/



































































































Автор: Овчаренко Н.И.
Теги: электротехника электроэнергетика электростанции электрические станции
ISBN: 5-93196-020-1
Год: 2000




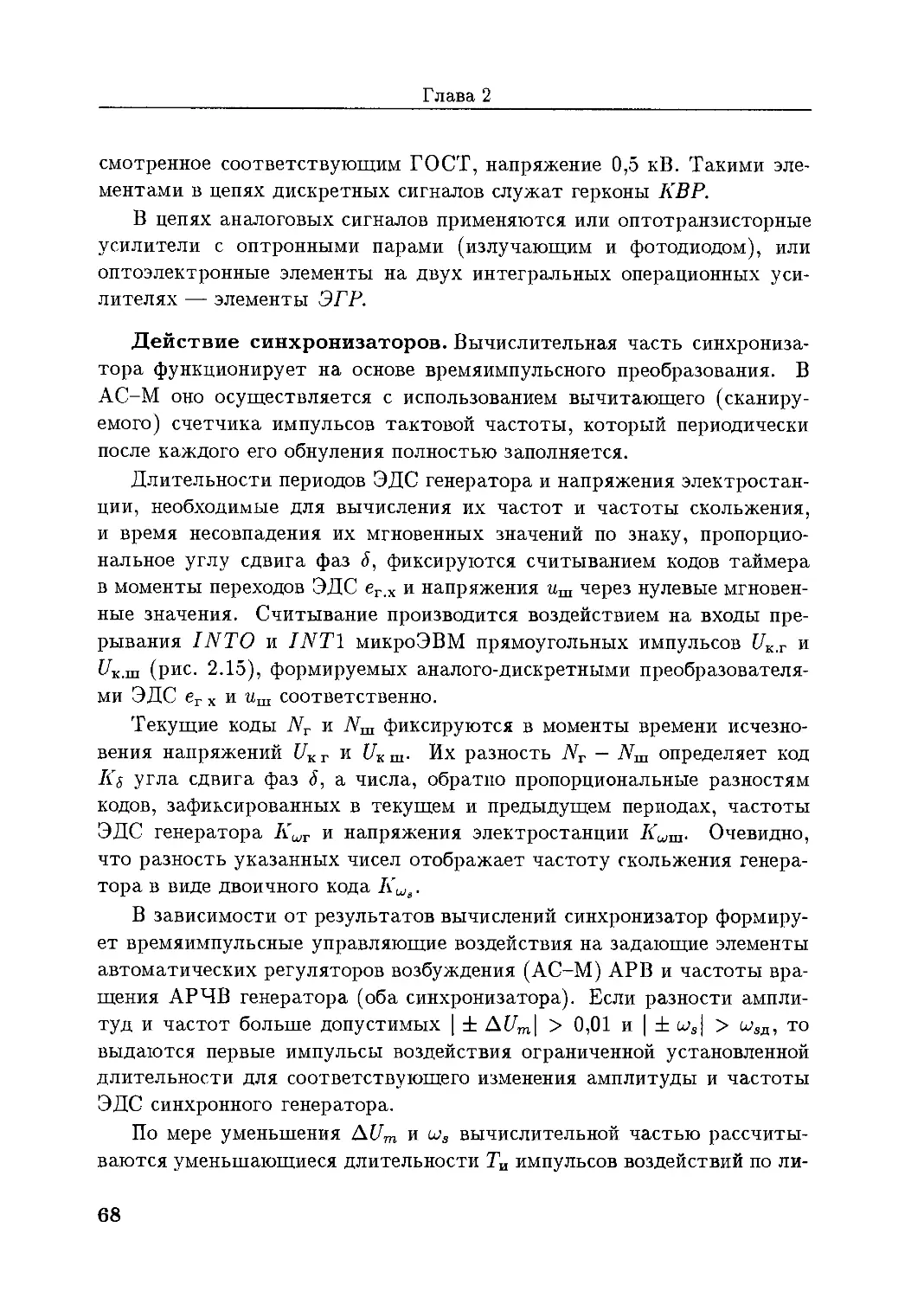
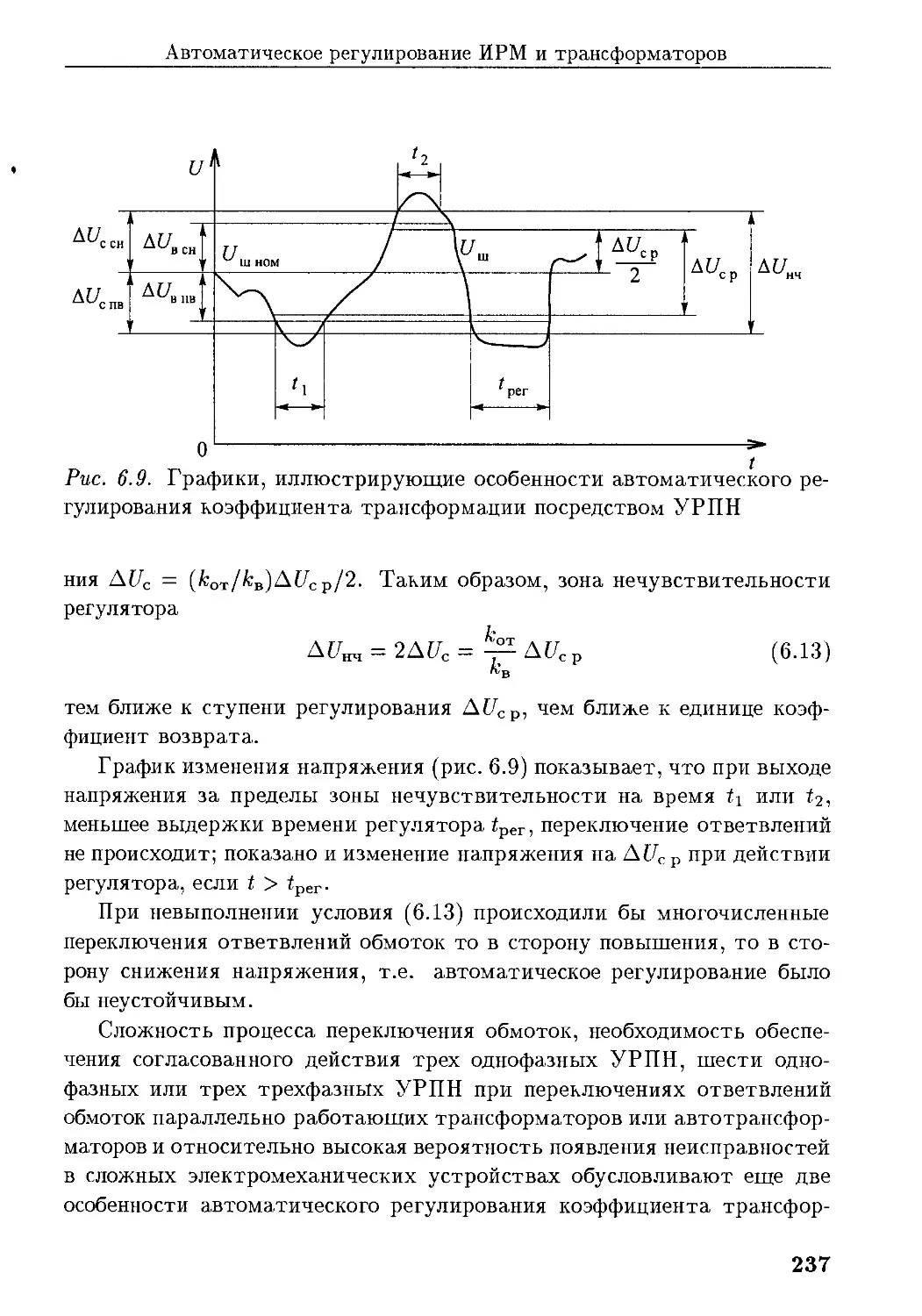
Текст
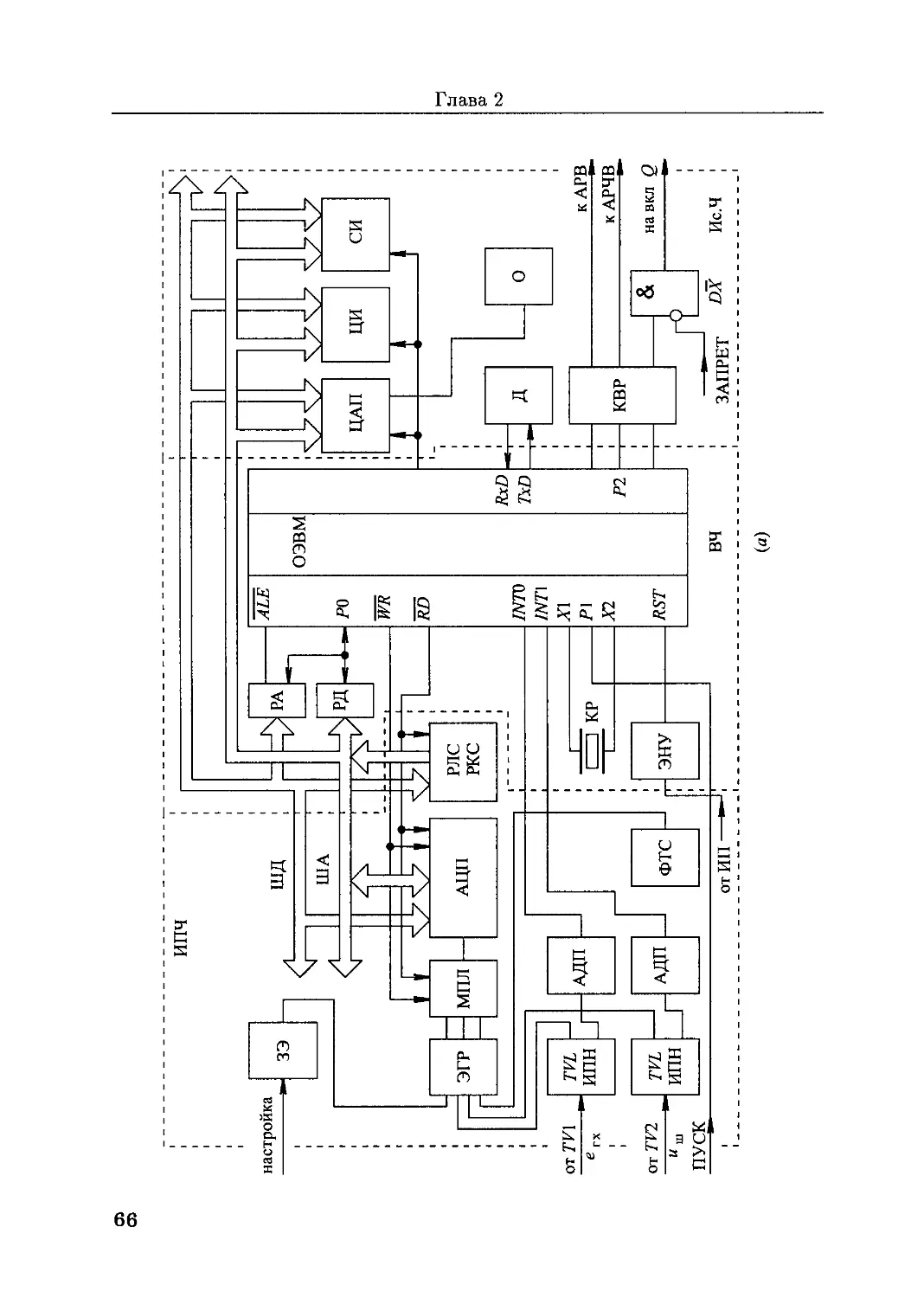
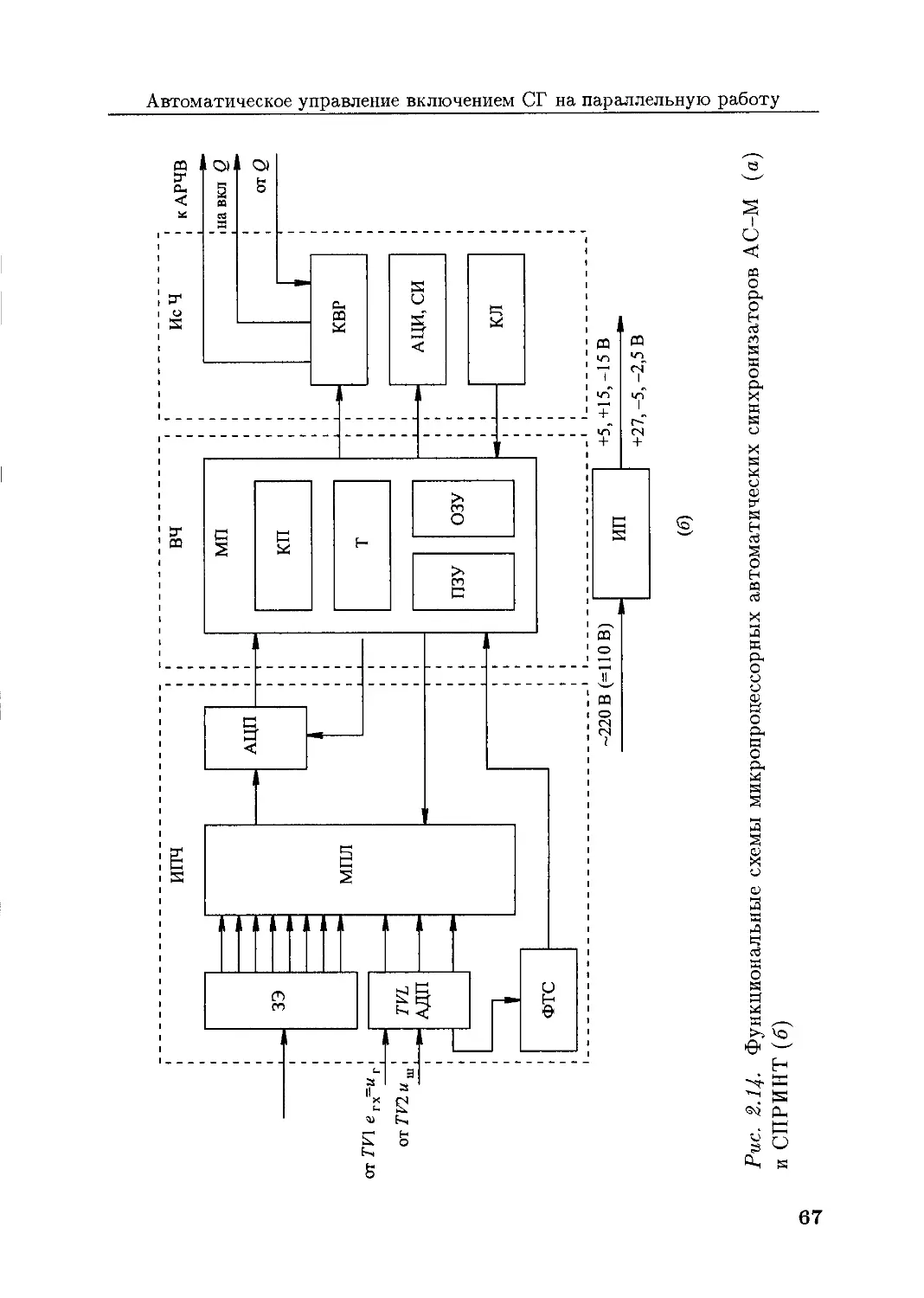
