/
































































































































































































































































































































































































































































































































































Автор: Дубошин Г.Н.
Теги: механика динамика астрономия небесная механика справочное руководство астродинамика
Год: 1976




Текст
Г.КДубошин
СПРАВОЧНОЕ РУКОВОДСТВО ПО НЕБЕСНОЙ МЕХАНИКЕ И
АСТРОДИНАМИКЕ
М.: Наука. Глав. ред. физ.-мат. лит., 1976864 стр.
Настоящее издание является справочным руководством по классической и
прикладной небесной механике. Оно существенно отличается от первого издания,
увидевшего свет в 1971 году. В данном издании введена новая часть (часть IX),
посвященная движению небесных тел около центра масс. Другие разделы
небесной механики, охватывающие теорию невозмущенного и возмущенного
движений небесных тел, аналитические, численные и качественные методы,
значительно расширены и дополнены.
В новом изложении представлена часть VI, посвященная теории движения
искусственных спутников Земли и теории гравитационного поля Земли, теория
движения Луны и качественная небесная механика, составляющая содержание
части X.
Предисловие ко второму изданию 17
Предисловие к первому изданию 19
Часть I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ. 21
ОСНОВНЫЕ ПОНЯТИЯ И ФОРМУЛЫ (АБАЛАКИН В.К.)
Глава 1. Системы координат 21
§ 1.01. Небесная сфера 21
§ 1.02. Главные круги, линии и точки небесной сферы 22
§ 1.03. Горизонтальная система координат 24
§ 1.04. Экваториальные системы координат 25
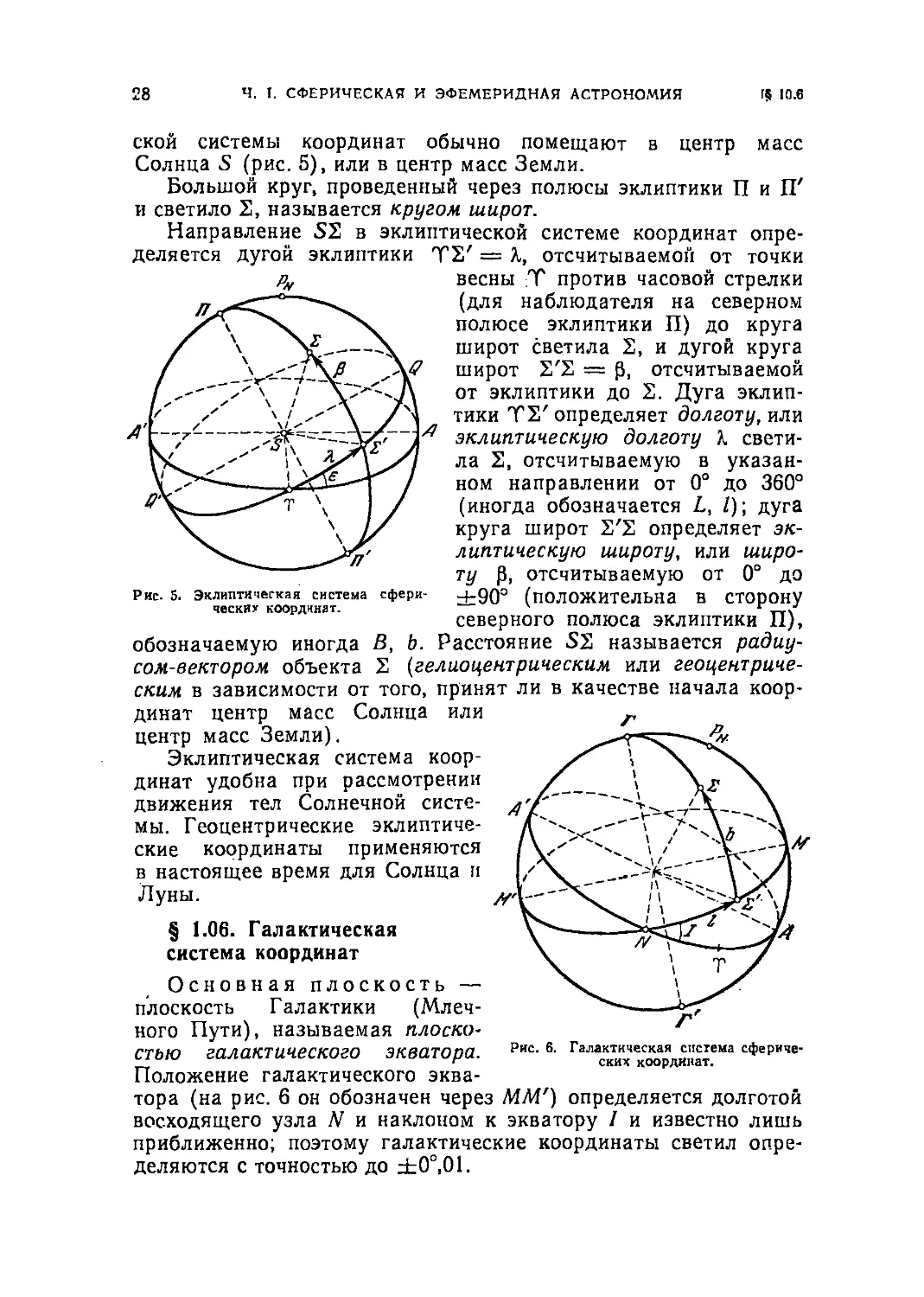
§ 1.05. Эклиптическая система координат 27
§ 1.06. Галактическая система координат 28
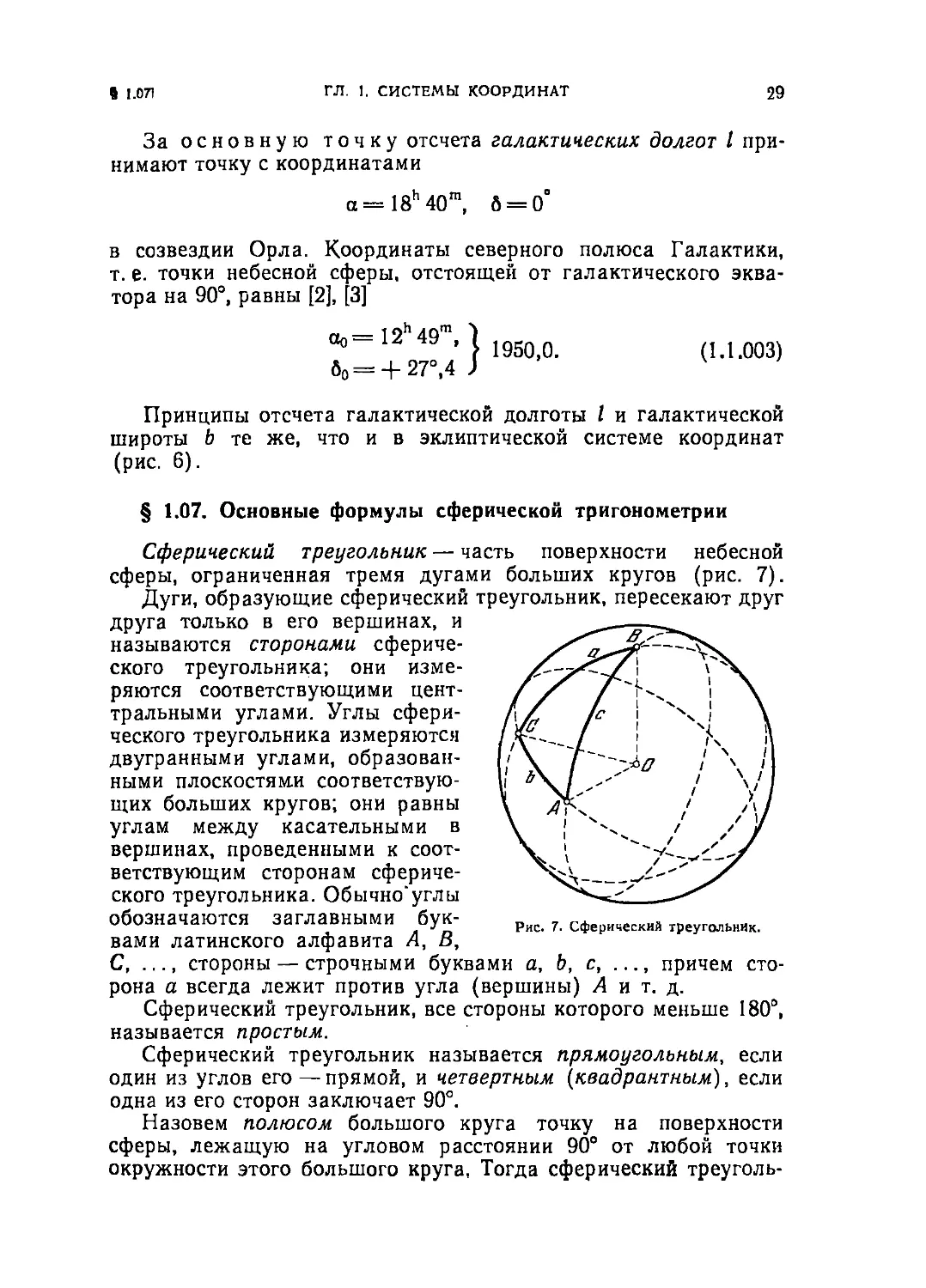
§ 1.07. Основные формулы сферической тригонометрии 29
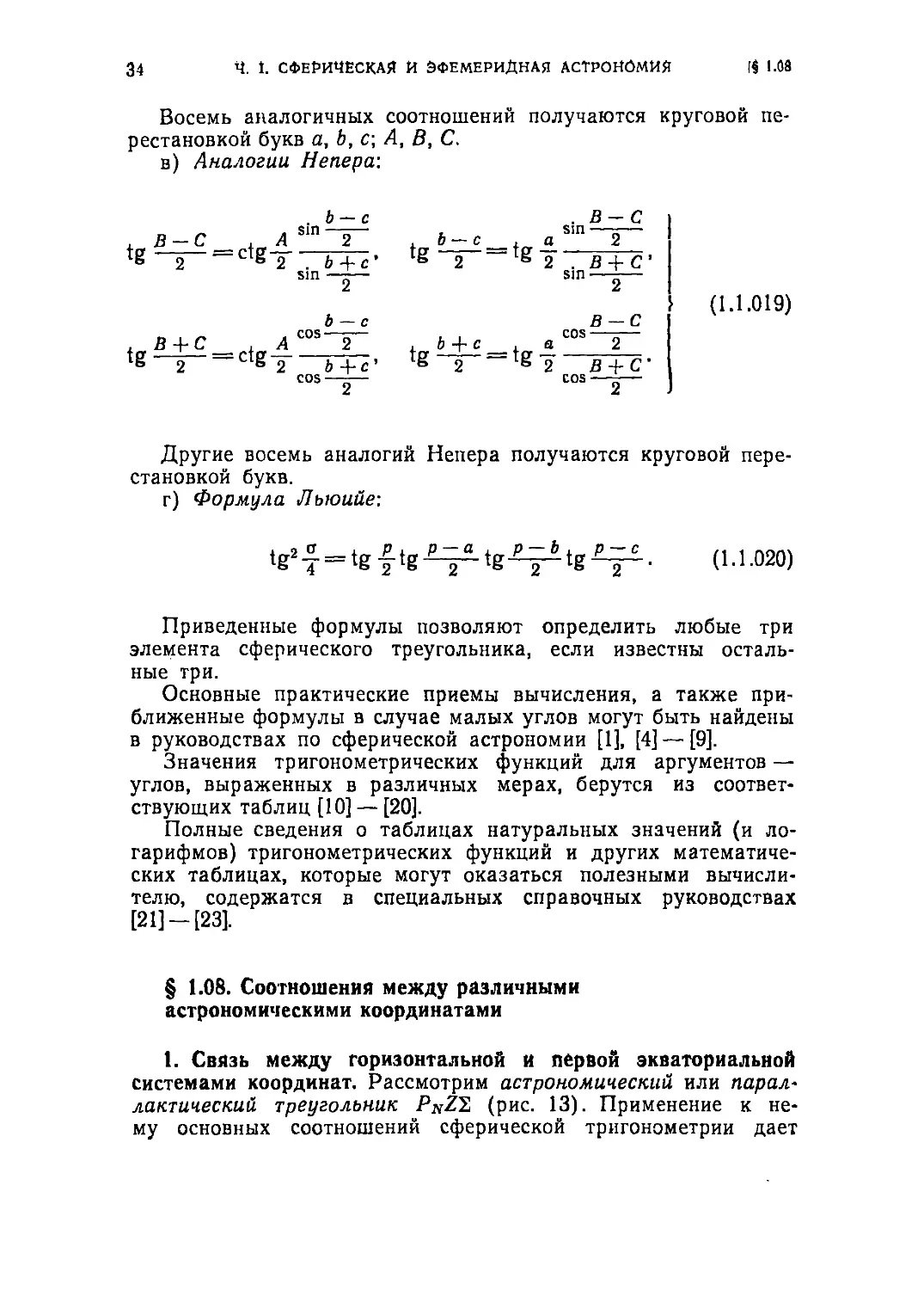
§ 1.08. Соотношения между различными астрономическими 34
координатами
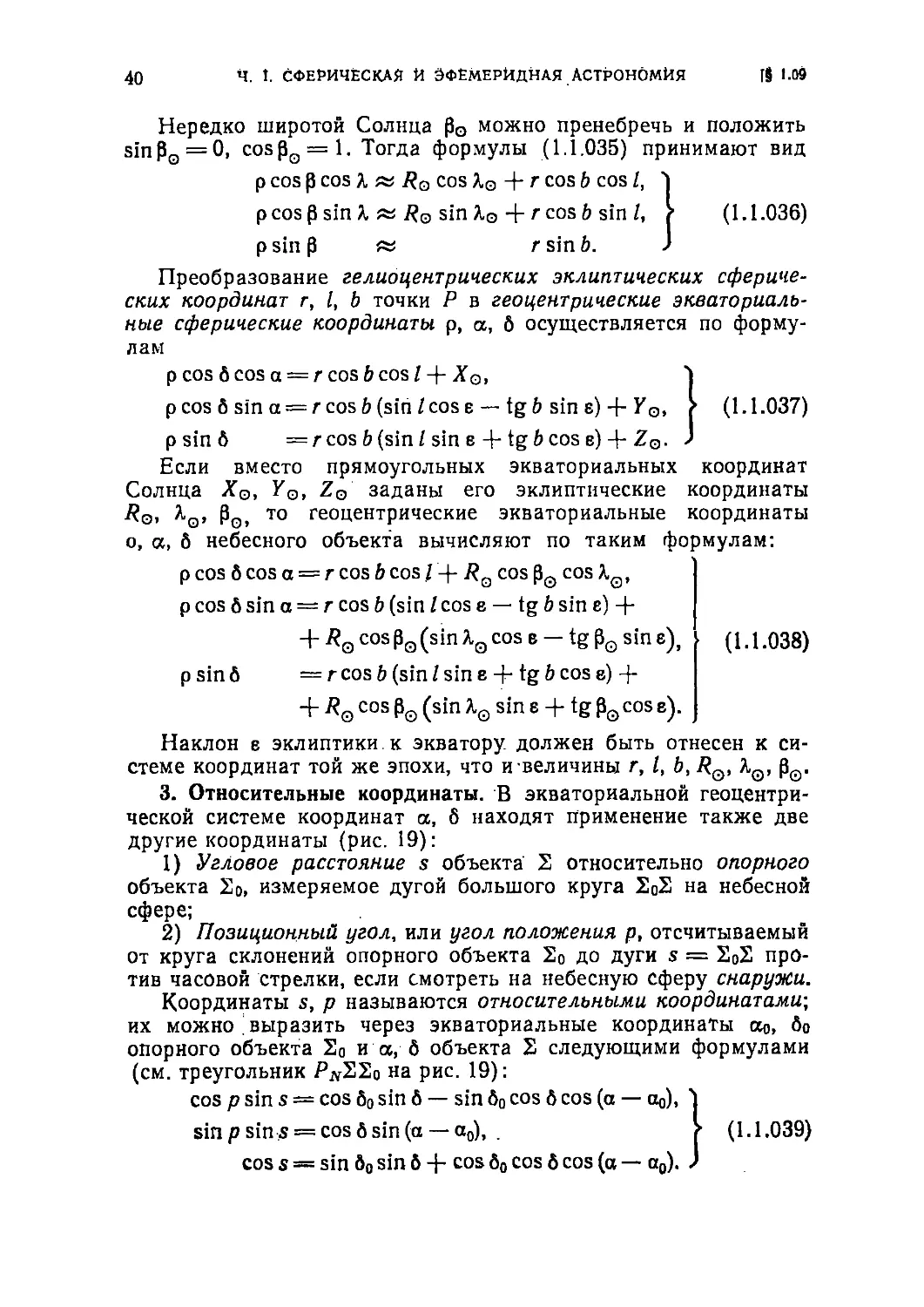
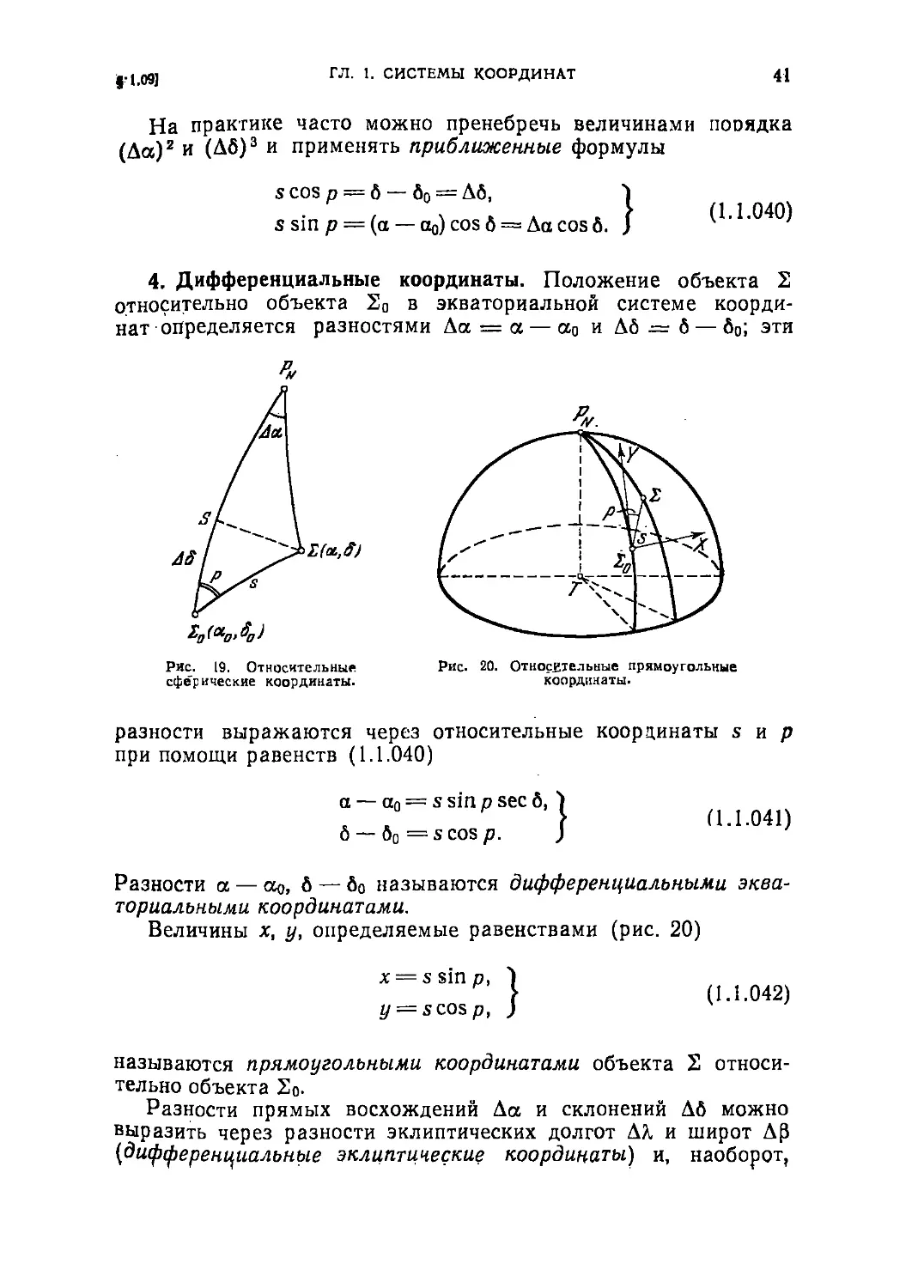
§ 1.09. Прямоугольные системы координат 37
§ 1.10. Системы географических координат 45
§ 1.11. Соотношения между астрономическими и геодезическими 50
координатами
§ 1.12. Планетоцентрические системы координат 58
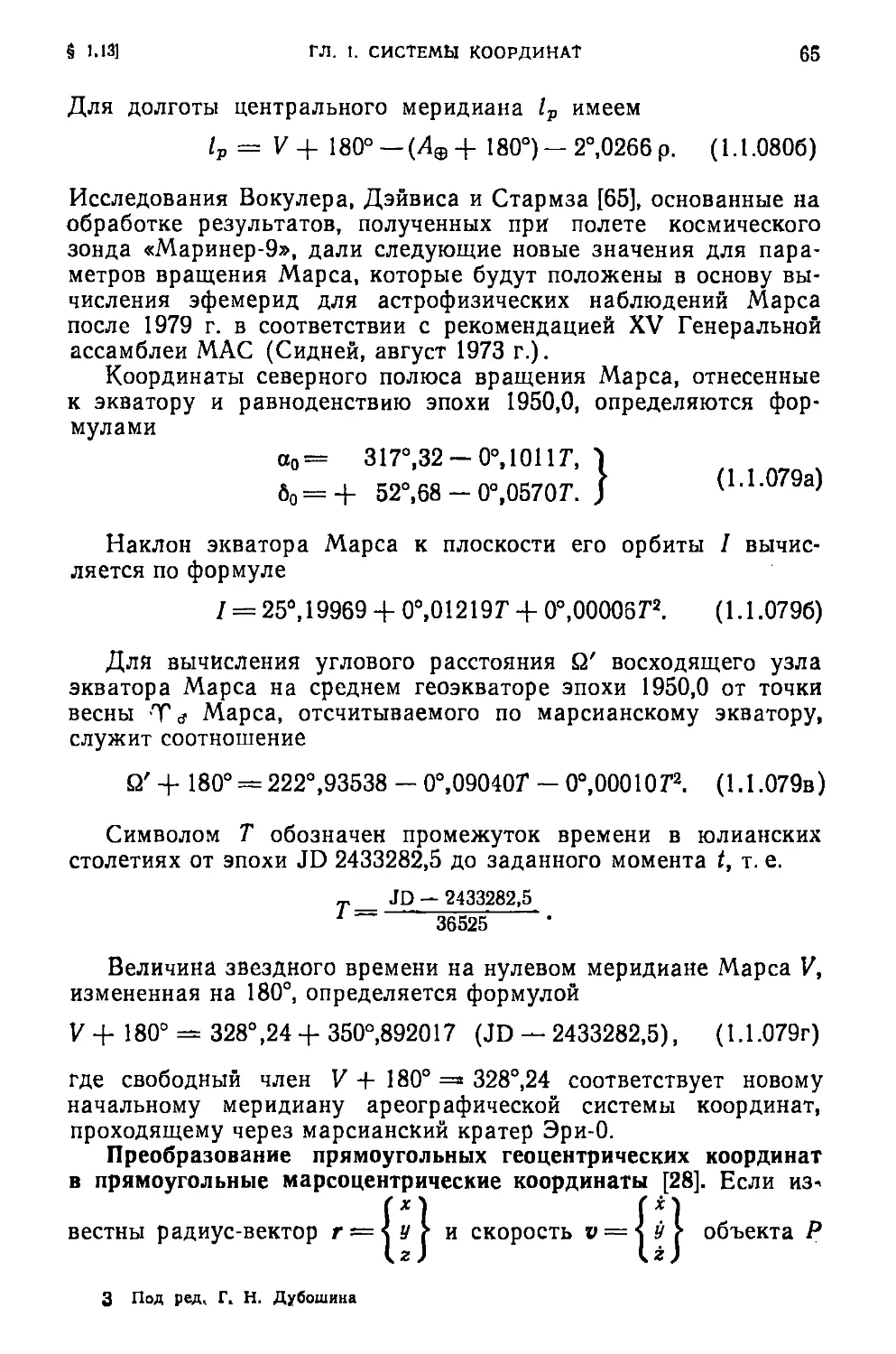
§ 1.13. Марсоцентрическая и ареографическая системы координат 64
§ 1.14. Юпитероцентрическая и зенографическая системы координат 68
§ 1.15. Сатурноцентрическая система координат 70
§ 1.16. Системы координат, определяемые осевым вращением Солнца, 70
Венеры, Урана и Нептуна
§ 1.17. Луноцентрическая и селенографическая системы координат 72
§ 1.18. Орбитальная система координат 82
§ 1.19. Объектоцентрическая система координат 80
Глава 2. Редукционные вычисления 85
§2.01. Прецессия 85
§ 2.02. Редукция звездных положений с учетом прецессии и 89
собственного движения
§ 2.03. Нутация 91
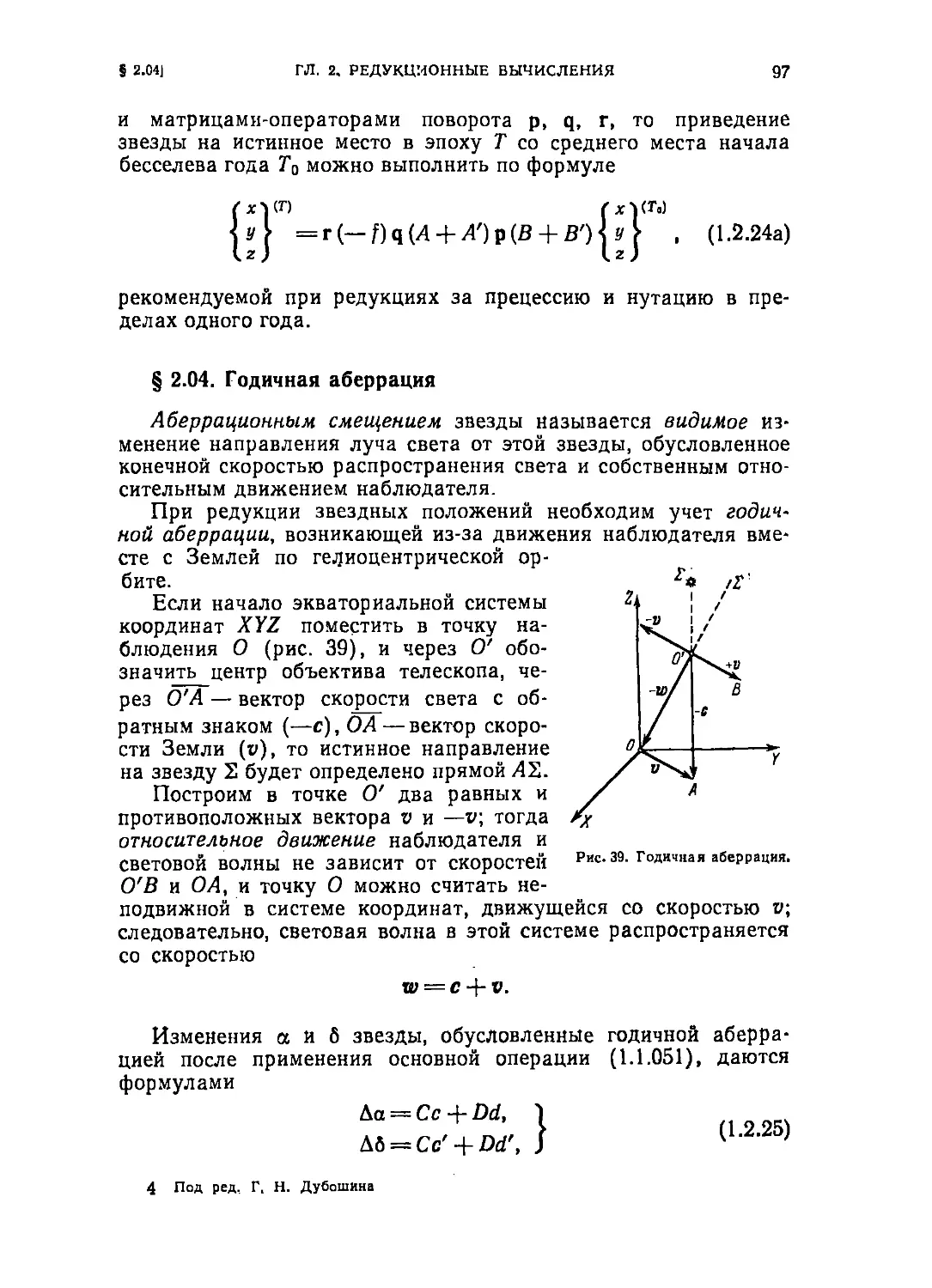
§ 2.04. Годичная аберрация 97
§ 2.05. Сводка основных формул редукции звездных положений 101
§ 2.06. Учет влияния членов второго порядка 103
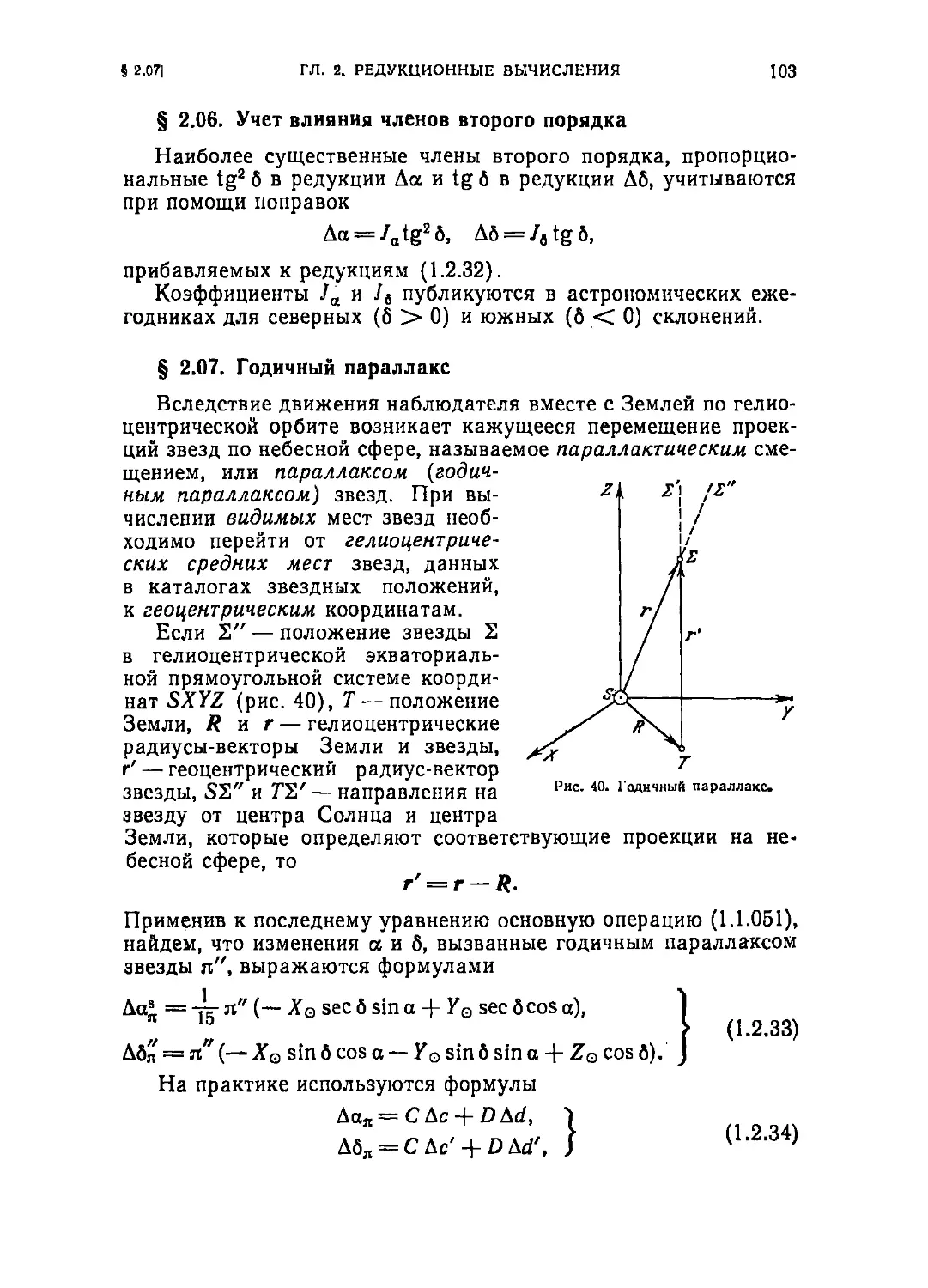
§ 2.07. Годичный параллакс 103
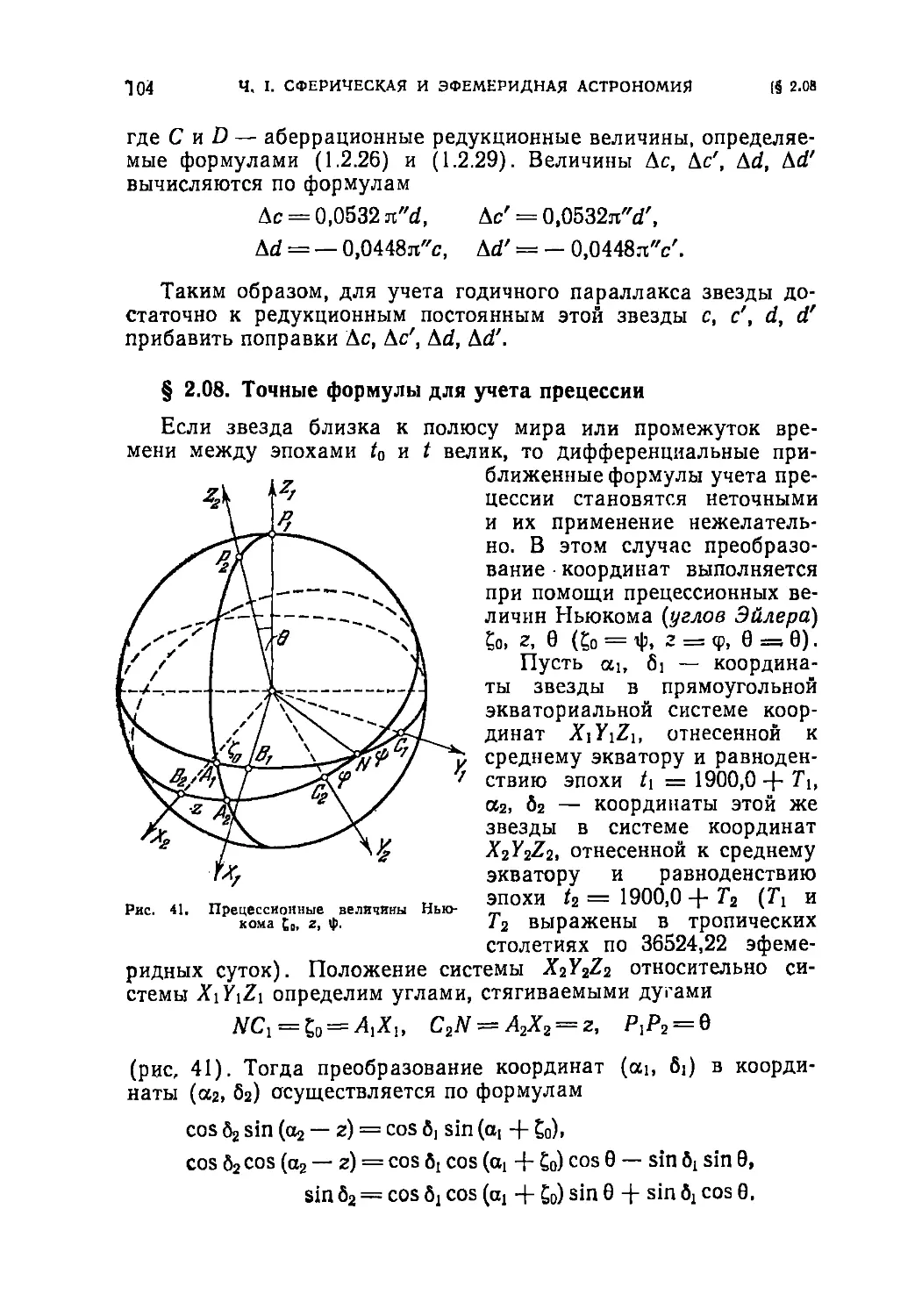
§ 2.08. Точные формулы для учета прецессии 104
§ 2.09. Формулы учета прецессии в прямоугольных экваториальных 105
координатах
§ 2.10. Формула учета прецессии в прямоугольных эклиптических 107
координатах
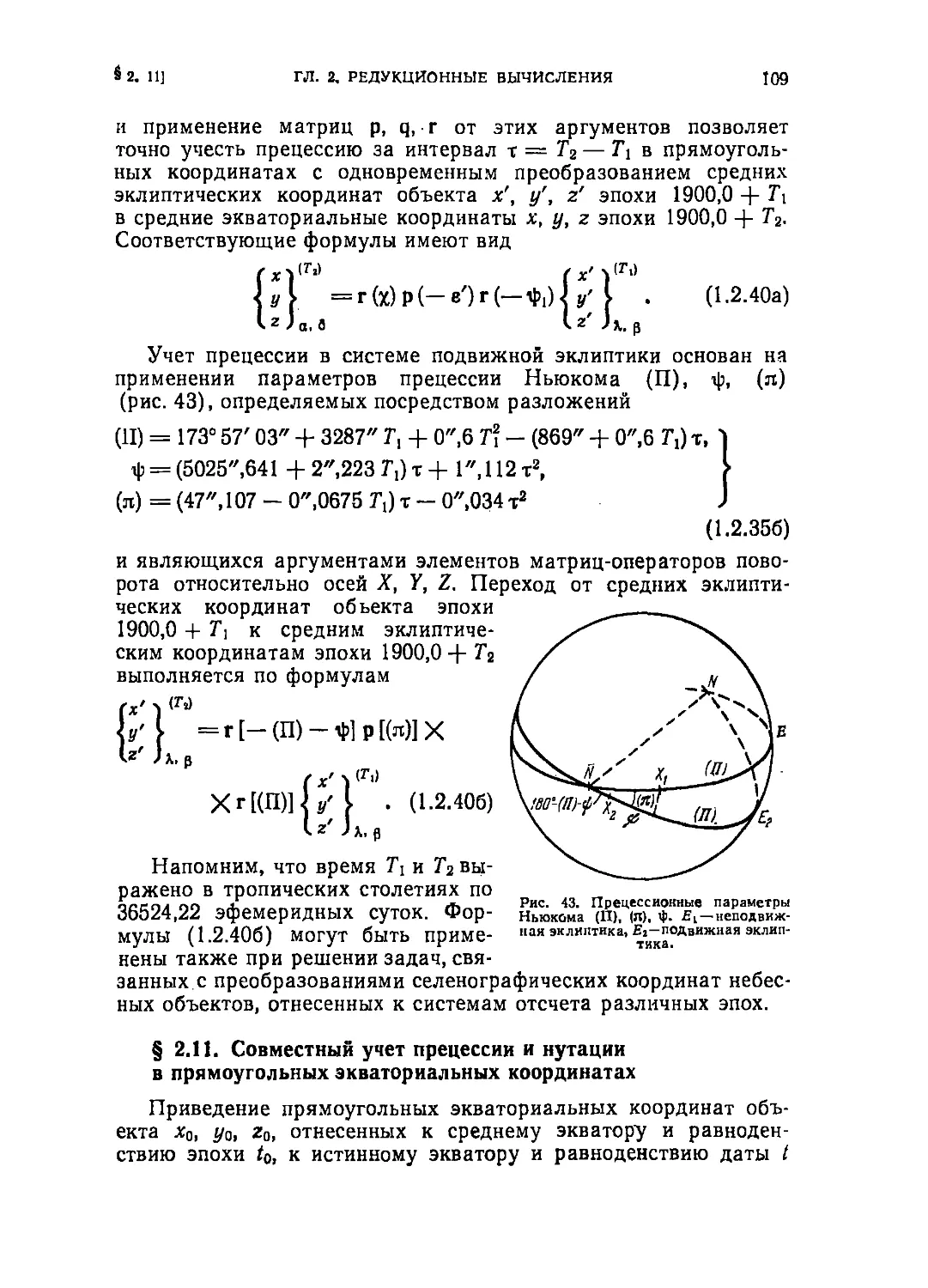
§ 2.11. Совместный учет прецессии и нутации в прямоугольных 109
экваториальных координатах
§ 2.12. Формулы учета прецессии в координатах и элементах орбит при 111
умеренных и малых разностях эпох
§2.13. Аберрация света 114
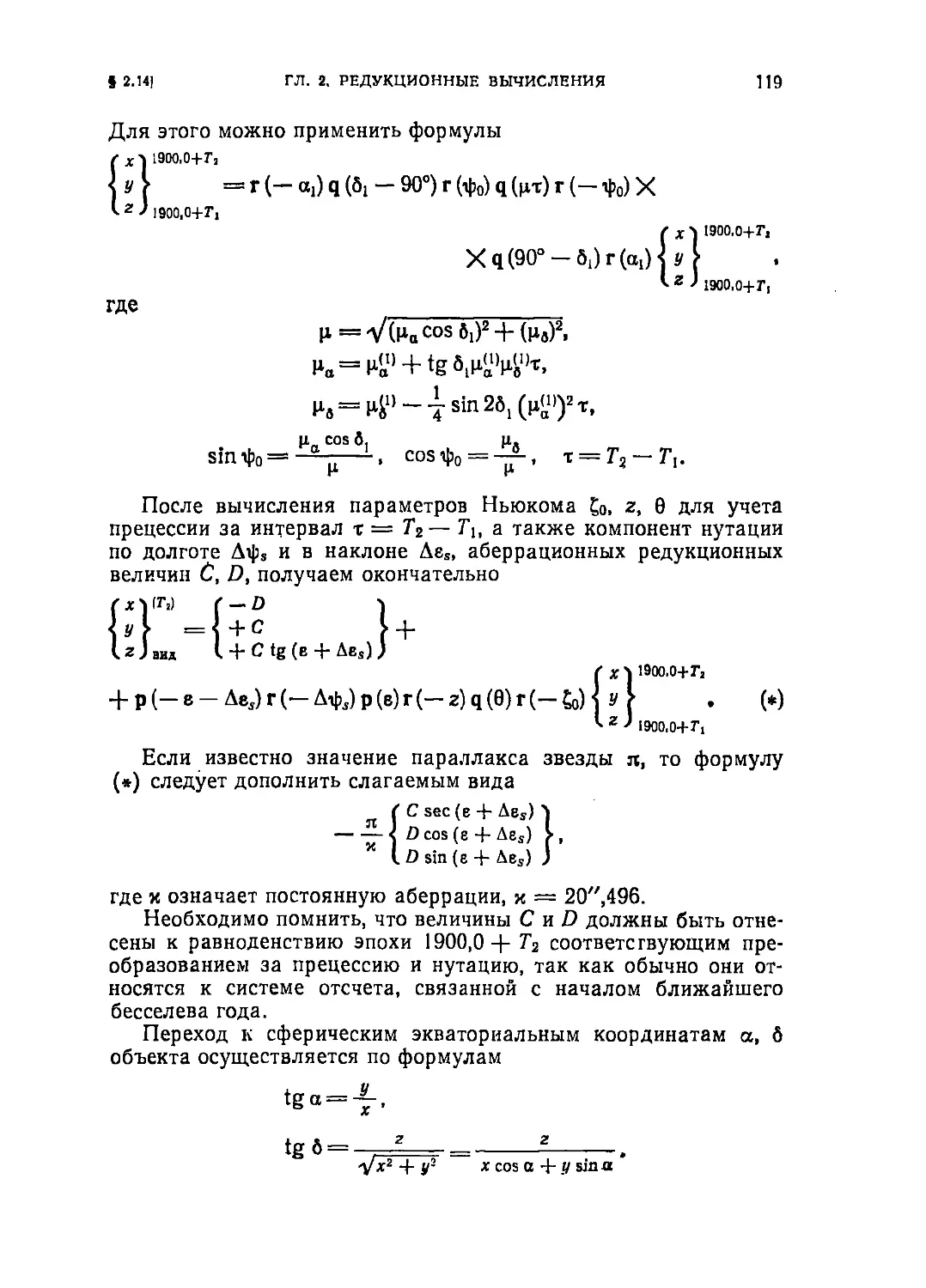
§ 2.14. Приведение звезды на видимое место в прямоугольных 118
координатах
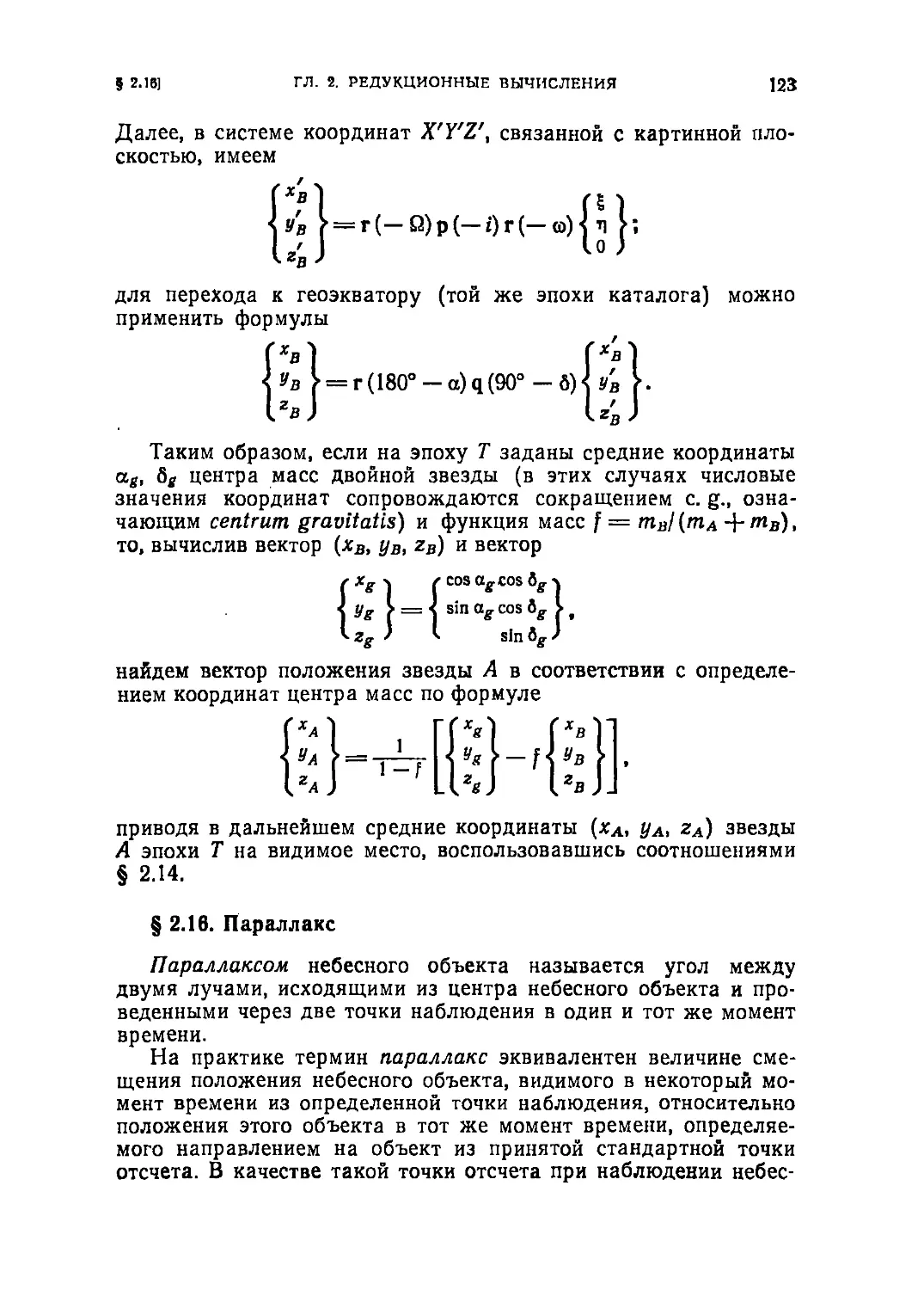
§ 2.15. Об учете орбитального движения компонент двойных звезд 121
§ 2.16. Параллакс 123
§ 2.17. Учет суточного параллакса в горизонтальной системе 125
§ 2.18. Формулы учета суточного параллакса в экваториальной системе 126
координат
§ 2.19. Формулы учета суточного параллакса в координатах Солнца и 128
планет
§ 2.20. Формулы учета суточного параллакса в системе эклиптических 130
координат
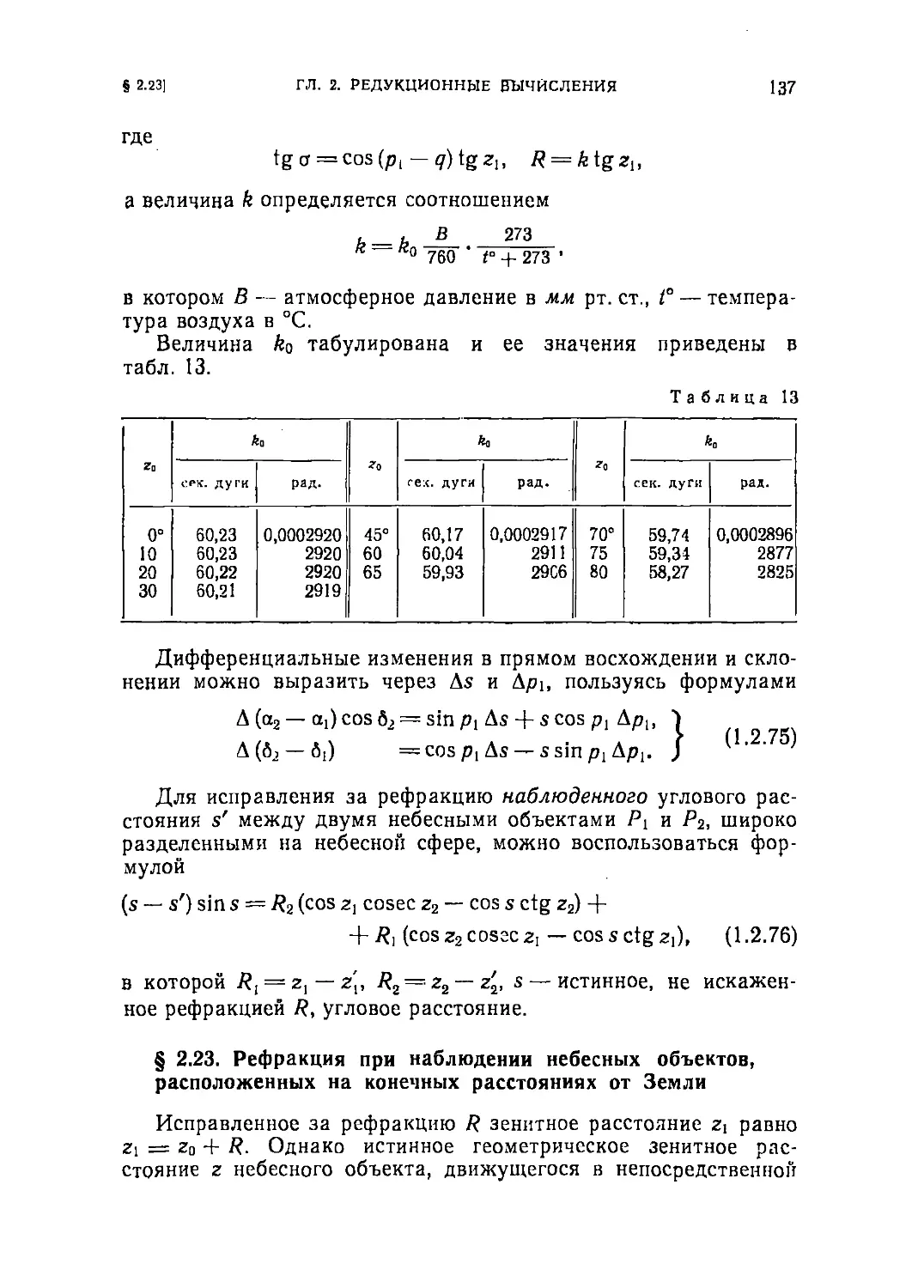
§2.21. Астрономическая рефракция 131
§ 2.22. Формулы учета рефракции в координатах небесных объектов 136
§ 2.23. Рефракция при наблюдении небесных объектов, расположенных 137
на конечных расстояниях от Земли
§ 2.24. Дифференциальная прецессия и нутация. Дифференциальная 139
аберрация и дифференциальный параллакс
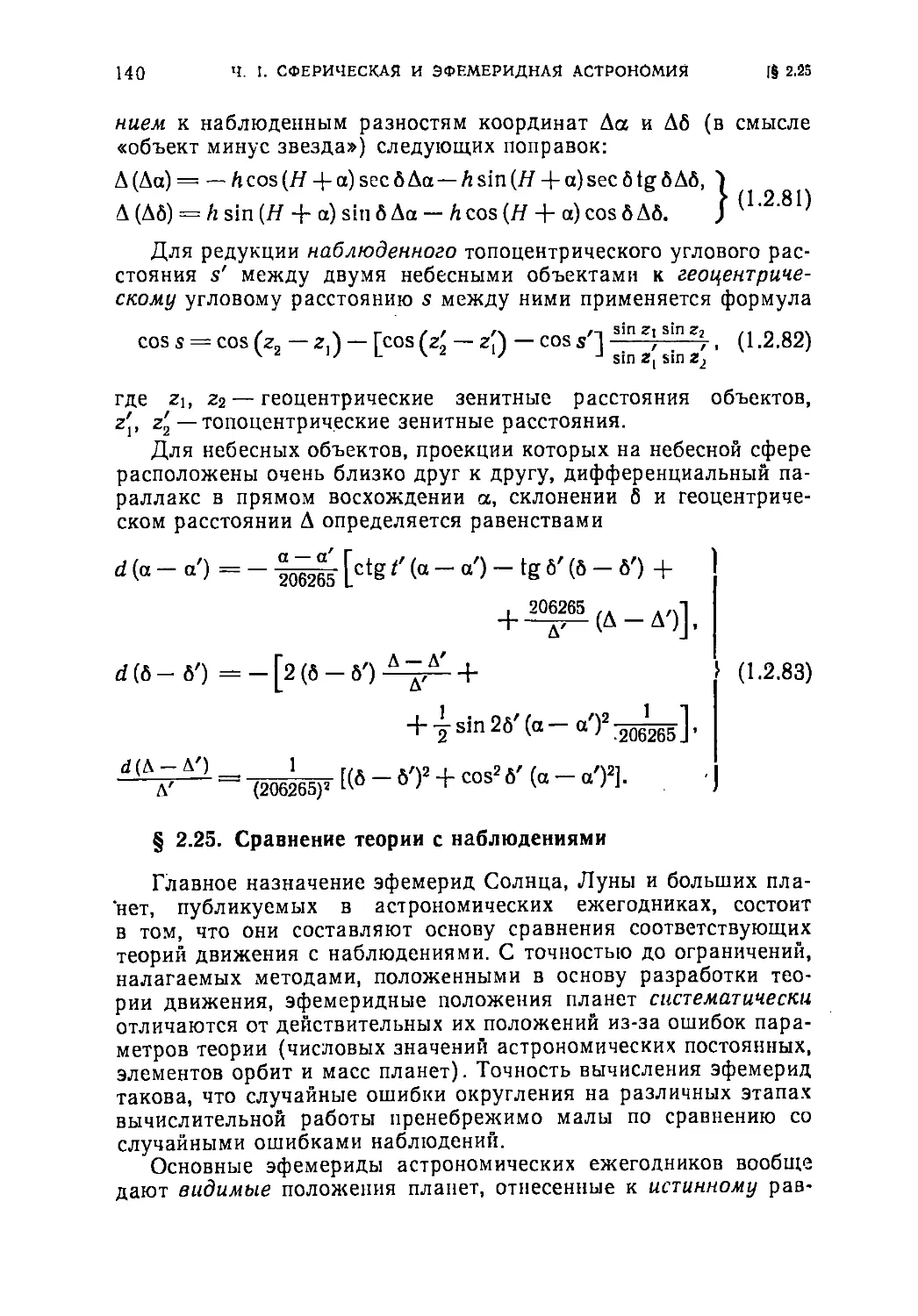
§ 2.25. Сравнение теории с наблюдениями 140
§ 2.26. Каталоги звездных положений 143
§ 2.27. Геоцентрические координаты нуль-пункта селенографической 145
системы отсчета
§ 2.28. Вычисление топоцентрических расстояний до точек лунной 146
поверхности
Глава 3. Время и его измерение 149
§ 3.01. Основные понятия и определения 149
§ 3.02. Звездное и солнечное время. Всемирное время 152
§ 3.03. Квазиравномерное всемирное время 156
§ 3.04. Связь между всемирным временем и звездным гринвичским 157
временем
§ 3.05. Эфемеридное время 161
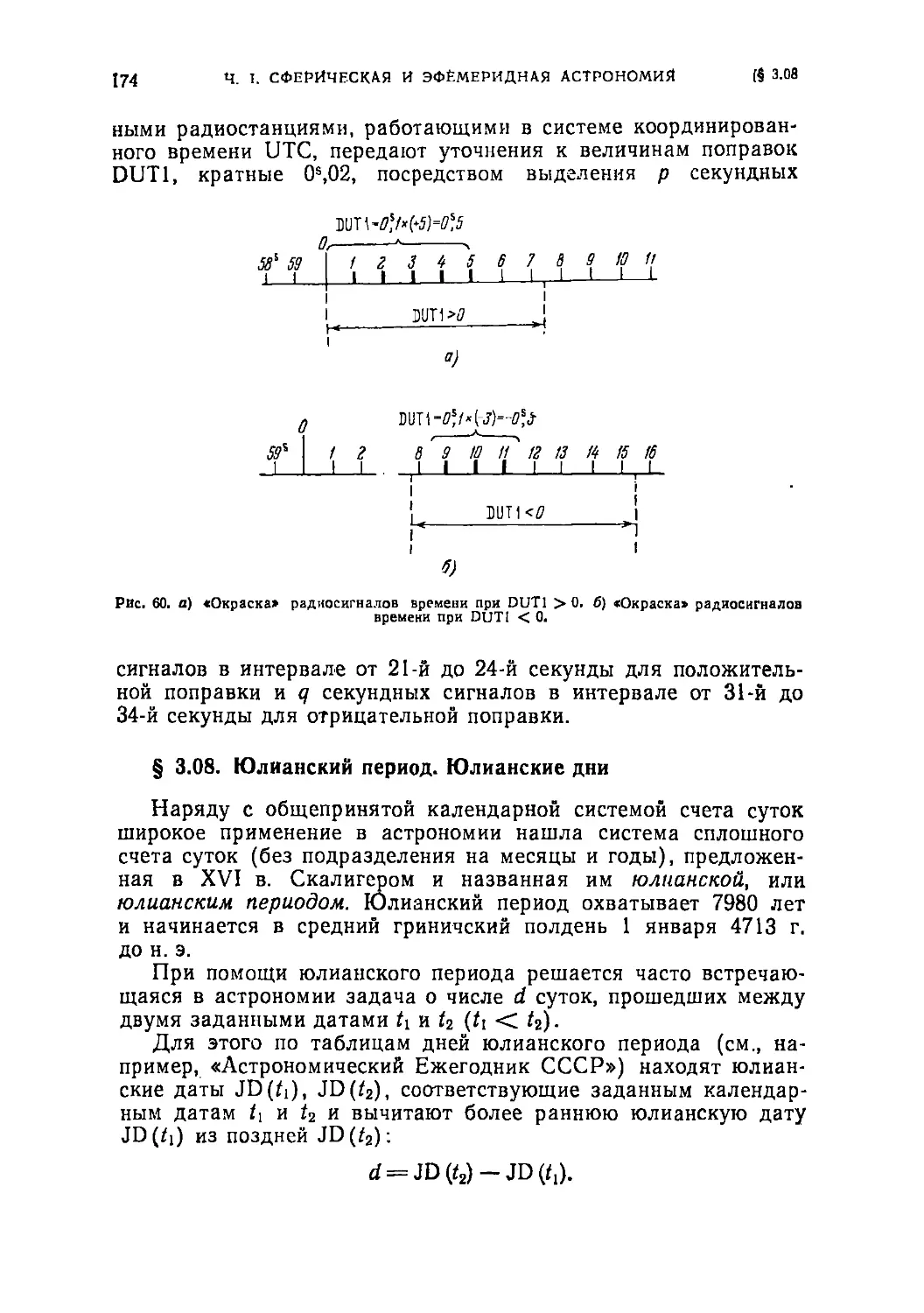
§ 3.06. Поправка за эфемеридное время 165
§ 3.07. Атомное время 167
§ 3.08. Юлианский период. Юлианские дни 174
Глава 4. Астрономические постоянные 176
§ 4.01. Новая система астрономических постоянных (система 177
астрономических постоянных MAC 1964)
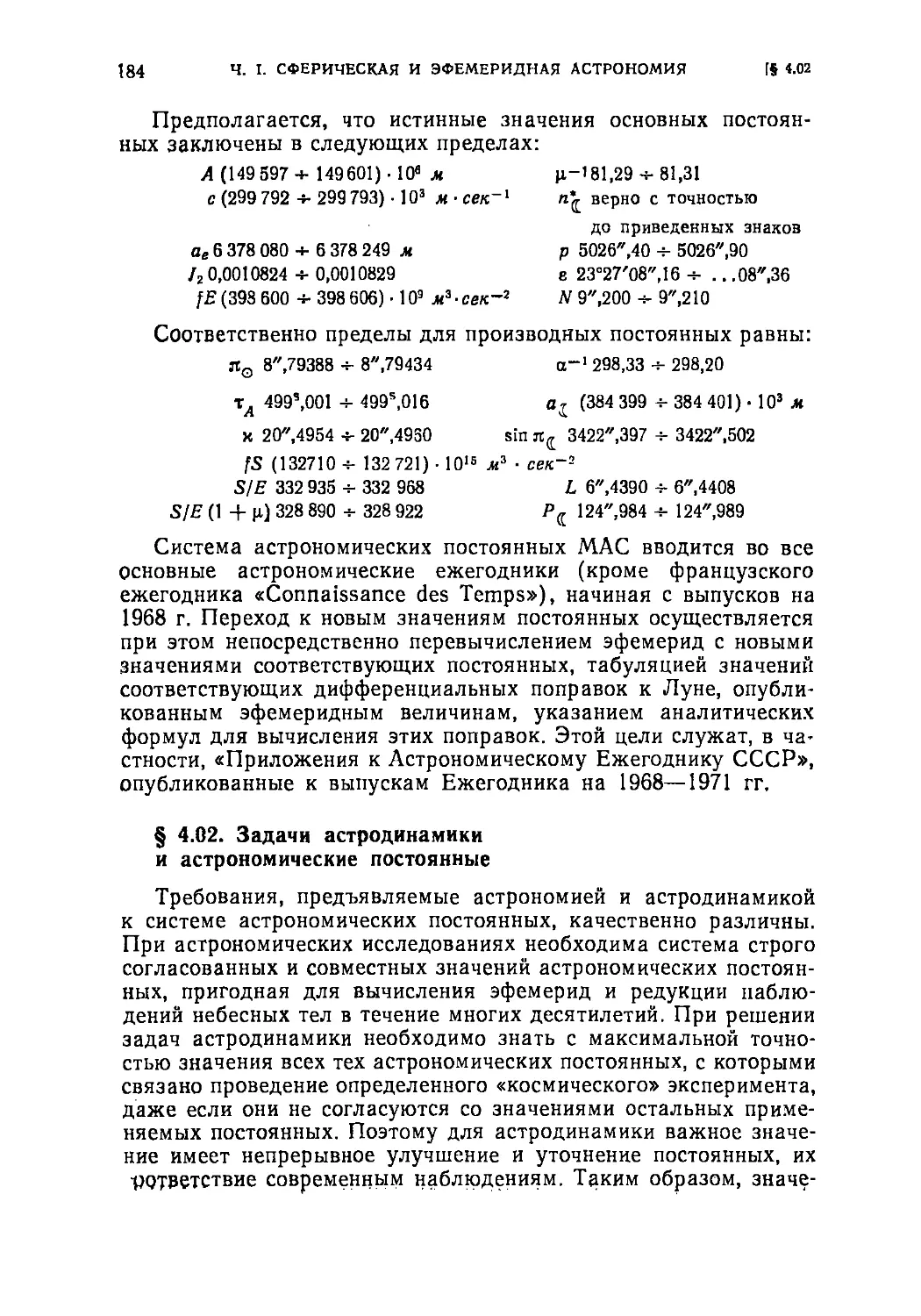
§ 4.02. Задачи астродинамики и астрономические постоянные 184
§ 4.03. Результаты радиолокационных определений астрономической 185
единицы в км.
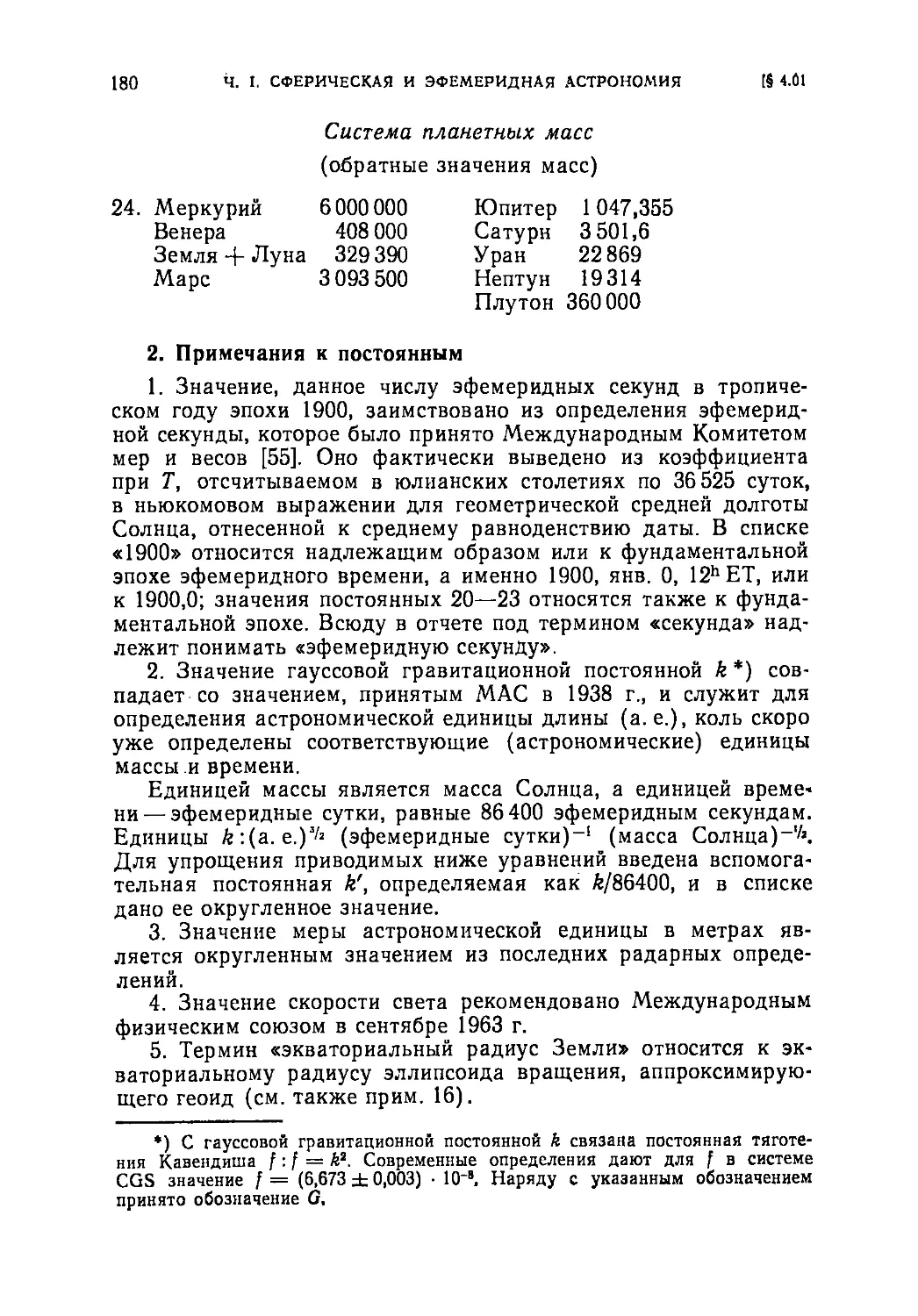
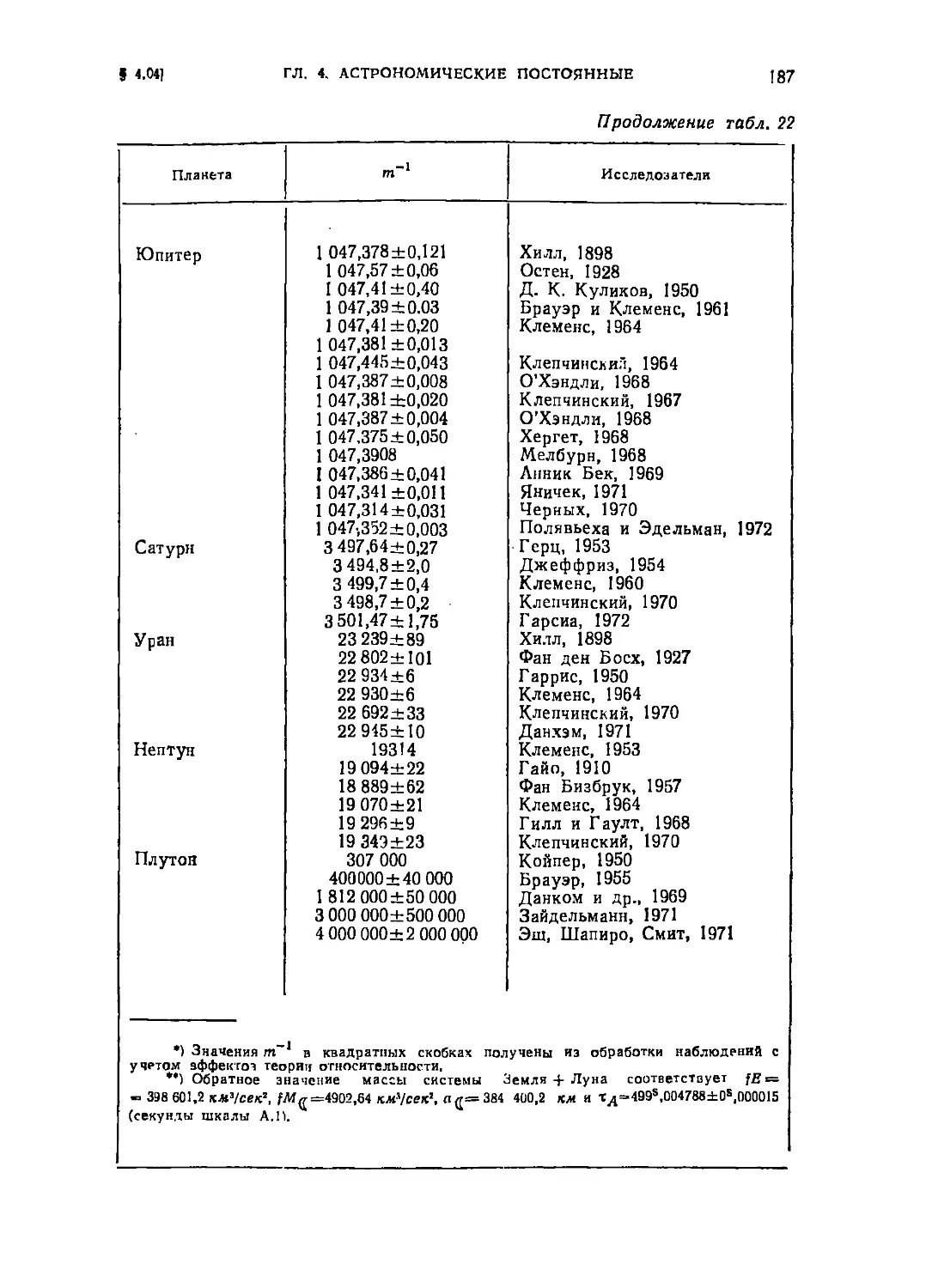
§ 4.04. Значения масс больших планет 185
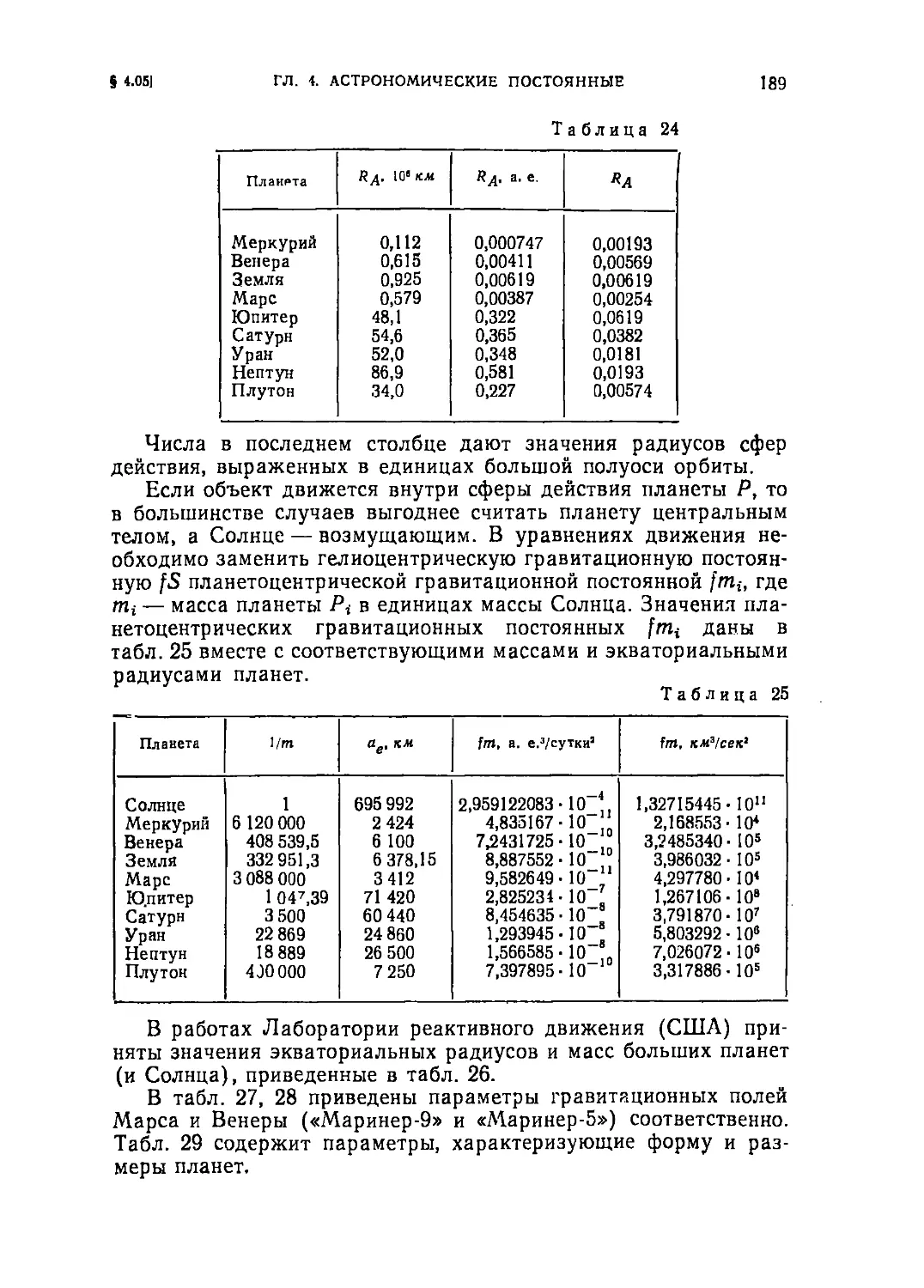
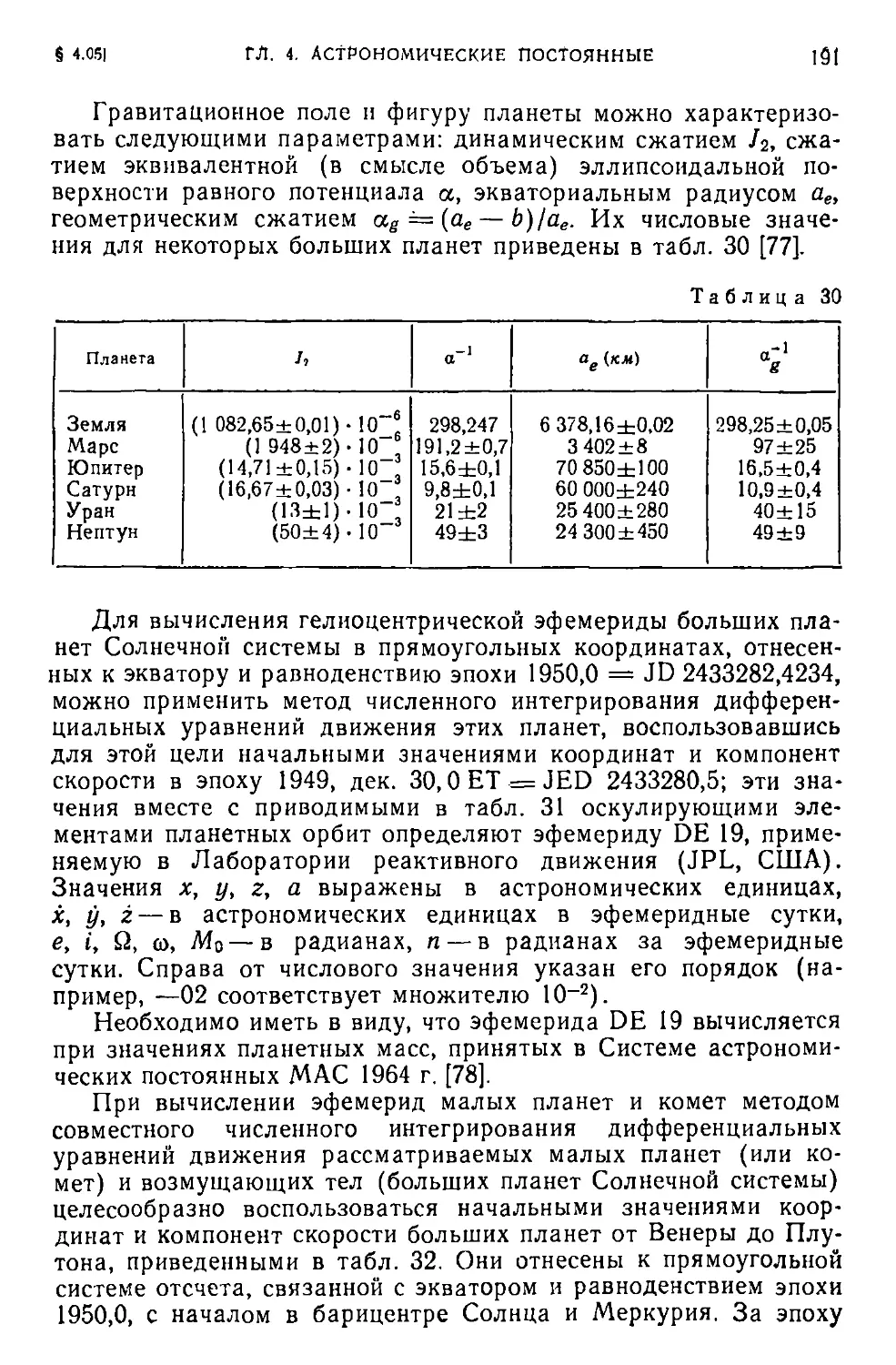
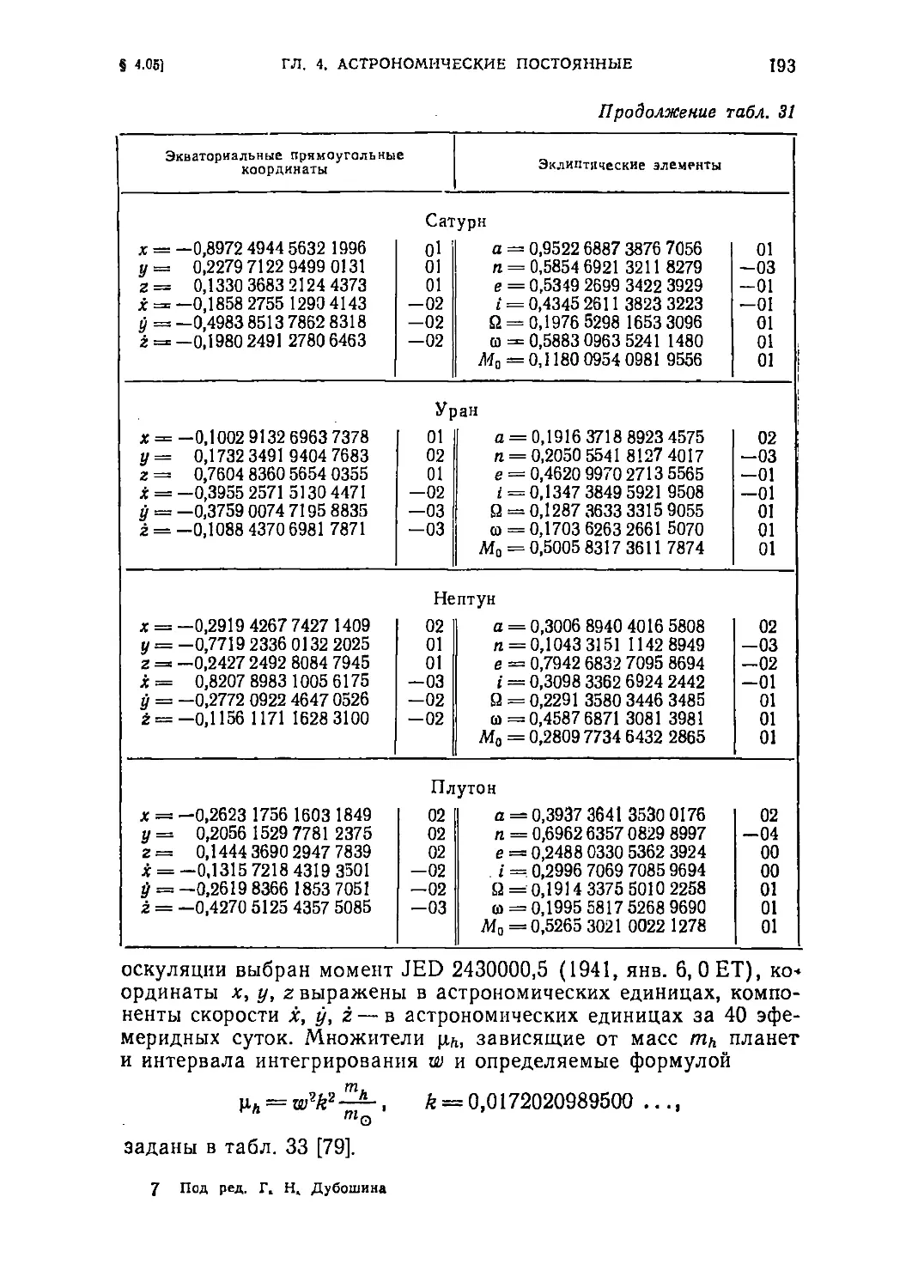
§ 4.05. Астродинамические характеристики тел Солнечной системы 188
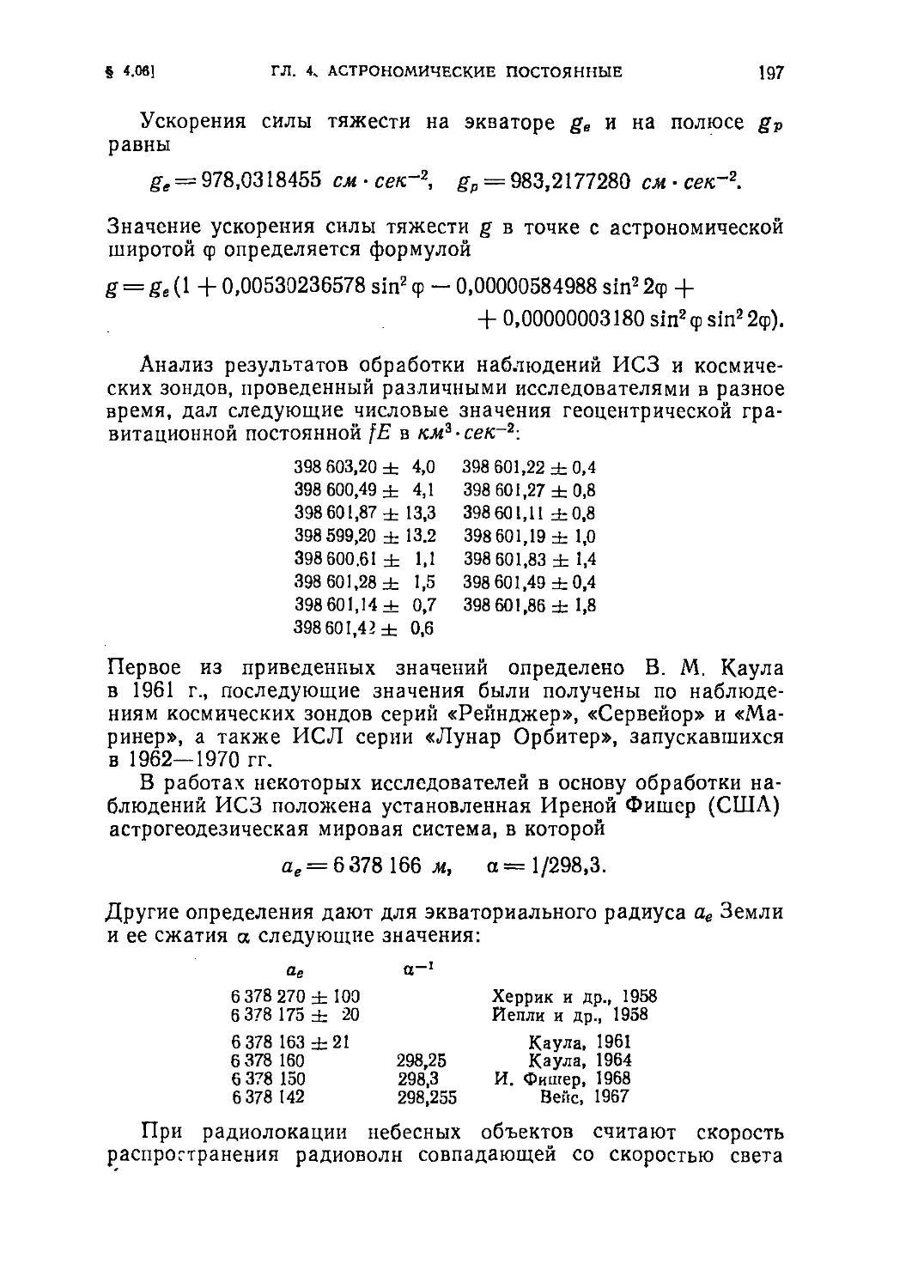
§ 4.06. Астродинамические постоянные, связанные с Землей 195
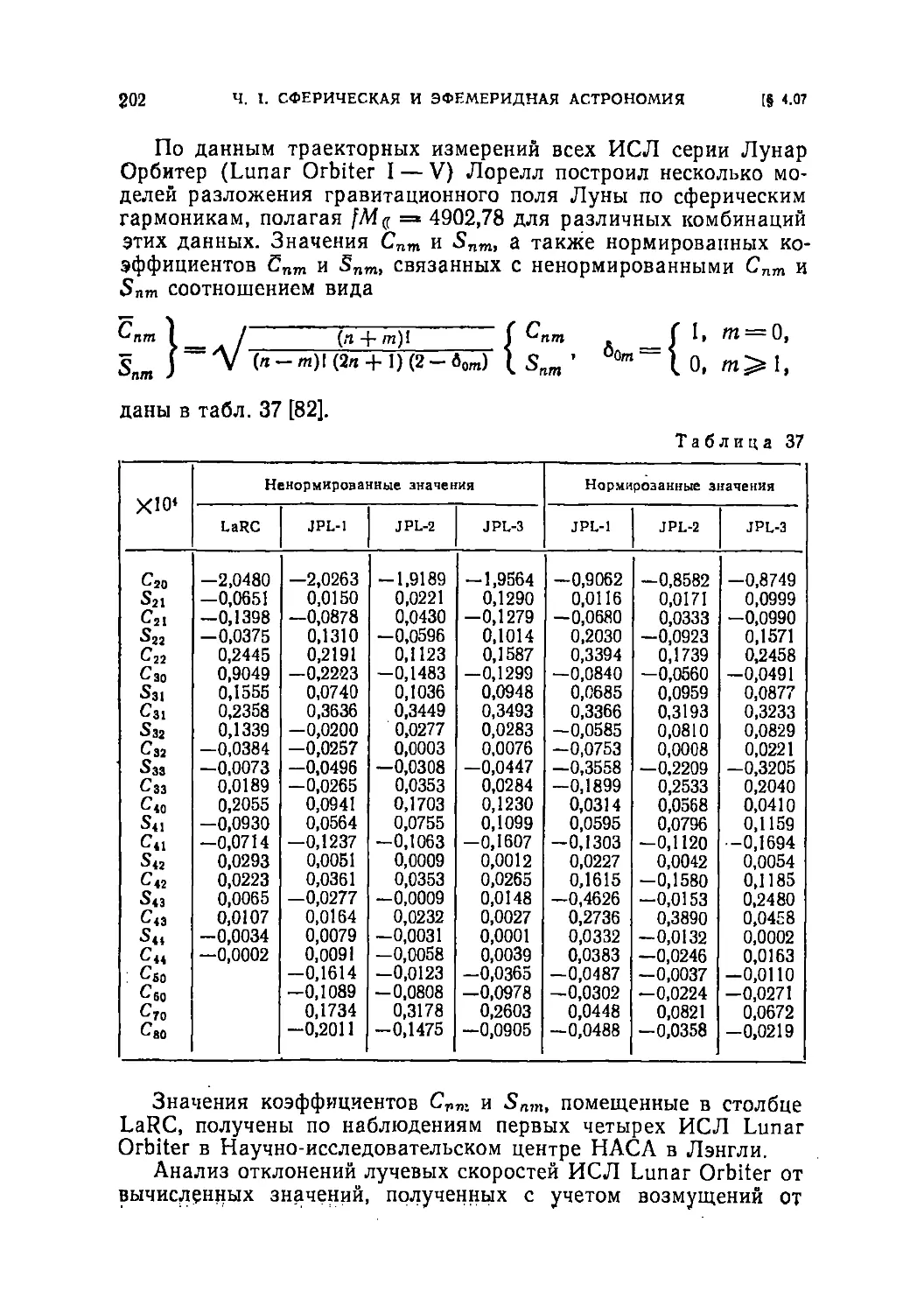
§ 4.07. Астродинамические постоянные, связанные с Луной 198
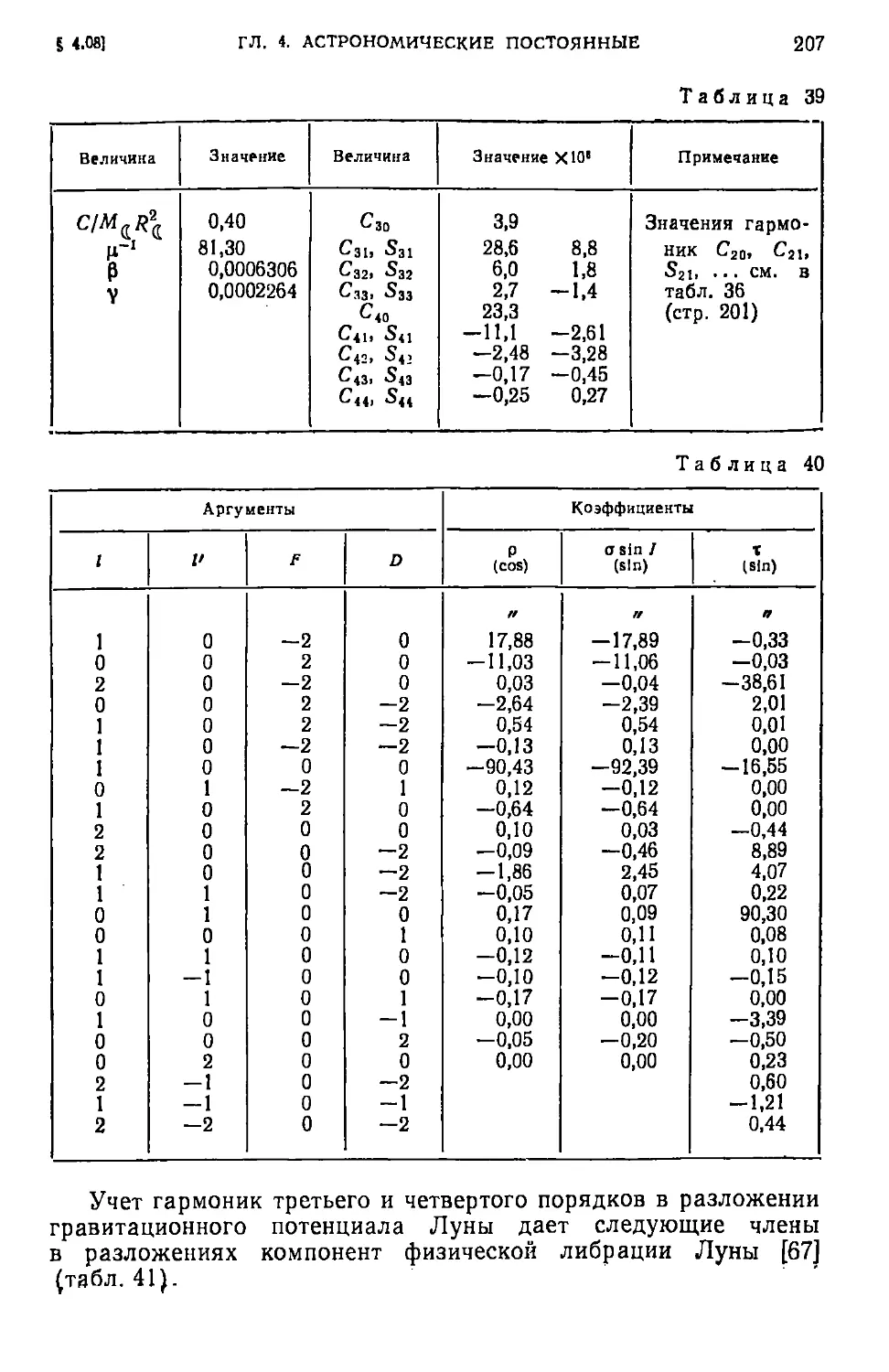
§ 4.08. Либрация Луны 203
Литература к части I 208
Часть II. ЗАДАЧА ДВУХ ТЕЛ (АКСЕНОВ Е.П.) 211
Глава 1. Общая теория невозмущенного кемеровского движения 211
§ 1.01. Постановка задачи. Различные формы дифференциальных 211
уравнений движения
§ 1.02. Первые интегралы уравнений невозмущенного кеплеровского 214
движения
§ 1.03. Типы невозмущенного кеплеровского движения 216
§ 1.04. Элементы орбиты 218
§ 1.05. Формулы, связывающие постоянные интегрирования и элементы 220
орбиты
Глава 2. Основные формулы невозмущенного цеплеровского 221
движения
§ 2.01. Эллиптическое движение 221
§ 2.02. Круговое движение 224
§ 2.03. Гиперболическое движение 225
§ 2.04. Параболическое движение 227
§ 2.05. Прямолинейное движение 229
§ 2.06. Вычисление эфемерид планет и комет 230
Глава 3. Разложение координат невозмущенного кеплеровского 231
движения в ряды
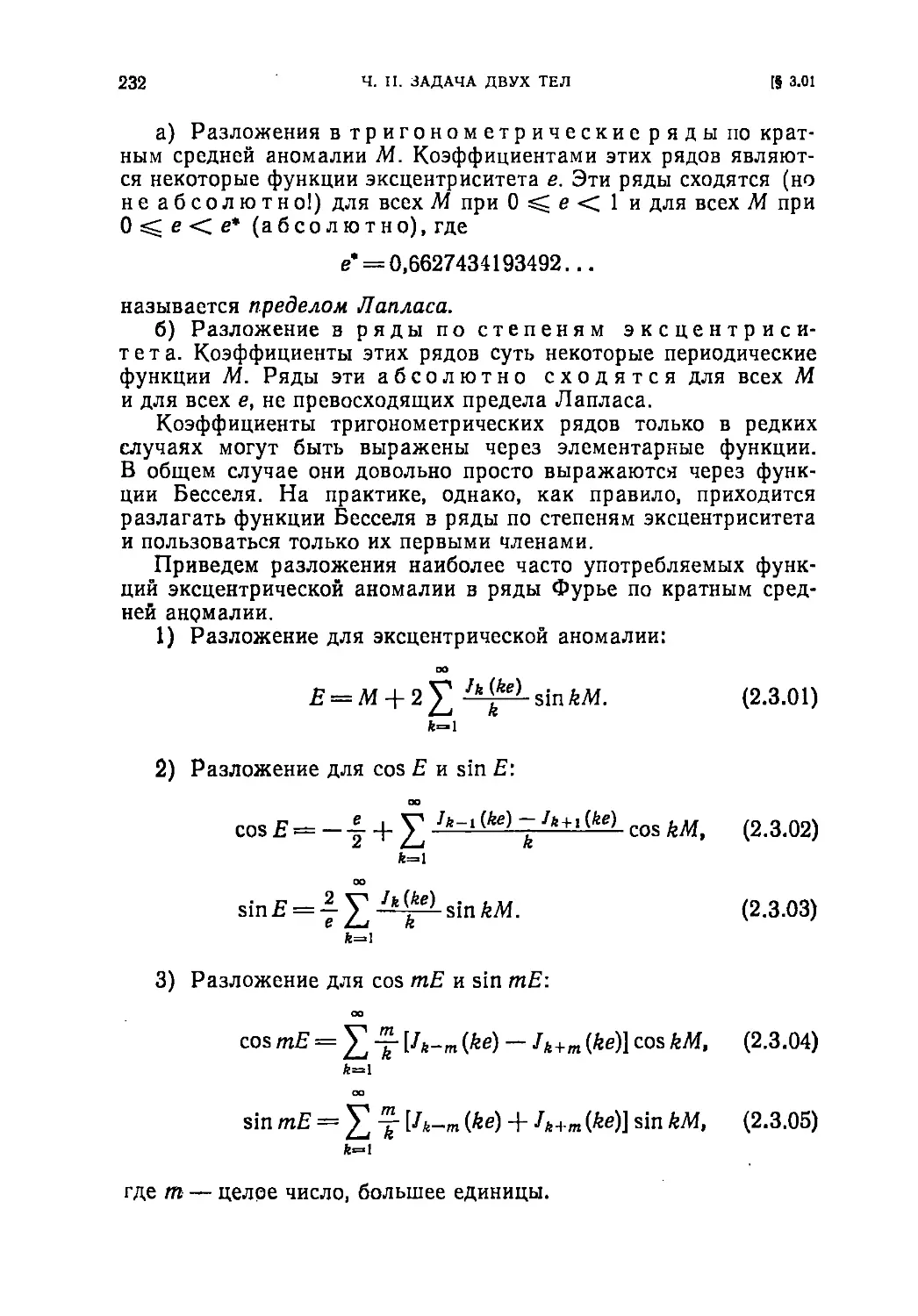
§ 3.01. Разложение функций эксцентрической аномалии в 231
тригонометрические ряды по кратным средней аномалии
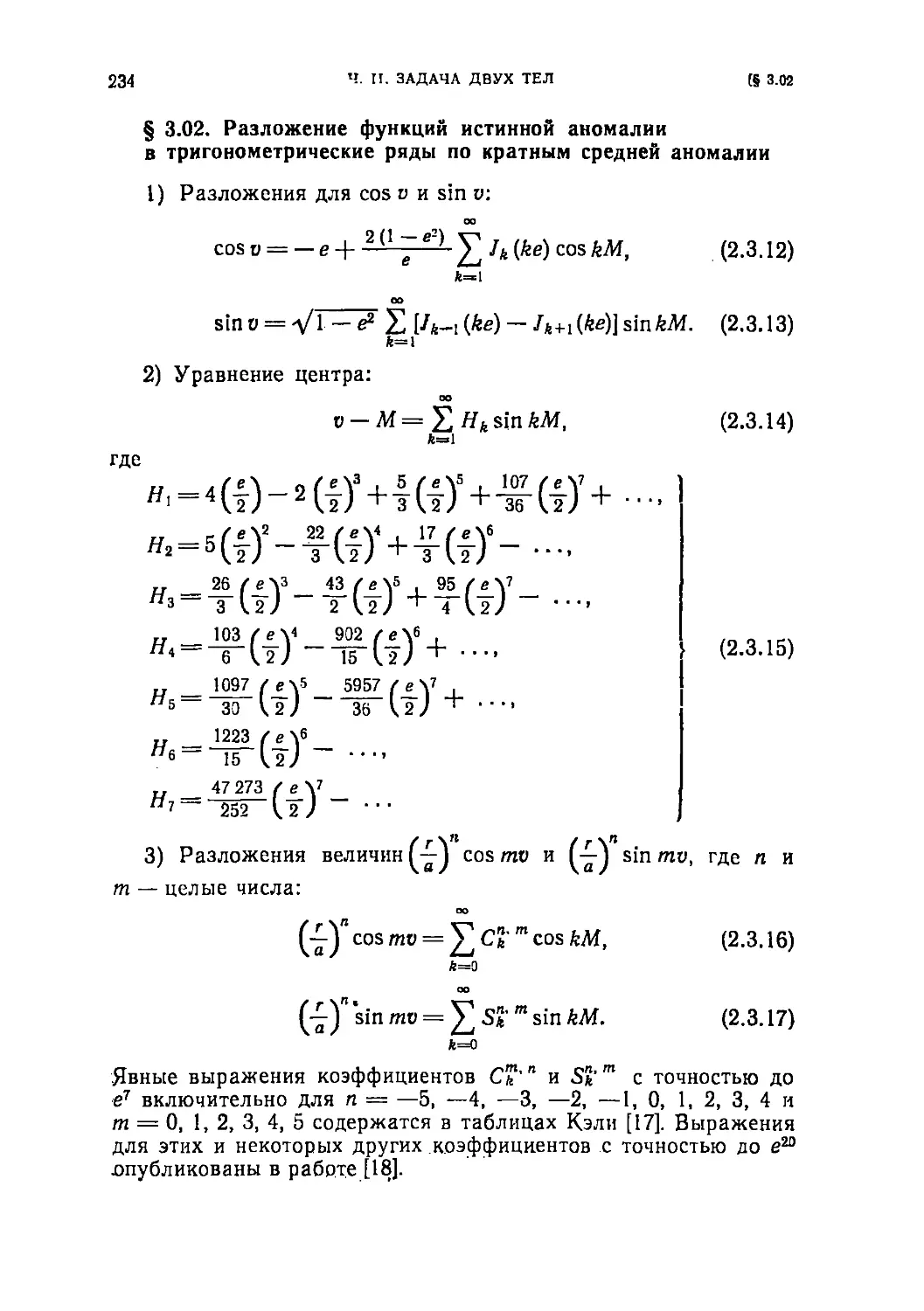
§ 3.02. Разложение функций истинной аномалии в тригонометрические 234
ряды по кратным средней аномалии
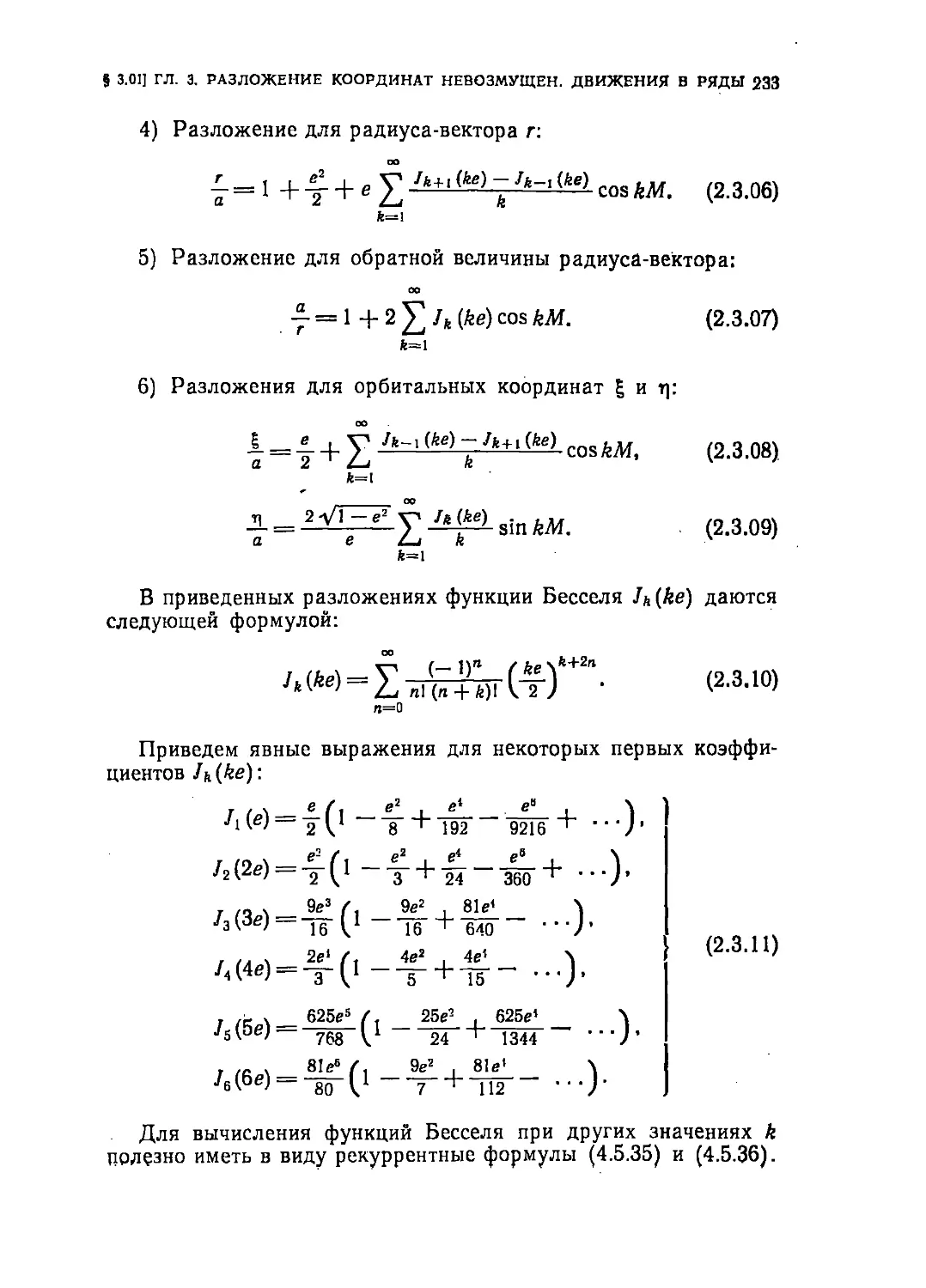
§ 3.03. Первые члены рядов по. кратным средней аномалии для 235
некоторых функций
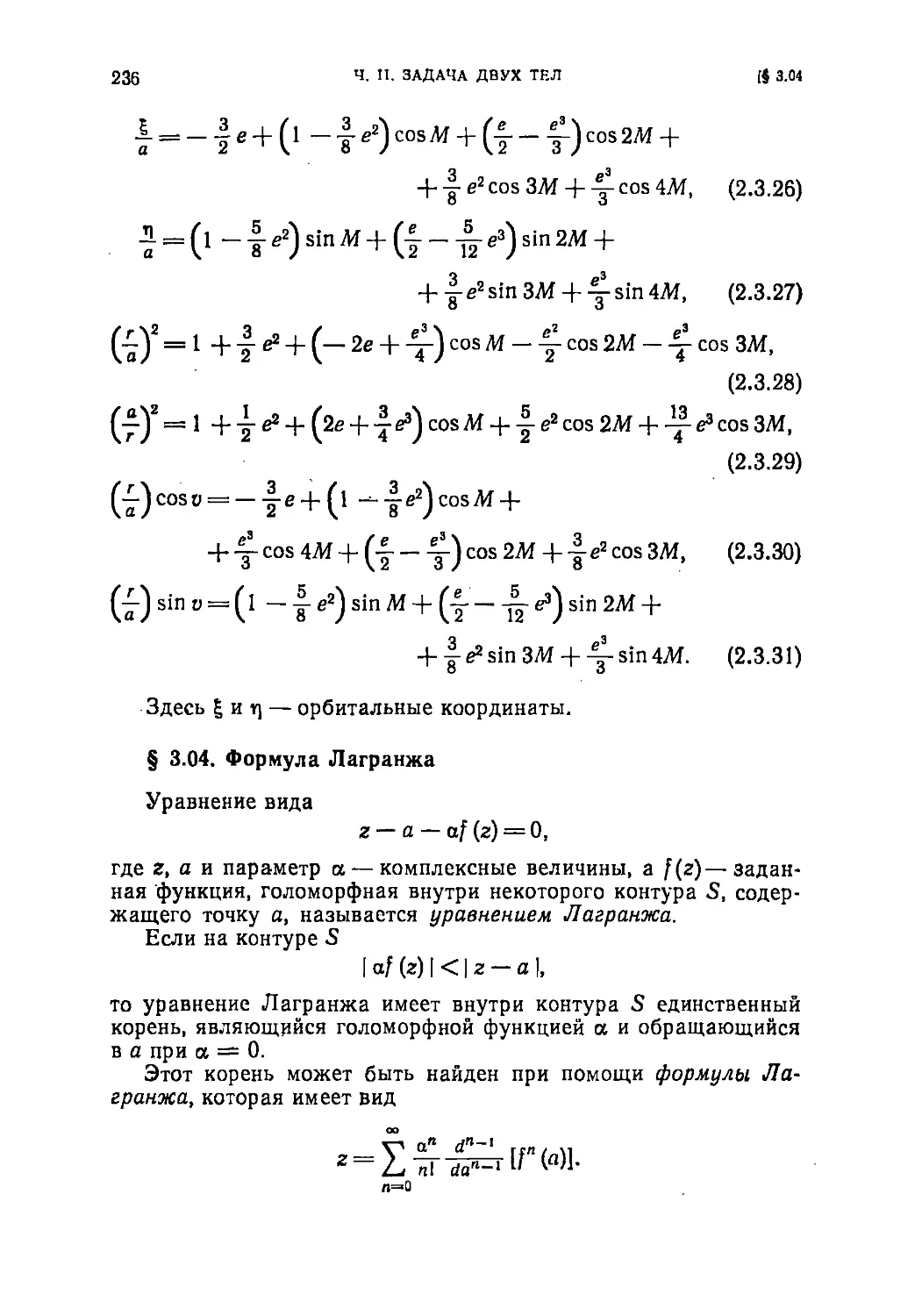
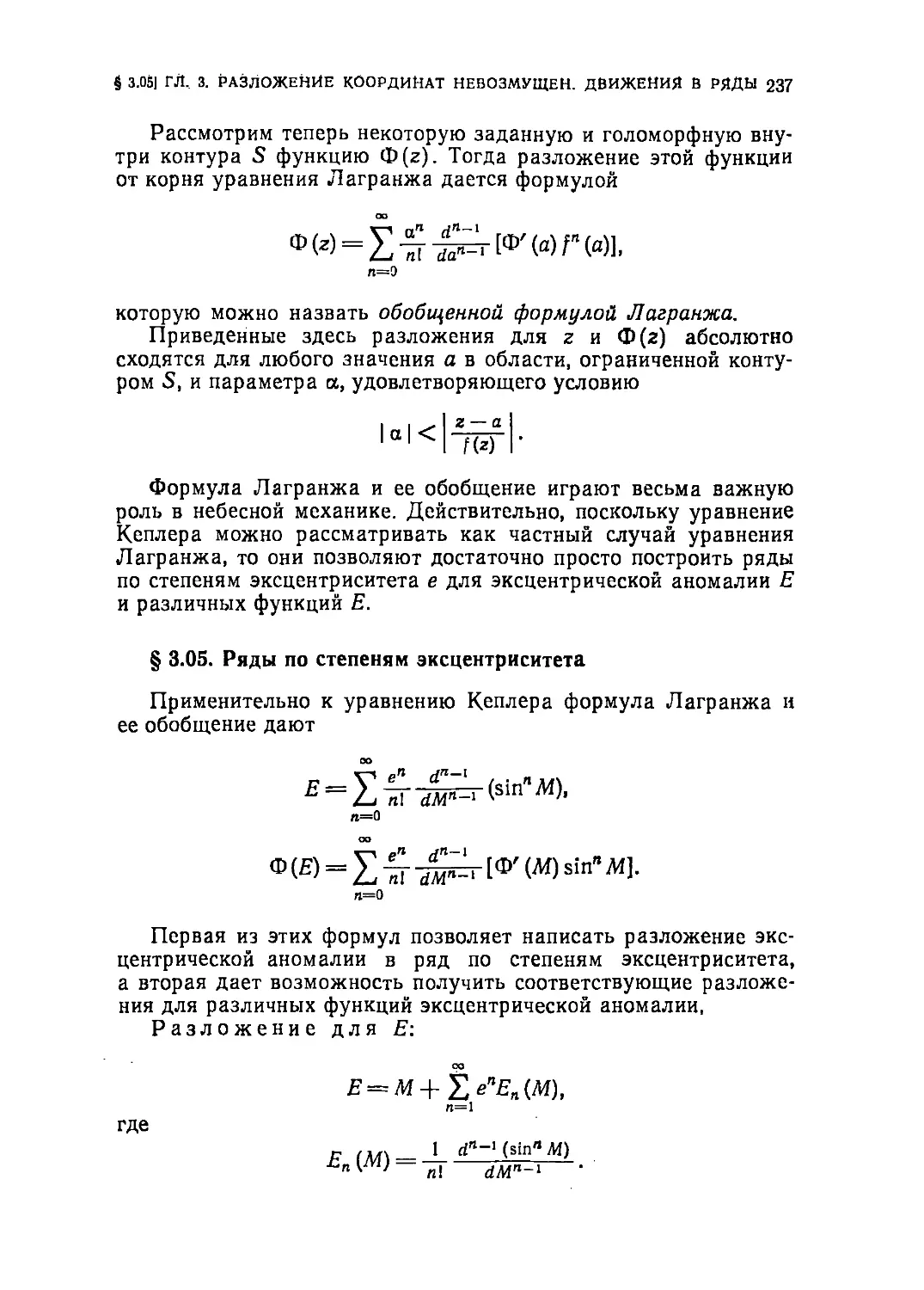
§ 3.04. Формула Лагранжа 236
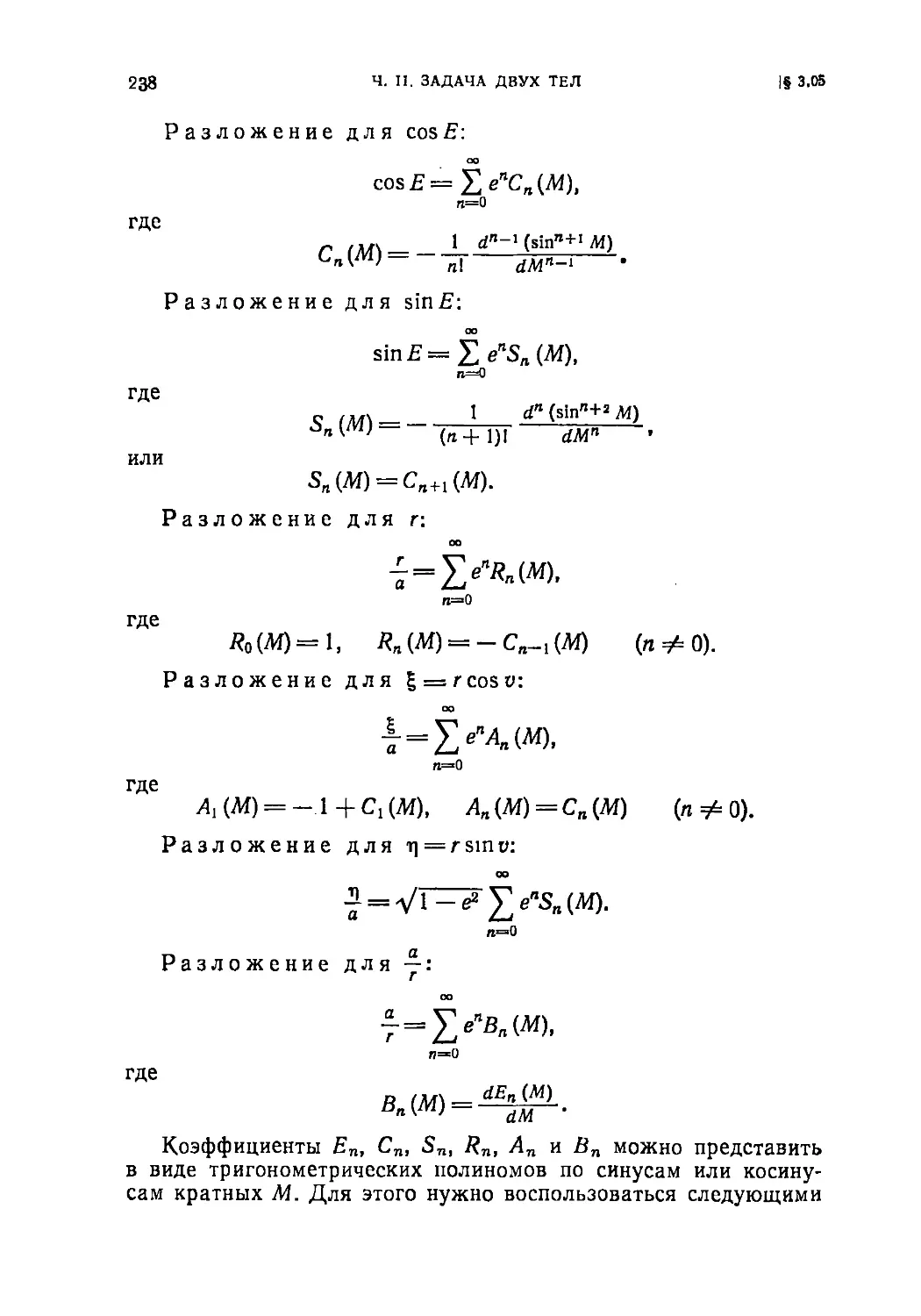
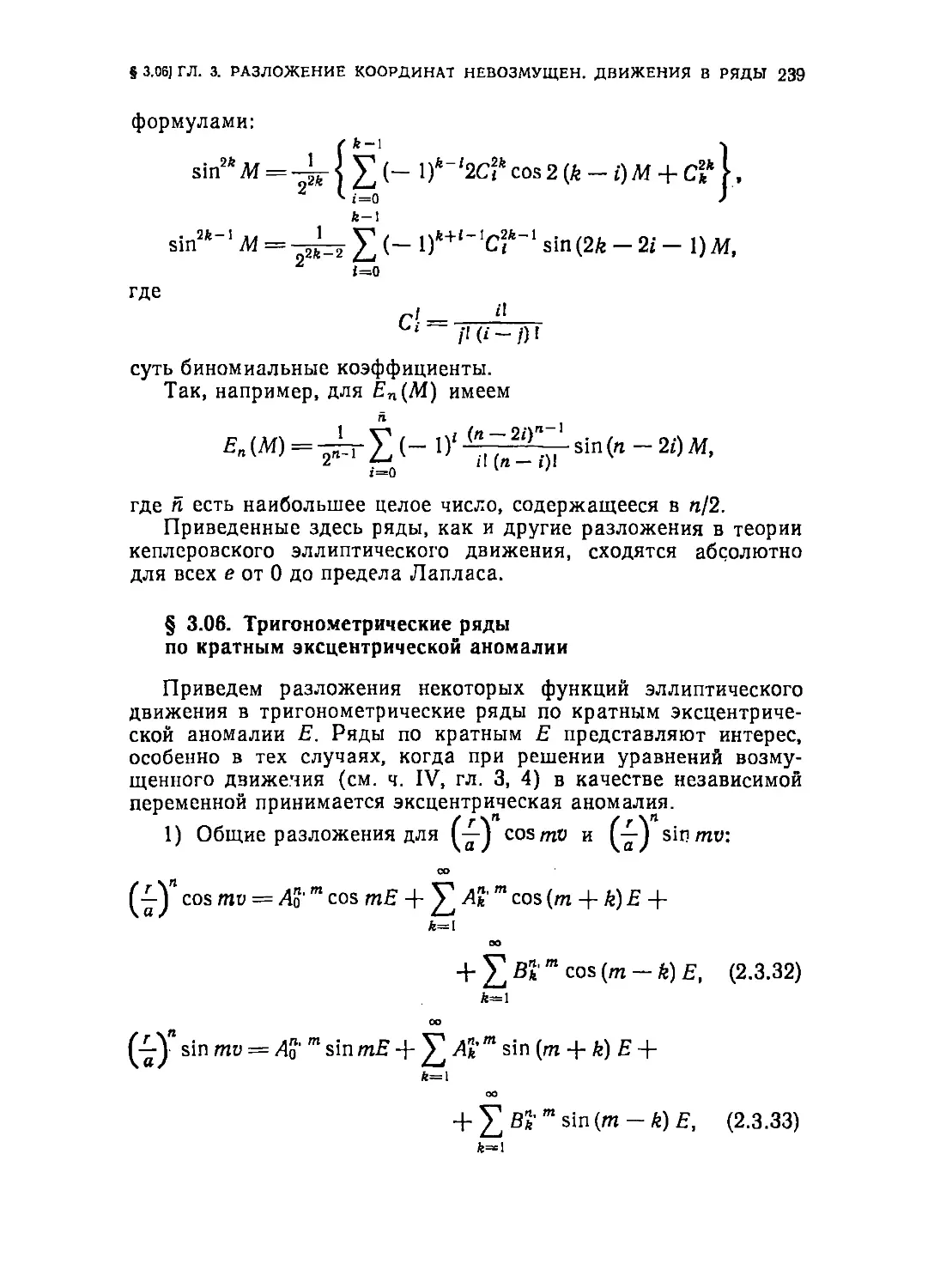
§ 3.05. Ряды по степеням эксцентриситета 237
§ 3.06. Тригонометрические ряды по кратным эксцентрической аномалии 239
§ 3.07. Ряды по кратным истинной аномалии 241
§ 3.08. Разложения координат невозмущенного кеплеровского движения 242
в ряды по степеням времени
§ 3.09. Степенные ряды в случае эллиптического движения 244
Литература к части II 245
Часть III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ (РЯБОВ 247
Ю.А.)
Глава 1. Вычисление координат невозмущенного кеплеровского 247
движения по элементам орбиты
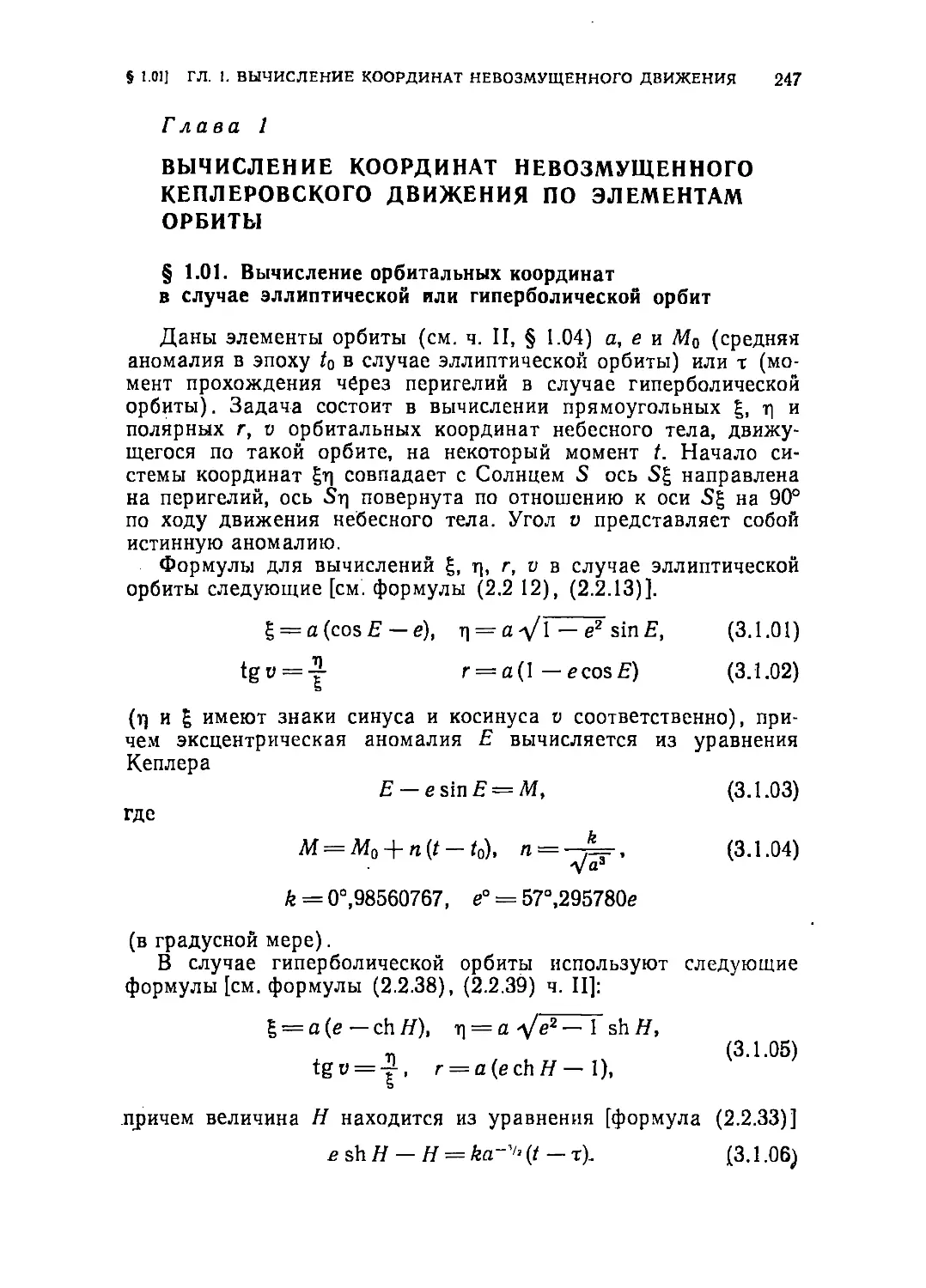
§ 1.01. Вычисление орбитальных координат в случае эллиптической или 247
гиперболической орбит
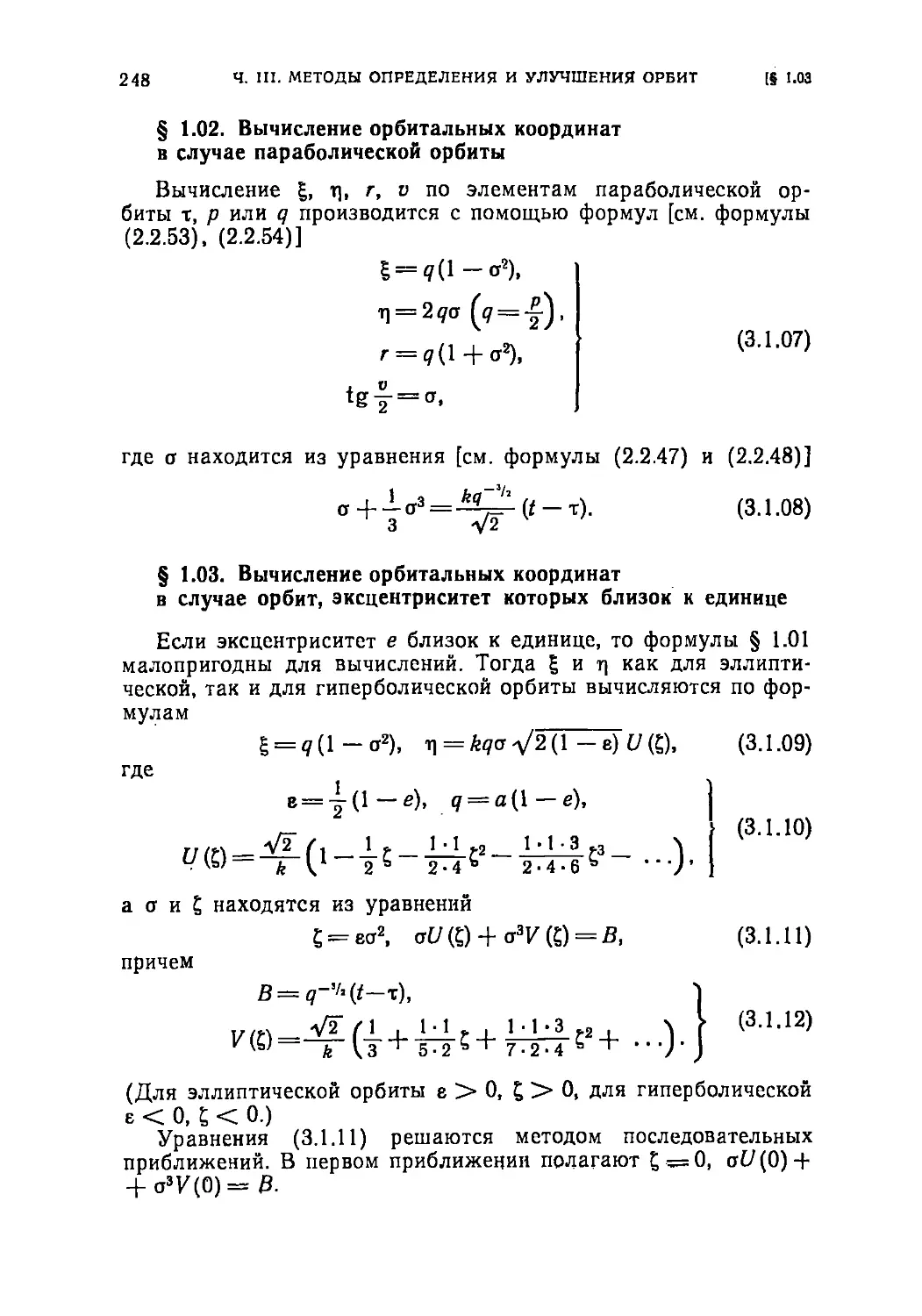
§ 1.02. Вычисление орбитальных координат в случае параболической 248
орбиты
§ 1.03. Вычисление орбитальных координат в случае орбит, 248
эксцентриситет которых близок к единице
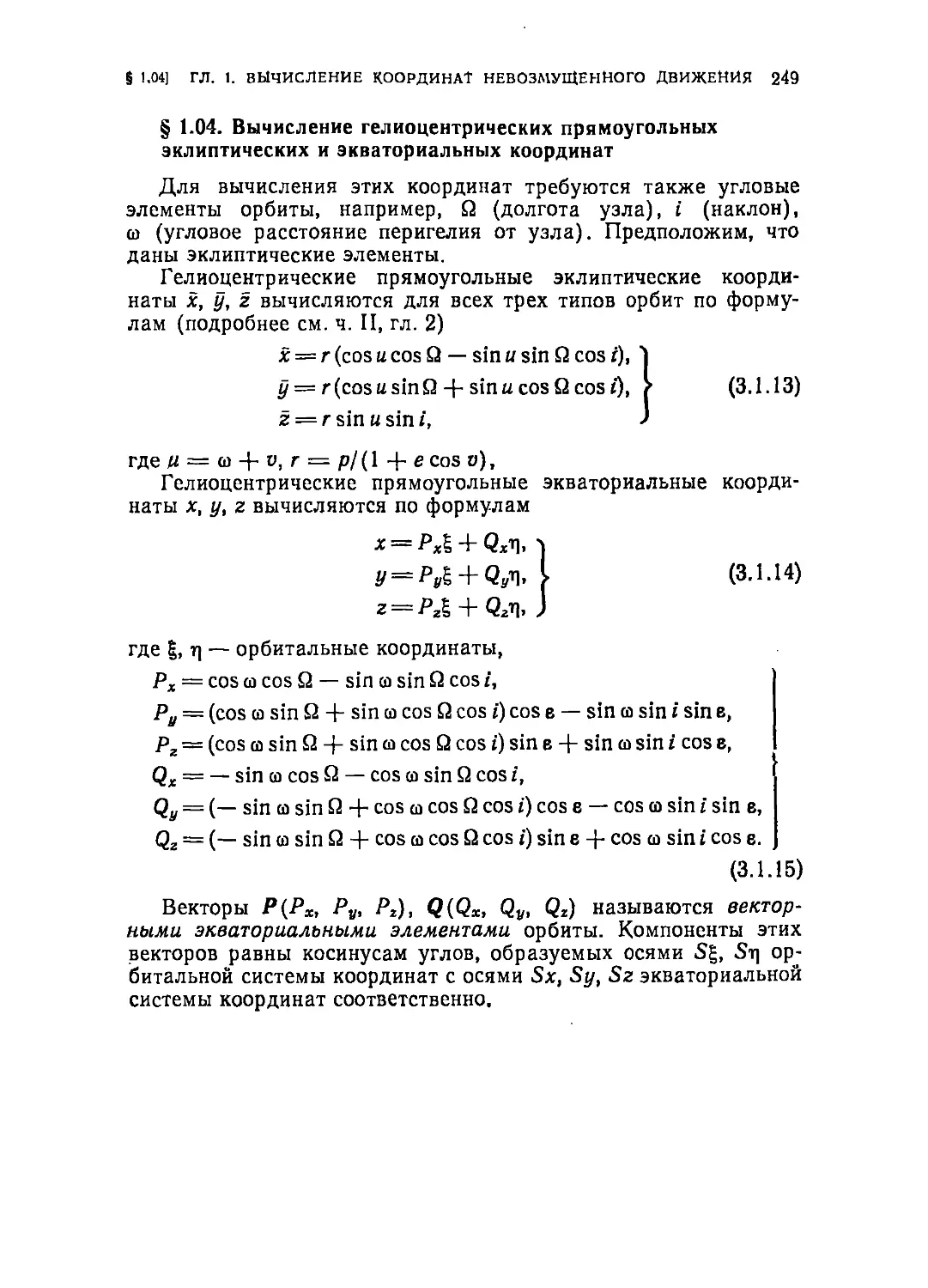
§ 1.04. Вычисление гелиоцентрических прямоугольных эклиптических и 249
экваториальных координат
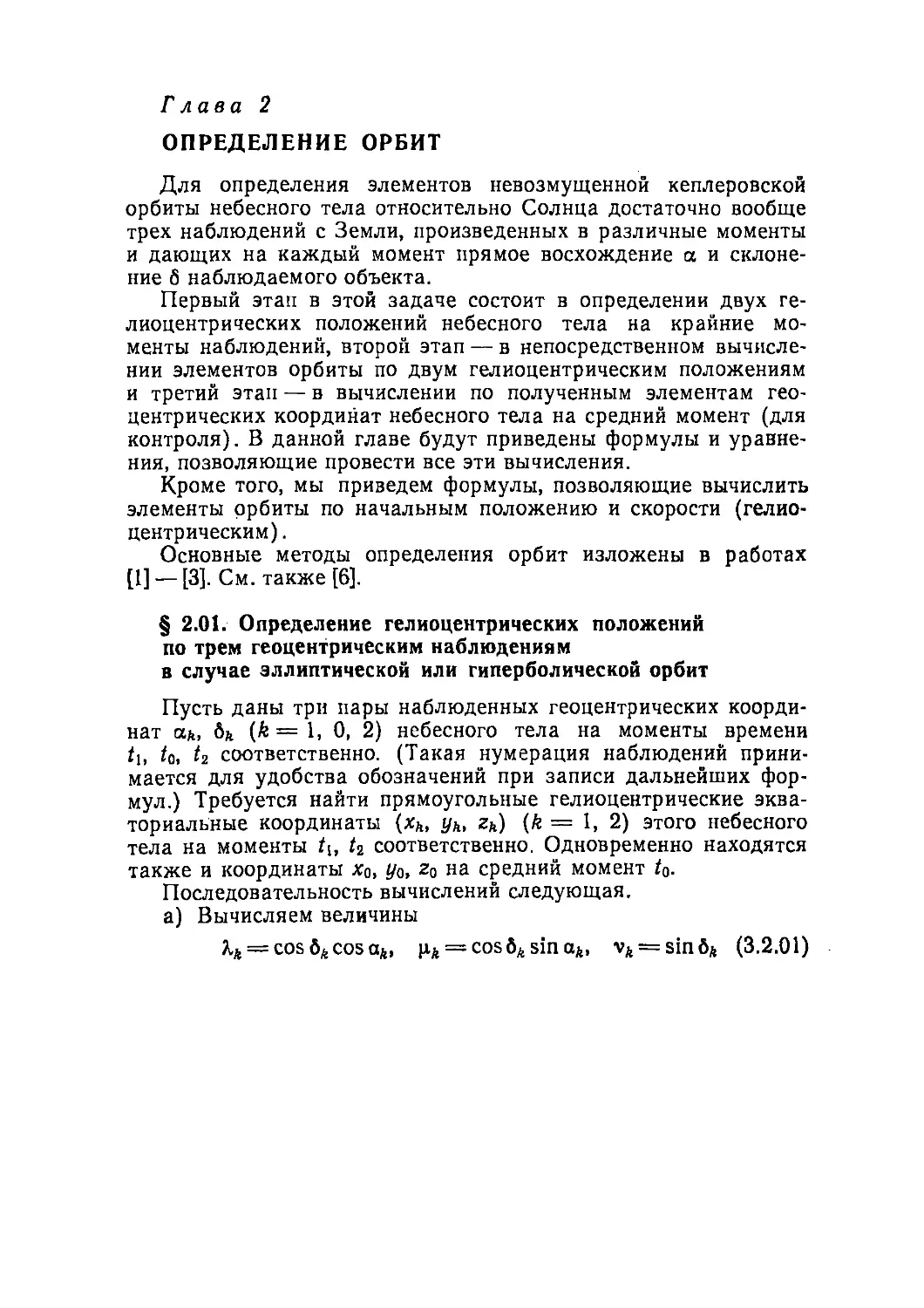
Глава 2. Определение орбит 250
§ 2.01. Определение гелиоцентрических положений по трем 250
геоцентрическим наблюдениям в случае эллиптической или
гиперболической орбит
§ 2.02. Особые случаи, встречающиеся при вычислении 254
гелиоцентрических координат
§ 2.03. Определение гелиоцентрических положений по четырем 255
геоцентрическим наблюдениям в случае эллиптической или
гиперболической орбит
§ 2.04. Определение гелиоцентрических положений по трем 257
геоцентрическим наблюдениям в случае параболической орбиты
§ 2.05. Вычисление элементов эллиптической орбиты по двум 260
гелиоцентрическим положениям
§ 2.06. Определение элементов гиперболической орбиты по двум 262
гелиоцентрическим положениям
§ 2.07. Определение элементов параболической орбиты по двум 263
гелиоцентрическим положениям
§ 2.08. Уравнения Ламберта и Эйлера 264
§ 2.09. Определение элементов эллиптической или гиперболической 265
орбиты по двум гелиоцентрическим положениям с помощью
уравнения Ламберта
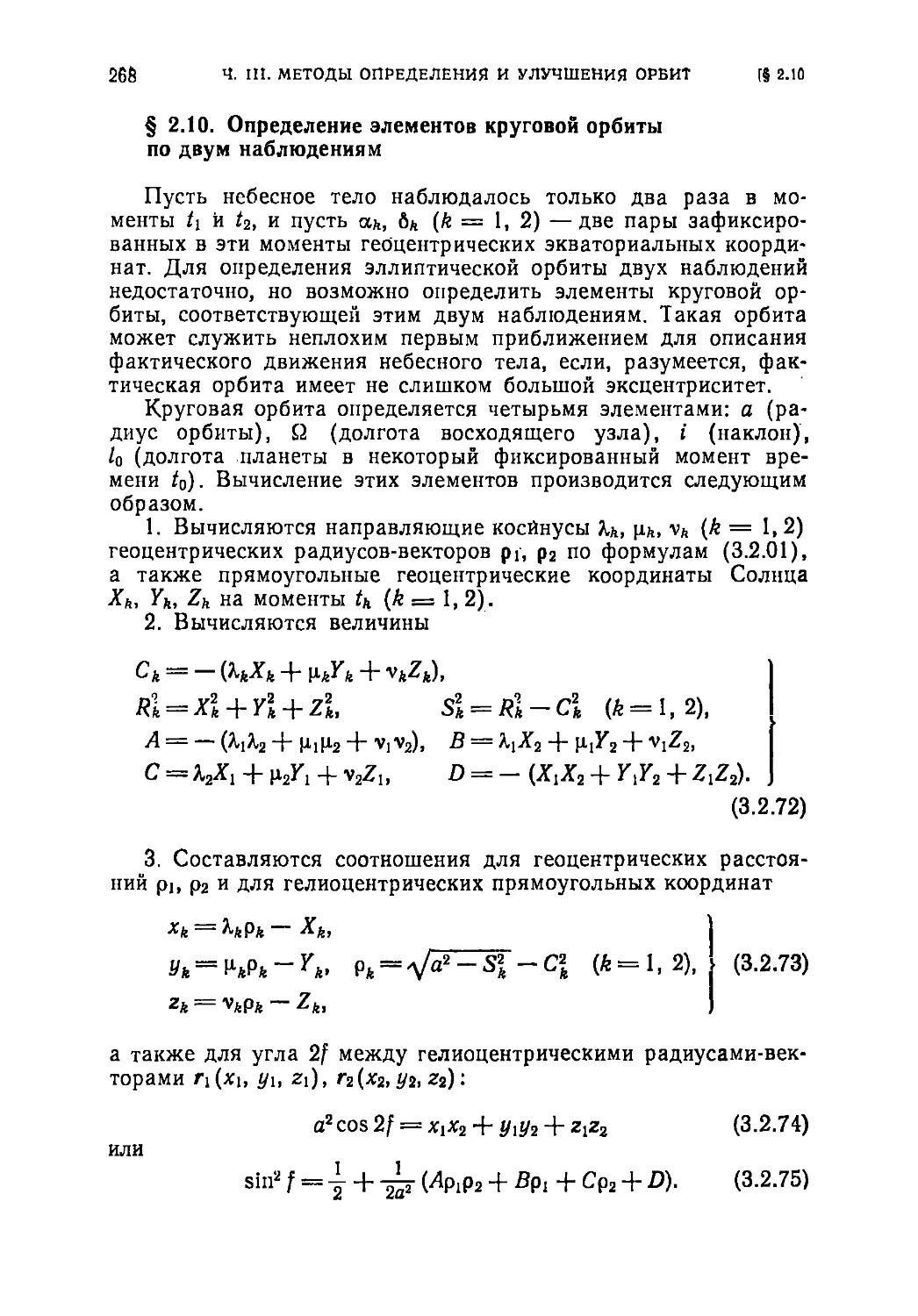
§ 2.10. Определение элементов круговой орбиты по двум наблюдениям 268
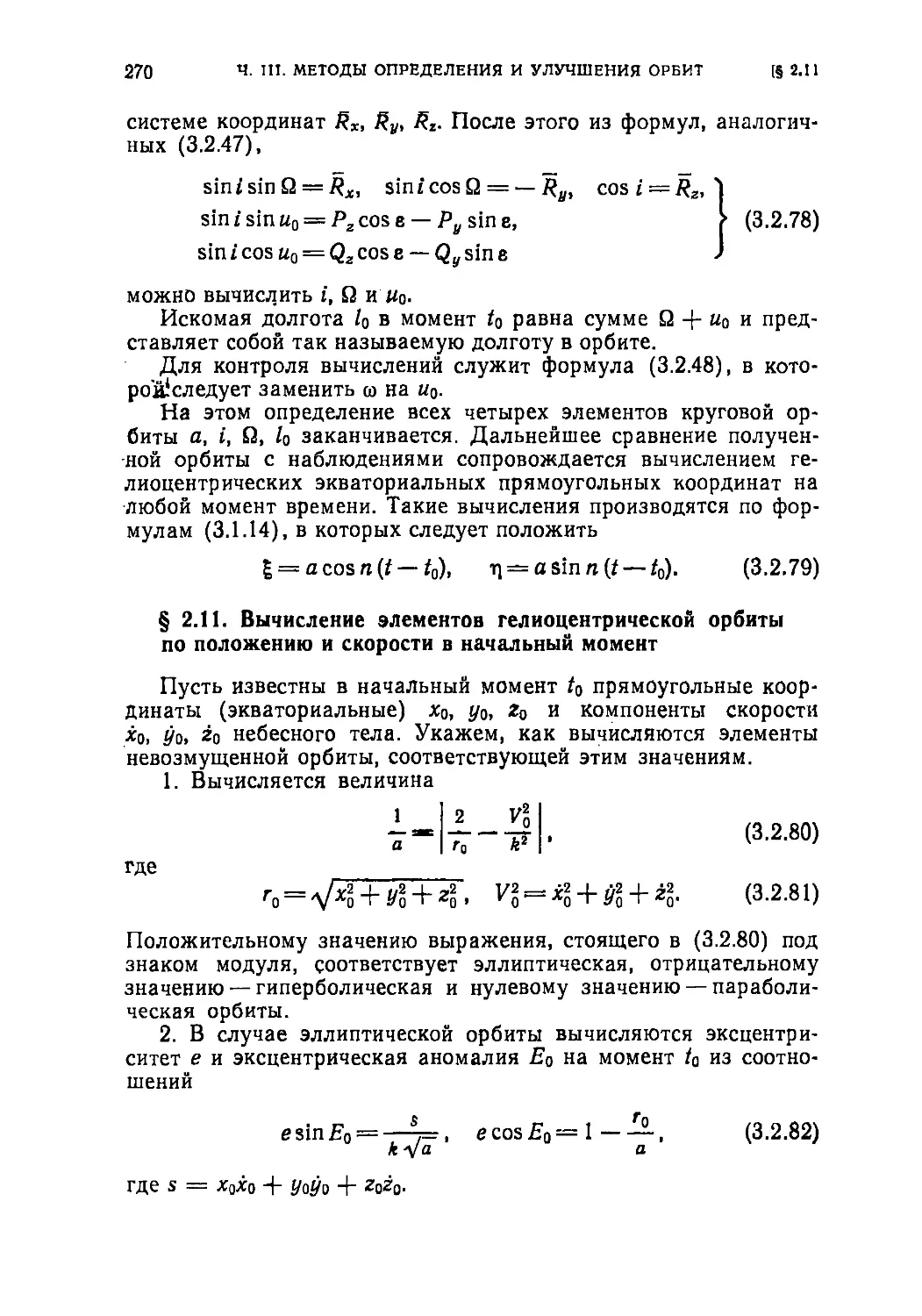
§2.11. Вычисление элементов гелиоцентрической орбиты по положению 270
и скорости в начальный момент
Глава 3. Улучшение первоначальной орбиты 273
§ 3.01. Дифференциальное исправление орбит. Постановка, задачи 273
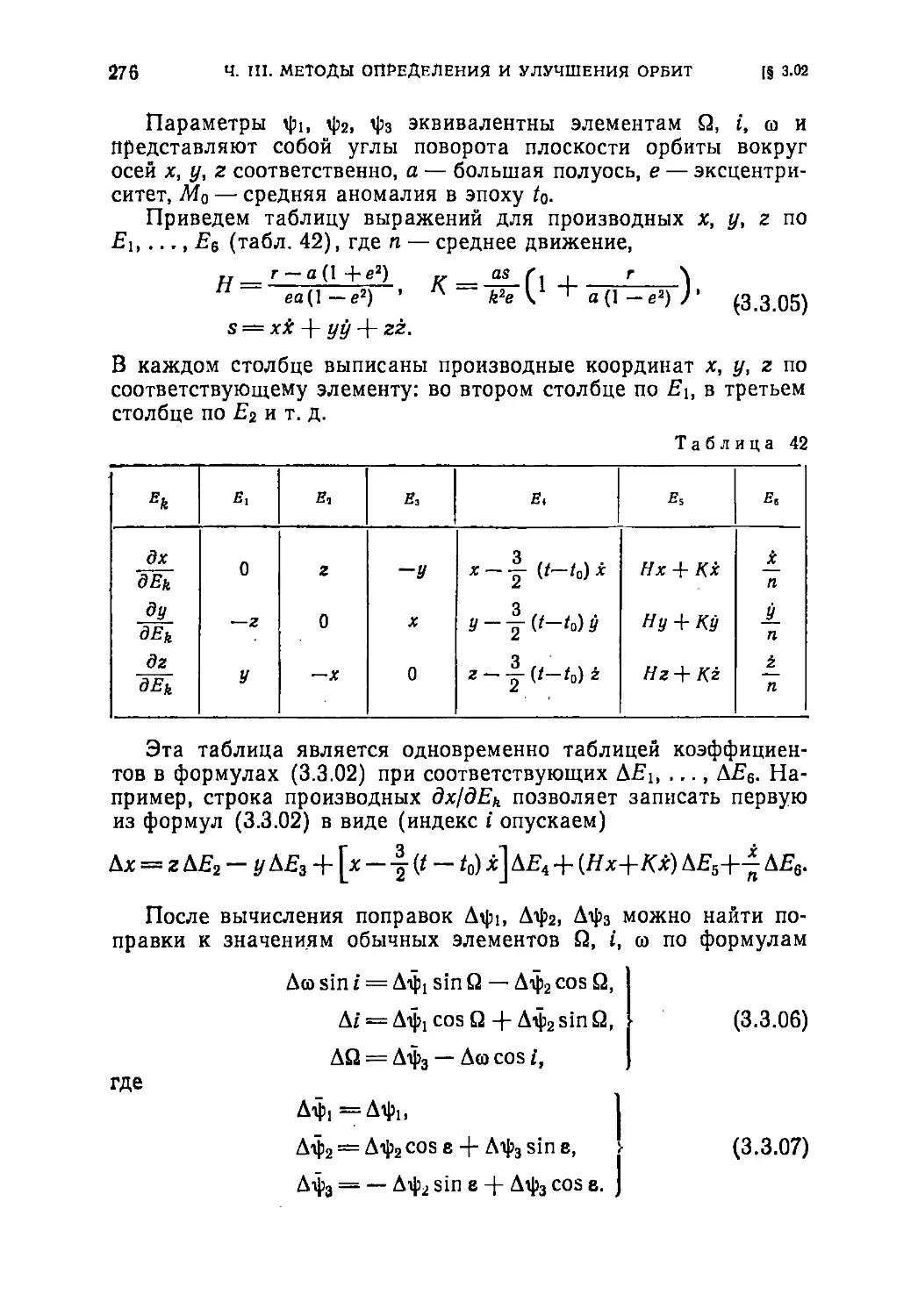
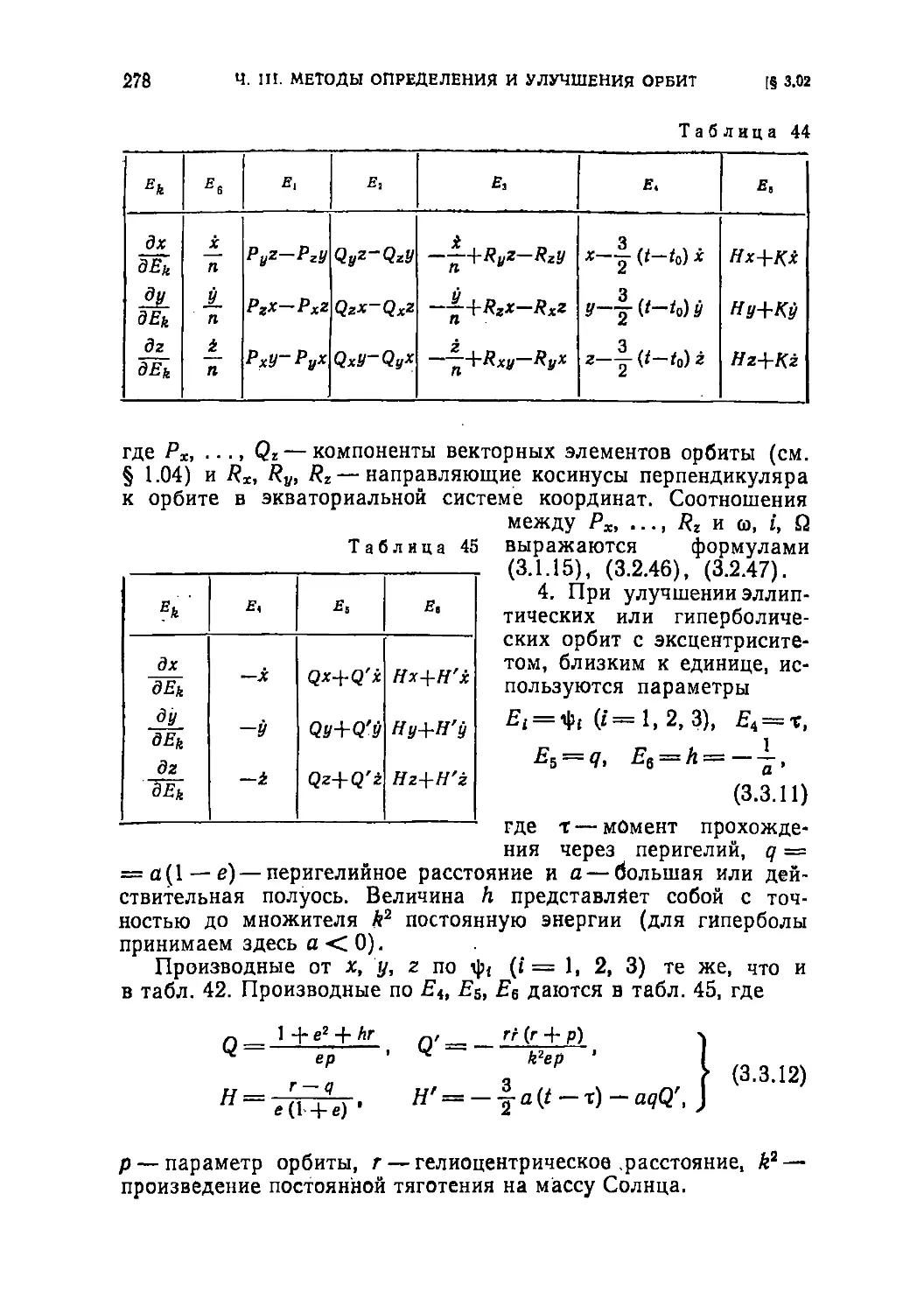
§ 3.02. Выражения для производных от координат по элементам (или по 275
функциям элементов)
§ 3.03. Условные уравнения, составляемые по наблюдениям долготы и 281
широты небесного тела
Глава 4. Определение и улучшение элементов орбит искусственных 283
спутников Земли
§ 4.01. Определение элементов орбит ИСЗ по положению и скорости в 283
момент выхода на орбиту
§ 4.02. Определение предварительных элементов орбиты ИСЗ по 285
наблюдениям
§ 4.03. Улучшение орбит ИСЗ 287
Литература к части III 287
Часть IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ (ГРЕБЕНИКОВ Е. 288
Д., РЯБОВ Ю. А.)
Глава 1. Дифференциальные уравнения движения задачи л тел в 288
координатах
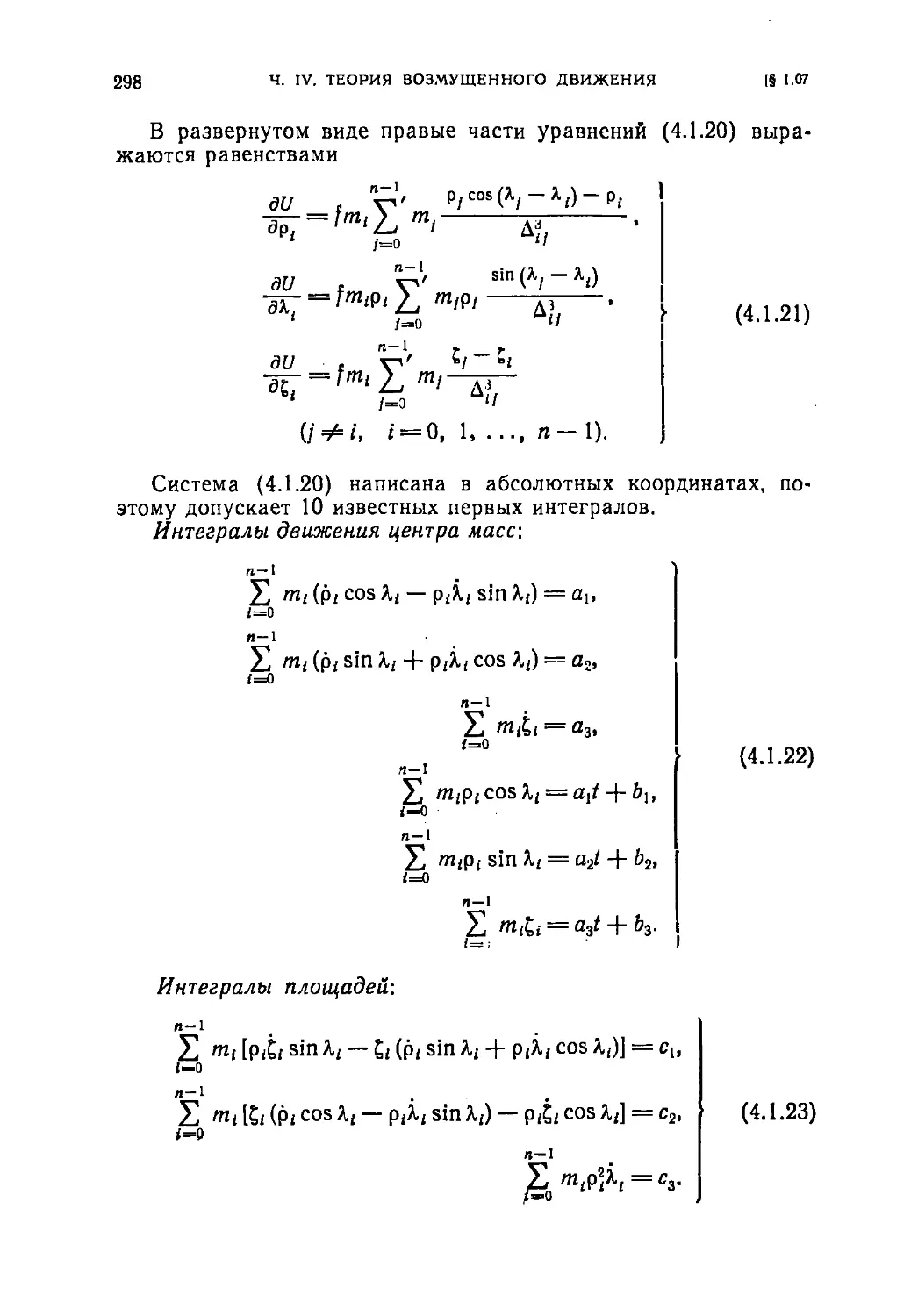
§ 1.01. Уравнения абсолютного движения 288
§ 1.02. Уравнение Лагранжа—Якоби 290
§ 1.03. Уравнения движения в барицентрических прямоугольных 291
координатах
§ 1.04. Уравнения движения в координатах Якоби 292
§ 1.05. Уравнения относительного движения в прямоугольных 293
координатах
§ 1.06. Уравнения движения в идеальных прямоугольных координатах 295
Ганзена
§ 1.07. Уравнения абсолютного движения в цилиндрических координатах 297
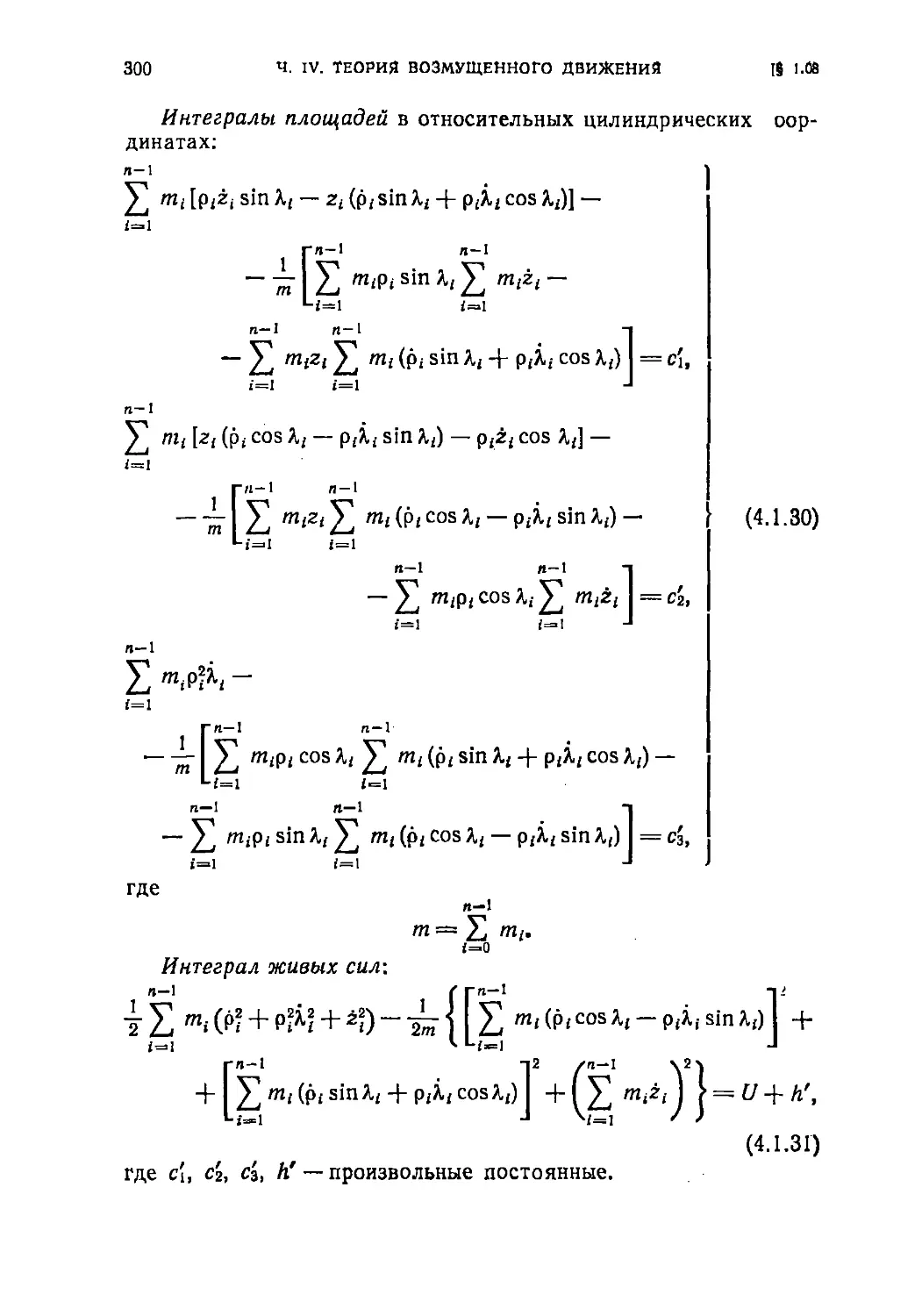
§ 1.08. Уравнения относительного движения в цилиндрических 299
координатах
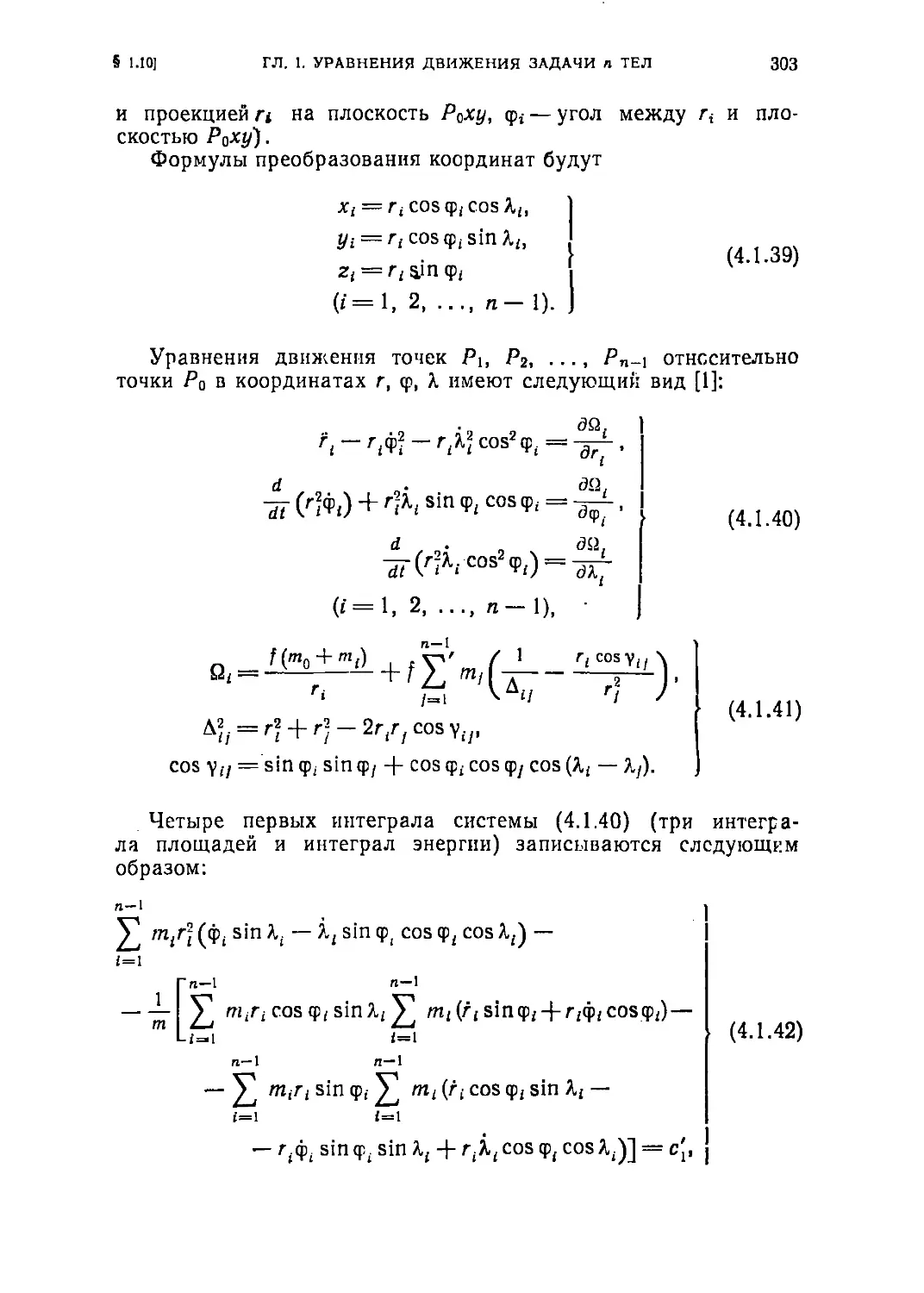
§ 1.09. Уравнения абсолютного движения в сферических координатах 301
§ 1.10. Уравнения относительного движения в сферических координатах 302
§ 1.11. Уравнения движения в полярных координатах Ганзена 305
§ 1.12. Уравнения Клеро—Лапласа 306
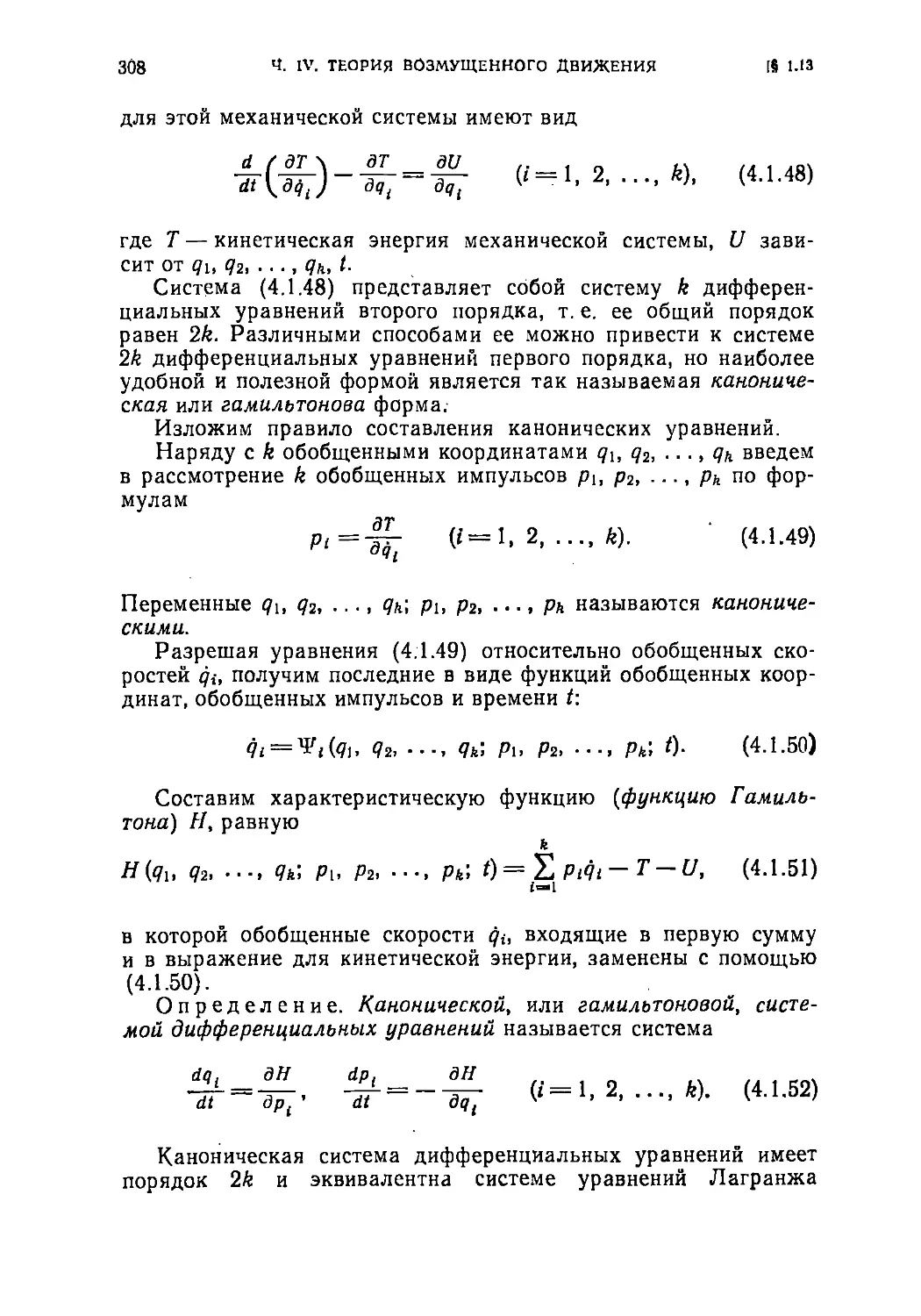
§ 1.13. Общее правило составления канонических уравнений 307
§ 1.14. Первая каноническая форма уравнений абсолютного движения 309
§ 1.15. Вторая каноническая форма уравнений абсолютного движения 310
§ 1.16. Третья каноническая форма уравнений абсолютного движения 312
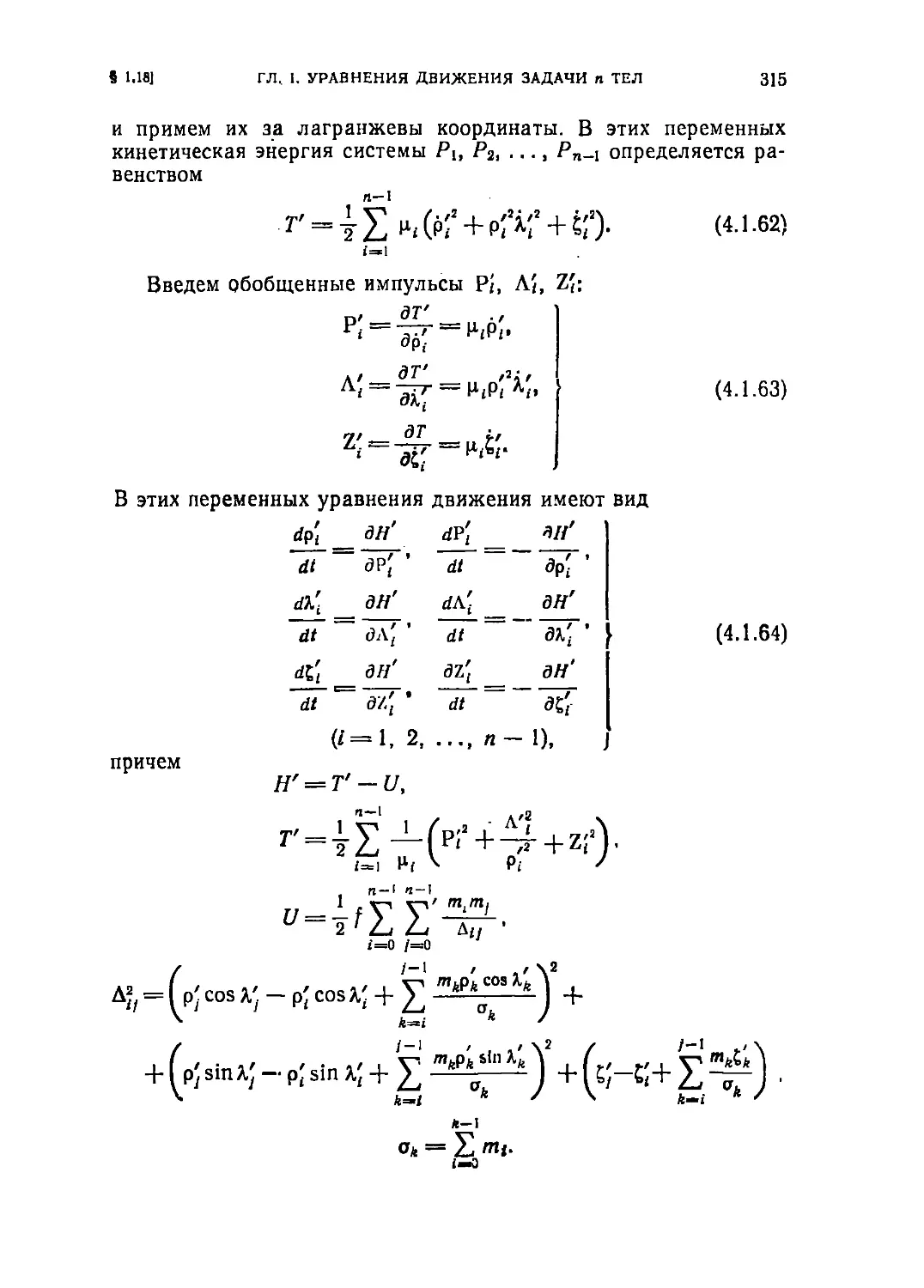
§ 1.17. Первая каноническая форма уравнений относительного движения 313
§ 1.18. Вторая каноническая форма уравнений относительного движения 314
§ 1.19. Третья каноническая форма уравнений относительного движения 316
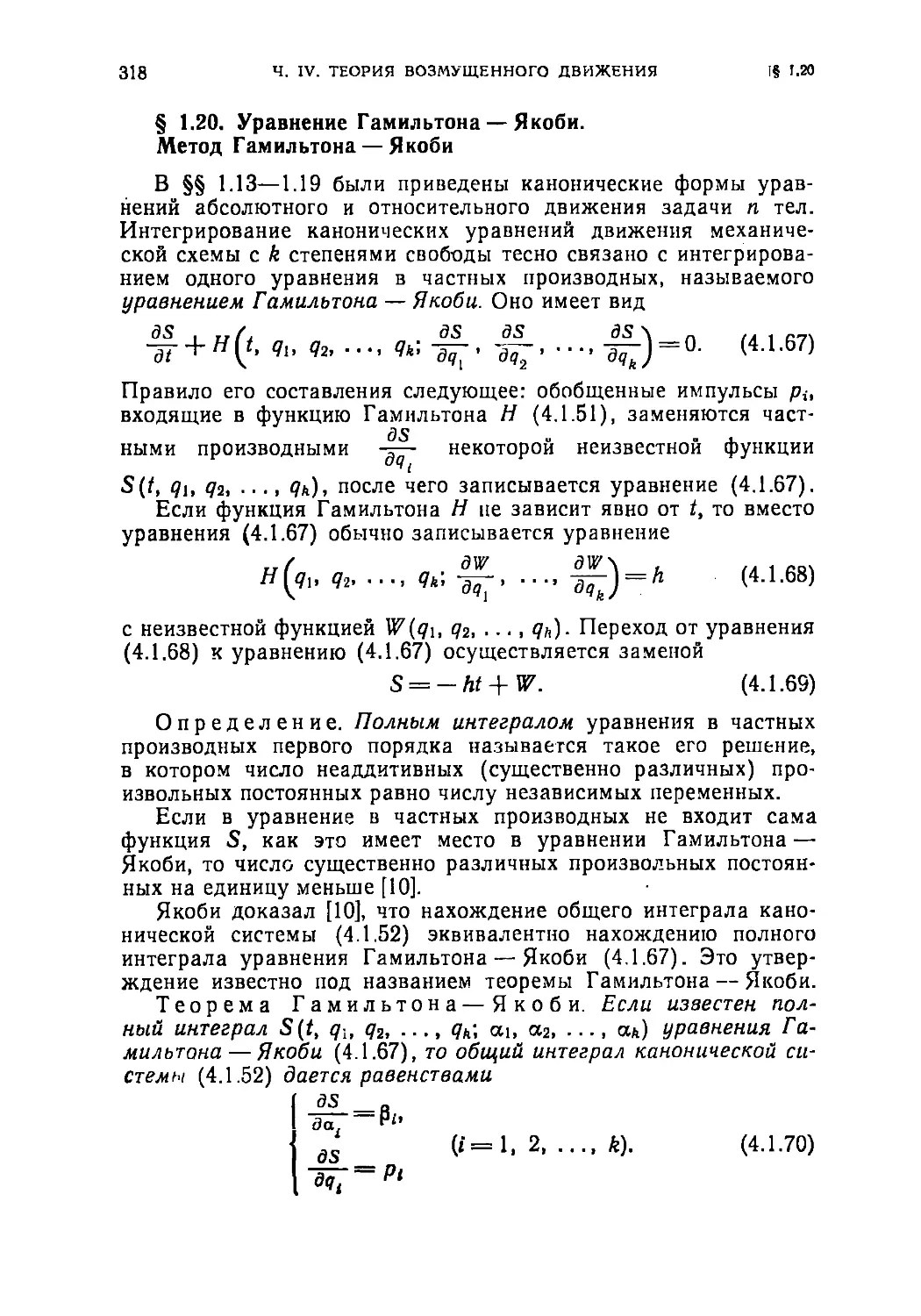
§ 1.20. Уравнение Гамильтона—Якоби. Метод Гамильтона—Якоби 318
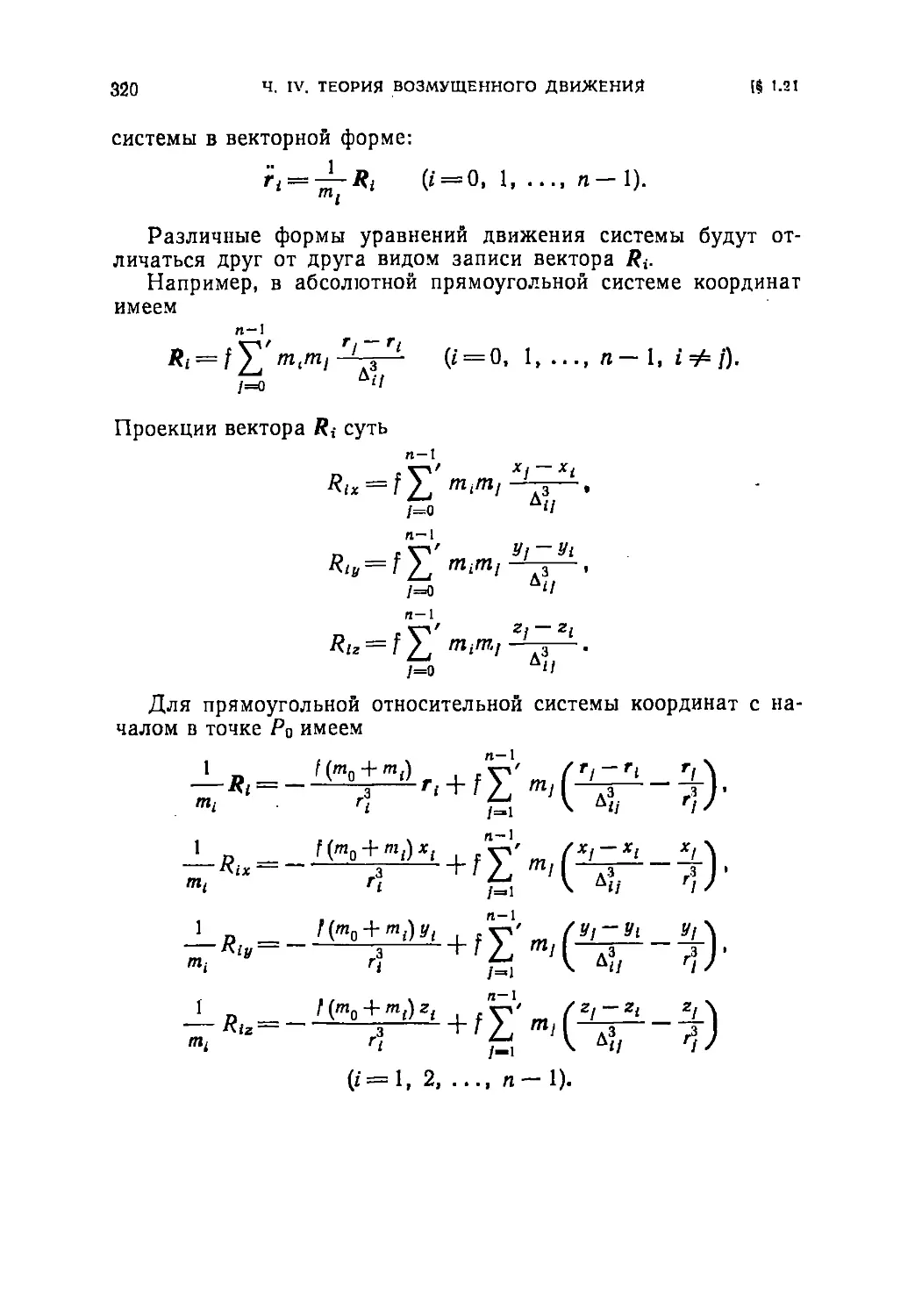
§ 1.21. Уравнения движения системы в векторной форме 319
Глава 2. Дифференциальные уравнения поступательно- 321
вращательного движения небесных тел
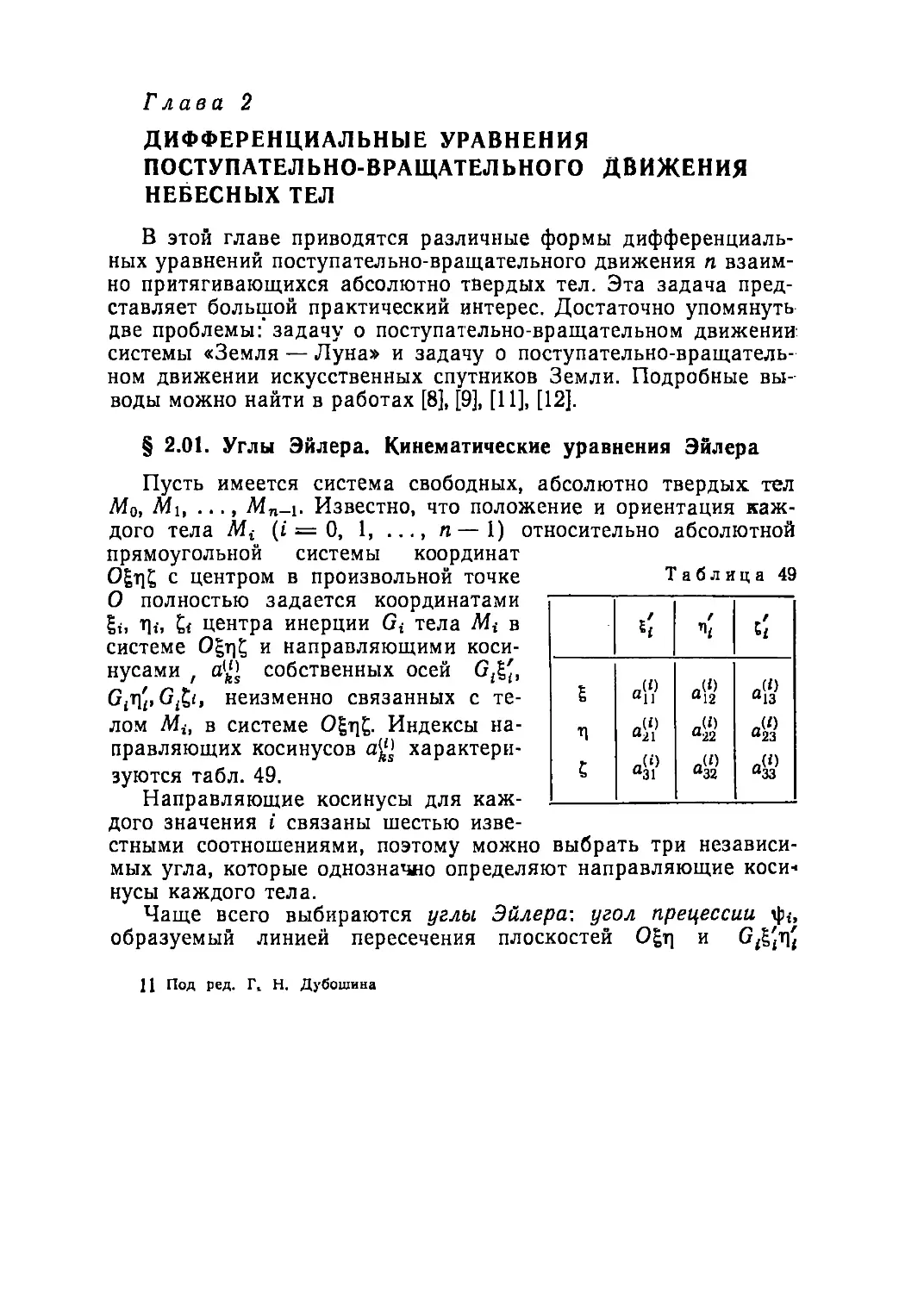
§ 2.01. Углы Эйлера. Кинематические уравнения Эйлера 321
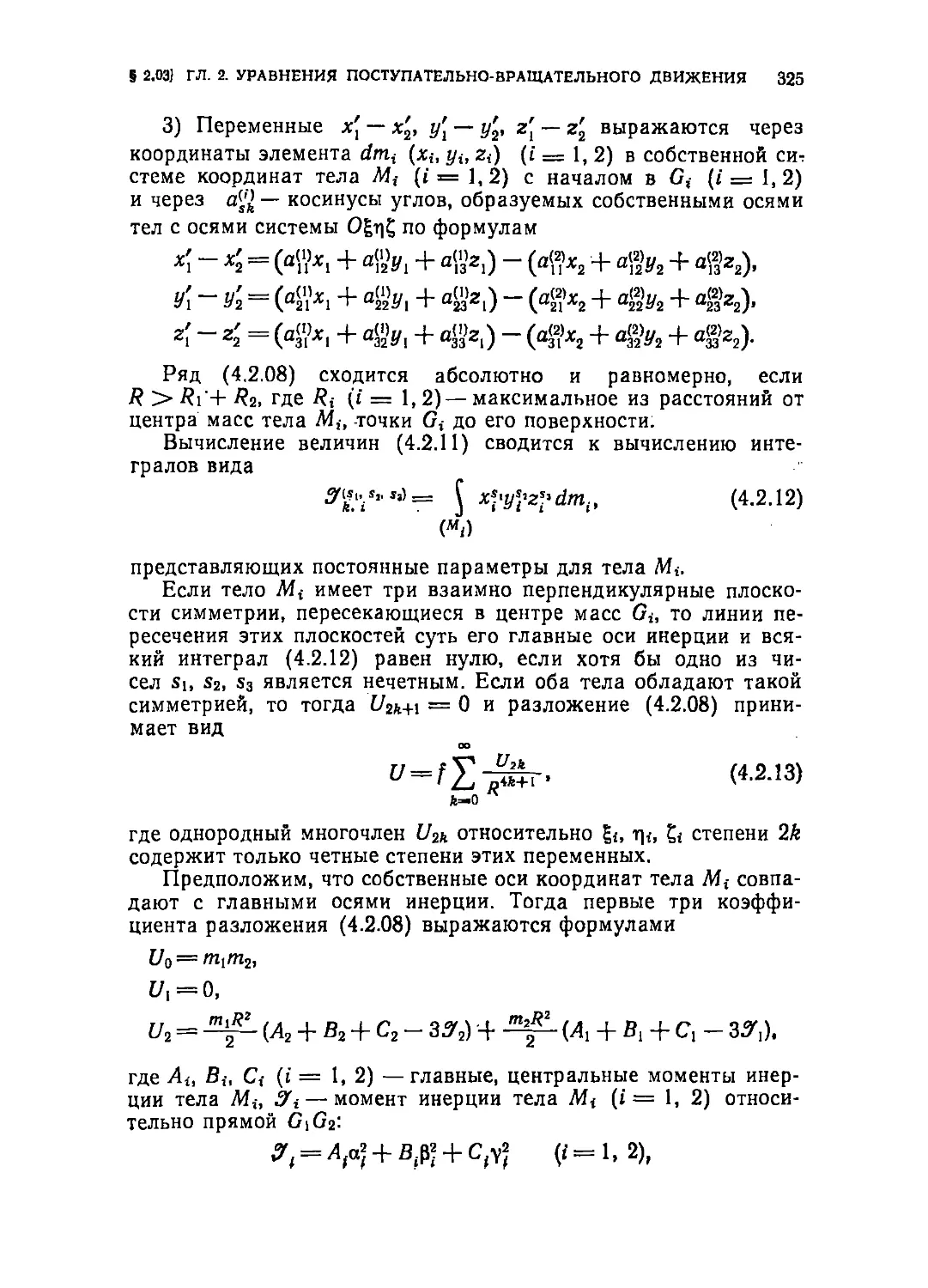
§ 2.02. Силовая функция системы тел 323
§ 2.03. Разложение силовой функции двух тел 324
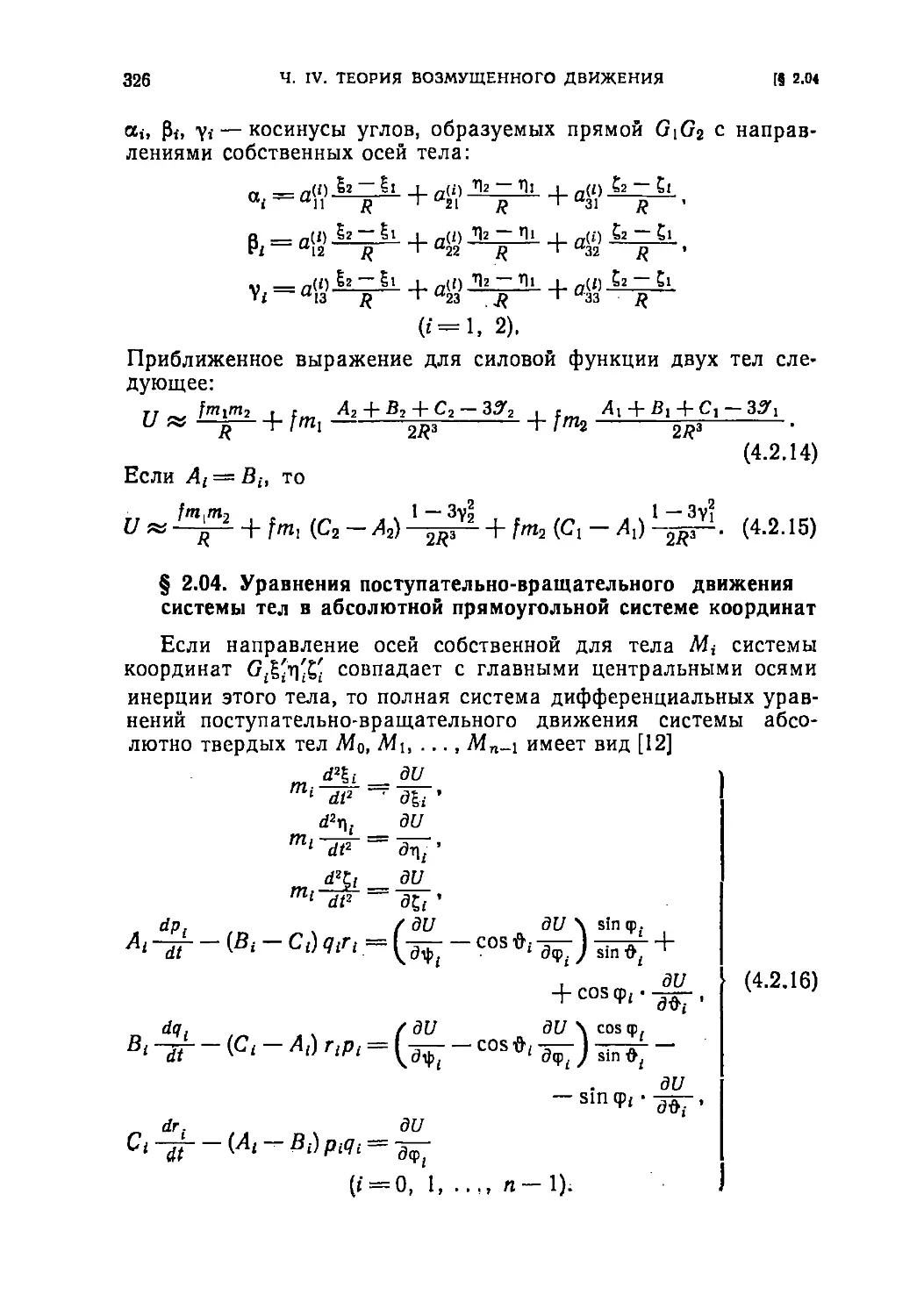
§ 2.04. Уравнения поступательно-вращательного движения системы тел в 326
абсолютной прямоугольной системе координат
§ 2.05. Уравнения поступательно-вращательного движения системы тел в 328
относительной прямоугольной системе координат
§ 2.06. Каноническая форма уравнений поступательно-вращательного 330
движения системы тел
Глава 3. Дифференциальные уравнения возмущенного движения 332
тела для различных систем оскулирующих элементов
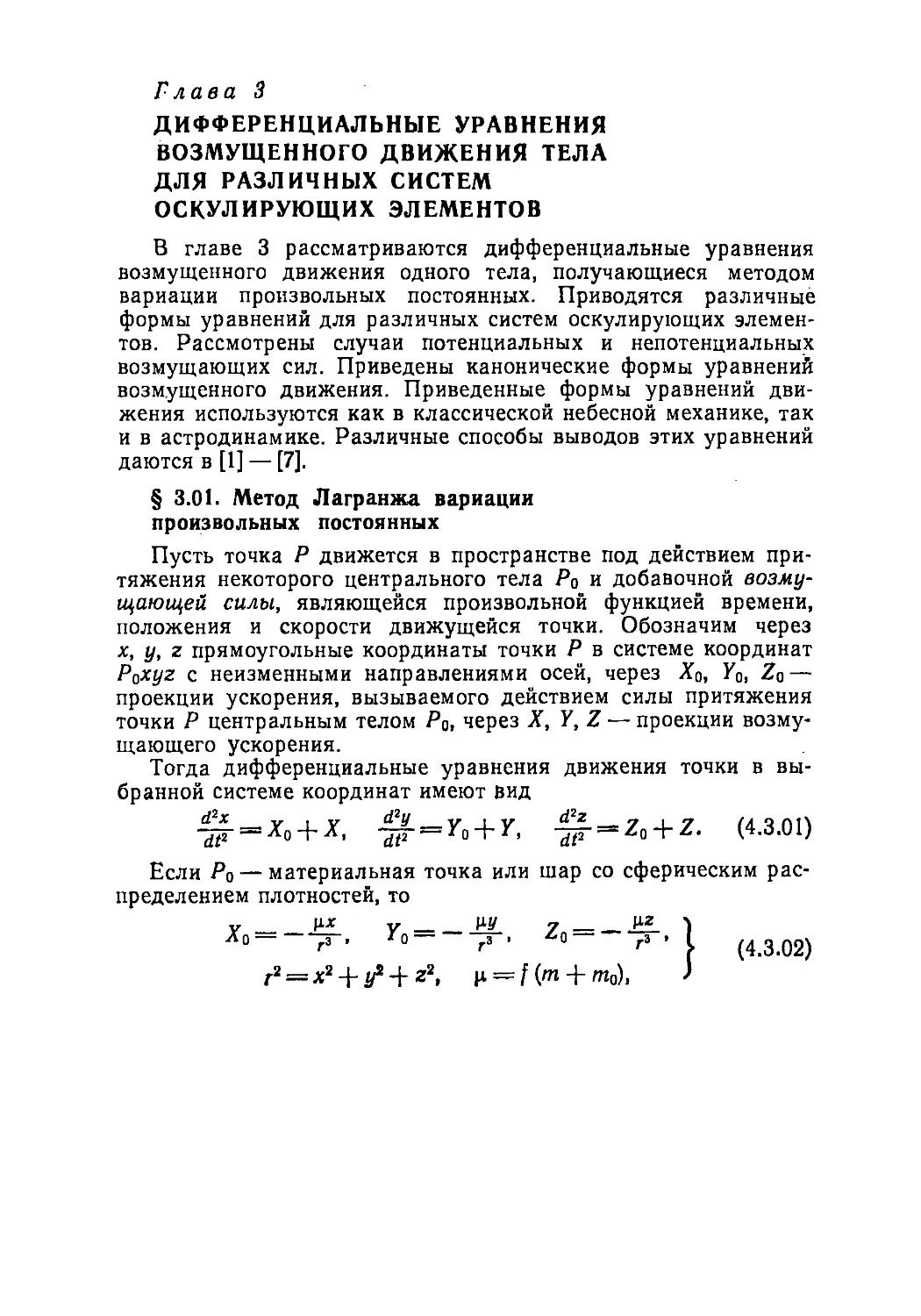
§ 3.01. Метод Лагранжа вариации произвольных постоянных 332
§ 3.02. Уравнения Ньютона для кеплеровских оскулирующих элементов 334
(общий случай)
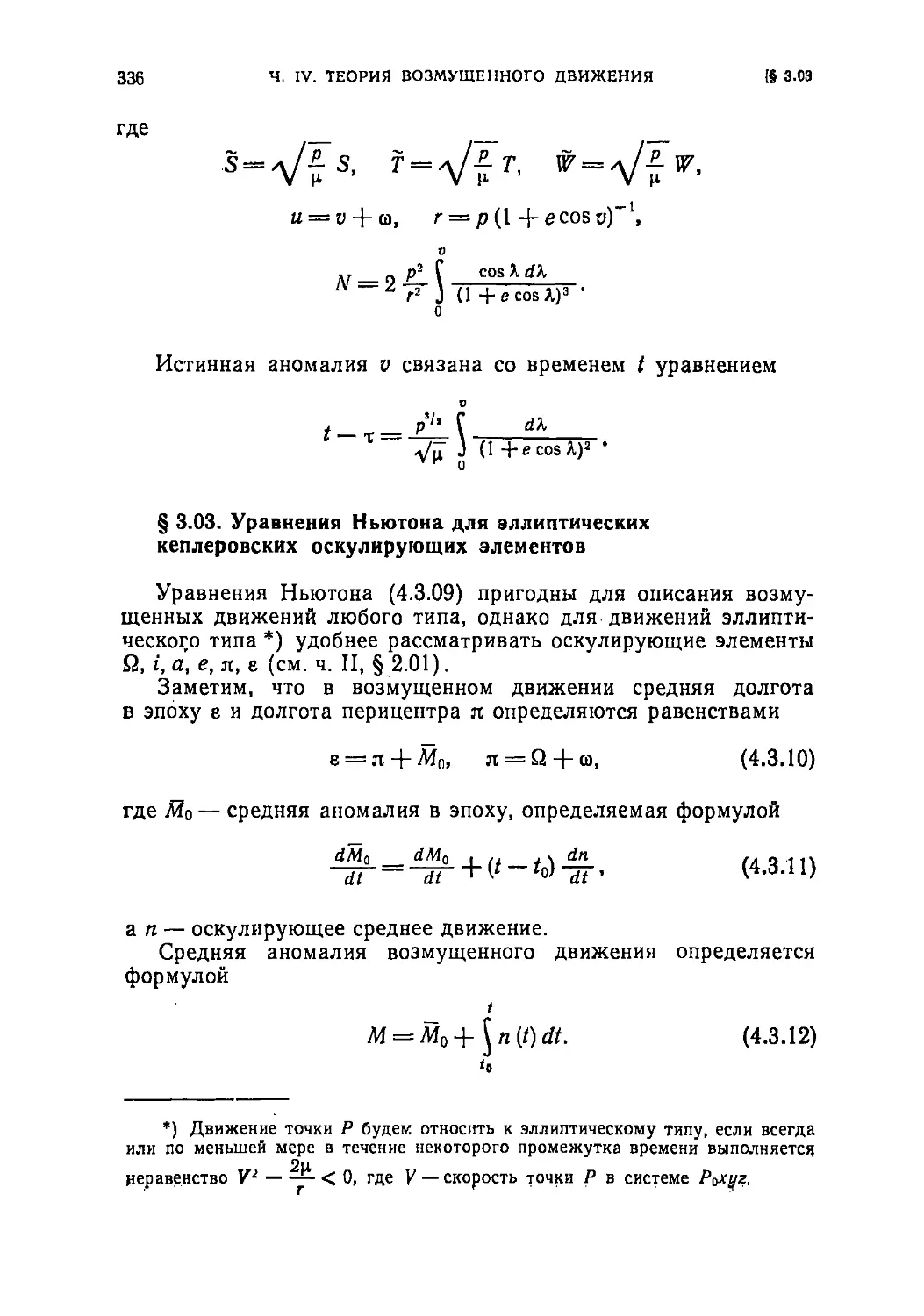
§ 3.03. Уравнения Ньютона для эллиптических кеплеровских 336
оскулирующих элементов
§ 3.04. Уравнения Лагранжа для кеплеровских оскулирующих элементов 337
(общий случай)
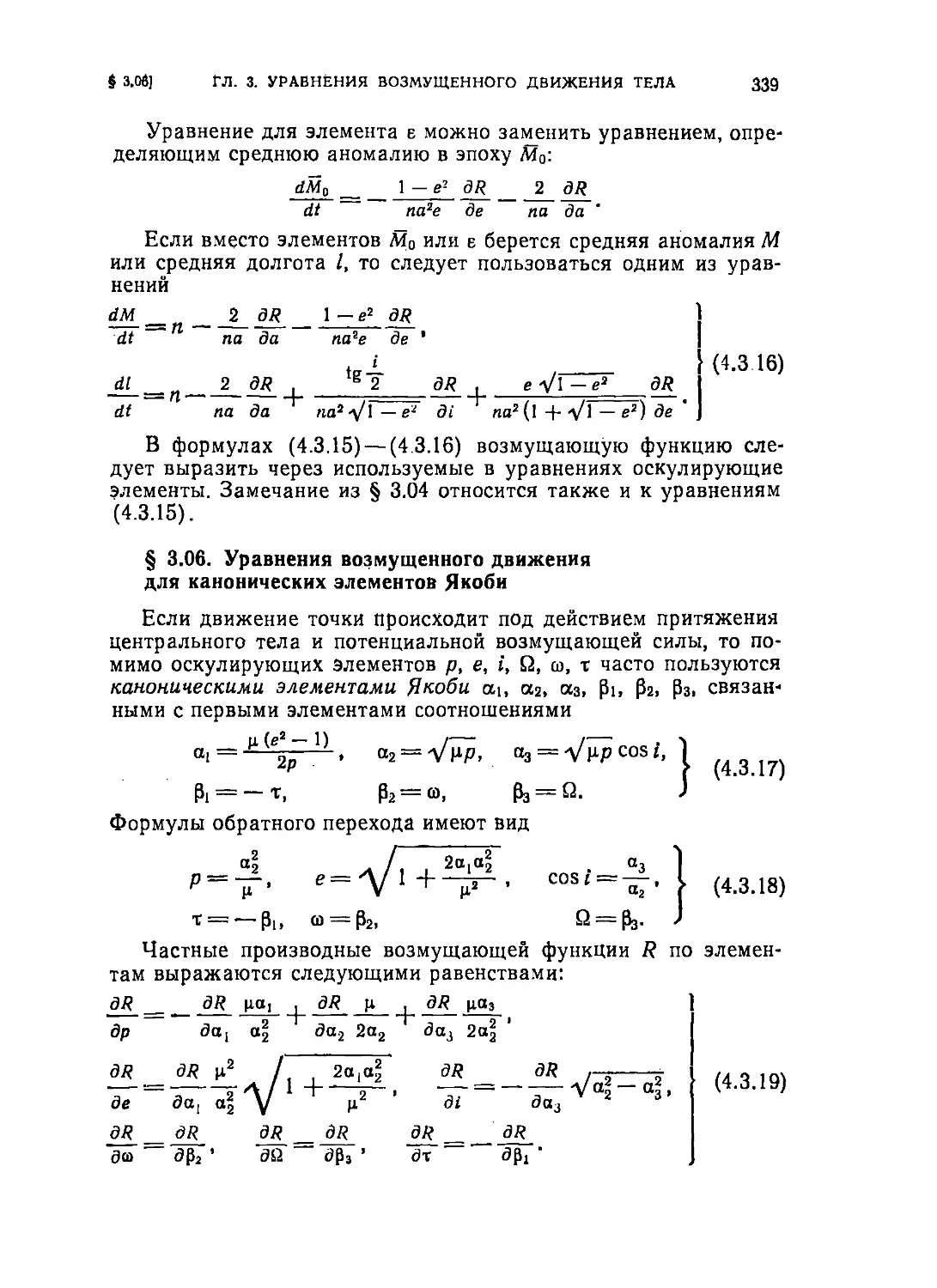
§ 3.05. Уравнения Лагранжа для эллиптических кеплеровских 338
оскулирующих элементов
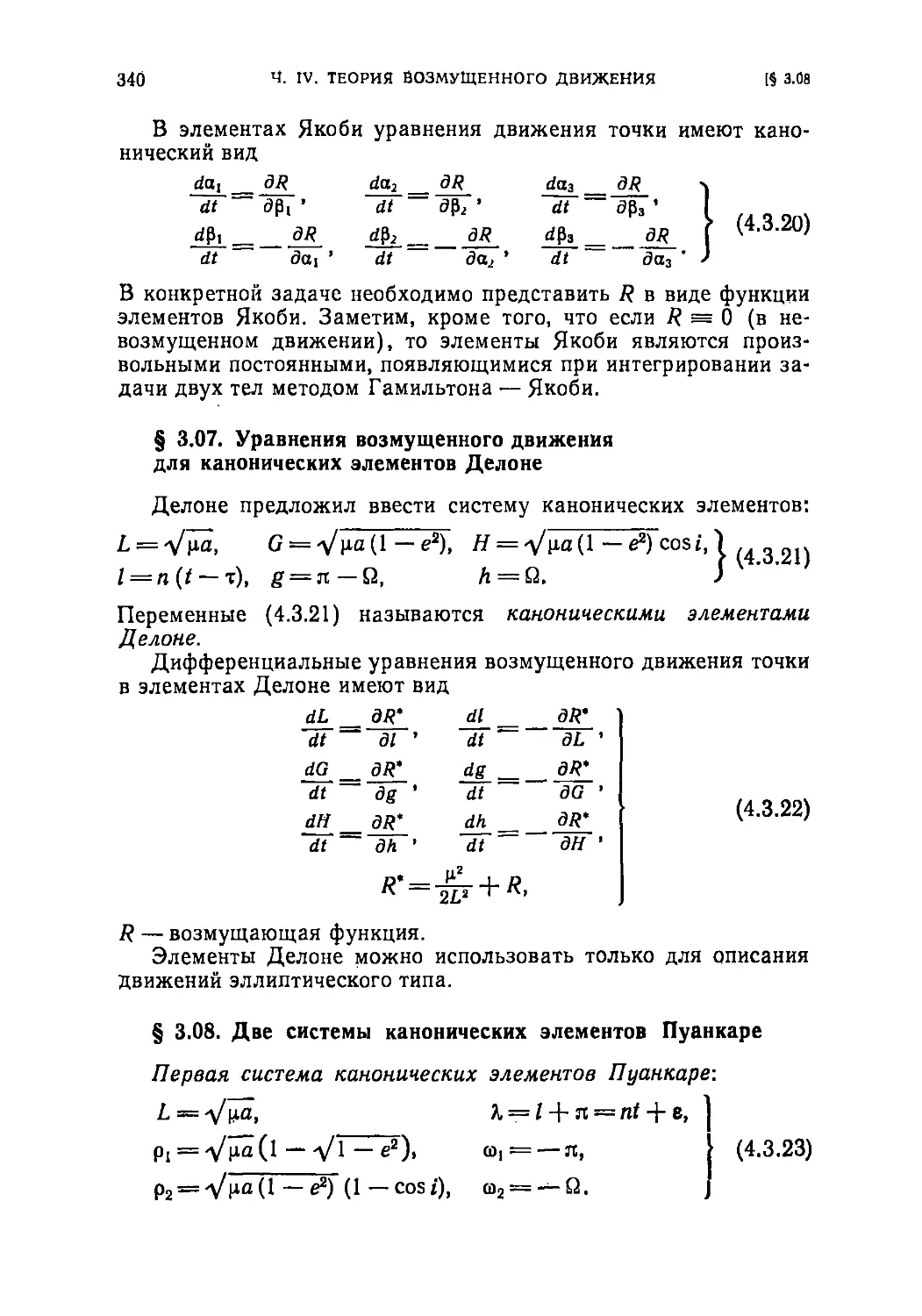
§ 3.06. Уравнения возмущенного движения для канонических элементов 339
Якоби
§ 3.07. Уравнения возмущенного движения для канонических элементов 340
Делоне
§ 3.08. Две системы канонических элементов Пуанкаре 340
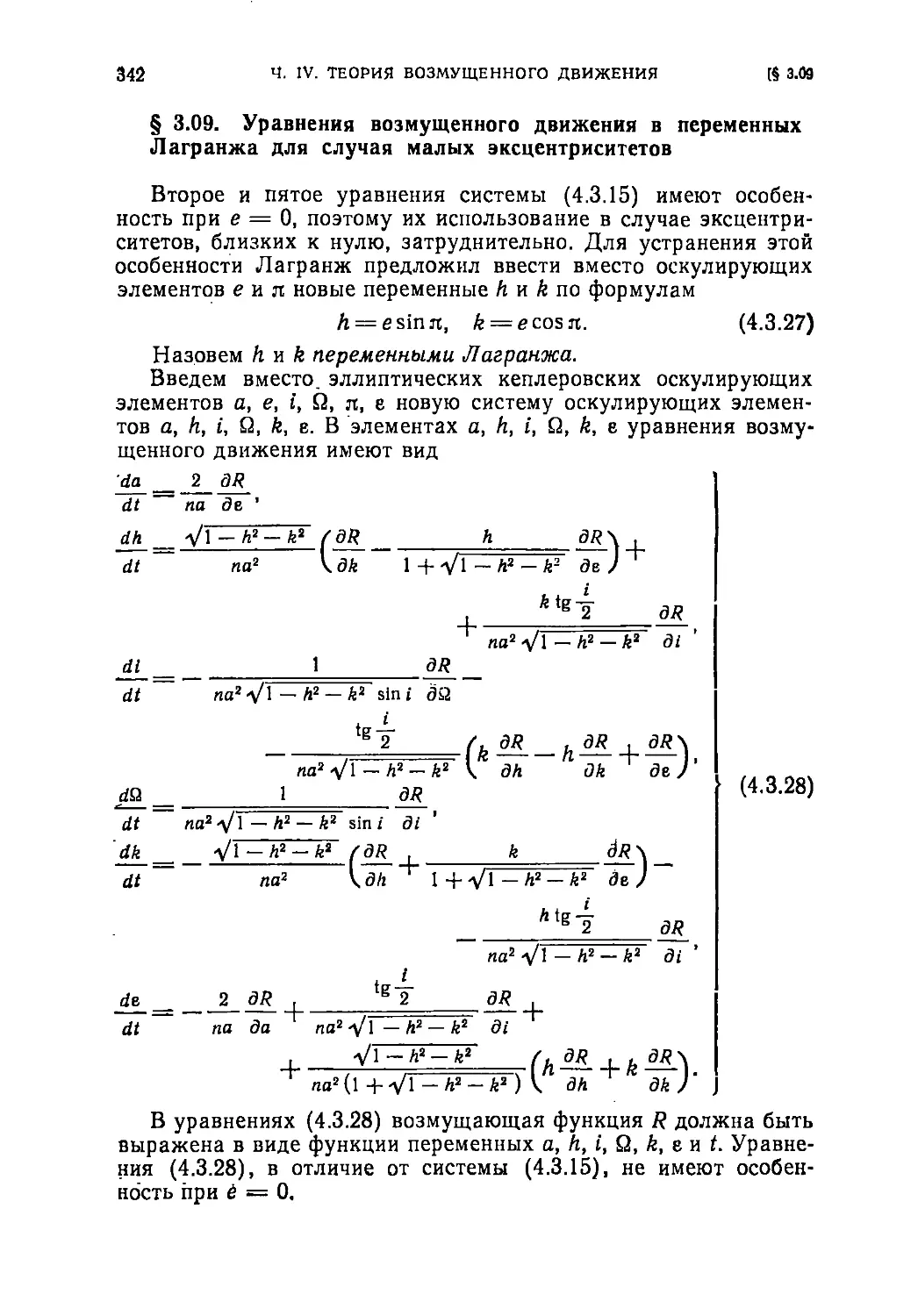
§ 3.09. Уравнения возмущенного движения в переменных Лагранжа для 342
случая малых эксцентриситетов
§ 3.10. Уравнения в переменных Лагранжа для случая малых наклонов 343
§ 3.11. Уравнения возмущенного движения в переменных Лагранжа 344
(общий случай)
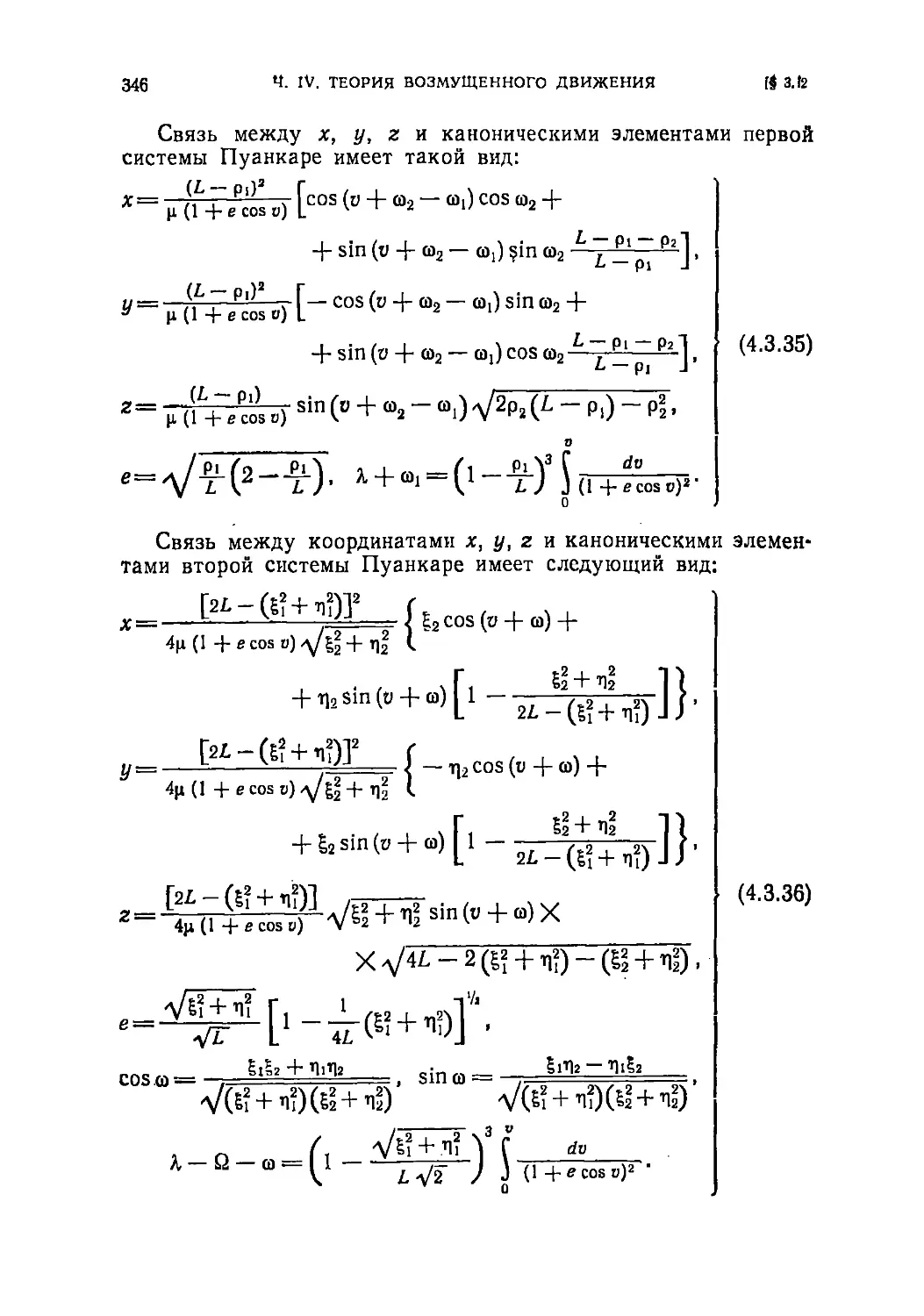
§ 3.12. Связь между прямоугольными координатами движущейся точки и 345
различными системами канонических элементов
Глава 4. Дифференциальные уравнения возмущенного движения 347
задачи п тел для различных систем оскулирующих элементов
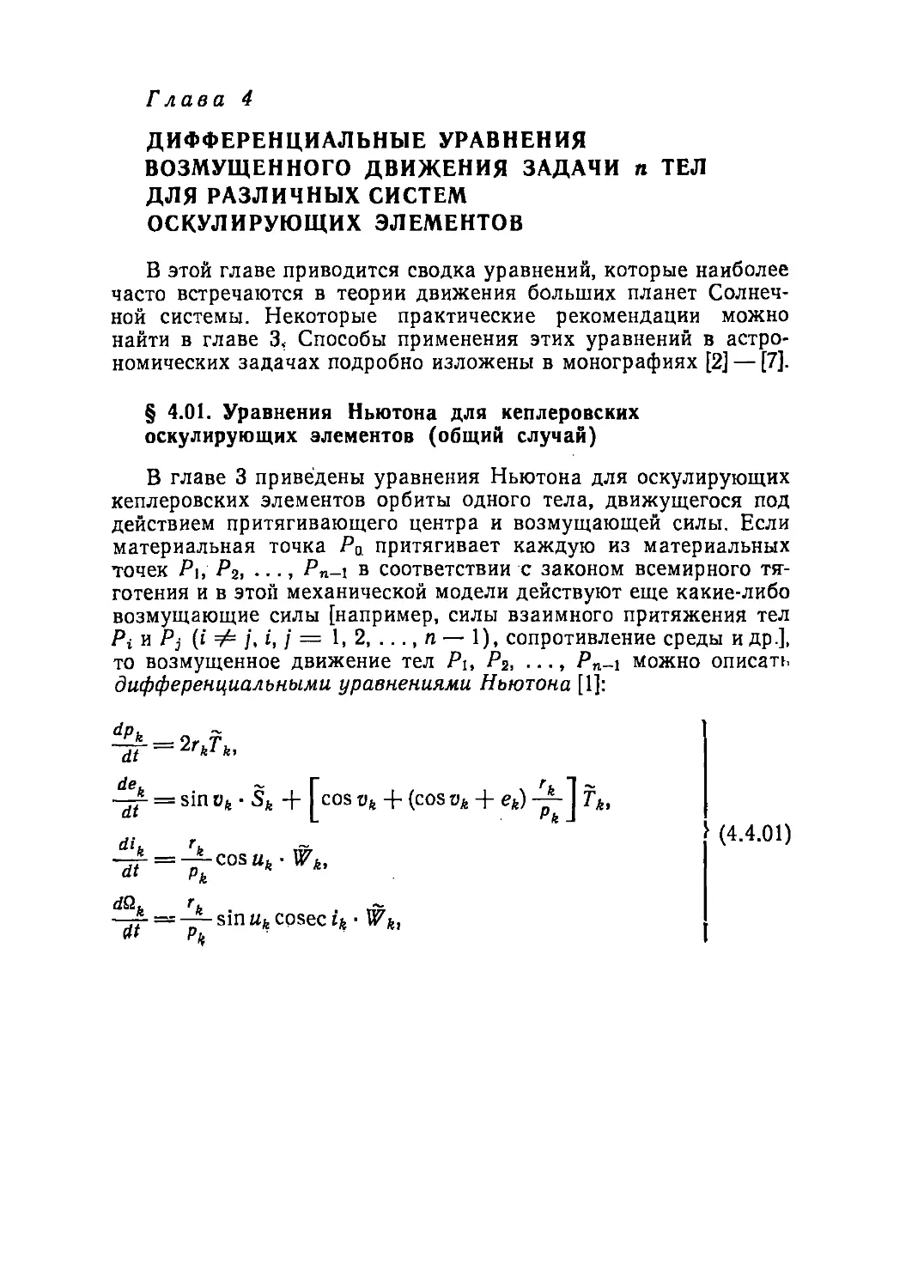
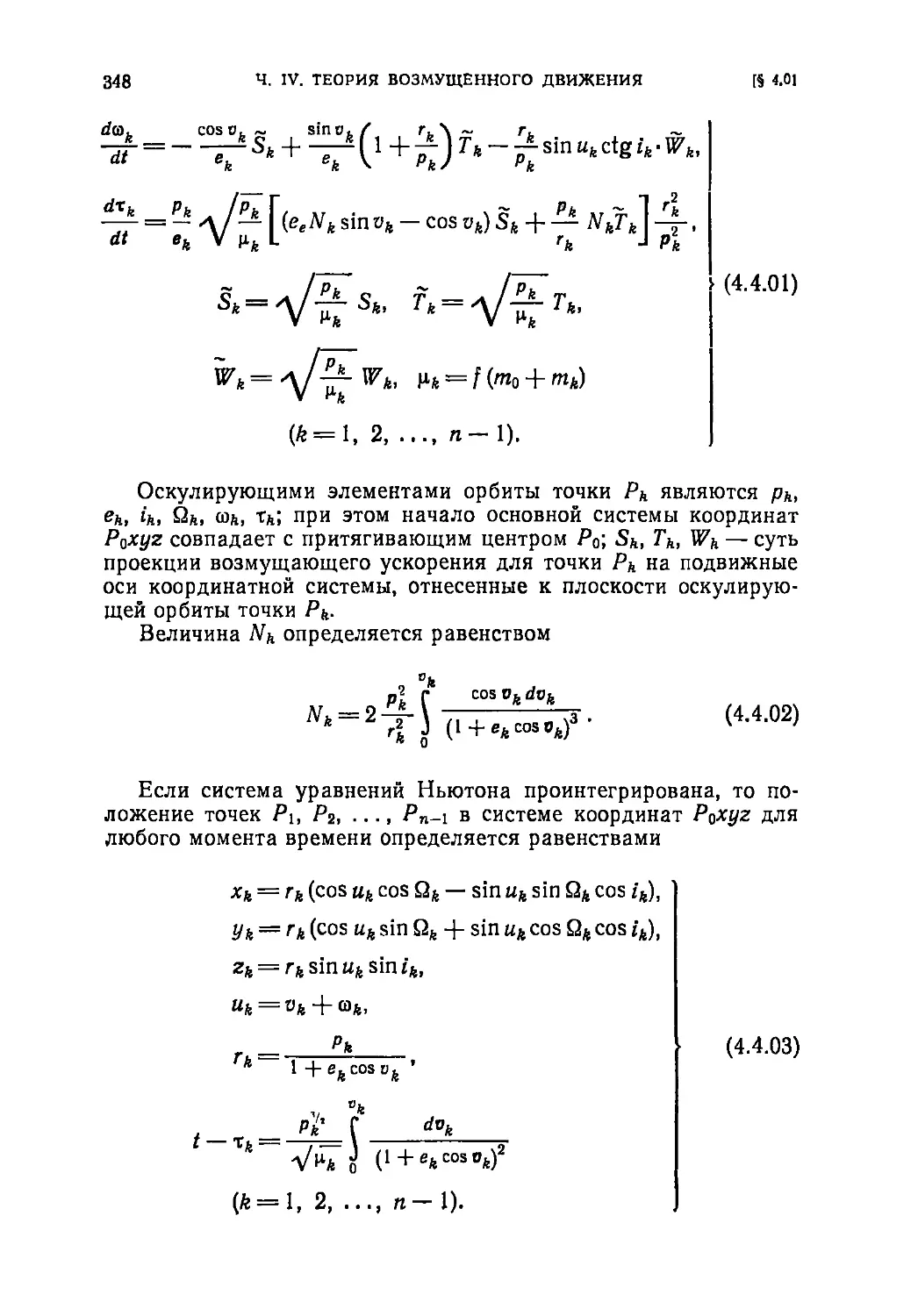
§ 4.01. Уравнения Ньютона для кемеровских оскулирующих элементов 347
(общий случай)
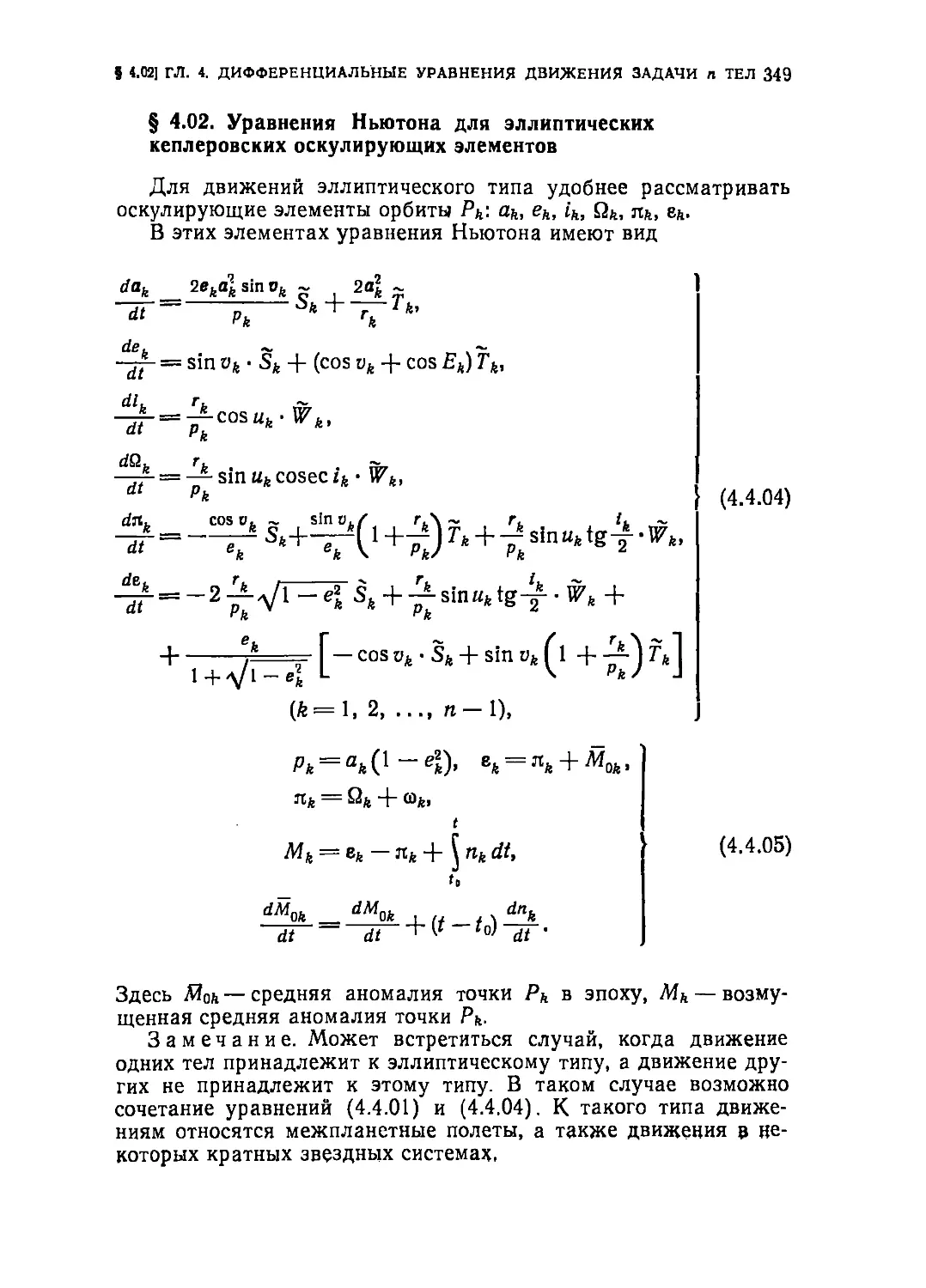
§ 4.02. Уравнения Ньютона для эллиптических кемеровских 349
оскулирующих элементов
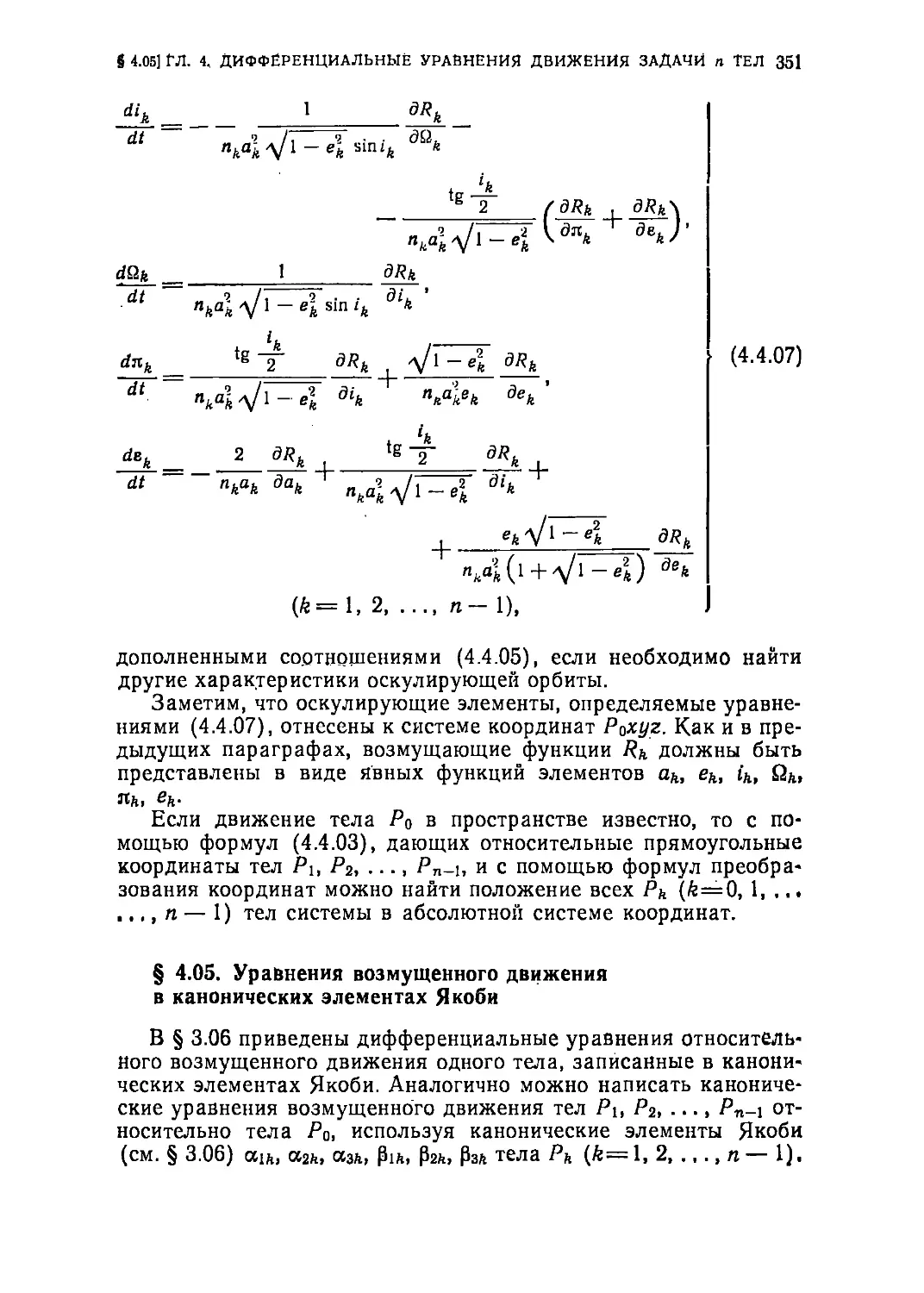
§ 4.03. Уравнения Лагранжа для кемеровских оскулирующих элементов 350
(общий случай)
§ 4.04. Уравнения Лагранжа для эллиптических кеплеровских 350
оскулирующих элементов
§ 4.05. Уравнения возмущенного движения в канонических элементах 351
Якоби
§ 4.06. Уравнения возмущенного движения в канонических элементах 353
Делоне
§ 4.07. Две системы канонических элементов Пуанкаре 353
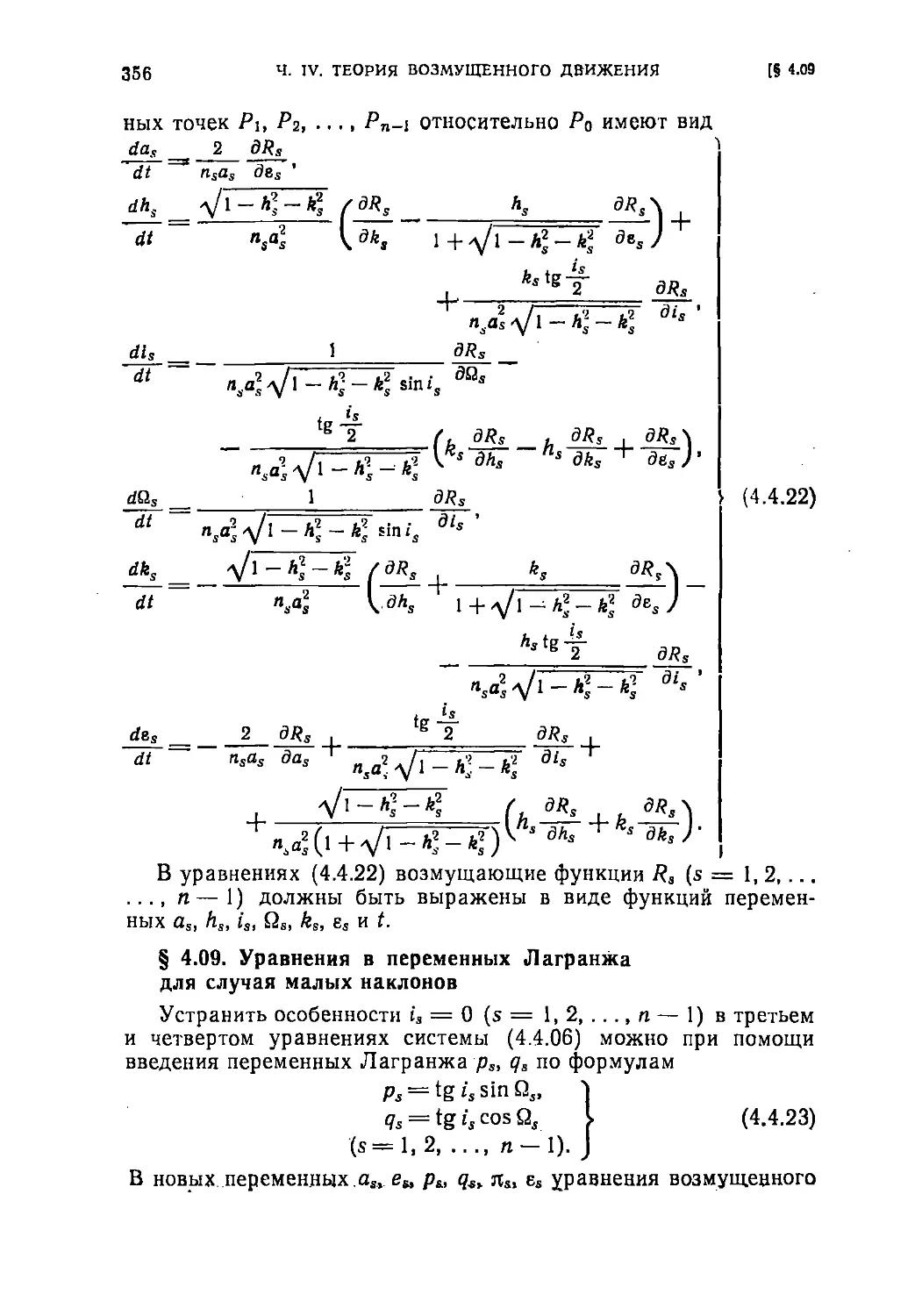
§ 4.08. Уравнения возмущенного движения в переменных Лагранжа для 355
случая малых эксцентриситетов
§ 4.09. Уравнения в переменных Лагранжа для случая малых наклонов 356
§ 4.10. Уравнения возмущенного движения в переменных Лагранжа 357
(общий случай)
Глава 5. Специальные функции 359
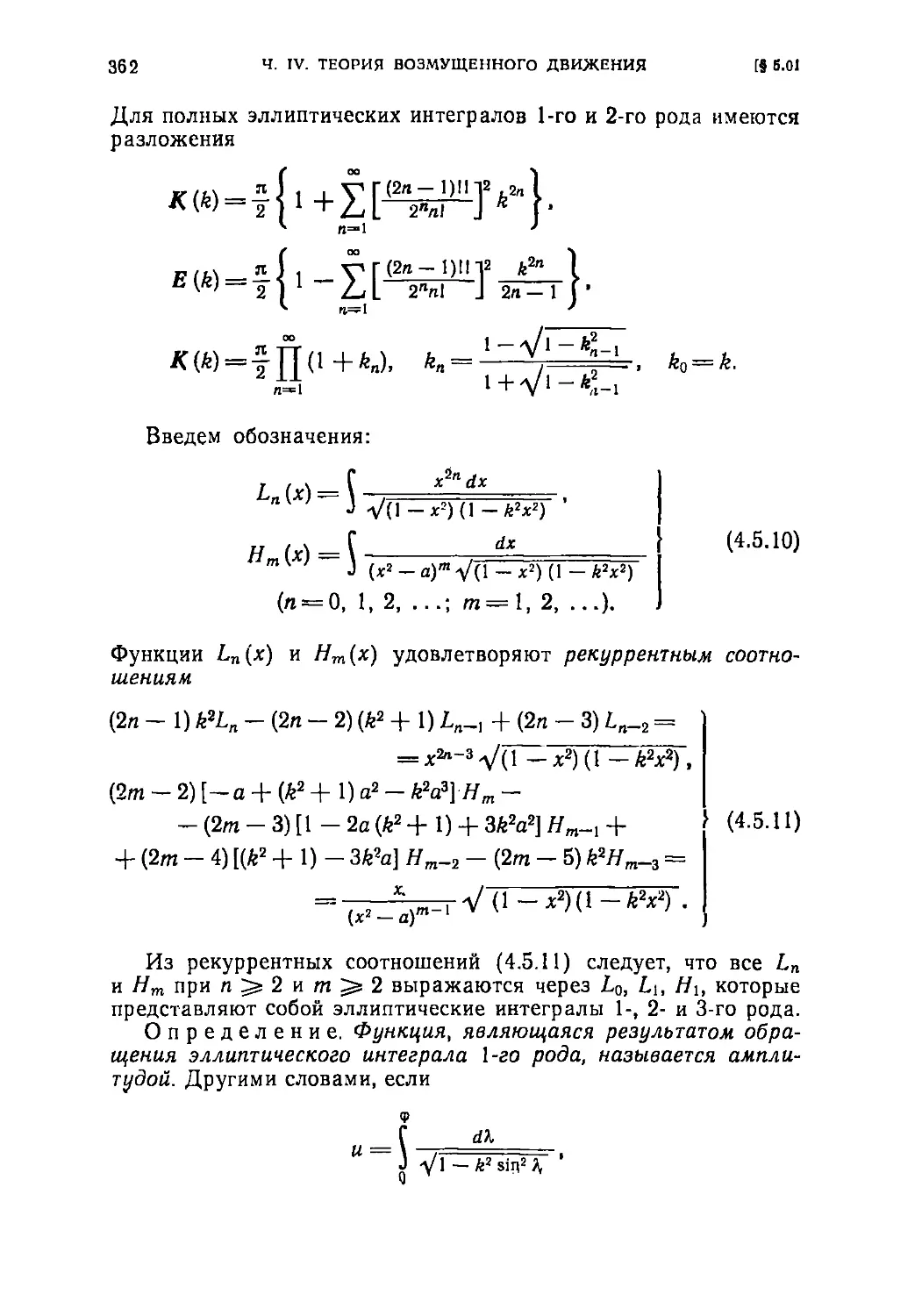
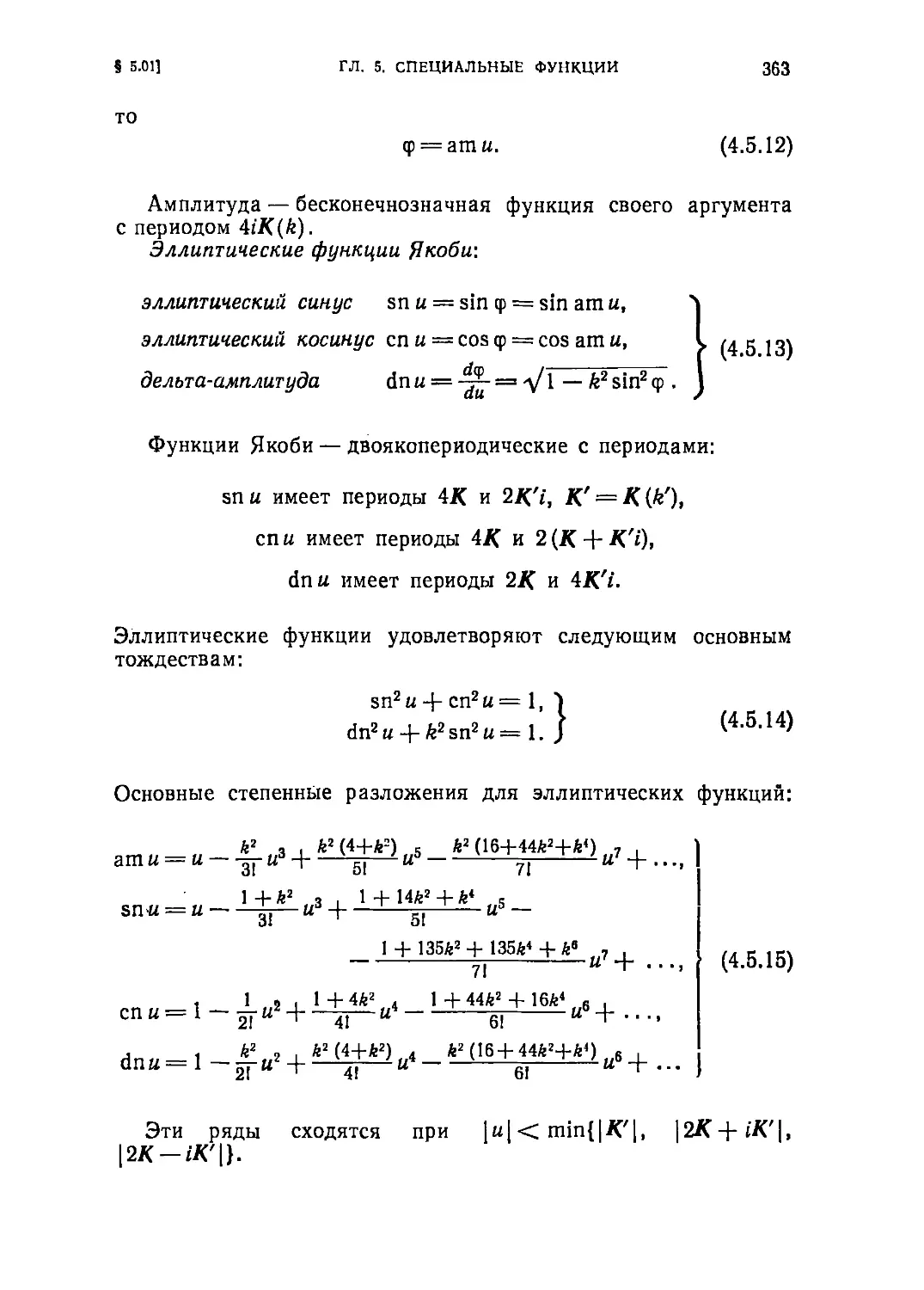
§ 5.01. Эллиптические интегралы и эллиптические функции 359
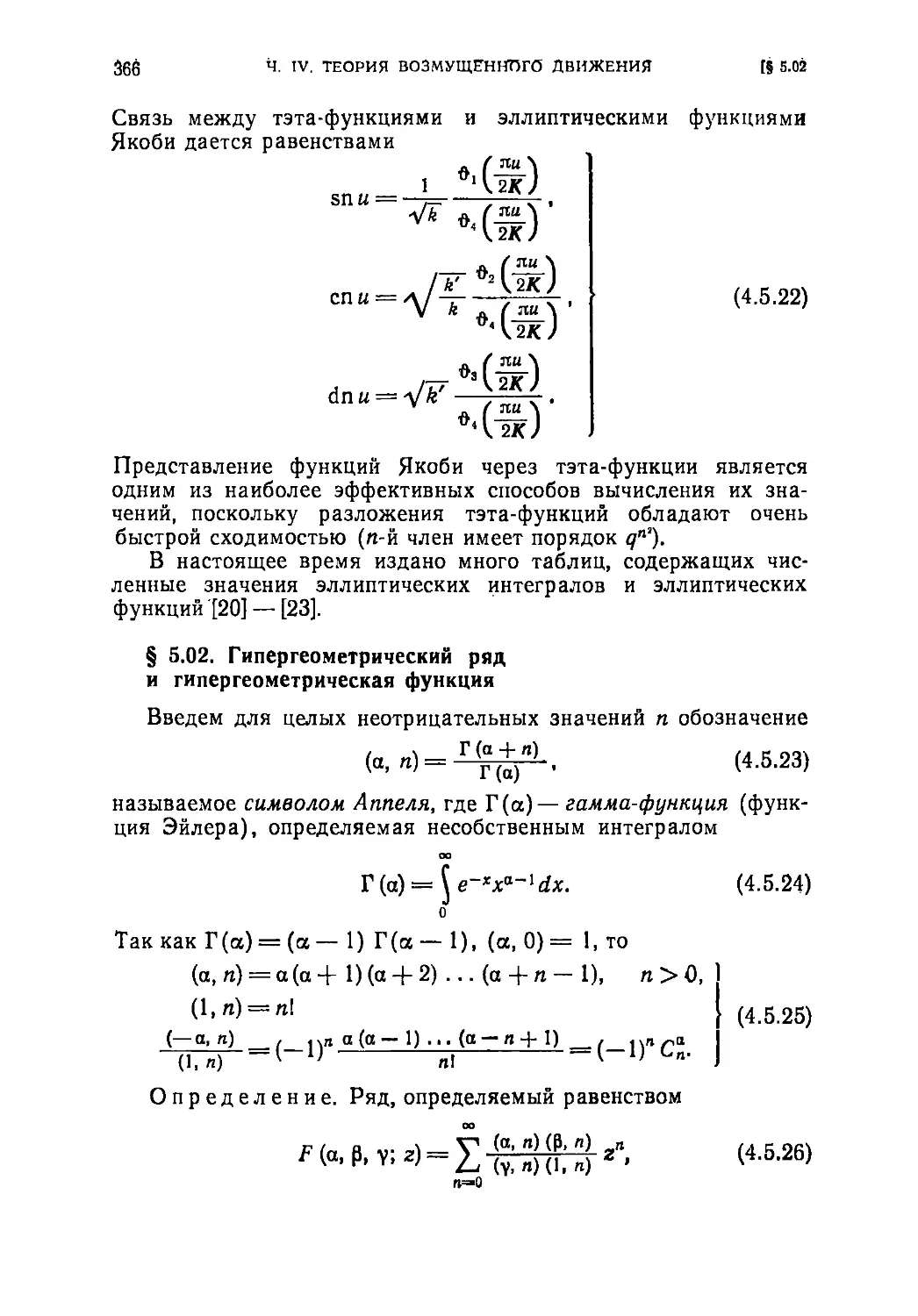
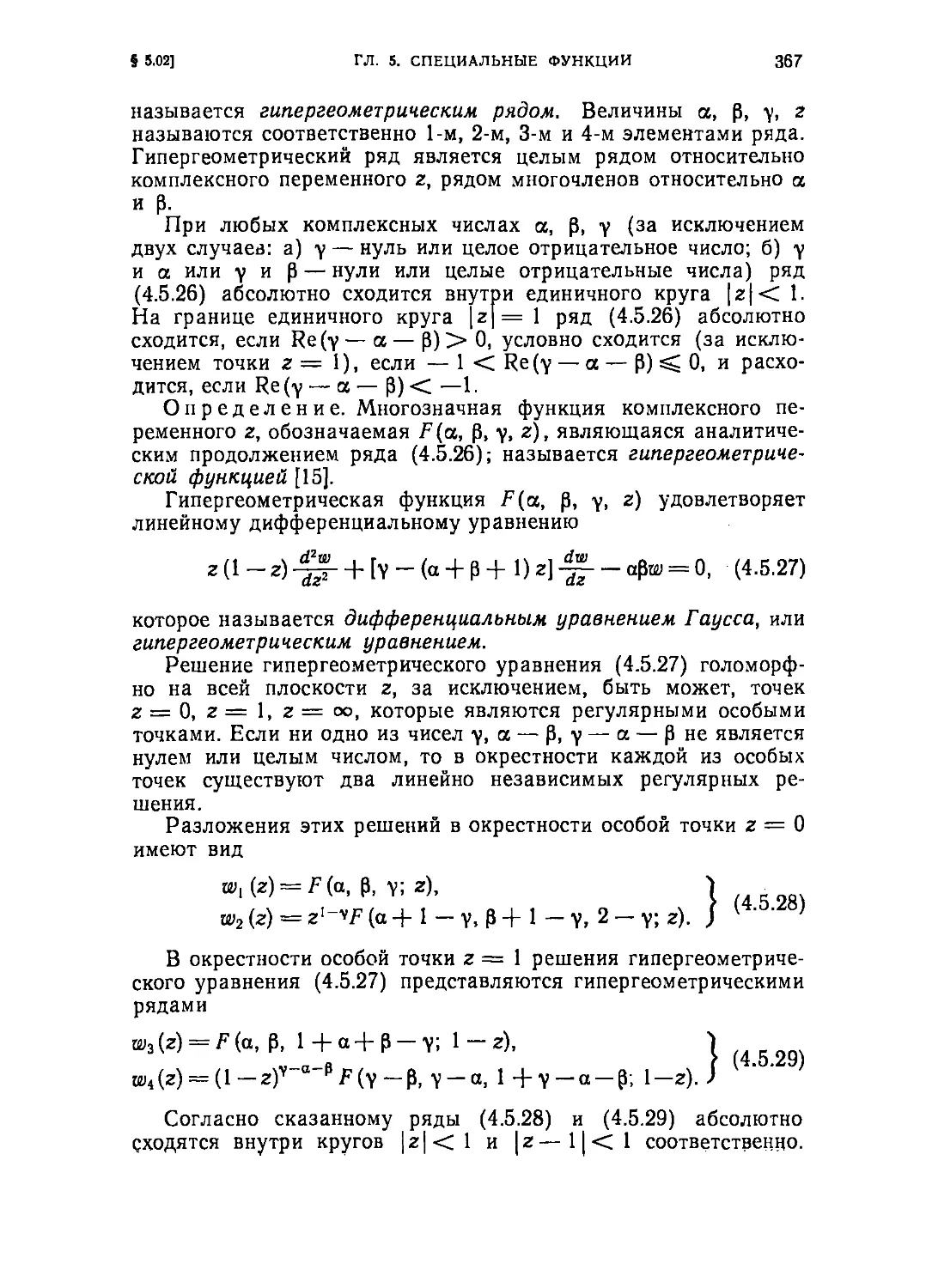
§ 5.02. Гипергеометрический ряд и гипергеометрическая функция 366
§ 5.03. Полиномы Лежандра. Функции Лежандра 368
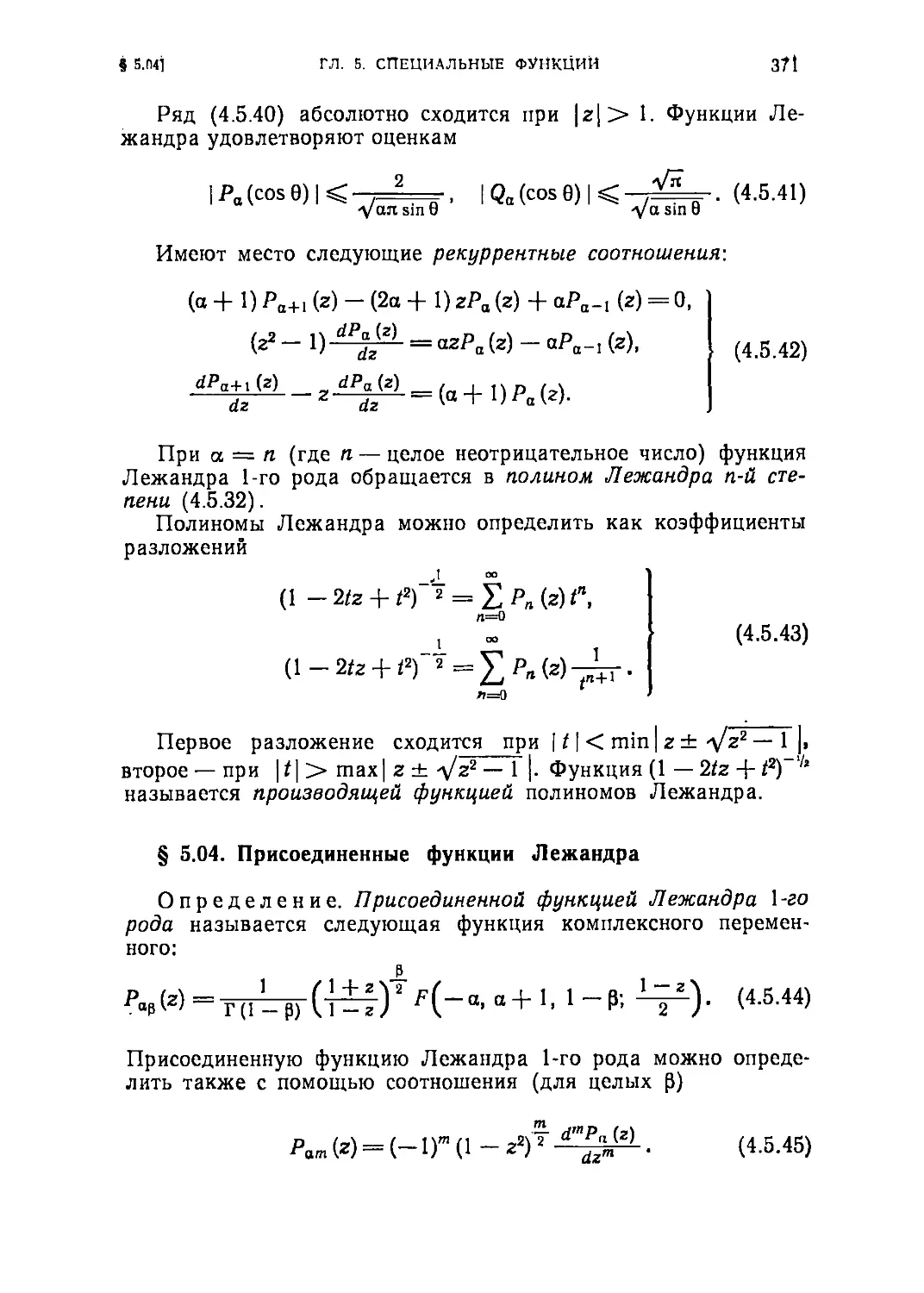
§ 5.04. Присоединенные функции Лежандра 371
§ 5.05. Сферические функции 373
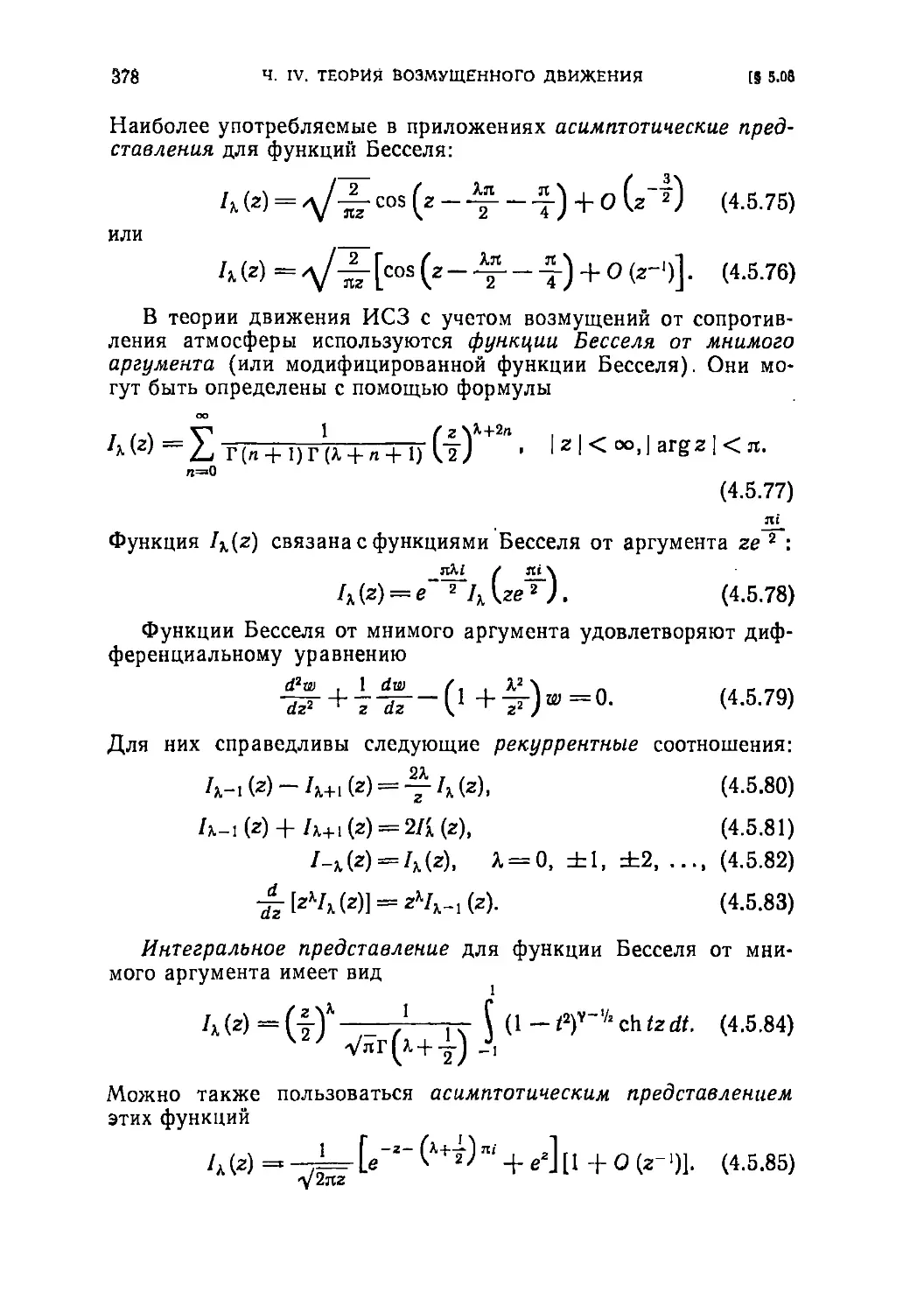
§ 5.06. Цилиндрические функции. Функции Бесселя 375
§ 5.07. Функции Ламе 379
§ 5.08. Полиномы Гегенбауэра. Коэффициенты Лапласа 380
§ 5.09. Числа Коши 384
Глава 6. Разложение возмущающей функции 385
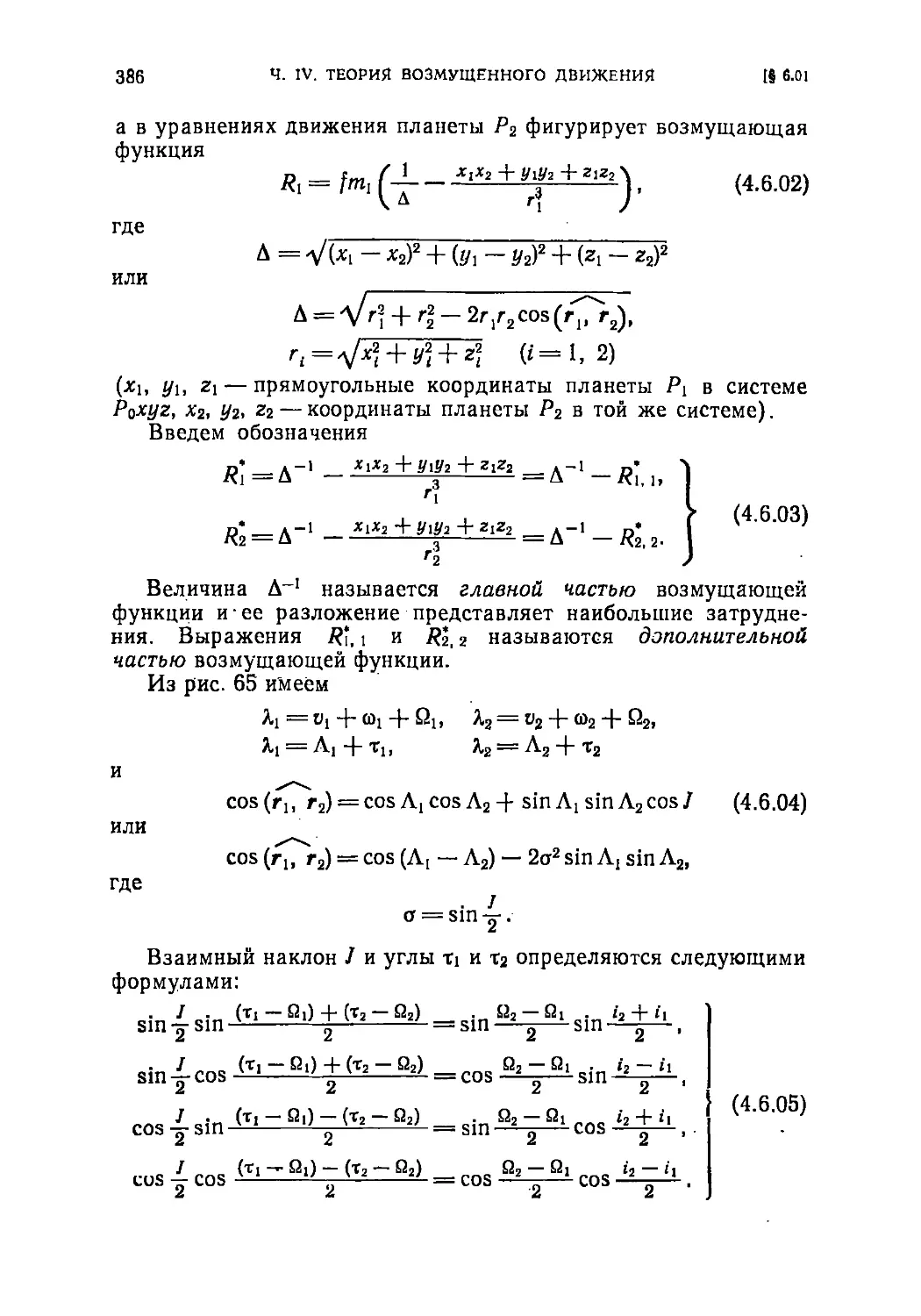
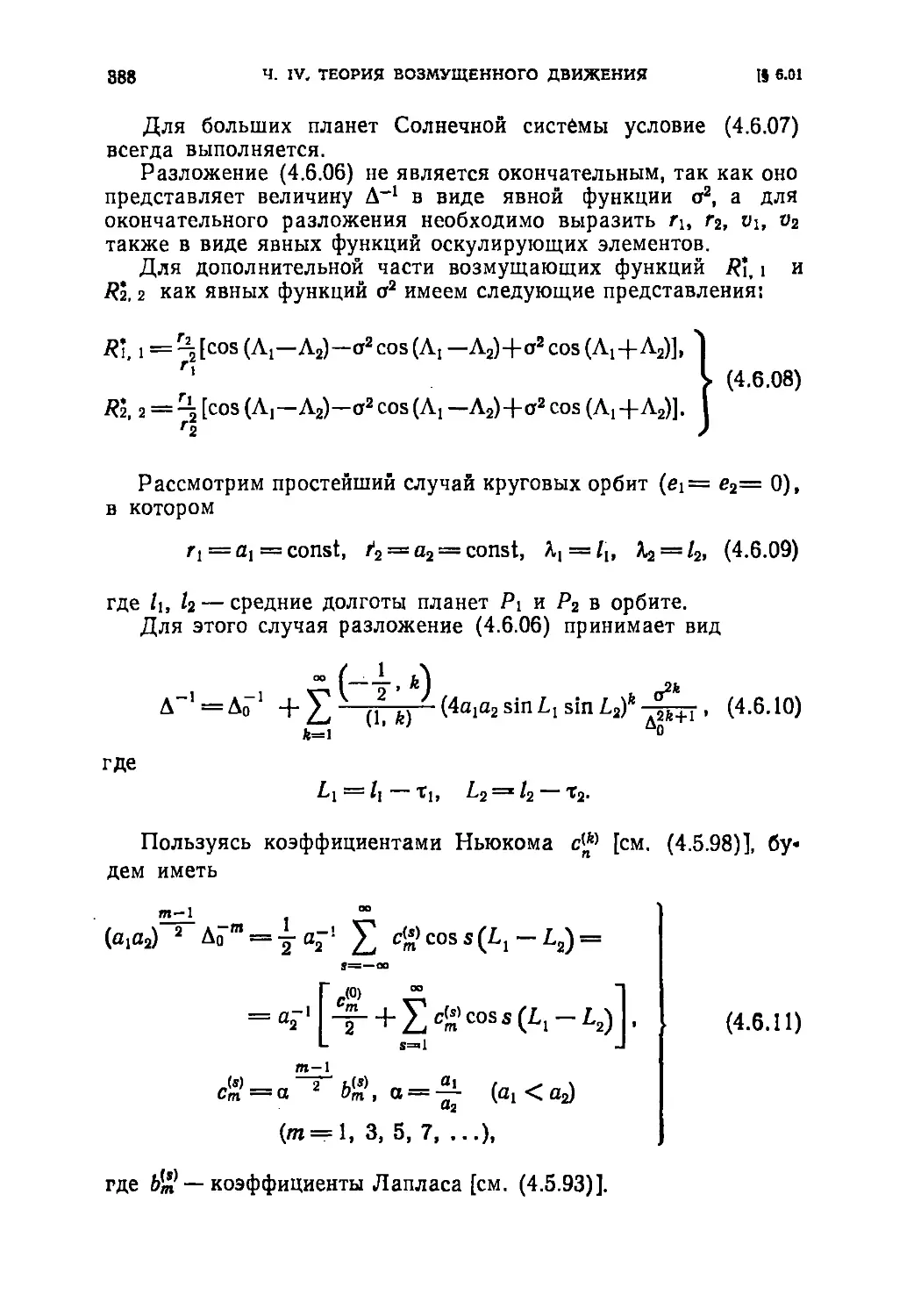
§ 6.01. Разложение возмущающей функции в задаче о движении двух 385
планет (случай круговых орбит)
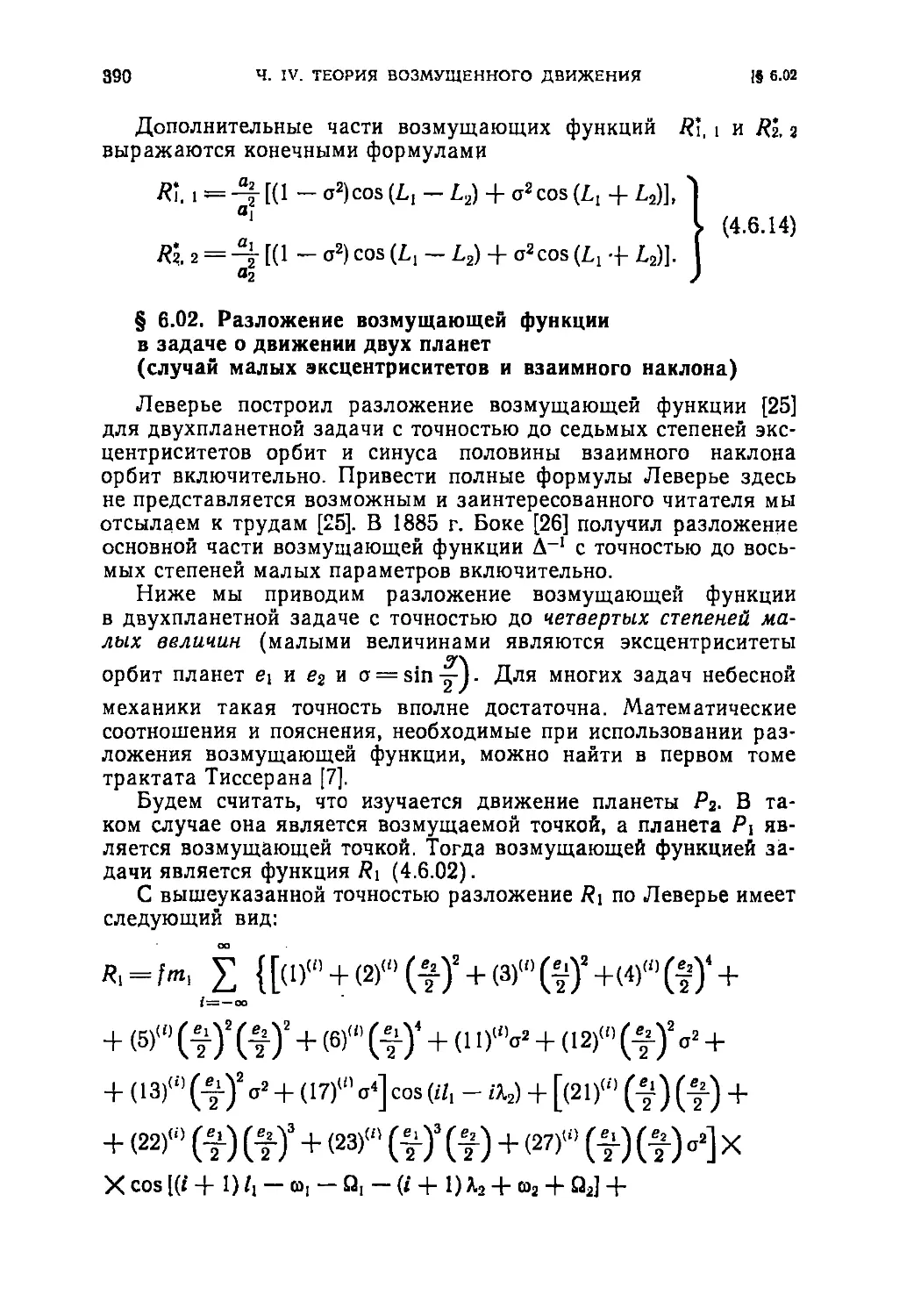
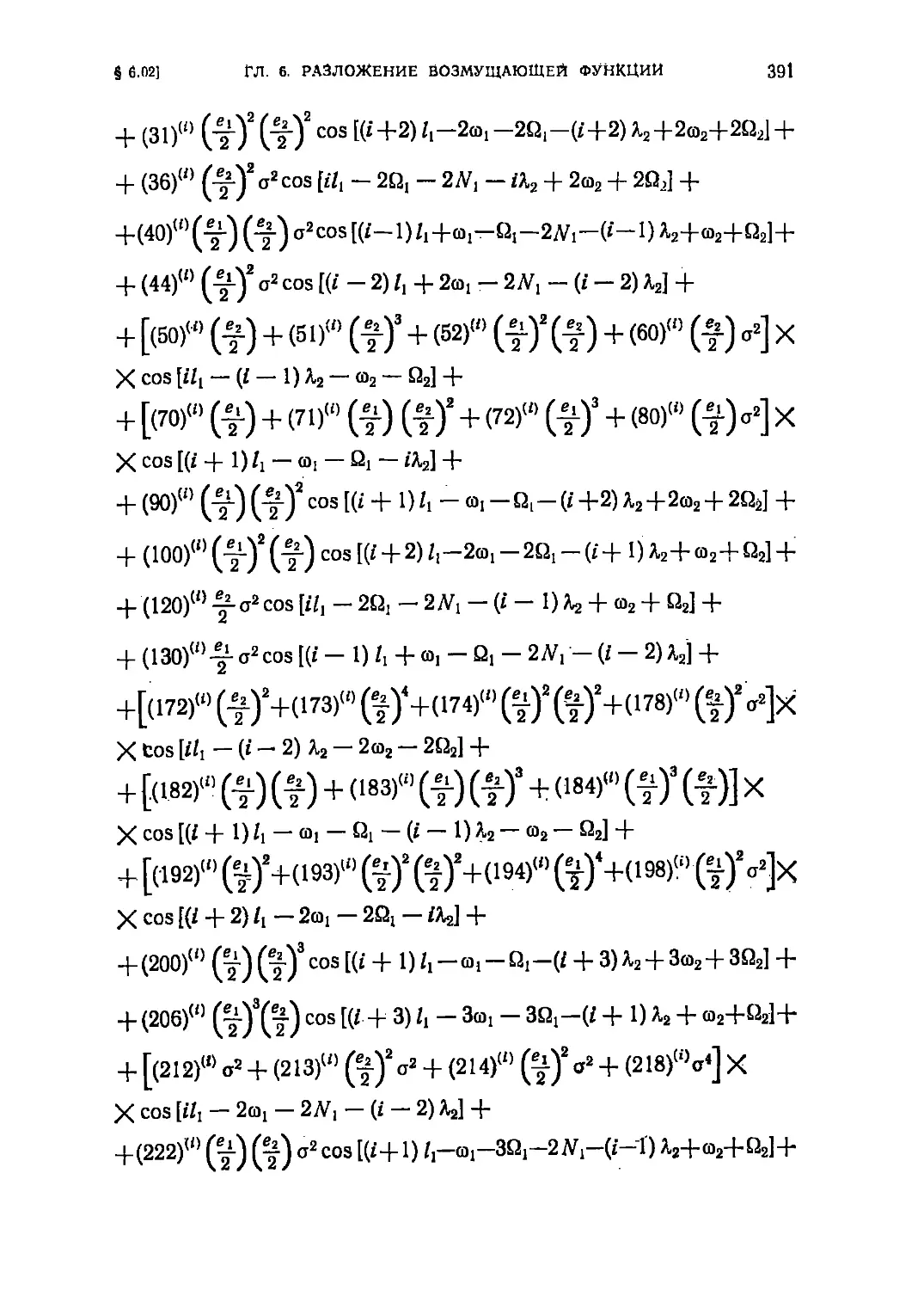
§ 6.02. Разложение возмущающей функции в задаче о движении двух 390
планет (случай малых эксцентриситетов и взаимного наклона)
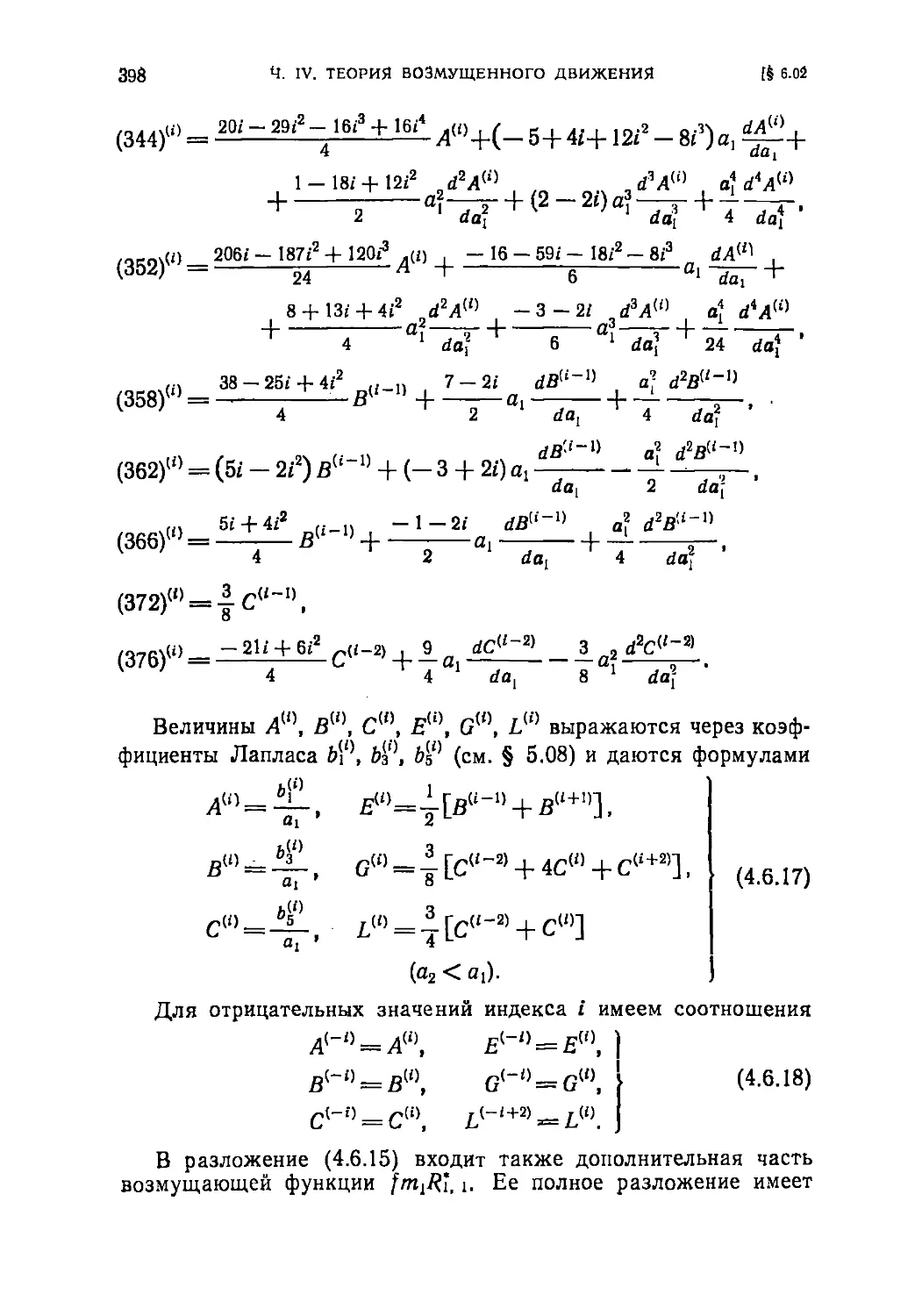
§ 6.03. Разложение возмущающей функции в случае произвольного 400
взаимного наклона
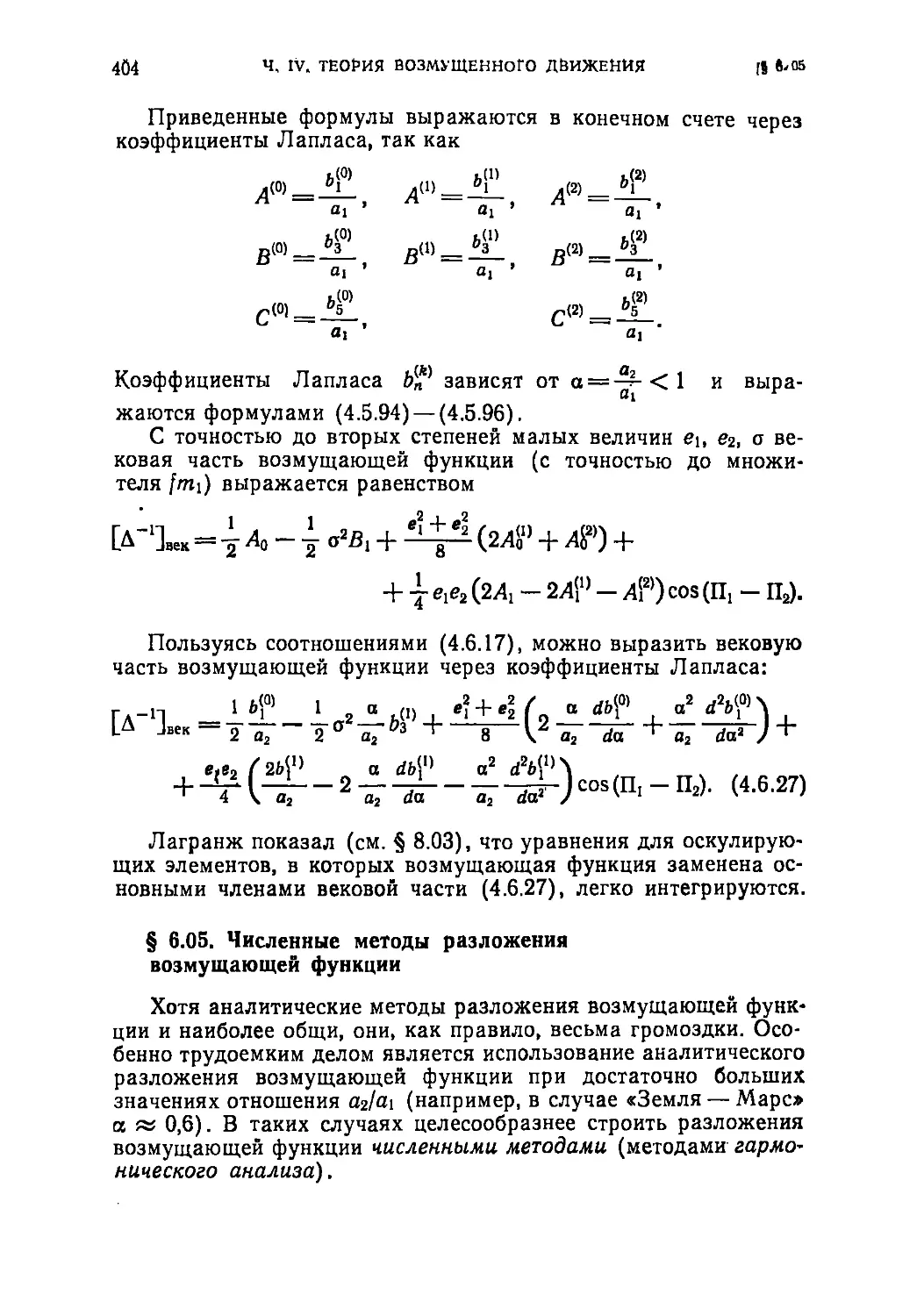
§ 6.04. Вековая часть возмущающей функции в двухпланетной задаче 402
§ 6.05. Численные методы разложения возмущающей функции 404
§ 6.06. Полуаналитический метод Брауэра—Клеменса разложения 405
возмущающей функции
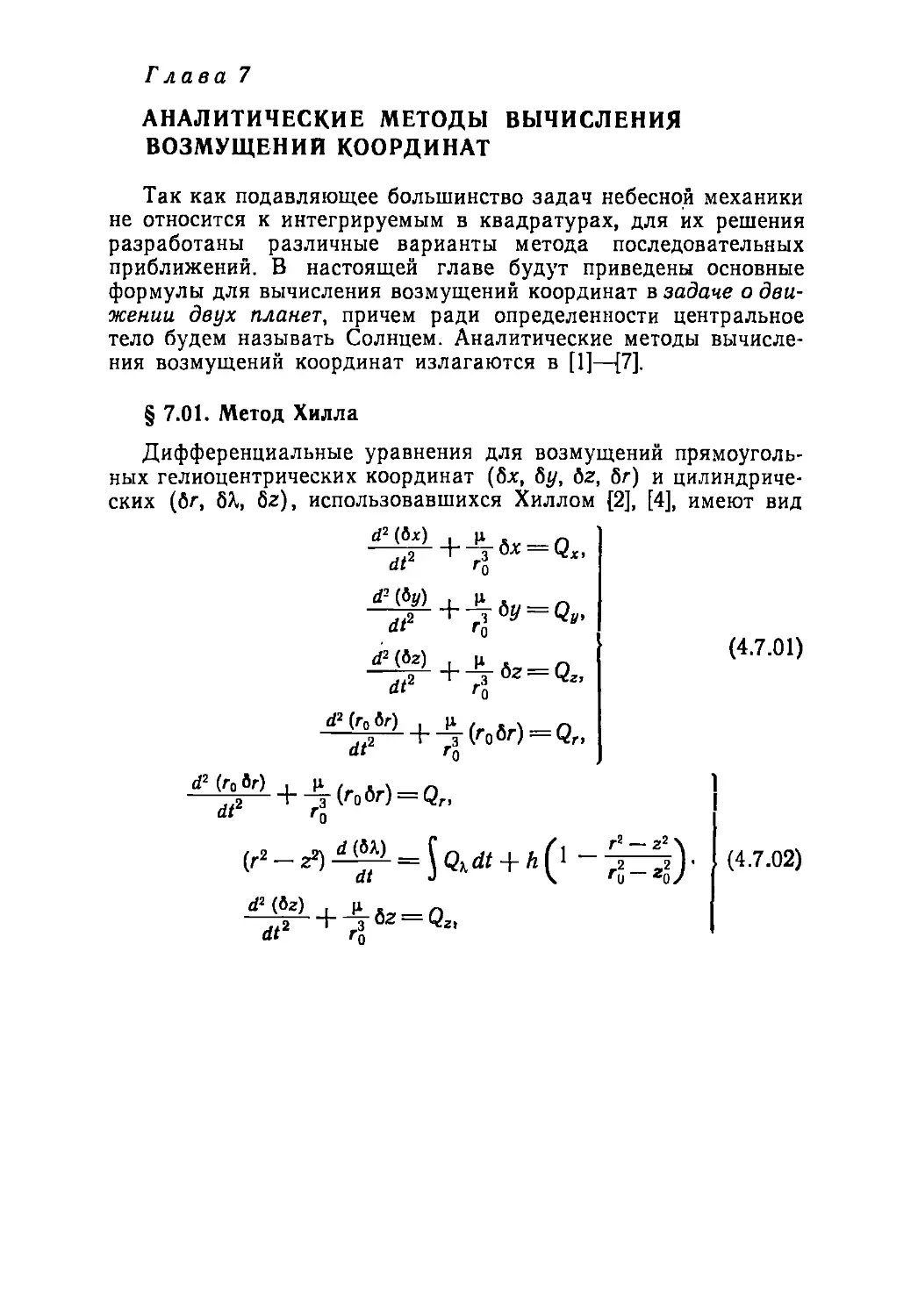
Глава 7. Аналитические методы вычисления возмущений координат 408
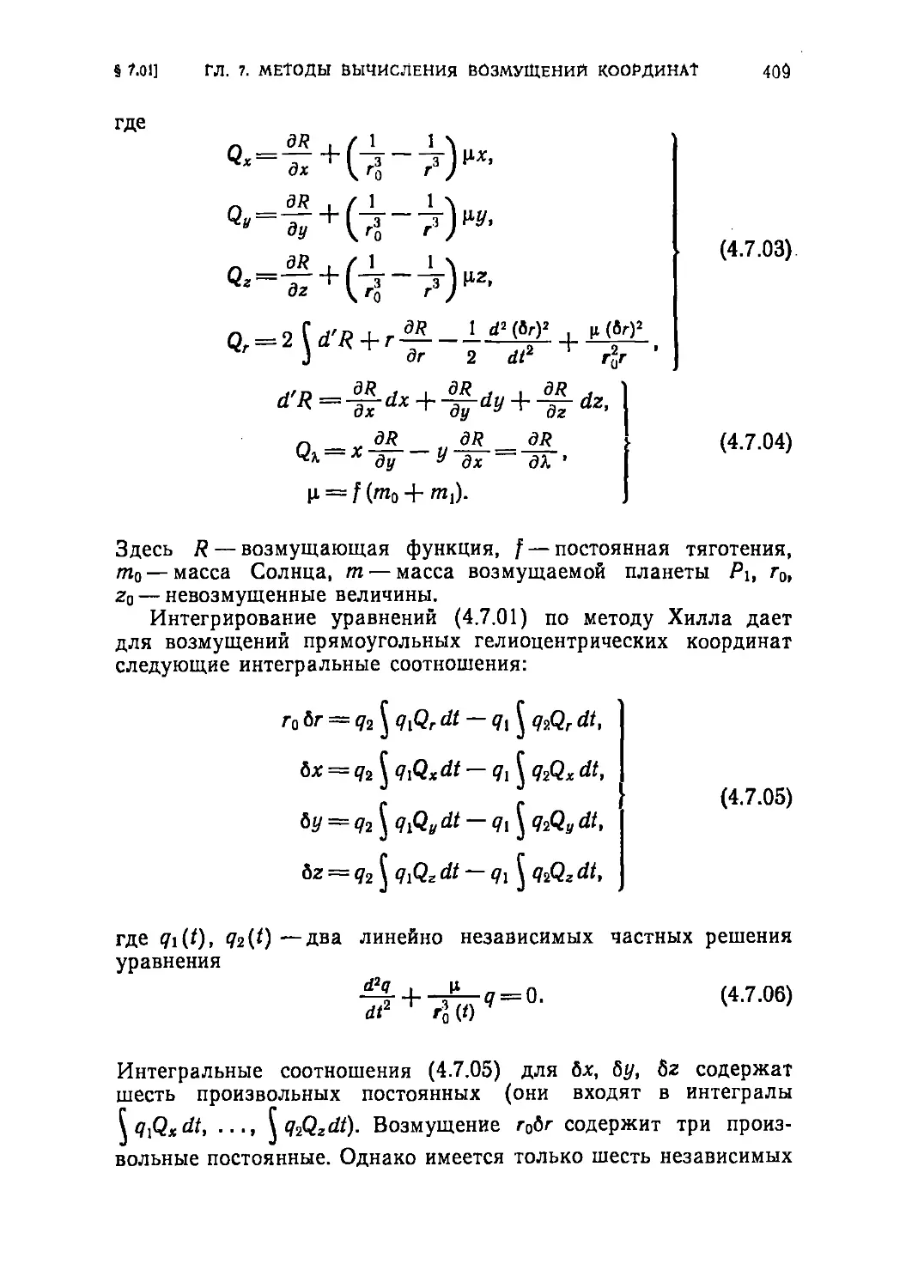
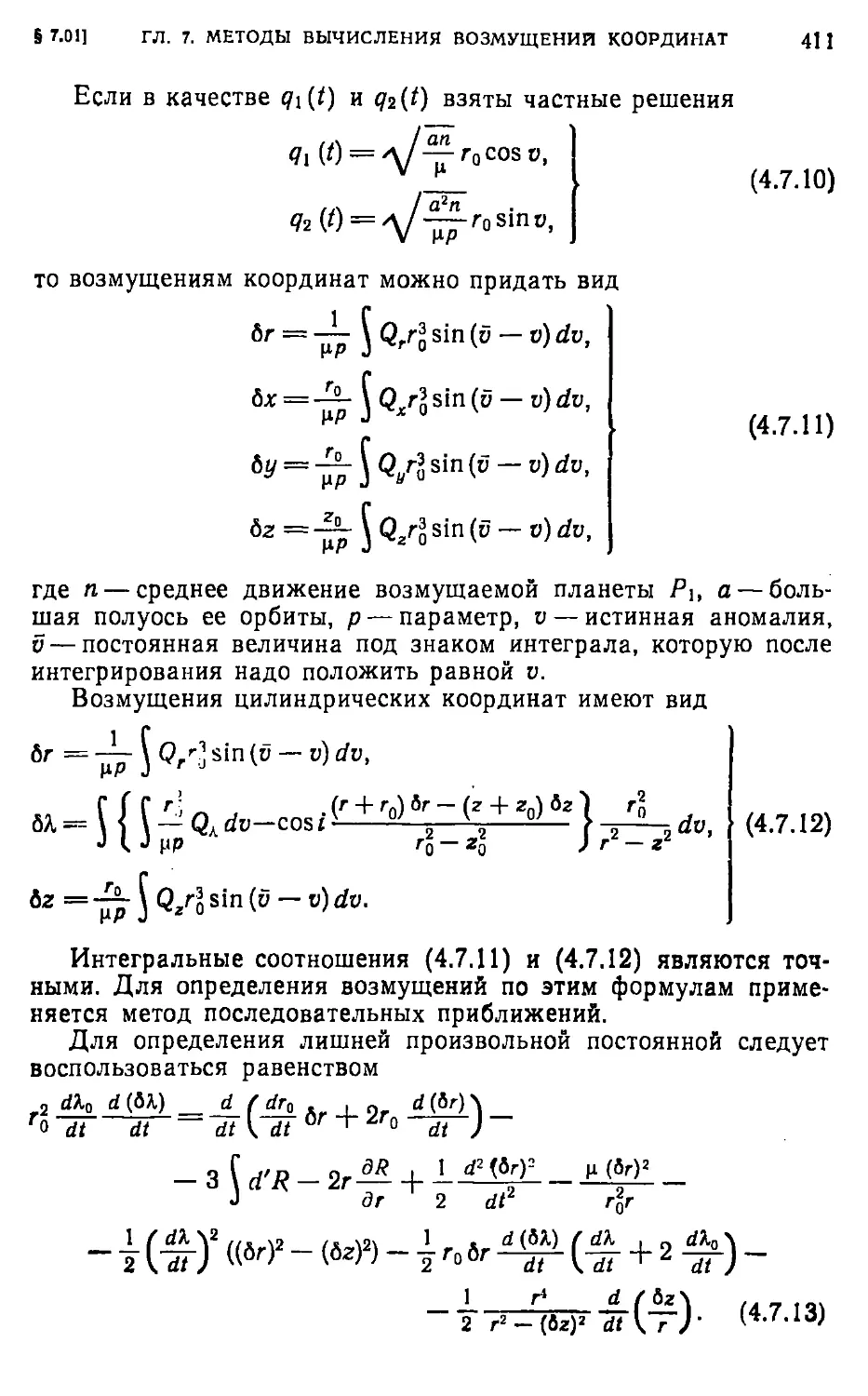
§7.01. Метод Хилла 408
§ 7.02. Метод Ганзена 412
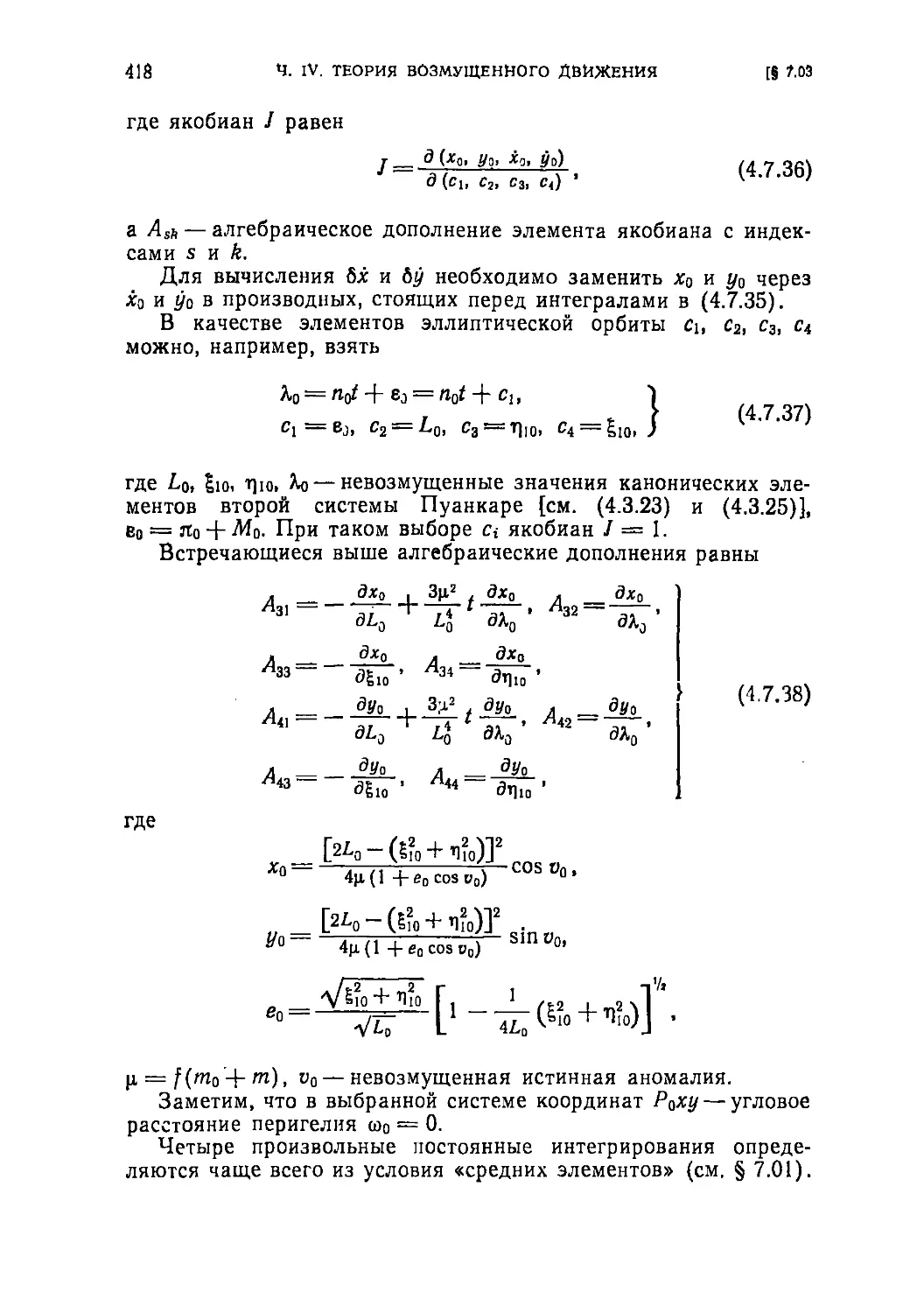
§ 7.03. Метод Брауэра 415
§ 7.04. Метод Лапласа—Ньюкома 419
Глава 8. Аналитические методы вычисления возмущений элементов 421
§ 8.01. Общий вид. возмущений элементов. Порядок, степень, ранг и 421
класс возмущений
§ 8.02. Метод Гаусса вычисления вековых возмущений первого порядка 422
§ 8.03. Метод Лагранжа определения вековых возмущений в 424
двухпланетной задаче
§ 8.04. Основы метода Делоне 426
§ 8.05. Связь между возмущениями координат и возмущениями 430
элементов
Глава 9. Методы теории возмущений, основанные на схемах 432
осреднения
§ 9.01. Основные схемы осреднения возмущающей функции в 432
двухпланетной задаче
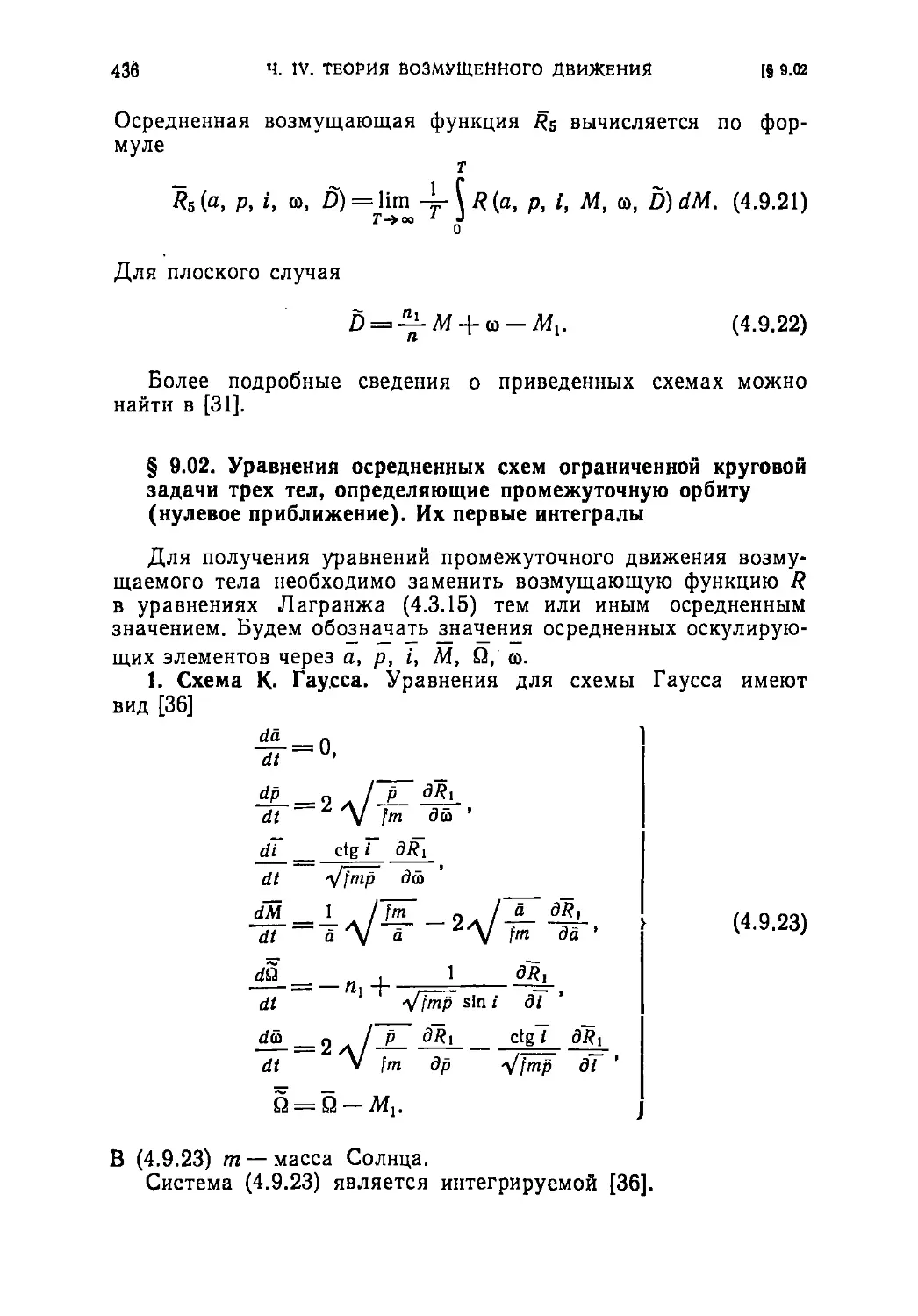
§ 9.02. Уравнения осредненных схем ограниченной круговой задачи трех 436
тел, определяющие промежуточную орбиту (нулевое
приближение). Их первые интегралы
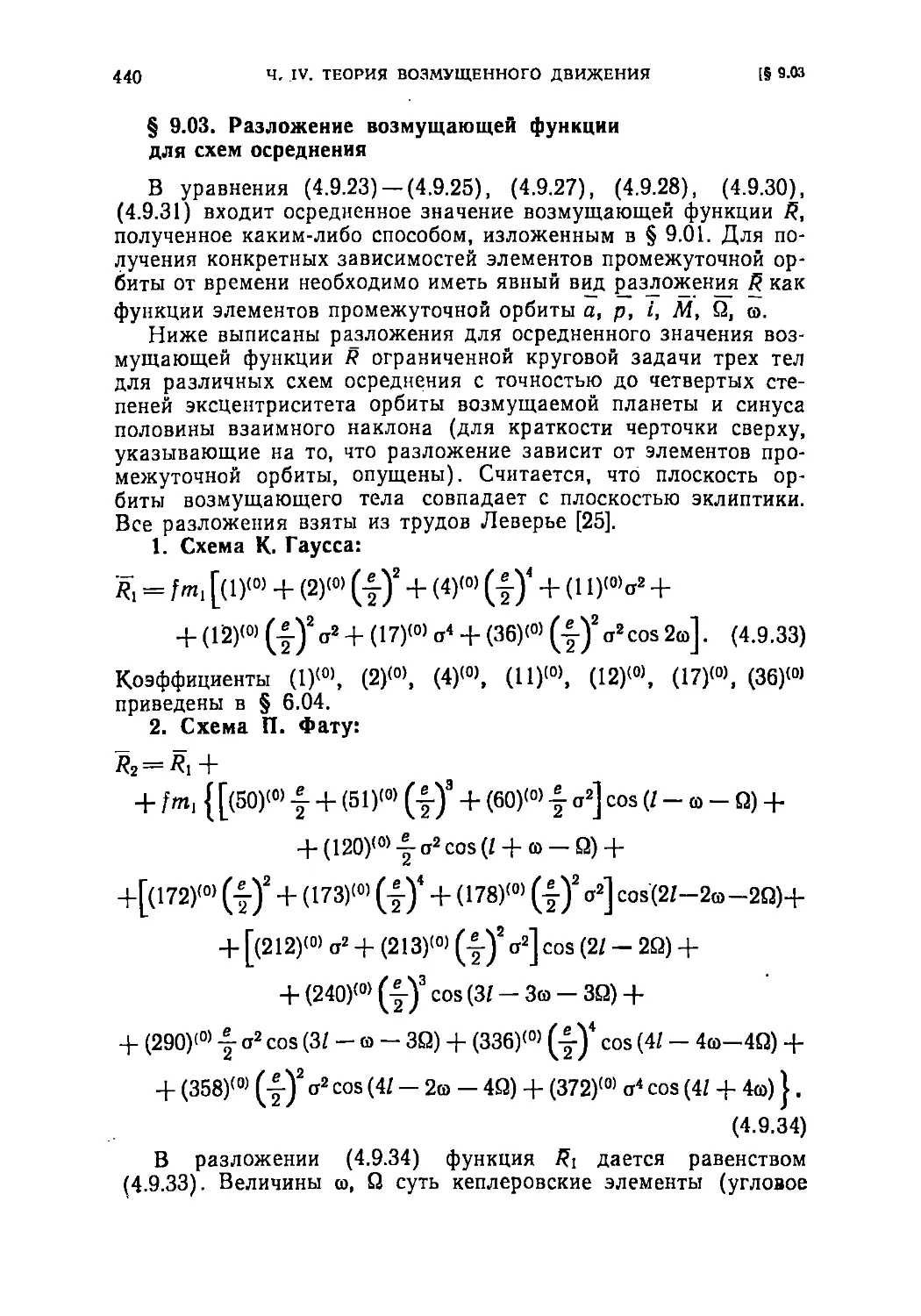
§ 9.03. Разложение возмущающей функции для схем осреднения 440
§ 9.04. Основы метода теории возмущений 442
Глава 10. Теория движения Луны 443
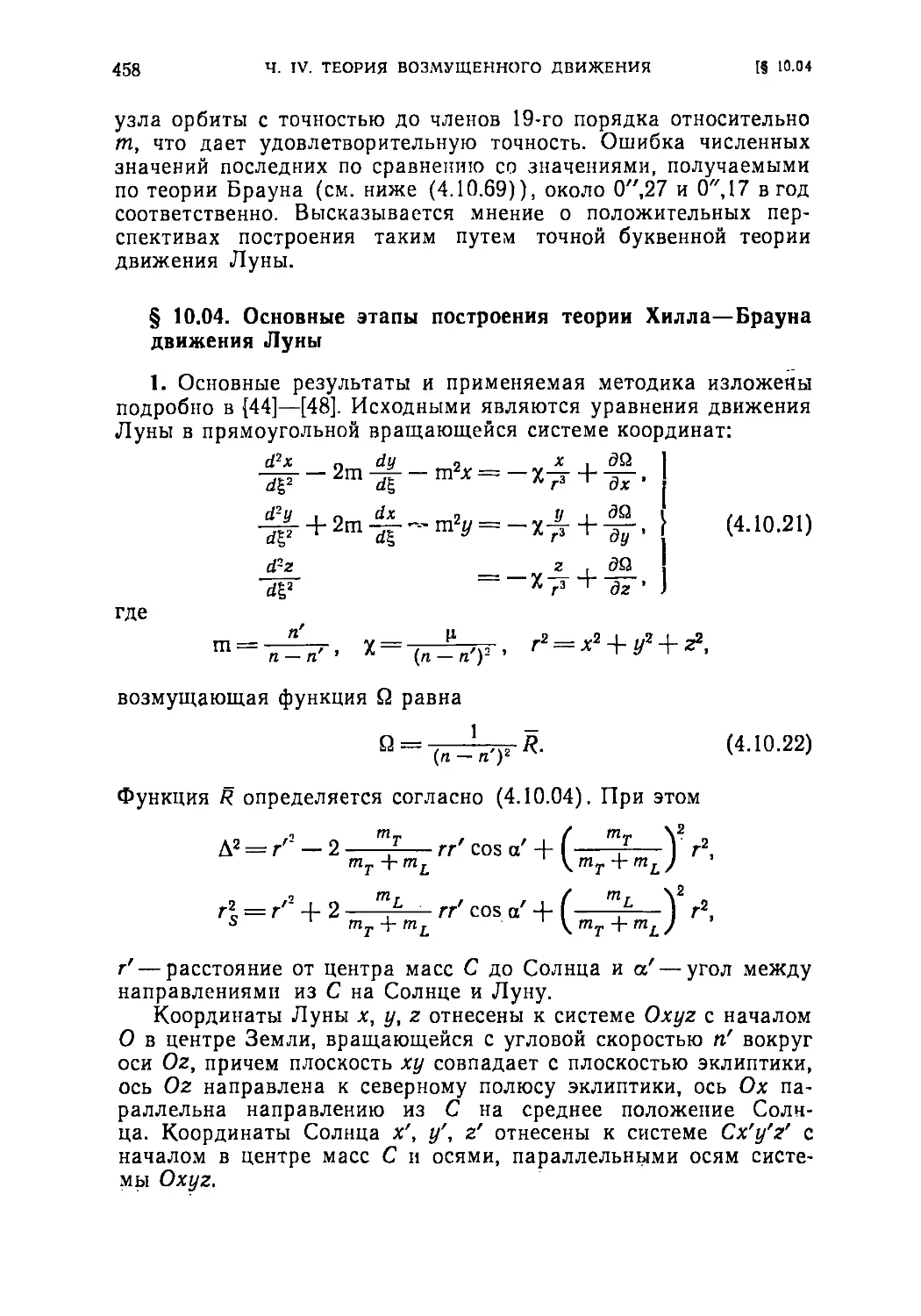
§ 10.01. Уравнения основной проблемы в теории движения Луны 444
§ 10.02. Разложение возмущающей функции в основной проблеме теории 445
движения Луны
§ 10.03. Решение Делоне основной проблемы в теории движения Луны 447
§ 10.04. Основные этапы построения теории Хилла — Брауна движения 458
Луны
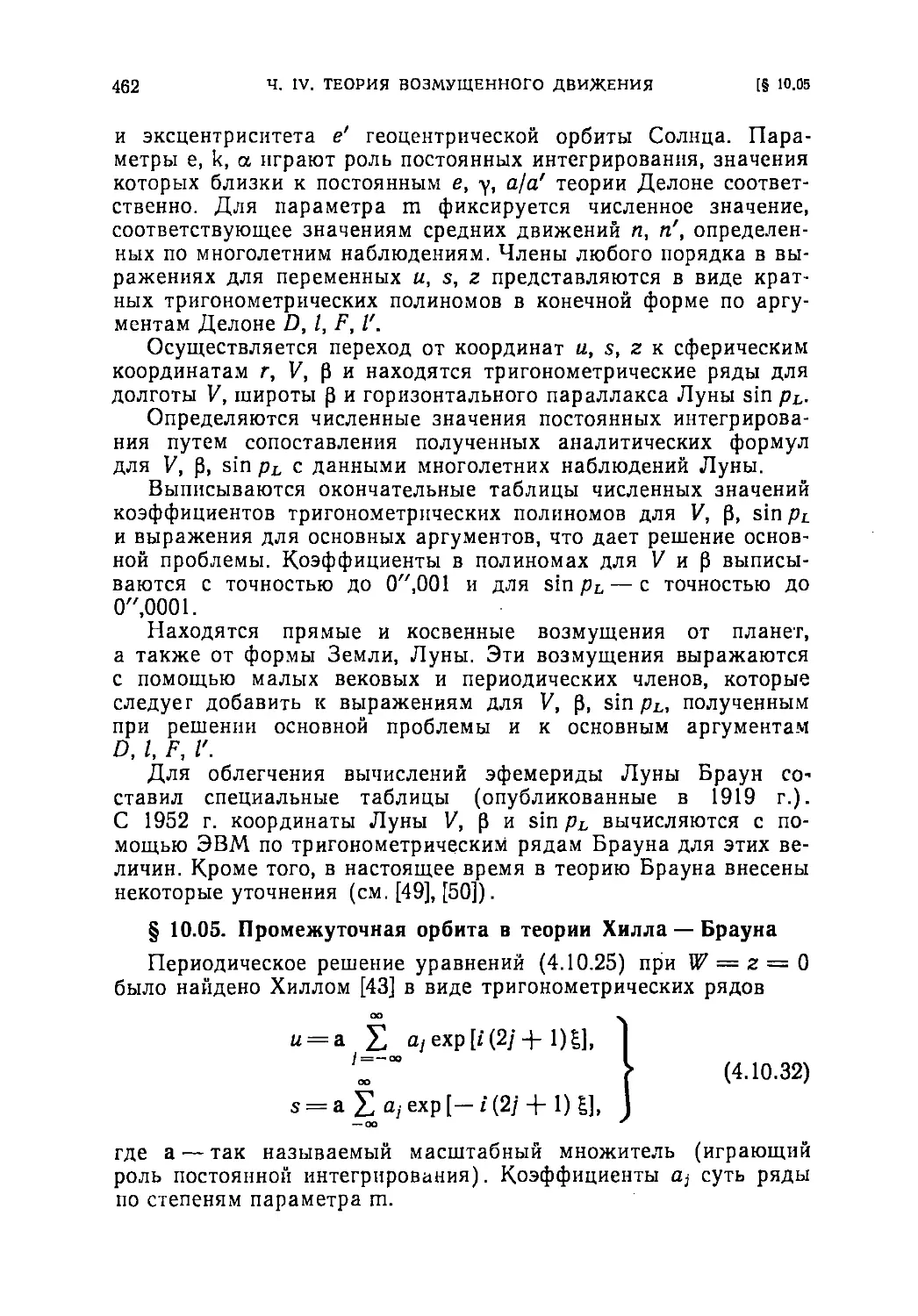
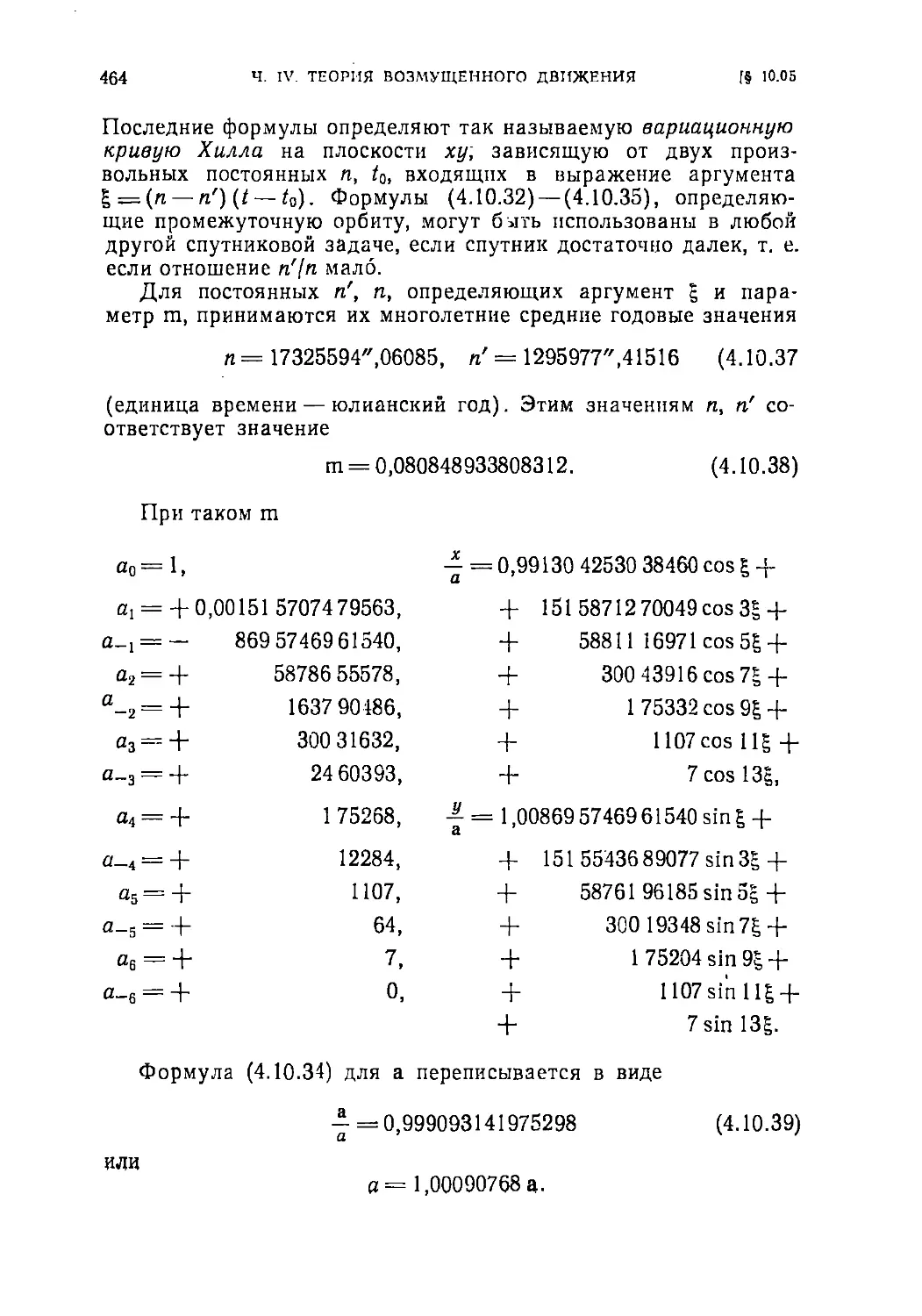
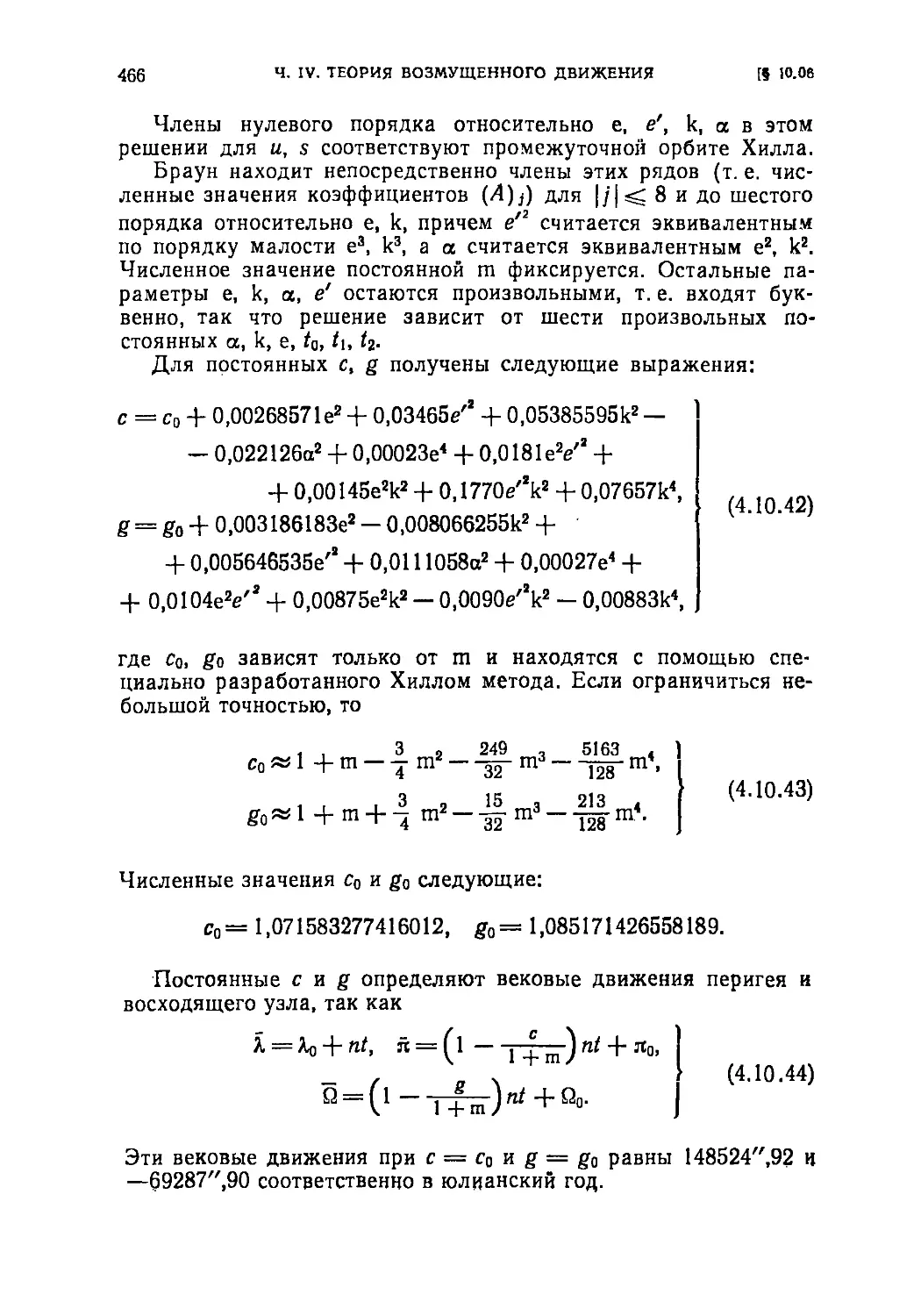
§ 10.05. Промежуточная орбита в теории Хилла — Брауна 462
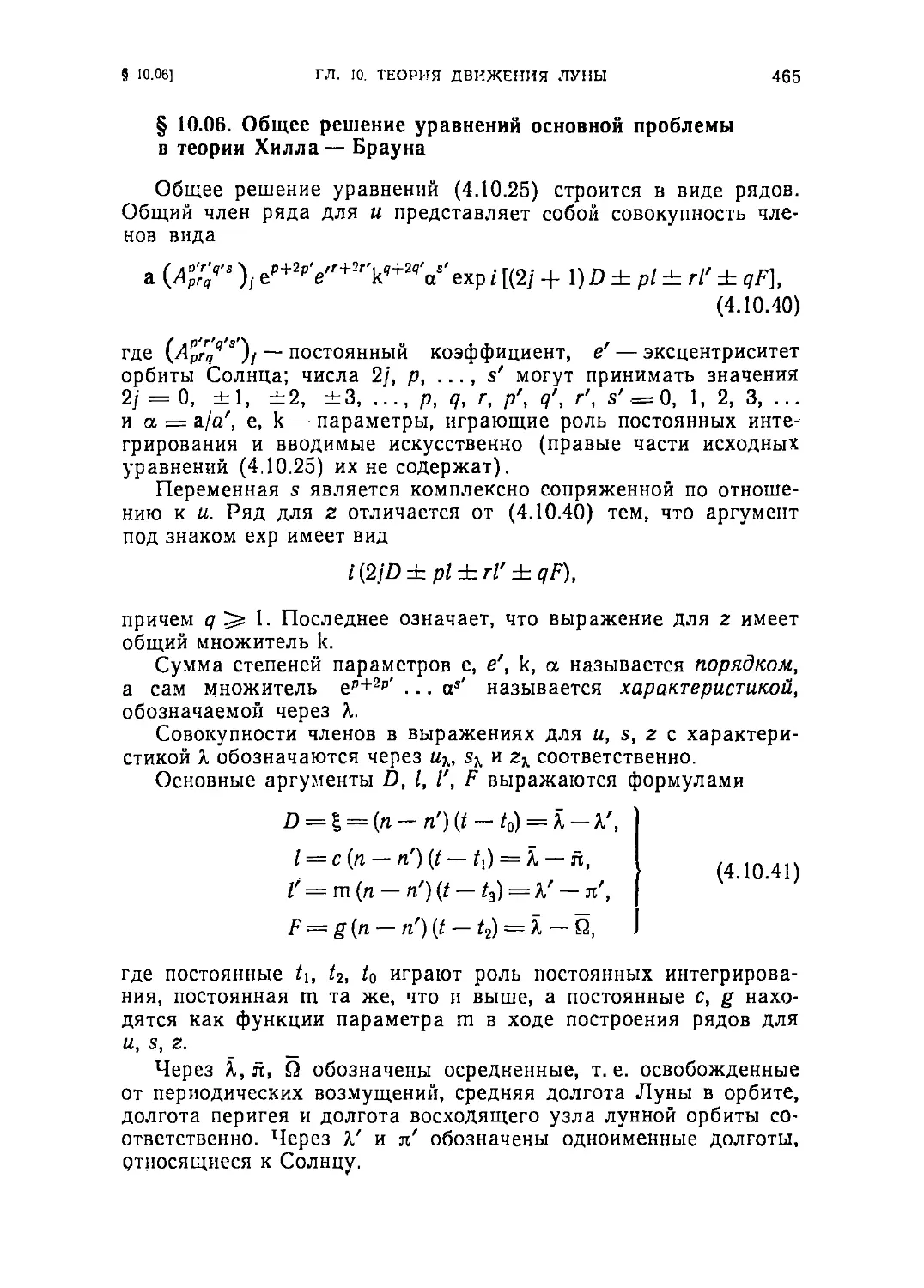
§ 10.06. Общее решение уравнений основной проблемы в теории Хилла 465
— Брауна
§ 10.07. Переход к сферическим координатам 467
§ 10.08. Численные значения постоянных интегрирования и параметров в 468
теории Хилла—Брауна
§ 10.09. Окончательные выражения для долготы V, широты р и синуса 470
параллакса sinpL, соответствующие решению основной проблемы
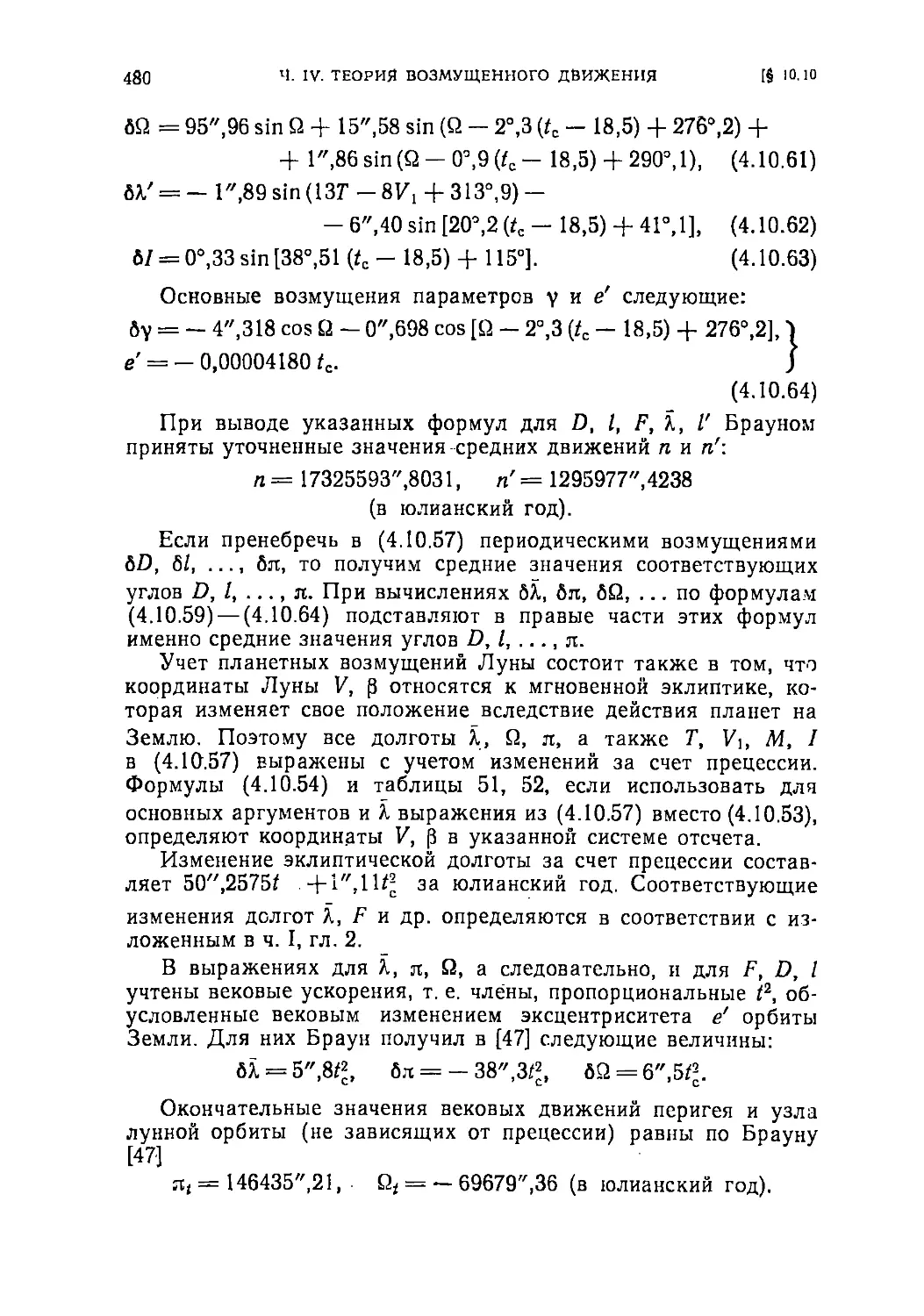
§ 10.10. Возмущения Луны, обусловленные притяжением планет, 477
фигурами Земли и Луны
§ 10.11. Уточнение теории движений Луны Хилла — Брауна 481
Глава 11. Теория движения больших планет 484
§ 11.01. Внутренние планеты 487
§ 11.02. Внешние планеты 493
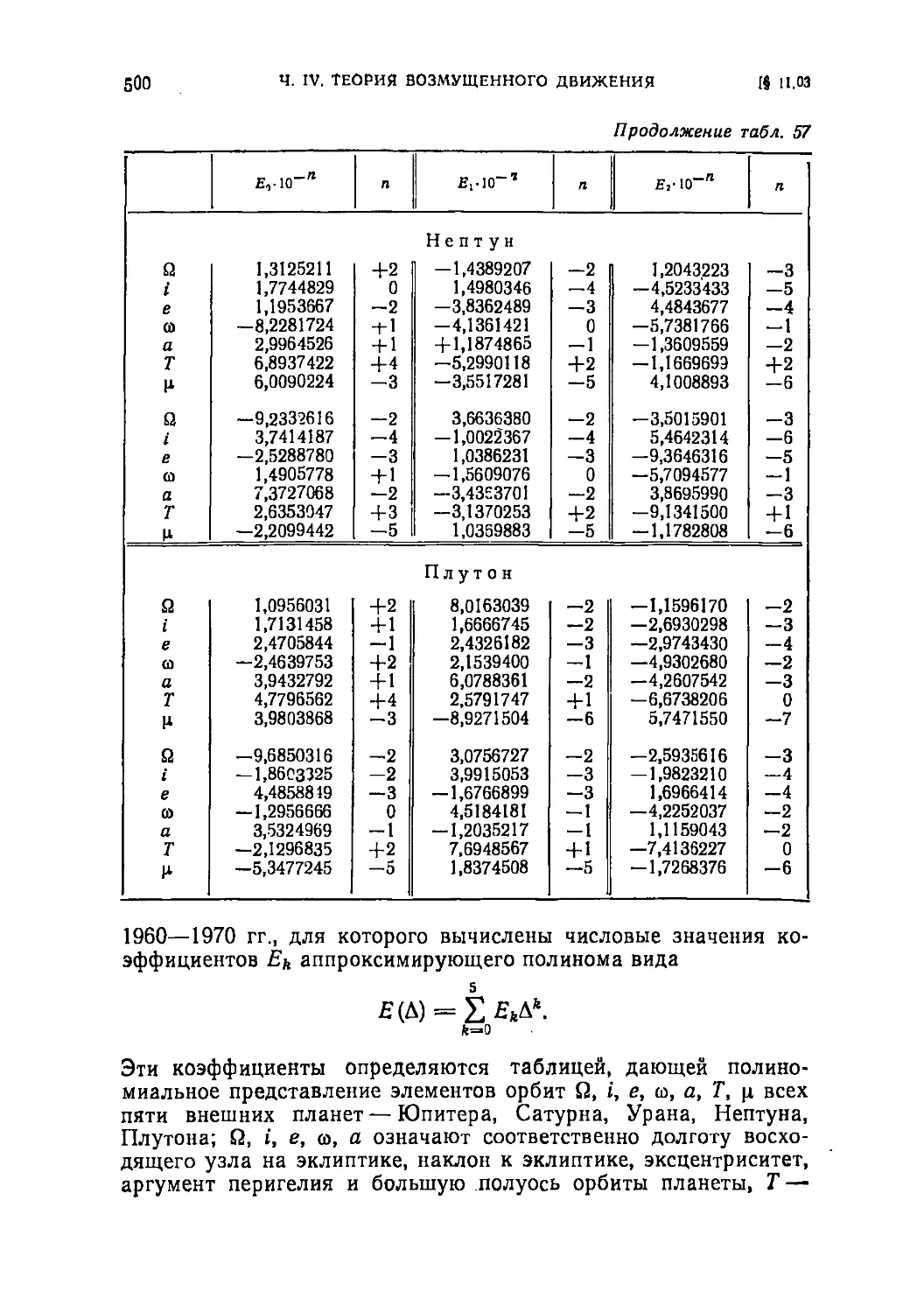
§ 11.03. Полиномиальное представление оскулирующих элементов орбит 498
внешних планет
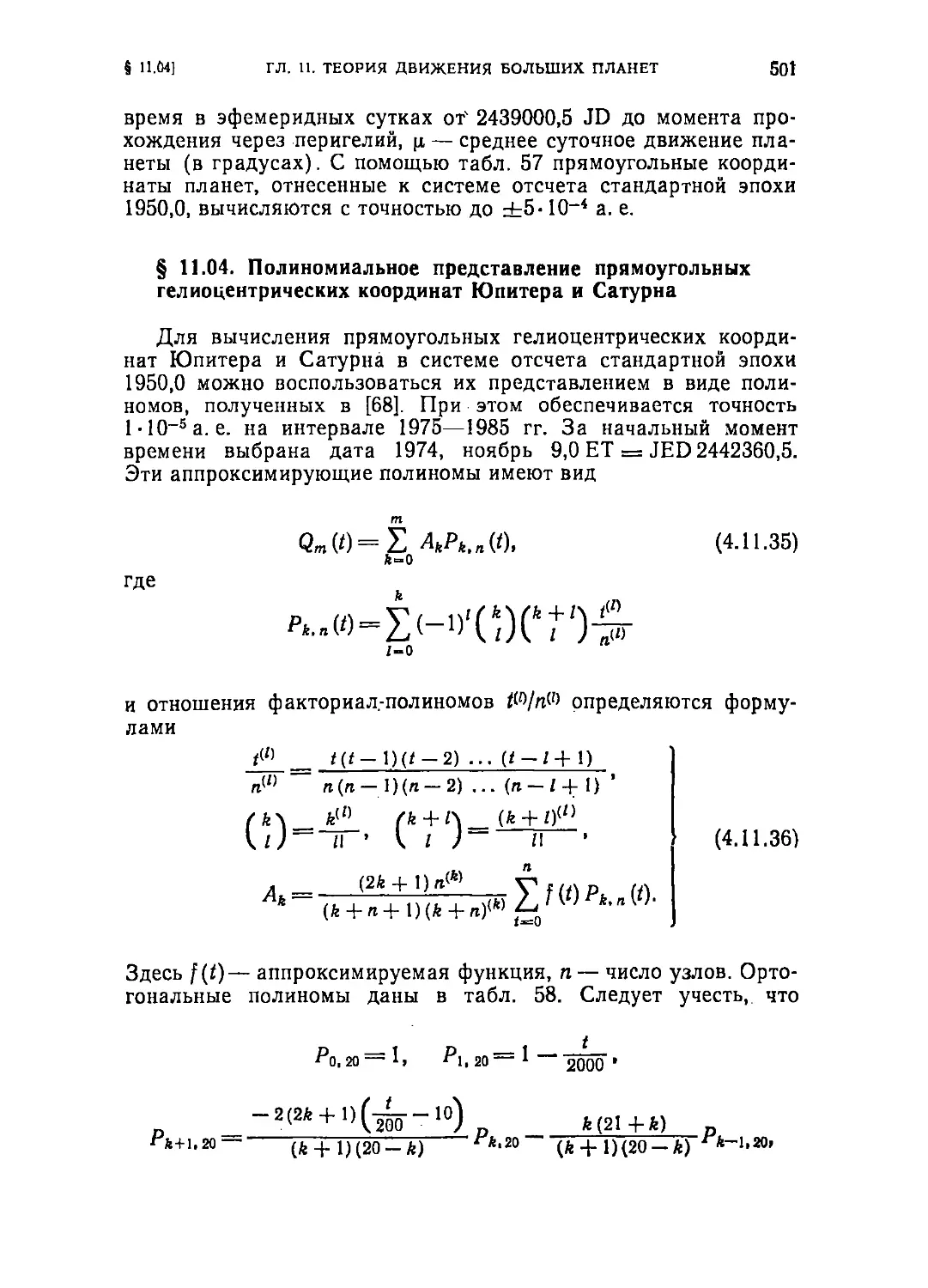
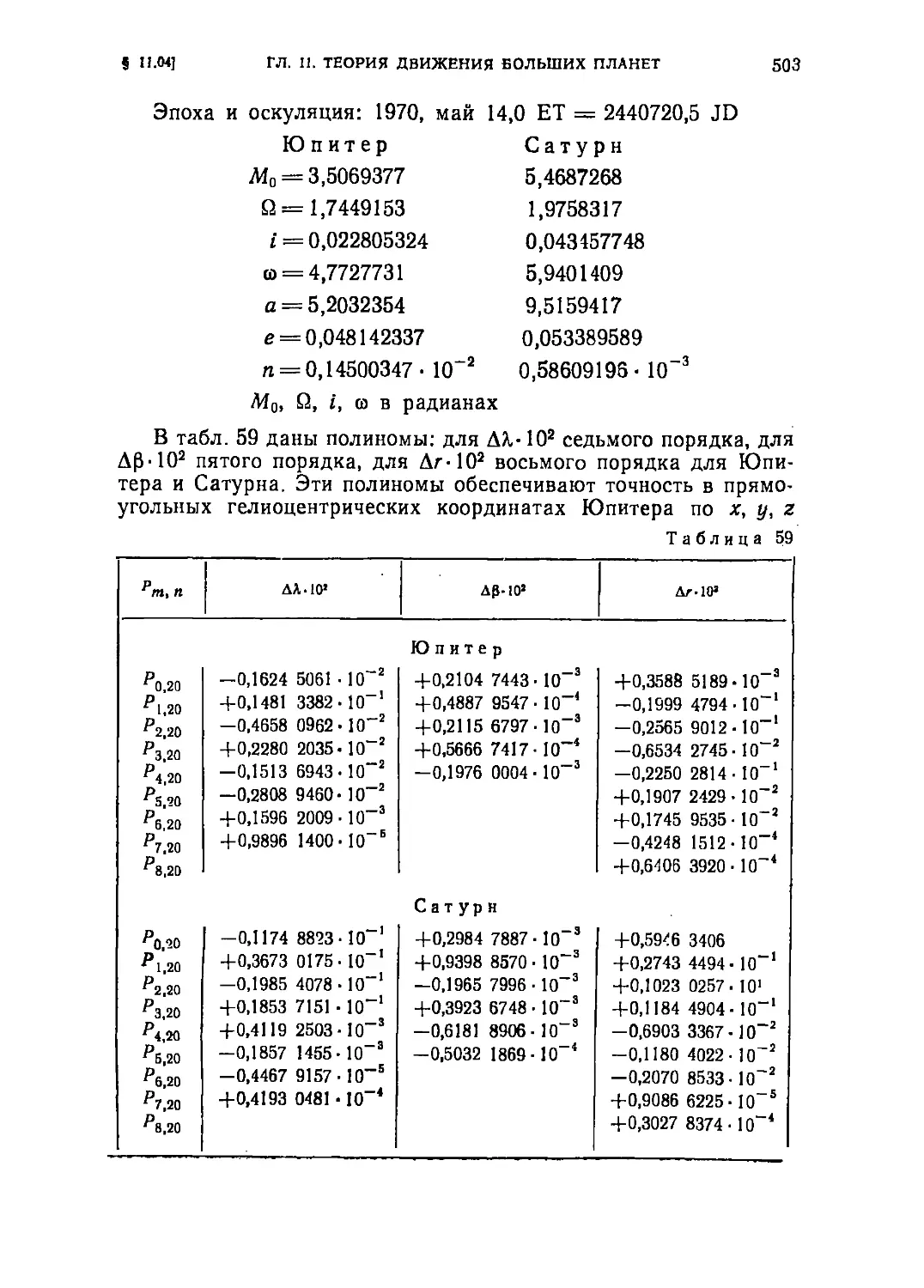
§ 11.04. Полиномичльное представление прямоугольных 501
гелиоцентрических координат Юпитера и Сатурна
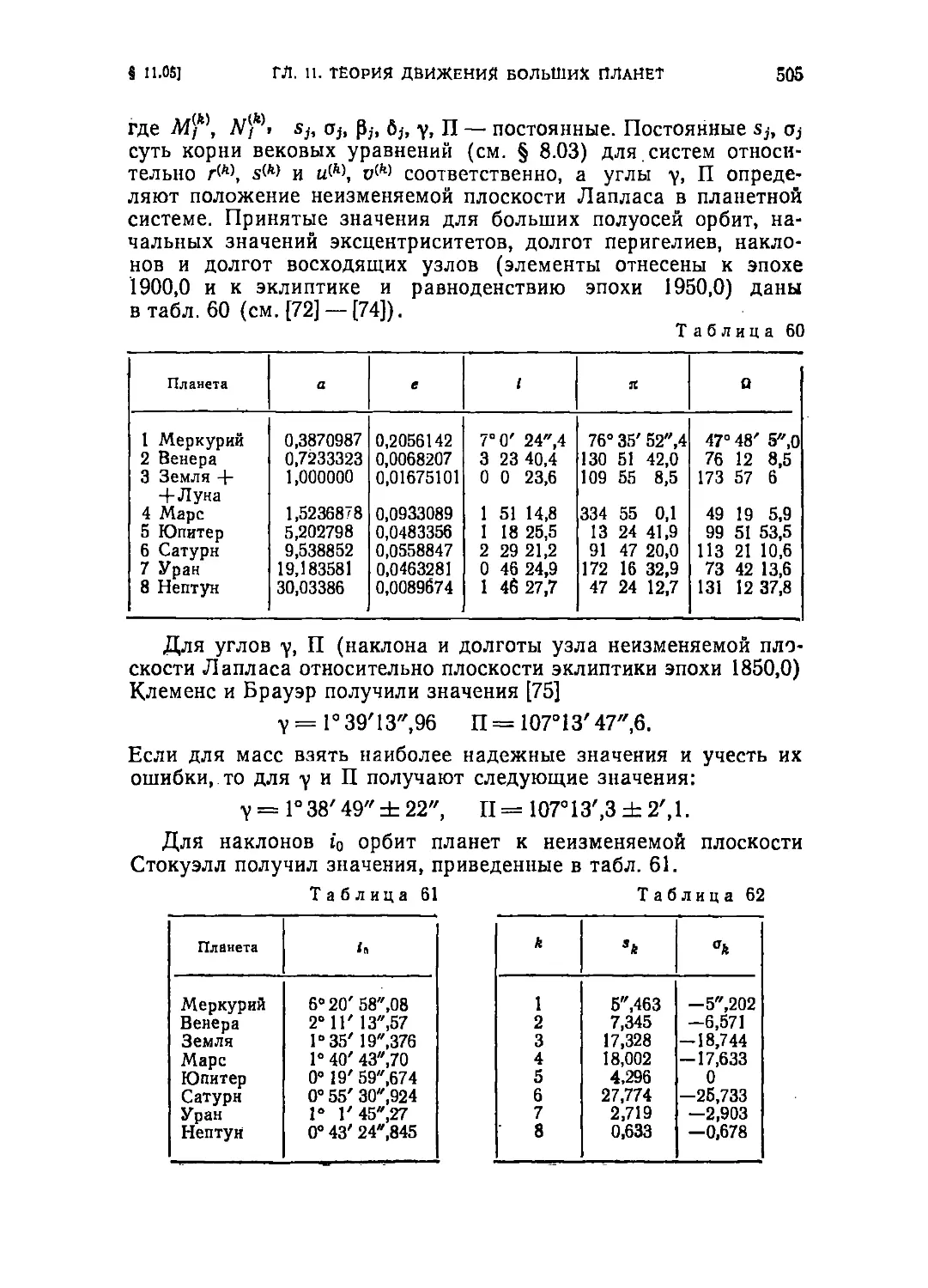
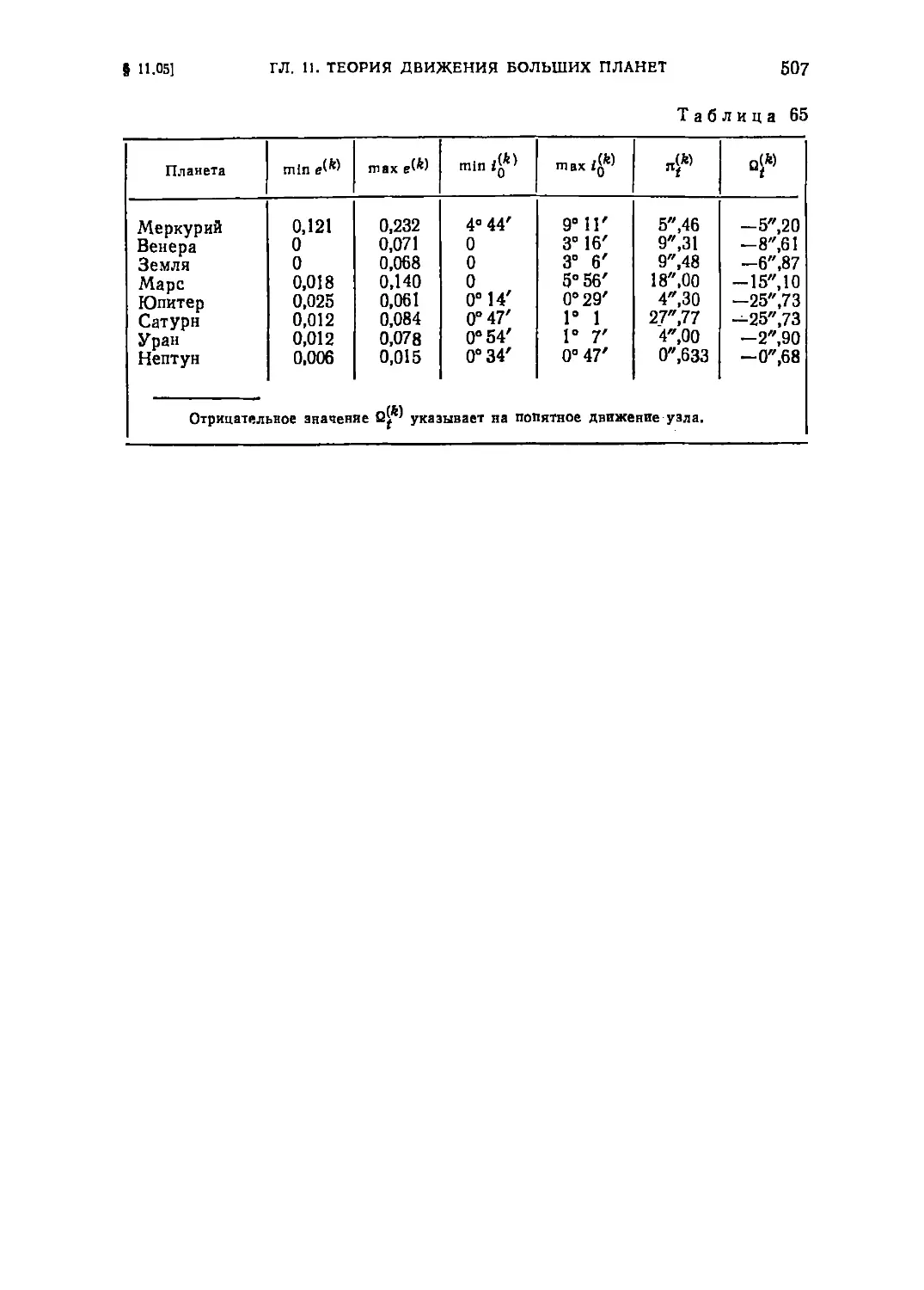
§ 11.05. Тригонометрическая теория вековых возмущений орбит 504
больших планет
Глава 12. Движение малых тел Солнечной системы 508
§ 12.01. Невозмущенное движение спутников 509
§ 12.02. Возмущения оскулирующих элементов орбит спутников, 510
вызываемые сжатием планеты
§ 12.03. Возмущения в движении спутников, вызываемые притяжением 513
Солнца
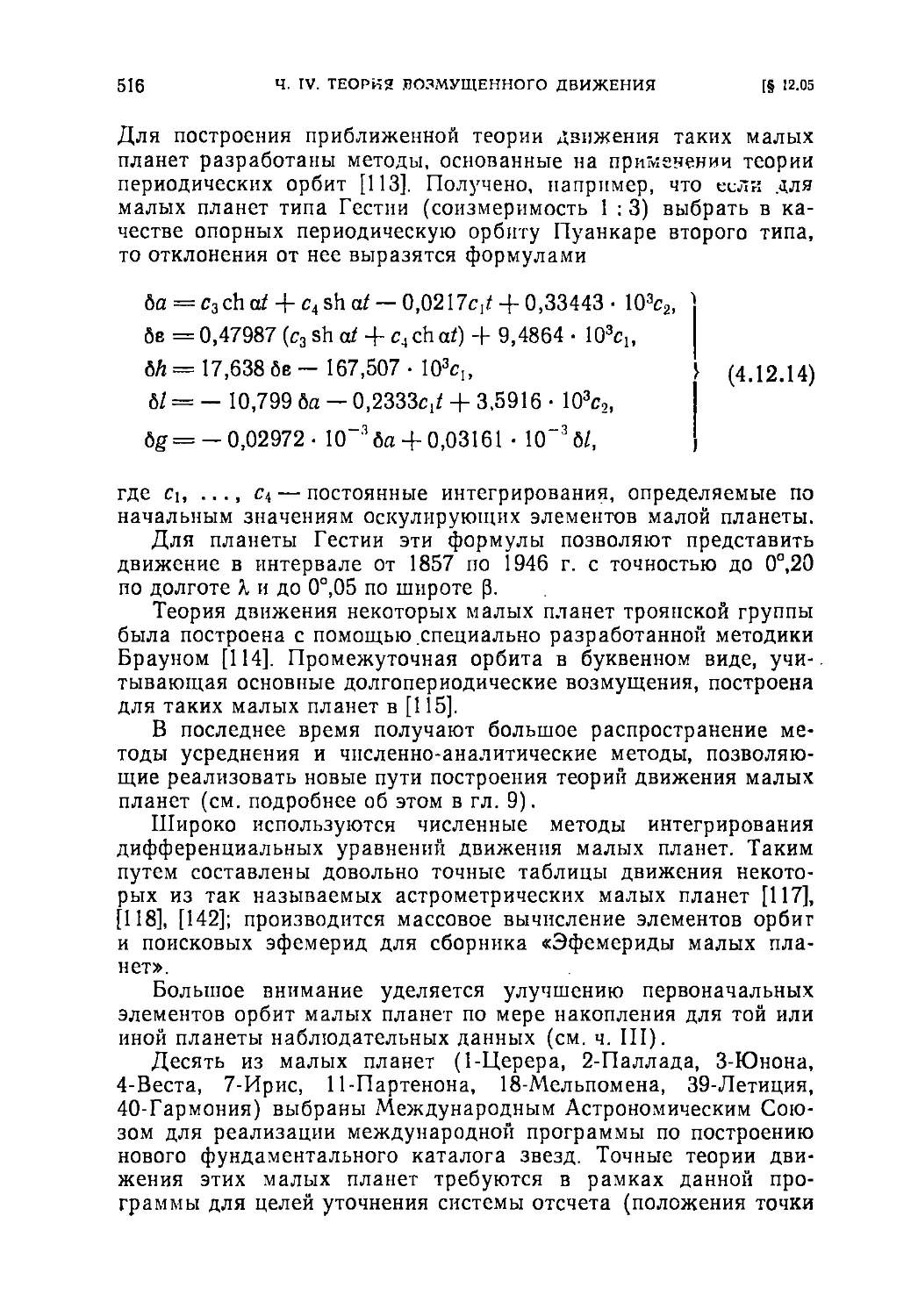
§ 12.04. Общие сведения о характере движения малых планет 513
§ 12.05. Возмущенное движение малых планет 514
§ 12.06. Общие сведения о движении комет 517
§ 12.07. Возмущенное движение комет 518
Литература к части IV 519
Часть V. ЗАДАЧА ТРЕХ ТЕЛ (ГРЕБЕНИКОВ Е. А.) 524
Глава 1. Неограниченная задача трех тел 524
§ 1.01 Различные формы дифференциальных уравнений движения задачи 524
трех тел
§ 1.02. Лагранжевы решения. Точки либрации 527
Глава 2. Ограниченная круговая задача трех тел 533
§ 2.01. Дифференциальные уравнения движения. Интеграл Якоби 533
§ 2.02. Поверхность нулевой относительной скорости 534
§ 2.03. Лагранжевы решения ограниченной круговой задачи трех тел. 535
Точки либрации
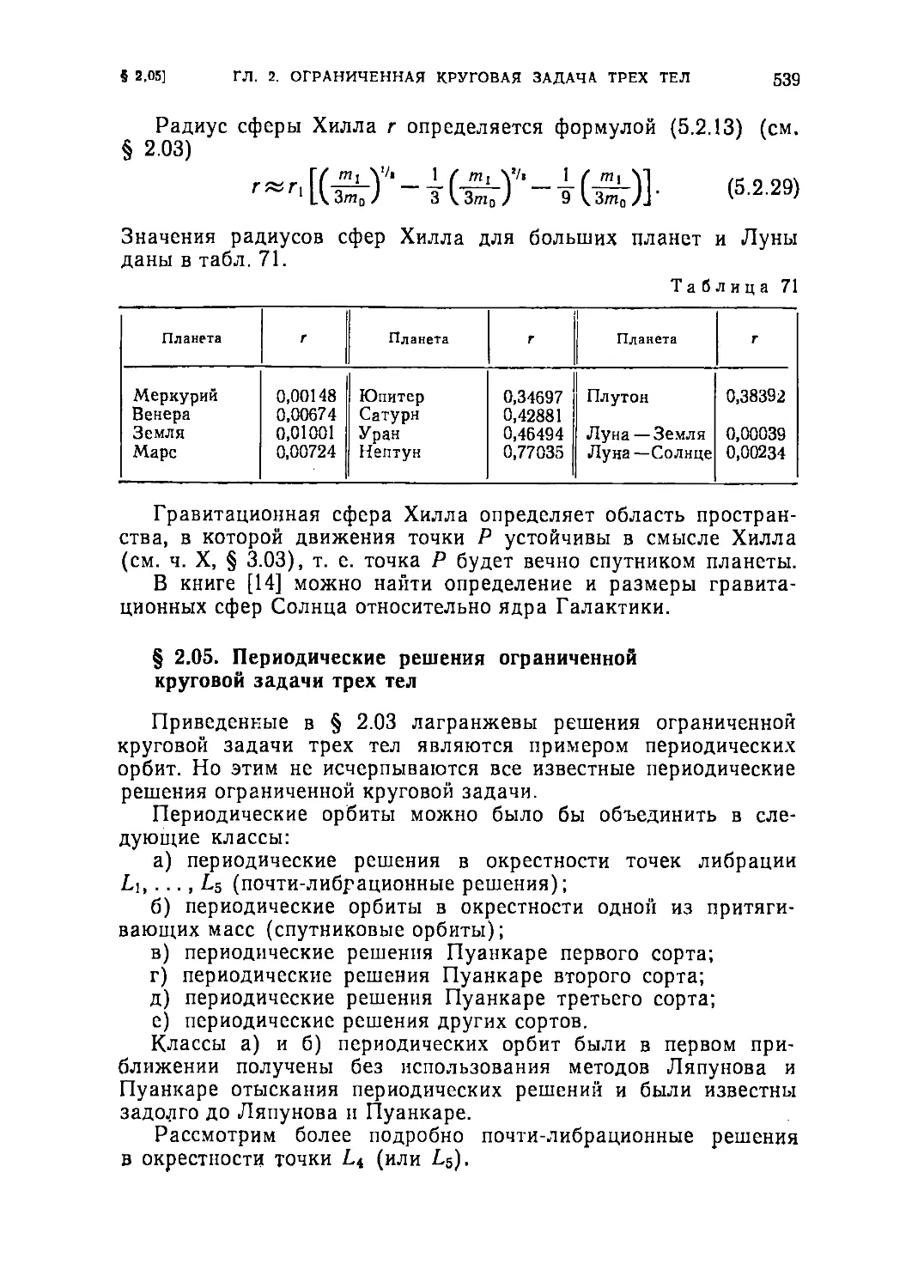
§ 2.04. Различные гравитационные сферы 536
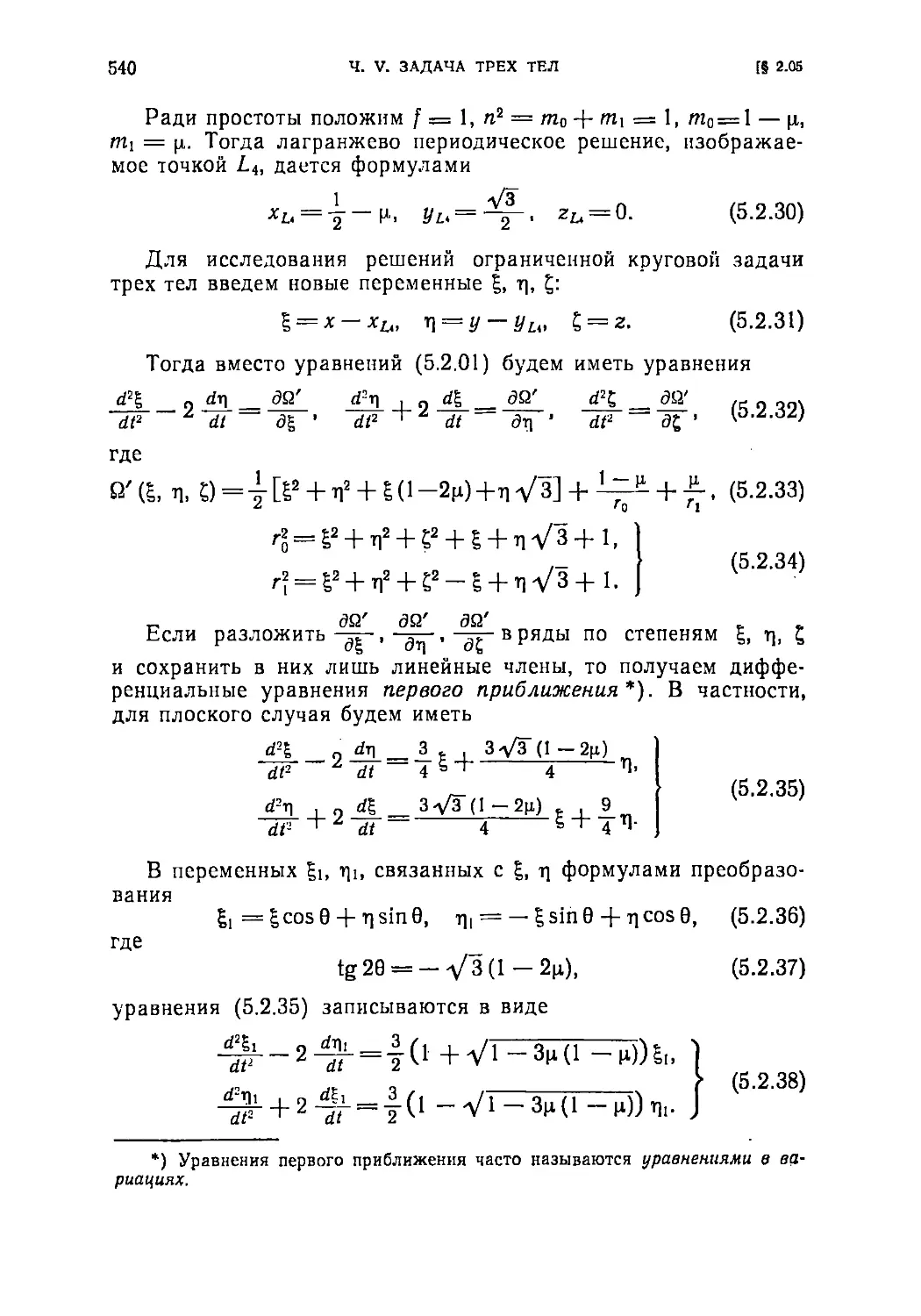
§ 2.05. Периодические решения ограниченной круговой задачи трех тел 539
§ 2.06. Критерий Тиссерана 542
§ 2.07. Уравнения ограниченной круговой задачи в эллипсоидальных 542
переменных
§ 2.08. Уравнение Гамильтона — Якоби в эллипсоидальных переменных 546
§ 2.09. Понижение порядка системы уравнений плоской ограниченной 547
круговой задачи трех тел
Глава 3. Другие ограниченные задачи трех тел 548
§ 3.01. Общий случай ограниченной задачи трех тел 548
§ 3.02. Задача двух неподвижных центров 549
§ 3.03. Задача Хилла 551
Литература к части V 552
Часть VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ 554
(АКСЕНОВ Е. П.)
Глава 1. Гравитационное поле Земли. Дифференциальные 555
уравнения движения искусственного спутника
§ 1.01. Потенциал притяжения Земли 555
§ 1.02. Стандартная Земля 559
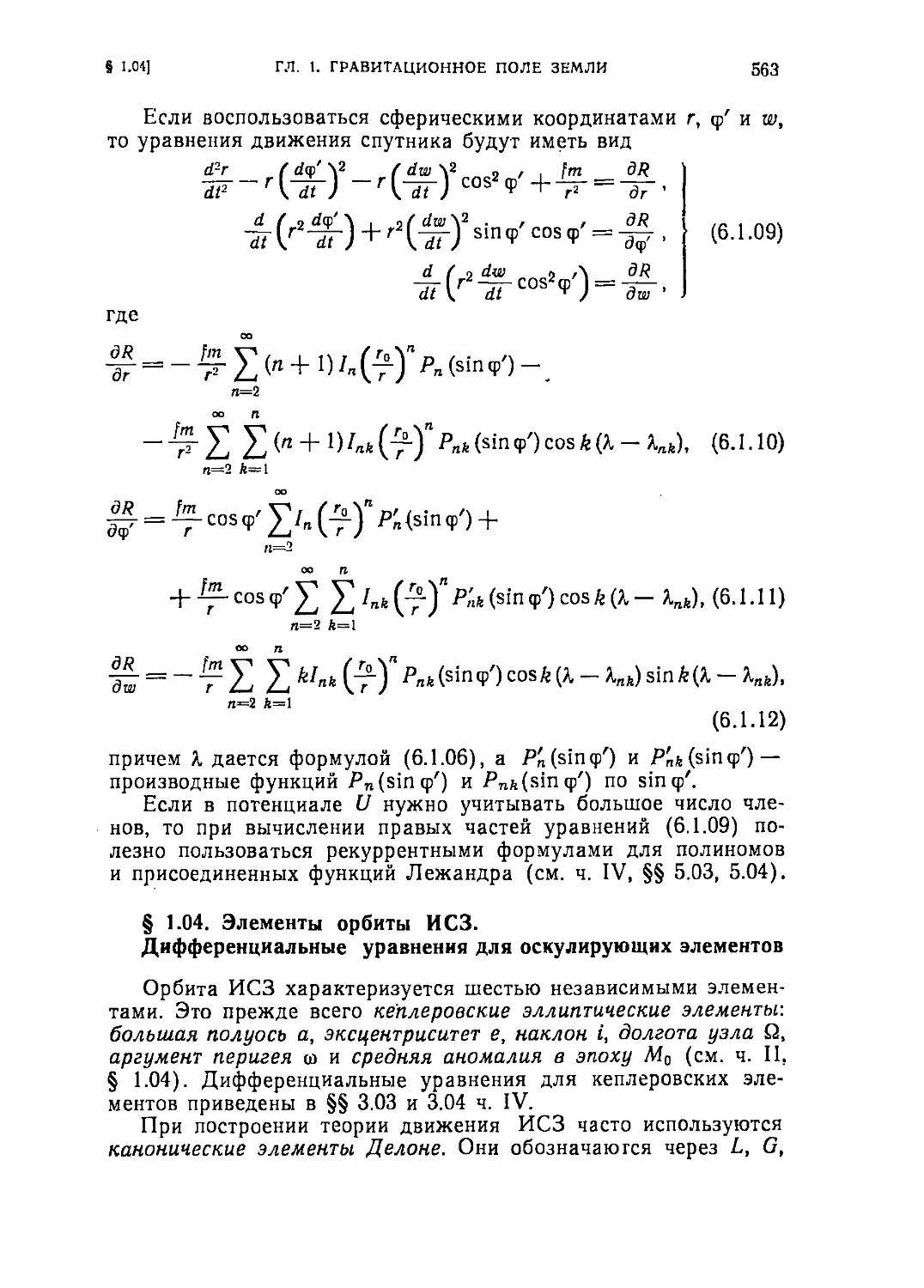
§ 1.03. Дифференциальные уравнения движения спутника 562
§ 1.04. Элементы орбиты ИСЗ. Дифференциальные уравнения для 563
оскулирующих элементов
Глава 2. Возмущения, вызываемые второй зональной гармоникой 565
геопотенциала
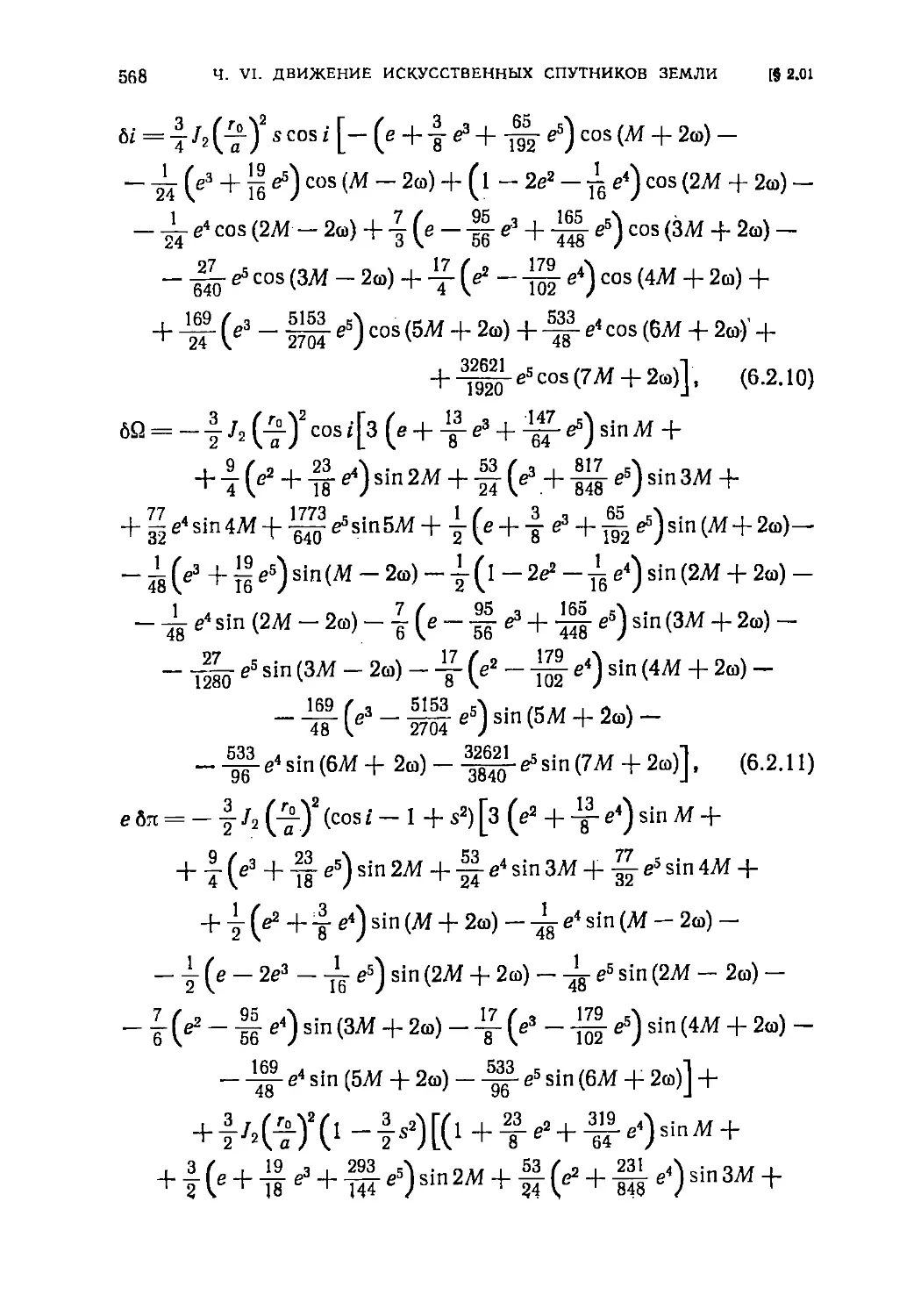
§ 2.01. Возмущения от второй зональной гармоники как функции 565
средней аномалии
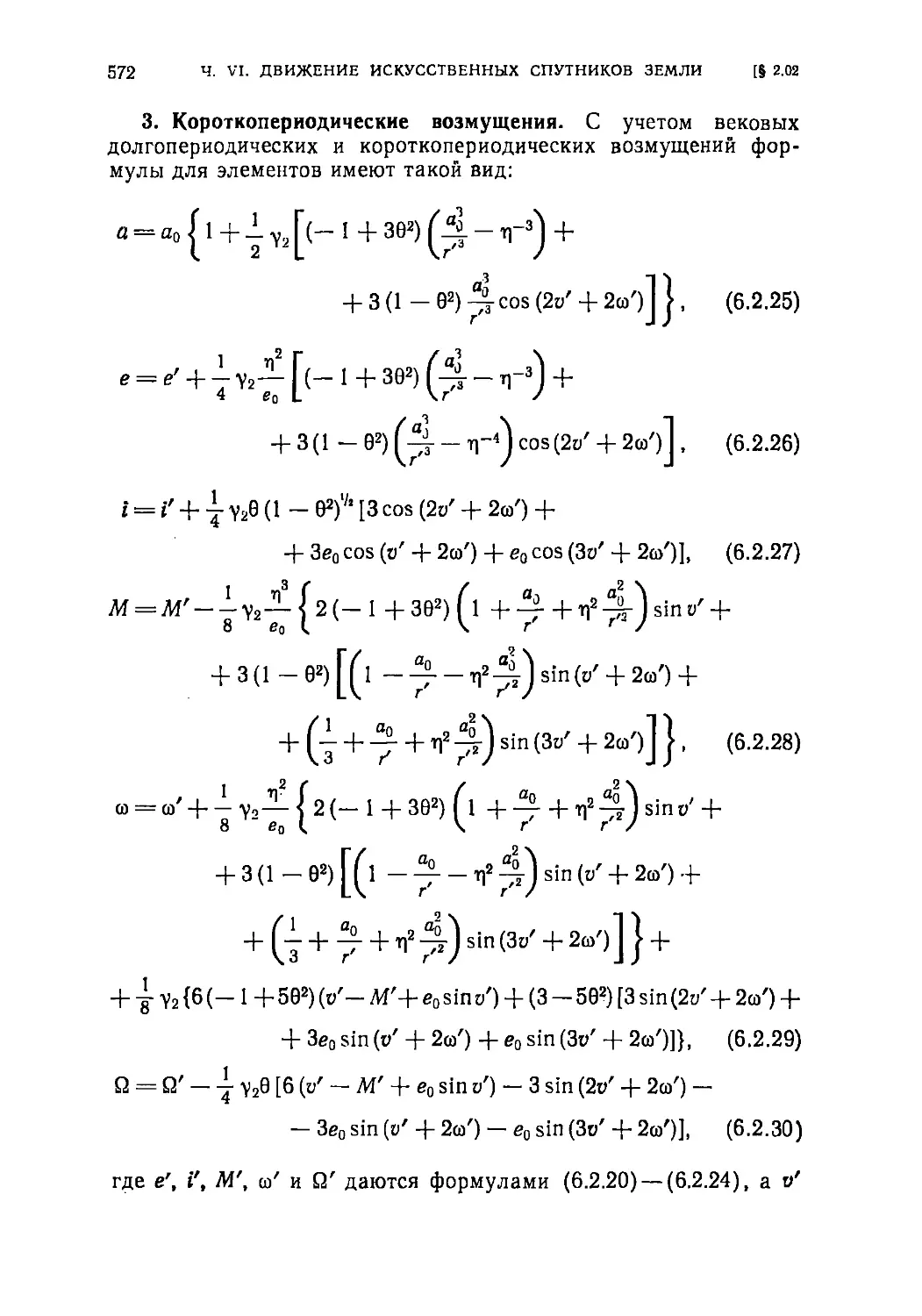
§ 2.02. Возмущения от второй зональной гармоники как функции 570
истинной аномалии
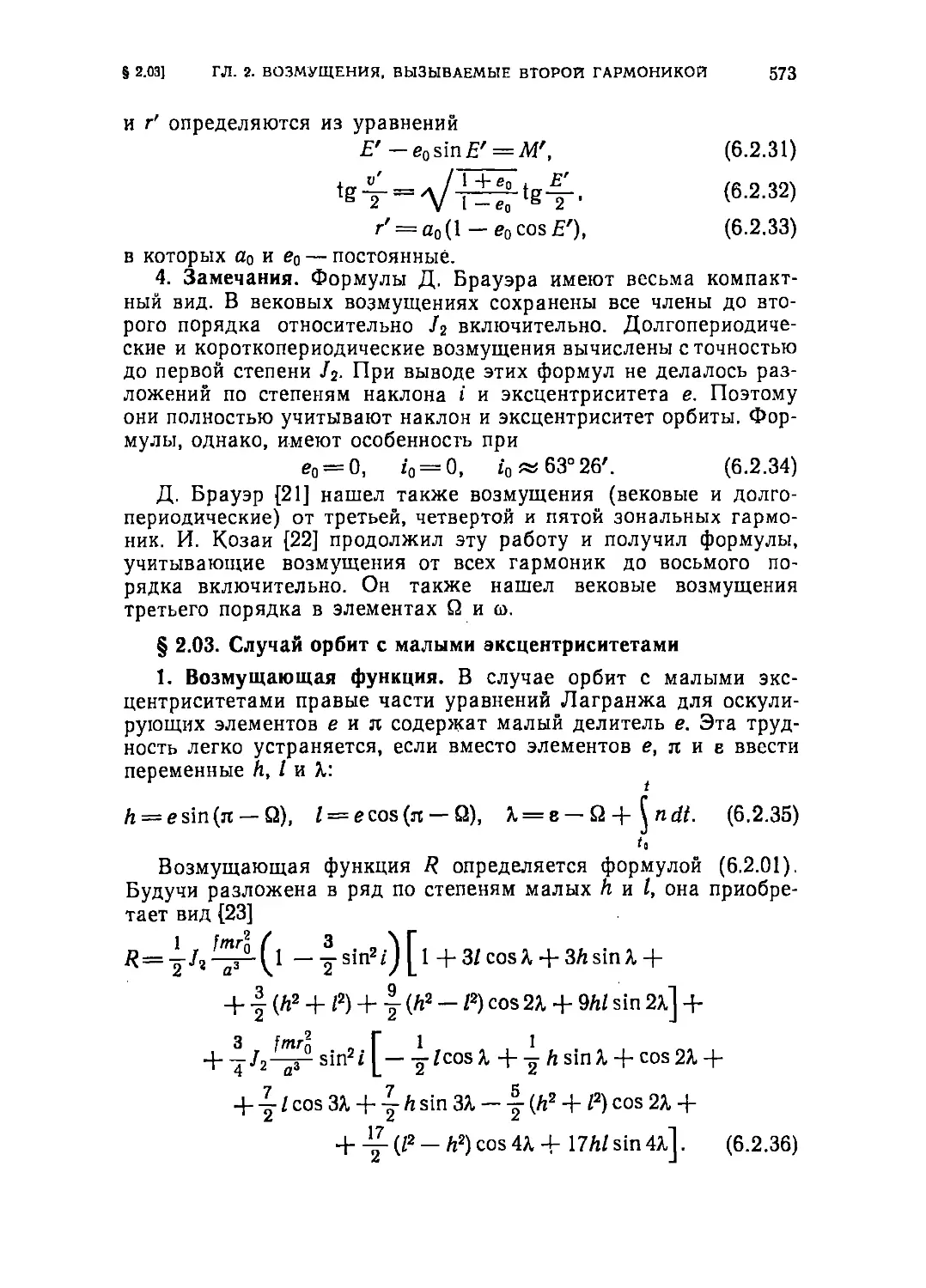
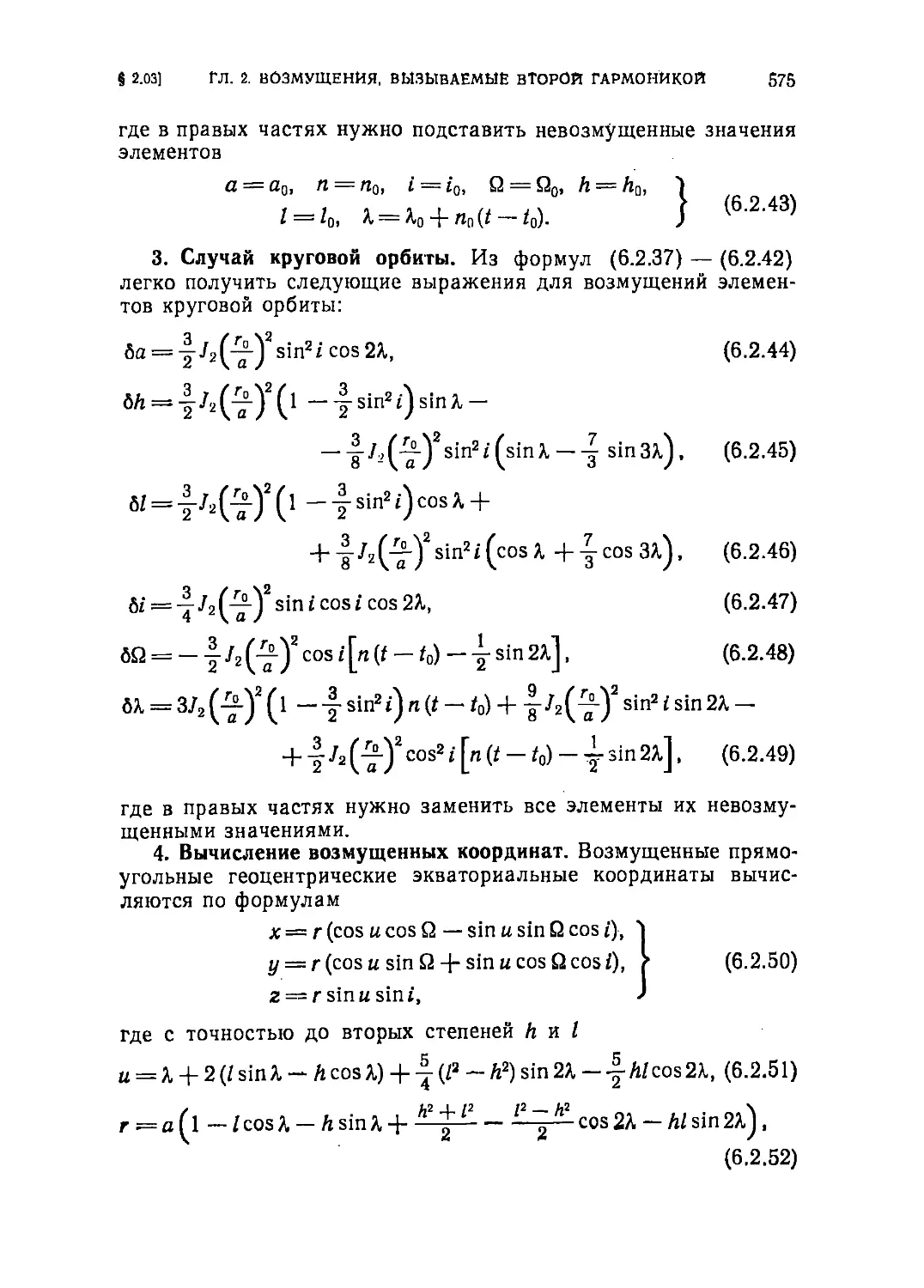
§ 2.03. Случай орбит с малыми эксцентриситетами 573
Глава 3. Теория промежуточных орбит ИСЗ 577
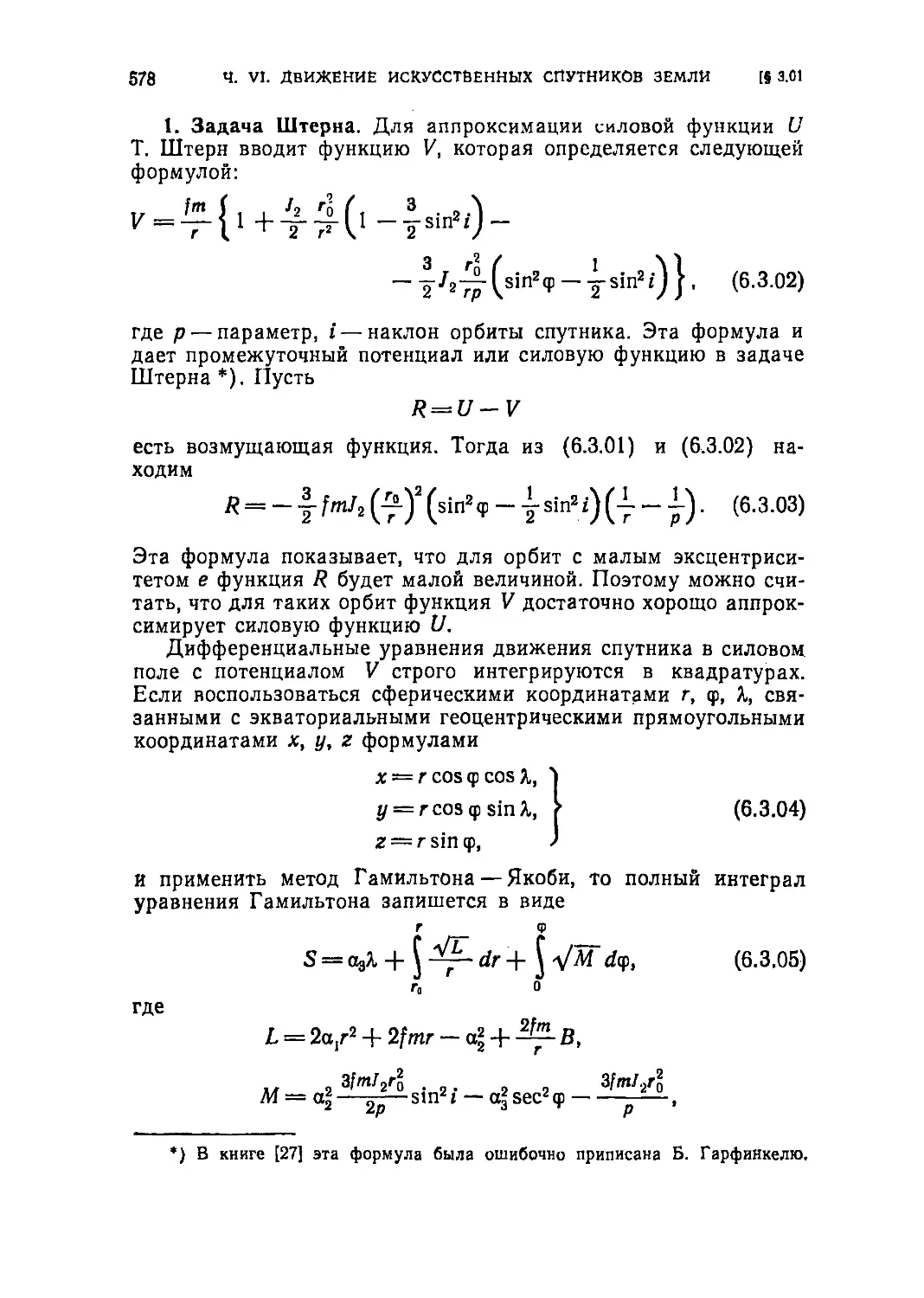
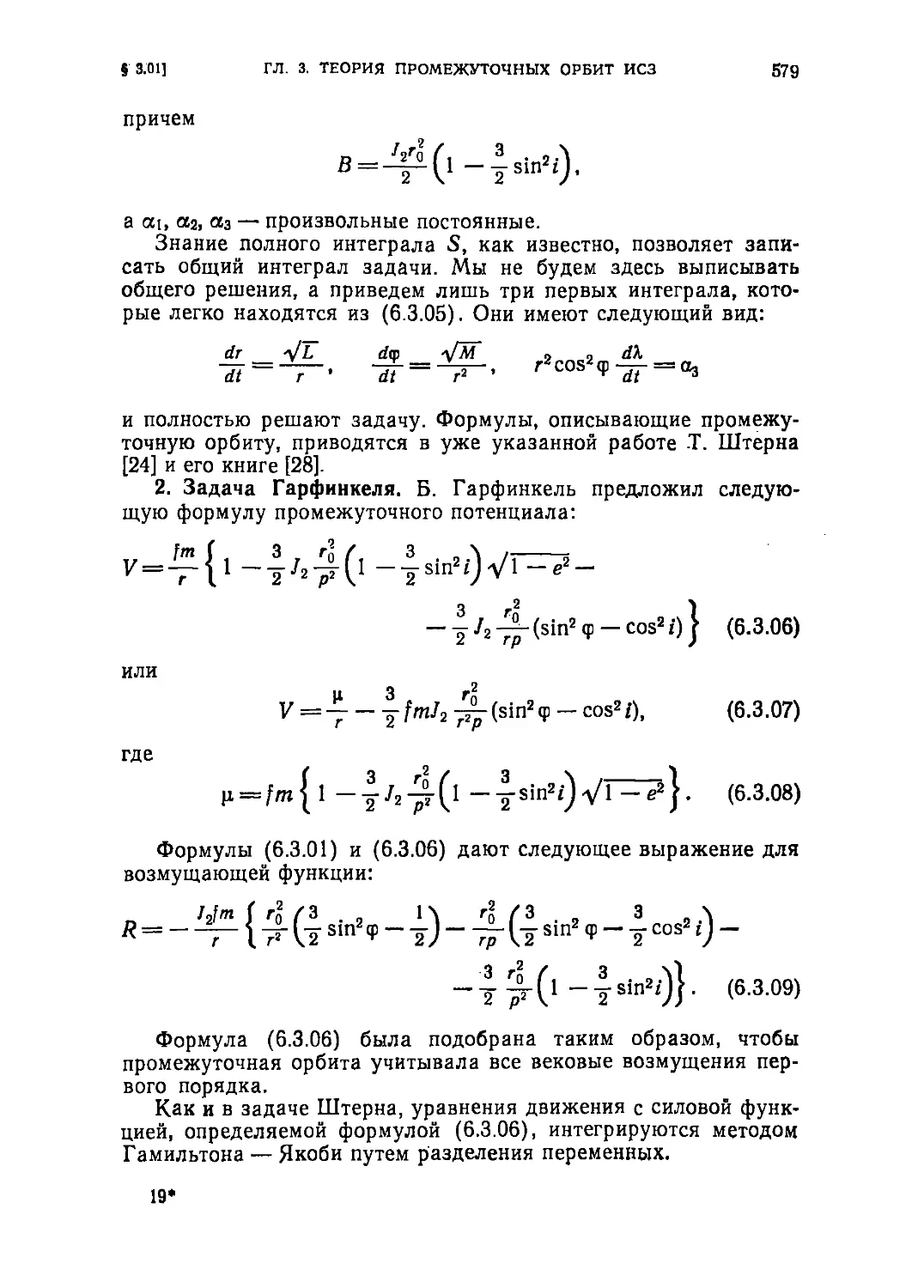
§ 3.01. Задачи Штерна, Гарфинкеля и Акснеса 577
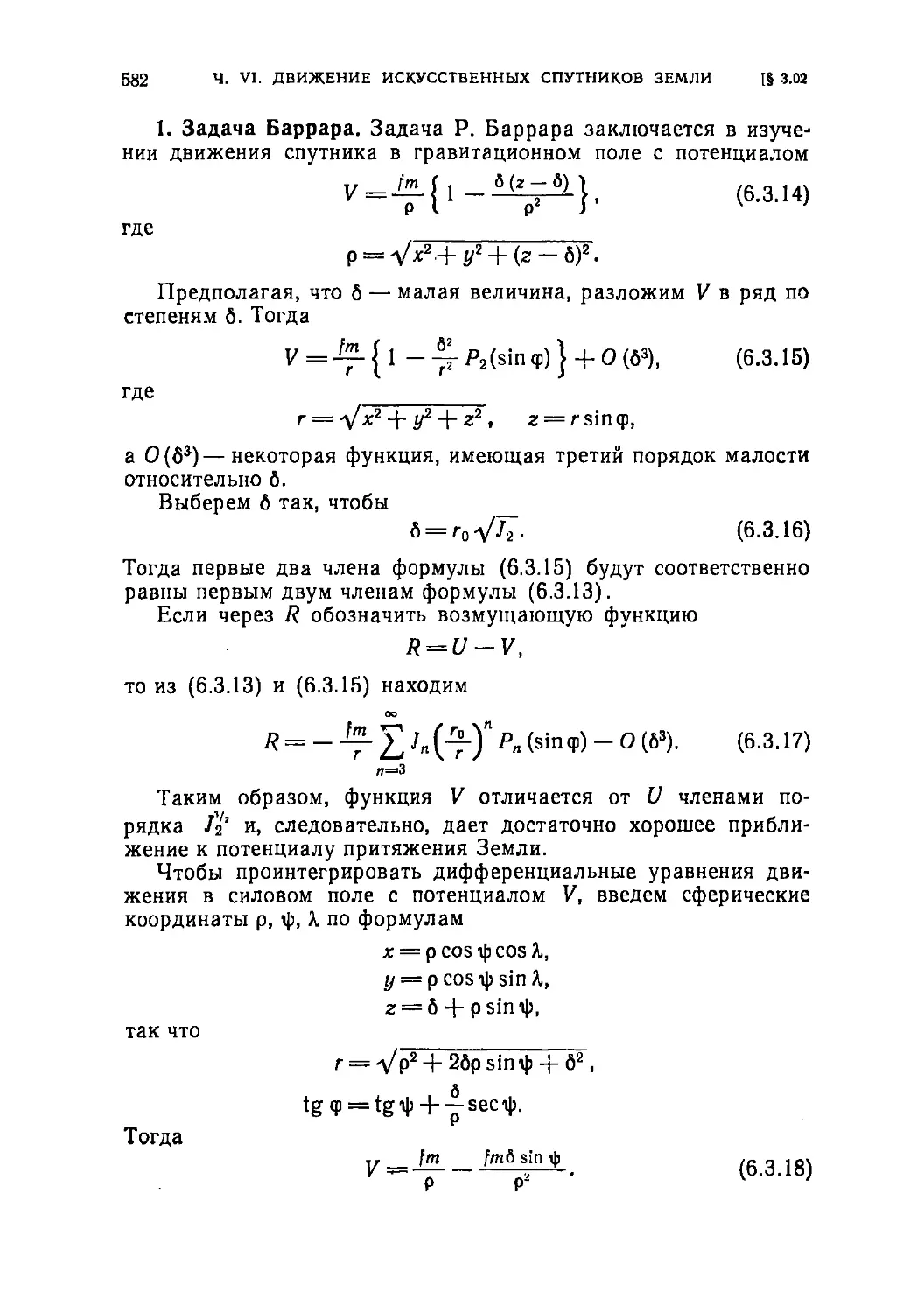
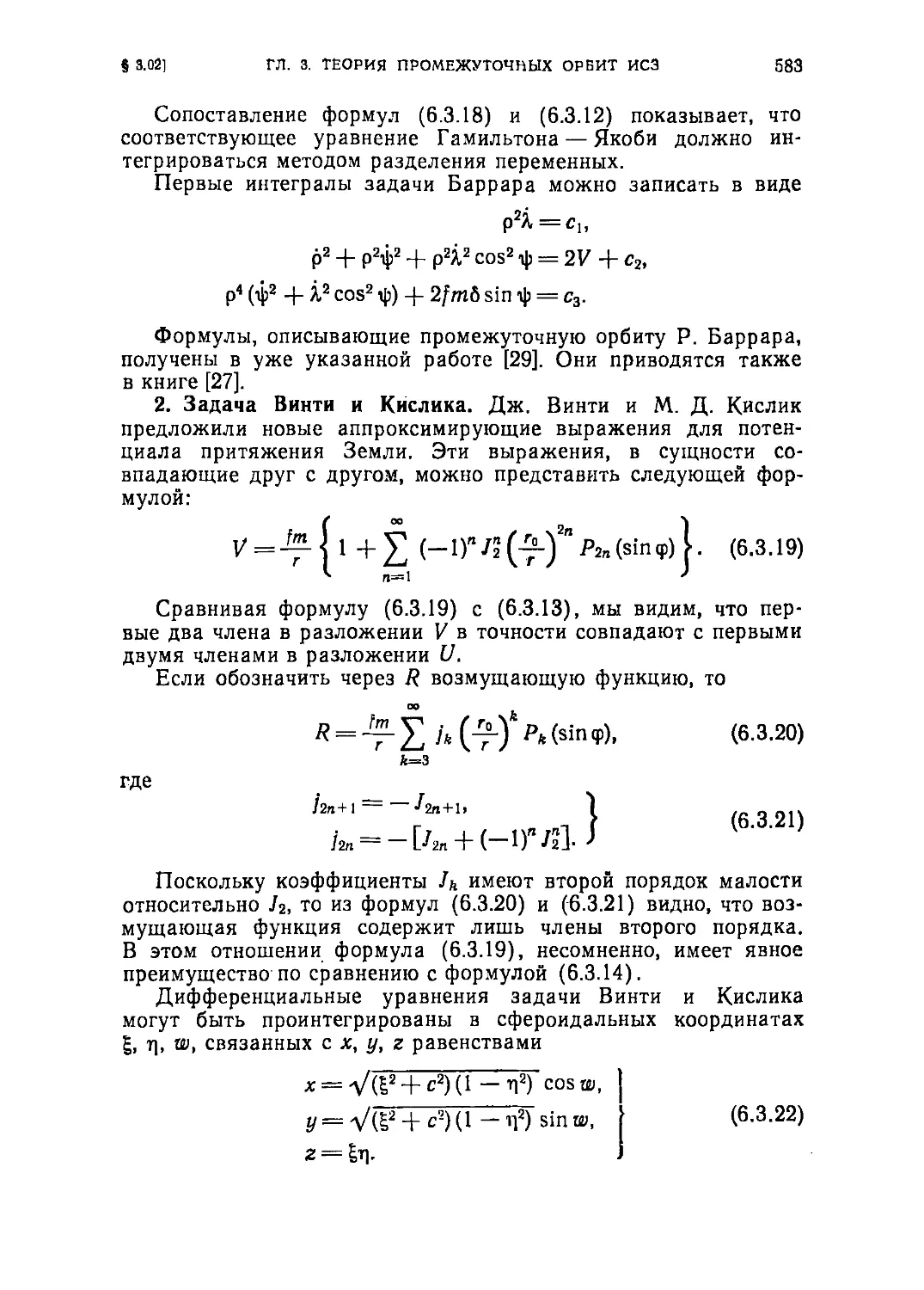
§ 3.02. Задачи Баррара, Винти и Кислика 581
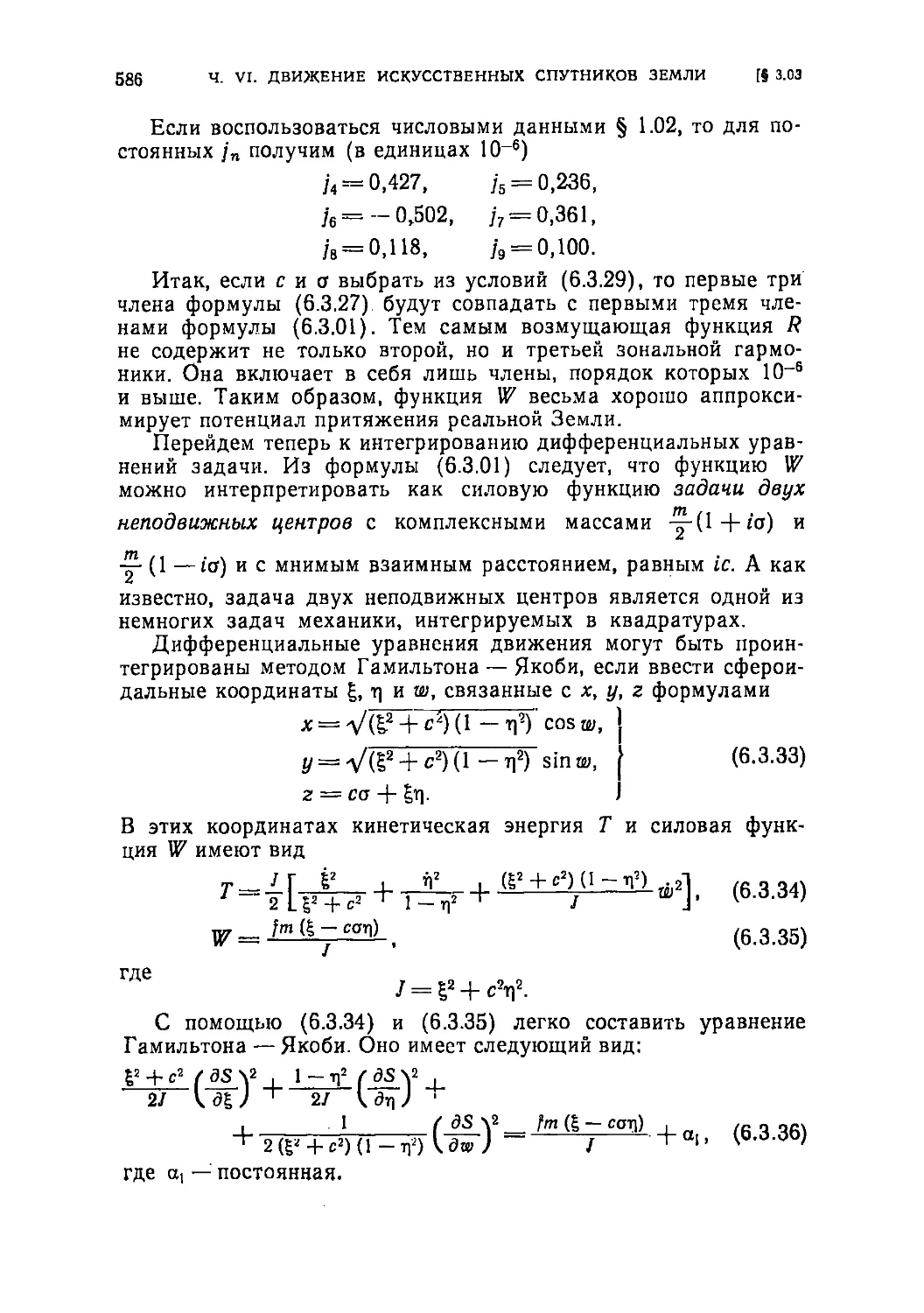
§ 3.03. Обобщенная задача двух неподвижных центров 584
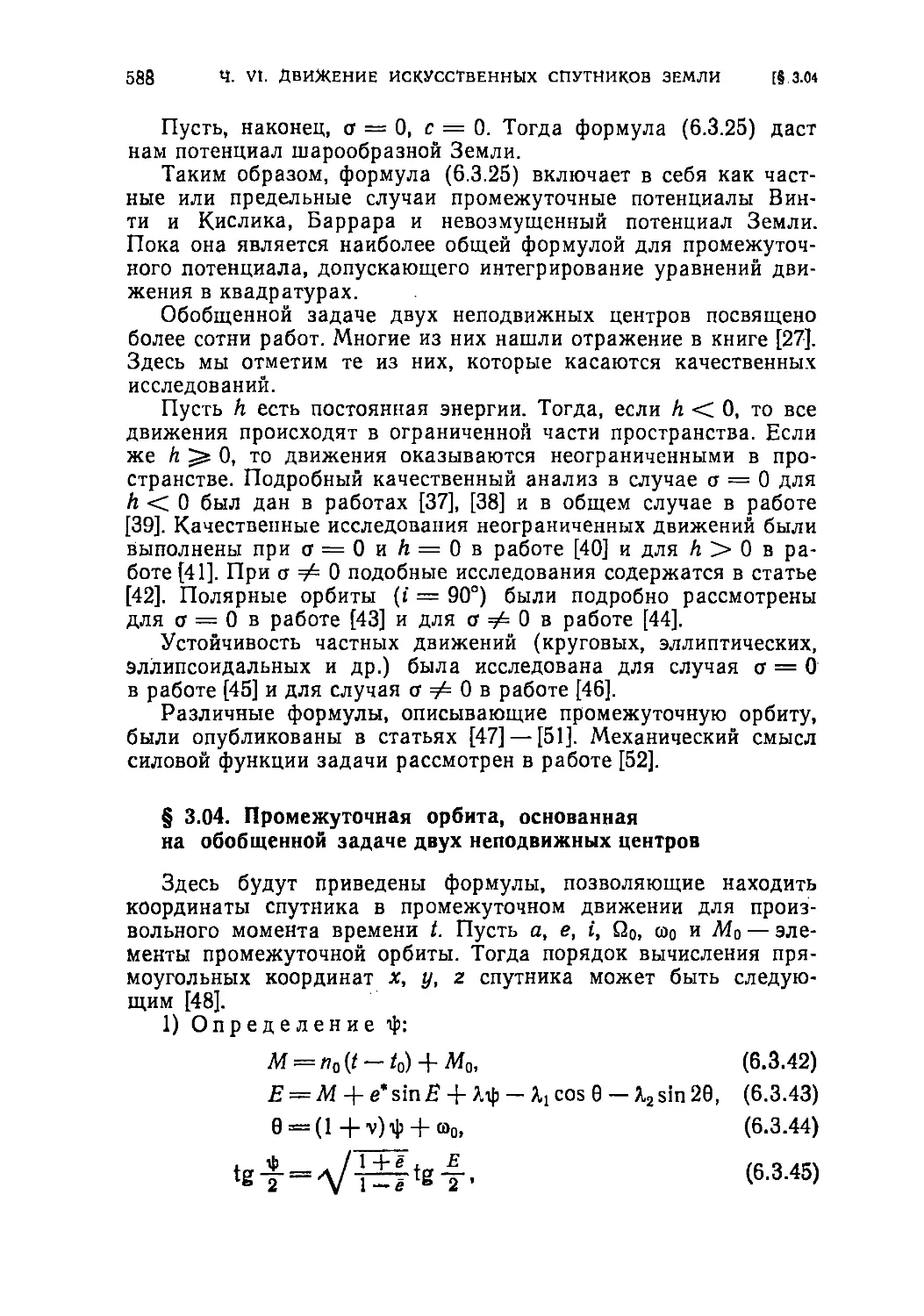
§ 3.04. Промежуточная орбита, основанная на обобщенной задаче двух 588
неподвижных центров
§ 3.05. Дифференциальные уравнения для элементов промежуточной 591
орбиты
Глава 4. Возмущения гравитационной природы 593
§ 4.01. Возмущения от зональных гармоник высших порядков 593
§ 4.02. Возмущения от зональной гармоники произвольного порядка 597
§ 4.03. Возмущения от тессеральных и секториальных гармоник 601
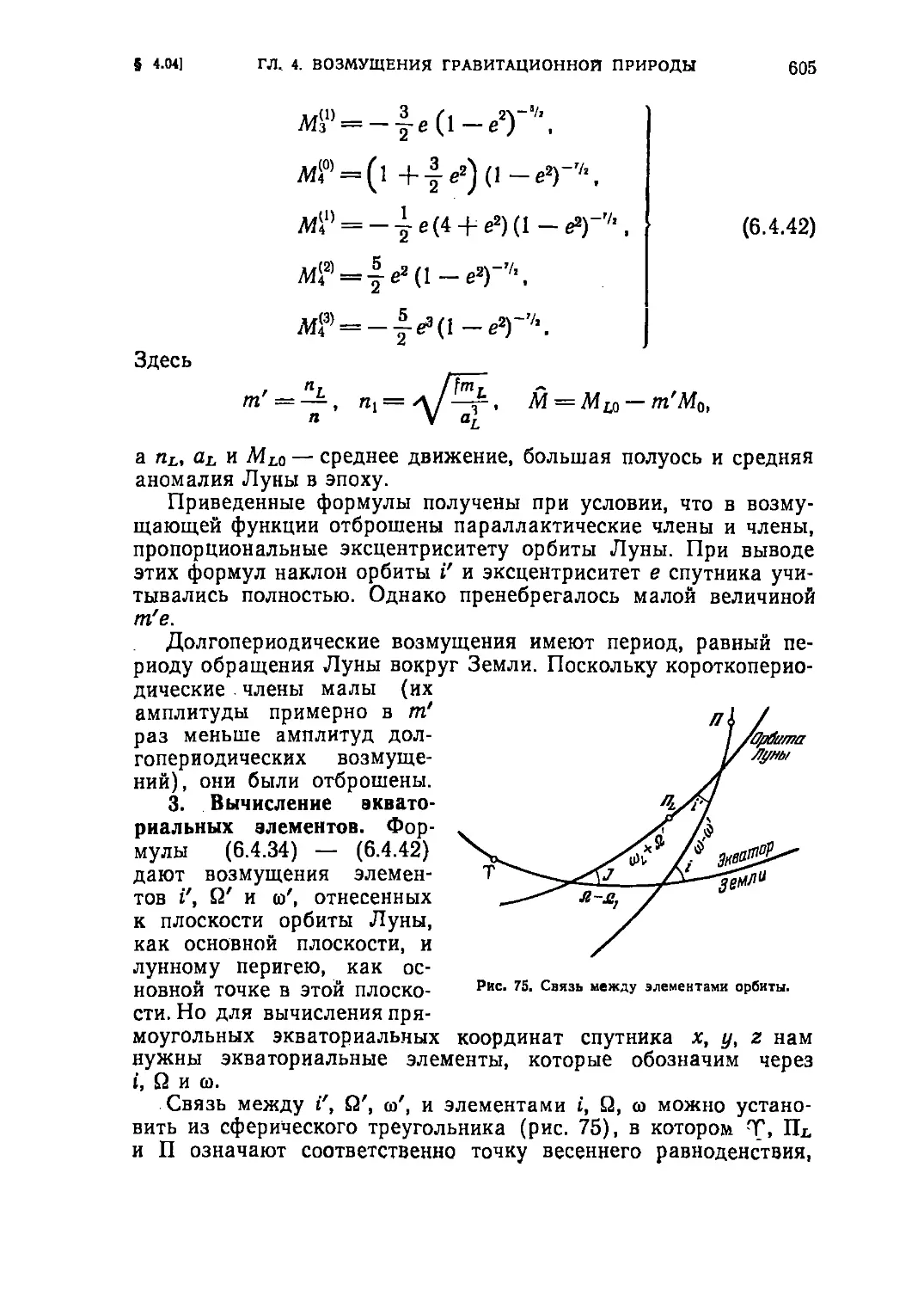
§ 4.04. Лунно-солнечные возмущения 603
§ 4.05. Определение постоянных интегрирования 607
§ 4.06. Вычисление возмущенных координат спутника 608
Глава 5. Возмущения, вызываемые сопротивлением атмосферы и 609
световым давлением
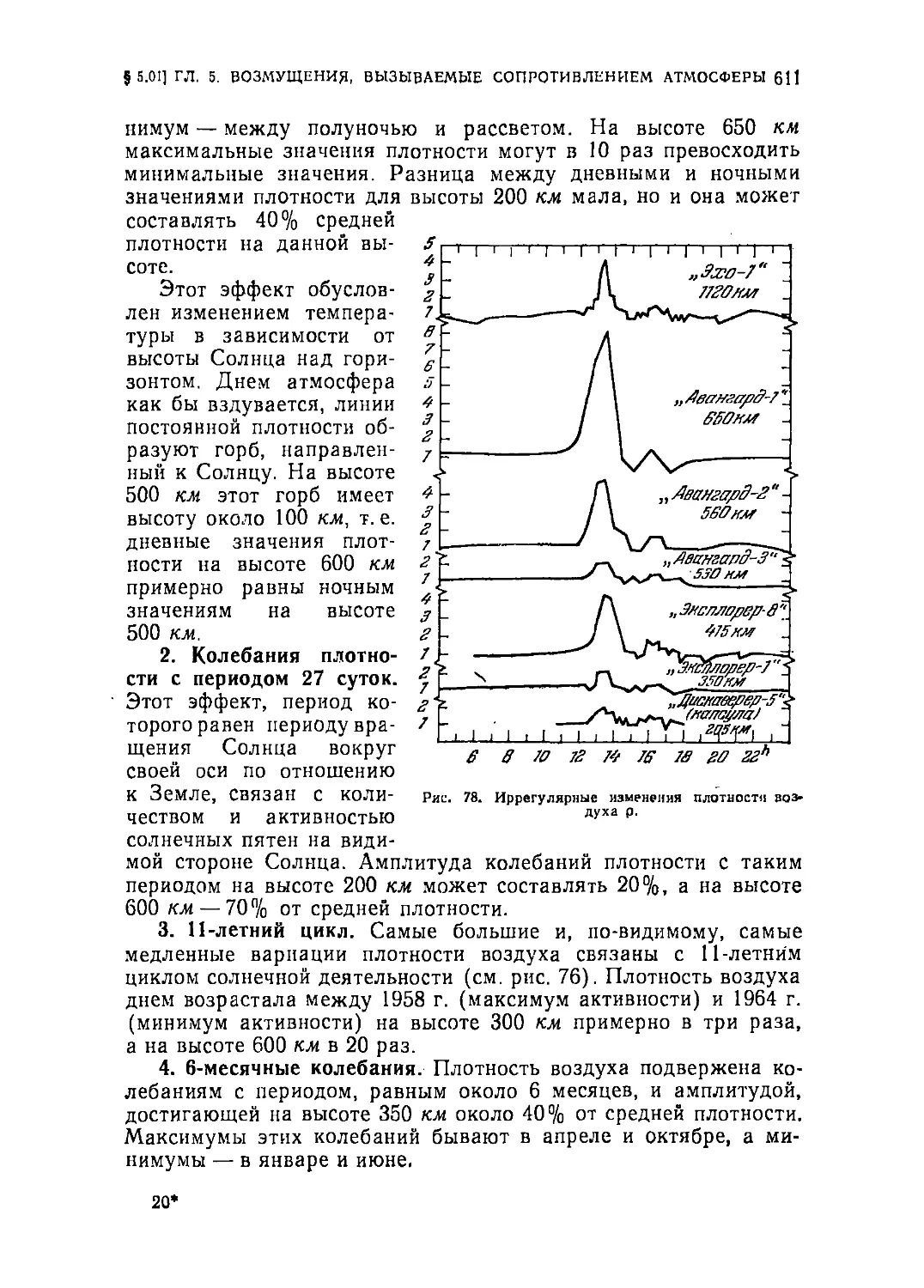
§ 5.01. Плотность атмосферы 609
§ 5.02. Стандартная атмосфера 612
§ 5.03. Сила сопротивления атмосферы 612
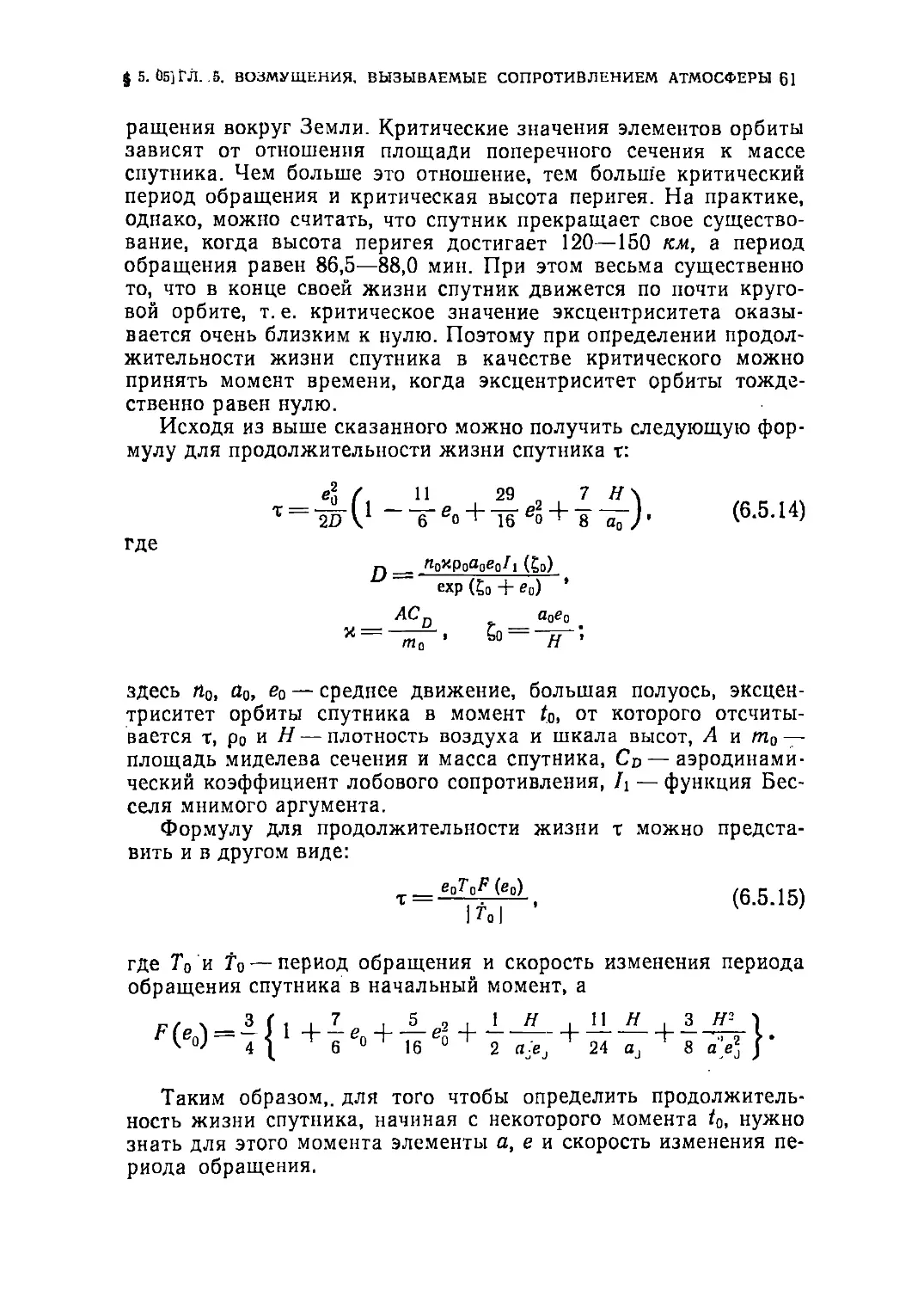
§ 5.04. Основные возмущения от сопротивления атмосферы 613
§ 5.05. Продолжительность жизни спутника 614
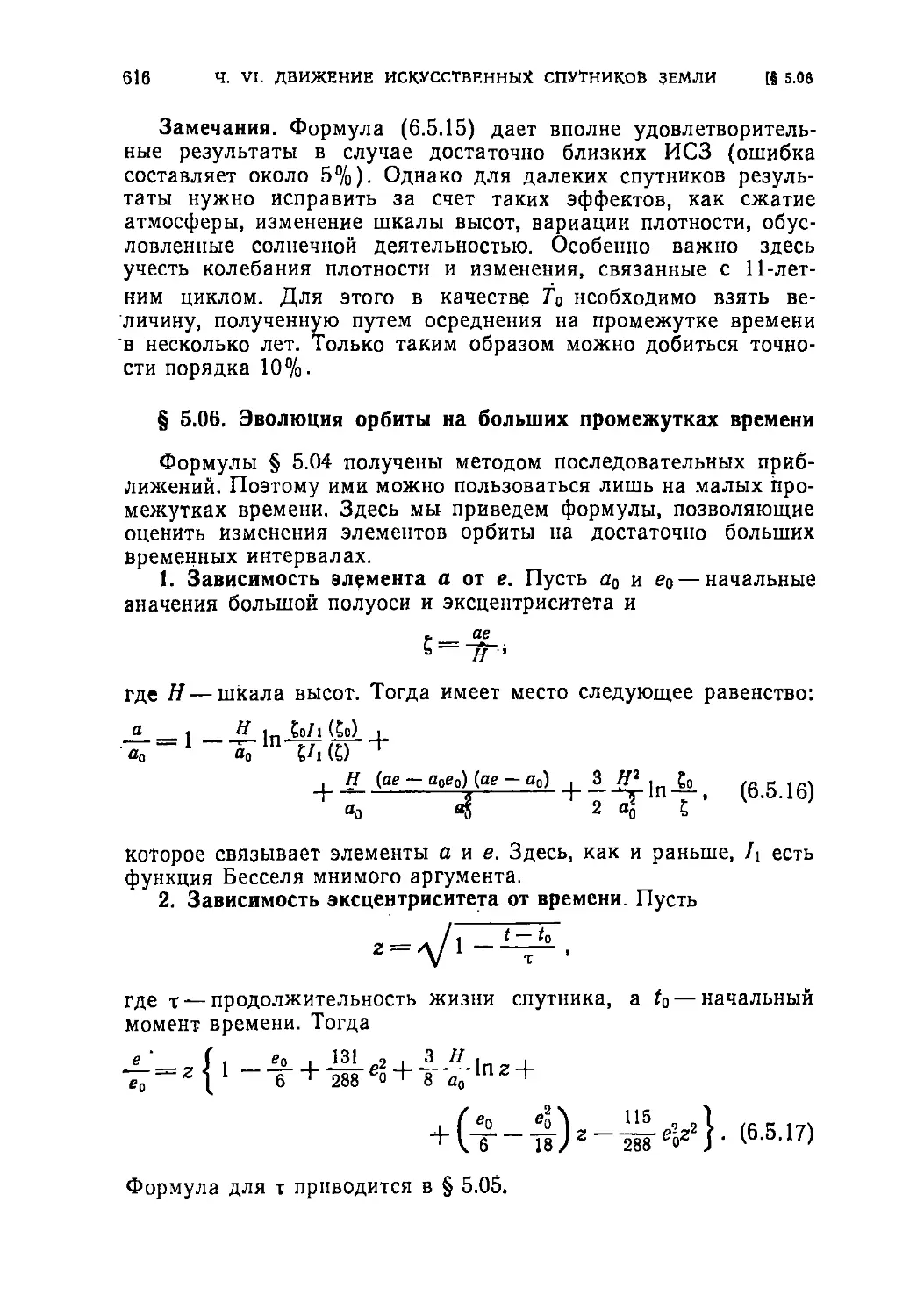
§ 5.06. Эволюция орбиты на больших промежутках времени 616
§ 5.07. Сила светового давления 617
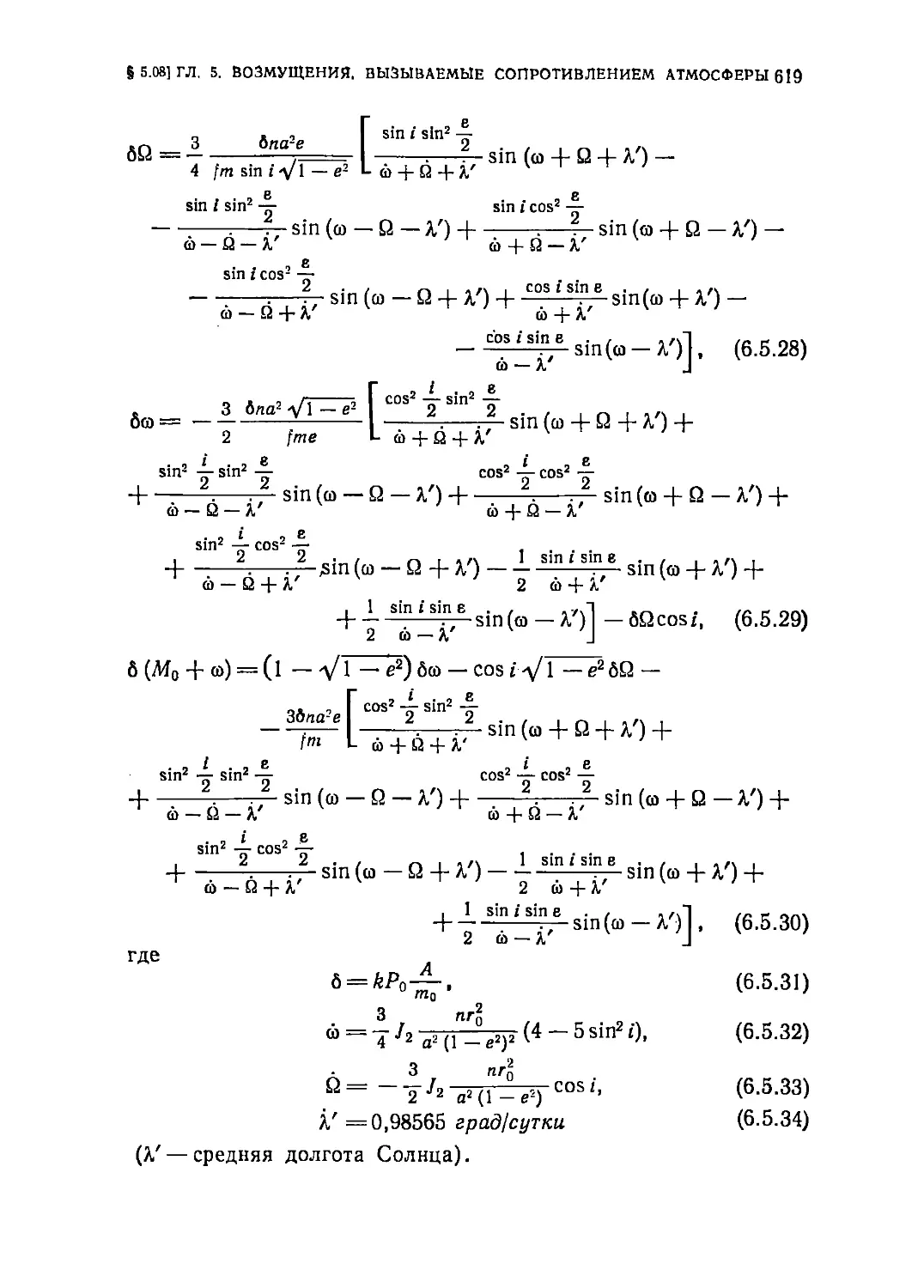
§ 5.08. Возмущения от светового давления (без учета тени) 618
§ 5.09. Возмущения от светового давления (с учетом тени) 620
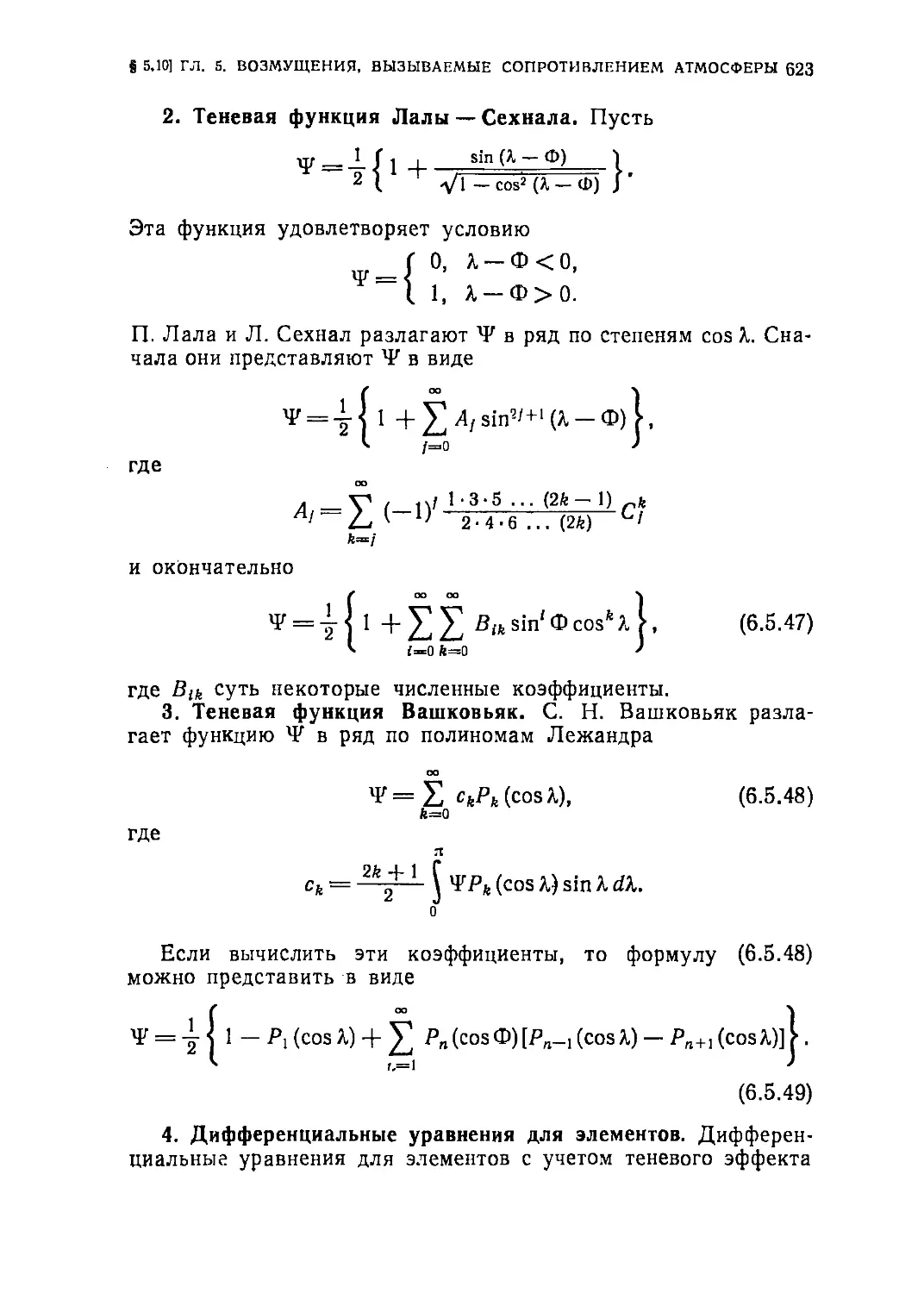
§ 5.10. Теневая функция 622
Глава 6. Другие возмущения в движении ИСЗ 625
§ 6.01. Возмущения, вызываемые прецессией и нутацией 625
Экваториальной плоскости Земли
§ 6.02. Возмущения, вызываемые приливной деформацией Земли 628
§ 6.03. Релятивистские эффекты. Влияние электромагнитных сил и 630
притяжения атмосферы
Литература к части VI 632
Часть VII. ЧИСЛЕННЫЕ МЕТОДЫ (РЯБОВ Ю. А.) 635
Глава 1. Интерполирование и приближение функций 635
§ 1.01. Таблица разностей функции 635
§ 1.02. Интерполяционные формулы 637
§ 1.03. Остаточные члены интерполяционных формул 639
§ 1.04. Обратное интерполирование 642
§ 1.05. Интерполирование функции двух переменных 643
§ 1.06. Приближение функций с помощью сплайнов 644
§ 1.07. Среднеквадратичные приближения функций 645
§ 1.08. Сглаживание табличных значений функции 647
§ 1.09. Равномерные приближения 648
§ 1.10. Аппроксимация периодических функций с известным периодом 649
тригонометрическими полиномами по методу наименьших
квадратов
§ 1.11. Аппроксимация условно-периодических функций с известными 650
частотами полиномом Фурье по методу наименьших квадратов
§ 1.12. Определение неизвестных частот периодической или 651
условнопериодической функции по совокупности табличных
данных
§ 1.13. Выделение «вековой части» функции по совокупности табличных 653
значений
Глава 2. Численное дифференцирование и интегрирование 655
§ 2.01. Численное дифференцирование с помощью интерполяционных 655
формул
§ 2.02. Другие формулы численного дифференцирования 657
§ 2.03. Численное интегрирование функции по таблице ее значений с 658
постоянным шагом
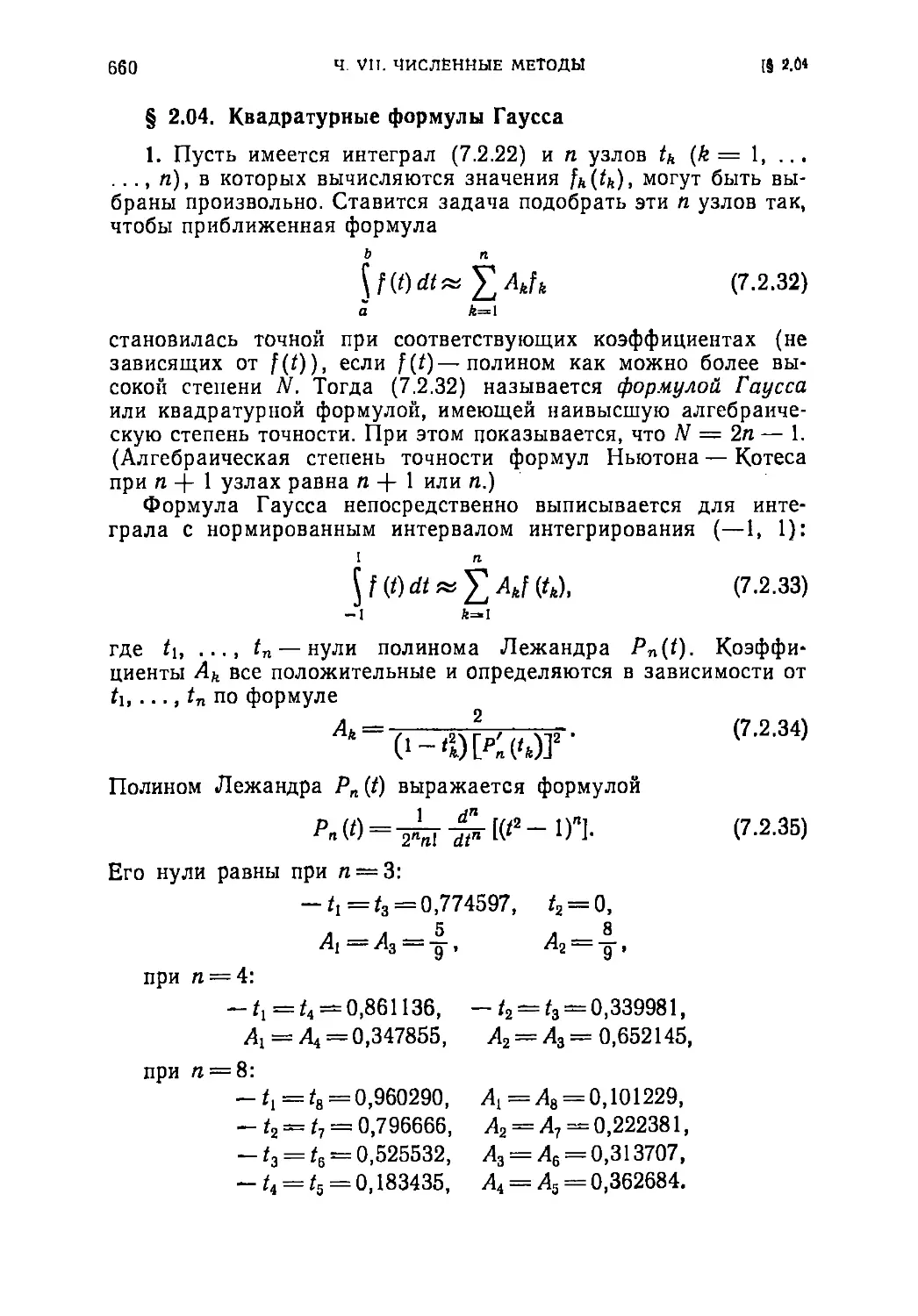
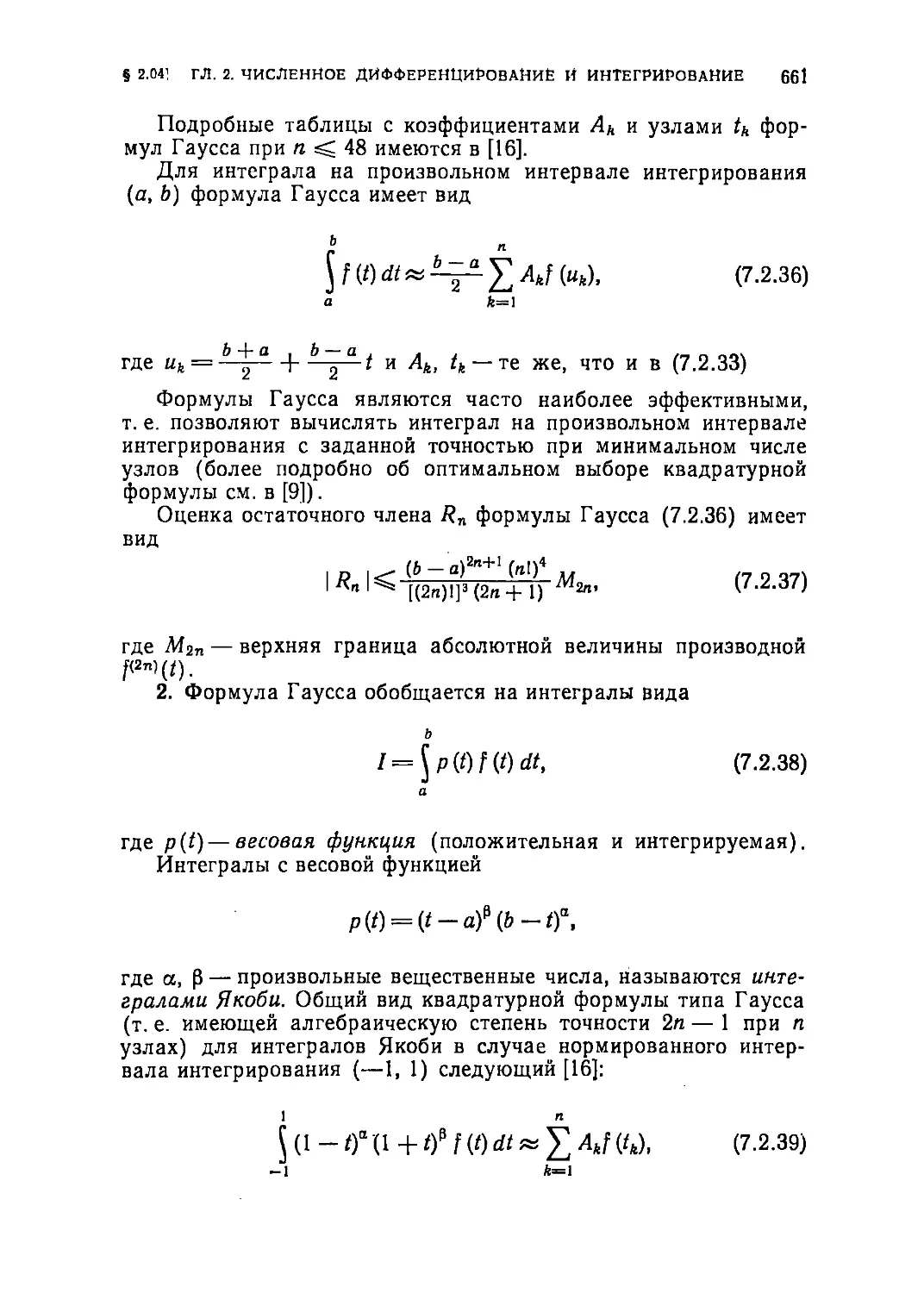
§ 2.04. Квадратурные формулы Гаусса 660
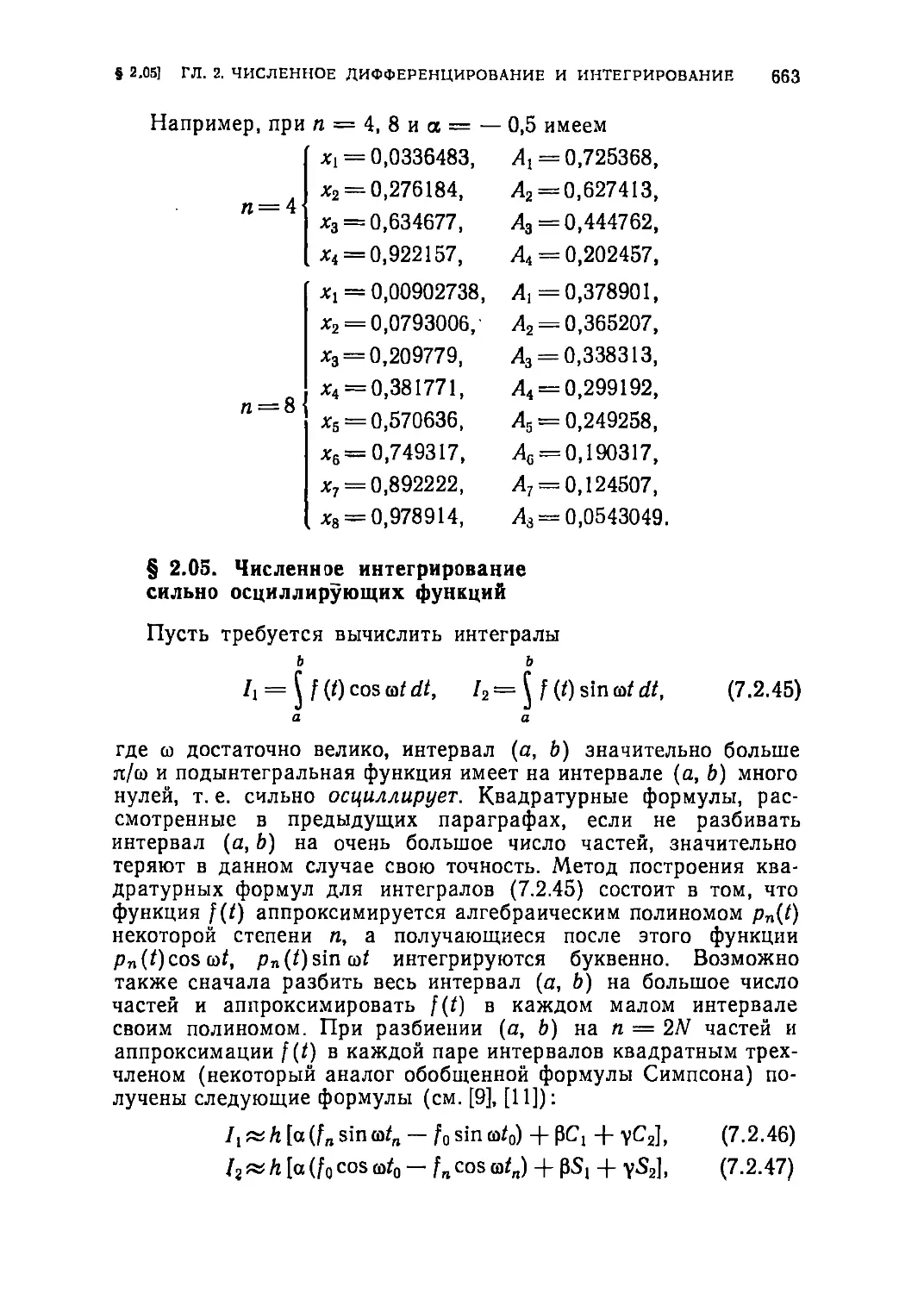
§ 2.05. Численное интегрирование сильно осциллирующих функций 663
§ 2.06. Правило Рунге практической оценки погрешности квадратурных 664
формул
§ 2.07. Квадратурные формулы для несобственных интегралов 665
Глава 3. Численное решение обыкновенных дифференциальных 667
уравнений
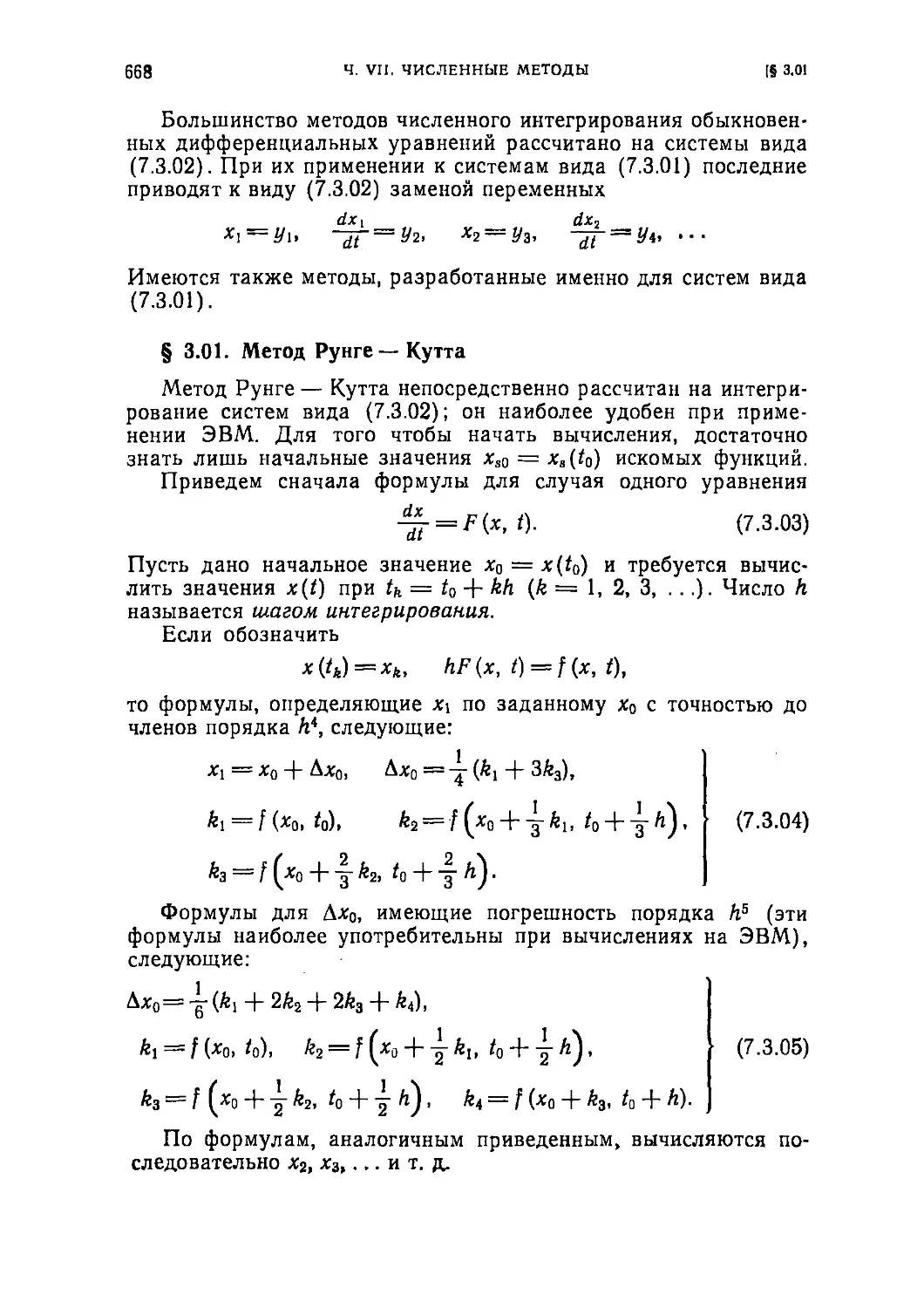
§ 3.01. Метод Рунге—Кутта 668
§ 3.02. Метод Адамса 670
§ 3.03. Метод Коуэлла 672
§ 3.04. Метод Штермера (для уравнений второго порядка) 673
§ 3.05. Метод Коуэлла A-й вариант) 674
§ 3.06. Метод Коуэлла B-й вариант) 675
§ 3.07. Накопление погрешностей при численном интегрировании 676
§ 3.08. Метод Энке численного интегрирования уравнений 676
возмущенного движения
§ 3.09. Общая постановка краевой задачи для обыкновенных 678
дифференциальных уравнений. Случай линейной краевой задачи
§ 3.10. Метод стрельбы при нахождении решения линейной 679
двухточечной краевой задачи
§ 3.11. Краевая задача для квазилинейной системы с линейными 682
краевыми условиями
§ 3.12. Краевая задача для системы, близкой к нелинейной 683
невозмущенной системе
§ 3.13. Применение метода градиентного спуска для решения 684
нелинейной краевой задачи общего вида
§ 3.14. Разностный метод решений краевых задач 687
Глава 4. Метод наименьших квадратов решения алгебраических и 689
трансцендентных уравнений
§ 4.01. Постановка задачи 689
§ 4.02. Линейные и равноточные условные уравнения 690
§ 4.03. Вероятностные оценки погрешности решения 691
§ 4.04. Неравноточные условные уравнения 691
§ 4.05. Линеаризация условных уравнений общего вида 692
Литература к части VII 693
Часть VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ 694
АСТРОДИНАМИКИ (ГРЕБЕНИКОВ Е. Л.)
Глава I. Сведения из вариационного исчисления и математической 694
теории оптимальных процессов
§ 1.01. Понятие функционала 696
§ 1.02. Задача Лагранжа. Множители Лагранжа. Уравнения Эйлера 698
§ 1.03. Первая формулировка задачи Майера 699
§ 1.04. Вторая формулировка задачи Майера 699
§ 1.05. Изопериметрическая задача 700
§ 1.06. Задача Больца 700
§ 1.07. Третья формулировка задачи Майера. Обобщение теоремы 701
Лагранжа. Характеристические уравнения (обобщенные уравнения
Эйлера—Лагранжа)
§ 1.08. Свойство множителей Лагранжа на ломаных экстремалях. 703
