/

















































































































































Текст
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск 68
Н. П. ВАСИЛЬЕВА и И. ГАШКОВЕЦ
ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
В ПРОМЫШЛЕННОЙ
АВТОМАТИКЕ
ГОСУДАРСТВЕННОЕ ЭНЕРГЕТИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МОСКВА 1962 ЛЕНИНГРАД
Редакционная коллегия
И. В. Антик, А. И. Бертинов, С. Н. Вешеневский,
В. С. Кулебакин, В. С. Малов, В. Э. Низе, А. Д. Смирнов,
Б. С. Сотсков
ЭЭ-5(4)-3
В книге в доступной форме показана область при-
менения логических элементов, способы применения
алгебры логики лри решении вопросов автоматического
управления, объяснены принципы действия бесконтакт-
ных элементов. Даны описания некоторых наиболее це-
лесообразных схем этих элементов.
Описаны также вспомогательные устройства. При-
ведены примеры проектирования логических элементов
для наиболее часто встречающихся систем автоматики.
Книга рассчитана на инженеров и техников научно-
исследовательских и проектных институтов, а также на
студентов старших курсов институтов.
6П2.15 Васильева Наталья Петровна и
В 19 Гашковец И ржа Стефан
Логические элементы в промышленной автоматике,
М.—Л., Госэнергоиздат, 1962, 160 с. с черт. (Библиотека по
автоматике, вып. 68)
6П2.15
Редактор Я. Л. Прохоров
Техн. редактор Я. А. Бульдяев
Сдано в набор 30/VH 1962 г.
Т-11955 Бумага 84ХЮ87за
Тираж 29 ООО экз.
Цена 55 коп.
Подписано к печати 19/Х 1962 г.
8,20 п. л. Уч.-изд. л. 11,0
коп. Заказ 2528
Типография Госэнергоиздата. Москва, Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
Рост объема промышленного производства ведет к непрерывно-
му развитию и совершенствованию автоматического управления про-
изводственными процессами. В связи с этим в. последние годы появ-
ляется много новых приборов и устройств, позволяющих решать
различные задачи автоматического управления на «более высоком
техническом уровне. К числу таких устройств относятся и логиче-
ские элементы, описанию и применению которых посвящена эга
книга.
При автоматическом управлении различными процессами боль-,
шое количество выполняемых операций носит характер логических
решений, т. е. осуществление той или иной операции определяется
тем, выполняются или нет в определенные моменты времени опре-
деленные условия.
Работа схем управления, основанных на выполнении логических
решений, до последнего времени обычно описывалась без примене-
ния какой-либо математической символики, а составление схем
с логическими элементами, в особенности синтез сложных схем, про-
водилось на основании накопленного опыта путем сравнения свойств
более простых схем с новыми свойствами, необходимыми для про-
ектируемых схем. При этом время проектирования и качество полу-
ченных схем в значительной степени зависели от опыта и индивиду-
альных способностей проектировщика. Очевидно, что в расчете на
такие способы проектирования было очень трудно разработать ре-
комендации, позволяющие проектировать логические схемы опти-
мальным образом. Также трудно передавать опыт проектирования
и учить интуитивному подходу, особенно в более сложных случаях,
когда результат логических решений зависит не только от мгновен-
ных комбинаций входных сигналов., но и от их последовательности.
Быстрое развитие техники приборостроения в прошлом десяти-
летии принесло с собой новые возможности для создания схем
управления на бесконтактных логических элементах вместо элек-
тромеханических реле, которые раньше применялись почти исключи-
тельно для этих целей.
Бесконтактные логические элементы обладают лучшими эксплуа-
тационными качествами, чем реле, неограниченным сроком службы,
надежностью, малой чувствительностью к влиянию внешней среды,
взрыв.обезопасностью, они не требуют наладки и ухода.
Однако большое разнообразие типов логических элементов за*
трудняет проектирование сложных схем, необходимых для реализа-
ции сложных логических функций, особенно когда при проектиро-
вании требуется выполнение каких-либо условий оптимальности.
3
Все эти .причины привели к появлению классификации логиче-
ских функций и элементов, их реализующих, и развитию и разработ-
ке алгебраических методов синтеза логических схем из логических
элементов.
В этой книге сделана попытка популярно и сжато изложить
эти вопросы.
Первая часть книги после краткого 'перечисления задач, которые
решаются в области автоматического управления, посвящена изло-
жению проблем, возникающих при синтезе логических схем, и опи-
санию метода синтеза схем, основанного на формальном подходе и
не требующего интуитивного способа решения. В этом методе ис-
пользуется экономичная запись логических соотношений между от-
дельными величинами при помощи алгебры логики, которая позво-
ляет удобно и просто выражать одни величины через другие, а так-
же позволяет упрощать и изменять логические функции согласно
требованиям, ставящимся на отдельных этапах синтеза. При изло-
жении метода синтеза схем с помощью алгебры логики авторы ши-
роко пользовались картами Карно (Karnaugh), а также некоторыми
средствами другой новой области математической теории, так назы-
ваемой теории конечных автоматов.
С целью повышения наглядности изложения все понятия, от-
дельные операции и шаги синтеза объясняются с помощью простых
примеров.
Во второй части книги описываются отдельные виды и типы
логических элементов., главным образом бесконтактных; 'Приводятся
их классификация и характеристики. В конце книги на некоторых
примерах показаны способы составления логических схем из различ-
ных типов логических элементов.
Книга выходит как совместное издание Государственного изда-
тельства технической литературы ЧССР (SNTL) и Госэнергоиздата.
В 1962 г. эта книга выйдет из печати на русском и чешском языках.
Она возникла в процессе сотрудничества научных работников Со-
ветского Союза и Чехословакии. Работа над рукописью была услож-
нена многими методическими и языковыми трудностями, с которы-
ми всегда связана .переработка относительно нового и обширного
материала в сжатую и популярную форму.
Нам хотелось бы выразить свою благодарность всем, кто ока-
зал нам помощь в подготовке этой книги, и в особенности инж.
Н. Фриштацкому, инж. А. Климецу, инж. 3. Пасеку, инж.
Б. П. Петрухину, инж. Н. Л. Прохорову и канд. техн. шук О. А. Се-
дых, которые участвовали в обсуждении отдельных вопросов, а так-
же канд. техн. наук 'П. П. Пархоменко, инж. Груша и инж. М. Тау-
шевой за ценные замечания, сделанные ими лри рецензировании
рукописи. Мы также благодарны институтам и фирмам, которые
предоставили нам информации о своих изделиях.
Мы надеемся, что настоящая книга позволит более, широкому
кругу людей, работающих в области автоматизации, познакомиться
с методами составления схем из логических элементов и поможет
им использовать логические элементы в тех случаях, когда это це-
лесообразно.
В связи с тем, что настоящая книга является первой попыткой
популярного изложения данного вопроса, мы будем очень благодар-
ны всем, кто пришлет .нам свои замечания.
Авторы
ГЛАВА ПЕРВАЯ
ЗАДАЧИ АВТОМАТИКИ, ВЫПОЛНЯЕМЫЕ
С ПОМОЩЬЮ УСТРОЙСТВ ДИСКРЕТНОГО
ДЕЙСТВИЯ
Прогресс современной техники характеризуется стремительным
развитием автоматики. Устройства автоматики выполняют такие за-
дачи, как контроль, сигнализация, блокировка, защита, автоматиче-
ское и программное управление. Выполнение этих задач связано
с осуществлением различных элементарных операций, которые мож-
но описать функциональными зависимостями между входными и
выходными величинами элементов, из которых созданы автоматиче-
ские устройства.
1-1. НЕПРЕРЫВНЫЕ И ДИСКРЕТНЫЕ ВЕЛИЧИНЫ
Входные и выходные переменные величины, называемые также
сигналами, могут иметь различную физическую природу, например
электрическое напряжение, ток, сопротивление, давление воздуха,
объем жидкости, положение
вала. Эти величины могут ме-
няться плавно в разных преде-
лах (рис. 1-1,а) или скачком
между несколькими уровнями.
В большинстве случаев скачко-
образные изменения происхо-
дят между двумя уровнями,
как показано на рис. 1-1,6. Ве-
личины, изменяющиеся скачком
между двумя или несколькими
значениями, называются ди-
скретными в отличие от непре-
рывных величин, меняющихся
плавно.
Приведем несколько приме-
ров, в которых нас интересуют
только дискретные значения ве-
личин: при контроле обраба-
тываемых деталей важно знать,
5
имеет ли контролируемый размер величину большую или
•меньшую, чем заданная; при сигнализации состояния бака важно
только, полон он или нет; при блокировке движения лифта
важно, закрыты двери или открыты; при защите двигателя от пере-
грузки имеет значение, превышает его ток допустимую величину
или нет; при управлении транспортером нужно знать, движется он
или стоит, включен ли двигатель, проходит ли материал через опре-
деленное место или нет; при программном управлении часто имеет
значение, прошло ли определенное время или нет.
Некоторые переменные величины в этих примерах (размер, со-
стояние бака, величина тока) могут меняться плавно. Однако изме-
рительные устройства, выдающие значения сигналов, должны разли-
чать только два значения величин, меньшие или большие предель-
ного значения.
В других случаях переменные величины по своей природе имеют
дискретный характер, например состояние дверей (открыто — закры-
то), состояние выключателя (включен — выключен); здесь переход
из одного состояния в другое происходит скачком.
1-2. УСТРОЙСТВА ДИСКРЕТНОГО ДЕЙСТВИЯ
Устройства, работающие с дискретными сигналами, называются
устройствами дискретного действия. Эти устройства отличаются от
устройств непрерывного действия тем, что они более надежны, ме-
нее чувствительны к влиянию внешней среды, обычно допускают
больший разброс параметров деталей, из которых они состоят, и
больший разброс параметров источников энергии. Передача дискрет-
ных сигналов 'более помехоустойчива, чем передача непрерывных
сигналов.. Эти преимущества объясняются тем, что в устройствах
дискретного действия весь диапазон изменения сигнала использует-
ся только для определения нескольких Значений величины, и поэто-
му допустимы значительные отклонения от номинальных значений
без ложных сигналов. Например, для правильной работы стандарт-
ного электромагнитного реле допускаются колебания напряжения
срабатывания в пределах (20—30) % и напряжения отпускания
в пределах (0—30) % номинального значения.
1-3. АВТОМАТИЧЕСКИЙ КОНТРОЛЬ
Задачами автоматического контроля является определение год-
ности продукции (отбраковка), определение правильности проте-
кания какого-либо технологического процесса, а в некоторых слу-
чаях и распределение продукции по сортам, по качеству, по разме-
рам и т. п. Основной операцией автоматического контроля, выпол-
няемого с помощью устройств дискретного действия, является из-
мерение необходимых параметров и преобразование измеренных
величин в дискретные сигналы. При этом всем значениям измеряе-
мой величины, лежащим выше предельного значения, соответствует
одно значение сигнала, а всем значениям, лежащим ниже предель-
ного значения, соответствует другое значение сигнала (рис. 1-2).
Автоматический контроль может быть двух видов: контроль
продукции, имеющей непрерывный характер (например, контроль
толщины листа при прокатке, толщины изоляции провода), и штуч-
6
Рис.% 1-2. Преобразование непре-
рывного сигнала в дискретный.
ной продукции (например, контроль размеров шариков для подшип-
ников, параметров полупроводниковых триодов).
Автоматический контроль штучной продукции является более
сложным, так как требует осу-
ществления ряда вспомогатель-
ных операций: подачи изделий
к контрольному стенду, их
блокировки между измерения-
ми при загрузке и разгрузке
стенда.
При автоматическом конт-
роле часто используются диф-
ференциальные методы измере-
ний с нуль-органом в качестве
измерительного элемента. Та-
кой элемент, в сущности, опре-
деляет знак входной величины,
которая образуется как раз-
ность между измеряемой и за-
данной величинами, причем
последняя получается с по-
мощью образцового изделия.
Этот метод отличается универсальностью и повышенной точностью.
В качестве измерительных схем применяются компенсационная, мо-
стовая и дифференциальная схемы.
1-4. СИГНАЛИЗАЦИЯ
Устройства сигнализации преобразуют сигналы, применяемые
в схемах автоматики, в сигналы, которые -может воспринимать чело,
век. Чаще всего применяются оптические сигналы (лампочки, поло-
жение стрелок приборов, показания цифровых панелей и др.). Опти-
ческие сигналы требуют непрерывного внимания человека.. Поэтому
иногда применяется мигающий свет или звуковой сигнал (гудок,
звонок и т. п.).
Сигнализация часто сопровождается автоматической записью
с помощью регистрирующих приборов, которые могут записывать
одновременно несколько величин. Анализ таких записей помогает
определить причины неожиданных нарушений процесса.
1-5. АВТОМАТИЧЕСКАЯ БЛОКИРОВКА И ЗАЩИТА
Сигналы контроля можно использовать для остановки техноло-
гического процесса а том случае, если продолжение работы опасно
или процесс протекает неправильно, например выдается большой
процент брака или производительность ниже границы рентабельно-
сти. Другим примером автоматической защиты является блокиров-
ка, применяемая на испытательных стендах высокого напряжения,
защитные решетки которых нельзя открыть, пока включено высокое
напряжение.
Устройства защиты очень разнообразны. Всем известны элек-
трические предохранители и автоматические выключатели, которые
отключают сеть при чрезмерной нагрузке. Машины защищаются от
перегрева наиболее нагруженных деталей (например, подшипники
повышенной скорости вращения). Котлы и баки защищаются от по-
7
вЫшеннб'го давления или пониженнбго уровня жидкости. Для защи-
ты обслуживающего персонала от травм применяются специальные
блокировки (например, устройство защиты, останавливающее дви-
жение пуансона у прессов).
Основным требованием к устройствам защиты и блокировки,
является высокая надежность работы. В особенно ответственных
случаях эти устройства имеют специальный источник питания, за-
щищенный от коротких замыканий и обрыва линии передачи. В дру-
гих случаях предусматриваются цепи периодической проверки рабо-
ты устройств блокировки, защиты или аварийной сигнализации.
Все эти задачи также .выполняются с помощью дискретных
операций.
1-6. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
(Процессы автоматического контроля, сигнализации, блокировки
и защиты имеют пассивный характер в том смысле, что они либо
выдают информацию о протекании процесса, либо его останавливают
или препятствуют его запуску. Однако гораздо чаще нужно активно
воздействовать на характер протекания процесса, т. е. управлять им.
В большинстве случаев управляемый объект состоит из .большо-
го числа устройств, работу которых нужно координировать по уров-
ню мощности, по скорости или по времени. При этом (Многие из не-
обходимых операций имеют дискретный характер. В тех случаях,
когда работа объекта сводится к запуску или остановке отдельных
его частей или всего объекта в целом, дискретный характер управ-
ления очевиден. Легко показать, что и при циклическом характере
работы объекта управление также производится с помощью
дискретных операций, так как последовательность манипуляций,
образующих цикл, обеспечивается регулированием подачи энергии
к различным двигателям и устройствам объекта.
При автоматическом управлении отдельные операции выполняют-
ся или по команде обслуживающего персонала, или в зависимости
от выполнения предыдущих операций, или в зависимости от значе-
ния каких-либо параметров или, наконец, в зависимости от време-
ни. В тех случаях, где программа выполнения операций должна
часто меняться во времени, применяются так называемые программ-
ные устройства, которые позволяют легко изменять временную
программу операций. Такая форма автоматического управления на-
зывается программным управлением.
Дискретные сигналы имеют большое значение и в цепях авто-
матического регулирования. Простейшие и очень распространенные
системы автоматического регулирования работают с дискретными
сигналами. В системах, у которых цикл регулирования протекает
с максимальной скоростью, применяется также дискретный вид сиг-
налов и воздействий на объект. И, наконец, в экстремальных и са-
монастраивающихся системах автоматического регулирования дис-
кретные операции играют решающую роль, определяющую харак-
тер всего процесса регулирования.
1-7. СЛОЖНЫЕ СИСТЕМЫ КОНТРОЛЯ И УПРАВЛЕНИЯ
С ростом числа операций контроля и усложнением объектов
управления усложняется также и аппаратура контроля и управле-
ния. В настоящее время имеется стремление к применению ком-
плексной аппаратуры, которая выполняет все требуемые функции и
8
операции. Такая комплексная аппаратура дает возможность исполь-
зовать некоторые устройства для выполнения нескольких функций,
применять однотипные элементы, унифицировать приборы и рабочие
уровни сигналов. Это не только позволяет снизить стоимость авто-
матики, но также и повышает надежность и упрощает уход и об-
служивание.
С усложнением задач автоматики ее устройства по своей слож-
ности и характеру работы приближаются к цифровым вычислитель-
ным машинам, поэтому опыт эксплуатации и проектирования по-
следних может быть использован при создании сложных автомати-
ческих систем. Однако в этой книге мы не будем затрагивать эти
проблемы и ограничимся рассмотрением более простых задач про-
ектирования и применения автоматических устройств дискретного
действия.
1-8. ОСНОВНЫЕ ЧАСТИ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Для наглядности дальнейшего изложения рассмотрим схему
автоматического управления простейшим лифтом (рис. 1-3).
Управляемый объект состоит из кабины, которая опускается и
поднимается в шахте, оборудованной дверями. Устройство автома-
тического управления содержит следующие элементы:
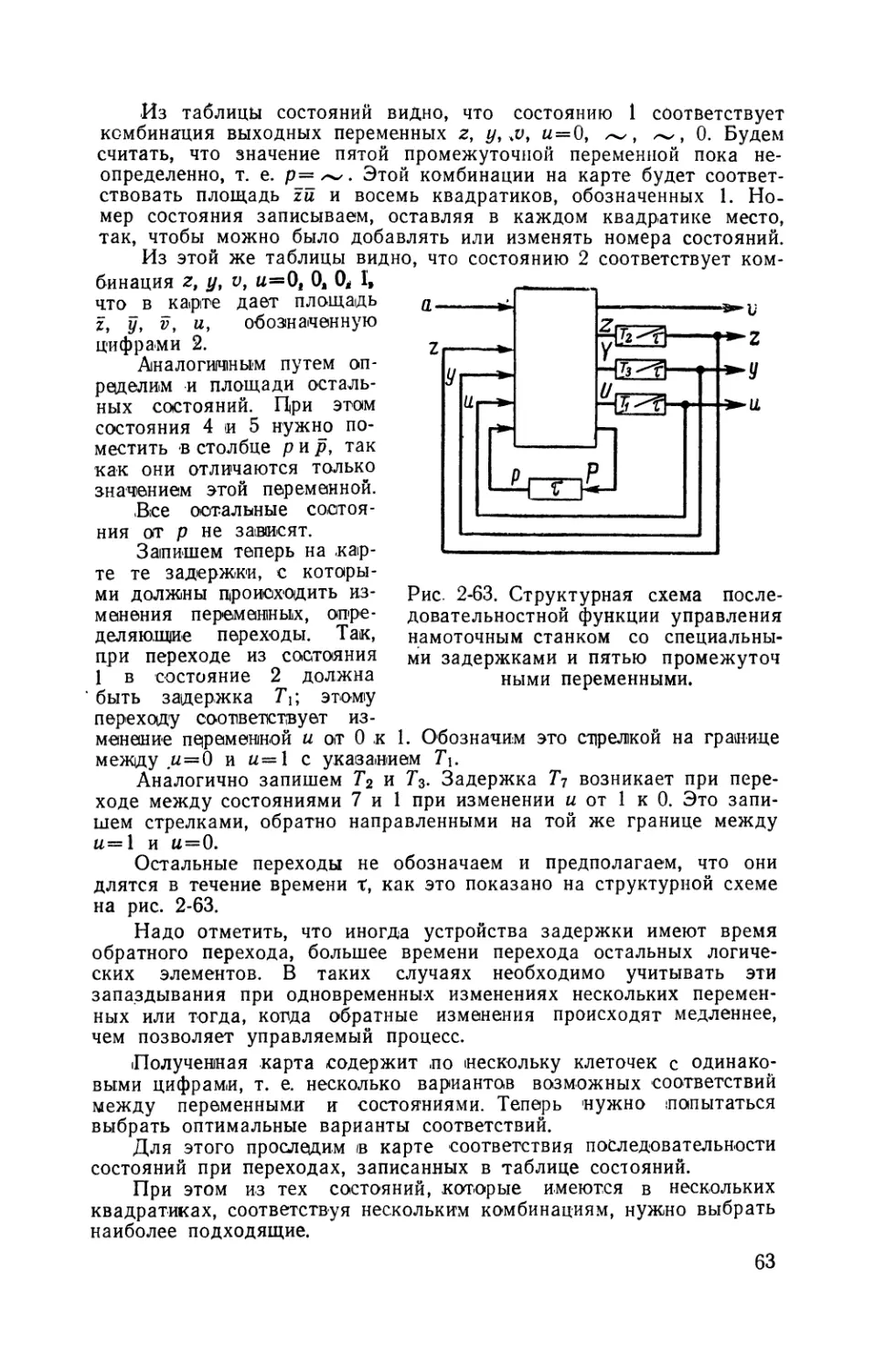
Рис. 1-3. Схематическое изображение про-
стейшего лифта.
/—датчики положения дверей; 2 —кабина лифта;
3—кнопки управления; 4—двигатель; 5—датчик по-
ложения кабины; 6—исполнительное устройство;
7—датчик перегрузки двигателя; 8 — функциональ-
ная часть автоматики; 9 — сеть питания; 10 — кноп-
ка сигнализации: 11 — звонок; 12—сигнальные лам-
почки.
9
1) Входные устройства — датчики, которые измеряют входные
величины и преобразуют их в сигналы двух значений. В нашем при-
мере входными устройствами являются кнопки на этажах и в ка-
бине, датчики положения дверей, датчики положения кабины, дат-
чики перегрузки двигателя. Сигналы от входных устройств посту-
пают в функциональную часть устройства.,
2) Функциональную часть, преобразующую входные сигналы
в выходные, в соответствии с заданными логическими функциями
и состоящую из логических элементов, которые будут подробно опи-
саны в следующих главах.
3) Усилители, которые повышают уровень мощности выходных
сигналов функциональной части.
4) Исполнительные устройства, направляющие поток энергии
в управляемый объект. Обычно исполнительные устройства преоб-
разуют сигналы одного рода в сигналы другого рода, например
электрические в механические, световые, звуковые, пневматические
в механические и т. п. Однако иногда исполнительные устройства
совмещают функции преобразования сигналов и усиления. Поэтому
отдельные усилительные устройства используются не всегда. В на-
шем примере исполнительными устройствами являются звонок, ко-
торый вызывает обслуживающий персонал, лампочки, сигнализирую-
щие отсутствие лифта на этаже, контакторы, включающие электро-
двигатель.
Наиболее сложной частью автоматических устройств является
функциональная часть, анализу и синтезу работы которой посвяще-
на гл. 2.
ГЛАВА ВТОРАЯ
ОСНОВЫ АЛГЕБРЫ ЛОГИКИ ДЛЯ АНАЛИЗА
И СИНТЕЗА СХЕМ УПРАВЛЕНИЯ
Функциональная часть автоматики должна преобразовывать
входные сигналы в выходные в соответствии с требованиями, ко-
торые предъявляются к работе автоматизируемого объекта.
В связи с тем что в рассматриваемых дискретных системах каж-
дый из сигналов может иметь только два значения, эти преобразо-
вания должны выполняться по особым законам, аналогичным зако-
нам, определяющим правильность и ложность высказываний в ло-
гике.
Для законов логики был создан способ их записи в форме ал-
гебраических выражений, имеющих вид формул, переменные члены
которых обозначаются буквами, а зависимости между переменными
выражаются специальными символами логических функций.
Теория логических функций, разработанная ирландским мате-
матиком Булем {Л. 1], была успешно применена впервые американ-
ским ученым Шенноном [Л. 2] и русским ученым В. И. Шестако-
вым [Л. 3] для исследования и проектирования релейно-контактных
схем, а в дальнейшем получила широкое развитие в работах рус-
ского ученого М. А. Гаврилова {Л. 4]. Алгебра логики основана на
понятии принадлежности или непринадлежности какого-либо собы-
тия к классу, характеризующемуся каким-либо сзойством, и на
законах суммы, произведения и инверсии, как это будет подробнее
показано дальше.
Логические функции суммы, произведения и инверсии очень
удобны и естественны для выражения свойств параллельного и по-
следовательного соединения замыкающих и размыкающих контак-
тов реле, на которых в основном строятся логические релейно-кон-
тактные схемы. Однако многие бесконтактные логические элементы
позволяют непосредственно получать и другие логические функции,
как будет показано дальше.
2-1. ВХОДНЫЕ И ВЫХОДНЫЕ СИГНАЛЫ
И ИХ ОБОЗНАЧЕНИЯ
Как уже было сказано выше, дискретные сигналы могут иметь
несколько уровней, в частном случае два уровня.
С помощью преобразователей многоступенчатые и даже непре-
рывные входные сигналы могут всегда быть приведены к сигналам
двух уровней, а с помощью логических схем и преобразователей
выходные двузначные сигналы могут быть преобразованы в непре-
рывные или многоступенчатые. Поэтому в дальнейшем ограничимся
рассмотрением сигналов двух уровней. Входные и выходные сигналы
функциональной части автоматического устройства могут иметь раз-
ную физическую сущность и разные относительные значения уров-
ней. Это может быть, например, напряжение, включенное или от-
ключенное контактом, т. е. равное нулю или какому-то уровню, или
ток двух уровней, или два значения давления воздуха в пневмати-
ческих системах и т. п.
Выбор вида сигнала и его уровней определяется техническими
требованиями к работе устройства в целом. В настоящее время су-
ществует большое разнообразие видов сигналов и их уровней. Фи-
зические обозначения не применяются для описания работы
устройств в алгебре логики, так как при ее применении нет никакой
необходимости обращать внимание на физическую сущность сигна-
лов. Вполне достаточно обозначить каждый сигнал какой-нибудь
буквой и приписать ему два возможных значения. Обычно им при-
писывают значения 0 и 1. Значения 0 и 1 выбраны потому, что во
многих случаях сигналы, выраженные в физических единицах, имеют
значения, близкие к нулю или к некоторой максимальной величине,
принимаемой за 1 в относительных единицах. Однако иногда мини-
мальный уровень сигнала существенно отличается от нуля, поэтому
нельзя отождествлять логическую условную запись значений сигна-
лов с их физическим значением в относительных единицах.
Логические значения сигналов можно понимать и следующим
образом: 1 обозначает, что какое-то действие или событие происхо-
дит, а 0 — что оно не происходит.
В нашем примере (лифт) обозначим сигнал кнопки «вверх»
буквой а3. В дальнейшем будем считать, что Аз=1, если кнопка на-
жата, и «з=0, если кнопка отпущена. Сигнал, поступающий на кон-
тактор с выхода функциональной части и включающий двигатель
для движения лифта вверх, обозначим буквой vu а сигнал, посту-
пающий на второй контактор, включающий двигатель для движения
лифта вниз, обозначим буквой и2. Будем считать V\ = \ или v2—\t
если напряжение, поданное на соответствующий контактор, больше
напряжения срабатывания контактора. Очевидно, при vi = v2=0
лифт будет неподвижен.
11
2-2. ЛОГИЧЕСКИЕ ФУНКЦИИ И ИХ ИЗОБРАЖЕНИЙ
Логические функции выражают зависимость выходных сигналов
или переменных от входных сигналов или переменных. Каждую ло-
гическую функцию с несколькими выходными переменными всегда
можно разбить на несколько функций с одной выходной перемен-
ной или, как говорят, с одним выходом. Поэтому рассмотрим сна-
чала функции с одним выходом. Эти функции в' зависимости от чис-
ла входных переменных можно разделить на функции одной пере-
менной, двух переменных и многих переменных.
Очень существенно разделение логических функций на два клас-
са в зависимости от того, являются ли они функциями только од-
новременных комбинаций значений входных переменных или зависят
также и от последовательности этих комбинаций. Если функции за-
висят только от одновременных комбинаций значений входных пе-
ременных, то они называются комбинационными 1*. Еслб же значение
функций зависит и от предыдущих комбинаций значений входных
переменных, т. е. от последовательности значений, то они называют-
ся последовательностными 2.
Последующие разделы будут посвящены комбинационным функ-
циям, пока не будет введено название последовательностные.
а) Функции одной переменной
Самые простые логические зависимости выражают функцию од-
ной переменной. Обозначим входную переменную буквой а, а вы-
ходную переменную или значение функции буквой v. Переменная а
может иметь значения 0 и 1. Выходная переменная может образо-
вать четыре разные комбинации значений, соответствующие четырем
функциям одной переменной. Эти функции показаны на следующих
таблицах.
а
V
0
1
0
1
а
V
0
1
1
0
а
V
0
1
0
0
а
V
0
1
1
1
v=a
v=a
v=0
Таблицы построены таким образом, что в каждой строке запи-
сано значение входной величины а и соответствующее ему значе-
ние выходной величины v. Под таблицами записаны алгебраические
выражения, соответствующие этим функциям.
Первая функция (v='a) называется повторением. Она вы-
ражает равнозначность обеих переменных.
1 Для этих функций применяются также названия: производя-
щие [Л. 5], примитивные [Л. 6] или одмотактмые [Л. 4].
2 Для этих функций применяются также названия: временные
[Л. 5], непримитивные [Л. 6], а для схем, соответствующих этим
функциям,—многотактные [Л. 4] и последовательностные (схемы
или машины) [Л. 7—9].
12
Вторая функция (v = a) называется инверсией, отрица-
нием, дополнением и обозначается чертой над независимой пере-
менной. Она часто называется просто НЕ, так как можно сказать:
выход v будет тогда, когда не будет входа а.
Третья и четвертая функции, в сущности, выражают независи-
мость v от а. Они называются соответственно «нулевой» и «единич-
ной» функциями.
В нашем примере с лифтом для описания действия сигнализа-
ции применяется функция повторения. Обозначим сигнал от кнопки
для звонка буквой k, а входной сигнал для звонка буквой z. Тогда
между положением кнопки и звонком будет зависимость z—k. Этот
пример тривиален, но он показывает способ записи функции и ее
соотношение с работой реальной схемы в самом простом случае.
Примером инверсной функции могут служить функции сигналь-
ных ламп лифта. Лампа должна гореть, если лифт не находится
на данном этаже, и не должна гореть, если лифт находится на дан-
ном этаже. Пусть сигнал датчика положения обозначим буквой d,
а входной сигнал лампы — /. Если лифт находится на первом эта-
же, rfi='l, а в остальных положениях d{ — 0. Тогда сигнализацию
определяет функция l\ — d\.
б) Функции двух переменных
Функции двух переменных являются основными функциями ал-
гебры логики. Две входные переменные дают четыре комбинации:
0,0; 0,1; 1,0; 1,1. Обозначим входные переменные буквами а и Ъ и
составим таблицу всех возможных комбинаций значений выходов.
Существует 16 возможных комбинаций, т. е. 16 логических функций
двух переменных. В приведенной ниже таблице показаны названия
функций, значения выходной переменной в зависимости от комбина-
ции входных переменных, символическое обозначение функций и
выражения их в так называемых нормальных формах, которые бу-
дут объяснены далее.
Рассмотрим некоторые из этих функций. Так, v0 и vl5 являются
соответственно нулевой и единичной функциями, они не зависят от
комбинаций значений входных переменных. Функции £>ю и vn яв-
ляются функциями повторения и зависят каждая только от одной
из двух переменных входа. Функции v3 и V5 есть инверсии этих пе*
ременных, они также фактически являются функциями только од-
ной переменной.
Функция vs называется логическим произведением, а также
конъюнкцией, или функцией И. Ее символическое изображение
имеет такой же вид, как и символ обычного алгебраического произ-
ведения *:
v = abt
Как и в обычном произведении, функция равна 1, только если
оба сомножителя равны единице. Таким образом логическое Умно-
жение не отличается от обычного умножения. Эта функция получила
название И потому, что ее словесное выражение звучит так:
Выход будет равен 1, если и первый вход, и второй вход будут
равны 1.
Иногда используются символы а,&Ь\ адб; а[\Ь.
13
Таблица функций двух переменных
\ Входные
\ перемен-
>v ные
а
110 0
1.
шение
Нормальные формы
Название
функции N.
Ь
10 10
о£
2 «
s о
К о
ио
Сумма про-
изведений
Произведение сумм
0о
Нулевая
00 00
0
—
(a+b)(a+b)(a+'b)
(a+b)
01
Стрелка Пирса,
НИ... НИ...
00 0 1
alb
ah
(a+b)&+b)(a+b)
02
Запрет а
00 10
b±a
ab
(a+b)(a+b)(a+~b)
0з
Инверсия а
00 1 1
а
ab+ab
(a+b) (a+b)
04
Запрет b
0 1 00
ab
(a+b) (a+b) (a+b)
05
Инверсия b
0101
b
ab+ab
(a+b)(a+'b)
06
Неравнозначность
0 110
афЬ
ab+ab
(a+b)(a+'b)
07
Штрих Шеффера
0 111
•
a\b
ab+ab+ab
(a+b)
08
Произведение И
10 00
a-b
ab
(a+b)(a+~b)(a+b)
09
Равнозначность
10 0 1
a^b
ab+ab
(a+b)(a+b)
010
Повторение b
10 10
b
ab+ab
(a+b)(a+b)
0ц
Импликация b
10 11
a*b
ab+ab+ab
(a+b)
012
Повторение а
1100
a
aJb+ab
(a+b) (a+b)
013
Импликация а
110 1
b^a
ab+ab+ab
(a+b)
014
Сумма, ИЛИ
1110
a+b
ab+db+ab
(a+b)
015
Единичная
1111
1
ab+db-j-
+ab+ab
—
14
Покажем некоторые свойства логического произведения, кото-
рые вытекают из того, что переменные могут иметь только два зна-
чения: 0 и 1.
д.0 = 0
а-1 = а
а>а = а
а*а = 0.
В нашем примере (лифт) с помощью логического произведения
выражается ряд условий. Примером может служить одно из усло-
вий, при выполнении которого лифт может двигаться: если и одна,
и вторая дверь шахты будут закрыты. Обозначим разрешение дви-
жения буквой с, а сигналы датчиков положения дверей буквами
С\ и с2.
Тогда c=CiC2, причем С\ и с2 равны 1, если двери закрыты.
Функция, приведенная в 14-й строчке таблицы функций, назы-
вается логической суммой, а также дизъюнкцией и функцией ИЛИ.
Ее символическое изображение такое же, как и при обычном алге-
браическом суммировании 1.
v = а + Ь.
Однако логическое суммирование отличается от суммирования
арифметического.
Из приведенной таблицы видно, что логическая сумма имеет
значение 1, когда равна 1 или одна, или другая, или обе входные
переменные (отсюда название функции ИЛИ). Функция имеет зна-
чение 0 только тогда, когда равны нулю все входные переменные.
Для логической суммы справедливы следующие равенства:
а -\- 0 = а
а+ 1 = 1
а + а = а
а-\- а = 1.
На основании этих равенств можно написать, что 0+1=а+1=
= 1 + 1 = 1.
Это выражение говорит о том, что результат суммирования ра-
вен 1, если одно из слагаемых равно 1 независимо от значения
другого слагаемого.
Рассмотрим пример применения логической суммы в схеме уп-
равления лифтом. Лифт должен двигаться вверх, когда нажимается
кнопка а\ или кнопка а2у расположенные на первом и на втором
этажах. Назовем сигнал движения буквой а, тогда
а = ai + а2-
Иногда используются символы aV6; a\Jb.
15
Рассмотренные нами функции произведения, суммы и инверсии
достаточны для того, чтобы удобно и быстро получить алгебраиче-
ское выражение для любой логической зависимости между перемен-
ными. Поэтому мы пока остановимся на этих функциях и обра-
тим внимание на способы их изображения и преобразования, кото-
рые позволяют найти формы алгебраических выражений, наиболее
удобные для решения технических задач.
в) Графические изображения логических функций
двух переменных
Нами уже были описаны алгебраический и табличный способы
изображения логических функций. Однако они не всегда удобны
для полного представления всех связей между переменными и
функциями, поэтому остановимся на некоторых других способах
изображения.
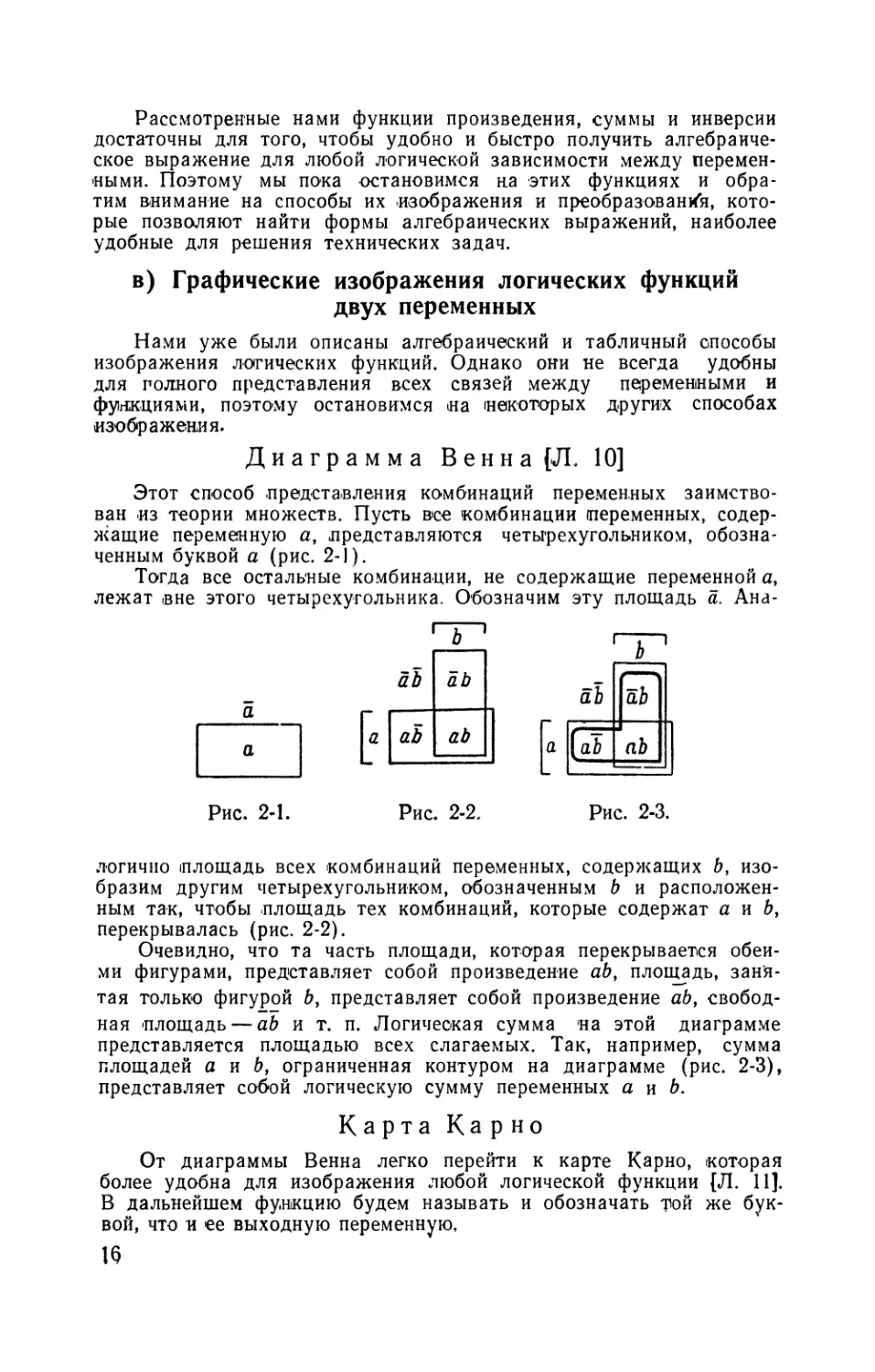
Диаграмма В е н н а [Л. 10]
Этот способ представления комбинаций переменных заимство-
ван из теории множеств. Пусть все комбинации переменных, содер-
жащие переменную а, представляются четырехугольником, обозна-
ченным буквой а (рис. 2-1).
Тогда все остальные комбинации, не содержащие переменной а,
лежат вне этого четырехугольника. Обозначим эту площадь а. Ана-
ab
ab
ab
ab
(—^
ab
ab
{ab
ab
и
Рис. 2-1.
Рис. 2-2,
Рис. 2-3.
логично площадь всех комбинаций переменных, содержащих Ь, изо-
бразим другим четырехугольником, обозначенным b и расположен-
ным так, чтобы площадь тех комбинаций, которые содержат а и Ь,
перекрывалась (рис. 2-2).
Очевидно, что та часть площади, которая перекрывается обеи-
ми фигурами, представляет собой произведение ab, площадь, заня-
тая только фигурой Ьу представляет собой произведение ab, свобод-
ная площадь — ab и т. п. Логическая сумма на этой диаграмме
представляется площадью всех слагаемых. Так, например, сумма
площадей а и Ь, ограниченная контуром на диаграмме (рис. 2-3),
представляет собой логическую сумму переменных а и Ь.
Карта Ка р но
От диаграммы Венна легко перейти к карте Карно, которая
более удобна для изображения любой логической функции [Л. 11].
В дальнейшем функцию будем называть и обозначать той же бук-
вой, что и ее выходную переменную,
15
Карта Карно разделена на квадратики, причем каждому квад-
ратику карты соответствует определенная комбинация значений всех
входных переменных. Тогда каждая сторона квадратика представ-
ляет собой границу между значениями переменных. Пример карты
для переменных а и b показан .на рис. 2-4. Обозначения входных
переменных ставятся сбоку или сверху карты и относятся ко всему
столбцу или строке следующих за ними квадратиков, причем счита-
ется, что значение входных переменных в этих квадратиках рав-
ны 1. Таким образом, в приведенной карте в левом верхнем квад-
ратике обе переменные а и b равны нулю, в правом верхнем квад-
ратике Ь='\, а а=0, в обоих нижних квадратиках а=1, а 6 = 1
только в правом нижнем квадратике.
Эти значения входных переменных не пишутся на карте, они
подразумеваются, а на карте в квадратиках пишутся значения са-
Рис. 2-4. Рис. 2-5. Рис. 2-6. Рис. 2-7.
мих функций при данных комбинациях значений переменных. На-
пример, функция произведения Vs—ab будет изображена картой
(рис. 2-5), а функция суммы vl4=a + b изображается картой на
рис. 2-6.
Если сравнить карту любой функции двух переменных с соот-
ветствующей строчкой таблицы функций двух переменных, то уви-
дим, что каждый квадратик карты соответствует одной комбинации
значений входных переменных. Эта аналогия выявится еще ярче,
если буквенные обозначения в карте Карно заменить числовыми
значениями входных переменных. Так, например, для функции сум-
мы получим карту, изображенную на рис. 2-7.
Это представление более наглядно, чем только буквенное, осо-
бенно в начале ознакомления с таким изображением функций. Од-
нако после некоторой практики от него легко перейти к буквенно-
му, которое удобнее при большом числе переменных.
г) Определение алгебраического выражения
функции по карте Карно
Алгебраическое выражение функции по данной карте можно за-
писать несколькими способами, при этом получаются выражения
различной сложности, несмотря на то, что в конечном счете они бу-
дут определять одну и ту же функцию.
Для простейшего решения технических задач важно научиться
получать сразу наиболее простые и удобные по форме алгебраиче-
ские выражения.
3-2528 \7
Когда мы имеем карту какой-то функции, то мы можем запи-
сать эту функцию в виде произведений суммы или в виде сумм
произведений. Рассмотрим несколько 'Примеров.