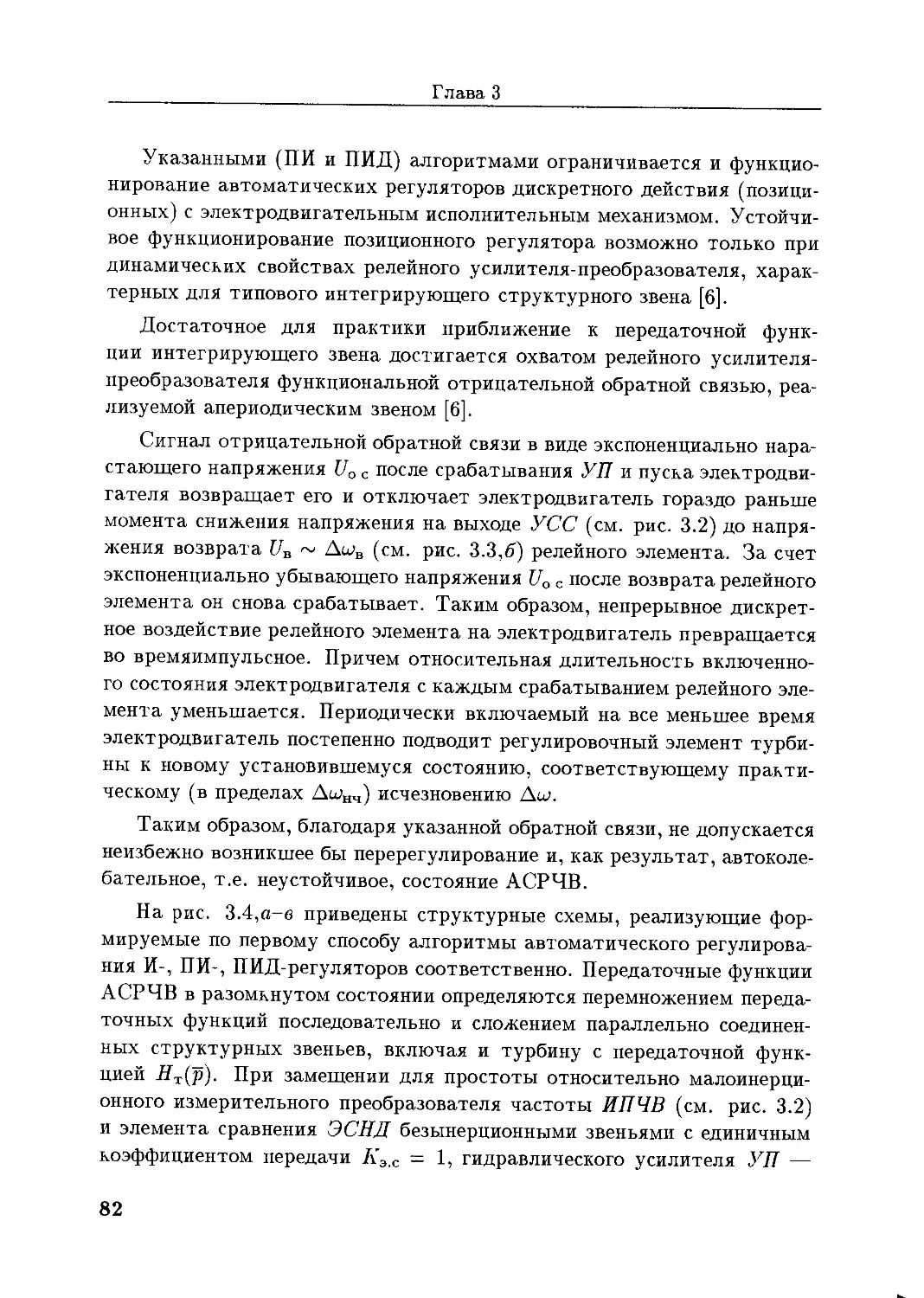
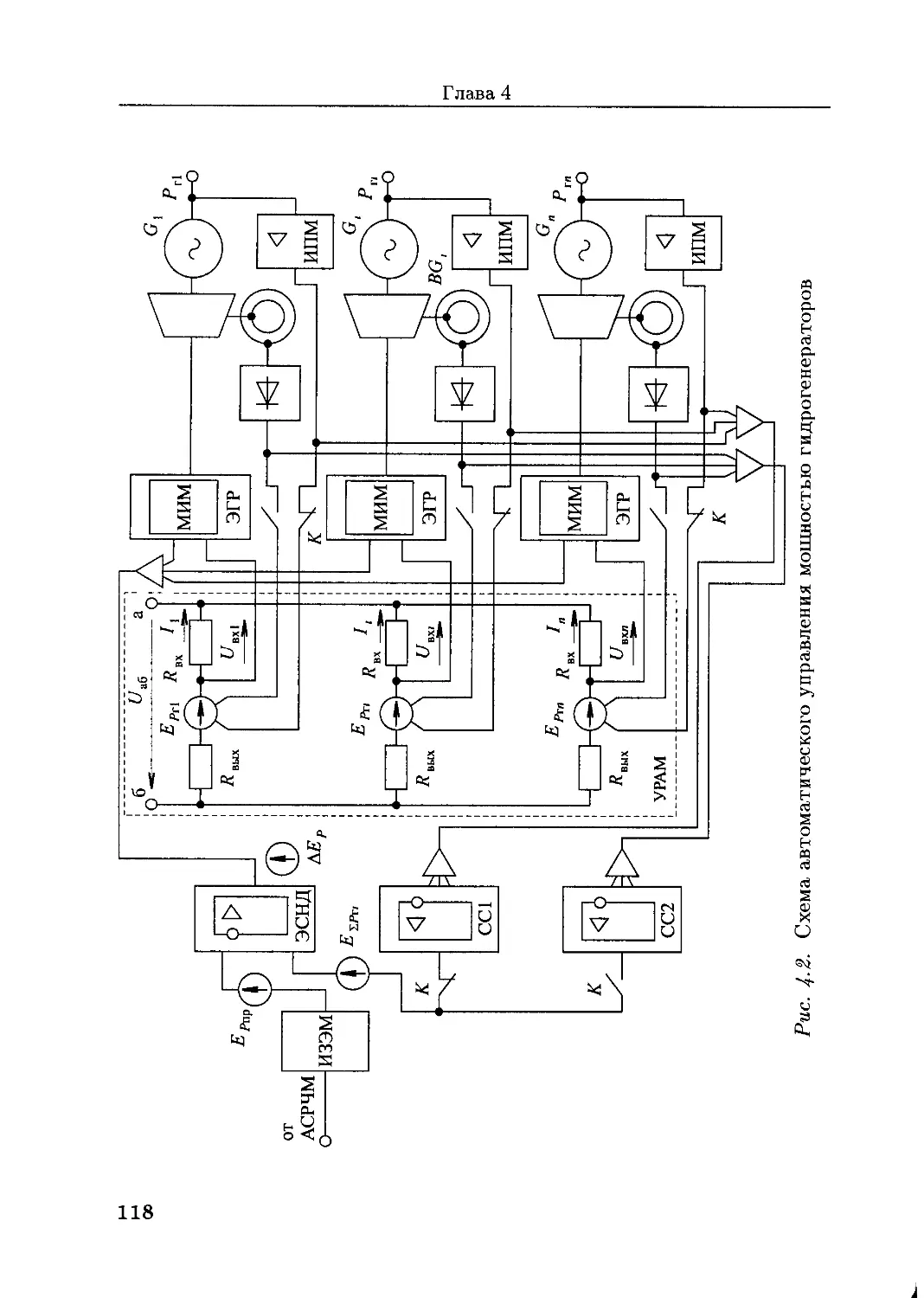
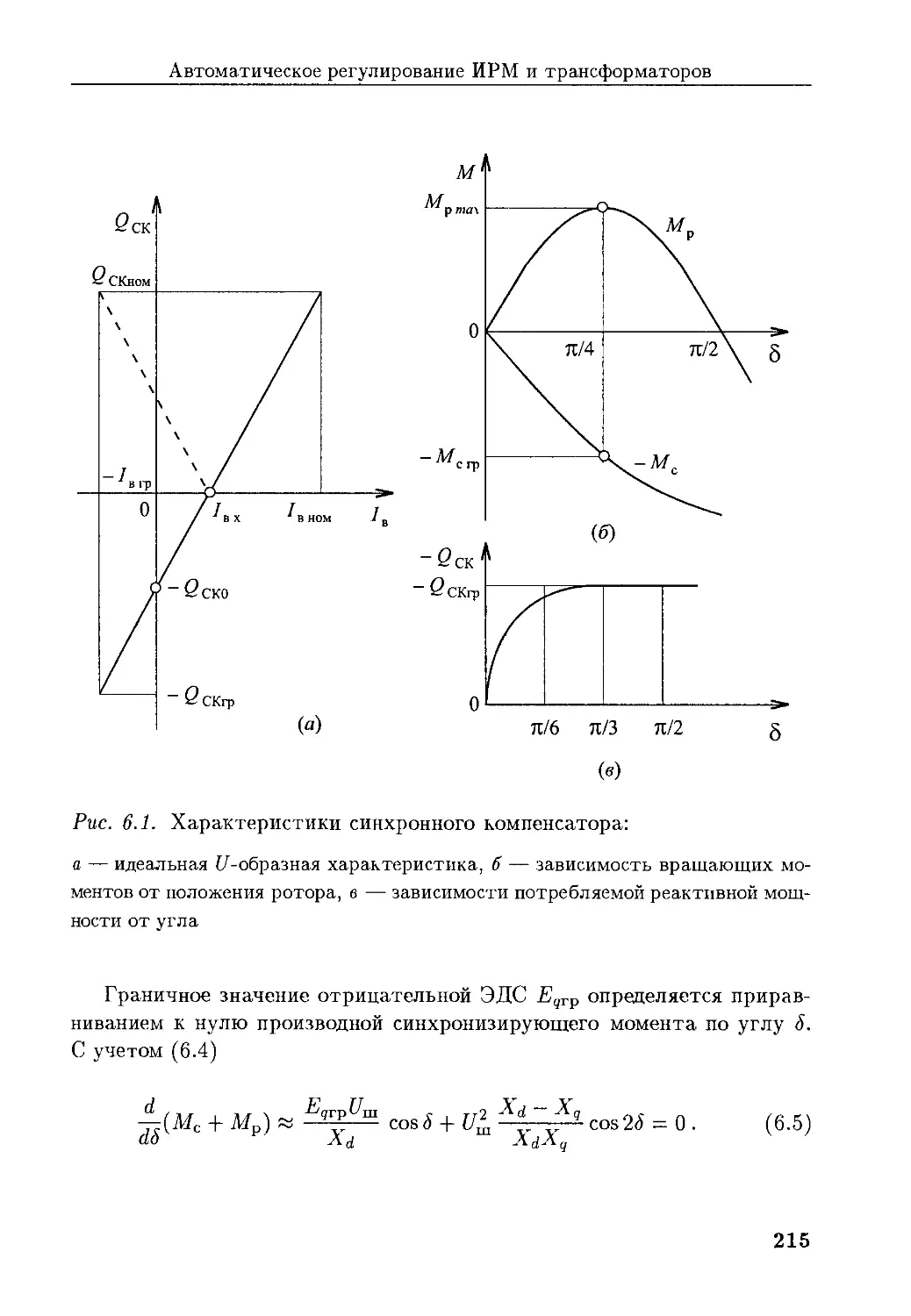
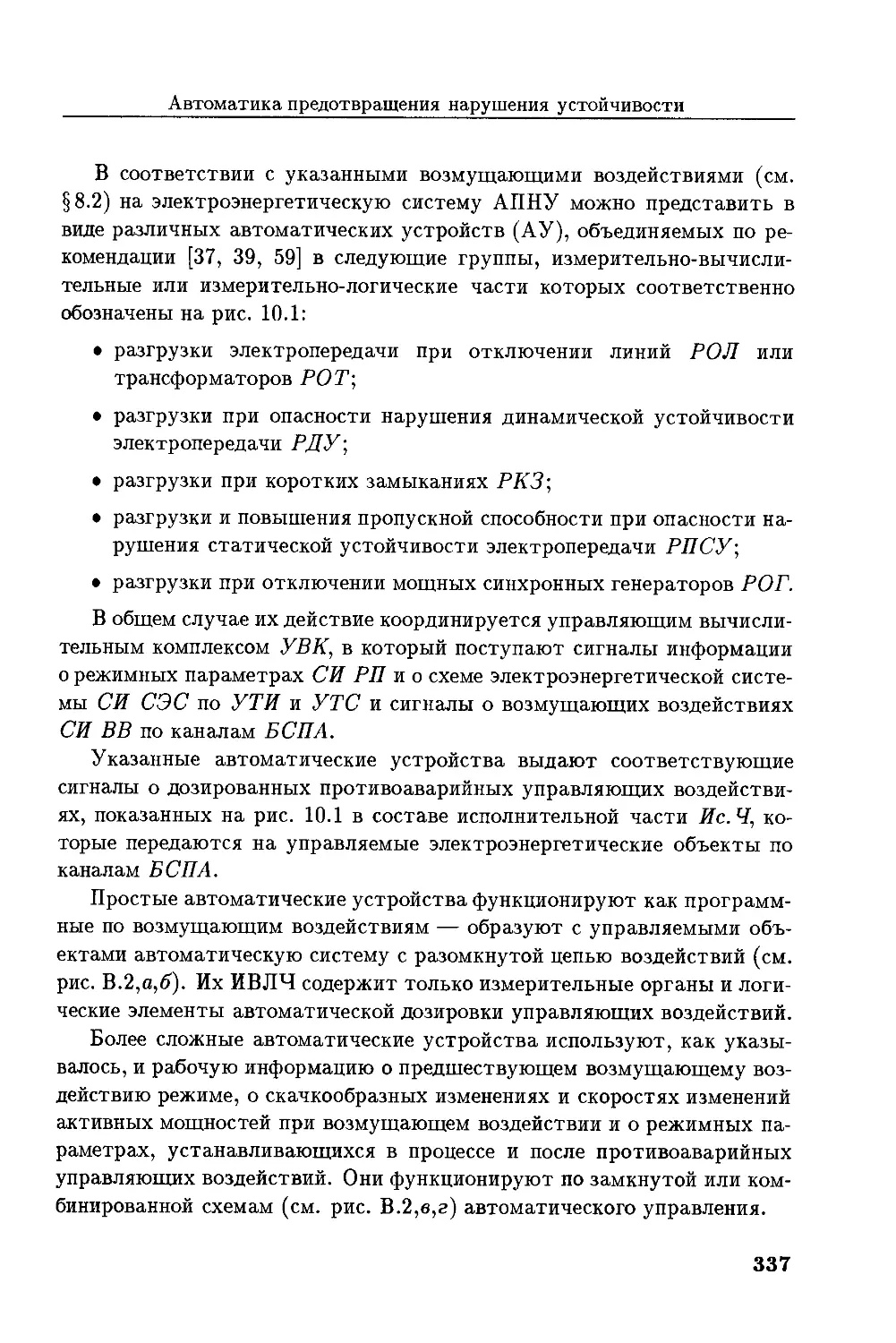
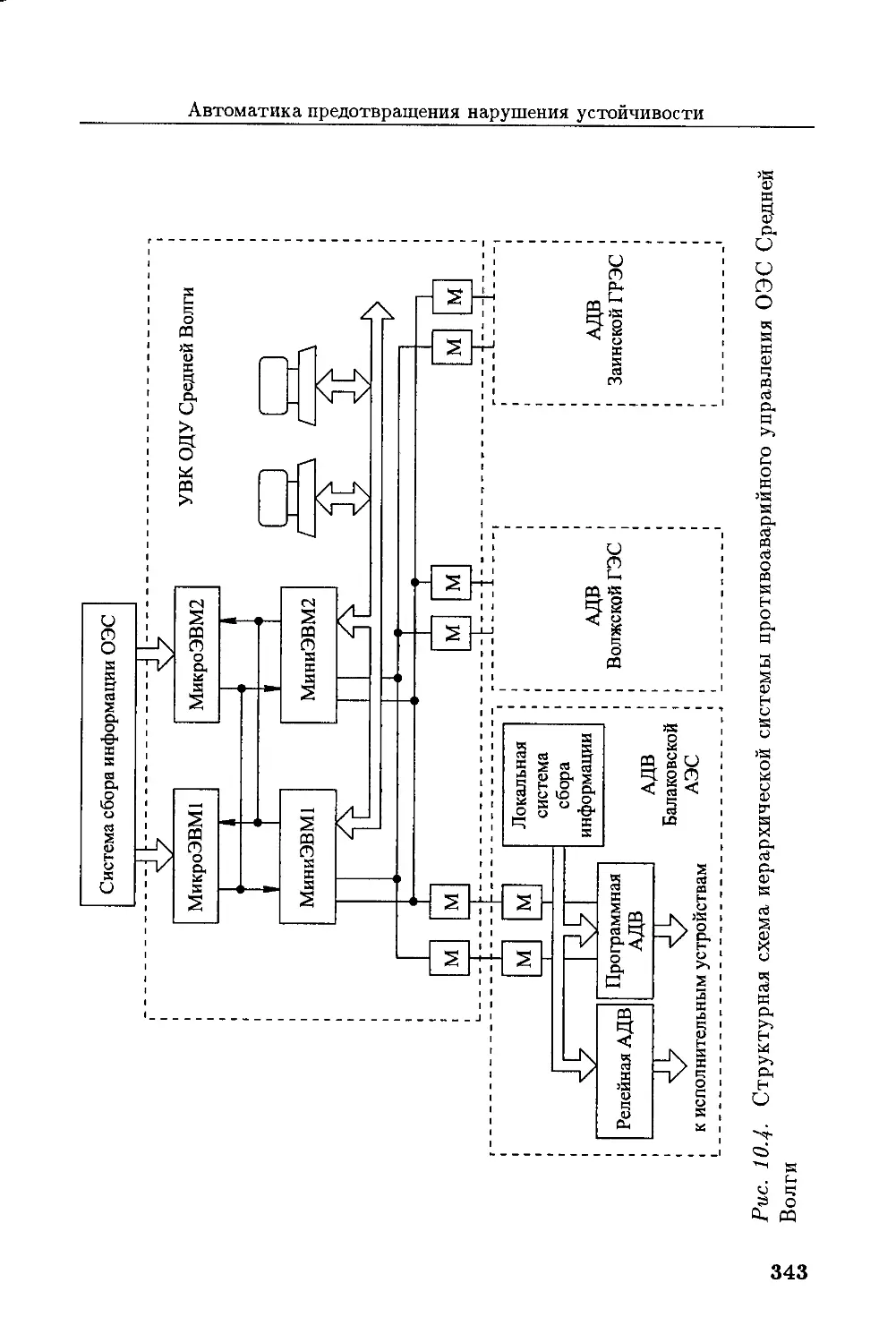
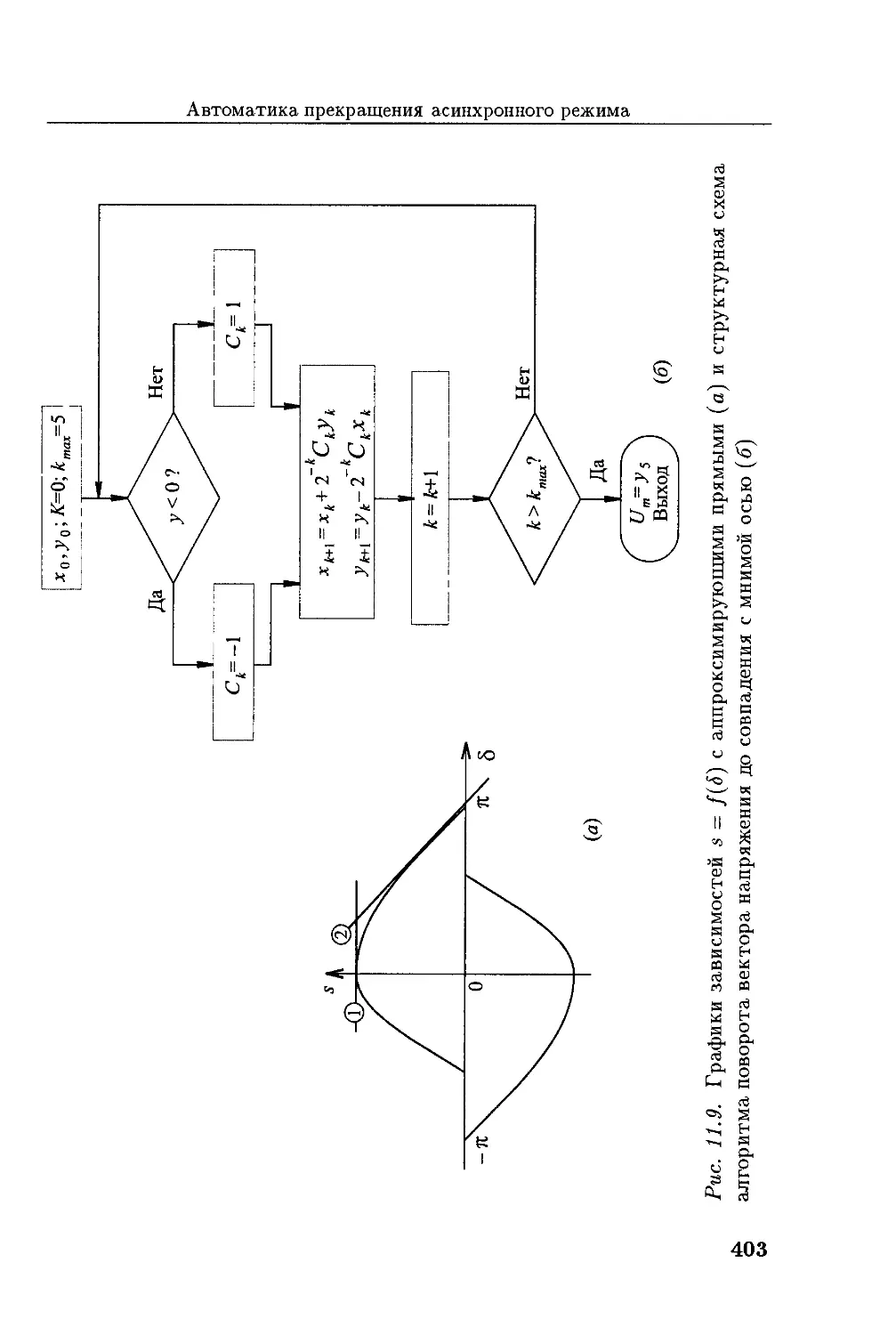
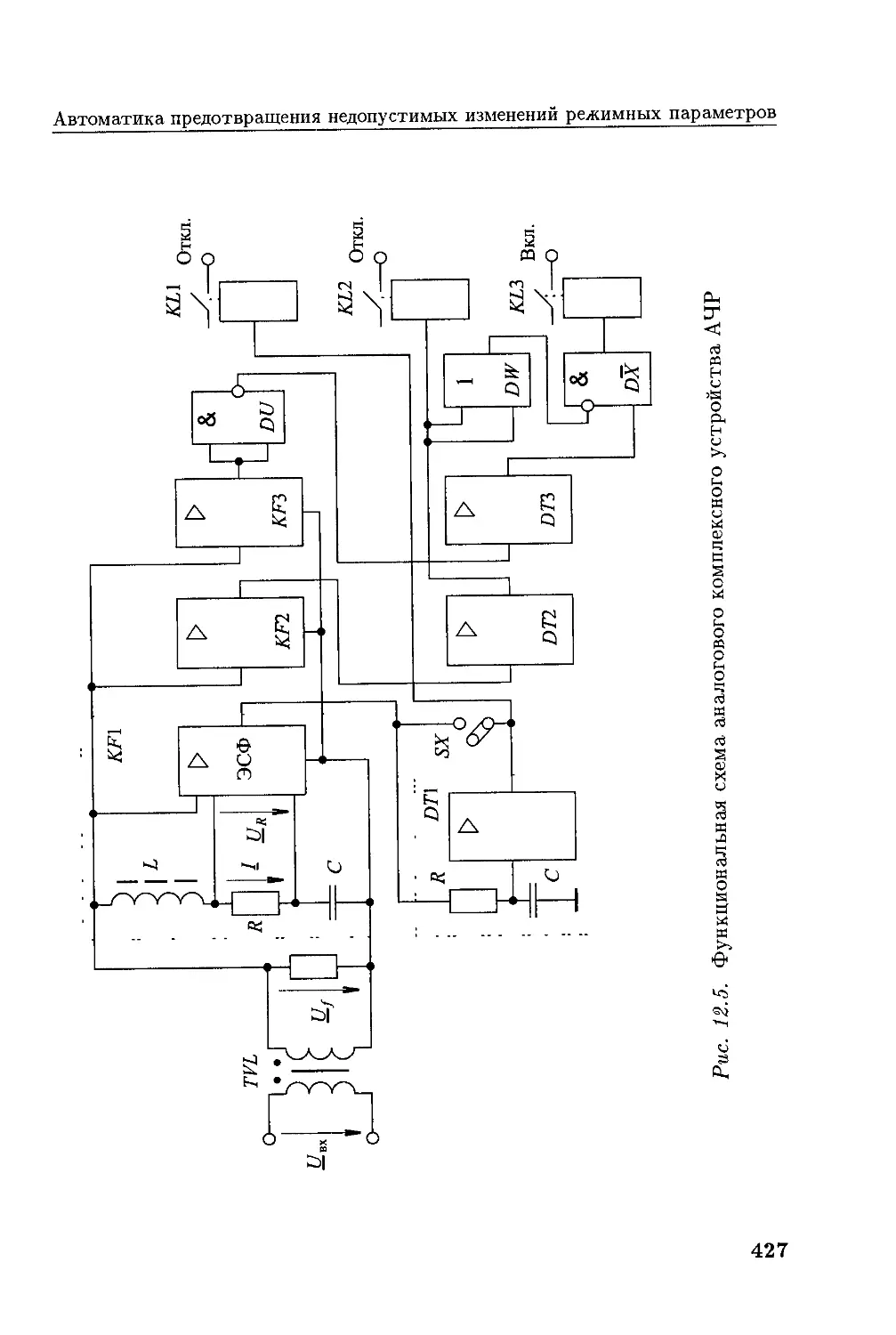
Автоматик
Электрических станций
9 "сгроэиергетическик
смете-*
Н.И. Овчаренко
Автоматика
электрических станций
и электроэнергетических
систем
Москва
«Издательство НЦ ЭНАС»
2000
^ДК 621.311.1618 5
ББК 31.27-05
035
2000 — 504 с ил
Иэд во НЦ ЭНАС
ISBN 5-93196-020-1
ББК 31 27-05
ISBN 5—93196 020-1
© «Издательство НЦ ЭНАС* 2000
Овчаренко Николай Ильич — лауреат
премии президента Российской Федерации
в области образования, доктор техниче-
ских наук, профессор кафедры «Релейная
защита и автоматизация энергосистем»
Московского энергетического института
(технического университета). Автор
нескольких монографий, учебных пособий
и учебников. Наиболее крупные: моногра-
фия «Аналоговые и цифровые элементы
автоматических устройств энергосистем»
(1989 г.) и учебник для вузов в двух книгах
«Элементы автоматических устройств
энергосистем» (1995 г.).