Условие Вейерштрасса — Эрдмана
§ 1.09. Принцип максимума Понтрягина 704
§ 1.10. Принцип оптимальности Беллмана 706
Глава 2. Основные уравнения динамики тел переменной массы 707
§ 2.01. Основное уравнение динамики точки переменной массы 707
(уравнение Мещерского)
§ 2.02. Обобщенное уравнение Мещерского 708
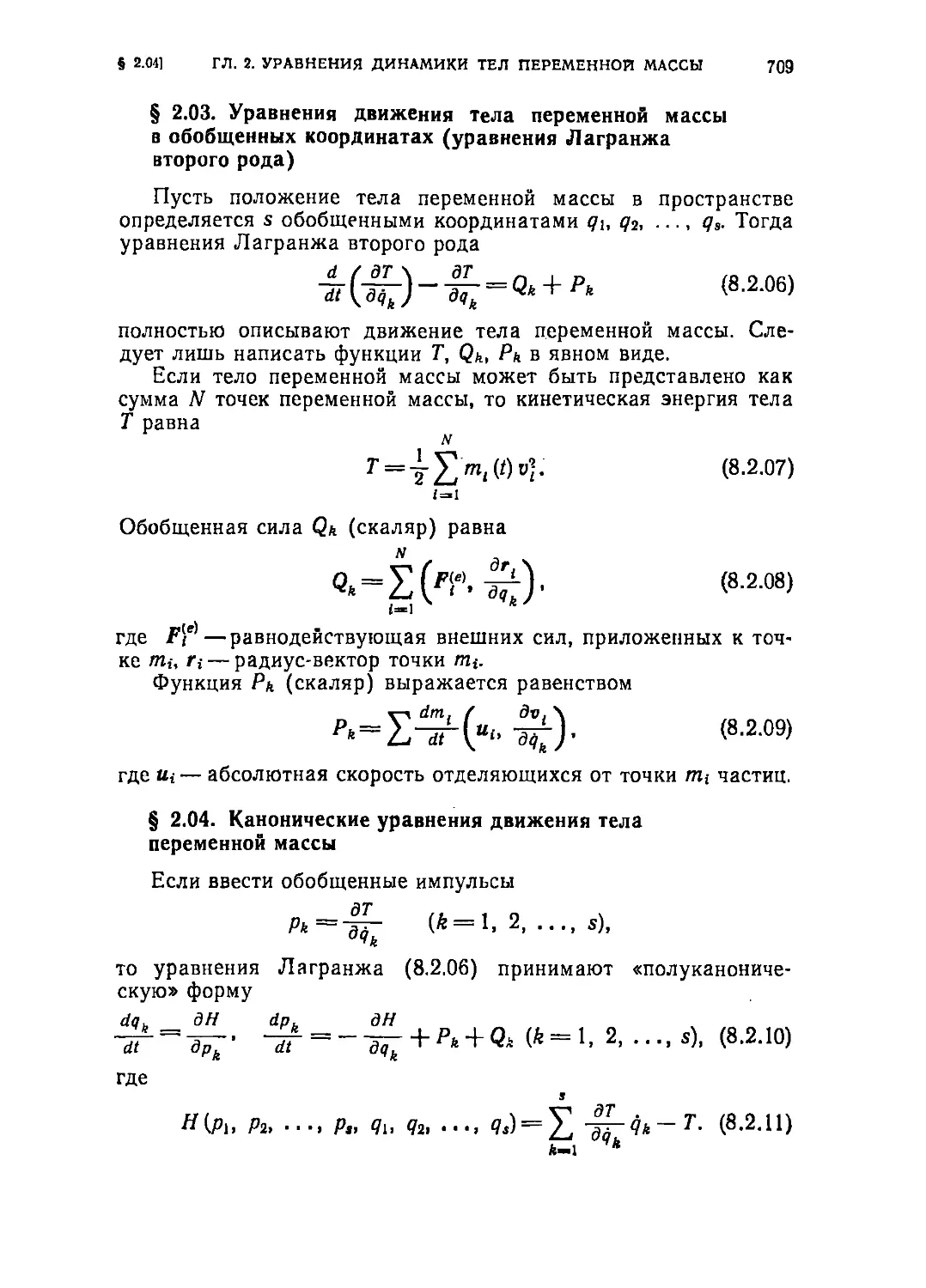
§ 2.03. Уравнения движения тела переменной массы в обобщенных 709
координатах (уравнения Лагранжа второго рода)
§ 2.04. Канонические уравнения движения тела переменной массы 709
Глава 3. Некоторые оптимальные задачи динамики полета в 711
околоземном пространстве
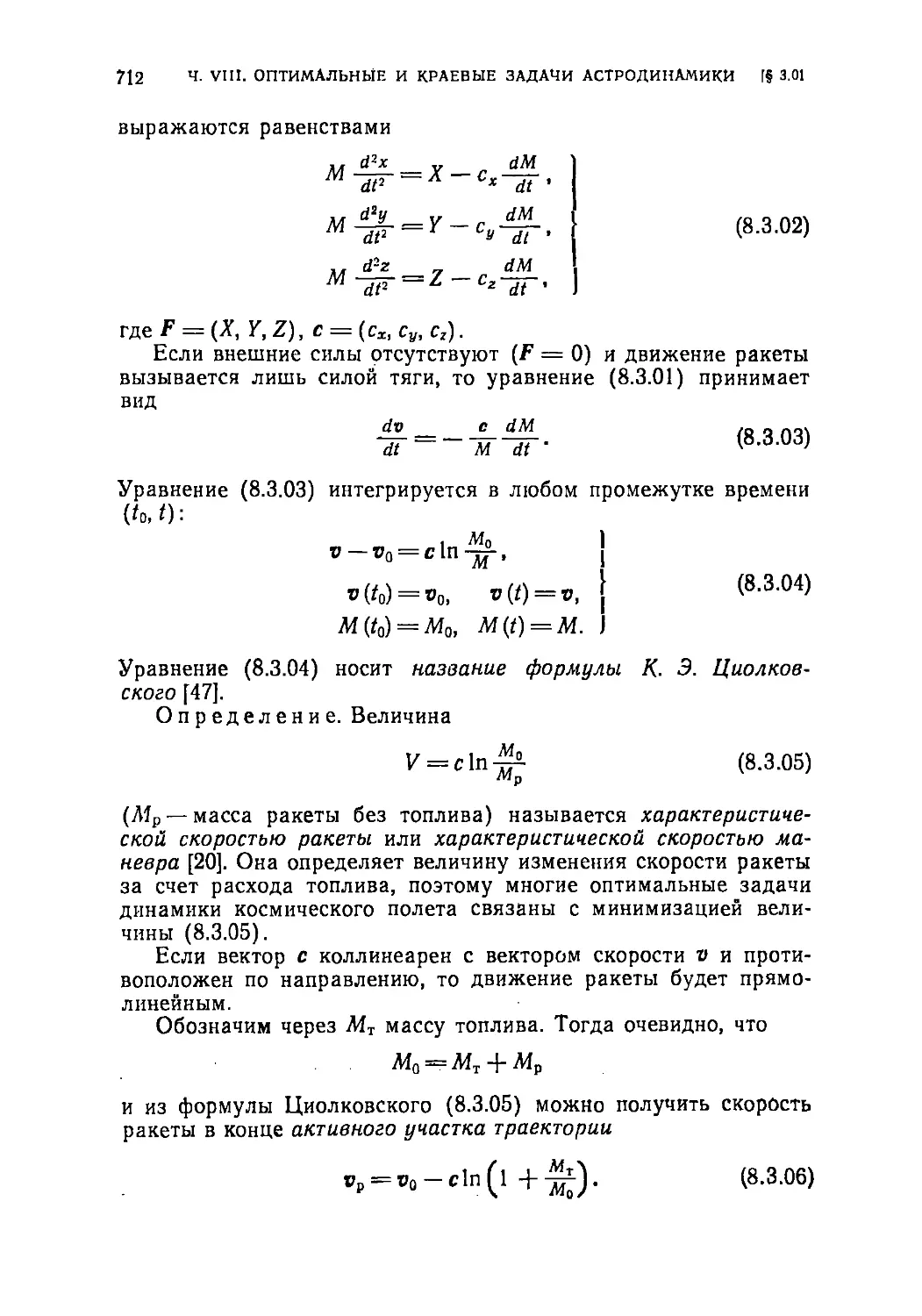
§ 3.01. Уравнения движения ракеты. Формула Циолковского 711
§ 3.02. Развернутая форма характеристических уравнений для задачи о 714
движении ракеты
§ 3.03. Определение базис-вектора и/7-траектории. Определение 715
функций переключения
§ 3.04. Определение импульсной тяги. Точки соединения на 717
оптимальных траекториях
§ 3.05. Максимизация высоты вертикального подъема ракеты в 717
однородном поле тяжести
§ 3.06. Максимизация горизонтальной дальности полета ракеты в 720
однородном поле тяжести при заданной программе расхода
топлива
§ 3.07. Общая вариационная задача для движения ракеты в однородном 722
поле тяжести
§ 3.08. Общая вариационная задача для движения ракеты в однородном 723
поле тяжести при наличии аэродинамического сопротивления
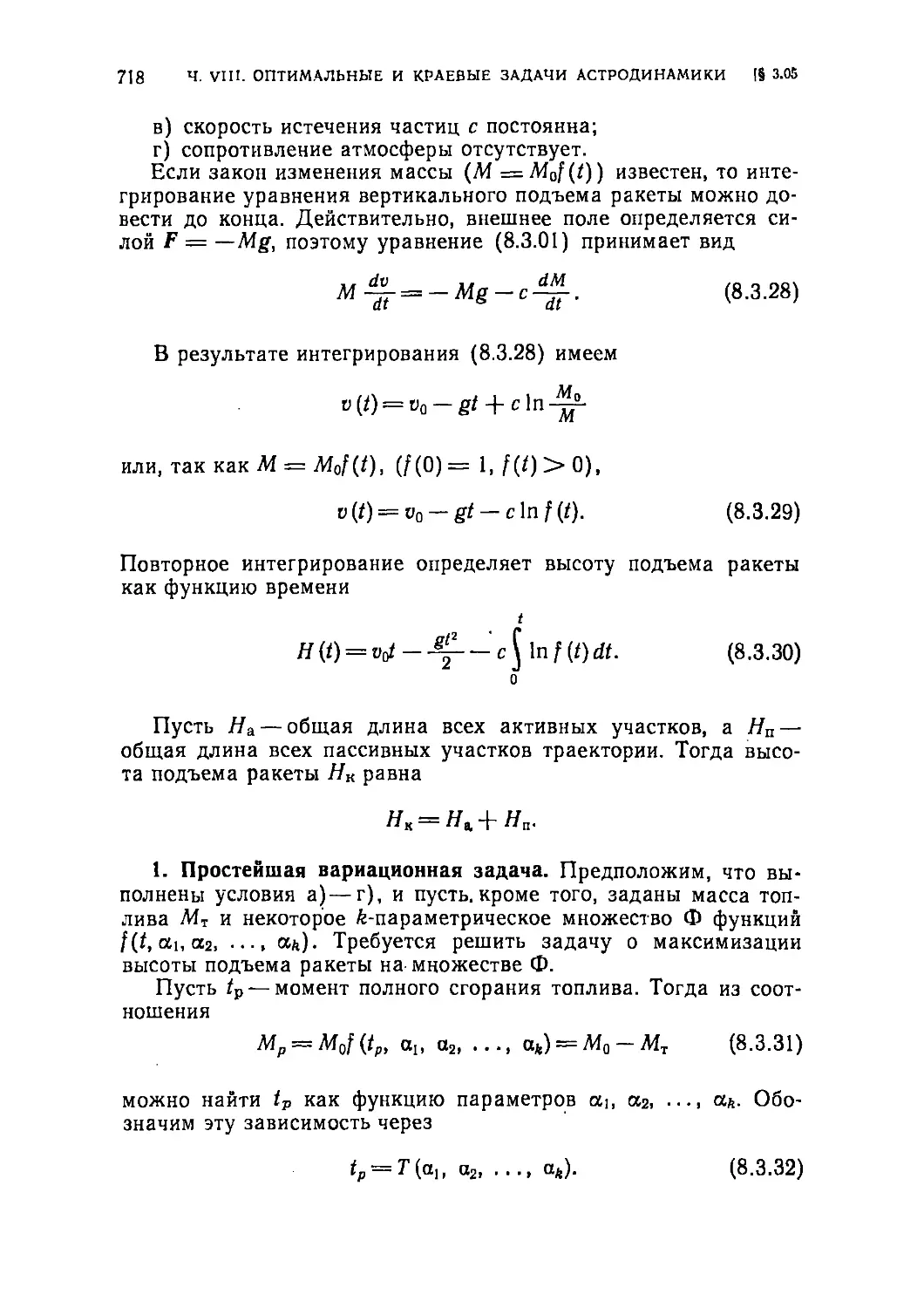
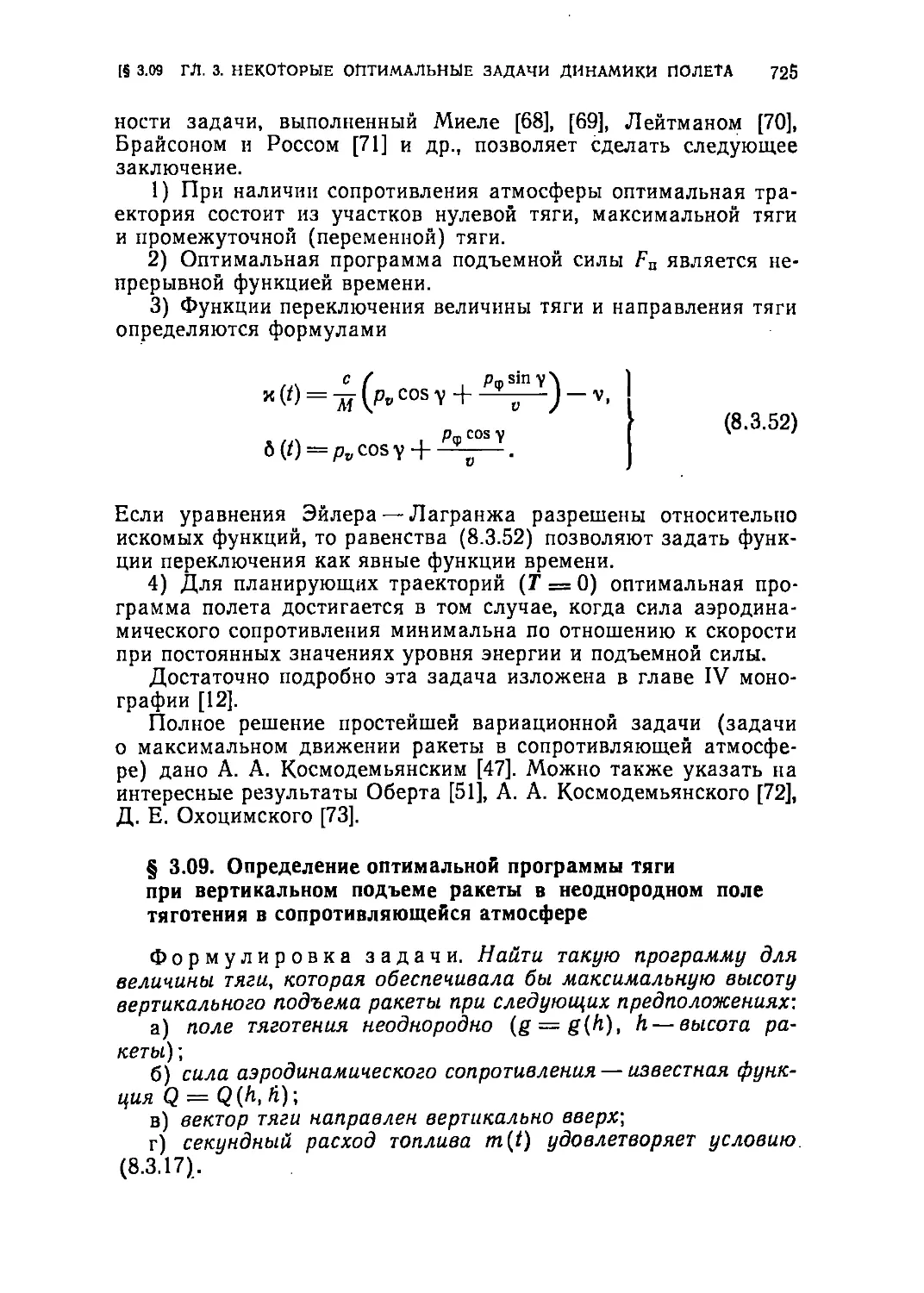
§ 3.09. Определение оптимальной программы тяги при вертикальном 725
подъеме ракеты в неоднородном поле тяготения в
сопротивляющейся атмосфере
§ 3.10. Задача о максимизации полной энергии космического аппарата 726
§3.11. Задача о минимизации характеристической скорости маневра 728
Глава 4. Межорбитальные перелеты 729
§4.01. Простейшая краевая задача 729
§ 4.02. Уравнение для базиса-вектора на участке нулевой тяги при 730
движении ракеты в ньютоновском поле тяготения
§ 4.03. Уравнение для базиса-вектора на участке промежуточной тяги 732
при движении ракеты в ньютоновском поле тяготения
§ 4.04. Уравнение для базиса-вектора на участке максимальной тяги при 733
движении ракеты в ньютоновском поле тяготения
§ 4.05. Метода-траекторий. Структура оптимальной траектории 733
§ 4.06. Связь между величиной импульса и элементами эллиптической 734
орбиты
§ 4.07. Оптимальный и-импульсный переход между двумя заданными 735
компланарными эллиптическими орбитами
§ 4.08. Оптимальный переход между двумя компланарными круговыми 737
орбитами
§ 4.09. Оптимальный переход между двумя соосными орбитами 738
§ 4.10. Другие траектории перелета в случае компланарных орбит планет 738
старта и назначения
§4.11. Траектории полета вблизи нескольких планет 740
§ 4.12. Начальный этап (запуск и уход) межпланетной траектории 743
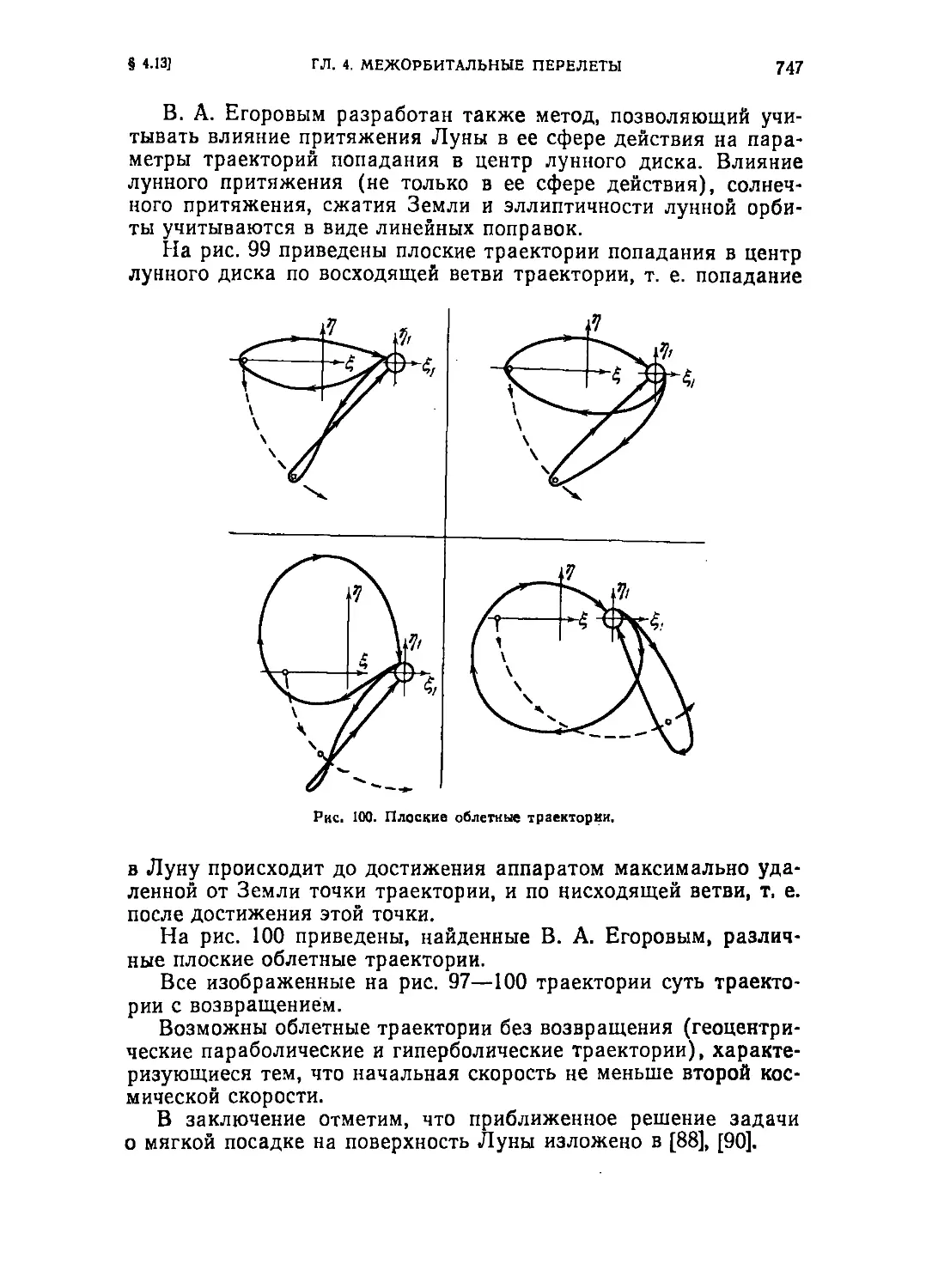
§4.13. Полеты к Луне 744
Литература к части VIII 748
Часть IX. ДВИЖЕНИЕ ЕСТЕСТВЕННЫХ И ИСКУССТВЕННЫХ 751
НЕБЕСНЫХ ТЕЛ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС (ДЕМИН В.Г.)
Глава 1. Дифференциальные уравнения движения небесных тел 751
относительно центра масс
§ 1.01. Вращение Земли относительно центра масс 751
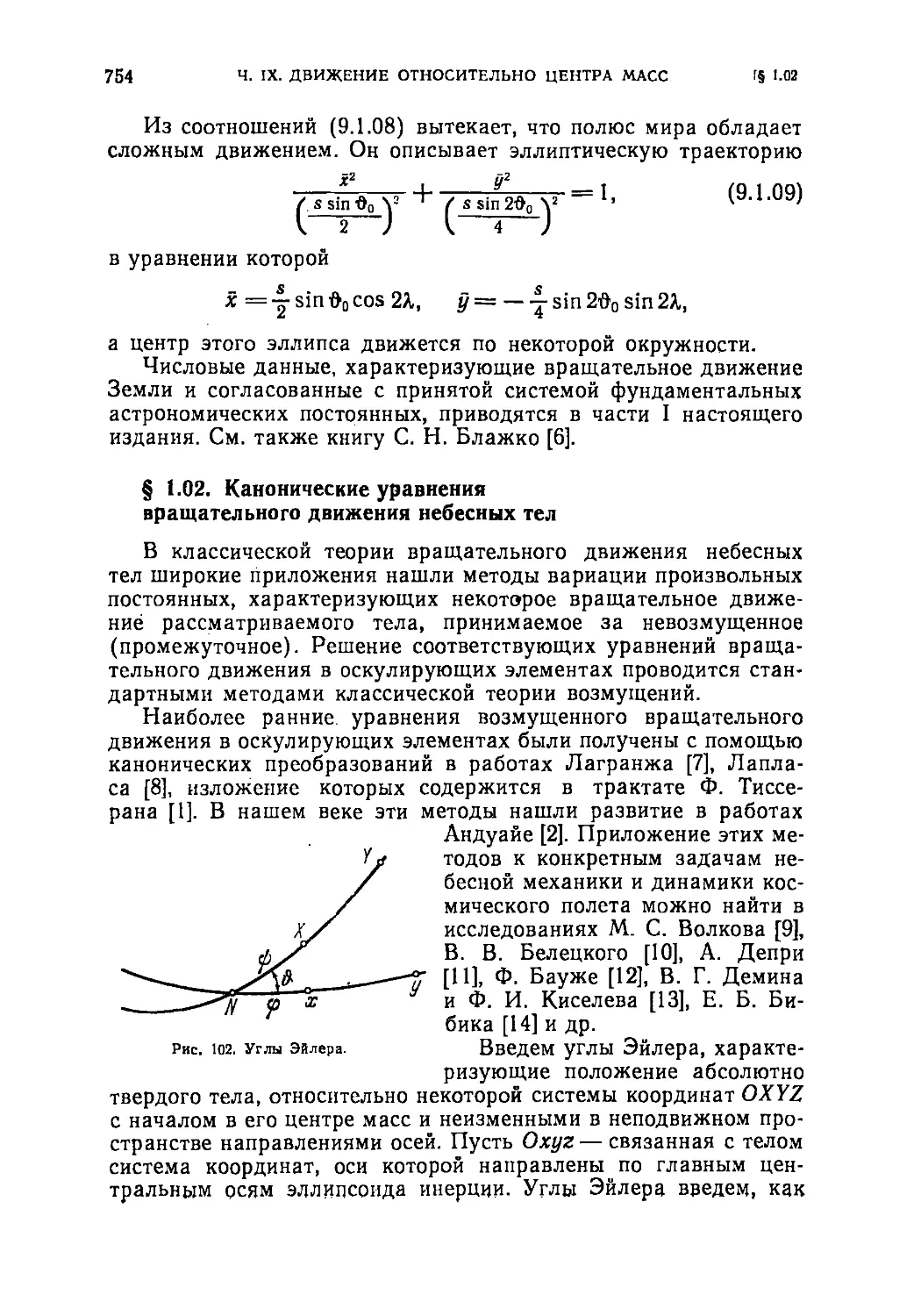
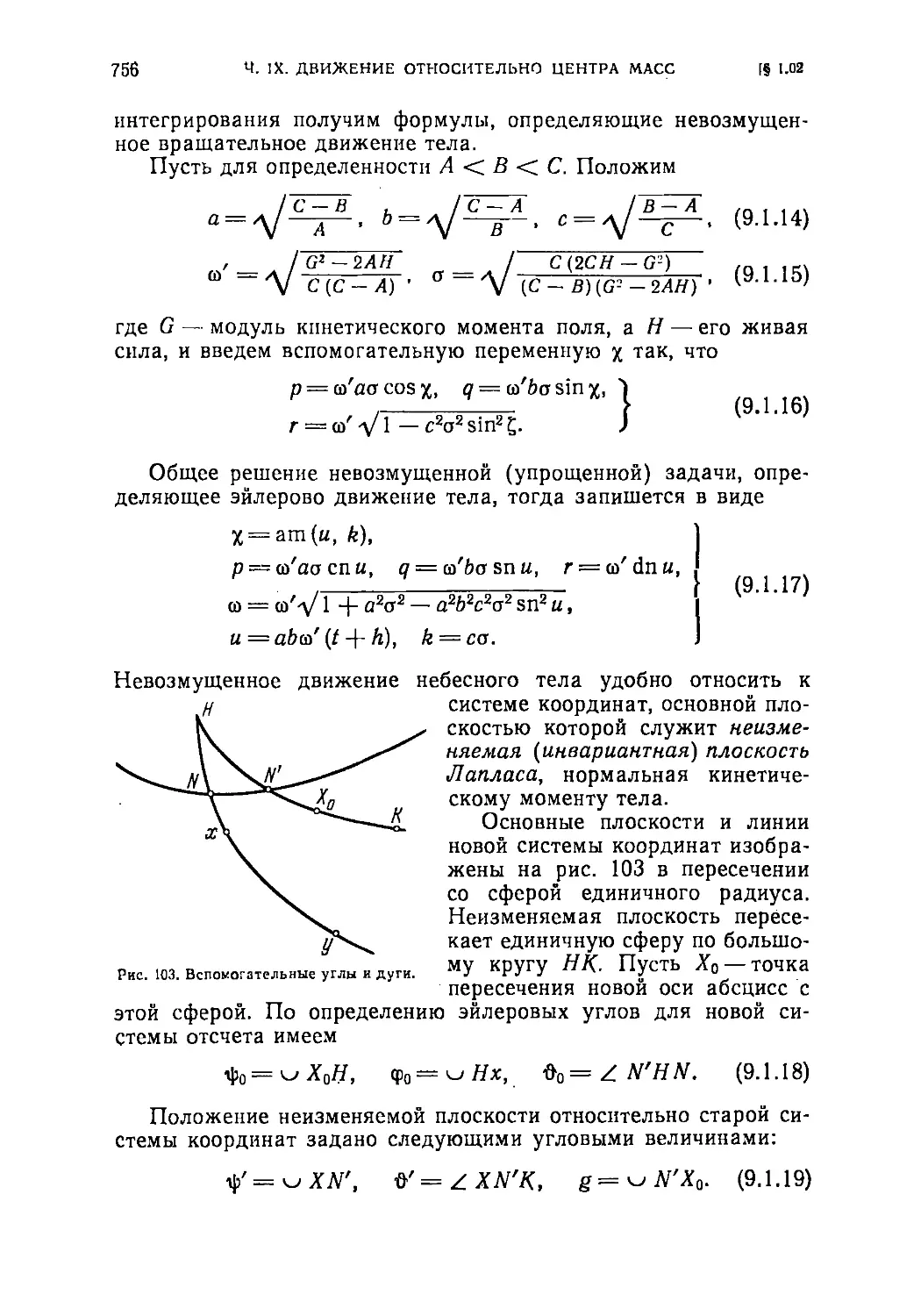
§ 1.02. Канонические уравнения вращательного движения небесных тел 754
§ 1.03. Астродинамические дифференциальные уравнения возмущенного 759
движения спутника относительно центра масс
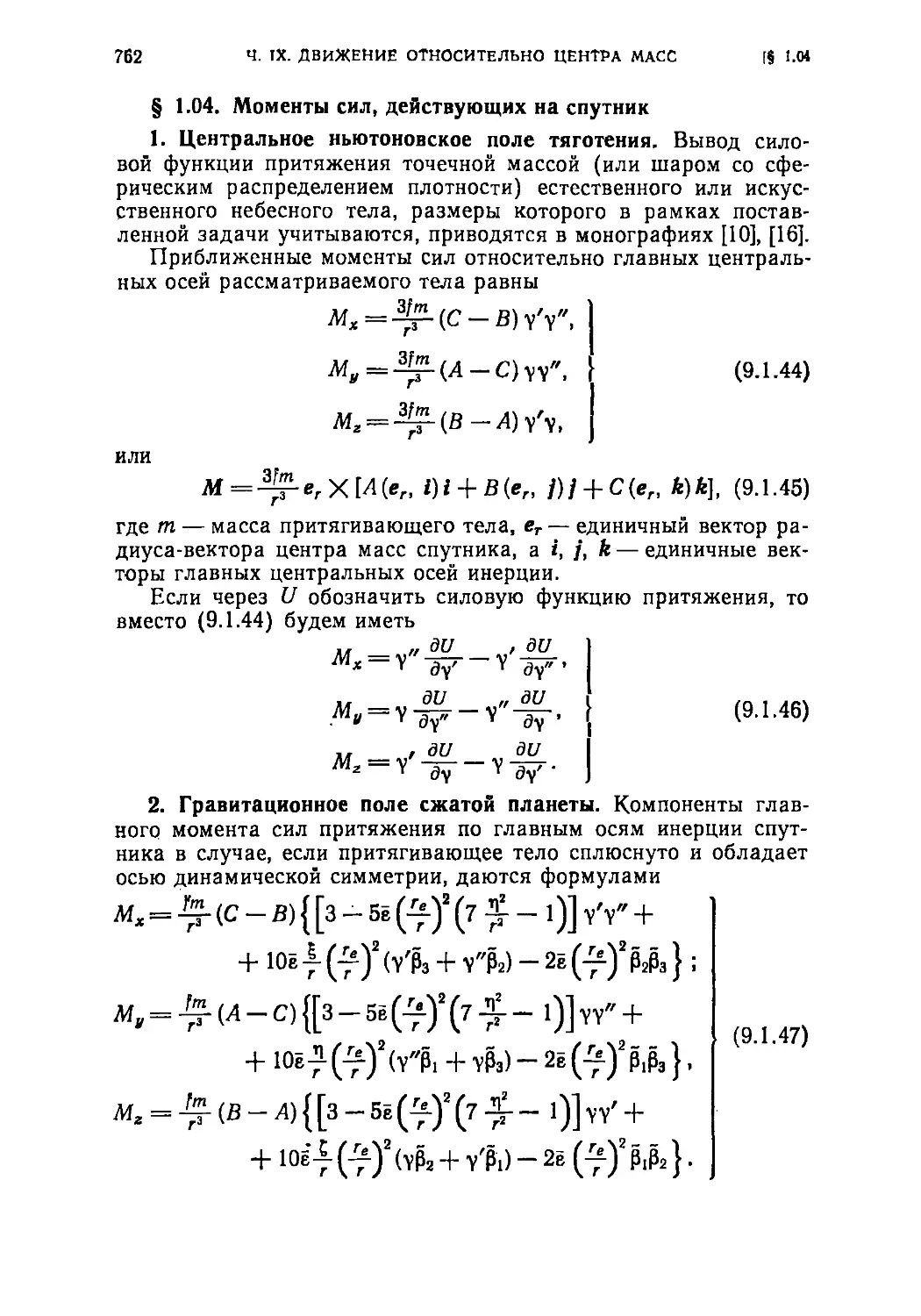
§ 1.04. Моменты сил, действующих на спутник 762
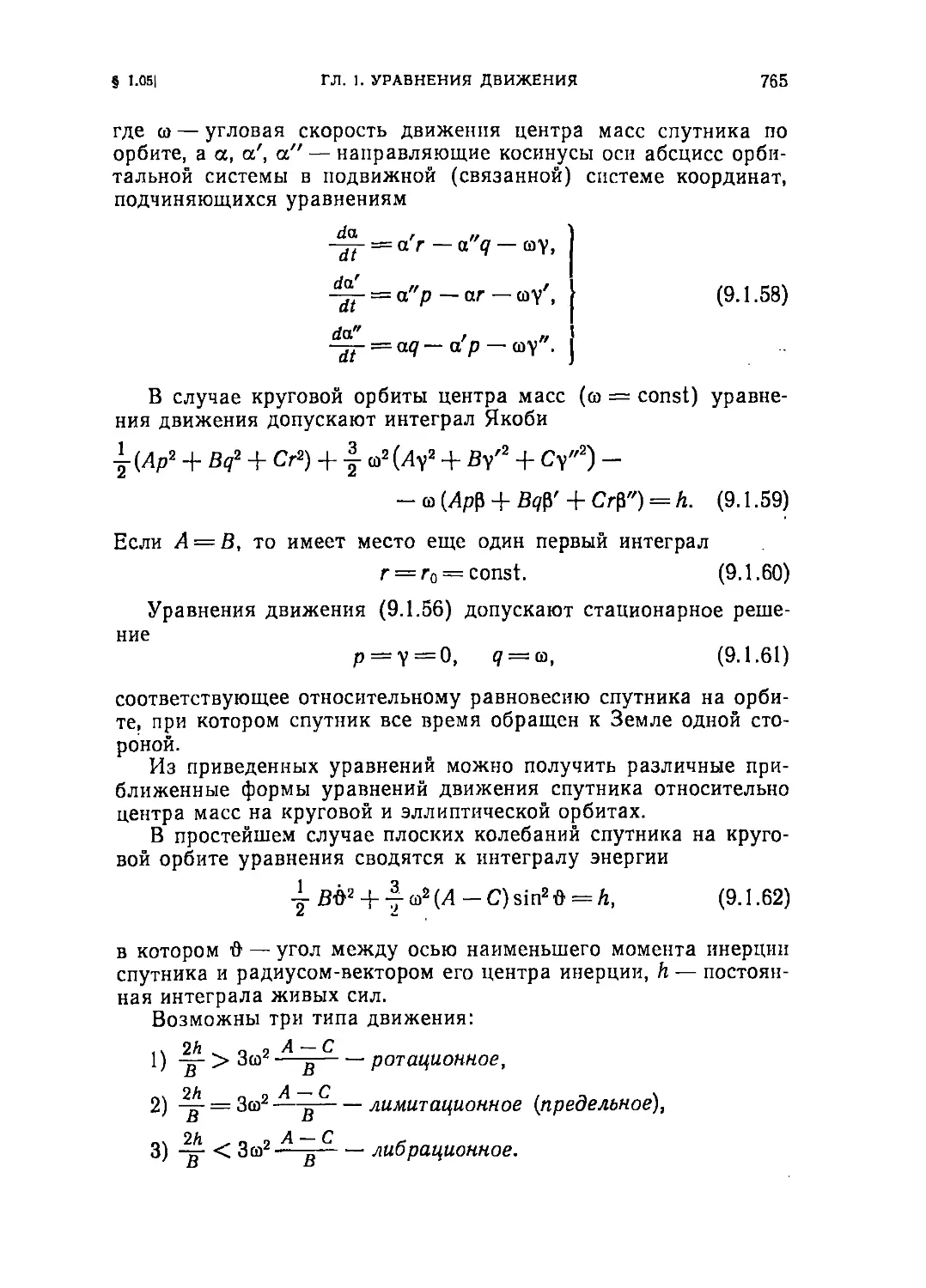
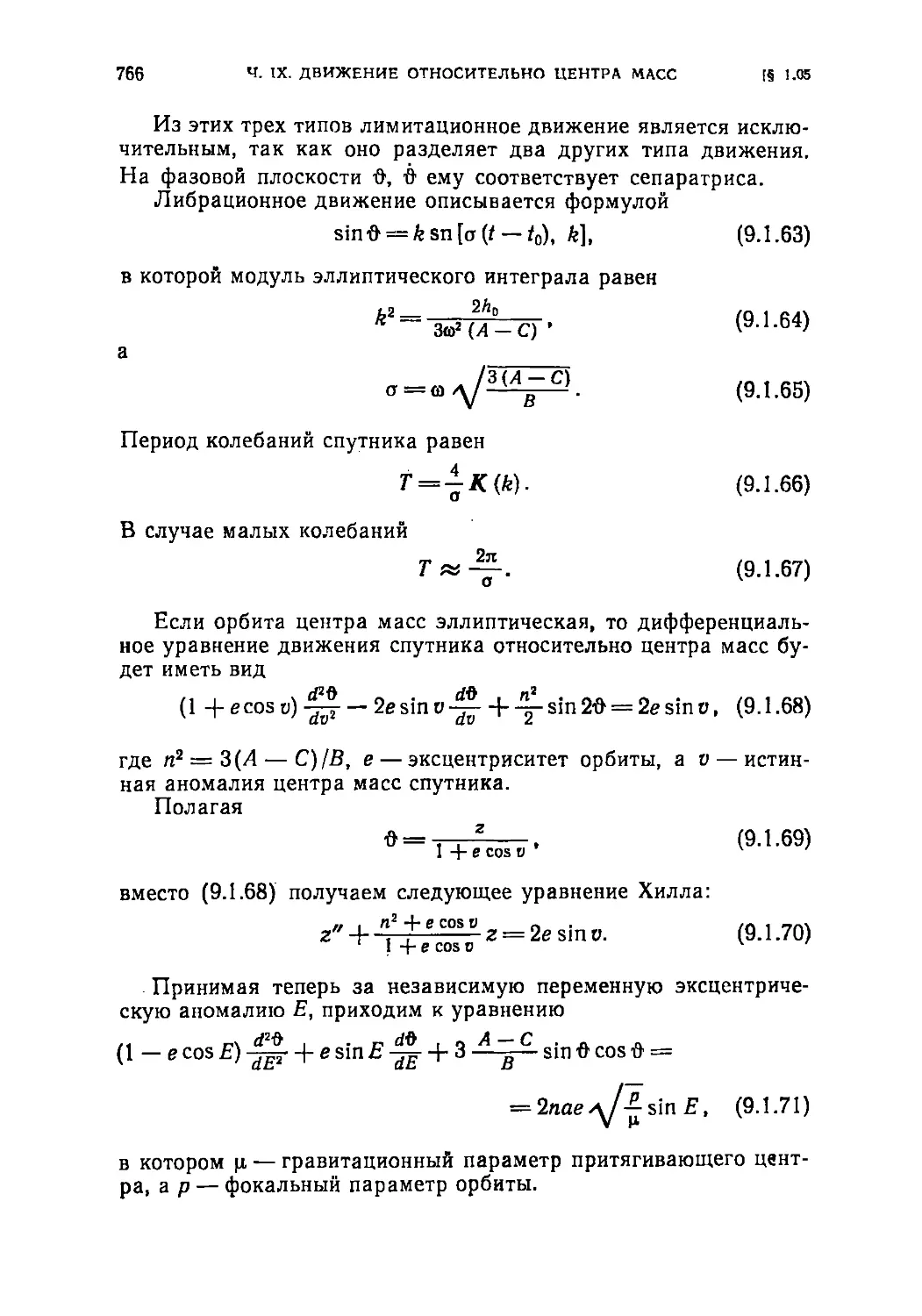
§ 1.05. Движение спутника относительно центра масс в центральном 764
ньютоновском поле
§ 1.06. Задача о поступательно-вращательном движении двух 768
гравитирующих динамически симметричных тел
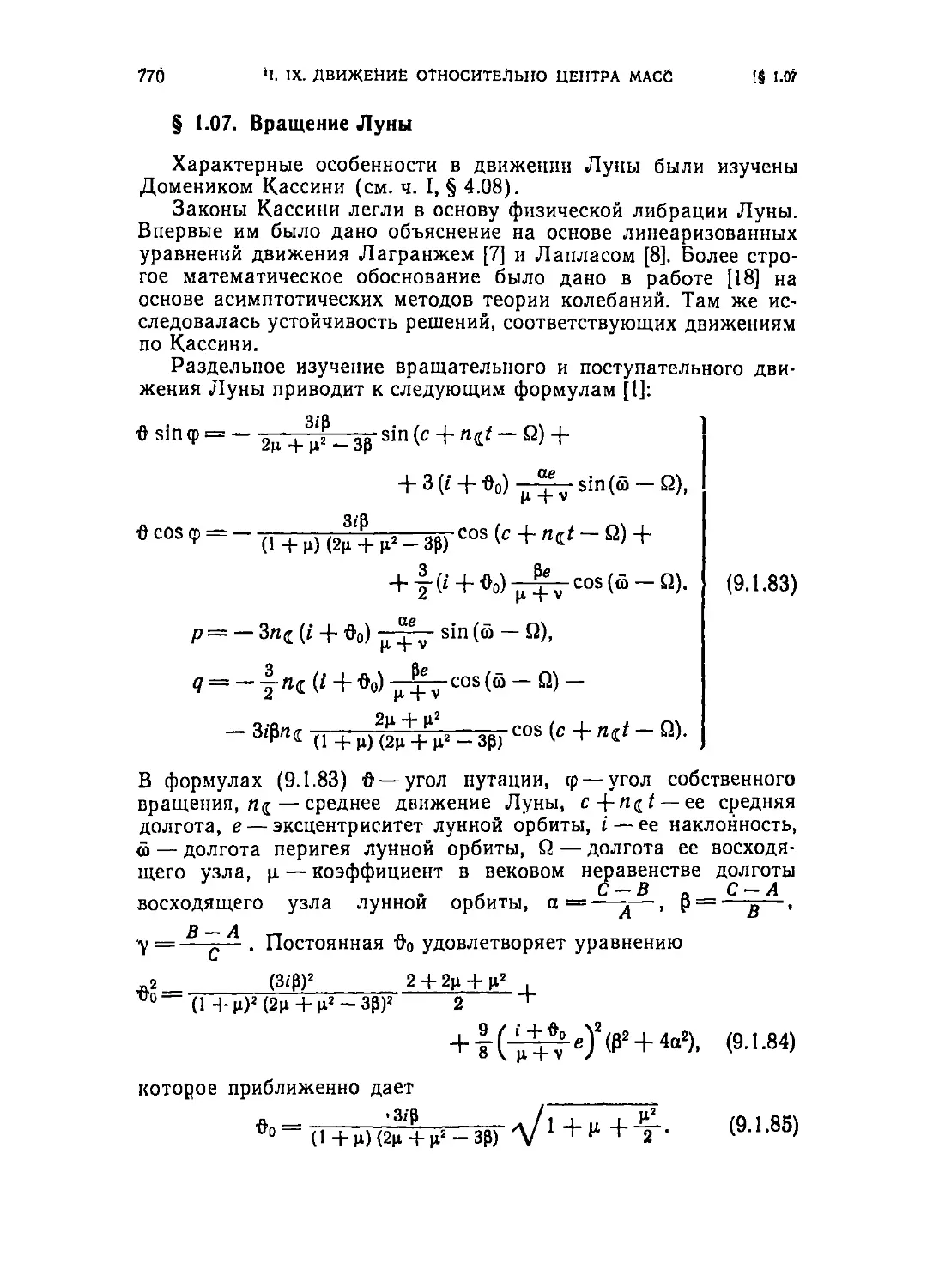
§ 1.07. Вращение Луны 770
§ 1.08. Дифференциальные уравнения движения деформируемого 771
небесного тела
§ 1.09. Теория фигур небесных тел 772
Глава 2. Устойчивость и стабилизация вращательного движения 777
искусственных небесных тел
§ 2.01. Устойчивость движения спутников в гравитационном поле сил 777
§ 2.02. Устойчивость движения спутников под действием моментов сил 781
различной природы
§ 2.03. Стабилизация движения спутников и космических аппаратов 784
Литература к части IX 786
Часть X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА (ГРЕБЕНИКОВ 788
Е.А.)
Глава 1. Периодические и условно-периодические решения. 788
Финальные движения
§ 1.01. Метод малого параметра Пуанкаре 788
§ 1.02. Метод Ляпунова 790
§ 1.03. Периодические решения, полученные методом Пуанкаре 792
§ 1.04. Периодические решения, полученные методом Ляпунова 795
§ 1.05. Периодические решения, полученные качественными методами 797
§ 1.06. Почти-периодические функции и их свойства. Условно- 798
периодические функции
§ 1.07. Теорема Арнольда о существовании условно-периодических 831
решений гамильтоновых систем
§ 1.08. Условно-периодические решения в небесной механике. 803
Геометрическая интерпретация
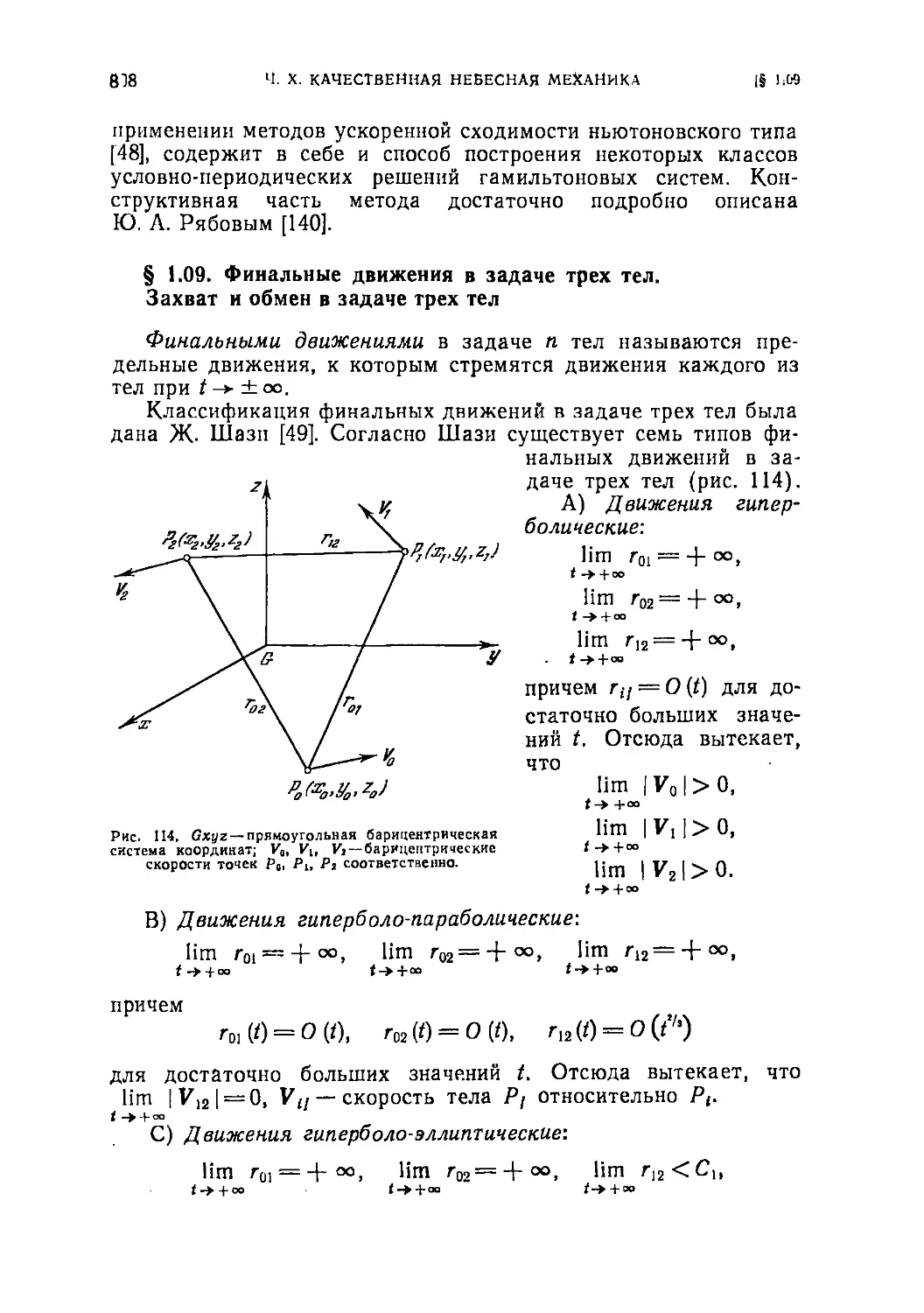
§ 1.09. Финальные движения в задаче трех тел. Захват и обмен в задаче 808
трех тел
Глава 2. Проблема интегрируемости и сходимость рядов в небесной 811
механике
§ 2.01. Теорема. Пуассона об интеграле гамильтоновой системы 812
§ 2.02. Теорема Брунса о несуществовании алгебраических первых 813
интегралов задачи трех тел, отличных от классических
§ 2.03. Теорема Пуанкаре о несуществовании однозначных 814
аналитических первых интегралов гамильтоновой системы
§ 2.04. Случаи интегрируемости уравнения Гамильтона — Якоби 815
методом разделения переменных
§ 2.05. Теорема о неприводимости уравнения Гамильтона — Якоби для 817
плоской ограниченной круговой задачи трех тел к уравнению типа
Штеккеля
§ 2.06. Соударения 817
§ 2.07. Решение задачи трех тел в виде рядов, сходящихся для всех 820
вещественных значений времени. Теорема Зундмана
§ 2.08. Сходимость рядов Хилла в основной проблеме теории движения 821
Луны
§ 2.09. Характер сходимости рядов классической теории возмущений 822
§ 2.10. Теоремы Пуанкаре о ранге и классе возмущений 825
§2.11. Поиск частных, первых и общих интегралов заданной 826
аналитической структуры обыкновенных дифференциальных
уравнений на ЭВМ. Приложение к ограниченной задаче трех тел
§ 2.12. Поиск решений уравнения Гамильтона—Якоби на ЭВМ. 827
Приложение к ограниченной задаче трех тел
Глава 3. Проблема устойчивости в небесной механике 829
§ 3.01. Определение устойчивости по Ляпунову 829
§ 3.02. Определение орбитальной устойчивости 831
§ 3.03. Другие определения устойчивости 832
§ 3.04. Знакопостоянные и знакоопределенные функции. Полная 834
производная в силу системы
§ 3.05. Теоремы Ляпунова об устойчивости 835
§ 3.06. Устойчивость по отношению к части переменных. Теорема В.В. 836
Румянцева
§ 3.07. Связка первых интегралов. Способ Н.Г.Четаева 837
§ 3.08. Устойчивость при постоянно действующих возмущениях. 838
Теорема И.Г.Малкина
§ 3.09. Теоремы Лапласа — Лагранжа и Пуассона об отсутствии вековых 839
возмущении больших полуосей
§ 3.10. Теоремы об устойчивости планетных орбит 839
§ 3.11. Теоремы Арнольда об устойчивости решения гамильтоновой 841
системы в общем эллиптическом случае
§ 3.12. Устойчивость лагранжевых равновесных решений задачи трех тел 843
§ 3.13. Устойчивость других решений задачи трех тел 846
§ 3.14. Устойчивость орбитальных движений искусственных 847
Литература к части X 848
Предметный указатель 853
Предметный указатель
Аберрация 114 Амплитуда 362
- годичная 97 Аналогии Непера 34
- дифференциальная 139 Аномалия истинная 217, 222, 226,
- звездная 115 234, 263
- планетная 116 - средняя 222, 261
- суточная 116 - - в эпоху 221, 224
- эллиптическая часть 117 - эксцентрическая 81, 222, 232, 237,
«Авангард-1», 620 261
Азимут 24, 25 Апекс 115
- геодезический 50, 52 Апогей 217, 564
Альмукантарат 24 Апоцентр 217
Амальтея 510 Аппроксимация 649
Аргумент перицентра 219, 221
- широты 222, 226
Ариэль 510
Астрономическая единица 185
- -световая 115, 185
Астрономические постоянные 176
- - новая система 177
Афелий 217
Базис-вектор 715, 730—733
Базис частотный 800
Барицентр системы «Земля—Луна»
491
Бюро времени международное 167
Вариационная кривая Хилла 464
Вариация 455
- аргумента 696
- первая 698
Вектор Лапласа 216
Венера 72, 186, 188—190, 488, 489,
504—507, 538, 539
Вертикал 23
- первый 23
Вертикаль 22
- астрономическая 46
- геодезическая 48
- местная 47
Веса неизвестных 691
- условных уравнений 692
Весовая функция 661
Веста 514, 516, 517
Високосы задержанные 151
Возмущающая функция 385, 433,
440, 447
- - весовая часть 402
- - главная часть 386, 402
- - дополнительная часть 392, 398
- - задачи п тел 294
- - нерезонансная часть 344
- - от сжатия планеты 510
- - резонансная часть 344
Возмущения в движении ИСЗ от
прецессии и нутации
экваториальной плоскости
Земли 625
от приливной деформации
Земли 628
от притяжения атмосферы 632
релятивистские 630
электромагнитные 631
- вековые 566, 571
- - го, порядка, 1, 571
- долгопериодические 569, 571
- класс 422
- короткопериодические 566, 572
- лунно-солнечные 569
- Луны 477
- периодические 422
- порядок 422
- смешанные 422
- солнечные спутников 513
- степень 422
Возмущения элементов 441, 574
- - орбиты ИСЗ вековые 593, 599, 604
долгопериодические 594, 599,
600, 604
лунно-солнечные 603, 606
от высших гармоник
от светового давления 618, 620
от сопротивления атмосферы
609, 613
с периодом около суток 601
Время атомное 167—169
- всемирное 149, 155—157, 163
- - квазиравномерное 156
-звездное 149, 152, 153, 158
- - гриничское 158
- - истинное 160
- - квазиистинное 158
- - среднее 159
- - эфемеридное 163
- солнечное 155
-среднее 154
-эфемеридное 149, 150, 157, 161, 163,
165, 177
Высота 24
- ортометрическая 54
Гамма-функция 366
Ганимед508, 510
Гармоники зональные 566
- секториальные 556, 562, 603
- тессеральные 556, 562, 603
Гармония 516
Гекуба 514, 517
Географос 517
Гестия514, 516, 517
Гидальго 513, 517
Гильда517
Гиперион 510
Главный эллиптический член в
долготе 451
- в широте 451
Год аномалистический 151
-бесселев 87,151
-високосный 151
- драконический 151
- звездный 150
- сидерический 150, 457
-тропический 151
Горизонт астрономический 23
- геодезический 50
- местный 82
Град 26
Группа типа Гильды 513
Дальность горизонтальная 720
- наклонная 25—27
Дата юлианская 175
Движение гиперболическое 244
- кеплеровское 211
- круговое 243, 244
- поступательно-вращательное 321—
331
- промежуточное 588—502
- прямолинейное 229
- собственное 85
- спутника либрационное 765—767
- - лимитационное 765
- - орбитальное 847, 848
- - ротационное 765
-среднее 221, 224
- эллиптическое 243, 244
Движения лагранжевы в планетной
задаче 840
- финальные 808, 809
Девиация 81
Деймос 510
Диона510
Дифференциальный метод
исправления элементов орбит
273, 285
Дифференцирование численное 655,
657
Долгота астрономическая 47
- галактическая 28
- геодезическая 49, 52
- геоцентрическая 52
- перицентра 222, 226
- планетоцентрическая 59
- селенографическая 73
- узла 219, 221, 224, 227, 262
- - в эпоху 224
- эклиптическая 28
- эфемеридная 162
Европа 508, 510
Задача Акснесса 580, 581
-Баррара581,582
- Больца 700
- вариационная общая 719
- - простейшая 718
- - с подвижными концами 700
- Винти и Кислика 581, 584
- Гарфинкеля 579
- двух неподвижных центров 549,
550, 584
обобщённая 551, 588, 848
--тел 211
- изопериметрическая 700
- краевая 678—684
Задача Лагранжа 698
- Майера 699, 701
- п тел 288
двухпланетная 385, 400
- - - планетная 385, 405, 839, 840
- Стерна 578
- трех тел 792—795, 806, 808, 811,
819, 823
неограниченная 524—542
- ограниченная 548
гиперболическая 549
круговая 533, 542, 546—548
плоская 534, 817, 845
параболическая 549
планетная 815
эллиптическая 549
---Хилла551,552
Задачи вариационные традиционные
695
- интегрируемые 811
- модельные 577
- экстремальные 694
Законы Кассини 203, 770
Захват 809, 810
Звезды двойные 121
Земля 186, 188—192, 457, 488, 489,
504—507, 538, 539, 753
Зенит 23, 25
- геодезический 48
Знаменатели малые 429
Зонды космические 200
Изменения вековые 90
- годичные 90
Икар 517
Интеграл адельфический 813
- алгебраический 813
- движения центра масс 289, 298, 302,
310,328
- живых сил 290, 293, 295, 299, 300,
302,303,310,328
- площадей 289, 293, 295, 300, 302,
303,310,328
-полный 318, 757
-рефракции 133
- Якоби 534
Интегралы Лапласа 215
- Якоби 661
Интегрирование численное 658
Интегрируемость 812, 815
Интерполирование 635
- обратное 642
Ио 508, 510
Ирис 516
Календарь григорианский 151
-юлианский 151
Каллисто 508, 510
Каталоги звездные 143—145
Колюр равноденствий 24
- солнцестояний 24
Комета Вольфа 1, 519
- Лекселя 518
-Отерма3 519
Кометы гиперболические 517
- долгопериодические 517
- короткопериодические 517
- параболические 517
Координаты астрономические 46
- барицентрические 291, 294
- видимые 62
- галактические 28
- Ганзена идеальные 295, 305
- - полярные 305
- географические 55
- геодезические 46, 48
- геоцентрические 52
- дифференциальные 41
- небесные 45
- обобщенные 214
- орбитальные 216, 223, 226, 228, 233
- - относительные 40, 41
- - полярные 216
- - цилиндрические 294
- сферические 213, 295
-центра масс 210
- цилиндрические 211
- экваториальные 37
- эклиптические 37, 38
- Якоби 292
Коэффициенты Ганзена 235
-Лапласа 381—383
- Ньюкома 383
- Фурье 800
Кривая Хилла 535, 545
Критерий Тиссерана 542
- Уиттекера 797
Круг большой 23
- равных высот 24
- склонений 52
- широт 28
Петиция 516
Либрация Луны 203—207
- - оптическая 75, 204
- - параллактическая 204
- - суточная 204
- - физическая 74—77, 205
Линия апсид 217
- геодезическая 50
Линия отвеса 22
- полуденная 23
- узлов 219
Луна 74—78, 93, 138, 186, 192, 194,
198, 199, 538, 539, 770, 822
«Лунар орбитер I, III, IV» 200, 201
Лунация 150
Люки 514
«Маринер- 2, 4, 5, 6, 7, 9», 65, 200
Марс 64, 65, 186, 188—192, 488, 492,
504—507, 538, 539
Масконы 203
Матрица ориентации экваториальная
81
Международное условное начало 56
Мельпомена 516
Меридиан астрономический 47
- геодезический 48
- лунный 59
- местный 46
- небесный 23
- нулевой 46
- основной 39
- селенографический 58
- центральный 57
- эфемеридный 162
Меркурий 186, 188—190,192, 194,
487, 489, 504—507, 538, 539
Место видимое 103
- истинное 103
- наблюдения фиктивное 103
- нормальное 142
- среднее 103
Месяц аномалистический 152, 482
- драконический 152, 492
- сидерический 457, 482
- синодический 150, 152
- тропический 152
- эфемеридный 150
Метод Адамса 670
- Болина 515
-Брауэра415
- Брауэра — Клеменса 405
- Бренделя 515
-Ганзена412, 514
- Гаусса 690
- градиентного спуска 685, 695
- Делоне 447
- Делоне — Цейпеля 426
- Коуэлла 481, 671, 674, 675
- Лагранжа 333
- Лагранжа—Шарпи 547
- Лапласа—Ньюкома 419
- Линдштедта 824
- Ляпунова 790
- малого параметра 789
Метод наименьших квадратов 689
- разностный 687
- Рунге — Кутта 668
- скорейшего спуска 685, 695
- стрельбы 679
- улучшения орбит ИСЗ 287
-Хилла408, 514
- Штермера 673
- Энке 675
Методы осреднения 432
- - Боголюбова 442
Мимас 510
Минималь 697
Минута 26
- десятичная 26
- звездная 161
- средняя 160
-Миранда 510
Многочлены сферические 373
Множители параллактические 129
Момент прохождения через
перицентр 219, 222, 225, 227
Моменты сил аэродинамических 763
- - магнитного взаимодействия 763
- - от ньютоновского поля тяготения
762
- - от сжатия планеты 762
- - светового давления 764
Надир 23, 25
Наклон 219, 221, 224, 225, 227, 262
- критический 597
- лунно-солнечный 86
- орбиты 219
- - к экватору 61
- - к эклиптике 61
- средний 86
- эклиптики к экватору 24
Накопление погрешности 676
Невязки остаточные 691
Нептун 72, 157—191, 193, 194, 494—
498, 500, 504—507, 538, 667
Неравенство 454
- годичное 455
- параллактическое 455
Нереида 510
Нутация 91—94
- в долготе 75
- в наклоне 75
- дифференциальная 139
Оберон 510
Область притяжения положения
равновесия 830
- сплошной устойчивости по
Лагранжу 832
Ода 513
Операция основная 43
Орбита гиперболическая 219, 247,
267, 271
- круговая 217, 268
- невозмущенная 211
- оскулирующая 334
- параболическая 217, 248, 266, 271
- первоначальная 273
- предварительная 279
- промежуточная 462
- - ИСЗ 577
- прямолинейная 218
- эллиптическая 217, 247, 260, 266,
270, 275, 277
Оси средние 771
Остаточные разности 141
Остаточный член 639, 659
Ось мира 23
- основная 22, 25
Отклонение среднее квадратичное
695
Паллада516, 517
Параллакс 123
- годичный 103,124
- горизонтальный экваториальный
125
средний 125, 128
- Луны 74
- рефракционный 138
- Солнца 179
- суточный 124—127, 130
Параллель 47
- геодезическая 47
- небесная 25
- суточная 25
Параметр 217, 219, 221, 227, 260
Параметры прецессии Ньюкома 108,
109
Партенона516
Перегрузка 713
Перелеты межорбитальные 729
- многоимпульсные 735
- - одноимпульсные 736
- - траектории 739, 740—743
- - моноэллиптические 740, 741
- - полиэллиптические 740, 741
Переменные Клеро—Лапласа 306
- Лагранжа 342—344
Перигей 217, 564, 614
Перигелий 217
Период обращения 226, 271
- юлианский 174, 175
- - модифицированный 175
Перицентр 217
Планеты малые 513
Плоскость Лапласа неизменяемая
290, 756
- основная 22, 25
Плотность воздуха 610—612
Плутон 187—190, 193, 494-^98, 500,
538, 539
Поверхность относимости
фундаментальная 43, 46
- Хилла 534, 545
Показатели Фурье 800
Полеты к Луне 744
Полином Лагранжа 639
Полиномы Гегенбауэра 380
- интерполяционные 637
- Лежандра 368, 372, 555
- Ньюкома операторные 401
Политика оптимальная 706
Положение географическое 46
Полуось большая 221, 260
- действительная 225
Полюс большого круга 29
- галактический 29
- географический 46
- геодезический 48
- истинный 57, 85
- мира 23
- - северный 23
- - южный 23
- орбиты 23
- средний 57, 85
- эклиптики северный 24
- - южный 24
Полярное расстояние 26
Постоянная аберрации 98
- - суточной 116, 179
- гравитационная гауссова 180
- - гелиоцентрическая 179
- - геоцентрическая 197, 283
- - луноцентрическая 199, 200
- - планетоцентрическая 194
- живых сил 214
- либрации физической 74
- лунного неравенства 179
-нутации 91, 178
- параллактического неравенства 179
-площадей 215
- синуса параллакса Луны 179
- тяготения 179
- энергии 214
Постоянные астродинамические
195—203
- астрономические 176
- Гайна 74, 76
-Лапласа 215
- редукционные 92
Почти-период 798
Правило Непера 32
- Рунге 664
Предел Лапласа 232
Представления интегральные 369,
376
Прецессия 85, 104—114
- годичная 88
- дифференциальная 139
- лунно-солнечная 86
- матрица 92
- общая 105
- от планет 87
- по прямому восхождению 88
- по склонению 89
Приближение наилучшее
среднеквадратичное 645
Принцип максимума Понтрягина 695,
704
- оптимальности Беллмана 696, 706
Программа оптимальная 725
Программирование динамическое
706
Продолжительность жизни спутника
615
Прямое восхождение 27
- - планетоцентрическое 59
- -траектории715
Пункты Лапласа 52
Пятиугольник Непера 32
Равноденствие среднее 62
Разложение радиуса-вектора 233
Разности вторые 636
- первые 635
- центральные 636
Ракета 711
Расстояние зенитное 25
- перигейное 221
- перигелийное 221
- - - го, сорта, 1, 539, 541, 542, 792
- - - го, сорта, 2, 539, 541, 542
- - - го, сорта, 3, 539, 541, 793
- - Шварцшильда 542
- равновесные 527
- частные Лагранжа 527, 540, 541, 549
- томографические 528, 532
- коллинеарные 528—530, 535
- круговые 528
- треугольные 535, 843—846
Рея 510
Ряд гипергеометрический 367
- Фурье почти-периодической
функции 800
Ряды Зундмана 821
- Линдштета 825
- Ляпунова 821
-Хилла821,822
Сатурн 187—191, 193—195, 493—
498, 501—507, 538, 539, 667
Сближения комет с большими
планетами 518
Световое давление 617
Свободный период Эйлера 753
Сгущения орбит малых планет 513
Секунда атомная 167
- десятичная 26
- звездная 26
- средняя 160
- эфемеридная 150
Семейства комет 517, 519
Силовая функция двух тел 324
- - задачи двух неподвижных центров
586
- - - п тел 289, 301
- трех тел 524, 526
- - притяжения Земли 195, 555, 561
- - - Луны 198—202
- - системы тел 323
Силы аэродинамические 612
Символ Аппеля 366
Система алгебраическая
редукционных величин 95
- астрогеодезическая мировая 197
- геодезических данных 50
- координат ареографическая 64
- - афродитографическая 71
- - барицентрическая 22
- - галактическая 28, 36
- - гелиографическая 70
- - геоэкваториальная 59
- - горизонтальная 24, 34
- - йовицентрическая 68
- - луноцентрическая 73
- - марсоцентрическая 64
- - нептуноцентрическая 72
- - объектоцентрическая 82
- - орбитальная 80, 764
- - перигейная 760
- - сатурноцентрическая 70
- - селенографическая 73
- - селеноцентрическая 22, 73
- - селеноэкваториальиая 72
- - топоцентрическая 22
- - ураноцентрическая 72
- - экваториальная вторая 27, 35, 36
первая 26, 34
- - эклиптическая 27, 35
- - юпитероцентрическая 68
- Ляпунова 791
-отсчета 21
- постоянных MAC 178, 185
- тригонометрическая редукционных
величин 95
- юлианская 152
Системы координат
гелиоцентрические 22
- - зенографические 69, 69
- - планетоцентрические 58
- - прямоугольные 37
Склонение 26, 27
- планетоцентрическое 59
Скобка Пуассона 812
Скорость космическая вторая 218
- - первая 218
- света 253
- характеристическая 712, 728
Служба времени 173
- широт международная 57
Соизмеримость средних движений
432
Солнце 189, 190
- среднее экваториальное 150
- - эфемеридное 162
Соударения 817—819
Спектр функции 800
Сплайн 644
Спутник Юпитера VI 508, 510
--VII 508, 510
--VIII 509, 510
--IX 510
--Х510
--XI 510
--XII 510
Спутники галилеевы 508
- гиростаты 778, 779, 783, 786
- Земли искусственные 554
- Луны искусственные 200
-планет 508—510
- Сатурна 796
Среднее равноденствие даты 161
Стабилизация вращательная
движения 786
- гироскопическая 778
- оптимальная 785
Стандартная атмосфера 612
- Земля 559
Сутки звездные 149, 150, 154
- истинные солнечные 149
- квазиистинные 150, 158
- средние 150
- -солнечные 150
Сфера влияния 538
- гравитационная Хилла 538, 539
- действия 537
- небесная 22
- тяготения 537
Сферический избыток 33
Сфероид 48
стандартный относимости 49, 50
Схемы осреднения 432, 433
--Гаусса 433, 434, 436, 440
- - Делоне — Хилла 433, 435, 439, 440
- - Моисеева 433, 434, 438, 440
- - Фату 433, 434, 436, 440
Счет времени гражданский 156
Таблица Куммера 368
- Кэли 234
Таблицы рефракции Пулковские 135
- Эккерта 495
Теневая функция 622—624
Теорема Арнольда об условно-
периодических движениях 801
- - об устойчивости планетаых орбит
840
- Брунса о существовании интегралов
813,814
- - о сходимости 823
- Вейерппрасса—Слудского-
Зундмана 819
- Гамильтона—Якоби 318
Теорема Зундмана о рядах 820
- - о соударениях 819
- Крудели 774
- Лагранжа 699
- - обобщение 702, 703
- Лапласа 839
- Лапласа — Лагранжа 839
- Ляпунова о голоморфном интеграле
791
- - о периодических решениях
- Малкина 838
- о неподвижной точке 798
- Пуанкаре о несуществовании
первых интегралов 814
- - о существовании периодического
решения 789
- Пуассона 812
- - об устойчивости 839
- Румянцева 837
- синусов 30
Теоремы Арнольда об устойчивости
решения гамильтоновой
системы 841, 842
- Ляпунова об устойчивости 835, 836
- Пуанкаре о равновесии
вращающихся жидкостей 773,
774
- - о ранге и классе возмущений 825
Теория возмущений 432, 442
- движения больших планет 484
Клеменса 485
Леверье 444
Ньюкома 484-^87
Хилла 486
Шараф 486
- - Луны 443, 457
- аргументы фундаментальные 452
- основная проблема 444, 482
- Хилла — Брауна 458^70, 481
Тетис 510
Тефия510
Титан 510
Титания510
Точка весеннего равноденствия 24,
150
- для планеты 59
- истинная 150
- квазиистинная 150
- средняя 150
- весны 24
- запада 23
- зимнего солнцестояния 24
- зимы 24
- лета 24
Точка летнего солнцестояния 24
- осени 24
- осеннего равноденствия 24
- севера 23
- соединения 717
- юга 23
Точки либрации 541
- - коллинеарные 531, 536
- - треугольные 529, 536
- равноденственные 23
- угловые 703
Траектории межпланетные 743
Траектория облетная 747
- оптимальная 733, 734
Треугольник параллактический 34
- сферический 29
- - присоединенный 32
Тритон 510
Троянцы 513
Туле 513
Тэта-функции 365
Тяга импульсная 717
Углы Эйлера 321, 757
Угол вертикали 52
- возвышения 24
- места 24
- наклона траектории 82
- поворота траектории 83
- позиционный 40
- скоростного курса 83
- часовой 26
- - эфемеридный 162
- эксцентриситета 222
Узел восходящий 219
- нисходящий 219
Узлы таблицы 635
- - равноотстоящие 646
Уклонение абсолютное 50
- астрономо-геодезическое 50
-отвеса50, 51
- относительное 48
Умбриель 510
Управление оптимальное 702
Уравнение Бесселя 376
- Вавра 774
- времени 155
- Гамильтона — Якоби 318
- Гаусса 367
- гипергеометрическое 367
- Кеплера 222, 223
- Лагранжа 236
- Лагранжа — Якоби 290
- Ламберта 264
- Ламе 379
- Лапласа 52
Уравнение Лежандра 370
- Мещерского 707
- - обобщенное 708
- параболической орбиты 265
- порождающее 788
- световое 115
- типа Штеккеля 817
- Хилла 766
- центра 234, 241
Уравнения Беллмана 706
-Брауэра416
- в вариациях 540
- в форме Клеро — Лапласа 213
- Клеро — Лапласа 306
- Лагранжа для оскулирующих
элементов 338, 350
- нормальные 690
- Ньютона для оскулирующих
элементов 335, 336, 345, 349
- условные 275, 282, 689, 692
- - неравноточные 691
- характеристические движения
ракеты 715
- Эйлера кинематические 323
- Эйлера—Лагранжа 724
- обобщенные 701
Уран 72, 187—191, 193—195, 494—
499, 504—507, 538, 667
Условие Вейерштрасса — Эрдмана
703
Устойчивость асимптотическая 830
- - в целом 830
- вероятность 841
- вращательного движения 775
- лагранжевых решений 843
- орбитальная 831, 847, 848
- по Лагранжу 832, 839
- по Ляпунову 830
- по Пуассону 832, 846
- по Хиллу 832, 846
- по Якоби 833
- равномерная 830
Участок активный 711
- максимальной тяги 720
- нулевой тяги 720
- пассивный 701
Феба 510
Фигуры равновесия небесных тел 773
Фобос 510
Формула Баррара 587
- Бесселя 638, 640
- Брунса 775
- Лагранжа 236
- - интерполяционная 638, 640
- - обобщенная 237
Формула квадратурная 665
- Лапласа для рефракции 137
- Льюийе 34
- Пицетти — Сомильяна 776
- Родрига 369
- Стерлинга 637, 640
- Циолковского 712
- Эверетта 638, 640
- Эрмита 662, 665
Формулы Андуайе—Ньюкома 112
- Борда 33
- Брауэра 573
- Гаусса квадратурные 660
- Деламбра 33
- Каньоли 32
- Леверье 390
- Михайлова 59
- Ньютона — Котеса 659
- Ньютона интерполяционные 637,
640
- обобщенные трапеций 659
- пяти элементов 31
- Чебышева 662
Функции Бесселя 375—379
- - от мнимого аргумента 378
- Ганкеля 379
- Крампфа — Радо 135
- Ламе 379
- Лежандра 371
- - присоединенные 371, 372, 553
- наклона 598
- Неймана 379
- почти-периодические 798
- сферические 373
- - зональные 373
- - секториальные 373
- - тессеральные 373
- условно-периодические 660, 800
- цилиндрические 379
- - эксцентриситета 597
- эллиптические
- - Вейерштрасса 364
- - Якоби 363, 366
Функционал 696, 697
Функция возмущающая 294, 337
- гипергеометрическая 367
- дохода 706
- переключения 715, 717, 723, 725
- производящая 371, 375
- спектральная 800
- Уиттекера 797
Церера 514—517, 667
Час 26
- звездный 161
- средний 161
Числа Коши 384
- Крюгера 105
Число Циолковского 713
Шаг интегрирования 668
- таблицы 635
Широта астрономическая 47
- галактическая 29
- геодезическая 49
- геоцентрическая 52
- планетоцентрическая 59
- приведение 52
- приведенная 52
- селенографическая 73
- эклиптическая 28
Шкала высот 609
Эвекция 455
Эдда517
Экватор астрономический 47
- галактический 28
- географический 46, 47
- геодезический 48
- Земли средний 78
- Луны истинный 78
- - средний 78
- небесный 23
Эклиптика 23
Экстремаль 697
Эксцентриситет 217, 219, 221, 225,
260
- эллипсоида относимости 52
Элементы канонические Делоне 340,
345, 563
- Пуанкаре 340, 341, 344, 346, 354
- - Якоби 339, 345, 352
- Кэррингтона 70
Элементы Лагранжа 338
-орбиты 218
- - векторные экваториальные 249,
261, 263, 269
- - кеплеровские 219
- - оскулирующие 334
- - эклиптические 219
- средние 410
Эллипс гемановский 737
Эллипсоид общий земной 48
Эллипсоиды Маклорена 775
- Якоби 775
Эллиптические интегралы, второго
рода 360
- - первого рода 358
- - полные 360
- - третьего рода 360
Энергия барицентрическая 290
Энцелад 510
Эпоха 25, 222
Эрос 517
Эфемерида 230
- астрометрическая 141
- геоцентрическая 142
-Луны 481
Эфемериды 140
- больших планет 487, 491
- для физических наблюдений 59
- малых планет 667
«Эхо- 1», 620 Янус 510
Юнона 516, 517 Япет510
Юпитер 187—192, 194, 195, 493—
499, 501—507, 538, 539, 667
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
После выхода в свет первого издания «Справочного руковод-
ства» интерес к небесной механике и астродинамике не только
не уменьшился, а, наоборот, увеличился и, стало быть, необхо-
димость в подобной справочной литературе возросла. По этой
причине первое издание быстро разошлось. Мы отдавали себе
отчет в том, что в первом издании не все вопросы небесной ме-
ханики и астродинамики были достаточно подробно изложены,
а некоторые вовсе не излагались. В связи с этим возникла необ-
ходимость в переработке и дополнении многих разделов спра-
вочника.