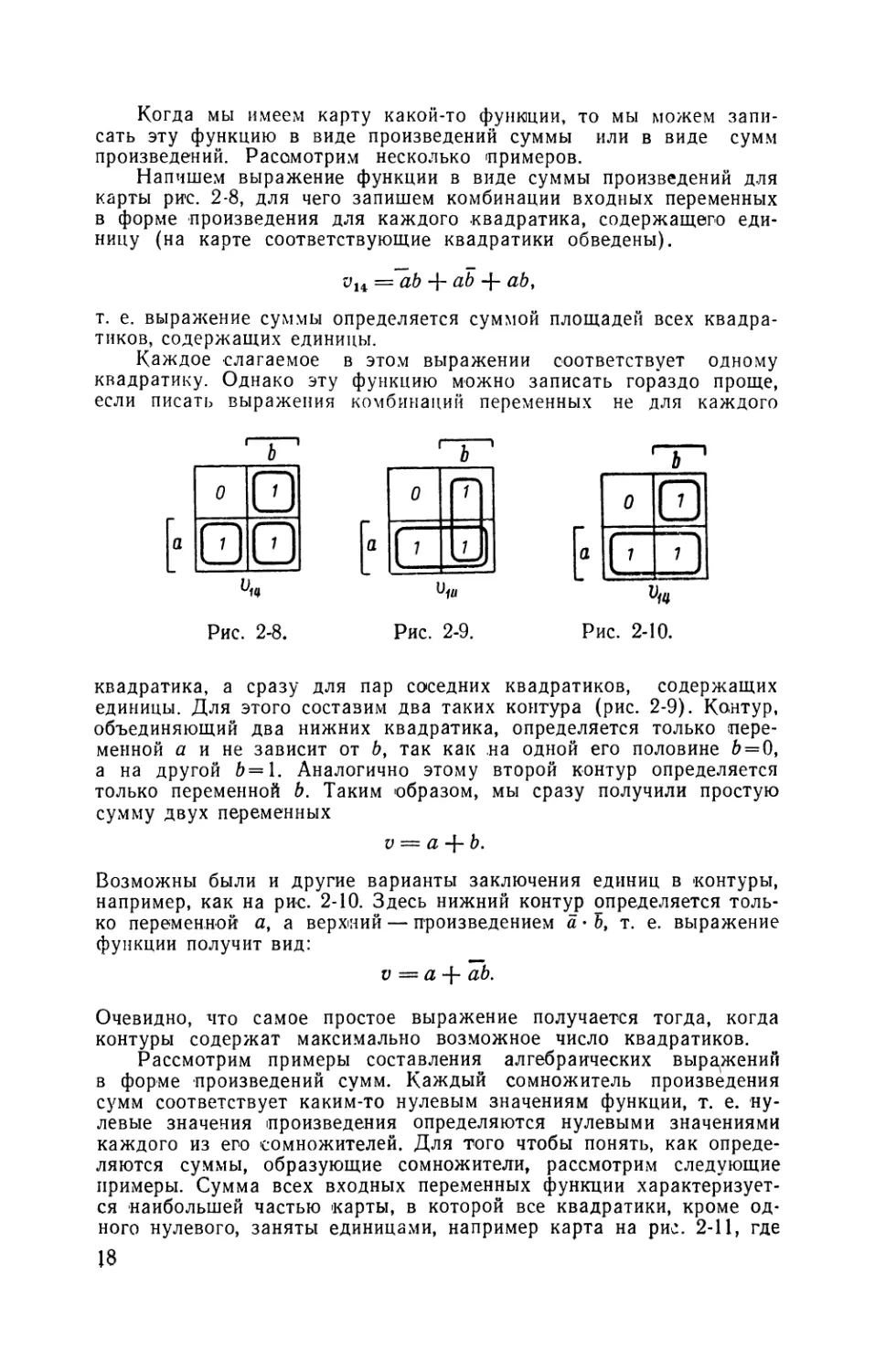
Напишем выражение функции в виде суммы произведений для
карты рис. 2-8, для чего запишем комбинации входных переменных
в форме произведения для каждого квадратика, содержащего еди-
ницу (на карте соответствующие квадратики обведены).
у14 = ab + ab + ab,
т. е. выражение суммы определяется суммой площадей всех квадра-
тиков, содержащих единицы.
Каждое слагаемое в этом выражении соответствует одному
квадратику. Однако эту функцию можно записать гораздо проще,
если писать выражения комбинаций переменных не для каждого
квадратика, а сразу для пар соседних квадратиков, содержащих
единицы. Для этого составим два таких контура (рис. 2-9). Контур,
объединяющий два нижних квадратика, определяется только (пере-
менной а и не зависит от 6, так как ;на одной его половине 6 = 0,
а на другой 6 = 1. Аналогично этому второй контур определяется
только переменной 6. Таким образом, мы сразу получили простую
сумму двух переменных
v = а + 6.
Возможны были и другие варианты заключения единиц в контуры,
например, как на рис. 2-10. Здесь нижний контур определяется толь-
ко переменной а, а верхний — произведением а - Ъ, т. е. выражение
функции получит вид:
v = а + ab.
Очевидно, что самое простое выражение получается тогда, когда
контуры содержат максимально возможное число квадратиков.
Рассмотрим примеры составления алгебраических выражений
в форме произведений сумм. Каждый сомножитель произведения
сумм соответствует каким-то нулевым значениям функции, т. е. ну-
левые значения произведения определяются нулевыми значениями
каждого из его сомножителей. Для того чтобы понять, как опреде-
ляются суммы, образующие сомножители, рассмотрим следующие
примеры. Сумма всех входных переменных функции характеризует-
ся наибольшей частью карты, в которой все квадратики, кроме од-
ного нулевого, заняты единицами, например карта на рис. 2-11, где
18
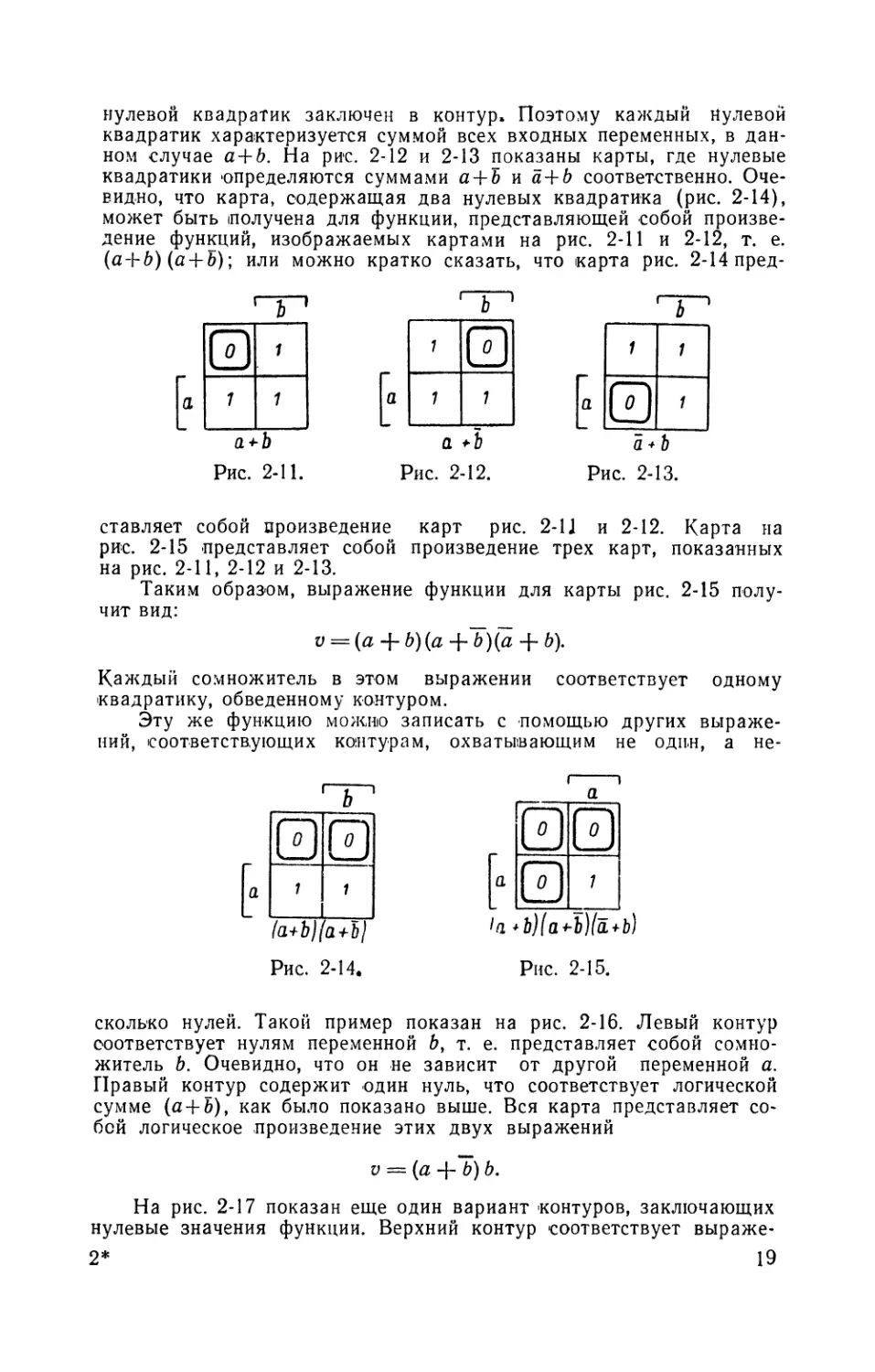
нулевой квадратик заключен в контур. Поэтому каждый нулевой
квадратик характеризуется суммой всех входных переменных, в дан-
ном случае а + b. На рис. 2-12 и 2-13 показаны карты, где нулевые
квадратики определяются суммами а + b и а+b соответственно. Оче-
видно, что карта, содержащая два нулевых квадратика (рис. 2-14),
может быть получена для функции, представляющей собой произве-
дение функций, изображаемых картами на рис. 2-11 и 2-12, т. е.
(а-\-Ь) (а + Ъ)\ или можно кратко сказать, что карта рис. 2-14пред-
Рис. 2-11. Рис. 2-12. Рис. 2-13.
ставляет собой произведение карт рис. 2-11 и 2-12. Карта на
рис. 2-15 представляет собой произведение трех карт, показанных
на рис. 2-11, 2-12 и 2-13.
Таким образом, выражение функции для карты рис. 2-15 полу-
чит вид:
v = (a + b)(a +~b)(a + b).
Каждый сомножитель в этом выражении соответствует одному
квадратику, обведенному контуром.
Эту же функцию можно записать с помощью других выраже-
ний, соответствующих контурам, охватывающим не один, а не-
Рис. 2-14. Рис. 2-15.
сколько нулей. Такой пример показан на рис. 2-16. Левый контур
соответствует нулям переменной 6, т. е. представляет собой сомно-
житель Ь. Очевидно, что он не зависит от другой переменной а.
Правый контур содержит один нуль, что соответствует логической
сумме (а + Ь), как было показано выше. Вся карта представляет со-
бой логическое произведение этих двух выражений
v = (a +7) b.
На рис. 2-17 показан еще один вариант контуров, заключающих
нулевые значения функции. Верхний контур соответствует выраже-
2* 19
нию at левый контур — выражению Ь. Следовательно, общая карта
на рис. 2-17, изображающая произведение обоих контуров, представ-
ляет собой изображение функции
v = ab.
Таким образом, при составлении сумм, соответствующих контурам,
охватывающим нули, в виде слагаемых записываются переменные,
площади единичных значений которых лежат вне этого контура и
инверсии тех переменных, площади нулевых значений которых так-
0
0
0
7
(а+Ъ)Ъ
Рис. 2-16.
10
1
аЬ
Рис. 2-17.
же лежат вне контура. Полученные выражения функции отличают-
ся друг от друга видом и сложностью. Приведенные примеры пока-
зывают, что с помощью карты Карно легко получить различные вы-
ражения для одной и той же функции. При этом для получения
простейших выражений нужно стремиться составлять выражения
для наиболее крупных контуров, охватывая все единицы или все
нули. В некоторых случаях различные выражения функций имеют
примерно одинаковую сложость, но их различный вид позволяет
выбрать вариант, наиболее удобный для реализации в i данной си-
стеме логических элементов, или выбрать наиболее экономичную си-
стему элементов.
д) Инверсия функции. Правило де Моргана
Итак, как было показано выше, сумма переменных представ-
ляется на карте Карно суммой площадей, занимаемых единичными
значениями хотя бы одной из переменных, произведение же пред-
ставляется площадью, общей для единичных значений всех сомно-
жителей. По таким же правилам можно получить карты сумм и
произведений функций, суммируя или перемножая значения функ-
ций, стоящие в одинаковых квадратиках исходных карт.
Очень легко с помощью карты получить и инверсию функции.
Для этого надо построить другую карту, на которой все единицы
исходной карты заменить нулями, а все нули — единицами. Пример
таких инверсных карт показан ниже. На карте рис. 2-18 представ-
лена функция vu=a+b, а на карте рис. 2-19 инверсная ей функ-
ция v\4=ab.
Еще один пример инверсии произведения Vs=ab (карта на
рис. 2-20) показан на карте (рис. 2-21)
v8 — а + Ь.
20
ётй инверсные карты наглядно поясняют правило де Моргайа,
которое выражается следующим образом:
а + b = ab
ab = а +Т.
Если назвать сумму и произведение дуальными функциями, то
это правило можно сформулировать следующим образом: инверсия
0
1
1
1
ь
1
0
0
0
Рис. 2-18.
Рис. 2.19.
ь
Ь 1
0
0
/
1
0
1
/
0
Рис.
2-20.
Рис. 2-21.
функции равна дуальной функции инверсных переменных. Легко по-
казать, что инверсия инвертированной функции равна исходной
функции. Для этого достаточно дважды инвертировать любую
карту.
Таким образом
v = V.
Тогда правило де Моргана можно выразить таким образом:
а + b = ab.
ab = a -\-b.
Этим правилом приходится часто пользоваться при составлении
схем в тех случаях, когда один тип логических элементов имеет
преимущества перед другим (например, ИЛИ перед И) и во многих
других случаях для упрощения схем.
е) Функции многих переменных
Логические функции трех переменных дают уже 8 комбинаций
значений входных переменных, что дает возможность составить
256 логических функций. При табличном изображении получилась
бы таблица с 8 столбцами и 256 строчками. Логические функции че-
тырех переменных дают 16 комбинаций значений входных перемен-
-ных и позволяют составить 65536 логических функций. Функции
пяти переменных дают 32 комбинации входов и 4 294 967 296 функ-
ций. Для п входных переменных получается 2П комбинаций значе-
ний входов и 22 функций. Очевидно, составление таблиц, аналогич-
ных той, которую мы составили для функций двух переменных, не-
2
возможно. В этом случае функции многих переменных приходится
разбивать на более простые.
Наибольшее значение среди функций многих переменных имеют
функции логического произведения и логической суммы.
Логическое произведение многих переменных
v = abc ...
имеет значение 1 в том и только в том случае, если все входные пе-
ременные равны 1, так же как и для функции двух переменных.
Логическая сумма многих переменных:
v = a + b + c + ...
имеет значение 0 в том и только в том случае, если все входные пере-
менные равны нулю.
Примером функции многих переменных может служить функ-
ция, выражающая условие движения лифта, охватывающая все
частичные условия, рассмотренные раньше.
Выходной сигнал v\ для движения лифта вверх может быть
выдан, если:
1) нажата хоть одна из кнопок в первом и втором этажах аь
а2, или кнопка в лифте аз, т. е.
а — а\ + а2 + ai>
2) все двери в шахте закрыты
С = Ci#2>
3) кабина лифта не находится на верхнем этаже (т. е. сигнал
датчика положения d2 не равен 1);
4) двигатель не перегружен (сигнал датчика перегрузки g не
равен 1);
5) кабина не движется вниз, т. е. v2—Q.
Все эти условия можно записать в виде произведения прямых
и инверсных сигналов, выражающих частичные условия
vx = acd2gv2,
т. е. vt = 1 только в том случае, если а = 1, с — 1, d2 = 0, g — 0,
v2 = 0.
Аналогично записываются условия для движения лифта вниз
v2 = bcdjzvl9
где dx — сигнал датчика положения на первом этаже, а
Ь — сигнал от кнопок на спуск лифта.
Еще одной довольно распространенной функцией многих пере-
менных является функция инверсии суммы, часто называе-
мая НИ.. .НИ:
v = a-\-b-\~c = abc.
22
Эта функция имеет значение 1 только в том случае, если все
входы равны 0. Фактически мы уже ^использовали эту функцию
в выражении условия, разрешающего движение лифта вверх.
Из остальных функций многих переменных наибольшее значение
имеют так называемые симметричные функции.
Симметричные функции характеризуются тем, что их значение
не зависит от того, какая из входных переменных имеет значение 0
или 1, а определяется тем, сколько входных переменных равны ну-
лю и сколько — единице. Симметричные (пороговые) функции ха-
рактеризуются порогом, определяющим число входных переменных,
которые должны быть равны единице, чтобы выход был 1. Так, на-
пример, для трех входных переменных а, Ьу с при пороге, равном
двум, симметричная функция будет иметь вид
v = 2 (я, Ь, с) = ab + ас + be =(а + Ь) (а + с) (Ь + с).
Функция произведения многих переменных представляет собой тоже
симметричную функцию с порогом, равным числу сомножителей,
а функция суммы — симметричную функцию с порогом, равным 1.
ж) Изображение логических функций многих
переменных
Изображение логических функций с помощью таблиц для функ-
ций больше чем двух переменных становится очень громоздким,
так как число строк таблицы равно числу комбинации значений
входных переменных. Карта Карно имеет то преимущество, что на
ней изображаются только значения функций, т. е. она имеет столь-
ко клеточек, сколько таблица строк. Это делает ее гораздо более
наглядной и менее громоздкой, что позволяет применять ее для
анализа и синтеза схем.
Карта для функций трех переменных
По сравнению с картой двух переменных карта трех перемен-
ных имеет вдвое увеличенное число квадратиков (прибавление каж-
дой новой переменной удваивает карту
потому, что новая переменная должна ( JT l
иметь площадь, общую со всеми комби- , х
нациями старых переменных). На
рис. 2-22 изображена карта для трех
переменных с числовыми данными
суммы
а = al + а2 ~f~ аз-
0
1
1
1
1
1
1
1
Рис. 2-22.
Третья переменная а3 имеет значе-
ния, равные 1 в. двух средних столбцах
и значения, равные 0 в обоих крайних
столбцах.
Отметим, что как в карте суммы двух переменных, так и в кар-
те суммы трех переменных все квадратики, кроме одного, в котором
все переменные имеют нулевое значение, имеют значения 1.
23
Карта для функций четырех переменных
Четвертую переменную добавим к карте трех переменных так
же, как добавили третью переменную, но только удвоим площадь
в вертикальном направлении. Единичные значения четвертой пере-
, менной будут изображены двумя
9 средними строками (рис. 2-23).
В качестве примера заполним эту
карту для функции, выражающей
условия i2, 3, 4 и 5 движения лифта
вверх, рассмотренные выше,
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
h = cd2gv2
Эта функция — произведение че-
тырех переменных. Так же как и для
случая двух переменных, она харак-
теризуется только одним квадрати-
ком с единицей. Это наименьшая воз-
можная часть карты, занимаемая
единичными значениями функции.
Очевидно, что наибольшую часть
карты занимают единичные значения
функции суммы всех переменных, у которой только один квадратик
не занят единицей.
Рис. 2-23.
Карта для функций пяти переменных
Чтобы пятая переменная имела общие площади со всеми ос-
тальными переменными, ее приходится изображать площадью, раз-
битой на две части, расположенные симметрично, как показано на
карте (рис. 2-24), где изображена функция
»i = (ai + а2 + аг) cz-
z 1 1 Z
0
0
'0
0
0
1
0
0
0
0
1
0
Q
1
0
0
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
v1
Рис, 2-24.
24
Левая и правая половины карты отличаются друг 6т друга
лишь значением переменной а3. Эта карта как бы составлена из
двух карт четырех переменных, симметричных относительно общей
границы.
Карта для функций шести переменных
Карта для шести переменных образуется как бы из четырех
карт четырех переменных. В качестве примера изобразим на
рис. 2-25 функцию
^1 = (Я1 + Д2 + Дз)^2г-
На этой карте две переменные а3 и z изображены разделенны-
ми площадями, симметричными но отношению к центральным осям.
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
' 0
0
0
0
0
0
1
0
0
0
о'
0
Q
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
»1
Рис. 2-25.
Карты для числа .переменных, большего шести, применяются
редко, так как они становятся громоздкими и не наглядными. Одна-
ко принцип их составления остается прежний—с каждой новой пе-
ременной площадь удваивается, а новые переменные распределяются
так, чтобы иметь общую площадь со всеми переменными. Но обыч-
но гораздо проще при большом числе переменных постараться
уменьшить их число, вводя функцию промежуточных переменных.
2-3. НЕКОТОРЫЕ ЗАКОНЫ АЛГЕБРЫ ЛОГИКИ
В предыдущих параграфах были показаны некоторые законы
алгебры логики для функций двух переменных. Распространим
их на функции многих переменных и приведем еще некоторые
другие.
25
Коммутативный (переместительный) закон
Очевидно, что для логической суммы и произведения порядок
расположения переменных не играет роли. Тогда
а = ^i + а2 + ai = а2 + аг + а\
и
vt = ac^gol = d2v2gca.
Если карты этих функций не будут иметь разного расположе-
ния входных переменных, то они будут одинаковы; поэтому при
сравнении функций нужно следить за порядком расположения (обо-
значения) переменных.
Ассоциативный (сочетательный) закон
Также очевидно, что результат последовательного умножения и
сложения переменных не зависит от порядка этих действий. Так,
например,
a=(at + а2) + аг = ах + (а2 + а3)
и
c = cl(ctct) = {clct)cl.
Поэтому в выражениях суммы и произведения не нужно пи-
сать скобки.
Дистрибутивный (распределительный) закон
Одна из форм дистрибутивного закона имеет такой же вид,
как и в обычной алгебре, и говорит о том, что общий множитель
можно выносить за скобки. Напри-
1 а~э 1 мер,
I : I
aih + a*h + Дз/i = (ai + я2 + а*) /i-
ш
Z)
1
i
1 0
1
0 1
1
1
1
1 0
1
0 !
1
1
\о
1
0 !
1
1
1
1 0
'
V. .
Докажем дистрибутивный закон
для данной функции с помощью ее
карты (рис. 2-26).
Выражение этой функции в фор-
ме сумм произведений можно полу-
чить, если написать его по таким же
правилам, как для функций двух пе-
ременных, т. е. записывая значения
комбинаций переменных для обведен-
ных следующими контурами групп
единиц. Нижний квадратный контур
определяется значениями a{j{ и не
зависит от переменных а2 и я3.
Средний квадратный контур определяется произведением a2j\
и не зависит от а\ и а3. Правый контур определяется произведе-
нием Яз/i и не зависит от Дь 02- Таким образом, мы получили вы-
ражение функции в форме суммы произведений
Рис. 2-26.
Vi = a1j1 + a2j1 + a3j1.
26
Для того чтобы получить выражение этой функции в форме произ-
ведения сумм, нужно записать суммь! переменных, определяющих
контуры нулевых значений функции: левый верхний пунктирный
контур определяется значениями переменных аь а2 и а3. Следова-
тельно, первый сомножитель будет:
#1 + а2 + #з-
Второй пунктирный контур содержит восемь нулей (внешние сто-
роны квадратиков считаются такими же смежными, как и внутрен-
ние). Он определяется только переменной j\ и не зависит от осталь-
ных переменных. Поэтому второй сомножитель состоит только
из одного члена /ь Таким образом, выражение функции в форме
■произведения сумм, написанного для приведенных контуров,
имеет вид*
01=(Я1 + Я2 +a3)/V
Следовательно,
+ a2h + Яз/i = (0i + я2 + а*) /V
Но дистрибутивный закон в алгебре логики имеет и дуальную
форму, которой нет в обычной алгебре. Получим эту форму для
следующей функции vt с помощью правила де Моргана — Шеннона1
следовательно,
(я, +li)(a2 + +7,) = а^а, + Tv
Эта форма дистрибутивного закона справедлива и для неинвер
тированных переменных, например,
(6 + а) (с + а) = be + а.
2-4. РАЗНЫЕ ФОРМЫ АЛГЕБРАИЧЕСКИХ ВЫРАЖЕНИЙ
ЛОГИЧЕСКИХ ФУНКЦИЙ
В предыдущих главах уже было показано, что одну и ту же
функцию можно записать с помощью различных алгебраических
выражений. Сколько можно составить различных наборов контуров,
ограничивающих все 0 и все 1 на карте функции, столько суще-
ствует различных выражений функции. Чем больше число пере-
менных, от которых зависит функция, тем больше вариантов вы-
ражений имеет функция. Среди всех возможных выражений наи-
большее значение для практики имеют две так называемые
нормальные формы, которые однозначно связаны с любой произволь-
ной функцией, и. так называемые минимальные формы, позволяю-
щие реализовать функцию минимальным количеством заданных
элементарных функций.
1 Правило де Моргана-Шеннона — это правило де Моргана,
распространенное Шенноном на функции многих переменных. Его
можно выразить следующим образом: инвертированная функция
равна функции инвертированных переменных, в. которой все суммы
заменены произведениями, а произведения — суммами.
27
Нормальная дизъюнктивная форма
(сумма произведений)
Эта форма представляет
из которых соответствует
(71
ч. *
1 0 1
V. /
□
Г N
l£J
3
□
□
(71
V J
□
□
г—ч
171
□
Г N
Рис. 2-27.
собой сумму произведений, каждое
одной единице на карте функции
(т. е. каждый контур включает в се-
бя только одну клеточку). Поэтому
каждое произведение содержит все
входные переменные (прямые или
инверсии) функции.
Карта, например, для рассмот-
ренной выше функции V\ с контура-
ми, определяющими нормальную
дизъюнктивную форму, имеет вид,
показанный на рис. 2-27.
Напишем выражение функции
как сумму сомножителей, определяю-
щих каждую единицу:
vx = axa2a3jx +ala2a3jl +
+ аха2а3] + axa2a3jx + аха2а3)х +
+ аха2аъ]х + аха2а3[.
Нормальная конъюнктивная форма (произведение сумм)
Эта форма представляет собой произведение сумм, каждая
из которых соответствует одному нулю на карте функций (т. е.
каждый контур включает в себя только одну клеточку. Поэтому
каждая сумма содержит все. входные переменные (прямые или
инвертированные).
В качестве примера вернемся опять к рассмотренной выше
функции и составим ее выражение как произведение сумм, опре-
деляющих каждый 0 на рис. 2-27.
Как было показано раньше, сумма, определяющая каждый О,
равна сумме инверсий входных переменных, определяющих данный
квадратик. Тогда
»i = Тр>\ + ^2 + ал + jx)(ax + а2 + а3 + jx)(ax + а2 + а3 + /,)Х
Х(а~х + а2 + аг + jx){ax + ~а2 + а3 + jx)(ax + а2 + аг + jx) X
X(#i + я2 + а3 + jx){ax + а2 + а3 +Jx)(ax + а2 + а3 + jx).
Рассмотренные нормальные формы удобны для сравнений
функций между собой. Очевидно, что, когда функции имеют
одинаковые выражения, они тождественны. Нормальные формы
применяются в некоторых методах минимизации, однако мы будем
рассматривать более простой и наглядный, как нам кажется,
метод минимизации при помощи карты.
28
а) Элементарные функции
Итак, любую функцию можно выразить нормальной формой.
Следовательно, для реализации любой функции достаточно иметь
устройства, выполняющие суммирование, умножение и инвертиро-
вание. Если можно выполнить суммирование или умножение двух
переменных, то на основании ассоциативного закона можно полу-
чить сумму или произведение любого числа переменных.
Однако для реализации любой функции не обязательно полу-
чать сумму, произведение и инверсию. Достаточно, например, реа-
лизовать сумму и инверсию, а произведение получать, используя
правило де Моргана. Так же можно обойтись без суммирования,
если использовать произведение и инверсию, так как сумму можно
получить, используя то же правило де Моргана.
Таким образом, любая сложная функция может быть выраже-
на через элементарные функции, к которым относятся сумма,
произведение и инверсия. Однако эти функции не являются един-
ственными элементарными функциями. В § 2-2 было показано 16
таких функций двух переменных, среди которых особое место зани-
мают инверсия суммы, часто называемая НИ...НИ или стрелкой
Пирса (функция v{) и инверсия произведения, называемая штри-
хом Шеффера (функция v7).
Эти функции отличаются тем, что любую сложную функцию
можно выразить через каждую из них без помощи других элемен-
тарных функций. Покажем это, например, для штриха Шеффера.
На основании определения этой функции (см. таблицу
в § 2-2)
а/а = а,
тогда
Ф\ь\Ъ =^1Ь=Ъ1 = а+Ь.
Следовательно, штрих Шеффера позволяет получить сумму и ин-
версию, а этого достаточно для построения любой функции. Ана-
логично для стрелки Пирса (инверсии суммы)
а [а —а, {а j а) [ (b J b) = а [ Ъ = а + Ь = ab,
т. е. стрелка Пирса позволяет получить инверсию и произведение,
что тоже достаточно для построения любой функции.
Интересны также функции запрета (v2 и и4) и импликация
(0ц и vu).
Если одну из входных переменных импликации сделать по-
стоянно равной нулю, то
а -+0 — а + 0 = д.
Далее,
(а -> 0) -* b = д + b = a + bt
т. е. из импликации и нулевой функции тоже можно построить
любую другую функцию.
29
-Для того чтобы сделать функцию запрета универсальной, к ней
нужно добавить единичную функцию:
(1 ^ а) = а-1 = д, (1 + а) = ab = ab,
что также позволит построить на ней любую функцию.
Из этих двух функций в техническом отношении проще
импликация, так как для того чтобы подавать на вход постоянный
куль, достаточно ничего к нему не присоединять, в то время как
для подачи постоянной 1 нужен источник постоянного сигнала.
Из таблицы элементарных функций остались нерассмотренными
равнозначность и неравнозначность. Для применения в качестве
универсальных функций они неудобны, но они интересны тем, что
превращают входную переменную в ее инверсию или повторяют
ее в зависимости от значения второй переменной.
Например, афО=а, аф1 = а.
Из изложенного выше можно сделать вывод, что любые логи-
ческие функции могут быть построены из одного или нескольких
типов элементарных логических функций путем соответствующего
комбинирования. Набор типов элементарных функций можно поло-
жить в основу системы логических элементов.
Такими могут быть, например, инверсия и сумма, или инверсия
и произведение, или сумма и импликация, или стрелка Пирса
(НИ...НИ), как будет показано в гл. 3.
б) Минимальные формы выражения функций
и их нахождение
Одной из главных задач синтеза функциональной части .авто-
матики является определение такой формы выражения нужной
логической функции, которую можно реализовать минимальным
количеством возможно более простых логических элементов. Это
значит, что выражение функции должно содержать как можно
меньше членов, каждый из которых должен содержать как можно
меньше переменных.
Приведем несколько правил, которые позволяют получить
наиболее простые выражения функций в форме произведений сумм
или суммы произведений. В основу определения минимальных
форм выражений положим карту Карно, так как она дает ясное
представление о характере функции, о возможности ее упрощения,
о влиянии отдельных переменных на сложность выражения функ-
ции. Используя карту, легче найти такое выражение функции,
которое является выгодным при использовании элементов опреде-
ленного типа.
Рассмотрим сначала одно из свойств карты. Области отдель-
ных переменных распределяются на карте таким образом, что при
переходе от одного квадратика к соседнему (меняется всегда значе-
ние только одной переменной от своего прямого значения к его
инверсии и обратно. Рассмотрим это на примере функции
vl = {al + a2 + a3)jl,
показанной на карте рис. 2-28.
30
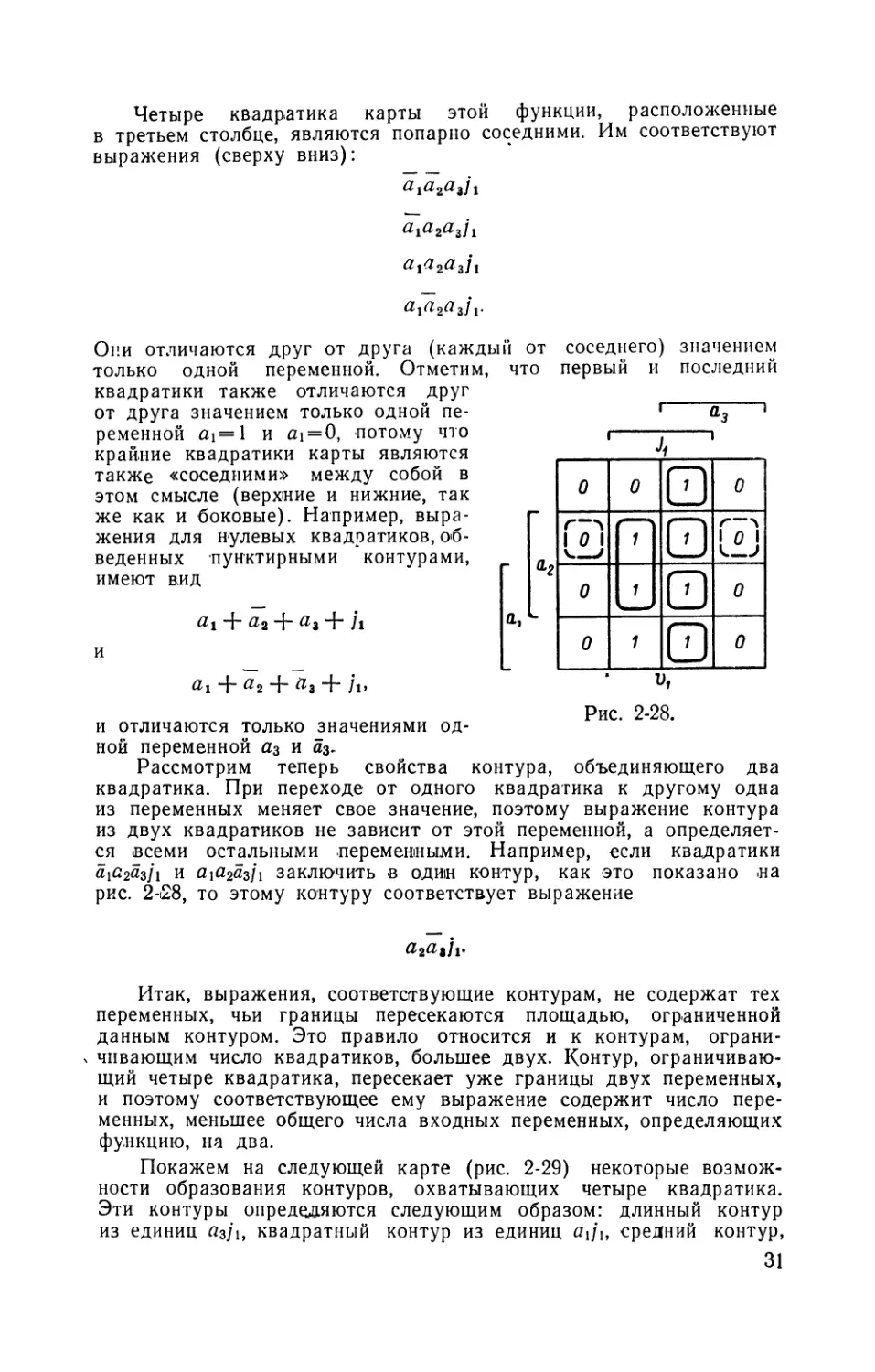
Четыре квадратика карты этой функции, расположенные
в третьем столбце, являются попарно соседними. Им соответствуют
выражения (сверху вниз):
axa2azjl
axa2az\v
Они отличаются друг от друга (каждый от соседнего) значением
только одной переменной. Отметим, что первый и последний
квадратики также отличаются друг
от друга значением только одной пе-
ременной ai=l и 01=0, потому что
крайние квадратики карты являются
также «соседними» между собой в
этом смысле (верхние и нижние, так
же как и боковые). Например, выра-
жения для нулевых квадратиков, об-
веденных пунктирными контурами,
имеют в,ид
Д1 + Я2 + Я3 + /1
и
а! + а9+Ъш + jlt
и отличаются только значениями од-
ной переменной а3 и аз.
Рассмотрим теперь свойства контура, объединяющего два
квадратика. При переходе от одного квадратика к другому одна
из переменных меняет свое значение, поэтому выражение контура
из двух квадратиков не зависит от этой переменной, а определяет-
ся всеми остальными переменными. Например, если квадратики
«iG2«3/i и aia2azji заключить в один контур, как это показано на
рис. 2-i28, то этому контуру соответствует выражение
a2atjv
Итак, выражения, соответствующие контурам, не содержат тех
переменных, чьи границы пересекаются площадью, ограниченной
данным контуром. Это правило относится и к контурам, ограни-
чивающим число квадратиков, большее двух. Контур, ограничиваю-
щий четыре квадратика, пересекает уже границы двух переменных,
и поэтому соответствующее ему выражение содержит число пере-
менных, меньшее общего числа входных переменных, определяющих
функцию, на два.
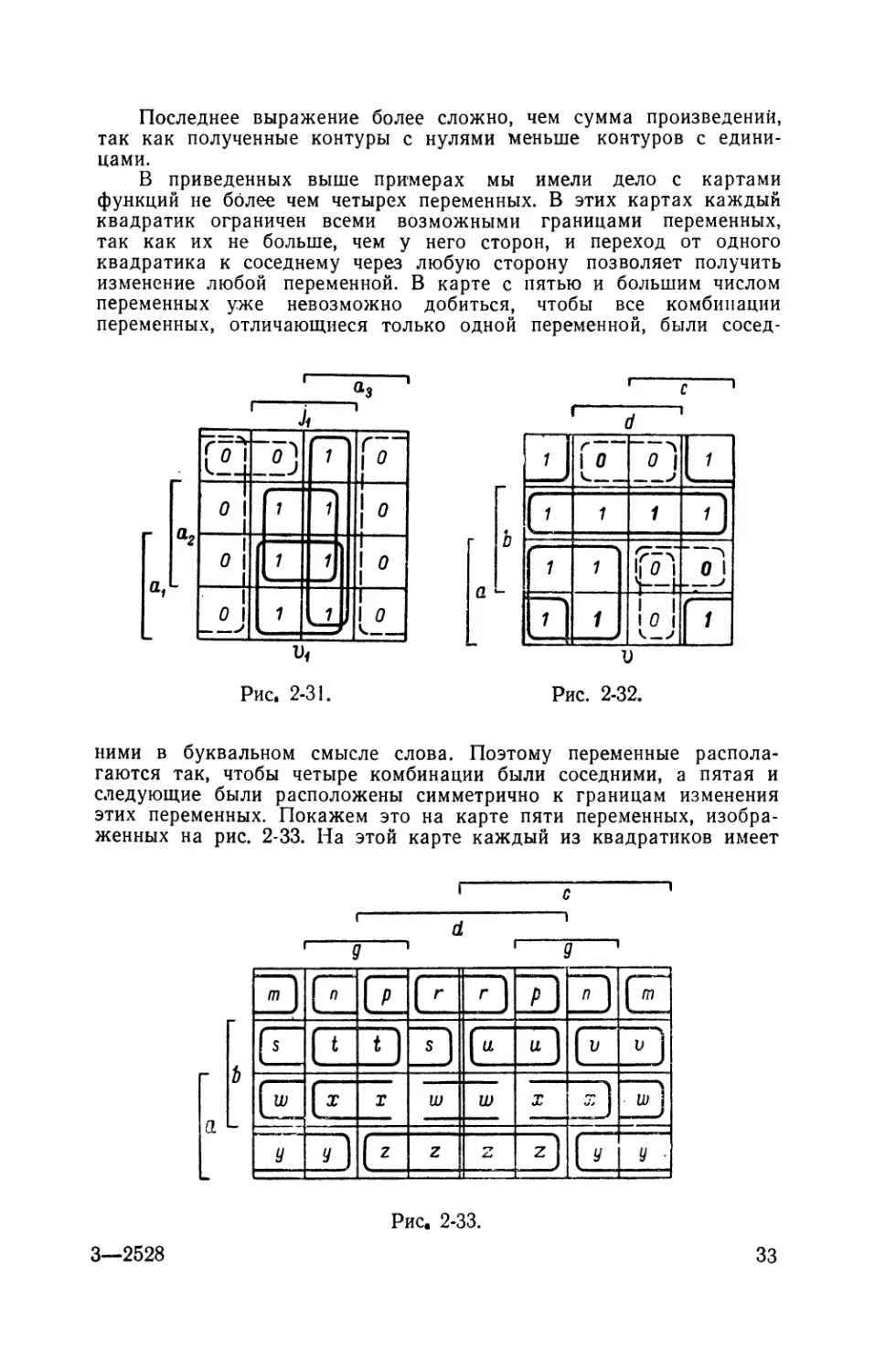
Покажем на следующей карте (рис. 2-29) некоторые возмож-
ности образования контуров, охватывающих четыре квадратика.
Эти контуры определяются следующим образом: длинный контур
из единиц Я3/1, квадратный контур из единиц axju средний контур,
0
0
□
0
t—
l£J
1
□
/ "\
1 о 1
0
1
□
0
0
1
□
0
Рис. 2-28.
31
бхватывающий нули (ji+a2) й контур, охватывающий углобые ну-
ли (a2+/i).
Группы из четырех квадратиков, соседние между собой, можно
объединить в контуры из восьми квадратиков, как показано на
следующей карте (рис. 2-30). Этому контуру соответствует выраже-
ние, состоящее из одной переменной j\.
Очевидно, чем больше соседних квадратиков содержит контур,
тем проще выражение, которое ему соответствует.
Если выражение содержит одну переменную, значит соответ-
ствующий ему контур занимает !/2 карты, если оно содержит две
переменные, то контур занимает V4 карты, и в общем случае, если
1
0 1
J
0
1
I
I 0
"i
1
1
..j
1
_£J
1
1
n.
1
1
Jmml
f
I 0
I
Рис. 2-29.
0
1
t
I 0
0 I
1
1
j 0
0 j
1
1
I 0
0 I
J
x
1
I 0
Рис. 2-30.
выражение содержит n переменных, то контур содержит (Уг)71 ар-
ты. Поэтому для получения наиболее простого выражения фунь ши
нужно составлять контуры с возможной максимальной площадью
единиц или нулей. При этом контуры должны охватывать все еди-
ницы или все нули карты и могут накладываться один на другой.
Так, у рассматриваемой функции две минимальные формы полу-
чаются при следующих контурах, изображенных на рис. 2-31: кон-
туры, заключающие единицы, образуют сумму произведений
#1/1 + 02/1 + 03/1; контуры, заключающие нули, образуют произведение
сумм (ai + a2+az)ju которое в данном случае проще (только два
члена), так как оно образовано из меньшего числа контуров.
Несмотря на то что некоторые квадратики при составлении
контуров могут входить сразу в два контура или даже в три, как
в последнем примере, нельзя составлять лишние контуры, все
квадратики которых входят в другие контуры. Чтобы избежать
получения лишних контуров, целесообразно начинать составление
контуров с тех квадратиков, которые могут войти только в один
единственный контур. Например, в следующей карте (рис. 2-32) это
будут квадратики с жирными единицами и нулями.
Для контуров с единицами получим
v = ЪЗ + ас + &Ь
и для контуров с нулями
v=(a+b + 1)(а + 7+ 3) (а+ Г+ 4
32
Последнее выражение более сложно, чем сумма произведений,
так как полученные контуры с нулями меньше контуров с едини-
цами.
В приведенных выше примерах мы имели дело с картами
функций не более чем четырех переменных. В этих картах каждый
квадратик ограничен всеми возможными границами переменных,
так как их не больше, чем у него сторон, и переход от одного
квадратика к соседнему через любую сторону позволяет получить
изменение любой переменной. В карте с пятью и большим числом
переменных уже невозможно добиться, чтобы все комбинации
переменных, отличающиеся только одной переменной, были сосед-
1
Г™
1
0 1
1
1
i 0
1
0 1
1
1
1
I 0
1
0 1
J
1
I 0
к*
Рис. 2-31.