Предисловие
Исполняется 50 лет со времени издания первого учебника «Автома-
тизация энергетических систем», подготовленного в Московском энерге-
тическом институте (МЭИ) доктором техн, наук, проф. И. И. Соловье-
вым (М.;Л.: Госэнергоиздат, 1950) по новой учебной дисциплине — ав-
томатизации электроэнергетических систем, введенной тогда в учебные
планы подготовки инженеров-электроэнергетиков. Учебник был постро-
ен в соответствии со сложившейся к тому времени концепцией осуще-
ствления автоматического управления. Он освещал теоретические осно-
вы и техническое осуществление автоматизации наиболее ответственной
операции включения синхронных генераторов на параллельную работу
(их синхронизации) и автоматического регулирования режимами рабо-
ты синхронных генераторов. В него входили лишь начальные практиче-
ские положения по возникшей в годы Отечественной войны автоматике
противоаварийного управления электроэнергетическими системами.
Противоаварийная автоматика усложнялась и совершенствовалась в
связи с развитием в послевоенные годы электроэнергетических систем
(ЭЭС), возникновением их объединений (ОЭС) и созданием затем Еди-
ной энергосистемы (ЕЭС) страны. Совершенствовалась и техника авто-
матического управления нормальными режимами работы энергосистем.
Учебные пособия Новочеркасского политехнического института «Ав-
томатизация энергетических систем» авторов А.Д. Дроздова, А. С. За-
сыпкина, А. А. Аллилуева и др. (М.: Энергия, 1977) и Московского
3
энергетического института 1981 г. [1] обобщали теорию и технику то-
го времени по автоматической синхронизации генераторов, автоматиче-
скому регулированию напряжения и реактивной мощности, частоты и
активной мощности и содержали, особенно [1], уже развившиеся основы
противоаварийной автоматики и технические сведения по их электро-
магнитной, дискретно-полупроводниковой и релейно-контактной реали-
зации.
За последнее десятилетие произошло существенное обновление тех-
нических средств автоматического управления нормальными режимами
работы электрических станций и электроэнергетических систем и, осо-
бенно, противоаварийного управления ими.
Разработаны и внедрены новые аналоговые на интегральных ми-
кросхемах и цифровые микропроцессорные автоматические управляю-
щие устройства: аналоговый и цифровой автоматические синхрониза-
торы с вычислительными алгоритмами функционирования, аналоговый
и микропроцессорный автоматические регуляторы возбуждения мощ-
ных синхронных генераторов и компенсаторов и специализированные
микросхемные и микропроцессорные автоматические регуляторы возбу-
ждения асинхронизированных генераторов и статических тиристорно-
реакторных управляемых источников реактивной мощности; микро-
схемный автоматический регулятор частоты вращения гидрогенерато-
ров; микропроцессорная электрическая часть автоматической системы
управления (в том числе противоаварийного) мощностью паровых тур-
бин, микропроцессорные на специально разработанных в ВЭИ высокона-
дежных цифровых вычислительных средствах автоматизированные си-
стемы управления (АСУ) гидроэлектростанциями и АСУ технологиче-
скими процессами тепловых и атомных электростанций (АСУ ТП).
На основе цифровой вычислительной техники созданы автоматизи-
рованные системы диспетчерского управления ЭЭС, ОЭС и ЕЭС в це-
лом [3].
Цифровая вычислительная техника позволила создать общесистем-
ную иерархически построенную и рассредоточенную противоаварийную
автоматику предотвращения нарушения устойчивости электроэнергети-
ческих систем, усовершенствовать автоматику ликвидации асинхрон-
ных режимов [37, 39] и разработать интегрированные микропроцессор-
ные комплексы противоаварийной автоматики.
В ранее изданной литературе учебный материал по перечисленным
новым техническим средствам автоматического управления практиче-
ски отсутствует.
4
Подготовленный учебник содержит новые научно-технические мате-
риалы и восполняет существующий пробел в учебной литературе.
Учебный процесс подготовки инженеров-электроэнергетиков в по-
следние годы усовершенствовался, поднялся на более высокий методоло-
гический и научно-технический уровень в связи с аттестацией студентов
на степень бакалавра и вводом магистратуры.
Учебник полностью соответствует новой программе учебной дисцип-
лины «Автоматика электроэнергетических систем» учебного плана спе-
циальности «Автоматическое управление электроэнергетическими си-
стемами» и подготовлен на основе обновленного и существенно допол-
ненного лекционного курса кафедры релейной защиты и автоматизации
энергосистем МЭИ.
Он построен по-новому в учебно-методическом и научно-техническом
планах и состоит из двух разделов: автоматика нормальных режимов и
противоаварийная автоматика.
В первом разделе учебный материал расположен в соответствии
с технологическим процессом производства, передачи и распределения
электроэнергии. Впервые введена начальная глава по автоматическо-
му управлению пуском электроэнергетических агрегатов: гидро- и тур-
богенераторов с кратким рассмотрением особенностей автоматического
управления изменениями состояний энергоагрегатов атомных электро-
станций.
После изложения теоретических и технических сведений по автома-
тической синхронизации генераторов рассматривается теория и прак-
тика современного автоматического регулирования частоты вращения
и активной мощности, а затем автоматического регулирования напря-
жения и реактивной мощности синхронных и асинхронизированных ге-
нераторов, вращающихся и статических компенсаторов и трансформа-
торов.
Раздел завершается рассмотрением АСУ ТП электростанций и све-
дениями о разрабатываемых и внедряемых АСУ электроэнергетически-
ми системами, а также автоматизированной системы диспетчерского
управления (АСДУ) ЕЭС России.
Второй раздел построен в соответствии с целенаправленной и строй-
но (пирамидально) организованной современной противоаварийной ав-
томатикой электроэнергетических систем.
Прежде всего рассмотрены автоматические устройства повторных
включений как технические средства возможной ликвидации возмуща-
ющих воздействий, обычно приводящих к аварийному режиму ЭЭС.
5
Главным же образом речь идет об общесистемной, иерархически по-
строенной, осуществляемой цифровой вычислительной техникой автома-
тике предотвращения нарушения устойчивости электроэнергетических
систем (АПНУ). Должное место отводится современной микропроцес-
сорной реализации основной особенности АПНУ — дозировке противо-
аварийных управляющих воздействий и автоматике ликвидации асин-
хронных режимов. Рассматривается и автоматика ограничений изме-
нений режимных параметров — напряжения и частоты и их восстанов-
ления.
В связи с появлением в последнее время микропроцессорных инте-
грированных комплексов противоаварийной автоматики их техническое
рассмотрение является завершающим.
В целом учебник соответствует современной и перспективной поста-
новке учебного процесса в высших учебных заведениях, подготавливаю-
щих инженеров-электроэнергетиков и магистров по специальности «Ав-
томатическое управление электроэнергетическими системами», и мо-
жет использоваться при подготовке по специальностям «Электрические
станции» и «Электрические системы и сети».
Он будет полезен и для аспирантов по специальности «Электриче-
ские станции (электрическая часть), сети, электроэнергетические систе-
мы и управление ими».
Учебник содержит не только принципы действия, но и технические
описания новых, особенно микропроцессорных, технических средств ав-
томатическою управления, и поэтому может использоваться для повы-
шения квалификации эксплуатационного персонала электроэнергетиче-
ских систем.
В заключение хотел бы отметить, что при подготовке рукописи учеб-
ника учтены содержательные предложения по ее построению и совер-
шенствованию отдела устойчивости, моделирования и противоаварий-
ной автоматики ОАО «Институт «Энергосетьпроект».
Необходимо отметить большую учебно-методическую работу авто-
ра — доктора техн, наук, проф. Н.И. Овчаренко, преподавательского
состава кафедры, а также заведующей учебной лабораторией Н. П. Фа-
зуловой и оператора ПЭВМ З.М. Немчиновой, участвовавших в подго-
товке и оформлении рукописи.
