенной машиной в кубических метрах, в тоннах,
* Технические характеристики и эксплуатационные расчеты отечественных машин приводятся в фундаментальном справочнике: Строительные машины/ Под ред. проф. В. А. Баумана и Ф. А. Лапира. А1., Машиностроение, 1976.
43
Рис. 43. Схема комплексной механизации при разработке выемки: а — разработка грунта одноковшовым экскаватором; б — транспортирование грунта тракторными прицепами; в — насыпка грунта с уплотнением и разравниванием бульдозером.
штуках, тонно-километрах в единицу времени (час, смена, год), подразделяется на техническую и эксплуатационную.
Техническая производительность обычно подсчитывается за один час, а эксплуатационная — за смену и за год.
Часовая техническая производительность Птехн — это наивысшая производительность за час непрерывной работы машины, которая может быть достигнута в конкретных условиях рабочими, полностью овладевшими передовыми методами управления машиной и ее обслуживания.
На рис. 43 показана схема комплексной механизации при проведении выемки одноковшовым экскаватором, транспортировании грунта от забоя в насыпь тракторными прицепами и разравнивании насыпи бульдозером. По этой схеме непрерывность работы экскаватора может быть обеспечена непрерывной подачей под погрузку тракторных прицепов. Конкретными условиями, влияющими на техническую производительность экскаватора, являются свойства разрабатываемого грунта, глубина выемки и положение загружаемого тракторного прицепа по отношению к экскаватору.
В сменной эксплуатационной производительности Псм учитываются необходимые в течение смены перерывы как конструктивнотехнического, так и технологического характера.
Конструктивно-технические перерывы зависят от конструкции машины и связаны с техническим уходом за нею (пуск, смазка и прочистка машины), питанием машины топливом, водой и пр.
Технологические перерывы зависят от технологии строительного производства и условий использования машины в строительстве. К ним относятся:
перерывы во время передвижения самоходных машин в пределах участка работы (например, передвижение экскаватора вдоль забоя, рис. 43);
перерывы, связанные с подготовкой рабочего места машины (например, очистка погрузочной дороги, дна и бровок выемки);
перерывы для смены транспортных средств (например, тракторных прицепов у экскаватора) и т. д.
44
Глава II
ОСНОВНЫЕ СВЕДЕНИЯ
О СТРОИТЕЛЬНЫХ МАШИНАХ
§ 6. ОБЩАЯ КЛАССИФИКАЦИЯ СТРОИТЕЛЬНЫХ МАШИН
Различают машины-двигатели, преобразующие энергию в механическую работу, и рабочие машины, преобразующие механическую работу, получаемую от двигателя, в работу по выполнению технологических операций.
Строительные машины являются рабочими машинами. Поэтому при их изучении целесообразна классификация по технологии рабочего процесса, для выполнения которого машина предназначена.
Строительные машины, непосредственно работающие на строительстве (на строительной площадке), подразделяются на следующие классы: транспортирующие машины; погрузочно-разгрузочные машины; грузоподъемные машины; машины для производства земляных работ; оборудование для свайных работ; дробильно-сортировочные установки; машины для приготовления, транспорта и укладки бетонной смеси и растворов; механизированный инструмент для строительства; оборудование для отделочных работ *.
Современные строительные машины состоят из шести основных частей: рабочего оборудования, непосредственно осуществляющего технологическую операцию, например, перемещение материала, разработку грунта, перемешивание бетонной смеси и т. п.; ходового оборудования, служащего для передвижения машины; силового оборудования, т. е. двигателя, являющегося источником энергии для осуществления движения элементов машины; передаточных механизмов, связывающих силовое оборудование с рабочим и ходовым оборудованием; механизмов управления, служащих для включения или выключения отдельных механизмов машины; рамы (станины, Платформы), на которой устанавливается оборудование, механизмы управления и другие части машины.
У некоторых машин отдельные части могут отсутствовать, например силовое оборудование у прицепных машин, ходовое — у стационарных.
§ 7. КАТЕГОРИИ ПРОИЗВОДИТЕЛЬНОСТИ МАШИН
Производительность машины, определяемая количеством продукции, произведенной машиной в кубических метрах, в тоннах,
* Технические характеристики и эксплуатационные расчеты отечественных машин приводятся в фундаментальном справочнике: Строительные машины/ Под ред. проф. В. А. Баумана и Ф. А. Лапира. М., Машиностроение, 1976.
43
Рис. 43. Схема комплексной механизации при разработке выемки: а — разработка грунта одноковшовым экскаватором; б — транспортирование грунта тракторными прицепами; в — насыпка грунта с уплотнением и разравниванием бульдозером.
штуках, тонно-километрах в единицу времени (час, смена, год), подразделяется на техническую и эксплуатационную.
Техническая производительность обычно подсчитывается за один час, а эксплуатационная — за смену и за год.
Часовая техническая производительность Птехн — это наивысшая производительность за час непрерывной работы машины, которая может быть достигнута в конкретных условиях рабочими, полностью овладевшими передовыми методами управления машиной и ее обслуживания.
На рис. 43 показана схема комплексной механизации при проведении выемки одноковшовым экскаватором, транспортировании грунта от забоя в насыпь тракторными прицепами и разравнивании насыпи бульдозером. По этой схеме непрерывность работы экскаватора может быть обеспечена непрерывной подачей под погрузку тракторных прицепов. Конкретными условиями, влияющими на техническую производительность экскаватора, являются свойства разрабатываемого грунта, глубина выемки и положение загружаемого тракторного прицепа по отношению к экскаватору.
В сменной эксплуатационной производительности Псм учитываются необходимые в течение смены перерывы как конструктивнотехнического, так и технологического характера.
Конструктивно-технические перерывы зависят от конструкции машины и связаны с техническим уходом за нею (пуск, смазка и прочистка машины), питанием машины топливом, водой и пр.
Технологические перерывы зависят от технологии строительного производства и условий использования машины в строительстве. К ним относятся:
перерывы во время передвижения самоходных машин в пределах участка работы (например, передвижение экскаватора вдоль забоя, рис. 43);
перерывы, связанные с подготовкой рабочего места машины (например, очистка погрузочной дороги, дна и бровок выемки);
перерывы для смены транспортных средств (например, тракторных прицепов у экскаватора) и т. д.
44
Таким образом, эксплуатационная сменная производительность машины
Псм = ПтехнпСм = Птехн (Тс — SQ, (76)
где Птехн — техническая производительность; псм — число часов чистой работы машины в смену; Тс — полное время смены, ч; 2УП — время сменных перерывов работы машины, ч.
Часто сменную производительность машины записывают так:
Псм = ПтехнТ'еКд, (77)
где Кв — коэффициент использования сменного времени,
Кв = -Гс7^п- (78)
* с
В годовой эксплуатационной производительности Пгод учитываются: конструктивно-технические перерывы, связанные с ремонтом машины; технологические перерывы, связанные с переброской машины с объекта на объект и с климатическими условиями (например, прекращение работы в зимнее время вследствие промерзания грунта при маломощных экскаваторах); организационные перерывы, связанные с праздниками, выходными днями при непрерывной рабочей неделе и нерабочими сменами при работе в одну или две смены, и т. д.
Таким образом, годовая эксплуатационная производительность машины
Пгод = ПСМЛ?, (79)
где N — число смен работы машины в году.
При подсчете технической производительности следует учитывать вид машины — прерывного действия или непрерывного.
Машины прерывного действия характеризуются тем, что процессы их работы состоят из чередующихся рабочих и нерабочих движений (так на. ываемых циклов). Например, цикл одноковшового экскаватора (рис. 43) включает рабочее движение — черпание ковшом грунта и отгрузка его в тракторный прицеп и холостые движения — возвращение порожнего ковша в забой.
Процесс работы машин непрерывного действия характеризуется совмещением вс времени рабочего хода с нерабочим. Поэтому нерабочий ход совершенно не влияет на производительность машины. Машины непрерывного действия могут выдавать материал непрерывным потоком (например, ленточный конвейер, см. рис. 56) или отдельными порциями (например, ковшовый конвейер, см. рис. 62).
Для машин прерывного (цикличного) действия техническая производительность, м3/ч (или т/ч) определяется по формуле
Птехн = -в-, (80)
где Q — продукция, выдаваемая за один цикл, м3 (или т); t — продолжительность цикла, с.
45
У машин непрерывного действия, выдающих материал непрерывным потоком, техническая производительность, т/ч,
Птехн = ЗбООЕц, м3/ч, или Птехн = Fиу, (81)
где F— сечение перемещенного материала, м2; v — скорость движения этого материала, м/с; у — насыпная масса, кг/м3.
Если же машины непрерывного действия перемещают материал отдельными порциями q, м3, расстояние между которыми а, м, то техническая производительность, т/ч,
Птехн = 3600 ± V, М3/г, ИЛИ Птехн =
Для повышения технической и эксплуатационной производительности машин наряду с конструктивными мероприятиями особенно важно внедрять передовые методы работы новаторов производства. Эти методы характеризуются: достижением высоких количественных и качественных показателей путем сокращения простоев, тщательной подготовкой рабочего места, отличным уходом за оборудованием и совершенствованием приемов работы; повышением производительности труда за счет сокращения времени на вспомогательные операции и увеличения времени на основную работу; улучшением работы благодаря внедрению рационализаторских предложений.
§ 8. СИЛОВОЕ И ХОДОВОЕ ОБОРУДОВАНИЕ. СИСТЕМЫ УПРАВЛЕНИЯ
В строительных машинах применяется следующее силовое оборудование: электродвигатели, двигатели внутреннего сгорания, гидравлический привод, пневматический привод. Условные обозначения силового оборудования показаны на рис. 44.
Электрические двигатели обладают рядом существенных достоинств: значительной перегрузочной способностью, что особенно важно для машин периодического действия, выполняющих тяжелые работы; высокой экономичностью; независимостью от температурных и атмосферных условий; постоянной готовностью к работе; чистотой рабочего места; не требуют топлива; их применение дает возможность установки индивидуальных двигателей для каждого механизма (многомоторный привод), что исключает сложные трансмиссии, а также возможность дистанционного управления, автоматизации и создает удобство управления отдельными механизмами.
Благодаря этим достоинствам электрические двигатели широко применяются на стационарных и многих передвижных машинах.
Недостаток их заключается в необходимости питающей сети.
Для машин непрерывного действия при непрерывном режиме работы с примерно постоянной нагрузкой применяют электродвигатели переменного тока общепромышленных типов. Для машин периодического действия при кратковременно-повторном режиме
46
5
Рис. 45. Условное изображение секционного распределителя:
1 — предохранительный клапан; 2 — обратный клапан; 3 — трехпозн-ционные золотннкн; 4 — четырехпозицноиный золотник; 5 — коробка перепускных клапанов.
Распределители предназначены для изменения направления потока жидкости (включение, реверс и остановка гидродвигателей). Обычно в строительных машинах применяются золотниковые распределители с ручным управлением как более надежные. По конструктивным признакам различают моноблочные, размещенные в одном корпусе, и секционные, у которых каждый золотник размещен в своей секции (корпусе); секции соединяются друг с другом болтами. Для управления гидроцилиндрами двустороннего действия и гидромоторами применяются трехпозиционные распределители (подъем, нейтральное положение и спуск). Если обе полосы гидроцилиндра или гидропотока необходимо соединить, то применяют четырехпозиционные распределители (еще и плавающее положение) (рис. 45).
Регулирующая гидроаппаратура включает клапаны и дроссели. Клапаны могут быть: предохранительные — на случай отказа распределителя, превышения нагрузки на гидродвигатели и т. п. и обратные — для пропускания жидкости в одном направлении. Дроссели предназначены для регулирования скорости рабочего органа изменением расхода жидкости. Фильтры служат для очистки рабочей жидкости от механических примесей.
К основным преимуществам гидропривода относятся: большая надежность в работе; широкие возможности регулирования; возможность работы при больших усилиях; плавность работы; возможность использования для рабочих операций индивидуальных двигателей при независимости от внешнего источника питания, а также изменения скоростей без применения передач, что позволяет получить простую систему малых габаритов и веса, особенно при наличии нескольких механизмов.
49
a
Рис. 46. Гидродинамическая передача:
а — гидромуфта; б — одноступенчатый гидротрансформатор.
Применение гидропривода требует высокой точности изготовления его агрегатов и применения соответствующих жидкостей в зависимости от температуры воздуха *.
Гидродинамический привод (гидродинамическая передача) представляет собой механизм (гидромуфту или гидротрансформатор) для передачи энергии от ведущего вала к ведомому за счет скоростного напора циркулирующей рабочей жидкости.
Гидромуфта (рис. 46, а) состоит из корпуса 1, заполненного жидкостью, насосного колеса 4 и турбинного колеса 2. Колесо 4 жестко связано с валом двигателя 5, а колесо 2 — с ведомым валом. При вращении вала двигателя жидкость, находящаяся между лопатками насосного колеса, под действием центробежных сил устремляется от центра к периферии, вследствие чего кинетическая энергия жидкости возрастает. Переходя на лопатки турбинного колеса 2, жидкость устремляется от периферии к центру и, теряя кинетическую энергию, оказывает на эти лопатки давление, которое создает крутящий момент на ведомом валу 3. Крутящие моменты на валах 3 и 5 одинаковые (без учета потерь в самой гидропередаче).
Основными достоинствами гидромуфты является то, что она поглощает крутильные колебания силовой передачи, повышает устойчивость работы двигателя, улучшает разгон машины и облегчает ее управление.
Гидротрансформатор (рис. 46, б) служит для автоматического регулирования крутящего момента вала машины при изменении нагрузки. Он состоит из трех рабочих колес с криволи
* Подробнее см.: Каверзив С. В. Гидропривод строительных и дорожных машин. Красноярский политехнический институт, 1975.
50
нейными лопатками 6: насосное 10 и турбинное 11 — вращающиеся колеса, колесо-реактор 9 — неподвижное. Изнутри лопатки закрыты круглыми стенками, образующими внутри колес кольцевую полость круглого сечения небольшого диаметра. Рядом расположенные колеса также образуют кольцевую замкнутую по окружности полость. По этой полости циркулирует рабочая жидкость.
Насосное колесо 10 соединено с корпусом 12 (ротором) и через него с валом 13 двигателя. Турбинное колесо 11 связано через ведомый вал 7 с силовой передачей. Реактор 9 закреплен неподвижно на втулке 8, соединенной с картером. Ротор 12 гидротрансформатора с расположенными в нем рабочими колесами установлен на подшипниках внутри закрытого картера.
При работе гидротрансформатора масло захватывается лопатками вращающегося насосного колеса 10, отбрасывается центробежной силой к наружной окружности и попадает на лопатки турбинного колеса И. Благодаря создаваемому при этом напору, это колесо приводится в движение вместе с ведомым валом 7. Затем жидкость поступает на лопатки неподвижно закрепленного колеса-реактора 9, изменяющего направление потока жидкости, и опять поступает в насосное колесо, непрерывно циркулируя по замкнутому кругу внутренней полости рабочих колес (как указано стрелками) и участвуя в общем вращении с колесами.
Лопатки неподвижного колеса-реактора изменяют направление проходящего через него потока жидкости. На лопатках реактора возникает усилие, вызывающее появление реактивного момента.
Таким образом, реактор дает возможность получать на валу турбинного колеса крутящий момент Af2, отличающийся от момента М1У передаваемого двигателем.
Чем медленнее вращается турбинное колесо по сравнению с насосным колесом (например, при возрастании приложенной к валу турбинного колеса внешней нагрузки), тем значительнее лопатки реактора изменяют направление проходящего через него потока жидкости и тем больший дополнительный момент передается от реактора турбинному колесу, вследствие чего увеличивается крутящий момент на его валу.
Эффект саморегулирования гидротрансформатора улучшает работу двигателя внутреннего сгорания и всей силовой передачи.
Пневматический привод применяется лишь в некоторых типах вспомогательных устройств, чаще в тормозных устройствах, а иногда — в системах управления. Этот привод, как и гидравлический, состоит из рабочих цилиндров с поршнями, системы распределения и трубопровода, но вместо жидкости, нагнетаемой насосом, применяется сжатый воздух, подаваемый компрессором.
В строительстве применяются поршневые и ротационные компрессоры. У поршневых компрессоров при движении поршня в цилиндре засасывается воздух через автоматически действующий клапан. При обратном движении поршня воздух сжимается до тех пор, пока давление не превысит давление в
51
воздухосборнике. После этого выпускной клапан открывается, и сжатый воздух поступает в воздухосборник, а оттуда в трубопровод.
В ротационных компрессорах всасывание и нагнетание происходит вследствие периодического изменения рабочих полостей, образованных между лопастями и стенками корпуса, аналогично поршневым компрессорам, с той разницей, что поршень имеет возвратно-поступательное движение, а пластины — вращательное вместе с ротором, который получает привод непосредственно от двигателя, что упрощает устройство компрессора, делает его компактным и более надежным.
Существенный недостаток пневматического привода — его небольшой КПД в связи с падением давления сжатого воздуха и его утечками.
Ходовое оборудование должно обеспечивать достаточную силу тяги и необходимую скорость движения при заданных дорожных и технологических условиях работы машины (например, передвижение по грунту при его копании), а также постоянную устойчивость машины.
Различают основные виды ходового оборудования: гусеничное, пневмоколесное, рельсовое и шагающее. Чаще всего у строительных машин применяется гусеничное (например, см. рис. 125) и пневмоколесное (см. рис. 122) оборудование, а для некоторых машин — рельсовое (см. рис. 115).
Гусеничное оборудование благодаря высокой проходимости (вездеходности) применяется для плохих дорожных условий и больших уклонов. Недостаток его — сложность конструкции и относительно малая скорость передвижения.
Пневмоколесное оборудование маневренно, обеспечивает высокую скорость передвижения и отнссительно большие подъемы пути; отличается простотой конструкции и удобством эксплуатации. Недостатком являются большие расходы на пневмошины.
Рельсовое оборудование отличается простотой конструкции, надежностью и долговечностью, но требует устройства и переноски железнодорожных путей; осуществимо только при весьма пологих подъемах этих путей.
Шагающее оборудование имеет механизм шагания (гидравлический с цилиндрами или механический с эксцентриками или кривошипами), опорные лыжи и опорную базу. Передвижение машины осуществляется «шагами» — сначала машина опирается на свою базу, а лыжи выносятся вперед, затем поднимается база и перемещается вперед, пока машина стоит на лыжах. Применяется шагающее оборудование при очень малой несущей способности грунтов в карьерах и гидротехническом строительстве *.
* Подробнее см.: Домбровский Н. Г. Экскаваторы. М., Машиностроение, 1969.
Рис. 47. Системы управления:
а — непосредственное рычажное управление для ленточного тормоза; б — то же, рычажно гидравлическое; в — то же, с серводвигателем; 1,2 — цилиндры; 3 — бачок для пополнения жидкости; 4 — обратный клапан; 5 — золотник; 6 — гидравлический цилиндр (серводвигатель); 7 — поршень; 8 — рычажный механизм. осуществляющий обратную связь
Системы управления должны обеспечивать легкость, точность и быстроту управления машиной.
При непосредственном воздействии рабочего на педаль или рычаг применяют механические (рис. 47, а), пневматические и гидравлические (рис. 47, б) системы управления.
Для уменьшения усилий на рычагах и педалях управления используют дополнительный источник энергии (рис. 47, в) — электрический или гидравлический двигатель малой мощности (серводвигатель), который повторяет первичное усилие на рычаге или педали, увеличивая его до требуемой величины. Для того чтобы вторичное (рабочее) перемещение было синхронным (точным и с минимальным запаздыванием) первичному перемещению, применяют так называемую следящую (точно воспроизводящую) систему. В этой системе имеется механизм, регулирующий отклонение управляемого механизма от необходимого положения, и источник энергии, возвращающий этот механизм в требуемое положение (обратная связь).
53
§ 9. ТЕХНИКА БЕЗОПАСНОСТИ И ОХРАНА ТРУДА ПРИ РАБОТЕ СТРОИТЕЛЬНЫХ МАШИН
В Конституции (Основном Законе) Союза Советских Социалистических Республик (ст. 42) сказано, что право граждан СССР на охрану здоровья обеспечивается, в частности, развитием и совершенствованием техники безопасности и производственной санитарии.
Коммунистическая партия и Советское правительство уделяют большое внимание оздоровлению труда и его безопасности. Еще в мае 1918 г. В. И. Лениным был подписан декрет «Об инспекции труда», а в конце 1918 г. был утвержден первый советский Кодекс законов о труде.
За годы пятилеток произошло коренное улучшение условий труда и техники безопасности, в результате чего производственный травматизм снизился в несколько раз. Облегчение и оздоровление условий труда, устранение причин травматизма и заболеваемости рабочих рассматривается как государственная задача.
На всех предприятиях работа по технике безопасности возложена на главных инженеров, в распоряжении которых для этой цели существуют специальные бюро или выделенные для этого работники.
Охрана труда и техника безопасности обеспечивается: Гостех-горнадзором СССР, контролирующим техническое состояние подъемных устройств, проведение горных работ; Главной государственной санитарной инспекцией, контролирующей соблюдение норм и правил производственной санитарии; техническими инспекциями центральных комитетов профсоюзов (по отрасли промышленности). В контроле по соблюдению законов о труде участвуют также и местные профсоюзные организации, имеющие в своем составе комиссии и общественных инспекторов по охране труда. Обязательными являются специально изданные правила по технике безопасности (СНиП).
Правила техники безопасности при работе строительных машин можно разделить на общие, применяемые к любым машинам, и специфические, относящиеся только к определенному типу машин.
В общие правила техники безопасности при работе строительных машин входят следующие положения:
к управлению машиной могут быть допущены рабочие, имеющие удостоверение на право управления машиной; они же должны быть снабжены инструкцией, содержащей требования по технике безопасности, соблюдение которых необходимо при работе на данной машине, и правила ее эксплуатации;
машинист и рабочие бригады должны иметь удобную спецодежду, а в необходимых случаях — защитные приспособления (например, рукавицы, защитные очки и т. п.);
каждая вновь установленная и отремонтированная машина до сдачи ее в эксплуатацию должна быть осмотрена и испытана на хо
54
лостом ходу и под нагрузкой; об этом должен быть составлен акт, и сделаны соответствующие записи в журнале;
все движущиеся части машины (валы, шкивы, ролики, цепные передачи, фрикционные диски, муфты, отводные ролики и т. п.) должны быть ограждены в местах возможного доступа к ним людей;
чистка, смазка, регулировка и ремонт машины могут производиться лишь после отключения ее двигателя от электросети и после принятия мер, исключающих возможность произвольного перемещения движущихся частей машины;
в нерабочее время должна быть исключена возможность случайного пуска машины; пусковые устройства должны быть выключены и заперты;
стационарные машины должны быть установлены и надежно закреплены на прочном основании в соответствии с проектом; полы помещений, где работают машины, должны быть чистыми и не скользкими;
при остановке и перемещении передвижных машин должна быть исключена возможность их произвольного передвижения и опрокидывания;
передвижные машины при работе в ночное время независимо от освещенности места работ должны иметь переднее и заднее освещение.
Устройство, эксплуатация и ремонт временных электрических установок и сетей для строительства должны быть также регламентированы.
Специфические правила техники безопасности, относящиеся только к определенному типу машин, изложены в соответствующих главах книги.
К работе на строительстве могут быть допущены инженерно-технические работники, хорошо знающие правила безопасности, и рабочие, которые получили установленный инструктаж по технике безопасности. Повторные проверки знаний рабочих и повторный инструктаж должны проводиться не реже одного раза в год.
Вопросы для самопроверки
1. Перечислите классы строительных машин.
2. Чему равен коэффициент использования сменного времени и как он определяется при подсчете производительности машины?
3. Как от технической производительности перейти к расчету эксплуатационной производительности?
4. Дайте характеристику и определите область применения каждого вида силового оборудования.
5. Охарактеризуйте виды ходового оборудования и систем управления строительных машин.
6. Как обеспечивается охрана труда и техника безопасности при работе машин?
55
Глава III
ТРАНСПОРТИРУЮЩИЕ
И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫЕ МАШИНЫ
На строительствах применяют транспортирующие машины цикличного и непрерывного действия. К первым относятся грузовые автомобили, автотягачи, тракторы и машины рельсового транспорта, ко вторым — конвейеры и пневмотранспортные установки *.
Грузовые автомобили по назначению и соответствующей им конструкции кузова подразделяются на бортовые (грузоподъемностью 1,5—3 т и выше), имеющие кузова-платформы с откидными бортами и предназначенные для перевозки массовых и штучных грузов; автосамосвалы (грузоподъемностью 2—40 т и выше) — автомобили с опрокидными кузовами, которые применяются для перевозки песка, гравия, щебня, грунта и других насыпных грузов; специализированные автомобили — автоцементовозы, автоцистерны, автолесовозы, панелевозы и другие машины со специальными кузовами.
При благоприятных дорожных условиях (небольшие подъемы и удовлетворительное покрытие дороги) к бортовым автомобилям прицепляют автоприцепы грузоподъемностью 2—8 т и перевозка грузов производится автопоездами. На основе унифицированных самосвалов и автотягачей созданы семейства транспортных и строительных машин (рис. 48).
Тракторный транспорт на строительстве используется в вида поездов, состоящих из тягача-трактора мощностью 60—400 кВт, как правило, на гусеничном ходу и из тракторных прицепов на колесном ходу. Прицепы применяются бортовые и саморазгружаю-щиеся, с открывающимися внизу створками днища и опрокидывающимся кузовом. Бортовые автомобильные и тракторные прицепы предназначены для перевозки штучных грузов, а саморазгружаю-щиеся — для перевозки грунта и сыпучих материалов.
В тех случаях, когда для эксплуатации строящихся предприятий или для реконструкции существующих уложены железнодорожные пути широкой (1524 мм) или узкой колеи (750 мм), на строительной площадке применяются машины рельсового транспорта: обычно мотовозы с двигателями внутреннего сгорания мощностью 40— 200 кВт (реже электровозы), вагоны, полувагоны и платформы.
Машины непрерывного действия. Конвейеры и пневмотранспортные установки перемещают грузы потоком, постоянным по произ-
* Convey (англ.) — перевозить.
56
Рис. 48. Семейство строительных и транспортных машин на базе унифицированных тягачей:
а — строительные машины на базе одноосного тягача; б — строительные машины на базе двухосного тягача; в — транспортные машины на базе самосвала повышенной проходимости; 1 — скрепер; 2 — землевоз; 3 — пневмошинный каток; 4 — монтажный край;
5 — цементовоз; 6 — тяжеловоз; 7 — панелевоз; 8 — тяжеловоз повышенной грузоподъемности; 9 — трелевочный тягач; 10 — лесовоз; 11 — грейдер-элеватор; 12 — одноковшовый погрузчик; 13 — вилочный погрузчик; 14 — лесопогрузчик; 15 — погрузчик-смеситель; 16 — одноковшовый экскаватор; 17 — бульдозер; 18 — плужный снегоочиститель; 19 — корчеватель; 20 — путепроводчик; 21 — буровая установка; 22 — тягач с прицепами; 23 — самосвал; 24 — седельный тягач; 25 — бортовой автомобиль; 26 — лесовоз; 27 — грузовой автомобиль повышенной проходимости; 28 — седельный тягач; 29 — тягач повышенной проходимости; 30 — буровая установка.
57
водительности и направлению. Эти машины преимущественно применяются для перемещения сыпучих материалов (гравий, щебень, цемент, грунты и т. п.) и пластичных (бетонная смесь, растворы), а иногда мелкоштучных (камень, кирпич). Для того чтобы машины непрерывного транспорта работали с высокой производительностью, материалы должны подаваться на них непрерывно и сниматься с них безотказно.
Конвейеры используются для транспортирования механическим путем на небольшие расстояния насыпных и штучных грузов; наиболее распространенные из них ленточные, вибрационные, ковшовые и винтовые; последние два вида применяются как вспомогательные в других установках.
В пневмотранспортных установках, применяющихся на строительной площадке главным образом для транспортирования гипса и цемента при штукатурных работах, материал перемещается по системе трубопроводов под действием движущегося под давлением и с большой скоростью воздуха.
§ 10. УСТРОЙСТВО АВТОМОБИЛЕЙ И ТРАКТОРОВ
Автомобиль состоит из двигателя, шасси и кузова. Автомобильный двигатель является источником механической энергии. Шасси включает силовую передачу (трансмиссию), служащую для передачи вращающего момента от вала двигателя к ведущим колесам автомобиля; ходовую часть — тележку, на которой установлены двигатель, механизмы и кузов автомобиля; устройства для управления — рулевое управление и тормоза.
Двигатель 2 (рис. 49, а, б, в) расположен в передней части автомобиля. Вращающий момент, развиваемый двигателем, подводится к сцеплению 3, представляющему дисковую фрикционную муфту. С помощью педали эту муфту можно выключить (разъединить рабочие диски), и тогда двигатель также отключится от силовой передачи. От сцепления вращающий момент передается коробке передач 4, в которой имеется набор шестерен. Переключая шестерни, например, увеличивая передаточное число, можно на ходу автомобиля понижать обороты ведущих колес 9 при тех же оборотах коленчатого вала 16 двигателя. Благодаря этому достигается увеличение тягового усилия на ведущих колесах автомобиля при том же вращающем моменте, развиваемом двигателем на его коленчатом валу.
Увеличение тягового усилия необходимо при движении автомобиля по особенно тяжелой дороге (подъемы, неровности), а также при трогании с места, так как приходится в этот момент преодолевать и силы инерции.
На большегрузных автомобилях и мощных тракторах наряду с коробкой передач устанавливают и гидротрансформатор (гидромеханическая трансмиссия). Такая трансмиссия, несмотря на боль-
68
Рис. 49. Конструкции ппевмоколесных машин:
а — схема размещения механизмов колесного трактора; б — общий вид грузового двухосного автомобиля без кузова; в — схема силовой передачи автомобили.
2
шой вес и стоимость, окупается увеличением производительности машины и снижением расхода топлива.
Коробка передач также дает возможность осуществить задний ход автомобиля соответствующим переключением шестерен с помощью рычага 6. От коробки передач 4 вращающий момент с помощью карданного механизма 8 передается главной передаче, состоящей из двух конических шестерен 20 и 21 и расположенной в заднем мосту 10 автомобиля. Задний мост на рессорах 12 подвешен к раме автомобиля И.
Так как коробка передач со сцеплением и двигателем укреплена непосредственно на раме, то при движении автомобиля по неровной дороге главная передача вместе с мостом 10 качается относительно рамы, и при этом изменяется угол наклона между валами 17. Карданный механизм 8 дает возможность передавать вращение валам под меняющимся углом; этот механизм состоит из вала 23 и карданных шарниров 22. Малая коническая шестерня 21 главной передачи приводится в движение карданным механизмом, а большая шестерня 20 присоединена к дифференциальному механизму (дифференциалу) 19.
При движении автомобиля по криволинейному участку дороги колесо, катящееся по внутренней кривой, должно вращаться медленнее, чем колесо, катящееся по внешней кривой и проходящее за одно и то же время больший путь. Такое движение колес обеспечивается дифференциалом, соединенным с полуосями 18 ведущих колес 9.
Направление движения автомобиля изменяют рулевым колесом 7, с помощью которого поворачиваются передние колеса 1 и 13 оси 14, находящейся на передней рессорной подвеске 15.
Управляют тормозами автомобиля с помощью рычага 5 или тормозной педали, которыми с помощью тормозных тяг зажимаются тормозные колодки передней оси 14 и задних полуосей колес.
Дифференциал (рис. 50, а) устроен следующим образом. На внутренних концах приводных валов 4 (полуосей) закреплены кониче-60
ские шестерни. Концы полуосей с полуосевыми шестернями входят в коробку дифференциала.
В коробке 1 установлены шестерни-сателлиты 5, которые сцеплены одновременно с обеими шестернями приводных валов и могут свободно вращаться на цапфах. К коробке дифференциала прикреплена ведомая шестерня 2 главной передачи, с которой сцеплена ведущая шестерня 3.
Рассмотрим сначала прямолинейное движение автомобиля.
При вращении карданного вала ведущая шестерня главной передачи приводит во вращение ведомую главную Шестерню и соединенную с ней коробку дифференциала. Вместе с коробкой совершают круговое движение и сателлиты, установленные на цапфах в коробке дифференциала. Будучи скреплены одновременно с шестернями приводных валов, сателлиты приводят во вращение оба приводных вала, которые вместе с жестко связанными ведущими колесами вращаются в одном направлении и с одинаковой скоростью. При этом сателлиты не вращаются на цапфах, а только совершают круговое движение вместе с коробкой дифференциала.
Теперь рассмотрим движение на повороте правого и левого колес при угле а за время движения t. Из рис. 50, б следует, что путь левого (внутреннего) колеса
SBH = гыка1 = [r---а, (83)
а правого (наружного! колеса
Snap — Г0)нар/ = -) а. . (84)
Следовательно,
«вн Ч" «нар — • (8о)
Средняя точка задней ведущей оси «О» (место дифференциала) проходит путь
Scp = <осрг/ = №, (86)
откуда
«ср =4г- (87>
Поэтому
«вн "Т «нар = 2tt)Cp, (88)
т. е. сумма угловых скоростей ведущих колес автомобиля равна двойной угловой скорости дифференциала.
Если ювн = 0, то <онар = 2 соср. Такое положение возможно в том случае, если левое колесо стоит на твердой почве, а правое с почвой не сцепляется.
При движении по прямой юви = «нар = «ср. Таким образом, дифференциал автомобиля, благодаря проворачиванию сателлитов на цапфах, обеспечивает автоматическое регулирование угловых скоростей колес в зависимости от сил сопротивлений, действующих на колеса.
61
6
Рис. 51. Гидравлический привод автосамосвала: а — схема привода: б — схема управления приводом.
У автосамосвалов кузов делается опрокидным. Опрокидывание кузова 6 (рис. 51, а), соединенного с надра.мником 4 и рамой 7, осуществляется с помощью гидравлического подъемника 8. Масло в подъемник подается шестеренным насосом 5, приводимым во вращение карданным механизмом 9, соединенным с так называемой коробкой отбора мощности 1. Эта коробка представляет собой механизм, состоящий из шестерен, присоединяющихся к шестерням коробки передач 3 рычагом, приводимым в движение двигателем автомобиля 2.
Схема работы гидравлического подъемника (рис. 51, б) состоит в "следующем.
62
При положении «подъем кузова» кран управления 10 устанавливается таким образом, что наело из шестеренного насоса поднимает клапан 13, сжимая пружину 11, входит под поршень 12 и своим давлением передвигает его вперед.
При зафиксированном положении кузова клапан 13 прижат пружиной 11, а кран управления 10 установлен так, что насос 5 работает сам на себя.
При опускании кузова установка крана управления 10 дает возможность маслу, находящемуся ранее под поршнем 12, поступать на поршень сверху.
Тракторы применяются на пневмоколесном и гусеничном ходу. Двигатель, силовая передача и устройства управления у трактора на пневмоколесном ходу (рис. 49, а) аналогичны автомобилю.
Основными частями гусеничного трактора являются двигатель, силовая передача, ходовое устройство и устройства управления — рычаги и тормоза.
Силовая передача трактора (рис. 52) состоит из сцепления 1, соединенного через вал 2 с коробкой передач 3, главной передачи 10, бортовых фрикционов 6, находящихся в заднем мосту 8, и бортовых редукторов (конечных передач) 5, приводящих в движение ведущие колеса 4.
Рама 15, гусеницы 11, рессора 16, натяжные колеса 14 с натяжным приспособлением 17, опорные катки 12 и ролики 13, поддерживающие гусеничную ленту вверху, являются основными частями ходового устройства трактора.
Ведущие колеса вытягивают гусеничную ленту из-под опорных катков и этим создают толкающие усилия, под воздействием которых трактор совершает поступательное движение; одновременно гусеничные ленты выстилаются перед опорными катками подобно «бесконечным рельсам» *.
Трансмиссия гусеничного трактора принципиально отличается от силовой передачи автомобиля отсутствием дифференциала, так как поворот трактора осуществляется за счет разницы скоростей движения гусениц. Это достигается применением бортовых фрикционов, представляющих собой многодисковые муфты, а также тормозов, установленных на этих муфтах.
Так как тракторы применяются не только для передвижения прицепов, но и как машины с различным навесным оборудованием (бульдозер, кусторез и др.) и со скреперами, в силовой передаче имеется вал отбора мощности 9. Этот вал подключается к коробке передач с помощью муфты 7 и служит для присоединения шестеренного насоса или лебедки.
Увеличение скорости движения трактора и улучшение его тяговых качеств достигается в дизель-электрическом тракторе
* Выражение «бесконечные рельсы» принадлежит изобретателю гусеничного хода Федору Блинову, который получил в 1897 г. патент на изобретение-, названное им вагоном с бесконечными рельсами для перевозки по шоссейным и проселочным дорогам.
63
Рис. 52. Устройство гусеничного трактора:
а — схема трансмиссии; б — схема размещения механизмов; в — ходовая часть; г — схема трансмиссии при дизель-элек-трическом приводе.
/г
б
(рис. 52, г). Передача мощности от двигателя к ведущим колесам происходит следующим образом: от дизеля 21 через редуктор 20 — силовому генератору 19\ от силового генератора — тяговому двигателю /<5; далее через коническую передачу 10, фрикционы и бортовые редукторы — на ведущие колеса 4.
§ 11. ТЯГОВЫЕ РАСЧЕТЫ АВТОТРАКТОРНОГО ТРАНСПОРТА
Вращение коленчатого вала двигателя автомобиля создает при помощи силовой передачи движение ведущих колес автомобиля или гусениц трактора, которые благодаря сцеплению с покрытием дороги сообщают автомобилю или трактору поступательное движение. Силы, под действием которых происходит движение, называются силами тяги, а расчеты, в которых фигурируют эти силы,— тяговыми расчетами. Помимо сил тяги при движении автомобиля или трактора возникают силы, направленные в сторону, противоположную движению,— силы сопротивления.
Основные тяговые расчеты автомобильного транспорта заключаются в решении двух задач — установлении максимального подъема, по которому может двигаться автомобиль, и определении скорости его движения.
Сила тяги на ведущих колесах автомобиля, даН ^кгс), должна быть равна силам сопротивления движению, т. е. при его движении с равномерной скоростью (рис. 53):
F = Gfcos a -f- Gsin а = G(f + tga) cos а. (89)
Поскольку при небольших углах подъема cos а да 1, формулу (89) можно записать так:
F = G(/±i), (90)
где G — вес автомобиля с грузом, даН (кгс); i — уклон пути (плюс при подъеме и минус при спуске); / — коэффициент качения; величины f установлены экспериментально (например, на щебеночной дороге при пневмоколесном ходе f — 0,02 4- 0,03, на асфальтированной 0,01—0,02).
Сила тяги F автомобиля может быть реализована, если сцепление между колесами и покрытием дороги достаточное, в противном случае сила тяги не будет уравновешиваться силой сцепления Fcu и колеса начнут скользить по дороге (буксовать).
Следовательно, условие, предупреждающее буксование,
FCU>F (91)
или
<pGcu>G(/ + i), (92)
где <р — коэффициент сцепления, характеризующий прочность контакта колеса с дорогой; Ссц — сцепной вес автомобиля, т. е. та часть его полного веса, которая приходится на ведущие колеса.
Из формулы (92) следует, что максимальный подъем, по которому сможет двигаться автомобиль,
1макс = Ср-%1-А (93)
3 642
65
Рис. 53. Схема к тяговому расчету автомобиля.
Величина коэффициента сцепления зависит не только от покрытия дороги, но и главным образом от ее состояния. На мокром чистом асфальте коэффициент сцепления относительно высок — 0,5, на том же асфальте, но грязном — 0,3, на сухой щебеночной, дороге <р = 0,4, а на мокрой — 0,25.
При движении в тяжелых дорожных условиях применяются автомо-
били повышенной проходимости.
Чтобы увеличить силы сцепления и тяги, уменьшить сопротивление
движению и обеспечить возможность преодоления автомобилем неровностей дороги — увеличивают число ведущих осей, применяют
шины низкого давления со специальным глубоким рисунком протектора (беговой части покрышки) и т. п.
Для’ определения скорости движения автомобиля в известных дорожных условиях, т. е. при известных величинах f и i, удобно
пользоваться так называемыми динамическими характеристиками автомобиля, составленными заводом-изготовителем.
Исходя из формулы (90) можно записать, что при равномерной скорости движения
4=^-
(94)
Левая часть равенства (94) представляет собой силу тяги автомобиля, отнесенную к его весу, и носит название динамического фактора автомобиля D *.
Как видим, динамический фактор численно равен сумме коэффициента качения и уклона дороги. Для определенного автомобиля D изображают графически в зависимости от скорости движения. Так как коробка передач изменяет передаточное число от двигателя к ведущим колесам, то динамическая характеристика автомобиля (график динамического фактора) состоит из ряда кривых, каждая из которых соответствует определенному набору шестерен, т. е. I, II, III и т. д. скоростям.
На рис. 54 изображена динамическая характеристика автосамосвала. На графике показан пример определения скорости движения груженого автомобиля при f = 0,02 и i — 0,04, т. е. при f + i = = 0,06. Как видно из рис. 53, в этих дорожных условиях автомобиль будет двигаться на III передаче и развивать скорость v = = 17 км/ч.
* Поскольку грузовые автомобили развивают относительно небольшую скорость движения, мы не будем учитывать сопротивление воздушной среды WB, при котором динамический фактор, введенный академиком Е. А. Чудаковым, р —
D = g—- (отношение избытка тяги над сопротивлением воздушной среды к весу автомобиля).
66
Из формулы (94) следует, что динамический фактор D = обратно пропорционален весу автомобиля, состоящему из полезной нагрузки и собственного веса машины. Следовательно, если вес порожнего автомобиля Go, то динамический фактор этого автомобиля
Do = . (95)
ио
Шкала динамического фактора порожнего автомобиля учитывает соотношение формулы (95). На рис. 54 показана ордината £>, соответствующая 100%-ной загрузке автомобиля, и£>0, соответствующая порожнему автомобилю, т. е. нулевой загрузке. Кроме того, приведены ординаты, соответствующие 25, 50 и 75%-ной загрузке автомобиля. Например, при 25%-ной загрузке и D = f + i = 0,06 автомобиль будет развивать скорость 40 км/ч, двигаясь на III передаче.
Техническая производительность автомобиля, т/ч,
П _ zgg\
Птехн— 100()Г , РО,
где Q — перевозимый груз, кг; Т — продолжительность рейса автомобиля, включая время его загрузки, груженого хода, разгрузки и порожнего хода, с.
Время хода, с
= 3fiLKy
3*
67
где L — расстояние транспортирования, м; v—скорость автомобиля, определяемая по его динамической характеристике, км/ч; Ку — коэффициент, учитывающий замедления и ускорения, обычно равный 1,05—1,15; 3,6 — переход от м/с к км/ч.
Для увеличения производительности автомобилей применя-
Рис. 55. Схема к тяговому расчету ются прицепы, которые увеличи-автопоезда. вают количество перевозимого за
один рейс груза, а при пневмо-колесных тягачах — полуприцепы (см. рис. 48, а).
Пользуясь динамическими характеристиками, можно также
определить скорости, развиваемые груженым автомобилем с прицепами. В этом случае необходимая сила тяги автомобиля с грузом (рис. 55), даН (кгс),
F = nQ0(f±i) + G(f±i), (98)
где п — число прицепов; Qo — вес груженого прицепа, даН (кгс). Тогда аналогично формуле (95) динамический фактор будет численно равен:
D = тг = (л пг + 0 ± <")
Проверка по сцеплению при автопоездах проводится по формуле, аналогичной (93),
<pGcu > Ш + G) (f + 0- (ЮО)
Для тракторных поездов основные тяговые расчеты сводятся к определению числа прицепов в поезде и скорости его движения. Скорость движения гусеничных тракторов значительно ниже скорости движения автомобилей, поэтому нет надобности пользоваться для тяговых расчетов динамическими характеристиками тракторов, можно исходить из их заводской технической характеристики. В этой характеристике приводятся номер передачи, скорость движения v и тяговое усилие на крюке FKp на указанной передаче.
Тяговое усилие на крюке, даН (кгс), в заводской характеристике дано при движении трактора по горизонтальной площадке:
FKp = Fr— wGrp, (101)
где Fr — сила тяги, приложенная к гусеницам, даН (кгс); w — основное удельное сопротивление движению при гусеничном ходе, равное, например, на грунтовой неровной дороге 0,08ч-0,12; GTp — вес трактора, даН (кгс).
Необходимое тяговое усилие трактора с прицепами на пневмо-колесном ходу при движении на подъем, даН (кгс), определяется так же, как для автопоезда:
Fr = nQ0 (f + i) + GTP (w + i). (102)
68
Из формул (101) и (102) следует, что
Ркр + wGTP = nQ0 (f -f- z) + GTp (w i). (ЮЗ)
После необходимых преобразований получим число прицепов
Чтобы гусеницы трактора не буксовали, должно соблюдаться следующее условие:
cp0GTp>Fr. (105)
Коэффициент сцепления <р0 при гусеничном ходе значительно выше, чем при пневмоколесном. Для грунтовых дорог, например, он равен 0,8—0,9.
Зная необходимую силу тяги на крюке FKp по технической характеристике трактора можно установить, на какой передаче будет двигаться тракторный поезд и какова будет его скорость.
Техническая производительность тракторного поезда определяется по формуле, аналогичной (96) *.
Число вагонов п при рельсовом транспорте определяется исходя из формулы (100), в которой коэффициент сцепления ср = 0,18 4-4-0,22, G и бСц — полный и сцепной вес (мотовоза или электровоза), Qo — вес груженого вагона, i — руководящий подъем. Вместо коэффициента качения f в формулу (100) следует подставлять основное сопротивление движению ш, равное для рельсовых путей 0,003— 0,004.
§ 12. УСЛОВИЯ ПРИМЕНЕНИЯ
АВТОТРАКТОРНОГО ТРАНСПОРТА В СТРОИТЕЛЬСТВЕ
Автомобили обладают хорошей маневренностью, благодаря которой они могут доставлять грузы непосредственно к строящемуся объекту и вывозить грунт из котлованов, не требуя большой площади для подъезда и разворотов; они обладают также большой скоростью передвижения, рентабельной при дальности перемещения груза на 3—4 км и больше. При этом чем больше дальность транспортирования, тем выгоднее, как правило, применять автомобили большей грузоподъемности.
Применение автомобильного транспорта наиболее эффективно для строительств с усовершенствованными дорогами, связывающими их с производственными предприятиями, складами и базами строительных материалов.
Тракторный транспорт используется для перевозки грузов в прицепах при небольшой скорости и значительной силе тяги. Его применение целесообразно для условий пересеченной местности и плохих дорог при небольшом расстоянии перевозки (2—3 км).
* Подробнее тяговые расчеты см.: Фиделев А. С. Автотракторный транспорт в строительстве. Киев, Вища школа, 1973.
69
Для повышения производительности автотракторного транспорта необходимо улучшать использование парка машин, рационально планировать перевозки и правильно организовывать движение.
Особое внимание при эксплуатации автотракторного парка необходимо обращать на увеличение срока службы автомобилей и тракторов, на увеличение длительности межремонтных пробегов и на наиболее рациональное использование авторемонтных средств. Лучшие водители добиваются наиболее длительных пробегов, а также экономии горючего и шин.
Чтобы при отрицательной температуре воздуха не допустить замерзания воды в системе охлаждения, изменения качества рабочей смеси топлива и смазки, затрудняющего пуск двигателя, машины необходимо хранить в отапливаемых гаражах.
Планирование перевозок должно в первую очередь предусматривать уменьшение пробегов без груза; осуществлять планирование следует с помощью диспетчерского управления. Для установления наилучших маршрутов перевозок при значительном числе поставщиков и потребителей расчеты по планированию производятся с применением электронно-вычислительной техники *.
При работе «с колес» (см. рис. 1) поставщики строительных конструкций и материалов должны планировать очередные рейсы в точном соответствии с технологией монтажа сооружения, а автохозяйства — точно соблюдать график доставок.
Известны три схемы движения панелевозов на монтаже зданий «с колес»: маятниковая, челночная и получелночная.
При маятниковой схеме тягач работает с одним полуприцепом-панелевозом и вместе с ним простаивает под погрузкой на предприятии и под разгрузкой на объекте монтажа. >
При челночной схеме тягач работает с тремя оборотными полуприцепами и подобно челноку непрерывно перемещается от домостроительного предприятия к монтажной площадке и обратно, задерживаясь в этих пунктах лишь для смены буксируемых панелевозов.
При получелночной схеме тягач работает с двумя оборотными полуприцепами, отцепляя их только у объекта монтажа. Такая система движения оправдана, если погрузка конструкций на предприятии обеспечена с минимальной затратой времени.
Безопасная работа автомобильного транспорта в специфических условиях строительства обеспечивается рядом дополнительных требований.
На площадке, где производится погрузка сыпучих грузов на автомобили из неподвижных бункеров, должны быть сделаны указатели и разграничительные линии установки автомобилей под погрузку, с тем чтобы центр кузова автомобиля находился под центром отверстий бункеров.
* Подробнее о технико-экономических расчетах автотранспорта см.: Кантор е р С. Е. Методы обоснования эффективности применения машин в строительстве. М., Стройиздат, 1969.
70
При подаче автомобилей под погрузку из бункеров или под экскаваторную погрузку нельзя допускать проход кабины под бункером или ковшом экскаватора.
При засыпке выемок (котлованов, траншей, оврагов и т. п.) автомобили, груженные грунтом, следует подавать на расстояние не ближе 1 м от края выемки; проезд автомобилей к выемкам, имеющим козырьки, запрещается. При разгрузке автосамосвалов на насыпях или эстакадах необходимо оставлять проходы для рабочих, очищающих поднятые кузова скребками или лопатками с удлиненными рукоятками.
При работе автосамосвалов запрещается: разгрузка на ходу; езда с поднятым кузовом; перевозка длинномерных грузов даже при наличии прицепов; осмотр и ремонт во время загрузки или при поднятом кузове; перевозка людей в кузовах.
Кузова автомобилей, предназначенные для перевозки длинномерных грузов, должны быть без бортов, со съемными или откидными стенками.
Штучные грузы следует укладывать так, чтобы они в пути не сдвигались; при необходимости между некоторыми грузами прокладывают распорки.
Прицеп к бортовому автомобилю присоединяют при помощи жесткого дышла и чеки, причем дышло должно поворачиваться свободно. Прицеп, предназначенный для перевозки длинномерных грузов, должен иметь поворотное устройство; высота прицепа должна быть на одном уровне с подом кузова автомобиля; двухосные прицепы должны быть снабжены задним фонарем и стоп-сигналом.
Охрана природы от выхлопных газов автотракторного транспорта заключается в применении нейтрализаторов для снижения токсичности этих газов; в увеличении производительности машин, что позволяет уменьшить их число при том же объеме работ; в недалеком будущем будут созданы электромобили (машины, работающие на аккумуляторах).
§ 13. УСТРОЙСТВО ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
Ленточные конвейеры применяются для перемещения в горизонтальном и наклонном направлениях однородных сыпучих, пластичных и мелкоштучных материалов *. Достоинством этих конвейеров являются простота конструкции, малый собственный вес, высокая надежность работы и удобство в эксплуатации. Гибкая бесконечная лента 4 ленточного конвейера (рис. 56), лежащая на ролико-опорах 7 и 8, огибает приводной барабан 3 и натяжной барабан 5. Для натяжения ленты служит винтовое устройство 6. Вал барабана 3 через редуктор 2 присоединен к двигателю 1.
На строительстве применяются передвижные, установленные на колесах, и переносные звеньевые конвейеры. Передвижные
* Первый ленточный конвейер был построен в 1860 г. А. Лопатиным, назвавшим его песковозом.
71
4
Рис. 56. Ленточный конвейер:
а — приводное устройство; б — натяжное винтовое устройство: в — разрез конвейера.
конвейеры перемещают груз на расстояние 10—15 м при высоте разгрузки 2—4 м.
Переносные конвейеры имеют раму, состоящую из отдельных звеньев длиной в 2—3 м, соединяемых при помощи зажимов; длина такого конвейера обычно 50—100 м и может изменяться при добавлении или удалении звеньев.
Лента несет на себе перемещаемый материал и в то же время служит тяговым элементом, воспринимающим натяжение от приводного барабана. Наиболее широко применяются прорезиненные тканевые ленты, состоящие из нескольких слоев (прокладок) хлопчатобумажной ткани (называемой бельтингом), связанных между собой резиной.
Ширина и число прокладок лент стандартизированы.
Ленту выбирают по максимальному натяжению SMaKC, даН (кгс). Число прокладок определяется по формуле
где В — ширина ленты, м; р — допускаемая нагрузка на 1 м ширины одной прокладки ленты, при обычном бельтинге равная 460— 550 даН (кгс).
Длина конвейеров ограничивается прочностью ленты. Для повышения прочности ленты применяют особо прочный бельтинг или уточно-шнуровую ткань, которые увеличивают допускаемую нагрузку примерно в два раза.
Рабочей ветви ленты при помощи роликоопор придается желобчатая или плоская форма. Преимущественно применяется желобчатая форма (рис. 56, в), так как при ней значительно увеличивается производительность конвейера.
В соответствии с желобчатой формой рабочей части ветви верхние роликоопоры бывают трехроликовыми или двухроликовыми, а нижние, в связи с плоской формой ветви,— однороликовыми.
72
Рис. 57. Передвижной конвейер с ребристой лентой: а — общий вид; б — схема ленты.
Рис. 58. Способы соединения концов лент:
а — склеиванием; б — металлическими шарнирами; в — крючками.
При гладкой поверхности ленты угол наклона конвейера для сыпучих материалов не должен превышать 18—20°, а для кирпича 25—30°, так как при больших углах начинается продольное сползание груза. Для увеличения угла наклона до 60° у передвижных конвейеров без нижних роликоопор применяют ребристые ленты (рис. 57).
При монтаже ленты ее концы приходится соединять. Лучшим способом соединения ленты является склейка концов резиновым клеем с последующей вулканизацией, при которой прочность стыка достигает 85% прочности цельной ленты. Перед склейкой каждый из концов ленты срезают ступенями по числу прокладок (рис. 58, а).
73
Рис. 59. Схемы к определению;
а — тягового усилия на барабане; б — сечения материала на плоской ленте; в — то же, желобчатой; г — силы тяги.
Широко применяют соединения металлическими шарнирами (рис. 58, б), которые приклепывают медными заклепками к концам ленты. В желобчатых лентах шарниры составляются из нескольких частей (по числу роликов в опоре). За рубежом применяют соединения специальными крючками (рис. 58 в), образующими петли, которые соединяют стальным канатом. Достоинство такого соединения — быстрота выполнения, недостаток в его малой прочности — 50% прочности цельной ленты.
Чтобы лента не скользила на приводном барабане, необходимо соблюдать условие, приведенное в уравнении Эйлера (24).
Из рис. 59, а следует, что тяговое усилие на барабане может быть определено из выражения
S„ = Sc + WB. (107)
Подставив усилие на сбегающей ветви ленты Sc из формулы (24) в (107), получим
— Sh(1 Да-)- (108)
Как видно из уравнения (108), величина тягового усилия, которое может быть передано с приводного барабана на ленту, возрастает с увеличением угла обхвата а, коэффициента трения f и усилия на набегающей ветви ленты SH. Увеличить угол обхвата а можно двумя приводными барабанами или специальными прижимными устройствами. Однако на строительствах, как правило, применяются ленточные конвейеры с однобарабанным приводом (см. рис. 56), при котором а = 210 4- 240°. В этом случае необходимая величина тягового усили W достигается увеличением коэффициента трения f между барабаном и лентой. Для этого барабан обшивают деревом или резиной. Например, при очень влажной атмосфере и а = 240°
74
для чугунного или стального барабана / = 0,1 и е,а = 1,52, а для деревянной и резиновой футеровки f = 0,15 и е1а — 1,87.
Для обеспечения нормальной работы ленточных конвейеров необходимо: систематически вести наблюдение за работой ролико-спор, периодически смазывать их подшипники, своевременно менять неисправные ролики; систематически регулировать движение ленты и не допускать ее смещения; постоянно наблюдать за работой натяжных устройств, очищать направляющие подвижные подшипники натяжных барабанов, регулярно осматривать загрузочные и разгрузочные воронки и очищающие устройства.
Запрещается останавливать ленточные конвейеры до полного опорожнения (за исключением аварийных случаев), очищать и ремонтировать во время движения, пускать без предварительного сигнала, предотвращать сбегание ленты на сторону установкой упоров и устранять буксование ленты на приводном барабане подсыпанием канифоли, песка и др. Передвижные конвейеры перемещают под руководством производителя работ или мастера.
Аналогичные требования предъявляются при эксплуатации и других конвейеров.
§ 14. ПРОИЗВОДИТЕЛЬНОСТЬ и мощность
ЛЕНТОЧНЫХ КОНВЕЙЕРОВ. ИХ АВТОМАТИЗАЦИЯ
Производительность ленточного конвейера определяется площадью сечения насыпного материала на ленте F, м2, скоростью движения ленты v, м/с, и насыпной массой груза у, кг/м3, и подсчитывается по формуле (81).
На плоской ленте насыпной груз располагается в виде равнобедренного треугольника (рис. 59, б). Чтобы материал не осыпался через края ленты, принимается основание треугольника, равное 0,8 В — ширины ленты, а угол при основании треугольника <р = = 0,35 <р0. Угол естественного откоса материала в состоянии покоя для приближенных подсчетов <р0 45° и, следовательно, ж 16°.
Так как на наклонной ленте происходит некоторое уменьшение угла <рх, при подсчетах вводят еще поправочный коэффициенте, принимаемый в зависимости от угла наклона конвейера.
Площадь сечения материала на плоской ленте (рис. 59. б)
Л = с = -’8В~ tg Ф1 с = 0,045В2с. (109)
На желобчатой ленте (рис. 59, в) площадь сечения материала равна сумме площадей трапеции F2 и треугольника Fv При подсчете площади F2 принимают стандартный угол наклона роликов 20° и длину нижнего ролика а 0,39В. Тогда
В2 = /г2 = . ±^£tg20° = -^=^tg20^ =
= 0-^-°’392g-tg 20- = 0,045В2. (110)
75
Согласно формулам (81), (109) и (ПО) производительность ленточного конвейера с желобчатой лентой, т/ч,
n = 3,6(F1 + F2)uy = 0,16B2uY(c+!)• (Ill) При угле наклона конвейера 0 = 0 4- 10° с = 1; при 0 = 10 4-4- 15° с = 0,95; при 0 = 15 4- 20° с = 0,9; при 0 > 20° с = 0,85.
Из формулы (111) можно определить и ширину ленты В, м, когда задана производительность П, т/ч. Ширина ленты В, кроме производительности, должна также соответствовать кусковатости материала.
При рядовом материале
В>2Ор + 0,2м, (112)
а при сортированном материале
В > 3,3DC + 0,2 м. (113)
Здесь Dp — размер наибольшего, a Dc — среднего типичного куска, м.
Для строительного производства выпускаются конвейеры производительностью 60—140 т/ч с лентой шириной 0,4—0,5 м при ее скорости 1—1,6 м/с.
При штучных грузах производительность конвейера, шт./ч, определяется исходя из времени схода штучного груза с ленты t, с
j-j_ 3600 _ 3600а . .
11 — ~t — , (114)
где I — расстояние между грузами, м.
Мощность двигателя ленточного конвейера слагается из мощности, расходуемой на перемещение материала и на холостой ход. При перемещении насыпного груза по прямолинейному наклонному участку (рис. 59, г) мощность, кВт,
WO „
" Лоо~ ’
где W — требуемая сила тяги, даН(кгс); v — скорость движения груза (ленты), м/с.
При движении материала непрерывным потоком
W — yFL sin 0 + yFL cos 0 • w, (116)
где F — сечение материала на ленте, м2; yF — вес груза на 1 м длины ленты, даН(кгс); w — общий коэффициент сопротивления движению груза, равный для роликоопор на шарикоподшипниках 0,03—0,04.
Так как L sin 0 = Н, L cos0 = £г, а из выражения (81) yF = ygj, следовательно, формулу (116) можно записать так:
+-5^-. (Н7)
3,6 v 1 3,6и v f
76
Из формул (115) и (117) следует, что
*т ПН . ПАрсу /11 о\
= “36СГ + “Збб- ’ ( 8)
пя _
где — мощность, требуемая для подъема материала на высоту OOU
г, ,—г / 1~1б г (21
п непрерывным потоком с интенсивностью 11, т/ч; —-----------мощ-
ность, расходуемая на преодоление сопротивления материала перемещению на горизонтальном пути.
Мощность N2 при холостом ходе ленты массой <?л, кг/м, и сопротивлении движению wx определяют исходя из того, что во время движения одной ветви ленты вверх, а другой вниз составляющие их веса <?л Lsin р уравновешиваются, а сопротивления движению лент по роликам qLcos |3 • w складываются. Поэтому
д, a/jjLcos р • wxv _ 2qiiLrWxv ,q
~ 100 ~ 100 ' 1 '
При ширине ленты В = 0,4 4- 0,5 м можно принимать = = 0,015.
Мощность двигателя конвейера, кВт, определяют по формуле
^ = —4^ + ^), (120)
где k — коэффициент, зависящий от длины конвейера L, м (при L < 15 k = 1,5; при L = 15 4- 40 fe = 1,1; при L >40 k =,1); k0 — коэффициент установочной мощности, равный 1,2—1,3; т] — КПД привода.
При производстве работ в промышленном строительстве, когда необходимо перемещать большие массы грунта, гравия, песка на большие расстояния, устанавливают последовательно ряд полуста-ционарных ленточных конвейеров. При последовательной установке конвейеров применяют дистанционно-автоматическое управление, при котором предусматривают: автоматический последовательный пуск конвейеров с центрального пункта управления; выключение электродвигателя конвейера при пробуксовке приводного барабана, обрыве ленты или какой-либо иной неисправности; отключение всех конвейеров, передающих материал на поврежденный конвейер.
Дистанционное автоматическое управление способствует сокращению числа обслуживающего персонала и является более надежным, чем управление каждым приводом конвейера в отдельности.
На рис. 60 приведена одна из схем управления и блокировки электродвигателей последовательно работающих конвейеров. Первый конвейер включают нажатием на центральном пульте управления кнопки Ц. При этом катушка контактора пускателя 1Л замыкает его линейные контакты 1Л1, 1Л2 и 1ЛЗ. Двигатель Мх начинает вращать приводной барабан первого конвейера. Одновременно
77
Рис. 60. Схема управления и блокировки электродвигателей последовательно работающих конвейеров:
Мп М2, Мд — двигатели; 1Л, 2Л, ЗЛ — катушки контактов пускателей; 1Л1, 1Л2, 1ЛЗ, 2Л2, 2ЛЗ и ЗЛ1, ЗЛ2, ЗЛЗ — линейные контакты пускателей; 1РЦ, 2РЦ, ЗРЦ — центробежные механические реле; 1РТ, 2РТ, ЗРТ — тепловые реле; 1РТ1, 2РТ1, ЗРТ1 — контакты теплового реле без самовозврата; Ц — пусковая кнопка центрального пункта; 1Ст, 2Ст, ЗСт — кнопки «Стоп» у каждого конвейера; 1РЦ1, 2РЦ1. ЗРЦ] — блок-коитакты
начинает действовать и центро-бежное механическое реле. Когда ротор двигателя Mj набирает полное число оборотов, т. е. когда в первом конвейере прекращается действие инерционных усилий, реле 1РЦ замыкает блок-контакт 1РЦ1 в цепи управления двигателем второго конвейера.