/
г
I 0
V
J
1
1
1
1
1
1
1
щ
^
0 I
j
,'}
1
1
и
Рис. 2-32.
ними в буквальном смысле слова. Поэтому переменные распола-
гаются так, чтобы четыре комбинации были соседними, а пятая и
следующие были расположены симметрично к границам изменения
этих переменных. Покажем это на карте пяти переменных, изобра-
женных на рис. 2-33. На этой карте каждый из квадратиков имеет
Е
Е
W
3
Е
3—2528
Рис. 2-33.
33
непосредственные границы четырех переменных a, b, d, g, а граница
пятой переменной с показана двойной линией. На карте показаны
как контуры, содержащие переменную с или с, так и контуры, не
зависящие от с. Квадратики, заключенные в один из этих контуров,
обозначены одинаковыми буквами. В дальнейшем мы будем назы-
вать все квадратики, отличающиеся значением только, одной пере-
менной, соседними, несмотря на то, что иногда они расположены
не рядом.
Выражения для контуров карты рис. 2-33 имеют вид:
т
= abdg
п = abdg
p = abdg
г = abdg
s
= abcg
t = abcg
и = abed
v — abed
w
= abg
x = abg
у —abd
z = abd.
Конечно, эти контуры не являются единственно возможными,
они показаны только в качестве примеров.
Рассмотрим пример определения минимальной формы функции
пяти переменных, изображенной на карте рис. 2-34. Эта функция
V
Рис. 2-34.
в форме суммы произведений содержит шесть обязательных чле-
нов, соответствующих квадратикам, которые можно включить
только в один контур, а именно: abd, abc, beg, bdg, abcdt~bcdg.
После этого остается квадратик abedg, который можно включить
в три разных контура, показанных в левой части карты штрих-
пунктирными линиями. Этим контурам соответствуют следующие
выражения: acd, bed, cdg. На карте показаны еще два контура,
которые являются излишними (тонкие линии). Интересно отметить,
что один из них (acg) больше некоторых обязательных конту-
ров, но тем не менее без обязательных контуров обойтись нельзя,
34
поэтому контур acg становится лишним.. Итак, функция имеет три
равноценные минимальные формы:
v = abd + abc + Ъcg + bdg + acd + abed + bedg =
= abd + abc + 6cg -f bdg + fod + a&cd + bedg =
= flW + abc + leg + + edg + flfod +
которые отличаются пятым членом.
При образовании произведения сумм получаются четыре обяза-
тельных контура
(д+Т + с + 3), {а+Ъ+~с+1), Jb + ~c + d + g), {b+1+l + g),
обозначенных на карте жирным пунктиром. Их выбор определяет
контур (Ь + с + d + g), а этот в свою очередь контур
(а + b + d -f- g). Последний нулевой квадратик + 6 + c + d +
может быть заключен либо в контур (а + b + с + d), либо в кон-
тур (а + с + d+ g), либо (л + b +~с + g). Эти контуры изображены
штрих-пунктиром в правой части карты. Таким образом, имеется
три варианта выражения в форме произведения сумм:
v=(a~+~b + c +1){а + F+7+ d)(F+l + d + g) X
X(b + c + d + g)(b + c + d + ^(a+l+d + g)(a + b+~c~+d) =
=(a+T+c + d)(a + b+l+lt)(b+l + d + g)^^
X(b + c + d+li)(a+F+d+'g)(a+mc + d + g) =
= (a +~b + с + d)(a + T + ~c~+ ~d)(b+7+ d + g)(b +~c+ d + g) X
X{b + c + 7+g)(a + b + d+~g)(a+b+l + g).
На этом мы заканчиваем рассмотрение комбинационных функ-
ций и переходим к последователыностным (многотактным) функциям.
2-5. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ФУНКЦИИ
Комбинационные функции, описанные в предыдущих парагра-
фах книги, выполняют такие задачи автоматики, условия которых
выражаются логическими зависимостями, связывающими выходные
переменные величины с мгновенными комбинациями входных пере-
менных. Однако существуют задачи, которые нельзя выразить
таким видом функций. Это такие задачи, когда одной и той же
комбинации значений входных переменных должны соответствовать
разные значения выходных переменных в зависимости от того,
какие были предшествующие комбинации значений входных пере-
менных, т. е. от их последовательности.
Покажем это на схеме управления лифтом.
3* 35
В предыдущем параграфе было показано, что функция, зна-
чение которой равно 1, в случае, когда лифт должен идти вверх,
имеет вид
где а = ах + #2 + #з — переменная, которая равна 1 при нажатии
любой из кнопок „вверх";
]х — переменная, которая равна 1 только тогда, когда движение
вверх разрешено, т. е. закрыты все двери (с=1), лифт
не находится на верхнем этаже (d2 — 0), двигатель не пере-
гружен (g = 0) и лифт не движется вниз (и2 = 0), т. е.
h = cd2gxv2.
Предположим, что /i = l, тогда, для того чтобы движение лифта
началось (i>i = l), нужно, чтобы а=1, т. е. была нажата одн^
из кнопок а,\> а2, а3. Тогда, если после нажатия кнопку отпустить,
лифт остановится. Но по условию он не должен останавливаться
при отпускании кнопок, пока не достигнет верхнего этажа, т. е.
пока /i не станет равным 0. Следовательно, мы требуем, чтобы
Vf=\ и при а=0, если перед этим а было равно 1 (пришел сигнал
«вверх»). Если было а—0 (сигнал «вверх» не приходил), то при той
же комбинации а = 0, y'i = l, V\ остается равным 0 (лифт стоит).
Таким образом, значение функции определяется последователь-
ностью комбинаций входных переменных. При этом различные со-
стояния функции различаются переходами из одного состояния
в другое, сопровождающимися или подготавливающими соответ-
ствующие изменения выходных переменных, которые могут в раз-
личных состояниях иметь одинаковые, >и разные значения [Л. 7 и 9].
Приведем простейший пример составления таблицы состояний
последовательностной функции, где каждому состоянию соответ-
ствует свое значение выходной переменной.
а) Таблица состояний
Последовательностную функцию можно описать (При помощи так
называемой таблицы состояний, в которой фиксируются изменения
функции при любом изменении входных переменных или при изме-
нении порядка их -появления. В связи с тем, что в Общем случае
не все изменения функции проявляются в изменении значений ее
выходных переменных, выходные переменные не всегда «можно ис-
пользовать для полного определения функции. Поэтому отдельные
состояния отличаются друг от друга либо значением выходных пе-
ременных, либо переходами в .последующие состояния, которые под-
готавливают эти изменения выходных переменных, либо и тем и
другим вместе.
а, /,
5
0,0
0,1
1,1
1,0
vt
1
1
1
2
1
0
2
1
2
2
1
1
36
В примере с лифтом возможны два состояния S: лифт движется
(ai = l) и лифт стоит (v = 0). Обозначим эти состояния цифрами, на-
пример 2 и 1. В левом столбце таблицы поставим значения 5
исходных состояний функции, а в соответствующих строчках —jio-
следующие -состояния функции, в которые она должна перейти,
при значении комбинаций входных переменных, проставленных
в верхней строке таблицы и при данном исходном состоянии
функции.
Таким образом, каждому квадратику средней части таблицы
соответствует одна комбинация 'входных переменных и исходного
состояния функции. Так,- например, первому квадратику слева
в первой строчке соответствует исходное состояние 1 и комбинация
входных переменных 0,0. При этом состояние функции не должно
изменяться, поэтому последующее состояние функции, записанное
в этом квадратике, будет равно исходному, т. е. 1. То же самое
последующее состояние будет в квадратиках первой строчки при
комбинациях 0,1 и 1,0, потому что по условиям работы лифта вы-
ходная переменная и, следовательно, состояние функции при этих
комбинациях не должны меняться. В квадратике с комбинацией 1,1
этой же строчки записано состояние 2, так как по условиям рабо-
ты лифт должен двигаться вверх, т. е. v\ должно стать равным 1.
Таким образом, из этого квадратика функция переходит в другую
строчку в квадратик с той же комбинацией входных переменных
и остается в ней (так как в нем стоит цифра 2) до тех пор, пока
не изменится комбинация ьходных переменных. Если комбинация
еходных переменных изменится на 0,1 (т. е. кнопка будет отпуще-
на), то состояние функции не изменится, так как в новом квадра-
тике стоит опять цифра 2 (f лифт будет продолжать подъем).
И только если функция перейдет в оставшиеся квадратики этой
строчки 0,0 или 1,0, то ее состояние вновь изменится на 1, при ко-
тором лифт стоит, т. е. ui=0.
Таблица состояний, которую мы получили, имеет во всех
квадратиках номера последующих состояний и полностью опреде"-
ляет последовательностную функцию. Любой последовательности
комбинаций значений входных переменных соответствует последо-
вательность состояний и значений выходной переменной. Изменению
входных переменных соответствует переход в той же строчке, если
не изменяется номер состояния. При изменении номера состояния
происходит переход в другую строчку, но в том же столбце.
б) Промежуточные переменные
В нашем примере каждому состоянию последовательностной
функции соответствует свое значение выходной переменной, так как
пример является достаточно простым. В общем случае состояние
функции не всегда соответствует определенным значениям выход-
ной переменной, и в таких случаях приходится вводить промежу-
точные переменные, комбинации значений которых совместно
с входными переменными определяют значения выходных перемен-
ных. Для общности изложения введем и в нашем очень простом
примере промежуточную переменную р,' определяющую состояние
функции. Тогда одному состоянию поставим в соответствие pi = l,
а второму состоянию /?i=0, что в нашем случае даст V\=p\.
37
в) Промежуточная функция
Таблица состояний показывает, при каких исходных состояниях
и каких комбинациях входных переменных функция переходит
в другие состояния, а при каких остается в том же состоянии.
Если состояния заменить значениями промежуточной переменной,
то по таблице состояний можно постро-
■ ~ 1 ить карту функции, которую назовем
, , промежуточной функцией Р. Она пока-
«// зана на рис. 2-35.
В нашей карте первая строчка со-
ответствует исходному состоянию \ г. е.
Pi=0, а вторая строчка состоянию 2, т. е.
Pi — \. В квадратиках карты, соответст-
вующих квадратикам таблицы состоя-
Р ний, вместо цифры 1 (состояние 1)
должен стоять 0, а вместо цифры 2 (со-
Рис. '2-35. стояние 2) должна стоять 1. Разумеется,
что столбцы таблицы и карты располо-
жены в той же последовательности.
Карта позволяет найти значения промежуточной функции Р\.
Pi = a/i + Pi/i (по жирным контурам); или Pi=(a+Pi)/i (по пунк-
тирным контурам).
щ
\
01
1
JJ
1
1°
г) Структурная схема последовательностной функции
Последующие значения промежуточной переменной равны
исходным значениям промежуточной функции. Другими словами,
значение промежуточной переменной в последующий момент вре-
мени равно значению промежуточной функции в данный момент
времени. Это можно записать так:
Я (*) = />! 0 + 4
Здесь т обозначает запаздывание, a t — время.
С помощью введения промежуточной функции и промежуточ-
ной переменной последовательностная функция переходит в комби-
национную, которая содержит обратную связь и запаздывание.
В нашем примере это функция Pi с входными переменными a\j\
и р\ и выходными переменными V\ и Pi, которые изменяются
с запаздыванием т после изменения входных переменных. Для та-
кой функции можно построить структурную схему с обратной
связью (рис. 2-36).
Для более общего случая, при котором выходная переменная
не всегда равна промежуточной переменной, структурная схема
изображена на рис. 2-37.
Во многих случаях технического осуществления последова-
тельностных функций запаздывание возникает автоматически, так
как оно свойственно большинству устройств, реализующих логиче-
ские функции. Но в некоторых устройствах запаздывание недоста-
точно (например, в электронных устройствах), и тогда его необхо-
димо вводить. Специальные устройства для получения запаздыва-
ния будем называть устройствами задержки. Собственное запазды-
вание логических элементов создает задержку между входом и
38
Выходом функции, а устройства задержки обычно помещают в цепь
обратной связи, что позволяет получать выход либо с задержкой,
либо без нее, как показано на рис. 2-38.
Таким образом, последовательностную функцию можно харак-
теризовать наличием обратной связи 'между выходами и входами
Рис. 2-36. Структурная Рис. 2-37. Структурная
схема последовательно- схема общей последова-
стной функции. тельностной функции.
логической функции и присутствием запаздывания в цепях обратной
связи. Это запаздывание может быть очень мало, но необходимо
для сохранения сигнала выхода в течение некоторого времени
Рис. 2-38.^Структурная схема общей после-
довательностной^функции с задержкой в
цепи обратной связи.
после изменения сигнала входа. Другими словами, запаздывание
необходимо для «запоминания» информации о предыдущих ком-
бинациях значений входных переменных. Эта информация сохра-
няется в виде значения промежуточной переменной в течение вре-
мени запаздывания.
д) Элементарные последовательностные функции
Последовательностную функцию с одной промежуточной пере-
менной и одной обратной связью можно назвать элементарной по-
следовательностной функцией. Часто ее называют функцией памяти.
Полученная выше функция Pi= (a + Pi)ji является одним из приме-
ров такой функции. В качестве более общих примеров элементар-
ных последовательностных функций следует остановиться на двух
группах функций, являющихся наиболее распространенными.
Первая группа состоит из функций с преимущественным дей-
ствием выключающего сигнала Ь перед включающим сигналом а:
P = (a + p)b; Р = (а + р)Ь;
р = (а + р)Ь и р = {а + р\Ь.
Эти функции можно получить из приведенной выше карты
(рис. 2-35), переставляя столбцы в. таблице состояний (при замене
/1 ка Ь).
39
Вторая группа состоит из функций с преимущественным дей-
ствием включающего сигнала:
p = a + pb,
р = # + рЬ и
Р =
Р
■■ а + Ьр\
= а + рЬ.
7П
ID
7
г—
I о
1
0 I
)
1
7
I
9
Рис. 2-39.
Функция в рассматриваемом нами случае (управление лифтом)
является примером первой группы, т. е. в ней преобладающее
влияние имеет отключающий сигнал ]\. Это соответствует условиям
работы лифта при движении вверх. Ка-
• £ 1 бина остановится, если, например, лифт
, -— ,2 дошел до верхнего этажа, и повторное
нажатие кнопки а не приведет к движе-
нию вверх. То же самое будет, если
лифт остановится из-за того, что откры-
лась дверь кабины. Пока /i = 0, лифт не
начнет двигаться.
Продолжим составление функции
управления лифтом для его спуска.
Условия спуска лифта, как мы уже го-
ворили, аналогичны условиям его подъ-
ема, если заменить сигналы от кнопок а
сигналами от кнопок Ь, которых тоже три (на двух этажах и в лиф-
те). Нажатие любой из кнопок должно приводить к движению лиф-
та вниз, .поэтому составляем функцию ИЛИ:
Ь = Ьг + Ьг + b3.
Движение лифта вниз возможно (так же как и вверх), только
если все двери закрыты (с=1), двигатель не перегружен (g=0),
датчик положения не выдает сигнал, соответствующий этажу на-
значения (di = 0), и лифт в данный момент не двигается в проти-
воположную сторону (в данном случае вверх), т. е. t;i = 0. Эти
условия записываются в виде функции «И», как и при движении
вверх:
h = cdgvv
Построим таблицу состояний этой функции. Пусть движению
вниз соответствует состояние 3. Тогда из условий работы получим:
в, h
67
0 0
01
1 1
1 0
1
3
1
1
1
3
СО СО
1
1
0
1
Карту функции получим, выбрав v2=P2 и заменив в соответствии
с этим состояние 1 значением промежуточной переменной рг=0,
а состояние 3 — значением рг=1 (рис. 2-39). Алгебраическое выра-
жение этой функции, записанное для нулевых контуров, показан-
ных на карте, аналогично выражению функции Р\.
Р*={Ь + pt)jx%
40
е) Взаимнозависимые последовательностные функции
Таким образом, .мы получили две последовательные функции
Pi и Р2. Однако эти функции зависят друг от друга, так как
в переменную /2 входит vi, которое является функцией pi и, на-
оборот, ]\ зависит'от £>2, которое является функцией р2.
Поэтому при совместном действии эти функции представляют
собой одну последовательностную функцию, которая определяется
комбинациями значений переменных pi и р2 и может иметь другие
свойства, чем функции Р\ и Р2 в отдельности.
Проверим, отвечает ли общая функция Р\Р2.всем требованиям
к работе лифта и не возникают ли недопустимые положения. Для
о L
ч
01
0_0
oi
01
01
1 0
1 0
0_0-
01
1 0
1 1
0 1
0 1
0 1
01
01
0 0
0 0
0 0
00
0 0
0 0
0 0
0 0
01
01
01
01
01
01
01
01
0 0
0 0
0 0
00
0 0
0 0
0 0
0 0
0 0
о о
0 0
0 0
0 0
00
0 0
0 0
0 0
00
0 0
00
11
11
11
11
11
11
11
11
0 0
00
0 0
0 0
Рис. 2-?0.
этого составим карту общей функции. Алгебраические выражения
этой функции получим, подставив в Pi и Р2 значения ]\ и /V
h=cdlgv2, J2=cd\gv\. Тогда
Pi={a + Pi)cd2~gp2
и
Рш = (Ь +рш)с!1~Цр1ш
Для упрощения введем новые переменные lt и /2, равные
h = cd2g и l2 = cdx~g,
и получим
Pi = (a + PifpJi
и
р2 = (6 + р2) pj2.
Карта общей функции составляется по этим выражениям сле-
дующим образом: соответственно двум промежуточным перемен-
ным pi и р2 карта имеет четыре строки, а соответственно входным
переменным а, Ь, /ь 1%—16 столбцов (рис. 2-40).
41
ж) Устойчивые и неустойчивые комбинации и колебания
Полученная карта позволяет проверить все переходы между
состояниями. Те квадратики, у которых комбинация промежуточных
переменных равна комбинации значений функции Pi, Р2, соответ-
ствуют устойчивым комбинациям, так как они показывают, что
последующее состояние равно исходному (т. е. оно не будет изме-
няться без изменения входных переменных). На карте эти квадра-
тики подчеркнуты. Все остальные комбинации переменных неустой-
чивы, так как в них последующие комбинации не равны исходным
(следовательно, состояние изменится без изменения входных пере-
менных). Неустойчивые комбинации переходят либо в устойчивые,
либо опять в неустойчивые. Примером первого является переход
из неустойчивой комбинации pip2I2/iab в устойчивую комбинацию
piP2hl\ab благодаря изменению комбинации значений промежуточ-
ной функции, выражающейся в изменении промежуточных пере-
менных.
Переход неустойчивой комбинации в неустойчивую вызовет
дальнейший переход в новую комбинацию. Эти переходы будут
продолжаться либо до устойчивой комбинации, либо до повторе-
ния цикла из неустойчивых комбинаций. Такой цикл может вызвать
периодические изменения выходной функции, так как она связана
с промежуточными переменными, которые в этом случае сами изме-
няются периодически.
Примером постепенного перехода в несколько неустойчивых
комбинаций с последующим переходом в устойчивую комбинацию
может служить переход из комбинации j?ip2/2/ia5 в комбинацию
P\p2hUdb при изменении /2, а затем при изменении р2 переход
в комбинацию pip2Z2/ia& и, наконец, при изменении pi переход
в устойчивую комбинацию p^hhdb.
Примером колебаний или циклических изменений функции
является переход между состояниями р\р2 и p2pi при комбинации
входных переменных l2l\ab.
В нашем случае (управление лифтом) такие колебания недо-
пустимы, и поэтому нужно либо сделать переход в эти состояния
невозможным, либо изменить функцию Ри Р2. Если проверить все
переходы и комбинации, которые имеются в карте, то можно убе-
диться, что все они соответствуют и удовлетворяют условиям рабо-
ты лифта, кроме комбинации pxfohhab. Эта комбинация не только
вызывает колебания, но она недопустима еще и потому, что ее
квадратик содержит значение функции Рь Р2=1,1, которое проти-
воречит условиям работы лифта, так как лифт не может одновре-
менно подниматься и опускаться. Если можно обеспечить, чтобы
комбинация входных сигналов Ь=а=\, которая приводит к этому
состоянию, никогда не возникала, тогда функцию можно не изме-
нять. В более простом случае с помощью механической блокировки
можно сделать так, чтобы нажать две кнопки одновременно было
невозможно. Если же устранить возможность одновременного по-
явления двух сигналов нельзя, то необходимо изменить комбинацию
значений в этом квадратике. Для этого есть три возможности:
Pi, Р2=0,0 или 0,1 или 1,0. Это соответствует переходу лифта в не-
рабочее состояние или его движению вниз или вверх.
Выберем первый вариант и рассмотрим, какое при этом долж-
но быть алгебраическое выражение функции. Для этого, как всегда,
42
составим контуры, заполнив карты отдельно для функций Pi и Р2.
Из карты на рис. 2-41, изображающей функцию Рь для нулевых
контуров получим:
Pi=hMa + Р1){ГЛ + Ь + рх\
При помощи дистрибутивного закона упростим выражение Pt:
Из этих выражений видно, что Pi = 0 при /i = 0 или /?2 = 0, т. е. па
карте можно было бы не изображать те части, где функция имеет
сплошные нулевые значения в строчках или столбцах, составляю-
-.1
0
0
о)
1
1
1
"Т
"~
1
IF
0
"7.
i
V
0
0
ii
0
0
0
0
0
0
_д__
м
0
3
0
ч.
0
0
»!
0
0
0
V
0
0
0
0
\о
0
0
i
1)
0
0
0
г
1
1
1
1
1
1
1
1
j
0
0
0
Pi
Рис. 2-41.
тих половину карты. Эти части карты вносят в выражение функ-
ции одночленные сомножители (в нашем случае это переменные
Карта функции Р2, построенная таким образом, имеет вид,
показанный на рис. 2-42. Для единичных контуров получим:
Pll2(P2 + ab + l1b)\
для нулевых контуров
Р2 = М(/>2 + Ь)(р2 +Тг +
Из этих выражений при помощи дистрибутивного закона получим:
Р2 = Pih [р% + Ь (а +
Это выражение, так же как и выражение для Pi, довольно сложно,
но его можно упростить, только изменяя самую функцию. По-
смотрим, можно ли это сделать. Из карты видно, что единица
в квадратике р\P2hl\&Ь_ усложняет функцию Р2, так как она вносит
в ее выражение член l\b. Условия работы лифта позволяют заме-
нить нулем эту единицу, так как это значит, что при одновремен-
43
Г2
0
ID
7
1
1
\ 0
ч.
0
(•
7
1
, ;
1
1
•7
1
5
Рис. 2-42.
1
Ь1ц
0
ш
_о__
;
7
" 0
ш
J0
1'
1
7
7
1
0
Рис. 2-43.
/
1 0
V
/
си
-(Li
7
N
0]
;
7
;
7
7
;
Рис. 2-44.
ном нажатии обеих кнопок лифт не будет двигаться. Карта будет
иметь вид, как на рис. 2-43.
Алгебраическое выражение функции для этой карты по еди-
ничным контурам имеет вид
Я2 = РМРж+'аЬ)
и по нулевым контурам
P2 = PiU(Pi + b)(p2 + a).
Аналогично для Plt заменив единицу в квадратике рх~р2121фа
нулем, получим карту, показанную на рис. 2-44. Тогда по единич-
ным контурам
Pi = P*h(Pi + ab),
44
а по нулевым
/>2 = М(А + л)(>1 +1Л
Дальнейшее упрощение функции невозможно без нарушения задан-
ных условий работы лифта. Окончательный выбор наилучшей фор-
мы алгебраического выражения можно сделать лишь с учетом
свойств конкретных логических элементов, на которых будет реали-
зоваться данная функция.
2-6. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНаСТНОЙ ФУНКЦИИ
Способ постепенного решения, который был применен выше,
может быть удобен в очень редких случаях. Он был использован
в методических целях, чтобы постепенно познакомить читателя
с элементарными логическими функциями, с элементарными после-
довательностными функциями и способами их изображения в таб-
лицах, картах и алгебраических выражениях. Для этого общая
логическая функция была разбита на более простые части, которые
постепенно усложнялись. Несмотря на то, что на (практике довольно
часто встречается необходимость добавить или расширить круг ло-
гических функций, в общем случае выгоднее подходить к решению
вопроса в целом, определяя последовательностную функцию сразу
со всеми входами и выходами.
Покажем на том же примере общий подход к синтезу схем.
а) Формулировка условий работы
Общая последовательностная функция имеет:
Входные переменные
# = ^i + а2 + аг — сигналы кнопок, включающих движение вверх;
Ь — bx + Ь2 + — то же» Для движения вниз;
dx — сигнал датчика положения кабины внизу;
d2 — то же вверху;
c=cxc2g — сигнал, разрешающий движение, когда обе двери
закрыты (Cj = l, с2 = \) и мотор не перегружен
(£ = О)-
Выходные переменные:
vx — движение вверх;
v2 — движение вниз.
б) Таблица состояний
Таблица состояний для этого простого примера будет опять
содержать состояния, определяющиеся только различными комби-
нациями выходных переменных.
Таблица состояний для пяти входных переменных должна
иметь 32 столбца (25 = 32 комбинации) и два столбца для выход-
ных переменных, как видно из рис. 2-45.
При составлении таблицы учитываем все заданные условия
(читателю рекомендуется составлять таблицу в процессе чтения).
1) Назовем нерабочее состояние лифта состоянием 1 (как и
раньше). Ему соответствует первая строчка таблицы. Тогда вся ле-
45
вая часть таблицы, где с=0, т. е. когда движение лифта не разре-
шено, будет заполнена единицами. Правая половина таблицы
представляет собой область разрешенного движения (с=1).
2) Движение вверх назовем состоянием 2. Ему соответствует
вторая строчка таблицы. Из условий работы следует, что при
di=0 d2—\, т. е. когда лифт поднялся до верхнего этажа, он дол-
жен остановиться, т. е. перейти в состояние 1. Поэтому во второй
строчке в столбцах d\d2 также будут единицы.
3) Движение вниз назовем состоянием 3. Ему соответствует
третья строчка таблицы. Из условий работы следует, что при d{=\
fl?2=0, т. е. когда лифт спустился до нижнего этажа, он должен
остановиться, т. е. перейти в состояние 1. Поэтому в третьей строч-
ке в столбцах d\d2 также будут единицы.
S
1 а '
' а ■
' а '
1 а 1
г~сП
1 а 1
' a 1
' a '
vi
vz
1
1111
1111
/ 111
1111
1713
1211
31 2 1
0
0
2
1111
1111
1111
1111
1111
2222
2222
1
0
3
1111
1111
1111
1111
3 3 33
<"Ч» ^ч, <\//4,
1111
3333
0
1
Рис. 2-45.
4) Комбинация d\ = d2=\ неосуществима, так как лифт не мо-
жет одновременно находиться внизу и наверху. Поэтому в той
части таблицы, которая соответствует d[d2, не надо записывать ни-
каких состояний. Запишем в эти столбцы символ ^. Вообще говоря,
туда можно было бы записать любое состояние. Так, например,
если учитывать возможность появления ложных сигналов, можно
было бы предписать остановку лифта, соответствующую цифре 1.
Однако если этого не требуется, то выгоднее записать ~, с тем
чтобы его было можно заменить впоследствии значением, удобным
для упрощения функции.
5) Среди различных существующих возможностей выберем
такой режим работы лифта, чтобы после нажатия какой-либо
из кнопок последующие сигналы от любых кнопок не влияли на
работу лифта, пока движение, вызванное нажатием первой кнопки,
не окончится. Если, например при движении лифта вверх нажать
кнопку «вниз», то лифт будет продолжать подниматься. Этому
условию соответствует состояние 2 во всей оставшейся части
второй строчки и состояние 3 во всей оставшейся части третьей
строчки.
6) Первая строчка в правой половине таблицы содержит пере-
ходы из нерабочего состояния в состояние движения. Начнем с ле-
вой стороны. Первые четыре комбинации соответствуют верхнему
положению лифта (^2=1, di=0). Поэтому при первых трех комби-
нациях лифт продолжает стоять (в таблице — единицы), и только
при четвертой (при 6 = 1) он перейдет в состояние 3 (движение
вниз). Аналогично этому комбинации 9-я, 11-я и 12-я содержат 1,
46
а 10-я комбинация 2, так как при а=\ кабина должна подни-
маться.
Среди последних четырех комбинаций 1 будет во второй и чет-
вертой, что соответствует случаю остановки лифта между этажами,
когда нажаты обе кнопки или не нажата ни одна из них. Если
в том же положении лифта нажата только одна из кнопок,
то лифт должен перейти на подъем или спуск, поэтому при первой
и третьей комбинациях стоят 3 и 2 соответственно.
в) Выбор промежуточных переменных.
Карта соответствий
Чтобы можно было построить карту промежуточных функций,
нужно каждому состоянию поставить в соответствие комбинацию
промежуточных переменных.
Наша промежуточная функция имеет три состояния. Для ее
осуществления необходимо ввести по меньшей мере две промежу-
точные переменные, так как минимальное количество промежуточ-
ных переменных рМин определяется выражением
2^мин ^ g ^ 2^мин *
р
(из рмин переменных можно получить 2 мип разных комбинаций
и соответствующих им S состояний). В нашем примере 5=3, поэто-
2
_2
Рис. 2-46. Структур-
ная схема последова-
тельностной функции
с двумя промежуточ-
ными переменными.
Рис. 2-47.
му Рмин=2. Структурная схема такой по-
следов.атель!ност1ной функции показана на
рис. 2-46.
Для наглядности изложения введем
карту соответствий между состояниями и
промежуточными неременными. Эта карта отличается от карты функ-
ций только тем, что *в клеточках ставится номер состояния, а роль
независимых переменных играют промежуточные переменные. Со-
стояния, которым таким способом поставлены в соответствие проме-
жуточные переменные, отличающиеся значением только одной пе-
ременной, будем называть соседними. Их можно найти таким же
способом, как «соседние» квадратики карты Кдрно.
Покажем (рис. 2-47), как выглядит карта соответствий для
нашего примера при произвольно выбранном соответствии. Оче-
видно, состояние 1 соответствует комбинации Pi=P2=l, состоя-
ние 2 — комбинации Pi = 0, Р2=1, а состояние 3 — комбина-
ции р1=р2=0.
47
Максимальное число промежуточных переменных, которое
имеет смысл вводить, определяется требованиями к переходам
между состояниями. Как видно из карты соответствий, переход
между соседними состояниями осуществляется с помощью измене-
ния только одной переменной. Однако не все состояния являются
соседними. Так, например, состояния 1 и 3 не соседние и переход
между ними происходит при изменении двух переменных.
Изменение состояния, которое происходит с одновременным
изменением нескольких переменных, повышает требования
к устройствам, осуществляющим эти функции. Условие правильной
работы в таких случаях состоит в том, что запаздывания всех
переменных, изменяющихся одновременно, должны быть одинако-
выми, независимо от того, какой переход совершается у различных
переменных — из единицы в нуль или из нуля в единицу. Если
времена перехода будут отличаться друг от друга, то в промежу-
ток времени между наименьшим запаздыванием и наибольшим мо-
гут возникнуть ложные комбинации переменных и функция сможет
перейти в недопустимые состояния.
Так называемые синхронные логические системы полностью
лишены этого недостатка, так как они реагируют на сигналы и
выдают их в определенные промежутки времени, синхронные для
всех элементов. '
В асинхронных системах запаздывание возникает у каждого
логического элемента индивидуально (как, например, у реле), по-
этому строго одинаковые запаздывания у них получить очень труд-
но или невозможно. Чтобы исключить ложную работу схем, состав-
ленных из асинхронных элементов, в несинхронизированной системе,
необходимо, чтобы различным состояниям схемы соответствовали
такие комбинации переменных, при которых разница между
задержками и случайные изменения величин задержек не влияли
бы на переходы между состояниями. Для этого достаточно, чтобы
тем состояниям, между которыми возможен переход, соответство-
вали соседние комбинации промежуточных переменных, у которых
при переходах меняется только одна переменная. Такой выбор соот-
ветствия состояний и комбинаций промежуточных переменных
иногда можно сделать с минимальным числом промежуточных
переменных Рмин. Однако это возможно лишь тогда, когда некото-
рые переходы между состояниями вообще не требуются.
В нашем примере нужны переходы между состояниями 1 и 2,
1 и 3, но не -нужен переход между состояниями 2 и 4. В этом мож-
но убедиться, просмотрев таблицу состояний, где во второй строчке
нет состояния 3, а в третьей строчке нет состояния 2. С этой точки
зрения предыдущая карта соответствий неудачна. Чтобы нужные
состояния были соседними, можно, например, составить карту так,
как показано на рис. 2-48.
Эта карта соответствий отвечает поставленным требованиям,
так как в ней все нужные переходы связаны с изменением только
одной промежуточной переменной в один такт.
Если число переходов из любого состояния получается боль-
шим, чем число промежуточных переменных, то для получения
переходов с помощью, изменения только одной промежуточной
переменной число промежуточных переменных необходимо увели-
чить по меньшей мере так, чтобы оно было равно числу нужных
переходов из каждого состояния. В общем случае, если нужно
48
обеспечить переход из одного любого состояния в другое любое
состояние, то число промежуточных переменных будет равно:
/?макс = 5 — 1,
так как при S состояниях из каждого состояния возможны S—1
переходов. Это число промежуточных переменных является макси-
мальным. Дальнейшее увеличение числа промежуточных перемен-
ных не имеет смысла, так как оно либо вызовет необходимость
изменения больше чем одной переменной при каких-то переходах,
либо лишние переменные вообще не будут использованы.
Рис. 2-48. Рис. 2-49.
При использовании максимального количества промежуточных
переменных рМакс каждому основному состоянию соответствует
уже не одна, а несколько комбинаций промежуточных переменных,
т. е. появляются несколько состояний. Например, если нужно обес-
печить соседний переход между любыми четырьмя основными со-
стояниями, то это можно сделать следующим образом: рмакс =
= 4—1=3, и карта соответствий будет иметь вид, показанный на
рис. 2-49.
Из карты видно, что каждому основному состоянию (обозна-
ченному одинаковыми .цифрами со штрихами и без них) соответ-
ствуют два квадратика, т. е. два состояния, отличающиеся комби-
нациями промежуточных переменных, распределенных таким обра-
зом, что из каждого состояния можно перейти в любое другое при
изменении только одной переменной. Однако при таком способе
составления переходов количество промежуточных переменных
р-астет пропорционально числу требуемых состояний, поэтому этот
способ неэкономичен.
Более экономичным является такой метод синтеза, при кото-
ром те переходы из одного состояния в другое, какие нельзя сде-
лать соседними, делаются не прямо, а с помощью промежуточных
переходов между состояниями, каждый из которых соседний. Для
таких переходов используются свободные квадратики в карте соот-
ретствий. Поэтому такие переходы можно осуществить только тогда,
когда из свободных квадратиков можно образовать цепь соседних
квадратиков и когда крайние квадратики этой цепи могут быть
соседними необходимым состояниям. Такие переходы осуществляют-
ся при одновременном изменении только одной переменной.
Постепенный переход отличается от прямого перехода тем, что
он длится дольше на такое количество интервалов запаздывания,
сколько промежуточных квадратиков понадобилось для образования
цепи промежуточных состояний. Под интервалом запаздывания
4-2528 49
здесь подразумевается запаздывание на один такт в синхронных
системах логических элементов.
Примером постепенного перехода из одного состояния в другое
мог бы служить рассмотренный выше случай управления лифтом,
если бы в нем был необходим переход из состояния 2 в состоя-
ние 3 и обратно при изменении всего одной переменной. Тогда
можно было бы пустой квадратик, соответствующий четвертой
неиспользованной комбинации переменных, ис-
» пользовать для про межуточного состояния 2 или 3.
Тогда мы получили 'бы, например, такую
карту, как показано на рис. 2-50. Это промежу-
точное состояние 2Г неустойчивое, так как пере-
ход через него происходит без изменения входных
переменных.
Когда свободных квадратиков для образова-
ния таких цепей нет, тогда можно увеличить чи-
сло промежуточных переменных и новые свобод-
ные комбинации использовать для образования
переходных цепей цромежуточных состояний.
В общем случае, если нужно обеспечить соседние переходы
введением промежуточных состояний между любыми из 5 основных
состояний, где
3_
1
2*
2_
Рис. 2-50.
2 > 5> 0,75-2
необходимо иметь р переменных, где
/? = 2/?мин — 1.
Например, для восьми основных состояний
р = 6 — 1 =5; /?Макс = 8 — 1=7; /?Мин=3.
Карта для р = 5 имеет вид, показанный на рис. 2-51.
Если S лежит в пределах
0,75-2
= 5>2
^мин 1
1
2
2"
2"'
5
6
8
8'
1'
2'
i'f
5'
6'
7
7'
4"
3
и
6"
б"'
7"
8"
3">
3"
З1
и*
-5"
5"'
8"'
50
Рир. 2-51.
То число р выбирается по формуле
/> = 2/?Мин —2,
Так, например, для 5 = 6 получим
/?мин = 3, /?=6 — 2 = 4,
Карта для р=4 показана на рис. 2-52.
Сравительные числа промежуточных переменных, характеризую-
щие различные способы переходов,
приведены в следующей таблице: i р i
5
^мин
Р
/*макс
2
1
1
1
4
2
2
3
8
3
5
7
16
4
7
15
32
5
9
31
1
2
5
5'
1'
2'
6
6'
3
3'
5"
6"
а
4'
5"'
6"
Рис. 2-52.
Нужно отметить, что на практи-
ке встречаются различные комбина-
ции переходов, позволяющие умень-
шить число промежуточных перемен-
ных по сравнению со значениями р
ИЛИ рмакс-
С другой стороны, уменьшение числа промежуточных перемен-
ных и приближение его к нижнему пределу может усложнить ком-
бинационную часть функции, поэтому не всегда выгодно выбирать
минимальное число промежуточных переменных.
Очень часто выходные переменные можно и следует использо-
вать в качестве промежуточных переменных, и поэтому обычно
нецелесообразно выбирать число промежуточных переменных мень-
ше, чем число выходных переменных, особенно в тех случаях, где
запаздывание получается по природе работы элементов. К сожа-
лению, авторам неизвестен ни один метод однозначного выбора
промежуточных переменных, позволяющий получить сразу опти-
мальный результат. Обычно при синтезе функций необходимо срав-
нить несколько вариантов. С этой точки зрения карта соответствий
является очень полезной, так как дает хорошее представление
о всех соотношениях между состояниями.
г) Соответствие состояний комбинациям промежуточных
переменных
После выбора числа промежуточных переменных можно при-
ступить к выбору комбинаций их значений, которые дол1жны соот-
ветствовать отдельным состояниям последовательностной функции.
Очевидно, что каждому состоянию можно поставить в соответ-
ствие различные комбинации значений промежуточных переменных
и получить таким образом разные карты соответствий.
4*
51
Количество таких карт соответствий возрастает, необычайно
быстро с ростом числа промежуточных переменных. Так, для двух
переменных их 2-3-4 = 24, для трех 8! = 40 320, для четырех
161 = 20 922 789 880 000 и для р переменных их (2*>)! Наша задача
заключается в том, чтобы найти такие соответствия, при которых
комбинационная часть функции получается наиболее простой, т. е.
такой, которую можно осуществить наименьшим количеством эле-
ментарных функций и, таким образом, наименьшим количеством
элементов.
Очевидно, невозможно перепробовать все варианты соответ-
ствий, особенно для р>3. К сожалению, других методов решения
этой задачи при /?>3 пока не существует. Поэтому можно привести
только несколько правил, которые позволяют исключить заведомо
неподходящие варианты и существенно сократить количество попы-
ток поисков хорошего варианта.
Упрощение комбинационной части
функции выбором соседних состояний
Нам уже известно, что комбинационные функции тем проще,
чем больше в их карте непрерывные площади, занимаемые одним
значением функции (нулем или единицей). Чтобы увеличить эти
площади, нужно выбирать соседними те. состояния, из которых
возможен переход в одно и то же последующее состояние при
одинаковых значениях входных переменных. При этом для нагляд-
ности удобно составить так называемую таблицу переходов, из ко-
торой видно, из каких исходных состояний в какие последующие
состояния переходит функция при одинаковых значениях входных
переменных [Л. 8]. Эту таблицу легко построить, используя таблицу
состояний. Для этого против каждого последующего состояния 5
запишем все номера исходных состояний s, т. е. номера строчек,
в которых находится это последующее состояние 5. При этом запи-
сываем попарно те строчки, в которых больше переходов при оди-
яний (рис. 2-45); при этом число переходов при одинаковых значе-
ниях входных переменных больше в первой и во второй, а также
в первой и третьей строках, чем во второй и третьей. Заполнение
второй и третьей строк проще, так как последующие состояния 2
и 3 встречаются только в двух строках каждое.
Теперь по этой таблице переходов нужно составить карту
соответствий так, чтобы пары состояний, стоящие в отдельных
строчках правого столбца таблицы переходов, сделать соседними.
Если при этом в одной строчке одно состояние находится в двух
парах, то из них достаточно образовать цепь соседних квадратиков.
Так, например, для приведенной таблицы переходов целесообразнее
наковых значениях входных пере-
менных.
Для нашего примера эта таб-
лица имеет вид (см. табл.).
2
3
1,2; 1,3
1,2
1,3
Первая строка этой таблицы
определяется следующим образом:
в состояние 1 функция переходит
из исходного состояния 1, 2 и 3,
так как единица находится во
всех трех строках таблицы состо-
52
всего из пар 1—2 и 1—3 образовать* цепь соседних состояний
2—1—3 или 3—1—2. При таком выборе выполняется оптимальное
условие и для второй и третьей строчек. Поэтому можно выбрать
вариант, показанный на рис. 2-53, и не следует выбирать вариант
(рис. 2-54), в котором состояния 1 и 3 не соседние.
Однако во многих случаях нельзя однозначно определить вы-
Т"1
2
1
2
3
3
1Г
Рис. 2-53.
Рис. 2-54,
Рис. 2-55.
бор соседних состояний, исходя только из правого столбца таблицы
переходов.
Так, например, для следующей таблицы переходов:
S
1
1,2; 1,3
2
1,2; 1,4
3
1
4
3,4
1
3
2
4
Рис. 2-56.
оптимальные соотношения для правого столбца можно выполнить
только частично, а именно картами, показанными на рис. 2-55
и 2-56.
В первой карте не полностью выполняется оптимум для первой
строчки (1,3), а во второй карте — для второй строчки (1,4).
В таких случачх надо выбирать такой вариант, при котором
как можно больше исходных состояний станут соседними своим
последующим состояниям (т. е. состояния в левом столбце жела-
тельно также сделать соседними состояниям в правом столбце таб-
лицы переходов).
Тогда при переходе между состояниями, выбранными таким
образом, будет меняться всего одна промежуточная переменная.
Из этого следует, что остальные промежуточные переменные не
изменяются и в картах их промежуточных функций в соответствую-
щих местах будут одинаковые значения функции, т. е. площади
с одинаковыми значениями функции будут больше, если количество
таких переходов сделать возможно большим.
Из приведенных правил вытекает, что для последнего примера
лучше выбрать второй вариант (рис. 2-56), так как в нем являют-
ся соседними и состояния 1—3 и 2—4, что отвечает и первому,
и второму правилам.
53
Иногда, однако, выбор оптимальных соотношений между сд*
стояниями на правой стороне таблицы переходов противоречит опти-
мальному выбору по обоим столбцам таблицы. Тогда обычно вы-
годнее выполнить оптимальные соотношения, определяющиеся пра-
вым столбцом таблицы переходов, так как они упрощают все про-
межуточные функции, а соотношения, определяющиеся обеими
столбцами, одной функцией меньше,
Упрощение комбинационной части
функции использованием выходных
переменных для промежуточных функций
Выбор соседних состояний по описанным выше правилам
существенно сокращает число возможных вариантов комбинацион-
ной части функции. Однако и при соблюдении этих правил остает-
1
2
3
с
с
Рг '
3
2
1
' 4 '
3
1
2
6
р21
2
1
3
1
3
2
С
Рг '
2
3
1
2
1
3
L
f)
Pz '
3
1
2
S
Рис. 2-57.