Заведующий кафедрой релейной защиты и автоматизации
энергосистем МЭИ, член-корреспондент РАН,
доктор техн, наук, проф. А. Ф. Дьяков
Введение
Процесс производства и передачи электроэнергии является столь ди-
намичным и постоянно подверженным случайным возмущающим воз-
действиям, что без автоматического управления его функционирование
невозможно. Такие его особенности, как равенство в каждый момент
времени генерируемой и случайно изменяющейся, требуемой нагрузкой,
мощностей, время от времени возникающие короткие замыкания, вы-
сокая быстротечность электромагнитных и электромеханических пере-
ходных процессов, обусловили развитие технических средств автомати-
ческого управления еще в начальный период становления электроэнер-
гетики. Под автоматическим понимается управление процессом про-
изводств, передачи и потребления электроэнергии в целом без непосред-
ственного участия человека.
На современном этапе автоматическое управление производится от-
дельными электроэнергетическими объектами и их взаимодействующи-
ми совокупностями. Управление процессом производства и передачи
электроэнергии в целом пока еще осуществимо лишь при некотором опе-
ративном вмешательстве человека - диспетчера электроэнергетической
системы (ЭЭС). Такое управление называется автоматизированным.
Оно реализуется автоматизированной системой диспетчерского управле-
ния (АСДУ) (рис. В.1), важнейшей частью которой является управляю-
щий вычислительный комплекс УВК, расположенный на диспетчерском
пункте (ДП) электроэнергетической системы [3].
Автоматическое управление осуществляется на основе переработки
информации о свойствах управляемых электроэнергетических объектов
(УЭО), их состояниях и режимах работы, характеризующихся режим-
ными параметрами Y и складывающейся ситуации в ЭЭС в результате
возмущающих воздействий Z.
7
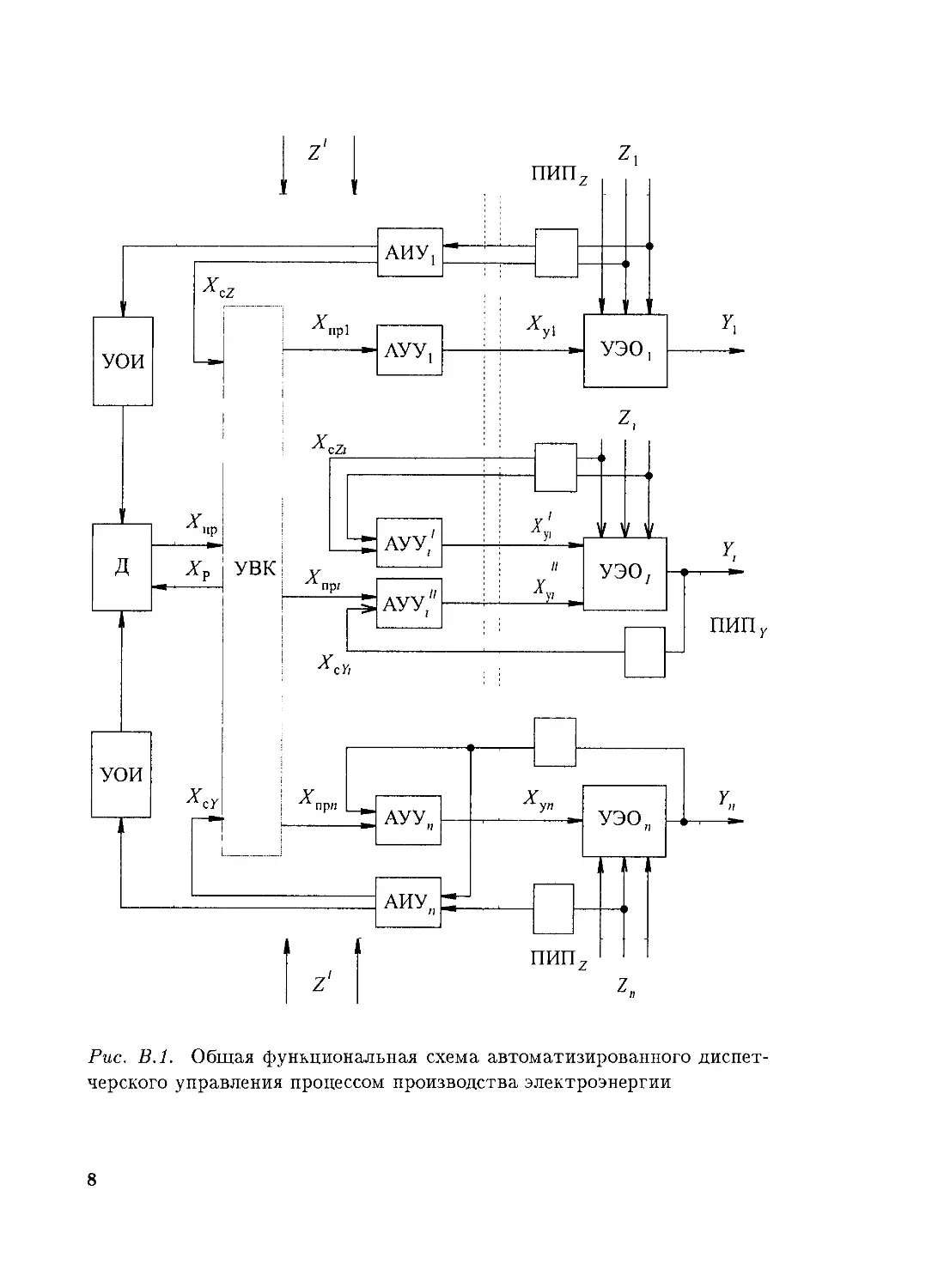
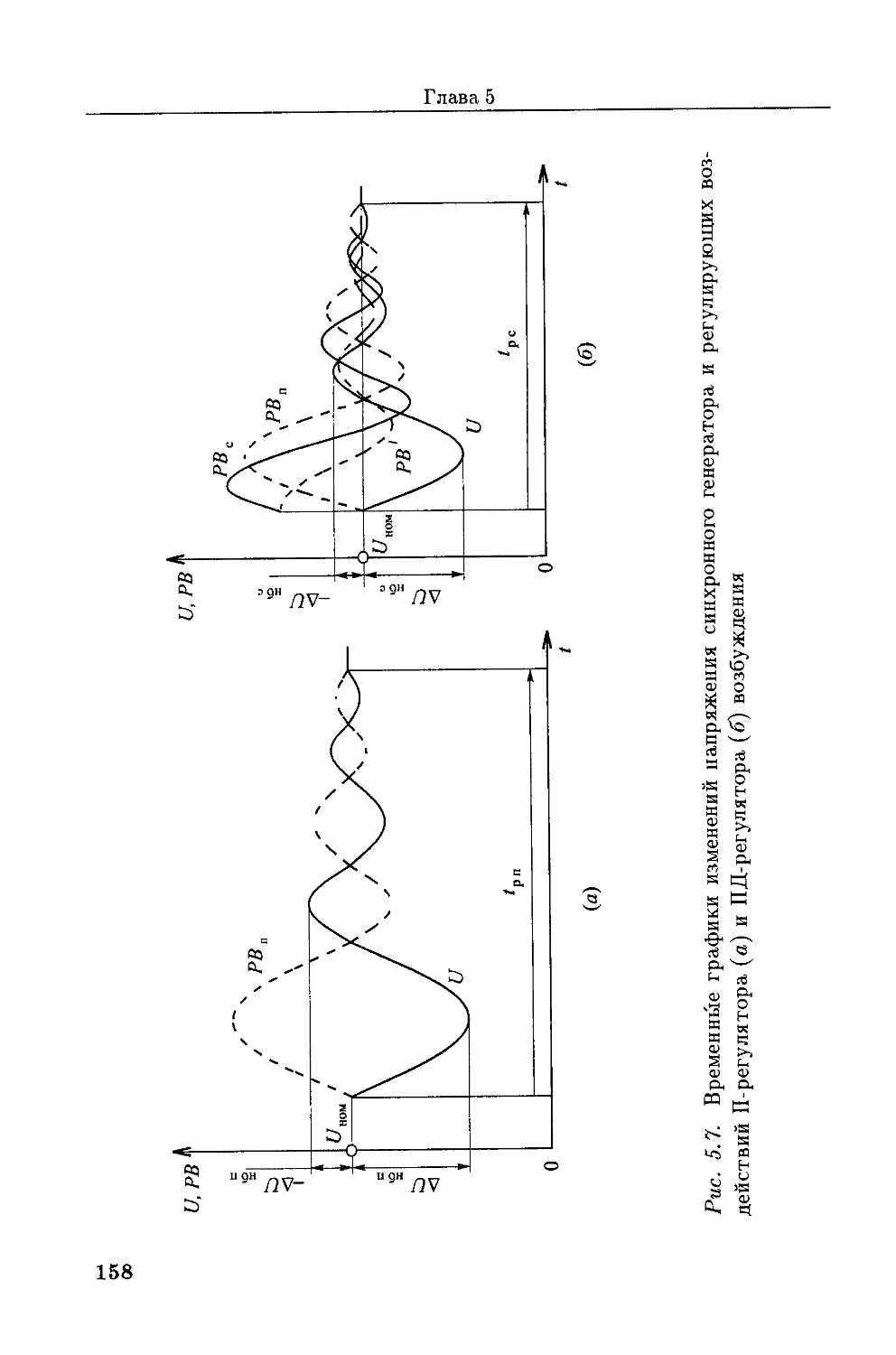
Рис. В.1. Общая функциональная схема автоматизированного диспет-
черского управления процессом производства электроэнергии
8
Информация в виде различных электрических сигналов поставляет-
ся автоматическими информационными устройствами АИУ по каналам
высокочастотной связи с ее источниками: первичными измерительными
преобразователями (ПИП) режимных параметров ПИП у управляемых
электроэнергетических объектов и возмущающих воздействий ПИП z-
На диспетчерском пункте информация вводится в цифровые ЭВМ упра-
вляющего вычислительного комплекса и отображается для восприятия
человеком.
На устройства отображения УОИ поступают (посюянно или по вы-
зову) результаты обработки информации УВК в виде рекомендаций Хр
для действий диспетчера Д.
В соответствии с программой А'пр функционирования УВК, зада-
ваемой человеком, управляющие ЭВМ вырабатывают программные за-
дания Xnpj-Xnpn действия автоматических управляющих устройств
АУУ1~АУУП, установленных на управляемых электроэнергетических
объектах УЭОу-УЭОп и непосредственно оказывающих на них упра-
вляющие воздействия Ху1-Хуп. Большинство автоматических управля-
ющих устройств также используют сигналы от источников информации
xcYl,xcZl.