При этом замыкается цепь катушки контактора 2Л, и его линейные контакты 2Л1,2Л2 и 2ЛЗ включают двигатель М2. По достижении ротором двигателя М2 полного числа оборотов центробежное реле 2РЦ замыкает блок-контакт 2РЦ1 в цепи управления двигателем М3 третьего конвейера. Катушка контактора ЗЛ через свои линейные контакторы ЗЛ1, ЗЛ2 и ЗЛЗ включает двигатель М3 третьего конвейера. При окончании пуска двигателя М3 центробежное реле ЗРЦ замыкает блок-контакт ЗРЦ1. После этого кнопка Ц отпускается.
Для остановки конвейера достаточно нажать одну из кнопок 1Ст, 2Ст или ЗСт. Например, при нажатии кнопки 2Ст выключается двигатель М2. Если снизится скорость вращения его ротора, реле 2РЦ разомкнет блок-контакт 2РЦ1, т. е. выключится двигатель М3. В свою очередь, сни
жение скорости вращения ротора двигателя М3 приведет к срабатыванию реле ЗРЦ и размыканию блок-контакта ЗРЦ1, т. е. к выключению двигателя Мг
Рис. 61. Схема центробежного реле. При пробуксовке барабана од-
ного из конвейеров или обрыве его ленты срабатывает центробежное реле и отключаются все двигатели.
В центробежном реле (рис. 61) на оси 4, соединенной с осью натяжного барабана конвейера и вращающейся в шариковых подшипниках, насажен груз 3 в виде кольца. Когда начинает вращаться натяжной барабан, кольцо 3 под действием центробежной силы по-
78
ворачивается вокруг оси 5. При этом влево перемещается втулка 2, которая, воздействуя на плечо рычага 8, перемещает изоляционный штифт 7 вправо.
После нажатия штифта 7 на контактную пружину 6 последняя мгновенно переходит из положения а в положение б, в результате чего переключается контакт.
При уменьшении скорости вращения барабана конвейера втулка 2 перемещается пружиной / вправо, отводя плечо рычага, а штифт— влево, и контактная пружина 6 возвращается в положение а. Настройка на обороты срабатывания осуществляется изменением натяжения пружины 1, отжимающей втулку 2.
§ 15. КОВШОВЫЕ, ВИНТОВЫЕ
И ВИБРАЦИОННЫЕ КОНВЕЙЕРЫ
Ковшовые и винтовые конвейеры при
меняются на строительстве в различных передвижных и инвентарных построен- Рис- 62- Ковшовый конвейер, ных установках (дробильно-сортировочных, бетоносмесительных и т. п.).
Ковшовый конвейер (рис. 62) состоит из приводного 1 и натяжного 2 барабанов (звездочек), тягового органа 3 (цепи или ленты) и ковшей 4. Нижняя часть с натяжным устройством называется башмаком, а верхняя часть е приводным устройством — головкой. Конвейер заключен в металлическом кожухе (на рисунке не показан). 121
К достоинствам ковшовых конвейеров относятся малые размеры в плане, возможность подачи груза на значительную высоту (практически до 50 м) и большой диапазон производительности (5—140 м3/ч и выше). Недостатки: чувствительность к перегрузке и необходимость равномерной подачи к ним груза.
Производительность ковшового конвейера определяется по формуле (82), в которой порция груза, м3,
q — Тббо ’
(121)
где i0 — емкость ковша, л; ¥ — коэффициент наполнения ковша, равный 0,6—0,85.
Винтовой конвейер (рис. 63) состоит из желоба 5, приводного вала 4 с укрепленным на нем транспортирующим винтом 3, промежуточных подшипников 2, упорного подшипника 6, загрузочной воронки 1, разгрузочных люков 7 с задвижками и привода. При вращении лопастей материал продвигается вдоль оси желоба подобно
79
Рис. 63. Винтовой конвейер:
а — общий вид; б — сплошной винт для сыпучих материалов; в — ленточный винт для мелкоштучных; г — фасонный винт для тестообразных и мокрых; д — то же, лопастный
тому, как удерживаемая от вращения гайка движется вдоль винта. Такой гайкой является материал, а удерживает его от вращения вместе с винтом трение о желоб.
К достоинствам винтовых конвейеров относятся сравнительно простая конструкция и несложность ухода за ними; небольшие габаритные размеры в поперечном сечении; удобство промежуточной разгрузки и возможность полной герметизации, что особенно важно для пылящих грузов, например цемента.
Основным недостатком винтовых конвейеров является значительное трение материала о винт и желоб. Оно приводит к изменению и истиранию транспортируемого материала, сильному износу винта и желоба и высокому удельному расходу энергии. Винтовые
80
Рис. 64. Вибрационный конвейер с электромагнитным вибровозбудителем.
3
Рис. 65. Двухтрубный вибрационный конвейер с эксцентриковым приводом.
конвейеры применяются для производительности до 100 м3/ч и длине транспортирования до 30 —40 м.
Производительность винтового конвейера определяется по формуле (81), в которой площадь материала, м2,
/7 = 2^^, (122)
а скорость его движения, м/с,
»=-§- (123)
Здесь D, S и п —• диаметр, шаг (м) и частота вращения конвейера.
Коэффициент наполнения желоба Т принимается относительно небольшим — 0,15—0,4, чтобы избежать скопления материала у промежуточных подшипников.
Коэффициент с учитывает уменьшение наполнения желоба с увеличением угла fl:
Р 0° 5° 10й 15° 20°
С 1,0 009 0,8 0 7 0,65
Вибрационные конвейеры обеспечивают как перемещение груза без помощи механических тяговых органов (ковшей, винтов), так и герметизацию пылевидных материалов.
Вибрационные конвейеры работают с электромагнитным вибровозбудителем или механическим приводом в виде эксцентрикового или кривошипно-шатунного механизма. Грузонесущими органами служат трубы или открытые лотки, желоба и т. п.
Вибрационный конвейер с электромагнитным вибровозбудителем (рис. 64) состоит из грузонесущей трубы 2, подвешенной на упругих тягах 1. Труба совершает направленные колебания по осих— х, вызываемые электромагнитным вибровозбудителем 4 на подвеске 3. Такое направление колебаний под углом а к оси трубы приводит к скачкообразному движению частиц материала вперед по транспортирующему органу. При большой длине грузонесущей трубы она разделяется на участки, каждый из которых имеет свой вибровозбудитель.
81
Электромагнитный вибровозбудитель состоит из корпуса, жестко соединенного с грузонесущей трубой, и реактивной массы сердечника с катушками 5. Между корпусом и сердечником установлены пружины. Подбирая жесткость пружин, можно обеспечить совпадение частоты собственных колебаний грузонесущего органа и вынужденных колебаний реактивной массы, т. е. работать в резонансном режиме. При этом амплитуда колебаний трубы и, следовательно, величина скачков материала увеличивается. Производительность конвейера возрастает.
При механическом приводе колебательные движения сообщаются трубе при помощи кривошипа или эксцентрика. Применяются также конвейеры (рис. 65), состоящие из двух труб 1, соединенных листовыми пружинами 2. Эксцентриковый привод 3 придает этим трубам колебания в противоположных направлениях, т. е. навстречу друг другу. В результате силы инерции колеблющихся масс уравновешиваются и фундамент 4 освобождается от вибрационных нагрузок. Такие конвейеры выпускают длиной до 80 м; угол наклона возможен до 20°.
Производительность вибрационного конвейера также определяется по формуле (81).
Скорость перемещения материала по трубе V, м/с, если считать, что материал после «прыжка» успевает упасть на исходную поверхность и что режим работы близок к резонансному, определяется из выражения *
v= -^-ctga, (124)
где ш — частота вынужденных колебаний, Гц; a — угол перемещения материала, град; g — ускорение силы тяжести, м/с2.
Если принять, что труба вибратора наполнена на 25%, частота вынужденных колебаний <о = 50 1/с и a = 20° (т. е. v = 0,27 м/с), то производительность вибрационного конвейера, т/ч,
П = З.бЕоу = 3,6 • 0,27у = 0,2Е>2у. (125)
На строительных площадках чаще всего вибрационные конвейеры применяют для подачи материала равномерным потоком на небольшие расстояния. Это так называемые вибропитатели и виброжелоба (рис. 66).
Вибрационный питатель (рис. 66, а) состоит из подвижного лотка 1 и электромагнитного вибровозбудителя 3. Питатель присоединяется к несущей конструкции бункера на подвесках 2.
Вибрационный желоб (рис. 66, б) состоит из корпуса 4, подвески 5 и вибровозбудителя 6.
Вспомогательным оборудованием транспортирующих машин являются бункеры, затворы и питатели.
* Подробнее см.: В а й с о н А. А. Подъемно-транспортные машины. М., Стройиздат, 1969.
82
Бункеры — устройства в виде больших сосудов — применяют для промежуточного накапливания насыпных материалов. Наиболее распространены бункеры пирамидальной и конической формы и сочетания призмы с пирамидой, а также цилиндра с конусом. При проектировании бункеров особое внимание обращают на то, чтобы предотвратить образование свода материалов над выпускным отверстием, так как это уменьшает эксплуатационную надежность бункеров.
Затворы — используют для открывания и закрывания выпускных отверстий бункеров, а в некоторых случаях и для регулирования выпускаемых через них струй материала. Бункерные затворы можно разделить на три группы: плоские для мелкокусковых легкосыпучих грузов, лотковые и секторные для крупнокускового материала. Затворы применяют, когда материал надо отгружать периодически, отдельными порциями, например, в автомобили, вагоны и т. п.
Питатели — применяют тогда, когда нужен равномерный поток материалов (например, при загрузке конвейеров). В основном питатели являются короткими, но усиленными конвейерами — ленточными, пластинчатыми, винтовыми, вибрационными. Методика их расчета принципиально не отличается от расчета соответствующих конвейеров.
83
§ 16. ПНЕВМОТРАНСПОРТНЫЕ УСТАНОВКИ
Пневматическое транспортирование сыпучего материала в трубопроводах основано на сообщении этому материалу большой скорости движущимся потоком воздуха.
Устройства пневматического транспорта обладают рядом достоинств:
герметизация процесса транспортирования способствует устранению потерь материала, что особенно важно для пылевидных, таких как цемент, гипс и других материалов;
компактность установки и изгибы трубопровода дают возможность применять ее в стесненных условиях;
полная механизация загрузки и разгрузки и возможность полной автоматизации процесса транспортирования.
Основными недостатками пневмотранспортных устройств являются:
сравнительно высокий расход энергии (1—4 кВт • ч на 1 т перемещенного материала), так как кроме материала транспортируется и большое количество воздуха;
быстрый износ частей в случае транспортирования абразивных материалов.
В строительстве применяют две системы пневматического транспортирования — всасывающую и нагнетательную. При всасывающей системе материал подается в транспортный трубопровод и перемещается в нем благодаря разрежению воздуха. При нагнетательной системе перемещение материала в транспортном трубопроводе происходит нагнетанием в него воздуха компрессором.
При всасывающей установке (рис. 67, а) материал через всасывающее сопло / попадает в транспортный трубопровод 2. В месте разгрузки материал переходит в соответствующее хранилище (бункер <?). Здесь сечение расширяется, скорость воздуха резко падает
Рис. 67. Схемы пневмотранспортных установок: а — всасывающей; б — нагнетательной.
84
/Т \
Рис. 68 Всасывающее сопло.
и материал выпадает. Воздух поступает в фильтр 4, после очистки — в воздушный насос 5, откуда через выхлопной трубопровод — в атмосферу.
При нагнетательной установке (рис. 67, б) материал из пневмовинтового насоса 6 поступает через транспортный трубопровод 2 в бункер 3, а воздух через фильтр 4 — в атмосферу.
Всасывающее сопло состоит из трубы 1 и кожуха 2 (рис. 68). Оно соединяется с трубопроводом гибким шлангом. Материал засасывается в приемную часть сопла, а затем, встречая на пути по соплу дополнительные потоки засасываемого извне воздуха, приходит во взвешенное состояние и перемещается по трубопроводу.
Пневмовинтсвой насос показан на рис. 69. Из бункера материал подается через воронку 2 питателя в смесительную камеру 6 при помощи быстровращающе-гося от электродвигателя винта 3. Винт вращается в цилиндрическом кожухе со сменными вкладышами 4 и имеет переменный шаг, уменьшающийся в направлении движения материала. Такой переменный шаг необходим для уплотнения материала, предупреждающего выход сжатого воздуха из смесительной камеры по винту в бункер.
Степень уплотнения материала винтом регулируется клапаном 5. В нижней части смесительной камеры находятся форсунки, через которые вводится сжатый воздух, разрыхляющий поступивший в камеру материал и уносящий его по транспортному трубопроводу. Подшипники предохраняются уплотнением 1.
Всасывающие и нагнетательные установки имеют следующие технологические отличия.
При всасывающих установках можно перемещать материал из нескольких мест в одно, а при нагнетательных — из одного в несколько; у всасывающих установок перепад давления воздуха не превышает 0,05 МПа (0,5 кгс/см2), так как при большем разреже-
Рис. 69. Пневмовннтовон насос.
85
a 6
Рис. 70. Пневматические установки для транспортирования гипса и цемента:
а — по трубопроводу; б — по мусоропроводу.
нии резко снижается переносная способность струи воздуха. Ввиду этого транспортирование возможно только на короткие расстояния; у нагнетательных установок перепад давления доходит до 0,6 МПа (6 кгс/см2) и поэтому протяженность транспортирования может достигать 2 км.
На рис. 70, а показана схема небольшой нагнетательной установки для транспортирования гипса и цемента производительностью 2—3 т/ч, применяемая при штукатурных работах в зданиях высотой 5—14 этажей.
Гипс или цемент пневмовинтовым насосом 1 подается в трубопровод 5 и сжатым воздухом транспортируется в приемный бункер 4. Отсюда по питающему трубопроводу 3 материал поступает по этажам в раздаточные бункеры 2.
В некоторых установках для подачи строительного гипса на этажи используют мусоропроводы (рис. 70, б). Смесь гипса с воздухом из трубопровода 12 поступает непосредственно в мусоропровод И. Здесь скорость уменьшается, и частицы гипса оседают внизу, заполняя мусоропровод, закрытый снизу пробкой 7, подвешенной на тросе 8 и поднимаемой по мере окончания штукатурных работ в нижних этажах. Выгрузка производится через окна мусоропровода переносными винтовыми разгружателями 10. На рис. 70, б также показаны передвижной компрессор 6 и тележка 9.
Примером всасывающей установки может служить устройство для саморазгрузки автоцементовоза (рис. 71).
Пневматический транспорт успешно применяется и для бетонной смеси (см. § 48).
Аэрожелоба применяют для транспортировки сухих пылевидных материалов (например, цемента), которые легко насыщаются
86
Рис. 71. Автоцементовоз:
а — общий вид; б — схема самозагрузки; 1 — вакуумметр; 2 — влагомас-лоотделитель; 3 — ротационный компрессор-вакуум-насос; 4 — инерционный фильтр; 5 — фильтр второй ступени очнстки; 6 — крышка; 7 — сопло; 8 — загрузочный шланг; 9 — распределительная труба; 10 — сигнализатор уровня; 11 — фильтр первой ступени очнстки; 12 — цистерна; 13 — шланг; /4 — мановакуумметр; 15 — обратный клапан; 16 — предохранительный клапан; 17 — пробковый край; 18 — аэролоток; 19 — воздухопровод; 20 — обратный клапан; 21 — разгрузочный кран.
Рис. 72. Аэрожелоб.
воздухом и благодаря этому при небольшом уклоне (0,04—0,05) становятся легкоподвижными (текучими).
Аэрожелоб (рис. 72) состоит из двух частей 1 и 3, изготовленных из листовой стали и соединенных болтами. Между частями желоба помещают тканную пористую перегородку 2. Материал поступает из бункера 9 и движется в желобе по поверхности перегородки. В нижнюю часть желоба от вентилятора 6 через всасывающий фильтр 5 и гибкий шланг 8 подают воздух, который равномерно распределяется по всей поверхности перегородки и, проходя сквозь нее, аэрирует слой материала, приводя его в состояние текучести. Далее воздух проходит сквозь слой материала и пропускается через матерчатые фильтры 4, расположенные в окнах по всей длине крышки желоба. Подача воздуха регулируется дросселем 7. Пневматический желоб выгоднее винтового конвейера тем, что в нем отсутствуют движущиеся изнашивающиеся части и он мало расходует энергии *.
§ 17. ПОГРУЗОЧНО-РАЗГРУЗОЧНЫЕ МАШИНЫ
Для разгрузки песка, гравия и щебня из железнодорожных вагонов используют специальные разгрузочные машины. Соответственно условиям разгрузки они выпускаются различных конструкций. Например, для разгрузки платформ — скребковую, у которой скребок сбрасывает груз с устанавливаемых перед машиной платформ; для разгрузки полувагонов — разгрузочно-штабелевочную, у которой висящие на портале ковшовые конвейеры опускаются в полувагон, находящийся в портале машины, и передают груз на конвейер, а с него в штабель; для разгрузки вагонов с цементом — въезжающая в эти вагоны пневматическая машина, у которой подгребающие диски подают цемент к винту, а от него с помощью всасывающей пневматической установки в бункер. Для разрыхления смерзшегося нерудного материала применяют бурофрезерную рых-лительную установку, которая имеет на портале раму с вертикально вращающимися рыхлителями, опускающимися в полувагон, вводимый в портал машины.
Для механизации погрузки материалов в автомобили и прицепы служат самоходные погрузчики, которые по принципу работы бывают непрерывного и периодического действия.
Погрузчики непрерывного действия используются преимущественно на базисных складах насыпных материалов, а периодического действия — на строительных площадках и выпускаются на базе пневмоколесных тягачей и специальных шасси (пневмоколесные), гусеничных тракторов (гусеничные) и с использованием узлов грузовых автомобилей (автопогрузчики).
Погрузчики непрерывного действия выпускаются на гусеничном и пневмоколесном ходу. Наиболее распространенными являются
* Подробнее о конвейерном транспорте см.: Спиваковский А. О., Дьячков В. К- Транспортирующие машины. М., Машиностроение, 1968.
88
Рис. 73. Фронтальные погрузчики:
а — гусеничный; б — пиевмоколесный; 1 — ковш; 2 — рычажный механизм, 3 _ стрела; 4 — гидропривод навесного оборудования; 5 — портал.
89
Рис. 74. Сменное рабочее и навесное оборудование одноковшовых погрузчиков: а — землеройно-погрузочное; б — грузоподъемное; в — снегоочистительное; г — вспомогательное; / — нормальный ковш; 2 — увеличенный ковш; 3 — уменьшенный ковш; 4 — двухчелюстный ковш; 5 — скелетный ковш; 6 — ковш с боковой разгрузкой; 7 —• ковш с увеличенной высотой разгрузки; 8—ковш с принудительной разгрузкой; 9 —бульдозерный отвал; 10 — экскаватор обратная лопата; // — грейфер; 12 — грузовые вилы; 13 — грузоподъемный кран; 14 — челюстный захват; 15 — монтажно-поворотный захват для столбов и свай; 16 — вилы для навоза и силоса; 17 — плужный снегоочиститель; 18 — роторный снегоочиститель; 19 — кусторез; 20 — корчеватель-собиратель; 21 — виб-роуплотннтель; 22 — бункер-дозатор; 23 — асфальтовзламыватель.
90
ковшовые погрузчики, забирающие сыпучие материалы винтом с лопастями и передающие его на наклонный ковшовый конвейер, а с конвейера в штабель или подвижной состав. Иногда применяются погрузчики, забирающие материал шаровой головкой или роторным колесом и передающие груз на ленточный конвейер, входящий в шаровую головку или находящийся сбоку роторного колеса *.
Погрузчики периодического действия в отличие от погрузчиков непрерывного действия, которые применяются только для насыпных материалов, являются универсальными. Они кроме основного рабочего органа — ковша (емкостью Рис- 75. Пневмогусеничное колесо. 0,3—5 м3) оборудуются сменным грузоподъемным оборудованием.
Наибольшее распространение получили фронтальные погрузчики (рис. 73), так как они устойчивы и обеспечивают удобйую разгрузку, отличаются высокой маневренностью, малой металлоемкостью и небольшой продолжительностью цикла погрузки. Емкость ковша фронтальных погрузчиков ’ доходит до 7,5 м3 при мощности двигателя до 400 кВт и весе машины около 50 т.
Область использования современных погрузчиков периодического действия значительно расширена благодаря различному сменному оборудованию (рис. 74).
Пневмоколесные погрузчики более маневренны, чем гусеничные. Применение у них пневмогусеничных колес (рис. 75) обеспечивает такие же тягово-сцепные качества и малое давление на грунт, как и у гусеничных.
У автопогрузчиков основным видом рабочего оборудования является вилочный захват, который можно подвести под штучный груз, установленный на подкладках.
Автопогрузчик также оборудован рядом съемных грузоподъемных приспособлений, расширяющих область его применения,— крановой стрелой, штырем для труб, ковшом для сыпучих материалов и т. п.
Основой погрузчика (рис. 76) служит тележка на пневматических шииах, которую собирают из узлов грузовых автомобилей. Автомобильный двигатель и управляемые колеса 13 расположены в задней части погрузчика, а ведущие колеса 17 — в передней.
* Подробнее о разгрузочных машинах и погрузочных непрерывного действия см.: Фиделев А. С. Подъемно-транспортные машины. Киев, Вища школа, 1976.
91
Рис. 76. Общий вид автопогрузчика.
Подъемная часть погрузчика (рис. 76, 77) состоит из основной рамы 2, установленной шарнирно в передней части погрузчика. Внутри рамы 2 перемещается выдвигающаяся внутренняя рама 4, а вдоль выдвигающейся рамы, в свою очередь, передвигается каретка 8 с вилочным захватом 5.
Подъемный механизм устроен следующим образом: на нижней балке основной рамы установлен гидравлический цилиндр 1. Шток 10 поршня 3 связан с верхней поперечной балкой 6 выдвижной рамы. Звездочки 7 прикреплены к поперечной балке. Цепи 9 присоединены одним концом к каретке 8 и перекинуты через звездочку, а другим концом прикреплены к основной раме 2. При перемещении в цилиндре 1 поршня 3 со штоком 10 последний поднимает вспомогательную внутреннюю раму 4, при этом поднимается и ка
92
ретка 8, которая проходит путь, равный удвоенному пути поршня 3.
Благодаря этому, когда внутренняя рама 4 еще не выдвинута, каретка 8 с вилочным захватом находится в самом нижнем положении, а когда внутренняя рама выдвинута на всю длину, то и каретка находится в самом верхнем положении.
Основная рама 2 вместе с кареткой 8 и вилочным захватом 5 для удобства перемещения груза может изменять свое положение в вертикальной плоскости наклоном вперед на 3 — 4° и назад на 12 —1 5°. Наклон рамы 2 осуществляется двумя гидравлическими цилиндрами 12 и тягами 14 и 15. Управление цилиндрами выполняется рукоятками 11 распределителя масла 16. Грузоподъемность автопогрузчиков 0,25—5 т. Производительность погрузчиков цикличного действия определяется по формуле (80).
Длительность цикла погрузчика ляций с рабочим оборудованием
Рис. 77. Схема гидроподъемника автопогрузчика.
t включает как время манипу. (ковшом, вилочным захватом)
так и время движения самого погрузчика, зависящее от дальности расположения груза от места погрузки и от скорости движения
погрузчика.
Для правильной эксплуатации погрузчиков площадка, на которой происходит их рабочее перемещение, должна быть специально подготовлена. Кроме того, должно производиться постоянное наблюдение за соединениями трубопроводов и системой управления и своевременная проверка рабочих органов.
Вопросы для самопроверки
1. Сравните трансмиссию автомобиля и гусеничного трактора.
2. Объясните принцип действия дифференциала.
3. Сравните тяговые расчеты автомобиля, автопоезда и тракторного поезда.
4. Вычертите схемы ленточных, вибрационных, ковшовых и винтовых конвейеров.
5. Запишите и сравните формулы производительности каждого из этих конвейеров.
6. Объясните схему дистанционного автоматического управления конвейерами.
7. Опишите рабочий процесс загрузки и разгрузки фронтального погрузчика и автопогрузчика.
Глава IV
ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
В строительстве грузоподъемные машины применяются при монтаже конструкций промышленных и жилых зданий, при установке и монтаже оборудования, для подачи строительных материалов, деталей и конструкций к месту их укладки.
Используемые на строительной площадке грузоподъемные машины в зависимости от их конструкции и назначения можно разделить на следующие группы (рис. 78).
Простые машины:
домкраты (машины, воздействующие на груз снизу) — предназначены для подъема грузов на небольшую высоту;
строительные лебедки — применяются для подъема и подтягивания грузов или являются составной частью более сложных машин;
тали — предназначены для подъема груза на небольшую высоту; строительные подъемники — служат для подъема груза на платформе, перемещающейся по направляющим.
Краны:
стреловые стационарные — поднимают и перемещают груз в пределах площади, охватываемой стрелой; используются для монтажа конструкций и оборудования;
башенные — передвигаются по рельсовым путям; используются для перемещения грузов и монтажа конструкций в зоне рельсового пути; наличие башни дает возможность обслуживать площадь, охватываемую стрелой, на большой высоте;
самоходные стреловые — предназначены для монтажных и погрузочно-разгрузочных работ; отличаются большой маневренностью; зона, обслуживаемая краном, может быть любой конфигурации;
козловые — производят перемещение грузов и монтаж конструкций в пределах площади прямоугольника, обслуживаемого краном;
кабельные — используются для перемещения грузов и монтажа конструкций в зоне каната, натянутого между двумя опорами; канат служит несущей конструкцией для перемещения грузов.
Простые грузоподъемные машины обеспечивают в основном только вертикальные перемещения грузов и поэтому состоят из одного механизма подъема.
Краны перемещают грузы как в вертикальном, так и в горизонтальном направлении. Поэтому у них, кроме механизма подъема груза, имеются все или часть следующих механизмов: поворота, 94
Рис. 78. Схема грузоподъемных машин (стрелками указано возможное перемещение груза):
а — домкрат винтовой; б — лебедка; в — тзлъ‘, г — стреловой вантовый кран; д— строительный подъемник; е — башенный кран; ж — автомобильный кран;
з — козловой кран; и — кабельный кран с неподвижными опорами.
горизонтального передвижения груза, изменения наклона стрелы и передвижения крана *.
В зависимости от условий использования машины режим (интенсивность) ее работы может быть различным. Это учитывается при расчете механизмов и металлических конструкций грузоподъемных машин выбором соответствующих коэффициентов запаса прочности, динамических коэффициентов и т. д.
В грузоподъемных машинах, используемых в строительном производстве, различают три режима работы: легкий, средний и тяжелый. Режим устанавливается в зависимости от ряда факторов согласно нормативам Гостехгорнадзора. К этим факторам относятся степень использования машины в течение года и суток, использование по грузоподъемности, число включений и др. Обычно на строительствах при монтажных работах устанавливают легкий режим, а при перегрузочных — средний.
§ 18. СПЕЦИАЛЬНЫЕ ДЕТАЛИ И УЗЛЫ ГРУЗОПОДЪЕМНЫХ МАШИН
Механизмы грузоподъемных машин состоят из общемашиностроительных деталей и узлов (см. главу I) и из специальных (стальные канаты, блоки, полиспасты, барабаны, тормозные устройства и др.). Применение тех или иных специальных деталей и узлов обусловлено спецификой работы грузоподъемных машин.
На рис. 79 показана принципиальная схема механизма подъема груза с электрическим приводом. Груз подвешивается к крюку 8, прикрепленному к подвижной обойме 7 канатного полиспаста. Сбегающая с неподвижного блока 6 через направляющий блок 5 ветвь каната 4 навивается на барабан 3, который связан с двигателем 1 зубчатой передачей 2. На валу двигателя установлен колодочный тормоз 9, предназначенный для удержания поднятого груза на весу.
В механизмах с групповым приводом (рис. 79, б) двигатель 1 через гибкую и зубчатую передачи 2 приводит в движение валы барабанов. Сами же барабаны 3 включаются при помощи муфт включения 10. В этих механизмах ленточные тормоза 11 используются не только для удержания груза на весу, но и для регулирования скорости его спуска.
Из рис. 79 видно, что, например, в механизме подъема большинство деталей и узлов — специальные.
Стальные канаты применяются в качестве тягового органа для грузоподъемных и других строительных машин, для строповки грузов, расчалки мачт и строительных конструкций во время монтажа и т. д. Изготовляются они свивкой из тонких стальных проволок диаметром 0,5—2 мм (реже до 5 мм), с пределом прочности при растя-
* Последнее время для монтажных работ в труднодоступных местах начали успешно применяться вертолеты-краны, обеспечивающие подачу на сооружение строительных конструкций длиной до 22 м и весом до 12 т. Радиус действия таких кранов до 400 км, высота полета до 4 км, скорость полета до 180 км/ч, минимальная высота стояния при монтаже 5,5—6 м.
96
Рис. 79. Принципиальная схема подъемного механизма:
а — с индивидуальным электроприводом; б — с групповым приводом.
жении 1,4—2 ГПа (140—200 кгс/мм2). Проволоки предварительно свиваются в пряди 1, а затем пряди свиваются вокруг пенькового сердечника 2 (рис. 80), который придает канату гибкость и удерживает внутри его смазку.
В зависимости от направления свивки проволок в прядях и прядей между собой различают канаты односторонней и крестовой свивки. Если проволоки в прядь и пряди в канат свиты в одном направлении, такие канаты называются канатами односторонней свивки, при свивке в противоположных направлениях — канатами крестовой свивки.
Стальные канаты должны обладать прочностью, гибкостью, долговечностью и не должны сплющиваться или раскручиваться во время работы. Эти свойства в наибольшей степени присущи стальным канатам двойной крестовой свивки (рис. 80), которые, как правило, и применяются в грузоподъемных машинах.
Для возможности выбора стальных канатов в стандартах и паспортах заводов-изготовителей указана величина разрывного усилия каната в целом, определяемого непосредственно испытанием его на разрывной машине.
По нормам Гостехгорнадзора стальные проволочные канаты подбирают исходя из разрывного усилия каната в целом с учетом необходимого запаса прочности, даН (кгс),
5макс<4, (126)
где Змакс — наибольшая расчетная нагрузка на канат; R — разрывное усилие каната в целом; k — коэффициент запаса прочности, принимаемый в зависимости от режима работы машины и ее назначения: для легкого режима — 5, среднего — 5,5 и тяжелого — 6.
При выборе каната, кроме его расчетной прочности, учитывают и срок службы, зависящий от диаметра огибаемых им блоков и барабанов; чем меньше этот диаметр, тем быстрее канат приходит в негодность.
4 642
97
_______Шаг cSuSku___,, i Минимальные отношения диа-метров барабанов и блоков к диа-метру каната dK, по нормам Гос-техгорнадзора, для легкого режи-г ма—16, среднего—18 и тяжело-Рис. 80. Канат двойной крестовой го — 20.
свивки. Критерием для определения
надежности проволочного каната и пригодности его для дальнейшей эксплуатации служит количество обрывов проволок на шаге свивки и износ по диаметру проволок каната. Шагом свивки каната называется расстояние между двумя метками, в которое укладывается число витков, равное числу прядей в канате. Изображенный на рис. 80 канат состоит из шести прядей, поэтому шаг свивки включает здесь шесть витков.
В случае появления обрывов проволок в канатах они подлежат браковке согласно «Правилам устройства и безопасной эксплуатации грузоподъемных кранов».
Крюки являются основным наиболее универсальным грузозахватным устройством. К ним при помощи стропов, захватов, клещей и других приспособлений можно подвешивать различные грузы, как штучные, так и емкости с материалом. Крюк нельзя применять, если на нем нет клейма завода-изготовителя с указанием грузоподъемности.
Во время эксплуатации необходимо следить за надежностью крепления крюка в обойме и его состоянием. Крюки, имеющие отгиб рога, поверхностные трещины или износ, должны быть заменены новыми.
Полиспасты (рис. 81) представляют собой систему из подвижных и неподвижных блоков, последовательно огибаемых канатом. Блоки полиспаста собираются на осях в две обоймы: подвижную и неподвижную. Один конец каната закрепляют на подвижной (рис. 81,6, г) или неподвижной (рис. 81, а, в) обойме, а второй (обегающий) — на барабане лебедки.
Если подвесить груз Q к подвижному блоку (рис. 82, а) и один конец каната, огибающего этот блок, закрепить неподвижно, то сила тяги 5 на другом конце каната будет приблизительно в два раза меньше веса груза, а скорость подъема груза в два раза меньше скорости движения тянущего конца каната.
Следовательно,
S = <127)
где т]бл — КПД блока, учитывающий потери на трение в подшипниках оси блока и на преодоление жесткости изгибаемого каната при его прохождении по блоку. В зависимости от конструкции подшипников и условий их смазки КПД блоков колеблется в пределах 0,94—0,99.
Применение полиспаста с подвижными блоками дает выигрыш в силе и проигрыш в скорости. Благодаря этому уменьшается передаточное число механизма и, следовательно, размеры и вес лебедки.
S8
Рис. 81. Схемы одинарных полиспастов:
а, б — с ветвью, сходящей с верхнего блока; в, г — с ветвью, сходящей с нижнего блока.
У одинарных полиспастов, показанных на рис. 81, а, б, тянущий конец каната сходит с блока верхней неподвижной обоймы, а на рис. 81, в, г — с блока нижней подвижной обоймы. Полиспасты первого типа применяются в стреловых кранах, а второго типа — в мостовых и козловых.
Основной характеристикой полиспаста является его кратность «пол, т. е. отношение скорости навивания каната на барабан к скорости подъема груза:
i™ = -7- • (128)
гр
Кратность полиспаста равна числу ветвей каната, на которые распределяется нагрузка, приложенная к подвижной обойме. У полиспаста, показанного на рис. 81, а и в, im„ — 4; на рис. 81, б
= 3; на рис. 81, г imJ1 = 5.
Для выбора каната полиспаста и расчета лебедки необходимо определить натяжение каната Sb сходящего с последнего блока и идущего к барабану лебедки. При подъеме груза это натяжение будет наибольшей расчетной нагрузкой на канат
где т]пол — КПД полиспаста.
Натяжение в ветвях полиспаста (рис. 81) определяется по уравнениям
' S% = 51Т]бл; S3 — = (130)
= З3т]бл = 5]Т]бл; ... Sn = SjTKn •
4*
99
!ШЛ
Рис. 82. Схемы подвижных блоков:
а — при выигрыше в силе; б — при выигрыше в скорости.
Здесь п — количество всех ветвей каната полиспаста, включая и тянущую.
Чтобы определить натяжение S15 рассечем канаты плоскостью /—I и составим уравнение равновесия нижней части.
Для полиспастов, у которых тянущая ветвь сходит с верхнего отклоняющего блока (рис. 81, а, б),
а 6
$2 + S3 + • • + Sn — Q — 0;
51Т)бл ~f~ Sj.'i'ls.n + • • + 5гт]бл — Q = 0;
Si =---------------------------------—r. (i:
Пбл + 'Чел 4- • •, 4- Пбл
Решая совместно уравнения (127) и (131), получаем
(132)
с нижнего
(133)
(134)
ема груза
Пбл 4- Пбл 4- ' ‘' + Пбл1 'Ппол - ?
1пол
Для полиспастов, у которых тянущая ветвь сходит подвижного блока (рис. 81, в, г),
Si 4~ 5а + S3 4- • • • + Sn — Q = 0;
+ ‘81'Пбл + S т]бл + • • 4- 51т]бл — Q = 0;
£ _______________Q___________
1 4- Пбл 4- Пбл 4- • • 4- Пб7‘
Решая совместно уравнения (127) и (133), получаем:
1 4- Пбл 4- Пбл 4- • ’' 4- Пбл1 Нпол - ;
ПОЛ
Для того чтобы обеспечить прямолинейность подп
в козловых кранах, обычно применяют сдвоенные полиспасты (рис. 83), у которых на барабан навиваются два конца каната.
При одновременном навивании обоих концов каната средняя его точка на уравнительном блоке В остается неподвижной. Уравнительный блок при подъеме груза не вращается и только при неравномерной вытяжке концов каната слегка проворачивается. Сдвоенный полиспаст по существу представляет два отдельных полиспас-
„ Q
та, нагруженных каждый грузом
Если к подвижному блоку (см. рис. 82, б) приложить силу тяги S, а к тяговому органу подвесить груз Q, то сила тяги будет в два раза больше скорости подъема блока. В данном случае будет проигрыш в силе, затрачиваемой на подъем груза, и выигрыш в скорости подъема груза.
100
Рис. 83. Схема сдвоенного полиспаста.
Рис. 84. Схема полиспаста
для выигрыша в скорости.
Эти полиспасты применяются главным образом в гидравлических и пневматических подъемниках для увеличения скорости движения груза по сравнению со скоростью движения поршня (см. § 17). На рис, 84 приведена схема полиспаста гидрав
лического подъемника. Его кратность /пол = т. е. скорость подъе
ма груза огр в четыре раза больше скорости движения поршня vn.
Барабан служит для преобразования вращательного движения привода механизма в поступательное движение подъема, спускания или подтягивания груза. Как правило, барабаны имеют цилиндрическую форму.
Однослойная навивка на барабан с канавками (рис. 85) увеличивает площадь соприкосновения каната с барабаном и удлиняет срок службы каната.
Многослойная навивка на гладкие барабаны (рис. 86) применяется только в тех случаях, когда надо уменьшить размеры барабана, например при большой высоте подъема.
Барабаны изготовляются из чугунного или стального литья, а также из стальной трубы.
Конструкции крепления конца каната на барабане должны быть надежны, доступны для осмотра и легки для подтягивания и смены каната.
Во время эксплуатации место крепления конца каната на барабане должно ежедневно проверяться. Все конструкции крепления конца каната на барабане основаны на использовании сил трения. Для того чтобы уменьшить усилие, действующее на крепление, согласно существующим правилам, на барабане предусмотрено не менее 1,5 несматываемых витка. Они в 2,5—4 раза уменьшают усилие в месте закрепления каната.
При выборе лебедки исходят из того, чтобы ее барабан вмещал длину каната, м,
= /ДПол -j- (1,5 4- 2) л (2?бар + ^к), (135)
181
Рис. 85. Барабан с канавками:
1 — барабан; 2 — масленка; 3 — болт; 4 — зубчатое колесо;
5 — бронзовая втулка; 6 — ось барабана; 7 — ступица.
где Н — максимальная высота подъема груза, м; 1ПОЛ — кратность полиспаста; Рбар — диаметр барабана, м; — диаметр каната, м.
Второй член правой части равенства (135) учитывает несматывае-мые витки на барабане.
Длина каната должна быть меньше, чем канатоемкость барабана L лебедки, т. е. меньше той максимальной длины каната, которая может быть навита на барабан диаметром £>баР и длиной /0.
При однослойной навивке на барабан с канавками (рис. 85) его канатоемкость, м,
L = л (Обар + dj г. (136)
Здесь z — число рабочих витков каната по длине барабана, z =» — где t = dK + (0,002 ч- 0,003) м — шаг винтовой навивки.
При многослойной навивке (рис. 86) канатоемкость барабана, м, L = ixD^ptiZi, (137)
где ОСр — средний диаметр навивки, м; zt — число рабочих витков на гладком барабане fzx = п— число слоев каната на \ “к /
барабане.
102
Рис. 86. Барабан с гладкой поверхностью.
Средний диаметр навивки, м, определяется из выражения 2ndK
^ср = &бар 4" 2 = ^бар 4“ fldK.
(138) Число слоев п ограничивается высотой борта барабана. Требуется, чтобы между верхним слоем каната и концом борта оставался запас, равный 2dK (см. рис. 86).
Следовательно, число слоев, которое можно вместить на барабане, определится из уравнения ^борт — Рбар — 4dK = 2ndK, (139) откуда п = ———-------------2, (140)
где Рборт — диаметр борта барабана, м.
Тормоза, которыми снабжаются механизмы грузоподъемных машин, с помощью сил трения уменьшают скорость движения и останавливают поступательно перемещающиеся или вращающиеся массы. В механизмах подъема тормоза останавливают груз и удерживают его в подвешенном состоянии, а в механизмах передвижения и поворота останавливают движущиеся или поворачивающиеся конструкции.
Рабочей поверхностью тормозов обычно служит специальная фрикционная лента, обладающая повышенным коэффициентом трения и высокой износостойкостью.
В грузоподъемных машинах применяются четыре типа тормозов с различными конструкциями рабочих частей: ленточные, колодочные, дисковые и конусные. Все эти тормоза разделяются по назначению на стопорные и спускные, по характеру работы — на замкнутые и разомкнутые. Управляются они вручную, при помощи электромагнитов и электрогидравлических толкачей.
Тормоза, которые служат только для остановки и удержания груза в поднятом положении, называются стопорными. Тормоза, которые, помимо остановки и удержания груза, могут регулировать скорость его опускания, называются спускными.
Замкнутые тормоза постоянно замкнуты усилием пружины или весом груза и размыкаются только на тот период, когда механизм работает. Разомкнутые тормоза замыкаются только тогда, когда нужно остановить механизм.
Ленточный тормоз (рис. 87) имеет огибающую тормозной шкив 1 упругую стальную ленту 2, к рабочей поверхности которой прикреплена фрикционная лента 3. Лента охватывает тормозной шкив и крепится набегающим концом 8 к станине или тормозному рычагу, а сбегающим концом 4 — к тормозному рычагу 6.
103
Рис. 87. Простой ленточный тормоз:
а — общий вид; б — схема; в — условное обозначение.
Для возможности регулирования длины ленты один ее конец (сбегающий) крепится винтовой стяжкой 5 к тормозному рычагу. Торможение осуществляется затягиванием тормозной ленты под действием замыкающего груза 7, пружины или при нажатии на рычаг ногой. Этот тормоз называется простым ленточным тормозом.
При вращении тормозного шкива (рис. 87, б) по стрелке / усилие, даН (кгс), прилагаемое к рычагу, определяется исходя из уравнения его равновесия
(141)
При вращении шкива по стрелке II:
Сп = -^L , (142)
так как конец ленты, прикрепленный к рычагу, становится ее набегающим концом.
Как следует из формулы Эйлера (24) и выражений (141) и (142), величина усилия, необходимого для торможения, будет различной при разных направлениях вращения шкива Gn > Gi. Поэтому простые ленточные тормоза являются тормозами одностороннего действия и применяются в тех механизмах, где требуется работа тормоза только при спуске груза (механизмы подъема).
Для реверсивного торможения механизмов передвижения и вращения автомобильных и гусеничных кранов применяются более рациональные с точки зрения затрачиваемого усилия конструкции плавающих простых тормозов двухстороннего действия (рис. 88). В этой конструкции оба конца ленты прикреплены к рычагам 1, сходящимся в одной точке 9, к которой прикреплена тяга 10 для управления тормозом. Поскольку тормоза механизмов передвижения и вращения самоходных кранов выполняются нормально разомкнутыми, то между концами лент размещается разжимающая пружина 2, а сами концы ленты находятся в корытообразном упоре 3. Тормоз называется плавающим, потому что не имеет закрепленных точек, и в зависимости от направления вращения шкива концы ленты прижимаются к одной из сторон корытообразного упора. При
104
Рис. 88. Схема плавающего простого ленточного тормоза двухстороннего действия:
а — разомкнутое положение; б — замкнутое положение.
этом упирающийся конец ленты всегда остается набегающим, а второй конец — сбегающим. Усилие, прилагаемое к тяге управления 10, будет всегда оставаться приблизительно одинаковым, и тормоз обеспечит равный тормозной момент при вращении тормозного шкива в разных направлениях.
Лента тормоза выполняется из двух отдельных частей 4 и 8, соединенных болтом 5 с пружиной 6. Затягивая гайку 7 на болте 5, регулируют натяжение ленты.
Колодочные тормоза, простые по конструкции и надежные в эксплуатации, широко применяются в грузоподъемных машинах. В этих тормозах тормозной момент создается за счет прижатия двух колодок с прикрепленными к ним фрикционными лентами к тормозному шкиву. Колодочные тормоза пригодны для двухстороннего торможения и применяются в качестве стопорных нормально замкнутых тормозов. Усилие, прижимающее тормозные колодки, создается весом груза или пружиной, а размыкание колодок в период работы механизма осуществляется электромагнитом.
В зависимости от типа применяемого электромагнита и соответствующей ему рычажной системы различают колодочные тормоза с длинноходовым и короткоходовым электромагнитами.
В распространенном колодочном тормозе с короткоходовым электромагнитом (рис. 89, а) тормозной момент создается пружиной. Магнит клапанного типа с коротким ходом якоря (2—4 мм) располагают непосредственно на одном из рычагов тормозных колодок.
Работает этот тормоз следующим образом. Одновременно с выключением электродвигателя механизма прекращается питание
105
ТдТ
Рис. 89. Колодочный тормоз с короткоходовым электромагнитом:
а — конструкция; б — условное обозначение»
Рис. 90. Колодочный тормоз с электрогид-равлическнм толкателем.
током катушки электромагнита; электромагнит 8 не может больше удерживать якорь 9, который отходит от сердечника. При движении якоря высвобождается шток 7, и пружина 5, упираясь в скобу 4 и гайку 6, стремится раздвинуть их, в свою очередь перемещая навстречу один другому вертикальные рычаги 1 и 10. Рычаги, сбли-жась, прижимают колодки 2 к тормозному шкиву. Гайка 3 служит для регулирования хода якоря, а гайка 11 — для регулировки отхода колодок.
Вместо электромагнитов для управления тормозами грузоподъемных машин применяют электрогидравлические толкатели. По сравнению с электромагнитами они просты по конструкции и в
106
Рис. 91. Схемы и условные обозначения тормозов с осевым нажатием: а — однодисковый; б — конусный.
вксплуатации, обладают плавностью и надежностью, выдерживают большой срок службы. На рис. 90 показан колодочный тормоз с электрогидравлическим толкателем. Рычаги с тормозными колодками стягиваются при помощи пружины 5, действующей через угловой рычаг 4 вниз. Электрогидравлический толкатель представляет собой корпус 1, в котором находится гидравлический цилиндр с поршнем и центробежный насос, приводимый во вращение двигателем 3, включающимся автоматически при включении основного электродвигателя механизма. При этом насос подает масло под поршень, который штоком 2 поднимает угловой рычаг, размыкая тормозные колодки.
Для рассмотренных конструкций ленточных и колодочных тормозов характерно, что усилие, создающее тормозной момент, направлено всегда перпендикулярно к валу, подлежащему остановке.
В некоторых грузоподъемных машинах (тали, тельферы) для компактности применяют тормоза, у которых усилие замыкания тормозных поверхностей действует вдоль оси тормозного вала. К тормозам с осевым нажатием относятся дисковые и конусные.
Дисковый тормоз (рис. 91, а) состоит из неподвижного 1 и вращающегося 2 дисков с фрикционной лентой <3. Тормоз замыкается посредством осевого перемещения вращающегося вместе с валом диска 2 и прижатия его к неподвижному диску 1. Для уменьшения тормозного усилия применяют систему из нескольких параллельно работающих дисковых тормозов; такая система называется многодисковым тормозом.
Конусный тормоз (рис. 91, б) состоит из неподвижного 4 и вращающегося 5 конусов. Вследствие трения между рабочими поверхностями конусов создается необходимый тормозной момент.
§ 19. ДОМКРАТЫ
В строительном производстве домкраты используются ири монтажных и ремонтных работах, когда надо поднять большой груз на небольшую высоту, обычно до 0,5—0,6 м; они имеют небольшой вес и их легко переносить с места на место. Домкрат может быть также составной частью строительных машин и приспособлений.
107
Рис. 93. Винтовой домкрат.
Наиболее распространены реечные, винтовые и гидравлические домкраты.
Реечный домкрат (рис. 92) состоит из деревянного или металлического корпуса 1, в котором по направляющим перемещается зубчатая рейка 2, имеющая наверху грузовую поворотную головку 5, а внизу лапу 6 для подъема низко расположенных грузов. Грузоподъемность на лапе обычно равна половине основной грузоподъемности на головке домкрата. Рейка перемещается в направляющих корпуса при вращении рукояти 3, передающей движение через зубчатую передачу 4.
Усилие, необходимое для подъема груза (рис. 94, а), даН (кгс),
q^-р= 2
-—, (143)
где Q — вес поднимаемого груза, даН (кгс); <1Ш — диаметр начальной окружности ведущей шестерни, связанной с рейкой, м; г — длина плеча рукояти, м; i — передаточное число зубчатой передачи; т] — КПД механизма домкрата, равный 0,80—0,85 при непосредственном зацеплении ведущей шестерни с рейкой и 0,65—0,67 при наличии промежуточных шестерен.
Реечные домкраты изготовляют грузоподъемностью 3—5 т при максимальной высоте подъема 0,4—0,6 м. Они применяются для правки стальных конструкций, выверки колонн, подъема грузов, а также при погрузочно-разгрузочных, монтажных и ремонтных работах.
Винтовой домкрат (рис. 93) состоит из корпуса 1, чугунного или стального винта 2 с прямоугольной или трапецоидальной резьбой, бронзовой гайки 6 и приводной рукоятки 5 с трещоткой 4. На винте свободно укреплена грузовая головка 3, которая, упираясь в поднимаемый груз, остается во время вращения винта неподвижной.
108
Окружное усилие Р, необходимое для вращения винта, нагруженного силой G, определяется по формуле (7).
Поэтому при длине рукоятки I и среднем радиусе винта г окружное усилие, даН (кгс),
Р = ^-Gtg(X + p). (144)
Винтовые домкраты обычно самотормозящие и не тре-
буют никаких дополнительных Рис. 94. Схема гидравлического домкрата, устройств для удержания гру-
за. Поэтому угол подъема винтовой линии X в винтовых домкратах применяется меньше угла трения р (обычно 4—6°). Согласно формуле (10) КПД самотормозящего винтового домкрата ц меньше 0,5. Низкий КПД является недостатком винтовых домкратов.
Винтовые домкраты изготовляются грузоподъемностью от 2 до 50 т. При грузоподъемности, превышающей 20 т, вращение винта домкрата осуществляется через червячную передачу. Винтовые домкраты имеют ручной или электрический привод. Они используются
как при монтажных и ремонтных работах, так и для осуществления наиболее рациональных механизированных способов подъема опалубки, подмостей и т. п.
Гидравлический домкрат состоит из цилиндра, поршня, нагнетательного и спускного клапанов. Подъем груза осуществляется подачей в цилиндр домкрата жидкости под давлением, а спуск — выпусканием этой жидкости через спускной клапан. Регулируя сте
пень открытия спускного крана, можно изменить скорость истече
ния жидкости и, следовательно, скорость опускания груза. В качестве жидкости в гидравлических домкратах применяют минеральное масло или воду, смешанную с глицерином. Рабочая жидкость подается в цилиндр домкрата при помощи насосов, имеющих ручной или машинный привод. Насосы могут устанавливаться непосредственно у домкрата, соединяясь с ним в единый блок, или раздельно, соединяясь с домкратом трубопроводами. При раздельной установке один насос может обеспечить работу группы дом
кратов.
На рис. 94 показан единый блок, состоящий из домкрата,
поршневого насоса с ручным приводом и бака для масла. Качатель-
ное движение рукоятки 5 насоса вызывает возвратно-поступательное движение поршня 4 в цилиндре 3. При этом масло из бака 6
засасывается клапаном 7 и подается через нагнетательный клапан 2 в цилиндр 1 домкрата. Естественно, что под обоими поршнями давле-
ние одинаково, т. е.
F f •
Поэтому рабочее усилие на рукоятке,
109
Рис. 95. Схема действия гидравлического домкрата непрерывного подъема.
необходимое для подъема груза Q, даН (кгс),
Рр = (?4---------- = ----(145)
где f и F — площади поперечного сечения поршней, м2; d и D — диаметры этих поршней, м; /иг — плечи рукоятки, м; т] — КПД домкрата.
Из выражения (145) видно, что, подбирая малую величину соот-d- л
ношения можно получить в гидравлическом домкрате большой выигрыш в силе. Это позволяет делать гидравлические домкраты большой грузоподъемности при относительно небольших габаритах и весе. В практике строительства наиболее распространенными являются домкраты грузоподъемностью 100—200 т при высоте подъема 0,15—0,20 м и собственной массе 180—330 кг.
При подъеме крупных сооружений (пролеты мостов, доменные печи, сборные этажи зданий и т. п.) весом в сотни и даже тысячи тонн применяют несколько домкратов, соединенных в общую батарею, питаемую жидкостью от одной насосной установки. Запорная и регулирующая арматура, установленная на каждом домкрате батареи, позволяет отключить любой домкрат и регулировать скорость его опускания и подъема.
Для подъема груза на высоту, превышающую высоту подъема домкрата, применяются гидравлические домкраты непрерывного действия (рис. 95), у которых груз поднимается цилиндром, а поршень опирается на основание. Такие домкраты, кроме цилиндра 1 и поршня 2, имеют возвратные пружины <3, сжимающиеся при подъеме цилиндра и обеспечивающие подтягивание поршня в цилиндр после выпуска из него жидкости.
Порядок работы таков:
I — включается насос, и цилиндр поднимается с грузом в верхнее положение, возвратные пружины сжимаются и под лапы цилиндра подводятся опорные брусья; II — открывается спускной клапан, и поршень под действием возвратных пружин подтягивается в цилиндр; III — под основание поршня подкладываются опорные брусья; IV — включается насос, и цилиндр поднимает груз еще на один ход домкрата. В дальнейшем цикл может повторяться.
ПО
§ 29. ТАЛИ И ЛЕБЕДКИ
Тали представляют собой простые по устройству и небольшие по размерам гр узо подъемные машины, подвешиваемые к высоко расположенным опорам. В зависимости от привода тали разделяются на ручные и электрические.
Электрические тали, подвешиваемые к тележкам, которые передвигаются по рельсу, называются электротельферами (рис. 96). Тележки электроталей в большинстве случаев имеют электрический привод. Электротельферами управляют снизу при помощи свисающего легкого пульта с кнопками, соединенного с электроаппаратурой тельфера гибким кабелем.
Электроталь состоит из электродвигателя, барабана 1, на котором подвешен грузовой полиспаст с крюковой обоймой, зубчатых передач 2, многодискового тормоза 3, управляемого электромагнитами, и автоматического грузоупорного дискового тормоза. Как только груз отделяется от земли, на зубчатом колесе 4 возникает момент, который перемещает колесо по резьбе 6 к храповику 7 и зажимает его, после чего эта система (диск 8, храповик и зубчатое колесо) продолжает вращаться как одно целое.
По окончании подъема и прекращении работы привода груз начал бы опускаться и вращать валы механизма в обратную сторону, но собачка 9 сейчас же упирается в храповик и останавливает его. Вследствие этого останавливается и зубчатое колесо, связанное с храповиком силой трения, и дальнейшее опускание груза прекращается. При опускании груза вал 5 вращается в сторону опускания, зубчатое колесо отходит от храповика вправо, тормоз размыкается, и груз под действием собственного веса опускается, однако, подчиняясь закону свободного падения, он опускается ускоренно, приводя в такое же ускоренное движение все звенья подъемного механизма, в том числе и зубчатое колесо. В результате через короткий промежуток времени зубчатое колесо начинает обгонять вал и перемещаться по резьбе 6 влево, доходит до храповика и зажимает его. При этом тормоз замыкается и останавливает груз. Продолжающий вращаться в направлении опускания груза рабочий вал снова отводит зубчатое колесо вправо, размыкает тормоз, и груз снова получает возможность свободно опускаться, что завершается, как и в первом цикле, автоматическим замыканием тормоза.
Таким образом, процесс опускания груза при этом тормозе состоит из ряда чередующихся свободных падений и остановок. Чтобы сократить продолжительность и путь отдельных падений груза, при регулировании тормоза стараются довести зазор е (рис. 96, в) до минимума. В хорошо отрегулированном тормозе неравномерность опускания груза практически не должна ощущаться.
Электрические передвижные тали выпускают грузоподъемностью от 0,25 до 5 т при высоте подъема 6 м. Применяются также электро-тали грузоподъемностью 10 т. Благодаря компактности конструкции, простоте обслуживания и легкости установки электротали
ill
Рис. 96. Таль электрическая передвижная (электротельфер):
а — общий вид; б — кинематическая схема; в — схема грузоупорного тормоза; а — храповое устройство.
находят широкое применение для выполнения подъемно-транспорт-ных, монтажных и ремонтных работ.
Строительные лебедки — это машины для перемещения груза, в которых тяговый орган — канат — навивается на барабан или свивается с него. Лебедки бывают общего назначения, применяемые как самостоятельный механизм, и специальные, входящие в состав кранов или других строительных машин. По конструкции передаточного механизма от двигателя к барабану строительные лебедки разделяются на электрореверсивные и фрикционные.
У электрореверсивной лебедки (рис. 97) двигатель 7 через упругую муфту 6 и зубчатые колеса цилиндрического (реже червячного) редуктора 3 вращает барабан 2.
Для электрореверсивных лебедок характерна жесткая кинематическая связь барабана с двигателем. При такой связи изменение направления вращения барабана достигается изменением направления вращения (реверсированием) двигателя.
Жесткая связь барабана с двигателем осуществляется зубчатой передачей редуктора 3. Иногда для увеличения передаточного числа механизма или по конструктивным соображениям кроме редуктора применяют открытые зубчатые передачи.
Пуск и реверсирование двигателя осуществляется электрической пусковой аппаратурой в виде барабанного контроллера, магнитных пускаталей, контакторов и т. п. Эту аппаратуру устанавли-
112
Рис. 97. Электрореверсивная лебедка с тяговым усилием 5000 даН (кгс): а — общий вид; б — кинетическая схема.
вают в защитном кожухе 8 на раме 1 или в месте, удаленном от лебедки.
Электрореверсивные лебедки оборудуются стопорными колодочными тормозами, управляемыми электромагнитами. Тормозным шкивом, зажимаемым колодками тормоза 4, служит половина упругой муфты 5 увеличенного диаметра, которая закреплена на валу редуктора.
Фрикционные лебедки отличаются от электроре-версивных тем, что они имеют фрикционную связь между барабаном и двигателем, т. е. барабан подключается к двигателю посредством фрикционной муфты (рис. 98).
У фрикционных лебедок двигатель вращает зубчатое колесо всегда в одну сторону. Подъем груза осуществляется при включенной
113
Рис. 98. Фрикционная двухбарабанная лебедка с тяговым усилием 1200 даН (кгс): а — общий вид; б — кинематическая схема; 1 — клиноременная передача; 2 — зубчатая передача; «? — фрикционная муфта; 4 — ленточный тормоз; 5 — электродвигатель; 6 — промежуточный вал; 7 — ось барабана; 8 — рама; 9 — стопорное устройство; 10 — барабан.
фрикционной муфте, а спуск его — под действием собственного веса при выключенной муфте. Для регулирования скорости опускания груза применяются спускные ленточные нормально замкнутые тормоза. При этом фрикционные лебедки обязательно оборудуются храповыми остановами, обеспечивающими удержание груза в поднятом состоянии или его стопорение при внезапном отключении двигателя.
У фрикционных лебедок барабаном управляют раздельно с помощью фрикционов. Это дает возможность делать фрикционные лебедки с несколькими барабанами при одном двигателе.
Электрореверсивные лебедки надежны в работе, просты в управлении и поэтому являются наиболее эффективными грузоподъемными устройствами, применяемыми в строительстве как самостоятельно, так и в качестве крановых механизмов.
Электрореверсивные лебедки выпускаются отечественной промышленностью с тяговым усилием 200—1200 даН (кгс), а фрикционные 500—5000 даН (кгс).
Лебедку обычно выбирают по тяговому усилию и канатоемкости барабана.
Тяговое усилие лебедки равно натяжению в канате обегающей ветви полиспаста Sj, определяемому по формуле (129).
Канатоемкость барабана лебедки находят по формуле (136) или (137). Мощность двигателя лебедки, кВт,
Qu_
(146)
частота вращения барабана, мин-1,
частота вращения двигателя
Пдр Пбар^ред- (148)
114
Рис. 99. Строительный подъемник:
а — принципиальная схема; 6 — устройство с шарнирно-сочлененной стрелой для выгрузки материалов; в — то же, с выдвижной площадкой.
Здесь Q — поднимаемый груз, даН (кгс); v — скорость его подъема, м/с; т] = г)лт]пол — общий КПД лебедки и полиспаста; Dcp — средний диаметр навивки каната на барабан, м; ipeA — передаточное число редуктора и открытых передач лебедки.
§ 21. СТРОИТЕЛЬНЫЕ ПОДЪЕМНИКИ, ПЕРЕНОСНЫЕ КРАНЫ-ПОДЪЕМНИКИ
Строительными подъемниками называются грузоподъемные машины, у которых груз перемещается в специальном устройстве (платформа, клеть, ковш), движущемся в жестких направляющих *.
Наиболее распространена серийно выпускаемая конструкция мачтовых подъемников (рис. 99, а), которые представляют собой решетчатую мачту прямоугольного сечения 6, устанавливаемую на опорной платформе непосредственно у строящегося здания 9. Мачта состоит из отдельных секций, соединяемых болтами во время монтажа. Нижняя и верхняя секции оборудованы направляющими блоками 3 ц 8 для каната. По мере увеличения высоты здания мачта подъемника наращивается за счет монтажа дополнительных промежуточных секций. При большой высоте (свыше 10 м) мачту крепят кронштейнами 7 к стене строящегося здания. По направляющим мачты при помощи каната 2 и лебедки 1 перемещается на роликах каретка 5 с грузовой платформой 4.
Грузы обычно подаются на этажи через оконные проемы с помощью шарнирно-сочлененной стрелы (рис. 99, б) или в случае
* Исключение составляют иногда применяющиеся внутри строящихся многоэтажных зданий подъемники, имеющие тросовые направляющие (струнные подъемники).
115
Рис. 100. Грузопассажирский подъемник:
1 — мачта; 2 — кабина;
3 — подвесная площадка;
4 — стрела; 5 — головка;
6 — стойка; 7 — противовес; 8 — опорный блок-
небольшой высоты проемов с помощью выдвижной площадки 13 и откидной решетки 14 (рис. 99, в). Шарнирно-сочлененную стрелу 12 с гуськом 11 и стопорным устройством 10 прикрепляют к платформе 4.
В нижнем положении к барабану гуська стрелы прикрепляют груз. Каретка стрелы поднимается до требуемого этажа и стопорится электромагнитными стопорами. Затем грузовой канат 2 ослабляют, после чего стрела поворачивается вокруг нижнего шарнира, гусек посредством оттяжки спрямляется и тем самым подает груз в проем здания. Если подаются штучные материалы, на карабин гуська надевают площадку или контейнер, если сыпучие— бадью, ящик или ковш.
Подъемники применяются главным образом для подачи материалов во время отделочных, сантехнических, электромонтажных и ремонтных работ. Их грузоподъемность 0,3—0,5 т, скорость подъема 0,4—0,6 м/с, высота подъема до 60 м.
Чтобы сделать подъемники мобильными, их опорную платформу монтируют на пневмоколесном ходу. Находят применение также монтажные вышки на автомобилях с телескопической выдвижной трубой и платформой.
При строительстве многоэтажных зданий необходимо обеспечить подъем людей к месту их работы. Для этой цели используют пристав-
ные мачтовые подъемники (рис. 100), оборудованные кабиной с ловителями на случай обрыва каната и выдвижной платформой с откидными ограждениями для безопасного перехода людей внутрь здания. Производительность
подъемника определяется по формуле (80), из которой цикл подъемника, с,
п>
(149)
h — высота подъема, м; vn и осп — скорости подъема и спуска, м/с; tn — суммарное время, затрачиваемое на погрузку и разгрузку, с.
Производительность установленного подъемника может быть увеличена благодаря улучшению организации работ на строительной площадке (увеличение числа часов чистой работы в смену) и сокращению времени погрузочно-разгрузочных работ максимальной их механизацией.