Во второе издание добавлена новая часть, девятая, «Движе-
ние естественных и искусственных небесных тел относительно
центра масс», написанная В. Г. Деминым.
Существенной переработке подверглись все части «Справоч-
ного руководства», за исключением первых трех.
В части IV добавлена новая глава, посвященная применению
методов осреднения в небесной механике. Добавлены теоремы
о канонических уравнениях и преобразованиях, уравнения в пе-
ременных Лагранжа, приведено более полное (с точностью до
четвертых степеней малых величин) разложение в форме Ле-
верье возмущающей функции, разложение возмущающей функ-
ции, пригодное для любых наклонов. Полностью переработано
изложение теории движения Луны (глава 10), добавлены новые
данные об эфемеридах больших планет на следующее десяти-
летие.
В части V добавлены уравнения движения ограниченной за-
дачи трех тел в эллипсоидальных и эллиптических переменных,
уравнение Гамильтона — Якоби в этих переменных, изложен ме-
тод понижения порядка системы.
Значительно расширена часть VI, посвященная движению
ИСЗ. Добавлены две новые главы, в которых достаточно под-
робно изложена теория промежуточных орбит ИСЗ и теория
возмущений, вызываемых прецессией и нутацией экваториаль-
ной плоскости Земли, приливной деформацией Земли. Рас-
смотрено влияние электромагнитных сил и релятивистских
18 ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
поправок. Более подробно изложена теория возмущений от со-
противления атмосферы и светового давления. Приведены также
новые данные о гравитационном поле Земли и структуре земной
атмосферы.
В большой степени переработана и дополнена часть VII. До-
бавлены новые параграфы по теории приближений функций,
в частности, аппроксимация функций с помощью сплайнов, ап-
проксимация периодических и условно-периодических функций
тригонометрическими многочленами, выделение вековой части
функции по совокупности табличных значений. Расширена
глава, посвященная численным методам решения дифференци-
альных уравнений.
В части VIII значительно расширена глава 4 «Межорбиталь-
ные перелеты».
Подверглась также большой переработке часть X «Качест-
венная небесная механика». В ней расширена теория устойчи-
вости движения, в частности, приведены формулировки теорем
Ляпунова, включены новые параграфы, посвященные методу
разделения переменных, намного подробнее изложена теория
периодических и условно-периодических решений в приложении
к задачам небесной механики, добавлены новые результаты по
устойчивости лагранжевых решений задачи трех тел.
Сделаны некоторые дополнения и в других частях справоч-
ника. Мы внесли также все исправления, любезно присланные
нам пользователями, за что выражаем им искреннюю благодар-
ность.
Декабрь 1974 г. Авторы
ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
В последние годы появилось довольно много отечественных
и переводных изданий, предназначенных для широкого круга
научных и инженерно-технических работников, занимающихся
классической и современной небесной механикой и астродина-
микой, а также для студентов и аспирантов, специализирую-
щихся в этих научных направлениях. Читателя, желающего
приобрести глубокие и систематические знания в этой области
науки, мы отсылаем прежде всего к двухтомному изданию
Г. Н. Дубошина «Небесная механика», посмертно изданному
сочинению М. Ф. Субботина «Введение в теоретическую астро-
номию», «Аналитическим и численным методам небесной меха-
ники» Г. А. Чеботарева, а также к переведенным на русский
язык «Методам небесной механики» Д. Брауэра и Дж. Кле-
менса, «Аналитическим основам небесной механики» А. Уинт-
нера и другим работам.
Предлагаемый справочник преследует иную цель. По за-
мыслу авторов он должен выполнять функции «оперативного
помощника» в практической повседневной работе уже сложив-
шегося специалиста. Именно эта идея и была положена в основу
справочника; поэтому его содержание составляют основные
уравнения движения небесных тел для различных систем коор-
динат и оскулирующих элементов, методы и результаты небес-
ной механики и астродинамики, приведенные без подробных вы-
кладок и выводов. Мы ограничивались только минимальным
количеством необходимых пояснений и комментариев.
Мы сочли необходимым включить в настоящее издание не
относящиеся по традиции к небесной механике основные соот-
ношения и формулы сферической и эфемеридной астрономии,
необходимые в расчетах по небесной механике и астродина-
мике, новую систему астрономических постоянных, утвержден-
ную Международным Астрономическим союзом в 1964 г., раз-
личные системы счета времени, а также основы вариационного
исчисления и математической теории оптимальных процессов,
на которых базируются методы решения астродинамических
задач. Эти вопросы составляют содержание частей I и VIII.
20 ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
Остальные части Справочника посвящены традиционным анали-
тическим, численным и качественным методам классической и
современной небесной механики.
Мы разделили работу между собой следующим образом:
В. К. Абалакиным написаны часть I и § 10.02 из части IV,
Е. П. Аксеновым — части II и VI, Е. А. Гребениковым — главы
1 — 8 из части IV, части V, VIII, IX, Ю. А. Рябовым — части III
и VII, а также главы 9—11 из части IV (за исключением
§ 10.02).
В каждой части введена трехступенчатая нумерация формул.
В номере формулы первое число соответствует части, второе —
главе, третье — порядковому номеру формулы внутри главы.
В ссылке на параграф из данной части указывается лишь его
номер; если же делается ссылка на параграф из другой части,
то указывается и номер части. Каждая часть сопровождается
библиографией.
Авторы заранее приносят благодарность читателям, которые
сообщат критические соображения и замечания.
В заключение мы благодарим профессора Г. Н. Дубошина
за многочисленные обсуждения содержания и стиля изложения
справочника, оказавшиеся для нас весьма полезными.
Январь 1970 г. Авторы
Часть I
СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ
АСТРОНОМИЯ,
ОСНОВНЫЕ ПОНЯТИЯ И ФОРМУЛЫ
Изучение движения небесных объектов в Солнечной системе
связано в той или иной степени с двумя проблемами астроно-
мии — проблемой точного предвычисления положения небесного
объекта в определенной системе координат на заданный момент
времени и проблемой обработки наблюдений этого объекта. Для
правильного решения этих проблем необходимо знать не только
закон движения небесного объекта, но и законы изменения
ориентировки в пространстве систем координат, относительно
которых происходит рассматриваемое движение, необходимо
уметь найти путем подходящего преобразования координат та-
кую систему отсчета, в которой уравнения движения имеют наи-
более выгодную для поставленных целей форму.
С необходимостью учета изменений положения основных
элементов координатных систем во времени связана также за-
дача сравнения наблюденных положений объекта с теоретиче-
ски предвычисленными, особенно при больших промежутках
времени наблюдения. К ней тесно примыкают вопросы фиксации
физических моментов наблюдений в различных системах изме-
рения времени и перехода от одной системы к другой.
Наконец, совершенствование теории движения небесного
объекта, сопутствующее повышению точности наблюдений, тре-
бует улучшения числовых значений параметров теории, к кото-
рым относятся астрономические постоянные — универсальные
величины, соотношения между которыми следуют из основных
законов механики неба.
Изложению этих вопросов с конечной целью дать читателю
возможность применения рабочих формул в конкретных случаях
посвящена эта часть настоящего «Справочного руководства».
Глава 1
СИСТЕМЫ КООРДИНАТ
§ 1.01. Небесная сфера
Наблюдения и предвычисления положений небесных тел,
а также изучение их движения, всегда связаны с определенной
системой отсчета (системой координат и системой измерения
времени).
22 Ч. I. СФЕРИЧРХКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 1.02
Все системы астрономических (i; аэродинамических) коор-
динат строятся по одному и тому же принципу: всегда выбирают
основную (фундаментальную) плоскость и указывают направ-
ление основной (главной) оси системы координат.
За начало координат принимают обычно либо точку наблю-
дения на земной поверхности, либо центр Земли, Солнца или
планеты и т. д.
В основу сферической астрономии положено понятие небес-
ной сферы, центр которой совпадает с началом рассматриваемой
системы отсчета, а радиус может быть выбран совершенно про-
извольным (обычно его полагают равным единице). Таким об-
разом, вводится понятие топоцентрической небесной сферы
с центром в точке наблюдения (в топоцентре), геоцентрической
небесной сферы с центром, совпадающим с центром масс Земли,
гелиоцентрической небесной сферы с центром в центре масс
Солнца, планетоцентрической небесной сферы с центром в цен-
тре масс планеты. Аналогично вводятся соответствующие раз-
личные системы координат: топоцентрическая, геоцентрическая,
гелиоцентрическая, планетоцентрическая и т. д. Иногда вводят
барицентрическую систему координат, начало которой совпадает
с центром масс (барицентром) системы нескольких небесных
тел (например, системы Солнце + внутренние планеты).
Необходимо всегда иметь в виду, что термином «плането-
центрическая (селено-, или луноцентрическая) система коорди-
нат» обозначается система, основная плоскость которой парал-
лельна плоскости небесного экватора для Земли, и проводить
четкое различие между этим термином и термином «планетогра-
фическая (селенографическая) система координат», относя-
щимся к системам, основной плоскостью которых является пло-
скость экватора собственного осевого вращения планеты
(Луны). В случае планетографических систем координат латин-
ское название небесного тела заменяется в наименовании коор-
динат соответствующим греческим эквивалентом (например,
юпитероцентрические координаты, но зенографические коорди-
наты, марсоцентрические координаты, но ареографические ко-
ординаты и т. д.). Планетографические системы координат при-
меняются большей частью для определения положений точек
и деталей поверхности соответствующих планет [1].
§ 1.02. Главные круги, линии и точки небесной сферы
В любой точке земной поверхности существует основное на-
правление, которое в первом приближении можно счи-
тать неизменным: это — направление линии отвеса, или верти-
кали, совпадающее с направлением линии действия силы тя-
жести в данном топоцентре.
1.021
ГЛ. I. СИСТЕМЫ КООРЛЛНАТ
23
Прямая, проведенная через центр Т небесной сферы, парал-
лельно местной линии отвеса, пересекает небесную сферу
в точке Z, расположенной над головой наблюдателя и называе-
мой зенитом места наблюдения. Диаметрально противополож-
ная точка пересечения Na называется надиром (рис. 1). Пло-
скость, проведенная через центр Т перпендикулярно к верти-
кали ZNa, пересекает небесную сферу по большому кругу,
называемому математическим,
или астрономическим горизон-
том. Прямая, проведенная че-
рез центр Т параллельно оси
суточного вращения Земли,
называется осью мира и пере-
секает небесную сферу в по-
люсах мира. Полюс мира PN,
расположенный ближе всего
к проекции Полярной звезды
на небесной сфере, называет-
ся северным полюсом мира,
а другой полюс мира Ps —
южным.
Сечение небесной сферы
плоскостью, проходящей через
центр Т перпендикулярно к оси
мира PNPS, определяет боль-
шой кругAW/Г— небесный экватор. Плоскость,проведенная че-
рез ось мира PnPs и вертикаль ZNa, называется плоскостью не-
бесного меридиана и в сечении с небесной сферой дает большой
круг — небесный меридиан. Пересечение плоскостей небесного
меридиана и астрономического горизонта определяет полуден-
ную линию NS. Точкой севера N называется точка пересечения
полуденной линии с небесной сферой, ближайшая к северному
полюсу мира Pn\ диаметрально противоположная точка 5 есть
точка юга. Линия пересечения (линия узлов) плоскостей мате-
матического горизонта и небесного экватора пересекает небес-
ную сферу в точке востока Е, расположенной слева для на-
блюдателя, обращенного лицом к точке юга 5, и в точке
запада W. Точки N, S, Е, W определяют главные стороны
(румбы) горизонта. Сечение небесной сферы любой плоскостью,
проходящей через отвесную линию, определяет большой круг —
вертикал. Вертикал, проходящий через точки востока Е и за-
пада W, называется первым вертикалом.
Пересечение небесной сферы с плоскостью, параллельной
плоскости годового движения Солнца и проходящей через центр
Т, представляет собой большой круг QQ' — эклиптику, пересе-
кающую небесный экватор в двух равноденственных точках.
Рис. 1. Небесная сфера.
24 Ч. !. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ 15 1.03
Равноденственная точка, в которой Солнце при своем движении
по эклиптике переходит из южного полушария в северное (отно-
сительно экватора), называется точкой весеннего равноденствия
(точкой весны) и обозначается знаком зодиакального созвездия
Овна Т. Вторая равноденственная точка, в которой Солнце
переходит из северного полушария небесной сферы в южное, на-
зывается точкой осеннего равноденствия (точкой осени) и обо-
значается знаком зодиакального созвездия Весов —.
Небесный меридиан пересекается с эклиптикой в точке лет-
него солнцестояния (точке лета), отстоящей от точки весны {V
на 90° по эклиптике в направлении движения Солнца, и в диа-
метрально противоположной ей точке зимнего солнцестояния
(точке зимы). В своем годовом движении Солнце проходит
точку весеннего равноденствия 20—22 марта, точку летнего
солнцестояния 21—23 июня, точку осеннего равноденствия 23—
24 сентября, точку зимнего солнцестояния 21—22 декабря.
Большой круг небесной сферы, проходящий через полюсы
мира PN и Ps и точки весны Т и осени —, называется колю-
ром равноденствий; большой круг, проведенный через полюсы
мира и точки лета и зимы, называется колюром солнцестояний.
Острый угол, под которым пересекаются плоскости эклип-
тики и экватора, называется наклоном эклиптики к экватору
и обозначается символом е; приближенно он равен 23°26'.
Ось, проходящая через начало координат и перпендикуляр-
ная к плоскости эклиптики, пересекает небесную сферу в полю-
сах эклиптики. Полюс эклиптики, расположенный в северном
полушарии, называется северным, а противоположный полюс —
южным.
§ 1.03. Горизонтальная система координат
Основная плоскость — плоскость астрономического
горизонта, основное направление — направление, па-
раллельное отвесной линии (вертикали).
Направление Г2 на светило 2 из точки наблюдения Т
(рис. 2) определяется дугой горизонта S2' = А, измеряемой
двугранным углом между плоскостями небесного меридиана и
вертикала, проходящего через 2, и дугой вертикала 2'2 = п,
измеряемой от горизонта до малого круга, проведенного парал-
лельно плоскости горизонта через 2 и называемого альмуканта-
ратом, или кругом равных высот.
Основные координаты, определяющие положение светила 2
на небесной сфере: азимут А, отсчитываемый от точки юга S
в сторону точки запада W по дуге горизонта до вертикала све-
тила 2, и высота h (угол возвышения, угол места), отсчитывае-
мая по дуге вертикала 2-
§ 1.041
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
25
''"" т
^^—_-<
V W
V
ч
?'
/
>
Азимут Л отсчитывается от 0° до 360°, высота h — от 0° до
±90° (высота зенита Z равна +90°, высота надира Na рав-
на -90°).
Вместо высоты h можно ввести ее дополнение до 90°, назы-
ваемое зенитным расстоянием г и отсчитываемое по дуге вер-
тикала 2 от точки зенита Z до z
альмукантарата 2. Зенитное
расстояние г меняется от 0° до
180°, так что всегда
2 + й = 90°. A.1.001)
Иногда азимут А отсчиты-
вается от точки юга 5 в обе
стороны от 0° до ±180°; тогда
различают западные (положи-
тельные) и восточные (отри-
цательные) азимуты. При ре-
шении геодезических и навига-
ционных задач принято вести
отсчеты азимутов А от точки
севера N. Расстояние от на-
блюдателя Т до объекта 2 по
прямой ТЪ называют наклонной дальностью и обозначают сим-
волом р (иногда рл).
§ 1.04. Экваториальные системы координат
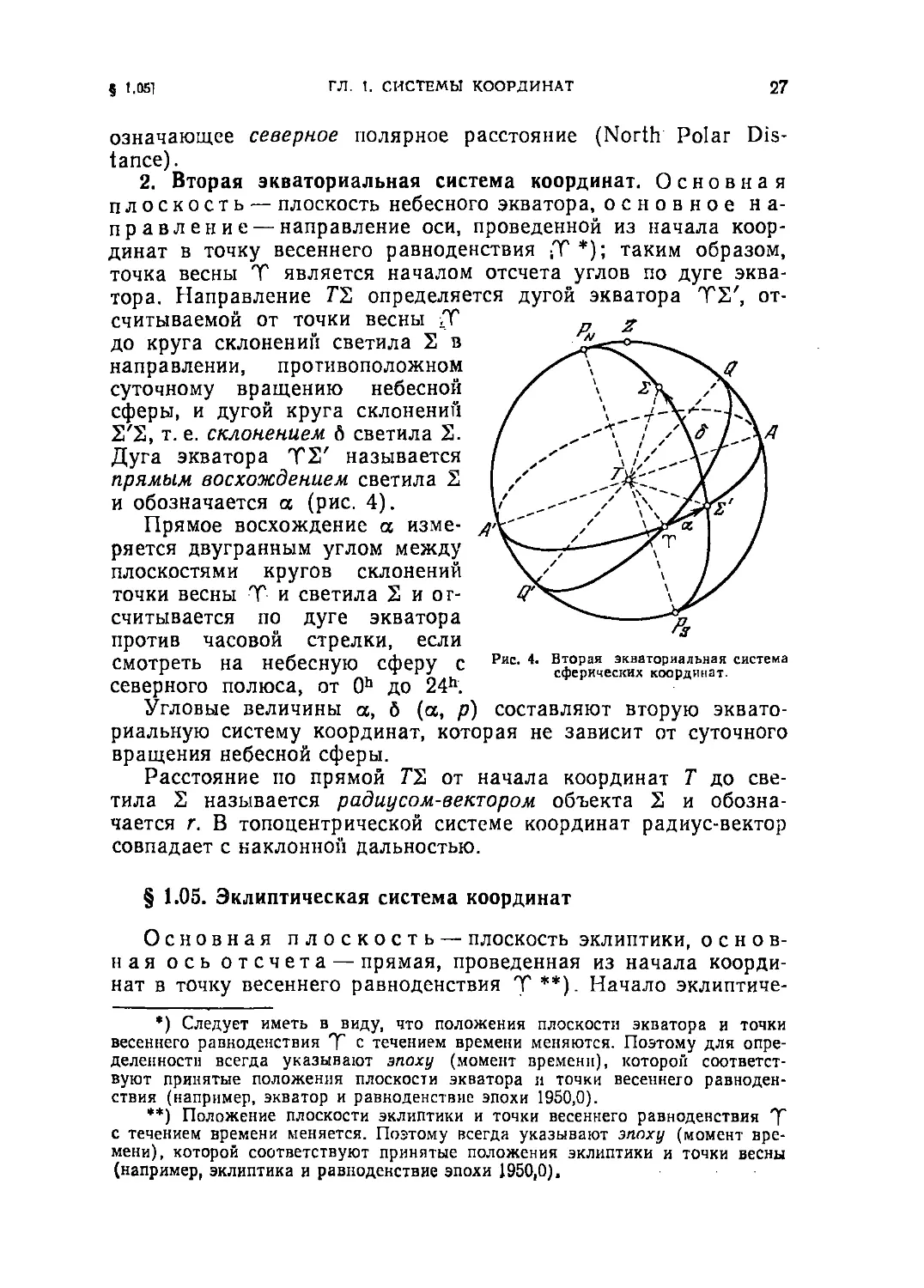
1. Первая экваториальная система координат. Основная
плоскость — плоскость небесного экватора*), основное
направление — направление оси, проведенной из начала
координат в южную точку экватора. Большой круг, проходящий
через ось мира PNPs и светило 2 (рис. 3), называется часовым
кругом, или кругом склонений. Направление 72 из точки Т —
центра небесной сферы, например, топоцентрической — на 2 оп-
ределяется дугой ЛЕ' = t экватора, измеряемой двугранным
углом между плоскостями небесного меридиана и круга скло-
нений, и дугой 2/2 = б круга склонений, измеряемой от эква-
тора до малого круга, проведенного через 2 параллельно пло-
скости небесного экватора и называемого суточной (небесной)
параллелью светила 2.
Рис. 2. Горизонтальная система сферичеек х
координат.
*) Положение в пространстве плоскости экватора с течением времени из-
меняется; поэтому всегда указывается эпоха — момент времени, которому
соответствует принятое в системе координат положение плоскости экватора.
В настоящее время широко распространена система координат с экватором
и равноденствием эпохи 1950,0 (см. § 2.02),
26
Ч I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
IS 1.04
Таким образом, положение светила 2 на небесной сфере
определяется часовым углом t, отсчитываемым от южной точки
экватора А в сторону точки запада W по дуге экватора до круга
склонений светила 2, и склонением б, отсчитываемым по дуге
круга склонений от экватора до суточной параллели.
Часовой угол t отсчитывается от 0h до 24h (т. е. от 0° до
360°) *), склонение 6 — от 0° до ±90°; склонение северного по-
люса мира PN равно +90°, скло-
нение южного полюса мира Ps
равно —90°. Вместо склонения б
иногда вводят его дополнение до
90°, называемое полярным рас-
стоянием р, отсчитываемое по
дуге круга склонений от северно-
го полюса мира PN до суточной
параллели светила 2. Полярное
расстояние р изменяется от 0° до
180°, так что всегда
p + fl = 90°. A.1.002)
Угловые величины t, б (t, p)
составляют первую экваториаль-
ную систему координат. Расстоя-
ние по прямой Г2 от начала
координат Т до объекта 2 назы-
вается радиусом-вектором объекта 21 и обозначается через г.
В топоцентрическои системе координат радиус-вектор и наклон-
ная дальность совпадают.
В старой астрономической литературе можно встретить
также обозначение NPD, относящееся к этой же величине р и
Л
Рис. 3. Первая экваториальная система
сферических координат.
*) Наряду с радианной и градусной мерой дуг и углов в астрономии
принята временная (часовая) мера, т. е. некоторые угловые величины изме-
ряются в часах (h), минутах (т), секундах времени (s). Указанные системы
измерения углов и дуг связаны между собой следующими соотношениями:
1ь = 15° = л/12,
lm = 15' = я/720,
Is = 15"= я/43200,
60° = 2ярад.,
1° = 4ГП = я/180,
l' = 4s = л/10800,
\" = 0s,666 ... = я/648000.
Кроме того, можно встретить десятичное подразделение полной окруж-
ности на 400 равных частей, каждая из которых носит название града (g).
Каждый град в свою очередь подразделяется на 100 десятичных минут
(' или с), каждая десятичная минута — на 100 десятичных секунд (" или ее).
В некоторых работах углы выражаются в долях полной окружности —
в оборотах (г), т. е. 1г _= 360°.
$ t.OSl
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
27
означающее северное полярное расстояние (North Polar Dis-
tance).
2. Вторая экваториальная система координат. Основная
плоскость — плоскость небесного экватора, основное на-
правление— направление оси, проведенной из начала коор-
динат в точку весеннего равноденствия ;Т *); таким образом,
точка весны Т является началом отсчета углов по дуге эква-
тора. Направление Г2 определяется дугой экватора ТЕ', от-
считываемой от точки весны ЛГ
до круга склонений светила 2 в
направлении, противоположном
суточному вращению небесной
сферы, и дугой круга склонений
2'2, т. е. склонением б светила 2.
Дуга экватора Т2' называется
прямым восхождением светила 2
и обозначается ос (рис. 4).
Прямое восхождение ос изме-
ряется двугранным углом между
плоскостями кругов склонений
точки весны Т и светила 2 и ог-
считывается по дуге экватора
против часовой стрелки, если
смотреть на небесную сферу с
северного полюса, от 0h до 24h.
Угловые величины ос, б (ос, р) составляют вторую эквато-
риальную систему координат, которая не зависит от суточного
вращения небесной сферы.
Расстояние по прямой Г2 от начала координат Т до све-
тила 2 называется радиусом-вектором объекта 2 и обозна-
чается г. В топоцентрической системе координат радиус-вектор
совпадает с наклонной дальностью.
Рис. 4. Вторая экваториальная система
сферических координат.
§ 1.05. Эклиптическая система координат
Основная плоскость — плоскость эклиптики, основ-
ная ось отсчета — прямая, проведенная из начала коорди-
нат в точку весеннего равноденствия Т **). Начало эклиптиче-
*) Следует иметь в виду, что положения плоскости экватора и точки
весеннего равноденствия Т с течением времени меняются. Поэтому для опре-
деленности всегда указывают эпоху (момент времени), которой соответст-
вуют принятые положения плоскости экватора и точки весеннего равноден-
ствия (например, экватор и равноденствие эпохи 1950,0).
**) Положение плоскости эклиптики и точки весеннего равноденствия "X
с течением времени меняется. Поэтому всегда указывают эпоху (момент вре-
мени), которой соответствуют принятые положения эклиптики и точки весны
(например, эклиптика и равноденствие эпохи 1950,0),
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
Г§ 10.6
тп'
Рис. 5. Эклиптическая система сфери-
ческих координат.
ской системы координат обычно помещают в центр масс
Солнца 5 (рис. 5), или в центр масс Земли.
Большой круг, проведенный через полюсы эклиптики П и П'
и светило 2, называется кругом широт.
Направление S2 в эклиптической системе координат опре-
деляется дугой эклиптики Т2' = К, отсчитываемой от точки
весны Т против часовой стрелки
(для наблюдателя на северном
полюсе эклиптики П) до круга
широт светила 2, и дугой круга
широт 2'2 = р, отсчитываемой
от эклиптики до 2. Дуга эклип-
тики Т2' определяет долготу, или
эклиптическую долготу X свети-
ла 2, отсчитываемую в указан-
ном направлении от 0° до 360°
(иногда обозначается L, I); дуга
круга широт 2'2 определяет эк-
липтическую широту, или широ-
ту р, отсчитываемую от 0° до
±90° (положительна в сторону
северного полюса эклиптики П),
обозначаемую иногда В, Ь. Расстояние S2 называется радиу-
сом-вектором объекта 2 (гелиоцентрическим или геоцентриче-
ским в зависимости от того, принят ли в качестве начала коор-
динат центр масс Солнца или
центр масс Земли).
Эклиптическая система коор-
динат удобна при рассмотрении
движения тел Солнечной систе-
мы. Геоцентрические эклиптиче-
ские координаты применяются
в настоящее время для Солнца н
Луны.
§ 1.06. Галактическая
система координат
Основная плоскость —
плоскость Галактики (Млеч-
ного Пути), называемая плоско-
стью галактического экватора.
Положение галактического эква-
тора (на рис. 6 он обозначен через ММ') определяется долготой
восходящего узла N и наклоном к экватору / и известно лишь
приближенно; поэтому галактические координаты светил опре-
деляются с точностью до ±0°,01.
Рис. 6. Галактическая система сфериче-
ских координат.
в 1.071
ГЛ. I. СИСТЕМЫ КООРДИНАТ
29
За основную точку отсчета галактических долгот I при-
нимают точку с координатами
a=18h40m, 6 = 0°
в созвездии Орла. Координаты северного полюса Галактики,
т. е. точки небесной сферы, отстоящей от галактического эква-
тора на 90°, равны [2], [3]
Oo=12h49m,
60=-f 27°,4
1950,0.
A.1.003)
Принципы отсчета галактической долготы / и галактической
широты b те же, что и в эклиптической системе координат
(рис. 6).
§ 1.07. Основные формулы сферической тригонометрии
Сферический треугольник — часть поверхности небесной
сферы, ограниченная тремя дугами больших кругов (рис. 7).
Дуги, образующие сферический треугольник, пересекают друг
друга только в его вершинах, и
называются сторонами сфериче-
ского треугольника; они изме-
ряются соответствующими цент-
тральными углами. Углы сфери-
ческого треугольника измеряются
двугранными углами, образован-
ными плоскостями соответствую-
щих больших кругов; они равны
углам между касательными в
вершинах, проведенными к соот-
ветствующим сторонам сфериче-
ского треугольника. Обычно'углы
обозначаются заглавными бук-
вами латинского алфавита А, В,
С стороны — строчными буквами а, Ь, с, ..., причем сто-
рона а всегда лежит против угла (вершины) Л и т. д.
Сферический треугольник, все стороны которого меньше 180°,
называется простым.
Сферический треугольник называется прямоугольным, если
один из углов его — прямой, и четвертным (квадрантным), если
одна из его сторон заключает 90е.
Назовем полюсом большого круга точку на поверхности
сферы, лежащую на угловом расстоянии 90е от любой точки
окружности этого большого круга, Тогда сферический треуголь-
Рис. 7. Сферический треугольник.
30
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
Г§ 1-07
ник, образованный полюсами больших кругов, дуги которых ог-
раничивают данный сферический треугольник ABC (при усло-
вии расположения полюсов сторон этого треугольника в направ-
лении соответствующих вершин),
называется полярным данному.
Связь между элементами сфери-
ческого треугольника ABC и поляр-
ного ему PQR (рис. 8) дается сле-
дующими соотношениями:
р=180°-А, Р=180°-а,
q= 180° -В, Q=180°-b,
г =180° —С, Я =180° -с.
A.1.004)
Если дано соотношение вида
Рис. 8. Полярной треугольник. f (Д gf ?; а, Ь, с) = 0,
то для сферического треугольника, полярного данному, имеем
f{P. Q, R\ Р, q,r) = O,
т. е. выполняется соотношение
fA80° —а, 180е —Ь, 180°-с; 180° -А, 180° - В, 180° - С) = 0.
Такое преобразование называется корреляцией [4].
1. Основные системы соотношений, связывающих различные
элементы сферического треугольника. Систе.ма I. Соотноше-
ния между тремя сторонами и одним углом (теорема коси-
нусов) :
cos a = cos Ь cos с + sin Ь sin с cos A, "j
cos b = cos a cose + sin a sin с cos B, ?• A.1.005)
cos с = cos a cos b + sin a sin b cos C. J
Система П. Соотношения между двумя сторонами и
двумя противолежащими углами (теорема синусов):
sinasin5 = sinbsin A,
sin Ъ sin С = sin с sin В,
sin с sin A = sin a sin С,
или
sin a
sin A
sin b
sinfi
sin с
"slrTc"'
A.1.006)
A.1.007)
9 I.ОЛ
ГЛ. I. СИСТЕМЫ КООРДИНАТ
31
Система III. Соотношения между тремя сторонами и
двумя углами (формулы пяти элементов):
sin a cos В = cos й sin с — sin й cos с cos Л,
sin a cos С = cos с sin й — sin с cos й cos Л,
sin й cos С = cos с sin a — sin с cos a cos В,
sin й cos A = cos a sin с — sin а cos с cos 5,
sin с cos Л = cos a sin й — sin a cos й cos C,
sin с cos В = cos й sin a — sin й cos a cos С.
A.1.008)
Система IV. Соотношения между двумя сторонами и
двумя углами:
cos a cos В = sin a ctg с — sin В ctg C,
cos a cos С = sin a ctg Ь — sin С ctg B,
cos й cos С = sin b ctg a — sin С ctg A,
cos й cos Л = sin й ctg с — sin Л ctg C,
cos с cos Л = sin с ctg 6 — sin Л ctg B,
cos с cos В = sin с ctg a — sin В ctg Л.
Корреляция соотношений A.1.005) дает:
cos Л = — cos В cos С + sin В sin С cos a,
cos В = — cos С cos Л + sin С sin Л cos й,
cos С = — cos Л cos В + sin Л sin В cos c.
A.1.009)
A.1.010)
Каждое из соотношений A.1.010) связывает три угла и одну
сторону.
При помощи корреляции соотношений A.1.008) получаем со-
отношения между тремя углами и двумя сторонами:
sin Л cos b = cos В sin С + sin В cos С cos a,
sin Л cos с = cos С sin В + sin С cos В cos a,
sin В cos c.== cos С sin Л + sin С cos Л cos 6,
sin В cos a = cos Л sin С + sin Л cos С cos b,
sin С cos a = cos Л sin В -f sin Л cos В cos c,
sin С cos b = cos В sin Л -|- sin В cos Л cos c.
A.1.011)
32
Ч. I, СФЕРИЧЕСКАЯ И ЭФеМеРИДНАЯ АСТРОНОМИЯ
Й 1.0 7
Система V. Соотношения между шестью элементами
{формулы Каньоли):
sinasin с + cos a cos с cos В = sin A sin С — cos A cos С cos b,
sin Ь sin a + cos b cos a cos С = sin 5 sin A — cos В cos A cos c,
sin с sin й + cos с cos 6 cos Л = sin С sin 5 — cos С cos В cos a.
A.1.012)
В случае прямоугольного сферического треугольника
(Л = 90°) справедливы соотношения (рис. 9):
cos a = cos b cos с = ctg В ctg С,
sin b = sin a sin В = tg с ctg C,
} A.1.013)
Рис. 9. Прямоугольный
сферический треугольник.
Рис. 10. Первая
схема для правила
Непера.
cos 5 = cos b sin С = tg с ctg a,
cos С = cos с sin В = tg b ctg a.
Формулы A.1.013) можно получить, воспользовавшись пра-
вилом Непера, основанным на пятиугольнике Непера (рис. 10)
при указанном порядке обо-
значения сторон этого пяти-
угольника.
Косинус стороны пяти-
угольника Непера равен:
1) произведению синусов
противолежащих сторон;
2) произведению котанген-
сов прилежащих сторон [4].
2, Квадрантный (четверт-
ной) сферический треуголь-
ник. При помощи корреляции формул A.1.013) получаются фор-
мулы для квадрантного сферического треугольника (а = 90°):
cos А = — cos В cos С = — ctg b ctg с,
sin В = sin Л sin b = tg С ctg с,
sinC = sin Лsinc==tgBctg6, A.1.014)
cos b = cos В sin с == — tg С ctg A,
cos с = cos С sin b = — tg В ctg A.
Формулы A.1.014) можно вывести из общих соотношений,
полагая в них а = 90° или по правилу Непера (рис. 11).
С четвертным сферическим треугольником ABC можно свя-
зать присоединенный сферический треугольник АА'С (рис. 12),
сторона с' которого является продолжением стороны с и допол-
няет ее до 90°. Тогда в сферическом треугольнике ВАС две
i i.o
t\rt. i. системы Координа*
стороны равны по 90°, угол А = 90е. В присоединенном сфериче-
ском треугольнике АА'С:
В' =180° -А, а' = Ь, с' = 90° -с, С = 90° -С, й' = 5,
поэтому применение к нему формул A.1.013) дает формулы
A.1.014).
Кроме того, имеют место:
а) формулы Борда:
a=90°
A_ /sin(p — Ь) sin (p — c)
> 2 V sin p sin (p — a)
sin (p — a) sin (p — c)
sinp sin(p — b)
С / sin (p — a) sin (p -^T)
&~2 V Sin p Sin (p — c) 'I Рис. 11. Вторая Рис. 12. ЧртвертноЯ
схема для правила сферический треуголь-
A.1.015) Непера. иик и присоединенный
^ ' сферический треуголь-
где а + Ь-\- с = 2р.
Определяя сферический избыток о следующей формулой:
ст = Л + В + С-180° A.1.016)
и применяя корреляцию к формулам A.1.015), находим фор-
мулы Борда:
A.1.017)
б) формулы Деламбра:
в-с
. Ь+с
sin—^—
COS-
COS-
COS-
. А
sin —
cos
sin-
Ь — с
sin ¦
B-C
cos-
2
6-е
sinT
sin
B+C
„„I
a
cos —
cos-
A.1.018)
2 Под ред. Г. Н, Дубошина
34 Ч. 1. СФЕРИЧЕСКАЯ И ЗФЕМЕРИДНАЯ АСТРОНОМИЯ Л 1.08
Восемь аналогичных соотношений получаются круговой пе-
рестановкой букв а, Ь, с; А, В, С.
в) Аналогии Непера;
. Ъ-с . В-С
. В-С , A """Г" . Ь-с . а*Ш—2-
2 . B + C
SI"
A.1.019)
Ь-с В-С
В+С . А^Т , Ь + с , aC0S—2-
I ==: ptOT ТОГ ' = TD1
2 иб2 Ь+с' к 2 К 2 R-i-C-
eos
Другие восемь аналогий Непера получаются круговой пере-
становкой букв.
г) Формула Льюийе:
tg2T = tg|tg-^tg^tg^. A.1.020)
Приведенные формулы позволяют определить любые три
элемента сферического треугольника, если известны осталь-
ные три.
Основные практические приемы вычисления, а также при-
ближенные формулы в случае малых углов могут быть найдены
в руководствах по сферической астрономии [1], [4] — [9].
Значения тригонометрических функиии для аргументов —
углов, выраженных в различных мерах, берутся из соответ-
ствующих таблиц [10] — [20].
Полные сведения о таблицах натуральных значений (и ло-
гарифмов) тригонометрических функций и других математиче-
ских таблицах, которые могут оказаться полезными вычисли-
телю, содержатся в специальных справочных руководствах
[21]-[23].
§ 1.08. Соотношения между различными
астрономическими координатами
1. Связь между горизонтальной и первой экваториальной
системами координат. Рассмотрим астрономический или парал'
лактический треугольник PNZ2 (рис. 13). Применение к не-
му основных соотношений сферической тригонометрии дает
§ I.08J
ГЛ. I. СИСТЕМЫ КООРДИНАТ
35
формулы
cos A sin Л = cos 6 sin f = sin г sin А, ]
cos A cos A = — sin б cos ф -f- cos б sin <p cos t = sin z cos A,
sin A =sin6sin<p-f-cosflcos<pcos/ =cosz,
cos б sin/ = cos A sin A = sin z sin A,
cos б cos/ = sin h cos <p -f- cos A sin <p cos A =
= cos г cos ф + sin г sin <p cos A,
sin б =sin h sin<p — cos A cos qp cos A =
= cos 2 sin ф — sin z cos ф cos A,
A.1.021)
1
где ф — астрономическая широта места наблюдения (см. § 1.10),
А — азимут, отсчитываемый от точки юга к западу от 0° до 360°.
Рис. 13. Параллактический треугольник.
Рис. И. Связь между экваториальными си-
стемами сферических координат.
2. Связь между первой и второй экваториальными системами
координат. Обе системы координат отличаются друг от друга
только началом отсчета и направлением отсчета часовых углов t
и прямых восхождений а. Угловые величины / и а связаны соот-
ношением (рис. 14)
a + t = s, A.1.022)
где s — местное звездное время, измеряемое часовым углом ЛГ
точки весеннего равноденствия Т относительно местного мери-
диана (см. § 3.02).
Координата б является общей для обеих систем координат.
3. Связь между второй экваториальной и эклиптической си-
стемами координат. Из сферического треугольника, образован-
ного полюсом мира Р^, полюсом эклиптики П и светилом 2
2»
36
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 1.08
(рис. 15), находим
cos б cos a = cos p cos Я, ")
cos б sin а = cos p sin Я cose —sin p sine, > A.1.023)
sin б =cosp sin Я sin e + sin p cos e, )
cos p cos Я = cos б cos a, "]
cosp sin Я = cos б sin a cose + sin б sine, ? A.1.024)
sinp =— cos б sin a sine + sin б cose, )
где e — наклон эклиптики к экватору, отнесенный к осям коор-
динат той же эпохи, что и
а, б; Я, р.
4. Связь между второй
экваториальной и галакти-
ческой системами коорди-
нат. Вывод формул связи
основан на применении ос-
новных соотношений сфери-
Рис. 15. Связь между второй эквато-
риальной и эклиптической системами
сферических координат,
Рис. 16. Связь между второй эквато-
риальной и галактической системами
сферических координат.
ческой тригонометрии к сферическому треугольнику, образован-
ному полюсом мира PN, северным полюсом Галактики Г и све-
тилом 2 (рис. 16):
sin b = sin б0 sin б -f- cos 60 cos б cos (a — Oq), "]
cos b cos I = cos б sin (a — a0), r A.1.025)
cos b sin I = cos бо sin б — sin 60 cos б cos (a — Oq), )
sin б = sin 6 sin60 + cos b cos 60 sin/, "j
cos б sin (a — a0) = cos b cos /, > A.1.026)
cos б cos (a — ao) = sin b cos 60 — cos b sin 60 sin /. )
Здесь «о, бо обозначают прямое восхождение и склонение по-
люса Галактики Г (см. формулу A.1.003)).
На практике перевод экваториальных координат а, б в га-
лактические I, b выполняется при помощи сетки Вульфа или
специальных таблиц [3], [24].
11.09)
ГЛ, !, СИСТЕМЫ КООРДИНАТ
37
§ 1.09. Прямоугольные системы координат
За основную координатную плоскость берется плоскость
эклиптики или экватора, основная ось отсчета ОХ направлена
из начала О координат в точку весеннего равноденствия Т,
ось OY—под углом 90° к оси ОХ, ось OZ дополняет систему
до правой (рис. 17).
1. Связь между экваториальной и эклиптической прямо-
угольными системами координат. Если основная плоскость
OXY — плоскость экватора, а
начало О выбрано в центре
небесной сферы, то прямо-
угольная система координат
OXYZ называется экватори-
альной.
Экваториальные сфериче-
ские 'координаты г, а, б любой
точки Р связаны с экватори-
альными прямоугольными ко-
ординатами этой же точки х,
у, г соотношениями
je = rcos б cos a,
f = rcos6sina, \ A.1.027)
координат.
Если основная плоскость
эклиптической системы сфери-
ЧеСКИХ КООрдИНат — ПЛОСКОСТЬ
эклиптики — совпадает с пло-
скостью ОХ'У прямоугольной системы координат OX'Y'Z', на-
чало которой, как и прежде, лежит в центре небесной сферы,
а ось ОХ' направлена в точку весеннего равноденствия \f\
то система координат OX'Y'Z' называется эклиптической
(рис. 17).
Эклиптические сферические координаты г, %, р точки Р вы-
ражаются через эклиптические прямоугольные координаты
х?, у', г' этой же точки посредством формул
х' = г cos р cos К,
у' = г cos p sin К,
г' — г sin р.
A.1.028)
Переход от прямоугольных экваториальных координат х, у, г
точки Р к эклиптическим прямоугольным координатам х', у', г'
этой же точки выполняется по следующим формулам, преобра-
38 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ Г§ 1.09
зования экваториальных прямоугольных координат в эклипти-
ческие:
х' = х 1
Л Л, I
/ = z,sine + «/cose, > A.1.029)
z' = z cos e — у sin e. )
Формулы обратного преобразования имеют вид
1
у = у' cos е — z' sin е, > A.1.030)
2 = г/ sin e + z' cos e.
Формулы перехода от сферических эклиптических координат
к прямоугольным экваториальным координатам (с тем же на-
чалом) записываются в виде
х = г cos р cos Л, 1
г/= г cos p (cos e sin A, — .sinetgP), ? A.1.031)
z = л cos p (sine sin A, + cose )
Формулы перехода от сферических экваториальных коорди-
нат к прямоугольным эклиптическим имеют вид
х' = т cos б cos a, ")
у' = г cos б (sin e tg б -f cos e sin а), \ A.1.032)
z'= r cos fi (cos e tg б — sine sin а). )
2. Связь между гелиоцентрической и геоцентрической систе-
мами координат. Если начало одной системы координат не сов*
падает с началом другой, то для преобразования координат,
кроме возможных поворотов осей координат, необходим еще и
параллельный перенос осей координат в новое начало отсчета
(рис. 18).
Если х, у, z — координаты точки Р в гелиоцентрической
прямоугольной экваториальной системе координат SXYZ,
XQ, Yq, Zq — координаты Солнца в геоцентрической экватори-
альной прямоугольной системе координат • 7"SHZ, то прямо-
угольные координаты |, г\, ? точки Р в системе THHZ опреде-
ляются формулами
A.1.033)
11.091
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
39
Если ввести геоцентрические экваториальные сферические ко-
ордин-аты р, а, б точки Р (геоцентрическое расстояние р обозна-
чается иногда символом А), то будем иметь
р cos б cos а = х +
pcos6 sin а = у-\-
psin6 =2 +
A.1.034)
За.мечание. Очевидно, гелиоцентрические прямоугольные
экваториальные координаты Земли Хт, YT, ZT равны геоцентри-
ческим прямоугольным экваториальным координатам Солнца,
взятым с обратными знаками, т. е. — Хо, — Уо, —Zo.
Рве. 18. Переход от гелиоцентрической системы координат к ггодентрическоД системе
координат.
Для перехода от гелиоцентрических эклиптических сфериче-
ских координат г, I, b к геоцентрическим эклиптическим сфери-
ческим координатам р, Я, р можно применить формулы
р cos p cos К = RQ cos ps cos KQ + r cos b cos /,
p cos p sin Я = RQ cos pQ sin Яо + r cos b sin I,
psinp =/?osinPo -frsinu,
A.1.035)
где RQ, Яо, ро — геоцентрические эклиптические координаты
(радиус-вектор, долгота и широта) Солнца.
40 Ч. 1. СФЕРИЧЕСКАЯ И ЭФЕМЕРЙДНАЯ АСТРОНОМИЯ Г8 t.09
Нередко широтой Солнца pQ можно пренебречь и положить
sin ро = 0, cos ро = 1. Тогда формулы A.1.035) принимают вид
р cos p cos К « /?о cos A,© + г cos Ь cos /, "]
р cos p sin А, « R0 sin А,о + г cos 6 sin/, ? A.1.036)
р sin p « г sin 6. J
Преобразование гелиоцентрических эклиптических сфериче-
ских координат г, I, Ь точки Р в геоцентрические экваториаль-
ные сферические координаты р, а, б осуществляется по форму-
лам
р cos б cos а = г cos й cos/ + Хо, 1
р cos б sin а = г cos 6 (sin/cose — igb sin e)-f Уо, \ A.1.037)
p sin 6 = rcos&(sin/sin e-Mgftcose) + Zo. >
Если вместо прямоугольных экваториальных координат
Солнца Хо, Yq, Zo заданы его эклиптические координаты
/?о, XQ, po> то геоцентрические экваториальные координаты
о, ос, б небесного объекта вычисляют по таким формулам:
р cos б cos а = г cos Ь cos / + RQ cos PQ cos A,Q,
p cos б sin а = r cos b (sin / cos e — tg b sin e) +
+ RQ cos PQ(sin KQ cos e — tg p0 sin e),
A.1.038)
psin6 =r cos 6 (sin/sine + tgbcose) +
+ RQ cos pQ (sin XQ sin e + tg pQ cos e).
Наклон е эклиптики.к экватору должен быть отнесен к си-
стеме координат той же эпохи, что и величины г, I, b, RQ, XQ, pQ.
3. Относительные координаты. В экваториальной геоцентри-
ческой системе координат а, 8 находят применение также две
другие координаты (рис. 19):
1) Угловое расстояние s объекта 2 относительно опорного
объекта So, измеряемое дугой большого круга SoS на небесной
сфере;
2) Позиционный угол, или угол положения р, отсчитываемый
от круга склонений опорного объекта 2о до дуги s = 202 про-
тив часовой стрелки, если смотреть на небесную сферу снаружи.
Координаты s, p называются относительными координатами;
их можно i выразить через экваториальные координаты ссо, бо
опорного объекта So и а, б объекта S следующими формулами
(см. треугольник PjvSSo на рис. 19):
cos p sin s = cos б0 sin б — sin б0 cos б cos (a — oq), Л
sin p sin s = cos 6 sin (а — а0), ?• A.1.039)
cos s = sin б0 sin 6 + cos 60 cos б cos (a — a0). )
|-i.09J
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
41
На практике часто можно пренебречь величинами поиядка
(ДаJ и (ДбK и применять приближенные формулы
S COS p = б — б0 = Дб,
s sin p — (a — oq) cos б = Да cos 6.
A.1.040)
4. Дифференциальные координаты. Положение объекта 2
относительно объекта 20 в экваториальной системе коорди-
нат определяется разностями Да = а — а0 и Дб = б — б0; эти
Рис. 19. Относительный
сферические координаты.
Рис. 20. Относительные прямоугольные
координаты.
разности выражаются через относительные координаты sup
при помощи равенств A.1.040)
a — oq = s sin p sec 6,
б — 60 =scos p.
П.1.041)
Разности а — ао, б — бо называются дифференциальными эква-
ториальными координатами.
Величины х, у, определяемые равенствами (рис. 20)
x = s sin p, *)
y = scosp, )
A.1.042)
называются прямоугольными координатами объекта 2 относи-
тельно объекта 2о-
Разности прямых восхождений Да и склонений Дб можно
выразить через разности эклиптических долгот ДА, и широт Др
{дифференциальные эклиптические координаты) и, наоборот,
42
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
при помощи следующих формул:
Да cos б = cos r| cos р ДЯ — sin т| Др — sin б cos а Де,
Дб = sin т] cos р ДЯ + cos tj Лр + sinaAe,
ДЯ cos р = cos т| cos б Да + sin т) Дб + sin p cos Я Де,
ДР = — sin т) cos б Да + cost) Дб — этЯДе.
Вспомогательный угол т) вычисляется по формулам
sin т) == cos Я sec б sin е == cos a sec p sin e,
причем
— 90° < л < -f 90°.
A.1.043)
A.1.044)
A.1.045)
5. Дифференциальные изменения координат. Малые изме-
нения координат объекта на небесной сфере с достаточной сте-
пенью точности могут быть выражены дифференциальными фор-
мулами, которые выводятся из основных соотношений, связы-
вающих сферические координаты с положением объекта в про-
странстве. Формулы A.1.027) дают
dx = — dr — 2 cos a db
у da,
= -ydr — zsin a db + xda,
dz = — dr -+- г cos б db,
cos б da = cos a— —sin a-y~.
A.1.046)
dz
db — — sin б cos a ~— sin б sin a -j- + cos б -^,
dr = cos 6cosadx + cos6sinadi/ + sin6dz.
A.1.047)
Заменой a на К и б на р получим формулы дифференциаль-
ных изменений координат в эклиптической системе:
dx'^Ij-dr — z'cosЯсГр- у' dk,
dy' = jLdr — z' sin Я dp + x' dk,
dz' = ^r dr + r cos (Jdp;
cos p dk = j (cos к dy' — sin к dx'),
dp = у (— sinpcos kdx' — sinPsin kdy' + cos pdz
dr = cos p cos к dx' + cos p sin к dy' + sin p dz'.
A.1.048)
A.1.049)
§ 1.09]
ГЛ. I. СИСТЕМЫ КООРДИНАТ
43
6. Основная операция. Если в прямоугольной экваториаль-
ной системе координат TXYZ (ось ТХ направлена в точку весен-
него равноденствия Т) объект 2 из положения, определяемого
радиусом-вектором г = г(х, у, z)= r(rx, ry, rz), сместился на
Дг и занял положение 2', определяемое радиусом-вектором
г' = г'(*', У', z') = r'(r'x, т'ц, г'г), то (рис. 21)
а' = а + Да,
Здесь
Arx = Дг cos a cos б — г sin а cos б Да — г cos а sin б Дб,
Агу = Дг sin а cos б + г cos а cos б Да — л sin а sin б Дб,
Дг2 = Дг sin б + г cos б Дб;
Дгг Дгу
Да = — sec б sin а f- sec б cos а ,
ЕДг,
Дг„
Дб = —-sin б cos а— sin6sina —+ cos6— ,
или
A.1.050)
A.1.051)
( Да4) f — se
1A6J == 1 — si
— sec б sin a + sec б cos a 0
sin б cos а —sin б sin a cos б.
г-'Дгх
г-1 Агв
г-1 Дл,
Соотношения A.1.051) для приращений Да и Дб, обусловленных
малым перемещением объекта на Дг, определяют основную опе-
рацию [60].
Если
г' = г + v At,
где v — вектор скорости объекта 2, v = v (х, у, z) — v (vx, vy, v2),
то при Д? -> 0 основная операция A.1.051) дает
da
A.1.052)
A.1.053)
где матрица К(а, б) — оператор основной операции
( — sec б sin a + sec б cos a 0
Ma> >ж=\ — sin6cosa — sin6sin,a cos6
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
I! 1.09
Основную операцию можно выполнить и в других системах
координат при помощи соответствующей оператор-матрицы К
(например, К(к, р)).
7. Преобразование координат при помощи матриц [61]. При-
менение прямоугольных координат в сочетании с матрицами-
операторами поворота р, q, r, определяемыми равенствами
P(B) =
о о
cos 0 sin 6
¦ sin 0 cos 8 .
Г F)
}¦
( со
= -si
I 0
cos 0 sin 0
sin 0 cos 0
0
f cos 8 0 — sinO")
I sin О О cos О J
где 0 — произвольный угол поворота, позволяет выразить фор-
мулы преобразования координат, приведенные выше, в компакт-
ном, удобном для машинных вычислений виде. Так, с учетом
соотношений A.1.027) и A.1.028)
формулы A.1.023) и A.1.029)
связи экваториальных и эклипти-
ческих координат записываются
в виде
A.1.029а)
Обратное преобразование имеет
вид
(Ы.ОЗОа)
Рис. 21. Связь между приращениями
радиуса-вектора объекта и прираще-
ниями сферических координат.
Если (х, у, z)t,t означает радиус-вектор небесного объекта,
координаты которого заданы в первой экваториальной системе
{х 1 ( cos t cos б ¦)
У \ =Г< sin/cos б I
z)t,b I sin a J
то переход ко второй экваториальной системе можно выполнить
по формуле
\у\ =r(-s)|o -1 о\\у\ , A.1.022а)
UJa.e 40 0 1 J Uh.fi
где s означает местное звездное время, связанное с прямым вос-
хождением а и часовым углом t небесного объекта соотноше-
нием A.1.022).
S i.io]
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
45
Сохраняя прежний принцип отсчета азимута А от точки юга
к западу от 0° до 360°, получим формулы A.1.021а), связываю-
щие горизонтальные координаты хн, ун, zH объекта с его эква-
ториальными координатами (х, у, z)tt6, в следующем виде:
Ы =Я[-(90°-
cos Л cos А
(СО5ЛСО8Л) (хн) (х)
i smAcoshb = i 2/tf> = q(90°-qpH 2/}
I sinAJ ^2UJ ^z),
A.1.021a)
-и' "" t, 6
Обращаясь к формулам A.1.022а), получаем соотношения
между горизонтальными координатами объекта и его координа-
тами, отнесенными ко второй экваториальной системе:
1 0
|Л =r(-
о \
A.1.0226)
При отсчете азимутов А от точки севера к востоку от 0°
до 360° соответствующие горизонтальные координаты объекта
х'н, у'н, z'H связаны с его координатами хн, уа, zH соотноше-
ниями
Аналогичным образом можно выразить в матрично-векторной
форме и соотношения A.1.035), A.1.037), A.1.038). Например,
формула A.1.037) принимает вид
f cos a cos вч г cos / cos Ь \ t Xq \
р I sin а cos в > = р (— 8) г < sin Z cos b > -(- < YQ V .
I sin oJ I sin b) IZQ )
§ 1.10. Системы географических координат
Положения точек на поверхности Земли могут быть отне-
сены к двум системам координат: либо к системе астрономиче-
ских, или небесных, координат, не зависящей ни от формы, ни
от размеров Земли и полностью определяемой направлением
46 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 1.10
силы тяжести в данной точке, т. е. зависящим от него направ-
лением астрономической вертикали, или отвесной линии, либо
к системе геодезических координат, вычисляемых на основе оп-
ределенной математической поверхности (например, эллипсоида
вращения), аппроксимирующей реальную физическую поверх-
ность Земли и называемой фундаментальной поверхностью от-
носимости (см. ниже общий земной эллипсоид, или сфероид,
и референц-эллипсоид).
Обе эти системы и представляют системы географических
координат; положение точки земной поверхности, отнесенное
к любой из них, называется географическим положением этой
точки. Обычно географические координаты точки в этих двух
различных системах не отличаются более чем на несколько се-
кунд дуги, однако всегда следует точно указывать, о какой си-
стеме географических координат идет речь.
1. Астрономические координаты. В системе астрономических
координат, к которой относятся положения точек земной поверх-
ности, полюсы Земли определяются как точки пересечения по-
верхности Земли осью вращения и называются географическими
полюсами. Плоскость, проведенная перпендикулярно к земной
оси вращения через центр масс Земли, пересекает земную по-
верхность по географическому экватору.
Так как реальная форма Земли отклоняется от сферической,
то астрономические координаты не могут быть выражены через
угловые расстояния точек, измеренные на поверхности и отне-
сенные непосредственно к географическим полюсам и экватору,
как это было в случае экваториальной системы на небесной
сфере. Необходимо определить систему астрономических коор-
динат через углы в пространстве, фиксирующие направление
местной астрономической вертикали относительно основных на-
блюдаемых направлений, измерив, например, астрономическими
способами угол между направлением вертикали и направлением
на северный полюс мира. Этот угол определит положение вер-
тикали в плоскости местного меридиана, т. е. в направлении
север — юг.
Установив далее положение плоскости местного небесного
меридиана относительно общепринятого основного, или нуле-
вого, меридиана, мы фиксируем положение вертикали в направ-
лении восток — запад.
При определении системы координат точек земной поверх-
ности через углы, фиксирующие направление вертикали, необ-
ходимо учитывать влияние местных аномалий на направление
силы тяжести, определяющее астрономическую вертикаль. Так
как местная вертикаль вообще не пересекает ось вращения
Земли, плоскость небесного меридиана, проходящая через вер-
тикаль и ось небесной сферы, направленную от наблюдателя
§ 1.10] ГЛ. 1. СИСТЕМЫ КООРДИНАТ 47
к северному полюсу мира, не проходит через ось вращения
Земли, а параллельна ей и пересекает поверхность Земли по
кривой, не проходящей, вообще говоря, через географические
полюсы.
Тем не менее в обычном геометрическом смысле с углом
между вертикалью и осью вращения Земли отождествляют угол
в плоскости местного меридиана, заключенный между верти-
калью и осью небесной сферы в данной точке земной поверх-
ности. Таким образом, положение этой точки фиксируется отно-
сительно точки, в которой этот угол равен нулю, т. е. полюс
мира находится в зените, и измеряется дугой небесного мери-
диана, заключенной между полюсом и зенитом.
Дополнение до 90° острого угла между астрономической вер-
тикалью и осью вращения Земли называется астрономической
широтой фа. Геометрическое место точек на поверхности Земли
с астрономической широтой, равной 0°, называется астрономиче-
ским экватором, геометрические места точек с другими фиксиро-
ванными частными значениями астрономической широты назы-
ваются параллелями. Принято считать широты точек в север-
ном полушарии положительными, в южном — отрицательными.
Экватор и параллели являются кривыми двоякой кривизны,
мало отличающимися от плоских кривых. Астрономический эк-
ватор не совпадает с географическим экватором — экватором
вращения, но все вертикали в точках астрономического экватора
перпендикулярны к оси вращения Земли и, следовательно, па-
раллельны плоскости географического экватора и пересекают
небесную сферу по небесному экватору. Широты географических
полюсов необязательно равны точно 90°, однако можно считать,
что точки с астрономической широтой в 90° являются астроно-
мически определенными географическими полюсами.
Двугранный угол, заключенный между плоскостями мери-
диана данной точки и местного меридиана общепринятой точки
отсчета на поверхности Земли, называется астрономической дол-
готой данной точки Ха.
За основную плоскость отсчета принята плоскость мери-
диана, проходящего через Гриничскую обсерваторию. Астроно-
мические долготы отсчитываются к западу (положительные) и
к востоку (отрицательные) от Гринича от 0° до 180° (или в ча-
совой мере от 0h до 12h).
Геометрическое место точек земной поверхности с одной и
той же астрономической долготой называется астрономическим
меридианом. Вследствие отклонений в направлении вертикали
от точки к точке поверхности Земли плоскости местных мери-
дианов в различных точках с одинаковой астрономической дол-
готой, вообще говоря, не совпадают, а параллельны друг другу.
Таким образом, астрономические меридианы на поверхности
48 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [| 1.10
Земли являются кривыми двоякой кривизны. Пересечение по-
верхности Земли плоскостью местного небесного меридиана
определяет кривую, не проходящую через географические по-
люсы; она совпадает с астрономическим местным меридианом
только в данной точке.
Таким образом, из-за влияния аномалий силы тяжести на
положение астрономической вертикали и на вид и свойства ме-
ридианов и параллелей астрономическая система географиче-
ских координат непригодна для точного выражения геометриче-
ских соотношений на поверхности Земли; поэтому обращаются
к географической системе геодезических координат.
2. Геодезические координаты. Основу географической систе-
мы геодезических координат составляет поверхность эллипсоида
вращения, аппроксимирующая реальную поверхность Земли. Па-
раметры этой фундаментальной поверхности относимости яв-
ляются частью системы астрономических постоянных (см. § 4.01).
Необходимо иметь в виду, что непосредственные результаты аст-
рономо-геодезических измерений на местности всегда дают
куски уровенной поверхности, которые нельзя точно «рассте-
лить» на эллипсоиде вращения. Поэтому за математическую
поверхность Земли принимают уровенную поверхность, совпа-
дающую при определенных условиях со средней поверхностью
воды спокойного океана. Эта поверхность называется «геои-
дом». Наиболее близкий к геоиду эллипсоид, наилучшим обра-
зом представляющий фигуру и гравитационное поле всей Земли
в целом, называется общим земным эллипсоидом, или сферои-
дом; однако используемые в различных странах для обработки
отдельных рядов геодезических измерений референц-эллипсоиды
не совпадают, как правило, с общим земным сфероидом. В си-
стему астрономо-геодезических постоянных включают параметры
(экваториальный радиус ае и сжатие ее) общего земного сфе-
роида, принятого во всем мире для астрономических и геодези-
ческих работ. Положение любой точки поверхности Земли
относительно такого стандартного сфероида определяется рас-
стоянием по нормали от поверхности сфероида и положением
основания этой нормали на поверхности сфероида.
Геодезическими полюсами называются точки пересечения оси
вращения сфероида с его поверхностью; плоскость, образуемая
большой полуосью производящего эллипса, называется пло-
скостью геодезического экватора. Геодезическая вертикаль
в любой точке земной поверхности совпадает с нормалью
к стандартному сфероиду, проходящей через эту точку; таким
образом, геодезический зенит представляет точку Zg пересечения
небесной сферы с геодезической вертикалью.
Систему геодезических меридианов образуют эллипсы, по
которым плоскости, проведенные через ось вращения сфероида,
§ I.
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
49
пересекают его поверхность, геодезические параллели — это кру-
ги пересечения плоскостей, перпендикулярных к оси вращения,
с поверхностью сфероида. Геодезическая вертикаль любой точки
лежит в плоскости геодезического меридиана и пересекает, сле-
довательно, ось вращения сфероида; однако геодезическая вер-
тикаль вообще не проходит через центр сфероида.
Геодезическая широта <рг измеряется углом между геодези-
ческой вертикалью и плоскостью геодезического экватора.
Геодезическая долгота Kg измеряется двугранным углом между
плоскостями геодезических меридианов, проходящих через дан-
ную точку и общепринятую начальную точку отсчета.
Геодезические координаты определяются относительно на-
правления геодезической вертикали, которое нельзя получить
непосредственно из наблюдений. Поэтому геодезические коор-
динаты непосредственно измерить нельзя —• их можно вычис-
лить по измерениям расстояний и углов на поверхности Земли,
т. е. по результатам геодезических съемок. Эти вычисления
производятся на основе определенного общепринятого земного
сфероида — стандартного референц-эллипсоида, определяемого
конкретными числовыми значениями большой полуоси произво-
дящего эллипса и сжатия — параметра, характеризующего от-
клонение от сферы. Поэтому координаты в геодезической си-
стеме относятся, как правило, к этому принятому земному сфе-
роиду (см. табл. 1 элементов земных эллипсоидов, принятых
в различных геодезических системах).
Таблица 1
*"^^ Авторитет
Элемент ^^-^^
Экваториальная по-
луось ае, м
Полярная полуось Ь,
м
Обратная величина
сжатия а—1
*) По Рудзскому.
Бессель
A841)
6 377 397
6 356 079
299,15
Кларк
A880)
6 378 249
6 356 515
293,47
Гельмерт
A907)
6 378 200
6 356 818
298,25 *)
Хэйфспд
A909)
6 378 388
6 356 912
297,0
Красозский,
Изотоз
A940)
6 378 245
6 356 863
298,3
Положение стандартного сфероида относимости относительно
Земли фиксируется принятыми значениями геодезической ши-
роты и долготы определенного исходного пункта, на котором
определены астрономические долгота и широта, а также при-
нятым значением геодезического азимута геодезической ли-
нии избранного направления, проходящей через этот пункт. Эта
so
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 1.11
система принятых параметров называется геодезической систе-
мой данных (системой исходных геодезических дат), а пункт,
для которого приняты определенные значения геодезических
координат, называется начальным.
Линия кратчайшего расстояния, лежащая всеми своими точ-
ками на стандартном сфероиде относимости, называется геоде-
зической линией, или просто геодезической. Геодезический ази-
мут есть угол между геодезическим меридианом наблюдателя
и касательной к геодезической в точке наблюдения, измеряемый
в плоскости, касательной к сфероиду в точке наблюдателя. Гео-
дезический горизонт определяется плоскостью, проведенной пер-
пендикулярно к геодезической вертикали в точке наблюдения.
§ 1.11. Соотношения между астрономическими
и геодезическими координатами
Астрономическая и геодезическая системы географических
координат не зависят друг от друга; разности между соответ-
ствующими координатами Ха, ф„ и Kg, <pg одной и той же точки
можно обнаружить только из наблюдений (рис. 22). Эти раз-
ности обусловлены глав-
ным образом неправиль-
ными изменениями в на-
правлении силы тяжести
при переходе от точки
к точке земной поверхно-
сти, несовпадением оси
вращения Земли с осью
вращения эллипсоида от-
носимости и центра этого
эллипсоида с центром
масс Земли. Поэтому аст-
рономическая вертикаль
образует с геодезической
вертикалью угол, кото-
рый называется уклоне-
нием отвеса. Различают абсолютное уклонение отвеса, измеряе-
мое углом Эабс между астрономической вертикалью и нормалью
к общему земному эллипсоиду, и относительное {астрономо-гео-
дезическое) уклонение отвеса, равное углу, заключенному ме-
жду астрономической вертикалью и нормалью к принятому ре-
ференц-эллипсоиду.
Уклонение отвеса 8 можно разложить на две составляю-
щие — меридиональную составляющую ? с положительным на-
правлением отсчета от геодезического зенита Zg к северному
полюсу мира Ру и составляющую по дуге первого вертикала т]
/п
Рис 22. Астрономические и геодезические коор-
динаты.
§ 1.11]
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
51
с положительным направлением отсчета от геодезического зе-
нита к точке востока (рис. 23).
Уклонение отвеса может быть найдено из гравиметрических
измерений как угол между градиентами потенциала Земли U
(геоида G) и потенциала V, соответствующего данному эллип-
соиду относимости Е (например, нор-
мального потенциала общего земного эл-
липсоида), которые вычисляются в соот-
ветственных точках г, ге, ф, к, т. е.
grad U • grad V
= arccos
grad U 11 grad V \ '
Таким образом,
I = 8 cos a, ")
. . [ A.1.054)
T]=8sina, J ч
где а — геодезический азимут направле-
ния полного уклонения отвеса 8, опреде-
ляемый формулой
[grad V, grad U] ¦ [grad V, ег]
"" a I [grad V, grad Щ 11 [grad V, ez] j •
-ffradl/
Рис. 23. Связь между укло-
нением отвеса В и его состав-
ляющими \ и ц.
в которой ег — единичный вектор, направленный по оси враще-
ния Земли.
Для 8, \ т] имеются приближенные формулы
V V. re d<p r d<p J
. _1_ dre 1_ dr
' re d<p г йф '
1 dr
f> cos2 <?\dk
Tl = —
где
dr,
d<f
Г COS ф
dV
(Эф
A.1.055)
dU
dU
dl
dV
dre
dr дф dr
Чу ~ ~ ~Ш_ ' dX~~~ dU
dr dr
A.1.056)
Из сферического прямоугольного треугольника PNZaT (см.
рис. 22) имеем
cos {Ка — ке) = tg фо ctg (фй -f I),
sin {Ka — кг) cos фв = sin ti
A.1.057)
52 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 1.П
или, приближенно,
(К -ЯФ)°созФв= ' } A.1.058)
Астрономический азимут А и геодезический азимут ag изме-
ряются в различных плоскостях; однако относительная погреш-
ность измерения обоих азимутов в плоскости астрономического
горизонта не превышает величины порядка 10~8. Поэтому в сфе-
рическом треугольнике SgSaPN можно принять SaPN=l80° — фа",
тогда, с той же степенью точности,
А — ае = (Ка — kg) sin фо = r\ tg фа. A.1.059)
Соотношение A.1.059) называется уравнением Лапласа; оно
дает возможность вычисления геодезического азимута для тех
триангуляционных пунктов, на которых, кроме астрономического
азимута А, из наблюдений определяется и астрономическая дол-
гота Ка (пункты Лапласа).
Разности между астрономическими и геодезическими коорди-
натами часто достигают 5"— 10", иногда 20"; уклонения отвеса
в 30" — 40" чрезвычайно редки (уклонению в 1" по долготе
на широте ф = 45° соответствует 22 м на поверхности Земли
в направлении параллели).
1. Геоцентрические координаты. Кроме координатных си-
стем на поверхности Земли необходима еще система координат,
определяющая положение точек земной поверхности относи-
тельно центра принятого эллипсоида относимости (который, как
можно считать с определенной степенью приближения, совпа-
дает с центром масс Земли).
С этой целью вводят расстояние р от центра эллипсоида от-
носимости, называемое геоцентрическим радиусом-вектором,
геоцентрическую широту ф' — угол между радиусом-вектором р
и плоскостью геодезического экватора, и геоцентрическую дол-
готу, совпадающую с геодезической долготой К; геоцентрическим
зенитом называется точка пересечения продолжения радиуса-
вектора р с геоцентрической небесной сферой (рис. 24,а).
Угол ф — ф' между радиусом-вектором р и нормалью к эл-
липсоиду называется углом вертикали, или приведением ши-
роты. В астрономии геоцентрическую широту ф' иногда назы-
вают приведенной широтой.
Зависимость между геодезической широтой ф и геоцентриче-
ской широтой ф' имеет вид
tg ф' == A — е2) tg ф =^ A — а)^ф, A.1.060)
где е означает эксцентриситет эллипсоида относимости, соответ-
ствующий сжатию а этого эллипсоида. Если ае и Ъ — соответ-
§ i.HI
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
53
ственно большая полуось (экваториальный радиус) и малая (по-
лярная) полуось эллипсоида относимости, то
CLe-Ь
A.1.061)
ае ае '
е = д/2а - а2, а=1- <\Л - ег ¦
Положение точки О на поверхности Земли можно определить
высотой Н этой точки по нормали к эллипсоиду относимости и
прямоугольными координатами х, у точки О' пересечения этой
нормали с поверхностью эллипсоида, отнесенными к системе
координат ХУ, лежащей в плоскости геодезического меридиана
У,,
Рис. 24. а) Геоцентрическая и астрономическая широта, б) Прямоугольные координаты
точки земной позерхности
точки О, причем ось ТХ направлена в точку пересечения мери-
диана с экватором, ось ГУ — в северный геодезический полюс
P'tj (рис. 24, б). Для прямоугольных координат х, у точки О
имеем
^ = Ссо5ф, y = Ssinq> A.1.062)
и
р = С<\Л — е2B — e2)sin2(p, A.1.063)
где
C = -==J===r. 5 = (l-e2)C. A.1.064)
-yl — e sin-* ф
Угол вертикали ф — ф' можно определить по формулам
tg(<p —ф)= i
A.1.065)
где
-е2
54 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 1.П
Таблица значений функций С и 5 по аргументу ф для эллип-
соида MAC опубликована в «Приложениях к Астрономическому
Ежегоднику СССР» на 1968—1971 гг.
Функции С и S, а также геоцентрический радиус-вектор р
(в единицах экваториального радиуса ае земного эллипсоида)
и угол вертикали ф — ф' можно вычислить, воспользовавшись
разложениями
5 = 0,99497418 —0,00167082 cos 2ф + 0,00000210соз4ф>
С= 1,00167997 — 0,00168208 cos 2ф +0,00000212 cos 4ф|
р =0,99832707 + 0,00167644соз2ф—0,00000352со84ф)
ф _ ф' = 692",743 sin 2ф - 1",163 sin 4Ф + 0",003 sin 6ф,
полученными для элементов земного сфероида MAC (см. гл. 4):
_ С O*7Q 1 СЛ т 1 /000 ОС
ае = о о7о 1Ы) м, к = 1/^Уо,2о.
Высота Я точки наблюдения О над эллипсоидом относимо-
сти учитывается следующими поправками к координатам х, у
точки О':
Дя = Я cos ф, Дг/ = Я sin ф.
Поэтому полные координаты X, У точки наблюдения О равны
X = С cos ф, Y = S' sin ф,
где
С = аеС + Я, 5' = aeS + Я.
Ортометрическая высота h точки наблюдения О над геоидом
(уровнем моря), не совпадающая, вообще говоря, с Я, может
быть учтена с некоторой степенью приближения, если рассма-
тривать h как приращение геоцентрического радиуса-вектора р,
по формулам
l,568/i • 10" )зтф,
A.1.067)
tg ф' = @,993305 + 0,011Л • 10~7) tg ер,
где h — в метрах.
Так как формулы A.1.067) применяются к широте ф, приве-
денной к уровню моря, то при больших высотах h необходимо
пользоваться более точными формулами А. А. Михайлова:
(р + Др) sin ф' =
= [5+ A,5678-0,0136cos2Ф)/1- 10~7]su^, ,{ { 06g)
(р + Др) cos ф' =
= [С + A,5678 + 0,0136соэ2ф)Л • 10~7]cosФ.
р cosф' = (С -+ l,568/i- 10 7)cos(p.
§ l.II]
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
55
Прямоугольные координаты х, у точки О можно выразить
через приведенную широту *) и, называемую также параметри-
ческой или геометрической широтой.
Если продолжить перпендикуляр (рис. 25), опущенный на
плоскость геодезического экватора из
точки О, до пересечения с описанной
вокруг земного сфероида сферой (ра-
диуса ае и центром в Т), то угол и
между радиусом ТР и плоскостью гео-
дезического экватора называется при-
веденной широтой.
Очевидно, что
; = aecosu, ")
i = ae Vl — e2sinu = ae{\ — aKin u. ) ~T
A.1.069)
a: x
Рис. 25. Приведенная широта.
Приведенная широта и связана с геодезической широтой
и геоцентрической широтой ф' соотношениями
= A — a) tg ф = -р^г^-
A.1.070)
2. Изменения географических координат. Местная система
отсчета, состоящая из системы горизонтальных координат и
астрономической системы географических координат, зависит от
положений астрономической вертикали и оси вращения Земли.
Географические координаты, зависящие от направления верти-
кали относительно оси вращения Земли, подвержены влиянию
изменений как в положении вертикали, так и в положении оси
вращения внутри Земли.
На горизонтальные координаты оказывают влияние как из-
менения в направлении вертикали относительно Земли, так и
перемещения вертикали в пространстве, обусловленные движе-
нием Земли вокруг центра масс, движущегося в свою очередь
относительно ее оси вращения.
Наблюдениями была обнаружена изменяемость астрономи-
ческих широт и долгот земной поверхности, в которой основную
роль играет движение географических полюсов по поверхности
*) Не следует смешивать с геоцентрической широтой <р', иногда рстре-
чающейся под этим же названием.
56
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
II 1-П
Земли. Для непрерывного наблюдения за положением истинного
географического полюса в 1895 г. была учреждена Международ-
ная служба широт (МСШ), объединявшая пять обсерваторий
мира, лежащих под широтой 39°08', но под различными долго-
тами. С 1960 года МСШ была заменена Международной служ-
бой движения полюсов (МСДП) с центром в Мицзусаве (Япо-
ния). В ее работе, кроме обсерваторий МСШ, принимают уча-
стие еще около 50 обсерваторий и станций.
Табли ца 2
Обсерватория МСШ
Каплофорте, Италия
Гейтерсбург, США
Китаб, СССР
Мидзусава, Япония
Юкайя, США
Долгота от Гринича
8°18'44"
77 11 57
66 52 51
141 07 51
123 12 35
Широта
39°08'С8",941
13,202
01,850
03,602
12,096
Основная задача МСДП (International Polar Motion Service)
состоит в систематическом определении по широтным наблюде-
ниям прямоугольных координат х и у истинного географиче-
ского полюса Земли в избранной для этой цели системе от-
счета. Начало этой системы коорди-
нат, называемое Международным
условным началом (МУН) (СЮ,
the Conventional International Ori-
gin), лежит в точке Ро, определяе-
мой номинальными значениями гео-
графических широт, приписанными
пяти обсерваториям МСШ и приве-
денными в табл. 2. Оси Р0Х и Р0У
этой системы направлены по каса-
тельным соответственно к среднему
меридиану Гринича и к меридиану
под западной долготой 90° от него
(рис. 26). Международное услов-
ное начало (МУН) было введено в практику обработки ши-
ротных наблюдений и определений времени с 1 января 1968 г.
Оно фактически совпадает со средним положением истинного
полюса Земли в течение периода 1900—1905 гг. (иногда непра-
вильно называемым средним полюсом эпохи 1903,0), относи-
тельно которого изучалось перемещение истинного полюса до
1955 г. С 1955 по 1959 г. в качестве начала отсчета положений
истинного полюса служило среднее положение, выведенное
проф. Чеккини из наблюдений за период с 1949 по 1958 гг.,
Рис. 26. Координаты истинного по-
люса относительно среднего полюса.
§ 1.111
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
а с 1959 по 1967 гг. — так называемый средний полюс эпохи.
На этих началах отсчета были основаны работы Международ-
ного Бюро времени (Париж, Франция) по вычислению коор-
динат х, у истинного полюса Земли. Если угол у измеряется
дугой среднего меридиана истинного полюса Р, заключенной
между истинным положением полюса Р и МУН Ро, а Г есть угол
при среднем полюсе Ро, отсчитываемый к востоку от сред-
него меридиана точки наблю-
Х(Гринич)
дения О до дуги РаР (см.
рис. 26), то координаты х и у
истинного полюса Р можно вы-
разить через углы у и Г соот-
ношениями
* = YCosr, У = У sin Г.
Если фо, Ко — средние зна-
чения астрономической широ-
ты и долготы точки земной по-
верхности, отнесенные к сред-
нему полюсу Ро, то истинные
(мгновенные) координаты ф, К
этой точки О, отнесенные
к мгновенному полюсу Р, определяются через прямоугольные
координаты х, у полюса Р формулами (рис. 27)
Рис. 27. Связь между истинными и средними
географическими координатами.
J
A.1.071)
Значения координат х, у мгновенного полюса периодически
публикуются в Circulaires BIH, издаваемых в Париже Между-
народным Бюро времени (BIH), причем циркуляры Circulaire В
и Circulaire D содержат наблюденные значения координат,
a Circulaire С — их экстраполированные значения. До 1 де-
кабря 1967 г. эти данные публиковались в Bulletin Horaire.
Необходимо иметь в виду, что координаты МУН на 1 ян-
варя 1968 г. в старой системе равны
*сю = + 0",007, г/сю = + 0",233.
Соответствующие поправки к координатам истинного полюса и
моментам времени в системах UT1 и UT2, обусловленные выбо-
ром различных начал отсчета при определении положений
истинного полюса, сведены в табл. 3 [61].
В 1970 г. организованная Военно-морской лабораторией
вооружения США Служба определения движения полюсов
Земли (Dahlgren Polar Monitoring Service) начала определение
58 4. t. СФЕРИЧЕСКАЯ и ЭФЁМЕРиДНАЯ АСТРОНОМИЯ [8 1.12
Таблица 3
Год
1955
1956
1957
1958,65
1959,10
1959,95
1960
1961
1962
1963
1964
1965
1966
1967,45
1967,95
1968
*С10 — *МБВ
+0,048
+0,048
+0,048
50
68
70
68
62
55
47
40
31
22
12
7
0
Поправки к
усю-умъв
+0,043
+0,043
+0,043
62
173
173
183
194
203
211
218
224
229
232
233
0
UT1 или UT2
+0,0025
24
24
15
-0,0028
28
32
37
+0,0004
03
04
05
34
20
20
0
Примечания
] Переход от полюса Чек-
\ кини к среднему по-
J люсу эпохи
| Принятие FK4 и новых
\ значений долгот
( Принятие МУН, новых
1 значений долгот и но-
] вого значения по-
1 стоянной аберрации
координат истинного полюса на основе анализа доллеровых
наблюдений ИСЗ [62], [63] и публикует значения х, у с точно*
.стью до 0,01 м, охватывая также наблюдения прошлых лет.
Средняя квадратичная ошибка этих определений порядка 1 м.
Результаты, получаемые службами IPMS и DPMS, обрабаты-
ваются Международным Бюро времени совместно с результа-
тами наблюдений на обсерваториях, сотрудничающих с МБВ.
Координаты истинного полюса в системе МУН за период
с 1899 по 1968 г. были определены и опубликованы Висенте и
Юми [64].
§ 1.12. Планетоцентрические системы координат [25]
В первой планетоцентрическои экваториальной системе ко-
ординат за основную плоскость принимается плоскость экватора
планеты, за основную точку отсчета — нисходящий узел ??Пл
гелиоцентрической орбиты планеты на ее экваторе, т. е. точка
весеннего равноденствия для планеты.
Положение проекции любой точки пространства на небес-
ную сферу в такой планетоцентрическои системе координат оп-
ределяется угловым расстоянием D этой точки от экватора пла-
неты, отсчитываемым по кругу склонения, проходящему через
полюсы мира планеты Рая, ^пЛ| и дугой экватора планеты от
§ 1.12]
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
59
Пп.
точки весеннего равноденствия Тпл до круга склонения, прохо-
дящего через данную точку (рис. 28). Величина D называется
планетоцентрическим склонением и считается положительной
к северу от экватора планеты, А — планетоцентрическое прямое
восхождение и отсчитывается от точки весеннего равноденствия
Тпл к востоку.
Вторая планетоцентрическая система координат использует
в качестве основной плоскости и основной точки отсчета соот-
ветственно плоскость гелиоцентри-
ческой орбиты планеты и точку ве-
сеннего равноденствия ТПл- Эта си-
стема является аналогом геоцентри-
ческой эклиптической системы ко-
ординат.
Положение точки на плането-
центрической небесной сфере в та-
кой системе координат определяет-
ся планетоцентрической широтой Ь,
отсчитываемой от плоскости орбиты
по планетоцентрическому кругу ши-
рот (большой круг планетоцентри-
ческой небесной сферы, проходящий
через полюс гелиоцентрической ор-
биты планеты Ппл и данную точку),
и планетоцентрической долготой I,
измеряемой дугой орбиты планеты
между точкой весеннего равноденствия планеты Тпл и кругом
широт данной точки.
Выбором в качестве основной плоскости и основной точки
отсчета соответственно плоскости небесного экватора и точки
весеннего равноденствия Т Земли определяется третий вид
планетоцентрической системы координат — геоэкваториальной.
Планетоцентрические системы координат применяются при
вычислениях величин, характеризующих геометрическую кар-
тину поверхности вращающейся планеты при наблюдениях
с Земли и дающих возможность построить планетографическую
систему координат на поверхности планеты, аналогичную гео-
графической координатной сетке на Земле. Таблицы числовых
значений этих величин, вычисленных для ряда равноотстоящих
дат, называются эфемеридами для физических наблюдений со-
ответствующей планеты (Марса, Юпитера, Сатурна) и публи-
куются в астрономических ежегодниках.
Вид диска планеты зависит от положений Земли и Солнца
на планетоцентрической небесной сфере; при этом видимое
планетоцентрическое положение Земли диаметрально противо-
положно геоцентрическому положению планеты. В герэкраторн-
Риг. 28. Планетоцентрическая си-
стема сферических координат.
60
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 1.12
альной планетоцентрическои системе координат планетоцентри-
ческое склонение D$ Земли равно по величине и противополож-
но по знаку геоцентрическому склонению б планеты, а разность
планетоцентрического прямого восхождения /1$ Земли и гео-
центрического прямого восхождения ос планеты равна ±180°.
Зкватор
планеты
Эклиптика
Экватор
Земли
Рис. 29. Планетоцеитрическая небесная сфера. Связь между геоцентрическими и плането-
центрическиыи сферическими координатами.
То же справедливо и для планетоцентрических координат AQ,
Do Солнца, т. е.
, = a±12h,
= - 6,
A.1.072)
Вычисление планетоцентрических координат Земли, отнесен-
ных к плоскости экватора и точке весеннего равноденствия Тпл
планеты, выполняется при помощи следующих трех групп фор-
мул (рис. 29):
sin / sin N = sin i sin Q,
sin / cos N = cos i sin e -f sin i cos e cos Q,
cos / = cos i cos e — sin i sin e cos Q,
sin / sin со = sin e sin Q,
sin/cos щ= sin/cose + cos i sine cos Q
A.1.073)
§ 1.121 ГЛ. I. СИСТЕМЫ КООРДИНАТ 61
(сферический треугольник Т Д N);
sin / sin Q' = sin /cos (N — a0),
sin / cos Q' = — cos/cos60 + sin/sin60 sin (N — <xo'
cos/ = cos/sin6a + sin/cos60sin(N —a0), } A.1.07'.)
sin /sin (Л — со) = — cos 60 cos (N — a0),
sin /cos (Л — to) = — sin / sin 60 + cos / cos 60 sin {N — a0)
(сферический треугольник Tn.^Q);
cos D® cos (Л© — Q') = cos б sin (oq — a),
cos D© sin (A® — Q') = — cos 60 sin б + sin 60 cos б cos (a0 — a),
sin D® = — sin fij sin б — cos 60 cos б cos (cto — a), [
cos D® sin P = cos 60 sin (a0 — a),
cos D® cos P = sin 60 cos о — cos 6j sin б cos (a0 — a)
A.1.075)
(сферический треугольник РПЛЕРЫ).
В формулах A.1.073) — A.1.075) введены следующие обозна-
чения (см. рис. 29):
«о, So — геоцентрические экваториальные координаты север-
ного полюса экватора планеты Рил,
# = HPAf — угловое расстояние от точки весеннего равноден-
ствия до восходящего узла орбиты планеты на экваторе Земли,
/ — наклон орбиты планеты к экватору Земли,
ш — угловое расстояние между восходящими узлами орбиты
планеты на экваторе Земли и на эклиптике,
Q' — планетоцентрическое прямое восхождение восходящего
узла экватора планеты на экваторе Земли,
/ — наклон орбиты планеты к экватору планеты,
Л — планетоцентрическая долгота восходящего узла орбиты
планеты на эклиптике, измененная на ±180°,
Q — геоцентрическая долгота восходящего узла орбиты пла-
неты на эклиптике,
i — наклон орбиты планеты к эклиптике,
е— наклон эклиптики к экватору,
Р — угол положения оси вращения планеты на геоцентриче-
ской небесной сфере, отсчитываемый при центре планеты от на-
правления на северный полюс мира к востоку,
Е, S — положения Земли и Солнца на планетоцентрической
небесной сфере,
О — планетоцентрическая долгота Солнца.
62 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 1.12
При этом видимые координаты а, б планеты (см. § 2.05),
публикуемые в «Астрономическом Ежегоднике», приводим
к среднему равноденствию и экватору даты (§ 2.01) вычитанием
нутации (§ 2.03):
Aas = ^- (cos е + sin e tg б sin а) — -^- tg S cos а, { Q7Q.
Дб" = sin e cos а Дт|э + sin а Де.
Планетоцентрическую долготу Солнца О находим по фор-
муле
tg(O-A) = tg(/-Q)seci, A.1.077)
где / — гелиоцентрическая долгота планеты.
Планетоцентрические координаты AQ, DQ Солнца вычис-
ляются по формулам
tgi4o = tg©cos/, ")
• п >л • г \ A.1.078)
sin Do = sin О sin/. J
Если V означает часовой угол точки весеннего равноденствия
Тлл планеты (нисходящего узла орбиты планеты на ее эква-
торе) относительно нулевого меридиана планетографической си-
стемы, то планетоцентрический часовой угол Земли относительно
этого же меридиана равен V — А$. При наблюдениях с Земли
планетоцентрическое звездное время на нулевом меридиане V
следует уменьшить на величину поворота планеты за аберра-
ционное время Тар, т. е. на цтаР, где \л есть средняя суточная
скорость осевого вращения планеты, ^ = 360°/Р, Р — период
осевого вращения, определяемый из наблюдений. Тогда долгота
центрального меридиана планеты 1Р, т. е. планетографического
меридиана, проходящего через центр Земли, определяется фор-
мулой
A.1.078а)
Для вычисления величины V в момент времени t служит фор-
мула
V V + Vt0), A.1.0786)
в которой К^есть значение V в некоторый начальный момент t0,
для которого из наблюдений известна долгота центрального ме-
ридиана /р1, а также величина Лф, таким образом,
A.1.078b)
где ро — геоцентрическое расстояние планеты в момент /0.
1.12]
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
63
Формулы перехода от геоэкваториальных координат небес-
ного объекта к его планетоэкваториальным координатам при-
обретают удобный и компактный вид, если воспользоваться
прямоугольными системами отсчета и матрицами-операторами
поворота р, q, г.
Если (х, у, г) означает плането-
центрический геоэкваториальный
радиус-вектор объекта,
( х "J Г cos a
i у \ = г j sin а
cos а cos fl ")
cos fl > i
sine)
a {l, Л. S)—планетоцентрический
планетоэкваториальный радиус-век-
тор этого же объекта,
' cos A cos D")
¦ = г \ sin A cos D > i
sinZ) )
Рис. 30. Связь планетографических и
планетоцентрических (планетоэква-
ториалькых) координат.
то переход от геоэкваториального
положения к планетоэкваториаль-
ному положению объекта можно выполнить по одной из следую-
щих формул:
j = р (—
/) г A80° — Л) р (г) г (Q) р (е)
J
р (/) г C60° - п') р (90° - й0) г (90° + о,)
\у \ .
где угловые величины /, Л, Q', /, ft, со — аргументы матриц-опе-
раторов—вычисляются по формулам A.1.073) и A.1.074).
Необходимые при решении некоторых задач значения пла-
нетографической долготы /0 подсолнечной точки 5 (рис. 30)
можно вычислить по формуле
1е = 360° - V + Ав.
Для вычисления планетографической долготы утреннего тер-
минатора, т. е. границы ночи и дня, планеты можно воспользо-
ваться формулой
64 ч. 1, СферичёсКая и эфеМериДная астрономия [$ 1.13
где дуга ГТ-ПЛ определена соотношением
Планетографическая долгота вечернего терминатора ^?) полу-
чается изменением 1\М) на 180° *). На рис. 30 l\M) есть дуга ОТ.
§ 1.13. Марсоцентрическая и ареографическая
системы координат
Марсоцентрическая система координат основана на средних
экваториальных координатах северного полюса Марса, опреде-
ляемых с учетом прецессии формулами Вокулера [26]
0о,6533Г1, бо= + 53°,009 + 0°,3542 Г„ A.1.079)
и средних элементах орбиты, данных с учетом прецессии Нью-
комом с поправками Росса (ч. IV, гл. 10)
Q = 49°10'18",97 + 2775",491 Г, - 0",033 Т\
i = 1°51'00",00 - 2",385 Г, + 0",045 Т\.
'\ A.1.080)
Интервал 7\ отсчитывается от эпохи 1950,0 до заданного мо-
мента в тропических столетиях по 36524,22 эфемеридных суток
и вычисляется по формуле A.1.081) (см. гл. 3).
Для привязки деталей, наблюдаемых на поверхности Марса,
строится ареографическая система координат, состоящая из ме-
ридианов и параллелей. При этом долгота центрального мери-
диана, проходящего через центр Земли на планетоцентрической
сфере, отсчитывается относительно нулевого меридиана к за-
паду; нулевой меридиан проходит вблизи Meridiani Sinus в ок-
рестности Sinus Sabaeus; его положение определяется долготой
центрального меридиана 1Р = 344°,41 в средний гриничскйй
полдень января 15, 1909 года. Период вращения Марса относи-
тельно его точки весеннего равноденствия fT* равен [27]
24h37m22s,6689, среднее суточное движение нулевого меридиана
равно 350°,891962.
Величина V для любой даты JD определяется в соответствии
с формулой A.1.078в) соотношением
V + 180° = 329°,479 + 350°,891962 (JD + ДГ — 2418322,0).
A.1.080а)
*) Приведенное здесь формулы преобразования планетографических ко-
ординат справедливы в случае отсчета планетографической долготы в на-
правлении прямого осевого вращения планеты, т. е. к востоку. Если плане-
тографическая долгота отсчитывается к западу — например, в случае арео-
графической системы координат, — то при использовании этих формул ее
следут считать отрицательной.
§ 1.13] ГЛ. 1. СИСТЕМЫ КООРДИНАТ 65
Для долготы центрального меридиана 1Р имеем
lp = V+ 180° — (Лш+ 180°)-2°,0266р. A.1.0806)
Исследования Вокулера, Дэйвиса и Стармза [65], основанные на
обработке результатов, полученных при полете космического
зонда «Маринер-9», дали следующие новые значения для пара-
метров вращения Марса, которые будут положены в основу вы-
числения эфемерид для астрофизических наблюдений Марса
после 1979 г. в соответствии с рекомендацией XV Генеральной
ассамблеи MAC (Сидней, август 1973 г.).
Координаты северного полюса вращения Марса, отнесенные
к экватору и равноденствию эпохи 1950,0, определяются фор-
мулами
ао= 317°,32 — 0°,1011Г, 1
бо=+ 52°,68 - 0°,05707\ J A.1.079а)
Наклон экватора Марса к плоскости его орбиты / вычис-
ляется по формуле
A.1.0796)
Для вычисления углового расстояния Q' восходящего узла
экватора Марса на среднем геоэкваторе эпохи 1950,0 от точки
весны Т а Марса, отсчитываемого по марсианскому экватору,
служит соотношение
Q'+ 180о = 222о193538-0о109040Г-0°100010Г2. A.1.079в)
Символом Т обозначен промежуток времени в юлианских
столетиях от эпохи JD 2433282,5 до заданного момента t, т. е.
т_ JD —2433282,5
36525
Величина звездного времени на нулевом меридиане Марса V,
измененная на 180°, определяется формулой
V + 180° = 328° ,24 + 350°,892017 (JD — 2433282,5), A.1.079г)
где свободный член V + 180° => 328°,24 соответствует новому
начальному меридиану ареографической системы координат,
проходящему через марсианский кратер Эри-0.
Преобразование прямоугольных геоцентрических координат
в прямоугольные марсоцентрические координаты [28]. Если из-*
(*1 ( 1
вестны радиус-вектор г = < У ? и скорость » = ¦<!/?¦ объекта Р
3 Под ред, Г. Н. Дубошика
66
Ч. Т. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
г» 1.13
в момент / относительно геоцентрической экваториальной си-
стемы координат, то преобразование этих величин в марсоцен-
трические
гм = \Ум
выполняется следующим
" образом (рис. 31).
1) По формулам
A.1.079) вычисляют а0,
So в момент t, предвари-
тельно определив
_ JD (<) — 2433282,4234
1 ! ~~ 36524,22
A.1.081)
где JD(f) — юлианская
дата (см. § 3.08).
2) Определяют эле-
менты орбиты Марса Q и
( по формулам A.1.080) с Т\ или по формулам (см. ч. IV, гл. 11)
Q = 48°,78644167 + 0°,77099167 Т — 0°,13888889 • 10~5 f,
t == 1°,85033333 — 0°,67500000 • 10~3 Т + 0°, 12611111 • 10~4:
где наклон е эклиптики к экватору равен
е = 23°,45229444 — 0°,13012500 ¦ 10"' Т —
Рис. 31. Связь между геоцентрическими и марсо
центрическими прямоугольными координатами.
A.1.082)
- 0М6388889 • 10"бГ2
0°,50277778 • 10~в Тъ. A.1.083)
Здесь Т означает время в юлианских столетиях по 36 525 эфе-
меридных суток, отсчитываемое от эпохи 1900, янв. 0,5 эфеме-
ридного времени = JD 2415020,0 до момента t:
Т =
JD @—2415020,0
36 525
A.1.084)
3) Находят наклон / орбиты Марса к его экватору:
cos / = cos (x — i) sin (i|) — б0) +
+ sin (х — 0 cos (i|) — So) cos ф,
sin / = V1 —cos2/,
A.1.085)
§ 1.13!
ГЛ. !. СИСТЕМЫ КООРДИНАТ
67
где вспомогательные углы ф, х> ^. вычисляют по формулам
sin ф cos х = — cos Q cos a0 cos e — sin Й sin a0,
sin ф sin x = sin e cos a0,
cos ф = sin Q cos cto cos e — cos Q sin a0,
sin ф cos ij) = sin Q sin a0 cos e + cos Q cos a0,
sin ф sin i|) = sin Q sin e.
A.1.086)
4) Вычисляют углы шм и Пм, определяющие направление
основной оси отсчета ОХМ, направленной в точку весеннего рав-
ноденствия Марса .T<f. Угол сом составлен осью ОХМ с линией
узлов экваториальных плоскостей Земли и Марса, им опреде-
ляет угловое расстояние от земной точки весеннего равноден-
ствия iT. до восходящего узла экватора Марса на экваторе
Земли:
sin aM sin / = sin ф sin (x — i),
cos сод, sin / = sin (x — i) sin Сф — б0) cos ф — cos (x — i) cos (i|)
- во), )
A.1.087)
A.1.088)
Находят i'm — взаимный наклон экваториальных плоскостей
Марса и Земли (рис. 31):
5) Вычисляют элементы матрицы преобразования Т:
Р*в) = cos cum cos QM — sin aM sin QM cos iM,
p^ = cos сод, sin QM -{- sin aM cos QM cos iM,
Pz = sin cum sin iM,
Qf = — sin aA, cos Сд, — cos ым sin QM cos iM,
QvS1 = — sin co^ sin QM + cos co^ cos Q^ cos iMt
Qze) == cos aM sin iM,
A.1.089)
Если геоцентрический радиус-вектор Марса есть р, то опре-
деляют
г •= г - p, r = r-p.
A.1.090)
68
Тогда
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
I.I4
A.1.091)
где матрица преобразования Т имеет вид
j plei pie) pie)
*?'
*
?
A.1.092)
Аналогично решается и обратная задача.
§ 1.14. Юпитероцентрическая и зенографическая
системы координат
Система координат, начало которой совпадает с центром
масс Юпитера, основная плоскость — с экватором Юпитера и
основная точка отсчета — с точкой весеннего равноденствия
Юпитера Т^, называется юпитероцентрической. Она лежит
в основе вычислений эфемериды для физических наблюдений
Юпитера. Положение юпитероцентрической (йовицентрической)
системы координат определяется средними экваториальными
(геоцентрическими) координатами северного полюса экватора
Юпитера [25]
ao=17h52
З'НГ.б-бОТ,
A.1.093)
и средними элементами орбиты Юпитера (см. ч. IV, гл.. 11)
Q = 99°56'36",00 + 3639",075 Г, + Г',222 Т\,
i = Г18'21",30 - 20",492 Г, + 0",014 Т\,
A.1.094)
Ti вычисляется по формуле A.1.081).
В связи с различием в скоростях вращения экваториальной
зоны Юпитера, широты точек которой заключены между +10°
и —10°, и других зон его поверхности на средних широтах вве-
дены две зенографические системы координат — система I и си-
стема II; положение нулевого меридиана — начала отсчета зе-
нографических долгот — определяется значениями долготы
центрального меридиана в системе I и системе II в эпоху 1897,
июль 14,5 UT (JD 2414120,0), равными соответственно 47°,31 и
§ 1.14] ГЛ. 1. СИСТЕМЫ КООРДИНАТ 69
96°,58 (см. гл. 3). Принятые в обеих системах суточные движе-
ния нулевого меридиана относительно точки весеннего равно-
денствия Юпитера [Тъ и соответствующие им периоды равны:
система I 877°,90, 9h50m30s,003,
система II 870°,27, 9h55m40s,632.
Эти системы введены Мартом и носят условный характер,
как и гелиографическая система Кэррингтона координат точек
поверхности Солнца [25].
Соответствующие значения величины V в обеих этих систе-
мах отсчета определены следующими формулами:
(V + 180°), = 10Г.00 + 877°,90 (JD - 2414120,0), |
{V -fl80% = 150°,00 + 870°,27(JD-2414120,0). J AЛ'093а)
Долготы центрального меридиана вычисляются посредством
соотношений
/, = (V -f 180°)j - (Л© + 180°) - 5°,070р,
/„ = (У + 180е),, - (Л9 + 180°) - 5°,026р. | ° ¦110936)
Следует заметить, что, строго говоря, в формулах A.1.093а),
как. впрочем, и в аналогичных формулах для других планет, не-
обходимо учесть переход ко всемирному времени введением по-
правок AT в начальную и рассматриваемую эпохи, так как вы-
числение эфемериды основано на величинах, отнесенных к эфе-
меридному времени. (См., например, формулу A.1.080а), в кото-
рой величина AT' равна AT — 0d,000096.)
Для радиоастрономических наблюдений Юпитера введена
специальная система зенографических координат — система III,
нулевой меридиан которой совпадает с нулевым меридианом
системы II в эпоху 1957, янв. 1,0 UT (JD 2435839,5). Нулевой
меридиан системы III совершает полный оборот за 9h55m288,8.
Соответствующая эфемерида для определения долгот на-
блюдаемых источников радиоизлучения на поверхности Юпи-
тера вычислена Б. Моррисон на основании следующих элемен-
тов системы III:
эпоха: 1957, янв. 1,0 UT = JD 2435839,5,
период: 9h55m29s,37,
долгота центрального меридиана в эпоху: 108°,02,
суточное движение: 870°,544
и опубликована в [29].
70
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
Г§ 1.16
§ 1.15. Сатурноцентрическая система координат
Сатурноцентрическая система координат определяется сред-
ними экваториальными координатами северного полюса Са-
турна [25]
а0 = 2h33m39s,93 + Ю15в,20 Тх + 56s, 18 т] +
б0 = + 83°18'37",3 + 1570",4 Г, - 46",3 Т\ -
i средними элементами орбиты Сатурна (см. ч. IV, гл. 11)
Q = 113°13'14",84 + 3142",902 Г, — О
i = 2°29'25",15 - 14", 164 Г, - 0",055 Т2и
где Г] вычисляется по формуле A.1.081).
Аналога географической системы координат
ческой системы — не существует.
хронографи-
§ 1.16. Системы координат, определяемые осевым вращением
Солнца, Венеры, Урана и Нептуна
1. Гелиографическая система кординат. Осевое вращение
Солнца определяется так называемыми элементами Кэрринг-
тона:
наклоном солнечного экватора
к эклиптике / (рис. 32), равным
7° 15', и
долготой восходящего узла эк-
ватора Солнца на эклиптике Q,
заданной соотношением
Q = 73°40' + 50",25 {t - 1850,0).
Система элементов Кэрринг-
тона эквивалентна следующей
системе параметров вращения
Солнца, аналогичной системам
параметров вращения, принятым
для Марса, ЮпИТера И ДруГИХ
планет:
координаты северного полюса вращения Солнца, отнесенные
к геоэкватору и равноденствию даты, определяются формулами
сх0 = 285°,82 + 0°,001993 {t — 1850,0),
бо= +63°,62 + 0°,001518(*- 1850,0),
звездное время на начальном гелиографическом меридиане
дано соотношением
у = 180°+ 14°,18439716(JD-2398220,0).
X
Рис. 32. Св»ь
§ 1.16! ГЛ. 1. СИСТЕМЫ КООРДИНАТ 71
За начальный меридиан в гелиографической системе коор-
динат принят гелиографический меридиан, который прошел
через восходящий узел экватора Солнца на эклиптике в сред-
ний гриничский полдень 1 января 1854 года, т. е. в эпоху
JD 2398220,0. Среднее суточное изменение гелиографической
долготы соответствует периоду вращения Солнца Р = 25,38 су-
ток. Средний синодический период вращения Солнца равен
27,2753 суток. Моменты начала синодических оборотов Солнца,
в которые гелиографическая долгота центрального меридиана
обращается в нуль, образуют так называемый ряд Кэрринг-
тона и приводятся в специальной таблице в «Астрономическом
Ежегоднике СССР».
В некоторых случаях могут понадобиться координаты не-
бесных объектов в гелиографической системе отсчета. Если
исходными являются гелиоцентрические эклиптические прямо-
угольные координаты объекта х, у, г, отнесенные к эклиптике и
среднему равноденствию даты, то преобразование к гелиографи-
ческим координатам г, L, В можно выполнить по формулам
( cos L cos В 1 Г х 1
Л sinLcosB [ = rC60°-Af)p(/)r(Q)b \.
К sin В) (г)
где М есть гелиографическая долгота восходящего узла эква-
тора Солнца на эклиптике, определяемая соотношением
М = 360° - -^g- (JD - 2398220,0).
При задании положения объекта координатами, отнесенными
к средней геоэкваториальной системе отсчета рассматриваемой
даты JD, формулы преобразования имеют следующий вид:
( cos L cos В Л
Г < sin L cos В > =
(. sinBJ
= rC60°-Af)p(/)r(Q)p(e)
где Хо, Уо, ZQ — средние прямоугольные экваториальные коор-
динаты Солнца в геоцентрической системе отсчета приводят-
ся в специальной таблице в «Астрономическом Ежегоднике
СССР».
2. Афродитографическая система координат. С осевым вра-
щением Венеры связана афродитографическая система коорди-
нат, определяемая следующей системой параметров, найденных
72 Ч. I. СФЕРИЧЕСКАЯ И ЭФЁМЕРИДНАЯ АСТРОНОМИЯ Г$ 1.17
на основе радиолокационных наблюдений Венеры:
а0 = 98° - 0°,0015551 (t — 1964,5),
60 = -69° - 0°,0007748 {t - 1964,5),
V = 238°,75 + Г.483924 (JD - 2438566,5).
Период вращения Венеры равен 242,6 суток.
3. Ураноцентрическая система координат. Эта система опре-
деляется средними координатами северного полюса вращения
Урана, отнесенными к среднему геоэкватору и равноденствию
даты:
ао = 76°,О51 + 0°,0142 (* — 1900,0),
60 = + 14°,855 + 0°,0013 (t - 1900,0)
и средними элементами орбиты Урана
Q = 73°29'23",65 + 1838",25 Т,
i = 0°46'21"I80 + 2",00 7\
где Т — промежуток времени в юлианских столетиях по 36 525
суток от фундаментальной эпохи JD 2415020,0 до рассматривае-
мого момента t. Период вращения Урана равен 10h49m.
4. Нептуноцентрическая система координат. Эта система
определена средними координатами северного полюса вращения
Нептуна
cto = 295°, 153 + 0°,008364 (/ - 1900,0),
бо= + 41°,348 + 0°,002367 (t - 1900,0)
и средними элементами его орбиты
Q = 130°41'43",27 + 3966",54Г,
t= Г46'45",30- 33",00Г.
Звездный период вращения Нептуна равен 14h.
Заметим, что для Урана и Нептуна, как и для Сатурна, си-
стемы координат, аналогичные географической, не установлены.
§ 1.17. Луноцентрическая и селенографическая
системы координат
Положение и скорость объекта относительно Луны удобно
определяется в подвижной системе координат, оси которой вра-
щаются вместе с Луной; эта подвижная координатная система
называется селеноэкваториальной луноцентрической системой
координат. Основной координатной плоскостью является пло-
скость истинного экватора Луны; за основную точку отсчета
§ 1.17]
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
73
принята точка пересечения первого радиуса с лунным эквато-
ром (рис. 33). Первый радиус определяется пересечением пло-
скости лунного меридиана, проведенной через центр масс Земли,
с плоскостью лунного экватора в момент времени, когда сред-
няя долгота ([ Луны равна средней долготе ее восходящего
узла Q, и направлен в сторону Земли.
Для точек на поверхности Луны селеноэкваториальная луно-
центрическая система координат совпадает с селенографической
Ряс. 33. Луноцвнтрическая система координат.
системой, введенной специально для целей привязки деталей
лунной поверхности к лунному экватору и направлению первого
радиуса.
В обеих системах — селеноэкваториальной луноцентрической
и селенографической*)—селенографические долготы X отсчи-
тываются по лунному экватору от основной точки (точки пере-
сечения нулевого селенографического меридиана, проходящего
через первый радиус, с лунным экватором) к востоку (на гео-
центрической небесной сфере — к западу); селенографические-
широты р — острые углы между луноцентрическим радиусом-
вектором и плоскостью лунного экватора, как обычно, отсчиты-
ваются от экватора Луны по лунным меридианам; таким обра-
зом, селенографические долготы К возрастают в направлении
к Морю Кризисов, селенографические широты р считаются
*) Очевидно, что направления на небесный объект в обеих системах сов-
падают; поэтому в литературе обе системы часто называются селенографи-
ческими.
74 Ч Т. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 1.17
положительными к северу от лунного экватора, т. е. в полуша-
рии Луны, содержащем Море Ясности.
Положение нуль-пункта (начала отсчета) системы селено-
графических координат можно определить прямоугольными эк-
ваториальными геоцентрическими координатами х0, у0, Zq, вы-
числяемыми по формулам (см. § 2.28):
х0 = R& (cos \J) cos Q' — sin \|) sin Q' cos i) -f x<[,
y0 = R([ (cos \J) sin Q' + sin г|) cos Q' cos i) -f y^,
Zo = R& sin if sin i + zg,
где R(?, хц, У&, z<7 ¦—соответственно радиус Луны и геоцентри-
ческие координаты Луны, выраженные в единицах экваториаль-
ного радиуса Земли ае,
причем t — взаимный наклон плоскостей среднего лунного эква-
тора и истинного (или среднего) экватора Земли, Q' — прямое
восхождение восходящего узла среднего лунного экватора на
истинном (среднем) экваторе Земли, Д — угловое расстояние
между восходящими узлами среднего лунного экватора на
истинном (среднем) экваторе Земли и на эклиптике (см. рис. 33).
Величины I, Q', Д определяются формулами A.1.104). В случае
истинного экватора Луны необходим учет физической либрации
(см. § 4.08).
Определение положения нулевого меридиана селенографиче-
ской системы координат на практике довольно затруднительно
(его долгота от нисходящего узла лунного экватора на эклип-
тике равна ([ —Q); поэтому проще производить микрометриче-
скую привязку к детали лунной поверхности с известными селе-
нографическими координатами к0, р0- Таким репером на Луне
выбран небольшой кратер Mosting А, положения которого в гео-
центрической экваториальной системе координат а, 8 публи-
куются в специальной эфемериде в «Астрономическом Ежегод-
нике СССР»; эфемерида лунного кратера Mosting А вычис-
ляется на основании постоянных Гайна [25]:
Яо = -5° 10'07", h = 15'33",4,
ро = _3°1ГО2", /=Г32'20", / = 0,73,
где Ко, Ро — селенографические координаты кратера Mosting A
относительно истинного экватора Луны, И — луноцентрический
радиус-вектор кратера, соответствующий среднему параллаксу
Луны, jig = 57'02",608, / — постоянный наклон лунного эква-
тора к эклиптике; f— функция трех моментов инерции Луны,
известная под названием постоянной физической либрации.
8 1.17] ГЛ. 1. СИСТЕМЫ КООРДИНАТ 75
Условия освещенности кратера Mosting А Солнцем, т. е. его
видимости, определяются неравенством
1A80°+ d + Я.о) - Lo |< 90°,
где Lo — средняя геоцентрическая долгота Солнца.
Положение объектов в селенографической системе координат
свободно от влияния оптической (геометрической) и физической
либрации Луны (см. § 4.08). При переходе, например, к геоэк-
ваториальной луноцентрической (селенографической) системе
координат, получаемой параллельным переносом осей геоцент-
рической экваториальной системы координат в новое начало —
центр масс Луны, в уравнениях движения объекта необходимо
учесть физическую либрацию Луны в долготе т, в наклоне лун-
ного экватора к эклиптике р и в долготе восходящего узла лун-
ного экватора на эклиптике а; разложения компонент физиче-
ской либрации даны в формулах A.1.103).
1. Преобразование прямоугольных экваториальных коорди-
нат в прямоугольные селеноэкваториальные луноцентрические
координаты. Если положение объекта в момент времени t
в прямоугольной геоцентрической системе экваториальных коор-
динат X'Y'Z' определяется радиусом-вектором г' = г'(х', у', z'),
то переход к положению этого объекта в селеноэкваториальной
луноцентрической системе координат SHZ, определяемому луно-
центрическим радиусом-вектором А = Д(?, т], ?), выполняется
следующим образом.
1. Вычисляют аргументы физической либрации Луны; для
этого находят среднюю долготу перигея Солнца Г:
Г = 28Г.2208333 + 1°,7191750 Т +
+ 0°,4527778- 10~3Г2 + 0°,3333333 • 10~Г', A.1.097)
среднюю долготу Солнца Lo:
L3 = 279°,6966778 + 36000°,768925 Т +
+ 0°,3025000- 10~V, A.1.098)
среднюю долготу восходящего узла Q орбиты Луны:
Q = 259°, 1832750 — 1934°, 1420083 Т +
+ 0°,20777778 • 10Г2 + 0°,22222222 ¦ 10~5г\ A.1.099)
среднюю геоцентрическую долготу Луны ([ :
(J = 270°,4341639 + 481267°,8831417 Г —
-0°, 11333333- 10 Г2-Ь0о, 18888889- 10 ~5Г! A.1.100)
§ 1.1
ГЛ. ). СИСТЕМЫ КООРЛИНАТ
77
инерции Луны
Р = 0,0006276, у = 0,0002303.
Эти значения близки к принятым в современной теории физи-
ческой либрации Луны [67]
Р = 0,00063065, v = 0,000226,
которые входят также в теорию движения Луны LURE-1 (Lu-
nar Ranging Experiment) [68]. Параметры этой теории уточнены
по лазерным измерениям топоцентрических расстояний до Луны.
Поэтому можно считать более точными разложения компонент
т, а, р, коэффициенты которых заданы табл. 4 [78]. Кроме того,
разложение т дополняется членом -\-7"fi sin Q.
Таблица 4
т (sin)
a sin/ (sin)
р (cos)
Фундаментальные аргументы
/
0
0
1
1
1
1
2
2
2
0
0
1
1
1
0
0
1
1
1
с
0
1
-1
0
0
0
-1
0
0
0
0
0
0
0
0
0
0
0
0
F
2
0
0
0
0
0
0
—2
0
2
2
—2
0
0
2
2
—2
0
0
D
—2
0
j
-2
— 1
0
—2
0
2
— 2
0
0
2
0
—2
0
0
—2
0
Коэффициенты
1",7
91,7
— 1,2
4,2
-3,5
-16,9
1,0
15,3
10,0
—3",2
-10,6
-23,8
2,5
-100,7
-3",2
-11,0
23,9
-1,9
—98,5
Фундаментальные аргументы, входящие под знаками sin
и cos, имеют следующий смысл: /=Mj — средняя аномалия
Луны, /' = Мо — средняя аномалия Солнца, F — средний аргу-
мент широты Луны, D — средняя элонгация Луны от Солнца
78 Ч. !. СФЕРИЧЕСКАЯ И ЭФЕМЕРИЯНАЯ АСТРОНОМИЯ Г§ 1.1?
и определяются разложениями [см. также формулы D.10.57)]
Q = 259°10'59",79— 1934°08'ЗГ',23 Т + 7",48 Т2 + 0",0080 Г3,
I = 296°06'16",59 + 477198о50'56",79 Т + 33",09 Т2 + 0",0518 Т\
I' = 358°28'33",00 + 35999°02'59",10Г- 0",54 Г2 — 0",0120 Г3,
F= 1Г15'03",20 + 483202°01/30",54Г— 11",56 Г2 — 0",0012 Г3,
D = 350°44'14",95 + 445267°06'51", 18 Т - 5",17 Т2 + 0",0068 Г3.
Связь фундаментальных аргументов Брауна /, /', F, D, по
которым проведены разложения координат Луны в его Lunar
Theory, с фундаментальными аргументами Ганзена g, g', со, со'
может быть представлена следующим векторно-матричным соот-
ношением:
/' ( _ I 0 10 0 I I g'
D [ ~] 1 -1 1 -1 || со'
FJ М 0 1 qJ ^а
где шиш' означают угловые расстояния перигеев лунной и сол-
нечной орбит от восходящего узла орбиты Луны на эклиптике,
gag' — средние аномалии Луны и Солнца.
2. Вычисляют углы i, Q' поворотов осей координат и вспомо-
гательный угол Д по формулам
sin i cos Q' = cos и sin v — sin и cos v cos w,
sin / sin Q' = — sin и sin w,
cos i = cos и cos v + sin и sin v cos w,
sin i cos Д = sin и cos v — cos и sin v cos w,
sin i sin Д = — sin v sin w.
A.1.104)
в которых
ы = /, и = е, w = Q A.1.105)
в случае перехода от среднего земного экватора к среднему эк-
ватору Луны, или
ы = / + р, f = e, oy = Q + a A.1.106)
при переходе от среднего экватора Земли к истинному (т. е.
с учетом физической либрации) экватору Луны.
При переходе от истинного экватора Земли необходимо в Q
ввести нутацию в долготе Дф (см. § 2.03).
1.171
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
79
или
Далее вычисляют угол \р по формуле
¦ф = Л + ([ — Q (средний экватор Луны)
A.1.107)
) = Д + (([ + т) — (Q + а) (истинный экватор Луны). A.1.108)
3. Вычисляют элементы матрицы поворота осей Р[Рц}:
Р] | = cos Q' cos i|> — sin Q' sin i|> cos i,
PI2 = sin Й' cos ф + cos Q' sin ф cos i,
A.1.109)
P2, = — cos Q' sin t|) — sin Q' cos т|з cos i,
p22 = — sin Q' sin ф + cos Q' cos Up cos i,
P3, = sin Q'sin/,
Ръ.> = — cos Q' sin /,
Я33 = cos i.
4. Если jc'j, y'^,
динаты Луны, то
—геоцентрические экваториальные коор-
х' = к1 —
г' = z' —;
A.1.110)
Тогда прямоугольные селеноэкваториальные луноцентрические
координаты I, т], ? объекта находят по формуле
U) U3
A.1.111)
Обратное преобразование выполняется по аналогичным фор-
мулам.
Замечание. Координаты объекта х', у', z' и Луны х'„, у'*,
z' должны быть отнесены до начала вычислений к одному и
тому же экватору и равноденствию (например, эпохи 1950,0).
2. Преобразование прямоугольных геоцентрических эклипти-
ческих координат в прямоугольные селеноэкваториальные лу-
ноцентрические координаты. Если положения объекта и Луны
в момент времени / заданы в геоцентрической эклиптической си-
стеме прямоугольных координат XYZ радиусами-векторами гс =
= га{х, у, г) и г^ = г2 (*с, #2, 2g) соответственно, то положе-
ние объекта в луноцентрической селеноэкваториальной системе
80
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
1.19
прямоугольных координат SHZ, определяемое радиусом-векто-
ром rL, rL = rL(%, T|, ?), можно получить при помощи следую-
щих уравнений:
= г [180° + (d +т) - (Q+a)] р [- (У+р)] г (Q+a)
в которых символы ([,Q, /; т, р, а имеют смысл, указанный на
стр. 74—75, а матрицы поворота, риг определяются форму-
лами [28] (см. также
стр. 44)
(\ о о л
= <0 cos ф sin<p I
(.0 — sin ф cos ф j
f cos ф sin ф 0 ~\
= < — sin ф cos ф 0 > .
I 0 0 1 )
Аналогичным образом оп-
ределяются соответствую-
щие компоненты вектора
скорости объекта в ука-
занной системе коорди-
нат. Как и в предыдущем
случае, необходимо до
начала вычислений
привести координаты и
компоненты скоростей
Луны и объекта к эклип-
тике и равноденствию од-
ной и той же эпохи (на-
пример, даты).
§ 1.18. Орбитальная
система координат
При изучении движе-
ния ИСЗ удобной оказы-
вается система коорди-
нат, начало которой сов-
падает с центром масс
Земли, а основная плоскость параллельна плоскости орбиты
объекта в некоторую определенную эпоху t = t0; основная ось
отсчета направлена в перигей (рис. 34). Эта система отсчета
называется орбитальной системой координат. Под влиянием
Рис. 34. Орбитальная система координат.
§ 1.18] ГЛ. 1. СИСТЕМЫ КООРДИНАТ 81
возмущений основная плоскость системы, плоскость орбиты, дви-
жется в инерциальном пространстве, непрерывно меняя положе-
ние относительно выбранной системы отсчета.
Положение объекта определяется в системе орбитальных ко-
ординат эксцентрической аномалией Е (см. ч. II, гл. 2)*), де-
виацией D и радиальным расстоянием г0. Девиация D изме-
ряется в плоскости, перпендикулярной к плоскости орбиты
в момент времени t = /0. углом между плоскостью орбиты в этот
момент и геоцентрическим направлением на объект. Радиальное
расстояние го измеряется от центра масс Земли до положения
объекта в момент / = t0. Эксцентрическая аномалия Е отсчиты-
вается в плоскости орбиты от перигея П в направлении движе-
ния объекта от 0° до 360°, девиация D положительна над основ-
ной плоскостью и меняется от —90° до +90°. Обычно D пола-
гают равным нулю.
1. Преобразование прямоугольных экваториальных коорди-
нат в прямоугольные орбитальные координаты. Если в момент
времени t положение объекта в геоцентрической прямоугольной
экваториальной системе координат определено радиусом-векто-
ром г(х, у, z), а скорость его — вектором v(x, у, г), то при из-
вестных значениях экваториальных элементов ориентации орби-
ты объекта Q', со', i' (см. ч. II, гл. 2) положение г0 ?= го(хо, Уо, z0)
и скорость Vo =vQ(xo,ya,zo) в орбитальной системе координат
определяются следующим преобразованием.
1. Вычисляются элементы экваториальной матрицы ориента-
ции (проективные коэффициенты):
Рх = cos ш' cos Q' — sin со' sin Q' cos /',
Py = cos ш' sin Q' + sin to' cos Q' cos i',
A.1.112)
Qx = — sin ca' cos Q' — cos m' sin Q' cos /',
Qy = — sin a/ sin Q' + cos со' cos Q' cos /',
Q,, = cos со'sin z',
Rx = sin Q' sin /',
Ry = — cos Q' sin i',
Rz = cos V.
Если заданы значения эклиптических элементов ориента-
ции орбиты объекта Q, a, i, то проективные коэффициенты
*) Следует иметь н виду, что начало координат не совпадает с геомет-
рическим центром орбиты.
82
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
'§ 1.19
вычисляются по формулам
Рх = cos ш cos Q — sin ш sin Q cos /,
Py = (cos ш sin Q + sin w cos Q cos i) cos e —
— sin w sin /sine,
Рг == (cos со sin Q + sin со cos Q cos i) sin e -+-
+ sin со sin (cos e,
Qx = — sin со cos Q — cos о sin Q cos i,
Qy = (— sin m sin Q + cos w cos Q cos /) cos e —
— cos ш sin /sin e,
Qz = (— sin a sin Q + cos w cos Q cos *') sin e +
+ cos ш sin / cos e,
Ry = — cos Q sin / cos e — cos i sin e,
Rz = cos i cos e — sin / cos Я sin e.
2. Преобразование имеет вид
A.1.113)
(*o) [P* Py P*} (x)
< Уо > = < Qx Qy Qz> < у > ,
I z0 ) I «x Ry Rz ) I Z )
%] (/>, P» P.) ft)
fa\ = \Qx Qy Qz> \y \.
z0 J {Rx Ry R2) U j
A.1.114)
A.1.115)
§ 1.19. Объектоцентрическая система координат*)
Ориентировка космического аппарата обычно определяется
системой относительных координат, связанной с движущимся
объектом. Начало этой системы координат помещено в центр
инерции объекта, основная плдскость совпадает с плоскостью
местного горизонта, т. е. перпендикулярна к направлению ра-
диального расстояния г0 объекта. Основная ось отсчета направ-
лена обычно в точку юга S.
Ориентировка объекта в пространстве относительно ради-
ального расстояния определяется углом наклона траектории fl
к плоскости местного горизонта, т. е. углом между вектором ско-
рости v объекта и плоскостью местного горизонта, и азимутом Л,
отсчитываемым в плоскости местного горизонта от точки севера
/V до проекции вектора скорости v на эту плоскость. Угол на-
*) В литературе встречаются также оСозначения «ЛА центрическая» и
«КЛА-центрическая»,
i 1.191
ГЛ. 1. СИСТЕМЫ КООРДИНАТ
83
клона траектории 6 меняется в пределах —90° ^ 0 ^ +90°,
азимут А положителен при отсчете к востоку и меняется от 0°
до 360°. Азимут можно заменить углом поворота траектории \|зс,
называемым также углом скоростного курса и отсчитываемым
в плоскости местного горизонта от точки юга S в сторону за-
пада от 0° до 360°. Как и в случае орбитальной системы коорди-
нат (§ 1.18), расстояние от
центра масс Земли до объекта
называется радиальным {гео-
центрическим) расстоянием
го(г).
1. Преобразование объекто-
центрических координат в гео-
центрические прямоугольные
экваториальные координаты.
Если в момент времени t оп-
ределены скорость v и геоцен-
трическое расстояние г объек-
та, его склонение б, угол на-
клона траектории 6 и азимут
А, а также географическая
долгота X подспутниковой
точки (рис. 35), то переход от
координат в объектоцентрической системе к геоцентрическому
положению r(x,y,z) и геоцентрической скорости v(x, у, г) вы-
полняется следующим образом.
Вычисляем местное звездное время s по формулам (см. гл. 3,
§ 3.02)
Рис. 35. Объектоцентрическая система ко-
ординат.
fill
где т — местное среднее время в момент t, ц = 0,0027379093
(редукция средних единиц времени к звездным), d = JD—
— 2415020,0 (JD — юлианский день в 0h даты наблюдения),
™ d
36525
Тогда
x = r cos 6coss,
у = г cos б sins,
z = r sin б.
A.1.117)
Далее находим проекции вектора скорости v на направления
основных румбов 5 и Е и геоцентрического расстояния г:
vr = a sin 9,
vs= — и cos 9 cos A,
vE = v cos 6 sin A
A.1.118)
84 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ *СТРОНОМНЯ Г§ 1.19
и компоненты вектора скорости v по осям координат:
( sin б cos s — sin s cos б cos s j f vs)
= \ sin б sins coss cos б sins \\ v „ \m A1119^
I" i I III " "
z ) [ — cos б 0 sin б | ( vr )
2. Обратное преобразование. Обратное преобразование осу-
ществляется при помощи формул
a = arctg-f-, 0°<а<360°.
Квадрант а определяется по знакам у и х:
у>0, х>0, 0°<а<90°, у<0, х<0, 180°<а<270°,
г/>0, х<0, 90°<а<180°, у<0, л:>0, 270°<а<360э,
-7=L:^, 9
V*2 + у"
360°, v = У г2 + г/2 + z2,
е = 90° — р,
я
—a
При определении квадранта А необходимо принимать во
внимание знаки числителя и знаменателя соответствующей фор-
мулы, подобно тому как это делается в случае для а.
Г лава 2
РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
Основные плоскости и оси координатных систем, к которым
отнесены наблюденные или вычисленные положения и скорости
небесных объектов, не сохраняют свои направления в простран-
стве неизменными с течением времени. Поэтому наблюдения не-
бесных объектов, произведенные в различные моменты времени,
относятся, вообще говоря, к различным системам координат и
нуждаются в редукции, или приведении, к одной и той же си-
стеме координат, соответствующей определенной эпохе — фикси-
рованному моменту времени. Различие в положении наблюда-
теля относительно центра Земли или центра Солнца, перемеще-
ние наблюдателя в пространстве из-за осевого вращения Земли
и ее движения по гелиоцентрической орбите и т. п. обусловли-
вают необходимость введения соответствующих поправок в на-
блюдения. Наконец, при распространении в атмосфере Земли
луча света от небесного объекта или радиолуча, отраженного
от его поверхности, их направления испытывают изменения, ко-
торые также необходимо учесть при обработке и анализе на-
блюдений.
Таким образом, редукционные вычисления определяют по-
правки к наблюдениям, учитывающие:
1) прецессию оси вращения Земли,
2) нутацию оси вращения Земли,
3) параллакс,
4) аберрацию,
5) рефракцию.
§ 2.01. Прецессия
Сложное перемещение полюсов мира PN и Ps no небесной
сфере, обусловленное притяжением экваториального избытка
массы Земли со стороны Луны и Солнца, состоит из равномер-
ного движения среднего полюса Рт по малому кругу радиуса
е = 23° 27' с центром в полюсе эклиптики П и колебательного
движения истинного полюса Pv относительно среднего Рт.
8fi
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 2.0 1
тп:
Рис. 36. Положения дуг подвижных экватора и
эклиптики относительно неподвижных эхватора
и эклиптики. Общая прецессия, лунно-солнеч-
ная прецессия, прецессия от планет.
Первое движение, совершаемое с периодом 25 725 лет, назы-
вается лунно-солнечной прецессией, второе движение — нута-
цией; главные члены нутации имеют период около 19 лет.
На лунно-солнечную прецессию накладывается прецессия от
планет, обусловленная вековым движением плоскости эклип-
тики под действием возмущений в движении Земли от планет.
Это движение плоскости эклиптики представляет собой враще-
ние с угловой скоростью л относительно оси, ориентированной
. определенным образом и ле-
жащей в самой плоскости
эклиптики.
Если на рис. 36 Е0Е'а и
А0А'0 означают положения
дуг неподвижных эклиптики
и экватора на небесной сфе-
ре в фундаментальную
эпоху отсчета t0, ЕЕ' и
АА' — положения подвиж-
ных эклиптики и экватора
на небесной сфере в эпоху
tu N — восходящий узел
подвижной эклиптики ЕЕ'
на неподвижной Е0Е'а и К —
точку пересечения мгновенной оси вращения плоскости эклип-
тики с небесной сферой (при определении положительного
направления вращения против часовой стрелки), то полученные
таким образом дуги и углы имеют следующий смысл:
TiTo = Ф1 — лунно-солнечная прецессия,
TiT = х — прецессия от планет,
yf = \jj — общая прецессия по долготе, причем точка F
такова, что MF = /VTo,
ео — средний наклон эклиптики к экватору в фундаменталь-
ную эпоху /о,
е' — наклон среднего подвижного экватора к неподвижной
эклиптике, называемый лунно-солнечным наклоном,
е — наклон среднего подвижного экватора к подвижной
эклиптике, называемый просто средним наклоном,
(T0N = (П)— долгота восходящего узла N, отсчитываемая
по неподвижной эклиптике ЕОЕ'О от средней точки весеннего рав-
ноденствия То фундаментальной эпохи t0,
{TN = (П) + ij) — долгота восходящего уз-ла N, отсчитывае-
мая по подвижной эклиптике ЕЕ' от средней точки весеннего
равноденствия Т эпохи (даты) t,
л — наклон подвижной эклиптики к неподвижной,
|ПГ/С = П — долгота мгновенной оси вращения плоскости
эклиптики ЕЕ'.
§ 2.011
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
87
Если р\ — годичная лунно-солнечная прецессия \Р\ = —тг—
dt
производная, отнесенная к тропическому году как единице вре-
мени V qx = -?¦ — годичная прецессия от планет, р=—?- —
годичная (полная) прецессия по долготе, я = —-^—годичная
угловая скорость вращения плоскости эклиптики, то, согласно
Ньюкому [8], имеем
Р: = 50",37084 + 0",00493 Т,
я = 0",47107-0",00068 Т,
П = 173° 57' 03" + 3287" Т + 0",6 Т2,
еэ=23э27'08",26.
A.2.01)
Здесь время Т отсчитывается в тропических столетиях по
36524,22 эфемеридных суток от фундаментальной эпохи 1900,0 =
= JD 2415020,3134 до рас-
сматриваемого момента
[юлианской даты
t
JD @ - 2415020,3134
36524,22
A.2.02)
Обозначение 1900,0 от-
носится к началу бесселева А'\
года 1900, совпадающему с
эпохой 1900, янв. 0,8134 эфе-
меридного времени*).
Экваториальная геоцен-
трическая система прямо-
угольных координат OXYZ
(рИС. 37) ВращаеТСЯ ОТНО- Рис. 37. Прецессионные величины л, р,, qu П.
сительно оси 02 эклиптиче-
ской геоцентрической прямоугольной системы координат 0X72
с угловой скоростью р\\ эклиптическая система ОЯ72 вращается
относительно оси ОК. с угловой скоростью я, проекции которой
на оси эклиптической системы координат равны
я= = л cos II, пй = я sin II, я2 = 0.
*) Эпоха 1900,0 означает момент времени вблизи начала 1900 г., когда
средняя долгота Солнца, уменьшенная на постоянную аберрации, была равна
280°; этот момент приходится на дату 1900, янв. 0,8134 эфемеридного вре-
мени. [См. ниже бесселев год, тропический год.]
88 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.01
Так как компонента л* изменяет средний наклон е, то
-^- = л cos П. A.2.03)
Компонента пу вращает плоскость эклиптики в отрицатель-
ном (т. е. по часовой стрелке) направлении, смещая точку ве-
сеннего равноденствия Т; поэтому экваториальная система ко-
ординат OXYZ вращается относительно оси OZ с угловой ско-
ростью <7ь определяемой формулой
q\ sin e = л sin II. A.2.04)
Вектор абсолютной угловой скорости вращения экваториаль-
ной системы координат OXYZ равен
м = Pi - Ч\
с проекциями на оси OX, OY, OZ:
ю* = 0,
<йи = — pi sine = — п, > A.2.05)
mz = p, cos e — <7i = m.
Величины m и п называются годичной прецессией по пря-
мому восхождению и годичной прецессией по склонению (ргае-
cessio annua).
Проекция вектора р\ на направление ОТ\ определяет ско-
рость изменения наклона е':
¦^- = Pl sine sin %. A.2.06)
Аналогичное рассмотрение вращения эклиптической системы
координат OX?Z показывает, что проекция вектора угловой
скорости ш на ось 02 определяет полную скорость смещения
по эклиптике точки весеннего равноденствия Т:
р — pi — qx cos e. A.2.07)
Вектор абсолютной угловой скорости вращения эклиптической
системы равен
со' = р — я. A.2.08)
Для среднего наклона е эклиптики к экватору имеем
е = 23° 27' 08",26 - 46",846 Т - 0",0059 Т2, A.2.09)
§ 2.02] ГЛ. 5. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 89
Согласно Ньюкому [31] имеем следующие формулы для пре-
цессионных величин qu p, т, п:
?1 = 0">12473-0",01887 7\
р = 50",25641 + 0",02223 Т,
т" = 46",08506 + 0",02794 Т,
т5=35,072337+08>0018627Г, ' A.2.10)
п" = 20",04685 - 0",00853 Т,
п = Г.336457 - 0s,0005687 T
и для лунно-солнечного наклона е':
е' = 23° 27'08",26 + 0",0606 Т2 — 0",00773 Р. A.2.11)
§ 2.02. Редукция звездных положений
с учетом прецессии и собственного движения
Скорость точки, определяемой радиусом-вектором г в пря-
моугольной экваториальной системе координат OXYZ, вращаю-
щейся с угловой скоростью и = Pi — qu равна
в = Кг]. A.2.12)
Через промежуток времени At точка переходит в новое поло-
жение относительно системы отсчета OXYZ, определяемое ра-
диусом-вектором г',
г'= г+ [и, г] Д/. A.2.13)
Это обстоятельство приводит к изменению экваториальных
координат а, б точки, производные которых определяются фор-
мулами, получаемыми применением основной операции A.1.051)
к уравнению A.2.13):
-?¦ = № + п tg 6 sin a = ра,
-77-= ncosa = рй.
Величины ра и рй определяют скорости прецессионного из-
менения экваториальных координат а, б звезды. Специальные
таблицы [32], [33] дают возможность по заданным значениям
а, б найти ра и рй.
Изменение координат а, б некоторых звезд обусловлено их
собственными движениями ца и ji4 (ца — собственное движение
90 Ч. Т. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ Г§ 2.02
звезды по прямому восхождению, fie — по склонению). Тогда
полные первые производные экваториальных сферических коор-
динат а, б звезды по времени, отнесенные к тропическому году
как к единице времени, будут
-Щ- = Ра + На. ~Ш = РЛ + 1*в- О 2-15)
Величины -утр и -jrr называются годичными изменениями (va-
riatio annua) и обозначаются (VA)a, (VAN:
(VA)a = pa + VLa, (VA)b = P& + ц6. A.2.16)
Для полных вторых производных по времени от экваториаль-
ных сферических координат а, б имеем
+ га sec2 6 sin 0^ + 2^) + 2tg6-fxafxe, j A-2.17)
: = 4COSansina(p + 2fX)sin6cos6'A" J
или
Dt2 100
D<2 ~ 100
где величины (У5)а и (VS)e отнесены к тропическому столетию
и называются вековыми изменениями (variatio saecularis).
Если обозначить изменения собственных движений ца и цв
за сто лет через Л{ха и Дцл, то для полных изменений собствен-
ных движений можно написать следующие формулы:
-^2. = -щ-A(ie = га tg б cos а- ца + га sec2 б sin а- у,ц + 2 tg
^ = -^ Лцв = - га sin а • ц„ - sin б cos б • ц2.
A.2.18)
Числовые значения полных третьих производных экватори-
D3a Д3б
альных сферических координат по времени -^ и -^ опреде-
D2a
ляются путем сопоставления значении вторых производных -^
и -дз-, наиденных в различные эпохи t\ и г2. Если разность
§ 2.031 ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 91
эпох равна tj (ti = t2 —1\), то с точностью до третьих разно-
стей вторых производных имеем
Р3а 1_ [Y D?a N _ (]У-аЛ
DP ~~ tj [V DP )i=,u \ DP
D4 1
DP ~ т, [V DP Jt=tti \ DP
Для перевода экваториальных сферических координат звезды
эпохи tD(a,o, 6o) на эпоху t служат следующие формулы:
a{t) = а0 + (VA)a(t - t0) + (УЯ-^ЧпГ- + Н1«
" """ " A2 19)
б @ = б0 -f {VA)b (t -10) -f (VS)b i^ii + Ш, [±=Js-J ,
где третьи члены прецессии Ша и III6 имеют вид
10°3 D3a ТТТ _ 10°3
ITT _ ТТТ _
1И«~ 6 DP ' 1И«— 6 DP
и разность эпох т= t — t0 выражена в тропических годах.
Начальные значения координат звезд в эпоху t0 опреде-
ляются из наблюдений и публикуются в специальных каталогах
звездных положений, в которых приводятся также значения всех
необходимых для редукций производных и собственных движе-
ний вместе с их вековыми вариациями (VS) (см. § 2.26).
§ 2.03. Нутация
Нутация представляет собой часть общего движения полюса,
зависящую от периодических движений Луны и Солнца по гео-
центрическим орбитам. Явление нутации заключается в перио-
дических колебаниях истинного полюса относительно среднего
полюса экватора. Главный член нутации зависит от долготы
восходящего узла орбиты Луны и имеет период 6798 суток или
18,6 года. Амплитуда этого члена, равная 9",210, известна как
постоянная нутации. Остальные члены нутации зависят от сред-
них долгот и средних аномалий Луны и Солнца и их линейных
комбинаций с долготой восходящего узла лунной орбиты. Сме-
щение истинного полюса относительно среднего можно разло-
жить на нутацию в долготе Aif, изменяющую положение точки
весны Т, и нутацию в наклоне Ле, изменяющую наклон е эклип-
тики к экватору. Теория вращения несферичной Земли в поле
тяготения Солнца и Луны, разработанная подробно Вулар-
дом [34], дает разложения компонент нутации в ряды по коси-
нусам и синусам указанных выше аргументов, позволяющие
вычислить нутацию на любой момент времени.
92
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[« 2.03
Очевидно, смещение среднего полюса экватора из положе-
ния Рт, занимаемого в момент времени t, в положение истин-
ного полюса экватора Р„ можно выполнить двумя поворотами
системы координат OXYZ, связанной со средним экватором:
сначала на угол Aifs (нутация по долготе) относительно оси
ОН (рис. 38), проходящей
через положение полюса эк-
липтики П в момент време-
ни t, а затем на угол Деа
(нутация в наклоне) отно-
сительно прямой ОТ.
Тогда суммарный эле-
ментарный поворот системы
__ координат OXYZ, опреде-
/ ляемый вектором
Аи = Д% -(- Aes,
переместит неподвижную
точку пространства относи-
тельно этой системы отсчета
на
Рис. 38. Нутация. Дг = [Д<*>, г]
и прежний радиус-вектор г будет связан с новым г' равенством
г' = г + Аг = г + [До, г].
Изменения координат а, б, обусловленные нутацией, выра-
жаются формулами
Да = (cos е + tg б sin а sin е) Дт^ — tg б cos а • Де„
Дб = sin e cos а ¦ Ai^ + sin а • Ае^.
Таким образом, полные изменения координат а, б звезды,
обусловленные совместным влиянием прецессии и собственного
движения в течение времени, выражаемого в долях тропического
года т, и влиянием нутации, можно учесть, применяя следующие
формулы:
Да = (пг + п tg б sin а) т + цат + "|
-\- (cos е + tg 6 sin а sin е) А% — tg б cos а • Ае,, > A.2.21)
Дб = пх cos а + ц6т + sin e cos а ¦ Дт^ -f- sin а • Де^ J
или
Да = (пг -\- п tg б sin а) (х Н——J — tg б cos а ¦ Ае4 + — Дф, +
Дб = п cos а (х -j——J -f sin а • Дв, + jx6t.
A.2.20)
2.03'
ГЛ. 1. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
93
В «Астрономическом Ежегоднике СССР», как и в других
основных астрономических ежегодниках, до выпусков на 1960 г.
была принята следующая система обозначений:
) A.2.22)
л — T-t- р( , а— де, с — pi 15 .
л — р, ' й — fle> ? ~ р, 15
где Дг|э и Ле — долгопериодические компоненты нутации в Дол-
готе и в наклоне, d\j> и de — короткопериодические компоненты
нутации в долготе и наклоне, так что
Л-ф,, = Д-ф
j), Aes = Ae + de.
Разложения компонент нутации Aij)s и Aes в тригонометриче-
ские ряды по фундаментальным аргументам теории движения
Луны были получены Вулардом [34] и приведены в табл. 5, 6.
Таблица 5
Период
(а сутках)
6798
183
3399
365
122
365
178
183
91
1305
206
173
386
347
1095
200
347
6786
212
120
1616
412
3233
+ 1
+2
+2
0
+2
+2
+ 1
0
+2
+ 1
0
0
+1
+1
0
+1
+1
+1
+1
+1
+2
0
0
Аргументы
1
0
0
0
0
0
0
0
0
0
—2
+2
0
0
0
+2
—2
0
0
+2
0
—2
+ 1
+ 1
0
0
0
+1
+1
-1
0
+2
+2
0
0
0
+ 1
-1
0
0
-1
—2
0
+1
0
0
-1
1
0
+2
0
0
+2
+2
+2
0
+2
+2
0
+2
0
0
—2
0
+2
+ 2
0
+2
+2
0
0
р.
и
0
—2
0
0
—2
—2
—2
0
—2
0
—2
—2
0
0
0
+2
—2
—2
—2
2
0
-1
-1
Нутация по долготе Дф.
Коэффициенты при
синусах аргумента
—17",2327—С.01737Г
—1,2729—0,00013 7"
+0,2088+0,00002 Т
+0,1261-0,00031 Г
—0,0497+0,000i2 T
+0,0214—0,00005 Т
+0,0124+0,00001 Т
+0,0016—0,00001 Т
—0,0015+0,00001 Т
+0,0045
+0,0045
-0,0021
-0,0015
-0,0010
+0,0010
-0,0005
-0,0005
-0,0004
+0,0004
+0,0003
—0,0003
-0,0003-
-0,0002
Нутация наклона Де
Коэффициенты прн
косинусах аргумента
+9",2100+0",00091
+0,5522—0,00029
-0,0904+0,00004
+0,0216-0,00006
-0,0093+0,00003
—0,0066
+0,0007
—0,0024
+0,0008
+0,0005
+0,0003
+0,0003
+0,0002
—0,0002
-0,0002
+0,0002
Г
Г
Г
Г
Г
94
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИЛНАЯ АСТРОНОМИЯ
[§ 2.03
Таблица 6
Период
(в сутках)
13,7
27,6
13,6
9,1
31,8
27,1
14,8
27,7
27,4
9,6
9,1
7,1
13,8
23,9
6,9
13,6
27,0
32,0
31,7
9,5
13,2
34,8
14,2
5,6
12,8
14,8
9,6
23,9
14,7
7,1
6,9
29,8
15,4
29,5
26,9
9,1
25,6
9,4
13,7
32,6
13,8
9,8
7,2
27,8
5,5
8,9
Q
+2
0
+ 1
+2
0
+2
0
+ 1
+ 1
+2
+ 1
+2
0
+2
+2
0
+ 1
+ 1
+ 1
+ 1
+2
0
+2
+2
+2
+ 1
0
+1
+1
+ 1
+ 1
0
0
0
0
0
0
+2
+ 1
+ 1
+ 1
+2
+2
+2
+2
+2
Аргументы
1 V F
0
+1
0
+1
+1
]
0
+1
—1
-1
+1
0
+2
+ 1
+2
0
-1
-1
+ 1
-1
0
+1
0
+1
+2
0
+ 1
+ 1
0
0
+2
+ 1
0
0
+ 1
+ 1
+ 1
+ 1
-2
-1
+2
-1
0
+ 1
+3
+1
0 +2
0 0
0 +2
0 +2
0 0
0 +2
0 0
0 0
0 0
0 +2
0 +2
0 +2
0 0
0 +2
0 +2
0 +2
0 +2
0 0
0 0
0 +2
+ 1 +2
+ 1 0
-1+2
0 +2
0 +2
0 0
0 0
0 +2
0 0
0 +2
0 +2
-1 0
+ 1 0
0 0
0 -2
0 +2
+1 0
-1 +2
0 0
0 +2
0 0
-1 +2
-1 +2
0 0
0 +2
+ 1 +2
D
0
0
0
0
-2
0
+2
0
0
+2
0
+2
0
2
0
0
0
+2
—2
+2
0
—2
0
+2
—2
+2
+2
-2
—2
+2
0
0
-2
+ 1
0
0
0
0
0
п
0
+2
+2
0
0
0
Нутация по долготе (ЭД>.
Коэффициенты
при синусах аргумента
-0",2037-0",00002 Т
+0,0675+0,00001 Т
-0,0342-0,00004 Т
-0,0261
-0,0149
+0,0114
+0,0060
+0,0058
-0,0057
-0,0052
-0,0044
—0,0032
+0,0028
+0,0026
-0,0026
+0,0025
+0,0019
+0,0014
-0,0013
-0,0009
+0,0007
-0,0007
-0,0006
-0,0006
+0,0006
-0,0006
+0,0006
+0,0005
—0,0005
-0,0005
-0,0004
+0,0004
-0,0004
—0,0004
+0,0004
+0,0003
-0,0003
-0,0003
—0,0002
-0,0002
+0,0002
-0,0002
-0,0002
—0,0002
-0,0002
+0,0002
Нутация наклона йг.
Коэффициенты при
косинусах аргумента
+0",0884-0",00005 Т
+0,0183
+0,0113-0,00001 Г
—
-0,0050
....
—0,0031
+0,0030
+0,0022
+0,0023
+0,0014
-0,0011
+0,0011
—0,0010
-0,0007
+0,0007
+0,0005
-0,0003
+0,0003
+0,0003
-0,0002
+0,0003
—
—0,0003
+0,0003
+0,0003
+0,0002
$ 2.031 ГЛ. 8. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 95
В системе обозначений A.2.22) формулы редукции прини-
мают вид
Дб = Аа' + BV + щт + [AW + B'b'] *),
где величины a, b, a', b', называемые редукционными постоян-
ными, определялись ранее выражениями
а = m* + ns tg б sin а, Ь = -тд- tg б cos а,
а' = п" cos а, Ь' = — sin а.
Редукционные величины А, А', В, В', Е составляют так назы-
ваемую алгебраическую систему.
Наряду с алгебраической системой редукционных величин
вводится еще тригонометрическая система f, f, g, g', G, G', ко-
торая до 1960 г. определялась формулами
m'A + E = f, n"A = gcosG, B = gsinG,
mM' =f, n"A' = g'cosG', В' = gr sin G'.
В этих обозначениях формулы редукции имеют вид
Да= f + ±-g tg б sin (G + а) + ц„т + [f + 1je/tg 6 sin (G
sin (G'+a)], J
J
A.2.24)
Согласно рекомендациям MAC в астрономических ежегодни-
ках, начиная с 1960 г., принято учитывать прецессию от начала
ближайшего к рассматриваемому моменту бесселева года, т. е.
для первой половины календарного года (янв. 1 — июль 1) пре-
цессия учитывается от начала бесселева года, соответствующего
данному календарному году, а для второй половины календар-
ного года (июль 1 —дек. 31) прецессия учитывается от начала
бесселева года, соответствующего следующему календарному
году.
В соответствии с этими решениями MAC, направленными на
ослабление влияния членов второго порядка, в настоящее время,
т. е. в ежегодниках на 1960 г. и последующие годы, принята сле-
дующая система соотношений, определяющих редукционные ве-
личины алгебраической и тригонометрической систем:
A -f А' = пх + (Д-ф + dip) sin e, / = -^ [шх + (А-ф + dip) cos e],
В + В' = — (Ае + de), g cos G = A + A',
*) Выражения в квадратных скобках представляют собой выделенные
совокупности короткопериодических членов.
96 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.03
причем редукционные постоянные а, Ь, а', Ь' (так называемые
«малые буквы») вычисляются по формулам
1 / т.
а = -jg- f — + tg б sin a), a' = cos а,
6 = -jg- tg б cos а, b' = — sin а.
Принятые в приведенных соотношениях обозначения имеют
следующий смысл: т — часть тропического года от рассматривае-
мого момента времени до начала ближайшего к нему бесселева
года, числовые значения т публикуются для 0h эфемеридного и
звездного времени каждого дня года в астрономических ежегод-
никах, е — истинный наклон эклиптики к экватору.
Дробную часть тропического года т можно вычислить непо-
средственно по формуле [25]
т = т0 + 0,00273791 d,
в которой то — промежуток времени от начала бесселева года
до начала соответствующего календарного года (янв., 0), выра-
женный в долях тропического года *), d — промежуток времени
в эфемеридных сутках от заданного момента до начала кален-
дарного года (янв. 0). Для вычисления величины т0 для любого
года М (М > 1900) можно воспользоваться формулой [25]
т° = ~ 365^422"[0.8134 — 0,0312 у°-41900 +0,2422* +у].
где N = NQ-\- х, если NQ — ближайший високосный год, предше-
ствующий году М, причем у — 1 при х = 0, у = 0 при х ф 0.
Значения прецессионных величин пг, п, pt, qi берутся для на-
чала бесселева года, ближайшего к рассматриваемому моменту
времени: если, например, данный момент попадает в первую
половину календарного года (янв. 0 — июль 1), то для начала
бесселева года, соответствующего этому году, если во вторую
половину (июль 1 — дек. 31), то для начала следующего бессе-
лева года.
Если воспользоваться прямоугольными экваториальными ко-
ординатами, в которых положение звезды определяется векто-
ром
( cos a cos 61
: i sin а cos б > t
sin в )
W 4
UJa.6
*) Величину to (dies reductus) можно вычислить, пользуясь специальной
таблицей в [35].
S 2.04)
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
97
и матрицами-операторами поворота р, q, г, то приведение
звезды на истинное место в эпоху Т со среднего места начала
бесселева года То можно выполнить по формуле
Ы =г(-
. A.2.24а)
рекомендуемой при редукциях за прецессию и нутацию в пре-
делах одного года.
§ 2.04. Годичная аберрация
Аберрационным смещением звезды называется видимое из-
менение направления луча света от этой звезды, обусловленное
конечной скоростью распространения света и собственным отно-
сительным движением наблюдателя.
При редукции звездных положений необходим учет годич-
ной аберрации, возникающей из-за движения наблюдателя вме-
сте с Землей по гелиоцентрической ор-
бите. ^* it
Если начало экваториальной системы Ц
координат XYZ поместить в точку на-
блюдения О (рис. 39), и через О' обо-
значить центр объектива телескопа, че-
рез О'А — вектор скорости света с об-
ратным знаком (—с), ОА—вектор скоро-
сти Земли (v), то истинное направление
на звезду 2 будет определено прямой АН.
Построим в точке О' два равных и
противоположных вектора v и —v\ тогда
относительное движение наблюдателя и
СВетОВОЙ ВОЛНЫ Не ЗаВИСИТ ОТ СКОрОСТеЙ
О'В и 0/4, и точку О можно считать не-
подвижной в системе координат, движущейся со скоростью v\
следовательно, световая волна в этой системе распространяется
со скоростью
-е
Рис. 39. Годичная аберрация.
Изменения а и б звезды, обусловленные годичной аберра-
цией после применения основной операции A.1.051), даются
формулами
Да = С с + Dd,
До = Сс' + Dd',
A-2.25)
4 Под ред. Г, Н. Дубошина
98 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ |§ 2.01
в которых аберрационные редукционные величины С и D опре-
деляются равенствами *)
С = — и cos © cos e, 1
г, ¦ X \ 0-2-26)
а их числовые значения публикуются в астрономических еже-
годниках на 0h каждого дня года.
Величина и называется постоянной аберрации и определяется
формулой
Ъ= 20"'496- A -2-27)
86400яо sin ГС VI — <
Здесь С = 299792,5 км/сек, ае = 6 378 160 м, ла = 8",794, п" —
среднее суточное движение Земли, е — эксцентриситет земной
орбиты, О — истинная геоцентрическая долгота Солнца.
Редукционные постоянные с, с', d, d' из A.2.25) равны
с = -jg-sec б cos a, c' = tgecos6 — sin б sin а, i
, ' A.2.28)
d = -тд- sec б sin a, d' = sin6cosa.
Начиная с 1960 г. публикуемые в астрономических ежегод-
никах аберрационные редукционные величины С, D вычис-
ляются непосредственно по скорости движения Земли относи-
тельно барицентра Солнечной системы [25]:
С = + 1191",303 Y + 20",496 е cos e cos Г =
= + 1191",303 (Y + 0,000051448 + 0,000007658 Г),
D = - 1191",303 X + 20",496 е sin Г =
= - 119Г.303 [X + 0,000282687 - 0,000002388 Г),
i = с • tg e.
A.2.29)
Они относятся к равноденствию и экватору начала бли-
жайшего бесселева года. Компоненты скорости Земли Я, ?, Z
находятся численным дифференцированием прямоугольных
*) Компоненты вектора v гелиоцентрической скорости Земли содержат
члены, пропорциональные эксцентриситету земной орбиты; их совокупность
называется эллиптической частью аберрации, или Е-членами. Учет эллиптиче-
ской аберрации необходим только при вычислениях особо высокой точности
(см. стр. 118).
I 2.041
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
99
Таблица 7
Коэффициенты
а С при cos
-18",7974
-0,00187 Т
+0,3150
—0,00076 Т
-0,3149
+0,00076 Т
-0,0078-
—0,0076
+0,00005 Т
—0,0059
-0,0018
—0,0018
—0,00021 Т
+0,0007
-0,0004
—0,0004
+0,0003
+0,0003
-0,0003
-0,0002
+0,0002
-0,0002
+0,0002
+0,0002
+0,0002
—0,0002
—0,0002
-0,0001
+0,0001
+0,0001
-0,0001
—0.0001
—0,0001
—0,0001
-0,0001
+0,0001
-0,0001
-0,0001
—0,0001
+0,0001
—0,0001
-0,0001
+0,0001
+0,0001
+0,0001
-0,0001
+0,0001
в D при sin
—20",490l
+0,3433
-0,00086 Т
-0,3432
+0,00086 Т
-0,0085
-0,0084
+0,00006 Т
—0,0065
-0,0019
-0,0019
—0,00023 Т
-0,0007
—0,0005
—0,0004
+0,0004
—0,0003
—0,0003
+0,0003
—0,0003
+0,0002
+0,0002
—0,0002
—0,0002
-0,0002
-0,0001
+0,0001
+0,0001
-0,0001
-0,0001
—0,0001
-0,0001
—0,0001
+0,0001
—0,0001
-0,0001
-0,0001
+0,0001
-0,0001
—0,0001
—0,0001
+0,0001
+0,0001
—0,0001
+0,0001
в 1 при ens
-8",1547
+0,00427 Т
+0,1366
—0,00041 Т
-0,1366
+0,00041 Т
-0,0034
—0,0033
-0,0026.
-0,0007
—0,0006
—0,00009 т
+0,0003
—0,0002
—0,0002
-0,0007
+0,0001
-0,0001
—0,0001
+0,0001
—0,0001
+0,0001
+0,0001
+0,0001
—0,0001
-0,0001
—0,0001
+0,0001
+0,0001
—0,0001
-0,0001
Аргумент
0г,776935216 + 100г,002135903 Т +
+ 0Г,000000841 Т2
0г,781168981 + 0г,004775486 Т
0г,772701420 + 199Г,999496319 Т
0r,75I206 + 1336r,855231 T
0г,625778 + 8r,429397 T
0',768468 + 299r,996857 T
0г,737778 + 3r,393872 T
0г,875778 + 8',429397 Т
0г,214597+99г,992585 71
0г,573719 + 2662Г,4О759О T
0г,251556 + 16г,858794 71
0г,031252 + 1342',227848Г
0г,396924 + 19Г.570099 Т
0',877235 + 2485r,009062 T
0г,371308 + 162Г, 553367 Т
0',018315 + Ю0',057325 71
0г,535556 + 99Г,946947 Т
О',215681 +225M04598 71
0Г,201158 + Г,189942Г
0г,963042 + 83М 33790 Т
0г,268315 + 100^,057325 Т
0г,785556 + 99',946947 Т
0г,621308 + 162г,553367Г
0г,402713 + 108М31533 7-
0г,965681 + 225М04598 Т
0г,699748 + 3810г,561421Г
0г,764234 + 399г,994217Г
0Г,354808 + 0г,606836 Т
0М04808 + 0г,606836 Т
0М51157 + 9Г.572739 71
0г,516912 + 283г,138062Г
0г,222556 + 6r,787744 T
0г,219914 + 125г,107238 7'
0r,243023 + 193r,663651 T
0^82563 + 37^,450905 7-
0'-,9б9914+125М07238 71
0г,501556 + 16',858794 Т
0г,661810 + 25г,100327 7"
0r,247257 + 93r,666291 T
0',806619 + 106r,337981 T
0г,833956 + 74г,897034 Т
0^21146 + 183М40702 Т
100 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.04
Продолжение табл. 7
Коэффициенты
в С при cos
-0",0001
+0,0001
+0,0001
—0,0001
-0,0001
-0,0001
+0,00006 Т
—0,0001
+0,0001
—0,0001
b~D при sin
—0",0001
+0,0001
+0,0001
-0,0001
—0,0001
-0,0001
+0,00006 Т
+0,0001
-0,0001
—0,0001
в 1 при cos
Аргумент
0г,814287 + 187Г,658469 7'
0г,583956 + 74г,897034 Т
О'.бБЗОвб + ЮО'^^бЗвТ1
0г,000785+99г,591634Г
0г,803086 + 100',412638 Г
0г,250785 + 99Л,591634 Т
0л,487778 + З',393872 Т
0U97336 + П36г,850959 Т
0г,411810 + 25г,100327 7'
0r,432563 + 37r,450905 T
экваториальных барицентрических координат Земли X, У, Z,
определяемых формулами
i + L, mi
L. -¦ _
У=-
где Xg, Уд, Zq — прямоугольные экваториальные геоцентриче-
ские координаты Солнца, xit yu z4 — прямоугольные экватори-
альные гелиоцентрические координаты ?-й планеты, масса ко-
торой rrii выражена в единицах массы Солнца.
При вычислениях принимаются во внимание Юпитер, Са-
турн, Уран и Нептун. Коэффициент 119Г',303 в формулах
A.2.29) соответствует постоянной аберрации и = 20",496 и ско-
рости Земли, выраженной в астрономических единицах за эфе-
меридные сутки.
Для перевода редукционных величин С, D с эпохи t0 на
эпоху t служат формулы
С, = Си - 0,0002235 Du (t - t0),
Dt = Dtt + 0,0002656 Cu {t — to),
где разность эпох t —10 выражена в тропических годах.
§ 2.05] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ ЦI
В. С. Губановым недавно были выведены разложения абер-
рационных редукционных величин С и D, а также i, отнесенных
к экватору и равноденствию даты [70] (см. табл. 7).
Следует предостеречь от «экономии» за счет отбрасывания,
казалось бы, несущественных, т. е. с малыми коэффициентами,
членов, так как влияние долгопериодических членов с амплиту-
дами 0",0001 взаимно не уничтожается. Заметим, что аргу-
менты разложений выражены в частях полной окружности, т. е.
1Г = 360°.
Еще один метод вычисления аберрационных редукционных
величин С и D предложен Аткинсоном [71].
§ 2.05. Сводка основных формул редукции
звездных положении
Главными видами редукции звездных положений являются
приведение звезды со среднего места на истинное место и со
среднего места на видимое место, а также обратное приведение.
Средним местом звезды называется ее гелиоцентрическое по-
ложение, отнесенное к среднему экватору и равноденствию
определенной эпохи, выбираемой обычно совпадающей с мо-
ментом начала определенного бесселева года.
Для приведения звезды со среднего места эпохи t0 на сред-
нее место эпохи t служат формулы A.2.19):
a (t) = а (*0) + (VА)а {t - t0) + (VS)a
t>{t) = Hto) + (VAN(t-to) + {VS)b
Если эпоха t совпадает с моментом начала определенного
бесселева года, то формулы A.2.19) дают среднее место звезды
ct @, 6@ на начало этого года; если эпоха t совпадает с не-
которой данной датой, то эти формулы определяют среднее ме-
сто звезды на дату.
Имеем
аист = <хсред + Аа + ВЬ + цат + Е + [А'а + В'Ь],
бист = бсред + Аа' + ВЬ' + ц6т + [А'а' + В'Ь']
или
аИст = «сред + f + iV 8 te бо sin (G + ао) + Цат +
A.2.31)
: ocpe* + g cos (G + а„) + ц6т + [tf COS (G' ¦
102 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ Г§ 2,03
Формулы A.2.30) и A. 2.31), принятые в астрономических еже-
годниках до 1960 г., дают совместный учет прецессии, нутации
и собственного движения звезды от момента начала данного
бесселева года t до рассматриваемой даты t + т, где доля тро-
пического года т равна d/36524,22 a d означает число дней от
момента t до этой даты. Они определяют истинное место звезды
в эпоху t + т.
В астрономических ежегодниках начиная с 1960 г. приняты
полные формулы редукции звездных положений, включающие
влияние короткопериодических членов нутации, а именно:
{А + А')а + (В + В')Ъ + Е
+ -jg-g sin (G + ао) tg в0 +
вист = бсред + (A + A') a' + (B + Br) br +
= бсред + g COS (G + Oo) +
Для приведения звезды на видимое место необходимо
к истинному месту аИСт, бист прибавить поправки Да и Дб за
аберрацию (звездную, или годичную), вычисляемые по форму-
лам A.2.25). Кроме того, при точных вычислениях необходимо
ввести поправки за влияние членов второго порядка, за годич-
ный параллакс и, в случае редукции положений компонент
двойных звезд, за орбитальное движение. Выражения для этих
поправок приведены ниже.
В каталогах положения двойных звезд отнесены чаще всего
к центру масс двойной системы. Поправки Да* и Дб" за орби-
тальное движение при редукции координат компонент двойных
звездных систем от центра масс к яркой (главной) звезде А
выражаются через относительные координаты s", p звезды-
спутника В, относительно главной звезды и вычисляются по
формулам
ТВ"secв sin
т+7
где
Д/7 = — 0°,0056sec б sin a(t —10),
Разность эпох t —10 выражена здесь в тропических годах.
A.2.32)
I Z.07|
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
103
§ 2.06. Учет влияния членов второго порядка
Наиболее существенные члены второго порядка, пропорцио-
нальные tga б в редукции Да и tg б в редукции Дб, учитываются
при помощи поправок
Act = /atg26, Дб = /а tg б,
прибавляемых к редукциям A.2.32).
Коэффициенты /а и /в публикуются в астрономических еже-
годниках для северных (б > 0) и южных (б < 0) склонений.
§ 2.07. Годичный параллакс
Вследствие движения наблюдателя вместе с Землей по гелио-
центрической орбите возникает кажущееся перемещение проек-
ций звезд по небесной сфере, называемое параллактическим сме-
щением, или параллаксом (годич-
ным параллаксом) звезд. При вы-
числении видимых мест звезд необ-
ходимо перейти от гелиоцентриче-
ских средних мест звезд, данных
в каталогах звездных положений,
к геоцентрическим координатам.
Если 2" — положение звезды 2
в гелиоцентрической экваториаль-
ной прямоугольной системе коорди-
нат SXYZ (рис. 40), Г — положение
Земли, R и г — гелиоцентрические
радиусы-векторы Земли и звезды,
г' — геоцентрический радиус-вектор
звезды, SE" и ГЕ' — направления на
звезду от центра Солнца и центра
Земли, которые определяют соответствующие проекции на не-
бесной сфере, то
#¦' = #¦ — #.
Применив к последнему уравнению основную операцию (.1.1.051),
найдем, что изменения а и б, вызванные годичным параллаксом
звезды п", выражаются формулами
Рис. 40. Годичный параллакс
= -jg- n" (— XQ sec б sin a + YQ sec б cos a),
b'n = n" (—XQ sin б cos a — Yo sin б sin a + ZQcos6).
На практике используются формулы
Дсся = С Ас + D Ad,
Дбл == С Ас' + D Ad',
A.2.33)
A.2.34)
104
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
2.08
где С и D — аберрационные редукционные величины, определяе-
мые формулами A.2.26) и A.2.29). Величины Ac, Ac', Ad, Ad'
вычисляются по формулам
Ас = 0,0532 n"d, Ac' = 0,0532n"d',
Ad = — 0,0448л"с, Ad' = - 0,0448л;"с'.
Таким образом, для учета годичного параллакса звезды до-
статочно к редукционным постоянным этой звезды с, с', d, d'
прибавить поправки Ac, Ac', Ad, Ad'.
§ 2.08. Точные формулы для учета прецессии
Если звезда близка к полюсу мира или промежуток вре-
мени между эпохами t0 и t велик, то дифференциальные при-
ближенные формулы учета пре-
цессии становятся неточными
и их применение нежелатель-
но. В этом случае преобразо-
вание •координат выполняется
при помощи прецессионных ве-
личин Ньюкома (углов Эйлера)
So> г, 0 (So = ф, г = ф, 0 =5 0).
Пусть аь 6i — координа-
ты звезды в прямоугольной
экваториальной системе коор-
динат X\Y\Z\, отнесенной к
У среднему экватору и равноден-
' ствию эпохи U = 1900,0 + Ти
а2, б2 — координаты этой же
звезды в системе координат
X2Y2Z2, отнесенной к среднему
экватору и равноденствию
„ ,, г, и эпохи t2 = 1900,0+ Г2 (Ti и
Рис. 41. Прецессионные величины Нью- _ ' х
кома и г, ч>. Т2 выражены в тропических
столетиях по 36524,22 эфеме-
ридных суток). Положение системы X2Y2Z2 относительно си-
стемы XiYiZi определим углами, стягиваемыми дугами
(рис, 41). Тогда преобразование координат (оц, 6i) в коорди-
наты (а2, 82) осуществляется по формулам
cos 62 sin @2 — г) = cos б, sin {a{ -f ?0).
cos б2 cos (ог — г) = cos 6: cos (щ + So)cos 6 ~ sin *i sin 9>
sin 62 = cos 6j cos (a, + Co) sin G + sin 6j cos 0.
§ 2.09]
ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
Ю5
Величины прецессионных параметров Ньюкома ?о, z, 9 опре-
деляются разложениями Ньюкома — Андуайе:
?о = B304",253 + Г.3973 Г, + 0",00006 Г?) т +
+ @",3023 - 0",00027 Г]) т2 + 0",01800т3,
г = B304",253 + l".3973 Г, + 0",00006 Г?) т +
+ (Г',0950 + 0",00039 Г,) т2 + 0",01832т3, " "
6 = B004",685 - 0",8533 Г, - 0",00037 т]) т -
- @",4267 + 0",00037 Г,) т2 - 0",04180т3,
где
Величина ^о + z = Л1 называется общей, или полной пре-
цессией по прямому восхождению и определяется разложением
М = D608",506 + 2",7946 Ту + 0",00012 Г?) т +
+ (Г',3973 + 0",00012 Г,) т2 + 0",03632т3. A.2.36)
Величины М и N = 0 часто называются числами Крюгера.
§ 2.09. Формулы учета прецессии в прямоугольных
экваториальных координатах
Если положение объекта в некоторый момент времени t от-
носительно геоцентрической прямоугольной экваториальной си-
стемы X\Y\Z\ определено координатами Хи'Уи ги то положение
этого же объекта в геоцентрической прямоугольной экватори-
альной системе координат X2Y2Z2, ориентация которой относи-
тельно системы координат XiY^Zi задана эйлеровыми углами
?о, z, 8, в этот же момент t определяется следующей формулой
преобразования:
A.2.37)
где матрица прецессии Р имеет вид
Р =\ ху Yy zy\.
A.2.38)
106 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [5 2.09
Здесь
Хх = cos So cos г cos 9 — sin So sin z,
Yx = — sin So cos z cos 8 — cos So sin 2,
Zx = — cos zsin 8,
Xy = cos So sin 2 cos 8 + sin So cos z,
Yy = — sin So sin z cos 8 + cos So cos z, A.2.39)
Zy = — sin z sin 0,
Xz = cos So sin 8,
yz = —sin So sin 9,
Zz = cos8.
Если положения систем координат X\Y\Z\ и X2Y2Z2 отнесены
соответственно к эпохам 1900,0 + Т\ и 1900,0 + Т2, то для вы-
числения Хх, Yx Zz следует применить формулы A.2.35) и
A.2.39).
Для элементов Хх Zz матрицы прецессии Р имеются так-
же разложения по степеням времени [36], выведенные для раз-
личных начальных эпох. Эти разложения существенно облег-
чают процесс вычислений при приведении координат на опреде-
ленную стандартную эпоху, например, на эпоху 1950,0, и при
обратном переходе.
Применение матриц-операторов поворота р, q, r, элементы
которых являются функциями параметров прецессии z, 8, So
Ньюкома, определяемых разложениями A.2.35), дает возмож-
ность получить удобные и компактные формулы для учета пре-
цессии в прямоугольных экваториальных координатах в системе
экватора даты. Если (х\, у\, z\) и (х2, у2, г2) суть положения
небесного объекта, отнесенные к прямоугольным средним эква-
ториальным системам отсчета эпох 1900,0 -f Ti и 1900,0 + Г2, то
точные формулы преобразования имеют вид
- So) {».' I ¦
= r(-z)q @) г (- So) {». I ¦ A.2.37а)
В некоторых случаях возникает необходимость учесть пре-
цессию в координатах небесного объекта за промежуток вре-
мени между заданной эпохой 1900,0 + Т2 = / и стандартной
эпохой 1950,0 (или 1960,0, 1975,0, 2000,0). Прецессионные пара-
метры Ньюкома So. z, 0 можно вычислить, воспользовавшись
следующими разложениями, в которых Т означает промежуток
времени в юлианских столетиях..
2.10) ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ Ю7
Стандартная эпоха 1950,0:
?о = 2305",001 Т + 0",302 Т2 + 0",018 Г3,
г = 2305",001 Т + 1 ",095 Т2 + 0",018 Т3,
6 = 2004",338 Т - 0",427 Т2 - 0",042 Г3,
т _ [JD @ — 2433282,4234]
~~ 3^525 "
Стандартная эпоха 1960,0:
Со = 2305", 140 Т + 0",302 Т2 + 0",018 Т3,
г = 2305", 140 Т + 1",0Э5 Т2 + 0",018 Т3,
0 = 2004",216 Т - 0",427 Г2 - 0",042 Т3,
т_ [JD( 0 —2436934,8453]
~ 36 525
Стандартная эпоха 1975,0:
So = 2305",350 Т + 0",302 Г + 0",018 Г3,
z = 2305",350 Т + Г',095 Г + 0",018 Г3,
6 = 2004",088 Т - 0",427 Г - 0",042 Т3,
т_ [JD @ —2442413,4782]
1 ~~~ 36525
Стандартная эпоха 2000,0:
So = 2305",699 Т + 0",302 Г2 + 0",018 Г3,
г = 2305",699 Г + 1",0Э5 Т2 + 0",018 Г3,
6 = 2003",874 Т — 0",427 Т2 — 0",042 Г3,
т_ IJD(/) —2451544,5331]
36 525
§ 2.10. Формулы учета прецессии
в прямоугольных эклиптических координатах
Если положение объекта определено прямоугольными эква-
ториальными координатами хи \)и zt, отнесенными к среднему
экватору и равноденствию эпохи t, то положение этого объекта
в прямоугольной эклиптической системе X'Y'Z' эпохи 1950,0
определяется координатами х', у', г', вычисляемыми по формуле
{I'] = Р, {х, у, Z}_ й равнод, A.2.40)
*¦ z ' экл. и равиод. Даты '•
эпохи 1950,0
где матрица преобразования Pi имеет следующий вид:
( %Х< Ух COS Е1960 + %Х sin 8lgBD. —Ух Sin Б1950 + Zx COS Е19БО. )
Pj = i Xy, Yy cos eI9B0 + Zy sin e1950, — Yy sin Ei9s0 + Zy cos e1950, У (\ .2.41)
l Хг, Уг cos ElgB0 + Zz sin ebB3, — Yz sin Ei9Bo + Zz cos ei9B0 J
108
4. t. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
1§ 2.10
Величины Хх, Ху, ... вычисляются по формулам A.2.35) и
A.2.39), в которые следует подставить значение Т\ = 0,5 (время
в тропических столетиях, протекшее
от эпохи 1900,0 до эпохи 1950,0),
81950 — средний наклон эклиптики
1950,0
= 23026'44",84,
sin 6I95o = 0,39788118,
cos е195о = О,91743695).
Для преобразования прямо-
угольных эклиптических координат
объекта х', у', z', отнесенных к сред-
нему равноденствию и эклиптике
эпохи t, в прямоугольные экватори-
ЭЛЬНЫе КООрДИНЭТЫ ЭТОГО Объекта
*• У> г- отнесенные к среднему эква-
тору и равноденствию стандартной
эпохи 1950,0 можно применить формулу
Рис. 42. Прецессионные параметры
зкв. и равнод.
эпохи 1950,0
экл. и равнод.
даты t
в которой матрица преобразования
1ХХ Х
где
Хх,
— X у sin e
1
Yx Yy cos et + Yz sin e, — Yy sin
Zx Z cos et + Zz sin et — Zy sin ef
означает средний наклон эклиптики эпохи t, а величины
..., Zz вычисляются по формуле A.2.39).
Обратные преобразования выполняются при помощи соот-
ветствующих транспонированных матриц Pi и Рг.
Введение параметров прецессии Ньюкома в системе непо-
движной, т. е. отнесенной к фиксированной эпохе, эклиптики и
подвижного экватора (среднего экватора даты) \j3i, x. е' (рис. 42),
определяемых разложениями
ф, = E037",084 + 0",493 Г,) т - 1",072 т2, ")
X =A2",473-Г/,887Г1)т-2",381т2, > A.2.35а)
е' = в + @",0606 - 0",0092 Г,) т2 — 0",00773 т3, J
где
в = 23° 27' 08",26 - 46",845 Г, - 0",0059 Т\ + 0",00181 Т],
§2. 11]
ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
109
и применение матриц р, q, г от этих аргументов позволяет
точно учесть прецессию за интервал т = Т2 — Т\ в прямоуголь-
ных координатах с одновременным преобразованием средних
эклиптических координат объекта х', у', z' эпохи 1900,0 + 7\
в средние экваториальные координаты х, у, z эпохи 1900,0 + Г2.
Соответствующие формулы имеют вид
у\ =
(Z\>
A.2.40а)
Учет прецессии в системе подвижной эклиптики основан на
применении параметров прецессии Ньюкома (П), ф, (я)
(рис. 43), определяемых посредством разложений
(II) = 173° 57' 03" + 3287" Г, + 0",6 Г? - (869" + 0",6 Г,) т,
ф = E025",641 + 2",223 Г,) т + 1", 112 т2,
(л) = D7", 107 - 0",0675 Тх) т - 0",034 т2
A.2.356)
и являющихся аргументами элементов матриц-операторов пово-
рота относительно осей X, Y, Z. Переход от средних эклипти-
ческих координат обьекта эпохи
1900,0 + Т\ к средним эклиптиче-
ским координатам эпохи 1900,0 + Т2
выполняется по формулам
= г[-(П)-1Йр[(я)]Х
Хг[(П)]
Id.
A.2.406)
Рис. 43. Прецессионные параметры
Нькжоиа (П), (л), ф. Ei — неподвиж-
ная эклиптика, Е2—подвижная эклип-
тика.
Напомним, что время Т\ и Т2 вы-
ражено в тропических столетиях по
36524,22 эфемеридных суток. Фор-
мулы A.2.406) могут быть приме-
нены также при решении задач, свя-
занных с преобразованиями селенографических координат небес-
ных объектов, отнесенных к системам отсчета различных эпох.
§ 2.11. Совместный учет прецессии и нутации
в прямоугольных экваториальных координатах
Приведение прямоугольных экваториальных координат объ-
екта х0, г/о, г0, отнесенных к среднему экватору и равноден-
ствию эпохи *о, к истинному экватору и равноденствию даты /
ПО Ч. I. СФЕРИЧЕСКАЯ И ЭФЕИЕРИДНАЯ АСТРОНОМИЯ
можно выполнить, применяя формулу
2.П
где
ист. экв.
и равнод.
даты t
Хх — Ху Дфа cos е — Ух — У)
— Хг Дт|>5 sin e, —
Хх AiJ)s cos e + Yxt
"t~ Xy — Д; Де$,
Хх Дф$ sin е + Ух t
+ Xy aes + Хг,
средн. экв.
и равнод.
эпохи ta
s cos e —
Уг Ai|)s sin e,
cos e +
~ Zy
s cos e —
— Zz Ai()s sin в
J)i cos e +
ij)s sin e +
+ Yy Aes + ^г.
т|)$ sin e +
+ Zy Де4
A.2.42)
причем Афв = Atp + dip — нутация в долготе, Aes = Ae + dz —
нутация в наклоне, е — истинный наклон эклиптики к экватору.
Все эти величины берутся из «Астрономического Ежегодника
СССР» на заданную дату t, или
вычисляются (см. стр. 93).
Аналогично решается обрат-
ная задача.
Замечание. Совместный
учет прецессии и нутации в пря-
моугольных эклиптических коор-
динатах производится по форму-
лам
= ЕМПЯЁ,
рпш
Рис. 44. Компоненты нутации Дф и Де5-
ист. экл.
и равнод.
даты t
¦ш
средн. экл.
я равнод.
впохи t.
где матрицы Е и Ео определены равенствами
f1 ° ° ) -
= < 0 cos e sin е > = р (е), Ео=
(.0 —sine cose)
cos e,
|0 sin et cos e
Применение матриц p, q, r к преобразованию средних пря-
моугольных экваториальных координат небесного объекта
даты Т в истинные координаты дает следующие формулы точ-
ного учета нутации (рис. 44):
\у\ =р(-е-Де,)г(-ДтМр(е)Ы , A.2.42а)
I Z ) ист. I. z ) средн.
5 2.12] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ Ш
где Arjjs = Агр -f- drjj и Aes = Ае + de означают компоненты нута-
ции по долготе и в наклоне, определяемые разложениями Ву-
ларда, аргументы и коэффициенты которых приведены в таблице
на стр. 93, а е — средний наклон эклиптики к экватору даты Т.
Для совместного учета прецессии между эпохами 1900,0 + Т\
и 1900,0 + Т2, т.е. за интервал т = Г2 — Ти и нутации в пря-
моугольных экваториальных координатах можно воспользо-
ваться следующими формулами:
\у\ = Р (- вг, - Aes) г (- Д^) р (еГг) X
I. г ) ист
(Г,)
' A-2.426)
среди
В случае эклиптических координат х', у', г' имеем
\у'\ = г [- (П) - $ - А*,] Р [(я)] г [(П)] \у'\ • A.2.42а)
V. Z ) ист t 2 ) среди
§ 2.12. Формулы учета прецессии в координатах
и элементах орбит при умеренных и малых разностях эпох
Если начальная эпоха t0 и конечная эпоха t разделены срав-
нительно небольшим промежутком времени t — t0, не превышаю-
щим нескольких десятков лет, то преобразование сферических
координат (или элементов ориентации орбиты) объекта может
быть выполнено следующим образом.
Вычисляются:
а) общая прецессия по прямому восхождению
б) прецессия по склонению
N = Q = n(t-ta),
в) общая прецессия по долготе
a=p(t-t0),
г) взаимный наклон плоскостей эклиптики эпох t и t0
b = n{t-t0),
д) величины сие'
112 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [5 2.1?
Годичные прецессионные^ величины т, fi, p, n и долгота оси
вращения эклиптики П вычисляются на среднюю эпоху
i = ~(t + t0) по формулам Ньюкома — Андуайе [31]:
т = 3s,07234 + 0s,00186 71, = 46",0851 + 0",0279 Г„
п == ls,33646 - 0s,00057 Г, = 20",0468 - 0",0085 Г„
я = 0",4711-0",0007Г1,
П=173о57',06 + 54',77Г„
в которых Т\ — время в тропических столетиях по 36524,22 эфе-
меридных суток, отсчитываемое от эпохи 1900,0 (JD 2415020,3134)
до рассматриваемого момента (в данном случае до 7).
1. Формулы редукции экваториальных координат а, б от t0
к t и обратно имеют вид
6 — б0 = N cos -J (a -f cio).
Правые части этих формул вычисляются итерационным ме-
тодом (начиная с a = a0, б = бо) до получения постоянных зна-
чений a — a0, б — б0.
2. Предыдущие формулы можно заменить следующими:
a = a0 + {m + п sin a tg 6) (t — t0),
б = б0 + ii cos a {t — ^o).
3. Формулы редукции за прецессию эклиптических коорди-
нат от эпохи to на эпоху t имеют вид
К = Яо + а — Ъ cos (Яо + с) tg p,
Р = Эо + Ъ sin (Ло + с).
Редукция от эпохи t на эпоху t0 выполняется по формулам
Я,, == Я — а + b cos (Я, + с') tg p0,
4. Преобразование эклиптических элементов *) ориентации
орбиты объекта Q, со, i, со осуществляется по формулам
Q = Йо + a — b sin (fi0 + с) ctg t,
m = co0 + b sin (fi0 + c) cosec i,
i = i0 +b cos (Qo -f c),
й = й0 + a + 6 sin (Qo + c) tg -j •
Относительно элементов орбиты небесного объекта см. ч. II, § 1.04.
§2.12) ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 1 13
Для обратного преобразования от эпохи / на эпоху /0 служат
формулы
Qo = Q - а + Ь sin (Q + с') ctg iQ.
щ = а — Ъ sin (Q + с') cosec i0,
iQ = i - й cos (Q + с'),
й0 = й — а — Ъ sin (Q + с') tg ~.
5. Преобразование экваториальных элементов ориентации
орбиты объекта Q', ш', i', й' от эпохи U на эпоху t выполняется
по формулам
Q' = Q; + М - N ctg | (Г + i'o) cos i- (Q' + Q'o),
со' == coj + N cosec 1 (/' + <) cos 1 (Q' + QJ),
Й' =« ffij + Af + JV tg | (*' + Q cos 1 (Q' + Q'Q)
и от эпохи t на эпоху t0 — по формулам
Q'o = Q' - М + N ctg 1 (i' + Q cos 1 (Q' + QJ),
coj = со' - Af cosec 1 (i' + /J) cos 1 (Q' -f Qj),
/J = r +yVsiny(Q'+QJ),
ffiJ = ffi' - Af - JV tg ^ («"' + Q cos 1 (Q' + QJ).
6. Компоненты векторных экваториальных элементов орбит
Р(Рх,Ру,Рг), QiQx.QyQ.). R(Rx,R«,Rz)
преобразуются с учетом прецессии по формулам преобразова-
ния, применяемым в случае прямоугольных экваториальных ко-
ординат— по формулам A.2.37).
Формулы преобразования эклиптических прямоугольных ко-
ординат применимы для редукции за прецессию эклиптических
векторных элементов Р(е), Q(e\ R{e).
7. Приведем также формулы учета прецессии оси вращения
Луны в селеноэкваториальных координатах. При рассмотрении
положений небесных объектов в системе отсчета, основной пло-
скостью которой является плоскость среднего экватора Луны,
а основная ось отсчета направлена в нисходящий узел геоцен-
трической орбиты Луны на лунном экваторе, соответствующие
114
Ч. 1. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
2.13
координаты небесных объектов изменяются со временем из-за
попятного движения линии лунных узлов по эклиптике. Это дви-
жение аналогично явлению прецессии земной оси вращения и
подчиняется законам Кассини (см. § 4.08).
Если положение небесного объекта отнесено к прямоуголь-
ным селеноэкваториальным системам отсчета HjHiZi и S2H2Z2
эпох 1900,0 + ^i и 1900,0 + 7*2 (рис. 45), то переход от одной
1900,0*-Тг
Рис. 45. Редукция селенографических координат в системе подвижной эклиптики.
системы к другой легко выполняется посредством формул, осно-
ванных на соотношениях A.2.406) учета прецессии в системе
подвижной эклиптики, а именно,
е-
p (/) г C60° - Q2-(II)-i|>) p (- (я)) г (Q, + (П)) p (-J
так как, согласно законам Кассини, экватор Луны сохраняет
постоянный наклон / к эклиптике той же даты.
§ 2.13. Аберрация света
Аберрация — явление, заключающееся в кажущемся пово-
роте светового луча, обусловленном как движением объекта, так
и движением наблюдателя относительно одной и той же инер-
циальной системы отсчета. Эффект собственного движения не-
§2.13] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ Ц5
бесного объекта, не зависящий от движения наблюдателя, учи-
тывается поправкой за аберрационное время, определяющей
изменения в координатах объекта за промежуток времени рас-
пространения света от небесного объекта до наблюдателя — за
световой промежуток т. Влияние перемещения наблюдателя из-
вестно под названием звездной аберрации (суточной, годовой,
вековой). Суммарный эффект называется планетной аберрацией.
Общие законы аберрационного смещения све-
тил могут быть сформулированы в следующей форме.
1. Аберрационное смещение объекта на небесной сфере про-
исходит по дуге большого круга, проведенного через истинное
(геометрическое) положение этого объекта и апекс *) движе-
ния наблюдателя.
2. Аберрационное смещение приближает объект к апексу
движения наблюдателя.
3. С точностью до малых величин первого порядка величина
аберрационного смещения пропорциональна синусу углового
расстояния объекта от апекса движения наблюдателя.
1. Поправка за аберрационное время. Если P{t) и T(t) —гео-
метрические положения небесного объекта (планеты) и Земли
в момент времени t, P(t-—т)— геометрическое положение объек-
та в момент, предшествующий моменту / на величину светового
промежутка т, то направление прямой, соединяющей положе-
ния Г(/) и P(t — x), определяет видимое направление объекта Р
в момент t, т. е. видимое направление в момент t на небесный
объект, обладающий собственным движением, совпадает с гео-
метрическим (истинным) направлением на этот объект, в мо-
мент t — т.
Если геоцентрическое расстояние объекта Р в момент вре-
мени t равно р а. е., то световой промежуток т определяется
формулой [37J
тл = 499а,012,
та — световое уравнение, или световая астрономическая еди-
ница.
Все поправки за аберрационное время т в общем случае мо-
гут быть изображены формулой вида
Видимое положение =
= истинному положению — (суточное движение) X тлр,
T4 = 0d,0057756.
Эти же поправки за аберрационное время применяют при
редукции положений точек, расположенных на поверхности
•) Апексом движения называют точку пересечения оси вектора мгновен-
ной скорости (наблюдателя) с небесной сферой в направлении движения.
116 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.13
вращающейся планеты и отнесенных к определенной детали ее
поверхности.
2. Планетная аберрация. Движение Земли в течение абер-
рационного времени т можно считать прямолинейным и равно-
мерным. В треугольнике РТ0Т (рис. 46)
РТ = сх, Т0Т = vx,
где с — скорость света, v — скорость Земли, обусловливающая
годичную звездную аберрацию. В неподвижной системе коорди-
нат, связанной с Солнцем, наблюдатель видел бы объект Р
в истинном направлении ТР, в геоцентри-
P(t-v) ческой подвижной системе объект наблю-
дается в видимом направлении ТР', ко-
, торое совпадает с направлением векто-
\сг ' Ра — суммы скоростей с и —v. Так как
/' МТ = с, NT = v, то видимое направле-
ние ТР' на объект параллельно направ-
лению MN и, следовательно, параллель-
но истинному направлению. Таким обра-
зом, видимое направление на объект
в момент t совпадает с истинным направ-
Рис. 46. Планетная аберра- ЛвНивМ Ни ЭТОТ обЪвКТ в МОМвНТ t — Т
цня- (первая теорема Гаусса о пла-
нетной аберрации).
При исправлении видимого направления ТР' на объект Р за
звездную аберрацию (aberratio fixarum) получается направле-
ние ТР, т. е. истинное направление на объект в момент t совпа-
дает с направлением прямой, соединяющей положение Земли
в момент t с положением объекта в момент t — т (вторая
теорема Гаусса о планетной аберрации).
Обе теоремы о планетной аберрации применяются при срав-
нении наблюденных положений объектов с предвычисленным-и
(см. § 2.25) [38].
3. Суточная аберрация. Вопросы учета годичной аберрации
в положениях звезд изложены в § 2.04.
С явлением суточного вращения Земли связана суточная
аберрация светил.
Если наблюдатель расположен в точке L с геоцентрическими
координатами р, X, ср', то радиус его параллели равен р cos q/,
а линейная скорость вращения есть (рис. 47)
v = р cos cp'-g- = v0 -?- cos ф',
где s — местное звездное время, v0 — линейная скорость точки
на экваторе, v0 = 0,465 км-сек~1. Отношение vo/c называется по-
стоянной суточной аберрации (с — скорость света).
i 2.13| ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
Учет суточной аберрации в а и б дается формулами
a s г is 0s,02132
Accs = |авид — аист] = —, п п— cos ф cos t sec б.
cosф sin/sinб,
117
д/l —el sin2 ф
AC// Г « С If/ О ,01У8
Дб" = [бВИд — бИ„]" = ¦ '
где t — s — а — часовой угол наблюдаемого объекта с коорди-
натами а, б; ф—геодезиче-
ская широта места наблю-
дения, связанная с геоцен-
трической широтой места ф'
формулой A.1.067) или
1Г
р cos ф' =
¦у 1 — е\ъ\х?ч
СОЭф,
в которой ае и во — соответ-
ственно большая полуось
экваториального сечения и
эксцентриситет меридио-
нального сечения земного
сфероида.
Поправки за суточную
аберрацию в азимуте А и
высоте h объекта (при от-
Рнс. 47. Суточная аберрация.
счете А от точки юга S к востоку) определены формулами
0",3198
I — "вид "ист г
'¦ == "вид Лист =
y\/l —в] sin2 ф
O",3198
— el sin2
cos ф sec h cos A,
cos ф sin ft sin Л.
Поправки за суточную аберрацию в часовом угле t и скло-
нении б объекта равны
, 0",3198
»ВИ1 *ИСТ
'вид *ист
/\J\ —eg sin2 q>
cos
0s,02132
— в§ sin2 ф
cos ф sec б cos t,
. _ 0g,3198
Оист 1
Овид Оист
2 ¦ 2
1 — воsin Ф
cos ф sin б sin U
118 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.14
4. Замечание о вычислении эллиптической аберрации. При
необходимости особо точной редукции средних мест близполюс-
ных звезд в случае большой разности эпох Т нельзя пренебре-
гать изменением эллиптической части аберрации (Я-членов):
Е-члены следует исключить из координат звезды, отнесенных
к экватору и равноденствию начальной эпохи /0. и прибавить их
новые значения после редукции среднего места звезды на новую
эпоху t = tQ -\- Т.
Ф. Скотт [39] предложил следующие формулы редукции
средних мест близполюсных звезд от эпохи 1950,0 на эпоху
t= 1950,0 -{-Т с учетом ?-членов аберрации в прямоугольных
координатах звезды х, у, z (х = cos a cos 8, у = sin a cos б, г =
= sin S):
6,04 -0,46)
-от\{т }ю-9,
3,20 -0,04 J Ч J
где Р — известная матрица прецессии A.2.38).
Если координаты звезды уже редуцированы за прецессию, то
влияние изменений в членах эллиптической аберрации учиты-
вается поправками
Да3 = 13 751s {Ay cos а — Ах sin а) sec б,
Дб" = 206 265" [Az cos 5 — {Ах cos а + Ay sin а) sin б],
где Ах, Ay, Az вычисляются по формулам
Ах) ( 6.04--0,461 (Т
ьу\ = ] -7,65 -0,09 \\Т
Az J т (. —3,20 —0,04 J w
§ 2.14. Приведение звезды на видимое место
в прямоугольных координатах
Применение матриц-операторов поворота р, q, г дает воз-
можность получить точные и удобные формулы приведения
среднего положения небесного объекта на видимое место, если
воспользоваться прямоугольными координатами.
1. Экваториальные координаты. Если на эпоху 1900,0 + Tt
заданы сферические экваториальные координаты ai, 6i небес-
ного объекта и компоненты его собственного движения \i^\ \i{j\
то сначала необходимо учесть эффект собственного перемещения
объекта, переводя его положение только собственным движе-
нием от эпохи 1900,0 +Ti к эпохе 1900,0 + Т2, т. е. относя поло-
жение объекта к эпохе 1900,0 -\- Т2 и равноденствию 1900,0 + 7V
§2.14] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 119
Для этого можно применить формулы
] 1900,0+Г,
2 ' 1900,0+Г,
Л =T(-o,)q(e,-90e)r(>|)o)q(|iT)r(-*o)X
' 1
\ 1900,0+Г,
Л
• Z ' 1900,0+Г,
где
и. cos в,
"^ ', cos ф0 =
После вычисления параметров Ньюкома ?0. z, 0 для учета
прецессии за интервал т = Т2— Ти а также компонент нутации
по долготе Arj3s и в наклоне Aes, аберрационных редукционных
величин С, D, получаем окончательно
№ 1+
вид l + Ctg(e + Aes))
f X "J 1900.0+ Г,
+ p(-e-Ae,)r(-A^)p(e)r(-z)q(e)r(-WJ!'f • (*)
*> Z J 1900,0+Г,
Если известно значение параллакса звезды л, то формулу
(*) следует дополнить слагаемым вида
( С sec(e -f Aes) ^
< D cos (e + Aes) > ,
" l О sin (e + hes) )
где x означает постоянную аберрации, к = 20",496.
Необходимо помнить, что величины С и D должны быть отне-
сены к равноденствию эпохи 1900,0+ Т2 соответствующим пре-
образованием за прецессию и нутацию, так как обычно они от-
носятся к системе отсчета, связанной с началом ближайшего
бесселева года.
Переход к сферическим экваториальным координатам а, б
объекта осуществляется по формулам
х cos в + у sin a
120 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [5 2.14
при этом квадрант а определяется знаками у и х, а знак б —
знаком z.
2. Эклиптические координаты. Можно также рекомендовать
вычисление видимых мест звезд в прямоугольных координатах,
используя в качестве промежуточного этапа преобразование
в прямоугольной эклиптической системе отсчета, с переходом
в конце вычислений к сферическим экваториальным координа-
там звезды [72].
Если заданы исходные сферические координаты ai, 6i и ком1-
поненты собственного движения \i^, (xj,11 на эпоху 1900,0 + Т\,
то соответствующие векторы положения звезды (х\, yi, z{) и ее
собственного движения (ц^1*, (х^1*, ц^) в прямоугольных эквато-
риальных координатах вычисляются по формулам
cosa( cosfij "J
cos Sj > ,
sinflj
Г*!1» Г cos a,
S У\ г = \ sinai
( —
= < + cos ai cos 61 — sin ai sin 61
t 0 cos 61
Компоненты вектора (Ji^\ \i^\ ц^1), необходимого в дальней-
шем для точного приведения координат за собственное движение
в течение интервала т = Т2 — Т\ на эпоху 1900,0 -J- Т2, опреде-
ляются следующими соотношениями:
ДО> = - cos a, cos б, {№J + [|хП>]2} + } sin 26, cos б, sin а, [ц^]2,
^ = - sin a, cos б, {[>У>]2 + ОУ >]2} + у sin 26, sin б, sin а, [ц«)]«,
р,у) = — sin б, [ц^0]2 — -j sin 26, cos б, [\i^
]_
2
Если Г = ¦?¦ G*1 + Т2) есть средняя эпоха, то
{
w
и средние эклиптические прямоугольные координаты звезды на
эпоху 1900,0 + Т2 и равноденствие 1900,0 + ^1 вычисляют по
формуле
4
§ 2.15]
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
121
Истинные координаты в эклиптической системе отсчета эпохи и
равноденствия 1900,0 -f- Т2 с учетом прецессии за интервал т
получаются по формуле A.2.42в). Для перехода к видимому
месту в эклиптических координатах
необходимо учесть аберрацию и
параллакс; это выполняется при по-
мощи следующих соотношений
(рис. 48):
{'Г-
= г [-(Щ-
- ДяЬ] р [(П)] г [(П)] X
sin О1
Л
cosO")
0 J
Рис. 48. Приведение на истинное
место в прямоугольных эклиптичес-
ких координатах.
где О означает истинную долготу
Солнца. Переход к видимому поло-
жению звезды в экваториальной системе координат основан на
соотношении
Гхут-z
\у\ =р(-в-
откуда
= ^, tga= ,4-
x V*2 +
§ 2.15. Об учете орбитального движения компонент
двойных звезд
Для двойных звёзд в каталогах звездных положений обычно
дают средние координаты центра масс двойной системы. По-
этому при вычислении видимых мест необходимо определить ви-
димые координаты одной из компонент двойной звезды (чаще
всего дают видимое место более яркой составляющей А).
Орбита звезды-спутника В относительно главной звезды А
определяется семью элементами — шестью элементами кепле-
рова движения а, е = sin <p, T, i, со, Q и суммой масс шА + шв
компонент-системы. Вместо суммы масс можно взять период
122
Ч. 1. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
IS Z.I5
обращения Р, связанный с тА + тв соотношением
г'
где п — параллакс двойной звезды.
Элементы i, со, Я фиксируют положение истинной орбиты
двойной звезды В в пространстве и определяются следующим
образом. Если ввести в рассмотрение картинную плоскость, т. е.
плоскость, перпендикулярную к лучу зрения (рис. 49), то проек-
ция истинной орбиты на эту
плоскость есть видимая орби-
та звезды В. Угол наклона
плоскости истинной орбиты к
картинной плоскости есть i.
Связывая с картинной плоско-
стью правую систему прямо-
угольных координат X'Y'Z' с
началом в центральной звезде
А с осью АХ', направленной
к северному полюсу мира, и
осью AZ' — к наблюдателю,
можно ввести элемент Q как
позиционный угол узла Д ви-
димой орбиты на истинной
орбите, причем Я ^ 180°. На-
Рис. 49. Переход от барицентра двойной КОНвЦ, уГЛОВОв рЭССТОЯНИе 0)
звездной системы к одной из компонент. периастра П ОТ уЗЛЭ ^, ОТСЧИ-
тываемое в направлении дви-
жения звезды В от 0е до 360°, является последним элементом,
определяющим ориентацию орбиты.
Если теперь рассмотреть обычную орбитальную систему ко-
ординат SH, ось Е которой направлена в периастр П орбиты,
а ось Н — в точку с v = 90°, то координаты звезды-спутника |, ij
в момент t определяются формулами
I = r cos v = a (cos E — sin cp) = аХ,
yj = r sin v = a sin E cos ф = аУ,
где величины X, Y могут быть взяты из таблиц Иннеса [73]. Для
вычисления г, Е, v можно воспользоваться формулами [см. также
формулы B.2.06) —B.2.13)]
/1 r-\ j. v / I -f e , ?
= a(l -ecosE), tg Y = Д/T^7tg T*
S 2.16] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 123
Далее, в системе координат X'Y'Z', связанной с картинной пло-
скостью, имеем
" = r(—О)р(—0г(—«)
для перехода к геоэкватору (той же эпохи каталога) можно
применить формулы
Таким образом, если на эпоху Т заданы средние координаты
ag, 8g центра масс двойной звезды (в этих случаях числовые
значения координат сопровождаются сокращением с. g., озна-
чающим centrum gravitatis) и функция масс f = mBl {mA + mB),
то, вычислив вектор (хв, ув, zB) и вектор
{
Уе \ =
)
найдем вектор положения звезды А в соответствии с определе-
нием координат центра масс по формуле
приводя в дальнейшем средние координаты (хА, уА, гА) звезды
А эпохи Т на видимое место, воспользовавшись соотношениями
§ 2.14.
§ 2.16. Параллакс
Параллаксом небесного объекта называется угол между
двумя лучами, исходящими из центра небесного объекта и про-
веденными через две точки наблюдения в один и тот же момент
времени.
На практике термин параллакс эквивалентен величине сме-
щения положения небесного объекта, видимого в некоторый мо-
мент времени из определенной точки наблюдения, относительно
положения этого объекта в тот же момент времени, определяе-
мого направлением на объект из принятой стандартной точки
отсчета. В качестве такой точки отсчета при наблюдении небес-
124 Ч. 1„ СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§2.16
ных объектов в Солнечной системе принимают центр масс Зем-
ли, при наблюдениях звезд — центр масс Солнца. В первом слу-
чае угловое расстояние на небесной сфере между проекциями
небесного объекта, равное разности направлений на этот объект
из центра масс Земли и из точки на поверхности Земли, назы-
вается геоцентрическим, или суточным параллаксом. Разность
направлений на звезду, проведенных из центра Солнца и центра
Земли, называется гелиоцентрическим, или годичным параллак-
сом (см. §2.07).
При сравнении теоретических (вычисленных) положений не-
бесного объекта, отнесенных к центру масс Земли, с наблюден-
ными (топоцентрическими) положениями необходимо редуци-
ровать топоцентрическое положение к центру масс Земли
введением поправок за параллакс. Для Солнца и планет эти
поправки малы и на практике их квадратами можно пренебречь.
В случае наблюдений Луны параллакс достигает большой ве-
личины, и при редукции необходимо учитывать в общих форму-
лах поправок члены третьего порядка; для ИСЗ параллакс
настолько значителен, что необходимо применять точные фор-
мулы учета параллакса, основанные на знании истинного поло-
жения наблюдателя.относительно центра масс Земли.
Геоцентрический (суточный) параллакс. При вычислении
поправок за параллакс принимают элементы — экваториальный
радиус ае и сжатие а — оп-
ределенного земного сферо-
ида (например, земного
сфероида Ф. Н. Красовско-
го, характеризующегося
элементами ае = 6378245 м,
а = 1/298,3).
ав Если Af2 и 02 — соот-
Рис. 50. Суточный параллакс. ВвТСТВеННО ТОПОЦентрИЧв-
ское и геоцентрическое на-
правления на объект 2 (рис. 50), то из треугольника 0ЛГ2 имеем
sin р = -~ ^т- sin z = р -^- sin z,,
где г — зенитное расстояние объекта 2 относительно геоцентри-
ческого зенита точки наблюдения, Д — геоцентрическое расстоя-
ние объекта 2, г/ае = р ^ 1.
Для точек экватора р = 1, и потому
sin р = -г- sin z.
Максимальное значение параллакса, /этах = л, достигается
при г = 90°, когда объект находится на горизонте места наблю-
5 2.171
ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
125
дения. Это значение я называется горизонтальным экваториаль-
ным параллаксом и измеряется углом, под которым из центра
небесного объекта, лежащего на горизонте точки экватора, ви-
ден экваториальный радиус Земли ае. Имеем
Таким образом,
sin p = p sin л sin z.
A.2.43)
Если ввести средний экваториальный горизонтальный парал-
лакс объекта п0 на среднем геоцентрическом расстоянии этого
объекта Ао формулой
то для р получим
sin п0 = ¦—¦,
Ао ¦
sin р = р -jg- sin л0 sin z.
A.2.44)
§ 2.17. Учет суточного параллакса
в горизонтальной системе координат
Координаты лго, г/о. Zo места наблюдения О — начала топо-
центрической горизонтальной системы координат OX'Y'Z' — от-
носительно геоцентрической горизонтальной системы координат
CXYZg (рис. 51) равны
х0 = г sin (ф — ф'),
й> = 0,
Z0 = Г COS (ф — ф').
Топоцентрические горизонтальные коор-
динаты А', г', А' небесного объекта свя-
заны с геоцентрическими координатами
следующими формулами:
A' sin г' cos A' = A sin z cos Л—г sin(<p—q/),]
Д' sin г' sin A' = A sin z sin A,
A'cosz' =Acosz — rcos^ — <p')J
A.2.45)
Рис. 51. Учет суточного па-
раллакса в горизонтальных
координатах.
Если известны A, z, А, г, ф, то из формул A.2.45) однознач-
но определяются А', г', А'. Аналогично решается и обратная
задача.
126
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 2.13
Можно также использовать и следующие формулы:
... т sin А
где
sin (z' — y)
р sin л sin (ф — ф')
sin 2
р sin я cos (ф — ф')
A.2.46)
cosy
Угол y определяется из соотношения
A.2.47)
A.2.48)
При вычислении разности г' — z в первом приближении сле-
дует положить
Y = (ф — ф')cos А' = (ф — ф') cos A.
Точные формулы A.2.45) — A.2.48) применяются при редук-
ции наблюдений Луны и объектов, движущихся на небольших
геоцентрических расстояниях.
Для достаточно удаленных от Земли небесных тел (больших
и малых планет, комет) учет суточного параллакса осуществ-
ляется по приближенным формулам
Y = (ф — ф') cos A,
А' — А = рл sin (ф — фО sin A cosec z = рл sin (ф — ф') sin A sec h,
z' — г = h — h' = рл sin (z — y) = P" cos (A -f y).
A.2.49)
или
A' — A = ря sin (ф—ф') sin A' cosec z' = ря sin (ф—ф') sin A' sec ft',
z' — z = A — h' = рл sin (z' — y) = ря cos (ft7 + y).
A.2.50)
t
§ 2.18. Формулы учета суточного параллакса
в экваториальной системе координат
Координаты Хо, Уо. %о точки наблюдения О в прямоугольной
геоцентрической экваториальной системе координат CXYZ (ось
СХ которой направлена в точку запада W, ось CY — на 90°
к югу, ось CZ — в северный полюс мира PN\ рис. 52) могут быть
§2.18]
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
12?
выражены через геоцентрический радиус-вектор т и геоцентри-
ческую широту ф' места наблюдения формулами
XQ = 0, Yo = r cos ф', ZQ = rsinq>'.
Топоцентрические координаты объекта (в первой экватори-
альной системе) ?, б', Л' и геоцентрические координаты t, б, А
Рис. 52. Учет суточного параллакса в экваториальных координатах.
этого же объекта связаны соотношениями (при наблюдении
объекта из точки О в момент s местного звездного времени
Д' cos б' sin t' = A cos б sin t,
Д' cos б' cos t' = A cos б cos t — r cos
A.2.51)
t = s — a.
Из формул A.2.51) можно вывести соотношения
, . , . р cos ф' sin я sin t
6 V' 'J cos б — p cos ф' sin it cos / '
, ,,, ... p sin it sin <p' cosec у sin E — y)
° ^ ' 1 — p sin л sin ф' cosec у cos F — y) '
A'
sin F — y)
sin (б'— у) '
A.2.52)
где вспомогательный угол у определяется формулой
tg у = tg ф' cos у {? - t) sec 1 {? + t).
A.2.53)
128 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.19
Если известны геоцентрические экваториальные координаты
объекта а, б, А, то
г /ч р cos ф' sin я sin (s — a)
k ' cos 6 — р coscp' sinn cos (s — a) '
а уравнение для б' — б не изменяется.
Приведение топоцентрических координат а', б' к геоцентри-
ческим а, б удобно выполняется по формулам
sin (а — а') = р sin л cos ф' sec б sin (s — а'),
sin (б — б') = р sin л sin ф' cosec у sin (у -^ б')
где вспомогательный угол у определяется по формуле A.2.54).
Как уже было отмечено выше, приведенные формулы пред-
назначены для точного учета суточного параллакса в координа-
тах Луны и ИСЗ, движущихся на небольших геоцентрических
расстояниях.
§ 2.19. Формулы учета суточного параллакса
в координатах Солнца и планет
В случаях редукции за суточный параллакс наблюдений
Солнца, больших и малых планет, комет формулы приведения,
указанные в предыдущих параграфах, можно существенно упро-
стить, ограничиваясь членами первого порядка.
Для экваториальных координат а, б имеем
а — а' = лрсоэф' sin f'sec б', 1
б — б'= л (р sinф'cos б'— р cos q/sin 6'cos f), \ (I.2.56)
Д — Д' = р sin ф' sin 6' + Р cos ф'cos б' cos t'. )
В формулах A.2.56) топоцентрические координаты небесного
объекта можно заменить геоцентрическими координатами.
Горизонтальный экваториальный параллакс л небесного
объекта на геоцентрическом расстоянии А можно выразить че-
рез средний горизонтальный экваториальный параллакс Солнца
п0 соотношением
я = -5Ч A.2.57)
где геоцентрическое расстояние А выражено в а. е., а горизон-
тальный экваториальный параллакс Солнца л0 определяется,
формулой
Ц. (Л=1а.е.). A.2.58)
§ 2.19] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
Если принять (XII Генеральная ассамблея MAC, 1964)
ае = 6 378 160 м,
А =149,6- 109 м,
то [37]
8
Если геоцентрическое расстояние Д небесного объекта неиз-
вестно, как это часто бывает на первых этапах работы по
определению орбит малых планет и комет, то для каждого
наблюдения вычисляют параллактические множители раА и рвА,
применяя формулы
раА = 8",794р cos ф' sin / sec б = 0s,5863p cos q/ sin t sec 6,
p6A = 8",794 (p sin q/ cos б — p cos <p' sin б cos /),
где
t = s - a = So + A + y.) Tut - Л — a.
So означает звездное гриничское время в 0h всемирного вре-
мени даты наблюдения, Тит — момент наблюдения по всемир-
ному времени, К — долготу наблюдения, положительную к за-
паду от Гринича,
1 +ц=^ 1,0027379093.
Величины р cos q/ и р sin <p' можно вычислить по формулам
A.1.067).
После определения геоцентрического расстояния объекта А
поправки за параллакс вычисляются по формулам
Да — -д—, Дб—
Второй способ введения поправок за параллакс в прямо-
угольные геоцентрические координаты объекта заключается
в редукции геоцентрических координат Солнца Xq, К©, Z©
к месту наблюдения; для этого вычисляют
АЛ^о = — aep cos ф'cos s = ДХ4, cos s,
ДУ© = — аер cos ф' sin s =Axy sin s,
S.ZG = — aep sirup' =AZ,
где экваториальный радиус Земли ае — 426,64-10~7 а. е.
Величины Аяу и AZ опубликованы в «Астрономическом Еже-
годнике СССР на 1941 год» для 216 обсерваторий мира (по эле-
ментам земного сфероида Хэйфорда) и в «Астрономическом
Ежегоднике СССР на 1954 год» для 312 обсерваторий (элемен-
ты земного сфероида Ф. Н. Красовского). Эти же величины,
а также значения р cos q/, p sin q/ можно найти в выпусках
5 Под ред. Г. Н. Дубошина
130 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.20
ежегодников «Astronomical Ephemeris», «American Ephemeris &
Nautical Almanac», «Connaissance des Temps».
Вычислив геоцентрические координаты Солнца Xq, У©, Zg
на момент наблюдения Гит + Л7\ где AT — поправка за эфеме-
ридное время, находим значения топоцентрических координат
Солнца по формулам
X® = Xq -\- АХ®,
Y'e^Ye + bYe,
Zq = Zq -j- AZg.
Так как прямоугольные координаты Солнца XQ, YG, Zq от-
носятся обычно к системе отсчета, связанной со средним равно-
денствием и экватором стандартной эпохи 1950,0, то прямоуголь-
ные экваториальные координаты места наблюдения х0, t/0> Zo He"
обходимо привести к той же системе отсчета поворотом системы
координат CXYZ вокруг оси CZ на угол 6Ь — s (ось СХ прохо-
дит через точку весны Т 1950,0) и учетом прецессии в сферических
координатах q/, s от эпохи 1950,0 до момента наблюдения i.
Для этого можно применить следующие приближенные фор-
мулы:
*р, 1950,о = Р cos ф'cos [s — th(t—l 950,0)] + п {t — 1950,0) р sin q/,
Уо. 1950,0 = Р cos ф'sm [s — m(t—l 950,0)],
2о, i950,o = р sin ф' — rt (^ — 1950,0) р cos q/ cos s.
Промежуток времени t^- 1950,0 необходимо выразить в тро-
пических годах по формуле
U- 1950 01 JD @-2433282,4234.
[I i3Ju,ujTponi год— 365 2422 '
прецессионные величины тип вычисляются по формулам Ныо-
кома A.2.10) на среднюю эпоху t = -^(t-\- 1950,0), т. е. в этих
формулах время Т необходимо вычислять по формуле
т_ JD @ — 2396758,2034
1 ~ 73048,44
где JD(f)— юлианская дата наблюдения,
§ 2.20. Формулы учета суточного параллакса
в системе эклиптических координат
Формулы поправок за суточный параллакс к эклиптическим
геоцентрическим координатам Д, К, р получаются заменой в фор-
мулах поправок к экваториальным координатам величин а, б на
X, р и выражением экваториальных координат места наблюде*
§ 2.211 ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 131
ния р, ф', s через эклиптические координаты р, Ф, 2 посредством
формул
COS ф'COS S = COS Ф COS 2, *)
cos cp'sins = cos Ф sin 2 cose — sin Фете, f A.2.59)
sin ф' = cos Ф sin 2 sin e + sin Ф cos e, )
где е означает истинный или средний наклон эклиптики к эква-
тору.
Таким образом, с учетом A.2.59) имеем
.,» pcosO sin я sin (S — X)
cos p - p cos Ф sin n cos B - X) '
. /„ „/> p sin я sin Ф cosec у sin (p — y)
s \P P ) 1 — p sin л sin Ф cosec у cos ({J — y) '
tg Y = 1?ф cos 1 (Я - V) sec[2 - |(Я + V)],
A' _ sin(P-y)
Д sin(p'-v)'
Для обратного Приведения (от топоцентрических координат
объекта к геоцентрическим) служат формулы
sin (К — V) = р sin п cos Ф sec p sin B — %'),
sin (р — РО = р sin п sin Ф cosec y sin (y — P')-
Соответствующие приближенные формулы имеют вид
р - р' = - Р"адТ sin p' cos B - К') + -^- sin Ф cos p',
Л — Л' = pnQ sin 1" cos Ф cos p' cos B — К') + pnQ sin 1" sin Ф sin p'.
Если геоцентрическое расстояние Д небесного объекта неиз-
вестно, то точный учет суточного параллакса в эклиптических
координатах можно произвести при помощи приема Гаусса —
перехода к фиктивному месту наблюдения [40].
Учет годичного параллакса рассмотрен в § 2.07.
§ 2.21. Астрономическая рефракция
Астрономической рефракцией называется явление прелом-
ления в атмосфере Земли светового луча, идущего от небес-
ного объекта, расположенного вне пределов земной атмо-
сферы. Астрономическая рефракция обусловливает отклонение
132
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 2.21
Z,
видимого направления на объект OS' от истинного направления
на этот объект 02, измеряемое углом R, который называется
углом рефракции, или просто рефракцией (рис. 53).
Атмосферной рефракцией г называется аналогичное явление,
наблюдаемое в случае нахождения небесного объекта а в преде-
лах эффективной атмо-
сферы Земли. Разность ме-
жду астрономической и
атмосферной рефракция-
ми называют дифферен-
циальной рефракцией *) р.
Дифференциальная ре-
фракция р равна (рис. 53)
р = R - г.
Предельный случай ат-
Рис. 53. Астроно«Ическая рефракция, атмосферная МОсферНОЙ рефраКЦИИ —
и дифференциальная рефракция. при НабЛЮДеНИИ ЗеМНОГО
предмета на видимом го-
ризонте— называется геодезической рефракцией.
Наблюдения небесных объектов при помощи радиотехниче-
ских средств измерения отягощены влиянием ионосферной, или
электронной рефракции, обусловленной изменениями направле-
ния при распространении радиоволн в атмосфере и ионосфере
Земли.
Ионосферная рефракция радиолуча вычисляется на основе
эмпирической модели ионосферы Земли, соответствующей опре-
деленной системе геомагнитных координат (координаты север-
ного геомагнитного полюса X = 291°, ср = 79°). При радиолока-
ции небесных объектов поправка к расстоянию в м Др при раз-
личных высотах h (углах возвышения) для модели ионосферы,
принятой в Лаборатории реактивного движения JPL (США),
может быть задана таблицей 8.
h
0°
10
20
30
23,435
19,608
14,462
11,129
h
40°
50
60
Др
9,090
7,816
7,001
Та
h
70°
80
90
блица 8
др
6,423
6,008
6,008
*) Она отличается от дифференциальной рефракции в астрометрическом
смысле.
2.21]
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
133
Если Zq — наблюденное зенитное расстояние небесного объек-
та 2, 2\ — его истинное зенитное расстояние, то астрономиче-
ская рефракция R в точке наблюдения О на поверхности Земли
(см. рис. 53) равна
R = zl-z0. A.2.61)
Таким образом, для приведения видимого зенитного расстояния
Zq к истинному Z\ необходимо прибавить рефракцию R:
Z[ Zq -p A-
Для рефракции R выведена приближенная формула
В 273 ,
R = 60",343
760 f + 273
A.2.62)
A.2.63)
дающая хорошее приближение при умеренных зенитных рас-
стояниях го ^ 603, но непригодная для редукции наблюдений,
произведенных вблизи горизонта.
В — давление в мм ртутного
столба.
Формула A.2.63) выведена в
предположении о плоском рас-
слоении атмосферы Земли и соот-
ветствует закону Гладстона
где
П — 1 = Сб,
"о-1 =0,2260,
Рис. 54. Астрономическая рефракция.
6 — плотность воздуха в слое
с показателем преломления п,
6о и п0 — соответственно плотность и показатель преломления
воздуха в приземном слое.
В теории астрономической рефракции второго приближения,
учитывающей сферичность слоев воздуха равной плотности, вы-
водится интеграл рефракции (рис. 54) :
= sinzo\ ¦
dn
п
nr V
—) -«n
A.2.64)
где rQ = 6371 км — средний радиус Земли, п0 — показатель пре-
ломления воздуха в приземном слое на уровне места наблюде-
ния О, г — геоцентрический радиус сферической границы раз-
дела слоя воздуха с показателем преломления п.
134
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
Г§ 2.21
С точностью до малых величин второго порядка имеет место
формула Лапласа
R = Яо A - Pa) tg 20 - Ro (ft, - 1 RQ) tg3 z0, A -2.65)
Ро — высота однородной атмосферы плотности бо, выражен-
ная в средних радиусах г0 Земли
Ро = -^-- A-2-66)
При нормальных условиях Я = 1033,3 г/см2, бо ~
= 0,0012932 г/см3 *), Яо = 7990 кл:
Ло-С. 7G0 мм рт. CT. = 60",27tg20- 0",0669tg3Z0. A.2.67)
На основании формулы A.2.67) составлена таблица значений
нормальной рефракции для ряда значений наблюденного зенит-
ного расстояния z0 [4] (табл. 9).
Таблица 9
z0. град.
0
10
20
Л0°, 760 мм
0",00
10, 63
21, 93
z0, град.
30
40
50
Я(Л 760 мм z0, град.
0'34",78
50, 53
1 11, 69
60
70
75
Я[)°, 760 мм.
1'44",05
2 44,24
3-41,61
Коэффициенты формулы Лапласа #0A — Во) и Ro (fa — -^ Roj
определяются как функции длины волны к излучения (табл. 10).
Таблица 10
К, ммк
400
450
500
550
Яо (I—Ро)
61 ",43'
60,95
60,61
60,37
Ло@о~тл°) Г'ммк
0",0680
0,0675
0,0672
0,0670
600
650
700
«оН-Ро»
60",18
60, 04
59, 92
Ко (ft.—J-Ло)
0",0668
0, 0666
0, 0665
Астрономическая рефракция меняется в зависимости от дли-
ны волны к излучения светил в области фотографических лучей
•) Согласно исследованиям Реньо в Париже (ф = 48°50'). Чтобы перейти
к значению 80 в Пулково при тех же метеоусловиях, необходимо умножить
эту величину на отношение 981,90/980,97, что дает б0 = 0,0012944 г/см3.
5.2Ц
гл. 2, Редукционные вычисления
135
быстрее, чем в визуальной области. При наблюдении на одина-
ковом зенитном расстоянии z0 двух звезд, эффективные длины
волн излучения которых отличаются на 5 ммк, разности рефрак-
ций в фотографических лучах (X — 430 ммк) и визуальных лу-
чах (X = 575 ммк) определяются формулами
Я, = 430 ммк,
Л = 575 ммк,
! = - 0",0452 tg z0 + 0",000043 tg3 z0,
A.2.68)
Разности Azi между исправленными зенитными расстояниями
двух звезд, наблюдаемых на одинаковом зенитном расстоянии
2о, при различии эффективных длин волн на 5 ммк в зависимо-
сти от z0, приведены в табл. 11.
Таблица 11
z0, град
30
60
70
Лг1 (фот)
0",026
0,078
0,124
Лг1 (виз)
0",010
0,032
0,051
z0, град
75
80
Дг1 (фот)
0",167
0,249
Лг1(виз)
0",068
0,104
Приведенной таблицей можно воспользоваться для оценки
порядка величины погрешности, допускаемой при фотографиче-
ских методах определения положения небесных объектов, напри-
мер малых планет и ИСЗ, из-за отличия их цветовых характе-
ристик от известных характеристик звезд сравнения.
Применение формул, выведенных в теории астрономической
рефракции для больших Zo (z0 > 70°) и основанных на функциях
Крампа — Радо ТиФ (см. [1], [7], [41] — [43]), позволяет продол-
жить таблицу значений нормальной рефракции Rq°,7gqmm Для
зенитных расстояний z0 > 75° (см. табл. 12).
Таблица 12
78°
80
82
84
R0°. 760 мм
4'37",1
5 30,8
6 48,1
8 48,0
zo
85°
86
87
88
*0°, 760 мм
10'16",0
12 15,5
15 04,9
19 18,2
zo
88,5
89,0
89,5
90
Яо°, 760 мм
22'15",4(Я = 5750А)
26 03,8
31 04,9
37 52
В практических расчетах широкое распространение получили
«Пулковские таблицы рефракции» [44], основанные на теории
Гюльдена!
136 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.22
§ 2.22. Формулы учета рефракции
в координатах небесных объектов
Астрономическая рефракция влияет только на зенитное рас-
стояние z небесного объекта, азимут А остается неизменным.
Поэтому
zl = z0 + R, Л = Л0. A.2.69)
Влияние астрономической рефракции на экваториальные ко-
ординаты а, б небесного объекта учитывается по следующим
формулам:
б, — б0 = =F R cos q,
(а, -ею) cos
= =F R cos q, "i
= + Я sin q, J
где q — параллактический угол. Для Дб верхний знак берут для
северных широт (ср > 0), нижний — для южных широт (ср < 0);
в формуле для Да cos б верхний знак соответствует условию
0h<^<12h, нижний —условию 12h</<24h, где t — часовой
угол объекта.
Рефракция в параллактическом угле q вычисляется по фор-
муле
Ri A.2.71)
(знак минус для ср > 0, плюс — для ср < 0).
Если разности истинных координат г, а, б объектов, распо-
ложенных достаточно близко на небесной сфере, суть Дг, Да, Дб,
а разности наблюденных координат г', а', б', суть Дг', Да', Аб',
то с точностью до малых первого порядка имеем
A.2.72)
Дб = Дб' + Р6 Да' + Q6 Дб',
где
Ра = k A - tg z' cos q tg 6 + tg2 z' sin2 q),
Qa = k (tg2 z' sin q cos 7 — tg z' sin ^ tg 6') sec 6',
p& =:&(tg2z'sin<7cos<7cos6' -f- tgz' sin q sin 6'), A.2.73)
В 273°
Влияние рефракции на угловое расстояние s и позиционный
угол pi учитывается поправками, вычисляемыми по формулам
Др, = k [sin (/j, - (?) tg z, У^дУ, + tg б sin qf tg z,],
2.23]
ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
137
где
а величина k определяется соотношением
, В 273
"¦ — "¦о 760 to + 273 •
в котором В — атмосферное давление в мм рт. ст., f — темпера-
тура воздуха в °С.
Величина ko табулирована и ее значения приведены в
табл. 13.
Таблица 13
Zo
0°
10
20
30
срк. дугн
60,23
60,23
60,22
60,21
рад.
0,0002920
2920
2920
2919
45°
60
65
се.(. дуги
60,17
60,04
59,93
рад.
0,0002917
2911
29С6
70°
75
80
сек. дуги
59,74
59,34
58,27
рад.
0,0002896
2877
2825
Дифференциальные изменения в прямом восхождении и скло-
нении можно выразить через As и Дрь пользуясь формулами
Д (<х2 — щ) cos б2 = sin py As + s cos p,
AF2 — 60 =cos/?, As — s sin pi
:¦}
A.2.75)
Для исправления за рефракцию наблюденного углового рас-
стояния s' между двумя небесными объектами Pi и Р2, широко
разделенными на небесной сфере, можно воспользоваться фор-
мулой
(s — s') sin s = R2 (cos 2j cosec z2 — cos s ctg z2) +
+ R] (cos z2 cossc Zi — cos s ctg 2i), A.2.76)
в которой /?, = 2, — г,, R2~Z2~~ z'v s — истинное, не искажен-
ное рефракцией R, угловое расстояние.
§ 2.23. Рефракция при наблюдении небесных объектов,
расположенных на конечных расстояниях от Земли
Исправленное за рефракцию R зенитное расстояние Z\ равно
Z\ = zQ + R. Однако истинное геометрическое зенитное рас-
стояние z небесного объекта, движущегося в непосредственной
138
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 2.23
близости от Земли (Луна, ИСЗ), отличается от исправленного
за рефракцию R зенитного расстояния г\ (рис. 55).
Истинное зенитное расстояние z объекта L равно углу ZOL.
Разность ? = Z\ — z равна внутреннему углу O'LO треуголь-
ника LO'O, определяющему
параллактическое измене-
ние зенитного расстояния z
небесного объекта L при пе-
ремещении наблюдателя из
точки О в точку О', т. е. при
его подъеме на высоту h.
Величина h для различных
зенитных расстояний z0 мо--
жет быть задана таблицей
(табл. 14), составленной
для нормальных условий
(Р = 0° С, В = 760 мм рт.
ст.) и для X = 575 ммк
(виз.) [4], [7].
Величина ? называется
рефракционным параллак-
сом, или параллактической
рефракцией.
Если объект движется
на расстоянии Д от точки
наблюдения, то рефракционный параллакс ? можно вычислить
ПО формуле
sin ? = -V- (п0 sin zo — sin z,) =* я (л0 sin z0 — sin zt), A.2.77)
Рис. 55. Рефракционный параллакс.
где я — горизонтальный экваториальный параллакс объекта,
п0 = 1,000283 — показатель преломления воздуха при Р =
= + Ю° С и В = 762 мм рт. ст.
Величина % для Луны (я^ = 57'03") достигает ~ Г',2.
Таблица 14
Zo
0°
30
40
50
60
h (м)
2,3
3,1
4,0
5,7
9,4
Zo
70°
75
78
80
82
h{M)
20,0
34,9
51
71
105
Zo
83°
84
85
86
87
h[M)
132
171
228
316
461
?0
88°
88,5
89
89,5
90
ГЦм)
715
917
1204
1622
2251
$ 2.24] ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 139
Для вычисления ? в случае ИСЗ удобна формула Кар-
ского [45]
206264",8 (п0 - 1) sin г0 - R" cos га + *"' 1 sin га
Vcos2 Z\ + а — cos z!
где
У
A.2.78)
Здесь Я означает высоту объекта над поверхностью Земли. Ре-
фракция R" вычисляется для условий (t° С и В) в момент на-
блюдения, показатель преломления воздуха Ло для этих же усло-
вий находится по формуле
П0 — 1 =(Яо->с. 760 мм — 1)-2юГррг= 1,05- Ю (L279)
273° + Г ш (L2-79)
§ 2.24. Дифференциальная прецессия и нутация.
Дифференциальная аберрация
и дифференциальный параллакс
Поворот осей системы координат, обусловленный прецессией
(и нутацией), изменяет относительные координаты двух близких
точек на небесной сфере. В частности, изменяются позиционные
углы звезды, измеренные относительно других звезд, лежащих
в ее окрестности.
Если t — эпоха наблюдений, t0 — эпоха, к которой необхо-
димо отнести наблюденное значение позиционного угла р, то
соответствующая поправка равна
Др = — л sec б sin a-(f —10), A.2.80)
где t — ^о выражается в тропических годах, я = 0°,0056.
В малой области небесной сферы поправки за прецессию и .
нутацию к координатам объектов, обладающих собственным дви-.
жением, мало отличаются от поправок к координатам соседних
звезд. Так как координаты звезд даны в системе среднего эква-
тора и равноденствия эпохи 1950,0 или начала другого бесселева
года, то координаты объекта с собственным движением, отне-
сенные к этой же системе, получаются исправлением за диффе-
ренциальную прецессию и нутацию поправками:
Д6, "I
Д (Д6) = - g sin (G + а) Да.
Дифференциальные координаты .небесного объекта, движу-
щегося относительно звезды сравнения, отягощены влиянием
дифференциальной аберрации. Ее учет производится прибавле-
140 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.25
нием к наблюденным разностям координат Да и Д6 (в смысле
«объект минус звезда») следующих поправок:
Л(Ла) = — ftcos(tf + a)sec6Aa — Asin(tf + a)sec6tg6A6, ")
Д (Дб) = h sin (Я + a) sin б Да - Л cos (Я + a) cos б Дб. J (I -2"8 ^
Для редукции наблюденного топоцентрического углового рас-
стояния s' между двумя небесными объектами к геоцентриче-
скому угловому расстоянию s между ними применяется формула
cos
s = cos (z2 - 2]) - [cos (z'2 - z\) - cos s'] 5|пТ;пгг, , A.2.82)
Sin 2 МП Z^
Sin 2, МП
где z\, 22 — геоцентрические зенитные расстояния объектов,
z', z'2—топоцентрические зенитные расстояния.
Для небесных объектов, проекции которых на небесной сфере
расположены очень близко друг к другу, дифференциальный па-
раллакс в прямом восхождении а, склонении б и геоцентриче-
ском расстоянии Д определяется равенствами
A.2.83)
§ 2.25. Сравнение теории с наблюдениями
Главное назначение эфемерид Солнца, Луны и больших пла-
нет, публикуемых в астрономических ежегодниках, состоит
в том, что они составляют основу сравнения соответствующих
теорий движения с наблюдениями. С точностью до ограничений,
налагаемых методами, положенными в основу разработки тео-
рии движения, эфемеридные положения планет систематически
отличаются от действительных их положений из-за ошибок пара-
метров теории (числовых значений астрономических постоянных,
элементов орбит и масс планет). Точность вычисления эфемерид
такова, что случайные ошибки округления на различных этапах
вычислительной работы пренебрежимо малы по сравнению со
случайными ошибками наблюдений.
Основные эфемериды астрономических ежегодников вообще
дают видимые положения планет, отнесенные к истинному рав-
§ 2.25) ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 141
ноденствию даты, непосредственно сравнимые, таким образом,
с наблюдениями. Поэтому достаточно ввести все необходимые
редукции в наблюденное положение небесного объекта и срав-
нить его с эфемеридным положением этого объекта, полученным
интерполированием в эфемериде на момент наблюдения, выра-
женный в эфемеридном времени (точнее, в шкале всемирного
времени UT, исправленного введением приближенной поправки
за эфемеридное время Д7\ см. §§ 3.05 и 3.06). В случае мери-
дианных наблюдений эти редукции слагаются из поправок за
инструментальные погрешности, рефракцию, параллакс, фазу,
суточную аберрацию, изменяемость широты места наблюдения
(если последняя поправка не включена в поправку за парал-
лакс) .
Наблюденные положения слабых объектов определяются
дифференциальными методами, основанными на измерении раз-
ностей между соответствующими координатами объекта и коор-
динатами звезд, лежащих в его непосредственной окрестности.
При редукции фотографических наблюдений влияние дифферен-
циальной рефракции и аберрации учитывается в постоянных
пластинки, координаты наблюдаемого объекта получаются в том
же виде, что и координаты опорных звезд, и отнесены к тому же
равноденствию и экватору. Положения опорных звезд являются
обычно средними местами, взятыми из некоторого фундамен-
тального каталога (§ 2.26), поэтому наблюденное положение
является астрометрическим положением, и при редукции к стан-
дартному равноденствию эпохи 1950,0 оно непосредственно
сравнимо с астро метрической эфемеридой. Дифференциальная
прецессия и нутация не входят в редукцию фотографического
наблюдения, однако следует учесть- поправку за параллакс.
Микрометрические измерения (привязки) наблюдаемого
объекта относительно соседних звезд иногда производятся ви-
зуально и определяют положение объекта, сравнимое с астро-
метрической эфемеридой. В этом случае необходимо, строго
говоря, учесть поправки за дифференциальные различия в ре-
фракции, аберрации, прецессии и нутации между положениями
опорной звезды и объекта. Эти поправки прибавляются к поло-
жению звезды сравнения вместе с соответствующими разно-
стями координат. Однако в большинстве практических случаев
эти поправки пренебрежимо малы.
Аргументом теорий движения небесных тел, на основе кото-
рых вычисляются их эфемериды, является эфемеридное время;
моменты наблюдения фиксируются при этом по всемирному вре-
мени. Вообще говоря, поправка за эфемеридное время AT =
= ЕТ — UT должна быть включена в число неизвестных попра-
вок к параметрам, определяемых путем анализа остаточных
142
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
2.25
разностей в смысле «наблюденное минус вычисленное» (О—С,
observatum minus calculatum).
Разности между вычисленным и наблюденным положениями
объекта обычно выражены как остаточные разности в указан-
ном выше смысле вида Да cos б и Д6. Остаточные разности,
вычисленные на промежутке времени, на котором влияние по-
грешностей принятых значений постоянных параметров меняется
линейно со временем, могут быть объединены в среднюю оста-
точную разность, относящуюся к среднему моменту наблюдения
(в нормальное место). Приравняв каждую из них линейной ком-
бинации неизвестных поправок к параметрам с соответствую-
щими коэффициентами, получим условное уравнение; из таких
условных уравнений с соответствующими весами (вес нормаль-
ного места определяется обычно числом объединенных наблю-
дений) образуют систему нормальных уравнений, решение ко-
торой определяет неизвестные поправки к параметрам (см.
ч. VII, гл.4).
При сравнении наблюдений объекта с его геометрической
эфемеридой (при отсутствии эфемериды видимых или астро-
метрических положений) исправляют геометрическое положение
поправкой за световой промежуток т (см. § 2.05), интерполируя
координаты из эфемериды на момент / — т + Л7\ если / — мо-
мент наблюдения по всемирному времени UT.
При сравнении с наблюдениями геоцентрических эфемерид
остаточные разности О—С образуются согласно правилам, ил-
люстрируемым табл. 15 [36].
Таблица 15
Наблюденное
положение
в момент t UT
видимое
видимое
видимое
астрометриче-
ское
астрометриче-
ское
астрометриче-
ское
Необходимые поправки
— (прецессия, нута-
ция, годичная абер-
рация)
— (прецессия, нута-
ция)
+ (прецессия, нута-
ция, годичная абер-
рация)
+ (годичная аберра-
ция)
Эфемеридное
положение
видимое
астрометрическое
геометрическое
видимое
астрометрическое
геометрическое
Интерполирование
на момент ЕТ
/ + ДГ
* + ДГ
<-Т + ДГ
< + дг
t + ДГ
t — х + ДГ
При отсутствии геоцентрической эфемериды можно поступить
следующим образом: экваториальные прямоугольные коорди-
§ 2.26; ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 143
наты Солнца XQ, Уо, ZQ, вычисленные на момент t -f- AT, скла-
дываются с эфемеридными гелиоцентрическими прямоугольными
координатами объекта х, у, г, вычисленными на момент t — т -f
-f AT. Определяемые формулами
р cos a cos 6 = х + XQ,
р sin а cos б = у -\- YQ,
р sin б =z-\-Zo
прямые восхождения а и склонения б отличаются от соответ-
ствующих астрометрических эфемеридных значений этих коорди-
нат на члены эллиптической части аберрации (?-члены) и по-
этому не могут быть непосредственно сравнены с наблюденными
астрометрическими положениями; даже если они приведены
к истинному равноденствию даты, их нельзя непосредственно
сравнивать с наблюденными видимыми положениями.
В этом случае образование остаточных разностей следует
правилу:
(Наблюденное астрометрическое положение в момент t)
минус
'эфемеридное геоцентрическое положение, вычисленное по'
Xo(t + AT), УО(/ + ДГ), Zotf + AD и
хЦ-т + АТ), y(t~x + AT), z(t-x
минус
(?"-члены).
?-члены аберрации можно приближенно вычислить по фор-
мулам [36]:
в прямом восхождении
в склонении
- 0",341 cos (l Ih 15m + a) sin б - 0",029 cos 6.
§ 2.26. Каталоги звездных положений
Основная астрономическая система отсчета определяется со-
вокупностью точных положений и собственных движений звезд;
звездные положения и компоненты собственных движений вме-
сте с другими величинами для определенной эпохи даются в
специальных списках — каталогах звездных положений, или
звездных каталогах. Положение звезды обычно определяется
144 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.S6
заданием средних экваториальных координат —прямого восхо-
ждения а и склонения б, отнесенных к началу некоторого бессе-
лева года, одного и того же для всех звёзд каталога и называе-
мого эпохой, или равноденствием каталога. Учет влияния пре-
цессии позволяет перейти от заданного равноденствия каталога
к любому другому. Средней эпохой наблюдений звездного ката-
лога называется средняя дата всех наблюдений звезд, положен-
ных в основу при его составлении.
Собственные движения звезд в виде годичных собственных
движений по прямому восхождению [ia и по склонению цв отне-
сены либо к средней эпохе, либо к равноденствию каталога.
Каталоги содержат также величину годичной прецессии и
вековое изменение VS или сумму годичной прецессии и годич-
ного собственного движения, ц — годичное изменение VA, назва-
ние звезды, номер по другим каталогам, видимые звездные вели-
чины и другие характеристики.
В зависимости от точности координат звезд звездные ката-
логи могут быть разделены на звездные обзоры и точные ката-
логи.
Точные каталоги, дающие координаты звезд с максимальной
возможной точностью, могут быть разделены в зависимости от
метода составления на три основных класса:
1) абсолютные каталоги, содержащие положения звезд, по-
лученные абсолютными методами наблюдения;
2) дифференциальные каталоги, положения звезд в которых
также получены из наблюдений, но относительными, или диф-
ференциальными методами. Если они содержат звезды некото-
рой избранной области неба в виде сферического пояса (зоны)
в 5—15° по б, то их называют также зонными каталогами;
3) фундаментальные каталоги, содержащие точные положе-
ния звезд, полученные в результате обработки координат звезд
по нескольким абсолютным каталогам.
Средние разности координат звезд двух каталогов, Ki и /Сз,
меняющиеся по определенному закону вместе с изменениями
координат звезд, называются систематическими разностями
Ki — ¦'Сг- Систематические разности обусловлены систематиче-
скими ошибками наблюдений. Фундаментальные каталоги пред-
назначены для того, чтобы систематические (и случайные)
ошибки положений звезд были сведены к минимуму. Соответ-
ствующая система данных называется нормальной, или фунда-
ментальной системой каталога.
В настоящее время основными являются фундаментальные
системы каталогов Ньюкома (Catalogue of Fundamental Stars
for the Epochs 1875,0 and 1900,0 Reduced to an Absolute System,
Astron. Pap. Vol. VIII, 1898), Ауверса (Fundamental-Catalog fur
die Zonenbeobachtungen am nordlichen Himmel fur die Epoche
§ 2.27) ГЛ. 2, РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 145
1875,0, Publ. der Astr. Ges. XIV, 1879) и Босса (General Ca-
talogue of 33324 Stars for the Epoch 1950,0, 1937). Положения
и собственные движения звезд в «Астрономическом Ежегоднике
СССР» даны в системе каталога FK4 (Fourth Fundamental Ca-
talogue), полученного в Астрономическом вычислительном ин-
ституте в Гейдельберге (ФРГ) в результате переработки ката-
лога FK3 (Dritter Fundamentalkatalog des BAJ); этот каталог
содержит средние места и собственные движения 1535 звезд на
эпохи 1950,0 и 1975,0.
Основные формулы редукций звездных положений даны
в самих каталогах. Для редукции фотографических наблюдений
небесных объектов можно воспользоваться каталогами Астроно-
мической обсерватории Йельского университета (йельские ката-
логи, публикуемые й. Барней в Transactions of the Astr. Obs.
Yale Univ.), охватывающими зону по S от +60° до —30°.
В 1959 г. для целей обработки наблюдений искусственных
спутников Земли в Смитсонианской астрофизической обсервато-
рии был создан каталог положений и собственных движений
258 997 звезд [The SAO Star Catalog, SAO Special Report,
No. 151].
§ 2.27. Геоцентрические координаты нуль-пункта
селенографической системы отсчета
При решении астродинамических задач, связанных с Луной,
часто возникает необходимость определения координат начала
селенографической системы отсчета в геоэкваториальной (либо
эклиптической) системе. Такую задачу можно рассматривать
как более частный случай задачи о предвычислении на любой
момент времени положений точек лунной поверхности в геоцен-
трической системе координат заданной фундаментальной эпохи
и равноденствия.
При пользовании «Астрономическим Ежегодником СССР»
геоцентрические эклиптические прямоугольные координаты Xе,,
Ye, Zc точки R на лунной поверхности, отнесенные к эклиптике и
равноденствию стандартной эпохи То, можно вычислить на ос-
нове эфемериды видимых координат Луны а~, 6'^, sinn^ даты Т
по следующим формулам:
Xе W«)
1 46 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2,28
где
у4 = г(-О-а)р(/ + р)гA80°- ([ -T + Q + a)M
а ?, ?, т) означают селенографические прямоугольные коорди-
наты точки R, определяемые соотношениями
(П ( cos Я cos р 1
J g ? = fl([i sinXcosp \ .
ItiJ I sin p J
В геоэкваториальной системе отсчета соответствующие коорди-
наты точки R вычисляются по формулам
0)q(-e)r(z)
I sin 6^ J
где
Л ,
- ([ -т)Ы.
Заметим, что в эти формулы входят истинные координаты
Луны а^б^, sin пй на дату Т, которые получаются из видимых
координат путем прибавления к ним поправок за аберрацию,
вычисляемых как произведения скорости изменения соответ-
ствующих координат на аберрационный промежуток т. Симво-
лом ёг обозначено значение среднего наклона эклиптики к эк-
ватору в эпоху Т. Чтобы найти координаты нуль-пункта селено-
графических координат, достаточно в предыдущих формулах
положить [74]
ш-ча-
§ 2.28. Вычисление топоцентрических расстояний
до точек лунной поверхности
В случаях подготовки эфемерид для проведения сеансов ра-
диолокации или светолокации (лазерной локации) Луны из на-
земных пунктов необходимо вычислять топоцентрические значе-
ния расстояний от данной обсерватории О до точки лунной
поверхности R с определенными селенографическими координа-
§ 2.28] ГЛ. 2. РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ 147
тами R&,K p. Для этой цели можно применить следующие фор-
мулы [75].
Селеноцентрические геоэкваториальные координаты точки R,
отнесенные к истинному равноденствию и экватору даты Т, вы-
числяются при помощи следующих соотношений:
( cos Я cos P
ХгA80°- ([ - т-f Q + а + Д\Ш sin Л cos p
I sin р
Чтобы определить соответствующие геоцентрические экватори-
альные координаты X, У, Z точки R, необходимо к координа-
там х, у, z прибавить геоцентрические экваториальные коорди-
наты Луны х*, у^, Zg, вычисляемые на основе эфемериды ви-
димых сферических лунных координат а^,
< sin a* cos
sin reff I .
u I sin
т. е.
Если известны геоцентрические координаты ро, ср', I обсервато-
рии О, то ее прямоугольные координаты х0, Уо, %о определяются
формулами
( COS S COS ф' "
) < sin scosi
(. sin!
1 ф'1
«p'i
где s — истинное местное звездное время. Таким образом, окон-
чательно находим
) топоцентр I Z/r +2 — Zq J
и искомое топоцентрическое расстояние D вычисляем как
D = {X2 + Y2 -t- Z2L'.
148 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 2.28
Предыдущие формулы могут быть с успехом применены и
к вычислению геоцентрических сферических геоэкваториальных
координат точек лунной поверхности, например, лунного кра-
тера Mosting А. Действительно,
Y
где
D, = (*2 + У2)'/г = (D2 - Z2)'1'.
В случае кратера Mosting А/Ц{= 1739,5 км.
Синус параллакса кратера Mosting А вычисляется по фор-
муле
= -^-, ae = 6378,160 км,
если D выражено в километрах.
Глава 3
ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ
Исторически в современной астрономии сложились три си-
стемы измерения времени, из которых две — всемирное время и
звездное время — связаны с вращением Земли вокруг оси, а си-
стема эфемеридного времени основана на движении Земли,
Луны и планет Солнечной системы по их орбитам (гелиоцентри-
ческим в случае планет и геоцентрической для Луны).
Кроме того, в настоящее время введена система атомного
времени, основанная на электромагнитных колебаниях, погло-
щаемых или излучаемых при квантовых переходах атомов (и мо-
лекул) на различные энергетические уровни, например, цезия
или водорода. Все эти вопросы и рассматриваются в настоящей
главе.
§ 3.01. Основные понятия и определения
Естественными единицами измерения звездного времени и
солнечного времени являются соответственно звездные сутки и
истинные солнечные сутки.
Течение звездного времени определяется суточным движе-
нием по небесной сфере звезд или точки весеннего равноден-
ствия; за точку, определяющую своим суточным движением по
небесной сфере истинное солнечное время, принимают центр ви-
димого диска Солнца. Однако на практике применение истин-
ного солнечного времени затруднено тем, что изменения часового
угла центра истинного Солнца непропорциональны углам пово-
рота Земли вокруг оси, так как Солнце движется не по эква-
тору, а по эклиптике, и притом неравномерно. Поэтому вводят
среднее экваториальное Солнце — фиктивную точку, равномерно
движущуюся по экватору таким образом, чтобы в каждый мо-
мент времени / ее прямое восхождение А было равно средней
долготе Солнца L, т. е. чтобы было А = Lo -{- и (t — /0). где Lo —
средняя долгота Солнца в начальную эпоху t0.
Промежуток времени между двумя последовательными одно-
именными кульминациями точки весеннего равноденствия Т. на
одном и том же меридиане называется звездными сутками.
150 Ч. 1. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.01
В зависимости от того, какую точку весеннего равноденствия
рассматривают—истинную (учитывается прецессия и полная
нутация), квазиистинную (прецессия + долгопериодическая ну-
тация) или среднюю (только прецессия) — различают истинные,
квазиистинные или средние звездные сутки.
Промежуток времени между двумя последовательными одно-
именными кульминациями истинного (среднего экваториаль-
ного) Солнца на одном и том же меридиане называется истин-
ными (средними) сутками.
Вращение небесной сферы происходит неравномерно, поэтому
последовательные кульминации точки весеннего равноденствия
|Т происходят через неравные промежутки времени, и продол-
жительность звездных суток как основной единицы измерения
времени, а также секунды — основной физической единицы вре-
мени, определяемой как 1/86400 часть суток, непостоянна. По
этой причине была введена равномерная шкала времени, не свя-
занная с вращением Земли и основанная на гравитационной тео-
рии движения небесных тел: независимая переменная, входящая
в дифференциальные уравнения движения, определяет эфемерид-
ное время — равномерное время ньютоновой механики. Длитель-
ность эфемеридной секунды установлена заранее. Ее прини-
мают равной 1/31556925,9747 части тропического года, равного
365,24219879 эфемеридных суток, в фундаментальную эпоху нью-
комовых «Таблиц движения Солнца», т. е. 1900, янв. О, 12h,
когда геометрическая средняя долгота Солнца была равна
279°4Г48",04 (см. §3.05).
Для измерения более продолжительных промежутков вре-
мени в качестве единицы вводят период одного обращения
Луны вокруг Земли — синодический месяц (лунация).