Управляющий вычислительный комплекс УВК с устройствами его
информационного обеспечения АИУ и автоматические управляющие
устройства АУУ образуют автоматическую управляющую систему.
В зависимости от видов используемой информации: известной зара-
нее — априорной или получаемой в реальном времени функционирова-
ния ЭЭС — рабочей информации автоматическое управляющее устрой-
ство АУУ совместно с управляемым электроэнергетическим объектом
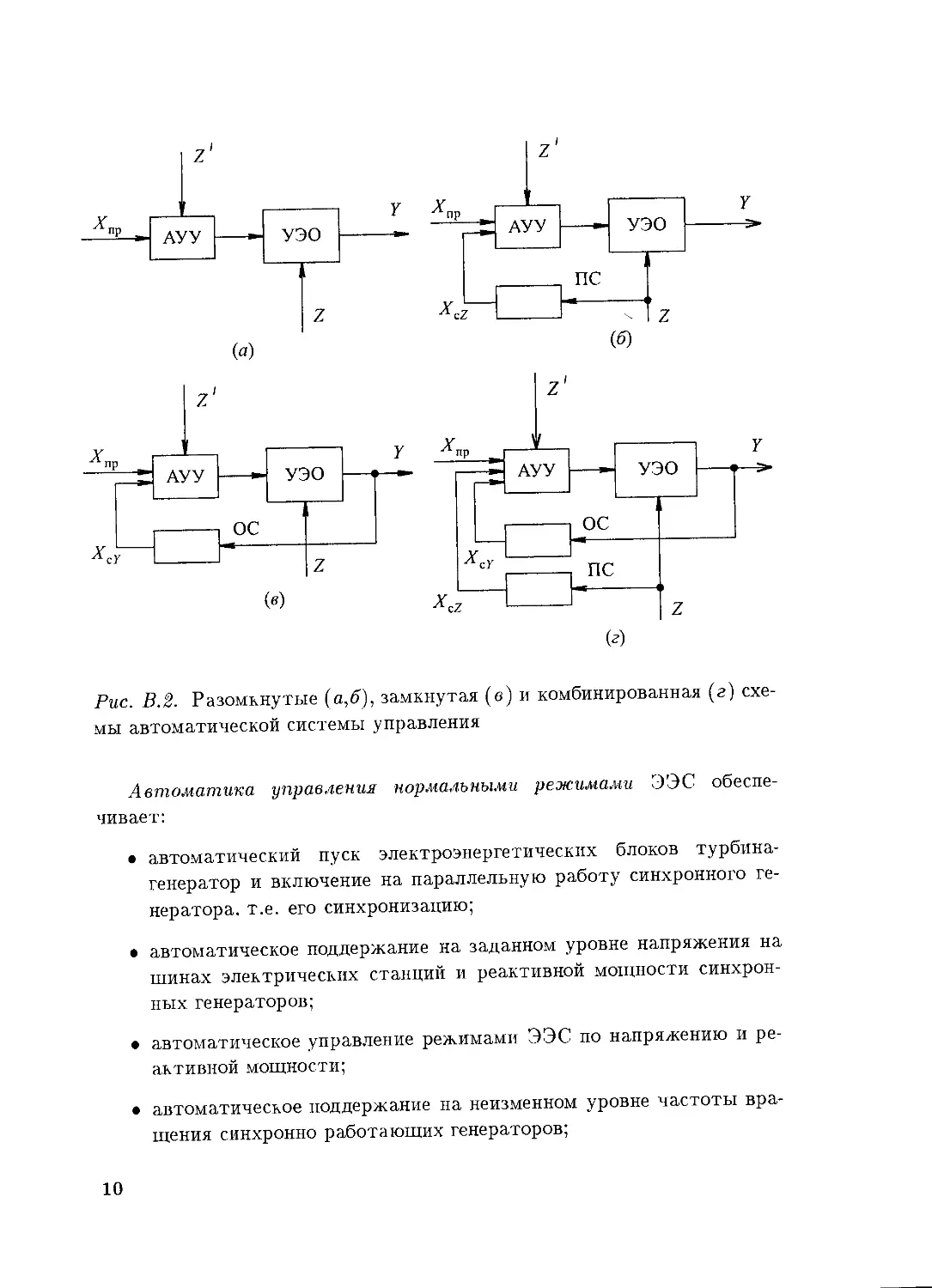
УЭО образует автоматическую систему с разомкнутой (рис. В.2,а и б),
замкнутой (рис. В.2,б) или комбинированной (рис. В.2,г) цепями воз-
действия [1]. По разомкнутой схеме работают программные автомати-
ческие устройства (рис. В.2,а) и функционирующие только по возму-
щающим воздействиям Z (прямая связь ПС на рис. В.2,б), а по замкну-
той — автоматические устройства, использующие рабочую информацию
(по цепи обратной связи ОС) о режимных параметрах Y (рис. В.2,в)
электроэнергетического управляемого объекта.
Технические средства автоматического управления процессом про-
изводства и передачи электроэнергии делятся на автоматику упра-
вления нормальными режимами работы ЭЭС и автоматические
устройства противоаварийного управления — противоаварийную авто-
матику.
9
Рис. В.2. Разомкнутые (а,б), замкнутая (в) и комбинированная (г) схе-
мы автоматической системы управления
Автоматика управления нормальными режимами ЭЭС обеспе-
чивает:
• автоматический пуск электроэнергетических блоков турбина-
генератор и включение на параллельную работу синхронного ге-
нератора. т.е. его синхронизацию;
• автоматическое поддержание на заданном уровне напряжения на
шинах электрических станций и реактивной мощности синхрон-
ных генераторов;
• автоматическое управление режимами ЭЭС по напряжению и ре-
активной мощности;
• автоматическое поддержание на неизменном уровне частоты вра-
щения синхронно работающих генераторов;
10
• оптимальное (по характеристикам относительного прироста рас-
хода условного топлива) распределение случайно изменяющейся
электрической нагрузки ЭЭС между электрическими станциями
и между электроэнергетическими блоками электростанций.
Указанные функции автоматики управления нормальными режима-
ми реализуются автоматическими воздействиями на изменения впуска
энергоносителя в турбины, автоматическим включением в определенный
момент времени и при соответствующих условиях выключателя син-
хронного генератора, непрерывным управлением (регулированием) воз-
буждения синхронных генераторов и компенсаторов, дискретным упра-
влением устройствами регулирования под нагрузкой (УРПН) трансфор-
маторов и автотрансформаторов, регулированием реактивной мощности
непрерывно управляемых ее источников — статических компенсаторов
(СТК) и дискретным управлением мощностью конденсаторных уста-
новок.
Соответственно различаются: пусковые автоматы (ПА) гидротур-
бин и комплексы автоматических устройств управления пуском (КАУП)
тепловых турбоагрегатов, автоматические регуляторы частоты враще-
ния турбин (АРЧВ), устройства автоматической синхронизации гидро-
и турбогенераторов (УАС), автоматические регуляторы возбуждения
(АРВ) синхронных генераторов и компенсаторов, автоматические регу-
ляторы частоты промышленного тока и активной мощности синхронных
генераторов (АРЧМ), автоматические устройства оптимального распре-
деления нагрузки (УРАН) электроэнергетической системы между часто-
торегулирующими электростанциями, автоматические регуляторы ко-
эффициентов трансформации (АРКТ) и автоматические регуляторы ре-
активной мощности статических установок ее генерирования или потре-
бления (АРРМ).
В последнее время в связи с бурным внедрением в технику автома-
тического управления микропроцессоров и цифровых ЭВМ разрабатыва-
ются комплексные (интегрированные) автоматические системы управле-
ния режимами работы электроэнергетических блоков электростанций,
узловых общесистемных подстанций и магистральных электропередач
высокого и сверхвысокого напряжений.
Назначением противоаварийной автоматики является решение
острой и специфической проблемы современных объединенных и еди-
ной электроэнергетической систем страны — обеспечение совместно-
го функционирования (синхронной устойчивости) множества мощных
электростанций, связанных длинными и сильно нагруженными лини-
11
ями электропередачи в условиях больших возмущающих воздействий
в виде неизбежных коротких замыканий (КЗ) и связанных с ними от-
ключений мощных электроэнергетических объектов, обусловливающих
скачкообразные изменения генерируемых, передаваемых и предельных
(по устойчивости) мощностей. При этом возникает аварийный режим
работы ЭЭС с избытком или недостатком генерируемой мощности, гро-
зящий развитием общесистемной аварии с нарушением устойчивости и
разъединением ОЭС, с остановкой тепловых электро’станций и прекра-
щением электроснабжения потребителей на больших территориях.
Аварийная ситуация начинается с возникновения главного возмуща-
ющего воздействия — короткого замыкания и обусловленного им и его
отключением нарушения баланса мощностей и развивается с пониже-
нием напряжения и частоты вращения синхронных генераторов в не-
достаточной по мощности (дефицитной) и их повышением в избыточ-
ной частях ЭЭС. Особенно опасно уменьшение частоты, приводящее к
снижению производительности установок собственных нужд тепловых
электростанций и в результате к опасности необратимого ее падения —
«лавине частоты». Аналогично снижение напряжения, обусловленное
недостатком генерируемой реактивной мощности, может развиться в
«лавину напряжений».
Противоаварийная автоматика должна прежде всего ликвидировать
возмущающее воздействие. Это делается автоматическими устрой-
ствами релейной защиты (АУРЗ) и автоматикой повторного включе-
ния (АПВ) выключателей, отключенных АУРЗ. Короткие замыкания
(особенно однофазные КЗ на воздушных линиях) в большинстве своем
неустойчивые (дуговые). При успешном повторном включении возму-
щающее воздействие, оказываемое релейной защитой на ЭЭС, устра-
няется.
При устойчивых КЗ и повторных отключениях релейной защитой
поврежденных электроэнергетических объектов вновь появляется, как
следствие, небаланс мощностей. Возникает опасность — нарушение
синхронной устойчивости электроэнергетической системы. Вступает в
действие общесистемная противоаварийная автоматика, предназначен-
ная не допустить нарушения синхронных динамической или статиче-
ской устойчивости или сохранить результирующую (после кратковре-
менного асинхронного режима) устойчивость функционирования ЭЭС,
ОЭС и ЕЭС в целом. Она состоит из рассредоточенных по электро-
энергетическим системам комплексов автоматических устройств, свя-
занных каналами обмена информацией и управляемых от УВК, — авто-
12
матики предотвращения нарушения устойчивости (АПНУ) и устройств
автоматики ликвидации возникающего асинхронного режима рабо-
ты (АЛАР).