116
Рис 101. Кран переносный грузоподъемностью 0,5 т.
Легкие переносные краны-подъемники по своему назначению и области применения подобны строительным подъемникам — обес-печигают только вертикальный подъем грузов весом до 1000 даН (кгс). Они используются там, где невозможно или нецелесообразно ставить более дорогие подъемники, а также на погрузочно-разгрузочных работах.
Наиболее распространенная конструкция свободно устанавливаемых кранов имеет в качестве основания ходовую тележку 1, на которой установлен трубчатый стакан 2 (рис. 101). В трубчатый стакан основания вставляется стальной стержень поворотной рамы 5, благодаря чему рама имеет возможность поворачиваться относительно основания. На поворотной раме шарнирно закреплена трубчатая стрела 8, удерживаемая тягой 6, установлена лебедка 4 с червячным редуктором и аппаратурой управления и расположен противовес 3. Лебедка обеспечивает подъем и опускание груза при помощи двухкратного полиспаста с крюковой обоймой 10, Поворот
117
рамы со стрелой, изменение вылета стрелы и передвижение крана выполняются вручную. Вылет стрелы изменяется винтовой стяжкой 7, укорачивающей или удлиняющей тягу 6 На конце стрелы установлен ограничитель высоты подъема крюковой обоймы, выполненный в виде рычага 9, который при своем повороте воздействует на конечный выключатель и отключает электродвигатель лебедки.
Переносные краны-подъемники легко разбираются на составные части и переносятся на новое место установки.
|/ § 22. СТРЕЛОВЫЕ СТАЦИОНАРНЫЕ КРАНЫ
В отличие от подъемников стреловые стационарные краны механизируют не только вертикальное, но и горизонтальное перемещение груза в зоне, охватываемой стрелой. Работу кранов обеспечивают следующие механизмы: подъема груза, изменения вылета стрелы и поворота стрелы.
К стреловым стационарным кранам относятся мачтово-стреловые краны и кран-мачты. Характерной особенностью мачтово-стреловых кранов (деррик-кранов) является стационарно устанавливаемая мачта, поддерживаемая канатными растяжками (вантами) или жесткими раскосами. При первом способе крепления мачты краны называются вантовыми, а при втором — жестконогими.
К мачте этих кранов шарнирно закрепляют стрелу, совместно с которой она может поворачиваться вокруг вертикальной оси. Подъем груза, изменение вылета стрелы и поворот мачты осуществляется лебедками, расположенными у основания мачты.
Вантовые мачтово-стреловые краны (рис. 102) состоят из мачты 9, стрелы 8, грузового полиспаста 6, стрелового полиспаста 3, электрических лебедок 14, опорной балки 11 и удерживающих мачту вант 2. Нижний и верхний концы мачты находятся в специальных неподвижных опорах 1 и 15, дающих возможность мачте совместно с закрепленной у ее основания стрелой поворачиваться при помощи поворотного круга 10 и тягового каната 16 на 360° вокруг вертикальной оси.
Для растяжек применяют стальные канаты, число которых (от 4 до 12) определяется грузоподъемностью мачтово-стреловых кранов. Вантовые канаты от верхней неподвижной опоры 1 (рис. 102, б) натягиваются стяжными муфтами или полиспастами с ручными лебедками и прикрепляются к естественным или искусственным якорям. Ручные лебедки или стяжные муфты служат для регулирования натяжения вант в процессе эксплуатации крана. В вантовых мачтово-стреловых кранах мачта длиннее стрелы примерно на 20—40%, и поэтому при угле наклона вант около 30° стрела имеет возможность свободно проходить под вантами.
Нижней опорой мачты служит специальная шаровая пята 15 с осевым отверстием для прохода сбегающих ветвей канатов 17 крановых полиспастов к лебедкам. Шаровая опорная поверхность пяты обеспечивает возможность некоторого отклонения мачты от
118
f
Рис. 102. Вантовый мачтово-стреловой кран грузоподъемностью 15 т:
а — общий вид; б — оголовок; в — нижняя опора крана.
вертикали в связи с упругими деформациями вант и неравномерностью их натяжения.
Стрела 8 мачтово-стреловых кранов удерживается в наклонном положении стреловым полиспастом 3. Сбегающие ветви канатов обоих полиспастов через направляющие блоки вводятся внутрь мачты к оси ее вращения; канат стрелового полиспаста—в верхнюю часть мачты, а канат грузового полиспаста — в нижнюю. Оба каната проходят через отверстие в пяте мачты вниз и через направляющие
119
Рис. 103. Диаграмма грузоподъемности мачтово-стрелового крана.
блоки 12 и 13 идут на барабаны лебедок 14, устанавливаемых на расстоянии 15—30 м от крана. В мачтово-стреловых кранах применяются электрореверсивные или многобарабанные фрикционные лебедки.
Иногда к оголовку основной стрелы шарнирно крепят дополнительную насадку-гусек 4 (рис. 102, а), имеющую свой грузовой полиспаст 5. Сбегающий канат полиспаста 5 также пропускается через отверстие в опорной пяте мачты и навивается на отдельный барабан лебедки. Грузоподъемность грузоподъемности основной стрелы
Рис. 104. Жестконогий мачтовостреловой кран:
1— основание; 2 — балки-лежни: 3 — подкосы; 4 — мачта; 5 — верхняя опора мачты; 6 — стреловой полиспаст; 7 — стрела; 8 — грузовой полиспаст; 9 — поворотный круг.
гуська значительно меньше (обычно 20—25%). Хвостовая
часть гуська удерживается канатными тягами 7, прикрепленными к
стреле через стяжки, которые позволяют изменять угол наклона гуська по отношению к оси стрелы. Наличие гуська в мачтово-стреловых кранах увеличивает вылет основной стрелы и позволяет вести монтаж конструкций на большой высоте. Как видно из графика (рис. 103), грузоподъемность крана является постоянной на всех вылетах стрелы.
Описанные вантовые мачтово-стреловые краны применяются для монтажа сборных конструкций в промышленном строительстве. Однако во многих случаях шарнирное крепление стрелы к низу мачты создает неудобства, так как по мере увеличения высоты строения полезный вылет стрелы уменьшается.
Этот недостаток устранен всовмещенных мачтовостреловых кранах, у которых помимо основной установлена дополнительная стрела, прикрепляемая к средней секции мачты. Совмещенные мачтово-стреловые краны могут быть исполь-
120
зованы при монтаже многопролетных цехов промышленных предприятий. В этом случае основной стрелой устанавливают тяжелые колонны, подстропильные и стропильные фермы и подкрановые балки, а вспомогательной стрелой монтируют фермы, фонари и прогоны смежных пролетов.
Жестконогие мачтово-стреловые краны
Рис. 105. Схема к расчету усилий в вантах.
(рис. 104) отличаются от вантовых тем, что у них мачта не поддерживается вантами, а вместе с горизонтальными балками-лежнями и
подкосами образует жесткую пространственную конструкцию, причем горизонтальные балки разгружают фундамент от восприятия горизонтальных нагрузок. Отсутствие вант дает возможность делать стрелу этих кранов длиннее мачты в 1,5—2 раза. Однако наличие подкосов ограничивает угол поворота мачты со стрелой в пределах 270° и обычно не превышает 240°. Конструкция опор мачты, расположение лебедок, механизм поворота, схема канатоведения принципиально не отличаются от описанных ранее устройств ван-
товых мачтово-стреловых кранов.
’ Жестконогие мачтово-стреловые краны изготовляются грузоподъемностью от 0,75 до 35 т.
Расчет усилий в вантах стационарного стрелового крана (рис. 105) с достаточной точностью производится в предположении, что стрела крана находится в плоскости ванты и вся нагрузка
стрелы передается на одну ванту.
'Из уравнения моментов относительно точки О усилие в ванте, даН (кгс),
с Qo6vi(lcosa + k)+QCTp(0,5lcosa + k) + 0,5WveTH
/7 cos р ’ '
где Qo6m — вес груза, крюка и полиспастов; QCTp — вес стрелы; 1Гвет — ветровая нагрузка.
Из формулы (150) видно, что усилие в ванте возрастает с увеличением вылета стрелы и угла наклона ванты р. Поэтому ванты закладывают с таким расчетом, чтобы угол их наклона был не более 30°.
В действительности мачта поддерживается несколькими вантами, и при их равномерном расположении по окружности усилие в наиболее загруженной ванте зависит от числа вант и может быть уточнено по формуле
s = SBK1, (151)
где — коэффициент, зависящий от количества вант:
Число вант 4 6 8 10 12
1 0,667 0,5 0,4 0,3
121
Стальные канаты для вант подбирают по максимальному усилию, причем коэффициент запаса прочности k должен быть не менее 3,5 1см. формулу (126)].
Стационарная установка и сравнительная сложность перемещения являются основным недостатком рассмотренных мачтово-стреловых кранов, ограничивающим область их применения. Однако, благодаря простоте устройства и большой грузоподъемности, они используются на строительстве сооружений с большой концентрацией веса поднимаемых элементов на квадратный метр площади застройки.
§ 23. СТРОИТЕЛЬНЫЕ БАШЕННЫЕ КРАНЫ
Башенные краны занимают ведущее место среди грузоподъемных машин, особенно в жилищном и гражданском строительстве. Они являются основными подъемно-транспортными машинами, обеспечивающими не только перемещение грузов на строительной площадке, но и установку сборных элементов на место их монтажа при возведении зданий и сооружений. Условия выполнения подъемно-транспортных и монтажных работ при помощи башенных кранов влияют на всю организацию работ на строительной площадке, так как вылет стрелы крана и длина путей для его перемещения определяют размеры складской площадки, расположение подъездных дорог, растворных узлов и других временных сооружений и устройств.
Г-образная несущая конструкция башенных кранов позволяет сохранить наибольший полезный вылет стрелы по мере роста сооружения и обеспечивает наилучший охват обслуживаемой зоны строительства.
Башенные краны выполняют полезную работу по перемещению и монтажу конструкций за счет трех рабочих движений *: перемещения крана по рельсам; подъема и опускания груза; поворота стрелы с грузом. Эти рабочие движения дают возможность башенным кранам взять изделие непосредственно с прибывшей на площадку машины или со склада и переместить его на место укладки в сооружении без промежуточной перегрузки.
Положительные качества башенных кранов позволяют использовать их не только в жилищном и гражданском строительстве, но и в самых разнообразных условиях промышленного строительства.
Башенные краны классифицируются по грузовому моменту (произведению величины груза на вылет стрелы, тм), по способу установки на строительной площадке, по типу башни и стрелы.
По грузовому моменту краны согласно ГОСТу разделяются на шесть типоразмеров: 25, 60, 100, 160, 250, 400, 600 и 1000 тм. Соответственно этим группам марка крана будет: К61, К62 и т. д.
* Рабочими называются движения, которые кран совершает с грузом на крюке.
122
По способу установки — передвижные, оборудованные ходовым устройством на рельсовом пути, стационарные, устанавливаемые на фундаменте и обслуживающие площадку с одной стоянки, и самоподъемные, устанавливаемые на конструкциях возводимого сооружения и перемещаемые по нему собственными механизмами подъема.
По типу применяемых башен — с поворотной башней при размещении опорно-поворотного устройства на ходовой части и с неповоротной башней, у которой вращается только стрела, оголовок и противовесная консоль, находящиеся на верху башни.
По типу стрелы — с подъемной стрелой, вылет которой изменяется подъемом, и с балочной стрелой, по которой перемещается тележка с грузом, а вылет изменяется ее передвижением по стреле.
Положительные качества башенных кранов позволяют использовать их не только для возведения жилых и гражданских зданий, но и в самых разнообразных условиях промышленного строительства.
По технологическому принципу башенные краны можно разделить на три группы:
1) краны общего назначения для гражданского и промышленно: го строительства;
2) краны для высотного строительства;
3) специальные краны для промышленного строительства.
В первую группу, которая охватывает четыре первых типоразмера по грузоподъемности (25—250 тм), входят передвижные краны с поворотной башней и, обычно, с подъемной стрелой; во вторую группу (пятые и шестые типоразмеры — грузоподъемность 600 и 1000 тм) — стационарные и самоподъемные краны с неповоротной башней и балочной стрелой. Первая группа кранов обслуживает здания высотой до 16 этажей, а вторая (стационарные краны) — сооружения высотой до 70 м. Третья группа — специальные краны для промышленного строительства отличаются большой грузоподъемностью при значительном вылете стрелы (до 80 т X 50 м = = 4000 тм), что обусловило их специфические особенности (см. ниже).
Кран общего назначения (рис. 106) состоит из опорно-ходовой части /, передвигающейся по рельсам при помощи механизма 2, на которую через специальный упорный шариковый подшипник 14 опирается поворотная платформа 3. Она вращается механизмом 13 вокруг центральной оси I—I. На платформе установлена башня 11, уложен балласт 4 и смонтированы стреловая 5 и грузовая 12 лебедки. Башня имеет шарнирное крепление в точке А, используемое при ее подъеме и опускании.
Стрела 10 шарнирно крепится непосредственно к башне и поддерживается канатными тягами 7, которые через направляющие блоки 8 соединены с подвижной обоймой стрелового полиспаста 6.
123
д
Рис. 106. Башенный кран общего назначения:
а — схема конструкции; б — принципиальная схема действующих усилий; в — схема поворотного механизма.
Изменением длины стрелового полиспаста,лебедкой 5 можно менять вылет стрелы.
Подъем и опускание груза выполняются грузовым полиспастом 9 при помощи лебедки 12.
Рабочее движение поворота стрелы осуществляется вращением платформы С башней, балластом, механизмами и др. Специальный упорный шариковый подшипник 14 (рис. 106, в) состоит из трех колец, между которыми располагаются стальные шары. Наружное кольцо 15 укреплено на неподвижном основании крана, а внутренние — соединены с поворотной платформой 3. Наружное кольцо имеет зубья или цевки, по которым обкатывается ведущая шестерня механизма поворота 13, установленного на поворотной платформе. Конструкция колец такова, что шариковое опорно-поворотное устройство воспринимает вертикальные нагрузки, направленные вниз и вверх, а также горизонтальные нагрузки. В этих кранах любой груз Q и вес стрелы бстр (рис. 106, б) всегда уравновешиваются усилием Т в канатной тяге стрелового полиспаста, т. е. сохраняется
124
Рис. 107. Самоподъемный башенный кран:
а — общий вид: б — установка полиспастов для подъема башни, в — узел крепления башни к стене здания.
равенство
Та = QI + GCTpZx. (152)
При параллельности канатной тяги и оси башни последняя испытывает только сжимающее усилие GcyM и разгружается от изгибающего момента.
Нижнее расположение всего балласта крана и механизмов дает возможность снизить общий центр тяжести крана и центр приложения суммарной ветровой нагрузки, а также уменьшить сжимающее усилие GcyM, воспринимаемое башней. Все это позволяет значительно уменьшить конструктивный вес крана.
Самоподъемный кран представляет собой такую конструкцию, которая, будучи установлена непосредственно на строящемся здании, по мере увеличения его высоты может быть переставлена по вертикали. В связи с этим обычная опорно-ходовая часть крана заменена специальным опорным устройством, позволяющим устанавливать кран на каркас или стены здания и переставлять его.
Самоподъемный башенный кран (рис. 107) состоит из неподвижной башни 5 с поворотным оголовком, к которому прикреплены стрела 3 с грузовой кареткой, противовесная консоль 1 с механизмами и кабина управления 2. Башня установлена на опорной раме
125
2
Рис. 108. Механизм передвижения стреловой тележки.
6, снабженной выдвижными консольными балками 7, которыми кран в четырех точках опирается на каркас или стены возводимого здания, а для восприятия отрицательных (отрывающих) опорных реакций балки соединяются винтовыми тягами 9 с дополнительными анкерами 8, заводимыми в проемы кладки стен этажом ниже.
Для подъема крана служит устройство, состоящее из обоймы 4, охватывающей башню, полиспастов И для подъема крана и лебедки 10. Во время работы обойма находится в верхней части башни, а когда надо поднять кран, она опускается на возведенные стены здания, опираясь на них своими балками. При помощи лебедки 10 и подъемных полиспастов 11 башню крана подтягивают вверх по направляющим обоймы. На время вертикального перемещения башни опорные консольные балки и анкеры убирают, а затем вновь выдвигают, закрепляя башню на новом месте.
Механизм передвижения стреловой тележки по балочной стреле самоподъемного крана (рис. 108) состоит из тягового каната 3, направляющих блоков 2 и электрореверсивной лебедки 1. Тяговый канат навивается на барабан лебедки, а два свободных конца каната проходят через направляющие блоки 2 и крепятся к тележке с противоположных сторон. Вращение барабана в ту или другую сторону заставляет перемещаться тележку 5 на колесах 4 по монорельсу 8 вдоль стрелы. Тележка несет на себе блоки 7, через которые проходит канат грузового полиспаста 6. При перемещении тележки блоки обкатываются по грузовому канату 9 и крюк с грузом, не изменяя своего положения по высоте, перемещается вдоль стрелы вместе с тележкой.
Горизонтальное перемещение груза вдоль стрелы при помощи тележки требует меньше энергии, чем перемещение этого груза изменением вылета.
Поворотный оголовок 1 (рис. 109) вращается (перекатывается) по укрепленным на башне роликам 2 при помощи механизма поворота, состоящего из двигателя, колодочного тормоза 4, червячного редуктора 5, муфты предельного момента 6, открытой зубчатой передачи 7, шестерни 8 и цевочного колеса <3. Механизм располагается на неподвижной башне.
126
Рис. 109. Схема механизма поворотного оголовка.
Самоподъемные башенные краны могут обслуживать строительство зданий и сооружений любой высоты. Однако краны рассмотренной конструкции при грузоподъемности 3—5 т и вылете стрелы 22 м и более имеют вес, допустимый только для зданий, сооруженных с металлическим каркасом.
Стационарные башенные краны предназначены для строительства высотных зданий с железобетонным каркасом. Для уменьшения массы крана и снижения ветровой нагрузки на него решетчатую башню изготовляют из труб. До высоты 16 этажей кран стоит свободно и может перемещаться, а при дальнейшем наращивании башню крепят к строящемуся зданию специальными связями. Опорная часть крана с балластными плитами устанавливается на четырех фундаментных блоках.
Кран (рис. ПО) состоит из башни, промежуточных секций, верхней секции с устройством 1 для монтажа промежуточных секций и поворотного оголовка с противовесной консолью и горизонтальной стрелой, по которой движется стреловая каретка.
Башня наращивается методом «сверху». Выдвижение верхней секции с противовесной консолью и стрелой осуществляется по монтажной стойке 2, которая, выдвигаясь сама, последовательно крепится с одной стороны к каждой верхней промежуточной секции башни. В образовавшийся проем с помощью ручной лебедки вводится поднятая заранее самим краном и установленная на монтажной площадке объемная секция 3 (рис. ПО, б). После этого стыкуют введенную секцию с основной башней снизу и с опускаемой верхней секцией сверху. Конструкция стыка секций башни представляет собой два фланца с фиксированной посадкой (рис. ПО, в), соединяемых между собой на восьми болтах. В соответствии с требованиями по технике безопасности во время работ по стыкованию секций
127
Рис. ПО. Стационарный башенный кран для высотного строительства: а — общий вид; б — введение секции в башню; в — вид стыка секций башни.
монтажники находятся в подвесных люльках, перемещающихся вместе с монтажной стойкой.
Специальные башенные краны для промышленного строительства применяют для монтажа электростанций, доменных, мартеновских, прокатных, прессовых и других цехов металлургических, химических и машиностроительных заводов. Это краны повышенной грузоподъемности со значительным вылетом стрелы и большой высотой подъема, что обусловлено габаритами объектов и большой массой их сборных элементов. Масса таких кранов составляет 100—
128
400 т; монтаж их сложен. Эти краны выполняются как с неподвижными башнями и поворотными оголовками, так и с поворотными башнями.
Специальный башенный кран (рис. 111) состоит из неподвижной башни 5 и поворотного оголовка 6 со стрелой и противовесной консолью. Башня опирается через мощный портал 2 на ходовое устройство 1. Все механизмы 3 установлены на верхней части портала, а управление ведется из кабины 4. У этого крана нет механизма передвижения, его перемещают по рельсам только без груза при помощи лебедок, устанавливаемых на подкрановых путях. Во время работы кран опирается на специальные опоры 7, расположенные в нижней части портала. Такая система упрощает конструкцию ходового устройства, но делает кран менее маневренным. Поскольку маневренность крана является главным фактором его производительности, в ряде случаев такие краны вы
Рис. 111. Специальный башенный кран для промышленного строительства.
полняют самоходными.
§ 24. ОСОБЕННОСТИ ИСПОЛНЕНИЯ БАШЕННЫХ КРАНОВ ДЛЯ УСЛОВИЙ СБОРНО-МОНТАЖНОГО СТРОИТЕЛЬСТВА
Для повышения производительности и снижения стоимости работы машин в современных условиях сборно-монтажного строительства конструкции башенных кранов должны обеспечивать: удобную и точную наводку монтируемого элемента к месту его монтажа; плавную посадку монтируемого элемента на место установки; хорошую связь машиниста е монтажником и удобство управления движениями крана; безопасность работы; сокращение трудоемкости и продолжительности перебазировки крана на новое место работы; устойчивость крана.
5 642 1 29
Точная наводка конструкции к месту ее монтажа производится четвертым рабочим движением крана, т. е. горизонтальным перемещением крюка с грузом вдоль стрелы (кбашне или от башни). Для этой цели используют механизм изменения вылета стрелы или механизм передвижения стреловой тележки, несущей на себе грузовой полиспаст.
Плавная посадка конструкции на место установки требует значительного снижения скорости ее опускания. У большинства кранов подъем и опускание груза осуществляется механизмом, представляющим собой обычную электрореверсивную лебедку с приводом от асинхронного кранового двигателя. Механические характеристики таких двигателей (зависимость частоты вращения от развиваемого момента п = f (7И)) не позволяют получить малых скоростей посадки груза, так как изменение веса груза резко изменяет скорость опускания. Поэтому в механизмах подъема современных башенных кранов применяются специальные схемы управления электрооборудованием, дающие возможность изменить механическую характеристику привода и получить устойчивые низкие посадочные скорости при любых колебаниях нагрузки.
Распространенной является схема, в которой используются вихревые тормозные генераторы, монтируемые на одном валу с двигателем. Они состоят из стального массивного ротора, вращающегося в постоянном магнитном поле неподвижного статора. Ротор тормозного генератора соединен с ротором основного двигателя и вращается вместе с ним. Тормозной момент создается благодаря взаимодействию постоянного магнитного поля статора и поля, возникающего от индуцированных в роторе вихревых токов. Он пропорционален скорости вращения ротора (скольжению) и регулируемому току возбуждения обмоток статора. Механические характеристики тормозного генератора и основного двигателя дают серию результирующих жестких механических характеристик привода, обеспечивающих низкие скорости опускания груза на место установки.
В кранах с большим грузовым моментом для лебедок подъема груза применяют двигатели постоянного тока, что позволяет повысить скорость подъема и опускания малых грузов и крюка без груза, осуществить плавное регулирование скорости, а также плавный пуск и торможение груза.
Управление работой башенного крана машинист осуществляет из кабины, располагаемой в большинстве случаев на уровне подвеса стрелы. Электрические схемы кранов и их конструкция предусматривают возможность одновременной работы нескольких механизмов, что позволяет машинисту совмещать рабочие движения крана (подъем, поворот, передвижение), сокращая продолжительность цикла и повышая производительность.
При любом по высоте расположении кабины на башне крана машинист не может наблюдать за всеми местами работы монтажников. Поэтому разработаны и применяются системы дистанционного управления работой крана. Монтажник с помощью переносного
130
пульта непосредственно на рабочем месте подает управляющие команды механизмам по радио или по проводам, связывающим пульт с аппаратурой управления механизмами крана.
Наиболее целесообразно комбинированное управление краном. При такой системе управление ведется машинистом из хорошо оборудованной, удобной для работы кабины, а дистанционное управление с места монтажа используется только в некоторых случаях на малых посадочных скоростях.
Представляет интерес для дальнейшего повышения производительности башенных кранов система программно-дистанционного управления. При этой системе операции по доставке деталей со склада (или непосредственно с транспортных средств) на здание выполняются автоматически системой адресования программного управления двигателями, а точность позиции обеспечивается управлением по радио на малых скоростях подъема и опускания грузов. Вместо крановщика краном управляют попеременно два оператора: такелажник на складе и монтажник на строящемся здании, причем каждый из них имеет свой нагрудный пульт. Управление краном не мешает им выполнять свои обязанности. Поскольку оператор находится в непосредственной близости от мест расположения деталей, не нужен сигнальщик.
Для составления программы автоматического управления подачей конструкций к месту их монтажа требуется: определить зоны складирования материалов и места остановки панелевозов; обозначить монтажные зоны на здании (в каждой захватке): для подачи крюка в эти зоны определить исходные положения крана и углы поворота стрелы, по которым на кране выставить датчики ориентации.
По составленной программе работа на строительной площадке выполняется в следующем порядке.
После подъема конструкции на небольшую высоту (для проверки надежности строповки) такелажник набирает на своем пульте номер требуемого участка (зоны), затем подает команду на движение крана. Груз автоматически поднимается на безопасную высоту и автоматически по кратчайшему пути в минимальное время доставляется в заданную зону. Здесь управление краном переходит к монтажнику, который с помощью своего пульта управления устанавливает конструкцию в проектное положение и после ее закрепления, включив программу возврата, посылает крюк крана к такелажнику.
Безопасность работы на кране обеспечивается ограничивающими устройствами, автоматически отключающими механизмы при неправильных действиях машиниста, могущих вызвать аварию. Для безопасной работы на кране необходимо предотвратить следующие неправильные действия: подъем грузов, масса которых превышает допустимую грузоподъемность на данном вылете стрелы; подъем крюковой обоймы до соприкосновения со стрелой; движение в конец рельсового пути, когда возникает опасность схода крана с рельсов; излишний поворот при наличии поворотного механизма 5* 131
4
Рис. 112. Ограничитель грузоподъемности: а — датчик фактической нагрузки и схема его установки; б — схема установки задатчика предельного груза.
Рис. 113. Схема электрического моста сопротивлений датчиков.
с канатной передачей; движение тележки по стреле в конец поддерживающей ее балки.
Один из широко применяемых для кранов ограничителей грузоподъемности показан на рис. 112. Принцип его работы заключается в постоянном сравнении фактической загрузки крана с максимально допустимой и выключении двигателей в случае, когда фактическая нагрузка превышает предельно допустимую.
Фактическая нагрузка крана измеряется датчиком, состоящим из упругого кольца 3, потенциометра 2 и герметического корпуса 1 (рис. 112, а). При растяжении кольца ползун потенциометра перемещается и изменяет соотношение плеч своих сопротивлений. Датчик 6 установлен между двумя канатными тягами 4 стрелы. Усилие растяжения его кольца пропорционально усилию в стреловых канатах и, следовательно, весу груза. Меняя распорками 5 угол р, можно изменять величину усилия, передаваемого на кольцо датчика.
Предельно допустимая величина груза зависит от вылета стрелы. Поэтому у основания стрелы 7 устанавливается задатчик предельного груза (рис. 112, б). При изменении вылета стрелы ее движение через поводок 8 передается на ось 9 с закрепленным на ней профилированным кулачком 10. По кулачку перекатывается ролик рычага 11, связанный с ползуном 12 потенциометра. Положение ползуна определяет соотношение плеч сопротивлений потенциометра и этим задает предельную величину груза на крюке при данном вылете стрелы. Изменяя профиль кулачка, можно применять такой задатчик на кранах с различными зависимостями предельного груза от вылета стрелы.
Сопротивления плеч потенциометра датчика 1 фактической нагрузки и потенциометра задатчика 2 предельного груза включаются по схеме электрического моста сопротивлений (рис. 113). Когда вес поднимаемого груза меньше предельно допустимого при данном вылете стрелы, мостовая схема не уравновешена и через катушку поляризованного реле PH проходит ток. Этим дается разрешение на работу крана. Если вес поднимаемого груза превысит предельно 132
2
Рис. 114. Перевозка и монтаж башенного крана с поворотной платформой: а — в транспортном положении: б — начало подъема; в — подъем.
допустимый, ток, проходящий через реле PH, изменит свое направление, что приведет к размыканию контактов реле и полному отключению крана.
Ограничители высоты подъема крюка основаны на воздействии крюковой обоймы на упор, соединенный с конечным выключателем.
Ограничители движения крана по рельсам, каретки по стреле и поворота крана состоят из ограничивающих упоров и электрических конечных выключателей с рычагом. Ограничивающие упоры устанавливают на месте, где требуется прекратить движение. При достижении конечным выключателем ограничивающего упора его рычаг цепляется за упор и отключает конечный выключатель, останавливая двигатель соответствующего механизма.
Кроме описанных ограничивающих устройств, предотвращающих неправильные действия машиниста, по правилам Гостехгор-надзора башенные краны должны иметь устройства, сигнализирующие об опасности и предотвращающие угон крана при ураганном ветре. Для этой цели на башенных кранах устанавливают ветромер-анемометр, измеряющий скорость ветра. Если скорость и продолжительность действия воздушного потока превысят допустимые величины, ветромер подает сигнал об опасности, автоматически отключает механизмы крана и включает противоугонное устройство.
Перебазировка башенных кранов на новое место работы требует выполнения довольно трудоемких операций по демонтажу, перевозке и монтажу деталей. В состав монтажных работ входят: подготовка монтажной площадки для производства работ (устройство подкранового пути и защитного заземления, подводка электроэнергии, устройство якорей и т. п.); монтаж крана; испытание и сдача крана инспекции Гостехгорнадзора.
Наименьшие трудовые затраты нужны на перебазировку башенных кранов с поворотной башней. Их транспортируют в сложенном виде, укрепив свободный конец башни 2 на тягаче 1 (рис. 114, а}. Под ходовую часть крана 3 подводят ось с пневматическими колесами 4, и кран в горизонтальном положении перевозят на подготовленный рельсовый путь нового строительного объекта. С помощью автокрана головную часть колонны снимают с тягача и опирают на козлы или другую подставку высотой 0,6—0,7 м (рис. 114, б). Натяжением собственного стрелового полиспаста через монтажную стойку 5 опорную часть крана наклоняют и двумя передними тележками устанавливают на рельсы, закрепляя их противоугонными захватами. При дальнейшем натяжении полиспаста опорную часть поднимают еще выше и выкатывают из-под нее транспортную ось. Ослаблением полиспаста устанавливают на рельсы и две другие тележки. Затем на поворотную платформу укладывают балласт и тем же полиспастом поднимают башню со стрелой в вертикальное положение (рис. 114, в).
Демонтируют башенные краны в обратной последовательности. Краны с башней небольшой высоты перевозят без разборки.
Краны для многоэтажного строительства имеют устройство для
134
7
Рис. 115. Ходовая часть крана для передвижения по криволинейным участкам пути.
наращивания башен дополнительными секциями. Перевозят их без дополнительных секций, которые монтируют после подъема башни.
Малая трудоемкость и быстрота производства монтажно-транспортных работ при перевозке башенных кранов в значительной степени обусловливают снижение стоимости работы крана. Однако даже самые совершенные способы монтажа требуют сравнительно больших затрат времени и потому нецелесообразны, когда требуется переместить башенный кран на другой, параллельный или пересекающийся путь в пределах строительной площадки.
Такая потребность встречается в строительстве довольно часто, в особенности при обслуживании краном зданий сложной конфигурации.
Для придания маневренности кранам в пределах строительной площадки их ходовая часть выполнена так, что они могут передвигаться и работать на криволинейных путях с малым радиусом закрепления (7—8 м, считая по внутреннему рельсу). Для этой цели опорная рама крана 1 (рис. 115) имеет четыре поворотных кронштейна 3, укрепленных на раме вертикальными шкворнями 2. Кронштейны через оси 4 опираются на балансирные тележки 5 с противоугонными захватами 6.
При работе крана два кронштейна, расположенные на одном рельсе, фиксируют при помощи тяг; два других кронштейна при этом могут отклоняться благодаря их шарнирному соединению с опорной рамой. В случае изменения направления поворота два других кронштейна закрепляют, а первые становятся шарнирными.
В кранах с небольшим грузовым моментом (до 60 т • м) движение по кривым малого радиуса обеспечивается наиболее просто устройством ходовых тележек с колесами, перемещающимися вдоль их оси в пределах 50—70 мм. Приводные балансирные тележки устанавливают при этом на внешнем рельсе большого радиуса.
Такие системы ходовой части обеспечивают безопасное передвижение и работу кранов на пути с малым радиусом закругления и исключают возможность схода с рельсов при отклонениях в размерах колеи.
Устойчивость башенных кранов. Башенные краны должны иметь надежную устойчивость, гарантирующую их от опрокидывания
135
a
Рис. 116. Схемырасчету устойчивости башенного крана:
а — в рабочем состоянии; fj — в нерабочем состоянии.
5
как во время работы, так и в нерабочем состоянии. Различают грузовую и собственную устойчивость крана, т. е. когда он работает и когда стоит без груза.
Условие устойчивости крана с грузом на крюке (рис. 116, а):
Р1 + №1Р1 + Г2р2 < mGx, (153)
где Р — вес груза, даН (кгс); I — расстояние по горизонтали от точки подвеса груза до ребра опрокидывания А, м; и — ветровые нагрузки на груз и кран при рабочем состоянии, даН (кгс); Р1 и р2 — соответственно плечи ветровых нагрузок, м; т — коэффициент условий работы, равный 0,72; G — вес крана с противовесом, даН (кгс); х — расстояние по горизонтали от центра тяжести крана с противовесом до ребра опрокидывания А, м.
Условие устойчивости крана без груза (рис. 116,6):
Гор < Gx, (154)
где — ветровая нагрузка на кран в нерабочем состоянии, даН (кгс); р — плечо этой ветровой нагрузки, м.
§ 25. САМОХОДНЫЕ СТРЕЛОВЫЕ КРАНЫ
Самоходные стреловые поворотные краны (рис. 117) состоят из ходовой части 3, на которой размещена поворотная платформа 1 со всеми механизмами, рабочим оборудованием и системой управления. Платформа опирается на ходовую часть через опорно-поворотное устройство 2. В большинстве конструкций это устройство, как и у башенных кранов с поворотной башней, представляет собой шариковый или роликовый упорный подшипник, воспринимающий вертикальные (вниз и вверх) и горизонтальные нагрузки.
Автономность привода и большая маневренность позволяют применять самоходные стреловые краны для монтажных и погрузочно-разгрузочных работ в самых разнообразных условиях гражданского и промышленного строительства.
При монтаже конструкций самоходными кранами к их устройству предъявляются особые требования, обусловленные необходимостью снижать стоимость их эксплуатации и повышать производительность. Поэтому в современных конструкциях кранов механизмы подъема позволяют получать низкие посадочные скорости, управление делается комбинированным для совмещения рабочих движений, устанавливаются ограничивающие устройства (ограничители грузоподъемности, высоты подъема и др.), применяются унифицированные узлы конструкций и механизмов, повышающие надежность работы кранов.
Самоходные стреловые краны классифицируются по следующим признакам: по конструкции ходового устройства — автомобильные, на шасси автомобильного типа, пневмоколесные и гусеничные; по роду привода — одномоторные с механическим приводом, многомоторные с дизель-генераторной установкой или с гидравлическим
137
Рис. 117. Схема самоходного стрелового крана.
приводом; по виду стрелового оборудования — невыдвижное, выдвижное без рабочей нагрузки, телескопическое выдвижное с рабочей нагрузкой и башенно-стреловое.
Автомобильные краны монтируют на шасси бортовых автомобилей, двигатели которых используются для привода всех механизмов крана. Кран передвигается с опущенной стрелой и укрепленным крюком нормальным ходом автомобиля.
В этих кранах (рис. 118) на шасси автомобиля жестко закреплена рама, на которой смонтированы опорно-поворотное устройство, поворотная платформа и выносные опоры.
На поворотной платформе расположены лебедки подъема груза и стрелы, механизм поворота платформы, кабина управления и стреловое оборудование.
Применение сменного стрелового оборудования расширяет монтажные возможности кранов. Для этой цели краны кроме основной невыдвижной стрелы Н оснащают выдвижной стрелой В,удлиненной невыдвижной стрелой У, удлиненной стрелой с гуськом Г и башенно-стреловым устройством Б. В зависимости от условий монтажных работ на поворотной платформе крана устанавливают соответствующий вид стрелового оборудования.
Работа автомобильных кранов с максимальной грузоподъемностью допустима только при установке их на выносных опорах, увеличивающих опорную базу крана и воспринимающих на себя нагрузку в процессе подъема груза. При работе крана без выносных опор его грузоподъемность резко снижается. Грузоподъемность серийно выпускаемых кранов составляет от 4 до 16 т.
Рассмотрим кинематическую схему автомобильного крана (рис. 119) с одномоторным механическим приводом.
Вращение от двигателя 1 к механизмам, расположенным на поворотной платформе, передается от коробки передач 2 через редук
138
Рис. 118. Основное и сменное стреловое и башенно-стреловое оборудование автомобильного крана.
и тормозами управляет машинист из
тор <3 отбора мощности и редуктор 4 неповоротной части крана. Коническая шестерня 5 находится в зацеплении с двумя коническими зубчатыми колесами 9 реверсивно-раздаточной коробки 6 и вращает их в разные стороны. Включением фрикционных муфт 8 это вращение передается на барабаны лебедок механизмов подъема 14 и изменения вылета стрелы 10, а также на механизм поворота крана 11. Включая правые или левые фрикционные муфты 8, изменяют направление вращения механизмов. При вращении выходного вала поворота его шестерня обкатывается по неподвижному зубчатому венцу 12 опорно-поворотного устройства, и таким образом вращается вся поворотная платформа. Малые посадочные скорости достигаются применением регулируемых колодочных тормозов 13.
Фрикционными муфтами
хорошо оборудованной кабины при помощи пневматической системы, питаемой сжатым воздухом от компрессора 7.
' В настоящее время все шире применяются в автомобильных кранах электрический и гидравлический приводы механизмов.
Электрический привод предусматривает установку на кране генератора трехфазного тока, приводимого в движение от двигателя автомобиля. На каждом механизме устанавливают индивидуальный электродвигатель, получающий питание от генератора.
При использовании многомоторного гидравлического привода управление упрощается и повышается надежность работы механизмов. Кроме того, достигается плавность пуска и остановки и широкое бесступенчатое регулирование скорости механизма подъема.
На рис. 120 показана схема гидропривода автомобильного крана, на ходовой раме которого расположены два аксиально-поршневых насоса, приводимых в действие через редуктор отбора мощности.
Рабочая жидкость от насоса 7 поступает к гидрораспределителю 8, расположенному на ходовой раме автомобиля, и далее либо к
339
8
Рис. 119. Кинематическая схема автомобильного крана с одномоторным приводом.
гидроцилиндрам И, 12, 13 и 14 выносных опор и 9, 10 блокировки рессор, либо через вращающиеся соединения 26 к гидрораспределителю 33, установленному на поворотной платформе, с помощью которого управляют гидромотором 28 поворота платформы и гидроцилиндром 29 изменения вылета стрелы. От насоса 2 жидкость через вращающееся соединение 26 подается к гидрораспределителю 22 и далее к гидромотору 21 грузовой лебедки или к гидроцилиндру 18 изменения длины стрелы. В гидробак 1, расположенный на ходовой раме в непосредственной близости от насосов, жидкость поступает через фильтр 3, в котором установлен предохранительный клапан.
Рабочие скорости регулируют изменением оборотов приводного двигателя и дросселированием жидкости золотником гидрораспределителя. Величина хода золотника, при котором регулируется скорость, увеличивается с уменьшением внешней нагрузки на гидропривод.
Опускание груза и стрелы, уменьшение ее длины с заданной скоростью производятся с помощью тормозных гидроклапанов 17, 19, 30, пропускающих расход жидкости, равный количеству жидкости, подводимой к гидромотору. В аварийной ситуации (при выходе из строя приводного двигателя или насоса) груз опускают, открыв вентиль 20.
140
1_ г1 грузоподъемностью 4—16 т.
Рис. 121. Выносные опоры крана с гидроприводом для их установки.
Рабочие секции гидрораспределителя, предназначенные для управления гидромоторами механизмов подъема груза и поворота платформы, оснащены дополнительными сблокированными гидро распределителями, с помощью которых включают и выключают цилиндры 16 и 27 тормозов.
Кран оборудован приборами безопасности, при включении которых электромагниты гидроклапанов 15, 24, 31 отключаются от источника электропитания и предохранительными гидроклапанами 23 и 32 соединяют гидролинии управления, а гидроцилиндры тормозов — с дренажной гидролинией, в результате чего происходит разгрузка насосов, остановка механизмов и замыкание тормозов.
Для уменьшения скорости поворота платформы при работе с башенно-стреловым оборудованием в гидроприводе использован регулятор потока 25. При отказе приводного двигателя кран можно перевести в транспортное положение при помощи ручного насоса 4, от которого жидкость поступает в напорные гидролинии насосов 2 и 7 через вентили 5 и 6.
Устройство и способ установки выносных опор существенно влияют на время подготовки крана к работе. Наиболее рациональна конструкция, показанная на рис. 121. Выносные опоры выполнены откидывающимися в вертикальной плоскости. Опора состоит из откидывающейся балки 2, которая через шаровой подпятник опирается на башмак 1. Балки опускаются и опоры устанавливаются гидроцилиндрами 3. Каждая опора имеет самостоятельный гидравлический привод. Это позволяет при помощи распределительных клапанов обеспечивать независимую установку каждой выносной опоры крана применительно к неровностям рабочей площадки. Управлять выносными опорами можно как с земли, так и из кабины крановщика.
Благодаря большой скорости передвижения автомобильные краны широко применяют в строительстве для выполнения самых разнообразных монтажных работ, если они ведутся на отдаленных друг от друга объектах и машины приходится часто перебрасывать с одного участка на другой. В этом случае экономически целесообразно механизировать даже самые небольшие по объему работы, так как расходы по перевозке и эксплуатации автомобильных кранов незначительны.
Краны на шасси автомобильного типа имеют большое число осей — до двенадцати. Это значительно увеличивает грузоподъемность крана (до 500 т), не увеличивая нагрузку на ось, что обеспечивает передвижение по автомобильным дорогам общего назначения.
142
Высота подъема, м
Рис. 122. Схема гидравлического крапа грузоподъемностью 125 т с телескоп ическо й стр елой:
• — схема крана; б — грузовая характеристика с различными видами стр®ло» вето оборудования.
OOQLS
Рис. 123. Схемы ходовых частей пневмоколесных кранов:
а — с одной управляемой осью; б — с двумя управляемыми осями; в— двухосный седельного типа с одной управляемой осью; г — трехосный с двумя управляемыми осями.
На рис. 122 показана диаграмма грузоподъемности такого крана, из которой видно, например, что при вылете стрелы 36 м и высоте подъема 48 м грузоподъемность крана составляет 3 т, а при вылете стрелы 14 м и высоте 72 м — Ют.
Как правило, в кранах на шасси автомобильного типа применяется гидравлический привод.
Пневмоколесные краны отличаются от автомобильных тем, что они имеют специальную ходовую часть в виде опорной рамы на пневматических колесах. Это позволяет выпускать такие краны грузоподъемностью от 16 до 100 т.
Задние оси этих кранов обычно выполняются неподрессорен-ными или имеют очень жесткую подвеску, вследствие чего такие краны могут передвигаться с большой скоростью только по хорошим дорогам. Краны небольшой грузоподъемности благодаря широко расставленным колесам могут работать без выносных опор.
Маневренность пневмоколесных кранов определяется схемой их ходовой части. Применяются ходовые части с двумя, тремя и четырьмя осями, из которых обычно одна или две — управляемые. Колеса передней оси так же, как и у автомобилей, оборудованы рулевым управлением.
Размеры площади разворота крана определяются наружным и внутренним радиусами поворотов. Величины радиусов (рис. 123, а):
^тах =4^: <155>
= —£7-. (156)
С (Jo Ug
Краны с двумя управляемыми осями (рис. 123, б) при повороте колес в одну сторону могут передвигаться боком. При этом радиусы поворота уменьшаются почти в два раза. Особенно высокой маневренностью обладают краны седельного типа, выполненные в виде полуприцепа к одноосному тягачу (рис. 123, в, г).
Сравнительно большая скорость передвижения (до 20 км/ч) дает возможность быстро перемещать кран с объекта на объект и также быстро менять место его работы в пределах строительной площадки.
144
Рис. 124. Мотор-колесо:
1— вал электродвигателя; 2 — редуктор; 3— цапфы; 4 — дисковый тормоз; 5 — венец колеса.
Проходимость пневмоколесных, как и других самоходных кранов, повышается с увеличением их сцепного веса, т. е. веса, приходящегося на ведущие колеса, и коэффициента сцепления колес с грунтом. Коэффициент сцепления увеличивается при
Рис. 125. Гусеничный кран грузоподъемностью 100 т.
применении специальных шин с крупным расчлененным рисунком протектора, например, «косая елка», или шин низкого давления. Сцепной вес кранов повышают увеличением числа ведущих колес. На кранах с дизель-электрическим приводом устанавливают на каждое ведущее колесо электродвигатель, редуктор, электромагнитный тормоз и цепные передачи; наиболее прогрессивным является мотор-колес-ный привод (рис. 124) с двигателем постоянного тока.
Гусеничные краны имеют решетчатую стрелу 2 и ходовую часть в виде литой рамы 1, опирающейся на две гусеничные тележки 3 (рис. 125).
Привод гусеничных кранов в большинстве случаев дизель-электрический. Дизель-электрическая установка 2 (рис. 126) смонтирована на поворотной платформе, на которой размещены механизмы стреловой лебедки 3, грузовых лебедок основного 5 и вспомогательного 1 подъема и механизм поворота платформы 4. Каждый механизм имеет индивидуальный электродвигатель, питаемый генератором переменного тока. На ходовой части размещены двигатели механизма передвижения. Каждая гусеница 6 имеет отдельный привод, включающий карданный механизм 7, коническую и цилиндрическую передачу 8 и ведущую звездочку 9. Отдельный привод позволяет поворачивать кран вокруг центра вращения платформы включением одной из гусениц.
145
3
J
Рис. 126. Схемы гусеничного крана грузоподъемностью 100 т:
а — кинематическая схема механизмов, установленных иа поворотной платфор-ме; 6 — то же, на ходовой части.
Эти краны оснащаются дополнительными секциями для удлинения стрелы и башенно-стреловым устройством. Рабочими движениями управляют из кабины или дистанционно — с переносного пульта.
Гусеничные краны работают без выносных опор и могут свободно перемещаться по неподготовленной рабочей площадке в любом направлении. Эти преимущества, а также большая грузоподъем-146
Рис. 127. Схема для определения устойчивости крана: а — в рабочем состоянии; б — в нерабочем состоянии.
ность гусеничных кранов (до 160 т) обусловили их широкое применение на строительно-монтажных работах в промышленном строительстве.
Тракторные краны составляют особую группу. Они представляют собой тракторы, на которых смонтировано крановое оборудование.
На гусеничных и колесных тракторах из-за недостатка свободного места не устанавливают оборудования стреловых кранов обычных конструкций. Тракторные краны имеют неповоротную стрелу с малым вылетом и используются для производства специальных работ вспомогательного характера, например, как трубоукладчики, погрузчики и т. п.
Устойчивость передвижных стреловых кранов. Расчет устойчивости передвижных стреловых кранов (автомобильных, гусеничных, на пневмоколесном ходу) определяется правилами Гостехгор-надзора.
Как было указано, различают грузовую и собственную устойчивость крана, т. е. при работе и в нерабочем состоянии (рис. 127).
Правила Гостехгорнадзора регламентируют коэффициент запаса грузовой устойчивости крана, равный отношению удерживающего момента относительно ребра опрокидывания А к опрокидывающему моменту, т. е. моменту от наибольшего груза на крюке крана. Когда кран с наибольшим грузом стоит на горизонтальной поверхности и на него не действуют никакие дополнительные силы, устанавливается коэффициент грузовой устойчивости
(157) Здесь:
Mq — момент, создаваемый собственным весом крана G, даН (кгс):
M°Q^G(b + c), (158)
147
где b — расстояние от оси вращения крана до ребра опрокидывания, м; с — расстояние от оси вращения крана до его центра тяжести, м; Mq — момент, создаваемый весом наибольшего груза Q;
MQ = Q(a — b), (159)
где а — расстояние от оси вращения крана до оси подвешенного груза, м.
При работе крана возникают еще дополнительные моменты, уменьшающие удерживающий момент. Эти моменты соответствуют следующим условиям: кран находится на наклонной местности (Mg); кран поворачивается с грузом на крюке (Мцб); происходит движение с ускорением поворота стрелы, которая находится под углом 45° к ребру опрокидывания А — А (Метр); груз поднимается (опускается) с ускорением (ТИ^под); кран передвигается в неуста-новившемся режиме (пуск или торможение) (Мпер); изменяется вылет стрелы, т. е. с ускорением перемещается оголовок стрелы в горизонтальной и вертикальной плоскостях (МСтр.поД); кран подвергается действию ветра (Мвет)- Коэффициент запаса грузовой устойчивости крана
МДб ^стр МдПОд Мпер Мстр.под ^вет । (160)
Физический смысл формулы (160) таков: если к крюку прикрепить груз, больший на 15%, чем расчетный Q, кран опрокинется *.
Коэффициент запаса собственной устойчивости крана без груза, установленного на наклонной местности при минимальном вылете стрелы (рис. 127, б) и подвергающегося действию ветра, по нормам для крана в нерабочем состоянии определяется из выражения: м
К2 = —^>1,15. (161)
^вет
Здесь момент, создаваемый собственным весом крана, даН • м (кгс - м),
Mc = G[(b — с) cos а — AjSina], (162)
а момент, создаваемый ветром, даН • м (кгс • м),
Мвет = 1Г2р2, (163)
где Ц72 — ветровая нагрузка (для крана в нерабочем состоянии), действующая на подветренную площадь крана, даН (кгс); р2 — расстояние от центра парусности до уровня земли, м.
§ 26. КОЗЛОВЫЕ И КАБЕЛЬНЫЕ КРАНЫ
Козловые краны (рис. 128) представляют собой передвижные пролетные строения (мостовую балку или ферму 8), вдоль которых передвигается тележка 5, несущая подъемный механизм. Балка
* Подробнее см.: Фиделев А. С. Подъемно-транспортные машины. Киев, Вища школа, 1976.
148
или ферма крана опирается на две ноги 1 и 6, снабженные ходовыми рельсовыми тележками 10 с механизмом передвижения 9. Опорные ноги крана жестко прикрепляются к ферме, а при больших пролетах (более 30 м) одна из ног обычно имеет шарнирное крепление для компенсации возможных температурных изменений длины фермы. Для удобства выполнения перегрузочных операций ферма или балка иногда имеет одну или две консоли, выступающие за пределы опорных ног крана. Козловые краны выполняются с многомоторным приводом. Электроэнергия к ним подается через гибкий кабель или троллеи, протянутые вдоль всего рельсового пути.
Грузовая тележка 5 несет на себе вынесенные за пределы конструкции пролетного строения блоки грузового полиспаста 7. Полиспаст (рис. 128, б) состоит из двух спаренно работающих полиспастов, подвижные обоймы 11 которых соединены траверсой 12 с крюком, а сбегающие ветви канатов закреплены на общем барабане электрореверсивной лебедки 3.
Механизм передвижения грузовой тележки состоит из тяговой электрореверсивной лебедки 4, на барабан которой навивается бесконечный канат с закрепленной на нем тележкой. Реверсируемое
149
Рис. 129. Общий вид монтажного козлового крана для сборного строительства.
вращение барабана вызывает передвижение тележки по рельсам, уложенным на верхнем поясе фермы.
Каждая нога крана в зависимости от его грузоподъемности опирается на две или одну ходовые двухколесные тележки, имеющие механизм передвижения, установленный на обеих ногах крана. Управление всеми механизмами сосредоточено в кабине 2, расположенной в верхней части опорной ноги крана.
Козловые краны описанной конструкции выпускаются грузоподъемностью от 10 до 50 т и применяются для сборки конструкций и для монтажа тяжелого оборудо-
вания.
Более легкие козловые краны грузоподъемностью до 5т не имеют специальной грузовой тележки, а оборудуются монорельсом, по которому передвигается электротельфер, управляемый из кабины или снизу переносным кнопочным пультом.
На рис. 129 показан двухконсольный кран, применяемый в строительстве сборных жилых домов. Он оборудован двумя электротельферами с кабинами управления 4, перемещающимися по общему монорельсу 3. Опорные ноги 1 крана состоят из двух стоек в форме трехгранных пирамид, шарнирно соединенных в верхней части и связанных балкой 2. Конструкция опор и ходовых тележек крана обеспечивает его передвижение по криволинейным участкам подкранового пути, а также перевод крана на другой путь, расположенный перпендикулярно или под углом к основному. Этим обеспечивается монтаж зданий непрямоугольной формы. Грузоподъемность крана 10 т, высота подъема 23—25 м, производительность 30—40 панелей в смену.
Козловые краны для промышленного строительства выпускаются грузоподъемностью до 200 т, пролетами до 60 м и высотой подъема груза до 76 м.
Кабельный край (рис. 130) представляет собой две трубчатые или решетчатые башни 1, между которыми натянут несущий стальной канат 3 закрытой конструкции. По этому канату на колесах
150
Рис. 130. Кабельный кран.
перемещается грузовая тележка 4, несущая грузовой полиспаст с крюковой обоймой 8. Тележка перемещается тяговым канатом 6 при помощи одной или двух лебедок. Канат грузового полиспаста 5 обычно закреплен одним концом на одной из башен, а вторым — на барабане грузовой лебедки. Грузовые тележки делаются с двумя, четырьмя и более колесами (в зависимости от грузоподъемности). Заданное натяжение несущего каната обеспечивается специальным полиспастом 7 и лебедкой, установленной у основания башни. Для укрепления крана имеются главные 2 и боковые ванты, якоря, лебедки и полиспасты натяжения главных вант.
Стационарные и передвижные кабельные краны грузоподъемностью до 5 т применяются для малоэтажного жилищного строительства, строительства новых и реконструкции действующих заводских цехов. Кабельные краны грузоподъемностью 5—15 т используются для монтажа конструкций тяжелых цехов.
Средний пролет кабельных кранов составляет 250—400 м, что является основным преимуществом, позволяющим применять их в местах, трудно доступных для других грузоподъемных машин. Высота подъема кабельных кранов зависит от рельефа местности и застройки обслуживаемого участка: она определяется из соображений, чтобы при максимально возможном провесе несущего каната можно было пронести груз над объектами, находящимися на трассе тележки.
При расчете несущего каната кабель-крана исходят из следующих трех положений: канат представляет собой тяжелую гибкую нить, несущую равномерно распределенную нагрузку q, даН/м (кгс/м), от собственного веса и нагруженную сосредоточенным
151
Рис. 131. Схема к расчету несущего каната кабель-крана.
грузом (тележкой с грузом) Q; условно принимается, что длина кривой каната равна прямой, соединяющей точки А и В (рис. 131); максимальная стрела провеса каната /макс находится посередине пролета.
Кабельные краны, как правило, имеют одинаковую высоту башен, поэтому приводим расчет несущего каната применительно к этому случаю. Суть расчета заключается в определении опорной реакции Тд или равной ей Тв- Зная величину Та и приняв запас прочности на разрыв k = 3 4, определяем разрывное усилие
каната, даН (кгс),
Н~кТд. (164)
По этому усилию подбираем канат.
Для подсчета Тд надо найти величины составляющих Уд и Нд, так как
Тд = У Н\ +Уд. (165)
Согласно рис. 131, момент относительно опоры В
MB^VAl-ql-2-------Q-^0. (166)
Отсюда вертикальная составляющая Уд, даН (кгс),
(167)
Для определения горизонтальной составляющей Нд разрежем канат посредине пролета и приложим натяжение Тс, действующее в точке С. Тогда момент относительно точки С определится из выражения
МС = Ул4-^макс-4- -Г = 0’ G68)
откуда после преобразований получим горизонтальную составляющую Нд, даН (кгс):
На = -У-(Уд±------4-). (169)
/макс 2 8 /
Из формулы (169) следует, что чем меньше стрела провеса fK№.c, тем больше величина горизонтальной составляющей Нд. Теоретически при отсутствии стрелы провеса (/макс = 0) составляющая Нд равна бесконечности. Практически допустимый провес /Накс в
152
кабель-кранах определяют исходя из коэффициента провеса
6 = 2^ — 0,035 4-0,05.
(170)
Поэтому из формул (169) и (170) можно записать, что горизонтальная составляющая На, даН (кгс):
н-'=т(4-4)- <171»
§ 27. ЭКСПЛУАТАЦИЯ ГРУЗОПОДЪЕМНЫХ МАШИН
Изготовление и эксплуатация грузоподъемных машин регламентируются «Правилами устройства и безопасной эксплуатации грузоподъемных кранов», контроль за выполнением которых возлагается на органы Гостехгорнадзора.
Грузоподъемные машины можно изготовлять только на предприятиях, имеющих на это разрешение соответствующего окружного отделения Гостехгорнадзора СССР. Машины должны быть зарегистрированы в органах Гостехгорнадзора, которые выдают разрешение на эксплуатацию грузоподъемных машин. Чтобы получить такое разрешение, надо иметь соответствующую техническую документацию, персонал специальной квалификации и провести техническое освидетельствование и испытание машины.
Техническая документация представляется заводом-изготовителем. Она состоит из паспорта машины и инструкций по ее монтажу и эксплуатации.
В паспорт заносятся следующие основные данные: полная техническая характеристика машины; техническая характеристика механизмов, ограничительных устройств и других приборов безопасности; характеристики грузозахватных органов, канатов и подкранового пути; данные о проведенных испытаниях; основные чертежи, кинематические схемы механизмов, схемы управления машиной и т.п.; сведения о ведомственной принадлежности машины, о лицах, ответственных за ее безопасную работу, о ремонте, результатах освидетельствования и т. п.
Управлять грузоподъемными машинами и обслуживать их разрешается лицам не моложе 18 лет, которые прошли медицинское освидетельствование и обучение по соответствующей программе. Аттестация этих лиц и допуск к работе на грузоподъемной машине производятся специальной квалификационной комиссией, в которую обязательно входит представитель органов Гостехгорнадзора.
Ответственность за исправное состояние и безопасную работу грузоподъемных машин возлагается специальным приказом на представителя технической администрации с соответствующей квалификацией.
153
Техническое освидетельствование. Чтобы установить соответствие состояния грузоподъемных машин требованиям Гостехгор-надзора, ежегодно проводят их частичное освидетельствование и не реже одного раза в три года — полное.
При полном техническом освидетельствовании грузоподъемной машины производят осмотр, статическое и динамическое испытания. Кроме того, должно быть проверено состояние металлоконструкций грузоподъемной машины и ее сварных соединений, а также лестниц, площадок и ограждений, крюка и деталей его крепления в обойме, канатов, блоков, осей и деталей их крепления, состояние защитного заземления подкранового пути (в кранах с электрическим приводом) и т. п.
Статическим испытанием машины проверяют ее прочность и грузовую устойчивость (для стреловых кранов). При первичном техническом освидетельствовании, а также после монтажа, капитального ремонта или изменения конструкции статическое испытание производят нагрузкой, на 25 % превышающей грузоподъемность машины.
Во время испытания контрольный груз поднимают на высоту 100—200 мм и выдерживают в таком положении в течение 10 мин; после этого груз опускают и проверяют, не появились ли остаточные деформации в конструкции крана.
Динамическое испытание грузоподъемной машины для проверки действия механизмов и их тормозов производят наибольшим рабочим грузом или грузом, на 10% превышающим грузоподъемность машины. При этом не менее двух раз выполняют все рабочие движения машины с грузом на крюке.
Результаты технического освидетельствования и испытания записывают в паспорт грузоподъемной машины. При удовлетворительных результатах в паспорт вносят запись о разрешении на работу грузоподъемной машины и указывают дату следующего освидетельствования.
Внеочередные освидетельствования грузоподъемной машины следует производить после каждого монтажа, капитального ремонта, смены механизма подъема, крюка или канатов.
Правила безопасности. Грузоподъемными машинами можно поднимать и перемещать только такие грузы, масса которых не превышает грузоподъемности машин. У стреловых кранов при этом надо учитывать положение опор и вылет стрелы.
На грузоподъемных машинах, находящихся в работе, должны быть четко, крупными надписями обозначены регистрационные номера, грузоподъемность и дата следующего испытания.
На предприятиях надо разработать способы правильной строповки грузов и обучить этим способам строповщиков, которых следует обеспечить рассчитанными, испытанными и промаркированными съемными грузозахватными приспособлениями и тарой надлежащей грузоподъемности.
Должен быть установлен порядок обмена условными сигналами между строповщиком и крановщиком.
154
Стреловой кран следует устанавливать на все имеющиеся опоры и применять прочные и устойчивые инвентарные основания.
Не разрешается устанавливать краны для работы на свежена-сыпанном, неутрамбованном грунте, на краю откоса, выемки и на площадке с уклоном, превышающим указанный в паспорте.
При подъеме груза его сначала надо приподнять на высоту не более 200—300 мм для проверки правильности строповки и надежности действия тормоза. Нельзя поднимать, опускать и перемещать груз, если под ним находятся люди. Не разрешается также опускать груз в автомашины и полувагоны или поднимать его, когда в кузове или кабине находятся люди.
Запрещено оставлять груз в подвешенном состоянии после окончания работы или на перерыв. Рубильник в кабине крановщика или на портале башенного крана в это время должен быть отключен и заперт. Не допускается подтаскивать груз по земле, полу или рельсам крюком крана.
Кроме указанных общих правил безопасности надо соблюдать дополнительные правила, указанные в «Правилах устройства и безопасной эксплуатации грузоподъемных кранов», утвержденных Гостехгорнадзором СССР.
Производительность. Техническая производительность грузоподъемных машин определяется по формуле (80).
Продолжительность рабочего цикла ta гр узо подъемной машины складывается из машинного времени /маш и времени, затраченного на выполнение монтажных операций /монт.
Длительность монтажных операций включает в себя время, требуемое для операций, выполняемых вручную специальными рабочими (строповка груза, установка, отцепка и т. д.).
Машинное время учитывает продолжительность всех операций, выполняемых машиной: подъем груза, поворот стрелы, изменение вылета стрелы, передвижение крана и др.
Машинное время вертикального перемещения крюка, мин, определяется полной длиной его пути по вертикали и скоростью движения:
+ <172>
где Н' и Н" — длина пути крюка при подъеме и опускании, м; г»! и v.2 — скорости подъема и опускания, м/мин.
Машинное время горизонтального перемещения крюка может состоять из продолжительности поворота и передвижения крана, передвижения грузовой каретки по стреле и крюка при изменении вылета стрелы. Машинное время поворота стрелы /пов, мин, определяют по формуле
<|73>
где а — угол поворота стрелы в одну сторону, град; п — частота вращения стрелы в минуту.
155
Машинное время передвижения крана, каретки или крюка при изменении вылета стрелы, мин,
*пер = -V ’ (174)
где S — путь передвижения, м; v — скорость передвижения,м/мин.
Общее машинное время цикла
^маш :7: Т ^пов ^пер* (175)
Производительность кранов можно повысить увеличением количества груза, поднимаемого за один раз, или уменьшением продолжительности цикла. Так как количество груза лимитируется грузоподъемностью крана, следует максимально использовать эту грузоподъемность, подбирая соответствующую тару для сыпучих и вяжущих материалов, создавая специальные стропы, позволяющие поднимать одновременно несколько, штучных грузов.