Рис. 2-58.
ся еще возможность циклических - перестановок комбинаций проме-
жуточных перменных. Так, в нашем примере управления лифтом
можно выбрать варианты соответствий, показанные на рис. 2-57,0,
б, в и а и 2-58,а, б, в и г, которые оптимальны с точки зрения
соотношения между состояниями.
Среди этих вариантов целесообразно остановиться на таком
соответствии между состояниями и промежуточными переменными,
при котором либо выходные переменные могут быть равны про-
межуточным переменным, либо промежуточная и выходная функ-
ции могут иметь общую составляющую, чтобы отличаться друг
от друга по возможности меньше.
Так в нашем примере лучше всего выбрать
А = 01» Рг = *>2 или Pt = v2t p2 = vv
т. е. карты, показанные на рис. 2-57,а или 2-58,а.
54
Для того чтобы найти сразу подходящие соответствия, обычно
начинают с построения карты соответствий не для промежуточных
переменных, а прямо для выходных переменных. Затем сравнивают
соотношения в этой карте с оптимальными соотношениями по
таблице переходов и, если потребуется, изменяют или добавляют
промежуточные переменные так, чтобы выполнить оптимальные
соотношения между переходами.
Так, для нашего примера управления лифтом при P\ = v\ и
p2=v2 получим карту, изображенную на рис. 2-59.
Можно убедиться, что здесь выполняются все возможные
оптимальные соотношения между переходами.
При окончательном выборе соответствий между комбинациями
промежуточных переменных и состояниями функции, реализуемой
на асинхронных логических элементах, без син-
хронизации системы надо учитывать также воз- • и2 '
можность возникновения ложных значений вы-
ходных сигналов, если при переходах меняются
две или больше пр ом ежу тачных переменных од-
новременно.
Однако кратковременные ложные комбинации
иногда допустимы, когда выходные • устройства
(усилители, исполнительные устройства) не успе-
вают на них реагировать.
В тех случаях, когда недопустимы даже
кратковременые неправильные значения проме-
жуточных или выходной функций, тогда выбор соответствий цроиз-
водится так, чтобы при всех переходах либо менялась только одна
промежуточная переменная, либо при изменении нескольких пере-
менных все их комбинации давали одинаковый выход.
3
2
Рис. 2-59.
д) Построение карты промежуточных функций
После того как выбраны соответствия между комбинациями
промежуточных переменных и отдельными состояниями, т. е. когда
построена карта соответствий, можно построить карту промежуточ-
ных функций. Для этого все номера последующих состояний таб-
лицы нужно заменить комбинациями промежуточных переменных
по карте соответствий. Затем каждую строчку таблицы состояний
надо переписать в строчку карты, у которой комбинация промежу-
точных переменных совпадает с номером исходного состояния по
карте соответствий.
Рассмотрим это на нашем примере управления лифтом. По
карте соответствий (рис. 2-59) состоянию 1 соответствует комбина-
ция vuv2=0fl\ состоянию 2 — комбинация v\fv2= 1,0 и состоянию 3 —
комбинация vi,v2=0,l. Входные переменные, расположенные в виде
столбцов, оставим в том же порядке, как и в таблице состояний,
а промежуточные переменные изобразим строчками, как показано
на рис. 2-60.
Сначала запишем все безразличные комбинации ^. Затем
начнем записывать те, состояния которых меньше, например, со-
стояния 2. В первой строчке карты, которая соответствует первой
строчке таблицы состояний, запишем комбинации V\V2=\fi в те
места, где в таблице состояний стоит 2. То же самое сделаем
Э последней строчке карты, которая соответствует второй строчке
55
таблицы. Во второй строчке карты, соответствующей третьей строч-
ке таблицы, эта комбинация не появляется, так как в ней нет со-
стояния 2.
Комбинацию 0,1 запишем в первую и вторую строчки карты
в те квадратики, которые соответствуют состоянию 3 в первой и
третьей строчке таблицы.
В остальных квадратиках имеется только состояние 1, чему
в карте соответствует комбинация 0,0. Третья строчка карты
*2
0
0
0
0
J-
0
0
г
0,0
0,1
0,0
1,0
Ofi
Ofi
0,1
0J3
w
0
0
0
0
~|-
0
0
о;
0,1
0,1
0,1
0
0
0,1
0,1
0,1
0,1
I
0
0
0
0
~|-
0
0
0
0
—i\fKi
w
w
1,0
w
w
%o
w
1,0
Рис. 2-60.
остается пустой, так как соответствующая ей комбинация проме-
жуточных переменных не используется.
Для получения алгебраических выражений промежуточных
функций удобнее пользоваться отдельными картами для каждой
из функций Vi и V2, как показано на рис. 2-61,а и б соответ-
ственно.
Рис. 2-51,
56
Карту для V\ получим, взяв левые значения функции из кар-
ты ViV2, а карту V2 — правые значения из той же карты. Разу-
меется, каждую из этих карт можно было получить прямо из таб-
лицы состояний, для первой карты записывая 0 в те квадратики,
где в таблице стоят состояния 1 и 3, которым соответствует
v! = 0, и записывая 1 в те квадратики, где в таблице стоит состоя-
ние 2, которому поставлено соответствие i>i = l. Для второй кар-
ты 0 соответствует состояниям 1 и 2, а 1 — состоянию 3.
Из этих карт получим:
Vt = v2cd2 (vt + ab)
и
У2 = vxcdx (v2 + ab).
Первые три сомножителя в этих выражениях соответствуют
контурам с нулями функции, как показано на картах пунктиром.
При этом пустые квадратики и квадратики, содержащие ^,
заключались в контуры как нули, чтобы образовать наибольшие
непрерывные площади. Оставшуюся площадь можно было выра-
зить как сумму произведений (соответствующие контуры показаны
сплошной линией).
Очевидно, что рассмотренный способ синтеза функций позво-
лил получить те же результаты, которые были получены в разд. 2-5
при постепенном методе синтеза (l\ = cd2 и l2—cd\, pi = Vi и p2=v2).
2-7. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОСТНОЙ ФУНКЦИИ,
СОДЕРЖАЩЕЙ СПЕЦИАЛЬНЫЕ ЗАДЕРЖКИ
До сих пор мы не обращали внимания на значения запаздыва-
ния при переходах между состояниями. Величина этого запаздыва-
ния определяет скорость изменения состояний последовательностной
функции. Она определяет минимальную продолжительность суще-
ствования входных переменных, которую устройства, реализующие
последовательностную функцию, способны отличить и на которую
они будут правильно реагировать. С этой точки зрения выгодно,
чтобы необходимое запаздывание было по возможности меньше.
Для промышленной автоматики часто допустимо иметь запаздыва-
ние порядка сотых долей секунды.
Однако бывают случаи, когда задачи 1автоматики требуют
введения более продолжительного запаздывания между изменением
входных и выходных сигналов. Например, при управлении маши-
ной, выполняющей циклические операции, бывает нужно запускать
и останавливать отдельные двигатели в заданной последователь-
ности и с заданной задержкой между операциями.
Если характер управляемого процесса такой, что он проте-
кает с известной скоростью и известными и допустимыми отклоне-
ниями от стандартного хода, то им можно управлять, выдавая
с момента запуска в заранее определенные интервалы времени и
в заранее определенной последовательности сигналы, которые
включают и выключают отдельные исполнительные устройства
(двигатели, электромагниты, клапаны и др.).
Такую последовательность управляющих сигналов можно опи-
сать последовательностной функцией, у которой выходные перемен-
ные меняются с заданными задержками. Устойчивые состояния
57
функции будут соответствовать исходному и окончательному Со-
стоянию цикла работы. В этом случае входная перменная являет-
ся запускающим сигналом цикла.
Особенность работы состоит в том, что последовательность
управляющих сигналов протекает независимо от действительного
хода управляемого процесса и правильность работы обеспечивается
только постоянством его параметров и постоянством задержек
устройства, выдающего управляющие сигналы соответственно
заданной последовательности. Покажем на примере особенности
лоследовательностной функции со специальными задержками при
переходах между состояниями. Для этого рассмотрим способ состав-
ления последовательностной функции управления намоточным стан-
ком для горячей проволоки. Этот станок служит для намотки
стальной проволоки, выходящей из прокатного стана в горячем
виде. Проволока имеет определенную длину, например 150—200 м.
Начало проволоки входит в барабан станка, который наматывает
проволоку, вращаясь со скоростью, соответствующей скорости дви-
жения подаваемой проволоки. После прохода конца проволоки
в барабан намотка окончена. Станок останавливается, барабан рас-
крывается и проволока сбрасывается на транспортер. После этого
барабан вновь закрывается и затем разгоняется. После оконча-
ния разгона барабан вновь готов к намотке следующего куска про-
волоки.
Работа станка образует цикл, который начинается проходом
переднего конца проволоки в барабан и заканчивается разгоном
барабана.
Для запуска используем сигнал фотоэлемента, который разме-
щается у входа в барабан и выдает сигнал, когда проволока нахо-
дится перед ним. Этот сигнал обозначим входной переменной а.
Когда проволока находится перед фотоэлементом, а=1.
Барабан вращается электрическим двигателем, который вклю-
чается сигналом z. При этом запуск двигателя происходит в два
этапа. Сначала двигатель включается через сопротивление в цепи
якоря, а после определенного интервала времени это сопротивление
замыкается накоротко контактором, управляемым сигналом у.
Торможение барабана после окончания намотки производится
электрически при помощи другого сопротивления, которое подклю-
чается к якорю двигателя контактором, управляемым сигналом V.
Барабан открывается отключением вспомогательного электрод-ги-
дравлического двигателя, который был предварительно включен
сигналом и.
Последовательностная функция в. этом примере должна иметь
четыре выходные переменные, соответствующие четырем сигналам
z, г/, v, иу и одну входную переменную а.
Построим таблицу состояний этой функции.
а) Таблица состояний, учитывающая специальные
задержки
Таблица состояний будет иметь два столбца соответственно
одной входной переменной а и четыре столбца для значений выход-
ных .переменных z, у, v, и.
Начнем с нерабочего состояния 1. Это состояние существует
только после включения энергии питания схемы управления. При
58
Название состояния
№
т
0 | ,
г
У
V
и
Нерабочее
1
2
0
'Ч,
*Ч/
0
Закрытие барабана
2
т2
3
'ч,
0
0
0
Запуск
3
4
*ч,
1
0
0
1
Вращение барабана
4
4
5
1
1
0
1
Намотка
5
CD
5
1
1
0
1
Выключение двигателя
6
7
'Ч,
0
'Ч,
0
1
Торможение
7
г7
8
'Ч,
0
'Ч,
1
1
Раскрытие барабана
8
Т8
2
0
'Чу
0
нем оба двигателя выключены (z—u=0). Переменные у и v могут
иметь любое значение, потому что включенное или отключенное
сопротивление пуска или торможения не влияют на нерабочее со-
стояние станка. Берем эти значения такими, чтобы выходная функ-
ция получилась наиболее простой. Для этого пока запишем в соот-
ветствующие квадратики символ ^, который обозначает, что пере-
менная может иметь значение либо 0, либо 1.
Состояние 1 неустойчиво и переходит в состояние 2. При этом
входная переменная а должна быть равна 0, так как в стоящий
станок проволока не должна подаваться. Это должно обеспечи-
ваться управлением подачи проволоки, которого мы здесь не будем
касаться. Поэтому в состоянии 1 а не может быть равным 1, и
в столбец а=\ можно записать ^, который позднее выберем таким,
чтобы промежуточная функция была возможно простой. Следова-
тельно, состояние 2 запишем в столбец а = 0.
Вторая строчка соответствует закрыванию барабана (и=\).
При этом барабан должен стоять (г=0), у и v должны быть рав-
ны нулю, так как в последующем состоянии 3 начинается пуск
двигателя барабана и оба контактора, управляемые сигналами у
и v, должны быть предварительно разомкнуты. Так :же как и в со-
стоянии 1, в состоянии 2 невозможно, чтобы а равнялось 1. По-
этому последующее состояние 3 запишем в столбце а = 0, а в столб
це а=\ запишем <-^. Переход из состояния 2 в состояние 3 должен
продолжаться в течение времени Т2, необходимого для закрытия
барабана. Это запишем в столбце, обозначенном Т.
Состояние 3 соответствует запуску двигателя, поэтому г—\
и y=v = 0. Сигнал и=1, т. е. барабан остается закрытым. Это со-
стояние длится время Г3, пока функция не перейдет в последующее
состояние 4. При этом а=0; а=1 опять невозможно, так как бара-
бан вращается пока еще с недостаточной для намотки скоростью.
59
Полная нужная скорость вращения барабана достигается
в последующем состоянии 4, при котором сопротивление пуска
замкнуто накоротко (у—\). При этом станок готов к намотке.
Поэтому состояние 4 не должно изменяться без изменения вход-
ной переменной а. Такое свойство характеризует устойчивое со-
стояние. Поэтому в столбце а = 0 последующее состояние равно
исходному состоянию 4. В дальнейшем устойчивые состояния будем
отмечать чертой снизу. Когда проволока попадает в барабан, а=\
и функция переходит в состояние 5. В этом состоянии выходные
переменные не изменяются, так как вращение барабана продол-
жается с той же скоростью. Тем не менее это новое состояние,
которое устойчиво, пока ai = l, потому что после окончания намот-
ки, которая длится, пока не кончится проволока, т. е. пока а
не станет равным нулю, функция должна перейти в новое состоя-
ние 6, соответствующее выключению двигателя, т. е. z=0, в то
время как в состоянии 4 при а—О функция приходила в состоя-
ние ^ При этом состояние у может быть любым, v = 0, и=\. После
отключения двигателя должно включиться тормозное сопротивле-
ние, т. е. 0=1. Этому соответствует состояние 7, в которое перей-
дет функция (при этом а—О). Появление сигнала а=\ невозможно,
так как намотка окончена, и до разгрузки барабана от намотанной
проволоки и последующего разгона станка до требуемой скорости
подача новой проволоки не должна осуществляться. Поэтому
в столбце а—\ опять запишем ^. Состояние 7 соответствует тор-
можению, при нем v=\. Двигатель остается отключенным (2=0),
у может быть любым, и=\. Торможение продолжается в тече-
ние Г7, после чего функция перейдет в состояние 8, если а = 0. Зна-
чение а=1 опять не может появиться, так как в неподвижный
барабан проволока не должна подаваться. Поэтому при а=\ опять
ставим ^.
При состоянии 8 (раскрытие барабана) 2=0, ы = 0, у и v могут
быть любыми. Состояние 8 длится в течение времени Т8, необхо-
димого для раскрытия барабана и сброса проволоки.
Следующей операцией является закрытие барабана. Это соот-
ветствует состоянию 2, поэтому для а=0 запишем последующее
состояние 2. Значение а=1 опять не может появиться.
б) Упрощение таблицы состояний
При построении таблицы состояний на основании заданных
условий работы управляющего устройства может случиться, что
некоторые состояния или их последовательности будут повторяться.
Это может произойти потому, что при построении таблицы состоя-
ний были введены состояния, которые на самом деле излишни и
которые, если их оставить в таблице, привели бы к усложнению
структуры управляющего устройства. Поэтому необходимо прове-
рить, содержит ли полученная таблица одинаковые состояния.
Для этого необходимо сравнить между собой все строчки таб-
лицы состояний. Если в ней есть строчки, которые не отличаются
друг от друга или отличаются лишь в неопределенных значениях
состояний и выходных переменных (^) или задержек, то можно
вместо таких строчек записать одну, которая содержит все опре-
деленные величины из всех сравниваемых строчек.
60
В нашем примере строчки 1 и 8 отличаются только значениями
запаздывания. Так как в строчке 1 можно допустить наличие
задержки (это значит, что после включения схемы в работу бара-
бан раскроется не моментально, а только после задержки), то мож-
но строчки 8 и 1 заменить одной общей с задержкой Г8.
Обозначим эту новую строчку номером 1, вычеркнем строчку 8
и запишем вместо состояния 8 в оставшихся строчках везде со-
стояние 1, которое теперь означает и нерабочее состояние, и раскры-
тие барабана. Таким образом, мы получим таблицу с семью со-
стояниями.
5
т
0
а
1
г
у
V
и
1
2
0
'Ч,
0
2
т2
3
'Ч,
0
0
0
1
3
4
1
0
0
1
4
4
5
1
1
0
1
5
6
5
1
1
0
1
6
7
'Х-
0
'Ч,
0
1
7
т,
1
'Ч/
0
'Ч,
1
1
Строчки- 4 и 5 этой таблицы имеют одинаковую комбинацию
выходных переменных, однако отличаются состояниями 4 и 6, по-
этому их нельзя заменить одной строчкой.
в) Выбор промежуточных переменных с учетом задержек
между состояниями
Необходимость в получении разных, независимо настраиваемых
задержек влияет на выбор промежуточных переменных. Так как
можно сделать, чтобы каждая промежуточная переменная позволя-
ла получить два перехода с разными задержками (от 0 до 1
с задержкой ть от 1 до 0 с задержкой to), то для четырех разных
задержек нашего примера надо иметь по меньшей мере две проме-
жуточные переменные.
При выборе соответствий между комбинациями значений про-
межуточных переменных р, имеющих одинаковое малое запаздыва-
ние, можно было использовать все комбинации промежуточных
переменных. В отличие от этого при выборе соответствий между
комбинациями промежуточных переменных п, которые должны
обладать специальными запаздываниями, обычно нельзя использо-
вать все комбинации переменных, так как прохождение всех состоя-
ний последовательностной функции связано с многократным изме-
нением (0 и 1) значений переменных я. И в общем случае эти пере-
ходы должны иметь независимые друг от друга величины' задер-
жек. Поэтому можно каждую переменную п использовать только
для двух из всех нужных переходов между состояниями. Из этого
следует, что число состояний t, имеющих переходы со специальными
61
задержками, связано с числом промежуточных переменных п выра-
жением
Подчеркнем, что блоки запаздывания должны обладать возмож-
ностью произвольной настройки задержек ti и to- В таком случае
число переменных п является минимальным. Если же запаздывания
ti и То не являются независимыми, то необходимое число перемеи-
4шх п возрастает до
n = t,
так как практически можно независимо регулировать только одно
из них.
В дальнейшем обозначим промежуточные переменные, связан-
ные со специальными задержками, буквами пи п2... и т. д.
V
\
if
\
1
\
\
6.
t
+ 7 _
+7 _
I
\
и -
t
1
1
3
t
Рис. 2-62.
В нашем примере переменные пх и п2 определяют четыре со-
стояния. Оставшиеся три состояния с безразличными временными
переходами достаточно определить двумя промежуточными пере-
менными, которые можно комбинировать по правилам, приведен-
ным в § 2-6. Они будут меняться с минимальным запаздыванием т,
присущим элементам.
Таким образом, мы получили минимальное число промежуточ-
ных переменных, равное четырем.
Посмотрим, можно ли применить выходные переменные в ка-
честве промежуточных переменных. Если использовать все выход-
ные переменные, то к ним приходится добавить еще одну проме-
жуточную переменную, которая отличала бы состояния 4 и 5, так
как эти состояния не отличаются значениями выходных перемен-
ных. Таким образом, число промежуточных переменных возрастает
до пяти.
Построим карту соответствия, показанную для этого случая
на рис. 2-62.
62
Из таблицы состояний видно, что состоянию 1 соответствует
комбинация выходных переменных z, у, j), и=0, ~, ~, 0. Будем
считать, что значение пятой промежуточной переменной пока не-
определенно, т. е. р= ~. Этой комбинации на карте будет соответ-
ствовать площадь zu и восемь квадратиков, обозначенных 1. Но-
мер состояния записываем, оставляя в каждом квадратике место,
так, чтобы можно было добавлять или изменять номера состояний.
Из этой же таблицы видно, что состоянию 2 соответствует ком-
бинация г, у, v, u=0t 0, 0, I,
что в карте дает площадь
z, у, v, и, обозначенную
цифрами 2.
Аналогичным путем оп-
ределим и площади осталь-
ных состояний. При этом
состояния 4 и 5 нужно по-
местить в столбце рнр, так
как они отличаются только
значением этой переменной.
Все остальные состоя-
ния от р не зависят.
Запишем теперь на .кар-
те те задержки, с которы-
ми должны происходить из-
менения переменных, опре-
деляющие переходы. Так,
при переходе из состояния
1 в состояние 2 должна
быть задержка Тх\ этому
переходу соответствует из-
менение переменной и от 0 к 1. Обозначим это стрелкой на границе
между и=0 и м=1 с указанием Т\.
Аналогично запишем Т2 и 73. Задержка Т7 возникает при пере-
ходе между состояниями 7 и 1 при изменении и от 1 к 0. Это запи-
шем стрелками, обратно направленными на той же границе между
и= 1 и и=0.
Остальные переходы не обозначаем и предполагаем, что они
длятся в течение времени т, как это показано на структурной схеме
на рис. 2-63.
Надо отметить, что иногда устройства задержки имеют время
обратного перехода, большее времени перехода остальных логиче-
ских элементов. В таких случаях необходимо учитывать эти
запаздывания при одновременных изменениях нескольких перемен-
ных или тогда, когда обратные изменения происходят медленнее,
чем позволяет управляемый процесс.
(Полученная карта содержит ло нескольку клеточек с одинако-
выми цифрами, т. е. несколько вариантов возможных соответствий
между переменными и состояниями. Теперь нужно попытаться
выбрать оптимальные варианты соответствий.
Для этого проследим ib карте соответствия последовательности
состояний при переходах, записанных в таблице состояний.
При этом из тех состояний, которые имеются в нескольких
квадратиках, соответствуя нескольким комбинациям, нужно выбрать
наиболее подходящие.
Рис 2-63. Структурная схема после-
довательностной функции управления
намоточным станком со специальны-
ми задержками и пятью промежуточ
ными переменными.
63
Рассмотрение можно начать с любого устойчивого состояния,
которое полностью определено, например с состояния 5. Из него
переходим в состояние 6, как показано стрелкой в карте соответ-
ствия. Из квадратиков с цифрой 6 выберем соседний, чтобы при
этом переходе изменялась лишь одна промежуточная переменная.
Из состояния 6 перейдем также в соседнее состояние 7, затем
имеем несколько возможностей для перехода в состояния 2 через
состояние 1. Кратчайшие из них имеют пять переходов, как пока-
зано на карте. Из состояния 2 перейдем в состояние 3 и оттуда
1—1—7
2 "
; -
<-
1
- 2
~ t
6 _
t
7 *~
~ .7
1
1
1
_ а
~t
1
3
Т
Рис, 2-64.
в состояние 4, которое тоже устойчивое. Переход между состоя-
ниями 4 и 5 является также переходом между соседними состоя-
ниями.
Переходы между состояниями 6—7—1—2 довольно сложные,
с тремя промежуточными состояниями.
В нашем случае, однако, это не страшно, так как переходы
между состояниями 7—1—2 содержат специальные задержки и
запаздывания, возникающие при переходе между промежуточными
состояниями, суммируются с задержками T^ и Ти что легко учесть
при их настройке.
Соответствие между переменной р и состояниями 4 и 5 мы
выбрали произвольно (можно было бы сделать и наоборот), при
этом получилось, что состояние 1 находится в клеточке, где все
промежуточные переменные, кроме р, равны нулю. Но у нас первое
состояние включает в себя и исходное состояние схемы, которое
проще всего осуществить при равенстве нулю всех промежуточных
переменных. Поэтому в нашей карте соответствий лучше изменить
везде р на р и наоборот. Тогда после перестановки столбцов по-
лучим карту соответствий, показанную на рис. 2-64, где в первом
состоянии все промежуточные переменные равны нулю.
Условимся в дальнейшем, чтобы не загромождать карту, запи-
сывать задержку только у одной границы переменных.
Попробуем еще уменьшить число промежуточных переменных.
Из предыдущей карты видно, что можно не использовать перемен-
ную v и все-таки все состояния можно поместить в карту, так как
для состояний 2, 6, 7 в этом случае останется четыре квадрати-
64
ка £, и. Состояние 1 от v совсем не зависит. Посмотрим для этого
случая карту соответствий (рис. 2-65).
Начнем с состояния 1 и последовательно запишем номера со-
стояний во все те квадратики, которые они могут занимать по
таблице состояний. Затем образуем последовательность состояний,
- 7.
;
- t
2,lf>
1
7
1
l
6
t -
J>7-
I
5_-
+ Ч
t
3
I
3
t
-Z
-У
-и
Рис. 2-65.
Рис. 2-66. Структурная схема по-
следовательностной функции со
специальными задержками и че-
тырьмя промежуточными перемен-
ными.
начиная с полностью опреде-
ленных состояний 4 и 5. При
этом вычеркнем те состояния,
которые не подходят в тех слу-
чаях, где имеется возможность выбора. Для перехода между со-
стояниями 6—7—1 имеются две возможности, как это показано дву-
мя последовательностями на карте соответствия.
Эти варианты отличаются последовательностью изменения пере-
менной у и р. В первом случае переход между состояниями 6—7
связан с изменением р, а изменение у входит в переход 7—1, во
втором — наоборот. Если изменение связано с большим запаздыва-
нием за счет запаздывания обратного перехода задержки Г3, то
в первом случае это запаздывание появится при переходе 6—7,
во втором — при переходе 7—1 и его можно включить .в требуемую
задержку Т7. В нашем примере предположим, что время обратного
перехода равно т. Структурная схема
будет иметь вид, как показано на
рис. 2-66.
г) Таблица переходов
Построим еще таблицу переходов,
чтобы проверить оптимальность выбора
соответствий между состояниями и ком-
бинациями переменных.
Сравнивая эту таблицу с получен-
ными картами соответствий, можно за-
ключить, что при применении четырех
или пяти промежуточных переменных
выполнимо максимально возможное количество оптимальных соот-
ношений, т. е. все оптимальные соотношения, за исключением пере-
хода 1—7.
S
1
7
2
1
3
2
4
3,4
5
4,5
6
5
7
6
5—2528
65
д) Карты промежуточных и выходных функций
Построим теперь карты промежуточных функций. Начнем
с карты пяти промежуточных переменных.
Выше было показано, что для этого нужно в квадратики кар-
ты, соответствующие исходным состояниям, записать значения про-
межуточных переменных, соответствующие последующим состоя-
ниям.
Карта будет иметь пять промежуточных переменных zyvup и
входную переменную а, как показано на рис. 2-67.
000/0
1001 0
0000 0
0111 1
011 GO
от 0
ооюо
01011
11010
11010
11011
11 011
ZYVUP
Рис. 2-67.
Рекомендуется расположить промежуточные переменные так
же, как в карте соответствия рис. 2-64. В таком случае квадратики,
изображающие исходные состояния, будут лежать в тех же местах,
где они обозначены в карте соответствия, но карта промежуточных
функций в нашем случае будет представлять собой удвоенную
карту соответствия — для а—\ и а—О. Тогда каждое исходное со-
стояние будет изображено двумя квадратиками соответственно
двум значениям входной переменной а. Пары квадратиков располо-
жены симметрично относительно границы переменной а.
В эти квадратики записываются последующие состояния в виде
соответствующих им комбинаций промежуточных переменных. Так,
.например, два квадратика zyvup соответствуют исходному состоя-
нию 4. В одном из них, который находится в половине карты, где
а = 0, запишем ту же комбинацию значений промежуточных функ-
ций ZYVUP= 11010, так как (по таблице состояний) при а=0 со-
стояние 4 переходит в то же состояние 4. Так же как в таблице
состояний, подчеркнем эту комбинацию, чтобы обозначить ее как
устойчивое состояние. Во второй квадратик, соответствующий исход-
ному состоянию 4 и находящийся в половине карты, где а=1,
запишем комбинацию значений промежуточных функций, соответ-
66
ствующих состоянию 5, т. е. комбинацию ZYVUP= 11011, так как
по таблице состояний видно, что при а=0 функция переходит из со^
стояния 4 в состояние 5.
Аналогичным путем заполним и остальные квадратики карты
промежуточной функции ZYVUP.
На основании полученной карты построим карты отдельных
выходных переменных промежуточной функции (рис. 2-68, 2-69
и 2-70). Из них определим самые простые алгебраические выраже-
ния, заключая в контуры единицы или нули.
0
0 I
0
г
/
7
1
)
0
0
0
0
0
i
<-^>
'"О
.0
1
0
1
0
1
1
=
1
1
/
Рис. 2-69.
67
f
1 о
1
0
Г
1
1
1
1
I °
0
•
1
1
1
1
0
I
I
II
1
1
ч.
0
I
II
-f
Г
I
h
I
1
/
|
I
I
I
I
v
V
J
L_
I
Для рис. 2-68
Для рис. 2-69
Для рис. 2-70
Рис. 2-70,
Z = vup + a; Y = z + yu\
Z =~vu (p + a); Y = (z + y)u.
V = yz; U = v~+ p.
P = я + P~v\ p=z(a + p)v.
0010
1010
0000
0110
0100
0111
1110
1111
1110
ZYUP
Рис. 2-71.
Построим теперь карту промежуточных функций по карте соот-
ветствий с четырьмя промежуточными переменными (рис. 2-65) (пер-
вый вариант); эта карта показана на рис. 2-71.
Из нее определим карты отдельных промежуточных функций,
показанные на рис. 2-72, и самые простые алгебраические выраже-
ния этих функций:
Z = zp + yu + a Y = z + у и
или или
Z = и (z + 7) (р + а)\ Y = и (z + у)]
U = z+~y + p. P = zp + a\
P = z(p + a).
В этом варианте нужно еще определить выходную функцию V,
которой нет в карте промежуточных функций. Ее карту получим,
если перепишем значения выходной переменной V прямо из таблицы
состояний в те квадратики карты функции V, которые соответ-
ствуют отдельным состояниям. Так, например, состоянию 1 соот-
ветствует (по карте соответствия) комбинация промежуточных
переменных гуйр и значение выходной переменной (по таблице
состояний) и т. д. Карта функции V показана на рис. 2-73,
откуда
v = zyp.
1 а ' 1 U Г1
Р 1 ' Р ' ' Р ' 1 7
У
0
н
—"\
, 1
1
г
fE
—^
1
0
/—■
i
+—
"Л"
>
I
1
(—
1 0
V
■-4
0
\
1
J
\
>
0
I
;
1
т
!
1
0 1
1
1
1
1
1
1
!
;
1
j
х
1
'ш i
t
1
1
'
1
.
Z
1
1
F
.
0 \
—>
CI
1
0
i
\\о
]v
0
—1
I
-I
>
1
1
1
1
"1
1
1
к.
1
0 1
)
'и
69
Рис. 2-72.
Рис. 2-73.
Второй вариант промежуточной функции с четырьмя промежу-
точными переменными показан на карте, изображенной на рис. 2-74.
Распишем опять карты для отдельных переменных и найдем
их выражения соответственно контурам на рис. 2-75:
Z — а + up Y = z;
или
Z=(a + p)u\ Р = а + ир
или
U = y + p. Р=(а + р)и.
z l
0 010
00 00
ООО 1
101 0
0 011
от
1110
1111
1111
то
Z YUP
Рис. 2-74.
Выходная функция V, показанная на рис. 2-76, определена так
же, как в предыдущем случае, по карте соответствия и по таблице
состояний.
70
' т
с
0 1
1
0
0
0 1
0 |
1
7
7
;
1
J
1
1
1 ■
Го"
0
1
—
—^
~ 1
1
N
0 |
1
0)
Г™
—
1
!
1
[
\
У
1
1
7
!
7
0 I
7
I
Г
1
^
7
Г
1
J
i
V.
/'
ч ,, ...
0}
ч.
.
и
Рис. 2-75,
По контурам карты рис. 2-76 находим V=yp.
Сравнивая результаты всех трех вариантов, предварительно
можно сказать, что последний вариант самый простой, так как его
2
1
0
0
1
0
0
0
0
0
0
0
0
Рис. 2-76.
алгебраические выражения самые .простые. Но окончательно судить
о том, какой вариант лучше, можно только после анализа получен-
ных выражений, с учетом функций, реализуемых заданной системой
логических элементов.
7!
2-8. ЗНАЧЕНИЯ ФУНКЦИИ ПРИ НЕПРАВИЛЬНОЙ
ПОСЛЕДОВАТЕЛЬНОСТИ ВХОДНЫХ СИГНАЛОВ
При составлении таблицы состояний, описывающей работу
схемы управления, принципиально возможно предусмотреть любое
значение функции при любой комбинации входных сигналов, в том
числе и тех, которые при нормальной работе не должны появлять-
ся, и определить, каким образом схема должна на них реагировать.
Но это обычно усложняет составление карт и приводит к более
сложной логической функции. Поэтому целесообразнее составлять
функцию, учитывая только нормальные условия работы схемы, и
затем проверять ее с точки зрения безопасности при работе с не-
правильной последовательностью входных сигналов,
а) Правильные и неправильные комбинации
и последовательности выходных сигналов
С точки зрения безопасности можно отличать следующие ком-
бинации и последовательности выходных сигналов:
1) правильные, т. е. те, которые соответствуют нормальной по-
следовательности операций управляемого процесса;
2) неправильные — те, которые не соответствуют нормальной
последовательности операций управляемого процесса. Они могут
быть двух видов:
а) неопасные, т. е. не приводящие к повреждению или аварии
управляемого объекта и
б) опасные, которые могут привести к повреждениям управляе-
мого объекта, или опасные для обслуживающего персонала.
Неправильные комбинации и последовательности выходных
сигналов могут возникнуть или из-за повреждения логических эле-
ментов, или из-за повреждения источников входных сигналов, дат-
чиков или их цепей. Повреждение логических элементов должно
быть предотвращено их правильным выбором и защитой от внеш-
них влияний (повреждений), а появление неправильных входных
сигналов иногда нельзя предотвратить, так как входные устройства
и линии передачи их сигналов обычно труднее защитить от влияния
окружающей среды и случайных повреждений, потому что они
должны находиться непосредственно вблизи управляемого объекта.
Чтобы избежать опасных ситуаций, в этом случае логическую функ-
цию можно проверить и, если нужно, изменить так, чтобы предот-
вратить опасные или аварийные комбинации или последовательности
выходных сигналов.
Покажем это на нашем примере.
б) Определение опасных комбинаций выходных сигналов
Опасные комбинации необходимо определять из условий работы
управляемого объекта. Так, например, из условий работы намоточ-
ного станка известно, что опасными состояниями являются:
1) одновременное включение и торможение двигателя. Это
соответствует следующей комбинации выходных сигналов:
72
2 = 1; К=1;
2) одновременное включение двигателя и раскрытие бараба-
на, т. е.
Z=l; U = 6.
Возможность существования таких комбинаций можно опреде-
лить, если образовать произведение функции ZV и ZU. Если они
при всех значениях функций равны нулю, то опасных комбинаций
не существует; если есть случаи, когда, они равны единице, то —
существуют.
В нашем примере произведение ZV равно единице только в по-
следнем варианте. Однако при небольшом изменении функции V
можно получить, что ZV—0. Достаточно умножить функцию V
на Z. Тогда V=zyp, и эта опасная комбинация не сможет возник-
нуть при любой последовательности входных сигналов.
Произведение ZU может быть равным 1 во всех вариантах, и
без существенных изменений это устранить невозможно. Для устра-
нения этого нужно было бы взять другую промежуточную перемен-
ную вместо z или вместо и и выбрать такую карту соответствия,
чтобы условие гй=0 всегда выполнялось. Однако, прежде чем изме-
нять промежуточную функцию, целесообразно определить, при ка-
ких последовательностях входных сигналов возникает ги='\, кроме
того, нужно проверить, не возникают ли в схеме и неправильные
последовательности комбинаций выходных сигналов.
в) Определение неправильных последовательностей
комбинаций выходных сигналов
Определим последовательности комбинаций выходов, которые
могут возникнуть в данной схеме управления, и проверим, какие
из них опасны и какие только неправильны. Для этого необходимо
дополнить карту промежуточной функции теми значениями перемен-
ных в пустых квадратиках, которые им приписывались при заклю-
чении в контуры, т. е. при определении выражений функции.
Покажем это, например, для второго варианта функции с че-
тырьмя промежуточными переменными. Сделаем это для следую-
щих выражений отдельных переменных:
Z = а + ир\ У = z\ U = у + р\ Р = а + up.
Тогда полная карта промежуточных функций будет иметь вид, по-
казанный на рис. 2-77,а, а карта выходных функций будет иметь
вид, как на рис. 2-77,6.
Карту выходных функций получить в нашем случае очень про-
сто, записывая в каждый квадратик соответствующее ему значение
переменных г, у\ и и значение функции V, определенной как V=yp.
В эту же карту выходной функции запишем по таблице состоя-
ний номера состояний, которым соответствуют отдельные квадрати-
ки. В квадратики с запрещенным состоянием по первому условию
(zv=^z\) запишем хи а по второму условию (гй=^=1) запишем х2.
Затем обозначим стрелками переходы в нормальной последова-
тельности состояний, включая изменение входной переменной а.
Двойными стрелками обозначим неправильные изменения со-
стояний, возникающие в результате появления неправильного зна-
73
чения входной переменной. При этих переходах считаем, что а пере-
ключается неправильно только 1 раз, с чего и начинается непра-
вильная последовательность переходов. Эти переходы определим по
карте промежуточной функции, предполагая, что они могут начать-
ся с любого состояния нормальной последовательности при обрат-
0 01 0
00 00
00 01
юю
10.1 1
1 001
10 01
1 он
0 010
0 010
ООН
10 1 0
1011
юн
101 1
1011
0 11 0
0110
от
1110
1111
1111
1111
1111
0110
010 0
0 101
111 0
1111
1101
110 1
1111
ZVUP
V1 ♦
= 0 000
сг
- W
001 0=
7ч>
ООН -■
2' :
0001
—*
о 2 z
0001
о "7
0011
> ft
0010
01 ОО*
<% =
= гг
0100.
■ 1> =
т 6 -.
0101
t
01 01
0101
0101
$010 V
=0700
^ m
1100_
110 0
' 5
11 01
и -
11 01
t
♦ 4. -
11 0 1
.МОЛ
ft ^
0 x2
1100
1000_
. \\\ 5
101 0
iii
1011
111
зт
1001
t
1001 _
1011
* it,
7 07 0,
=> a*
JO 00
г.
Рис. 2-77.
ном правильном изменении входной переменной. Так, например,
из состояния 3, определенного комбинацией zyupa, и неправильном
изменении переменной а функция перейдет в состояние 3, опреде-
ленное комбинацией zyupa. Так как переменная а дальше не изме-
няется, функция переходит в состояние, определяемое комбина-
цией значений функции в этом квадратике. Это комбинация ZYUP=
= 1111 (в правой половине карты промежуточной функции). Этот
переход требует изменения двух -переменных: у из 0 в 1 и р из 0
а 1. Так как первый переход происходит с задержкой Г3, а второй
с запаздыванием т, которое предполагаем существенно меньше Т$,
то почти во всех случаях переменная р изменится раньше и функ-
ция перейдет в новое состояние, обозначенное Х\. Только тогда, ког-
74
1 ;
да неправильное изменение а произойдет к самому концу задерж-
ки Г3, так, что у изменится раньше, чемч р; функция перейдет в со-
стояние 4. Это устойчивое состояние является -нормальным и изме-
няется дальше в состояние 5. Из состояния a'i функция должна пе-
рейти в состояние х2, так как по карте промежуточной функции по-
следующее состояние определено комбинацией ZYUP= 1101. Это опять
переход с изменением двух переменных у и и. Допустим, что Г3<Г7.
Тогда функция перейдет обязательно в состояние 5, определенное
комбинацией ZYPU= 1111, которое является устойчивым. Очевидно,
одно неправильное изменение а приводит к переходу в опасное со-
стояние Х\, которое затем переходит в нормальное устойчивое со-
стояние 5. Таким образом, мы определили все неправильные после-
довательности, возникающие при одном неправильном изменении а
в состоянии 3.
Аналогичным путем можно получить все неправильные после-
довательности, возникающие при одном неправильном изменении а
в остальных нормальных состояниях. Все они обозначены двойными
стрелками. Можно убедиться, что почти все возникшие таким обра-
зом последовательности проходят через опасные состояния х\
или х2 и затем переходят а устойчивое правильное состояние 5.
Последовательности, которые возникли при одном изменении а,
не охватывают некоторые квадратики. Соответствующие им состоя-
ния могут попасть в другие неправильные последовательности, кото-
рые могут возникать при двукратном неправильном изменении а.
Так, например, если в состоянии х\, в которое функция перешла
после изменения а из 0 в 1, а изменится обратно из 1 в 0, то функ-
ция перейдет в состояние хи определенное комбинацией ZYVP—1011,
и оттуда при изменении z — в нормальное состояние 7, как это
обозначено тройными стрелками в карте выходной функции.
Однако такие переходы маловероятны, так как обычно повреж-
дение приводит к появлению постоянного неправильного значения
входной переменной.
В карте выходной функции стрелками из четырех черточек по-
казаны еще переходы, возникающие при трехкратном неправильном
изменении а. Интересно отметить, что все эти последовательности
кончаются ,в нормальном устойчивом состоянии 5.
Попробуем теперь изменить промежуточную функцию так, что-
бы не возникли опасные состояния. Это можно сделать либо изме-
нением промежуточных переменных и выходной функции, либо
изменением только промежуточной функции. Первый случай тре-
бует вновь проделать весь ход синтеза с дополнительными условия-
ми. Покажем ниже вторую возможность.
г) Ограничение переходов последовательностной
функции
Посмотрим, каким путем функция попадает в опасные состоя-
ния. В нашем примере нет ни одного случая, чтобы функция попала
в-опасное состояние непосредственно при изменении переменной а
без промежуточного состояния. Следовательно, надо изменить пере-
ходы промежуточной функции так, чтобы она не могла попадать
в опасные состояния из предыдущих промежуточных состояний,
которые она переходит при неправильных изменениях а.
75
Для этого проследим, каким образом функция попадает в опаС*
ные состояния, и изменим значения промежуточной функции в пре-
дыдущих состояниях так, чтобы этих переходов избежать.
Так, например, если выбрать для Z второе выражение, которое
мы получили из пунктирных контуров в карте Z (рис. 2-75), то бу-
дем иметь:
Z=(a +\р)и
и из состояния 1 уже невозможно будет перейти в состояние дг2.
Остался переход в состояние х\. Из состояния 3 функция пере-
ходит туда при значении р=1. Поэтому функцию Р целесообразно
изменить, например, следующим образом:
Р = ay + up.
Из состояния 7 в состояние Х\ функция переходит с задерж-
кой 7*2, которая всегда больше, чем т — запаздывание перехода
Г У
-0010+
■0000+
1
0001 =
t
■ h> II <
1ою4 10Ю
>1000
г ft
%000*
>0010
>
0010
0010
i
001 и
t
1010
1011
ii
>101 1
001 1
0011
0110
0110
1
от
1110
t
л
J111
\п
от
0110
0 100
0101
1110
t 1
J110
Г л
1100
оюо
0110
ZVUP
Рис. 2-78.
в состояние 2. Поэтому функция сразу перейдет в состояние 2, а в
Х\ не попадет.
Изобразим еще раз измененную карту промежуточной функции
(рис. 2-78). Переходы непосредственно обозначим прямо в карте
промежуточных переменных.
Из карты видно, что последовательности, которые содержали
бы неправильные состояния, не возникают.
Рассмотрим теперь возможности появления неправильных по-
следовательностей правильных состояний.
К числу таких последовательностей относится последователь-
ность состояний 7—2 и с некоторой вероятностью последователь-
ности состояний 2—1. Ни одна из них не является опасной, как
можно убедиться из таблицы состояний и условий работы станка.
Первая означает, что барабан, не закончив торможения, вновь
начнет вращаться; вторая означает, что барабан лишний раз
раскроется.