С видимым движением Солнца относительно Земли по эклип-
тике связана еще одна единица измерения времени — год. При-
меняются три годовых периода различной продолжительности.
Промежуток времени, измеряемый продолжительностью од-
ного полного обращения Солнца вокруг Земли относительно
направления на одну и ту же звезду, называется сидерическим,
или звездным годом. Его продолжительность в средних солнеч-
ных сутках d определяется формулой
сидерический год = 365d,25636042 + 0d,00000011T *).
Промежуток времени между двумя последовательными про-
хождениями центра истинного Солнца через среднюю точку
*) Г в этом соотношении, как и в соотношениях, встречающихся ниже,
означает время, протекшее от фундаментальной эпохи 1900, янв. 0,12h эфе-
меридного времени до рассматриваемого момента и отсчитываемое в юлиан-
ских столетиях по 36 525 эфемеридных суток.
§ 3.01] ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 151
весеннего равноденствия называется тропическим годом:
тропический год = 365d,24219879 — 0d,00000614 T.
Начало тропического года совпадает с моментом начала бессе-
лева {фиктивного) года, за который принимают момент времени,
когда долгота среднего эклиптического Солнца*), уменьшенная
на величину постоянной аберрации и отсчитываемая относи-
тельно средней точки весеннего равноденствия Тср, равна 280°.
Бесселев год на 08,148 Т короче тропического года. Момент на-
чала бесселева года обозначается номером соответствующего
календарного года, сопровождаемым нулем десятых (например,
1950,0; в данном случае этот момент совпадает с датой 1950,
янв. 0,9234).
Продолжительность бесселева года определяется формулой
бесселев год = 365d,24219879 — 0d,00000785 T.
Промежуток времени между двумя последовательными про-
хождениями центра Солнца через перигей его видимой геоцен-
трической орбиты называется аномалистическим годом:
аномалистический год = 365d,25964134 + 0d,00000304 T.
Наконец, драконический год равен промежутку времени ме-
жду двумя последовательными прохождениями Солнца через
восходящий узел орбиты Луны на эклиптике:
драконический год = 346d,620031 + 0d,000032 T.
Поскольку при летосчислении календарный год должен быть
близок к тропическому году и содержать целое число суток, лю-
бой солнечный календарь состоит из годов по 365 и 366 суток.
Юлианский календарь, дающий летосчисление по старому
стилю, содержит последовательно три года по 365 суток, за
которыми идет один год в 366 суток, называемый високосным.
В системе юлианского календаря високосным годом считается
год, номер которого делится на 4. Таким образом, средняя про-
должительность юлианского года равна 365,25 суток, юлиан-
ского столетия — 36 525 суток. Юлианский год на 0d,0078 длин-
нее тропического года, что дает ошибку в одни сутки за 128 лет.
В системе григорианского календаря (новый стиль), введен-
ной в 1582 г., существенное повышение точности календаря
достигнуто задержанными високосами — високосными годами
считаются только те столетние годы A600, 1700 2000, . . .),
число сотен в номере которых делится на 4. Таким образом,
средняя продолжительность григорианского календарного года
*) То есть средняя долгота Солнца. Средним эклиптическим Солнцем на-
зывается фиктивная точка, равномерно движущаяся по эклиптике со средней
угловой скоростью истинного Солнца,
152 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.02
равна 365,2425 суток, что дает накопление ошибки в одни сутки
за 3333 года.
В основу лунных и лунно-солнечных календарей положен
синодический месяц, определяемый как промежуток времени
между последовательными одноименными фазами Луны:
синодический месяц = 29d,5305887 + 0d,0000002 T.
Кроме того, рассматриваются сидерический, тропический, анома-
листический и драконический месяцы.
Сидерический месяц измеряется продолжительностью одного
полного обращения Луны по геоцентрической орбите относи-
тельно направления на одну и ту же звезду:
сидерический месяц =27d,3216614 + 0d,0000002 T.
Тропический месяц равен промежутку времени между двумя
последовательными прохождениями центра Луны через среднюю
точку весеннего равноденствия:
тропический месяц = 27d,3215821 + 0d,0000001 T.
Аномалистический месяц—промежуток времени между дву-
мя последовательными прохождениями центра Луны через пе-
ригей ее орбиты:
аномалистический месяц = 27d,5545509 — 0d,0000011 T.
Драконический месяц — промежуток времени между двумя
последовательными прохождениями Луны через восходящий
узел ее орбиты на эклиптике:
драконический месяц = 27d,2122204 + 0d,0000004 T.
Свободные члены приведенных соотношений дают среднюю про-
должительность указанных лунных периодов в эпоху 1900,0 и со-
ответствуют фундаментальным аргументам Брауна теории дви-
жения Луны.
В астрономии принята также система непрерывного счета
суток, день за днем, начиная с определенной, весьма удаленной
в прошлое даты — юлианский период, или юлианская система,
введенная в XVI в. (см. § 3.08).
Подробное рассмотрение вопросов, связанных с измерением
времени, можно найти в [46] — [48].
§ 3.02. Звездное и солнечное время. Всемирное время
Звездное время на меридиане места наблюдения (мест-
ное звездное время) s определяется и измеряется часовым
углом точки весеннего равноденствия Т (рис. 56). Местное
звездное время основного (гриничского) меридиана называется
§ З.П2]
ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ
153
гриничским звездным временем S. Имеем соотношение
s = S-l, A.3.01)
где / — долгота места наблюдения (считается положительной
к западу от Гринича и отрицательной к востоку).
Как уже было указано выше, положение плоскости мери-
диана истинной точки весеннего равноденствия Тист не остается
неизменным, так как точка весны
Тист участвует в сложном движе-
нии: она движется в плоскости эк-
липтики со скоростью 50",25 в год
(общая прецессия по долготе — см.
гл. 2). На общую прецессию в дол-
готе накладываются периодические
колебания (нутация). Соответст-
вующее истинной точке весны ТИСт
звездное время называется истин-
ным звездным временем.
Истинную точку весеннего рав-
ноденствия Тист можно заменить
средней точкой весны ТсРед, кото-
рая обладает только прецессионным
движением и определяет среднее
равноденствие даты. Звездное вре-
мя, измеряемое часовым углом средней точки весеннего равно-
денствия Тсред, называется средним звездным временем и от-
личается от истинного звездного времени на величину полной
нутации по прямому восхождению
Рис. 56. Местное заезд;ое время.
-jg- (Ai|j
cos e.
Звездное время s легко измеримо: оно равно прямому вос-
хождению а в момент прохождения звезды через местный
меридиан
s = a при t = 0.
Гриничское звездное время в этот момент равно
Следует помнить, что для каждой звезды существует критиче-
ская дата, в которую происходят две верхние кульминации
этой звезды: одна не позже 3m56s после начала даты, другая —
не ранее Зт563 до начала следующей даты, вследствие того,
что звездные сутки на 3m56s короче средних солнечных (см.
стр. 160, 161).
154 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.02
Прямые восхождения звезд при определениях времени бе-
рутся из фундаментальных каталогов звездных положений с уче-
том движения точки весеннего равноденствия (§ 2.26). По ре-
шению XI Генеральной ассамблеи MAC (Беркли, США; 1961)
для этой цели рекомендован «The Fourth Fundamental Catalo-
gue» (FK4).
При определении звездного времени, кроме прецессии и ну-
тации точки весеннего равноденствия, учитывают также измене-
ние положения плоскости местного меридиана вследствие дви-
жения полюсов Земли и короткопериодических неравенств в уг-
ловой скорости ее вращения.
Период вращения Земли в эфемеридных секундах можно
представить формулой
Р = 8616ЛЮ087 + 0',001635 Т + 1,816 Дй",
где Т — время в юлианских столетиях по 36 525 эфемеридных
суток от эпохи 1900, янв. 0,5 ЕТ, ДВ"— суточное изменение
флуктуации долготы Луны В", входящей в выражение редук-
ции ДГ для перехода от всемирного времени UT к эфемерид-
ному ЕТ:
ДГ = + 24S,349 + 723,318 Т + 29s,950 Т2 + 1,82144 В"
(см. §3.06).
Из-за прецессии средние звездные сутки продолжительно-
стью в 24h среднего звездного времени на 0s,0084 короче дей-
ствительного периода вращения Земли. Истинные звездные
сутки отличаются от периода вращения Земли на переменную
величину, зависящую от нутации земной оси вращения.
Истинное звездное время из-за своей неравномерности не-
пригодно для измерения промежутков времени и применяется
только для определения моментов времени (эпох).
Выражение часового угла истинной точки весеннего равно-
денствия |Тист относительно мгновенного местного меридиана
можно представить в виде
t
s = s0 + \ со dt -\- р cos е° — а -\- Л-ф cos е0 — — Дтр Дв sin е0 — Д/ + Ы,
A.3.02)
где t — равномерно меняющееся время ньютоновой механики,
(р cos е° — а) — общая прецессия по прямому восхождению,
(Ат)) cos е0—g-AiJ) Aesinej] — нутация по прямому восхождению,
(—Д/ + 81)—изменение положения плоскости местного мери-
диана из-за движения полюсов и изменения направления верти-
3.02]
ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ
155
кали, е° — средний наклон эклиптики в фундаментальную эпоху
1900, янв. 0,5, во — средний наклон эклиптики даты.
Истинное солнечное время (v) — часовой угол центра истин-
ного Солнца относительно местного меридиана с долготой / от
Гринича, измененный на 12h.
Среднее солнечное время (гп) — часовой угол центра сред-
него экваториального Солнца относительно местного меридиана
с долготой / от Гринича, измененный на 12h.
„.Разность Е = v — m называется уравнением времени и вы-
ражается приближенным равенством
Е = 460s sin g - 592s sin 2 (Г + g),
где g — средняя аномалия истинного Солнца, Г — средняя дол-
гота перигея солнечной орбиты. График уравнения времени Е
представлен на рис. 57.
Значение величины «уравнение времени Е -j- 12h» на начало
каждых суток года приводится в астрономических ежегодниках.
Рис. 57, График уравнения времени.
Всемирное время (М) — это местное среднее солнечное вре-
мя на гриничском меридиане. Соответствующая система изме-
рения времени — система всемирного времени, обозначаемая UT
(Universal Time) [или TU (Temps Universel), или WZ (Weltzeit)],
применяется для фиксации моментов наблюдения небесных
объектов и астрономических явлений и до 1960 г. применялась
как система основного аргумента всех астрономических эфеме-
рид. Астрономические эфемериды после 1960 г. публикуются по
156 Ч: I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.03
аргументу «эфемеридное время», за исключением эфемерид для
физических наблюдений Солнца, Луны и планет. Необходимо
иметь в виду, что аргумент основных эфемерид Солнца и пла-
нет, основанных на гравитационных теориях движения, выра-
жен как до, так и после 1960 г. фактически в системе эфемерид-
ного времени, так как в этом случае старое название аргумента
«всемирное время» лишь формально заменено новым названием
«эфемеридное время». [См. § 3.05.]
До 1 января 1925 г. астрономическая система счета времени
обозначалась GMT (Greenwich Mean Time) и означала время
в средних солнечных сутках, которое отсчитывалось от среднего
гриничского полудня соответствующей даты, начинавшейся по
гражданскому счету времени в среднюю гриничскую полночь,
т. е. на 12h раньше.
После 1 января 1925 г. в астрономической практике повсе-
местно введена система гражданского счета времени, обозначае-
мая теперь через UT. Обозначение UT всегда относится к вре-
мени, отсчитываемому от средней гриничской полуночи, даже
для моментов времени и дат до 1925 г.
Для юлианской системы сплошного счета суток прежний
принцип счета суток от среднего гриничского полудня, следую-
щего за гриничской полуночью, определяющей момент начала
рассматриваемой календарной даты, сохранился и после 1 ян-
варя 1925 г.
Таким образом,
до 1 января 1925 г. t> = /0.
после 1 января 1925 г. t>=12h + *oi
где tQ — часовой угол центра истинного Солнца.
§ 3.03. Квазиравномерное всемирное время
Неравномерность суточного вращения Земли обусловливает
неравномерность системы (или шкалы) всемирного времени UT.
Поэтому все численные выражения, определяющие звездное и
всемирное время, должны содержать члены, учитывающие не-
равномерность вращения Земли.
Неравномерность суточного вращения Земли вызвана сле-
дующими причинами:
1. Непредвидимым изменением положения оси вращения
Земли, проявляющимся как движение земных полюсов. Оно но-
сит неправильный характер и может быть определено по дан-
ным наблюдений Международной службы движения полюсов
Земли (МСДП), ранее называвшейся Международной службой
широт.
§ 3.04] ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 157
2. Сезонными вариациями угловой скорости вращения Зем-
ли, обусловленными метеорологическими причинами и повто-
ряющимися более или менее регулярно из года в год.
3. Вековым замедлением вращения, обусловленным рассея-
нием энергии вращательного движения Земли из-за приливного
трения.
4. Флуктуациями в угловой скорости вращения Земли, свя-
занными, по-видимому, с солнечной активностью.
Из наблюдений непосредственно получается всемирное время
UT0.
Обсерватории, объединенные в МСДП, определяют две по-
правки: ДА,— поправку к UT0, обусловленную отклонением
мгновенного полюса относительно среднего положения, и Д7",—
поправку, вызванную сезонными вариациями, вычисляемую пу-
тем экстраполяции прежних наблюдений.
Таким образом, получаются еще две системы всемирного
времени:
1. UTl^UTO + ДЯ,
2. иТ2 = иТ1+Д7-,
UT2 — квазиравномерное всемирное время представляет наи-
лучшее возможное приближение к равномерной шкале времени,
которое можно получить из наблюдении суточных движений
звезд.
Поправки ДЯ и Д7 систематически публикуются в циркуля-
рах Circulaires du Bureau de l'Heure и годовых отчетах Rapports
Annuels, издаваемых Международным Бюро времени, для ре-
дукции моментов подачи радиосигналов времени к шкале UT2.
Радиосигналы в системе всемирного времени UT2 немедлен-
но дают относительно равномерную временную шкалу, пригод-
ную для практических применений на промежутках времени до
одного года. Однако для получения абсолютно равномерной
шкалы времени необходимо перейти к системе эфемеридного
времени (§§ 3.05 и 3.06).
§ 3.04. Связь между всемирным временем
и звездным гриничским временем
Если местное среднее солнечное время и местное звездное
время на меридиане места наблюдения с долготой / от Гринича
суть соответственно m и s, то всемирное время М и гриничское
звездное время S в этот же физический момент времени опре-
деляются формулами
M = m-\-l, S = s + l, A.3.04)
где долготу Z считают положительной к западу от Гринича.
158 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ Г§ 3.04
Всемирное время М и гриничское звездное время 5 связаны
следующим соотношением:
S=l2* + M + a{M)± Na, A.3.05)
где Na — нутация по прямому восхождению, а(М)—прямое
восхождение среднего экваториального Солнца.
Прямое восхождение среднего экваториального Солнца, от-
считываемое от средней точки весеннего равноденствия рассма-
триваемой даты t = t0 -j- M, определяется формулой
а (М) = \8h 38m 45S,836 + 236s,55536049 (d + M) + 0S,0929 ^*
A.3.06)
в которой d — число суток от эпохи 1900, янв. 0, 12h
(JD 2415020,0) до гриничской полуночи — момента начала рас-
сматриваемой даты ^o(JD(/o)).
Если ввести истинноезвездное время в 0h UT (в гриничскую
полночь), So, определяемое соотношением
So = 6h 38ra 45S,836 + 8640184S,542 T + 0s,0929 f + Na =
^а, A.3.07)
то истинное звездное время S в момент М всемирного времени
равно
A.3.08)
где ц = 0,0027379093 — редукция среднего времени к звездному.
При отбрасывании полной нутации в прямом восхождении
Na = -jg- (Дг|з + d$) cos в
соотношение A.3.07) определяет среднее звездное время 5„
в 0h UT, при исключении из рассмотрения короткопериодической
части нутации по прямому восхождению -jj dr|) cos в формула
A.3.07) определяет квазиистинное звездное время в 0h UT. В со-
ответствии с этим формула A.3.08) определит либо среднее
звездное время Sm, либо квазиистинное звездное время S в мо-
мент М всемирного времени.
Величины истинного звездного времени So и среднего звезд-
ного времени Sin в 0h UT публикуются в «Астрономическом Еже-
годнике СССР» вместе со значениями нутации по прямому вос-
хождению.
у ,
=JD 2433282,5, то среднее звездное время S°m в 0hUT можно
ф
S 3.041 ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 159
Для вычисления среднего звездного времени S°m в 0h UT
можно воспользоваться также формулами
S°m = 99°,6909833 -f 36000°,76892500 Т + 0°,3870833 • 10~3 Г2 =
= 99°,6909833 + 0°,985647335375 d + 0°,3870833 • 10~3 t =
= 0г,276919398+ 100Г,0021359028 7" +0г, 1075231 . 10~5Г2 =
= 0г,276919398+ 0r,00273790926493d + 0r, 1075231 • Ю~5Т2,
A.3.09)
в которых
d = JD(fQ)-JD 2415020,0, T = d/36525.
Если в качестве основной эпохи выбрать дату 1950, янв. 1,0 =
JD 2433282,5, то сред ° h
вычислить по формулам
S°m = 6h 40ra 18s,130 + 8640184s,635 f + 05,0929 f* =
= 6h 40m 18s, 130 + 236s,5553630039 d' + 0s,0929 f =
= 100°,0755417 + 36000°,769312083 f + 0°,387083 • 10~3 f* =
= 100°,0755417 + 0°,98564734598 d' + 0°,337083 • 10~3 f* =
= 0r,2779876158 + 100r,002136978009 f + 0r, 1075231 • 10~5 /'=
= 0r,2779876158 + 0r,0027379092944 / + 0r, 1075231 • 10~5r'J,
A.3.10)
в которых
d' = JD (f0) - JD 2433282,5, V = d'/36525.
При отсчете времени от неподвижной точки весеннего равно-
денствия Т i95o,o стандартной эпохи 1950,0 для вычисления звезд-
ного среднего времени Sm в 0h UT можно применить формулы
S?, = 6h 40ra + 8639877s,302 Г, - 0s,0002 f\ =
= 6h 40m + 236s,5469487064d! - 0s,0002 f\ =
*= 100° + 35999°,488756250 Tx — 0°,83333 • 10~6 T\ =
— 100° + 0O,985612286277d, - 0°,83333 • 10~6 T\ =
— 0r,2777777778 + 99r,99857987847 7\ - 0r,23148 • 10""8 Г2 =
= 0r,2777777778 + 0л,0027378119063 d, -0r,23148 • 10~8 Т\,
A.3.11)
где di = JD(t0) — JD 2433282,4234, Tx = di/36525.
J60 4. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.04
Если достаточно знать время с точностью до ±0s,013
(±0°,00006), то истинное гриничское звездное время S можно
вычислить по формуле
S = 100°,0755417 + 360°,98564734598 d' + 0°,387083 • 10~3 f* -
- 4°,3339 • 10 sin A2°, 11279 - 0°,052954 d') +
+ 0°,0532 • 10~3 sin 2 A2°, 11279 - 0°,052954 d') -
-0°,519- 10~3sin2F4°,37545 4-13°,176396d')-
-0°,3244- 10~3sin2B80°,08122 + 0°,935647d'). A.3.12)
Если задано гриничское (среднее или истинное) время S,
то соответствующее всемирное время М определяется по фор-
муле
M = S — S0 — v{S — S0), A.3.13)
где v = 0,0027304336 — редукция звездного времени к среднему
солнечному.
Из формул A.3.04) непосредственно следуют соотношения
между местным средним временем т и местным звездным вре-
менем s на меридиане с долготой / от Гринича:
s = S0+m + \i(m + l),
m = s — S0 — \(s — So-\-1).
Вычисление редукций \i(m + l) и v(s — So + /) производится
при помощи специальных таблиц (см. на стр. 161).
Перевод среднего времени в звездное и наоборот. Так как
тропический год содержит
365,24219879 сред. солн. суток = 366,24219879 звездн. суток,
то
средние солнечные сутки = A + [х) звездн. суток,
где
^ = 65^19879 = 0,0027379093.
Поэтому
1 средние сутки = 24h 03m 56s,55536 звездного времени,
1 средний час = lh00m09s,85647 » »
1 средняя минута = 1Ш 00s, 16427 » » ,
1 средняя секунда = ls,00274 » »
Любой промежуток т среднего времени между двумя физи-
ческими моментами t2 и ti(t2 ^ /i) в одной и той же временной
§ 3.05] ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 161
системе содержит т(\ + \i) единиц звездного времени, состав-
ляющих промежуток s звездного времени между теми же физи-
ческими моментами времени t2 и /j, т. е.
s = (l+n)m. A.3.14)
Обратные соотношения дают
1 средние звездные сутки = A —v) средн. солнечн. суток,
где
V- 366,24219879 -
Поэтому
1 звездные сутки = 23h 5бш 04s,09054 среднего времени,
1 звездный час = 59m 50s, 17044 » »
1 звездная минута = 59S,83617 » » ,
1 звездная секунда = 0э,99727 » »
Таким образом,
m==(l_v)s. A.3.15)
Промежуток пг среднего времени (s звездного времени) ра-
вен промежутку в m единиц звездного времени (s единиц сред-
него времени) плюс (минус) редукция ^ffi(vs).
Величина редукции \im(vs) дается в таблицах Па — lib,
Ilia — Illb перевода среднего времени в звездное (и обратно),
публикуемых в «Астрономическом Ежегоднике СССР».
§ 3.05. Эфемеридное время
Неравномерность шкалы всемирного времени привела к не-
обходимости введения новой временной шкалы, определяемой
орбитальными движениями тел Солнечной системы и представ-
ляющей шкалу изменения независимой переменной дифферен-
циальных уравнений ньютоновой механики, положенных в ос-
нову теорий движения этих небесных тел.
Для удобства рассматривается геоцентрическое движение
Солнца, а в качестве основного параметра, определяющего но-
вую равномерную временную шкалу, берется долгота Солнца L,
отнесенная к среднему равноденствию даты. Эта новая времен-
ная шкала получила название шкалы эфемеридного времени.
Согласно теории движения Земли Ньюкома определяющий па-
раметр имеет следующее выражение:
?. = 279°4Г48",04+ 129602768", 13 Т + 1",089Г2 + SLp. A.3.16)
Здесь Т измеряется в юлианских столетиях по 36525 эфемерид-
ных суток и отсчитывается от эпохи 1900, янв. 0, 12h ET, SLP
6 Под ред. Г, Н, Дубошина
162 Ч. !. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ Й 3.05
означает совокупность периодических возмущений средней дол-
готы.
Эпоха 1900, янв. 0,5 ЕТ выбрана в качестве нуль-пункта
шкалы эфемеридного времени и соответствует моменту эфеме-
ридного времени вблизи начала календарного года 1900, когда
средняя геометрическая долгота Солнца, отнесенная к среднему
равноденствию даты, была равна 279° 41' 48",04.
Основной единицей измерения эфемеридного времени яв-
ляется тропический год в фундаментальную эпоху 1900, янв.
0,5 ЕТ продолжительностью в 365,24219879 эфемеридных суток.
Мера этой единицы времени определяется числовым коэффи-
циентом при Т в формуле A.3.16). Поэтому тропический год
в фундаментальную эпоху 1900, янв., 0,5 ЕТ содержит
31556925,9747 эфемеридных секунд. В соответствии с этим
в 1956 г. было установлено следующее определение эфемеридной
секунды.
Секунда есть 1/31556925,9747 часть тропического года в фун-
даментальную эпоху 1900, янв. 0,12h эфемеридного времени.
Система эфемеридного времени обозначается через ЕТ (Ephe-
meris Time); соответствующие юлианские даты сопровождаются
обозначением JED (Julian Ephemeris Date).
Эфемеридный меридиан. Эфемеридный меридиан занимает
в пространстве такое положение, которое занимал бы гринич-
ский меридиан при условии равномерного вращения Земли с уг-
ловой скоростью, соответствующей определению эфемеридного
времени, а именно, один полный оборот за одни эфемеридные
сутки. Эфемеридный меридиан проходит восточнее гриничского
меридиана на угловом расстоянии 1,002738 .,, ЛГ, где
ДГ = ЕТ-иТ A.3.17)
— поправка за эфемеридное время.
С эфемеридным меридианом связываются эфемеридная дол-
гота I* и эфемеридный часовой угол t*. Поэтому все вычисления,
связанные с астрономическими явлениями, зависящими от вра-
щения Земли, выполняются в системе эфемеридного времени от-
носительно эфемеридного меридиана, подобно тому как это
имело место в случае системы всемирного времени относи-
тельно гриничского меридиана.
Необходимо всегда иметь в виду, что введение системы эфе-
меридного времени не внесло никаких изменений ни в измере-
ние, ни в определение всемирного времени. Поэтому в формуле
прямого восхождения среднего Солнца а^ аргумент Т может
быть выражен как в системе всемирного времени, так и в си-
стеме эфемеридного времени, и во втором случае эта формула
определит прямое восхождение среднего эфемеридного Солнца
3.05]
ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ
163
а—Эф для 0h ET; соответствующая формула для So определит, та-
ким образом, в этом случае эфемеридное звездное время SI
в 0h ET (в эфемеридную полночь).
Введение эфемеридного меридиана позволяет сформулиро-
вать следующие точные определения:
1) эфемеридное время есть часовой угол эфемеридного сред-
него Солнца относительно эфемеридного меридиана, изменен-
ный на 12h;
2) всемирное время, или гриничское среднее время, есть ча-
совой угол среднего Солнца относительно гриничского меридиа-
на, измененный на 12h;
3) эфемеридное звездное время есть часовой угол точки ве-
сеннего равноденствия относительно эфемеридного меридиана;
4) гриничское звездное время есть часовой угол точки весен-
него равноденствия относительно гриничского меридиана.
е-^ fpuz/uv — Мес/пшк
рш c/fl/й меридиа//
меридиан меридиан
¦%\ft*
¦&*+//¦
О
-S-
-?*-
-?-
'ср 'ист
¦Л-fMj-
Рис. 58. Звездное время, всемирное время, эфемеридное время.
Таким образом, между тремя системами измерения вре-
мени — всемирного времени UT, звездного времени 5 и эфеме-
ридного времени ЕТ — имеют место следующие соотношения
(рис. 58).
6*
164 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
Всемирное время
[§ 3.05
Гриничское звездное время
S=\2h + M + a_ (Af) = S0 +
О
Часовой угол среднего Солнца
Т_ относительно гриничского мери-
о
диана
Г_= I2h + М = S - а_ (М)
© о
Гриничский часовой угол све-
тила с координатами а, б
7" = S — a
Местный часовой угол светила
При кульминации на гриничском
меридиане
Т = 0h (верхняя)
или
Т = 12 (нижняя)
= a (верхняя)
= a+ 12h (нижняя)
Эфемеридное время
ЕТ = UT + ДГ = М * = М + №
(Относительно поправки Д7" за эфе-
меридное время см. § 3.06.)
Эфемеридное звездное время
S*=12h + Al* + a_(Af*) =
= S* + (l + |x)Af*
Часовой угол среднего эфеме-
ридного Солнца относительно эфеме-
ридного меридиана Т_
°
= S* — а_ (ЛГ).
о
Эфемеридный часовой угол све-
тила с координатами а, 6
Местный часовой угол светила
Г = S* - а - Г = Г - /',
При кульминации на эфемерид-
ном меридиане
7"* = 0h (верхняя)
7"*= 12h (нижняя)
или
S* — а (верхняя)
S*=u+ I2h (нижняя)
При кульминации на местном меридиане
или
Г = / (верхняя)
T = l+ I2h (нижняя)
S — / = а (верхняя)
S — / = a + 12h (нижняя)
или
* = Г (верхняя)
* = г* + 12Ь (нижняя)
S* — Г = а (верхняя)
S* — Г = a + 12h (нижняя)
Символы О, © и Оэф означают соответственно истинное Солнце, сред-
нее Солнце и среднее эфемеридное Солнце.
I 3.06] ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 165
§ 3.06. Поправка за эфемеридное время
Наблюдения Луны дают возможность удобно и точно опре-
делить величину расхождений между всемирным временем UT
и эфемеридным временем ЕТ в моменты наблюдений. Сущность
методики такого определения состоит в сравнении эфемерид-
н ы х положений Луны, вычисленных на основе исправленной
лунной теории Брауна по аргументу, выраженному в системе
эфемеридного времени, с ее наблюденными положениями,
моменты определения которых фиксируются по всемирному вре-
мени.
Точнее говоря, определяют флуктуацию долготы Луны В"
как разность между наблюденной долготой Луны Янабл и значе-:
нием А,выч долготы Луны, вычисленной на основе лунной теории,
а затем применяют формулу
ДГ = + 24S,349 + 72S,318 T + 29s,950 T2 + 1,82144 В"'.
Так как для обработки наблюдений Луны необходимо
определенное время, то, очевидно, точные значения поправки
за эфемеридное время Д7" могут быть найдены с некоторым за-
паздыванием только для прошедших промежутков времени.
Таким образом, были получены значения Д7", приводимые
в табл. 16.
При определении величины поправки Д7" по наблюдениям
Луны необходимо иметь в виду различие между эфемеридным
временем ЕТ и его приближением UT -f- ДГ; это различие обус-
ловлено недостатками теории Луны.
Согласно решениям XIII Генеральной ассамблеи MAC каж-
дая различаемая (по своей теоретической основе) эфемерида
Луны обозначается специальным индексом /. В настоящее время
различают следующие эфемериды Луны:
/ = 0 — улучшенная эфемерида Луны, УЭЛ (Improved Lu-
nar Ephemeris),
/ = 1 — УЭЛ, в которой осуществлен переход на новую си-
стему астрономических постоянных MAC и исправлена ошибка
в коэффициенте члена № 182 разложений теории Брауна,
/ = 2 — эфемерида Луны у = 1, в которой учтены уточнения
солнечных возмущений по Эккерту; эта эфемерида Луны публи-
куется в ежегодниках, начиная с выпусков на 1972 г.
В соответствии с этим введены обозначения ETj и ДГ,- =
= ETj — UT; таким образом, эфемеридное время, определяе-
мое сравнением наблюдений положений Луны в системе ка-
талога FK4 с эфемеридными положениями из УЭЛ (/ = 0),
обозначается через ЕТО, а разность ЕТО — UT2 — через ДГ0;
CD
CO COCO GO GO
CD 00 ->J OS '
CD
GO CO GO GO GO
Ol _rf».CO_S3_—p
"oi oi*oi"oi"oi
CO CD CO CD CO
— ^—..— ,— ^-„,—_.— OOOOO O.OOOO
„ „ CO 00 J*J _СП Ol tfcbCOSS^O CD00->JCnOl 4^ GO S3 "— О
"сл"О1О1"сл"сл Ol'oi'oi'oi'oi "oi"oi"oi*01 СЛ Ol"cn"cn Ol"cn "сл"о1Сл101
j to sa ю to
*. GO № — О
tsD tO tO КЗ N3
^ ^ со со со
Ю Ю ЬЭ КЗ Ю
CjO СО СО СО СО
S3 S3 S3 S3 S3
CO S3 S3 S3 S3
to to fo to to
S3 — — О О
CD 00 00 ->J СЛ
+ +111
00 -4 СЛ 4^ CO ^-* О О ГО CO ..
аюючи
1 G0 rfb-СП GO
—> СО GO 00 GO
•*-! *>J 00 СЛ С_
00 00 ->1 OS OS
UOOOOl —
01 *. to coco
OfflSOS
Ol CO 00 rfi- NO 0O 4^ O0 CO CD
CDCDtOOlOO ОСООСЛСЛ
-SOOiOO O^ —СОЮ
+
+
NJNJMN)
_GO_CO_CO_OJwGO
tO Ю tO tO tO
GOCO_GO_GOiGO
+ 4-
Ю tO tO Ю tO S3 N3 Ю Ю —¦
S3 J3 S3J3 S3 ,S3^-^-OCO
+
+
_—О
''i1
-f- Ti
. GO ,"P."
"b""
osgo'''—o"o
C0«.OiasG0
*-G0Ol — "vj
-J СП S3 •— CO
-СО ¦— 00 00 00 -J
O 4JO14A
CD
4
CD
4
CD
^-3 OS Ol
01 1 1
CD CD CO CD CD
- - - !¦*•] ooicDooi слоэо5сло5 слслелелсл слслслслсл
>^ CO Ю *~* ^Э CD 0o ""^ Oi СЛ >ft* CO Ю ¦¦—* CO CD 0o ¦"•J O5 СЛ »^ СО Ю ^^ О CD 0o ¦"•J Oi СЛ ^ CO to >-^ CO
"сл'сл'сл'слЪг *сл"сл*ёл ел "ел сл'сл'ёл'ёл'сл *сл'елЪ1'слЪ1 "ел "ел ^i "ел "ел "сл^л*сл"слЪ1 "ел "ел ~т "ел "ел
" ""
+
GO GO CO GO GO
GOS3J3—
"coco o"oi"*s3
00 ^- Ol 4 N3
со со со оэ со ьэ
3 №
COOO
OS -J OS OS 00
**¦ GO CD
oss
О СЛ О ОО СП •—• 00 hO ~^J Л. --J ¦—» ОЭ CD 4^ ¦—'ОТ'—0СО
>^¦(OOOCDO •—• -J СЛ СЛ О O'-'COOirfJk. CnCJlN30o-s]
ЬЭ ¦*•] — CD СЛ СЛ^СОООСО 4^bDOCDCD tsD ¦—' СЛ CD ¦—^
ОЭ СО СО СО СО
^о^'сл'сл'оо
w со со со со
ел 4^ со со со
^S3Ol^
CD *> S3 —
со со со со со
Ю Ю ^- •—' О
"сл^-'сл'^-'со
00 — СО -J ^-
3 S3
GO CO S3 S3 S3
о О со со со
Ol GO Ol 00 Ol
OSOOlOl OlOODl
s
§ 3.o?i fji. з. время и его Измерение 16?
аналогично сравнение наблюдений Луны с эфемеридой Луны
/= 1 дает ЕТ1 и A7\ = ET1—UT2. Эти значения поправок за
эфемеридное время публикуются в «Астрономическом Ежегод-
нике СССР на 1972 г.».
§ 3.07. Атомное время
Шкала атомного времени AT основана на применении высо-
костабильных молекулярных и атомных эталонов частоты для
регулировки кварцевых часов. Она отличается почти совершен-
ной равномерностью и не зависит от вращения Земли. Шкала
Бремени, основанная на нескольких атомных часах, может счи-
таться равномерной с точностью до 10~п, тогда как единица
времени, определяемая по гелиоцентрическому движению Земли,
точна до 10~9. Начало шкалы атомного времени может быть
принято произвольным.
За 1 атомную секунду принят промежуток времени, в тече-
ние которого происходит 9 192 631770 колебаний атома цезия;
этот интервал соответствует одной эфемеридной секунде с точ-
ностью до ±2-10~9. Точнее, за величину атомной секунды при-
нята продолжительность 9 192 631770 колебаний излучения,
соответствующего резонансной частоте перехода F = 4,
М = 0 +± F = 3, М = 0 между энергетическими уровнями
сверхтонкой структуры основного состояния 25i/2 атома цезия-133
при отсутствии возмущений от внешних полей.
В настоящее время с Международным Бюро времени (BIH)
сотрудничают около 30 научно-исследовательских институтов и
лабораторий, располагающих атомными эталонами времени и
частоты:
DHI — Германский гидрографический институт (Гамбург,
ФРГ),
F — Национальная комиссия времени (Париж, Франция),
FOA — Научно-исследовательский институт национальной
обороны (Стокгольм, Швеция),
IEN — Национальный электротехнический институт (Турин,
Италия),
IGMA — Военно-географический институт (Буэнос-Айрес, Ар-
гентина),
ILOM — Международная широтная обсерватория (Мидзу-
сава, Япония),
MSO — Обсерватория Маунт-Стромло (Канберра, Австралия),
NBS — Национальное Бюро стандартов (Боулдер, США),
NIS — Национальный институт стандартов (Каир, ОАР, Еги-
пет),
NPL — Национальная физическая лаборатория (Теддинг-
тон, Англия),
168 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.0?
NPRL — Национальная лаборатория физических исследова-
ний (Претория, ЮАР),
NRC — Национальный научно-исследовательский совет (От-
тава, Канада),
OMSF — Морская обсерватория (Сан-Фернандо, Испания),
ON — Невшательская обсерватория (Невшатель, Швейца-
рия),
ONBA — Морская обсерватория (Буэнос-Айрес, Аргентина),
ONRI — Национальная обсерватория (Рио-де-Жанейро, Бра-
зилия),
ОР — Парижская обсерватория (Париж, Франция),
ORB — Бельгийская обсерватория (Брюссель, Бельгия),
РТВ — Физико-технический институт (Брауншвейг, ФРГ),
РТСН — Генеральная почтовая дирекция (Берн, Швейца-
рия),
RGO — Гриничская обсерватория (Херстмонсо, Англия),
RRL — Научно-исследовательские радиолаборатории (Токио,
Япония),
ТАО — Токиоская астрономическая обсерватория (Токио,
Япония),
TCL — Лаборатории телесвязи (остров Тайвань),
URE — Институт радиотехники и электроники (Прага,
ЧССР),
URSS — Государственная лаборатория эталона времени и ча-
стоты (Москва, СССР),
USNO — Морская обсерватория США (Вашингтон, США),
ZIPE — Центральный институт физики Земли (Потсдам,
ГДР).
Существует несколько независимых шкал системы атомного
времени AT.
Шкала А1 — основная шкала США, определяемая осредне-
нием показаний атомных часов, регулируемых 16 цезиевыми
эталонами частоты, расположенными в Морской обсерватории
США и Морской научно-исследовательской лаборатории (Ва-
шингтон, Ричмонд), в Национальном Бюро стандартов США,
в Национальной физической лаборатории (Теддингтон) и Ла-
боратории CNET (Банье, Франция). Нуль-пункт шкалы А1 со-
впадает с моментом 1958, янв. 1, 0h UT2.
Шкала NBS-A строится в Национальном Бюро стандартов
США.
Шкала A3 (старая) — основная шкала, созданная осредне-
нием показаний атомных часов в Боулдере (США), Невшателе
(Швейцария), Теддингтоне (Великобритания). За начало шка-
лы A3 принят момент 1958, янв. 1, 0h UT.
Шкала AM — средняя шкала атомного времени, полученная
осреднением всех функционирующих атомных часов. Нуль-
8 3.07) ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 169
пункт шкалы AM совпадает с тем же моментом 1958, янв.
1, 0h UT. В последнее время она больше не строится.
Шкала A3 (новая) введена с 1 января 1966 г. как средне-
взвешенная шкала, вычисленная по показаниям всех атомных
часов, связанных с BIH; при этом веса всех атомных часов при-
няты равными единице, кроме NBS, для которых вес принят
равным пяти.
Шкала атомного времени ТА-1 принята в СССР и основана
на двух кварцевых часах, регулируемых цезиевым эталоном ча-
стоты. Нуль-пункт шкалы ТА-1 совпадает с моментом 1964, янв.
1, 12hUT2, т. е. в этот момент TA-1=UT2. Разности шкал
UT2 — ТА-1 публикуются в Бюллетене «Эталонное время»
с 1965 г. Необходимо отметить, что время UT2, отнесенное к си-
стеме советских служб времени, отличается от системы сводных
моментов UT2 def, публикуемой Бюро BIH, на несколько мсек.
Шкала всемирного согласованного времени UTC введена для
передачи несогласующихся между собой систем времени AT и
UT2 при помощи одних и тех же радиосигналов времени. Вы-
полнение соотношений
| UT2 - UTC | < 100 мсек
(В означает величину скачка в моментах подачи сигналов,
^v/v = 5-10~10я— относительное изменение частоты v атомного
эталона) обеспечивает наиболее точное представление квази-
равномерного времени UT2 шкалой LJTC.
Шкала атомного времени со скачками (ступенчатая шкала)
TAS связана со шкалой атомного времени AT соотношением
вида
где величина скачка В может быть кратной ±100 мсек и вы-
бирается так, чтобы время шкалы TAS было как можно ближе
к времени UT2.
В соответствии с рекомендациями XIV Генеральной конфе-
ренции мер и весов, принятыми в октябре 1971 г., в настоящее
время введено Международное атомное время IAT, определяе-
мое как «.. .координата временной ориентировки, установлен-
ная Международным Бюро времени на основе показаний часов
атомных, функционирующих в различных учреждениях в соот-
ветствии с определением секунды SI — единицы времени Ме-
ждународной системы единиц».
Связь системы атомного времени IAT с системой эфеме-
ридного времени ЕТ определяется через посредство системы
170 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 3.07
всемирного времени UT1 соотношением
ЛГ(Л) = IAT + 32S,18 - UT1.
Числовые значения поправки АГ(Л) даны в табл. 17—19. Здесь
же приведены значения разности UT1 — UTC = AUT1, о коде
передачи которой по радио см. ниже. Величина ДГ(Л) дает пер-
вое приближение к поправке AT за эфемеридное время, ДГ =
= ЕТ — UT. Отметим, что при необходимости отнесения поло-
жений Луны к системе фундаментального каталога FK4 следует
до интерполирования лунной эфемериды, вычисленной на основе
теории движения Луны / = 2, уменьшить величину ДГ(Л) на
18,34.
Естервинтер и Коген в работе, связанной с выводом новых
элементов орбит больших планет и Луны, определили экстрапо-
лированные значения разностей ЕТО — UT2, AT — UT, AT — ЕТ,
которые приводятся в табл. 20.
В соответствии с решениями Международного консультатив-
ного комитета по радиосвязи CCIR начиная с эпохи 1972, янв.
1,0 в системе координированного всемирного времени UTC в ка-
честве единицы принята секунда SI, т. е. секунда системы атом-
ного времени 1АТ. При этом разность показаний часов, функ-
ционирующих в системах UTC и UT1, не должна превышать
700 мсек. В связи с важностью для целей навигации и геодезии
системы времени UT1 комиссия 31 MAC на XIV Генеральной
ассамблее MAC (август 1970 г., Брайтон, Англия) рекомендо-
вала передавать поправки к радиосигналам времени в форме
разности UT1 — UTC. Таким образом, система UTC должна
быть близкой к UT1. Если разность UT1 — UTC превосходит
по абсолютной величине 0,7 сек, то в системе UTC делается ска-
чок в 1 сек, т. е. пропускается или вводится лишняя секунда
в серии секундных сигналов в зависимости от знака этой раз-
ности. Связь систем времени IAT и UTC определяется соотно-
шением вида
IAT - UTC = Л, + В, (JD - То),
где А\, В\ — числовые коэффициенты, То — некоторая началь-
ная эпоха. Например, для интервала 1968, дек. 1 — 1972, янв. 1
IAT - UTC = 4s,2131700 + 0s,002592 (JD - 2439126,5),
где счет юлианских суток JD ведется в системе UT.
С целью получения разности IAT — UTC до целых 10 сек
в систему UTC был введен скачок в —0s, 1077580. Таким обра-
зом, до момента 1971, дек. 31, 23h 59m 60s, 107 ... в старой си-
стеме UTC соотношение между системами IAT и UTC содержало
i 3.071
ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ
171
Таблица 17
Дата
AUT1
Дата
Д11Т1
Дата
AUT1
1956
Янв. 1
Янв. 4
Янв. 5
Апр. 1
Июль 1
Окт. 1
1957
Янв. 1
Апр. 1
Июль 1
Окт. 1
+31,34
31,43
31,52
31,56
+31,66
31,79
31,92
32,00
-0,08
-0,08
-0,02
-0,04
-0,07
-0,01
-0,04
-0,06
-0,07
-0,02
1958
Янв. 1
Апр. 1
Июль I
Окт. 1
1959
Янв. 1
Апр. 1
Июль 1
Окт. 1
I960
Янв. 1
Апр. 1
Июль 1
Окт. 1
+32,17
32,32
32,45
32,52
+32,67
32,80
+32,91
33,00
+33,15
33,28
33,39
33,45
-0,04
-0,05
-0,06
-0,01
-0,03
-0,03
—0,06
0,00
—0,01
-0,03
—0,02
+0,03
1961
Янв. 1
Апр. 1
Июль 1
Июль 31
Авг. 1
Окт. 1
1962
Янв. 1
Апр. 1
Июль 1
Окт. 1
+33,58
33,70
33,80
33,86
+33,99
34,12
34,23
34,31
+0,02
+0.02
+0,04
+0,06
+0,01
+0,04
+0,04
+0,01
0,00
+0,02
Таблица 18
Дата
ДГ(Д)
Д11Т1
Дата
AUTI
Дата
Д11Т1
1963
Янв. 1
Апр. 1
Июль 1
Окт. 1
Окт. 31
Нояб. 1
1964
Янв. 1
Март 31
Апр. 1
Июль 1
Авг. 31
Сент. 1
Окт. 1
Дек. 31
1965
Янв. 1
Февр. 28
Март 1
Апр. 1
Июнь 30
И юль 1
Авг. 31
Сент. 1
Окт. 1
+ 34,47
34,58
34,73
34,83
+35,03
35,22
35,22
35,40
35,52
+35,73
35,94
36,14
36,31
-0,03
-0,05
—0,09
-0,09
-0,12
-0,02
—0,08
-0,15
-0,05
-0,11
-0,11
—0,01
—0,02
-0,11
—0,01
-0,06
+ 0,04
0,00
-0,08
+0,02
-0,01
+0,09
+0,06
1966
Янв. 1
Апр. 1
Июль 1
Окт. 1
1967
Якв. 1
Апр. 1
Июль 1
Окт. 1
1968
Янв. 1
Янв. 31
Февр. 1
Апр. 1
Июль 1
Окт. 1
1969
Янв. 1
Апр. 1
Июль 1
Окт. 1
f 36,54
36,76
36,99
37,18
+37,43
37,65
37,87
38,04
+38,29
38.52
38,75
38,95
+39,20
39,45
39,70
39,91
-0,05
—0,03
—0,02
+0,02
+0,01
+0,02
+0,04
+0,10
+0,09
+0,09
-0,01
0,00
+0,01
+0,04
+0,03
+0,02
+0,01
+0,03
1970
Янв. 1
Апр. 1
Июль 1
Окт. 1
1971
Янв. 1
Апр. 1
Июль 1
Окт. 1
Дек. 31
1972
Янв. 1
Апр. 1
Июнь 30
Июль 1
Окт. 1
Дек. 31
1973
Янв. 1
Апр. 1
Июль 1
Окт. 1
Дек. 31
1974
Янв. 1
+40,18
40,45
40,70
40,89
+41,16
41,41
41,68
41,92
42,22
+ 42,22
42,52
42,82
43,07
+43,37
43,67
43,96
44,19
+44,48
0,00
—0,03
-0,05
-0,01
—0,04
-0,05
—0,08
—0,09
-0,15
-0,04
-0,34
—0,64
+0,36
+0,11
-0,19
+0,81
+0,5!
+0,22
-0,01
-0,30
+0,70
172 4. t. сферическая и эфенеридная Астрономия IS з.о?
Таблица 19
Дата
1974
Янв. 1
Апр. 1
Июль 1
Окт. 1
ДГ(Л)
s
+ 44,48
44,8
45,1
45,3
Дата
1975
Янв. 1
Апр. 1
Июль 1
Окт. 1
АГ(Л)
s
-I-45,6
45,9
46,2
46,4
Дата
1976
Яна. 1
Апр. 1
Июль 1
Окт. 1
1977
Янв. 1
ДГ(Л)
s
+46,7
47*0
47,3
47,5
+47,8
Дата
1912,5
1913,5
1914,5
1915,5
1916,5
1917,5
1918,5
1919,5
1920,5
1921,5
1922,5
1923,5
1924,5
1925,5
1926,5
1927,5
1928,5
1929,5
1930,5
1931,5
1932,5
1933,5
=ET0 — UT2
5
13,0
14,2
15,3
16,4
17,4
18,3
19,1
19,8
20,5
21,1
21,6
22,0
22,3
22,6
22.7
22,8
22,9
23,0
23,2
23,3
23,5
23,6
AT —UT
s
18,8
20,1
21,4
22,7
24,0
24,6
25,1
25,5
25,8
26,5
27,0
27,5
27,9
28,1
28,1
28,0
27,9
27,6
27,3
27,0
26,7
26,5
AT —ET
s
5,8
5,9
6,1
6,3
6,6
6,3
6,0
5,7
5,3
5,4
5,4
5,5
5,6
5,5
5,4
5,2
5,0
4,6
4,1
3,7
3,2
2,9
Дата
1934,5
1935,5
1936,5
1937,5
1938,5
1939,5
1940,5
1941,5
1942,5
1943,5
1944,5
1945,5
1946,5
1947,5
1948,5
1949,5
1950,5
1951,5
1952,5
1953,5
1954,5
ЕТ0 — UT2
s
23,6
23,6
23,6
23,6
23,8
24,0
24,3
24,7
25,2
25,6
26,1
26,6
27,1
27,6
28,2
28,9
29,4
29,7
30,3
31,0
31,1
Таб^
AT — UT
s
26,3
26,1
26,0
26,0
26,2
26,3
26,6
26,9
27,3
27,7
28,2
28,6
29,0
29,4
29,8
30,1
30,3
30,6
30,8
30,9
31,1
[ица 20
AT-ET
s
2,7
2,5
2,4
2,4
2,4
2,3
2,3
2,2
2,1
2,1
2,1
2,0
1,9
1,8
1,6
1,2
0,9
0,9
0,5
-0,1
0,0
смещение частоты Av/v (см. выше; например, 1 фев. 1968 г.
Av/v = —300- Ю-10 иВ = +0s,100), а с М0Мента 1972, янв. 1,
0h0m03 в новой системе UTC разность между IAT и UTC выра-
жается целым числом секунд A янв. 1973 г. она равна 123 в со-
ответствии с Отчетом CCIR) [76, 63].
Как уже было сказано ранее, положительный знак разности
UT1 — UTC (в случае превышения 0а,7 по абсолютной величине)
определяет скачок в одну дополнительную (положительную)
секунду, при отрицательном знаке этой разности делается про-
пуск в одну (отрицательную) секунду. Решения CCIR предусма-
3.07]
ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ
173
57*
58 59
60 \
о
I
30 июня, 23ь59т
{июля,
JTC
тривают введение скачка (или пропуска) в Is в системе UTC
в последнюю секунду 31 декабря или 30 июня (а в случае необ-
ходимости— в обе эти даты, как это было в 1972 г.). Таким об-
разом, положительная секунда начинается в 23h59m60s UTC и
оканчивается в 0h 0m 0s UTC первых суток следующего месяца.
В случае отрицательной секунды после момента 23h 59m 58s UTC
через одну секунду сле-
дует момент 0h 0m 0s пер-
вых суток следующего
месяца.
Поэтому если событие
произошло в момент t в
системе UT1, то в случае
«лишней» положительной
секунды момент события,
указанного стрелкой, есть
23h 59m 60s,4 UTC (рис.
59, а), а в случае отри-
цательной секунды мо-
мент события есть 30
июня, 23h59m588,6 UTC
(рис. 59,6).
Согласно рекоменда-
циям CCIR радиосигна-
лами времени в системе
UTC сообщается также
приближенная величина
разности UT1 — UTC =
= DUT1 как кратное 0s, 1.
При этом величина и
знак поправки DUT1 оп-
ределяются числом выделяемых «окрашенных» секундных сиг-
налов и положением группы этих сигналов относительного ми-
нутного импульса, отсутствие «окраски» секундных сигналов
означает, что DUT1 = 0. Таким образом, положительное значе-
ние DUT1 указывается выделением соответствующего числа п
последовательных секундных сигналов, следующих за минутным
сигналом, где п — целое, меняющееся от 1 до 7 (рис. 60, а):
57 58
О
30'июня, 23''59"
¦1 июля, 0пОт
6
Рис. 59. а) Пою»игельная «дополнительная* се-
кунда, б) Отрицательная «дополнительная» секунда.
Отрицательная поправка DUT1 указывается «окраской» т
последовательных секундных сигналов, следующих за девятым
секундным сигналом до секундного сигнала 8i -f- m включи-
тельно (рис. 60,6), DUT1 = — 0U Хт.
Необходимо отметить, что советские радиостанции Службы
времени в дополнение к информации, передаваемой иностран»
174
Ч. I. СФЕРИЧЕСКАЯ И ЭФЁМЕРИДНАЯ АСТРОНОМИИ
[§ 3.08
ными радиостанциями, работающими в системе координирован-
ного времени UTC, передают уточнения к величинам поправок
DUT1, кратные 0s,02, посредством выделения р секундных
58l 59
J 1_
/ г з
I I I
5 6 7
I1L
DUTW
9 10 U
I I L
S9%
f г
J I
9 10 II 12 13 ft 15 16
1 I I I I I III
I ,
Рис. 60. а) «Окраска» радиосигналов времени при DUT1 > 0. б) «Окраска» радиосигналов
времени при DUTI < 0.
сигналов в интервале от 21-й до 24-й секунды для положитель-
ной поправки и q секундных сигналов в интервале от 31-й до
34-й секунды для отрицательной поправки.
§ 3.08. Юлианский период. Юлианские дни
Наряду с общепринятой календарной системой счета суток
широкое применение в астрономии нашла система сплошного
счета суток (без подразделения на месяцы и годы), предложен-
ная в XVI в. Скалигером и названная им юлианской, или
юлианским периодом. Юлианский период охватывает 7980 лет
и начинается в средний гриничский полдень 1 января 4713 г.
до н. э.
При помощи юлианского периода решается часто встречаю-
щаяся в астрономии задача о числе d суток, прошедших между
двумя заданными датами ?i и t% (ti < ^)-
Для этого по таблицам дней юлианского периода (см., на-
пример, «Астрономический Ежегодник СССР») находят юлиан-
ские даты JD(^i), JD(?2), соответствующие заданным календар-
ным датам /i и t2 и вычитают более раннюю юлианскую дату
JD(^i) из поздней JD(^)
S 3.08] ГЛ. 3. ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ 175
При этом необходимо иметь в виду, что юлианские даты со-
хранили свое начало по старому астрономическому счету в гри-
ничский полдень и после 1925 г. Поэтому юлианская дата, соот-
ветствующая некоторому моменту определенной календарной
даты, будет выражена номером юлианского дня, соответствую-
щим гриничскому полдню этой календарной даты и сопровож-
даемым долей суток, протекшей после этого полдня. Напри-
мер, моменту времени (дате) t = 1970 май, 5,725 UT соответ-
ствует юлианская дата JD 2440712,225.
В зависимости от системы измерения времени юлианский
день и юлианская дата могут относиться как к моментам все-
мирного времени UT, так и к моментам эфемеридного времени
ЕТ. В последнем случае юлианская эфемеридная дата JED от-
личается от юлианской даты JD, выраженной в системе всемир-
ного времени UT, на величину А7" — поправки на эфемеридное
время.
Юлианский эфемеридный день в этом случае представляет
число эфемеридных суток, прошедшее от даты — 4712, янв. 1,
12hET до 12hET времени заданной календарной даты.
Напомним, что фундаментальной эпохе ньюкомовых планет-
ных теорий 1900, янв. 0,12hET соответствует юлианская эфеме-
ридная дата JED 2415020,0.
Для непрерывного счета звездных суток введены аналогич-
ные понятия — юлианский звездный день и юлианская звездная
дата.
Юлианская звездная дата определяется как промежуток
звездного времени, протекший от начала юлианского периода до
рассматриваемого момента и выраженный в звездных сутках,
причем целая часть равна номеру юлианского звездного дня
JSD, а дробная часть — гриничскому звездному времени
(в звездных сутках). Эти понятия относятся равным образом
к истинному и среднему звездному времени.
Юлианская дата JD и юлианская звездная дата JSD свя-
заны соотношениями вида [36]
JSD = + 0,671 + 1,0027379093 JD,
JD = — 0,669 +- 0.9971695664JSD.
В работах Смитсонианской астрофизической обсерватории вве-
ден модифицированный юлианский период — система непрерыв-
ного счета суток, за начало которой выбрана дата 1858, ноябрь,
17,0 UT = JD 2400000,5; таким образом, модифицированная
юлианская дата MJD связана с юлианской датой JD соотноше-
нием [49]
MJD = JD - 2400000,5.
Глава 4
АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ
Под системой астрономических постоянных понимают срав-
нительно небольшую группу параметров, определяющих дина-
мику Солнечной системы, необходимую для предвычисления по-
ложений небесных объектов и для редукции и интерпретации их
наблюдений. В систему астрономических постоянных включены
также геодезические постоянные, связанные с Землей. Таким
образом, система астрономических постоянных составляет чис-
ленную основу всех редукционных вычислений в астрономии
(см. гл. 2). Так как позиционные наблюдения небесных объек-
тов производятся с поверхности Земли и дают топоцентрические
положения небесных объектов, то для перехода от точки наблю-
дения (топоцентра) к центру масс Земли в систему астрономи-
ческих постоянных включены параметры, характеризующие фи-
гуру и размеры, вращение и гравитационное поле Земли (точнее
говоря, земного сфероида, аппроксимирующего с определенной
степенью точности реальную Землю). Дальнейшие редукции
состоят в переходе к барицентру системы Земля -f- Луна и
к центру масс Солнца, поэтому в систему астрономических по-
стоянных включены параметры геоцентрического движения
Луны и гелиоцентрического движения Земли.
Астрономические постоянные составляют совокупность чис-
ловых параметров, часть которых определяется из обширных
рядов наблюдений (фундаментальные, или основные постоян-
ные), а значения остальных могут быть выведены из них при
помощи определенных теоретических соотношений (производ-
ные постоянные).
Требование согласованности всех принятых числовых
значений, постоянных в пределах погрешностей их определения
иихсовместностив смысле точного удовлетворения основ-
ных теоретических соотношений, является главным требованием,
предъявляемым к системе астрономических постоянных. При
этом для астрономических исследований важно сохранение си-
стемы астрономических постоянных неизменной в течение воз-
можно более длительного времени. Это необходимо, чтобы
§ 4.01] ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ J77
обеспечить единую однородную основу для сравнения теорий
движения Солнца, Луны и планет с наблюдениями и последую-
щего анализа расхождений в смысле О—С, цель которого
в уточнении всех или по меньшей мере части параметров, лежа-
щих в основе соответствующей теории движения. Поэтому в об-
щепринятой системе астрономических постоянных, независимо
от новых определений и уточнений, могут сохраниться старые
числовые значения некоторых постоянных.
Подробные сведения об астрономических постоянных можно
найти в [37], [50] — [54].
§ 4.01. Новая система астрономических постоянных
(система астрономических постоянных MAC 1964)
Недостатки старой системы астрономических постоянных
(принятой в Париже в 1896 г.) в отношении точности числовых
значений некоторых постоянных (например, постоянной аберра-
ции и) и удовлетворения требованию внутренней согласован-
ности системы привели к необходимости ее ревизии и переопре-
деления.
Попытка построения совершенной системы астрономических
постоянных была предпринята де Ситтером [55], который создал
внутренне согласованную систему, содержащую 40 постоянных
вместе с их вековыми изменениями. Завершил эту работу аме-
риканский астроном Д. Брауэр. Система де Ситтера — Брауэра
отличалась от старой системы астрономических постоянных тем,
что в ней были приведены также дифференциальные зависи-
мости между основными и производными постоянными, суще-
ственно облегчающие возможность уточнения числовых значе-
ний последних при уточнении значений основных постоянных.
Однако некоторые недостатки этой системы, как, например,
несоответствие принятого значения постоянной нутации, вычис-
ленного в рамках гипотезы о гидростатическом равновесии Зем-
ли, наблюденному значению этой постоянной помешали введе-
нию системы де Ситтера — Брауэра вместо общепринятой си-
стемы 1896 г.
Система де Ситтера — Брауэра была пересмотрена в 1948 г.
Клеменсом, построившим новую систему астрономических по-
стоянных и указавшим пути ее введения в практику. Исследова-
ния Клеменса имеют огромное значение, так как в них впервые
рассмотрены вопросы введения равномерного (ньютонова) вре-
мени, названного впоследствии эфемеридным временем (см.
§ 3.05).
Во время работы симпозиума MAC № 21 по .проблеме
«Астрономические постоянные» (Париж, 1963) для подготовки
проекта новой системы астрономических постоянных была.
178 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.01
создана специальная рабочая группа, в задачи которой входило
назначение числовых величин основных астрономических по-
стоянных: астрономической единицы в метрах, скорости света
в километрах в секунду, экваториального радиуса Земли, дина-
мического коэффициента формы Земли, геоцентрической грави-
тационной постоянной, массы Луны, среднего сидерического
движения Луны. Симпозиум рекомендовал сохранить прежние
числовые значения постоянных прецессии и нутации [54].
Рабочая группа подготовила проект новой системы астроно-
мических постоянных, которая под названием «Система астро-
номических постоянных MAC» была принята и утверждена на
XII Генеральной ассамблее MAC (Гамбург, 1964). Ниже приво-
дится выдержка из отчета Исполкому MAC рабочей группы, со-
держащая систему астрономических постоянных MAC с подроб-
ными комментариями [37].
1. Система астрономических постоянных MAC.
Определяющие постоянные
1. Число эфемеридных секунд
в одном тропическом году
A900) 5 = 31556925,9747
2. Гауссова гравитационная
постоянная, определяющая
астрономическую единицу
(а. е.) k = 0,01720209895
Основные постоянные
3. Мера (длина) 1 а. е. в м . А =149600- 106
4. Скорость света (м/сек) . . с = 299792,5 • 103
5. Экваториальный радиус
Земли, м ае = 6378 160
6. Динамический коэффи-
циент формы Земли . . . /2 = 0,0010827
7. Геоцентрическая грави-
тационная постоянная
(м3-секг2) fЯ = 398 603 • 109
8. Отношение масс Луны и
Земли ц = 1/81,30
9. Сидерическое среднее дви-
жение Луны (рад/сек)
A900) п\ = 2,661699489 ¦ 10~5
10. Общая прецессия в долготе
за тропическое столетие
A900) р = 5025",64
П. Наклон эклиптики A900) е = 23°27'08",26
12. Постоянная нутации A900) Л/ = 9",210
i 4.01] ГЛ. 4, АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ
Вспомогательные постоянные и коэффициенты
179
Постоянная &/86 400, употреб-
ляемая, когда за единицу
времени принята 1 сек . . k'— 1,990983675 ¦ 10
Число секунд дуги в одном ра-
диане 206 264",806
Коэффициент для постоянной
аберрации (прим. 15) . . . F{ = 1,000142
Коэффициент для среднего
расстояния Луны (прим. 20) F2 = 0,999093142
Коэффициент для параллакти-
ческого неравенства (прим.
23) F3
-7
Производные постоянные
13. Параллакс Солнца . , . arcsin(ae/^) = n0 =
= 8",79405 (8",794)
14. Световой промежуток для
единичного расстояния
(световое уравнение) . .
15. Постоянная аберрации . .
16. Сжатие Земли
17. Гелиоцентрическая грави-
тационная постоянная
(м3 -сек-2)
18. Отношение масс Солнца и
Земли
19. Отношение масс Солнца и
системы Земли + Луна . .
20. Возмущенное среднее рас-
стояние Луны (м) ...
" =384 400- 103
21. Постоянная синуса парал-
лакса Луны ajad = siring = 3422",451
22. Постоянная лунного нера-
/ л
= Is /0,00200396
Fyk'xA = и = 20",4958 B0",496)
а = 0,0033529 = 1/298,25
= fS =132718- 1015
венства
23. Постоянная параллактиче-
ского неравенства ....
= 6",43987F",440)
180 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.01
Система планетных масс
(обратные значения масс)
24. Меркурий 6000 000 Юпитер 1047,355
Венера 408 000 Сатурн 3 501,6
Земля + Луна 329 390 Уран 22 869
Марс 3 093 500 Нептун 19314
Плутон 360 000
2. Примечания к постоянным
1. Значение, данное числу эфемеридных секунд в тропиче-
ском году эпохи 1900, заимствовано из определения эфемерид-
ной секунды, которое было принято Международным Комитетом
мер и весов [55]. Оно фактически выведено из коэффициента
при Т, отсчитываемом в юлианских столетиях по 36 525 суток,
в ньюкомовом выражении для геометрической средней долготы
Солнца, отнесенной к среднему равноденствию даты. В списке
«1900» относится надлежащим образом или к фундаментальной
эпохе эфемеридного времени, а именно 1900, янв. 0, 12hET, или
к 1900,0; значения постоянных 20—23 относятся также к фунда-
ментальной эпохе. Всюду в отчете под термином «секунда» над-
лежит понимать «эфемеридную секунду».
2. Значение гауссовой гравитационной постоянной k *) сов-
падает со значением, принятым MAC в 1938 г., и служит для
определения астрономической единицы длины (а. е.), коль скоро
уже определены соответствующие (астрономические) единицы
массы и времени.
Единицей массы является масса Солнца, а единицей време-
ни— эфемеридные сутки, равные 86 400 эфемеридным секундам.
Единицы &:(а. е.)% (эфемеридные сутки) (масса Солнца)~1/а.
Для упрощения приводимых ниже уравнений введена вспомога-
тельная постоянная k', определяемая как Л/86400, и в списке
дано ее округленное значение.
3. Значение меры астрономической единицы в метрах яв-
ляется округленным значением из последних радарных опреде-
лений.
4. Значение скорости света рекомендовано Международным
физическим союзом в сентябре 1963 г.
5. Термин «экваториальный радиус Земли» относится к эк-
ваториальному радиусу эллипсоида вращения, аппроксимирую-
щего геоид (см. также прим. 16).
*) С гауссовой гравитационной постоянной k связана постоянная тяготе-
ния Кавендиша f : f = k1. Современные определения дают для f в системе
CGS значение /= F,673 ± 0,003) ¦ 10"'. Наряду с указанным обозначением
принято обозначение О.
§ 4.01] ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 181
6. Термин «динамический коэффициент формы Земли» отно-
сится к коэффициенту второй гармоники в выражении грави-
тационного потенциала Земли, принятом Комиссией № 7 MAC
в 1961 г. (см. также прим. 16).
7. Геоцентрическая гравитационная постоянная fE предна-
значена для применения в случае геоцентрических орбит, когда
единицами длины и времени являются метр и секунда; Е озна-
чает массу Земли, включая ее атмосферу.
Третий закон Кеплера для тела массы М, движущегося по
невозмущеннон эллиптической орбите вокруг Земли, можно за-
писать в виде
где п — сидерическое среднее движение в радианах в секунду,
а — среднее расстояние в метрах. Значение fE основано на из-
мерениях силы тяжести и наблюдениях ИСЗ.
8. Снова в массу Земли включена масса атмосферы. Обрат-
ное значение числа 81,30 равно 0,0123001.
9. Это значение для сидерического среднего движения Луны
согласуется со значением тропического среднего движения, ис-
пользуемым в The Improved Lunar Ephemeris, уменьшенным на
величину общей прецессии в долготе.
10—12. Значения главных постоянных, определяющих отно-
сительные положения и движения экватора и эклиптики, яв-
ляются общепринятыми, используемыми в настоящее время. Ве-
ковые члены и производные величины уже табулированы в дру-
гих местах.
13. Для параллакса Солнца следует применять округленное
значение 8",794, кроме тех случаев, когда требуются дополни-
тельные знаки, чтобы обеспечить численную согласованность.
14. Значение светового промежутка для единичного расстоя-
ния численно равно числу световых секунд в одной астрономи-
ческой единице. Его обратная величина равна скорости света
в астрономических единицах в секунду.
15. С точностью до коэффициента Л постоянная аберрации
равна отношению скорости некоторой фиктивной планеты пре-
небрежимо малой массы, движущейся по круговой орбите еди-
ничного радиуса, к скорости света; она обычно выражается
в секундах дуги умножением на число секунд в одном радиане.
Коэффициент Ft равен отношению средней скорости Земли
к скорости фиктивной планеты и задан формулой
182
4. t. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
4.01
где по — сидерическое среднее движение Солнца в радианах
в секунду, аа — возмущенное среднее расстояние Солнца в аст-
рономических единицах и е — средний эксцентриситет орбиты
Земли.
Ньюкомовы значения для по, ао и е достаточно точны для
этой цели. Значения коэффициента Fi и постоянной аберрации х
даны в табл. 21.
Следует применять округленное значение 20",496, за исклю-
чением тех случаев, когда требуются дополнительные знаки,
чтобы обеспечить численную
Таблица 21 согласованность.
16. Из условия, что ре-
ференц-эллипсоид вращения
для Земли должен быть
уровенной поверхностью,
вытекает, что для определе-
ния ее геометрической фор-
мы и внешнего гравитацион-
ного поля достаточно трех
параметров, если известны угловая скорость вращения (со)
Земли и относительная масса атмосферы (ца). Переменностью
скорости вращения Земли можно пренебречь; значение имеет
только масса атмосферы. Необходимые числовые величины —
Эпоха
1800
1900
2000
1,0001427
1,0001420
1,0001413
X
20",49583
20,49582
20,49581
ш = 0,000072921 рад-сек
-1
= 0,000001.
Выражения для сжатия а и наблюденного значения ускоре-
ния силы тяжести на экваторе ge в терминах основных постоян-
ных с точностью до второго порядка имеют вид
3 , . 1 . 9 .-? 15 , 39
"8" h-
39 2
- " т
56
2
т
ge = (fE/al) (l - ца +1/2 - т + fll - p2m + ^
где т = aedJ/ge получается последовательными приближениями.
Новое значение а дано здесь только для астрономических при-
ложений (поправки за параллакс и т. д.).
17. Гелиоцентрическая гравитационная постоянная соответ-
ствует fS, но предназначена для гелиоцентрических орбит, когда
единицами являются метр и секунда.
18—19. Производные значения масс Земли и системы Зем-
ля + Луна отличаются от общепринятых в настоящее время, но
они не будут введены до тех пор, пока не будет пересмотрена
вся система планетных масс в целом (см. прим. 24).
20. Возмущенное среднее расстояние Луны равно большой
полуоси вариационной орбиты Хилла и отличается от большой
§ 4.01] ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 183
полуоси, вычисленной по закону Кеплера, коэффициентом F2,
который зависит от хорошо определенного отношения средних
движений Солнца и Луны [56].
21. Постоянная синуса параллакса для Луны обычно выра-
жается в секундах дуги умножением на число секунд дуги
в одном радиане. Соответствующее значение самого я* равно
3422",608.
22. Постоянная лунного неравенства определяется данной
формулой и обычно выражается в секундах дуги.
23. Постоянная параллактического неравенства определяется
данным выражением; коэффициент ^з согласуется с соответ-
ствующими величинами в «Таблицах» Брауна.
24. Система планетных масс является принятой в текущих
эфемеридах, и значения, данные для обратных величин масс,
включают массы атмосфер и спутников. Значение для Нептуна
равно принятому в численном интегрировании уравнений движе-
ния внешних планет; значение, используемое в ньюкомовых тео-
риях внутренних планет, равно 19 700. В планетной теории при-
нятое отношение массы Земли к массе Луны равно 81,45 (тогда
как в лунной теории 81,53) и отношение массы Солнца к массе
одной только Земли равно 333 432. Эта система масс должна
быть пересмотрена в течение нескольких ближайших лет, когда
будут получены улучшенные значения для масс внутренних пла-
нет, основанные на анализе движения космических зондов.
3. Поправочные коэффициенты и пределы. С точностью до
первого порядка относительные погрешности производных по-
стоянных заданы формулами
AnG Aag SA Дт^ t\A Дс
nQ ae A ' zA А с
Дх Ду4 Дс Дт. Да Д/2
х А с т.' а /,'
ЗД/4 [е ) _ _ Д(/?) , 3 SA
А ' S_ ~ fE +
Е A + ц) ) 3 Д/1 Д (/?)
fE 1 +
I Д(?Я) 2 Дл? I Дц Д sin п^ _ Дае
3 fE 3 я*т 3 1+ц ' sinitj ad
Дц Да^ Л/4 Д/3^ 2Дц
184 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.02
Предполагается, что истинные значения основных постоян-
ных заключены в следующих пределах:
Л A49 597+ 149601). 10е м ц-'81,2Э + 81,31
с B99 792 + 299 793) ¦ 103 м ¦ сек~' п^ верно с точностью
до приведенных знаков
ае 6 378 080 + 6 378 249 м р 5026",40 -=- 5026",90
/2 0,0010824 + 0,0010829 е 23°27'08",16 ¦*- .. .08",36
fE C98 600 + 398 606) ¦ 109 м3-сек~2 N 9",200 -г- 9",210
Соответственно пределы для производных постоянных равны:
По 8",79388 -f- 8",79434 а-1 298,33 -*¦ 298,20
хА 499*,001 -ь 4995,016 Oj C84 399 -s- 384 401) • 103 м
у. 20",4954 ч- 20",4930 sin яс 3422",397 н- 3422",502
fS A32710 -н 132 721) ¦ 1016 м3 ¦ сек-1
S/E 332 935 + 332 968 L 6",4390 ~- 6",4408
S/Я A + ц) 328 890 -н 328 922 Р ^ 124",984 н- 124",989
Система астрономических постоянных MAC вводится во все
основные астрономические ежегодники (кроме французского
ежегодника «Connaissance des Temps»), начиная с выпусков на
1968 г. Переход к новым значениям постоянных осуществляется
при этом непосредственно перевычислением эфемерид с новыми
значениями соответствующих постоянных, табуляцией значений
соответствующих дифференциальных поправок к Луне, опубли-
кованным эфемеридным величинам, указанием аналитических
формул для вычисления этих поправок. Этой цели служат, в ча-
стности, «Приложения к Астрономическому Ежегоднику СССР»,
опубликованные к выпускам Ежегодника на 1968—1971 гг.
§ 4.02. Задачи астродинамики
и астрономические постоянные
Требования, предъявляемые астрономией и астродинамикой
к системе астрономических постоянных, качественно различны.
При астрономических исследованиях необходима система строго
согласованных и совместных значений астрономических постоян-
ных, пригодная для вычисления эфемерид и редукции наблю-
дений небесных тел в течение многих десятилетий. При решении
задач астродинамики необходимо знать с максимальной точно-
стью значения всех тех астрономических постоянных, с которыми
связано проведение определенного «космического» эксперимента,
даже если они не согласуются со значениями остальных приме-
няемых постоянных. Поэтому для астродинамики важное значе-
ние имеет непрерывное улучшение и уточнение постоянных, их
•ротзетствие современным наблюдениям. Таким образом, значе-
§ 4.04] ГЛ. 4. Астрономические постоянные 185
ние одной и той же астрономической постоянной, применяемое
в классической эфемеридной астрономии, может существенно
отличаться от значений этой же постоянной, применяемых
в астродинамике.
Кроме того, для решения задач астродинамики необходимы
основные параметры планет, характеризующие их сферы гра-
витационного действия, время перелета между орбитами и т. п.
§ 4.03. Результаты радиолокационных определений
астрономической единицы в км
Развитие радиоастрономических методов наблюдения дало
интересные и важные результаты в области определения точных
расстояний до ближайших небесных тел непосредственно в кило-
метрах по измерениям времени запаздывания отраженного сиг-
нала относительно момента посылки начального импульса.
Ниже приведена сводка некоторых определений астрономи-
ческой единицы на крупнейших радиоастрономических обсерва-
ториях мира (с = 299792,5 км/сек)
1960, Мак Гуайр, Моррисон, Уонг 149 540 000 ± 13 600
1961, СССР, ИРЭ, Котельников 149 599 500 ± 800
1961, Манчестерский университет, Джодрелл Бэнк 149 601 000 ± 5 000
1961, MIT, Лаборатория им. Линкольна, Миллстоун 149 597 850 ± 400
1961, JPL, Голдстоун 149 598 845 ±250
1962, NBS, Джикамарка 149 59/400 ± 600
1962, Манчестерский университет, Джодрелл Бэнк 149 596 600 ± 900
1962, JPL, Голдстоун 149 598 900 ± 670
1964, СССР, ИРЭ, Котельников 149 598 000 ± 130
1964, JPL, Голдстоун 149598388 ±500
1969 Мельбурн, Малхолланд, Сегрен, Стариз . . . 149 597 892,6 ± 200
В результате обработки 5-летнего ряда радиолокационных
наблюдений Меркурия и Венеры сотрудники Лаборатории им.
Линкольна (Массачусетский технологический институт, США)
под руководством И. Шапиро получили следующее значение
световой астрономической единицы хА:
хА = 499s,004780 ± O'.OOOOOl.
§ 4.04. Значения масс больших планет
В Системе астрономических постоянных MAC 1964 г. времен-
но приняты старые значения масс больших планет, определен-
ные Хиллом и Ньюкомом. Однако исследования последних лет
дают разнообразные новые значения, основанные на анализе
траекторных измерений при полетах космических зондов, а так-
же на обработке наблюдений малых планет и спутников. Эти
значения частично приведены в табл. 22.
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.04
Таблица 22
Планета
Исследователи
Меркурий
Венера
Земля + Луна
Марс
6 120 000±43 000
5 970 000±460 000
6 480 000±350 000
5 980 000±170 000
6 Л0000±40 000
6 021 000±53 000
[6 029 000±53 000] *
5 983 000±Ю000
6 039 000±15 000
5931000±65 000
5941 000±9 600
6 025 000±15 000
6 020 000±3 000
409 ЗЭ0±1 400
406 645±208
408 539,5±12,0
408 539±12
408 250±120
[408 450±120]*)
408 526 ±30
408 508 ±6
408 522±5
408 521,8 ±1,0
408 522,7±2,0
408 945+300
408 523,5±1,0
328 452 ±43
328S90±16 1
328 900 + 15 /
328 939 ±40
328 898 ±3**)
328 900 ±1
328 900,2 ±0,4
328 915±4
328 900 ±60
[328 950±60]
3110 000±7 700
3 079 000±5 700
3 111 000±9 000
[3 107 000+9 000]
3 094 000 ±3 000
3 098 600 ±600
3 098 700+100
3 098 714±5
3 098 720±70
3098 697±100
1-
Рабе, 1949
Данком, 1956
Брауэр, 1950
Бохан и Маковер, 1961
Клеменс, 1967
Эш, Шапиро, Смит, 1967
Мелбурн, 1968
1969
Лизке и Налл, 1969
Эш, Шапиро, Смит, 1971
Эш и др., 1971
Клеменс, 1943
Рабе, 1949
Эндерсон, Налл, Торнтон,
1963
Клеменс, 1964
| Эш, Шапиро, Смит, 1967
Мелбурн, 1968 (Маринер-2)
Эндерсон, Эфрон, Мелбурн,
1968 (Маринер-5)
Данком, 1965
Эндерсон, Моттингер
Рабе, 1949
Рабе, 1967
Рабе и Фрэнсис, 1967
Рабе и Фрэнсис, 1968
Сёгрен, 1966
Мелбурн, 1968
Лизке, 1968
Эш, Шапиро, Смит, 1967
Рабе, 1949
Юри, 1952
Эш, Шапиро, Смит, 1967
Уилкинз, 1967
Налл, 1969 (Маринер-4)
(Маринер-9)
Эндерсон, Эфрон, Уонг, 1970
S 4.04]
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 187
Продолжение табл. 22
Планета
Юпитер
Сатурн
Уран
Нептун
Плутон
1 047,378±0,121
1 047,57 ±0,06
1047,41 ±0,40
1 047,39 + 0.03
1 047,41 ±0,20
1 047,381 ±0,013
1 047,445 + 0,043
1 047,387 + 0,008
1047,381 ±0,020
1 047,387 + 0,004
1 047,375 + 0,050
1 047,3908
I 047,386 + 0,041
1 047,341 ±0,011
1047,314 + 0,031
1 047..352 +0,003
3 497,64+0,27
3 494,8±2,0
3 499,7 ±0,4
3 498,7 ±0,2
3 501,47+1,75
23 239+89
22 802±Ю1
22 934+6
22 930+6
22 692 + 33
22 945 + 10
19314
19 094±22
18 889±62
19 070 + 21
19 296 + 9
19 34Э±23
307 000
400000+40 000
1812 000±50 000
3 000 000 ±500 000
4 000 000+2 000 000
Исследозатели
Хилл, 1898
Остен, 1928
Д. К. Куликов, 1950
Брауэр и Клеменс, 1961
Клеменс, 1964
Клепчииски.Ч, 1964
О'Хэндли, 1968
Клепчинский, 1967
О'Хэндли, 1968
Хергет, 1968
Мелбурн, 1968
Лнник Бек, 1969
Яничек, 1971
Черных, 1970
Полявьеха и Эдельман, 1972
Герц, 1953
Джеффриз, 1954
Клеменс, 1960
Клепчинский, 1970
Гарсиа, 1972
Хилл, 1898
Фан ден Босх, 1927
Гаррис, 1950
Клеменс, 1964
Клепчинский, 1970
Дан.хэм, 1971
Клеменс, 1953
Гайо, 1910
Фан Бизбрук, 1957
Клеменс, 1964
Гилл и Гаулт, 1968
Клепчинский, 1970
Койпер, 1950
Брауэр, 1955
Данком и др., 1969
Зайдельманн, 1971
Эш, Шапиро, Смит, 1971
•) Значения т~1 в квадратных скобках получены из обработки наблюдений с
учетом эффектов теории относительности.
*•) Обратное значение массы системы Земля + Луна соответствует f? =
- 398 601.2 км'/сек2, f
(секунды шкалы АЛ
М^ =4902,64 к*Усек!, ng=384 400,2 км и T>1=.499S,004788±0S1000015
]88 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.05
§ 4.05. Астродинамические характеристики тел
Солнечной системы
При движении объекта в пределах Солнечной системы по
гелиоцентрической орбите главной силой, определяющей это
движение, является сила тяготения Солнца, а притяжение планет
вызывает возмущения, обусловливающие отклонение реального
движения от кеплерова, или невозмущенного, движения. Однако
при сближении с какой-либо планетой рассматриваемый объект
попадает в область притяжения этой планеты, в каждой точке
которой планета притягивает объект сильнее Солнца. Границей
области притяжения является сфера радиуса RG- Значения ра-
диусов сфер — областей притяжения (гравитационных сфер)
для планет приведены в табл. 23 (по Г. А. Чеботареву и
М. Д. Кислику) [58].
Таблица 23
Планета
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
Плутон
Ra. »¦ е-
0,00213
0,00972
0,01444
0,01044
0,50042
0,61845
0,67056
1,11104
0,55371
(Чеботарев),
МЛН. КМ
0,32
1,45
2,16
1,56
75,0
93,0
100,0
166,0
83,0
«О
(Кислик),
млн. км
0,36
1,70
2,50
1,80
88,0
108,0
116,0
194,0
—.
На границе гравитационной сферы притяжения Солнца и
соответствующей планеты равны.
При рассмотрении движения объекта, проходящего вблизи
планеты Р, всегда можно сравнить величины отношений «воз-
мущающего» ускорения от Солнца as к «основному» ускоре-
нию аР от планеты в гелиоцентрической и планетоцентрической
системах координат, т. е. величины [as/flp]ren и [aslaP]ull. Область
пространства, окружающего планету Р, в каждой точке которой
имеет место неравенство
[а5/аР\ПЛ < [а3/аР]тел,
называется областью действия планеты Р, а ограничивающая
ее сфера — сферой действия планеты. Радиусы сфер действия
планет Солнечной системы приведены в табл. 24.
S 4.05]
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 189
Таблица 24
Плаирта
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
Плутон
Яд. \й'км
0,112
0,615
0,925
0,579
48,1
54,6
52,0
86,9
34,0
RA, а. е.
0,000747
0,00411
0,00619
0,00387
0,322
0,365
0,348
0,581
0,227
0,00193
0,00569
0,00619
0,00254
0,0619
0,0382
0,0181
0,0193
0,00574
Числа в последнем столбце дают значения радиусов сфер
действия, выраженных в единицах большой полуоси орбиты.
Если объект движется внутри сферы действия планеты Р, то
в большинстве случаев выгоднее считать планету центральным
телом, а Солнце — возмущающим. В уравнениях движения не-
обходимо заменить гелиоцентрическую гравитационную постоян-
ную fS планетоцентрической гравитационной постоянной /яг,-, где
rrii — масса планеты Pi в единицах массы Солнца. Значения пла-
нетоцентрических гравитационных постоянных fmt даны в
табл. 25 вместе с соответствующими массами и экваториальными
радиусами планет.
Таблица 25
Планета
Солнце
Меркурий
Венера
Земля
Марс
Ю.питер
Сатурн
Уран
Нептун
Плутон
1/И1
1
6 120 000
408 539,5
332 951,3
3 088 000
1 047,39
3 500
22 869
18 889
4J0 000
ае, км
695 992
2 424
6 100
6 378,15
3412
71420
60 440
24 860
26 500
7 250
1т, а. е.3/суткиа
2,959122083-10,
4,835167-10" '
7,2431725-10"
8,887552-10" °
9,582649-10"''
2,825231-10 „
8,454635-10"°
1,293945-10"'
1,566585-10"'
7,397895-10"'
Ы, км31секг
1,32715445-10"
2,168553-10*
3,2485340- 105
3,986032- 105
4,297780-10*
1,267106-10е
3,791870-107
5,803292-10е
7,026072-106
3,317886-105
В работах Лаборатории реактивного движения (США) при-
няты значения экваториальных радиусов и масс больших планет
(и Солнца), приведенные в табл. 26.
В табл. 27, 28 приведены параметры гравитационных полей
Марса и Венеры («Маринер-9» и «Маринер-5») соответственно.
Табл. 29 содержит параметры, характеризующие форму и раз-
меры планет.
190 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.05
Таблица 26
Планета
Солнце
Меркурий
Венера
Земля *)
Марс
Юпитер
Сатурн
Уран
Нептун .
Плутон
ае, км
695 992,0
2 435,0 + 3
6 052,0 + 3
6 378,16
3 393,4 ±4
71 372,0
60 401,0
23 535,0
22 324,0
7016,0
•) В таблице указано значение 1/т для
1/т
1
5 983 000+25 000
408 522 + 3
328 900,1+0,3
3 098 700 ±100
1 047,3908 + 0,0074
3 499,2 + 0,4
22 930+6
19260+100
1812 000±40 000
системы Зрмля+Луна.
Таблица 27
/2
С22
•$2.2
/з
с»,
Значения коэффи-
циентоз ХЮ
196,4±0,6
-5,5±0,1
3,1 ±0,2
3,6±2,0
0,5±0,4
S,,
Сз2
5з2
Сзз
S33
Значения коэффи-
циентов XIIIs
2,6 ±0,5
-0,6±0,2
0,3±0,2
0,48±0,03
0,35±0,03
Таблица 28
С22
S22
Значения
коэффициентов ХЮ"
2,7±0,9
-0,1 ±0,6
0,5±0,7
Таблица 29
Меркурий
Венера
Марс
Юпитер
Сатурн
Уран
Нептун
ае [км)
2 432±7
6 052 ±6
3 402 ±8
70 850 ±100
60 000±240
25 400±280
24 300 ±450
а
¦ ¦ ¦
0,ОЮЗ±0,0033
0,0607 ±0,0020
0,1092±0,0057
0,028 ±0,016
• ¦ •
4.051
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ
191
Гравитационное поле и фигуру планеты можно характеризо-
вать следующими параметрами: динамическим сжатием /2, сжа-
тием эквивалентной (в смысле объема) эллипсоидальной по-
верхности равного потенциала а, экваториальным радиусом ае,
геометрическим сжатием ag = (ае — Ь)/ае. Их числовые значе-
ния для некоторых больших планет приведены в табл. 30 [77].
Таблица 30
Планета
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
1,
A 082,65+0,01) -10"""
A 948 + 2)-10 ,
A4,71+0,15) -10 ,
A6,67 + 0,03) -10"'
A3±1) - 10~з
E0+4)-10
а
298,247
191,2 + 0,7
15,6±0,1
9,8±0,1
21 ±2
49±3
ае {км)
6 378,16 ±0,02
3 402±8
70 850±100
60 000±240
25 400 + 280
24 300 + 450
298,25+0,05
97 ±25
16,5+0,4
10,9+0,4
40+15
49±9
Для вычисления гелиоцентрической эфемериды больших пла-
нет Солнечной системы в прямоугольных координатах, отнесен-
ных к экватору и равноденствию эпохи 1950,0 = JD 2433282,4234,
можно применить метод численного интегрирования дифферен-
циальных уравнений движения этих планет, воспользовавшись
для этой цели начальными значениями координат и компонент
скорости в эпоху 1949, дек. 30,0ET = JED 2433280,5; эти зна-
чения вместе с приводимыми в табл. 31 оскулирующими эле-
ментами планетных орбит определяют эфемериду DE 19, приме-
няемую в Лаборатории реактивного движения (JPL, США).
Значения х, у, z, а выражены в астрономических единицах,
х, у, z — в астрономических единицах в эфемеридные сутки,
е, i, й, со, Мо — в радианах, п — в радианах за эфемеридные
сутки. Справа от числового значения указан его порядок (на-
пример, —02 соответствует множителю 10~2).
Необходимо иметь в виду, что эфемерида DE 19 вычисляется
при значениях планетных масс, принятых в Системе астрономи-
ческих постоянных MAC 1964 г. [78].
При вычислении эфемерид малых планет и комет методом
совместного численного интегрирования дифференциальных
уравнений движения рассматриваемых малых планет (или ко-
мет) и возмущающих тел (больших планет Солнечной системы)
целесообразно воспользоваться начальными значениями коор-
динат и компонент скорости больших планет от Венеры до Плу-
тона, приведенными в табл. 32. Они отнесены к прямоугольной
системе отсчета, связанной с экватором и равноденствием эпохи
1950,0, с началом в барицентре Солнца и Меркурия. За эпоху
192
Ч. I, СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
(§4.0
Таблица 31
Экваториальные прямоугольные
координаты
х= 0,3439 2628 2595 0512
у= 0,45612086 7296 2349
г = —0,1092 5237 7672 6325
х = —0,8466 3252 4718 1976
у= 0,25614777 7129 3402
г= 0,1458 6762 7826 5551
*= 0,1429 7052 94718901
у = 0,6470 0406 9944 5343
2= 0,2824 8152 5073 4543
х = —0,1989 3793 1396 6423
у= 0,3113 2345 4293 3853
2 = 0,2659 4964 8941 4391
Барицентр
х = —0,1363613301100869
у= 0,8933 9775 6948 9210
2= 0,3874 5843 1572 1408
jc = —0,1732 0015 4902 0189
у = —0,2244 2676 7908 6503
2 = —0,9733 4185 6786 7504
х = —0,1369 8312 5671 4650
у= 0,84313716 17710496
2= 0,4238 3609 4908 1033
х = —0,7384 5892 9362 9874
у = —0,9477 3446 0757 8137
г = —0,4151 6538 4773 5353
х= 0,3349 3566 44617624
у = -0,3473 7659 9386 1919
z =-0,1572 1612 0308 8752
х= 0,5585 6549 6410 6917
у== 0,4962 2486 5918 9390
2= 0,1992 2660 7644 6181
Эклиптические элементы
Меркурий
00
-01
-01
-02
-01
-01
0 = 0,3870 97676143 4659
га = 0,7142 5062 8941 1173
6 = 0,2056 2139 2696 1776
/ = 0,1222 3790 41013027
й = 0,8331 9221 2035 1764
ш = U,v>u51 /122 ooob 47ob
Мо = 0,5416 5385 1667 6136
Венера
00
00
00
-01
-02
-02
0 = 0,7233 3519 4140 1882
« = 0,2796 2279 9327 9817
6 = 0,6810 9366 0405 9934
/ = 0,5923 9147 6374 4428
Q = 0,1330 5193 1376 6087
@ = 0,9562 7719 8582 3581
MQ = 0,5378 2134 9887 7672
системы Земля + Луна
00
00
00
-01
-02
-03
0 = 0,1000 0078 7236 0544
n = 0,1720 1921 9320 3717
6 = 0,1675 0114 1626 6023
/ = 0,3019 54351067 9661
Q= 0,5866 9905 6919 3158
to = 0,2198 0752 5929 5807
Ma = 0,6213 6054 9876 8146
Марс
01
00
00
-02
-02
-02
0 = 0,1523 7494 5726 3805
« = 0,9145 57816237 8094
6 = 0,9326 081021188317
/ = 0,3228 8222 5779 1756
й = 0,8581 8453 5514 8757
@ = 0,49915092 0674 7051
Mo = 0,2938 8519 6401 7474
Юпитер
01
01
01
-02
-02
-02
a = 0,5202 6553 8209 9465
re = 0,1450 2774 0969 2968
6 = 0,48910755 7695 3513
/ = 0,22810075 4232 1975
ii — 0,1744 6738 0279 8027
00 = 0,4777 3851 4538 7904
Mo = 0,5279 6468 2494 4107
00
-01
00
00
00
00
01
00
-01
-02
-01
01
00
01
01
-01
-01
-05
01
01
01
01
-02
-01
-01
00
01
01
01
-02
-01
-01
01
01
01
§ 4.05]
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 193
Продолжение табл. 31
Экваториальные прямоугольные
координаты
х = —0,8972 4944 5632 1996
« = 0,2279 7122 9499 0131
2= 0,1330 3683 2124 4373
х = —0,1858 2755 1290 4143
у = —0,4983 8513 7862 8318
г = —0,1980 2491 2780 6463
jc = —0,1002 9132 6963 7378
у = 0,1732 34919404 7683
2 = 0,7604 8360 5654 0355
х = -0,3955 2571 5130 4471
у = —0,3759 0074 7195 8835
z =-0,1088 4370 6981 7871
х = —0,2919 4267 7427 1409
у = -0,7719 2336 0132 2025
2 = -0,2427 2492 8084 7945
х= 0,8207 89831005 6175
у = —0,2772 0922 4647 0526
2==—0,1156 1171 1628 3100
х = -0,2623 1756 1603 1849
(/= 0,2056 1529 77812375
2= 0,1444 3690 2947 7839
х = -0,1315 7218 4319 3501
у = —0,2619 8366 1853 7051
2 = —0,4270 5125 4357 5085
Эклиптические элементы
Сатурн
01
01
01
-02
-02
—02
а = 0,9522 6887 3876 7056
я = 0,5854 6921 3211 8279
е = 0,5349 2699 3422 3929
i = 0,4345 2611 3823 3223
П = 0,1976 5298 1653 3096
и = 0,5883 0963 5241 1480
AfD= 0,1180 0954 0981 9556
Уран
01
02
01
—02
—03
-03
а = 0,1916 3718 8923 4575
га = 0,2050 5541 8127 4017
е = 0,4620 9970 2713 5565
г = 0,1347 3849 5921 9508
Q = 0,1287 3633 3315 9055
ш = 0,1703 6263 2661 5070
Мо = 0,5005 8317 36117874
Нептун
02
01
01
—03
—02
-02
а = 0,3006 8940 4016 5808
га = 0,1043 3151 1142 8949
е = 0,7942 6832 7095 8694
i = 0,3098 3362 6924 2442
Q = 0,2291 3580 3446 3485
в =0,4587 6871 3081 3981
Мо = 0,2809 7734 6432 2865
Плутон
02
02
02
-02
—02
-03
а = 0,3937 3641 3530 0176
га = 0,6962 6357 0829 8997
е = 0,2488 0330 5362 3924
i = 0,2996 7069 7085 9694
Q = 0,1914 3375 5010 2258
в = 0,1995 5817 5268 9690
Л10 =0,5265 3021 0022 1278
01
-03
-01
-01
01
01
01
02
-03
-01
-01
01
01
01
02
-03
-02
-01
01
01
01
02
-04
00
00
01
01
01
оскуляции выбран момент JED 2430000,5 A941, янв. 6, 0 ЕТ), ко*
ординаты х, у, z выражены в астрономических единицах, компо-
ненты скорости х, у, г — в астрономических единицах за 40 эфе-
меридных суток. Множители ци, зависящие от масс rrih планет
и интервала интегрирования w и определяемые формулой
"!й- , k = 0,0172020989500 ....
заданы в табл. 33 [79].
7 Под ред. Г, Н, Дубошина
194 4, t. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ Г§ 4.05
Таблица 32
Венера
Земля+Луна
Марс
Юпитер
jc—0,51139 42959
(/-0,47809 76854
2—0,18308 74810
i+0,56637 68182
(/—0,51208 71589
z-0,26649 78745
jc—0,26149 89917
(/+0,86962 37687
2+0,37716 52157
i-0,67465 73183
(/—0,17009 48008
z-0,07377 43192 0
x—1,29547 7589
(/-0,84141 36141
z—0,35135 13446
x+0,34400 42605
y—0,36966 74843
z-0,17893 73952
x+3,42947 2643
(/+3,35386 9719
z+1,35494 8917
ж-0,22286 47739
«/+0,20227 68826
z+0,09223 05178 0
Сатурн
Уран
Нептун
Плутон
jc+6,64145 3441
Н-5,97156 9844
2+2,18231 5015
i-0,16622 88590
у+0,14627 12350
z+0,06765 63647 0
х+\ 1,26304 125
(/+14,69525 888
2+ 6,27960 5833
х- 0,13013 08165
(/+ 0,07588 05177 9
z+ 0,03508 96779 2
х—30,15522 934
(/+ 1,65700 0860
2+ 1,43785 8110
ж— 0,0096195989 84
у— 0,11506 57040
г— 0,04688 87522 6
х—21,12383780
у+28,44651 101
z+15,38826 655
х— 0,07074 48500 7
(/— 0,08655 92722 0
г— 0,00594 68507 13
Таблица 33
Планеты
Меркурий
Венера
Земля + Луна
Марс
Юпитер
Сатурн
Уран
Нептун
Плутон
то/т
6 000 000
408 000
329 390
3 093 500
1 047,355
3 501,6
22 869
19314
360 000
1,16044 00324 925-06
1,43738 28387 533-06
1,53049 79255 114-07
4,52052 58318 044-04
1,35212 34100 324-04
2,07031 14839 169-05
2,45138 00002 948-05
1,31516 53701582—06
Начальные значения прямоугольных координат и компонент
скорости для совместного численного интегрирования дифферен-
циальных уравнений движения внешних планет Солнечной
4.06)
ГЛ. 4, АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ
195
системы Юпитер — Плутон в экваториальной системе отсчета
с началом в барицентре Солнца и внутренних планет (Мерку-
рий— Марс) заданы в табл. 34. В ней координаты выражены
Таблица 34
Юпитер
Сатурн
Уран
jc+3,42947 41518 908
у+3,35386 95971 068
z+1,35494 90171 466
ж—0,22286 42281 7945
?+0,20227 87133 1527
z+0,09223 14175 6018
х+6,64145 54254 92
(/+5,97156 95787 84
z+2,18231 49972 76
х—0,16622 83105 3739
у+0,14627 30891 2448
z+0,06765 72853 1701
*+11,26304 37207 37
(/+14,69525 76793 51
z+ 6,27960 52506 73
Уран
Нептун
Плутон
к- 0,13013 02676 6296
у+ 0,07588 24087 8556
z+ 0,03509 06129 1124
х—30,15522 68759 35
(/+ 1,65699 96640 44
z+ 1,43785 75272 05
х— 0,00961 90501 6700
у— 0,11506 38130 4315
z— 0,04688 78172 6993
х—21,12383 53379 49
(/+28,44650 98142 06
z+15,38826 59679 25
х— 0,07074 43012 4870
у— 0,08655 73812 1042
z— 0,00594 59157 2372
в астрономических единицах, а компоненты скорости в астроно-
мических единицах за 40 эфемеридных суток. При этом масса
Солнца т0 увеличена на сумму масс внутренних планет, так что
т= 1,00000597682,
т. е. ц = 0,47346236303935. Начальная эпоха: JED 2430000,5.
В случае совместного численного интегрирования уравнений
движения больших планет от Венеры до Плутона масса Солнца
увеличена на величину массы Меркурия; поэтому ц =
= 0,47345961216687.
§ 4.06. Астродинамические постоянные, связанные с Землей
Внешний гравитационный потенциал Земли U может быть
представлен в следующем виде (см. ч. VI, гл. 1):
п==2 т=0
согласно рекомендации MAC [37].
cos
A.4.01)
196 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.06
Часто потенциал И записывают в другой форме, выделяя
зональные гармоники Jn = — Сп0:
(тУcos mA+5»«sin mA) • (!-4-02)
n= 2 m=»l J
В формулах A.4.01) и A.4.02) г означает геоцентрический ра-
диус-вектор объекта, К и ф' — его географическую долготу и гео-
центрическую широту, ае — экваториальный радиус земного сфе-
роида, fE — геоцентрическую гравитационную постоянную. Ко-
эффициенты Рпт и Рп — присоединенные функции Лежандра и
полиномы Лежандра (см. ч. VI, гл. 1 и ч. IV, гл. 5). Коэффи-
циенты разложений A.4.01) и A.4.02) потенциала U опреде-
ляются по результатам обработки и анализа наблюдений ИСЗ.
Их численные значения приведены в ч. VI, гл. 1.
В настоящее время для характеристики формы Земли принят
референц-эллипсоид MAC, заменивший международный земной
сфероид Хэйфорда; параметры референц-эллипсоида MAC в со-
четании с коэффициентом формы Земли (коэффициентом второй
гармоники /2) и значением угловой скорости вращения Земли
образуют международную систему относимости 1967 года, ут-
вержденную на XIV Генеральной ассамблее Международного
геодезического и геофизического союза (МГГС) в Люцерне:
ае==6 378 160 м,
/2= 10 827- 10~7,
f? = 398 603- 109 м3-сек~2,
@ = 7,2921151467- 10~5 сек~1
(см. §4.02).
Отсюда вытекают следующие значения производных пара-
метров:
а = 298,2471671,
Ь = 6 356 774,516 м,
е2 = 0,006694605336,
е'2 = 0,006739725136,
где а — сжатие земного сфероида, Ь — полярная полуось, е и
е' — соответственно эксцентриситет меридианного сечения и вто-
рой эксцентриситет.
§ 4.06] ГЛ. 4, АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 197
Ускорения силы тяжести на экваторе ge и на полюсе gp
равны
?, = 978,0318455 см ¦ секг\ gp = 983,2177280 см ¦ сек~2.
Значение ускорения силы тяжести g в точке с астрономической
широтой ф определяется формулой
g = ge (I + 0,00530236578 sin2 ср — 0,00000584988 sin2 2ф +
+ 0,00000003180 sin!<psln22<p).
Анализ результатов обработки наблюдений ИСЗ и космиче-
ских зондов, проведенный различными исследователями в разное
время, дал следующие числовые значения геоцентрической гра-
витационной постоянной fE в км3-сек-2:
398 603,20 ± 4,0 398 601,22 ±0,4
398 600,49 ± 4,1 398 601,27 ±0,8
398 601,87 ± 13,3 398601,11 ±0,8
398 599,20 ± 13.2 398 601,19 ± 1,0
398 600.61 ± 1,1 398 601,83 ± 1,4
398 601,28 ± 1,5 398 601,49 ±0,4
398 601,14+0,7 398 601,86 =fc 1,8
398 601,42 ± 0,6
Первое из приведенных значений определено В. М. Каула
в 1961 г., последующие значения были получены по наблюде-
ниям космических зондов серий «Рейнджер», «Сервейор» и «Ма-
ринер», а также ИСЛ серии «Лунар Орбитер», запускавшихся
в 1962—1970 гг.
В работах некоторых исследователей в основу обработки на-
блюдений ИСЗ положена установленная Иреной Фишер (США)
астрогеодезическая мировая система, в которой
ае = 6 378 166 л*, а =1/298,3.
Другие определения дают для экваториального радиуса ае Земли
и ее сжатия а следующие значения:
ае а-1
6 378 270 ±100 Херрик и др., 1958
6 378 175 ± 20 Йепли и др., 1958
6 378 163 ±21 Каула, 1961
6 378 160 298,25 Каула, 1964
6 378 150 298,3 И. Фишер, 1968
6 378 142 298,255 Вейс, 1967
При радиолокации небесных объектов считают скорость
распространения радиоволн совпадающей со скоростью света
198 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4-07
в вакууме, которая, по определениям Фрума, равна
с = 299 792,5 км-сек-1.
По новейшим определениям, выполненным Ивенсоном
(К. L. Evenson) при помощи гелиево-неодимиевого лазера, ско-
рость света в вакууме равна
с = B99792456,2 ± 1,1) н\сек [80].
Скорость суточного вращения Земли со определяется фор-
мулой
360 л _,
ffl~ 86164,09892 + 0,001647" гРаа ' сек >
где Т — промежуток времени от основной эпохи 1900, янв.
0,5 ЕТ = JD 2415020,0 до рассматриваемого момента времени t,
выраженный в юлианских столетиях.
§ 4.07. Астродинамические постоянные, связанные с Луной
Движение объектов в поле тяготения Луны определяется си-
ловой функцией притяжения Луны, имеющей следующее выра-
жение в луноцентрической селеноэкваториальной системе коор-
динат:
Щ(г / А + В + С — 3/\
С/с = U(rL, Я, р) = —-|1-| ; I. A.4.03)
rL \ ZM^rl )
Формулу A.4.03) представляют также в следующем виде:
U {ги Л, р) =
A.4.04)
Здесь rL означает луноцентрический радиус-вектор объекта
(искусственного спутника Луны, ИСЛ), К и р — селенографиче-
скую долготу и широту подспутниковой точки, А, В, С — глав-
ные центральные моменты инерции Луны, с которыми связан
момент инерции Луны относительно направления луноцентриче-
ского радиуса rL ИСЛ, а именно:
I = А12 + Вт? + Сп2. A.4.05)
Направляющие косинусы /, т, п луноцентрического радиуса-
вектора rL могут быть выражены через экваториальные эле-
S 4.07] гл. 4. Астрономические постоянные ig§
менты i, ш и Q орбиты ИСЛ и через аргумент широты и ИСЛ
посредством формул
/ = cos и cos Q — sin и sin Q cos /,
m = cos и sin Я -4- sin и cos Q cos i,
« = sin «sin/, * A-4-06)
U = V -\- @.
Луноцентрическая гравитационная постоянная /Ms связана
с геоцентрической гравитационной постоянной fE соотношением
= \ifE, [I-1 =81,30. A.4.07)
Если принять ц-1 = 81,3015 ± 0,0033, fM^ = 4,9027779 X
X Ю3 км3-сек'2, массу Земли Е = 5,975-1027 г и средний радиус
Луны R& = 1738,09 км, то при значениях а, Ь, с полуосей эллип-
соида Луны а = 1738,57 км, b = 1738,21 км, с = 1737,49 км
формулы
Л = -g-Mj (Ь2-(-с2), Б==-д-Л1([ (с2 +а2), С = -^М^ (а2-\-Ь2) A.4.08)
дают следующие значения главных центральных моментов инер-
ции Луны:
Л = 0,88781798 • 1035 кг ¦ м2, 5 = 0,88800195 ¦ 1035 кг ¦ м\
С = 0,88836978- 1035 кг ¦ м2.
Коэффициенты / и L определяются следующими формулами:
g 2С А — В 3 я2-Ь62 2с2
4 MrrRl 20 R\
L
4 Aljflfc 20 Я'с
и равны
/ = 0,00031066, L = 0,000062148.
Современные определения числовых значений селеноцентри-
ческой гравитационной постоянной fMK и отношения масс Земли
и Луны \л, выполненные на основе анализа траекторных изме-
рений космических зондов и искусственных спутников Луны,
представлены в табл. 35 [81].
Среднее геоцентрическое расстояние Луны по радиолока-*
ционным измерениям Йепли и др. равно
att= 384400,2 ± 1,1 км.
200 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.07
Таблица 35
Космический зонд
Рейнджер 6
8
9
6-9
Сервейор 1
3
4
5
6
7
Лунар Орбитер 1
1-5
1-5
Маринер 2
4
5
Пионер 6
7
6,7
Маринер 6
7
Пионер 8
9
Венера 4—7
4
5
6
7
5,6
5
6
4902,66 ±0,19
4902,54+0,17
4902,63±0,12
4902,71 ±0,30
4902,63±0,07
4902,65+0,24
4902,64 + 0,25
4902,63 ±0,25
4902,63±0,24
4902,64+0,24
4902,64 ±0,24
4902,66 ±0,19
4902,64 ±0,11
4902,73
4902,78±0,05
4902,75±0,12
4902,716 ±0,10
4902,806
4902,702
4902,638
4902,808
4902,682
4902,717
4902,642
81,3030
81,3050
81,3035
81,3022
81,3035
81,3032
81,3034
81,3035
81,3035
81,3034
81,3034
81,3030
81,3001 ±0,0013
81,3015±0,0017
81,3013±0,0017
81,3005±0,0007
81,3021 ±0,0004
81,3016±0,0020
81,3005±0,0002
81,3005±0,0002
81,3008 ±0,0001
81,3020±0,0020
81,3005
81,3006
81,3022
81,3033
81,3002
81,3026
81,3018
81,3033
i 4.07]
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ
201
А. Шапиро из Военно-морской лаборатории NRL (США) по-
лучил для радиуса Луны, направленного в сторону Земли, зна-
чение
Я С = 1737 930 ± 150 м.
Для выражения в км геоцентрических расстояний Луны, пу-
бликуемых в эфемеридах Луны и вычисленных на основании
улучшенной эфемериды Луны (/= 0, см. стр. 165), необходимо
умножить их значения из ежегодников на величину
q = 86,315745 (/? + fM^)'h = 6378,3255 км.
Силовую функцию притяжения Луны можно представить
также в следующем виде:
Шй Г
—L ) Рпт (sin p) {Cnm cos тЯ+ Srtm sin mX)
в соответствии с рекомендациями MAC [37].
При обработке наблюдений искусственных спутников Луны
Lunar Orbiter I, III и IV, выполненной в США Толсоном и Гап-
цынским [59], были приняты fMc =4902,64 км3/сек2, Rц =
= 1738,09 км и для коэффициентов Спт и 5nm разложения U g
получены числовые значения, приведенные в табл. 36 вместе
с их вероятными ошибками.
Таблица 36
л
2
3
4
5
т
0
1
2
0
1
2
3
0
1
2
3
4
0
1
2
3
4
5
с„т-10<
—2,0596±0,141
-0,1661 ±0,051
0,2042±0,029
-0,3773±0,180
0,3012 ±0,048
0,1294±0,028
0,0317±0,015
0,0798±0,128
-0,1560±0,036
0,0011 ±0,010
—0,0082±0,008
—0,0007±0,003
—0,5505±0,171
—0,0385±0,037
0,0342±0,009
—0,0071 ±0,002
—0,0008±0,001
—0,0003 ±0,0002
0,0080±0,039
—0,0342±0,025
0,1762 ±0.053
-0,0147±0,033
—0,0043±0,018
0,0391 ±0,028
0,0072±0,013
—0,0001 ±0,006
0,0011 ±0,003
0,08?9±0,031
—0,0203±0,008
—0,0(Г-8 ±0,002
—0,0013±0,001
0,0003±0,0002
202
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
[§ 4.07
По данным траекторных измерений всех ИСЛ серии Лунар
Орбитер (Lunar Orbiter I — V) Лорелл построил несколько мо-
делей разложения гравитационного поля Луны по сферическим
гармоникам, полагая Щ% =*¦ 4902,78 для различных комбинаций
этих данных. Значения Спт и Snm, а также нормированных ко-
эффициентов Спт и Snm, связанных с ненормированными Спт и
Snm соотношением вида
_ / {п + т)\ Г
даны в табл. 37 [82].
Таблица 37
хю*
^20
Q
s22
с22
С зо
Сч
s32
S33
С33
с40
stl
С 42
stl
Сц
Cso
" 60
Ненормированные значения
LaRC
—2,0480
-0,0651
—0,1398
—0,0375
0,2445
0,9049
0,1555
0,2358
0,1339
—0,0384
-0,0073
0,0189
0,2055
—0,0930
-0,0714
0,0293
0,0223
0,0065
0,0107
-0,0034
—0,0002
JPL-1
—2,0263
0,0150
—0,0878
0,1310
0,2191
—0,2223
0,0740
0,3636
-0,0200
-0,0257
-0,0496
—0,0265
0,0941
0,0564
—0,1237
0,0051
0,0361
—0,0277
0,0164
0,0079
0,0091
-0,1614
-0,1089
0,1734
-0,2011
JPL-2
-1,9189
0,0221
0,0430
-0,0596
0,1123
-0,1483
0,1036
0,3449
0,0277
0,0003
-0,0308
0,0353
0,1703
0,0755
-0,1063
0,0009
0,0353
—0,0009
0,0232
—0,0031
—0,0058
—0,0123
-0,0808
0,3178
-0,1475
JPL-3
— 1,9564
0,1290
—0,1279
0,1014
0,1587
—0,1299
0,0948
0,3493
0,0283
0,0076
—0,0447
0,0284
0,1230
0,1099
-0,1607
0,0012
0,0265
0,0148
0,0027
0,0001
0,0039
-0,0365
—0,0978
0,2603
—0,0905
Нормированные значения
JPL-1
—0,9062
0,0116
—0,0680
0,2030
0,3394
—0,0840
0,0685
0,3366
—0,0585
—0,0753
—0,3558
—0,1899
0,0314
0,0595
-0,1303
0,0227
0,1615
—0,4626
0,2736
0,0332
0,0383
—0,0487
—0,0302
0,0448
—0,0488
JPL-2
-0,8582
0,0171
0,0333
—0,0923
0,1739
-0,0560
0,0959
0,3193
0,0810
0,0008
—0,2209
0,2533
0,0568
0,0796
-0,1120
0,0042
-0,1580
—0,0153
0,3890
—0,0132
—0,0246
—0,0037
—0,0224
0,0821
—0,0358
JPL-3
-0,8749
0,0999
-0,0990
0,1571
0,2458
-0,0491
0,0877
0,3233
0,0829
0,0221
-0,3205
0,2040
0,0410
0,1159
-0,1694
0,0054
0,1185
0,2480
0.04S8
0,0002
0,0163
—0,0110
-0,0271
0,0672
-0,0219
Значения коэффициентов Cvm и Snm, помещенные в столбце
LaRC, получены по наблюдениям первых четырех ИСЛ Lunar
Orbiter в Научно-исследовательском центре НАСА в Лэнгли.
Анализ отклонений лучевых скоростей ИСЛ Lunar Orbiter от
вычисленных значений, полученных с учетом возмущений от
S 4.08]
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ
203
Земли, Солнца, Венеры, Марса, Юпитера и Сатурна в предпо-
ложении трехосности фигуры Луны, позволил выделить локаль-
ные аномалии гравитационного поля Луны, связанные с опре-
деленными областями лунной поверхности. Предполагается, что
эти (положительные) аномалии обусловлены концентрациями
масс малой протяженности, сосредоточенными в слоях Луны на
глубине от 25 до 125 км и получившими название «масконов».
Селенографические координаты масконов, а также значения
аномалий kg' силы тяжести с оценками избытка массы Am при-
ведены в табл. 38 [81].
Таблица 38
Маскон
Маге Imbrinum
Mare Serenitatis
Mare Crisium
Mare Nectaris
Sinus Aestum
Mare Humorum
Mare Humboldtianum
Mare Oriental e
Mare Smythii
Без названия
Без названия
Grimaldi
Sinus Iridum
Координаты центра
P
38°
28
16
-16
10
-25
57
-20
- 4
— 7
-17
- 6
45
Я.
-18°
18
58
34
— 8
-40
82
-95
85
27
70
-68
-31
Аномалия
Ag', см/сек1
0,17
0,17
0,10
0,09
0,06
0,05
0,04
0,04
0,04
0,04
0,03
0,02
0,07
Избыток
массы
Am. 10" г
1,50
1,50
0,75
0,70
0,45
0,35
0,30
0,30
0,30
0,30
0,22
0,15
-0,50
§ 4.08. Либрация Луны
Вращение Луны в первом приближении описывается тремя
эмпирическими законами, открытыми в 1693 г. и носящими имя
Кассини. Законы Кассини можно сформулировать следую-
щим образом.
1. Луна вращается равномерно вокруг оси, остающейся не-
подвижной в теле Луны, причем период вращения Луны совпа~
дает с периодом ее обращения по орбите вокруг Земли.
2. Плоскость экватора Луны сохраняет постоянный наклон
к эклиптике.
3. Восходящий узел экватора Луны на эклиптике всегда со-
впадает с нисходящим узлом орбиты Луны на эклиптике.
Экватор Луны, о котором идет речь в законах Кассини, на-
зывается средним экватором Луны. Экватор Луны, в положении
которого учтена физическая либрация в наклоне и узле, назы-
вается истинным экватором Луны.
204 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ [§ 4.08
Осевое вращение Луны с равномерной угловой скоростью и
неравномерное, согласно закону площадей, движение Луны по
геоцентрической орбите определяют для земного наблюдателя
кажущиеся колебания Луны в восточно-западном направ-
лении. Это явление называется оптической (геометрической)
либрацией Луны по долготе. Вследствие наклона экватора
Луны к лунной орбите возникают кажущиеся колебания
Луны в северно-южном направлении; эти колебания называются
оптической (геометрической) либрацией Луны по широте. Опти-
ческая либрация по широте равна селенографической широте
земного наблюдателя, отсчитываемой от среднего экватора
Луны; ее геоцентрическое значение равно Ь, топоцентрическое
значение — Ь'. Если оптическая либрация по долготе есть / (гео-
центрическое значение, отличное от топоцентрического /'), то
селенографическая долгота земного наблюдателя равна I. Гео-
центрическая оптическая либрация по широте Ь обращается
в нуль, когда Луна проходит через узлы орбиты; поэтому период
этой либрации равен драконическому месяцу в 27d,21222, ампли-
туда 6° 40'. Геоцентрическая либрация по долготе I обращается
в нуль, когда Луна находится в окрестности перигея и апогея
(в сизигиях); ее средний период равен аномалистическому ме-
сяцу в 27d,55455 и амплитуда колеблется от 4°,8 до 8°,1 вслед-
ствие изменений элементов орбиты Луны.
Если К', р' — истинные топоцентрические эклиптические ко-
ординаты Луны, то топоцентрическая оптическая либрация по
долготе V и по широте Ь' может быть вычислена по точным
формулам
cos (([ — Q + /') cos Ь' = cos (V — Q — N) cos P',
sin (([ — Q + /') cos b' =
= sin (Я' — Q — N) cos p' cos / — sin p' sin /,
sin V = — sin (X' — Q— N) cos p' sin / — sin p' cos /,
A.4.10)
в которых N = &ty -\- dip — нутация в долготе, Q — долгота вос-
ходящего узла орбиты Луны на эклиптике, / — наклон эква-
тора Луны к эклиптике.
Если взять геоцентрические эклиптические координаты Лу-
ны X, р, то формулы A.4.10) дадут геоцентрическую оптическую
либрацию по долготе / и по широте Ь. Приближенные формулы
для оптической либрации Луны могут быть выведены из
A.4.10); они приведены в астрономических ежегодниках (см.
например, [25]).
Перемещение земного наблюдателя, обусловленное суточ-
ным вращением Земли, вызывает весьма малую суточную, или
параллактическую либрацию Луны,
S 4.08] ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 205
Отклонение реального вращательного движения Луны от
вращения, характеризуемого законами Кассини, обусловлено
явлением, порожденным колебаниями Луны относительно неко-
торого среднего положения и называемым физической либрацией
Луны. Амплитуда наибольшего члена физической либрации не
превосходит нескольких дуговых минут.
Если рассмотреть вращение Луны как движение системы
прямоугольных координат XY2, ось LX которой направлена по
первому радиусу Луны, ось L7 — к востоку от LX на 90° и
ось L2 — в северный полюс Луны, относительно системы эклип-
тических прямоугольных координат XYZ, то взаимное располо-
жение обеих систем в каждый момент времени можно опреде-
лить углами Эйлера ф, 8, -ф, имеющими следующий смысл:
Ф — угловое расстояние положительного направления оси LX
от нисходящего узла экватора Луны на эклиптике,
В — наклон экватора Луны к эклиптике,
ij) — долгота нисходящего узла экватора Луны на эклиптике.
Законы Кассини можно математически выразить через углы
Эйлера в форме
ф = 180° + ([ — 1|з, 9 = /, i|3 = Q. A.4.11)
Действительное вращение Луны описывается «возмущен-
ными» углами Эйлера, т. е. для точного описания реального
движения необходимо ввести возмущения — функции времени т,
р, а; тогда
ф= 180°+ <t +т — ф — а, 8 = / + р, i]j = Q + o A.4.12)
суть выражения для «возмущенных» углов Эйлера.
Величина т называется физической либрацией Луны по дол*
готе, р — физической либрацией наклона, в — физической либ-
рацией в узле.
Решение уравнений Эйлера, составленных в предположении,
что Луна есть абсолютно твердое тело и величины т, р, а —
малые первого порядка, а именно:
A.4.13)
г + ypq = 3M®yR 5xy,
в которых р, q, r — компоненты вектора угловой скорости вра-
щения Луны по осям X, 7, 2, а, |3, у — функции главных мо-
ментов инерции относительно осей X, ?, 2, М® — масса Земли,
R — геоцентрическое расстояние Луны, х, у, z — луноцентри-
ческие геоэкваториальные координаты Земли, дает выражения
для т, р, а в виде разложений в ряды периодических членов,
206 Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРЙДНАЯ АСТРОНОМИЯ [§ 4.08
аргументы которых построены в виде комбинаций фундамен-
тальных аргументов теории Луны Брауна.
Таким образом, эти разложения имеют вид
т= X ai sin hi,
Р= Е bt cos ft, | A.4.14)
a sin/= E ci sin hit
i
где аргументы А,- определяются равенствами типа
fii = kl -\- k'l' -\- mF -\- nD A.4.15)
(k, k', m, n, = 0, ±1, ±2, ...),
а коэффициенты а,-, Ь,-, cs зависят от постоянной физической
либрации f, равной отношению величин аир:
В «Астрономическом Ежегоднике СССР» принято значение
/ = 0,73; если принять / = 0,633 и наклон / = Г 32' 04", то для
ос, р, у получим
а = (С — В)/А = 0,0003984, "j
Р = (С - А)/В = 0,0006294, I A.4.17)
Y = (В -А)/С = 0,0002310, J
что соответствует значениям главных моментов инерции Луны В
и С:
В = 1,0002311 Л и С=1,0006295Л.
В последние годы обработка результатов лазерной локации
Луны, полученных при помощи лазерных уголковых отражате-
лей, установленных на лунной поверхности экипажами косми-
ческих кораблей серии «Аполлон» (США), привела к необходи-
мости уточнения ряда параметров фигуры и вращательного
движения, т. е. физической либрации Луны. Некоторые из этих
параметров, а также коэффициенты гармоник третьего и чет-
вертого порядков разложения гравитационного поля Луны, оп-
ределенные на основе анализа траекторных измерений искус-
ственных спутников Луны типа Lunar Orbiter, приведены
в табл. 39 [67]. Коэффициенты разложений компонент физиче-
ской либрации Луны и аргументы, соответствующие указанным
значениям р и у и учету влияния вторых гармоник в фигуре
Луны, заданы табл. 40 [67].
5 4.08]
ГЛ. 4. АСТРОНОМИЧЕСКИЕ ПОСТОЯННЫЕ 207
Таблица 39
Величина
ц-1
р
Y
Значение
0,40
81,30
0,0006306
0,0002264
Величина
Сза
Сц, S3i
Сз2> 5з2
C.i3i 5зз
с<0
С4=, S4.
С4З1 54з
C44i Sti
Значение Х10'
3,9
28,6 8,8
6,0 1,8
2,7 -1,4
23,3
-11,1 -2,61
—2,48 —3,28
—0,17 -0,45
—0,25 0,27
Примечание
Значения гармо-
ник С20, С2и
S2\, ... см. в
табл. 36
(стр. 201)
Таблица 40
Аргументы
1
0
2
0
1
1
1
0
1
2
2
1
1
0
0
1
1
0
1
0
0
2
I
2
0
0
0
0
0
0
0
1
0
0
0
0
1
1
0
1
-1
1
0
0
2
-1
—1
-2
—2
2
—2
2
2
—2
0
—2
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
D
0
0
0
-2
-2
—2
0
1
0
0
n
—2
-2
0
1
0
0
1
-1
2
0
о
j
—2
P
(cos)
n
17,88
-11,03
0,03
-2,64
0,54
—0,13
-90,43
0,12
-0,64
0,10
—0,09
— 1,86
-0,05
0,17
0,10
-0,12
-0,10
-0,17
0,00
-0,05
0,00
Коэффициента
a sin /
(sin)
ft
-17,89
-11,06
-0,04
-2,39
0,54
0,13
-92,39
-0,12
—0,64
0,03
—0,46
2,45
0,07
0,09
0,11
-0,11
—0,12
-0,17
0,00
—0,20
0,00
X
(sin)
It
-0,33
—0,03
-38,61
2,01
0,01
0,00
-16,55
0,00
0,00
—0,44
8,89
4,07
0,22
90,30
0,08
0,10
-0,15
0,00
—3,39
-0,50
0,23
0,60
-1.21
0,44
Учет гармоник третьего и четвертого порядков в разложении
гравитационного потенциала Луны дает следующие члены
в разложениях компонент физической либрации Луны [67]
(табл. 41).
208
Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
Таблица 41
Аргументы
1
1
0
1
2
1
0
0
1'
0
0
0
0
0
1
0
F
-1
1
—2
—2
0
0
1
D
0
0
0
0
0
0
0
Коэффициенты
Р
(cos)
//
-0,03
0,25
-0,24
0,48
(sin)
/I
-0,03
-74,72
0,23
0,26
a sin /
(cos)
//
-0,03
74,72
-0,22
-0,26
(sin)
//
0,03
0,25
0,24
0,49
t
(cos)
f/
-10,41
0,91
-0,04
0,02
(sin)
//
-1,55
-0,01
0,90
-0,08
0,50
ЛИТЕРАТУРА К ЧАСТИ I
1. Блажко С. Н., Курс сферической астрономии, изд. 2-е, Гостехиздат,
1954.
2. Р е к е г L., Tabulky galaktickych smerovych kosinu, Astron. Ustav CSAV,
Publikace с 48, Praha, 1964.
3. Torgard Ingrid, Lund Observatory Table for the Conversion of Equa-
torial into Galactic Coordinates Based on the Galactic Pole R. A. 12h49m,
Decl. +27°,4 A950,0), Ann. Observ. of Lund, Nos. 15, 16, 17, 1961.
4. Danjon A., Astronomie Generale, Sennac. Paris, 1952.
5. В е н т ц е л ь М. К., Сферическая астрономия, М., 1952.
6. 3 а г р е б и н Д. В., Введение в астрометрию, М., 1966.
7. Казаков С. А., Курс сферической астрономии, М., 1940.
8. Newcomb S. A., A Compendium on Spherical Astronomy, Washington,
1906.
9. W о о 1 а г d E. W., С 1 e m e n с e G. M., Spherical Astronomy, Academic
Press, New York, 1966.
10. А н г е л о в С. А., Шестизначные таблицы тригонометрических функций
с аргументом, выраженным в часовой мере [0"(ls) 12h], M., 1957.
11. Жонголович И. Д., Саба нин а Т. Б., Таблицы натуральных значе-
ний tg(x/2) и tg2(x/2) с пятью значащими цифрами, Изд-во АН СССР,
Л., 1963.
12. 3 а г р е б и н Д. В., Семизначные таблицы натуральных значений триго-
13.
нометрических функций для каждой сотой града, М., 1966.
Хренов Л. С., Семизначные таблицы тригонометрических функций
[(П10"K60°], М., 1956.
14. X р е н о в Л. С, Восьмизначные таблицы тригонометрических функций,
М., 1967.
15. Comrie L. N., Seven-Figure Trigonometric Tables for Every Second of
Time, London, 1939.
16. Natural Sines and Cosines to Eight Decimal Places, LI. S. Coast and Geode-
tic Survey. Spec. Publication, No. 231, 1942.
17. P e 1 e r s J., Siebenstellige Werte der trigonometrischen Funktionen von
Tausendstel zu Tausendstel des Neugrades, Berlin, 1941.
18. Peters J., Achtstellige Taftln der trigonometrischen Funktionen fur.jede
Sexagesimalsekunde des Quadrantan, Berlin, 1939.
ЛИТЕРАТУРА К ЧАСТИ I 209
19. Roussilhe Н., В г a n d i с о и г t M., Tables а 8 decimales des valeurfc
naturelles des sinus, cosinus et tangentes dans le systeme decimal de cen-
tigrade en centigrade de 0 a 100 grades, Paris, 1933.
20. S a 1 z e r H. E., L e v i n e N., Tables of Sines and Cosines to Ten Decimal
Places at Thousandths of a Degree, Pergamon Press, New York, 1962.
21. Бурунова Н. М., Справочник по математическим таблицам. Дополне-
ние № 1, M., 1959.
22. Л е б е д е в А. В., Федорова Р. М., Справочник по математическим
таблицам, М, 1956.
23. Da vies Н. Т., Fisher V е г a, A Bibliography and Index of Mathemati-
¦ cal Tables, Evanston, 111., 1949.
24. О h 1 s s о п J., Lund Observatory Tables for the Conversion of Equatorial
Coordinates into Galactic Coordinates Based on the Galactic Pole R. A.
12h40m, Decl. +28° A900,0), Ann. Observ. of Lund, 3, 1932.
25. Астрономический Ежегодник СССР. Объяснение.
26. V а и с о u 1 е u r s de G., Icarus 3, 236, 1964.
27. A s h b г о о k J., Astron. J. 58, 145, 1953.
28. E s с о b a 1 P. R., Methods of Orbit Determination, Wiley & Sons, London,
1965.
29. M о r r i s о n Berenice L., U. S. Naval Observ. Circular, Nos. 92, 94,
Washington, 1964.
30. Чикан OB Ю. А., Тр. Городск. астрон. обсерв. Казанск. ун-та 35, 1968.
31. Идельсон Н. И., Редукционные вычисления в астрономии. Приложе-
ние к Астрономическому Ежегоднику СССР на 1941 год.
32. Peters J., Prazessionstafeln fur das Aquinoktium 1950,0, Veroff. des Ast-
ron. Rechen-Inst. zu Berlin-Dahlem, Nr. 50, 1934.
33. Peters J., Tafeln zur Berechnung der jahrlichen Prazes&ion in Rectascen-
sion fur Aquinoktium 1950,0, Veroff. des Astron. Rechen-Inst. zu Berlin-
Dahlem, Nr., 51, 1934.
34. W о о 1 a r d E. W., Theory of the Rotation of the Earth Around Its Center
of Mass, Astron. Papers 15, part I, Washington, 1953 [есть русский пере-
вод: Э. Вулард, Теория вращения Земли вокруг центра масс, М., 19631.
35. В a u s с h i n g e r J., Tafeln zur theoretischen Astronomie, 2. Auflage, Leip-
zig, 1934.
36. Explanatory Supplement to the Astronomical Ephemeris and the American
Ephemeris & Nautical Almanac, London, 1961.
37. Trans, of the I. A. U., vol. XII B, 591, 1966.
38. Куликов Д. К-, Об учете аберрации планет, Астрон. ж. 36, 2, 340, 1959.
39. S с о 11 F. P., Astron. J., 69, 372, 1964.
40. Д у б я г о А. Д., Определение орбит, Гостехиздат, 1949.
41. Dinulescu N. I., Refractia astronomica, Bucuresti, 1967.
42. G a r f i n k e 1 В., Astron. J. 50, 169, 1944.
43. Kramp C, Analyse des refractions astronomiques et terrestres, Stras-
bourg, 1799.
44. Таблицы рефракции Пулковской обсерватории, Л., 1956.
45. Karsky G., Бюлл. астрон. ин-тов Чехословакии 10, 1, 32, 1959.
46. Б а к у л и н П. И., Блинов Н. С, Служба точного времени, «Наука»,
1968.
47. К о v a I e v s k у J., Metrologia 1, 4, 169, 1965.
48. Sadler D. H., Ephemeris Time. Occasional Notes Roy. Astron. Soc. 3,
17, 103, 1954.
49. Veis G., Spec. Rept. Smithsonian Inst. Astrophys. Observ. No. 123, 1963.
50. Идельсон Н. И., Фундаментальные постоянные астрономии и геоде-
зии, Астрономический Ежегодник СССР на 1942 год, 409, 1941.
51. Куликов К. А., Новая система астрономических постоянных, «Наука»,
1969.
52. Lederle Т., Wiss. Z. Techn. Univ. Dresden 41, 3, 643, 1965.
2Ю Ч. I. СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ
53. Makemson Maud W., Baker R. M. L. Jr., Westrom G. В., As*
trounaut. Sci. 8, No. I, 1, 1961.
54. I. A. U. Symposium No. 21: The System of Astronomical Constants, Bull,
astrort. 25, ff. I—III, 1965.
55. К о v a 1 e v s к у J., L'Annuaire du Bureau des Longitudes pour l'An 1966,
B. 1 —V. 24, 1965.
56. Proces Verbaux des seances, deuxieme serie 25, 77, 1957.
57. Brown E. W., Mem. Roy. Astron. Soc. 53, 89, 1897.
58. Чеботарев Г. А., Аналитические и численные методы небесной меха-
ники, «Наука», 1965.
59. Dollfus A., Ed., Moon and Planets. II, North-Holland Publishing Com-
pany, Amsterdam, 1968.
60. Куликов Д. К-, Теория эфемерид пар Цингера, М. — Л., 1951.
61. Mueller I. I., Spherical & Practical Astronomy As Applied to Geodesy,
Ungar Publ. Сотр., New York, 1969.
62. U. S. Naval Weapon Lab. Techn. Report TR-2734, 1972.
63. Bureau International de l'Heure: Rapport annuel pour 1972, Paris, 1973.
64. Yu mi S., Vicente R. O., Publ. Int. Lat. Obs. Mizusawa 7, No. 1, Mizu-
sawa, 1969.
65. V a u с о u 1 e u r s G. de, D a v i e s M. E., Sturras F. M., Journ. Geophys.
Research, 1972.
66. К о z i e 1 K., Measure of the Moon, D. Reidcl Publ. Сотр., 1967.
67. К a u 1 a W. M., В a x a P., The Moon, 8, No. 3, 1973.
68. Bender P. L, Currie D. G., Dicke R. H., Eckhardt D. H., F a 1-
1 e r J. E., К a u 1 a W. M., M u 1 h о 11 a n d J. D., P 1 о t k i n H. H., P о u 11-
ney S. K., Silver berg E. C, Wilkinson D. Т., W i 11 i a m s J. G.,
Alley С. О., Science 182, 229, 1973.
69. E с k h a r d t D. H., Measure of the Moon, 1973.
70. Г у б а н о в В. С, Астрон. ж. 49, 5, 1972.
71. A t k i n s о n R. d'E., Astron. J. 77, No. 6, 1972.
72. Dufour H.-M., Fontaine A., Bull, astron. 23, f. 2, 1959.
73. Innes R. T. A., Tables of X & Y. App. Union Obs. Circ, No. 71, 1927.
74. Абалакин В. К., Бюлл. ИТА АН СССР 13, № 1 A44), стр. 13, 1971.
75. Абалакин В. К., Бюлл. ИТА АН СССР 13, № 1 A44), стр. 17, 1971.
76. Сб. «Время и частота», М., 1973.
77. Kovalevsky J., Phys. Earth and Planet. Interiors 6, 26, 1972.
78. Jet Propulsion Lab. Techn. Report 32-1306, 1968.
79. Veroff. des Astr. Rechen-Inst. zu Heidelberg, Nr, 18, 1966.
80. Even son К. М., Phys. Rev. Letters 129, 1346, 1972; Proc. XVII Gen.
Assembly of URSI, Warszawa, 1972.
81. Сб. «Исследования космического пространства» 5, М., 1973.
82. Lore 11 J., JPL Techn. Report 32-1387, 1969.
Часть П
ЗАДАЧА ДВУХ ТЕЛ
Глава 1
ОБЩАЯ ТЕОРИЯ НЕВОЗМУЩЕННОГО
КЕПЛЕРОВСКОГО ДВИЖЕНИЯ
В этой главе приводятся основные сведения о задаче двух
тел, в частности, различные формы дифференциальных уравне-
ний и их первых интегралов. Выводы и дополнительные подроб-
ности можно найти в [1] — [5].
§ 1.01. Постановка задачи. Различные формы
дифференциальных уравнений движения
Пусть в пространстве имеется изолированная система двух
тел Pq и Р, с массами 1щ и гп, и пусть эти тела притягиваются
друг к другу как материальные точки согласно закону всемир-
ного тяготения Ньютона*). Требуется изучить движение одного
тела относительно другого. Движение, получаемое на основе
задачи двух тел, называется невозмущенным кемеровским дви-
жением.
1. Дифференциальные уравнения движения в абсолютной
системе координат. Возьмем абсолютную систему координат
O|ti? и обозначим через ?0, Ло> Ео координаты центра масс тела
Ро, а через |, т], ? — координаты центра масс тела Р. Тогда диф-
ференциальные уравнения движения тел Ро и Р запишутся
в виде
B.1.01)
*) Это строго справедливо для тел сферической структуры и приближен-
но— для тел, размеры которых малы по сравнению с разделяющим их рас-
стоянием» ¦
d2io с S —
dZ n\-
dP m r*
»
d% f
dt2 '
So —
mu гз
"U So -
Л
С
212 Ч. И. ЗАДАЧА ДВУХ ТЕЛ В 1.01
где / — постоянная тяготения, а
г = V(E - loJ + (ч - Л,J + (S - ?0J B.1.02)
есть расстояние между телами Ро и Р.
Абсолютная система координат О|г)(; на практике не является
удобной. Поэтому приходится пользоваться другими системами
координат.
2. Дифференциальные уравнения относительного движения.
Возьмем прямоугольную систему координат PQxyz с началом
в центре масс тела Ро, с осями Рох, Роу, Poz, соответственно
параллельными осям О?, Ох\, О?. Тогда формулы преобразова-
ния координат имеют вид
Б = 6о + *. Ч = Чо + У, S = ?о + z. B.1.03)
Дифференциальные уравнения относительного движения
тела Р запишутся следующим образом:
?!.— _ .Н. ^L — — BL _^!? — _ _М^_ (9 ] М)
dt* г3 ¦ dt2 ~ г3 ' dt2 ~~ г3 • \z-l-v'i)
где
И = /(лю + л1). r = V^2 + I/2 + 22. B.1.05)
Дифференциальные уравнения B.1.04) описывают невозму-
щенное кеплеровское движение планеты относительно Солнца,
невозмущенное движение спутника относительно планеты, не-
возмущенное движение искусственного спутника относительно
Земли и т. д.
3. Дифференциальные уравнения относительного движения
в цилиндрических координатах. Введем цилиндрические коорди-
наты р, Я, г по формулам
* = pcos^, # = psinA, z — z. B.1.06)
Тогда дифференциальные уравнения движения тела Р отно-
сительно Ро будут иметь вид
B.1.07)
IF ~ P VdT
d2z \xz
~dF W
где
а ц определяется формулой B.1.05).
§ 1.01] ГЛ. 1. ОБЩАЯ ТЕОРИЯ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ 213
4. Дифференциальные уравнения относительного движения
в сферических координатах. Пусть г, ф, X — сферические коор-
динаты, определяемые формулами
x = r cos ф cos к, у = г соБф sin Л, 2 = r sin ср. B.1.08)
Тогда движение тела Р относительно Ро описывается следую-
щей системой дифференциальных уравнений:
B.1.09)
где [д, дается формулой B.1.05).
5. Дифференциальные уравнения относительного движения
в форме Клеро — Лапласа. Из второго уравнения B.1.07) нахо-
дим интеграл площадей
P2j? = c, B.1.10)
где с — произвольная постоянная. Если в начальный момент
dX :
Р = Ро, -ft =Л0,
то с = р^0.
Введем переменные и и s по формулам
« s f B1Л1)
Тогда, приняв за независимую переменную долготу Я, уравне-
ния B.1.07) можно преобразовать к виду
d2u , .. р.,
dK т" с^
d's . я \ B-1.12)
После того как из уравнений B.1.12) переменные и и s бу-
дут найдены как функции Я, уравнение B.1.10) позволит связать
долготу К со временем t.
Дифференциальные уравнения в форме Клеро — Лапласа
были использованы Лапласом в теории движения Луны.
214 Ч. 11. ЗАДАЧА ДВУХ ТЕЛ [§ .1.04
6. Каноническая форма уравнений относительного движения.
Уравнения B.1.04) можно записать в канонической форме:
dx дН dy d# dz дН
dt дх ' It ~ ду ' ~dt dz '
dx _йЯ_ dy_ дН dz_ дН
dt ~ дх ' dt ~ dy ' dt ~~ ~dz~'
где
1 "-' ' -2 + 22)--^. B.1.14)
B.1.13)
Примем теперь за обобщенные координаты q\, q2, <7з сфери-
ческие координаты
ql=r, ^2 = Ф, Яз = Ъ- B.1.15)
Тогда обобщенные импульсы ри рг, рз определятся формулами
а канонические уравнения движения запишутся в виде
где
-— B.1.18)
есть функция Гамильтона в новых переменных.
§ 1.02. Первые интегралы уравнений
невозмущенного кеплеровского движения
Дифференциальные уравнения B.1.04) допускают следую-
щие первые интегралы.
Интегралы площадей:
где С\, Cz, c3 — произвольные постоянные (постоянные площа-
дей).
Интеграл энергии, (живой силы):
x* + y2 + z2 = ^+h, B.1.20)
где п — произвольная постоянная (постоянная энергии или по-
стоянная живой силы).
1.02]
ГЛ. 1. ОБЩАЯ ТЕОРИЯ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ
215
Если через V обозначить скорость тела Р относительно Pq,
то интеграл энергии можно записать в виде
B.1.21)
Интегралы Лапласа:
— ^у- + у {ху — ух) — z(zx — xz) = Ац
— ¦^- + z(yz — zy) — x (ху — ух) = А2,
~-y- + x(zx — xz) — y (yz — zy) = А3,
B.1.22)
где Ai, А2, Аз — произвольные постоянные (постоянные Лапласа).
Интегралы Лапласа можно также записать в виде
У**3 ~~" ^2 — »
B.1.23)
Между постоянными интегрирования имеют место две сле-
дующие зависимости:
СА. + с^ + СзАз^О, , BL24)
Поэтому из семи приведенных здесь интегралов только пять яв-
ляются независимыми.
Вектор момента количества движения и век-
тор Лапласа. Равенства B.1.19) показывают, что постоян-
ные С\, Сг, с3 суть проекции вектора момента количества движе-
ния (на единицу массы) тела Р на координатные оси. Модуль
этого вектора (в дальнейшем будем его называть постоянной
площадей) равен
а его направляющие косинусы относительно осей х, у, z будут
Сз
с
Рассмотрим вектор к, проекции которого на координатные
оси равны Аь Аг, Аз- Этот вектор, модуль которого
216 Ч. II. ЗАДАЧА ДВУХ ТЕЛ Г§ 1.03
а направляющие косинусы суть
называется вектором Лапласа.
Из равенства B.1.24) следует, что вектор момента количе-
ства движения и вектор Лапласа перпендикулярны друг к другу.
§ 1.03. Типы невозмущенного
кеплеровского движения
Из интегралов площадей B.1.19) и интегралов Лапласа
B.1.22) находим
с,л: + с^ + Сзг = 0, B.1.25)
\ir + М + Х2у + Я3г = с2. B.1.26)
Уравнение B.1.25) показывает, что движение тела Р проис-
ходит в плоскости, проходящей через точку Ро перпендикулярно
к вектору момента количества движения. Поскольку уравне-
ние B.1.26) определяет поверхность второго порядка, то тра-
ектория тела Р есть кривая второго порядка — коническое
сечение.
1. Орбитальные координаты. Возьмем новую систему коорди-
нат Ро?т]?, ось Pol которой направлена по вектору Лапласа, ось
Ро?— по вектору момента количества движения, а ось Рот] До-
полняет систему до правой. Тогда формулы преобразования ко-
ординат будут иметь вид
^^ + ^ + *
в силу чего уравнения B.1.25) и B.1.26) преобразуются к виду
5 = 0. цг + АЕ = с2. B.1.27)
Переменные | и т] называются орбитальными координатами.
2. Уравнение орбиты в полярных координатах. Пусть
\=r cost;, T| = rsinu. B.1.28)
Тогда из B.1.27) находим
г = т-г^ , B.1.29)
1 + е cos v '
ГДе
§ 1.03] ГЛ. 1. ОБЩАЯ ТЕОРИЯ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ 21?
Уравнение B.1.29) есть полярное уравнение конического
сечения, фокус которого находится в начале координат (точ-
ке Ро). Величина р называется (фокальным) параметром кони-
ческого сечения, е — эксцентриситетом, полярный угол v —
истинной аномалией.
Из уравнения B.1.29) следует, что минимальное значение
радиуса-вектора г достигается при v = 0; соответствующая
этому значению г точка орбиты называется перицентром. В слу-
чае движения тела относительно Солнца перицентр называют
перигелием, в случае движения тела относительно Земли — пе-
ригеем и т. д. Поскольку эта точка лежит на оси Pol, вектор
Лапласа направлен в перицентр орбиты. Для ограниченных
в пространстве движений при v = л радиус-вектор г достигает
максимального значения. Соответствующая ему точка орбиты
называется апоцентром. В случае движения тела относительно
Солнца она называется афелием, а в случае движения тела от-
носительно Земли — апогеем. Прямая, соединяющая апоцентр и
перицентр, носит название линии апсид.
3. Классификация орбит в задаче двух тел. Из равенств
B.1.24) и B.1.30) находим формулу
h=-^(e2-l), B.1.31)
связывающую постоянные ft, с и е, а из интеграла энергии
¦имеем
V20 = ^ + h, B.1.32)
'О
где г0 и Vq — значения радиуса-вектора и скорости в начальный
момент времени.
В зависимости от начальных условий или постоянных инте-
грирования будем иметь следующие типы орбит:
а) эллиптическая орбита
сфО, 0 < е < 1, ft<0, Уо<д/^, Л<ц; B.1.33)
б) круговая орбита*)
сфО, е = 0, A = -i<0, Vo = ysJ±, Я = 0; B.1.34)
в) параболическая орбита
, в=1, А = 0, У0 = д/-^, А = ц; B.1.35)
*) Круговая орбита может рассматриваться также как частный случай
эллиптической (е = 0).
218 **. "¦ ЗАДАЧА ДВУХ ТЕЛ t§ I.04
г) гиперболическая орбита
с^О, е>1, А>0, ^о > д/4~ • K>VL'< BЛ.36)
д) прямолинейная траектория
с = 0. B.1.37)
Условия B.1.33) — B.1.37) легко вытекают из формул
B.1.29) —B.1.32).
Следует заметить, что при с = 0 и А < 0 движение будет
происходить по отрезку прямой, при с = 0 и А = 0 — вдоль
луча и, наконец, при с = 0, h >¦ 0 — вдоль всей прямой. Таким
образом, если А ¦< 0, то невозмущенное движение будет проис-
ходить в ограниченном пространстве, а если ft ^ 0, то мы будем
иметь неограниченное в пространстве движение.
4. Первая и вторая космические скорости. Наименьшая на-
чальная скорость, которую нужно сообщить телу, чтобы оно
стало искусственным спутником Земли (ИСЗ), называется пер-
вой космической скоростью. Она равна скорости кругового дви-
жения [круговой скорости) на данной высоте, т. е.
VC = ^J-^, B.1.38)
где ц есть произведение постоянной тяготения на массу Земли
(массой ИСЗ можно пренебречь), а г0—геоцентрическое рас-
стояние ИСЗ. На поверхности Земли первая космическая ско-
рость составляет около 7,91 км/сек.
Второй космической скоростью называется наименьшая на-
чальная скорость, которую нужно сообщить телу, чтобы оно, на-
чав движение вблизи поверхности Земли, преодолело земное
притяжение. Очевидно, она равна скорости параболического
движения на данной высоте [параболической скорости)
Эта скорость, так же как и Vc, меняется с высотой. Будучи при-
веденной к поверхности Земли, она составляет около 11,2 км/сек.
§ 1.04. Элементы орбиты
Элементами орбиты называются величины, характеризующие
положение орбиты в пространстве, ее размеры и форму, а также
положение небесного тела на орбите. Элементы, характеризую-
щие положение плоскости орбиты и ориентацию орбиты в этой
плоскости, вводятся следующим образом. Пусть движение не-
бесного тела рассматривается в системе координат Рцхуг
в 1.04]
ГЛ. ]. ОБЩАЯ ТЕОРИЯ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ
219
(рис. 61) с началом в центре масс центрального тела Ро, и пусть
оси PQx, PQy, PqZ пересекают небесную сферу в точках X, Y, Z.
Будем рассматривать плоскость большого круга XY как основ-
ную плоскость, а точку X — как основную точку на этом круге.
Предположим, что плоскость орбиты пересекает небесную сферу
по большому кругу NAM, а радиус-вектор перицентра пересе-
кает небесную сферу в точке А. Тогда прямая N'P0N, по кото-
рой плоскость орбиты пересекает основную плоскость, назы-
вается линией узлов. Когда
движение небесного тела про-
исходит против часовой стрел-
ки, если смотреть из полюса
орбиты С, точка N называется
восходящим узлом, а точка
N'— нисходящим узлом. Дуга
XN, обозначаемая через Я, на-
зывается долготой восходя-
щего узла или просто долготой
узла. Угол MNY, обозначае-
мый через i, под которым пло-
скость орбиты пересекает ос-
новную плоскость, называется
наклоном орбиты; наклон ор-
биты — ЭТО ТаКЖе Дуга бОЛЬ- Рис. в1. Элементы орбиты.
шого круга ZC. Дуга NA, обо-
значаемая через ш, называется угловым расстоянием перицентра
от узла (аргумент перицентра). Величины Я, i, ш составляют
первую группу элементов орбиты; первые два из них характе-
ризуют положение плоскости орбиты, а третий — ориентацию
орбиты в этой плоскости. При этом очевидно, что
0°<г<180°, 0°<Я<360°, 0°<(й<350°.
В случае движения планет за основную плоскость чаще всего
принимают плоскость эклиптики, а за основную точку — точку
весеннего равноденствия. В теории движения ИСЗ в качестве
основной плоскости обычно берут плоскость экватора, а за ос-
новную точку — точку весеннего равноденствия. В первом случае
элементы орбиты называются эклиптическими, во втором — эк-
ваториальными.
Элементы, характеризующие размеры и' форму орбиты, —
это параметр р и эксцентриситет е.
Последним, шестым элементом является т — момент прохож-
дения через перицентр. Этот элемент определяет положение не-
бесного тела на орбите.
Элементы р, е, i, Я, со, т называются кеплеровскими элемен-
тами. Они определяют орбиту независимо от ее типа. Различие
220 ч- п- ЗАДАЧА ДВУХ ТЕЛ [§ 1.05
будет лишь в том, что для эллиптической орбиты е < 1, для
параболической е = 1 и для гиперболической е > 1. Различные
модификации элементов р, е, i, Q, ш, т, часто встречающиеся
в литературе, подробно рассматриваются в §§ 2.01—2.04.
§ 1.05. Формулы, связывающие постоянные интегрирования
и элементы орбиты
Формулы, связывающие семь постоянных интегрирования
С\, С2, Сз; К\, кг, ta; h и пять независимых элементов орбиты
р, е, t, Q, со имеют вид
С! = V^P sin i sin Q,
! B.1.40)
cos/,
A,, = це (cos w cos Я — sin и sin Й cos i), ~\
A,2 = fie(cosasinQ + sin a cos Q cos i), > B.1.41)
A,3 = tiesin wsinf, J
c = Vi^". k = ev, A = --J-(l-e2). B.1.42)
Шестой элемент т является постоянной интегрирования, воз-
никающей при решении дифференциального уравнения
c2 = — VW sin г cos Й,
связывающего истинную аномалию v с временем
Г лава 2
ОСНОВНЫЕ ФОРМУЛЫ НЕВОЗМУЩЕННОГО
КЕПЛЕРОВСКОГО ДВИЖЕНИЯ
В главе 2 приводится общее решение задачи двух тел для
различных типов движения (эллиптического, гиперболического,
параболического и прямолинейного). Подробное освещение
этих вопросов можно найти в [1] — [5].
§ 2.01. Эллиптическое движение
Эллиптическое движение определяется следующими усло-
виями:
сфО, ft<0, 1Л,<д/-^-. B.2.01)
где h — постоянная энергии, г0 и Vo — значения модулей ра-
диуса-вектора и скорости в начальный момент времени.
1. Элементы орбиты. Эллиптическая орбита характери-
зуется следующей основной системой элементов: а — большая
полуось, е — эксцентриситет, i—.наклон, Я — долгота восходя-
щего узла, со — угловое расстояние перицентра от узла, Мо —
средняя аномалия в эпоху (см. § 1.04). В литературе часто
встречаются различные модификации элементов а, е, i, Я, со, Ма.
Так, вместо элемента а можно рассматривать параметр ор-
биты р, элемент q, среднее движение и, период обращения Т,
которые связаны с а формулами
р = а{\~ е\ <7 = а A-е), B.2.02)
- г=^- B-2-оз)
В случае движения относительно Солнца q называется периге-
лийным расстоянием, в случае движения относительно Земли q
называется перигейным расстоянием и т. д.
222 Ч. II. ЗАДАЧА ДВУХ ТЕЛ [§ 2.01
Вместо е иногда рассматривают элемент ср, определяемый
формулой
e = sincp
и называемый углом эксцентриситета.
Вместо со часто вводят элемент л:
я = Й + со, B.2.04)
называемый долготой перицентра.
Вместо Мо можно рассматривать момент прохождения через
перицентр т и среднюю долготу в эпоху г, связанные с Мо ра-
венствами
M0 = n[t0 — r), e = Q + a + M0, B.2.05)
где t0 — начальный момент времени (эпоха).
2. Вычисление прямоугольных координат. Пусть, как и
раньше (см. §¦ 1.01), движение тела Р рассматривается в си-
стеме координат Poxyz. Тогда для вычисления х, у, г могут слу-
жить следующие формулы:
M = n{t-to) + MQ, B.2.06)
Е - е sin Е = М, B.2.07)
д (!-
Г2 2 0<»
1+ в cos v • 1-^.uaj
u = v + a, B.2.10)
х = г (cos н cos Q — sin и sin Q cos i), Л
у = r (cos и sin Q + sin и cos Q cos i), > B.2.11)
z = rsinusini. )
Здесь М называется средней аномалией, Е — эксцентрической
аномалией, v — истинной аномалией, и — аргументом широты,
а уравнение B.2.07) — уравнением Кеплера.
Формулы B.2.06) — B.2.11) позволяют вычислить прямо-
угольные координаты х, у, г для любого момента времени t,
если известны элементы а, е, i, Q, со, Мо- Действительно, вычис-
лив по первой формуле B.2.03) п, мы для любого момента t
по формуле B.2.06) находим М. Решив далее уравнение Кеплера
B.2.07), находим Е, после чего по формулам B.2.08) — B.2.10)
вычисляем последовательно v, r, и, а затем по формулам B.2.11)
х, у, г.
Для решения уравнения Кеплера обычно используется метод
последовательных приближений. При этом в качестве первого
i 2.01] ГЛ, 2. ОСНОВНЫЕ ФОРМУЛЫ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ 523
приближения для Е принимается М или некоторая величина,
для которой в зависимости от М и е построены специальные
таблицы. Для значений эксцентриситета, близких к единице,
приведенные выше формулы малопригодны. Модификация фор-
мул для этого случая дана в § 1.03 ч. III.
Достаточно полный обзор работ, посвященных способам ре-
шения уравнения Кеплера, содержит статья [6]. Вспомогатель-
ные таблицы приводятся в [7] — [11]. Кроме того, можно указать
также таблицы для значений v — М в зависимости от М [12] —
[15]. Для вычисления положений ИСЗ И. Д. Жонголовичем и
В. М. Амелиным составлены таблицы, дающие v — М с точ-
ностью до 0°,01 [16].
Радиус-вектор г и прямоугольные координаты х, у, г можно
вычислять и по другим формулам, не требующим знания истин-
ной аномалии v. Эти формулы имеют вид
r = a{\ -ecosE), B.2.12)
l = a (cos E — е), ~\
\ [ B.2.13)
т) = а-у 1 — е2 sin?, )
B.2.14)
Здесь I и т] — орбитальные координаты, а направляющие коси»
нусы Рх, Ру, ..., Q2 определяются через элементы Q, ш, i сле-
дующим образом:
Рх = cos со cos й — sin ш sin Q cos i, "j
/>Jf = coscu-sinQ -f sin со cos Я cos/, f B.2.15)
Qx = — sin cd cos Я — cos a sin Я cos /,
Qy = — sin cd sin Я -j- cos ш cos Я cos/, ^ B.2.16)
Qz = cos со sin/.
Для контроля вычислений используют равенства
B.2.17)
При массовых вычислениях формулы B.2.12) — B.2.16)
имеют преимущество по сравнению с формулами B.2.08) —
B.2.11), ибо величины Рх, Ру, ,.,, Qz не зависят от времени и
224 4. li. задача Двух тел [§ 2.02
для каждого момента нужно вычислять лишь Е, cos E и sin E,
после чего легко находятся г, |, т), а затем и х, у, г.
3. Скорость в эллиптическом движении. Пусть V — ско-
рость, Vr — радиальная скорость и Vn — трансверсальная ско-
рость. Тогда
B.2.19)
B.2.20)
Дифференцируя по времени формулы B.2.11), найдем
х = -j Vr + (— sin и cos ?2 — cos и sin Q cos i) Va,
y = jVr-ir{— sin и sin Q + cos и cos Я cos i) Vn,
г = у Vr + cos и sin i • Vn.
B.2.21)
Эти формулы позволяют вычислить проекции скорости на оси
координат. Для вычисления V имеем формулу
V2 = х2 + у2 + г2, B.2.22)
которую можно использовать для контроля.
§ 2.02. Круговое движение
Круговое движение имеет место, когда
B.2.23)
где [х = I(то'-\- /га), rQ и Vo — начальные значения модулей ра-
диуса-вектора и скорости.
1. Элементы орбиты. Поскольку е=0, положение перицент-
ра не определено. Поэтому можно положить а =0 и круговая
орбита будет характеризоваться следующими элементами: а —
радиус, i — наклон, Я — долгота узла, Мо — средняя аномалия
в эпоху (см. § 2.01). Вместо Мо можно рассматривать среднюю
долготу в эпоху е, определяемую формулой B.2.05). Вместо а
можно ввести среднее движение п или период обращения Т по
формулам B.2.03).
2. Вычисление прямоугольных координат. Все формулы кру-
гового движения можно получить из формул эллиптического
§ 2.03] ГЛ. 2. ОСНОВНЫЕ ФОРМУЛЫ НЕВОЗМУЩЁННОГО ДВИЖЕНИЯ 225
движения, если в них положить е = 0, со = 0. В случае круго-
вого движения имеем
Поэтому формулы B.2.06) — B.2.11) переходят в следующие:
M = n(t-to) + MQ, B.2.24)
х = a (cos M cos Я — sin M sin Я cos t), "]
у = a (cos M sin Я + sin M cos Я cos i), > B.2.25)
2 = asinAfsini. J
Вместо формул B.2.13), B.2.14) будем иметь
x = aPxcosM 4-aQxSinAf, "j
г/ = аРу cos M + aQtf sin M, > B.2.26)
г = аРг cos M -\-aQz sin Af, J
так как
g = acosAf, ri==asinAf. B.2.27)
Здесь Px, Py, ..., Qz определяются формулами B.2.15) и
B.2.16).
3. Скорость в круговом движении. Дифференцируя формулы
B.2.25) по времени, получим
х — ап{— sin Л1 cos Я — cosAf sin Я cost), ")
у = ап{— sinAf sin Я + cosAfcosficosi), > B.2.28)
z — an cos M sin i. )
Скорость V найдется по формуле
V2 = x2 + y2+z2 = ^-. B.2.29)
§ 2.03. Гиперболическое Движение
Гиперболическое движение имеет место, когда
А>0, V\>^, сФО, B.2.30)
'о
где h — постоянная энергии, г0 и Vo — начальные значения мо-
дулей радиуса-вектора и скорости.
1. Элементы орбиты. Гиперболическая орбита характери-
зуется следующими элементами: а — действительная полуось,
е — эксцентриситет, i — наклон, Я — долгота узла, со — угловое
расстояние перицентра от узла, т — момент прохождения через
перицентр (см. § 1.04). Иногда рассматривают модификации
8 Под ред. Г. Н. Дубошина
226 Ч. II. ЗАДАЧА ДВУХ ТЕЛ [§ 2.03
этих элементов. Так, вместо а вводят параметр орбиты р или
элемент q по формулам
р = а(е2-1), <7 = а(е-1). B.2.31)
Вместо элемента со часто рассматривают элемент
я = Я + <в,
называемый долготой перицентра.
2. Вычисление прямоугольных координат. Пусть движение
тела Р рассматривается в относительной системе координат
Рохуг. Тогда для вычисления прямоугольных координат х, у, г
могут служить следующие формулы:
B
B
B
B.
.2.33)
.2.34)
.2.35)
.2.36)
л: = т (cos м cos Q — sin u sin Я cos i),
г/= г (cos м sin Q + sinwcosQcos/), > B.2.37)
z = /* sin и sin/.
Здесь о — истинная аномалия, и — аргумент широты.
Для решения уравнения B.2.33) пользуются методом после-
довательных приближений.
Приведенные формулы требуют вычисления истинной ано-
малии. Можно, однако, воспользоваться формулами, по кото-
рым радиус-вектор и прямоугольные координаты вычисляются
без предварительного определения v. Эти формулы имеют такой
вид:
г = а(еспЯ-1), B.2.38)
g = a(e-chtf), 1
. > B.2.39)
т] = ал/е2 - 1 sh Я, J . V ;
B.2.40)
где | и т] — орбитальные координаты, а направляющие косинусы
Лс, Ру, ¦ ¦ ¦, Qz определяются формулами B.2.15) и B.2.16).
§ 2.04] ГЛ. 2. ОСНОВНЫЕ ФОРМУЛЫ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ 227
Замечание. Если в формулах эллиптического движения
заменить а на —а и V— 1 Я на Я, то мы получим соответствую-
щие формулы гиперболического движения.
3. Скорость в гиперболическом движении. Для вычисления
проекций скорости на координатные оси нужно воспользоваться
следующими формулами:
х = — Vr + (— sin и cos Q — cos и sin Q cos i) Vn,
*/= 7 Vr + (— sin «sin Q + cos u cos Q cost) Vn, f B.2.41)
2 = у Vr + cos и sin i • Vn,
где радиальная Уг и трансверсальная Vn составляющие скорости
определяются уравнениями
Vr = д/у е sin v, B.2.42)
B.2.43)
Скорость V находится из формулы
V2 = x2 + y2 + z2.
При этом для контроля можно пользоваться интегралом энергии
B-2-44)
§ 2.04. Параболическое движение
Параболическое движение имеет место, когда
А = 0, Vl = ^-, c?=0, е=1, B.2.45)
"о
где h — постоянная энергии, г0 и Vq — начальные значения мо-
дулей радиуса-вектора и скорости.
1. Элементы орбиты. Параболическая орбита характери-
зуется следующими пятью элементами: р — параметр орбиты,
i — наклон, Q — долгота узла, со — угловое расстояние пери-
центра от узла, т — момент прохождения через перицентр (см.
§ 1.04). Часто вместо параметра вводят элемент
q = \. B.2.46)
В случае движения относительно Солнца q называется периге-
лийным расстоянием, а при движении относительно Земли —
перигейным расстоянием.
228 Ч. II. ЗАДАЧА ДВУХ ТЕЛ [§2.04
Вместо элемента а иногда рассматривают долготу пери-
центра л = Я + со.
2. Вычисление прямоугольных координат. Пусть движение
тела Р рассматривается в относительной системе координат
PQxyz. Тогда прямоугольные координаты х, у, г могут быть вы-
числены по формулам
B.2.48)
B.2.49)
u = v + a, B.2.50)
x = r (cos и cos Я — sin «sin Я cos/), 1
у = r (cos и sin Я + sin и cos Я cos/), > B.2.51)
z = rsin«sin/. J
Кубическое уравнение B.2.48), называемое иногда уравне-
нием Баркера, всегда имеет единственный действительный ко-
рень. Вспомогательные таблицы можно найти в [7] — [11].
Вместо формул B.2.48) — B.2.51) можно также воспользо-
ваться следующими формулами:
B.2.52)
B.2.53)
B.2.54)
B.2.55)
где g и tj — орбитальные координаты а == tg -|-, а Рх, Ру, ..., Qz
даются уравнениями B.2.15) и B.2.16).
3. Скорость в параболическом движении. Для вычисления
проекций скорости на координатные оси имеем следующие фор-
мулы:
х 1
х = — Vт -\- (— sin и cos Я — cos и sin Я cos i) Vn,
у = — Vr + (— sin и sin Я -f cos и cos Я cos i) Vn,
z = j- Vr -f cos и sin/ • Vn,
B.2.56)
§ 2.05) ГЛ. 2. ОСНОВНЫЕ ФОРМУЛЫ НЕВОЗЛУЩЕННОГО ДВИЖЕНИЯ 229
где радиальная VT и трансверсальная Vn составляющие скорости
определяются уравнениями
Vr = д/-?- sin о, Vn = д/-^- A + cos о). B.2.57)
Для вычисления скорости V могут служить формулы
V2 = x2 + y2 + z2 = V2 + V2n,
V2 = ^. B.2.58)
Последней формулой следует воспользоваться для контроля.
§ 2.05. Прямолинейное движение
Прямолинейное движение имеет место, когда
с = 0, B.2.59)
где с — постоянная площадей.
Положение прямой в пространстве можно задать тремя на-
правляющими косинусами Рх, Pv, Рг (см. B.2.15)), между ко-
торыми существует соотношение
р1 + Р2у + р1 = 1. B.2.60)
Для прямоугольных координат х, у, г будем иметь следующие
формулы:
х = Рхг, у = Руг,- г = Ргг, B.2.61)
где г — радиус-вектор.
1. СлучайЛ = 0. Здесь
где n = /(mo + m), а го — значение радиуса-вектора в началь-
ный момент t = *о- Знак «+» нужно брать тогда, когда началь-
ная скорость Vo направлена от тела Ро, и знак «—», когда Va
направлена к телу /V
2. СлучайА<0. Для радиуса-вектора имеем
r = a{\-cosE), B.2.63)
где Е определяется из уравнений Кеплера при е = 1,
E-sinE = n{t~x), B.2.64)
причем
аи т — постоянные интегрирования; а характеризует наиболь-
шее удаление тела Р от Ро, т— момент времени, когда г-0.
230. Ч. II. ЗАДАЧА ДВУХ ТЕЛ [§ 2.06
3. Случай /г>0. Радиус-вектор задается формулой
г = а(сЬЯ-1), B.2.65)
где Н определяется из уравнения
shH-H = n(t-x), B.2.66)
причем п = д/^г • а и т — постоянные интегрирования.
Замечание. Приведенные формулы показывают, что пря-
молинейные движения при h ф 0 можно рассматривать как вы-
рожденное эллиптическое (А •< 0) и вырожденное гиперболиче-
ское движение (h > 0), когда е = 1.
§ 2.06. Вычисление эфемерид планет и комет
Эфемеридой называется совокупность геоцентрических поло-
жений небесного тела для ряда равноотстоящих моментов вре-
мени.
В случае гелиоцентрического движения за основную пло-
скость принимают плоскость эклиптики, а за основное направ-
ление — направление на точку весеннего равноденствия. По-
этому элементы Я, i, со будут отнесены к плоскости эклиптики
и точке весеннего равноденствия.
Обозначим через р, а, б соответственно геоцентрическое рас-
стояние небесного тела, прямое восхождение и склонение небес-
ного тела. Для вычисления этих величин будем иметь следую-
щие уравнения:
р cos б cos a = Axl + Bxt\ + X, ~)
р cos б sin а = Ау\ + Вит\ + Y, > B.2.67)
р sin б = Аг1 + Вл + Z. )
Здесь X, Y, Z — геоцентрические прямоугольные экваториаль-
ные координаты Солнца, I и т] — орбитальные координаты небес-
ного тела,
Ау = Ру COS Е
-Pzsine, \ B.2.68)
+ Рг COS 8, )
— Q.sine, >
-j-QzC0S8, J
Аг = Ру sin e + Рг cos е,
Ву = Qycose-Q,sine, f B.2.69)
где e — наклон эклиптики к экватору, а Рх, Pv Qz даются
формулами B.2.15) и B.2.16).
Значения X, У, Z приводятся в ежегодниках, а формулы для
вычисления орбитальных координат I и т] в случае эллиптиче-
ского, гиперболического и параболического движений были рас-
смотрены в §§ 2.01—2.04.
Глава 3
РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗМУЩЕННОГО
КЕПЛЕРОВСКОГО ДВИЖЕНИЯ В РЯДЫ
При рассмотрении невозмущенного кемеровского движения,
а также в теории возмущений (ч. IV, гл. 6) возникает необходи-
мость в явных выражениях координат невозмущенного движения
(а также различных функций от координат) через время, истин-
ную, эксцентрическую и среднюю аномалии. В подавляющем
большинстве случаев этого удается добиться только при помощи
различного рода разложений в ряды (в первую очередь тригоно-
метрические) . Способы разложения в ряды описаны во многих
курсах небесной механики, например, в [1] — [5]. Коэффициенты
наиболее употребительных рядов табулированы [17], [18].
Ниже приводятся основные разложения, чаще всего исполь-
зуемые на практике.
§ 3.01. Разложение функций эксцентрической аномалии
в тригонометрические ряды по кратным средней аномалии
Общее решение задачи двух тел (см. формулы гл. 2) дает
координаты тела Р в виде неявных функций времени.
Приведенные в главе 2 формулы позволяют достаточно просто
вычислять координаты и составляющие скорости для всех типов
невозмущенного движения. Однако в некоторых случаях необхо-
димо иметь выражения для координат в виде явных функ-
ций времени. Поскольку связь между координатами и
временем устанавливается через посредство вспомогательных
переменных типа эксцентрической аномалии Е, связанных со
временем t при помощи трансцендентных уравнений, такие вы-
ражения могут быть получены только в виде рядов*).
В небесной механике известны два вида разложений коорди-
нат эллиптического движения, пригодных для исследования дви-
жения на всем бесконечном промежутке времени.
•) $вные выражения для координат в конечном виде можно по-
лучить только в некоторых частных случаях, таких, например, как круговое
движение и прямолинейное движение «параболического» класса.
232 Ч. II. ЗАДАЧА ДВУХ ТЕЛ [§ 3.01
а) Разложения в тригонометрические ряды по крат-
ным средней аномалии М. Коэффициентами этих рядов являют-
ся некоторые функции эксцентриситета е. Эти ряды сходятся (но
не абсолютно!) для всех М при 0<е< 1 и для всех М при
0^е<е* (абсолютно), где
е" = 0,6627434193492...
называется пределом Лапласа.
б) Разложение в ряды по степеням эксцентриси-
тета. Коэффициенты этих рядов суть некоторые периодические
функции М. Ряды эти абсолютно сходятся для всех М
и для всех е, не превосходящих предела Лапласа.
Коэффициенты тригонометрических рядов только в редких
случаях могут быть выражены через элементарные функции.
В общем случае они довольно просто выражаются через функ-
ции Бесселя. На практике, однако, как правило, приходится
разлагать функции Бесселя в ряды по степеням эксцентриситета
и пользоваться только их первыми членами.
Приведем разложения наиболее часто употребляемых функ-
ций эксцентрической аномалии в ряды Фурье по кратным сред-
ней аномалии.
1) Разложение для эксцентрической аномалии:
Е = М + 2 ? Ij^- sin kM. B.3.01)
ы
2) Разложение для cos Е и sin Е:
hdke) > B3<02)
B.3.03)
3) Разложение для cos mE и sin mE:
oo
cos mE = Y,T t7*-- № ~ /*+« ike)] cos kM, B.3.04)
oo
sin m? = Jy [/*_„ (fee) + Jk+m {ke)] sin feM, B.3.05)
где m — целое число, большее единицы.
§ 3.01] ГЛ. 3. РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗМУЩЕН. ДВИЖЕНИЯ В РЯДЫ 233
4) Разложение для радиуса-вектора г:
O-Wto) cos Шя B з.об)
5) Разложение для обратной величины радиуса-вектора:
B.3.07)
6) Разложения для орбитальных координат ? и х\:
B.3.09)
В приведенных разложениях функции Бесселя Jh(ke) даются
следующей формулой:
.fc+2n
п=0
Приведем явные выражения для некоторых первых коэффи-
циентов /ft(ke):
8 + 192 9216
9е3 /, 9е2 8Ie* \
B.3.11)
25е? , 625е*
9е2 . 81е'
— + -JT2
Для вычисления функций Бесселя при других значениях k
полезно иметь в виду рекуррентные формулы D.5.35) и D.5.36).
234
Ч. И. ЗАДАЧА ДВУХ ТЕЛ
(§ 3.02
§ 3.02. Разложение функций истинной аномалии
в тригонометрические ряды по кратным средней аномалии
1) Разложения для cos v и sin v:
cos v = — e -f-
2 A-е2)
?[
2) Уравнение центра:
v - м =
?/*(fte)cosftAf, B.3.12)
l{ke)-Jk+1{ke)]sinkM. B.3.13)
HksinkM, B.3.14)
где
_ 26 /eV 43 /в\Б , 95 /eV
_ 1097 /?\5 _
— 30 \2)
1223 /е
5957
36
47 273 / е V
252
B.з,5)
— \ cos mt) и I —J sin mu, где л и
т — целые числа:
^У cos mv =
-?¦) sin mt» =
cos
sin
Явные выражения коэффициентов С™
7 5
™1"
B.3.16)
B.3.17)
с точностью до
р
е7 включительно для п — —5, —4, —3, —2, —1, 0, 1, 2, 3, 4 и
т = 0, 1, 2, 3, 4, 5 содержатся в таблицах Кэли [17]. Выражения
для этих и некоторых других коэффициентов с точностью до е20
.опубликованы в работе [18].
§ 3.03] ГЛ. 3. РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗМУЩЕН. ДВИЖЕНИЯ В РЯДЫ 235
4) Коэффициенты Ганзена. Коэффициентами Ганзена Xtm
называются коэффициенты разложения функции
где г = д/— 1» в ряд вида
оо
(¦?)" exp imv = ? Xlm exp ikM. B.3.18)
— оо
Выражения коэффициентов Ганзена с точностью до е20 можно
найти в работе [18].
Общее выражение для Х1'т имеет вид
Xkm = (l +&УК~Ь Ek-Vp ОИ. B.3.19)
где
XF{k — p — n — I, —m — n—l,k — p — m+U &1), B.3.20)
причем
р-= , 1__, B.3.21)
а через F(a, b, с; х) обозначена гипергеометрическая функция.
§ 3.03. Первые члены рядов по кратным средней аномалии
для некоторых функций
Приведем явные выражения для наиболее часто употребляе-
мых функций эллиптического движения с точностью до е3 вклю-
чительно:
Е = М + [е - -у) sin М + -J sin 2Af + -| е3 sin 3M, B.3.22)
о = М + Bе - -J) sin Af -f -f-^sin2M + j| e3sin 3Af, B.3.23)
B.3.24)
?. = 1 + [e - -^-) cos M + e2 cos 2Af + j- e3 cos 3M, B.3.25)
236 ч- П- ЗАДАЧА ДВУХ ТЕЛ [§ 3.04
т—ie+0 -|^)cos^ + (t-t)cos2M +
+ -|e2cos3M+ -J-cos4AT, B.3.26)
B.3.27)
— 2e + -^-)cosM--f cos 2M --? cos 3M,
B.3.28)
-^J= 1 +y e? + Be + | e3) cos M + -| e2 cos 2Af + -у-е'созЗМ,
B.3.29)
-y-cos 4Af + (¦§¦- -y) cos 2Af + T e2 cos 3M> B.3.30)
f) sin » = (l -1- e») sin M + (f - A e») sin 2M +
^in4M. B.3.31)
Здесь ? и г) — орбитальные координаты.
§ 3.04. Формула Лагранжа
Уравнение вида
г — а — af (г) = 0,
где г, а и параметр а — комплексные величины, a fB)—задан-
ная функция, голоморфная внутри некоторого контура 5, содер-
жащего точку а, называется уравнением Лагранжа.
Если на контуре 5
\af(z)\<\z-a],
то уравнение Лагранжа имеет внутри контура 5 единственный
корень, являющийся голоморфной функцией а и обращающийся
в а при а = 0.
Этот корень может быть найден при помощи формулы Ла-
гранжа, которая имеет вид
п=0
§ 3.05] ГЛ, 3. РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗМУЩЕН. ДВИЖЕНИЯ В РЯДЫ 237
Рассмотрим теперь некоторую заданную и голоморфную вну-
три контура 5 функцию Ф[г). Тогда разложение этой функции
от корня уравнения Лагранжа дается формулой
п=Э
которую можно назвать обобщенной формулой Лагранжа.
Приведенные здесь разложения для z и Ф(г) абсолютно
сходятся для любого значения а в области, ограниченной конту-
ром S, и параметра а, удовлетворяющего условию
г —а
Формула Лагранжа и ее обобщение играют весьма важную
роль в небесной механике. Действительно, поскольку уравнение
Кеплера можно рассматривать как частный случай уравнения
Лагранжа, то они позволяют достаточно просто построить ряды
по степеням эксцентриситета е для эксцентрической аномалии Е
и различных функций Е.
§ 3.05. Ряды по степеням эксцентриситета
Применительно к уравнению Кеплера формула Лагранжа и
ее обобщение дают
п=0
= Z 5"
sin"
п=й
Первая из этих формул позволяет написать разложение экс-
центрической аномалии в ряд по степеням эксцентриситета,
а вторая дает возможность получить соответствующие разложе-
ния для различных функций эксцентрической аномалии,
Разложение для Е:
где
238 ч- II- ЗАДАЧА ДВУХ ТЕЛ |§ 3.05
Разложение для cos?:
ОО
cos Е=?епСп(М),
где
1 rf"-1 (sinn+' M)
Разложение для sin Я:
где
(n+1), dMn
или
Разложение для г:
n=0
где
Ro(M)=l, Rn (Af) = - Cn_, (Af) (л Ф 0).
Разложение для g =
п=»0
где
A, (Af) = - 1 + С, (Af), A, (Af) = С„ (Af) (л ^= 0).
Разложение для i] = rsinu:
Разложение для —:
П=0
где
Коэффициенты Я„, С„, Sn, Rn, An и В„ можно представить
в виде тригонометрических полиномов по синусам или косину-
сам кратных М. Для этого нужно воспользоваться следующими
§ 3.06) ГЛ. 3. РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗМУЩЕН. ДВИЖЕНИЯ В РЯДЫ 239
формулами:
sin2* М = -^ | У (- 1 )*"'2С?* cos 2 (k - 0 М + С\к \,
где
суть биномиальные коэффициенты.
Так, например, для Еп(М) имеем
En (M) = -^ry- 2j (~ 0 — ~— sin (« —
1=0
где п есть наибольшее целое число, содержащееся в п/2.
Приведенные здесь ряды, как и другие разложения в теории
кеплеровского эллиптического движения, сходятся абсолютно
для всех е от 0 до предела Лапласа.
§ 3.06. Тригонометрические ряды
по кратным эксцентрической аномалии
Приведем разложения некоторых функций эллиптического
движения в тригонометрические ряды по кратным эксцентриче-
ской аномалии Е. Ряды по кратным Е представляют интерес,
особенно в тех случаях, когда при решении уравнений возму-
щенного дзижечия (см. ч. IV, гл. 3, 4) в качестве независимой
переменной принимается эксцентрическая аномалия.
( г\п ( г\п
1) Общие разложения для I—J cosmu и [ — 1 sinmu:
со
— I cos mv = Ао'т cos тЕ + V Atm cos (m -
*m cos (m~k)E, B.3.32)
j^J sin mv = Ao m sin mE + J] Atm sin (m + k) E +
В*1 m sin (m - й) Е, B.3.33)
*=«!
240 ч- "¦ ЗАДАЧА ДВУХ ТЕЛ [§ 3.06
где
В%-т = (- р)* С%+т A - е2)п/2 A - рТ Тк («, - т),
причем
Р 1+л/1-е2 '
a ^(fl, b, c; x) — гипергеометрическая функция (см. ч. IV, § 5.02).
2) Разложение для (yj :
(-!)" = Л?>0+ 2 ?^°cos??, B.3.34)
где
3) Разложение для —:
?= ' И +9 У p»rns*f?Y B.3.35)
4) Разложение для Г—J :
^^(l-^)-3/' ^г^СЦ-йл/Г77?)^*^^ . B.3.36)
5) Разложение для cos d и sin и:
cos v = - р + A - р2) S Р*-1 cos *?, B.3.37)
оо
sin v = A - Р2) Z Р*-1 sin *?. B.3.38)
§ 3.07] ГЛ. 3. РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗА1УЩЕН. ДВИЖЕНИЯ В РЯДЫ 241
6) Разложение для истинной аномалии:
B.3.39)
где р определяется формулой B.3.21).
§ 3.07. Ряды по кратным истинной аномалии
Приводимые ниже разложения некоторых функций в триго-
нометрические ряды по кратным v особенно полезны в тех слу-
чаях, когда при интегрировании дифференциальных уравнений
возмущенного движения за независимую переменную прини-
мается истинная аномалия (см. ч. IV, гл. 3, 4).
1) Разложение для М (уравнение центра):
j )— p)*sinfa>. B.3.40)
2) Разложение для Е:
°°
?iJL*t>. B.3.41)
3) Разложения для cos E и sin E:
оо
-pf»)Z(-P)*~lcosfto, B.3.42)
оо
(p)?(— p)*-1 sin to. B.3.43)
—J :
^ ("' °) + 2 Z C*Pft71ft ("• 0) cos *y ' B-3'44)
242 Ч. II. ЗАДАЧА ДВУХ ТЕЛ [§ 3.08
5) Приближенная формула для М:
М = v - 2е sin v + (-| е2 + -^-) sin 2о - ¦? sin Зо + -& e*sin 4t>-
B.3.45)
§ 3.08. Разложения координат невозмущенного
кеплеровского движения в ряды по степеням времени
Рассмотрим частное решение дифференциальных уравнений
невозмущенного кеплеровского движения
* = -^. д — ф. *=-¦?¦. B.3.46)
удовлетворяющего начальным условиям при t = t0:
х = х0, У = Уо, г = г0,
х = х0, у = у0, г = z0.
Если исключить случай прямолинейных движений, то на
основании теоремы Коши о существовании решений системы
дифференциальных уравнений решение уравнений можно пред-
ставить в виде рядов по степеням t — t0, сходящихся во всяком
случае при достаточно малых значениях t — to.
Пусть
z = zQF + z0G; B.3.47)
тогда F и G будут частными решениями уравнений
/4-^ = 0, G + -?-G = 0, B.3.48)
удовлетворяющими начальным условиям
F(to) = \, G(to) = O, F(to) = O, G{to) = \. B.3.49)
Подставляя в уравнения B.3.48) ряды
f=Zak(t-t0)k, G=fJbk(t-t0)k B.3.50)
k=0 ft=0
и приравнивая нулю коэффициенты при одинаковых степенях
t — /о. мьт можем последовательно найти коэффициенты ай и Ьи,
удовлетворяющие условиям B.3.49).
§ 3.08] ГЛ. 3. РАЗЛОЖЕНИЕ КООРДИНАТ НЕВОЗМУЩЕН. ДВИЖЕНИЯ В РЯДЫ 243
В результате будем иметь:
ao=l, at = 0,
j_ji_ _±_м_-
О г О г
& Гп Z In
3 ц . . , 7 ц .3 I |i! .
а& — — Т "J Г0« + 7 -J Г0 - - -J го>
2 г'
16
8 т1 ° 16 rj ° 120 г\
6 rj Г° 2 7f
40
8 г
.5 '0
12
1 Li . . . 7 ц ., 7 и2 .
4 rS ° 72 г* ° 24 г °
где Го — значение г при t = t0 н
Га
B.3.51)
B.3.52)
B.3.53)
Полученные разложения сходятся в случае кругового дви-
жения при
|f-*ol<«>. B.3.54)
в случае эллиптического движения для всех to при
в случае параболического движения для всех to при
\t ~ to К
B.3.55)
B.3.56)
244 Ч. II. ЗАДАЧА ДВУХ ТЕЛ 1§ 3.09
и в случае гиперболического движения для всех to при
7! - arctg V^T]. B.3.57)
где п — среднее движение, q — перигелийное расстояние, е —
эксцентриситет, а — действительная полуось гиперболы.
Следует заметить, что радиус сходимости существенным об-
разом зависит от момента ^о (здесь мы привели минимальные
значения радиуса сходимости, которые достигаются при to = т,
где т — момент прохождения через перицентр).
§ 3.09. Степенные ряды
в случае эллиптического движения
В случае эллиптического движения формулы предыдущего
параграфа можно заметным образом упростить. Если положить
e = n(/-*o) = Af-Afo, B.3.58)
^ л/?- B-з;59)
то для F и G найдем
B.3.60)
ij Р«Я C + 7?)--& Р1q]&+ ... B.3.61)
Прямоугольные координаты х, у, г будут определяться фор-
мулами B.3.47).
Для кругового движения
р=\, 9 = 0
и правые части B.3.60) и B.3.61) представляют собой разложе-
ния cos 8 и sin 8 в степенные ряды, сходящиеся на всем беско-
нечном промежутке времени.
Литература к части и 245
ЛИТЕРАТУРА К ЧАСТИ II
1. Дубошин Г. Н., Небесная механика. Основные задачи и методы, «Нау-
ка», 1968, 1975.
2. С у б б о т и н М. Ф., Введение в теоретическую астрономию, «Наука»,
3. Орлов А. Я. и Орлов Б. А., Курс теоретической астрономии, Гостех-
издат, 1940.
4. С м а р т У. М., Небесная механика, «Мир», 1965.
5. Брауэр Д., Клеменс Дж., Методы небесной механики, «Мир», 1964.
6. Wood H., J. and Proceed of the Roy. Soc. of New South Wales 83, 150,
1950.
7. Субботин М. Ф., Формулы и таблицы для вычисления орбит и эфеме-
рид, Ташкент, 1929.
8. Субботин М. Ф., Таблицы и формулы. Вспомогательные таблицы для
вычисления орбит и эфемерид. Приложение к «Курсу небесной механики»,
т. 1, М., 1941.
9. S t u m p f К., Himmelsmechanik, Bd. 1, Berlin, 1959.
10. Дубяго А. Д., Определение орбит, Гостехиздат, 1949.
11. Bauschinger J., Tafeln zur theoretischen Astronomie, 2 Auflage, neu-
bearb. von G. Stracke, 1934.
12. T i e t j e n F., Veroff d. Astr. Recheninstituts 1, Berlin, 1892.
13. Peters J., Veroff d. Astr. Recheninstituts 41, Berlin, 2-te Aufl., 1933.
14. Schlesinger F., Udick S., Publ. of the Allegheny Obs. 17, 1912.
15. Boiquet F., Tables du mouvement keplerien, Paris, 1920.
16. Ж о н г о л о в и ч И. Д., Амелин В. М., Сборник таблиц и номограмм
для обработки наблюдений искусственных спутников Земли, Изд-во АН
СССР, 1' 0.
17. С а у 1 е у A., Mem. Roy. Astron. Soc. 29, 1861.
18. J a r n a g i п М. P., Astron. Papers 18, 1965.
Часть III
МЕТОДЫ ОПРЕДЕЛЕНИЯ
И УЛУЧШЕНИЯ ОРБИТ
Под методами определения орбит подразумеваются методы
вычисления элементов орбиты небесного тела по наименьшему
числу наблюдений в предположении, что движение этого небес-
ного тела является невозмущенным кеплеровским (эллиптиче-
ским, гиперболическим или параболическим). Эти методы при-
меняются вообще для определения предварительной орбиты
вновь открываемого небесного тела, например, малой пла-
неты или кометы. Они могут применяться также при теоретиче-
ском анализе движений естественных или искусственных небес-
ных тел.
Методы улучшения орбит преследуют цель уточнения эле-
ментов предварительной невозмущенной орбиты по большому
числу наблюдений или определения по этим наблюдениям более
точных элементов оскулирующей орбиты небесного тела, отне-
сенной к тому или иному моменту времени (см. ч. IV, гл. 3).
В эту часть мы включаем также главу о вычислениях ко-
ординат небесных тел по элементам их орбит, поскольку такие
вычисления используются при определении орбит
Все формулы в этой части написаны в предположении, что
центральным телом, вокруг которого происходит движение, яв-
ляется Солнце. Масса Солнца принимается равной единице,
а масса небесного тела, движущегося вокруг Солнца, пренебре-
жимо мала. За единицу расстояния принимается астрономиче-
ская единица, а за единицу времени средние солнечные сутки.
Если массой m этого небесного тела пренебречь нельзя, то надо
заменить ниже во всех соответствующих формулах постоян-
ную тяготения k2 на &2A +т). Если в качестве центрального
тела рассматривается Земля, то kz надо заменить на k2M,
где М — масса Земли. Подробное изложение методов опреде-
ления орбит дано в работах [1] — [4]. Обзор методов содер-
жится в [5].
§ 1.011 ГЛ. I. ВЫЧИСЛЕНИЕ КООРДИНАТ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ 247
Г лава 1
ВЫЧИСЛЕНИЕ КООРДИНАТ НЕВОЗМУЩЕННОГО
КЕПЛЕРОВСКОГО ДВИЖЕНИЯ ПО ЭЛЕМЕНТАМ
ОРБИТЫ
§ 1.01. Вычисление орбитальных координат
в случае эллиптической или гиперболической орбит
Даны элементы орбиты (см. ч. II, § 1.04) а, е и Мо (средняя
аномалия в эпоху to в случае эллиптической орбиты) или т (мо-
мент прохождения чбрез перигелий в случае гиперболической
орбиты). Задача состоит в вычислении прямоугольных |, г\ и
полярных г, v орбитальных координат небесного тела, движу-
щегося по такой орбите, на некоторый момент t. Начало си-
стемы координат ?г] совпадает с Солнцем S ось Sg направлена
на перигелий, ось 5т] повернута по отношению к оси Sg на 90°
по ходу движения небесного тела. Угол v представляет собой
истинную аномалию.
Формулы для вычислений g, r\, r, v в случае эллиптической
орбиты следующие [см. формулы B.2 12), B.2.13)].
I = a (cosE — e), ц = а VI — e2 sinE, C.1.01)
tgo = -|- r = a(l -ecos?) C.1.02)
(ц и ? имеют знаки синуса и косинуса v соответственно), при-
чем эксцентрическая аномалия Е вычисляется из уравнения
Кеплера
E-esir\E = M, C.1.03)
где
M = M0 + n{t-t0), n = -^=r, C.1.04)
k = 0°,98560767, е° = 57°,295780е
(в градусной мере).
В случае гиперболической орбиты используют следующие
формулы [см. формулы B.2.38), B.2.39) ч. II]:
\ = а (е — ch Я), т] = а л/е2 — 1 sh Я,
п C.1.05)
tgu = -^, r = a(echH— 1),
причем величина Я находится из уравнения [формула B.2.33)]
в shH — H = ka-Vl(t — т). C.1.06)
248
Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ
[§ 1.03
§ 1.02. Вычисление орбитальных координат
в случае параболической орбиты
Вычисление |, т], г, v по элементам параболической ор-
биты т, р или q производится с помощью формул [см. формулы
B.2.53), B.2.54)]
г =
T-а,
а2),
C.1.07)
где а находится из уравнения [см. формулы B.2.47) и B.2.48)]
'' (* —т). C.1.08)
§ 1.03. Вычисление орбитальных координат
в случае орбит, эксцентриситет которых близок к единице
Если эксцентриситет е близок к единице, то формулы § 1.01
малопригодны для вычислений. Тогда ? и т\ как для эллипти-
ческой, так и для гиперболической орбиты вычисляются по фор-
мулам
g = ?(l—a2), ¦x\ = kqa^2(\ — е) U (?), C.1.09)
где
'
1 • 3
C.1.10)
а а и ? находятся из уравнений
причем
(Для эллиптической орбиты е > 0, ? > 0, для гиперболической
е < 0, I < 0.)
Уравнения C.1.11) решаются методом последовательных
приближений. В первом приближении полагают ?^0, о?/@) +
3К?
I 1.04] ГЛ. 1. ВЫЧИСЛЕНИЕ КООРДИНАТ НЕВОЗМУЩЕННОГО ДВИЖЕНИЯ 249
§ 1.04. Вычисление гелиоцентрических прямоугольных
эклиптических и экваториальных координат
Для вычисления этих координат требуются также угловые
элементы орбиты, например, Я (долгота узла), i (наклон),
о (угловое расстояние перигелия от узла). Предположим, что
даны эклиптические элементы.
Гелиоцентрические прямоугольные эклиптические коорди-
наты х, у, z вычисляются для всех трех типов орбит по форму-
лам (подробнее см. ч. II, гл. 2)
х = г (cos и cos Я — sin и sin Я cos i),
C.1.13)
¦
z = r sin и sin /,
•1
где и = a -{- v, r = p/(l+e cos v),
Гелиоцентрические прямоугольные экваториальные коорди-
наты х, у, z вычисляются по формулам
C.1.14)
где g, т| — орбитальные координаты,
Рх = cos со cos Я — sin и sin Я cos /,
Ри = (cos ш sin Я + sin и cos Я cos i) cos в — sin a sin i sin e,
Pz = (cos a sin Я + sin со cos Я cos i) sin в -f sin со sin i cos e,
Qx = — sin ш cos Я — cos и sin Я cos i,
Qy = (— sin a sin Я + cos со cos Я cos i) cos e — cos a sin i sin в,
Q2 = (— sin ш sin Я + cos a cos Я cos /) sin e + cos со sin i cos e.
C.1.15)
Векторы P{PX, Pv, Pz), Q{QX, Qv, Qz) называются вектор-
ными экваториальными элементами орбиты. Компоненты этих
векторов равны косинусам углов, образуемых осями Sg, 5т] ор-
битальной системы координат с осями Sx, Sy, Sz экваториальной
системы координат соответственно.
Глава 2
ОПРЕДЕЛЕНИЕ ОРБИТ
Для определения элементов невозмущенной кемеровской
орбиты небесного тела относительно Солнца достаточно вообще
трех наблюдений с Земли, произведенных в различные моменты
и дающих на каждый момент прямое восхождение а и склоне-
ние б наблюдаемого объекта.
Первый этап в этой задаче состоит в определении двух ге-
лиоцентрических положений небесного тела на крайние мо-
менты наблюдений, второй этап — в непосредственном вычисле-
нии элементов орбиты по двум гелиоцентрическим положениям
и третий этап — в вычислении по полученным элементам гео-
центрических координат небесного тела на средний момент (для
контроля). В данной главе будут приведены формулы и уравне-
ния, позволяющие провести все эти вычисления.
Кроме того, мы приведем формулы, позволяющие вычислить
элементы орбиты по начальным положению и скорости (гелио-
центрическим).
Основные методы определения орбит изложены в работах
[1] —[3]. См. также [6].
§ 2.01. Определение гелиоцентрических положений
по трем геоцентрическим наблюдениям
в случае эллиптической или гиперболической орбит
Пусть даны три пары наблюденных геоцентрических коорди-
нат ал, 6ft (Jfe= 1, 0, 2) небесного тела на моменты времени
ti, to, t2 соответственно. (Такая нумерация наблюдений прини-
мается для удобства обозначений при записи дальнейших фор-
мул.) Требуется найти прямоугольные гелиоцентрические эква-
ториальные координаты (Xh, Ун, Zft) (ft = 1, 2) этого небесного
тела на моменты t\, U соответственно. Одновременно находятся
также и координаты Хо, у0, z0 на средний момент /0-
Последовательность вычислений следующая.
а) Вычисляем величины
%к ~ cos 6ft cos ak, nft = cos6ftsinaft, vft = sin6ft C.2.01)
g 2.01!
ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ
251
Но
Vo
Hi
Vl
H2
v2
uk =
Yk
Zk
Hi
Vl
H2
v2
(направляющие косинусы геоцентрических радиусов-векторов
Pi. Po. Рг).
Rl = Xg + Y* + Z\, С = - (Я0Х0 + ц/п + vnZn)
и определители
! = 1, 0, 2), C.2.02)
где Хк, Yh, Zh — прямоугольные геоцентрические экваториаль-
ные координаты Солнца на моменты t\, t0, t2 соответственно.
Все эти величины остаются постоянными при дальнейших
вычислениях.
Соотношение для контроля:
W = D + Ui -f UQ + U2, C.2.03)
где W — определитель, получаемый из D путем замены элемен-
тов первого столбца величинами L, М, N соответственно, причем
L = h + Ьо + ^2 + Х| + Хо + Х2, Af=|i, + Но + \i2
N = v, + vo + v2 -f Zx + Zo -f Z2.
б) Вычисляем величины
fi = k (t2 — ^o), т2 = k (tQ —1{), rQ = k (t2 —
k = 0,01720210,
2^ 40+2) C1
в) Из уравнений
Yo+Y2
где
C.2.04)
?g, C.2.05)
C.2.06)
определяем геоцентрическое расстояние р0 и гелиоцентрическое
расстояние г0 на момент Не-
обычно эти уравнения записывают в виде
C.2.07)
где
и решают методом последовательных приближений.
252 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 2.01
Можно также использовать вместо C.2.06) более точные
формулы для пи п2:
и вместо первого из уравнений C.2.07) более точное соотно-
шение
Po = P-Qr-3-QV. C.2.09)
где
(W/ + W/) C.2.10)
г) Используя полученные значения р0 и г0, а также П\ и я2,
вычисленные по формулам C.2.06) или C.2.08), находим гео-
центрические расстояния pi, p2 на моменты tu t2 соответственно
по двум из трех уравнений:
= ро|хо + nlYl —Yo + n2Y2, > C.2.1
p2n2v2 = povo + nxZx — Zo + n2Z2,
причем выбираем непосредственно для вычислений такие два
уравнения, для которых определитель коэффициентов левых ча-
стей наибольший.
Эти уравнения отражают точную зависимость между pft при
условии, что пи пг суть точные отношения площадей треуголь-
ников
[Г,Г2] '
об, азованных соответствующими гелиоцентрическими радиуса-
ми-векторами Г\, га, г2. Формулы C.2.06) или C.2.08) дают при-
ближенные значения щ, пг.
д) Вычисляем гелиоцентрические координаты Xk, Ук, zh и ге-
лиоцентрические расстояния Гь. (k = 1,0, 2) по формулам
C.2.12)
Соотношения для контроля:
1) (ro)=ro, где (r0)—значение, полученное при решении
уравнений C.2.05);
2) х0 = пм + пгхг, t/o = щух + n2yz, г0 =
Ук = Ц*Ра — Yk,
г*. = ^ьРа — Zk,
S 2.01]
ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ
253
е) Исправляем моменты наблюдений t\, t0, t2, учитывая ско-
рость света (вводя поправку за аберрационное время) по фор-
муле (ч. I, §2.13)
fh = tk-jPk F=1,0,2), C.2.13)
где с — скорость света; в принятых единицах измерения 1/с =
= 0,0057756.
Вычисления, указанные в пунктах б) —д), дают нам геоцен-
трические расстояния и гелиоцентрические координаты в первом
приближении.
Второе приближение для этих величин получим следующим
образом.
а) Перевычисляем величины т,, т0, т2, п°, п°, беря моменты
t°, t%, t^, исправленные за аберрацию.
б) Исходя из значений гелиоцентрических расстояний, полу-
ченных в первом приближении, находим величины r]h (ft —
= 1,0,2), представляющие отношения площадей секторов к со-
ответствующим площадям треугольников:
_ (г\Тг) _
[f\r2]
Рассмотрим, например, формулы для вычисления цо- Эта ве-
личина может быть представлена непрерывной дробью
Чо=1+-п-
C.2.14)
!+¦
где
А-"а А=
f + l+l
m-
1+ ...
-IT'
I =
- j. X2 = 2 (г,гя + хЛ + yiy2 + 2lz2),
C.2.15)
s = -
6-8-10
5-7-9
6-8-
5.7-9-11
m .
~4~ '
C.2.17)
и вычислена с помощью итераций. В первом приближении по-
лагают
Е-0. А = -^т
254 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 2.02
и находят по формуле C.2.14) первое приближение для г\0- За-
тем вычисляют последовательно х, ?, h по формулам C.2.17),
C.2.16), C.2.15) и с новым значением h уточняют щ и т. д.
в) Вычисляем более точные значения величин ti\, п2 по фор-
мулам ni = nf\lt]i (i = 1, 2) и с этими значениями п\, п2 нахо-
дим уточненные значения pi, pOl р2 непосредственно из уравне-
ний C.2.11).
г) По формулам C.2.12) вычисляем второе приближение
для xh, yk, zh, rk (k = 1, 0, 2).
Точно так же можно получить дальнейшие приближения, но
обычно они не требуются.
Случаи эллиптической и гиперболической орбит отличаются
друг от друга тем, что при вычислении г\о в первом случае
х > 0, а во втором х < 0.
§ 2.02. Особые случаи, встречающиеся при вычислении
гелиоцентрических координат
Вычисление гелиоцентрических положений указанным выше
путем оказывается непосредственно невозможным, если опреде-
литель D [коэффициент при р0 в уравнении C.2.05)] равен нулю.
Это будет тогда, когда все три наблюденные геоцентрические
положения лежат на одном большом круге небесной сферы.
Возможны при этом следующие случаи.
1) Определители Uu Uo, U2 не все равны нулю.
Тогда первое из уравнений C.2.05) после подстановки в него
выражений C.2.06) для п\, п2 приведется к виду
- пр, + U0- n°2U2 - (AlUl -f A2U2) г~3 = 0, C.2.18)
из которого можно найти г0. Второе из уравнений C.2.05) по-
зволит найти рь. Дальнейшие вычисления выполняются так же,
как указано выше.
2) U\ = Uo = U2 = 0, но не все миноры
№| |»| «. ^ pi -21 C.2.19)
определителя D равны нулю.
Это будет иметь место, если все три наблюденные положе-
ния небесного тела лежат на эклиптике. Найти из уравнений
C.2.05) ро и г0 в этом случае нельзя. Для определения элемен-
тов орбиты требуется тогда не три, а четыре наблюдения.
3) U\ = Uo = U2 = 0, все мнноры C.2.19) равны нулю, так
что Я,1 = Хг, [ii = \i2, vi = V2 (видимые положения небесного
g 2.03) ГЛ. 2 ОПРЕДЕЛЕНИЕ ОРБИТ 255
тела для крайних моментов /i и t2 совпадают), но миноры
C.2.20)
Но
Vo
Hi
Vl
i
Яо
Vo
X,
Vl
Ho Hi
- n\U\ + U'Q- n\W2 - {AXU\ + A2U'2) гГ3 = 0, C.2.21)
не все равны нулю.
Тогда составляется уравнение, аналогичное C.2.18),
где
из которого определяется г\. (Если не все наблюденные поло-
жения лежат на эклиптике, то не все U\, С/о, Ur2 обращаются
в нуль.)
Из уравнения
К
Ho
Vo
Hi
Vl
Yk
Zk
(* =
1,
o,
2),
где
С, = -
- *? + У? + Z\,
находится pi. Из основных уравнений C.2.11) находится далее
Р2 и т. д.
4) Если Ux = Uo = U2 = 0 и все миноры C.2.19), C.2.20)
равны нулю, то все наблюденные геоцентрические положения
небесного тела совпадают друг с другом. Элементы орбиты оп-
ределить нельзя.
§ 2.03. Определение гелиоцентрических положений
по четырем геоцентрическим наблюдениям
в случае эллиптической или гиперболической орбит
Пусть даны четыре пары наблюденных геоцентрических
экваториальных координат ак, 8к (k = 1, 0, 2) и ао, бо на момен-
ты U, to) t'o, 1т. соответственно (при этом tx < /0 < t'o < t2).
Обозначим через \h, \ik, vft (k = 1, 0, 2), К'о, ц0', v'o направ-
ляющие косинусы геоцентрических радиусов-векторов р1? р0, Рц,
р2, вычисляемых по формулам, аналогичным C.2.01).
К использованию четырех наблюдений приходится прибегать
тогда, когда все наблюденные положения небесного тела или
лежат точно на эклиптике или достаточно близки к ней. Опре-
деление гелиоцентрических положений выполняется следующим
образом.
256 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 2.03
Рассматриваем уравнения C.2.11) для геоцентрических рас-
стояний pi, ро, р2, записав их в виде
РоМ.0 — Р2Л2^2 = Р1Л^1 — n^i + Ya — лгУ2, > C.2.22)
Выбрав два из этих уравнений, для которых определитель коэф-
фициентов левых частей наибольший, выразим р2 через pi:
p2 = K!±pl + Ll%- + L2± + L3, C.2.23)
где величины К, L\, L2, L3 выражены через
bk,Vk.Vk,Xk.Yk.Zk F=1,0,2).
Рассмотрим аналогичные уравнения для геоцентрических
расстояний рр pg, p2, из которых также выразим р2 через pL:
P2 = ^4pi + L;-|+L'2^ + ^. C.2.24)
Коэффициенты К', L\, Ц, Ц вычисляются по
К' Н> V **' Yk> Zt(ft= 1, 2) и К' 1*о. Vo. К Го. Z'Q.
Величины пи п^, п\, п.2 представляют собой отношения пло-
щадей треугольников, образованных соответствующими радиу-
сами-векторами. Приближенно полагают
щ = —, n't=-+- (/ = 1,2), C.2.25)
Tq Tg
где
Подставив эти значения п\, п2, п\, п\ в C.2.23) и C.2.24), по-
лучим два уравнения для нахождения в первом приближении
значений pi, p2. Приближенные значения гелиоцентрических ко-
ординат на моменты t\, t2 вычислим далее по формулам
Z, (i=l, 2). C.2.27)
Дальнейшее уточнение гелиоцентрических кородинат можно
выполнить принципиально так же, как было указано в преды-
дущем параграфе, а именно:
1. С помощью уравнений C.2.22) находим р0, исходя из по-
лученных значений pi, p2, а из соответствующих уравнений для
рр Ро, р2 находим Ро.
§ 2.04| ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 2Б7
Затем по формулам, аналогичным C.2.27), находим гелио-
центрические координаты на моменты / , t'u.
2. Моменты t\, to, t'o, U исправляем за аберрационное время.
3. По полученным приближенным значениям гелиоцентриче-
ских координат на моменты U, to, t'o, t2 находим величины
"Hii- \> Щ* Лр Лс' 'Hj — отношения площадей соответствующих
секторов и треугольников и уточняем значения ti\, пг, п[, пг по
формулам
С этими значениями щ, ..., пг снова решаем уравнения C.2.23)
и C.2.24) относительно pi, рг и т. д.
§ 2.04. Определение гелиоцентрических положений
по трем геоцентрическим наблюдениям
в случае параболической орбиты
Обозначим опять через ah, бь (k = \, 0, 2) три пары наблю-
денных геоцентрических координат на моменты tlt t0, t2, через
Xh, Yh, Zh — соответствующие геоцентрические координаты
Солнца, а через hk, цл, v^ — направляющие косинусы геоцентри-
ческих радиусов-векторов, вычисляемые по формулам C.2.01).
Применение общего метода, изложенного в § 2.01, оказы-
вается невозможным, так как определитель D весьма мало от-
личается от нуля.
Рассмотрим уравнения относительно геоцентрических рас-
стояний pi, po, р2, записанных в виде C.2.22). Выбрав два из
этих уравнений с наибольшим определителем, выражаем р2 че-
рез Р!:
92 = KI±Pl + LlJ± + L2-L + L3, C.2.28)
где К, L\, L2, L3 — величины, вычисляемые по
К, (**, V*. Xk, Yk, Zk (A =1,0, 2).
В первом приближении полагаем
«.- — . ла- —.
где Ti, to, T2 определяются по формулам C.2.26). После этого
C.2.28) запишется в виде
P2 = MPl + m, C.2.29)
где М, т — известные числа.
\j Под ред. Г. Н. Дубошина
258 4. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ 1§ 2.04
Вместе с C.2.29) рассмотрим соотношение
C.2.30)
где
[ C.2.31)
Это соотношение, в котором R, х предполагается выраженным
через pi с помощью C.2.29), C.2.31), рассматривается как урав-
нение относительно рь
Путем вариации значений pi и последующего интерполиро-
вания находим такое pi (в пределах нескольких значащих
цифр), что левая часть этого уравнения, обозначаемая через
/(pi), обращается в нуль. Далее по формулам C.2.29), C.2.31)
находим р2, Х\, уи z\, x2, y2, z2, r\, г2, заканчивая этим вычислен
ния гелиоцентрических положений в первом приближении.
Переходя ко второму приближению, вычисляем по тем же
двум из уравнений C.2.22) значение ро, соответствующее пер-
вому приближению для pi, а затем Го по формуле
г§ = р2 + 2Сор0 + Я2, C.2.32)
где
П /j у I ,, V 1 v 7 ^ Р2 У2 _1- V2 1 72
"О \ й О ' ^0 О ' 0 О)' v0 0 ' 0 ' 0"
Исправляем далее моменты ti, t0, t2 за аберрационное время и
перевычисляем величины Ti, то, х2. Вычисляем более точные зна-
чения величин пи п2 по формулам C.2.06) или C.2.08) и заново
решаем уравнение C.2.30), находя уточненные значения pi, р2,
^li У\1 **\t X2t y2t Z2, /*i, Т2.
В третьем приближении (если оно требуется) сначала вы-
числяем значения р0, г0, соответствующие второму приближению
для pi, а также х0, Уо, %а по формулам, аналогичным C.2.31),
C.2.32). Далее с имеющимися значениями pi, p0, р2 уточняем
поправки моментов U, t0, t2 за аберрационное время; Используя
полученное второе приближение для гелиоцентрических поло-
жений на эти моменты, вычисляем величины х\\, щ, Ц2 — отно-
шения площадей соответствующих секторов и треугольников
по формулам
, 2 г л -,-'/.
-Г-
а02 I
(га + r2y- \
('о + г,)
Л"
g 2.04J ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 259
где
*?* = (*« ~ Ч)г + (»i - УкУ + («, - zkf.
После этого находим более точные значения пг и п2:
1 То r\t 2 To TJi
И опять возвращаемся к решению уравнения C.2.30) относи-
тельно pi и т. д.
Уравнение C.2.30) обладает, как правило, одним положи-
тельным корнем pi. Однако в некоторых, хотя и в очень редких,
случаях это уравнение имеет три положительных корня. Тогда
мы получим три системы элементов, т. е. три разные параболи-
ческие орбиты, отвечающие трем использованным наблюдениям.
Вопрос о том, какая из орбит соответствует фактическому дви-
жению данного небесного тела, выясняется только после при-
влечения четвертого наблюдения, если такое, разумеется, вы-
полнено. Вычисляя три варианта теоретического положения
небесного тела на момент четвертого наблюдения и сравнивая
с фактическими наблюдательными данными на этот момент,
нетрудно произвести правильный выбор.
Ответ на вопрос о количестве положительных корней урав-
нения C.2.30) сравнительно легко получить при анализе более
простого уравнения, имеющего то же самое количество положи-
тельных корней. Это более простое уравнение получается из
уравнения Эйлера C.2.61) (см. ниже § 2.08) при 0О = 1,
rj -j- rg = 2r и записывается в виде
го2 = с\ C.2.34)
где
, _ ft2 (f, - f,)' A + Af)»
C ~~ 2 A - ?Af + M2)
v2_ ^A+AfJ r2 r_ A +
4A — ?M + Af2) A ' *¦ 2A— EM + .
F{ = h {X2 - X,) + и., (Y2 - Ki) + v, (Z2 - Z,),
F2 получается из F\ после замены всех индексов A) на B) и
наоборот, а М, Со, Ro — величины, выписанные в C.2.29),
C.2.32) соответственно.
260 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [g 2.05
В уравнении C.2.34) неизвестной является величина р, свя-
занная с геоцентрическими расстояниями pi и рг формулами
__ 2р __ 2Afp
Pl ~~ 1 + At ' Pz ¦"" 1 + М "
Все остальные величины Г, 2, Со, i?o. ?2 известны.
Количество положительных корней уравнения C.2.34) отно-
сительно р и их приближенные значения можно определить гра-
фическим путем. Для этого достаточно построить графики, на-
нося по оси абсцисс значения р, а по оси ординат значения
величин г, а2 и га2. По формуле pi = 2р/A + М) получим соот-
ветствующие приближенные значения корней pi исходного урав-
нения C.2.30). Уточнение этих значений проводится с помощью
варьирования и интерполирования.
§ 2.05. Вычисление элементов эллиптической орбиты
по двум гелиоцентрическим положениям
Выше было указано, каким образом по трем или четырем
наблюдениям небесного тела в моменты tu ta, t2 или t\, t0, t0, U
можно найти его гелиоцентрические координаты на эти мо-
менты. Для непосредственного определения элементов орбиты
достаточно знать гелиоцентрические координаты на два мо-
мента, за которые принимают t\ и f2.
Таким образом, пусть даны гелиоцентрические координаты
Xh, yh, zk, rh (k = 1, 2) на два момента U, t2. Элементы эллипти-
ческой орбиты вычисляются следующим образом.
1. Вычисляется параметр орбиты р по формуле
(J) C.2.35)
где
В2 = (ул - у2г,J + (ад - адJ + (Xly2 -. x2y{J C.2.36)
и т] — отношение площадей сектора и треугольника, образован-
ных радиусами-векторамиTi, r2, т. е.
Способ вычисления этой величины был указан в § 2.01.
2. Вычисляется эксцентриситет е по формулам
- /l + Й1 , U + «2 ,„ о Q^
е2 = з— или ez=—§—• C.2.37)
r г
g 2.05] ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 26!
где
g\ — д . g2 = —-g—.
и В определяется согласно C.2.36).
Совпадение значений е, находимых по обеим формулам
C.2.37), является контролем вычислений.
3. Определяется большая полуось орбиты а:
а = г^т. C.2.38)
4. Вычисляются эксцентрические аномалии Е\, Е2 и средние
аномалии М\, М2 на моменты t\, tj соответственно:
tg?ft = - ** r (*=1, 2), C.2.39)
причем числитель и знаменатель в этой формуле имеют знаки
sin Eh и cos Ex соответственно (отсюда определяются четверти,
в которых расположены углы Еи Е2);
Мк = Ек-еътЕк (& = 1,2). C.2.40)
5. Вычисляется среднее движение п:
цм n==ka->K C.2.41)
t2 —
Совпадение обоих значений п является контролем всех вы-
числений в пунктах 2—4.
6. Вычисляются экваториальные векторные элементы орбиты
Рх, Ру, Pz, Qx, Qy, Qz ПО формулам
C.2.42)
где
1 C.2.43)
'\х— в ¦ '\у— в . '\z— в
Контроль:
r2(C2 + s2)=i, P,Q, + PuQe + PtQs = b- j C'
252 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ S 2.06
7. Вычисляются направляющие косинусы перпендикуляра
к орбите в экваториальной системе координат:
Контроль:
8 Вычисляются направляющие косинусы перпендикуляра
к орбите в эклиптической системе координат:
Ry — Ry cos e + R, sin e,
Rz — Rzcos e — Ry sin e,
C.2.46)
где б — наклон эклиптики к экватору.
9. Вычисляются долгота восходящего узла Q, наклон i и
угловое расстояние перигелия от узла ш по формулам
sin i sin Q = RX, sin i cos Q = — Ry, cos i==Rz,
sinisin(о = Ргcose ^- Py sine,
sin / cos со = Q? cos e — Qy sin e.
Контроль:
C.2.47)
Pu sec e — Px fg Q
На этом вычисление элементов заканчивается. Для контроля
надо вычислить по этим элементам и по формулам C.1.01),
C.1.14), A.1.034) координаты а, б на средний момент to (в слу-
чае трех наблюдений) или на средние моменты to, to (в случае
четырех наблюдений).
Отсутствие хорошего совпадения может указывать не только
на ошибки вычислений, но и на то, что фактическое движение
данного небесного тела плохо описывается на данном интервале
времени невозмущенной кеплеровской орбитой.
Такое сравнение вычисляемых по элементам и наблюденных
координат на средний момент выполняется также в случае оп-
ределения элементов гиперболической и параболической орбиты.
§ 2.06. Определение элементов гиперболической орбиты
по двум гелиоцентрическим положениям
Вычисление параметра орбиты р, эксцентриситета е, действи-
тельной полуоси а, а также элементов Q, /, ш выполняется так
же, как и в случае эллиптической орбиты. При этом мы полу-
чим е > 1.
§ 2.0?) ГЛ. 2, ОПРЕДЕЛЕНИЕ ОРБИТ 2S3
Вместо средней аномалии в эпоху принимают в качестве ше-
стого элемента момент т прохождения через перигелий. Фор-
мулы для вычисления т следующие (см. ч. II, § 2.03):
chtffe = -^ii, shtffe = ^==r (A =1,2), C.2.49)
ае еа Ve2 — 1
ka-'i'(tk-x) = eshHk-Hk (Jfe = 1, 2), C.2.50)
где gh (k = 1, 2) вычисляются согласно C.2.37).
Для контроля вычисляется
г — е sh Я) + Я[ — Яг
к (t2 — ti)
Это значение а должно совпадать по абсолютной величине с вы-
числяемым по формуле C.2.38).
§ 2.07. Определение элементов параболической орбиты
по двум гелиоцентрическим положениям
1. Вычисляются истинные аномалии t»i, v% на моменты t\, t2
и перигелийное расстояние q по формулам (см. ч. II, § 2.04)
. VI У(Г, + Г2У - S* - 2Г, , D2 2Л2 - Л/{Г, + Г2J - S2 п - ^оч
tgT= v^^~- tgT= v^r"> (¦ -52)
1 + tg3 ^ 1 + tg2 -f
где
Значения q, вычисленные по обеим формулам C.2.53),
должны совпадать.
2. Вычисляется момент т прохождения через перигелий:
(/ = 1,2). C.2.54)
Оба значения т должны совпадать друг с другом.
3. Компоненты векторных элементов Рх, Qx можно найти по
формулам
—- sin »2 ~ s'n 0i —"^ c°s Vi cos v2
Px — «in 2 @,-0,) • Qi ^ Э ип2(о2-»,) ' C-2-55)
а компоненты векторных элементов Pw, Qv, Pz, Qz по аналогич-
ным формулам, в которых Xk заменяются на у*, и zft соответ-
ственно.
Для перехода к элементам Q, со, /.служат формулы C.2.42) —
C.2.47).
264 4. lit. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ !§ 2.в8
§ 2.08. Уравнения Ламберта и Эйлера
В задачах определения и исследования орбит важное значе-
ние имеют уравнения Ламберта и Эйлера, связывающие два по-
ложения небесного тела на невозмущенной кеплеровской ор-
бите.
Пусть Г\ и г2— гелиоцентрические радиусы-векторы небес-
ного тела в моменты t\ и t2 соответственно, as — расстояние
между концами векторов ги г2, т. е. хорда, соединяющая два
положения небесного тела на орбите в моменты tu t2. Тогда
в случае эллиптического движения имеет место соотношение
k {t2 - f,) = а''' [е - sin e =F (б - sin б)], C.2.56)
где k — постоянная тяготения, а — большая полуось орбиты,
е и б — углы, изменяющиеся в пределах от 0° до 180° и опреде-
ляющиеся однозначно по формулам
-;П2 е — 'I + r2 + s -2 0 _ г, + г2 - s ,„ 2 -7\
Slfl Y 4Н ' Sln~ 4^ • yp-t-bl)
Верхний знак минус в правой части C.2.56) берется, если угол
между радиусами-векторами гь г2 меньше 180°, а нижний знак
плюс, если этот угол больше 180°.
Соотношение C.2.56) и называется уравнением Ламберта.
Оно остается справедливым также для гиперболического дви-
жения, если считать, что а < 0 и \а\ равно действительной полу-
оси гиперболической орбиты, а величины б и б полагать чисто
мнимыми (е = ie,\, б = idi, I = л/— 1 ).
Уравнение Ламберта записывается также в ином виде после
представления углов е и б в виде рядов по степеням величин
Vri + Г2 + S I
Та ' V
+ Л2 — 5
V Та
Если обозначить
j , m2 = j д/Vi + r2 — s, C.2.58)
то получим вместо C.2.56) уравнение
• C-2-Б9)
удобное в равной мере для эллиптических (а >¦ 0) и для ги-
перболических (а <; 0) орбит. В обоих случаях правая часть
этого уравнения не содержит мнимых величин.
§ 2.09] ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 265
В пределе при \а\ -> оо мы получим так называемое уравне-
ние Эйлера для параболической орбиты
k ft, - *,) = | [(/"I + r2 + s?' + (/, + r2- s)'hl C.2.60)
Если угол между радиусами-векторами Ту и г2 меньше 180°,
так что надо брать в правой части данного уравнения знак ми-
нус, и если s значительно меньше, чем Г\ -f- г2, то правая часть
представляет собой разность двух близких чисел и вычисляется
весьма неточно. Тогда используют обычно следующую форму
уравнения Эйлера:
0О • 4/>2 (*а - /,J = s2 (г, + г2), C.2.61)
(где
98ес2Т
= C'2'62)
или
83
83 4 . 95 5 .
20 736 с ^ 41 472 С ^
Уравнение C.2.30), используемое при определении гелио-
центрических положений в случае параболической орбиты (см.
§ 2.04), представляет собой некоторый аналог уравнения Эйлера.
§ 2.09. Определение элементов эллиптической
или гиперболической орбиты
по двум гелиоцентрическим положениям
с помощью уравнения Ламберта
Пусть даны гелиоцентрические (экваториальные или эклип-
тические) прямоугольные координаты Xh, Ун, Z\ (Дг = 1, 2) и со-
ответствующие радиусы-векторы г\, г2 небесного тела на мо-
менты времени t\, t2 соответственно.
Вычисляем длину хорды s, равную
S = У(*2 - XlJ + (у2 - у{у + (z2 - ZlJ ,
и величины т,\, т2 по формулам C.2.58). Уравнение C.2.59)
переписываем в следующем виде:
=Q - -w тц К ~ mD ~ ъг.тт* К " О + • ¦ • <3-2-64>
266 Ч. Ш. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ
где
IS 2.09
В качестве неизвестной величины принимается —. Если Q =
= 0, то — = 0, а = оо (параболическая орбита). Если Q ф 0,
то — находится методом последовательных приближений. За
нулевое приближение принимается
П\ _ 10Q
\а)о
ml —
C.2.65)
При этом, если Q > 0, то получим положительное решение —
уравнения C.2.64) и а равно большой полуоси эллиптической
орбиты. Если же Q < 0, то решение уравнения C.2.64) отрица-
тельное и \а\ равно действительной полуоси гиперболической
орбиты.
Эксцентриситет е эллиптической орбиты находится на осно-
вании того, что углы е и б, определяемые согласно C.2.57), удо-
влетворяют соотношению
е — Ъ = Е2 — Еи C.2.66)
где Ei и Е2 — эксцентрические аномалии небесного тела в
моменты ti и t2 соответственно. С помощью же соотношения
г = аA —ecosf) могут быть выведены формулы
,-rtf Ba^ri-r2y
JL Г (Г2-Г1У- , Bа -г,- r2y I
|_Sln -Г~ ™2—2~ J
(r2 —
соэес
в — i
Bа — Г\ — г2) sec
е-б
C.2.67)
причем знаки синуса и косинуса угла (Е{ -\-Е2)/2 совпадают со
знаками числителя и знаменателя правой части последней фор-
мулы соответственно. По формулам C.2.67) находим эксцентри-
ситет е и угол Е\ -f- E2, а затем с помощью C.2.66) находим
эксцентрические аномалии Е\, Е2.
По формулам C.2.40) и C.2.41) вычисляем далее средние
аномалии 'М\, М% на моменты t\ и t2 соответственно, а также
в 2.09] ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 267
среднее угловое движение п. Вторая из формул C.2.41) служит
при этом для контроля предыдущих вычислений.
В случае гиперболической орбиты (тогда мы получим при
решении уравнения C.2.64) а < 0) эксцентриситет орбиты и
момент прохождения через перигелий находятся следующим об-
разом.
Вычисляем величины ei и 6i на основании формул
„1.2 Ei _ n+r2+s ,2 fl,
Sn 2 — sn
2 41 a 1 ' °" 2 — 4 |a | ' v-*-*~i
Эти величины таковы, что
в, —в, = Яя —Я„ C.2.69)
а Й1 и Я2 удовлетворяют C.1.05), C.1.06) при / = Л и t = t2
соответственно и представляют собой аналоги эксцентрических
аномалий в случае гиперболического движения.
С помощью соотношения г = а{\—еспЯ) (а<0), рас-
сматриваемого при t = t\ и t = t2, можно вывести формулы,
аналогичные C.2.67):
С2= ^ Г B| д| Ч-/-1 + /-2J (ri-r2y- П >|
L °h2 Г sh2 *2 J I C.2.70)
th —Ц; = 1ГГ.
По этим формулам находим е, Hi -f Hz, а затем Нх и Я2 с по-
мощью C.2.68). Контролем вычислений служит формула
C.2.51).
С помощью C.2.50) находим далее момент т прохождения
небесного тела через перигелий орбиты.
Вычисление элементов Q, i, со производится одинаково для
эллиптической и гиперболической орбит по формулам C.2.42) —
C.2.47). При этом следует иметь в виду, что указанные формулы
предполагают использование экваториальных гелиоцентрических
координат xh, yk, zh (k = 1, 2). Если же xh, yk, zh — эклиптиче-
ские координаты, то нет необходимости в преобразованиях, ука-
занных в § 2.05, п. 8. Тогда мы получим вместо C.2.47) фор-
мулы
sint sinQ =/?х> . sirusinco = PZ) Л
sirucosQ = — Ry, sin i cos со = Q?, ? C.2.71)
cos i = Rz, )
где Rx Qz определяются согласно C.2.42), C.2.43), C.2.45).
268 4. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 2.10
§ 2.10. Определение элементов круговой орбиты
по двум наблюдениям
Пусть небесное тело наблюдалось только два раза в мо-
менты t\ и t2, и пусть ak, &h (ft = 1, 2) —две пары зафиксиро-
ванных в эти моменты геоцентрических экваториальных коорди-
нат. Для определения эллиптической орбиты двух наблюдений
недостаточно, но возможно определить элементы круговой ор-
биты, соответствующей этим двум наблюдениям. Такая орбита
может служить неплохим первым приближением для описания
фактического движения небесного тела, если, разумеется, фак-
тическая орбита имеет не слишком большой эксцентриситет.
Круговая орбита определяется четырьмя элементами: а (ра-
диус орбиты), Q (долгота восходящего узла), i (наклон),
/о (долгота планеты в некоторый фиксированный момент вре-
мени ^о)- Вычисление этих элементов производится следующим
образом.
1. Вычисляются направляющие косинусы Яд, \ih, vft (k = 1,2)
геоцентрических радиусов-векторов pi, р2 по формулам C.2.01),
а также прямоугольные геоцентрические координаты Солнца
Xh, Yh, Zk на моменты tk (k = 1, 2).
2. Вычисляются величины
С = Яз-Л] -j- Ц2*1 ~Ь ^2^1i ^ === — (л]Л2 ~Ь * 1* 2 i ^1^2/"
C.2.72)
3. Составляются соотношения для геоцентрических расстоя-
ний рь р2 и для гелиоцентрических прямоугольных координат
НУк, P^V^ST-C* (A = l,2), C.2.73)
= vftpft - Zk,
а также для угла 2f между гелиоцентрическими радиусами-век-
торами ъ&и у и zi), г2(х2, у2, z2):
a2 cos 2f = xiXa + у&2 + гхг2 C.2.74)
или
sin* f = j + ^ Ир,Ря + SPi + CP2 + D). C.2.75)
§ 2.10] ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 269
Последние две формулы, выведенные из геометрических сообра-
жений, определяют так называемое геометрическое значение
/геом угла /. Вместе с тем, поскольку небесное тело движется по
круговой орбите радиуса а равномерно с угловой скоростью
п = ka~\ то за время t2 — t\ гелиоцентрический радиус-вектор
опишет угол n(t2 — t\). Следовательно,
/ = *(V tl) a~\ ? = 0°,98560767. C.2.76)
Последняя формула определяет так называемое динамическое
значение /дин угла f.
Соотношения C.2.75) и C.2.76) образуют систему двух урав-
нений относительно двух неизвестных а и /. Ее нетрудно решить,
например, путем варьирования значений а и последующего ин-
терполирования. При каждом заданном а можно вычислить не-
посредственно динамическое значение /дин согласно C.2.76), за-
тем по формулам C.2.73) pi и р2 и далее геометрическое зна-
чение ^ом согласно C.2.75). Искомое а должно быть таковым,
ЧТО /геом = /дин-
4. Ось Si, орбитальной системы координат принимается на-
правленной в ту точку круговой орбиты, в которой небесное
тело, движущееся по этой орбите, должно находиться в момент
^о = (^i + t2)l2. Ось Si] повернута по отношению к оси S?, как
обычно, на 90° в плоскости орбиты по направлению движения
небесного тела.
Векторные экваториальные элементы орбиты Рх, ..., Qz (см.
C.1.15)) вычисляются при таком выборе орбитальной системы
координат по формулам
Рх = qi (*i + х2), Qx = q2 (x2 - х,), 1
РУ = ЧЛУ1 + У2), Qj, = <72U/2-</i), > C.2.77)
Рг = Ц\ fa + z2), Qz = qAz2 — zl), J
где
1 1
Ч{~ 2acosf ' Ч2~ 2asinf "
При этом надо иметь в виду, что угол со, выписанный в C.1.15),
представляет собой в данном случае угловое расстояние между
восходящим узлом орбиты и точкой, в которой небесное тело на-
ходится в момент f0) т. е. аргумент широты в этот момент. Этот
угол обозначается через и0.
5. Вычисляем по формулам C.2.45), C.2.46) направляющие
косинусы перпендикуляра к плоскости орбиты в эклиптической
270 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§2.11
системе координат Кх, ?„, Rz- После этого из формул, аналогич-
ных C.2.47),
sin/sin й = /?я, sinicosQ = —# cosi = /?,, Ч
sin i sin и0 = Рг cos e — P^sine, > C.2.78)
sin i cos u0 = Qz cos e — Qy sine J
можно вычислить i, Я и «о-
Искомая долгота /0 в момент tQ равна сумме Q -f- и0 и пред-
ставляет собой так называемую долготу в орбите.
Для контроля вычислений служит формула C.2.48), в кото-
рои!следует заменить ш на и0.
На этом определение всех четырех элементов круговой ор-
биты a, i, Я, /0 заканчивается. Дальнейшее сравнение получен-
ной орбиты с наблюдениями сопровождается вычислением ге-
лиоцентрических экваториальных прямоугольных координат на
любой момент времени. Такие вычисления производятся по фор-
мулам C.1.14), в которых следует положить
t = acosn(t — t0), т\ = a sin n{t — t0). C.2.79)
§ 2.11. Вычисление элементов гелиоцентрической орбиты
по положению и скорости в начальный момент
Пусть известны в начальный момент ?о прямоугольные коор-
динаты (экваториальные) х0, yQ, г0 и компоненты скорости
^о, Уо, 2о небесного тела. Укажем, как вычисляются элементы
невозмущенной орбиты, соответствующей этим значениям.
1. Вычисляется величина
1 2 VI
а
r0
C.2.80)
где |_"
§. C.2.81)
Положительному значению выражения, стоящего в C.2.80) под
знаком модуля, соответствует эллиптическая, отрицательному
значению —гиперболическая и нулевому значению —параболи-
ческая орбиты.
2. В случае эллиптической орбиты вычисляются эксцентри-
ситет е и эксцентрическая аномалия Ео на момент to из соотно-
шений
esin?0 = —4=, ecos?0=l--^, C.2.82)
к у а а
где s = х0хо + УоУо + zozo.
§ 2.11] ГЛ. 2. ОПРЕДЕЛЕНИЕ ОРБИТ 271
Затем с помощью уравнения Кеплера
M0 = E0 — esinE0 C.2.83)
вычисляется средняя аномалия в эпоху to.
В случае гиперболической орбиты формулы для вычисления
эксцентриситета, аналога эксцентрической аномалии Но и мо-
мента х прохождения через перигелий следующие:
—'-=, ech#0 = - + l, C.2.84)
k -у а а
0-H0 = ka-'''{t0-x). . C.2.85)
В случае параболической орбиты достаточно вычислить пара-
метр орбиты р и момент т прохождения через перигелий. Фор-
мулы для вычислений следующие:
^ ^ ) C.2.86)
где
C.2.87)
кл/р
3. Из соотношений
k -y/p sin i' sin Q' = yoZQ — zQy0,
k V'p sin i' cos Q' = xo^o"~
k л/р cos i' = xoyo — yoxo
C.2.88)
находятся элементы i', Q', отнесенные к экватору, а также пара-
метр р. В случае параболической орбиты это значение р должно
совпадать с тем, которое находилось согласно C.2.86). В случае
эллиптической или гиперболической орбит следует для контроля
проверить соотношения
C.2.89)
используя найденные значения а, е.
4. Экваториальный элемент о/ находится по формулам
, га cosec i'
о—
k{p-r0) • «"о— «„cosO'+y.elnO"
со' = иб —
C.2.90)
причем числители и знаменатели выписанных формул имеют
знаки синуса и косинуса углов «о, «6 соответственно.
272
Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ
Г§2.11
5. Переход к эклиптическим элементам выполняется по сле-
дующим формулам:
sin i sin Q = sin i' sin Q',
sin / cos Q = — cos V sin e + sin V cos e cos Q'
cos i = cos i' cos e + sin /' sin e cos Q',
sin i sin d = sine sin Q',
sin i cos d = sin i' cos e — cos i' sin e cos Q',
a = a' — d.
C.2.91)
В заключение заметим, что все формулы, приведенные выше
в главах 1 и 2, рассчитаны прежде всего на применение совре-
менной вычислительной техники. Формулы, где встречаются
ряды, выписаны так, что очевидна структура общего члена и
можно проводить вычисления с необходимой точностью.
Для облегчения некоторых вычислений, например, при опре-
делении среднего углового движения п по заданной большой
полуоси орбиты а и наоборот, при решении уравнения Кеплера
и т. д. можно рекомендовать специальные таблицы, имеющиеся
в [1], [3].
Глава 3
УЛУЧШЕНИЕ ПЕРВОНАЧАЛЬНОЙ ОРБИТЫ
Способы, изложенные в предыдущей главе, позволяют полу-
чить лишь предварительную орбиту. Ошибки элементов такой
орбиты обусловлены недостаточной точностью наблюдений, по-
терей точности при вычислениях. Кроме того, поскольку факти-
ческая орбита любого небесного тела не является невозмущенной
(кеплеровой), элементы предварительной орбиты представляют
собой, по существу, некоторые средние элементы кеплеровой
орбиты, приближенно представляющей возмущенное движение,
наблюдаемое на данном интервале времени.
Методы улучшения первоначальной орбиты небесного тела
преследуют цель или уточнения предварительных элементов кеп-
леровой орбиты в предположении, что движение остается невоз-
мущенным, или нахождения как можно более точных значений
оскулирующих элементов орбиты на тот или иной момент вре-
мени в предположении, что имеет место возмущенное движение.
Наряду с учебными пособиями [1], [2] для более подробного
ознакомления со способами улучшения орбит можно рекомендо-
вать [7], [8].
§ 3.01. Дифференциальное исправление орбит.
Постановка задачи
В настоящее время для улучшения первоначальной орбиты
наиболее эффективным является так называемый дифферен-
циальный метод исправления элементов орбиты, рассчитанный
на применение современной вычислительной техники и позво-
ляющий использовать всю совокупность наблюдений данного не-
бесного тела.
Пусть имеются наблюденные значения геоцентрических эква-
ториальных координат а'н), б((н) (?= 1, ..., п) на моменты
t\, ..., tn. Пусть имеется таблица значений а[в), б(,в\ геоцентри-
ческих расстояний р(гв), а также прямоугольных экваториальных
гелиоцентрических координат xf\ у[в\ z^B\ вычисленных на эти
274
Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ
[§ 3.01
же моменты по элементам предварительной орбиты, отнесенной
к моменту to-
Обозначим через Ааи Д8г-, Ах,-, Ауи Azi ошибки вычисленных
координат, так что
— а[в>,
Да. = а<
Ax.=x\-xf\
б4 = 6<н> — 6<3>,
где х*, у\, z\ — значения х, у, г, точно соответствующие наблю-
денным а[н), б[н). Предполагается, что ошибки Да,- Azi малы
и зависят только от погрешностей элементов предварительной
орбиты на момент t0.
Зависимость Да*, Дб,- от Axit Ayi, AZi выражается с точностью
до членов первого порядка формулами
cos
Да,- = sin а( • Д^ -\ cos at • Ау{,
P P
= — — sin
cos a-i • Axj sin 6^ sin a{ • Ay{ +
+ —
C.3.01)
где а,-, б,, Pi — вычисленные значения (индекс «в» для сокра-
щения записи опускаем).
В свою очередь зависимость Дд^, Ayit Azt от поправок к эле-
ментам предварительной орбиты выражается с точностью до
членов первого порядка формулами
C.3.02)
(/=1, 2, .... я),
где ?i Е6 — элементы орбиты, a (jjjt) < ¦•• —значения
частных производных х, у, z по Eh на момент tt. Членами по-
рядка выше первого в формулах C.3.01), C.3.02) относительно
Ах, Ay, Az и AEh пренебрегают. В формулах C.3.02) часто для
S 3.02] ГЛ. 3, УЛУЧШЕНИЕ ПЕРВОНАЧАЛЬНОЙ ОРБИТЫ 275
удобства вычислений в качестве Е\ Е5 принимают некото-
рые функции элементов.
Вычисление координат а<в), б<в>, х<в), yf\ г(гв) может произ-
водиться по формулам невозмущенного движения. Тогда ошибки
Да,-, Д6,-, Axj, At/i, Az,- обусловлены отклонением фактического
движения от невозмущенного, и ДЯь (k = 1, ..., 6) надо рассма-
тривать как поправки к элементам (или функциям от элементов)
невозмущенной орбиты, учет которых позволит получить невоз-
мущенную орбиту, достаточно хорошо описывающую фактиче-
ское движение. Однако чаще всего координаты сс(в), 8'в>, я(в>, у^\
zW вычисляются с учетом возмущений. Тогда A?ft рассматри-
вают как погрешности начальных значений элементов (или
функций элементов) оскулирующей орбиты на момент t0, учет
которых позволит вычислить более точно возмущения. Члены,
обусловленные изменениями Eh с течением времени и неточно-
стью метода вычисления возмущений, считаются имеющими бо-
лее высокий порядок малости и при составлении соотношений
C.3.02) не учитываются.
После нахождения численных значений производных
-gg-j , .-• подставляют выражения C.3.02) для Axit
в C.3.01) и получают соотношения вида
fl«'> Д?, + ... + о$'> Д?6 = cos 6, ¦ Да,, |
} C-03)
где а<?\ Ь^ — численные коэффициенты. Эти соотношения пред-
ставляют собой так называемые условные уравнения относи-
тельно A?"i, ..., Д?б, решаемые по способу наименьших квад-
ратов (с применением ЭВМ, если число наблюдений достаточно
велико). См. ч. VII, гл. 4.
§ 3.02. Выражения для производных от координат
по элементам (или по функциям элементов)
Укажем формулы для производных -т§-, -ri~, -=?-, при-
O?fc 0cj Ocj
fc j j
нимая в качестве Е\, ..., Es несколько наиболее употребляемых
в этой задаче систем параметров (элементов или функций эле-
ментов) для орбит различных типов.
1. В случае эллиптических орбит с довольно значительным
эксцентриситетом е, но не близким к единице, принимают
Ei = ф| (* = 1, 2, 3), ?4 = In а, Е5 = е, Е6 = Мо, C.3.04)
так что
Д?, = Д^ (i = l, 2, 3), Д?4 = ^-. Д?5 = Де, Д?6
276
Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ
[§ 3.02
Параметры tpi, \|з2, \|зз эквивалентны элементам Q, i, ш и
представляют собой углы поворота плоскости орбиты вокруг
осей х, у, г соответственно, а — большая полуось, е — эксцентри-
ситет, Мо — средняя аномалия в эпоху to.
Приведем таблицу выражений для производных х, у, z по
Е\ Е6 (табл. 42), где п — среднее движение,
ц_ г — а(\ +еа) к J^_f\ |
еаA_е2) • A- fe2g ^i -t-
s = xx + yy + гг.
C.з.О5)
В каждом столбце выписаны производные координат х, у, г по
соответствующему элементу: во втором столбце по Е\, в третьем
столбце по Е2 и т. д.
Таблица 42
Ek
-.
0
—z
У
E,
г
0
—X
E,
-у
X
0
E,
2
3
z-J-(/-;„) г
-¦
Hx + Kx
Hz+Ki
E,
X
n
У
n
2
n
Эта таблица является одновременно таблицей коэффициен-
тов в формулах C.3.02) при соответствующих Д?ь ..., АЕ6. На-
пример, строка производных дх/дЕк позволяет записать первую
из формул C.3.02) в виде (индекс i опускаем)
Ах = гАЕ2-у АЕ3 + [х - -f (t -10) х] АЕА + (Нх+К*) Д?5+| АЕ6.
После вычисления поправок Д\|л, Ai]32, Афз можно найти по-
правки к значениям обычных элементов й, i, ш по формулам
C.3.06)
Асо sin i = Аор! sin Q — А^2 cos й,
Ai = Aty! cos Q + Д-ф2 sin Q,
ДЯ = Ai]33 — Aa cos i,
где
Aip,
^ Д^гcos e
= — A^2 sin e
sin e,
cos e.
C.3.07)
3.02]
ГЛ. 3. УЛУЧШЕНИЕ ПЕРВОНАЧАЛЬНОЙ ОРБИТЫ
277
(Величины Aipi, Aif>2, Д"ф3 суть поправки углов поворота плоско-
сти орбиты вокруг осей Ox, Оу, Oz эклиптической системы ко-
ординат.)
Значения х, у, z находятся проще всего с помощью интерпо-
ляционных формул (см. ч. VII, гл. 1) по таблицам прямоуголь-
ных координат, вычисленных для равноотстоящих моментов
времени.
2. В случае эллиптических орбит с малыми эксцентрисите-
тами используются параметры
= Ф, 0 = 1, 2,3), ?4 =
C.3.08)
так что
(/=1,2,3),
АЕ6 = АМ0
Да
Таблица для производных координат х, у, г по Е\, ..., Е6
или же для коэффициентов формул C.2.02) отличается от
табл. 42 только одним столбцом, соот-
ветствующим Е3 = -фз и приведенным в'
табл. 43.
3. При произвольных эксцентрисите-
тах и наклонах эллиптических орбит мо-
гут быть использованы параметры
Е5 = е, Е6 = М0 + г, C.3.09) °L
где р, q, г—компоненты вектора ("фь^г,
^з) в системе координат х, у, z, плос-
кость ху которой совпадает с плоскостью
орбиты, а ось х направлена в ¦перигелий.
Соотношения между Ар, Aq, Ar и приращениями элементов
ДЙ, At, Дш следующие:
дх
дЕъ
ду
дЕз
дг
дЕз
Т
а б л и ц а 43
Е,
it
---у
g
п + х
i
п
Ai = Ар cos а — Aq sin a,
sin ( Дй = Ар sin a + Aq cos со
Да + cos / Дй = Дл.
C.3.10)
Производные
дх
даются в табл. 44.
278
Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 3.02
Таблица 44
Ek
дх
dEh
ьЧ-
дг
ES
X
п
L
п
z
п
я.
PyZ-РгУ
Ргх~Рхг
Е,
Qzx~Qxz
Qxy-QyX
Е,
п °
п
--+Rxy-Ryx
Е,
з
я.
Ну+Ку
Hz+Kz
где Px, ¦¦¦, Qz — компоненты векторных элементов орбиты (см.
§ 1.04) и Rx, Rv, Rz — направляющие косинусы перпендикуляра
к орбите в экваториальной системе координат. Соотношения
между Рх, ..., Rz и со, i, Q
Таблица 45 выражаются формулами
C.1.15), C.2.46), C.2.47).
4. При улучшении эллип-
тических или гиперболиче-
ских орбит с эксцентрисите-
том, близким к единице, ис-
пользуются параметры
Et = *t 0=1,2,3), ?4 = т,
?5 = Я> Ее = h = — -^.
C.3.11)
где х — момент прохожде-
ния через перигелий, q =
= а[\ — е) — перигелийное расстояние и а — большая или дей-
ствительная полуось. Величина h представляет собой с точ-
ностью до множителя к2 постоянную энергии (для гиперболы
принимаем здесь а < 0).
Производные от х, у, г по г|)( (i = 1, 2, 3) те же, что и
в табл. 42. Производные по Eit Es, Е5 даются в табл. 45, где
?»¦
ах
dEk
ду
dz
Е,
-л
-у
-г
Qx+Q'x
Qy+Q'y
Qz+Q'z
Е,
Hx+Ff'x
Ну+Н'у
Hz+H'z
ер
'_ rr{r + p)
k2ep
C.3.12)
р — параметр орбиты, г — гелиоцентрическое .расстояние, k2
произведение постоянной тяготения на массу Солнца.
§ 3.02] ГЛ. 3. УЛУЧШЕНИЕ ПЕРВОНАЧАЛЬНОЙ ОРБИТЫ 279
Так как е = 1 -+- qh, h = ——, то после нахождения Aq, АЛ
получим исправленные значения а, е по формулам
е = 1 + (? + Aq) (Л + АЛ), Да = а2 АЛ.
5. Если предварительная орбита является параболической,
а уточненная орбита может быть как эллиптической, так и
гиперболической, то принимаются или те же параметры, что и
в пункте 4, т. е.
?, = ф, ('=1, 2, 3), Е4 = т, ?s = <7> ?6 = A, C.3.13)
или
?, = 11), (/ = 1,2, 3), Е4 = т, ?s = qr, ?6 = е, C.3.14)
с учетом, что для предварительной орбиты h — 0, е = 1.
После определения поправок А<7, АЛ при использовании па-
раметров C.3.13) находят е по формуле
e=l+{q + Aq)Ah, C.3.I5)
так что при АЛ < 0 уточненная орбита будет эллиптической,
а при АЛ > 0 — гиперболической.
Значение а находят по формуле
а = -~. C.3.16)
Выражения для производных х, у, г по т, q, Л записываются
в том же виде, что и в табл. 45, а величины Q, Q', Я, Н' вычис-
ляются по формулам
±,
±-
т = -Д= = 41,1058431,
V2fe
причем о находится из уравнения
C.3.17)
-Щ-х). C.3.18)
Если используется система параметров C.3.14), то производ-
ные х, у, z no q, e следует взять из табл. 46 (остальные про-
изводные по Ei = % (i=l, 2, 3) и Ei = т те же, что и
в табл. 42, 45 соответственно),
280 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [S 3.02
Таблица 46
ч
дх
дЕк
ду
дЕк
дг
дЕк
ч
|[» lit „,]
е
Lx-K [дг—| (t-t) *]
i» — *Г [*—|- (*—т) *]
Lz-K [z~| (/-¦г) г]
где
a* +
+ 5
4o*
_ 5
10a2 + 30
10a2 + 30
C.3.19)
6. Вместо параметров \|з4 или р, q, r во всех приведенных
выше системах можно ввести сами элементы Q, а, i. Если за-
менить этими элементами параметры ф4 в системах C.3.04),
C.3.11), C.3.13), то следует воспользоваться значениями про-
изводных от х, у, z no Q, ш, i из табл. 47,
Таблица 47
-.
дх
дЕк
ду
dEk
дг
a
—г sine — у cos e
X COS 8
xsin e
RyZ - Rzy
RxV - Ryx
i
Nyz — Nzy
Nzx - Nxz
Nxy - Nyx
где e — наклон эклиптики к экватору,
Ny = sinQcose, Ry = — sin:cosQcose — cosisine, \ C.3.20)
Nz = cosQsine, ' Rz — — sin/cosQsine + cosicose.
Если ввести элементы Q, ш, i вместо ifi в систему C.3.08)
или вместо р, q, r в систему C.3.09), то будем иметь
= Q, Ег--= ы,Е3 = i,Ei =
е, Е6 =
и. C.3.21)
6 3.631
ГЛ. 3. УЛУЧШЕНИЕ ПЕРВОНАЧАЛЬНОЙ ОРБИТЫ
281
Таблица 48
дх
д(й
ду
д(й
дг
да
@
п
у
п г х
г
-~ "~ "f" /\хУ *\уХ
Производные от х, у, г по Q, i останутся такими же, как
и в табл. 47, а производные по ш представлены в табл. 48.
Если элементы й, a, i отне-
сены к экватору, то в форму-
лах следует положить е = 0.
§ 3.03. Условные
уравнения, составляемые
по наблюдениям долготы
и широты небесного тела
Если движение данного не-
бесного тела происходит по
орбите, имеющей малый на-
клон к эклиптике, то при улуч-
шении элементов эллиптиче-
ской орбиты часто используют расхождения между на-
блюденными эклиптической долготой К и эклиптической
широтой р. Величины ЛЯ = A.W — № и Ар == рМ — р<в>, где ин-
дексом (н) отмечены наблюденные значения координат и ин-
дексом (в)—вычисленные, выражают обычно через поправки
к следующим элементам орбиты: п (среднее угловое движение),
е (средняя долгота в орбите в эпоху — см. ч IV, § 3.03), л, (дол-
гота перигелия), Q (долгота узла), е (эксцентриситет), i (на-
клон орбиты). Вместо поправки к наклону i рассматривают при
этом поправку к величине y = sin -j.
С помощью, например, D.10.14) из ч. IV можно вывести
следующие выражения, связывающие АХ и Ар с поправками
Ал, Ае, Ая к указанным элементам орбиты:
+ 2y2 sin Ba + M) - 2Y2 sin Ba + 3M)] Ae +
+[- 2 cos M + -|ecos2M]eAn + 4v2cosBa + M) ДП +
— 2y sin Ba + 2M) — 4ye sin Bco + 3M) + iye sin Ba + M)] Ay,
C.3.22)
Afl = [2 sin (со + M) + 2e sin (a -f 2M) — 2e sin со] Ay -f
•f [— 2y sin (a -f 2M) — 2y sin со] Ле +
4- 2Y cos (со + M) [Ле + An (/ - /0) - Щ, C.3.23)
282 4. 111. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ IS 3.03
где коэффициенты в C.3.22) выписаны с точностью до членов
второго порядка, а в C.3.23)—с точностью до членов первого
порядка относительно ей у.
Приведенные выражения служат для составления условных
уравнений, соответствующих зафиксированным на различные
моменты времени tk (k = 1, 2, 3, ...) расхождениям ДЯ*, Д0ь.
В качестве неизвестных принимаются искомые поправки An, Де,
Дя, Де, Ду, Д?2 к известным первоначальным значениям величин
л, е, я, е, у, Q.
При малых е и \ обычно используют в качестве неизвест-
ных е Дя и ^ДЯ вместо Дя и Д?2 соответственно, чтобы коэффи-
циенты при всех неизвестных в условных уравнениях имели один
и тот же порядок величины
Погрешности элементов орбиты сказываются сильнее всего
на долготе Я, особенно если проводится сравнение теории и на-
блюдений на большом промежутке времени. Поэтому часто на-
клоном орбиты и расхождениями Др в широте пренебрегают и
составляют условные уравнения для Дп, Де, Де, еАя только на
основании зафиксированных расхождений ДХ.
Глава 4
ОПРЕДЕЛЕНИЕ И УЛУЧШЕНИЕ ЭЛЕМЕНТОВ ОРБИТ
ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ
Запуск любого искусственного спутника Земли производится
так, чтобы он совершал движение по заранее намеченной ор-
бите. (Эта орбита выбирается в соответствии с преследуемыми
при запуске целями.) Программа автоматического управления
ракетой-носителем на активном участке движения составляется
так, чтобы к моменту выхода на орбиту, тек моменту окон-
чания работы реактивных двигателей, космический аппарат на-
ходился в заранее намеченной точке пространства над Землей
и имел заранее намеченную скорость, соответствующую выбран-
ной орбите. В этбй главе изложены основные способы опреде-
ления орбит ИСЗ. Ряд дополнительных сведений читатель най-
дет в монографии [8] и статьях [9] — [11].
§ 4.01. Определение элементов орбит ИСЗ
по положению и скорости в момент выхода на орбиту
Выберем прямоугольную систему координат хуг, начало ко-
торой О совпадает с центром Земли, плоскость ху — с плоско-
стью экватора, а ось Ог направлена к северному полюсу. Пусть
в момент to ИСЗ находится в точке с координатами дг0, уо, Zq и
имеет скорость Vo e компонентами xq, y0, Zo-
1) Большая полуось а геоцентрической эллиптической ор-
биты вычисляется по формуле
д= /IVf' ^o = !Vol, C.4.01)
где r0 = (*q + у\ + ZgI/! — геоцентрическое расстояние ИСЗ,
Vl = ^. C.4.02)
fMT — так называемая геоцентрическая гравитационная постоян-
ная (см. ч. I, § 4.06), a Vc — круговая скорость на расстоянии га
от центра Земли (см. ч. II", § 1.03).
284 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 4.01
2) Эксцентриситет е выражается по формулам
т
C.4.04)
где фо — угол между радиусом-вектором г0 и вектором скоро-
сти VQ.
В частности, если Vo -I- ro (фо = 90°), то
¦ш-
C.4.05)
Формулу C.4.03) можно записать также в виде
^)со52Фо, C.4.06)
где еа вычисляется по формуле C.4.05) и представляет собой
значение эксцентриситета орбиты в том случае, если r0 JL Vo.
3) Истинная аномалия v в момент t0 находится по формуле
где
Числитель и знаменатель в формуле C.4.07) имеют знаки си-
нуса и косинуса vQ соответственно. Формулу C.4.07) можно
переписать в виде
5i"*co7° C.4.08)
где угол фо определяется по формуле C.4.04). При cos ф0 > 0
(фо < 90°) имеем 0 < v0 < 180°, при cos ф0 < 0 (ф0 > 90°)
имеем 180° < Vo < 360°, причем v0 отсчитывается от направле-
ния на перигей П орбиты до г0 в направлении движения ИСЗ.
В частности, если ф0 = 90°, то v0 = 0, т. е. радиус-вектор г0 сов-
падает в момент выхода на орбиту с направлением на перигей.
4) Долгота восходящего узла орбиты Q и наклон i опреде-
ляются по формулам
a sin i )
a sin i cos Q = — (zoxq — xozo), ? C.4.09)
a cos i
где
in i sin Q = уог0 — гоУо> ")
in i cos Q = — (zoxq — xozo), ?
os i = Xaifo — yo^o, J
S 4.02] ГЛ. 4. ОПРЕДЕЛЕНИЕ И УЛУЧШЕНИЕ ЭЛЕМЕНТОВ ОРБИТ ИСЗ 285
5) Угловое расстояние и перигея от узла орбиты находится
по формуле
a = uo-vo, C.4.10)
где
*
причем числитель и знаменатель в этой формуле имеют знаки
синуса и косинуса и0 соответственно.
Фактическое положение ИСЗ в момент выхода на орбиту,
а также величина и направление скорости всегда отклоняются
от расчетных. Поэтому обязательно возникает задача об уточ-
нении элементов орбиты ИСЗ по наблюдениям, для решения
которой применяют обычно метод дифференциального исправ-
ления орбит.
§ 4.02. Определение предварительных элементов орбиты
ИСЗ по наблюдениям
Для вычисления элементов невозмущенной орбиты ИСЗ во-
обще достаточно трех наблюдений.
Пусть а*, 6й (k =^ 1, 0, 2) —наблюденные топоцентрические
экваториальные координаты спутника на моменты t\, to, ti со-
ответственно. Пусть Хк, Yk, Zk {k = 1, 0, 2) — известные геоцен-
трические экваториальные координаты пунктов наблюдения и
pft — неизвестные топоцентрические расстояния (от пункта на-
блюдения до спутника) на моменты t\, t0, t% соответственно.
Предполагается, что промежутки между моментами наблюде-
ний малы по сравнению с периодом обращения спутника.
Вычисления можно выполнить по схеме, аналогичной той,
которая указана в § 2.01, сохраняя те же обозначения.
Рассматриваются уравнения относительно топоцентрических
расстояний,
= —(П1У1 —У0 — Л2У2), Г C.4.
= — ("i^i - Zo -f rtjZa), )
.12)
n2V2p2:
где Kh, ц*. Vft — направляющие косинусы топоцентрических ра-
диусов-векторов:
. = cos at cos 6ft, nft = sin aft cos 6A, vfc = sin6ft,
C.4.13)
Xl = 1 + -^ (xl + 2t,t2), x2 == 1 + x (T? + 2t1^)'
о о *
/"о — геоцентрическое расстояние спутника в момент to.
286 Ч. III. МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ [§ 4.02
Уравнения C.4.12) . решаются методом последовательных
приближений.
В первом приближении полагают xi = Х2 = 1. »fc'= "? и на-
ходят из уравнений C.4.12) значения pi, po, рг. После этого
находят в первом, приближении геоцентрические координаты
Хк, Ук, zh и геоцентрические расстояния rh (k = 1, 0, 2) по фор-
мулам
n,i7 C.4.14)
Zfc = PfcVft -Г?к>
Во втором приближении вычисляют jji. X2 с полученным значе-
нием г0, затем уточняют щ, Пг и снова решают уравнения C.4.12)
относительно pi, ро, рг-
В следующем приближении можно вычислить щ, п% по точ-
ным формулам
1 1 T]i ^ ^ Т]2
где tji, т]о. Л2 — соответствующие отношения площадей эллипти-
ческих секторов и треугольников, заключенных между геоцен-
трическими радиусами-векторами ги г0, г2 (см. § 2 01) и т. д.
После того как найдены достаточно точные значения топо-
центрических расстояний, а также геоцентрических координат
Xh, Ук, zh (k = 1, 0, 2), вычисляют элементы орбиты по двум гео-
центрическим положениям (см. § 2.05)
Элементы предварительной орбиты спутника вычисляются,
как правило, не вполне точно из-за ошибок наблюдений и из-за
больших отклонений истинного движения спутника от невозму-
щенного эллиптического.
Наблюдения ИСЗ отличаются той особенностью, что мо-
менты наблюдений фиксируются неточно (из-за быстрого види-
мого движения спутников на небесной сфере). В работе [11]
рассматривается вопрос об определении орбиты по четырем и
большему числу наблюдений с грубо известными моментами.
В работе [9] рассматривается вопрос об определении элементов
оскулирующей орбиты с одновременным учетом части возму-
щений.
Если проводятся радиолокационные наблюдения, позволяю-
щие определить не только угловые координаты, но и расстояния
(топоцентрические) до спутника, то можно вычислить геоцен-
трические координаты по формулам C.4.14) и, следовательно,
для вычисления элементов орбиты в принципе достаточно двух
наблюдений.