Продолжительность цикла можно уменьшить в результате уменьшения машинного и монтажного времени. Машинное время цикла зависит от конструктивных свойств машины, мастерства рабочего, управляющего ею, и производственных условий, в которых машина работает.
Конструктивные свойства машины, влияющие на продолжительность машинного времени цикла, определяются рабочими скоростями, системой управления и кинематической схемой машины, от которой зависит возможность совмещения отдельных операций. Для уменьшения машинного времени краны должны обладать широким пределом регулирования скорости опускания и подъема крюка, что дает возможность в 2—3 раза увеличивать скорость подъема небольших грузов и опускания крюка.
Значительное влияние на продолжительность машинного времени оказывает система управления. Наиболее целесообразен гидравлический и многодвигательный привод с электрической системой управления, позволяющий совмещать все движения крана и независимо управлять ими. Значительное сокращение продолжительности цикла обеспечивает автоматизация процессов управления краном: автоматическое регулирование скорости подъема и опускания груза в зависимости от его массы, автоматизация контроля выполненной работы и т. п.
От мастерства рабочего, управляющего машиной, зависит полнота использования конструктивных свойств и возможность (в пределах, допускаемых кинематической схемой машины и производственными условиями) максимального совмещения рабочих операций. В результате совмещения операций, т. е. одновременного выполнения движений подъема и поворота, поворота, передвижения и т. д., сокращается машинное время цикла.
При совмещении операций полная длительность цикла, мин,
/ц = е^маш ~Ь ^монт» (176)
где е — коэффициент, учитывающий совмещение операций и равный примерно 0,6—0,8.
156
Большое влияние на продолжительность машинного времени цикла оказывают также производственные условия, в которых работает кран, т. е. организация его рабочей зоны. Материалы и детали, подлежащие подъему, надо располагать так, чтобы средний угол поворота крана и средний путь его перемещения были наименьшими.
Длительность монтажных операций в основном зависит от двух факторов: конструктивных возможностей крана и конструкции захватных приспособлений. В современных кранах предусмотрена наилучшая видимость машинистом места установки груза, так как это имеет большое значение для согласования действий такелажников или монтажников и машиниста; кроме того, обеспечиваются плавность торможения, устраняющая излишнее раскачивание груза при его посадке, и малые посадочные скорости, сокращающие длительность монтажных операций крана.
Вопросы для самопроверки
1. Изобразите схему шестикратного полиспаста механизма подъема груза. Определите усилие для подбора каната, если вес груза на крюке Q — 20 т, а КПД одного блока т]бл = 0,98.
2. Составьте схемы устройства реечных, винтовых и гидравлических домкратов, сравните области их применения и формулы усилий, необходимых для подъема груза.
3. Составьте кинематические схемы электрореверсивной и фрикционной лебедок. Определите мощность двигателя электрореверсивной лебедки механизма подъема из предыдущего примера (вопрос 1), если скорость подъема груза на крюке игр = 30 м/мин, а КПД лебедки т] = 0,9.
4. Начертите схемы устройства мачтового подъемника, легких переносных кранов-подъемников и мачтово-стреловых кранов. Опишите области их применения. Выведите формулу для определения усилий в вантах мачтово-стрелового крана.
5. Начертите схемы конструкций различных типов башенных кранов. Дайте сравнительную оценку этим конструкциям на основании требований сборномонтажного строительства.
6. Опишите области применения различных типов самоходных стреловых кранов. Изобразите схемы их устройства и объясните условия работы. Проанализируйте различные системы привода и управления механизмами с точки зрения требований сборного строительства.
7. Изложите области применения и приведите схемы устройства козловых и кабельных кранов.
8. Объясните необходимые условия и порядок ввода в эксплуатацию грузоподъемной машины на строительной площадке.
9. Объясните требования Гостехгорнадзора к устойчивости самоходных стреловых кранов. Покажите схемы действующих на кран нагрузок для определения грузовой и собственной устойчивости кранов. Напишите уравнения устойчивости.
10. Сравните методику расчета устойчивости башенного и самоходного стрелового кранов.
11. Приведите формулу производительности грузоподъемных машин и объясните способы определения входящих в нее величин. Укажите способы повышения производительности.
Глава V
МАШИНЫ ДЛЯ ПРОИЗВОДСТВА ЗЕМЛЯНЫХ РАБОТ
Земляные работы являются одним из самых массовых и трудоемких процессов в строительстве. На 1 м3 объема промышленного сооружения выполняется в среднем 1,5—2 м3 земляных работ, а на 1 м3 объема гражданского сооружения — до 0,5 м3.
Стоимость производства земляных работ значительна, и в среднем в промышленном и гражданском строительстве она составляет 10—15% полной стоимости работ.
Земляные работы, выполняемые в процессе строительства, заключаются в разработке различных выемок — котлованов и траншей; в образовании насыпей — плотин, дорожного полотна, подсыпок территории, отвалов; в планировке площадей, при которых небольшие выемки чередуются с подсыпками; в обратной засыпке землей траншей, фундаментных котлованов; в отделочных работах путем разравнивания и уплотнения насыпей. Кроме того, перед началом земляных работ часто приходится проводить подготовительные работы — очищать территорию от лесонасаждений и разрыхлять очень плотные или мерзлые грунты.
При производстве земляных работ применяются землеройнотранспортные машины, экскаваторы, оборудование для гидромеханизации и машины для подготовительных и вспомогательных работ.
Землеройно-транспортные машины (бульдозер и скрепер), отделив от массива грунт, транспортируют его в насыпь. Экскаваторы * (одноковшовый и многоковшовый), отделяя от массива грунт или набирая отделенный другим способом грунт, перемещают его на небольшое расстояние и выгружают в транспортные средства или в находящуюся рядом насыпь.
Гидромеханизационное оборудование отделяет, транспортирует и укладывает грунт с помощью воды.
Четвертая группа машин уплотняет или разрыхляет грунт, очищает строительную площадку от лесонасаждений, подготовляет к выемке мерзлые грунты и бурит скважины.
* Excavare (латинское) — выдалбливание.
Первый одноковшовый экскаватор был построен в США Отисом в 1834 г., а первый многочерпаковый (землечерпалка) — в России на Ижорском заводе в 1911 г.
158
§ 28. СВОЙСТВА ГРУНТОВ. ОСНОВНЫЕ ПОНЯТИЯ О СОПРОТИВЛЕНИИ ГРУНТА РЕЗАНИЮ И КОПАНИЮ
На работу землеройных машин оказывают влияние гранулометрический состав грунта (относительное содержание кусков — зерен разной крупности) *, физические и механические его свойства.
Физические свойства грунтов. К основным физическим свойствам грунтов относятся плотность, влажность, влагоемкость и водо-проницательность.
Плотность грунта (у) — это масса единицы объема грунта, взятого в естественном состоянии, вместе с порами (в плотном теле). Плотность оказывает большое влияние на сопротивление грунтов разработке (машинами), увеличивая силу трения и работу по подъему грунта. Например, для легких грунтов у = 1,6, средних— 1,7 и плотных —1,8 т/м3.
Влажность — это содержание воды в грунте, которое измеряется в процентах. Влажность существенно влияет на сопротивление грунтов резанию.
Влагоемкость — это способность грунтов поглощать воду. Влагоемкость больше у грунтов с мелкими фракциями и органическими примесями, например у пылеватых глин. Такие грунты легче размокают и разбухают при наличии воды, изменяя при этом свой объем под давлением, плохо дренируют, медленно высыхают; при большом содержании воды в грунтах они опасны для работы тяжелых машин, плохо заполняют ковш, налипая на его стенки, и заставляют часто прерывать работу для его очистки.
Водопроницаемость — это свойство грунта пропускать через себя воду; она зависит от размеров фракций и пор в породе. Водопроницаемые грунты с крупными фракциями (песчаные, каменистые) являются наиболее устойчивыми основаниями для работы тяжелых машин.
Механические свойства грунтов. Эти свойства, характеризующие способность грунтов сопротивляться внешним нагрузкам, имеют наибольшее значение для работы машин. Основные механические свойства таковы: пластичность, разрыхляемость, сопротивление осадке, внутреннее и внешнее трение и сопротивление резанию и копанию.
Пластичност ь — это способность грунта сохранять остаточную деформацию, полученную под действием внешних сил, и после прекращения действия этих сил. При увеличении содержания воды в пластичном грунте он переходит в текучее состояние. Влажные пластичные грунты (глины, суглинки) хорошо уплотняются, чем обеспечивают наибольшее наполнение ковшей, но иногда плохо выгружаются (при свободной выгрузке — под действием только собственного веса породы).
* Granulum (латинское) — зерно.
159
Рис. 132. Срезание грунта при траекториях:
а— горизонтальной; б — наклонной; в— почти вертикальной.
Связность (сцепление) — это свойство грунтов противостоять воздействию внешних сил, стремящихся разъединить его частицы. Связность является одной из основных составляющих сопротивления грунта резанию. К типичным представителям связных грунтов относятся глины, а несвязных — сухие пески.
Разрыхляемость — это способность грунта увеличивать объем при разработке вследствие потери связи между частицами. Разрыхляемость измеряется коэффициентом разрыхления йр, который представляет собой отношение объема разрыхленного грунта к объему, который он занимал в естественном состоянии (в плотном теле). Например, йр для легких грунтов равен 1,2, для средних — 1,3 и плотных — 1,75.
Сопротивление грунта осадке возникает при перемещении опорных поверхностей ходового оборудования машин по грунту.
Трение грунта о грунт (внутреннее) и о другие тела (внешнее) характеризуется соответствующими коэффициентами трения. Например, коэффициент внутреннего трения р, для легких грунтов равен 0,9, средних — 0,5 и плотных — 0,3.
Сопротивление грунта резанию и копанию является важнейшим механическим свойством, определяющим производительность землеройных машин. Процесс копания включает все сопротивления при наполнении ковша, а процесс резания — только сопротивление от резания стружки грунта.
Как видно из рис. 132, в процессе резания возникает как касательное сопротивление Рк, т. е. сопротивление в плоскости резания, так и усилие отпора Ро. Усилие отпора направлено нормально к усилию и обычно препятствует внедрению режущей кромки ковша в глубь грунта. Величина усилия отпора Ро переменна, зависит
160
Рис. 133. Срезание грунта ковшом с зубьями.
Рис. 134. Схема сечения прорези, образуемой ножом в грунте:
/ — область лобовых сопротивлений грунта; 2 — зона разрушения грунта по бокам иожа.
от формы и положения режущей кромки ковша, а также от положения самого ковша.
При работе на плотных глинистых и каменистых грунтах сопротивление резанию значительно снижается, когда режущая кромка оснащается зубьями (рис. 133). Зубья, создавая зоны отрыва грунта, взаимно влияют друг на друга. Эти зоны показаны на рисунке пунктиром /—1, 2—2, 3—3, 4—4.
Исследованиями проф. Ю. А. Ветрова установлены такие особенности процесса резания грунтов. Отделение от массива и разрушение грунта происходит в пределах прорези трапецеидального, расширяющегося к поверхности массива сечения (рис. 134). Для практических расчетов боковые стороны сечения прорези можно считать прямолинейными, наклоненными под углом у0 к поверхности резания. Расширение прорези начинается с глубины kбок^З ’ 1* ^3
глубина резания зубом или ножом и kr„K — коэффициент глубины расширяющейся части прорези. Угол у0 для большинства грунтов равен 30°, а коэффициент = 0,85 ч- 0,9.
Разрушение грунта во время отделения стружки (слоя грунта) происходит в результате развития в нем сложного напряженного состояния.
При этом в разных частях прорези разрушение идет по-разному: перед лобовой гранью ножа происходит преимущественно сдвиг и сжатие, в боковых расширениях прорези — отрыв и сдвиг и у боковых ребер ножа возле режущей кромки — срез.
Важной особенностью процесса является то, что сопротивления грунта резанию из-за неодинакового их характера в различных местах прорези имеют разную удельную величину, что учитывается при конструировании ковшей. Например, если принять удельное сопротивление резанию перед лобовой гранью за 100%, то в боковых расширениях прорези у тяжелого суглинка будет 30%, а у мергелистой глины 20% *.
* Подробнее см.: Ветров Ю. А. Резание грунтов землеройными машинами. М., Машиностроение, 1971.
6 642 1 61
Рис. 135. Ковш полукруглой формы со сплошной режущей кромкой.
Для лучшего врезания в сыпучие и разрыхленные грунты и захвата проф. Д. И. Федоровым предложена конструкция экскаваторных ковшей полукруглой формы с выступающей вперед сплошной режущей кромкой (рис. 135). Эти ковши повышают производительность экскаваторов в указанных грунтах.
Касательное сопротивление копанию Рл слагается из сопротивления грунта
резанию, волочению перед ковшом, перемещению в ковше и трению самого ковша о грунт.
Для преодоления касательного сопротивления копанию Рл к ковшу прикладывают тяговое усилие, а чтобы реакция отпора Рв не вытеснила ковш из грунта, ее уравновешивают весом ковша или создают напор на ковш. Уравновешивать Ро весом ковша можно при горизонтальной или наклонной траекториях (обратная лопата, драглайн, скрепер — рис. 132, а и б), а при вертикальной или близкой к ней траектории (рис. 132, в) применяют напор на ковш (прямая лопата).
Для установления величины сопротивления грунта копанию проф. Н. Г. Домбровским и его сотрудниками были проведены экспериментальные исследования режимов работы экскаваторов как на моделях в лабораторных условиях, так и на машинах с различными емкостями ковшей. Эти исследования показали, что максимальное касательное сопротивление копанию Рл, даН (кгс), в конце наполнения ковша может приниматься пропорциональным сечению стружки:
PK = k1Cb, (177)
где с — толщина стружки; b — ширина стружки; — удельное сопротивление копанию. Например, если принять для экскаватора с прямой лопатой в тяжелом суглинке за 100%, то соответственно для экскаватора-драглайна k} составит 135%, а в тяжелой глине — соответственно 165 и 215%.
Введя в формулу (177) путь 5 наполнения ковша, получим
PKS = kyCbS, (178)
отсюда
(179)
ь — .к cbS ’ где PKS — работа; cbS — объем грунта.
Таким образом, из формулы (178) следует, что расход механической работы на копание 1 м3 в каждом данном грунте является примерно постоянной величиной.
162
Формула (177), как и всякая эмпирическая формула, действительна только для условий проведенных исследований, т. е. только при обычных формах и размерах ковшей, при нормальной степени износа и затупления зубьев и т. п.
Равенство (178) можно представить как
= н-ап/^-р-, (180)
Кр
где q — емкость ковша; feHan — коэффициент его наполнения разрыхленным грунтом; qrp — часть разрыхленного грунта, срезанная ковшом, которая в него не попадает; kp — коэффициент разрыхления грунта.
Из формулы (180) следуют важные для практики выводы. При прочих равных условиях:
с увеличением усилия Рк на зубьях ковша увеличивается его наполнение;
в менее крепком грунте (при меньшем k±) следует применять ковш увеличенной емкости.
§ 29. ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫЕ МАШИНЫ
Землеройно-транспортные машины при поступательном перемещении послойно снимают грунты, транспортируют их и разгружают. По типу .рабочего органа они разделяются на ковшовые— скреперы и ножевые — бульдозеры, а также применяемые в дорожном строительстве различные грейдерные машины.
Скреперы и бульдозеры, благодаря высокой маневренности, простоте рабочего процесса и высокой производительности, широко применяются в строительном производстве при разработке легких и среднеплотных грунтов.
Условиями, ограничивающими применение землеройно-транспортных машин, являются: очень плотные и липкие грунты, а для скреперов и грунты с каменистыми включениями, значительная длина транспортирования и наличие подъемов свыше 10%, атмосферные осадки и морозы.
Бульдозер представляет собой машину обычно на базе трактора, оснащенную навесным рабочим оборудованием, предназначенную для выемки грунта и транспортирования его на небольшие расстояния (80—100 м).
Бульдозер состоит из рамы, на которой крепится отвальный щит (отвал) с нижней кромкой, оборудованной ножом, и механизма управления отвалом. Отвал во время движения трактора опускается и ножом срезает стружку грунта. Срезанный грунт скапливается впереди отвала, образуя призму волочения, которая затем перемещается к месту разгрузки и там разравнивается отвалом или остается.
Бульдозеры могут быть классифицированы по устройству отвала (с неповоротным и поворотным отвалом), по типу механизма управления и по ходовому устройству (гусеничному и колесному).
163
7
Рис. 136. Схема гидравлического управления бульдозером.
Неповоротный отвал устанавливается перпендикулярно к продольной оси трактора; жестко связанный с рамой, он может перемещаться в вертикальной плоскости (подниматься и опускаться). Поворотный отвал связан с рамой шарнирно и благодаря этому может устанавливаться в плане под углом до 65° в обе стороны к продольной оси трактора. Оба типа отвалов могут иметь наклон к горизонту в вертикальной плоскости до 10°.
Бульдозеры выпускаются с канатно-блочным и гидравлическим механизмом управления, при помощи которого поднимается и опускается отвал.
Преимущественное распространение в строительстве получили гидравлическое управление и гусеничный ход.
Бульдозеры используются для снятия верхнего слоя грунта при планировке, для рытья неглубоких котлованов, устройства выемок для полотна дорог, для создания дорожных насыпей, дамб и т. п. При обратной засыпке грунта в узкие котлованы и траншеи особенно удобен бульдозер с поворотным отвалом; он движется вдоль траншеи, а косостоящий отвал сбрасывает в нее грунт.
В бульдозере с гидравлическим управлением и неповоротным отвалом (рис. 136) подъем, опускание отвала и закрепление его в нужном положении осуществляются силовыми гидравлическими цилиндрами двухстороннего действия 6. Два силовых цилиндра шарнирно соединены с рамой трактора, а штоки 5 шарнирно присо-
164
Рис. 137. Бульдозер с гидрофицированным поворотом в плане и наклоном отвала: / — ножи; 2 — козырек; 3 — отвал; 4 — гидроцилиндры подъема и опускания отвала; 5 — направляющие ползунов опорных пальцев; 6 — опорный шарнир; 7 —гндроцилинд-ры перекоса отвала; 8 — направляющие ползунов толкателей; 9 — ползун толкателя; 10 — универсальная рама; // — толкатель; 12— гидроцнлиндр поворота отвала в плане; 13 — наголовник; 14 — штырь; 15, 16 — проушины.
единены к отвалу и толкающей раме. Рабочая жидкость по маслопроводу 7, имеющему предохранительный клапан 3, нагнетается в силовые цилиндры шестеренным насосом 4 из бака 2 при соответствующем положении распределителя 1. В зависимости от положения распределителя рабочая жидкость поступает в надпоршневое пространство цилиндров, что соответствует принудительному заглублению или подъему отвала.
Для того чтобы отвал сохранял определенное положение, распределитель переключается в положение «заперто»; тогда прекращается доступ масла в гидравлические цилиндры. Если требуется предоставить возможность отвалу перемещаться по поверхности земли, приспосабливаясь к ее неровностям, распределитель переводится
165
Рис. 138. Прицепной скрепер с тяговой загрузкой и гидроуправлением: а — схема; б — приводная гидросистема; / — дышло передней оси; 2 — хобот тяговой рамы; 3 — заслонка; 4 — ковш; 5 — упряжной шарнир; 6 — разгружающая задняя стенка; 7 — заднее колесо; 8 — буфер; 9 — ножи; 10 — универсальный шарнир; И — насос; 12 — распределитель; 13 — масляный бак; 14 — гидроцилнндры подъема ковша; 15 — гидроцилиндры заслонки; 16 — гндроцилиндр разгружающей стенки; 17 — приводная часть; 18 — исполнительная часть.
в положение «плавающее». При этом положении верхние и нижние полости каждого цилиндра соединены между собой через маслопровод и распределитель. Поэтому поршень может свободно перемещаться вверх и вниз.
У бульдозера с поворотным отвалом и поперечным его наклоном (рис. 137) вместо толкающих брусьев применена арочная рама, к вершине которой шарнирно присоединен отвал. Края отвала удерживают толкатели, соединенные ползунами с боковыми направляющими арочной рамы. Поворот отвала в плане производится гидроцилиндрами, при этом ползуны толкателей изменяют положение на направляющих рамы и укрепляются закладными штырями. Поперечный наклон отвала осуществляется опусканием проушины одного толкателя и подъемом другой.
В настоящее время находят применение бульдозеры на промышленных гусеничных тракторах мощностью до 1000 кВт. В благоприятных климатических и грунтовых условиях применяются пневмо-колесные бульдозеры (скорость передвижения которых в 2—3 раза больше, чем гусеничных) мощностью до 1600 кВт с длиной отвала до 5 м и высотой до 1,6 м.
166
В СССР созданы бульдозеры с автоматической системой для исполнения завершающего этапа планировочных работ. При наезде гусеницы на неровности грунта изменяется положение отвала. Соответствующий датчик подает сигнал в блок управления, который с помощью электрозолотника воздействует на подачу масла в гидроцилиндры подъема отвала. Этим положение отвала изменяется и он срезает неровности грунта.
Скрепер (рис. 138) состоит из ковша, ходовой части на пневмо-колесном ходу, сцепного устройства и механизма управления, с которым осуществляется опускание, подъем и разгрузка ковша. Ковш снабжен передней шарнирной заслонкой, увеличивающей его емкость и не дающей высыпаться грунту при транспортировании.
Цикл скрепера состоит из следующих операций: 1) срезания стружки грунта и заполнения ковша при движении скрепера G опущенным ковшом и приоткрытой заслонкой; 2) транспортирования грунта к месту разгрузки с ковшом, поднятым в транспортное положение, и с закрытой заслонкой; 3) разгрузки ковша на ходу при полностью открытой заслонке и разравнивании грунта ножом ковша; 4) возвращения скрепера в транспортном положении к месту набора грунта.
Все типы скреперов можно классифицировать по способу загрузки, разгрузки, по виду управления и по конструктивной связи с двигателями.
По способу загрузки скреперы разделяются на загружаемые движущимся усилием — тяговая загрузка (рис. 138) ив принудительной загрузкой (рис. 139). Принудительная (обычно элеваторная) загрузка обеспечивает наполнение ковша независимо от
167
Рис. 140. Способы загрузки скреперов:
а — свободная загрузка; б — полупринудительная передняя; в — принудительная; / — ковш; 2 — подножевая плита с ножами; 3 — заслонка; 4 — разгружающий узел.
толщины срезаемой стружки, так как ей не приходится преодолевать сопротивление грунта, находящегося в ковше.
По способу разгрузки скреперы разделяются на три группы: со свободной разгрузкой, с принудительной и с полупринудительной разгрузкой.
При свободной разгрузке ковш наклоняется вперед (рис. 140, а). Этот способ разгрузки применяется главным образом на скреперах с малой емкостью ковша.
При полупринудительной разгрузке днище, выполненное как одно целое с задней стенкой, поворачивается вокруг оси, расположенной около ножа скрепера, благодаря чему часть грунта свободно высыпается, а часть выталкивается задней стенкой (рис. 140, б); при этом боковые стенки только частично очищаются от налипшего грунта кромками поворачивающейся задней стенки.
Принудительная разгрузка осуществляется прямолинейным перемещением задней стенки относительно днища и боковых стенок (рис. 140, в). Такая разгрузка обеспечивает полную выгрузку грунта, так как задняя стенка очищает днище и боковые стенки ковша от налипшего грунта.
Управление скреперами бывает гидравлическое и канатно-блочное; первое применяется чаще, так как реализуются достоинства гидропривода (см. § 8) и исключается ненадежность работы быстро изнашивающихся канатов.
По конструктивной связи с двигателями современные скреперы могут быть классифицированы по такой схеме:
прицепные скреперы — одноосные и двухосные с трактором-тягачом (рис. 141, а);
навесные скреперы — с двухосным пневмоколесным тягачом (рис. 141, б);
с одноосным пневмоколесным тягачом (рис. 141, в);
самоходные скреперы — с приводом передних и задних колес (рис. 141, г).
Прицепные скреперы с тракторными тягачами (рис. 141, а) широко применяются при относительно небольших расстояниях транспортирования (200—400 м). Гусеничный ход тракторов-тягачей не ограничивает их силу тяги по сцеплению, но небольшие ско-168
Рис. 141. Схемы скреперов с указанием распределения их веса по осям (кружками обведены проценты сцепных весов).
Схема навесного тол-
Рис. 142.
кающего устройства:
1 — толкающая плита; 2 — кронштейн; 3 — рама трактора; 4 — амортизационный блок; 5 — дополнительный блок на случай перегрузки; 6 — буфер скрепера.
рости движения трактора (до 12 км/ч) приводят к резкому падению производительности при увеличении длины транспортирования.
Стремление увеличить скорости движения скреперов и этим расширить границы их применения (расстояния до 2—3 км) побудило использовать пневмоколесные тягачи, которые могут развивать скорости до 50 км/ч, но по сравнению с гусеничным ходом имеют малый коэффициент сцепления с грунтом. Поэтому пневмоколесные тягачи применяются с навесными скреперами, часть веса которых нагружает ведущую ось тягача и таким образом увеличивает его сцепной вес (рис. 141, б и в).
Чтобы использовать вес тягача и навливают второй двигатель на заднюю ось (рис. 141, г). Особо перспективным является самоходный дизель-электрический скрепер, каждое колесо которого имеет отдельный электрический привод (см. рис. 124). Все мотор-колеса этого скрепера питаются от электрического генератора, который приводится в действие дизелем.
При загрузке ковша для лучшего его наполнения навесные скреперы подталкиваются толкачами (рис. 142). Толкачи во время работы находятся только в скреперном забое, и каждый из них обслуживает группу из нескольких скреперов.
Скреперы применяются как при возведении насыпей и устройстве выемок, так и при планировке площадок.
В СССР разработаны скреперы с системой автоматической планировки площадок. При прохождении передней осью скрепера по неровностям грунта ковш отклоняется от ранее заданного углового положения относительно вертикали, что регистрируется маятником
скрепера как сцепной, уста-
169
~ось; 15 — задние колеса; 16 — ша
Рис. 143. Прицепной скрепер 7 с полупринудительной раз-. у д грузкой ковша и канатно-75 / \ блочным управлением:
/ /а — общий вид скрепера с трак* / / тором-тягачом; б — схема канат-
/12 / но-блочного управления скрепе-' //, ра; а — схема запасовки каиа-тов’ % — канаты лебедки; 3 — неподвижная обойма бло-/ /'' ков; 4 — полиспаст; 5 — попе-' $ речный полиспаст; 6 — направляющий блок; 7 — тяговая рама; 8 — заслонка; 9 — канат поворотного днища; 10 — шарнир заслонки; 1! — ковш; 12 — поворотное днище; 13 — пружина возврата днища; 14 — задняя днища; 17 — шарнир ковша; 18 — подно-
-жевая плита; 19 — подвижная обойма заслонки; 20 — подвижная обойма ковша; 21 — шарнир передней части рамы; 22 — полиспаст; 23 — передние колеса; 24 — дышло; 25 — флюгерный блок; 26 — подвижная обойма блоков; 27 — направляющий блок.
Рис. 144. Автогрейдер:
I — балансир движителя; 2 — основная рама; 3 — рыхлитель заднего хода; 4 —отвал; 5 — тяговая рама; 6 — бульдозерный отвал: 7 — механизм выкоса тяговой рамы; 8 — механизм подъема рабочего органа.
Рис. 145. Грейдер-элеватор:
/ — одноосный тягач; 2 — генератор; 3 — плужная рама; 4 — дисковый плуг; о — конвейер: 6 — двигатель привода конвейера; 7 — гидроцилиндры подъема и складывания конвейера; 8 — гидроцилиндр поворота плуга; 9— основная рама: 10 — гндроцилиндры подъема плужной рамы и нижней части конвейера.
датчика. По его сигналу действует схема, подобная описанной выше у бульдозеров, и поток масла от насоса поступает в цилиндры, управляющие ковшом, для восстановления заданного положения.
В настоящее время наиболее распространенными конструкциями скреперов являются:
прицепные, с емкостью ковша до 10 м3 и мощностью трактора до 300 кВт с тяговой загрузкой, канатно-блочным (рис. 143), реже
17J
гидравлическим управлением и полупринудительной разгрузкой; навесные и самоходные (рис. 139) с емкостью ковша до 30 м3 и мощностью двигателя до 500—600 кВт с принудительной загрузкой, гидравлическим управлением и принудительной разгрузкой. Эти скреперы являются наиболее прогрессивными.
Автогрейдер (рис. 144) имеет ножевой рабочий орган для профилированных работ в виде узкого отвала, прикрепленного к поворотному кругу. При помощи механизмов управления отвалу можно придавать различные положения в пространстве.
Срезаемый грунт перемещается вдоль отвала, образуя в конце его боковой валик. Приподняв отвал, можно уложить грунт клиновидным слоем.
Грейдер-элеватор (рис. 145) применяют в дорожном строительстве в тех случаях, когда необходимо создавать невысокие насыпи и неглубокие выемки. Грейдер-элеватор срезает грунт обычно дисковым сферическим ножом, который направляет этот грунт на конвейер или питатель, а оттуда в насыпь *.
§ 30. РАСЧЕТ ПРОИЗВОДИТЕЛЬНОСТИ ЗЕМЛЕРОЙНОТРАНСПОРТНЫХ МАШИН И СПОСОБЫ ЕЕ ПОВЫШЕНИЯ
Техническая производительность бульдозера, м3/ч, при разработке и перемещении грунта (в плотном теле) подсчитывается по формуле
где Кп — объем призмы волочения, срезанной отвалом, м8; kQ — коэффициент сохранения грунта во время его транспортирования;
— продолжительность цикла, с.
Обычно принимают, что грунт располагается перед отвалом под углом естественного откоса <р0 и что объем призмы волочения (рис. 146), м3, /М2 1Н2
= <182>
где I — длина отвала, м; Н — высота отвала по хорде, м; и = = tg фо — коэффициент трения грунта о грунт; kp — коэффициент разрыхления грунта.
Коэффициент сохранения грунта kc зависит от длины транспортирования снятого грунта L„ и величины уклона i. Например, при L„ = 30 м и i = 0 kc = 0,6, при Ln = 30 и I = +10% kc = 0,37, а при Ln= 100 м, i = 0 и i = + 10% k соответственно равен 0,2 и 0,12.
Продолжительность цикла /ц слагается:
из времени, с, набора грунта, который производится на первой передаче при наибольшем тяговом усилии трактора и минимальной
* Подробнее см.: Домбровский Н. Г., Г а л ь п е р и н М. И. Землеройно-транспортные машины. М., Машиностроение, 1965.
172
скорости Uj, км/ч,
t = 3,6Л<6 = 3,6УП 1 V] c/Uf ’
где с — глубина резания, м; Ен6 — длина пути набора грунта, м;
из времени, с, движения бульдозера при
перемещении грунта обычно на второй или третьей передаче
3,6LnKrp
‘2 — v гр
Рис. 146. Призма волочения.
(184)
из времени, с, движения при обратном ходе, совершаемого обычно на третьей или четвертой передаче заднего хода трактора
4 V 4
пор
В формулах (184) и (185): игр и ипгр установившиеся скорости груженого и порожнего хода бульдозера, км/ч; Кгр и /Спор — соответствующие этим скоростям коэффициенты, учитывающие ускорения, замедления и переключения передач.
Коэффициенты /<гр, Кпор можно определить следующим образом.
Если принять, что разгон и торможение совершаются по трапецеидальной тахограмме (рис. 147), то
v (i2/пер) — /-jOrp tga” ’ (186)
где v — фактическая средняя скорость, м/с; /пер — время на переключение передач, с; tg а — j — ускорение (замедление), м/с2.
Так как
^р = -У, (187)
и учитывая, что площадь тахограммы определяет величину пути и (?2 "Ь /пер) = /-п> (188)
то из формул (186) — (188) получим
/<гр = 1 + + jL (189)
Если принять V в км/ч, то
+ <19°)
Величины Кт при Ln = 20 ~ 100 м изменяются от 1,8 до 1,25, а Кпор от 2 до 1,5.
Как следует из формулы (181), для обеспечения высокой производительности бульдозера необходимо увеличивать объем призмы
173
Рис. 147. Тахограмма движения бульдозера.
волочения Vn и коэффициент сохранения грунта kc, а также сокращать продолжительность цикла ta. На практике это достигается: перемещением с грунтом под уклон;
маятниковым движением трактора без разворотов, когда скорости его переднего и заднего хода примерно равны;
установкой для легких грунтов на отвале боковых щитков, что превращает отвал в своеобразный бездонный ковш, увеличивая возможный объем призмы волочения;
движением бульдозера по одному и тому же пути, так как образующаяся при этом траншея своими стенками удерживает грунт на отвале от перемещения в сторону;
спаренной работой бульдозеров (рис. 148), что увеличивает больше чем в два раза объем призмы волочения;
применением для рыхления грунтов при обратном ходе приспособления из свободно подвешенных зубьев, монтируемых на тыльной стороне бульдозера. При движении бульдозера вперед отвал срезает и перемещает разрыхленный грунт, и зубья отклоняются назад, а при обратном маятниковом' ходе зубья разрыхляют грунт.
Для обеспечения безопасной работы бульдозера запрещается перемещать им грунт на подъем более 15° и под уклон более 30°, а также выдвигать отвал бульдозера за бровки откоса выемки.
Техническая производительность скрепера (грунт в плотном теле), м3/ч, определяется по формуле
где q — емкость ковша, м3; /гнап — коэффициент наполнения ковша разрыхленным грунтом (в легких грунтах kaan — 1,05, средних — 0,9, плотных — 0,8).
Продолжительность цикла /ц так же, как и у бульдозера, слагается:
1) из времени, с, копания грунта, которое, как правило, производится на первой передаче при скорости V\, км/ч,
Здесь 1,5—коэффициент, учитывающий время на подъемы и опускания ковша при его заполнении; LH6 — длина пути набора грунта, м,
?(1 +т) feHan cbk9
(193)
174
Рис. 148. Работа двумя бульдозерами* I — грунт, перемещенный одиночным бульдозером; » г-2 — грунт, перемещенный двумя бульдозерами.
~ Х.4 шг
где т — отношение объема призмы воло- — чения, накапливающейся перед ковшом,к * и его емкости, например, для легких грун-тов т = 0,27, средних — 0,1 и плотных — щ 0,05; с — средняя толщина срезаемой
стружки (глубина резания), м, например, в легких — 0,15, средних — 0,06 и плотных — 0,03; b — ширина резания, м;
2) из времени, с, движения при груженом и порожнем ходе
/ + = 3 6Ln ( , (194)
игр ипор \ игр ипор /
с увеличением длины транспортирования от 100 до 500 м коэффициенты /Ср и /<пор уменьшаются (7(гр = 1,25 4- 1,05, /С„ор = = 1,5 Ч- 1,1);
3) из времени на разгрузку скрепера — /4; при нормальной влажности грунта (не более 10—15%) для скреперов с емкостью ковша q = 2,25 ~ 2,75 м3 /4 = 15 с; при q = 6 4- 10 м3 Ц — 20 с, а при q — 15 м3 /4 = 30 с;
4) из времени на повороты, с,
/5 “
(195)
где п — число поворотов за цикл; /Пов — время поворота, с, (приблизительно 12—15 с).
Для того чтобы определить скорости груженого и порожнего хода прицепного скрепера (см. рис. 143), следует подсчитать необходимые тяговые усилия, даН (кгс), на крюке трактора.
При груженом ходе (например, на подъем)
F' = (GCKp + (f + 0 + GTpi, (196)
а при порожнем (например, под уклон)
F" = GCKp(f — i) — GTpi. (197)
Здесь GCKp — вес скрепера, даН (кгс); GTp — вес трактора, даН (кгс); у — плотность грунта, кг/м3; f — коэффициент качения, приблизительно равный на разрыхленной дороге — 0,2, а на уплотненной— 0,1; i — уклон скреперной дороги (положительный при подъеме и отрицательный на спуске).
Зная величины F' и F", нетрудно по заводской характеристике трактора найти, на каких передачах и с какими скоростями будет двигаться скрепер.
Навесные и самоходные скреперы развивают большие скорости движения, определять которые целесообразно по их динамическим характеристикам, подобным динамическим характеристикам автосамосвалов (см. § 11).
175
На рис. 149 приведена динамическая характеристика навесного скрепера с ковшом 15 м3. На этой характеристике показана величина полезной нагрузки и ограничение по сцеплению, т. е. указано, при каком наименьшем коэффициенте сцепления шин с дорогой (ф) скрепер может двигаться.
Поясним пользование этой характеристикой на примере. Надо определить установившуюся скорость движения скрепера, если известно, что вес грунта в его ковше Qrp = 24,3 т. Коэффициент качения f = 0,06 и подъем i — 0,04. Таким образом D = f + i — = 0,06 + 0,04 = 0,1 и из графика (рис. 149) следует, что скрепер будет двигаться со скоростью 18 км/ч, а коэффициент сцепления ф не должен быть меньше 0,15.
В тех случаях, когда во время набора грунта следует применить и толкач, число скреперов N, которое он может обслужить, подсчитывается по формуле
N =---------------я--------------
3,6Лнб1,5 3,6Анб
1 -J- I vl---------------^0
(198)
где /ц — продолжительность цикла скрепера, с; щ и и0 — скорости движения толкача со скрепером и без него, км/ч; t — время на подход толкача к скреперу, приблизительно равное 40 4- 60 с.
В формуле (198) учитывается, что толкач сопровождает скрепер при наборе грунта, затем возвращается в начало участка набора для обслуживания следующего скрепера и подходит к нему. Тол
176
кач должен иметь синхронную скорость со скрепером, достаточную мощность, безударную «мягкую» стыковку. При этом надо иметь в виду, что при совместной работе скрепера с толкачом усилие последнего может быть реализовано на 60—70% от возможного по условиям сцепления.
Для повышения производительности скрепера необходимо увеличивать наполнение его ковша kHan и сокращать длительность цикла /ц.
Для скреперов с тяговой загрузкой главным для увеличения наполнения ковша является увеличение толщины срезаемой стружки с и облегчение ее прохождения в ковш. Для этого применяются следующие основные способы:
набор грунта при движении под уклон 10—15%;
установка ковшей с зубьями и совковых ножей;
использование телескопического ковша, при врезании которого в грунт малый ковш находится в переднем положении, а после заполнения он перемещается в заднее положение, и грунт поступает в переднюю часть телескопического ковша;
применение скреперных поездов, заключающееся в том, что во время копания два скрепера соединяются вместе. Первый — набирает грунт, а второй — его толкает. Затем загруженный скрепер тянет вторую машину, также помогая ее загрузке. После заполнения второго скрепера машины разъединяются.
При навесных и самоходных скреперах с тяговой загрузкой для определения тягового усилия по сцеплению Р можно исходить из того, что в середине пути набора грунта
Р = КсЦФ(2ССкр + <2гР), (199)
где Кса — коэффициент сцепного веса (отношение сцепного веса к
полному); Qrp—вес грунта в ковше, Qrp=
«р
Y-
В конце пути копания
Р = 2КСЦ <р (GCKP + Qrp). (200)
Поскольку полностью реализуется возможная сила сцепления, расчетная скорость копания определяется по динамической характеристике скрепера при соответствующих ф и Qrp. Например, на рис. 149 (пунктирная линия) при ф = 0,2 и Qrp = 24,3 т получаем скорость копания v 10 км/ч.
Сокращения продолжительности цикла скрепера можно достичь следующими мероприятиями:
организовать движение скреперов таким образом, чтобы длина пути между местом набора и местом разгрузки грунта была наименьшей из всех возможных и чтобы при этом выбранная трасса имела минимальное число поворотов;
уделять особое внимание уплотнению и хорошему состоянию дорог, по которым движутся скреперы, чтобы увеличить их скорость.
177
Рис. 150. Графики зависимости производительности скреперов от дальности перемещения грунта и емкости ковша.
С целью предупреждения несчастных случаев запрещено людям находиться между скрепером и тягачом или толкачом; не допускается приближение скреперов к откосу выемки на расстояние менее 0,5 мик откосу свеженасыпанной насыпи — менее 1 м; при работе колонны скреперов расстояние между ними должно быть не меньше 20 м.
Для повышения технико-экономических показателей работы скреперов следует при увеличении дальности транспортирования грунта применять скреперы с большей емкостью ковша. Это положение иллюстрируют графики производительности скреперов, приведенные на рис. 150.
§ 31. ОДНОКОВШОВЫЕ ЭКСКАВАТОРЫ
Одноковшовые экскаваторы являются основными машинами при производстве земляных работ — ими выполняют до 70% всего объема работ.
По выпуску одноковшовых экскаваторов наша страна занимает первое место в мире.
Одноковшовый экскаватор состоит: из рабочего оборудования в виде ковша, стрелы и элементов, связывающих ковш со стрелой; механического и стрелового оборудования; рамы и ходового устройства.
178
Рис. 151. Рабочий цикл экскаватора, оборудованного прямой лопатой.
Все типы одноковшовых экскаваторов можно классифицировать по пяти признакам: 1) по виду рабочего оборудования; 2) по типу привода; 3) по числу двигателей; 4) по ходовому оборудованию; 5) по области применения.
Рабочее оборудование, предназначенное для производства земляных работ, состоит из прямой лопаты, обратной лопаты, драглайна и грейфера. Кроме того, применяется рабочее оборудование для строительных и вспомогательных работ: кран, копер.
Указанное рабочее оборудование имеет жесткое или гибкое соединение. У экскаватора с прямой и обратной лопатой соединение ковша со стрелой жесткое, у драглайна и грейфера — гибкое.
Когда экскаватор снабжен всеми или почти всеми видами рабочего оборудования, он называется универсальным. На строительных площадках обычно применяются универсальные экскаваторы, так как здесь выполняются разные работы при относительно небольшом их объеме.
На экскаваторах применяются приводы: двигатели внутреннего сгорания, электрические двигатели, а также дизель-электри-ческие установки. Установки могут быть с одним двигателем (одномоторные) и с несколькими двигателями (многомоторные). Привод бывает механический и гидравлический.
По ходовому оборудованию универсальные экскаваторы разделяются на гусеничные, пневмоколесные и на базе тракторов или автомобилей. Чаще всего первые выпускаются с емкостью основного ковша (прямой лопаты) 0,4—6 м3, вторые — 0,4—0,5 м3 и третьи — 0,1—0,3 м3.
В зависимости от преимущественного применения экскаваторы с емкостью основного ковша 0,1—0,3 м3 называют строительно-вспомогательными; с ковшом емкостью 0,4—2 м3 строительными, а с ковшом 2,5—6 м3 строительно-карьерными.
Кроме указанных экскаваторов применяются карьерные экскаваторы-лопаты с ковшом до 20 м3, предназначенные для разработки крепких пород с погрузкой в транспортные средства большой грузоподъемности (например, автосамосвалы грузоподъемностью 65— 200 т); вскрышные экскаваторы-лопаты с ковшом до 50 м3 для
179
Рис. 152. Ковш прямой лопаты.
погрузки в отвал; шагающие экскаваторы-драглайны с ковшом до 100 м3, передвигающиеся по слабым грунтам, которые часто встречаются при гидротехническом строительстве; туннельные и шахтные экскаваторы-лопаты с ковшом до 1,5 м3 с укороченными стрелой и рукоятью в связи с ограниченными размерами подземных выработок.
Экскаватор с прямой лопатой является основной и наиболее часто используемой землеройной машиной. Он применяется для разработки грунта с погрузкой на транспорт или, реже, для отсыпки в отвал, а также для погрузки сыпучих и кусковатых материалов, Во всех случаях разрабатываемый забой должен располагаться выше уровня стояния экскаватора.
Рабочий цикл экскаватора, оборудованного прямой лопатой (рис. 151), состоит из таких операций: опускания рукояти 5 с ковшом 4 к подошве забоя (положение А и Б); подъем ковша к голове стрелы 3 канатом 2 от подъемной лебедки 1 с одновременным выдвижением напорным механизмом 6 рукояти 5 для обеспечения копания (положение В); выведение ковша из забоя после его наполнения втягиванием рукояти с последующим поворотом платформы и выдвижением ковша для установки его над местом разгрузки (положение Г и Д); разгрузка ковша открыванием днища (положение Е); поворот платформы для возвращения ковша в исходное положение.
Ковш прямой лопаты (рис. 152) состоит из четырех стенок и откидного днища. Передняя стенка оснащается сменными зубьями 3, изготовленными из износоустойчивой марганцовистой стали. Днище запирается засовом 4. Этот засов при разгрузке выдвигается цепью 6 и канатом 9, соединенным обычно со специальным барабаном.
Когда в начале копания ковш опускается передней стенкой вниз, днище под действием собственного веса закрывается, а затем задвигается и засов. Угол резания изменяют закреплением тяг 7 в отверстиях 8, сделанных в рукояти 1. Задняя стенка снабжена про-189
8
Рис. 153. Рабочий цикл обратной лопаты.
ушинами для шарнирного крепления рычагов днища 5, тяг 7, рукояти 1 и обоймы блока 2 подъемного полиспаста.
Экскаватор с обратной лопатой (рис. 153) предназначен для разработки грунта ниже уровня стояния машины. Его применяют преимущественно для рытья котлованов и траншей при прокладке трубопроводов и устройстве фундаментов.
Рабочий цикл экскаватора осуществляется в следующем порядке: ковш 6 вместе с рукоятью 5 и стрелой 8 опускается к подошве забоя (положение Л) постепенным разматыванием с барабана лебедки
181
4
Рис. 155. Ковш экскаватора-драглайна.
подъемного каната 2, проходящего через блок 3, через блок 4 на конце рукоятки и образующего с этими блоками подъемный полиспаст; ковш заполняется грунтом посредством натяжения тягового каната 7 при ослабленном (или слегка приторможенном) подъемном полиспасте; подъемным полиспастом поднимается стрела вместе с рукоятью и ковшом при заторможенном тяговом канате (положение Г), после чего экскаватор поворачивается к месту разгрузки; для выгрузки грунта открывается днище 1 (положение Д') или запрокидывается ковш 6 (положение В) подтягиванием подъемного троса при опущенном тяговом канате; экскаватор поворачивают в обратном направлении и приводят ковш в исходное положение для нового цикла дальнейшим опусканием тягового каната (положение В).
Экскаватор-драглайн (рис. 154) применяют для разработки глубоких выемок в легких и средних грунтах с отсыпкой грунта в отвал или, реже, с погрузкой в транспорт, а также для устройства высоких насыпей и других работ, требующих большого радиуса действия. Его используют также для извлечения грунта из-под воды. При работе пользуются лебедками с тремя барабанами (два для подъема стрелы и ковша, третий для привода тягового каната — тяговый барабан).
Ковш 6 (рис. 155) представляет собой открытый спереди и сверху совок, подвешенный на цепях 7 к подъемному канату 4 и на цепях 1 — к тяговому канату 3. Цепи 7 закрепляются сзади центра тяжести ковша таким образом, что в свободном состоянии ковш поворачивается зубьями вниз под действием собственного веса. Тяговый канат 3 через блок 5, установленный на конце подъемного каната 4, связывается с разгрузочным канатом 2.
182
Рис. 156. Рабочий цикл экскаватора-грейфера.
Во избежание залипания ковша его днище иногда изготовляют из цепей, которые прогибаются при разгрузке, выталкивая грунт.
Рабочий цикл экскаватора-драглайна (рис. 154) состоит из следующих операций: подъема ковша 7 к голове стрелы при слегка натянутом тяговом канате (положение Л); забрасывания ковша в забой под действием собственного веса несколько дальше головы стрелы отпусканием тягового каната 3, а затем подъемного каната 4 (положение Б и В); копания грунта ковшом, движущимся по откосу в направлении к экскаватору посредством натяжения тягового каната 3 (положение Г), при этом ковш врезается под действием собственного веса и тягового усилия; подъема ковша подъемным канатом 4 с одновременным натяжением и притормаживанием тягового каната 3, при этом разгрузочный канат 2 поддерживает переднюю часть ковша в поднятом положении, предупреждая высыпание грунта; одновременно происходит поворот экскаватора к месту разгрузки (положение Д); разгрузки ковша, опрокидывающегося передней частью вниз под действием собственного веса при отпущенном тяговом канате (положение Е), и поворота платформы в исходное положение. Стрела экскаватора удерживается стреловой лебедкой под углом 25—45° к горизонту при помощи полиспаста.
Экскаватор-грейфер (рис. 156) применяется при разработке легких грунтов, копании котлованов, погрузке и разгрузке сыпучих и мелкокусковых материалов. Копание может производиться выше или ниже уровня установки экскаватора; возможна погрузка в отвал и на транспорт. Экскаватор-грейфер должен иметь лебедки с тремя барабанами: один — для каната подъема стрелы, другой — для подъемного и третий — для замыкающего канатов.
Ковш 8 состоит из двух или более челюстей, соединенных шарнирно на нижней головке 7. К челюстям шарнирно прикреплены жесткие тяги 5, которые также шарнирно соединяются на верхней головке 4. Ковш подвешен на подъемном канате 3, идущем к подъем-
183
Рис. 157. Схема работы двухканатного грейфера:
I — разгрузка; // — опускание на материал; 111 — захват материала; IV — подъем.
ному барабану 9. На тяговом барабане 1 находится замыкающий канат 2, огибающий блок 6 и прикрепленный к верхней головке 4.
Рабочий цикл экскаватора-грейфера осуществляется следующим образом: ковш 8 опускается в раскрытом положении на грунт ослаблением подъемного 3 и замыкающего 2 канатов (положение Л); ковш наполняется смыканием челюстей, которое осуществляется натяжением каната 2 (положение Б); ковш поднимается одновременной навивкой на барабан 9 подъемного 3 и барабан 1 замыкающего 2 канатов; платформа экскаватора поворачивается к месту разгрузки, и ковш разгружается при опускании замыкающего каната и притормаживании подъемного каната; челюсти раскрываются под действием собственного веса, а также и веса грунта (положение В); затем экскаватор поворачивается в первоначальное положение.
Схема работы грейфера показана на рис. 157.
§ 32. КОНСТРУКЦИИ ЭКСКАВАТОРОВ
Экскаваторы строительные имеют гусеничный (реже пневмо-колесный) ход, однодвигательный механический или гидравлический привод. На рис. 158 показан экскаватор на гусеничном ходу с м е-ханическим приводом и прямой лопатой.
Ковш прямой лопаты 11 открыт сверху и имеет открывающееся днище. Он укреплен на рукояти, состоящей из двух балок 10, снабженных снизу зубчатой кремальерной рейкой.
Балки 10 охватывают стрелу 9 и могут передвигаться в седловых подшипниках 7, находящихся на напорном валу. Ковш может совершать одновременно два движения — вращение в вертикальной плоскости вокруг оси напорного вала и поступательное движение в седловых подшипниках. Первое движение (подъем ковша) осуществляется с помощью подъемного каната 8 от подъемного барабана 4. Второе движение (напор ковша) осуществляется напорным механизмом, состоящим из напорного барабана 5, реверса с горизонтальным валом 18, фрикционных муфт и втулочно-роликовых цепей. Устройство напорного механизма рассмотрено ниже.
Пята 12 стрелы шарнирно прикреплена к поворотной платформе. Это позволяет в случае необходимости менять угол наклона стрелы 184
при помощи каната 6, идущего от барабана стреловой лебедки 25. Подъемная лебедка 4, стреловая лебедка 25 так же, как и напорный механизм, приводятся в действие от одного двигателя 1, установленного на поворотной платформе.
Угол наклона стрелы прямой лопаты изменяют во время прекращения ее работы, передвигая шестерню по шлицам вала червячной передачи 26.
На поворотной платформе, кроме двигателя 1 с пусковой аппаратурой 2, размещены редуктор 3, главная лебедка с подъемным 4 и напорным 5 барабанами и органы управления с пультом 13. Поворотная платформа может вращаться вокруг своей вертикальной оси, закрепленной в нижней раме 14.
На нижней раме имеется неподвижный зубчатый венец 20, по верхней опоре которого перекатываются ролики, облегчающие вращение поворотной платформы. Поворот платформы происходит при последовательном включении кулачковой муфты, соосной валу 27 механизма поворота, и одной из конусных муфт 16 конических шестерен 17 механизма реверса. Вал 27 вращает шестерню 24, которая обегает зубчатый венец 20. Вместе с поворотом платформы поворачивается и стрела с рукоятью и ковшом.
Нижняя рама 14 опирается на гусеничное ходовое оборудование. Привод гусениц осуществляется ходовым механизмом. Ходовой механизм включается последовательным включением одной из конусных муфт 16 и кулачковой муфты, соосной вертикальному валу 19 ходового механизма. Вал 19 приводят в движение конические шестерни 23, а с помощью кулачковых муфт 22 включаются звез, очки 21 горизонтального вала ходового механизма, соединенные цепью со звездочками, сидящими на валу ведущих колес 15 гусениц.
Напорный механизм применяется только при оборудовании прямой лопатой. Он предназначен для перемещения рукояти в седловом подшипнике, т. е. для осуществления напорного движения ковша и изменения вылета рукояти.
Напорные маханизмы по способу передачи на рукоять разделяются на зубчато-реечные и канатные, а по способу передачи усилий от силовой установки — на независимые, зависимые и комбинированные. При независимом напорном механизме и однодвигательном приводе подъем и напор ковша осуществляется независимо включающимися муфтами.
Зависимый напорный механизм имеет общую канатную передачу для напора и подъема ковша. Подъемное и напорное усилия ковша связаны между собой, что затрудняет работу. Поэтому этот механизм теперь не применяют.
В комбинированном напорном механизме используются конструктивные особенности обоих типов напорных механизмов.
Типовая схема независимого напора при однодвигательном приводе показана на рис. 159.
Один из барабанов, например барабан 5 главной лебедки, управляющий напорным механизмом, связывается цепной передачей 7
185
Рис. 158. Строительный экскаватор с прямой лопатой:
а — общий вид; б — кинематическая схема в перспективе; в — кинематическая схема в условных обозначениях.
"Z3
s
15
Рис. 159. Схема перемещения с зубчато-реечной передачей.
рукояти при независимом напоре
с промежуточным валом 6; звездочка передачи сидит на промежуточном валу 6 свободно и может связываться с валом при помощи муфты 8. Включая муфту 8 звездочки или ленточную муфту 4 барабана, можно дать вращение барабану 5 в том или ином направлении, т. е. реверсировать его.
Передаточное число в обеих передачах разное. Благодаря этому скорость вращения барабана различна в разных направлениях, что дает возможность получить более быстрое втягивание рукояти, чем ее выдвижение (напор). Для напора обычно используются мощная муфта 4 включения барабана, а для втягивания — цепная передача 7.
С барабана 5 при помощи второй цепной передачи 3 вращение передается промежуточному валу (оси) 2, находящемуся на оси вращения стрелы. Это нужно для того, чтобы при изменении угла наклона стрелы расстояние между звездочками цепной передачи не менялось. Со звездочек 11 промежуточного вала (оси) 2 третьей цепной передачей 12 вращение передается напорному валу 1, шестерни 13 которого взаимодействуют с кремальерой 14 рукояти и перемещают ее.
Барабан подъема ковша 9 включается ленточной муфтой 10, спускается же ковш под действием собственного веса на тормозе.
Подъемный канат закреплен на стреле в точке 15. На рис. 160, а показана та же схема независимого напора с действующими при копании силами.
188
11 а — независимого; б — комбинированного.
При комбинированном напорном механизме (рис. 160, б) второй конец подъемного каната закрепляется не на стреле, а на допрлнительном барабане Б, посаженном на напорном валу.
Из схемы сил на рис. 160,а видно, что напорное усилие SH при выдвижении рукояти должно преодолевать не только сопротивление внедрению зубьев ковша в грунт, но и составляю
щую натяжения подъем-
ного 1СЯНЙТЙ С няппян Рис- 161 Одноковшовый строительный гидрав-ного каната г>п, направ- лический экскаватОр.
ленную вдоль рукояти.
При комбинированном напоре (рис. 160, б), благодаря применению дополнительного барабана Б, часть натяжения подъемного каната помогает выдвинуть рукоять. Это способствует уменьшению расхода энергии на напор ковша. Освобождающаяся энергия позволяет повысить усилие на зубьях ковша экскаватора и применить ковш большей мощности.
Значительные затруднения представляет профилировка барабана Б, так как она может быть сделана только исходя из изменения составляющих <Sn и Sn во время подъема ковша; изменение же крепости грунта в забое и затупление зубьев ковша учесть практически весьма трудно.
Общий вид строительного экскаватора с гидравлическим приводом приведен на рис. 161, а его гидравлическая схема на рис. 162. Она состоит из масляного бака 1, регулируемого
189
сдвоенного насоса 2, распределителей 3 и 15, гидромоторов привода гусеничного хода 6 и 14, гидромотора поворота платформы 9, гидроцилиндра поворота рукояти 7, гидроцилиндров стрелы 10 и 11, гидроцилиндра поворота ковша 13.
Распределительные устройства образуют две группы гидромоторов: первая питается расходом от одного потока (гидромоторы 6 и 9, гидроцилиндр 7), а вторая от одного или двух потоков при нейтральном положении золотников распределителя 4. Использование двух силовых потоков одновременно позволяет увеличить скорость гидроцилиндров привода ковша и стрелы и сократить длительность цикла. Для увеличения скорости передвижения экскаватора и равномерной загрузки насосов гидромоторы гусеничного хода подключаются к разным силовым потокам.
На трубопроводах гидромоторов установлены блоки подпиточных клапанов 5, которые позволяют избежать разрыва сплошности потока жидкости (кавитации), например, при движении экскаватора под уклон. При недостаточном расходе жидкости или при прекращении подачи ее в напорную магистраль гидромотора через подпиточный клапан жидкость подсасывается из сливной магистрали.
В магистрали штоковых полостей гидроцилиндров рукояти и стрелы расположены предохранительные клапаны 8, которые исключают перегрузки в системе при нейтральном положении золотников управления. В магистрали поршневых полостей гидроцилиндров стрелы установлен дроссель с обратным клапаном 12, предназначенный для ограничения скорости опускания стрелы.
Измерение давления в напорных и сливной магистралях осуществляется манометрами. Фильтры 19 предназначены для очист-
190
zo
20
/4
6
г
Рис. 163. Одноковшовые экскаваторы строительновспомогательные с гидравлическим приводом рабочего оборудования:
а — общий вид экскаватора ва тракторе, оборудоваио-го обратной лопатой: б — схема экскаватора, оборудованного прямой лопатой: в — схема экскаватора, оборудованного краном: г — общий вид экскаватора на шасси автомобиля.
ки рабочей жидкости от механических примесей, а перепускной клапан 18 — для предохранения сливной магистрали от разрушения и избыточного давления при загрязнении фильтроэлементов. Для контроля температуры применен термодатчик 20. Для подогрева жидкости в холодное время и охлаждения ее в летний период установлен теплообменник 17 с краном 16.
Строительно-вспомогательные экскаваторы с гидравлическим приводом рабочего оборудования конструируются на базе колесного трактора или на шасси грузового автомобиля. Эти машины предназначены для небольших объемов земляных работ.
Экскаватор на базе трактора (рис. 163, а) может .работать с прямой или обратной лопатой как кран, а также как бульдозер.
Ковш 1 крепится шарнирно к рукоятям 2. Ковш обратной лопаты поворачивается штоком гидравлического цилиндра двойного действия 20. В процессе копания грунта рукоять поворачивается при помощи двух гидравлических цилиндров 3 относительно точки своего шарнирного крепления к стреле 4. Цилиндр 19 служит для подъема и опускания стрелы.
191
Рабочее оборудование экскаватора крепится к колонке 5, которая может поворачиваться вместе с этим оборудованием на 180° в плане во время работы и дополнительно на 80° для установки рабочего оборудования в транспортное положение (ковшом вперед). Колонка поворачивается при помощи двух гидравлических цилиндров 9, штоки которых связаны цепью.
Цепь охватывает звездочку, расположенную в нижней части колонки 5. Устойчивость машины в
Рис. 164. Схема экскаватора с безнапорной прямой лопатой.:
1 — стреловой барабан лебедки; 2 — подъемный барабан лебедки; 3 — тяга передней стойки; 4 — передняя стойка; 5 — блок на передней стойке; 6 — канат подвески стрелы; 7 — головной блок стрелы; 8— стрела; 9 — подъемный канат; 10— ковш; 11 — рукоять; 12 — шарнир соединения рукояти со стрелой; 13 — пятовой шарнир стрелы.
процессе разработки грунта обеспечивается опорными башмаками 7, которые подымаются и опускаются при помощи цилиндров 6.
Рама 8 экскаватора подвешивается к полуосям заднего моста трактора и раме двигателя 14. К раме экскаватора шарнирно крепятся две толкающие балки 11 неповоротного бульдозера с отвалом 12. Отвал поднимается и опускается цилиндром 13.
Гидропривод экскаватора состоит из масляного бака 15, насосной группы 10, распределителя, управляемого рычагами 17, маслопровода 18 и гидравлических цилиндров 3, 9, 19 и 20. Насосная группа приводится в действие от двигателя трактора.
Сидение водителя 16 сделано поворотным. Этим обеспечивается удобство управления как во время работы, так и при транспорти
ровании.
Для переоборудования экскаватора с обратной лопатой на прямую (рис. 163, б) ковш снимают с рукояти и поворачивают на 180°. Штоки гидроцилиндров 3 прикрепляют шарнирно к нижней проушине рукояти. В этом случае цилиндр 3 служит для открывания и закрывания днища ковша.
Для перехода экскаватора, оборудованного обратной лопатой, к работе с краном ковш заменяется крюком 22 (рис. 163, в). Груз поднимается и опускается при помощи стрелы 4 и поворотом рукояти 2. Цилиндр ковша обратной лопаты при этом не используется, но для сокращения монтажных работ его оставляют на рукояти. Шток цилиндра, вдвинутый до отказа, закрепляется на специальной проушине 21 (рис. 163, а).
Конструкция экскаватора с гидравлическим приводом на базе автомобиля (рис. 163, г) аналогична конструкции экскаватора, установленного на тракторе. Она снабжена теми же видами оборудования, но не имеет бульдозера.
На строительно-вспомогательных экскаваторах с механическим
192
Рис. 165. Строительно-карьерный экскаватор:
а — общий вид; б — кинематическая схема; 1 — кузов; 2 — двуногая стойка; 3 — механизм открывания днища ковша; 4 — стрелоподъемный канат; 5— головные блоки; 6 — подъемный канат; 7 — ковш; 8 — стрела; 9 — рукоять; 10 — напорный механизм; 11 — двигатель ходового механизма; 12 — тормоз ходового механизма; 13 — редуктор ходового механизма; 14 — вводная коробка кабеля; 15 —гусеничная тележка; 15 — нижняя рама; 17 — подводка кабеля; 18 — подъемный двигатель; 19 — цепь привода стрелоподъемной лебедки; 20 — подъемный барабан; 21 — канаты подъема ковша; 22 — кремальеры рукояти; 23 — напорные шестерни; 24 — напорный двигатель; 25 — вертикальный поворотный двигатель; 26 — обегающая шестерня; 27 — неподвижный зубчатой венец; 28 — стрелоподъемная лебедка; 29 — муфты; 30 — ведущее колесо.
7 642
193
приводом прямая лопата применяется без напорного механизма (рис. 164). Рукоять шарнирно соединяется со стрелой. Такие экскаваторы применяются на гусеничном и на пневмоколесном ходу. При черпании изменяется угол наклона как рукояти с ковшом, так и стрелы.
Строительно-карьерные экскаваторы (рис. 165), по сравнению с рассмотренными выше, работают в более тяжелых условиях. Поэтому они имеют, кроме прочной конструкции, многомоторный привод, т. е. привод с отдельными двигателями для подъема ковша, его напора, поворота машины и ее передвижения; применяется также и малоопорный гусеничный ход.