Нужно отметить, что переходы между состояниями в тех слу-
чаях, где они происходят при одновременном изменении нескольких
переменных, зависят от свойств элементов задержки. В нашем при-
76
мере мы предполагали, согласно свойствам большинства таких эле-
ментов, что элемент задержки не реагирует на сигналы, длитель-
ность которых меньше времени задержки, т. е. если сигнал на входе
элемента задержки короче самой задержки, то на выходе элемента
задержки сигнала не будет. Если же элементы задержки имеют
какие-либо другие свойства, то их надо обязательно учитывать.
2-9. ЗАКЛЮЧЕНИЕ
В заключение коротко сформулируем ход синтеза последова-
тельностной функции.
1) Из условий работы управляемого объекта определяется
таблица состояний, содержащая последовательности состояний, нуж-
ные задержки и комбинации выходных переменных.
2) При наличии одинаковых строчек таблица упрощается.
3) Определяется число промежуточных переменных, нужное для
состояний и переходов между ними, предписанных в таблице со-
стояний.
4) По таблице состояний строится таблица переходов.
5) Строятся нужные варианты карт соответствия между со-
стояниями и комбинациями значений промежуточных переменных,
затем полученные соответствия оцениваются по оптимальности
соотношений между состояниями, выраженными в таблице пере-
ходов.
6) Строятся карты промежуточной и выходной функций. Из них
определяются минимальные формы алгебраических выражений
отдельных промежуточных и выходных функций.
7) Наилучший вариант проверяется с точки зрения безопас-
ности, для чего из полученных минимальных форм промежуточных
и выходных функций строится полная карта промежуточной функ-
ции и при данных возможных неисправных комбинациях и после-
довательностях входных переменных анализируются все возможные
переходы. После этого то мере необходимости вводятся нужные
изменения.
Отметим, что окончательную оценку минимальности форм про-
межуточной и выходной функций можно сделать только с учетом
свойств элементов, на которых строится схема при реализации этих
функций.
Пример этого будет рассмотрен в гл. 5.
ГЛАВА ТРЕТЬЯ
ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
3-1. ОПРЕДЕЛЕНИЕ, ТРЕБОВАНИЯ, ХАРАКТЕРИСТИКИ,
КЛАССИФИКАЦИЯ
а) Определение логических элементов
Логические элементы — это устройства, служащие для практи-
ческой реализации логических функций. Эти устройства строятся на
использовании самых различных физических явлений и свойств.
77
В настоящее время уже достаточно широко применяются элек-
тромеханические, электромагнитные, электронные и полупроводнико-
вые (вентильные и транзисторные) логические элементы и разрабо-
таны пнев;матические, трансфлюксорные, параметронные, криотрон-
ные [Л. 12] и многие другие виды логических элементов.
б) Дискретный характер работы
Для всех видов логических элементов общим является дискрет-
ный характер их работы, который заключается в том, что входные
и выходные величины используются только в крайних значениях,
а все промежуточные значения, если они возможны, являются нера-
бочими 1. В качестве примера рассмотрим наиболее знакомый вид
логических элементов — электромеханические реле. Входным пара-
метром или входным сигналом для таких реле является напряжение
на его катушке. Оно может быть либо достаточным для срабаты-
вания реле, либо меньше. Выходным параметром или выходным
сигналом является состояние контактов реле, которые могут быть
либо разомкнуты, либо замкнуты.
Несмотря на различие физических процессов, происходящих на
входе и выходе реле, их можно характеризовать только двумя поло-
жениями и условно обозначать одинаковыми математическими сим-
волами 0 и 1.
Так, если входное напряжение на катушке реле меньше его на-
пряжения срабатывания, его условно можно считать нулем, так как
оно не произведет никакого действия на реле, а если оно равно
или превышает напряжение срабатывания и может включать реле,
то его условно считают единицей. Положение контактов также
можно условно считать нулем или единицей, в зависимости от того,
разомкнут контакт или замкнут. Таким образом, независимо от фи-
зической природы явления (электрической, механической или любой
другой), определяющей характер входных и выходных величин
(сигналов) логического элемента, два крайних состояния этих вели-
чин могут характеризоваться нулем и единицей.
. У бесконтактных логических элементов, построенных на исполь-
зовании электрических .принципов, входные и выходные величины
в большинстве случаев представляют собой напряжение или ток,
меняющие дискретно свой уровень. При этом обычно нижний уро-
вень входного и выходного сигналов выбирается равным нулю, что
мнемонически облегчает применение условных 0 и 1 для обозначе-
ния уровней сигналов у таких элементов. Однако существуют
электрические бесконтактные элементы, у которых нижний уровень
сигнала существенно отличаются от нуля и его считают нулем
условно, так же как верхний уровень входных и выходных сигна-
лов считают «единицей» независимо от его количественного выра-
жения и знака.
У логических элементов неэлектрических или сочетающих элек-
трический принцип действия с другими физическими принципами
входными и выходными величинами могут быть различные физиче-
ские параметры, например состояние контактов, как мы уже отме-
тили у электромеханических реле, значение давления у пневмати-
1 Здесь и ниже рассматриваются только двухпозиционные логи
ческие элементы.
78
ческих элементов и др. Все эти входные и выходные величины мо-
гут изменяться дискретно или в некоторых пределах плавно, но для
работы логических элементов важны только их предельные, край-
ние значения, которые и принимаются условно за нуль и единицу*
в) Логические функции, выполняемые логическими
элементами
Существуют различные тенденции построения логических эле-
ментов в виде стандартных блоков в зависимости от того, какие
логические функции или их сочетания должны выполнить эти
отдельные логические блоки. Не касаясь здесь логических элемен-
тов, предназначенных специально для вычислительных машин, оста-
новимся только на тех тенденциях, которые имеют место при раз-
работке логических элементов для промышленной автоматики.
Как было показано в гл. 2, существует большое количество
логических функций или связей. Тем не менее, любые сложные схе-
мы могут быть осуществлены с помощью двух (например, И и НЕ)
или даже одного (например, штрих Шеффера) типа простейших
логических элементов.
Однако сложная логическая схема, построенная из одинаковых
однофункциональных элементов, например из штрихов Шеффера,
содержит довольно большое число логических элементов.
Число логических элементов в той же схеме может быть со-
кращено, если для ее построения использовать не один тип логи-
ческих элементов, а несколько типов, выполняющих основные про-
стейшие функции, такие, например, как И, ИЛИ и НЕ. Логические
схемы, построенные из таких элементов, соответствуют непосред-
ственно алгебраическим выражениям, содержащим суммы, произве-
дения и инверсии, что облегчает их составление.
Поэтому многие фирмы, выпускающие логические элементы,
положили в основу разработки своих логических элементов именно
эти три типа логических функций. Для удобства сборки схем раз-
личные типы элементов выпускаются, как правило, в виде стандарт-
ных блоков. Благодаря этому, если один тип логических элементов
имеет более сложную внутреннюю схему, т. е. имеет большее число
деталей, то его габариты определяют минимально возможные раз-
меры блока, а его стоимость обычно более высока, чем стоимость
других типов элементов.
Для лучшего использования габаритов такого стандартного
блока в нем часто совмещают две простейшие логические функции,
например ИЛИ и НЕ или ИЛИ и И, так, чтобы внешние соедине-
ния позволяли комбинировать эти функции между собой или с дру-
гими логическими элементами. Таким образом, блоки логических
элементов в системе элементов с основными логическими функция-
ми И, ИЛИ и НЕ стандартны только по своим размерам, но отли-
чаются друг от друга выполняемыми функциями и обычно., числом
входов.
В такой системе логических элементов наряду с основными ло-
гическими функциями И, ИЛИ и НЕ путем внешних пересоединений
обычно можно получать и функции типа ЗАПРЕТ и некоторые дру-
гие типы распространенных простых логических функций на одном
блоке. Однако сами блоки из-за своего разнообразия не могут быть
сделаны ни очень дешевыми, ни достаточно малыми.
79
а/ ф б) t)
Второй тенденцией развития логических элементов является
использование для построения логических схем однофункциональ-
ного элемента, выполняющего какую-то логическую функцию, содер-
жащую инвертирование, например стрелка Пирса (ИЛИ и НЕ или
НИ ... НИ ...). Габариты и стоимость такого элемента могут быть
предельно снижены благодаря его простоте. Поэтому, несмотря на
то, что схема, построенная из таких логических элементов, будет
иметь большее число блоков, чем схема с элементами И, ИЛИ, НЕ,
она благодаря меньшим габаритам, меньшей стоимости и большей
надежности отдельных бло-
-Ч^\ -И L__ _J^7L КОа сможет серьезно конку-
-"Н—I -*4<У рировать с последней.
Третьей тенденцией в
построении логических эле-
ментов является создание
-^TTL НЧ | многофункциональных эле-
"*1±J ментов, представляющих со-
ф е) бой блоки, каждый из ко-
торых^ позволяет получить
Рис. 3-1. Условные обозначения логи- одну или несколько слож-
ческих элементов. ных логических функций,
а—или; б—И; в—НЕ; г—или с отрица- Эти логические функции
нием(НИ... НИ...); д — равнозначность; обычно представляют собой
^-неравнозначность. .произведения сумм или сум-
мы произведений с прямым
и инверсным выходами. Имеются логические блоки такого типа как
с несколькими в.ходами и выходами, так и с большим числом вхо-
дов (лорядка 20) и несколькими выходами. Несмотря на то, что
внешние пересоединения позволяют получать в таких логических
элементах различные комбинации логических функций, трудно пред-
ставить себе, что во всевозможных логических схемах элементы та-
кого типа были бы использованы полностью. Однако вероятно, что
в некоторых случаях их применение может дать экономию места и
стоимости.
В настоящее время из трех рассмотренных выше тенденций по-
строения логических элементов наибольшее распространение нахо-
дят первая и вторая, в которых логические элементы выполняют
только простейшие логические функции И, ИЛИ и НЕ и их комби-
нации типа НИ ... НИ . ..
Благодаря наличию различных принципов построения логиче-
ских элементов, выпускаемых в разных странах и разными фирма-
ми, для них трудно создать единую систему условных изображе-
ний, необходимых для составления принципиальных схем. Поэтому
более наглядным и общим является представление логических эле-
ментов в виде блок-схем, построенных из блоков, изображающих
простейшие логические функции, которые они выполняют. На
рис. 3-1 показаны условные изображения некоторых логических
функций.
г) Характеристики вход —выход
При создании сложных логических схем из логических элемен-
тов на основании таблиц функций, карт или полученных алгебраи-
ческих выражений можно составить принципиальную схему сигна-
лизации, блокировки, автоматического или программного управления
8Q
либо сразу в виде блоков из логически^ элементов, либо сначала
в виде блоков, изображающих все простейшие логические функции,
а затем переработать ее и упростить с учетом типов применяемых
логических элементов.
Для лучшего представления о • работе логических элементов и
выявления основных требований, предъявляемых к ним независимо
от выбранной системы логических элементов, рассмотрим в качестве
примера принципиальную схему, составленную в виде блоков про-
стейших логических функций. В качестве такой схемы возьмем
Рис. 3-2. Логическая схема управления лиф-
том.
схему управления лифтом, логика работы которой нам уже знакома.
В гл, 2 были получены следующие выражения, связывающие
выходные сигналы, идущие к двигателю, через усилители, с сигна-
лами, получаемыми от кнопок и датчиков:
V, = Рх = cgp2d2 (Pi + ab) — контактор „вверх";
V2 = р2 = cgpxdx (р2 + ab) — контактор „вниз",
где а = ах + #2 + аз — кнопки „вверх";
b = Ьх + b2 + b3 — кнопки „вниз";
с = схс2 — конечные выключатели открытых дверей;
рх и р2 — обратные связи (промежуточные переменные);
dx и d2 — датчики положения лифта на этажах;
g — датчик перегрузки двигателя.
На рис. 3-2 показана принципиальная логическая схема управ-
ления лифтом, составленная на основании приведенных выражений 1
без попыток упрощений. Эта схема является сравнительно простой
и все-таки позволяет сделать некоторые общие выводы о требова-
ниях, предъявляемых к логическим элементам, из которых она мо-
жет быть создана. Положим, что каждая логическая функция реа-
1 Более подробно об этом написано в гл. 5.
6-г2528
81
лизуется логическим элементом, выполненным в виде одного бло-
ка,—это упростит рассмотрение и не изменит характер выводов.
Одним из наиболее очевидных свойств логических элементов,
вытекающим из логического характера их построения, является то,
что логические элементы в большинстве своем должны иметь не-
сколько входов и один выход (то, что он может быть размножен,
в данном случае несущественно), т. е. каждый из них реализует
функцию многих переменных.
Далее мы видим, что даже в такой простой схеме последова-
тельные логические цепочки содержат 2, 3, 4 и даже 5 логических
элементов. При переходе от одного элемента к последующему уро-
вень сигнала не должен затухать. Кроме того, ряд логических эле-
ментов управляет не одним элементом, а несколькими логическими
элементами параллельно. Например, каждый последний из элемен-
тов И в двух верхних цепочках посылает свой сигнал на элемент
ИЛИ (сигналы обратной связи) на элемент И и на выходной уси-
литель. Это позволяет сделать вывод о том, что логические элемен-
ты, кроме выполнения логических функций, должны иметь усиле-
ние по мощности, т. е. каждый логический элемент должен быть
в состоянии управлять несколькими логическими элементами.
На основании этого целесообразно рассматривать в каждом ло-
гическом элементе, кроме его логических свойств, еще и усилитель-
ные, характеризующие уровни входных и выходных сигналов. Наи-
более наглядно эти свойства отражаются в характеристике элемен-
та, представляющей собой зависимость выходной величины от вход-
ной величины. Но так как входных величин в произвольном
логическом элементе может быть несколько, то нужно уточнить,
что будет пониматься под характеристикой вход — выход. Очевид-
но, что в данном случае нецелесообразно учитывать наличие не-
скольких входов у логических элементов, а проще рассматривать
в каждом элементе как бы отдельно его усилительную часть, кото-
рая повторяет или инвертирует сигнал, приходящий на нее.
Иначе говоря, многовходовой логический элемент можно харак-
теризовать зависимостью величины его выхода от величины сигна-
ла, приходящего на один из его входов. Для элементов, выполняю-
щих логические функции И и ИЛИ, это будет, в сущности, харак-
теристика повторителя. Для элемента, выполняющего функции
НИ ... НИ ..., это будет характеристика инвертора. Инвертор и
повторитель являются единственными одновходовыми логическими
элементами. Не говоря уже об инверторе, отметим, что такой эле-
мент, как повторитель, применяется самостоятельно довольно широ-
ко, например в регистрах сдвига и многих других случаях.
Таким образом, многовходовые элементы с точки зрения уси-
ления и затухания сигнала характеризуются такими же зависимо-
стями выхода от входа, как и одновходовые логические элементы —
повторитель и инвертор.
Рассмотрим характеристику вход — выход, которую должны
иметь повторители, чтобы логическая схема любой сложности могла
правильно работать. Очевидно, что из-за дискретного характера
работы логических элементов идеальной зависимостью выходного
сигнала элемента от его входного сигнала должна была бы быть
идеальная релейная характеристика, показанная на рис. 3-3,а.
На графике рис. 3-3,а по оси абсцисс отложена входная вели-
чина а, по оси ординат — выходная величина Ь. Так как зависи-
8?
месть 6 = ф(а) характеризует связь входных и выходных величий
логических элементов не отдельно взятых", а нагруженных (вклю-
ченных) на такие же другие элементы и управляемых подобными
же элементами, то, очевидно, выход одного является входом дру-
гого и т. д. Поэтому входные и выходные величины а и Ъ должны
быть физически однородными величинами. Для электрических эле-
иманс
"макс
алр амакс
в)
it
: апр1 атяс
anpt anpi ашнс
Рис, 3-3. Характеристики вход — выход эле-
мента повторителя.
а —идеальная релейная характеристика; б и в —реаль-
ные характеристики.
ментов это обычно напряжение (иногда ток) входа и выхода. Для
контактных реле это ток на входе катушки реле и ток, замыкае-
мый контактами реле.
У идеального логического повторителя максимальный входной
сигнал аМакс должен быть равен максимальному выходному сигна-
лу бма&с, а предельное значение входного сигнала апр, при кото-
ром происходит скачкообразное включение повторителя, может быть
равно половине максимального сигнала, т. е. аПр = амакс/2. Тогда,
если повторитель будет иметь такую характеристику, он будет вы-
полнять также и функцию формирователя сигнала, т. е. если на
него будут приходить сигналы, меньшие апр, его выход будет ра-
вен 0, а если сигналы будут больше апр, он будет выдавать пол-
ный выходной сигнал 6Макс без искажений. Таким образом, эле-
мент с такой характеристикой будет восстанавливать затухающий
сигнал, если он не уменьшился больше чем вдвое по сравнению
с максимальным сигналом, и не будет реагировать на сигналы по-
мехи, если они не достигают уровня половины максимального
6* 83
сигнала. Очевидно, что При наличии логических элементов с такими
характеристиками любая сложная схема будет достаточно помехо-
устойчива и сможет иметь цепочки из логических элементов любой
длины, так как в ней затухание сигнала будет невозможно. Это
свойство очень важно для создания кольцевых или замкнутых
схем, т. е. схем с обратной связью, так как в таких схемах сигнал
обегает элементы бесконечное число раз, что равноценно разомкну,
той цепи с бесконечно большим числом элементов [Л. 13].
Однако в реальных элементах получение такой идеальной ха-
рактеристики вход — выход практически невозможно или очень
сложно, так как устройства с характеристиками такого типа рабо-
тают очень неустойчиво, переходя при малейших колебаниях внеш-
Рис. 3-4, Условия устойчивости характеристик повторите-
лей.
них параметров то в гистерезисный цикл, то в режим с конечным
коэффициентом усиления. Тем не менее реальные характеристики
логических повторителей (рис. 3-3,6 и в) также могут обеспечить
помехоустойчивость схемы и статическую устойчивость в замкнутых
или длинных цепях. Помехоустойчивость схемы, состоящей из логи-
ческих повторителей с реальными характеристиками типа рис. 3-3,6
и в несколько уменьшится по сравнению с помехоустойчивостью по-
вторителя (рис. 3-3,а), так как на выходе элемента минимальный
сигнал будет только при сигналах входа, меньших апР2, которое при
симметричной характеристике меньше аМакс/2. Формирование (или
восстановление) входного сигнала, меньшего чем аМакс, также бу-
дет возможно в полной мере, только начиная с уровня аПр, кото-
рый выше, чем аМакс/2. Однако оно все же возможно, и поэтому
логическая схема из таких элементов будет работать устойчиво, т. е.
сигнал, попавший в длинную или замкнутую цепь, не будет в ней
затухать при выполнении следующих условий.
Характеристика вход— выход элемента ((рис. 3-4,а и б) должна
иметь три участка: 1-й участок, лежащий ниже прямой 0—1, на ко-
тором производная db\da<\\\ 2-й участок, на котором db\da>\, и
3-й участок, лежащий выше прямой 0—1, на котором db/da<\.
Прямая 0—1 представляет собой характеристику замкнутой цепоч-
ки, т. е. геометрическое место точек, на которых вход равен выходу.
Характеристики такого вида всегда будут иметь две устойчивые
внешние точки и одну (для характеристики рис. 3-4,а) или две
84
(для характеристики на рис. 3-4,6) внутренние неустойчивые точки
пересечения с прямой 0—1.
Легко проследить, что при появлении на входе первого из эле-
ментов, включенных в данную цепочку (или охваченного обратной
связью) сигнала, большего апр (рис. 3-4,а) или anpi (рис. 3-4,6),
сигнал выхода возрастет и будет продолжать возрастать при пе-
реходе от элемента к элементу (при условии, что все элементы име-
ют такие же характеристики), пока не достигнет верхней точки пе-
ресечения характеристики с прямой 0—11.
Следовательно, логическая схема, построенная на повторителях,
будет помехоустойчива и будет надежно работать в длинных и
замкнутых цепях, при условии, что характеристики вход — выход
повторителей будут отвечать требованиям, изложенным выше. Отме-
тим, что если характеристика повторителя линейна, т. е. совпадает
с прямой 0—1, то повторитель с такой характеристикой не будет
обладать способностью ни восстанавливать уровень сигнала, ни
уменьшать помеху, и сложная логическая схема, составленная толь-
ко из повторителей такого типа, не будет надежно работать при
наличии длинных цепей или контуров с обратными связями. Это,
однако, не значит, что все элементы, входящие в длинную или коль-
цевую логическую схему, обязательно должны иметь устойчивые
характеристики, как на рис. 3-4,а или 6. Важно, чтобы характери-
стика разомкнутой цепи для кольцевой схемы или просто общая
характеристика длинной цепи, представляющая собой зависимость
выходной величины последнего элемента от входной величины пер-
вого элемента, отвечала поставленным выше требованиям, т. е. име-
ла вид, показанный на рис. 3-4,а или 6. Такая общая характеристи-
ка может быть получена умножением характеристик вход — выход
отдельных элементов, составляющих цепочку, причем общая харак-
теристика нескольких «устойчивых» элементов получается более
крутой, т. е. более устойчивой, и поэтому в такую цепочку можно
включить отдельные элементы с характеристикой неустойчивой или
безразличной, как прямая 0—1, лишь бы в целом общая характери-
стика оказалась устойчивой.
Рассмотрим теперь характеристику вход — выход инверторов.
Идеальной характеристикой инвертора была бы изображенная на
рис. 3-5,а. Инвертор с такой характеристикой обладает достаточной
помехоустойчивостью и формирует нулевой сигнал, так как сигналы,
#макс ^
большие чем апр = —т>—» обязательно будут давать нулевой выход,
а сигналы, меньшие апр, не будут уменьшать сигнал выхода эле-
мента бмакс.
В реальных логических инверторах такую характеристику полу-
чить достаточно сложно. Характеристика инверторов обычно либо
имеет вид релейной петли (рис. 3-5,6), ли"бо имеет наклонный участок
с конечной величиной наклона, как показано на рис. 3-5,0 и г.
Очевидно, что характеристики, показанные на рис. 3-5,6 и в,
также обладают помехоустойчивостью и способностью формировать
нулевой сигнал, хотя и в меньшем диапазоне изменения сигналов,
^ Ямакс ^
чем идеальная характеристика, так как anpi> —— >ЛпР2. Харак-
теристики же, изображенные на рис. 3-5,г, обладают каждая только
одним из этих свойств. Характеристика // помехоустойчива, так как
85
апр1&пр2 анакс ^Г1р2 *пр1 ^ыинс
В) г)
Рис» 3-5. Характеристики вход — выход инверторов,
а —идеальная характеристика; б, в и г —реальные характеристики.
Рис. 3-6. Получение характеристики двух по-
следовательно включенных инверторов с ха-
рактеристиками типа II (рис. 3-5,г).
при сигналах, меньших аПрь ее выходной сигнал не изменяется, но
при сигналах, больших аПрь но меньших аМакс, ее выходной сигнал
уменьшается, но не достигает нулевого. Характеристика //, наоборот,
хорошо формирует нуль при сигналах, больших аПр9, но ее выход
меньше полного даже при небольших сигналах помехи. Обычно чис-
ло инверторов в схемах, для которых важно иметь устойчивую ха-
рактеристику, не ограничивается одним, а при включении последо-
вательно хотя бы двух инверторов с подобными характеристиками
их общая характеристика вход — выход будет иметь вид устойчи-
вой характеристики повторителя. Это легко доказать с помощью
графического построения такой характеристики. На рис. 3-6 пока-
зано построение общей характеристики вход — выход для двух ин-
верторов, имеющих характеристики типа // (рис. 3-5,г)\
Пусть &i = cpi'(ai) и &2=<Ма2). Здесь на графике рис. З-б а\ и
а2 — входные сигналы первого и второго инверторов, а Ь\ и Ь9 —
их выходные сигналы. Зависимость Ь9=Ц)(а\) равна произведению
<Pi(tfi)<P2(02) и t представляет собой общую характеристику двух
инверторов. Она обладает всеми свойствами устойчивой характери-
стики повторителя. Такое же построение можно было бы сделать
и для инверторов с характеристиками типа 1 на рис. 3-5,г. Общая
характеристика этих инверторов имела бы такой же вид, как на
рис. 3-6. Таким образом, для устойчивой работы длинных или коль-
цевых логических схем с инверторами необходимо, чтобы их харак-
теристики имели один участок с наклоном больше единицы и хотя
бы один участок с наклоном меньше единицы.
Инвертор с характеристикой, имеющей наклон, равный единице
(пунктир на рис. 3-5,г), не обладает ни помехоустойчивостью, ни
свойством формирования нуля, поэтому кольцевая схема (например,
триггер) или длинная цепочка, построенная на элементах с такой
характеристикой, работать не может.
В заключение еще раз подчеркнем, что длинная цепочка из ло-
гических элементов или кольцевая цепочка из любого числа эле-
ментов (цепочка с обратной связью) будет работать статически
устойчиво, т. е. без искажения или пропуска сигналов, если их об-
щие характеристики вход — выход будут иметь вид, показанный на
рис. 3-4,а или б, даже в том случае, если отдельные элементы этих
цепочек будут иметь характеристики, не обладающие устойчивостью.
д) Классификация логических элементов
В основу классификации логических элементов можно положить
самые различные признаки. В дальнейшем будут рассматриваться
только электрические логические элементы, которые по физическим
основам работы можно подразделить на
1) электромеханические;
2) полупроводниковые (вентильные и транзисторные);
3) электронные и электронно-вентильные;
4) магнитно-полупроводниковые (магнитно-вентильные и фер-
рит-транзисторные) ;
5) магнитные (трансфлюксоры, лэддики, биаксы и т. д.);
6) параметрические (криотроны, параметроны, феррорезонанс-
ные и др.) [Л. 12].
Среди этих видов логических элементов можно выделить полу-
проводниковые вентильные элементы, которые отличаются от осталь-
97
ных тем, что на них можно выполнять только некоторые логические
действия, а усилительные функции и функции инвертирования они
выполнять не могут. Логический элемент, состоящий из одних вен-
тилей, не может иметь устойчивой характеристики, поэтому на од-
них таких элементах нельзя создавать замкнутые или длинные ло-
гические цепочки. Все остальные приведенные виды логических эле-
ментов наряду с логическими выполняют также функции усиления.
Одним из весьма существенных признаков, разделяющих все
логические элементы на две группы, является синхронный или асин-
хронный характер их работы.
К асинхронным логическим элементам относятся все элементы,
время действия которых, т. е. время прохождения сигнала or вхо-
да к выходу (иногда его называют запаздыванием), определяется
только физическим процессом происходящим в элементе и никак
не регламентируемым извне. Асинхронные элементы, если не при-
нято специальных мер для синхронизации системы в целом, рабо-
тают без общего ритма. Примером асинхронных элементов является
электромеханические реле, время переключения которых для любых
двух или нескольких реле всегда может немного отличаться. Дру-
гим примером асинхронных элементов являются статические тригге-
ры на транзисторах, время переключения которых определяется все-
ми параметрами элементов схем триггеров и практически для двух
подобных триггеров всегда отличается друг от друга.
К синхронным логическим элементам относятся элементы, у ко-
торых время передачи сигнала от входа к выходу (запаздывание)
для всех одинаково, и определяется специальным внешним устрой-
ством, например источником питания переменного напряжения или
источником тактовых импульсов. Такие элементы в сложной схеме
работают с общим для всех элементов режимом, их время работы
определяется тактами. Синхронные логические элементы делятся на
одпотактные, двухтактные и многотактные. В однотактных системах
все логические элементы находятся в одинаковых условиях, и при
прохождении тактового импульса они одновременно выдают выход-
ной сигнал, который накапливается в линиях задержки (например,
на емкости), а после окончания этого тактового импульса выход-
ной сигнал из линии задержки подается на вход последующего эле-
мента уже как входной сигнал этого элемента, причем входной сиг-
нал действует до появления следующего тактового импульса, когда
снова все элементы выдают выходной сигнал. Таким образом, вре-
мя работы всех элементов одинаково и регламентируется частотой
поступления тактовых импульсов.
В двухтактных системах все логические элементы делятся на
две группы, которые работают в противоположных тактах, причем
последовательно соединяются элементы, находящиеся в разных так-
тах. Тогда при появлении одного из тактовых импульсов элементы
одной из групп одновременно выдают выходные сигналы, а элемен-
ты другой группы получают эти сигналы как входные. При приходе
следующего тактового импульса группы элементов меняются места-
ми, и те, которые выдавали выходные сигналы, теперь .получают вход-
ные, а те, которые. получали входные сигналы, выдают выходные.
Замкнутые цепочки из двухтактных логических элементов обя-
зательно должны содержать четное число элементов, так как иначе
первый элемент не будет управляться последним. Поэтому элемен-
тарная память (динамический триггер) из двухтактных элементов
всегда строится на двух элементах. Двухтактные элементу не со-
держат линий задержек, поэтому они обычно более стабильны,
и в этом их преимущество перед однотактными, однако иногда
они требуют применения большего числа элементов, чем одно-
тактные.
К многотактным логическим элементам относятся все остальные
синхронные логические элементы, где число тактовых импульсов
и соответствующее им число групп логических элементов, работаю-
щих в различных тактах, больше 2.
Многотактные логические системы делают либо затем, чтобы
с помощью увеличения числа тактов предотвратить обратную пере-
дачу сигналов с выхода на вход без применения вентилей (напри-
мер, в параметронных логических элементах), либо чтобы восста-
навливать исходное положение элементов в тех случаях, где выда-
ча выходного сигнала не сопровождается приходом элемента в ис-
ходное состояние (например, в транфлюксорных логических эле-
ментах).
Если в двухтактных системах, несмотря на наличие двух групп
элементов, работающих в разных тактах, практически почти всегда
каждый элемент может выполнять свою логическую функцию, то
в многотактных элементах это обычно затруднительно. Часть эле-
ментов в многотактных системах работает вхолостую с точки зре-
ния выполнения логических задач. Это приводит к увеличению об-
щего числа элементов многотактных систем по сравнению с одно-
тактными и двухтактными.
Кроме того, многотактные системы требуют применения более
сложных источников питания, позволяющих получать в разных ли-
ниях сдвинутые на такты импульсы питания, в то время как в од-
нотактной и двухтактной системах в качестве источников питания
применяются обычные источники переменного напряжения. Поэто-
му, несмотря на возможность создания на этих системах безвен-
тильных элементов, многотактные системы пока не нашли широкого
применения в схемах промышленной автоматики.
Задачи, которые решаются в промышленной автоматике, такие
как сигнализация, блокировка,' автоматическое и программное
управление, в зависимости от технологических особенностей при-
менения^ могут иметь совершенно различный объем и соотношение
логической и силовой (исполнительной) частей. Есть случаи, в ко-
торых логическая часть очень невелика, но имеет большое число
выходов, например, если должно приводится в действие относитель-
но^ большое количество мощных исполнительных механизмов. И есть
противоположные случаи, когда логическая схема имеет очень боль-
шое количество внешних и внутренних входов, на ней решаются
сложные логические задачи, в частности различные вычислительные
операции, требующие применения большого количества логических
элементов. Очевидно, в этих двух противоположных случаях тре-
бования к логическим элементам будут различны.
В первом случае более выгодно применить устройства, позво-
ляющие совместить несложные логические функции с мощным уси-
лителем, т. е. мощные логические элементы, чем несколько маломощ-
ных логических элементов со специальным источником питания и
несколькими мощными усилителями.
Во втором случае, наоборот, так как число логических элемен-
тов должно быть большим, выгоднее использовать малогабаритные,
89
т. е. маломощные логические элехМенты со специальными выходными
усилителями.
Синхронные логические элементы требуют в общем случае син-
хронного входного сигнала; для асинхронных элементов входной
сигнал может создаваться независимым источником питания.
Если логические элементы имеют релейную характеристику, то
входной сигнал не обязательно должен быть двухзначным, он мо-
жет иметь и непрерывный характер.
В настоящее время для решения задач промышленной автома-
тики чаще всего применяются бесконтактные магнитно-полупровод-
никоЕые логические элементы, работающие на частотах 50 и 400 гц,
реже на частоте в несколько килогерц, с выходной мощностью не
выше десятых долей ватта и транзисторные логические элементы
мощностью от нескольких милливатт до нескольких десятых долей
ватта.
Входная мощность бесконтактных логических элементов колеб-
лется от долей милливатт до десятков милливатт. Коэффициент
усиления логических элементов, т. е. число элементов, которым мо-
жет управлять один элемент, обычно не превышает 10, реже 20.
16ых
3-2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ РЕЛЕ — КОНТАКТНЫЕ
ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
Электромеханические реле в огромном большинстве случаев
применения используются для решения логических задач. Они пред-
ставляю г собой контактные логические элементы. Исключение со-
ставляет только применение реле в качестве чисто усилительных
устройств или для размыкания и замыкания
цепей с плавно изменяющимися сигналами,
Контактные реле имеют типичную релей-
ную характеристику вход — выход (рис. 3-7),
на которой по оси абсцисс откладывается ток,
протекающий по обмотке катушки реле, а по
оси ординат — ток, замыкаемый контактами
реле. Таким образом, электромеханические ре-
ле имеют два устойчивых состояния выхода
(контакты разомкнуты — ток ,в.ыхода равен ну-
лю или контакты замкнуты и ток выхода ра-
вен своей номинальной величине) в зависимо-
сти от того, достигает ли сигнал входа вели-
чины, необходимой для срабатывания или от-
пускания реле, или нет.
Логические функции с помощью реле мо-
гут осуществляться двумя способами: 1) с помощью комбинирова-
ния нескольких обмоток у многообмоточных реле, 2) с помощью
комбинирования включения контактов реле.
Второй способ создает гораздо больше возможностей для ре-
шения логических задач и поэтому используется гораздо шире, чем
первый. Но первый способ также иногда .находит применение; кро-
ме того, он характерен не только для реле, а и для других элек-
тромагнитных устройств., например для магнитных усилителей
■в релейном режиме, поэтому остановимся кратко и на нем. Этот
способ выполнения логических функций на реле требует наличия
стольких обмоток на катушке реле, сколько входных переменных
*отп ^ср
Рис. 3-7. Характе-
ристика вход—вы-
ход контактного
реле.
90
имеет логическая функция. Тогда величины входных сигналов (ток
входа) и числа витков отдельных обмоток рассчитываются так,
чтобы н. с. срабатывания или отпускания реле достигалась только
при нужной, логической комбинации входных сигналов на отдель-
ных обмотках реле.
Таким образом, для осуществления логической функции И на п
входов реле должно иметь п одинаково включенных обмоток. Вход-
ной сигнал, подаваемый на обмотку, должен создавать в ней намаг-
ничивающую силу, которая в реле без обмотки смещения в п раз
меньше намагничивающей силы срабатывания реле, но больше, чем
ширина петли характеристики. Тогда реле сработает и замкнет свои
замыкающие контакты только при наличии сигналов на всех п вхо-
дах. Если это реле имеет и размыкающие контакты, то при сраба-
тывании реле они разомкнутся и на них осуществится функция И
с отрицанием.
Для осуществления на реле логической функции ИЛИ на п вхо-
дов реле также должно иметь п обмоток, включенных одинаково,
причем каждый сигнал должен создавать н. с, большую чем н. с.
срабатывания, чтобы реле могло сработать от сигнала, поданного
на любую из его обмоток. Тогда реле будет замыкать замыкающие
контакты при наличии любого из сигналов. Размыкающие контакты
этого реле выполняют функцию ИЛИ с отрицанием, т. е. НИ...
НИ... Недостатки такого способа выполнения логических функций
очевидны. Чем на большее число входов рассчитаны реле, тем более
стабильны должны быть сигналы, чтобы избежать ложной работы
при выполнении функции И, так как нельзя выбрать сигналы с за-
пасом ни на срабатывание, ни на отпускание.
Обмотки реле, выполняющего функцию ИЛИ, должны занимать
Гораздо больше места, чем обмотки такого же реле, выполняющего
функцию И на то же число входов.
Наиболее удобно выполнять логические функции с помощью
нескольких обмоток на поляризованных реле, так как они обладают
высокой чувствительностью и управляются сигналами малой мощ-
ности. Однако они имеют обычно только один переключающий
контакт.
Более распространено выполнение логических функций на одно-
обмоточных реле с помощью различных способов включения контак-
тов реле.
Функция И на п входов выполняется последовательным вклю-
чением замыкающих контактов п реле. На рис. 3-8,а показана та-
кая схема на три входа а, Ь и с. Напряжение на выходной нагруз-
ке схемы появляется только при замыкании всех контактов, т. е.
при наличии сигналов на всех реле
vt = abct
На размыкающих контактах этих реле, включенных последова-
тельно, выполняется функция ИЛИ с отрицанием (НИ ... НИ ...)
v2=abc=a+b + c (рис. 3-8,6).
Функция ИЛИ на п входов выполняется параллельным включе-
нием замыкающих контактов п реле. На рис. 3-9,а показана схема
на три входа a, b и с. Напряжение на выходной нагрузке схемы
появляется при замыкании любого из контактов, т. е. при появлении
сигнала на любом из реле v{=a + b + с. На размыкающих контактах
91
этих реле, включенных параллельно, выполняется функция И с отри-
цанием (рис. 3-9,6)
v2 = a + b-{-c = abc.
Функция НЕ выполняется размыкающим контактом реле, вклю-
ченным последовательно с выходной нагрузкой (рис. 3-10). Появле-
ние сигнала на реле отключает нагрузку от напряжения.
а а с
0t
Г—If—II—1Г
* a be
a h с
Г*
¥~V
Рис. 3-8.
□—0
При выполнении простейших логических функций с помощью
комбинирования включения контактов минимальное число реле рав-
но числу входных величин и в определенных пределах не зависит
от количества выполняемых логических
функций, так как обычно реле имеют
достаточно большое число замыкающих
и размыкающих контактов.
Рис. 3-10.
Рис. 3-11.
Этот способ выполнения логических функций на реле более рас-
пространен, чем первый.
В таблице элементарных функций в гл. 2 показаны все возмож-
ные логические функции двух переменных. Мы уже видели, как вы-
полняются с помощью контактов реле четыре из них, распростра-
ненные на три переменных. Приведем еще несколько примеров для
наиболее часто встречающихся функций двух переменных. На
рис. 3-11,а цепочка контактов двух реле осуществляет функцию за-
прета V\ = ab. С появлением сигнала на входе b выход обязательно
равен 0. Если сигнал на входе b отсутствует, выход Vi==a. Парал-
лельное включение инверсных контактов этих же реле позволяет
получить функцию импликации, когда вход v9=a+b (рис. 3-11,6).
Эту же функцию можно было получить инвертированием выхода V\,
так как v\ = v2, но это потребовало бы включить вместо v\ еще одно
реле с размыкающим контактом.
92
На рис. 3-12,а и б показаны логические^ функции неравнознач-
ности—верхние цепочки контактов v\ = ab + ab и равнозначности —
нижние цепочки контактов v2 = ab + ab, также инверсные между со-
бой vi = v2. При этом ,на рис. 3-1 2,а показаны схемы, полученные
а)
Рис. 3-12.
на обычных контактах реле, а на рис. 3-12,6 — схемы, полученные
на переключающих контактах.
Остановимся в заключение на выполнении схемы памяти, кото-
рая представляет собой не что иное, как реле с самоблокировкой.
На рис. 3-13 показана схема па-
мяти, у которой выходное реле V л %
включается сигналом от входа а и
замыкает свой контакт v, сохраняя
его замкнутым уже .независимо от < 10-
дальнейшего присутствия сигнала а. а Ъ
Отключить его можно только с по- |—м Т ц Л/—^ +
мощью_ сигнала, приходящего на вход | v
а в
дальнейшего присутствия сигнала а.
реле В, так как если 6 = 1, то раз- i * if—*
мыкающий контакт b разомкнётся и т v
отключит реле V, которое в свою р
очередь разблокируется и останется ' " '
в отключенном состоянии независимо
от дальнейших изменений значения входа В. Выражение, характе-
ризующее состояние сигнала на обмотке реле V, имеет вид
V = (a + v)b,
где v — состояние контактов реле, т. е. состояние выхода.
Это выражение показывает, что состояние реле, названное в преды-
дущей главе последующим состоянием, определяется не только зна-
чением независимых входных переменных а и Ьу но и значением
промежуточной переменной v, которая в данном случае представ-
ляет собой состояние контактов в исходный момент. Запаздывание
в контуре равно времени срабатывания или отпускания реле.
93
Описанию реле как элемента логических схем, а также анализу
и синтезу логических схем на основе реле посвящено большое коли-
чество печатных работ, поэтому в настоящей книге подробнее оста-
навливаться на этих вопросах нецелесообразно. Отметим только,
что логические схемы на реле, если не приняты меры для синхро-
низации схемы в целом, являются типично асинхронными схемами,
так как времена срабатывания разных реле всегда могут немного
отличаться одно от другого. Это очень важно иметь в виду при со-
ставлении схем с обратными связями.
3-3. ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
НА ПОЛУПРОВОДНИКОВЫХ ВЕНТИЛЯХ
И СОПРОТИВЛЕНИЯХ
Для построения логических элементов в принципе могут быть
использованы применяемые на практике выпрямители любого типа.
Однако селеновые и купроксные вентили • имеют менее подходящие
параметры, чем германиевые и кремниевые вентили, которые имеют
меньшие размеры и меньшее потребление мощности. При примене-
нии их на повышенных частотах
J, или при импульсном питании
/ / имеет значение также меньшая
I собственная емкость последних*
/ Кремниевые вентили имеют те же
/ преимущества, что и германиевые
/ v вентили, и, кроме того, надежно
* ^ + работают в более широком диа-
пазоне температур.
Возможность использования
вентилей в качестве логических
р « элементов основана на их особен-
^ис. с*-14. нести резко изменять свое сопро-
тивление с изменением полярно-
сти .приложенного к ним напряжения. Вольт-амперная характери-
стика вентиля показана на рис. 3-14. В положительном (прямом)
направлении вентиль проводит относительно большой ток с малым
падением напряжения, а в обратном направлении — относительно
малый ток с большим падением напряжения. Его прямое "сопро-
тивление может быть в десятки тысяч раз меньше обратного.
Несмотря на то что при рассмотрении принципа работы логи-
ческих схем принимают обычно прямое сопротивление вентиля рав-
ным нулю, а обратное сопротивление — равным бесконечности, при
проектировании логических схем с вентилями необходимо учитывать
конечные значения этих величин.
Простейшие логические функции, которые можно построить на
полупроводниковых вентилях, ограничиваются логической суммой
(ИЛИ) и логическим умножением (И) [Л. 10].
Построение логической функции ИЛИ основывается на свойстве
вентильных схем, изображенных на рис. 3-15,а для положительных
сигналов и 3-15,6 — для отрицательных сигналов иметь на своем
выходе v напряжение, абсолютное значение которого всегда равно
наибольшему из абсолютных значений напряжений входов а, Ь,
с т. е. v=a+b + .< .. Действительно, при наличии хотя бы
на одном из входов напряжения, равного единице (указанной на
94
рисунке полярности) при напряжениях остальных входов, раьиых
нулю, соответствующий вентиль открыт и сигнал выхода равен еди-
нице, если пренебречь прямым падением напряжения на этом вен-
тиле.
На рис. 3-15 показаны схемы ИЛИ для двух входов, но прин-
ципиально они могут быть построены на большее число входов
с соответственным увеличением числа вентилей.
b +0—М-
с +
aj
а -0—М-
5*
ь - 0—Н-
6)
1-4
5"
Рис, 3-15.
Построение логической функции И основывается на свойстве
вентильных схем, изображенных на рис. 3-16,а для положительных
сигналов, и рис. 3-16,6 — для отрицательных сигналов иметь на
своем выходе v напряжение, абсолютное значение которого всегда
равно наименьшему из абсолютных значений напряжений входов
а, Ь, с,..., т. е. v — a • Ь ... В самом деле, при наличии хотя бы на
одном из входов напряжения, равного нулю, соответствующий вход-
а + <Н4-
+ 0
r
- и
r
а -
Ь - 0-М
6)
Рис. 3-16.
ной вентиль открыт, а следовательно, если можно считать, что его
прямое сопротивление равно нулю, напряжение на выходе также
равно нулю; чтобы выходное напряжение было равно единице, все
входные сигналы должны быть равны единице.