ЛИТЕРАТУРА К ЧАСТИ III 287
§ 4.03. Улучшение орбит ИСЗ
Метод улучшения орбит ИСЗ применяется не только для
того, чтобы уточнить элементы предварительной орбиты, но
также для того, чтобы определить как можно более точные зна-
чения элементов оскулирующей орбиты на различные моменты
времени. Как правило, применяют метод дифференциального
исправления орбит (см. гл. 3). При этом используются, напри-
мер, следующие системы элементов:
Q, со, i, In a, e, Мо, C.4.15)
Q, со, i, In а, е, Мо + ®, C.4.16)
Q.u.l,T,q,h = ~. C.4.17)
Система элементов C.4.15) используется, если орбита имеет
заметный, но не близкий к единице эксцентриситет; система
C.4.16)—если орбита имеет малый эксцентриситет; система
C.4.17) — если эксцентриситет орбиты близок к единице.
Производные от координат х, у, z по выписанным парамет-
рам, с помощью которых составляются условные уравнения,
приведены в § 3.02. В работе [10] рассматривается вопрос о со-
ставлении условных уравнений с учетом неточности фиксации
моментов наблюдений.
Ввиду довольно значительных вековых возмущений элемен-
тов Q и со (см. ч. IV, § 8.01) целесообразно положить в услов-
ных уравнениях
AQ = AQ0 + &'t, Аш = Дсо0 + n'U
где Q', со' — вековые возмущения элементов Q, со, и рассматри-
вать Q' и со' как неизвестные, подлежащие определению из
условных уравнений.
ЛИТЕРАТУРА К ЧАСТИ III
1. Субботин М. Ф., Введение в теоретическую астрономию, «Наука»,
1968.
2. Дубяго А. Д., Определение орбит, Гостехиздат, 1949.
3. О р л о в А. Я., Орлов Б. А., Курс теоретической астрономии, Гостех-
издат, 1940.
4. Str a eke G., Bahnbestimmung der Planeten and Kometen, Berlin, 1929.
5. Баженов Г. М., Уч. зап. Харьковского ун-та 42, 17, 1952.
6. Crawford R. Т., Determination of orbits of comets and asteroids, New-
York, 1930.
7. Самойлова-Яхонтова Н. С, Бюлл. Ин-та теор. астрон. АН СССР,
№ 53, 447, 1944.
8. Escobal P. R., Methods of Orbit determination, Wiley and Sons, 1965.
9. В r i g g s R. E., S 1 о w e у J. W., Spec. Rept. Smithsonian Inst. Astroph.
Obs. № 27, 1—8, 1959.
10. Куликов Д. К., Батраков Ю. В., Бюлл. Ин-та теор. астрон. АН
СССР 7, 554, 1960.
11. Батраков Ю. В., Бюлл. Ин-та теор. астрон. АН СССР 7, 570, 1960.
Часть IV
ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Глава 1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
ЗАДАЧИ п ТЕЛ В КООРДИНАТАХ
В этой главе приводятся различные формы дифференциаль-
ных уравнений движения задачи п тел, рассматриваемых как
материальные точки, а также их первые интегралы. Подробные
выводы можно найти в учебниках и монографиях [1] — [8].
§ 1.01. Уравнения абсолютного движения
Пусть имеется п материальных точек Ро, Р\ Pn_i с мас-
сами tnQ, mi, ..., trin-i соответственно, взаимно притягивающихся
по закону всемирного тяготения. Задача п тел состоит в нахож-
дении и изучении всевозможных движений этой системы мате-
риальных точек.
Если O|t]? — абсолютная прямоугольная система координат
с началом в произвольно выбранной точке О и с неизменными
направлениями осей, |(, r\it ?,¦ — координаты точки Р,-, а взаим-
ное расстояние точек Р* и Pj есть
= о,
п
1),
то дифференциальные уравнения движения системы точек имеют
такой вид:
d?l, ди
= 0, 1
_ ди
dU
...п-1).
D.1.01)
§ 1.01]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ ft ТЕЛ
289
Функция U называется силовой функцией и выражается фор-
мулой
с/=т'Ё Ё'-Р-. DЛ-02)
i=0 /=0 "
где / — постоянная тяготения. В D.1.02) i ф j, на что указывает
штрих при знаке суммы.
Уравнения D.1.01) в развернутой форме имеют вид
... Л 1 _ _
1=0
., п-1
dt2
/-o
ДЗ
dP
/=o
D.1.03)
(/ = 0, 1 n-1, }Ф1).
Система D.1.01) имеет порядок 6л, поэтому для нахождения
ее общего решения необходимо знать 6л независимых первых
интегралов. Известны 10 первых интегралов системы D.1.01),
содержащих алгебраические функции координат и их произ-
водных.
Интегралы движения центра масс:
п-1
i.=0
п-1
п—1
1=й
п-1
Интегралы площадей:
п-1
п-1
п—1
п—1
D.1.04)
п-1
- hit) = с2,
D.1.05)
10 Под ред. Г. Н, Дубошина
290 ч- IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 1.02
Интеграл живых сил (интеграл энергии)
п-1
i=0
в интегралах D.1.04) — D.1.06) величины аи а2, а3, b\, b2, Ь3,
С\, Сг, с3,1г — произвольные постоянные.
Интегралы D.1.04) указывают на то, что центр масс си-
стемы движется прямолинейно и равномерно относительно абсо-
лютной системы координат. Из D.1.05) следует, что момент
количества движения системы постоянен и по величине и по
направлению. Интеграл D.1.06) выражает постоянство полной
энергии системы, так как функция (¦—U) — потенциальная энер-
гия системы, а левая часть равенства представляет собой кине-
тическую энергию системы. Более подробно вопрос о существо-
вании первых интегралов изложен в главе 2 части X.
Знание 10 первых интегралов позволяет понизить порядок
системы D.1.01) на 10 единиц, после чего получится система
порядка 6га—10. Возможно понизить порядок системы еще на
две единицы благодаря тому, что в уравнения движения время
не входит явным образом и применима теорема Якоби о послед-
нем множителе [10].
Неизменяемая плоскость Лапласа — это плоскость, перпен-
дикулярная к моменту количества движения. Ее уравнение имеет
вид
?о, т]о, ?о — координаты произвольной точки пространства (в ка-
честве таковой можно взять центр масс системы).
§ 1.02. Уравнение Лагранжа — Якоби
В качественных исследованиях часто используется соотно-
шение (см. [3])
~?- = 2U + 4h\ D.1.07)
Называемое уравнением Лагранжа — Якоби. Здесь
п-1 п-1
г=о /=о
есть момент инерции системы относительно центра масс,
" h==h ък ;
/г* называется внутренней или барицентрической энергией,
§ 1.03] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ 291
Имеет место следующий вывод об устойчивости движений
механической системы. Если h* > 0, то по крайней мере одно из
взаимных расстояний между телами Д^ неограниченно возрас-
тает при /->оо и, следовательно, движения механической си-
стемы неустойчивы в смысле Лагранжа (см. ч. X, § 3.03). Если
h* ^ 0, то возможны как устойчивые, так и неустойчивые
в смысле Лагранжа движения механической системы. Если си-
стема устойчива в смысле Лагранжа, то ее потенциальная энер-
гия на бесконечном промежутке времени принимает бесконечное
число раз значения, сколь угодно близкие к 2Н*.
§ 1.03. Уравнения движения
в барицентрических прямоугольных координатах
Пусть G — центр масс материальной системы, состоящей из
п материальных точек Ро, Pi Р„_ь a I, fj, g—его прямо-
угольные координаты в абсолютной системе O|ii?, являющиеся
линейными функциями времени t. Пусть ?', т]', ?j — барицентри-
ческие координаты точки Р*. Тогда дифференциальны^ уравне-
ния движения системы имеют вид
d% dU rf\' dU
dt1 dl\ dt7 дц\ '
(«-0, 1 n-1),
2' L, L,
D.1.08)
Очевидно, что интегралы движения центра масс удовлетво-
ряются тождественно, т. е.
2> %
п—\ п—I п—I
i=0 /=0 J=o
Интегралы площадей и живых сил имеют вид
i=0 i=-0
но следует учесть, что координаты точек и их производные
10*
292
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 1.04
связаны приведенными соотношениями. Другая форма интегра*
лов уравнений движения в барицентрических координатах, полу-
ченная в результате понижения порядка системы на шесть еди-
ниц, дана в книге [1].
§ 1.04. Уравнения движения в координатах Якоби
Выберем следующим образом относительную систему коор-
динат:
1) проведем через точку Ро оси координат, параллельные аб-
солютным осям, и определим положение точки Pi в этой системе
координатами х\, у\, г\\
2) проведем через центр масс G\ точек Ро и Pi оси коор-
динат, параллельные предыдущим, и определим положение
точки Рг относительно этой системы координат координатами
х[, у'2, г'2; и вообще,
3) определим положение точки Р& координатами х'к, у'к, г'к,
отсчитываемыми в прямоугольной системе координат с осями,
параллельными предыдущим и проходящими через центр масс
точек Ро, Pi Pft-i (k = 2, 3 п — 1)— точку Gft_i. Ради
симметрии обозначений координаты точки Ро относительно си-
стемы Ogr|? обозначим через x'Q, у'й, г'й.
Выбранные таким образом прямоугольные координаты назы-
ваются координатами Якоби (см. [1], [3], [5]).
Введем величины (х,-, аи имеющие размерности массы и опре-
деляемые равенствами
= /По, \1к = ¦
к
(*=1, 2 n-1).
D.1.09)
(ij называются «приведенными массами».
Дифференциальные уравнения движения системы в коорди-
натах Якоби записываются в форме
dt2
dU
dU
dU
1, 2 n-1).
D.1.10)
S 1.05]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ
293
Силовая функция U выражается формулой D.1.02), но взаим-
ные расстояния A,-j должны быть выражены через координаты
Якоби.
Взаимное расстояние A(J- при / > i выражается через коорди-
наты Якоби с помощью формулы
Система D.1.10) имеет четыре первых интеграла (интегралы
площадей и интеграл энергии):
л-1
п-1
п-1
D.1.12)
где с\, с'2, с[, ti — произвольные постоянные интегрирования.
§ 1.05. Уравнения относительного движения
в прямоугольных координатах
Пусть выбрана прямоугольная система координат Р^хуг с
началом в точке Ро и с осями, параллельными осям системы
GIW (§ 1.03). Такая система не имеет общего названия, од-
нако если точка Ро изображает Солнце, то система называется
гелиоцентрической. Аналогично можно говорить о геоцентриче-
ской, сатурноцентрической и вообще о планетоцентрической си-
стемах. (Подробнее см. ч. I, гл. 1.)
Пусть координаты точки Pt (i = 1, 2 п— 1) в выбран-
ной системе суть х{, yit zt. Новые координаты выражаются через
барицентрические координаты с помощью равенств
х = |' |/> у ==т,'_т,') 2.=?' 5' D.1.13)
A=1, 2 п-1).
294
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 1.05
В этих переменных уравнения движения точек Pi, Р% ..., Pn-i
имеют вид
df2
dxt
dt'
(/=1, 2 «-1).
D.1.14)
Функции R{ (t=l, 2 n—1) называются возмущаю-
щими или пертурбационными функциями:
t = f Z' miRih j Ф i,
D.1.15)
Формулы перехода от координат х, у, z к барицентрическим
координатам |', ц', ?' имеют такой вид:
п-1
п-\
(/ = 0. 1 п-1),
л-1
m =
(-0
4 1-flei ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 295
Известные интегралы уравнений D.1.14) имеют вид:
интегралы площадей:
«-1 Гп-1 га-1
«-1 Гп-1 га-1 п-1 л-1 "I
Z mi toei - ziyi) - -^ Z miyi Z m^i - Z m'2' Z m&i = ci-
i=\ Li = l i=l J=l ?=.1 J
n—I "I
n-1 rn-l n-1 n-1 n-1 "I
Z mi (xmi - ум - -^ Z miJc' Z m?' ~ Z m'yi Z mijti = c";
n-1 rn-1 я—I n-1 n—I
n-1 rn-l n-1
интеграл живых сил:
г/л-1 \2 /n-1 \2 /n-I
- -k KZ «aJ + \Lx m*) + [Z ««*ij J=u
§ 1.06. Уравнения движения
в идеальных прямоугольных координатах Ганзена
Пусть материальная точка Р движется под действием ньюто-
новского притяжения материальной точки Ро и возмущающего
ускорения, порождаемого возмущающей функцией R.
Тогда в прямоугольной системе координат Рохуг уравнения
движения точки Р имеют вид D.1.14) (опущен индекс «i»)
IF P ~"a7'
rf-y . I (m0 + m) у j3/?^
d^2 + г3 ~ ду •
d2z , f (m0 + m) z dR
dt2 ' r1 ~aF"
Идеальными координатами точки Ро по Ганзену называются
прямоугольные координаты X, У, Z, связанные с прежними
прямоугольными координатами х, у, z формулами
296 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
а их производные — аналогичными равенствами
1.06
Направляющие косинусы а Yz удовлетворяют очевидным
соотношениям
=1> «Y
или
D.1.16)
Систем идеальных координат — бесконечное множество, по-
этому для выбора определенной системы необходимо наложить
дополнительное условие. В качестве такого условия Ганзен взял
равенство
Y@* + Yi@y + Y2@z«i0, D.1.17)
т. е.
Координаты X, Y, 0 называются ганзеновскими. Очевидно,
что во все время движения точки Р плоскость PqXY проходит
через радиус-вектор г точки Р.
В координатах. Ганзена уравнения движения имеют вид
(см. [3])
¦ у i l(mo + m)X _ dR
А "I ? Ж
г3
f (ш0 + т) Y
dR
dY '
{XY - YX)
I YV V Y}
(AY - YX)
а.2 у
dR
- Л
D.1.18)
D.1.19)
§ 1.071
ГЛ. !. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ
297
Возмущающая функция R должна быть выражена в виде явной
функции координат X и У.
Эти уравнения определяют X(t), Y(t), a2(t), p\z(O> после
чего можно найти у2 @ > а @, Р @, оц (t), рх (/).
Переход к первоначальным координатам осуществляется по
формулам
у @ = а, @ JT @ + р, @ У (/).
Как видно из условия D.1.17), координатная плоскость P0XY
совпадает с плоскостью оскулирующей орбиты точки Р (см.
§ 3.02).
В принципе можно ввести идеальные координаты и в задаче
п(п>2) тел, однако практически это малоцелесообразно.
§ 1.07. Уравнения абсолютного движения
в цилиндрических координатах
Пусть цилиндрические координаты точки Pt суть ри Я,, Si
(i = 0, 1 п—1). Формулы перехода от цилиндрических
к абсолютным координатам %и т),-, Si имеют вид
Здесь pi — проекция радиуса-вектора rt точки Pt на координат-
ную плоскость О?т], \t — долгота точки Pit т.е. угол между по-
ложительным направлением оси Og и р{.
Уравнения движения в абсолютных цилиндрических коорди-
натах имеют вид
dU
3U
(t = 0, 1, .... га— 1),
n-l n-\
' ni[m-i
<=0 /=0
D.1.20)
298
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 1.07
В развернутом виде правые части уравнений D.1.20) выра-
жаются равенствами
"~1 п те /1 1 \ « 1
dU
dU
га-1
т,р.
sin (Л/ — Я,,)
/=¦0
n-l
D.1.21)
(/^fe/, f = 0, 1, .... n-l).
Система D.1.20) написана в абсолютных координатах, по-
этому допускает 10 известных первых интегралов.
Интегралы движения центра масс:
га-1
(=0
n-l
pr cos Xt — рДг sin А,г) = alt
mi (pj sin hi -|- P;A(cos ^i)== °2>
n-l
я-1
/TZiPj COS A,( =
n-l
sin Я,г = a2/ -f b2,
Л-1
D.1.22)
i = a3t + b3.
1=; I
Интегралы площадей:
n-l
: sin Xt — Sj (p^ sin Аг + P(Aj cos A;)] = cu
[ (pj cos Aj — piA/ sin Аг) — Piti cos A/] = c2,
i=0
n-l
z
n-l
D.1.23)
1.08] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ
Интеграл энергии:
п-1
299
Т Z mi (Pi + Pi*¦? + С?) = ?/ + А. D.1.24)
1=0
§ 1.08. Уравнения относительного движения
в цилиндрических координатах
Формулы перехода от относительных прямоугольных коорди-
нат хи yit zt к относительным цилиндрическим координатам
р,-, Х{, г{ имеют вид
х? = р,-cos A,,, yt — р; sin Klt Zi — Zj
(«¦=1, 2 B-l).
Уравнения движения точек Ри Р2, ¦ • •, Pn-i относительно
точки PQ записываются следующим образом (см. [1]);
где
T1 __ „2
^ = P! + 9) ~ 2PiP, cos (Л( - к,)
D.1.25)
D.1.26)
D.1.27)
D.1.28)
D.1.29)
300
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЙ
II 1.0
Интегралы площадей в относительных цилиндрических оор-
динатах:
mi [piZi sin Xt — Zi (pi sin kt + рД/ cos kt)\ —
1
rn-l n-l
"~ — I / ffliPi Sin Xi / ttliZ-i —
n—1 n-l
^sin л*+p^«'cos л
n-l
1=1 «=1
(Pi cos Л, — рД, sin Я^ — p(z, cos Л/] —
н-l n-l
-I
n-l
n-l
-I
= c'2'
n-l
Л-1
n-l
'p'cos Ki Y mi (i>1 sin
i=i
n—1 rt—1 -i
— ^ mjP( sin Xt Y mi (Ptcos h — Pfiisin h)
i=l (=1 -I
D.1.30)
где
Интеграл живых сил:
n-l
n—1 f гл-1
т Y mi (p? +p^? + *<) ~ "i i Z
'(p'cos л' ~
sin
-1=1 J 4/=i
где с\, сГ2, Съ, h' — произвольные постоянные.
D.1.31)
1.09]
ГЛ. I. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ
301
§ 1.09. Уравнения абсолютного движения
в сферических координатах
Перейдем от абсолютных прямоугольных координат lit r\u
к сферическим координатам по формулам
i = 7-? cos <р, cos
?,¦ = r{ sin фг
(i = o, I «-D.J
D.1.32)
где Ti — радиус-вектор точки Pit Xi — долгота точки Pi, ф* —
угол между радиусом-вектором rt и плоскостью О|т].
В абсолютных сферических координатах уравнения движения
системы имеют такой вид [1]:
m
i (fi - ГМ ~ rM cos2 Ф|) = "^ ¦
D.1.33)
Силовая функция равна
/=o
ли
где
cos Yi/ =
lj ) )iill D.1.34)
sin <р^ sin ф/ + cos ф, cos ф/ cos (Xt — Л/), D.1.35)
a Yij — угол, образованный радиусами-векторами rt и г;-.
Система дифференциальных уравнений движения п тел
D.1.33) имеет 10 известных первых интегралов.
302 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Интегралы движения центра масс:
f§ 1.10
п—1
1=0
л-1
= я,,
=0
n-l
1=0
nti {fi sin ф; -f- /"(ф( cos ф[) = а3,
п-1
п-1
i=0
п-1
i=0
D.1.36)
Интегралы площадей:
п-1
У, m,r? (w, sin Я, — Я,, cos ф.. sin ф, cos Л..
(=0
п-1
i=0
Ф; cos ^i + ^i cos Ф; Sin Ф; sin ^) = —
п-1
D.1.37)
Интеграл энергии:
n-l
(=0
Как и раньше, аь а2, аз,
постоянные.
D.1.38)
Ь2. Ь3) си с2, с3, h — произвольные
§ 1.10. Уравнения относительного движения
в сферических координатах
Пусть точка Ро является началом системы координат Poxyz.
Введем сферические координаты ти А,,-, ф* (rt — расстояние точ-
ки Рг (i = 1, 2, . . ., я — 1) от точки Ро, Ki — долгота точки Ри
т. е. угол, образованный положительным направлением оси Рох
1.10]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ
303
и проекцией п на плоскость Роху, ф4 — угол между rt и пло-
скостью Роху).
Формулы преобразования координат будут
D.1.39)
г/; = г, cos ф, sin А,,
г, = rt sjn tp,
(«¦=1, 2 n-1).
Уравнения движения точек Ри Р2, ..., Рп-\ относительно
точки Ро в координатах г, ф, л имеют следующий вид [1]:
ri — г№ ~~ ri^i cos Ф ==: ~л~^.
да,
d
IT
= 1, 2 п-1),
D.1.40)
cos Y(/ = sin ф; sin ф/ + cos ф, cos cp/ cos (Лг —
D.1.41)
Четыре первых интеграла системы D.1.40) (три интегра-
ла площадей и интеграл энергии) записываются следующим
образом:
п-1
п-1
У тгг\ (ф; sin kt — XL sin ф; cos ф^ cos к
[n-l
n-l
mji sin ф,- > m{ (/¦( cos ф1 sin лг —
— rfi. sin ф; sin kt + riki cos ф^ cos Я;)] = cj, j
п-1
D.1.42)
304
n-l
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
mtr\ (ф, cos Х{ -j- ki cos ф^ sin ф, sin Л4) +
.-n-l n-l
m
— Гjф^ sin ф, cos Я* —
Л —1 П—\
1=\
1=1
-1
= — с'2,
n-l
cos2 ф< ~
[п-1 л-1
^ m/, cos ф, cos Я( V
*=1 i=l
sin Л,- —
— Г;ф/ ЭШф^ ЭШ;
n-l
COS
cos ф; cos Xt) —
п-1
Ф( sin X{ V m, (r; cos ф^ cos Xt —
i=i
— Г(фг sin ф; cos ЛЛ — ri%l cos ф; sin KM = с'ъ,
n-l
»=]
— 7Г— 1 I / «I (^i COS ф.- COS X, —
-|2
— г4фг sin ф4 cos Xi — гг%1 cos фг sin Лг) +
ГЛ-1
+ I ^ mt {fi cos фг sin Kt — ггфг sin фг sin Я
sinФ.
(=i
J f = U
где
n—I
m—
[§ МО
D.1.42)
§ 1.Щ
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ
305
§ 1.11. Уравнения движения в полярных координатах
Ганзена
Назовем полярные координаты гишв плоскости оскулирую-
щей орбиты точки Р полярными координатами Ганзена (рис.62).
Рис. 62. Идеальные координаты Гакзена. Пл. ху— оснозная координатная плоскость;
пл. XY — плоскость оскулирующей орбиты; П —перицентр оскулирующей орбиты, xft,=Q;
Х?1=а; ХП = х; I — наклон; ХР*=Ш — долгота точки Р в плоскости XY\ JC(j=L —долгота
точки Р в плоскости ху; PQ=B — широга точки Р; Oil —линия узлов.
Связь между идеальными (см. § 1.06) и полярными координа-
тами Ганзена дается формулами
X = rcosw, Y = г sin од.
В полярных координатах г и од уравнения движения точки Р
имеют вид [3]
T — i
f (rn0 + m
r2
d . , .
-dJ^rm
dR
dr '
dR
i ==~dw'
D.1.43)
Если обозначить через
то второе уравнение D.1.43) запишется следующим образом:
dt
dw
Если R ^ 0, то уравнения D.1.43) описывают невозмущен-
ное кеплеровское движение и их общее решение известно (см.
ч. II).
306
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
И 1.12
Направляющие косинусы ганзеновской системы координат
относительно первоначальной системы P^xyz находятся из урав-
нений
&2 ^ Y dR
у2 h dZ '
у2
X dR
h dZ
а а, р, у. aii Pi. Yi. Y2 определяются из соотношений D.1.16).
Окончательные формулы для гелиоцентрических прямоуголь-
ных координат х, у, z планеты Р имеют вид
х = су cos w + Pr sin w,
у = щг cos w + Р[Г sin w,
г = a.,r cos w + Р/ sin w.
D.1.44)
Формулы D.1.44) содержат семь произвольных постоянных,
но две из них характеризуют положение оси РаХ в плоскости
оскулирующей орбиты PqXY, поэтому одной из них можно при-
дать фиксированное значение.
§ 1.12. Уравнения Клеро — Лапласа
Введем вместо относительных цилиндрических координат
Pi, A,;, Zj новые переменные uit Xt, st (переменные Клеро —Лап-
ласа) по формулам
1 z,
Если в качестве нззависимой переменной взята одна гз дол-
гот Я*, то уравнения движения системы в переменных Клеро —
Лапласа будут иметь вид (см. [Г], [3])
d'u,
d2s
^- +
d'X,
= 0, 1 n— 1).
D.1.45)
§ 1.13]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ
307
Для функций Ui, Su Ц Клеро и Лапласом выведены фор-
мулы
D-b46)
ШШ «"-*>•
Вспомогательная функция Га определяется дифференциальным
уравнением
dT. Л.
¦р к k
1 к —ИГ¦
aKk uk
Функции Ри Л,-, Zu входящие в соотношения D.1.46), имеют
следующий вид:
..2 «-'. г .. Ы ъ \ ..2,
(Я,,- — Яу)
ГК + и,
, п-1
Uj COS (Я; — Я;)
'i)si«( , ,г' uisj — uisi siui
и? + и^ - 2ujU/ cos (Яг - Я. ¦) + («;Sy - u,s(J
= j-5
Если уравнения D.1.45) проинтегрированы, т.е. «,, Я,-, s,- из-
вестны как функции долготы Xk, то для нахождения их зависи-
мости от времени t следует найти Kk{t) из уравнения
D.1.47)
§ 1.13. Общее правило составления
канонических уравнений
Пусть механическая система, имеющая k степеней свободы,
движется в потенциальном поле с силовой функцией U. Тогда ее
движения описываются k обобщенными (лагранжевыми) коор-
динатами q\, q2, .. ¦, qh и уравнения Лагранжа второго рода [9]
308 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [8 1.13
для этой механической системы имеют вид
d ( дГ\ дТ dU /¦ 1 о м 1л i ла\
где Г — кинетическая энергия механической системы, U зави-
сит ОТ 01, 02, • ¦ • , 9ft, *¦
Система D.1.48) представляет собой систему & дифферен-
циальных уравнений второго порядка, т. е. ее общий порядок
равен 2k. Различными способами ее можно привести к системе
2k дифференциальных уравнений первого порядка, но наиболее
удобной и полезной формой является так называемая канониче-
ская или гамильтонова форма.
Изложим правило составления канонических уравнений.
Наряду с k обобщенными координатами q\, q2, ¦ ¦ ¦, Qk введем
в рассмотрение k обобщенных импульсов ри р2, ..., Рь. по фор-
мулам
/>?=-??¦ ('=1.2 k). ' D.1.49)
Переменные q\, q2, .. ¦, Яь\ pi, p2, • • ¦, Ph называются канониче-
скими.
Разрешая уравнения D.1.49) относительно обобщенных ско-
ростей qit получим последние в виде функций обобщенных коор-
динат, обобщенных импульсов и времени t:
qi = ^i(qu Яч. Якш, Ри Рч. рк; 0- D.1.50)
Составим характеристическую функцию (функцию Гамиль-
тона) Н, равную
k
H(qu q2 qk\ Ри Pi Pk\ t)='Z р^{ —Т — U, D.1.51)
в которой обобщенные скорости qu входящие в первую сумму
и в выражение для кинетической энергии, заменены с помощью
D.1.50).
Определение. Канонической, или гамильтоновой, систе-
мой дифференциальных уравнений называется система
Каноническая система дифференциальных уравнений имеет
порядок 2k и эквивалентна системе уравнений Лагранжа
§ I.М| ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 309
D.1.48). Если Я не зависит явно от времени t, то система D.1.52)
имеет первый интеграл
H{qu Цъ •¦•, Як, Ри р2, .... Pk) = h, D.1.53)
называемый интегралом энергии. В этом случае Н представляет
собой полную энергию механической системы, h — произволь-
ная постоянная.
Из изложенного правила следует, что движение механиче-
ской системы может быть описано бесконечным множеством ка-
нонических уравнений вида D.1.52). Все определяется выбором
лагранжевых координат Ц\, Цг, .. •, <7ь.
§ 1.14. Первая каноническая форма уравнений
абсолютного движения
Примем абсолютные прямоугольные координаты ?,, т],-, \\
(i = 0, 1 п—1) в качестве лагранжевых координат <7j
(/ = 1,2,..., Зп), положив
h = q3t+\, "Hi = 9зг+2. ?/ = ?з;+з (»=0, 1, ...,л—1),
а для масс точек Ро, Ри ..., Рп-\ введем обозначения
(«=0. U п — 1).
В этих обозначениях кинетическая энергия системы прини-
мает вид
Обобщенные импульсы даются равенствами
p,=-f|- = m;<7, (/=1, 2 Зп).
В канонических переменных р, и qj (мы их называем абсо-
лютными, так как они связаны с абсолютными прямоугольными
координатами) уравнения движения системы имеют вид
где гамильтониан равен
D.1.54)
310 Ч- IV- ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ I! I.IS
причем
Зл 1 1
Зл ,
-LyfL и-1
+ (<7з/+2 - <7з:+2J + (<7з/+з -
Система канонических уравнений имеет 10 известных первых
интегралов.
Интегралы движения центра масс:
я-1 п-1
i=0
n-l n-l
V V /_,• _
jL* ( + 2 — UV *-f 4 3i+2?3i+2 '
n-l и-1
Интегралы площадей:
л-1
n-l
n-l
2j
Интеграл энергии:
H = h.
§ 1.15. Вторая каноническая форма уравнений
абсолютного движения
Примем абсолютные цилиндрические координаты р,-, Я,-, ?;
(? = 0, 1, ..., п — 1) в качестве лагранжевых координат. Тогда
соответствующие им обобщенные импульсы Р*, Л,-, Z,- выра-
жаются формулами
А, = т|р*ЛA Zi=mi>l D.1.55)
§ 1.15;
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ
311
В новых переменных уравнения движения имеют вид
дН
"врГ1
дН
i __ дН
dP[
dt
dXt
dt
dH
~apt-
dH
~ dAt '
dH
dt
dAt
dt
dZi
dt dZt ' dt
'¦ = 0, 1 n-1),
D.1.56)
где
H=T-U,
. n-1 .
n-1 n-1
1=0 /=0
= P? + P? ~ 2
cos (^ -
Известные десять первых интегралов системы D.1.56) имеют
вид
FI-1
i=0
n-1
я-1
sin
?
)n-l
f=0
sin Яг =
n-1
z
1=0
n-1
i=0
n-1
p^sina,, — g,rP,sin^4
(Pt cos Л, - ¦^± ЛЛ - p^Z, cos Яг] = c2,
n-1
Z Л^ = c,,
@
Z
(=0
Д(Р, A, Z; p, Л, Е) = Л.
312
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 1.16
§ 1.16. Третья каноническая форма уравнений
абсолютного движения
Рассмотрим в качестве лагранжевых координат абсолютные
сферические координаты ги А,,-, ф* [см. формулы D.1.32)]. Тогда
соответствующие им обобщенные импульсы А\, Л,-, Ф* выра-
жаются равенствами
п дТ
ar
Л, = —г- =/nrrA,.COS2m,,
D.1.57)
В этих переменных дифференциальные уравнения движения
имеют вид
dr{
dt
dt
d<ft
dt
дН
dRt '
дН
дН
(i = 0, 1,
dR,
dt
dt
dt
..., n-
dH
дН
дН
-1).
D.1.58)
Гамильтониан задается равенствами
н = т~и,
2 {Го «Л ^cos2?i г2/
n-1 n-I
u~ 2> L L д,/ •
(=0 /=Q
cos ^г/ = sin ф( sin ф/ -+¦ cos ф^ cos ф/ cos (Я; — Я/).
Так как дифференциальные уравнения D.1.58) описывают
абсолютное движение системы материальных точек, то она имеет
S 1.17] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 313
десять известных первых интегралов:
S/ sin ф, cos A,, sin Я,, \
I R[ cos фг cos Xi —' !-Ф,- Л-i j = au
^ / . sin ф sin Я, cos A,, \
> I /?, cos ф, sin Я,; —= -<T>i-\ — Ai)=a2,
jr -j V ^*/ f ¦ COS Ш, 7
(=0
п-1
л-1
cos фг cos kt = а
n-l
? /n^f cos ф^ sin Ki ==a^ + ^21
n-l
1=0 '3 3>
n-l
У. (Ф; sin A,; — Л^еф;СозА,г) = Ci,
i=0
n-l
У (Ф^ cos X, + Лг tg ф, cos X,) = — Co,
n-l
(=0
1 , «I , Л?
§ 1.17. Первая каноническая форма уравнений
относительного движения
Примем координаты Якоби х', у\, г\ (i = 1, 2 я—1)
(см. § 1.04) в качестве лагранжевых координат q] и введем обо-
значения
*1 = 031-2. ^ = Gзг-1> 2J==^( (' = 1.2 п-1), D.1.59)
а величины ц< [см. D.1.09)] обозначим следующим образом:
Тогда кинетическая энергия системы будет равна
Зл—3
314 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
поэтому обобщенные импульсы будут равны
[§ 1.18
В канонических переменных р' и qr, дифференциальные
уравнения относительного движения имеют такой вид:
dq'\ _ дНг
1Г~
ср, _
1Г~
дН'
= 1,2 Зл-3);
D.1.60)
P'3n-v Ч[, Я'2
n-3 ,2
(/-1 '
^з/-1 - </3|-1 + 2, а.
k=i *
(/>/)¦
Четыре известных первых интеграла системы D.1.56) выра-
жаются равенствами
п-1
п-1
п-1
§ 1.18. Вторая каноническая форма уравнений
относительного движения
Вместо прямоугольных координат Якоби х'{, у\, z\ (§ 1.04)
введем цилиндрические координаты р?, К[, t,\ по формулам
<==;; (»-i,2 л-i) D.1.61)
§ 1.18]
ГЛ, 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ
315
и примем их за лагранжевы координаты. В этих переменных
кинетическая энергия системы Pi, Pa Р„-\ определяется ра-
венством
Введем обобщенные импульсы Pj, Л{, Z':
В этих переменных уравнения движения имеют вид
причем
dt dPft ' dt
дН'
dT
dt dV/,
dt
dt
Ч1 \
дН'
=1, 2 л-1),
if т> j]
1 — 1 — U,
n-l n-\
j=0 /=0
/-1
Bk )
+
k=-l
к-\
Ok =
D.1.63)
D.1.64)
316
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 1.19
Четыре известных первых интеграла системы D.1.64) даются
соотношениями
n-1
? fP;z; situ; -1\ (p; sin ц + 4 cos я;)] = <,
(p:cos ^ - ^ Л0 - p^z^cos m]=c'v
Pi
§ 1.19. Третья каноническая форма уравнений
относительного движения
Рассмотрим в качестве лагранжевых координат сферические
координаты г\, К\, ф,, связанные с относительными координа-
тами Якоби х\, у\, г\ (i = 1, 2, ..., п— 1) формулами
х\ = т\ cos ф^ cos
(i=l, 2 л-1).
Кинетическая энергия системы точек Ри
ляется равенством
D.1.65)
..., Рп-\ опреде-
поэтому обобщенные импульсы равны
§ 1.19]
ГЛ, 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ
317
В этих переменных канонические уравнения относительного
движения записываются в виде
dr\ дН'
dt dR';
дН'
dt
dt
дН'
Br\
dHr
{' dA't дН'
dt
дА'{ ' dt d
= l. 2 n-1),
где
i=.l V
D.1.66)
AJ, = U cos „; cos ^ - r\ cos ^ cos ^ +
+ f r; cos Ф; sin я; - r; cos Ф; sin ц + ? "^«y>^Y +
sin ф; -.; sin?; + ? .=ф^)' (/ > о.
Четыре известных первых интеграла системы D.1.66) выра-
жаются соотношениями
п-1
п-1
cos я; + л; tg Ф; sin я;) = -
n-\
l-=\
318 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ !§ 1.20
§ 1.20. Уравнение Гамильтона —Якоби.
Метод Гамильтона — Я коби
В §§ 1.13—1.19 были приведены канонические формы урав-
нений абсолютного и относительного движения задачи п тел.
Интегрирование канонических уравнений движения механиче-
ской схемы с k степенями свободы тесно связано с интегрирова-
нием одного уравнения в частных производных, называемого
уравнением. Гамильтона — Якоби. Оно имеет вид
dS dS d
qu q2 qk;Wr ^- a
Правило его составления следующее: обобщенные импульсы ри
входящие в функцию Гамильтона Н D.1.51), заменяются част-
ными производными -=— некоторой неизвестной функции
S(t, <7i, qi, ¦¦., ?й), после чего записывается уравнение D.1.67).
Если функция Гамильтона Н не зависит явно от t, то вместо
уравнения D.1.67) обычно записывается уравнение
q2 4ki -gf ~Wk) D.1.68)
с неизвестной функцией W(qu q2 <7a). Переход от уравнения
D.1.68) к уравнению D.1.67) осуществляется заменой
S = -ht + W. D.1.69)
Определение. Полным интегралом уравнения в частных
производных первого порядка называется такое его решение,
в котором число неаддитивных (существенно различных) про-
извольных постоянных равно числу независимых переменных.
Если в уравнение в частных производных не входит сама
функция S, как это имеет место в уравнении Гамильтона —
Якоби, то число существенно различных произвольных постоян-
ных на единицу меньше [10].
Якоби доказал [10], что нахождение общего интеграла кано-
нической системы D.1.52) эквивалентно нахождению полного
интеграла уравнения Гамильтона — Якоби D.1.67). Это утвер-
ждение известно под названием теоремы Гамильтона — Якоби.
Теорема Гамильтона—Якоби. Если известен пол-
ный интеграл S(t, qu q2, .... qn\ on, a2 an) уравнения Га-
мильтона— Якоби D.1.67), то общий интеграл канонической си-
стемы D.1.52) дается равенствами
dS я
57 —Р"
dS («"=!. 2 k). D.1.70)
d4t
= Pt
§ 1.21] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 319
Первые k уравнений определяют обобщенные координаты qt
как функции t и 2k произвольных постоянных ос,-, р,-. Подставляя
Яг = q{(t, ai, а2 aft; рь ?2, ¦ ¦, Рь) во вторую группу урав-
нений D.1.70), находим обобщенные импульсы pi как функции t
и 2А произвольных постоянных аи Pi-
Если известно общее решение канонической системы уравне-
ний D.1.52)
Qi "===~ Qi \"i ^1 > ^2i ¦ • ¦» Otjbt Pii P2* • * • » PA/» I
A = 1,2 k), J
то методом Якоби [10] можно построить полный интеграл
S(t, Я\ Як, ai, a2 czft) уравнения D.1.67).
Имеем дифференциальное равенство
Y
D.1.72)
Найдем из первых k равенств D.1.71) величины Pi =
= xi(fi qu <7г ^л; он, сх2, -. -, ось) и подставим их в другие k
соотношений. Получим
Pi = Pi(t, <7i, ?2. ¦¦¦• ?*; ai. «2, .... a*).
Если в равенстве D.1.72) заменить pt на Pit то, согласно ме-
тоду Якоби, оно будет полным дифференциалом функции S. Его
интегрирование дает нам полный интеграл уравнения Гамиль-
тона — Якоби, так как найденная функция S зависит от t,
Яи Яг, ¦ ¦ ¦, qk\ a>, a2> ..., aft.
Если W(qu qi Яь\ h, a2, ¦.., c»a) является полным инте-
гралом уравнения Гамильтона — Якоби D.1.68), то общий ин-
теграл канонической системы D.1.52) выражается равенствами
?-'+* ^Н„ ПН" <4Х73)
(t = 2, 3 k, /=1, 2 к).
§ 1.21. Уравнения движения системы в векторной форме
Пусть г,- — радиус-вектор точки Pt в некоторой системе коор-
динат, а V{ и gi — скорость и ускорение точки Рг в выбранной
системе координат. Тогда, очевидно,
Vl = Г„ gi = Г?.
Если /?i — равнодействующая всех сил, приложенных к точке Ри
то можно написать дифференциальные уравнения движения
320 ч- IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 1.21
системы в векторной форме:
Различные формы уравнений движения системы будут от-
личаться друг от друга видом записи вектора /?;.
Например, в абсолютной прямоугольной системе координат
имеем
п-1
mlm,^^- {1 = 0. 1 п-1,1Ф1).
Проекции вектора Rt суть
п-1
т т xi~xJ
1=0 и
п-1
п-1
\' г, —г.
Для прямоугольной относительной системы координат с на-
чалом в точке Pq имеем
Г (ffi0 + mf) z.
(/=1, 2 п-1).
Глава 2
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
НЕБЕСНЫХ ТЕЛ
В этой главе приводятся различные формы дифференциаль-
ных уравнений поступательно-вращательного движения п взаим-
но притягивающихся абсолютно твердых тел. Эта задача пред-
ставляет большой практический интерес. Достаточно упомянуть
две проблемы: задачу о поступательно-вращательном движении
системы «Земля — Луна» и задачу о поступательно-вращатель-
ном движении искусственных спутников Земли. Подробные вы-
воды можно найти в работах [8], [9], [11], [12].
§ 2.01. Углы Эйлера. Кинематические уравнения Эйлера
Пусть имеется система свободных, абсолютно твердых тел
Мо, Mi Mn-i. Известно, что положение и ориентация каж-
дого тела Mi (t = 0, 1 п—1) относительно абсолютной
прямоугольной системы координат
О1ц? с центром в произвольной точке Таблица 49
О полностью задается координатами
Ei. Л«> & центра инерции G, тела Mt в
системе О?т]? и направляющими коси-
нусами , а{?1 собственных осей G^',
?<, неизменно связанных с те-
,-, в системе О|т]?. Индексы на-
правляющих косинусов ajjj'J характери-
зуются табл. 49.
Направляющие косинусы для каж-
дого значения i связаны шестью изве-
стными соотношениями, поэтому можно выбрать три независи-
мых угла, которые однозначно определяют направляющие коси-
нусы каждого тела.
Чаще всего выбираются углы Эйлера: угол прецессии $и
образуемый линией пересечения плоскостей О|т] и ОД^
лом
л
с
4?
4?
4?
4'2>
42
42
4'i
4?
11 Под ред. Г, Н. Дубошина
322
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 2.01
с положительным направлением оси О| (рис. 63); угол собствен*
ного вращения ф,-, образуемый положительным направлением
оси G,.|j с линией пересечения GiN\ угол нутации fy, образуе-
мый положительными направлениями осей О? и G(?'.
Рис. 63. Системы координат для описания поступательно-вращательного движения небес-
ного тела. О lit —абсолютная система координат; ^fii^fii — барицентрическая система
координат с осями, параллельными осям системы О?т]С; G.J.T1.J; —собственная для
тела М, система координат.
Направляющие косинусы выражаются через углы Эйлера
с помощью соотношений [8], [9]:
г\11 == cos фг cos tyt — sin фг sin fy cos ^,
zlj,' = cos фг sin tyl + sin ф^ cos г|з^ cos ЪР
зМ = БШф; sin'&p
, cos г|з^ — соэф( sin\|3f cosd(,
D.2.01)
— cos г|зг
Пусть pit qu Ti — проекции абсолютной угловой скоро-
сти вращения тела Mi на оси координат |^, т\[, ?'.. Величины
D.2.02)
§ 2.02] ГЛ. 2. УРАВНЕНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 323
Ри Qu rt связаны с углами Эйлера кинематическими уравне-
ниями Эйлера
Pi = т|э, sin q>i sin ft,- + bi cos ф,,
qt — aJ3, cos ф( sin &i — &[ sin ф;,
Г, = 0^СОЗй,-{-ф,
(i = 0, 1, .... n-1).
§ 2.02. Силовая функция системы тел
Обозначим через U{j силовую функцию взаимного притяже-
ния (или взаимный потенциал) тел Mi и Mj. Из теории потен-
циала известно [10], что
„„_, J$ ^L. ,4.2.03)
iMi) (Mj)
Здесь Ац — взаимное расстояние между частицами тел Mt и Mj,
отличное от нуля, если тела Мг и Mj не имеют общей части. Си-
ловая функция Uij является функцией 12 переменных: |{, i\t, U>
Ej. ЛЯ Sj, Фг. Фг, ¦&,", t|)j, ф;, &,-¦
Для фактического выражения (Уг-;- в виде явной функции этих
12 переменных приходится пользоваться разложением в ряд
D.2.04)
Коэффициенты разложения Ljfj суть целые многочлены отно-
сительно разностей координат центров масс G* и G,- с коэффи-
циентами, зависящими от углов Эйлера.
В частности,
= 0,
Щ = I ^i/ [т^ (Л/ + В/ + С/ ~
(/л,- — масса тела М{, пг} — масса тела Mj), если тела М{ и М}
обладают тремя взаимно перпендикулярными плоскостями сим-
метрии, а оси симметрии, являющиеся одновременно главными
центральными осями инерции, приняты за оси собственных
систем координат. В формуле D.2.05) Л„, Bs, С, (s = i, /')—-
324 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ |§ 2.03
главные, центральные моменты инерции тел, a j[''!) — момент
инерции тела Ms относительно прямой, проходящей через центры
масс Gj и Gj.
Силовая функция системы тел представляется формулой [11]
П-1 П-1
Она зависит от 6п переменных: ?,-, т){, ?,-, -ф-i, ф,-, Ф* (t = 0, 1, ...
1)
§ 2.03. Разложение силовой функции двух тел
Г. Н. Дубошиным получена [1] явная форма разложения си-
ловой функции двух тел Mi и М2 с массами т.\ и т2. Силовая
функция D.2.03) для случая двух тел может быть написана
в виде
U = f $J *H?!!L, D.2.07)
{М,) (М.)
где Д — взаимное расстояние между частицами тел М\ и М2.
Имеет место следующее разложение:
k=0
l/a = 2-i "к X (ё2 ~ Si) Ob ~ ^i) (?2 ~~ Si) • D.2.09)
tt(*i, ft,, fc3) у «f*|, ftj, fcii Si. Sj. Sj) ^ (y(S|, S,, Sj) /Д n |n\
(M,) (Af.)
Функция f/ft является гармоническим многочленом относи-
тельно разностей координат.
В формулах D.2.08) — D.2.11) использованы следующие обо-
значения.
1) R — расстояние между центрами масс тел Mi и М2,
точками Gi и G2 с прямоугольными координатами gi, tji, ^i и
|2i Л21 ?2 соответственно в неподвижной прямоугольной системе
координат О?т]?.
2) A{k" k" к''s"s''Sl) — численные коэффициенты, зависящие
в конечном счете от коэффициентов полиномов Лежандра и ко-
эффициентов биномиальных выражений,
§ 2.03] ГЛ. 2. УРАВНЕНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 325
3) Переменные х\ — х2, у[ — у2, z\ — z2 выражаются через
координаты элемента dm.^ (xit г/,-, z{) (i =1,2) в собственной сиг
стеме координат тела Mf (i = 1,2) с началом в G, (/ = 1,2)
и через а^>— косинусы углов, образуемых собственными осями
тел с осями системы О|т)? по формулам
А ~ А = №
Ряд D.2.08) сходится абсолютно и равномерно, если
R > /?Г+ /?2, где /?,- (i = 1,2)— максимальное из расстояний от
центра масс тела М{, точки G* до его поверхности.
Вычисление величин D.2.11) сводится к вычислению инте-
гралов вида
^ *{г*dmit D.2.12)
представляющих постоянные параметры для тела М,.
Если тело Ali имеет три взаимно перпендикулярные плоско-
сти симметрии, пересекающиеся в центре масс Git то линии пе-
ресечения этих плоскостей суть его главные оси инерции и вся-
кий интеграл D.2.12) равен нулю, если хотя бы одно из чи-
сел S\, s2, s3 является нечетным. Если оба тела обладают такой
симметрией, то тогда U2h+i = 0 и разложение D.2.08) прини-
мает вид
fc-0
где однородный многочлен U2h относительно \и t\u & степени 2k
содержит только четные степени этих переменных.
Предположим, что собственные оси координат тела Mf совпа-
дают с главными осями инерции. Тогда первые три коэффи-
циента разложения D.2.08) выражаются формулами
U2 = -^f- (А2 + В2 + С2 - ЗЗд Ч- -^ (А, + В, + С, - ЗУ,).
где Аи В{, С,- (i = 1, 2) —главные, центральные моменты инер-
ции тела Ми Ьг — момент инерции тела Mi (» = 1, 2) относи-
тельно прямой G\G2'
326
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
М 2.04
«i. Р». \i — косинусы углов, образуемых прямой G\Gt с направ-
лениями собственных осей тела:
«i-eiv-S^
V. =
Приближенное выражение для силовой функции двух тел сле-
дующее:
U я» fmRm2 + /т, —-- ?2j?3 2 ~—L + /т2 — '2J?3 '~—L •
D.2.14)
Если At == Bit to
1 —
-. D.2.15)
§ 2.04. Уравнения поступательно-вращательного движения
системы тел в абсолютной прямоугольной системе координат
Если направление осей собственной для тела Mt системы
координат ОД^т)^ совпадает с главными центральными осями
инерции этого тела, то полная система дифференциальных урав-
нений поступательно-вращательного движения системы абсо-
лютно твердых тел Мо, Mi, ..., Afn_i имеет вид [12]
ди
dU
af/
dp,
dq,
dr.
= {щ -cos *'
— 81Пф(
dU
dU
D.2.16)
2.04] ГЛ. 2. УРАВНЕНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 327
Система D.2.16) имеет порядок 12м, так как каждое из урав-
нений второй группы также является дифференциальным урав-
нением второго порядка относительно углов Эйлера.
Действительно, если воспользоваться кинематическими урав-
нениями Эйлера, уравнениям поступательно-вращательного дви-
жения системы в абсолютных осях можно придать вид
mt
dU
dU
dt2
dt3
= ЧГ,,
dt2
0, 1 n-1),
D.2.17)
где
sin bt = b&i - А(ф, cos «
J-) sin ф^ cos Ф(
A ipt sin cpi cos (pi sin ft,- +
I. D.2.18)
= 7Г AS ***' cosec ft/ -~
i^Bi- D>( sin ф, sin^ + *i cos ф;) (ijj, cos ф, sin fy — ¦ft^ sin ф,),
ф*cos^ + ф()[(
BtCl cos2
sin 1"cos *
Дифференциальные уравнения D.2.16) или D.2.17) имеют
только десять известных первых интегралов, вытекающих из
основных теорем механики.
328
4- iv. теория возмущенного движения
18 2.0&
Интегралы движения центра масс системы:
S m '
m
m
m
В формулах D.2.19) I* fj, ?-- координаты центра масс си-
стемы материальных тел Мо, М\,..., Mn_i, m — общая масса си-
стемы, аи а2, аз. Ь\, Ь2, Ьъ — произвольные постоянные.
Интегралы площадей:
п-1
I
, - 6iCi) +
п-1
+ слой}=с2,
D.2.20)
где c\, c2, c3 — произвольные постоянные, а$ — направляющие
косинусы собственных осей тела М{, выражаемые через углы
Эйлера по формулам D.2.01).
Интеграл энергии:
п-1
D-2-21)
(=0
где Л — произвольная постоянная.
§ 2.05. Уравнения поступательно-вращательного движения
системы тел в относительной прямоугольной системе
координат
Возьмем начало координат новой системы в центре масс Go
тела Мо, оставляя направления осей координат параллельными
соответствующим осям абсолютной системы. Обозначим относи-
тельные прямоугольные координаты центра масс Gt тела Л1,- че-
рез хи уи ги так что
*1 = Е/-Ео. ifi = 4f —Чэ. Zi = ^-Zo D.2.22)
(«¦=!, 2 п-1).
Очевидно, это преобразование не влияет на углы Эйлера. Та-
ким образом, состояние движения системы материальных тел
в 2.05] ГЛ. 2. УРАВНЕНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 329
относительно центра масс Go определяется переменными
Х\, У\, z^\ X2, У2, z2; ...; *n-ii Уп—1> 2л-ь
^oi Фо> fy>; 4>i. Ф1. fy; $2, Ф2. ^2; ¦••; ^п-ь Фп-i. tfn-i-
Уравнения движения тел Ми М2, ..., Afn_i относительно центра
масс Go и вращательного движения тела Мо имеют вид
D.2.23)
d2xi
dt2 .
d2yt
dt2
d!zl
momi
mOmi
dUi0
dx{
dUi0
6R{
1 dxt '
1 dy, '
U '¦
u ф
dt
s
dt2 ~~ momi dzt ^ дг{ • dt2
(r = 1, 2 л—1, s = 0, 1 л—1).
Здесь Ui0 — взаимный потенциал тел Mt и Мо,
функции Ws, 0S, Ф8 выражаются формулами D.2.18). Порядок
системы D.2.23) равен 12л — 6.
Система D.2.23) имеет четыре первых интеграла (три ин-
теграла площадей и интеграл энергии), которые можно полу-
чить, если в равенствах D.2.20) и D.2.21) сделать замену
D.2.22):
Е {mi [(У1 + Ло) (*1 + to) - (z< + So) Wi
S Wi Kz, + So) № + So) - (xt + to) {it + So)] +
1=0
n-I
[(*, + lo) (ft + Ло) - (»i + По) (if + So)! +
[{tt + loJ + «i + TioJ + (*i + SoJ] +
ззо
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 2.06
§ 2.06. Каноническая форма уравнений
поступательно-вращательного движения системы тел
Рассмотрим в качестве обобщенных координат абсолютные
прямоугольные координаты ?,-, т]г-, ?,¦ центров масс Gj и эйлеровы
углы системы фг-, ер,-, fti. Принимая во внимание, что кинетиче-
ская энергия системы тел в абсолютной системе координат вы-
ражается равенством
п-1
Т = Т
К
ОД, D.2.24)
введем соответствующие обобщенные импульсы gj, т)*, ?,] и
Ф*. Ф/. ft] с помощью формул
дт . л , аг ... . „. аг
—^
D.2.25)
в1; = —7- = i4,Pi COS ф,- — Bfli Sin ф/
(f = 0, I п-\).
В этих переменных уравнения поступательно-вращательного
движения системы п тел Мо, Ми ..., Mn-i имеют такой вид:
dli дН d?; дН
dt
dAi
dt
dU
dt
*Ki
d<
d<Pt
dt
d*,
ai; ¦
дН
дщ '
дН
dt,] '
дН
H*t '
дН
д<р\ '
дН
dt
dr\*
dt
' К
dt
•
dt
dt
db\
дН
dff
d<f>{
дН
dt
dt
{1 = 0, 1, .... n-1),
D.2.26)
§ 2.06] ГЛ, 2. УРАВНЕНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 331
где гамильтониан
Я = Т - U,
причем кинетическая энергия Т выражается через импульсы
формулой
л-1
1=0
sin ф, - ф; cos Ф| cos Ф, + *; cos Ф. sin *г
cosec2 fy
jij cos фг — ф) cos ф( cos Ф, — ф! sin ф( sin Ф,J + -^—ф*2] •
Система уравнений D.2.26) имеет десять первых интегралов,
которые можно получить из D.2.19) — D.2.21) заменой скоро-
стей импульсами по формулам
cosec ¦&,-
Pi=~Ai
cosec ¦&¦¦
* sin ф^ — ф* sin ф^ cos Фг + Ф) cos ф? sin ¦&(),
' cos ф; — ф) cos <pi cos f^ — Ф* sin ф^ sin Ф,), D.2.27)
Аналогично можно написать в канонической форме и диффе-
ренциальные уравнения поступательно-вращательного относи-
тельного движения системы п тел.
Г лава 3
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
ДЛЯ РАЗЛИЧНЫХ СИСТЕМ
ОСКУЛИРУЮЩИХ ЭЛЕМЕНТОВ
В главе 3 рассматриваются дифференциальные уравнения
возмущенного движения одного тела, получающиеся методом
вариации произвольных постоянных. Приводятся различные
формы уравнений для различных систем оскулирующих элемен-
тов. Рассмотрены случаи потенциальных и непотенциальных
возмущающих сил. Приведены канонические формы уравнений
возмущенного движения. Приведенные формы уравнений дви-
жения используются как в классической небесной механике, так
и в астродинамике. Различные способы выводов этих уравнений
даются в [1] — [7].
§ 3.01. Метод Лагранжа вариации
произвольных постоянных
Пусть точка Р движется в пространстве под действием при-
тяжения некоторого центрального тела Ро и добавочной возму-
щающей силы, являющейся произвольной функцией времени,
положения и скорости движущейся точки. Обозначим через
х, у, z прямоугольные координаты точки Р в системе координат
Poxyz с неизменными направлениями осей, через Хо, Yo, Zq —
проекции ускорения, вызываемого действием силы притяжения
точки Р центральным телом Ро, через X, Y, Z — проекции возму-
щающего ускорения.
Тогда дифференциальные уравнения движения точки в вы-
бранной системе координат имеют вид
^ = Х0 + Х, ^ = Y0 + Y, ^- = Z0 + Z. D.3.01)
Если Ро — материальная точка или шар со сферическим рас-
пределением плотностей, то
^о тъ . I D.3.02)
! 3.0Ц
ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
333
где f — постоянная тяготения, т — масса точки Р, т0 — масса,
тела Ро.
Если положить X = О, У = О, Z = 0, то система D.3.01) об-
ращается в систему уравнений невозмущенного кеплеровского
движения
dt*
d2y
= -^-. D-3.03)
общее решение которой выражается равенствами
: = rct, -тг=Л/~
z =,
= Vf [^ sin t, + -g- A+ е cos
r =-
1 + e cos о '
a = cos и cos Q — sin и sin Q cos /,
P = cos u sin Q + sin и cos Q cos i,
D.3.04)
Общее решение D.3.04) уравнений невозмущенного движения
зависит от шести произвольных постоянных, например, Q, i, ш,
а (или р), е, 1 (или Мо) для эллиптического движения (см.
ч. II, гл. 1,2).
Согласно методу Лагранжа решение уравнений D.3.01) оты-
скивается в том же виде D.3.04), что и решение невозмущенной
системы, лишь с той разницей, что Q, i, со, р, е, т рассматри-
ваются в формулах D.3.04) не как постоянные, а как функции
времени, определяемые таким образом, чтобы удовлетворялись
уравнения возмущенного движения D.3.01).
Следовательно, формулы D.3.04) можно рассматривать как
формулы перехода от старых переменных х, у, г, х, у, г к новым
переменным Q(t), i(t), ®{t), p(t), e(t), x(t).
Если такую замену осуществить, то вместо дифференциаль-
ных уравнений возмущенного движения D.3.01) будем иметь
334
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 3.02
новую систему дифференциальных уравнений
dii p
dt ~ t
di
dt r
da _
dp
ь dt
de
2' dt
dx
3> dt
D.3.05)
где
= Ft(t, Q, i, ш, р, e, т) A = 1 6),
равносильную системе D.3.01).
Траектория возмущенного движения в каждый момент вре-
мени соприкасается с траекторией невозмущенного движения
для этого же момента и представляет собой огибающую семей-
ства траекторий невозмущенных движений.
Траектории семейства невозмущенных движений называются
оскулирующими орбитами, а их элементы — оскулирующими
элементами. Система дифференциальных уравнений D.3.05) мо-
жет быть названа системой уравнений для оскулирующих эле-
ментов. Возмущенное движение может рассматриваться как
непрерывно изменяющееся
кеплеровское движение, а
возмущенная орбита — как
непрерывно изменяющаяся
оскулирующая орбита.
§ 3.02. Уравнения
Ньютона
для кеплеровских
оскулирующих элементов
(общий случай)
Назовем оскулирующей
плоскостью плоскость, про-
ходящую через радиус-век-
Рис. 64. Проекции возмущающего ускорения. ТОР г ТОЧКИ г И ее ВеКТОр
S-проекция на радиус-вектор трчки Р, Г-на СКОРОСТИ V. Введем ПОДВИЖ-
трансверсаль, W — на бинормаль оскулирующей г ¦"¦ ¦"¦
орбиты. ную прямоугольную систему
координат PSTW следую-
щим образом (рис. 64): ось PS направим по радиусу-вектору г
точки Р, ось РТ выберем в оскулирующей плоскости перпен-
дикулярно к PS и направим ее так, чтобы при совмещении PS
с Рох ось РТ можно было бы совместить с осью Роу, ось PW
направим перпендикулярно к оскулирующей плоскости таким
образом, чтобы выбранные оси составляли правую систему.
3.02]
ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
335
Направляющие косинусы новых осей в системе координат
Poxyz выражаются формулами [1]:
cos (S, x) = a = cos и cos Q — sin и sin Q cos i,
cos (S, y) = P = cos и sin Q -f- sin и cos Q cos i,
cos(S, z) = у = sin u sin i,
cos (T, x) = a' = — sin и cos Q — cos и sin Q cos i,
cosG\ y) = §' = — sin«sinQ + cos и cos Q cost, D.3.06)
cos G\ z) = y' = cos u sin i,
cos (U^, ^) = a" = sin Q sin i,
cos (UP, г/) = p" = — cos Q sin i,
cos (W, z) = y" = cos i.
Обозначим проекции возмущающего ускорения на три новые
координатные оси через 5, Т, W соответственно. Тогда, очевидно,
+
аХ
= aS + a'T + a"W,
D.3.07)
D.3.08)
Дифференциальные уравнения для оскулирующих элементов,
которые могут быть названы уравнениями Ньютона*), имеют
вид [1], [3]
dp п.?
чг-2гТ'
l?- = sin v • S + [cos v + (cos v + е) j\ f,
dt p
D.3.09)
*) M. Ф. Субботин называет эти уравнения «уравнениями Эйлера» [3].
336 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ (§ 3.03
где
\-l
Р- V cos Я dl
л2
Истинная аномалия v связана со временем t уравнением
dx
§ 3.03. Уравнения Ньютона для эллиптических
кеплеровских оскулирующих элементов
Уравнения Ньютона D.3.09) пригодны для описания возму-
щенных движений любого типа, однако для движений эллипти-
ческого типа *) удобнее рассматривать оскулирующие элементы
Я, i, а, е,п, г (см. ч. II, § 2.01).
Заметим, что в возмущенном движении средняя долгота
в эпоху е и долгота перицентра я определяются равенствами
е = п + М0, n = Q + a, D.3.10)
где Мо — средняя аномалия в эпоху, определяемая формулой
i§i**„)*•., D.3.11)
а п — оскулирующее среднее движение.
Средняя аномалия возмущенного движения определяется
формулой
t
M = MQ+ \n[t)dt. D.3.12)
*) Движение точки Р будем относить к эллиптическому типу, если всегда
или по меньшей мере в течение некоторого промежутка времени выполняется
2ц
неравенство V2 — < 0, где V — скорость точки Р в системе
5 3.041 ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
Уравнения Ньютона имеют в этих элементах вид
da 2еаг sin v -х , 2а2 ~
dt р й + "''>
~ = sin v • S + (cos v + cos E) f,
J«—.Icosa.fr,
337
-^=- = -sin«cosec/-U?,
dn cos о ~ , sin о
~df~ e~'i>+~7~
W
= Г— cosq • S + sin d(l +-Vrl,
D.3.13)
§ 3.04. Уравнения Лагранжа для кеплеровских
оскулирующих элементов (общий случай)
Пусть существует такая возмущающая (пертурбационная)
функция R[x, у, z, t), что проекции возмущающего ускорения
X, Y, Z определяются формулами
dR
ЕЕ.
дх '
ду '
В этом случае проекции возмущающего ускорения S, T, W
в уравнениях Ньютона D.3 09) могут быть выражены через,
частные производные функции R по элементам, и мы полу-
чаем [1]
dp
dt
de
dt
di
dt
2 Vp" dR
Vl* да '
\—e2dR
р dR
e л/\1р д<а це дх
1
sin
dR . cost
dR
s'n'
1
cosf
dt
dt
dR 2 Vp dR . ]—e2dR
j= 1 7=
sin i di VH dp e Vцр <Эе
dx p g/?
dt ~ ~di"
D.3,14)
338
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 3.05
Естественно, в уравнениях D.3.14), называемых уравнениями
Лагранжа, возмущающая функция R должна быть представлена
как явная функция элементов Q, i, p, е, со, т (см. гл. 6).
Замечание. При i = 0 третье и четвертое уравнения си-
стемы D.3.14) имеют особенность. Для ее устранения вместо на-
клона i вводят новую переменную / = cos i, а частную произ-
dR , dR dR . .
водную -jp- заменяют по формуле -р- = —^j-
§ 3.05. Уравнения Лагранжа для эллиптических
кеплеровских оскулирующих элементов
Если в качестве оскулирующих элементов принять а, е, i, Q,
я, е, причем во все время движения эксцентриситет e(t)<. 1,
то для них дифференциальные уравнения имеют вид
da_ 2 dR
dt па де '
i D.3.15)
de 2_ dR_,
dt na da na
Иногда вместо первых двух уравнений системы D.3.15) рас-
сматриваются уравнения для среднего движения п и пара-
метра р орбиты:
dn
dt
3 dR
a2 de '
dp 2 Vl — e2 f dR ¦ dR \
dt ~~ na \d~n "г" дв )'
Вторым из этих уравнений можно также заменить либо первое,
либо второе уравнения системы D.3.15).
$ 3.06]
ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
339
Уравнение для элемента е можно заменить уравнением, опре-
деляющим среднюю аномалию в эпоху Мо:
dM0
dt
1 -
па-
el
Ч.
dR
де
2
па
dR
да
Если вместо элементов Мо или е берется средняя аномалия М
или средняя долгота /, то следует пользоваться одним из урав-
нений
dM
dt
dt
¦ п —
2 dR 1-е2 dR
па da
паге де
i
dR
} D.3.16)
па da
di
па
¦2(l + Vl ~e2) de '
В формулах D.3.15) — D.3.16) возмущающую функцию сле-
дует выразить через используемые в уравнениях оскулирующие
Элементы. Замечание из § 3.04 относится также и к уравнениям
D.3.15).
§ 3.06. Уравнения возмущенного движения
для канонических элементов Якоби
Если движение точки происходит под действием притяжения
центрального тела и потенциальной возмущающей силы, то по-
мимо оскулирующих элементов р, е, i, Q, со, т часто пользуются
каноническими элементами Якоби аь осг, аз, Pi, P2. Рз, связан-
ными с первыми элементами соотношениями
a,=-
а2:
¦у/цр, a3 =
2p
Pi = — T, P2 = CD, Рз :
Формулы обратного перехода имеют вид
14}
D.3.17)
Р = Т'
2а,
D.3.18)
т== — Pi, со == р2. Q —Рз-
Частные производные возмущающей функции R по элемен-
там выражаются следующими равенствами:
dR dR_
да,
др
, d/? ji , dR [ia3
да2 2а,
де да, а| у
dR
да
dR
ЕЕ.
дп
dR dR ,-
di да V 2 3
D.3.19)
340
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
И 3.08
В элементах Якоби уравнения движения точки имеют кано-
нический вид
dB| dR du2 dR da3 dR s
-йг^Ж1 ~df=w 1г=-д^' I , , .
dPi dR dp2 dR dp3 dR \ \*шОшМ>
dt dai ' dt da2 ' dt da3 ' У
В конкретной задаче необходимо представить R в виде функции
элементов Якоби. Заметим, кроме того, что если R = 0 (в не-
возмущенном движении), то элементы Якоби являются произ-
вольными постоянными, появляющимися при интегрировании за-
дачи двух тел методом Гамильтона — Якоби.
§ 3.07. Уравнения возмущенного движения
для канонических элементов Делоне
Делоне предложил ввести систему канонических элементов:
1.3.21)
-e^cosi,
Переменные D.3.21) называются каноническими элементами
Делоне.
Дифференциальные уравнения возмущенного движения точки
в элементах Делоне имеют вид
D.3.22)
R — возмущающая функция.
Элементы Делоне можно использовать только для описания
движений эллиптического типа.
§ 3.08. Две системы канонических элементов Пуанкаре
Первая система канонических элементов Пуанкаре:
D.3.23)
dL
dt
dG
dt
dH
dt
dR*
dl '
dR'
dg •
dR*
dh '
dl
dt ~~
dg
dt
dh
dt
== 2L2
dR'
dL
dR'
dG
dR*
dH
— е2) A — cost), ш2 = —Q.
3.08]
ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
341
В элементах D.3.23) уравнения возмущенного движения
точки имеют вид
dL
dt
dX
dt
dR'
dpi _ dR'
dt da>i
ад*
ад*
dL '
dco,
~dT
OR*
dt
da,
~dT
dR'
D.3.24)
Вторая система канонических элементов Пуанкаре:
= V2pi cos ®u tj, =
D.3.25)
В элементах D.3.25) уравнения возмущенного движения точ-
ки имеют вид
dL
dt
dX
dt
dR'
dX '
dL '
d\x
dt
dt ~
dR*
dR'
dt
dt
dR'
D.3.26)
В уравнениях D.3.24) и D.3.26) функция R* выражается ра-
венством D.3.22), с той лишь разницей, что возмущающую
функцию R необходимо в одном случае выразить через элементы
первой системы Пуанкаре, а во втором случае — через элементы
второй системы Пуанкаре.
Замечание 1. Канонические элементы Пуанкаре могут
применяться только для описания движений эллиптического
типа.
Замечание 2. Элементы Делоне и первая система Пуан-
каре обладают некоторой однородностью: элементы L, G, H; L,
pi, p2 имеют размерность секториальной скорости, а элементы
'¦ g, h> К wii Ш2 являются угловыми переменными. Другими сло-
вами, эти канонические элементы принадлежат к так называе-
мым каноническим переменным «действие — угол».
Замечание 3. Элементы |i, щ имеют величину порядка
оскулирующего эксцентриситета (для малых эксцентриситетов),
а переменные ?2, Лг — величину порядка наклона оскулирующей
орбиты (для малых наклонов), поэтому вторая система канони-
ческих элементов Пуанкаре удобна для получения явного раз-
ложения возмущающей функции в задачах астрономии.
Замечание 4. В некоторых работах применялись и другие
системы канонических элементов (Леви-Чивита, Хилл, Де Сит-
тер, Андуайе и др.), но они не получили большого распростра-
нения в небесной механике (см. [3]— [4]).
342
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§3.09
§ 3.09. Уравнения возмущенного движения в переменных
Лагранжа для случая малых эксцентриситетов
Второе и пятое уравнения системы D.3.15) имеют особен-
ность при е = 0, поэтому их использование в случае эксцентри-
ситетов, близких к нулю, затруднительно. Для устранения этой
особенности Лагранж предложил ввести вместо оскулирующих
элементов е и л новые переменные h и k по формулам
A = esinn, & = ecosn. D.3.27)
Назовем h и k переменными Лагранжа.
Введем вместо, эллиптических кеплеровских оскулирующих
элементов а, е, i, Q, я, е новую систему оскулирующих элемен-
тов a, h, i, Q, к, е. В элементах a, h, i, Q, k, e уравнения возму-
щенного движения имеют вид
da 2 dR
dt na de '
dh
dt
di
dt
— h2 — k2
dR
dk
!+¦
A2 - k2 de
dR
па*
- A2 -
di
dR
—h2 — k* sini
па'
В 2 Л dR h dR ¦ dR\
— h2 — k2 \ dh Ok de)'
1
dR
dt
dk
dt
no2Vl —A2 —A2 sin/ di
'. — h2 — k2 /¦dR ,
na'
6R
dh
_ h2 - k2 de
dR
de 2 dR .
dt na da
na1
dR
— A2 —A2 di '
na
Vl -h2-k2
Vl - A2 - k2
di
-h2-k2)
dh
dk
D.3.28)
В уравнениях D.3.28) возмущающая функция R должна быть
выражена в виде функции переменных a, h, i, Q, k, e и t. Уравне-
ния D.3.28), в отличие от системы D.3.15), не имеют особен-
ность при 6 = 0.
3.10]
ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
343
§ 3.10. Уравнения в переменных Лагранжа
для случая малых наклонов
Устранение особенности i = 0 в третьем и четвертом урав-
нениях систем D.3.14) и D.3.15) может быть осуществлено либо
с помощью замены / '= cos i, как было указано в замечании из
§ 3.04, либо введением новых переменных р и q вместо i и Q,
как предложил Лагранж. Связь между переменными Лагранжа
р и q и оскулирующими элементами i и Q дается соотноше-
ниями
p = tgfsinQ, ) *)
} D 3 29)
q = tgt cos Q. J
В переменных а, е, p, q, я, е уравнения возмущенного дви-
жения имеют вид
da _ 2 dR
dt па де '
1
de
dt ~
d-E-=.
dt
dq_
dt
dR
— й*
dR
na?e dn
— e2 ) дг
na
2 V —
na2
pa +
- e2 (l +
f' dR
(dR_ dR\
+ P2 + Q2 ) V dn ~^ de. ) '
dp
(
dR . dR\
дл de)'
dn = 1 + P2 + q2
dt
^W 1 + Vl+P2+?2
V dp^4 dq)
de 2 dR
dt na da nd
D.3.30)
de ' J
В уравнениях D.3.30) возмущающая функция R, разумеется,
должна быть выражена в виде функции переменных а, е, р, q,
п, е и t.
*) Не следует путать перменную Лагранжа р с фокальным параметром
доническрго сечения, который также обозначается буквой р.
344
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Г§ 3.11
§ 3.11. Уравнения возмущенного движения
в переменных Лагранжа (общий случай)
Для случая малых эксцентриситетов (е « 0) и малых накло-
нов (i яз 0) удобнее рассматривать вместо оскулирующих эле<
ментов е, i, Q, л переменные Лагранжа h, k, р, q. Тогда уравне-
ния возмущенного движения в переменных a, h, р, q, k, e пред-
ставляются равенствами
da _ 2 dR
dt ~~ na дв '
dh _ Vl-A2-fe2 (dR __
dt
na'
dR
dk
k (l + p2 + дг)
i + Vi — л2 —
1
dp ^ A + Pa + q2)% dR
dq
dt
nal
,2 J\ _ fc2 _
яо
i2 Vl - A2 - fe2 A+ Vl + P2 + ?2) V dh
dk
dR
dsI
dq _ (I + P2 + «?2)J/i dR_ _
dt na2 Vl — AJ — ft2 <3p
A + P2 + q*)
яо
B VT - A2 - k* A + Vl + P2+q2)
dk
dt
rfe
' dh dk dej'
1 + Vl - A2 - А2 бе
I
na da """
1 + P2 + q2
i2 Vl — A2 — k1 1 + Vl + P2 + q2
dp
I УТ^^П^" /fc jg_ , k dR\
na? A + Vl - A2 - k2 ) \ dh dk)'
D.3.31)
В уравнениях D 3.31) необходимо выразить возмущающую
функцию R как функцию переменных a, h, p, q, k, e и /. Эти
уравнения не имеют особенностей при е = 0 и i = 0.
В заключение укажем на связь между переменными Ла-
гранжа h, k, p, q и каноническими элементами Пуанкаре D.3.23)
и D.3.25). С точностью до первых степеней эксцентриситета е
I 3.12]
ГЛ. 3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ ТЕЛА
34S
и наклона i (точнее, с точностью до 2 sin у « tg t\ будем иметь
1
4 4
g, « *J}ia e cos я = ^\ла k,
4 4
t]j ял — -y (ia e sin я = — V
4
h,
T]2 = —
2 sin у cos Q
2 sin -7J- sin Q « —
2,
tg / cos Й =
o tg i sin Q
D.3.32)
В соотношениях D.3.32) p0 — фокальный параметр (этот
символ мы ввели, чтобы отличить его от переменной Лагран-
жа р).
§ 3.12. Связь между прямоугольными координатами
движущейся точки и различными системами
канонических элементов
Прямоугольные координаты точки связаны с каноническими
элементами Якоби равенствами
„2
x=
A + е cos о)
\i (I + ecos о)
[cos (и + р2) cos рз - -^ Sin (о + р2) sin р3] ,
[cos (о + р,) sin рз + -J- sin (о + P2)cos p3] ,
-V
1 +
2a,aj
f + P,=^l
е cos оJ
D.3.33)
Связь между (х, у, г) и каноническими элементами Делоне
имеет вид
у [cos (v + g) cos A - sin {v + g) sin A -|-],
D.3.34)
G
A + ecos o)
sin (o
_ /
G2 ,_
G3
dw
A + ecos wJ
346
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
«3.12
Связь между х, у, г и каноническими элементами первой
системы Пуанкаре имеет такой вид:
mm-^oU [cos (u + ffl2 - ffll) cos ffl* +
+ sin (v + co2 — coO ?in co2 L 7-7^1 •
у = —, ~* Pl)—г Г— cos (v -f ш2 — ш,) sin ш2 +
э ц A + е cos о) L " ^
+ sin (и + и2 — Ш]) cos ш2—~р' ~Р2.1,
L — Pi J
._ (^~Pi)
p, A + ecos v)
D.3.35)
A + ecosoJ'
Связь между координатами х, у, г и каноническими элемен-
тами второй системы Пуанкаре имеет следующий вид:
cos a =
D.3.36)
Глава 4
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
ВОЗМУЩЕННОГО ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ
ДЛЯ РАЗЛИЧНЫХ СИСТЕМ
ОСКУЛИРУЮЩИХ ЭЛЕМЕНТОВ
В этой главе приводится сводка уравнений, которые наиболее
часто встречаются в теории движения больших планет Солнеч-
ной системы. Некоторые практические рекомендации можно
найти в главе 3, Способы применения этих уравнений в астро-
номических задачах подробно изложены в монографиях [2] — [7].
§ 4.01. Уравнения Ньютона для кеплеровских
оскулирующих элементов (общий случай)
В главе 3 приведены уравнения Ньютона для оскулирующих
кеплеровских элементов орбиты одного тела, движущегося под
действием притягивающего центра и возмущающей силы. Если
материальная точка Ра притягивает каждую из материальных
точек Р\, Рг, ¦ ¦ ¦, Рп-\ в соответствии с законом всемирного тя-
готения и в этой механической модели действуют еще какие-либо
возмущающие силы [например, силы взаимного притяжения тел
Рг и Pj {гф j,i, j = 1, 2, .... га — 1), сопротивление среды и др.],
то возмущенное движение тел Pi, Pz, ..., Pn-i можно описать
дифференциальными уравнениями Ньютона [1]:
dt —^kik,
~^- = sin vk • Sk -f [cos vk + (cos vk + ek) -^-J fk,
dt
r
d?lb r.
~W^p sin ufcpsec '•
D.4.01)
348
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
В 4.01
d®. cos о.
^
?*
D.4.01)
= 1, 2, .... n-1).
Оскулирующими элементами орбиты точки Ph являются ph,
е*., к, Qa, cos, тА; при этом начало основной системы координат
Рохуг совпадает с притягивающим центром PQ; Sh, Th, W^ — суть
проекции возмущающего ускорения для точки Рк на подвижные
оси координатной системы, отнесенные к плоскости оскулирую-
щей орбиты точки Р&.
Величина Nh определяется равенством
»* = '
cos vk dvk
rf J (l+eftcosoftK
D.4.02)
Если система уравнений Ньютона проинтегрирована, то по-
ложение точек Pi, Pz, ..., Рп-\ в системе координат Paxyz для
любого момента времени определяется равенствами
*ft = ''ft (cos «ft cos Qft — sin uk sin Qft cos ik),
У к = г к (cos uk sin Qft + sin uk cos QA cos /4),
dvb
D.4.03)
v ft
^ - Tfe = —?=
= 1, 2 n-
I 4.02] ГЛ. 4. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 349
§ 4.02. Уравнения Ньютона для эллиптических
кеплеровских оскулирующих элементов
Для движений эллиптического типа удобнее рассматривать
оскулирующие элементы орбиты Pk- a&, eh, ih, Qk, nk, е&.
В этих элементах уравнения Ньютона имеют вид
dak 2ekak sin ofe ~
~dT~~ p~k Ь
de
r
dt
d?l,
dn,
dt
j- = sin vk ¦ Sk + (cos vk + cos Ek) fk,
= -^-cosuft- Wk,
= — sin uk cosec ik • Wk,
} D.4.04)
' — cos vk • Sft + sin :
+ -^-j faJ
JOft
dt
dt
D.4.05)
в эпоху, Mh — возму-
Здесь Mok — средняя аномалия точки
щенная средняя аномалия точки Pk.
Замечание. Может встретиться случай, когда движение
одних тел принадлежит к эллиптическому типу, а движение дру-
гих не принадлежит к этому типу. В таком случае возможно
сочетание уравнений D.4.01) и D.4.04). К такого типа движе-
ниям относятся межпланетные полеты, а также движения в не-
которых кратных звездных системах,
350
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
IS 4.04
§ 4.03. Уравнения Лагранжа для кеплеровских
оскулирующих элементов (общий случай)
Если возмущающие силы потенциальны, т. е.
dRk
dx.
У ь =
dRk
dRk
dzk
то вместо уравнений Ньютона D.4.01) обычно используются
уравнения Лагранжа:
dRk
Pk
dt
dt
dlk
dt
dt
dt
v ^k ^
1 — e\ dRk
1 dRk
*JvkPk sin '* dilk
1 dRk
cos /„ dRk
л/^кРк smik dik
P d*k
+
COS I.
2Vp, dRk \e\ dRk
/ Г г / -.
1-4 d^
deh
dt
dek
D.4.06)
= I,2 я-I).
J
Связь между оскулирующими элементами и относительными
прямоугольными координатами точек Pi, Рг. • ¦ •. Рп-\ выра-
жается формулами D.4.03).
§ 4.04. Уравнения Лагранжа для эллиптических
кеплеровских оскулирующих элементов
Для исследования движений эллиптического типа при нали-
чии возмущающих функций удобнее пользоваться следующими
уравнениями Лагранжа:
D.4.07)
dak
dt
dek
dt
2
"A
я*4е*
Й31А
9 Л
"к"* ч ~
l\-t
ь V1
-4
dRk
дЧ'
g 4.05] ГЛ. 4, ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ л ТЕЛ 351
if*
dt
dRt
g 2 /dRk , dRk\
~ i + I\ i v дп. де. ) '
ПкаЬ Л/ ' — в* * *
ft. « V л
— ег sin /ь
dek
dt
~ +
v~
4
**
+
lit 2
nkak У1~ек
dRk
^1)
dek
D=1, 2 n-
D.4.07)
дополненными соотношениями D.4.05), если необходимо найти
другие характеристики оскулирующей орбиты.
Заметим, что оскулирующие элементы, определяемые уравне-
ниями D.4.07), отнесены к системе координат Poxyz. Как и в пре-
дыдущих параграфах, возмущающие функции Rh. должны быть
представлены в виде явных функций элементов ак, ек, ih, Qh,
nh, eh.
Если движение тела Ро в пространстве известно, то с по-
мощью формул D.4.03), дающих относительные прямоугольные
координаты тел Pi, Лг. • • ¦. Pn-i, и с помощью формул преобра-
зования координат можно найти положение всех Р\ (k=0, 1, ...
..,, п — 1) тел системы в абсолютной системе координат.
§ 4.05. Уравнения возмущенного движения
в канонических элементах Якоби
В § 3.06 приведены дифференциальные уравнения относитель-
ного возмущенного движения одного тела, записанные в канони-
ческих элементах Якоби. Аналогично можно написать канониче-
ские уравнения возмущенного движения тел Pi, Рг, ..., Pn-i от-
носительно тела Ро, используя канонические элементы Якоби
(см. § 3.06) «is, a2k, азк, Pih, Ргь, Рз* тела Ph {k=l, 2, .... п— 1).
352
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЙ
4.03
Эти уравнения имеют вид
daik __ dW da2k _ 6U*
dt ^Pife dt ^P2h *
dU*
dt
ay
D.4.08)
(ft ^= 1 > Z, . . ., n 1J,
где возмущающая функция ?/* (при наличии сил взаимного нью-
тоновского притяжения) выражается через прямоугольные яко-
биевы координаты формулой
п-1
-^-. D.4.09)
Взаимные расстояния До* и Дч- выражаются формулами D.1.10)
и
тк =xk + г/й + гк ¦ D.4.10)
Связь между каноническими элементами Якоби и кеплеров-
скими элементами относительного движения (начало координат
основной координатной системы совпадает с точкой Ро) дается
равенствами
„ . <404-0
Pu = ~Tfe> Pi* = flJft» Рз4==^А>
mkak-\
-'k = fmomk»k'
к
/=0
D.4.11)
Для движений эллиптического типа удобнее воспользоваться
соотношениями
= V^afe C1 — 4)cos '"*. hk =
} D.4.12)
=1,2 n-1).
§ 4.07] ГЛ. 4. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ П ТЕЛ 353
§ 4.06. Уравнения возмущенного движения
в канонических элементах Делоне
Для описания относительного движения точек Р\, Pi Pn-i
(см. § 4.05) можно использовать также канонические элементы
Делоне Lk, Gh, Hh, lh, gh, hh (k = 1, 2 n — 1) (см. § 3.07):
D.4.13)
Введем гамильтониан
D.4.14)
где возмущающая функция U* выражается равенством D.4.09).
Тогда уравнения для элементов Делоне примут канонический
вид
D.4.15)
dLk
dt
««*
dt
dF dGk
dlk ' dt
dF dgk
dLk ' dt
(*=1,2, .
dF
dF
dGk
.., n-
dHk
dt
dhk
dt
-1).
dF
dhk'
dF
dHk
Эти уравнения описывают относительные движения, по-
скольку кеплеровские оскулирующие элементы отнесены к коор-
динатной: системе P
§ 4.07. Две системы канонических элементов Пуанкаре
Наряду с каноническими элементами Якоби и Делоне в за-
дачах небесной механики (при малых эксцентриситетах и накло-
нах) применяются каьонические элементы Пуанкаре.
12 Под ред. Г. Н. Дубошина
354 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [« 4.0*
Первая система канонических элементов Пуанкаре:
.^VSO -V1 ~el)'
Pz. k = V^fcC1-**) A - cos ifc),
Л* = nk{t —
(Oi.ft = — "ft.
Jit
«ft = -5-
L
D.4.16)
(ft=l, 2 n-1).
Вторая система канонических элементов Пуанкаре:
?2. ft = V2P2, ft cos щ, h,
I**
D.4.17)
(*=1, 2 n-1).
Формулы D.4.17) выражают элементы второй системы Пуан-
каре через элементы первой системы. Связь между элементами
второй системы Пуанкаре и кеплеровскими оскулирующими
элементами относительного движения дается соотношениями
D.4.18)
(A = 1.2 n-I).
§ 4.08] ГЛ. 4. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 353
С помощью элементов D.4.16) и D.4.17) уравнения возму-
щенного движения точек Р\, Р%, .. ., Рп-\ можно написать
в виде
D.4.19)
dLk
dt —
dlk
dt
dLk
dt
d4
dP
dXh '
dP
dLk '
dF
dXk '
dF
dP\,k
dt
dai,h
dt
(*=1, 2,
dli.k
dt
di\i.h
dF
дщ.к '
dP
aPi, k '
.... n —
dF
dF
dpi.
dt
dt
1);
dh.
dt
dib.
k
k
k
dF
Эа>2. ft '
dF.
dp2,ft
dF
дт]з, * '
dP
dt
dt dti,k' dt
!=1, 2 n-1),
D.4.20)
где гамильтониан F выражается соотношением D.4.14).
Канонические системы уравнений D.4.08), D.4.15), D.4.19),
D.4.20) имеют порядок 6га — 6 и определяют (если воспользо-
ваться формулами § 3.09) положение точек Р\, Р2 Pn-i
в координатной системе Р^хуг. Если движение точки Ро в абсо-
лютной системе известно, то легко определяется абсолютное
движение всей системы п материальных точек.
§ 4.08. Уравнения возмущенного движения в переменных
Лагранжа для случая малых эксцентриситетов
Второе и пятое уравнения системы D.4.06) имеют особенно-
сти при es = 0 (s = 1, 2, .... л— 1), поэтому их использова-
ние в случае эксцентриситетов, близких к нулю, затруднительно.
Для устранения этих особенностей Лагранж предложил вместо
оскулирующих элементов ея, я, (s = 1, 2, ..., п — 1) ввести пе-
ременные hs, ks по формулам
= essinns,
(s=I, 2 n-1)
D.4.21)
Введем теперь вместо систем эллиптических кеплеровских
элементов as, es, is, Qs, ns, es (s = 1, 2 n—1) новые си-
стемы оскулирующих элементов as, hs, is, Qs, ks, es. В этих эле-
ментах уравнения возмущенного движения системы материалы-
12*
356
ч- IV- ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 4.09
ных точек Pi,
das _ 2 <Э/
dt ~
dh.
Рп-\ относительно Ро имеют вид
dzs '
*:->
dt
dls
dt
dus
е*.
+ -
6RS
nas л/1 - A: - ki
dRs
М
dhs
dks
dt nrfji-h)-k]tlnit
я *'""*' (it
ад,
dt
¦)-
dt.
dRs
tg 2
dt
dt.
dhs
+ ks
D.4.22)
В уравнениях D.4.22) возмущающие функции Ra (s = 1,2,...
..., n—1) должны быть выражены в виде функций перемен-
ных as, hs, is, Qs, ks, es и t.
§ 4.09. Уравнения в переменных Лагранжа
для случая малых наклонов
Устранить особенности ts = 0 (s = 1,2 л — 1) в третьем
и четвертом уравнениях системы D.4.06) можно при помощи
введения переменных Лагранжа ps, qs по формулам
\ D.4.23)
¦(я==1,2 п-\). )
В новых переменных.as,es> p*, qtt я», е« уравнения возмущенного
§4.101 ГЛ. 4. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ЗАДАЧИ п ТЕЛ 357
движения системы материальных точек Pi, Pi, ..., Рп-\ относи-
тельно Ро имеют вид
das __ 2 dRs
dt nsas des
-el dR,
etVl-e
dt
dt
dn.
(l+P2s + 9?f dRs
—I)
(s==l, 2 rt-1). j
Как и в случае D.3.29), не следует путать переменные Ла-
гранжа ps (s = 1, 2, ..., я^1) с фокальными параметрами
конических сечений. В уравнениях D.4.24) возмущающие функ-
ции Rs должны быть выражены в виде функций переменных
as, es, ps, qs, ns, es и t.
§ 4.10. Уравнения возмущенного движения
в переменных Лагранжа (общий случай)
Для случая малых эксцентриситетов и малых наклонов
(еа « 0, is « 0, s = 1, 2, ..., п — 1) удобнее рассматривать
вместо оскулирующих элементов es, is, fis, ns переменные Ла-
гранжа hs, ks, ps, qs- Тогда уравнения возмущенного движения
системы материальных точек Pi, Р^, ..., Рп-\ относительно Л>
358
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 4.10
в переменных as, hs, ps, qs, ks, es имеют вид
das _ 2 dRs
dt
des '
3
dt
¦s у * ~ *« *s (^J_
V. dks
— h2 — k2 de.
di
dPs qsdqs)'
(. ад._ . ад, ад
?'У/а ад.
dt
«у, V»-*;-*
ЙА4 "л dks "t" й
*s ад,
d/
«iOj das
я.Д.
- *! - k\ 1 + V" +P? +
D.4.25)
1 ^0+V^P^)Vi^" ^J
В уравнениях D.4.25) необходимо выразить возмущающие
функции Rs через as> /zs, ps, ?а, &s, es и t.
В заключение укажем, что и в случае многих материальных
точек связь между каноническими элементами Пуанкаре D.4.16)
и D.4.17) и переменными Лагранжа hSy kst ps> qs выражается
приближеиными равенствами D.3.32).
Глава 5
СПЕЦИАЛЬНЫЕ ФУНКЦИИ
В задачах небесной механики и динамики космического по-
лета весьма часто приходится пользоваться специальными функ-
циями. К их числу относятся эллиптические функции Якоби,
функции Бесселя, сферические функции, гипергеометрические
функции и т. д.
Функции Бесселя нашли применение в разложениях коорди-
нат невозмущенного кеплеровского движения (см. ч. II, гл. 3),
в теории движения ИСЗ в сопротивляющейся среде (см. ч. VI,
гл. 2). Сферические функции и, в частности, полиномы Лежандра
используются в теории притяжения (см. ч. VI, гл. 1). Большие
удобства дает применение гипергеометрической функции при
разложении возмущающей функции в классических задачах не-
бесной механики (см. гл. 6). Через эллиптические функции
Якоби выражается решение задачи о движении ИСЗ с учетом
возмущений от фигуры Земли [19].
В этой главе содержатся основные сведения из теории спе-
циальных функций. Дополнительные сведения можно найти
в учебных пособиях и монографиях [13] — [16]. Кроме того,
можно рекомендовать таблицы и справочные руководства
И. С. Градштейна и И. М. Рыжика [17], А. М. Журавского [18],
Е. Янке и Ф. Эмде[19].
§ 5.01. Эллиптические интегралы
и эллиптические функции
Определение. Эллиптическим интегралом 1-го рода на-
зывается функция
sinq>
j ,*'¦*¦«¦)¦ D-501)
360 ч- iv- ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ t§ S.01
Величина k называется модулем эллиптического интеграла. Ве-
личина k' = Vl —k2 называется дополнительным модулем. Це-
лесообразно рассматривать лишь 0 ^ k < I и 0 < А' < 1,
Определение. Эллиптическим интегралом 2-го рода на-
зывается функция
sin ф
ix. D.5.02)
Определение. Эллиптическим интегралом 3-го рода на-
зывается функция
П (ф, п, k) = J
ф
. D.5.03)
6 A +« sin2 Л) VI — *2яш2Л
sin Ф
dx
Величина n — параметр эллиптического интеграла 3-го рода.
Полный эллиптический интеграл 1-го рода:
К (k) = F(-, k) = [ , . , dX . D.5.04)
W 42 ) J Vl - k2 sin2 Л Ч '
Полный эллиптический интеграл 2-го рода:
я
"я"
Е(й) = ?(|-, Л:) = J V1 — >fe2 sin2 Л rfA,. D.5.05)
о
Полный эллиптический интеграл 3-го рода:
П (± , п, k) = ^ d) . D.5.06)
V2 ¦ ¦) J A +лзт2Я) Vl-A2sinU
§ 5.01] ГЛ. S. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 361
Функциональные соотношения для эллиптических интегралов:
Я(-ф1й) = -?(Ф, к),
F{rm±y,k) = 2пК (k)
Л(пя±ф, к) = 2пЕ (к) ± Е (ф, А),
df (ф, ft) _ __1_ f ? (ф, fe) - /fe'V (ф, 6) _ jfesin<pcos<p
dk ~~ k'2 \ k Vi - & sin2
dK (k) = E{k) К (k)
dk kk'1 ft '
дЕ (ф, ft) _ E (ф, k)-F (ф, ft)
D.5.07)
В приложениях часто используются следующие тригономет-
рические и степенные разложения:
2 ( 2
к) = — К (к) ф — sin ф cos ф ( а0 + -5- a! sin2 ф +
, 2-4
2
—
1 я я
BЯ—
1-12 ,2п
B«-1I!"|2 ft2"
И kw
D.5.08)
При к близком к 1 удобнее пользоваться разложениями
Bn-l)!! =
2пи!
3 ¦ 5 ... Bп - 1).
2га — 1 '
D.5.09)
362
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 5.01
Для полных эллиптических интегралов 1-го и 2-го рода имеются
разложения
-2< I +2.L 2-я» J k ]'
^ п=-1 >
п{\ угBя-1)"Т *2п X
— 2 1 L L L 2пя1 J 2n - 1 f '
V1—**-i
Введем обозначения:
-*2)d -k2x2)
I* m \л) —
} D.5.10)
c2-a)mV(l--*2)(l -k2x2)
n = 0, 1, 2, ...; to=I, 2, ...).
Функции Ln(x) и Нт(х) удовлетворяют рекуррентным соотно-
шениям.
Bn - 1) k*Ln - Bя - 2) (й* + О ?„_, + Bn - 3) Ln_2 =
a* -
Bm - 2) [-a
-Bт
+ Bm - 4) [(** + 1) - 3*'a] Ят_2 - Bm - 5)
D.5.11)
Из рекуррентных соотношений D.5.11) следует, что все Ln
и Ят при л^2ит^2 выражаются через Lo, Li, Яь которые
представляют собой эллиптические интегралы 1-, 2- и 3-го рода.
Определение. Функция, являющаяся результатом обра-
щения эллиптического интеграла 1-го рода, называется ампли-
тудой. Другими словами, если
§ 5.011 ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 363
ТО
Ф = аты. D.5.12)
Амплитуда — бесконечнозначная функция своего аргумента
с периодом 4iK{k).
Эллиптические функции Якоби:
эллиптический синус sn и — sin ф = sin am и,
эллиптический косинус сп и = cos ф = cos am и, ъ (д к i
дельта-амплитуда dn и = -j~ = -\Л — k2 sin2 ф .
Функции Якоби — двоякопериодические с периодами:
sn и имеет периоды 4К и 2#C'j, К' = К (kr),
сп и имеет периоды 4/С и 2 (К + K'i),
dnu имеет периоды 2/С и 4К'/.
Эллиптические функции удовлетворяют следующим основным
тождествам:
sn2u + cn2u= 1,
dn2« + &2sn2u= 1.
Основные степенные разложения для эллиптических функций:
3! м п 5! 7!
71
D.5.15)
... |
Эти ряды сходятся при |ы| < min{|#C'|,
KiK'|}
364 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Основные тригонометрические разложения:
К 5.01
cnu =
пи
2*
kK
kK
it
2K
oo
¦% A
oo
+
n-
q
1 ~f" Q
oo
1
1
1
" 2
qn
+ <
2n
. nnu
К
Ч.К
пли
„OS ^ ,
D.5.16)
где q = e
Эллиптические функции Якоби удовлетворяют следующим
дифференциальным уравнениям:
ricnu
d dnu
~du~
= _ д/A _ dn2 и) (dn2 u - fe'2) .
Дифференцирование эллиптических функций выполняется по
формулам
d
D.5.17)
du
den и
du
d dnu
du
= — snu dnu,
= — k2snucnu.
Эллиптической функцией Вейерштрасса называется решение
дифференциального уравнения
- g2w - g3
D.5.18)
где
оо оа
оо оо
§ 5.01]
ГЛ. Б. СПЕЦИАЛЬНЫЕ ФУНКЦИИ
365
причем штрих в суммах означает, что тип одновременно не
обращаются в нуль, шь со2 — любые комплексные числа, отно-
шение которых не является вещественным числом.
Функция Вейерштрасса обозначается символом f (и) и одно
из ее разложений вблизи и — 0 имеет вид
W «г +
y'J___J !__)
L-i \ (u — 2m®i — 2гаш2J Bmcui + 2«co2J J "
+ 2«ш2J
D.5.19)
Числа 2a>i и 2шг являются периодами функции f(u).
Основные соотношения для функции Вейерштрасса:
(- и) = р (и), р' (и) = - f (- и),
» g2»2 аз»4 , й2»6
4.5
4.7
24-3-5-' "*" 2* • 5 • 7 • 11
en2 (и, Й)
dn2 (и, k)
—e3
К (к)
—«3
D.5.20)
> e2 > e3 — вещественные корни уравнения
g3 = 0 (если g\ - 27g23 > 0).
Тэта-функции определяются соотношениями
sinBn— l)u,
/ 1N2 oo
" = 2E
i («) = E qn'e2niu = 1 + 2 ? ?"' cos 2nu,
П=— oo n=I
П=1
D.5.21)
366
4. TV. ТЕОРИЯ ВОЗМУЩЕГННПГО ДВИЖЕНИЯ
[§ 5.02
Связь между тэта-функциями и эллиптическими функциями
Якоби дается равенствами
л ( пи\
спи
-V?
( Ли \
"F 2 \Ж)
( ли \ '
Лтк)
.(
D.5.22)
¦&
Представление функций Якоби через тэта-функции является
одним из наиболее эффективных способов вычисления их зна-
чений, поскольку разложения тэта-функций обладают очень
быстрой сходимостью (л-й член имеет порядок qnl).
В настоящее время издано много таблиц, содержащих чис-
ленные значения эллиптических интегралов и эллиптических
функций [20] — [23].
§ 5.02. Гипергеометрический ряд
и гипергеометрическая функция
Введем для целых неотрицательных значений л обозначение
называемое символом Аппеля, где Г (а)— гамма-функция (функ-
ция Эйлера), определяемая несобственным интегралом
Г(а)=
Так как Г (а) = (а— 1) Г(а— 1), (а, 0) = 1, то
(а, п) = а(а + 1) (а + 2) ... (а + п - 1), п > О,
(—Д. и) _ / 1 чл д(а— 1) ... (а — /»+ 1) __ /_ 1 у1 /^а
A, л) ""^ ч п\ к ' п-
Определение. Ряд, определяемый равенством
D.5.24)
D.5.25)
F (а В v?)-
г № P. Y. z) —
n=-o
D 5 2
§ 5.02] ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 367
называется гипергеометрическим рядом. Величины а, р, у, г
называются соответственно 1-м, 2-м, 3-м и 4-м элементами ряда.
Гипергеометрический ряд является целым рядом относительно
комплексного переменного z, рядом многочленов относительно а
и р.
При любых комплексных числах а, р, у (за исключением
двух случаев: а) у — нуль или целое отрицательное число; б) у
и а или у и р — нули или целые отрицательные числа) ряд
D.5.26) абсолютно сходится внутри единичного круга |z|< 1.
На границе единичного круга \z\ = 1 ряд D.5.26) абсолютно
сходится, если Re (у— а — р)> 0, условно сходится (за исклю-
чением точки z = 1), если — 1 < Re (у — а — Р) ^ 0, и расхо-
дится, если Re (у — а — Р) < —1 ¦
Определение. Многозначная функция комплексного пе-
ременного z, обозначаемая F(a, p, у, z), являющаяся аналитиче-
ским продолжением ряда D.5.26); называется гипергеометриче-
ской функцией [15].
Гипергеометрическая функция F(a,, p, у, z) удовлетворяет
линейному дифференциальному уравнению
^ 1)г]4^-арШ = 0, D.5.27)
которое называется дифференциальным уравнением Гаусса, или
гипергеометрическим уравнением.
Решение гипергеометрического уравнения D.5.27) голоморф-
но на всей плоскости г, за исключением, быть может, точек
z = 0, г = 1, г = оо, которые являются регулярными особыми
точками. Если ни одно из чисел Yi a — р, у — а — р не является
нулем или целым числом, то в окрестности каждой из особых
точек существуют два линейно независимых регулярных ре-
шения.
Разложения этих решений в окрестности особой точки z = 0
имеют вид
»,(*) = /'<«, Р, у; г),
w2 (z) = z'-V (а + 1 - y, Р + I - Y, 2 - V, г).
В окрестности особой точки z = 1 решения гипергеометриче-
ского уравнения D.5.27) представляются гипергеометрическими
рядами
1+a+p-YJ 1 - 2), |
Согласно сказанному ряды D.5.28) и D.5.29) абсолютно
Сходятся внутри кругов |z|< 1 и \z—1|<1 соответственно.
368
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Г§ 5.03
В окрестности особой точки z = оо имеем следующие два
регулярных решения:
w5 B) = z~aF (a, 1 + a — y, 1 -f a — p"; ^-) .
1 + P-y. H-P-a;4-1.
D.5.30)
абсолютно сходящиеся при |г|> 1. Все известные 24 решения
гипергеометрического уравнения (таблица Куммера) можно
найти в книге [15].
Приведем выражения некоторых элементарных функций че-
рез гипергеометрический ряд [17]:
A — z)~a = F (a, p, p; z),
оо
л=0
arcsinz=zF(l,l,f,z2),
arctgz= 2FD-, 1, 4"• —
2 ' 2
= — f(— — — 1- kA
D.5.31)
В небесной механике и астродинамике чаще всего встре-
чается гипергеометрический ряд с вещественным аргументом,
который в дальнейшем будем обозначать буквой х.
§ 5.03. Полиномы Лежандра. Функции Лежандра
Определение. Полиномами Лежандра называются мно-
гочлены п-й степени
D.5.32)
§ 5.03]
ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ
369
Весьма распространено следующее представление для поли-
номов Лежандра (формула Родрига):
?п[(х2-т D.5.33)
Из предыдущей формулы имеем, в частности:
/>„(*)= 1.
Р, (х) = х,
Р4(х) = i- C5х4 — 30.x;2 + За:),
р5 (Х) = 1 F3jc5 - 70г> + 15а:).
Ес$и * = cos9, то получаем
D.5.34)
1-3
^2-4 B/г — 1) Bя — 3
р0 (cos В) = 1, Pi (cos 9) = cos 6,
Р2 (cos 9) *= \ C cos 26 + 1), Р3 (cos В) = -I E cos 36 + 3 cos 6),
Pi (cos 6) = -p- C5 cos 46 + 20 cos 26 + 9),
p5 (cos B) = -t^- F3 cos 56 + 36 cos 39 + 30 cos 9).
Кроме того, применяется интегральное представление Ла-
пласа
л
JL J ( ± у2 1 )"
рп (х) = JL J (х ± у*2 — 1 cos ф)" dcp,
D.5.35)
0
интегральные представления Мейера
cos I n + —
Pn(cosB)=—
V2 (cos ф — cos 0)
sin \n + —j ф
n J V2 (cos 6 — cos ф)
D.5.36)
370 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
а также
^„(cose)= ? pnk cos (n — 2k) e,
2 Bfe—1)M Bn — 2fe — 1I!
[§ S.03
6n_2fc (ЩИ Bn — 2k)U '
60 = 2, 6L = 62= ... =fln=l.
Соотношения ортогональности полиномов Лежандра:
f 0.
V
-1
1
\xkPn{x)dx=0 при k = 0, 1, ...,«— 1,
U)dx- k(k-\)...(k-
x) ax
2л
¦^ J ^n+i (cos8)cos8rf8=C'ffi+a.
D.5.37)
Определен ие. Линейное дифференциальное уравнение
второго порядка
A—z2) -у— — 2z-t~ + а(а + l)w = 0 D.5.38)
CLZ UZ *
называется дифференциальным уравнением Лежандра. Оно
имеет два независимых решения.
Первое решение — функция Лежандра 1-го рода, выражае-
мая с помощью гипергеометрического ряда
D.5.39)
абсолютно сходящегося в круге \г— II < 2.
Второе решение — функция Лежандра 2-го рода
п B)_
a.fl
а + 1.1\ D540)
§ S.041
ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИЙ
371
Ряд D.5.40) абсолютно сходится при |z|> 1. Функции Ле-
жандра удовлетворяют оценкам
|Qa(cos6)|<-
(cos в)
Имеют место следующие рекуррентные соотношения:
(а + 1) Ра+1 (г) - Bа + 1) zPa (z) + aPa.{ (z) = 0, )
-. D.5.41)
D.5.42)
При а = п (где п — целое неотрицательное число) функция
Лежандра 1-го рода обращается в полином Лежандра п-й сте-
пени D.5.32).
Полиномы Лежандра можно определить как коэффициенты
разложений
п=0
л=о
^в+1
D.5.43)
Первое разложение сходится при 111 < min | z ± yz2 — 1 |>
второе — при \t\> max| z ± -y/z2 — 1 |. Функция A — 2tz -f t2)~'12
называется производящей функцией полиномов Лежандра.
§ 5.04. Присоединенные функции Лежандра
Определение. Присоединенной функцией Лежандра 1 -го
рода называется следующая функция комплексного перемен-
ного:
- «¦
D.5.44)
Присоединенную функцию Лежандра 1-го рода можно опреде-
лить также с помощью соотношения (для целых р)
372 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ tS 5.04
Присоединенная функция Лежандра является одним из ли-
нейно независимых решений дифференциального уравнения
=:0l D.5.46)
рассматриваемого в комплексной области, если а+ Р1?^—я<0.
Если a = п, р = т, где п— натуральное, а т = 0, 1, . ., «,
г = х, то гипергеометрический ряд, входящий в выражение
присоединенной функции Лежандра 1-го рода, обращается
в обобщенный полином
__ (-1ГBяI дчТ..,-^ f«-« m-n+1 1_ 1_\
D.5.47)
Присоединенные функции Лежандра удовлетворяют г/сло-
виям ортогональности
V ( 0,
\ Pnm{x)Pnk(x)dx = \ 2 (в
-I I 1ЙТ" (n
V ( 0 тФк
D.5.48)
¦m)\ '
, (cos Э) Pnk (cos 9) sin Э dQ =
о о
4n (fi + /n)l D.5.49)
2я+ 1 (« —m)! ' m —«•
Важное свойство полиномов Лежандра выражается соотноше-
нием
Р„ (COS Э COS 0! + Sin 0 Sin 0! COS (ф — ф[)) = Рп (COS 0) Рп (COS 0^ -f
m=l
Равенство D.5.50) представляет собой теорему сложения
для полиномов Лежандра.
Рекуррентные соотношения, интегральные представления и
асимптотические разложения для присоединенных функций Ле-
жандра можно найти в [13], [15].
§ 5.05] ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 373
§ 5.05. Сферические функции
Пусть задано уравнение Лапласа
Определение. Сферическими многочленами Рп(х, у, г)
называются однородные многочлены переменных х, у, г сте-
пени п, являющиеся решениями уравнения Лапласа D.5.51).
Уравнение D.5.51) имеет 2« + 1 линейно независимых ре-
шения Рп(х, у, г). В сферических координатах г, 8, <р
(х = г sin Э cos ф, у = г sin Э sin cp, z = r cos 8) сферические мно-
гочлены имеют вид
Ра {г, 6, Ф) = r'lYn (в, ф), 0<е<л, 0<ф<2л. D.5.52)
Опреде л ен ие. Функции Кп(8, ф) называются сфериче-
скими функциями Лапласа, или сферическими функциями п-го
порядка.
Функция УП(Э, ф) является решением уравнения в частных
производных
. D.5.53)
Сферическая функция «-го порядка Уп(8, ф) выражается
формулой
п.
Yn (9, ф) = а0Рп (cos 8) + Е (am cos mq> + bm sin imp) Pnm (cos 6),
m=l
D.5.54)
где uq, fli, ..., Яш bii • ¦ •. йп — постоянные коэффициенты.
Определение. Функции Упо = Лг(cos 8) называются зо-
нальными сферическими функциями, или зональными гармо-
никами. Функции Ynn(9, ф) = Pnn (cos 8) cos щ и Y'nn(Q, <p) =
= Рпл (cos 8) sin тгф называются секториальными сферическими
функциями, или секториальными гармониками, а функции
У„т (9. ф) = pnm (cos 8) cos /пф, Y'nm (8, ф) = Pnm (cos 8) sin тф
@ < m < n)
называются тессеральными гармониками. Зональные гармоники
обращаются в нуль на множестве параллелей, разделяющих
единичную сферу на зоны: секторйальные гармоники обра-
щаются в нуль на множестве меридианов, разделяющих сферу
на п секторов, а тессеральные гармоники равны нулю и на мно-
жестве параллелей и на множестве меридианов,
3?4
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
II 5.05
Свойства ортогональности сферических функций на единич-
ной сфере выражаются равенствами
2
0,
oJ o
и
о о
и
о о
Л 2л
И
о о
л 2л
\ \ Ynm(Q>4>)Yks(Q,4>)sinQdQdq> =
0,
h ф) У'кк (8, ф) sin 9dQ dq> = { 2п-{2п)\
(в, ф) п. (в, ф) sin e de йФ == о,
о о
где 6nfc — символ Кронекера [14],
П 2л
g;
о о
g;i
Л 2Л
J 5 У. (в, ф)Ур(в, ф)81пв?/в?/ф =
о о
о,
2я
2л + I
m=\
« = i
D.5.55)
D.5.56)
Теорема. Всякая непрерывная и дважды дифференцируе-
мая с непрерывными производными функция /@, ф), определен-
ная на единичной сфере, разложима в абсолютно и равномерно
сходящийся ряд по сферическим функциям.
Другими словами,
/(в, ф)=
п=о
" 1
+ ? (Лптсо5тф + ВПт51птф)Рпт(со8 0) , D.5.57)
т= 1 J
§ 5.06] ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 375
где
-я 0
0
я
-Я О
п я
( ^
-Я О
D.5.58)
§ 5.06. Цилиндрические функции. Функции Бесселя
Определение. Функцией Бесселя 1\{г) порядка X назы-
вается функция
оо
Ix{z) является аналитической функцией z при всех комплекс-
ных значениях г (кроме, быть может, г = 0) и аналитической
функцией К для всех Я. Функция Бесселя Iy.{z) называется так-
же цилиндрической функцией 1-го рода.
Если X — натуральное число, то вместо D.5.59) будем иметь
Si \\п / - ч 2п+Я,
При Re Я. > — у справедливо соотношение
(-
7(z) = (
,( /1S \ e'z cose sin» 6 с/в. D.5.61)
T)r(T)J
Если X = п — натуральное число, то функция Бесселя In(z) яв-
ляется коэффициентом разложения
г _
D.5.62)
Функция е2 \ tJ называется производящей функцией для
функций Бесселя.
376 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Простейшие функции Бесселя суть
[5 5.08
'¦ <¦> - f [' - тпг ©°+тпг Ш* - *V Ш' +•••]¦ («¦«)
Через эти две функции можно выразить функции Бесселя
всех других целых порядков. Для этой цели следует восполь-
зоваться рекуррентными соотношениями, связывающими функ-
ции Бесселя:
/„-и
9м
(z) = -? Л.
Кроме того, справедлива формула
(«=1,2,...), D.5.65)
(«=1,2,...). D.5.66)
[г). D.5.67)
Для функций Бесселя имеют место следующие интегральные
представления:
я
L (z) = \ \ cos (пф — z sin ф) йф,
(z) = — \ cos (г sin ф) cos 2«ф rfqp,
D.5.68)
Функция Бесселя I\(z) является частным решением уравне-
ния Бесселя
d2w
dz2
1 dw
D.5.69)
а функция Бесселя. I\{kz) есть частное решение уравнения
(также называемого уравнением Бесселя)
d2w
1 dw
D.5.70)
§ S.06] ГЛ. t. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 37?
Свойство ортогональности: если вещественное
число Я > —1, то
1
= 0. D.5.71)
Для вещественных К > —1 функция Бесселя 1\{г) имеет
бесчисленное множество вещественных корней. Если z = klt
z = fe2 —¦ два различных положительных корня уравнения
Ix(zl) = 0, то получаем второе свойство ортогональности функ-
ций Бесселя
2
\zIx(klZ)IK(k2z)dz = 0. D.5.72)
о
Пусть Wy,(z)—общее решение уравнения Бесселя D.5.69).
Тогда имеют место рекуррентные соотношения
dz
Гх_, B) + Wk+l (z) = Ц- WK (z), WV-, (г) - W\+1 (г) = 2
D.5.73)
В частности,
1 *¦ ' dz
Теоремы сложения и умножения для функций Бесселя:
оо
Wo WR2 + r2-2Rrcos4>) = Wo (/?) /0 (г) + 2 ? №„ (/?) /„ (г) cos tup,
в частности,
/0 (V/?2 + r2-2/?/-cosT) = /0 (R) /0 (r) + 2 I; /„ (/?) /„ (r) cos mp.
D.5.74)
При | z | <| 11 имеем
WK(z + t)= t t
etkr cos e = ^/|L ^ (я + ^ ,-»/в+1 (ЛГ) pn (cos 9).
378 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [5 5.08
Наиболее употребляемые в приложениях асимптотические пред-
ставления для функций Бесселя:
= Vi"cos (z ~ "T""" т) + °
или
= V"sr [cos (z ~ "^ ~ т) + ° B~')] •
В теории движения ИСЗ с учетом возмущений от сопротив-
ления атмосферы используются функции Бесселя от мнимого
аргумента (или модифицированной функции Бесселя). Они мо-
гут быть определены с помощью формулы
п=0
D.5.77)
Функция 1\{г) связана с функциями Бесселя от аргумента ze 2 :
riki / ni\
I. (z\ = P~ 2 h I 7P 2 ) (А Ъ 7R\
Функции Бесселя от мнимого аргумента удовлетворяют диф-
ференциальному уравнению
d?w , 1 dw
Для них справедливы следующие рекуррентные соотношения:
/fc-,(z)-/x+,(z) = -f/k(z), D.5.80)
z) = 2/ji(z)l D.5.81)
z) = /x(z), Л = 0, ±1, ±2 D.5.82)
\ = *h-iV). D.5.83)
Интегральное представление для функции Бесселя от мни-
мого аргумента имеет вид
ch ^гЛ. D.5.84)
Можно также пользоваться асимптотическим представлением
этих функций
^["(Х+т)я' ] +O(z"')l. D.5.85)
§ S.07] ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ 379
Функции Бесселя, порядок которых равен половине нечетного
числа, выражаются через элементарные функции. В частности,
К (г) = д/1 (- *Г + Щ • '-* <*> = V1 (~ Ъ? ~ *т) ¦
V п \ уг гуг/ V п \ л/г г\г)
Кроме функций Бесселя к цилиндрическим функциям отно-
сят функции Неймана (или функции Бесселя 2-го рода) и
функции Ганкеля.
Функцией Неймана порядка к (X ф 0) называется функция
cos Ы ~ и*
а функциями Ганкеля 1-го и 2-го рода называются соответ-
ственно комбинации
Описание других свойств цилиндрических функций вообще
и функций Бесселя, в частности, можно найти в [13] — [16].
§ 5.07. Функции Ламе
Определение. Уравнением Ламе в форме Вейерштрасса
называется уравнение
+ B]A = 0, D.5.86)
где jp(z) — эллиптическая функция Вейерштрасса, п — целое
неотрицательное число, В — некоторая постоянная.
Существует 2« + 1 значение постоянной В, для которых ре-
шение уравнения Ламе имеет вид либо многочлена относительно
JP(z), либо произведения такого многочлена на множители вида
- ea,
Итак, для заданного п существует 2«'+' 1 решение уравне-
ния Ламе указанного вида, которые, называются функциями.
Ламе п-й степени 1-го разряда.
380 ч- IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 5.03
Если еи е2, е3 (см. § 5 01) вещественны {в\ >е2>е3), то
при четном п имеется -у+ 1 вещественных и различных значе-
ний В, для которых уравнение D.5.86) имеет решение вида
A(z) = LMfP(z) — егJ • D.5.87)
t=o
Для нечетного п имеется (п -f- l)/2 вещественных и различных
значений В, для которых решение уравнения Ламе имеет нид
п-1
Коэффициенты bh выражаются через В с помощью равен-
ства
к
B,)И Bя - 1) B7-зЬ ¦ ¦ BВ - 2s
s=0
Для того чтобы уравнение Ламе D.5.86) имело решения
в конечном виде D.5.87) и D.5.88) относительно f (z), необхо-
димо определять постоянную В из уравнений:
для четного п из условия
для нечетного п из условия
С помощью функций Ламе выражаются так называемые
эллипсоидальные функции, являющиеся решениями уравнения
Лапласа, преобразованного к эллипсоидальным координатам.
Более подробно о функциях Ламе см. книги [16].
§ 5.08. Полиномы Гегенбауэра. Коэффициенты Лапласа
Определение. Полиномами Гегенбауэра называются ко-
эффициенты Cn{t) разложения
A - 2ta + а2)'* = I С* (t) an. D.5.90)
п=0
> 5.081
ГЛ. 5. СПЕЦИАЛЬНЫЕ ФУНКЦИИ
381
С помощью гипергеометрического ряда они представляются
формулой
Основные рекуррентные соотношения для полиномов Геген-
бауэра:
D.5.92)
(л + 2) С„+2 (t) = 2 (А + я + 1) гС„+1 @ - BJL + я) С„ (О,
BА + я) Cj @ = 2Л [С^+1 (/) - t&nt\ @],
Тригонометрическое представление для Cn(t):
1=0 fe=0
Кроме того, отметим, что полиномы Гегенбауэра ортогональ-
ны на отрезке [—1, 1] с весом A — ff''1'.
Определение. Коэффициенты Ьп разложения
оо
A + z2 - 2z cos X)~ = 4" Е Ь"*'cos ЙЛ D.5.93)
называются коэффициентами Лапласа. Они выражаются через
гипергеометрический ряд с помощью формул
D.5.94)
(- k\
^ W ) kr(n n_,. . , j. Л
где Г4-1 fej — символ Аппеля D.5.23).
382
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 5.08
Первый из рядов D.5.94) сходится (см. § 5.01) при |z|< 1,
а второй — при | г |< 2~'/2. Для больших значений k примене-
ние первого ряда D.5.94) более выгодно, поскольку в этом слу-
чае его коэффициенты быстро стремятся к нулю. Если | г \ > 2~'/l,
то второй ряд D.5.94) расходится, но для любого конечного k
им можно пользоваться, так как он является асимптотическим.
В развернутом виде ряды D.5.94) имеют вид
"*¦ 2! (k+\)(k
я-(т+0(т+2)-(т+*-1) , -
...].
+
В частности,
1 .- *
• ¦ ¦ I i Р —- i Гг ¦
D.5.95)
Основные рекуррентные соотношения для коэффициентов
Лапласа:
2/г
2k -n + 2 v
Ьп = V z \Ьп+2 — "n+2 J,
2^ + ^ ~ 2 .(ft-1)
2k-n+ 2 °п '
= A + г
п A
) b«U - г {Ъ№ +
) = B* + /i) ft» - B*-« + 2) ь
= Bk + п) ft*+B* - я+ 2)
D.5.96)
Соотношения D.5.96) позволяют определить все коэффи-
циенты Лапласа, если известны коэффициенты bi0) и Ь^\
§ 5.08) ГЛ. 8. СПЕЦИАЛЬНЫЕ ФУНКЦИЙ 383
Интегральные представления для коэффициентов Лапласа:
ш я (я + 2)... (я + 2k - 2) 2 _k.,
°п ~~ Bk- 1I1 п Л
z cos Я + VI — г2 sin2 Я \"~ sin2ft Я dh
x~zi ) Vl-z2sin2f'
л/2
— г2 sin2 Я
D.5.97)
где K(z) и ?(z)—полные эллиптические интегралы 1-го и 2-го
рода.
Наряду с последним рекуррентным соотношением D.5.96)
применяется другое соотношение, выведенное Ньюкомом.
Введем величины
Jk> r)
2r+1 ~,r
(hk + r)
I - И
-i-(r.+2ft+4r-l)
Z2 X
D.5.98)
' J
которые называются коэффициентами Ньюкома и функцией
Ньюкома соответственно. Очевидно, что
c[k) — c(k, 0) c(-
я п 9 п
c()
п '
Для «логарифмических производных» функций Ньюкома
имеется рекуррентное соотношение
(я=1, 3, 5, ...; k,r, s = 0, I, 2, ...).
В аналитических выкладках использование Сп иногда ока-
зывается более удобным, чем использование коэффициентов
Лапласа.
384
Ч. IV, ТЕОРИЯ ЙОЗМУЩеННОГО ДВИЖЕНИЯ
§ 5.09. Числа Коши
Пусть имеется выражение
где р — произвольное целое число, /, q — целые неотрицатель-
ные числа.
Определение. Числами Коши называются члены, не за-
висящие от х в разложении I по степеням х. Для них принято
обозначение jV_Pi ,, q.
Для вычисления чисел Коши имеются следующие формулы
л рекуррентные соотношения:
1, если / + ? — р = 0,
О, если сумма j + q — р отрицательна
или нечетна,
D.5.99)
= {
N-p. Ж, ц = Л/-р
и, в частности,
= Л^_р+1, о,
Цз-1, о,
Глава 6
РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ
В задаче трех и большего числа материальных точек при
аналитическом приближенном ее решении приходится иметь
дело с разложением возмущающей функции в кратные ряды
Фурье. Этот необходимый этап в теории возмущенного движе-
ния связан с трудоемкими вычислениями. Для многих практиче-
ских задач можно использовать разложения, приводимые в этой
главе. Наряду с разложениями, включенными в главу 6, в небес-
ной механике применяются разложения с использованием кано-
нических оскулирующих элементов. Их можно найти в ряде по-
собий, например, [б] — [7].
§ 6.01. Разложение возмущающей функции в задаче
о движении двух планет (случай круговых орбит)
Определение. Планетной задачей п тел назовем задачу
о движении п — 1 тел (планет) Pi, Р2 Рпм с массами
mu т2, ..., т„_1 соответственно относительно центрального тела
Ро с массой то под действием сил взаимного тяготения, причем
будем считать, что mh <S m0 (k = 1, 2 n — 1).
Таким образом, планетный вариант задачи трех тел — это
задача о движении двух планет Pi и Рг, с массами mi и т2 со-
ответственно относительно центрального тела Ро с массой
( §С m0, m2 <S m0).
При решении задачи можно воспользоваться различными
формами уравнений движения, приведенными в главе 1. Однако
при интегрировании дифференциальных уравнений для оскули-
рующих элементов необходимо иметь явное выражение для воз-
мущающей функции через оскулирующие элементы.
В двухпланетной задаче в уравнениях движения планеты Pi
относительно центрального тела Ро в качестве возмущающей
функции фигурирует функция
Ri = ftf (± _ *.*. + у.У. + '.»»\, D.6.01)
13 Под ред. Г. Н. Дубошина
386
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 6.01
а в уравнениях движения планеты Р2 фигурирует возмущающая
функция
*, = \Щ (-f - ** + '¦* + "*), D.6.02)
где
или
Д = у(д, - .
Л = -
- z2J
- 2л1л2со5(г'^г2),
(jti, i/i, Zi — прямоугольные координаты планеты Pi в системе
Poxyz, х2, Уг, 2г — координаты планеты Р2 в той же системе).
Введем обозначения
D.6.03)
Величина Л~' называется главной частью возмущающей
функции и ее разложение представляет наибольшие затрудне-
ния. Выражения R',\ и R2,2 называются дополнительной
частью возмущающей функции.
Из рис. 65 имеем
или
где
cos(rb r2) = cos Л! cos Л2-f- sinA[ sinЛ2cos/ D.6.04)
cos {г 1, г2) = cos (Л! — Л2) — 2а2 sin Aj sin A2,
а = sin у.
Взаимный наклон / и углы ti и т2 определяются следующими
формулами:
sin-jsin-
sin-s-cos
= cos ikz^i sin Az
cos -j cos
— fii) — (t2 — Q2)
'2 = cos
cos
«а —
D.6.05)
6.01]
ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ
387
Существуют три метода разложения возмущающей функции:
аналитический, численный и полуаналитический.
.Рис. 65. Определение вспомогательных величин. I Ai = O| — долгота восходящего узла
орбиты планеты P.; t\, tj—наклоны орбит; nt, Па — перицентры орбит; flini=ffiii
Я,|П|=Ш] — аргументы перицентров; II|P|"=Di, II1Pi = di — истинные аномалии планет р1ш Р,;
Д,р,1=ц1т JijPi=u, —аргументы широты; ?7 —взаимный наклон; 1f4fti'>i=''ii *У*ЛЛ=*1—
истинные долготы лланет в орбите; JVPi=Ai, JVPi«=A,—истинные долготы планет в орбите,
отсчитываемые от точки ЛГ; SliN=Ni; SliN=Na; Qt + Ifi-Xu Qf + N^x*
Сначала мы приведем основные формулы для аналитического
разложения возмущающей функции в планетной и лунной тео-
риях.
Введем обозначение
А„-[г?+ /5-
(А,-АО]*-
Тогда очевидно, что
а -1 а -1 f i I 4o2riri sin Ai sin Л2 ]'
А = До \ I Н -j i
I До J
ИЛИ
1 +
-т-0
" гт—rt— {4rxr2 sin Al sin Л2)
D.6.06)
где (—у ^) — символ Аппеля [см. D.5.23)].
Ряд D.6.06) сходится абсолютно, если
оа<-^1
4г,га '
D.6.07)
13»
388
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Н 6.01
Для больших планет Солнечной системы условие D.6.07)
всегда выполняется.
Разложение D.6.06) не является окончательным, так как оно
представляет величину Л в виде явной функции а2, а для
окончательного разложения необходимо выразить ru r2, v\, v2
также в виде явных функций оскулирующих элементов.
Для дополнительной части возмущающих функций /?*, i и
Rz 2 как явных функций а2 имеем следующие представления:
?!. 1 = -2[cos(A1-A2)-a2cos(Ai-A2)+a2cos(A1+A2)],
#2,2 = -2 [cos (A,-A2)-a2 cos (Aj -A2)+a2 cos (A, +A2)].
r2
D.6.08)
Рассмотрим простейший случай круговых орбит (ei= е2= 0),
в котором
= flj = const, /2 = a2 = const,
= Z2, D.6.09)
где l\, h — средние долготы планет Pi и Р2 в орбите.
Для этого случая разложение D.6.06) принимает вид
l' 4
sin
, D.6.10)
где
= /, — Tj, L2=*l2 — x2.
Пользуясь коэффициентами Ньюкома c(nw [см. D.5.98)], бу«
дем иметь
ет-1
а-!
s=i
eS?-a
m-\
(m=l, 3, 5, 7, ...),
где b{n — коэффициенты Лапласа [см. D.5.93)].
D.6.11)
§ 6.01] ГЛ. в. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 389
Подставляя выражения D.6.11) в D.6.10), после преобразо-
ваний получим
™ cos (sZ.2-sZ.,) +
00
+ or2 ? A[l) cos [(S + 1) L2 - (s - 1) L,] +
oo
+ a4 ? ^2>cos [(s -f 2) L2 - (s - 2) Z.,] +
oo
+ a6 2 43) cos [(s + 3) L2 - (s - 3) L,] +
oo
+ a8 ^ 44) cos [(S + 4) L2 - (s - 4) L,] + • ¦ ¦ D.6.12)
Коэффициенты Af\ ..., A^ выражаются формулами
3> + 94s-") + |
= c
- j
= 7 4S) - т °2 (c Г" + 4S+1))+й °4 Ds)+34s)+4s+2))-
- -§ a6 (#-
a%Af = 14S> - -{! a2D*-'> +
Ц -*> + 84») + 34*+*)) - ....
D.6.13)
Формулы D.6.13) позволяют выписать в явном виде разложение
основной части возмущающей функции с точностью до о8 вклю-
чительно.
390 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ 18 6-02
Дополнительные части возмущающих функций R\, i и Ri a
выражаются конечными формулами
Я'. i = -Ц- [A - a2) cos (L, - L2) + а2 cos (L, + Z-2)], ]
"' I D.6.14)
г, 2 д2 a cos , 2 a cos ! 2 . j
§ 6.02. Разложение возмущающей функции
в задаче о движении двух планет
(случай малых эксцентриситетов и взаимного наклона)
Леверье построил разложение возмущающей функции [25]
для двухпланетной задачи с точностью до седьмых степеней экс-
центриситетов орбит и синуса половины взаимного наклона
орбит включительно. Привести полные формулы Леверье здесь
не представляется возможным и заинтересованного читателя мы
отсылаем к трудам [25]. В 1885 г. Боке [26] получил разложение
основной части возмущающей функции А~' с точностью до вось-
мых степеней малых параметров включительно.
Ниже мы приводим разложение возмущающей функции
в двухпланетной задаче с точностью до четвертых степеней ма-
лых величин (малыми величинами являются эксцентриситеты
орбит планет в\ и е2 и а = sin yj. Для многих задач небесной
механики такая точность вполне достаточна. Математические
соотношения и пояснения, необходимые при использовании раз-
ложения возмущающей функции, можно найти в первом томе
трактата Тиссерана [7].
Будем считать, что изучается движение планеты Рз. В та-
ком случае она является возмущаемой точкой, а планета Pi яв-
ляется возмущающей точкой. Тогда возмущающей функцией за-
дачи является функция /?i D.6.02).
С вышеуказанной точностью разложение /?i по Леверье имеет
следующий вид:
(?)' + A1I V + A2)»'
+ A3)(|) (ff с' + A7f а*] cos (tf, - /jg + [B1)'" (^) (f) +
+ B2)(I) (f) (f K + B3>"> (f K (f) + B7Г (f) (f) a2] X
X cos [(/ + I) /, - И| - Q, - (i + 1) k2 + cos + QJ +
6.02] ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 391
У (У [
ftУ (тУ cos
+ C6)ш ftJ a2 cos [tf, ~ 2Q, - 2tf, — il2 + 2ш2 + 2Q2]
+ D4)(O ftJ a2 cos [(* - 2) /, + 2», - 2tf, - (i
+ [E0)<'> (^) + E If (f K + (B2)« (f-J (f) + F0)w (A) G2] X
X cos [lli — (f — 1)Я2 —co2 — Q2] +
+ [<70)w (f) + G1)(i) (f) (f J + G2)» (^K + (80У> (^) o«] X
)(O
(90)(O (т
+ A20)@ f-a2cos [«, - 2Q! - 2ЛГ, - (t - 1) ^ + ш2 + QJ +
+ A30)<0-5-o2cos [(/ - 1) /, + », - Q, - 2^,- (/ - 2) Aj +
X tos [*/, - (i - 2) Л, - 2ш2 - 2Q2] +
+ [Д82)« ft) ft) + A83)"' ft) ftK +. A84)*" (^K ft)] X
X cos [(* + 1) h - ш, - Qi - (t - 1) Я2 - ш2 - Q2] +
X cos [(/ + 2) /, — 2щ - 2Q1 -
+ B00)(i) (y)(|Kcos[(j + l)/1-<o1-Q1-(/
+ B06)@ (уK(|) cos [(/.+ 3) h ~ 3«i - 3Q,-
+ [B12f o» + B13)U) (|J a2 + B14)w (^J a2 + B18)('V] X
X cos [ih - 2ш! - 2tf, - (i - 2) AJ +
+B22)'" Q-) (|) a2cos [(/+1) /,-^,-30,-2^,-^
392 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 6.02
+B26)(() (!)(!) a2cos №-l) 'i+ffli-Q|-2^,-(/-3)X2-cos-QJ+
+ B40)(О (-f K cos [Й, - (i - 3) Л, - Зю2 - 3fi2] +
+ B50)<0 (у)(тJсоя[(/ + 1)/, - Ш1—Q,—<* - 2)Я2-2ш2-2а2]+
+ B60)(l) (?)' (|) cos [(t + 2) /, - 2ш, - 2Q, - (i-1) Я2-ш2-О2] +
+ B70)(O (fff cos [(: + 4) /, - 3Q, - Зш, - ЗЛ2] +
+ B90)(O (-I-) a2 cos [H, - 2ш, - 2N{ - (i - 3) Я2 - ш2 - Q2] +
+ C00)@ (^-) a2 cos [(i + 1) /, - a, - 3Q, - 2^ - (i - 2) Я2] +
+ C36)(O (f L cos [«, - {I -i)l2- 4ш2 - 4fi2] +
+ C40)(() (^) (|K cos [(: + l)/i —eoi—Qi — (i-3) Я2-Зш2-За2] +
+ C44)(O(^J(|)Z cos [(i+2) /, - 2ffl,-2Q, - {1-2) Я2-2ш2-2Й2]+
+ C52)(() {^)\ cos [{i + 4) /, - 4ш, - 4Q, - ih2] +
+ C58)<0 (|J a2 cos [i/, - 2QL - 2^, - (i - 4) K2 - 2oo2 - 2Q2] +
+ C62)(O (^) (|) a2cos [(i + 1) h - ш.-г^, - (/-3) *2-q2-
+ C66)(fl (^-J a2cos [(i + 2) /, - 2ш, — 4Q, — 2iV, — (i -
+ C72)(<) o4 cos [Й, - 4Q: - AN, - (t - 4) Я2] +
+ C76)(O (Ц) (|) a2 cos [(? +l)h- и, - 5Q, - AN, - (i - 3) K2 +
1/?I,i, D.6.15)
где fm^.i — дополнительная часть возмущающей функции,
разложение которой приведено ниже, a>i, Qi, Ni, an, Q2 — углы,
изображенные на рис. 65, 1\, 12 — средние долготы планет Р, и
Я2 в эпоху:
к = n,t + е,, е, = М10 + щ + Qi
2. е2 = Afjo + ш2 + Q2, > D.6.16)
а, -f Ni-Qa-Nz, J
§ 6.02] ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 393
nil n2 — средние движения планет Р\ и Р2, Л110, М2о — значения
средних аномалий в момент t = 0.
Разложение D.6.15) является точным относительно а — от-
ношения больших полуосей орбит возмущаемой и возмущающей
точек (а= — < 1J, на что указывает суммирование по индексу
i от — оо до + оо. На практике, в зависимости от заданной точ-
ности, ограничиваются той или иной степенью а. Если необхо-
димо сохранить в разложении D.6.15) члены до s-й степени
включительно относительно а, то необходимо произвести сумми-
рование по I от —s до -f s. Соответственно нужно обрывать раз-
ложения для коэффициентов Лапласа и их производных по сте-
пеням а, входящих в коэффициенты (l)w, B)№ и т. д. следую-
щим образом:
= ЫААA) + B - 8/2) а
"' day
Л1
¦ +
I A
г I'
-f
2
d>
¦
-r
r
d'A^
da]
1@ ! (
ai
3 з
2
I
i
О Of
X) LI
da]
da]
da]
а] о
2
,4'
2
1 "'
8
a4
2
4
/I"
da\
л«
i
T
da, 2 rfaf
= Bi -f 4i2) Ain — 2ai a? g~
394 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 6.02
B2)'" = (— i - 50г2 - U? - 8i4) Aw + (-3 + Ш + 10i2) a,
2 da] l da) 2 da]
B3)(i) = (-: - 7i2 - 14i3 - 8i4) Л(г) + C + 9/ - i2) a,
da]
2a
a[ da]
_ Б _ g. _ 4.2) ^
2 ' da] ' daj 4 rfa4
dd] 4 da{
2 da2 '
da, 4 da2
7-2/
+ 2
E2)M = (-4t'2 + 8.-3) Л(г) + D-4/--U*) a, ^
d
dot •
§ 6.02I гл. 6. Разложение вОзмуЩаюЩей функции 395
G if = -8i3A(i) + (-2 + 4/ + 4J") а
а, da, •
4f
= (8г + 9/2)А" + -10-г + 4'2 а,
-4-i)a2 = L г
l da\ 2 da\
(lOO)'" = Bf + 7z2 + 4r3) A(i) + -4-27'-4'2 a,
1-2/ 9 rf2/t'° a]
a] dA
da2, +T da] '
A73) ==
20 -« d^(i> 8-21
2 daf 3 d^ 6
A74)<" = (_8i2 + 18i3 - 8г4) A{i) + (lO — 13* — 8i2 + 8/3) a,
34 — 25/
¦ + (-3 + 20a,"" в'
2 " ,,_,-,-, d^ 2 da2 .
2
A82)« « B: - 4i2) A(i» + (- 2 + 40 a, ^ - a\
da/
396 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 6.02
A83f = (-1 - 40/2 - 14/") А@ + (- 3 + Й + 8/2 - Si3) а,
-21+ 19/ Л||О
+ 2 "> da\
-3-25/ ,d2^'> , -9-/
2 a' da? + 3
A93)(() = (- 10/3 - 8t*) ЛA) + (- 2 + / + 8г2 + 8i3) a,
2 ao
#1Q4\@ — IK —321я —TOf8 —8J4 M) , 8 + 23/ + 24/2 + 8^ _ dAw
A94) = 5 Л i 3 a: —fzr
2 da2 3 ' da] 6 dat
(l) Иг + Зг^ + ЗО/З + В/4 @ 8 + 23/ + 24/2 + 8/3
3 Ь
4 + 3/
2 a' da] + 3 a' da3 6 da4 '
@ + -9-23/-24/2-8/3
3 + / 2d^ H^ 3 d3^») a4
+ 2 °' da2 + 3 Ol da? 6 da4 '
B13)"' —2((_2)^«-> + a
6.02] ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 397
B26)(i) = E/ - 2/2) В""»
dai 2 da\
-3+20 a,
da, 2 da\
g»
B50)w = D/ - 9/2 + 4:3)
B60)
@
1-6,-
t-3 (
А
1 da\ 24 do3
l
2
65t2
2 da? 6 ' rfa] 24
A H
H
3 ' da] 6
398
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
6.02
f =
f = vu-
(_ 5+ А1+1И. _ 8(.з} ^>
1-18/+12*2
206t — 187t2 + 120/3 .(« , — 16 — 59t — 18/2 — 8t3
1 ОЛ + R
~3-2i d3Aw a4,
1 da?
3" n Uj и ft- ¦
a' da] 24~ daj '
C58)(O =
-Я1'-" + '
a,
2 da,
C62)(O = Ei - 2/2) BU~1] + (- 3 + 20 Щ ¦
da{
da,
4 daf
w =
9.
4 da,
_ в. .
8 ' da
Величины /4@, B@, C@, ?@, G(<), L(o выражаются через коэф-
фициенты Лапласа b\l\ Ьз\ Ь^ (см. § 5.08) и даются формулами
8 l^ -r^ -r^ j. D.6.17)
3
(a2
Для отрицательных значений индекса i имеем соотношения
С(— О /"*(О т '
(-1+2)
D.6.18)
В разложение D.6.15) входит также дополнительная часть
возмущающей функции fm^', i. Ее полное разложение имеет
§ 6.02]
ВИД
ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ
399
2a
х
*W)cos
^
УХО cos
J
sin (»-»,)
sin
пчО I \ ^ Ч ^ Г" . . \ ¦ / v f I\ rQV
a* | 2-i 2-> ^ T" ^m' T" *' *» ~
— cos (ш — т,) cos (a, — tJ В^'В^] cos (fcjAf, + fe2M2) +
OO OO
+ Z Z t-s*n (® ~~т'^ s'n ^' ~ t^ >'*m*i) ¦+¦
+ cos (© — T[) cos (и, — T]) вУ/в^] cos (AjAf, — ?2M2) +
OO DO
Z\^ Г • \ /- \ лB) (I)
?_, 1 I I) i *i T
+ cos (со — т,) sin (со, — ¦*{) В^Л*!?] sin {kiMi + k2M2) +
OO OO
X^ \л Г ' I \ (~ \ Ji{2)n(l)
fcl=-oo ft,= -oo
- cos (ш - т,) sin (И! - т,) ЛУХЛ sin {k,Mx - k2M2)}, D.6.19)
причем
й[ = l[—Mi, a2 = l2 — M2, со = co2 -f- T; — t2, D.6.20)
где Mi и М2 — средние аномалии планет Pi и Р2. Коэффициенты
А и В определяются по формулам
Ло^О,
_ 3
— у е2.
? = /Е, Vl — в?
ВТ = -^е24Т^?2,
D.6.21)
400 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [8 6.03
В формулах D.6.21) в\ и е2 — эксцентриситеты орбит, I^-i,
/й,_1 — функции Бесселя.
Чтобы получить разложение R*, i с точностью до четвертых
степеней малых величин, необходимо, пользуясь разложениями
для функций Бесселя D.5.60) с точностью до г4, вычислить
n(l) n(l) nB) RB)
3#4 Яз 04
И<1) дМ д&) лР) n(l) n(l
Л_з, . . ., /Ц , А-З, . • . , /Ц , Д-3 #4
и подставить их выражения в D.6.19). Все остальные слагаемые
в D.6.19) должны быть отброшены, так же как должны быть
отброшены все слагаемые, порядок которых больше четырех, по-
лучаемые в произведениях А$А($ и т. д.
Чтобы получить разложение дополнительной части возму-
щающей функции /?5,2 для планеты Р\, необходимо в разложе-
нии D.6.19) для /?1,1 заменить все индексы «1» на «2» и, наобо-
рот, «2» на «1».
Замечание. Если необходимо иметь разложение возму-
щающей функции в других элементах, для соответствующих
преобразований следует воспользоваться либо формулами
D.3.17), либо D.3.21), либо D.3.23), либо D.3.25).
§ 6.03. Разложение возмущающей функции
в случае произвольного взаимного наклона
Разложение Леверье, приведенное в § 6.02, выведено при
Of
условии, что or = sin-к- — малая величина. Для произвольного
наклона @ ^ or ^ 1) разложение возмущающей функции двух-
планетной задачи получено Р. А. Ляхом [126] (случай круговых
планетных орбит е\ = е2 = 0) и Б. К. Мартыненко [127] (случай
малых эксцентриситетов).
Разложение Б. К. Мартыненко для возмущающей функции
Ri D.6.02) дается соотношениями
«.-?• i>m 11е^1 ? z ? i
т=2 si=0sf±0 i=0(l)/=-m fcL=-Si fti=""-st
i = \j\ = m (mod 2), a = -%-<\,
v = а2, ц = 1 — a2.
D.6.22)
Суммирование по i начинается с нуля, если m — четное число,
и с единицы, если т — нечетное.
В D.6.22) Mi, M2, Lu Li, как и раньше, — средние аномалии
и долготы возмущающей и возмущаемой планет, а.\ — большая
§ 6.03] ГЛ. в. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 401
полуось орбиты возмущающей планеты. Долготы отсчитываются
от точки пересечения орбит.
Для коэффициентов разложения D.6.22) имеются соотноше-
ния
AZiX'kAv, \l) = №iX\A rn-^V, ll), D.6.23)
где
D.6.24)
*К lO^pM'^v, ц),
(ря + ft2 - ft,)! (/it - k2 - p, - p2)! p2! (ft, - p, + p2)!' V*-»-*«»;
Семииндексный параметр p^'/f1**'*, выражается через опера-
торные полиномы Ньютона по формулам
р?'Д\ = lift,V, -m-\)Щ(/, m), D.6.26)
где
D
din a *
р*1^ — численные коэффициенты полиномов Ньюкома.
Так как выражения D.6.26) являются алгебраическими по-
линомами, а не рядами относительно or, разложение D.6.22) схо-
дится при любых 0 ^ a <; 1, лишь бы я < 1 и эксцентриситеты
ей в2, были достаточно малыми.
Замечание. В §§ 6.01—6.03 приводились разложения воз-
мущающей функции для двухпланетной задачи. В задаче о дви-
жении п планет (п > 2) можно пользоваться теми же разложе-
ниями, так как полная возмущающая функция для любой из
планет складывается из нескольких возмущающих функций для
соответствующих двухпланетных задач.
402 ч- IV- ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 6.04
§ 6.04. Вековая часть возмущающей функции
в двухпланетной задаче
Вековая часть возмущающей функции — это часть разложе-
ния возмущающей функции, не содержащая периодических чле-
нов, аргументы которых суть средние долготы или средние ано-
малии. Можно доказать, что дополнительная часть возмущаю-
щей функции (/?*,[ или /?2, г) не содержит вековую часть. Таким
образом, вековая часть возмущающей функции появляется в ре-
зультате разложения в ряд главной части возмущающей функ-
ции А. Полное выражение для вековой части возмущающей
функции имеет труднообозримый вид, хотя с помощью гипергео-
метрического ряда и разложений Кэли [27] принципиально мо-
жет быть выписано. У Леверье [25] выписана в явном виде ве-
ковая часть с точностью до седьмых степеней эксцентриситетов
и величины or— sin у.
Ниже приведено разложение вековой части возмущающей
функции с точностью до четвертых степеней малых величин
*,. век = f«, { (I)™ + B)<0) (f У + Of (?)' + DГ (fi-У +
+ EГ (^J (f J + F)@) (?)* + A1)@) о» + A2)™ (f )V +
+ A3f D-)V+ A7)" c<
+ B3Г" (?)' (U) + B7)(-" (Ь) (|) a»] cos (co2 + Q2 - ш, - Q.) +
+ C1)(-2) (-^J(f JcosBq2 + 2Q2 - 2ш, - 2Q,) +
+ C6)@) (-J-J a2 cos Bco2 + 2Q2 - 2Q, - 2Nt) +
+ D0)@ (^-) (f) a2 cos (a, - Q, - 2.V, + ш2 + Q2) +
+ D4)B)(-|!-Ja2cosBQ1-2iV1)}.
Как и раньше, нижний индекс 2 относится к элементам воз-
мущаемой планеты, а индекс i — к возмущающей.
Коэффициенты предыдущей формулы даются соотношениями
mw> _л@)
da, 2 da]
6.04| ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 403
dA^ 9 d2,4@) 3
Ef
w
da, 2 rfaf
4 .4
L
2 da] 8 da\ '
„2 *
«lit" . , d'A"> o , Al<» «; i'rf"
dat 1 da\
1^ + ia;^ + 2a;^ + ^^
rfe, 2 * da\ l da\ ^ 4 daj
2 2 da, + 4 da]
dB'0) a2, d2Bm
2 da.
D4f =iB«» + -3-a,+
4 ' 2 2 ' dfll ^ 4
404 Ч' IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [J в'05
Приведенные формулы выражаются в конечном счете через
коэффициенты Лапласа, так как
А{0) — -^- ЛA)--^- B)_Ь'2)
R(Q) *S" „(в bi" дсо »Р
flj ulj Д| '
С@1 = -
ai а, ¦
Коэффициенты Лапласа ft?' зависят от а = -^-<1 и выра-
жаются формулами D.5.94) —D.5.96).
С точностью до вторых степеней малых величин е\, е2, а ве-
ковая часть возмущающей функции (с точностью до множи-
теля /mi) выражается равенством
I 1 1 -2 L -2
| ехе2 BАХ - 2AV - А?]) cos (П, - П2).
Пользуясь соотношениями D.6.17), можно выразить вековую
часть возмущающей функции через коэффициенты Лапласа:
Лагранж показал (см. § 8.03), что уравнения для оскулирую-
щих элементов, в которых возмущающая функция заменена ос-
новными членами вековой части D.6.27), легко интегрируются.
§ 6.05. Численные методы разложения
возмущающей функции
Хотя аналитические методы разложения возмущающей функ-
ции и наиболее общи, они, как правило, весьма громоздки. Осо-
бенно трудоемким делом является использование аналитического
разложения возмущающей функции при достаточно больших
значениях отношения агМ (например, в случае «Земля — Марс»
а « 0,6). В таких случаях целесообразнее строить разложения
возмущающей функции численными методами (методами гармо-
нического анализа).
§ 6.06] ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИЙ 405
Если известны числовые значения элементов орбит двух пла-
нет в планетном варианте задачи трех тел, то возмущающую
функцию R [см. формулы D.6.01) и D.6.02)] при некоторых
общих предположениях можно представить двойным рядом
Фурье по кратным средних аномалий Mi и М2 или по кратным
средних долгот 1\ и 12:
оо оо
fcl=0 ftj=-oo
D.6.28)
где
2л 2л
I
о о
D.6.29)
2я 2л ч '
,. *» = 1ST П ^ Si" (*lM'
Точность представления возмущающей функции разложением
D.6.28) зависит от точности вычисления коэффициентов At,, *„
В и,, ft2 по формулам D.6.29). Как указывают Брауэр и Клеменс
[2], для вычисления возмущений в движении Марса, обусловлен-
ных притяжением Земли, с восемью десятичными знаками необ-
ходимо знать 8000 значений R. Такие вычисления возможны
лишь на ЭВМ.
Замечание. В дифференциальные уравнения движения
входит не возмущающая функция /?, а ее частные производные
по координатам либо по элементам. Разложение этих производ-
ных в виде D.6.28) производится аналогичным образом.
§ 6.06. Полуаналитический метод Брауэра — Клеменса
разложения возмущающей функции
Существуют различные способы разложения возмущающей
функции, основанные на сочетании аналитических и численных
методов. Здесь мы излагаем метод Брауэра — Клеменса [2].
Имеем
-^l) =WI[l-2acos(?1-Q)-f a2\ ^ [I-2bcos {E1
D.6.30)
где Д — взаимное расстояние между планетами Pt и Р2,
а\ — большая полуось орбиты планеты Р\ [а2 •< а\, поэтому
406 ч- IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
планету Pi называют внешней),
[§6.06
, D.6.31)
, D.6.32)
Yo=l + (f-
?)* ~ 2e, cos El + e\ cos* ?, + ej cos F,
D.6.33)
f cos F = 2 (-^-J e2 - 2*,e, (-^-) cos /C2 +
-f 2x, (^-) cos K2 cos ?, - 2x, (-J) ^l"^ sin ^
/ sin /=" = - 2x2e, (-J) д/1 ~ e2 sin Кi +
+ 2x2
cos
2x2 (-J-
D.6.34)
^) cos /Cx sin ?,.
Здесь ?i, ?2 — эксцентрические аномалии планет Pi и P2, eu e2 —
эксцентриситеты их орбит.
Вспомогательные величины xi, хг, ^Ci, K2 определяются из
равенств (см. рис. 65)
щ cos (ш: — Ni — К2) = cos (ш2 — iV2),
x,sin(Q1-Af1-/C2)=cos/sin((D2-iV2)> J
x2cos(q, — Af] — /Ci) = cos/ cos(q2— iV2), i
x2 sin (а, — Af, — Ki) = sin ((o2 — iV2).
g
Формулы D 6.31) — D 6.35) дают возможность вычислить
величину D 6.30) для любого момента времени по следующей
схеме: если заданы элементы орбит планет Pi и Р2, то по фор-
мулам D.6.05) вычисляем Ni, N2, J. Для заданного момента вре-
мени решаем уравнения Кеплера
\,2 — е1р 2 sin ?].2 =
i, 2
и находим эксцентрические аномалии Е\, Е2. Далее, используя
равенства D.6.34), вычисляем /sin/7 и fcosF. Имея эти вели-
чины, определяем сначала у0 и у2, а далее С, q, Q, после чего из
в 6.06] ГЛ. 6. РАЗЛОЖЕНИЕ ВОЗМУЩАЮЩЕЙ ФУНКЦИИ 407
D.6.31) определяем а, Ъ, N. Окончательно равенство D.6.30)
дает (aJA)*.
Однако для определения величины aJA целесообразнее при-
менять метод Брауэра — Клеменса [2], который заключается
в следующем.
Рассмотрим случай внешней планеты Pi. Разделим отрезок
[Mi, Mi -f 2л] на 2п равных частей и для каждого из частных
значений средней аномалии Mi решаем соответствующее урав-
нение Кеплера, в результате чего находим 2п значений эксцен-
трической аномалии Е\. Далее по схеме, описанной выше, нахо-
дим yo. Y2. С, q, Q, N, а, Ъ. Для каждой пары значений Q я Ь
разлагаем в ряд Фурье по кратным Е2 выражение
[1 — 2Ъ cos(?2 + Q) + йа]~я/"а. Для вычисления коэффициентов
Фурье используем метод гармонического анализа.
Первая квадратная скобка в соотношении D.6.30),
[1 — 2a cos (?2 — Q)+a2]~s/2 разлагается в ряд Фурье по крат-
ным аргумента Е2 — Q при помощи коэффициентов Лапласа.
Далее в этот ряд подставляется 2п значений величины Q, в ре-
зультате чего получается 2/г рядов, которые должны быть пре-
образованы в 2л рядов Фурье по кратным эксцентрической ано-
малии Я2-
Перемножая 2п значений величины Ns соответственно на 2п
рядов Фурье для [1 — 2acos(?2 — Q) + a2]~s/2 и на 2п рядов
Фурье для [1—2Ь cos (Яг + Q)+ Ь2]~я/2, получим 2п рядов для
(ai/A)s. Имея 2п тригонометрических рядов по cos/?2 и sin/?2
для (ai/A)s, мы можем с помощью гармонического анализа пред-
ставить (ai/А)8 в виде двойного ряда Фурье по кратным эксцен-
трической аномалии внутренней планеты Е2 и средней аномалии
внешней планеты М\. Коэффициенты этого ряда находятся мето-
дами гармонического анализа и вычисляются на основании ра-
нее полученных коэффициентов.
Используя разложения для эллиптического движения и функ-
ции Бесселя (см. ч. II, § 3.01), можно представить выражение
(ai/A)" в виде двойного ряда Фурье по кратным средних ано-
малий Mi и М2.
Глава 7
АНАЛИТИЧЕСКИЕ МЕТОДЫ ВЫЧИСЛЕНИЯ
ВОЗМУЩЕНИЙ КООРДИНАТ
Так как подавляющее большинство задач небесной механики
не относится к интегрируемым в квадратурах, для их решения
разработаны различные варианты метода последовательных
приближений. В настоящей главе будут приведены основные
формулы для вычисления возмущений координат в задаче о дви-
жении двух планет, причем ради определенности центральное
тело будем называть Солнцем. Аналитические методы вычисле-
ния возмущений координат излагаются в [1]—[7].
§ 7.01. Метод Хилла
Дифференциальные уравнения для возмущений прямоуголь-
ных гелиоцентрических координат (б*, 8у, dz, бг) и цилиндриче-
ских Fr, 8K, бг), использовавшихся Хиллом [2], [4], имеют вид
dt1
d2 (by)
dt2
d2 Fz)
dt2
D.7.01)
dt'
d2Fz)
dt2 "*"
dt
D.7.02)
§ 7.01] ГЛ. 7. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ КООРДИНАТ 409
где
17
D.7.03)
О =х — — —
^ ду У дх
V- — / (Щ + mj).
D.7.04)
Здесь /? — возмущающая функция, / — постоянная тяготения,
от0 — масса Солнца, т — масса возмущаемой планеты Pi, r0,
z0 — невозмущенные величины.
Интегрирование уравнений D.7.01) по методу Хилла дает
для возмущений прямоугольных гелиоцентрических координат
следующие интегральные соотношения:
Го бг == q2 J q{Qr dt — q^ q9Qr dt,
Ьх = q2 J qiQxdt - q1 J q2Qx dt,
6z = q2
D.7.05)
где q\{t), ?г@ —два линейно независимых частных решения
уравнения
-—к- Н—г1—ff = 0. D.7.UD)
Интегральные соотношения D.7.05) для б^, бг/, 6z содержат
шесть произвольных постоянных (они входят в интегралы
\qiQxdt, ..., \q2Qzdt). Возмущение го6г содержит три произ-
вольные постоянные. Однако имеется только шесть независимых
410 ч. iv. теория возмущенного движения [$ r.oi
произвольных постоянных, так как возмущения 6х, by, 6z, 8r
связаны тождествами
r0br = xQbx + у0by + zDbz + ^Fл2+б^2+б22) —\(гобгJ, D.7.07)
dx0 d(&x) . dy0 d(by) . dz0 d (flz)
dt dt dt dt dt dt t\t
j_ ay0 a (ay) , аг0 a (oz) , \i , .
+(^y+m\ - i «•
Произвольные постоянные интегрирования могут быть опре-
делены различными способами. Например, они могут быть опре-
делены из условия выбора оскулирующих элементов:
D.7.09)
Ганзен предложил определять произвольные постоянные ин-
тегрирования не из условия «оскуляции» (в начальный момент
возмущения координат и скоростей или возмущения элементов
равны нулю), а из условия, что в формулах возмущенной тео-
рии могут отсутствовать те или иные возмущения. Например,
в методе Хилла возмущение долготы имеет вид
6Я = С\ + C2v + F (sin v, cos и),
где Ci и С2 — произвольные постоянные интегрирования, v — не-
возмущенная истинная аномалия, F — некоторый тригонометри-
ческий многочлен относительно v.
Если бы С\ и С2 определялись из условия оскулирующих эле-
ментов, то следовало бы написать для них уравнения
, = 0 и
Если же Ci и С2 определяются по-Ганзену, то лучше всего
положить Ci = С2 = 0. Тогда возмущение 6Я периодически за-
висит от v.
Очевидно, что в этом случае элементы возмущенной орбиты,
хотя и определяются уравнениями для оскулирующих элемен-
тов, на самом деле не являются рскулирующими. Ганзен пред-
ложил назвать эти элементы средними элементами. Средние
элементы получили большое распространение в аналитической
небесной механике, так как они очень часто представляют астро-
номические наблюдения на больших промежутках времени
лучше, чем оскулирующие элементы. Математический аспект
введения «средних» элементов в аналитические теории движе-
ния небесных тел изучен в монографии [36}
i 7.01] ГЛ. 7. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИИ КООРДИНАТ 41 1
Если в качестве <7i@ и q2(t) взяты частные решения
q, (t) — л —i
q2 @ = ¦
D.7.10)
то возмущениям координат можно придать вид
6r
D.7.11)
где п — среднее движение возмущаемой планеты Р\, а — боль-
шая полуось ее орбиты, р — параметр, и —истинная аномалия,
v — постоянная величина под знаком интеграла, которую после
интегрирования надо положить равной и.
Возмущения цилиндрических координат имеют вид
1
D.7.12)
= \ < \ — Qj,dv-cosi
.2 Jl
=-^ $ Q,rg sin (б-о) Л.
Интегральные соотношения D.7.11) и D.7.12) являются точ-
ными. Для определения возмущений по этим формулам приме-
няется метод последовательных приближений.
Для определения лишней произвольной постоянной следует
воспользоваться равенством
- <До <*(ДЯ.) _ d (dra , - dFr)
2r +
dr
(бг)} -
dt2
r\r
"dT + 2
--—^~—Г—
2 r2-(fiz)' dt\r
412 Ч, IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 7.02
Для получения возмущений первого порядка необходимо
подставить в D.7.12) невозмущенные значения координат и эле-
ментов (на это указывает нижний индекс «0»)
Г Г Г /е \ ~\
V = \ ^Jfo-f2rg ^ rQ2[z~ sin vQX0-\-Ya) dvoj sin(u0 -tH)du0,
o^ = \ Zo sin (u0 — v0) dv0,
где
Формулы для возмущений первого порядка D.7.14) написаны
при условии, что за основную координатную плоскость выбрана
плоскость невозмущенной орбиты (i = 0°, г0 = 0).
Подробные рекомендации, необходимые для использования
метода Хилла, можно найти в [2], [28].
Замечание. В качестве переменной интегрирования можно
принять не только истинную аномалию возмущаемой планеты v,
но и другие переменные, например, время t или эксцентрическую
аномалию Е.
§ 7.02. Метод Ганзена
Основная идея метода Ганзена состоит в том, что рассмотре-
ние возмущенного движения планеты Р разделяется на следую-
щие этапы: сначала можно интегрировать уравнения в прямо-
угольных координатах Ганзена D.1.18) или в полярных коорди-
натах Ганзена D.1.43), т. е. сначала можно изучить возмущен-
ное движение точки Р в плоскости оскулирующей орбиты XY
(см. рис. 62). Затем можно рассмотреть уравнения, определяю-
щие положение плоскости оскулирующей орбиты XY относи-
тельно плоскости ху; далее в долготу (см. рис. 63) необходимо
внести поправки, обусловленные движением оскулирующей
плоскости. Для планет Солнечной системы эти поправки доста-
точно малы.
Существо метода Ганзена состоит в следующем (подробно-
сти см. в [2]).
Связь между сферическими координатами г, L, В и коорди-
натами Ганзена г, w выражается формулами (см. рис. 62)
cos В cos {L — Q) = cos (a> — а), "\
cos 5 sin (L — Q)=cos* sin(o> — a), > D.7.16)
sin В = sin i sin (a> — a). )
8 7.02] ГЛ. 7. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ КООРДИНАТ 413
Если вместо i и й подставить io = i(t0) и Qo = Q(M> то Ра<
венства D.7.16) нарушатся, но это «нарушение» будет порядка
возмущающих масс. Обозначим через s, sA sin cp, — s^coscp по-
правки к правым частям соответствующих формул D.7.16), лик-
видирующие нарушение равенств, а через Г — поправку к Qo. ко-
торая вообще является функцией i и Q. Кроме того, положим
Тогда будем иметь строгие равенства:
cos Ь cos (A — Qo— Г) = cos (ад — Яо) -\- sA sincp, *)
cos В sin (L — Qo— Г) = cos iQ sin (ад — Qo) — sAcosy, > D.7.17)
sin В =sin /Osin(o) — Qo) + s. )
Обозначим через г и v поправки к величинам, характеризую-
щим некоторый вспомогательный эллипс, лежащий в плоскости
оскулирующей орбиты, и введем их, согласно Ганзену, с по-
мощью соотношений
HqZ = Eq — во sin Eq,
r0 cos v0 = a0 (cos ?0 — eQ),
D.7.18)
r0 sin v0 = aQ V1 — el sin EQ.
r = ro(l+v). D.7.19)
Здесь а0, n0, eQ — постоянные величины, параметры вспомога-
тельного эллипса, v0, Eq — истинная и эксцентрическая анома-
лии, г0 — радиус-вектор вспомогательного эллипса, noz — возму-
щенная средняя аномалия.
Вспомогательный эллипс выбирается таким образом, чтобы
точка с истинной аномалией v0 лежала на возмущенном радиусе-
векторе г. Тогда ад — долгота планеты Р, отсчитываемая от на-
чальной точки, а г0 и v0 — радиус-вектор и истинная аномалия
той точки вспомогательного эллипса, в которой возмущенный
радиус-вектор г пересекает этот эллипс.
Таким образом, для полного решения возмущенной задачи
по методу Ганзена необходимо определить v, z, s, А, ср как функ-
ции времени, а также выяснить смысл величин п0, а0, е0, я0 (дол-
гота перигелия вспомогательного эллипса) и постоянных, появ-
ляющихся в процессе интегрирования.
Для определения возмущенной средней аномалии пог и вели-
чины v имеются интегральные соотношения
D.7.20)
414 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 7.02
где Со, С — произвольные постоянные,
W — — 1-4-2 — -
ha
причем
0 = -„ = fc =-L5—S '-
. ___ е cos (х — Яо) — eD
D.7.23)
Величины h, g, т] можно рассматривать как некоторую систему
оскулирующих элементов. Величина х (см- Рис- 62) представ-
ляет долготу мгновенного перигелия, отсчитываемую от оси X.
Выясним смысл величины Г-^rJ. входящей в равенство
D.7.21). Функция W зависит от времени / двояким образом: че-
рез посредство параметров г0 и и0 вспомогательного эллипса
и через посредство оскулирующих элементов. Обозначим «пер-
вое время» через т, а для «второго времени» сохраним прежнее
обозначение t. Символом f-з—J будем обозначать производную
по т функции W(t) = W{x, t), рассматриваемой как функция
двух переменных т и t, в которой после дифференцирования т
снова заменено на t.
Обозначим г, у, z и v, рассматриваемые как функции т, соот-
ветственно через р, о, ? и д. Тогда
W(r, v, г, v)== W(p, a, ?, ¦&)= \
} D.7-24)
В D.7.24) po и coo — те же самые функции от ?, что и г0 и Vo от 2.
В D.7.21) величина \~^г) означает производную W по ?, в ко-
торой после дифференцирования ? заменено на г.
Решение интегральных уравнений D.7.20) и D.7.21) воз-
можно получить методом последовательных приближений.
В первом приближении г и v определяются из соотношений
где
^o = -l+2-A-^H-2A^5cos<B + 2^^T]sincu. D.7.26)
$ 7.03] ГЛ. 7. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ КООРДИНАТ 415
Здесь р и со— эллиптические значения, зависящие от невозму-
щенной средней аномалии.
Замечание. Вычисление возмущений высшего порядка в г
и v подробно рассмотрено в [2]. Для решения этой задачи необ-
ходимо прежде всего выразить функцию W через компоненты
возмущающих сил, далее нобходимо получить явное выражение
для W как функции оскулирующих элементов и параметров
вспомогательного эллипса и, наконец, выбрать удачную незави-
симую переменную интегрирования. Чаще всего — это время или
эксцентрическая аномалия возмущаемого, тела. Как и в методе
Хилла, важно установить зависимость между постоянными инте-
грирования.
Неизвестные величины s, А, ф определяются из равенств
s = q sin (ад — Qo) — р cos (ад — Q0)i
A sincp = —,
A cos ф = tg i0
D.7.27)
К COS l0
где
p = sin i sin (or — Qo), q = sin i cos (a — Qo) — sin i0,
x = 1 + cos iQ cos i — sin iQ sin i cos (a — fi0).
Вспомогательная величина Г определяется из соотношения
t
Г=\—._ . " Wdt,
J к -yjp V/ (m0 + m)
в котором W* — компонента возмущающей силы, перпендику-
лярной к плоскости оскулирующей орбиты.
§ 7.03. Метод Брауэра
Пусть основная координатная плоскость Р^ху совпадает
с плоскостью невозмущенной эллиптической орбиты, причем ось
Рох направлена в неподвижный перигелий, ось Роу направлена
под прямым углом к Рох в направлении движения возмущаемой
планеты Р, ось PQz дополняет оси Рох и Роу до правой тройки.
Следуя Брауэру [2], обозначим через х0, у0, z0, х0, yQ, z0 (z0 = О,
z0 = 0) невозмущенные прямоугольные координаты и компо-
ненты скорости возмущаемой планеты Р. Они зависят от вре-
мени и элементов, орбиты. Тогда возмущенные координаты и
скорости представляются равенствами
416
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 7.03
Уравнения для возмущений прямоугольных координат имеют
вид
или
<Р FДС)
di2
d2 №y)
dt2
d2 Fz)
dt2
d'[6x)
dt2 '
d<2
d2F2) ,
-r
-+¦
rl
rl
1162
r3
H (Уо + «У)
r3
ц бг
r3
5 (x
rQ
ЗМ'Уо /„
5 \Л
ro
rl
Mo
rl
дх
dR
dy
dR
— dz
Уо У)
D.7.29)
dt2
D.7.30)
которые будем называть уравнениями Брауэра. Функции Gx, Gv
иС,в D.7.30) равны соответственно
3 (*o 6x + y0 by)
r0
7.03]
ГЛ. 7. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ КООРДИНАТ
41?
Рассмотрим однородную систему, соответствующую первым
двум уравнениям Брауэра:
d2 (бх) . (хбх Зцх„ (дс0 бдс + у„ бу) п
d2 (бу) , ц бу Зцуо (х0 &х + у0 бу) _п
73. I S s —и-
D.7.32)
Третье уравнение системы Брауэра принципиально не отли-
чается от третьего уравнения в методе Хилла, поэтому вычисле-
ние возмущений 6z можно вести по четвертой формуле D.7.11).
Общее решение системы D.7.32) имеет вид [2]
дха
дх0
дх0
дУо
D.7.33)
где Си с2, с3, с4 — любые четыре элемента, определяющие движе-
ние в плоскости эллиптической орбиты, Си С2, С3, С4 — произ-
вольные постоянные. Очевидно, что
дх0
дх0 |^ г дха г дха
ос2 л осз 4 dct
dct '
D.7.34)
Для интегрирования уравнений D.7.30) Брауэр применяет
метод вариации произвольных постоянных. В результате полу-
чается
D.7.35)
14 Под ред. Г. Н. Дубошина
418 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
где якобиан / равен
Уо, х0, у0)
с2, с3,
[§ 7.03
D.7.36)
а Л8й — алгебраическое дополнение элемента якобиана с индек-
сами s и k.
Для вычисления Ьх и бг/ необходимо заменить х0 и г/0 через
ха и г/о в производных, стоящих перед интегралами в D.7.35).
В качестве элементов эллиптической орбиты Си с2, с3, с*
можно, например, взять
D.7.37)
где Lo, |ю, т]ю, ко — невозмущенные значения канонических эле-
ментов второй системы Пуанкаре [см. D.3.23) и D.3.25)],
е0 = яо + Мо- При таком выборе d якобиан / = 1.
Встречающиеся выше алгебраические дополнения равны
_ д*о I Зц2 , дх0 . _ дх0
/»31 — ,, "Г . 4 aj • 32 — ~Т7 '
_ _Ё??. /а —
! — рл. • Л34 —
дув
dL,
\ D.7.38)
где
4ц A + е0 cos в0)
[2L0 — Ц10 + T)io)J
4ц A +e0coso0)
•COSOfl,
/(mo + m). vo — невозмущенная истинная аномалия.
Заметим, что в выбранной системе координат Р<>ху — угловое
расстояние перигелия шо == 0.
Четыре произвольные постоянные интегрирования опреде-
ляются чаще всего из условия «средних элементов» (см. § 7.01).
i 7.04] ГЛ. 7. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ КООРДИНАТ
§ 7.04. Метод Лапласа— Ньюкома
419
Из уравнений возмущенного движения, записанных в поляр-
ных координатах Ганзена D.1.43), имеем
i
dR
D.7.39)
где а; — возмущенная истинная долгота возмущаемой планеты
Р, отсчитываемая в плоскости ее оскулирующей орбиты. Если
принять
W = Wq + 6W,
dt
D.7.40)
то для возмущения 6w будем иметь уравнение
г. 1 f dR
-el +1r)
dt, D.7.41)
откуда
% + Jp J ^ Л] dt.
D.7.42)
Здесь С\ — произвольная постоянная. В D.7.42) входит возму-
щенный радиус-вектор г, поэтому для определения bw необхо-
димо сначала вычислить возмущение радиуса-вектора г. Лаплас
разработал метод определения возмущения радиуса-вектора г,
а Ньюком получил возмущение натурального логарифма ра-
диуса-вектора
p = lnr, Po = lnro, бр = р — ро = 1п —. D.7.43)
'О
Уравнение для бр имеет вид
.
14*
420 ч- IV- ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [* 7.04
Уравнение D.7.44) имеет вид
а соответствующее ему однородное уравнение имеет вид D.7.06).
Интегрирование уравнения вида D.7.45) рассмотрено в § 7.01.
Можно написать, что
бр =^|- \qlQdt - *&- J qAdt. D.7.46)
Функции qi(t) и дгЩ даны в § 7.01.
Глава 8
АНАЛИТИЧЕСКИЕ МЕТОДЫ ВЫЧИСЛЕНИЯ
ВОЗМУЩЕНИИ ЭЛЕМЕНТОВ
Наряду с методами вычисления возмущений в координатах в
небесной механике и астродинамике широко используются раз-
личные способы вычисления возмущений в оскулирующих эле-
ментах путем приближенного интегрирования уравнений для оску-
лирующих элементов (см. гл. 3 и 4). Некоторые из этих методов
излагаются в главе 8. Другие способы можно найти в [1]—[7].
§ 8.01. Общий вид возмущений элементов.
Порядок, степень, ранг и класс возмущений
В главе 3 приведены дифференциальные уравнения возму-
щенного движения, записанные для различных систем элемен-
тов. Интегрирование этих уравнений выполняется либо методом
последовательных приближений, либо при помощи рядов.
Пусть ? — один из возмущенных элементов. Если обозначить
через ?о его невозмущенное значение, а через б| — возмуще-
ние, то
& = ?о + в?- D.8.01)
Если б? определяется с помощью метода рядов, то будем
иметь
« = ? в*Б. D.8.02)
Определение. Величина бъ.1, пропорциональная произве-
дению степеней возмущающих масс, сумма показателей которых
равна k, называется возмущением k-го порядка.
422 ч- IV- ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 8.02
Множитель при произведении степеней масс в возмущении
6й1 в общем случае состоит из слагаемых вида
(«„ п) '(«г. я) 2 ... (sq, п)
где
(s, n)=fjs<%, («I, n) = ?\{ (q, ) ?4.
причем А—постоянный коэффициент,п\, ..., пт — невозмущен-
ные средние движения взаимодействующих тел, р, ku k2, ...
..., kg — целые неотрицательные числа, ЯЯ0 — одночлен, целый
относительно невозмущенных эксцентриситетов и синуса поло-
вины взаимного наклона, sl'>, s(,", ..., s^ — целые числа.
Определение. Степень одночлена 5Шо называется сте-
пенью возмущения бй|.
Определение. Разность k — р называется рангом возму-
щения 8kl-
Определение. Число k ~-^q~-^p, где q — сумма всех
встречающихся в данном слагаемом чисел k\, ..., kq, называется
классом возмущения 8ъ.1-
Возмущения можно разделить на вековые, смешанные и пе-
риодические.
Возмущение называется вековым, если оно содержит время
t лишь в виде степенных функций. Если некоторое возмущение
содержит произведение степенных и тригонометрических функ-
ций времени t, то оно называется смешанным. Наконец, если
возмущение состоит только из тригонометрических функций, то
оно называется периодическим. Более подробно об этом можно
прочесть в [6].
§ 8.02. Метод Гаусса вычисления вековых возмущений
первого порядка
При построении аналитических теорий движения небесных
тел коэффициенты вековых возмущений должны вычисляться
с большей точностью, так как влияние этих возмущений про-
порционально различным степеням времени /. Для вычисления
вековых возмущений первого порядка Гаусс разработал метод,
пригодный для любых орбит эллиптического типа [4].
Этот метод обладает двумя достоинствами: а) вековые воз-
мущения вычисляются независимо от других возмущений^
i 8.U2]
ГЛ. 8. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИИ ЭЛЕМЕНТОВ
423
б) в процессе вычисления не используется разложение возму-
щающей функции.
Пусть оскулирующие элементы р, е, i, Q, ш, т определяются
из дифференциальных уравнений Ньютона D.3.09) для двухпла-
нетной задачи. Обозначим через ар, ае, аи аа, affl, ax коэффи-
циенты вековых возмущений первого порядка элементов р, е, i,
Q, ш, т соответственно (см. D.8.03)).
Тогда имеем
2Л 2л
0 0
2л 2л
\ \
о о
2л 2я
о о
2п 2я
\{ slno • 5+[coso+(coso+e)y] f
о
2я
\~cosu-WdMdMu
о
D.8.04)
о о
2я 2л
1 Г Г Г
0 0
2л 2л
+т)т~
— — sinuctgt-
0 0
Здесь M, Mi —.невозмущенные средние аномалии возмущаемого
и возмущающего тел. Под знаком интегралов в D.8.04) оскули-
рующие элементы принимают невозмущенные значения.
Точность вычисления коэффициентов вековых возмущений
ар, ..., ат определяется точностью вычисления определенных
интегралов, входящих в формулы D.8.04). Эта точность может
быть сколь угодно высокой. На современных вычислительных
машинах подобные вычисления не вызывают никаких трудно-
стей.
424
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
В 8.М
§ 8.03. Метод Лагранжа определения вековых возмущений
в двухпланетной задаче
Введем вместо оскулирующих элементов еи е2,
i, Q2 планет Р\ и Р2 новые элементы:
hs = essinUs, ps' = tg is sin Qs,
ft, = e, cosily 9i = tgiJcosQ,s (s
Пг, t'i, i2,
= 1,2),} <4-8-05>
которые часто называются элементами Лагранжа.
Для этих элементов, используя вековую часть возмущающей
функции D.6.27), выписанную с точностью до вторых степеней
0, в\, е2, можно написать следующую систему дифференциаль-
ных уравнений:
dhj
dt
dki
dt
dpi
dt
dqi
dt
dh2
dt
dk2
dt
dpi ,
dt
~dl
2fm2N
2fm2P
nA
k2,
A
2fm2N
nA 1 +
2{m2N
.2 41 T
I
nLa
2fm2N
a Pi*
2fmiP
2fm2N
nA
ki +
-^- «2
h2,
42,
!i
k2,
2fmiP.
nA
= -^^-pi + ^^-p2,
где
Л
о a,
a av < a2, Ь{з\ bf1 — коэффициенты Лапласа.
D.8.06)
D.8.07)
§ 8.03] ГЛ. 8. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ ЭЛЕМЕНТОВ
425
Система D.8.06) является линейной системой с постоянными
коэффициентами, и ее общее решение можно написать в виде [2]
А, = ¦ 1L=, [Mi0 sin (М + P.) + Mf
) sin
п\
fc)].
L= [All" cos (A,,* + p,) + M(i2)cos (M + Pj)] ,
1 [M2n sin (Л,< + A) + M22) sin (V + P2)].
-P^ + M^'cos
' cos
P\ =
1
a\
a2
a2
cos yi + Lf cos (X2/ + Y2)].
D.8.08)
где hi, Я2, ai = 0, X2 — корни вековых (характеристических)
уравнений
2fN
~ Р2) = 0, D.8.09)
= 0. D.8.10)
_ „ль/
Произвольными постоянными в общем решении D.8.08) можно
считать рь р2, М", Mf, Yi> Y21 L{{\ L?\ а остальные величины
определяются из соотношений
\ D.8.11)
Из условия х\ = 0 следует, что в двухпланетной задаче су-
ществует решение, при котором плоскости орбит планет совпа-
дают (й = tj, Qi = Яг). Заметим, что хг < 0.
2!Nm2
/B^_,B) «2°^
V
426 ч- IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 8.04
Замечание 1. Изложенный метод решения дифферен-
циальных уравнений для элементов Лагранжа D.8.06) получил
в специальной литературе название «метода Лагранжа вычисле-
ния вековых возмущений», хотя, как видно из общего решения
D.8.08), элементы Лагранжа изменяются периодическим обра-
зом. Это объясняется тем, что в уравнениях для элементов со-
хранена лишь вековая часть возмущающей функции с точ-
ностью до вторых степеней малых величин.
Замечание 2. Метод Лагранжа допускает простое обоб-
щение на случай n-планетной задачи, и изложение этого во-
проса можно найти в книге [2]. Можно показать, что для всех
планет Солнечной системы, кроме Плутона, все корни Я поло-
жительны и различны, а все корни и отрицательны и различны,
кроме одного, равного нулю.
§ 8.04. Основы метода Делоне
Для решения основной проблемы (см. гл. 10) теории Луны
Делоне [2], {29] разработал метод решения канонических уравне-
ний движения, получивший в литературе название «метода Де-
лоне». Метод Делоне был видоизменен Цейпелем, и здесь мы
изложим основные формулы «метода Делоне — Цейпеля» [2], [30].
Пусть уравнения движения небесного тела записаны с по-
мощью канонических переменных Делоне D.3.21) и имеют вид
D.3.22). Гамильтониан системы R* выражается через возму-
щающую функцию R (см. § 3.07).
В основной проблеме теории движения Луны разложение
возмущающей функции R в виде явной функции элементов Де-
лоне представляется четырехкратным рядом вида
оо оо оо оо
Я = Z ? ? ? APv р,, Р). р, cos (p,/ + p2g + p3h + Pik),
Pi=0 p!=-(x> рз=-оо р,= -°о
D.8.12)
где /, g — элементы Делоне, а через h обозначена разность эле-
мента Делоне и долготы перигея орбиты Солнца, k — средняя
аномалия Солнца. Функция R зависит явно от времени посред-
ством средней аномалии Солнца k, поэтому вместо канониче-
ской системы шестого порядка D.3.22) Делоне и Цейпель рас-
сматривали каноническую систему восьмого порядка:
dL__dF_ dl _ dF
dt ~~ dl ' dt ~ dL
dG__df_ dg _ dF
dt ~ dG
dh_=_dF_
dt dH
dk _ dF
at — дк
dt
dH
dt
dK
dt
dg
dF
'~ dh
dF
~ dk
§ 8.04] ГЛ. 8. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ ЭЛЕМЕНТОВ 427
где
F = ^j-vK + R, D.8.14)
v — среднее движение Солнца.
Уравнения D.8.13) отличаются от D.3.22) тем, что их га-
мильтониан F не зависит явно от времени.
Основная идея метода Делоне заключается в том, что с по-
мощью некоторого канонического преобразования переменных
из канонических уравнений исключаются наиболее влиятельные
члены. Заменим гамильтониан F в уравнениях D.8.13) прибли-
женным значением F:
? D.8.16)
где
Q = Plt + p2g + p3h
Гамильтониан D.8.16) отличается от D.8.14) тем, что в D.8.16)
сохранены лишь два члена разложения возмущающей функции
D.8.12) с коэффициентами Ло, о, о, о и Qi = ЛР1, Pjip,iP), где р\, р2,
р3, рк принимают конкретные значения. Оставленный единствен-
ный периодический член в гамильтониане D.8.16) имеет отно-
сительно больший коэффициент, чем все другие отброшенные
периодические члены из D.8.12).
Ради симметрии введем обозначения
J D.8.18)
Тогда вместо системы D.8.13) рассмотрим уравнения
i?i _ EL Eh- _ _ JL. (ь — 1 2 1 4\ U 8 1 Ъ\
dt ~~ dlk' dt — dLk \В—1.*зО,1)- ^.e.iyj
Вместо прежних канонических переменных (Lh, lk) с по-
мощью производящей функции SW1, Pi\ l\ , L.\ , U, 1%, U, /4)
введем такие новые канонические переменные Lk\ /i", чтобы
в преобразованных уравнениях гамильтониан был бы функцией
только L\», Li», Li4, M".
В теории движения Луны функция Г, имеет множите-
лем малый параметр К = \2/п2 (отношение квадратов средних
428
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 8.М
движений Солнца и Луны ~ 0,006), поэтому производящую
функцию S(,L^; lk) будем искать в виде ряда по степеням ма-
лого параметра X:
D.8.20)
в котором член Sj пропорционален V. Новый гамильтониан
можно также представить рядом
С точностью до членов второго порядка относительно К вклю-
чительно новый гамильтониан и производящая функция выра-
жаются формулами
sinQ.
Q(»
TC\ Sin8
I'I-л!!!
uF1
"^0,0,0,0
dL
•I
"l—
,' ^"
dL,
?,=Z.
. + !.
D.8.21)
По аналогичным формулам можно вычислить и приближения
более высоких порядков. Для этого необходимо воспользоваться
S 8.04] ГЛ. 8. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ ЭЛЕМЕНТОВ 429
основным уравнением метода Делоне — Цейпеля:
, U\ й , Li4)- D.8.22)
Соответствующие приближения получаются из D.8.22), если
разложить левую часть в ряд Тейлора и приравнять величины
одинакового порядка малости. Связь между старыми и новыми
каноническими переменными выражается равенствами
(*= 1,2,3),
D.8.23)
С помощью теоремы о неявных функциях из D.8.23) полу-
чим Lk, k в виде функций Цч, 9A) = pil\l) + раф + рзЙ" + М°-
Величины Lft, ^ являются некоторым приближением для точных
элементов Делоне, так как мы рассматривали приближенные
уравнения движения D.8.19) вместо точных уравнений D.8.13).
Указанный метод позволяет, в сущности, исключить из уравне-
ний член, содержащий cos 9. Если в конкретной задаче требуется
исключить другие члены, аргументы которых кратны 8, то
можно повторить преобразование Делоне — Цейпеля, однако
здесь встречаются трудности, связанные с появлением малых
знаменателей [см. формулы D.8.21)]. Влияние малых знамена-
телей различно в различных задачах небесной механики, но, как
показали Делоне и Цейпель, в теории движения Луны эти труд-
ности преодолимы. Следует, однако, сказать, что строгого мате-
матического обоснования метода Делоне не получено (имеется
в виду доказательство сходимости использованных рядов).
Брауэр {2] модифицировал метод Делоне применительно к за-
даче о движении искусственного спутника.
430 ч- IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [| 8.05
§ 8.05. Связь между возмущениями координат
и возмущениями элементов
Пусть Xi,х2, ..., хт — некоторая система координат, а
ось а.2, • •-. as — некоторая система элементов. Обозначим пол-<
ное возмущение координаты Хг через 6хи а полное возмущение
элемента а,- — через 6oci. Согласно D.8.02)
bXi = Y. <***!, &*i = Y. ЬкЩ- D.8.24)
k—i fc=i
Пусть координаты и элементы связаны соотношениями
Xi = fi{t, щ, а2 as) (/=1, 2 m). D.8.25)
Тогда полные возмущения координат выражаются через полные
возмущения элементов с помощью ряда
оо
*,!*,!... А.!
Х( ki к'1 Н (во,)"' ... (оа,)Ч D.8.26)
\ 1 2**" s У О
Для возмущений первого и второго порядка имеем
D.8.27)
В формулах D.8.26) и D.8.27) индекс «0» означает, что в ча-
стных производных элементы заменены своими невозмущен-
ными значениями.
В частности, для возмущений первого порядка полярных ко-
ординат Ганзена (см. § 1.11) имеем
fii/ + [#i cos M + 2Я2 cos 2M + ЗЯ3 cos ЗМ + ... ] б]/ —
- [HY cos M + 2Нг cos 2M + ЗЯ3 cos ЗМ + ... ] в,я +
- sin м + -^ sin 2уИ + ... ] в,в, D.8.28)
Г / r! cos v \ / 2о?л Л 1 -
D.8.29)
§ 8.05] ГЛ. 8. МЕТОДЫ ВЫЧИСЛЕНИЯ ВОЗМУЩЕНИЙ ЭЛЕМЕНТОВ 431
Здесь 8\l, bin, б\в — возмущения первого порядка средней дол-
готы, долготы перицентра, эксцентриситета, М — средняя ано-
малия, Hk — коэффициенты уравнения центра [см. формулы
B.3.14) —B.3.15)].
Для выражения возмущений прямоугольных координат че-
рез возмущения канонических элементов следует воспользо-
ваться соотношениями § 3.09. Выражения возмущений элемен-
тов через возмущения координат можно получить аналогичным
образом.
Глава 9
МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ,
ОСНОВАННЫЕ НА СХЕМАХ ОСРЕДНЕНИЯ
Большинство методов, изложенных в главах 7 и 8, основано
на использовании кеплеровского эллипса в качестве нулевого
приближения для построения теории возмущений. Такой подход
целесообразен в следующих случаях:
1) возмущения достаточно малы;
2) промежуток времени, на котором используется возмущен-
ная теория, невелик;
3) имеют место одновременно случаи 1) и 2).
Если не имеют места случаи 1)—3), тогда целесообразно
строить варианты теории возмущений, основанные на примене-
нии асимптотических методов [32].
К таким задачам относятся так называемые «резонансные
задачи», для которых характерна соизмеримость средних дви-
жений планет, приводящая к появлению малых знаменателей
в процессе построения классических вариантов теории возму-
щений.
Сущность излагаемых методов состоит в том, что в качестве
нулевого приближения (или промежуточной орбиты) для реше-
ния уравнений динамики берется не решение задачи двух тел,
а решение одного из упрощенных вариантов ограниченной кру-
говой задачи трех тел, чаще всего получаемых с помощью ме-
тодов осреднения. Далее, теория возмущений строится с по-
мощью метода Н. Н. Боголюбова [32] и его вариантов, разрабо-
танных для задач с быстрыми и медленными переменными {33]
и специально для планетных задач [34] — {36].
§ 9.01. Основные схемы осреднения
возмущающей функции в двухпланетной задаче
Все схемы осреднения возмущающей функции R D.6.02) де-
лятся на две группы.
1) Схемы осреднения, не учитывающие соизмеримость или
почти соизмеримость средних движений возмущающей и воз-
« 9.011 ГЛ. 9. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ 433
мущаемой планет. К ним относятся схемы К. Гаусса. П. Фату и
Н. Д. Моисеева [31].
2) Схемы осреднения, учитывающие это свойств К таковым
относятся прежде всего схемы Делоне — Хилла [31].
Пусть разложение возмущающей функции R для ограничен-
ной круговой задачи трех тел имеет вид
оо оо оо
R = fmi Z Еи Zb С»,.»,. k, {a, p, i) X
X cos (*,Af - fc2M, + k2Q + k3a), D.9.01)
где f — постоянная тяготения, mi — масса возмущающей ^плане-
ты (обычно Юпитера), а, р, i, M, Q, ш — кеплеровские элементы
орбиты возмущаемой планеты, М{ — средняя аномалия возму-
щающей планеты.
Удобно рассматривать разложение D.9.01) в виде суммы
трех функций:
RB = fmlCQ,o.o(a, p,i), D.9.02)
fc,=0 ft,= -cx. fts=-oo !
кроме kx = k = O;
oo oo oo "\
/?« = /«! Z E Z Cft,,ft],ft](a, p, OX I
ftl=o fe— м- ,
X cos (A,Af - AaAf, + *2U + M).
Функции /?B, /?p, /?н называются соответственно вековой, резо-
нансной (долгопериодической) и нерезонансной (короткоперио-
дической) частями возмущающей функции R.
Отличие между разложениями D.9.03) и D.9.04) состоит
в том, что суммирование в D.9.03) ведется только по тем зна-
чениям индексов k\ и k2, которые удовлетворяют условию
а в D.9.04) выполняется противоположное неравенство. При ис-
пользовании классических методов теории возмущений функция
Rp порождает «малые знаменатели» в теории возмущений, или
долгопериодические неравенства.
434 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 9.Р1
Действительно, если М = nt -f- Мо, М\ = n\t -f- Mi,o> to
«.*-? Ё Ё с"м+'Г;."'>5'"<^-*"-
где А — величина, не зависящая от времени. При условии
\k\n + k2tii\ ^ О(гп\) коэффициенты при тригонометрических
функциях могут достигать сколь угодно больших величин.
1. Схема К. Гаусса. Будем обозначать осредненную возму-
щающую функцию во всех схемах через /?,-. Согласно схеме
Гаусса
2л 2л
#, (а, р, i, а) =-^2) $Я(а, Р, i, M, Q, n)dMdMlt D.9.05)
о о
или
ОО
Я, (а, р, I, ю) = fmi ? Со, о, и, (а, Р, 0 cos k3a. D.9.06)
2. Схема П. Фату:
2л
R2{a, p, I, M, a)=~^R(a, p, I, M, Q, <o)dMu D.9.07)
о
или
оо оо
R2 (а, р, i, М, ш) = fnii X X С*„ о, ft, {a, p, i) cos (k^M + ^зш)-
fc1=0 fts=-oo
Для
3.
/?з(я,
или
RAa,
плоского
1
Схема
р, i, Й,
Р. 1, Й.
if
н
о
ш
варианта i
(а,р,М) =
схемы
= /т.
. Д. Моисеева:
2л
о
оо
1 Z
Фату
оо
Zcftl
ft,=0
[а, р, i
00
имеем [34]
, о(а,
, м,
Со, А„
p)cos^,
Q, а, М,
, ft,(а. Р,
М.
)dM,
ОХ
D.9.
D.9.
D.9.
.08)
09)
10)
]. D.9.11)
Для плоского варианта схемы Н. Д. Моисеева имеем [34]
Й0)(а, р, ш, Af,)= ? Со, »,(а, р) cos fc2 (Q - Af,). D.9.12)
$ 9.01] ГЛ. 9. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ 435
4. Первая схема Делоне — Хилла. Введем аномалию Дело-
не D по формуле
D = klM + k2{Q-Ml), D.9.13)
где k\, k2 — некоторые известные положительные числа и такие,
что k\ti — k2n\ = 0.
С помощью D.9.13) исключим из разложения D.9.01) вели-
чину Q — М\. Получим
оо по оо
RA (a, p, i, M, со, D) = /m, ^ 2, L, C*" *•¦ *° (a- p' ^ X
Й!=0 ft]= —00 fcj= —OO
X cos \(ki - k2 ЬЛ M + 4*- D + fe3fl)l. D.9.14)
В результате осреднения разложения D.9.14) по М получаем
2л
Я4(а, р, *, ю, D) = -^ \ /?(а, р, i, Af, ш, D)dM, D.9.15)
о
или
оа оо
Я4 (а, Р, /, и, D) = f/и, Е Е С1Й jj (а, р, /) cos {sD + А3ш).
D.9.16)
Для плоского варианта первой схемы Делоне — Хилла имеем [31]
/?f (a, p, D) = fmi Z С8Й„ s?; (a, p) cos sD. D.9.17)
В плоском варианте аномалия Делоне D выражается соотно-
шением
D = kxM + k2(a — Ali). D.9.18)
5. Вторая схема Делоне — Хилла. Введем обобщенную анома-
лию Делоне D по формуле
D = ^-M + Q — Mi D.9.19)
и исключим из разложения D.9.01) разность Q — Mi. Будем
иметь
оо оо оо
?5 (а, р, /, М, «в, ?>) = /т, 2, 2^ L С*'' *'¦ k> (а> Л О X
X cos [ *'" ~ *'"' М + fe2D 4- ?з<»1 ¦ D.9.20)
436
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§9.02
Осредненная возмущающая функция R$ вычисляется по фор-
муле
г
R5(a, р, i, ш, D) = lim 4"\я(а, р, I, M, ш, D)dM. D.9.21)
Для плоского случая
D.9.22)
Более подробные сведения о приведенных схемах можно
найти в [31].
§ 9.02. Уравнения осредненных схем ограниченной круговой
задачи трех тел, определяющие промежуточную орбиту
(нулевое приближение). Их первые интегралы
Для получения уравнений промежуточного движения возму-
щаемого тела необходимо заменить возмущающую функцию R
в уравнениях Лагранжа D.3.15) тем или иным осредненным
значением. Будем обозначать ^начения осредненных оскулирую-
щих элементов через а, р, i, M, Q, ш.
1. Схема К. Гаусса. Уравнения для схемы Гаусса имеют
вид [36]
dt
fm да
di
dt
ctgi
d~M _ I /7^~ 9 /~й~ dR,
~2Т~~~й/\1 а г/\ fm da '
dR,
1
d& n ,
dt V fmp sin i di
dt V fm dp
1=0 —Л1,.
ctg i dRx
•y/lmp di
В D.9.23) m — масса Солнца.
Система D.9.23) является интегрируемой [36].
D.9.23)
i 9.02]
ГЛ. 9. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ
437
2. Схема П. Фату. Уравнения для схемы Фату имеют
вид [36]
da_ _ 2 /_о
dt v fm
dp _ i
1Г~'
m дМ '
d~R2
да '
di ctg t dR2
dt ~ '~ " '
dM
dt
d&
dt
_ 1 . / fm „ / a
"ТА/Т ~2/\llm-
da
slfmp sin i di
-^- = _ 2 J^^- <**7
rf< V fm 56
D.9.24)
/mp di
Система D.9.24) имеет два известных первых интеграла [31],
[36], однако ее общий интеграл неизвестен.
В плоском случае уравнения для схемы Фату имеют вид
da la dRf
— = 2 Л I =- ,
dt V fm дМ
dM 1 / fm
V
fm да '
da , г
-it = - я, - 2 Л/ -f-
fm dp •
Известен общий интеграл системы D.9.25):
D.9.25)
м
¦-*'-[
dM
J I I fm la
Щ — А / -^ - 2 Л / -г-
а V а V fm
da
ш —Ш0 = —^ J V "f^"
D.9.26)
438
ч< iv, теория возмущенного движения [§ э.ог
! выражается соотноше-
В равенствах D.9.26) функция
нием D.9.09).
3. Схема Н. Д. Моисеева. Уравнения для схемы Н. Д. Мои-
сеева имеют вид [36]
dt
dt " 'V fm да
dl __ ctg I dfl3
dR3
dt
<3ш
"JJrnp sin i
dM _ 1 /ТгГ _ 9 /37
dt — а Л/ a У fm
da
dt
ctg
fm
di
dQ . 1 ЭД3
= — П\-{—/—-—=- ¦ — .
dt Л/fmp sin / di
D.9.27)
Известны [31], [36] два первых интеграла системы D.9.27),
однако ее общий интеграл неизвестен.
Плоский вариант осредненнои модели Н. Д. Моисеева отно-
сится к интегрируемым задачам [31]. Уравнения для этого слу-
чая выражаются равенствами
D.9.28)
— -0
dt ~u>
dt 2/\
dM 1
dt a \
da
dt П
Ее общий интеграл:
/— бф
fm da '
la " V fm da '
1 " V fm dp J
/fmp
/-,
¦y/fm
A*-Afo=\ iVT -
da
_]Л.
D.9.29)
9.02]
ГЛ. 9. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИИ
439
4. Первая схема Делоне — Хилла. Уравнения для первой
схемы Делоне — Хилла имеют вид [36]
— = 2k л/— -Ri
dt ' V fn
dp _ „ /T"
dD
дТ ctg7 d7?« _
dt л/fmp (Эй
sin'
dM _ 1 / fm _ „ /_a_ _a^4_
~dT~~a~'\ d Л/ fm da '
da
ctgt
= —«I +
1
di
ai?4
s'n *
D.9.30)
Известны [36] два первых интеграла системы D.9.30), кото-
рых, однако, недостаточно, чтобы выписать ее общий интеграл.
Уравнения плоского варианта
dp
/m dD '
~P~ d~R~f
Tm~~dD~'
dt a \ a
da
fm da '
It
D.9.31)
имеют известный общий интеграл
V й ——
fm , k2 .. /j._ -
=с„
2a
dD
l
/т
fm dp
—шо = —2
P
Cm
D.9.32)
440 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [S 9.03
§ 9.03. Разложение возмущающей функции
для схем осреднения
В уравнения D.9.23) —D.9.25), D.9.27), D.9.28), D.9.30),
D.9.31) входит осредненное значение возмущающей функции Й,
полученное каким-либо способом, изложенным в § 9.01. Для по-
лучения конкретных зависимостей элементов промежуточной ор-
биты от времени необходимо иметь явный вид разложения Д как
функции элементов промежуточной орбиты а, р, i, M, Q, ю.
Ниже выписаны разложения для осредненного значения воз-
мущающей функции R ограниченной круговой задачи трех тел
для различных схем осреднения с точностью до четвертых сте-
пеней эксцентриситета орбиты возмущаемой планеты и синуса
половины взаимного наклона (для краткости черточки сверху,
указывающие на то, что разложение зависит от элементов про-
межуточной орбиты, опущены). Считается, что плоскость ор-
биты возмущающего тела совпадает с плоскостью эклиптики.
Все разложения взяты из трудов Леверье [25].
1. Схема К. Гаусса:
= fmi [A)«о) + B)(« (|J + D)'°' (|L + A D@)a2 +
+ (Г2)<°> (!Jа* + A7)@> а4 + C6)<°> (у)'а2cos 2ш]. D.9.33)
Коэффициенты A)<°>, B)<°>, D)<°\ A1)«>>, A2)<«, A7)<°\ C6)<«
приведены в § 6.04.
2. Схема П. Фату:
#2=*! +
+ /т. { [E0)<°> у + E1)'« (тK + F0)«°> | a2] cos (I - ш - Q) +
+ A20)<0) у а2 cos {I + a - О) +
+[A72)<°> (у)' + A73)"» (|L + A78)<°> (|J а2] cosB/-2o>-2G)+
+ [B12)(°> а2 + B13У0' (уJ а2] cos B/ - 2Q) +
+ B40){0) (уK cos C/ - Зи - 3Q) +
+ B90)(°> у а2 cos C/ - и - 3Q) + C36)"» (уL cos D/ - 4a-4Q) +
+ C58)@) (уJ а2 cos D/ - 2и - 4Q) + C72)@) а4 cos D/ + 4ш)}.
D.9.34)
В разложении D.9.34) функция ?i дается равенством
D.9.33). Величины ш, Q суть кеплеровские элементы (угловое
6 9.03] ГЛ. 9. МЕТОДЫ ТЕОРИИ ВОЗМУЩЕНИЙ 441
расстояние перигелия от узла и долгота восходящего узла), Z —
средняя долгота возмущаемого тела, равная
l = nt + e = M + a + Q. D.9.35)
Коэффициенты E0)<°\ E1)<°> C72)<°> даны в § 6.02.
3. Схема Н. Д. Моисеева:
Яз = й +
+ /т, { [(Б0)"> у + E1)<'> (|K + F0)'» | a2] cos (/, - ш - Q) +
+ A20)<]> у а2 cos (/, + со - Q) +
+[A72)<2> (f J + A73)«) (уL + A78)<« (-§-Ja2]cosB/I-2o>-2Q)+
+ [B12)<2> а2 + B13)<2> (уJ a2] cos B/, - 2Q) +
+ B40)<3> (yKcos C/, - Зи - 3Q) + B90)<3)|- a2 cos C/,-вв-ЗО) +
+ C36)«) (уL cos D/, - 4и - 4Q) +
+ C58)<4> (уJ a2 cos D/, - 2ш - 40) + C72)<4> о4 cos D/, - 40)};
D.9.36)
/j — средняя долгота возмущающего тела, равная
I = Af1 + cB, + O,. D.9.37)
Коэффициенты E0L), E1)(>) C72) <4> приведены в § 6.02.
4. Первая схема Делоне — Хилла для соизмеримости
П[: л = 1:2. В данном случае аналитическая структура осред*
ненного значения возмущающей функции существенно зависит
от отношения П\: п (см. D.9.14) — D.9.16)).
В частности, для отношения П\: п = 1: 2 будем иметь
U = R.+fm, { [E0)<2> | + E1)<2) (у)' + F0)W у a2] cos {D + 2со) +
+ [A72)D>(yJ + A73У« (у)' + A78)«> (|J a2]cos BD + 4ш) +
+ [B12)(%2 -f B13JW (уJ a2] cos BD + 2m) +
+ B40)'5> (уK cos CD + 6m) + B90)® у а2 cos {3D + 4m) +
+ C36)® (уL cos D?> + 8m) + C58)« (уJ а2 cos DD + 6m) +
+ C72)(8) ст4 cos (AD + 4ш) ] . D.9.38)
Коэффициенты E0)<2), E1)B' C72)& приведены в § 6,02.
442
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 9.Й4
§ 9.04. Основы метода теории возмущений
Пусть элементы промежуточной орбиты а, р, i, M, Q, ш най-
дены как функции времени [36]—{39].
Будем искать решение уравнений Лагранжа D.3.15) мето-
дом Н. Н. Боголюбова {32]
а = а + ба (а, р, i, M, Q, ш),
р = Р + Ьр (а, р, i, M, Q, й),
М = М + Ш(а, /г, i, Af, Q, й),
Q = Q + бЙ(а, р, Т, М, Q, ш),
ш = ш -f- б(о (а, р, t, M, Q, ш).
Добавки (возмущения) ба бш в методе Н. Н. Боголю-
бова зависят от новых переменных а, ..., ©, а не от t, как
в классических вариантах теории возмущений.
Возмущения ба, ..., бш ищутся в форме степенных рядов по
степеням малого параметра (в данном случае mi) следующего
вида:
ба= ? m\a.(a, p, i, Q, ю, М),
бш=
i, p, i, Q, со, М).
D.9.40)
_ Неизвестные функции ак(а, р, i, M, Q, а), ..., ak{a, p, I, M,
Q,<b), согласно методу Н. Н. Боголюбова, находятся как реше-
ния некоторых линейных уравнений в частных производных пер-
вого порядка [36]. Этот асимптотический метод особенно эффек-
тивен, когда уравнения промежуточного движения удается про-
интегрировать. В этом случае упомянутые уравнения в частных
производных решаются в аналитическом виде, и последователь-
но можно найти сначала возмущения первого порядка в смысле
Н. Н. Боголюбова аь Pi т, далее, возмущения второго по-
рядка а2, Р2, -.., со2 и т. д.
Теория возмущений первого порядка для резонансных задач
изложена в монографии [36], а возмущений второго порядка —
в диссертации [40].
Глава 10
ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
Первые теории движения Луны, основывающиеся на интегри-
ровании дифференциальных уравнений движения задачи трех
тел, принадлежат Клеро, Даламберу и Эйлеру. Развитием работ
Клеро и Даламбера является теория Лапласа, который составил
таблицы положений Луны с точностью до О',5. Подобные тео-
рии и таблицы движения Луны строились Дамуазо, Плана, Пон-
текуланом, Ганзеном, Делоне и другими авторами.
Наиболее совершенной с практической точки зрения явилась
теория Ганзена; таблицы, составленные Ганзеном в 1857 г., ис-
пользовались для вычисления эфемериды Луны р. астрономиче-
ских ежегодниках с 1862 по 1923 г. С 1883 г. в таблицы Ган-
зена вводятся поправки Ныокома, так как эти таблицы в своем
первоначальном виде стали плохо представлять наблюдения;
расхождения, составлявшие \"—2" в период 1750—1850 гг., до-
стигли 5" в 1870 г., 10" в 1880 г. и 18" в 1889 г. Аналитическое
(буквенное) решение основной проблемы в теории движения
Луны построено Делоне (окончательные результаты опублико-
ваны в 1867 г. [41]).
Работы Хилла (см. [43]), опубликованные в 1878 и 1886 гг.,
послужили основой для полной теории движения Луны, которая
была построена в 1904—1909 гг. Брауном [44]—[48]. В 1919 г. им
опубликованы таблицы, которые стали использоваться с 1923 г.
для вычисления эфемериды Луны. С 1960 г. эфемерида Луны
для астрономических ежегодников вычисляется непосредственно
по тригонометрическим рядам Брауна без помощи его таблиц
(с точностью 0s,001 по а и 0",01 по 6).
Теория Хилла — Брауна с учетом внесенных в нее поправок
(см. [49], [50]) наиболее полно учитывает в пределах точности,
принятой при вычислениях, гравитационные эффекты в движе-
нии Луны. В этой главе мы изложим результаты теории Делоне
и теории Хилла — Брауна.
444 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 10.01
§ 10.01. Уравнения основной проблемы
в теории движения Луны
Основной проблемой в теории движения Луны называется
задача о движении Луны под действием притяжения Земли и
Солнца при условии, что все три тела рассматриваются как ма-
териальные точки, а Земля (или, точнее говоря, центр масс си-
стемы Земля — Луна) движется относительно Солнца по эллип-
тической орбите. Поскольку центральным телом в этой задаче
l
Рис. 66. Система Земля —Луна —Солнце. С —центр масс Земли и Луны; О —центр Земли;
L — Луна; S — Солнце.
является Земля, то принимают, что Солнце описывает вокруг
центра масс Земли и Луны эллиптическую орбиту.
Пусть OXYZ—неподвижная прямоугольная геоцентрическая
система координат, причем плоскость XY совпадает с плоскостью
эклиптики, ось ОХ направлена к точке весеннего равноденствия,
ось OZ—к северному полюсу эклиптики. Обозначим через тт
и ша массы Земли и Солнца соответственно. Если пренебречь
массой Луны, то ее движение в рамках основной проблемы опи-
сывается уравнениями
d2* _ bim x i dR iPY _ ,» Y dR
_
где возмущающая функция записывается в виде
D.10.02)
причем Xs, Ys, Zs = 0 — координаты Солнца в выбранной си-
стеме координат, г = л/Х2 -\-Y2-\-Z2— расстояние от Земли до
Луны, rs = ^JX2S + Y2S — расстояние от Земли до Солнца, Д=
=у (х _ xsJ + (У — YsJ + Z2 — расстояние от Луны до Солнца.
§ 10.02] ГЛ. 10, ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 445
Если масса Луны учитывается, то при составлении уравне-
ний движения Луны в рамках основной проблемы используют
систему координат Якоби (см. § 1.04).
Координаты Луны X, Y, Z отнесены к системе OXYZ, рас-
смотренной выше. Координаты Солнца X', У", Z' отнесены к си-
стеме CX'Y'Z', начало которой совпадает с центром масс С
Земли и Луны и оси которой параллельны осям системы OXYZ
(рис. 66).
Уравнения движения Луны записываются в виде
<РХ ,, . . . X , dR
-jjt = — к wh- + mv 7т + ~дТ •
d'Y 2, . Y , dW
~dir — — я* {тт + tnL) -p? + -gy-,
-—-
D.10.03)
где mL — масса Луны, R — возмущающая функция, определяе-
мая формулой
й-«*-^Ф+*)- D-10-04)
причем
D.10.05)
[Ai на рис. 66 совпадает с rs]. Если а' — большая полуось орби-
ты Солнца относительно центра масс С Земли и Луны и «' —
среднее суточное движение Солнца, то
mL-{-ms) = n'!af\ D.10.06)
§ 10.02. Разложение возмущающей функции
в основной проблеме теории движения Луны
Возмущающую функцию R, используемую в уравнениях
D.10.01) и определяемую формулой D.10.02), можно записать
в виде
D.10.07)
V ' о J
0=2
где Pa(cosa) —полиномы Лежандра [см. формулы D.5.34)], a —
446 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 10.02
угол между геоцентрическими направлениями OS, OL на
Солнце и Луну соответственно (см. рис. 66).
Так как согласно D.10.06)
+
ms
и (гптЦ- rnL)/ms ~ 1/330000, то обычно заменяют k2ms в D.10.07)
на n'V3.'
Функцию R можно разложить в ряд по элементам орбит
Луны и Солнца. В качестве таких элементов орбиты Луны ис-
пользуются эксцентриситет е, долгота перигея л, долгота вос-
ходящего узла Q, средняя долгота в орбите X, наклон к эклип-
тике I [точнее говоря, -sin i или sin (i/2)]. В качестве элементов
орбиты Солнца берутся эксцентриситет е', долгота перигея л',
средняя долгота в орбите %'.
Разложение функции R с точностью до членов порядка
е2, е' , Y2 = sinz-2-, —г записывается в виде
+ е[-| соб(ЗЛ - 2V - л) - jcosft - л) - -Jcos {К - 2Х' + л)] +
+ е' [^- cos BЯ, - 3V + л') + -| cos (V - л')—|cos BЯ-Я'- л')] +
+ е2 \j cos BЯ' - 2л) + |cos DЛ - 1%' - 2л) - \ cosB^ - 2л)] +
+ ee'[fcos (Я - Я' + л - л') - -|cos (Я - Я' - л + л') -
- -Jcos (Л + Я' - л - л') + х cos (ЗА, — 3V - я + л') -
- \ cosC^ - V — л - л') - Щ- cos (Я — 3V + я + л')] +
+ е'2 [| cos BЛ.' - 2л') + -у- cos BЛ - 4Я' + 2л')] +
+ Y2[f cos BЯ, - 2Q) + f cos BV - 2Q)] +
+ " [i" cos ^ ~Л') + Т cos $k ~ 3^')] } ¦ D-10-09)
3 ю.оз] гл. ю. Теория движения луны 447
Наиболее полное разложение возмущающей функции с точ-
ностью до членов шестого порядка относительно е, е', у и треть-
его относительно а/а', содержащее 324 члена, имеется в [51].
Разложение по полиномам Лежандра возмущающей функ-
ции, используемой в уравнениях D.10.03), записывается с точ-
ностью до членов пятого порядка в виде
DЛ0Л°)
где а' —угол между направлениями CS и CL (см. рис. 66).
При решении основной проблемы функцию R заменяют
функцией R, а k2ms — величиной п/2а/3 и используют разложение
вида D.10.09). После нахождения окончательных формул для
возмущений в них вносят поправки, обусловленные такой за-
меной.
§ 10.03. Решение Делоне основной проблемы
в теории движения Луны
Исследования Делоне содержатся полностью в [51]. Изложе-
ние математических основ метода, применявшегося Делоне,
имеется, например, в [7], [41], [42].
Делоне рассматривает в качестве исходных канонические
уравнения движения вида D.3.22) относительно переменных
L, G, H, I, g, ft. Эти переменные связаны с ос'кулирующими эле-
ментами орбиты Луны вокруг Земли: большой полуосью а, экс-
центриситетом е, наклоном i, долготой перигея л, долготой вос-
ходящего узла Q, средней долготой в орбите Я по формулам
D.3.21), так что
^V1"!^1
T Г } D.10.11)
P. = Л / 1 r^ . Sin — = Л I
где \L = k2(mT + mL).
Выше мы кратко указали (см. § 8.04) на принцип метода Де-
лоне. В соответствии с этим принципом Делоне выполнил 497
последовательных канонических замен переменных
[L *)->UU> O->UB> Л-.-.,
448 Ч< IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ Ю.ОЗ
а также сопутствующих замен переменных а, е и \~sin~,
(а, в, у) - (a V^ Л - (а< V W0 - • • •,
называя эти замены операциями. Параллельно производились
преобразования возмущающей функции R, выражающейся не-
посредственно через а, е, у, I, g, h. Для простоты записи все пе-
ременные при этих преобразованиях обозначаются у Делоне
одинаково, т. е. верхние индексы отсутствуют. В процессе вы-
полнения операций переменные а, е, у теряют свой смысл оску-
лирующих большой полуоси, эксцентриситета, синуса половины
наклона орбиты, но все же остаются близкими к ним. Точно так
же получаемые последовательно переменные I, g, h не выра-
жаются через оскулирующие элементы К, л, Q по формулам
D.10.11), но в среднем отражают поведение этих элементов
в соответствии с D.10.11). Связь между переменными а, е, у и
L, G, Н, получаемая в ходе преобразований, становится отлич-
ной от D.10.11). Все формулы Делоне располагает по степе-
ням переменных е, у, отношений а/а', п'/п, а также е', причем п
связано с а формулой
и представляет собой аналог среднего движения Луны.
В конце концов Делоне приходит к таким окончательным пе-
ременным, что соответствующая возмущающая функция R со-
держит лишь малые члены выше шестого или седьмого порядка
относительно е, е', у, -у а/а', п'/п. Полагая ее равной нулю,
Делоне получает уравнения
dL__n dl __ dR0
dt ~~ ' dt~~ dL
где #о — невозмущенная часть гамильтониана (см. 4.3.21), выра-
женная через окончательные переменные. При этом /?о не зави-
сит от угловых переменных /, g, h.
Окончательные уравнения Делоне для I, g, h в явном виде,
если ограничиться членами пятого порядка относительно е, е',
у, п'/п, а/а', следующие:
dl
3265 / п' у 243925 / п' у D.10.12)
128 \п) 2048 \п)
Г 81 Гп'у, 2475 / п' Vh / а \2\
-ЧзгЧт; +-Т28Л-тЛи^) )•
10.03]
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
449
1Г~и 2 Y + 8е" 4 e Д n )
_15
2
351
~~ 16 Y
1995 /л'У
,2 _
297
64
17709 / n'
401
16
_177_
128"
27 ,,2 J89
1б"^ ~ 32
Ю949
32
(
2048 U
D.10.12)
¦ J
Решение этих уравнений вида
1 = ®xt + const,
при постоянных а, е, y> п вместе с выражениями для L, G, Н че-
рез а, е, у, п рассматривается как общее решение исходной за-
дачи, но представленное не исходными переменными, а другими,
связанными с исходными переменными последовательностью
преобразований.
Формулы Делоне для L, G, Н, если ограничиться в них чле-
нами не выше пятого порядка, следующие:
-64(—J +ТбЧ—J }
25
128
225
n J + 64 ^ n J + TF ^J J '
27
675
n' \3
D.10.13)
. 16
Если были бы выведены формулы, непосредственно свя-
зывающие окончательные переменные L, G, . . ., у, выписан-
ные в D.10.12), D.10.13), с первоначальными переменными
L, G у (по Делоне они обозначаются, как мы уже отмечали
15 Под ред. Г. Н. ДуСошииа
450
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 10.01
одинаково), то можно было бы получить решение исходных
уравнений движения в явном виде. Делоне не рассматривает
подобные формулы. Его цель — получить формулы для сфериче-
ских координат Луны: истинной эклиптической долготы V, эк-
липтической широты р и синуса горизонтального параллакса
Луны sin pL-
Формулы, связывающие V, р, s'mpL с элементами орбиты
Луны в невозмущенном движении, т. е. с первоначальными пе-
ременными а, е, у, I, g, h, следующие (коэффициент при sin I
в выражении для V и коэффициент при sin (g -\- I) в выражении
для р выписаны по Делоне полностью, а остальные коэффи-
циенты с точностью до членов четвертого порядка относительно
Y. е):
X 6in (g + I) + Bуе - f- Ye3) sin (g + 21) -
— 2ye sin g + j ye2 sin {g + 3/) —
1 Я
— j ye2 sin {g — /) + у ye3 sin {g + 41) —
— i- Ye3 sin (g-2/) -1 у3 sin Cg + 3/) -
- Y3e sin Cg + 4/) + У3е sin Cg + 21),
j e3 cos 3/ + у e4 cos 4/ } ,
sm pL =
(те2 ~ ж"е4)sin 2/ + IIе3 sin зг
Y V) sin (
!esinBg + /)-
¦^ е4 sin 4/ + (- y2 - Y4 + 4Y V) sin Bg + 2/) +
+ (— 2\'2e) sin Bg -
4~ Y2g2 sin Bg + 4/) — ^ yV sin 2g +
где аг — экваториальный радиус Земли.
D.10.14)
10.03]
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
451
В соответствии со своими 497 операциями Делоне преобра-
зовывает эти выражения и получает формулы зависимости V,
Р от окончательных переменных в следующем виде:
D.10.15)
Р = Z В (а, е, у, я) sin (*,/ + k2g + k3h + q)
и для 1/л аналогичное разложение по косинусам, где q зависит
от угловых элементов орбиты Солнца.
Члены Asinl и В sin(g + /) в этих рядах для V и р назы-
ваются главным эллиптическим членом в долготе и главным
членом в широте соответственно, а их коэффициенты А, В обо-
значаются соответственно через Vi, р*-.
Далее Делоне выполняет еще одну замену переменных а, е,
у, чтобы в новых переменных (обозначаемых снова через а, е
и у)
1) коэффициенты V; и Pf, т. е. коэффициенты при sin/ и
sin (g +1) в рядах для V, р, соответственно имели тот же вид,
что и в формулах D.10.14) невозмущенного движения;
2) сумма I + g + h, определяемая с помощью уравнений
D.10.12), выражалась так же, как в невозмущенном движении
— nt + const, n2 —
k2 (mT
Формулы Делоне такой замены переменных, если ограни-
читься в них наиболее существенными членами, запишутся
в виде
а -> а { 1 - (| - 3Y2 + 4 е2 + е'
т
* -
— (—
_67_ 2 1
rinQ 777
V QR4 ORR V
81_
2595
57
Г—
V255
256
225
341 2
7395 ,
991 2
14865
512 '
- . 1705
991 ,2\ ,
, 224041
32768
'"
}¦
103
22457
2768
где т = п'/п. (Если обозначить новые переменные справа дру-
гими символами и написать вместо —> знак равенства, то мы по-
лучили бы обычные формулы замены переменных.)
15*
452 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 10.03
Сумма I + g + h рассматривается как осредненная средняя
долгота Луны к, а п в выражении для этой суммы как некото-
рое среднее значение среднего углового движения Луны.
Выраженные согласно D.10.12) переменные I, g, h рассмат-
риваются как осредненные значения или вековые части соответ-
ствующих исходных переменных. При этом g, h определяют
осредненные значения л, Я оскулирующих долгот перигея и узла
лунной орбиты
Q = h, л = g+ h,
а I = X — п — осредненная средняя аномалия.
В качестве аргументов синусов и косинусов в окончательных
выражениях для V, р, 1/г Делоне использует переменные I, V
(среднюю аномалию Солнца), D и F, равные
D = k — к', F = l + g = k — Q,
где К'— средняя долгота Солнца. Эти переменные носят назва-
ние основных или фундаментальных аргументов в теории дви-
жения Луны.
Окончательные выражения для V, C и sinjBi. следующие (мы
полностью выписываем коэффициенты главного эллиптического
члена в долготе и главного члена в широте, все члены до треть-
его порядка относительно е, е', у, -\/а/а', пг, а также наиболь-
шие в случае Луны члены 4-, 5- и 6-го порядков):
V = I + [(- Зе' +Ц- у2е') m-Щ^- еЧ ¦ т> +
,B\ , 1233 „ . 14913 о . 2792109 Л1 . .. „. ,
e IT"'" + ^2-'" +-64-m + —2048—"» JJ Sin (/ — I ) +
,/ 21 717 2 3089 3\ . ,, , ,,, .
e \ — -4-m — -33-w2 gj-m3)\ sin(/+/') +
1 e2sin2/ + e2e'I^-wsinB/ - I') - ё*е'~тъЩ21 + I') +
+ [-}| e3] sin 3/ + [- y2 + ~- YW] sin 2F +
+ [- 2Y2e] sinB/;- + /) + [ Y2e (- 3 + ^ m)] sinBf - /) +
75 ,\ , / 11 47 9 , 1101
59 , 64271 Л з , 893 4 . 2855 Л . ОГ1*ч ,
l2 + I02T О "l + -72-m + -mm\sin 2D } +
-г [-^ Л'т + ^ e'm2 + if- e'm3 + ^- e'm4] sin BZ) - /') +
§ 10.03] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 453
+ [е' (- ii т2 - Щ- /и3)] sin BD + I') +
ее' Щ- т2 sin BD + 1 — Г) + е2-^ т2 sin B?> + 20 +
15 с г > , ^263 359
48217 , , 1880537 . , 130463405 Л . .__. ,ч *.
-7бГ еОТ + "92I6- еГП + 221184 - ет\ 51П BD ~ 0 *)
. Г ,/35 . 1801 - . 31589 ,\1 . .._ , „. .
+ [ее ^ /и + -32- т2 + ~ш~ т3)\ sin {2D-1- Г) +
, Г ,С 15 173 , , 50125 з , 29217241 ЛТ . /пп , , ,/ч .
+ [ее' {- т «г - -^ т2 + -^ т* + -jp^-m^J sin BD - I + I') +
. Г 2/45 .53 , . 263089 3 , 7700107 Л1 . /nri ол ,
Че{1?т + -Тт +-3072-m + -18432-'" 4jJs>nBD-20 +
+ [— T" Y2em] sin BD + 2F - I) + ~ e^e'm sin BD - 21 - V) +
(| m --^-m2)]sinBD - 2/0 + -^f- e3^ sin BD - 3/) +
Y2e] sin BD - 2F + 0 +1^- w4 sin 4D
15 93 , 6887 Л a . _
32
, D.10.17)
-| Ye'm sin (F — /') _ A ye'm sin (F + /') + 2Ye sin(f + 0 +
-J Ye2 sin
[_ 2Ye - 5Y3e + ^ ует2] sin (F - t) +
+ [- 4 Ye2 + -^ Ye2»t] sin (F - 2/) - IY3 sin 3F +
+ [-^ Ye2m + ^ y«2 + ¦§¦ Y^3] sin BD + F) - 4Y3e ¦ sin CF - /) +
§
454 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 10.03
+ ^уе'т2sinBD + F- /') + \ yem2sinBD + F + I) f
ОС
-^ vee'/n sin BЛ + F — / — /') +
Ь (т m + tJ m2 + wm3Ksi
)] f - П ~
- j ye'm sin BD - f + /') + j Y^"i sin BD-F + l)
+ [Ve Cm + -^ m2 + ^ m3)] sin BD - F - /) +
+ Щ- ye2m sin BD - F - 21) -
32
-T ym Ifsin(D + F) - X Ym "F"sin (D ~ ^-
| e2- -^- /n2)]cos/- }e'm2cosf
+ ^ee' ¦ m [cos (/ - Г) - cos (I + Г)] + e2 cos 2/ + -| e3 cos 3/ —
-1 Y2e cos BF - /) + [^e»m + ^2 + ^w3 + Щ m4] cos 2D +
+ \ e'm2 cos BD - /') - 1 e'/n2 cos BD f Г) +
187 , , 29513
Щ- ee'm cos BD - I - I') - -J ee'm cos BD - / + /') -
-^-m~cosD}. D.10.19)
Полное выражение для V, выписанное у Делоне [51], содер-
жит 479 гармоник, коэффициенты которых выписаны с точ-
ностью до членов шестого порядка относительно е, е', у, V а/а'
и восьмого-девятого порядка относительно т. Каждая гармо-
ника носит название неравенства, так что V представляется
10.63]
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
455
в виде суммы правильной части X (соответствующей равномер-
ному движению по круговой орбите) и совокупности неравенств.
Неравенства с аргументами 2D, 2D — /, V, D (отмеченные
звездочкой) носят название вариации, эвекции годичного нера-
венства и параллактического неравенства соответственно.
Полные выражения для р и sin pL у Делоне содержат 436 и
100 гармоник соответственно.
Поправки, вводимые в формулы для V, |3, sin pL вследствие
замены возмущающей функции R [см. D.10.10)] ее разложением
вида D.10.09), заключаются в следующем:
1) все члены, соответствующие возмущениям от Солнца (за-
висящие от ш), умножаются на
1 . ГПг + И,
!+¦
т.
ip
2) отношение а/а' заменяется на
a mT-mL
Приведем также грубые формулы для оскулирующих эле-
ментов орбиты Луны а, е, я, i и средней долготы Луны Я, кото-
рые могут быть полезными при приближенном анализе особен-
ностей движения Луны:
а=а0 +-|a0m2cos2D,
е =eQ + -J/n2cosB?>-/) + ^ m2 cos BD +/)+
+ -?me0cos BD - 21) - Ц/n-°4-cos (D - /) -
-im*cos/+ J^-e'cos(D-/-n,
8
= й _ 1 ™L sin BD - /) + 1 — sin BD + /) -
4 6q 4 6q
Q
К =% — |-m2sin2?),
О
D.10.20)
456 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 10.03
где Y = sin у, а в качестве а0, е0, у0, могут быть приняты или
постоянные Делоне, или соответствующие начальные значения
элементов а, е и sin у.
Формулы D.10.17) —D.10.19) и выражения для I, g, h, полу-
чающиеся из D.10.12), дают искомое решение основной проб-
лемы в теории движения Луны в буквенном виде, содержащее
постоянные интегрирования, роль которых играют а, е, у, п, т,
а также начальные значения /, D, F, причем а, п, т связаны
друг с другом, так что независимых постоянных интегрирования
шесть. Это буквенное решение можно использовать при построе-
нии теории движения не только Луны, но и других спутников
планет. Однако при этом надо иметь в виду следующее.
Решение Делоне не дает возможности прогнозировать дви-
жение по начальным значениям оскулирующих элементов ор-
биты или координат небесного тела, так как зависимость по-
стоянных интегрирования Делоне от начальных значений исход-
ных переменных задачи неизвестна. Вместе с тем в случае не-
бесных тел, в частности Луны, движение которых изучалось
длительное время, значения постоянных интегрирования воз-
можно определить по эмпирическим характеристикам движения,
полученным из наблюдений, и построить таким образом кон-
кретную теорию движения этих небесных тел.
Методика определения постоянных а, е, у, п в случае Луны
следующая.
1. Исходными являются эмпирические значения многолет-
него среднего движения Луны п, коэффициента главного эллип-
тического члена в долготе Vi, коэффициента главного члена
в широте Pf, а также постоянного члена (sin/7x,H в представле-
нии синуса параллакса Луны. Эти значения определяются при
анализе данных многолетних наблюдений.
2. При принятых п' (среднее движение Земли), е' (эксцент-
риситет орбиты Земли) вычисляется т = —-, а затем е и у так,
чтобы коэффициенты Vi и Pf в выражениях для V и р (имею-
щие тот же вид, что и для невозмущенного движения) были
равны своим эмпирическим значениям. В силу такого выбора
постоянные е и у могут служить некоторым эквивалентом сред-
него эксцентриситета лунной орбиты и синуса половины сред-
него наклона этой орбиты.
3. Постоянная а определяется так, чтобы свободный член
в формуле для sin pL был равен эмпирическому значению
(sinpLH. Затем вычисляется а/а' при принятом значении синуса
параллакса Солнца, равного ат/аг.
S 10.03] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 457
Такое независимое друг от друга определение п и а противо-
речит, строго говоря, принятому соотношению в теории Делоне
между этими величинами.
Делоне принял в {51] для средней многолетней продолжи-
тельности сидерического месяца PL, сидерического года Рт, для
величин Vi, pF, (sinpLH, для синуса горизонтального парал-
лакса Солнца sin/7o, для эксцентриситета орбиты Земли е' сле-
дующие значения:
/>L = 27d,32I661, Рт = 365d,25637,
yi = 22639,06, pf = 18535,55, е' = 0,01677106,
и получил, считая экваториальный радиус Земли единицей
длины,
m = 0,07480133, е = 0,05489930, Y = 0,04488663,
а = 60,31854, а/а' = 0,00255878.
Выражения для основных аргументов I, D, F Делоне не при-
водит. Их общий вид
/ = щ1 + /0, D = a2t + Dj, F = ш3* + Fq,
где коэффициенты при t вычисляются по правым частям
D.10.12) и формулам D.10.16) с помощью численных значений
е, y> п, fn, я, е', я', а /0> ^Oi ^о — постоянные (начальные значе-
ния), которые определяются по данным наблюдений.
Значения п — coi и п — ы3 равны средним многолетним веко-
вым движениям перигея я* и восходящего узла Q* лунной ор-
биты.
Полные формулы Делоне D.10.12) содержат члены до седь-
мого порядка относительно т. Этого недостаточно для получе-
ния достаточно точных коэффициентов мь а2, ш3 в аргументах
/, D, F ввиду медленной сходимости разложений по т. Ошибка
значения векового движения перигея, определяемого по форму-
лам Делоне, составляет около 300" (в год).
Теория Делоне была усовершенствована для целей практики
Радо и Андуайе A28]. В 1915—1926 гг. вычисления эфемериды
Луны, публиковавшейся во французскОлМ астрономическом еже-
годнике, основывались на этой теории.
В {129] рассматривается вопрос о перестройке теории Делоне
с помощью применения ЭВМ для реализации аналитических вы-
кладок. Излагается методика исследований и некоторые окон-
чательные численные результаты. Сообщается, что получены
буквенные выражения (непосредственно они не приводятся) для
среднего движения по долготе, вековых движений перигея и
458
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 10.04
узла орбиты с точностью до членов 19-го порядка относительно
т, что дает удовлетворительную точность. Ошибка численных
значений последних по сравнению со значениями, получаемыми
по теории Брауна (см. ниже D.10.69)), около 0",27 и 0", 17 в год
соответственно. Высказывается мнение о положительных пер-
спективах построения таким путем точной буквенной теории
движения Луны.
§ 10.04. Основные этапы построения теории Хилла—Брауна
движения Луны
1. Основные результаты и применяемая методика изложены
подробно в {44]—[48]. Исходными являются уравнения движения
Луны в прямоугольной вращающейся системе координат:
#х о„ dy . _ х . 3Q
d-z
дп
дг ' )
где
D.10.21)
возмущающая функция Q равна
<4Л0-22>
Функция R определяется согласно D.10.04). При этом
д2 = S _ 2 _^_ rr' cos a' + f—5—Y r\
mT+mL \mT + mLJ
Г2 =S + 2 -^- rr' cos а'
т' — расстояние от центра масс С до Солнца и а' — угол между
направлениями из С на Солнце и Луну.
Координаты Луны х, у, z отнесены к системе Oxyz с началом
О в центре Земли, вращающейся с угловой скоростью п' вокруг
оси Oz, причем плоскость ху совпадает с плоскостью эклиптики,
ось Oz направлена к северному полюсу эклиптики, ось Ох па-
раллельна направлению из С на среднее положение Солн-
ца. Координаты Солнца х', у', г' отнесены к системе Сх'у'г' с
началом в центре масс С и осями, параллельными осям систе-
мы Oxyz.
10. 04]
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
459
Вместо времени t в качестве аргумента используется пере-
менная |, связанная с t формулой
? = (л-я') (*-*„),
где t0— начальный момент, п — среднее движение Луны по
своей орбите относительно Земли. Между п и оскулирующей
большой полуосью а орбиты Луны имеет место соотношение
а3п2 = [1,
где \и = к2 {тт-\-mL).
Если выделить в Q главную часть
D П.23)
то уравнения D.9.21) примут вид
d\
а гз л дх .
— — JL I dQ
— X г, -г йу .
dz
d2z ] 2 z i ""
rf|2 Т ш* А ,.3 Т Д, •
где й = Q — йо-
Далее вводятся комплексные переменные
Уравнения относительно и, s, z имеют вид
- 2m Ds + |
где rz = us + z2, U7 = 2Й и Z) — оператор:
D.10.24)
D.10.25)
Именно решение этих уравнений непосредственно и строится
в теории Хилла — Брауна.
2. При построении решения уравнений движения исполь-
зуется упрощенное выражение для возмущающей функции Q,
D.П.26)
460
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 10.04
получающееся, если в D.10.10) заменить k2ms на п'~а'~ и все
множители, зависящие от тт, mL при (г/г')а, — на единицу. Вы-
деляемая из этого выражения для Я главная часть QQ остается
такой же, как D.10.23), т. е.
D.10.27)
Эта функция получается из D.10.26), если пренебречь эксцент-
риситетом е' орбиты Солнца и членами порядка {г/г'K и выше.
Тогда D.10.26) переписывается в виде
Qo = mW2 (a) = m2 (| x* - ± г2) =
где й = й2 -f- • • • + ^5. причем
Й2 = т* [{-ff ИР2 (а') - х2 + \ф + j г2
Qft = т2 -~г- (jr)k Pk (cos a') (k = 3, 4, 5).
D.10.28)
D.10.29)
Разложение возмущающей функции W = 2Q в уравнениях
D.10.25), используемое Брауном, имеет вид
D.10.30)
где
W2 = m2 [ j (u
3 9 3
— -2 uz2c3 — ^
16
A
D.10.31)
Ю.04] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 461
5 ,2 . 13 ,t ( I , ] ,з 5
3 ,2 15 ,i , /3 , , 27 ,з 261 ,sy, ...-i
+D *'2+те"
e'3) S + Ee' - 22e'3)
e'2^2 + ^e'V2 + о
Ц-
Г — средняя аномалия Солнца, uk, Си являются комплексно со-
пряженными с ah, Cfe. Поправки, вводимые Брауном в получен-
ные формулы для решения основной проблемы и обусловленные
использованием упрощенного выражения D.10.26) для возму-
щающей функции, такие же, как и в теории Делоне (см.
§ 10.03).
3. Метод решения уравнений D.10.25) заключается в том,
что сначала строится промежуточная орбита, соответствующая
периодическому решению этих уравнений при W = z = 0. Пере-
менные и, s для этой орбиты представляются в виде тригоно-
метрических рядов в комплексной форме с аргументом \, коэф-
фициенты которых в свою очередь представляют ряды по сте-
пеням параметра т.
Методом последовательных приближений ищется далее
общее решение уравнений D.10.25) в виде совокупности членов
различного порядка относительно некоторых параметров е, k, a
462 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ Ю.05
и эксцентриситета е' геоцентрической орбиты Солнца. Пара-
метры е, к, а играют роль постоянных интегрирования, значения
которых близки к постоянным е, у, а/а' теории Делоне соответ-
ственно. Для параметра m фиксируется численное значение,
соответствующее значениям средних движений п, п', определен-
ных по многолетним наблюдениям. Члены любого порядка в вы-
ражениях для переменных и, s, z представляются в виде крат-
ных тригонометрических полиномов в конечной форме по аргу-
ментам Делоне D, I, F, V'.
Осуществляется переход от координат и, s, z к сферическим
координатам г, V, р и находятся тригонометрические ряды для
долготы V, широты р и горизонтального параллакса Луны sin pL.
Определяются численные значения постоянных интегрирова-
ния путем сопоставления полученных аналитических формул
для V, р\ sin pL с данными многолетних наблюдений Луны.
Выписываются окончательные таблицы численных значений
коэффициентов тригонометрических полиномов для V, р, sin pL
и выражения для основных аргументов, что дает решение основ-
ной проблемы. Коэффициенты в полиномах для V и р выписы-
ваются с точностью до 0",001 и для sin pL— с точностью до
0",0001.
Находятся прямые и косвенные возмущения от планет,
а также от формы Земли, Луны. Эти возмущения выражаются
с помощью малых вековых и периодических членов, которые
следует добавить к выражениям для V, р, sin pL, полученным
при решении основной проблемы и к основным аргументам
D, I, F, V.
Для облегчения вычислений эфемериды Луны Браун со-
ставил специальные таблицы (опубликованные в 1919 г.).
С 1952 г. координаты Луны V, р и sin pL вычисляются с по-
мощью ЭВМ по тригонометрическим рядам Брауна для этих ве-
личин. Кроме того, в настоящее время в теорию Брауна внесены
некоторые уточнения (см. [49], [50]).
§ 10.05. Промежуточная орбита в теории Хилла — Брауна
Периодическое решение уравнений D.10.25) при W = z = 0
было найдено Хиллом [43] в виде тригонометрических рядов
' °° v D.10.32)
где а — так называемый масштабный множитель (играющий
роль постоянной интегрирования). Коэффициенты flj суть ряды
по степеням параметра гл.
§ 10.06]
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
463
Хилл нашел коэффициенты а5- при } = 0, ±1 ±6 с точ-
ностью до т9. Выпишем первые семь коэффициентов с точ-
ностью до т6:
ао=1,
25
23
640 Г
833
3
803
1920
299
2400
1
m -
43
14
36 m - 27 Ш'
6109 «
5
7381
210 -З4
m°
7200
3-212
1
D.10.33)
Масштабный множитель а (его еще называют возмущенной
большой полуосью лунной орбиты) связан с гп и с некоторым
средним значением а оскулирующей большой полуоси орбиты
Луны соотношением
2304
288
n5 —
45293
41472
m°
D.10.34)
В свою очередь а связано со средним движением п соотноше-
нием а3п2 = k2(mT + mL).
Прямоугольные координаты х, у выражаются формулами
х = JL±L = а [(flQ + а_,) cos ? + (fl, + а_2) cos 3| +
+ (а2 + а_3) cos 5| + ¦¦¦],
У = JL^- = а [(а0 — fl-i) sin | + (flj — а_2) sin 3| +
+ (а2 — а-з) sin 5? + •¦¦]•
Приближенно имеем
х = a [(l - -{I m2) cos | + A m2 cos 3&],
j/ = a[(l + -]| m2) sin I + -| m2 sin 3g].
D.10.35)
D.10.36)
464
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Г§ 10.05
Последние формулы определяют так называемую вариационную
кривую Хилла на плоскости ху, зависящую от двух произ-
вольных постоянных п, tQ, входящих в выражение аргумента
? = (n — n')(t~ t0). Формулы D.10.32) —D.10.35), определяю-
щие промежуточную орбиту, могут быть использованы в любой
другой спутниковой задаче, если спутник достаточно далек, т. е.
если отношение п'\п мало.
Для постоянных п', п, определяющих аргумент g и пара-
метр т, принимаются их многолетние средние годовые значения
п = 17325594",06085, п' = 1295977",41516 D.10.37
(единица времени — юлианский год). Этим значениям п, п' со-
ответствует значение
т = 0,080848933808312. D.10.38)
При таком m
ао=1,
а, = + 0,00151 5707479563,
а_, = — 869 57469 61540,
а2 = + 58786 55578,
а-2 = + 1637 90186,
а3 = + 300 31632,
а_3 = + 24 60393,
а4 = + 1 75268,
= + 12284,
= + 1107,
= + 64,
= + 7,
= + 0,
-J = 0,99130 42530 38460 cos I +
+ 151 58712 70049 cos 3% +
+ 58811 16971 cos 51 +
+ 300 43916 cos 71 +
+ 1 75332 cos 9? +
+ 1107 cos 11| +
+ 7 cos 13s,
^ = 1,00869 57469 61540 sin I +
EL
+ 151 5543689077 sin 3* +
+ 58761 96185 sin 5g +
+ 300 19348 sin 7? +
+ 175204 sin 9| +
+ 1107 sin 11| +
+ 7sinl3g.
Формула D.10.34) для а переписывается в виде
- = 0,999093141975298
D.10.39)
ИЛИ
«= 1,00090768 а.
§ 10.06] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 465
§ 10.06. Общее решение уравнений основной проблемы
в теории Хилла— Брауна
Общее решение уравнений D.10.25) строится в виде рядов.
Общий член ряда для и представляет собой совокупность чле-
нов вида
a «/'), ep+2pVr+2rV+2Vexpi[Bj +l)D±pl±rl'± qF],
D.10.40)
где {Aprq4 s)/ — постоянный коэффициент, е' — эксцентриситет
орбиты Солнца; числа 2/, р, ..., s' могут принимать значения
2\ = 0, ±1, ±2, ±3 р, q, r, p', q', r\ s' = 0, 1, 2, 3, ...
и а = а/а', е, к — параметры, играющие роль постоянных инте-
грирования и вводимые искусственно (правые части исходных
уравнений D.10.25) их не содержат).
Переменная s является комплексно сопряженной по отноше-
нию к и. Ряд для z отличается от D.10.40) тем, что аргумент
под знаком ехр имеет вид
i{2jD±pl±rl'±qF),
причем q ^ 1. Последнее означает, что выражение для z имеет
общий множитель к.
Сумма степеней параметров е, е', к, а называется порядком,
а сам множитель ер+2р' . .. as' называется характеристикой,
обозначаемой через К.
Совокупности членов в выражениях для и, s, z с характери-
стикой X обозначаются через и-^, s^ и zx соответственно.
Основные аргументы D, I, V, F выражаются формулами
= k — л,
{n- n') (t — t2) = k — Q,
D.10.41)
где постоянные t\, t%, t0 играют роль постоянных интегрирова-
ния, постоянная m та же, что и выше, а постоянные с, g нахо-
дятся как функции параметра m в ходе построения рядов для
и, s,z._
Через Я, it, Q обозначены осредненные, т.е. освобожденные
от периодических возмущений, средняя долгота Луны в орбите,
долгота перигея и долгота восходящего узла лунной орбиты со-
ответственно. Через X' и л' обозначены одноименные долготы,
относящиеся к Солнцу.
466
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[5 10.08
Члены нулевого порядка относительно е, е', к, а в этом
решении для и, s соответствуют промежуточной орбите Хилла.
Браун находит непосредственно члены этих рядов (т. е. чис-
ленные значения коэффициентов {A)j) для |/'|^ 8 и до шестого
порядка относительно е, к, причем е'2 считается эквивалентным
по порядку малости е3, к3, а а считается эквивалентным ег, к2.
Численное значение постоянной m фиксируется. Остальные па-
раметры е, к, а, е' остаются произвольными, т. е. входят бук-
венно, так что решение зависит от шести произвольных по-
стоянных а, к, е, t0, U, U.
Для постоянных с, g получены следующие выражения:
с = с0 + 0,0026857 le2 + 0,03465e'2 + 0,05385595k2 —
- 0,022126а2 + 0,00023е4 + 0,0181е2е'2 +
+ 0,00145e2k2 + 0,1770e'V + 0,07657k4,
g = go-f 0,003186183е2-0,008066255к2+
+ 0,005646535e'J + 0,0111058а2 + 0,00027е4 +
+ 0,0104е2е'2 + 0,00875е2к2 — 0,0090e'V - 0,00883к4,
где с0, go зависят только от m и находятся с помощью спе-
циально разработанного Хиллом метода. Если ограничиться не-
большой точностью, то
, , 3 о 249 , 5163
Cq « 1 + ГП — -j Ш2 32~ m J28"
15
213
D.10.43)
Численные значения с0 и gQ следующие:
со= 1,071583277416012, go= 1,085171426558189.
Постоянные с и g определяют вековые движения перигея и
восходящего узла, так как
Л = Яо + л/, ii = (l-
nt
D.10.44)
Эти вековые движения при с = с0 и g = g0 равны 148524",92 и
—69287",90 соответственно в юлианский год.
§ 10.07]
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
467
§ 10.07. Переход к сферическим координатам
Переход от переменных и, s, z к истинной эклиптической
долготе V, эклиптической широте |} и синусу горизонтального
параллакса sin pL осуществляется с помощью формул
и — s
= -^ = psin(V-n,
—.
D.10.45)
Если
« = "о + «д.. s = s0 + sx,
где Ud s0 соответствуют промежуточной орбите, и через и^, s*,
сокращенно обозначаются совокупности всех остальных членов
в выражениях для и, s с различными характеристиками к, то
D.10.46)
где ат — экваториальный радиус Земли, принимаемый за еди-
ницу,
z z Г u. s. u.s. ~\
1 1 I Л_ 1 Л, 1 Л Л, I
р ро L «о s0 ~т" uoso J
«о
s0
uoso
ро
°0.
D.10.47)
Величины l/ыо. l/s0, 1/ро разлагаются в ряды по степеням па-
раметра т, преобразуемые в тригонометрические ряды того же
вида, что ряды для и0, s0, po-
Постоянная а входит лишь как множитель в выражения для
и, s, z, г, р, р0. Поэтому при построении формул для V и C эта
постоянная сокращается. Она остается лишь в знаменателе об-
щего множителя а-г/а для sin pL. После представления sin pL
в виде ряда D.10.40) свободный член этего ряда равен именно
ат/а.
468 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 10.08
§ 10.08. Численные значения постоянных интегрирования
и параметров в теории Хилла — Брауна
Параметры п, п', т полагаются равными значениям D.10.37)
и D.10.38), полученным по результатам анализа многолетних
наблюдений Луны и Солнца.
Величина аг/а равна постоянному члену (s\npLH в выраже-
нии для синуса параллакса Луны sin pL в виде тригонометриче-
ского ряда. Эта величина также определяется эмпирически по
многолетним наблюдениям.
Постоянные to, U, h или же постоянные члены в выражениях
для основных аргументов D, I, F находятся на основании зна-
чений долготы узла, долготы перигея и средней долготы в ор-
бите, принятых для Луны в начальную эпоху.
Параметр а, равный а/а', непосредственно не требуется. Де^о
в том, что при построении решения задачи была использована
упрощенная возмущающая функция D.10.26). Поэтому для уточ-
нения этого решения следует заменить во всех формулах (см.
§§ 10.03 и 10.04, п. 2) отношение а/а' на величину cti, равную
а т- — т.
что эквивалентно замене а на (а/а)а\. При этом значение отно-
шения а/а принимается равным 0,9990931420 в соответствии
с D.10.39), а значение отношения а/а' находится по формуле
а а
D.10.49)
где аТ/а' и ат/а — принятые значения солнечного параллакса и
постоянной части синуса параллакса Луны. Параметр cti вычис-
ляется затем по формуле D.10.48) в зависимости от принятого
отношения масс mT/mL Земли и Луны.
Чтобы определить значения постоянных е, к, Браун связы-
вает их с параметрами е, у теории Делоне. А именно, он нахо-
дит с помощью формул D.10.46), D.10.47) и рядов для и, s, г
коэффициент Vt главного эллиптического члена в долготе и
коэффициент pF главного члена в широте (т. е. коэффициен-
ты при sin/ и sin F в рядах для У и р соответственно), вы-
раженные буквенно через параметры е, к, а\. Он получает вы-
ражения вида
У2 = 99 972 871е + 0,0145776е3-0,02435ее'-|- ...,
Р/, = 1,99974473k -f 0,991675k3 - 0,250242ке2 + . ¦.
с точностью до членов пятого порядка. Согласно же теории
гл. т. теория движения луны
§ 10.08]
Делоне
Браун приравнивает эти выражения и получает формулы
е = 2,00054273е - 0,3668152е3 + 0,01873ее'2 -
— 2,011602еу2 — 0,0342еа2 + 0,019е5 + 0,35eV2 —
- 0,246е3у2 - 0,56ее'У + 0,91 \еу\
к = 1,00012765у - 0,496091 у3 - 0,499243уе2 -
-0,0037уе'2 + 0,0049уа? - 0,128у5 + 1,07у3е2 -
469
D.10.51)
позволяющие вычислить е, к по заданным значениям е, у, а\, е'.
Браун использовал при построении окончательных формул
три различные системы значений исходных постоянных
Vh $F, aT/a',
o, mTlmL, e'
и соответствующих значений е, у, аи указанных в табл. 50. Там
же приведена система значений (е), использовавшаяся Эккертом
и др. [49], [50] при уточнении теории Брауна.
Таблица 50
Vi
*F
mTlmL
ат/а'
e'
e
У
ai
(Ь)
22639",580
18461,480
3422,700
81,500
8,7800
0,01677191
0,05490056
0,04488716
0,00250532
lei
22639° ,500
18461,350
3422,700
81,530
8,80549
0,01675104
0,0549003678
0,0448868447
0,00251287
№
22639",550
18461,400
3422,540
81,530
8,80549
0,01675104
0,0549004891
0,0448869669
0,00251273
(в)
22639",550
18461,400
3422,452
81,30
8,80549
0,01675104
0,0549004891
0,0448869669
0,002509351
(б)-Браун [46], Г47]. {с), (d)-BpayH [48], (d). («) — Эккерт и др. [49], [50].
Значения постоянных с, g вычисляются по формулам
D.10.51), D.10.42) при заданных е, е', у, а\, а вековые движе-
ния ж, Qt перигея и узла -^ по формулам D.10.44). В случае
470 ч- iv. теория возмущенного движения [$ зо.оэ
системы постоянных (Ь) Браун получил
с =1,0717079217, g = 1,0851953910, |
Л/= 146426",92, Я, = - 69672",04 J DЛ0-52)
(в юлианский год).
Выражения для основных аргументов D, I, /', F и для к сле-
дующие:
D = 350° 44' 23",67 + 16029616",64569f,
/ = 296°6'25",31 + 17179167",14/,
Г = 358° 28' 33",00 + 1295965",7910f,
F=11°15'H",92 + 17395266",10f,
А, = 270°26' П",71 + 17325594",06085^,
D.10.53)
где t отсчитывается в юлианских годах от эпохи 1900,0. Коэффи-
циенты при t в этих формулах для D, I, F равны п — п', п — я(,
п—Qt соответственно.
§ 10.09. Окончательные выражения для долготы V,
широты р и синуса параллакса sin pL, соответствующие
решению основной проблемы
Для переменных и, s, г и, таким образом, для прямоуголь-
ных координат л:, у, z имеются выражения в виде рядов D.10.40)
с коэффициентами, выраженными буквенно через параметры
е, к, е', ось Исходя из формул D.10.51) и D.10.46), можно было
бы с помощью операций над рядами вывести формулы, пред-
ставляющие V, р и sin pL в виде аналогичных рядов
V = к + Z ck sin т^, P = Zcftsinij3b sinpL = ?cftCosij)b
D.10.54)
где фи — различные комбинации четырех основных аргумен-
тов D, I, /', F, a cft — коэффициенты, выраженные буквенно че-
рез параметры е, е', у, ось Однако такие операции с рядами,
имеющими сложные буквенные коэффициенты (полиномы по
степеням параметров), вполне доступные при использовании
больших электронно-вычислительных машин, необозримо тру-
доемки при ручных выкладках. Поэтому Браун выполняет пре-
образования, задаваясь с самого начала численными значениями
параметров е, е', у, ai и оперируя, таким образом, с рядами,
имеющими численные коэффициенты. Почти не приводя выкла-
док (колоссальных и при таком упрощении), Браун получает
ряды D.10.54) с численными коэффициентами ск. Значения
последних, в секундах и их долях, соответствующие различ-
§ I0.09J
ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
471
Таблица 51
Долгота V
Характе-
ристика
1
е
е
а.
е2
ее'
е'2
Уг
Кратности
аргументов
к, кг ft3 к,
0
1
0
0
2
1
1
1
0
0
00 6
4
2
00 6
4
2
0
—2
-4
-6
1 0 4
2
0
—2
—4
—6
00 3
1
00 4
2
0
-2
—4
-6
10 4
2
10 0
—2
-4
-6
— 10 4
2
0
-2
— 4
—6
20 2
0
п
02 4
2
0
-2
—4
A) —вариация, B) —
неравенство.
+ 0",127
+ 13,902@
+ 2369,902
+ , 23
+ 1,919
+ 191,953
+22639,500
- 4586,426(я
- 38,428
— ,393
- ,289
- 24,420
- 668,111C>
— 165,145
- 1,877
- ,024
+ ,403
- 125,154!4)
+ ,213
+ 14,387
+ 769,016
- 211,656
- 30,773
— ,570
- ,051
- 2,921
- 109,667
- 205,962
- 4,391
— ,072
+ ,283
+ 14,577
+ 147,693
+ 28,475
+ ,636
+ ,011
- ,189
— 7,486
- 8,096
1 С1
— ,151
- ,085
- 5,741
- 411,608
- 55,173
+ ,025
Характе-
ристика
ео, \
е о,\
е3
eV
ее'2
е'3
еу2
к,
1
0
3
2
2
1
1
0
1
1
Кратно 1-ти
аргументоз
ft; is *4
0
1
0
1
_]
2
— 2
3
0
0
эрекция, C) —годичное иеразенстпо
0 1
-1
-3
-5
0 3
1
— I
—3
0 4
2
0
-2
—4
-6
0 2
0
-4
—6
0 4
2
0
-2
-4
-6
0 2
0
—2
—4
0 4
2
0
—2
-4
0 0
-2
—4
2 4
2
0
-2
-4
-2 4
2
0
-2
—4
°к
— 8,466
+ 18,609
+ 3,215
+ ,014
+ ,150
+ 18,023
— ,0оо
+ ,021
+ 1,060
+36,124
-13,193
- 1,187
- ,293
- ,290
- 8,627 _
— 2,740
- ,091
+ ,033
+ 1,181
+ 9,703
— 2,494
+ ,360
+ ,014
- ,014
- 1,167
- 7,412
- 311
+ ,024
+ ,757
+ 2,580
+ 2,533
+ ,022
- ,103
- ,344
— ,010
- ,018
— ,992
-45,099
- ,179
- ,301
- ,067
- 6,382
+39,532
+ 9,366
+ ,202
D) —параллактическое
472
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ Ю.ОЭ
Продолжение табл. 51
Характе-
ристика
eV
e2ai
ee'a]
e'2a,
Y2«i
e1
e3e'
eV2
ее'3
eri
eV
0
0
2
1
1
0
0
4
3
3
2
2
1
1
0
2
Кратности
аргументе
fti ftj fti
1
2 2
0
—2
1 -2 2
0
1
-1
2
0
0
1
]
2
-2
3
-3
4
1
0
—2
— 4
0 1
-1
-3
-5
0 3
1
-1
-3
0 1
-1
-3
0 1
— 1
2 1
-1
—3
0 2
0
—2
—6
0 2
0
—2
-4
-6
0 2
0
—2
—4
0 0
-2
—4
0 2
0
—2
—4
0 0
—2
-4
0 2
0
0-2
0 0
+ ,066
+ ,415
-2,152
— 1,440
+ ,076
+ ,384
+ ,011
- ,586
+1,750
+ 1,225
+ ,059
+ ,023
+ 1,267
+ ,137
+ ,233
— ,122
-1,089
- ,276
— ,039
— ,042
+ ,255
+ ,584
+ ,254
+ ,070
+ 1,938
+ ,952
— ,014
— ,025
- ,551
— ,482
— ,100
— ,039
+ ,088
+ ,681
— ,183
— ,029
— ,067
- ,297
— ,161
+ ,062
+ ,197
+ ,254
+ ,036
- ,018
- ,250
- ,016
+ ,032
+ ,051
- ,013
—7,649
Характе-
ристика
eV
ее'?2
e'Y
V1
e3ai
e2e'ai
ee'2a,
eY2a,
e'v2ai
e5
2
2
2
1
1
1
1
0
0
0
3
2
2
1
1
1
0
5
Кратно:ти
аргументов
k2 k$ k\
0
0
0
1
1
-1
-1
2
2
0
0
1
-1
2
0
0
1
0
2 2
0
-2
-2 4
2
0
-2-2
-4
2 2
0
-2
-4
-2 2
0
-2
—4
2 2
0
-4
-2 2
0
2
2-2
-2 2
—2
4 2
0
2
0 1
-1
-3
-5
0 1
-3
0 1
-1
Q
0-3
2 1
-1
-3
-2 3
1
-1
-3
2 1
-1
-3
0 0
-2
- ,123
-3,996
+ ,557
- ,459
- ,459
-1,298
+ ,538
+ ,173
+ ,012
+ ,263
+ ,059
- ,024
+ ,083
- ,083
+ ,426
+ ,019
— ,064
— ,304
+ ,018
— ,372
+ ,083
— ,065
— ,066
- ,025
+ ,016
+ ,014
+ ,418
+ ,074
— ,042
+ ,130
+ ,045
+ ,016
+ ,092
+ ,084
— ,014
— ,352
+ ,042
+ ,012
+ ,045
+ ,024
+ ,030
— ,010
- ,041
— ,016
- ,011
- ,035
+ ,013
+ ,020
+ ,H3
— ,069
10.09]
гл. ю. Теория движения луны
4?3
Продолжение табл. 51
Характе-
ристика
е'е'
е3е'2
eV3
e3v2
e3v2
e2e'y-
eV
к
4
3
3
2
3
3
3
2
2
4
Кратности
аргументов
ft2 ftj ft.
1
2
—2
3
0
0
0
1
1
-1
0 0
— 2
0-2
0 0
— 2
0—2
2 2
0
2-2
-2 2
0
2 0
-2
-2 0
0 0
— 2
-,040
—,030
-,016
+,016
+ .011
-,010
—,011
-,330
+,092
-,033
—,055
+ ,043
+,028
+,026
+,048
—,019
Характе-
ристика
e-e'y2
ee'V
ey*
e^ct|
ее ct i
ely-
е-у
Кратности
аргументоз
ft, ft, fts ft,
2-1
2-1
1 2
1 -2
1 0
1 0
4 0
3-1
4 0
2 0
—2
4
2 0
-2 2
0
-2—2
—2 2
4 0
-4 0
О
0-1
0-1
2 0
—2
4 0
+.022
+.016
-.053
-.029
—.024
+,015
-,016
+.090
-,080
—,019
+.010
—.023
—,025
+.010
+.011
Таблица 52
Широта E
Характе-
ристика
Y
ye
ye'
Кратности
аргументоз
fti kt ft3 ft.