При многоопорном гусеничном ходе между соседними опорными катками размещается меньше двух звеньев гусеницы. Поэтому звенья не прогибаются между катками вверх. Такая гусеница равномерно распределяет давление на слабый грунт и применяется у большинства строительных экскаваторов (см. рис. 158, а).
При малоопорном гусеничном ходе звенья гусеницы могут прогибаться вверх. Хотя такая гусеница менее равномерно распределяет давление на грунт, она лучше переносит перегрузки, возникающие при движении экскаватора по каменистому грунту.
Применение многомоторного привода значительно упрощает кинематическую схему (рис. 165,6) по сравнению с одномоторным, при котором требуются муфты, передаточные цепи, промежуточные валы и т. п., что вызывает необходимость частой наладки и ремонта. Подъемный двигатель 18 через муфту и зубчатые колеса приводит в движение подъемный барабан 20, а также используется для привода (через цепную передачу и червячную пару) стрелоподъемной лебедки 28. Отключение лебедки от двигателя осуществляется снятием цепи 19.
Напорный механизм экскаватора представляет собой самостоятельный агрегат, установленный на стреле рядом с напорным валом. Напорный двигатель 24 через зубчатые колеса сообщает поступательное движение кремальерам рукояти 22.
Поворотный механизм приводится в движение вертикальными двигателями 25. Двигатели через зубчатые колеса вращают шестерни 26, которые, обкатываясь по неподвижному зубчатому венцу 27, вращают поворотную платформу экскаватора.
Ходовой двигатель 11 через зубчатые колеса, поперечный вал и далее через муфты и второй комплекс зубчатых колес вращает ведущие колеса 30 гусеницы, чем приводится в действие ходовой механизм экскаватора.
§ 33. ЭКСПЛУАТАЦИЯ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ
Производительность экскаватора. Технической производительностью экскаватора является его призводительность при непрерывной работе, высококвалифицированном управлении и при конкретных условиях разработки грунта.
Эти условия характеризуются наполнением ковша в зависимос-
194
Рис. 166. Схемы расположения прямой лопаты и транспорта:
а — при погрузке в транспорт на уровне лопаты (угол поворота 70—90°); б — при погрузке в транспорт выше уровня лопаты (угол поворота 80—90°); в — при погрузке в тупиковом забое (угол поворота 80—100°).
ти от разрабатываемого грунта, углом поворота экскаватора при разгрузке, существенно влияющим на длительность рабочего цикла машины, а также особенностями разгрузки ковша. Угол поворота при разгрузке р зависит от схемы расположения экскаватора и транспорта. Например, при расположении транспорта на уровне стояния прямой лопаты этот угол обычно составляет 70—90° (рис. 166, а), в случае расположения транспорта выше уровня стояния лопаты 80—90° (рис. 166, б), при тупиковом забое с применением автомобильного транспорта 80—100° (рис. 166, в), а при тупиковом забое и рельсовом транспорте — 120—140°.
Техническая производительность одноковшовых экскаваторов, м3/ч, вычисляется по формуле
_ 3600дйиап _ 36ОО9Л„
А1техн — Т~ь — I >
1Ц«Р «ц
где q — емкость ковша, м3; kmn — коэффициент наполнения ковша грунтом в разрыхленном состоянии; /гр — коэффициент разрыхления грунта в ковше; Кн — коэффициент наполнения ковша грунтом в плотном теле; /ц — продолжительность рабочего цикла, с.
Величину коэффициента наполнения в плотном теле Ки можно легко определить в условиях строительства. Для этого объем вынутого грунта, замеренного в массиве, делят на число черпаний экскаватора, сделанных при выемке этого объема грунта, и на емкость ковша экскаватора. Например, в легких грунтах при прямой лопате Кп = 0,9, а при драглайне — 0,8; соответственно в тяжелых — 0,7 и 0,6.
Рабочий процесс экскавации грунта складывается из ряда операций: копания, вывода машины из грунта, подачи его на разгрузку, разгрузки, поворота в забой и направления ковша в грунт.
При достаточной квалификации машиниста рычаги переключаются до конца следующей операции. При работе на средних вылете и высоте разгрузки, если угол поворота прямой лопаты не меньше
7*
195
Р = 45 ч- 50°, опытный машинист подает ковш на разгрузку во время поворота. Вывод ковша из грунта он также совмещает с окончанием набора грунта. Таким образом, при правильно запроектированной схеме и месте подачи транспорта продолжительность рабочего цикла слагается из времени копания 4оп, поворота на разгрузку /Пов, разгрузки /раз и поворота в забой /п,3.
Опыт показывает, что необходимость выбирать место в забое для черпания замедляет обратный поворот /п.3, на который теоретически должно быть затрачено меньше времени, чем на поворот с груженым ковшом. Поэтому /п.з может быть принято равным /пов.
Следовательно, при совмещении операций длительность рабочего цикла экскаватора, с,
/ц S3 ^К0П + 2/пов + /раз- (202)
На продолжительность разгрузки влияют как емкость ковша и свойства грунта, так и соотношение емкостей транспортных средств и ковша. Как показывает практика, это соотношение не следует принимать менее 3—4. При меньшем соотношении удлиняется время разгрузки, так как ковш надо более точно устанавливать над кузовом, чтобы часть грунта не высыпалась мимо него.
Например, при работе прямой лопаты в транспорт емкостью не менее 3—4 емкостей ковша с поворотом на 90° в средних грунтах, если q — 0,5 м3, то /ц = 13 с, если q — 2 м3, то /ц = 20 с, в тяжелых грунтах ta соответственно равен 15 и 22 с.
При работе драглайна в отвал с поворотом на 135° соответственно с теми же емкостями ковша в средних грунтах рабочий цикл равен 19 и 22, а в тяжелых 22 и 25 с.
На основании технической производительности экскаватора определяется его сменная эксплуатационная производительность, м3,
Псм = Птехя/Стр/СперИр, (203)
где Ктр — коэффициент, учитывающий перерывы на смену транспортных средств у экскаватора; Кпер — коэффициент, учитывающий время на передвижку экскаватора; пр — число часов работы экскаватора в смену, исключая время на пересмену, смазку машины, крепежный ремонт, очистку ковша, подготовку забоя, а при разработке скальных пород — также и взрывы*.
В свою очередь,
1Z _ Znorp _ Ф/Птехн (9Г\Л\
Л тр — ~t ZuT — n/п дГТ ’
Чтогр ч *обм '<'11техн "Г *обм
где /ПОгр — время погрузки транспортных средств емкостью Q (автосамосвала, тракторного поезда и т. п.), ч; /обм — время на их
* Нетрудно видеть, что = псм, т. е. числу часов чистой работы
экскаватора в смену (см. § 7).
196
обмен у экскаватора, ч;
Апер —
!эл
^эл "Ь 4ер
где V—объем элемента забоя, разрабатываемого с одной стоянки экскаватора, м3; /эл — продолжительность разработки этого элемента, ч; 4еР — время передвижения экс
Рис. 167. Кривые зависимости себестоимости от сменной производительности экскаватора средней мощности при работе с ковшами:
/ — нормальной емкости; 2 — увеличенной емкости.
каватора, ч.
Новаторы-машинисты одноковшовых экскаваторов достигли очень высокой производительности на отечественных экскаваторах *.
Методы работы новаторов основываются на следующих условиях:
1) освоении машины; уменьшении продолжительности рабочего цикла благодаря максимальному совмещению операций; увеличении наполнения ковша за счет работы в легких и среднеплотных породах коротким ходом ковша, а в плотных — подбоем с обрушением породы; обеспечении сохранности машины (тщательный уход, своевременный профилактический ремонт и т. п.);
2) правильном выборе транспортных средств, соответствующих емкости ковша экскаватора;
3) хорошей организацией транспорта — непрерывной подаче поездов и автомобилей;
4) правильном установлении размеров забоя и положения транспортных средств с тем, чтобы средний угол поворота экскаватора был наименьшим, а производительность его — наибольшей;
5) отличной подготовке забоя — тщательно подобранной подошве уступа, а при скальных породах — и хорошо раздробленном
материале;
6) применении в средних и легких грунтах сменных ковшей увеличенной емкости.
На рис. 167 приведены кривые, показывающие, как снижается себестоимость разработки С 1 м3 глинистого грунта одним и тем же экскаватором при увеличении его сменной производительности Псн и при работе с ковшом увеличенной емкости.
Работа экскаватора в забое. Нормальным забоем для прямой лопаты является забой с боковой погрузкой. Тупиковые забои применяются только в виде исключения.
В забоях, превышающих высоту черпания экскаватора, нависающие козырьки должны быть обрушены взрывами или вручную. В зимнее время работа экскаватора разрешается только при рыхлении промерзшего грунта или при его оттаивании.
* Подробнее см.: Фиделев А. С. Повышение производительности строительных машин. Киев, Буд1вельник, 1974.
197
Разработка скальных пород без рыхления их взрывными работами не разрешается. Перед взрывом экскаватор должен отводиться в безопасное время по указанию лица, ведущего взрывные работы.
Экскаваторы-драглайны должны быть расположены на уступе вне призмы обрушения. Высота уступа не должна превышать глубину черпания драглайна.
Машинист экскаватора должен следить за состоянием забоя и, в случае угрозы обрушения уступа, отвести экскаватор в безопасное место.
Воспрещается в радиусе действия экскаватора располагать какое-либо оборудование и находиться людям. Не разрешается присутствие на экскаваторе посторонних лиц. При спаренной работе экскаваторов расстояние между ними должно быть не менее удвоенной суммы их радиусов разгрузки.
Каждый экскаватор должен иметь исправный звуковой сигнал. Таблица с обозначением сигналов вывешивается на видном месте и в кабине экскаватора. Начало и конец погрузки, передвижка экскаваторов и автосамосвалов, прицепов и т. п. должны сопровождаться сигналами. Всякий непонятный или неправильно поданный сигнал должен восприниматься как сигнал «Стоп».
Ковш должен разгружаться с минимальной высоты (не более 0,4 м) во избежание повреждения транспортных средств. При погрузке в автотранспорт ковш экскаватора не должен проходить над кабиной шофера.
Передвигать экскаватор нужно по подготовленной трассе. По слабым грунтам он должен двигаться по специальным щитам, уменьшающим давление на грунт. На практике успешно применяются щиты, изготовленные из спаренных швеллеров. Движение экскаватора под проводами высокого напряжения разрешается, если между высшей точкой экскаватора и проводами будет не менее 3 м при высоком напряжении и не менее 1,5 м при низком. Во время движения стрела экскаватора должна стоять по направлению его движения, а ковш находиться на высоте не более 1 м от земли. При движении электрических экскаваторов заземление корпуса экскаватора не должно нарушаться. Выводить экскаватор из забоя для ремонта или переводить его в другой забой нужно в присутствии производителя работ или строительного мастера.
Уход за экскаватором. Особое внимание нужно обращать на своевременную замену изношенных зубьев ковша, так как их износ и затупление значительно увеличивают сопротивление грунтов резанию и расход энергии на него.
Все механизмы экскаватора необходимо своевременно смазывать: без надлежащей смазки механизмы экскаватора быстро изнашиваются и выходят из строя. Смазку производят в соответствии с заводскими инструкциями, учитывая климатические условия.
Экскаваторы в северном исполнении, как и другие строительные машины, сохраняют работоспособность при температуре до —60° С. Выпускаются они на базе серийных машин и отличаются от них
198
применением хладостойких низколегированных сталей, конструктивным упрочнением ответственных деталей и узлов (ходовой части, рабочего оборудования и др.), устройствами для поддержания рабочей температуры этих узлов и для облегчения пуска двигателей внутреннего сгорания, утепленной кабиной машиниста.
§ 34. МНОГОКОВШОВЫЕ ЭКСКАВАТОРЫ
Многоковшовый экскаватор отличается от одноковшового применением нескольких ковшей вместо одного; одновременным копанием грунта, его перемещением и отгрузкой на транспорт или в отвал; движением во время экскавации грунта не только ковшей или скребков, прикрепленных к цепи или колесу, но и самой машины.
При той же мощности двигателя и скорости движения ковша удельное усилие резания, развиваемое многоковшовым экскаватором, значительно ниже такого же усилия одноковшового. Это объясняется тем, что общая длина режущей части находящихся одновременно в работе ковшей многоковшового экскаватора значительно превышает длину режущей части одноковшового экскаватора. Многоковшовый экскаватор является машиной непрерывного действия, и при той же мощности двигателя производительность его выше производительности одноковшового. Поэтому толщина стружки, снимаемой многоковшовыми экскаваторами, невелика. Они могут работать только в нетяжелых однородных грунтах без каменистых включений и менее универсальны, чем одноковшовые экскаваторы. Этим значительно сужается область применения многоковшовых экскаваторов в строительстве.
На строительных площадках применяются многоковшовые экскаваторы, которые при движении вырывают позади себя траншею для кабелей и трубопроводов. Эти экскаваторы называются траншейными.
Цепные экскаваторы с наклонной или, реже, вертикальной рамой наиболее распространены среди траншейных. Весьма перспективными при значительном объеме работ являются роторные экскаваторы.
Наклонная ковшовая рама 16 цепного экскаватора (рис. 168) опирается роликами 11 на верхние полки изогнутых направляющих 9 верхней рамы 10, которые установлены на нижней раме 19. Передний конец ковшовой рамы 16 через два кронштейна вала 7 ковшовой цепи и ролики опирается на нижние полки направляющих верхней рамы. Две ковшовые цепи с ковшами огибают поддерживающие ролики 14, натяжные колеса 17 и ведущие звездочки 6, приводимые во вращение передачей 8 через предохранительную фрикционную муфту и вал 7.
Подъем и опускание ковшовой рамы осуществляется лебедкой 20 через блоки 5 и 3 и полиспаст 4.
199
4 5 6.
7
Работа экскаватора с наклонной рамой 16 начинается с опускания ее на поверхность земли посредством постепенного растормаживания барабана лебедки 20. Когда рама 16 достигает поверхности земли, включается ковшовая цепь 15. Цепь начинает перемещать ковши 12, зачерпывающие при этом грунт снизу вверх. Ковши снабжены зубьями 13. Разгружаются они опрокидыванием над лотком при огибании ведущих звездочек. С лотка грунт ссыпается на конвейер 18.
Заглубляясь под действием собственного веса в грунт и разрабатывая его ковшами, ковшовая рама опускается до необходимой
200
Рис. 169. Запасовка канатов подъема ковшовой рамы экскаватора:
/ — барабан лебедки; 2 — полиспаст, 3 — блоки.
глубины, которая фиксируется торможением барабана 20. В процессе дальнейшей разработки траншеи экскаватор постепенно подвигается вперед, срезая стружку грунта. Рабочая скорость машины может изменяться в довольно широких пределах.
Рабочие органы и гусеничный ход приводятся в действие через коробку передач 2 от двигателя 1, который установлен на переднем конце нижней рамы 19.
На рис. 169 приведена схема за-пасовки канатов подъема наклонной ковшовой рамы экскаватора.
Роторный многоковшовый экскаватор (рис. 170) имеет рабочее колесо (ротор) 1, состоящее из двух дисков, на которых крепятся ковши 3.
Ширина прямоугольной траншеи равна ширине ковшей. По дну траншеи, которое зачищается башмаком 8, движется опорное колесо 7. Ротор установлен на четырех роликах 2, находящихся на основной раме 12. Вал ротора 11 приводится в движение от электродвигателя 9 через упругую муфту 10 и редуктор. К торцам дисков ротора прикреплены зубчатые венцы 6 ротора. Эти венцы сцеплены с шестернями приводного вала ротора. Электродвигатель установлен на внутренней раме 5, связанной с основной рамой 12. При движении экскаватора с одновременным вращением ротора ковши 3 срезают грунт. Срезанный грунт при верхнем положении ковшей высыпается на конвейер 14, отбрасывающий его в сторону от траншеи. Конвейер приводится в движение двумя электродвигателями 16 через редукторы 15. Подъем и опускание основной рамы 12 с ротором осуществляется гидравлическими цилиндрами 13\ угол наклона конвейера 14 изменяется гидравлическими цилиндрами 4. Показанный на рис. 170 роторный экскаватор прицепляют к трактору с дизель-электрическим приводом.
Роторные экскаваторы более долговечны, чем цепные, так как в них отсутствует быстроизнашивающаяся ковшовая цепь. Они допускают большую скорость движения ковшей, в то время как в цепях при большой скорости появляются вредные динамические нагрузки. Роторные экскаваторы более производительны, но их масса при той же глубине траншеи больше, чем у цепных экскаваторов, так как диаметры их роторов должны быть большими.
Техническая производительность многоковшового экскаватора, м3/ч,
60<7л/г,,,„
Птех» = = °’06^н^ (206)
где q — емкость ковша, л; п — число разгрузок ковшей в минуту;
201
Рис. 170. Роторный траншейный экскаватор большой мощности (емкость ковшей 250 л) с днзель-электрнческим приводом.
Рис. 171. Схема к расчету производительности траншейного экскаватора.
/гнап — коэффициент наполнения ковша грунтом в разрыхленном состоянии; kp — коэффициент разрыхления грунта; К.а — коэффициент наполнения ковша грунтом по плотному телу (для песка, супеси — 1, суглинка — 0,75, глины — 0,65).
Число черпаний (разгрузок) в минуту при скорости черпания и, м/с, и шаге ковшей а, м, определяется по формуле
Так как ковш экскаватора должен наполниться, пройдя всю длину откоса, техническую производительнось, м3/ч, можно определить и таким образом (рис. 171):
Птехн = 3600£>/гсл (208)
где b и h — ширина и глубина траншеи, м; v — скорость движения траншейного экскаватора, м/с.
Из формулы (207) следует, что при уменьшении глубины траншеи h, чтобы не уменьшилась производительность экскаватора Птехн, надо увеличивать скорость его движения и, что возможно благодаря
202
Рис. 172. Схема работы траншейного экскаватора по заданному уклону.
большому диапазону скоростей движения у экскаваторов этого типа.
Автоматическое устройство, которое обеспечивает работу траншейных экскаваторов по заданному уклону I, показано на рис. 172. В направляющем пункте 1, выполняющем роль задатчика, генерируется и моделируется инфракрасный световой луч, который поступает на приемный пункт 2. Приемный пункт на рабочем органе машины имеет фотоэлемент, дающий при изменении направления луча соответствующий сигнал на исполнительный механизм рабочего органа. Вместо луча лазера применяют также копирный трос, протянутый параллельно оси транш;и, по которому движется щуп датчика.
§ 35. ОБОРУДОВАНИЕ ДЛЯ ГИДРОМЕХАНИЗАЦИИ
Гидромеханизация в строительстве — это способ производства земляных работ, при котором для разработки грунта, его транспортирования и укладке в тело сооружения или отвал используется водяной поток.
Гидромеханизация основана на свойстве быстродвижущейся воды размывать грунт и нести его во взвешенном состоянии к месту укладки, где вследствие уменьшения скорости вода теряет несущую способность и частицы грунта оседают *.
Способом гидромеханизации в промышленном и гражданском строительстве обычно производят намыв территорий и насыпей.
При гидромеханизации применяются следующие способы разработки грунтов:
гидромониторный, при котором грунт размывается струей воды, выбрасываемой под большим напором из насадки снаряда — гидромонитора, к которому вода подводится по трубам от насосной станции;
* Использование воды для разработки грунтов, транспортирования и укладки их в отвал известно очень давно. До начала XIX в. применялся естественный безнапорный водяной поток, а напорные гидравлические работы были организованы впервые в России в 1830 г. на Урале при разработке золотоносных россыпей. Теоретически напорные гидравлические работы были обоснованы в 1836 г. инженером-строителем Н. П. Мельниковым в труде «Курс практической гидравлики». Широкое развитие гидромеханизация получила после Октябрьской революции. В настоящее время СССР по применению гидромеханизации, особенно на гидротехнических строительствах, занимает первое место в мире.
203
Рис. 173. Схема гидромониторной разработки выемки под дорогу с укладкой грунта в насыпь при подходе к мосту.
землесосный (подводный) — пловучим землесосным снарядом (земснарядом), засасывающим разрыхленный грунт и вместе с водой направляющим его на берег;
механогидравлический, когда грунт разрушается экскаваторами, бульдозерами и другими машинами и, смешиваясь затем с водой, направляется к месту укладки или обогащения.
На рис. 173 показан гидромониторный способ разработки. Насосная станция 7 перекачивает воду по трубам 6 к гидромонитору 9. Образовавшаяся в результате размыва грунта пульпа (смесь воды с грунтом) стекает в расположенную позади гидромонитора яму, так называемый зумпф, откуда засасывается стационарной землесосной установкой 8 и направляется по магистральному пульповоду 5 к месту укладки грунта в насыпь на подходе к мосту. На насыпи пульпа выпускается из ответвлений разводящего пульповода 4, находящегося на эстакаде; частицы грунта выпадают, а очищенная вода через водосбросный колодец 1 и трубопровод 2 поступает в водоотводную канаву 3.
Основными достоинствами гидромеханизации земляных работ, стимулирующими ее широкое внедрение в строительство, являются:
высокая производительность снарядов, позволяющая выполнять крупные объемы работ в чрезвычайно короткие сроки;
малое количество рабочих и высокая производительность труда; невысокая первоначальная стоимость оборудования;
204
Рис. 174. Гидромонитор.
возможность идеальной сортировки грунта по крупности его частиц, достигаемая при намыве земляных плотин или иных земляных сооружений, требующих водонепроницаемости.
К недостаткам гидромеханизации следует отнести значительный расход энергии, так как с грунтом необходимо переместить в несколько раз большее количество воды; зависимость от характера разрабатываемого грунта; снижение производительности при работе в зимних условиях.
Эффективность применения гидромеханизации,, обеспечивающая высокие технико-экономические показатели, зависит от пригодности грунтов для производства работ этим способом, обеспеченности дешевой электроэнергией и от получения у места производства работ необходимого количества воды. При этих условиях стоимость разработки грунта при гидромеханизации в 1,5—3 раза меньше, чем при экскаваторных работах.
Основным механическим оборудованием гидромеханизации являются: гидромониторы, образующие плотную и компактную струю воды, вылетающую с большой скоростью из насадки; центробежные насосы, подающие напорную воду к гидромониторам; грунтовые насосы и гидроэлеваторы для перемещения пульпы и земснаряды, разрыхляющие грунт под водой, засасывающие и транспортирующие пульпу.
Гидромонитор предназначен для получения плотной скоростной струи и для управления этой струей при размыве грунта.
Основными частями гидромонитора (рис. 174) являются: нижнее колено 1, принимающее воду под давлением от насосной станции, верхнее колено 3 и ствол 8 с насадкой 7, из которой вылетает струя
205
воды, направляемая в забой для размыва грунта. Для выпрямления струи в стволе имеются продольные ребра 6.
Нижнее колено 7 соединяется с верхним коленом «3 при помощи разъемной обоймы 13, прикрепленной к фланцу верхнего колена болтами 2, и опорного фланца, навинченного на резьбу, имеющуюся в верхней части колена 1. В пространстве между фланцами и нижним выступом обоймы помещается упорный шарикоподшипник 14. Это обеспечивает возможность вращения верхнего колеса со стволом и насадкой вокруг нижнего колена на 360°.
Для уплотнения применяется манжет 11, проложенный между обоймой 13 и фланцем верхнего колена. Этот манжет прижимается к фланцу нижнего колена давлением воды.
Для соединения со стволом 8 на конце верхнего колена 3 имеется прикрепленный винтами шар 10, входящий в оголовок 9 ствола. Оголовок имеет шипы, при помощи которых ствол шарнирно соединяется с верхним коленом, несущим на себе соединительные кронштейны. Уплотнение шарнира достигается прижатой к шару сальниковой набивкой 4 с кольцом 5. Такая конструкция позволяет стволу с насадкой поворачиваться в вертикальной плоскости на угол до 60°.
Гидромонитор установлен на салазках 12, облегчающих его передвижение по подошве забоя.
Уравновешивание ствола с насадкой достигается противовесом при помощи деревянного рычага-водила. Этот рычаг прикреплен шарнирно на вертикальном кронштейне, который, в свою очередь, прикреплен к верхнему колену и соединен с хомутиком на стволе.
Количество воды, поступающее из насадки, м3/ч, по формулам гидравлики
Q = 3600рсоин = ЗбООрсо "К2gh, (209)
где со — площадь сечения насадки, м2; ин — скорость вылета воды из насадки, м/с; р — коэффицент расхода, приблизительно равный 0,94; h— напор воды у насадки монитора, м; g — ускорение силы тяжести, равное 9,81 м/с2.
При определении необходимой водопроизводительности гидромонитора руководствуются нормативными данными, на основании которых, в зависимости от категории грунта и высоты забоя, устанавливают необходимый напор у насадки гидромонитора йи удельный расход воды q, т. е. количество воды, м3, на 1 м3 размываемого грунта в плотном теле. Например, при высоте забоя 10—15 м для рыхлого суглинка h = 60 м, q = 6,5; для плотного суглинка h = = 90 м, q = 8, 5; для жирной глины h = 160 м, q = 19.
Зная количество грунта, м3, которое надо размыть за час, производительность по грунту П и удельный расход воды q, легко определить необходимую водопроизводительность гидромонитора, м3/ч,
Q = (210)
«В
206
Рис. 175. Грунтовый насос.
где kB — коэффициент использования рабочего времени гидромонитора.
Так как напор у насадки также известен, то на основании формул (209) и (210) после необходимых преобразований получим сечение насадки, м2,
3600£вр \2gh' ' ’
По этому сечению и подбирают диаметр соответствующей насадки (имеются таблицы, облегчающие этот подбор).
Для эффективной работы гидромонитора особое значение приобретает компактность струи. По мере удаления от насадки сопротивление воздуха постепенно расслаивает целостность струи воды и лишает ее компактности. Поэтому следует стремиться к максимальному приближению монитора к забою. Однако такое приближение создает опасность для стоящего у рычага-водила мониторщика при обрушении забоя. Правила техники безопасности требуют, чтобы расстояние от гидромонитора до забоя было не меньше его высоты.
Для того чтобы гидромонитор мог близко стоять у забоя, применяют гидромониторы ближнего боя с дистанционным управлением.
Грунтовый насос представляет собой центробежный насос, предназначенный для перекачивания по трубам пульпы, которая содержит абразивные и крупные фракции грунта.
Грунтовые насосы изготовляются только с одним колесом, т. е. одноступенчатыми, иначе крупные фракции пульпы затрудняли бы работу землесоса при переходе ее из одного рабочего колеса в другое; кроме того, чтобы обеспечить прохождение крупных фракций, применяется минимальное количество лопаток (обычно 2—3), а проходное сечение рабочего колеса делается почти равным всасывающему патрубку.
Рабочим органом грунтового насоса (рис. 175) является колесо 3, закрепленное на валу 10, вращающемся в кольцевых подшипниках 9 и имеющем упорный шарикоподшипник 11. Рабочее колесо 3 крепится на валу 10 с помощью упорного кольца 8, состоящего из двух половин и соединяемого с колесом 3 болтами. Корпус 4 снабжен крышками 5 с укрепленными на них для предохранения от износа броневыми дисками 6.
207
Втулка рабочего колеса 3 снабжена сальником 7, к которому подается чистая вода под давлением с целью отжима частиц грунта, просачивающихся в зазоры между колесом и крышкой корпуса. Уплотнительное кольцо 2 препятствует обратному стоку жидкости из напорного отделения корпуса в вакуумное; это кольцо вместе с всасывающим патрубком 1 крепится к крышке корпуса и предохраняет ее входное отверстие от износа.
Для осмотра корпуса и для контроля величины зазора между колесами 3 и броневым диском 6 имеется специальный люк.
Грунтовый насос крепится к основанию болтами и присоединяется к электродвигателю эластичной муфтой 12.
Производительность грунтового насоса по воде QB указывается в заводских характеристиках; производительность по грунту, м3/ч, определяется по формуле
<212>
где т — пористость грунта.
Мощность грунтового насоса, кВт,
<213>
где уп — удельная плотность пульпы, кг/м3; Н — высота подъема пульпы м; т] — КПД грунтового насоса.
При определении величины удельной плотности пульпы уп, входящей в формулу (213), учитывается, что масса грунта и воды должна быть равной массе пульпы
^вТв + ^грУгр = [Кв + УгР(1—/п)]уп, (214)
где Ув и Угр — объемы воды и грунта; уа и угр — их плотности.
Разделив правую и левую части равенства (214) на Угр и учиты-vB вая, что — q, получим
*гр
<7Тв + Yrp = (q + 1 — т) уп. (215)
Приняв ув = 1 кг/м3, определим плотность пульпы, кг/м3,
При гидромониторной разработке применяются забойные передвижные землесосные установки, которые монтируются на полозьях из труб, на металлических листах и на плашкоуте (плоскодонном судне). Грунтовые насосы, установленные на полозьях или на металлических листах, обычно передвигаются при помощи тракторов. Применяются также грунтовые насосы на шагающем ходу с механическим и гидравлическим приводом.
Гидроэлеватор (рис. 176), как и грунтовый насос, применяется для перемещения пульпы. При этом фракции грунта могут быть значительно большими, чем при грунтовом насосе. Пульпа поступает
208
по трубе 1 в приемную камеру 2. Здесь она смешивается с напорной водой, вытекающей с большой скоростью из насадки 5, увлекается в горловину 3 и далее по подъемной трубе 4 — в пульповод. Удельный расход воды при гидроэлеваторе очень большой, он составляет 50—100 м3/м3. Гидроэлеваторы имеют очень низкий КПД, но обладают важным положительным свойством — в отличие от землесосов они могут бесперебойно работать в случае попадания воздуха в всасывающую трубу. Это свойство используется при устройстве небольших котлованов, когда невозможно создать достаточные размеры зумпфа для землесоса.
Земснаряды (рис. 177) применяются при землесосной подводной разработке. Земснаряд состоит из понтона 15, свай, надпалубной надстройки 2, электромеханического и вспомогательного оборудования, которое монтируется на понтоне. В передней части понтона
устанавливается стрела, к ко- Рис. 176. Гидроэлеватор.
торой привешивается прием-
но-разрыхлительное устройство. Оно состоит из металлической фермы 6, на которой размещаются фрезерный разрыхлитель 9 с валом 8 и редуктор 4 с электродвигателем 3, который приводит во вращение вал. Вал 8 состоит из отдельных секций, соединенных муфтами 7.
Ферма шарнирно укрепляется на понтоне и при помощи полиспаста 5 может подниматься и опускаться лебедкой 16 вместе с разрыхлителем. Всасывающий трубопровод 10 крепится к ферме под
валом разрыхлителя и соединяется с трубопроводом на понтоне шлангом. Во время вращения разрыхлителя 9 разрушенный грунт по всасывающему трубопроводу поступает к грунтовому насосу 11 и по шарнирному плавучему пульповоду транспортируется на берег. Пульповод состоит из отдельных труб, уложенных от снаряда до берега на поплавках и соединенных между собой шаровыми шарнирами. Грунтовый насос 11 при помощи эластичной муфты соединяется с электродвигателем 12. Во время работы с помощью одной из
209
Рнс. 177. Малогабаритный земснаряд производительностью; по воде 380 м3/ч, по грунту 20—45 м3/ч.
лебедок 13 опускается в дно одна из свай А или Б, и снаряд вместе с приемно-разрыхлительным устройством перемещается от одного борта к другому при помощи лебедок 14 и двух носовых канатов с якорями В и Г.
Это происходит следующим образом. Опущенная свая, например А, служит осью вращения снаряда при повороте. Одна из лебедок 14 подтягивает канатом снаряд к якорю В, а другой лебедкой сматывается канат якоря Г. Затем опускается свая Б, поднимается свая А, соответствующая лебедка 14 подтягивает снаряд к якорю Г и т. д. Промывную воду в грунтовый насос подает насос 18 по трубопроводу 17. Для монтажных работ служит кран 1.
Одним из наиболее важных способов повышения производительности оборудования гидромеханизации и снижения расхода электроэнергии является уменьшение удельного расхода воды. Этому служит усовершенствование оборудования путем создания мониторов ближнего боя, применение механического рыхления плотных пород и конструирования земснарядов с черпающими устройствами в виде лопастных колес с напорным ходом и с автоматизацией управления.
Для непрерывного контроля за содержанием грунта в пульпе на ряде отечественных земснарядов установлены у-пульпомеры, в которых используются у-лучи радиоактивного изотопа — кобальта и газовый счетчик.
Непрерывный контроль за содержанием грунта в пульпе позволяет своевременно уменьшать удельный расход воды, что значительно повышает производительность земснарядов по грунту.
Техника безопасности гидравлического способа проведения земляных работ требует выполнения следующих правил:
запрещено находиться людям в зоне действия работающего гидромонитора; при установке его должна быть предусмотрена возможность быстрого отключения агрегата от напорного водовода; нельзя оставлять действующий гидромонитор без надзора; во время перерыва в работе ствол гидромонитора должен быть опущен вниз;
гидромониторы, работающие вблизи линий электропередачи, должны быть оборудованы ограничителями, исключающими возможность попадания струи на провода;
при смене насадок, подтягивании фланцев и муфт трубопроводов, а также при устранении неисправностей гидромониторов и т. п. необходимо закрывать задвижку или прекращать работу насосной станции;
рабочий персонал, находящийся у монитора, должен быть связан телефоном с насосной станцией и диспетчером и располагать средствами аварийной сигнализации;
пуск насосных агрегатов допускается только по распоряжению лица, ответственного за работу в забое.
211
§ 36. МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ И ВСПОМОГАТЕЛЬНЫХ РАБОТ
Кусторезом (рис. 178, а) очищают территорию строительства от кустарника и мелкого леса с диаметром ствола до 15—20 см. Кусторез, представляющий собой навесное оборудование на гусеничном тракторе, состоит из толкающей рамы 4, отвала 1 с ножами 2, механизма управления и ограждения 3.
Древовалом (рис. 178, б) удаляют деревья и пни, которыми покрыта территория. На тракторе устанавливается толкающая рама 5, предназначенная для наклона дерева, и отвальный нож 6 — для поддевания и резки корней.
Рыхлители применяются для рыхления тяжелых грунтов (с целью облегчения последующей работы землеройных машин) и различных покрытий дорог при их ремонте. Рыхлители работают на прицепе у трактора. Основой рыхлителя (рис. 178, в) служит тяговая рама 12. Задняя часть тяговой рамы представляет собой загруженный балластом ящик 8, в дне которого закреплены рыхлитель-ные стойки 9 со съемными зубьями 10. Рама соединена шарнирами с подъемной рамой 7, опирающейся на полуоси. На концах полуосей крепятся металлические или на пневматических шинах колеса 11. Поднимается тяговая рама с помощью полиспаста 13 и лебедки.
Вибрационные машины и катки, прицепляемые к тракторам, служат для искусственного уплотнения свеженасыпанных масс грунта.
Действие катков основано на статическом распределении давления от веса машины. В зависимости от способа передвижения катки разделяются на прицепные, перемещаемые обычно трактором, и самоходные. Самоходные катки применяются главным образом в дорожном строительстве. Прицепные катки бывают гладкие, кулачковые и на пневматических шинах.
Кулачковый каток (рис. 178, г) конструктивно отличается от гладкого, наличием кулачков на ободе барабана и очистительным устройством, которое выполнено в виде гребенки. Кулачки имеют форму, легко проникающую в толщу уплотненного грунта. Этим они обеснечивают уплотнение нижележащих слоев и увеличение глубины уплотнения.
Катки на пневматических шинах обычно применяются для окончательной укатки свеженасыпанного грунта после его предварительного уплотнения кулачковыми катками. При выборе катка, кроме его веса, учитывается также величина давления на грунт. Для гладких катков в качестве расчетного давления принято считать давление на 1 см длины барабана, а для кулачковых и на пневматических шинах — давление от массы, приходящейся на 1 см2 площади кулачка или контакта шины с грунтом.
При подборе трактора для катков необходимо, чтобы тяговое усилие, развиваемое трактором на крюке FKp, даН (кгс), было достаточным для преодоления сопротивлений, возникающих при работе
212
Рис. 178. Машины для подготовительных и вспомогательных работ: а — кусторез: б — древовал: в — рыхлитель; г — каток.
катка:
FKP>U71 + r2 + GIpt. (217)
Здесь — сопротивление передвижению катка, даН (кгс):
U71 = GK(a» + i), (218)
где GK — вес катка, даН (кгс); w — основное сопротивление его движению по разрыхленному грунту в начале укатки (для гладких катков w = 0,18, для кулачковых легких до 6 т — 0,27 и тяжелых 10— 35 т — 0,37, для катков на пневматических шинах — 0,20); GTp —-вес трактора, даН (кгс); i — уклон местности, наибольшее значение которого 0,1; W2 — сопротивление от преодоления силы инерции катка, даН (кгс):
г«=зйг- <219>
где v — рабочая скорость движения катка, км/ч; t — время разгона катка, приблизительно равное 4—5 с.
Техническая производительность рыхлителей и катков, м3/ч, определяется по формуле (рис. 179)
Птехн
3600 (Ь — fcr) lh (3-64+zb
(220)
Здесь b — рабочая ширина рыхлителя или ширина полосы, укатываемой за один проход катка; м; Ьг— ширина, перекрываемая при
213
Рис. 179. К расчету производительности рыхлителя и катка.
4 3 Z f
Рис. 180. Схема виброуплотняющей машины.
каждом проходе (для рыхлителей м, для катков — 0,2 м);
I — длина укатываемого участка, м; v — скорость движения трактора, км/ч; t — время на изменение направления движения, равное приблизительно 30—40 с; h—глубина разрыхления или уплотнения за один проход, м; п —число проходов рыхлителя или катка по одному й тому же месту.
Распространенным методом уплотнения рыхлоотсыпанных, несвязанных грунтов является поверхностное вибрирование. Наиболее эффективно виброуплотнение галечниковых и щебеночных грунтов с помощью катков с эксцентриковыми вибровозбудителями, а также вибрационных машин, которые предназначены для стесненных условий строительных площадок.
Принципиальная схема вибрационной грунтоуплотняющей машины самоходного типа (виброплиты) дана на рис. 180. Уплотняющее действие на грунт передается опорной плитой 1, на которую через четыре спиральные цилиндрические пружины 4 опирается корпус машины 7. На корпусе установлены двигатель 6 и оборудование управления машиной. К нему же через резиновые амортизаторы крепится рулевая штанга 8, на которой сосредоточены рычаги управления. Для сообщения колебаний опорной плите на ней жестко закреплен дебалансный вибровозбудитель направленного действия. Он состоит из двух находящихся в зацеплении зубчатых колес 3, на которых имеются симметричные дебалансы. Весь вибровозбудитель заключен в герметический корпус 5, наполненный маслом.
Зубчатые колеса с дебалансами (неуравновешенными массами} вращаются в разные стороны. Этим создается суммарная вынуждающая (центробежная) сила дебалансов Р, действующая в направлении, перпендикулярном к линии х — х, соединяющей оси дебаланс-ных колес.
Весь корпус вибровозбудителя может поворачиваться вокруг горизонтальной оси 2, изменяя тем самым направление действия суммарной вынуждающей силы.
Возмущающая сила-Р при наклоне вибратора на угол а раскладывается на вертикальную Ръ и горизонтальную Рг. Вертикальная сила сообщает плите машины вибрационное движение, а горизонтальная вызывает поступательное перемещение всей машины. Поворот вибратора осуществляется штурвалом на рулевой штанге
214
о
Рис. 181. Машины для разработки мерзлых грунтов: а — траншейная многоковшовая; 6 — двухклиновая.
через самотормозящий редуктор. Мощность двигателя таких машин до 25 кВт; глубина уплотнения 0,6—1,2 м.
Машины для подготовки к выемке мерзлых грунтов. Крепость мерзлых грунтов увеличивается в 30—50 раз по сравнению с естественным состоянием. При подготовке к выемке таких грунтов в основном применяются четыре способа машинной разработки:
1) нарезание грунта на блоки с помощью баров или дисков, а затем удаление этих блоков одноковшовым экскаватором;
2) скалывание грунта ударами, а затем также удаление его одноковшовым экскаватором; эффективность этих ударов увеличивается применением вибрирующих механизмов.
3) скалывание грунта клыками ковшей экскаватора с одновременным удалением грунта этими ковшами;
4) рыхление грунта с последующей его уборкой землеройнотранспортными машинами.
215
Рис. 182. Схема рыхлителя для мерзлых грунтов:
1 — цилиндр подъема; 2 — опорная рама; 3 — телескопическая тяга; 4 — рабочая балка; 5 — нижняя рама; 6 — зуб.
Машина, действующая ударами клиньев, показана на рис. 181,5; траншейный экскаватор, на ковшах которого установлены в ступенчато-шахматном порядке клыки пирамидальной формы,— на рис. 181, а. Эти клыки, двигаясь по разным дорожкам, перекрывают всю траншею.
При подготовке к выемке мерзлых грунтов на значительных площадях, например больших котлованов, применяется тяжелый рыхлитель с гидравлическим управлением (рис. 182). Методы выемки мерзлых грунтов продолжают совершенствоваться.
Машины для водопонижения уровня грунтовых вод. При уровне воды до 5 — 6 <м применяют легкие иглофильтровые установки; при 15—20 м — иглофильтры с эжекторным устройством (с отсасывающим струйным насосом), а при 3) ми более глубинные трубчатые насосы.
Иглофильтр представляет собой трубу диаметром 40—70 мм с фильтром на конце. Служащая колодцем труба сообщается с коллектором, соединенным с откачивающим насосом.
Глубинный насос — вертикальный центробежный или поршневого типа насос с малыми поперечными размерами, устанавливаемый в буровую скважину в погруженном положении.
Машины для бестраншейной прокладки. При монтаже подземных коммуникаций вместо траншей часто применяют бестраншейную прокладку, которая сокращает в несколько раз объем земляных работ и при этом в значительной степени сохраняются асфальтовые и бетонные покрытия дорог и улиц.
Для бестраншейной прокладки применяются машины, осуществляющие прокол, продавливание и горизонтальное бурение. Наиболее перспективными для этих работ являются пневмопробойники, впервые предложенные Сибирским отделением Академии наук СССР.
Корпус пневмопробойника является рабочим органом, образующим скважину. Ударник, совершающий с помощью сжатого воздуха возвратно-поступательное движение и наносящий удары по переднему торцу корпуса, забивает его в грунт. При реверсирова-216
нии ударник наносит удары по хвостовой части корпуса и тем самым возвращает машину по готовой скважине назад *
Машины для проведения подземных выработок большого сечения. Для этих выработок, кроме шахтных и тоннельных экскаваторов, применяются проходческие щиты, которые ограждают эти выработки от обрушения. Основная несущая конструкция — опорное кольцо с ножом, частично срезающим породу. Внутри щита находятся рабочие, отбивающие породу с помощью механизированного инструмента. У механизированных щитов в их передней части находятся специальные механизмы для разработки породы **.
§ 37. БУРОВЫЕ СТАНКИ
При подготовке строительных площадок иногда возникает необходимость бурения глубоких скважин для разведки грунтов, для закладки взрывчатых веществ, водоснабжения, водопонижения и т. п. Такие скважины бурятся специальными станками, применяющимися на геологоразведочных и карьерных работах, которые разделяются по способу бурения на следующие виды:
1. Станки ударно-вращательного бурения, у которых буровой инструмент наносит своими лезвиями удар по забою скважины и высекает в нем соответствующее углубление — вруб; при последующих ударах буровой инструмент, поворачиваясь вокруг своей оси, разрушает выступы между полученными врубами; продукты разрушения обычно выносятся сжатым воздухом; применяются в крепких породах.
2. Станки огнеструйного бурения, у которых в реактивную горелку подается горючая смесь — кислород и керосин. На породу воздействует пламя, выходящее с большой скоростью (1800 м/с) при большой температуре (до 2300° С). Горелку охлаждают водой, которая, переходя в пар, выносит на поверхность продукты разрушения породы; эти станки также применяются для крепких пород.
3. Станки вращательного бурения, предназначенного для мягких и средних пород; буровой инструмент состоит из спиральной штанги и лезвия; лезвие, вращаясь, снимает тонкий слой грунта, который по спирали выдается из скважины.
При работах нулевого цикла на строительных площадках для свайных фундаментов, а также установки опор необходимо бурить скважины малой глубины (3—5 м) и относительно большого диаметра — 300—400 мм. Такие скважины бурят мобильными бурильными машинами, смонтированными на базе автомобилей или тракторов. Бурильная машина (рис. 183) снабжена крановым устройством, обеспечивающим установку свайных фундаментов, столбов, оболочек в пробуренные скважины. Буровое оборудование размещено на поворотной платформе, которая через опорно-поворотное устройство
* Подробнее см.: Механизация строительства, 1977, № 7.
j ** Подробнее см.: Малевич Н. А. Горнопроходческие машины и комплексы. М., Недра, 1971.
217
Рис. 183. Мобильная бурильная машина (кинематическая схема).
3 установлена на шасси автомобиля высокой проходимости. Привод бурового оборудования осуществлен от автономного двигателя 11; трансмиссия состоит из карданного вала 10, коробки передач 9, поворотного редуктора 8, вращателя 6. Последний представляет собой двухступенчатый редуктор и предназначен для передачи вращения на буровую штангу. Подача бурового инструмента и частичное его извлечение проводятся гидравлическими цилиндрами. Отбор мощности на механизм вращения 2 всей машины и на лебедку 1 осуществляется редуктором 7 через реверс 5. Лебедка имеет два барабана — один для подвески 13 штанги и второй — для подвески 14 крюка. Гидропривод питается от шестеренного насоса 12, установленного на двигателе 11. Гидропривод обслуживает цилиндры 4, а также цилиндры выносных опор машины.
Вопросы для самопроверки
1. Объясните целесообразность установки зубьев на ковшах.
2. Выведите формулы производительности бульдозера, скрепера, одноковшового и многоковшового экскаваторов и рыхлителя; сравните их.
3. Сравните рис. 158 и 159. Замените номера узлов на рис. 158 номерами тех же узлов с рив. 159.
218
4. Опишите гидравлические схемы рис. 136, 138 и 162.
5. Приведите классификации бульдозеров, скреперов и одноковшовых экскаваторов.
6. Определите величину коэффициента ускорения, замедления и переключения передач при Ln = 40 м; огр = 6 км/ч; / = 0,1 м/с2 и /пер = 2 с.
7. Охарактеризуйте способы повышения производительности землеройнотранспортных машин и экскаваторов.
8. Составьте кинематическую схему многомоторного одноковшового экскаватора на основе рис. 165.
9. Составьте по рнс. 170 кинематическую схему привода роторного колеса.
10. Определите производительность по грунту гидромонитора с насадкой диаметром 50 мм при работе в забое плотного суглинка высотой 10—15 м.
11. Составьте принципиальную схему виброуплотняющей машины.
12. Составьте таблицу условий применения всех описанных в этой главе машин.
Глава VI
ОБОРУДОВАНИЕ
ДЛЯ СВАЙНЫХ РАБОТ
Свайные работы производятся при устройстве оснований под фундаменты гражданских и промышленных сооружений, при возведении мостов, пристаней, набережных и для защиты сооружений от подмыва, фильтрации и вспучивания грунта. Основания из свай уплотняют грунт и передают нагрузку сооружения на плотный материк или на слой грунта, высота которого соответствует длине свай, а защита сооружения от проникновения воды осуществляется устройством сплошной и устойчивой стенки свай, называемой шпунтовым ограждением.
Применяются сваи из различного материала — деревянные, железобетонные, металлические и комбинированные, а также набивные, изготавливаемые в скважинах, сделанных предварительно в грунте. Погружают сваи в грунт забивкой, вибрацией и завинчиванием. Для облегчения и ускорения погружения сваи в грунт одновременно с забивкой осуществляют подмыв грунта под сваей струей вода. Наиболее распространенными способами являются забивка и вибрация.
Для свайных работ в настоящее время применяются дизель-молоты, вибропогружатели и вибромолоты, реже паровоздушные молоты. Процесс погружения сваи состоит из ее подъема, установки и забивки, а затем перемещения сваебойной установки к месту установки следующей сваи.
Для быстрой и точной установки на место ее забивки применяются копры, чаще всего на базе тракторов (рис. 184) и вибровдавливающие агрегаты (см. рис. 192).
§ 38. ДИЗЕЛЬ-МОЛОТЫ
Дизель-молоты работают по принципу двухтактных дизелей *. Ударная часть молота при совершении рабочего хода сжимает заключенный в цилиндре воздух, значительно повышая его температуру; подаваемая в этот период в цилиндр горючая смесь взрывается и отбрасывает цилиндр вверх, совершая холостой ход, при дальнейшем падении ударной части рабочий цикл повторяется.
* Идея создания дизель-молота возникла в СССР в 1928 г. (авторы 3. И. Торопов и И. А. Агапов); дизель-молоты начали широко применяться у иас с 1942 г. главным образом при производстве восстановительных работ.
220
В наиболее совершенном трубчатом дизель-молоте (рис. 185) ударной частью является тяжелый поршень 6, имеющий шаровую головку 9. Цилиндр 7 этого молота представляет собой длинную трубу, открытую сверху. В нижней части отверстие трубы закрыто пятой 11, которая имеет возможность двигаться в небольших пределах вдольоси трубы. Герметичность соединения пяты с трубчатой
221
Рис. 185. Трубчатый дизель-молот:
а — схема молота; б — подъем поршня; в — рабочий ход и впрыск горючего; г — момент удара и распыления горючего; д — сгорание н холостой ход.
частью обеспечивается уплотняющими кольцами 10. В теле пяты имеется сферическая впадина 1, а на нижней опорной поверхности штырь 12, входящий в наголовник сваи. Дизель-молот подвешивают к стреле копра, устанавливают на головку сваи и закрепляют в стреле; поршень 6 подхватывают кошкой 13, поднимают, и затем с помощью рычага кошки поршень освобождают. Происходит взрыв рабочей смеси и начинается работа дизель-молота.
Запас топлива помещается в резервуаре 4, который укреплен на цилиндре. Ниже расположен топливный насос 2 плунжерного типа низкого давления. Насос приводится в действие поршнем молота посредством рычажка 3, который свободным концом входит внутрь цилиндра через прорезь в его стенке. При падении поршень отжимает рычажок, который, в свою очередь, действует на плунжер насоса.
Топливо подается струйкой в сферическую впадину пяты. Смазка стенок цилиндра производится из масляной камеры 5, расположенной в верхней части поршня.
Патрубки 8, расположенные наклонно по бокам цилиндра, служат для удаления продуктов сгорания и засасывания свежего воздуха, что осуществляется при холостом ходе поршня.
222
грунтах, так как
Рис. 186. Штанговый дизель-молот: 1 — корпус цилиндра; 2 — штырь; 3 — поршень; 4 — топливная трубка; 5 — топливный насос; 6 — топливный резервуар; 7 — наковальня; 8 — штанга; 9 — кошка; 10 — рычаг.
Масса забиваемой трубчатыми дизель-моло-тами сваи может доходить до 12 т. Когда масса забиваемой сваи относительно небольшая, применяют штанговый дизель-молот (рис. 186), у которого топливо подается насосом высокого давления. В момент удара цилиндра 1 штырь 2, находящийся на нем, передвигает рычажок насоса 5; топливо поступает в трубку 4 и впрыскивается в полость цилиндра. Затем происходит сгорание и холостой ход ударного цилиндра 1.
Существенными достоинствами дизель-мо-лотов являются: небольшой мертвый вес, независимость от внешнего источника питания и малый расход горючего.
К недостаткам дизель-молотов следует отнести: значительные потери энергии удара на сжатие воздуха (50—60%); нецелесообразность применения для забивки тонких свай в слабых
при малом сопротивлении сваи не происходит воспламенение горючего в цилиндре молота из-за относительно быстрого опускания неподвижной части молота вместе со сваей.
Для отвода тепла при интенсивной работе трубчатых дизель-молотов применяется воздушное охлаждение. Для работы при низких температурах эти дизель-молоты выпускаются в северном исполнении.
Основными параметрами дизель-молотов являются: энергия удара; масса ударной части молота; частота ударов; мощность молота; его мертвая масса.
При работе дизель-молотами погружение сваи теоретически наблюдается как при рабочем ходе (в момент удара), так и при холостом,— в момент воспламенения рабочей смеси и резкого повышения давления в цилиндре, что оказывает дополнительное (реактивное) воздействие на погружаемую сваю. Однако при относительно плотном грунте сопротивление его погружению сваи возрастает настолько, что энергия расширения газов практически не оказывает дополнительного воздействия на забиваемую сваю.
Поэтому обычно энергию дизель-молота подсчитывают только для рабочего хода
Е = QHi\ —Ьсж, (221)
где Лсж — расход энергии на сжатие воздуха в цилиндре молота при падении ударной части; Q — вес ударной части, даН(кгс); Н — ход ее, м; т| — КПД, учитывающий потери на трение.
223
Рис. 187. Примерная индикаторная диаграмма дизель-молота.
Работа сжатия определяется по индикаторной диаграмме или аналитически. Примерная индикаторная диаграмма работы дизель-молота приведена на рис. 187. Точка 1 (начало сжатия) соответствует моменту встречи цилиндра с поршнем при падении, точка 2 — концу сжатия, точка 3 — сгоранию, а точка 4 — отрыву цилиндра от поршня при взлете. Площадь 1—2—5 представляет расход энергии £сж.
Частота ударов молота п имеет также большое значение. Если удары молота будут следовать один за другим быстро, изменения в
сопротивлении грунта не успеют закончиться между двумя последовательными ударами. В этом случае окружающий сваю грунт будет постоянно разрыхленным, и, следовательно, сопротивление его погружению свай будет меньшим.
Зная энергию удара молота Е и число его ударов в минуту п, можно определить мощность молота, кВт,
" “ • <222>
Основным параметром свайного молота является и его мертвая масса которая позволяет судить о металлоемкости молота сопоставлением с полной массой Q + Qv Например, у трубчатых молотов, выпускаемых в СССР, Е = 22500 4- 90 000 Дж (2250 -4-9000 кгс • м); п = 43 4- 55 ударов в минуту; = 1250 4-4000 кг; = 0,5 4- 0,55. У штангового молота соответствен-Ч “г 41
но 1500 Дж (150 кгс • м); 100 ударов в минуту; ПО кг; 0,63.
У паровоздушных свайных молотов двойного действия при холостом ходе подъем тяжелого поршня осуществляется силой пара (сжатого воздуха), а при рабочем ходе на оголовок сваи наносится удар как весом поршня, так и силой пара (сжатого воздуха). Поэтому энергия удара у этих молотов
Е = QHr\ + pFH. (223)
Здесь дополнительно обозначено: р — давление пара (сжатого воздуха) в цилиндре молота; F — рабочая площадь поршня — бойка.
У паровоздушных молотов Е = 3000 4- 18 000 Дж (300 4-1800 кгс • м); масса ударной части Q = 200 4- 1100 кг; число ударов в минуту п = 100 4- 170; _ = 0,73 4- 0,86.
J J Q + Qi
Достоинство этих молотов по сравнению с дизель-молотами — большее число ударов в минуту, а существенный недостаток — зависимость от внешнего источника энергии (парового котла или компрессора). Большой вес корпуса молота Qj необходим, чтобы 224
при рабочем ходе сила пара или сжатого воздуха, действуя на поршень, не поднимала корпус, прикрепленный к свае.
Техника безопасности. Для обеспечения безопасности при свайных работах необходшмо выполнять следующие правила.
Состояние путей, по которым передвигаются копры, следует проверять перед началом каждой смены. Во время работы копер необходимо закреплять противоугонными устройствами.
Перемещения и повороты копра допускаются только под руководством производителя работ или мастера.
Во время перерыва в работе свайный молот на копре должен быть опущен.
Пребывание людей под свайным молотом запрещается.
При подтягивании свай канатами от лебедок, установленных на копре, канаты следует пропускать через блок, укрепленный у основания копра.
§ 39. СВАЙНЫЕ ВИБРОПОГРУЖАТЕЛИ И ВИБРОМОЛОТЫ
Для погружения свай в легкие грунты, преимущественно несвязные водонасыщенные, советские ученые и инженеры впервые успешно применили вибрационный способ, который осуществляется прикреплением вибропогружателя к головке сваи или шпунта.
Вибропогружатель возбуждает в свае направленные вдоль ее оси колебания с определенной амплитудой. Эффект виброметода состоит в том, что грунты под действием вибрации сваи значительно снижают свое сопротивление в результате появления в них пластических деформаций.
В указанных грунтах скорость вибропогружения свай по сравнению с забивкой дизель-молотами увеличивается в 3—4 раза, а стоимость работ уменьшается в 2—2,5 раза.
В Советском Союзе выпускаются два типа вибропогружателей высоко- и низкочастотные (с числом вращ ний п — 1500 и 420 мин-1).
Привод высокочастотного вибропогружателя (рис. 188) осуществляется электродвигателем 4 посредством цепной перед чи 5 и редуктора с зубчатыми колесами 2. Дебалансы 3 вращаются в разные' стороны.
Это создает суммарную вынуждающую (центробежную) силу Р, направление действия которой ограничено вертикальной осью. Как видно из рис. 188, силы Р взаимно уничтожаются, а Рх складываются.
Для крепления вибратора к свае, шпунту или трубе служит наголовник /.
В процессе вибрационного погружения колебания совершают только свая и нижняя часть вибратора, а пригрузочная плита 6 с электродвигателем на рессорах 7 почти не колеблется.
Благодаря такой конструкции улучшаются условия работы электродвигателя и имеется возможность подбирать вес вибратора,
Рис. 188. Схема высокочастотного вибропогружателя.
Рис. 189. Высокочастотный вибропогружатель: 1 — наголовник; 2 — корпус вибратора; 3 — пружинное устройство; 4 — серьга; 5 — пригрузочная плита; 6 — электродвигатель; 7 — подвеска вибропогружателя; 8 — пальцы; 9 — цепная передача; 10 — конический редуктор.
необходимый для наилучшего эффекта погружения за счет увеличения или уменьшения веса пригрузочной плиты.
У низкочастотного вибропогружателя вибрации осуществляются с помощью дебалансных валов, вращающихся также в разные стороны.
Конструкции вибропогружателей приведены на рис. 189 и 190.
Вибромолоты, передающие сваям как вибрации, так и удары*,
* Первый вибропогружатель создан проф. Д. Д. Барканом, а вибромолот — С. А. Цаплиным.
226
Рис. 190. Низкочастотный вибропогружател ь:
I — электродвигатель; 2 — кожух трансмиссии; 3— корпус вибровозбудителя; 4 — подшипник дебалансиого вала; 5 — дебалансиый вал; 6 — шестерня привода деба-лансных валов; 7—дебаланс.
применяют для более тяжелых условий производства свайных работ (большая масса сваи и грунты большей плотности).
Вибромолот (рис. 191) состоит из вибровозбудителя направленного действия, в котором дебалансы 4 установлены на валах двух электродвигателей, наголовника или плиты 1 для соединения с погружаемой конструкцией. Пружины 2 служат для упругой связи вибровозбудителя с наголовником. При вынужденных колебаниях системы бойками 3 наносится удар.
При возведении временных ограждений из стальных шпунтов свай (например, для защиты при возведении фундаментов зданий) эти сваи в дальнейшем должны быть удалены. Для этой работы также применяются вибромолоты.
У высокочастотных вибропогружателей максимальная возмущающая сила Рмакс = 25 000 даН (кгс), у низкочастотных 18 500, а у вибромолотов 21 800 даН (кгс) при энергии удара £ = = 390 000 Дж (39 000 кгс • м) и частоте вращений п = 480 мин—1.
Как правило, вибропогружатели являются частью специальных вибровдавливающих агрегатов (рис. 192).
Для устройства буронабивных свай иногда применяется комплект машин, объединяемый в самоходный агрегат. Этот комплект включает буровой став, состоящий из закрепленного на его конце долота с двухлопастным наконечником; буровую мачту, по которой 8* 227
72
Рис. 192. Вибровдавливающий агрегат;
/ — генератор; 2 — электродвигатель; 3 — лебед-ка; 4 — задняя рама; 5 — трактор; 6 — опора передней рамы; 7 — мачта; 8 — оголовок стрелы; 9— направляющая; 10 — вибропогружатель; 11 — канатно-блочная система; 12 — передняя рама; 13 — трубчатый лидер.
перемещается каретка, и механизм вращения бурового става; бетонирующий ковш, из которого после бурения поступает бетон в скважину *.
Вопросы для самопроверки
1. Охарактеризуйте достоинства и недостатки дизель-молотов, вибропогружателей, вибромолотов и паровоздушных молотов.
2. Составьте кинематические схемы вибропогружателей иа основе рис. 189 и рис. 190.
3. Как определяется энергия удара дизель-молота и чем она отличается от энергии удара паровоздушного молота?
* Подробнее см.: Строительные и дорожные машины, 1976, № 12 и 1977, Ns 7.
228
Глава VII
ДРОБИЛЬНО-
СОРТИРОВОЧНЫЕ УСТАНОВКИ
Добываемые обычно в карьерах каменные материалы обрабатываются на камнедробильных и промывочно-сортировочных заводах и в виде готового продукта стандартного качества доставляются на строительство.
Иногда на строительных площадках, когда требуется небольшое количество щебня, используют дробильно-сортировочные установки производительностью 10—30 т/ч.
Практика показала, что процесс дробления требует большого расхода энергии и приводит к быстрому износу дробящих частей, поэтому при выборе дробильных и сортировочных машин руководствуются основным принципом дробления, сформулированным около 70 лет назад проф. Г. О. Чечоттом: «Не дробить ничего лишнего».
Исходя из этого принципа при необходимости большого измельчения приходится применять дробление в две или три стадии (приема), т. е. пропускать дробимый материал через две или три дробилки разных типов и размеров, соответствующих размерам кусков этого материала.
Дробление в одну стадию приводит к тому, что получаемые в большом количестве мелкие зерна заполняют промежуток между крупными зернами и защищают их от непосредственного воздействия дробящих машин, сами подвергаясь ненужному измельчению с непроизводительной затратой энергии.
В связи с разделением процесса дробления на несколько последовательно выполняемых стадий различают три вида дробления — крупное, среднее и мелкое.
Стремление «не дробить ничего лишнего» потребовало также установки перед дробилкой грохота, в котором отсеиваются мелкие куски материала, а крупные, не прошедшие через отверстия решета (сита) грохота, поступают в дробилку.
§ 40. ДРОБИЛЬНЫЕ МАШИНЫ И ГРОХОТЫ
В передвижных дробильных установках применяют: щековые дробилки, в которых раздавливание происходит между неподвижной и подвижной (реже двумя подвижными) щеками в результате, в основном, периодического сжатия;
229
Рис. 193. Щековые дробилки:
а — схема дробилки с простым движением щеки; б — схема дробилки со сложным движением щеки; в — общий вид дробилки со сложным движением щеки.
конусные дробилки, в которых раздавливание породы происходит между неподвижным внешним и подвижным внутренними конусами;
валковые дробилки, в которых порода раздавливается между двумя валками, вращающимися в разные стороны;
роторные дробилки, в которых порода разбивается ударами молотков, находящихся на быстро вращающемся роторе.
Щековые дробилки обычно применяются для первичного дробления. Их достоинства — простота конструкции, ухода и ремонта, надежность в работе.
Движение щеки дробилки бывает простое или сложное.
В дробилке с простым движением щеки (рис. 193, а) крутящий момент от двигателя передается клиноременной передачей эксцентриковому валу 4. На этом валу укреплен шатун 5, совершающий возвратно-поступательное движение в вертикальной плоскости. К нижней части шатуна шарнирно примыкают концы распорных плит 8 и 9. Противоположный конец распорной плиты 9 примыкает к подвижной щеке 10, подвешенной шарнирно к оси 2.