Для того чтобы реальное прямое падение напряжения на вен-
тиле заметно не увеличивало потенциала выхода, необходимо, что-
бы сопротивление R было гораздо больше прямого сопротивления
вентиля. Эти схемы также могут быть построены на большое число
входов.
Рассмотрим пример совместного использования логических функ-
ций И и ИЛИ, реализованных на вентилях и сопротивлениях. На
рис. 3-17,а показана блок-схема функции v = d(c+ab), а на
рис. 3-17,6 — принципиальная схема, выполняющая эту функцию на
диодах и сопротивлениях при положительном сигнале. Величины,
приходящие на входы а и Ь, логически умножаются, и их произвел
95
дение попадает на оДйн из входов суммы. Там происходит логиче-
ское сложение этого произведения с другим входом с суммы. Нако-
нец, выход суммы снова логически умножается на вход d, и в ре-
зультате получаем на выходе v.
Рассмотрим возможность физической осуществимости такой
функции. Если на входы а и Ъ приходят единицы: а=6 = 1, то вен-
тили а и Ь заперты, а сопротивления R\ и R2, включенные последо-
вательно между +U и землей, образуют делитель напряжения. Так
как величину напряжения U нельзя выбирать существенно больше,
чем напряжение входного сигнала, то Ri^R2.
Определим теперь условия работы второго и третьего каскадов,
т. е. суммы и выходного произведения. При нулевых сигналах, при-
ходящих на входы И [af=0 и (c+ab)=0] на выходе v уровень на-
пряжения также должен быть равен нулю. Однако при этом сопро-
тивления R5 и /?2 образуют делитель напряжения между +U и зем-
лей. Поэтому, для того чтобы уровень выходного напряжения был
близок к .нулю, необходимо, чтобы </?3>^2, «о так как /?2~#ь то
R{2>R\. Следовательно, уровень мощности сигнала, который можно
снять с выхода схемы произведения, включенного после схемы сум-
мы, будет также гораздо ниже, чем уровень мощности сигнала на
выходе предыдущего каскада схемы произведения. Это свойство
привело к тому, что практически на вентилях и сопротивлениях
не строятся логические функции, требующие включения более чем
двух каскадов последовательно. Два каскада, как видно из рассмо-
тренного примера, -позволяют образовывать произведения сумм,
или суммы произведений, но не позволяют получать даже самые
простые алгебраические выражения, содержащие члены, вынесен-
ные за скобки. Для получения более сложных алгебраических логи-
ческих функций применяются двухкаскадные схемы на выпрямите-
лях и сопротивлениях, с последующим усилением до уровня сигна-
лов входов первого каскада.
Несмотря на то что электронные диоды обладают хорошими
выпрямительными свойствами, в логических схемах они почти пол-
ностью вытеснены германиевыми и кремниевыми выпрямителями
благодаря целому ряду преимуществ последних. Поэтому остано-
вимся подробнее на функциях, которые могут быть выполнены
электронными триодами и пентодами [Л. 10].
Рис. 3-17.
3-4. ЭЛЕКТРОННЫЕ ЛАМПЫ В КАЧЕСТВЕ
ЛОГИЧЕСКИХ ЭЛЕМЕНТОВ
96
В качестве переключающего устройства электронная лампа
обычно работает следующим образом: когда к сетке (или сеткам)
приложен верхний уровень входного напряжения сигнала (единица),
то анодный ток лампы близок или равен току насыщения, а когда
к сетке приложен нижний уровень напряжения сигнала (нуль),
анодный ток равен нулю, лампа заперта. Это делается для того,
чтобы выходные величины практически мало зависели от колеба-
ний уровней входных сигналов вблизи 0 и 1, т. е. в режиме пере-
ключений лампы должны иметь устойчивую характеристику (см.
§ 3-1). В отличие от цепей с диодами триоды и пентоды могут
иметь сколько угодно последовательно включенных каскадов, так
как благодаря наличию усиления в них нет необходимости увели-
чивать выходное сопротивление от каскада к каскаду.
а) Логические элементы на триодах
Рассмотрим, как выполняется логическая операция НЕ (инвер-
сия) с помощью электронного триода. На рис. 3-18 показана прин-
ципиальная схема такого инвертора, где v = a. Анод через анодное
сопротивление RA подключен к источнику анодного питания £/а,
а выходное напряжение снимается с анода через делитель, нижний
а (б-
Рис, 3-18. Рис. 3-19.
конец которого подключен к источнику отрицательного напряже-
ния—-• £/д. Когда входной сигнал на сетке имеет уровень 1, анод-
ный ток близок или равен току насыщения, а анодное напряжение
мало. Когда входной сигнал равен нулю, напряжение на сетке
уменьшается, анодный ток падает до нуля, а анодное напряжение
возрастает до максимального. Таким образом, изменения сеточного
напряжения вызывают противоположные изменения анодного на-
пряжения, и значения выходного напряжения представляют собой
инверсию значений входного напряжения. Делитель напряжения
позволяет получить нужный уровень выходного напряжения по от-
ношению к земле.
С помощью нескольких триодов можно легко получить произ-
ведение инверсий их входов, т. е. инверсию суммы. Рассмотрим
это явление для двух триодов, включенных по схеме, показанной
на рис. 3-19. Триоды соединены так, что их аноды подключены
к анодному напряжению через общее анодное сопротивление Rz.
Тогда, если входной сигнал на сетке хотя бы одной из ламп ра-
вен 1, лампа будет открыта, и выходное напряжение будет иметь
низкий уровень; только если обе лампы будут иметь нулевые сиг-
7—2528 97
палы на сетках, f. е. будут заперты, выходное напряжение будет
иметь высокий уровень (выходной сигнал будет равен 1). Если со-
стояния входов и выходов записать в форме карты, то получим
(рис. 3-19,6):
v = ab = а + Ь.
Если бы вместо двух триодов было включено п триодов с п неза-
висимыми входами и общим анодным сопротивлением, то выход
также выражался бы как произведение инверсий или инверсия
суммы всех входов (НИ ... НИ ...)
v = abc = а + b + с + ...
Легко показать, что, используя подобным образомг соединенную
пару триодов совместно с единственным триодом, осуществляющим
инверсию, можно построить на них все основные логические функ-
ции в соответствии с равенствами алгебры логики.
aj 6j
Рис. 3-20,
На рис. 3-20,а и б показаны блок-схемы для получения логиче-
ской суммы и произведения. Можно ради единообразия в основу
построения всех логических функций положить блок из двух трио-
дов, дающих произведение инверсий, т. е НИ... НИ..., и строить
все функции на нем. Тогда для получения инверсии одной входной
величины сигнал входа подается на обе сетки триодов. Однако чис-
ло ламп в такой логической системе будет значительно превышать
минимально необходимое.
б) Логические элементы на пентодах
Рассмотрим, какие логические функции можно выполнять на
пентоде, применяя его в качестве логического элемента. Принци-
пиальная схема включения пентода показана на рис. 3-21,а. На его
экранную сетку подается положительное напряжение, и тогда две
93
остальные сетки могут оыть использованы как независимые входы.
Если хоть один из сигналов обеих сеток* будет иметь низкий уро-
вень (0), пентод будет заперт. Он будет открыт (т. е. будет прово-
дить ток) только в том случае, если напряжения на обоих входах
вырастут до максимального уровня (1). В карте на рис. 3-21,6 по-
казаны все возможные состояния выходов в зависимости от входов
пентода. Очевидно, что пентод реализует логическое суммирование
инверсных входов или инверсию произведений входов:
v = а -\-б= ~ab.
К сожалению, эта функция не может быть распространена на
п входов, так как мы не имеем ламп, содержащих п подобных се-
ток, которыми можно было бы управлять с помощью приблизитель-
но одинаковых напряжений.
Пентоды также могут работать по схеме с общим анодным со-
противлением, как показано на рис. 3-22,а. Если любой один или
оба пентода открыты, выходное
напряжение схемы будет иметь ' ~1 1
низкий уровень (0). Высокий уро- { 1
вень напряжения выхода будет
а1-
;
1
1Г
1
7
1
0
1
0
0
0
1
7
0
1
6)
Рис. 3-22.
только в том случае, если оба пентода закрыты; тогда состояние
входов и выходов можно выразить с помощью карты на рис. 3-22,6.
Эта карта показывает, что, если хотя бы на одном пентоде обе
сетки имеют сигналы, равные 1, выход схемы равен 0. Таким обра-
зом, при значениях с=1 и d—\ независимо от значений а и Ь
(т. е. при любых а и Ь) выход будет равен 0. Аналогично, при
а= \ и Ь = \ независимо от значений cud выход также равен нулю.
При всех остальных комбинациях входных переменных выход ра-
вен 1, так как в этих случаях всегда хоть один вход на каждой
лампе равен нулю, и поэтому оба пентода закрыты. Очевидно, что
эти соотношения выражаются функцией
v=(a + b)(c + d)..
Следовательно, при работе двух пентодов с общим анодным со-
противлением реализуется функция произведения сумм инверсных
входов. Так же как и с помощью одних триодов, с помощью толь-
ко одних пентодов можно реализовать все логические функции,
7* ' 99
используя пентод как простои инвертор и в схеме с общим анод-
ным сопротивлением, однако очевидно, что это даст выигрыш в ко»
личестве элементов только в отдельных частных случаях.
в) Комбинированные электронные логические элементы
Триоды и пентоды иногда используются в комбинациях с пита
•кием через общее анодное сопротивление, как показано на рис. 3-23.
В этой схеме два триода имеют входы а и Ь и рЬботают парал-
лельно с пентодом, имеющим входы с и d. Проводя те же рассуж-
дения, что и раньше, легко показать, что логическая функция, реа-
Рис. 3-23.
лизуемая на выходе этой схемы, представляет собой произведение
инверсных входов триода на сумму инверсных входов пентода, т. е.
v = ab(c + d).
г) Логические элементы на катодных повторителях
Следует остановиться на еще одном способе построения логи-
ческих элементе на электронных лампах. Имеется в виду использо-
вание триодов по схеме катодного повторителя. В этом случае вы-
ходное напряжение снимается с катодного сопротивления, и поэто-
му оно повторяет, а не инвертирует сигнал на сетке триода. На
рис. 3-24,а показана схема двух триодов, включенных как катодные
повторители через общее катодное сопротивление. В такой схеме
+ иа
О 1
1 1
100
Рис. 3-24.
си d)
v
выход равен нулю только в том случае, если закрыты оба триода,
а при наличии сигнала, равного единице", хотя бы на одной из двух
сеток по катодному сопротивлению идет ток открытого триода и
выходное напряжение приблизительно равно исходному, т. е. сиг-
нал выхода I. Таким образом, карта для этой схемы имеет вид,
как на рис. 3-24,6, а функция выхода есть логическая сумма входов
v — a + b.
Можно параллельно соединять большое число катодных повто-
рителей, при этом на выходе будет реализована логическая сумма
входов v = a-\-b-\-c + ...
Для правильной работы катодных повторителей общее катодное
сопротивление RK должно быть значительно больше анодных сопро-
тивлений, которые ставятся при использовании триодов в отдель-
ности.
Нужно отметить, что усиление по напряжению катодных повто-
рителей меньше единицы и поэтому из них нельзя образовать замк-
нутые или длинные цепи, так как их характеристика неустойчива
в том смысле, как было определено выше.
Обычно катодные повторители используются не просто как ло-
гические устройства. Чаще всего они ставятся на выходе логических
схем, так как совмещают логические функции с большим усилением
по мощности. Их удобно также использовать для согласования
схем.
3-5. ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ НА ТРАНЗИСТОРАХ
а) Принцип действия и характеристики
Логические элементы на транзисторах в последнее время исполь-
зуются очень широко благодаря малым габаритам и весу и отно-
сительной простоте схем. Транзисторные логические элементы яв-
ляются типичными асинхронными логическими элементами, так как,
несмотря на очень высокое быстродействие, время их работы имеет
конечную величину, которая изменяется от одного экземпляра
транзистора к другому, а также зависит от параметров схем. По-
этому в схемах с транзисторными элементами нельзя рассчитывать
на строго одновременную работу логических элементов, возбужден-
ных одним и тем же сигналом. Это необходимо учитывать при про-
ектировании логических схем, чтобы избежать хотя бы и кратко-
временных, но ложных сигналов там, где они недопустимы.
При построении логических элементов транзисторы используют-
ся главным образом в схеме с общим эмиттером (рис. 3-25), так
как эта схема наилучшим образом позволяет реализовать ряд эле-
ментарных логических функций и наиболее простым способом согла-
совать работу одного логического элемента на несколько подобных
же элементов.
Как уже неоднократно говорилось выше, уровень сигналов вхо-
дов и выходов (входные и выходные переменные логических функ-
ций) меняется дискретно от уровня нуля до уровня единицы. На
транзисторных элементах обычно нулевой сигнал близок к потен-
циалу земли, а сигнал единица имеет порядок нескольких вольт и
положителен для транзисторов, с п—р—п переходом и отрицателен
для транзисторов с р—п—р переходом. Так как транзистор
работает как усилитель тока, сигналы можно рассматривать и как
соответствующие уровни тока.
101
Благодаря дискретному изменению уровней входного и выход-
ного сигналов транзистор работает в режиме переключений. Рас-
смотрим кратко этот режим работы транзистора. На рис. 3-26 при-
ведено типичное семейство характеристик транзистора дл* схемы
с общим эмиттером. По оси ординат отложен ток коллектора /к,
а по оси абсцисс— напряжение между эмиттером и коллектором
ик,э. Постоянным параметром отдельных характеристик является
ток базы. На этом же се-
мействе характеристик по-
строена нагрузочная прямая
ab, представляющая собой
зависимость напряжения
эмиттер — коллектор £/к.э от
тока коллектора и сопротив-
ления Як при заданном на-
пряжении питания схемы,
равном {/к.вмакс В даль-*
нейшем; ик.э будем назы* У i ' [ 1 *—^—1П7~'**о
вать выходным иапряжени-
Рис. 3-25.
Рис. 3-26.
ем транзистора. Угол наклона прямой ab определяется величиной со-
противления /?к, включенного в цепь коллектора. Таким образом, на-
грузочная прямая определяет величину выходного напряжения, ко-
торое может иметь транзистор при заданном напряжении питания
и выбранном сопротивлении коллектора RK. Точки пересечения на-
грузочной прямой с характеристиками транзистора дают рабочие
точки схемы, т. е. зависимость выходного напряжения £/к.э от тока
базы /б- При изменении тока базы рабочие точки перемещаются
с одной кривой на другую по прямой ab.
Когда ток базы /б=0, транзистор находится в точке Ь, его внут-
реннее сопротивление очень велико, а ток коллектора, протекаю-
щий через него, очень мал и напряжение питания схемы почти це-
ликом приложено к транзистору, т. е. между эмиттером и коллек-
тором. Обычно такое состояние характеризуется как закрытое (ино-
гда говорят, что транзистор находится в режиме отсечки). При воз-
растании тока базы сопротивление транзистора падает, а рабочая
точка перемещается влево и вверх по прямой ab. Выходное напря-
жение уменьшается и определяется опять точкой пересечения пря-
мой ab с характеристикой транзистора при данном токе базы. Ког-
да ток базы достигает некоторой предельной для данного напряже-
ния питания схемы и RK величины (например, ток /55 на рис. 3-26),
102
его Дальнейшее увеличение не будет вызывать роста тока коллек-
тора /к и уменьшение £/к.э также прекратится.
В этой рабочей точке (точка а на рис. 3-26) транзистор будет
находиться в. состоянии насыщения, или, как говорят, он будет
полностью открыт, так как его сопротивление будет минимальным,
а выходное напряжение £/к.э близко к нулю. Таким образом, тран-
зистор имеет две предельные рабочие точки на своих характеристи-
ках — это точка отсечки и точка насыщения. По характеристикам
транзистора LfK.8 = <p(/K, ^б) с помощью нагрузочной прямой ab
можно построить характеристику вход—выход, если по оси абс-
цисс отложить ток базы /б, а по оси ординат—выходное напряжение
транзистора £/к.э, соответствующее точкам пересечения характери-
стик с нагрузочной прямой. Такая характеристика построена на
нижней части рисунка 3-26. Отметим, что нагрузочная кривая, при-
веденная на рис. 3-26, является предельной кривой для холостого
хода, так как она определяется только сопротивлением Ri{. Так как
полезная нагрузка обычно присоединяется к выходу, т. е. на на-
пряжение (Ук.э, то при присоединении нагрузочного сопротивления
меняется наклон нагрузочной линии ab. Сопротивление нагрузки
и Дк образуют делитель напряжения, к которому присоединен тран-
зистор. Поэтому чем больше нагрузка, т. е. чем меньше нагрузоч-
ное сопротивление по сравнению с Rn, тем круче идет нагрузочная
линия ab. При этом положение точки а мало изменяется. Можно
считать, что нагрузочная линия вращается около точки а. Очевид-
но, что характеристика транзистора в схеме с общим эмиттером
является характеристикой инвертора. Из анализа этой характери-
стики можно заключить, что для статически устойчивой работы
замкнутого контура или цепочки из большого числа последователь-
но включенных транзисторных инверторов необходимо, чтобы вы-
ходной сигнал элементов, соответствующий единице, создавал ток
базы у последующих элементов больший, чем ток, соответствую-
щий точке насыщения характеристики. При этих условиях харак-
теристика двух последовательно включенных инверторов будет
устойчивой.
Очевидно, что при включении на выходе транзисторного логи-
ческого элемента нескольких подобных же элементов выходное
напряжение управляющего транзистора не должно уменьшаться
больше, чем это допустимо, чтобы во всех присоединенных элемен-
тах ток базы был достаточен для насыщения. Это условие легко
осуществимо, так как малое изменение тока базы транзистора вы-
зывает значительное измененние тока, протекающего в цепи эмит-
тер — коллектор, благодаря тому, что транзистор представляет со-
бой усилитель. В схеме с общим эмиттером транзистор характери-
зуется коэффициентом усиления по току р, представляющим собой
отношение тока коллектора к току базы: р= при постоянном
(/к.э. Для отечественных транзисторов этот коэффициент обычно
колеблется от 10 до 100. Мы видели, что в рассматриваемой схеме
транзистор представляет собой устройство, управляемое током. Од-
нако ради единообразия изложения будем в дальнейшем считать,
что входные и выходные величины его являются напряжениями.
Входным напряжением будем считать напряжение между эмит-
тером и базой t/э.б, которое можно определить как £/э.б=/б/?э.б.иПри
этом нужно помнить, что сопротивление Я9.ь является нелинейным
103
сопротивлением, а его величина зависит от величины тока базы /б-
Так как величина этого сопротивления колеблется от элемента
к элементу, иногда бывает необходимо последовательно с базой
присоединять входное сопротивление, благодаря которому ток на-
грузки распределяется более равномерно между присоединенными
элементами.
Выходным напряжением, как уже говорилось выше, является
напряжение между эмиттером и коллектором £/к.э.
б) Логические функции, выполняемые на транзисторных
логических элементах
Те тенденции, которые сложились при определении круга логи-
ческих функций, которые должны выполнять системы логических
элементов, нашли наиболее яркое отражение при определении этого
круга функций для транзисторных логических элементов.
Первая из них заключается в том, что с помощью транзисто-
ров создаются логические элементы различных типов, выполняю-
щие несколько основных элементарных логических функций, «^при-
мер функцию инверсии, И и ИЛИ. Вторая тенденция заключается
в построении одного универсального элемента, выполняющего такую
элементарную комбинацию логических функций, с помощью кото-
рой легко построить все другие логические функции. Чаще всего
это функция ИЛИ с отрицанием (НИ... НИ). При этом предпола-
гается, что увеличение числа логических элементов в общей схеме
управления по сравнению с предыдущим вариантом (на элемен-
тах ИЛИ, И и НЕ) при использовании одного универсального эле-
мента компенсируется стандартизацией и всеми обусловленными
ею преимуществами.
Последняя тенденция определения круга функций, выполняемых
системой логических элементов, заключается в создании логических
элементов, реализующих уже не элементарные, а более сложные
логические функции с большим числом входов и выходов, а имен-
iho: произведения сумм или суммы произведений.
Рассмотрим все три типа систем логических элементов на тран-
зисторах [Л. 14—16].
в) Транзисторные элементы, выполняющие элементарные
функции И, ИЛИ, НЕ
Как уже было сказано, транзисторная схема с общим эмит-
тером, показанная на рис. 3-25, представляет собой принципиаль-
ную схему инвертора. Логический элемент НЕ является самым про-
стым из транзисторных логических элементов и, как будет показа-
но ниже, он входит как составная часть в логические элементы, вы-
полняющие почти все остальные логические функции.
Основные элементарные логические функции могут быть полу-
чены с помощью одних транзисторов, однако, как будет ясно из
дальнейшего, логические элементы в этих случаях будут уступать
в экономичности, надежности и простоте логическим элементам,
представляющим собой комбинации полупроводниковых диодов
с транзисторами,
104
На рис. 3-27,а показана схема логического элемента, выпол-
няющего функцию И с отрицанием на три входа, выполненного
на одних транзисторах. Очевидно, напряжение U будет равно нулю
только в том случае, если будут открыты все три триода, т. е. если
на входы a, b и с будут поданы отрицательные сигналы
(а=1, b= 1 и с=\). Карта функ-
ции такого элемента показана на
** рис. 3-27,6.
7
/
1
7
7
1
0
1
Рис. 3-27.
Нужно отметить, что использование в качестве выходного сиг-
нала напряжения на сопротивлении RK для получения прямой
функции И нецелесообразно, так как при этом сигнал выхода не
будет иметь общей точки с сигналом входа и не сможет быть ис-
пользован для управления подобными же элементами.
Рис. 3-28.
На рис. 3-28 показана другая схема, выполняющая логическую
функцию И, построенная также на одних транзисторах, но лишен-
ная этого недостатка. Эта схема работает следующим образом: при
отсутствии сигнала на входах a, b и с транзисторы Т\, Т2, Т3 будут
закрыты, и их общий выход v' будет иметь отрицательный потен-
циал, т. е. i/=l. Если один или два из входных сигналов станут
равными 1, потенциал v' останется отрицательным, т. е. выход v'
останется равным 1. И только в том случае, если все три входа а,
b и с будут равны 1, выход v' станет равным нулю. Карта для это-
го выхода имеет такой же вид, как и карта на рис. 3-27,6.
105
Таким образом, на транзисторах Т{, Т2 и Г3 и сопротивлениях
выполняется инверсия логического произведения:
Транзистор Т4 инвертирует сигнал i/, так как, когда v'=l, он от-
крыт и его выход равен 0, а когда v'=0, он закрыт и его выход
равен 1.
Итак, v = v', и схема в целом реализует логическую функ-
цию И:
В схеме логического элемента И, построенного по такому прин-
ципу, число транзисторов на единицу больше числа входов. Поэтому
этот элемент довольно дорог. Гораздо проще функция И реализует-
ся с помощью вентилей и двух транзисторов. Схема такого элемен-
та на три входа показана на рис. 3-29.
В этом элементе используется вентильная логическая схема И
с последующим усилением и двойным инвертированием на транзи-
сторах Т\ и Т2. Работает схема следующим образом: при отсут-
ствии сигналов на .входе потенциал входов а, Ь, с равен нулю, все
вентили открыты и потенциал точки d равен нулю. Если оддш из
входов получает отрицательный потенциал, соответствующий вен-
тиль запирается, однако потенциал точки d остается равным нулю,
пока хотя бы один из входов имеет потенциал, равный нулю.
Следовательно, vr—abc. Если v'=\ (отрицательный потенциал),
открывается транзистор Ти выход которого представляет собой ин-
версию v\ т. е. V\ = v'=abc При Pi = 0 на базе второго транзисто-
ра Т2 появляется плюс, и он закрывается. Таким образом, в схеме
можно одновременно снимать два усиленных _ инверсных выхода.
На йыходе транзистора Т\ мы получаем Vi = abc, а на выходе Т2
v2=abc.
Число входов такого элемента может быть достаточно высоким,
причем число вентилей равно числу входов. Эта схема И получила
наибольшее распространение.
Схема логического элемента, выполняющего функцию ИЛИ на
три входа с помощью только одних транзисторов, показана на
рис. 3-30,а. Входные транзисторы Гь Г2, Г3 включены на общее кол-
лекторное сопротивление Ri, поэтому, если хоть один из этих тран-
v' — abc.
v = abc.
V1 - a be
Рис. 3-29.
106
зисторбв открыт, потенциал выхода отбудет равен нулю, и только
тогда, когда все три входа равны нулю (а = & = с=0), все транзи-
сторы закрыты, потенциал выхода v\ = \. Карта этой функции пока-
зана на рис, 3-30,6.
Выходной транзистор Г4 инвертирует вход v{ и позволяет .по-
лучить логическую сумму входов а, Ъ и с.
Недостатком этой схемы является большое количество транзи-
сторов, равное числу входов плюс 1. Поэтому гораздо чаще исполь-
□
0
0
0
0
0
0
0
v
4>
Рис. 3-30.
зуются схемы, в которых реализация логической функции ИЛИ
производится на вентилях или просто на сопротивлениях, а усиле-
ние и инвертирование — на транзисторах.
Схема логического элемента ИЛИ >на диодах на три входа по-
казана на рис. 3-31. Как уже было сказано в параграфе, посвя-
щенном вентильным логическим элементам, потенциал выхода диод-
ной схемы ИЛИ всегда равен наибольшему из абсолютных значе-
ний потенциалов входов, поэтому, если а, или Ь, или с равны 1, то
транзистор Т\ открыт и ^i = 0, при этом выход v2 будет равен 1.
Следовательно, эта схема также дает прямую и обратную
функцию ИЛИ:
у, == а + Ь + с; А2 = и, = а + Ь + с,
причем она имеет только два транзистора независимо от числа вхо-
дов и число вентилей, равное числу входов.
Другой вид элемента ИЛИ, где логическая функция реализуется
на сопротивлениях, показан на рис. 3-32. Работа этой схемы похо-
жа на работу предыдущей схемы. Однако, так как в этой схеме нет
107
входных вентилей, то приходится уменьшать влияние входов друг
иа друга с помощью сопротивлений \R\. Величина этих сопротивле-
ний должна быть выбрана так, чтобы при наличии нуля на одном
из входов потенциалы других входов падали незначительно, так
как иначе выход элементов, включенных на входе такого типа эле-
I 1
Рис. 3-31.
мента ИЛИ, нельзя будет использовать для одновременного управ-
ления другими логическими элементами. При открытом транзисто-
ре Т\ сопротивление R\ шунтирует выход предыдущего элемента, и
поэтому для уменьшения нагрузки предыдущего элемента следует
брать его достаточно большим, однако не больше того, при кото-
ром ток базы достаточно велик для открытия триода Т\.
г ? -и,
Рис. 3-32.
Схемы памяти или статические триггеры, которые являются
примером реализации простейших последовательностиых логических
функций, используются в схемах промышленной автоматики очень
широко. Поэтому и логическая функция память часто называется
в числе основных элементарных логических функций, и очень важно
знать, насколько сложно реализуется эта функция в данной системе
элементов.
Мы уже встречались с тем, как выполняется эта функция на
реле с самоблокировкой. Она легко может быть получена и с по-
108
мощью транзисторных Логических элементов, выполняющих такие
логические функции, как НЕ, И, ИЛИ. Как уже указывалось, функ-
цию ламяти можно записать, например, следующим образом:
V =(a + v)F1
где а и Ь — входные переменные (входные сигналы);
v — промежуточная переменная, характеризующая в данном
случае состояние выхода в исходный момент; V — состояние выхо-
да в последующий момент времени. Как видно из этого выражения,
эту функцию можно выполнить, например, таким образом: на эле-
менте ИЛИ можно получить сумму x = a + v, на инверторе — инвер-
сию входа у — Ь, а затем с .помощью элемента И получить произ-
ведение ху — (a + v)b. В таком случае у нас будет использовано три
элемента (ИЛИ, И и НЕ), два из которых — ИЛИ и И — являются
достаточно громоздкими, так как содержат еще инвертирующие вы-
ходные транзисторы. Очевидно, что выполнение функции памяти на
элементах И, ИЛИ и НЕ получится достаточно громоздким. Для
выполнения такой функции на транзисторных элементах более целе-
сообразно использовать элементы НИ ... НИ которые позволяют
получить двухпозиционный статический триггер всего на двух
транзисторах. Это будет показано немного дальше.
Отметим здесь, однако, что некоторые фирмы выпускают спе-
циальные транзисторные элементы памяти в виде отдельных блоков.
Их схема чаще всего аналогична схеме памяти .на двух элементах
НИ ... НИ ... и содержит два транзистора. Применение такого блока
позволяет подбирать согласованные транзисторы для каждого бло-
ка, что повышает их устойчивость и надежность. Тем самым сни-
жаются требования к остальным элементам, выполняющим только
комбинационные логические функции. Имеется несколько систем
транзисторных элементов, основанных на элементарных функциях И,
ИЛИ, НЕ и память. Типичной с этой точки зрения является систе-
ма Simatik фирмы Сименс (ФРГ) [Л. 16].
г) Унифицированный (однофункциональный)
логический элемент
В качестве унифицированного логического элемента, выполняю-
щего одну определенную логическую функцию, с помощью которой
могут быть построены все основные элементарные и более сложные
логические функции, чаще всего
используется элемент НИ... НИ...
[Л. 17]. Примером такой системы
может служить система Norbit
(фирма Milliard, Англия) и др.
Выпускаемые ими элементы име-
ют модификации, отличающиеся
только числом входов.
Схема элемента НИ... НИ... «а
три входа представлена на
рис. 3-33. Работа такого транзи-
сторного элемента ничем не от-
личается от описанной выше ра-
боты элемента ИЛИ без инверти-
Рис. 3-33.
109
рующего выходного триода. С помощью таких нескольких элементов
очень просто осуществляются элементарные логические функции
И, ИЛИ и память. Для осуществления схемы И требуется логиче-
ских элементов НИ ... НИ ... на один больше числа входов. Такая
схема на два входа показана на рис. 3-34. Ее логическое действие
можно описать следующим образом:
v1—al и v2 = a2,
а
V3 = Vl + V2 = а\ + а2 = Я 1#2'
По существу, она отличается от рассмотренной выше схемы эле-
мента И (рис. 3-28) только наличием неиспользованных входов и
Рис. 3-34,
очень проигрывает по числу используемых деталей диодно-тран-
зисторным элементам И, выполненным по схеме, показанной на
рис. 3-29.
Для получения схемы ИЛИ требуется два элемента
НИ.... НИ причем первый должен иметь число входов, равное
требуемому, а второй — минимальное, так как он осуществляет
только инвертирование. Схема такого элемента на два входа приве-
дена на рис 3-35, причем вход Ь2 второго элемента не использует-
ся. Для этой схемы
vi — #i + &ii a v2 = аг + bv
Естественно, что эта схема по своему принципу не отличается
от схемы элемента ИЛИ (рис. 3-32),
Покажем, как с помощью двух логических элементов
НИ ... НИна два входа каждый, можно получить схему статиче-
ского триггера или схему памяти с двумя устойчивыми состояниями.
Для этого выход каждого из элементов подается на один из входов,
другого элемента, образуя замкнутую цепь (рис. 3-36). Очевидно,
что выход первого элемента будет Vi=a\ + V2, а выход второго эле-
110
мента V2=b2+V\. Тогда, подставляя значения v2 и V\ в эти выра-
жения, получим
Vt = ai + b2 + vx = ci\ (^2 + vj,
V* = b2 + ax + v2 = 6*2 (tf i + a2).
Это те самые выражения для функции памяти, которые мы рас-
сматривали выше.
Эти выражения показывают, что выход функции в последую-
щий момент времени зависит как от сигнала входа, так и от значе-
I J I J И,
Рис. 3-35.
ния самой функции в настоящий момент. Отметим, что в схеме
статического триггера элементы НИ... НИ... используются пол-
Рис. 3-36.
«остью, и этот элемент является примером довольно экономичного
статического триггера, выражающегося функцией V= (a+v)b.
Итак, с помощью универсального элемента НИ ... НИ... выпол-
нение функций НЕ, ИЛИ и память почти равноценно с точки зрения
количества используемых деталей выполнению этих функций спе-
циальными элементами НЕ? ИЛИ, память. И только при выполне-
!!!
нии функции И использование универсального элемента НИ ... НИ ...
явно невыгодно. Это необходимо учитывать при проектировании
сложных логических схем, как при выборе типов элементов, на ко-
торых должна строиться та или иная схема, так и при определении
элементарных логических функций, которые должны выполняться
выбранными типами логических элементов.
Подчеркнем еще раз, что преимущества стандартного (унифи-
цированного) элемента заключаются главным образом в том, что
он очень удобен в серийном производстве и может наиболее полно
использовать габариты стандартного блока, а следовательно, и все-
го пространства, занимаемого логическими элементами.
д) Многофункциональные логические элементы
Третье направление в развитии систем логических элементов —
это разработка многофункциональных элементов, имеющих отно-
сительно большое число входов при небольшом числе выходов.
В предыдущей главе было показано, что любую логическую
функцию можно записать как сумму произведений или произведе-
ние сумм, сомножителями или слагаемыми которых соответственно
являются некоторые входные переменные или их инверсии. Эта
форма записи логических функций, называемая канонической, и
положена в основу принципа построения многофункциональных ло:
гических элементов.
Рассмотрим в качестве примера многофункциональных логиче-
ских элементов элементы Logacec Лаборатории физических иссле-
дований (АСЕС, Бельгия) [Л. 18]/
Эти элементы используются для реализации любых логических
функций, выраженных в виде сумм произведений. Следует отметить,
что число слагаемых суммы и число сомножителей каждого произ-
ведения может меняться в довольно широких пределах.
Число входов определяется числом переменных или их инвер-
сий, входящих в функцию, причем переменная, повторяющаяся п раз
в выражении канонической формы, рассматривается здесь как п пе-
ременных. При этом ограничении любая каноническая функция по-
лучается с помощью простых соединений внешних зажимов эле-
мента.
Логические элементы состоят из двух основных частей: диод-
ных схем, реализующих функцию суммы произведений, и транзи-
сторных инверторов. Пример диодной схемы, соединенной для
реализации функции
у = аха2 + Ьфффь + с + dxd2dz,
показан на рис. 3-37. Здесь величинами а\, а2, bu b2, bi} b4, с, dlt
d2, d3 могут быть как независимые входные переменные, так и про-
межуточные переменные, взятые после инвертирующих транзисто-
ров, включенных на выходе этой схемы.
В системе Logacec значению нуля переменной соответствует по-
тенциал земли, а значению единицы — потенциал 12 в.
Напомним, что вследствие пассивности диодных схем их нельзя
использовать больше, чем в двух каскадах без дальнейшего усиле-
ния, и на них нельзя получить функцию инвертирования. Эти две
функции и выполняют два последовательно включенных транзисто-
Н2
+ и
pa. Первый дает инверсию суммы произведений, а второй — ее
прямое выражение.
Соединения диодных схем И и ИЛИ осуществляются с по-
мощью внешних зажимов вне элемента. Это и позволяет подавать
любой выход на любой из входов в соответствии с природой задачи.
При составлении последовательностных схем выходы элемен-
тов подсоединяются как ко входам других элементов, так и к соб-
ственным входам. Таким образом, появляются замкнутые контуры
обратной связи между входами и выходами, которые способны
запомнить даже кратковременные ложные сигналы. Эти ложные
сигналы могут возникать из-за наличия запаздывания у выходного
инвертирующего усилителя, кото-
рый выдает инверсию переменной
позже, чем появляется выход пер-
вого каскада. Для устранения
влияния этого необходимо, чтобы
это запаздывание 'было суще-
ственно короче времени работы
первого каскада усилителя любого
логического элемента. Тогда пе-
реходный шериод не будет влиять
на работу элемента, и ошибочная
работа будет исключена. Для уве-
личения времени работы транзи-
сторных элементов между диод-
ной схемой и транзисторами вклю-
чается /?С~цепочка, дающая мил-
лисекундную задержку.
На рис. 3-38 приведена полная схема элемента Logacec с внеш-
ними соединениями, включенными для выполнения следующей за-
дачи:
Рис. 3-37.
X = az + bxy\
Y = bxy + axyz + be;
Z = cx + cy + dz.
Эти функции потребовали использования всех 17 входов элемента
(справа стоят 20 сомножителей, но член bxy -повторяется 2 раза;
все входы расположены в той же последовательности, что и в пра-
вых частях всех трех выражений по очереди).
Описываемый элемент имеет штепсельную конструкцию, соеди-
нения И и ИЛИ делаются не на самом элементе, так что элемент
можно заменить, не нарушая соединений. Стандартные элементы
имеют 13 и 17 входов, два и три выхода. Имеется вспомогательный
чисто диодный элемент на 17 входов без выходов мощности. Он
может применяться для комбинирования со стандартными элемен-
тами и дает возможность довести число входов до 30 или 34.
Рассмотрим для сравнения, сколько логических элементов, вы-
полняющих простейшие логические функции И, ИЛИ и НЕ, потре-
а—2528 ИЗ
Рис. 3-38.
бовалось бы для выполнения на них той же задачи, которая реше-
на на рис. 3-38.
Для этого представим написанные выше выражения в следую-
щем, более удобном для реализации на элементах такого типа виде:
Х = (а7)+_Ь(ху);
Y = b(xy)+(a7)(xy)+bc;
Z — c (ху) + dz.
Очевидно, что для реализации этой функции потребовалось бы
семь элементов И, три элемента ИЛИ и два элемента НЕ. На
рис. 3-39 .показана блок-схема, реализующая эту последовательно-
стную логическую функцию.
Соотношение чисел используемых деталей получается в пользу
многофункционального элемента, благодаря тому, что выражаемая
функция содержит большое число элементарных функций И и малое
число инверсий, т. е. представляет собой наиболее невыгодный слу-
чай для использования транзисторных элементов типа И и ИЛИ,
имеющих прямой и инверсный выход. Однако в практике очень
часто встречается необходимость в выполнении таких логических
114
функций, у которых число выходов близко к числу входов или тре-
буется большое количество элементов памяти. Очевидно, что в этих
слуаях многофункциональные элементы будут уступать одно-двух-
функцион.альным.
Нужно отметить также, что включение емкостей в многофунк-
циональных элементах хоть и делает возможным реализацию на
них последовательностных логических функций, но не меняет асин-
хронный характер их работы, как и у всех транзисторных элементов
вообще.
Поэтому авторы многофункциональных элементов Logacec
предусмотрели возможность вводить большие или меньшие задерж-
ки в некоторые из логических элементов с помощью внешнего кон-
денсатора (от одной до нескольких микрофарад), присоединенного
параллельно к внутреннему конденсатору. Это может оказаться
необходимым, если в течение данного состояния в последователь-
ностной схеме должны измениться две или несколько переменных
в определенном порядке.
Отметим, однако, что временные задержки, необходимые для
этого, у транзисторных логических элементов всегда очень невелики
(несколько миллисекунд), в то время как у других асинхронных
элементов, например реле, приходится существенно затягивать вре-
мя ^срабатывания (например, с помощью короткозамкнутых витков).
Допустимый температурный режим работы транзисторных ло-
гических элементов колеблется у систем различных фирм от —10—
0°С до + (40—50)° С.
3-6. МАГНИТНО-ПОЛУПРОВОДНИКОВЫЕ ЛОГИЧЕСКИЕ
ЭЛЕМЕНТЫ
Магнитно-полупроводниковыми логическими элементами назы-
ваются логические элементы, принцип действия которых основан на
применении ферромагнитных сердечников с прямоугольной петлей
гистерезиса в сочетании с полупроводниковыми устройствами.
В дальнейшем магнитно-полупроводниковые элементы с вентилями
Рис. 3-39.
115
будем называть магнитно-вентильными элементами, а магнитные
элементы с транзисторами — феррит-транзисторными1 элементами.
Наиболее широкое -использование в автоматике в настоящее
время нашли магнитно-вентильные логические элементы [Л. 19], так
как они являются наиболее надежными устройствами в широком
диапазоне рабочих температур (от температур порядка —60° С и
до + (50—125)° С.
Магнитно-полупроводниковые логические элементы можно раз-
делить на асинхронные и синхронные, из которых значительно шире
разработаны и используются синхронные элементы.
Магнитно-вентильные синхронные логиче-
ские элементы.
Среди магнитно-вентильных синхронных элементов наиболее
широко распространены двухтактные элементы, у которых в один
такт происходит управление элементом, а во второй такт — выдача
сигналов. Длительность тактов обычно задается источником питаю-
щего переменного напряжения или тока, а параметры элементов
рассчитаны так, что все переходные процессы в них (в частности
процесс перемагничивания) заканчивается в течение одного такта.
Так как последнее свойство характерно для быстродействующих
магнитных усилителей, то схемы таких магнитных усилителей и
послужили основой для создания одной из групп магнитно-вен-
тильных логических элементов.
Из-за того что такты выдачи сигнала и управления различны,
в любой схеме всегда имеются две группы логических элементов,
смещенных на такт одна относительно другой. В один из тактов
одна группа логических элементов выдает выходные сигналы, дру-
гая группа в этот такт управляется. В следующий такт управляет-
ся первая группа элементов, а выдает выходные сигналы вторая
группа. Обычно источник питания представляет собой источник
переменного или импульсного тока или напряжения синусоидаль-
ной или другой формы, и такты совпадают с его полупе-
риодами. В зависимости от того, является ли источник питания ис-
точником напряжения (источник с малым внутренним сопротивле-
нием) или источником тока (источник с высоким внутренним со-
противлением), схемы магнитных логических элементов делятся на
два широких класса: дроссельные и трансформаторные соответ-
ственно.
а) Дроссельные двухтактные магнитно-вентильные
логические элементы
Дроссельные двухтактные магнитно-вентильные логические
элементы получили наиболее широкое развити среди всех типов
магнитно-вентильных элементов (в СССР, в США фирма Westing-
house (Л. 20], во Франции фирмы Schneider и SEA).
1 Сочетание магнитных сердечников с транзисторами в логиче-
ских элементах имеет место в основном для ферритовых сердеч-
ников, отчасти из-за сравнительно низких магнитных свойств по-
следних, требующих увеличения коэффициента усиления. Ленточные
металлические сердечники имеют более узкую петлю гистерезиса и
гораздо более высокую индукцию насыщения, что позволяет полу-
чать на них требуемые характеристики и без применения транзи-
сторов.
116
В логических элементах этого типа простейшие логические
функции ИЛИ и И выполняются с помощью вентилей, а магнитные
сердечники несут функции усиления с повторением или инвертиро-
ванием сигналов входа. Однако специфика магнитно-вентильных
схем такова, что вентильные группы часто нельзя отделить от
остальной схемы элемента, так как именно сочетание вентильных
цепей с магнитными позволяет получить нужные простейшие,
а иногда и более сложные логические функции.
В основу работы дроссельных магнитно-вентильных схем поло-
жен принцип действия быстродействующего магнитного усилителя
Рэйми, который позволяет реализовать как
функцию повторения сигнала, так и функ-
цию инвертирования.
н,1
Рис. 3-40.
Рис. 3-41.
На рис. 3-40 изображена принципиальная схема быстродей-
ствующего усилителя Рэйми. Наличие двух напряжений питания
и U^ (одного в рабочей, а другого в управляющей цепи) на-
ряду с вентилями, включенными соответствующим образом,
позволяют разделить во времени работу управляющей и рабочей
цепей схемы на дв.а такта. Так как и V^ синфазны, то в пер-
вый полупериод проводит только рабочая цепь схемы, а управляю-
щая блокирована вентилем. Очевидно, что в следующий полупе-
риод они .поменяются ролями. Для упрощения дальнейшего изло-
жения будет считать, что материал сердечника усилителя имеет иде-
альную прямоугольную летлю гистерезиса (рис. 3-41).