0 016
4
2
0
—2
—4
— 6
1014
2
0
—2
— 4
—6
-1016
4
2
0
—2
—4
0 114
2
0
n
-4
0-1 1 4
cft
+ 0",015
+ 1,192
+ 117,262
+ 18161,480
— 623,658
- 3,675
- ,037
+ ,213
+ 15,122
+ 1010,180
- 166,577
— 6,580
- ,095
+ ,042
+ 3,000
+ 199,485
- 999,695
— 33,359
- ,475
- ,024
— 1,269
- 6,492
— 29,689
- ,418
+ ,154
Характе-
ристика
ye'
Yai
Y3
ye-
Кратно.ти
аргументоз
ft, k, fts ft,
2
0
—2
—4
0 013
1
-1
-3
0 03 2
0
—2
—4
2 014
2
0
— 2
—4
-6
—2 01 6
4
2
0
—2
-4
+ 8,001
+ 4,863
+ 12,140
+ ,113
— ,029
- 5,357
+ 4,795
+ ,350
- ,143
- 6,299
- 2,185
— ,063
+ ,028
+ 1,523
+61,913
-15,565
— ,635
- ,081
+ ,060
+ 2,413
- 1,624
—31,763
— 2,14b
- ,048
4 74
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Продолжение табл. 52
Характе-
ристика
уее'
ye'2
vpn.
Iе 1
ve'Qi
у1- wi
y3e
Кратности
аргументе!
ft, ftj ftj «!4
1112
0
—2
—4
-6
-1-11 4
2
0
-2
—4
1-11 4
2
0
-2
—4
-1114
2
0
— 2
-4
0 212
о
-2
—4
0—2 1 4
2
0
—2
1011
— 1
—3
—5
-1013
1
— 1
—3
0 113
1
-1
— 3
0-1 1 1
—1
-3
103 2
0
-2
-1 03 2
0
—2
- ,239
-5,331
-7,463
— ,600
- ,015
+ ,341
+8,902
+5,096
+ ,826
+ ,017
+ ,030
+ 1,141
+6,756
+ ,795
+ ,171
- ,051
— 1,323
-5,655
-1.773
— ,058
- ,016
- ,056
-1,096
- ,029
+ ,013
+ ,387
+ ,019
+ ,136
- ,666
+ ,429
+ ,306
+ ,012
— ,208
+ .139
+ ,591
+ ,035
+ ,014
+ ,804
+ ,013
+ ,026
- ,018
— ,806
- ,034
- ,031
-1,021
- ,329
— ,244
-2,814
+ ,292
Характе-
ристика
Yv
ye3
yeV
yee'2
ye'3
I
Y3<Zi
\e-a.
Кратности
аргументов
&i кг к3 ftt
0 13 0
—2
0-13-2
3 01 2
0
— 2
-3 016
4
2
0
— 2
2 112
0
-2
— 4
-6
2-11 4
2
0
-2
2-1 1 2
0
— 2
-2114
2
0
—2
1 21 0
—2
-4
-1-2 1 4
2
0
1-2 1 2
0
n
-1212
0
—2
0 3 1-2
0-3 1 2
0 03-1
-3
2 011
— 1
—3
—2 0 1 3
1
-1
cft
+ ,011
— ,093
+ ,056
+ ,139
+3,984
-1,516
+ ,031
+ ,021
+ ,255
-1,585
- ,147
— ,027
— ,644
- ,657
- ,053
- ,011
+ ,217
— ,063
+ ,314
+ ,063
+ ,114
+ ,809
— ,084
— ,029
+ ,056
— ,303
— ,129
- ,055
— ,272
- ,031
+ ,0^2
+ ,319
+ ,062
+ ,054
+ ,117
+ ,107
- ,115
- ,096
— ,069
— ,037
+ ,014
+ ,032
+ ,010
— ,065
+ ,112
+ ,039
- ,049
— ,078
+ ,036
10.09]
ГЛ. !0. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ
475
Продолжение табл. 52
Характе-
ристика
уее'а>
yV
у3ее'
ye1
Кратности
аргумента!
к\ ft, fh к^
1111
-1
-3
-1-11 3
-1
1-11-3
-1113
1
-1
2 03 0
—2
-2 03 2
0
—2
1 13—2
-1-13 2
-1 13-2
4 012
0
— 2
— 4 012
0
—2
ск
+ ,101
-,011
+,021
-,013
-.031
-,013
+ .022
-,056
+ ,020
-,116
— ,022
—,066
+ ,130
+,010
—,011
-,011
+ .017
+,011
+,266
-,135
+,025
-.091
-.010
Характе-
ристика
уеъе'
уеЧ'2
Ye3<Xi
YeVci!
Y3e3
¦ye5
Кратности
аргумещО!
й| к™ кз «t
3 110
— 2
-3-11 2
0
3-1 I 2
0
3-11-2
-3110
—2
2 2 1-2
-2-2 1 4
2-2 1 0
— 2
3 0 1—1
2 111
2-1 1 -1
—2 11 1
3 03 0
5 010
-2
-,063
-,056
+ .010
+ .024
+,011
+ ,076
—,019
-.024
-,010
-,023
+.013
+ .016
+,013
+,013
+,010
-.016
+ ,017
— ,014
+,018
—,012
Таблица 53
Синус параллакса
Характе-
ристика
1
e
e'
Ol
ft,
0
1
0
0
Кратности
аргумеитоз
ft: ft: ft«
0
0
1
0
0 6
4
2
0
0' 4
2
0
—2
— 4
—6
0 4
2
0
-2
— 4
0 3
1
+ 0",0032
+ ,2607
+ 28,2333
+ 3422,7000
+ ,0433
+ 3,0861
+ 186,5398
+ 34,3117
+ ,6008
+ ,0086
— ,0053
— ,3000
- ,3997
+ 1,9178
+ ,0339
+ ,0023
— ,9781
Характе
ристика
e2
ее'
к
2
1
1
Кратности
аргументов
ft, ft, kt
0 0 4
2
0
2
— 4
—6
1 0 4
2
0
—2
—4
—6
— 10 4
2
0
-2
— 4
+ ,0054
+ ,2833
+ 10,1657
— ,3039
+ ,3722
+ ,0109
— ,0012
— ,0484
— ,9490
+ 1,4437
+ ,0673
+ ,0015
+ ,0060
+ ,2302
+ 1,1528
- ,2257
— ,0102
476
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[§ 10.09
Продолжение табл. 53
Характе-
ристика
е'2
У1
еа.
e'ai
е3
eV
ее'*
е'3
еу2
eV
0
0
1
0
3
2
2
1
1
0
1
1
2
Кратности
аргументов
к, к, к,
2
0
0
1
0
1
— 1
2
-2
3
0
0
1
0 2
0
2
—4
2 0
—2
— 4
0 1
-1
—3
0 3
1
-1
0 2
0
—2
—4
-6
0 2
0
—4
— 6
0 2
0
-2
— 4
0 0
—2
— 4
0 2
0
—2
0—2
2 0
—2
—4
-2 2
0
0-2
ск
-,0028
-,0086
+,0918
+,0028
-,0124
-,1052
+.0031
-.1093
+.0118
—,0386
+.0027
+,1494
-,0037
+,0243
+,6215
-,1187
+,0074
+,0046
-,0051
-,1038
+.0324
+ .0017
+ ,0213
+,1268
—.0017
-,0043
— ,0106
+,0484
+ .0044
+,0112
+,0196
-,0212
+ ,0036
-,0010
-,0833
+,0014
-,0481
-,7136
+0,192
Характе-
ристика
е'у2
e2cii
ee'ai
e*
eV
eV2
ее'3
e2y2
I
eeV
e3ai
eVcii
*i
0
0
2
1
1
0
4
4
3
3
2
2
1
2
2
1
1
1
3
2
2
1
5
Кратности
аргументов
k2 ft3 A,
1
1
0
1
-1
0
0
0
1
J
2
-2
3
0
0
I
1
— 1
0
1
-1
0
0
2 0
-2
-2 2
0
0 1
-1
-3
0 1
-3
0 1
-3
2-1
-3
0 2
0 0
-2
0 0
-2
0 2
0
n
0-4
0 2
0
0-2
2-2
-2 2
2
2—2
-2 0
-2 2
0
0-1
0 1
0-1
2-1
0 0
-2
+ ,0013
-,0066
+ ,0014
+ ,0017
-,0100
+,0155
—,0088
+,0164
—,0025
—,0014
+ ,0036
+,0071
-,0017
+ ,0018
+ ,0401
—,0130
—,0097
-,0045
+,0017
+.0115
-,0017
+,0020
+,0013
+,0024
+ ,0014
—.0090
— ,0053
-,0141
-,0032
+ ,0024
-.0027
-,0029
+ ,0017
+,0015
-,0028
+,0010
+,0026
-,0012
ным \|3fe, собраны в таблицах (см. [47], [48]), где они выписаны
с точностью до 0",001 для V, р и с точностью до 0",ООШдля
sinpL. Всего эти таблицы содержат 312, 349 и 185 коэффициен-
тов сй соответственно. Браун указывает в таблицах также глав-
ную характеристику каждого коэффициента ch, т. е. множители
из параметров е, е', у, а\ младшего порядка, который бы присут-
ствовал в буквенном выражении для ch через эти параметры.
Приведем эти таблицы в сокращенном виде, ограничиваясь
коэффициентами с*, равными или превышающими по абсолют-
§ 10.101 ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 477
ной величине 0",01 в случае долготы (табл. 51), а также широты
(табл. 52) и 0",001 в случае синуса параллакса Луны (табл. 53).
Подразумевается, что выражение для \|зй имеет вид
Ч>» - k,l + kj' + k3F + k,D.
В соответствующих столбцах таблиц выписаны кратности аргу-
ментов k\, k2, kit /г* со знаком плюс или минус. При этом повто-
ряющиеся кратности k\, k2, k3 опускаются. Например, в первых
трех строках табл. 51 имеем k\ = k2 = k3 = 0, но непосред-
ственно выписаны эти значения лишь в первой строке. Повто-
ряющиеся характеристики также опускаются.
Табл. 51—53 вместе с формулами D.10.53) для основных
аргументов представляют собой окончательный результат Бра-
уна, полученный им при решении основной проблемы в теории
движения Луны. При этом долготы F, к и сферические коорди-
наты V, р измеряются в координатной системе, определяемой
неизменными эклиптикой и средней точкой весеннего равноден-
ствия эпохи 1900,0. (В условиях основной проблемы эклиптика
не меняет своего положения в пространстве.)
§ 10.10. Возмущения Луны, обусловленные притяжением
планет, фигурами Земли и Луны
Таблицы для V, р, sin pL, приведенные в предыдущем пара-
графе, учитывают возмущения Луны от Солнца в рамках основ-
ной проблемы. Но, кроме того, в теории Брауна находятся
также возмущения (см. [47]) в координатах V, р и в синусе
параллакса, обусловленные:
1) прямым действием планет на Луну,
2) косвенным действием планет (т. е. отклонениями в дви-
жении Солнца от эллиптической орбиты вокруг центра масс си-
стемы «Земля — Луна» вследствие действия планет на Землю),
3) фигурой Земли,
4) фигурой Луны.
Найденные возмущения выражаются:
а) тригонометрическими членами, добавляемыми непосред-
ственно к V, р, sin pL [совокупности этих членов обозначаются
через 6V, бр, б (sin pL)];
б) вековыми и тригонометрическими членами, добавляемыми
к основным аргументам D, I, I', F, а также к параметрам е', у.
Численные значения соответствующих коэффициентов нахо-
дятся на основании известных данных о движении планет и
о форме Земли и Луны.
478 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ Г§ 10.10
Если ограничиться наиболее существенными членами, то 67,
бр, б (sin pi,) представляются с помощью следующих формул:
б7 = 0",8225ш(Г-У,) +
+ 0",307 sin BГ - 2V, + 179°,8) + 0",348 sin (ЗГ - 27, + 272°,9) +
+O"I176sinDr-3V1+271°,7)+O",136sinB0+2r-2VI + 179°,5)+
+ 0", 129 sin (I - Т + V, + 180°,0) + 0", 152 sin [I + Т - 7,) +
+ 0", 127 sin (/ + ЗГ - ЗУ, + 180°,0) +
+ 0",658 sin BD-1-3T + 37, + 180°,0) +
+ 0", 137sinBD-1-2T + 27,) + 0",133sin BD - / + Г - V,) +
+ 0", 157 sin BD - I + 2Т - 27, + 179°,6) +
+ 0", 195 sin BM - 2Г + 180°,2) +
+ 0",327 sin BM - Т + 224°,4) + 0",643 sin (/ - Г + 178в,8) +
+ 0", 187 sin B/ - 2Т + 359°,6) + 0", 165 sin B1 - Т + 241°,5) +
+ 0", 167 sin BD + 7 - Т + 178°,5) + ОМ 44 sin (/ - 7 + Т + 1°,0)+
+ ОМ 58 sin (Л-7-Г+179°,0) + 0", 190 sin (/ + 27 - 2Г + 180°,0) +
+ 1М37 sin BD - / - 27 + 2Г + 180°,3) +
+ 0",211 sin BD - I + / - Т + 178е,4) +
+ 0",436 sin BD - / - 37 + 2Г + 7°,5) +
+ 0",240 sin B/ - 2D + 27 - 27 + 179°,9) +
+ 0",284 sin {21 — 2D + 37 - 2Г + 172°,5),
бр = 0",068 sin (- F + 2D - 6Г + 57, + 270°,0) +
+ 0",077 sin (Я + 5Г - 37, + 215°,6) +
+ 0,074 sin (Я - 5Г + 37, + 51°,6) + 0",083 sin (F + 2ft). D.10.55)
б (sin pL) = О^.ООЭб cos BD - / - 2/ + 2Г + 180°,3) +
+ 0",0055 соэ BD-1-3T + 37, + 180°,0) +
+ 0",0036cosBD - /- 3/ + 2Т + 7°,5). D.10.56)
Полные формулы для 67, бр, 6(sinpi,) содержат 414, 117 и
67 членов соответственно. В этих формулах через Т(=Х' + 180°),
7i, M, I обозначены средние эклиптические долготы Земли, Ве-
неры, Марса и Юпитера соответственно.
§ Ю.10] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 479
Для них, а также для основных аргументов и Я, Q, я полу-
чены с учетом рассматриваемых возмущений выражения
D = 350° 44' 23",67 + 16029616",3793 f+6",05 ^+0",0068 t\+bD,
/'= 358° 28'33",00 + 1295965",7910/-0",54^_0",0120^+бГ,
F= 11° 15' 11",92+ 17395273",1729f-0",34^-0",0012^+6F,
I = 270° 26' 11",71 + 17325644",0606 t + 7",H ^+0",0068 ^+6Я.
Г = 99°41'48",04+ 1296027",68Ш + Г'.ОЭО^ + бГ,
7, = 342° 46' 1",39 + 2106691",62881,
M = 293°44'51", 36 + 689101", 1762f,
/ = 238° 3' 0",88 + 109306",9152 + 6/,
Q = 259° 10' 59",79 - 69629", 11231 + 7",48 ^ + 0",0081\ + &Q,
n = 334° 19' 46",40 + 146485",2252^- 37", 171\ - 0",0451\ + 6л,
D.10.57)
где
причем t отсчитывается в юлианских годах от эпохи 1900,0,
a tc — в юлианских столетиях от той же эпохи, и (если огра-
ничиться наиболее существенными членами)
6A,= 14",27sin(Z+ 167'-1871-1о,0(^- 18,5) + 151°, 1)+
+ 7",261sinQ +
+ 0",84 sin [20°,2 (/с - 18,5) + 4Г,1] +
+ 0",31 sin [/ + 37- - 107, - 2°,6 (/с - 18,5) + 33°] +
+ 0",282 sin [Q - 2°,3 (tc - 18,5) + 276°,2] +
+ 0",237 sin A37- - 87, + 313°,9) +
+ 0", 108 sin {/ + 29Г — 267i + 112°,0) +
+ 0", 126 sin {2D - / + 2171 - 207,. + 273°,0), D.10.59)
бп = - 2",076 sin Q -
- 2",10 sin [20°,2 (tc - 18,5) + 4Г,1] -
- ОМ 18 sin (/ + 167- - 187, - 1°,0 {tc - 18,5) + 151е, 1) -
- 0", 10 sin [119°,0 (*с - 18,5) + 152°] -
- 0",840 sin [Q - 2°,3 (fc - 18,5) + 276°,2] -
-0",593sinA3r-87, + 313o,9), D.10.60)
480 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ Ю.10
6Й = 95",96 sin Q + 15",58 sin (Q - 2°,3 (fc - 18,5) + 276°,2) +
+ 1",86 sin (Q — 0э,9 (/с- 18,5) +290°, 1), D.10.61)
&к' = — 1",89 sin A3Г - 87, + 313°,9) -
- 6",40 sin [20*,2 (<с - 18,5) + 4Г.1], D.10.62)
6/ = 0°,33 sin [38°,51 {tc - 18,5) + 115°]. D.10.63)
Основные возмущения параметров у и е' следующие:
6Y = — 4",318 cos Q — 0",698 cos [Q — 2°,3 (/с — 18,5) + 276°,2],
е' = - 0,00004180 fe.
D.10.64)
При выводе указанных формул для D, I, F, к, /' Брауном
приняты уточненные значения средних движений п и п'\
п== 17325593",8031, п'= 1295977",4238
(в юлианский год).
Если пренебречь в D.10.57) периодическими возмущениями
6D, 61, ..., бя, то получим средние значения соответствующих
углов D, I, ..., я. При вычислениях бХ, бя, 6Q, ... по формулам
D.10.59) — D.10.64) подставляют в правые части этих формул
именно средние значения углов D, /,..., я.
Учет планетных возмущений Луны состоит также в том, что
координаты Луны V, р относятся к мгновенной эклиптике, ко-
торая изменяет свое положение вследствие действия планет на
Землю. Поэтому все долготы к, п, л, а также Т, Vi, M, I
в D.10.57) выражены с учетом изменений за счет прецессии.
Формулы D.10.54) и таблицы 51, 52, если использовать для
основных аргументов и к выражения из D.10.57) вместо D.10.53),
определяют координаты V, |3 в указанной системе отсчета.
Изменение эклиптической долготы за счет прецессии состав-
ляет 50",2575? .-\-\",llt2c за юлианский год. Соответствующие
изменения долгот к, F и др. определяются в соответствии с из-
ложенным в ч. I, гл. 2.
В выражениях для к, я, й, а следовательно, и для F, D, I
учтены вековые ускорения, т. е. члены, пропорциональные t2, об-
условленные вековым изменением эксцентриситета е' орбиты
Земли. Для них Браун получил в [47] следующие величины:
Ьк = 5",8^, вл = — 38",3^, 6Q = 6",5^.
Окончательные значения вековых движений перигея и узла
лунной орбиты (не зависящих от прецессии) равны по Брауну
[47]
nt = 146435",21, Q* = — 69679",36 (в юлианский год).
§ 10.11] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 481
При этом основная доля изменений по сравнению со значениями
D.10.52) приходится на прямое действие планет B",69 для пе-
ригея и —Г',42 для узла) и влияние фигуры Земли F",41 для
перигея и —6",00 для узла).
В выражение для средней долготы Я Браун вводит дополни-
тельно так называемый эмпирический член, равный
ДЯ = 10",71 sin[140°,0(fc- 18°,5) + 170°,7]. D.10.65)
Он не вытекает из каких-либо гравитационных возмущений
Луны, и Браун его подобрал эмпирическим путем так, чтобы
таблицы движения Луны, составленные на основании всех по-
лученных формул при дополнительном учете D.10.65), представ-
ляли наблюденные положения Луны с точностью 0",1 между
1720 и 1930 гг. и с точностью 0",6 между 1625 и 1720 гг.
§ 10.11. Уточнение теории движения Луны Хилла—Брауна
Уточнения теории Хилла — Брауна, указанные в [49], сво-
дятся к следующему.
1. Эмпирический член исключен и заменен поправкой к сред-
ней долготе
ДА = - 8",72 — 26",75 tc — 11",22 Рс, D.10.66)
соответствующей переходу к эфемеридному времени (см. ч. I,
гл. 3). Эта поправка вносится в выражения для Я и основных
аргументов D, I, F.
2. При построении таблиц коэффициентов тригонометриче-
ских рядов для V, р, sinpz, используется только система (d)
табл. 50 численных значений параметров. Эти таблицы пере-
вычислены заново. Поправки к коэффициентам Брауна незна-
чительные (не более нескольких сотых долей секунды для V, |J
и нескольких тысячных — для sin pL).
3. Вычисление эфемерид производится не по таблицам Бра-
уна, а непосредственно с помощью тригонометрических рядов
Брауна для координат. Это позволило увеличить точность эфе-
мерид до 0а,001 по а и до 0",01 по 6.
Рекомендация к вычислению эфемериды Луны с учетом этих
уточнений принята на VIII съезде MAC в 1952 г. Эфемерида
Луны, вычисленная таким путем, приводится с 1960 г. в астро-
номических ежегодниках, а на 1952—1954 гг. дана в [43].
В работе [50] рассматривается вопрос о существенной пере-
стройке теории Хилла — Брауна.
1. Заново выполняется переход от возмущений в прямо-
угольных координатах к выражениям для сферических коорди-
яат (с помощью вычислений на ЭВМ). При этом обнаружены
•расхождения с результатами Брауна,
16 Под ред. Г, Н. Дубошина
482 ч IV- теория возмущенного движения [§ ю.п
2. Используются новые значения параметров (значения (е)
табл. 50), соответствующие системе фундаментальных астроно-
мических постоянных, принятой на XII Генеральной ассамблее
MAC в Гамбурге в 1964 г., и современным наблюдательным
данным. Исправленные значения т, п, п' равны соответственно
п = 17325593,5356 - 10",38fc, f
ri = 1295977",4238 - 0",04 ta > D.10.67)
т =0,08084893679. J
3. Даны таблицы поправок к соответствующим коэффициен-
там в выражениях для V, sin pL, приведенных Брауном и в [49].
Поправки даны с точностью 0",0001 в случае V и 0",00001 в слу-
чае sin р^. Приведена исправленная таблица коэффициентов
выражения для 0 и указаны поправки по сравнению с табли-
цей Брауна [46]. Коэффициенты даны с точностью до 0",0001.
Для средних значений основных аргументов D, I, F и для А
приняты формулы:
D = 350° 44' 14",95 + 1602961611", 18 Т — 5",17 Т2 + 0",0068 Т3,
1 = 296° 06' 16.",59 + 1717915856",79 Г+33",09 Т2 + 0",0518 Т3,
F= M°15'03'!f120 + 1739527290",54Г- 11",56 Г2 —0",0012 Г3,
К = 270° 26' 02",99 + 1732564379",31 Г — 4",08 Т2 + 0",0068 Т3,
D.10.68)
где время Т измеряется в юлианских столетиях по 36 525 эфе-
меридных суток от фундаментальной эпохи 1900, январь 0, 12 ЕТ.
Формулы для средних значений Q, я, /', на которые переход
к эфемеридному времени не влияет, оставлены без изменений
по сравнению с теми, которые получаются непосредственно из
выписанных в D.10.57), если пренебречь 6Я, бя, б/' и заменить t
и t0 на 100 ГиГ соответственно. .
Коэффициенты при Т в выражениях для Л, /, F (точнее, про-
изводные по Т) определяют продолжительность синодического,
аномалистического и драконического месяцев соответственно
(см. ч. I, гл. 3), в течение которых Я, / и F изменяются на 360°.
Через эти промежутки времени «средняя» Луна — без учета ее
периодических возмущений — возвращается в среднюю точку
весеннего равноденствия, в перигей своей орбиты и в восходя-
щий узел своей орбиты на эклиптике соответственно.
Продолжительность сидерического месяца определяется при-
нйтым значением среднего движения п (см. D.10.67)).
Уточненные по сравнению с D.10.52) значения вековых дви-
жений перигея и восходящего узла лунной орбиты в основной
§ 1'0.П] ГЛ. 10. ТЕОРИЯ ДВИЖЕНИЯ ЛУНЫ 483
проблеме движения Луны следующие:
л, = 146426",97490, Q, = - 69672",03245. D.10.69)
Сравнение теории движения Луны, полученной после веек
уточнений, с наблюдательными данными, а также с результа-
тами численного интегрирования показывает [49], [50], что с при-
нятой точностью эта теория учитывает все гравитационные эф-
фекты. Расхождения между эфемеридой Луны, вычисляемой на
основании такой теории, и точными наблюдениями служат сей-
час для определения разности между всемирным и эфемерид-
ным временем (см. ч. I, § 3.05).
Глава 11
ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ
Первая теория движения Юпитера и Сатурна, основанная на
вычислении возмущений по дифференциальным уравнениям дви-
жения, принадлежит Эйлеру A748).
Фундаментальные теории движения всех больших планет
(кроме Плутона), мало уступающие по точности современным
теориям, были созданы Леверье [52].
Леверье опирался на дифференциальные уравнения вида
D.3.15) для оскулирующих элементов. С помощью метода по-
следовательных приближений он получил решение уравнений
с точностью до членов второго и частично третьего порядков от-
носительно возмущающих масс. Сначала он построил формулы
для возмущений оскулирующих элементов, а затем составил
соответствующие выражения для долгот, широт и радиусов-
векторов планет. Значения постоянных интегрирования (элемен-
тов исходной эллиптической орбиты) Леверье находил с по-
мощью сравнения своих теорий с данными всех имеющихся на-
блюдений, применяя методы улучшения орбит (см. ч. III, гл. 3).
Теории Леверье использовались с 1880 до 1901 г. для со-
ставления эфемерид планет во всех астрономических ежегодни-
ках. Во французском астрономическом ежегоднике теории Ле-
верье для внутренних планет (Меркурия, Венеры, Земли и
Марса) используются до сих пор. Что касается внешних планет
(Юпитера, Сатурна, Урана, Нептуна), то после 1915 г. фран-
цузский ежегодник перешел на теории Гайо, построенные по ме-
тодике Леверье, но с более точными значениями масс планет
и постоянных интегрирования.
В 1895—1898 гг. теории движения внутренних планет (Мер-
курия, Венеры, Земли, Марса), а также Урана и Нептуна были
опубликованы. Ньюкомом [56] — [58]. Ньюком использовал ме-
тод Лапласа (см. § 7.04), внеся в него ряд изменений.
С 1901 г. все астрономические ежегодники, кроме француз-
ского, переходят на теории Ньюкома движения планет. В случае
Меркурия, Венеры, Земли эти теории используются в ежегод-
ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 485
никах до настоящего времени. В случае Марса к 1912 г. обнару-
жилось, что расхождения между наблюдаемыми геоцентриче-
скими положениями планеты в оппозиции и вычисляемыми по
теории Ньюкома достигают 4". На основании сравнения теории
и наблюдений Росс получил в 1917 г. новые значения элементов
исходной орбиты и вывел эмпирические поправки к их вековым
движениям. С тех пор и по настоящее время астрономические
ежегодники основывают эфемериду Марса на теории движения
Ньюкома с поправками Росса. Ввиду присутствия эмпирических
вековых поправок эта теория не является чисто гравитационной.
Расхождения теории с наблюдениями остаются все же замет-
ными: до 2" по долготе и до 0",1 по широте.
Теории Ньюкома не являются строго обоснованными, так
как в их основе лежит не закон всемирного притяжения Нью-
тона, а закон силы, обратно пропорциональной величине г2+6,
где б = 0,0000001612. При таком законе теоретическое вековое
движение перигелиев орбит планет увеличивается дополнительно
на -т-б • п, где п — среднее движение планеты.
Расхождения теорий Ньюкома и наблюдений для Меркурия,
Венеры, Солнца составляют в настоящее время около 0",1 по
долготе и по широте.
Клеменс построил с помощью метода Ганзена новую теорию
движения Марса, опубликовав первую часть в 1949 г. и вторую
часть в 1961 г. [65].
Был выполнен ряд работ по уточнению теорий Ньюкома.
Морган и Скотт вывели [130] по данным большого ряда наблю-
дений Солнца поправки к начальным значениям элементов
в теории движения Земли. Клеменс сравнил теорию Ньюкома
для Меркурия с наблюдениями планеты в 1765—1937 гг., что
позволило уточнить постоянные интегрирования [131]. Данком
уточнил [132] постоянные в теории движения Венеры на основа-
нии данных наблюдений в 1750—1949 гг. Клеменс и Данком
[133] сравнили теорию Ньюкома для Земли с данными числен-
ного интегрирования уравнений движения Земли на период
1920—2000 гг. Сравнение показало ошибки теории Ньюкома
в представлении широты.
Поправки к начальным элементам эллиптических орбит пла-
неты обнаруживаются потому, что для уточнения теорий движе-
ния привлекаются современные точные наблюдения. Исправ-
ление вековых членов в формулах для элементов орбит связано
с уточнениями системы масс планет по сравнению с той, кото-
рую использовал Ньюком, а также уточнением постоянной пре-
цессии.
В настоящее время появились новые возможности для уточ-
нения параметров гравитационного поля Земли, масс внутрен-
486 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
них планет с помощью анализа движения искусственных спутни-
ков Земли и космических аппаратов, запускаемых к планетам.
Радарная и лазерная техника позволяет получить качественно
новые данные наблюдений, включающие непосредственное оп-
ределение расстояний до планет. Однако переход на новые тео-
рии движения планет является сложным мероприятием и его
нельзя осуществить немедленно.
Комиссия № 4 (Эфемериды) Международного Астрономи-
ческого Союза приняла на съезде в Брайтоне в 1970 г. решение,
чтобы национальные астрономические ежегодники продолжали
до 1978 г. публиковать эфемериды планет, основывающиеся на
прежних теориях. Это аргументируется следующими обстоят
тельствами.
1. Новая система планетных масс должна быть принята од-
новременно с новыми значениями постоянных прецессии и ну-
тации и должна быть приурочена к выпуску нового фундамен-
тального звездного каталога. Это необходимо для того, чтобы
планетные эфемериды строились на единой системе отсчета, об-
щей для видимых положений планет и звезд.
Теории Ньюкома обладают тем важным преимуществом, что
основывающиеся на них эфемериды представляют собой одно-
родный материал, позволяющий связать различные наблюдения
в единую систему.
2. Уточнение геоцентрических эфемерид Марса и Вене-
ры следует отложить до построения новой теории движения
Земли.
3. Формула для нутации должна быть уточнена с учетом
оолее реальной модели Земли и в соответствии с новыми дан»
ными о приливных факторах.
4. Выпуск нового фундаментального каталога звезд требует
значительного времени. Его публикация будет осуществлена не
ранее 1978 г., после чего в конце 1978 г. будет опубликован
международный «Астрономический Ежегодник» с новыми эфе-
меридами на 1980 г.
Имеются основания полагать [134], что новая теория Кле-
менса для Марса позволит уменьшить расхождения между эфе-
меридой и наблюдениями Марса до 0",02 — 0",03 и по долготе
и по широте. Определение ¦ постоянных теории Клеменса уже
почти закончено, но на публикацию окончательных результатов
потребуется еще некоторое время.
Новые теории Меркурия, Венеры и Земли, опирающиеся на
новую систему планетных масс, позволяют также значительно
уменьшить расхождения между эфемеридами и наблюдениями.
Ситуация в отношении внешних планет следующая.
В 1890 и в 1898 гг. Хиллом опубликована [59], [60] теория
движения Юпитера и Сатурна, построенная с помощью метода
§11.01] ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 487
Ганзена (см. § 7.02). В 1955 и в 1964 гг. опубликована теория
движения Плутона, построенная Ш. Г. Шараф [61], [62].
Эфемериды Юпитера и Сатурна в астрономических ежегод-
никах (кроме французского) основывались с 1901 до 1960 г. на
теориях Хилла, а эфемериды Урана и Нептуна — на теориях
Ньюкома.
После 1960 г. эфемериды всех пяти внешних планет (вклю-
чая Плутон) в ежегодниках вычисляются по таблицам их пря-
моугольных координат, полученных Эккертом, Брауэром и Кле-
менсом с помощью численного интегрирования [64].
В Морской обсерватории США была проведена большая ра-
бота по обработке всех имеющихся наблюдений внешних планет
и по соответствующему уточнению их масс и элементов орбит,
служащих исходными при построении их теорий движения [135],
[136]. Выявлены расхождения между эфемеридами и наблюде-
ниями, достигающие около 1". Подробнее об этом см. ниже
в§ 11.02.
§ 11.01. Внутренние планеты
Важное значение в теории движения планет имеют так на-
зываемые средние элементы эллиптической орбиты, получаю-
щиеся, если принять во внимание только их вековые возмуще-
ния. В теориях Ньюкома для средних элементов L (средняя дол-
гота в орбите), я (долгота перигелия), Q (долгота восходящего
узла), i (наклон к эклиптике), е (эксцентриситет), л (среднее
движение, получаемое из наблюдений, т. е, включающее вековое
возмущение средней долготы), а\ (большая полуось, находимая
по п на основании третьего закона Кеплера), а (большая полу-
ось, освобожденная от влияния упомянутых вековых возмуще-
ний) приняты следующие выражения [120]:
Меркурий
L = 178° 10' 44",68 + 538106654",80 Г+1",084Г2,
п = 75° 53' 58",91 + 5599",76 Т + 1",061 Т2,
Q = 47° 08' 45",00 + 4266",75 Т + 0",626 Т\
i = 7° 00' 10",37 + 6",699 Т - 0",066 Тг,
е =» 0,20561421 + 0,00002046 Т — 0,000000030 Т2,
п = 14732",4197380 — 0",OOOQ01355 T,
а = 0,38709860, ^ = 0,38709867.
D.11.01)
488
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[$ 11.01
Венера
L = 342° 46' 01",39 + 210669162",88 Т + I'M 148 Т2,
п = 130° 09' 49",8 + 5068",99 Т — 3",515 Т\
Q = 75° 46' 46",73 + 3239//,46 Т + 1",476 Г2,
/ = 3°23'37",07 + 3"N21 Т - 0",0№5Т2, D.11.02)
е = 0,00682069 - 0,00004774 Т + 0,000000091 Т2,
п = 5767",6697692 + 0",0000002628 Т,
а = 0,72333162, а,= 0,72333222.
Земля
L = 99° 41' 48",04 + 129602768", 13 Т + Г',039 Т2,
я= 101° 13' 15",0 + 6189",03 Т+ 1",63 Г2 + 0",012 Т3,
6 = 0,01675104 — 0,00004180 Т— 0,000000126 Т2, \ D.11.03)
п = 3548", 1928323 - 0Г',000001103 Т,
а = 1,00000023, а, = 1,00000030.
Марс (с уточнениями Росса)
L = 293° 44' 51 ",46 + 68910103",83 Т + 1",1184 Т2,
л = 334° 13'05",53+6€26",73 Г+0",4675 Г2-0",0043 Т3,
Q = 48° 47' 1 Г',19 + 2775",57 f-0",005 Г2-0",0192 Г3,
? = 1°51' 01 ",20 - 2",430 Т + 0",0454 Т2, D.11.04)
е = 0,09331290 + 0,000092064 Т - 0,000000077 Т2,
п = 1886",5186207 + 0",000000463 Т,
а= 1,52368840, а, = 1,52369146.
В этих формулах Т — время, отсчитываемое в юлианских
столетиях по 36 525 эфемеридных суток от фундаментальной
эпохи 1900, январь, 12h ET.
Долготы L, я, П отнесены к мгновенной эклиптике и средней
точке равноденствия текущего момента, так что выписанные
формулы для этих долгот включают изменения за счет прецес-
сии. Для Земли всегда i — 0.
Если ограничиться упрощенной формой теории Ньюкома, то
для вычисления периодических возмущений могут быть приме-
нены формулы, выведенные в [68]. Эти формулы позволяют вы-
числять небесные координаты планет с точностью до 0'»1,
§ 11.01]
ГЛ. П. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ
489
Гелиоцентрические экваториальные координаты планет в
прямоугольной системе XYZ определяются по формулам
E = g + esinE,
sin u = a
— ezsin?, l = v
— e), A = / + /
D.11.05)
ro = a(l — ecosE), sinp = sinisinu,
r = r0 + br, u = l — Q,
x = r cos A cos p,
у = г (sin X cos p cos e — sin p sin e),
z = r (sin A cos p sin e + sin p cos e).
Здесь L означает среднюю долготу и / — истинную долготу пла-
неты в орбите, g — среднюю аномалию планеты, и — аргумент
широты, р — эклиптическую широту, А — эклиптическую истин-
ную долготу, б/ — периодические возмущения в долготе, Ьг —
периодические возмущения в радиусе-векторе, а, е — большую
полуось и эксцентриситет орбиты планеты, R — приведение
к эклиптике.
Периодическими возмущениями бр в широте всюду прене-
брегаем.
Меркурий. Суммы периодических возмущений в долготе 67
и широте бр не превосходят соответственно 30" и 1". Для полу-
чения Аире точностью до Г достаточно воспользоваться сред-
ними элементами орбиты по Ньюкому. Прямоугольные эквато-
риальные координаты Меркурия с точностью до ±2-10~5 а. е.
могут быть получены с помощью этих средних элементов и сле-
дующих формул для б/, RFr = бр = 0):
61 = — Г',6 sin Eg2 — 2g,) + 7",2 cos Eg2 — 2g,) +
+ 2,0 sin Bg5 - gl) + 2,6 cos Bg5 - gl) -
- 3,5 cos Bg2 - gl) - 2,0 cos Bg2 - 2g,) +
+ 2,8 cos Eg2 - 3gl),
R = — 772",6 sin 2« + 1",4 sin 4u,
D.11.06)
При вычислении эфемерид с точностью до ±0',1 возмуще-
ниями широты бр можно также пренебречь, а в долготе учесть
возмущения б/, заданные табл. 54.
490
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 11.01
Таблица 54
Аргумент
&2 — gl
&2
2g2 - 3gi
2g2 - 2gi
2g2 - gl
2g2
3g2 - 3g,
3g2 - 2g,
3g2 - gi
4g2 ~ 3g,
4g2 - 2g,
5&2 — 5gi
5ff2 — 4gi
5g2 - 3g,
5g2 - 2gi
5g2 — gi
cos
0" 579
. 0,238
-0,522
-1,988
-3,514
—0,684
-0,339
-0,194
-0,334
0,182
0,674
2,766
7,190
1,437
sin
0",413
0,178
0,679
1,231
0,252
0,416
1,284
-0,532
-0,221
-0,351
-0,494
— 1,557
-0,313
Аргумент
5ff2
gl — gl
2ff3 - 2?,
2g3 - gi
4g3 ~ 2ffi
4g3 - gi
gs — 2ffi
gs — gi
gs
2gs - 3gt
2&в - 2gi
2g6 - gi
2ff5
3^5 — gl
2g5 - gi
cos
0",366
—0,199
—0,347
-0.33T
—0,669
-0,179
-0,697
-0,315
0,202
¦ 0,749
2,615
0,424
0,318
-0,191
s!n
0",000
0,196
-0,276
0,453
-0,480
0,564
1,971
0,264
-0,329
Венера. Суммы периодических возмущений в долготе б/ и
широте 6C не превосходят соответственно 30" и 2". Для вычис-
ления долготы К и широты р с точностью до Г можно восполь-
зоваться средними элементами орбиты по Ньюкому.
Прямоугольные экваториальные координаты Венеры с точ-
ностью до ±2-10~5 а. е. можно вычислить при помощи этих
средних элементов и следующих формул для б/, 8г (бр = 0):
6l = - 2",4 cos (g3 - g2) + 4",3 sin (ft - g2) -
- 9,6 cos Bg3 - 2g2) + 5,9 sin Bg3 - 2g2) +
+ 7,1 cos Cg3 - 3g2) - 2,5 cos Cg3 - 2g2) + 2,4 sin Cg3 - 2ft) -
- 1,5 cos Eg3 - 4g2) - 2,6 cos (ft — ft) — 1,4 sin (ft - ft) -
-1,6 sing5+ 2,8 sin B37°,24+ 150°,27Г), D.11.07)
1076 Ig r = 51 cos Bg3 - 2g2) + 83 sin Bg3 - g2) - 83 sin Cg3 - 3ft),
D.11.08)
fl = _181",0sin2u,
g3 = 358°,63 + 35999°,36 7\
g5 = 225°,43 + 3034°,89 T,
При вычислении эфемериды с точностью до 0',1 необходимо
учесть возмущения в долготе б/, приведенные в табл. 55.
§ 11.01]
ГЛ. П. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 491
Таблица 55
Аргумент
gl — 2g2
g3 — g2
2a-3 2^2
3g3 _ з^2
З^з — 2g,
4g3 — 4g~2
4g-3 Зст,
5g3 5g-~
5g3 — 4g-j
5^-3^2
cos
¦ 0",250
-0,353
-2,378
-9,573
7,121
-2,475
0,926
-0,654
0,180
-1,529
-1,077
sin Аргумент
0,000
4,272
5,930
—0,319
2,398
0,462
0,171
0,276
-0,379
0,954
6g3 - 6g2
go-, 5<r2
gg3 4g,
go 5,/
gs _ g^'
gb
2as g-.
3gt 2g,
3g4 g2'
ge
cos
0",000
0,147
-0,169
-0,23!
-2,617
-0,730
-0,474
—0,503
-0,648
sin
0",142
0,142
-1,397
-1,562
0,508
-0,447
— 1,020
-0,208
Земля. Суммы периодических возмущений в долготе и ши-
роте не превосходят соответственно 30" и 1",5. Эфемериду
с точностью до Г можно вычислить на основании выражений
для средних элементов орбиты по Ньюкому, приведенных выше.
Прямоугольные экваториальные координаты барицентра
системы «Земля + Луна» с точностью до ±2-10~5 а. е. вычис-
ляются по средним элементам и следующим формулам для
61, 6г.
Ы = 2",3 cos (ft - ft) + 4",2 sin (g2 - g3) +
- 4,7 cos {2g2 - 2g3) - 2,9 sin Bg2 - 2g3) +
+ 1,8 cos Bg2 - 3g3) + 1,7 sin Bg2 - 3g3) - 0,7 cos Cg2 - 3g3) +
+ 1,5 cos {3g2 - 4g3) + 0,8 cos Cg2 - 5g3) + 0,7 sin {3g2 - 5g3) +
+ 2,0 cos Bg4 - 2g3) - 1,7 cos Bg4 - ft) - 0,6 sin Bg4 - ft) -
— 7,2 cos (g5 — ft) — 2,6 sin g5 + 1,5 sin Bg5 — ft) +
- 1,9 sin E7°,24 + 150°,27 T) + 6,4 sin B31°, 19 + 20°,20 T), D.11.09)
1076lgr=-21cos(g2-g3)-36cosBg2-2g3)-58sinBg2-2g3)-
- 20 sin Bft - 2g3) + 71 sin (g5 - ft) + 40 cos B^5 - 2g3), D.11.10)
g4 = 319,58 + 19139,98 T,
g5 = 225,28 + 3034,58 7,
При вычислении эфемериды Земли с точностью до 0',1 не-
обходимо сохранить в долготе члены долгого периода
Г ,882 sin E7°,24 + 150°,27 Т) + 6",400 sin B31°,19 + 20°,20 Т)
492
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
[< М.01
и учесть периодические возмущения долготы, приведенные
в табл. 56.
Таблица 56
Аргумент
&2 —?3
2g2 - 2g3
2g2 - 3g3
3g2 — 3g3
3g2 - 4g3
3g2 - 5g3
2g4 - 2g3
*g* ~ g*
cos
2",353
—4,702
1,795
-0,666
1,508
0,763
1,963
-1,659
sin
4",228
-2,903
1,737
0,397
0,684
—0.E67
-0,617
Аргумент
4g4 - 3?»
4g, - 2g3
gs— ёз
g5
2g5 - 2g3
2gs — g3
3ff5 - 2g3
gG-g3
COS
0",526
—7,208
-0,537
sin
0",483
—2,582
2,728
1,518
0,551
0,412
M a p с. Суммы периодических возмущений в долготе и ши-
роте Марса не превосходят соответственно 132" и 2".
При вычислении эфемериды Марса с точностью до Г в дол-
готе следует учесть следующие периодические возмущения:
Ы = + 7",002 cos (ft - ft) + 13,082 cos (ft - 2g4) -
- 6,848 cos Bft - 3ft) + 16,667 cos (ft - ft) + 19", 146 sin (ft - ft) -
- 15,691 cos Bg5 - 2gi) - 21,637 cos Bg5 - ft) +
+ 52,490sin D7°,48 + 19°,771 T). D.11.II)
Прямоугольные экваториальные координаты Марса с точ-
ностью до ±2-10—5 а. е. можно вычислить с помощью средних
элементов Ньюкома и следующих формул для б/, бг:
Ы = + 0",6 sin (ft - 2gi) + 3",4 cos (g2 - 3g4) - 5",4 sin (ft - 3gA) -f
+ 0",7 cos ft + 7",0 cos (ft - g4) - 4",9 sin (ft - ft) +
+ 13", 1 cos (ft - 2g4) - 4",9 sin (g, - 2g4) + 1",4 cos (ft - 3g4) -
- 0",6 sin (ft - 3g4) - 6",8 cos Bg3 - 3ft) -
- 2",7 sin Bg3 - 3g4) - 4",4 cos Bg3
- 2",1 sin Bg3 - 4g4) + 2",6 sin Cg3 -
+ l",0 sin (З^з - 6g4) + 0",9 cos D^ - 7gi) -
- 0",6 cos Eg3 - 9g4) - 1 ",5 cos (8g3 - 15g4) +
+ 2",2 cos (ft - 2ft) - 2",3 sin (ft - 2g4) +
+ W,7 cos (g5 - ft) + 19",1 sin (ft - ft) + 3",6 cos g5 -
- IM sings - 2",1 cos Bg5 - 3g4) - 15",7 cos Bg5 - 2gi) -
- 3",3 sin Bft - 2Si) - 21",6 cos Bg5 - g4) - 3",2 sin Bg5 - g4)
§ 11.02] ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 463
- 1",4 cos 2g5 - 1",3 cos Cg5 - 3g4) - 1",7 cos Cg5 - 2g4) -
- 2",0 sin Cg5 - 2gi) - 2",8 cos Cg5 - gi) -
- 1",5 sin Cg5 - g4) + 1",1 cos (g6 - g4) - 0",8 sin(g6 - Si) -
- 0",8 sin g6 + 0",5 cos Bg6 - 2g4) + 1 ",5 cos Bg6 - g4) +
+ l",0 sin Bgs - gi) + 52",5 sin D7°,48 + 197°,71 T) +
+ 0",6sinB12D,87+1190°,5ir), D.11.12)
1076 lg r = + 39 cos (g3 - g<) + 57 sin (g3 -gJ-U cos (g3 - 2g4) -
- 26 sin (g3 - 2g4) - 15 sin {g3 - 3g4) + 23 cos Bg3 - 3g4) -
- 60 sin Bg3 - 3gi) + 18 sin {2g3 - 4gt) - 20 cos Cg3 - 5g4) +
+ 28 cos (g5 - 2gi) - 27 sin (g5 - 2gi) + 174 cos (g5 - gi) +
- 152 sin {g5 - g4) + 13 sin g5 + 30 sin Bg5 - 3g4) -
- 46 cos Bg5 - 2g4) + 217 sin Bg5 - 2gA) - 24 cos Bg5 - g4) +
-f 164 sin Bg5 - gi) - 15 sin 2g5 + 21 sin Cg5 - З54) -
- 26 cos Cg5 - 2g4) + 22 sin (Зя5 - 2#4) + 17 sin Cg5 - gi) -
-Ilsin(g6-g4)-14sinBg6-g4), D.11.13)
g3 = 358°,42 -f- 35998°,93 T,
g6=175°,53+ 122Г.67Г.
Во всех формулах, приведенных выше, Т означает время,
отсчитываемое от фундаментальной эпохи 1900, янв. 0, 12hET
в юлианских столетиях по 36 525 эфемеридных суток.
§ 11.02. Внешние планеты
1. Имеются следующие выражения для средних элементов
орбит внешних планет [137], полученные на основании анализа
большого ряда наблюдательных данных и включающие эмпири-
ческие поправки.
Юпитер
L = 238° 02' 57",32 + 10930687", 148 Т + 1 ",20486 Г2- 0,005936 Г3,
л = 12° 43' 15",34 + 5795",862 Т + 3",80258 Г2 - 0",91236 Г3,
Q = 99° 26' 36", 19 + 3637",908 Т + 1",2680 Т2 — 0",03064 Г3,
е = 0,04833475 + 0,000164180 Т — 0,0000004676 Т2 -
-0,0000000017 Г3,
i = 1° 18'31",45 - 20",506 Г + 0",014 Г2,
а = 5,202561.
D.11.14)
494 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ П.02
Сатурн
L = 266° 33' 51 ",76 + 4404635",5810 Т + 1", 16835 Г2 -0",021 Г3,
л = 9Р05'53",38 +7050",297 Т + 2",9749 Т2 + 0",0166Г3,
Q=112°47'25",40 + 3143",5025r — 0",54785 Г2 — 0",0191 Г3,
е = 0,05589232 - 0,00034550 Т - 0,000000728 Т2 +
+ 0,00000000074 Т\
i = 2° 29' 33",07" - 14", 108 Т - 0",05576 Т2 + 0",00016 Г3,
а = 9,554747.
D.11.15)
Уран
L = 244°Il'50",89+ I547508",765 Т + 1", 13774 Г2-0,002176 Г3,
п = 17 Г 32' 55", 14 + 5343",958 Т + 0",8539 Г2 - 0",00218 Г3,
Q = 73° 28' 37",55 + 1795",204 Т + 4",722 Г2,
е = 0,0463444 - 0,00002658 Т + 0,000000077 Г2,
/ = 0° 46' 20",87 + 2",251 Т + 0",1422 Г2,
а = 19,21814.
D.11.16)
Нептун
L = 84° 27'28",78 + 791589",291 Т + 1 ",15374 Г2 -0",2176Г3,
п = 46' 43' 38",37 + 5128",468 Г + 1 ",40694 Т2 - 0",002176 Р,
Q = 130° 40' 52",89 + 3956",166 Т + 0",89952 Т2 - 0",016984 Г3,
е = 0,00899704 + 0,000006330 Т — 0,000000002 Г2,
i = у 46' 45",27 - 34",357 Т - 0",0328 Г2,
а = 30,10957.
D.11.17)
Аргумент Т тот же, что и в аналогичных формулах для сред-
них элементов внутренних планет. В выражения для угловых
переменных также включена прецессия.
Для Плутона в качестве средних принимаются постоянные
элементы
т = 1989, октябрь, 0,0344, е = 0,2486438, "J
я = 113°31'17",72, I = 17°8'48",40, > D.11.18)
Q= 108° 57'16", 18, а = 39,517738, J
§ 11.02] ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 495
где т — момент прохождения через перигелий орбиты. Угловые
элементы отнесены к фундаментальной эпохе 1900, январь 0,5
(юлианская дата JD 2415020,0).
2. Значения элементов орбит на юлианскую дату 2430000,5,
которые соответствуют начальным данным для численного ин-
тегрирования уравнений движения внешних планет, выполнен-
ного Эккертом и др. [64], следующие (угловые элементы отне-
сены к эклиптике и равноденствию эпохи 1950,0):
Юпитер
? = 29°5'0",096, I =1° 18' 27", 115,
(o = 274°35'34",956, е = 0,490137305, \ D.11.19)
Q = 99° 57'2", 186, а = 5,2043041446.
Сатурн
g=318°29'31",276, / =2°29'13",115,
со = 336° 27'3",205, 6 = 0,0562631702, ) D.11.20)
О = 113° 14' 42",242, а = 9,5836692762.
Уран
g = 256° 41' 33",515, I = 0° 46' 23",706,
и=89°14'38",424, 6 = 0,0447360290, } D.11.21)
й = 73°48' 17",521, а= 19,3160573025.
Нептун
g == 133° 46' 57",978, I = 1° 46' 33",407,
и = 270°0'43",841, е = 0,0118545587, \ D.11.22)
Q=131°16'44",491, a = 29,9867909509.
Плутон
g = 289° 16'47",700, I = 17°7/2Г',357,
со= 113°20'31",719, е = 0,2459387823, } D.11.23)
Q = 109°36'24",672, a = 39,5181761979.
В этих формулах g — средняя аномалия и со — угловое расстоя-
ние перигелия от узла.
Таблицы Эккерта и др. были сравнены с наблюдениями Юпи-
тера и Сатурна за 1913—1968 гг., Урана — за 1830—1968 гг.,
Нептуна — за 1846—1968 гг. [138], [139]. Средние ошибки
начальных элементов, а также средней долготы в орбите AZ, и
средней широты ДВ оказались следующими (указаны также
отклонения положений планет в км, соответствующие ошибкам
Да, ДА АВ):
496 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 11.02
Юпитер
Д^ = ± 0",240, А/ = ± 0",023,
Дсо = ± 0",996, Де = ± 0,0000000538,
ДЙ = ± 0",967, Да = ± 0,0000000327 а. е. (±5 км),
М = ± 0,016 (± 60 км), АВ = ± 0,032 (± 120 км).
D.11.24)
Сатурн
Ag =± o",23i, м = ± о",о25,
Дсо = ± 0",625, Де = ± 0,0000000664,
ДЙ = ± 0",582, Да = ±0,0000001812 а. е. (±27 км),
AL=± 0",018 (± 125 км), АВ = ± 0",032 (± 222 км).
D.11.25)
Уран
Д?=±0",409, М =±0",036,
Дсо = ± 2",903, Де = ± 0,0000000979,
ДЙ = ± 2",875, Да == ± 0,0000006719 (± 100 км),
AL = ± 0",033 (± 462 км), АВ = ± 0",047 (± 659 /ел).
D.11.26)
Нептун
hg = ± 2",289, Ах = ± 0",021,
Дсо = ± 2",422, Де = ± 0,0000001216,
AQ = ± 0",795, Да = ± 0,0000007826 (± 565 км),
AL = ± 0",059 (± 1282 км), АВ = ± 0",003 (± 65 км).
D.11.27)
Плутон
Д? = ±59",941, Д/ =±0",516,
Асо = ± 59",478, Де = ± 0,0000199257,
AQ == ± 0",906, Даь= ±0,0040007226 (±598 108 км),
Д1=±7",486(±214400«:жI ДВ = ± Г',107 (± 31 700 км).
D.11.28)
Расхождения между эфемеридами и наблюдениями Нептуна
систематические и составляли к 1968 г. около 4". Расхождения
для остальных внешних планет достигают Г',5. На основании
этого сравнения теории и наблюдений Данкомом и др. (см. [134])
получена новая система значений масс внешних планет и по-
в 11.02] ГЛ. И. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 497
строены новые таблицы движения и эфемериды (Данном назы-
вает их поисковыми).
Новые массы (обратные значения)
Юпитер 1047,355, Нептун 19349 + 28, }
Сатурн 3 498,7 ±0,2, Плутон 3 000000 + 500 000.1 D.11.29)
Уран 22 692 + 33, J
Элементы орбит на эпоху JD 2430000,5, лежащие в основе этих
«поисковых» эфемерид, а также их ошибки и средние ошибки
AZ., АВ вместе с соответствующими отклонениями положении
в км, следующие:
Юпитер
g = 29° 4' 57",592 i = Г 18' 26",726
+ 0",189, ±0",018,
со = 274°35'26",412 е = 0,0490143422
+ 0",782, ±0,0000000423,
Q = 99° 57' 13",050 а = 5,2043055494
±0",760, ±0,0000000257 (+4 км),
№ = + 0",013 (± 49 км), ЬВ = ± 0",025 ( + 94 км).
D.11.30)
Сатурн
g = 318° 29' 32",032 i = 2° 29' 12",716
±0",192, ±0",021,
и = 336° 26'58",466 e = 0,0562636509
±0",516, ±0,0000000548,
Q = 113° 14' 46", 475 а = 9,5836743386
±0",480, ± 0,0000001496 (± 22 км),
М = ± 0",015 (± 104 км), ЬВ = ± 0",027 (± 187 км).
D.11.31)
Уран
g = 256° 41' 41 ",245 i= 0°46'23",578
±0",357, ±0",031,
оо = 89°14/24",497 е= 0,0447344038
± 2",535, ± 0,0000000855,
Q = 73° 48'23",532 а = 19,3161021827
±2",510, ± 0,0000005886 (± 88 км),
М = ± 0,028 (± 392 км), АВ = ± 0",041 (± 574 км).
D.11.32)
498 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§
Нептун
g=133°44'55",031 i= 1°46'33",796
±2",082, ±0",019,
а = 270° 3' 39",032 е= 0,0118574023
±2",204, ±0,0000001109,
Q = 13 Г 16' 38",320 а = 29,9871269920
±0",723, ± 0,0000034442 (± 515 км),
М=±0",053 (±1151 км), ДВ = ±0",003 (± 65 км).
D.11.33)
Плутон
g = 289°21'5",510 i = 17°7'22",464
±15",563, ±0",134,
ю=113°16'38",202 е= 0,2460004277
±15",442, ±0,0000051949,
Q = 109° 36' 23",321 а = 39,5326598084
± 0",235, ± 0,0010398701
Д?. = ±Г',944(±55 766 км), (± 157538 км),
ДВ = ± 0",200 (± 5 728 км).
D.11.34)
Новые таблицы движения внешних планет обнаруживают
лучшее согласие с наблюдениями, но все же расхождения
остаются, и они достигают около 1" для первых четырех планет
для наблюдений в указанные выше периоды. Остается неясной
причина большого расхождения эфемериды с наблюдением Неп-
туна в 1795 г. (составляющего около 8"). В случае Плутона рас-
хождения гораздо более заметные.
§ 11.03. Полиномиальное представление
оскулирующих элементов орбит внешних планет
Приближенные выражения для оскулирующих элементов
орбит внешних планет даются в [69] в виде полиномов по целым
положительным степеням величины Д:
. JD — 2439000,5
1000
JD означает юлианскую дату, соответствующую данному мо-
менту эфемеридного времени, 2439000,5 JD отвечает календар-
ной дате 1965, авг. 28,0 ЕТ, лежащей в середине интервала
§ 11.03]
ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 499
Таблица 57
я
i
е
ш
а
Т
И
а
i
е
@
а
Т
|i
а
i
е
ш
а
Г
Q
/
е
ш
а
Г
Я
(
е
ш
а
Г
И
Q
i
е
ш
а
Г
?,•10-"
9,9971228
1,3065898
4,8214465
-8,6736669
5,2022448
3,8299871
3,3104861
5,9708000
2,6773133
— 1,3093000
8,4037740
4,6300583
8,9052590
— 1,1091990
1,1322723
2,4894499
5,5010095
—2,3159373
9,5549738
4,2015986
3,3375185
2,9041366
1,2017440
1,2670837
3,4785001
—3,3410097
8,8090919
1,7501589
7,3792593
7,7211961
4,7381701
—2,6553996
1,9194488
3,9262107
1,1720659
1,2972192
—3,2789710
5,3797195
—6,4696332
1,0904281
—4,1078603
—9,9930353
п
+ 1
0
—2
+i
0
+4
2
-5
-5
—7
—2
-4
-1
—5
+2
. 0
—2
+i
0
+4
,_.о
—2
—3
—3
0
—2
+ 1
—4
+ 1
1
—2
+2
+ 1
+4
—2
1
—6
-3
-1
-1
+ 1
—5
?,-10""
Юпитер
5,8526026
1,4084863
5,6035467
1,0291983
8,1415574
9,6409740
— 1,9504958
7,9243872
1,0887924
-8,1917619
3,6835043
—5,2980909
4,0286662
1,2690885
Сатурн
-9,8621384
-6,0737447
—1,5768445
7,7311179
—2,6142078
2,7005950
1,4206969
-1,5404362
—3,8974352
-2,9029529
— 1,2911143
7,3610456
-3,6198248
—3,8417567
Уран
—4,7157638
-1,2683946
1,2444339
2,6783701
— 1,0717839
2,0462688
1,3667035
—3,9291655
6,5986652
— 1,7974709
4,4682210
-3,1012181
8,7867100
2,8477759
—4
-5
-5
—2
—4
—2
-5
—4
-5
-5
2
— 4
-1
-5
-3
-4
—3
-1
-3
+ 1
-5
п
4
— 4
0
-3
+ 1
—5
—2
-4
—4
0
—3
+2
-6
—2
-5
Q
—2
-2
-1
-5
?,•10-"
8,3809330
2,3259666
—6,1529060
1,0791798
-1,3423825
8,4590520
3,2162619
-1,1028318
-6,6570452
1,2330581
-1,1107278
1,0634678
1,1383794
-2,2471905
7,3792433
1,3827719
2,1192353
—2,3954780
1,1823079
— 1,0486151
—7,0838820
1,9924624
6,3687835
3,0406136
1,3182603
-8,0531459
3,6759985
4,1924464
8,4437073
3,9767404
4,4195098
-4,1491180
1,4194056
-3,1830210
-1,3982915
3,7841020
— 1,1427062
1,7248491
2,6639683
2,6308812
2,3250942
-2,4237710
п
-5
-6
. ,. у
-4
Q
-6
-4
-6
-5
—2
-4
— 1
-6
-4
—4
-4
—2
-4
0
-7
-3
-5
-5
-1
-4
0
-6
-3
-5
-1
—3
+ 1
-6
—3
-5
—4
—2
—3
. 0
-6
500
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [$ 11.03
Продолжение табл. 57
а
i
е
ш
а
Т
И
а
i
е
со
а
Т
V-
а
i
е
со
а
Т
а
i
е
ш
а
Г
?,-10-"
1,3125211
1,7744829
1,1953667
—8,2281724
2,9964526
6,8937422
6,0090224
—9,2332616
3,7414187
—2,5288780
1,4905778
7,3727068
2,6353047
—2,2099442
1,0956031
1,7131458
2,4705844
—2,4639753
3,9432792
4,7796562
3,9803868
—9,6850316
— 1,8603325
4,4858849
-1,2956666
3,5324969
—2,1296835
—5,3477245
п
+2
0
—2
+i
+i
+4
-3
—2
—4
-3
+ 1
—2
+3
—5
+2
+ 1
j
+2
+ 1
+4
-3
-2
-2
2
0
1
+2
-5
Нептун
-1,4389207
1,4980346
—3,8362489
-4,1361421
+ 1,1874865
—5,2990118
—3,5517281
3,6636380
— 1,0022367
1,0386231
— 1,5609076
—3.43E370I
—3,1370253
1,0359883
Плутон
8,0163039
1,6666745
2,4326182
2,1539400
6,0788361
2,5791747
—8,9271504
3,0756727
3,9915053
— 1,6766899
4,5184181
-1,2035217
7,6948567
1,8374508
п
—2
—4
—3
0
-1
+2
-5
—2
4
-3
0
—2
+2
-5
—2 1
—2
—3
-1
—2
+ 1
—6
—2
—3
—3
-1
-1
+ 1
?,-10-"
1,2043223
—4,5233433
4,4843677
—5,7381766
-1,3609559
-1,1669699
4,1008893
—3,5015901
5,4642314
-9,3646316
—5,7094577
3,8695990
—9,1341500
— 1,1782808
— 1,1596170
—2,6930298
—2,9743430
—4,9302680
—4,2607542
—6,6738206
5,7471550
—2,5935616
— 1,9823210
1,6966414
—4,2252037
1,1159043
—7,4136227
— 1,7268376
п
-3
—5
—4
-1
—2
+2
-6
-3
—6
-5
j
-3
+ 1
-6
—2
—3
-4
—2
—3
0
—7
-3
4
—4
—2
—2
0
—6
1960—1970 гг., для которого вычислены числовые значения ко-
эффициентов Ek аппроксимирующего полинома вида
Эти коэффициенты определяются таблицей, дающей полино-
миальное представление элементов орбит fi, i, e, ш, а, Т, ц всех
пяти внешних планет — Юпитера, Сатурна, Урана, Нептуна,
Плутона; Й, i, e, ш, а означают соответственно долготу восхо-
дящего узла на эклиптике, наклон к эклиптике, эксцентриситет,
аргумент перигелия и большую полуось орбиты планеты, Т —
11.04]
ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ
sot
время в эфемеридных сутках ot 2439000,5 JD до момента про-
хождения через перигелий, ц — среднее суточное движение пла-
неты (в градусах). С помощью табл. 57 прямоугольные коорди-
наты планет, отнесенные к системе отсчета стандартной эпохи
1950,0, вычисляются с точностью до ±5-10~4 а. е.
§ 11.04. Полиномиальное представление прямоугольных
гелиоцентрических координат Юпитера и Сатурна
Для вычисления прямоугольных гелиоцентрических коорди-
нат Юпитера и Сатурна в системе отсчета стандартной эпохи
1950,0 можно воспользоваться их представлением в виде поли-
номов, полученных в [68]. При этом обеспечивается точность
1 -10~5 а. е. на интервале 1975—1985 гг. За начальный момент
времени выбрана дата 1974, ноябрь 9,0 ЕТ = JED 2442360,5.
Эти аппроксимирующие полиномы имеют вид
где
/-о
D.11.35)
и отношения факториал-полиномов ДО/п@ определяются форму-
лами
t(t — 1)(/ — 2) ... (/ — ; + !)
*<«
л(л-1)(л-2) ... («-/+
l\ '
Ak =
(fc+ «+!)(*+ «)<*» f
D.11.36)
Здесь f(t)— аппроксимируемая функция, п — число узлов. Орто-
гональные полиномы даны в табл. 58. Следует учесть, что
^0,20—
. ^^ у —к
t
2000 '
(As + 1Д20 —ft)
502
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Г§ 11.04
где t — время в эфемеридных сутках, отсчитываемое от момента
1974, Ноябрь 9,0 ЕТ, т. е. от даты JED 2442360,5.
р
т, п
Л>,20
^1,20
а '
г 2i20
^3,20
^4.20
^5,20
^0,20
^7,40
^8,20
P$,1Q
^10,20
^11,20
'12,20
п
^13,20
^0,20
Pl.20
^2,20
^3,20
^4,20
^5,20
Р 6.20
^7,2D
^8,23
^9,20
^П.20
"ll,20
-0,5189
0,2039
0,6242
-0,1592
-0,1459
0,8876
0,6066
0,9466
0,1247
-0,5480
-0,1130
-0,7192
-0,1094
0,4869
-0,7167
0,1574
0,3739
-0,2918
-0,1261
-0,6455
0,1166
0,1645
0,3183
0,5517
-0,5155
-0,9240
X
2628
5601 • 101
1579 - 101
3438 • 101
2072-101
3537-10
2588-10
8362-10
3486-10 ,
7640-10""'
9745-10
7346-10
1184- 10"*
8828-10"8
6062 • 101
2814-101
7272 ¦ 101
7350-10
7801
9077-10"
0395 -10~2
5968-10
5251 • 10~5
5754-10~!
1369-10
6146-10~в
у
Юпитер
—0,2601 6222-10
0,4302 3396-101
—0,2420 2482 ¦ 101
—0,3553 8980 ¦ 101
0,4759 6364
0,3410 2135
0,7443 6918 -10~2
—0,3421 7351 ¦ 10~2
-0,2769 1932 • Ю~*
-0,4876 5036- 10~3
0,3600 0700-10""*
0,1452 8590-10
0,2836 1805-10~5
0,7127 0814 -10
Сатурн
0,4351 0899
0,8798 3031 ¦ 101
—0,3624 6259
—0,7682 8612
—0,1829 2245 -КГ1
0,1266 3525-10"'
0,1391 9532-10
-0,1484 9326-10"
—0,3746 8500 - 10~4
—0,2070 4454-10
0,1970 1806-10
Тг
0,1570
0,1795
—0,1190
-0,1485
0,2398
0,1441
0,1713
-0,1700
—0,1218
-0,1955
0,1819
0,6383
0,1194
0,4896
0,3570
—0,3116
-0,3164
—0,2101
0,5505
0,5238
—0,9549
-0,1567
—0,1659
0,9038
1 б л и ц а 58
z
7985-10~2
7737-101
8266-101
6831 ¦ 1О1
2821
3524
6468 -10~2
9921 ¦ 10~2
5987-10~2,
6998-10~3
5625-10"*
1438-10~5
0562-10
9564
3107- 10
5530
6612
2987¦10~2
6198-Ю,
2746-10
2784-10" s
0728-10"*
5770-10~5
0685 • 10""
Получены также полиномы [70], позволяющие вычислять сфе-
рические координаты (радиуса-вектора г, долготы к и широты р)
Юпитера и Сатурна, отнесенные к среднему равноденствию стан-
дартной эпохи 1950,0. В форме полиномов представлены раз-
ности АК = К — Яо, Лр = р — р0, Лг = г — г0, где Яо, Ро, г0 озна-
чают координаты, вычисленные по формулам эллиптического
движения (см. ч: 1,тл. II), исходя из систем оскулирующих эле-
ментов Юпитера и Сатурна.
S H.04]
ГЛ. II. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ
503
Эпоха и оскуляция: 1970, май 14,0 ЕТ = 2440720,5 JD
Юпитер Сатурн
Мо = 3,5069377 5,4687268
Q = 1,7449153 1,9758317
I = 0,022805324 0,043457748
© = 4,7727731 5,9401409
а = 5,2032354 9,5159417
е = 0,048142337 0,053389589
« = 0,14500347 • 10~2 0,58609195- 10~3
Мо, Q, i, и в радианах
В табл. 59 даны полиномы: для ДА,-102 седьмого порядка, для
Лр-102 пятого порядка, для Дл-102 восьмого порядка для Юпи-
тера и Сатурна. Эти полиномы обеспечивают точность в прямо-
угольных гелиоцентрических координатах Юпитера по х, у, z
Таблица 59
гт, п
ДА,. 10»
др. ioJ
Дт-.Ю»
¦0,20
Р
Р2.20
Р3,20
Р4,20
Р5.20
Р6,20
Р7.20
Р8,20
^1,20
Р2,20
Р3,20
Р4,20
Р5,20
^6,20
Р7,20
^8,20
— 0,1624 5061 ¦
+0,1481 3382-
—0,4658 0962-
+0,2280 2035-
-0,1513 6943-
—0,2808 9460-
+0,1596 2009.
+0,9896 1400 ¦
-0,1174 8823 •
+0,3673 0175.
-0,1985 4078 ¦
+0,1853 7151 ¦
+0,4119 2503'
—0,1857 1455-
-0,4467 9157 ¦
+0,4193 0481 -
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
10"
Юпитер
+0,2104 7443.
+0,4887 9547 ¦
+0,2115 6797.
+0,5666 7417-
-0,1976 0004-
10"
10"
10"
10"
10"
Сат ур н
+0,2984 7887
+0,9398 8570
—0,1965 7996
+0,3923 6748
—0,6181 8906
-0,5032 1869
10"
10"
10"
1(Г
10"
10"
+0,3588 5189.
-0,1999 4794.
—0,2565 9012.
—0,6534 2745.
—0,2250 2814.
+0,1907 2429'
+0,1745 9535-
—0,4248 1512 -
+0,6405 3920 ¦
+0,59':б 3406
+0,2743 4494 ¦
+0,1023 0257.
+0,1184 4904.
-0,6903 3367 •
-0,1180 4022-
-0,2070 8533-
+0,9086 6225 ¦
+0,3027 8374 ¦
10"
10"
10"
10"
10"
10"
10"
10"
10"
10
Ю1
10"
10"
10"
10"
10"
10"
-1
504 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 11.05
соответственно 0,4-Ю-5, 0,6-10~5, 0,3-10—5 на интервале 1965—
1975 гг., а для Сатурна по х, у, г соответственно 0,7-Ю,
0,7-10~5, 0,6-10~5 в астрономических единицах.
§ 11.05. Тригонометрическая теория вековых возмущений
орбит больших планет
Рассматриваются дифференциальные уравнения для оскули-
рующих элементов орбит больших полуосей а.(к\ эксцентрисите-
тов e<ft>, наклонов i<ft>, долгот перигелиев nw, долгот восходящих
узлов fi(ft> (k = 1, 2, ..., 8) Меркурия, Венеры, Земли, Марса,
Юпитера, Сатурна, Урана, Нептуна. Верхний индекс A) при-
писывается элементам Меркурия, индекс B) — элементам Ве-
неры и т. д. Плутон не учитывается, так как его орбита обла-
дает большим эксцентриситетом и захватывает часть орбиты
Нептуна.
Вместо eW, t<h), n(ft), QW вводятся переменные
rw = едаcosп(*>, и<» = sinti»cosQW, )
> Г4 11 371
u!« = sin *'<*> sin Q(fe) I ^¦11-°'^
(ft = l, .... 8).
В возмущающей функции сохраняется лишь ее вековая часть,
а в последней отбрасывают члены выше второго порядка отно-
сительно /¦(ft), s<h>, ы<*>, i>w. Тогда правые части уравнений относи-
тельно а<6' обращаются в нуль, так что
fl(« = aW = const (й = 1, 2 8), D.11.38)
а уравнения относительно И6', sW, u<ft>, yW являются линейными
с постоянными коэффициентами. При этом уравнения расщеп-
ляются на две независимые системы относительно r&\ s<A' и ы<*>,
»W соответственно. Впервые эти уравнения были рассмотрены
Лагранжем [71], [72] (см. § 8.03).
Решение этих уравнений при конкретных значениях масс
и больших полуосей орбит планет имеет чисто тригонометриче-
скую форму
7 \ D.11.39)
J
Z^
7
= Yi Щк) cos {a[ + в/) + sin y cos П,
D.11.40)
ptt) = X Nf> sin (a/ + 6y) + sin у sin П,
11.OS]
ГЛ. 11. ТЕОРИЯ ДВИЖЕНИЙ БОЛЬШИХ ПЛАНЕТ
505
где М\ \ N) \ S], Oj, р,-, б,-, у. П — постоянные. Постоянные Sj, a,
суть корни вековых уравнений (см. § 8.03) для.систем относи-
тельно /"(ft), sW и u(ft), o(fe) соответственно, а углы y> П опреде-
ляют положение неизменяемой плоскости Лапласа в планетной
системе. Принятые значения для больших полуосей орбит, на-
чальных значений эксцентриситетов, долгот перигелиев, накло-
нов и долгот восходящих узлов (элементы отнесены к эпохе
1900,0 и к эклиптике и равноденствию эпохи 1950,0) даны
в табл. 60 (см. [72] — [74]).
Таблица 60
1
2
3
4
5
6
7
8
Планета
Меркурий
Венера
Земля +
Марс
Юпитер
Сатурн
Уран
Нептун
а
0,3870987
0,7233323
1,000000
1,5236878
5,202798
9,538852
19,183581
30,03386
е
0,2056142
0,0068207
0,01675101
0,0933089
0,0483356
0,0558847
0,0463281
0,0089674
7°
3
0
1
1
2
0
1
1
0'
23
0
51
18
29
46
46
24",4
40,4
23,6
14,8
25,5
21,2
24,9
27,7
76°
130
109
334
13
91
172
47
я
35' 52",4
51
55
55
24
47
16
24
42,0
8,5
0,1
41,9
20,0
32,9
12,7
47°
/6
173
49
99
113
73
131
Q
48'
12
57
19
51
21
42
12
5",0
8.5
6
5,9
53,5
10,6
13,6
37,8
Для углов у, П (наклона и долготы узла неизменяемой пло-
скости Лапласа относительно плоскости эклиптики эпохи 1850,0)
Клеменс и Брауэр получили значения [75]
Y=l°39'13'/,96 П=107°13'47",6.
Если для масс взять наиболее надежные значения и учесть их
ошибки, то для у и П получают следующие значения:
Y = 1° 38' 49" ± 22", П = 107°13',3 ± 2',1.
Для наклонов i0 орбит планет к неизменяемой плоскости
Стокуэлл получил значения, приведенные в табл. 61.
Таблица 61 Таблица 62
Планета
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
6°20'58",08
2°1Г13",57
1°35'19",376
1° 40' 43",70
0° 19' 59",674
0° 55' 30",924
1° Г45",27
0° 43' 24",845
к
1
2
3
4
5
6
7
8
5",463
7,345
17,328
18,002
4,296
27,774
2,719
0,633
"к
-5",202
-6,571
-18,744
-17,633
0
—25,733
-2,903
—0,678
506
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
И.OS
Приближенные значения постоянных sk, ak, М^\ Mft) ука-
заны в табл. 62—64 (более точные значения даны в [73], [74],
[76]).
Таблица 63
/ \
1
2
3
4
5
6
7
8
1
0,175
—0,025
0,002
—0,002
0,036
0,001
0,000
0,000
2
0,006
0,021
-0,013
0,015
0,019
0,000
0,000
0,000
3
0,004
0,016
0,010
-0,015
0,018
0.003
0,000
0,000
4
0,001
0,003
0,030
0,072
0,019
0,015
0,001
0,000
5
0,000
0,000
0.000
0,000
0,045
-0,015
0,001
0,000
6
0,000
0,000
0,000
0,000
0,033
0,049
0,001
0,000
7
0,000
0,000
0,000
0,000
-0,032
—0,002
0,030
0,001
8
0,000
0,000
0,000
0,000
0,001
0,000
-0,003
0,009
Из выражений D.10.18), D.10.19) вытекает, что эксцентри-
ситеты eW и наклоны iW орбит всех планет обладают либрацион-
ным изменением, оставаясь заключенными между некоторыми
пределами, а долготы перигелиев itW и долготы восходящих уз-
лов QW обладают медленным вековым движением.
Таблица 64
X
1
2
3
4
5
6
7
1
0,125
—0,036
0,004
0,001
0,000
-0,003
-0,001
2
0,012
0,010
-0,027
-0,007
0,000
—0,002
-0,001
3
0,008
0,008
0,024
0,005
0,003
-0,002
—0,001
4
0,002
0,002
-0,036
0,060
0,010
—0,001
—0,001
5
0,000
0,000
0,000
0,000
—0,006
—0,001
—0,001
6
0,000
0,000
0,000
0,000
0,016
—0,001
—0,001
7
0,000
0,000
0,000
0,000
—0,001
0,018
0,001
8
0,000
0,000
0,000
0,000
0,000
-0,002
0,012
Приближенные пределы изменения эксцентриситетов и на-
клонов орбит по отношению к неизменяемой плоскости Лапласа
и соответствующие значений вековых движений nf\ Qfy даны
в табл. 65.
S 11.051
ГЛ. II. ТЕОРИЯ ДВИЖЕНИЯ БОЛЬШИХ ПЛАНЕТ 507
Таблица 65
Планета
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
min е<*>
0,121
0
0
0,018
0,025
0,012
0,012
0,006
max e'*'
0,232
0,071
0,068
0,140
0,061
0,084
0,078
0,015
min f<*>
4° 44'
0
0
0
0°14'
0°47'
0°54'
0°34'
п,ВХ#>
9°1Г
3°16'
3° 6'
5°56'
0°29'
Г 1
1° Т
0°47'
5",46
9",31
9",48
18",00
4",30
27",77
4",00
О",633
Отрицательное значение В™' указывает на попятное движение узла.
-5",20
-8",61
-6",87
-15",10
—25",73
-25",73
—2",90
—0",68
Глава 12
ДВИЖЕНИЕ МАЛЫХ ТЕЛ
СОЛНЕЧНОЙ СИСТЕМЫ
Эта глава посвящена движению естественных спутников
больших планет, малых планет и комет. В настоящее время из-
вестны всего 33 спутника: у Земли 1 спутник, у Марса — 2,
у Юпитера — 13, у Сатурна—10, у Урана — 5, у Нептуна — 2
спутника, причем 13-й спутник Юпитера открыт в 1974 г. *).
Анализ и теория движения спутников Марса содержится
в работах [77] — [82]. Учитываются сжатие Марса и возмущение
Солнца. Теория движения этих спутников, основанная на интер-
претации потенциала сфероида как потенциала в обобщен-
ной задаче двух неподвижных центров, имеется в [83], [84] (см.
ч. VI, §3.03).
Теория движения четырех галилеевых спутников Юпитера
(Ио, Европа, Ганимед, Каллисто) была разработана еще Лап-
ласом. Более современная теория, которая используется для
астрономических ежегодников, принадлежит де Ситтеру [85].
Учитываются сжатие Юпитера, солнечные возмущения и взаим-
ные возмущения спутников. Теория движения самого близкого V
спутника Юпитера, на движение которого сильно влияет сжатие
планеты, приводится в [86]. Теория движения VI спутника Юпи-
тера, построенная с помощью формул теории движения Луны
Делоне (см. гл. 10), изложена в [87]. Теория движения VII спут-
ника Юпитера, основанная на методе Хилла — Брауна (см.
гл. 10), имеется в [88]. Аналогичная теория движения VIII спут-
ника Юпитера имеется в [89]. Полуаналитическая теория движе-
ния этого спутника в форме, соответствующей теории Делоне,
построена в [90]. Эта теория является наиболее точной по срав-
нению с предыдущими и весьма перспективной, так как объеди-
няет чисто аналитические методы и численные методы с исполь-
зованием современных электронно-вычислительных машин. Дви-
•) В печати имеется сообщение об открытии в 1975 г. еще одного,
14-го спутника Юпитера.
S 12.01] ГЛ. 12. ДВИЖЕНИЕ МАЛЫХ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ 509
жение этого спутника изучалось также численными методами
[91], [92].
Теория движения спутников Сатурна, основанная на класси-
ческом методе учета возмущений, г лла построена Г. Струве [93].
Теория движения этих спутников, основанная на методе
А. М. Ляпунова, построена Г. Н. Дубошиным и А. И. Рыбако-
вым [94] —[100]. Учитываются сжатие Сатурна, притяжение
кольца Сатурна, солнечные возмущения и взаимные возмуще-
ния спутников.
§ 12.01. Невозмущенное движение спутников
В первом приближении считают, что движение спутника пла-
неты происходит по невозмущенной эллиптической орбите во-
круг центра планеты (см. ч. II, гл. 1).
В качестве основной выбирается обычно система координат,
начало которой помещено в центр планеты, плоскость ху совпа-
дает с экваториальной плоскостью планеты, и оси сохраняют
неизменное положение в пространстве, причем ось z направлена
вдоль вектора угловой скорости вращения планеты.
Невозмущенная эллиптическая орбита спутника определяется
обычно следующими элементами (см. ч. II, § 1.04): а — большая
полуось, е — эксцентриситет, i — наклон, Q — долгота восходя-
щего узла, ш — угловое расстояние перицентра от узла, Т — мо-
мент прохождения спутника через перицентр.
Вместо Q, ы, Т используют также элементы л = Я + со —
долготу перицентра, М — среднюю аномалию, Я = Q + w + М —
среднюю долготу.
Среднее движение спутника п и сидерический период обраще-
ния Р определяются по формулам
m) f n_ 2n
n
где f — постоянная тяготения, то — масса планеты, m — масса
спутника.
Планетоцентрические координаты спутника х, у, г вычис-
ляются по элементам орбиты с помощью формул гл. 2 ч. II.
Приводим табл. 66 значений средних элементов орбит,
а также масс спутников.
Значения большой полуоси а в тыс. км и сидерического пе-
риода Р в средних солнечных сутках заимствованы из [137]. Зна-
чения эксцентриситета е и наклона i к экватору центральной
планеты — из [140], значения масс m с вероятными ошибками
в долях массы центральной планеты — из [134]. Звездочкой *
отмечены спутники, обладающие обратным движением.
Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ 1% 12.02
Таблица 66
*
о.
№
е
2
Я
о.
О
я
ев
О.
>9
Я
>.
[-
I Hen
Спутник
Фобос
Деймос
Амальтея, V
Ио
Европа
Ганимед
Каллисто
VI
VII
X
XII*
XI*
VIII*
IX*
Янус
Мимас
Энцелад
Тефия
Диона
Рея
Титан
Гиперион
Япет
Феба *
Миранда
Ариэль
Умбриэль
Титания
Оберон
Тритон *
Нереида
Год
откр.
1877
1877
1892
1610
1610
1610
1610
1904
1905
1938
1951
1938
1908
1914
1966
1789
1789
1684
1684
1672
1655
1848
1671
18?8
1948
1851
1851
1787
1787
1846
1949
а,
ТЫС. КМ
9,3
23,5
181,2
421,2
670,3
1068,6
1881,0
11445,4
11732,0
11825
21206,0
22589,0
23490,0
23941,0
157,4
185,0
238,3
294,3
376,4
526,0
1221,0
1480,0
3560,0
12926,0
130,0
190,6
265,9
437,6
585,7
354,0
5575,0
Р, ср.
солн.
сут.
0,32
1,26
0,50
1,77
3,55
7,15
16,69
250,57
259,65
263,55
631,1
692,5
738,9
758,0
0,75
0,94
1,37
1,89
2.Z4
4,52
15,97
21,32
79,92
523,7
1,41
2,52
4,14
8,71
13,46
5,88
362,0
е
0,019
0,0031
0,0028
0,0000
0,0003
0,0015
0,0075
0,1580
0,2073
0,13
0,17
0,21
0,41
0,32
0,0
0,0201
0,0044
0,0000
0,0020
0,0010
0,0289
0,104
0,0284
0,1659
—
0,007
0,0081
0,0023
0,0010
0,0000
0,75
1
1М
1,8
0,4
0,0
0,0
0,0
0,0
27,6
24,8
28,8
146,7
163,4
149,1
153,9
0,0
1,5
0,0
1,1
0,0
0,3
0,3
0,6
14
150
—
0
0
0
0
160
5,0
т
2,7-10"'
4.8-10"9
18.100
D,153+0,343) • 10~5
B,508+0,049)-10~5
(8,079+0,011 > -10—5
D,797 + 0,417)-10
8,5-10-;°
0,35-10-
0,010-10" °
0,007.10"°
0,020-10"" °
0,077-10"
0,015-10 10
—
F,59±0,015).Ю
A,48+0,61)-Ю-7
A,095+0,22)-10"°
B,39+0,053). 10""
C,2 ±5,6)-10-"
B,4619±0,0029)-l0
2-Ю
C,94±1,93)-10~в
—
I -10—"
15-10"*
6 - 10~"
50-10 ,
29 -10
C,3±1,96) ¦ Ю~3
§ 12.02. Возмущения оскулирующих элементов орбит
спутников, вызываемые сжатием планеты
Укажем приближенные формулы для возмущений оскули-
рующих элементов.
Возмущающая функция R рассматривается обычно с точно-
стью до первой степени сжатия (см. ч. VI, § 2.01)
A-3 sin2 б), D.12.01)
§ 12.02] ГЛ. 12. ДВИЖЕНИЕ МАЛЫХ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ 511
где р — экваториальный радиус планеты, г — планетоцентриче-
ский радиус-вектор, б — склонение (планетоцентрическая ши-
рота) спутника,/ — параметр, характеризующий сжатие планеты.
Разложение функции R (см. ч. VI, § 2.01) по степеням экс-
центриситета е и по кратным средней аномалии М имеет вид
(с точностью до е4)
+ 3 (е + у е3) cos М + J- (е2 + -J- е4) cos 2Af +
+-Щ- е3 cos 3Af + Ц- е4 cos 4Af] +
+ ¦§¦ sin2 i [~ e3cos (Af - 2ш) + -^ е4 cos BM - 2со) -
- у (е - у е3) cos (Af + 2со) + (l - -| е* + -Ц е4) cos BАГ+2ш) +
+ т (е ~ же3)cos {3? +2ш) + -т (е2 ~ тге4)cos <4М + 2с°)+
+ -^- e3cosEM + 2ш) + ^-e4cos FАГ + 2со)] } . D.12.02)
Выражения для возмущений первого порядка элементов
а, е, i, Q, л, е (долгота в начальную эпоху ?0), получаемые не-
посредственно из уравнений Лагранжа для оскулирующих эле-
ментов, имеют вид (с точностью до е2)
~ = I (т^-J { 2 (l - -| sin2 i) [e cosM +1 е2 cos 2Af] +
+ sin2/ • [- у е cos (Af + 2ш) + (l - у e2) cos BAf + 2co) +
+ -j e cos CAf + 2co) + -y- e2 cos DAf + 2co)] } , D.12.03)
te=l(ffi[(\ -f sin2t)[(l +^-e2)cosAf + |ecos2Af +
+ -g- e2cos 3Al\ + j sin2/ • [j (l - -|- e2) cos (Af + 2co) +
+ -jj^cos (Af — 2co) — yecosBAf + 2co) +
Ж e2)COSCM + 2t°) + "T
+ 4fJ- e2 cos EAf + 2a)] }. D.12.04)
6/ = 1 / (?.)* sin / cos / • [-e cos (Af+2co)+( 1 -2e2) cos BAf+2co)+
+ у e cos CAf + 2co) +1- e cos CAf + 2e) + -f e2 cos DАГ + 2co)],
D.12.05)
512 ч. iv. теория возмущенного движения [4 12.02
6Q = /(?-J cos i • [A + ге2)nt + Зе sin М + |-е2 sin 2Af +
+ у е sin {М + 2ш) - у A - 2е2) sin {2M + 2ш) -
- \е sin (ЗМ + 2ш) - -^- е2 sin DЛ* + 2ш)], D.12.06)
е 6л = - / (?J (cos i - cos2 i) [ent + Зе2 sin M + у e2 sin (Л*+2ш) —
— у e sin BЛ* + 2(o) - -g- e2 sin (ЗЛ1 + 2ш)] —
- -g- e2 sin (M - 2(o) + 5e sin BM + 2co) -
- ^- e sin {AM + 2ш) -
D.12.07)
] [yJ2(o)
(i f
+ у(i - -fg- e2) sin BAf + 2(o) + -§¦ e sin {Ш + 2ш) +
+ -^- e2 sin DAf + 2(o)] - (cos i - cos2 i) [A + 2e>) nt +
+ 3esinAf+ -|-e2sin2iW+ yesin(Af+ 2(o) —
-y A-2Й2) sin BАГ+2a>)~ e sin CAf+2») - j e2 sin DAf+2ш)] }.
D.12.08)
Для коэффициентов при вековых возмущениях первого по-
рядка элементов Q, л, е, вычисленных без разложения по сте-
пеням е, справедливы следующие выражения:
V COSt
n
D.12.09)
¦п.
I,/|)V5 cos2 i — 2 cos i — 1
§ 12.04] ГЛ. 12, ДВИЖЕНИЕ МАЛЫХ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ 513
§ 12.03. Возмущения в движении спутников,
вызываемые притяжением Солнца
Солнечные возмущения спутников вычисляются по форму-
лам, приведенным в гл. 10. Можно использовать непосредственно
буквенные формулы теории Делоне (§ 10.03) или формулы для
промежуточной орбиты Хилла (§ 10.05). Более точное вычисле-
ние возмущений по методу Хилла — Брауна выполняется так
же, как и в случае Луны, но с учетом конкретных численных
значений масс, средних движений и т. д.
§ 12.04. Общие сведения о характере движения
малых планет
К настоящему времени зарегистрировано 1816 малых пла-
нет, для которых определены более или менее точные элементы
орбиты. Эти планеты имеют свой номер и внесены в каталог
малых планет.
В первом приближении считают, что малые планеты дви-
жутся по невозмущенным эллиптическим орбитам. В сборниках
«Эфемериды малых планет» [101], издаваемых Институтом тео-
ретической астрономии АН СССР, публикуются список зареги-
стрированных малых планет и элементы их эллиптических орбит,,
отнесенных к определенной эпохе. В этих сборниках публикуют-
ся ежегодно поисковые эфемериды малых планет, вычисляемые
в большинстве случаев с учетом возмущений.
Большинство зарегистрированных малых планет (97%)
имеет большие полуоси орбит в интервале от 2,06 до 3,64 а. е.
(средние суточные движения п от 1200" до 510" соответственно).
Малых планет, имеющих п > 1200" (т. е. находящихся
ближе к Солнцу), зарегистрировано 21, а имеющих я < 510"
(т. е. находящихся дальше от Солнца, чем основная масса) —
39. Из последних выделяются две группы: 14 так называемых
«троянцев», со средним суточным движением около 300", и
22 малые планеты со средним движением около 450" (так назы-
ваемая группа типа Гильды — первой открытой малой планеты
с таким средним движением и зарегистрированной под № 153).
Средние движения «троянцев» относятся к среднему движе-
нию Юпитера приближенно как 1 : 1 (случай соизмеримости
1/1), а средние движения малых планет типа Гильды — как 2 : 3.
Три малые планеты: 487 Ода (я = 487"), 279 Туле (я = 404"),
944 Гидальго (я = 254") движутся изолированно.
Если рассматривать распределение основной массы малых
планет по их среднему движению я, то обнаруживаются сгуще-
ния орбит вблизи некоторых значений п (я == 565", п = 640",
я = 710 — 730" и др.) и резкие минимумы (так называемые
17 Под ред, Г, Н. Дубошина
514 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [$ 12.65
люки) вблизи значений п, соответствующих соизмеримости п со
„/ 1 19 9 4
средним движением п' Юпитера вида — = Т" т- т< т< ~ч~>
п. 2, о о / 7
¦g-i и др. Наиболее ярко выражены люки при
D.12.10)
!(„ = 598,3),
4 (« = 747,8).
Первый люк называют по имени малой планеты 46 Гестии
(л = 884",6). второй — по имени малой планеты 108 Гекубы
(п = 614",3).
Эксцентриситеты орбит основной массы малых планет за-
ключены между 0,02 и 0,42. Среднее значение эксцентриси-
тета для всей совокупности орбит составляет около 0,15.
Наклоны орбит основной массы малых планет заключены
между 0,5 и 30°. Среднее значение наклонов для всех совокуп-
ностей орбит — около 10°. Более подробно о распределениях
элементов орбит малых планет см. в [102], [141].
§ 12.05. Возмущенное движение малых планет
Орбиты большинства малых планет отличаются от орбиг
больших планет значительными эксцентриситетами и накло-
нами. Кроме того, отношение больших полуосей орбит большин-
ства малых планет к большой полуоси орбиты основной возму-
щающей планеты Юпитер мало отличается от единицы. Эти
обстоятельства являются причиной трудностей при непосред-
ственном применении к малым планетам аналитических мето-
дов учета возмущений, разработанных для больших планет.
Исключение составляет метод Ганзена (см. § 7.02), являю-
щийся полуаналитическим и применимым к орбитам с большими
эксцентриситетами и наклонами. Этим методом была построена
[103] очень детальная теория движения малой планеты 4 Веста,
учитывающая полностью все возмущения первого и второго по-
рядка от всех больших планет. Эта теория близка по точности
к аналитическим теориям больших планет (разности С—О не
превышают по ос и б нескольких секунд дуги).
Теории, приближающиеся по точности к теории Весты, по-
строены методом Ганзена для малых планет 29, 447, 13 в рабо-
тах [104] — [106] соответственно.
С помощью метода Хилла построена теория движения Це-
реры с учетом возмущений первого порядка и разработана [107],
[108] методика вычислений возмущений второго порядка.
§ 12.05] ГЛ. 12. ДВИЖЕНИЕ МАЛЫХ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ 515
Если ограничиться основными членами, то для Цереры воз-
мущения радиуса-вектора г, долготы К в оскулирующей орбите
и широты р по отношению к плоскости невозмущенной орбиты
могут быть представлены следующими формулами:
бг = 0,00028159 + 0,00000663 v cos v — 0,00008703 и sin w —
- 0,00112275 sin (о - 2w) - 0,00389088 sin Bo - 2o>') +
+ 0,00230699 sin Bv - 3w') - 0,00131026 cos Cd - 5ro'), D.12.11)
6Я = v [- 41",97999 - 13",05433 cos v — 0",99541 sin v -
- 0",25601 cos 2v + 0",05211 sin 3o] - 146",720 cos {v - w') +
+ 163",001 sin (o - w') - 609",928 cos (v - 2w') -
— 101",209sin(j) - 2w) + 514",984cosBd - 2ш') +
+ 394",398cos Bo - 3a/) + 129",916 sin Bo - 3t»') +
+ 189",954 cos Bw - 5a»') + 321",923 sin Bv — 5w') +
+ 189",432 sin Cd - 5ш'), D.12.12)
6P = 3",29691 + о B",28354 cos v - 6",67905 sin v) +
+ ll",356cosuy'- 10",104sin2uy'- 13",781 sin(u — 2ш') +
+ 29",460 sinBo - 3o»') - 24",250 cos Cw - 5o»'). D.12.13)
где v — истинная аномалия в невозмущенном движении и/ =
= ^ — v,
it = nv + MJ 0,
Мо, Mo ~ средние аномалии Цереры и Юпитера в начальную
эпоху соответственно; единица расстояния — астрономическая
единица.
Расхождения между теорией (с учетом лишь возмущений
первого порядка) и наблюдениями в период ус 1801 по 1946 г.
довольно значительные: до 180" по ос и до 57" по б.
Теории движения, обладающие примерно такой же точностью
или менее точные, были построены также для некоторых других
малых планет (см. [105], [109], [ПО]).
К малым планетам, средние движения которых п соизме-
римы со средними движениями Юпитера п', все упомянутые ана-
литические методы неприменимы. Для приближенного учета
возмущений (прежде всего вековых и долгопериодических) та-
ких планет используются методы Болина и Бренделя (см. [109],
[111] — [112]). Метод Бренделя пригоден также для учета возму-
щений обычных малых планет, средние движения которых несо-
измеримы со средним движением Юпитера. Теории движения
малых планет, построенные этими методами, могут использо-
ваться главным образом для вычисления поисковых эфемерид
17*
516 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 12.05
Для построения приближенной теории движения таких малых
планет разработаны методы, основанные на применении теории
периодических орбит [113]. Получено, например, что если для
малых планет типа Гестии (соизмеримость 1 : 3) выбрать в ка-
честве опорных периодическую орбиту Пуанкаре второго типа,
то отклонения от нее выразятся формулами
D.12.14)
t + c4 sh at — 0,0217 с :t + 0,33443 ¦ 103c2,
бе = 0,47987 (c3 sh at + c4 ch at) + 9,4864 ¦ 103cb
bh = 17,638 бе - 167,507 • 103c,,
6/ = - 10,799 6a - 0,2333c!/ + 3,5916 ¦ 103c,,
flg=- 0,02972- 10~3fla + 0,03161 • 106/,
где с\, ..., с4 — постоянные интегрирования, определяемые по
начальным значениям оскулирующих элементов малой планеты.
Для планеты Гестии эти формулы позволяют представить
движение в интервале от 1857 по 1946 г. с точностью до 0°,20
по долготе к и до 0°,05 по широте C.
Теория движения некоторых малых планет троянской группы
была построена с помощью .специально разработанной методики
Брауном [114]. Промежуточная орбита в буквенном виде, учи-,
тывающая основные долгопериодические возмущения, построена
для таких малых планет в [115].
В последнее время получают большое распространение ме-
тоды усреднения и численно-аналитические методы, позволяю-
щие реализовать новые пути построения теорий движения малых
планет (см. подробнее об этом в гл. 9).
Широко используются численные методы интегрирования
дифференциальных уравнений движения малых планет. Таким
путем составлены довольно точные таблицы движения некото-
рых из так называемых астрометрических малых планет [117],
[118], [142]; производится массовое вычисление элементов орбит
и поисковых эфемерид для сборника «Эфемериды малых пла-
нет».
Большое внимание уделяется улучшению первоначальных
элементов орбит малых планет по мере накопления для той или
иной планеты наблюдательных данных (см. ч. III).
Десять из малых планет A-Церера, 2-Паллада, З-Юнона,
4-Веста, 7-Ирис, 11-Партенона, 18-Мельпомена, 39-Летиция,
40-Гармония) выбраны Международным Астрономическим Сою-
зом для реализации международной программы по построению
нового фундаментального каталога звезд. Точные теории дви-
жения этих малых планет требуются в рамках данной про-
граммы для целей уточнения системы отсчета (положения точки
12.06]
ГЛ. 12. ДВИЖЕНИЕ МАЛЫХ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ
517
равноденствия и экватора), к которой привязываются коорди-
наты звезд.
Важное практическое значение имеет в настоящее время
изучение движения малых планет, подходящих близко к Земле
и другим внутренним планетам D33 Эрос, 1566 Икар, 1620 Гео-
графос, 1685 Торо), которые используются для уточнения зна-
чения солнечного параллакса и масс внутренних планет.
Приведем список с элементами орбит а, п, е, i для некоторых
из упомянутых малых планет:
Планеты
Церера A)
Паллада B)
Юнона C)
Веста D)
Гестия D6)
Гекуба A08)
Гильда A53)
Эдда F73)
Гидальго (944)
Эрос D33)
Икар A566)
Географос A620)
а
2,7674
2,7692
2,6703
2,5779
2,5245
3,2192
3,9754
2,8154
5,8201
1,4581
1,0777
1,2440
п
770",719
769,962
813,144
857,254
884,572
614,300
447,653
751,096
252,701
2015,293
3171,343
2557,308
е
0,0785
0,2352
0,2556
0,1870
0,1704
0,0842
0,1536
0,0127
0,6565
0,2229
0,8267
0,3353
1
Ю-,610
34,831
12,990
10,775
2,315
4,385
7,845
2,856
42,494
10,828
22,994
13,328
§ 12.06. Общие сведения о движении комет
Наблюдавшихся к настоящему времени комет (точнее, по-
явлений комет) насчитывается более 1650. Полагают, что в пер-
вом приближении они движутся относительно Солнца по невоз-
мущенной (эллиптической, параболической или гиперболиче-
ской) орбите. Элементы невозмущенной орбиты определены,
более или менее точно для комет в 763 появлениях. Из них около
600 различных комет (см. [119]). Из этих комет можно выде-
лить параболические и гиперболические (движущиеся в первом
приближении по параболической или гиперболической орбите),
долгопериодические (движущиеся по эллиптической орбите
с эксцентриситетом, близким к единице, и очень большим перио-
дом) и короткопериодические, наблюдавшиеся в нескольких и
даже многих появлениях. Среди последних определенно выде-
ляются четыре группы или, как говорят, семейства комет: семей-
ства Юпитера, Сатурна, Урана, Нептуна. Орбиты комет, принад-
лежащих семейству какой-либо из этих планет, имеют афелий-
ные расстояния, близкие к большой полуоси орбиты этой
планеты, т.е. близкие к 5.2; 9,5; 19,2; 30,1 а. е. соответственно
518 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ [§ 12.07
Кроме того, имеется группа на 17—20 комет, афелийные рас-
стояния которых близки к 52 а. е., а также кометы с очень
большими афелийными расстояниями (от 300 а. е. и более). По-
следние приближаются по характеру своего движения к долго-
периодическим кометам.
Эксцентриситеты кометных орбит (за исключением орбит
четырех комет) находятся в пределах от 0,40 до 1,00 и среднее
значение эксцентриситета для всей совокупности орбит состав-
ляет около 0,67, т. е. кометные орбиты значительно более вы-
тянуты, чем орбиты малых планет.
Наклоны кометных орбит также в среднем больше, чем
наклоны орбит малых планет (среднее значение наклона для
комет семейства Юпитера равно 13°,1). Кроме того, имеются ко-
меты с обратным движением, что не наблюдается ни для одной
малой планеты.
Более подробно об орбитах комет см. в [121].
§ 12.07. Возмущенное движение комет
Изучение возмущений комет от больших планет Солнечной
системы проводится почти исключительно с помощью численного
интегрирования уравнений движения. Наибольшее внимание
уделяется короткопериодическим кометам. Основным является
при этом вопрос о влиянии на орбиты комет тесных сближений
этих комет с большими планетами. Под тесным сближением ко-
меты с большой планетой подразумевается прохождение кометы
через сферу действия планеты. Подробный анализ этого вопроса
содержится в [121]. Там же приводится обширный список лите-
ратуры о движении комет. См. также [122].
Полученные результаты позволяют утверждать, что при тес-
ных сближениях комет с большими планетами и прежде всего
с Юпитером происходят очень существенные изменения орбит
комет. Например, комета Лекселя перед сближением с Юпите-
ром в 1767 г. имела большую полуось а = 5,1 а. е. и перигелий-
ное расстояние q = 2,96 а. е. После сближения с Юпитером ко-
мета была «переброшена» на орбиту с а около 2,5 а. е. и
9 — 0,67 а. е. После повторного сближения с Юпитером в 1779 г.
комета больше не наблюдалась.
Согласно вычислениям Леверье [122] новая орбита кометы
после этого сближения с Юпитером могла быть эллиптической
с большими перигелийным q, афелийным Q расстояниями и пе-
риодом, или даже гиперболической в зависимости от точного
значения большой полуоси а0 орбиты перед сближением. Таким
образом, возмущения от Юпитера могли как превратить эту
комету из коротко- в долгопериодическую, так и выбросить ее
за пределы Солнечной системы по гиперболической орбите,
ЛИТЕРАТУРА К ЧАСТИ IV
519
Комета Вольфа I имела три тесных сближения с Юпитером:
в 1757, 1875 и 1922 гг.
Изменения элементов а, е, q и периода Р иллюстрируются
табл. 67.
Таблица 67
до 1756
1757-1875
1872—1922
1923-1959
а
3.39
4.09
3,61
4,11
е
0,630
0,408
0,555
0,404
Q
1,26
2.42
1,61
2,45
Р лет
6,25
8,27
6,85
8,33
Комета Отерма 3 до тесного сближения с Юпитером в 1937 г.
имела а = 8,053 a. e., <?=5,4 a. e., Q=10,6 a. e. и Р = 22,85 года
(она совершала движение за пределами орбиты Юпитера и не
наблюдалась с Земли). После 1937 г. до 1962 г. комета имела
элементы а = 4,42 а. е., q = 3,4 а. е., Q = 4,5 а. е., Р = 9,30 лет
и наблюдалась во всех точках орбиты, расположенной между
орбитами Марса и Юпитера. После сближения с Юпитером
в 1963 г. комета была переброшена на орбиту q = 5,4 а. е. и
Q = 9,0 а. е., т.е. комета до 1937 г. принадлежала семейству
Сатурна, в период 1938—1963 гг. — семейству Юпитера, после
1963 г. — опять семейству Сатурна.
Исследования численными методами движения ряда наблю-
давшихся долгопериодических комет имеются в [124], [125]. По-
лучено, что возмущения больших планет превращают сильно
вытянутые эллиптические орбиты большинства рассмотренных
комет в гиперболические.
ЛИТЕРАТУРА К ЧАСТИ IV
1. Дубошин Г. Н., Небесная механика. Основные задачи и методы,
изд. 3-е, «Наука», 1975.
2. Брауэр Д., Клеменс Дж., Методы небесной механики, «Мир»,
1964.
3. С у б б о т и н М. Ф., Введение в теоретическую астрономию, «Наука»,
1968.
4. Субботин М. Ф., Курс небесной механики, т. 2, ОНТИ, 1937.
5. Шар лье К., Небесная механика, «Наука», 1966.
6. П у а н к а р е А., Лекции по небесной механике, «Наука», 1965.
7. Tisserand F., Traite de Mecanique celeste, t. I—IV, Paris, 1889—
1896.
8. Некрасов А. И., Курс теоретической механики, т. 2, Гостехиздат,
1953.
9. С у с л о в Г. К., Теоретическая механика, Гостехиздат, 1944.
10. Валле-Пуссен Ш. Ж., Лекции по теоретической механике, т. II,
ИЛ, 1949.
11. Дубошин Г. Н., Теория притяжения, Физматгиз, 1961.
520 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
12. Д у б о ш и н Г. Н., Астрон. ж. 35, 2, 1958.
13. Смирнов В. И., Курс высшей математики, т. III, ч. 2, т. IV, Гостех-
издат, 1953.
14. Ф и х т е н г о л ь ц Г. М., Курс дифференциального и интегрального ис-
числения, т. 2, Гостехиздат, 1948.
15. Кампе де Ферье Ж., Кемпбелл Р., Петь о Г., Фогель Т.,
Функции математической физики. Справочное руководство, Физматгиз,
1963.
16. Уиттекер Е. Т., Вате он Г. Н., Курс современного анализа, изд. 2-е,
т. I, Физматгиз, 1962; т. II, Физматгиз, 1963.
17. Град штейн И. С. и Рыжик И. М., Таблицы интегралов, сумм, ря-
дов и произведений, Физматгнз, 1962.
18. Журавский А. М., Справочник по эллиптическим функциям, Изд-во
АН СССР, 1940.
19. Янке Е., Эмде Ф., Леш Ф., Специальные функции. Формулы, гра-
фики. Таблицы, «Наука», 1968.
20. Шулер М., Гебелейн X., Таблицы эллиптических функций, ВЦ АН
СССР, вып. 13, 1961.
21. Беляков В. М., Кравцова Р. И., Раппопорт М. Г., Таблицы
эллиптических интегралов, т. I, Изд-во АН СССР, 1962.
22. Беляков В. М., Кравцова Р. И., Раппопорт М. Г., Таблицы
эллиптических интегралов, т. 2, Изд-во АН СССР, 1963.
23. Л о м к а ц и Ц. Д., Таблицы эллиптических функций Вейерштрасса, ВЦ
АН СССР, 1967.
24. Демин В. Г., Движение искусственного спутника в нецентральном поле
тяготения, «Наука», 1968.
25. Leverrier U. I., Ann. Obs. Paris 1, 1855, 2, 1856.
26. В о q u e t F., Ann. Obs. Paris 19, 1885.
27. С а у 1 ey A., Mem. Roy. Astron. Soc. 29, 191, 1859.
28. Проскурин В. Ф., Тр. Ин-та теор. астрон. АН СССР 2, 3, 1952.
29. Delaunay С, Theorie du mouvement de la Lune 1, Paris, 1960.
30. Zeipel H., Ark. Mat., Astron., Fysik. 11, № 1, 7; 12, Ks 9; 13, JSTs 3,
1901 — 1917
31 M о и се е в Н. Д., Тр. Гос. астрон. ин-та им. П. К. Штернберга, т. XV,
вып. 1, 1945.
32. Боголюбов Н. Н., М и т р о п о л ь с к и й Ю. А., Асимптотические ме-
тоды в теории нелинейных колебаний, Физматгиз, 1963.
33. Волосов В. М., Успехи матем. наук 17, вып. 6, 1962.
34. Гребе ников Е. А., Бюлл. Ии-та теор. астрон. АН СССР 11, № 5
A28), 293, 1968.
35. Г р е б е н и к о в Е. А., Астрон. ж. 47, вып. 2, 1970.
36. Г р е б е н и к о в Е. А., Рябов Ю. А., Новые качественные методы в не-
бесной механике, «Наука», 1971.
37. Г р е б е н и к о в Е. А., Миронов С. В., Приходько В. А., Астрон,
ж. 50, 6, 1973.
38. П р и х о д ь к о В. А., Препринт ИТЭФ, № 60, 1973.
39. Миронове. В., Препринт ИТЭФ, № 90, 1973.
40. Г р е б е н и к о в Е. А., Некоторые качестьенные исследования дифферен-
циальных уравнений небесной механики, докт. дисс, МГУ—ГАИШ, 1967.
41. Brown F. W., An introductory Treatise on the Lunar Theory, Cambridge,
1896, 1960.
42. С март У., Небесная механика, «Мир», 1965.
43. Hill G., Collected Works, vol. 1, 1905, Washington.
44. Brown E. W., Mem. Roy. Astron. Soc. 53, 39—116; 163—202, 1900.
45. Brown E. W., Mem. Roy. Astron. Soc. 54, 1, 1904.
46. Brown E. W., Mem. Roy. Astron. Soc. 57, 51, 1905.
47. В г о w n E. W., Mem. Roy. Astron. Soc. 59, 1, 1909.
ЛИТЕРАТУРА К ЧАСТИ IV 521
48. Brown E. W., Tables of the motion of the Moon, London, 1919.
49. Improved Lunar Ephemeris, 1952—1959, USA, 1954.
50. Eckert W. I., Walker M. I., Eckert D., Astron. J. 71, № 5, 1966.
51. Delaunay C, Mem. Academ. Sci. Paris 28, 1860, 29, 1867.
52. Lever rier U. I., Recherches astronomiques, Ann. obs. Paris 4, 5, 6, 10,
It, 12, 13, 14, 1855—1877.
53. G a i 11 о t A., Ann. Obs. Paris 24, 1904.
54. G a i 11 о t A.. Ann. Obs. Paris 28, 1910.
55. Gail lot A., Ann. Obs. Paris 31, 1913.
56. N e w с о m b S., Astron. Papers 5, part 4, 1895.
57. Newcomb S., Tables of the four inner planets, Astron. Papers 6, parts
1—4, 1895—1898.
58. Newcomb S., Tables of the heliocentric motion of Uranus and Neptune,
Astron. Papers 7, parts 3, 4, 1898.
59. Hill G. W., A new theory of Jupiter and Saturn, Astron. Papers 4, 1890.
60. H i 1 1 G. W., Tables of Jupiter, Tables of Saturn, Astron, Papers 7,
1898.
61. Шараф Ш. Г., Тр. Ин-та теор. астрон. АН СССР 4, 1955.
62. Шараф Ш. Г., Будникова Н. А., Тр. Ин-та теор. астрон. АН СССР
10, 5, 1964; И, 89, 1966.
63. Ross F. E., New elements of Mars and Tables for correcting the helio-
centric positions derived from Astronomical Papers 6, part 4; Astron. Pa-
pers 9, part 2, 1917.
64. Brower D., Clemence G., Eckert W. I., Coordinates of five ou-
ter planetes, 1653—2060, Astron. Papers 12, 1951.
65. Clemence G., Theory of Mars. Astron. Papers 11, part 2, 1949; 16,
part 2, 1961.
66. Clemence G., Theory of Mercury, Astron. Papers 11, part 1, 1943.
67 Dun comb R. L., Motion of Venus 1750—1949, Astron. Papers 16, part 1,
1958.
68. Д о м а н с к а я Н. С, Бгалл. Ин-та теор. астрон. АН СССР 10, 2, 1965.
69. Aldo Кг an j с, Mem. Soc. Astron. Hal., Nuova ser. 34, № 3, 1963.
70. Ф у р с е н к о М. А., Методы вычисления эфемерчды Луны, Бюлл. Ин-та
теор. астрон. АН СССР 10, № 4, 272, 1965.
71. LagrangeG., Ouevres, 5, Paris, I870.
72. Stockwell G., Smithsonian Contrib. Knowledge 18, 1870.
73. Brower D., van Woerkom A. G., The secular variations of the or-
bital elements of the principal Planets, Astron. Papers 13 part 2, 1950.
74. Шараф Ш Г, Будникова Н. А., Бюлл. Ин-та теор. астрон. АН
СССР 11, № 4, 231, 1967.
75. С 1 е m e n с е G., В г о w e r D., Astron. J. 60, 118, 1955.
76. Скрипниченко В. И., Бюлл. Ин-та теор. астрон. АН СССР 11, № 7,
441, 1968.
77. Struve H., Astron Nachr. 138, 219, 1895.
78. Burton H. E., Astron. J. 39, № 929, 1929.
79. W о о 1 а г d E. W., Astron. J. 51, № 1150, 1944.
80. К о с а ч е в с к и й М. П., Тр. Гос. астрон. ин-та им. П. К. Штернберга
24, 199—214, 1954.
81. Ко сач е ве к ий М. П., Тр. Гос. астрон. ин-та им. П. К. Штернберга
28, 277, 1960.
82. К о с а ч е в с к и й М. П., Тр. Гос. астрон. ин-та им. П. К. Штернберга
28, 293, 1960.
83. Вашковьнк С. Н., Вестн. Моск. ун-та, физ., астрон., № 3, 35, 1968.
84. Вашковьяк С. Н., Вестн. Моск. ун-та, фпз. астрон., № 1, 87, 1969.
85. D e Sitter, Theory of Jupiter's satellite;, Acad. Sci. Proc. Amsterdam 21,
22, 1919.
86. V a n W о e r k о m e A. G., Astron. Papers 13, part 1, 1950.
522 Ч. IV. ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
87. Проскурин В. Ф., Бюлл. Ин-та теор. астрон. АН СССР 6, № 1, 25,
1955.
88. Токмалаева С. С, Тр. Ин-та теор. астрон. АН СССР 5, 3, 1956.
89. П р о с к у р и н В. Ф., Успехи астрон. наук 5, 245, 1950.
90. К о v a I e v s k у J., Bull. Astron. 23, 1969
91. Б о ев а Н. Ф., Астрон. ж. 12, № 5, 476, 1935.
92. Куликов Д. К., Бюлл. Ин-та теор. астрон. АН СССР 4, № 7, 311,
1950.
93. Struve G., Veroff. Sternwarte Babelsberg VI, Heft 1, 1924; Heft 2, 1926;
Heft 3, 1929; Heft 4, 1930; Heft 5, 1933.
94. Д у б о ш и н Г. Н., Тр. Гос. астрон. ин-та им. П. К. Штернберга 15,
вып. 1, 158, 251, 1945.
95. Дубошин Г. Н., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 121,
1960.
96. Дубошин Г. Н., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 149,
1960.
97. Дубошин Г. Н., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 161,
1960.
98. Г р е б е н и к о в Е. А., Астрон. ж. 36, вып. 2, 361, 1959.
99. Рыбаков А. И., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 171,
1960.
100. Рыбаков А. И., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 249,
1960.
101. «Эфемериды малых планет», ежегод. сб., «Наука».
102. П у т и л и н И. Н., Малые планеты, Гостехиздат, 1953.
103. Leveaux G., Ann. Observ. Paris 15, 1880; 17, 1885; 20, 1892; 22, 1896;
25, 1908.
104. О s t e n H., Astron. Nachr. 4, № 6, 1923.
105. Newcomb S., Astron. Abh. Erganzungshefte zu Astron. Nachr. 5, № 6
1928.
106. Osten H., Astron. Abh. Erganzungshefte zu Astron. Nachr. 2, № 15,
1908.
107. Проскурин В. Ф., Тр. Ин-та теор. астрон. АН СССР 2, 3, 1952.
108. Проскурин В. Ф., Тр. Ин-та теор. астрон. АН СССР 9, 3, 1962.
109. Brendel M., Abh. Kon. Gesellschaft d. Wissenschaft Gottingen, 1, 2, 6,
7, 1898—1911.
110. Горшков П. М., Вести. Всеросс. Астрон. союза, вып. 2, 50, 1919.
111. Bohlin К., Bihang till К. Svenska Vet. Ak. Hand. 14, № 5, 1888.
112. Bohlin K-, Formeln und Tefeln zur Gruppenweise Berechnung der all-
gemeinen Storungen benachbarter Planeten, Upsala, 1896.
113. Чеботарев Г. А., Успехи астрон. наук 5, 1950.
114. Brown E. W., Trans, of the Astron. Observ. of Jale University 3, part 3,
1925.
115. P я б о в Ю. А., Астрон. ж. 34, вып. 4, 1957.
116. Newcomb S., Astron. Nachr. 58, № 209, 1862.
117. Her get P., Clemence G. M., Hertz H., Astron. Papers 11, part 4
1950.
118. Her get P., Astron. Papers 16, part 3, 1962.
119. Baldet F., Catalogue Generate des orbits de comets de l'an 466 a 1952
Paris, 1952.
120. Чеботарев Г. А., Аналитические и численные методы небесной меха-
ники, «Наука», 1965.
121. Казимирчак-Полонская Е. И., Тр. Ин-та теор. астрон АН
СССР 7, 1961.
122. L е v е г г i е г N. J., Ann. Observ. Paris 3, 1857.
123. Чеботарев Г. А., Божков а А. И., Бюлл. Ин-та теор. астрон АН
СССР 6, № 4, 1955.
ЛИТЕРАТУРА К ЧАСТИ IV 523
124. Галибина И. В., Бюлл. Ин-та теор. астрон. АН СССР 9, № 7, 1964.
Т25. М а к о в е р С. Г., Бюлл. Ин-та теор. астрон. АН СССР 9, № 8, 1964.
126. Л я х Р. А., Бюлл. Ин-та теор. астрон. АН СССР 7, 6, 1959.
127. Мартыненко Б. К., Бюлл. Ин-та теор. астрон. АН СССР 10, 7, 1965,
457—506.
128. Andoyer H., Cours de Mecanique celeste, т. I A923); т. II, Paris, 1926.
129. Депри А., Анрар Ж-, Ром А., Бюлл. Ин-та теорет. астрон. АН СССР
12, № 1, 1971.
130. М о г g а п Н. R., Astron. J. 42, 1933.
131. Clemen се G. M., Astron. Papers 11, ч. 2, 1943.
132. D u п с о m Ь е R. L, Astron. Papers 16, ч. 1, 1958.
133. С 1 е m е п с е G. М„ D u n с о m b e R. L., Astron. J. 62, 1957.
134. Duncombe R. L., Recent advances in dynamical astronomy, edited by
B. D. Tapley, V. Szebehely, D. Reidel publishing company, 1973.
135. Klepczynski W. Y., Seidelmann P. K-, Duncombe R. L., Ast-
ron. J. 74, 1969; 75, 1970.
136. Seidelmann P. K., Duncombe R. L, Klepczynski W. Y., Jack-
son E. S., Astron. J. 76, 1971
137. Э с к о б а л П., Методы астродинамики, «Мир», 1971.
138. Wylic L. R., Publ U. S. Naval Obs. 15, серия 2, ч. З, 1947.
139. Cohen С. Y., Hubbard E. C, Oester winter C, Astron. J. 72,
1967.
140. Куликовский П. Г., Справочник любителя астрономии, «Наука», 1971.
141. Чеботарев Г. А., Шмакова М. Я., Бюлл. Ин-та теорет, астрон. АН
СССР 12, № 8, 1971.
142. Duncombe R. L., Astron. Papers 20, ч. 2, 1970.
Часть V
ЗАДАЧА ТРЕХ ТЕЛ
Глава 1
НЕОГРАНИЧЕННАЯ ЗАДАЧА ТРЕХ ТЕЛ
Ниже приводятся основные сведения о задаче трех тел.
Даются некоторые формы дифференциальных уравнений дви-
жения. Рассмотрены частные ее решения. Дополнительные све-
дения можно найти в монографиях и учебных пособиях [1] — [5].
§ 1.01. Различные формы дифференциальных уравнений
движения задачи трех тел
Пусть имеются три материальные точки Pq, Р\, Рг с массами
пг0 Ф 0, гп\ ф 0, «г Ф 0, взаимно притягивающие друг друга по
закону всемирного тяготения. Неограниченная задача трех тел
состоит в определении и изучении всевозможных движений ма-
териальных точек Ро, Pi, P2. Поскольку задача трех тел — част-
ный случай задачи п тел, уравнения движения в различных си-
стемах координат могут быть получены из уравнений задачи п
тел (ч. IV, гл. 1), если положить в них п = 2.
В частности, дифференциальные уравнения абсолютного дви-
жения получаются из уравнений D.1.01) и имеют вид
mi ~lw~=='
dU
dU
E.1.01)
(/ = 0, 1,2).
Силовая функция задачи U определяется формулой
E.1.02)
1.01]
ГЛ. 1. НЕОГРАНИЧЕННАЯ ЗАДАЧА ТРЕХ ТЕЛ
525
где f — постоянная тяготения, ДОь Дог, Ai2 — взаимные расстоя-
ния между точками Ро и Л, ^о и Р2, Pi и Р2 соответи.зенно, вы-
ражаемые формулами
А?, = & -
- лJ
л,J
/, / = 0, 1, 2; i
E.1.03)
Уравнения E.1.01) имеют 10 известных первых интегралов:
шесть интегралов движения центра масс системы, три интеграла
площадей и интеграл энергии. Эти интегралы получаются из
D.1.04) — D.1.06), если в последних положить п — 2.
Порядок системы E.1.01), равный 18, можно понизить на
12 единиц.
В развернутой форме уравнения E.1.01) имеют вид
"Id
dt2
dt2
dt2
dt7
dt2
dt2
dt
dt2
dt2
1Щ
/WIq
jmQ
li-Eo
До.
Ci-Co
^01
.3
Д01
д39
Ai
An
+ /m2 -
+ /m2-^
+ /«,
|2 — ^u
дЭ '
;j »
A3 '
Д,2
12 — Л I
.3 •
3 *
?8-S2
A3 •
Д12
Д12
Д3о '
E.1.04)
Дифференциальные уравнения неограниченной задачи трех
тел в других системах координат и в явном виде приведены
в книгах [1] — [5].
В барицентрической равномерно вращающейся с некоторой
постоянной угловой скоростью п. прямоугольной декартовой си-
стеме координат Gxy, расположенной в плоскости начального
526
Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
1.01
треугольника Р0Р\Р2, уравнения движения плоской задачи имеют
вид [2]
d2y.
dyi _ 2
4F~nX
dx. „
^ 2
' ди
1 dU \
dt
E.1.05)
(i-0, 1,2).
Силовая функция U выражается формулой E.1.02), где
Кроме того, координаты хи у{ (i = 0, 1, 2) удовлетворяют
соотношениям
E.1.06)
+ m1yl + mjj2 = 0,
так как центр масс G принят за начало координат.
Если точка Ро изображает Солнце, то уравнения движения
точек Pi и Р2 в прямоугольной гелиоцентрической системе коор-
динат выражаются равенствами
dt- r\ I h\2 г\\
+ 1 (^о + п\) у\ i Г у2 — У: У'
т == / "*2 I т ;
Л V Д?2 г:
dt1
f(m0
' 1
dt1
I
_ fm
xt—x2
XT]
г, J
/Ц
f (w0 + т2) z2
E.1.07)
где xt, уi, zt — прямоугольные гелиоцентрические координаты
точки Р, (t = l, 2),
§ 1.021
ГЛ. 1. НЕОГРАНИЧЕННАЯ ЗАДАЧА ТРЕХ ТЕЛ
527
Система имеет четыре известных первых интеграла (три инте-
грала площадей и интеграл энергии):
— — [(mitji + m2y2) (m,z, + m2z2) —
m2z2) (m^i + m2y2)] + m, (^z, — zty{) -f
— Ziiiz) = cu
m2x2) —
m2x2) (ffi,Zi
\
"T~ ^2 1*^2^2 """" -^2^2/ — ^2*
\~ ff72*2) (ff*i*/i + ^2^2) ~~
j_
m
¦1^[(m[xl+m2x2J + >
E.1.08)
E-1.09)
где m = ffio 4- ffii + fti2; c\, c2, c3, A — произвольные постоянные.
A. M. Ляпуновым выведены уравнения движения в задаче
трех тел [1] в специальных переменных, особенно удобных для
отыскания частных решений Лагранжа.
§ 1.02. Лагранжевы решения. Точки либрации
Определение. Равновесным решением некоторого вектор-
ного дифференциального уравнения
к^Х, E.1.10)
называется постоянный вектор у = а, удовлетворяющий уравне-
нию E.1.10).
Для того чтобы постоянный вектор у = а был частным реше-
нием уравнения E.1.10), необходимо и достаточно, чтобы он
был решением векторного функционального уравнения
E.1.11)
для любого хеХ Чаще всего ищут равновесные решения в слу-
чае автономных систем дифференциальных уравнений (F зави-
сит только от искомого вектора у). Тогда равновесные решения
определяются функциональным уравнением
/40 = 0, E.1-1?)
528
Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
[§ 1.02
Если применить E.1.12) к уравнениям E.1.05), в которых
уравнения для координат точки Ро заменены тождествами
E.1.06), то необходимое и достаточное условие существования
равновесных решений (или положений равновесия) в задаче
трех тел выражается уравнениями
maxQ -f-
+ m2X2 — 0,
x, — .
A
- п*
п*х2 + fm,
fm0
= 0,
= 0,
3
..ч —u>
E.1.13)
Система E.1.13) состоит из шести уравнений с семью неиз-
вестными: п, х0, хи х2, уо, уи у2.
Определение. Лагранжевыми частными решениями за-
дачи трех тел называются вещественные решения системы
E.1.13).
Таковыми являются:
а) круговые лагранжевы решения;
б) коллинеарные лагранжевы решения;
в) гомографические лагранжевы решения.
Решения а) и б) являются частным случаем решений в) и
их выделение в отдельные группы объясняется методическими
соображениями.
Круговые лагранжевы решения — это такие решения системы
E.1.13), для которых
к.2^
Шд + nij + Ш2
E.1.14)
E.1.15)
(а — произвольная постоянная) и среди неизвестных Хо, х\, х2,
Уо, У\, У2 четыре считаются произвольными постоянными. Если,
например, считать, что у0 = у\ = 0, а х0 и х\ — известные, от-
личные от нуля числа, то
х0
.
1.021
ГЛ. 1. НЕОГРАНИЧЕННАЯ ЗАДАЧА ТРЕХ ТЕЛ
529
Точка Р2 с массой т2 занимает одно из двух положений L4 и
L5 на рис. 67. Точки L4 и L5 называются треугольными точками
либрации.
В системе координат Gxy точки Ро,
Ри Р2 образуют неподвижный равно-
сторонний треугольник со стороной
а, ориентация которого определяется
четырьмя произвольными постоянны-
ми. Отсюда следует, что при задан-
ном а имеется четырехпараметриче-
ское семейство круговых лагранжевых
решений.
В абсолютной системе координат
О?г]? центр масс треугольника Р0Р\Р2
будет двигаться равномерно и прямо-
линейно, а точки Ро, Р\, Р2 будут рав-
номерно вращаться вокруг G с угло-
вой скоростью п. Таким образом, рав-
новесные решения в системе Gxy не
будут таковыми в системе О?г]?.
Коллинеарные лагранжевы решения определяются из си-
стемы E.1.13), если считать, что у0 = у\ = у2 = 0, а абсциссы
Рис. 67. Треугольные точки лн-
б
W
р, рг
Рис. 68. Первое взаимное распо-
ложение точек Р„, Pi, Pi.
У,
я
Рис. 69. Второе взаимное располо-
жение точек Ра, Ри Pi.
точек Pq, Pi, Pj определяются из системы уравнений
+ пг2х2 = О,
— x0)
¦
г-
„2„ | fm1 {х2 — xi) | fmo{x2 — xo)
E.1.16)
Возможны три расположения точек Pq, Pi, P2 на прямой:
1) х0 < х\ < х2 (рис. 68),
2) х2 < х0 < xi (рис. 69),
3) ^о<-«2<^1 (рис.70).
530 Ч. V. ЗАДАЧА ТРЕХ ТЕЛ I§ I.02
Решение системы E.1.16) для случая 1) сводится к решению
уравнения
(«о + «i) z5 + (Зт0 + 2т,) г4 + C/иа + от,) г3 -
— (mi + 3m2) г2 — Bm, + 3m2)z — (mi + m2) = 0, E.1.17)
где
z = Xl~Xl . E.1.18)
Если считать *i известным, то после решения E.1.17) хэ
и х2 определяются из равенств
_ m2z-(mi+m2) (, , ]q)
'о — *1 I511»)
рт s а угловая скорость п дается форму-
лой
х\ (wij + т, + mj2 z*
Существует однопараметрическое семейство частных решений
типа 1), так как х\ — произвольный параметр.
Для случая 2) решение системы E.1.16) сводится к решению
алгебраического уравнения
+ /и,) z5 + Bт0 + Зт,) 24 + (т0 + Зт^ 23 -
- (то + Зт2) г2 - Bта + Зт2) г - (т„ + т2) = 0, E.1.22)
где
z= xr2~xr° . E.1.23)
*о — *i
Если «о задано и уравнение E.1.22) решено, то х\, х% и «
определяются по формулам
' E.1.24)
т, -
m,-m2z '
f (mi - m2zK [т0 (г
x\ (#Bj + m, + mJ (z + IJ [m,a + {m, + m..)] '
Так как лго — произвольный параметр, то здесь также имеется
однопараметрическое семейство коллинеарных лагранжевых ре-
щений.
1.021
ГЛ. 1. НЕОГРАНИЧЕННАЯ ЗАДАЧА ТРЕХ ТЕЛ
531
Наконец, для случая 3) решение системы E.1.16) сводится
к решению уравнения
{та + т2) z5 + (Заи,) + 2т2) г4 + (Зяг0 + т2) z3—
- {т2 + Зяг,) z2 - {2т, + Зот,) г - (m, + «s) = 0, E.1.27)
где
г= xxl2ZI] ¦ E.1.28)
Считая х2 произвольным параметром, все остальные неиз-
вестные находим из соотношений
„ т,г-(т, + /яЛ. E.1.29)
E.1.30)
-. E.1.31)
_ mt — (т0 + т2) z
Здесь также имеется однопараметрическое семейство колли-
неарных лагранжевых решений.
Если т0 > т\ S> m2, то положение точки Р2 в случае 1) на-
зывается точкой либрации L2, положение Р2 в случае 2) назы-
вается точкой либрации L3, a
положение Р2 в случае 3) на-
зывается точкой либрации L\.
Замечание 1. Положе-
ние тел Ро, Р\, Pi неизменно
лишь в системе координат
Gxyz. В абсолютной системе
O?ri? (рис. 71) вся система об-
ладает поступательно-враща-
тельным движением, так как
центр масс G движется прямо-
линейно и равномерно относи-
тельно Ogrit, а прямая Gx вра-
щается с постоянной угловой
скоростью п в плоскости
Gxy || О1ц.
Замечание 2. Нас инте-
ресуют лишь положительные
корни уравнений E.1.17), E.1.22), E.1.27). Согласно теореме
Декарта {6], [7] каждое из этих уравнений имеет только один
положительный корень.
В книгах [1] — [4] можно найти координаты точек либрации
L\, L2, L3 для задачи трех тел: Солнце — большая планета—•
астероид.
Рис. 71. Коллипеарные и треугольные точки
либрации.
532 Ч. V. ЗАДАЧА ТРЕХ ТЕЛ [§ 1.02
Гомографические лагранжевы решения — это частные реше-
ния уравнений E.1.05), удовлетворяющие условиям
¦Ж = Р@, E.1.32)
где р(/)—некоторая функция времени, А*0/ — начальное значе-
ние взаимного расстояния A,-j. Очевидно, что круговые лагран-
жевы решения и коллинеарные лагранжевы решения являются
частным случаем томографических решений, получаемых при
р(/)= 1. Доказательство существования томографических кол-
линеарных и треугольных лагранжевых решений можно найти
в книге Г. Н. Дубошина [3]. Полную теорию томографических
решений в задаче п тел, построенную Пицетти, можно найти
в книге А. Уинтнера [8] (см также [9]).
Примечание. Используются и другие обозначения точек
либрации.
Глава 2
ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ
Эта глава посвящена важнейшей задаче небесной меха-
ники— ограниченной круговой задаче трех тел. Она нашла ши-
рокое применение как в классической небесной механике (тео-
рия движения Луны), так и в динамике космического полета
(задача достижения Луны). Изложены сведения о либрацион-
ных решениях. Приведены сведения о сферах действия планет,
§ 2.01. Дифференциальные уравнения движения.
Интеграл Якоби
Ограниченная круговая задача трех тел — это задача о дви-
жении материальной точки Р2 = Р с нулевой массой ш2 = 0,
притягиваемой по закону Ньютона двумя другими материаль-
ными точками Ро и Pi, имею-
щими отличные от нуля мас-
сы mQ и пг1 и движущимися
по круговым кеплеровским
орбитам вокруг общего
центра масс.
Ограниченная задача
трех тел представляет собой
предельный вариант неог-
раниченной задачи трех тел,
поэтому дифференциальные
уравнения движения в раз-
личных системах координат могут быть получены из уравнений
E.1.01), если в них положить ш2 = 0.
Чаще всего для описания движения точки Р используется
барицентрическая прямоугольная система координат Gxyz, рав-
номерно вращающаяся с угловой скоростью, равной среднему
движению п точек Pq и Pi, причем плоскость Gxy совпадает
с плоскостью орбит точек Ро и Pi, которые находятся на оси Gx
(рис. 72). Координаты х, у, г точки Р определяются из системы
Рис. 72. Равномерно вращающаяся барицентри-
ческая система координат.
534 Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
дифференциальных уравнений [1], [3], [4]
0-пчг~
dt2
dt2
d?z
df
где
дх '
dQ
dz '
[§ 2.02
E.2.01)
E.2.02)
— постоянная тяготения.
Система E.2.01) обладает первым интегралом
+ Ш°=^-С, E.2.03,
называемым интегралом Якоби.
Плоская ограниченная круговая задача трех тел описы-
вается системой дифференциальных уравнений четвертого по-
рядка
A4^
dt-
dt дх •
E.2.04)
4F + м dt — ду •
для которых интеграл Якоби имеет вид
Другие первые интегралы систем E.2.01) и E.2.04) неизвестны,
поэтому общее решение ограниченной круговой задачи трех тел
до настоящего времени не найдено.
§ 2.02. Поверхность нулевой относительной скорости
Определение. Поверхностью нулевой относительной ско-
рости (поверхностью Хилла) называется поверхность, опреде-
ляемая уравнением
2Й = С, E.2.05)
или, в развернутом виде,
E.2.06)
§ 2.03] ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ 535
В плоской ограниченной круговой задаче трех тел поверх-
ности нулевой скорости соответствует кривая нулевой скорости
(кривая Хилла)
п2 (х2 + у2) + 2/ ( , т° + . "" "\ = С. E.2.07)
Из E.2.06) видно, что поверхность нулевой скорости сим-
метрична относительно координатных плоскостей Gxy и Gxz.
Поверхность нулевой скорости разделяет пространство на обла-
сти, в которых возможны реальные движения точки Р (области
возможности движения 2Q ^ С), и области, в которых ее реаль-
ные движения невозможны (области невозможности движения
2Q < С). Эти поверхности хорошо изучены [1] — [4], [10] — [13].
§ 2.03. Лагранжевы решения ограниченной
круговой задачи трех тел. Точки либрации
Ограниченная круговая задача трех тел имеет известные
частные решения: треугольные лагранжевы решения и колли-
неарные лагранжевы решения. Томографических лагранжевых
решений нет, так как расстояние PqP\ постоянно.
Как и в случае неограниченной задачи, координаты точек
либрации Z-4 и L5 в системе Gxy даются равенствами
y2 = ±4f(x1-x0). E.2.08)
^ = , y2 ±fAx0).
Будем считать в дальнейшем, что PqP\ = 1. Тогда
ya=±^f. (.5.2.09)
Величина г, введенная для точки либрации Lx в § 1.02, равна
z = Tr7. л = 1рр1!- E.2.10)
Расстояние г определяется как положительный корень урав-
нения
+ Cmj + m,) r3 - m,r2 + 2mxr - /я, = 0, E.2.11)
получаемого из уравнения E.1.17), если заменить г через г и
положить гпг = 0.
Решение E.2.11) можно представить в виде ряда по степе-
ням малого параметра
если считать т\ < щ.
536 Ч. V. ЗАДАЧА ТРЕХ ТЕЛ [§ 2.04
Для г имеем выражение
r = v-yv2-{v3- ... E.2.13)
Для точки либрации L2 величина 2, определяемая соотноше-
нием E.1.18), равна
2 = х2 — *, = РХР2 = г. E.2.14)
В этом случае г должно определяться как положительный ко-
рень уравнения
+ Cm0 + т,) г3 - т,г2 - 2т,г - /я, = О, E.2.15)
E.2.16)
получаемого из E.1.17) при z = г и т2 = 0.
Для точки либрации L2 имеем
Наконец, для точки либрации L3 величина z равна
z = *0 —*а = |Я0Я| = п. E.2.17)
Она определяется как положительный корень уравнения
(mo+m|jr5 + Bmo+3m,)rt +
+ (m 4 3m ) r\ — mr\ — 2m/, - m = 0, E.2.18)
получаемого из E.1.22), если положить z = Т\ и т2 = 0.
Решение уравнения E.2.18) можно представить в виде ряда
л=1--^ + |й-Ц24- .... E.2.19)
где
ц= —. E.2.20)
Решение уравнений E.2.11), E.2.15) и E.2.18) можно искать
и в виде других степенных рядов (см. [2], [3]).
Зная координаты точек либрации, можно определить значе-
ния постоянной Якоби С для лагранжевых решений. Численные
значения постоянной Якоби для Lu ..., L5 можно найти, на-
пример, в [1] — [4].
§ 2.04. Различные гравитационные сферы
Для наглядности предположим, что одним притягивающим
телом (Pq) является Солнце, другим (Pi) — большая планета,
Луна или какой-либо спутник большой планеты, а точка с ну-
§ 2.04] ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ 537
левой массой (притягиваемое тело) Р — комета, астероид или
искусственный небесный объект.
Пусть /?0 — ускорение, сообщаемое нулевой массе Р Солн-
цем, когда последнее принимается за центральное тело, a fi —
возмущающее ускорение, вызываемое притяжением планеты Р\.
Пусть, далее, R\ — ускорение, сообщаемое нулевой массе Р
планетой Pi, когда планета принимается за центральное тело,
a Fo — возмущающее ускорение, вызываемое притяжением
Солнца Ро.
Определение. Сферой тяготения планеты называется об-
ласть трехмерного пространства, в которой
Я, > Яо. E.2.21)
Очевидно, граница сферы тяготения планеты определяется
уравнением
Я, = Ro. E.2.22)
Легко убедиться, что поверхность E.2.22) не является сферой
в строгом смысле. Приближенное значение радиуса сферы тяго-
тения планеты определяется по формуле
Р = г1^-^-. E.2.23)
где г\ — расстояние планеты Pi от Солнца Ро.
Определение. Сферой действия планеты Р\ называется
область пространства, в которой
Граница сферы действия планеты Pi определяется уравнением
ъ-Ь E-2-25)
Приближенное значение радиуса сферы действия планеты опре-
деляется по формуле
?Ш E-2-2б)
Так как г\ для всех больших планет не постоянно, а колеблется
в некоторых пределах, то отсюда следует, что р и pi также ко-
леблются в некоторых пределах. Подробности о гравитацион-
ных сферах можно найти в [14]. В табл. 68 приводятся радиусы
сфер тяготения больших планет и Луны в а. е., а в табл. 69 —
радиусы их сфер действия (а. е.).
538
Планета
Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
Таблица 68
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
Плутон
Луна — Земля
Луна —Солнце
Pmln
0,00013
0,00112
0,00171
0,00078
0,15298
0,15222
0,12091
0,21452
0,04959
0,00027
0,00019
Ртах
0,00019
0,00114
0,00177
0,00095
0,16855
0,17017
0,13289
0,21823
0,08214
0,00030
0,00019
[§ 2.М
Таблица 69
Планета
Меркурий
Венера
Земля
Марс
Юпитер
Сатурн
Уран
Нептун
Плутон
Луна—Земля
Луна—Солнце
Pi, mln
0,00060
0,00409
0,00610
0,00350
0,30665
0,34428
0,32991
0,57551
0,17825
0,00042
0,00105
Pi, max
0,00091
0,00415
0,00631
0,00422
0,33786
0,38488
0,36261
0,58547
0,29523
0,00047
0,00108
Определение. Сферой влияния планеты Р\ относительно
Солнца Ро называется сфера, центр которой совпадает с цент-
ром планеты и с радиусом
р2
где, как и раньше,
E.2.27)
E.2.28)
М. Д. Кислик показал [15], что построение траекторий кос-
мического полета методом «склеивания» выгоднее, если вместо
сфер действия рассматривать сферы влияния. В этом случае
ошибки в параметрах траектории при переходе от одного при-
тягивающего центра к другому в среднем минимальны. Сред-
ние радиусы сфер влияния больших планет относительно Солнца
в а. е. даны в табл. 70.
Таблица 70
Планета
Меркурий
Венера
Земля
Pi
0,00241
0,01138
0,01672
Планета
Марс
Юпитер
Сатурн
Pi
0,01204
0,58863
0,72241
Планета
Уран
Нептун
Плутон
Pi
0,77592
1,29766
0,61885
Определение. Гравитационной сферой Хилла [11] назы-
вается область пространства с центром в планете Pi и с радиу-
сом г, равным расстоянию Либрационной точки L\ от планеты Pi.
- 2.05]
ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ
539
Радиус сферы Хилла г определяется формулой E.2.13) (см.
§ 2.03)
Значения радиусов сфер Хилла для больших планет и Луны
даны в табл. 71.
Таблица 71
Планета
Меркурий
Венера
Земля
Марс
г
0,00148
0,00674
0,01001
0,00724
Планета
Юпитер
Сатурн
Уран
Нептун
г
0,34697
0,42881
0,46494
0,77035
Планета
Плутон
Луна — Земля
Луна—Солнце
г
0,38392
0,00039
0,00234
Гравитационная сфера Хилла определяет область простран-
ства, в которой движения точки Р устойчивы в смысле Хилла
(см. ч. X, § 3.03), т. е. точка Р будет вечно спутником планеты.
В книге [14] можно найти определение и размеры гравита-
ционных сфер Солнца относительно ядра Галактики.
§ 2.05. Периодические решения ограниченной
круговой задачи трех тел
Приведенные в § 2.03 лагранжевы решения ограниченной
круговой задачи трех тел являются примером периодических
орбит. Но этим не исчерпываются все известные периодические
решения ограниченной круговой задачи.
Периодические орбиты можно было бы объединить в сле-
дующие классы:
а) периодические решения в окрестности точек либрации
L\, ..., L5 (почти-либрационные решения);
б) периодические орбиты в окрестности одной из притяги-
вающих масс (спутниковые орбиты);
в) периодические решения Пуанкаре первого сорта;
г) периодические решения Пуанкаре второго сорта;
д) периодические решения Пуанкаре третьего сорта;
е) периодические решения других сортов.
Классы а) и б) периодических орбит были в первом при-
ближении получены без использования методов Ляпунова и
Пуанкаре отыскания периодических решений и были известны
задолго до Ляпунова и Пуанкаре.
Рассмотрим более подробно почти-либрационные решения
в окрестности точки Lt (или L5).
540 Ч. V. ЗАДАЧА ТРЕХ ТЕЛ [§ 2.05
Ради простоты положим f = 1, п2 = т0 + тх = 1, то = 1 — ц,
mi = p.. Тогда лагранжево периодическое решение, изображае-
мое точкой 14> дается формулами
хц = ~-^, Уи=^~. *ь = 0. E.2.30)
Для исследования решений ограниченной круговой задачи
трех тел введем новые переменные |, т\, ?:
l = x — xLl, r\ = y — yLt, ? = z. E.2.31)
Тогда вместо уравнений E.2.01) будем иметь уравнения
dt2 dt ~ dl ' di2 ~Г dt ~~ дт\ ' dt2
где
^. E.2.33)
E.2.34)
Если разложить -~-, —з—,—^-в ряды по степеням ?, tj, ?
и сохранить в них лишь линейные члены, то получаем диффе-
ренциальные уравнения первого приближения*). В частности,
для плоского случая будем иметь
„ dr] jj. t , 3 Уз"A —2ц)
' ~ l rii ~ 4 ё 4^
E.2.35)
d-'Л . о ««1 _ ЗУЗТ! —2ц)
1F + Z~T
В переменных ?ь tji, связанных с g, ti формулами преобразо-
вания
&, =|cose + rjsine, n, = — Е sin e + л cos e, E.2.36)
где
V2n), E.2.37)
E.2.38)
уравнения E.2.35) записываются в виде
¦^-2-7^ = 40+Vl-3|*A -.*))&„
*) Уравнения первого приближения часто называются уравнениями в ва-
риациях.
2.0S] ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ 541
Общее решение системы E.2.38) имеет вид [2]
?, = С] cos (k^t + щ) + С2 cos (k2t + а2),
т), = qfit sin (k{t -f- а[) + ^2^2 sin (k2t -\- a2)
где Сь С2, аь аг — произвольные постоянные, а
J E.2.39)
(* = 1, 2),
если ±Яь ±Яг являются корнями характеристического уравне-
ния
*-4-Ь2 + -ТИA-ц) = 0 E.2.40)
и
0<ц<ц0, 1-цо<A<1, E.2.41)
причем
^ = 1^^.-0,03852. E.2.42)
Условия E.2.41) и E.2.42) указывают на то, что лагранжево
треугольное решение L4 устойчиво в смысле Ляпунова в первом
приближении (см. ч. X, гл. 3).
Если A0 < ц < 1 — цо, то общее решение уравнений E.2.38)
будет содержать неограниченные функции времени, поэтому
в этом случае точка либрации L4 неустойчива в смысле Ляпу-
нова (см. ч. X, гл. 3).
Замечание 1. Эти выводы в равной мере относятся и
к точке либрации Ls.
Замечание 2. Точки либрации L\, L2, L3 неустойчивы
в смысле Ляпунова даже в первом приближении [1].
Полученные Пуанкаре [16] периодические решения классов
в), г) и д) характеризуются тем, что их периоды совпадают
с периодом «порождающего» решения, т. е. решения уравнений
движения при нулевом значении малого параметра.
Различия между ними следующие:
1) решения первого сорта — это плоские почти-круговые пе-
риодические решения;
2) решения второго сорта — плоские почти-эллиптические пе-
риодические решения;
3) решения третьего сорта — пространственные периодиче-
ские решения.
Для решений первого сорта оскулирующий эксцентриситет
пропорционален \i [см. E.2.40)] и поэтому обращается в нуль
вместе с и, а для решений второго сорта е ф 0 при и = 0. Пуан-
каре доказал, что такие периодические решения имеются и в не-
ограниченной задаче трех тел.
Б42
Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
[§ 2.07
К периодическим решениям класса е) можно отнести перио-
дические орбиты с периодом, отличным от периода порождаю-
щего решения. Такими являются периодические решения Шварц-
шильда [17]. Эти вопросы подробно рассмотрены в фундамен-
тальном сочинении Пуанкаре [16], а также в книгах Г. Н. Дубо-
шина [3], Ф. Мультона [18], Г. А. Чеботарева [19] и К. Зигеля [20].
Кроме аналитических методов для отыскания периодических
решений ограниченной круговой задачи трех тел применялись и
численные методы. Эти результаты, сопровождаемые подробной
библиографией, можно найти в монографии В. Себехея [21].
§ 2.06. Критерий Тиссерана
При близком прохождении кометы от большой планеты эле-
менты ее орбиты могут заметно измениться, поэтому возникает
вопрос об отождествлении комет с различными системами эле-
ментов.
Необходимым условием тождественности двух комет является
равенство значений постоянной
Якоби С для различных систем
элементов {22]. В литературе
это утверждение получило на-
звание критерия Тиссерана.
Аналитически критерий
Тиссерана выражается равен-
ством, вытекающим из интег-
¦* рала Якоби
1 , 2я
то(-аоДО)
',,0,0)
1 , In'
-е*)cosi2,
E.2.43)
Рис. 73. Прямоугольные барицентрические
координаты точки Р с нулевой массой.
С —центр масс точек та и mi. О—середина
отрезка m^nii.
где п' — среднее движение возмущающей планеты, k — постоян-
ная Гаусса.
§ 2.07. Уравнения ограниченной круговой задачи
в эллипсоидальных переменных
Если ввести вместо прямоугольных барицентрических коор-
динат х, у, г точки Р (см. рис. 73) эллипсоидальные коорди-
наты и, v, w по формулам
у = csh«sinucosa>,
: = а' 2 а° — с ch и cos v,
= с sh и sin v sin w,
с —
E.2.44)
2.0?]
ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ
543
то тогда уравнения E.2.01) принимают вид
(ch2u — cos2 и) и + у sh 2и ¦ (й2 — о2) —
— у sh 2и sin2 v ¦ w2 + sin 2v • iiii +
+ 2ra (ch2 u — cos2 v) cos аи • z) — n sh2 и sin 2v sin w ¦ w =
= - (a^c~ °о) sh и cos и + -^ sh 2m A - sin2 и sin2 да) +
+ -x Ч*1! sh u cos и — -^T ^2 sh 2u sin2 v,
(ch2« — cos2 v)v — -j sin 2u (ii2 — d2) —
— у sh2 и sin 2u ¦ ш;2 + sh 2tt ¦ ui> —
— 2n (ch2 и — cos2 u) cos да • u + n sh 2u sin2 и sin да ¦ й =
*='*lai~lh) chusinv --y-sin2u(l +sh2usin2©)-
T 4rl ch и sin и — -^3- T2 sh2 и sin 2v,
sh u sin и cos да • гй + 2 ch и sin v cos w • uw +
-J- 2 sh u cos v cos и> • иш; + n sh u cos v sin 2да • ri —
— я ch и sin v sin 2да ¦ i) = n? sh и sin v sin и> cos2 да,
ч>2=
mo(l — ch и cos o) mi A + ch ц cos о)
(ch u — cos вK (ch и + cos aK
(ch и — cos aK ' (ch и + cos oK
E.2.45)
Каноническая форма уравнений E.2.45) запишется
du_==_dH_ ]
dt дри '
dv _ дН
dt dpv '
dw _ dH_
dt dpw
dpu дН
dt ~ ШГ'
dpv дН
dt == ~§v~'
dpw __ дН
dt ~~ dw '
в виде
E.2.46)
544
4. V. ЗАДАЧА ТРЕХ ТЕЛ
[§ 2.07
В уравнениях E.2.46) функция Гамильтона // дается равен-
ством
Я (и, v, w, pu, Pv, pw) = 2e2(ch"u_caos2p) + 2ci I">ln, p +
, (nc2 sin 2b — 2/ ch и sin o) cos w • pu .
' 2c2(ch2M — cos2 в) "¦"
, (rcc2 sh 2u — 2/ sh и cos в) cos a> • pv ,
"¦" 2c2(ch2« — cos2 в) '
. (I — nc1 ch ц cos в) sh и sin о sin w • pw ,
~"~ c2 sh2 u sin2 в '
~ 2l Ch " Sln ^
E.2.47)
+ (nc2 sh 2A — 2/ sh u cos uJ] +
+ "? (sh2 u + cos2 v — sh2 и sin2 v sin2 ш) —
__ F [(mB -f ffi|)cha-f (fna — mt) cos v]
с (ch2 и — cos2 v)
. ncjui — Op)
'— 2
Интеграл энергии:
H(u,v,w,pu,pv,Pw) = h. E.2.48)
Для плоского варианта ограниченной круговой задачи трех
тел имеем следующие уравнения.
Уравнения движения в эллиптических переменных и, v:
(ch2 и - cos2 v) и + ~ sh 2и (й2 - гJ) + sin 2v ¦ uv +
+ 2п (ch2 и — cos2 v) v =
n2 (a, — a0) , , «2 sh 2u .
= 4^—^-sh«cosu4 2 1"
f sh ц cos в Г ffip A — ch и cos o) /^(I + elm cosbI
¦t" c3 L (ch ы — cos uK (ch u + cos вK J
f sh 2 ц sin2 о
Г m
L(ch«-
~~ 2c3
(ch2 и — cos2 v) v — —у— ( — й2
j
m,
cos vj3 (ch u + cos v)
-f sh 2и • uv —
-2n(ch2u-cos2u)ii = - 2c
¦t
— a0) . . я2 sin 2b
- ch и sin и ^
/chusino Г mo(l — ch ц cos о)
3 L (ch u — cos oK
f sin 2b • sh2 и
2c3
71 ( 1 + Ch U COS t))
(ch a + cos oK
1
J
(ch и — cos вK ' (ch и + cos i
E.2.49)
2.0?]
ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ
545
Канонические уравнения:
du _ дН
dt дра '
dv _ дН
dt ~ др„ '
dt
Функция Гамильтона:
Н(и, v, pa, pv) =
_2 , _2
¦ +
(«c2sin2o — 2/ch и sin v)pu
2с2 (ch2 и — cos2 v) ' 2с2 (ch2 и — cos2 в)
(лс2 sh 2и — 21 sh и cos в) pv
2е2 (ch2 и — cos2 в)
X
~ 8с2 (ch2 и — cos2 о)
X [{пс2 sin 2v—21 ch и sin vJ + (nc2 sh 2u—21 sh u cos uJ
. ra2c2 (sh2 u + cos2 в) f [(mB + /n^ch u + (m0 — mi)cos в]
+ 2
с (ch2 и —cos2 в)
»__
Интеграл энергии:
E.2.50)
E.2.51)
E.2.52)
H(u, v, pu, pv) = h.
Поверхность Хилла дается соотношением
п2с (ch2 и - cos2 v) [(fll~flo)' -c(ai — a0) ch a cos о +
+ с2 ch2 и cos2u + с2 sh2 и sin2 у cos2 w1 +
-f 2/ [ffi0 (ch u + cos v) + /n, (ch u — cos v)\ —
- cC (ch2 u - cos2 v) = 0, E.2.53)
С ~постоянная, определяемая начальными условиями.
В плоском случае кривая Хилла имеет уравнение
п2с3 ch4 и — п2с2 (а, — а0) ch3 и cos и — с (^аой, + С) (ch2 и — cos2 и) +
+ [2f(mo + mi) + п2с2 {а{ — а0) cos3 v]chu +
-f 2f (m0 — m,) cos и — n2c3 cos-1 у = 0. E.2.54)
В эллиптических переменных кривая Хилла имеет более про-
стой вид, чем в прямоугольных координатах E.2.07). Уравнение
E.2.54) разрешимо в явном виде относительно ch и или cos и, так
как оно представляет собой алгебраическое уравнение четвертой
степени относительно этих переменных.
18 Под Гед. Г. Н. Дубошина
546
Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
tt 2.08
Эллипс
Приближенные области возможности движения на плоскости
Gxy, приведенные во многих книгах [2, 4], отображаются
в заштрихованные области на
рис. 74.
Вся плоскость Gxy отобража-
ется на плоскости (cos v, ch и) в
полосу {chu :з= 1, —1 <; cos v <; 1},
поэтому при достаточно больших
положительных энергиях обла-
стью возможности движения на
плоскости (cos v, ch и) будет вся
указанная полоса.
cos г/
Рис. 74. Области возможности движения
(заштрихованные части) на плоскости
(cost», ch u), где о, и —эллиптические
координаты. Отмеченные прямые линии
и эллипс изображают кривую Хилла на
этой плоскости.
§ 2.08. Уравнение
Гамильтона —Якоби
в эллипсоидальных
переменных
В эллипсоидальных коорди-
натах и, v, w уравнение Гамиль-
тона—Якоби для ограниченной круговой задачи имеет вид
+ 2 — f-^ps'n2u — /ch и sin v\ sh2и sin2 v cos w +
-|- 2 -у- f-^y- sh 2« — /sh u cos v) sh2 к sin2 v cos да +
-f- 2 -J^- (/ — nc2ch и cos u) (ch2 и — cos2 v) sh u sin© cos w =
= 2Ac2 (ch2 и - cos2 v) sh2 u sin2 и +
-f- 2fc [(m0 -f ffij) chu + (m0 — mj) cos v] sh2u sin2 v. E.2.55)
as
В плоском варианте (w = 0, w = 0, "^-=0j [32]i
Ц
-Ц
2 -Ц- (-^- sh 2u — /sh«cosu) x= 2Ac2(ch2u - cos2o) +
2/c
mL) ch и + (mj — т{) cos w]. E.2.56)
. 2.09]
ГЛ. 2. ОГРАНИЧЕННАЯ КРУГОВАЯ ЗАДАЧА ТРЕХ ТЕЛ
547
§ 2.09. Понижение порядка системы уравнений
плоской ограниченной круговой задачи трех тел
Методом Лагранжа —Шарпи [33] уравнение Гамильтона —
Якоби E.2.56), которое является нелинейным уравнением в част-
ных производных с двумя аргументами, можно привести к ква-
зилинейному уравнению в частных производных, искомая функ-
ция в котором также зависит от двух аргументов. Это уравнение
имеет вид [34]
ди
+
л/
— <р dv
), E.2.57)
Д, (в) —5J1- sh* 2u
ch 2u
+ 2fc (m0 + mi) ch u + a,
- [he2 + "V(Vfl°J] cos 2v +
а^~ °о)
+ 2fc (ffij — m,) cos v — a,
(ch и cos 3o - ch 3u cos o),
Л3 (u, v) = " ^
f (ы, и, ф) = 2nc2 (ch 2u — cos 2o) —
n2c3 {at — aB) (sh и cos За — 3 sh 3a cos o)
E.2.58)
8 V А2 + 0,5Л3 + Ф
, я2е3 (а, — д0) (sin о ch За — 3 sin 3d ch и)
8V Л,+0,5Л3-ф
а — произвольная постоянная.
Кроме того, интегрирование уравнения Гамильтона — Якоби
E.2.56) сводится к нахождению одного первого интеграла обык-
новенного дифференциального уравнения второго порядка [34]
2[Д(и) + Ai{v) + A3(u,v)]-^ +
2«c2(ch2U-cos2w)[l +(J?
(u, v)}'1' =0.
E.2.59)
Вопросы интегрируемости уравнений ограниченной круговой
задачи трех тел рассматриваются в части X.
Глава 3
ДРУГИЕ ОГРАНИЧЕННЫЕ ЗАДАЧИ ТРЕХ ТЕЛ
В целом ряде практических задач астрономии и динамики
космического полета вместо рассмотрения задачи трех тел в
строгой постановке вполне достаточно исходить из различных
упрощенных ее вариантов, так называемых ограниченных задач.
В этой главе излагаются ограниченные задачи, нашедшие наи-
более широкие приложения на практике.
§ 3.01. Общий случай ограниченной задачи трех тел
Ограниченная задача трех тел — это задача о движении ма-
териальной точки Р с нулевой массой, притягиваемой по закону
Ньютона двумя другими материальными точками Ро и Pit имею-
щими отличные от нуля массы 1 — jx и ц и движущимися по
кеплеровским орбитам вокруг общего центра масс. Ограничен-
ная круговая задача трех тел является частным случаем этой
задачи.
Дифференциальные уравнения движения задачи могут быть
написаны в различных видах, однако наиболее удобная форма
уравнений была дана Нехвилом {23] и Н. Ф. Рейн [24]. Пусть
Gxyz— барицентрическая прямоугольная неравномерно вращаю-
щаяся система координат, плоскость Gxy которой совпадает
с плоскостью орбит конечных масс, а направление оси Gx сов-
падает с направлением PqP\. Дифференциальные уравнения дви-
жения точки Р имеют вид [23]
E.3.01)
cPx
dv2
d-y
dv2
+
2 dy —
dv
n dx
1 dv
d*z
1
1
+
1
e cos
I
e cos
1
V
V
dU
dx '
dU
dy '
dV
dv2 1 + e cos v dz
§ 3.02] ГЛ. 3. ДРУГИЕ ОГРАНИЧЕННЫЕ ЗАДАЧИ ТРЕХ ТЕЛ 549
где v — истинная аномалия одной из возмущающих масс, а
функция U выражается соотношением
U = ~^- + -?- + | (х2 + у2) - j ez2cos v, E.3.02)
Переход от истинной аномалии v к времени t осуществляется
с помощью равенства
dv A + е cos оJ .- о п,ч
1Г= ^ ¦ {5-3>04)
е, р — соответственно эксцентриситет и параметр конического се-
чения.
Системы единиц выбраны следующим образом: PqP\ = 1,
сумма масс возмущающих тел равна единице, постоянная тяго-
тения / = 1.
Уравнения E.3.01) имеют томографические лагранжевы част-
ные решения, рассмотренные в § 1.02. В выбранной системе
координат томографические решения изображаются неподвиж-
ными точками. Например, точка либрации LA имеет координаты
*4 = 0. E.3.05)
В зависимости от значения эксцентриситета е можно различать
три частных случая ограниченной задачи трех тел: ограничен-
ная эллиптическая задача @ < е < 1), ограниченная параболи-
ческая задача (е=1), ограниченная гиперболическая задача
(е>1). Некоторые варианты ограниченной задачи трех тел,
когда все массы отличны от нуля, рассмотрены в работе
Н. Д. Моисеева [25].
§ 3.02. Задача двух неподвижных центров
Задача двух неподвижных центров — это задача о движении
материальной точки Р с нулевой массой в ньютоновском поле
притяжения, создаваемом двумя неподвижными в абсолютной
системе координат O?tj? притягивающими центрами Ро и Pi
с массами пг0 и Ш\ соответственно.
Если началом координат О выбрана середина отрезка
Р0Р1 = 2с и ось О? направлена по прямой Р0Ри то уравнения
550 ч- v- ЗАДАЧА ТРЕХ ТЕЛ
движения точки Р имеют вид
dt2
d-j _ dU
' dt- ~ dr\ • dt2
где
[§ 3.02
E.3.06)
E.3:07)
E.3.08)
Задача двух неподвижных центров относится к интегрируемым
задачам небесной механики. Если перейти от координат \, tj, ?
к эллипсоидальным координатам X, ц, w с помощью соотноше-
ний [26]
5 = с л/{к2- 1)A -ц2) cos
w
E.3.09)
и ввести новую независимую переменную [26] т:
dt 1
It ~ к2 — ц2 '
то система E.3.06) приводится к уравнениям
dk
dt
E.3.10)
dw
~dT
E.3.11)
где
~f" (^2 — Ci) к ^з к g
, — "I
E.3.12)
Интегрирование уравнений E.3.11) дает общее решение задачи
двух неподвижных центров, зависящее от шести произвольных
§ 3.03] ГЛ. 3. ДРУГИЕ ОГРАНИЧЕННЫЕ ЗАДАЧИ ТРЕХ ТЕЛ 551
постоянных Си С2, С3, С4, С5, С6. Качественному анализу задачи
двух неподвижных центров посвящено много работ [4], B7] —
[30]. Особое значение приобрела эта задача в связи с исследова-
нием движения искусственных спутников планет. В этом случае
потенциал сфероидальной планеты удается с высокой точностью
аппроксимировать потенциалом так называемой обобщенной за-
дачи двух неподвижных центров [26], [31].
В спутниковой теории массам неподвижных центров припи-
сываются надлежащим образом выбранные комплексно-сопря-
женные значения, а сами центры располагаются на некотором
мнимом расстоянии. Развитая на основе обобщенной задачи тео-
рия движения ИСЗ изложена в ч. VI.
§ 3.03. Задача Хилла
Задача Хилла — это предельный вариант ограниченной эл-
липтической задачи трех тел Ро, Р\, Р, получаемый из послед-
ней, если Солнце Ро удаляется на бесконечность таким образом,
чтобы оставалось справедливым соотношение
E.3.13)
где по — большая полуось орбиты Солнца, п0 — среднее движе-
ние Солнца.
Из равенства E.3.13) вытекает, что масса Солнца т0 неог-
раниченно возрастает и, следовательно, возмущающее влияние
Солнца на движение точки Р в некоторой степени сохраняется.
Если ввести планетоцентрическую прямоугольную вращаю-
щуюся систему координат P\xyz, ось Рхх которой проходит че-
рез Солнце Ро, то уравнения движения в задаче Хилла примут
вид [1]ЧЗ]
&х о„ dy , {т^_3гёх = — ,
E.3.14)
d2z , ]m\Z , , dQ
IF -r—f3--rnoz —-fa'
где
E.3.15)
r — планетоцентрическое расстояние точки Р, п ^-планетоцен-
трическое расстояние Солнца Pq.
552 Ч. V. ЗАДАЧА ТРЕХ ТЕЛ
Если эксцентриситет орбиты Солнца е0 = 0, то Q = 0 и урав-
нения Хилла E.3.14) принимают вид
0,
E.3.16)
Уравнения E.3.16) допускают интеграл Якоби
(f )' + Ш + (-ST = ^ - ** + ^ + «А- E-3-17)
где h — произвольная постоянная.
Наконец, плоская круговая задача Хилла описывается систе-<
мой дифференциальных уравнений четвертого порядка:
d?x
— zno-jf-t- -=-^ лпус = о,
E.3.18)
Уравнения Хилла служат основой для теории движения Луны
Хилла — Брауна, изложенной в гл. 10 ч. IV.
ЛИТЕРАТУРА К ЧАСТИ V
1. Субботин М. Ф., Курс небесной механики, т. 2, ОНТИ, 1937.
2. С у б б о т и н М. Ф., Введение в теоретическую астрономию, «Наука»,
1968.
3. Д у б о ш и н Г. Н., Небесная механика. Аналитические и качественные ме-
тоды, «Наука», 19.64.
4. Ш а р л ь е К-, Небесная механика, «Наука», 1966.
5. Пуанкаре А., Лекции по небесной механике, «Наука», 1965.
6. К у р о ш А. Г., Курс высшей алгебры, изд. 9-е, «Наука», 1968.
7. Сушкевич А. К., Курс высшей алгебры, Гостехиздат, 1941.
8. У и н т н е р А., Аналитические основы небесной механики, «Наука», 1967,
¦ 9. Б р у м б е р г В. А., Астрон. ж. 34, 1, 1957.
10. Мул ьт он Ф., Введение в небесную механику, ОНТИ, 1935.
11. Hill G., Amer. J. Math. 1, 1878.
12. Моисеев Н. Д., Тр. Гос. астрон. ин-та им. П. К. Штернберга 9, вып. 1,
7, 1939.
13. Рейн Н. Ф., Тр. Рос. анстрон. ин-та им. П. К. Штернберга 9, вып. 1, 191,
1939.
14. Чебот ар ев Г. А., Аналитические и численные методы небесной меха-
ники, «Наука», 1965.
1.5. Кис лик М. Д., Косм, исследования 2, 6, 853, 1964.
16. Анри Пуанкаре, Избранные труды, т. I, «Наука», 1971; т. II, «Наука»,
1972.
17. Schwarzschlld К., Astron. Nachr. 147, № 3522, 287, 1898.
18. М о u 11 о n F. R., Periodic orbits, Washington, 1920.
ЛИТЕРАТУРА К ЧАСТИ V 553
19. Чеботарев Г. А., Успехи астрон. наук 5, 176, 1950.
20. 3 и гель К. Л., Лекции по небесной механике, ИЛ, 1959.
21. Szebehely V., Theory of orbits, Academic Press, New York and London,
1967.
22. Tisserand F., Traite de Mecanique celeste, t. I—IV. Paris, 1889—1896.
23. N e с h v i 1 e V., Compt. Rend. 182, 310, 1926.
24. Рейн Н. Ф., Тр. Гос. астрон. ин-та им. П. К- Штернберга 14, вып. 1, 127,
1940.
25. Моисеев Н. Д., Тр. Гос. астрон. ин-та им. П. К. Штернберга 21, 3,
1952.
26. Демин В. Г., Движение искусственного спутника в нецентральном поле
тяготения, «Наука», 1968.
27. Б а д а л я н Г. К., Асгрон. ж. 11, 4, 346, 1934.
28. Tallqvist H., Acta Soc. Sci. Fennicae, nova серия А, 1, № 1, 1927.
29. Алексеев В. М., Бюлл. Ин-та теор. астрон. АН СССР 10, 4 A17), 241,
1965.
30. Иванов Ю. И., Тр. Астрофиз. ин-та АН Каз. ССР 7, 32, 1966.
31. Аксенов Е. П., Гребен и ков Е. А., Демин В. Г., Астрон. ж. 40,
2, 363, 1963.
32. Гребеников Е. А., Киоса М. Н., ПММ 38, 2, 364, 1974.
33. Степанов В. В., Курс дифференциальных уравнений, Гсстехиздат, 1953.
34. Гребеников Е. А., Киоса М. Н., ДУ IX, 11, 2041, 1973.
Часть VI
ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ
ЗЕМЛИ
На движение искусственных спутников Земли действует це-
лый ряд возмущающих факторов, важнейшими из которых яв-
ляются несферичность Земли, сопротивление атмосферы, притя-
жение Луны и Солнца и световое давление. Однако наибольшие
возмущения в движении близких спутников обусловлены второй
зональной гармоникой потенциала притяжения Земли. Поэтому,
как и в теории Луны, здесь следует выделить главную проблему.
Эта проблема заключается в решении дифференциальных урав-
нений движения, возмущающей функцией в которых является
вторая зональная гармоника геопотенциала. Очень важно, чтобы
главная проблема была решена с высокой степенью точности и
по возможности строго в математическом отношении. Решение
главной проблемы составляет первый этап в построении теории
движения ИСЗ. Второй этап заключается в определении осталь-
ных возмущений.
Решение главной проблемы в теории движения ИСЗ может
быть получено двумя путями: во-первых, с помощью методов
классической теории возмущений и, во-вторых, путем построения
промежуточных орбит с использованием некоторых аппроксими-
рующих выражений для потенциала притяжения Земли, допу-
скающих интегрирование уравнений движения спутника в замк-
нутой форме. Результаты применения классических методов из-
ложены в главе 2. Теория промежуточных орбит изложена
в главе 3.
Определение возмущений гравитационной природы (возму-
щения от зональных, тессеральных и секториальных гармоник
геопотенциала и возмущения от притяжения Луны и Солнца) не
вызывает особых трудностей. В настоящее время теория этих
возмущений разработана достаточно полно и с высокой точ-
ностью. Основные формулы для этих возмущений приведены
в главе 4.
Серьезные трудности вызывает определение возмущений от
сопротивления атмосферы и светового давления. В первом слу-
чае эти трудности лежат в области физики. Они обусловлены
сложной структурой земной атмосферы. Вп втором случае эти
трудности находятся в области математики. Они связаны с раз-
§ 1.01] ГЛ. I. ГРАЙИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ 555
рывностью возмущающей функции, обусловленной теневым эф-
фектом. Тем не менее и здесь получены очень важные резуль-
таты. Некоторые из них изложены в главе 5.
Помимо несферичности Земли, сопротивления атмосферы,
притяжения Луны и Солнца и светового давления, на движение
ИСЗ оказывают влияние и другие факторы. К ним относятся
прецессия и нутация экваториальной плоскости Земли, прилив-
ная деформация Земли, электромагнитные силы, притяжение
атмосферы, а также релятивистские эффекты. Все эти факторы
вызывают малые возмущения в движении ИСЗ. Однако и эти
возмущения по крайней мере в некоторых случаях необходимо
учитывать. Определение этих возмущений из наблюдений позво-
ляет получить важные геофизические сведения. Все эти малые
возмущения изложены в последней, шестой, главе.
Глава 1
ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ.
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
ИСКУССТВЕННОГО СПУТНИКА
В этой главе даны формулы для потенциала земного притя-
жения. Приведены числовые значения параметров, характери-
зующих гравитационное поле Земли. Даны различные формы
дифференциальных уравнений движения ИСЗ.
§ 1.01. Потенциал притяжения Земли
Потенциал (силовая функция) притяжения Земли U во
внешнем пространстве дается формулой [1]
°° я
Z ?{т)Пp"k{s[n<p'){c»kC0Skl + s»kS[nkK) ¦ FЛ-
Z ?{т)-01)
в которой / — постоянная тяготения, m и г0 — масса и средний
экваториальный радиус Земли, г, q/ и к — геоцентрический ра-
диус-вектор, геоцентрическая широта и долгота внешней точки
(ч. I, § 1.10), Рп — полином Лежандра n-го порядка, Pnh — при-
соединенная функция Лежандра, /п, Спь и Snh — безразмерные
постоянные, характеризующие фигуру Земли [2]. Необходимые
сведения о полиномах и присоединенных функциях Лежандра
556 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 1.01
приведены в §§ 5.03 и 5.04, ч. IV (формулы D.5.33), D.5.34),
D.5.45)).
Представление гравитационного потенциала U в форме
F.1.01) было рекомендовано Международным Астрономическим
союзом. Однако в литературе широко распространены и другие
формы записи разложения потенциала притяжения Земли по
сферическим функциям. Приведем главнейшие из них. Прежде
всего имеем
я=2
П
Z/п* (¦?¦)" р«» (sin «р')cos k & -к^ • <6-l -
fe=l J
Z(?) -02)
n=2 J
где постоянные /n, Inh и Япй связаны с постоянными In, Cnk и
соотношениями
или
h= — Jn, Ink = VCfi
Пусть теперь
Тогда формулу F.1.02) можно представить в виде
-! -04)
Первый член в формулах F.1.01), F.1.02) и F.1.04) дает
потенциал притяжения шарообразной Земли. Те члены в этих
формулах, которые содержат Pn(sinq/), называются зональ-
ными гармониками. Члены, содержащие присоединенные функ-
ции Лежандра, при п ф k называются генеральными гармони-
ками, а при п = k — секториальными гармониками. Поскольку
тессеральные и секториальные гармоники зависят от долготы К,
они характеризуют отличие Земли от тела, динамически сим-
S l.oil
ГЛ. 1. ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ
557
метричного относительно оси вращения. Нечетные зональные
гармоники и долготные члены, для которых п + k нечетно, ха-
рактеризуют асимметрию Земли относительно плоскости эква-
тора.
Числовые значения постоянных fm, ro, /„, Cnh и Snh (или
in, Ink, ^nft, Anh и Bnh) определяются либо при помощи грави-
метрических и геодезических измерений, либо по наблюдениям
Луны и искусственных небесных тел. Числовые значения этих
постоянных приводятся в табл. 72—77).
Таблица 72
Таблица 73
Автор
Хейфорд [3]
Гапошкин [4]
Андерле и Остер-
винтер [5]
Гапошкин [3]
Брауэр и др. [3]
fm, км'/сек1
398625,0
398603,2
398588,9
398601,3
398603
г„, км
6378,388
6378,165
6378,050
6378,155
6378,160
Автор
Кук [6]
Кинг-Хили
и Кук [7]
Козаи [8]
Козаи [8]
Смит [9]
1082,65+0,10
1082,64+0,02
1082,64+0,01
1082,63+0,01
1082,64+0,08
Таблица 74
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Козаи [10]
1082,47
-2,57
-1,84
-0,06
0,39
-0,47
—0,02
0,11
Козаи [8]
1082,645+0,006
—2,546+0,020
-1,649±0,016
—0,210+0,025
0,646 + 0,030
—0,333+0,039
—0,270+0,050
—0,053+0,060
-0,054+0,050
0,302+0,035
-0,357+0,047
—0,114+0,084
0,179+0,063
Кинг-Хили и др. [11]
-2,53+0,02
—0,22+0,04
—0,41+0,06
0,09+0,06
-0,14±0,05
0,29 ±0,006
—0,40+0,06
Числовые значения, приводимые в табл. 73—75, получены на
основе спутниковых наблюдений. Чисто динамический метод
был использован также Гапошкиным для определения постоян-
ных Ank и Bnh (табл. 76 и 77). Каула и Кенляйн при определе-
нии Л„й и Bnh (табл. 76 и 77) применяли метод, основанный на
совместном использовании спутниковых и гравиметрических
данных.
558 Ч. VI. ДВИЖЕНИИ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 1.01
Таблица 75
Автор
п k
2 1
2 2
3 1
3 2
3 3
4 1
4 2
4 3
4 4
Каула [12]
'пк-^
0,07
1,77
1,95
0,38
0,22
0,66
0,15
0,06
0,007
62°,2
-14,6
7,6
—20,8
22,8
216,9
28,8
-4,0
24,3
Koiaii [13]
0
2,32+0,30
3,95 + 0,36
0,41+0,21
1,91+0,29
2,64+0,44
0,17±0,06
0,046 + 0,035
0,056 + 0,030
-37°,5+5°,6
22,0+11,0
31,0+14,0
51,3 + 2,9
163,5+6,5
54,0+11,0
-13,0+19,0
50,3+6,0
Таблица 76
Автор
п к
2 2
3 1
3 2
3 3
4 1
4 2
4 3
4 4
5 1
5 2
5 3
5 4
5 5
6 1
6 2
6 3
6 4
6 5
6 6
7 1
7 2
7 3
7 4
7 5
7 6
7 7
Гапошкин [4]
2,38
1,94
0,73
0,56
—0,57
0,33
0,85
—0,05
-0,08
0,63
—0,52
-0,26
0,16
—0,05
0,07
-0,05
—0,04
—0,31
-0,04
0,20
0,36
0,25
-0,15
0,08
—0,21
0,06
-1,35
0,27
-0,54
1,62
—0,47
0,66
— 0,19
0,23
-0,10
-0,23
0,01
0,06
-0,59
-0,03
-0,37
0,03
-0,52
-0,46
-0,16
0,16
0,16
0,02
-0,10
0,05
0,06
0,10
Каула
Ank-i0°
2,42
1,90
0,69
0,55
-0,59
0,28
0,89
-0,32
-0,01
0,68
-0,67
0,08
-0,45
-0,19
0,08
0,10
0,08
-0,04
0,15
0,06
0,31
-0,03
-0,41
0,22
[14]. [15]
Bnk-M
— 1,39
0,11
—0,78
1,29
-0,48
0,69
0,19
0
0,02
-0,25
0,12
0,37
-0,21
0,13
-0,41
0,46
-0,43
-0,38
-0,15
0,06
0,26
-0,32
0,15
—0,31
Кенляй
Ank10'
2,47
1,95
0,76
0,51
-0,56
0,40
0,87
-0,01
-0,08
0,62
-0,57
0,30
0,07
-0,03
0,09
0
-0,03
-0,29
0,03
0,22
0,37
> [16]
Bnk-W
-1,34
0,28
-0,56
1,59
—0,46
0,66
-0,21
0,34
-0,09
—0,22
-0,01
0,07
-0,62
-0,02
-0,34
0,03
-0,45
—0,44
-0,43
0,20
0,17
1.02]
ГЛ. 1. ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ
559
Таблица 77
Автор
п к
8 1
8 2
8 3
8 4
8 5
8 6
8 7
8 8
9 1
9 2
10 1
10 2
10 3
10 4
11 1
12 1
12 2
13 12
13 13
14 1
15 12
15 13
15 14
Гапошкин [4]
—0,08
0,03
-0,04
-0,21
—0,05
-0,02
-0,01
-0,25
0,12
0
0,11
-0,11
—0,07
-0,07
-0,05
-0,16
-0,10
-0,06
-0,08
—0,02
-0,06
-0,06
0,01
0,07
0,04
0
-0,01
0,12
0,32
0,03
0,10
0,01
0,04
-0,13
—0,04
0,03
-0,11
0,01
-0,07
-0,01
0,05
0,01
0,01
0,06
-0,07
-0,02
Каула
Л.*-101
-0,06
0,08
0,08
0,08
0,03
0,10
0
-0,09
0,02
0,01
-0,13
-0,12
[14. 15]
Bnk-W>
0,06
—0,07
0,22
0,04
—0,34
0,12
0,03
-0,09
-0,01
-0,04
-0,07
-0,01
Кенляйн [16]
-0,07
0,08
-0,16
0,11
0,11
-0,04
-0,19
-0,02
-0,07
—0,04
-0,06
0,01
Bnk-la'
0,08
0,04
0,09
0,04
-0,12
0,06
-0,05
0,04
0,03
0,05
-0,06
-0,02
Приведенные таблицы показывают, что точность определения
постоянных гравитационного поля Земли (особенно коэффи-
циентов высших гармоник) все еще невелика. Определение этих
постоянных остается одной из важнейших задач современной
небесной механики и гравиметрии.
§ 1.02. Стандартная Земля
Под Стандартной Землей понимается совокупность коэффи-
циентов разложения потенциала земного притяжения и геоцент-
рических координат нескольких пунктов на земной поверхности.
Стандартная Земля I была опубликована в 1966 г. [17]*). Она
была получена на основе фотографических наблюдений специ-
альных спутников, выполненных на 15 камерах Бейкера—
Нанна. Коэффициенты геопотенциала, соответствующие Стан-
дартной Земле I, приведены в табл. 76, 77.
В 1970 г. была опубликована Стандартная Земля II [19].
При ее выводе были использованы наблюдения 19 спутников,
*) См. также русский перевод [18].
560 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 1.03
Таблица 78
л k
2 2
3 2
4 1
4 3
5 1
5 3
5 5
6 2
6 4
6 6
7 2
7 4
7 6
8 1
8 3
8 5
8 7
9 1
9 3
9 5
9 7
9 9
Ю 2
Ю 4
10 6
Ю Я
Ю 10
И 2
И 4
11 6
11 8
И 10
12 1
12 3
12 5
12 7
12 9
12 11
СлЗ
13 3
13 5
13 7
13 9
13 П
13 13
14 2
14 4
14 6
14 8
14 10
Ank-W
241,29
89,204
-52,989
98,943
-5,3816
-43,083
12,593
5,4825
—0,040342
8,8693
28,306
— 19,727
-25,847
3,1254
—5,7444
—5,6733
3,4390
13,823
—9,6463
-0,61435
—5,0450
— 8,2490
—3,1225
—4,8185
-3,2486
7,3957
12,377
4,8900
—3,0193
3,7517
6,4546
-11,736
-4,5955
5,8386
2,3375
1,4507
— 3,2232
-4,4921
—5,6042
2,3833
9,6637
-5,2217
—2,5623
-3,3749
—7,0288
3,2120
0,78017
1,9140
— 3,0273
5,3732
Bnft-10'
-136,41
-63,468
—48,765
-15,467
-9,7905
-8,6663
—59,910
-35,175
-40,388
—7,4756
15,645
-11,390
10,209
2,5696
1,8086
6,1636
8,9168
— 1,6100
-11,817
0,33551
-12,700
9,2326
-10,450
—4,3248
-20,153
-7,9706
—2,5885
-9,1994
5,4317
0,69005
— 1,6993
— 1,8900
-3,1000
5,4784
4,2637
9,9784
4,2858
—4,8206
2,6288
—2,8930
-4,7760
-0,32562
10,767
5,8541
7,4643
-4,5289
—3,7527
-5,8721
-6,0838
-4,3168
Л k
3 1
3 3
4 2
4 4
5 2
5 4
6 1
6 3
6 5
7 1
7 3
7 5
7 7
8 2
8 4
8 6
8 8
9 2
9 4
9 6
9 8
Ю 1
Ю 3
10 5
10 7
10 9
11 1
11 3
11 5
И 7
11 9
11 11
12 2
12 4
12 6
12 8
12 Ю
12 12
13 2
13 4
13 6
13 8
13 10
13 12
14 1
14 3
14 5
14 7
14 9
14 11
Ank-W
196,98
68,630
33,024
—7,9692
61,286
—26,693
—9,8984
2,7873
-21,143
24,142
20,285
-0,087024
15,916 '
4,8161
-15,378
-5,3903
-7,7364
0,66741
5,7125
2,4186
23,359
11,251
—2,3346
-8,0004
5,4961
—0,68563
0,43900
—6,3247
3,2523
4,5726
11,750
11,785
2,7481
—4,3649
—2,3868
-0,57854
-1,8590
-1,9407
-4,7456
-1,9980
-8,3417
—4,1759
8,6589
-0,13229
—2,3090
1,9042
-2,5958
1,1061
4,9539
2,7833
впкЛ0>
26,015
143,04
70,633
33,928
—35,087
8,3010
3,7652
4,4626
-52,264
11,567
-23,448
9,8461
-6,7710
8,4140
7,5264
25,930
6,7607
-8,1733
11,183
22,028
5,7239
-10,167
-14,137
-14,279
3,2003
0,62498
2,9751
-13,109
13,215
— 1,3862
-0,99451
-4,0688
7,5986
—2,2262
-0,06677
3,3752
0,48382
-5,7771
1,7367
5,7030
5,9782
—2,0231
— 1,0528
8,2192
4,9664
0,11919
-2,3344
0,84132
9,2345
-8,1637
1.02]
ГЛ. 1. ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ 561
Продолжение табл. 78
п k
14 12
14 14
15 2
15 4
15 6
15 8
15 10
15 12
15 14
16 1
16 3
16 5
16 7
16 9
16 11
16 13
16 15
17 12
17 14
18 13
19 12
19 14
20 14
21 14
1,2481
—5,2082
-4,4833
1,3916
7,0020
—9,7657
—2,0648
1,0524
1,2193
-2,3789
-4,7358
-4,4201
10,591
0,90001
0,68502
3,5475
-3,5485
8,3097
-1,6058
0,46903
6,7115
—0,39779
1,1130
5,2067
—5,7314
-1,2840
-1,6056
6,6644
-11,872
-3,5710
0,053724
0,68726
-2,6786
7,6413
3,2610
3,2230
0,81008
-10,628
-7,0765
2,0683
0,084126
0,35424
2,7286
-3,5547
—0,82623
-2,3817
-1,6183
3,0801
л к
14 13
15 1
15 3
15 5
15 7
15 9
15 11
15 13
15 15
16 2
16 4
16 6
16 8
16 10
16 12
16 14
16 16
17 13
18 12
18 14
19 13
20 13
21 13
22 14
5,1554
—0,35971
0,83016
3,1684
11,856
2,2064
—3,2585
-3,7348
0,14515
2,1327
— 1,1591
—5,8439
-8,4738
—2,9849
2,2834
—0,73590
—2,9522
3,2749
1,1662
—2,7446
3,3201
5,8374
0,36928
-8,0549
Bnk-w
4,5453
4,0142
-0.57218
0,18250
4,2690
2,6632
9,4052
0,40249
— 1,4802
3,0669
4,3001
—4,2809
-0,24677
—0,052467
-3,4087
-2,2626
0,86217
0,04292
0,84724
-4,8376
-6,3128
3,3320
-1,6288
2,6440
полученные камерами Бейкера — Нанна и лазерными установ-
ками. Использовались как обычные, так и синхронные наблюде-
ния. Кроме того, были привлечены гравиметрические измерения
и геодезические данные, а также наблюдения зондов. В резуль-
тате были определены координаты многих наблюдательных
станций и все коэффициенты разложения потенциала до 16-го
порядка и некоторые более высокого порядка. Точность коорди-
нат многих станций составляет 10 м или лучше.
Ниже приведены основные параметры, характеризующие
гравитационное поле Земли. Для fm и г0 имеем
fm = 3,986013 • 1020 еж3 • сек~2, го = 6378,155 м.
Коэффициенты /„ равны:
/2= 1,082628- 10~3,
/4= — 1,5930 - 10~6,
/6 = 5,0200 • 10~7,
/в = — 1,1800- Ш~г,
/3 = -2v5380- 10
/6 = — 2,3000
/7 = _ 3,6200 • 10
-8
-7
1,0000- 10~\
562 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 1.03
/.2
/к
Лб
/IB
^20
= - 3,5400
= - 4,2000
= — 7,3000
= 1,8700- 1
= — 2,3100
= - 5,0000
¦ ю-7,
¦ ю-8,
¦ ЮЛ
o~7,
• юЛ
¦ ю-9.
Jn
Лз
/is
/l7
/21
= 2,0200 • 10
= -1,2300-
= - 1,7400 ¦
= 8,500- 10"
= — 2,1600-
= 1,4400- 10
-7
Ю-7,
io-7,
¦8
j
Ю-7,
-7
Коэффициенты тессеральных и секториальных гармоник
(полностью нормированные) приводятся в табл. 78.
§ 1.03. Дифференциальные уравнения движения спутника
Возьмем прямоугольную геоцентрическую систему коорди-
нат Oxyz, ось Ог которой направлена к северному полюсу,
плоскость ху совпадает с плоскостью экватора Земли, а ось Ох
направлена в точку весеннего равноденствия. Пусть далее
г, ф', w — геоцентрический радиус-вектор, геоцентрическая ши-
рота и прямое восхождение. Тогда
х = г cos ф' cos w, «/ = r«^'siriBy, z = rsinq/. F.1.05)
Если обозначить через 5 звездное гриничское время (см. ч. I,
§3.02), то
к = w + S. F.1.06)
Предположим, что на спутник действует только сила притя-
жения Земли. Тогда, полагая
F.1.07)
мы можем записать уравнения движения спутника в виде
d?x . fmx dR
~dF~T~~~r*~~ дх '
d-y , !my dR
¦W + ~F^ = ~dy- '
d2z . fmz dli
dt2 + r3 ~ dz '
где функция R выражена посредством формул F.1.05) — F.1.07)
и F.1.01) (или F.1.02), F.1.04)) через х, у, г,
§ 1.04] ГЛ. 1. ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ 563
Если воспользоваться сферическими координатами г, q/ и w,
то уравнения движения спутника будут иметь вид
d2r
dt2
F.1.09)
dR
dt V dt "" * ; -= "aJ-
где
dR____fn
dr ~ r
n=2
oo n
п=2 А=1
¦ costf^h lnk\7) P'llk(sin^cosk{-K~ ^ft)' <6>
n=2 k=\
oo n
n=2 A=l
F.1.12)
причем Я дается формулой F.1.06), a Pn(sinq/) и Р^(з1пф') —
ПрОИЗВОДНЫе фуНКЦИЙ Pn(s\ny') И Р„й(81Пф') ПО 81Пф'.
Если в потенциале U нужно учитывать большое число чле-
нов, то при вычислении правых частей уравнений F.1.09) по-
лезно пользоваться рекуррентными формулами для полиномов
и присоединенных функций Лежандра (см. ч. IV, §§ 5.03, 5.04).
§ 1.04. Элементы орбиты ИСЗ.
Дифференциальные уравнения для оскулирующих элементов
Орбита ИСЗ характеризуется шестью независимыми элемен-
тами. Это прежде всего ке'плеровские эллиптические элементы:
большая полуось а, эксцентриситет е, наклон i, долгота узла й,
аргумент перигея ш и средняя аномалия в эпоху Мо (см. ч. II.
§ 1.04). Дифференциальные уравнения для кеплеровских эле-
ментов приведены в §§ 3.03 и 3.04 ч. IV.
При построении теории движения ИСЗ часто используются
канонические элементы Делоне. Они обозначаются через L, G,
564 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ t§ I.04
Я, I, g, h и связаны с кемеровскими элементами следующими
формулами:
G = <\/fma{l — e2),
Я = V/'naCl-e2) cos i, h = Q, _
где f — постоянная притяжения, т — масса Земли, п = ,™
есть среднее движение спутника. Дифференциальные уравнения
для элементов Делонэ приведены в § 3.07 ч. IV.
В случае малых эксцентриситетов или малых наклонов, вме-
сто элементов Делонэ, следует пользоваться каноническими эле-
ментами Пуанкаре. Первая система элементов Пуанкаре опре-
деляется формулами
L = л/fma, Я = / + Q + со,
Pl = У/^A-УГ^72), и, = - (Q + со),
яA — е2)A — cos г), со2 = —
или
Pi = L — G, ai = — g — h,
P2 = G — Я, C02 = — A.
Элементы второй системы Пуанкаре таковы:
?! = V2Pi COS CO,, T], = V2Pi Sin CO!.
^2 = V2P2 cos o>2. Л2 = V2P2 sin co2.
Дифференциальные уравнения для элементов Пуанкаре даны
в § 3.08 ч. IV.
В случае малых эксцентриситетов можно также использовать
элементы /, h й Яо:
/ = ecosco, A = о +
и a, i, Q.
В некоторых публикациях, вместо элементов а и е, исполь-
зуются параметры гя и г а:
гя = аA—е), гд = аA+в),
называемые соответственно перигейным расстоянием и апогей-
ным расстоянием. Часто также употребляются параметры
/in и hA-
hn = rn — R, hA=-rA — R,
где R — радиус Земли. Эти параметры называются соответ-
ственно высотой перигея и высотой апогея.
Глава 2
ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ ВТОРОЙ
ЗОНАЛЬНОЙ ГАРМОНИКОЙ ГЕОПОТЕНЦИАЛА
В этой главе даны различные формулы для вычисления воз-
мущений элементов орбиты ИСЗ, обусловленных второй зональ-
ной гармоникой потенциала притяжения Земли.
§ 2.01. Возмущения от второй зональной гармоники
как функции средней аномалии
1. Возмущающая функция. Возмущающая функция, обуслов-
ленная второй зональной гармоникой потенциала притяжения
Земли, дается формулой (см. F.1.01))
) F-2.01)
Разложение функции R по степеням эксцентриситета е с точ-
ностью до е6 включительно имеет следующий вид [20]:
ё cos ЪМ + ^ е* cos 6М] +
j Vm-J s2 [^ (/ + -^ е5) cos (M - 2со) +
-к (е4+1ое6)cos BМ -2(о)
cos <зм -
566 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 2.01
+ |_ ее cos DМ - 2ш) - ± (е - \ е3 + -^ ё>) cos (M + 2ш) +
+ 0 -4е2 + -Ц-^-^
где через s обозначен синус наклона.
2. Вековые возмущения. Вековые возмущения содержатся
только в угловых элементах ш, Мо (или е) и долготе узла Q.
Если обозначить через Q, со и Мо коэффициенты при вековых
возмущениях этих элементов, то будем иметь {20]
Q = - 4 J2n (-JJ cos i A - e*Y\ F.2.03)
4 ()
Т^ №.2.04)
где п — среднее движение спутника.
Вековые возмущения элементов л и е даются формулами
.2.0Ь)
cos2 t - 2 cos t - 1 - Vl - e
Формулы F.2.03) — F.2.07) справедливы при всех значениях
наклона i и е < 1.
Вековое движение узла достигает максимума при i = 0°, 180°
{экваториальные орбиты) и обращается в нуль при ( = 90° {по-
лярные орбиты), а вековое движение перицентра достигает мак-
симума при i = 0°, 180° и обращается в нуль при i = 63°26'
(случай критического наклона).
3. Короткопериодические возмущения. Короткопериодические
возмущения содержатся во всех элементах. С точностью до
§ 2.01] ГЛ. ?. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ ВТОРОЙ ГАРМОНИКОЙ 567
членов первого порядка относительно /2 они имеют такой вид:
-g- е4 cos AM + ~ e5 cos 5M] +
га(е3 + тв е0cos (м -2со) + О - 4 ** + т1g4)cos {2М +2со)
±е* cos BAf - 2ш) + \ (е - -^ е3 + -g|- ^) cos (ЗМ + 2со) +
+ -J^ e5 cos (ЗМ - 2со) 4- -? f е2 - -^ е4) cos DAf + 2ш) +
4- ~ е4 cos FМ 4- 2м) 4- Н5й^-е5 cos GM + 2со)]' F-2-08)
шeS)cos 4М+-жe4cos 5М+-W ^cos
iV (^ + т&е4)cos (м -2(о) + ту (^ - i e0cos BМ - 2(°) -
- т (е - -т ^ + тв- ^cos ByW +2ю) +
X (е ~ Ж ^ + ^ е') C0S DМ + 2и) + 15 * cos (Ш - 2и)
. 169 / 30 331
+ 1е
cos FM 4-2ш) 4-^-е4 cos GM 4-2a,) 4-
4- ^ffp e5 cos (8M + 2(о)]. F.2.09)
568 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 2.01
3 .^„V -Г ( I 3 о , 65 л ... . „ .
бг = -г Jo I — I s cos 2 — I е + -о- е5 + -ттпг е I cos (М + 2со) —
4 ' \ О / L\ о 1У^/ л
— JL ^е3 + || е5) cos (М — 2со) + (l — 2е2 — ^ е4) cos BM + 2со) —
1 1 / QP» IRK \
— — е4 cos BМ — 2оо) + -т f е —Ш e* ^ 48" е5) cos ^^ "^ 2@^ ~~
"~ Ш * cos CyW "~ 2@^ + "Т (^ ~ "W е0 cos ^4уИ"+(fl) +
+ ^- (е3 - Щ. е») cos EAi + 2co) + -f- e4 cos,
+ g e" sin 4Af + ^ е5sin5M + I (е +1 е3 + ^ «*) sin (М + 2со)-
- 1 (е3 +1| е5) sin(Af - 2ш) - у (l - ге2 -1 е4) sin BуИ + 2ш) -
- ± е* sin BM - 2Ш) - ~ (е - ¦§ е3 + -Jg- e5) sin (ЗМ + 2со) -
- т||о- е5 sin (ЗМ - 2ш) - Ц- (е2 - ^g- e4) sin (AM + 2ш) -
169 ( , 5153 л . ,«.. , „ 1
- -^- е4 sin FМ+2ш)--^- e5sinGAf + 2a>)]1 F.2.11)
евя = - -|/2 (-^J(cosj - 1 + «2)[3 (е2 + ^-е4) sin Af +
+ j (е3 + ~ е5) sin 2М +1| е4 sin ЗМ + -g- e5 sin 4M +
+ Ке2 +1-е4) sin (Л1 + 2со) - ^-е4 sin (Л1 - 2со)-
- у (е - 2е3 - -L e5) sinBM + 2m) - -^ e5sinBM - 2ш) -
- j (е2 - ~ е4) sin CAf + 2w)-~ (f - -{g- e5) sin DM + 2ш) -
- ~ е4 sin EМ + 2т) - -^ е5 sin FM + 2и)] +
2.01] ГЛ. 2. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ ВТОРОЙ ГАРМОНИКОЙ 569
Т (е3 + W е0sin BМ - 2(о) ~ We*sin (ЗМ ~ 2(о) ~
- К1 - -If ^+^ е0sin (зм+2и) - 4-е5 sin DM -2и) -
533 / , 46811 Л .
Г е )sin
10660-
^ ], F12.12)
+ ^ е5) sin (уИ + 2со) +-j^ (е3 + § е5) sin (уИ - 2И)+
т 0 ~ т!е2+-же4)sin BуИ +2и) + же"sin BМ ~2(о)
Щ- е* sin F/И + 2со) + -^ е5 sin GM + 2со)] -
570 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 2.02
- JjL е5 sin (ЗМ - 2со) - -? [f - ¦]§¦ e*) sin DM + 2со) -
- -§- е4 sin FM + 2со) - -^-е5 sin GM + 2со)], F.2.13)
где а, е, s должны быть заменены невозмущенными значениями.
Возмущенное значение средней аномалии М вычисляется по
формуле
t
М = Мо + (п„ + в - Л) (/ - tQ) + бв - бя -1- -^ \&а dt, F.2.14)
«в
где индекс «О» относится к невозмущенным значениям эле^
ментов.
4. Замечания. Формулы этого параграфа можно использовать
для изучения движения широкого класса искусственных спутни-
ков Земли. Однако нужно иметь в виду, что они дают только
возмущения первого порядка относительно /г. Для того чтобы
эти формулы были применимы на больших промежутках вре-
мени, к ним нужно добавить вековые возмущения второго по-
рядка и долгопериодические возмущения первого порядка от-
носительно h- Поскольку в разложении возмущающей функции
были отброшены члены порядка е7 и выше, формулы F.2.08) —
F.2.13) непригодны при больших эксцентриситетах. Кроме того,
они имеют особенность при е = 0.
Самыми значительными возмущениями от второй зональной
гармоники являются вековые возмущения. Они могут достигать
величины порядка нескольких градусов в сутки. Так, для треть-
его советского ИСЗ суточные изменения элементов Q и со соста-
вляли — 2°,67 и 0°,44 соответственно.
Наибольшие амплитуды периодических возмущений большой
полуоси достигают порядка нескольких километров. Для треть-
его советского ИСЗ амплитуды периодических возмущений с ар-
гументами BМ ¦+- 2со) и (ЗМ ¦+- 2со) были равны 7,4 и 2,6 км.
Наибольшие амплитуды периодических возмущений эксцентри-
ситета составляют несколько единиц четвертого знака после за-
пятой, что может вызывать отклонения в высоте перигея в не-
сколько километров. Самые большие возмущения элементов
t, Q, л, в имеют порядок нескольких минут дуги.
§ 2.02. Возмущения от второй зональной гармоники
как функции истинной аномалии
Использование истинной аномалии в качестве независимой
переменной позволяет получить выражения для возмущений
в замкнутой форме относительно эксцентриситета орбиты спут-
§ 2.02] ГЛ. 2. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ ВТОРОЙ ГАРМОНИКОЙ 571
ника. Здесь мы приведем результаты Д. Брауэра {21]. Брауэр
решал задачу в элементах Делоне методом Цейпеля (см. ч. IV,
§8.04).
1. Вековые возмущения. Обозначим через М", со" и Q" зна-
чения средней аномалии, углового расстояния перигея от узла и
долготу узла с учетом только вековых возмущений от второй
зональной гармоники потенциала притяжения Земли. Тогда
М" = п0 { 1 + -§¦ у2гг3 (- 1 + 362) +
3
+ 128
>'7 [(- 15 + 16п + 25тJ) + C0 - 96-п - 90тJ) б2 +
+ A05 + 144-п + 25т,2) б4]} (t - t0) + Ml, F.2.15)
• -jfe Y^-8 [(- 35 + 24т, + 25т]2) + (90 - 192т, - 126т,2) б2 +
+ C85 + 360т, + 45т,2) В4]} (/ - tQ) + <, F.2.16)
" f W + -& Y^~8 [(- 5 + 12т, + %2) +
+ (- 35 - 36т, - 5т]2) 92]} (/ - t0) + Qo, F-2.17)
где
„ / ffll ., r ( ^ Д /p ft i n\
Hq = /* / —g- , Yg == * 2 I ] » (D.Z.loj
т| = ^/П^, 6 = cosi0, F.2.19)
f0 — начальный момент времени и а0, е0, t0, M", ш", п" — по-
стоянные интегрирования.
2. Долгопериодические возмущения. Обозначим через е', i',
М', со' и Q' значения элементов с учетом вековых и долгоперио-
дических возмущений. Тогда
e' = ea + -^y2earf[\ - 11Э2 — 40Э4A — 592)]cos2to", F.2.20)
i' = А, - e0TT2ctg to (e' - e0), F.2.21)
M' = M" + ~yl.2t]-l[l - lie2 — 4064(l -592)"I]sin2co") F.2.22)
- 40 B + 5e%) Q4 A - 562)-1 - 400e^66 A - 562)] sin 2co", F.2.23)
+ 200в4A - 592Г2] sin 2co", F.2.24)
где М", со" и п" определяются формулами F.2.15) — F.2.17).
572 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 2.02
3. Короткопериодические возмущения. С учетом вековых
долгопериодических и короткопериодических возмущений фор-
мулы для элементов имеют такой вид:
+ 3 A - б2) ~ cos Bvf + 2co')l J , F.2.
25)
+ 3A - 6-') (^ - тр4) cosBa' + 2со')] , F.2.26)
i = i' + j y2B A - в2)''2 [3 cos {2v' + 2со') +
a' + 2co/)], F.2.27)
("i"+ ^ + ц2 7*)sin {3v'+ 2cu°] }' Fl2-28)
+ 3e0 sin («' + 2co') + e0 sin Cw' + 2co')]}, F.2.29)
Q = Q' - -J- Y2B [6 (u' - M' + e0 sin o7) - 3 sin Bv' + 2a') -
- 3e0 sin (o' + 2co') - e0 sin Cd7 + 2m')]. F.2.30)
где e\ i', M', ш' и Q' даются формулами F.2.20) —F.2.24), а в'
§ 2.03] ГЛ. 2. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ ВТОРОЙ ГАРМОНИКОЙ 573
и г' определяются из уравнений
Е' -eosinE' = Mf, F.2.31)
-e0cos?/). F.2.33)
в которых а0 к е0 — постоянные.
4. Замечания. Формулы Д. Брауэра имеют весьма компакт-
ный вид. В вековых возмущениях сохранены все члены до вто-
рого порядка относительно /2 включительно. Долгопериодиче-
ские и короткопериодические возмущения вычислены с точностью
до первой степени /г. При выводе этих формул не делалось раз-
ложений по степеням наклона i и эксцентриситета е. Поэтому
они полностью учитывают наклон и эксцентриситет орбиты. Фор-
мулы, однако, имеют особенность при
ео==О, /0 = 0, го«63°26'. F.2.34)
Д. Брауэр [21] нашел также возмущения (вековые и долго-
периодические) от третьей, четвертой и пятой зональных гармо-
ник. И. Козаи [22] продолжил эту работу и получил формулы,
учитывающие возмущения от всех гармоник до восьмого по-
рядка включительно. Он также нашел вековые возмущения
третьего порядка в элементах Q и со.
§ 2.03. Случай орбит с малыми эксцентриситетами
1. Возмущающая функция. В случае орбит с малыми экс-
центриситетами правые части уравнений Лагранжа для оскули-
рующих элементов сил содержат малый делитель е. Эта труд-
ность легко устраняется, если вместо элементов е, я и е ввести
переменные h, l и Я:
h = es\n{n — Q), l = ecos{n — Q), l, = e-Q+Jnd/. F.2.35)
и
Возмущающая функция R определяется формулой F.2.01).
Будучи разложена в ряд по степеням малых hut, она приобре-
тает вид {23]
~{h2
{h2 + I2) + у (Л2 -12) cos 2Й, + Ш sin 2я] +
T/zT sin2' l~ 2"/cos ^ + ^ Л sin Я, + cos 2Я, +
+ \ I cos ЗЙ, + j h sin ЗЙ, - -| (ft2 + I2) cos 2k +
+ ^-{l2- ft2) cos 4Л -f 17ft/ sin 4l]. F.2.36)
574 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 2.03
В формуле F.2.36) сохранены все члены до второго порядка
малости относительно е включительно.
2. Возмущения элементов. Решение уравнений для эле-
ментов a, A, I, Q, ( и А. позволяет найти выражения для воз-
мущений в виде [23]
6а = ЗУ2 (-уJ (l — 4 sin2 О V cos ^ + я sin к) +
+ f/a (-J-J sin2 г (--i / cos Я + 1 ft suU + cos 2Я+
+ у/cos 31+у A sin ЗА,), F.2.37)
jlsin 2 A, - |-A cos 2 A,] - -|/2(-^-Jsin2t (sin^, - jsin3;i +
+ 5/ sin 2X + h cos 2Я - -y- / sin 4Я + -у- Л cos 4я) +
+ 4^(^Jcos2i[in (t-tj-jlsin2A,], F.2.38)
+4i c°s 2^+4h sin 2Л] ~ 4 /2(irJ sin2' (~cos % ~
— j cos ЗА, — 5A sin2X — Ц-1 cos 4Я, — -у Л sin 4Я, + / cos 2l
F.2.39)
dQ = - 4^-2 (-jJ cos f [n (f - f0) + у / sin я, — у A cos Й, —
— у sin 2Я, — -g- / sin ЗЛ + -g- A cos ЗЯ,], F.2.40)
бг = -|-^2 ("Tf) sin i cos г Г— / cos Я + A sin 1 +
|) F.2.41)
i/2("?J sin2'" (~ i h cos Л ~ il sin Л + тsin 2X ~
- i|h cos ЗЯ + f-1 sin3^) + 4/2(-^Jcos2f [я (t - t0)
/sina АсозЛ
, F.2.42)
§ 2.03] ГЛ. 2. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ ВТОРОЙ ГАРМОНИКОЙ 575
где в правых частях нужно подставить невозмущенные значения
элементов
J
F.2.43)
3. Случай круговой орбиты. Из формул F.2.37) — F.2.42)
легко получить следующие выражения для возмущений элемен-
тов круговой орбиты:
inzicos2^, F.2.44)
= |/2(^J(l -fsin^sinl-
-4/L)(^Jsin2/(sirU-4 sin35l). F.2.45)
F.2.46)
6i = -| J2 (Iff sin i cos: cos 2K F.2.47)
6Q = - |/2(-^J cos i[n (t - t0) - у sin 2Я], F.2.48)
6Я = 3/2(Jff (l --f sin2t) n (f - /0) + |"/2(^-J sin2 i sin 2Л -
+ p2 (-J-J cos2 i [n (t -to)~Y sin 2^], F.2.49)
где в правых частях нужно заменить все элементы их невозму-
щенными значениями.
4. Вычисление возмущенных координат. Возмущенные прямо-
угольные геоцентрические экваториальные координаты вычис-
ляются по формулам
х = г (cos и cos Q — sin и sin Q cos j), "j
y = r (cos и sin Q + sin и cos Q cost), > F.2.50)
2 = r sin и sin i, >
где с точностью до вторых степеней Ли/
||, F.2.51)
F.2.52)
576 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОЙ ЗЕМЛИ [§ 2.03
причем
а = ао-\- 6а, i = i0 -f Ы, Q = Qa + 6Q,
u J F.2.53)
a 6a, 6i, ..., 6Я определяются формулами F.2.37) —F.2.42).
5. Замечания. Выведенные выше формулы имеют компакт-
ный вид и не содержат особенностей при е0 = 0. Они удобны
для исследования движения спутников с малыми эксцентриси-
тетами. Однако, поскольку решение задачи было получено в не-
тригонометрическом виде и не были вычислены вековые члены
порядка ]\, ими можно пользоваться только на небольших про-
межутках времени.
Глава 3
ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ
В этой главе изложена теория промежуточных орбит ИСЗ.
Эти орбиты строятся на основе некоторых аппроксимирующих
выражений для потенциала притяжения Земли, допускающих
интегрирование дифференциальных уравнений движения спут-
ника в квадратурах. Поскольку аппроксимирующие выражения
включают в себя основную часть возмущающей функции, обус:
ловленной несферичностью Земли, промежуточные орбиты ока-
зываются более близкими к истинной орбите спутника, чем кеп-
леровский эллипс. В некоторых случаях метод промежуточных
орбит позволяет математически строго решить главную проб-
лему в теории движения ИСЗ.
§ 3.01. Задачи Штерна, Гарфинкеля и Акснеса
В этом параграфе рассмотрены модельные задачи Т. Штерна
[24], Б. Гарфинкеля [25] и К. Акснеса [26], которые дают прибли-
женные решения проблемы о движении спутника с учетом сжа-
тия Земли. Эти решения определяют некоторые промежуточные
орбиты, которые более близки к истинной орбите спутника, чем
кеплеровская орбита, и могут рассматриваться как невозмущен-
ные при построении полной теории движения спутника. По-
скольку здесь вводятся формулы, которые аппроксимируют
только первые два члена потенциала притяжения Земли, то для
силовой функции U можно принять следующее упрощенное вы-
ражение:
^{(JD4)} F.3.01)
где f—постоянная притяжения, т и г0 — масса и средний эква-
ториальный радиус Земли, /2 — безразмерная постоянная, г и
Ф — геоцентрический радиус-вектор и широта спутника. В фор-
муле F.3.01) отброшены члены, имеющие порядок /| и выше.
19 Под ред, Г. Н. Дубошина
578 ч. vi. Движение искусственных спутников земли [§ з.01
1. Задача Штерна. Для аппроксимации лиловой функции U
Т. Штерн вводит функцию V, которая определяется следующей
формулой:
где р — параметр, i — наклон орбиты спутника. Эта формула и
дает промежуточный потенциал или силовую функцию в задаче
Штерна *). Пусть
есть возмущающая функция. Тогда из F.3.01) и F.3.02) на-
ходим
R = - ¦§- fml2 (-^J (sin2cp - 1 sin» i) A - 1). F.3.03)
Эта формула показывает, что для орбит с малым эксцентриси-
тетом е функция R будет малой величиной. Поэтому можно счи-
тать, что для таких орбит функция V достаточно хорошо аппрок-
симирует силовую функцию U.
Дифференциальные уравнения движения спутника в силовом
поле с потенциалом V строго интегрируются в квадратурах.
Если воспользоваться сферическими координатами г, qp, А,, свя-
занными с экваториальными геоцентрическими прямоугольными
координатами х, у, г формулами
X = Г COS ф COS X, 1
у = г cos ф sin %, \ F.3.04)
г —г )
и применить метод Гамильтона — Якоби, то полный интеграл
уравнения Гамильтона запишется в виде
Г ф
J^$ftp. F.3.05)
г, о
где
L = 2a,r2 + 2fmr -а\ + Ё^-В,
.. , 3fml2r2o Щ ml
M = °2 2Г~ ~ °3 SeC f у
*) В книге [27] эта формула была ошибочно приписана Б. Гарфинкелю.
§ 3.01] ГЛ. 3. ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ 579
причем
a oci, яг, а,з — произвольные постоянные.
Знание полного интеграла S, как известно, позволяет запи-
сать общий интеграл задачи. Мы не будем здесь выписывать
общего решения, а приведем лишь три первых интеграла, кото-
рые легко находятся из F.3.05). Они имеют следующий вид:
dt~ г • dt — г* • r cos ф dt — °з
и полностью решают задачу. Формулы, описывающие промежу-
точную орбиту, приводятся в уже указанной работе -Т. Штерна
[24] и его книге [28].
2. Задача Гарфинкеля. Б. Гарфинкель предложил следую-
щую формулу промежуточного потенциала:
-|/2-|-(sin2cp-cos2i)} F.3.06)
или
V=-y-jfmJa 4-(81п2Ф - cos*/), F.3.07)
где
Формулы F.3.01) и F.3.06) дают следующее выражение для
возмущающей функции:
JJm < г2й /3 . 14 г» /3
F.3.09)
Формула F.3.06) была подобрана таким образом, чтобы
промежуточная орбита учитывала все вековые возмущения пер-
вого порядка.
Как и в задаче Штерна, уравнения движения с силовой функ-
цией, определяемой формулой F.3.06), интегрируются методом
Гамильтона — Якоби путем разделения переменных.
19*
580 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 3.01
Первые интегралы задачи Гарфинкеля имеют вид
Y (г2 + г2у2 + г2 cos2 фЛ2) — V = <xi,
2цг + 2а/2 —r2r2== a2,
г2 cos2 фЯ, = а3.
где аь аг, аз — произвольные постоянные. Формулы, описываю-
щие промежуточное движение, приводятся в работе Б. Гарфин-
келя [25].
3. Задача К. Акснеса. К- Акснес строит свою промежуточ-
ную орбиту на основе промежуточного потенциала V, определя-
емого формулой
Формула для возмущающей функции R в этом случае имеет
вид
(fJ(fl)(ii) F.3.11)
Функция V, таким образом, мало отличается от U, если эксцен-
триситет орбиты спутника является малой величиной. Как и
в задаче Гарфинкеля, она выбрана так, чтобы промежуточная
орбита учитывала вековые возмущения первого порядка отно-
сительно /2.
Общее решение уравнений промежуточного движения в этом
случае также может быть найдено методом Гамильтона —
Якоби. Оно получено в работе [26]. Приведем здесь первые ин-
тегралы задачи Акснеса. Они таковы:
G4 - г* (cos2 ФЛ2 + ф2) G2 - /, (fmf го2 C sin2 Ф - 1 ) = 0,
Здесь L, G, Н — канонические постоянные Делоне.
4. Замечания. Предложенные Т. Штерном, Б. Гарфинкелем
и К. Акснесом промежуточные потенциалы по своей структуре
имеют много общего друг с другом. Все три потенциала можно
записать в такой общей форме:
V = F(r) + ^p-. F.3.12)
Отсюда и следует интегрируемость рассмотренных задач, ибо
эта форма, как известно, позволяет проинтегрировать соответ-
ствующее уравнение Гамильтона — Якоби методом разделения
§ 3.02] ГЛ. 3. ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ 581
переменных [27]*). Далее, все промежуточные потенциалы об-
ладают тем важным свойством, что они дают возможность по-
строить промежуточные орбиты, учитывающие важнейшие не-
равенства в движении спутника, а именно, вековые возмущения
первого порядка относительно сжатия Земли.
К настоящему времени наиболее полно разработана проме-
жуточная орбита Акснеса. На ее основе была развита теория,
учитывающая вторую, третью и четвертую зональные гармоники
геопотенциала. Эта теория дает вековые возмущения до третьего
и периодические до второго порядка относительно /2 включи-
тельно.
Недостатки всех промежуточных потенциалов заключаются
в следующем. Все они зависят не только от характеристик гра-
витационного поля Земли, но и от элементов орбиты (большая
полуось, эксцентриситет, наклон) спутника. Поэтому точность
аппроксимации для разных орбит будет разной. Во всех случаях
возмущающая функция содержит коротко-периодические члены
первого, порядка относительно /2. Следовательно, промежуточ-
ные орбиты не учитывают этих возмущений, и их нужно опре-
делять методами теории возмущений.
§ З.С2. Задачи Баррара, Винти и Кислика
В этом параграфе будет рассмотрен другой тип аппроксими-
рующих выражений для потенциала притяжения Земли. Эти
выражения были предложены Р. Барраром [29], Дж. Винти [30]
и М. Д. Кисликом [31]. Все они обладают двумя важнейшими
свойствами. Во-первых, они отличаются от потенциала реаль-
ной Земли членами порядка выше первого относительно сжа-
тия. Во-вторых, дифференциальные уравнения движения в гра-
витационном поле, определяемом аппроксимирующими потен-
циалами, строго интегрируются в квадратурах. В отличие от
промежуточных потенциалов, рассмотренных в предыдущих па-
раграфах, они зависят только от постоянных гравитационного
поля Земли, и не зависят от элементов орбиты спутника. Воз-
мущающая функция в этом случае не содержит второй зональ-
ной гармоники.
Если отбросить тессеральные и секториальные гармоники,
то потенциал притяжения Земли можно записать в виде
л=2
где Рп — полином Лежандра л-го порядка.
*) К сожалению, задача не интегрируется, если во втором слагаемом
F.3.12) показатель у г будет равен 3, а не 2. В этом случае формула F.3.12)
содержала бы как частный случай формулу F.3.01).
582 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 3.02
1. Задача Баррара. Задача Р. Баррара заключается в изуче-
нии движения спутника в гравитационном поле с потенциалом
f{^} F.3.14)
где
Предполагая, что б — малая величина, разложим V в ряд по
степеням б. Тогда
^{^J OF3), F.3.15)
где
г = V*2 + У2 + z2, z = rsinqp,
а О (б3)—некоторая функция, имеющая третий порядок малости
относительно б.
Выберем б так, чтобы
б = гоЛ/77- F.3.16)
Тогда первые два члена формулы F.3.15) будут соответственно
равны первым двум членам формулы F.3.13).
Если через R обозначить возмущающую функцию
R = U — V,
то из F.3.13) и F.3.15) находим
л=3
Таким образом, функция V отличается от U членами по-
рядка ft и, следовательно, дает достаточно хорошее прибли-
жение к потенциалу притяжения Земли.
Чтобы проинтегрировать дифференциальные уравнения дви-
жения в силовом поле с потенциалом V, введем сферические
координаты р, rf, к по формулам
х = р cos ф cos Я,,
^ = р cos -ф sin Я,
z = 6 + psini|),
так что
г = д/р2 + 2бр sin-ф + б2,
tg<P = tgiJ) + — sec-ф.
Тогда
sin 1|) /к „ ]
р . (b.d.1
§ 3.02] ГЛ. 3. ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ 583
Сопоставление формул F.3.18) и F.3.12) показывает, что
соответствующее уравнение Гамильтона — Якоби должно ин-
тегрироваться методом разделения переменных.
Первые интегралы задачи Баррара можно записать в виде
Р2 + рЧ2 + Р2^2 cos2 ф = 2V + съ
р4 (ijJ + к2 cos2 гр) + 2/тб sin ij) = с3.
Формулы, описывающие промежуточную орбиту Р. Баррара,
получены в уже указанной работе [29]. Они приводятся также
в книге [27].
2. Задача Винти и Кислика. Дж. Винти и М. Д. Кислик
предложили новые аппроксимирующие выражения для потен-
циала притяжения Земли. Эти выражения, в сущности со-
впадающие друг с другом, можно представить следующей фор-
мулой:
=-тЧ
— О" /5 (-?-)*" ^»- (sin Ф)}. F.3.19)
Сравнивая формулу F.3.19) с F.3.13), мы видим, что пер-
вые два члена в разложении V в точности совпадают с первыми
двумя членами в разложении U.
Если обозначить через R возмущающую функцию, то
4=3
где
\
—ч hi- )
hn = — Ihn + \
Поскольку коэффициенты /* имеют второй порядок малости
относительно /2, то из формул F.3.20) и F.3.21) видно, что воз-
мущающая функция содержит лишь члены второго порядка.
В этом отношении формула F.3.19), несомненно, имеет явное
преимущество по сравнению с формулой F.3.14).
Дифференциальные уравнения задачи Винти и Кислика
могут быть проинтегрированы в сфероидальных координатах
|, т], w, связанных с х, у, г равенствами
— тг) cos,
F.3.22)
¦ vi2) sin w, \
I
584 ч- VI- Движение искусственных спутников Земли [§ з.оз
Первые интегралы задачи записываются в следующем виде:
rf< ' ' d' ' ' F.3.23)
(Г + с2)A-г]2)-^- = «з,
где
Ф (Б) = (I2 + С) B^ + 2fml - a») + c2a§,
F.3.24)
а аь а2, аз — канонические постоянные Якоби.
3. Замечания. Хотя задача Баррара и представляет интерес
и могла бы найти приложения при изучении движения далеких
спутников, нужно все же подчеркнуть особую важность задачи
Винти и Кислика. Здесь мы имеем интегрируемую динамиче-
скую проблему, которая имеет важнейшие приложения в совре-
менной небесной механике, как в теории движения ИСЗ, так и
в теории движения естественных спутников планет.
Промежуточная орбита, основанная на задаче Винти и Кис-
лика, исследовалась не только авторами, но и многими дру-
гими. Рабочие формулы для вычисления промежуточной орбиты
были получены Дж. Винти [30], [32], М. Д. Кисликом [31], [33] и
И. Ижаком [34].
§ 3.03. Обобщенная задача двух неподвижных центров
В 1961 г. Е. П. Аксенов, Е. А. Гребеников, В. Г. Демин пред-
ложили для построения теории движения ИСЗ использовать
обобщенную задачу двух неподвижных центров [35], [36]. Задача
Эта заключается в исследовании движения спутника в гравита-
ционном поле, потенциал которого дается формулой
F.з.25)
Здесь / и m — постоянная притяжения и масса Земли, i =.
-c(ff + /)]2, 1
-c@-iW, J
а с и cr — некоторые вещественные постоянные.
§ 3.03]
ГЛ. 3. ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ
585
Предполагая, что сна малы, разложим W в ряд по полино-
мам Лежандра. Тогда получим
3.3.27)
где коэффициенты J'k даются равенством
+ 0* + 0 - ^) (* - О'}- F-3.28)
7* = ~ Т
Отсюда, в частности, следует, что при вещественных с и а для
любого целого k коэффициенты J'k являются величинами дей-
ствительными.
Выберем теперь с и а из условий
тг г if г
J 2 2' 3 •'З"
Тогда
—
F.3.29)
Подставляя в F.3.29) вместо г0, /2 и /3 их числовые значе-
ния из § 1.02, найдем
с = 209,729 км, а = — 0,035647. F.3.30)
При этих значениях для г0, с и а из формулы F.3.28) получаем
/;= 1,166 • ю~8, /g=—0,006- ю~в.
При этом /^ для k ^ 6 будут меньше 10~9. Таким образом, хотя
1\ и /4 не равны друг другу, однако их разность меньше, чем /4.
Вследствие малости отношения с/г0 постоянные J'k убывают
с возрастанием k быстрее, чем /й- Поэтому разность функций U
и W будет содержать члены, порядок которых 10~6 и выше.
Пусть
R = U-W,
где U дается формулой F.3.01), есть возмущающая функция.
Тогда
П=4
где
F.3.31)
F.3.32)
586 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 3.03
Если воспользоваться числовыми данными § 1.02, то для по-
стоянных /„ получим (в единицах 10~6)
74 = 0,427, /5 = 0,236,
/6 =-0,502, 77 = О,361,
/8 = 0,118, /9 = 0,100.
Итак, если с и а выбрать из условий F.3.29), то первые три
члена формулы F.3.27) будут совпадать с первыми тремя чле-
нами формулы F.3.01). Тем самым возмущающая функция R
не содержит не только второй, но и третьей зональной гармо-
ники. Она включает в себя лишь члены, порядок которых 10~6
и выше. Таким образом, функция W весьма хорошо аппрокси-
мирует потенциал притяжения реальной Земли.
Перейдем теперь к интегрированию дифференциальных урав-
нений задачи. Из формулы F.3.01) следует, что функцию W
можно интерпретировать как силовую функцию задачи двух
т
неподвижных центров с комплексными массами -тгО+кт) и
у- A —iff) и с мнимым взаимным расстоянием, равным ic. А как
известно, задача двух неподвижных центров является одной из
немногих задач механики, интегрируемых в квадратурах.
Дифференциальные уравнения движения могут быть проин-
тегрированы методом Гамильтона — Якоби, если ввести сферои-
дальные координаты ?, т| и ш, связанные с х, у, г формулами
|
у=*т/A* + с*)A—1\*) sin®, f F.3.33)
z = ca + |t). j
В этих координатах кинетическая энергия Т и силовая функ-
ция W имеют вид
2 Ц2 + с2 + 1-гJ
fm Ц-card | F335)
где
С помощью F.3.34) и F.3.35) легко составить уравнение
Гамильтона — Якоби. Оно имеет следующий вид:
2/ \dl) " 2/ \di\
_, ¦ 1 ( dS у _ fm (t - сот]) . /6ч
где а, — постоянная.
§ з.оз; гл. з. теория промежуточных орбит исз 587
Полный интеграл уравнения F.3.36) находится методом раз-
деления переменных и дается формулой
где
Ф (I) = (I2 + с2) Bа,?2 + 2/т| - а!) + cW3, |
F (л) = A - ц") Bа,с V - 2/шсат, + а|) - а2, J F'38)
а щ, а2, а3 — произвольные постоянные Якоби.
Из F.3.37) нетрудно найти три первых интеграла задачи
F.3.39)
^ J
Введем новую независимую переменную т согласно уравне-
нию
dt = Jdx. F.3.40)
Тогда из равенств F.3.39) находим
F.3.41)
где ci, c2, c3 — постоянные интегрирования.
Таким образом, задача свелась к обращению квадратур.
После того, как из первых двух равенств F.3.41) найдем ? и т)
как явные функции т, третье равенство F.3.41) даст w как функ-
цию т, а уравнение F.3.40) позволит связать т с временем t.
Замечания. Функция W содержит два параметра с и а,
которые мы выбрали так, чтобы вторая и третья гармоники
в разложении потенциала U совпадали с таковыми в разложе-
нии W. Рассмотрим теперь некоторые частные случаи.
Пусть а = 0, с Ф 0. Тогда формулы F.3.28) и F.3.29) дают
и, следовательно, формула F.3.27) совпадает с формулой Вин-
ти и Кислика.
Пусть а = 0, с Ф 0. Тогда, если ввести
р = V''2 — 2гс + с2,-
разложить W в ряд по степеням с и сохранить члены до с2
включительно, то получим формулу Баррара.
588 4. vt. Движение искусственных спутников земли [§ 3.04
Пусть, наконец, а = 0, с = 0. Тогда формула F.3.25) даст
нам потенциал шарообразной Земли.
Таким образом, формула F.3.25) включает в себя как част-
ные или предельные случаи промежуточные потенциалы Вин-
ти и Кислика, Баррара и невозмущенный потенциал Земли.
Пока она является наиболее общей формулой для промежуточ-
ного потенциала, допускающего интегрирование уравнений дви-
жения в квадратурах.
Обобщенной задаче двух неподвижных центров посвящено
более сотни работ. Многие из них нашли отражение в книге [27].
Здесь мы отметим те из них, которые касаются качественных
исследований.
Пусть h есть постоянная энергии. Тогда, если h < 0, то все
движения происходят в ограниченной части пространства. Если
же h ^ 0, то движения оказываются неограниченными в про-
странстве. Подробный качественный анализ в случае а = 0 для
h < 0 был дан в работах [37], [38] и в общем случае в работе
[39]. Качественные исследования неограниченных движений были
выполнены при а = 0иА = 0в работе [40] и для h > 0 в ра-
боте D1]. При а ф 0 подобные исследования содержатся в статье
[42]. Полярные орбиты (» = 90°) были подробно рассмотрены
для а — 0 в работе [43] и для а Ф 0 в работе [44].
Устойчивость частных движений (круговых, эллиптических,
эллипсоидальных и др.) была исследована для случая а = 0
в работе [45] и для случая а ф 0 в работе [46].
Различные формулы, описывающие промежуточную орбиту,
были опубликованы в статьях [47] — [51]. Механический смысл
силовой функции задачи рассмотрен в работе [52].
§ 3.04. Промежуточная орбита, основанная
на обобщенной задаче двух неподвижных центров
Здесь будут приведены формулы, позволяющие находить
координаты спутника в промежуточном движении для произ-
вольного момента времени t. Пусть а, е, i, Qo, coo и Mq — эле-
менты промежуточной орбиты. Тогда порядок вычисления пря-
моугольных координат х, у, z спутника может быть следую-
щим [48].
1) Определение *ф:
M = no(t-to) + Mo, F.3.42)
Е = М + е*sinЕ + Яф — Хх cos 6 — к2sin 26, F.3.43)
B = (l+v)iJ) + co0( F.3.44)
З*ет- F-3-45)
§ 3.04] ГЛ. 3. ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ ?89
где п0, е*, X, Яь Я,2, v и ё определяются формулами
Us* —e*
е* = е{\ - вЦ\ - e2)(l - s2) + eV(l - s2)(l - e«)C + e
й, = - -Jg- A - е2K/! B4 - 96s2 + 75s4),
Л, = у в3стs D - 5s?) A - е2?',
+ ^[B88 - 1296s2 + 1035s4) - е2A44 + 288s2 - 510s4)],
e = e{l+e2(l-e2)(l-2s2) +
+ e4(l - e2) [C - 16s2 + 14s4) - 2e2 A - s2J]}.
Вычисление \|з производится методом последовательных при-
ближений, причем в качестве нулевого приближения можно
взять
2) Определение 1 и ср:
| = аA -ecos?), F.3.46)
^ y F.3.47)
где
k\ = e2s2 [1 - i + a2] - 4eV (l - s2) (l - e2),
kt = eYs2 - eV A - 10s2 + 1 Is4 + *V).
3) Определение Й:
Й = (iij) + Ц, + Ц, sin ij) + ц2 sin 52\J3 + n' cos 8, F.3.48)
где
ц = -1- e2 A + a2) a - -^ e4 F - 17s2 - 24eV) a,
H, = -
jij = e3aas A - e2).
590 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 3.04
4) Определение р и р':
1+rfsinq,
где
d = ecrs{l -e2[E-6s2)-e2(l -2s2)]}.
5) Определение прямоугольных координат:
х = р (cos ф cos Q — a sin ф sin Q — р sin Q),
у = p (cos ф sin Й + a sin ф cos Й + p cos Q),
z = со + p' (s sin ф -+- y),
где
P = 2еста s{l - e2 D - 5s2 + e2s2)},
у = - ест {A - 2s2) - e2 [C - 12s2 + 10s4) + e2A - 2s4)]}.
Здесь
e = -, p = a(l —e2), s = sin/, a = cosi, F.3.51)
а с и а связаны с r0, J2 и /3 формулами F.3.29).
Замечания. Приведенные здесь формулы описывают все
возможные орбиты спутника, основанные на обобщенной задаче
двух неподвижных центров. Они не имеют особенностей ни при
каких значениях е и /. Ими можно пользоваться как в случае
критической наклонности, так и при е = 0.
При выводе этих формул были сохранены все члены до е4
включительно и отброшены члены, пропорциональные еб, т. е.
члены третьего порядка относительно /2. Здесь мы, однако, от-
бросили некоторые периодические члены с амплитудами, не пре-
восходящими 1 м.
Нужно иметь в виду, что наиболее точно должны вычис-
ляться величины и0, К, ц, v, которые являются коэффициентами
при t. Здесь мы привели для них выражения с точностью до
второго порядка относительно /2. Но в работе [53] получены
также члены третьего порядка.
Заметим, наконец, что при a = 0 приведенные формулы опи-
сывают промежуточную орбиту, основанную на задаче Винти и
Кислика, а при с = 0 и а = 0 — невозмущенную кеплеровскую
орбиту. При этом элементы а, е, i, Йо, too и Мо превращаются
S 3.0S] ГЛ. 3. ТЕОРИЯ ПРОМЕЖУТОЧНЫХ ОРБИТ ИСЗ 591
соответственно в большую полуось, эксцентриситет, наклон, дол-
готу узла, аргумент перигея и среднюю аномалию в эпоху. За-
дача об определении элементов промежуточного движения по
начальным условиям рассмотрена в работах [49], [51].
§ 3.05. Дифференциальные уравнения
для элементов промежуточной орбиты
Рассмотренная в предыдущем параграфе промежуточная ор-
бита учитывает главный член, а также вторую, третью и часть
четвертой зональные гармоники потенциала притяжения Земли.
Чтобы построить полную теорию движения спутника, которая
учитывала бы все остальные возмущающие факторы, нужно
иметь дифференциальные уравнения для элементов промежуточ-
ного движения. Здесь мы приведем одну систему таких урав-
нений. Она получена в работе [54].
Пусть L, G, Н суть новые элементы, которые связаны с
а, е, i следующими формулами:
G = У/«аA -е2) { 1 + ? [D - 5s*) + е2D - 3s»)]}.
Н = ^fma A-е2) cos /{ 1 + -?- [2 - 3s2 + е2 B - s2)] },
где е, s и а даются равенствами F.3.51).
Пусть далее элементы /, g, h имеют вид
где
Тогда оказывается, что элементы L, G, H, I, g, h являются
каноническими и дифференциальные уравнения для них запи-
шутся в виде
^L^IBL dl = dR'
dt
dG
dH
dt
dl '
dR'
dR'
dh '
dt
dg
dt
dh
dt
dL
dR'
dR'
dH
Здесь
у?' = - a, + R, F.3.53)
592 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 3.05
где R — возмущающая функция, a at определяется формулой
а с и а даются равенствами F.3.29).
Если R = 0, то уравнения F.3.52) определяют промежуточ-
ное движение, в котором величины L, G, Н являются постоян-
ными, а /, g, h — линейными функциями времени.
Замечания. При с = 0 и a = 0 элементы L, G, H, I, g, h
превращаются в элементы Делоне в теории кеплеровского дви-
жения. В работе [54] предложены также другие системы кано-
нических элементов, в частности, системы, аналогичные первой
и второй системам Пуанкаре.
Из уравнений F.3.52) нетрудно получить дифференциальные
уравнения для элементов а, е, i и М = /, м = g и Q = К. Эти
уравнения выведены в работе [55]. Они аналогичны уравнениям
Лагранжа для оскулирующих элементов и превращаются в та-
ковые при с = 0. В работе [56] получены уравнения, аналогич-
ные уравнениям Ньютона, в которых правые части содержат не
производные возмущающей функции по элементам, а три комт
поненты возмущающего ускорения. Еще одна система уравне-
ний, не имеющая аналогов в теории возмущений кеплеровских
элементов, была получена в работе [57]. Все эти уравнения об-
ладают тем важным свойством, что дают возможность уже
в первом приближении получать неравенства, обусловленные
комбинированным влиянием различных возмущающих факторов
и сжатием Земли.
Невозмущенный гамильтониан, равный —ai, приведен нами
с точностью до с4 включительно. В работе [53] он найден с точ-
ностью до с6, т. е. с точностью до членов третьего порядка отно-
сительно Jz включительно.
Глава 4
ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ
В этой главе даны формулы для возмущений элементов ор-
биты ИСЗ, вызываемых зональными гармониками высших по-
рядков, тессеральными и секториальными гармониками геопо-
тенциала и притяжением Луны и Солнца.
§ 4.01. Возмущения от зональных гармоник
высших порядков
1. Возмущающая функция. Возмущающая функция, обус-
ловленная зональными гармониками потенциала притяжения
Земли, имеет вид (см. § 1.01)
()*P*(sin(P/). F.4.01)
В §§ 2.01 — 2.03 были рассмотрены возмущения от второй
зональной гармоники. Здесь приводятся формулы для возмуще-
ний от гармоник, пропорциональных /3, U, ..., I&.
2. Вековые возмущения. Вековые возмущения имеют только
элементы Q, м и М. Обозначая через ДЙ и Дсо коэффициенты
при вековых возмущениях элементов Q и со, согласно [58] будем
иметь
ДЙ = - п cos i [i| v4 B + Зе2) D - 7s2) -
Ye (8 + 406* + 15e4) (8 - 36s2 + 33s<) +
F.4.02)
Ди = - ДЙcost + n [-jj- y4 D + 3^(8 - 40s2 + 35s4) -
y(8 + 20e2 +5e4) (I6 ~168s2 +378s4 ~231s6) +
Y ^64 + 336e2 + 280e4 + 35fi6) ([ 28 " 2304s2
+ 9504s4- 13728s6 + 6435s8)], F.4.03)
594 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.01
где
()k F-4.04)
Вековое возмущение элемента М оказывается равносильным
среднему движению п плюс некоторое постоянное возмущение
порядка J\. Среднее движение п определяется непосредственно
из наблюдений, а для вычисления большой полуоси пользуются
формулой
^^[^2л/Т^^B-Зз2)], F.4.05)
которая имеет ошибку порядка J\.
Из формул F.4.01) — F.4.03) следует, что вековые возмуще-
ния первого порядка обусловлены лишь гармониками четного
порядка.
3. Долгопериодические возмущения. Долгопериодические воз-
мущения элементов е, i, Q, м и М определяются формулами [58]
k=i
6
fifi cos I + -—^ Yj c* sin №> F.4.09)
в которых
ei = T Y3 D - 5s2) - A Ys D + Зе2) (8 - 28s2 + 21s*) +
32
35
+ 2062 + 5e*) F4 - 432s* + 792s* - 429s»),
= es[^y<F -7s2) -^.YeB+ ez)A6 -
Y8D8 + 8062 + 15e»)C2 - 176s2 + 286s< - 143s6)],
= e2s2 [w^(8 - 9s2) - ^ Y7(8 + Зе2) (80 -220s2 + 143s4)],
§ 4.01, ГЛ. 4. ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ 695
Ьх = - е [у y3 A6 - 40s2 + 25s4) -
- -^ Y5 D + Зе2) C2 - 296s2 + 560s4 - 315s6) +
+ Ж Y7 (8 + 20e2 + 5e4) B56 - 4864s2 +
+ 18 000s4 - 23892s6 + 10 725s8)],
b2 = - A [4" Y4 B4 - 56s2 + 35s4) -
- i^- y6 B + e2) F4 - 384s2 + 636s4 - 330s6) +
+_g|_Y8D8+80e2+15e4)A28 - 1408s2+4312s4-5148s6+2145s8)],
ft3 = _e3s^Y6(96_220s2+ 135s4)-
- ^g- y7 (8 + Зе2) (960 - 4800s2 + 7304s4 - 3575s6)],
bt = - eV [-^ Ye (80 - 182s2 + 110s4) -
Y8 A0 + 3e2) C20 - 1448s2 + 2080s4 - 975s6)],
b5 = - e5s4 [^ Yr B40 - 544s2 + 325s4)],
b6 = - eV [^ y8 A68 - 380s2 + 225s4)] ;
c, = - s[| Y3 D - 5s2) - A Y5D + гбе2 + 6e4) (8 - 2852 + 21s4) +
+ ~Ш Y? (8 + 12462 + 145e4 + 20e6) F4 - 432s2 + 792s4 - 429s6)],
-7s2) -
\(H 14^ + 3e4)A6 - 48s2 + 33s4) +
1024
105
Ye F72 + 5264e2 + 455064 + 525e6) X
X C2 - 176s2 + 286s4 - 143s6)],
E96 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.01
с, = - eV [-Ц- Y5 C + 2<?) (8 - 9s2) -
Ъ® + 212 + 44){80 -220s2 + 143s4)],
Ye D + Зе2) A0 - 1 Is2) -
D0 + 88е* + 15е") D0 - 104s2 + 65s*)],
- 13s*)],
i = * [у Y3 D - 5s2) - A Ys D + 9е*) (8 - 28s2
ОС _
+ 548" Ъ (8 + 60в2 + 25е*) F4 ~ 432s2 + 792s4 ~ 429s6)J •
2= es2 [A Y4 F - 7s2) - -g- Y6 A + e2) A6 - 48s2 + 33s«) +
^ Ya D8 + 160^ + 45e4) C2 - 176s2 + 286s4 - 143s6)],
3= eV [ш Ys (8 ~ 9s2) - JgjL Y7 (8 + бе2) (80 - 220s2 + 143s4)],
M Y6 A0 - 1 Is2) - -$jL Y8 B0+Эе2) D0-10452+65s4)],
где
g' = ar(t-10) + и0 - 90°, F.4.11)
а ш' — коэффициент при вековом возмущении углового расстоя-
ния перигея от узла, т. е.
Здесь ш—коэффициент при вековом возмущении элемента а от
второй зональной гармоники.
В формулах F.4.06) — F.4.10) v = со'/я или с принятой точ-
ностью
Поскольку v имеет порядок /2, то долгопериодические возму-
щения элементов е, t, Q, ю и М пропорциональны hlJz, т. е.
§ 4.02] ГЛ. 4. ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ 597
имеют тот же лорядок, что и короткопериодические возмущения
от второй зональной гармоники. Большая полуось не содержит
долгопериодических возмущений порядка h/h- Поэтому с при-
нятой точностью
6а = 0.
4. Замечания. Приведенные формулы для возмущений строго
учитывают эксцентриситет е, ибо при их выводе не производи-
лось разложений по степеням е. Полученными формулами можно
пользоваться при любых наклонах i, за исключением окрест-
ности критического наклона i « 63° 26.
Вековые возмущения пропорциональны /* и тем самым при-
мерно в 1000 раз меньше вековых возмущений от второй зональ-
ной гармоники. Амплитуды долгопериодических возмущений
имеют тот же порядок, что и амплитуды короткопериодических
возмущений, вызываемых второй гармоникой. Амплитуды ко-
роткопериодических возмущений пропорциональны Ik, т. е. имеют
порядок l\. Период долгопериодических возмущений равен пе-
риоду обращения перигея.
Приведенные формулы учитывают влияние зональных гар-
моник лишь до восьмого порядка включительно. Однако вслед-
ствие того, что коэффициенты h медленно убывают с возраста-
нием k, при точных исследованиях необходимо учитывать также
влияние гармоник более высокого порядка. В этих случаях
следует воспользоваться формулами, содержащимися в работах
[59] — [61]. Эти формулы дают возмущения от зональной гармо-
ники любого порядка.
§ 4.02. Возмущения от зональной гармоники
произвольного порядка
В этом параграфе мы приведем формулы для вековых и дол-
гопериодических возмущений, вызываемых гармоникой по-
рядка т. Выражение для возмущающей функции в этом случае
имеет вид
1. Функции эксцентриситета Afift)(e)., Функция М^\е) опре-
деляется следующей формулой:
F.4.13)
Подробно эти функции были рассмотрены в работе [62]. Здесь
мы приведем о них только самые необходимые сведения.
598 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.02
При положительном п функция М^'(е) является многочле-
ном относительно е. Для четного k степень многочлена равна п,
если п четно, ил— 1, если я нечетно. Для нечетного k степень
функции М^ равна л или п—1, смотря по тому, четно или
нечетно л — 1. Если е мало, то М^ (е) имеет порядок eh. Далее
имеем
M<f>(e)^0, k>n,
Для вычисления М^ могут служить следующие формулы;
М«.=0, М*> = (|)\ F.4.14)
-=Ц=^- Л* (*> = Bп - 1) Af«, —(n —1)(I—e») Mi*22, F.4.15)
Для вычисления производной функции М^ по е следует вос-
пользоваться формулой
F.4.16)
или
Явные выражения для некоторых М^(е) приведены в ра-
боте [61].
2. Функции наклона L^is). Функция L.T (s) определяется
формулой
... 1 р
L™ (s) = 4~ \ Рп (s cos «)cos Ьи du. F.4.18)
Эти функции также были рассмотрены в работе [61].
Функция Ln (s) является многочленом л-й степени относи-
тельно s. При этом для малых s этот многочлен имеет поря-
док sh. Если п -\- k нечетно, то L^ (s) тождественно равна нулю.
Далее имеем
600 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.02
бсо = - абй + ^" ? Т L^^-' Sin
Ш = - -^A - *Г
Здесь /?„ и Q,1 определяются равенствами
Аргумент g' дается формулой
a nv есть среднее движение перигея. Для вычисления v может
быть использована формула F.3.46).
5. Долгопериодические возмущения в случае нечетной гар-
моники. Пусть т = 2л -{- 1. Тогда формулы для возмущений бу-
дут иметь вид
ff+1)gft'> c«iB* +
2 2M&lK cos Bik
ft=0
^5?2, 2FfM2 /?21
6. Замечания. Приведенные здесь формулы дают вековые
возмущения с точностью до \т и долгопериодические возмуще-
в 4.03] ГЛ: 4. ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ 601
ния с точностью до jm/J2 включительно. Они позволяют находить
возмущения от любого числа зональных гармоник. Использова-
ние рекуррентных соотношений для функций М^'(е) и A[,fc)(s)
дает возможность весьма быстро проводить практические вы-
числения.
Теория возмущений от зональных гармоник в общем случае
подробно изложена в работах [59], [61]. Вековые и важнейшие
долгопеоиодические возмущения исследованы в статьях [63], [64].
§ 4.03. Возмущения от тессеральных
и секториальных гармоник
1. Возмущающая функция. Возмущающая функция, обуслов-
ленная долготными членами потенциала притяжения Земли,
имеет вид
*=Ч- Z Z ;«* (т)"р»* <sln rtcosk ft - ***)> <6-4-24>
л=2 k=l
где /„ft и Knh — постоянные, численные значения которых приво-
дятся в табл. 75 на стр: 558.
В этом параграфе рассматриваются возмущения от всех дол-
готных членов потенциала до секториальной гармоники четвер-
того порядка включительно.
2. Возмущения с периодом около суток. Долгопериодические
возмущения, общий период которых мало отличается от 24h,
имеют вид [65]
ое = Уз1 T4i sin (gr - Из,) + Л5, sin (g' + Q31)] +
+ Y32 Изг cos (g7 - 2Q32) + A'32 cos (g' + 2Q32)] +
+ Y33 Изз sin (/ - 3Q33) + Ah sin (/ + ЗЙМ)], F.4.25)
fit = V22JB22 cos гйи + V41S41 sin fi4l + Y42B42 cos 2Q42 +
+ Y43B43 sin 3^ + Y44S44 cos 4Q44, F.4.26)
6fi = Y22C22 sin 2Q22.+ Y41C41 cos fi41 + Y42C42 sin 2fi42 +
+ Y43C43 cos 3Q43 + y44C44 sin 4Q44l F.4.27)
e 6(o + а 6Й = Y31 t^3i cos (gr — Q3]) + A31 cos {gr + fi3,)] —
- Y32 [A32 sin (gf - 2fi32) + A'v sin fe' + 2fi32)] +
+ Y33 Изз cos {gf - ЗОц) + A'x cos (/ + Зад, F.4.28)
еЬМ = Y3i [A,i cos (g7 - Q31) + Л31 cos (g' + Q31)] -
- Y32 [42 sin (gf - 2Оз2) + Лз1 sin (g' + 2fi32)] +
+ Y33 Иззcos (g' - 3QM) + AUcos (gf + Зад, F.4.29)
602 Ч, VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.0Э
где
^3i=4-(l — «)A — 10а- 15а2),
Л 2/1 \
51 = - 4 О + «) О + 1Оа -
я _ilaf4 —7s2) С - 15 4-
41 — IF ^ " 4I—16
причем
s = sin i0, a = cos /0,
a. i0 — наклон орбиты в невозмущенном движении.
В формулах F.4.25) —F.4.29)
где п — среднее движение спутника, ро — параметр его невозму-
щенной орбиты, tii — угловая скорость вращения Земли, со' и
Q' — коэффициенты вековых возмущений элементов а и Q, to —
начальный момент времени, S — звездное гринвичское время.
3. Замечания. Приведенные формулы учитывают влияние
всех тессеральных и секториальных гармоник потенциала до
четвертого порядка включительно. Они дают только долгоперио-
дические возмущения с общим лериодом приближения, равным
§ 4.MJ ГЛ. 4. ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ 603
одним суткам. Амплитуды долгопериодических возмущений
имеют множитель п/пи который для близких спутников рав-
няется 10 ¦— 15. Короткопериодические возмущения не содер-
жат этого множителя, и их амплитуды примерно в 10 Ч- 15 раз
меньше амплитуд долгопериодических возмущений для близких
спутников. С принятой точностью долгопериодические возмуще-
ния в большой полуоси равны нулю.
Тессеральные и секториальные гармоники не вызывают ве-
ковых возмущений. Однако нужно иметь в виду, что эти члены
могут вызывать резонансные эффекты (даже в случае близких
спутников).
В правых частях формул F.4.25) — F.4.29) отброшены члены,
пропорциональные эксцентриситету орбиты е. Однако их можно
найти в работе [65].
§ 4.04. Лунно-солнечные возмущения
1. Система координат и возмущающая функция. Рассмотрим
сначала возмущения, вызываемые Луной. Пусть Ох'у'г' — пря-
моугольная, геоцентрическая система координат, плоскость х'у'
которой совпадает с плоскостью орбиты Луны, а ось Ох' на-
правлена в перигей лунной орбиты. Обозначим далее через
V, Q', со' наклон, долготу узла и угловое расстояние перигея от
узла орбиты спутника, отнесенные к этой системе координат.
Тогда возмущающая функция, обусловленная притяжением
спутника Луной, дается формулой
F.4.30)
Здесь f — постоянная тяготения, mL — масса Луны,
А = V(*' - *iJ + (У' - УьJ + (*' - zLJ,
cos i|) = cos и' cos (Я' — vL) — sin и' cos V sin (Q' — vL),
где xL, yL, zL — прямоугольные координаты Луны, vL — истин-
ная аномалия Луны, и' — аргумент широты спутника
и'^и + со', F.4.32)
a v — истинная аномалия спутника.
Если пренебречь параллаксом Луны, то для возмущающей
функции /??. будем иметь
^-Ccos2Hf-\). F.4.33)
604 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.04
2. Вековые и долгопериодические возмущения. Вековые и
долгопериодические возмущения элементов спутника, вызывае-
мые притяжением Луны, имеют вид [66] (см. также [67])
ба = 0, F.4.34)
Q' + C, F.4.36)
<'=т fi)' (IK {-в ct^r+d? Кsin''cos 2 (^-*-«'«')+
+ M2) sin2 -y tg ¦?- cos 2 (m'o + со' - fi' + Af) -f
+ Mf> cos2-^- ctg ~ cos 2 {m'v - to' - fi' + Щ } , F.4.37)
?K J, |_ 2/п'М40)и cos /' + 2m' cos Г M42)u cos 2a/ -f
+ Aff cos V sin 2 (m'o -ff + M) +
MZ) sin2 -^- sin 2 («'o + «' - Q' + AJ) -
- M? cos2 у sin 2 (m'v - to' - fi' + M)} , F.4.38)
бМ0=-л/1-е2С--1^- )[*-) -1—ШПЗсозЧ#-1)р +
0 V 2\ п J \aj л/\-е3 i V
+ ЗАГ J° sin2 V cos 2©' • v + -^r M40) sin2 i' sin 2 (m'o + Af - Q') +
+ -^т- Mf sin4 -y sin 2 (m'o + ©' - Q' + A?) +
+ -^Mf cos4-^-sin 2 (m'w — ©' - Q' + Af)} , F.4.39)
где
В = M^[vsin2/' sin2©' - -^r sin4-^cos 2(m'o + ©' - Q' + Af) +
+ -±r cos4-?-cos2(/n'u - ©' - Q' + Af)]. F.4.40)
+ Mi" - Aff) [d sin2 Г cos 2ш' +
-^7-sin4-^-sin2(/n'u + (o/-fi'4-M) +
-±r cos4 у sin 2 (m'o - со' - 9J + Af)] -
, F.4.41)
ГЛ. 4. ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ
605
Здесь
F.4.42)
"z.
л
Af = А!и -
a ret, Oi и Mx,o — среднее движение, большая полуось и средняя
аномалия Луны в эпоху.
Приведенные формулы получены при условии, что в возму-
щающей функции отброшены параллактические члены и члены,
пропорциональные эксцентриситету орбиты Луны. При выводе
этих формул наклон орбиты V и эксцентриситет е спутника учи-
тывались полностью. Однако пренебрегалось малой величиной
т'е.
Долгопериодические возмущения имеют период, равный пе-
риоду обращения Луны вокруг Земли. Поскольку короткоперио-
дические члены малы (их
амплитуды примерно в т'
раз меньше амплитуд дол-
гопериодических возмуще-
ний), они были отброшены.
3. Вычисление эквато-
риальных элементов. Фор-
мулы F.4.34) — F.4.42)
дают возмущения элемен-
тов V, Q' и о/, отнесенных
к плоскости орбиты Луны,
как основной плоскости, и
лунному перигею, как ос-
новной точке в этой плоско-
сти. Но для вычисления пря-
моугольных экваториальных координат спутника х, у, г нам
нужны экваториальные элементы, которые обозначим через
(, Q и со.
Связь между i', Q', со', и элементами ?, Я, со можно устано-
вить из сферического треугольника (рис. 75), в котором -Т, Ш,
и П означают соответственно точку весеннего равноденствия,
Рис. 75. Связь между элементами орбиты.
606 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 4.М
перигей Луны и перигей спутника. Решая этот треугольник, по-
лучим
sin / sin (fi — QL) = sin i' sin (Q' + ©/.),
sin i cos (Q — QL) = cos i' sin / + sin i cos / cos (Q' + ®L),
cos / = cos i' cos / — sin /'sin /cos (Q'
sin i1 sin (со — со') = sin / sin (Q'
sin i cos (© — со') = sin i' cos / + cos i' sin / cos (Я' -f <ot),
F.4.43)
где /, Qt и (Oi, — наклон, долгота узла и угловое расстояние
перигея от узла лунной орбиты по отношению к плоскости зем-
ного экватора. Эти величины можно выразить через эклипти-
ческие элементы Луны. Так, например, / определяется из фор-
мулы
cos / = cos in cos e — sin i^ sin e cos Q j, F.4.43')
где e — наклон эклиптики к экватору, ij и Qj — наклон и дол-
гота узла лунной орбиты относительно плоскости эклиптики.
Формулы F.4.43) и F.4.43') позволяют, таким образом,
найти экваториальные элементы i, Q и м, если известны эле-
менты г', Q' и о/.
4. Возмущения, вызываемые притяжением Солнца. Солнеч-
ные возмущения элементов орбиты спутника можно вычислить
по формулам этого параграфа, если в них принять, что mL —
масса Солнца, Мц, <hl, nL и аь — соответственно средняя ано-
малия в эпоху, долгота перигея, среднее движение и большая
полуось солнечной орбиты и / = е, QL = 0. При этом элементы
i', Q' и со' будут отнесены к плоскости эклиптики и перигею ор-
биты Солнца.
5. Замечания. Рассмотренные в этом параграфе формулы
дают основные неравенства в движении спутника, обусловлен-
ные притяжением Луны и Солнца. При их выводе были отбро-
шены неравенства, пропорциональные параллаксам и эксцен-
триситетам возмущающих тел. Эти неравенства можно найти
в работах [68], [70].
Построенная теория не является тригонометрической, т. е.
в ней содержатся вековые возмущения тех элементов (наклон
и эксцентриситет), которых не должно быть по существу задачи.
Однако теория достаточно компактна и ею можно пользоваться
на промежутках времени порядка нескольких десятков оборотов
спутника. Чисто тригонометрическая теория, дающая возмуще-
ния экваториальных элементов, развита в работах [69], [70].
§ 4.05]
ГЛ. 4. ВОЗМУЩЕНИЯ ГРАВИТАЦИОННОЙ ПРИРОДЫ
607
§ 4.05. Определение постоянных интегрирования
Согласно §§ 2.01—4.04 формулы для элементов а, е, i, Q, а,
М можно записать в виде
а = а0 -\- 6а, Я = fi0 -f ой,
е = ей-\-6е, со = ш0 + бсо,
F.4.44)
где а0, е0, /о, йо, со0, Мо — постоянные интегрирования, а 6а, fie, ...
..., 6М — суммарные возмущения соответствующих элементов,
являющиеся функциями времени t и постоянных а0, е0 Мо,
т. е.
6a = 4>i(t\ оо, е0 Мо),
6e = 4>2{t; а0, eQ Мо),
6i = Фз V; а0, е0 Мо),
6Q == ф4 {t; а0, е0, .... Мо),
6<a = (f5(t; а0, ео\ ..., Мо),
ЬМ = ф6 (t; а0. е0 Мо).