При движении шатуна 5 вверх поднимаются примыкающие к нему распорные плиты 8 и 9, а подвижная щека 10 с установленной на ней дробящей плитой 11 приближается к плите 13 неподвижной щеки 1. При этом щека 10 совершает простое качательное движение вокруг оси качания 2. Когда шатун 5 движется вниз, концы распорных плит 8 и 9 опускаются и подвижная щека 10 под действием собственного веса и тяги 7 оттяжного устройства с пружиной 6 отходит от неподвижной дробящей щеки. Пружина 6 оттяжного устройства, обеспечивающая возврат щеки, удерживает также распорные пли-
S30
Рис. 194. Схема автоматического регулятора режима питания.
Для обеспечения более равно-
ты 9 и 8 от выпадания. Зев дробилки ограничивается закладными клиньями 12.
Рабочий ход, при котором дробится камень, происходит при сближении щек, а холостой ход, при котором раздробленный камень под действием силы тяжести опускается вниз, осуществляется при каждом отходе подвижной щеки. Сопротивление движению подвижной щеки резко возрастает при рабочем ходе и падает при холостом. Это создает переменную нагрузку на двигатель,
мерной нагрузки двигателя и равномерного хода дробилки на эксцентриковый вал 4 устанавливают два тяжелых чугунных маховика 3, запасающих избыточную энергию двигателя при холостом ходе и отдающих ее при рабочем ходе.
В камнедробилке со сложным движением щеки (рис. 193, б) отсутствует шатун. Подвижная щека 10 в верхней части имеет подшипник, который охватывает эксцентрик вала 4. Вследствие такого устройства при вращении вала подвижная щека не только качается, но и движется вниз и вверх, т. е. совершает сложное движение, и дробление камня происходит в результате как раздавливания, так и истирания. Изменение степени измельчения * достигается регулированием размера разгрузочной щели 15 (рис. 193, в) установкой между концами распорной плиты 9 и заднего упора дополнительных прокладок 14. Дробилки со сложным движением щеки более просты по конструкции, менее металлоемки и компактны. Поэтому они часто применяются в передвижных дробильно-сортировочных установках.
Выпускаются также щековые дробилки, снабженные автоматическим регулятором режима питания (рис. 194). На одной из боковых стенок верхней части камеры дробления укреплен источник света /, на противоположной стенке помещается фотосопротивление 2, электрически связанное через реле времени с катушкой магнитного пускателя пластинчатого питателя. При перегрузке дробилки материал загораживает путь световому лучу, и пускатель питателя через определенный период, заданный настройкой реле времени, отключается. При опускании уровня камня ниже луча света последний вновь освещает фотосопротивление и питатель с некоторой выдержкой времени включается.
Конусные дробилки производят дробление породы между внешними и внутренними усеченными конусами. Внешний конус 1 (рис. 195, а, б) является неподвижным, и его вертикальная ось
* Степень измельчения — отношение среднего размера загружаемого в дробилку камня к размеру раздробленного.
231
представляет собой ось машины. Внутренний подвижный конус 2 насажен на вал, нижний конзц которого свободно входит во внутреннее эксцентрично расточенное отверстие стакана эксцентрика 3. Верхний конец вала шарнирно подвешен на траверсе, которая перекрывает загрузочное отверстие дробилки, опираясь своими концами на станину (рис. 195, в). Геометрическая ось вала подвижного конуса располагается под углом 2—3° к оси машины.
При вращении стакана эксцентрика нижний конец вала совершает движение по круговой траектории, а геометрическая ось вала описывает коническую поверхность. При таком движении вала конус с геометрической осью О1 (рис. 195, г) будет как бы обкатывать внутреннюю поверхность неподвижного конуса с осью О.
Дробление камня, загруженного в дробилку сверху, происходит на той же половине кольцевого пространства, на которой сближаются поверхности подвижного и неподвижного конусов. На стороне, противоположной дроблению, поверхности расходятся, и камень под действием силы тяжести опускается вниз. При этом куски камня, достигшие соответствующей степени измельчения, проваливаются через разгрузочную щель дробилки. Ширина этой щели
232
Рис. 196. Валковая дробилка: а — общий вид; б — схема.
измеряется от наименьшего размера I до наибольшего / + г, где г — эксцентриситет внутреннего отверстия стакана эксцентрика. Таким образом, ход подвижного конуса S = 2г.
Процесс дробления в конусных дробилках сходен с процессом дробления в щековых, но совершается он непрерывно, а не периодически. Кроме того, благодаря конической форме дробящих поверхностей, происходит не только раздавливание камня, как в щековых дробилках, но и его изгиб (правая фигура рис. 195, г). Этим облегчается процесс дробления, так как сопротивление изгибу пород значительно меньше сопротивления раздавливанию.
' На рис. 195, а показана дробилка с крутым конусом.
Наряду с такими дробилками применяются дробилки и с пологим конусом (рис. 195, б), вал которого сделан консольным, не имеющим верхней опоры. Они предназначены для вторичного дробления, т. е. в эти дробилки поступают куски камня, уже предварительно измельченные в дробилке для крупного дробления. Поэтому загрузочное отверстие у дробилки с пологим конусом не должно быть таким широким, как у дробилки с крутым конусом. Это обстоятельство позволило внешний и внутренний конусы расположить с вершинами наверху и создать так называемую зону параллельности 4, дающую возможность получить более однообразный по размерам щебень.
Валковые дробилки (рис. 196) преимущественно применяются для вторичного дробления, которое совершается раздавливанием кусков камня между валками, вращающимися навстречу друг другу с постоянной скоростью.
Наиболее широко применяются дробилки с одним неподвижным 2 и вторым подвижным 3 валком (рис. 196, б), т. е. с валком, установленным в подвижных подшипниках 6, скользящих по направляющим/ станины 1. С одной стороны подшипников находятся упоры, а с другой — пружины 4. Подвижность валка также предохраняет машину от поломки при попадании между валками недробимых предметов. Для обеспечения необходимой степени измельчения расстояние между валками изменяют установкой сменных стальных прокладок между упорами 5 и корпусом подшипника.
Роторные дробилки применяют для ударного дробления известняков, доломитов, гипса и т. п. Они могут работать при большой степени измельчения — до 10—20.
233
В коробчатом корпусе.? роторной дробилки вращается массивный ротор 1 (рис. 197) с закрепленными на его внешней части молотками 2. В корпусе дробилки над ротором подвешены две броневые отражательные плиты 4 и 7, нижняя часть которых опирается на пружинно-регулировочное устройство 5 и 6. Это устройство позволяет устанавливать плиты на необходимую величину разгрузочной щели и этим обеспечивать необходимую степень измельчения.
Ударное дробление каменных пород наиболее эффективно как по расходу энергии, так и по качеству продукта, в котором преобладает кубообразная форма зерен. Кроме того, при ударном дроблении более мягкие куски превращаются в мелочь, а прочные — сохраняют свою форму и выходят в виде готового продукта повышенной прочности.
Таким образом, роторные дробилки обладают избирательностью дробления, что обеспечивает получение щебня высокого качества, а также обогащение перерабатываемого материала. Благодаря малой металлоемкости и небольшим габаритным размерам роторные дробилки успешно применяются на передвижных дробильных установках.
Мельницы, которые представляют собой вращающиеся с шарами и загруженным материалом барабаны, применяются для получения порошкообразных продуктов. Мелющими телами могут быть также стержни и короткие ролики. Для домола цемента, особенно ле-
234
жалого, применяют вибромельницы, у которых барабан установлен эластично и интенсивно вибрирует вместе с шарами и материалом.
Грохотами производят механическую сортировку для разделения материалов на классы по крупности после их дробления.
Механическая сортировка осуществляется при движении Материала по просеивающей поверхности сита или решета (стальной лист с отверстиями). Зерна материала, превышающие размер отверстий сит, сходят с поверхности грохочения, образуя верхний класс. Зерна материала, прошедшие через отверстия, образуют нижний класс.
Эффективность (качество) сортировки снижается при засорении зерен верхнего класса мелкими фракциями и соответственном уменьшении продукции нижнего класса. Высокая эффективность сортировки достигается при правильном выборе размеров отверстий сита,
235
скорости движения материала по ситу и угле наклона сита в зависимости от гранулометрического состава материала.
Инерционный грохот (рис. 198) представляет собой вибрирующий механизм, состоящий из вала /, вращающегося в подшипниках 3, установленных на подвижном корпусе 4, и двух маховиков 2 с дебалансами на валу грохота. Вал получает вращение от электродвигателя с помощью клиноременной передачи через ведущий шкив 7. Подвижной корпус с ситами 6 опирается на неподвижную раму 5 при помощи пружины 8. Силы инерции, возникающие при вращении неуравновешенных маховиков, вызывают колебательные движения всей системы. Направление действия этих сил инерции непрерывно меняется, и поэтому траектории движения точек сита, зависящие от жесткости и расположения пружин, приобретают форму овалов, а сортируемый материал на сите как бы подкидывается. Поперечные болты с распорными трубками соединяют между собой обе продольные стенки корпуса. Трубки придают ситам выпуклую форму с постепенно увеличивающимся в сторону разгрузки уклоном, что способствует повышению производительности.
Промывочные машины применяются в тех случаях, когда необходимо отделить загрязняющие примеси. Наиболее распространенной из них является цилиндрическая гравиемойка, у которой внутри наклонного вращающегося барабана перемещается гравий, а поток воды направлен против его движения и это способствует промывке.
§ 41. ПРОИЗВОДИТЕЛЬНОСТЬ ДРОБИЛОК И ГРОХОТОВ
Для расчета производительности щековой дробилки сначала необходимо определить частоту вращения эксцентрикового вала п.
Для упрощения выкладок примем, что неподвижная щека расположена вертикально, а подвижная отклоняется параллельно самой себе, т. е. при увеличении ширины разгрузочной щели I на ход щеки S угол а остается неизменным (рис. 199).
При отклонении подвижной щеки в правое крайнее положение раздробленный материал в виде призмы трапецеидального сечения под действием силы тяжести должен опуститься вниз.
На основании закона свободного падения тела время падения, с,
(224)
где h — высота призмы материала, см; g — ускорение силы тяжести, равное 981 см/с2.
Для обеспечения наибольшей производительности дробилки надо, чтобы выпадение материала закончилось во время отхода подвижной щеки вправо /2, т. е. — t2.
Так как вал за одно вращение совершает два качания (вправо и влево), то время отхода вправо, с,
Ч > (225)
где zi — частота вращения эксцентрикового вала в минуту.
23b
Рис. 199. Схема к расчет)' числа оборотов эксцентрикового вала.
Из формул (224) и (225) после необходимых преобразований получаем:
п = —. (226)
/4
Из рис. 199 видно, что высота трапеции, см,
Следовательно, из формул (226) и (227)
п « —--30 = 665 1/ . (228)
1/ 2.S ' S
г g tg а
Так как истечение дробленого материала, находящегося под давлением, не точно совпадает с движением щеки, на основании допол-
нительных исследований следует принимать п « 500 .
Формула (228) показывает, что с увеличением хода подвижной щеки уменьшается частота вращения эксцентрикового вала, поэтому у более крупных дробилок, имеющих большие S, п меньше, чем у мелких.
За одно вращение вала площадь поперечного сечения призмы выпадения, м2, заштрихованная на рис. 199, может быть выражена как
F = е 4- (е + S) h> (229)
или из формул (226) и (229)
F = (2е + S) S (230)
2 tg а ' '
Объем призмы, м3, при длине загрузочного зева Ъ
V = Fb (231)
237
Рис. 200. Схема к расчету производительности дробилки с пологим конусом.
и, следовательно, при поворотах эксцентрикового вала в минуту техническая производительность дробилки, м3/ч,
Птехн = бОрЕп, (232) где р — коэффициент разрыхления, равный 0,3—0,7. Этот коэффициент уменьшается с повышением прочности дробильного камня, а также с увеличением степени измельчения (с уменьшением
ширины разгрузочной щели). Так, для дробилки, показанной на рис. 193, в, при ширине разгрузочной щели 100 мм и дроблении по-
род средней крепости р = 0,7, а при ширине разгрузочной щели 50 мм р= 0,54. В формулах (229)—(231), согласно которым подсчиты-
вают производительность дробилки, все линейные величины — е, S, b и h выражены в метрах.
Если принять (рис. 199) наибольший размер раздробленного камня е + 3, а наименьший е, то средний размер продукта дробления
d = , (233)
и поэтому формула (230) может быть записана так
F = -^-. (234)
tga ' ’
Из формул (232)—(234) производительность дробилки, м3/ч, Птехн = п. (235)
1g ч*
Следовательно, производительность дробилки при всех прочих равных условиях тем меньше, чем меньше d, т. е. обратно пропорциональна степени измельчения.
Производительность дробилок с пологим конусом определяется из положения, что время, необходимое для прохождения зоны параллельности каждым куском дробленого камня, не должно быть меньше одного полного оборота вала.
Поэтому можно считать (рис. 200), что за одно вращение вала из дробилки выпадает раздробленный продукт объемом, м3,
V = nDodl, (236)
где Do — диаметр нижней окружности подвижного конуса, м; d — ширина зоны параллельности, м; / — ее длина, м.
Техническая производительность конусных дробилок, т/ч,
Пихи = бОЕрпу, (237)
где у — плотность дробленой породы, т/м3.
Определение производительности валковых дробилок основывается на предположении, что через разгрузочную щель
238
шириной 2е, м, с учетом величины раздвигания валков, а, м, выходит непрерывный поток раздробленного материала со скоростью и, м/мин.
Таким образом, площадь поперечного сечения выходящего материала, м2,
F = LB(2e+a), (238)
а техническая производительность дробления, м3/ч,
Птехн = 60/щр.. (239)
Здесь LB— длина валка, м; р. — коэффициент, учитывающий как разрыхление материала, так и неполноту загрузки (ц = 0,1 4- 0,4). Величина а, входящая в формулу (238), составляет примерно
Окружная скорость валков, м/мин,
v — JiDgti, (240)
где DB — диаметр валка, м; п— частота вращения валка, мин-1. Дробимый кусок породы втягивается валками силой трения. При большой частоте вращения п сила трения между валками и куском породы может оказаться недостаточной для движения куска вместе с валками. Кроме того, при большой частоте вращения валков усиливается их износ вследствие стирания раздробляемой породой. Поэтому частота вращения валков ограничивается — п— = 40 ч- 250.
Производительность грохота, м3/ч, зависит от площади сита F, м2, и производительности 1 м2 сита q, м3/ч.
Содержание зерен в исходном продукте, форма зерен (щебень, гравий) и тип грохота (например, горизонтальный или наклонный) учитывается экспериментальными коэффициентами (Az), т. е.
Птехн = qFkt, м3/ч. (241)
§ 42. ПЕРЕДВИЖНЫЕ ДРОБИЛЬНО-СОРТИРОВОЧНЫЕ УСТАНОВКИ
Передвижные дробильно-сортировочные установки применяются для одно-, двух- и трехстадийного дробления.
Установка, приведенная на рис. 201, производит одностадийное дробление.
На двухосной раме 1 с металлическими колесами смонтированы Щековая дробилка 2, вибрационный грохот 3, дизель 4 и топливный бак 5. Рама установки опирается на две ходовые тележки. Сварная рама задней тележки соединена с рамой жестко, а передняя — шарнирно, что дает возможность транспортировать установку тягачом.
Исходный материал подается в приемное отверстие дробилки; раздробленный материал самотеком поступает на вибрационный грохот, где разделяется на две товарные фракции и отсев.
В установках трехстадийного дробления камень с большим количеством крупных включений подвергается первичному дроблению
239
Рис. 201. Передвижная дробильная установка одностадийного дробления.
в щековой дробилке 4 (рис. 202) и из нее поступает на конвейер 1. Раздробленный материал, не прошедший через отверстия верхнего сита 2, ссыпается для вторичного дробления на левую пару валков 8 с широким промежутком а между ними. Более мелкий материал, прошедший через сито 2, но не прошедший через сито 3, поступает для третичного дробления на правую пару валков 6 с узким промежутком б между ними, который соответствует необходимой крупности щебня; под валками имеется лента наклонного продольного конвейера 7, возвращающая раздробленный материал на конвейер 1 для нового цикла сортировки на сите 2 и т. д. Поперечный конвейер 5 отгружает готовую продукцию. Такие установки обслуживаются одним оператором с помощью кнопочного управления.
Применяется также дробильная установка двухстадийного дробления, у которой вторичное дробление осуществляется конусными и валковыми дробилками.
Чтобы определить, каких размеров и какое количество дробленого камня будет получено на дробильной установке, составляют ее количественную схему.
Для составления количественной схемы используют график процентного содержания зерен разного размера в дробленом продукте (рис. 203). По горизонтальной оси графика отложены размеры щебня в миллиметрах, а по вертикальной — фракционный состав в процентах; каждая кривая графика соответствует определенной ширине разгрузочной щели в пределах 5—160 мм. Из графика видно, что при любой величине разгрузочной щели дробилки около 8526 продукта имеют размеры кусков, не превышающие ширины выходной щели.
Пользование этим графиком можно проиллюстрировать, например, применительно к дробильной установке, изображенной на рис. 201.
его
/
2
Рис. 202. Передвижная дробильно-сортировочная установка: а — общий вид; б — схема вторичного и третичного дроблений.
Если ширина разгрузочной щели этой дробилки 55 мм, то зерна камня согласно графику будут составлять, %:
0 — 7 мм 8
0 — 25 мм 40
0 —70 мм 100
Следовательно, в результате первичного дробления будет получено отсева 0—7 мм — 8%, щебня 7—25 мм — 32% и щебня 25— 70 мм — 60%.
Соответствующая количественная схема дробления показана на рис. 204.
При эксплуатации дробилок во избежание выбрасывания камней из зева дробилки над ним необходимо устраивать защитный
241
Камень размером до 200 мм
,м м t щекобая дробилка
Рис. 203. График гранулометрического состава для определения процентного содержания зерен в дробленом продукте при щековых дробилках.
Рис. 204. Количественная схема дробильносортировочной установки производительностью 10 т/ч.
козырек. Перед пуском в ход дробилки надлежит проверить состояние креплений дробящих плит и других деталей. Пускать в ход дробилку можно только при совершенно разгруженном от материала зеве (вхолостую). Поэтому останавливать дробилку надо только спустя некоторое время после остановки ее питателя, чтобы машина успела пропустить через зев весь поступивший материал.
Чрезвычайно важным условием бесперебойной работы дробилок является их регулярная смазка в соответствии с заводской инструкцией. Точное выполнение этих инструкций по эксплуатации дробильных машин является обязательным.
Вопросы для самопроверки
1. Нарисуйте схемы щековой, конусной, валковой и роторной дробилок.
2. Выведите формулы производительности щековой, конусной и валковой д 'обилок и сравните их.
3. Подсчитайте процент фракций 0—5, 5—50, 50—80 и 80—90 мм при ширине разгрузочной щели дробилки 70 мм.
4. Составьте схему передвижной дробильной установки двухстадийного дроб-ения.
242
Глава VIII
МАШИНЫ ДЛЯ ПРИГОТОВЛЕНИЯ, ТРАНСПОРТИРОВАНИЯ И УКЛАДКИ БЕТОННОЙ СМЕСИ И РАСТВОРОВ
Смесь соответствующих материалов является основой для изготовления бетонов и растворов. Качество получаемой продукции обеспечивается правильным подбором составляющих смесь компонентов, точной дозировкой этих компонентов и тщательным их перемешиванием.
Машины для перемешивания материалов носят название смесительных. В зависимости от основного назначения они подразделяются на машины для приготовления бетонной смеси (бетоносмесители) и растворов (растворосмесители). В процессе перемешивания компоненты смеси равномерно распределяются по всему перемешиваемому объему. Эффективность работы машины оценивается степенью полученной однородности смеси через определенное время от начала перемешивания.
Приготовление смеси обычно состоит из следующих операций: дозировки материалов, входящих в состав смеси; загрузки смесительной машины составляющими материалами; перемешивания материалов; выгрузки из машины готовой смеси; перемещения составляющих материалов в процессе приготовления смеси.
Необходимое количество бетонов и растворов, удовлетворяющее растущей потребности современного строительства, и их высокое качество могут быть достигнуты только при комплексной механизации и автоматизации всех операций процесса приготовления смеси.
Комплексно-механизированные установки для приготовления бетонов и растворов обеспечивают наибольшую производительность и лучшие технико-экономические показатели.
§ 43. БЕТОННЫЕ И РАСТВОРНЫЕ УСТАНОВКИ
По назначению бетонные и растворные заводы и установки подразделяются:
а) на передвижные временного типа, сооружаемые для обслуживания одного или нескольких близко расположенных друг к другу строительных объектов;
б) районные, постоянно действующие, стационарного типа, выпускающие товарные бетоны и растворы, предназначенные для обслуживания строительных объектов, находящихся в радиусе действия этих заводов.
243
Рис. 205. Автоматизированная бетоносмесительная установка непрерывного действия: а — технологическая схема; б — общий вид.
Временные установки передвижного типа изготовляют инвентарными, сборно-разборной конструкции, что дает возможность сравнительно легко их демонтировать и перевозить на другой объект после окончания строительства. Компонуется технологическое оборудование в этих установках по партерной (ступенчатой) схеме.
Технологическое оборудование стационарных установок, как правило, располагается по башенной схеме, т. е. по вертикали. Такие установки позволяют получить несколько большую производительность, чем партерные установки, благодаря сокращению
244
времени промежуточных транспортных операций при прохождении материалов по технологическому циклу.
В зависимости от характера технологического процесса приготовления смеси бетонные и растворные установки разделяются на цикличные и непрерывного действия. У первых процесс приготовления смеси представляет собой цикл последовательно чередующихся операций. У вторых операции дозирования, перемешивания и выдачи готовой смеси происходят одновременно.
Автоматизированная бетоносмесительная установка передвижного типа непрерывного действия (рис. 205) состоит из отдельных блоков, обеспечивающих возможность ее быстрого перебазирования и ввода в эксплуатацию на других строительных объектах. Для монтажа и демонтажа установки используется кран грузоподъемностью 10 т. Производительность установки 30 м3/ч.
Для приготовления бетона заполнители (песок и щебень) подаются в расходные бункера 6 грейферным краном или через бункера-питатели 4 ленточными конвейерами 5. Двухрукавная течка 3 позволяет классифицировать заполнитель по его гранулометрическому составу. Из расходных бункеров заполнитель поступает через дозаторы непрерывного действия 2 на сборочный конвейер /, а затем конвейером 7 подается в смеситель непрерывного действия 15. Цемент пневмонагнетателем загружается в расходный бункер 8, имеющий фильтр 9 для очистки воздуха, выходящего в атмосферу при загрузке бункера. Из расходного бункера цемент проходит дозатор 10 и поступает в смеситель. Туда же подается вода из во до дозировочной системы, состоящей из расходного бака 11, насоса-дозатора 12 плунжерного типа и системы трубопроводов с трехходовыми кранами 13 и 14. Готовый бетон из смесителя поступает в накопитель 16 и из него в транспорт.
Установка, помимо приготовления бетона, может выдавать отдозированную сухую смесь в автобетоносмесители 18 для ее перевозки к месту приготовления на удаленных объектах. При этом сухие компоненты смеси после дозаторов направляются по двухрукавным течкам 20 и 19 непосредственно в барабан автобетоносмесителя.
Двухрукавная течка 19 позволяет направить сухие компоненты в цикличный тарировочный дозатор 17, предназначенный для проверки правильности настройки дозаторов непрерывного действия смесительной установки.
Управление работой установки выполняется машинистом из кабины 21, в которой размещаются главный пульт управления, пульт управления дозаторами и шкаф пусковой аппаратуры. Системой управления предусматривается три режима работы установки: автоматический одновременный пуск и остановка механизмов, осуществляемые при наличии транспорта для перевозки бетона; автоматический последовательный пуск и остановка механизмов при доработке материалов; ручной (наладочный) режим работы.
На рис. 206 показан общий вид мобильной бетоносмесительной установки непрерывного действия производительностью 120 м3/ч.
245
Рис. 206. Общий вид передвижной бетоносмесительной установки непрерывного действия производительностью 120 м3/ч.
Она так же, как и описанная выше установка, состоит из отдельных блоков для транспортирования и дозирования составляющих смеси 1, блока подачи цемента 2 и смесительного блока 3. Каждый такой блок имеет раму, выполненную в виде полуприцепов седельного типа к тягачу. Это позволяет использовать установку для скоростного строительства дорог и на других объектах, где требуются частые ее перевозки к местам потребления бетона.
Производство строительных работ требует не только приготовления бетонов и растворов, но и средств их доставки к местам потребления.
Способ доставки бетонов и растворов от смесительной установки к месту их укладки и необходимое для этого оборудование выбирают в зависимости от характера сооружения, общего объема укладываемой смеси, суточной потребности в смеси, высоты ее подъема и дальности горизонтального перемещения. При любом способе транспортирования смесь должна предохраняться от расслаивания на составные части.
В большинстве случаев при выполнении больших объемов бетонных работ экономически целесообразно транспортировать бетонную смесь по трубам при помощи бетононасосов, обеспечивающих перемещение бетона на сравнительно небольшие расстояния в пределах строительной площадки. При необходимости транспортирования бетона от центральных бетонных установок на удаленные строительные объекты лучшими транспортными средствами, обеспечивающими сохранение качества бетона, являются автобетоносмесители.
Для транспортирования растворов в пределах строительной площадки наиболее целесообразно применять растворонасосы, перемещающие растворы по трубам и резиновым шлангам.
§ 44. КЛАССИФИКАЦИЯ СМЕСИТЕЛЬНЫХ МАШИН
Как видно из рассмотренных технологических схем установок для производства бетонов и растворов,основной машиной, определяющей производительность и назначение установки, является смесительная машина.
Смесительные машины состоят из следующих основных частей: смесительного барабана, в котором производится перемешивание материалов; механизма загрузки, при помощи которого материалы подаются в смесительный барабан; механизма разгрузки, обеспечивающего выгрузку готовой смеси из смесительного барабана; двигателя; передаточных механизмов, осуществляющих передачу движения от двигателя к исполнительным органам смесительной машины; станины, на которой монтируются все части машины.
По характеру работы смесительные машины делятся на машины цикличного (периодического) действия и машины непрерывного действия.
В смесительных машинах цикличного действия перемешиваемые материалы загружаются отдельными порциями
247
Рис. 207. Принципиальные схемы способов перемешивания материалов в барабанах смесительных машин:
а—гравитационные бетоносмесители; б — лопастные растворосмесители; в — бетоносмесители непрерывного действия; г — роторные бетоносмесители; д — длаиетарно-роторные бетоносмесители; е — турбулентные растворосмесители.
(замесами), причем каждая новая порция составляющих может быть загружена в барабан лишь после выгрузки из него предыдущего готового замеса. Такой способ работы позволяет регулировать длительность цикла перемешивания в зависимости от состава смеси и дает возможность точно дозировать материалы для каждой порции. Эти машины обеспечивают высокое качество приготовляемой смеси и потому широко применяются в установках любой производительности.
В смесительных машинах непрерывного действия загрузка барабана, перемешивание и выгрузка готовой смеси ведутся одновременно и непрерывно.
По исполнению смесительные машины могут быть передвижными и стационарными.
Передвижными выполняются цикличные смесители с небольшим объемом замеса. Легкие и мобильные, на колесном ходу, они предназначаются для объектов с малым объемом работ. Стационарные смесительные машины применяются на заводах и установках большой производительности.
По способу перемешивания материалов в смесительном барабане различают: гравитационные смесители; смесители с принудительным перемешиванием.
248
В гравитационных смесителях (рис. 207, а) материалы перемешиваются во вращающемся барабане, на внутренней поверхности которого укреплены лопасти. При вращении барабана материал захватывается и поднимается лопастями, а затем благодаря действию гравитационных сил ссыпается вниз. Форма и расположение лопастей придают потоку падающего материала нужное направление и создают встречные потоки, повышая этим эффективность перемешивания. Траектория движения материала во вращающемся цилиндрическом барабане показана на рисунке пунктирной линией.
Достоинства гравитационных смесителей — простота конструкции, небольшой расход энергии и возможность перемешивания смеси с крупным твердым заполнителем. Их недостаток — большая длительность перемешивания и невозможность достижения однородности массы при перемешивании жестких и мелкозернистых смесей. Поэтому гравитационные смесители применяют только для приготовления пластичных бетонов.
В смесителях принудительного перемешивания (рис. 207, б, в, г, д, е) смесь приготовляется благодаря принудительному движению лопастей в массе материала. Перемешивание лопастями позволяет такие смесители применять для приготовления смесей любой консистенции.
В зависимости от состава смеси и назначения смесители принудительного перемешивания имеют различное конструктивное исполнение.
Цикличные растворосмесители (рис. 207, б) представляют собой неподвижный барабан, в котором вращается вал со сплошными винтовыми или плоскими отдельными лопастями. Корытообразные смесители непрерывного действия (рис. 207, в) для бетонов и растворов имеют плоские лопасти, образующие на валу прерывистую винтовую линию. Качество перемешивания смеси при непрерывном режиме работы обеспечивается, если смесь будет находиться в смесителе заданное время, что достигается при определенном соотношении между длиной корыта, угловой скоростью вала и схемой установки лопастей. Роторные смесители (рис. 207, г) представляют собой два концентрических неподвижных цилиндра (внешний и внутренний), образующих между собой рабочую зону, в которой вращаются по окружностям различных радиусов лопасти, укрепленные на общем роторе. Планетарно-роторные смесители (рис. 207, б) отличаются от роторных наличием двух встречных движений лопастей. Ротор вращает в кольцевой рабочей зоне валы с лопастями, а лопасти одновременно вращаются на своих валах, создавая дополнительные вихревые потоки смеси. У турбулентных смесителей (рис. 207, е) потоки смеси создаются быстро вращающимся ротором, установленным в коническом основании чаши. В таких смесителях приготовляются только подвижные растворы, у которых создаваемые ротором центробежные потоки приводят в движение весь объем смешиваемой массы.
249
В качестве главного параметра цикличных бетоно- и растворо-смесителей принят объем готового замеса, выраженный в литрах. Соотношение объема готовой смеси Гс и суммарного объема сухих компонентов VK, загружаемых для одного замеса, составляет: для бетонов = 0,65; для растворов —~~ я» 0,8.
ч<
Для свободного перемешивания компонентов смеси в гравитационных смесителях геометрический объем их барабана должен примерно в 3 раза превышать объем смеси.
Для смесительных машин непрерывного действия в качестве главного параметра принята их производительность, выраженная в м3/ч.
ГОСТ предусматривает цикличные бетоносмесители с объемом готового замеса 65, 165, 330, 500, 800, 1000, 1600 (только гравитационные), 2000 и 3000 л.
Лопастные растворосмесители выпускаются нашей промышленностью с объемом готового замеса 30, 65 и 250 лив турбулентном исполнении 65, 800, 1800 л.
Корытообразные бетоносмесители непрерывного действия выпускаются производительностью 5, 30, и 60 м3/ч. Они предназначены для приготовления бетонов или растворов и входят в состав передвижных смесительных установок (см. рис. 205 и 206).
§ 45. КОНСТРУКЦИИ СМЕСИТЕЛЬНЫХ МАШИН
В современных бетоно- и растворосмесительных установках при меняются гравитационные смесители и смесители принудительного перемешивания как цикличного, так и непрерывного действия.
Гравитационные бетоносмесители цикличного действия различаются как по форме, так и по способу загрузки и выгрузки барабана. Они выполняются передвижными для индивидуального использования и стационарными в качестве комплектующего оборудования партерных и башенных смесительных установок.
Бетоносмесители с грушевидным барабаном изготовляются небольшой емкости (до 165 л) в передвижном и стационарном исполнении.
Передвижной бетоносмеситель на колесном ходу (рис. 208) имеет объем замеса 65 л и используется как вспомогательное оборудование при небольших объемах бетонных работ. Загружается он вручную.
Смесительный барабан 7 такого смесителя посажен на выходной вал двухступенчатого редуктора и приводится во вращение двигателем 2 через клиноременную передачу /.Корпус редуктора состоит из двух частей, оси которых пересекаются под углом 45°. Первая часть выполнена в виде трубы 4, установленной в подшипниках горизонтально на основании 3 смесителя. Через эту трубу проходит быстроходный вал 12 редуктора. Во второй части 8 смонтирована коническая 13 и цилиндрическая 14 пары зубчатых колес. Благодаря такой конструкции редуктор может поворачиваться вместе с барабаном
250
Рис. 208. Передвижной гравитационный бетоносмеситель с объемом замеса 65 л: а — общий вид: б — кинематическая схема.
вручную штурвалом 5. При этом коническое зубчатое колесо перекатывается по шестерне, и ось барабана меняет свой угол наклона. Загрузка и перемешивание осуществляется при наклоне барабана к горизонту на 12°, а разгрузка при его опрокидывании под углом 40°. Три лопасти 6 внутри барабана обеспечивают перемешивание смеси и способствуют интенсивной выгрузке в момент опрокидывания барабана. Для фиксации различных положений барабана предусмотрено специальное тормозное устройство, состоящее из ножной педали //, пружины 10 и клина 9.
Бетоносмеситель стационарного исполнения с объемом замеса 65 л (рис. 209) предназначен для использования в партерных установках небольшой производительности. Он имеет скиповый подъемник, обеспечивающий подачу отдозированных компонентов смеси в барабан.
Барабан 8 такого смесителя посажен на тихоходном валу редуктора 11, установленного вместе с двигателем 14 на траверсе 13. Штурвалом 9 через редуктор механизма опрокидывания 10 траверса вместе с барабаном может поворачиваться вручную на раме неподвижного основания 1 в нужное положение (загрузка, перемешивание, выгрузка). Фиксация положения траверсы с барабаном осуществляется педалью 12, управляющей тормозным устройством. Для подъема ковша 5 по направляющим 4 и загрузки смесительного барабана служат два канатных барабана 6. Они установлены на общем валу, который вращается от собственного двигателя 7 через червячный редуктор 16. Автоматическая остановка ковша в положении разгрузки обеспечивается специальным устройством 15, воздействующим на конечные выключатели в электрической цепи питания двигателя. Дозировка воды осуществляется счетчиком-водомером 3. Управление работой двигателей ведется с пульта 2.
Бетоносмесители с двухконусным барабаном изготовляются с объемом готового замеса от 330 до 3000 л в стационарном исполнении
251
Рис. 209. Гравитационный бетоносмеситель с объемом замеса 165 л:
а — общий вид; б — смесительный барабан на траверсе; в — кинематические схемы.
Ими комплектуются передвижные и стационарные бетоносмесительные установки и заводы.
Бетоносмеситель с объемом замеса 1600 л (рис. 210) имеет смесительный барабан 10, выполненный в виде двух усеченных конусов (короткого и длинного), соединенных основаниями с цилиндрическим ободом, на котором укреплены зубчатый венец 12 и опорный бандаж 11. Барабан опирается на два опорных катка 4 и удерживается от опрокидывания тремя парами роликов 5, охватывающими с двух сторон опорный бандаж барабана. Смесительный барабан, опорные катки и поддерживающие ролики смонтированы на поворотной траверсе 6, опирающейся цапфами 7 на подшипники 9, установленные на стойках 1 неподвижного основания 2 бетоносмесителя.
На консольной площадке поворотной траверсы укреплен привод вращения барабана, состоящий из электродвигателя 8, редуктора 3
252
Рис. 210. Гравитационный бетоносмеситель с двухконусным барабаном: а — вид спереди; б — разгрузка; в — конструкция; г — кинематическая схема.
и ведущей шестерни 15, находящейся в зацеплении с зубчатым венцом 12 барабана.
Загружают составляющие материалы и выгружают готовый бетон через отверстия в торцах барабана. Загрузка материалов осуществляется через торцовое отверстие короткого конуса барабана, а выгрузка готовой смеси — через торцовое отверстие длинного конуса при наклоне траверсы с вращающимся барабаном под углом к горизонту 60°. При загрузке и в процессе перемешивания ось барабана занимает горизонтальное положение. Горизонтальное положение двухконусного барабана определяет объем загружаемых в него составляющих, который устанавливается с учетом предотвращения выброса материалов в процессе их перемешивания.
Для повышения производительности бетоносмесителей этого типа объем загружаемых материалов может быть увеличен на 10%,
253
при сохранении качества перемешивания. Это достигается тем, что загружают материал и выгружают готовую смесь только через отверстие длинного конуса барабана, а второе отверстие закрывают. Барабан при этом в процессе перемешивания устанавливается с небольшим наклоном его оси в сторону короткого конуса, отверстие которого постоянно закрыто.
Наклон траверсы с барабаном во время разгрузки и ее возврат в исходное положение осуществляют при помощи гидравлического или пневматического приводов.
Цилиндр пневматического привода 14 установлен шарнирно на раме 2 и шарнирно соединен выдвижным штоком 13 с поворотной траверсой 6. Сжатый воздух под давлением 0,35 МПа (3,5 кгс/см2) все время находится в верхней полости воздушного цилиндра. В нижнюю полость цилиндра может подаваться сжатый воздух под давлением 0,7 МПа (7 кгс/см2) от электровоздушного клапана 16.
При включении электромагнита 17 воздушного клапана 16 воздух под давлением 0,7 МПа (7 кгс/см2) поступает в нижнюю полость цилиндра, выдвигает поршень со штоком и наклоняет траверсу с установленным на ней барабаном под разгрузку. Более высокое давление воздуха в нижней полости цилиндра позволяет не только повернуть барабан, но и вытеснить из верхней полости цилиндра воздух под давлением 0,35 МПа (3,5 кгс/см2). По окончании разгрузки электровоздушный клапан выключается, и нижняя полость цилиндра сообщается с атмосферой. Находящийся в верхней полости сжатый воздух под давлением 0,35 МПа (0,35 кгс/см2) возвращает поршень со штоком, траверсой и смесительным барабаном в исходное положение.
Смесители принудительного перемешивания цикличного действия применяются для приготовления любых смесей. Различие конструкций обусловлено назначением машины.
Растворосмесители изготовляются передвижными для обслуживания отдельных объектов с малым объемом работ и стационарными для специализированных установок партерного или башенного типа. По конструкции различают лопастные растворосмесители с горизонтальным или вертикальным лопастным валом и турбулентные.
Лопастной растворосмеситель с объемом готового замеса 250 л (рис. 211) предназначен для приготовления цементных, известковых и других строительных растворов. Он оборудован скиповым подъемником для загрузки компонентов смеси.
Ковш 1 такого растворосмесители поднимается по направляющим двумя канатными барабанами 2 с приводом от общего двигателя 8 через промежуточный вал редуктора 7 и цепную передачу 9. Вал барабанов подъема ковша включается поворотом рукоятки 15, которая нажимным устройством 16 замыкает фрикционную муфту 17. Ковш опускается под действием силы тяжести при отпускании ленточного тормоза 3 и одновременном выключении фрикционной муфты. Смесительный барабан 4 имеет отверстие для загрузки компо-254
нентов смеси и разгрузочный затвор 6, управляемый пневмоцилиндром 5. При отсутствии на месте эксплуатации сжатого воздуха предусмотрено ручное управление затвором. Вал 10 смесительного барабана (рис. 211, б) несет на себе шесть прямых лопастей 11 и две лопасти —скребки 12, счищающие раствор с торцовых поверхностей барабана. Вал установлен в подшипниках скольжения 13, вынесенных за торцовые стенки барабана. В местах выхода вала из барабана предусмотрены уплотнения 14.
Передвижной турбулентный растворосмеситель с объемом замеса 65 л (рис. 212) предназначен для приготовления цементных, известковых, глиняных и других растворов подвижностью 7 см и более, а также бетонов с осадкой конуса больше 4 см. Этот смеситель используется как вспомогательное оборудование для производства отделочных и ремонтных работ при небольшой потребности в растворе. Он состоит из неподвижной вертикальной чаши 4 с конической поверхностью у основания. Двигатель 7 через клиноременную передачу 1 вращает ротор 5 с лопастями 6, расположенными на вертикальном валу 2 у основания чаши. Быстрое вращение ротора (550 об/мин прот в 30 об/мин лопастных смесителей) и коническая
2t>5
Рис. 212. Передвижной турбулентный растворосмеситель с объемом замеса 65 л.
поверхность основания чаши создают напор снизу, благодаря чему материал поднимается вверх по спирали и снова сбрасывается на вращающийся ротор. Готовая смесь выгружается через открывающийся затвор 3.
Такой принцип работы смесителя повышает его производительность и улучшает качество готовой смеси.
Роторные бетоносмесители предназначены для приготовления бетонных смесей любой консистенции и растворов. Наиболее рациональной областью их использования является приготовление мелкозернистых малоподвижных и жестких бетонных смесей.
Бетоносмеситель с объемом замеса 330 л роторного типа (рис. 213) предназначен для комплектования бетоносмесительных установок башенного типа с механизированной загрузкой составляющих бетона. Он представляет собой неподвижную цилиндрическую чашу с вертикальной осью. Рабочая зона смесителя выполнена в виде кольцевого пространства, заключенного между наружным 2 и внутренним 7 вертикальными цилиндрами. Внутренний цилиндр предназначен для предупреждения образования «мертвых зон» в процессе смешивания. Кольцевая рабочая полость изнутри выложена броневыми плитами.
Для выгрузки готовой смеси на периферийной части днища предусмотрен полусекторный люк, закрываемый затвором 13 с помощью пневмоцилиндра 12. Сверху корпус закрыт двумя крышками с быстрозажимными устройствами.
Смешивающий механизм, расположенный внутри рабочего пространства, представляет собой шестистержневый ротор 8, на концах которого на амортизационных устройствах 6 смонтированы держатели 3. Амортизационные устройства предназначены для преду-
236
Рис. 213. Роторный бетоносмеситель с объемом замеса 330 л:
а — общий вид; б — конструкция;
в — ротор смесителя.
преждения поломок при попадании крупных частиц заполнителя между лопастями и чашей.
На держателях ротора установлены смешивающие 1 и очистные 14 лопасти. Смешивающие лопасти расположены в плане таким образом, что они вращаются по окружностям с различными радиусами и перекрывают все сечение кольцевого рабочего пространства смесителя. Это создает мощные встречные потоки смеси, обеспечивающие быстрое и качественное перемешивание исходных материалов. Очистные лопасти очищают вертикальные цилиндрические поверхности кольцевого пространства. Зазоры между днищем чаши и смешивающими лопастями регулируются поднятием и опусканием держателей. Ротор вращается от одноступенчатого планетарного мотора-редуктора 10 через пару зубчатых колес 9. Сухие компоненты
Рис. 214. Планетарно-роторный бетоносмеситель с объемом замеса 800 л: а — конструкция; б — кинематическая схема смешивающего механизма.
загружаются через входной патрубок 4, а вода подается по кольцевой перфорированной трубке 5. Пусковая электроаппаратура смонтирована в шкафу И. Герметичность чаши смесителя создает благоприятные условия для его обслуживания.
Бетоносмеситель планетарно-роторного типа с объемом замеса 800 л (рис. 214) отличается от роторных смесителей конструкцией смешивающего механизма. Здесь выходной вал мотор-редуктора 1 через уравнительную муфту 2 вращает ротор, представляющий собой корпус планетарного редуктора 10. Центральное зубчатое колесо 3 неподвижно. Оно жестко закреплено на стойке 9, проходящей внутри центрального ограждающего цилиндра 8. При вращении корпуса редуктора (водила) паразитные шестерни 4 обкатываются по неподвижному зубчатому колесу и передают вращение валам 5, несущим на себе планшайбы 6 с лопастями 7. Таким образом, лопасти совершают сложное движение. Они движутся по кольцевому рабочему пространству смесителя и одновременно вращаются на своих валах. Это создает интенсивные пересекающиеся потоки и повышает 258
Рис. 215. Двухвальный бетоносмеситель непрерывного действия:
а — общий вид; б — расположение лопастных валов; в — кинематическая схема.
эффективность перемешивания. В остальном конструкция ничем не отличается от роторных смесителей.
Бетоносмесители принудительного перемешивания непрерывного действия предназначены для приготовления бетонных смесей и растворов любой консистенции. Ими комплектуются передвижные бетоносмесительные установки, обслуживающие крупные строительные объекты или районы строительства с большим потреблением смеси.
Бетоносмеситель непрерывного действия (рис. 215) представляет собой корытообразный корпус 3, внутри которого вращаются два вала 4 с насаженными на них плоскими лопастями 9. Лопасти сидят на валах попарно, причем каждая пара лопастей повернута относительно соседней пары на угол ср, равный 45,60 или 90°. Плоскость лопасти повернута относительно плоскости вала на угол 45°, что создает наиболее эффективное перемешивание.
Лопасти на валу образуют прерывистую винтовую линию, что обеспечивает не только интенсивное движение материала по окружности, но и его перемещение вдоль корыта от загрузочного 2 к выходному отверстию 6, перекрываемому секторным затвором. Последние несколько пар лопастей обычно повернуты так, что создают встречное движение материала, вызывающее подпор смеси и поддерживающее нужный уровень материала в барабане.
Валы с лопастями установлены на вынесенных наружу подшипниках 5 и вращаются двигателем 1 через клиноременную передачу 8, редуктор 7 и зубчатые колеса 10.
9*
259
§ 46. ПРОИЗВОДИТЕЛЬНОСТЬ СМЕСИТЕЛЬНЫХ МАШИН
Производительность смесительных машин цикличного действия зависит от емкости их барабана и времени, затрачиваемого на приготовление одного замеса.
Время, затрачиваемое на приготовление одного замеса, состоит из следующих элементов: времени, расходуемого на загрузку смесительного барабана (х; времени перемешивания /2; времени, затрачиваемого на разгрузку готовой смеси /3; времени, необходимого для возврата наклоненного барабана в исходное положение или для закрытия затвора при разгрузке через отверстие в днище барабана
Продолжительность загрузки смесительного барабана ty составляет в среднем 15—20 с при подаче материалов загрузочным ковшом и 10—15 с при загрузке из бункера. Продолжительность перемешивания /2 зависит от величины замеса, для обычного бетона перемешивание длится 60—120 с; для нормальных известковых или смешанных растворов это время колеблется в пределах 60—90 с, а для растворов с легкими заполнителями — 120—150 с. Время разгрузки готовой смеси t3 при опрокидном или наклоняющемся барабане составляет 10—20 с, а при неопрокидном — 20—30 с. Затрата времени на возврат барабана или закрытие затвора ti составляет 10—12 с.
Число замесов в течение часа работы
— 3600
^1 + ^2 + ^3 + ^4, ’
а часовая техническая производительность смесительной машины, м3/ч, с емкостью смесительного барабана 1/с, л, по готовой смеси
Птехн = "Ж • (243>
Из выражений (242) и (243) видно, что производительность смесительных машин может быть повышена за счет увеличения емкости барабана по загрузке или за счет сокращения времени операций цикла.
В смесительных машинах непрерывного действия время затрачивается только на полезную операцию перемешивания материала. Поэтому такие смесители имеют повышенную производительность.
Производительность смесителей непрерывного действия, м3/ч, в общем случае определяется произведением площади поперечного сечения материала в смесительном барабане F, м2, на скорость осевого перемещения смеси иос, м/с:
П = 3600Рцос. (244)
Осевая скорость перемещения смеси в барабане зависит от формы и схемы установки лопастей. В лопастных горизонтальных смесителях осевая скорость может быть рассчитана по формуле
foe = kBknv tg р, (245)
где kB — коэффициент возврата смеси в результате перемешивания, равный 0,68—0,75; kn — коэффициент прерывистости винтовой поверхности; v = ©7? — окружная скорость лопастей, м/с;
260
о — угловая скорость вала, рад/с; R — радиус наружной кромки лопастей, м; р — угол подъема винтовой линии, образуемой лопастями:
(246)
где t — шаг винта, образуемого лопастями, м.
Коэффициент прерывистости винтовой поверхности лопастного вала представляет собой отношение площади проекций лопастей на винтовую поверхность в пределах одного шага к площади сплошной винтовой поверхности.
Как видно из вышеприведенных формул, скорость осевого перемещения смеси в смесителях непрерывного действия зависит от частоты вращения вала, размеров лопаток и углов их установки. При увеличении частоты вращения возрастает скорость осевого движения смеси и производительность. Однако для получения требуемого качества смеси нужно затратить на перемешивание определенное время, поэтому с увеличением частоты вращения необходимо увеличивать длину смесителя или подбирать соответствующую схему установки лопастей.
§ 47. АППАРАТУРА ДЛЯ ДОЗИРОВАНИЯ СОСТАВЛЯЮЩИХ БЕТОНОВ И РАСТВОРОВ
Аппараты, отмеривающие нужное количество материалов, поступающих в барабан смесительной машины, называются дозаторами.
Процесс отмеривания материалов дозаторами должен быть точным, быстрым и максимально автоматизированным, так как только при этих условиях можно получить качественную смесь и повысить производительность установки. От точности дозирования составляющих зависит не только качество смеси, но и экономное расходование материалов. Допускаемое по ГОСТу отклонение в дозировании компонентов бетона не должно превышать ±2% для вяжущего и воды и ±3% для заполнителей.
Дозировать составляющие можно двумя способами — по объему и по весу. Кроме того, для обслуживания цикличных смесителей дозирование выполняют отмериванием порций каждого компонента (цикличные дозаторы), а для работы смесителей непрерывного действия взвешивают составляющие в процессе их движения к барабану (дозаторы непрерывного действия).
Дозирование по объему не требует сложного оборудования, но его точность значительно ниже, чем весового. Это объясняется тем, что объем некоторых материалов (цемент, песок) в значительной степени зависит от таких свойств, как плотность и влажность, которые могут колебаться в широких пределах. Так, плотность цемента зависит от высоты его засыпки и интенсивности заполнения мерника и может колебаться при этом в значительных пределах (до 50%), а объем песка при повышении его влажности от 0 до 5% увеличивается больше чем на 30%.
261
Рис. 216. Схема автоматического дозатора турбинного типа с индукционным счетчиком.
Объемное дозирование в силу малой точности допустимо только для воды. Оно осуществляется различными устройствами, обеспечивающими отмеривание заданной порции воды. Таким устройством, например, является автоматический дозатор турбинного типа (рис. 216). В корпусе 1 дозатора установлена турбинка 2, на лопастях которой закреплены стальные пластинки. При прохождении лопасти с пластинкой под индукционным датчиком 3 в последнем возникает электрический импульс. Проходное сечение корпуса и количество пластинок по
добраны так, что каждому импульсу соответствует доза воды, равная 1 л. Сигнал отдатчика поступает в счетное устройство импульсов. При совпадении числа импульсов с заданным срабатывает реле управления и клапан 4 перекрывает поток воды.
Весовые цикличные дозаторы состоят из мерного бункера 4 (рис. 217) с материалом, вес которого Gu через систему тяг 2 и рычагов 1, дающих выигрыш в силе, уравновешивается небольшим, задающим нужную дозу грузом Gr. Материал поступает в бункер из загрузочного устройства (питателя) 3, а выгружается после взвешивания через разгрузочный затвор 5.
Механическая система цикличного дозатора использует для уравновешивания мерного бункера с материалом квадрантное весовое устройство циферблатных указателей. Задатчиком порции и средством ее отсечки служат датчики, устанавливаемые в соответствующем месте шкалы циферблатного указателя и реагирующие на положение стрелки.
Квадрантное весовое устройство циферблатного указателя состоит из опорных 18 и грузоприемных 17 секторов-квадрантов, соединенных с кронштейнами 14, несущими на себе грузы 20. Опорные секторы подвешены на стальных лентах 16, расположенных на раме 11 корпуса 10, а стальные ленты 13 грузоприемных секторов соединены с траверсой 7 и тягой 9. Тяга проходит через масляный затвор 8, предохраняющий корпус от запыления.
Усилие от мерного бункера через рычажный весовой механизм дозатора передается на тягу 9 циферблатного указателя. Далее через траверсу и грузоприемные ленты 13 усилие передается на квадранты, заставляя их поворачиваться вокруг своих осей; левый квадрант по часовой стрелке, правый против часовой стрелки. При этом малые опорные секторы 18 без скольжения обкатываются по направляющим рамки 11. Под действием нагрузки грузы 20 все более отклоняются от вертикального положения до равновесия с взвешиваемым грузом. Одновременно с поворотом квадранты поднимаются вверх, увлекая за собой соединительный мостик 19, а вместе с ним и 262
зубчатую рейку 12. При этом сцепленное с рейкой зубчатое колесо 6 и сидящая на его оси стрелка 15 поворачиваются и стрелка показывает по шкале циферблата вес взвешиваемого груза.
После снятия нагрузки квадранты опускаются, мостик, рейка и зубчатое колесо перемещаются в обратном направлении, а стрелка, повернувшись против часовой стрелки, вновь становится против нуля. Механическая система с квадрантным весовым устройством циферблатных указателей создает широкие возможности для автоматизации процесса взвешивания.
Применяемые в смесительных установках виды порционных дозаторов с циферблатными указателями отличаются между собой типом датчиков, задающих и отсекающих порции материала, а также схемой автоматического управления процессом взвешивания.
Для примера описана работа автоматического дозатора (рис. 218) для заполнителей с фотоэлектрической системой управления.
В этих дозаторах датчиками, реагирующими на положение стрелки циферблатного указателя, служат фотосопротивления. В основе их работы лежит явление внутреннего фотоэффекта, состоящее в том, что электропроводимость полупроводниковых элементов пропорциональна количеству света, поглощаемого полупроводником.
Конструктивно фотосопротивление (рис. 218, б) представляет собой пластинку со слоем светочувствительного полупроводника 2 (сернистый кадмий), смонтированную на вспомогательной стрелке 15 задней стенки циферблатного указателя 1. Здесь же на кольце 14 размещаются осветительные лампы 3. Они помещены в закрытых цилиндрах, в торце которых имеется отверстие для прохода луча света. Лампы устанавливаются в местах, соответствующих дозам взвешиваемого материала.
Дозатор (рис. 218, а) состоит из обычного мерного бункера 6, связанного с квадрантным весовым устройством циферблатного указателя системой тяг 5 и рычагов 4. Материал поступает из
263
расходного бункера 13 через лотковый питатель 11, оборудованный электромагнитным вибратором 12.
Катушки электромагнитного вибратора (ЭВ) питаются от сети переменного тока через выпрямительные устройства В. При прохождении тока по обмоткам электромагнитов они поочередно притягивают и отпускают якорь, создавая этим колебания лотка. Амплитуда его колебаний зависит от величины напряжения, подаваемого на катушки вибратора. Изменяя напряжение и, следовательно, амплитуду колебаний, достигают увеличения или уменьшения потока материала, поступающего в весовой бункер. Материал перестает поступать в бункер, если колебания лотка прекращаются.
Процесс дозирования происходит следующим образом.
В схеме блока пускорегулирующей аппаратуры 10 включается в работу лампа 3, установленная на заданной дозе материала. На катушки электромагнитного вибратора лоткового питателя подается полное напряжение, и материал интенсивным потоком поступает в мерный бункер. Стрелка с фотосопротивлением на циферблатном указателе отклоняется по мере наполнения бункера. При заполнении бункера приблизительно на 90% заданной дозы фотосопротивление подходит к включенной лампе. Освещенность фотосопротивления увеличивается, и, следовательно, увеличивается его проводимость. Это используется для уменьшения напряжения, подаваемого из блока пускорегулирующей аппаратуры на катушки электромагнитного вибратора. Амплитуда колебаний лотка уменьшается, и происходит процесс досыпки материала малым потоком до заданной дозы. Такой режим досыпки в конце взвешивания повышает его точность, так как сводит к минимуму влияние сил инерции падающего в бункер материала.
Движение стрелки продолжается до тех пор, пока фотосопротивление не выйдет из-под луча света. После этого оно вновь уменьшит свою проводимость, что служит сигналом для полного отключе-264
Бетонный забой .. .. —з
u Номер машины iz:~3
„Дата СТ3'3 „ Помер замеса 1~~.зМарка бетона Г ""3
Время г- -л Отметка о Выдаче с^^понсистениип бетона с=з
Бетонный забой г.,. . ... - .. ... I
„ „ Помер машины i ~ 1
Дата cz.-:j Номер замеса iz ; з Марка бетона г~т п
Время х==р=1 Отметка о Выдаче ^^Консистенция бетона
Материал масса, не
1000 too io /
Цемен т I марка II марка 8 4 2 1 8 4 2 1 О • О • О О О О 8 4 2 1 • О О • О О О О 8 4 2 1 О О • О О О О О
Щебень,грабий 5~2имм 20-40 40-80 80-150 ООО» О О О О ООО» О О О О О О О О О • О О ОО • • • О О О О • О О • • О • о о о о о о • о О О • • О О О О О О О О О • • О
Песок ООО» О О • О о • о • • О • О
Soda О О • • • о о • О • • О
Заказчик ^Печать,подпись, дата |
Рис. 219. Принципиальная схема программного управления цикличным дозатором по перфокартам: а — перфокарта; б — схема управления.
ния вибратора, прекращения взвешивания и разгрузки бункера. Разгружают бункер затвором 7, управляемым пневматическим цилиндром 8 и электропневмопереключателем 9.
Циферблатный указатель может быть обрудован несколькими источниками света (до 6 штук), обеспечивающими приготовление бетонной смеси по разным рецептурам. Рецептура бетонной смеси задается перед началом смены соответствующей установкой ламп по рабочим шкалам всех дозаторов.
Дальнейшее развитие автоматизации процессов взвешивания способствовало созданию программного управления дозаторами при помощи перфокарт (рис. 219, а), представляющих собой листы картона с пробитыми отверстиями. Требуемый состав и количество бетонной смеси задаются числом и взаимным расположением отверстий (черные точки на рисунке) на перфокарте.
265
Рис. 220. Принципиальная схема дозатора непрерывного действия с регулированием по нагрузке.
Получив заказ со стройки, оператор автоматической смесительной установки закладывает перфокарту в считывающее устройство, в котором через пробитые отверстия замыкаются электрические контакты (k1 — kn) соответствующих сопротивлений (г1 — гл) одного из плеч электрического измерительного моста (рис. 219, б). Комбинация сопротивлений, обусловленная системой отверстий на перфокарте, приводит к разбалансу моста и появлению на его диагонали определенной величины напряжения, которое через электронный усилитель (ЭУ) подается на двухфазный серводвигатель (СД). Серводвигатель поворачивает укрепленную на его валу одну ампулу с источником света (ИС) и одновременно перемещает ползунок реохорда (Р), изменяя этим соотношение сопротивлений плеч моста. Вращение двигателя будет происходить до тех пор, пока мост не уравновесится и напряжение разбаланса, подаваемое на вход электронного усилителя, не станет равным нулю. При этом источник света остановится на циферблатном указателе в месте, соответствующем заданной дозе материала. В дальнейшем процесс дозировки проходит аналогично описанному ранее.
Дозаторы непрерывного действия предназначены для отмеривания материалов при их загрузке в барабаны смесителей непрерывного действия. Для этого дозаторы должны поддерживать непрерывный поток каждого компонента смеси на заданном уровне производительности.
Дозаторы непрерывного действия состоят из бункера с питателем и весового конвейера. Производительность дозатора П, определяемая нагрузкой материала на 1 м конвейера G, кг, скоростью движения его ленты и, должна поддерживаться постоянной и равной заданной, т. е.
П = Gv = const. (247)
266
Производительность для ее поддержания на заданном уровне может регулироваться изменением скорости ленты конвейера при постоянной нагрузке или изменением погонной нагрузки при постоянной скорости движения ленты.
Для примера рассматривается работа дозатора непрерывного действия для заполнителей с регулированием нагрузки (рис. 220).
Материал из бункера 1 поступает в вибролоток 2, находящийся под воздействием вибрации. Лоток равномерно высыпает материал на весовой конвейер 3, отрегулированный грузом 6 на определенную производительность. С весового конвейера материал непрерывным потоком подается на ленту сборочного конвейера 4 и совместно с другими компонентами направляется в барабан смесительной машины. Точность дозировки обеспечивается связью между положением коромысла 5 весового механизма и напряжением на катушках электромагнитного вибровозбудителя 10, которое регулируется включенным в систему индуктивным датчиком 8. Если вес материала, находящегося в данный момент на весовом конвейере, окажется больше заданного, то система рычагов придет в действие, и конец коромысла 5, на котором закреплен груз 6, поднимется вверх, увлекая за собой тягу 7, связанную с сердечником индуктивного датчика 8. Датчик подаст импульс через усилители блока приборов автоматики 9, и напряжение на катушках электромагнитного вибровозбудителя уменьшится. Уменьшение напряжения влечет за собой уменьшение амплитуды колебаний вибролотка 2, в результате чего материал поступает на весовой конвейер менее интенсивно, и коромысло 5 вновь занимает горизонтальное положение. При уменьшении веса материала на весовом конвейере действие системы автоматики приведет к увеличению напряжения на катушках вибровозбудителя и поток материала увеличится. Таким образом, датчик 8, изменяя напряжение на катушках вибратора, поддерживает равновесие между весовым конвейером и грузом 6, задающим вес материала на конвейере, чем обеспечивается весовая стабильность непрерывного потока материала.
Освоение промышленного производства таких дозаторов позволяет значительно расширить область применения смесительных машин непрерывного действия и способствует созданию на их базе экономически целесообразных заводов-автоматов для обеспечения бетоном крупных строительных объектов.
§ 48. БЕТОНОНАСОСЫ И ПНЕВМОНАГНЕТАТЕЛИ
Бетононасосы и пневмонагнетатели предназначены для перемещения бетона по трубам на сравнительно небольшое расстояние в пределах строительной площадки. Дальность подачи смеси бетононасосами по горизонтальному бетоноводу достигает 400 м, по вертикали 70 м. Монтируя последовательно ряд бетононасосных установок, можно увеличить дальность и высоту подачи. Подача бетона по трубам при возведении монолитных сооружений по сравнению-
267
с его подачей ленточными конвейерами или кранами повышает производительность труда и снижает себестоимость работ. Такой способ транспорта бетона позволяет работать в стесненных условиях и труднодоступных местах, где другие виды подачи не могут быть применены.
Бетононасосы поршневого типа отечественная промышленность выпускает производительностью 10, 20 и 40 м3/ч с механическим и гидравлическим приводом.
Принцип действия поршневого бетононасоса с механическим приводом (рис. 221) заключается в следующем.
Поступающая в приемный бункер 6 бетонная смесь подвергается непрерывному перемешиванию лопастями 5 для придания ей однородности и предупреждения расслоения. Из бункера смесь при помощи побудителя 7, выполненного в виде лопастей мешалки, поступает через всасывающий клапан 8 в цилиндр 11 насоса. Поршень 12 насоса совершает возвратно-поступательное движение при помощи кривошипно-шатунного механизма, коленчатый вал 2 которого приводится во вращение от основного электродвигателя 13 бетононасоса. Движение поршня строго согласовано с положением всасывающего 8 и нагнетательного 9 клапанов: при всасывающем движении поршня (положение 1, рис. 221, а) клапан 8 открывается, а кла
268
пан 9 закрывается; при нагнетательном движении поршня (положение //) наоборот. Синхронизация перемещений поршня и клапанов достигается при помощи кулисного механизма 1, получающего ка-чательное движение от профильных кулаков на коленчатом валу, и двух тяг 3 и 4, связывающих каждую из кулис с клапанами. Во время всасывающего движения поршня бетонная смесь поступает в полость цилиндра, а во время нагнетательного движения выталкивается в трубопровод 10. Побудитель 7 приводится во вращение от коленчатого вала насоса через цепную передачу 14, а смеситель, как правило, имеет собственный двигатель 15.
Для подачи бетона к месту назначения каждый бетононасос комплектуется бетоноводом и необходимым вспомогательным оборудованием. В комплект бетоновода входят различной длины прямые и изогнутые звенья труб одинакового диаметра. Звенья соединяются между собой с помощью быстродействующих рычажных замков, обеспечивающих натяжение стыка посредством его зажима перекидными рычагами. Герметичность соединения достигается установкой на стыках звеньев бетоновода резиновой прокладки.