Положим, что к началу того полупериода, когда проводит вен-
тиль рабочей цепи, поток единственного сердечника этой схемы был
равен —Ф8ч где <DS— поток насыщения сердечника. Тогда, если пре-
небречь падением напряжения от намагничивающего тока на сопро-
тивлениях рабочей цепи, все напряжение питания U„ будет при-
ложено к обмотке сердечника и сердечник будет перемагничивать-
ся от —Ф5 к +Ф3 (знаки выбраны условно). Если выбрать величи-
г/2
ну так, чтобы — I dt=2Ф3, то к концу полупериода
wv J
0
сердечник как раз достигнет положительного насыщения +Ф3.
При этом напряжение на нагрузке будет близко к нулю (выход
равен 0), так как по ней будет проходить только намагничивающий
ток.
Если бы к началу этого полупериода сердечник уже находил-
ся в состоянии положительного насыщения +Ф8, то для положи-
тельной полуволны рабочего напряжения он не представлял бы ни-
какого сопротивления, кроме активного сопротивления обмотки. По-
117
этому в этом случае можно считать, что все напряжение пита-
ния будет приложено к нагрузке Rh (выход равен 1). Таким
образом, в зависимости от того, в каком состоянии находился сер-
дечник к началу рабочего полупериода (—Ф8 или + Фв), его вы-
ходное напряжение или будет равно нулю (близко к нулю), или
будет иметь вид однополупериодного импульса напряжения, а со-
стояние сердечника к концу рабочего полупериода всегда соответ-
ствует + Ф8.
Состояние сердечника в начале рабочего полупериода опреде-
ляется предыдущим управляющим полупериодом, в котором про-
водит вентиль управляющей цепи, и сердечник либо размагничи-
вается из +Ф3 в —Фз, либо остается в состоянии + Ф3. Если
управляющее напряжение Uy=0, то сердечник размагничивается
под действием V из +Ф3 в —Ф8. Если же Uy^U' и его мгно-
венная полярность направлена встречно к полярности U[^t то UY
блокирует действие U'^. Следовательно, при Uy=\ сердечник не
может перемагничиваться и остается в положении + Ф8.
Таким образом, в рассматриваемом режиме, который также
можно назвать режимом переключений, управляющее напряжение
иу может иметь только два значения: либо £/у = 0, либо Uy=\.
Причем, если Uy = 0, то и Un в следующем полупериоде будет рав-
но нулю, а если £/у=1, то UH = \. Таким образом, рассмотренная
схема выполняет функцию повторения. Такая схема может иметь
коэффициент усиления по мощности порядка от нескольких единиц
до нескольких десятков, в зависимости от ее параметров. Усиление
в такой схеме возможно благодаря тому, что мощность, подводи-
мая к обмотке управления Яу, должна быть достаточна только для
размагничивания сердечника от +Ф8 до —Ф«ч т. е. Ру—1^и„>
где /ц—ток размагничивания. Мощность, которую можно снять
в нагрузке Рп, ограничивается только сопротивлением или нагре-
вом рабочей обмотки сердечника
Рн
Обычно US>U~ и /н> ^» следовательно, Рн > Ру-
Отметим, что в качестве управляющего напряжения может ис-
пользоваться напряжение постоянного тока, однополупериодное
или другой формы, но при выполнении условия \Uy\>\UL \ в тече-
ние управляющего полупериода при сигнале, равном 1.
Эта схема получила название быстродействующей, потому что
изменение сигнала вызывает полное изменение выходного напряже-
ния в следующем же рабочем полупериоде и не имеет никаких
длительных переходных процессов благодаря тому, что в конце
каждого рабочего полупериода сердечник всегда приходит в исход-
ное состояние положительного (условно) насыщения.
Если в этой схеме исключить напряжение питания управляю-
щей цепи то под действием только одного напряжения управ-
ления Uу схема будет выполнять функции инвертора (рис. 3-42).
Действительно, еслц в управляющий полупериод £/у = 1, то сердеч-
ник размагничивается (вниз по петле), и, следовательно, в следую-
щий рабочий полупериод он также будет намагничиваться (вверх
118
по петле) и его выходное напряжение будет равно нулю. Если
Uy = 0, то сердечник в управляющий 4 полупериод не размагничи-
вается, а в рабочий полупериод все его .напряжение приложено
к выходу и £/и=1. Подчеркнем еще раз, что и у повторителя, и
у инвертора выходное напряжение сдвинуто на половину периода
по отношению к своему входному напряжению, поэтому каждый
элемент может управлять другими элементами только при условии
включения их напряжений питания в противофазе.
На этих двух схемах, повторителе и инверторе, строится си-
стема логических элементов, в основу которых положены элемен-
ты, выполняющие логические функции И, ИЛИ и НЕ, а также не-
которые другие функции.
Рис. 3-42. Рис. 3-43.
Имеются и другие системы магнитно-вентильных элементов,
в основу которых положены схемы инверторов, позволяющие полу-
чить элементы, выполняющие функции ИЛИ, НЕ и И и другие
функции.
В СССР применяется также и система, построенная на исполь-
зовании одного унифицированного (стандартного) магнитно-вен-
тильного элемента НИ ... НИ имеющего один сердечник с двумя
обмотками.
Рассмотрим все эти виды магнитно-диодных элементов.
Магнитно-вентильные логические элементы
с диодной развязкой, выполняющие функции И,
ИЛИ, НЕ. Эти элементы построены ;на описанной выше схеме уси-
лителя Рейми с развязкой между элементами на управляемом
специальным источником тока UCMIR диоде1 (рис. 3-43). При по-
следовательном соединении .нескольких повторителей типа рис. 3-40
необходимо параллельно выходу одного и входу другого включать
сопротивления развязки, так как иначе вентиль рабочей цепи пер-
вого элемента и вентиль цепи управления второго элемента будут
включены встречно и схема не сможет работать. Включение вместо
сопротивления развязки на входе схемы рис. 3-43 вентиля /, откры-
того током смещения (/Cmi = ^cmi/#i) только в управляющий полу-
период работы элемента, и вентиля 2 на выходе схемы, открытого
током смещения /См2=^см2/^2 только в рабочий полупериод, по-
зволило улучшить ряд характеристик схемы, в частности устра-
нить влияние выхода на входы и увеличить диапазон допустимых
колебаний напряжения питания. Напряжения, создающие ток сме-
щения вентилей развязки, имеют синусоидальную форму. Мпновен-
1 Схема, впервые примененная фирмой Westinghouse и назван-
ная ею Сурак от слов Cybernetics (кибернетика); и pairing (ко-
робка)'.
П9
ная полярность напряжений UCmu Ucm2, и для управляющего
полупериода показана на рис. 3-43. Не вдаваясь в тонкости работы
схемы, отметим, что вентиль развязки заперт входным сигналом,
равным /, и открыт для тока намагничивания при сигнале, равном
нулю, благодаря смещению его вольт-ампер ной характеристики то-
ком смещения.
Когда вентиль / открыт, сердечник размагничивается под дей-
ствием напряжений U^, а когда вентиль закрыт, сердечник не мо-
жет размагнититься и выходной сигнал становится равным 1.
0
0
0
0
0
0
1
0
б)
Рис. 3-44.
Для осуществления логического элемента ИЛИ достаточно
к схеме рис. 3-43 в точке а подсоединить параллельно входному вен.
тилю 3 столько вентилей, сколько должно быть входов. Так как
при этом потенциал точки а будет равен максимальному из входов,
то при наличии хотя бы на одном из входов сигнала, равного 1,
вентиль / запрется (на нем будет напряжение входа), и на выходе
мы получим также сигнал, равный единице со сдвигом во времени
на такт.
Схема логического элемента И показана на рис. 3-44,а для
трех входов (a, b и с).
В этой схеме процесс размагничивания сердечника под дей-
ствием напряжения невозможен только тогда, когда заперты все
три вентиля смещения /, 2 и 3, в других случаях размагничивание
происходит, так как точка б элемента имеет наиболее низкий из
входных потенциалов (по абсолютному значению). Следовательно,
карта этого элемента имеет вид, как показано на рис. 3-44,6.
Число входов у такого элемента может быть достаточно высо-
ким (порядка 20—30) без каких-либо изменений параметров.
120
К каждому из входных вентилей такого элемента может быть
параллельно присоединено еще -несколько вентилей, так что схема
в целом будет выполнять функцию произведений сумм. На
рис. 3-45 показана схема элемента, выполняющего функцию
v=(a1 + ai + aa)(bl + bt) с.
Однако обычно эти элементы конструируются так, что в одном
блоке невозможно выполнить функцию произведений сумм. В од-
ном блоке размещается либо элемент И на несколько входов, либо
ИЛИ с задержкой на такт и набор вентилей, позволяющий расши-
рять число входов И и ИЛИ и присоединять ИЛИ на входы И. Это
„ М Т " * v-faf+af*-aj)flf+62)c
'см2
Рис. 3-45.
позволяет использовать минимальное число блоков при выполнении
сложной схемы. Так как блок с сердечником дороже блока из од-
них вентилей, то элемент ИЛИ с сердечником используется только
тогда, когда нужна задержка на такт для согласования работы раз-
личных элементов (при осуще-
ствлении последовательностных
функций или при .управлении от
нескольких элементов, стоящих
в разных фазах).
Схема элемента НЕ принци-
пиально не отличается от схемы
на рис. 3-42. На ее вход также
можно подсоединять несколько
входных вентилей по схеме ИЛИ,
образуя функцию ИЛИ с отрица-
нием (НИ... НИ...). Сочетание функции И с отрицанием получается
несколько более сложным, однако и оно реализовано с помощью од-
ного сердечника и диодов.
Для получения функции памяти можно использовать два эле-
мента НИ ... НИ .... на два входа каждый по такому же принципу,
как было показано для транзисторных элементов НИ ... НИ ... Од-
нако, так как рассматриваемые элементы двухтактные, то они ста-
вятся в противофазах так, чтобы выход каждого мог управлять
входом другого. Блок-схема этого элемента показана на рис. 3-46.
Благодаря тому, что элементы НИ... НИ... представляют собой ин-
121
ьёрторы, значение их выходов отличается не только по фазе, но про-
тивоположно по значению. Найдем их алгебраические выражения
Vi = ai + а2 и У2 = Ьг + Ь2;
но а2 = v2 и b2 = vl
vlt тогда
]/, z=ax + v2 и V2 =
Заменяя значения v2 и vlt найдем \
Vl=a1+(bl + vl)^al{Jbl + vl)
bi+(a1 + v2) = bl (al + v2).
Таким образом, сигнал а\ выключает первый элемент V\ и включает
второй элемент V2, а сигнал Ь\ — выключает второй элемент V2 и
. включает первый V\. Если слу-
этот элемент памяти может применяться для управления двумя
группами элементов, включая одну и выключая другую, и наоборот.
Однако при внезапном выключении и последующем включении
напряжения питания память, построенная на инверторах, не сохра-
няет своего предыдущего состояния, а попадает в произвольное по-
ложение.
Функцию памяти можно построить и на элементах, реализую-
щих функцию ИЛИ на два входа (с повторителями), если у них
есть третий запрещающий вход, т. е. на элементах запрета. Их ло-
гическая функция выражается следующим образом:
Блок-схема элемента памяти на двух элементах запрета показа-
на на рис. 3-47. Выходы каждого из этих элементов поданы взаим-
но на входы элементов, стоящих в противофазе, и объединены. Это
позволяет включать на выходе такой схемы памяти элементы,
стоящие в любой фазе. Память можно включить также от элемен-
та, стоящего в любой фазе (входы ах и &i), и выключать сигналами
любой фазы (входы а3 и 63)\ При необходимости выходы элемен-
тов, составляющих память, могут быть разъединены. Логическая
функция выхода первого элемента Vi= (ai + v2)az, второго элемен-
та V2=(bx + vx)bz-
Основным достоинством этого элемента памяти, как и всех
остальных многотактных последовательностных схем, созданных на
чайно будут поданы оба сиг-
нала, то и V\ и V2 будут рав-
ны нулю, что ясно из получен-
ных выражений. Несмотря на
то, что выходы обоих элемен-
тов должны быть объединены
(для улучшения устойчивости
характеристики [Л. 13]), каж-
дый выход управляет только
элементами, стоящими в. соот-
ветствующей фазе. Поэтому
Рис. 3-47.
«=(01 + а2)аг.
122
элементы,
обмоткой,
ловторителях, а не ,на инверторах, является то, что они сохраняют
(помнят) свое состояние при случайных перерывах напряжения пи-
тания [Л. 22].
Итак, рассмотренная система магнитно-вентильных элементов
с вентильной развязкой является довольно экономичной, так как по-
зволяет создать основные простейшие функции и их инверсии
(И, И, ИЛИ, ИЛИ и некоторые другие, например, запрет) в одно-
сердечниковой модификации.
Магнитно-вентильные логические
построенные на инверторах с третьей
были разработаны французской
фирмой SEA [Л. 23]. В основе
этих логических элементов лежит
принцип действия описанного вы-
ше инвертора. Основная принци-
пиальная схема такого трехобмо-
точного элемента показана на
рис. 3-48. Если вход b никуда не
подключен и входной является
только обмотка, подключенная
к входу а, то схема работает как инвертор из-за того, что источник
питания 0 является одновременно и источником питания рабочей
цепи предыдущего элемента. На рис. 3-49 показано последователь-
ное включение трех таких инверторов. Обмоточные данные их все-
гда выбраны так (wp>wy))t что размагничивание сердечника
управляемого элемента может происходить только в том случае,
Рис. 3-48.
Рис. 3-49.
если не перемагничивается сердечник управляющего элемента. Та-
ким образом, если выход первого элемента равен 1 (сердечник / не
перемагничивается), то сердечник // в управляющий лолупериодбу-
дет размагничиваться, и его выход в следующий рабочий полу-
период будет 0 (так как он 'будет перемагничиваться). Следова-
тельно, сердечник третьего элемента опять не будет размагничивать-
ся, и т. д. Сигнал инвертируется от элемента к элементу. Чтобы на
этом же элементе можно было получать функцию повторителя, на
его сердечник наматывается еще одна обмотка, имеющая на рис. 3-48
вход Ь, а в.ход а соединяется с другим концом источника питания
(пунктир на рис. 3-48). Тогда на вход а постоянно подается 1, и
сердечник размагничивается в каждом управляющем полупериоде,
т. е. выход элемента равен 0. Если теперь придет сигнал на обмот-
ку со входом Ь, в котором м.. д. с. направлено встречно м. д. с.
основной обмотки, то м. д. с. этого сигнала компенсирует размагни-
чивающую м. д. с. первой обмотки, сердечник не будет размагничи-
ваться, и на выходе появится 1. Таким образом, этот элемент в за-
висимости от включения сигнала и обмоток w{Y и w2y может вы-
полнять либо функцию повторения, либо функцию инвертора, т. е.
v = ab.
123
Если на вход Ь такого элемента подсоединить диодную схему
ИЛИ, а на вход а подать 1, то на выходе мы получим усиленное и
смещенное на такт ИЛИ. Если диодную группу подсоединить на
вход а, а на вход Ь дать 0, то на выходе будет функция ИЛИ
(НИ ... НИ ...). Однако функция И на одном таком элементе не
может быть реализована. На рис. 3-50 показана схема включения
сигналов и обмоток, позволяющая реализовать функцию И на два
входа. Очевидно, что для получения прямой функции И на два
входа нужно включить по
тд крайней мере еще один инвер-
ь~а' * тор, а для получения функции
Рис. 3-50. Рис. 3-51.
И на несколько входов число элементов, возрастет еще больше.
Это является недостатком этой системы элементов по сравнению
с предыдущей.
Магнитно-вентильный логический элемент-
инвертор может быть положен в основу создания стандартного
унифицированного логического элемента НИ ... НИ ... Включая та-
см
1
1
0
1
Рис. 3-52.
кие элементы в различных сочетаниях, можно получать все основ-
ные простейшие и любые сложные логические функции по тем же
принципам, какие были показаны для элемента НИ... НИ... на
транзисторах. Принципиальная схема этого элемента показана на
рис. 3-51, а элемент памяти, получаемый на элементах НИ ... НИ ...
(рис. 3-46), был описан выше.
Инверторы с пассивной цепью управления.
Представляет также интерес система логических элементов, осно-
ванная на инверторах, в которых размагничивание сердечника
происходит не за счет энергии управляющего элемента, а за счет
энергии источника питания рабочей цепи [Л. 24]. Схема такого эле-
мента, разработанного в Чехословакии, показана на рис. 3-52.
Этот инвертор имеет вентиль 2, управляемый источником UCm
и выполняющий роль развязки между элементами. Его работа
124
аналогична работе вентилей развязки, описанной выше. Вентиль /
в этой схеме также управляется напряжением £/см, и благодаря это-
му юн открыт в управляющий полупериод. Однако, как только ток
рабочей обмотки wp в этот полупериод превысит ток размагничива-
ния, вентиль / закроется. В этой схеме размагничивание сердечни-
ка происходит под действием напряжения U^t и оно возможно
только в том случае, если разомкнута цепь управления, т. е. на ее
вход подан сигнал, равный 1. Если входной сигнал а = 0, цепь уп-
равления замкнута, ток в рабочей обмотке возрастает и размаг-
ничивания не происходит, вентиль 1 запирается. Перемагничивание
сердечника в рабочем полупериоде происходит так же, как и во
всех описанных выше схемах. К концу рабочего полупериода сер-
дечник всегда приходит в исходное состояние, причем, если пере-
магничивание происходило, то У=0, а если нет, то V=l. Для пра-
вильной работы этой схемы внутреннее сопротивление источника си-
гнала в цепи управления должно быть малым, поэтому на выход
предыдущего элемента и ставится управляемый вентиль 2, который
при нулевом напряжении сигнала имеет малое сопротивление (от-
крыт), а при сигнале, равном 1, очень высокое сопротивление (за-
крыт) и не нагружает источник сигнала. Схема такого инвертора
позволяет совместить функции логического умножения большого
числа входных сигналов с инверсией на одном сердечнике, что вы-
годно отличает ее от схемы трехобмоточного элемента фирмы SEA.
Схема на три входа показана на рис. 3-53.
К каждому входу схемы, выполняющей инверсию произведения,
могут быть присоединены диодные группы ИЛИ так, что в этом
случае элемент может реализовать функцию инверсии произведения
сумм. Если на вход Ь элемента (рис. 3-52) также подать сигнал, то
работа элемента может быть описана картой, изображенной на
рис. 3-52,6, т. е. элемент может выполнять функцию импликации.
К входу Ь можно присоединить диодную группу по схеме ИЛИ,
а к входу а диодную группу произведения сумм, тогда общий вид
функции, которая может быть получена с помощью одного магнит-
ного сердечника, будет иметь вид
Рис. 3-53.
v =(а1'+ а2 + ...) (а[ + а2 + . ..) + Ьх + Ь2 + Ь3+...
125
б) Трансформаторные магнитно-вентильные логические
элементы
Основное отличие работы трансформаторных логических эле-
ментов от дроссельных заключается в том, что трансформаторные
элементы перемагничиваются импульсами тока, часто называемыми
продвигающими импульсами, протекающими по специальной об-
мотке. Поэтому для трансформаторных схем нужно иметь в каче-
стве источников питания генераторы тока (т. е. источники с боль-
шим внутренним сопротивлением), а не напряжения. Промышлен-
ные источники питания (/ = 50—400 гц) обычно представляют собой
источники напряжения, и так как
для трансформаторных элементов ис-
точники питания приходится созда-
вать специально, то обычно транс*
форматорные логические элементы
разрабатываются на более высокие
частоты (порядка единиц и десятков
килогерц). Это позволяет резко умень-
шить габариты сердеч;лш>в и применять ферриты, которые на низ-
ких частотах чрезвычайно неэффективны.
В СССР логические элементы трансформаторного типа нашли
широкое распространение в телемеханике в виде систем телесигна-
лизации и телеуправления [Л. 25, 26].
Рассмотрим принцип работы трансформаторного логического
элемента, принципиальная схема которого показана на рис. 3-54.
Через специальную обмотку wa сердечника пропускаются однопо-
лярные импульсы тока от источника тока /. Каждый импульс тока
способен перемагнитить сердечник (с прямоугольной петлей гистере-
зиса) только в одном направлении, например от —Ф3 к +Фв (см.
рис. 3-41 Если сердечник до прихода очередного импульса тока
был в состоянии — Ф«, то он перейдет в. состояние +Ф3, при этом
в рабочей обмотке появится импульс напряжения, который мы бу-
дем считать единицей. Импульс напряжения, наведенный в обмотке
управления, будет недостаточен для размагничивания предыдущего
элемента. Если до прихода очередного импульса тока питания сер-
дечник был в состоянии +Ф*, то при прохождении импульса тока
он в нем и останется, и импульс напряжения в рабочей обмотке
будет близок к нулю (небольшой импульс появится все же из-за на-
личия наклона горизонтального участка петли гистерезиса реаль-
ного сердечника). В этом случае выход элемента будет равен 0.
Состояние, в котором находится сердечник перед очередным им-
пульсом тока, зависит от значения сигнала управления а. Если а= 1,
то сердечник в управляющий полупериод размагничивается, если
а —0, то сердечник не размагничивается. Таким образом, рассматри-
ваемый элемент выполняет функцию повторителя (v = a). Подчер-
кнем, что в отличие от дроссельных схем в трансформаторных схе-
мах перемагничивание сердечника в управляющий и соответственно
в рабочий полупериоды соответствует тому, что выход равен 1,
а не 0.
Трансформаторный элемент описываемого типа также представ-
ляет собой синхронный двухтактный элемент, так как он управ-
ляется в такты, промежуточные между тактами, в которые на него
приходят перемагничивающие импульсы тока питания. Обычно в ка-
126
честве источника используется источник переменных по знаку им-
пульсов, которые разъединяются с помощью вентилей и подаются
на две группы элементов, так что, когда по одной труппе элементов
проходят леремггничивающие импульсы и элементы выдают выход-
ные сигналы,' другая группа элементов находится в. управляющем
.полупериоде и этими сигналами управляется. В следующий полупе-
риод обе группы меняются ролями.
На основе повторителя, схема которого показана на рис. 3-54,
строятся следующие типы элементов.
Элемент ИЛИ получается присоединени-
ем диодной группы ИЛИ с нужным чи-
Ь
0
0
1
0
Рис. 3-55.
слом вентилей на вход повторителя параллельно входному вентилю,
показанному на рисунке 3-54.
Диодную группу И невозможно присоединить к этой схеме без
дополнительного источника питания, поэтому логическая функция И
отсутствует в прямом исполнении в этой системе элементов. Для
получения функции инверсии в логический элемент вводится допол-
нительная обмотка рис. 3-55,а м. д. с. которой направлена навстре-
чу м. д. с. основной обмотки. Работа такого элемента описывается
картой на рис. 3-55,6. Эту функцию можно записать как v = ab, т. е.
это функция запрета. Очевидно, чтобы получить из этого элемента
просто инвертор, надо на его вход а подать постоянный сигнал,
равный 1, тогда и=1»5=5.
С помощью элементов ИЛИ и запрета можно построить и все
остальные логические функции, однако с точки зрения уменьшения
числа элементов это будет не лучшим вариантом.
Схема триггера на таком элементе также обязательно содер-
жит два сердечника, как и во всех других двухтактных системах
логических элементов.
в) Феррит-транзисторные элементы
Требования уменьшения мощности генераторов питания и по-
вышения усиления элементов привели к развитию феррит-транзи-
сторных элементов.
Феррит-транзисторный элемент строится на ферритовом сердеч-
нике, допускающем частоту питания до нескольких сотен килогерц,
поэтому его время переключения может быть меньше времени пере-
ключения металлических сердечников из ленты, выпуск которой
в настоящее время освоен промышленностью. Таким образом, по
быстродействию феррит-транзисторные элементы уступают только
транзисторным элементам, но пока превосходят последние по на-
дежности". Кроме того, феррит-транзисторные элементы в отличие
от транзисторных являются синхронными элементами*
127
Применение транзистора на выходе феррита позволяет полу-
чить в логических элементах ряд преимуществ по сравнению с чи-
сто ферритовыми трансформаторными логическими элементами. Од-
но из этих преимуществ заключается в том, что снижаются требо-
вания к прямоугольности петли гистерезиса феррита; второе—в том,
что значительно увеличивается коэффициент усиления элемента,
т. е. появляется возможность управлять большим числом элементов;
третье — в том, что снижаются требования к мощности и форме
тактовых импульсов тока, перемагничивающих сердечник, и, нако-
нец, последнее — в том, что полностью устраняется возможность
обратного влияния управляемых
элементов на управляющие эле-
и-а. менты.
На рис. 3-56 представлена схе-
Рис. 3-56.
ма феррит-транзисторного повто-
рителя, которая является основой
для создания других логических
схем.
Управляющий сигнал а раз-
магничивает сердечник до состоя-
ния— Os, при этом в обмотке wT, включенной между эмиттером и
базой триода, возникает напряжение, запирающее триод. При по-
явлении перемагничивающего тактового импульса тока в обмотке wa
сердечник начинает перемагничиваться. При этом в обмотке wp по-
является напряжение, отпирающее триод, и коллекторный ток трио-
да, проходящий через обмотку wT в направлении, поддерживаю-
щем перемагничивание сердечника, помогает тактовому импульсу
перемагнитить сердечник в состояние -f Ф8.
Таким • образом, в схеме действует положительная обратная
связь по току, приводящая к полному открытию триода. Нагрузкой
триода являются управляющие обмотки следующих элементов. Ло-
гические функции, которые может выполнять этот элемент, те же
самые, что и в трансформаторных схемах.
Функция ИЛИ получается простым подсоединением ко входу
элемента на рис. 3-56 выходов тех элементов, которые должны со-
ставить входные величины функции. Роль разделяющих вентилей
в этом случае играют выходные транзисторы этих элементов.
Функция запрета получается так же, как и в трансформаторных
элементах, введением обмотки запрета.
Феррит-транзисторные элементы могут быть как двухтактными,
так и однотактными и многотактными.
г) Асинхронные магнитно-полупроводниковые элементы
Типичными асинхронными магнитными логическими элементами
являются логические элементы, выполненные на магнитных усили-
телях с нефиксированным временем запаздывания. Такие логиче-
ские элементы выпускаются, например, фирмой GE (США) [Л. 21].
Эти элементы представляют собой двухсердечниковые магнитные
усилители с внутренной обратной связью, с несколькими обмотками
управления и несколькими добавочными сопротивлениями к этим,
обмоткам, включение которых можно комбинировать. Одна из об-
моток управления имеет ответвления, позволяющие устанавливать
различную величину м. д. с. смещения.
128
Отключение
Ул. s
Схема такого логического элемента (представлена на рис. 3-57, а
его характеристики и примеры логических функций, которые можно
получить на нем, на рис. 3-58. Очевидно что функция ИЛИ полу-
чается, если величину м. д. с. смещения выбрать равной м. д. с.
каждого из сигналов (рис. 3-58,а). Для получения функции И на
три входа (рис. 3-58,6) м. д. с.
смешения должна быть выбрана
в 3 раза больше м. д. с. сигнала.
Для получения функции инверсии
(рис. 3-58,в) достаточно не вклю-
чать смещение, тогда включение
любого сигнала будет переводить
усилитель из 1 в 0. Если включить
два сигнала а и Ь так, чтобы их
м. д. с. складывались, а третий
включить встречно (рис. 3-58,г),
то получим карту (рис. 3-58,е).
Этой карте соответствует логиче-
ская функция v = db + bc+cd.
При включении в элемент до-
полнительной обратной связи с помощью сопротивления R2 элемент
выполняет функцию память (рис. 3-58,д). Сигнал выключения памя-
ти подается на входы 3 и 4, включенные параллельно, что позволяет
отключать ее даже при наличии сигнала включения.
Элементы этого типа иногда могут заменить несколько элемен-
тов типа И, ИЛИ и НЕ, однако они довольно громоздки, более
сложны в изготовлении и надежно выполняют логические функции
только при стабильном значении сигналов и смещения.
Смещение
йИлючение
Рис. 3-57.
\V
и
п o,hxt - \
с/и
ь ~Г
с ^
см
М
Ь_ с
6)
и
, -J
я
b а
с ^
включение
Отключение
Рис. 3-58. Примеры
логических функ-
ций, выполняемых
универсальным ло-
гическим элемен-
том фирмы GE
(США).
а) v — a-\~b+c;__
б) v=abc, e)_v=a;
г) v =~а b + be + са\
д) память.
ъ
0
(/
0
0
0
д)
9—2528
129
Одно сердечников ые асинхронные магнитные
логические элементы также разработаны фирмой GE
(США) [Л. 27] и основаны на схеме односердечникового магнит-
ного усилителя с положительной обратной связью, введенной с по-
мощью конденсатора. Принципиальная схема элемента показана
на рис. 3-59,а, а его характеристика в режиме повторителя приведе-
на на рис. 3-59,6. Наличие конденсатора в этой схеме позволяет по-
лучить достаточно высокий ко-
эффициент обратной связи, так как
в обмотке обратной связи проте-
Рис. 3-59.
кает сглаженный ток. Однако схема уже не является быстродейст-
вующей. Время переходного процесса составляет несколько полу-
периодов, поэтому логические элементы, построенные на ней, явля-
ются асинхронными. Если время переходного процесса было бы
меньше периода частоты питания,
то эти элементы являлись бы од-
нотактными синхронными элемен-
тами. Изменением числа витков
обмотки обратной связи w0.c и из-
менением величины емкости коэф-
фициент усилений этой схемы мож-
у
to
6)
Рис. 3-60.
Рис. 3-61.
но изменять. Для получения элемента памяти коэффициент обрат-
ной связи делается большим единицы, и элемент вводится в релей-
ный режим. Для выключения сигнала в элемент вводится вторая об-
мотка, рис. 3-60а. Характеристика элемента памяти показана на
рис. 3-60,6.
Для реализации функции инверсии используется элемент (схе-
ма рис. 3-59,а), но с отключенной обмоткой смещения. Тогда он
имеет характеристику рис. 3-59,в. Элемент ИЛИ получается с по-
мощью нескольких обмоток управления wY, каждая из которых пол-
ностью управляет элементом. Элемент И в этой системе логических
130
элементов осуществляется на стольких сердечниках, сколько нужно
входов. Это делает реализацию функции И очень надежной, однако
элемент получается громоздким. Схема такого элемента для двух
входов показана на рис. 3-61.
3-7. ЗАПАЗДЫВАНИЕ И ЭЛЕМЕНТЫ ЗАДЕРЖКИ
При рассмотрении разных видов логических элементов мы по-
знакомились с их свойствами. Большинство из них сочетают логи-
ческие функции с функциями усиления, благодаря чему к выходу
элементов можно подключать несколько входов других элементов.
Обычно усиленный выходной сигнал имеет восстановленную форму,
так что при помощи таких элементов можно образовывать цепи
с обратными связями, необходимые для осуществления последова-
тельностных функций.
Запаздывание, которое является также необходимым условием
для образования поеледователыюстных функций, обычно сопро-
вождает усиление и формирование сигнала. У асинхронных элемен-
тов, таких, как, например, реле или транзисторные элементы, это
запаздывание определяется временем перехода выходного сигнала
из одного крайнего значения в другое при скачкообразном измене-
нии входного сигнала. Отметим, что запаздывание при переходах
из О ib 1 и из 1 в 0 может быть различным. Кроме того, значение
запаздывания колеблется от элемента к элементу и обычно зави-
сит от параметров цепей, в которые данный элемент включен. Это
в известной мере влияет на выбор комбинаций промежуточных пе-
ременных, как было показано в гл. 2.
У синхронных элементов, как, например, у магнитно-вентиль-
ных элементов, запаздывание между входом и выходом элемента
определяется временем одного такта.
Если для осуществления сложных комбинационных функций
необходимо соединять последовательно несколько элементов, то за-
паздывание у асинхронных элементов увеличится приблизительно до
суммы запаздывания отдельных элементов, а у синхронных эле-
ментов до длительности числа тактов, равных числу последователь-
но соединенных элементов.
В цепях обратных связей для введения промежуточных перемен-
ных существуют определенные ограничения числа элементов, кото-
рые могут быть включены в эти цепи. У асинхронных и одно-
тактных элементов это число элементов может быть любое. У двух-
тактных число элементов, образующих замкнутую цепь обратной
связи, должно быть четным, чтобы согласовать соотношение фаз
всех элементов в цепи. У многотактных это число должно быть
кратным числу тактов.
Соблюдая приведенное выше правило о числе элементов в це-
пях обратных связей, можно в эти цепи включить нужное количе-
ство элементов и таким образом получить любую задержку при
переходах между' состояниями последовательностной функции.
При этом для синхронных систем таблица состояний и полу-
ченная из нее карта промежуточных и выходных функций будут
точно описывать работу устройства только в том случае, если дли-
тельность входных сигналов будет равна или больше в целое число
раз задержек в цепях обратных связей.
Для асинхронных систем, элементы которых не реагируют на
сигналы с длительностью, меньшей времени срабатывания или от-
9* 131
-пускания, таблица расстояний и карты функций точно описывают
работу устройства при условии, что входные сигналы длятся не
меньше этого времени.
Для получения длинных задержек, которые встречаются в за-
дачах автоматики, иногда было бы необходимо в синхронных си-
стемах включать сотни и тысячи элементов.
Рис. 3-62.
Поэтому в тех случаях, когда требуется задержка, большая,
чем та, которую дает по природе своей работы логический элемент,
целесообразно включить в цепь обратной связи специальный элемент
задержки.
Для небольших задержек можно использовать простые цепоч-
ки RC, подключенные на в.ход усили-
1 тельной части логического элемента, как
| | t 'было показано, например, в § 3-5.
J С увеличением постоянной времени
I цепочки RC скорость изменения сигнала
"i i i ^ на выходе усилительной части такого
^ i | элемента падает, и для увеличения ско-
i LJLj рости изменения сигнала на выходе
элемента необходимо увеличить усиле-
Рис. 3-63. ние. При больших выдержках, получае-
мых с помощью контуров RC, обычно
необходим усилитель с релейной или
гистерезисной характеристикой, у которого время переключения
определяется главным образом параметрами самого усилителя.
Задержки для синхронных элементов. На
рис. 3-62,а показана схема элемента задержки для магнитных
двухтактных логических элементов. Работу элемента можно раз-
делить на два полупериода. В управляющий полупериод, если на
входе имеется сигнал, который в данной системе имеет форму од-
нополупериодного выпрямленного напряжения, конденсатор С за-
ряжается током, проходящим через сопротивление Ro и переход ба-
за—эмиттер транзистора. Постоянная времени CRo мала, и конден-
сатор заряжается полностью в течение нескольких тактов. В каж-
дый рабочий полупериод конденсатор разряжается под действием
источника U„ через сопротивление R. В это время мгновенное зна-
чение напряжения сигнала на входе равно нулю, и поэтому почти
все напряжение на емкости приложено к базе транзистора и тран-
зистор заперт.
Постоянная времени C(R+Ro), которая определяет время за-
держки, выбирается гораздо больше постоянной времени CRo. По-
132
этому в течение- одного рабочего полуперпода конденсатор не ус-
певает разрядиться и управляющее напряжение в следующий
управляющий полупериод заряжает его до более высокого значе-
ния до тех пор, пока не будет достигнут уровень входного сигнала.
Если входной сигнал выключить, то конденсатор будет постепенно
разряжаться и после определенного времени разрядится полностью.
Рис. 3-64. Условное
обозначение эле-
мента задержки на
выключение сиг-
нала.
Рис. 3-65. Последовательное
включение двух элементов
задержки на выключение.
Напряжение на нем станет приблизительно равным нулю, и тран-
зистор откроется током, проходящим через сопротивление R.
Таким образом этот элемент дает задержку при отключении
входного сигнала.
В зависимости от соединения транзистора с последующим эле-
ментом получим прямой или инвертированный сигнал. Так, натри-
мер, если присоединить инвертор с размагничиванием в рабочей це-
пи (как показано на рис. 3-62 пунктиром), то на его выходе полу-
чим сигнал р, который является инверсией входного сигнала Р с за-
держкой при выключении Т0 (рис. 3-63). В блочных схемах буде*м
ее обозначать символом по рис. 3-64.
Этот вид задержки имеет то преимущество, что она нечувстви-
тельна к„ отключению и повторному включению питающей сети.
Стабильные значения времени за-
держки, получаемые на этом эле-
менте, имеют порядок нескольких
секунд. pi
Последовательным включени-
ем двух элементов с инверторами,
как показано на рис. 3-65, полу- ^
чим задержку, которая имеет од- ^
но любое значение при включе-
нии Г2, определенное задержкой
второго элемента, и второе любое'' Рис 3-66.
значение Т\ при отключении вход-
ного сигнала, определенное за-
держкой первого элемента, как видно из диаграммы на рис. 3-66.
На другом принципе основаны так называемые магнитные эле-
менты задержки. В этих элементах используется переходный про-
цесс в магнитном усилителе при включении входного сигнала [Л. 28].
Схема подобного элемента задержки показана на рис. 3-67. Он
представляет собой магнитный усилитель с выходом постоянного
тока и положительной обратной связью, благодаря которой усили-
тель приобретает релейную характеристику. Кроме того, усилитель
имеет дополнительную обмотку, намотанную аналогично управляю-
щей обмотке, которая замкнута накоротко. Чем большую часть се^
чения окна магнитного усилителя занимает эта обмотка, тем мед-
леннее происходит изменение среднего значения магнитного пото-
П г—г
|. I—,—|
1x1 !л_
133
ка в обоих сердечниках при изменении управляющего тока и тем
медленнее изменяется выходное напряжение.
Такой принцип действия элемента задержки позволяет получить
задержку до нескольких сот периодов питающего напряжения. Не-
достатком его является плавно изменяющийся сигнал на выходе
элемента, поэтому, если задержка должна быть постоянной, необ-
ходимо после элемента задержки включить элементы, точно реаги-
Рис. 3-67,
рующие на определенную величину входного сигнала, т. е. выход-
ной сигнал которых изменяется скачкообразно (например, триггер
Шмидта).
Увеличения относительной мощности и получения больших за-
держек можно добиться, рассчитывая рабочие обмотки магнитно-
го усилителя на напряжение питания, существенно большее, чем
величина питающего напряжения (U^ и U'J). В этом случае ве-
личина выходного напряжения элемента задержки в течение боль-
шей части переходного процесса близка к нулю и только к концу
переходного процесса возрастает до своей максимальной величины.
В этих случаях можно получить задержку до нескольких тысяч пе-
риодов питающего напряжения.
Время задержки можно регулировать включением сопротивле-
ний в цепь управления или в короткозамкнутый контур дополни-
тельной обмотки, как показано на рис. 3-67 пунктиром.
ГЛАВА ЧЕТВЕРТАЯ
ВХОДНЫЕ ЭЛЕМЕНТЫ
Как было показано в гл. 1 нашей книги, входные элементы пе-
редают управляющие команды и вырабатывают сигналы, характе-
ризующие состояние управляемого объекта и поступающие на вход
функциональной части автоматики.
При этом можно различать следующие задачи, выполняемые
входными элементами:
1) Преобразование физического характера входных величин
в нужное воздействие на логические элементы (например, механиче-
ских входных величин в электрическое воздействие).
134
2) Преобразование уровней входных величин к нужным уров-
ням для логических элементов.
3) Преобразование непрерывно меняющихся сигналов в диск-
ретные сигналы.
Иногда один элемент должен решать все эти задачи вместе
или любые комбинации из них.
4-1. ПРЕОБРАЗОВАНИЕ УРОВНЯ И ФИЗИЧЕСКОГО
ХАРАКТЕРА ВХОДНОЙ ВЕЛИЧИНЫ
В случаях, когда входная величина имеет -по своей природе
дискретный характер и не отличается от физической природы вход-
ных сигналов функциональной части, необходимо только согласо-
вать уровень сигналов. При этом иногда необходимо сигнал увеличи-
вать, а иногда, наоборот, уменьшать. Это преобразование обычно
связано с потерями мощности. В тех случаях, когда источник вход-
ного сигнала не имеет достаточной мощности, необходимо исполь-
зовать усилитель.
Покажем несколько примеров таких преобразователей. На
рис. 4-1 показана принципиальная схема простого делителя постоян-
Рис. 4-1. Дели- Рис. 4-2. Понижаю-
тель напряже- щий трансформа-
ция, тор.
ного или переменного напряжения, который используется для по-
нижения входного напряжения UBx до требуемого уровня входного
сигнала а.
Преобразование переменного напряжения низкой частоты удоб-
нее и с гораздо меньшими потерями можно сделать при помощи
трансформатора рис. 4-2. Входное переменное напряжение транс-
формируется пропорционально соотношению чисел витков первич-
ной обмотки W\ и вторичной обмотки w2.
Очевидно, что при помощи трансформатора можно получить не
только уменьшение, но и увеличение напряжения сигнала а по
сравнению с UBX.
Усиление входного сигнала можно получить с помощью усили-
теля любого вида, который реагирует со скоростью, соответствую-
щей условиям работы присоединенных логических элементов и всей
системы. При этом линейность характеристики вход — выход уси-
лителя обычно не имеет значения, что существенно упрощает зада-
чу его осуществления. Можно применить усилитель с релейной ха-
рактеристикой, который имеет то преимущество, что дискретный
характер входного сигнала будет независимым от совершенства или
несовершенства дискретного характера входной величины.
135
Рис. 4-3. Индуктивный генера-
торный датчик положения.
/ — металлическая заслонка; 2— коле-
бательный контур; 3 — катушка об-
ратной связи.
Примером усилителя дискретного сигнала, может служить уси-
литель для фотоэлемента, работающего с двумя уровнями освеще-
ния. Такой усилитель <может быть построен на простой схеме с элек-
тронной лампой или тиратроном, так как требования к линейности
характеристики усилителя не очень высоки.
Очень часто встречается необходимость преобразования физи-
ческого характера входной величины. Так, например, будет, если
входной сигнал зависит от присутствия какого-нибудь предмета
в определенном месте. В этом случае входной величиной является
механическое перемещение относительно датчика положения. Если
это перемещение происходит до-
статочно быстро для получения
дискретного изменения сигналов
автоматики, то можно применять
любой датчик положения, кото-
рый на выходе дает сигнал, удоб-
ный для входа логических эле-
ментов.
Такого рода датчиками явля-
ются конечные выключатели,
кнопки, бесконтактные индуктив,-
ные датчики, фотоэлементы и др.
Контактные датчики, так же
как и все другие контактные эле-
менты, имеют известные недостат-
ки, связанные с содержанием
подвижных частей, электрически-
ми контактами, подвергающимися износу и требующими постоянно-
го или периодического ухода. В производственных условиях целесо-
образно применять в цепях с контактами напряжение порядка 100—
250 в, при которых контакты работают надежнее, чем при напряже-
ниях порядка нескольких .вольт, соответствующих обычно уровням
входных сигналов логических элементов. В таком случае между кон-
тактными цепями и .входными элементами необходимо включить
преобразователи уровня, о которых говорилось выше.
Бесконтактные преобразователи надежнее контактных преоб-
разователей, особенно при большой частоте переключений. Кроме
упомянутых выше фотоэлементов, наиболее распространенными яв-
ляются индуктивные, параметрические или генераторные датчики.
Принципиальная схема индуктивного генераторного датчика
положения показана на рис. 4-3. Это транзисторный генератор ко-
лебаний, амплитуда колебаний которого управляется при помощи
металлической заслонки / между катушкой колебательного контура
2 и катушкой обратной связи 3. При отсутствии заслонки в зазоре
между катушками схема генерирует колебания, которые вызывают
увеличение среднего значения тока через транзистор-генератор Т\.
Этот ток усиливается выходным транзистором. Когда заслонка про-
ходит между катушками, коэффициент обратной связи уменьшает-
ся, амплитуда колебаний падает и колебания прекращаются, что
в свою очередь вызывает закрытие выходного транзистора Т2.
На таком принципе построен датчик Б586 фирмы ЗПА Прага
[Л. 29].
Очевидно, если выходным сигналом датчика, который является
входным сигналом функциональной части автоматики, считать на-
пряжение коллектор—эмиттер выходного транзистора Т2, то при от-
сутствии заслонки в зазоре сигнал будет равен нулю, а при на-
личии ее сигнал будет максимальным.