F.4.45)
Постоянные а0, во Мо должны определяться из наблю-
дений. Их можно также определить по начальным условиям.
Пусть для момента t = to
Тогда, полагая в уравнениях F.4.44) и F.4.45) t = t0 и учиты-
вая малость 6а, бе Ш, в первом приближении найдем
== °о — «PiСо! ао.
= е'о — ф2
= Qq — ф4
ао. е'й
К),
Mo),
о = М^-ф6(^о; a'o, e'o Mo).
F.4.47)
Формулы F.4.47) позволяют, таким образом, найти постоян-
ные интегрирования, если известны начальные значения оскули-
рующих элементов. Формулы эти справедливы с точностью до
членов первого порядка. Однако решая уравнения F.4.44) ме-
тодом последовательных приближений, можно найти более точ-
ные значения постоянных ао, е0 Мо.
60в Ч. Vt. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ й 4.06
§ 4.06. Вычисление возмущенных координат спутника
Пусть для заданного момента времени t вычислены возму-
щенные значения элементов а, е, i, Q, со и М. Тогда возмущен-
ные значения прямоугольных геоцентрических экваториальных
координат х, у, г должны вычисляться по формулам B.2.06) —
B.2.11).
Обозначим через р, а и б топоцентрический радиус-вектор,
прямое восхождение и склонение спутника, а через X, Y, Z —
прямоугольные геоцентрические координаты наблюдателя:
X = рcosф'cosS, У = pcosq/sinS, Z = psinq>',
где р — геоцентрический радиус-вектор, ф' — геоцентрическая
широта наблюдения, S — местное звездное время. Тогда для
вычисления р, а, б будут служить следующие уравнения:
р cos б cos а = я — X, р cos б sin а = у — У, р sin б = z — Z.
Для вычисления азимута, и высоты спутника нужно восполь-
зоваться формулами A.1.021),
Глава 5
ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ
АТМОСФЕРЫ И СВЕТОВЫМ ДАВЛЕНИЕМ
В этой главе даны формулы для возмущений элементов ор-
биты ИСЗ, вызываемых сопротивлением атмосферы и световым
давлением. Приведены формулы для продолжительности жизни
спутника. Даны различные формулы для теневой функции.
§ 5.01. Плотность атмосферы
Плотность воздуха верхней атмосферы определяется как не-
посредственно, при помощи аппаратуры, установленной на спут-
никах и ракетах, так и косвенным путем, при помощи изучения
тех возмущений в движении спутника, которые вызывает сопро-
тивление атмосферы. В последние годы наиболее плодотворным
оказался второй метод. Он позволил нарисовать подробную
картину изменения плотности воздуха с высотой и со временем.
На рис. 76 приводится распределение плотности в зависи-
мости от высоты для 1958—1964 гг., полученное Кинг-Хили и
Уокер 171] по наблюдениям 29 спутников. Поскольку на этом
рисунке шкала значений плотности логарифмическая, прямая
линия строго соответствует экспоненциальному закону измене-
ния плотности р с высотой h. Поэтому в первом приближений
можно принять следующий закон:
^) F.5.01)
где Н — постоянная, а ро — значение плотности в исходной
точке. Если принять за эту точку перигей орбиты спутника, то
высоту h нужно отсчитывать от перигея.
Величина Н, называемая шкалой высот, в свою очередь яв-
ляется функцией высоты. На рис. 77 приводится график изме-
нения Н с высотой, из которого следует, что Н увеличивается
с высотой примерно от 35 км на высоте 200 км до 90 км на
высоте 700 км. Для спутников с перигейной высотой 200 км
20 Под ред. Г, Н. Дубошина
610
Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ
(I 5.01
значение Н будет заключаться между 30 и 50 км. Таким обра-
зом, формула F.5.01) тем лучше описывает распределение плот-
ности, чем более тонкий слой рассматривается.
/г,/гм
ff00 -
550 -
500 ¦
450-
400-
350 ¦
300-
250 -
200
-ф^Ч%>
^& — —
>04\ r"ff6
/¦Шимаяы/алн
{HOYUSOj
4
'¦—^:
Я//ев//алееж?1,ж
wmweB/itf/ma
/> 10''
Рис. 76 График изменения плотности воздуха р с высотой.
к
f
1
У/,
г
4
Y
7О0
8О
GO
4О
2О
Ю0 ?0О ЗО0 400 500 ffOO 7O0
ft.ffM
Рис. 77. График изменения шкалы высот Н с высоте.1!.
Рассмотрим теперь изменения плотности воздуха со i
менем.
1. Суточный эффект. В зависимости от времени суток п.
ность воздуха на данной высоте различна (рис. 78). Максш
плотности наблюдается примерно через 2h после полудня, а
5.01] ГЛ. 5. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 611
нимум — между полуночью и рассветом. На высоте 650 км
максимальные значения плотности могут в 10 раз превосходить
минимальные значения. Разница между дневными и ночными
значениями плотности для высоты 200 км мала, но и она может
составлять 40% средней
плотности на данной вы-
соте.
Этот эффект обуслов-
лен изменением темпера-
туры в зависимости от
высоты Солнца над гори-
зонтом. Днем атмосфера
как бы вздувается, линии
постоянной плотности об-
разуют горб, направлен-
ный к Солнцу. На высоте
500 км этот горб имеет
высоту около 100 км, т.е.
дневные значения плот-
ности на высоте 600 км
примерно равны ночным
значениям на высоте
500 км.
2. Колебания плотно-
сти с периодом 27 суток.
Этот эффект, период ко-
торого равен периоду вра-
щения Солнца вокруг
своей оси по отношению
к Земле, связан с коли-
чеством и активностью
солнечных пятен на види-
мой стороне Солнца. Амплитуда колебаний плотности с таким
периодом на высоте 200 км может составлять 20%, а на высоте
600 км — 70% от средней плотности.
3. 11-летний цикл. Самые большие и, по-видимому, самые
медленные вариации плотности воздуха связаны с 11-летним
циклом солнечной деятельности (см. рис. 76). Плотность воздуха
днем возрастала между 1958 г. (максимум активности) и 1964 г.
(минимум активности) на высоте 300 км примерно в три раза,
а на высоте 600 км в 20 раз.
4. 6-месячные колебания. Плотность воздуха подвержена ко-
лебаниям с периодом, равным около 6 месяцев, и амплитудой,
достигающей на высоте 350 км около 40% от средней плотности.
Максимумы этих колебаний бывают в апреле и октябре, а ми-
нимумы — в январе и июне,
в 70 73 74 /? IS 20 Z2h
Рич. 78. Иррегулярные изменения плотности воз-
духа р.
20*
612 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 5.03
5. Иррегулярные изменения плотности. Имеются спорадиче-
ские изменения плотности воздуха, связанные в первую очередь
также с деятельностью Солнца. Эти изменения, которые трудно
предсказать, могут длиться малое время (несколько суток или
несколько часов), но могут достигать достаточно большой ве-
личины (см. рис. 78).
Таким образом, плотность воздуха имеет весьма сложную
зависимость от времени, и построение точной теории движения
спутника в атмосфере является делом чрезвычайно сложным.
Однако теория может учесть наиболее значительные эффекты
в изменении плотности, и получаемые при помощи такой теории
некоторые средние изменения элементов, как показывает прак-
тика, могут достаточно точно описывать движение спутника.
§ 5.02. Стандартная атмосфера
Все сведения о плотности воздуха, полученные с использо-
ванием ИСЗ, содержатся в Стандартной атмосфере. Она состоит
из таблиц и формул, позволяющих находить плотность на дан-
ной высоте для данного момента времени. Основными входными
данными Стандартной атмосферы, помимо высоты h и местного
солнечного времени, являются широта точки <р, в которой опре-
деляется плотность, склонение Солнца 6О, индексы F\a,7 и Fioj.
характеризующие поток солнечного излучения на волне 10,7 см
и геомагнитный индекс /(р.
Таблицы и формулы Стандартной атмосферы учитывают все
вариации плотности, описанные в § 5.01.
Стандартная атмосфера издана как монография [72].
§ 5.03. Сила сопротивления атмосферы
При построении теории поступательного движения спутника
обычно принимают во внимание лишь ту компоненту F аэроди-
намических сил, направление которой противоположно вектору
относительной скорости. Выражение для F записывают в виде
F = jPV2ACD, F.5.02)
где р — плотность воздуха, V — скорость спутника относительно
атмосферы, Л — площадь поперечного миделевого сечения,
a CD — аэродинамический коэффициент лобового сопротивления
(безразмерный).
Если средняя длина свободного пробега молекул воздуха
значительно превосходит геометрические размеры спутника, то
коэффициент CD близок к 2. Если же мы имеем обратную кар-
тину, то CD мало отличается от единицы. Средняя длина сво-
8 5.04] ГЛ. 5. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 613
бодного пробега молекул на высотах свыше 160 км составляет
около 50 м. Поэтому для большинства спутников можно при-
нять CD « 2.
Для сферических спутников, движущихся по орбитам с вы-
сотой перигея от 180 до 500 км и эксцентриситетом от 0 до 0,2,
значение CD оказалось равным 2,1—2,2 [73]. Для цилиндриче-
ских спутников, движущихся по тем же орбитам, CD может при-
нимать значения между 2,1 и 2,25. Поэтому с ошибкой, не пре-
восходящей 5%, можно принять, что среднее значение CD рав-
но 2,2.
Площадь поперечного сечения А для несферических спутни-
ков является величиной переменной. Поэтому при точном изу-
чении поступательного движения спутника необходимо знать его
вращательное движение. Однако, если предположить, что при
вращении спутника вокруг центра масс различные его положе-
ния равновероятны, то для А можно взять среднее значение,
равное 0,25 площади внешней поверхности спутника.
Из предыдущего следует, что мы не можем с высокой сте-
пенью точности знать величины А и CD. Но для построения тео-
рии самым важным моментом является то, чтобы произведение
АСп было постоянным, а эта характеристика может опреде-
ляться непосредственно из наблюдений.
§ 5.04. Основные возмущения от сопротивления
атмосферы
Пусть сила сопротивления F дается формулой F.5.02),
а плотность воздуха зависит от высоты по экспоненциальному
закону F.5.01). Обозначим через An, Да, Ае, AM, AQ и Асо соот-
ветственно возмущения среднего движения, большой полуоси,
эксцентриситета, средней аномалии, долготы узла и углового
расстояния перигея от узла. Тогда возмущения этих элементов
от сопротивления воздуха будут определяться формулами [74]
An = k(t - t0), F.5.03)
|?fo), F.5.04)
&ю^^ F-5-05)
F.5.06)
^/0J, F.5.07)
Лео = I^a. v? (f - to)\ F.5.08)
614 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 5.05
где
k = { пЗвд. Bп$-'<> A + 2е0 + j е\ + ±=^ + -^ . F.5.09)
F.5.10)
)). F-5.1 О
ь=т. *=^- <6-5-12>
Здесь п0, аа, е0, i0 и р0 — соответственно значения среднего дви-
жения, большой полуоси, эксцентриситета, наклона и параметра
орбиты в момент времени t = to\ /о (С) и /i(?)—функции Бесселя
мнимого аргумента, 1г — коэффициент при зональной гармонике
потенциала притяжения Земли (см. § 1.01), ро — плотность воз-
духа в перигее, т0 — масса спутника, г0 — средний радиус
Земли. Для вычисления функций Бесселя от мнимого аргумента
можна обратиться к рекуррентным соотношениям D.5.80) —
D.5.82). Если ? > 3, то для вычисления функций Бесселя /0(?)
и Л(?) можно пользоваться асимптотическим представлением
D.5.85). Возмущения наклона i очень малы и могут не прини-
маться во внимание.
Замечания. Формулы F.5.03) — F.5.08) обеспечивают доста-
точную точность, если е0 < 0,2. Формула F.5.09) справедлива
при 0,02 < е0 < 0,2.
В этих выражениях для возмущений вращение атмосферы не
принимается во внимание. Эффект вращения атмосферы ча-
стично можно учесть, если в формуле F.5.09) х заменить на
x(l - -Jr- w cos i0J, F.5.13)
где гя и Ул — радиус-вектор и скорость спутника в перигее,
w —угловая скорость вращения атмосферы.
Формулы F.5.03) — F.5.08) позволяют легко вычислить воз-
мущения элементов, если известен коэффициент к. Этот коэффи-
циент определяется из наблюдений по изменению среднего дви-
жения п. Формула F.5.09) может служить для определения
плотности воздуха ро в перигее, если известны к, A, CD, Н и т0.
Подробности см. в [75] и [76].
§ 5.05. Продолжительность жизни спутника
Под влиянием сопротивления атмосферы высота перигея,
эксцентриситет и период обращения спутника монотонно умень-
шаются. Со временем они достигают некоторых критических
значений, при которых спутник может совершить одно-два об-
§5. 05]ГЛ. .5. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 61
ращения вокруг Земли. Критические значения элементов орбиты
зависят от отношения площади поперечного сечения к массе
спутника. Чем больше это отношение, тем больше критический
период обращения и критическая высота перигея. На практике,
однако, можно считать, что спутник прекращает свое существо-
вание, когда высота перигея достигает 120—150 км, а период
обращения равен 86,5—88,0 мин. При этом весьма существенно
то, что в конце своей жизни спутник движется по почти круго-
вой орбите, т. е. критическое значение эксцентриситета оказы-
вается очень близким к нулю. Поэтому при определении продол-
жительности жизни спутника в качестве критического можно
принять момент времени, когда эксцентриситет орбиты тожде-
ственно равен нулю.
Исходя из выше сказанного можно получить следующую фор-
мулу для продолжительности жизни спутника т:
11 29 7
1Гео + 1б «8 + 7
где
_
здесь п0, а0, е0 — среднее движение, большая полуось, эксцен-
триситет орбиты спутника в момент to, от которого отсчиты-
вается т, р0 и Н — плотность воздуха и шкала высот, А и т0 —
площадь миделева сечения и масса спутника, CD — аэродинами-
ческий коэффициент лобового сопротивления, 1Х — функция Бес-
селя мнимого аргумента.
Формулу для продолжительности жизни т можно предста-
вить и в другом виде:
где То и Го — период обращения и скорость изменения периода
обращения спутника в начальный момент, а
1 Я , II Я
Таким образом,, для того чтобы определить продолжитель-
ность жизни спутника, начиная с некоторого момента to, нужно
знать для этого момента элементы а, е и скорость изменения пе-
риода обращения.
616 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 5.06
Замечания. Формула F.5.15) дает вполне удовлетворитель-
ные результаты в случае достаточно близких ИСЗ (ошибка
составляет около 5%). Однако для далеких спутников резуль-
таты нужно исправить за счет таких эффектов, как сжатие
атмосферы, изменение шкалы высот, вариации плотности, обус-
ловленные солнечной деятельностью. Особенно важно здесь
учесть колебания плотности и изменения, связанные с 11-лет-
ним циклом. Для этого в качестве То необходимо взять ве-
личину, полученную путем осреднения на промежутке времени
в несколько лет. Только таким образом можно добиться точно-
сти порядка 10%.
§ 5.06. Эволюция орбиты на больших промежутках времени
Формулы § 5.04 получены методом последовательных приб-
лижений. Поэтому ими можно пользоваться лишь на малых про-
межутках времени. Здесь мы приведем формулы, позволяющие
оценить изменения элементов орбиты на достаточно больших
временных интервалах.
1. Зависимость элемента а от е. Пусть а0 и е0 — начальные
значения большой полуоси и эксцентриситета и
где Н — шкала высот. Тогда имеет место следующее равенство:
а _1 Н 1П Co/i (So) |
Н (ag-aoeo)(ag-ao)+1^lnjl| (fl
которое связывает элементы а и е. Здесь, как и раньше, h есть
функция Бесселя мнимого аргумента.
2. Зависимость эксцентриситета от времени. Пусть
где т — продолжительность жизни спутника, а t0 — начальный
момент времени. Тогда
Формула для т приводится в § 5.05.
§ 5.07] ГЛ. 5. ВОЗМУЩЕНИЯ. ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 617
3. Зависимость перигейного расстояния от времени. Обозна-
чим через гр перигейное расстояние, а через гр0 — его значение
для t = *o- Тогда
Н Г/, 17 Н\, 1
Р0-ГР—5-Ц1--е-—Iпт
4. Зависимость периода обращения от времени. Пусть Т —
период обращения спутника, а 7о— его значение в начальный
момент времени to. Тогда
5. Зависимость периода обращения от эксцентриситета:
J 1
6. Скорость изменения периода:
7. Замечания. Приведенные здесь формулы дают нам каче-
ственное представление об изменении элементов орбиты в зави-
симости от времени. Они были выведены при условии, что
0,02 < е < 0,2. Случай е > 0,2 рассмотрен в книге [75]. Точ-
ность приведенных формул составляет десятые доли процента,
а иногда и выше.
§ 5.07. Сила светового давления
Возмущающее ускорение F, обусловленное световым давле-
нием, определяется формулой
где
/Jg = 4>65.10-5-^, F.5.23)
018 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 5.08
А — площадь поперечного миделева сечения, т0 — масса спут-
ника, а' — среднее расстояние от Земли до Солнца, А —расстоя-
ние между спутником и Солнцем. Коэффициент k в случае зер-
кального отражения и полного поглощения равен 1,а в случае
полного диффузного рассеивания равен 1,44.
Поскольку точные значения величин Auk неизвестны, то на
практике числеиное значение коэффициента
6 = fcPo— F.5.24)
IiIq
следует определять из обработки наблюдений спутника.
§ 5.08. Возмущения от светового давления
(без учета тени)
Предположим, что спутник не входит в тень Земли. Тогда,
если отбросить короткопериодические неравенства, формулы для
возмущений элементов будут иметь вид G7], [78]
6а = 0, F.5.25)
1 рло2 Biri2 .
3 бла2 VI -'
бй =
2
/-; , Г cos2 — sin2 —
?Щ ^-Л cos(co + Q + Я')
sin2 \- sin* -| cos2 T cos21-
\ f 2
-f со5(со-й-Я') + .,26 ,, cos(a> + Q-
. \ -f 5(сойЯ) + .,6 ,
. , i ¦, e
sin* — cos- — ....
¦ 2 2 , „ . , ,¦. 1 sin ( sin e , , , /4
¦A —. =— cos (со — fi + к ) :— cos (со + к )
<n - a + к' 2 cb + X'
, 1 sin i sin e / , t\~\ ,n ~ n-\
H : r^— cos (со — к ) , F.5.26)
sin j sin2 —
: 7— COS (CO -f Й + к ) —
. - co + Q + a.
4 fm VI
P
sin / sin2 -y sin I cos2 -
-=7 cos (со — Q—k') + = ij- Cos (со + Q — kr) —
co-Q-a' co + Q-A'
sin /cos2 —
:—P-cos(cb-Q + V)+ c° .'соз^ + ЯО-
cos i sin в „ „ , , /vT ,- - _-.
: n- cos (со — к') \, F.5.27)
§ 5.08] ГЛ. 5. ВОЗМУЩЕНИЯ. ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 619
Г ¦ ¦ 2 е
*г> 3 Ьпа-е I 'sn~2~ ., ,/-,,,/\
бй = . : — sin (со + Q + А,) —
4 fm sin i V1 — е2 L m + й + Г
sin / sin2 — sin i cos2 —
-v— sin (со — Q — X') A : ^- sin (со + Q — X') —
(b — Q — a' m + Q — a'
sin i cos2 — . .
- :—Z— sin (со - Q + A/) + cos'Sln e sin(co + V) -
(o — Q + A, to + A.
3in(co — A/)l, F.5.28)
(b —
бсэ = ^ A- sin (oo + Q + Л ) +
2 fme L ш + а + Л' V '
sin2 — sin2 — cos2 — cos2 —
¦\ -. Д sin (cd — Q — Л') H n=- sin (со + Q - Л'
. , '¦ ¦> e
sin2 — cos- — ....
i 2 2 . , „ , , ,N 1 sin i sin e . . ,
+ sm(coQ+?O sm((B +
+ - Sl" ' Si"e sin (со - K')\ - 6Qcos/, F.5.29)
в (Mo + со) = (l — Vl — e2) бш — cos i Vl — e26Q —
cos2 i- sin2 A
/ e i e
sin2 — sin2 -=¦ cos2 — cos2 —
H ^ rf- sin (со — Q — Л'Л -¦ -r- sin (со + Q - Я') +
m — Q — Л со + й — я,
sin2 — cos2 — ....
¦ 2 2 . , „ , ,/4 1 sin i sin в . > i л/\ ¦
H : : — sin (со — Q + A, ) : — sin (со + Я ) +
о) — Q-j"A, 2 ш + Л.
1 sin ( sin e
-t-
где
. 1 sin i sine „;„,„ -,Л ,- K Qn4
+ —— tt-siiHco — Я) , F.5.30)
F.5.31)
0
F.5.32)
4J Г1
-— 2 JZ a2(l -e;) C0S'' F.5.33)
\' =0,98565 град/сутки F.5.34)
(V — средняя долгота Солнца).
620 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 5.09
Величины со и Q должны определяться формулами
где coo и Qo — значения со и Q в начальный момент времени
t = /Oj а значение X' можно взять из «Астрономического еже-
годника».
Важнейшей характеристикой возмущений является отноше-
ние А/т0. Для спутника «Эхо-1» это отношение равно 102 см2/г,
для «Авангарда-1» оно равно 0,1425 см2/г. Таким образом, воз-
мущения «Эхо-1», вызываемые солнечным давлением, должны
превосходить возмущения «Авангарда-1» примерно в 1000 раз.
§ 5.09. Возмущения от светового давления
(с учетом тени)
В отличие от силы притяжения, сила светового давления не
является непрерывной функцией и в общем случае нужно учи-
тывать экранирование света Землей. Пусть граница тени пере-
секает орбиту спутника в точках с эксцентрическими аномалия-
ми Ei и Е2 (спутник входит в тень при Е = Ei). Тогда возмуще-
ния за один оборот спутника будут описываться формулами [77]:
6a==^!*.(Scos?+ Тл/l —е2 sin?)|f|, F.5.35)
ое = -—X — S V1 — g2 cos 2E l -\-
+ r(-2ecos? + -j-sin2fi)ri + 4- \ TdE , F.5.36)
V Ла i it J
gj = °за J W\(\ -f^Vsin^ — — sin 2?] |?l cos со+
fmVl-e1 I L " 4 J \El
, , , ч Bl 3 f 1
+ WJ\ — e2lcos? — 4 cos 2?) sin со — -к e \ W cos со dE >,
4 J E, ?J J
F.5.37)
6Q = аЧ. i W ГA + e2) sin E — - sin 2?l I*1 sin ш —
/m sin i V1 — e2 (. L 4 J \Ej
F.5.38)
§ 5.09] ГЛ. 5. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 621
+ Т УП^»(е cos Е - 4 cos 2Е) |Н' - J- $ S </?¦], F.5.39)
2Я
= - 4 J ^-dM - У Т^7* бсо - У Г^72 cos 1-Ш-
- Т УП=
? _ 1. cos 2?) I*1 -1 в J Srf? } , F.5.40)
где
S = — cos у sin2 -jr cos (Q -f и + ^')—s'n2 y s'n2 "cos (ю—Q—A/)j
— cos2-5- cos24" cos (со -f Q — A/) — sin2-y cos2-§- cos (со — Q -f A/) +
-f у sin i sin e cos (со + A,') — -5- sin i sin e cos (a> — A,'), F.5.41)
Г = cos2 j sin2 -J sin (со + Q + A/) + sin2-| sin21- sin (со - Q - A,') +
-j- cos2 у cos2-^ sin (со + Q -- A,') + sin2-^ cos2-j sin (ю — Q + Я') —
— у sin г sin e sin (со + A,') + у sin i sin e sin (Q — A,'), F.5.42)
W = — sin / cos2 -| sin (Q — A,') — sin i sin2 ~ sin (Q + A,') —
— cos (sin в sin A,', F.5.43)
а б дается формулой F.5.24).
Пределы интегрирования Ех и Е2 определяются из уравнений
— cos a = — S(cos Е—е)—Т л/\ — е2 sin?,
г sin a = Го. — = 1 — е cos
F.5.44)
в которых a — угол между геоцентрическими радиусами-векто-
рами Солнца и спутника. При решении уравнений F.5.44) мож-
но считать, что в течение одного оборота величины Q, со, А/, а, е
и, следовательно, S и Т остаются постоянными.
622
. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ
[§ 5.10
§ 5.10. Теневая функция
В 1963 г. Ферраз-Мелло предложил ввести так называемую
теневую функцию. Эта функция равна единице, когда спутник
освещен Солнцем, и равна нулю, когда он находится в тени.
Если умножить правые части дифференциальных уравнений для
элементов на эту функцию, то они будут описывать движение
спутника с учетом теневого эффекта.
1. Теневая функция Ферраз-Мелло. Рассмотрим рис. 79, на
котором О — центр Земли, PC — часть орбиты спутника, ОС —
ось тени. Предполагая,
что тень имеет цилиндри-
ческую форму, имеем
sinO =
и, кроме того,
Га
г
Рис. 79. Эффект тени. Геометрическая картина.
где Н — угол между ра-
диусом-вектором спутни-
ка и радиусом-вектором
СОЛНЦЭ, & Го — Средний
радиус Земли.
Обозначим через 4я теневую функцию. Тогда будем иметь
*<*<*.
Разложим эту функцию в ряд Фурье:
где
l^ cos khd%.
Разбивая промежуток интегрирования [0, л] на [0, Ф] и
[Ф, л] и имея в виду F.5.45), находим
Поэтому
у = i _ _5_ _
JL
sin /гФ cos kK.
F.5.46)
§ 5.10] ГЛ. 5. ВОЗМУЩЕНИЯ, ВЫЗЫВАЕМЫЕ СОПРОТИВЛЕНИЕМ АТМОСФЕРЫ 623
2. Теневая функция Лалы — Сехнала. Пусть
* Vl - cos2 (* -
Эта функция удовлетворяет условию
Г 0, А-Ф<0,
I 1, Я-Ф>0.
П. Лала и Л. Сехнал разлагают W в ряд по степеням cos X. Сна-
чала они представляют ~V в виде
*¦ /=о
где
ft-/
и окончательно
_V / п/ 1-3-5 ... Bft-I)
-2. (-D а-4.6... B4)
= ^1 1
I г=о ft=o
BiksmlOcoskk>, F.5.47)
где B(/i суть некоторые численные коэффициенты.
3. Теневая функция Вашковьяк. С. Н. Вашковьяк разла-
гает функцию W в ряд по полиномам Лежандра
ОО
V=S ckPk (cos к), F.5.48)
ft=0
где
ck = -?Ш- J YPft (cos A) sin к dk.
о
Если вычислить эти коэффициенты, то формулу F.5.48)
можно представить в виде
F.5.49)
4. Дифференциальные уравнения для элементов. Дифферен-
циальные уравнения для элементов с учетом теневого эффекта
624 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 5.10
записываются в виде (см. § 3.05)
dL
dt
dG
dt
dH
dt
1ТГ "°
1 dl •
1тг dR
* dg '
dh '
dl
dt
dg
dt
dt
dL
da.
dG
dH
1ТГ "°
1 dL
dG
it; dR
1 dff
где ai дается формулой F.3.54), а Я — возмущающая функция,
обусловленная световым давлением.
5. Замечания. Наиболее правильно геометрическую картину
представляет, по-видимому, формула F.5.47). Формула F.5.49)
дает картину, аналогичную формуле F.5.46). Однако функция
С. Н. Вашковьяк удобна в том отношении, что она достаточно
просто может быть выражена через элементы орбиты. Дело
здесь заключается в том, что выражение для Pn(cosX) часто
встречается и в других задачах небесной механики и для него
уже имеется соответствующее разложение.
Используя свое представление теневой функции, Ферраз-
Мелло {79] развил общую теорию возмущений с учетом несколь-
ких первых членов разложения W. П. Лала и Л. Сехнал [80],
[81] разработали подробную полуаналитическую теорию коротко-
периодических возмущений. С. Н. Вашковьяк [82] построила тео-
рию долгопериодических возмущений с учетом любого числа
членов теневой функции. Эти две теории могут быть с успехом
использованы для практических целей.
Глава 6
ДРУГИЕ ВОЗМУЩЕНИЯ В ДВИЖЕНИИ ИСЗ
В этой главе кратко рассмотрены возмущения, вызываемые
прецессией и нутацией экваториальной плоскости Земли, при-
ливной деформацией Земли, электромагнитными силами и при-
тяжением атмосферы. Рассмотрены также релятивистские эф-
фекты. Все эти возмущения являются малыми. Однако при не-
которых исследованиях их нужно принимать во внимание.
§ 6.01. Возмущения, вызываемые прецессией
и нутацией экваториальной плоскости Земли
Вследствие прецессии и нутации система координат, связан-
ная с экваториальной плоскостью, не является инерциальной.
В результате этого в движении спутника появляются дополни-
тельные возмущения, которые могут рассматриваться как кос-
венные лунно-солнечные возмущения.
1. Система координат. В практике исследования ИСЗ наибо-
лее удобной системой координат является координатная си-
стема, предложенная Г. Вайсом и Муром. Наклон орбиты i и
аргумент перигея со в этой системе отсчитываются от экватора
даты (момента наблюдения), а долгота узла Я измеряется от
точки весеннего равноденствия эпохи (скажем 1950,0) вдоль
фиксированного экватора эпохи до линии узлов экватора даты,
а затем вдоль экватора даты до линии узлов орбиты ИСЗ
(рис. 80).
2. Формулы для возмущений. Возмущения большой полуоси
и эксцентриситета от прецессии и нутации равны нулю. Фор-
мулы для возмущений других элементов можно представить
в виде
ы = /,
F.6.01)
E26 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 6.01
где
G=^QIdt. F.6.02)
Величины Н, I, К определяются следующим образом. Пусть
is и Is— средняя долгота и средняя аномалия Солнца, LM и
1м — соответствующие элементы Луны, а Ом — долгота узла
Эклиптика t-tn
- Орбитй
Рис. 80. Прецессия и нутация экваториальной плоскости Земли.
лунной орбиты. Пусть далее ns, nM и QM — среднее движение
Солнца, среднее движение Луны и среднее движение узла лун-
ной орбиты, a Q — среднее движение узла орбиты спутника.
Тогда
7",Э
- Q - i|>) - -
?sin(QM-Q)-
м
и |3
aM + a
^-sin
'$ sin (QM + fi - ф) + 4^ff sin (QM + Q) +
,1 7afi .
0",97я„ 0",08п„
f- sin BLS - Q - ip) - ^- sin BLS - Q) -
- ' *. sinBLs + Q-H)) +
h sin BLS + Q) +
6.0Ц ГЛ. 6. ДРУГИЕ ВОЗМУЩЕНИЯ В ДВИЖЕНИИ ИСЗ 62?
+ -^% sin [ls - Q - i]>) + ^^- sin (ts + Q + Ц>) -
0",02nM
7-sinBLM-QAI-Q-T|))-
0",03нм 3",08«
ч- sin BLM -\- lM — Q — ib) -I :—^- sin (Q
0",13п„ , ч 0",07я„
Ssin(Q|)+^(Q + H), F.6.03)
M
0'7 ^2Q 0ff 77P
^f cs(Q + Q - i|>) + ^
0" 67 Й 0" I7?2
^f cos (QM + Q) - -?—% cos BQM - Q -
+ f'97"s cosBZ.s - Q —41) + f'08"^ cosBZ.s - Q) -
м
2пм ~ qm -
зпм -а а
4" П8я П" 1 Яг?
+ ¦' s cos(Q + ф) + \ s cos (Q - t|>), F.6.04)
К = 0",92 sin (QM + ip) - 0",92 sin (QM -1|)), F.6.05)
где
ф = 50",37337-, F.6.06)
причем Г есть время в годах от начальной эпохи 1950,0,
628 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 6.02
Суточные значения величин ns, nM и Qm равны
ns = 0°,9856, лм = 13°,1764, йм = - 0°,05295.
3. Замечания. Приведенные здесь формулы были получены
И. Козаи и X. Киношитой [83]. Они являются весьма точными.
При выводе этих формул в теории прецессии и нутации были
учтены все члены с амплитудами, превосходящими 0",01.
§ 6.02. Возмущения, вызываемые приливной деформацией
Земли
Потенциал земного притяжения изменяется со временем
также под действием приливной деформации Земли. Это приво-
дит к возмущениям орбиты спутника. Формулы для этих воз-
мущений были получены в работах И. Козаи {84], В. Каулы [85]
и П. Мюзена {86]. Здесь приведены формулы для возмущений
наклона и долготы узла орбиты. Выражения для возмущений
остальных элементов можно найти в указанных работах.
1. Возмущающая функция. Возмущающая функция, обус-
ловленная приливной деформацией Земли, вызываемой Луной
и Солнцем, имеет вид
) + k2^^P2(cosHs). F.6.07)
Здесь f — постоянная притяжения, г0 — средний радиус Земли,
tnM, тм и #м — масса, геоцентрический радиус-вектор Луны и
угол, образованный геоцентрическими направлениями на Луну *)
и на спутник; ms, rs и Hs — соответствующие величины, относя-
щиеся к Солнцу, k2 — постоянная, называемая числом Лява,
г —радиус-вектор спутника, Р2 —полином Лежандра второго
порядка.
2. Формулы для возмущений. Обозначим чрез п и р — сред-
нее движение и параметр спутника, через Q — среднее движение
его узла, а через п', т' и а' —среднее движение, массу и боль-
шую полуось внешнего тела (Луны или Солнца). Пусть далее
Л — — . I* — — . 8 — р2 ,
т
где с = 210 км.
*) Точнее, на «фиктивную» Луну (см. Замечание).
§ e.02]
ГЛ. 6. ДРУГИЕ ВОЗМУЩЕНИЯ В ДВИЖЕНИИ ИСЗ
629
Тогда возмущения наклона i и долготы узла Q определятся
следующими формулами:
V u' + nQ), F.6.08)
яр.
= AQ {t - t0)
ln(te' + r.B)
+ 4 62pY sin i ? (^°|^J sin (ИИ* + «8), F.6.09)
где k и п принимают следующие значения:
k = 0, л=1, 2 и k = 2, n = 0, ±1, ±2,
так что каждая сумма содержит 7 слагаемых.
Величина Дй дается равенством
ДЙ = - -| PV" B - 3 sin2 /') cos /,
F.6.10)
где i'—наклон орбиты внешнего тела относительно плоскости
экватора, а коэффициенты, пк, п и bk,n приведены в табл. 79.
Таблица 79
к п
0 1
0 2
2 0
2 -1
2 1
2 -2
2 2
"к, п
—0,2738 cos /
—0,0594 sin i
-0
—0,2861 cos i
—0,0123 cos/
0,6894 sin /
—0,0013 sin t
bft,n
0,2738 A-2 sin2 i)
0,0594 sin i cos /
—0,1781 sin/cos j
—0,2861 A—2 sin2 0
0,0123A —2 sin2/)
0,6894 sin / cos /
0,0013 sin/cos/
Рассмотрим теперь аргументы и* и 6, входящие в формулы
F.6.08) и F.6.09).
В случае Солнца мы имеем
и* = Ls — ns M, 9 = Q — n® M,
где Z-s и ns — средняя долгота и среднее движение Солнца,
пш — угловая скорость вращения Земли относительно своей оси,
а Д? — время запаздывания приливов.
В случае Луны имеем
u* = LM — nM М, 8 — Q — л© Д/,
где LM и пм — средняя долгота и среднее движение Луны. Со-
гласно спутниковым определениям
&2«0,30, Д?»20 мин.,
630 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 6.03
3. Возмущения с периодом около 18 лет. При выводе формул
F.6.08) и F.6.09) предполагалось, что наклон орбиты Луны
к плоскости земного экватора не изменяется со временем. По-
этому указанными формулами можно пользоваться на проме-
жутке времени около одного года. Если же учесть изменения
наклона лунной орбиты, то мы придем к долгопериодическим
возмущениям, период которых составляет около 18,6 года (пе-
риод обращения линии узлов орбиты Луны). Теорию этих воз-
мущений разработал И. Козаи {84]. Для них он нашел следую-
щие формулы:
6Q = — G cos i,
б© = G f 2 — -^sin2i\,
6M = - G A - e2)V°.(l + e2) (l -1 sin2/),
F.6.11)
где
F.6.12)
a N есть долгота узла орбиты Луны относительно эклиптики.
Эти выражения чрезвычайно важны при анализе движения
ИСЗ на больших промежутках времени.
4. Замечание. При выводе формул F.6.08) и F.6.09) пред-
полагалось, во-первых, что Луна и Солнце движутся относи-
тельно Земли по круговым орбитам и, во-вторых, что плоскость
лунной орбиты совпадает с плоскостью эклиптики. Поэтому
коэффициенты ап, ъ. и Ьп, s оказались общими и для Луны и для
Солнца.
Из-за запаздывания приливов при исследовании возмущений
вводят так называемую фиктивную Луну. Движение фиктивной
Луны происходит так, что и она и вершина прилива проходят
через местный меридиан в один и тот же момент времени.
§ 6.03. Релятивистские эффекты.
Влияние электромагнитных сил и притяжения атмосферы
1. Релятивистские эффекты. Наибольшие поправки к ньюто-
новскому движению спутника сводятся к поправкам к вековым
изменениям перигея и узла орбиты. Эти поправки даются фор-
мулами
4 пу rip
AQ-?inV^" F-6Л4)
^{ F.6.15)
§ 6.03] ГЛ. 6. ДРУГИЕ ВОЗМУЩЕНИЯ В ДВИЖЕНИИ ИСЗ 631
где
— fm л,— "
Здесь / — постоянная притяжения, т, г0 и п®— масса, средний
радиус и угловая скорость вращения Земли, с — скорость света,
п, а, е — среднее движение, большая полуось и эксцентриситет
орбиты спутника.
Релятивистские поправки весьма малы и едва ли их можно
обнаружить из наблюдений. Так для спутника ся= 10 000 км,
е = 0,2, i = 0°:
AQ = 0°,55 • 10"г, А© = 0°,42 ¦ 10"'.
2. Влияние электромагнитных сил. Пусть спутник обладает
электрическим зарядом Q. Тогда при его движении в магнитном
поле Земли на него будет действовать сила F, определяемая
формулой
F.6.16)
где V — вектор скорости спутника, а Ф — вектор магнитной на-
пряженности.
Компоненты вектора Ф можно найти из выражения для по-
тенциала магнитного поля, который может быть представлен
в виде ряда по сферическим функциям
W = Ц- {gfPx (sin ф) + Я|» (sin ф) ОД» cos X + Л|» sin Л] +...},
F.6.17)
где г — радиус-вектор, ф — широта, К — долгота спутника, го~-
средний радиус Земли, gf\ g\l), h[n и т. д. — коэффициенты,
характеризующие магнитное поле Земли. Так, например,
g(P> = - 0,3 (гаусса).
Формулы F.6.16) и F.6.17) позволяют составить выражения
для проекций возмущающего ускорения, которые входят в пра-
вые части уравнений Ньютона для оскулирующих элементов, и
тем самым написать дифференциальные уравнения для возму-
щений элементов.
Возмущения, вызываемые электромагнитными силами, иссле-
довались в работах [87], [88], [89]. Было показано, что эти возму-
щения очень малы. Они могут быть обнаружены, если потен-
циал спутника будет составлять величину порядка 100 вольт.
Но как было показано в работе [89], спутник при своем движе-
нии в атмосфере может приобрести потенциал лишь в несколько
Q32 Ч. VI. ДВИЖЕНИЕ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ [§ 6.03
десятых долей вольта. До настоящего времени не было обнару-
жено каких-либо невязок, которые можно было бы интерпрети-
ровать как электромагнитные влияния. Однако нужно отметить,
что теория электромагнитных возмущений разработана все еще
весьма слабо, и заведомо нельзя отрицать, что в некоторых слу-
чаях эти возмущения нужно учитывать.
3. Влияние притяжения атмосферы. Потенциал притяжения U
во внешнем пространстве можно представить в виде
где Uo — потенциал притяжения Земли, а С/' — потенциал при-
тяжения атмосферы.
Представляя Uo и U' в виде рядов по сферическим функ-
циям, для коэффициентов разложения U будем иметь (см.
§ 1-01)
Sn. k = Sn, k + 5„, k>
где Сп\ и sL?a —коэффициенты разложения Uo, a C'n,k и
Sn, ft — соответствующие коэффициенты U'. Зная распределение
плотности атмосферы, можно вычислить C'n,k и Sn,k-
В работе [90] были определены все коэффициенты до четвер-
того порядка включительно на каждый месяц 1958 г. Оказалось,
что все они существенно изменяются со временем. Так, С2, о при-
нимает значения от —0,06-10~9 до —2,00-Ю-9, а С\, о изменяется
в диапазоне от —0,51-10^9 до —1,24-10~9. Таким образом, раз-
личные вариации плотности атмосферы и связанные с ними из-
менения коэффициентов Cn,k и Sn,/s могут наложить определен-
ные ограничения на точность определения коэффициентов раз-
ложения геопотенциала по наблюдениям ИСЗ.
ЛИТЕРАТУРА К ЧАСТИ VI
1. Жон голович И. Д., Тр. Ин-та теор. астрон. АН СССР 3, 1952.
2. Д у б о ш и н Г. Н., Небесная механика. Основные задачи и методы, «Нау-
ка», 1968, 1975.
3. К о v a I e v s k у J., В а г П е г F., Space Sci. Revs 7, 1967.
4. G а р о s h к i n E, M., Space Research 7, 1967.
5. A n d e г 1 e R. I., О e s t e r w i n t e г С., Communication presentee au 4e
symposium du COSPAR a Varsovie, 1963.
6. Cook A. H., Geophys. J. Roy. Astron. Soc. 10, 1965.
7. King-Hele D. G., Cook G. E., Geophys. J. Roy. Astron. Soc. 10, 1965.
8. К о z a i Y., Spec. Rept. Smithsonian Inst. Astrophys. Observ. 165, 1964.
9. S m i t h D. E., Planet, and Space Sci. 13, 1965.
10. Kozai Y., Publs. Astron. Soc. Jap. 16, 1964.
11. King-Hele D. G., Cook G. E., Scott D. W., Planet, and Space Sci,
15. 1967.
ЛИТЕРАТУРА К ЧАСТИ VI 633
12. К a u I a W. M, J. Geophys. Res. 71, 1966.
13. Kozai Y., Smithsonian Astrophys. Obs. Spec. Rept., 38, 1961.
14. К a u 1 a W. M., J. Geophys. Res. 71, 4377, 1966.
15. К a u 1 a W. M-, J. Geophys. Res. 71, 5303, 1966.
16. К 6 h n 1 e i n W., Space Research 7, 1967.
17. Smithsonian Astrophys. Obs., Special Report, № 200, 1967.
18. Стандартная Земля, «Мир», М., 1969.
19. G а р о s с h к i n E. M., L a m b е с к К-, Smithsonian Astrophys Obs., Special
Report, № 315, 1970.
.20. Проскурин В. Ф„, Батраков Ю, В., БюлЛ. Ин-та теор, астрон. АН
СССР 7, №7 (90), 1960.
21. В г о u w е г D., Astron. J. 64, 5, 1959.
22. К о z a i Y., Astron. J. 67, № 1307, 1962.
23. Чеботарев Г. А., Бюлл. Ин-та теор. астрон. АН СССР 9, № 1 A04),
1963.
24. Sterne Т. Е., Astron. J. 63, 28, 1958.
25. G a r f 1 n k e 1 В., Astron. J. 63, 88, 1958.
26. A k s n e s К., Astrophys. Norv. 10, 69, 1965.
27. Д е м и н В. Г., Движение искусственного спутника в нецентральном поле
тяготения Земли, «Наука», М., 1968.
28. Штерн Т., Введение в небесную механику, «Мир», М., 1964,
29. В а г г а г R. В., Astron. J., 66, № 1, 1961.
30. Vinti J. P., Journ. Res. Nat. Bur Standards 63B, 105, 1959.
31. Кис лик М. Д., Сб. «Искусственные спутники Земли», вып. 4, 1960.
32. VintlJ. P., Res. Nat. Bur. Standards 65B, 131, 1961.
33. Кис лик М. Д., Сб. «Искусственные спутники Земли», вып. 13, 24, I960,
34. J z s a k J. G., Smithsonian Astrophys. Obs. Spec. Rep., № 52, 54, 1960.
35. А к с е н о в Е. П., Г р е б е н и К о в Е. А., Демин В. Г., Сб. «Проблемы
движения искусственных небесных тел», стр. 92, Изд-во АН СССР, 1963,
.36. Аксенов Е. П., ГребениковЕ. А., Демин В. Г,, Астрон. ж. 40,
363, 1963.
37. Аксенов Е. П., Г р е б е н и к о в Е. А., Демин В. Г., Сб. «Искусствен-
ные спутники Земли», вып. 16, 173, 1963.
38. Аксенов Е. П., Гребеников Е. А., Демин В. Г., Сб. «Проблемы
движения искусственных небесных тел», стр. 99, Изд-во АН СССР, 1963.
39. Алексеев В. М., Бюлл. Ин-та теор. астрон. АН СССР 10, 117, 1965.
40. Аксенов Е. П., Гребеников Е. А., Демин В. Г., Сообщ. Гос, ас-
трон, ин-та им. П. К. Штернберга, № 123, 22, 1962.
41. Чепурова В. М., Сообщ. Гос. астрон. ин-та им.' П. К- Штернберга,
№ 156, 14, 1968.
42. Носков Б. Н., Сообщ. Гос. астрон. ин-та им. П. К. Штернберга, Ne 159,
14, 1969.
43. Аксенов Е. П., ГребениковЕ. А., Демин В, Г., Вестн. Моск. ун-
та, сер. III, физ., астрон., № 5, 81, 1962.
44. Уральская В. С, Вестн. Моск. ун-та, сер. III, физ., астрон., № 4, 1964.
45. Аксенов Е. П., Гребеников Е. А., Демин В. Г., Сб. «Искусствен-
ные спутники Земли», вып. 16, 163, 1963.
46. Д е х т я р е в В. Г., ПМН 26, 6, 1962.
47. Аксенов Е. П., Вестн. Моск. ун-та, сер. III, физ., астр., № 6, 68, 1967.
48. Аксенов Е. П., Сообщ. Гос. астрон. ин-та им. П. К- Штернберга, № 155,
3, 1968.
49. Аксенов Е. П., Вестн. Моск. ун-та, сер. III, фнз., астр., № 3, 36, 1965.
50. Аксенов Е. П., Космические исследования 2, вып. 1, 14, 1964.
51. Аксенов Е. П., Тр. Гос. астрон. ин-та им. П, К. Штернберга 35, 36,
1966.
52. А к с е н о в Е. П., Астрон. ж. 45, 858, 1968.
53. Н а с о н о в а Л. П., Астрон, ж. 48, 194, 1971,
634 ч. vi. движение искусственных спутников земли
54. А к с е н о в Е. П., Астрон. ж. 45, 1284, 1968,
55. Т и м о ш к о в а Е. И., Астрон. ж. 48, 1061, 1971.
56. Аксенов Е. П., Носков Б. Н., Астрон. ж. 49, 1292, 1972.
57. Аксенов Е. П., Тр. Гос. астрон. ин-та им. П. К- Штернберга 35, 44,
1966.
58. Аксенов Е. П., Тр. Гос, астрон. ин-та им. П. К. Штернберга 35, 59,
1966.
59. Орлов А. А., Бюлл. Ин-та теор. астрон. АН СССР 10, № 1 A14), 1965.
60. К a u I a W. M., Geophys. J. 5, № 2, 1961.
61. Аксенов Е. П., Тр. Гос. астрон. ин-та им. П. К. Штернберга 36, 161,
1967.
62. Аксенов Е. П., Тр. Университета дружбы народов 21, математика,
вып. 2, 1967, стр. 184.
63. А к с е н о в Е. П., Прохорова И. П., Астрон. ж. 49, 630, 1972.
64. А к с е н о в Е. П., Прохорова И. П., Сб. «Наблюдения искусственных
спутников Земли», № II, 1974.
65. А к с е н о в Е. П., Тр. Гос. астрон. ин-та им. П. К. Штернберга 35, 75,
1966.
66. Дол га чев В. П., Вестн. Моск. ун-та, сер. физ., астр., № 1, 94, 1968.
67. Е г о р о в а А. В., Сб. «Искусственные спутники Земли», Изд-во АН
СССР, вып. 8, 1961.
68. Д о л г а ч е в В. П., Сообщ. Гос. астрон. ин-та им. П. К. Штернберга,
№ 161, 1969.
69. А к с е н о в Е. П., Тр. Гос. астрон. ин-та им. П. К. Штернберга 35, 93,
1966.
70. Уральская В. С, Сообщ. Гос. астрон. ин-та им. П. К. Штернберга,
№ 161, 1969.
71. King-Hele D. G., Walker D. М. С, Space Research. 2, 1961.
72. CIRA 1972, Akademie-Verlag. Berlin, 1972.
73. Cook G. E., Ministry of Aviation ARC Current Paper СР., 523, H. M. S.
O., London, 1960.
74. Аксенов Е. П., Носков Б. Н., Астрон. ж. 50, 590, 1973.
75. К и н г - X и л и Д., Теория орбит искусственных спутников в атмосфере,
«Мир», 1966.
76. Э л ь я с б е р г П. Е., Введение в теорию полета искусственных спутников
Земли, «Наука», 1965.
77. Kozai Y., Spec. Rept. Smithsonian Astroph. Obs., № 56, 1961.
78. Полях OB a E. H., Бюлл. Ин-та теор. астрон. АН СССР 9, № 1 A04),
1963.
79. F е г г a z - М е 11 о S., С. R. Acad. Sc.', Paris, 258, 463, 1964.
80. L a 1 а Р., S e h n a 1 L., Bull, of the Astron. Inst. of Czechoslovakia 20, 328,
1969.
81. La la P., Bull, of the Astron. Inst. of Czechoslovakia 22, 63, 1971.
82. В а ш к о в ь я к С. Н., Вестн. Моск. ун-та, сер. 111, физ., астрон., № 5, 1974.
83. Kozai Y., К i n о s h i t a, Celestial mechanics 7, 356, 1973.
84. Kozai Y., Publs. Astron. Soc. Japan 17, 395, 1965.
85. К a u 1 a W. M., Astron. J. 74, 1108, 1969.
86. M u s e n P., E s t e s R., Celestial mechanics 6, 4, 1972.
87. Westerman H. R., ARS Journ. 30, 204, 1960.
88. Sehnal L., Smithsonian Astrophys. Obs., Special Report, № 271, 1, 1968.
89. BeardD.B., JohnsonF. S.,J. Geophys. 65, 1, 1960.
90. Ш к о д р о в В. Г., Ш к о д р о в а Е. Б., Сб, «Наблюдения искусственных
спутников Земли», № 9, 1969, стр. 27.
Часть VII
ЧИСЛЕННЫЕ МЕТОДЫ
В небесной механике и динамике космического полета ши-
роко применяются численные методы, получившие особенно ин-
тенсивное развитие благодаря внедрению ЭВМ. Основные из
этих методов: интерполирование и приближенное представление
функций, численное дифференцирование и интегрирование, чис-
ленное решение дифференциальных уравнений, обработка ре-
зультатов наблюдений по методу наименьших квадратов и др.
Общие вопросы теории излагаются, например, в [1] — [12].
Глава 1
ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ
§ 1.01. Таблица разностей функции
Пусть имеется таблица значений функции f(t) для значений
аргумента ?_2, t-\, к, U, к, • • • (табл. 80).
t
fit)
. . .
. . .
t-г
f-2
t-1
f-l
h
to
T
/l
а б л и ц а 80
t2
h
. . .
. . .
Рассмотрим наиболее распространенный случай, когда эта
таблица составлена для равноотстоящих значений аргумента,
так что th = to + kh (k = 0, ±1, ±2, ...). Величина h назы-
вается шагом, таблицы, значения аргумента th (k = 0, ±1,
±2, ...) называются узлами таблицы.
При интерполировании и численном дифференцировании
функции f(t) используется таблица ее разностей (табл. 81).
В этой таблице через /' с различными нижними индексами
636
Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ
Таблица 81
[§ 1.01
t
t-2
'->
'о
<1
'2
h
f
f-2
f-l
fo
h
h
h
и
fll
f\
fl
fl
f\
fl
fk
f2
и
fl
fl
n
4
fl
f\
fl
fl
/?
f4
fk
n
p
f5
I'll
обозначаются первые разности (или разности первого порядка),
через /2 — вторые разности и т. д. Первые разности с дробными
нижними индексами находятся по формулам
=0, ±1, ±2,
G.1.01)
Вторые разности с целыми нижними индексами находятся по
формулам
и т. д. Первые, третьи и т. д. разности с целыми индексами и
вторые, четвертые и т. д. разности с дробными индексами назы-
ваются центральными разностями и они равны среднему ариф-
метическому из соседних разностей того же столбца. Например,
и т. д.
Если функция достаточно гладкая и ее значения вычислены
достаточно точно, а шаг таблицы мал, то разности довольно
быстро убывают вместе с увеличением порядка. Ошибки округ-
ления значений f приводят к тому, что значения разностей, на-
чиная с некоторого порядка, определяются именно этими ошиб-
ками; разности теряют плавный ход и, как говорят, «скачут»,
так что пользоваться ими нет смысла.
§ 1.02] ГЛ. I. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИИ 637
Если т-е разности, выраженные в единицах последнего де-
сятичного знака значений функции, превосходят по абсолютной
величине 2т~\ то в значениях функции обязательно имеется
погрешность, не меньшая половины последнего выписанного де-
сятичного знака.
§ 1.02. Интерполяционные формулы
Пусть функция f(t) задана табл. 80. Интерполяционные фор-
мулы позволяют вычислять (вообще, приближенно) значения
этой функции для промежуточных значений аргумента, не со-
впадающих с узлами таблицы. Эти формулы строятся с помощью
так называемых интерполяционных полиномов, которые пред-
ставляют собой полиномы по степеням независимой переменной,
точно совпадающие с f(t) в узлах. Для удобства вычислений
интерполяционные формулы располагаются по соответствующим
разностям табл. 81.
Обозначим через V значение аргумента, для которого тре-
буется вычислить значение функции f(t), через t0 — ближайший
к t* узел таблицы, и положим
Я^^Т*-- G-1.04)
так что t* = t0 + qh.
На практике используются чаще всего следующие интерпо-
ляционные формулы.
Формула Ньютона для интерполяции вперед
(применяется, если t* > t0, 0 < q ^-<r):
H 21 '1+ ¦" ~1 n\ 'л/2' I7-1-05)
Формула Ньютона для интерполяции назад
(применяется, если t* ¦< t0, -r- ^ q < 0j:
i <?(? + !) & , I <?(<?+!) •¦¦ (q + n— 1) f„
H 2! '-1 + •¦• "t fu l-n/2-
Формула Стирлинга:
T 2| fo-t- ••• -r- B/j-l)! 'o "+"
g»to»-l.)(q»-2»)...(g'-(n-l)')
T i2/j)I '0 • U-A
638 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 1.02
Формула Бесселя:
?(?»-!») ...(^-(„-l)') fa-я)
31 ''/г" ¦•¦ Г Bп)!
+ ET+T>i ^-^^+1- G-1.08)
Формула Эверетта:
G.1.09)
Формула Ньютона G.1.06) используется также для экстра-
поляции вперед, т.е. для вычислений f(t) при значениях аргу-
мента t, находящихся за пределами табл. 80 справа.
Если через t0 обозначен последний справа узел табл. 80, то
таблица разностей вида 81 будет содержать лишь разности с от-
рицательными нижними индексами. Для вычисления f(t*) при
t* > t0, t* — tQ-\-qh используют формулу G.1.06), но в этом
случае, q = {t* — to)jh > 0.
Точно так же можно экстраполировать f(t) для значений t
слева от начала табл. 80. Тогда применяется формула G.1.05)
при q <. 0.
Ценность формул Ньютона состоит в простоте структуры ко-
эффициентов, в возможности экстраполяции и в возможности
непосредственной интерполяции между узлами вблизи краев
табл. 80, когда соответствующие разности с нижними индек-
сами 0, 1 или 1/2 отсутствуют.
Формулы Стерлинга и Бесселя, вообще, более точные, чем
формулы Ньютона. Формула Бесселя особенно удобна при ин-
терполяции в точках, близких к середине интервала.
Формула Эверетта часто применяется при субтабулировании,
т.е. для составления новой таблицы значений функции f(t)
с более мелким шагом.
Формула Лагранжа:
§1.03] ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ 639
где
сол (t) = (t- Q (t -*,)...(/- tn), ft = f (*,).
Это — самая общая интерполяционная формула, выражающая
значение функции в точке t непосредственно через значения
этой функции в /i-f 1 узлах tQ, • ¦ ¦, tn, причем расположение
этих узлов произвольное, a t принадлежит интервалу (^о, tn).
Правая часть G.1.10)— полином по t.
Если узлы равноотстоящие, с шагом h, то формула Лагранжа
приобретает следующий вид:
где Сп— биномиальные коэффициенты, Q = (t — to)/h.
Полином в правой части G.1.10) называется полиномом Ла-
гранжа, и он дает приближенное представление функции f(t)
на всем отрезке [^о, tn]- Он может применяться не только для
вычислений промежуточных значений f(t), но и для различных
операций с этой функцией (дифференцирование, интегрирование
и др.).
Наивысший порядок разностей, сохраняемых в интерполя-
ционной формуле, называется порядком этой формулы. Если
таблица заданных значений функции достаточно обширна, то
принципиально возможно составить разности достаточно высо-
кого порядка и использовать соответственно интерполяционные
формулы такого же высокого порядка. На практике обычно
ограничиваются интерполяционными формулами не выше чет-
вертого или пятого порядков. Отбрасываемые при вычислениях
члены не должны, вообще говоря, превышать по абсолютной
величине погрешность, которой обладают сами табличные зна-
чения функции. Строгая оценка погрешности и сравнение интер-
поляционных формул между собой по их точности производится
с помощью анализа их так называемых остаточных членов.
§ 1.03. Остаточные члены интерполяционных формул
Остаточный член Rm(t) представляет собой разность между
точным значением функции f(t) в точке t и ее приближенным
значением, которое вычисляется по интерполяционной формуле,
оборванной на члене с разностью m-го порядка, т. е. погреш-
ность интерполяционной формулы порядка т.
Пусть функция f(t) дифференцируема п раз (п = т -f 1 или
т + 2). Обозначим через Мп верхнюю границу модуля произ-
водной fn{t) в интервале значений I, которые отвечают таблич-
ным значениям t, использованным при составлении интерпо-
640
Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ
[§ 1.03
ляционной формулы т-то порядка. Тогда оценки остаточного
члена для различных интерполяционных формул следующие.
Для формулы Лагранжа (в случае m+J узлов):
K'-'o) ••• (t~tm)l G.1.12)
Для формулы Эверетта!
ип+2
Q
Для остальных формул оценка имеет общий вид
G.1.13)
G.1.14)
где величина Qm(q) выражается различным образом для раз-
личных формул.
Для формул Ньютона интерполяции вперед и
q\-\) ... {\q\-m)\. G.1.15)
Для формулы Ньютона экстраполяции вперед:
Qm(q) = q{q + 0 ••• (q + m). G.1.16)
Для формулы Стирлинга:
q{q2 — I2) ... \q2 — (-^-J JJ, m — четное,
2{q2 — I2) ... ^2 — (m~ j J , m — нечетное
G.1.17)
Для формулы Бесселя:
m — четное,
m — нечетное.
G.1.18)
Если нет никакой информации о возможной величине произ-
водной /(т+1)@> Так чт0 число Mm+i остается неизвестным, то
можно воспользоваться разностями (m+l)-ro порядка, кото-
рые вычисляются по имеющейся таблице разностей. Если наи-
большие по абсолютной величине значения разностей (т 4- 1)-го
1.03]
ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ
641
порядка в строчках таблицы, близких к данному t, не превы-
шают Мт+и то, заменив в G.1.14) ftm+1Mm+i на Мт+и получим
практические оценки для \Rm(t)\, хотя строгое соблюдение
знака ^ гарантировать нельзя.
В оценке G.1.13) следует заменить в этом случае hm+2Mm.l2
на Мт+2, где последняя величина превышает по абсолютной ве-
личине разности (т + 2)-го порядка.
Значения величин Qm{q), равных Qm{q)/(m + 1) 1 для фор-
мул Ньютона, Стирлинга, Бесселя и Qm(q)/(m + 2)\ для фор-
мулы Эверетта, дают представление о точности интерполяцион-
ных формул при различных т и q.
Кроме того, эти величины представляют собой оценки коэф-
фициентов в соответствующих интерполяционных формулах при
разностях (m-fl)-ro порядка (в случае формулы Эверетта
(т + 2)-го порядка) и таким образом позволяют сделать вывод
о том, какими разностями можно пренебречь.
Приведем значения Q3 и Q4 для различных интерполяцион-
ных формул.
т = 3
2
-0,4
— 0,3
-0,2
-0,1
0,1
0,2
0,3
0,4
0,5
1
0,039
0,042
0,041
0,034
0,021
0,021
0,034
0,041
0,042
0,039
3
0,0078
0,0056
4
0,0391
0,0336
0,0034 0,0262
0,0016 0,0176
0,0004
0,0004
0,0016
0,0087
0,0078
0,0144
0,03
0,07
0,12
0,19
0,27 0,0078 0,0234
0,0034 0,0193
0,0056 0,0224
¦0,5
0,4
¦0,3
0,2
¦0,1
0,1
0,2
0,3
0,4
0,5
1
0,027
0,030
0,030
0,026
0,016
0,016
0,026
0,030
0,030
0,027
0,02
0,06
0,11
0,17
0,25
3
0,0117
0,0107
0,0С89
0,0063
0,0033
0,0033
0,0063
0,0089
0,0107
0,0117
4
0,0078
0,0060
0,0040
0,0025
0,0010
0,0006
0,0009
0,0008
0,0004
0,0000
5
0,0068
0,0061
0,0049
0,0034
0,0017
0,0016
0,0030
0,0040
0,0047
0,0049
В столбцах 1, 2, 3 и 4 даны значения Q3 и Q< для формул
Ньютона интерполяции, формулы Ньютона экстраполяции и
формул Стирлинга, Бесселя соответственно. В столбце 5 даны
значения Q4 для формулы Эверетта.
Приведенные числа показывают, что если ограничиться раз-
ностями нечетного порядка, то более выгодной с точки зрения
21 Под ред. Г. Н. Дубошина
642 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ I.04
точности является формула Стирлинга, особенно при неболь-
ших \q\. Если же ограничиваться разностями четного порядка,
то наиболее точной является формула Бесселя. Значения Q4 для
формулы Бесселя при 0 < q <С. 0,5 и при 0,5 <. q <С 1 располо-
жены симметрично относительно точки q = 0,5. Следовательно,
формулу Бесселя выгодней применять всегда при q > 0 для ин-
терполяции вперед.
Погрешность зкстраполяции_ по формуле Ньютона превы-
шает все остальные. Значения Q4 при экстраполяции при
q = 0,6; 0,7; 0,8; 0,9; 1,0
равны соответственно
0,34; 0,47; 0,61; 0,79; 1,00.
Они почти одинаковы при т = 3 и т = 4. Значения Qm для
формул Ньютона в столбце 1 изменяются очень мало при пере-
ходе от т = 3 к т — 4.
Исходя из значений Q3, Q*, можно сделать вывод, что, напри-
мер, при применении формулы Бесселя можно отбросить четвер-
тые разности, если они не превышают 20, и пятые разности, если
они не превышают 500 (в единицах последнего знака в значе-
ниях функции f(t)). При применении формулы Стирлинга и при
\q\^ 0,2 можно отбросить четвертые разности, если они не пре-
восходят 300.
§ 1.04. Обратное интерполирование
Обратное интерполирование заключается в нахождении зна-
чения аргумента, соответствующего заданному значению таб-
личной функции.
Обозначим последнее через f», а искомое значение аргу-
мента t — через ?„. Ближайшее табличное значение функции обо-
значим через fo. пронумеруем соответствующим образом пред-
шествующие и последующие значения функции и составим таб-
лицу разностей. Положим tt = tQ -f- nh, где п — неизвестное, так
что f, = f (tQ+ nt).
Вычисление п целесообразно выполнить следующим образом.
Перепишем, например, интерполяционную формулу Бесселя
G.1.08) в виде
. .. п(п~ \)\п —г-1
„t\ f f __ п l" ~ l) f2 V l ' f3 /7 i iq\
"'V. — /• 'o 21 ' Vi 31 ' V» • ¦ ' \'ЛАУ)
Эта формула рассматривается далее как уравнение относи-
тельно неизвестного п, и его решение ищется методом последо-
§ 1.05] ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИИ 643
вательных приближений. В первом приближении полагают
пО) = к=-кг G.1.20)
К
а последующие приближения л<*> (k == 2,3, ...)' ищутся по фор-
муле
M.21)
Аналогичным образом можно применить формулу Стирлинга
§ 1.05. Интерполирование функции двух переменных
Пусть имеются значения функции f(u, v) двух переменных
в узлах (u,-, t1,-) (t, / = 0, ±1, ±2, . . .) таблицы с двумя входами
по и и v и постоянными шагами ui+\ — u,- = A, uJ+i — а;- = /.
Полагая Ди,-, Vj)=fiij при любых i, /, введем для разностей
следующие обозначения:
fi+x.l-ft.l = biOft.,. \
. f aou 1 разности первого
lt.l+i — Ti,i — b tt.h > порядка
Alofii/+1 — A10/,i/ = AI7(,/, \ разности второго
^ порядка
разности третьего
порядка
Auzf(,/+i—^fi, iz= A^ft, /I ^
и т. д.
Наиболее простой является следующая формула, представ-
ляющая собой двумерный аналог формулы Ньютона G.1.05)
для интерполяции вперед:
/ («о + qh, v + si) « foo + ?A'°foo + sAolfoo + *^
y, /oo +
'И'-») доз/оО| GЛ.22)
21*
644 ч- VII. ЧИСЛЕННЫЕ МЕТОДЫ |§ 1.06
где q > 0, v > 0. Имеется четыре варианта двумерной формулы
Ньютона, получающихся в зависимости от направления интерпо-
лирования (вперед или назад) по каждой переменной и и и.
Например, при интерполировании по и назад, а по и вперед со-
ответствующая формула получается из G.1.22) после замены
всех множителей (q—1), (? — 2), ... в коэффициентах на
(<7 + О, (<7 + 2) причем тогда q < 0.
Правило составления коэффициентов простое: при разностях
A'J7oo выписывается произведение Ai(q)Bj(s), где Ai(q) и
Bj(s)—коэффициенты в одномерных формулах Ньютона для
интерполяции вперед или назад при разностях порядка i, j no
переменным и, v соответственно.
§ 1.06. Приближение функций с помощью сплайнов
В настоящее время во многих задачах численного анализа
широко используется аппроксимация функций не одним полино-
мом по независимой переменной t, а системой полиномов, на-
зываемой сплайном (см., например, [13]). Точное определение
сплайна следующее.
Пусть функция f(t) имеет известные значения в узлах
to, U, ..., tN, принадлежащих отрезку t0 ^ t ^ tN и располо-
женных произвольно. Сплайном порядка т для этой функции,
обозначаемым через Sm(f, t), называется функция, представи-
мая на каждом отрезке [?0> Ы. [t\, h], • ¦ ¦, Ujv-ь tN] полиномом
степени т, совпадающая с f(t) в узлах и имеющая в каждом
внутреннем узле t\, .. ., tN-\ непрерывные производные до по-
рядка т — 1. Можно записать:
... +a2mtm,
sm(f,t) =
... +flW", tN-x
G.1.23)
где а,ц — постоянные коэффициенты, определяемые из условий
dtk dtk dtk dtk
G.1.21
Эти условия представляют собой систему из N(m -\- 1)+ 1 — т
линейных алгебраических уравнений относительно N(m -f- 1) не-
известных коэффициентов ац.
S 1.07] ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИИ 645
Если функция f(t) аппроксимируется сплайном из линейных
функций (т=1), то условия G.1.23) полностью определяют
все коэффициенты ац. Если т ^ 2, то для определения пц при-
влекают дополнительные условия. Например, при т = 3 можно
принять следующие два дополнительных условия:
§ 1.07. Среднеквадратичные приближения функций
Функция f(t) с известными значениями в узлах to, .... t«
аппроксимируется функцией
^(О = аоФо(О.+ ••• +а«Ф»@ (л<^), G.1.25)
где flo а-п — постоянные коэффициенты и <ро(О. • • •. ф*@~
система функций, удовлетворяющих условиям
G.1.26)
(такие функции называются попарно ортогональными).
Чаще всего используют в качестве функций q>j(/) системы
ортогональных полиномов Лежандра, Чебышева, Лагерра, Эр-
мита и др. (см., например, [3]). Коэффициенты а0, ..., ап опре-
деляются из условия минимума суммы квадратов отклонений
f(t) от F(t) в узлах
t G-1.27)
Величина S называется средним квадратичным отклонением
F(t) от f(t). Функция F(t), реализующая минимум S, называется
наилучшим среднеквадратичным приближением исходной функ-
ции }(t) данной системой функций <ро(О> ¦•¦> Фп@-
Формулы для а0, ..., ап можно выписать в явном виде
Соответствующая величина Smin, равная минимальному значе-
нию среднего квадратичного отклонения S для данной системы
функций фо(О» ---> Фп@ и выражающая точность аппроксима-
646 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ |« 1.07
ции функции f(t) функцией F(t), определяется по формуле
N
С V Tf2 (* \ Л2т2 (f \ «2m2 ff VI /7 1 QQ^
йш1п — j?QL' Vk) aa% (.h) — • • • — «A {tk)i- V-1 -Zi))
Важным является случай, когда узлы t0 tN можно вы-
бирать произвольно внутри некоторого интервала (а, Ь). Тогда
в качестве системы функций qpj(/) выбирают полиномы Чебы-
шева, обозначаемые обычно через Tj(t), а в качестве узлов вы-
бирают корни полинома Чебышева 7V+i@- Если начало от-
счета t и единица длины выбраны так, что а = — 1, b = 1, то
эти корни равны
h = со» w^T я (* = 0, 1 N). G.1.30)
Общая формула для Tj(t) следующая:
71/@ = cos(/arccos0 (UK0, G.1.31)
причем То=\, Ti{t)=t, T2(t) = —1+2/2, а остальные T}(t)
(j ^ 3) определяются по рекуррентной формуле
Tl{t) = 2tT,.l{t)-T,-2it). G.1.32)
Если при построении аппроксимирующей функции вида
G.1.25) по полиномам Чебышева
F(fl = ao + eiM*)+ ••• +ajn{t) G.1.33)
используется W + 1 узлов и п = N, то мы получим интерполя-
ционный полином, т. е. полином N-н степени, совпадающий с f(t)
во всех узлах. Тогда S = 0.
Для произвольного интервала (а, Ь) узлы tk (k = 0, ..., N)
определяются формулой
^ ^|Шя> GЛ.з4)
а аргументом полиномов Чебышева в G.1.33) служит вместо t
переменная
Случай равноотстоящих узлов. Пусть узлы t0, ...
..., tN имеют один и тот же шаг й, и пусть начало отсчета и
единица длины таковы, что fo = O, ti = 1, .... tN = N. Тогда
при построении аппроксимирующей функции вида G.1.25) роль
§ ко
ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ
647
ортогональных полиномов <ро(О> <Pi@i ••• играют следующие
полиномы:
t{t—\)...(t — k + \)
дг (v - в ... (v - jfc + l) ¦
fc=l
G.1.35)
(/==1, 2, ..., п)
где С/, С*+й — биномиальные коэффициенты. В частности,
Л@=1p W 1 +
Коэффициенты а, в аппроксимирующей функции G.1.25) и со-
ответствующая величина Smin определятся формулами
¦G.1.36)
4=0
...(ff + l+j)
(/=1,2 n),
B/ + 1)ЛГ (ЛГ- 1) ... (tf - / + 1) a/
ft=0 /=0
причем знаменатель в последней сумме при / = 0 полагается
равным единице.
§ 1.08. Сглаживание табличных значений функций
Пусть в результате измерений или вычислений получена
таблица значений функции f(t) в узлах /0. U причем эти
значения обладают случайными ошибками. Ставится задача
исправить эту таблицу и получить «сглаженные» значения ис-
ходной функции в узлах, освобожденные в известной мере от
случайных ошибок. Эта задача решается путем построения ап-
проксимирующей сглаживающей функции F(t). При этом в ка-
честве F(t) обычно выбирается среднеквадратичное наилучшее
приближение функции f(t), рассмотренное в предыдущем пара-
графе. Соответствующие значения F(tj) в узлах являются иско-
мыми «сглаженными» значениями.
В частности, если узлы равноотстоящие и аппроксимирую-
щая функция F(t) строится по каждым пяти соседним значе-
ниям ИСХОДНОЙ фунКЦИИ f(t) С ПОМОЩЬЮ ПОЛИНОМОВ Pj,t{t) (j =
= 0, ..., 4) (см. формулу G.1.35)), то сглаженные значения
tj) = Fj для пятерки узлов tj, / = 0,1,2,3,4 выражаются
648
Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ
следующими формулами через значения f(tj) =
ции f (t) в этих узлах:
|§ 1.09
исходной функ-
Fo = ^ F9f0
4f, -
12/, + 17f2+ 12fa-3W,
= -& Bfo - 8A + 12f2 + 27 f3
w
G.1.37)
Формулы G.1.37) можно записать в ином виде, используя
таблицу разностей функции f(t), а именно:
FJ = fj-Jon (/ = 0.4), 3 )
2 F2 = f2—kn. \ G-1.38)
где f? — четвертая разность в строке, соответствующей
узлу t2.
Отсюда вытекает следующий упрощенный метод сглажива-
ния с помощью четвертых разностей. А именно, после того, как
в каждой строке вычислены четвертые разности /*, эти раз-
ности, умноженные на 3/35, вычитаются из соответствующих
значений функции fj. Таблица исправленных в каждой строке
значений /. — -=г /J отвечает более гладкой кривой.
§ 1.09. Равномерные приближения
Функция f(t) с известными значениями в узлах t0, .... ts
аппроксимируется функцией F(t), которая ищется в виде G.1.25)
с помощью системы ортогональных функций. Однако в отличие
от § 1.07 коэффициенты п] в G.1.25) ищутся из условия мини-
мума отклонения F(t) от f(t) по абсолютной величине, т.е. ми-
нимума функционала
max\F(tk)-f(tk)\
1 N).
G.1.39)
Функция F(t), реализующая минимум этого функционала, на-
зывается наилучшим равномерным приближением функции f(t)
данной системой ортогональных функций qpo(Oi • • ¦ > Фп(')| а ми*
нимум функционала G.1.39) представит собой наибольшую аб*
солютную погрешность б этого приближения,
1.101
ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ
649
В качестве системы ортогональных функций <ро(О> ф] @. •¦•
часто выбирают систему полиномов Чебышева, а наилучшее рав-
номерное приближение F(t) ищется методом итераций (см. [3],
т. 1).
Наилучшие равномерные приближения строятся также для
функций непрерывного аргумента, и они применяются для непо-
средственных вычислений значений многих распространенных
функций. Приведем примеры таких приближений для некоторых
функций, а также наибольшие абсолютные погрешности 6 этих
приближений на определенном интервале изменения t (см. [14]):
costas 1 - 0,49670* + 0.03705/2,
^-« 1 + 0,31755* + 0.20330*2,
у, 5 = 0,0069,
-J, 6 = 0,001,
в-t
1 — 0,9664/ + 0.3536*2, 0 < * < In 2, 6 = 0,003.
§ 1.10. Аппроксимация периодических функций
с известным периодом тригонометрическими полиномами
по методу наименьших квадратов
1. Пусть даны значения функции f(t) в равноотстоящих уз-
лах t\ f.v+i, причем f(tN+t)= f(ti) и число T = tN+\— U
рассматривается как период функции f(t). Ставится задача ап-
проксимации этой функции тригонометрическим полиномом вида
Bn+ 1<Л0. G.1.40)
Коэффициенты Ло Вп ищутся из условия минимума сред-
него квадратичного отклонения
N
S=Tl[f(t,)~F{tl)]2, G.1.41)
и окончательные формулы для них следующие:
N
/=!
N).
G.1.42)
650 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [Sl.ll
Соответствующая величина 5min минимума 5 выразится фор-
мулой
Smln = ? /»(*,) - i(lkA% + pjffr G.1.43)
где lh = Ph = N12 при 2k ф Np и lh — N, pk = 0 при 2k = Afy?
(p — целое число или нуль).
Коэффициенты Ао, Ah, Bh аппроксимирующего тригонометри-
ческого полинома связаны с точными значениями коэффициен-
тов Фурье Аь, Bh функции f(t), если она разлагается в равно-
мерно сходящийся ряд Фурье, следующими формулами:
= Ао + AN + A2N + ...,
= Ak+ AN-k + AN+k + A2N-k + A2N+k
= l, 2 я).
G.1.44)
Отсюда видно, что если коэффициенты Фурье убывают по
мере возрастания номера довольно быстро, то при небольших k
Ао« Ао, Ак « Ak, Bk « Вк.
2. Пусть узлы U, ..., tN расположены произвольно, но пе-
риод исследуемой функции f(t) известен и равен 7". Тогда аппро-
ксимирующий полином Фурье G.1.40) и условие минимума ве-
личины 5, как условие для нахождения коэффициентов Ло, Ак,
Bh, остаются без изменений. Пусть при этом N значительно
больше, чем 2/z-f 1. Тогда коэффициенты Ао, Ah, Bh опреде-
ляются из системы так называемых условных уравнений
G.1.45)
(/=1,2 ЛО.
решаемых по методу наименьших квадратов (см. гл. 4).
§ 1.11. Аппроксимация условно-периодических функций
с известными частотами полиномом Фурье
по методу наименьших квадратов
Пусть значения функции f(t) заданы в произвольных узлах
t\ tN и известно, что f(t) — условно-периодическая функция
с. несколькими, например, тремя, определенными частотами
§1.12] ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ 651
«вь «2. ОД. Аппроксимирующий полином Фурье ищется в виде
-f Bk!m sin (?co, + /ш2 + та3) fl. G-1 -46)
Количество узлов должно значительно превышать общее коли-
чество искомых коэффициентов Ahim, Bhim. Эти коэффициенты
ищутся тогда из условных уравнений
cos (feooj + /ш2 + т<й%) ts +
+ Bklm sin (йш, + /и2 + mcog) /J = f (Q G.1.47)
(s=l, 2 ЛО
по методу наименьших квадратов.
§ 1.12. Определение неизвестных частот периодической
или условно-периодической функции
по совокупности табличных данных
В астрономии часто встречается следующая задача.
Пусть на основании наблюдений или вычислений получены
значения функции f(t) для большого количества равноотстоя-
щих значений U, ..., /2jv+i аргумента / с шагом h, и изменение
этой функции носит колебательный характер. Требуется аппро-
ксимировать ее тригонометрическим полиномом вида G.1.46),
в котором неизвестны не только коэффициенты, но и частоты
и, кроме того, неизвестно само количество частот.
Прежде всего ставится задача об определении частот. Изла-
гаемая ниже методика описана в [10].
Перейдем к новому аргументу 8 по формуле 6 =
s=(t — t\)/h — N, чтобы точкам t\ ujjv+i соответствовали
точки
9 = — N, — N+1 0,1 N—l,N.
Обозначим искомые частоты по аргументу 8 через ось cc2i . ¦ •,
причем предположим, что все щ < я. Так как частоты по аргу-
менту t равны со,- = ccj/ft, то из а, < я вытекает 2Л < 2я/со^ Та-
ким образом, условие а,- < я соответствует требованию, чтобы
шаг h таблицы значений функции f(t) не превышал половины
периода Tj = 2л/со:-, соответствующего любой из частот coj.
Табличные значения функции f(t), отвечающие значениям
аргумента 9 = 0, ±1, ..., -±N, обозначим через /А и /_*
(k = 0, 1 N). Вычислим величины
652 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 1.12
составляющие N + 1 значений функций
"(e) = f(e) + f(-e), i»(e) = f(e)-f(-e), G.1.48)
где/@) = /(^(8)). Рассмотрим далее функции
N-1
®1 (р) = у «О + ? U, COS jj-jp + ^UN COS яр,
G.1.49)
J
аргумента p на отрезке 0 s^ p ^ Л/. Эти функции представляют
собой приближенные выражения косинус- и синус-преобразова-
ния Фурье функций м(8) и v (8) соответственно. Определяются
точки pi, р2, ..., соответствующие максимумам функций Ф\(р)
и Фг(р) (эти точки максимума должны для обеих функций
совпадать). Искомые частоты oci, a2. ¦ ¦ • равны
al = -JTPl . (/=1, 2 л),
где п — число найденных максимумов.
Практически удобно составить последовательности ah =
= (Di(&) и bh = Ф2(к) (k = 0, 1, ..., N) значений функций
Oi(p), Фг(р) при целых р и выделить наибольшие (пиковые)
значения этих функций или непосредственно, если они совпа-
дают с некоторыми из а^ и bh, или с помощью интерполиро-
вания.
Частоты а\, ..., ап, определяемые по обеим последовательно-
стям {аА} и {bh}, должны совпадать между собой в пределах той
или иной точности.
После того как си ап найдены, возвращаемся к исход-
ной переменной t и записываем искомый аппроксимирующий
полином Фурье в виде
F (t) = Ао + t {Ак cos oM + Bk sin oM),
где сой = сса/А. В этом выражении частоты coi, ..., со„ уже из-
вестны и требуется найти коэффициенты Ао, ..., Вп по задан-
ным 1 -f- 2N значениям функции f(t) в узлах t\ ^2jv+i. Это
выполняется точно так же, как указано в § 1.10.
Частоты coi, ..., ш„ могут оказаться все точно или с очень
небольшими отклонениями кратными одной и той же частоте ш.
Тогда, положив Т = 2л/со, получим обычный полином Фурье для
функции периода Т. В ином случае следует попытаться пред-
§ 1.13] ГЛ. 1. ИНТЕРПОЛИРОВАНИЕ И ПРИБЛИЖЕНИЕ ФУНКЦИЙ 653
ставить все соь ..., со„ как линейные комбинации нескольких
(двух, трех, четырех) различных частот.
В [14] указывается другой способ нахождения неизвестных
частот по заданной совокупности значений функции /(8):
/* = /(*) (k = 0, 1 N-l)
при целых значениях 0 = 0, 1 N— 1 нормированной пере-
менной 8.
Выбирается число га (^ Л//3), соответствующее длине иско-
мого аппроксимирующего полинома
F @) = А, + ? (Ак cos cofe8 + Bk sin coA8)
и равное количеству искомых частот toi, ..., соп в этом поли-
номе. Рассматривается система линейных уравнений
+ /-l) = 0 G.1.50)
(*¦ — 1. 2 N-2n)
относительно а\, ..., an. Предпочтительно иметь большое число
N табличных значений функции /(8), выбрать умеренное га, зна-
чительно меньшее Л//3, и решать систему G.1.50) методом наи-
меньших квадратов (см. гл. 4).
После того как аи ..., ап найдены, рассматривают тригоно-
метрическое уравнение
cos /га — a, cos (га — 1) со — ... — ап-1 cosoo — уа„ = 0. G.1.51)
Если выразить косинусы углов, кратных ш, через степени cos и,
то G.1.51) примет вид алгебраического уравнения га-й степени
относительно у = cos со. Корни уи ..., уп этого уравнения опре-
деляют га искомых частот ocft = arccosy\ (k = 1, ..., га) функ-
ции /(8) нормированной переменной 0.
§ 1.13. Выделение «вековой части» функции
по совокупности табличных значений
В небесной механике имеют, как правило, дело с функциями
двух типов: 1) функции, описывающие одно- или многочастот-
ные колебания и представимые полиномами Фурье, которые
были рассмотрены выше; 2) функции, обнаруживающие, кроме
подобных колебаний, также изменения, пропорциональные вре-
мени (независимому аргументу). Особенно важен случай, когда
эти изменения относительно малы и представляют собой так
называемые вековые возмущения.
К функциям первого рода относятся, например, оскули-
рующие большая полуось и эксцентриситет орбиты планеты.
654 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [I 1.13
К функциям второго рода — оскулирующие долгота узла и дол-
гота перигелия орбиты.
При анализе совокупности табличных значений функций вто-
рого рода ставится задача об аппроксимации этих функций
функциями вида
Ao + Bat + Fit), G.1.52)
где F(i)—обычный тригонометрический полином с одной или
несколькими частотами без свободного члена, a Ao-\-Bot — ли-
нейная часть функции F(t)—свободный член Ао плюс вековая
часть Bot.
а) Следуя [5], укажем методику определения Ао и Во-
Пусть /А = f(th) {k = 1 N)— заданные табличные зна-
чения функции f(t). Составляем соотношения
4> + ААк = /* (А=1 Ю. G.1.53)
представляющие собой условные уравнения (см. гл. 4) относи-
тельно неизвестных Ао, Во. Решение уравнений ищется по ме-
тоду наименьших квадратов (см. гл. 4), что приводит к следую-
щим выражениям:
N N IN
ft=i J *-i f G.1.54)
i = i-(t]+ ... +tN).
При таком выборе Ao, Bo линейная функция Ао + Bot соот-
ветствует табличным значениям fk (k = 1 Л/) в среднем.
Разности
f(tk)-Aa~Botk (*=1 Л/)
рассматриваются как совокупность табличных значений новой
функции f(t), которую следует аппроксимировать тригономе-
трическом полиномом F(t).
б) В [15] предложена другая методика выделения линейной
части функции f(t). А именно, рассматривается график этой
функции и подбирается графически такая прямая у = Ао -\- Bot
и такие примерно равноотстоящие точки t0, tu t^, что
и и
\ (f(t)-A0-Bat)dt= \ {f{t)-Ao-Bot)dt = Q.
и t.
При этом равенство нулю этих интегралов проверяется с по-
мощью оценок соответствующих площадей на рисунке с графи-
ком функции f(t) и с прямой у = Ао-\- Bot. В [15] достигается
точность определения Ло до 1° и Во до 0°,05 при принятой еди-
нице времени, равной одному году,
Глава 2
ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ
И ИНТЕГРИРОВАНИЕ
Численным дифференцированием и интегрированием назы-
ваются операции по нахождению производных и определенных
интегралов от функции при условии использования только таб-
лицы ее значений, которая или задается (если мы имеем дело
с табличной функцией) или может быть вычислена.
Методы численного дифференцирования и интегрирования
основаны на приближенном представлении функций с помощью
или интерполяционных полиномов или других аппроксимирую-
щих формул, рассмотренных в гл. 1. Литература по этому во-
просу весьма обширна (см. библиографию в [9], [16]). Мы огра-
ничимся в этой главе основными результатами, представляю-
щими наибольший практический интерес.
§ 2.01. Численное дифференцирование
с помощью интерполяционных формул
Пусть имеется таблица значений функции f (t) с равноотстоя
щими узлами, и пусть составлена таблица вида 81 ее разностей.
Формулы для производных от f(t) получаются дифференциро-
ванием интерполяционных формул для этой функции.
Дифференцируя формулы Ньютона для интерполяции впе-
ред, Стирлинга и Бесселя (при этом df/dt = hdf/dq), получим
соответственно следующие выражения производных в точках
t = tQ + qh @ ^ q < 1) вблизи узла t0:
Г (*о + qh) = 1 [/,', + -^ П + 3Q! ~31" + 2 fi + ••¦]• G-2-01)
г
1
• ¦ • J •
656 ч- VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 2.01
Из формулы Ньютона для интерполяции назад получим
(-l<<7<0). G.2.04)
Для вторых производных f"(t) имеют место следующие выраже-
ния, получаемые аналогичным образом:
G.2.05)
^+ •¦¦]•
G.2.07)
22 fi+
G.2.08)
Часто используют формулы для производных в узле t0. Они
получаются из приведенных выше (частично используем более
далекие члены) при q = 0.
ИзформулНьютонадляинтерполяциивперед:
+1Л-тЯ+ ¦¦¦]• G-2-09)
iJf4»"- ¦¦¦]¦ G-2Л0)
Из формул Ньютона для интерполяции назад:
r'l-+T'\+Tf1-.+ ¦¦¦]• G-2Л1)
^+ ] GЛ2)
Из формулы Стирлинга:
Г{'*) = т[П-тП + -я>П-шП+ •¦•]¦ G-2ЛЗ)
^o)=iJr[fo2—s-ZS + w'S- ••¦]¦ G-2Л4)
§ 2.02| ГЛ. 2. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ 657
Из формулы Бесселя:
-ifi+l2fi + l2f*l,+ •••]• G'2Л5)
Формулы численного дифференцирования можно вывести,
дифференцируя формулу Лагранжа (в случае равноотстоящих
узлов). Тогда получаем выражения для производных, содержа-
щие остаточный член. Значения производных выражаются в этом
случае через значения функции f (t) в узлах.
Наиболее употребительны следующие формулы:
= -Ш if о - V • + 8/з - f 4) + ¦? Р 0),
f" (t2) = oW (~
- 2f2) +1 /F> @,
G.2.17)
где остаточные члены выражены через производные функции /"',
/t4), fE), /F) в некоторых промежуточных точках 7, a fh = f(th)-
§ 2.02. Другие формулы численного дифференцирования
Формулы для производных находятся также при дифферен-
цировании аппроксимирующей функции F(t), полученной по ме-
тоду наименьших квадратов (см. § 1.07). Такие формулы учи-
тывают сглаживание узловых значений функции f(t), так что
они меньше зависят от возможных ошибок этих узловых значе-
ний. Приведем следующие формулы:
G.2.18)
Последняя формула совпадает со второй формулой из G.2.17).
Если функция аппроксимирована полиномом Фурье F(t)
G.1.40), то имеет место следующая приближенная формула для
производной f'(t):
G.2.19)
658 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 2.03
Приведем еще одну формулу, выражающую производную
через интеграл:
8
n*) = }lim-I- \xf{t + x)dx G.2.20)
—в
и справедливую, во всяком случае, если функция f(t) разла-
гается в окрестности точки t в ряд Тейлора. Отсюда вытекает
следующая приближенная формула:
8
G-2.21)
§ 2.03. Численное интегрирование функции
по таблице ее значений с постоянным шагом
Формулы для вычисления определенного интеграла
I=\f(t)dt G.2.22)
а
с помощью таблицы значений подынтегральной функции f(t)
называются квадратурными формулами. Наиболее простые из
них получаются, если имеется таблица значений f(t) в равно-
отстоящих узлах. Это — формулы Ньютона — Котеса, выводи-
мые путем замены функции /(/) ее интерполяционным полино-
мом Лагранжа и последующего буквенного интегрирования.
1. Обозначим
tk = t0 + kh, 6 = 0,1 га, h = {b-a)/n,
to = a, tn = b, f(th) = fh.
Общий вид формул Ньютона — Котеса следующий:
Z4kf G.2.23)
где А^ = (b — a)Hh и числа Hh, не зависящие от a, b и функ-
ции f(t), называются числами Котеса. Формула G.2.23) при
фиксированном га точная, т.е. знак г» заменяется на =, если
f(t)—полином степени га или ниже при га нечетном и степени
га -f- 1 или ниже при п четном.
При га = 1 G.2.23) совпадает с формулой трапеций
^ G.2.24)
2.03] ГЛ. 2. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ . 6§9
при га = 2 — с формулой Симпсона
/ж-Ц^(/;0 + 4/;1 + Ь)- G.2.25)
При га = 4 имеем
/«¦^р- G^ + 32^ + 12/2 + 32f3 + 7/ч) G.2.26)
и при га = 6
о + 216/, + 27/2 + 272/3 + 27f4 + 216f5 + 41/6). G.2.27)
Теоретические оценки остаточных членов Rn (п = 1,2,4,6)
этих формул, т. е. разностей между точным значением / и пра-
вой частью G.2.23) при указанных га, следующие:
^4, )
<7-2'28)
где Ms — верхняя граница абсолютной величины производной
/<¦>(/).
Формулы Ньютона — Котеса при га = 3, 5 менее выгодны
с точки зрения величины оценки их остаточных членов. При
больших га эти формулы неудобны из-за того, что коэффициенты
Hh велики и имеют чередующиеся знаки.
2. Широко применяются обобщенные формулы трапеций и
Симпсона, получающиеся, если интервал (а, Ь) разбить на га ча-
стей равноотстоящими узлами U tn с шагом /гик каждому
малому интервалу (th, fA+i) применить формулу G.2.24) или
к каждой паре интервалов (tk, tk+i), (tk+u tk+2) (тогда га чет-
ное) применить формулу Симпсона G.2.25). Тогда
»-i+у Л.) G.2.29)
или
G.2.30)
Оценки остаточных членов этих формул
x ^ G.2.31)
соответственно.
660
Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ
[§ 2.04
§ 2.04. Квадратурные формулы Гаусса
1. Пусть имеется интеграл G.2.22) и п узлов fo (k = 1, ...
. . ., я), в которых вычисляются значения fh(th), могут быть вы-
браны произвольно. Ставится задача подобрать эти п узлов так,
чтобы приближенная формула
G.2.32)
становилась точной при соответствующих коэффициентах (не
зависящих от f(t)), если f(t)—полином как можно более вы-
сокой степени N. Тогда G.2.32) называется формулой Гаусса
или квадратурной формулой, имеющей наивысшую алгебраиче-
скую степень точности. При этом показывается, что N = 2п — 1.
(Алгебраическая степень точности формул Ньютона — Котеса
при п -f- 1 узлах равна п -\- 1 или п.)
Формула Гаусса непосредственно выписывается для инте-
грала с нормированным интервалом интегрирования (—1, 1):
G.2.33)
-I
k=\
где t\, ..., tn — нули полинома Лежандра Pn(t). Коэффи-
циенты Ак все положительные и определяются в зависимости от
fi tn по формуле
Полином Лежандра Рп (t) выражается формулой
Его нули равны при га = 3:
— ^1 = ^з = 0,774597, ^ = 0,
"¦I = •"З ~ ~§ • 2 == Т '
при га = 4:
— *, = *„ = 0,861136, -/2 = ^3 = 0,339981,
Ах = Л4 = 0,347855, Л2 = Л3= 0,652145,
при /г = 8:
— ^ = ^8 = 0,960290, Л1 = Л8 = 0,101229,
— t2 = t7 = 0,796666, Л2 = Л7== 0,222381,
— ^3 = ^ = 0,525532, Л3==Д6 = 0,313707,
— tt = ts = 0,183435, Л4 = Л5 = 0,362684.
G.2.35)
§ 2.04] ГЛ. 2. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ 661
Подробные таблицы с коэффициентами Ah и узлами th фор-
мул Гаусса при п s^ 48 имеются в [16].
Для интеграла на произвольном интервале интегрирования
(а, Ь) формула Гаусса имеет вид
- п
Ъ~а ^ " г' ч G.2.36)
где uk = —2~ ~\ 2^t и Аь h — те же, что и в G.2.33)
Формулы Гаусса являются часто наиболее эффективными,
т. е. позволяют вычислять интеграл на произвольном интервале
интегрирования с заданной точностью при минимальном числе
узлов (более подробно об оптимальном выборе квадратурной
формулы см. в [9]).
Оценка остаточного члена Rn формулы Гаусса G.2.36) имеет
вид
|/г»'^ [BвI]»B+1) *" G.2.37)
где М2„ — верхняя граница абсолютной величины производной
2. Формула Гаусса обобщается на интегралы вида
ь
I=\p(t)f(t)dt, G.2.38)
где p(t) — весовая функция (положительная и интегрируемая).
Интегралы с весовой функцией
где а, р — произвольные вещественные числа, называются инте-
гралами Якоби. Общий вид квадратурной формулы типа Гаусса
(т. е. имеющей алгебраическую степень точности 2я — 1 при п
узлах) для интегралов Якоби в случае нормированного интер-
вала интегрирования (—1, 1) следующий [16]:
-o11 A+tf f (t) dt^Y, AJ ел- G-2-39)
662 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 2.04
где t\, ..., tn — нули полинома Якоби
а+Р+п] G-2.40)
и коэффициенты Ah выражаются формулой
я + 1)Г(Р + п+
Г — гамма-функция Эйлера.
Имеются квадратурные формулы для ряда частных случаез
G.2.39) при различных а, р.
При а = р = — у имеем формулу
Жр dt » V Л J (tk), A,= ...= Л„ = ?, G.2.42)
называемую формулой Эрмита. Узлы /i fn в этой формуле
являются нулями полинома Чебышева 7\jB) (см. § 1.07). Оценка
остаточного члена следующая:
\Яп\<-^=т-^ггМЯя. G.2.43)
Приведем значения tk при п = 3, 4, 5:
га = 3, —*, = /, = 0,707107, ^2 = 0,
п = 4, -^, = ^ = 0,794654, - t2 = t3 = 0,187592,
„ = 5, -^ = ^5 = 0,832497, —ta = tt = 0,374541, ^3 = 0.
Квадратурные формулы вида G.2.42) с одинаковыми коэф-
фициентами Ah носят название формул Чебышева.
Интересен частный случай интегралов Якоби при р = 0.
Тогда замена переменной A — t)/2 = x приводит к интегралу
вида
1
(*) dx. G.2.44)
В [16] приводятся для такого интеграла значения узлов хк и ко-
эффициентов Ah квадратурной формулы вида G.2.39) при раз-,
личных п ^ 8 и ос от —0,9 до 5.
§ 2.05] ГЛ. 2. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ
663
Например, при
я —
га = 8
л = 4, 8 и а = -
*i = 0,0336483,
*2 = 0,276184,
х3 = 0,634677,
хА = 0,922157,
xi = 0,00902738,
х2 = 0,0793006,
лг3 = 0,209779,
*4 = 0,381771,
х5 = 0,570636,
х6 = 0,749317,
х7 = 0,892222,
xs = 0,978914,
0,5 имеем
Л, = 0,725368,
Л2 = 0,627413,
Л3 = 0,444762,
Л4 = 0,202457,
Л! =0,378901,
А2 = 0,365207,
Л3 = 0,338313,
Л4 = 0,299192,
Л5 = 0,249258,
Л6 = 0,190317,
Л7 = 0,124507,
Л3 = 0,0543049
§ 2.05. Численное интегрирование
сильно осциллирующих функций
Пусть требуется вычислить интегралы
ь ь
G.2.45)
где ш достаточно велико, интервал (а, Ь) значительно больше
л/со и подынтегральная функция имеет на интервале (a, b) много
нулей, т. е. сильно осциллирует. Квадратурные формулы, рас-
смотренные в предыдущих параграфах, если не разбивать
интервал (а, Ь) на очень большое число частей, значительно
теряют в данном случае свою точность. Метод построения ква-
дратурных формул для интегралов G.2.45) состоит в том, что
функция f(t) аппроксимируется алгебраическим полиномом pn(t)
некоторой степени п, а получающиеся после этого функции
pn(t)cos at, pn(t)sin at интегрируются буквенно. Возможно
также сначала разбить весь интервал (а, Ь) на большое число
частей и аппроксимировать f(t) в каждом малом интервале
своим полиномом. При разбиении (а, Ь) на п = 2N частей и
аппроксимации f(t) в каждой паре интервалов квадратным трех-
членом (некоторый аналог обобщенной формулы Симпсона) по-
лучены следующие формулы (см. [9], [11]):
/,« h [a (fn sin wta - f0 sin co/o) + PC, + \C2], G.2.46)
/8» h [a (f0 cos со*,, - fn cos utn) + pS, + yS2], G.2.47)
664 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 2.06
где
а = (р2 + psin pcos p — 2sin2 рУр3 = -~ р3 — -^ Р5 + •••,
p = Dsinp-4/jcosp)y/j3==y— is"Р2 + "гГо Р4 + •¦¦•
С2 = у /о C0S Ш<0 + f 2 C0S <^2 + .-. + f я-2 COS <В*Я_2 + J fn C°S 00^„,
E! и 52 — аналогичные суммы для f (t) sin cat и
h = —^, р = oo/i, tk = a-\-kh, k = 0, ..., га, /„ = a, fn = Ь
га — четное число).
§ 2.06. Правило Рунге практической оценки
погрешности квадратурных формул
Теоретические оценки остаточных членов квадратурных фор-
мул, приводившиеся выше, требуют составления и анализа про-
изводных подынтегральной функции. Применение этих оценок
при конкретных вычислениях оказывается возможным лишь
в редких случаях. Практически эффективным является следую-
щий прием, носящий название правила Рунге (см. [3], [9]).
Пусть интеграл G.2.22) вычислен два раза по одной и той
же квадратурной формуле с использованием сначала га, а затем
т > п узлов, так что
где Si, S2 — соответственно вычисленные приближенные значе-
ния интеграла /, а Rn и Rm — соответствующие остаточные
члены. Как следует из теоретических оценок, эти остаточные
члены пропорциональны по своей величине {\/п)к и (\/m)h со-
ответственно, где k зависит от га и типа квадратурной формулы.
Тогда согласно правилу Рунге
, n ,_ |S2-S,| G.2.48)
1 — (л/m)
Эта формула дает достаточно надежное значение ошибки, если
во всяком случае т значительно больше га (например, т ^э 2га).
$ 2.07| ГЛ. 2. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ 665
§ 2.07. Квадратурные формулы
для несобственных интегралов
1. Пусть требуется вычислить интеграл
ь
I=\f(t)dt, <7.2.49)
в котором подынтегральная функция f (t) терпит при t=b беско-
нечный разрыв. Квадратурная формула строится с помощью
выделения в f(t) множителя, который обусловливает обращение
/(/) в бесконечность при t = b или указывает на порядок вели-
чины f(t) при t -> Ь — 0. Как правило, можно положить
f @ = Ф @/F - t)k @ < k < 1), G.2.50)
где функция qp(f) конечна на всем отрезке [0, Ь]. Тогда инте-
грал G.2.49) записывается в виде
ъ
I=\(b-t)~kq>{t)dt, G.2.51)
и множитель (b — t)~h рассматривается как весовая функция
типа Якоби. Квадратурную формулу для этого интеграла можно
строить исходя из G.2.39) или непосредственно, аппроксимируя
ф(/) соответствующим полиномом. Формула Эрмита G.2.42)
является одним из примеров подобного рода.
Можно также выполнить предварительно подстановку t/b =
= 1 —х, которая приводит к вычислению интеграла
1
/ = ь~к+х ^ х~\ [Ь A - х)] dx, G.2.52)
г. е. интеграла вида G.2.44) при —1 < а < 0, для которого
имеются таблицы коэффициентов и узлов квадратурной фор-
мулы.
2. Пусть требуется вычислить интеграл
DO
I=\f{t)dt, G.2.53)
666 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ !§ 4.07
в котором f(t) убывает при t->oo как некоторая степень t~h
(k > 1) и может быть представлена в виде
МО = Ф @/A+0*. k>\, G.2.54)
где функция ф(/) ограничена на всей полуоси 0 < t < оо.
После подстановки 1 + t = l/х приходим к интегралу
dx. G.2.55)
Таким образом, мы приходим к вычислению интеграла вида
G.2.44) при а > — 1.
Более подробно о квадратурных формулах для несобствен-
ных интегралов см. в [16].
Глава 3
ЧИСЛЕННОЕ РЕШЕНИЕ ОБЫКНОВЕННЫХ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ
Методы численного интегрирования дифференциальных урав-
нений движения небесных тел получили очень большое распро-
странение в связи с появлением электронных вычислительных
машин (ЭВМ). С помощью этих методов можно получить
таблицы численных значений координат небесных тел (или оску-
лирующих элементов их орбит) на различные моменты времени.
В 1951 г. в США были опубликованы построенные таким
путем таблицы координат пяти внешних планет (Юпитера, Са-
турна, Урана, Нептуна) на период с 1653 по 2060 г. [17]. В 1950
и 1962 гг. в США были опубликованы таблицы координат ма-
лых планет Цереры, Паллады, Юноны, Весты [18].
В Институте теоретической астрономии АН СССР (ИТА) ре-
гулярно публикуются эфемериды малых планет, получаемые при
помощи численного интегрирования.
Очень широко применяется численное интегрирование при
изучении движения комет и особенно в астродинамике для ре-
шения различных задач, относящихся к движению искусствен-
ных небесных тел. При этом важное практическое значение
имеют так называемые краевые задачи.
Чаще всего рассматривают уравнения движения в прямо-
угольных координатах ввиду простоты их правых частей. Тогда
обычно имеют дело с системой уравнений вида
^ = РЛ^ xn,t) (s=l n), G.3.01)
где Fs(xu ..., хп, t) — известные функции переменных хи ..., хп
и времени t. Значительно реже рассматривают уравнения отно-
сительно оскулирующих элементов орбит. В этом случае рас-
сматривается система уравнений первого порядка-
^f = Fs(xu .... хп, t) (s=l n), G.3.02)
однако правые части оказываются значительно сложнее.
668
Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ
[§ 3.01
Большинство методов численного интегрирования обыкновен-
ных дифференциальных уравнений рассчитано на системы вида
G.3.02). При их применении к системам вида G.3.01) последние
приводят к виду G.3.02) заменой переменных
dx2
Х2 — У г, ~л
Имеются также методы, разработанные именно для систем вида
G.3.01).
§ 3.01. Метод Рунге— Кутта
Метод Рунге — Кутта непосредственно рассчитан на интегри-
рование систем вида G.3.02); он наиболее удобен при приме-
нении ЭВМ. Для того чтобы начать вычисления, достаточно
знать лишь начальные значения xsQ = xa(t0) искомых функций.
Приведем сначала формулы для случая одного уравнения
^r = F{x, t). G.3.03)
Пусть дано начальное значение х0 = x(t0) и требуется вычис-
лить значения x(t) при th = to-{- kh (k = 1, 2, 3, . ..). Число h
называется шагом интегрирования.
Если обозначить
*('*)=**, hF (х, t) = f (х, t),
то формулы, определяющие х\ по заданному Хо с точностью до
членов порядка Л4, следующие:
]
4
= f{x0, t0),
= f
G.3.04)
Формулы для Дл;о, имеющие погрешность порядка h5 (эти
формулы наиболее употребительны при вычислениях на ЭВМ),
следующие:
к, = / (*0> t0), k2 = f [x0 + j ft,,
= f (*o + j k2,
k3, t0 + h).
G.3.05)
По формулам, аналогичным приведенным, вычисляются по-
следовательно Х2, Х3, . . ¦ И Т. Д.
§ 3.01] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 669
Для контроля точности применяют вычисления с половин-
ным шагом. А именно, вычисляют xi по приведенным формулам
с шагом, равным h, а затем с шагом, равным А/2. Разность ме-
жду полученными двумя значениями х\ принимают за погреш-
ность значения х\, вычисленного с шагом к. Аналогичным обра-
зом контролируют далее точность значения х2 и т. д.
Имеются программы вычислений на ЭВМ с автоматическим
выбором шага при заданной точности. В этом случае задается
погрешность б (например, 1 -10—6) и некоторый первоначальный
шаг интегрирования ft0. ЭВМ вычисляет по такой программе Х\
с шагом ft0 и с шагом hi = ho/2 и сопоставляет полученные зна-
чения (x\)ho, (x\)hi- Если разность между ними не превышает
по абсолютной величине б, то ЭВМ переходит к вычислению х2
с шагом ho. Если эта разность больше б, то ЭВМ выпол-
няет вычисления значения Х\ с шагом ft2 = Ai/2. Если
| {х\)ы —{x2)h2] < б, то ЭВМ переходит к вычислению х2 с ша-
гом ft. Если это условие не выполнено, то ЭВМ вычисляет Х\
с шагом ft3 = Лг/2 и т. д.
Для системы уравнений вида G.3.02) вычисления произво-
дятся параллельно для каждого уравнения по формулам, анало-
гичным G.3.04) или G.3.05). .
Пусть дана система двух уравнений
Ъ{х, у, t) G.3.06)
fa ' \л> У> Ч, dt -*"\л, у, ч
и начальные условия х0 = *(/о)> Уо = У {to)- Обозначим
tk = t0 + kh, hF (x, y,f) = f (х, у, t), АФ (х, y,t) = g {x, у, t),
= yk (? = 1,2,3,...).
Формулы, определяющие х\, у\, например, с точностью до чле-
нов порядка ft4, следующие:
хх = ха + A*o,
хо, У i = .
kl — f\Xo, Уо, to), 'l = йЧ*О> Уо, to),
h = g[xo-)r-*k1, «/о +-0-/1, to + -^h\.
k3 = f (x0 + -| k2, y0 + -| k, к + -f A) ¦
670 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 3.02
По таким же формулам вычисляются далее Х2, Уз, х3, уг,
и т. д.
Системы уравнений G.3.01) расписываются при применения
указанных выше формул в виде систем уравнений первого по-
рядка:
%-=*У» 1F = ^(*i *„, t) (s = \ Л). G.3.08)
Ввиду простоты правых частей первой группы уравнений (для
х5) и независимости функций Fa от у и ..., уп формулы упро-
щаются.
При вычислениях по методу Рунге — Кутта значений иско-
мых функций при каждом последующем значении аргумента
требуется вычислять несколько значений правых частей уравне-
ний в некоторых промежуточных точках. Поэтому объем вычис-
лений больше, чем при использовании разностных методов ре-
шения обыкновенных дифференциальных уравнений. Однако
метод Рунге — Кутта дает, вообще, большую точность, чем
разностные методы. Из последних мы рассмотрим методы
Адамса, Штермера, Коуэлла, так как они наиболее часто приме-
няются в небесной механике.
§ 3.02. Метод Адамса
Метод Адамса является наиболее простым из разностных ме-
тодов. Для того чтобы можно было начать вычисления, тре-
буется, как и в случае применения любых разностных методов,
знать значения неизвестных в нескольких равноотстоящих точ-
ках t0, U, t2, ... (а не только в начальной точке t0).
Пусть дано, например, одно уравнение G.3.03). Пусть из-
вестны значения x(to) = xQ, x(th) = xh (k = 1, 2, 3, 4), причем
th = /0 + kh. (Эти значения целесообразно вычислить по методу
Рунге — Кутта.) Составляется таблица разностей для функции
f(x, t)=hF(x, t) по известным значениям xk, f(xk, th)=fk
(k = 0, 1, 2, 3, 4) (табл. 82). Значение x(t5)= х5 находится
с помощью разложения решения x(t) в ряд Тейлора в окрест-
ности точки ti. Требующиеся для этого производные функции
f(x, t) различных порядков в точке (jc4, ^) выражаются с по-
мощью формулы Ньютона для экстраполяции вперед. Это при-
водит к следующим выражениям:
х5 = х< + Ах<, Д*4 =/4+ ±/>:+ ^/2+ |-/22+ -![/<. G.3.09)
Далее вычисляют }(х5, ts) = f5 и разности fi/t, f\, f^, fg> a за-
тем по таким же формулам х6 и т. д. Общая формула для вы-
числения AXk = Xk+i — Хк, k ^; 4 ПО ИЗВеСТНЫМ /ft, \h-l, . . . , fh-i
§ 3.02] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 671
Таблица 82
i
'о
1
t2
'з
и
X
x\
X2
X3
xt
t
to
1
/2
U
V
к
л
N,
к
fl
fl
3
I'll
к
n
и соответствующим разностям (табл. 83) записывается в виде
a*.-/. + t'U + ?«-. +тП-',1 + шП-г G.3.Ю)
Более сложная формула, куда входят разности пятого и бо-
лее высоких порядков, обычно не используется. Если требуется
Таблица 83
t
'ft-3
'ft-2
h-l
tk
X
xk-3
xk~2
Xk-\
Xk
f
fk-3
fk-2
fk-l
/ft
f
1
•
f
/ft-1
f3
f3
f
небольшая точность или если шаг интегрирования h достаточно
мал, то можно ограничиться в этой формуле разностями третьего
или даже второго порядка.
E72
Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ
[§ ЮЗ
§ 3.03. Метод Коуэлла
Пусть известны значения хк, xh-U ..., хА_4, k ^ 4 и состав-
лена таблица разностей (табл. 84).
Таблица 84
Xk-2
Xk-l
4
fk-2
tk
(fk+l)
fk-i
(Й
1-v.
«=.—)
/r4 -.\
При нахождении xh+\ по методу Коуэлла применяется, как
в методе Адамса, разложение решения x(t) в ряд Тейлора в ок-
рестности точки tk, но выражения для производных функции
f(x, t) в точке (xk, tk) составляются на основании интерполя-
ционной формулы Стирлинга. Это приводит к следующим вы-
ражениям:
**+! = ** +А**, G-3.11)
^=/* + т П + т П ~kn-m «• G-3-12)
где flk, f\ — центральные разности первого и третьего порядков
соответственно, равные
). П - т (« + «) (?313)
Эти разности, а также разности /?, /| неизвестны (их нельзя
вычислить с помощью лишь значений fh-i fk)- Поэтому
вычисление S.xk по формуле G.3.12) проводится с помощью
экстраполяции разностей четвертого порядка и последователь-
ных приближений.
Пусть /?_2 = (х. Тогда в первом приближении полагают, что
четвертые разности /?_,, Д также равны а. С этими значе-
ниями четвертых разностей вычисляют (в первом приближений)
разности flk, fl, f3k, отмеченные в табл. 84 скобками, а затем
и хк+х.
§ 3.04] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ 673
С этим значением xh+i вычисляют fk+\ и уточняют разности
fk+Ъ' fl> fl' fl-'h' fk-\ (в табл- 84 они п°Дчеркнуты). Имея
уточненное значение f\_l=a и полагая f\ = o., вычисляем раз-
ность f\, а затем Axk и xh+i во втором приближении и т. д. По-
сле аналогичных дальнейших вычислений xk+2, xh+3 приходится
обычно опять уточнять хк+\, поскольку уточняются разности
fl fl и ДР-
Формула G.3.12) метода Коуэлла выгодно отличается от
формулы метода Адамса тем, что коэффициенты при разностях
убывают гораздо быстрее. Поэтому, несмотря на большую гро-
моздкость вычислений, этот метод часто оказывается более
удобным, чем метод Адамса. Вычисления для систем уравнений
производятся по аналогичным формулам и таблицам разностей,
выписываемым параллельно для правых частей каждого урав-
нения.
§ 3.04. Метод Штермера (для уравнений второго порядка)
Этот метод аналогичен методу Адамса и является одним из
самых простых.
Пусть дано уравнение
~ = F(x,t) G.3.14)
и известны значения x(th)= xk (k = 0, 1, 2, 3, 4) в пяти точках
th = t0-\- kh. Обозначив
h*F (x, t) = f (x, t), f (xk, tk) = fk, G.3.15)
составим таблицу разностей. Формулы для вычисления xs сле-
дующие:
*5=-2х4-Хз + Д2*4, G.3.16)
А Х4 = /4 "Ь ~\2, f з "Г" ~\2 Iч, ~^~ 40"' 2" G.3.17)
Аналогичным образом вычисляют далее х6, х7 и т. д. Общие
формулы для любого Jfft+i, k ^ 4 записываются в виде
G.3.18)
Разностями выше четвертого порядка обычно пренебрегают.
Вычисления для систем уравнений вида G.3.01) проводят по
аналогичным формулам параллельно для каждого уравнения.
22 Под ред. Г. Н. Дубошина
674
4. VH. ЧИСЛЕННЫЕ МЕТОДЫ
П 3.05
§ 3.05. Метод Коуэлла A-й вариант)
Пусть дано уравнение G.3.14) и известны значения
X \*о) — -^От ¦ " ¦ j X \tffj == Xfcf к ^^ и.
Обозначим снова
h2F(x, t) = f(x, t), f{xh tt) = fi (i = 0, 1, 2, ...) G.3.20)
и составим таблицу разностей. Значение xk+l выражается через
Xk-i, xh, &2Хь опять согласно G.3.18), a A2xh определяется по
формуле
1 " ' "+J^fl, G.3.21)
12
40
60 480 '*'
где f\, f\, f\ — центральные разности. Поскольку эти разности
нельзя вычислить с помощью лишь значений ft (i ^ k), то А2хк
вычисляют с помощью последовательных приближений так же,
как и в случае уравнения первого порядка (см. § 3.03).
Пусть /?_3=а. Тогда в первом приближении полагаем, что
разности f\__2, /?_,> fsk равны также а. С этими значениями
Таблица 85
t
*k-2
X
xk-2
xk-l
xk
1
h
r
f"
p
W--.0
fU
f
f5
W-vJ
f8
i 3.06] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 675
шестых разностей вычисляем (в первом приближении) разности
/!> f\ (эти Разн°сти, а также все другие, необходимые для вы-
числения f\, f\, отмечены в табл. 85 скобками), а затем
A2*fe, *ft+i-
Исходя из этого значения Xk+\, вычисляем fft+i и уточняем
разности/2, !\_ъ, /*_,, /|_,/г, /|_2 (в табл. 85 они подчеркнуты).
Имея уточненное значение f|_2 —а и полагая /?_2 = /| =а>
вычисляем Д2хй и xft+i во втором приближении и т. д. При даль-
нейших вычислениях хк+2, хк+з приходится возвращаться к уточ-
нению xh, поскольку уточняются разности /|_j, f\.
§ 3.06. Метод Коуэлла B-й вариант)
Пусть дано уравнение G.3.14) и известны значения х0 х$.
Используя обозначения предыдущего параграфа, составим таб-
лицу разностей, причем в этой таблице добавим столбцы первых
и вторых сумм, обозначаемых через /~', /~2 с соответствующими
нижними индексами (табл. 86).
Таблица 86
t
ta
h
к
h
и
h
'б
X
ч
х\
х2
*3
*4
ч
f-2
fs~2
f*2
fs2
/б
/г2
f-1
fy!
h,
r-I
f
h
и
h
h
U
h
h
к
к
к
к
к
f»i.
f\
fl
fl
п
fl
f3
fl
fl
fl
fl
f4
ft
n
f
fl
Is
fl
Суммы ff ', f,2, начиная с fr/l, f3 2, составляются таким обра-
зом, что столбец значений /;- является столбцом первых раз-
ностей для //"' и вторых разностей для fj2. По одному из
22Ф
676 ч- vn- ЧИСЛЕННЫЕ МЕТОДЫ [§ З.ОЯ
значений ff1, fj2 можно взять произвольно. Полагают
f-2=y Lf 4-— f2 31 f* I 289 ffi /7 Q OO\
/3 лз 12 '3 ' 240 '3 60480 '3 ' 3628800 '3' V •a-^^l
I'I, == *4 ~~ Х3 ~ ~Ш f'h "^ 40 f'lt ~ 60 480 ^Vi" G.3.23)
Значение jc7 выражается через разности формулой
Y __ f-2 _| L f !_ f2 i 31 f4 __ 28Э f6 G 4 94^
Л7 /7 ' 12 '7 240 '7~ 60480 '7 3628800 >T V ¦°-^'i)
В этой формуле является известной (т. е. вычисляемой по из-
вестным значениям /0, ..., U) только вторая сумма f~2. Осталь-
ные члены неизвестны, поэтому вычисления производятся, как
и в первом варианте метода Коуэлла, с помощью экстраполя-
ции шестых разностей и последовательных приближений. Зна-
чения х8, хд, ... вычисляются последовательно по формуле, ана-
логичной G.3.24).
При интегрировании уравнений движения большинства ма-
лых планет и комет с шагом h = 10d при точности до семи
значащих цифр оказывается часто возможным ограничиться
в формуле G.3.24) четвертыми или даже вторыми разностями.
§ 3.07. Накопление погрешностей
при численном интегрировании
При численном интегрировании в результате округления на
каждом шаге в некоторой неточности формул происходит посте-
пенное накопление погрешности с увеличением числа шагов. Как
показывает теоретический анализ (см. [1], [2], [19]), ошибки
в координатах (при интегрировании уравнений движения в пря-
моугольных координатах) после п шагов численного интегриро-
вания пропорциональны л3/». Таким образом, через каждые
30 шагов эта ошибка вообще может увеличиться примерно
в 10 раз, т. е. теряется одна значащая цифра.
Косвенный контроль точности при численном интегрировании
осуществляется путем вычисления на каждом шаге констант
интегралов решаемых дифференциальных уравнений (если та-
кие интегралы имеются). Расхождения в значениях этих кон-
стант, появляющиеся на каком-то шаге, указывают на соответ-
ствующую потерю точности значений искомых неизвестных.
§ 3.08. Метод Энке численного интегрирования
уравнений возмущенного движения
Метод Энке численного интегрирования уравнений возму-
щенного движения небесных тел заключается в том, что эти
уравнения записываются в специальной форме; при этом урав-
§ 3.08] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 677
нения сохраняют простоту, характерную для уравнений в пря-
моугольных координатах, но позволяют вычислять непосред-
ственно именно возмущения. Изменение координат за счет не-
возмущенного движения может учитываться отдельно, например,
по обычным кеплеровским формулам.
Этот метод широко применяется в случае малых планет и
комет, но вполне целесообразен во всех случаях, когда движе-
ние рассматриваемых небесных тел мало отклоняется от кепле-
ровского.
Пусть х\, х2, Хз — прямоугольные координаты небесного тела
Р с массой т, движущегося под действием притяжения цен-
трального тела 5 (с массой 1) и возмущающих сил. Его урав-
нения движения при условии, что в отсутствие возмущающих
сил движение является кеплеровским, записываются в виде
^ ^г)^/л3 + ц/?, E = 1,2,3), G.3.25)
где k2 — постоянная тяготения, г — расстояние от 5 до Я я
\iks — относительно малые возмущающие части уравнений, про-
порциональные некоторому малому параметру ц,.
Если x°s (s= I, 2, 3) — координаты тела Р в невозмущенном
движении относительно 5, то уравнения относительно возмуще-
ний (отклонений от кеплеровского движения) us = xs — х°
(s = 1, 2, 3) записываются в виде
^ = к2 A + т) [qf {q) xs - uj/r? + ц^ (s = 1, 2, 3), G.3.26)
где в правых частях полагается xs = х^ + us,
и r0 — расстояние от 5 до Я в невозмущенном движении. Урав-
нения G.3.26) и называются уравнениями Энке. Величины ы3
имеют порядок ц, изменяются гораздо медленнее, чем xs, и шаг
интегрирования для этих уравнений может быть взят гораздо
большим, чем для первоначальных уравнений G.3.25). Вместе
с тем возмущающие части [iRs сохраняют, например, в случае
малых планет и комет такую же простую форму, что и в перво-
начальных уравнениях G.3.25).
Если положить в правых частях G.3.26)
а также xs = x°, то эти уравнения становятся особенно удоб-
ными для численного интегрирования. Их решение определяет
678 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 3.09
возмущения us с точностью до членов первого порядка относи-
тельно [л (возмущающих масс в случае малых планет и комет).
Такое решение может служить хорошим первым приближением.
Что касается непосредственного интегрирования уравнений
G.3.26), то метод может быть любым. Чаще всего применяют
метод Коуэлла.
§ 3.09. Общая постановка краевой задачи
для обыкновенных дифференциальных уравнений.
Случай линейной краевой задачи
В предыдущих параграфах рассматривались методы нахож-
дения решений обыкновенных дифференциальных уравнений при
заданных начальных условиях, т. е. решений задачи Коши. В на-
стоящее время в астродинамике часто встречаются задачи дру-
гого типа, а именно, краевые задачи (о ряде таких задач ска-
зано в ч. VIII).
Пусть дана система уравнений общего вида
^Г = М*. *„. 0 (я=1, .... я), G.3.27)
заданы точки tY tk (k ^ 2) и некоторые соотношения
Фо (*i (* i) *i (**) *п (*i) хп (tk)) = 0 G.3.28)
(а=1 п).
Задача о нахождении решения системы G.3.27), удовлетворяю-
щего соотношениям G.3.28), называется многоточечной краевой
задачей общего вида. Соотношения G.3.28) называются крае-
выми условиями. Если k = 2 (в краевые условия входят значе-
ния искомых функций в двух точках), то краевая задача назы-
вается двухточечной.
Вопрос о существовании решения общей краевой задачи
весьма сложный и исследован далеко не полностью. Эта задача
может а) не иметь решений, б) иметь единственное решение,
в) иметь конечное число решений, г) иметь бесконечное множе-
ство решений. Более простой и лучше исследованной является
двухточечная линейная краевая задача, когда система исходных
уравнений
^-=S a/ w х>+L {t) {s=l п) G-3-29)
и краевые двухточечные условия при t = 0, t = I
Фа(*i, • ¦ •. х„) = ? aalx, @) + Ьв,х, (/) = <?„ (or = 1 n) G.3.30)
§ 3.10) ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ 679
являются линейными. В G.3.29) функции pSj(t), f,(t) непре-
рывны на отрезке 0 ^ / < !, а в G.3.30) aaj, baj и qa — постоян-
ные числа.
Краевая задача при всех fs = 0, qa = 0 называется однород-
ной и при /s Ф 0 — неоднородной.
Условия существования решения. Пусть {<pSj(O}—
фундаментальная система решений уравнений G.3.29) при всех
/, = 0. Рассматривается матрица Q из элементов Фо(фи, ¦•¦
• •-, Фги-) (a, j = 1,2, ..., п).
1) Неоднородная краевая задача имеет единственное реше-
ние тогда и только тогда, когда det Q ф 0. 2) Однородная крае-
вая задача имеет нетривиальное решение тогда и только тогда,
когда det Q =0.
Важен вопрос о так называемой обусловленности краевой
задачи. Краевая задача называется хорошо обусловленной, если
малые изменения коэффициентов и правых частей исходных
дифференциальных уравнений, а также краевых условий приво-
дят к столь же малым по порядку величины изменениям реше-
ния. В противном случае краевую задачу называют плохо обус-
ловленной.
Методы решения и анализа краевых задач в настоящее время
интенсивно развиваются и приобретают все более и более важ-
ное место в теории дифференциальных уравнений. Мы ограни-
чимся изложением некоторых методов решения краевых задач
отдельного типа, не останавливаясь на их анализе. Более под-
робно можно прочитать о краевых задачах в [3], [9], [20].
§ 3.10. Метод стрельбы при нахождении решения
линейной двухточечной краевой задачи
Основной вариант этого метода заключается в следующем
(см. [9]).
Пусть дана система дифференциальных уравнений (в век-
торно-матричной форме)
G.3.31)
(точкой обозначено дифференцирование по переменной t), и
двухточечные краевые условия вида
Ах{0) = а, Вх{1) = Ь, G.3.32)
где векторы х, f, а и Ъ имеют соответственно размерности п, п,
•г — г и г, P(t)—матрица с непрерывными по t элементами,
4—постоянная матрица с п — г строками, а В — постоянная
матрица с г строками.
Решение данной краевой задачи ищем в виде
G.3.33)
680 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 3.10
где v(t)—частное решение исходной системы при начальном
условии, удовлетворяющем соотношению
Av@) = a, G.3.34)
a w(t)—нетривиальное решение однородной системы, получаю-
щейся из G.3.31) при / = 0,
x = P{t)x G.3.35)
с начальным при t = 0 условием, удовлетворяющим соотноше-
нию
Лш@) = 0. G.3.36)
Это векторное соотношение эквивалентно п — г линейным ал-
гебраическим уравнениям относительно п неизвестных компо-
нент W\(Q), ..., wn@) вектора w(Q). Эти уравнения всегда
имеют решение, зависящее от г произвольных постоянных. Та-
ким образом, из G.3.36) может быть найдена матрица W@)
с г столбцами. Если обозначить через W(t) матрицу из г реше-
ний системы G.3.35) при начальном условии №|г=0= №@), то
w{t) в G.3.33) запишется в виде
, G.3.37)
где с — произвольный вектор с г компонентами с\, ..., ст.
При определенных таким путем v{t) и w(t) функция G.3.33)
удовлетворяет первому из краевых условий G.3.32) при всех с.
Дальнейшая цель состоит в таком выборе вектора с, чтобы ре-
шение G.3.33) удовлетворило второму краевому условию (в точ-
ке t = l). Можно сказать, что подбираются такие начальные
условия при t = 0, чтобы интегральная кривая исходной си-
стемы G.3.31), удовлетворяя этим начальным условиям, до-
стигла бы при t = / нужной точки. Отсюда название метод
стрельбы.
Подчинив вектор с второму краевому условию, получим
+ Bv(l)=b. G.3.38)
Если
det [BW (/)] Ф 0 G.3.39)
(это — условие разрешимости поставленной задачи), то
c = [BW(l)]-1[b-Bv{l)]. G.3.40)
Функция
x(t) = W(t)c + v(t), G.3.4I)
где с определяется согласно G.3.40), дает решение f исходной
краевой задачи. Таким образом, построение этого решения сво-
дится к следующему;
§ 3.10] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ 681
1) нахождению каких-либо численных начальных условий
v@) из системы алгебраических уравнений G.3.34), при этом не
исключается случай а = 0; 2) нахождению матрицы №@) из
линейной алгебраической системы G.3.36); 3) построению ре-
шения задачи Коши исходных уравнений G.3.31) при начальном
условии лс(О) = v@); 4) построению матрицы решений W(t) за-
дачи Коши для однородной системы G.3.35) при начальных ус-
ловиях W \i=0 = W {0); 5) вычислению вектора с из G.3.40).
Для построения решений задач Коши можно применить лю-
бой из рассмотренных выше методов.
Для иллюстрации укажем, какой вид принимают приведен-
ные выше формулы в случае системы второго порядка
Ы0 G.3.42)
и краевых условий
а21 ф 0, Л
1 G' '
Начальные условия G.3.34) для Ui@), v2{0) примут вид
ao@) + flo@) = fl, G.3.44)
откуда всегда можно подобрать значения Ui@), v2@) при а ф 0
и о = 0. Начальные условия G.3.36) для и»@) имеют вид
ат @) + a2w2@) = 0, G.3.45)
откуда (например, при а2 ф 0) Wi@)= с, ш2@) = — cai/a2,
где с — произвольная постоянная. Таким образом, решение алге-
браического уравнения G.3.45) зависит от одной произвольной
постоянной и искомая матрица №@) имеет один столбец с эле-
ментами 1 и —aja2 соответственно. Матричное решение W{t)
однородной системы, получающейся из G.3.42) при /i= 0, /2= 0,
ищется при начальном условии
и представляет собой матрицу из одного столбца с элементами
Wi(t) и w2(t). Искомое решение краевой задачи запишется по
аналогии с G.3.41) в виде
х, @ = сш, @ + vx @, х2 (t) = cw> (t) + v2(t),
причем постоянная с находится из условия вида G.3.38)
ft, [cwt (I) + v{ @] + b2 [cw2 (I) + v2 (I)] = b.
Задача разрешима, если biW{(l)-\- bzw2(l) = D ф 0, и тогда
682 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ If 3.11
§ 3.11. Краевая задача для квазилинейной системы
с линейными краевыми условиями
Пусть дана система вида
x = P(t)x + F(x,t,ii), G.3.46)
где [л — малый параметр,
и даны краевые условия вида G.3.32)
Ах{0) = а, Вх{1) = Ь, G.3.47)
где векторы а, Ь или равны нулю или малы по норме. Для по-
строения решения такой краевой задачи можно применить метод
последовательных приближений.
Первое приближение хР>{1) удовлетворяет системе
уравнений
, t, ц) G.3.48)
и тем же краевым условиям G.3.47).
Имеем, таким образом, линейную краевую задачу. Находим
в виде
l' + v™{t), G.3.49)
где vVi(t)—частное решение системы G.3.48) при начальном
векторе ^''@), определяемом из соотношения (алгебраических
уравнений)
а G.3.50)
(при этом возможен случай а = 0), a W{t)— матрица решений
однородной системы
x = P(t)(x), G.3.51)
причем матрица начальных условий №@) определяется из соот-
ношения
AW {0) = 0. G.3.52)
Предполагается, что det[SW(/)] Ф 0. Тогда
с»' = [BW A)Г] [Ь - Bv<» @]. G.3.53)
Если считать для простоты, что || а [| и \\ Ь И имеют порядок
параметра ц, то |[яA;(/)|[~ц, || лс(п(ОИ~И-
Второе приближение х<2)@ удовлетворяет системе
уравнений
*ю = Р @ JtB) + F (*<¦>, t, ц) G.3.54)
$ 3.121 ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 683
и тем же краевым условиям G.3.47). Опять имеем линейную
краевую задачу, причем система G.3.54) отличается от системы
G.3.48) для первого приближения только лишь неоднородной
частью.
Ищем x№(t) в том же виде G.3.49)
xW = W{t)cW + v<n{t), G.3.55)
где v№(t)—частное решение системы G.3.54) при тех же на-
чальных условиях, при каких мы находили v^(t), a W(t) — та
же матрица, что и в G.3.49). Вектор с<2> определяем по формуле
сB) = [BW (/)]"' [6 - Яо») (/)]. G.3.56)
При этом (если ||а||~ц, ||6||~fi)
Построение дальнейших приближений выполняется анало-
гичным образом. Их сходимость гарантируется, во всяком слу-
чае, при достаточно малых ц.
При непосредственных вычислениях численные значения ц,
а также компонент векторов а и Ь краевых условий фикси-
руются. Выписанные выше оценки для || jtf1) ||, || Jc<2) — jtf1) || дают
представление о порядке этих величин, если считать, что ц,
|| а ||, || ft || имеют один и тот же порядок.
Замечание. Если систему уравнений для последователь-
ных приближений *W(f) (k = 1, 2, ...) выбрать в следующем
виде (вместо G.3.48) и G.3.54)):
G.3.57)
то порядок малости || дс<л+1> — х<й> || по ц составит не \ik, а ц2*.
Тогда мы получим при малых ц последовательность {*W(f)}. об-
ладающую квадратичной сходимостью, характерной для мето-
дов типа Ньютона.
§ 3.12. Краевая задача для системы,
близкой к нелинейной невозмущенной системе
Пусть дана нелинейная система вида
i , t) G.3.58)
и краевые условия типа G.3.47), и пусть при ц = 0 такая крае-
вая задача имеет точное или хотя бы приближенное решение
zo(/). Полагая г = г0 + х, приходим в отношении переменной .*
684 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 3.13
к системе вида G.3.46) и к краевым условиям G.3.47) при рав-
ных нулю или малых по норме а, Ь. Другими словами, мы при-
дем к краевой задаче, рассмотренной в § 3.11.
В небесной механике при ц = 0 мы имеем краевую задачу
для невозмущенного движения. Приближенное или даже точное
ее решение можно получить с помощью формул кеплеровского
движения. При \i ф 0 имеем краевую задачу для возмущенного
движения.
§ 3.13. Применение метода градиентного спуска
для решения нелинейной краевой задачи общего вида
Пусть дана нелинейная система
x = F(x,t) G.3.59)
и краевые двухточечные условия
Ф(*@), *(/)) = а G.3.60)
общего вида, где F и Ф — некоторые нелинейные вектор-функ-
ции. Предполагается, что условия существования решения та-
кой краевой задачи выполнены. Существование решения может
вытекать и из самого физического (механического) смысла за-
дачи.
Одним из эффективных методов решения задачи является
метод градиентного спуска (см., например, [20]). Ставится за-
дача отыскания начального вектора *@) = х0, минимизирую-
щего величину
{) = \\Ф(хо,хA))-а\?, G.3.61)
которая рассматривается как функция х0, и при этом х0 оты-
скивается- с помощью последовательных приближений х^ {k =
= 0, 1 2), приближающихся к ха по направлению градиента
функции р{х0). В G.3.61) x(l)= x(t)\t==i и x{t)— решение ис-
ходной системы G.3.59) при начальном условии x\t=o = *о, так
что р зависит от Хо как явно, так и неявно посредством хA).
Нулевое приближение Xq может быть выбрано, вообще го-
воря, произвольно, но, разумеется, целесообразно, чтобы х°
было более или менее близким к точному искомому вектору х0.
Переход от любого x[ak) к лс<*+п осуществляется по формуле
*(*+!) = XW - awu (Jr№)> Ау§ G.3.62)
где и (x^k\ ft) — вектор с компонентами
ui №h)=\р № + e,h) - р «OF <7-3-63)
0=1. 2 п),
§ 3.13] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 685
причем h — малая положительная постоянная, выбираемая про-
извольно, es — единичный вектор по оси /-й компоненты век-
тора х и а(й) — некоторая постоянная, выбираемая специальным
образом.
Смысл вектора и{х)*\ Л) заключается в том, что если р(х0)
рассматривается как функция х0, то и(д$°, А) есть дискрет-
ный эквивалент градиента функции р(х0) в точке хо= х[к). От-
сюда название метод градиентного спуска.
Для определения вектора и (*?*>, Л) при заданных х\® и h
требуется выполнить следующее.
1. Построить п + 1 решений (где п — размерность вектора х)
исходной системы G.3.59), соответствующих п -\- 1 вариантам
начальных условий:
x\t=o=x[k) + elh (для 1-го решения),
х |<=0 = х^ + eji (для п-го решения),
х |/=0 = *#° (для (л + 1)-го решения)
и обозначаемых через xf^f) (/=1 я+1) соответственно,
так что
жр> @) = *<*> + exh *W @) = *<*> + «Л х% @) = *(*>.
2. Построить векторы xf] (/) для этих решений на правом
конце отрезка [0, I].
3. Найти векторы Ф(*^@), *<*> (/)) (/= 1 п + 1), соот-
ветствующие краевым условиям G.3.60).
4. Найти значения функций
р(х\к)Щ р(х*Ч0)), Р(хР).
После всего этого компоненты вектора и{х^\ К) вычисляем
согласно G.3.63). Если оказывается, что /9(xf,w) = 0, то в сле-
дующем приближении х&+1) нет необходимости.
Постоянная а(А) в G.3.62) выбирается достаточно малой по
абсолютной величине и так, чтобы значение р(лс^+1)) оказалось
наименьшим по сравнению со всеми значениями р (дс0) для х0,
определяемого по формуле
*0=*0-aUDfe), A), G.3.64)
где х^ и и(х$\ Л) фиксированы. Для этого можно задать не-
которую последовательность малых по абсолютной величине
686 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 3.13
значений oti, а2, ... и построить решения xa{t) (а = 1, 2, ...)
исходной системы G.3.59) при начальных условиях
*а @) = ж»> - ааи «>, А) (а = 1, 2, ...),
далее найти векторы хаA), значения р(ха{0)) и, наконец,
Р(хок)) ~ Р(хо№)- Путем интерполяции или дальнейшего варьи-
рования значений а можно найти требуемое значение a<ft), при
котором разность р(x[,fe)) — р(ха @)) наибольшая.
Можно также применить более сложный, но и более эконом-
ный метод нахождения a(ft) как стационарной точки функции
P(,xok) — a«(*o*', А)) с помощью итерационного процесса типа
Ньютона.
Нулевое приближение ао = 0 (для простоты записи индекс k
во всех формулах опускаем). Первое приближение oti находим
следующим образом.
1. Строим два решения исходной системы G.3.59)
*i @ — при начальных условиях дс, @) = х0 — аф (х0, h),
X2{t) — при начальных условиях х2@) = х0 — (ао + т)и(*о. h),
где т — произвольно выбранное малое число, и находим х, (/),
2. Вычисляем согласно определению G.3.61) величину
9 >= р (хя @)) — р (Ж! @)). G.3.65)
3. Строим два решения исходной системы G.3.59)
х3 @ — при начальных условиях х3 @) = дс0 — (ао + I <71) и (*о> А),
ж4 (t) — при начальных условиях дс4 (О)=дсо—(ao+l <71+т)и (*о. А)
и находим х3{1), Xi(l).
4. Вычисляем величину
G.3.66)
Тогда
«^«о--^-!?!. G.3.67)
Таким же путем (ао заменяется во всех формулах на оч) можно
найти иг и т. д. Можно не добиваться нахождения a(ft) с боль-
шой точностью, если значение р (*[,*' — awu (*<*>, А)) еще су-
щественно отличается от нуля.
В результате описанного процесса найдем вектор х0 такой,
что с заданной точностью /з(дсо)= 0. Решение же задачи Коши
для исходной системы G.3.59) при начальных условиях лс(О) =
= х0 представит непосредственно искомое решение поставленной
краевой задачи.
§ 3.14] ГЛ. 3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 687
§ 3.14. Разностный метод решений краевых задач
Разностный метод состоит в принципе в том, что производ-
ные искомой функции x(t) заменяются их приближенными вы-
ражениями через значения x(t) в узлах. Тогда вместо диффе-
ренциальных уравнений и краевых условий для функции x(t)
получаем систему конечных уравнений (алгебраических, транс-
цендентных) относительно неизвестных значений xh = x(th)
этой функции в узлах.
Пусть дано, например, уравнение второго порядка
x + p(t)x + s{t)x*=f(t) G.3.68)
и краевые условия
b. G.3.69)
Отрезок [О, /] разбиваем на N частей равноотстоящими узлами
с шагом h = l/N:
Обозначим
х (tk) = xk, х (tk) = xk, x [tk) = xk
и выразим производные во внутренних узлах по разностным
формулам (см. G.2.17))
Y — Y V ^— 9у I y
¦ _. й + 1 й~1 " __, Я+1 К й—1 [*ч О 1УП\
Xk~ 2Л ' Xk J? ' <7-^-/0)
В крайних узлах t0, t^ имеем
х0« ^ , Хдг да ^ ¦
Исходное уравнение G.3.68) и краевые условия G.3.69) заме-
няем соотношениями
= /* G.3.71)
л» "~~ Лл X ., ~^ Д»
=b, G.3.72)
представляющими собой систему Af -f- 1 линейных алгебраиче-
ских уравнений относительно УУ + 1 неизвестных х0, ..., xN.
Решив эту систему уравнений, получим таблицу значении
xQ xN, являющуюся численным решением поставленной
краевой задачи (разумеется, приближенным).
688 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 3.14
В случае нелинейного уравнения вида G.3.68) с правой ча-
ю \(t, х, х) вместо f(t) система G.3.71) заменится следую-
й:
у
стью \(t, х
щей:
xk+i ~2xk + xk-\ , xk+\ ~ xk~\
V ^ P* 2Л
= f (tk,
xk, 4+1 h4-1 ) {k = \,2 N - 1). G.3.73)
Вместе с G.3.72) получим систему нелинейных конечных уравне-
ний относительно х0, .... xN. Их решение можно искать мето-
дом последовательных приближений того или иного типа.
Системы соотношений вида G.3.71) — G.3.72) в случае крае-
вых задач для дифференциальных уравнений более высокого
порядка или для систем уравнений составляются аналогичным
образом. Существует целый ряд вариантов разностных схем и
методики решения получаемых систем конечных уравнений (см.
[3], [9]). Важными являются вопросы о погрешности получае-
мых таким путем приближенных численных решений краевой
задачи, а также о сходимости процесса при последовательном
уменьшении интервала разбиения.
Можно также, получив разностным методом грубое решение,
использовать его в качестве нулевого приближения для метода,
изложенного в § 3.13.
Глава 4
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
РЕШЕНИЯ АЛГЕБРАИЧЕСКИХ
И ТРАНСЦЕНДЕНТНЫХ УРАВНЕНИЙ
В ряде задач небесной механики и астродинамики, связан-
ных с использованием наблюдательных данных для уточнения
элементов орбит небесных тел (см. ч. III) или параметров их
гравитационных полей, а также в задачах приближения функ-
ций (см. гл. 1) и др. приходится встречаться с системами алге-
браических или трансцендентных уравнений, число которых зна-
чительно превышает число неизвестных. Решение и анализ та-
ких систем уравнений, называемых условными, производится по
методу наименьших квадратов, принадлежащему Гауссу.
§ 4.01. Постановка задачи
Рассматривается система п уравнений относительно т неиз-
вестных XU ..., Хт'-
Ы*> xm) = lk (ft=l, .... л), G.4.01)
причем п значительно больше т и fk — в общем случае некото-
рые алгебраические нелинейные или трансцендентные функции.
Это — условные уравнения общего вида. Правые части lh пред-
ставляют собой обычно величины, определяемые по данным на-
блюдений, и их рассматривают как случайные величины, подчи-
няющиеся некоторому вероятностному закону распределения.
Разности
находимые при каких-либо фиксированных значениях Х\, ..., хт,
называются невязками условных уравнений и обозначаются
обычно через 6ft.
Ставится задача найти такие значения Х\ хт, при кото-
рых сумма квадратов невязок
...,хт) = ±б1 G.4.02)
690 Ч. VII. ЧИСЛЕННЫЕ МЕТОДЫ [§ 4.02
минимальна. Они и принимаются в качестве искомого решения
условных уравнений G.4.01).
Кроме того, ставится задача найти вероятные погрешности
полученного решения условных уравнений в предположении, что
величины 1\ /„ обладают некоторыми средними квадратич-
ными погрешностями.
§ 4.02. Линейные и равноточные условные уравнения
Пусть условные уравнения представляют собой систему ли-
нейных алгебраических уравнений вида
а%\ + ... + a™xm = lk (k=\ я), G.4.03)
и пусть при этом можно считать, что все случайные величины
1\, . .., /„ обладают одной и той же средней квадратичной по-
грешностью. Условные уравнения называются тогда равноточ-
ными, и их решение находится следующим образом.
Условие минимума суммы квадратов невязок G.4.02) как
функции переменных х\ хт приводит к следующим соот-
ношениям:
[аB) аA)] *2 + ... + Wm) с«>] хт =[1а,М],
[а<" а®] *, + [а<2' а™] *, + ...+ [ai»> а<2>] хт = [/ a™], j, G 4 04)
W» a<">] *, + [а& я(™>] х2 + ... + Wm) а(т)] хт = [I а»],
где
= Е 'feaf (/. «г = 1 «)¦
i
Эти соотношения представляют собой систему т линейных алге-
браических уравнений относительно того же количества т не-
известных Х\, ..., хт и носят название нормальных уравнений.
Если исключить тот случай, когда определитель этой системы
равен или близок к нулю (это говорит о неудачном выборе и
о непригодности исходных условных уравнений), то решение
нормальных уравнений отыскивают методом последовательного
исключения неизвестных (методом Гаусса) или с помощью оп-
ределителей. В последнем случае это решение выражается фор-
мулой
xk=^ (* = 1 m), G.4.05)
где D и Dh — определители, соответствующие общеизвестному
$ 4.041 ГЛ. 4. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ 691
правилу Крамера для решения линейных алгебраических урав-
нений. Формула G.4.05) и определяет искомое решение исход-
ных условных уравнений, реализующее минимум суммы квад-
ратов невязок G.4.02).
§ 4.03. Вероятностные оценки погрешности решения
Полученное решение условных уравнений, которое выра-
жается формулой G.4.05) и которое обозначим через х\ хт,
рассматривается как система случайных величин, связанных со
случайными величинами 1\, . .., 1п этой формулой. Существенно,
что G.4.05) определяет линейную связь между х\, ..., хт и
U, ..., 1п. При этом, если общая средняя квадратичная погреш-
ность величин 1\ /„ обозначается через а, то средние квад-
ратичные погрешности величин х\ хп выражаются следую-
щими простыми формулами:
ач = ~ (* = 1 т). Pk = -?~. G-4.06)
V°* Dkk
где Dhh — диагональные миноры определителя D (основного оп-
ределителя системы нормальных уравнений). Числа plt ..., рт
называются весами неизвестных х\ хт соответственно.
Величина <т вообще неизвестна. Используется ее наиболее
вероятное значение, вычисляемое по формуле
где s — сумма квадратов остаточных невязок, т. е. невязок, со-
ответствующих решению нормальных уравнений
С этим значением о вычисляются все aXjt-
Окончательно решение исходных условных уравнений запи-
сывается в следующем виде:
x* = Xk + aXh (k = 1 m). G.4.09)
Величины aXk указывают на степень уверенности определе-
ния неизвестных xi, ..., xm из этих условных уравнений.
§ 4.04. Неравноточные условные уравнения
Если средние квадратичные ошибки ci, ..., ап величин /],...
,..,/„ в правых частях условных уравнений G.4.01) различ-
ны, то уравнения называются неравноточными. Вообще, сами
значения ai о„ неизвестны, но должны быть известными
692 Ч. VII ЧИСЛЕННЫЕ МЕТОДЫ [§ 4.0S
соотношения между ними:
(Т! :а2: ...=qx:q2: ....
где q\, <7г, ¦ • ¦ — некоторые числа.
Методика подхода к решению и анализу таких, систем урав-
нений следующая.
Вводим величины
Pk=PK (*=1 я),
называемые весами условных уравнений, и выбираем число р
так, чтобы вес наименее точного условного уравнения был ра-
вен 1. Умножив затем каждое условное уравнение на его вес,
получим систему уравнений
Pkfk{xu .... xm) = pklk (k = \ п), G.4.10)
которые можно считать равноточными. В случае линейных урав-
нений поступаем далее так, как изложено в § 4.03.
Распространенным является случай, когда каждое /-е услов-
ное уравнение является результатом усреднения группы пред-
варительно полученных <?j уравнений. Тогда вес /-го условного
уравнения принимается равным q^
§ 4.05. Линеаризация условных уравнений
общего вида
Пусть даны условные уравнения общего вида G.4.01). Наи-
более эффективный путь их исследования состоит в применении
метода последовательных приближений и линеаризации урав-
нений на каждом шаге.
Прежде всего требуется найти каким-нибудь способом при-
ближенное решение х\ х®т исходных условных уравнений,
для которого невязки более или менее малы. Примем его за ну-
левое приближение. Полагая в G.4.01)
разлагаем левые части этих уравнений по степеням Д[д:л и от-
брасываем все члены выше первого порядка, приходя таким об-
разом к линеаризованным уравнениям относительно Д^. Если
эти уравнения равноточные (или приведены к равноточным), то
методом, описанным в § 4.03, находим решение этих уравнений
Ai*i, ..., Aixm и соответствующие средние квадратичные по-
грешности Cik и получаем первое приближение
x^ = xl + ^xk±alk (*=1 т) G.4.12)
к решению исходных условных уравнений G.4.01).
ЛИТЕРАТУРА К ЧАСТИ V1T 693
Полагая далее
хк = *у> + Ь2хк (к = 1 т) G.4.13)
и линеаризуя условные уравнения для Дг-^i. • ¦ -, &2Хт, находим
аналогичным образом АгЯь, Сгл и второе приближение
±o2lt G.4.14)
и т. д. Процесс продолжается, вообще, до тех пор, пока два со-
седних приближения не совпадут друг с другом в пределах же-
лаемой точности.
ЛИТЕРАТУРА К ЧАСТИ VII
1. Б pay эр Д., Клеменс Дж., Методы небесной механики, гл. IV, V
«Мир», 1964.
2. Ч е б о т а р е в Г. А., Аналитические и численные методы небесной меха-
ники, гл. VI, «Наука», 1965.
3. Б е р е з и н И. С, Жидков Н. П., Методы вычислений, т. I, Физматгиз,
1959; т. II, Физматгиз, 1960.
4. Бут А. Д., Численные методы, Физматгиз, 1959.
5. Щиголев Б. М., Математическая обработка наблюдений, изд. 3-е,
«Наука», 1969.
6. Л и н н и к Ю. В., Метод наименьших квадратов и основы теории обра-
ботки наблюдений, Физматгиз, 1958.
7. Д е м и д о в и ч Б. П., Марон И. А., Основы вычислительной матема-
тики, Физматгиз, 1963.
8. Д е м и д о в и ч Б. П., Марон И. А., Шувалова Э. 3., Численные
методы анализа, Физматгиз, 1963.
9. Б а х в а л о в И. С, Численные методы, т. I, «Наука», 1973.
10. Ланцош К., Практические методы прикладного анализа, пер. с англ.,
Физматгиз, 1961.
11. Хемминг Р. В., Численные методы, пер. с англ., «Наука», 1968.
12. М а к - К р а к е н Д., Дорн У., Численные методы и программирование
на ФОРТРАНе, «Мир», 1969.
13. Алберг Дж., Нильсон Э., Уолш Дж., Теория сплайнов и ее при-
ложения, «Мир», 1972.
14. Корн Г. К., Корн Т., Справочник по математике, «Наука», 1973.
15 К о v a I e vs k у J., Methode numerique de calcul de perturbations general.
Application au VIII-e satellite de Jupiter, Bull, astron., t. XXIII, 1959.
16. Крылов В. И., Шульгина Л. Т., Справочная книга по численному
интегрированию, «Наука», 1966.
17. В rower D., Clemen се G. M., Eckert W. Y., The rectangular coor-
dinates of five outer planets for years 1653—2060. Astronom. Papers 12,
1951.
18. Her get P., Rectangular coordinates of Ceres, Pallas, Juno, Vesta. Astro-
nom. Papers 16, part 3, 1962; 11, part 5, 1950.
19. Brower D., С 1 erne псе G. M., Astron. J. 60, № 3, 1955.
20. Шаманский В. Е., Методы численного решения краевых задач, «Нау-
кова думка», 1966.
Часть VIII
ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ
АСТРОДИНАМИКИ
Глава I
СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ
и математической теории
ОПТИМАЛЬНЫХ ПРОЦЕССОВ
Включение этого раздела в настоящее издание обусловлено
тем, что в последние годы динамика космического полета полу-
чила бурное развитие и значительно возросло количество иссле-
дователей, интересующихся и активно работающих в этой обла-
сти современной небесной механики.
При решении оптимальных и краевых задач динамики кос-
мического полета используются методы (классические и совре-
менные) вариационного исчисления и математической теории
оптимальных процессов. Математические методы, применяемые
в динамике космического полета, можно условно объединить
в следующие группы.
а) Методы классического вариационного исчисления, свя-
занные с решением основных вариационных задач (изопериме-
трическая задача, задачи Лагранжа, Майера и Больца), кото-
рые формулируются без привлечения функций управления.
К этой группе методов можно отнести и теорию экстремумов
функций и функционалов Лагранжа. В последние годы появи-
лись достаточно эффективные численные методы проверки необ-
ходимых и достаточных условий теории максимумов и миниму-
мов, когда количество независимых переменных велико. Особый
интерес представляют те методы, которые позволяют решать
экстремальные задачи в классе разрывных или не всюду диф-
ференцируемых функций.
Основные понятия и определения теории экстремумов и ва-
риационного исчисления читатель может найти в многочислен-
ных учебных пособиях (Г. М. Фихтенгольц [1], И. М. Гельфанд
и С. В. Фомин [2], Л. Э. Эльсгольц [3] и др.). Кроме того, можно
рекомендовать работы Блисса [4] — [7], Чикала [8], Хэнкока [9].
Хорнера [10], Миеле [11] и др. Достаточно полный обзор пере-
численных выше работ содержится в переведенном на русский
ГЛ. 1. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 695
язык сборнике статей [12], вышедшем под редакцией Лейтмана.
На работы, включенные в сборник [12], мы неоднократно будем
ссылаться. Следует указать и на книгу Миеле [13], также пере-
веденную на русский язык.
б) Методы классического вариационного исчисления, видо-
измененные и приспособленные для решения традиционных за-
дач (изопериметрической задачи, задач Лагранжа, Майера,
Больца), сформулированных с учетом функций управления.
Среди многих работ, рассматривающих оптимальные траекто-
рии космического полета с этой точки зрения, следует прежде
всего указать на исследования Лоудена [14] — [20], основанные
на решении задачи Майера в современной постановке (в на-
стоящем справочнике она названа «третьей формулировкой за-
дачи Майера»). Существенные результаты в этом направлении
получены В. Ф. Кротовым [21] —[23], В. А. Троицким [24] — [26],
Д. Е. Охоцимским и Т. М. Энеевым [27], Лейтманом [28] — [30].
Наконец, в сборнике [12] можно найти изложение различных
аспектов этого направления вариационного исчисления и много-
численные литературные ссылки (особенно главы II—V, XI).
в) Метод скорейшего спуска (или метод градиентов), кото-
рый с полным правом можно было бы отнести к группе а), так
как он появился еще во времена Коши. Однако большие вычис-
лительные возможности, появившиеся в связи с современной
вычислительной техникой, делают метод скорейшего спуска
весьма эффективным при решении оптимальных задач динамики
космического полета и по этой причине мы выделили его от-
дельно. Эффективность метода градиентов при нахождении от-
носительных экстремумов функций многих переменных была
показана, в частности, Кюрри [31], Розеном [32], Топкинсом [33],
а его эффективность в исследовании оптимальных траекторий
была установлена Штейном [34], Келли [35], Брайсоном и др. [36].
Достаточно подробное изложение метода градиентов примени-
тельно к оптимальным задачам динамики космического полета,
сопровождаемое весьма полным указателем литературы, дано
в сборнике [12] (гл. VI).
г) Принцип максимума Л. С. Понтрягина — один из основ-
ных методов математической теории оптимальных процессов.
Изложение этого принципа содержится в монографиях [37], [38]
Он особенно удобен при решении вариационных задач со свя-
зями, содержащими ограничения на функции управления. Основ-
ные математические проблемы обоснования принципа макси-
мума были решены его создателями (академиком Л. С. Понтря-
гиным и его учениками В. Г. Болтянским, Р. В. Гамкрелидзе
и Е. Ф. Мищенко). Некоторые математические аспекты прин-
ципа были изучены Л. И. Розоноэром [39]. Вопросы примени-
мости принципа максимума для исследования оптимальных
696 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.01
движений в динамике космического полета рассматривались
Лейтманом [28], [30], [40], В. К- Исаевым [41], [42] и др.
д) Принцип оптимальности Беллмана (или метод динамиче-
ского программирования) также является одним из основных
методов математической теории оптимальных процессов. Основы
этого метода изложены его создателем в книгах [43], [44] и в мно-
гочисленных научных статьях. Практическое применение метода
динамического программирования в динамике космического по-
лета связано с использованием ЭВМ с большой емкостью опера-
тивной памяти. Известно [12], что задача о минимизации инте-
грального функционала, зависящего от двумерного вектора уп-
равления, требует машинной оперативной памяти в 40 000 ячеек.
Для решения вариационных задач большей размерности тре-
буются еще более мощные вычислительные машины.
Описание принципа максимума и метода динамического про-
граммирования с точки зрения приложений в механике косми-
ческого полета можно найти в сборнике [12].
§ 1.01. Понятие функционала
Определение 1. Пусть У — множество (или простран-
ство) функций у(х) (y(x)^Y, a^x^.b), a R — некоторое
множество чисел L(L^R). Функционалом L[y(x)] называется
однозначное отображение функционального множества Y на чис-
ловое множество R [2], [3], [45]. Множество Y называется об-
ластью определения для функционала L[y{x)\, y(x) является
аргументом функционала L[y(x)] (см. [2], [3], [45]).
Определение 2. Вариацией аргумента у(х) функционала
L(y) называется
&У = у{х)-У1(х) {y{x)^Y, yi{x)e=Y). (8.1.01)
Аналогично определяются вариации производных аргумента,
если у(х) ^-дифференцируема на а ^ х ^ Ъ:
Кроме того, имеют место равенства
FуУ = Ьу', (Ьу)" = &у" Fz/)<*> = Ьу*К (8.1.02)
Определение 3. Функциональное пространство назы-
вается метрическим, если для него определено расстояние (вве-
дена метрика). Расстоянием р(уи г/г) между двумя произволу-
§ 1.01] ГЛ. 1. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 697
ными элементами у\{х) и у2(х) множества Y называется неко-
торая функция, удовлетворяющая следующим условиям:
а) р(У\, У2)= р(г/2, У\) для любых #i(*)e У и y2(x)z= У.
б) Р(Уи г/2)>0 при У\фуг, p{yuyi)=O для любого
Л)У
УЛ
в) р(г/ь Уз)^р(Уи У2)+р(у2, Уз) Для любых #,(х)е=У,
ййеУ, г/3(*)^ У (неравенство треугольника (см. [3]).
Здесь в качестве расстояния между элементами yi (x) и
Уг(х) пространства У примем
Р (Уи У2) = t sup | tf > (х) - г/^ (х) |. (8.1.03)
s=0 а < л < Ь ' '
Число ^ может равняться 0, 1, 2 и т. д.
Определение 4. Функционал L\y(x)] называется непре-
рывным на кривой у = у0 {х) в смысле близости k-го порядка,
если для любого г > 0 существует такое число б > 0, что при
р{У> Уо) < б выполняется неравенство
\L[y(x)]-L[yo(x)]\<e,
Определение 5. Функционал L[y(x)] называется линей-
ным, если
L[cy(x)] = cL[y(x)],
L [У1 (х) + у2 (х)] = L [У1 (х)] + L [у2 (х)].
Пусть У есть л-мерная область в л-мерном пространстве фа-
зовых координат у = {у\,у2, .... уп), U — множество т-мерных
функций и=(ии и2, ..., um) (u^U), управляющих измене-
нием фазового вектора у(х), a Dn+m = *Х U (декартово про-
изведение У и U).
Определение 6. Пара вектор-функций (у(х), и(л:))е
е Dn+m называется минимизирующей парой или минималью,
если она доставляет минимальное значение функционалу L[y(x),
и(х)]; (л + т)-мерная область Dn+m называется областью до-
пустимых функций. Пара (у (х), и (х)) е Dn+m, доставляющая
экстремум функционалу L, называется экстремалью (см. [37],
[38]).
Пусть из Dn+m можно выделить такое подмножество допу-
стимых функций, принадлежащих однопараметрическому семей-
ству у(х, \i), и(х, \л), где р. — параметр, что при ц = 0 получаем
минималь
у {х, 0) = у (х), и {х, 0) = и (х). (8.1.06)
698 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.05
Определение 7. Первой вариацией функционала L[y, и],
определенной на однопараметрическом семействе {у{х, ц),
и(х, \i)), называется функционал
Щ^о (8.1.07)
Аналогично определяется вариация /г-го порядка:
Lw[y(x), U(X)]=(J?L) (8.1.08)
Вариационное исчисление занимается исследованием экстре-
мальных значений различных функционалов, однако для астро-
динамики наиболее важными являются методы, позволяющие
находить экстремумы функционалов не на произвольных функ-
циональных множествах У, а на множестве решений некоторой
системы дифференциальных уравнений вида
? = f(y,u,x), (8.1.09)
где у(х)—/г-мерный фазовый вектор, определяющий положение
движущегося объекта, и(х)—га-мерный управляющий вектор.
§ 1.02. Задача Лагранжа. Множители Лагранжа.
Уравнения Эйлера
В динамике космического полета иногда рассматриваются
вариационные задачи, использующие лишь классические урав-
нения движения, в которых не участвуют управляющие функ-
ции. Для решения задач такого рода могут найти применение
вариационные задачи Лагранжа, Майера, изопериметрическая
задача, задача Больца.
Пусть «-мерный вектор у(х) = {ух{х), уг{х) Уп{х)) удо-
влетворяет га уравнениям связи вида
М*. 9(х). »'(*)) = 0, *о<*<*1 (/ = 1, 2 т<п) (8.1.10)
и р краевым условиям
Фа(*о, У(*о). *и y{Xi)) = 0 (k = \, 2 p<2n + 2). (8.1.11)
Задача Лагранжа. Среди всех кусочно-гладких векто-
ров у(х) найти такой у(х), который доставляет экстремум функ-
ционалу
L\y{x)\=\h(x,y,V')dx. (8.1.12)
Необходимое условие существования решения для этой за-
дачи сводится к достаточной гладкости функций fs (s = 0, 1, .,.
S 1.04 ГЛ. 1. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 699
..., т) и грй (k = 1, 2, ..., р). Условия, наложенные на fu \J?h
и другие функции, участвующие в формулировках перечислен-
ных задач, приводятся, например, в [45].
Для определения вектора экстремали у(х) можно восполь-
зоваться теоремой Лагранжа.
Теорема Лагранжа. Компоненты yi(x) (i = \, 2, ..., п)
вектора у(х), доставляющего экстремум функционалу (8.1.12),
должны удовлетворять (кроме уравнений связи (8.1.10)) уравне-
ниям Эйлера:
(З)^-0 (/г=1-2 ">• <8ЛЛЗ>
d
dx \dyk
где функция Лагранжа F(x,y,y') равна
m
F(x, у, y') = fo[x. У, У')+ ЕШ*. У. У'), (8.1.14)
Яя (л:) — множители Лагранжа.
Совместное решение системы уравнений Эйлера и уравнений
связи позволяют определить л + m неизвестных у\(х), у~ъ{х), ...
..., yn(x);fa(x), K2(x), К3(х), ..., hn(x). Функции у{(х) необ-
ходимо решают вариационную задачу для функционала (8.1.12).
§ 1.03. Первая формулировка задачи Майера
Пусть (п + 1)-мерный вектор у(х) = (у0(х), ух{х) ¦ уп(х))
удовлетворяет уравнениям связи
Ф((х. У, V') = O, xo^x<:Xi
(t = 0, I, 2 т<п)
и краевым условиям
где а0, а\, .... Ъп — заданные числа.
Среди гладких векторов у(х) найти такой, компонента уо(х)
которого имеет при х = Xi экстремум.
§ 1.04. Вторая формулировка задачи Майера
Пусть (п + 1)-мерный вектор у(х) = (уо(х), у\{х), ..., уп(х))
удовлетворяет m уравнениям связи
4i(x, У, у') = 0, *о<*<*1 (8.1.15)
(j —0, 1, 2 ш<п)
700 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.06
и р краевым условиям
уй{х0) = а0, yi{xo) = ax Уп(х0) = ап, (8.1.16)
= 0 F = 0, 1 р<п+ 1).
Среди гладких векторов у(х) найти такой, компонента Уо(х)
которого имеет максимум в точке х = х\,.
Задача Майера в такой формулировке относится к вариа-
ционным задачам «с подвижными концами-».
§ 1.05. Изопериметрическая задача
Пусть л-мерный вектор y{x) = (yi(x), ..., уп(х)) удовлетво-
ряет заданным краевым условиям
= Ь2 уп{хх)=Ъп } (8ЛЛ7)
(аи а2 ап, Ь\ Ьп — заданные числа) и интегральным
связям вида
= cs (s=l. 2 k), (8.1.18)
где cs — заданные числа.
Среди всех кусочно-гладких векторов у(х) найти такой, ко-
торый доставляет экстремум функционалу
L0[y(x)]=\f0{x,y,y')dx. (8.1.19)
х,
Если числа cs произвольные, то множество допустимых функ-
ций (см. § 1.01) может оказаться пустым, т. е. задача может не
иметь смысла.
§ 1.06. Задача Больца
Пусть л-мерный вектор y{x) = (yi(x), y2{x), ..., уп[х)) удо-
влетворяет m уравнениям связи
(i=l m< п) (8.1.20)
и р краевым условиям
), хь у(х,))«0 (* = 1, 2 р<2л + 2). (8.1.21)
§ 1.07] ГЛ. 1. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 701
Среди всех кусочно-гладких вектор-функций у(х) найти та-
кую, которая доставляет экстремум функционалу
U \у (*)] = \ fо {х, у, у') dx + go (х0, у (х0), хи у (*,)). (8.1.22)
Существуют и другие формулировки задачи Больца [45]. За-
метим также, что изопериметрическая задача, задачи Лагранжа
и Майера могут рассматриваться как частные случаи задачи
Больца.
§ 1.07. Третья формулировка задачи Майера. Обобщение
теоремы Лагранжа. Характеристические уравнения
(обобщенные уравнения Эйлера — Лагранжа)
В задачах механики космического полета применяется дру-
гая формулировка задачи Майера.
Пусть л-мерный фазовый вектор у(х) = {у\(х), й(*), •¦¦
¦ ¦-, Уп(х)), описывающий состояние управляемого объекта,
удовлетворяет л-мерному дифференциальному уравнению
(8.1.09)
-g- = f(y, и, х)
где «(*) = ("i(*)> С*). ¦••¦ ит(х)) есть m-мерный вектор
управления, непрерывный при всех хо ^ х ^ х\, кроме, быть мо-
жет, конечного числа точек разрыва. Пусть я-мерный вектор /
имеет непрерывные компоненты и частные производные доста-
точно высокого порядка по всем аргументам у, и, х в некоторой
(п + тп + 1) -мерной области Gn+m+u для которой допустимые
значения у, и и х являются координатами внутренних точек.
Пусть, кроме того, известны начальные условия
yko (* = 1. 2 п), (8.1.23)
так что при заданном векторе управления и(х) существует един-
ственное решение уравнения (8.1.09), непрерывное по х, но с-
разрывными производными в точках разрыва вектора и(х).
Предположим, что на систему наложены связи, описываемые
р равенствами
gs = {yi У я, "т; х)=0 (я=1, 2 р<т), (8.1.24)
где ga(y, и, х)—непрерывные и достаточное число раз диффе-
ренцируемые функции по всем аргументам. Функции gs(y, u,x)
должны быть такими, чтобы соответствующие им координаты
Уи У2, ¦¦•! Уя, Я^п принимали заданные значения при х = х\\
y,.l A=1,2 q). (8.1.25)
702 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.07
Обозначим через yq+i,i, Уд+2,1, ..., уп,\ значения переменных
Уя+и Уя+2 уп при х = х{. Заметим, что уд+и уя+2, ..., уп не
связаны краевыми условиями (8.1.25).
Задача Май ера для заданного х ¦= Х\. Необходимо
определить такой управляющий вектор и*(х), чтобы при и(х) =
= и*(х) соответствующее ему решение векторного уравнения
(8.1.09) у*{х) удовлетворяло уравнениям связи (8.1.24), крае-
вым условиям (8.1.25), а заданный функционал
Цуч+\.ь Уц+ч,\ Уп,\] (8.1.26)
принимал бы минимальное значение (см. [20]).
Замечание. Если Х\ переменно, то функционал
Мг/„+!,1. У„+2,1 Уп.и Xi] (8.1.27)
минимизируется и по Х\.
Управление и*(х) называется оптимальным управлением,
а соответствующее ему решение у* (х) уравнения (8.1.09) назы-
вается оптимальным решением (оптимальным движением, опти-
мальной траекторией).
Обобщение теоремы Лагранжа. Компоненты
и](х), и'2{х), .... и'т(х) оптимального вектора управления и*(х)
и компоненты у\(х), у(х) У'п(х) соответствующего ему
оптимального решения у*(х), доставляющие минимум функцио-
налу (8.1.26), должны удовлетворять (кроме уравнений (8.1.09),
условий связи (8.1.24) и краевых условий (8.1.23) и (8.1.25)) и
характеристическим уравнениям (или обобщенным уравнениям
Эйлера — Лагранжа)
+ Kt.o (/=1,2 я), (8.1.28)
-ZL
где функция Лагранжа F (х, у, и) выражается равенством *)
F(х, у, и) = — (X, f) + (u, g) =
п в
= -Zh M fi (х, У, и) + Е I*, (х) g, (-V, у, и). (8.1.30)
1 = 1 S=l
Функции ;.](*), Ы*). •••. K{x) и HiW, Ц2(«) M-pW
множители Лагранжа.
Таким образом, число функций, подлежащих определению,
равно 2n + m +/..' (п компонент оптимального решения у*(х),
*) Символом (а, Ь) обозначено скалярное произведение векторов а и Ь.
§ 1.08] ГЛ. 1. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 703
т компонент оптимального управления и*(х), п множителей Ла-
гранжа Xi{x) и р множителей Лагранжа цл(*)). Эти функции
определяются 2/г дифференциальными или интегральными урав-
нениями (8.1.09) и (8.1.28) н т -\- р функциональными уравне-
ниями (8.1.24) и (8.1.29), поэтому для однозначного их опреде-
ления необходимо иметь 2/г краевых условий. Выше написаны
n + q краевых условий (8.1.23) и (8.1.25). Остальные n — q
краевых условий определяются равенствами [4]
=-^7 (* = <7+1. ? + 2 /г). (8.1.31)
Замечание 1. Если решается вариационная задача для
функционала (8.1.27), то необходимо иметь не 2м краевых усло-
вий, а 2/г -f- 1 (см. [20]). Недостающее краевое условие имеет
вид [9]
diT" (8.1.d2)
Замечание 2. Если оптимальное решение у*{х) и опти-
мальное управление и*(х) принадлежат некоторому простран-
ству непрерывных функций, то вместо интегральных уравнений
(8.1.28) можно воспользоваться эквивалентными им дифферен-
циальными уравнениями
которые вместе с (8.1.29) представляют уравнения Эйлера
(§ 1.02) для функции Лагранжа (8.1.30) (см. [20]).
Замечание 3. Обобщение теоремы Лагранжа, как и сама
теорема Лагранжа (§ 1.02), выражает лишь необходимое усло-
вие существования оптимального решения и оптимального
управления.
§ 1.08. Свойство множителей Лагранжа
на ломаных экстремалях.
Условие Вейерштрасса — Эрдмана
Если вектор управления и(х) претерпевает конечные раз-
рывы в некоторых точках х = а\, х = а2 х = ah, принад-
лежащих отрезку [хо, Xi], то для существования ломаной экстре-
мали (экстремали, каждое звено которой также является экстре-
малью) необходимо, чтобы выполнялось условие Вейерштрас-
са — Эрдмана.
Условие Вейерштрасса — Эрдмана. В точках раз-
рыва (в угловых точках) множители Лагранжа Х\(х), К2(х), ...
704 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.09
..., Хп(х) и функция У, ^ч М —i должны быть непрерыв-
i=\
ными.
Аналитически условие Вейерштрасса — Эрдмана в форме,
удобной для задачи Майера, выражается неравенством [20]
(Цх), f(y*{x), u*(x), х))>(Цх), Г(у'(х), и(х), х)), (8.1.34)
которое должно выполняться при любом х е [ха, х{], в том числе
и в угловых точках х = ось х = аг> ..., х = а&.
В (8.1.34) вектор f(y*(x), и(х),х) вычисляется на минимали
У*(х), а вектор управления и(х) может быть любым, лишь бы
удовлетворялись уравнения связи (8.1.24).
§ 1.09. Принцип максимума Понтрягина
Пусть движение некоторого управляемого объекта описы-
вается /г-мерным дифференциальным уравнением
¦Ц-= /(*.«)• (8-1.35)
Вектор-функция f(y,u) считается непрерывной по всем аргумен-
там в (m-f- n) -мерной области ¦От+п=УХ?' и непрерывно
дифференцируемой по у е У. Если т-мерный управляющий век-
тор и(х) задан, то при конкретных начальных условиях уравне-
ние (8.1.35) имеет единственное решение.
Наряду с уравнением (8.1.35) рассмотрим функционал
L[y(x),u(x)]= [fo(y(x),u{x))dx =
Х9
1
/о (г/i (х) уп W; «1 (х) um (x)) dx, (8.1.36)
для которого подынтегральная функция fo(y(x), u(x)) непре-
рывно дифференцируема по всем аргументам в Dm+n.
В фазовом пространстве Y даны две точки, уо и у.
Необходимо найти среди допустимых управлений и(х), пере-
водящих движущийся объект из положения у0 в положение у,
такое управление и*(х), для которого функционал (8.1.36) при-
нимает наименьшее возможное значение, т. е.
L [у* 00, и* (х)] = inf L [у (х), и (х)]. (8.1.37)
§ 1.09] ГЛ. 1. СВЕДЕНИЯ ИЗ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ 705
В (8.1.37) у*(х)—решение уравнения (8.1.35), удовлетво-
ряющее условиям
0*(*о) = Уо. y'{xi) = V- (8Л.38)
Выше было сказано, что уо и у задаются, а значения незави-
симой переменной х, хо и Х\ не задаются, а определяются из
(8.1.38).
Для существования оптимального управления и*(х) и опти-
мального движения у*(х) необходимо существование ненулевой
непрерывной и дифференцируемой (п + 1) -мерной вектор-функ-
ции Мр(х) = ($о(х), ty\(x), ..., ^п(х)), компоненты которой
удовлетворяют системе дифференциальных уравнений
{у (*), и (х)) , v
у j
dx ?<, dyi \ (8.1.39)
(г = 0, 1, 2 л), *0 <*<*,. j
Кроме того, она должна быть такой, что функция
п
Н (if, у, и) = X Wft (У, «О.
рассматриваемая как функция keU, достигает при и —и* мак-
симума.
При х = Х\
% (*i) < 0, Е Ф* W ^ (У* (*i), и* (*i)) = 0.
ft=0
Если ч{з(х), у(а:), и(х) удовлетворяют системам (8.1.35) и
п
(8.1.39), то функции "фо и X 'Фа/ь рассматриваемые как функ-
ции х, являются постоянными и значение х\ можно заменить лю-
бым другим.
Чаще всего целесообразно в качестве множества управляю-
щих функций U рассматривать m-мерный (открытый или замк*-
нутый) параллелепипед
|uf|<l (s = l,2 m).
Если |«s|< 1, то принцип максимума совпадает с необходимым
условием Веиерштрасса [2], если же |и,|^1, то классическое
условие Веиерштрасса становится непригодным.
Существует большое число работ, посвященных различным
'аспектам принципа максимума. Среди них основополагающими
являются монографии [37], [38].
23 Под ред. Г, Н. Дубошина
706 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.10
§ 1.10. Принцип оптимальности Беллмана
Пусть состояние некоторой физической системы определяется
/г-мерным фазовым вектором.у. Пусть, кроме того, имеется се-
мейство преобразований {Т(у, и)} с переменным вектором (ре-
шением) и, играющим роль параметра и переводящим вектор у
в вектор г:
г = Т(у,и).
Процесс, состоящий из выбора N решений ии и2, ..., и.у,
назовем N-шаговым процессом.
Свяжем с Af-шаговым процессом некоторую скалярную функ-
цию
F{yu у2 yN; «1, «2. ¦¦•. «л/).
называемую критерием или функцией дохода.
Последовательность допустимых решений щ, и2, и3, .... «лг
называется политикой (стратегией). Политика, обеспечивающая
максимальное значение функции дохода F, называется опти-
мальной политикой или оптимальной стратегией.
Имеет место
принцип оптимальности [44]. Оптимальная стратегия
обладает тем свойством, что каковы бы ни были начальное со-
стояние и принятое начальное решение, последующие решения
должны составлять оптимальную стратегию относительно со-
стояния, возникшего в результате первоначального решения.
Из этого принципа выводятся основные уравнения динами-
ческого программирования (уравнения Беллмана), которые мо-
гут рассматриваться как некоторые рекуррентные соотношения,
описывающие многошаговую оптимизацию в предельном случае
при неограниченном возрастании числа шагов. Уравнения Белл-
мана являются функциональными уравнениями и им можно
придать различный вид.
Например, если рассматривается задача о максимизации
функционала
X,
L[u] = \F(y,u)dx
х,
при ограничениях
~f = G (у, и), у (х0) = с,
to, как показано в [44], решение этой задачи сводится к реше-
нию функционального уравнения
¦§L= sup [F{c,u) + G{c,u)-?\. (8.1.40)
axt 0<<L OC J
где f{c, x\) — «функция дохода на бесконечном числе шагов»
в терминологии Беллмана [44].
Глава 2
ОСНОВНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТЕЛ
ПЕРЕМЕННОЙ МАССЫ
В этой главе приводятся основные сведения из механики пе-
ременной массы. Подробности вывода соответствующих уравне-
ний можно найти в [46]—[50].
§ 2.01. Основное уравнение динамики точки
переменной массы (уравнение Мещерского)
Пусть масса М некоторого тела (рассматриваемого как ма-
териальная точка) изменяется в результате отделения от него
частиц.
Если движение точки переменной массы происходит в сило-
вом поле F, то уравнение ее движения в векторной форме имеет
вид [46], [47]
где v — скорость точки в некоторой неподвижной системе коор-
динат Oxyz, V\ — относительная скорость отделяющихся частиц,
М] — суммарная масса отделяющихся частиц.
Уравнение (8.2.01) называется уравнением И. В. Мещерского.
Если вместо относительной скорости V\ ввести абсолютную
скорость отделяющихся частиц
щ = У{ + », (8.2.02)
то уравнению Мещерского можно придать вид
4 ^(«.-»>- (8-2-03)
В некоторых задачах считается, что Mi = М.
23*
708
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 2.02
В координатной форме уравнения Мещерского записываются
следующим образом:
(8.2.04)
где х, у, z — координаты материальной точки в неподвижной си-
стеме координат Oxyz, щх, uXv, uu — компоненты абсолютной
скорости отделяющихся частиц, X, У, Z — компоненты равнодей-
ствующей F внешних сил.
§ 2.02. Обобщенное уравнение Мещерского
Пусть наряду с отделением частиц происходит присоединение
частиц к точке переменной массы. Тогда уравнение движения
в векторной записи имеет вид
м dv —
dMi
dt
dt
(8.2.05)
где V2 — относительная скорость присоединяющихся частиц,
М2 — суммарная масса присоединяющихся частиц.
Уравнение (8.2.05) может быть названо обобщенным урав-
нением Мещерского [46].
Другие формы записи уравнения (8.2.05):
a) М1Г:
б)
М
d2y _,
MJW = '
dt
dMi
dt
dt
dt
~dl
dM*
dt
dy_
dt
~dt
Абсолютная скорость присоединяющихся частиц и2 =
= (и2х, u2y, u2z) в системе координат Oxyz определяется вектор-
ным равенством
«2 = V2 + V.
Читателю, интересующемуся выводом уравнений Мещер-
ского, рекомендуем книгу А. А. Космодемьянского [47]. Там же
доказаны основные теоремы динамики точки переменной массы.
§ 2.041 ГЛ. 2. УРАВНЕНИЯ ДИНАМИКИ ТЕЛ ПЕРЕМЕННОЙ МАССЫ 709
§ 2.03. Уравнения движения тела переменной массы
в обобщенных координатах (уравнения Лагранжа
второго рода)
Пусть положение тела переменной массы в пространстве
определяется s обобщенными координатами q\, Цъ ¦ ¦ ¦, Ца- Тогда
уравнения Лагранжа второго рода
полностью описывают движение тела переменной массы. Сле-
дует лишь написать функции Т, Qk, Рк в явном виде.
Если тело переменной массы может быть представлено как
сумма N точек переменной массы, то кинетическая энергия тела
Т равна
n
Обобщенная сила Qh (скаляр) равна
) <8-2-08>
t
где Ft —равнодействующая внешних сил, приложенных к точ-
ке пги Гг — радиус-вектор точки т*.
Функция Pk (скаляр) выражается равенством
где щ — абсолютная скорость отделяющихся от точки т,- частиц.
§ 2.04. Канонические уравнения движения тела
переменной массы
Если ввести обобщенные импульсы
Рк=Ж- (А = 1. 2 s),
Чк
то уравнения Лагранжа (8.2.06) принимают «полуканониче-
скую» форму
dqk __ дН dpk _ дН
dt dpk dt
где
!=1, 2 s), (8.2.10)
ь Pi P», Qi, 42 9*) = 2j Ж"
710 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 2.04
Если внешние силы допускают силовую функцию U и абсо-
лютные скорости отбрасываемых частиц щ = 0 (t=l, 2, ...
..., N), а следовательно, и Ph = 0 (k = 1, 2 s), то в этом
случае уравнения движения (8.2.10) принимают каноническую
форму Гамильтона
da. дН dpb дН
"Ж—ЗрГ- -Ж-—Щ (*=1.2 4(8.2.12)
где Я = 2, -дГЦк~ '
k=\ k
Функция Лагранжа L равна Т + U.
Основные теоремы динамики тела переменной массы можно
найти, например, в [47]. Различные вопросы теории движения
тел переменной массы рассмотрены многими авторами [12], [13],
[30], [48]—[51].
Глава 3
НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ
ДИНАМИКИ ПОЛЕТА
В ОКОЛОЗЕМНОМ ПРОСТРАНСТВЕ
Глава 3 содержит различные формы уравнений ракетодина-
мики. Кратко излагается постановка и решение оптимальных
задач динамики полета в околоземном пространстве.
§ 3.01. Уравнения движения ракеты.
Формула Циолковского
Ракетой назовем аппарат, снабженный реактивными двига-
телями, движение которого происходит под действием внешней
силы F и реактивной тяги Т, обусловленной сгоранием топлива
(рабочего тела) в двигателях. Ракета — это частный случай тела
переменной массы, поэтому ее движение описывается уравне-
ниями Мещерского (8.2.01) и (8.2.05), в которых следует поло-
жить Mi = М (М — масса ракеты), Vi = —с (с — скорость исте-
чения частиц относительно ракеты на срезе сопел реактивных
двигателей).
Сила тяги Т равна
1 — с dt •
а уравнение движения ракеты принимает вид
Уравнение (8.3.01) справедливо при условии, что |с|= const.
Отрезок траектории, на котором Т Ф 0, называется активным
участком, а отрезок траектории, на котором Т = 0, называется
пассивным участком.
Если рассматривать движение ракеты в неподвижной системе
координат Oxyz, то уравнения для координат ракеты х, у, z
712
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 3.01
выражаются равенствами
.„ d2x
М
d'y
dt2
Y -с
dM
dt •
dM
у dt
dM
'г dt
(8.3.02)
= (X, Y,Z), с = (cx, cy, сг).
Если внешние силы отсутствуют (F = 0) и движение ракеты
вызывается лишь силой тяги, то уравнение (8.3.01) принимает
вид
Уравнение (8.3.03) интегрируется в любом промежутке времени
(to.t):
1
V - VQ = С In
J-
АГ (/о) == Af0, M{t) =
(8-3-04)
Уравнение (8.3.04) носит название формулы К. Э. Циолков-
ского [47].
Определение. Величина
= c\n
Мо
(8.3.05)
(Мр — масса ракеты без топлива) называется характеристиче-
ской скоростью ракеты или характеристической скоростью ма-
невра [20]. Она определяет величину изменения скорости ракеты
за счет расхода топлива, поэтому многие оптимальные задачи
динамики космического полета связаны с минимизацией вели-
чины (8.3.05).
Если вектор с коллинеарен с вектором скорости v и проти-
воположен по направлению, то движение ракеты будет прямо-
линейным.
Обозначим через Мт массу топлива. Тогда очевидно, что
и из формулы Циолковского (8.3.05) можно получить скорость
ракеты в конце активного участка траектории
(8.3.06)
§ 3.01] ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 713
Если начальная скорость ракеты v0 = О, то для абсолютной ве-
личины скорости vp в конце активного участка траектории имеем
(8.3.07)
Определение. Отношение Мт/Мр называется числом
Циолковского.
Уравнение
M-^ = F (8.3.08)
описывает движение ракеты на пассивных участках траектории,
а уравнение
MP~ = F (8.3.09)
описывает движение ракеты на последнем пассивном участке
траектории.
Пусть масса ракеты является заданной функцией времени
M(t) = MQf(t), где f(t)—некоторая неотрицательная монотон-
но убывающая функция времени, не превосходящая единицу.
Можно показать [47], что изменение массы ракеты по линейному
закону (f(t)= 1 — at, a = const, a > 0) порождает постоянную
силу тяги Т = const (при с = const), а изменение массы по по-
казательному закону (f(i) = e-at, a = const, a > 0) порождает
постоянное ускорение ракеты.
Определение. Функция
«М—4г = "^ (8-3.10)
называется расходом массы в единицу времени (например, се-
кундным расходом), а функция
"W —тяга? (8-ЗЛ1>
называется удельным расходом топлива в единицу времени.
Определение. Число
п = ^- (8.3.12)
(где ар — ускорение, сообщаемое ракете тягой, g — ускорение
силы тяжести) называется перегрузкой или величиной пере-
грузки.
Для показательного закона изменения массы перегрузка по-
стоянна.
Подробно эти вопросы рассмотрены в [20], [47], [49], [51].
714 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 3.02
§ 3.02. Развернутая форма характеристических уравнений
для задачи о движении ракеты
Пользуясь формулой для секундного расхода топлива
(8.3.10), уравнение движения ракеты (8.3.01) при наличии внеш-
ней силы Ф можно написать в виде
где I — единичный вектор направления тяги, г = (х, у, г)—ра-
диус-вектор ракеты в неподвижной системе координат Охуг,
G = -q|-O, с — модуль относительной скорости истечения газов.
К уравнениям (8.3.13) можно присоединить еще три условия:
"а) условие (8.3.10)
~?-=-m(t), (8-3.14)
определяющее массу ракеты, если известна зависимость секунд-
ного расхода топлива от времени;
б) тождество
mWx + 4 + 6^1, (8.3.15)
где 1Х, ly, U— направляющие косинусы вектора тяги;
в) условие ограниченности секундного расхода топлива
0<m@<m, (8.3.16)
где т — максимальное значение секундного расхода топлива.
Неравенство (8.3.16) эквивалентно уравнению [52]
т{т — т) — а2 = 0, (8.3.17)
где а — вспомогательная управляющая переменная.
Управляющая вектор-функция и(х) в общем случае имеет
компоненты /*, lv, lz, tn, а. Величины lx, ly, U характеризуют
ориентацию вектора тяги, а — ограниченность m(t). Если управ-
ляющий пятимерный вектор и(х) известен и непрерывен, то при
заданных начальных условиях
t = tQ, v = v0, r = rQ, M = MQ (8.3.18)
траектория ракеты и закон изменения массы М определяются
единственным образом (если сила есть непрерывная функция).
Пусть требуется определить такую оптимальную траекторию
ракеты, на которой некоторый функционал L[v, r, M] принимает
минимальное значение при t = fj.
§ 3.031 ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 715
Функция Лагранжа (8.1.30) в данном случае будет иметь
вид
F(r,v,l,m,a,t) = -[p, %¦ I + б) - (Л, v)
-m)-a?], (8.3.19)
где
Р @ = (Рх, Ру> Рг), Л @ = (Лх> Л„, Л2), V @, Hi @, № @
— множители Лагранжа.
Система характеристических уравнений (8.1.33) и (8.1.29)
с функцией Лагранжа (8.3.19) имеет вид
dpx
dt
dKx
dt
dAz
dt
о
0
X ¦
( aG\
\?' dx ) '
( dG\
V ' dz )'
СГП л 19
--~ЖРх + 2
= — 2ц2а.
dp
dt
dh
dt
dv
dt
\\l
' A
У (
\
cm
M'
с
i
(I2(m —
dpz A
Vv dt — Л*'
dG\
P' dy )'
. .
(P, ),
m
2m),
(8.3.20)
Система (8.3.20) содержит семь дифференциальных и пять ал-
гебраических уравнений.
§ 3.03. Определение базис-вектора и р-траектории.
Определение функций переключения
Определение. Вектор р с компонентами рх, ру, pz [см.
(8.3.19)] называется базис-вектором траектории [20].
Пользуясь обобщенными уравнениями Эйлера — Лагранжа
(8.3.20), можно показать [20], что вектор тяги Т коллинеарен ба-
зис-вектору р.
Определение. Годограф базис-вектора р называется
р-траекторией.
Определение. Функция, определяющая порядок состав-
ления экстремалей из частичных участков (дуг), называется
функцией переключения [53], [54].
Можно различать функцию переключения величины тяги
x(t) и функцию переключения направления тяги 6(t). Аналити-
716 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 3.03
ческий вид функций x[t), &(t) существенно зависит от решае-
мой задачи и от участка оптимальной траектории.
Анализ обобщенных уравнений Эйлера — Лагранжа, выпол-
ненный Миеле [55], Лейтманом [56], Миеле и Капеллари [57],
Фридом [58], Лбуденом [18], [20], [59], [60] и другими авторами,
показывает, что оптимальная траектория (экстремаль) может
состоять в общем случае из дуг следующих типов: участки ну-
левой тяги (т(/) = 0 и функция переключения величины тяги
неположительна, х(/)^0), участки промежуточной тяги
@<m(/)<m, функция переключения величины тяги равна
нулю, х@= 0) и участки максимальной тяги (m(<)= m, функ-
ция переключения величины тяги неотрицательна, х(/)^0).
Для двумерных (или большей размерности) оптимальных тра-
екторий функция переключения направления тяги неотрицатель-
на, 6@^0.
Лоуден показал [20], что базис-вектор p(t) удовлетворяет
векторному дифференциальному уравнению
g G), (8.3.21)
где векторный оператор V определяется формулой
—. д . д , д
v ~~ е* 17 "+" еУ ~ду "+"е* ~д!'
а ех, еу, ег — единичные векторы.
Лоуден также вывел [20] равенства, связывающие функцию
переключения величины тяги с базис-вектором и массой ракеты.
На участке нулевой тяги функцию x(t) можно определить из
равенства
x(O = -jjj-|p| +const, и@<0. (8.3.22)
На участке максимальной тяги n(t) определяете из диффе-
ренциального соотношения
Равенства (8.3.22) и (8.3.23) определяют явную зависимость
функции переключения величины тяги х@ от времени t, если
решены обобщенные уравнения Эйлера — Лагранжа (8.3.20), а
р и М найдены как функции времени t.
Если ускорение G — G(x, у, г), обусловленное внешней си-
лой, не зависит от времени, то уравнение (8.3.21) имеет первый
интеграл
lp,G)-{p,v) + wn = C. (8.3.24)
§3.05] ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 717
На участке нулевой тяги и на участке промежуточной тяги
(х@ = 0) интеграл (8.3.24) принимает вид
(p,G)-(p,v) = C, (8.3.25)
причем С сохраняет значение на всей оптимальной траектории.
Замечание. С = 0, если время перелета нефиксировано и
подлежит оптимизации [20].
§ 3.04. Определение импульсной тяги. Точки соединения
на оптимальных траекториях
Определение. Тяга Т называется импульсной при t = t\,
если т(м)= +оо (или, очевидно, —тг- = — оо).
В соответствии с условием (8.3.16) m = +°°. а это означает,
что решение вариационных задач с импульсной тягой может
оказаться более простым делом, так как ограничения вида
(8.3.16) или (8.3.17) отпадают.
Очевидно, участок приложения импульсной тяги вырождается
в точку, называемую точкой соединения. В точках соединения
меняется лишь скорость ракеты.
Теорема Лоудена [20]. В точках соединения функция
переключения величины тяги x(t) необходимо имеет нулевой
максимум, т. е.
*(') = -^г" = 0. (8.3.26)
Лоуденом установлены [20], [60]—[62] также свойства опти-
мальной траектории, на которой имеются точки соединения:
а) базис-вектор p{t) и его производная p{t) всюду непре-
рывны (в том числе и в точках соединения);
б) на любом активном участке вектор тяги совпадает с ба-
зисом, причем \p(t) | = Р (Р—'некоторая постоянная);
в) на любом участке нулевой тяги )p(t) | ^ Р;
г) |р| = 0 во всех точках соединения, исключая те, которые
совпадают с конечными точками оптимальной траектории.
Кроме того, в точках соединения векторы p(t) и p(t) ортого-
нальны
(р,р)=0. (8.3.27)
§ 3.05. Максимизация высоты вертикального подъема
ракеты в однородном поле тяжести
Пусть исследуется движение ракеты при следующих предпо-
ложениях:
а) ускорение силы тяжести постоянно, g= const;
б) вектор тяги направлен вертикально вверх;
718 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ |§ 3.05
в) скорость истечения частиц с постоянна;
г) сопротивление атмосферы отсутствует.
Если закон изменения массы (М =Mof(t)) известен, то инте-
грирование уравнения вертикального подъема ракеты можно до-
вести до конца. Действительно, внешнее поле определяется си-
лой F = —Mg, поэтому уравнение (8.3.01) принимает вид
= Mgc^. (8.3.28)
В результате интегрирования (8.3.28) имеем
v(t) = vQ-gt + c\n^-
или, так как М = Mof(t), (/@) = 1, f(t) > 0),
v(t) = vo-gt-clnf(t). (8.3.29)
Повторное интегрирование определяет высоту подъема ракеты
как функцию времени
t
= vJ--$?--c\\nf(t)dt. (8.3.30)
Пусть На — общая длина всех активных участков, а Нп —
общая длина всех пассивных участков траектории. Тогда высо-
та подъема ракеты Нк равна
Нк = #* + #„.
1. Простейшая вариационная задача. Предположим, что вы-
полнены условия а) — г), и пусть.кроме того, заданы масса топ-
лива Мт и некоторое ^-параметрическое множество Ф функций
f(t, ось <Z2, ¦•-, а*)- Требуется решить задачу о максимизации
высоты подъема ракеты на множестве Ф.
Пусть /р — момент полного сгорания топлива. Тогда из соот-
ношения
Мр = Afof {tp, а„ а2 а*) = Мо - Мт (8.3.31)
можно найти tp как функцию параметров ось a,2 aft- Обо-
значим эту зависимость через
tp = T(ait a2 ak). (8.3.32)
§ 3.05] ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 719
Формулы
i, <x2 cxft)-cln(l -^), (8.3.33)
г
Я,(а„ eta ak) = v0T-4?--c\lnf{t)dt, (8.3.34)
Яп(аь а2> .... aK) = -^- = -^-[u0-gr-
(8.3.35)
полученные из (8.3.29) и (8.3.30), выражают скорость ракеты и
длины активного и пассивного участков как функции парамет-
ров oti, 0C2, ..., зд.
Общая высота подъема ракеты равна
т
?)]¦. (8.3-36)
а,
Соотношение (8.3.36) показывает, что задача о максимиза-
ции высоты Як в известном классе функций [еФ является за-
дачей об исследовании на экстремум функции k переменных
см, оB, ..., аи (см. [1], [9], [30], [63]). Полное решение задачи для
однопараметрических семейств функций (/@= 1 — а* и /@ =
= е-°', а > 0) дано в [47].
2. Общая вариационная задача. Уравнениям (8.3.13),
(8.3.14) можно придать форму
-f--» = 0, *+g-if.-O. ^- + « = 0. (8.3.37)
Если секундный расход топлива ограничен, то следует добавить
еще условие (8.3.17)
т {т — т) — а2 = 0.
Пусть, кроме того, заданы граничные условия:
начальные условия / = 0, Н = Яо, v = v0, M
конечные условия t = tK, v = vK, Af = AfK.
3. Формулировка задачи. В классе функций H(t), v(t), M(t),
m(t), a(t), удовлетворяющих уравнениям (8.3.37), (8.3.17) и
граничным условиям (8.3.38), найти такую систему функций, ко-
торая максимизируе! функционал
L = Як - Яо, (8.3.39)
где Як — наибольшая {конечная) высота.
lo> J (8.3.38)
720 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 3.06
Функция Лагранжа (8.3.19) для данной задачи равна
F = - р (-g + -HJ-) - Ли + vm + |i [т (т - т) - а2], (8.3.40)
а уравнения Эйлера — Лагранжа (8.3.20) принимают вид
~dT~~A' ~ЪТ = 0' ~Ж=='ШР'
(8-3.41)
0 = v — р -j— -+- ]i(m — 2m), 0 = — 2ца.
Анализ уравнений (8.3.41), выполненный Миеле [55], [64],
Лоуденом [20], Лейтманом [65], показывает, что оптимальная
траектория состоит лишь из участков нулевой тяги и участков
максимальной тяги, причем на оптимальной траектории имеется
только одна угловая точка, т. е. оптималь состоит из двух участ-
ков (участка максимальной тяги и участка нулевой тяги). Для
данной задачи легко находится также функция переключения
величины тяги x(t) [12].
Из уравнений (8.3.41) вытекает, что одномерный базис-век-
тор р является линейной функцией времени.
§ 3.06. Максимизация горизонтальной дальности
полета ракеты в однородном поле тяжести
при заданной программе расхода топлива
Пусть движение ракеты исследуется при следующих допуще-
ниях:
а) Земля считается плоской и ускорение силы тяжести по-
стоянно, g = const;
б) сопротивление атмосферы отсутствует;
в) программа расхода топлива ст/М — заданная функция
времени f(t)\
г) вектор тяги Т(ТХ, Ту) всегда лежит в вертикальной пло-
скости Оху, проходящей через точку запуска О;
д) двигатель работает при 0 ^ t ^ t\, после чего выклю-
чается и ракета дальше движется под действием силы тяжести;
е) скорость истечения продуктов сгорания с постоянна.
Формулировка задачи. Требуется найти функцию Q(t),
управляющую ориентацией силы тяги, обеспечивающую макси-
мальную горизонтальную дальность ракеты L = OB (рис. 81).
Движение ракеты описывается системой уравнений
dt ' dt
(8.3.42)
§ 3.06] ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 721
Кроме того, заданы начальные условия:
при * = 0 * = «/== гг = и = О.
При t = t\ никаких условий не наложено.
Рис. 81. Оптимальная траектория перелета. ОД —активный участок полета; А — точка вы-
ключения даигателе.1; 6* —оптимальная управляющая функция.
Рассматривая (8.3.42) как уравнения связи, можно сде-
лать вывод, что данная вариационная задача является задачей
Майера. Функция Лагранжа
(8.3.19) имеет вид
F= — pxf cos 0—ру (/ sin 0—g)—
-Axu-Ayv. (8.3.43)
Исследуя обобщенные уравне-
ния Эйлера — Лагранжа с
функцией (8.3.43), Лоуден по-
казал [2], что управляющая
функция 0@ (угол наклона
вектора тяги к горизонту) на-
ходится из условия
tg0 =
(8.3.44)
Рис. 82. Полет ракеты в однородном поле
тяжести. АВ — касательная к траектории
в точке А.
где «1, Vi — проекции скорости ракеты в точке А выключения
двигателя (рис. 82). Из (8.3.44) следует, что максимальная
дальность достигается при постоянном 0 = 0*, независимо от
заданной программы расхода топлива f(t), так как последняя
не входит в (8.3.44).
Чтобы решить уравнения движения (8.3.42) и определить
однозначно ?шах, нужно задать конкретный вид функции f{t).
Лоуденом показано [20], [66], что при f = const и -^- — const
(8.3.45)
722
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 3.07
§ 3.07. Общая вариационная задача
для движения ракеты в однородном поле тяжести
Исследуется движение ракеты при допущениях а), б), г), д)
и е) § 3.06. Тогда система уравнений движения ракеты вместе
с условием (8.3.17) имеет вид
dx dy
~dT~U' ~dt
du en
dt
dM
(8.3.46)
dM . - ч on
~dY== — m> m{m —m) —a2 = 0.
Формулировка задачи. В классе функций x(t), y(t),
u(t), v(t), M(t), m(t), a(t), Q(t), удовлетворяющих уравнениям
(8.3.46) и некоторым граничным условиям (число граничных
условий не должно превышать 12), найти систему функций, ми-
нимизирующую некоторый функционал L = L(t, x, у, и, v, M).
Заметим, что среди искомых функций m(t) определяет про-
грамму расхода топлива, а в(*)—программу ориентации век-
тора тяги.
Функция Лагранжа (8.3.19) для данной задачи имеет вид
-f vm + ц [m (/ft - m) — a2], (8.3.47)
а соответствующие обобщенные уравнения Эйлера — Лагранжа
(8.3.20) принимают форму
~dt
dT
¦ = 0,
dt
dAy
dt
dv cm , ~
= 0,
Py Sln
(8.3.48)
0 = — -jg- (px cos 0 -f Py sin 0) + v + ц (m — 2m),
0 = — 2\ia, 0 = px sin 0 — py cos 0.
Анализ уравнений (8.3.48), выполненный различными ав-
торами [12], [56]—[58], [66], [67], позволяет сделать следующие
выводы:
§ 3.08| ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 723
1) дуги экстремалей, проходимые при промежуточной тяге,
отсутствуют;
2) угол Q(t), определяющий направление вектора тяги от-
носительно оси абсцисс, определяется формулой
где С\, Сг, С3, С4 — постоянные интегрирования;
3) если функционал L не зависит явно от и и v, то угол 0
постоянен;
4) оптимальная начальная скорость параллельна вектору
тяги (если L = L(t, х, у,т))\
5) если L не зависит от х, то тангенс угла 0 является ли-
нейной функцией времени.
Используя функции переключения y.(t) и б(/), связанные с
множителями Лагранжа формулами
б @ = рх cos 0 + РУ sin 0,
можно показать [12], что экстремаль состоит не более чем из
грех участков и разрыв в направлении вектора тяги возможен
только при условии рх = ру = 0.
Задача об оптимальном запуске искусственного спутника, ре-
шенная Лоуденом [20], является частным случаем изложенной
задачи.
§ 3.08. Общая вариационная задача
для движения ракеты в однородном поле тяжести
при наличии аэродинамического сопротивления
Пусть движение ракеты исследуется при следующих допуще-
ниях (см. рис. 82):
а) Земля считается плоской и ускорение силы тяжести по-
стоянно, g = const;
б) скорость истечения частиц с постоянна;
в) сила сопротивления атмосферы Q зависит от высоты ра-
кеты над горизонтом у, скорости v и от подъемной силы Fn;
г) вектор тяги Т(ТХ, Ту) лежит в вертикальной плоскости
Оху, проходящей через точку запуска О;
д) на величину секундного расхода топлива m(t) наложено
ограничение (8.3.16) или, что то же самое, (8.3.17).
724
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ If 3.08
Тогда уравнения движения ракеты вместе с условиями связи
(8.3.14) и (8.3.17) имеют вид
dx JM_ —
dt
M
dtp g cos ф . Fn + cm sin y
dt ~ v ' Mv
(8.3.49)
Формулировка задачи. В классе функций x(t), y(t),
w@> ф@> Al(i), m(t), a(t), y(t), Fn(t), удовлетворяющих урав-
нениям (8.3.49) и некоторым граничным условиям (число кото-
рых должно быть менее 12), найти такую систему функций, ко-
торая минимизирует некоторый функционал L=L(x,y,v,(p,M,t).
Функция Лагранжа (8.3.19) и соответствующие уравнения
Эйлера — Лагранжа имеют вид
_ ( . Q — cm cos y\ ( S cos ф , Fn + cm sin y\
F = -Pv{-gsincp Ti J -P<f[ — + m J -
— Axv cos ф — Ayv sinф + vm -f \i [m (m — m) — a2], (8.3.50)
dt
dt
M dy '
I
(/=¦„ +cm sin у)
= Pog cos ф
dv Q — cm cos y
~dt~~Pv M2
1- Axv sin ф — Ayv cos cp,
f n + cm sin у
pq,c sin у
u Af
0 = — 2ца,
Рф cos y
-f v + \i (m — 2m),
Pep
(8.3.51)
В формуле (8.3.50) >ои, /эф1 Лх, Л„, v, [i — множители Ла-
гранжа.
Анализ уравнений (8.3.51) при различных предположениях
относительно функционала L, силы сопротивления Q и размер-
[§ 3.09 ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 725
ности задачи, выполненный Миеле [68], [69], Лейтманом [70],
Брайсоном и Россом [71] и др., позволяет сделать следующее
заключение.
1) При наличии сопротивления атмосферы оптимальная тра-
ектория состоит из участков нулевой тяги, максимальной тяги
и промежуточной (переменной) тяги.
2) Оптимальная программа подъемной силы Fu является не-
прерывной функцией времени.
3) Функции переключения величины тяги и направления тяги
определяются формулами
с (
= т\ (Лcos
p cosv
2^
Если уравнения Эйлера — Лагранжа разрешены относительно
искомых функций, то равенства (8.3.52) позволяют задать функ-
ции переключения как явные функции времени.
4) Для планирующих траекторий (Г = 0) оптимальная про-
грамма полета достигается в том случае, когда сила аэродина-
мического сопротивления минимальна по отношению к скорости
при постоянных значениях уровня энергии и подъемной силы.
Достаточно подробно эта задача изложена в главе IV моно-
графии [12].
Полное решение простейшей вариационной задачи (задачи
о максимальном движении ракеты в сопротивляющей атмосфе-
ре) дано А. А. Космодемьянским [47]. Можно также указать на
интересные результаты Оберта [51], А. А. Космодемьянского [72],
Д. Е. Охоцимского [73].
§ 3.09. Определение оптимальной программы тяги
при вертикальном подъеме ракеты в неоднородном поле
тяготения в сопротивляющейся атмосфере
Формулировка задачи. Найти такую программу для
величины тяги, которая обеспечивала бы максимальную высоту
вертикального подъема ракеты при следующих предположениях:
а) поле тяготения неоднородно (g = g{h), h— высота ра-
кеты) ;
б) сила аэродинамического сопротивления — известная функ-
ция Q = Q(h,h);
в) вектор тяги направлен вертикально вверх;
г) секундный расход топлива m(t) удовлетворяет условию.
(8.3.17).
726
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИкИ |§ 3.10
Система уравнений задачи имеет такой вид:
dh
dt
¦=».
dv Q — cm
~~df ~ M <
dM
dt
m(m — m) — a2 = 0.
(8.3.53)
Функция Лагранжа и соответствующие характеристические
уравнения записываются следующим образом:
= — ^t{cm-Q-Mg) -
т(т—т) - a2], (8.3.54)
dt
dt
_Li
M dh
M dv '
1
dh
dv __ cm - Q
If— AP
0 = — ^pA
0 = — 2ац.
— 2m),
(8.3.55)
Полное решение вариационной задачи для функционала
L = h\ (hi — высота ракеты, достигаемая при t = ti) дано Лоу-
деном [20].
Предполагалось, что Q(h, /i) и g(h) —монотонно убывающие
функции высоты h, а
(Л, р, y — некоторые параметры; А зависит от миделева сечения
ракеты, р>0). Как показал Лоуден, оптимальная траектория
состоит либо из двух участков (участок максимальной тяги
m(t) =ши участок нулевой тяги т = 0), либо из трех участков
(участок максимальной тяги, участок промежуточной тяги и
участок нулевой тяги). См. также [65].
§ 3.10. Задача о максимизации полной энергии
космического аппарата
Формулировка задач.и. Требуется найти такой маневр,
чтобы полная энергия ракеты была максимальной в некоторый
(свободный для выбора) момент времени t = t[.
§ 3.10] ГЛ. 3. НЕКОТОРЫЕ ОПТИМАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ ПОЛЕТА 727
Задача решается при следующих предположениях:
а) внешнее силовое поле консервативно;
б) начальная точка траектории r(t0), начальная скорость
»(^о) и начальная масса ракеты Мо заданы:
в) масса ракеты Мр (без топлива) известна;
г) конечная точка траектории г(^) и конечная скорость v(ti)
заранее не известны;
д) секундный расход топлива ограничен.
Полная энергия ракеты Н равна
(MV(x,y,z)—потенциальная энергия ракеты), поэтому сфор-
мулированная задача является вариационной задачей о нахо-
ждении минимума функционала
ч*р у»*» °... v vJ - - v(.v» xv 20 - т
где
Эта задача относится к разряду задач Майера (см. § 1.07),
поэтому для нахождения оптимального решения (шестимерного
вектора с компонентами х, у, z, vx, vy, vz), оптимального управ-
ления (пятимерного вектора с компонентами 1Х, 1У, 1т,т,а),
множителей Лагранжа рх, ру, рг, Лх, Ау, Лг, v, [ii, ц2 необходимо
совместно решить уравнения движения ракеты (8.3.13) (система
шестого порядка), характеристические уравнения (8.3.20) (семь
дифференциальных уравнений и пять алгебраических уравне-
ний), уравнение (8.3.14), равенства (8.3.15) и (8.3.17).
Совместная система 21 уравнения (8.3.13) — (8.3.15), (8.3.17)
и (8.3.20) состоит из четырнадцати дифференциальных уравне-
ний и семи алгебраических уравнений, поэтому для определения
оптимального решения и оптимального управления необходимо
иметь четырнадцать краевых условий. Восемь из них даны в
формулировке задачи:
при Т1: Ггм v==Vo'м=м*} (ад
при t = Г[ М = Мр. )
Остальные шесть краевых условий определяются равенствами
(8.1.31) и имеют вид
av л гм—— л гп = — ' ^8-3-58^
х t=iti " t=ti t^=t\
728 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ |§ З.П
Условия (8.3.58) эквивалентны [20] условиям
P(tl) = v(tl), p{h) = G{xuy,,z), (8.3.59)
т. е. в конечной точке траектории базис-вектор совпадает с ко-
нечной скоростью, а производная базис-вектора равна ускоре-
нию, обусловленному внешним полем.
Подробный анализ уравнений (8.3.13) —(8.3.17), (8.3.20) с
краевыми условиями (8.3.57) и (8.3.58) проведен Лоуденом в ра-
ботах [20], [61]. Здесь же рассмотрена задача без предположе-
ния д).
§ 3.11. Задача о минимизации
характеристической скорости маневра
Формулировка задачи. Требуется минимизировать ха-
рактеристическую скорость маневра (8.3.05) при условии, что
конечные точки (r(to)=ro, r(t\) = r{) траектории и скорости
(v(lo) = vo, »(/i) = »i) в конечных точках заданы, а сам мо-
мент ti не фиксирован.
Минимизируемый функционал выражается формулой (8.3.05)
L = c\n^. (8.3.60)
Анализируя эту задачу, Лоуден показал [20], что на любом
активном участке оптимальной траектории базис-вектор должен
быть единичным вектором (р = 1), коллинеарным с вектором
тяги.
Теория оптимальных движений ракет в однородном поле тя-
жести получила значительное развитие и в работах [27], [41],
[42], [74].
Глава 4
МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
В главе 4 приводятся основные сведения о межорбитальных
перелетах. Дана постановка ряда оптимальных задач динамики
космического полета.
§ 4.01. Простейшая краевая
задача
Требуется найти элементы эл-
липтической орбиты р, е, со, имею-
щей одним из фокусов притягиваю-
щий центр О с массой т0 и прохо- о
ДЯЩеЙ через Две Заданные ТОЧКИ ЬЛ\ Рис. 83. Орбита перелета. MiM,-f
и Мъ если время перелета Т из Afi
в М2 известно (рис.83).
Уравнения, определяющие элементы р, е, а, имеют вид
, — со)] (t = l,2), J
с с 1-й ¦ р\ V7mo(l -е2K _ f (8.4.01) "
Е2 — Ei — e(sin?2~ sin?i)= ,-——Т, I ^ '
РУР
где Ей Е2 — значения эксцентрической аномалии для точек
Mi и М2.
Для однозначного определения неизвестных следует к урав-
нениям (8.4.01) добавить соотношения
sin (нг — ш) Vl —
cos(u{ — ш) + е
=
sinEt= .у ' г-, cosfi= , , v ' . ' . . (8.4.02
1. "t" S COS [U, — GO) I -|-g COS (И . — @) '
Выбор значений Е: и ?2 следует выполнять с учетом условия
signtg "'' " ^signtg-^- (i=l,2). (8.4.03)
730 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 4.02
С использованием такой методики в работе [75] была по-
строена таблица приближенных орбит перелета Земля — Венера.
Там же изложена методика учета дифференциальных поправок
к элементам, вызванных различными отклонениями в координа-
тах точек М[ и М2.
Замечание. Аналогичная методика применима и для опре-
деления параметров параболических и гиперболических орбит
перелета [76], только в этих случаях последнее уравнение систе-
мы (8.4.01) должно быть заменено соответствующим динамиче-
ским уравнением (см. ч. II, §§ 2.03, 2.04).
§ 4.02. Уравнение для базиса-вектора
на участке нулевой тяги
при движении ракеты в ньютоновском поле тяготения
Базис-вектор р, коллинеарный вектору тяги Г (см. § 3.03),
удовлетворяет векторному дифференциальному уравнению
(8.3.21)
-g- = V(p,G). (8.4.04)
Если внешнее поле потенциально, то уравнение (8.4.04) прини-
мает вид [20]
-g- = (p,VG), (8.4.05)
где VG — скалярное произведение вектора V и вектора G. Мож-
но показать [4], что справедливо тождество
(p,V) = |p||-, (8.4.06)
где -т- означает дифференцирование по направлению базиса-
вектора р.
Тождество (8.4.06) позволяет придать уравнению для базиса-
вектора (8.4.05) форму
Уравнения (8.4.05) и (8.4.07), определяющие базис-вектор
pit), справедливы для любого потенциального внешнего поля.
Если движение ракеты происходит в ньютоновском поле, то
G = _i^r, (8.4.08)
§ 4.021 ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ 731
Пользуясь (8.4.08), уравнение (8.4.07) можно привести к виду
^ ^Р,г)г-!^р. (8.4.09)
Однако ни одно из уравнений (8.3.21), (8.4.05), (8.4.07),
(8.4.08), рассматриваемых изолированно, не определяют базис-
вектор p(t), так как они содержат и другие неизвестные (на-
пример, г), поэтому указанные уравнения нужно рассматривать
в совокупности с уравнениями Эйлера (8.3.20) и уравнениями
движения (8.3.13).
На участке нулевой тяги движение ракеты в ньютоновском
центральном поле происходит по коническому сечению, поэтому
зависимость радиуса-вектора г от времени t известна (см. ч. II,
§ 3.06). Это облегчает решение уравнения для базиса-вектора.
Лоуден доказал [20], что компоненты qx, qY, Qz (в системе
координат OXYZ ось ОХ направлена по радиусу-вектору ракеты;
ось OY лежит в плоскости орбиты по направлению движения
ракеты; ось OZ перпендикулярна к плоскости OXY) вспомога-
тельного вектора q, связанного с базисом-вектором р равен-
ством
P = \r\q, (8.4.10)
определяются из системы уравнений
de2
d2qv dq
r 4 2
dqv
4- 2 =0
d*q?
(8.4.11)
где p — параметр орбиты, в — полярный угол ракеты в непо-
движной системе координат.
Полярный угол в определяется интегралом площадей (см.
формулу B.1.19))
r2
поэтому его также можно считать известной функцией времени.
В книге Лоудена [20] приведены компоненты рх, ру, Рг ба-
зиса-вектора как явные функции истинной аномалии. Явная за-
висимость р от времени содержит бесконечные ряды, так как
переход от истинной аномалии ко времени связан с решением
уравнения Кеплера (см. ч. II, § 2.01).
732
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 4.03
§ 4.03. Уравнение для базиса-вектора
на участке промежуточной тяги
при движении ракеты в ньютоновском поле тяготения
Нахождение явной зависимости базиса-вектора от времени
для участка промежуточной тяги в общем виде представляет
собой неразрешимую задачу. Однако, как показал Лоуден [20],.
[77], [78], если участок промежуточной тяги лежит в плоскости,
проходящей через притяги-
вающий центр, то такое ре-
шение может быть полу-
чено.
Участок промежуточной
тяги полностью определяет-
ся семью неизвестными
функциями времени: поляр,-
ные координаты ракеты г и
Э, компоненты скорости ра-
кеты v в системе координат
PTQ (рис. 84), vT и vq, углы
Ф и ijj и абсолютная вели-
чина реактивного ускорения а = ст/М (т — секундный расход
топлива, с—модуль скорости истечения газа, М — масса ра-
кеты).
Перечисленные семь неизвестных функций определяются из
следующих уравнений:
(8.4.12)
Рис. 84. Участок промежуточной тяги. PTQ —
подвижная прямоугольная система коорди-
нат, основная ось которой РТ направлена
вдоль тяги Г.
dt
dvQ
~dT
¦- 00-^ = 0- —simp,
d2ty 3/m0 .
-rtTr = pr- sin ф cos ф,
dr . , dQ .
VT = -77- Sin ф + Г —Г7- Sin ф COS ф,
dt
dr
vQ = — -j- cos ф -f г -ТГ sin ф.
dt
dt
(8.4.13)
(8.4.14)
(8.4.15)
(8.4.16)
(8.4.17)
(8.4.18)
Уравнение (8.4.12) очевидно (см. рис. 84). Уравнения (8.4.13)
и (8:4.14) описывают движение ракеты [см. (8.3.01)] в системе
координат PTQ. Уравнения (8.4.15) и (8.4.16) определяют про-
екции базиса-вектора р на оси РТ и PQ. Уравнения (8.4.17) и
§ 4.05] ГЛ. 4. МЕЖСРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ 733
(8.4.18) выражают связь между проекциями скорости ракеты
vT, vq и радиальной и трансверсальной компонентами скорости
ракеты г и г©.
Интегрирование уравнений (8.4.12) — (8.4.18) существенно
упрощается, если время перелета не фиксировано. Соответствую-
щие результаты можно найти у Лоудена [20], [77]—[79]. В част-
ности, Лоуден показывает, что для малых углов ф тяга на участ-
ке промежуточной тяги направлена по биссектрисе угла между
касательной к траектории и трансверсалью PQ.
§ 4.04. Уравнение для базиса-вектора
на участке максимальной тяги
при движении ракеты в ньютоновском поле тяготения
Участок максимальной тяги полностью определяется теми
же семью величинами, которые приведены в § 4.03, с той лишь
разницей, что модуль реактивного ускорения а принимает мак-
симальное значение
s = -f-. <8-4Л9>
где m — величина, ограничивающая секундный расход топлива
[см. (8.3.16)]. В силу этого на участке максимальной тяги не-
обходимо решать те же уравнения (8.4.12) — (8.4.18) с заменой
т на т. Принципиально трудности, встречающиеся при интегри-
ровании уравнений для участка промежуточной тяги, остаются
и здесь.
§ 4.05. Метод р-траекторий. Структура
оптимальной траектории
В книге Лоудена [20] рассмотрено движение ракеты по опти-
мальной траектории при следующих допущениях:
а) оптимальная траектория — кривая, лежащая в плоскости,
проходящей через центр притяжения;
б) поле тяготения ньютоновское;
в) время перелета не фиксировано и подлежит оптимизации;
г) все участки максимальной тяги суть точки соединения.
Предположение а) означает, что базис-вектор р является
двумерным. Предположение в) упрощает интегрирование урав-
нений для базиса-вектора р (см. §§ 4.02, 4.04), так как согласно
замечанию из § 3.03 первый интеграл (8.3.25) уравнений для
базиса-вектора имеет более простой вид. Предположение г)
означает, что максимальная тяга аппроксимируется импульсами.
Если уравнения для базиса-вектора проинтегрированы и,
следовательно, известна явная зависимость проекций базиса-
734 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 1.06
вектора рх и ру от времени или от другого параметра (напри-
мер, от истинной аномалии), то, исключая время, получим урав-
нение р-траектории, содержащее модуль базиса-вектора. Анали-
тический вид уравнения р-траектории весьма громоздок даже
для участка нулевой тяги [20], а для других участков оптималь-
ной траектории получение уравнения р-траектории встречает
непреодолимые трудности, связанные с интегрированием урав-
нений (8.4.12) —(8.4.18).
Исследование на экстремум модуля базиса-вектора как функ-
ции истинной аномалии, выполненное Лоуденом [20], [77], [78]
для определения постоянной Р (см. § 3.03), позволяет сделать
вывод: если один из участков оптимальной траектории является
пассивным и представляет дугу конического сечения и он на-
чался (или закончился) в результате действия импульса, при-
ложенного в апсидальной точке и направленного по касательной
к орбите, то тогда и все остальные участки траектории являют-
ся пассивными и точки соединения всегда совпадают с их апси-
дальными точками. В частности, если дуга круговой орбиты
является частью оптимальной траектории, то и все остальные
пассивные участки оптимальной траектории являются дугами
конических сечений с совпадающими осями. Таким образом,
оптимальная траектория состоит из пассивных участков (дуг ко-
нических сечений), началами и концами которых являются точки
соединения.
§ 4.06. Связь между величиной импульса
и элементами эллиптической орбиты
Формулы задачи двух тел позволяют написать следующие
соотношения (рис. 85):
v, = q V/^oP sin {и — со), 1
vu = s^J^, } (8.4.20)
qcos(u — со) = s — р~\ j
Vq = s Vf moP sin ф — q ¦y/frtiap sin (и — со) cos cp, (8.4.21)
vT = s V/moP secф — vQtg Ф, (8.4.22)
где
S = T- 4 = j. (8-4.23)
p — параметр эллипса.
В результате действия мгновенного импульса Т положение
ракеты и проекция vQ остаются неизменными, а изменяются
§ 4Л7]
ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
735
лишь элементы орбиты р, q, со и, конечно, в первую очередь vT.
Если обозначить через р\, <7ь coi элементы новой эллиптической
орбиты, то очевидно, что
(vT)i =
весф — vQigy
(8.4.24)
и, следовательно,
(8.4.25)
Приращение Лит определяет
величину приложенного им-
пульса.
В практических расчетах
удобнее вместо (8.4.21) поль-
зоваться равенством
<7sin(« — ш) =
.(.-
/
¦»•-
Рис. 85. Связь между импульсом и элемен-
тами орбиты. О — притягивающий центр
с массой та; П — перицентр эллиптической
о.збиты; Р — положение аппарата в произ-
вольный момент времени; vr, vu—радиаль-
ная и трансверсальная компоненты ско-
рости; Г —импульс; Dj- и dq —компоненты
скорости аппарата в направлении приложен-
ного импульса и перпендикулярного к нему.
/fmop БШф
(8.4.26)
Таким образом, параметры обеих орбит должны удовлетво-
рять следующим соотношениям:
q cos (и — со) = s — р~1
q sin (и — со) = ( s —
<7i sin
(и — coj) = (s
(8.4.27)
Анализ уравнений (8.4.27) и вывод аналитических выраже-
ний для частных производных импульса по элементам сделан
Лоуденом [12].
§ 4.07. Оптимальный л-импульсный переход между двумя
заданными компланарными эллиптическими орбитами
Пусть ро, q0, coo — элементы начальной эллиптической орби-
ты, рп, <7п, Шп — элементы орбиты назначения, рь, qh, сол—эле-
менты k-тл промежуточной орбиты, вызванной fe-м импульсом,
приложенным в точке (s^, и&) (^ = 1, 2, ..., п).
736
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 4.07
Тогда полное приращение скорости космического аппарата
в результате маневра в целом выражается соотношением
k=\
где
-i )seccpft.
(8.4.28)
(8.4.29)
Функция W зависит от Зп —3 переменных (pu qu иь ..., pn-u
<7n-i, Ып-i), так как po> <7о, coo, Pn, <7n, ып считаются известными.
Необходимые условия существования экстремума функции
W, очевидно, имеют вид
dW __ dW _ dW
dPk ~~ de>k ~ dcok ~
= l, 2 n-1). (8.4.30)
Присоединение к системе (8.4.30), состоящей из Зп — 3 урав-
нений, еще 4п — 4 уравнений типа (8.4.27)
ft г* f\ о fit ^^^ /л 1 -¦ * о ^^_ п ^
Qk-i sin (ufe — tufe—i) = ysk — -j=
I tg фА,
qk sin
( °'rk) ^
in{uk-ak) = [sk r . Itgi
V У >moPk Sln Ук '
= l, 2 n-
(8.4.31)
позволяет написать совместную систему, состоящую из In — 7
уравнений и содержащую In — 7 неизвестных ръ., qk, ah,
sk, uk, vf\ фй. Решение этой общей системы дает параметры
всех промежуточных орбит, координаты точек приложения им-
пульсов (sft, us), компоненты скорости v(^ и направления им-
пульсов фь.
Эти результаты получены Лоуденом [12] в предположении,
что число импульсов п задано. Более общая задача (когда п
также неизвестно) рассматривалась в работах [80]—[82].
Одноимпульсный переход с одной орбиты на другую возмо-
жен лишь тогда, когда орбиты пересекаются, причем оптималь-
ной задачи не возникает, так как в этом случае величина им-
пульса однозначно определяется элементами первоначальной
орбиты и орбиты назначения.
. 08]
ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
737
Решение уравнений (8.4.30) и (8.4.31) для двухимпульсного
маневра в общем случае неизвестно, но для ряда частных слу-
чаев оно получено. В частности, получено аналитическое реше-
ние задачи об оптимальном повороте оси орбиты [12].
§ 4.08. Оптимальный переход
между двумя компланарными
круговыми орбитами
Если минимизируется количество топлива, то согласно § 4.05
орбитами перехода являются эллипсы с совпадающими боль-
шими осями. Эти эллипсы соприкасаются друг с другом и с кру-
говыми орбитами в своих апсидальных точках (здесь круговые
орбиты — это орбиты старта и назначения). Анализ такого клас-
са орбит перехода был впервые сделан Романом [83], и по этой
Рис. 86. Трехимпульсная орбита перехода.
ABC и CDE—два гояа|юзских полуэллипса;
А, С, ? —точки "соединения.
причине они называются гомановскими эллипсами. Очевидно,
что если последним участком оптимальной траектории является
не сам гомановский эллипс, а круговая орбита, то минимальное
количество импульсов равно двум.
Хелькер и Зильбер показали [81], что при /"е/г,-> 15,6 (ге —
радиус внешней круговой орбиты, г\ — радиус внутренней кру-
говой орбиты) оптимальных маневров не существует, т. е. соот-
ветствующая вариационная задача не имеет решения. Они же
показали, что существуют трехимпульсные переходы, более вы-
годные с точки зрения расхода топлива (рис. 86). Вопрос об
оптимальном переходе между почти круговыми орбитами рас-
сматривался многими авторами и, в частности, Лоуденом [20],
[84] и Смитом [85].
24
- Дубошина
738 4. Vtlt. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 4.10
§ 4.09. Оптимальный переход
между двумя соосными орбитами
Как показали Смит [85] и Плиммер [86], уравнения (8.4.30) и
(8.4.31) могут быть решены в случае двухимпульсного перехода,
Рис. 87. Оптимальный переход между со-
осными орбитами. /, // — орбиты перехода;
Л, Я—точки соединения для орбиты /;
С, D — течки соединения для орбиты //.
Рис. 88. Оптимальный переход между со-
осными орбитами. /, // — орбиты перехода;
А, Я —точки соединения для орбиты /;
С, D — точки соединения для орбиты 11.
Рис. 89. Оптимальный переход между со-
осными орбитами. /, // — орбиты перехода;
А, В—точки соединения для орбиты /;
С, D — точки соединения для орбиты II.
Рис. 90. Оптимальный переход между со-
осными орбитами. /, // —орбиты перехода;
/, В — точки соединения для орбиты /;
С, D — точки соединения для орбиты //.
если аи = саг или Ш1 = шг + л. Анализ этого решения показы-
вает, что возможны оптимальные переходы, изображенные на
рис. 87—90.
§ 4.10. Другие траектории перелета
в случае компланарных орбит планет старта и назначения
В §§ 4.07—4.09 приведены некоторые оптимальные (с точки
зрения расхода топлива) траектории перелета. Достаточно пол-
ная классификация траекторий перелета с круговой орбиты на
другую компланарную круговую орбиту дана К. Эрике [88]. Ука-
жем также на книгу [90] П. Эскобала, содержащую приближен-
ный аналитический метод построения межпланетных траекто-
рий. В его основу положен метод сфер действия, названный
§ 4.101
ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
739
Эскобалом «методом кусочно-невозмущенных орбит». Этот ме-
тод нашел эффективное применение в исследованиях В. А. Его-
рова [87] (см. § 4.13).
Основных типов перелет-
ных эллиптических траекто-
рий — тринадцать. Один тип
отличается от другого как уг-
ловой дальностью щ (это угол,
образованный гелиоцентриче-
ским радиусом-вектором точки
старта и точки назначения),
так и направлением касатель-
ных к траектории перелета в
точке старта и в точке назна-
чения. Для гомановских орбит
Tit =180° и касательные к
траектории перелета в началь-
ной и конечной точках совпа-
дают с касательными к круго-
вым орбитам планет. Для дру-
гих двенадцати типов перелет-
ных траекторий либо r\t ф 180'
Рис. 91. Орбиты быстрых перелетов. Угловая
Dpfiumtt
переле/паУ'2.
либо направления касатель*
ных не совпадают. В зависимо-
сти от значения т,( Эрике де-
лит траектории перелета на
быстрые и медленные. Если
r\t < 180°, такие траектории
называются быстрыми, если
T\t > 180° — медленными. На
рис. 91 приведены две орбиты
быстрых перелетов. Одна изо-
бражает быстрый перелет на
внешнюю круговую орбиту,
другая — на внутреннюю кру-
говую орбиту. На рис. 92 изо-
бражены две орбиты длитель-
ных перелетов.
Эллиптичность и наклон ор-
бит планет старта и назначе-
НИЯ СущеСТВвННО УСЛОЖНЯЮТ За-
дачу об определении парамет-
Ров перелетной траектории, од-
НЭКО ДЛЯ МЭЛЫХ ЭКСЦеНТрИСИ-
тетов и наклонов она часто
решается аналитическими и численными методами [88]. Отме-
тим также, что траектории перелета весьма чувствительны к
Рис. 92. Орбиты медленных перелетов. Орбита
ЭТ Убй°ьше *«?
«1-точки старта; Я.-течки назначения.
24*
740 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 4.11
ошибкам в начальных данных. Особенно чувствительны к по-
следним «медленные» траектории. Для попадания в Венеру и
Марс ошибка в гиперболической геоцентрической скорости не
должна превышать 0,15 м/сек по модулю. Поэтому на практике
перелеты без коррекции на гелиоцентрическом участке траекто-
рии не встречаются.
При расчете перелетных траекторий с возвращением на пла-
нету старта существенной является геометрия дуги возвраще-
ния, целиком определяющая время нахождения (период захва-
та) космического аппарата на спутниковой орбите планеты на-
значения.
В частности, можно построить возвратную траекторию, сим-
метричную траектории перелета, но для этого необходимо подо-
ждать время, по истечении которого планеты старта и назначе-
ния образуют определенную геометрическую конфигурацию.
Из расчетов Эрике следует, что симметричные полеты с Зем-
ли к Венере и Марсу с возвращением требуют очень длитель-
ные периоды захвата, значительно превышающие год. Это часто
нежелательное обстоятельство можно обойти, если воспользо-
ваться несимметричными перелетными траекториями с возвра-
щением [88].
Рассмотренные перелетные орбиты являются эллиптически-
ми, и, они, как правило, оптимальны относительно энергетиче-
ских затрат, но не оптимальны относительно времени перелета
(в особенности «медленные траектории»}. Возможен также пе-
релет по гиперболической и параболической траекториям. На
такой перелет, очевидно, нужно меньшее время перелета, однако
подобные орбиты не оптимальны с точки зрения расхода топ-
лива, так как для их реализации требуется большая начальная
скорость. Например, при перелете из окрестности Земли необ-
ходима начальная геоцентрическая скорость не меньше
16,7 км/сек. Гиперболические и параболические орбиты невы-
годны с точки зрения энергетического критерия и при возвраще-
нии на планету старта.
Перечень формул, позволяющих вычислить все параметры
гелиоцентрического участка траектории перелета для различ-
ных вариантов, можно найти в главе 9 книги [88].
§ 4.11. Траектории полета вблизи нескольких планет
Все эллиптические траектории полета к нескольким планетам
можно разделить на две группы: моноэллиптические и поли-
эллиптические.
Моноэллиптическая траектория полета представляет собой
дугу эллипса, пересекающего планетные орбиты в точках, в
окрестностях которых в процессе полета находятся планеты.
§4.11]
ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
741
Полиэллиптическая траектория является составной траекто-
рией и состоит из двух, трех и т. д. участков, каждый из кото-
рых представляет собой дугу эллипса с собственными парамет-
рами. Среди полиэллиптических траекторий можно выделить
биэллиптические (состоящие из двух участков), триэллиптиче-
ские (состоящие из трех участков) траектории и т. д.
На рис. 93 изображены моноэллиптические траектории одно-
годичного полета с возвращением. Траектории № 1 и № 2 изо-
бражают полет к Венере и
Марсу с возвращением к
Земле. Траектория № 3 —
полет к Меркурию, Венере
и Марсу с возвращением к
Земле. Все эти траектории
являются чисто кинематиче-
скими, так как при опреде-
лении их параметров не учи-
тываются силы притяжения.
Один из основных заданных
заранее параметров являет-
ся время полета, которое
в данном случае равно
году. Если время полета за-
дано, то оно целиком опре-
деляет, согласно третьему
закону Кеплера, большую
полуось траектории полета.
Например, для одногодич-
ного полета к Венере и Марсу с возвращением большая ось эл-
липтической траектории должна равняться 2 а. е., и если афелий
такой траектории будет находиться на расстоянии 1,52 а. е. (она
касается круговой орбиты с радиусом, равным большой полуоси
орбиты Марса), то ее перигелий будет находиться внутри орби-
ты Венеры, так как расстояние ее перигелия от Солнца вычис-
ляется по формуле
Rp = 2a-Ra = 2- 1,52 = 0,48 а. е.,
где а — большая полуось траектории полета, Ra, Rp — гелиоцен-
трические расстояния ее афелия и перигелия соответственно.
Моноэллиптическая траектория, касательная к круговым ор-
битам Венеры и Марса (рис. 94), характеризуется периодом,
равным 1,185 года, и эксцентриситетом 0,357. Такая траектория
пересечет земную орбиту второй раз через 1,185 года и, следо-
вательно, Земля будет находиться в этот момент на угловом
расстоянии от точки старта, равном 67°. Отсюда следует, что
такая траектория с возвращением невыгодна, так как «встреча»
Рис. 93. Моноэллиптические траектории одно-
годичного полета. Траектории № 1 и № 2 изо-
бражают полет к Венере и Марсу с возвраще-
нием. Траектория № 3—полет к Меркурию, Ве-
нере и Марсу с возвращением.
742
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [| 4.11
с Землей может состояться лишь спустя много оборотов. Эти
расчеты показывают, что среди траекторий полета к одной или
к нескольким планетам с возвращением выгодными являются
лишь те, период обращения по
которым кратен году, т. е. ра-
вен одному, двум, трем и т. д.
годам.
Если пренебречь притяже-
нием планет и наклоном их ор-
бит, то полет по многоэллипти-
ческой траектории может быть
реализован без коррекции. При
учете этих факторов необхо-
димо приложить в некоторых
точках траектории такие кор-
ректирующие импульсы, кото-
рые, во-первых, исключили бы
захват космического аппарата
планетами и, во-вторых, обес-
печили бы постоянство ее
эксцентриситета и большой по-
луоси.
Эрике показал [88], что сре-
ди полиэллиптических траекто-
рий полета к Меркурию, Вене-
ре и Марсу наиболее выгодными и удобными с точки зрения
практической реализации являются полуторагодичные триэллип-
Рвс. 94. Моноэллиптическая траектория,
касательная к круговым орбитам Венеры и
Марса с периодом, равным 1,185 года. Она
не обладает свойством возвращения в окрест-
ность Земли на первом обороте. Г, —точка
старта; Г] —положение Земли на орбите
в момент второго прохождения аппарата
через точку Ti.
Рис. 95. Полуторагодичная триэллип-
тическая траектория полета к Мер-
курию, Венере и Марсу с возвраще-
нием.
Рис. 96. Биэллиптическая траекто-
рия полета к Марсу и Венере с воз-
вращением.
тические траектории с возвращением (рис. 95). Такая траекто-
рия касается орбиты Земли в начальный и в конечный момен-
§ 4-12] ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ 743
ты полета, орбит Марса и Меркурия и дважды пересекает
орбиту Венеры. Среди биэллиптических траекторий не суще-
ствуют такие, которые касались бы орбиты Земли и в началь-
ный, и в конечный моменты. На рис. 96 приведена биэллипти-
ческая траектория полета к Марсу и Венере с возвращением.
Наконец, отметим, что принципиально возможны составные
траектории полета вблизи нескольких планет, состоящие из дуг
других конических сечений (гипербол и парабол), однако они
далеко не оптимальны с точки зрения энергетического критерия.
§ 4.12. Начальный этап (запуск и уход)
межпланетной траектории
В §§ 4.08 — 4.11 рассматривался гелиоцентрический участок
перелетной орбиты. Назовем начальным этапом траектории пе-
релета ее участок, начинающийся в момент старта на Земле и
кончающийся точкой, являющейся началом гелиоцентрического
участка. Начальный этап принято также называть [88] запуском
и уходом космического аппарата.
Начальный этап сам в свою очередь состоит из трех эта-
пов [88].
Этап 1. Активный участок траектории, на котором аппарат
приобретает первую космическую скорость. В конце этого этапа
аппарат становится искусственным спутником планеты, движу-
щимся по круговой орбите, как правило, на высоте 200—500 км.
Этап 2. Активный участок траектории, на котором аппарат
приобретает планетоцентрическую гиперболическую скорость,
большую (или во всяком случае не меньшую) второй космиче-
ской скорости.
Этап 3. Планетоцентрический гиперболический участок
траектории (как правило, пассивный), начинающийся в точке,
где аппарат приобрел гиперболическую скорость, и кончающий-
ся в точке, где начинается гелиоцентрический полет. Этот уча-
сток простирается до такого расстояния, на котором притяже-
нием планеты по сравнению с притяжением Солнца можно пре-
небречь (заметим, что гелиоцентрический участок перелетной
траектории не обязательно начинается на границе сферы дей-
ствия планеты; см. ч. V, § 2.05).
Возможны два типа перехода от этапа 1 к этапу 2:
а) так называемый непрерывный уход, когда скорость аппа-
рата непрерывно увеличивается от нулевой до планетоцентриче-
ской гиперболической скорости;
б) наличие пассивного участка траектории, состоящего из
одного или нескольких оборотов, на котором аппарат является
круговым или почти круговым искусственным спутником (иногда
этот участок траектории называется орбитой ожидания).
744 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ *ЛЭ
Для выбора параметров начального этапа необходимо ре-
шить уравнения типа (8.3.20) при заданных внешних силовых
полях (к которым относятся прежде всего притяжение планеты
и сопротивление ее атмосферы). Формулы для приближенного
расчета (без оптимизации) параметров начального этапа траек-
тории перелета выведены Эрике [88].
В заключение отметим, что имеется обширная литература,
посвященная проблеме входа космического аппарата в атмо-
сферу планеты. Укажем на монографию Г. Е. Кузмака [91], в
которой с помощью асимптотических методов типа Крылова —
Боголюбова изучается движение (как правило, около центра
масс) неуправляемого космического, аппарата при входе в атмо-
сферу. Некоторые вопросы управляемого движения космических
аппаратов в земной атмосфере изучаются в статьях [92]—[96].
§ 4.13. Полеты к Луне
Термин «полеты к Луне» объединяет разнообразные задачи
астродинамики: задача о попадании в Луну неуправляемого
или управляемого аппарата, создание искусственных спутников
Луны, облет Луны без возвращения и облет Луны с возвраще-
нием на Землю, мягкая посадка аппарата или космического ко-
рабля с космонавтами на лунную поверхность, старт с поверх-
ности Луны аппарата или космического корабля и переход на
возвратную к Земле траекторию.
К настоящему моменту все перечисленные задачи не только
решены теоретически, но и практически реализованы, поэтому
существует обширная библиография по этой важной проблеме.
Из капитальных изданий укажем на книги В. А. Егорова [87],
К. Эрике [88] и В. И. Левантовского [89], во многом дополняю-
щие одна другую.
Полное решение проблемы попадания неуправляемого аппа-
рата в Луну получено В. А. Егоровым [87]. Проблема решалась
автором на базе всестороннего численного исследования урав-
нений движения ограниченной круговой задачи трех тел (Зем-
ля — Луна — космический корабль) в сочетании с эффективным
применением метода сфер действия (см. ч. V, гл. 2). Кроме того,
им найдены многочисленные конкретные траектории попадания,
траектории облета Луны, нетривиальные недолетные траекто-
рии, т.е. такие траектории, для которых геоцентрический радиус-
вектор имеет по крайней мере два максимума, расположенных
за лунной орбитой, и минимум, расположенный внутри лунной
орбиты (рис. 97). В. А. Егоровым также рассчитаны наиболее
важные, с точки зрения практики, траектории облета с пологим
возвращением в атмосферу Земли (рис. 98). Этой проблеме по-
священа отдельная глава в книге П. Эскобала [90].
§ 4. 13]
ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
745
Рис. 97. Классы особых нетривиальных долетных траекторий.
.7/
Рис. 98. Траектории с пологим возвращением в атмосферу Земли Они касаются атмосфер-
ных слоев, распрлржен;ных концентрически с центрами а центре Земли.
746
Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ [§ 4.13
Количественный анализ, выполненный В. А. Егоровым, пока-
зал, что достаточно точное определение параметров энергети-
чески оптимальных пространственных траекторий и достаточно
точная оценка влияния ошибок в начальных данных на решение
конечной задачи могут быть сделаны в рамках ограниченной
круговой задачи трех тел без учета притяжения Солнца и дру-
гих планет, а также без учета на первом шаге эллиптичности
лунной орбиты.
ч
у
7 м
\у
'Л
Рис. 99. Траектории попадания в центр лунното диска.
Лунное притяжение мало меняет параметры траекторий по-
падания в центр видимого лунного диска, поэтому при определе-
нии начальных данных для пассивного участка перелетной
траектории лунное притяжение не принималось в расчет. Если
место старта находится в северном полушарии Земли, то суще-
ствуют два основных типа траекторий попадания:
а) траектории, проходящие над северным полушарием;
б) траектории, проходящие над южным полушарием.
Из типа а) наиболее выгодными (отвечающими минималь-
ным энергетическим затратам) являются «северо-восточные»
траектории, из типа б) — «юго-восточные» траектории. Но по
сравнению с орбитами плоской круговой задачи трех тел для
реализации «северо-восточных» траекторий требуются значи-
тельно большие энергетические затраты, в отличие от «юго-вос-
точных» траекторий, для которых эти затраты примерно та-
кие же.
4.13]
ГЛ. 4. МЕЖОРБИТАЛЬНЫЕ ПЕРЕЛЕТЫ
747
В. А. Егоровым разработан также метод, позволяющий учи-
тывать влияние притяжения Луны в ее сфере действия на пара-
метры траекторий попадания в центр лунного диска. Влияние
лунного притяжения (не только в ее сфере действия), солнеч-
ного притяжения, сжатия Земли и эллиптичности лунной орби-
ты учитываются в виде линейных поправок.
На рис. 99 приведены плоские траектории попадания в центр
лунного диска по восходящей ветви траектории, т. е. попадание
.7/
Рис. 100. Плоские облетные траектории.
в Луну происходит до достижения аппаратом максимально уда-
ленной от Земли точки траектории, и по нисходящей ветви, т, е.
после достижения этой точки.
На рис. 100 приведены, найденные В. А. Егоровым, различ-
ные плоские облетные траектории.
Все изображенные на рис. 97—100 траектории суть траекто-
рии с возвращением.
Возможны облетные траектории без возвращения (геоцентри-
ческие параболические и гиперболические траектории), характе-
ризующиеся тем, что начальная скорость не меньше второй кос-
мической скорости.
В заключение отметим, что приближенное решение задачи
о мягкой посадке на поверхность Луны изложено в [88], [90].
748 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ
ЛИТЕРАТУРА К ЧАСТИ VIII
1. Фихтенгольц Г. М., Курс дифференциального и интегрального исчис-
ления, т. 1, «Наука», 1966.
2. Г е л ь ф а и д И. М. и Фомин С. В., Вариационное исчисление, Физ-
матгиз, 1961.
3. Эльсгольц Л. Э., Дифференциальные уравнения и вариационное ис-
числение, «Наука», 1965.
4. Б л и с с Г. А., Лекции по вариационному исчислению, ИЛ, 1950.
5. В 1 i s s G. A., J. U. S. Artillery 51, 296, 1920.
6. В 1 i s s G. A., Trans. Amer. Math. Soc. 21, 79, 1920.
7. В 1 i s s G. A., Trans Amer. Math. Soc. 21, 93, 1920.
8. Cicala P., An Engineering Approach to the Calculus of Variations. Lev-
rotto and Bella, Torino, 1957.
9. Hancock H., Theory of Maxima and Minima, Dover, New York, 1960.
10. H о r n e r J. M., Optimum orbital Transfers. American Rocket Society Un-
dergratuate Comptetion, 1960.
11. M i e 1 e A., ARS Journal 29, 75, 1959.
12. Методы оптимизации с приложениями к механике космического полета,
под ред. Дж. Лейтмана, «Наука», 1965.
13. М и е л е А., Механика полета, т. I ,«Наука», 1965.
14. L a w d e n D. F., Interplanetary Rocket Trajectories. Adv. Space Sci., I,
Academic Press, New York, 1959. Русский перевод: Лоуден Д. Ф.,
«Межпланетные траектории ракет», Сб. «Космические траектории», ИЛ,
М., 1963.
15. Lawden D. F., J. Brit. Interplanet. Soc. II, 278, 1952.
16. Law den D. F., J. Brit. Interplanet. Soc. II, 321, 1952.
17. Lawden D. F., J. Brit. Interplanet. Soc. II, 216, 1952.
18. Lawden D. F., ARS Journal 23, 360, 1953.
19. Lawden D. F., J. Brit. Interplanet. Soc. 13, 87, 1954.
20. Лоуден Д. Ф., Оптимальные траектории для космической навигации,
«Мир», 1966.
21. Кротов В. Ф., Автоматика и телемеханика 23, № 12, 1962.
22. Кротов В. Ф., Автоматика и телемеханика 24, № 5, 1963.
23. К р о т о в В. Ф., Автоматика и телемеханика 25, № 7, 1964.
24. Троицкий В. А., Прикл. матем. и механ. 21, № 4, 1957.
25. Т р о и ц к и й В. А., Прикл. матем. и механ. 25, № 4, 1961.
26. Т р о и ц к и й В. А., Прикл. матем. и механ. 29, № 4, 1965.
27. Охоцимский Д. Е. и Энеев Т. М., Успехи физ. наук 63, вып. 1,
1957.
28. L e i t m a n G., J. Aero/Space Sci. 26, 586, 1959.
29. Lei t man G., Progr. Astronaut. Sci. I, Ch. 4, Amsterdam, 1962.
30. Лейтман Дж., Введение в теорию оптимального управления, «Наука»,
1968.
31. С и г г у Н. В., Quart. Appl. Math. 2, 258, 1944.
32. Rosen В., J. Indian Math. 8, 181, 1960.
33. Top kins С. В., Modern Mathematics for the Engineer, Ch. 18, New York,
1956.
34. Stein M. L., J. Res. Nat. Bur. Stand. B50, 277, 1953.
35. К e 11 e у Н. В., ARS Journal 30, 917, 1960
36. В г у son A. E., Car oil F. I., Mikami K. and Den ham W. F., De-
termination of the lift or drag program that minimizes reentry heating with
acceleration or range constraints using a steepest descent computation pro-
cedure. Представлено на 29 съезде JAS, New York, January 23—25, 1961.
37. П о н т р я г и н Л. С, Болтянский В. Г., Гамкрелидзе Р. В.,
Мищенко Е. Ф., Математическая теория оптимальных процессов, «Нау-
ка», изд. 2-е, 1969,
ЛИТЕРАТУРА К ЧАСТИ VIII 749
38. Б о л т я н с к и й В. Г., Математические методы оптимального управле-
ния, «Наука», изд. 2-е, 1969.
39. Роз он о эр Л. И., Автоматика и телемеханика 20, № 10, 1320; № 11,
1441; № 12, 1561 A959).
40. L e i t m а п G., J. Aero/Space Sci. 29, № 8, 1962.
41. Исаев В. К., Автоматика и телемеханика 22, № 8, 1961.
42. Исаев В. К., Автоматика и телемеханика 23, № 1, 1962.
43. Беллман Р., Динамическое программирование, ИЛ, 1960.
44. Беллман Р., Г л и к с б е р г И., Гросс О., Некоторые вопросы мате-
матической теории процессов управления, ИЛ, 1962.
45. Цлаф Л. Я., Вариационное исчисление и интегральные уравнения
«Наука», 1966.
46. Мещерский И. В., Работы по механике тел переменном массы, Гос-
техиздат, 1952.
47. Космодемьянский А. А., Курс теоретической механики, ч. II, «Про-
снещение», 1966.
48. К а р а г о д и н В. М, Теоретические основы механики тела переменного
состава, Оборонгиз, 1963.
49. Гантмахер Ф. Р., Левин Л. М., Теория полета неуправляемых ра-
кет, Физматгиз, 1959.
50. Р о с с е р Д., Ньютон Р., Гросс Г., Математическая теория полета
неуправляемых ракет, ИЛ, 1950.
51. Оберт Г., Пути осуществления космических полетов, Оборонгиз, 1948.
52. Valentine F. A., The problem of Lagrange with differential inequali-
ties as added side conditions. Dissertation, Dept. of Math., University of
Chicago, Illinois, 1937.
53. С i с a 1 a P., Piecemeal solutions in the programming of optimal flight
trajectories, NASA, TT № F-3, 1959.
54. С a r f i n k e 1 В., Quart. Appl. Math. 9, № 2, 1951.
55. M i e 1 e A., Z. Flugwiss. 6, № 3, 1958.
56. Leitman G., J. Aeron. Sci. 26, № 9, 586, 1959.
57. M i e 1 e А., С a p p e 11 a r i J. O., Z. Flugwiss. 7, № 1, 1959.
58. F r i e d B. D., ARS Journal 27, № 6, 1957.
59. Lawden D. F., Quart. J. Mech. and Appl. Math. 7, № 4, 488, 1954.
60. L a w d e n D. F., Astronaut. Acta 1, № 1,41, 1955.
61. Lawden D. F., Interplanetary rocket trajectories, Adv. Space Sci., vol. 1,
chap. 1, New York, Academic Press, 1959. Русский перевод: Л о у-
ден Д. Ф., «Межпланетные траектории ракет», Сб. «Космические траек-
тории», ИЛ, М., 1963.
62. LawdenD. F., Astronaut. Acta 8, № 2, 106, 1962.
63. Смирнов В. И., Курс высшей математики, т. 1, «Наука», 1965.
64. М i е 1 е A., J. Aero/Space Sci. 25, № 7, 1958.
65. L e i t m a n G., Aeron. Engin. Rev. 16, № 6, 63, 1957.
66. LawdenD. F., ARS Journal 27, № 12, 1957.
67. Fried B. D. and Richardson J. M., J. Appl. Phys. 27, № 8, 1956.
68. M i e 1 e A., Astronaut. Acta 4, № 4, 264, 1958.
69. M i e le A., NAS.A, TN, № D-155. 1959.
70. L e i t m a n G., Astronaut. Acta 2, № 3, 1956.
71. Б г у s о n A. E., R о s s S. E., ARS Journal 28, № 7, 1958.
72. Космодемьянский А. А.,.Докл. АН СССР 111, вып. 1, 1946,
73. Охоцимский Д. Е., Прикл. матем. и механ. 10, вып. 2, 1946.
74. Leitm an G., J. Aero/Space Sci. 29, № 8, 1962.
75. Аксенов Е. П., Г р е б е н и к о в Е. А., Демин В. Г., Пирогов Е. Н.,
Сообщ. Гос. астрон. ин-та им. П. К- Штернберга, № 125, 12, 1962.
76. Г р е б е н и к о в Е. А., Демин В. Г., Межпланетные полеты, «Наука»,
1965.
77. L a w d e n D. F., ARS Journal 31, № 4, 566, 196L
750 Ч. VIII. ОПТИМАЛЬНЫЕ И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ
78. L a w d е п D. F., Astronaut. Acta 8, № 2, 106, 1962.
79. L a w d e n D. F., Astronaut. Acta 4, № 3, 218, 1958.
80. E d e 1 b a u m T. N.. ARS Journal 29, 864, 1959.
81. Hoelker R. F., Silber R., The bi-elliptical transfer between circular
coplanar orbits, Army Ballistic Missile Agency, Redstone Arsenal, Ala.
Rept., NDA-TN-2-59, 1959.
82. Rider L., ARS Journal 30, 254, 1960.
83. H о h m a n n W., Die Erreichbarkeit der Himmelskorper, Русский перевод:
Гоман «Досягаемость небесных тел» в книге Н. А. Рынина «Теория кос-
мического полета», Изд-во АН СССР, 1932.
84. Lawden D. F., J. Brit. Interplanet. Soc. 12, № 2, 68, 1953.
85. Smith G. C, Astronaut. Acta 5, № 5, 253, 1959.
86. Plimmer R. N. A., Proc. 10th Intern. Astronaut. Congr, London, 1959
A960).
87. E г о р о в В. А., Пространственная задача достижения Л\'ны, *Наука»,
1965.
88. Эрике К., Космический полет, т. II, часть вторая, «Наука , 1970.
89. Л е в а н т о в с к и й В. И., Механика космического полета в элементарном
изложении, «Наука*, 1970.
90. Э скоб а л П., Методы астродинамики, «Мир», 1971.
91. Кузмак Г. Е., Динамика неуправляемого движения летательного аппа-
рата при входе в атмосферу, «Наука», 1970.
92. Иванов Н. М., Лохов Г. М, Павлов В. В., Яковлев О. С, Кос-
мич. исслед. X, вып. 3, 319, 1972
93. Иванов Н. М., Соболевский В. Г., Космич. исслед. X, вып. 3, 326,
1972.
94. Охоцимский Д. Е., Бельчанский Г. И., Геловани В. А., Кос-
мич. исслед. IX, вып. 5, 635, 1971.
95. О х о ц и м с к и й Д. Е , Сихарулидзе Ю. Г., Космич. исслед. IX,
зып. 5, 648, 1971.
96. Иванов Н. М., Бочаров Л. А., Голуб И, Б., Космич, исслед. IX,
вып. 5, 662, 1971,
Часть IX
ДВИЖЕНИЕ ЕСТЕСТВЕННЫХ
И ИСКУССТВЕННЫХ НЕБЕСНЫХ ТЕЛ
ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
Глава 1
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
НЕБЕСНЫХ ТЕЛ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
Эта глава в основном содержит различные формы дифферен-
циальных уравнений движения искусственных и естественных
небесных тел относительно центров инерции, которые нашли
наибольшие приложения в классической теории вращательного
движения Земли и Луны и в динамике космического полета.
Более общий случай поступательно-вращательного движения
небесных тел изложен в главе 2 части IV настоящего справоч-
ника.
Вывод приводимых формул и различного рода подробности
можно найти в монографиях [1]—[4].
Кроме того, даны краткие сведения из теории фигур планет.
§ 1.01. Вращение Земли относительно центра масс
С достаточной для многих практических нужд точностью дви-
жение естественных небесных тел, прежде всего Земли и Луны,
можно изучать в рамках ограниченной постановки задачи, когда
взаимодействием поступательного и вращательного движений
тела можно пренебречь и считать движение центра инерции не-
бесного тела заранее известным.
Предполагая Землю абсолютно твердым телом, рассмотрим
ее движение относительно центра масс под действием силы при-
тяжения со стороны Солнца (или Луны), принимаемого за мате-
риальную точку.
Введем две прямоугольные геоцентрические системы коорди-
нат (рис. 101): систему О\г\^, основной плоскостью которой слу-
жит плоскость эклиптики некоторой эпохи, ось абсцисс направ-
лена в точку весеннего равноденствия той же эпохи, а ось ап-
пликат— к полюсу эклиптики; и систему координат Oxyz, оси
которой направлены по главным центральным осям инерции
Земли,
752
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
[§ 1.01
Положение Земли будем задавать эйлеровыми углами <р, \jj, ¦&,
введенными, как показано на рис. 101.
Дифференциальные уравнения вращательного движения
Земли можно записать в виде *):
dU
dt
(9.1.01)
гдеЛ,В, С — главные центральные моменты инерции Земли,
U — силовая функция, а компоненты угловой скорости Земли по
ее главным центральным осям
инерции р, q, r задаются ки-
нематическими уравнениями
Эйлера *)
р ^
г == ф — т|з cos ¦&.
(9.1.02)
Точное выражение силовой
функции, входящей в уравне-
ния (9.1.01), представляется
рядом по сферическим функ-
циям Лежандра и его можно
найти в книге [5].
Если возмущающим телом
служит Солнце, то в разложе-
нии силовой функции в ряд можно ограничиться второй сфери-
ческой гармоникой. Тогда согласно [3], [5] будем иметь следую-
щую приближенную формулу:
Рис. 101. Системы координат.
U =
- В)у2-(С - A)z\
(9.1.03)
в которой т — масса Солнца, р — его геоцентрическое рас-
стояние.
*) Приводимые здесь динамические и кинематические уравнения Эйлера
несколько разнятся от встречающихся в динамике твердого тела, что объяс-
няется специальным рыбором направлений отсчета эйлеровых углов, принятых
в астрономии.