Эксплуатация бетононасосов обеспечивает хорошие техникоэкономические показатели только в том случае, если по бетоно-воду перекачивается бетонная смесь определенного состава, а за бетононасосом установлен тщательный уход и соблюдается режим его работы. Смесь должна быть пластичной с осадкой конуса 4—12 см и ограниченной крупностью заполнителя.
При устройстве линии бетоновода следует учитывать, что прямые горизонтальные и вертикальные трубы и колена при движении по ним бетонной смеси создают различные по величине сопротивления. Поэтому, рассчитывая бетоновод, все сопротивления приводят к одному виду сопротивлений — к сопротивлению, возникающему в горизонтальном бетоноводе. При этом пользуются опытными коэффициентами эквивалентности: для 1 м вертикального бетоновода kB = 8, колена под углом 90° k} = 12, под углом 45° k.2 = 7 и под углом 22° 30' k3 = 4. Общая приведенная длина бетоновода, м,
— Ц 4- Z2 4" Zg, (248)
где Zj — общая длина горизонтальных участков бетоновода, м; Z2— общая приведенная длина вертикальных участков бетоновода, м; 13 — общая приведенная длина местных сопротивлений (колена трубопровода), м.
Величины Z2 и 13 находят из условий:
Z2 = kBH, (249)
где Н — общая высота подъема бетонной смеси,
l3 — n1fe1 + n2k2 + n3k3. (250)
Здесь п1( «2, п3 — количества однотипных колен на линии бетоновода.
Для возможности транспортирования бетонной смеси требуется, чтобы приведенная длина бетоновода Lnp была меньше или равна
269
Рис. 222. Бетононасос с гидравлическим приводом:
а — общий вид; б — схема движений вспомогательной стрелы с бетоноводом; в — принципиальная схема работы бетононасоса.
дальности подачи бетона по горизонтали, которая указывается в характеристике бетононасоса.
Рассмотренная конструкция поршневого бетононасоса имеет ряд недостатков: сравнительную сложность устройства и большое количество движущихся частей, что усложняет эксплуатацию и приводит к частым поломкам деталей бетононасоса; невозможность регулировать количество подаваемой бетонной смеси и допускать перерывы в работе бетононасоса; сложность очистки бетоновода после окончания работы и др.
Бетононасосы с гидравлическим приводом (рис. 222) частично устраняют недостатки механического привода. Они состоят из установленных под расходным бункером-побудителем 2 двух рабочих цилиндров 4, снабженных двумя шиберными затворами — вертикальным 7 и горизонтальным 6. Движение поршням рабочих цилиндров и шиберным затворам сообщается маслоприводными цилиндрами 5 и 3.
270
Рис. 223. Схема пневматического бетононагревателя.
Принцип работы такого бетононасоса можно проследить по рис. 222, в. Правый рабочий цилиндр засасывает смесь из приемного бункера, а левый рабочий цилиндр в это время выжимает ее в бетоно-вод 1 (положение /). По достижении порш- = нями крайних положений подается сигнал в систему управления на изменение направления движения поршней и шиберных затворов. При этом горизонтальный зат- t вор открывает доступ смеси из бункера в левый цилиндр и закрывает ее поступление в правый цилиндр. Вертикальный затвор открывает вход смеси в бетоновод из правого цилиндра и закрывает левый цилиндр (положение II). Затем цикл повторяется, и бетонная смесь непрерывным потоком перемещается по бетон оводу.
Бетононасосы с гидравлическим при
водом по сравнению с механическим имеют меньше конструктивных узлов и поэтому надежнее в работе. Их рабочие поршни движутся с постоянной скоростью и не создают больших инерционных нагрузок в отличие от кривошипно-шатунного механизма. Производительность бетононасосов с гидравлическим приводом может регулироваться в широких пределах, а повышение давления свыше установленного предела исключается предохранительными устройствами гидросистемы. Дальность подачи таких бетононасосов больше, чем у бетононасосов с механическим приводом.
Бетононасосы с гидравлическим приводом комплектуются сочлененной из нескольких звеньев стрелой 8, несущей на себе бетоновод (рис. 222, а). Стрела крепится на поворотной платформе 9, установленной на раме бетононасоса, и может вращаться вокруг вертикальной оси. Путем изменения гидравлическими цилиндрами угла наклона между звеньями обеспечивается перемещение головки стрелы с концевым звеном бетоновода в нужное положение (рис. 222, б). Этим в определенных условиях достигается возможность подачи бетона к месту укладки без монтажа бетоновода.
Пневматические бетононагнетатели (рис. 223) предназначены для перемещения порций бетона по трубам при помощи сжатого воздуха. Они представляют собой нагнетатель (резервуар) 5, загружаемый бетоном через воронку <3. После загрузки закрывается конусный затвор 4, и в резервуар по трубопроводу 1 подается сжатый воздух с давлением 0,5—0,6 МПа (5—6 кгс/см2). Под действием сжатого воздуха бетонная смесь поступает в бетоновод 7 и перемещается к месту выгрузки. Для побуждения выхода бетона в бетоновод и предотвращения образования пробок в резервуаре установлен направляющий конус 2 с соплами 6, через которые подается воздух, воздействующий на бетонную смесь в месте ее выхода из резервуара.
271
В конце бетоновода устанавливается разгрузочный бункер — успокоитель, обеспечивающий спокойный выход бетона из бетоновода и отделение от него воздуха, насыщающего бетон в процессе перемещения. Пневматическая установка подает бетон порциями и поэтому в любой момент может прекратить работу при несложной очистке бетоновода. Недостатком этой установки является большой расход электроэнергии. Дальность подачи находится в пределах 150 м.
§ 49. АВТОБЕТОНОСМЕСИТЕЛИ И АВТОБЕТОНОВОЗЫ
Автобетоносмесители и автобетоновозы предназначены для перевозки бетонных смесей. Их устройство обеспечивает достаточное сохранение качества смеси (подвижность и однородность) при ее перевозке.
Автобетоносмесители применяются для транспортирования бетонной смеси в тех случаях, когда строительные объекты значительно удалены от бетоносмесительной установки и автобетоновозы, а тем более автосамосвалы, не могут обеспечить сохранения качества бетона, так как он в пути следования успевает расслоиться. В связи с целесообразностью изготовления бетонной смеси на центральных бетоносмесительных установках с последующей ее развозкой по объектам автобетоносмесители приобретают важное значение для транспортирования бетона.
Автобетоносмеситель представляет собой самоходный смонтированный на шасси грузовой автомашины агрегат, имеющий смесительный барабан грушевидной формы с приводом для его вращения.
Эти машины могут быть использованы как для перевозки готовой бетонной смеси, так и для приготовления ее из сухих компонентов в пути следования машины.
В первом случае готовая смесь загружается в барабан автобетоносмесителя на центральной бетоносмесительной установке. В пути следования барабан, вращаясь при небольших оборотах (4,5— 6 об/мин), непрерывно перемещает смесь, благодаря чему она сохраняет свою однородность и не расслаивается при транспортировке на расстояние до 40 км. При более значительных расстояниях перевозки бетонная смесь приготовляется в пути следования автобетоносмесителя.
В этом случае на центральной смесительной установке в барабан загружают отмеренные дозы заполнителей, цемента и заливают воду в дозировочный бак. В пути (за 15—20 мин до прибытия к месту назначения) водитель включает смесительный барабан и заливает в него необходимую порцию воды. Такой способ позволяет доставлять на строительство свежую, требуемого качества бетонную смесь независимо от расстояния между строительным объектом и бетонным заводом.
Автобетоносмеситель с объемом готового замеса 3,2 м3, показанный на рис. 224, а, смонтирован на шасси грузового автомобиля 1. Он состоит из двигателя 8, водомерного бака 3, центробежного во-272
дяного насоса для подачи воды из водомерного бака в барабан, смесительного барабана 4 грушевидной формы, загрузочной воронки 5, распределительного желоба 6, редуктора 2 и металлической сварной рамы 7, на которой смонтированы все узлы. Рама автобетоносмесителя устанавливается на шасси автомашины. Самостоятельный двигатель для вращения смесительного барабана обеспечивает независимые условия работы автомашины и смесительного барабана.
Вращение от вала двигателя к барабану передается через реверсивный редуктор 2 (рис. 224, б). Включением кулачковой муфты 15 реверса можно поочередно вводить в зацепление с валом ведомые зубчатые колеса, которые обеспечивают изменение направления вращения смесительного барабана. Управление кулачковой муфтой реверса осуществляется рычагами управления, расположенными у двигателя и у места разгрузки бетона. Такое двойное расположение рычагов удобно для управления машиной одним человеком.
Смесительный барабан (рис. 224, б, в) установлен под углом 15° к горизонту на три опорные точки: подшипник 12 в передней части и два опорных ролика 13, на которые опирается бандаж 10 барабана. Со стороны кабины барабан имеет сферическое днище с приводной
273
звездочкой 11. Внутри барабана смонтированы две винтовые лопасти 9, обеспечивающие смешивание исходных материалов при вращении барабана в одну сторону и выгрузку готовой смеси при вращении барабана в другую сторону. Барабан вращается от редуктора через цепную передачу 14.
При развозке готового бетона машина работает
Рис. 225. Автобетоиовоз.
следующим образом.
На центральной смесительной установке барабан загружают бетоном, придавая ему перед загрузкой вращение с небольшой частотой (4,5—6 об/мин). Тут же водяной бак заполняют водой. По пути движения машины вращение барабана не прекращается. По прибытии на место выдачи бетона переключением рукоятки управления реверсом барабан переводят на обратный ход и ему придается большая частота вращения (7,5—10 об/мин). При этом начинается выгрузка готового бетона. После окончания выгрузки включается центробежный насос для подачи воды из промывочного отделения водяного бака в смесительный барабан. После промывки вращение барабана прекращается, и машина отправляется в обратный рейс.
Производительность автобетоносмесителя, м3/ч, определяется по формуле
Птехн
607 Т
(2.51)
где V — полезная емкость барабана, м3; Т — длительность рейса автобетоносмесителя, состоящая из времени груженого и порожнего хода, а также продолжительности загрузочных (4—5 мин), разгрузочных (2—3 мин) и промывочных (1—1,5 мин) операций.
Автобетоновоз (рис. 225) представляет собой специализированную емкость, выполненную в виде глубокого ковша с плавно сопряженными бортами и днищем, смонтированную на шасси автомобиля. Такая форма ковша позволяет локализировать поличастотную вибрацию рамы автомобиля, вызывающую расслоение бетона. Кроме того, ковш смонтирован на шасси так, что основная масса перевозимой смеси располагается рядом с кабиной в зоне, где амплитуда колебаний рамы машины минимальна. За счет плавного сопряжения бортов и днища ковша значительно улучшается разгрузка автобетоновоза. Опорно-поворотная платформа позволяет разгружать ковш на три стороны при его опрокидывании на 70°. Это дает возможность эксплуатировать автобетоновоз в условиях стесненной строительной площадки. Автобетоновозы являются наиболее эффективным видом транспорта при перевозке смеси на расстояние от 10 до 40 км.
274
§ 50. РАСТВОРОНАСОСЫ
Растворонасосы предназначены для транспортирования строительных растворов по резиновым шлангам или металлическим трубам к местам их раздачи или для непосредственного нанесения растворов на оштукатуриваемые поверхности.
Наиболее широко применяются диафрагмовые растворонасосы плунжерного типа, работающие по принципу обычного водяного поршневого насоса. При всасывающем ходе плунжера раствор засасывается из бункера в рабочую камеру, при нагнетательном — выталкивается в напорный трубопровод. Промышленность выпускает растворонасосы такого типа производительностью 2; 4 и 6 м3/ч.
Растворонасос с плоской диафрагмой (рис. 226) установлен на раме 19. Насос имеет плунжер 12, который посредством кривошипно-шатунного механизма 13 и 14 и двух пар зубчатых колес 16 приводится в возвратно-поступательное движение электродвигателем 15 с пускателем 18. Плунжер 12 воздействует через промежуточную жидкость (воду) в насосной камере 11 на плоскую резиновую диафрагму 3. Когда плунжер совершает нагнетательный ход, резиновая диафрагма под давлением воды выпучивается в сторону рабочей камеры 4. Вследствие этого объем рабочей камеры уменьшается и раствор из нее вытесняется через нагнетательный клапан 5 в воздушный колпак 7 и далее в напорную линию растворо-вода 9. При обратном ходе плунжера вода перестает давить на диафрагму, и она, выпрямляясь (на рис. 226, аэто положение обозначено пунктиром), создает в камере разрежение, которое способствует всасыванию через клапан 2 новой порции раствора по всасывающему патрубку 1 из расходного бункера. В дальнейшем цикл нагнетания и всасывания повторяется, и раствор непрерывно поступает из бункера в растворовод. Для направления и ограничения хода клапанов 2 и 5 на них установлены проволочные дужки 17.
Воздушный колпак 7, на котором установлен манометр 8, служит для уменьшения величины пульсации при поступлении раствора в растворовод и для придания его потоку большей равномерности. При нагнетательном ходе плунжера раствор, быстро выталкиваемый диафрагмой из рабочей камеры в воздушный колпак, не успевает весь пройти в растворовод за время нагнетательного хода плунжера, и часть его остается внутри колпака, сжимая находящийся в нем воздух. Как только плунжер начнет совершать ход всасывания и прекратится поступление раствора в воздушный колпак, раствор, находящийся в колпаке, вытеснится предварительно сжатым воздухом в растворовод. При новом нагнетательном ходе плунжера явление повторяется, в результате чего раствор будет выходить из наконечника сопла непрерывной струей. Для выпуска раствора и снижения давления в колпаке и раствороводе служит перепускной кран 6, установленный в нижней части воздушного колпака.
Воду в насосную камеру 11 заливают через отверстие в устройстве 10, открываемое вентилем 24 (рис. 226, в). Корпус 23 этого
275
устройства закрыт крышкой 21. Если насосная камера не полностью будет залита водой, то при нагнетательном ходе плунжера воздух, занимающий не залитую водой часть камеры, будет сжиматься, и степень деформации диафрагмы уменьшится. В результате производительность растворонасоса снизится или его работа прекратится совсем. Поэтому во время работы растворонасоса необходимо следить за тем, чтобы его камера всегда была заполнена водой.
Предохранительное устройство предназначено для предотвращения возникновения в насосной камере давления выше допустимого 1—1,5 МПа (10—15 кгс/см2), которое может появиться при закупорке растворовода или по другим причинам. Для этой цели выходное отверстие 25 из насосной камеры перекрывается шариковым клапаном 22, прижимаемым к седлу пружиной 27. Степень нажатия пружины регулируется резьбовой пробкой 20 в зависимости от допускаемого давления. Пробка закрыта защитным колпачком 29. Если давление в насосной камере станет выше допустимого, вода своим давлением на нижнюю часть шарика преодолеет нажатие пружины и выльется через боковые отверстия 26 корпуса 28', при этом прекратится подача раствора, хотя плунжер и будет продолжать возвратно-поступательные движения. Чтобы возобновить работу, следует остановить растворонасос, устранить причину, вызвавшую повышение давления, долить воду в насосную камеру.
Достоинства диафрагмовых растворонасосов рассмотренной конструкции — долговечная работа их плунжера и буксы сальников, так как они не соприкасаются с раствором, а также точность действия предохранительного устройства, компактность и небольшой вес. Недостатки этих насосов заключаются в том, что они не могут перекачивать густые растворы (с осадкой конуса менее 8—10 см), .276
сложно налаживаются после срабатывания предохранительного устройства (доливка воды и т. д.), имеют сравнительно частые разрывы диафрагмы и низкий КПД.
§ 51. МАШИНЫ ДЛЯ УКЛАДКИ И РАСПРЕДЕЛЕНИЯ БЕТОНА
Состав оборудования, применяемого при возведении сооружений и конструкций из монолитного бетона, зависит от конструкции сооружения и принятой организации производства работ.
Укладка и распределение бетона осуществляется из специальных бункеров и бадей, перемещаемых кранами, бетононасосами, самоходными бетоноукладчиками и т. п.
На рис. 227, а показана, для примера, схема организации работ при бетонировании массивных фундаментов. В этом случае над фундаментом 5 сооружается специальная эстакада 1, по которой могут перемещаться автобетоносмесители или автобетоновозы 2, разгружающие смесь в приемные воронки 3. В начале бетонирования высота подачи бетона значительная. Для того чтобы бетон не расслаивался, его подают к месту укладки виброжелобами (рис. 227, б) или виброхоботами 4 (рис. 227, в). Виброжелоб устанавливается под углом 5—20°. Благодаря вибровозбудителям 6 обеспечивается движение бетонной смеси на расстояние до 20 м.
Виброхобот состоит из звеньев хобота 8, подвешенных на тросах 9 к эстакаде. Между звеньями с определенным шагом установлены гасители скорости движения смеси 10, предохраняющие ее расслоение. В верхней части хобота закреплен вибровозбудитель 6 и установлена загрузочная воронка 7. С помощью виброхоботов можно опускать бетонную смесь на глубину 10—80 м.
Рис. 227. Бетонирование массивных фундаментов:
а — схема организации работ; б — внброжелоб; в — виброхобот; г — бункер с вибровозбудителем.
277
Рис. 228. Схема бетонирования фундаментов с помощью бетоноукладчиков.
При подаче бетонной смеси кранами применяются специальные бункера (рис. 227, г) с вибровозбудителями 6. Они имеют форму, обеспечивающую полную и быструю разгрузку при открывании затворов 11.
При бетонировании монолитных конструкций, расположенных несколько выше или ниже нулевой отметки, широкое применение находят самоходные бетоноукладчики. Такой бетоноукладчик (рис. 228) представляет собой самоходную машину 7, на вращающейся платформе 4 которой имеется приемный бункер-скип 5 и конвейер 3. Бетонная смесь из автобетоновоза 6 скиповым подъемником 5 подается на конвейер 3 и далее через хобот 2 поступает в опалубку 1 бетонируемой конструкции. Телескопический конвейер бетоноукладчика может перемещать бетонную смесь на расстояние 5— 30 м, на высоту до 8 м и вниз под углом до 10°. Этим обеспечивается широкая маневренность бетоноукладчиков при возведении монолитных сооружений и конструкций.
Поверхностный слой бетонируемой конструкции или отформованного изделия в ряде случаев требует дополнительной отделки. Эта операция выполняется машинами, рабочим органом которых служит вращающийся барабан или диск.
Bonpocei для самопроверки
1. Составьте схему и объясните работу передвижной бетоносмеснтельной установки непрерывного действия.
2. Изобразите принципиальные схемы устройства смесителей различных типов. Опишите их работу и область применения.
3. Составьте кинематические схемы гравитационных смесителей и опишите их работу.
4. То же, планетарно-роторного смесителя и корытообразного смесителя непрерывного действия принудительного перемешивания.
5. Изобразите принципиальные схемы цикличных дозаторов и опишите их работу.
6. Изобразите схему цикличного дозатора с фотоэлектрической системой управления. Объясните развитие автоматизации порционной дозировки и изобразите схему программного управления по перфокартам.
7. Опишите рабочий процесс смесителей непрерывного и цикличного действия. Приведите формулы для определения производительности этих смесителей.
8. Изобразите схемы устройства и объясните работу бетононасосов с механическим и гидравлическим приводом. Расскажите основные правила их эксплуатации.
9. Опишите назначение и работу автобетоносмесителей и автобетоновозов. Начертите схему устройства автобетоносмесителя.
10. Начертите схему устройства растворонасоса и объясните его работу.
278
Глава IX
МЕХАНИЗИРОВАННЫЙ
ИНСТРУМЕНТ. ОБОРУДОВАНИЕ ДЛЯ ОТДЕЛОЧНЫХ РАБОТ*
§ 52. ОБЩАЯ ХАРАКТЕРИСТИКА ИНСТРУМЕНТА И ЕГО СИЛОВОГО ОБОРУДОВАНИЯ
Механизированным инструментом называются различные по устройству и назначению ручные машины, включающие двигатель, передаточный механизм и рабочий орган. Масса большинства механизированных инструментов обычно составляет 2—6 кг, а для более мощных может достигать до 30 кг. Использование механизированного инструмента очень эффективно. Применение его повышает производительность ручного труда в 6—10 раз. Отечественная промышленность изготовляет свыше тысячи видов механизированного инструмента различного назначения с электрическим и пневматическим приводом.
Механизированный инструмент разделяют на группы ручных машин, объединенных одинаковыми функциональными признаками. Основная номенклатура механизированного инструмента приведена в табл. 1.
У большинства из перечисленных инструментов в равной степени находят применение как пневматические, так и электрические двигатели. Только деревообрабатывающие инструменты, как правило, изготовляются с электрическими двигателями.
Пневматические двигатели применяются ротационные и турбинные.
Ротационный двигатель (рис. 229) состоит из статора 1 и ротора 2, в радиальных пазах которого перемещаются лопатки 3. Ось вращения ротора расположена эксцентрично относительно внутренней цилиндрической поверхности статора. Сжатый воздух поступает через отверстие 6 в полость между лопатками и выходит через отверстие 4 в атмосферу. Благодаря разности давления на входе и на выходе ротор начинает вращаться. Клапаны 5 соединены с полостью повышенного давления, что заставляет лопатки прижиматься своими кромками к внутренней поверхности статора в начале пуска. При вращении сила прижатия увеличивается за счет действия центробежной силы.
Турбинные двигатели (воздушные турбинки) могут быть радиальными (рис. 230, а) и аксиальными (рис. 230, б). Основными элементами воздушной турбинки являются посаженное на вал 4 рабочее
* Автор § 52—54 главы IX канд. техн, наук доцент В. Л. Сакович; § 55 этой главы написан |А. П. Обозным|.
279
Рис. 229. Схема ротационного пневматического двигателя.
Рис. 230. Воздушные турбинки: а — радиальная; б — аксиальная.
колесо 2 с лопатками 3 и сопловой аппарат 1. Сжатый воздух сопловым аппаратом направляется на лопатки рабочего колеса, заставляя его вращаться.
В ручных машинах наибольшее распространение получили
ротационные двигатели с частотой вращения до 8000 об/мин. Воздушные турбинки обладают частотой вращения 20 000—40 000 об/мин и находят применение только в быстроходных шлифовальных машинах.
Одним из достоинств пневматических двигателей является воз
можность легко и в широком диапазоне изменять скорость вращения вала путем изменения количества подаваемого воздуха.
Электродвигатели применяются двух типов: универсальный коллекторный двигатель, который может работать как от сети переменного тока (от одной фазы), так и от сети постоянного тока, и асинхронный короткозамкнутый двигатель трехфазного тока. Эти двигатели имеют постоянную скорость вращения ротора. Для изменения скорости вращения в последнее время в ручных машинах находят применение электродвигатели с электронным управлением. Напряжение электрического тока для ручных машин не должно превышать 250 В. Для работы в сырых условиях, опасных в отношении поражения электрическим током, принимают напряжение до 40 В. Инструмент для обработки дерева, а также шлифовальные и точильные машины делают с двигателями закрытого типа, в которых все части, находящиеся под напряжением, закрыты от попадания пыли, влаги, паров легко воспламеняющихся жидкостей и т. п.
По эксплуатационным показателям — массе, габаритам, удобству и надежности электрифицированный и пневматический инструмент в большинстве случаев является примерно равноценным.
По сравнению с электрическими, пневматические двигатели имеют большую удельную мощность, т. е. при равной мощности
280
Таблица 1
Группа ручных машин Наименование Назначение
1 2 3
С роторными Сверлильные вращатель- Сверление дерева, цветных и чер-
двигателями иые Сверлильные ударно-вращательные Шлифовальные Бороздоделы Гайковерты Вырубные ножницы Кромкорезы Деревообрабатывающие: пилы дисковые, цепные, ленточные; долбежники, рубанки, циклевочные машины и др. ных металлов, пластмасс и других синтетических материалов Сверление бетона, кирпичной кладки Шлифовка, зачистка, полировка металла, гранита, мрамора и др. Выборка пазов в кирпичной кладке для электропроводки в зданиях Завинчивание и отвинчивание резьбовых соединений при монтажных и слесарно-сборочных работах Резка листового проката черных и цветных металлов, пластмасс Снятие фасок под сварку металлических листов и труб толщиной 4— —30 мм Выполнение плотничных, столярных, паркетных и других работ по дереву
Ударного действия Зубила, молотки Перфораторы бетоноло-мы Зачистка сварных швов, обработка металла Пробивка борозд, ниш, отверстий в кирпичной кладке, бетоне, рыхление мерзлых грунтов, разрушение асфальтобетона, фактурная обработка камня
Огнестрельные Монтажные пистолеты Забивка крепежных деталей (дюбелей) в бетонные и кирпичные стены для крепления к ним различного оборудования
пневматический двигатель легче электрического. Однако для его работы необходимо иметь пневматическую установку, состоящую из компрессора с двигателем, воздухосборника и воздухораспределительной сети. На строительных площадках применяются передвижные пневматические установки.
Необходимая производительность компрессора Q,( определяется суммарным расходом воздуха всех подключенных к сети инструментов, причем учитываются одновременность их включения, а также увеличение расхода воздуха, м3/мин, на 30—50% вследствие износа инструментов и утечек в сети:
QK = (1,3-г- 1,5) ^2<7, (252)
где q — расход воздуха одним инструментом, м3/мин; ki — коэффициент одновременности, значение которого зависит от числа
281
инструментов No: при No — 1 4- 5 kx = 1,0 4- 0,8, а при No = 5 4-4- 10 k± = 0,8 4- 0,7.
Для строительных работ используются обычно компрессоры с давлением 0,6—0,7 МПа (6—7 кгс/м2) производительностью до 10 м3/мин свободного воздуха.
Механизированный инструмент применяется также с двигателем внутреннего сгорания. Этот инструмент отличается автономностью действия и поэтому используется для работ, удаленных от источников электроэнергии.Типичным представителем этого вида инструмента является бензомоторная пила, получившая широкое применение на лесозаготовках для валки и предварительной разделки деревьев. Существуют также бензомоторные ручные трамбовочные и шпалоподбивочные машины для ремонта автомобильных и железных дорог. Основным надостатком механизированного инструмента с бензодвигателями является повышенный по сравнению с электрифицированным или пневматическим инструментом вес и более сложная эксплуатация, особенно бензодвигателя.
§ 53. РУЧНЫЕ МАШИНЫ С РОТОРНЫМ ДВИГАТЕЛЕМ
Все существующие конструкции машин с роторными двигателями могут быть сведены к шести основным конструктивным схемам (рис. 231).
Если рабочий орган ручной машины быстроходный, то вал ротора двигателя служит и рабочим валом — шпинделем инструмента. В этом случае конец вала имеет устройство для крепления исполнительного органа или державки. Это так называемые безре-дукторные схемы (схема а). По такой схеме выполняются дисковые пилы для дерева, шлифовальные машины.
По этой . схеме изготовлена пневмошлифовальная машина (рис. 232), состоящая из корпуса 1, в котором размещены ротационный пневмодвигатель 2, центробежный регулятор частоты вращений 4, шпиндель 5 и рукоятка 3 с пусковым устройством. Вал пневмодвигателя соединен муфтой со шпинделем, на выступающем конце которого при помощи фланцев и гайки крепится абразивный круг, закрытый защитным кожухом 6. При нажатии на рычаг пускового устройства сжатый воздух через канал рукоятки и отверстие в дроссельной шайбе попадает в рабочую полость пневмодвигателя и вращает ротор со шпинделем. При достижении двигателем максимальной частоты вращения кулачки регулятора под действием центробежных сил расходятся и продвигают втулку навстречу потоку сжатого воздуха, перекрывая входное отверстие в дроссельной шайбе. Частота вращений при этом снижается, и втулка регулятора возвращается в исходное положение, открывая отверстие в дроссельной шайбе. Регулятор обеспечивает вращение шлифовального круга в заданных пределах и снижает расход воздуха на холостом ходу. Такая пневмошлифовальная машина с диаметром шлифовального
282
Рис. 231. Конструктивные схемы механизированного инструмента с роторными двигателями:
а — безредукторная схема; б — е — схемы с редуктором; Д — двигатель; Р — редуктор; И — инструмент.
Рис. 232. Пневмошлифовальная ручная машина:
1 _ корпус; 2 — пневмодвигатель; 3 — рукоятка; 4 — регулятор числа оборотов; 5 — шпиндель; 6 — кожух.
Рис. 233. Пневматическая сверлильная машина:
1 — шпиндель; 2 — корпус; 3 — регулятор; 4 — пневмодвигатель; 5 — рукоятка;
6 — пусковое устройство; 7 — глушитель; 8 — дополнительная рукоятка.
283
круга 100 мм (8000 об/мин, масса 3,5 кг) при рабочем давлении воздуха 0,5 МПа (5 кгс/см2) развивает мощность до 1 кВт.
Когда необходимо получить рабочую частоту вращения, меньшую, чем частота вращения двигателя, или преобразовать вращательное движение в поступательное или возвратно-поступательное, применяют передаточный механизм с редуктором (схемы, приведенные на рис. 231, б — е).
Редуктор в схеме, показанной на рис. 231, б, служит для изменения частоты вращения инструмента, а в схеме на рис. 231, в — как для изменения частоты вращения, так и для изменения положения инструмента по отношению к валу двигателя (угловая схема). Обычно применяется та схема, которая позволяет сделать машину компактной и удобной в обращении. Эти схемы применяются в сверлиль-
284
ных (рис. 233) и шлифовальных машинах, в гайковертах, дисковых пилах по дереву, бороздоделах. Например, бороздодел (рис. 234), предназначенный для выборки пазов и сверления отверстий в кирпичной кладке при прокладывании внутренней электропроводки в зданиях, комплектуется сверлильной насадкой со шлямбурным
285
резцом и пылесосом для отсоса пыли из патрубка защитного кожуха. На корпусе бороздодела имеются ролики 6, служащие для облегчения при его передвижении.
В машинах, изготовленных по схеме, показанной на рис. 231, г, рабочий вал параллелен валу двигателя, причем его скорость может быть больше скорости вала двигателя (ускоряющая передача). По этой схеме изготовляются электрорубанки, паркетострогальные и паркетошлифовальные машины, а также угловые гайковерты.
В гайковерте (рис. 235) сжатый воздух через пусковое устройство поступает в пневмодвигатель, который через цепную передачу передает вращение маховику ударного механизма. В начале завинчивания этот механизм работает как обычная муфта. При увеличении усилия завинчивания маховик периодически входит в зацепление с кулачковой муфтой, нанося удары, которые через сменную головку ключа передаются резьбовому соединению.
Схема, приведенная на рис. 231, <5, применяется в цепных пилах (рис. 236), ленточных пилах, долбежниках по дереву, в которых рабочий орган движется по замкнутому контуру.
Ручные машины с возвратно-поступательным движением рабочего органа выполнены по схеме (рис. 231, ё), имеющей кривошипношатунный механизм, кривошип которого обычно делается в виде эксцентрика укрепленного на валу редуктора. По такой схеме изготавливаются вырубные ножницы (рис. 237), кромкорезы.
§ 54. ИНСТРУМЕНТ УДАРНОГО ДЕЙСТВИЯ
Ударный пневматический инструмент. Принцип действия ударного пневматического инструмента можно показать на примере отбойного молотка (рис. 238). Сжатый воздух, поступая в цилиндр (ствол) 7, воздействует попеременно с двух сторон на поршень 8 и вынуждает его совершать возвратно-поступательное движение. В конце рабочего хода поршень наносит по хвостовику рабочего наконечника 9 удар, в результате чего совершается полезная работа.
• Название пневматическому ударному инструменту дается с учетом его основного назначения: пневмомолоток, бурильный молоток (перфоратор), бетонолом, трамбовка и др. В зависимости от назначения инструменты изготовляются различного размера, веса, мощности и с различным числом ударов. В то же время один и тот же инструмент может быть использован для разных работ при соответствующей замене рабочего наконечника. Так, рубильно-чеканочные молотки применяются и для рубки стального листа, и для пробивки проемов в стене.
Ударно-пневматический инструмент может отличаться по типу пускового устройства, по системе воздухораспределения, по конструкции приспособления, удерживающего рабочий наконечник, и по типу поворотного механизма для ударно-поворотного инструмента.
Пусковые устройства служат для управления действием инструмента. При помощи пускового устройства регу-
286
Рис. 238. Отбойный молоток:
1 — рукоятка; 2 — пружина возврата рукоятки; 3 — золотник воздушного затвора; 4 — корпус воздушного затвора; 5 — пружина воздушного затвора; 6 — золотник воздухораспределен ия; 7 — ствол; 8 — поршень-боек; 9 — рабочий наконечник; 10 — удерживающая пружина; // —концевая букса; 12 — золотниковая коробка; 13 — сетка: 14 — штуцер.
лируется момент подачи сжатого воздуха в инструмент, а в некоторых случаях также и количество поступающего воздуха, т. е. интенсивность действия инструмента.
Пусковые устройства бывают управляемые вручную (нажимом клавиша или курка, каку пнев-мошлифовальной машины, изображаемой на рис. 230) и автоматические.
Автоматические пусковые устройства включают подачу воздуха только при определенном нажиме инструментом на обрабатываемый материал. Они же автоматически выключают подачу сжатого воздуха, как только нажим на материал прекратится.
Показанный на рис. 238 отбойный молоток имеет автоматическое пусковое устройство. При нажатии на рукоятку 1 сжимается пружина 2 возврата рукоятки, золотник воздушного затвора 3 перемещается вниз, открывая подачу воздуха. Как только нажатие на рукоятку прекратится, под действием пружины 2 она отжимается, а под действием другой пружины 5 золотник переместится вверх, перекроет воздушные клапаны и прекратит подачу воздуха в инструмент.
Воздухор а с п р еделительное устройство правильной и эффективной работы Чем рациональнее это устройство, те!
имеет большое значение для пневматического инструмента. I лучшие показатели его работы.
287
Рис. 239. Золотниковая система воздухораспределеиия: а — прямой ход поршня; б — обратный ход поршня.
В начале рабочего хода
Системы воздухораспределеиия могут быть саморегулирующими, клапанными и золотниковыми. Все они различны по конструкции. Например, саморегулирующая система в одних конструкциях имеет каналы в теле цилиндра, а в других — в теле поршня-бойка; клапаны делаются в виде кольца, пластины, шарика, золотники — в виде цилиндра, трубки и т. п.
Наиболее рациональной является золотниковая система воздухораспределе-ния, которая экономно расходует воздух и может работать при понижении давления до 0,3 МПа (3 кгс/см2). Эта система показана на примере трубчатого золотника пневматического молотка (рис. 239).
Полый золотник (зачернен) свободно передвигается в золотниковой камере, к стенкам которой он хорошо пригнан.
золотник находится в нижнем положении,
а поршень вверху (рис. 239, а). Сжатый воздух по каналу 1 поступает в рабочую камеру 5 и передвигает поршень вниз. Происходит
рабочий ход поршня.
Воздух из холостой камеры 6 выходит в атмосферу по каналу 9’—7. После того как этот канал перекрывается поршнем, воздух из камеры 6 продолжает выходить в атмосферу через канал 3'—3, выточку золотника и далее по каналу 9—7. При таком непрерывном
выходе воздуха из камеры 6 поршень почти не испытывает противодавления при рабочем ходе.
Изменение положения золотника происходит следующим образом.
Когда поршень минует отверстие канала 4', сжатый воздух из камеры 5 по каналу 4'—4 поступит под выступ золотника. В этот
момент давление воздуха на золотник сверху и снизу уравновесится и достаточно будет небольшого снижения давления в рабочей камере 5, чтобы передвинуть золотник вверх. Это произойдет в конце рабочего хода, когда поршень пройдет канал 9', соединив рабочую камеру 5 с атмосферой. При этом давление на золотник сверху падает. Давление снизу уменьшается медленнее вследствие сопротивления в канале 1. Перевес давления снизу заставляет золотник передвинуться вверх.
При верхнем положении золотника (рис. 239, б) доступ сжатого воздуха в рабочую камеру 5 прекращается. Одновременно сжатый воздух по каналу 10, через выточку золотника, затем по каналу 2—3' поступает в холостую камеру 6, заставляя поршень совершить обратный холостой ход.
При движении поршня вверх воздух из рабочей камеры 5 выходит в атмосферу через канал 9'—7, а затем через каналы 4'—4 и 8'—8,
288
выточку золотника и канал 9—7. После того как поршень перекроет отверстие канала 8', воздух в рабочей камере начнет сжиматься, и давление на золотник сверху начнет возрастать. В конце холостого хода давление на золотник сверху и снизу станет почти равным. Но как только поршень пройдет канал 9' и холостая камера 6 соединится с атмосферой, давление на золотник снизу резко уменьшится. Золотник передвинется в нижнее положение, и снова начнется рабочий ход поршня.
Рабочие наконечники воспринимают удары поршня-бойка и передают их обрабатываемому материалу, производя рубку, трамбовку, бурение и т. д. Форма рабочих наконечников соответствует их целевому назначению. Рабочий наконечник обычно состоит из трех частей: 1) собственно рабочей части наконечника — пики отбойного молотка, трамбовки, зубила и т. п.; 2) хвостовика, служащего для закрепления наконечника в буксе инструмента и для восприятия удара от бойка; 3) средней части или стержня.
Рабочие наконечники изготовляются из высокоуглеродистых инструментальных сталей. Наконечники, работающие в наиболее тяжелых условиях (например, при обработке весьма крепких камней), изготовляются из легированных инструментальных сталей с последующей специальной термообработкой. Для увеличения стойкости и уменьшения износа наконечников применяют электроискровое упрочнение острия наконечника твердыми сплавами . В бурильных инструментах коронки буров армируют пластинками из твердых сплавов.
Для закрепления рабочего наконечника в инструменте служат концевые буксы и другие удерживающие приспособления. Наиболее простым удерживающим приспособлением является пружина специальной навивки, например, в отбойном молотке (рис. 238). В некоторых инструментах легкого типа рабочие наконечники в буксе не закрепляются, а удерживаются рукой.
Основными параметрами пневматических инструментов являются: частота движения рабочего органа; мощность или энергия единичного удара; расход воздуха; давление воздуха перед инструментом; вес и размеры инструмента.
Рабочая частота пневматических молотков находится в пределах 700—2400 ударов в минуту, причем более мощные и тяжелые инструменты имеют меньшее число ударов.
От мощности инструмента в известной степени зависит его производительность: чем мощнее инструмент, тем он производительнее.
Для ударных инструментов в заводских характеристиках обычно указывается величина работы единичного удара, существенно влияющая на производительность инструмента.
Эту энергию можно выразить через работу сжатого воздуха
А = PcpFS, (253)
где Рср — среднее избыточное давление сжатого воздуха, действующее на поршень при рабочем ходе (это давление равно средней 10 642 289
разности давлений над и под поршнем); F — площадь поршня; S — ход поршня.
Формула (253) показывает, что энергия единичного удара прямо пропорциональна среднему избыточному давлению и объему цилиндра.
Учитывая КПД удара поршня по рабочему наконечнику т]у, энергию единичного удара рабочего наконечника можно представить в следующем виде:
А = Лт)у. (254)
Работа удара пневматических клепальных и отбойных молотков составляет примерно 50 Дж (5 кгс • м), бетоноломов— ПО Дж (11 кгс • м).
Зная по паспорту инструмента величину работы единичного удара Л0 и число ударов в минуту пуд, мощность молотка, кВт, можно определить по формуле
= (255)
Расход воздуха (количество потребляемого инструментом воздуха в единицу времени) является одним из основных показателей, определяющих экономичность пневматического инструмента.
Расход воздуха принято исчислять в м3/мин, т. е. в кубических метрах свободного воздуха за минуту. Поэтому, если указано, что для данного инструмента расход воздуха составляет q, м3/мин, то под этим следует понимать тот объем, который занимал воздух до своего сжатия. Чем меньше при заданной мощности расход воздуха, тем более совершенен инструмент. Для большинства ручных пневматических инструментов воздух расходуется в пределах 0,4—2 м3/мин, в зависимости от типа и мощности инструмента.
Износ инструмента, его неисправность могут резко увеличить расход потребляемого воздуха по отношению к нормальному паспортному расходу.
Давление воздуха 0,5 МПа (5 кгс/см2) считается нормальным для большинства инструментов отечественного производства. Все параметры инструмента указаны для расчетного давления.
При эксплуатации необходимо следить за сохранением этого давления, так как падение давления ниже нормального резко снижает работоспособность инструмента: уменьшается сила удара и частота ударов, резко понижается КПД инструмента, увеличивается расход воздуха на единицу продукции.
Электроинструмент ударного действия. Типичными представителями электроинструментов ударного действия, выпускаемых в настоящее время промышленностью, являются: электромолотки, электроперфораторы, электротрамбовки и электробетоноломы. Электротрамбовки бывают с пружинным ударным механизмом (рис. 240, а) и компрессионно-вакуумным (рис. 240, б).
290
Рис. 240. Схемы устройства электротрамбо вок:
а — с пружинным ударным механизмом; б — с компрессионно-вакуумным ударным механизмом.
В электротрамбовке с пружинным ударным механизмом электродвигатель через кривошипно-шатунный механизм 1 сообщает возвратно - поступательное движение подвижному цилиндру 2, скользящему в корпусе 5. Движение подвижного цилиндра передается через систему пружин 3 трамбующему башмаку 4. При движении цилиндра вверх сжимается нижний пакет пружин, трамбующий башмак отрывается от грунта и ускоренно следует за подвижным цилиндром. При приближении кривошипа к верхней точке цилиндр замедляет движение, сжимается верх
ний пакет пружин. Скорость движения башмака уменьшается, затем он останавливается и устремляется вниз, ударяя по грунту.
В электротрамбовке с компрессионно-вакуумным ударным механизмом электродвигатель через кривошипно-шатунный механизм 1 сообщает возвратно-поступательное движение подвижному цилиндру 2, внутри которого движется поршень-боек 3, наносящий удары по башмаку 4. При перемещении цилиндра вверх в его полости, над бойком, образуется разрежение. Под действием разности давления — атмосферного и остаточного — боек 3 также перемещается вверх. После верхней мертвой точки цилиндр движется в обратном направлении вниз, а боек вследствие сжатия воздушной подушки постепенно теряет скорость, останавливается и затем устремляется вниз, ударяясь по трамбующему башмаку 4. Далее цикл повторяется.
Выпускаемые промышленностью электроударные инструменты имеют энергию эффективного удара примерно 20—50 Дж (2— 5 кгс • м), частоту 1000—1100 ударов в минуту.
Монтажные пистолеты. Для крепления оборудования на бетонных, железобетонных, кирпичных и металлических основаниях применяются монтажные пистолеты. Промышленность выпускает однозарядный, самовзводный монтажный пистолет (рис. 241). Забивка дюбеля 4 осуществляется ударом разгоняемого в стволе 3 поршня 2. В момент выстрела движение поршня тормозится сопротивлением дюбеля.
В качестве источника энергии в пистолете используются малогабаритные пороховые патроны 1 диаметром 6,9 мм. Дюбель устаная-
10!
Рис. 241. Принципиальная схема монтажного пистолета.
ливается в канале ствола. При ударе бойка по патрону воспламеняется порох и газы воздействуют на поршень, который, двигаясь по каналу ствола, ударяет по дюбелю, внедряемому в строительную конструкцию. Пистолет имеет устройство, исключающее выстрел без прижатия наконечником к месту забивания дюбеля, при не полностью закрытом пистолете и патроннике ствола, а также при падении пистолета с высоты до 1,5 м на бетонный пол.
Сила звука при выстреле незначительная, поэтому не нужны противошумные наушники и ограничение числа выстрелов в день.
Долговечность пистолета 25 тыс. выстрелов, а производительность достигает 50 выстрелов в час. Небольшая длина 400 мм и масса 4,5 кг позволяют легко манипулировать пистолетом.
Условия правильной эксплуатации механизированного инструмента. Чтобы обеспечить долговечную и надежную работу инструмента, необходимо организовать его правильное хранение, уход за ним во время работы, а также своевременный и качественный его ремонт. Подробные сведения по обслуживанию и правила по технике безопасности приводятся в инструкциях, прилагаемых к инструменту. Существуют также следующие общие правила.
Инструменты должны храниться в кладовой в специально отведенном для них месте на стеллажах. Наблюдение за содержанием и ремонтом инструмента должно быть поручено специально выделенному для этого высококвалифицированному работнику.
В работу выдается только исправный и укомплектованный рабочими органами и приспособлениями инструмент. Рабочие органы режущего инструмента (фрезы, пилы, наконечники и др.) должны быть правильно заточенными. Затупление их резко снижает производительность инструмента, увеличивает потребляемую мощность, что ведет к перегрузке двигателей и быстрому износу инструмента. Для обеспечения непрерывной работы каждый инструмент должен быть снабжен тремя-четырьмя комплектами рабочих органов, заменять которые следует по мере их затупления.
К работе допускаются рабочие, прошедшие специальное обучение. Рабочий обязан содержать инструмент в чистоте, периодически (согласно инструкции) его смазывать и следить за тем, чтобы размеры и форма рабочих органов были в точности такие, какие требуются для данного типа инструмента.
При работе с электроинструментом должны соблюдаться следующие правила:
перед его включением проверить соответствие напряжения и частоты тока в сети с номинальными данными инструмента;
292
инструмент и питающие шнуры должны иметь надежную изоляцию, состояние которой проверяется перед началом работы;
включать электродвигатели следует только перед самым началом рабочей операции;
запрещается устранять любые неисправности во время работы;
при любом ремонте необходимо отсоединять питающий шнур от электросети;
нельзя оставлять без надзора электроинструмент, присоединенный к сети.
При работе с пневматическим инструментом необходимо:
шланги присоединять и разъединять только после прекращения подачи сжатого воздуха;
перед присоединением к инструменту шланг следует продуть;
подавать воздух только после установки инструмента в рабочее положение;
холостая работа инструмента допускается только для опробы-вания его перед работой или при ремонте;
после работы инструмент следует тщательно вытирать, а ударный пневмоинструмент рекомендуется хранить в керосиновой ванне.
Испорченный во время работы механизированный инструмент нужно передать в ремонтную мастерскую и заменить его исправным, не делая никаких исправлений на месте работы.
§ 55. ОБОРУДОВАНИЕ ДЛЯ ОТДЕЛОЧНЫХ РАБОТ
Основными отделочными работами в строительстве являются штукатурные, малярные и работы по отделке полов.
Механизированное производство штукатурных работ включает приготовление растворов и нанесение их на поверхность с последующей обработкой штукатурного слоя.
Для штукатурных работ применяют обычные известково-песчаные и сложные растворы с добавками гипса, цемента или декоративных примесей; применяют также сухие смеси для однослойной гипсоизвестковой и торкрет-штукатурки.
Приготавливают растворы в зависимости от их вида и условий строительства централизованно (с доставкой растворов с завода) или непосредственно у строящихся объектов. В последнем случае обычные растворы или растворы из сухих смесей приготовляют на передвижных или стационарных штукатурных узлах.
При штукатурных работах применяют электромолоток для снятия наплывов раствора и бетона и насечки поверхностей; сопло для нанесения слоев раствора бескомпрессорным способом (рис. 242, а); сопло для воздушного распыления (рис. 242, б) при схеме механизации работ комплектом машин с компрессором; в первом случае применяют затирочные машинки облегченного типа электрической конструкции (рис. 242, в), во втором — машинки пневматической конструкции (рис. 242, г). Основными узлами пневматической машинки являются ротационный пневмодвигатель
293
Рис. 242. Приспособления и механизированный инструмент для нанесения раствора: а — сопло бескомпрессорное; б — сопло с воздушным распылением; в «— затирочная машинка с высокочастотным электродвигателем; г — пневматическая затирочная машинка а пневмоприводом; д — шпатель для однослойной штукатурки; е — сопло для нанесения торкрет-штукатуркн.
Рис. 243. Малярные приспособления:
а — универсальная удочка: / — корпус головки; 2 — удочка; 3 — клапан; 4 — корпув распылителя; 5 — крышка; б — шпатель с принудительной подачей шпаклевки: 6 — лезвие; 7 — трубка; 8 — клапан; а— комбинированный валик для шпаклевания потолков: 9 — клапан; 10 —. шпатель; 11 — валик; 12 — ванночка; а — окрасочный валик с клапаном] 19 — чехол; 14 — шланг; 15 — клапан.
294
Рис. 244. Агрегат для механизации малярных работ:
а — пневматический пистолет-краскораспылитель; б — агрегат с компрессором;
1 — ниппель для сжатого воздуха; 2 — наконечник для сжатого воздуха; 3 — курок; 4 —накоиечиик для краски; 5 — ниппель; 6 — насадка; 7 — игла;
8 — регулировочный винт; 9 — компрессор; 10— нагнетательный бак; 11— пистолет-краскораспылитель.
с четырьмя лопатками и планетарный редуктор, смонтированные в одном корпусе, служащем рукояткой машинки.
Для отделки стен из крупных блоков пиленого известняка применяют однослойную штукатурку типа гипсоизвестковой шпаклевки. Шпаклевку наносят шпателем (рис. 242, д), к которому по шлангу подают раствор от растворосмесительного агрегата.
Для отделки поверхностей торкрет-штукатуркой применяют сопло, к которому подается по шлангам сухая смесь и вода (рис. 242, е).
Малярные работы состоят из подготовки поверхностей под окраску и нанесения красочных составов. Приспособления для малярных работ показаны на рис. 243. Кроме того, для нанесения масляных красочных составов применяется пистолет-распылитель (рис. 244), а при маловязких составах — электрокраскопульт (рис. 245).
295
Рис. 245. Электрокраскопульт:
I — корпусная часть; 2 — электродвигатель; 3 — шатун; 4 — ресивер; 5 — напорный шланг с удочкой; б — нагнетательный клапан; 7 — перепускной клапан; 8 — всасывающий шланг с фильтром; 9 — всасывающий клапан; 10 — клапанная коробка; // — диафрагма.
Рис. 247. Паркетошлифовальная машина:
Рис. 246. Машина для острожки деревянных полов:
1 — ножевой барабан; 2 — корпус; 3 — стойка; 4 — тяга; 5 — пакетный выключатель; 6 — гайка; 7 — амортизационная пружина; 8 — задние ролики; 9 — траверса; 10 — ножи; 11 — передний ролик.
1 — шлифовальный фибровый диск; 2 — виит; 3 — кожух; 4 — шаровая опора; 5 — корпус (улитка); 6 — вентилятор; 7 — электродвигатель; 8 — выключатель;
9 — мешок; 10 — труба; И — колеса.
Для перемешивания слежавшегося во время транспортирования раствора применяется установка, включающая смеситель и растворонасос для подачи раствора на этажи.
Красочные составы перемешивают в пневмоэмульсаторах, в которых перемешивание производится с помощью сжатого воздуха, и в мешалках — с помощью лопастей. Для подготовки на строительном объекте всех малярных составов и механизированного нанесе-
296
Рис. 248. Двухтраверсиая моза-ично-шлифовальиая машина: / — кронштейн; 2 — колесо; 3 — шестерня; 4 — зубчатое колесо; 5 — резиновая шайба; 6 — камнедер-жавка; 7 — абразивный камень; 8— кожух; 9 — редуктор; 10 — зубчатое колесо; 11 — электродвигатель; 12 — выключатель.
ния их на окрашиваемые поверхности рационально применять пе-редвижные малярные станции *.
Деревянные и мозаичные полы после укладки требуют обработки поверхности. Машины для отделки полов приведены на рис. 246, 247, 248. Производительнось машины для острожки полов (рис. 246) 15—20, паркетошлифовальной (рис. 247) — 40—60, мозаично-шлифовальной (рис. 248)—7—8 м2/ч. Мощность двигателя у этих машин около 1,5 кВт.
При устройстве полов из полимерных материалов применяется тележка с вибрационными катками для приглаживания линолеума, укладываемого на мастике; при полах из полотнищ полихлорвинилового линолеума для их сварки используют специальный электроинструмент. Техника безопасности при работе с этими машинами заключается в проверке перед работой их исправности, защитных кожухов и изоляции питающих шнуров. Запрещается регулировка двигателя при работе машины.
Вопросы для самопроверки
1. Назовите группы, на которые разделяется механизированный инструмент; охарактеризуйте конструктивные особенности каждой группы.
2. Опишите силовое оборудование для механизированного инструмента.
3. Как определяется производительность компрессора?
4. Приведите классификацию по конструктивным схемам ручных машин с роторными двигателями.
5. Опишите инструмент для отделочных работ.
6. Расскажите, как работают машины для отделки полов.
7. Укажите, какими правилами техники безопасности следует руководствоваться при работе с механизированным инструментом.
* Подробнее см.: Канюка Н. С., Резуник А. В., Но в а ц -кий А. А. Комплексная механизация трудоемких работ в строительстве. Киев, Буд(вельник, 1977.
297
Глава X
ОБОРУДОВАНИЕ ДЛЯ ПРОИЗВОДСТВА
ЖЕЛЕЗОБЕТОННЫХ ИЗДЕЛИЙ*
§ 56. СПОСОБЫ ПРОИЗВОДСТВА ЖЕЛЕЗОБЕТОННЫХ ИЗДЕЛИЙ
Производство железобетонных изделий состоит из следующих основных процессов: армирования, формования и твердения. Под армированием подразумевается укладка арматуры в форму или в готовое изделие; процесс формования включает в себя укладку бетонной смеси в форму и ее уплотнение; твердение происходит под влиянием ускоряющей процесс тепловлажностной или тепловой обработки.
Этим основным процессам всегда предшествуют вспомогательные процессы приготовления бетонной смеси и изготовления арматуры, которые могут выполняться на предприятиях, производящих железобетонные изделия, или на специализированных заводах товарного бетона и арматуры.
Основные процессы производства железобетонных изделий могут быть организованы по трем способам: стендовому; агрегатнопоточному; конвейерному.
Стендовый способ производства характерен тем, что все процессы (армирование, формование, твердение) совершаются в неподвижных формах, которые собираются на гладкой площадке-стенде. Изделия в процессе их изготовления и до приобретения бетоном необходимой прочности остаются на месте, а оборудование для выполнения отдельных операций перемещается от одной формы к другой. Стендовый способ дает возможность изготовлять широкую номенклатуру изделий любых габаритов и обычно применяется на открытых полигонах. Особенно он эффективен при изготовлении длинномерных, предварительно напряженных изделий.
Характерной особенностью поточных способов производства является последовательное перемещение формы с изделием на различные рабочие посты, где изделие проходит технологическую обработку при помощи стационарно установленного оборудования.
Агрегатно-поточный способ производства заключается в том, что формование изделий происходит на одном рабочем месте, а перемещение формы с изделием к месту твердения и к месту распалубки выполняются подъемно-транспортной машиной (краном, тельфером и т. п.). При таком способе каждое изделие перемещается независимо
* Глава X составлена в соавторстве с канд. техн, наук И. И. Назаренко.
298
от состояния других изделий, т. е. ритм потока не является принудительным.
Агрегатно-поточный способ наиболее соответствует условиям мелкосерийного производства на заводах средней мощности, так как не требует больших капитальных затрат и допускает изготовление широкой номенклатуры изделий. Путем несложной переналадки оборудования можно осуществлять переход от одного типа изделия к другому без существенного снижения производственной мощности предприятия.
При конвейерном способе производства изделия формуются на специальных передвижных поддонах (формах-вагонетках), одновременно перемещающихся по рельсовому пути от одного поста формования к другому. После каждого такого перемещения формы-вагонетки останавливаются на определенное время для выполнения на них , рабочих операций. Каждая операция выполняется в одной и той же точке конвейера стационарным оборудованием, а степень готовности изделия нарастает при движении формы-вагонетки вдоль конвейера. При такой технологии ритм потока будет принудительным, так как перемещение каждого изделия зависит от состояния готовности других изделий.
Прогрессивность конвейерного способа заключается в том, что весь процесс производства можно расчленить на отдельные, полностью механизированные операции, а работу конвейера в целом можно автоматизировать. Однако ввиду сравнительно большой стоимости установки и сложности перехода на выпуск изделий другого типа эта технология целесообразна только при массовом производстве однотипных изделий и применяется на предприятиях большой мощности.
Современные заводы и полигоны для производства железобетонных изделий представляют собой комплексно-механизированные предприятия, технологическое оборудование которых и типоразмеры отдельных машин определяются конструкцией изготовляемых изделий и принятым способом производства.
Совершенство конструкций отдельных машин и агрегатов, целесообразность выбранного их состава и взаимосвязи являются основными факторами, влияющими на технико-экономические показатели предприятия и, следовательно, на стоимость строительных работ в целом.
Основой индустриализации строительства является сборный железобетон, поэтому изучение средств механизации его производства является для инженера-строителя необходимым.
§ 57. ОБОРУДОВАНИЕ ДЛЯ АРМИРОВАНИЯ
Железобетонные изделия армируются обычными сварными сетками и каркасами или предварительно напряженными стержнями, проволочными пакетами и непрерывно наматываемой проволокой.
299
Рис. 249. Горячекатаная арматурная сталь периодического профиля.
Рис. 250. Схема установки с гидродомкратом для упрочнения арматуры.
При непрерывной намотке предварительно напряженной проволоки процессы изготовления арматуры и армирования изделий (укладка арматуры в изделие) совмещаются, а в остальных случаях армированию изделий всегда предшествует процесс изготовления арматурных конструкций.
Для армирования железобетонных изделий применяют арматурную сталь круглого сечения в виде стержней или проволоки. Некоторые классы арматурной стали изготовляют периодического профиля (рис. 249) для улучшения ее сцепления с бетоном. Арматурная сталь малого диаметра (до 14 мм) поставляется в бухтах, а большого диаметра — в виде прутков длиной 6—12 м.
Оборудование для изготовления арматурных конструкций включает в себя следующие группы станков и аппаратов по назначению: для упрочнения арматурной стали; для заготовки элементов арматурных конструкций (стержней, проволочных пакетов и т. п.); для сварки арматурных конструкций.
Механическое упрочнение стали основано на том, что в процессе ее деформации при напряжении, превышающем предел текучести, происходит перестройка кристаллической структуры стали (явление наклепа) и повышается расчетный предел текучести. Это явление используется для повышения несущей способности горячекатаной арматурной стали и, следовательно, для экономии металла.
В практике производства железобетонных изделий получило распространение упрочнение арматурной стали способом вытяжки прутков в холодном состоянии заданным усилием. Растягивают прутки на станках с гидравлическим или механическим приводом. В установках с гидродомкратом (рис. 250) упрочняемый стержень 4 одним концом укрепляют в неподвижной концевой опоре 5, а другим в захвате 3 гидродомкрата 1. Усилие вытяжки контролируется по манометру 2, а удлинение — по шкале рейки 6.
Заготовка арматурной стали при изготовлении сеток и каркасов заключается в ее очистке, правке, резке на куски нужной длины и гибки прутьев по заданному профилю.
Арматурная сталь малого диаметра, поступающая в бухтах, проходит операции очистки, правки и резки на станках-автоматах (рис. 251). На этих станках проволока 7, помещенная на вертушке 8, протягивается через барабан для правки 6 непрерывно вращающимися
300
Рис. 251. Станок-автомат для правки и резки арматурной стали: а — общий вид; б — принципиальная схема; в — схема правки.
подающими роликами 5 и, пройдя между режущими шестернями-ножами 3, находящимися в исходном (неподвижном) положении, поступает в приемную часть станка 2. Верхний ролик прижимается винтом 4. При упоре конца проволоки в рычаг механизма отмеривания длины 1 происходит включение режущих шестерен 3, которые отрезают прутки нужной длины. Отрезанный пруток 11 падает на кронштейны приемного устройства 2 и затем подается на дальнейшую обработку. Режущие шестерни приводятся во вращение двигателем 10.
Устройство для правки арматуры представляет собой вращающийся от самостоятельного привода 9 полый барабан с пятью радиальными отверстиями, в каждом из которых при помощи пары пробок удерживаются плашки с отверстиями для прохождения проволоки. Плашки имеют форму кубиков и изготовляются из специальной стали. Подвинчиванием пробок плашки устанавливаются так, чтобы ось, проходящая через их отверстия, образовала волну с определенной амплитудой, устанавливаемой в зависимости от диаметра и жесткости выпрямляемой стали. Таким образом, при вращении барабана протягиваемая через него проволока многократно изгибается в различных направлениях, в результате чего она полностью выпрямляется и очищается от окалины и грязи.
Тяжелая арматура, поступающая в прутках, а также легкая арматура в процессе ее обработки режутся на стержни требуемой
301
Рис. 252. Схема гибки арматурного стержня.
длины. Для этой цели применяются специальные приводные станки, на которых можно резать арматурную сталь диаметром до 70 мм.
Гибка арматурных стержней для придания им заданной формы (хомуты, монтажные петли, отгибы и т. п.) производится на станках, у которых основной рабочей частью является диск 2 (рис. 252), поворачиваемый на необходимый угол вокруг центрального паль-
ца 5. Изгибаемый стержень 3 или пакет стержней укладывается на
диск между центральным пальцем 5 и упором 1. При вращении диска стержень 3 загибается рабочим пальцем 4, укрепленным на диске, после чего диск возвращается в исходное положение. Промышленностью выпускается несколько типов приводных станков, обес-
печивающих гнутье стержней диаметром до 90 мм.
Сварка арматурных сеток и каркасов является завершающей операцией в процессе их изготовления.
Одноточечные сварочные машины, конструкция и принцип работы которых известны из курса технологии металлов, не могут обеспечить производительность, необходимую в условиях массового производства, и непригодны для изготовления сеток и каркасов больших размеров. В связи с этим развитие оборудования для сварки арматуры идет по пути использования принципа многоточечной контактной сварки; этот принцип позволяет создать высокопроизводительные машины с достаточной степенью автоматизации.
Принцип работы многоточечных сварочных машин (рис. 253) заключается в том, что электроды 4 трансформатора 3 подводятся к свариваемым стержням 2 с одной стороны (односторонняя подводка тока), и происходит одновременное сваривание двух точек пересекающихся стержней при их сжатии шунтирующей токопроводящей пластиной 1. Основной сварочный ток будет последовательно проходить через обе точки сварки и шунтирующую медную пластину, незначительно ответвляясь по арматурному стержню (цепь тока обозначена стрелками). Такое токораспределение, обусловленное малым сопротивлением шунтирующей пластины по сравнению с сопротивлением арматурного стержня, уменьшает требуемую мощность сварочного трансформатора и не вызывает излишнего нагрева арматуры.
Комплектуя нужное количество сварочных головок (головка — это два рабочих электрода и шунтирующая пластина), можно получить машину для сварки сеток любого размера и одновременно производить сварку целой группы точек.
В таких машинах (рис. 254) сетка движется вдоль оси продольных стержней 1 между неподвижными электродами 5 и шунтирующими пластинами 4, управляемыми при помощи пневматических цилиндров 3. После каждого передвижения сетки на один шаг к местам расположения электродов подается очередной поперечный
302
Рис. 253. Схема сварочной головки для многоточечной сварки арматурных сеток.
Рис. 254. Схема многоточечной сварочной машины.
стержень 2, котрый сваривается во всех точках его пересечения с продольными стержнями. Сетка захватывается за поперечные стержни зубом 6 и перемещается на один шаг при помощи каретки 7 и пневматического цилиндра 8, поршень которого совершает возвратно-поступательные движения. Двигаясь вперед, зуб отклоняется, встречая на своем пути поперечный стержень, а во время обратного хода — захватывает стержень и перемещает всю сетку.
Армирование предварительно напряженных железобетонных изделий осуществляется двумя способами:
отдельными стержнями или пучками проволоки — линейное армирование;
непрерывной нитью тонкой высокопрочной проволоки — непрерывное армирование.
В связи с этим различают две группы оборудования: для линейного армирования; для непрерывного армирования.
Оборудование для линейного армирования состоит из приспособлений для захвата и удержания концов арматуры и машин для ее натяжения.