Пассивным индуктивным преобразователем может служить
любой индуктивный датчик положения. Прин-
ципиальная схема простейшего из таких дат-
чиков показана на рис. 4-4. С изменением
зазора 3 между якорем / и- сердечником дат-
чика 2 изменяется индуктивность его обмо-
ток и переменное напряжение перераспреде-
ляется между обмотками и нагрузочным со-
противлением в зависимости от величины ин-
дуктивности. При удалении якоря индуктив-
ность обмоток минимальна, поэтому напряже-
ние на сопротивлении нагрузки будет макси-
мальным. Наоборот, при приближении якоря
индуктивность будет максимальной, а напря-
жение на нагрузке будет минимальным.
с
ft.
loft-
Рис. 4-4. Индуктив-
ный датчик поло-
жения.
якорь; 2 — сердеч-
ник; 3 — зазор.
4-2. ПРЕОБРАЗОВАНИЕ НЕПРЕРЫВНОГО СИГНАЛА
В ДИСКРЕТНЫЙ
Во многих случаях практики входной сигнал меняется плавно
или недостаточно быстро для правильной работы логических элемен-
тов. Это имеет особенное значение для логических элементов, ха-
рактеристика вход — выход кото-
рых не имеет релейного (гистере-
зисного) характера. Тогда медлен-
но изменяющиеся входные сигна-
лы вызывают .медленные измене-
ния всех остальных (промежуточ-
ных и выходных) сигналов, что
может приводить к нечеткому сра-
батыванию выходных устройств,
Рис. 4-5. а при более сложных логических
функциях создавать ложные зна-
чения сигналов. У последователь-
ностных функций такие сигналы могут приводить к получению не-
правильных последовательностей состояний, т. е. к сбою работы все-
го управляющего устройства.
Поэтому в тех случаях, где входной сигнал может меняться
плавно или недостаточно быстро, необходимо применять входные
элементы, обладающие релейной (гистерезисной) характеристикой
вход — выход.
Усиление, уровни входных величин и устойчивость значений
входных величин определяется характером входных величин и уело-
виями работы автоматики. Транзисторные элементы с релейной ха-
рактеристикой и входной величиной в виде напряжения строятся
по принципу триггера Шмидта. На рис. 4-5 показана принципиаль-
ная схема такого триггера. Это транзисторный усилитель постоян-
ного тока с положительной обратной связью, у которого коэффи-
циент усиления больше или меньше единицы в зависимости от зна-
чения входной величины. В схеме применяются два транзистора
одинакового типа.
137
На рис. 4-6 показана схема с взаимно дополняющими транзи-
сторами (т. е. с р-п-р и /2-/7-/1 переходами), которая немного проще.
Она отличается также тем, что при повышении входного напряже-
ния или тока выходной сигнал а падает до значения, близкого к ну-
лю, а при понижении входной величины выход воз-
растает до максимального значения.
Если плавно изменяющаяся входная величина
имеет достаточную мощность и не требуется точ-
ного и стабильного" определения границ между
значениями, соответствующими входным сигна-
4q. лам 0 и 1, то в качестве входных элементов мож-
VJn но применить любые логические элементы, обла-
дающие релейной характеристикой. При этом
нужно, чтобы скорость переключения таких эле-
ypl ментов при медленно изменяющемся сигнале бы-
g * ла достаточной для правильной работы.
Лг | Для синхронных систем логических элементов
4=- сигналы непрерывного характера необходимо пре-
образовывать в импульсные, синхронные с такто-
выми импульсами сигналы, иначе синхронность
работы системы будет нарушена.
Если входной сигнал постоянный или имеет характер синхрон-
ных импульсов и меняется плавно или дискретно, но в произволь-
ные моменты времени, как это обычно и бывает, то в логических
элементах могут возникать неполные или искаженные сигналы. Они
могут привести к сбою работы логических схем, образующих тре-
Рис. 4-6.
бых
Рис. 4-7. Схема синхронизатора.
буемые функции (особенно последовательностные функции), если
они спроектированы таким образом, что с изменением состояния
последовательностной функции меняется больше, чем одна промежу-
точная переменная.
Поэтому, если желательно сохранить преимущества синхронных
систем логических элементов, выражающиеся ч том, что в таких
системах может меняться несколько переменных одновременно, то
необходимо обеспечить преобразование входных величин в синхрон-
ные импульсы двух предельных крайних значений (0 и 1). В каче-
стве такого синхронизирующего элемента можно применять, напри-
мер, элехмент, схема которого приведена на рис. 4-7.
138
Рис. 4-8. Вольт-амперная харак
теристика четырехслойного
р-п-р-п диода.
Этот синхронизирующий элемент предназначен для применения
с магнитными логическими элементами. Он состоит из генератора
импульсов на магнитном сердечнике и полупроводникового диода
типа р-п-р-п с отрицательным сопротивлением. Этот диод имеет ха-
рактеристику, показанную на рис. 4-8. Из этой характеристики
видно, что четырехсложный диод имеет большое сопротивление до тех
пор, пока напряжение в прямом .направлении меньше напряжения
пробоя Un. После пробоя напряжение на диоде падает до неболь-
шого значения порядка 1 в и диод остается проводящим, пока ток
через него не 'упадет ниже значе-
ния hn, после чего он снова запи-
рается.
В схеме на рис. 4-7 напряже-
ние ип управляемого диода вы-
бирается больше 'максимального
значения напряжения питания вы-
ходной цепи На выходе эле-
мента появится сигнал только
тогда, когда управляемый диод
перейдет в проводящее состояние
под влиянием импульсного напря-
жения, которое больше, чем зна-
чение Un.
Это импульсное напряжение
возникает на вторичной обмотке
w2 магнитного генератора импуль-
сов в интервале намагничивания
его сердечника. Его сердечник намагничивается под действием на-
пряжения с/См, приложенного к обмотке W\, которая рассчитана
так, чтобы сердечник намагничивался полностью в течение неболь-
шой доли полупериода. Ток через рабочую обмотку W\ ограничен
сопротивлением R. Благодаря диоду в рабочей цепи сердечник на-
магничивается в один из полупериодов напряжения питания, ко-
торый считаем рабочим полупериодом. Импульсное напряжение на
обмотке w2 появляется в самом начале этого полупериода и сразу
открывает управляемый диод. Поэтому выходное напряжение появ-
ляется только в виде максимального сигнала или не появляется
совсем, если предварительно сердечник не был достаточно размаг-
ничен.
Намагничивание сердечника генератора импульсов обусловлено
его предыдущим размагничиванием, которое происходит в проме-
жутках между рабочими полупериодами также через рабочую
обмотку от источника напряжения Уем- Размагничиванием можно
управлять при помощи управляющей обмотки w$. Если через вход-
ной диод подключить к этой обмотке источник напряжения, то раз-
магничивание сердечника будет пропорционально величине этого
напряжения. Изменяя эту величину, меняем амплитуду импульса
в последующем рабочем полупериоде и, как только она станет
меньше напряжения пробоя £/п, управляемый диод не откроется, и
напряжение выхода будет равно нулю.
Таким образом при значениях входного напряжения, меньших
определенной границы, выхода не будет, а при значениях, больших
этой границы, получим полный выход в виде синхронных импуль-
сов.
139
ГЛАВА ПЯТАЯ
ПРИМЕРЫ СИНТЕЗА СХЕМ НА ЛОГИЧЕСКИХ
ЭЛЕМЕНТАХ
В гл. 2 мы познакомились с методами определения логических
функций по условиям работы автоматического устройства,
а в гл. 3 — с логическими элементами, на которых можно реализо-
вать эти логические функции.
Рассмотрим теперь несколько примеров составления схем на
логических элементах.
В принципе можно было бы синтезировать схемы прямо по
условиям их работы. Однако этот способ годится только в самых
простейших случаях, так как он не позволяет внести в ход синтеза
никакой методики и основывается лишь на интуитивных способно-
стях проектировщика. Поэтому мы рекомендуем по исходным дан-
ным и условиям работы строить карты функций и по ним получать
различные варианты алгебраических выражений.
Из алгебраических выражений можно прямо строить структур-
ные схемы и путем сравнения выбирать наилучший вариант.
В основу построения структурной схемы на логических элемен-
тах нужно опять класть принципы минимизации, причем в зависи-
мости от реальных условий и возможностей использования опреде-
ленного типа логических элементов эти принципы могут быть совер-
шенно различны. Например, можно строить схему, стараясь полу-
чить минимальное число элементов с любым числом входов, или
строить схему, стараясь получить минимальное число всех входов
на любом числе элементов. Очевидно, первый случай имеет место
тогда, когда стоимость элементов мало зависит от числа входов.
Второй случай соответствует обратной картине, когда стоимость
элемента зависит главным образом от числа входов. Можно пред-
ставить себе и другие промежуточные варианты х. Поэтому на прак-
тике нужно прежде всего решить, какие соображения должны быть
положены в основу минимизации структурной схемы, учитывая, что
реальные типы элементов могут иметь ограничения по числу входов
и подключаемых на их выходе элементов (коэффициенту усиления).
В настоящее время принципы минимизации разработаны достаточно
хорошо только для контактно-диодных схем.
Покажем на нашем примере управления лифтом (гл. 2), как
строится схема управления из различных видов элементов. При
этом будем исходить из варажений логических функций, получен-
ных в § 2-5: _ _
Pi=Ptlt(Pi + abr, (5-1)
P* = Pil*(P* + ab)\ (5-2)
»i = Pi, (5-3)
v2 = p2> (5-4)
1 Надо также помнить, что число последовательно включенных
элементов, охваченных обратной связью, определяет задержку по-
следовательностной функции и этим ограничивает минимально допу-
стимую длительность входных сигналов (см. § 3-7).
140
где
/j = Cgd2\
(5-5)
/2 = cgdx\
(5-6)
a = а1 + a2 + ai>
(5-7)
b = bx + 62 + 63;
(5-8)
с = cxc2.
(5-9)
5-1. ПРИМЕР СХЕМЫ НА ЭЛЕМЕНТАХ И, ИЛИ и НЕ
Предположим, что схема будет строиться из элементов ИЛИ,
( И, с любым числом входов и элементов НЕ, причем, как правило,
' элементы обладают запаздыванием т и усилением. Структурная
схема точно по уравнениям (5-1)(5-2) показана на рис. 5-1. Эта
схема содержит четыре элемента ИЛИ (два с тремя входами и
два с двумя входами), семь элементов И (четыре с тремя входами
и три с двумя входами) и семь элементов НЕ.
Рассмотрим возможности упрощения схемы, причем будем
в данном случае стремиться к тому, чтобы уменьшать общее число
элементов схемы, не увеличивая общего числа входов всех элемен-
тов. С этой целью проанализируем, какие из элементов включены
последовательно. Обратим внимание сначала на последовательное
соединение одинаковых элементов (т. е. ИЛИ, ИЛИ или И, И).
Очевидно, такое последовательное соединение можно заменить од-
ним элементом с соответствующим числом входов.
На рис. 5-2 показана часть схемы рис. 5-1, в которой объеди-
нены элементы, образующие функции р\1\ и р212. Таким образом,
число элементов И сократилось до пяти (три с двумя входами и
два с пятью входами). По такому же принципу можно выбросить
элемент И, образующий сигнал с, и прибавить по одному входу
на выходных элементах И.
Таким образом, заменяем один элемент с двумя входами и два
элемента с пятью входами двумя элементами с шестью входами,
как видно из части схемы на рис. 5-3. Общее число входов не из-
меняется. Но если бы функция с имела больше, чем два входа,
например четыре входа: с=с\с2сзс4, то, выкинув этот элемент и
перенеся его вход на выходные элементы И, мы получили бы общее
увеличение входов.
Другой возможностью упрощения схемы является замена пере-
менных их инверсиями. При этом имеются два варианта.
Во-первых, можно иногда выбрать выходной сигнал датчиков так,
чтобы не нужно было их инвертировать. В нашем примере можно
было бы выбрать датчики положения такими, чтобы они давали
инвертированные сигналы, т. е. чтобы сигнал был равен нулю, ког-
да лифт находится на соответствующем этаже, и равен единице во
всех остальных случаях. В этом случае можно сэкономить два из
семи инверторов (инверторы для получения d\ и d2).
Во-вторых, если бы на выходе схемы стояли инверторы, а ис-
полнительные органы или усилители могли работать от инвертиро-
141
142
ванного сигнала, то можно было бы сэкономить на выходных инвер-
торах.
Если же входные и выходные сигналы нельзя заменить их ин-
версиями, то можно преобразовать схемы так, чтобы свести число
инверторов к минимуму без увеличения числа остальных элементов.
Покажем это на нашем примере, предполагая, что заданные
нами входные сигналы нельзя заменить инверсными. Исходя из
схемы на рис. 5-2, заменим сначала элементы И на выходе дуаль-
ными им элементами ИЛИ и одновременно все переменные инвер-
тированными сигналами. Это соответствует преобразованию исход-
ного выражения по правилу Моргана-Шеннона.
Подставляя в уравнения (5-1) и (5-2) соответствующее выра-
жение вместо переменных pi, р2, l\, 12, получим:
Pi = v2 + с + g + d2 + {vx + ab)\
P2 = vt + с + g + dx + (vx+ab).
Полученная схема показана на рис. 5-4, но в ней число инвер-
торов не уменьшилось, так как вместо трех инверторов в цепях
сигналов dx, d2 и g нужно было ввести инзерторы в цепи сив цепи
(vx + ab) и (v2 -f- ab). Преобразуем по тому же правилу функции
ИЛИ образующие эти цепи. Тогда получим выражения:
Pi = ^2 + с + g + d2 + vx ab\
Рг = f i + c~+ g + dx + V2ab.
На рис. 5-5 показана схема, соответствующая этим выраже-
ниям. После преобразования последнего сомножителя получим:
Pi = ^ 2 +~с_+ § + d2 + ^Ja + b)\
P2 = vx+l + g + dx +72{a + b).
В схеме, реализующей эти функции, на два инвертора меньше,
чем в исходной (см. рис. 5-6). Конечно, проделанные преобразова-
ния можно было провести без построения схем алгебраическим пу-
тем, но приведенные схемы хорошо иллюстрируют связь между
алгебраическими преобразованиями и их реализацией в логиче-
ских элементах.
Отметим на этом примере еще одну , особенность построения
структурных схем, которая имеет место в тех .случаях, когда эле-
менты, выполняющие различные функции, имеют разную стоимость.
Так, в большинстве типов логических элементов элемент И соче-
тается с усилителем и стоит гораздо дороже элемента ИЛИ бла-
годаря увеличенному числу вентилей или сердечников, входящих
в элемент И. При построении схем на таких логических элементах
целесообразнее использовать схемы, содержащие как можно меньше
элементов И за счет увеличения числа элементов ИЛИ. Приведен-
ный выше пример показал, что с помощью применения правила
Моргана-Шеннона можно преобразовать выражение, содержащее
большое число функций И, к выражению, содержащему большее
число функций ИЛИ.
143
Рис. 5-5.
D
Рис. 5-6.
1Q—2528
145
5-2. ПРИМЕР СХЕМЫ НА ЭЛЕМЕНТАХ НИ... НИ.
Покажем теперь, как построить эту схему на одном типе эле-
ментов, например НИ ... НИ ... с любым числом входов.
Исходим опять из уравнений (5-1) — (5-4). Подставим в эти
уравнения выражения, определяющие переменные pi, р2, lu h, и
преобразуем их при помощи правила Моргана-Шеннона таким
образом, чтобы все функции имели форму функций НИ ... НИ. По-
лучим выражения
P1=vt + cl + ct + g + dt + [vl + {a+-b)\9
Р2 = vt + сх + с2 + g + dt + [v2 + (а + b)]
# = ci\ + #2 + <V, b = b1+b2-\-b3.
Из этих выражений очень легко построить схему, если принять во
внимание, что каждое инвертирование обеспечивается одним элемен-
том НИ... НИвходы которого образуют инвертированные сла-
гаемые.
Схему удобнее всего строить, начиная с элементов, образующих
функции, охватывающие все переменные. Входные сигналы этих
элементов соответствуют слагаемым, входящим в выражение под
наибольшим штрихом. Эти слагаемые являются либо просто пере-
«■□КФ
MZKtS*
*г\
»□
Рис. 5-7.
146
Мёнными (в нашем примере переменные И\ d2, g), либо инвертиро-
ванными переменными (в нашем примере cb с2), либо более слож-
ными выражениями под более короткими штрихами (в нашем при-
мере это выражение [v\ -f (a + b)], которое мы для наглядности на-
писали в скобках, хотя скобки не нужны, так как последователь-
ность инвертирования и суммирования вполне определена длиной
штрихов). Инверсию простых переменных образуем при помощи
одного элемента НИ... НИсоответственно либо выражению
ci = Ci + C\, что означает, что мы к обоим входам элемента подсоеди-
няем сигнал С], либо выражению с^^ + О, которое реализуется
присоединением сигнала только к одному из входов элемента. По-
строенная таким образом схема показана на рис. 5-7.
5-3. ПРИМЕР ПОСТРОЕНИЯ СХЕМЫ
НА МНОГОФУНКЦИОНАЛЬНЫХ ЭЛЕМЕНТАХ
Для построения схемы на многофункциональном элементе, при-
веденном в § 3-5, необходимо преобразовать функцию в форму сум-
Рис. 5-8.
10*
147
мы произведения. Так как самое простое выражение, которое мы
получили из карты этой функции, имеет форму произведения сум-
мы, то необходимо эту функцию инвертировать. Тогда из выраже-
ний (5-1) и (5-2) получим:
Л = Рг +~Тх+~Рх&+Ь)\
Рг = Р1+Т2 + р2(а +"&),
причем последние члены нужно преобразовать в соответствии с рас-
пределительным законом:
Pi = Р2 + Тх +~Рг~а +~рф\
Р2 = Рг +Т2 +~р2а + p2F.
Затем, подставляя вместо /, и /2 их выражения из (5-5) и (5-6),
а вместо а, Ь и с их выражения из (5-7), (5-8) и (5-9), получим окон-
чательно:
Pi = Рг+(сг +~с2 + g) + d2+~p1~a1~a2a3 +~p1bl + pxb2 + ~рхЬг\
Рг = Pi +{ct +~c2 + g) + dl +~p2ax + p2a2 + ~ргаъ + ~pj>1bjbt.
Очевидно, что для образования такой функции нужно иметь
элемент с двумя выходами Р\ и Р2 с числом суммирующих входов,
равным числу всех слагаемых (т. е. 18), и с числом входов произве-
дений, равным числу всех сомножителей, образующих разные про-
изведения (т. е. 20). Кроме того, необходимо образовать инверсии
входных сигналов аь а2у а3, Ь\9 b2, Ь3, с\ и с2. Для этого необходимо
было бы использовать четыре элемента с тремя выходами каждый.
Более правильно образовать отдельно функции a, b и ci + c2+g
(это можно сделать на одном элементе), выходные переменные
которых подаются на вход второго элемента, образующего остав-
шуюся функцию. Тогда полученные нами выражения приобретают
вид
Pi^P2 + (Ci + c~2 + g) + d2 +~р1~а~ +~рхЬ\
?2 -= Pi + (Ci + Ч + g) + dt + р2а + p2~b.
Чтобы не нужно было инвертировать две входные переменные
сх и с2» целесообразно выражение в скобках изобразить так:
(Ci+C2 + g)=ctc2g.
Схема, соответствующая этим выражениям, показана на
рис. 5-8. Она потребовала 6 выходов (после усиления), 16 сумми-
рующих входов и 11 умножающих входов, что вполне можно осу-
ществить на двух стандартных многофункциональных элементах,
рассмотренных в § 3-5.
148
5-4. УЧЕТ ВЛИЯНИЯ ЗАПАЗДЫВАНИЯ
В КОМБИНАЦИОННОЙ ЧАСТИ СХЕМ
При синтезе логических функций мы предполагаем, что комби-
национные функции меняют свое значение одновременно с измене-
нием входных сигналов. Однако при физическом осуществлении ком.
бинационных функций это предположение не всегда может быть вы-
полнено. В асинхронных системах логических элементов появляются
задержки, обусловленные временами запаздывания отдельных эле-
ментов, в синхронных системах значение функции появляется с за-
держками на один или большее число тактов.
Наличие этого запаздывания в цепях логических схем, выпол-
няющих комбинационные функции, будет проявляться либо только
в том, что выход функции будет появляться позже входа без ис-
кажений логической функции, либо будут внесены кратковремен-
ные ложные сигналы.
Рассмотрим оба случая:
1. Запаздывание без влияния
на логическое значение функции
Такое запаздывание возникает, например, в синхронных систе-
мах, где более сложная функция для реализации на логических эле-
ментах разбивается на несколько простейших и вся функция полу-
чается последовательным соединением этих элементов.
Примером такой функции может служить нижняя часть схемы
на рис. 5-1, образующая функции /ь /2. Если образование каждой
изображенной функции длится один такт, то изменение значений
функций 1\ и /2 произойдет на два такта позднее, чем изменение
любого из входных сигналов. Однако функции /г и /2 точно соот-
ветствуют логическому выражению комбинационной функции, в ко-
торой не учитывалось это запаздывание.
Это свойство можно легко объяснить тем, что запаздывание
между любым входом и выходом имеют одинаковые значения, так
что все сигналы приходят на входы отдельных элементов с одина-
ковыми запаздываниями и элементы выдают правильные сигналы,
соответствующие мгновенным значениям их входов.
В. асинхронных системах труднее обеспечить постоянное запаз-
дывание от элемента к элементу, поэтому, строго говоря, в асин-
хронных схемах, в которых сигналы проходят параллельно, нельзя
гарантировать полное отсутствие кратковременных ложных сигна-
лов. Поэтому во всех асинхронных цепях, за исключением простых,
содержащих только последовательно соединенные элементы, может
возникать второй тип запаздывания.
2. Запаздывание, вызывающее кратковременные
ложные сигналы
В системах с разветвляющимися цепями может случиться, что
запаздывания в отдельных цепях будут различными. Разница за-
паздываний в асинхронных схемах такого рода неизбежна, а в син-
хронных цепях может возникнуть за счет неправильного проекти-
рования схемы, если число тактов, продвигающих сигналы в разных
параллельных плечах разветвленной схемы, будет разным.
149
Примером схемы, где может возникать разное запаздывание
в разных частях схемы, является верхняя часть схемы рис. 5-1, на-
пример цепи, образующие функции ab и ab. Если инверторы обла-
дают запаздыванием, то на входе последующих элементов И появ-
ляются инвертированные сигналы с запаздыванием. Очевидно, что
в течение этого запаздывания значение сигналов на входах элемен-
тов И не соответствуют требуемой логической функции. Так, напри-
мер, при одновременном появлении обоих входов а и b на выходе
элементов возникнут кратковременные ложные сигналы, длитель-
ность которых равна запаздыванию в элементах НЕ, так как толь-
ко после этого запаздывания исчезают сигналы а и Ь-
Такие ложные сигналы могут вызвать неправильное переклю-
чение промежуточных переменных и тем самым неправильные вы-
ходы всей функции, так как эти ложные сигналы запоминаются
в последующих цепях памяти. Менее опасными являются такие
сигналы, если они подаются только на выходные усилители и ис-
полнительные устройства, которые обычно достаточно инерционны,
чтобы не реагировать на такие кратковременные сигналы.
В синхронных системах такие сигналы можно полностью
устранить, собирая схему так, чтобы в любом плече разветвляю-
щейся цепи запаздывание имело одинаковое число тактов 1. С этой
целью иногда приходится ставить дополнительные повторители.
Например, в схеме на рис. 5-1 необходимо поставить (повторители
в цепях а и Ь, имеющие такое же запаздывание, как инверторы
в цепях а и Ъ-
В асинхронных системах выравнивать задержки в отдельных
плечах очень трудно, и работа таких схем при изменениях парамет-
ров ненадежна. Поэтому обычно нужно на выходе комбинационной
части схемы включать задержку, которая больше, чем разность
между запаздываниями в отдельных плечах схемы 2.
5-5. ПРИМЕРЫ СИНТЕЗА СЧЕТЧИКА ИМПУЛЬСОВ
Покажем еще один пример синтеза логической функции. Пусть
требуется при наименьшем числе двухтактных синхронных элемен-
тов создать логическую схему для счета отдельных импульсов, дли-
на которых равна одному такту и которые появляются синхронно
с тактовыми импульсами логических элементов.
Число разрядов счетчика не задано, поэтому построим схему
одного разряда. Последовательное соединение таких разрядов по-
зволит получить счетчик любого числа импульсов.
Условия работы одного /-го разряда счетчика следующие:
1) Счетчик должен выдавать сигнал на выходе *г-, этот сигнал
должен изменяться из I в 0 и обратно после прихода каждого
входного импульса а; так, например, если после прихода первого
импульса Xi пришел в состояние 1, то приход второго импульса
1 При этом, как было сказано раньше, схема будет точно реа-
лизовать нужную последовательностную функцию только в том слу-
чае, если входные сигналы будут продолжаться столько же тактов
(или будут в целое число раз больше), сколько образует цепь, замк-
нутая обратной связью.
2 При этом схема будет правильно реагировать только на сиг-
налы, длительность которых будет больше этой задержки.
150
приведет его в состояние 0, которое сохраняется до прихода треть-
его импульса, и т. д.
2) Счетчик должен выдавать на выходе yi так называемый
сигнал переноса, который представляет собой единичный импульс,
появляющийся после каждого четного импульса входа а и длящий-
ся только один такт. Этот сигнал служит входным сигналом для
следующего (старшего) разряда счетчика, т. е. a\ = yi_x. По этим
условиям- построим таблицу состояний:
Состояние
а1 =
У1-\
У1
0
1
х1
Исходное
1
1
2
0
0
Счет
2
2
3
1
0
Перенос
3
1
2
0
1
Выберем в качестве промежуточных переменных выходные пе-
ременные Хг и уг и составим карту соответствий этих промежуточ-
ных переменных (рис. 5-9). Напомним, что мы строим схему счет-
чика на синхронных элементах, для которых не страшно одновре-
менное изменение двух переменных, происходящее при переходе из
состояния 2 в состояние 3 и обратно. Для асинхронных элементов
эта карта соответствий не годилась бы.
Используя карту соответствий, составим карты промежуточных
функций Хг и Кг, от которых выходные переменные х\ и yi отли-
чаются только запаздыванием (рис. 5-10 и 5-Ш).
По контурам, показанным на рис. 5-11, получаем выражения
переменных Xi и yi\
Хх = аХг+liXv т. е. Хг = Уг+ Xitfi-v
Y^x.a, т. е. Y = yi-1xi.
Здесь Xi выражается функцией неравнозначности с обратной
связью по выходу.
Устройства, реализующие такую функцию, часто называют триг-
герами со счетным входом.
Если имеется логический элемент, выполняющий такую функ-
цию, то для построения одного разряда счетчика нужно использо-
вать его и элемент И для реализации функции Y=xa. Тогда схема
разряда счетчика будет выглядеть согласно
рис. 5-12.
Мы уже отмечали, что при синтезе нали-
чие запаздывания в элементах, образующих
комбинационную часть функции, не учитывает-
ся, и поэтому при составлении схем из эле-
ментов, запаздыванием которых пренебречь х
нельзя (например, синхронных элементов, у ко- *
торых выход сдвинут на такт по отношению 5
к входу), необходимо проверить, имеются ли
параллельные цепи с разными запаздываниями Рис. 5-9.
3
2
15|
(с разным числом тактов) и сделать в них запаздывание одинаковым.
Для того чтобы проверить схему нашего счетчика, рассмотрим
одновременную -работу, например, трех разрядов (рис. 5-13).
Очевидно, что если элементы И, образующие функции Hi, ра-
ботают со сдвигом на один такт каждый, то второй разряд будет
выдавать значение х2 позже на один такт, а х$ позже на два так-
та, чем х\. Поэтому мгновенные комбинации #3> *2, *ь образующие
число в двоичном коде, будут иногда иметь правильное значение
только после двух тактов.
0,0
1,о
1,0
0,1
0,0
10
xv
Рис. 5-10.
0
!
LU
7
0
0
0
0
0
п
1
■ А
0
0
Рис. 5-11.
Рис. 5-12. Логическая схема
ячейки двоичного счетчика
одиночных импульсов.
Рис. 5-13.
Если считывание результата производится все время и ложные
(кратковременные) комбинации недопустимы, то нужно либо уве-
личить запаздывание сигналов а{ и у и подаваемых на входы эле-
ментов, выполняющих функцию неравнозначности до величины за-
паздывания у2, либо построить схему с одинаковым запаздыванием
комбинационных функций
Yi = yi-1xi.
Второе легко сделать, так как
YY = хха\
У 2 = #i*2 = хххга\
У* = #2*3 = *l*2*3a И Т« Д-
т. е. все эти функции можно реализовать на элементах. И с увели-
чивающимся от разряда к разряду числом входов, но имеющих за-
153
Рис. 5-14.
паадывание по отношению к переключающемуся сигналу а на один
такт каждый. Такая схема показана на рис. 5-14.
Однако есть другая возможность построения счетчика без ус- .
ложнения элементов от разряда к разряду, если инвертировать
вход и выходы, так как при этом вместо элемента И нужно по-
ставить элемент ИЛИ, который в большинстве синхронных систем
элементов выполняется на одних диодах, т. е. практически без за-
держки.
Инверсная логическая функция одного разряда такого счетчи-
ка имеет вид
Xi = axi + хха — (а + хх) (хг + а) = ах г + ахи
Y = axi = а + Xi.
Vi-i
Здесь величина Xi выражается логической функцией равнознач-
ности, где на один из входов подан сигнал выхода Xi. Схема любого
разряда счетчика, считающего пропуски импульсов с помощью
элемента, выполняющего такую функцию, показана на рис. 5-15.
Очевидно, что число, выдаваемое таким
счетчиком, будет записано в обратном
коде.
Рассмотрим пример составления схе-
мы двоичного счетчика другого типа,
работающего без специального формиро-
вателя импульсов *и считающего импуль-
сы произвольной продолжительности.
При составлении таблицы состояний
в этом случае необходимо учесть, что
переход из одного состояния в другое
может осуществляться быстрее, чем ис-
чезнет сигнал входа. Будем считать ис-
ходное состояние, когда выходной сигнал счета и сигнал переноса
равны нулю, первым состоянием.
При появлении входногб сигнала */г_1 схема должна перейти
во второе состояние, где хг = 1, a #i=0. Если этот переход произо-
шел быстрее, чем пропал сигнал входа, то при том же сигнале #t_i
схема должна оставаться в исходном состоянии 2. Но при следую-
щем сигнале */г=1 схема должна перейти в новое состояние, где
лг=0, a yi — \. Поэтому необходимо ввести новое состояние 3,
в котором Хг = \ и */i=0, так же, как и во втором состоянии, но при
iji-\r=\ схема из состояния 3 переходит в состояние 4, где *,~0,
а */г=1. Таким образом, второе и третье состояния отличаются
Рис. 5-15. Логическая схе-
ма ячейки инверсного
двоичного счетчика.
153
Друг of Друга только переходами при г/г_ь=б и */i_i = l, однако это
различие очень существенно, так как им учитывается то, что сигнал
может быть длительнее перехода. Без учета этого явления мы по-
лучили бы предыдущую схему, которая без формирователя при
длительных сигналах считала бы каждый сигнал несколько раз.
Таблица состояний
У1-\
0 | 1
Ui
1
1
2
0
0
2
3
2
1
0
3
4
3
1
4
4
1
0
0
1
Возвращаясь к таблице состояний
для рассматриваемого случая, отметим,
что если бы нам не был нужен сигнал
переноса yi, то состояние 4 все равно
отличалось бы от состояния 1 разными
и Г
— if
б)
Рис. 5-16.
переходами при одинаковых значениях сигнала, так же как состоя-
ние 3 от состояния 2.
Итак, нам необходимо получить 4 состояния. Для этого необхо-
димо ввести две промежуточные переменные. В качестве одной из
них можно использовать х\\ другую необходимо ввести дополни-
тельно; yi использовать в качестве промежуточной переменной
нельзя, так как тогда 2-е и 3-е состояния не будут отличаться од-
но от другого. Обозначим вторую промежуточную переменную р и
составим карту соответствий так, чтобы все возможные переходы
't-7
ООО
100
110
100
110
011
ООО
011
а}
l<?j
7]
/
jj
/
PI
k.z-j
1
б/
l£j
i i
ГГ
71
\0\
6)
0
0
0
0
0
7]
0
/
Рис. 5-17.
из одного состояния в другое были соседними. У нас возможны пе-
реходы из 1 в 2, из 2 в 3, из 3 в 4 и из 4 в 1. В нашем случае
возможны два варианта карт соответствий, показанные на
рис. 5-16,а и б.
Построим карты функций по рис. БА7,а,б,в и г, в соответствии
с рис. 5-16,а. Тогда
154
или
Xi =(0i-i + />)(^i + *<V,
P = (yi-1 + P)(yi-t + Xi);
Yi =yi-iP-
На рис. 5-18 показана схема, реализующая эти функции на тран-
зисторных элементах И, ИЛИ и НЕ по варианту, содержащему мень-
ше элементов типа И (выра-
жения произведений сум'м|).
Окончательный выбор схе-
мы при реализации рассматри-
ваемой функции зависит от
технических свойств элементов,
при помощи которых эти схе-
мы должны быть осуществле-
ны. Например, для реализации
схемы на магнитно-полупровод-
никовых логических элементах,
у которых сумма образуется
практически без запаздывания, РисЛ5-18. Логическая схема ячей-
последний вариант является ки двоичного счетчика импульсов
наиболее оптимальным. произвольной длительности.
5-6. ЗАКЛЮЧЕНИЕ
Большое разнообразие логических элементов и различие их ло-
гических и динамических (временных) зависимостей, несмотря на
универсальный подход к анализу и синтезу схем, не позволяет при-
менять единый метод для составления схем из любых типов логи-
ческих элементов. В предыдущих разделах этой главы были при-
ведены некоторые правила и способы, удобные для составления
схем из логических элементов определенных типов. Однако оконча-
тельный выбор типов логических элементов, оптимальный для реше-
ния определенной задачи, должен быть сделан на основе сравнения
нескольких вариантов реализации данной функции различными ти-
пами логических элементов. При этом сравниваться могут различ-
ные параметры и свойства логических элементов, например размер,
вес, стоимость, характер реализуемой функции, надежность, долго-
вечность, требования к источникам питающего напряжения, допу-
стимые температура и вибрации, наличие агрессивной или пыльной
среды, влияние электрических или магнитных полей и др.
Очевидно, невозможно сформулировать общие рекомендации
для применения той или иной системы логических элементов и вы-
бор должен быть сделан на основе подробного анализа всех усло-
вий в каждом конкретном случае.
Однако алгебраические выражения, получаемые при синтезе
схем в некоторых из минимальных форм, благодаря своей универ-
сальности и сжатости, являются наиболее удобными из известных
выражений логических функций, так как на их основе можно со-
ставлять схемы из любых типов элементов. Кроме того, достаточно
155
простые правила позволяют преобразовать эти выражения в формы,
определяющие непосредственно соответствующие логические схемы.
Однако применение изложенного выше универсального подхода
и анализу и синтезу схем существенно облегчает составление необ-
ходимого числа вариантоз реализации поставленной логической за-
дачи, а алгебраический способ выражения функции является полез-
ным инструментом при определении его оптимального варианта.
ЛИТЕРАТУРА
1. Boole G., The Mathematical Analysis of Logic, Cambridge,
England, 1847.
2. Shannon С. E., A Symbolic Analysis of Relay and Swit-
ching Circuits, Trans. Amer. Inst. Electr. Engeenrs, v. 57, 1938.
3. Шестаков В. И., Алгебра двухполюсных схем, построен-
ных исключительно из двухполюсников (алгебра А-схем), Журнал
технической физики, т. II, вып. 6, 1941.
4. Гавр и лов М. А., Теория релейно-контактных схем, Изд.
АН СССР, 1950.
5. Базилевский А. А., Теория временных функций. Вопро-
сы теории математических машин, Физматгиз, 1958.
6. Цетлин М. А., О непримитивных схемах. Вопросы кибер-
нетики. Физматгиз, 1958.
7. Huffman D. A., The Synthesis of Sequential Switching
Circuits, Journal of the Franklin Institute, v. 257, № 3, 1954.
8. Humphrey W. S., Switching Circuits with Computer Ap-
plications, Mc Graw-Hill Book Сотр., 1958.
9. Moore E. F., Gedankenexperiments on Sequential Machines,
Automata Studies, Princeton University Press, 1956.
10. Caldwell S. H., Switching Circuits and Logical Design,
John Wiley and Sons, 1958.
11. Karnaugh M., The Map Method for Synthesis of Combi-
natorial Logic Circuits, Trans. AIEE, v. 72, pt I, 1953.
12. Сот с ко.в Б. С, Новые элементы быстродействующих вы-
числительных машин, изд. ВЗЭИ, 1960.
13. Гашковец И., Васильева Н. П., Вопросы устойчи-
вости замкнутых или длинных схем, построенных на некоторых ти-
пах логических элементов, «Автоматика и телемеханика», 1960,
Ко. 6.
14. Применение транзисторных и магнитных элементов в циф-
ровых вычислительных машинах, сборник статей, изд. «Советское
радио», 1960.
15. К1 i m е k A., Transistorove pordovaci ileny pro lodiche seh-
venem obvody Vyrhumna spreva, e. 85, UTIA CSAV Praha, 1961.
16. Weitb recht W., Sinn G., Aufbau des SIMATIC Sys-
tems, Siemens Zeitechrift, Heft 10, 1959.
17. Rawe W. D., Rayer G. H., Transistor NOR Circuits De-
sign, Communication and Electronics, № 31, 1957.
18. Ж о к e Логические элементы и их применение в каче-
стве статических реле /в многотактных схемах, Труды 1-го Между-
народного конгресса IFAC, Технические средства автоматизации,
изд. АН СССР, 1961.
19. Васильева Н. П., П ip о х о р о в Н. Л., Магнитные логи-
ческие элементы для схем автоматического управления, «Автома-
тика и телемеханика», 1959, № 12.
156
20. Baker Ь P., Cypak Systems and Application of Logic Func-
tions, Westinghouee Engineer, 1956, July.
21. Mathias R. A., Static Switching Devices Control Engi-
neering, N 5, 1957.
22. Прохоров H. Л., Схемы памяти на магнитных логиче-
ских элементах, Автоматическое регулирование и управление, Сбор-
ник трудов под ред. Цыпки на Я. 3., изд. АН СССР, 1961.
23. A u г i с о s t е J., L h о m m е Н., Les circuits logiques mag-
netiques, Application aux calculatrices numeriques et aux comman-
des a sequences industrielles, L'onde electrique, № 372, 1958.
24. Гашковец И., Васильева H. П., Магнитный логиче-
ский элемент, выполняющий функцию импликации, «Автоматика и
телемеханика», 1962, № 1.
25. Заволокина Е. И., Магнитные элементы в цифровых
вычислительных устройствах, Госэнергоиздат, 1959.
26. Ж о ж и к а ш в и л и В. А., М и т ю ш к и н К. Т., О работе
счетно-переключающих схем на магнитных элементах с прямо-
угольной петлей гистерезиса в устройствах телеуправления, «Авто-
матика и телемеханика», 1955, № 4.
27. Publ. by General Electric Sheneotady, Static Control System.
28. M a i о p и н а В. С, Седых О. А., Анализ работы и рас-
чет магнитного элемента выдержки времени с короткозамкнутым
витком, «Автоматика и телемеханика», 1962, № 1.
29. Katalog ty Zavody prumyslove automatisace, Praha.
СОДЕРЖАНИЕ
Предисловие • . . . . 3
Глава первая. Задачи автоматики, выполняемые с
помощью устройств дискретного действия 5
1-1. Непрерывные и дискретные величины 5
1-2. Устройства дискретного действия О
1-3. Автоматический контроль 6
1-4. Сигнализация 7
1-5. Автоматическая блокировка и защита 7
1-6. Автоматическое управление 8
1-7. Сложные системы контроля и управления 8
1-8. Основные части автоматических устройств ...... 9
Глава вторая. Основы алгебры логики для анализа
и синтеза схем управления . . 10
2-1, Входные и выходные сигналы и их обозначения ... 11
2-2. Логические функции и их изображения ........ 12
а) Функции одной переменной 12
б) Функции двух переменных .... . 13
в) Графические изображения логических функций двух
переменных . . 16
г) Определение алгебраического выражения функции по
карте Карно . . . . . 17
д) Инверсия функции. Правило де Моргана 20
е) Функции многих переменных 21
ж) Изображение логических функций многих переменных 23
2-3. Некоторые законы алгебры логики 25
2-4. Разные формы алгебраических выражений логических
функций 27
а) Элементарные функции 29
б) Минимальные формы выражения функций и их нахож-
дение 30
2-5. Последовательностные функции ..... 35
а) Таблица состояний 36
б) Промежуточные переменные 37
в) Промежуточная функция 38
г) Структурная схема последовательностной функции . . 38
д) Элементарные последовательностные функции .... 39
158
е) Взаимнозависимые последовательиостные функции . . 41
ж) Устойчивые и неустойчивые комбинации и колебания 42
2-5. Синтез последовательностной функции 45
а) Формулировка условий работы 45
б) Таблица состояний • 45
в) Выбор промежуточных переменных. Карта соответст-
вий . 47
г) Соответствие состояний комбинациям промежуточных
переменных 51
д) Построение карты промежуточных функций 55
2-7. Синтез последовательностной функции, содержащей
специальные задержки 57
а) Таблица состояний, учитывающая специальные за-
держки 58
б) Упрощение таблицы состояний 60
в) Выбор промежуточных переменных с учетом задержек
между состояниями 61
г) Таблица переходов 65
д) Карты промежуточных и выходных функций 66
2-8. Значения функции при неправильной последовательно-
сти входных сигналов 72
а) Правильные и неправильные комбинации и последова-
тельности выходных сигналов 72
б) Определение опасных комбинаций выходных сигналов 72
в) Определение неправильных последовательностей ком-
бинаций выходных сигналов 73
г) Ограничение переходов последовательностной функции 75
2-9. Заключение 77
Глава третья. Логические элементы
3-1. Определение, требования, характеристики, классифика-
ция 77
а) Определение логических элементов , 77
б) Дискретный характер работы 78
в) Логические функции, выполняемые логическими эле-
ментами 79
г) Характеристики вход — выход . 80
д) Классификация логических элементов 87
3-2. Электромеханические реле — контактные логические
элементы . . 90
3-3. Логические элементы на полупроводниковых вентилях
и сопротивлениях 94
3-4. Электронные лампы в качестве логических элементов 96
а) Логические элементы на триодах 97
б) Логические элементы на пентодах 98
в) Комбинированные электронные логические элементы . 100
г) Логические элементы на катодных повторителях . . . 100
3-5. Логические элементы на транзисторах 101
а) Принцип действия и характеристики 101
б) Логические функции, выполняемые на транзисторных
логических элементах 104
в) Транзисторные элементы, выполняющие элементарные
функции И, ИЛИ, НЕ 104
г) Унифицированный (однофункциональный) логический
элемент 109
159
д) Многофункциональные логические элементы 112
3-6. Магнитно-полупроводниковые логические элементы . . 115
а) Дроссельные двухтактные магнитно-вентильные логи-
ческие элементы 116
б) Трансформаторные магнитно-вентильные логические
элементы 126
в) Феррит-транзисторные элементы 127
г) Асинхронные магнитно-полупроводниковые элементы . 128
3-7. Запаздывание и элементы задержки 131
Глава четвертая. Входные элементы 134
4-1. Преобразование уровня и физического характера
входной величины 135
4-2. Преобразование непрерывного сигнала в дискретный . 137
Глава пятая. Примеры синтеза схем на логических
элементах 140
5-1. Пример схемы на элементах И, ИЛИ и НЕ 141
5 2. Пример схемы на элементах НИ... НИ 146
5-3. Пример построения схемы на многофункциональных
элементах 147
5-4. Учет влияния запаздывания в комбинационной части
схем 149
5-5. Примеры синтеза счетчика импульсов . 150
5-6. Заключение 155
Литература 156