§ 1.011 ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ 753
Если изучаемая планета обладает осью динамической сим-
метрии, т. е. А = В, то уравнения движения (9.1.01) будут до-
пускать первый интеграл
r = (p — TJ)cosft = cfl = const. (9.1.04)
При этом вместо системы (9.1.01) будем иметь уравнения вида
А$ sin ф + 2Л iH> cos & + Сш2д = -Ду ~,
Считая величины ф, ijj, Ф, в1, ^, ^2 малыми по сравнению
с саб1 и со-ф, уравнения (9.1.05) можно заменить следующей при-
ближенной системой:
db _ 1 dU
dt ~~ Ccosinfl аф '¦
dt
При /7 = 0 общее рещение системы (9.1.05) записывается
следующим образом:
(9.1.07)
г = и, J
где
a a и ?0 — произвольные постоянные.
Период Т = -jj- называется свободным периодом Эйлера. Для
Земли он приближенно составляет 302 ср. солн. суток.
Из уравнений (9.1.06) можно найти приближенные выраже-
ния для величин прецессии и нутации земной оси, вызванных
силами солнечного тяготения
--?-sin2A,) + -
(9.1.08)
ft = -^-sinfl0cos2;\,
В этих уравнениях использованы следующие обозначения:
tyoi Фр — постоянные величины, X = n't -\- Хо — долгота Солнца, а
... Зп'(С-А)
*~ 2пА '
754 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС Г§ 1.02
Из соотношений (9.1.08) вытекает, что полюс мира обладает
сложным движением. Он описывает эллиптическую траекторию
— 1 — = 1 (9 1 09)
( s sin ftp V ^ ( s sin 2ft0 у '¦ ^.l.u»;
V 2 ) I 4 )
в уравнении которой
Я,, у= — 4-sin2d0sin2;,,
а центр этого эллипса движется по некоторой окружности.
Числовые данные, характеризующие вращательное движение
Земли и согласованные с принятой системой фундаментальных
астрономических постоянных, приводятся в части I настоящего
издания. См. также книгу С. Н. Блажко [6].
§ 1.02. Канонические уравнения
вращательного движения небесных тел
В классической теории вращательного движения небесных
тел широкие приложения нашли методы вариации произвольных
постоянных, характеризующих некотэрое вращательное движе-
ние рассматриваемого тела, принимаемое за невозмущенное
(промежуточное). Решение соответствующих уравнений враща-
тельного движения в оскулирующих элементах проводится стан-
дартными методами классической теории возмущений.
Наиболее ранние, уравнения возмущенного вращательного
движения в оскулирующих элементах были получены с помощью
канонических преобразований в работах Лагранжа [7], Лапла-
са [8], изложение которых содержится в трактате Ф. Тиссе-
рана [1]. В нашем веке эти методы нашли развитие в работах
Андуайе [2]. Приложение этих ме-
тодов к конкретным задачам не-
бесной механики и динамики кос-
мического полета можно найти в
исследованиях М. С. Волкова [9],
В. В. Белецкого [10], А. Депри
[11], Ф. Бауже [12], В. Г. Демина
и Ф. И. Киселева [13], Е. Б. Би-
бика [14] и др.
Рис. юг. углы Эйлера. Введем углы Эйлера, характе-
ризующие положение абсолютно
твердого тела, относительно некоторой системы координат OXYZ
с началом в его центре масс и неизменными в неподвижном про-
странстве направлениями осей. Пусть Oxyz — связанная с телом
система координат, оси которой направлены по главным цен-
тральным осям эллипсоида инерции. Углы Эйлера введем, как
S 1.02] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ 755
показано на рис. 102, на котором ^XY и \jxy суть дуги боль-
ших кругов, а N — восходящий узел. Тогда
¦ф = <j NX — угол прецессии,
Ф = ^ Nx — угол собственного вращения,
& = Z xNX — угол нутации.
Обозначая теперь через Т живую силу тела, а через U — си-
ловую функцию и вводя канонические импульсы, сопряженные
с углами Эйлера
ръ = — Ар cos ф + Bq sin qp, f (9.1.10)
p^ = (Apsirup-\-Bqcosy)s'md —Сrcosd, )
приходим к следующей системе канонических уравнений вра-
щательного движения небесного тела:
Первая система канонических уравнений:
rfcp дК dPtf дК
dt dpy dt дф '
db дК dp. дК
~dT~ др^' ~dT= d?'
rfi|> дК dp^ дК
dt dp. ' dt dib *
(9.1.11)
в которых гамильтонова функция К равна
K = T-U. (9.1.12)
Соответствующее системе (9.1.11) уравнение Гамильтона —
Якоби имеет вид
(9.1.13)
Другие системы канонических уравнений движения тела во-
круг его центра масс связаны с выбором невозмущенного движе-
ния, интегрированием надлежащего уравнения Гамильтона —
Якоби и каноническими преобразованиями.
Один из способов выбора невозмущенного движения связан
со случаем Эйлера — Пуансо. Считая моменты сил, приложен-
ных к небесному телу, малыми, можно в исходном приближении
в качестве невозмущенного решения принять движение по Эйле-
ру — Пуансо. В этом случае, полагая в (9.1.13) U = 0, после его
756
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
[§ 1.02
интегрирования получим формулы, определяющие невозмущен-
ное вращательное движение тела.
Пусть для определенности А < В < С. Положим
VC
—
— B
С — А
В-А
(9.1.14)
, /G2 — 2AH I C
M =V C(C-A) ' a=\W=
CBCH —
B)(G?-2AH) •
где G — модуль кинетического момента поля, а Н — его живая
сила, и введем вспомогательную переменную % так, что
р
г
а'аа cos x, q =
ш
' V1 —
с2°2 sinZ
(9.1.16)
Общее решение невозмущенной (упрощенной) задачи, опре-
деляющее эйлерово движение тела, тогда запишется в виде
Х = апф, k),
р — щ'ао спи, q = a'basnu, r = co'dnu,
ш = со'V1 + а2а2 — a2b2c2a2 sn2 и,
u = aba>' (t-\- h), k = ca.
(9.1.17)
Невозмущенное движение небесного тела удобно относить к
системе координат, основной пло-
скостью которой служит неизме-
няемая (инвариантная) плоскость
Лапласа, нормальная кинетиче-
скому моменту тела.
Основные плоскости и линии
новой системы координат изобра-
жены на рис. 103 в пересечении
со сферой единичного радиуса.
Неизменяемая плоскость пересе-
кает единичную сферу по большо-
МУ КРУГУ Н^ ПУСТЬ ^0 - ТОЧКЗ
пересечения новой оси абсцисс с
этой сферой. По определению эйлеровых углов для новой си-
стемы отсчета имеем
г|зо=^;ГоЯ, фо=^Ях, bo=ZN'HN. (9.1.18)
Положение неизменяемой плоскости относительно старой си-
стемы координат задано следующими угловыми величинами:
, g=^N'X0. (9.1.19)
Рис. 103.Вспо«огатеЛьнЫеугЛыидуг„.
1.02]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ
757
Имеют место следующие соотношения, связывающие все введен-
ные величины:
sin ft sin (tJ; — ij)') = sin ft0 sin (i|H — g),
sin ft cos (\p — if') = cos ft0 sin ft' -j- sin ft0 cos ft' cos (ipj — g),
cos ft = cos ft0 cos ft' — sin ft0 sin ft' cos (г|>0 — g),
sin ft sin (ф0 — ф) = sin ft' sin (-ф0 — g),
sin ft cos (ф0 — ф) = sin ft0 cos ft' -f- cos ft0 sin ft' cos (ip0 — g).
(9.1.20)
Теперь запишем полный интеграл уравнения Гамильтона —
Якоби (9.1.13), определяющий эйлерово невозмущенное движе-
ние:
Здесь
(9.1.21)
F = {Ар sin ф + Bq cos ф) sin ft — Cr cos ft,
pq,=Cr = G cos ft0,
pfl = — Apcosy -\- В<78тф
G2 = AY + B2q2 + C2r2.
Если ввести дуги
ф),
(9.1.22)
то полный интеграл (9.1.21) примет вид
(9.1.23)
(9.1.24)
Связь между двумя системами углов Эйлера и постоянными
интегрирования дается формулами
cos ft cos ft0 -f sin ft sin ft0 cos (ф0 — ф) = —g-,
Sln *°
si"Z
COS Wo =
cosW =
cos ft — cos ftp cos ft'
sin ft0 sin ft'
cos ftp — cos ft cos ft'
sin ft sin ?
cos ft0
cos *
V G2 — F2 sin ft0
F cos ft + G cos ftp
(9.1.25)
758
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
[§ 1.02
Полный интеграл Гамильтона — Якоби приводит к следую-
щим трем первым интегралам невозмущенного движения:
— — f — dS — h
dF ' 1' ~dG Bii ~ШГ~ и
и которых fi, gi, ft] — произвольные постоянные.
Вместо (9.1.26) можно также записать
(9.1.26)
= Ч» —
cos<
Щ-Ц + A,).
(9.1.27)
х
От старых канонических переменных (эйлеровых углов и со-
ответствующих им им-
пульсов) можно перейти
к новым каноническим
переменным
F, G, Н,
h, B = Bi-n, h.
(9.1.28)
При рассмотрении возму-
щенного движения небес-
ного тела относительно
его центра инерции пере-
менные (9.1.28) могут
быть приняты в качестве
оскулирующих элементов.
Уравнения возмущенного
движения при этом будут
иметь вид
Рве. 104. Канонические угловые переменные
Андуайе.
Вторая система канонических уравнений:
dH _
~dT~-
dh _
~dT~
dF
dt
dfi
dK
dK
dG
dt
dg
dK
dg '
dK
dh
1Г
dF
dt
dG
dK
dH
(9.1.29)
в которых функция Гамильтона К должна быть выражена через
время и шесть новых переменных.
Развитие изложенного и его приложения к задачам астроно-
мии можно найти во втором томе сочинения Ф. Тиссерана [1].
Иной выбор канонических переменных предлагается М. Ан-
дуайе [2]. Позднее к нему же обращается А. Депри [11].
Последний вводит новые переменные следующим образом
(см. рис. 104). Рассмотрим систему координат OXYZ и Охуг.
§ 1.031 ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ 759
Линию узлов плоскостей OXY и Оху обозначим через ON. Вве-
дем углы Эйлера
q>=^>XN, ^=^Nx, ff=AYNH. (9.1.30)
Построим неизменяемую плоскость Лапласа, проходящую через
точку О и пересекающую плоскости Оху и OXY соответственно
по прямым ОН и ON'. Пусть далее
h^ZXON', g=ZN'OH, l=ZHOx, (9.1.31)
а / — угол между плоскостями ON'H и OXY, Ь — угол между
плоскостями Оху и ON'H. Положим
H = G cos I, L = G cos Ь, (9.1.32)
где G — момент количеств движения тела.
Величины L, G, H, I, g, h являются сопряженными канониче-
скими переменными, причем старые канонические переменные
связаны с новыми соотношениями
/7Ф = (Лр sin -ф -f B^cos^sin'O' + Cr cos ft = H, ")
pfl = Ap cos т|з — Bq sin Ф = G sin b sin (/ — ty), > (9.1.33)
p^=Cr = L, J
а компоненты момента количеств движения равны
i4p=Gsinbsin/, Bq = G sin b cos I, Cr = L. (9.1.34)
Гамильтониан задачи в этих переменных запишется следующим
образом:
72-L2) + y-? U(l,g, h,L, G, H).
(9.1.35)
где U — силовая функция.
Гамильтонова система уравнений движения имеет вид
JL__jH<i _dG___a/C_ dH__dK_ \
dt - т ' dt~ eg' dt- a* - j
dt — dL ' dt — dG ' dt ~~ dH "
§ 1.03. Астродинамические дифференциальные уравнения
возмущенного движения спутника относительно центра масс
При рассмотрении задач динамики космического полета по-
лучили распространение более громоздкие, неканонические си-
стемы дифференциальных уравнений вращательного движения
спутника в оскулирующих элементах. Некоторые из них можно
найти в монографии В. В. Белецкого [10].
760 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 1.03
Дифференциальные уравнения движения записываются в
«перигейной» системе координат OXYZ, ось аппликат Z которой
коллинеарна радиусу-вектору перигея орбиты, ось ординат Y
нормальна плоскости орбиты, а ось абсцисс X имеет танген-
циальное направление (в сторону движения спутника). Для слу-
чая спутника, обладающего осевой динамической симметрией
А = В, уравнения движения были указаны В. В. Белецким [10].
Они имеют следующий вид:
—тг = {Мх sin а -+- Mz cos а) cos p -f MY sin p,
—?¦ = -тг [{Mx sin a -f- My cos a) cos p — My sin p],
da 1 ,,. .. . .
~jt — ~f~~-—(M^cosa— My sin a),
-^- = -д + -q {— Mx [ctg ft (cos a sin -ф -f sin a cos -ф cos p) -f
+ ctg p cos a] + My sin p ctg ft cos -ф +
-f- Mz [ctg ft (sin a sin -ф — cos a cos p cos ij>) -\- ctg p sin a]},
-JL = r — ijjcosd —
— a(—sin^sindsinp + cos ft cos p) + pcosi)>sinO,
dt t
(9.1.37)
где Cr—Gcosft, а направляющие косинусы <z3, p3, Уз суть
a3=simj3sini&cos psina—cosifsin'O'COS a-f cos ¦& sin p sin a, 1
Рз = — sinij)sinusinp-f cosdcosp, } (9.1.38)
Y3=sin -ф sin ft cos p cos a-(-cos -ф sin ft sin ст+cos ft sin p cos a. j
В уравнениях (9.1.37) — (9.1.38) использованы следующие обо-
значения: G — модуль момента количеств движения спутника
относительно его центра инерции, р — угол между моментом ко-
личеств движения и осью ординат перигейной системы, a — угол
между осью аппликат и проекцией момента количеств движе-
ния на плоскость OXZ, Mx, My, Mz — проекции главного мо-
мента внешних сил на оси перигейной системы координат,
Ф, т|з, ft — углы Эйлера, вводимые стандартным для теоретиче-
ской механики образом *).
*) Переменные Белецкого связаны с переменными Аидуане — Депрц
Соотношениями I = ш, g = т|> г-, Л == a + -тт. Ь = Ь, I = р.
4 А
в 1.03] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ
Если приложенные силы обладают силовой функцией
761
где v — истинная аномалия центра инерции спутника, то систе-
ма (9.1.37) принимает следующую форму:
dG _ ди
dt dib '
dp _ 1 f
dt ~ G sin p ^ ai
do 1 dU
dt
p
do )'
dt
dr
G sin p dp '
A G \ dp
dU
dt u> dt G дф "
Эта система допускает первый интеграл
r = rQ = const.
dU
(9.1.39)
(9.1.40)
Если -0j- —0. то имеет место интеграл живых сил
G2-2AU = const. (9.1.41)
В случае движения спутника по круговой орбите с постоян-
ной угловой скоростью соо уравнения движения допускают интег-
рал Якоби
G2 -2AU -2Ащв cos p = const. (9.1.42)
В общем случае трехосного центрального эллипсоида инер-
ции спутника дифференциальные уравнения движения были
даны Ф. Л. Черноусько и имеют вид [15]
-тт = (Мх sin а -\- Mz cos a) cos а -\- Му sin р = М3,
*? = тг4— (Мх cos a-Mz sin о) = -^k~,
dt G sin p ч x ? ' G sin p '
^r = 4r (Mx sin в + Mz cos <т) cos p — MY sin p = ^~,
^Ф f 1 sin2 ф cos21
fsin2 ф . cos2t
Mi coj ф + Af2 sin
iF
(9.1.43)
Эти уравнения образуют замкнутую систему.
762
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
[« 1.04
§ 1.04. Моменты сил, действующих на спутник
I. Центральное ньютоновское поле тяготения. Вывод сило-
вой функции притяжения точечной массой (или шаром со сфе-
рическим распределением плотности) естественного или искус-
ственного небесного тела, размеры которого в рамках постав-
ленной задачи учитываются, приводятся в монографиях [10], [16].
Приближенные моменты сил относительно главных централь-
ных осей рассматриваемого тела равны
(9.1.44)
или
B(er,
¦С(е„ k)k], (9.1.45)
где т — масса притягивающего тела, еТ — единичный вектор ра-
диуса-вектора центра масс спутника, a i, /, k — единичные век-
торы главных центральных осей инерции.
Если через U обозначить силовую функцию притяжения, то
вместо (9.1.44) будем иметь
. „ 6U
dU
dU
, dU
ду" '
dU
ду
dU
(9.1.46)
2. Гравитационное поле сжатой планеты. Компоненты глав-
ного момента сил притяжения по главным осям инерции спут-
ника в случае, если притягивающее тело сплюснуто и обладает
осью динамической симметрии, даются формулами
10ё i- (^
М, = -g- (А - С) {[3 - 5в(-^
Y"P2) - 2ё (-^)
7 ? - 1)] чу» +
= -? (В - А) { [3 - 5ё (^-J G JJ-- 1)] уу>
(9.1.47)
§ 1.041 ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ 763
Здесь 6, т), ?, г — координаты и радиус-вектор центра масс спут-
ника в инерциальной системе координат О|т)? с началом в цент-
ре масс сжатой планеты, j$,, р2> р3—направляющие косинусы
оси ординат инерциальной системы относительно главных цен-
тральных осей инерции,
причем г„, гр — соответственно экваториальный и полярный ра-
диусы планеты, ат—ее угловая скорость, ge — ускорение силы
тяжести на экваторе.
3. Момент аэродинамических сил. С достаточной" для многих
астродинамических задач точностью момент аэродинамических
сил, действующих на спутник, можно принять равным
M=jPaVle0XCm + ±paVoP, (9.1.49)
Здесь ро — плотность потока, Vo —скорость центра масс спут-
ника относительно потока, е„ — единичный вектор этой скорости,
Cm = C?i + C?j + C?k, (9.1.50)
P = Pii + PJ + P?, (9.1.51)
где С?, Pi — константы, зависящие от положения спутника от-
носительно потока (от угла атаки), a i, /, k — единичные век-
торы главных центральных осей инерции спутника.
4. Моменты сил магнитного взаимодействия. Момент сил,
порожденных взаимодействием магнитного поля спутника с
внешним полем, определяется формулой
(9.1.52)
в которой / — магнитный момент спутника, Н — напряженность
внешнего магнитного поля.
Магнитный момент спутника порождается установленными
на нем постоянными магнитами и токовыми системами, а также
намагничиванием спутника в магнитном поле планеты. Послед-
ний эффект приводит к магнитному моменту спутника
I = -^-v{H, k)k, (9.1.53)
где цо — магнитная проницаемость спутника, v — объем его обо-
лочки, k — единичный вектор, направленный вдоль оси мате-
риальной симметрии спутника.
Напряженность магнитного поля Земли можно принять рав-
ной
Я = 7г[*г-3(*г, ег)ег], (9.1.54)
764 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 1.05
где \ю— величина магнитного момента земного диполя, при-
ближенно совпадающего с осью вращения Земли (Цт =
= 8-1025 эрстед -см3), kT — единичный вектор оси магнитного
диполя, ет — единичный вектор радиуса-вектора г.
5. Момент сил светового давления. Для спутников, представ-
ляющих собой тело вращения, приближенно момент сил свето-
вого давления может быть вычислен по формуле
М = ^ЧХ*. (9.1.55)
где ег — единичный вектор радиуса-вектора центра масс спут-
ника, k — единичный вектор его оси материальной симметрии,
X — угол между векторами ег и k, r0 — некоторое фиксированное
значение.
§ 1.05. Движение спутника относительно центра масс
в центральном ньютоновском поле
Предполагая размеры спутника достаточно малыми по срав-
нению с расстоянием до притягивающего центра и считая орби-
ту его центра масс эллиптической кеплеровской, из уравнений
движения, приведенных в [1], можно получить [10]
(9.1.56)
C-%- + (B-A)pq = 3-^(B-A)yy',
где у, у', у" — относительные направляющие косинусы оси
аппликат «орбитальной» системы координат (т. е. системы коор-
динат, ось аппликат которой направлена по радиусу-вектору
центра инерции спутника, ось ординат параллельна нормали к
плоскости орбиты, а ось абсцисс параллельна трансверсали)
в подвижной системе координат, оси которой направлены по
главным центральным осям инерции спутника.
Относительные направляющие косинусы удовлетворяют соот-
ношениям
~Щ- = УГ-у q
(9.1.57)
da
dt
~dT
da"
= a'r-
= a"p
= aq-
-a"c
— ar
a'p
1-*V.
-coy',
- coy".
§ 1.051 ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ 765
где со — угловая скорость движения центра масс спутника по
орбите, а ее, а', а" — направляющие косинусы оси абсцисс орби-
тальной системы в подвижной (связанной) системе координат,
подчиняющихся уравнениям
(9.1.58)
В случае круговой орбиты центра масс (со = const) уравне-
ния движения допускают интеграл Якоби
|(Л/>2 + Bq2 + Cr*) + | со2 (Лу2 + By'2 + CY) -
- со (ЛрР + Bqp + Cr$") = А. (9.1.59)
Если А = В, то имеет место еще один первый интеграл
г = г0 = const. (9.1.60)
Уравнения движения (9.1.56) допускают стационарное реше-
ние
р = у = 0, <7 = <в, (9.1.61)
соответствующее относительному равновесию спутника на орби-
те, при котором спутник все время обращен к Земле одной сто-
роной.
Из приведенных уравнений можно получить различные при-
ближенные формы уравнений движения спутника относительно
центра масс на круговой и эллиптической орбитах.
В простейшем случае плоских колебаний спутника на круго-
вой орбите уравнения сводятся к интегралу энергии
у ВЪ2 +-^ш2{А-С)sin2Ъ = к, (9.1.62)
в котором ¦& — угол между осью наименьшего момента инерции
спутника и радиусом-вектором его центра инерции, h — постоян-
ная интеграла живых сил.
Возможны три типа движения:
!)-=-> ЗаJ —б ротационное,
2) -д- = 3<в2 —п линитационное (предельное),
3) -р- < Зсо2-—я либрационное.
766 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 1.05
Из этих трех типов лимитационное движение является исклю-
чительным, так как оно разделяет два других типа движения.
На фазовой плоскости ¦&, Ь ему соответствует сепаратриса.
Либрационное движение описывается формулой
sinb = km[o{t — t0), k], (9.1.63)
в которой модуль эллиптического интеграла равен
* <9Л64)
(9.1.65)
Период колебаний спутника равен
T = ^K(k). (9.1.66)
В случае малых колебаний
Т^~. (9.1.67)
Если орбита центра масс эллиптическая, то дифференциаль-
ное уравнение движения спутника относительно центра масс бу-
дет иметь вид
dv^ dv 2 ' ' "
где л2 = 3(Л — С) IB, е — эксцентриситет орбиты, a v — истин-
ная аномалия центра масс спутника.
Полагая
(9.1.69)
1 + е cos о
вместо (9.1.68) получаем следующее уравнение Хилла:
Принимая теперь за независимую переменную эксцентриче-
скую аномалию Е, приходим к уравнению
sin ?", (9.1.71)
в котором [i — гравитационный параметр притягивающего цент-
ра, а р — фокальный параметр орбиты.
S 1.05]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ
767
Либрационные движения спутника подразделяются на нере-
зонансные и резонансные. Последние исследованы В. В. Белец-
ким [10], В. Г. Деминым и Р. Б. Сингхом [17]. В работе [17] по-
казано существование резонансов при n2 = -^k2 для любых
целых значений k.
Малые пространственные колебания спутника в случае кру-
говой орбиты описываются уравнениями
.., , 2 В — А ,
В — А
y =0.
(9.1.72)
Свойства пространственных колебаний определяются кор-
нями характеристического уравнения
(Я2 + л2) (Я.4 + а{к2 + а2) = 0, (9.1.73)
в котором
А-С
n2 = 3(в2 ¦
В
ai = co2[l+3^=^ +
В — С , В— А В —С
¦]•
= 4<в2
В —С В —А
(9.1.74)
Малые пространственные колебания на эллиптической орбите
описываются следующей системой дифференциальных урав-
нений:
A + е cos v) -jp + [е cos v + «i D + e cos и)] y —
— A + e cos v) a2 —:—\- e sin v • a3a = 0,
A + e cos w) -^j- + [e cos w + b1 A + e cos v)] a +
+ b2 A + e cos °) "j^ — e sin и • 53y = 0,
(9.1.75)
где
5,=
A
B-A
Л + С-Д
B-C + A
Л + С-Д г Д + С-/1
^ . 0.4 ~F. ¦
768
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
[§ 1.06
§ 1.06. Задача о поступательно-вращательном движении
двух гравитирующих динамически 'симметричных тел
Рассмотрим движение двух взаимно притягивающих абсо-
лютно твердых тел М{ и М2, обладающих осями динамической
симметрии. Движение тел будем относить к системе координат
O\XYZ с началом в центре масс тела М{ и с фиксированными
направлениями координатных осей.
Относительное движение центра масс тела будем определять
в канонических элементах Делоне L, G, H, I, g, h (см. формулы
D.3.21)). Движение тел М,- относительно их центров масс зада-
дим каноническими переменными Андуайе (см. § 1.02) Li, G,-,
Huluguhi (»=1, 2).
Дифференциальные уравнения поступательно-вращательного
движения тел в этих переменных имеют гамильтонову форму [14]:
dF
dL
dt
dG
dt
dH
dt
dLt
dt
dGi
dt
dH(
dt
dF
dl '
dF
dg '
dF
dh '
dF
~ dh '
dF
dSi'
dF
dh, '
dl
dt
dg
dt
dh
dt
dli
dt
dgi
dt
dhL
dt
dL
dF
dG
dF
dH
dF
dF
dF
A=1,2).
Гамильтониан F дается формулой
(9.1.76)
2{ml + m2)L2
причем
%
-Uo = %- BA2 + C2- 3/2) + %¦ Bi4, + C, - 3/,) ,(9.1.78)
2r3
где момент инерции /* относительно прямой О1О2 определяется
соотношением
/i --¦= А, (а? + р?) + Crf A=1, 2), (9.1.79)
в котором через а,-, (Ji, yi обозначены косинусы углов, образуе-
мых прямой О1О2 с главными центральными осями инерции
тел Mi.
1.06]
гл. l. уравнения Движения
769
Указанные направляющие косинусы вычисляются по форму-
лам
(9.1.80)
где х, у, г — координаты точки О2 в системе (
В канонических переменных коэффициенты в выражениях
для направляющих косинусов задаются формулами
G]
- H\ sin
— L? (G; sin ?г cos hi + H{ sin A, cos g,)] ,
- Я? cos A,
? — L? (G2 sin g( sin A( — Ht cos A; cos gt)] ,
-ffD cos
(9.1.81)
Разложение гамильтониана (9.1.77) в ряд имеет следующий вид;
IMWi
IMW
где au, a2l, a3l, а]Ц, a)J} — функции канонических переменных
L, G, H, Lh Gt, Hit g, h, ht.
25 Под ред. Г, Н. Дубошина
776
. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСЙ
И 1.07
§ 1.07. Вращение Луны
Характерные особенности в движении Луны были изучены
Домеником Кассини (см. ч. I, § 4.08).
Законы Кассини легли в основу физической либрации Луны.
Впервые им было дано объяснение на основе линеаризованных
уравнений движения Лагранжем [7] и Лапласом [8]. Более стро-
гое математическое обоснование было дано в работе [18] на
основе асимптотических методов теории колебаний. Там же ис-
следовалась устойчивость решений, соответствующих движениям
по Кассини.
Раздельное изучение вращательного и поступательного дви-
жения Луны приводит к следующим формулам [1]:
sinq> = —
2ц + ц
2 -
nn
р = -
Я = - у
в0)
sin (ш - Q),
-cos (й - Q)
(9.1.83)
В формулах (9.1.83) в — угол нутации, гр —угол собственного
вращения, п^ — среднее движение Луны, c+n&t — ее средняя
долгота, е — эксцентриситет лунной орбиты, t — ее наклонность,
<о — долгота перигея лунной орбиты, Q — долгота ее восходя-
щего узла, \i — коэффициент в вековом неравенстве долготы
восходящего узла лунной орбиты, а =—-^—> Р
о л
— . Постоянная Оо удовлетворяет уравнению
С-А
В
«8—
2 + 2ц + ц»
которое приближенно дает
/,
-ЗР) Л/
¦4-- (9Л-85)
§ 1.08]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ
771
Если принять [1]
ц = 0,004019, v = 0,008455, z=5°08'44",
Ф0=ГЗГ22", а = 0,000299, 0 = 0,000614,
то формулы (9.1.84)—(9.1.85) принимают вид
О sin ф = — 5493" sin (с -f пс* — Q) + 947" sin (m — Q),
ф cos ф = — 5471" cos (с + n^t — Q) -f 972" cos (m — Q),
p= —947"ncsin(m — Q),
— 180°.
(9.1.86)
Введем обозначение
Тогда формулы вращательного движения Луны приведутся
к виду
Ф = Ф0 — 1 l"cos 2 (с + ngt — Q) —
— 12" cos (с -f not + ю — 2Q) — 960" cos (с -f n^t — а),
(9.1.87)
+ 12" sin (с + n^t + ю - 2Q) + 960" sin (с -f ntf - S),
! - Q - Ф + 180°,
'sin С — 133" sin О,
где ([и О — соответственно средние аномалии Луны и Солнца,
ip — угол собственного вращения.
§ 1.08. Дифференциальные уравнения движения
деформируемого небесного тела
В небесной механике возникает необходимость исследования
движений малодеформированных планет (например, их свобод-
ной нутации). В этом случае движение тела относят к так назы-
ваемым «средним осям» [1].
Одним из способов выбора барицентрической системы коор-
динатных осей Oxyz состоит в нахождении минимума суммы
квадратов отклонений отдельных материальных точек, образую-
щих планету, за время dt от положений, которые бы они зани-
мали в случае «затвердения» рассматриваемой системы. Это
условие сводится к уравнению
S mi К-**—4zt ~f~ ryif ~\~ {ill — rxt ~Ь P2iJ ~Ь (zi — РУг ~\~ 4xif\ = min.
(9.1.88)
25*
772
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
Г§ 1.09
Составляющие момента количеств движения системы по ко-
ординатным осям обозначим через к, \i, v. Тогда
= Ap-Hq-Gr, 1
[ (9.1.89)
где А, В, С, G, F, H — центральные осевые и центробежные мо-
менты инерции небесного тела.
Дифференциальные уравнения вращательного движения не-
бесного тела записываются в форме
dt
~dT
dv
dt
(9.1.90)
(при подстановке в систему (9.1.90) значений к, ц, v из (9.1.89)
следует иметь в виду, что компоненты тензора инерции непо-
стоянны).
Уравнения вращательного движения планеты с учетом ее ма-
лых деформаций в предположении, что планета обладает осью
динамической симметрии, имеют вид
dG
'n~dJ-
A-^--(C-A)np-n~-Gn2 =
dt
dt
(9.1.91)
где n — постоянная угловая скорость вращения планеты вокруг
оси динамической симметрии, a L, М — моменты внешних сил.
Согласно Ляву [19] приближенно будем иметь
(9.1.92)
где р — постоянная, зависящая от упругих свойств планеты, ее
размеров и распределения плотности.
Период вращения планеты Т вследствие упругих деформаций
удлиняется на величину
ш
_
(С -
(9.1.93)
§ 1.09. Теория фигур небесных тел
Теория фигур равновесия небесных тел состоит в изучении
формы, которую принимает жидкость, частицы которой взаимно
притягиваются по ньютоновскому закону при отсутствии внеш-
них сил.
1.09]
ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ
Основной вклад в эту теорию был сделан И. Ньютоном,
Клеро, Лежандром, Лапласом, Маклореном, Якоби, А. Пуанкаре
н А. М. Ляпуновым. Последовательное изложение можно найти
в работах [20] — [26]. Приложения теории фигур планет в грави-
метрии даются в книге Н. П. Грушинского [27], а звезднодинами-
ческие аспекты обсуждаются в монографии К. Ф. Огородни-
кова [28].
Фигуры равновесия небесных тел изучаются на основе урав-
нений деформируемого тела (см. § 1.08), динамических уравне-
ний Эйлера и гидродинамических уравнений. Последние имеют
вид
х дх дх г" у
а>уу + сог2)
1 др _ дУ
— юу (а>хх
(9.1.94)
1 др _ дУ
х дг дг
согг) + г/со2,
согг) + zco2,
где p(x,y,z)—давление жидкости в текущей точке, V — потен-
циал сил притяжения, к (х, у, г) — плотность, ®х, щ, ш2 — компо-
ненты мгновенной угловой скорости.
Теорема Пуанкаре. Единственно возможным, движе-
нием жидкости, при котором она находится в состоянии относи-
тельного равновесия, является перманентное вращение ее вокруг
одной из главных центральных осей инерции.
Если ш = {сож, со,,, coz}, то, направляя ось аппликат вдоль
вектора ш, приведем уравнения (9.1.94) к форме
1 dp _ dW
х дх дх
1 dp _ dW
х ду ду
1 dp _ dW
х дг дг
где
(9.1.95)
I
(9.1.96)
V — потенциал силы тяжести.
Теорема. Если изолированная идеальная жидкость нахо-
дится в состоянии относительного равновесия, то ее эквипо-
тенциальные (уровенные) поверхности одновременно являются
774 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 1.09
поверхностями изобарическими (равного давления) и изостери-
ческими (равной плотности).
Следствие. Жидкая масса, находящаяся в состоянии относи-
тельного равновесия, ограничена уровенной поверхностью.
Если жидкость однородна и несжимаема, то уровенная по-
верхность удовлетворяет уравнению Вавра
?) (9.1.97)
в котором S — поверхность, ограничивающая жидкость, ds =
= {dx, dy, dz}, da — элемент поверхности, я — внешняя нормаль.
Теорема Лихтенштейна. Фигура относительного рав-
новесия однородной вращающейся жидкости обладает пло-
скостью симметрии (экватором), которая проходит через ее
центр инерции и перпендикулярна к оси вращения.
Следствие. Единственной фигурой равновесия невращающей-
ся однородной жидкости является сфера.
Приводимые ниже теоремы накладывают ограничения на
угловую скорость вращения жидкости, находящейся в состоя-
нии относительного равновесия.
Теорема Пуанкаре. Относительное равновесие жидко-
сти может иметь место только при угловых скоростях ее враще-
ния, не превосходящих -y/2n,fy..
Теорема Крудели. Если жидкость, находящаяся в со-
стоянии относительного равновесия, ограничена выпуклой по-
верхностью, то ее угловая скорость не может превосходить^nfx.
Рядом авторов при различных постановках задачи изучены
различные типы фигур равновесия вращающихся жидких масс.
Из них наиболее важные астрономические, гравиметрические и
геодезические приложения имеют эллипсоидальные фигуры рав-
новесия.
Условие, при котором эллипсоид
¦? + IT +-J = 1 (9.1.98)
с постоянной плотностью
является фигурой равновесия, сводится к уравнению
оо
u{\ — u)tdt f v(\.-v)tdt
2я/х
О
1 1.09] ГЛ. 1. УРАВНЕНИЯ ДВИЖЕНИЯ 775
В этом уравнении использованы обозначения
причем через s обозначена переменная, удовлетворяющая урав-
нению
V + +1 (9
Уравнение (9.1.100) допускает два типа эллипсоидальных
фигур равновесия:
1) u = v— эллипсоиды Маклорена,
оо
2) и =/= у, \A — и—и — uvt) -дз" = 0 — эллипсоиды Якоби.
о
(9.1.103)
Существуют два типа эллипсоидов Маклорена: сплюснутые и
дискообразные.
В зависимости от величины угловой скорости, точнее, значе-
ний параметра Q, имеют место следующие случаи:
1) 0 <: Q ^0,1871—два эллипсоида Маклорена и один
эллипсоид Якоби;
2) 0,1871 sg: Q < 0,2247 — два эллипсоида Маклорена;
3) Q = 0,2247 — один эллипсоид Маклорена;
4) Q > 0,2247 ни одного равновесного эллипсоида.
Из теорем теории фигур равновесия вращающихся жидких
масс вытекают некоторые важные гравиметрические результаты.
Ниже приводится ряд соответствующих теорем и формул.
Теорема Стоке а. Если вращающаяся жидкая масса на-
ходится в состоянии относительного равновесия, то сила тяжести
на ее поверхности и вне ее однозначно определяется заданием,
массы жидкости, угловой скорости ее вращения и уровенной по-
верхностью.
Формула Брунса:
G^H; (9-U04)
здесь д/дп — производная по нормали к уровенной поверхности,
Ri, R2 — главные радиусы кривизны уровенной поверхности, g —¦
ускорение силы тяжести.
Редукция Фая. Из (9.1.104) для Земли при
f = 6,67-10~8, х1 = 0,013, © = 0,000073,
776 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 1.09
где х\ — плотность воздуха, получаем формулу для приведения
в свободном воздухе:
-^ = 0,3086A +0,00071 cos 2Ф), (9.1.105)
Потенциал силы тяжести для уровенной поверхности, имею-
щей форму эллипсоида вращения, равен
¦arctg^-3-
1) arcctg sh w — 3 sh w] —
-^y-sin2u, (9.1.106)
где использованы эллиптические координаты и, v, w, связанные
с геоцентрическими прямоугольными координатами формулами
преобразования [27]
х = с sin и sin v ch w, Л
у = с sin и cos v sh w, ( (9.1.107)
2 = с cos и sh w, J
P2(cosu) — полином Лежандра второго порядка, а уровенная
поверхность соответствует следующим значениям [27]:
сЪш=±, sh^ = |. (9.1.108)
Из приведенного потенциала силы тяжести вытекает формула
для вычисления ускорения силы тяжести на уровенной поверх-
ности в функции геодезической широты, именуемая формулой
Пицетти — Сомильяна:
Va2 cos2 В + Ь2 sin- В
в которой ge, gP — ускорения силы тяжести на экваторе и по-
люсе соответственно, а В — геодезическая широта.
Глава 2
УСТОЙЧИВОСТЬ И СТАБИЛИЗАЦИЯ
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
ИСКУССТВЕННЫХ НЕБЕСНЫХ ТЕЛ
В этой главе приводятся без доказательств критерии устой-
чивости в смысле Ляпунова различных режимов вращения отно-
сительно центра масс искусственных спутников планет и косми-
ческих аппаратов, которые вытекают либо из строгого, либо и
из линейного анализа уравнений движения. Описываются раз-
личные способы стабилизации вращения космических аппаратов.
Даются только результаты исследования ограниченных задач
динамики космического полета, полученные в предположении,
что вращательное движение спутников не оказывает никакого
влияния на их орбитальное движение.
Основные результаты этой ветви астродинамики последова-
тельно изложены в [10] и [16]. Достаточно полно результаты ука-
занных исследований освещены в прекрасном обзоре В. М. Мо-
розова [29].
§ 2.01. Устойчивость движения спутников
в гравитационном поле сил
Задача о вращательном движении небесного тела относи-
тельно его центра инерции в ньютоновском поле тяготения допу-
скает в качестве частных решений положения относительного
равновесия, при которых главные центральные оси инерции
спутника, движущегося по круговой орбите, ориентированы
вдоль радиуса-вектора центра масс, касательной к орбите и нор-
мали к плоскости орбиты (см. § 1.05).
Впервые эта проблема была изучена Лагранжем [7], который
в 1780 г. указал необходимые условия устойчивости отмечен-
ных частных решений. В современных терминах решение задачи
дано в [1]. В последнее время в нелинейной постановке она
исследовалась В. В. Белецким [10], который указал и проанали-
зировал достаточные условия устойчивости. Как оказалось,
778 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 2.01
для устойчивости относительного равновесия тела на круговой
орбите достаточно, чтобы его наибольшая главная центральная
ось инерции была направлена вдоль радиуса-вектора его центра
масс, наименьшая — по нормали к плоскости орбиты, а сред-
няя — по касательной к орбите.
Из анализа интеграла Якоби вытекает, что существует че-
тыре устойчивых положения относительного равновесия спут-
ника на орбите, которые можно получить одно из другого по-
средством поворотов спутника на 180° вокруг радиуса-вектора и
нормали к плоскости орбиты. При этом должно выполняться не-
равенство
В>А>С. (9.2.01)
При помощи теорем Кельвина и Н. Г. Четаева В. В. Румян-
цев [16] показал, что при выполнении одного из неравенств
В>С> А, С> А>В, А>В>С (9.2.02)
положения относительного равновесия спутника неустойчивы,
а при выполнении одного из неравенств
С> В> А, А>С> В (9.2.03)
возможна их гироскопическая стабилизация.
Положения устойчивого относительного равновесия спутни-
ков на круговых орбитах являются центрами либрации. Границы
либрации спутников были оценены В. В. Белецким [10]. Области
либрации определяются неравенствами
(9.2.04)
в которых использованы обозначения § 1.05 и которые надлежит
рассматривать совместно с тривиальными геометрическими ин-
тегралами для относительных направляющих косинусов.
Более точная оценка границ либрации несимметричного
спутника приводится в работе Ликинса и Роута [30] и опирается
на анализ неравенства
3 [(Л - С) Y2 + (В - С) Y/?] + (В - А) рг + (В - С) р < g. (9.2.05)
Ряд работ посвящен исследованию устойчивости положений
относительного равновесия спутников, снабженных роторами,
т. е. спутников-гиростатов. Рассматривались два типа гироста-
тов. В первом типе постоянной во все время движения остается
§2.01] ГЛ. 2. УСТОЙЧИВОСТЬ И СТАБИЛИЗАЦИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 779
компонента момента количеств относительного движения ротора
по главным центральным осям инерции спутника
*, = const (/=1,2,3), (9.2.06)
а во втором типе неизменным остается вектор гиростатического
момента, т. е. его компоненты суть
з
Ai = kt + со ? /,/„ (/„р + /s2p' + Js3p") = const (9.2.07)
s=l
(« = 1,2,3),
где /s — осевые моменты инерции роторов, a /ei, /S2, /8з — направ-
ляющие косинусы свободных осей роторов. Второй тип гироста-
тов впервые был введен В. В. Румянцевым [16].
Устойчивость положений относительного равновесия гироста-
та исследовалась А. А. Анчевым [31] и В. В. Румянцевым [16].
Рассматривались следующие три положения относительного
равновесия:
О y" = P' = 1. Y = Y' = P = P" = O (9.2.08)
при k\ = k3 = 0;
2) у"—1, Y = Y' = P" = O, p = sinfl0> p' = cos % (9.2.09)
при k3 = 0, k2 sin ft0 — kx cos Oq — {B — А) со sin % cos flo = 0;
3) Y = P = O, p" = -Y' = sinO0, p' = Y" = cosd0 (9.2.10)
при kx = 0, k3 cos O0 — ?2 sin d0 + 4 (C — 5) со cos d0 sin d0 = 0.
Достаточные условия устойчивости указанных положений от-
носительного равновесия приводятся к виду [18]:
для первого случая
В + -^>А>С, В + ^>С; (9.2.11)
для второго случая
р I k2 . - . кг cos ftp r
(9.2.12)
третьего случая
(Л - В sin2Oo - С cos^o) (В - А +
+ 3 (В - С) (Л - В) sin2fl0 > 0.
(9.2.13)
780 Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС [§ 2.0!
В случае динамически симметричного спутника, когда А = В,
уравнения движения допускают следующие частные решения:
1H = 0, P"=l, y" = cx" = O, Q = Q0; (9.2.14)
2) Ъ = ЪафЪ, Y" = 0, P" = cosO0, Q = Qo = ^=-^cucos0o;
(9.2.15)
3) О = О0=?<=0, a" = 0, p" = cosfl0, Q = Q0 = 4^-=^a>cosd0,
(9.2.16)
где do — угол между осью динамической симметрии спутника и
нормалью к плоскости орбиты, Qo — угловая скорость вращения
спутника.
Этим решениям соответствуют перманентные вращения спут-
ника вокруг его оси симметрии, которая неизменно расположена
относительно орбитальной системы координат.
Необходимые условия устойчивости частных решений
(9.2.14) — (9.2.16) были получены Г. Н. Дубошиным [32], а доста-
точные условия устойчивости были установлены Ф. Л. Черноусь-
ко [33]. Они сводятся к следующим неравенствам:
для первого случая
для
для
второго
третьего
о ^-.
0 с
о>
случая
случая
С
— @
с ш
А
А
при
при
<С;
>с.
(9
(9
.2.
.2.
.2.
17)
18)
19)
Эти результаты были обобщены Н. Н. Колесниковым [34] на
случай осесимметричного спутника-гиростата, движущегося на
круговой орбите, в предположении, что k\ = k2 = 0, a k = fe3 =
= const. Он выявил три режима регулярной прецессии, анало-
гичных решениям (9.2.14) — (9.2.16). Случай (9.2.14) остается
без изменений, а для двух других случаев вместо (9.2.15) и
(9.2.16) будем иметь
Q==Q0 = j!i^-?-(ucosO0 — ~, (9.2.20)
о-4г. (9.2.24)
§2.02]ГЛ. 2. УСТОЙЧИВОСТЬ И СТАБИЛИЗАЦИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 781
Достаточные условия устойчивости для первого типа движения
приобретают вид
CQ0 + k> 4 (Л — С) ш при
СОо + А >(Л - С) ш при С>Л,
а для двух других случаев сохраняются неизменными.
§ 2.02. Устойчивость движения спутников
под действием моментов сил различной природы
Во многих случаях необходим совокупный учет воздействия
на вращательное движение спутника сил различной физической
природы (как сил тяготения, так и аэродинамических, магнит-
ных и иных сил).
Оценки показывают, что до высот полета спутника порядка
@,5 ± 0,3) ¦ I03 км гравитационный, магнитный и аэродинамиче-
ские моменты сил должны учитываться одновременно, так как
они сравнимы по величине. На более низких орбитах и при вхо-
де в атмосферу основное значение приобретают аэродинамиче-
ские силы. На больших высотах основное значение имеют гра-
витационные- моменты.
Разнообразные исследования в этом направлении выполнил
В. В. Белецкий [10]. Он, в частности, рассмотрел положения от-
носительного равновесия спутника, движущегося по круговой
орбите, при учете гравитационных и аэродинамических момен-
тов. В этом случае существуют три положения относительного
равенства, как это показано В. В. Белецким [10] и В. М. Моро-
зовым [35]:
1) ps=q==r = Ot p = p" = Y' = Y" = a = a'==O; (9.2.23)
2) p = q = r = 0, a" = Y" = P = P" = O, a" = sinft0; (9.2.24)
3) p = q = r = 0, Y' = Y" = a == P = 0, a" = sin GO| (9.2.25)
причем в первых двух случаях Ьо удовлетворяет уравнению
4=°. (9.2.26)
а в третьем — уравнению
й2 (С - В) sin % + \ ри20с (sin О0) = 0. (9.2.27)
Здесь через v0 обозначена скорость центра инерции тела, р —
плотность атмосферы, с (sin Oo)— коэффициент аэродинамиче-
ского момента, р, q, r — компоненты по главным центральным
осям инерции тела. Кроме того, ось аппликат связанной системы
должна быть осью симметрии поверхности, ограничивающей
тело.
782 ч. ix. Движение относительно центра масс [§ 2.02
Геометрическая картина движения такова:
в первом случае главные центральные оси инерции тела на-
правлены по осям орбитальной системы координат;
во втором случае ось ординат связанной системы направлена
по нормали к орбитальной плоскости, а две другие центральные
главные оси инерции повернуты на угол до относительно танген-
циального и радиального направления;
в третьем случае ось абсцисс коллинеарна радиусу-вектору
центра инерции, а ось аппликат наклонена к нормали к орби-
тальной плоскости под углом Фо-
Наиболее широкие достаточные условия устойчивости ука-
заны в работах В. В. Румянцева [16] и В. М. Морозова [35]. Они
имеют следующий вид:
для первого случая
В>А,
(9228)
p^A)>0, J
для второго случая (см. [36])
I (9.2.29)
B + 3A>4C-3(C-A)cos2&u,
для третьего случая
В>А,
(С -В)со2 +-рИб()
\ (9.2.30)
В задаче о движении спутника на геоцентрической эквато-
риальной круговой орбите положения его относительного равно-
весия существуют и при более общих предположениях относи-
тельно действующих на спутник моментов. В работе В. М. Мо-
розова [35] такие равновесные решения получены в случае
одновременного действия гравитационных, аэродинамических и
магнитных моментов. Они определяются из системы уравнений:
*3Р' - к,У = Зсо2 (С - В) YУ + j pvlc (а") а' -
¦ *3P = Зш2 (А - С) y'y" - - pvlc (а") а -
-[(А-С)а2-
<2Р - и,р' = Зсо2[В — А)уу' — (В — А)со2рр'
(9.2.31)
§2.02] ГЛ. 2. УСТОЙЧИВОСТЬ И СТАБИЛИЗАЦИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 783
где
х, = сой,- + alt (/ = 1, 2, 3), (9.2.32)
&,• — компоненты гиростатического момента по главным цент-
ральным осям инерции, а, Ь — характеристики постоянного маг-
нитного момента оболочки, /], l2, h — направляющие косинусы
постоянного магнитного момента относительно главных цент-
ральных осей инерции.
Отметим следующие возможные положения относительного
равновесия спутника-гиростата:
1) Y"=l, Y = Y' = P = P" = a' = a" = 0 (9.2.33)
при и1=х3 = 0, с@) = 0.
Для того чтобы это положение равновесия было устойчивым,
достаточно выполнения неравенств:
А>С, В>С, (Б-Л)^ + Х2>0,|
(В - С) со2 + х2 - Ь > 0, с' @) > 0; J ^^ '
2) Р'=1, a = Y" = cosd0, Y' = a' = 0 (9.2.35)
при х1 = х3 = 0, 3(Л — C)co2sinO0 + у ри^с (sin О0) = 0.
Достаточные условия устойчивости этого решения имеют вид
(9.2.36)
В > А, (В -
1
{ЗА + В - АС) со2 + х2 - Ь > 0.
Под действием гравитационных, магнитных и аэродинамиче-
ских моментов симметричный спутник-гиростат, центр инерции
которого описывает экваториальную круговую траекторию, мо-
жет совершать стационарные движения относительно центра
инерции. Такие движения выявлены в работе В. М. Морозова
[36]. Обозначим через а, р углы, задающие положение оси дина-
мической симметрии спутника в орбитальной системе координат,
а через Qo — угловую скорость вращения спутника вокруг этой
оси. Тогда будут существовать следующие стационарные режи-
мы вращения спутника:
2
784
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
[§ 2.03
где величины Qo и а0 удовлетворяют уравнению
sin do [(CQqCo + Лео + a) sin p0 + (С — А) со2 cos a0 + b cos (
1 +
2)
= a0,
PI
= 1
где величины Qo, a<>, po должны удовлетворять двум
тельным соотношениям.
При отсутствии аэродинамических сил имеет место
стационарный режим вращения:.
(sin do = 0, cosp3=?0),
CQoco + [4 (С — Л) со2 + b] cos a0 sin pD + Ы + a = 0.
Достаточные условия устойчивости получаются
связки первых интегралов и сводятся:
для случая 1 при р0 = л/2
CQ0co + 4 (С — А) со2 cos2 a0 + ka + а + & cos по > 0,
[CQ0M + (С — Л) со2 cos a + ka> -j- a +.b cos Oq] cos oq +
+ (Лео2 — b) sin2 a0 — y pwgc (sin a0) sin a0 +
+ у pWgc' (sin a0) cos a0 > 0,
для случая 2
Ceo2 + 4 (Л - С) со2 - Ь > 0,
3 (Л — С) со2 + у pv\c' (sin a0) > 0,
что при с = 0 для случая 3 дает
С<А, С<А + -
(9.2.38)
дополни-
еще один
(9.2.39)
методом
(9.2.40)
(9.2.41)
(9.2.42)
§ 2.03. Стабилизация движения спутников
и космических аппаратов
Проблема стабилизации движения спутников и космических
аппаратов относительно центра масс может быть решена либо
чисто классическими методами теории устойчивости, либо в со-
четании ее с теорией оптимального управления. Конечная цель
этой проблемы состоит в выборе таких уравнений, которые обес-
печивают устойчивый режим заданного движения.
§2.03] ГЛ. 2. УСТОЙЧИВОСТЬ И СТАБИЛИЗАЦИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ785
Этой проблеме посвящено значительное число работ. Один
из надежных способов стабилизации состоит в управлении дви-
жением с помощью диссипативных сил. В частности, среди ра-
бот этого направления можно отметить работы В. В. Румянце-
ва [37] и Кейна [38]. Этим же методом обеспечивал стабилиза-
цию движения В. А. Сарычев [39], который брал управляющие
моменты вида
(К = const, 7C>0).
Ряд работ посвящен оптимальной стабилизации, суть кото-
рой состоит в объединении теоремы Ляпунова об асимптотиче-
ской устойчивости со способом динамического программирова-
ния Беллмана. Этот метод был предложен Н. Н. Красовским [40].
Оригинальный способ стабилизации был указан В. В. Кре-
ментуло [41]. Уравнения движения спутника-гиростата, стабили-
зация движения которого осуществляется надлежащим выбором
вращения маховиков, приводимых во вращение двигателя, бра-
лись в виде
/,*! = Z2X3 ~ Z3X2 + «1,
Остальные уравнения можно получить циклической перестанов-
кой индексов. В этой системе использованы обозначения: х\, х2,
х3 — проекции угловой скорости гиростата на главные централь-
ные оси инерции, 1\, Z2, Z3 — проекции полного момента коли-
честв движения гиростата на те же оси, Л = А — Jx, 12 = В—1У,
/3 = С — /г, где А, В, С — главные центральные моменты инер-
ции аппарата с закрепленными маховиками, a Jx, Jv, Jz — мо-
менты инерции маховиков, ии и2, и3 — управляющие моменты.
Уравнения движения (9.2.44) допускают интеграл
г\ + г\ + г\ =¦ const. (9.2.45)
В. В. Крементуло принял в качестве координат, задающих
положение спутника в инерциальной системе координат, направ-
ляющие косинусы oti, j осей последней относительно связанных
со спутником осей координат. В этом случае систему (9.2.45)
необходимо дополнить уравнениями относительно направляющих
косинусов.
Задача состоит в таком выборе управления, чтобы решение
полной системы дифференциальных уравнений движения имело,
вид
f 1 при i = j,
*1 Ч Н и, atll ^ Q дри
786
Ч. IX. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС
Этому решению соответствует положение равновесия спутника-
гиростата, при котором связанные и инерциальные оси коорди-
нат совпадают.
Управление выбирается из условия, чтобы при достаточно
малых начальных возмущениях спутник-гиростат асимптоти-
чески стремился к равновесному положению (9.2.46) и при этом
достигался бы минимум функционала
(9.2.47)
в котором Q — неотрицательная функция, имеющая структуру
Q = Л (*,) + F2 (а„) + ? ntu] + к, (9.2.48)
где F\ и F2 — положительно определенные квадратичные формы
своих переменных, tii — положительные постоянные величины,
а через К обозначены члены выс-
шего порядка.
Искомый закон управления
имеет форму:
alkalk, (9.2.49)
Рис. 105. Схема гравитационной стаби-
лизации спутника.
где mi > 0, ajk — надлежащим
образом выбранные постоянные.
Стабилизация движения спут-
ника относительно центра масс
может быть осуществлена техни-
чески не только с помощью систе-
мы маховиков, но и другими спо-
собами. Один из способов пассив-
ной стабилизации спутника, не требующий двигателей и расхода
энергии, был предложен в 1956 г. Д. Е. Охоцимским. Подробная
теория способа была создана в цикле работ В. А. Сарычева [42].
Принципиальная схема стабилизации изображена на рис. 104.
Как видно из рис. 105, к корпусу спутника при помощи сфериче-
ского шарнира присоединяется стабилизатор, состоящий из двух
штанг равной длины, несущих на своих концах равные грузы.
Положение стабилизирующего устройства относительно спутни-
ка фиксируется специальными пружинами.
ЛИТЕРАТУРА К ЧАСТИ IX
1. Tisserand F., Traite de mecanique celeste, т. 2, Paris, 1891.
2. Andoyer M. H., Cours de mecanique celeste, т. 2, Paris, 1926.
?. С м а р т У. М., Небесная механика, пер. с англ., «Мир», М., 1965,
ЛИТЕРАТУРА К ЧАСТИ IX 787
4. Жуковский Н. Е., Механика системы. Динамика твердого тела, Гос-
техиздат, М. — Л., 1939.
5. Дубошин Г. Н., Теория притяжения, Физматгиз, 1961.
6. Блажко С. Н., Курс сферической астрономии, Физматгиз, 1948.
7. La grange J. L., Oeuvres de Lagrange, т. 5, Paris, 1870.
8. La p 1 a se P. S., Mecanique celeste, Paris, 1793.
9. Во л ков М. С, Бюлл. Ин-та теор. астрой. АН СССР, 8, № 5 (98), 343—
358, 1962.
10. Белецкий В. В., Движение искусственного спутника относительно цен-
тра масс, «Наука», М., 1965.
11. Депри А., «Механика», Сб. переводов, № 2, 3—9, «Мир», 1968.
12. Boigey F., Journ. de mecanique. 11, 3, 521—543, 1972.
13. Демин В. Г., Киселев Ф. И., Докл. АН СССР 214, № 5, 997—998,
1974.
14. Б и б и к Е. Б., «Проблема механики управляемого движения», Межвуз.
сб., № 7, 1975.
15. Черноусько Ф. Л., Прикл. матем. и мех. 27, № 3, 474—483, 1963.
16. Румянцев В. В., Об устойчивости стационарных движений спутников,
ВЦ АН СССР, М., 1967.
17. Демин В. Г., Сингх Р. Б., Космич. исслед. 9, № 2, 192—197, 1972.
18. Белецкий В. В., О законах Кассини, Препринт № 79 ИПМ АН СССР,
М, 1971.
19. Love A., Proc. Royal Soc. 82, 1909.
20. Аппе ль П., Фигуры равновесия вращающейся однородной жидкости,
ОНТИ, М. —Л., 1936.
21. Субботин М. Ф., Курс небесной механики, т. 3, Гостехиздат, М. — Л.,
1949.
22. К р а т В. А., Фигуры равновесия небесных тел, Гостехиздат, М. — Л.,
1950.
23. Лихтенштейн Л., Фигуры равновесия вращающейся жидкости, пер.
с нем. «Наука», М., 1965.
24. Сретенский Л. Н., Теория фигур равновесия жидкой вращающейся
массы, Успехи матем. наук 5, 1938.
25. Ляпунов А. М., Собрание сочинений, т. 3, Изд-во АН СССР, М., 1959.
26. П и ц е т т и П., Основы механической теории фигур планет, Гостехиздат,
М., 1933.
27. Грушинский Н. П., Теория фигуры Земли, Физматгиз, М., 1963.
28. Огородников К. Ф., Динамика звездных систем, Физматгиз, М., 1958.
29. М о р о з о в В. М., Устойчивость движения космических аппаратов, сер.
«Итоги науки», М., 1971.
30. Likins P. W., Wrout G. М., AIAA Journal 7, 6, 1134—1139, 1969.
31. Ан чев А. А., Космич. исслед. 4, № 2, 192—202, 1966.
32. Дубошин Г. Н., Бюлл. Ин-та теор. астрон. АН СССР 7, № 7, 511—520,
1960.
33. Черноусько Ф. Л., Прикл. матем. и мех. 28, № 1, 155—157, 1964.
34. Колесников Н. Н., Прикл. матем. мех. 30, № 3, 589—593, 1966.
35. Морозов В. М., Космич. исслед. 7, № 3, 395—401, 1969.
36. Морозов В. М., Космич. исслед. 5, № 5, 727—732, 1967.
37. Румянцев В. В., Космич. исслед. 6, № 5, 643—648, 1968.
38. К а пе Т. R, AIAA Journal 4, 8, 1391—1394, 1966.
39. Сарыч ев В. А., Космич. исслед. 3, № 5, 667—673, 1965.
40. М а л к и н И. Г., Теория устойчивости движения (дополнение IV
Н. Н. К р а с о в с к о г о), М., «Наука», 1966.
41. Крементуло В. В., Прикл. матем. и мех. 30, № 1, 42—50, 1966.
42. Сарычев В. А., Сб. «Искусств, спутники Земли», вып. 16, 10—33, Изд1-
во АН СССР, 1963.
Часть X
КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
Глава 1
ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ
РЕШЕНИЯ. ФИНАЛЬНЫЕ ДВИЖЕНИЯ
В этой главе приведены три фундаментальных метода каче-
ственного анализа: метод малого параметра А. Пуанкаре, метод
А. М. Ляпунова и метод исследования гамильтоновых систем
А. Н. Колмогорова и В. И. Арнольда. Эти способы позволяют
устанавливать существование периодических и условно-перио-
дических решений в задачах небесной механики. Кроме того,
изложены результаты об исследовании финальных движений в
задаче трех тел и проблемы захвата.
§ 1.01. Метод малого параметра Пуанкаре
Пусть имеется векторное дифференциальное уравнение
-|f = X(t,x,v), A0.1.01)
где х(хих2, ..., хп)— я-мерный вектор фазовых координат,
Х(Х\, Х2, ..., Хп)— л-мерная аналитическая вектор-функция
е(—оо, оо), xeG,, |ieM и периодическая по I с перио-
дом Т, t — скалярный аргумент, ц — скалярный параметр.
Кроме A0.1.01) рассмотрим векторное уравнение
4^ xW,0). A0.1.02)
называемое порождающим, или упрощенным, для уравнения
A0.1.01).
Пусть векторному уравнению A0.1.02) удовлетворяет перио-
дическая вектор-функция
*@)@ = Ч>@ (Ю.1.03)
с периодом Т;
ф(*+Г)е=ф@. /е= (-оо.оо). A0.1.04)
Решение A0.1.03) также называется порождающим
§ 1.01] ГЛ. 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 789
Сущность метода Пуанкаре состоит в определении необходи-
мых и достаточных условий существования Г-периодического
решения уравнения A0.1.01), близкого к решению q>(t) в том
смысле, что оно при ц = 0 обращается в ср(/).
Пусть искомое решение представляется векторным равен-
ством
*@ = ФС, И,Р), A0.1.05)
где л-мерный вектор р характеризует разность начальных усло-
вий для решения O(t, \л, р) и порождающего решения <р@. т. е.
Р = *(О)-ф(О). A0.1.06)
Заметим, что периодического решения x(t) = Ф(*, \i, р), удо-
влетворяющего начальному условию ж@) = <р@), не существует,
так как это противоречит теореме Коши существования и един-
ственности решения [1], если вектор X удовлетворяет условиям
этой теоремы.
Необходимым и достаточным условием существования Г-пе-
риодического решения x(t) = Ф(?, ц, Р) является выполнение
векторного равенства
Ф(Г,ц,Р)-Ф@,|1>Р) = 0. A0.1.07)
Условие A0.1.07) представляет собой векторное уравнение с не-
известным я-мерным вектором р, поэтому вопрос о существова-
нии Г-периодического решения x{t) = Ф(^, \i, p) равносилен во-
просу о разрешимости функционального уравнения A0.1.07) от-
носительно р.
Введем обозначения
, Р) = Ф (Т, ц, Р) - Ф @, \i, р), A0.1.08)
где символом D\t! обозначен якобиан л-го порядка.
Тогда имеет место
Теорема Пуанкаре. Если A([i, C) 13=^=0=5^0, то по край-
ней мере при достаточно малых \\i\ уравнение A0.1.01) имеет
единственное Т-периодическое решение, аналитическое относи-
тельно [х и обращающееся в порождающее решение x(°\t) = ф(?)
при ц = 0.
Если доказано существование периодического решения, то
целесообразно находить его либо в виде
*ж@=ф.@ + ^ p{ky h *
kl+... +*n+ft>i
S=I, 2, ..., n
790
Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
[§ 1.02
где компоненты рь р2, • ¦ ¦ ¦ Рп вектора j$ получаются в виде
рядов
п V*
A0.1.11)
в результате решения уравнения A0.1.07), либо сразу в виде
оо
* (I) =а 2-1 * V) V- > ^ 10. 1.12)
<7=0
где xW(t) суть Г-периодические функции t.
Вектор-функция х<з>(/) определяется из неоднородного век-
торного уравнения
A0.1.13)
где A(t) является Г-периодической матрицей, а №Ц1) — извест-
ная Г-периодическая вектор-функция. Более подробно эти во-
просы изложены в [2] — [6].
Если А@, 0) =0, то вопрос о существовании периодических
решений уравнения A0.1.01) и их числе становится чрезвычайно
сложным, так как в этом случае не имеет места теорема о неяв-
ных функциях, на основе которой разрешается функциональное
уравнение A0.1.07). Некоторые из этих особых случаев рассмот-
рены Пуанкаре [2] и изложены И. Г. Малкиным [3], [4], Г. Н. Ду-
бошиным [5] и К. Зигелем [6].
Метод Пуанкаре позволяет искать и А7"-периоднческие реше-
ния системы A0.1.01), где k — некоторое целое положительное
число. Для существования таких решений необходимо и доста-
точно выполнение условия
1, Р) —Ф@, ц, Р) = 0. A0.1.14)
§ 1.02. Метод Ляпунова
Определение. Векторное автономное дифференциальное
уравнение
¦%- = Ах + Х(х), A0.1.15)
в котором постоянная вещественная матрица А имеет вид
0 -Я, 0 0 ... 0
А. 0 0 0 ... 0
0 0 а„ а„ ... «i.n-2 , A0.1.16)
0 0 а21 ai2 ... а2,л-2
0
0 аП-2, 1 аП-2,2 ••• аП-2,П-
§ 1.051 ГЛ. 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 791
и п-мерная вектор-функция Х(х) является голоморфной отно-
сительно х в некоторой n-мерной области Gn(xe Gn), называет-
ся системой Ляпунова.
Теорема Ляпунова. Если уравнению A0.1.15) возможно
удовлетворить рядами
оо
ж@=?с**(*)(т), A0.1.17)
коэффициенты хМ(т) которых являются тригонометрическими
многочленами вида
W = Z (A{sk) cos st + B{sk) sin st), A0.1.18)
N
z
s=l
A0.1.19)
(Ю.1.20)
(с — произвольная постоянная), то ряды A0.1.17) абсолютно
сходятся при всяком /е(— оо, оо), если \с\ < с0, и поэтому они
представляют периодическое решение уравнения A0.1.15). .Пе-
риод Т является аналитической функцией с в области |с|< с0;
Со — некоторая положительная достаточно малая постоянная.
Очевидно, что теорема Ляпунова устанавливает существова-
ние континуального множества периодических решений уравне-
ния A0.1.15), так как —co<ic<:cQ. При доказательстве этой
теоремы [3], [5], [7], [8] и развивается метод отыскания периодиче-
ских решений, названный именем Ляпунова. Этот общий метод
отыскания периодических решений получил развитие в рабо-
тах [3], [8] -[11].
Эффективность метода Ляпунова значительно больше в тех
задачах, к которым применима теорема Ляпунова о голоморф-
ном интеграле [5], [7], [8].
Теорема Ляпунова о голоморфном интеграле.
Пусть К > 0, собственные значения матрицы А A0.1.16) не рав-
ны числам mXi (m = 0, ±1, ±2, ...) и вектор-функция Х(х) яв-
ляется голоморфной в области Gn относительно х, разложение
которой начинается с членов не ниже второго порядка. Пусть,
кроме того, система Ляпунова A0.1.15) имеет голоморфный, не
зависящий от t, интеграл, в котором совокупность членов вто-
рого порядка содержит компоненты х\ и х2 п-мерного вектора х.
Тогда система А. М. Ляпунова A0.1.15) всегда имеет перио-
дическое решение вида A0.1.17) — A0.1.20).
792 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 1.03
§ 1.03. Периодические решения, полученные
методом Пуанкаре
Первые найденные в небесной механике периодические ре-
шения— это эллиптическое движение в задаче двух тел (см.
ч. II, § 2.01) и лагранжевы решения в задаче трех тел (см. ч. V,
§§ 1.02, 2.03). После того как Хилл доказал, что уравнения за-
дачи, названной его именем (уравнения E.3.16)), допускают пе-
риодическое (почти-круговое) решение, Пуанкаре разработал
достаточно общий метод — метод малого параметра (см. § 1.01)
и на его основе установил [2] существование трех сортов перио-
дических решений в планетном варианте неограниченной задачи
трех тел (тело Ро имеет массу пг0, значительно большую масс
гп\ = aijj,, rri2 = (X2fi планет />i и Р%, также отличных от нуля,
ai > 0, иг > 0, (j, — малый положительный параметр). Частными
случаями этих решений являются периодические решения пер-
вого, второго и третьего сорта в ограниченной задаче трех тел
(см. ч. V, §2.05).
При ц = 0 планетный вариант неограниченной задачи трех
тел вырождается в две задачи двух тел (одна задача двух тел
с массами т0 и mi = 0, вторая задача двух тел с массами т0
и т2 = 0). Очевидно, что среди возможных движений в выро-
жденной задаче имеются кеплеровские эллипсы, описываемые
нулевыми массами т^ = т2 = 0. Пусть, в частности, кеплеров-
ские орбиты суть компланарные окружности. Пуанкаре доказал
[2], что при (j, ф 0 в плоской неограниченной задаче трех тел
существуют периодические решения, близкие к круговым. Точ-
нее, взаимные расстояния между тремя телами будут периоди-
ческими функциями времени, а чтобы координаты каждого тела
были периодическими функциями времени, необходимо рассмат-
ривать равномерно вращающуюся (с конечной угловой ско-
ростью) систему координат. В неподвижной системе координат
координаты трех тел не будут, вообще говоря, периодическими
функциями времени. Если ввести для таких периодических ре-
шений оскулирующий кинематический параметр — эксцентриси-
тет, то он имеет порядок величины ц. Эти плоские периодиче-
ские решения задачи трех тел были названы Пуанкаре реше-
ниями первого сорта, и они образуют четырехпараметрическое
семейство решений. Пуанкаре показывает, что все °о4 множе-
ство периодических решений не богаче, чем однократное беско-
нечное множество периодических решений, так как одни семей-
ства решений переходят в другие с помощью элементарных пре-
образований. Заметим также, что решение Хилла язляется част-
яым случаем периодических решений первого сорта Пуанкаре.
Периодические решения второго сорта — это периодические
решения плоского планетного варианта задачи трех тел, выро-
§ 1.03] ГЛ. 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 793
ждающиеся при ц = 0 в кеплеровские эллипсы с отличными от
нуля эксцентриситетами (почти-эллиптические орбиты). Нако-
нец, периодические решения третьего сорта — это пространствен-
ные периодические решения.
Доказательство существования периодических решений вто-
рого и третьего сорта в задаче трех тел сведено Пуанкаре [2]
к исследованию на экстремум некоторой функции Fu смысл ко-
торой следующий: пусть уравнения движения в задаче трех тел
записаны в гамильтоновой форме (см. ч. IV, § 1.13) с аналити-
ческой по ц при |ц|^ Цо функцией Гамильтона F вида
F (p, q + Bя), \л) s
Удобнее всего в этой задаче пользоваться каноническими эле-
ментами Делоне (см. ч. IV, § 4.06). Тогда роль переменных р
играют Lh, Gh, #а, переменных q играют h, qh, hk (A— 1, 2).
Пусть при A = 0 большие полуоси а(,0), а^0' кеплеровских
орбит планет Р\ и Р% выбраны таким образом, что п^Т и nf^T
(где nf\ п^ — средние движения планет Pi и Р%) кратны 2я.
Тогда вырожденная задача трех тел (т. е. две задачи двух тел)
допускает периодическое решение с периодом 2я по долготе.
Действительно, средние долготы планет /i0) и if1 за время Т из-
менятся ровно на 2п независимо от начальных значений долгот
/ць ifa и от начальных значений канонических элементов Де-
лоне ЯГо1, Hfl g$, g®, Лю, А$ (см. ч. IV, § 4.06).
Обозначим теперь через F\ среднее значение по времени t
функции F\{p,q), вычисленное после замены переменных р и q
решениями двух задач двух тел. Другими словами, долготы
/i0), /г0) заменяются линейными функциями t
/@) @), , .@) Ч
до) @), , ,@) J A0.1.22)
а все остальные переменные — постоянными значениями. Тогда
г
г->°°
. «Р.
Для существования периодических решений второго и треть-
его сорта достаточно [2], чтобы Л в пространстве параметров
#i0), //гП), lyo, 4o, gio_, gm имела экстремум. Пуанкаре доказы-
вает, что функция F\ всегда имеет экстремумы в пространстве
794 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 1.03
указанных параметров и, следовательно, всегда существуют в
планетной задаче трех тел периодические решения второго и
третьего сорта. Пуанкаре доказано также, что множество пе-
риодических решений третьего сорта богаче множества перио-
дических решений второго сорта, так как, если положить в клас-
се периодических решений третьего сорта наклон, равным нулю,
мы получим все множество периодических решений второго
сорта и некоторое подмножество периодических решений, не
принадлежащих классу решений второго сорта.
Как и в случае решений первого сорта, периодическими
функциями времени являются взаимные расстояния, а не коор-
динаты тел. Координаты тел будут периодическими функциями t
в равномерно вращающейся системе координат, угловая ско-
рость которой относительно неподвижной системы достаточно
мала.
АГ-периодические решения системы A0.1.01) Пуанкаре на-
зывает решениями второго рода. В «Новых методах» [2] он дает
исчерпывающий анализ проблемы существования и конкретного
построения периодических решений второго рода.
Для периодических решений первого, второго и третьего сор-
та, так же как и для периодических решений второго рода, ха-
рактерным является то, что они при jj, = 0 (когда массы двух
планет Ш\ = cci^, m2 = ссг^ обращаются в нуль) вырождаются
в кеплеровские орбиты (круговые или эллиптические), т. е. в вы-
рожденном случае перигелии и узлы планетных орбит непо-
движны. В связи с этим Пуанкаре ставит и решает новую за-
дачу о периодических решениях в проблеме трех тел: им до-
казано существование таких периодических решений, которые
характеризуются существенным (но спонтанным) изменением
долгот перигелиев и узлов, обусловленным взаимно близким
прохождением планет. Такие периодические решения названы
Пуанкаре решениями второго вида.
Методы Пуанкаре получили многочисленные приложения в
задаче трех тел. Шварцшильд доказал [12] существование пе-
риодических решений в ограниченной круговой задаче трех тел,
периоды которых в общем случае несоизмеримы с периодом по-
рождающего решения. Эти периодические решения вырождают-
ся при A = 0 во вращающиеся эллипсы вокруг центрального
тела (периодические решения с вращающейся линией апсид).
Следует также сказать о работе Цейпеля [13], содержащей де-
тальное исследование периодических решений третьего сорта,
о книге К. Зигеля [6], в которой доказывается существование
периодических решений гамильтоновых систем, когда матрица
линеаризованной части имеет пару чисто мнимых собственных
значений, Г. А. Мермана [14], в которой приведены новые четы-
рехпараметрические множества периодических решений в огра-
§ ,104] ГЛ. 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 795
ничейной круговой задаче трех тел и в задаче Хилла, Ю. В. Ба-
тракова [15], [16], рассматривающих существование шварцшиль-
довских периодических решений в пространственных неограни-
ченной и ограниченной задачах трех тел. Аналогичное семейство
периодических решений найдено Е. П. Аксеновым [90]. В этой
же задаче, исходя из орбит задачи двух неподвижных центров,
В. Г. Демин установил существование периодических орбит, за-
мыкающихся после нескольких оборотов [18]. Семейства перио-
дических решений конечных размеров в окрестности точек ли-
брации найдены Мультоном [17]. А. А. Орловым найдены новые
классы периодических решений в ограниченной задаче трех тел
[91]. Наконец, имеется статья монографического плана Г. А. Че-
ботарева [19], содержащая, помимо оригинальных результатов
автора, историю вопроса.
Описанные выше результаты относятся к ньютоновской за-
даче трех материальных точек, а не тел конечных размеров.
В связи с запросами астродинамики возникла необходимость
построения периодических решений в задачах с гравитационны-
ми полями, создаваемыми телами конечных размеров.
В работе [92] Е. П. Аксенов и В. Г. Демин установили су-
ществование .почти-эллиптических периодических относительно
«регуляризирующего времени т» экваториальных орбит в спут-
никовой задаче, когда центральное тело обладает динамической
симметрией и медленным {по сравнению со средним движением
спутника) вращением. Эти решения образуют двухпараметри-
ческое семейство и могут быть названы решениями второго сор-
та. В. Г. Деминым найден класс почти-круговых периодических
решений [87] в задаче о движении спутника в гравитационном
поле, порожденном притяжением сфероидальной планеты и двух
точечных масс, двигающихся по круговым орбитам вокруг пла-
неты на расстояниях, больших чем максимальное планетоцен-
трическое расстояние спутника. В этой же монографии можно
найти оо2 семейство периодических движений (относительно «ре-
гуляризирующего времени т») лунного спутника.
Вопрос о существовании периодических решений в спутнико-
вой задаче с критическим наклоном (sin2 i = 0,8) изучен
А. А. Орловым [93].
§ 1.04. Периодические решения, полученные
методом Ляпунова
Метод Ляпунова, изложенный в § 1.02, получил завершенное
применение в исследованиях Г. Н. Дубошина [20], [21] и
А. И. Рыбакова [22]—[25] по построению аналитических теорий
движения спутников в спутниковых системах, и, в частности, в
системе Сатурна.
796 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 1.04
Рассматривалась механическая модель, состоящая из цен-
трального тела — однородного эллипсоида вращения (Сатурн),
однородного плоского кругового кольца (кольцо Сатурна), вось-
ми однородных, одномерных, круговых колец (заменяющих
спутники) и материальной точки — Солнца, двигающейся, со-
гласно законам Кеплера, по эллипсу, фокус которого совпадает
с центром Сатурна.
Полная силовая функция V задачи о движении спутника
является суммой одиннадцати силовых функций и может быть
представлена, как показал Г. Н. Дубошин [20], в виде
?/ = ?/' + ?/". A0.1.23)
Функция V = l/'(p,z), U'(p, — z)= U'(p,z), зависит только от
двух цилиндрических координат р, z (не зависит от долготы),
причем является четной функцией относительно г. Функция
U"(p, I, z, t) представляет остальную часть функции U. Посколь-
ку силовые функции колец и эллипсоида вращения не зависят
от долготы I, отсюда следует, что
2Л
Vedl, A0.1.24)
где UQ — силовая функция, обусловленная притяжением
Солнца.
Модельная задача с силовой функцией V имеет [20] плоские
и пространственные периодические решения вида A0.1.17) —
A0.1.20), для нахождения которых используется теорема Ля-
пунова о голоморфном интеграле. Полная задача может иметь
периодические решения только в том случае, если период обра-
щения Сатурна вокруг Солнца и период периодического реше-
ния модельной задачи для спутника, зависящего от постоян-
ной с, соизмеримы.
Для построения этих периодических решений целесообразно
применять метод Пуанкаре. В общем случае полная задача не
имеет периодические решения, близкие к «ляпуновским» перио-
дическим решениям.
Конкретные вычисления для системы Сатурна, выполненные
А. И. Рыбаковым [22]—[25], дали удовлетворительное согласие
с многочисленными наблюдениями спутников Сатурна, прове-
денными Германом и Георгом Струве [94], [95] на протяжении
почти полстолетия с 1880 по 1928 г.
Некоторые семейства периодических решений в окрестности
точек либрации изучены Ю. А. Рябовым [26].
§ 1.0S] ГЛ. 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 797
§ 1.05. Периодические решения, полученные
качественными методами
Методы Ляпунова и Пуанкаре (§§ 1.01, 1.02) суть аналити-
ческие методы построения периодических решений систем обык-
новенных дифференциальных уравнений. Второе направление —
это установление существования периодических решений мето-
дами качественной теории.
Первая работа подобного характера принадлежит Е. Уитте-
керу [27] и опирается на рассмотрение действия в смысле Якоби
для гамильтоновых систем с двумя степенями свободы. В этом
случае положение точки в рассматриваемой динамической си-
стеме определяется двумя позиционными координатами (х, у)
и любая траектория точки является плоской. Критерий Уитте-
кера состоит в том [27], [58], что рассматривается некоторое
плоское кольцо на плоскости (я, у) и значение, построенной спе-
циальным образом, функции на внутренней и внешней границах
кольца. Эта функция (назовем ее функцией Уиттекера) имеет
следующую аналитическую структуру:
где U(x,y)—силовая функция, А — полная энергия системы,
р(х, у) —радиус кривизны контура С, проходящего через задан-
ные две точки траектории, у — угол наклона нормали, прове-
денной в точке (а;, у) контура С к оси Ох.
Критерий Уиттекера. Если во всех точках внутренней
границы кольца W < 0, а во всех точках внешней границы
W > 0, то в данном кольце имеется периодическая траектория
динамической системы, соответствующая данному значению h
полной энергии.
А. Синьорини [101] и Л. Тонелли [102] обобщили критерий
Уиттекера на случай обратимых (автономных) динамических
систем, а Дж. Биркгоф [100] распространил критерий Уиттекера
на неавтономные динамические системы с двумя степенями сво-
боды.
Основываясь на этом критерии, Н. Д. Моисеев [28], [29] уста-
новил существование четырех семейств периодических решений
в плоской ограниченной круговой задаче трех тел Солнце —
Юпитер — астероид. С помощью критерия Уиттекера Н. Д. Мои-
сеев нашел кольцевые области, в которых располагаются перио-
дические решения. Н. Ф. Рейн разработала [103] метод нахожде-
ния периода периодического решения в ограниченной задаче
трех тел, аналитическая структура которого неизвестна. В тео-
рии движения ИСЗ критерий Уиттекера был применен В. Г. Де-
миным [31].
798 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА (§ 1.06
Пуанкаре принадлежит первый вариант знаменитой теоремы
[96], [97] о неподвижной точке, однако в приложениях получила
большее распространение другая формулировка теоремы о не-
подвижной точке, принадлежащая Дж. Биркгофу [98], [99]. Зи-
гель дал новое доказательство [6] теоремы Биркгофа,. сопро-
вождаемое более точными необходимыми оценками для отобра-
жаемых областей и для постоянных.
Теоремы А. Пуанкаре и Дж. Биркгофа о неподвижной точке
применялись Биркгофом [100], Зигелем [6] и Ю. Мозером'[30] для
доказательства существования новых семейств (отличных от ре-
шений первого сорта Пуанкаре) почти-круговых решений огра-
ниченной круговой задачи трех тел.
Оригинальные результаты принадлежат А. Д. Брюно [143].
Исследование окрестности тора качественными аналитическими
и численными методами позволило удачно систематизировать
ранее известные и новые полученные им классы периодических
и условно-периодических решений ограниченной круговой задачи
трех тел.
§ 1.06. Почти-периодические функции и их свойства.
Условно-периодические функции
Определение 1. Функция f(x), непрерывная на всей ве-
щественной оси, называется почти-периодической в смысле Бора,
если для любого е > 0 существует положительное число / = /(е)
такое, что любой отрезок [а, а -\-1\ (а — любое вещественное
число) содержит по меньшей мере одно число г, для которого
\f(x + x)-f(x)\<e (-оо<х<оо). A0.1.26)
Число т(е) называется Е-почти-периодом функции f(x).
Класс почти-периодических функций достаточно хорошо изу-
чен в исследованиях П. Боля и Г. Бора и эти результаты изло-
жены в [32]—[34]. Мы приведем лишь те свойства почти-перио-
дических функций, которые чаще всего нужны в небесной меха-
нике.
Свойство 1. Пусть а есть я-мерный постоянный вектор,
f(x)(f\{x),f2(x) fn{x)) есть п-мерная почти-периодическая
вектор-функция (его компоненты — почти-периодические функ-
ции). Тогда скалярная функция
F(x) = {a,f(x)) A0.1.27)
является почти-периодической.
§ 1.06] гл. i. Периодические и условно-периодические решения 799
В частности, тригонометрический полином вида
г \Х)—2^i ake \l\j.l.Zo)
с вещественными Xs является почти-периодической функцией.
Свойство 2. Пусть fi(x), f2(x) fn(x) —почти-периодиче-
ские функции. Тогда
Ш*() A0.1.29)
— также почти-периодическая функция.
Свойство 3. Пусть fi(x), f2(x)—почти-периодические функ-
ции, причем
inf |/2(x)|>0.
хе( —оо, оо)
Тогда
Р{Х) = Ш (Ю.1.30)
— также почти-периодическая функция.
Свойство 4. Если производная f'(x) почти-периодической
функции f(x) равномерно непрерывна на всей вещественной оси
лб(—оо, оо), то она почти-периодическая функция.
Свойство 5. Пусть f (x) — почти-периодическая функция,
х
F(x)=\f(t)dt A0.1.31)
sup \F(x)\<oo. A0.1.32)
ле(-м, оо)
Тогда F(x) является почти-периодической функцией.
Свойство 6. Всякая почти-периодическая функция имеет ко-
нечное интегральное среднее
г
f(x)dx. A0.1.33)
4
Свойство 7. Интеграл от всякой почти-периодической функ-
ции представим в виде
f-x + y(x), A0.1.34)
8U0 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА |§ 1.06
где f — среднее значение функции f(x),~ ц>(х)—почти-периоди-
ческая функция.
Определение 2. Спектральной функцией для почти-пе-
риодической функции f(x) называется функция
a(k) = M{f{x)e-tKx). A0.1.35)
Свойство 8. Для любой почти-периодической функции f(x)
ее спектральная функция а(Х) не равна нулю лишь для конеч-
ной или счетной последовательности h, X2 Хп, ...
Определение 3. Числа hi, Яг, ..., кп, ..., для которых
а{%п)фЪ, называются показателями Фурье почти-периодиче-
ской функции f{x), а числа а(Х„) называются ее коэффициента-
ми Фурье. Множество всех показателей Фурье называется спек-
тром почти-периодической функции.
Определение 4. Рядом Фурье почти-периодической функ-
ции f(x) называется тригонометрический ряд
М*)~?а„е'Ч A0.1.36)
п
где
ап = а (К) = M{f (x) е~апх}. A0.1.37)
Множество {Я„} — спектр функции f (х).
Определение 5. Если среди показателей Фурье Xi, k2, ...
почти-периодической функции f(x) существуют такие k показа^
телей Хп,, Хп2, ••¦, Х„А, что все остальные представляются в
виде суммы
K=f,NiKi, A0.1.38)
где Ni, N2 Nh — целые числа, то такая почти-периодиче-
ская функция называется условно-периодической.
Совокупность Кп, Кп2, •¦¦, Я„й называется частотным бази-
сом условно-периодической функции.
Очевидно, что условно-периодическую функцию можно пред-
ставить рядом Фурье вида
/М~ Z /V'("•«*, A0.1.39)
\N[>0
где Х(Х„ , Кп КпЛ есть ^-мерный частотный базис, W есть
ft-мерный целочисленный вектор, норма которого
Е. A0.1.40)
(=-1
Этот частный случай почти-периодических функций наиболее
распространен в небесной механике.
$ 1.07] ГЛ, 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 801
§ 1.07. Теорема Арнольда о существовании
условно-периодических решений гамильтоновых систем
Пусть движение объекта описывается гамильтоновой систе-
мой 2п-го порядка
dt dq • dt dp UU.1.41J
с аналитическим по всем переменным р и q и периодическим
по q гамильтонианом H(p,q,\i), где ц — малый параметр. Фа-
зовое 2л-мерное пространство переменных р, q является прямым
произведением я-мерного тора на область «-мерного евклидова
пространства.
Если гамильтониан зависит только от переменных
р{Н = Н(р)), то уравнения A0.1.41) принимают вид
Уравнения A0.1.42) легко интегрируются, и мы имеем
Р = Ро. 1 = Ш + 10. A0.1.43)
Каждый тор р = ро инвариантен, и если частоты ац, шг, •¦¦
..., ш„ несоизмеримы, то мы имеем условно-периодическое дви-
жение на торе р = ро с частотами соь ш2, • ¦., con-
Основной вопрос, который возникает при рассмотрении га-
мильтоновых систем A0.1.41), можно сформулировать следую-
щим образом: существуют ли у системы инвариантные торы,
близкие к тору р = ро, и имеет ли движение на этих торах
условно-периодический характер? Этот вопрос в последние де-
сятилетия рассматривался К. Зигелем [6], А. Н. Колмогоровым
[35], В. И. Арнольдом [36], Ю. Мозером [37], [38]. Позднее су-
щественные обобщения были сделаны в работах [39], [40].
Ниже мы приводим теорему Арнольда [36] о существовании
условно-периодических движений для системы A0.1.41).
В задачах небесной механики не все компоненты я-мерных
векторов р и q входят в гамильтониан #(р, q) одинаковым обра-
зом, поэтому ради удобства будем рассматривать векторы р0, qa
размерности п0 и векторы pi, q\ размерности пи причем оче-
видно, что «о + п\ = п-
Теорема Арнольда. Пусть гамильтониан H(p,q)ss
= Н (ро, р., 9о. Ч\) зависит от параметра ц @ < ц <fx0). Ял-перио-
дичен по переменным q0 (Я (р0, рь q0 + 2л, ?,) ~Н{р0, р,, q0, qj),
аналитичен в 2п-мерной области
{Ро ег Go,
|Im?0|<p, (I0.1.44)
26 Под ред. Г. Н. Дубошнна
802
. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
[§ 1.0»
и представим в виде
H(p,q) = Ha (р0) + |*
где #2 имеет порядок ц2, а
Я|(р, Я) = НЛро, Pi,
2п 2Я
(р,
2п
оо
o, Pi. <7i) = #i
Я2 (р,
po, Pi. <7
0,
7/,(р0, Pi,
,(р0, ) Zl |? + ^ Е_ |/,, + fZ i.
где Я,о, kit кц = кц и кцк зависят только от р0, а
A0.1.45)
(Ю.1.46)
A0.1.47)
A0.1.48)
A0.1.49)
<&+.- ('-1 «О- (Ю.1.Б0)
Пусть, кроме того, в области F выполняются неравенства
а в области Go
det
Ф0, det |Л,/(ро) 1
A0.1.51)
A0.1.52)
Тогда для любого е > 0 существует такое бо (е; Но, Н\, Go\
р, R, С; ц0) > 0, что если 0 < б < бо и 0 < ц < б4, то имеют ме-
сто утверждения:
1. Область
{Ро «ее Re Go,
|Im<7ol = O, A0.1.53)
0 < Xi < б
состоит из Двух множеств F6 и /в, из которых F6 инвариантно
относительно канонических уравнений с гамильтонианом
A0.1.45), а другое, f6, мало в смысле меры
mes f& < e mes F6.
2. Множество Fu состоит из инвариантных «-мерных анали-
тических торов Та, задаваемых параметрическими уравнениями
t г (Г\\ е» Г\ 1 гт (f~i\
Ро — /'Ош "Т~ /Ош vK/t Чо "~~ Wj i бОш \Sk)i
Pi = V2 (т. + /1В (Q)) cos [Q, + gla (Q)], 1 A0.1.54)
Pi = V2(t« + /Ib(Q)) sin [Q, + giu (Q)],
$ 1.0В] ГЛ< 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИЭДИЧЕСКИЕ РЕШЕНИЯ 803
где Q = Qo Qi — угловые параметры, рош, тт — постоянные, за-
висящие от номера тора со.
3. Инвариантные торы Тш мало отличаются от торов
Ро = Pom = const, т = тш = const. A0.1.55)
Это отличие дается оценками
lfh(Q)l<«4, lfie(Q)l<efi, |ft.(Q)l<e5, |firle(Q)|<e5. A0.1.56)
4. Движение на торе Та условно-периодично с n-частотами и:
Эта общая теорема позволяет доказать, что в задаче о дви-
жении N планет существуют условно-периодические решения,
если массы планет достаточно малы и их невозмущенные эл-
липтические движения происходят в кольцеобразных областях
трехмерного пространства, не пересекающихся друг с другом.
Последнее условие для всех больших планет (исключая Плу-
тон) выполняется. Применение теоремы Арнольда в небесной
механике возможно, если написать уравнения движения в ка-
нонических переменных Делоне (см. ч. IV, гл. 1) и воспользо-
ваться теоремой Биркгофа [41] о приведении гамильтоновой си-
стемы к нормальной форме. Роль частот щ играют средние дви-
жения планет.
§ 1.08. Условно-периодические решения
в небесной механике. Геометрическая интерпретация
По традиции в задачах небесной механики условно-периоди-
ческим называется [140] такое решение, в котором позиционные
переменные (большая полуось, эксцентриситет, наклон и анало-
гичные им канонические переменные) выражаются в виде услов-
но-периодических функций времени, т. е. имеют вид A0.1.39)
И0, e{t), L{t), ¦¦¦)~lw?/tfe'W'. (Ю.1.58)
а угловые переменные (средняя и истинная долготы, средняя
аномалия, долгота перицентра, долгота узла и др.) выражаются
в виде сумм линейных функций и условно-периодических функ-
ций времени, т. е.
(о@. /(О, M(f), »@, Q(O)~a/+i^oVWlW>'. A0.1.59)
26*
804
Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
[§ 1.08
Не существуют в задачах небесной механики такие решения,
в которых все переменные (позиционные и угловые) представ-
лялись бы условно-периодическими функциями вида A0.1.58).
Можно дать два геометрических изображения условно-перио-
дических решений. Рассмотрим, ради простоты, совокупность
двух пар функций: одна па-
ра — оскулирующие боль-
шая полуось a(t) и эксцен-
триситет e(t), вторая па-
ра— средняя аномалия
M(t) и угловое расстояние
перицентра ш@-
Предположим, что a(t) и
e(t) имеют вид A0.1.58), а
М@ и ш@-вид A0.1.59).
Заметим, что с помощью та-
ких переменных можно опи-
сать движение пассивно гра-
витирующей (нулевой) мас-
сы Р в плоской ограничен-
ной задаче трех тел, или
движение каждой массы в
плоской JV-планетной зада-
че.
задаче а = а0, е = е0, а = ш0, М =
позиционные переменные (а,е) и одна
х
Рис.
106. Изойражеиие эллиптической орбиты
планеты Р в ее плоскости.
В невозмущенной
= a\t + MQ, т. е. две
угловая переменная (со) суть постоянные, а вторая угловая пе-
ременная (М) —линейная функция
времени. Не ограничивая общность,
можно положить шо = Мо = 0.
Одно геометрическое изображе-
ние для случая е0 < 1 дано на
рис. 106. Эллиптическая орбита точ-
ки Р неподвижна в неподвижной си-
стеме координат Sxy и касается
двух окружностей: окружности, ра-
диус которой равен расстоянию пе-
рицентра г0 = аоA — е0), и окруж-
ности, радиус которой равен рас-
стоянию апоцентра /?о = cto(l -f- e0).
Для получения второго геометрического изображения вос-
пользуемся тором, образованным прямым произведением двух
окружностей [141] с радиусами а0 и е0 (рис. 107). Введем на
торе две угловые координаты: долготу М и широту ш.
Так как ш = и0 = 0, М = a\t, то движение точки Р на торе
изображается равномерным движением по экватору тора.
Рис. 107. Изображение эллиптиче-
ской орбиты на торе.
§ 1.08] ГЛ. I. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 805
Допустим теперь, что a(t), e(t) суть функции вида A0.1.58),
a M(t), a(t)— вида A0.1.59). Так как условно-периодические
функции ограничены для всех /е(—оо, оо), имеем
Мтш < М (t) ~ aj < Mmix,
,<a{t) — a^< штах,
етах-
A0.1.60)
причем amin ^ a0 ^ amax, ?min sg; e0
Если ввести теперь величины
I'mln =
(ШЛ.6!)
TO ОЧеВИДНО, ЧТО Яшах ^ ^?о, ГпИп ^ Г0.
Для всех <е(—оо, оо) существует плоское круговое кольцо
rmin ^ r ^ /?max, внутри которого происходит движение точки Р
(рис. 108). Траектория иногда может касаться как внутренней,
Рис. I0S Изображение условно-пе-
риодического днижения в плоскости
орбиты.
Рис. 109. Перинлегматическая орбита
в задаче трех тел
так и внешней границы кольца, но вероятность такого события
равна нулю. Если существует условно-периодическое решение,
в котором а = const, е = const, M(t), w@ имеют вид A0.1.59),
то такое решение изображено на рис. 109. Такие решения часто
называются периплегматическими. За бесконечное время угло-
вые переменные M(t) и a(t) увеличиваются бесконечное число
раз на 2л, т. е. движущаяся точка Р бесконечное число раз об-
ходит начало координат, а воображаемая прямая, соединяющая
смежные по t максимум и минимум кривой, также совершает
бесконечное число поворотов вокруг начала.
806 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 1.08
Если для геометрического изображения воспользоваться то-
ром, то тогда существует в трехмерном пространстве тор (буб-
лик) с радиусами /?тах и rmin, а движение точки Р изображается
кривой, целиком расположенной внутри тора. При этом точка
совершает бесконечное число оборотов по долготе и бесконеч-
ное число раз переходит из верхней (северной) части тора в
нижнюю (южную). При а = const и е — const точка движется
по поверхности тора с радиусами RQ, г0, совершая бесконечное
число оборотов по долготе и широте (рис. 110, 111).
Таким образом, в случае а = const, e = const имеем обмотку
поверхности тора (если ai и а.2 рационально несоизмеримы)
или «заметывание» кольца.
В общем случае (a = a(t), e = e(t)) имеем «заметывание»
кольца, или всюду полное наполнение тора. В исключительных
Рис. ПО. Изображение простран- Рис. 111. Изображение услозно-перио-
стненного условно-периодического дического движения на торе,
движения.
случаях (например, если а\ и а2 рационально соизмеримы)
траектория замыкается после некоторого числа оборотов, и мы
получаем периодическое решение. Аналогичные геометрические
интерпретации условно-периодических решений можно дать и
в случае большего числа позиционных и угловых переменных.
Например, в пространственной ограниченной задаче трех тел
число позиционных и угловых переменных равно соответственно
трем (a(t), e(t), i(t) и M(t), a(t), fi@)- Вместо кругового
плоского кольца следует рассматривать полый цилиндр, основа-
нием которого служит круговое кольцо, а высота равна 2imax,
где \i(t) | < tmax- Вместо двумерной поверхности тора следует
рассматривать трехмерную поверхность тора, полученную пря-
мым произведением трех окружностей с радиусами атах, етах,
Imax-
Первые условно-периодические решения в задаче трех тел
нашел Пуанкаре [2]. Его метод малого параметра (см. § 1.01)
позволяет находить в определенных системах координат услов-
но-периодические решения задачи трех тел. Периодические ре-
шения первого, второго, третьего сорта суть, вообще говоря,
§ 1.08] гл. 1. Периодические и усл6вно-периодиЧескиё решения 80?
условно-периодические решения, так как координаты точек в
неподвижной прямоугольной системе координат даются функ-
циями типа A0.1.59). Периодические решения Шварцшильда
(см. § 1.03) также являются условно-периодическими решениями
в неподвижной системе координат.
Условно-периодические решения JV-планетной задачи, най-
денные Арнольдом в § 1.07, являются условно-периодическими
решениями второго сорта, пользуясь терминологией Пуанкаре.
В. Джефрисом и Ю. Мозером [42] и Г. А. Красинским [43]
доказано существование условно-периодических решений пер-
вого сорта (почти-круговых движений) в задаче трех тел и в
плоской JV-планетной задаче. Построены условно-периодические
Змипс
Рис. 112. Ь словно-периодическое
цвиженне спутника на эллипсоидаль-
ной поверхности.
Рис. 113. Часть трехмерного пространства,
в которой происходит условно-периодическое
движение спутника.
решения в окрестности точек либрации [36], [140]. Условно-пе-
риодические решения в осредненных вариантах плоской ограни-
ченной задачи трех тел найдены в [29], [140]. Все перечисленные
классы условно-периодических решений имеют «периплегмэти-
ческий» характер, или суть движения в торах или на торе.
Дж. Винти [45], М. Д. Кисликом [46], Е. П. Аксеновым,
В. Г. Деминым и Е. А. Гребениковым [47] доказано существо-
вание условно-периодических решений в задаче о движении ис-
кусственного спутника сфероидальной планеты. Ими доказано,
что при отрицательных энергиях спутника существуют условно-
периодические решения, всюду плотно обматывающие часть эл-
липсоидальной поверхности, заключенной между двумя парал-
лелями (рис. 112), или всюду плотно заполняющие тело враще-
ния, образованное вращением фигуры (рис. 113) вокруг оси Oz.
В конце заметим, что доказательство существования услов-
но-периОдических решений в планетных задачах, основанное на
818
Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
|§ L09
применении методов ускоренной сходимости ньютоновского типа
[48], содержит в себе и способ построения некоторых классов
условно-периодических решений гамильтоновых систем. Кон-
структивная часть метода достаточно подробно описана
Ю. Л. Рябовым [140].
§ 1.09. Финальные движения в задаче трех тел.
Захват и обмен в задаче трех тел
Финальными движениями в задаче п тел называются пре-
дельные движения, к которым стремятся движения каждого из
тел при t ->¦ ±оо.
Классификация финальных днижений в задаче трех тел была
дана Ж- Шази [49]. Согласно Шази существует семь типов фи-
нальных движений в за-
даче трех тел (рис. 114).
А) Движения гипер-
х болические:
lim Го; = -j- оо,
lim r02==-foo,
t ->+оо
lim r,, = -f oo.
Рис. 114. Gxyz — прямоугольная барицентрическая
система координат; Vo, Vi, ^ — барицентрические
скорости точек Ро, Pi, P% соответственно.
причем Гц = О (t) для до-
статочно больших значе-
ний /. Отсюда вытекает,
что
lim IVqIX),
lim |V,|>0,
lim |V2|>0.
В) Движения гиперболо-параболические:
lim Гт = + оо, lim rO2 = + °°. li
причем
= 0@,
для достаточно больших значений Л Отсюда вытекает, что
lim |Vi2| = 0, VtI —- скорость тела Pt относительно Pt.
+ <»
С) Движения гиперболо-эллиптические:
lim rOI = -f-oo, lim Го2 = -г-°°,
r,2<Cb
§ 1.09] ГЛ. 1. ПЕРИОДИЧЕСКИЕ И УСЛОВНО-ПЕРИОДИЧЕСКИЕ РЕШЕНИЯ 809
С] — некоторая постоянная, причем
г„@ = О@, ги @ = 0@
при достаточно больших значениях /.
D) Движения параболо-параболические:
lim гп = 4- оо.
причем все
для достаточно больших Л На бесконечности все относительные
скорости обращаются в нуль.
E) Движения параболо-эллиптические:
lim r0] = + °o, lim r02= + oo, lim ги<С,
(->+<» f-»+OO f->+OO
причем
го, (О = О(^), r02 = o(t'')
для достаточно больших t. Отсюда вытекает, что
lim |V01|= lim |Уи| = 0.
F) Движения ограниченные: все lim rit < С.
t->+oo
G) Движения осциллирующие: lim г01 < С, а Гоа(О и
t>+
с одной стороны неограничены, но и не стремятся к бесконечно-
сти при f->-(-oo. Существование таких движений у Шази не
было доказано. Этот вопрос положительно решен К. А. Ситни-
ковым [50].
Очевидно, что в приведенной классификации индексы 0, 1 и 2
не имеют существенного значения.
Пусть А — постоянная интеграла энергии, написанного в ба-
рицентрических координатах.
Если А < 0, то при /-> +оо финальные движения могут при-
надлежать только типам С), Е), F), G).
Если Л = 0, то при ^->+оо финальные движения принад-
лежат либо С), либо D).
Если А > 0, то при ^->-}-оо финальные движения могут при-
надлежать А), В), С).
Аналогичная классификация имеет место и п-ри t->—°о.
Переход от одного типа финальных движений (при /->—оо)
к другому (при ?->+оо) связан с так называемой проблемой
захвата, рассматривавшейся многими авторами [49], [51] — [53].
Согласно Шази назовем захватом в задаче трех тел следую-
щий переход:
А -+ С .
810 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 1.09
Наиболее полно проблема захвата рассмотрена В. М. Алек-
сеевым [54], [55].
Согласно Алексееву частичным захватом в задаче трех тел
называются переходы
С -+ Е , С -* G ,
— ОО
Е -> С , G
f->—оо t-У+оо t->— оо
Е -> G , G -> Е
f->-oo
Полным захватом называются переходы
C_»F, E -¦ F , G
Наконец, обменом в задаче трех тел называются переходы
С -* С , Е -> Е ,
t->-oo г->+оо /->-оо
F -> F , G
Последние переходы содержат как тривиальные случаи (ко-
гда остается без изменений не только тип финальных движений,
но и характер движений в системе трех тел), так и наиболее
интересные случаи, когда роль компонент в материальной си-
стеме существенно меняется. Например,
1)
С -> С
lim /*о] = -f- оо, Hm /"oi = -f- оо,
lim Ли—~f"°°> 1'т ri2=="f"o°.
lim T\2 ^ С, lim r^ ^ С.
2) F->F: тело Рг было спутником Ро при t->—оо, а при
f->-foo становится спутником Pi.
В. М. Алексеевым доказано, что все указанные типы пере-
ходов возможны в задаче трех тел. Иногда удается определить
вероятность захвата [52], [55].
Финальные движения в задаче п > 3 тел не изучены.
Глава 2
ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ
И СХОДИМОСТЬ РЯДОВ В НЕБЕСНОЙ МЕХАНИКЕ
Всякая задача небесной механики сводится к дифферен-
циальным уравнениям, и, следовательно, ее решение равносиль-
но решению дифференциальных уравнений, описывающих ее.
Однако термину «решение» дифференциальных уравнений на
разных этапах приписывалось различное содержание и в силу
сказанного проблема интегрируемости в небесной механике
трактовалась в различные эпохи по-разному.
С эпохи Лагранжа и Лапласа задача считается интегрируе-
мой, если она решается «в квадратурах», т. е. можно найти об-
щий интеграл дифференциальных уравнений задачи, содержа-
щий независимые произвольные постоянные, число которых в
точности равно порядку системы. С этой точки зрения наиболее
интересными интегрируемыми задачами являются задача двух
тел (ч. II) и задача двух неподвижных центров (см. ч. V, гл. 3).
В задаче п > 2 тел известны 10 первых интегралов (см. ч. IV),
и, как показал Лагранж, порядок системы может быть понижен
еще на две единицы. Следовательно, для нахождения ее общего
интеграла следует знать еще 6п— 12 первых интегралов, однако
фундаментальные исследования Брунса, Пуанкаре и Пенлеве
(см. §§ 2.03 и 2.04) доказали бесплодность дальнейших поисков.
Развитие аналитической теории дифференциальных уравне-
ний позволило дать еще одну трактовку проблеме интегрируе-
мости в небесной механике. Если можно найти решение диффе-
ренциальных уравнений задачи небесной механики в виде рядов,
сходящихся для любых априорно заданных параметров системы
(массы тел, начальные условия и др.), то данную задачу также
можно отнести к интегрируемым задачам. Для задачи трех тел
такое решение найдено Зундманом (см. § 2.05). Основные труд-
ности, которые возникают при отыскании решения в виде сте-
пенных рядов, связаны с устранением особенностей в дифферен-
циальных уравнениях, возникающих из-за возможности столк-
новения двух или большего числа тел (см. § 2.04).
812 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА |§ 2.01
Другая, качественная трактовка проблемы интегрируемости,
получившая развитие в наше время, понимается как построение
универсальной классификации всевозможных решений по раз-
личным свойствам и связанное с этим разбиение всего фазового
пространства на области, содержащие движения, принадлежа-
щие только одному классу. При этом сами решения в случае
надобности могут быть найдены приближенно либо аналитиче-
скими, либо численными методами.
Пуанкаре ввел понятие практической интегрируемости задач
небесной механики, понимая под этим нахождение приближен-
ного решения, удовлетворительно представляющего наблюдения
и охватывающего практически приемлемый промежуток време-
ни. В этом смысле все задачи небесной механики интегрируемы,
особенно в связи с большими возможностями электронных вы-
числительных машин. Использование методов теории возмуще-
ний (см. ч. IV, гл. 9) обусловливает появление асимптотических
расходящихся рядов. Практика построения теорий движения
тел Солнечной системы, накопленная в небесной механике на
протяжении двух столетий, говорит в пользу применения таких
рядов в конкретных задачах.
§ 2.01. Теорема Пуассона
об интеграле гамильтоновой системы
Пусть задача описывается гамильтоновой системой 2га-го по-
рядка
*-¦?¦ *—v- (I0-2-0I>
где H(q,p, t) — известная функция q, p и t.
Определение. Скобкой Пуассона двух скалярных функ-
ций
?\ fa,, q2 qn, Pi, ft, • • •. Pn) и F2{qu q2 <7n, Pi pn)
называется выражение
Теорема Пуассона. Если Fj = Ci u F2= C2 являются
двумя первыми интегралами системы A0.2.01), то выражение
(Fu F2) = С либо представляет собой первый интеграл системы
A0.2.01), либо является тождеством.
К сожалению, в задачах небесной механики теорема Пуас-
сона не позволяет получить новые первые интегралы, так как
она приводит к тем же известным интегралам или к их комби-
S 2.02) ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 813
нации. Она может быть использована лишь для формального
построения нового интеграла, не представляющегося конечным
выражением (см. [56], {57]), а рядом, сходимость которого не
установлена, например, адельфического {родственного) инте-
грала (см. [58]).
§ 2.02. Теорема Брунса о несуществовании
алгебраических первых интегралов задачи трех
тел, отличных от классических
Прежде чем сформулировать теорему Брунса, приведем не-
сколько лемм, имеющих самостоятельный научный интерес. Эти
леммы также принадлежат Брунсу [58].
Лемма 1. Если дифференциальные уравнения задачи трех
тел имеют каноническую форму A0.2.01), то всякий алгебраиче-
ский интеграл системы A0.2.01), не зависящий явно от t, имеет
вид
R(q,p,u) = C, A0.2.03)
u = rol+rQ2 + r]2, A0.2.04
где R(q,p,u)— рациональная функция переменных q, p, и.
Лемма 2. Всякий алгебраический интеграл системы
A0.2.01), не зависящий явно от t, является алгебраической ком-
бинацией интегралов вида
РАя, Р. и) -С- (Ю.2.05)
где Ри Р% — многочлены относительно q, p, и, обладающие не-
которой однородностью, а именно:
Р, (х2<7, х-'а х2«)^^Р,(?, р,и),
P2[x2q, к-1р, А)=хгРо(<7, р, и).
Лемма 3. Всякий алгебраический интеграл дифференциаль-
ных уравнений движения задачи трех тел вида A0.2.01), не за-
висящий явно от времени, является алгебраической комбина-
цией классических интегралов.
Заметим, что леммы 1—3 установлены Брунсом для задачи
п > 2 тел, а не только для задачи трех тел.
Л е м м а 4. Всякий зависящий явно от t алгебраический инте-
грал задачи трех тел является алгебраической комбинацией ал-
гебраических интегралов, не содержащих явно t, и интегралов
вида t — ср = с, где ф — алгебраическая функция переменных q',
р' (qf, p' — канонические переменные из § 1.14 ч. IV, где они
обозначены через q и р).
814 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 2.03
Теорема Брунса. Всякий алгебраический интеграл за-
дачи трех тел имеет вид
F(IU h /10)=С, A0.2.06)
где 1\, 12, ..., /ю — левые части классических интегралов, дан-
ных формулами в §§ 1.14 и 1.17 ч. IV, a F — алгебраическая
функция аргументов 1и ..., Ло-
Замечание. Теорема Брунса утверждает, что не суще-
ствуют другие интегралы, алгебраические относительно канони-
ческих переменных, введенных в §§ 1.14, 1.17 ч. IV, а следова-
тельно, и относительно прямоугольных координат в инерциаль-
ной системе отсчета и их производных, так как последние вы-
ражаются через указанные канонические переменные алгебраи-
ческим образом. Но из этого вовсе не следует, что вообще от-
сутствуют какие-либо алгебраические интегралы.
Пенлеве распространил лемму 4 на задачу п > 3 тел.
Подробное изложение теоремы Брунса содержится в [5], [58].
§ 2.03. Теорема Пуанкаре о несуществовании однозначных
аналитических первых интегралов гамильтоновой системы
Пусть имеется гамильтонова система 2га-го порядка
dt — ду • dt ~ дх • IIU.2.U7)
где функция Гамильтона H(x,y,\i) обладает свойствами:
1) непрерывна и однозначна относительно 2п + 1 аргумента
х, у, [i ([i — скалярный параметр) в Bга -f- 1)-мерной области
2) аналитична относительно ц при \ц\ ^ (х0:
3) периодична относительно у.
В силу условий 1)—3) H(x,y,[i) можно представить рядом
Н (х, у, ix) - Я0(х) + (| ц'Я, (х, у), A0.2.08)
(|
сходящимся при |(а|^(х0 для любых хеХ, у е(—оо, оо)п.
Теорема Пуанкаре. Если Нс = Н0(х) и гессиан
-, ,"¦ =^0, то уравнения A0.2.07), кроме первого инте-
I ах.ах.
§ 2-Ofl ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 8 15
грала Н(х, у, ц) = С, не имеют в области Dl a D, вообще
ря, другого однозначного аналитического интеграла (см. [2]).
Исключительные случаи, когда могут существовать другие
однозначные аналитические интегралы системы A0.2.07), также
исследованы Пуанкаре [2].
Из теоремы Пуанкаре следует, что в планетном варианте за-
дачи трех тел (пг1 <t; m0, m2 < mQ) не существует других одно-
значных интегралов, кроме интеграла энергии и интегралов пло-
щадей. Результаты Пуанкаре были распространены Пенлеве на
задачу п тел. Подробно эти вопросы изложены в учебнике
Г. Н. Дубошина [5].
§ 2.04. Случаи интегрируемости
уравнения Гамильтона — Якоби
методом разделения переменных
Теорема Гамильтона — Якоби (см. ч. IV, § 1.20) устанавли-
вает эквивалентность проблемы интегрируемости канонической
системы D.1.52) и уравнения Гамильтона — Якоби D.1.67) или
D.1.68). Это обусловило интенсивные исследования по пробле-
ме отыскания полного интеграла уравнения Гамильтона — Яко-
би, прежде всего методом разделения переменных [104].
Изложим кратко историю вопроса1.
В 1843 г. Якоби [105] нашел методом разделения переменных
полный интеграл уравнения вида
?Ш=Л- "°-209)
Р. Лиувилль [106], [107] показал, что интегрируемо более общее,
чем A0.2.09), уравнение Гамильтона — Якоби, а именно:
-w'н"
В 1880 г. Г. Морера [108] нашел методом разделения пере-
менных все случаи интегрируемости уравнения
В 1891, 1893 гг. П. Штеккель [109] исследовал проблему ин-
тегрируемости уравнения
<(?„ 42 <7*)DfY-2?/(?b Чг <7*) = 2А. A0.2.12)
(=1 N « /
816 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 2.0-1
Доказано, что если уравнение A0.2.12) допускает разделение
переменных, то необходимо существует система k2 функций
<Pij(<7i) (', / = 1,2, .... А) и система k функций ^Vi(qi) (i =
= 1, 2, ..., k), обладающих тем свойством, что коэффициенты
Qi{q\,q2, •¦-, <7*) и силовая функция U(q],q2, ..., q-*) представ-
ляются соотношениями
1 дА
A = det
Эти условия являются и достаточными [ПО].
После работы Штеккеля осталось найти случаи интегрируе-
мости уравнения Гамильтона — Якоби, содержащего, помимо
квадратов импульсов, также произведения импульсов с различ-
ными индексами, импульсами в первой степени и явно время в
характеристической функции, т. е. представляло интерес уравне-
ние Гамильтона — Якоби вида
1 ^ - --, qyds
f (
к
(?1 qk)~-U[qi qh) = h. A0.2.13)
Очевидно, что возможность интегрирования уравнения Га-
мильтона—Якоби целиком определяется аналитической струк-
турой коэффициентов а,-;(?ь?2 Ы, М?ь <72, ..., <7л) и си-
ловой функции U. Это побудило Т. Леви-Чивита [111] вывести
необходимые и достаточные условия, которым должны удовле-
творять коэффициенты уравнения A0.2.13), чтобы оно было ин-
тегрируемым методом разделения переменных. Для случая трех
степеней свободы (например, для пространственной ограничен-
ной задачи трех тел) эти условия выписаны и исследованы
Ф. Даль-Аква [112]. В 1911 г. П. Бургатти [113] выписал функ-
циональные зависимости импульсов от координат, приводящие
к интегрированию уравнения Гамильтона — Якоби. Н. Д. Мои-
сеев [114] и В. Г. Демин [87] указали на два обобщения уравне-
ний Лиувилля и Штеккеля, также интегрируемые методом раз-
деления переменных.
Вопросы интегрируемости уравнений в частных производных
первого порядка исследовал В. Г. Имшенецкий [121], идеи ко-
торого были использованы М. С. Яров-Яровым [122] для инте-
грирования неавтономного уравнения Гамильтона — Якоби.
§ 2.06] ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 817
§ 2.05. Теорема о неприводимости уравнения
Гамильтона — Якоби для плоской ограниченной
круговой задачи трех тел к уравнению типа Штеккеля
Уравнение Гамильтона — Якоби для плоской ограниченной
круговой задачи трех тел в эллиптических переменных и, v
E.2.56) не имеет форму уравнения Штеккеля A0.2.12), поэтому
правомерен вопрос о существовании такой замены переменных,
которая делала бы возможным такое преобразование.
Для случая двух степеней свободы назовем уравнением типа
Штеккеля уравнение
h ы [4^-+Ф1 м]2+и ы [4^+ф2 ш]2=ф. («/,)+ф2 ы,
A0.2.14)
где <7ь G2 — обобщенные координаты.
К такому уравнению сводится уравнение Штеккеля A0.2.12)
для k = 2 и обобщение В. Г. Демина [115].
Теорема [116]. Не существует никакая невырожденная
дифференцируемая замена переменных
q2),.
q2)
' J A0.2.15)
преобразующая уравнение Гамильтона — Якоби E.2.56) в урав-
нение A0.2.14).
Замечание. Если вместо уравнения A0.2.14) рассматри-
вается оно же, помноженное на общий множитель X(quq2)?^0,
то можно доказать, что утверждение теоремы остается в силе.
§ 2.06. Соударения
Пусть в абсолютной прямоугольной системе координат O|ti?
рассматривается задача п тел (/Mm*; ?i, т],-, ?i) i = 0, 1, 2, ...
..., га— 1), и пусть Л(|, r\, I) — некоторая конечная, но нефикси-
рованная точка в О|т]^. Обозначим через г,- расстояние APi.
Определение, k-кратным соударением (или столкнове-
нием) точек РП],Рп2, --^Pnh @ < rai <ге— 1, 0 < п2 < п— 1, ...,
0 ^ Ль ^ п—1; щфп.}, если i ф /) в конечный момент време-
ни ? называется явление, описанное условиями
limr,, =0 (s=l, 2, .... k). A0.2.16)
t->t
Точка А называется точкой соударения, ? — момент соударения.
Очевидно, что наименьшее значение k равно 2 и мы имеем
парное или двойное соударение, наибольшее значение k равно ц
818 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [g 2.06
и в таком случае точка соударения А совпадает с центром масс
системы G.
Если h<c.O (h — постоянная интеграла энергии), то в задаче
двух тел при прямолинейном движении будет бесчисленное мно-
жество вещественных моментов соударения, определяемых по
формуле
h i ^p = 0, ±1, ±2, ...), (Ю.2.17)
где я = ——-—г —, а — большая полуось орбиты, т. е. поло-
а'1
вина длины прямолинейного отрезка, в который вырождается
эллипс при е -> 1—0, ?о — один из моментов соударения.
При h ^ 0 существует лишь один вещественный момент со-
ударения, хотя, если рассматривать комплексные значения вре-
мени, здесь также будет бесчисленное множество моментов со-
ударения. Расстояние между телами в окрестности момента со-
ударения представляется разложениями
г =
J
Л>0> r==l»i ^ ""уц- to)h + 2, К (t - ;0Г. A0.2.20)
Отсюда следует, что для скорости имеем ряды
Л<0, о = -^ = |
A0
A0
п-3
) 3 ,
.2.
.2.
21)
22)
0, 0 = 1
n=3 ~
A0.2.23)
Формулы A0.2.21)—A0.2.23) показывают, что для любого h
limu = +°° A0.2.24)
и _
litn v Vr = ^6/ (fno + m,) f К + m,), A0.2.25)
§ 2.06] ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 819
Формулы A0.2.21) —A0.2.23) весьма важны, так как и в задаче
трех тел в случае двойных соударений имеется та же асимпто-
тика.
Если вместо времени в качестве независимой переменной
рассматривать эксцентрическую аномалию, то уравнения движе-
ния не будут иметь особенность, т. е. эксцентрическая аномалия
играет роль регуляризирующей переменной. Детально эти во-
просы изложены в [59], [60].
Исследование кратных соударений в задаче п ^ 3 тел чрез-
вычайно сложно потому, что до настоящего времени не известны
необходимые и достаточные условия наличия кратных соударе-
ний или их отсутствия.
Необходимое условие п-кратного соударения (теорема Вейер-
штрасса — Слудского — Зундмана) [5], [6], [61]. Необходимым
условием n-кратного соударения в задаче п тел в конечный ве-
щественный момент времени является равенство нулю момента
количества движения с системы.
Теорема Зундмана. В заоаче трех тел )с| = 0 только
в том случае, если движение трех тел происходит в некоторой
неизменной плоскости (см. [5]).
Таким образом, для исключения тройного соударения в за-
даче трех тел следует считать, что \с\ф 0. Именно в этом пред-
положении, конечно, не исключающем двойных соударений в за-
даче трех тел, Зундман исследовал характер последних и оценил
величины кинематических и динамических параметров системы
(прежде всего взаимные расстояния и относительные скорости).
Зундманом, в частности, доказаны следующие утверждения.
1) Если |с|> 0, то на любом конечном отрезке времени мо-
жет иметь место только конечное число двойных соударений.
Другими словами, последовательность последующих моментов
соударения {?ft}
*о < * i < h < ¦¦¦ <h< ¦¦¦
(?0— некоторый начальный момент) не может сходиться к ко-
нечному пределу. Это утверждение справедливо и для моментов
соударений, предшествовавших t0, так как уравнения движения
задачи трех тел, написанные в неподвижных прямоугольных
координатах, инвариантны относительно замены t на —t.
2) Если |с|>0 и ( — момент соударения двух тел, то при
/->? отрезок, соединяющий эти тела, стремится к определенному
предельному положению, а его угловая скорость стремится к
нулю (движение — почти прямолинейно, как в задаче двух тел).
Более того, расстояние монотонно убывает, а скорость неогра-
ниченно возрастает, причем имеет место равенство типа
A02.25)
820 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ -2.07
Другими словами, для моментов времени, близких к моменту
соударения, какова бы ни была далекая масса, решающей яв-
ляется сила притяжения близких тел.
3) Если |с|>0, то для всех /е(-°о, оо) два из наиболь-
ших взаимных расстояний ограничены снизу одной и той же по-
стоянной, а скорость удаленной массы ограничена сверху. Это
утверждение говорит о том, что с возрастанием (или с убыва-
нием) t периметр треугольника, образованного телами, не может
стремиться к нулю ни монотонным, ни осциллирующим образом.
Эти соображения позволили Зундману преодолеть математи-
ческие трудности, возникающие из-за возможных двойных со-
ударений в уравнениях движения задачи трех тел. Зундман не
нашел необходимые и достаточные условия отсутствия всяких
соударений в задаче трех тел, но, изучив характер соударений
с помощью метода регуляризации независимой переменной,
устранил эти особенности в дифференциальных уравнениях за-
дачи трех тел.
§ 2.07. Решение задачи трех тел в виде рядов,
сходящихся для всех вещественных значений времени.
Теорема Зундмана
Теорема Зундмана. Если момент количества движения
в задаче трех тел отличен от нуля (|е|>0), то прямоугольные
барицентрические координаты трех тел, их взаимные расстояния
и время t могут быть разложены в степенные ряды по степеням
переменной ы. Эти ряды сходятся при |ш| < 1 (см. [5], [6], [61]).
Связь между временем t и новой независимой переменной со
выражается равенствами
e2a +1
t
A0.2.26)
&=\{V+\)dt, dt = (U+\)~1ds, A0.2.27)
Г.
где U — силовая функция задачи, to — начальный момент вре-
мени. Постоянная Q однозначно определяется массами трех тел,
их начальными координатами и скоростями. В [5] для нее дается
явное выражение.
Так как интервал —1 < ы < 1 отображается взаимно одно-
значно с помощью A0.2.26) в бесконечный интервал — оо < s <
< +°°. а —оо < s <+оо с помощью A0.2.27) отображается
взаимно однозначно в бесконечный интервал —оо < I <; + оо,
§ 2.08| ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 821
то отсюда вытекает, что ряды, построенные Зундманом для за-
дачи трех тел, сходятся для всех вещественных значений вре-
мени /.
Исследования Д. Белорицкого [62] показали, что скорость
сходимости рядов Зундмана чрезвычайно мала, поэтому их ис-
пользование в приложениях в настоящее время невозможно.
Интересные исследования, примыкающие к работам Зундмана,
выполнил Г. А. Мерман [63].
Аналогичные результаты для задачи п > 3 тел неизвестны.
§ 2.08. Сходимость рядов Хилла
в основной проблеме теории движения Луны
В гл. 3 ч. V и в гл. 10 ч. IV приведены уравнения Хилла,
определяющие промежуточную орбиту Луны. Для теории Луны
Хилл рассматривал уравнения [см. E.3.18)]
¦dc,2 ^ZI" dl ^ Г3 U
в которых
I = (n ~n'){t- ta), A0.2.29)
* = \пТ-пу ' т = Т=7Г' ПО-2-30)
где mT, ril — массы Земли и Луны, п,п' — средние сидериче-
ские движения Луны и Солнца. Хилл показал (см. ч. IV, гл. 10),
что уравнения A0.2.28) имеют периодическое решение
A0.2.31)
*=0
где коэффициенты A2k+i и B2k+l разлагаются в ряды по степе-
ням малого параметра т.
А. М. Ляпунов показал [64], что уравнения A0.2.28) имеют
периодические решения вида
оо оо
X =— Си ГП Г к [к,), у — 2Li m Wrt V.SJ» \i\J.l.ol)
где Ph{l) и Qh(l) —тригонометрические полиномы относительно
coss? и sins? (s — целое число). Ряды Ляпунова A0.2.32) пред-
ставляют собой «перестроенные» ряды Хилла A0.2.31).
822 Ч- X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [| 2.09
В работе [64] Ляпунов не только построил формальные ряды
A0.2.32), но и доказал их сходимость: им доказано, что ряды
A0.2.32) абсолютно и равномерно сходятся для всякого значе-
ния / при | m | sg: 1/7. Для теории движения Луны m « 0,08085,
поэтому ряды Хилла применимы в этой задаче.
Другое доказательство сходимости рядов Хилла дал
А. Уинтнер [60]. Г. А. Мерман [65], М. С. Петровская [66] и
Ю. А. Рябов [67] занимались расширением области сходимости
рядов Хилла. Последнему принадлежит наиболее общий резуль-
тат (|m|s? 0,258).
§ 2.09. Характер сходимости рядов
классической теории возмущений
Если при интегрировании дифференциальных уравнений для
оскулирующих элементов применяется какой-нибудь из класси-
ческих методов теории возмущений (см. ч. IV), то любой эле-
мент на первом шаге представляется выражением вида
A0.2.33)
где п\, n2— невозмущенные средние движения планет (мы рас-
сматриваем планетный вариант задачи трех тел), 1\, 12— сред-
ние долготы, С, Ео, DSu s, — постоянные (С для некоторых эле-
ментов может равняться нулю, независимо от того, соизмеримы
или не соизмеримы п\ и п2), В1\',к\ зависит от аи а2, еь е2.
Sin2 у .
Если tii и п2— рациональные числа, то существует бесконеч-
ное множество значений k\ и k2, для которых k\ti\ -f- k2n2 = 0 и
члены с такими индексами k\ и k2 включены в Ct. Делители
с другими значениями &i и k2 будут ограничены снизу общей
постоянной, поэтому ряд из A0.2.33) будет сходиться для лю-
бого f е(—оо, оо), если еи е2 и sin2y не превышают некоторые
положительные пределы.
Если П\ и п2 — иррациональные числа, то для любой пары
таких чисел наверняка существуют такие целые индексы k\ и k2,
что \kitii + k2n2\ < а, а — произвольное положительное число.
Это обстоятельство ставит под сомнение сходимость ряда
A0.2.33) для любых t, сколь угодно близких к начальному мо-
менту ?о и для любых сколь угодно малых значений elt e2, sin2у.
§ 2.09] ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 823
Рассмотрим ряд
/ > ь 11 . • r = | ^j — fe21, A0.2.34)
в котором суммирование ведется по k\ и k2, удовлетворяющим
условию
fe^2<0, \ = щ/п2, p = sup{e! < 1, е2< 1, sin24}-
Очевидно, что ряд A0.2.34) является мажорантным для той
части ряда A0.2.33), для которой k\k2 < 0. Лишь только эта
часть ряда представляет интерес с точки зрения сходимости.
Пусть ряд X Z' Ktuktf сходится при |р| < 1.
Теорема Брунса. Значения v, для которых ряд A0.2.34)
сходится, и значения v, для которых ряд A0.2.34) расходится,
образуют всюду плотное множество на вещественной оси
(—оо.+оо).
Из теоремы Брунса, однако, не следует, что точки расходи-
мости ряда A0.2.33) также образуют всюду плотное множество,
хотя точки сходимости образуют такое множество. Как оказы-
вается, точки расходимости ряда A0.2.34) нарушают лишь рав-
номерную сходимость рядов вида A0.2.33) (член Ct-\-EQ не
рассматриваем). Подробности см. в [68], [69].
Рассуждения Брунса относятся к классической теории воз-
мущений первого приближения, когда невозмущенная орбита
суть кеплеровский эллипс. В этом случае k\ti\ -}- k2n2 не зависит
от малого параметра ц (см. § 1.03). При построении высших
приближений или при построении решений в окрестности дан-
ного периодического решения знаменатели типа k\ri\ -\- k2n2 бу-
дут зависеть от ц таким образом, что
!, A0.2.35)
fe=0
причем радиус сходимости рядов A0.2.35) для некоторых набо-
ров k\ и k2 будет сколь угодно мал.
Отсюда вытекает, что и в целом ряды, представляющие воз-
мущения, будут степенными рядами относительно -vVi расходя-
щимися на оси ц. Пуанкаре доказал [2], что такие ряды яв-
ляются асимптотическими, так как
824 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА |§ 2.09
для любого целого s > 0. В A0.2.36) через^ обозначен весь
бесконечный формальный ряд по степеням Vn > через Ф5 — сум-
ма его первых s членов.
Желание многих астрономов построить теории движения не-
бесных тел в «тригонометрической форме», подразумевая под
этим представление позиционных переменных (большие полу-
оси, эксцентриситеты, наклоны и их аналоги) в виде сумм пе-
риодических функций времени, а угловых переменных (долготы,
аномалии и их аналоги) —в виде сумм линейных функций вре-
мени и сумм периодических функций, привело к разработке
общего метода построения решений канонических систем с пе-
риодическим по угловым переменным и аналитическим по \i га-
мильтонианом, названного Пуанкаре «методом Линдштедта» [2].
Начало этого направления было положено Лапласом, а завер-
шенное развитие его мы получили благодаря Пуанкаре.
Сущность этого метода такова. Пусть имеется каноническая
система
где
н(Р, ч. и) = Яо(р)+Ё^'яЛр.«>. 1 (I02i38)
Н(р, q + Bя), ц) = Я (р, q, ц). J
Решение системы A0.2.37) отыскиваем в виде
причем коэффициентам разложений A0.2.39) заранее придаем
форму
v, v- \ (Ю.2.40)
qM = X Dcosas^ + Е Еsinast + Ft + К, J
где А, В, ..., К — величины, зависящие только от начальных
данных, as—величины, разлагаемые в ряды по степеням ц.
Ньюкомб, Линдштедт и Пуанкаре детально разработали
формальную сторону метода построения решений A0.2.39) как
в случае общих канонических систем, так и з случае задачи
§2.10) гл. 2. Проблема интегрируемости 825
трех тел. Кроме того, Пуанкаре [2] исследовал вопросы сходи-
мости рядов A0.2.39) и доказал, что из-за появления «малых
знаменателей» вида
Sitli + S2tl2 +'... + Shnh
{nit 112 ik — средние движения планет в планетной задаче,
S\,S2, ..., Sft — целые числа) они, вообще говоря, расходятся.
Но имея асимптотический характер, эти ряды с успехом могут
применяться при изучении движений небесных тел на конечных
интервалах времени, если их обрывать до появления в ряде
первого малого знаменателя.
В заключение отметим, что вопросы сходимости (точнее, рас-
ходимости) рядов Линдштедта в ограниченной задаче трех тел
изучены исчерпывающим образом Г. А. Мерманом [44].
§ 2.10. Теоремы Пуанкаре о ранге и классе возмущений
В § 8.01 ч. IV дано определение ранга и класса возмущений.
Пуанкаре установил две теоремы о ранге и классе возмущений
произвольного порядка в классической теории возмущений. Эти
теоремы, по существу, указывают на асимптотический характер
рядов теории возмущений не только в первом приближении.
Они могут быть с успехом применены для оценки промежутка
времени, на котором теория обеспечивает заданную точность
при условии, что в рядах сохранено заданное число членов.
Теорема Пуанкаре о ранге [70]. Если невозмущенные
средние движения П\, п2, ..., ra&_i— в планетном варианте за-
дачи k тел (задача о движении k — 1 планет) несоизмеримы, то:
1) в разложениях для возмущений канонических элементов
Пуанкаре Z.,-, Я,-, ?j, гц любого порядка отсутствуют члены, имею-
щие отрицательный ранг;
2) ранг каждого смешанного члена больше или равен еди-
нице;
3) возмущения 6Z.,- не содержат членов нулевого ранга.
Здесь i=l,2, ..., k — 1; / = 1, 2 2ft — 2. Относительно
канонических элементов Пуанкаре см. ч. IV, § 2.08.
Теорема Пуанкаре о классе. Если невозмущенные
средние движения несоизмеримы, то:
1) класс каждого члена в возмущениях любого порядка эле-
мента Xi неотрицателен;
2) класс каждого члена в возмущениях любого порядка для
элементов Lit \u т|3- не меньше 0,5.
Обобщение теоремы Пуанкаре о ранге для переменных, яв-
ляющихся ограниченными по времени и аналитическими функ-
циями первой системы канонических элементов Пуанкаре, дано
в [142].
826 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА IS 2.I1
§ 2.11. Поиск частных, первых и общих интегралов
заданной аналитической структуры обыкновенных
дифференциальных уравнений на ЭВМ.
Приложение к ограниченной задаче трех тел
Пусть имеется га-мерное дифференциальное уравнение
^ = Y(x,y), A0.2.41)
где у = (уиу2 </„), Y = (YU Y2, .... У„) — точки га-мерного
евклидова пространства /?„, х— скалярная независимая пере-
менная, л:е(—оо,оо). Введем в рассмотрение (я + 1)-мерное
евклидово пространство
и обозначим через Ромножество начальных точек (х0, Уо)^ Rn+i.
Пусть, кроме того, все интегральные кривые, порожденные на-
чальной областью Ро для всех х ^ х0, составляют многообразие
М(х,у(х)).
Очевидно,
PoczM<=Rn+1.
Будем считать, что вектор Y удовлетворяет в М условиям
теоремы Коши [104].
Наряду с уравнением A0.2.41) рассмотрим систему функ-
циональных равенств
Fk(x,y,aua2 ат) = 0 (k = 1,2 s<ra). A0.2.42)
Пусть Fk(x, у; аип2 ат) таковы, что при любом наборе
вещественных параметров аи а2, ..., ат они определены на
многообразии М вместе со своими частными производными
dPk dFk
—I—, —j- и имеют априори заданную аналитическую структу-
ру, содержащую неизвестные параметры аи а2, ..., ат.
Правомерна постановка следующих задач.
Задача 1. Пусть s= 1, и, следовательно, система A0.2.42)
сводится к одному функциональному равенству с неизвестными
параметрами Oi, a2, ..., ат. Найти критерий, основанный на ме-
тодах численного интегрирования, позволяющий утверждать, что
равенство A0.2.42) является частным интегралом уравнения
A0.2.41).
Задача 2. Ее формулировка подобна формулировке зада-
чи 1 с той лишь разницей, что вместо частного интеграла оты-
скивается первый интеграл уравнения A0.2.41).
Задача 3. Пусть s = п. Найти критерий, позволяющий
утверждать, что система п функциональных равенств A0.2.42)
представляет общий интеграл уравнения A0.2.41).
§2.12] ГЛ. 2. ПРОБЛЕМА ИНТЕГРИРУЕМОСТИ 827
Методы решения задач 1—3 изложены в [117]. Электронно-
вычислительные машины используются для составления и ре-
шения функциональных уравнений, неизвестными в которых
суть оь а2, ..., ат. Эффективность этих методов целиком опре-
деляется возможностями математического обеспечения ЭВМ.
С помощью таких методов было доказано, в частности, что
Г-д—J не может быть представлена [118] в виде отношения двух
полиномов от тригонометрических и гиперболических функций
cos v, sin v, ch и, sh и, где и, v — эллиптические переменные (см.
ч. V, §§ 2.07, 2.08).
§ 2.12. Поиск решений уравнения Гамильтона — Якоби
на ЭВМ. Приложение к ограниченной задаче трех тел
Рассмотрим уравнение Гамильтона — Якоби для задачи с
мя степенями свободы вида
двумя степенями свободы вида
Оно может быть приведено к виду
/ aft(?i. <7г) "я hfft(?b?2) ==(^)('7i> ?г)> A0.2.44)
ffe = —, Ф = Л-С/ + 4Е -ЬГ- (Ю.2.45)
С помощью обозначений
7'fe = -|?- + ffe('7iI'72) F=1,2) A0.2.46)
уравнение A0.2.44) приводится к системе
2
67"i Й7 dfi
dq2 dqi dq2
A0.2.47)
Пусть функции 7"Л имеют априори заданную аналитическую
структуру
(* = 1. 2) (Ю.2.48)
828 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА |§ 2.12
с неизвестными параметрами a\k\ af\ ..., а<?\ Чтобы проверить
гипотезу о существовании аналитической структуры для 7\ вида
A0.2.48), нами предложен метод [117], который сводится к ре-
шению методом Рунге —Кутта [119] системы обыкновенных диф-
ференциальных уравнений (а не уравнений в частных произ-
водных) и к применению теоремы Гамильтона — Якоби (см.
ч. IV, § 1.20). Как и в § 2.11, эффективность метода зависит от
возможностей математического обеспечения ЭВМ.
В частности, было доказано, что частные производные
OS OS г. п *
-т—, -тг—, входящие в уравнение Гамильтона — Мкоби для пло-
ской ограниченной круговой задачи трех тел E.2.56), не могут
иметь следующие аналитические структуры:
а) в виде квадратных радикалов от полиномов относительно
cos v, sin v, ch и, sh и четвертой степени;
б) в виде сумм полиномов относительно cos v, sin v, ch и,
sh и второй степени и квадратных радикалов от таких же поли-
номов четвертой степени;
в) в виде сумм полиномов второй степени и квадратных ра-
дикалов от отношений полиномов шестой и четвертой степени
[120].
Замечание. Методы поиска решении в буквенном виде на
ЭВМ являются, строго говоря, не обоснованными, так как они
сопровождаются многими ошибками. Они лишь служат сред-
ством прогноза в аналитических теориях. Однако они особенно
эффективны, если уравнения имеют известные первые интегра-
лы, используемые для контроля вычислений. Именно так обстоит
дело в ограниченной круговой задаче трех тел, где имеется ин-
теграл Якоби.
Глава 3
ПРОБЛЕМА УСТОЙЧИВОСТИ
В НЕБЕСНОЙ МЕХАНИКЕ
Основная задача теории устойчивости движения — это уста-
новление критериев, позволяющих судить, будет ли данное дви-
жение устойчивым или неустойчивым. При этом понятия «устой-
чивость движения» или «устойчивость решения» трактовались
в предшествующий период и трактуются в настоящее время по-
разному. В хронологическом порядке, по-видимому, сначала
появилось понятие «устойчивость по Лагранжу», далее «устой-
чивость по Пуассону», «устойчивость по Хиллу», «устойчивость
по Якоби», «устойчивость по Ляпунову», «устойчивость на ко-
нечном промежутке времени», «устойчивость при постоянно дей-
ствующих возмущениях» и др.
Хотя возраст теории устойчивости соразмерен с возрастом
теории дифференциальных уравнений, лишь в 1892 г. благодаря
Ляпунову она получила наиболее общую постановку и, главное,
весьма мощные и математически строгие методы исследования.
В приложениях постановка задачи об устойчивости движения,
принадлежащая Ляпунову, и методы, созданные им, оказались
весьма удачными и эффективными.
§ 3.01. Определение устойчивости по Ляпунову
Пусть имеется векторное дифференциальное уравнение
|г =/(*¦')- A0.3.01)
где л-мерная вектор-функция f{x,t) определена в (я + ^-мер-
ной области Gn+\=GnxU, t^lt=(a, oo), x e Gn, С„ — об-
ласть в л-мерном пространстве Rn.
Пусть, далее, уравнение A0.3.01) допускает частное решение
х = H(t). Это решение, следуя Ляпунову, будем называть невоз-
мущенным, а все другие — возмущенными.
830 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.01
Определение 1 [32]. Частное решение (невозмущенное
движение) x = x(t) называется устойчивым по Ляпунову по
отношению к вектору х, если для любого е > 0 и ^е(а, оо)
существует б = б(е, 20) > 0 такое, что выполняются следующие
условия:
1) все решения x(t) [в том числе и x(t)], удовлетворяющие
условию
}\x(to)-x(tn)\\<6, A0.3.02)
определены в бесконечном интервале t0 ^ t < °°;
2) для этих решений справедливо неравенство
:e A0.3.03)
при всех t0 ^ t < оо.
Здесь норма вектора x(t) понимается как сумма модулей
п
компонент \\x{t) || = ? \xk (t) |.
Определение 2. Если 6s=6(e) (не зависит от to^T) и
выполняются остальные условия определения 1, то решение x(t)
называется равномерно устойчивым в области Т.
Определение 3. Решение x(t) называется асимптотически
устойчивым при t -> оо, если оно устойчиво и к тому же
для любого tQ^(a,ao) существует Д = Д(?о)>О такое, что
все решения x(t), удовлетворяющие начальному условию
\\x{to) — x(ta)\\ < А, обладают свойством
Нт || *(*)-*(*) || = 0. A0.3.04)
В частности, тривиальное решение x(t) = 0 асимптотически
устойчиво, если оно устойчиво и
lim*@ = 0. A0.3.05)
Определение 4. и-мерный шар |[*||<Д(^о) при фиксиро-
ванном t0 называется областью_притяжения положения равно-
весия— тривиального решения х(/)==0, изображаемого нача-
лом координат в системе Ох\Хч ... хп-
Определение 5. Пусть область Gn = Rn- Если имеет ме-
сто определение 3 и А = оо, то решение x(t) называется асимп-
тотически устойчивым в целом. Для асимптотически устойчивого
в целом решения его областью притяжения является все про-
странство /?". _
Определение 6. Решение x(t) называется неустойчивым
по Ляпунову, если для некоторых е>0, to^(a,oo) и любого
§ з.02] гл. з. Проблема устойчивости в небесной механике 831
6>0 существует хотя бы одно решение x6(t) и момент t\ =
= h{8) > to такие, что
ll*e(fo)-*fo>)ll<* и ||жв(/,)-*(*,)||>в. A0.3.06)
Определение 7. Решение x[t) уравнения A0.3.01) назы-
вается устойчивым при постоянно действующих возмущениях
F(t,y), если для любых е>0 и t0^(a,oo) существует 6 =
= 8(e,to)> 0 такое, что при \\F(y, t) || < б все решения y(t)
векторного уравнения
^- = f(y,t) + F(y,t), (Ю.3.07)
удовлетворяющие условию ||у(<о)Н < б, определены в бесконеч-
ном интервале t e [t0, °°) и к тому же
|| у @ - х @1|< е при t e [tQ, oo). A0.3.08)
Аналогичные определения можно дать и для —oo < t ^ t0.
Ляпуновым разработаны два общих метода исследования на
устойчивость решений дифференциальных уравнений, получив-
шие в литературе название «первого метода Ляпунова» и «вто-
рого метода Ляпунова».
В § 3.05 приводятся основные теоремы Ляпунова. Эти вы-
дающиеся результаты послужили источником для огромного ко-
личества работ по качественной теории дифференциальных урав-
нений, теории нелинейных колебаний, аналитической и каче-
ственной небесной механике. Впервые они были опубликованы
в докторской диссертации А. М. Ляпунова [7]. Укажем также на
издания [8], [32], [71—73], содержащие подробное изложение как
основных теорем Ляпунова, так и результатов многих его после-
дователей.
§ 3.02. Определение орбитальной устойчивости
Определение 1. Если решение x(t) существует при
а ^ t ^ Ь, то множество точек L ={x(t); a ^.t ?b) называется
траекторией.
Определение 2. Положительной полутраекторией назы-
вается множество точек L+{x(t); to ^ t < oo}, отрицательной
полутраекторией — множество точек L-{x(t), — с» < t ^ to}.
Определение 3. Расстоянием точки х е Rn до некоторого
множества Z-c/J" называется величина
р(ж, L)=inf||jf-»|| A0.3.09)
[р (х, L) — расстояние точки х до «ближайшей» точки множе-
ства L].
832 Ч. X, КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.03
Определение 4. Решение x(t) (t0 z^ t <. ао) уравнения
A0.3.01) называется орбитально устойчивым при t->oo, если
для любого е > 0 существует б = б(е, /0) > 0 такое, что при
выполняется неравенство р (дс @, L+)<e при to^t <ао, где
l+ = {x(t),tB^t< со).
Если к тому же lim р(х @, L+) = 0, то решение асимптоти-
чески орбитально устойчиво.
Замечание. Из устойчивости решения вытекает его орби-
тальная устойчивость, но не наоборот.
§ 3.03. Другие определения устойчивости
Определение устойчивости по Лагранжу. Пусть
Gn — область конечных размеров, принадлежащая и-мерному
евклидову пространству Rn. Будем считать, что Gn имеет конеч-
ные размеры, если для любых хе Gn, у е Gn
\\х-у\\<С, A0.3.10)
где С — некоторая постоянная.
Частное решение x(t) уравнения A0.3.01) называется устой-
чивым по Лагранжу, если выполнены условия
x{to)t=Gn, x{t)<=Gn, t>t0. A0.3.11)
Условия A0.3.11) означают ограниченность решения x(t) для
всех значений t ^ t0.
Область сплошной устойчивости по Лагранжу — это область,
состоящая только из траекторий, устойчивых по Лагранжу.
Определение устойчивости по Пуассону. Част-
ное решение x(t) уравнения A0.3.01) устойчиво по Пуассону,
если точка М, описывающая траекторию, за бесконечное время
проходит бесконечное число раз через сколь угодно малую
окрестность начальной точки Mo-
Устойчивость по Пуассону траекторий получила большое раз-
витие в теории динамических систем [41].
Определение устойчивости по Хил л у. Плоская
ограниченная круговая задача трех тел имеет интеграл Якоби
E.2.07). Если постоянная интеграла Якоби С больше C(L2)
[C(L2) — значение постоянной интеграла Якоби для точки либра-
ции L2], то область возможности движения третьего тела
§ 3.03]
ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ
83?
(рис. 115) состоит либо из одной овальной области, содержащей
точки Ро и Л [при C(L2)< C< C(L])], либо из двух овальных
областей дна з корых сорж Р P
у
содержит тело Ро, а другая —
областей, одна из которых
(при С* > C(Li)), и области,
внешней относительно кри-
вой, расположенной за пре-
делами всех точек либра-
ции (кривая С*).
Если С > C(L2) и на-
чальная точка траектории
находится в одной из этих
овальных областей, то тра-
ектория называется устой-
чивой по Хиллу. В частно-
сти, таковыми являются
спутниковые орбиты при
/е(—оо, оо) [для них
C*>C(L1)>C(L2)].
Определение устойчивости по Я к о б и. Пусть да-
на система дифференциальных уравнений четвертого порядка
dx dy Л
dt dt ' A0.3.12)
ЧГ' ~df'
Рис. 115. Кривые Хилла нулевой скорости.
обладающая «интегралом энергии»
Пусть имеются два решения:
х = xm (t) + Ьх @; у = у™ (t) + by if),
A0.3.13)
A0.3.14)
A0Л15)
определяемые близкими начальными условиями и принадлежа-
щими одному и тому же изоэнергетическому семейству (для них
h одно и то же).
Траектория A0.3.14) называется устойчивой в смысле Якоби,
если любая траектория A0.3.15) с возрастанием t сближается
с первой (точнее, порядок величины расстояния между ними
выше первого порядка малости).
Понятия устойчивости в смысле Хилла и Якоби специально
приспособлены для исследования поведения решений ограничен-
ной задачи трех тел.
Определение устойчивости но Хиллу и Якоби впервые встре-
чается у Пуанкаре, однако наиболее корректные определения
27 Под ред. Г, Н, Дубошина
834 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.04
и, главное, наиболее общие качественные результаты в проб-
леме трех тел, связанные с ними, содержатся в работах
Дж. Биркгофа [74], Н. Д. Моисеева [75], [76] и В. В. Степа*
нова [77].
В литературе встречаются различные определения устойчи-
вости на конечном промежутке времени, и интересующемуся чи-
тателю можно указать работу [78].
§ 3.04. Знакопостоянные и знакоопределенные функции.
Полная производная в силу системы
Рассмотрим полицилиндр К — {Т < t < оо, [|«|| < а} в
(га + 1)-мерном пространстве Gn+[ = Gn X Л, Gn есть и-мерное
евклидово пространство, /; = (— °° < t < оо). Пусть веществен-
ная непрерывная скалярная функция V(x, t) задана в К.
Определение 1 [32]. V(x,t) называется знакопостоянной
(знакопостоянно положительной или знакопостоянно отрица-
тельной) в К, если
V{x, 0>0 (или V{x, 0<0)
при {х, t)^K.
Определение 2. V(x,t) называется знакоопределенно по-
ложительной в К, если существует непрерывная функция W(x)
при ilxii < а такая, что
V (*, 0 > W (х) > 0 при Ц х И Ф 0,
V{0, /) = W@) = 0.
Определение 3. V(x, t) называется знакоопределенно от-
рицательной в К, если существует непрерывная функция W(x)
при ЦхЦ < а такая, что
V(x,t)^~W(x)<0 при
V{0, t) =
Определение 4 ';7|. Функция V(x, f) имеет бесконечно ма-
лый высший предел при Х-+-0, если для любого е > 0 суще-
ствует б(е)'>- 0 такое, что
\V(x,t)\<*
при||*Ц<6 и fe=[f0, oo], 8detQ>T.
Из определения 4 следует, что V(x,t), допускающая беско-
нечно малый высший предел при х->0, ограничена в полици-
линдре /Со = {'о < t < оо, Цх|| < а} с К.
Пусть имеется система п дифференциальных уравнений
¦§ = *(*, 0 (ю.3.16)
§ 3.05] ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 835
такая, что Х@, t) = 0 и вектор-функция Х(х, t) непрерывна вме-
сте с частными производными первого порядка в полицилиндре
К" = {Т < t < оо, ||х||< А, А > а}, т. е. К с К*. Очевидно, что
уравнение A0.3.16) допускает тривиальное решение х = 0. Бу-
дем его называть невозмущенным движением, а всякое другое
решение — возмущенным движением.
Если система A0.3.16) имеет частное решение x*(t), то с по-
мощью замены
z(t) = x(t)-x*(t)
она преобразуется в систему
^ = Z (г, t\, Z (г, t) = X (x +z,t)-X (x\ t).
имеющую тривиальное решение z(t) = 0.
Отсюда следует, что задача об устойчивости произвольного
частного решения эквивалентна задаче об устойчивости три-
виального решения.
Пусть, кроме того, вещественная функция V(x, t) непрерывна
вместе с частными производными первого порядка в полици-
линдре К.
Определение 5 [7]. Функция V(x, t), определяемая равен-
ством
V(x, 0 = 4г + Е!г*'(х' fls^ + feradV, X), A0.3.17)
называется полной производной по времени t функции V(x, t)
в силу системы A0.3.16).
§ 3.05. Теоремы Ляпунова об устойчивости
Первая теорема. Если существует в К знакоопределенно
положительная функция V(x, t) такая, что ее полная производ-
ная V(x, t) no t в силу системы A0.3.16) является знакопостоян-
но отрицательной, то ее тривиальное решение х — 0 устойчиво
в смысле Ляпунова при t -> -f- oo.
Вторая теорема. Если существует в К знакоопределенно
положительная функция V(x, t), допускающая бесконечно ма-
лый высший предел при х->0 и такая, что ее полная производ-
ная V(x,t) no t в силу системы A0.3.16) является знакоопреде-
ленно отрицательной, то ее тривиальное решение х = 0 асимпто-
тически устойчиво в смысле Ляпунова при t -> оо.
Третья теорема. Пусть в К V(x, t) допускает бесконечно
малый высший предел при х -> 0 и имеет знакоопределенную
27*
836 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.08
производную V(x, t) no t в силу системы A0.3.16). Если при не-
котором to> Т в любой окрестности ||х||< А ^ а найдется точка
(*о, *о), в которой выполняется неравенство
V (*о.*о) • V (ж„, to)>O. A0.3.I8)
то тривиальное решение х = 0 системы A0.3.16) неустойчиво
в смысле Ляпунова при t -> оо.
Замечание 1. Во всех теоремах область определения
функции Х(х, t), вообще говоря, больше области определения
функции V(x,t). Это условие задано включением /Сс:/(*.
Замечание 2. В третьей теореме V(x,t) не обязательно
знакоопределенная функция.
Замечание 3. Как заметил Н. Г. Четаев [71], для того
чтобы тривиальное решение х = 0 было неустойчивым, достаточ-
но наличия хотя бы одного решения, исходящего из каждой,
сколь угодно малой окрестности начала х = 0 и выходящего
за пределы фиксированной окрестности. Тем самым условия
третьей теоремы Ляпунова могут быть ослаблены, что и сделал
Н. Г. Четаев (см. теорему Четаева в [32], [71]).
Пусть
Х(х, 0 = Ае + Ф(*. 0. A0.3.19)
где А — постоянная («X п)'-матрица, и вектор-функция ср(ж, О
такова, что ^1*'» ¦ при х^0 стремится к нулю равномерно по t.
Тогда справедлива следующая теорема, составляющая осно-
ву первого метода Ляпунова.
Теорема. Если все собственные значения матрицы А имеют
отрицательные вещественные части, то тривиальное решение
~х = 0 системы A0.3.16) асимптотически устойчиво в смысле Ля-
пунова при t -> +.оо.
§ 3.06. Устойчивость по отношению к части переменных.
Теорема В. В. Румянцева
Рассмотрим ^-мерный вектор Q>(x,t) (k ^ n) и обозначим
через у вектор
0 = Ф(*. 0-Ф@, 0. A0.3.20)
Определение. Тривиальное решение х = 0 называется
устойчивым в смысле Ляпунова по отношению к вектору Ф, если
для любого е > 0 существует б(е)>0, что при любых началь-
ных нормах, удовлетворяющих условию
И*(ОI1<6,
S 3.07] ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 837
выполняется неравенство
при всех t ^ t0.
Если k = n, то предыдущее определение сводится к опреде-
лению 1 из § 3.01.
Такое определение известно в литературе как определение
устойчивости по части переменных. Действительно, если вектор
Ф имеет компоненты Х\, х2, .. ., Xh (k ¦< п), то тогда речь идет
об устойчивости лишь k компонент вектора х = 0. Пусть век-
тор у имеет компоненты хи ..., Xh-
Теорема В. В. Румянцева [123]. Если существует зна-
коопределенная по отношению к вектору у функция V(x, t), пол-
ная производная V(x, t) no t которой в силу системы A0.3.16)
является знакопостоянной функцией противоположного с V зна-
ка, или тождественно равна нулю, то тривиальное решение х=0
устойчиво по отношению к вектору у.
Определение знакопостоянной и знакоопределенной по от-
ношению к части переменных функции V(x, t) можно найти в
[87], [123].
§ 3.07. Связка первых интегралов. Способ Н. Г. Четаева
Пусть система A0.3.16) имеет s ^ и известных первых ин-
тегралов
F,{x) = c, (/ = 1,2 s). A0.3.21)
Рассмотрим дифференцируемую функцию
V = V{FU F2 Fs, Л„ Л2 Xm), A0.3.22)
зависящую от некоторых неопределенных постоянных парамет-
ров Ль Лг, .... Лт, подбираемых таким образом, чтобы функция
V была бы знакоопределенной. Очевидно, что в силу уравнений
всегда V = 0, поэтому если V является знакоопределенной, то
отсюда вытекает устойчивость исследуемого решения х = 0 (за-
метим, что здесь вектор х означает «возмущения»). В конкретг
ных примерах основная задача состоит в выборе параметров Л,-,
чтобы V была бы знакоопределенной. Изложенный способ пред-
ложен Н. Г. Четаевым [124] и оказался весьма эффективным в
различных разделах механики, в частности в небесной механике
и астродинамике. Довольно часто зависимость A0.3.22) имеет
линейный вид относительно параметров Л,-, и эти параметры
выбираются таким образом [125], чтобы разложение V в окрест,-
ности х = 0 начиналось с квадратичной формы. Если построен,-
ная функция V является знакоопределенной, то тривиальное ре-
шение х — 0 устойчиво, так как V = О,
838 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.08
§ 3.08. Устойчивость при постоянно действующих
возмущениях. Теорема И. Г. Малкина
Пусть в полицилиндре К* = {Т < t < оо, \\y\\ < /1} наряду
с системой A0.3.16) задана система п дифференциальных урав-
нений
$ t) + R(y, t), A0.3.23)
где вектор-функция R(y,t) характеризует постоянно действую-
щие возмущающие факторы. В отличие от Х(х, t), которая то-
ждественно равна нулю при х = 0, R(y,t) может и не обра-
щаться тождественно в нуль при у = 0.
Определение. Тривиальное решение х = 0 системы
A0.3.16) называется устойчивым при постоянно действующих
возмущениях, если для любого е > 0 существуют Si(e) и б2(е)
такие, что всякое решение у системы A0.3.23), для которого на-
чальная норма ]]у(°'|| удовлетворяет условию
при любом векторе R(y,t), удовлетворяющем в полицилиндре
{*о < t < оо, \\у\\< е}, условию
\\R(y, /)]]<б2(г),
само удовлетворяет при всех t > t0 неравенству
t,yw, to)\\<B.
Впервые определение устойчивости при постоянно действую-
щих возмущениях было дано в статье Г. Н. Дубошина [126].
Теорема И. Г. Малкина [72]. Если для системы A0.3.16)
существует знакоопределенно положительная функция V{x,t),
полная производная по t которой V(x, t) в силу системы
A0.3.16) является знакоопределенно отрицательной и если в по-
лицилиндре К* норма \-fa-\ ограничена, то тривиальное реше-
ние х = 0 устойчиво при постоянно действующих возмущениях.
Г. Н. Дубошиным [126] было дано первое общепринятое опре-
деление устойчивости при постоянно действующих возмущениях
и рассмотрены некоторые, весьма важные в приложениях, слу-
чаи теоремы об устойчивости при постоянно действующих воз-
мущениях, когда возмущающие факторы R(y,t) голоморфны
по у и не зависят от L
S 3.10] ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 839
§ 3.09. Теоремы Лапласа — Лагранжа и Пуассона
об отсутствии вековых возмущений больших полуосей
Теорема Лапласа — Лагранжа [59]. Если невозму-
щечные средние движения планет в планетном варианте задачи
N тел несоизмеримы, то большие полуоси планетных орбит
(и, следовательно, средние движения и канонические элемен-
ты L) не содержат вековых возмущений первого порядка отно-
сительно возмущающих масс.
Теорема Пуассона [59]. Если невозмущенные средние
движения планет несоизмеримы, то возмущения второго порядка
(относительно возмущающих масс) больших полуосей не имеют
вековых членов.
Исследования возмущений третьего порядка больших полу-
осей показали, что они содержат вековые возмущения [79].
Теоремы Лапласа — Лагранжа и Пуассона указывают лишь
на устойчивость в смысле Лагранжа (см. § 3.03) планетных
орбит на конечном промежутке времени. Чем меньше возмущаю-
щие массы, тем больше этот промежуток.
§ 3.10. Теоремы об устойчивости планетных орбит
Дифференциальные уравнения для оскулирующих элементов,
положенные в основу теории вековых возмущений Лагранжа
(см. ч. IV, § 8.03), которые получаются из общих уравнений для
оскулирующих элементов в результате замены возмущающей
функции ее вековой частью (см. ч. IV, § 6.04) с точностью до
величин второго порядка малости (относительно эксцентрисите-
тов и наклонов), имеют первые интегралы
2>Ла*е| = С1. (Ю.3.24)
%mknka\te4k = C2. A0.3.25)
Здесь рассматривается планетный вариант задачи п тел
(п—1 планета и центральное тело), mft, пи — масса и среднее
движение А'-й планеты, ah, ей — большая полуось и эксцентри-
ситет ее орбиты, ih — наклон А-й планеты относительно плоско-
сти Лапласа (см. ч. IV, § 1.01). Интегралы A0.3.24) и A0.3.25)
впервые были найдены Лапласом.
Анализируя эти интегралы, Лаплас доказал теорему об
«устойчивости» планетных орбит в первом приближении.
840 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.10
Теорема Лапласа. Пусть выполняются следующие ус-
ловия:
1) движение веек планет происходит в одном направлении
(каждое слагаемое в интегралах A0.3.24) и A0.3.25) положи-
тельно) ;
2) массы всех планет mk [k=\, 2, .... и— 1) одного по-
рядка;
3) большие полуоси орбит ah являются колеблющимися и
ограниченными функциями времени t^(to,T), мало изменяю-
щимися около некоторых средних значений;
4) в некоторый начальный момент времени t0 все эксцентри-
ситеты и наклоны ek(U), ik{to) малы.
Тогда ek(t) и ik(t) являются малыми функциями для всех
t^(tB,T).
Теорема Лапласа, конечно, не позволяет сделать вывод
о том, что гипотетическая планетная система (и, в частности,
Солнечная система) устойчива в смысле Лагранжа для
t^(t0, оо), так как, во-первых, строго не известно, выполняется
ли условие 3) для всех ?е(/0, оо) [известно лишь, что в первом
и во втором приближении большие полуоси не имеют вековых
возмущений (см. § 3.09)], а во-вторых, интегралы A0.3.24) и
A0.3.25) являются интегралами приближенных уравнений.
Теорема Лапласа в сочетании с теорией вековых возмущений
второго порядка позволяет лишь утверждать, что на конечном
хотя, быть может, и весьма большом промежутке времени (тем
большем, чем меньше массы планет) движение планет имеет
условно-периодический характер. Такие движения Арнольд на-
звал лагранжевыми движениями в планетной задаче [36] (они,
естественно, отличны от лагранжевых равновесных решений).
Существенное добавление к решению проблемы устойчивости
принадлежит Арнольду.
Теорема Арнольда [80]. Если массы планет, эксцентри-
ситеты и наклоны их орбит достаточно малы при некотором
t = t0, то для большинства начальных условий движение планет
имеет условно-периодический характер для всех вещественных
значений времени —оо <(<оо м мало отличается от лагран-
жева движения с подходящими начальными условиями.
Условно-периодические решения порождаются начальными
условиями, принадлежащими области F6, определенной форму-
лой "A0.1.53). Для начальных условий, принадлежащих обла-
сти f& = F\Fb [F — область, в которой происходит движение
планет, определена формулой A0.1.44)], вопрос о существовании
условно-периодических движений остается открытым. Правда,
при этом мера /й может быть сделана сколь угодно малой по
сравнению с мерой Fu.
§ 3.11] ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 841
Таким образом, теорема Арнольда позволяет утверждать, что
движения в планетной задаче устойчивы в смысле Лагранжа
для большинства начальных условий не только в первом, но
и в любом приближении.
Если определить вероятность устойчивости в смысле Ла-
гранжа планетной системы как
то можно утверждать, что движение планет устойчиво с вероят-
ностью Р, сколь угодно близкой к единице.
Замечание 1. Р=1 не влечет за собой устойчивость в
смысле Лагранжа планетной системы, так как в этом случае
остается множество меры нуль, которое может, вообще говоря,
порождать неограниченные движения.
Замечание 2. Теорема Арнольда доказывается при усло-
вии, что области, в которых происходит движение каждой пла-
неты, не пересекаются. Это условие необходимо и в классиче-
ской теории возмущений.
§ 3.11. Теоремы Арнольда об устойчивости решения
гамильтоновой системы в общем эллиптическом случае
Арнольд установил общие теоремы об устойчивости положе-
ния равновесия гамильтоновых систем в общем эллиптическом
случае [80], которые оказались эффективными при исследовании
устойчивости лагранжевых треугольных решений.
Пусть имеется гамильтонова система с одной степенью сво-
боды
dq __ дИ dp _ дН ,.„ ч 97,
~df — ~dp~' ~df Щ" VV.a.*n
где гамильтониан представляется формулой
Н (р, q,t) = kr+fc о/ + Н (р, q, /), A0.3.28)
1=2
г = р2 + ql , A0.3.29)
H(p,q,t) = O(r"+>). A0.3.30)
R(p,q,t) предполагается аналитической по р, q, t и 2л-периоди-
ческой по t.
Уравнения A0.3.27) имеют тривиальное решение (положение
равновесия)
^ = ^ = 0. A0.3.31)
842 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§3.11
Определение. Общим эллиптическим случаем для га-
мильтониана A0.3.28) называется случай, когда среди постоян-
ных с2, Сз, с4, ..., сп [п может быть сколь угодно большим) есть
отличные от нуля.
Пусть X — некоторое иррациональное число. Обозначим че-
рез Ль множество таких иррациональных чисел Я, для которых
выполняется неравенство
\Кп-ш\> {mk+ny A0.3.32)
при всех целых пг > 0, п > 0. Пусть, кроме того, Л является
объединением точек плотности всех множеств Ль. Множество
всех вещественных чисел, не принадлежащих Л, имеет меру нуль.
Теорема 1. Если J;eA, то тривиальное решение A0.3.31)
р = q = 0 системы A0.3.27) с гамильтонианом Н(р, q, t) общего
эллиптического типа A0.3.28) устойчиво в смысле Ляпунова.
Пусть теперь имеется автономная гамильтонова система с
двумя степенями свободы вида
dqL=dH_ dq±_dH_ \
dt ~~ dp, ' dt др2 ' I
dt dqi ' dt dq2 ' J
Определение. Если гамильтониан Н{р\, р2, <7i. Я2) пред-
ставим в виде
Н{ри р2, Яи <72) = Vi+ Л2Г2 + Я0(г,, г2) + Н{р1,рг, Яи Яг),
A0.3.34)
причем
h (в) = На {еХ2, — еЯ,,) Ф 0, A0.3.35)
то такой случай, согласно определению Арнольда, называется
общим эллиптическим случаем для гамильтоновой системы
с двумя степенями свободы. Для случая п степеней свободы
Арнольд дает определение общего эллиптического случая в ра-
боте [36]. Гамильтониан, приведенный в § 1.07, принадлежит
к общему эллиптическому типу.
Теорема 2. Тривиальное решение р\ = р2 = Я\ = Яг = 0
(положение равновесия) автономной системы A0.3.33) с гамиль-
тонианом Н(ри Pi, Яи Яг) в общем эллиптическом случае устой-
чиво в смысле Ляпунова, если A,2Ai ^ Л.
Получены также некоторые результаты по устойчивости ав-
тономных систем общего вида с внутренним резонансом частот
[144J — [147}
§ 3.12) ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 843
§ 3.12. Устойчивость лагранжевых равновесных решений
задачи трех тел
Лагранжевы решения неограниченной задачи трех тел не-
устойчивы в смысле определения 1 (§3.01). Действительно, если
рассматривать некоторое частное решение неограниченной за-
дачи трех тел, определенное начальными условиями, близкими к
лагранжевым, то для этих начальных данных центр масс систе-
мы будет двигаться в неподвижной системе координат со ско-
ростью, отличной от скорости, определенной лагранжевыми на-
чальными данными. А это приводит к тому, что по истечении
некоторого конечного промежутка времени точки, изображаю-
щие возмущенное движение, будут находиться на достаточно
большом расстоянии от точек, изображающих лагранжево дви-
жение в абсолютной системе координат.
В связи с этим Раус [81] ставит и решает в первом прибли-
жении вопрос об устойчивости постоянной треугольной конфигу-
рации, образованной тремя телами. Другими словами, решается
задача об орбитальной устойчивости периодического лагран-
жева решения.
Позднее Ляпунов доказал более общий результат [64,1, что
если масса одной из точек достаточно велика по сравнению
с массами двух других тел, то треугольник Лагранжа в задаче
трех тел устойчив в первом приближении при условии, что экс-
центриситеты орбит меньше единицы.
Когда эксцентриситеты орбит близки к нулю, лагранжев тре-
угольник устойчив в первом приближении, если массы трех тел
пг0, тпи т.?. удовлетворяют условию
(mo+mi+m2y 2? (Ю.3.36)
Замечание. Устойчивость в первом приближении лагран-
жева треугольника в ограниченной круговой задаче трех тел
имеет место при выполнении условия
( + J>27, A0.3.37)
получающегося из A0.3.36) при ш2 = 0. Условие A0.3.37) в точ-
ности совпадает с условиями E.2.41) и E.2.42).
Существенно, что при выполнении условия A0.3.37) можно
говорить не только об устойчивости конфигурации, образованной
тремя телами, одно из которых имеет нулевую массу, но и об
устойчивости треугольных лагранжевых решений в первом при*
ближении в смысле определения 1 (§ 3.01).
Усилия многих исследователей были направлены на то, что-
бы исследовать устойчивость треугольных лагранжевых реше-
ний ограниченной круговой задачи трех тел не только в первом
844 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА 1§ 3.12
приближении. Однако до появления работы Арнольда [80] все
попытки оказались тщетными. Так как уравнения ограниченной
задачи гамильтоновы, то отсюда следует [41], что в первом при-
ближении устойчивость имеет место только в том случае, когда
все собственные значения матрицы линейного приближения [59]
имеют нулевые вещественные части [41] (см. ч. V, § 2.05). Это.—
особый случай в теории устойчивости (по терминологии Ляпу-
нова), так как учет м.алых членов высшего порядка может суще-
ственно изменить поведение решений в окрестности лагранже-
вых решений.
А. М. Леонтович, опираясь на общие теоремы Арнольда (см.
§ 3.11), доказал, что для всех значений масс т0 и ти удовлетво-
ряющих условию A0.3.37), кроме, быть может, множества лебе-
говой меры нуль, лагранжево треугольное решение ограничен-
ной круговой задачи трех тел устойчиво [82].
Корни характеристического уравнения E.2.40) выражаются
равенствами
H) , A0.3.38)
^^r, A0.3.39)
а условие A0.3.37) в обозначениях т0 = 1 —ц и Ш\ = ц — за-
писывается в виде
27цA-ц)<1. A0.3.40)
Пользуясь формулами A0.3.38) — A0.3.40), результат Леон-
товича можно сформулировать также следующим образом:
либрационные решения L4 и L$ плоской ограниченной круго-
вой задачи трех тел устойчивы в смысле Ляпунова, если
kiX\ + k2%2 Ф 0 (для любых целых чисел ki и k2) и Ф = aA,i —
— рАДг + уХ2 Ф 0 (a, {$, y — постоянные коэффициенты [82]).
Числа Я,[ и Х2 (или отношение XjX2), удовлетворяющие про-
тивоположному условию
A0.3.41)
образуют множество меры нуль. Таким значениям Х\ и Х2 соот-
ветствует множество значений ц меры нуль, удовлетворяющих
неравенству A0.3.40).
Ю. Мозер показал, что условие «feiA,i + к2Х2 ф 0 для любых
целых чисел k\ и k2» может быть заменено менее жестким усло-
вием «feiX + k2X2 Ф 0 для значений k\ и k2, удовлетворяющих не-
равенству 0 < | h | + | k21 ^ 4».
Таким образом, результаты Леонтовича и Мозера утвер-
ждают, что треугольные лагранжевы решения плоской ограни-
S 3.12] ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 845
ченной круговой задачи трех тел устойчивы для всех значений ц,
удовлетворяющих неравенству A0.3.40), кроме, быть может,
трех значений, подчиняющихся условиям
*,Я,|+Ы2 = 0, 0<|А,| + |Л2|<4, [
или 2 г (Ю.3.42)
Существуют лишь три таких значения ц:
Из «0,01091367.
A0.3.43)
Исследование устойчивости лагранжевых решений для этих
значений ц выполнено в работах А. П. Маркеева [83], [84], [127].
Комбинируя метод преобразований Биркгофа гамильтоновой
системы к нормальной форме [41] с теоремами Ляпунова о не-
устойчивости (см. § 3.05) и со способом Четаева (см. § 3.07),
А. П. Маркеев доказал, что при значениях ц, равных щ и \ч
A0.3.43), лагранжевы треугольные решения (точки либрации L4
и L5) плоской ограниченной круговой задачи трех тел неустой-
чивы, а при ц = |13 эти решения устойчивы.
Работа [127] полностью исчерпала проблему устойчивости
треугольных лагранжевых решений в плоской ограниченной кру-
говой задаче трех тел. В [128] А. П. Маркеев исследовал устой-
чивость треугольных равновесных решений в пространственной
ограниченной круговой задаче трех тел. Им доказано, что для
большинства начальных условий (в смысле меры Лебега) при
всех значениях ц, удовлетворяющих условию A0.3.40), кроме
двух значений, ц = \iu ц = ц2 из совокупности A0.3.43), тре-
угольные точки либрации устойчивы. При ц = \\\ и ц = \i2 имеет
место неустойчивость.
Отметим существенное отличие в поведении условно-периоди-
ческих решений в окрестности L* и Ls. В плоском случае любая
точка из достаточно малой окрестности L4 и Ls при всех значе-
ниях ц, удовлетворяющих условию 27ц A — ц) < 1, кроме двух
([х = щ, (i = {i,2), порождает условно-периодическое решение.
Другими словами, точки L4 и L5 устойчивы в смысле Ляпунова.
В пространственной задаче большинство точек (но не все) из
достаточно малой окрестности точек либрации порождают ус-
ловно-периодические решения. Неясно, имеют ли условно-перио-
дический характер решения, порождаемые точками, принадле-
жащими множеству малой (в смысле Лебега) меры, поэтому
говорить об устойчивости по Ляпунову (или о неустойчивости)
треугольных точек либрации в пространственной ограниченной
круговой задаче трех тел преждевременно.
846 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.13
Уравнений первого приближения (уравнения в вариациях)
для исследования окрестности точек либрации L4 и LB ограни-
ченной эллиптической задачи трех тел составляют линейную
систему с 2л-периодическими (относительно истинной аномалии
возмущающих тел) функциями, поэтому даже в первом прибли-
жении вопрос об их устойчивости представляется весьма слож-
ным. Для близкого к единице эксцентриситета орбит возмущаю-
щих масс точки либрации ?4 и L5 неустойчивы в смысле Ляпу-
нова [85]. Здесь же сформулирована теорема об устойчивости,
которая оказывается верной лишь с точностью до первой сте-
пени эксцентриситета орбит возмущающих масс. Этот результат
согласуется с результатами исследования Ляпунова [64]. В даль-
нейшем многие исследователи [86], [129], [130], [131] и др., поль-
зуясь аналитическими или численными методами, строили обла-
сти устойчивости и неустойчивости на плоскости параметров \i,
е (ц — малая возмущающая масса, е — эксцентриситет ее орби-
ты) для линеаризованной системы уравнений (уравнений пер-
вого приближения). В нелинейной постановке при малых е
A. П. Маркеевым [132] получены утверждения об устойчивости
для большинства (в смысле меры Лебега) начальных условий,
формальной устойчивости и неустойчивости по Ляпунову в за-
висимости от значений параметров ц и е.
§ 3.13. Устойчивость других решений задачи трех тел
Пуанкаре в «Новых методах» [2] доказал, что решения пло-
ской ограниченной круговой задачи трех тел, устойчивые в смыс~
ле Хилла (см. § 3.03), будут устойчивыми по Пуассону и, следо-
вательно, обладают свойством возвращаемости в любую сколь
угодно малую окрестность начальной точки.
Устойчивость по Пуассону свойственна и для других законов
тяготения [2], отличных от ньютоновского, если рассматривается
плоская ограниченная задача и существует интеграл энергии.
В неограниченной задаче трех тел свойство траекторий быть
устойчивым по Пуассону в общем не сохраняется.
Н. Д. Моисеевым построены [28], [29] области сплошной устой-
чивости и неустойчивости в плоской ограниченной круговой за-
даче трех тел с помощью критерия Уиттекера.
Существенные результаты по устойчивости решений гамиль-
тоновых систем, к которым относится и ограниченная круговая
задача трех тел (плоская и пространственная), принадлежат
B. Г. Демину [87]. Им доказано, что в случае спутниковых орбит
или в случае орбит, охватывающих обе притягивающие массы,
гамильтоновы уравнения ограниченной задачи трех тел, путем
замены переменных, можно привести к «невырожденному слу-
чаю» (хотя первоначальная задача является вырожденной) и
5 3.M1 ГЛ. 3. ПРОБЛЕМА УСТОЙЧИВОСТИ В НЕБЕСНОЙ МЕХАНИКЕ 847
к ним, следовательно, применима теорема Арнольда об устойчи-
вости в эллиптическом случае (см. § 3.11). Таким образом,
В. Г. Деминым доказано, что периодические и условно-периоди-
ческие решения ограниченной круговой задачи трех тел спутни-
кового типа или охватывающие обе притягивающие массы орби-
тально устойчивы (устойчивы относительно всех кеплеровских
элементов, кроме средней аномалии).
§ 3.14. Устойчивость орбитальных движений
искусственных спутников
Исследованию устойчивости движения спутников в последние
годы уделяется большое внимание. Работы по этой проблеме
можно разделить на две группы:
1) исследование устойчивости движения центра масс (орби-
тального движения) спутников;
2) исследование устойчивости движения спутника относи-
тельно центра масс.
Второе направление обсуждается в части IX. Мы коснемся
работ, примыкающих к первому направлению.
Известно [20], [47], [71], [87], [133], что спутниковая задача с
осесимметричным гравитационным полем допускает круговые
решения. В. Г. Деминым получены [87], [134] необходимые и до-
статочные условия устойчивости таких орбит материальной точ-
ки (спутника). Необходимые условия получены с помощью тео-
ремы Ляпунова «первого метода» (§ 3.05). Достаточные условия
получены с помощью способа Четаева (§ 3.07) образования ли-
нейной, относительно параметров X,- (§ 3.07), и квадратичной,
относительно первых интегралов, связки (задача имеет два из-
вестных первых интеграла [87]), т. е. функция Ляпунова отыски-
вается в виде
biF\ + F2, A0.3.44)
где Fu F2 — левые части интегралов площадей и энергии (см.
D.1.23), D.1.24)), записанные в цилиндрических переменных
р, Я, 2.
Если постоянно действующие факторы R(y,t) (§ 3.08) малы
и не зависят от долготы, т. е.
Я(У, *) = |1«>(P, 2, ц),
то устойчивость круговых орбит не нарушается при достаточно
малых по модулю значениях параметра [i. Другими словами,
зональные гармоники в разложении потенциала центрального
тела (см. ч. IV, гл. 5 и ч. VI) не нарушают устойчивости круго-
вых орбит, если только разложение потенциала сходится «доста-
точно быстро».
848 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА [§ 3.14
Обобщенная задача двух неподвижных центров (см. ч. VI)
также допускает круговые орбиты. Их устойчивость при по-
стоянно действующих возмущениях исследована в работах [135],
[136], [137], а для случая предельного варианта задачи двух не-
подвижных центров в [138]. Названная задача допускает в каче-
стве частных решений так называемые «эллипсоидальные и ги-
перболоидальные орбиты» [47]. Эти орбиты лежат на эллипсоиде
или на гиперболоиде вращения. Первые располагаются между
двумя параллелями, и если являются периодическими, то после
некоторого числа оборотов замыкаются, в противном случае
имеем обмотку части эллипсоида. Гиперболоидальные траекто-
рии не являются спутниковыми орбитами, так как при /—*¦ ± оо
материальная точка удаляется на бесконечность. С помошью
связки интегралов В. Г. Демин [87] показал, что эллипсоидаль-
ные орбиты устойчивы по отношению к большой полуоси и экс-
центриситету эллипсоида и гиперболоида, на которых происхо-
дит движение спутника. Устойчивость движения стационарных
(или суточных) спутников рассмотрена в [89], [137].
Если спутник имеет стреловидную форму, а центральное тело
суть шар со сферическим распределением плотности, то такая
задача, в частности, допускает частные решения, в которых
центр масс движется по круговой орбите вокруг шара.
Г. Н. Дубининым не только найдены частные решения в этой
задаче [139], но и изучена их устойчивость. Доказано [87], [139],
что круговые орбиты центра масс стреловидного спутника устой-
чивы по отношению к цилиндрическим переменным и их произ-
водным р, z, |p|, \г\, \Ц при наличии постоянно действующих
возмущений, обусловленных формой спутника, если предполо-
жить, что длина спутника достаточно мала.
В заключение отметим, что многие, не затронутые здесь, во-
просы устойчивости орбитальных движений изложены в моно-
графиях В. Г. Демина [87] и В. В. Румянцева [89].
ЛИТЕРАТУРА К ЧАСТИ X
1. Понтрягин Л. С, Обыкновенные дифференциальные уравнения, Физ-
матгиз, 1961.
2. Пуанкаре А., Избранные труды, т. I, «Наука», 1971; т. II, «Наука»,
1972.
3. М а л к и н И. Г., Методы Ляпунова и Пуанкаре в теории нелинейных ко-
лебаний, Гостехиздат, 1949.
4. М а л к и н И. Г., Некоторые задачи теории нелинейных колебаний, Гос-
техиздат, 1956.
5. Д у б о ш и н Г. Н., Небеснач механика. Аналитические и качественные
методы, «Наука», 1964.
6. 3 и г е л ь К. Л., Лекции по небесной механике, ИЛ, 1959.
7. Л я п у н о в А. М., Общая задача об устойчивости движения, Гостехиз-
дат, 1950.
8 Д у б о ш н н Г. Н., Основы теории устойчивости движения, Изд-во МГУ.
1952
ЛИТЕРАТУРА К ЧАСТИ X 849
9. Каменков Г. В., Тр. Университета дружбы народов 15, вып. III, сер.
теор. мех., 3, 1966.
10. Каменков Г. В., Тр. Университета дружбы народов 15, вып. III, сер.
теор. мех., 56, 1966.
11. Рябов Ю. А., Ученые записки МГУ, сер. матем., т. VII, вып. 165, 1954.
12. Sch warzschild К., Astron. Nachr. 147, № 3506, 17, 1898.
13. Zeipel H., Nova Acta Reg. Societ. sci. Upsaliensis, ser. Ill, 1904.
14. Мерман Г. А., Тр. Ин-та теор. астрон. АН СССР 1, 7, 1952.
15. Батраков Ю. В., Бюлл. Ин-та теор. астрон. АН СССР 6, № 2 F2),
112 1955
16. Батраков Ю. В., Бюлл. Ин-та теор. астрон. АН СССР 6, № 2 F2),
121, 1955.
17. М о u 11 о п F., Periodic orbits, Washington, 1920.
18. Демин В. Г., Астрон. ж. 38, вып. 1, 157, 1961.
19. Чеботарев Г. А., Успехи астрон. наук 5, 176, 1950.
20. Дубошин Г. Н., Тр. Гос. астрон. ин-та им. П. К. Штернберга 15,
вып. 1, 158, 1945.
21. Дубошин Г. Н., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 121,
1960.
22. Рыбаков А. И., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 171,
1960.
23. Рыбаков А. И., Тр. Гос. астрон. ин-та им. П. К- Штернберга 28, 203,
1960.
24. Рыбаков А. И., Тр. Гос. астрон. ин-та им. П. К. Штернберга 28, 249,
1960.
25. Рыбаков А. И., Сообщ. Гос. астрон. ин-та им. П. К. Штернберга,
№ 108, 23, 1960.
26. Р я б о в Ю. А., Астрон. ж. 29, 5, 582, 1952.
27. W h i 11 a k e г Е. Т., Моп. Notices Roy. Astron. Soc. 62, 346, 1902.
28. Моисеев Н. Д., Тр. Гос. астрон. ин-та им. П. К- Штернберга 9, вып. 2,
82, 1940.
29. Моисеев Н. Д., Тр. Гос. астрон. ин-та им. П. К. Штернберга 9, вып. 2,
116, 1940.
30. Moser J., Math. Ann. 126, 325, 1953.
31. Демин В. Г., Тр. Университета дружбы народов 17, вып. 4, сер. теор.
мех., 18, 1966.
32. Д е м и д о в и ч Б. П., Лекции по математической теории устойчивости,
«Наука», 1967.
33. Бор Г., Почти-периодические функции, Гостехиздат, 1934.
34. Левитан Б. М., Почти-периодические функции, Гостехиздат, 1953.
35. Колмогорова. Н., Докл. АН СССР 98, 4, 527, 1954.
36. Арнольд В. И., Успехи матем. наук 18, вып. 6 A14), 91, 1963.
37. М о з е р Ю., «Математика», Период, сб. перев. ин. статей 6, вып. 4, 3,
1962.
38. М о з е р Ю., «Математика», Период, сб. перев. ин. статей 6, вып. 5, 51,
1962.
39. Мозер Ю. И., Успехи матем. наук 23, вып. 4 A42), 179, 1968.
40. Мозер Ю. И., Успехи матем. наук 24, вып. 2 A46), 165, 1969.
41. Биркгоф Дж., Динамические системы, Гостехиздат, 1941.
42. J e i f г у s W. Н., М о s e r J., Astron. J. 71, 7, 568, 1966.
43. К р а с и н с к и й Г. А., Астрон ж. 15, 1, 1968.
44. Мерман Г. А., Тр. Ин-та теор. астрон. АН СССР 8, 5, 1961.
45. V i n t i J. P., J. Res. Nat. Bur. Stand. B62, 2, 79, 1959.
46. К и с л и к М. Д., Сб. «Искусственные спутники Земли», вып. 4, 3, Изд-во
АН СССР, 1960.
47. Аксенов Е. П., Г р е б е н и к о в Е. А., Демин В. Г., Сб. «Искусствен-
ные спутники Земли», вып, 16, 173, Изд-во АН СССР, 1963.
850 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
48. Канторович Л. В., А к и л о в Г. П., Функциональный анализ в нор-
мированных пространствах, Физматгиз, 1959.
49. С h а г у J., La theorie de la Relativite et la Mecanique celeste, t. I, t. II,
Paris, 1928—1930.
50. Ситников К. А., Докл. АН СССР 133, 2, 303, 1960.
51. С и тн и к о в К. А., Матем. сб. 32 G4), 3, 693, 1953.
52. Мерман Г. А., Бюлл. Ин-та теор. астрон. АН СССР 6, № 10 (83), 687,
1958.
53. А л е к с е е в В. М., Докл. АН СССР 108, 4, 1956.
54. Алексеев В. М., Успехи матем. наук 24, вып. 1, 1969.
55. А л е к с е е в В. М., Сб. «Проблемы движения искусственных небесных
тел», Изд-во АН СССР, 1963.
56. В о г i s G., Astron. J. 72, 3, 380, 1967.
57. С о п t о р о u 1 о s G., Astron. J. 72, 5, 669, 1967.
58. Уиттекер Е. Т., Аналитическая динамика, ОНТИ, 1937.
59. С у б б о т и н М. Ф., Введение в теоретическую астрономию, «Наука»,
1968.
60. Уинтнер А., Аналитические основы небесной механики, «Наука», 1967.
61. S u п d m a n К. F., Acta Math. 36, 105, 1912.
62. Beloritzky D., J. Observ. 16, 109—132, 149—172, 189—211, 1933.
63. Мерман Г. А., Бюлл. Ин-та теор. астрон. АН СССР 6, № 10 (83), 713
1958.
64. Ляпунов А. М., Собрание сочинений, т. 1, Изд-во АН СССР, 1954.
65. Мерман Г. А., Бюлл. Ин-та теор. астрон. АН СССР 5, № 4 F7), 185,
1952.
66. Петровская М. С, Бюлл. Ин-та теор. астрон. АН СССР 7, № 6 (89),
441, 1959.
67. Рябов Ю. А., Бюлл. Ин-та теор. астрон. АН СССР 8, № 10 A03), 772,
1962.
68. В г u n s К., Astron. Nachr. 109, № 2606, 215, 1884.
69. Ш а р л ь е К-, Небесная механика, «Наука», 1966.
70. Пуанкаре А., Лекции по небесной механике, «Наука», 1965.
71. Чет а ев Н. Г., Устойчивость движения, Физматгиз, 1955.
72. Малкин И. Г., Теория устойчивости движения, «Наука», 1966.
73. Немыцкий В. В., Степанов В. В., Качественная теория дифферен-
циальных уравнений, Гостехиздат, 1949.
74. В i r k h о 11 G., Amer. Trans. 17, 1917.
75. Моисеев Н. JX-, Тр. Гос. астрон. ин-та им. П. К. Штернберга 6, вып. 1,
3—98, 1936.
76. Моисеев Н. Д., Тр. Гос. астрон. ин-та им. П. К. Штернберга 9, вып. 2,
5—81, 1940.
77. Степанов В. В., Астрон. ж. 13, вып. 5, 435, 1936.
78. К а р а ч а р о в К. А., П и л ю т и к А. Г., Введение в техническую теорию
устойчивости, Физматгиз, 1963.
79. Mef fro у J., Bull, astron. 21,261, 1958.
80. A p н о л ь д В. И., Докл. АН СССР 137, 2, 255, 1961.
81. Routh Е. J., A treatise on the stability of a given state of motion, Lon-
don, 1877.
82. Л е о н т о в и ч А. М., Докл. АН СССР 143, 3, 525, 1962.
83. Маркеев А. П., Прикл. матем. и механ. 32, вып. 4, 738, 1968.
84. М а р к е е в А. П., Космич. исследования 5, 3, 1967.
85. Г р е б е н и к о в Е. А., Астрон. ж. 9, 3, 567, 1964.
86. Лукьянов Л. Г., Вестн. Моск. ун-та, физ., астрон., № 1, 63, 1969.
87. Демин В. Г., Движение искусственного спутника в нецентральном поле
тяготения, «Наука», 1968.
88. Белецкий В. В., Движение искусственного спутника относительно цен-
тра масс, «Наука», 1965,
ЛИТЕРАТУРА К ЧАСТИ X 851
89. Румянцев В. В., Об устойчивости стационарных движений спутников,
ВЦ АН СССР, 1967.
90. Аксенов Е. П., Астрон. ж. XXXVIII, 2, 336, 1961.
91. Орлов А. А., Тр. ГАИШ 15, вып. 2, 1950.
92. Демин В. Г., Аксенов Е. П., Вестн. Моск. ун-та, сер. III, № 6, 87,
1960.
93. Орлов А. А. Бюлл. Ин-та теор. астрон. АН СССР 7, 10, 1960.
94. Str uve H., Publications de l'observatoire central Nicolas, серия II, 11,
St.-Petersbourg, 1898.
95. S t r u v e G., Veroff. Univ. Sternwarte Berlin-Babelsberg, Berlin, 6, тет-
радь 5, 1939.
96. Пуанкаре А., О кривых, определяемых дифференциальными уравне-
ниями, Гостехиздат, 1947.
97. Р о i п с а г е Н., Rend. Circ. mat., Palermo, 33, 375, 1912.
98. Birkhoff G. D., Mem. Pont. Acad. Sci. Novi Lyncei C), 1, 85, 1935.
99. Birkhof f G. D., Trans. Amer. Math. Soc. 14, 14, 1913.
100. Birkhoff G. D., Trans. Amer. Math. Soc. 18, 190, 1917.
101. S i g п о г i n i A., Rendiconti dei Lirrcei 21, 36, 1912.
102. T о п e 11 i L., Rendiconti dei Lincei 21, 332, 1912.
103. P e й н Н. Ф., Докл. АН СССР XV, № 8, 1937.
104. Степанов В. В., Курс дифференциальных уравнений, Гостехиздат,
1953.
105. Я к о б и К., Лекции по динамике, ОНТИ, 1936.
106. L i о u v i 11 е R., Journ. de Math. XIV, 1, 1849.
107. L i о u v i 11 е R., Journ. de Math. XII, 1, 1847.
108. Мог era G., Atti della R. Acad. di Torino 16, 1880.
109. S t а с k e 1 P., Math. Ann. 42, 1893.
ПО. Лурье А. И., Аналитическая механика, Физматгиз, 1961.
111. Levi-Civita Т., Math. Ann. 59, 1904.
112. D a 11 - А с q u a F., Math. Ann. 66. 1908.
113. Burgatti P., Roma Lincei Rend. 20, 1911.
114. МультонФ, П., Введение в небесную механику, ОНТИ, 1935.
115. Демин В. Г., Вестн. Моск. ун-та, физ., астр., № 1, 1960.
116. Г р е б е н и к о в Е. А., К и о с а М. Н., ПММ 38, вып. 2, 1974.
117. Гребен иков Е. А., Киоса М. Н, ЖВМ и МФ 14, № 5, 1974.
118. Гребеников Е. А., Киоса М. Н., ДУ IX, 11, 1973.
119. Бе резин И. С, Жидков Н, П., Методы вычислений, «Наука», т. 2,
1966.
120. Киоса М. Н., Аналитические и численные методы исследования проб-
лемы интегрируемости задачи трех тел, канд. дисс, МГУ — ГАИШ, 1974.
121. И мш енецк и й В. Г., Интегрирование дифференциальных уравнений
с частными производными 1-го и 2-го порядка, Изд-во Москов. матем.
о-ва, М., 1916.
122. Яров-Яровой М. С, ПММ 27, вып. 6, 1963.
123. Румянцев В. В., Вестн. Моск. ун-та, № 4, 1957.
124. Чет а ев Н. Г., ПММ 10, 1, 135, 1946.
125. М е р к и н Д. Р., Введение в теорию устойчивости движения, «Наука»,
1971.
126. Д у б о ш и н Г. Н., Тр. ГАИШ XIV, 1, 153, 1940.
127. М а р к е с в А. П., Исследования устойчивости движения в некоторых за-
дачах небесной механики, Препринт ИПМ АН СССР, 1970.
128. М а р к е е в А. П., Астрон. ж. 48, 4, 1971.
129. D a n b у J. M. A., Astr. J. 69, 2, 1964.
130. N а у f e h A. H., К a m e I A. A., AIAA Journ. 8, 2, 1970.
131. М а р к е е в А. П., ПММ 34, 2, 1970.
132. М а р к е е в А. П., Препринт № 1 ИПМ АН СССР, 1973.
133. Чандрасекар С, Принципы звездной динамики, ИЛ, 1948.
852 Ч. X. КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА
134. Демин В. Г., Вестн. Моск. ун-та, сер. физ., астр., № 4, 76, 1960.
135. Аксенов Е. П., Г р е б е н и к о в Е. А., Демин В. Г., ИСЗ, вып. 16,
163, Изд-во АН СССР. 1963.
136. Д е г т я р е в В. Г.. ПММ 26, вып. 4, 1962.
137. Дегтярев В. Г., Инженерный журн. 3, вып. 3, 1963.
138. Ку н и ц ы н А. Л., Касмич. исследования 6, вып. 2, 324, 1966.
139. Д у б о ш и н Г. Н., Астрон. ж. XXXI, вып. 4, 723, 1959.
140. Г р е б е н и к о в Е. А., Рябов Ю. А., Новые качественные методы в не-
бесной механике «Наука», 1971.
141. Боголюбов Н. Н., Митропольский Ю. А., СамойленкоА. М.,
Методы ускоренной сходимости в нелинейной механике, «Наукова дум-
ка», 1971.
142. Гребеников Е. А., Астрон. ж. XXXV, вып. 6, 904, 1958.
143. Б р ю н о А. Д., Препринты №№ 97, 98 ИПМ АН СССР, 1974.
144. Ибрагимова И. К., Журн. выч.матем. и мат. физ. 6, 5, 1966.
145. К у н и ц ы н А. Л., ПММ 35, 1, 1971.
146. К у н и ц ы н А. Л., ДУ 7, 9, 1971.
147. Гольцер Я. М., Нурпеисов С, Изв. АН Каз. ССР, 1, 1972.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аберрация 114
— годичная 97
— дифференциальная 139
— звездная 115
— планетная 116
— суточная 116
—.эллиптическая часть 117
«Авангард-1» 620
Азимут 24, 25
— геодезический 50, 52
Альмукантарат 24
Амальтея 510
Амплитуда 362
Аналогии Непера 34
Аномалия истинная 217, 222, 226, 234
263
— средняя 222, 261
в эпоху 221, 224
— эксцентрическая 81, 222, 232, 237
261
Апекс 115
Апогей 217, 564
Апоцентр 217
Аппроксимация 649
Аргумент перицентра 219, 221
— широты 222, 226
Ариэль 510
Астрономическая единица 185
световая 115, 185
Астрономические постоянные 176
, новая система 177
Афелий 217
Базис-вектор 715, 730—733
Базис частотный 800
Барицентр системы «Земля — Луна»
491
Бюро времени международное 167
Вариационная кривая Хилла 464
Вариация 455
— аргумента 696
— первая 698
Вектор Лапласа 216
Венера 72, 186, 188-190, 488, 489,
504—507, 538, 539
Вертикал 23
— первый 23
Вертикаль 22
— астрономическая 46
— геодезическая 48
— местная 47
Веса неизвестных 691
— условных уравнений 692
Весовая функция 661
Веста 514, 516, 517
Високосы задержанные 151
Возмущающая функция 385, 433, 440,
447
— —, весовая часть 402
, главная часть 386, 402
, дополнительная часть 392, 398
, задачи п тел 294
, нерезонансная часть 344
от сжатия планеты 510
.резонансная часть 344
Возмущения в движении ИСЗ от пре-
цессии и нутации экваториальной
плоскости Земли 625
от приливной деформа-
ции Земли 628
от притяжения атмосфе-
ры 632
релятивистские 630
электромагнитные 631
— вековые 566, 571
— — 1-го порядка 571
— долгопериодические 569, 571
—, класс 422
— короткопериодические 566, 572
— лунно-солнечные 569
— Луны 477
— периодические 422
—, порядок 422
— смешанные 422
— солнечные спутников 513
—,степень 422
854
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Возмущения элементов 441, 574
орбиты ИСЗ вековые 593, 599,
604
долгопериодические 594,
599, 600, 604
— лунно-солнечные 603, 606
— — от высших гармоник
— от светового давления
618, 620
от сопротивления атмо-
сферы 609, 613
с периодом около суток
601
Время атомное 167—169
— всемирное 149, 155—157, 163
— — квазиравномерное 156
— звездное 149, 152, 153, 158
гриничское 158
истинное 160
квазиистинное 158
среднее 159
эфемеридное 163
— солнечное 155
— среднее 154
— эфемеридное 149, 150, 157, 161, 163,
165, 177
Высота 24
— ортометрическая 54
Гамма-функция 366
Ганимед 508, 510
Гармоники зональные 566
— секториальные 556, 562, 603
— тессеральные 556, 562, 603
Гармония 516
Гекуба 514, 517
Географос 517
Гестия 514, 516, 517
Гидальго 513, 517
Гильда 517
Гиперион 510
Главный эллиптический член в дол-
готе 451
в широте 451
Год аномалистический 151
— бесселев 87, 151
— високосный 151
— драконический 151
— звездный 150
— сидерический 150, 457
— тропический 151
Горизонт астрономический 23
— геодезический 50
— местный 82
Град 26
Группа типа Гильды 513
Дальность горизонтальная 720
— наклонная 25—27
Дата юлианская 175
Движение гиперболическое 244
— кеплеровское 211
— круговое 243, 244
— поступательно-вращательное 321 —
331
— промежуточное 588—592
— прямолинейное 229
— собственное 85
— спутника либрацнонное 765—767
лимитационное 765
орбитальное 847, 848
— — ротационное 765
— среднее 221, 224
— эллиптическое 243, 244
Движения лагранжевы в планет-
ной задаче 840
— финальные 808, 809
Девиация 81
Деймос 510
Диона 510
Дифференциальный метод исправле-
ния элементов орбит 273, 285
Дифференцирование численное 655—
657
Долгота астрономическая 47
— галактическая 28
— геодезическая 49, 52
— геоцентрическая 52
— перицентра 222, 226
— планетоцентрическая 59
— селенографическая 73
— узла 219, 221, 224, 227, 262
в эпоху 224
— эклиптическая 28
— эфемеридная 162
Европа 508, 510
Задача Акснесса 580, 581
— Баррара 581, 582
— Больца 700
— вариационная общая 719
простейшая 718
с подвижными концами 700
— Винти и Кислика 581, 584
— Гарфинкеля 579
— двух неподвижных центров 549,
550, 584
обобщённая 551, 588, 848
тел 211
— изопериметрическая 700
— краевая 678—684
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
855
Задача Лагранжа 698
— Майера 699, 701
— п тел 288
— двухпланетная 385, 400
планетная 385, 405, 839,
840
— Стерна 578
— трех тел 792—795, 806, 808, 811,
819, 823
неограниченная 524—542
— ограниченная 548
— — гиперболическая 549
круговая 533, 542, 546—
548
плоская 534, 817, 845
параболическая 549
планетная 815
— эллиптическая 549
Хнлла 551, 552
Задачи вариационные традиционные
695
— интегрируемые 811
— модельные 577
— экстремальные 694
Законы Кассини 203, 770
Захват 809, 810
Звезды двойные 121
Земля 186, 188—192, 457, 488, 489,
504—507, 538, 539, 753
Зенит 23, 25
— геодезический 48
Знаменатели малые 429
Зонды космические 200
Изменения вековые 90
— годичные 90
Икар 517
Интеграл адельфический 813
— алгебраический 813
— движения центра масс 289, 298,
302, 310, 328
— живых сил 290, 293, 295, 299, 300,
302, 303, 310, 328
— площадей 289, 293, 295, 300, 302,
303, 310, 328
— полный 318, 757
— рефракции 133
— Якоби 534
Интегралы Лапласа 215
— Якоби 661
Интегрирование численное 65я
Интегрируемость 812, 815
Интерполирование 635
— обратное 642
Ио 508, 510
Ирис 516
Календарь григорианский 151
— юлианский 151
Каллисто 508, 510
Каталоги звездные 143—145
Колюр равноденствий 24
— солнцестояний 24
Комета Вольфа 1 519
— Лекселя 518
— Отерма 3 519
Кометы гиперболические 517
— долгопериодические 517
— короткопериодические 517
— параболические 517
Координаты астрономические 46
— барицентрические 291, 294
— видимые 62
— галактические 28
— Ганзена идеальные 295, 305
полярные 305
— географические 55
— геодезические 46. 48
— геоцентрические 52
— дифференциальные 41
— небесные 45
— обобщенные 214
— орбитальные 216, 223, 226, 228,
233
— относительные 40, 41
полярные 216
цилиндрические 294
— сферические 213, 295
— центра масс 210
— цилиндрические 211
— экваториальные 37
— эклиптические 37, 38
— Якоби 292
Коэффициенты Ганзена 235
— Лапласа 381—383
— Ньюкома 383
— Фурье 800
Кривая Хилла 535, 545
Критерий Тиссерана 542
— Уиттекера 797
Круг большой 23
— равных высот 24
— склонений 52
— широт 28
¦Петиция 516
Либрация Луны 203—207
оптическая 75, 204
параллактическая 204
суточная 204
физическая 74—77, 205
Линия апсид 217
т- геодезическая 50
856
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Линия отвеса 22
— полуденная 23
— узлов 219
Луна 74—78, 93, 138, 186, 192, 194,
198, 199, 538, 539, 770, 822
«Лунар орбитер I, III, IV» 200, 201
Лунация 150
Люки 514
«Маринер-2, 4, 5, 6, 7, 9» 65, 200
Марс 64, 65, 186, 188—192, 488, 492,
504—507, 538, 539
Масконы 203
Матрица ориентации экваториальная
81
Международное условное начало 56
Мельпомена 516
Меридиан астрономический 47
— геодезический 48
— лунный 59
— местный 46
— небесный 23
— нулевой 46
— основной 39
— селенографический 58
— центральный 57
— зфемеридный 162
Меркурий 186, 188—190, 192, 194, 487,
489, 504—507, 538, 539
Место видимое 103
— истинное 103
— наблюдения фиктивное 103
— нормальное 142
— среднее 103
Месяц аномалистический 152, 482
— драконический 152, 492
— сидерический 457, 482
— синодический 150, 152
— тропический 152
— эфемеридный 150
Метод Адамса 670
— Болина 515
— Брауэра 415
— Брауэра — Клеменса 405
— Бренделя 515
— Ганзена 412, 514
— Гаусса 690
— градиентного спуска 685, 695
— Делоне 447
— Делоне — Цейпеля 426
— Коуэлла 481, 671, 674, 675
— Лагранжа 333
— Лагранжа — Шарпи 547
— Лапласа — Ньюкома 419
— Линдштедта 824
— Ляпунова 790
г- малого параметра 789
Метод наименьших квадратов 689
— разностный 687
— Рунге — Кутта 668
— скорейшего спуска 685, 695
— стрельбы 679
— улучшения орбит ИСЗ 287
— Хилла 408, 514
— Штермера 673
— Энке 675
Методы осреднения 432
Боголюбова 442
Мимас 510
Минималь 697
Минута 26
— десятичная 26
— звездная 161
— средняя 160
Миранда 510
Многочлены сферические 373
Множители параллактические 129
Момент прохождения через пери-
центр 219, 222, 225, 227
Моменты сил аэродинамических 763
магнитного взаимодействия 763
от ньютоновского поля тяготе-
ния 762
от сжатия планеты 762
светового давления 764
Надир 23, 25
Наклон 219, 221, 224, 225, 227, 262
— критический 597
— лунно-солнечный 86
— орбиты 219
к экватору 61
к эклиптике 61
— средний 86
— эклиптики к экватору 24
Накопление погрешности 676
Невязки остаточные 691
Нептун 72, 157—191, 193, 194, 494—
498, 500, 504—507, 538, 667
Неравенство 454
— годичное 455
— параллактическое 455
Нереида 510
Нутация 91—94
— в долготе 75
— в наклоне 75
— дифференциальная 139
Оберон 510
Область притяжения положения рав-
новесия 830
— сплошной устойчивости по Ла-
гранжу 832
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
857
Ода 513
Операция основная 43
Орбита гиперболическая 219, 247, 267,
271
— круговая 217, 268
— невозмущенная 211
— оскулирующая 334
— параболическая 217, 248, 266, 271
— первоначальная 273
— предварительная 279
— промежуточная 462
ИСЗ 577
— прямолинейная 218
— эллиптическая 217, 247, 260, 266,
270, 275, 277
Оси средние 771
Остаточные разности 141
Остаточный член 639, 659
Ось мира 23
— основная 22, 25
Отклонение среднее квадратичное 695
Паллада 516, 517
Параллакс 123
— годичный 103, 124
— горизонтальный экваториальный
125
средний 125, 128
— Луны 74
— рефракционный 138
— Солнца 179
— суточный 124—127, 130
Параллель 47
— геодезическая 47
— небесная 25
— суточная 25
Параметр 217, 219, 221, 227, 260
Параметры прецессии Ньюкома 108,
109
Партенона 516
Перегрузка 713
Перелеты межорбитальные 729
— многоимпульсные 735
— — одноимпульсные 736
.траектории 739, 740—743
— —,— моноэллиптические 740, 741
¦ ,— полиэллиптические 740, 741
Переменные Клеро — Лапласа 306
— Лагранжа 342—344
Перигей 217, 564, 614
Перигелий 217
Период обращения 271, 226
— юлианский 174, 175
модифицированный 175
Перицентр 217
Планеты малые 513
Плоскость Лапласа неизменяемая
290, 756
— основная 22, 25
Плотность воздуха 610—612
Плутон 187—190, 193, 494—498 500
538, 539
Поверхность относимости фундамен-
тальная 43, 46
— Хилла 534, 545
Показатели Фурье 800
Полеты к Луне 744
Полином Лагранжа 639
Полиномы Гегенбауэра 380
— интерполяционные 637
— Лежандра 368, 372, 555
— Ньюкома операторные 401
Политика оптимальная 706
Положение географическое 46
Полуось большая 221, 260
— действительная 225
Полюс большого круга 29
— галактический 29
— географический 46
— геодезический 48
— истинный 57, 85
— мира 23
северный 23
южный 23
— орбиты 23
— средний 57, 85
— эклиптики северный 24
южный 24
Полярное расстояние 26
Постоянная аберрации 98
суточной 116, 179
— гравитационная гауссова 180
гелиоцентрическая 179
геоцентрическая 197, 283
луноцентрическая 199, 200
планетоцентрическая 194
— живых сил 214
— либрации физической 74
— лунного неравенства 179
— нутации 91, 178
— параллактического неравенства
179
— площадей 215
— синуса параллакса Луны 179
— тяготения 179
— энергии 214
Постоянные астродинамические 195—
203
— астрономические 176
— Гайна 74, 76
— Лапласа 215
— редукционные 92
Почти-период 798
858
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Правило Непера 32
— Рунге 664
Предел Лапласа 232
Представления интегральные 369, 376
Прецессия 85, 104—114
— годичная 88
— дифференциальная 139
— лунно-солнечная 86
—, матрица 92
— общая 105
— от планет 87
— по прямому восхождению 88
— по склонению 89
Приближение наилучшее среднеква-
дратичное 645
Принцип максимума Понтрягина 695,
704
— оптимальности Беллмана 696, 706
Программа оптимальная 725
Программирование динамическое 706
Продолжительность жизни спутника
615
Прямое восхождение 27
планетоцентрическое 59
/^-траектории 715
Пункты Лапласа 52
Пятиугольник Непера 32
д среднее 62
Разложение радиуса-вектора 233
Разности вторые 636
— первые 635
~- центральные 636
Ракета 711
Расстояние зенитное 25
— перигейное 221
— перигелийное 221
— полярное 26
•— радиальное 81
— угловое 40
¦ перицентра от узла 221, 225,
227, 262
Расход массы 713
— топлива 713, 719
Редукция звездных положений 101
— Фая 775
Референц-эллипсоид стандартный 49
Рефракция 132
— астрономическая 131, 133
— атмосферная 132
— геодезическая 132
— дифференциальная 132
— ионосферная 132
— нормальная 134
— параллактическая 138
— электронная 132
Решение возмущенное 829, 835
— невозмущенное 829, 835
— оптимальное 702
— орбитально устойчивое 832
— порождающее 788
— равномерно устойчивое 830
— условио-периодическое 803, 804,
806
периплегматическое 805
— устойчивое при постоянно дей-
ствующих возмущениях 831
Решения периодические 539
Пуанкаре 2-го вида 794
2-го рода 794
1-го сорта 539, 541, 542, 792
2-го сорта 539, 541, 542
3-го сорта 539, 541, 793
Шварцшильда 542
— равновесные 527
— частные Лагранжа 527, 540, 541,
549
томографические 528, 532
— коллинеарные 528—530, 535
круговые 528
треугольные 535, 843—846
Рея 510
Ряд гипергеометрический 367
— Фурье почти-периодической функ?
ции 800
Ряды Зундмана 821
— Линдштета 825
— Ляпунова 821
— Хилла 821, 822
Сатурн 187—191, 193—195, 493—499,
501—507, 538, 539, 667
Сближения комет с большими плане-
тами 518
Световое давление 617
Свободный период Эйлера 753
Сгущения орбит малых планет 513
Секунда атомная 167
— десятичная 26
— звездная 26
— средняя 160
— эфемеридная 150
Семейства комет 517, 519
Силовая функция двух тел 324
задачи двух неподвижных цен-
тров 586
п тел 289, 301
трех тел 524, 526
притяжения Земли 195, 555, 561
Луны 198—202
¦ системы тел 323
Силы аэродинамические 612
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
859
Символ Аппеля 366
Система алгебраическая редукцион-
ных величин 95
— астрогеодезическая мировая 197
— геодезических данных 50
— координат ареографическая 64
— — афродитографическая 71
— — барицентрическая 22
— — галактическая 28, 36
— — гелиографическая 70
— — геоэкваториальная 59
горизонтальная 24, 34
йовицентрическая 68
— — луноцентрическая 73
—— марсоцентрическая 64
— — нептуноцентрическая 72
— — объектоцентрическая 82
орбитальная 80, 764
— — перигейная 760
— — сатурноцентрическая 70
— — селенографическая 73
селеноцентрическая 22, 73
— — селеноэкваториальная 72
— — топоцентрическая 22
ураноцентрическая 72
экваториальная вторая 27, 35,
36
первая 26, 34
эклиптическая 27, 35
юпитероцентрическая 68
— Ляпунова 791
— отсчета 21
— постоянных MAC 178, 185
— тригонометрическая редукционных
величин 95
— юлианская 152
Системы координат гелиоцентриче-
ские 22
зенографические 69, 69
планетоцентрические 58
прямоугольные 37
Склонение 26, 27
— планетоцентрическое 59
Скобка Пуассона 812
Скорость космическая вторая 218
первая 218
— света 253
— характеристическая 712, 728
Служба времени 173
— широт международная 57
Соизмеримость средних движений 432
Солнце 189, 190
— среднее экваториальное 150
эфемеридное 162
Соударения 817—819
Спектр функции 800
Сплайн 644
Спутник Юпитера VI 508 510
VII, 508, 510
VIII 509, 510
1X510
Х510
XI 510
XII 510
Спутники галилеевы 508
— гиростаты 778, 779, 783, 786
— Земли искусственные 554
— Луны искусственные 200
— планет 508—510
— Сатурна 796
Среднее равноденствие даты 161
Стабилизация вращательная движе-
ния 786
гироскопическая 778
оптимальная 785
Стандартная атмосфера 612
— Земля 559
Сутки звездные 149, 150, 154
— истинные солнечные 149
— квазиистинные 150, 158
— средние 150
солнечные 150
Сфера влияния 538
— гравитационная Хилла 538, 539
— действия 537
— небесная 22
— тяготения 537
Сферический избыток 33
Сфероид 48
— стандартный относимости 49, 50
Схемы осреднения 432, 433
Гаусса 433, 434, 436, 440
Делоне —Хилла 433, 435, 439,
440
Моисеева 433, 434, 438, 440
Фату 433, 434, 436, 440
Счет времени гражданский 156
Таблица Куммера 368
— Кэли 234
Таблицы рефракции Пулковские 135
— Эккерта 495
Теневая функция 622—624
Теорема Арнольда об условно-перио-
дических движениях 801
об устойчивости планетных ор-
бит 840
— Брунса о существовании интегра-
лов 813, 814
о сходимости 823
— Вейерштрасса — Слудского —
Зундмана 819
— Гамильтона — Якоби 318.
860
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Теорема Зундмана о рядах 820
о соударениях 819
— Крудели 774
— Лагранжа 699
, обобщение 702, 703
— Лапласа 839
— Лапласа — Лагранжа 839
— Ляпунова о голоморфном интегра-
ле 791
о периодических решениях
791
— Малкина 838
— о неподвижной точке 798
— Пуанкаре о несуществовании пер-
вых интегралов 814
— — о существовании периодическо-
го решения 789
— Пуассона 812
об устойчивости 839
— Румянцева 837
— синусов 30
Теоремы Арнольда об устойчивости
решения гамильтоновой системы
841, 842
— Ляпунова об устойчивости 835,
836
— Пуанкаре о равновесии вращаю-
щихся жидкостей 773, 774
о ранге и классе возмущений
825
Теория возмущений 432, 442
— движения больших планет 484
Клеменса 485
— — Леверье 444
Ньюкома 484—487
Хилла 486
Шараф 486
Луны 443, 457
, аргументы фундаменталь-
ные 452
, основная проблема 444,
482
— Хилла —Брауна 458—470, 481
Тетис 510
Тефия 510
Титан 510
Титания 510
Точка весеннего равноденствия 24,
150
для планеты 59
— истинная 150
квазиистинная 150
средняя 150
— весны 24
— запада 23
— зимнего солнцестояния 24
— зимы 24
«— лета 24
Точка летнего солнцестояния 24
— осени 24
— осеннего равноденствия 24
— севера 23
— соединения 717
— юга 23
Точки либрации 541
коллинеарные 531, 536
треугольные 529, 536
— равноденственные 23
— угловые 703
Траектории межпланетные 743
Траектория облетная 747
— оптимальная 733, 734
Треугольник параллактический 34
— сферический 29
присоединенный 32
Тритон 510
Троянцы 513
Туле 513
Тэта-функции 365
Тяга импульсная 717
Углы Эйлера 321, 757
Угол вертикали 52
— возвышения 24
— места 24
— наклона траектории 82
— поворота траектории 83
— позиционный 40
— скоростного курса 83
— часовой 26
эфемеридный 162
— эксцентриситета 222
Узел восходящий 219
— нисходящий 219
Узлы таблицы 635
равноотстоящие 646
Уклонение абсолютное 50
— астрономо-геодезическое 50
— отвеса 50, 51
— относительное 48
Умбриель 510
Управление оптимальное 702
Уравнение Бесселя 376
— Вавра 774
— времени 155
— Гамильтона — Якоби 318
— Гаусса 367
— гипергеометрическое 367
— Кеплера 222, 223
— Лагранжа 236
— Лагранжа — Якоби 290
— Ламберта 264
— Ламе 379
— Лапласа 52
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
861
Уравнение Лежандра 370
— Мещерского 707
обобщенное 708
— параболической орбиты 265
— порождающее 788
— световое 115
— типа Штеккеля 817
— Хилла 766
— центра 234, 241
Уравнения Беллмана 706
— Брауэра 416
— в вариациях 540
— в форме Клеро—Лапласа 213
— Клеро — Лапласа 306
— Лагранжа для оскулирующих эле-
ментов 338, 350
— нормальные 690
— Ньютона для оскулирующих эле-
ментов 335, 336, 345, 349
— условные 275, 282, 689, 692
неравноточные 691
— характеристические движения ра-
кеты 715
— Эйлера кинематические 323
— Эйлера — Лагранжа 724
обобщенные 701
Уран 72, 187—191, 193—195, 494—499,
504—507, 538, 667
Условие Вейерштрасса — Эрдмана
703
Устойчивость асимптотическая 830
в целом 830
—.вероятность 841
— вращательного движения 775
— лагранжевых решений 843
— орбитальная 831, 847, 848
— по Лагранжу 832, 839
— по Ляпунову 830
— по Пуассону 832, 846
— по Хиллу 832, 846
— по Якоби 833
— равномерная 830
Участок активный 711
— максимальной тяги 720
— нулевой тяги 720
— пассивный 701
Феба 510
Фигуры равновесия небесных тел 773
Фобос 510
Формула Баррара 587
— Бесселя 638, 640
— Брунса 775
— Лагранжа 236
¦ • интерполяционная 638, 640
. обобщенная 237
Формула квадратурная 665
— Лапласа для рефракции 137
— Льюийе 34
— Пицетти — Сомильяна 776
— Родрига 369
— Стирлинга 637, 640
— Циолковского 712
— Эверетта 638, 640
— Эрмита 662, 665
Формулы Андуайе — Нькжома 112
— Борда 33
— Брауэра 573
— Гаусса квадратурные 660
— Деламбра 33
— Каньоли 32
— Леверье 390
— Михайлова 59
— Ньютона — Котеса 659
— Ньютона интерполяционные 637,
640
— обобщенные трапеций 659
— пяти элементов 31
— Чебышева 662
Функции Бесселя 375—379
от мнимого аргумента 378
— Ганкеля 379
— Крампфа — Радо 135
— Ламе 379
— Лежандра 371
— — присоединенные 371, 372, 553
— наклона 598
— Неймана 379
— почти-периодические 798
— сферические 373
зональные 373
—. секториальные 373
тессеральные 373
— условно-периодические 650, 800
— цилиндрические 379
эксцентриситета 597
— эллиптические
— — Вейерштрасса 364
Якоби 363, 366
Функционал 696, 697
Функция возмущающая 294, 337
— гипергеометрическая 367
— дохода 706
— переключения 715, 717, 723, 725
— производящая 371, 375
— спектральная 800
— Уиттекера 797
Церера 514—517, 667
Час 26
— звездный 161
— средний 161
862
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Числа Коши 384
— Крюгера 105
Число Циолковского 713
Шаг интегрирования 668
— таблицы 635
Широта астрономическая 47
— галактическая 29
— геодезическая 49
— геоцентрическая 52
— планетоцентрическая 59
—, приведение 52
— приведенная 52
— селенографическая 73
— эклиптическая 28
Шкала высот 609
Эвекция 455
Эдда 517
Экватор астрономический 47
— галактический 28
— географический 46, 47
— геодезический 48
— Земли средний 78
— Луны истинный 78
средний 78
— небесный 23
Эклиптика 23
Экстремаль 697
Эксцентриситет 217, 219, 221, 225, 260
— эллипсоида относимости 52
Элементы канонические Делоне 340,
345, 563
Пуанкаре 340, 341, 344, 346,
354
— — Якоби 339, 345, 352
— Кэррингтона 70
Элементы Лагранжа 338
— орбиты 218
векторные экваториальные 249,
261, 263, 269
кеплеровские 219
— —¦ оскулирующие 334
эклиптические 219
— средние 410
Эллипс гемановский 737
Эллипсоид общий земной 48
Эллипсоиды Маклорена 775
— Якоби 775
Эллиптические интегралы второго
рода 360
первого рода 358
полные 360
третьего рода 360
Энергия барицентрическая 290
Энцелад 510
Эпоха 25, 222
Эрос 517
Эфемерида 230
— астрометрическая 141
— геоцентрическая 142
— Луны 481
Эфемериды 140
— больших планет.487, 491
— для физических наблюдений 59
— малых планет 667
«Эхо-Ь 620
Юнона 516, 517
Юпитер 187—192, 194, 195, 493—499,
501—507, 538, 539, 667
Янус 510
Япет 510
СПРАВОЧНОЕ
РУКОВОДСТВО
ПО НЕБЕСНОЙ
МЕХАНИКЕ
И АСТРОДИНАМИКЕ
Под редакцией
Г. Н. ДУБОШИНА
ИЗДАНИЕ ВТОРОЕ, ДОПОЛНЕННОЕ
И ПЕРЕРАБОТАННОЕ
щ
1Ю1
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1 978
Виктор Кузьмич Абалакин
Евгений Петрович Аксенов
Евгений Александрович Гребеников
Владимир Григорьевич Демин
Юрий Александрович Рябов
Справочное руководство по небесной механике
и астродинамике
М., 1976 г. 8Б4 стр. с нлл.
Редактор А. 3. Рывкин
Техн. редактор И. Ш. Аксельрод
Корректор М. Л. Медведская
Сдано в набор 26/IX 1975 г. Подписано к пе-
чати 2/Ш 1976 г. Бумага тип. № I 60x90'/,».
Фнз. печ. л. 54. Усл. печ. л. 54. Уч.-нзд. л. 56,47.
Тираж 4250 экз. Т-05611. Цена книги 3 р. 20 к.
Заказ № 840.
Издательство «Наука»
Главная редакция
физико-математической литературы
117071, Москва, B-7I, Ленинский проспект, 15
Ордена Трудового Красного Знамени
Ленинградская типография № 2
имени Евгении Соколовой Союзполиграфпрома
при Государственном комитете Совета
Министров СССР по делам издательств,
полиграфии и книжной торговли.
198052, Ленинград, Л-52, Измайловский пр., 29
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию 17
Предисловие к первому изданию 19
Часть I
СФЕРИЧЕСКАЯ И ЭФЕМЕРИДНАЯ АСТРОНОМИЯ.
ОСНОВНЫЕ ПОНЯТИЯ И ФОРМУЛЫ (АБАЛАКИН В. К.)
Глава 1. Системы координат 21
§ 1.01. Небесная сфера 21
§ 1.02. Главные круги, линии и точки небесной сферы 22
§ 1.03. Горизонтальная система координат 24
§ 1.04. Экваториальные системы координат 25
§ 1.05. Эклиптическая система координат 27
§ 1.06. Галактическая система координат 28
§ 1.07. Основные формулы сферической тригонометрии 29
§ 1.08. Соотношения между различными астрономическими координа-
тами 34
§ 1.09. Прямоугольные системы координат 37
§ 1.10. Системы географических координат 45
§ 1.11. Соотношения между астрономическими и геодезическими коор-
динатами 50
§ 1.12. Планетоцентрические системы координат 58
§ 1.13. Марсоцентрическая и ареографическая системы координат . 64
§ 1.14. Юпитероцентрическая и зенографическая системы координат 68
§ 1.15. Сатурноцентрическая система координат 70
§ 1.16. Системы координат, определяемые осевым вращением Солнца,
Венеры, Урана и Нептуна 70
§ 1.17. Луноцентрическая и селенографическая системы координат . 72
§ 1.18. Орбитальная система координат 82
§ 1.19. Объектоцентрическая система координат 80
Глава 2. Редукционные вычисления 85
§ 2.01. Прецессия 85
§ 2.02. Редукция звездных положений с учетом прецессии и собствен
ного движения 89
§ 2.03. Нутация 91
§ 2.04. Годичная аберрация 97
§ 2.05. Сводка основных формул редукции звездных положений . . 101
§ 2.06. Учет влияния членов второго порядка 103
§ 2.07. Годичным параллакс 103
§ 2.08, Точные формулы для учета прецессии 104
4 ОГЛАВЛЕНИЕ
§ 2.09. Формулы учета прецессии в прямоугольных экваториальных ко-
ординатах 105
§ 2.10. Формула учета прецессии в прямоугольных эклиптических ко-
ординатах 107
§ 2.11. Совместный учет грецессии и нутации в прямоугольных эква-
ториальных координатах 109
§ 2.12. Формулы учета прецессии в координатах и элементах орбит при
умеренных и малых разностях эпох Ill
§ 2.13. Аберрация света 114
§ 2.14. Приведение звезды на видимое место в прямоугольных коор-
динатах 118
§ 2.15. Об учете орбитального движения компонент двойных звезд . 121
§ 2.16. Параллакс 123
§ 2.17. Учет суточного параллакса в горизонтальной системе координат 125
§ 2.18. Формулы учета суточного параллакса в экваториальной си-
стеме координат 126
§ 2.19. Формулы учета суточного параллакса в координатах Солнца
и планет 128
§ 2.20. Формулы учета суточного параллакса в системе эклиптических
координат 130
§ 2.21. Астрономическая рефракция 131
§ 2.22. Формулы учета рефракции в координатах небесных объектов . 136
§ 2.23. Рефракция при наблюдении небесных объектов, расположен-
ных на конечных расстояниях от Земли 137
§ 2.24. Дифференциальная прецессия и нутация. Дифференциальная
аберрация и дифференциальный параллакс 139
§ 2.25. Сравнение теории с наблюдениями 140
§ 2.26. Каталоги звездных положений 143
§ 2.27. Геоцентрические координаты нуль-пункта селенографической
системы отсчета 145
§ 2.28. Вычисление топоцентрических расстояний до точек лунной по-
верхности 146
Глава 3, Время и его измерение 149
§ 3.01. Основные понятия и определения 149
§ 3.02. Звездное и солнечное время. Всемирное время 152
§ 3.03. Квазиравномерное всемирное время 156
§ 3.04. Связь между всемирным временем и звездным гриничским вре-
менем 157
§ 3.05. Эфемеридное время 161
§ 3.06. Поправка за эфемеридное время 165
§ 3.07. Атомное время 167
§ 3.08. Юлианский период. Юлианские дни 174
Глава 4. Астрономические постоянные 176
§ 4.01. Новая система астрономических постоянных (система астроно-
мических постоянных MAC 1964) 177
§ 4.02. Задачи астродинамики и астрономические постоянные .... 184
§ 4.03. Результаты радиолокационных определений астрономической
единицы в и , 185
§ 4.04. Значения масс больших планет 185
§ 4.05. Астродинамические характеристики тел Солнечной системы . . 188
§ 4.06. Астродинамические постоянные, связанные с Землей .... 195
§ 4.07. Астродинамические постоянные, связанные с Луной 198
§ 4.08. Либрация Луны 203
Литература к части I 208
ОГЛАВЛЕНИЕ 5
Часть II
ЗАДАЧА ДВУХ ТЕЛ (АКСЕНОВ Е. П.)
Глава 1. Общая теория невозмущенного кеплеровского движения . .211
§ 1.01. Постановка задачи. Различные формы дифференциальных урав-
нений движения 211
§ 1.02. Первые интегралы уравнений невозмущенного кеплеровского
движения 214
§ 1.03. Типы невозмущенного кеплеровского движения 216
§ 1.04. Элементы орбиты 218
§ 1.05. Формулы, связывающие постоянные интегрирования и элемен-
ты орбиты 220
Глава 2. Основные формулы невозмущенного кеплеровского движения 221
§ 2.01. Эллиптическое движение 221
§ 2.02. Круговое движение 224
§ 2.03. Гиперболическое движение 225
§ 2.04. Параболическое движение 227
§ 2.05. Прямолинейное движение 229
§ 2.06. Вычисление эфемерид планет и комет 230
Глава 3. Разложение координат невозмущенного кеплеровского движе-
ния в ряды 231
§ 3.01. Разложение функций эксцентрической аномалии в тригономет-
рические ряды по кратным средней аномалии 231
§ 3.02. Разложение функций истинной аномалии в тригонометриче-
ские ряды по кратным средней аномалии 234
§ 3.03. Первые члены рядов по.кратным средней аномалии для неко-
торых функций 235
§ 3.04. Формула Лагранжа 236
§ 3.05. Ряды по степеням эксцентриситета 237
§ 3.06. Тригонометрические ряды по кратным эксцентрической анома-
лии 239
§ 3.07. Ряды по кратным истинной аномалии 241
§ 3.08. Разложения координат невозмущенного кеплеровского движе-
ния в ряды по степеням времени 242
§ 3.09. Степенные ряды в случае эллиптического движения .... 244
Литература к части II 245
Часть III
МЕТОДЫ ОПРЕДЕЛЕНИЯ И УЛУЧШЕНИЯ ОРБИТ {РЯБОВ Ю. А.)
Глава 1. Вычисление координат невозмущенного кеплеровского движе-
ния по элементам орбиты 247
§ 1.01. Вычисление орбитальных координат в случае эллиптической
или гиперболической орбит 247
§ 1.02. Вычисление орбитальных координат в случае параболической
орбиты 248
§ 1.03. Вычисление орбитальных координат в случае орбит, эксцентри-
ситет которых близок к единице 248
§ 1.04. Вычисление гелиоцентрических прямоугольных эклиптических и
экваториальных координат 249
6 ОГЛАВЛЕНИЕ
Глава 2. Определение орбит 250
§ 2.01. Определение гелиоцентрических положений по трем геоцентриче-
ским наблюдениям в случае эллиптической или гиперболиче-
ской орбит ¦ 250
§ 2.02. Особые случаи, встречающиеся при вычислении гелиоцентриче-
ских координат 254
§ 2.03. Определение гелиоцентрических положений по четырем геоцен-
трическим наблюдениям в случае эллиптической или гипербо-
лической орбит 255
§ 2.04. Определение гелиоцентрических положений по трем геоцентри-
ческим наблюдениям в случае параболической орбиты .... 257
§ 2.05. Вычисление элементов эллиптической орбиты по двум гелиоцен-
трическим положениям 260
§ 2.06. Определение элементов гиперболической орбиты по двум гелио-
центрическим положениям 262
§ 2.07. Определение элементов параболической орбиты по двум гелио-
центрическим положениям 263
§ 2.08. Уравнения Ламберта и Эйлера 264
§ 2.09. Определение элементов эллиптической или гиперболической ор-
биты по двум гелиоцентрическим положениям с помощью урав-
нения Ламберта 265
§ 2.10. Определение элементов круговой орбиты по двум наблюдениям 268
§ 2.11. Вычисление элементов гелиоцентрической орбиты по положе-
нию и скорости в начальный момент 270
Глава 3. Улучшение первоначальной орбиты 273
§ 3.01. Дифференциальное исправление орбит. Постановка задачи . . 273
§ 3.02. Выражения для производных от координат по элементам (или
по функциям элементов) 275
§ 3.03. Условные уравнения, составляемые по наблюдениям долготы и
широты небесного тела 281
Глава 4. Определение и улучшение элементов орбит искусственных
спутников Земли 283
§ 4.01. Определение элементов орбит ИСЗ по положению и скорости
в момент выхода на орбиту 283
§ 4.02. Определение предварительных элементов орбиты ИСЗ по на-
блюдениям 285
§ 4.03. Улучшение орбит ИСЗ 287
Литература к части III 287
Часть IV
ТЕОРИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ (ГРЕБЕНИКОВ Е. А.,
РЯБОВ Ю. А.)
Глава 1. Дифференциальные уравнения движения задачи л тел в коор-
динатах 288
§ 1.01. Уравнения абсолютного движения 288
§ 1.02. Уравнение Лагранжа — Якоби 290
§ 1.03. Уравнения движения в барицентрических прямоугольных коор-
динатах 291
§ 1.04. Уравнения движения в координатах Якоби 292
§ 1.05. Уравнения относительного движения в прямоугольных коорди-
натах 293
§ 1.06. Уравнения движения в идеальных прямоугольных координатах
Ганзена 295
ОГЛАВЛЕНИЕ 7
§ 1.07. Уравнения абсолютного движения в цилиндрических коорди-
натах 297
§ 1.08. Уравнения относительного движения в цилиндрических коор-
динатах 299
§ 1.09. Уравнения абсолютного движения в сферических координатах 301
§ 1.10. Уравнения относительного движения в сферических координа-
тах 302
§ 1.11. Уравнения движения в полярных координатах Ганзена . . . 305
§ 1.12. Уравнения Клеро — Лапласа 306
§ 1.13. Общее правило составления канонических уравнений .... 307
§ 1.14. Первая каноническая форма уравнений абсолютного движения 309
§ 1.15. Вторая каноническая форма уравнений абсолютного движения 310
§ 1.16. Третья каноническая форма уравнений абсолютного движения . 312
§ 1.17. Первая каноническая форма уравнений относительного движе-
ния 313
§ 1.18. Вторая каноническая форма уравнений относительного движе-
ния 314
§ 1.19. Третья каноническая форма уравнений относительного движе
ния 316
§ 1.20. Уравнение Гамильтона — Якоби. Метод Гамильтона — Якоби 318
§ 1.21. Уравнения движения системы в векторной форме .... . 319
Г лава 2. Дифференциальные уравнения поступательно-вращательного
движения небесных тел 321
§ 2.01. Углы Эйлера. Кинематические уравнения Эйлера 321
§ 2.02. Силовая функция системы тел 323
§ 2.03. Разложение силовой функции двух тел . • 324
§ 2.04. Уравнения поступательно-вращательного движения системы тел
в абсолютной прямоугольной системе координат 326
§ 2.05. Уравнения поступательно-вращательного движения системы теп
в относительной прямоугольной системе координат 328
§ 2.06. Каноническая форма уравнений поступательно-вращательного
движения системы тел 330
Глава 3. Дифференциальные уравнения возмущенного движения тела
для различных систем оскулирующих элементов 332
§ 3.01. Метод Лагранжа вариации произвольных постоянных .... 332
§ 3.02. Уравнения Ньютона для кеплеровских оскулирующих элемен-
тов (общий случай) 334
§ 3.03. Уравнения Ньютона для эллиптических кеплеровских оскули-
рующих элементов 336
§ 3.04. Уравнения Лагранжа для кеплеровских оскулирующих эле-
ментов (общий случай) 337
§ 3.05. Уравнения Лагранжа для эллиптических кеплеровских оскули-
рующих элементов 338
§ 3.06. Уравнения возмущенного движения для канонических элемен-
тов Якоби 339
§ 3.07. Уравнения возмущенного движения для канонических элемен-
тов Делоне 340
§ 3.08. Две системы канонических элементов Пуанкаре 340
§ 3.09. Уравнения возмущенного движения в переменных Лагранжа
для случая малых эксцентриситетов 342
§ 3.10. Уравнения в переменных Лагранжа для случая малых накло-
нов ... 343
§ 3.11. Уравнения возмущенного движения в переменных Лагранжа
(общий случай) 344
§ 3.12. Связь между прямоугольными координатами движущейся точ-
ки и различными системами канонических элементов .... 345
8 ОГЛАВЛЕНИЕ
Глава 4. Дифференциальные уравнения возмущенного движения зада-
чи п тел для различных систем спекулирующих элементов 347
§ 4.01. Уравнения Ньютона для кеплеровских оскулирующих элемен-
тов (общий случай) 347
§ 4.02. Уравнения Ньютона для эллиптических кеплеровских оскули-
рующих элементов 349
§ 4.03. Уравнения Лагранжа для кеплеровских оскулирующих элемен-
тов (общий случай) 350
§ 4.04. Уравнения Лагранжа для эллиптических кеплеровских оскули-
рующих элементов 350
§ 4.05. Уравнения возмущенного движения в канонических элементах
Якоби 351
§ 4.06. Уравнения возмущенного движения в канонических элементах
Делоне 353
§ 4.07. Две системы канонических элементов Пуанкаре 353
§ 4.08. Уравнения возмущенного движения в переменных Лагранжа
для случая малых эксцентриситетов 355
§ 4.09. Уравнения в переменных Лагранжа для случая малых наклонов 356
§ 4.10. Уравнения возмущенного движения в переменных Лагранжа
(общий случай) 357
Глава 5. Специальные функции 359
§ 5.01. Эллиптические интегралы и эллиптические функции 359
§ 5.02. Гипергеометрический ряд и гипергеометрическая функция . . . 366
§ 5.03. Полиномы Лежандра. Функции Лежандра 368
§ 5.04. Присоединенные функции Лежандра 371
§ 5.05. Сферические функции 373
§ 5.06. Цилиндрические функции. Функции Бесселя 375
§ 5.07. Функции Ламе 379
§ 5.08. Полиномы Гегенбауэра. Коэффициенты Лапласа 380
§ 5.09. Числа Коши 384
Глава 6. Разложение возмущающей функции 385
§ 6.01. Разложение возмущающей функции в задаче о движении двух
планет (случай круговых орбит) 385
§ 6.02. Разложение возмущающей функции в задаче о движении двух
планет (случай малых эксцентриситетов и взаимного наклона) 390
§ 6.03. Разложение возмущающей функции в случае произвольного
взаимного наклона 400
§ 6.04. Вековая часть возмущающей функции в двухпланетной задаче 402
§ 6.05. Численные методы разложения возмущающей функции . . . 404
§ 6.06. Полуаналитический метод Брауэра — Клеменса разложения воз-
мущающей функции 405
Глава 7. Аналитические методы вычисления возмущений координат . . 40S
§ 7.01. Метод Хилла 408
§ 7.02. Метод Ганзена 412
§ 7.03. Метод Брауэра 415
§ 7.04. Метод Лапласа — Ньюкома 419
Глава 8. Аналитические методы вычисления возмущений элементов . .421
§ 8.01. Обший вид. возмущений элементов. Порядок, степень, ранг и
класс возмущений 421
§ 8.02. Метод Гаусса вычисления вековых возмущений первого по-
рядка 422
ОГЛАВЛЕНИЕ 9
§ 8.03. Метод Лагранжа определения вековых возмущений в двухпла-
нетной задаче 424
§ 8.04. Основы метода Делоне 426
§ 8.05. Связь между возмущениями координат и возмущениями эле-
ментов 430
Глава 9. Методы теории возмущений, основанные на схемах осреднения 432
§ 9.01. Основные схемы осреднения возмущающей функции в двухпла-
нетной задаче 432
§ 9.02. Уравнения осредненных схем ограниченной круговой задачи
трех тел, определяющие промежуточную орбиту (нулевое при-
ближение). Их первые интегралы 436
§ 9.03. Разложение возмущающей функции для схем осреднения . . 440
§ 9.04. Основы метода теории возмущений 442
Глава 10. Теория движения Луны 443
§ 10.01. Уравнения основной проблемы в теории движения Луны . . 444
§ 10.02. Разложение возмущающей функции в основной проблеме тео-
рии движения Луны 445
§ 10.03. Решение Делоне основной проблемы в теории движения Луны 447
§ 10.04. Основные этапы построения теории Хилла — Брауна движе-
ния Луны 458
§ 10.05. Промежуточная орбита в теории Хилла — Брауна 462
§ 10.06. Общее решение уравнений основной проблемы в теории Хил-
ла — Брауна 465
§ 10.07. Переход к сферическим координатам 467
§ 10.08. Численные значения постоянных интегрирования и парамет-
ров в теории Хилла — Брауна 468
§ 10.09. Окончательные выражения для долготы V, широты р и си-
нуса параллакса sin рь, соответствующие решению основной
проблемы 470
§ 10.10. Возмущения Луны, обусловленные притяжением планет, фи-
гурами Земли и Луны 477
§ 10.11. Уточнение теории движения Луны Хилла — Брауна .... 481
Глава 11. Теория движения больших планет 484
§ 11.01. Внутренние планеты 487
§ 11.02. Внешние планеты 493
§ 11.03. Полиномиальное представление оскулирующих элементов ор-
бит внешних планет 498
§ 11.04. Полиномиальное представление прямоугольных гелиоцентри-
ческих координат Юпитера и Сатурна 501
§ 11.05. Тригонометрическая теория вековых возмущений орбит боль-
ших планет 504
Глава 12. Движение малых тел Солнечной системы 508
§ 12.01. Невозмущенное движение спутников 509
§ 12.02. Возмущения оскулирующих элементов орбит спутников, вызы-
ваемые сжатием планеты 510
§ 12.03. Возмущения в движении спутников, вызываемые притяжением
Солнца 513
§ 12.04. Общие сведения о характере движения малых планет . . . 513
§ 12.05. Возмущенное движение малых планет 514
§ 12.06. Общие сведения о движении комет 517
§ 12.07. Возмущенное движение комет .... 518
Литература к части IV 519
Ю ОГЛАВЛЕНИЕ
Часть V
ЗАДАЧА ТРЕХ ТЕЛ (ГРЕБЕНИКОВ Е. А.)
Глава 1. Неограниченная задача л-рех тел 524
§ 1.01. Различные формы дифференциальных уравнений движения за-
дачи трех тел 524
§ 1,02. Лагранжевы решения. Точки либрации 527
Глава 2. Ограниченная круговая задача трех тел 533
§ 2.01. Дифференциальные уравнения движения. Интеграл Якоби . . 533
§ 2.02. Поверхность нулевой относительной скорости 534
§ 2.03. Лагранжевы решения ограниченной круговой задачи трех тел.
Точки либрации 535
§ 2.04. Различные гравитационные сферы 536
§ 2.05. Периодические решения ограниченной круговой задачи трех тел 539
§ 2.06. Критерий Тиссерана 542
§ 2.07. Уравнения ограниченной круговой задачи в эллипсоидальных
переменных 542
§ 2.08. Уравнение Гамильтона — Якоби в эллипсоидальных перемен-
ных 546
§ 2.09. Понижение порядка системы уравнений плоской ограниченной
круговой задачи трех тел E4f
Глава 3. Другие ограниченные задачи трех тел 548
§ 3.01. Общий случай ограниченной задачи трех тел 548
§ 3.02. Задача двух неподвижных центров 549
§ 3.03. Задача Хнлла 551
Литература к части V 552
Часть VI
ДВИЖЕНИЕ
ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ (АКСЕНОВ Е. П.)
Глава 1. Гравитационное поле Земли. Дифференциальные уравнения
движения искусственного спутника 555
§ 1.01. Потенциал притяжения Земли 555
§ 1.02. Стандартная Земля 559
§ 1.03. Дифференциальные уравнения движения спутника 562
§ 1.04. Элементы орбиты ИСЗ. Дифференциальные уравнения для
оскулирующих элементов 563
Глава 2. Возмущения, вызываемые второй зональной гармоникой гео-
потенциала 565
§ 2.01. Возмущения от второй зональной гармоники как функции
средней аномалии 565
§ 2.02. Возмущения от второй зональной гармоники как функции ис-
тинной аномалии 570
§ 2.03. Случай орбит с малыми эксцентриситетами 573
ОГЛАВЛЕНИЕ П
Глава 3. Теория промежуточных орбит ИСЗ 577
§ 3.01. Задачи Штерна, Гарфинкеля и Акснеса . 577
§ 3.02. Задачи Баррара, Винти и Кислика 581
§ 3.03. Обобщенная задача двух неподвижных центров 584
§ 3.04. Промежуточная орбита, основанная на обобщенной задаче
двух неподвижных центров 588
§ 3.05. Дифференциальные уравнения для элементов промежуточной
орбиты 591
Глава 4. Возмущения гравитационной природы 593
§ 4.01. Возмущения от зональных гармоник высших порядков .... 593
§ 4.02. Возмущения от зональной гармоники произвольного порядка ¦ 597
§ 4.03. Возмущения от тессеральных и секториальных гармоник . . ¦ 601
§ 4.04. Лунно-солнечные возмущения 603
§ 4.05. Определение постоянных интегрирования 607
§ 4.06. Вычисление возмущенных координат спутника 608
Глава 5. Возмущения, вызываемые сопротивлением атмосферы и све-
товым давлением 609
§ 5.01. Плотность атмосферы 609
§ 5.02. Стандартная атмосфера 612
§ 5.03. Сила сопротивления атмосферы 612
§ 5.04. Основные возмущения от сопротивления атмосферы 613
§ 5.05. Продолжительность жизни спутника 614
§ 5.06. Эволюция орбиты на больших промежутках времени . . . 616
§ 5.07. Сила светового давления 617
§ 5.08. Возмущения от светового давления (без учета тени) . . . .618
§ 5.09. Возмущения от светового давления (с учетом тени) 620
§ 5.10. Теневая функция 622
Глава 6. Другие возмущения в движении ИСЗ 625
§ 6.01. Возмущения, вызываемые прецессией и нутацией экваториаль-
ной плоскости Земли 625
§ 6.02. Возмущения, вызываемые приливной деформацией Земли . . 628
§ 6.03. Релятивистские эффекты. Влияние электромагнитных сил и
притяжения атмосферы 630
Литература к части VI 632
Часть VII
ЧИСЛЕННЫЕ МЕТОДЫ (РЯБОВ Ю. А.)
Глава 1. Интерполирование и приближение функций 635
§ 1.01. Таблица разностей функции 635
§ 1.02. Интерполяционные формулы 637
§ 1.03. Остаточные члены интерполяционных формул 639
§ 1.04. Обратное интерполирование 644
§ 1.05. Интерполирование функции двух переменных 643
§ 1.06. Приближение функций с помощью сплайнов 6^4
§ 1.07. Среднеквадратичные приближения функций 645
§ 1.08. Сглаживание табличных значений функции , 647
§ 1.09. Равномерные приближения 648
12 ОГЛАВЛЕНИЕ
§ 1.10. Аппроксимация периодических функций с известным периодом
тригонометрическими полиномами по методу наименьших квад-
ратов 649
§ 1.11. Аппроксимация условно-периодических функций с известными
частотами полиномом Фурье по методу наименьших квадратов 650
§ 1.12. Определение неизвестных частот периодической или условно-
периодической функции по совокупности табличных данных . . 651
§ 1.13. Выделение «вековой части» функции по совокупности таблич-
ных значений 653
Глава 2. Численное дифференцирование и интегрирование 655
§ 2.01. Численное дифференцирование с помощью интерполяционных
формул 655
§ 2.02. Другие формулы численного дифференцирования 657
§ 2.03. Численное интегрирование функции по таблице ее значений
с постоянным шагом 658
§ 2.04. Квадратурные формулы Гаусса 660
§ 2.05. Численное интегрирование сильно осциллирующих функций . . 663
§ 2.06. Правило Рунге практической оценки погрешности квадратур-
ных формул 664
§ 2.07. Квадратурные формулы для несобственных интегралов . . . 665
Глава 3. Численное решение обыкновенных дифференциальных урав-
нений 667
§ 3.01. Метод Рунге—Кутта 668
§ 3.02. Метод Адамса 670
§ 3.03. Метод Коуэлла 672
§ 3.04. Метод Штермера (для уравнений второго порядка) 673
§ 3.05. Метод Коуэлла A-й вариант) 674
§ 3.06. Метод Коуэлла B-й вариант) 675
§ 3.07. Накопление погрешностей при численном интегрировании . . . 676
§ 3.08. Метод Энке' численного интегрирования уравнений возмущен-
ного движения 676
§ 3.09. Общая постановка краевой задачи для обыкновенных диффе-
ренциальных уравнений. Случай линейной краевой задачи . . 678
§ 3.10. Метод стрельбы при нахождении решения линейной двухточеч-
ной краевой задачи 679
§ 3.11. Краевая задача для квазилинейной системы с линейными крае-
выми условиями 682
§ 3.12. Краевая задача для системы, близкой к нелинейной невоэму-
щенной системе 683
§ 3.13. Применение метода градиентного спуска для решения нелиней-
ной краевой задачи общего вида 684
§ 3.14. Разностный метод решений краевых задач 687
Глава 4. Метод наименьших квадратов решения алгебраических и
трансцендентных уравнений 689
§ 4.01. Постановка задачи 689
§ 4.02. Линейные и равноточные условные уравнения 690
§ 4.03. Вероятностные оценки погрешности решения 691
§ 4.04. Неравноточные условные уравнения 691
§ 4.05. Линеаризация условных уравнений общего вида 692
Литература к части VII 693
ОГЛАВЛЕНИЕ 13
Часть VIII
ОПТИМАЛЬНЫЕ
И КРАЕВЫЕ ЗАДАЧИ АСТРОДИНАМИКИ (ГРЕБЕНИКОВ Е. А.)
Глава 1. Сведения из вариационного исчисления и математической тео-
рии оптимальных процессов 694
§ 1.01. Понятие функционала 696
§ 1.02. Задача Лагранжа. Множители Лагранжа. Уравнения Эйлера 698
§ 1.03. Первая формулировка задачи Манера 699
§ 1.04. Вторая формулировка задачи Майера 699
§ 1.05. Изопериметрическая задача 700
§ 1.06. Задача Больца 700
§ 1,07. Третья формулировка задачи Майера. Обобщение теоремы
Лагранжа. Характеристические уравнения (обобщенные урав-
нения Эйлера—Лагранжа) 701
§ 1.08. Свойство множителей Лагранжа на ломаных экстремалях. Ус
ловие Вейерштрасса — Эрдмана 703
§ 1.09. Принцип максимума Понтрягина 704
§ 1.10. Принцип оптимальности Беллмана 706
Глава 2. Основные уравнения динамики тел переменной массы . 707
§ 2.01. Основное уравнение динамики точки переменной массы (урав-
нение Мещерского) 707
§ 2.02. Обобщенное уравнение Мещерского .... 708
§ 2.03. Уравнения движения тела переменной массы в обобщенных ко-
ординатах (уравнения Лагранжа второго рода) 709
§ 2.04. Канонические уравнения движения тела переменной массы . . 709
Глава 3. Некоторые оптимальные задачи динамики полета в околозем-
ном пространстве 711
§ 3.01. Уравнения движения ракеты. Формула Циолковского . . . .711
§ 3.02. Развернутая форма характеристических уравнений для задачи
о движении ракеты 714
§ 3.03. Определение базис-вектора и р-траектории. Определение функ-
ций переключения 715
§ 3.04. Определение импульсной тяги. Точки соединения на оптималь-
ных траекториях 717
§ 3.05. Максимизация высоты вертикального подъема ракеты в одно-
родном поле тяжести 717
§ 3.06. Максимизация горизонтальной дальности полета ракеты в од-
нородном поле тяжести при заданной программе расхода топ-
лива 720
§ 3.07. Общая вариационная задача для движения ракеты в однород-
ном поле тяжести 722
§ 3.08. Общая вариационная задача для движения ракеты в однород-
ном поле тяжести при наличии аэродинамического сопротив-
ления 723
§ 3.09. Определение оптимальной программы тяги при вертикальном
подъеме ракеты в неоднородном поле тяготения в сопротив-
ляющейся атмосфере 725
§ 3.10. Задача о максимизации полной энергии космического аппарата 726
§ 3,11. Задача о минимизации характеристической скорости маневра . 728
14 ОГЛАВЛЕНИЕ
Глава 4. Межорбитальные перелеты . 729
§ 4.01. Простейшая краевая задача 729
§ 4.02. Уравнение для базиса-вектора на участке нулевой тяги при
движении ракеты в ньютоновском поле тяготения 730
§ 4.03. Уравнение для базнса-вектора на участке промежуточной тяги
при движении ракеты в ньютоновском поле тяготения .... 732
§ 4.04. Уравнение для базиса-вектора на участке максимальной тяги
при движении ракеты в ньютоновском поле тяготения .... 733
§ 4.05. Метод р-траекторий. Структура оптимальной траектории . . . 733
§ 4.06. Связь между величиной импульса и элементами эллиптиче-
ской орбиты 734
§ 4.07. Оптимальный я-импульсный переход между двумя заданными
компланарными эллиптическими орбитами 735
§ 4.08. Оптимальный переход между двумя компланарными круговыми
орбитами 737
§ 4.09. Оптимальный переход между двумя соосными орбитами . . . 738
§ 4.10. Другие траектории перелета в случае компланарных орбит
планет старта и назначения 738
§ 4.11. Траектории полета вблизи нескольких планет 740
§ 4.12. Начальный этап (запуск и уход) межпланетной траектории . . 743
§ 4.13. Полеты к Луне 744
Литература к части VIII 748
Часть IX
ДВИЖЕНИЕ ЕСТЕСТВЕННЫХ И ИСКУССТВЕННЫХ
НЕБЕСНЫХ ТЕЛ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС (ДЕМИН В. Г.)
Глава 1. Дифференциальные уравнения движения небесных тел относи-
тельно центра масс 751
§ 1.01. Вращение Земли относительно центра масс 751
§ 1.02. Канонические уравнения вращательного движения небесных тел 754
§ 1.03. Астродинамические дифференциальные уравнения возмущенно-
го движения спутника относительно центра масс 759
§ 1.04. Моменты сил, действующих на спутник 762
§ 1.05. Движение спутника относительно центра масс в центральном
ньютоновском поле 764
§ 1.06. Задача о поступательно-вращательном движении двух гравити-
рующих динамически симметричных тел 768
§ 1.07. Вращение Луны 770
§ 1.08. Дифференциальные уравнения движения деформируемого не-
бесного тела 771
§ 1.09. Теория фигур небесных тел 772
Глава 2. Устойчивость и стабилизация вращательного движения искус-
ственных небесных тел 777
§ 2.01. Устойчивость движения спутников в гравитационном поле сил 777
§ 2.02. Устойчивость движения спутников под действием моментов сил
различной природы 781
§ 2.03. Стабилизация движения спутников и космических аппаратов . 784
Литература к части IX .,,.,.... 78E
ОГЛАВЛЕНИЕ 15
Часть X
КАЧЕСТВЕННАЯ НЕБЕСНАЯ МЕХАНИКА (ГРЕБЕНИКОВ Е. А.)
Глава I. Периодические и условно-периодические решения. Финальные
движения 788
§ 1.01. Метод малого параметра Пуанкаре 788
§ 1.02. Метод Ляпунова 790
§ 1.03. Периодические решения, полученные методом Пуанкаре . . . 792
§ 1.04. Периодические решения, полученные методом Ляпунова . . , 795
§ 1.05. Периодические решения, полученные качественными методами . 797
§ 1.06. Почти-периодические функции и их свойства. Условно-периоди-
ческие функции 798
§ 1.07. Теорема Арнольда о существовании условно-периодических ре-
шений гамильтоновых систем 831
§ 1.08. Условно-периодические решения в небесной механике. Геомет-
рическая интерпретация 803
§ 1.09. Финальные движения в задаче трех тел. Захват и обмен в за-
даче трех тел 808
Глава 2. Проблема интегрируемости и сходимость рядов в небесной
механике 811
§ 2.01. Теорема Пуассона об интеграле гамильтоновой системы . . .812
§ 2.02. Теорема Брунса о несуществовании алгебраических первых ин-
тегралов задачи трех тел, отличных от классических . . . .813
§ 2.03. Теорема Пуанкаре о несуществовании однозначных аналитиче-
ских первых интегралов гамильтоновой системы 814
§ 2.04. Случаи интегрируемости уравнения Гамильтона — Якоби мето-
дом разделения переменных 815
§ 2.05. Теорема о неприводимости уравнения Гамильтона — Якоби для
плоской ограниченной круговой задачи трех тел к уравнению
типа Штеккеля 817
§ 2.06. Соударения 817
§ 2.07. Решение задачи трех тел в виде рядов, сходящихся для всех
вещественных значений времени. Теорема Зундмана 820
§ 2.08. Сходимость рядов Хилла в основной проблеме теории движе-
ния Луны 821
§ 2.09. Характер сходимости рядов классической теории возмущений . 822
§ 2.10. Теоремы Пуанкаре о ранге и классе возмущений ...... 825
§ 2 11. Поиск частных, первых и общих интегралов заданной анали-
тической структуры обыкновенных дифференциальных уравне-
ний на ЭВМ. Приложение к ограниченной задаче трех тел . . 826
§ 2.12. Поиск решений уравнения Гамильтона — Якоби на ЭВМ. При-
ложение к ограниченной задаче трех тел 8.27
Глава 3. Проблема устойчивости в небесной механике 829
§ 3.01. Определение устойчивости по Ляпунову 829
§ 3.02. Определение орбитальной устойчивости 831
§ 3.03. Другие определения устойчивости 832
§ 3.04. Знакопостоянные и знакоопределенные функции. Полная произ-
водная в силу системы 834
§ 3.05. Теоремы Ляпунова об устойчивости 835
§ 3.06. Устойчивость по отношению к части переменных. Теорема
В. В, Румянцева 836
16 ОГЛАВЛЕНИЕ
§ 3.07. Связка первых интегралов. Способ Н. Г. Четаева 837
§ 3.08. Устойчивость при постоянно действующих возмущениях. Тео-
рема И. Г. Малкина 838
§ 3.09. Теоремы Лапласа — Лагранжа и Пуассона об отсутствии веко-
вых возмущений больших полуосей 839
§ 3.10. Теоремы об устойчивости планетных орбит 839
§ 3.11. Теоремы Арпольла об устойчивости решения гамильтоновой си-
стемы в общем эллиптическом случае 841
§ 3.12. Устойчивость лагранжевых равновесных решений задачи трех
тел 843
§ 3.13. Устойчивость других решений задачи трех тел 846
§ 3.14. Устойчивость орбитальных движений искусственных спутников 847
Литература к части X 848
Предметный указатель 853