Приспособления для захвата и крепления натягиваемой арматуры имеют различные конструкции в зависимости от применяемой арматуры (стержни, пучки проволок и т. п.), требуемого усилия натяжения и места натяжения (стенды, отдельные формы и т. п.). Для натяжения арматуры обычно используются специальные гидравлические домкраты с насосными установками.
При натяжении пучков проволоки на стендах от домкратов требуется большое усилие (600—900 кН) и значительная длина хода поршня (750—800 мм). В связи с этим такие домкраты, скомплектованные с насосной станцией, представляют собой передвижные установки большой массы (3—3,5 т) довольно сложной конструкции.
Натяжение арматуры непосредственно на форму или на изделие после его твердения выполняется переносными гидравлическими домкратами, имеющими небольшой ход поршня (50—200 мм). Для таких домкратов насосная станция обычно монтируется отдельно
303
Рис. 255. Гидравлический домкрат двойного действия для натяжения пучка арматурных проволок:
а — общий вид установки; б — схема домкрата.
на тележке и соединяется с цилиндром домкрата гибкими шлангами.
Для натяжения пучков арматурных проволок в железобетонных фермах и других уже затвердевших изделиях применяются домкраты двойного действия 2. (рис. 255). Такой домкрат состоит из двух цилиндров. Основной цилиндр Hz поршнем 10 служит для натяжения арматуры. Вспомогательный цилиндр 8 с поршнем 7 служит для анкеровки арматурных проволок 6 конусной пробкой 5.
Основной поршень 10 имеет конус для направления пучка проволок и наконечник 4, упирающийся в тело железобетонной балки. Проволоки закрепляются на фланце 9 основного цилиндра. При подаче жидкости насосной установкой 3 в цилиндр последний движется вправо и натягивает арматуру.
Для закрепления натянутых проволок в теле балки 1 жидкость подается в вспомогательный цилиндр, а поршень своим штоком вдавливает конусную пробку в отверстие балки, заклинивая все проволоки. Затем давление снимается, проволоки отрезаются и домкрат переносится к отверстию с другим пучком арматуры.
Эти и подобные им домкраты для натяжения арматурных стержней применяются при натяжении арматуры в сплошных и составных железобетонных конструкциях непосредственно на месте монтажа.
304
Рис. 256. Схема непрерывной намотки напряженной арматуры на железобетонные трубы.
Арматура предварительно напряженных железобетонных изделий может натягиваться не только механическим, но и электротермическим способом. При этом способе удлинение арматурных стержней до заданной величины происходит за счет их нагрева электрическим током. Нагретые стержни укладываются в подготовленную для изделия форму и укрепляются зажимами. После охлаждения в стержнях возникает нужное напряжение, которое передается затвердев
шему бетону при освобождении стержней из зажимов формы.
Оборудование для непрерывного армирования предназначено для навивки на контур изделия непрерывной нити высокопрочной проволоки с заранее заданным натяжением. В плоских изделиях контуром для навивки служат, как правило, специальные выдвижные штыри или другие опоры на поддоне формы, а в круглых — само изделие.
Непрерывное натяжение укладываемой проволоки создается двумя способами: за счет сматывания проволоки механизмом намотки с заторможенного определенным усилием шкива; за счет действия силы тяжести подвешенных на проволоке грузов.
Примером первого способа натяжения могут служить машины для непрерывной намотки напряженной спиральной арматуры на железобетонные напорные трубы (рис. 256). Здесь проволока 7 из бухты 5 несколько раз огибает для создания сцепления тормозной шкив 6 и через направляющую каретку 8 закрепляется на трубе 1. Вращением трубы и продольным движением каретки проволока наматывается на трубу по спирали и одновременно сматывается с заторможенного шкива, получая нужное натяжение на участке АБ. Сопротивление вращению шкива создается электромагнитной порошковой муфтой, сидящей на одном валу с тормозным шкивом. Муфта представляет собой полый стальной барабан 3, внутри которого расположен сердечник 4 с катушкой, питаемой постоянным током от селенового выпрямителя. Зазор между сердечником и внутренней полостью барабана заполнен ферромагнитным порошком с маслом. Между неподвижным барабаном и сердечником возникает мощное магнитное поле, создающее сопротивление вращению сердечника, жестко связанного с тормозным шкивом. Величина тормозного момента и, следовательно, усилие натяжения проволки регулируются реостатом 2, изменяющим силу тока в муфте.
11
305
Натяжение проволоки подвешенными на нее грузами используется в арматурно-намоточных машинах, применяемых при изготовлении плоских предварительно напряженных плит.
§ 58. ОБОРУДОВАНИЕ ДЛЯ УКЛАДКИ БЕТОННОЙ СМЕСИ В ФОРМЫ
Процесс формования железобетонных изделий состоит из двух основных операций: укладки бетонной смеси в подготовленную форму с заранее вложенной арматурой и уплотнения бетонной смеси в форме.
Укладка бетонной смеси в форму выполняется бетонораздатчи-ками и бетоноукладчиками.
Бетонораздатчики — это самоходные бункера, оборудованные затворами и предназначенные для транспортирования и выдачи бетонной смеси в форму.
Бетонораздатчик (рис. 257) состоит из сварной рамы, выполненной в виде портала 1, механизма 2 с электрическим приводом, при помощи которого бетонораздатчик передвигается по рельсам. На раме бетонораздатчика на резиновых амортизаторах 5 установлен бункер 6, выходное отверстие которого перекрыто секторным затвором 4, управляемым вручную штурвалом 3. Для получения быстрого и постоянного истечения бетона на одной из стенок бункера установлен вибровозбудитель 7.
Бункер бетонораздатчика загружается непосредственно из стационарного бункера бетоносмесительной установки или при помощи бадьи, транспортируемой краном. Загруженный бетонораздатчик перемещается к месту установки формы и укладывает в нее смесь. Количество бетонной смеси, поступающей в форму, регулируется степенью открывания затвора и скоростью перемещения бетонораздатчика вдоль формы. Уложенная смесь, как правило, разравнивается вручную.
Основным преимуществом бетонораздатчиков является простота их устройства, а недостатком — малая степень механизации.
Бетонораздатчики широко применяются при стендовом и поточноагрегатном способах производства. При конвейерном способе производства в большинстве случаев применяют более сложные, но более совершенные машины — бетоноукладчики.
Бетоноукладчики отличаются от бетонораздатчиков тем, что позволяют в большей степени механизировать не только укладку, но и процесс распределения бетонной смеси по форме и ее дозирование. Для этой цели у выходного отверстия бункера бетоноукладчика устанавливается его рабочий орган-питатель.
Ленточные питатели бетоноукладчиков (рис. 258, а) имеют транспортерную ленту 1 с приводным барабаном 2, расположенную под бункером 6 бетоноукладчика. При движении ленты бетонная смесь поступает из бункеров в форму непрерывным потоком. Для того чтобы бетонная смесь поступала в форму равномерно, независимо от ее выхода из бункера на ленту, впереди бункера по всей его ширине 306
устанавливается копильник 5. Передняя стенка копильника состоит из ряда заслонок 3, степень открывания которых регулируется гидравлическими цилиндрами 4. Этими заслонками можно регулировать толщину выдаваемого слоя на различных участках ленты и подавать нужные объемы бетонной смеси.
Принцип работы такого устройства основан на том, что высота /гх выходной щели бункера всегда превышает высоту h2 выходной щели копильника, благодаря чему в последнем образуется подпор, обеспечивающий устойчивую толщину выдаваемого в форму слоя бетонной смеси.
Бетоноукладчики с ленточными питателями обычно применяются при изготовлении широких плоских железобетонных изделий.
Для укладки смесей в узкие формы (до 2 м) целесообразно применять бетоноукладчики с вибролотковыми питателями.
11
307
Вибролотковый питатель (рис. 258, б) крепится к раме бетоноукладчика на пружинных амортизаторах 2. С задней стороны лотка 6 установлен электромагнитный вибровозбудитель 7, создающий направленные колебания. Бетонная смесь по лотку подается из бункера 1 через насадок Зв форму 5. Равномерность укладываемого слоя смеси и ее толщина обеспечиваются за счет применения насадка, выполняющего роль копильника. Меняя положение насадка по вертикали, можно получить слой различной толщины, а применяя на рабочей стенке насадка профилир 4, имеющий специальную конфигурацию нижней кромки, можно профилировать поверхность укладываемого слоя. Для более быстрого истечения смеси из бункера устанавливается вибровозбудитель 8.
Широкое применение находят бетоноукладчики с ленточными питателями в сочетании с вибронасадками (рис. 258, в). В таких бетоноукладчиках смесь ленточным питателем 7 из бункера 6 подается в полость между двумя коробами 1 и 4, подвешенными на амортизаторах 2 к раме 3 бетоноукладчика. В коробах установлены вибровозбудители 5, способствующие интенсивному заполнению формы 9 смесью из полости между коробами и уплотняющие смесь при движении бетоноукладчика вдоль формы. Процесс укладки и уплотнения смеси осуществляется послойно за несколько проходов бетоноукладчика с поочередным включением левого, а при обратном ходе, правого вибровозбудителя. При формовании изделий высотой более 0,2 м поверхностное уплотнение смеси вибронасадком оказывается недостаточным. Тогда форму устанавливают на виброплощадку 8 и вибрация изделия происходит одновременно снизу и сверху.
Поддон 11, устанавливаемый по высоте устройством 10, перекрывает выход остатка смеси из полости коробов при окончании формовки и перемещении вибронасадка за пределы формы.
§ 59. ВИБРАЦИОННЫЕ МАШИНЫ ДЛЯ УПЛОТНЕНИЯ БЕТОННЫХ СМЕСЕЙ
Вибрационные машины находят широкое применение в строительстве. В предыдущих главах описаны вибрационные конвейеры, вибрационные машины для уплотнения грунта, погружения свай и сортировки материалов. Еще более распространены вибрационные машины при выполнении бетонных работ и изготовлении железобетонных конструкций и изделий.
Такое широкое использование вибрационных машин объясняется тем, что создаваемая ими вибрация среды (бетонная смесь, грунт, транспортируемый материал) позволяет изменить ее свойства. При вибрации среда приобретает свойства текучести благодаря нарушению связей между ее частицами. Текучесть вибрируемой среды используется для уплотнения смесей и грунта, перемещения материалов по лоткам, способствует лучшему прохождению смесей в бункерах, уменьшает сопротивление грунта при погружении свай.
При изготовлении железобетонных изделий одной из основных операций является уплотнение бетонной смеси. Смысл уплотнения 308
ваключается в удалении из рыхлой бетонной смеси воздуха и излишней воды и максимального сближения частиц заполнителя. От степени уплотнения зависит качество изделия, т. е. прочность, водонепроницаемость, морозостойкость и другие его свойства.
Уплотнение может выполняться различными способами: вибрационным, вибропрессованием, прессованием, вакуумированием, центрифугированием и т. п.
Так, например, для уплотнения изделий, имеющих кольцевое сечение (железобетонные трубы) применяется центрифугирование. Принцип этого метода заключается в том, что цилиндрическую форму, заполненную
Рис. 259. Кривые удобо-укладываемости различных составов бетонной смеси:
1 — В/Ц = 0,4; 2 — В/Ц = = 0,45; 3 — В/Ц = 0,5.
арматурой и бетонной смесью, вращают с
большой скоростью. При этом бетонная смесь равномерно распреде-
ляется по кольцевому сечению формы и хорошо уплотняется, благодаря интенсивному воздействию центробежных сил.
При формировании тонкостенных изделий из пластичных бетонных смесей применяется вакуумирование. При этом способе уп-
лотнение смеси достигается путем отсоса вакуум-насосами воды и воздуха через щиты, оборудованные тонкими фильтрами.
Наибольшее распространение для уплотнения бетонных смесей получил вибрационный способ, осуществляемый вибрационными машинами. Главными параметрами такого способа являются амплитуда и частота колебаний. Они должны быть определенными для различных бетонных смесей и различных условий формования. Так, например, для заданного состава бетонных смесей и значений водоцементных отношений (В/Ц) кривые удобоукладываемости (рис. 259) определяют те значения амплитуд колебаний Л при фиксированной частоте <а, ниже которых время уплотнения t становится чрезмерно большим и уплотнение уже невозможно.
Задача эффективной работы вибромашин заключается в обеспечении необходимых режимов колебаний при формовании различных железобетонных изделий. Такая задача может быть решена после изучения принципа работы вибромашин и факторов, влияющих на режим их работы.
Конструкции вибромашин зависят от их назначения в технологическом процессе производства бетонных работ или изготовления железобетонных изделий. Любая вибромашина состоит из вибровозбудителя, рабочего органа и привода.' Вибровозбудитель представляет собой устройство, предназначенное для возбуждения механических колебаний. Рабочий орган служит для передачи колебаний обрабатываемой среде.
По способу передачи колебаний от рабочего органа к среде различают внутренние, поверхностные, наружные и станковые вибромашины (рис. 260).
309
Рис. 200. Схемы передачи колебаний обрабатываемой среде от рабочего органа вибромашин:
а — внутренних (глубинных); б — поверхностных; в — наружных; г— станковых.
Рис. 261. Схема дебалансных вибровозбудителей:
а — с круговыми колебаниями; б — с направленными колебаниями.
Рабочий орган внутренних (глубинных) вибромашин (рис. 260, а) представляет собой корпус 1 различной конфигурации, располагаемый внутри уплотняемой среды 3. Колебания передаются объему изделия в зоне корпуса. Рабочий орган 1 поверхностных вибромашин (рис. 260, б) передает колебания с поверхности уплотняемой среды. Наружные вибромашины (рис. 260, в) укрепляются на подлежащих колебаниям конструкциях (стенка бункера, опалубка бетонируемого изделия) и колебания среде 3 от корпуса 1 передаются через элементы этих конструкций. Рабочий орган станковых вибромашин (вибрационных площадок) (рис. 260, г) передает колебания одновременно всему объему изделия, находящемуся в форме на колеблющейся конструкции машины.
Все типы вибромашин имеют источник колебаний в виде вибровозбудителя 2. Наиболее часто применяются дебалансные, планетарные и электромагнитные вибровозбудители.
Дебалансный вибровозбудитель (рис. 261, а) представляет собой вращающийся вал 2 с укрепленным на нем неуравновешенным грузом 1, называемым дебалансом. Если дебаланс с массой т0 и расстоянием от оси вращения до центра массы г0 вращается с угловой скоростью со, возникает вынуждающая сила (центробежная сила инерции)
Qo = m(troar, (256)
где moro — статический момент массы дебаланса, характеризующий его статическую неуравновешенность.
Вынуждающая сила через жесткую связь вибровозбудителя а корпусом вибромашины 3 вызывает смещение центра тяжести корпуса из точки О на величину амплитуды А. Поскольку вынужда-
310
кидая сила за один оборот меняет свое направление на 360° , корпус будет вращаться с частотой вынуждающей силы по окружности с радиусом, равным амплитуде колебаний. Такие колебания корпуса вибромашины называются круговыми. При вращении центра тяжести корпуса с массой М по окружности возникает центробежная сила инерции массы корпуса
Q = МЛсо2. (257)
При динамическом равновесии системы (без учета сил упругости и сопротивлений) можно записать
myo©2 = МЛ<в2. (258)
Отсюда амплитуда колебаний корпуса вибромашины, м,
А = т • (259>
а 5
Рис. 262. Схема планетарных вибровозбудителей:
а — с наружной обкаткой; б — с внут ренней обкаткой.
Дебалансные вибровозбудители могут обеспечить не только круговые, но и направленные колебания рабочего органа вибромашины. Для этой цели с корпусом вибромашины связываются два вала с дебалансами (рис. 261, б). Эти валы вращаются в противоположные стороны синхронно и синфазно. Дебалансы имеют строго одинаковые массы и эксцентриситеты. При таком вращении горизонтальные составляющие вынуждающих сил взаимно уравновешиваются, а вертикальные составляющие складываются. Корпус вибромашины будет колебаться направленно по оси х — х с отклонением точки О в одну и другую сторону на величину амплитуды А. Колебания корпуса можно получить в любом направлении (вертикально, горизонтально, наклонно) в зависимости от расположения оси у — у, соединяющей два вала вибровозбудителей.
Направленные колебания применяются при формовании железобетонных изделий на виброплощадках, при уплотнении грунтов, погружении свай и т. д.
Планетарный вибровозбудитель (рис. 262) содержит бегунок-дебаланс 1, который при вращении, благодаря шарниру 2, отбрасывается в сторону и обкатывается по беговой дорожке корпуса 3 вибромашины. При этом возникает вынуждающая сила Qo= т^^2, изменяющая свое направление на 360° по мере обкатки бегунка. Корпус совершает круговые колебания с угловой частотой «, зависящей от частоты вращения самого бегунка <вб и соотношения диаметров бегунка d и беговой дорожки D.
По тому, какой своей боковой поверхностью бегунок обкатывается по беговой дорожке (наружной или внутренней), планетарные
311
Рис. 263. Электромагнитный однотактный вибровозбудитель:
а — схема конструкции: б — схема питания переменным током; s — схема питания с полупериодиым выпрямителем.
вибровозбудители подразделяют на вибровозбудители с наружной обкаткой (рис. 262, а) и с внутренней обкаткой (рис. 262, б).
Угловая частота колебаний корпуса определяется из условия, что обкатывание бегунка по беговой дорожке происходит без проскальзывания. Тогда точка контакта О будет мгновенным центром скоростей и движение бегунка можно рассматривать как складывающееся из относительного движения вокруг его собственной оси и переносного движения относительно оси кольца (рис. 262, а) или пальца (рис. 262, б). Для вибровозбудителя с наружной обкаткой скорость точки контакта бегунка с беговой дорожкой кольца в относительном и переносном движениях равна:
<обг 4- (о (R — г) — 0, (260)
откуда угловая скорость колебаний корпуса, 1/с,
= (261)
Знак минус показывает, что вращение бегунка и его обкатка происходит в различных направлениях.
Для вибровозбудителя с внутренней обкаткой скорость точки контакта будет
®б7? — со (R — г) — 0. (262)
Следовательно,
® = (263)
Из зависимостей (261) и (263) следует, что при R -> г угловая скорость со—>оо. Таким образом, планетарный вибровозбудитель дает увеличение частоты колебаний корпуса вибромашины при определенных оборотах двигателя. На практике так подбирают соотношение радиусов R и г, чтобы частота колебаний корпуса по отношению к частоте вращения приводного вала увеличивалась в 3—6 раз (9000—20000 кол./мин). Это позволяет повысить эффективность уплотнения бетонных смесей.
312
Электромагнитный однотактный вибровозбудитель (рис. 263) состоит из сердечника 3 с катушкой 4 и корпуса 9 с прикрепленным к нему якорем 7 электромагнита. Сердечник и корпус с якорем соединены между собой через плиту 2 винтовыми пружинами 6. На схеме показан вариант конструкции с прорезными винтовыми пружинами растяжения - сжатия, обеспечивающими более компактную конструкцию вибровозбудителя и бесшумность его работы. Корпус жестко соединяется с вибрируемой конструкцией 8, а сердечник с плитой составляют реактивную массу.
К концам обмотки подводится переменное или пульсирующее постоянное напряжение (рис. 263, б, в). Ток в обмотке порождает пульсирующую силу взаимного притяжения сердечника и якоря, вызывающую направленные колебания корпуса. Переменное напряжение возбуждает в обмотке два импульса тока за один период и частота вибрации будет в два раза выше частоты подаваемого напряжения. При полупериодном выпрямлении переменного напряжения частота вибрации будет совпадать с частотой питающего напряжения.
На реактивной массе прикрепляются дополнительные грузы 1 для регулировки амплитуды колебаний при различных величинах присоединяемых масс. Вибровозбудитель закрыт предохранительным кожухом 5.
Электромагнитные вибровозбудители широко применяются в питателях для насыпных материалов, в том числе работающих в составе весовых дозаторов (см. § 47), вибрационных конвейерах, формовочных машинах и других конструкциях, работающих на основе возбуждения направленных колебаний. К достоинствам таких вибровозбудителей относится простота конструкции и отсутствие вращающихся и трущихся пар, что повышает надежность их эксплуатации.
Эффективность уплотнения бетонных смесей и других технологических процессов, выполняемых с помощью вибрации, зависит от режима работы вибрационной машины. Этот режим обусловлен взаимодействием сил, возникающих во время ее работы.
На рис. 261 показано действие силы инерции колеблющейся массы машины МЛ®2 и вынуждающей силы m0r0®2. Кроме того, в системе всегда присутствуют сила упругости и сила сопротивления колебаниям, обусловленная гистерезисными потерями энергии в пружинах, материале корпуса вибромашины и т. п.
Сила упругости характеризуется коэффициентом жесткости пружин К и амплитудой А колебаний массы корпуса, вызывающей деформацию пружин. Эта сила выражается произведением К Л и всегда направлена против движения колеблющейся массы. Сила сопротивления мало влияет на режим работы машины и поэтому ею можно принебречь. С таким допущением уравнение динамического равновесия трех действующих в системе сил запишется в виде
К Л - МЛ®2 = ЩдГо®2,
813
Рис. 264. Амплитудно-частотная характеристика вибромашины.
откуда амплитуда колебаний
Собственная угловая частота <и0 при свободных (без вынуждающей силы) колебаниях системы, как известно из теоретической механики, определяется выражением
(265)
откуда коэффициент жесткости упругих связей
К = (ОоМ.
Подставляя значение К в формулу (264), получим
Д = —= ДД, (266)
М((4 —ш2)
где До = — амплитуда колебаний без учета влияния упру-
СО2
гих связей и сопротивлений; X = ------------динамический коэф-
(0g — (О2
фициент усиления амплитуды.
Разделив числитель и знаменатель на <во, можно представить .коэффициент усиления амплитуды в виде
График зависимости X, = f (ш/<оо) называют амплитудно-частотной характеристикой системы (рис. 264). Такая характеристика показывает, каким образом при заданной угловой частоте вынужденных колебаний можно получить различный режим работы вибромашины.
Подбирая жесткость упругих связей (пружина, резиновые опоры и др.), можно изменять угловую частоту собственных колебаний «0 и, следовательно, получать различные соотношения угловых частот <а/и0. При ш/<в0 = 1 наступает резонанс системы: оо и
Д -> оо (если сопротивление С = 0). При o/<o0 < 1 — дорезонансный режим. При ш/й)0 > 1 — зарезонансный режим.
На практике сопротивление колебаниям в системе всегда существует, и при С > 0 амплитуда колебаний в резонансном режиме значительно усиливается, но имеет конечное значение.
Этот принцип усиления амплитуды колебаний используется при создании машин, работающих в резонансном режиме. К таким машинам относятся виброплощадки с горизонтально направленными колебаниями для уплотнения длинномерных железобетонных
314
Таблица 2
Граничные частоты октавных полос, Гц Допустимые колебательные скорости и уровни виброскорости
прн передаче вибрации на руки при передаче вибрации на рабочее место
v, см/с уровень, дБ V, см/с уровень. дБ
45—90 2,5 114 0,27 95
90—180 1,8 111 0,35 97
конструкций, машины с использованием электромагнитных вибровозбудителей и др. Недостатком резонансных вибромашин является чувствительность их режима к изменениям угловой частоты колебаний и жесткости упругих связей.
Наиболее широко распространены в строительстве вибромашины, работающие в зарезонансном режиме. Это объясняется сравнительной простотой конструкции и стабильностью режима при соотношении угловых частот со/со0 >• 7.
При таком соотношении угловых частот X -► 1, и амплитуда колебаний может ориентировочно вычисляться по формуле (259). Изменение знака коэффициента X при его вычислении по формуле (267) объясняется тем, что в зарезонансном режиме перемещение массы и вынуждающая сила находятся в противофазе, так как вынуждающая сила для соблюдения динамического равновесия должна уравновесить силу инерции массы М (рис. 261, а).
Изменение соотношения угловых частот практически не влияет на работу машин с зарезонансным режимом колебаний. Сопротивление колебаниям также не оказывает существенного влияния на амплитуду, которая регулируется изменением только статического момента массы дебалансов.
Защита персонала от действия вибрации представляет собой весьма важную задачу охраны труда. Если вибрация, воспринимаемая человеком, превышает определенные пределы, то его самочувствие ухудшается, а работоспособность понижается. При чрезмерно интенсивном и длительном воздействии вибрации возникает так называемая вибрационная болезнь.
Для исключения вредного воздействия вибрации существуют санитарные нормы, ограничивающие вибрацию. Нормами предусматриваются два случая передачи вибрации работающему с вибромашинами: возможность передачи вибрации на руки работающего с ручными вибромашинами; возможность передачи вибрации на рабочее место (пол, сиденье машиниста, рабочая площадка и т. п.).
В обоих случаях устанавливаются предельно допустимые величины среднеквадратичных значений виброскорости в октавных полосах частот от 11 до 2800 Гц. Для каждой октавной полосы частот установлены свои предельно допустимые среднеквадратичные значения виброскорости v, см/с, и уровни виброскорости L, дБ.
Примеры санитарных норм приведены в табл. 2.
315
Рис. 265. Глубинная вибромашина с гибким валом.
Не всегда удается непосредственно измерить виброскорость или ее уровень, но легко измерить вибрографом амплитуду колебаний. Предельное значение амплитуды колебаний можно ориентировочно определить из выражения А = v/a>
Например, при частоте 50 Гц (и == 314 1/с) передающаяся на руки работающего амплитуда колебаний не должна превышать 2 5
—— = 0,008 см. При этой же частоте, но на рабочем месте А =
= = 0,0009 см.
314
Для выполнения санитарных норм при эксплуатации вибромашин необходимо обеспечить виброизоляцию защищаемых объектов. Виброизоляция заключается в том, что между источником вибрации и защищаемым объектом устанавливают упругие элементы пониженной жесткости. Это могут быть пружины, резиновые или пневматические амортизаторы.
Изложенные принципы устройства и работы лежат в основе конструкций вибрационных машин, применяемых в производстве железобетонных изделий. Некоторые из этих конструкций рассмотрены ниже.
Глубинные вибромашины широко применяются для уплотнения бетонных смесей при укладке их в монолитные конструкции, а также при изготовлении насыщенных арматурой изделий сборного железобетона.
Наиболее распространенной является глубинная вибромашина с гибким валом (рис. 265), состоящая из электродвигателя 1, гибкого вала 3 и корпуса 4. Гибкий вал заключен в специальную броню, на которую надет резиновый шланг 2. Присоединяется гибкий вал к электродвигателю и к корпусу винтовыми муфтами. Вращение от вала к планетарному вибровозбудителю 5 с внутренней обкаткой передается через шарнирное соединение в виде пружинной муфты. Во время работы корпус вибромашины удерживают за резиновый шланг, который служит достаточным виброизолятором.
316
Рис. 267. Уплотнение бетона глубинными вибромашинами:
а — общий вид глубинной вибромашины; б — уплотнение бетона пакетом вибромашин.
Часть ручных глубинных вибромашин изготовляется со встроенным в корпус машины высокочастотным электродвигателем. Такая вибромашина (рис. 266) представляет собой герметически закрытый корпус 3, внутри которого на вращающемся валу 5 электродвигателя 4 укреплен дебаланс 6. Рукоятка 1, за которую удерживают вибромашину, изолирована амортизатором 2.
Ручные глубинные вибромашины с гибким валом и вынесенным двигателем выпускают с диаметром корпуса 25—80 мм, массой до 16 кг и угловой частотой 890—2000 1/с.
При уплотнении больших масс монолитного бетона в гидротехническом строительстве применяются мощные подвесные глубинные вибромашины (диаметр корпуса 133—194 мм, масса 120—350 кг). Подвесная глубинная вибромашина (рис. 267, а) содержит вынесенный электродвигатель 2, корпус которого связан с корпусом машины 1 через виброизолятор. Для возбуждения колебаний в таких машинах используются, как правило, планетарные вибровозбудители.
317
Рис. 268. Поверхностная вибромашина.
Подвесные вибромашины могут применяться в строительстве группами (пакетами). Такой вибропакет (рис. 267, б) состоит из нескольких вибромашин 1, соединенных с рамой 2. Рама при помощи подвески 3 присоединяется к крюку крана или иного подъемного устройства.
Производительность глубинных вибромашин определяется по объему бетона, уплотненного с одной стоянки машины, и временем вибрирования этого объема, включая в него и время перестановки с одного места на другое.
Объем бетона, уплотненного с одной стоянки вибромашины, м3,
V = nR2h, (268)
где R — радиус действия вибромашины, м; h — толщина виб-рируемого слоя бетона, м.
При коэффициенте, учитывающем перекрытия зон действия машины, равном приблизительно 0,65, получим формулу технической производительности, м3/ч,
Птехн = nR?h • 0,65 ~ , (269)
где — продолжительность вибрирования на одном месте, с; t2 — продолжительность перестановки машины, с.
Оптимальное время вибрирования при котором вибромашина имеет наибольшую производительность, принимается обычно равным 30 с.
Радиус действия вибромашины зависит как от ее параметров (амплитуды, частоты, максимальной мощности, диаметра корпуса), так и от свойств бетонной смеси. Кроме того, он увеличивается до определенных пределов с увеличением продолжительности вибрирования. Влияние различных факторов на величину радиуса действия очень сложно и точно еще не установлено. Поэтому значение радиуса действия следует принимать по справочным или каталожным данным, полученным экспериментально.
318
Поверхностные вибромашины применяются для бетонирования полов, плит перекрытий, панелей, дорожных покрытий и т. п.
Площадочная поверхностная вибромашина (рис. 268) состоит из жесткой металлической
Рис. 269. Схема работы выброрейки.
площадки 1, на которой укреплен электродвигатель 2 с дебаланс-ным вибровозбудителем 3.
Вибромашина своей площадкой устанавливается непосредственно на бетонную смесь, прорабатывает данный участок на определенную глубину, после чего вручную переносится на новое место.
Виброрейка (рис. 269) отличается от площадочной вибромашины формой и размерами опорной площадки. Последняя выполняется в виде рейки 2, на которой жестко закреплены один или несколько вибровозбудителей 1. Виброрейка очень удобна для бетонирования широких (до 4 м) полос, особенно когда нужно получить ровную поверхность. Обслуживают виброрейку двое рабочих, которые перемещают ее за рукоятки с гибкими тягами 4, прикрепленными к опорным башмакам рейки 3.
Поверхностные вибромашины могут выполняться в виде виброщитов большого размера, предназначенных для заглаживания поверхности плоских железобетонных изделий и дополнительного уплотнения верхнего слоя бетонной смеси.
Виброщиты, которые используются для придания поверхности изделия нужного профиля, называются виброштампами.
Виброштамп (рис. 270) для формовки лестничных маршей состоит из рамы 1, на которой установлен электродвигатель <?, вращающий два вала 4 с четырьмя дебалансами 2. Снизу к раме прикреплена металлическая гребенка (матрица), имеющая контур, в точности соответствующий контуру черновых ступеней лестничного марша 5. Виброштамп снабжен расположенными по периметру направляющими и ограничивающими упорами для правильной посадки штампа относительно формы и ограничения его опускания.
Техническая производительность поверхностных вибромашин, М8/ч, определяется по формуле
nTCXH = F/i-^-, (270)
‘1 "Г ‘г
где г — размер уплотняемой площадки, м2; h — глубина проработки, м; и tt — продолжительность вибрирования и перестановки вибромашины, с.
Наружные вибромашины крепятся непосредственно к опалубке, через которую передают колебания бетонной смеси. Такие вибромашины применяются для уплотнения бетонных смесей для тонко-
319
Рис. 271. Кинематическая схема виброплощадки с вертикально направленными колебаниями.
стенных конструкций, балок, ферм, ригелей, при изготовлении их как на полигонах, так и непосредственно на строительстве.
В качестве вибровозбудителей при наружном вибрировании применяются универсальные электродвигатели со встроенными деба-лансными вибровозбудителями (рис. 268) или электромагнитные вибровозбудители.
Вибрационные площадки являются наиболее массовым видом оборудования, применяемого для уплотнения бетонных смесей при изготовлении железобетонных изделий. Различают виброплощадки по характеру колебаний, грузоподъемности, способу крепления формы и другим признакам.
320
По характеру колебаний бывают вибропло-шадки с круговыми и направленными (вертикальными или горизонтальными) колебаниями.
Для крепления формы к раме виброплощадки применяют механические, электромаг-
Рис. 272. Резонансная виброплощадка с горизонтально направленными колебаниями.
нитные и пневматические устройства.
Наибольшее распространение получили виброплощадки блоч-
ного типа с вертикально направленными колебаниями. Такая виброплощадка (рис. 271) состоит из унифицированных блоков 3, соединенных между собой парами карданных валов 4. Направленные колебания обеспечиваются вращением от двигателя 1 каждой пары валов ряда виброблоков в разные стороны. Синхронизация вращения валов в каждом ряду виброблоков и между рядами виброблоков обеспечивается синхронизаторами 2 и соединительным карданным валом 6. Синхронизатор представляет собой набор зубчатых колес с передаточным числом, равным единице. При этом выходные валы синхронизатора вращаются в разные стороны. Каждый виброблок содержит по два дебалансных вибровозбудителя 7 и опирается через виброизолирующие пружины 5 на неподвижную раму. Крепление формы 8 осуществляется пневмоприжимами.
Такие виброплощадки работают в зарезонансном режиме колебаний и имеют грузоподъемность 2—24 т.
Для формования длинномерных изделий применяются резонансные виброплощадки с горизонтально направленными колебаниями. Виброплощадка (рис. 272) представляет собой двухмассную колеблющуюся систему. Усиление колебаний рамы 5 с установленной на ней формой 4 с бетонной смесью происходит за счет соответствующего подбора величин активной (резонансной) массы плиты 3 и жесткости пружин 2. Вибровозбудитель 1 крепится к плите 3. От фундамента площадка виброизолирована пружинами 6. На виб-
роплощадках некоторых типов между активной плитой и рамой устанавливается упругий резиновый ограничитель 7. В таком случае рама совершает негармонические ударно-вибрационные колебания, способствующие более интенсивному уплотнению бетонных смесей.
§ 60. СПЕЦИАЛЬНЫЕ ФОРМОВОЧНЫЕ УСТАНОВКИ
Формовочные установки предназначены для изготовления различных конструкций железобетонных изделий.
Примером формовочной установки может служить установка для производства пустотных панелей (рис. 273). В этой установке траверса 3 с вибровкладышами 4 перемещается по направляющим при помощи канатной тяги электрореверсивной лебедкой 1. Запасовка каната через направляющие
321
Рис. 273. Установка для производства пустотных панелей.
Рис. 274. Вибровкладыш.
блоки 2, установленные в конце и в начале хода траверсы, позволяет, вращая барабан лебедки, изменять ход траверсы с вибровкладышами с прямого (в форму) на обратный (из формы). Изделие 5 формуется с помощью вибровкладышей и виброщита 6 на неподвижном формовочном столе 7, заменяющем виброплощадку.
Вибровкладыш (рис. 274) предназначен для образования пустот и уплотнения бетонной смеси. Он представляет собой корпус пус-тотообразователя 7, внутри которого располагаются дебалансные вибровозбудители 4, связанные между собой короткими валами 6 при помощи гибких муфт 5. Приводом для всей группы вибровозбудителей служит электродвигатель 2, вынесенный наружу и соединяющийся с валом вибровозбудителей при помощи клиноременной передачи 3. Для соединения вибровкладыша с траверсой машины на корпусе вкладыша предусмотрен хвостовик 1 с отверстием.
Формование изделий с применением вибровкладышей является эффективным способом, так как в этом случае энергия передается непосредственно уплотняемой среде.
Быстрейший переход на индустриальные методы строительства может быть достигнут при условии внедрения в практику крупнопанельного домостроения, отличающегося большой степенью унификации и высокой технологичностью элементов, из которых производится сборка дома. Для успешного решения этой проблемы необходимо обеспечение домостроительных комбинатов высокопроизводительным оборудованием. Примером такого оборудования могут служить кассетные установки.
Кассетнаяустановка (рис. 275) состоит из ряда рабочих отсеков 2, разделенных гладкими (стальными или железобетонными) перегородками 4. Через каждые два отсека установлены тепловые стенки 6, выполненные в виде герметических плоских коробок, во внутреннюю полость которых подается острый пар. Кассета замыкается двумя теплоизолирующими стенками 5 и сжимается
322
тягами 3, воспринимающими распорные усилия от бетона. Уставов ленная между стенками бортовая оснастка 7 фиксирует их взаимное расположение и определяет толщину изделия. К разделительным стенкам крепятся по торцам вибромашины 1, способствующие уплотнению бетонной смеси во время формовки. Одна из наружных стенок делается неподвижной, а все остальные оборудованы опорными роликами и могут раздвигаться по горизонтальным балкам рамы установки.
Процесс изготовления изделий в кассетах заключается в укладке и уплотнении бетонной смеси навесными вибромашинами в рабочих отсеках кассеты, тепловой обработки за счет подачи пара в тепловые стенки и распалубки, т. е. последовательного отодвигания стенок и выемки готового изделия.
Подача бетонной смеси наиболее целесообразно осуществляется пневматическим бетононасосом, подающим бетон от места приготовления в разгрузчик-гаситель, установленный над кассетами и распределяющий смесь по отсекам.
Трудоемкий процесс распалубки и сборки кассеты может выполняться специальными машинами, созданными для этой цели. Они позволяют механизировать операции последовательного передвижения стенок кассеты и их фиксирования в рабочем положении.
Вертикальные кассеты применяются для изготовления внутренних стен, перегородок, междуэтажных перекрытий и других гладких, без выступов и впадин, изделий. Поскольку в крупнопанельном домостроении такие изделия составляют около 70% всех сборных элементов здания, кассетный способ производства находит широкое распространение.
Крупнообъемное домостроение является дальнейшим повышением сборности зданий. Создание и усовершенствование оборудования для производства заводскими методами блок-комнат и блок-квартир открывает перспективы новых качественных изменений в методах индустриализации строительства.
Принцип работы созданных агрегатов заключается в том, что блоккомната формуется между стенками внутреннего сердечника и наружных щитов, взаимное расположение которых определяет толщину стенки комнаты. Наиболее распространенными являются кассетный и непрерывный способы формования объемных блоков.
Установка кассетного типа (рис 276, а) состоит из сердечника 1 и четырех шарнирно закрепленных щитов 3, перемещаемых гидроцилиндрами 4. На щитах закрепляется бортоснастка для образования в формуемом изделии оконных и дверных проемов. В собранном виде щиты соединяются между собой специальными замками, обеспечивая необходимый размер формуемого изделия. Бетонная смесь подается из бункера 2 в пространство, образованное между стенками сердечника и внутренней поверхностью щитов. Уплотнение смеси осуществляется послойно наружными вибромашинами, установленными на щитах. Потолочную плиту формуют дополнительно виброщитом.
324
Рис. 276. Способы формования объемных блоков: а — кассетный; б — непрерывный.
Установка для непрерывного формования объемных элементов (рис. 276, б) состоит из четырех наружных стенок 4 формы и съемного сердечника 6. На шарнирно закрепленные стенки формы в верхней части установлены наружные вибромашины 5.
Процесс формования блока заключается в следующем. Сердечник 6 устанавливают на платформу 3 в исходное верхнее положение. Бетонная смесь подается из бункеров 7 по всему периметру полости между стенками сердечника и стенками формы. При включенных вибромашинах и постепенном опускании сердечника гидроцилиндром 1 по направляющим 2 происходит послойное уплотнение смеси. В крайнем нижнем положении сердечника формуется потолочная плита. В обоих случаях получается железобетонный колпак с дверными и оконными проемами, который представляет собой готовую комнату. Такие колпаки монтируются по заданной схеме краном и в результате образуют готовое здание.
Вопросы для самопроверки
1. Опишите способы организации производства железобетонных изделий.
2. Изобразите принципиальные схемы станков для упрочнения и правки арматуры.
3. Изобразите схему и объясните работу многоточечных сварочных машин.
4. Опишите способы линейного напряженного армирования.
5. Изобразите схему машины для непрерывного предварительного напряженного армирования.
6. Изобразите схемы бетоноукладчиков с различными питателями и опишите их работу.
7. Где в строительстве применяется вибрация и в чем ее смысл?
8. Нарисуйте схемы и объясните работу вибровозбудителей различных типов.
9. Выведите формулу для определения амплитуды колебаний вибромашины и объясните возможные режимы ее работы.
10. Какие требования охраны труда предъявляются при работе с вибрационными машинами?
11. Опишите конструктивные особенности и работу виброплощадок, глубинных и поверхностных вибромашин.
12. Опишите установку для формования многопустотных железобетонных плит.
13. Изобразите схемы и объясните работу установок для формования объем-иыл железобетонных элементов.
325
Глава XI
ЭКСПЛУАТАЦИЯ, РЕМОНТ
И ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ СТРОИТЕЛЬНЫХ МАШИН
§ 61. ОСНОВНЫЕ ПОЛОЖЕНИЯ ПО ЭКСПЛУАТАЦИИ МАШИН
Для своевременного выполнения планируемых работ с минимальными затратами в строительных организациях устанавливается структура (состав) парка машин. При этом учитываются наиболее целесообразные способы производства работ, рациональная их последовательность и совмещение их выполнения во времени при обеспечении ритмичного и полного использования трудовых и материальных ресурсов.
Имеющийся на строительстве парк машин принято делить на три основные группы: машины, находящиеся в работе; машины в резерве, монтаже и переброске; машины в ремонте.
Число работающих машин следует увеличивать за счет:
уменьшения времени их монтажа и демонтажа, максимально механизируя эти работы;
сокращения времени переброски машин с одной строительной площадки на другую или с завода, ремонтирующего машины (применяются специальные большегрузные платформы или прицепы-тяжеловозы, чтобы при перевозке машины сократить объем ее монтажа или вообще обойтись без него);
ликвидации просрочек в выполнении заводских ремонтов (это достигается тщательной подготовкой заводов или мастерских к ремонтным работам и заблаговременной заготовкой запасных частей и материалов);
сокращения простоев работающих машин.
К простоям находящихся в работе машин относятся: простои, вызванные неподготовленностью объектов работы; переброска машин в пределах строительной площадки; простои из-за смежного оборудования (например, экскаватор при недостатке транспорта); простои, связанные с перебоями в снабжении сырьем для переработки, изделиями для монтажа сооружений, а также топливом, электроэнергией и т. п.; простои из-за прочих организационных неполадок.
Для максимального сокращения простоев и для увеличения числа работающих машин необходимо выполнять проект производства работ, в котором предусматривается наряду с превращением строительной площадки в монтажную также комплексная механизация работ, правильная расстановка машин и плановая переброска их с объекта на объект; следует производить точный подсчет потребности в транспортных средствах, смежной механизации и
326
в рабочем персонале; планировать все необходимые подготовительные работы (запасы и размещение сырья и изделий, подводка воды и энергии, устройство рельсовых путей и дорог и т. п.).
Особое значение имеет организация диспетчерской службы, основными задачами которой являются: участие в разработке и осуществлении мероприятий по эффективному использованию машин; оперативный учет и контроль выполнения работ, предусмотренных недельно-суточными графиками; принятие мер по предупреждению и устранению различных неувязок и простоев в процессе работы; организация и контроль выполнения графиков заправки машин на объектах; подготовка и передача оперативной информации.
Успех механизации строительных работ зависит не только от эффективного использования парка машин, но и от их исправного состояния, которое обеспечивается правильным обслуживанием и ремонтом машин. Учитывая это, для управления машинами и их обслуживания необходимо выделять постоянные бригады из квалифицированных рабочих.
Ответственность за правильную организацию эксплуатации и ремонта машин несут руководители организации, эксплуатирующей машины. За техническое состояние машины и за правильную ее эксплуатацию отвечают сменный машинист (моторист, водитель).
Правильное обслуживание работающих машин заключается в обеспечении достаточного количества смазки в узлах трения, в постоянном регулировании зазоров в сочленениях машины при сохранении их величины в допустимых пределах; в надежном и своевременном закреплении винтовых, клиновых и других неподвижных соединений; в точном соответствии режима и условий работы машины инструкции и паспорту; в выполнении всех правил техники безопасности. .
В зимнее время особое значение имеет утепление двигателей внутреннего сгорания, применение для них пусковых приспособлений, оборудование подогрева рабочей жидкости для машин с гидроприводом и воздуха на машинах с пневмосистемами, утепление и обогрев кабин машинистов и водителей.
§ 62 СИСТЕМА ПЛАНОВО-ПРЕДУПРЕДИТЕЛЬНОГО РЕМОНТА
Различают две системы ремонта строительных машин: ремонт по потребности и планово-предупредительный ремонт.
В первом случае машина ставится на ремонт при предельном износе или поломке каких-либо деталей, в результате чего дальнейшая эксплуатация машины невозможна. Эта система получила название «работа на износ» и в настоящее время не применяется.
Система планово-предупредительного ремонта (ППР) является наиболее совершенной системой организации и производства ремонтных работ. По системе ППР ремонты машин планируются заранее, исходя из отработанного количества машино-часов. Таким образом,
327
дефекты устраняются не тогда, когда машина пришла в негодность, а заблаговременно. При установлении сроков и вида ремонта исходят из такого износа машины, при котором не исключается возможность ее эксплуатации, но создается угроза аварийного нарастания износов при дальнейшей эксплуатации.
Система ППР позволяет: заранее уточнить и согласовать с основным производством время постановки машин на ремонт; во время эксплуатации сохранять нормальную работоспособность машины, благодаря своевременному уходу и ремонтам; заранее планировать весь комплекс ремонтных работ, т. е. графики ремонтов, заготовку ремонтных материалов и запасных частей, сборку узлов и агрегатов и необходимые трудовые затраты.
При системе ППР приняты следующие виды работ: техническое обслуживание и ремонты — текущий и капитальный.
Техническое обслуживания (ТО) предусматривает следующие работы: очистку, мойку, осмотр (ревизию) и контроль за техническим состоянием узлов, агрегатов, приборов, канатов, системы гидравлики и сменного рабочего оборудования, машины в целом; крепление деталей, регулировку механизмов, узлов и агрегатов; смазку, заправку машин, замену масел, топлива и охлаждающих жидкостей при переходе к осенне-зимнему и весенне-летнему периодам; опробование отдельных узлов, рабочего оборудования и машин в целом и замену или восстановление изношенных деталей.
Текущий ремонт (Т). При текущем ремонте производится частичная разборка строительных машин, устраняются неисправности в агрегатах и узлах, возникающие в процессе работы машины и препятствующие их нормальной эксплуатации, заменяются отдельные агрегаты, узлы и детали (кроме базовых) новыми или заранее отремонтированными.
Техническое обслуживание и текущие ремонты приводятся на вксплуатационных базах механизации специализированными бригадами с участием машинистов машин.
Капитальный ремонт (К). При капитальном ремонте производится разборка строительных машин, восстанавливаются все начальные посадки и сопряжения в соответствии с указаниями по капитальному ремонту машин, занятых в строительстве, заменяются изношенные агрегаты и узлы новыми или заранее отремонтированными.
Капитальный ремонт сложных строительных машин (экскаваторов, скреперов, бульдозеров, кранов и т. п.) проводится на специализированных ремонтных заводах.
Время работы от начала эксплуатации машины до первого капитального ремонта или между двумя капитальными ремонтами, выраженное в часах работы машины, называется межремонтным циклом, а число часов работы машины между одноименными техническими обслуживаниями или ремонтами называется периодичностью ремонтов и технических обслуживании.
Нормы периодичности ремонтов и технических обслуживании стро-
328
Рис. 277. Построение структурного годового графика техобслуживания и ремонтов.
ительных машин, а также их трудоемкости и продолжительности устанавливаются Госстроем СССР *.
Для наглядности и удобства планирования рекомендуется составить структурный годовой график ремонта машин; зная продолжительность каждого ремонта и техобслуживания, легко составить календарный график.
Пример расчета. Траншейный экскаватор проработал с начала эксплуатации 6000 ч. На запланированный период предусматривается работа 3000 ч.
Согласно нормам Госстроя СССР периодичность выполнения ремонта (техобслуживания) в машино-часах — капитальный ремонт 8000, текущий — 1000, техническое обслуживание — 200.
Необходимо определить потребность в ремонтах и техобслуживаниях этой машины за год ее эксплуатации.
Порядок составления графика:
1. Откладываем в масштабе запланированное количество часов работы машины (рис. 277, а). Затем определяем количество часов до ближайшего капитального ремонта (8000 ч — 6000 ч = 2000 ч) и также откладываем их на графике.
2. Откладываем, начиная от К, периодичность текущих ремонтов Т = 1000 ч (рис. 276, б).
3. Откладываем, начиная от К, периодичность технических обслуживании ТО = 200 ч (рис. 276, в).
Таким образом, потребность в ремонтах и технических обслуживаниях траншейного экскаватора за год его эксплуатации такова: капитальный ремонт К = 1, текущий ремонт Т = 2, технических обслуживании ТО = 12.
График легко составить и в тех случаях, когда нет ни одного капитального ремонта в году.
На рис. 278 приведен структурный годовой график технических обслуживании и ремонта траншейного экскаватора, когда планируется 1600 ч его работы в году (остальные данные те же, что и в предыдущем примере). Поскольку
* См.: Инструкция по проведению планово-предупредительного ремонта строительных машин (СН 207-68).
329
'Юоо
1600
6000-6000=2000
Рис. 278. Структурный график при 1600 ч работы в году.
8000 ч —6000 ч = 2000 ч и в планируемом году нет капитального ремонта, выносим его пунктиром. Потом строим график в указанном выше порядке, по которому определяем последовательность техобслуживаний и ремонтов и их количество: К = 0; Т = 1; ТО= 7.
Наиболее прогрессивным методом ремонта машин, обеспечива-
ющим сокращение времени ремонта, является агрегатноузловой. При этом методе узлы и агрегаты, требующие ремонта, снимают с машин и заменяют заранее отремонтированными из оборотного фонда или новыми. При агрегатном ремонте строительных машин в полевых условиях успешно применяются передвижные станции для механизации демонтажно-монтажных работ.
Для повышения эффективности агрегатно-узлового метода применяется техническая диагностика*. Она позволяет быстро и без разборки принимать решение о характере профилактических работ и устанавливать срок следующей диагностической проверки.
Таким образом исключаются излишние разборно-сборочные работы, уменьшаются простои машин из-за аварийных ремонтов, снижается трудоемкость и стоимость ремонтов. Важное значение имеет правильный выбор измеряемых величин для приборов диагностики.
Например, износ гидропривода строительных машин определяется утечками жидкости. Поэтому приборы диагностики в этом случае рассчитаны на измерения этих утечек и отсюда определения зазоров при деформации узлов и деталей. Зная допустимые зазоры и сравнивая их с установленными при диагностике, определяют, какие узлы гидропривода подлежат ремонту.
При ремонтных работах в основном применяются механизированный инструмент, тали, тельферы. Охрана труда и техника безопасности для этих машин изложены в главах IV и IX.
§ 63. ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ МАШИН
При конструировании строительных машин следует предусматривать: минимальную удельную металлоемкость, которая достигается за счет рационального применения высококачественных сортов металла;
простоту конструкции и удобство управления с учетом тяжелых производственных условий;
низкий удельный расход энергии — достигается, например для землеройных машин, рациональным выбором конструкции рабочего органа;
хорошую маневренность машины и высокие рабочие скорости, обеспечивающие большую производительность машины;
* Diagnostikos (греческое) — способный распознавать.
330
легкость монтажа и демонтажа, что особенно важно для большинства строительных машин, требующих частых перебросок с места на место при увеличивающихся темпах работ и суточной производительности;
широкое применение сменного оборудования, что значительно облегчает эксплуатацию машин;
надежность в работе и высокую износоустойчивость, что достигается в результате применения надлежащих материалов и герметичности узлов;
широкое внедрение во всех возможных случаях автоматики как средства, облегчающего труд и повышающего эффективность работы машин;
удобство ремонта — достигается простотой конструкции, легкостью монтажа и демонтажа при замене деталей;
комфортность (улучшение условий труда);
максимальное использование метода агрегатирования, что существенно облегчает снабжение запасными унифицированными частями, упрощает эксплуатацию и ремонт *.
Обеспечение указанных показателей и правильная эксплуатация является основой достижения хороших технико-экономических показателей работы строительных машин.
Стоимость работ, произведенных с помощью машины, слагается из ряда расходов, которые условно подразделяются на постоянные, единовременные и эксплуатационные.
Постоянные расходы Пр включают три группы отчислений: на погашение стоимости машины; на капитальный ремонт; на содержание базы механизации, гаражей, а также на содержание и ремонт путей и дорог в пределах строительной площадки. Первые две группы называются амортизационными.
Постоянные расходы подсчитывают на год работы машины.
Единовременные расходы Ер учитывают затраты, производимые в разовом порядке и предназначенные для подготовки машины к работе на ее рабочем месте, а также для демонтажа всего оборудования по окончании работ.
В общем случае единовременные расходы включают:
доставку машины с завода или с базы механизации, перемещение машины на площадке к рабочему месту, подготовку временных путевых и строительных конструкций для машинной установки (фундаменты, эстакады, навесы и т. п.);
монтаж машины, включая подводку и присоединение сетей для подачи электроэнергии, трубопроводов для воды и т. п.;
пробный пуск и опробование смонтированной машины;
демонтаж машины и разборку временных строительных конструкций;
обратную доставку машины на базу механизации.
* Подробнее см.: Домбровский Н. Г., Атаев С. С., Кулак Б. Ф. Механизация строительства. М., Знание, 1973.
331
Сюда относятся также расходы по перестановкам машины, если она должна работать на нескольких рабочих местах строительной площадки, причем перестановка требует в свою очередь демонтажных, транспортных и монтажных работ.
Единовременные расходы подсчитывают за время работы машины на данной площадке. Для автомобилей, тракторов, скреперов и подобных самоходных машин, которые не требуют монтажа и демонтажа, единовременные расходы небольшие.
В эксплуатационные расходы Эр входят: заработная плата рабочих, управляющих машиной, расходы на все ремонты машины (кроме капитального); стоимость энергии или топлива, воды, смазочных и обтирочных материалов; расходы по замене изношенного рабочего инструмента, тросов и т. п.
Все расходы подсчитывают для одного часа сменного рабочего времени машины (машино-час) или для одной рабочей смены, машины (машино-смена).
Стоимость машино-смены, руб.,
См..см= ^2- + + Эр, (271)
Д/п
где Л/г — число рабочих смен машины в году; Nn — число смен работы машины на данной строительной площадке.
Из формулы (271) следует, что стоимость машино-смены тем меньше, чем больше времени в году работает машина (чем больше Nr) и чем больше продолжительность нахождения ее на строительной площадке (чем больше Nn).
В связи с уменьшением сроков строительства, т. е. с уменьшением величины Nn, необходимо применять машины, у которых единовременные расходы Ер будут минимальными. Как правило, такие машины должны быть быстромонтирующимися и мобильными, т. е. легко и быстро перемещаться с базы механизации на строительную площадку и в пределах площадки.
Поскольку одна и та же работа может выполняться различными машинами, приходится сравнивать их экономическую эффективность, основываясь на так называемых приведенных затратах на единицу продукции (работы) *.
Когда сравниваются два варианта, часто оказывается, что для одного варианта годовые расходы меньше, чем для второго (Sj < < S2), но капиталовложения (стоимостьмашины) больше (/Q > К2). Очевидно, что возникает необходимость установить, за какое время (/ок), лет, окупятся дополнительные капиталовложения при втором варианте:
*°к - (272)
* Подробнее см.: Методика определения экономической эффективности использования в народном хозяйстве новой техники, изобретений и рационализаторских предложений. М., 1977.
332
откуда
•$! + 7^-= S2-г ~7^ ОК ‘ок
(273)
Величина, обратная t0K, получила название коэффициента эффективности капитальных вложений Ен; его величина определена Госпланом СССР: Ен = 0,15.
Таким образом, приведенные затраты единицы продукции, руб.,
7 ____S + ЕНК ___ Пр + ЕНК ( Ер Эр
П Пгод “ Пгод ‘ Л^пПсм + псм
(274)
Здесь дополнительно обозначено Пгод и Псм — эксплуатационная годовая и сменная производительность; Зр — зарплата за смену обслуживающих машину рабочих (например, такелажников при кранах).
Годовой экономический эффект от совершенствования технологии строительства за счет применения новых или модернизированных машин
3 = (Z;-Z;) А, (275)
где Zn и Zn — приведенные затраты единицы продукции (работы) при прежних и новых (модернизированных) машинах; А — годовой объем работы.
Применение современных высокопроизводительных строительных машин требует, чтобы инженеры-строители особое внимание уделяли повышению эффективности эксплуатации: увеличению использования машин во времени и их полезной нагрузки, совершенствованию технологического обслуживания и ремонта, уменьшению трудовых и материальных затрат.
Вопросы для самопроверки
1. В чем заключается правильное обслуживание строительных машин?
2. Охарактеризуйте виды ремонтов по системе ППР.
3. Составьте структурный годовой график ремонта одноковшового экскаватора небольшой мощности, если он с начала эксплуатации проработал 10 000 ч. На планируемый год предусматривается работа экскаватора в течение 3500 ч. Согласно нормативам инструкции Госстроя СССР периодичность ремонтов такая: капитальный ремонт — 12 000, текущий ремонт — 1500, техническое обслуживание — 150 ч.
4. В чем заключается и какое значение имеет техническая диагностика машин?
5. Какие расходы учитываются в стоимости машино-смены?
6. Как определить приведенные затраты единицы продукции?
ОГЛАВЛЕНИЕ
Предисловие .......................................................... 5
Введение ............................................................. 6
Вопросы для самопроверки ............................................. 9
Глава I. Детали машин ............................................... 11
§ 1. Общие положения ................................................ 11
§ 2. Трение в машинах ............................................... 12
§ 3. Соединения ..................................................... 16
§ 4. Передачи ...................................................... 22
§ 5. Оси и валы, их соединения и опоры .............................. 34
Вопросы для самопроверки ............................................ 42
Глава II. Основные сведения о строительных машинах .................. 43
§ 6. Общая классификация строительных машин ......................... 43
§ 7. Категории производительности машин ............................. 43
§ 8. Силовое и ходовое оборудование. Системы управления.............. 46
§ 9. Техника безопасности и охрана труда при работе строительных машин 54
Вопросы для самопроверки ............................................ 55
Глава III. Транспортирующие и погрузочно-разгрузочные машины .... 56
§ 10. Устройство автомобилей и тракторов............................. 58
§ 11. Тяговые расчеты автотракторного транспорта .................... 65
§ 12. Условия применения автотракторного транспорта в строительстве . 69
§ 13. Устройство ленточных конвейеров .............................. 71
§ 14. Производительность и мощность ленточных конвейеров. Их автоматизация ............................................................... 75
§ 15. Ковшовые, винтовые и вибрационные конвейеры................... 79
§ 16. Пиевмотр экспортные установки ................................ 84
§ 17. Погрузочно-разгрузочные машины................................ 88
Вопросы для самопроверки ............................................ 93
Глава IV. Грузоподъемные машины ................................... 94
§ 18. Специальные детали и узлы грузоподъемных машин .............. 96
§ 19. Домкраты ...................................................107
§ 20. Тали и лебедки .............................................II1
§ 21. Строительные подъемники, переносные краны-подъемники.........115
§ 22. Стреловые стационарные краны ................................118
§ 23. Строительные башенные краны .................................122
§ 24. Особенности исполнения башенных кранов дли условий сборно-монтаж-
ного строительства ............................................129
§ 25. Самоходные стреловые краны ...................................137
§ 26. Козловые и кабельные краны ...................................148
§ 27. Эксплуатация грузоподъемных машин ...........................153
Вопросы дли самопроверки ...........................................157
Глава V. Машины для производства земляных работ.........................158
f 28. Свойства грунтов. Основные понятия о сопротивлении грунта резанию
и копанию ....................................................159
334
§ 29. Землеройно-транспортные машины ................................163
§ 30. Расчет производительности землеройно-транспортных машин и способы ее повышения ..................................................172
§ 31. Одноковшовые экскаваторы ......................................178
§ 32. Конструкции экскаваторов ......................................184
§ 33. . Эксплуатация одноковшовых экскаваторов ......................194
§ 34. Многоковшовые экскаваторы .....................................199
§ 35. Оборудование для гидромеханизации .............................203
§ 36. Машины для подготовительных и вспомогательных работ............212
$ 37. Буровые станки ...............................................217
Вопросы для самопроверки ............................................218
Глава VI. Оборудование для свайных работ ............................220
§ 38. Дизель-молоты .................................................220
§ 39. Свайные вибропогружатели и вибромолоты.........................225
Вопросы для самопроверки ............................................228
Глава VII. Дробильно-сортировочные установки.........................229
§ 40. Дробильные машины и грохоты ...................................229
§ 41. Производительность дробилок и грохотов ........................236
§ 42. Передвижные дробильно-сортировочные установки .................239
Вопросы для самопроверки ............................................242
Глава VIII. Машины для приготовления, транспортирования и укладки бетонной смеси и растворов ............................................243
§ 43. Бетонные и растворные установки ...............................243
§ 44. Классификация смесительных машин ..............................247
§ 45. Конструкции смесительных машин ................................250
§ 46. Производительность смесительных машин .........................260
§ 47. Аппаратура для дозирования составляющих бетонов и растворов . . 261
§ 48. Бетононасосы и пневмонагнетатели ..............................267
§ 49. Автобетоносмесители и автобетоновозы ..........................272
§ 50. Растворонасосы ................................................275
§ 51. Машины для укладки и распределения бетона .....................277
Вопросы для самопроверки ..................................278
Глава IX. Механизированный инструмент. Оборудование для отделочных работ ...............................................................279
§ 52. Общая характеристика инструмента и его силового оборудования . 279
§ 53. Ручные машины с роторным двигателем ...........................282
§ 54. Инструмент ударного действия ..................................286
§ 55. Оборудование для отделочных работ ............................293
Вопросы для самопроверки .......................................297
Глава X. Оборудование для производства железобетонных изделий .... 298
§ 56. Способы производства железобетонных изделий....................298
§ 57. Оборудование для армирования ..................................299
§ 58. Оборудование для укладки бетонной смеси в формы................306
§ 59. Вибрационные машины для уплотнения бетонных смесей.............308
§ 60. Специальные формовочные установки .............................321
Вопросы для самопроверки ............................................325
Глава XI. Эксплуатация, ремонт и экономическая эффективность строительных машин .......................................................326
§ 61. Основные положения по эксплуатации машин ......................326
§ 62. Система планово-предупредительного ремонт; ....................327
§ 63. Экономический эффективность машин ............................330
Вопросы для самопроверки ............................................333
335
АЛЕКСАНДР САВЕЛЬЕВИЧ ФИДЕЛЕВ
ЮРИЙ ФЕДОРОВИЧ ЧУБУК
СТРОИТЕЛЬНЫЕ МАШИНЫ
Редактор А. И. Черкасенко
Переплет художника Г. Т. Конева Художественный редактор А. Е. Кононов Технический редактор Т. И. Трофимова Корректор Н. В. Волкова
Информ, бланк № 4114
Сдано в набор 29.03.78. Подл, в печать 5.02.79. БФ 08583. Формат 60Х901/!». Бумага типогр. № 2. Лит. гарн. Высокая печать. 21 печ. л. 22,31. уч.-изд. л. Тираж 27000 экз. Изд. № 3222. Цена 95 к.
Головное издательство издательского объединения «Вища школа»/ 252054, Киев, 54, ул. Гоголевская, 7.
Отпечатано с матриц Головного предприятия республикам' ского производственного объединения <Пол1графкнига» Госкомиздата УССР, 252057, г. Киев-57, ул. Довженко 3 на Белоцерковской книжной фабрик''. 256400, г. Белая Церковь, ул. К- Маркса, 4. Зак. № 642.