Особенно сложной, централизованной и иерархически построенной
является АПНУ. Она функционирует на основе результатов постоянных,
производимых циклически (через 5-10 с) расчетов устойчивости цифро-
выми ЭВМ. При этом вырабатываются необходимые по интенсивности
и длительности (дозированные) противоаварийные воздействия на элек-
троэнергетические объекты для каждого из фиксируемых возмущающих
воздействий. После каждого цикла расчетов они передаются на места их
возможного применения и запоминаются там как готовые к немедленной
реализации по сигналу о возникшем возмущающем воздействии.
Для предотвращения нарушения динамической устойчивости, про-
изводятся. например, кратковременная импульсная разгрузка паровых
турбин или кратковременное электрическое торможение гидрогенера-
торов. Предотвращение нарушения статической устойчивости в по-
слеаварийных и новых установившихся режимах работы достигается
переводом вращающихся гидроагрегатов из режима работы синхрон-
ным компенсатором в генераторный режим, отключением части ги-
дрогенераторов и другими действиями, направленными на ликвидацию
перегрузки (по условиям статической устойчивости) линий электропе-
редачи.
Аналогичные противоаварийные воздействия характерны и для
АЛАР. Если асинхронный режим ликвидировать не удается, действует
делительная автоматика, отключающая от ЭЭС несинхронно работаю-
щую электростанцию.
Балансы мощностей в обеих частях нарушаются. В избыточной ча-
сти ЭЭС частота и напряжение возрастают, а в недостаточной по мощ-
ности (дефицитной) части снижаются.
Начинает действовать противоаварийная автоматика предотвраще-
ния недопустимых, опасных изменений режимных параметров:
• автоматика ограничений снижений (АОСН) и повышений (АОПН)
напряжения;
• автоматика ограничений снижений (АОСЧ) и повышений (АОПЧ)
частоты.
Ее задачи — быстро снизить нарушенные балансы мощностей и спо-
собствовать их полному восстановлению и возврату режимных параме-
тров к номинальным значениям.
13
Последующее восстановление связи между разделенными частями
электроэнергетической системы производится автоматикой повторного
включения с синхронизацией (АПВС).
Как указывалось, информационное обеспечение АСДУ производит-
ся комплексом автоматических информационных устройств АИУг (см.
рис. В.1), формирующих и передающих сигналы в цифровом виде по вы-
сокочастотным каналам связи, организуемым по проводам линий элек-
тропередачи. Информация о режимных параметрах и об изменениях
схемы ЭЭС передается автоматическими устройствами телеизмерения
(УТИ) и телесигнализации (УТС).
Малая инерционность передачи сигналов информации о противоава-
рийных управляющих воздействиях и пуска исполнительных элементов
запоминания их дозировки и реализации обеспечивается быстродейству-
ющими устройствами передачи сигналов противоаварийной автоматики
(БСПА).
14
Раздел первый
Автоматика нормальных режимов
Глава 1. Автоматическое управление
изменениями состояния гидро-
и турбогенераторов
1.1. Назначение и особенности автоматического
управления
На электрических станциях (ЭС), вырабатывающих электроэнергию
путем преобразования в нее механической энергии синхронных генера-
торов, вращаемых турбинами, выполняются сложные технологические
процессы по образованию энергоносителя, особенно водяного пара, и пре-
вращению его потенциальной энергии в кинетическую энергию гидрав-
лических и паровых турбин.
Необходимое для этого согласованное взаимодействие энергетическо-
го оборудования и механизмов ЭС обеспечивается их автоматическим
управлением, реализуемым различными автоматическими устройства-
ми управления — устройствами автоматики, а управление производ-
ством электроэнергии в целом — автоматизированной системой упра-
вления технологическими процессами электростанций.
Автоматические управляющие устройства делятся на устройства
технологической автоматики и автоматики управления электрической
частью ЭС.
Особенностью технологической автоматики является формирова-
ние необходимой для функционирования автоматических устройств ин-
формации на основе преобразований в электрические сигналы в ви-
де изменений информационных параметров напряжения или тока из-
меняющихся параметров энергоносителя, механических и гидравличе-
ских параметров. Однако в ряде случаев используются неэлектриче-
ские (гидромеханические и гидродинамические) устройства автоматиче-
15
Глава 1
ского управления, например, частотой вращения гидравлических и па-
ровых турбин.
Автоматическое управление основными электроэнергетическими
агрегатами электрических станций — гидро- (ГГ) и турбогенераторами
(ТГ) сводится к управлению изменениями их состояния и обеспечению
оптимальных режимов работы. Изменения состояния: нормальные или
аварийные пуск и останов, включение на параллельную работу, перевод
из генераторного в режим синхронного компенсатора (СК) и обратный
перевод — производятся относительно редко и кратковременно автома-
тическими управляющими устройствами дискретного (релейного) дей-
ствия. Управление нормальными режимами работы выполняется по-
стоянно автоматическими управляющими устройствами непрерывного
действия, главным образом, автоматическими регуляторами.
Автоматические пуск и останов связаны с координированным авто-
матическим управлением многочисленным и разнообразным оборудова-
нием, обеспечивающим функционирование электроэнергетических агре-
гатов. Автоматическое управление существенно различно на гидро-
(ГЭС) и тепловых (ТЭС) электростанциях и имеет особенности на ги-
дроаккумулирующих (ГАЭС) и атомных (АЭС) электростанциях. В це-
лом комплекс технических средств автоматического управления вспомо-
гательным оборудованием образует технологическую автоматику упра-
вления электроэнергетическими агрегатами ЭС, а комплекс технических
средств автоматического управления ГГ и ТГ входит в состав автома-
тики электроэнергетических систем [1, 2].
1.2. Автоматическое управление гидрогенераторами
Формирование сигналов автоматического управления. Все-
российским научно-исследовательским и проектно-изыскательским ин-
ститутом «Гидропроект» разработаны типовой алгоритм и его реализа-
ция на логических элементах автоматического управления пуском, оста-
новом и переводом в режим работы синхронным компенсатором и возвра-
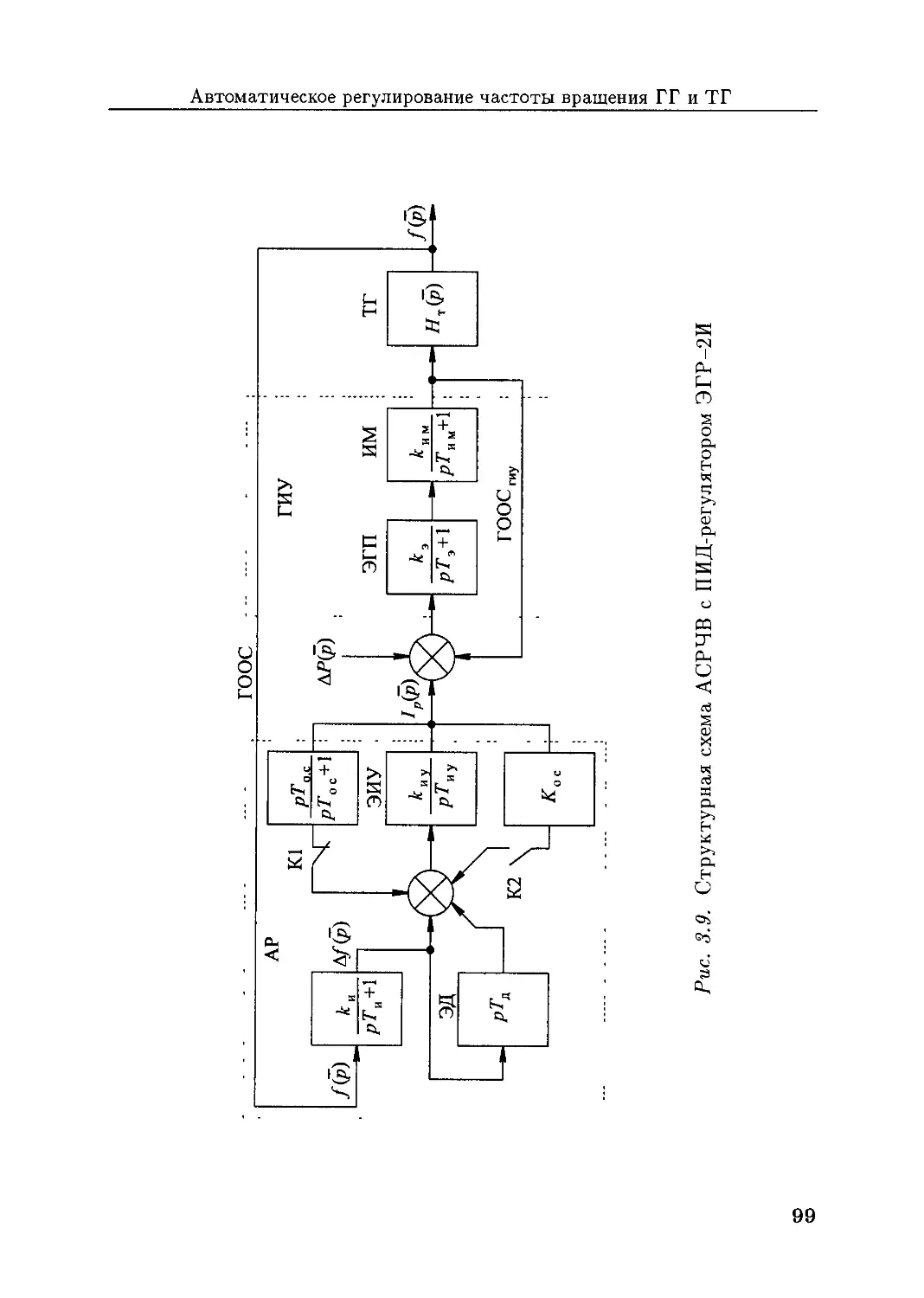
том в генераторный режим гидрогенератора ГЭС (рис. 1.1) с любыми ти-
пами гидротурбины и с применением последней модификации электроги-
дравлического автоматического регулятора частоты вращения ЭГР-2И
(см. гл. 3).
16
Автоматическое управление изменениями состояния ГГ и ТГ
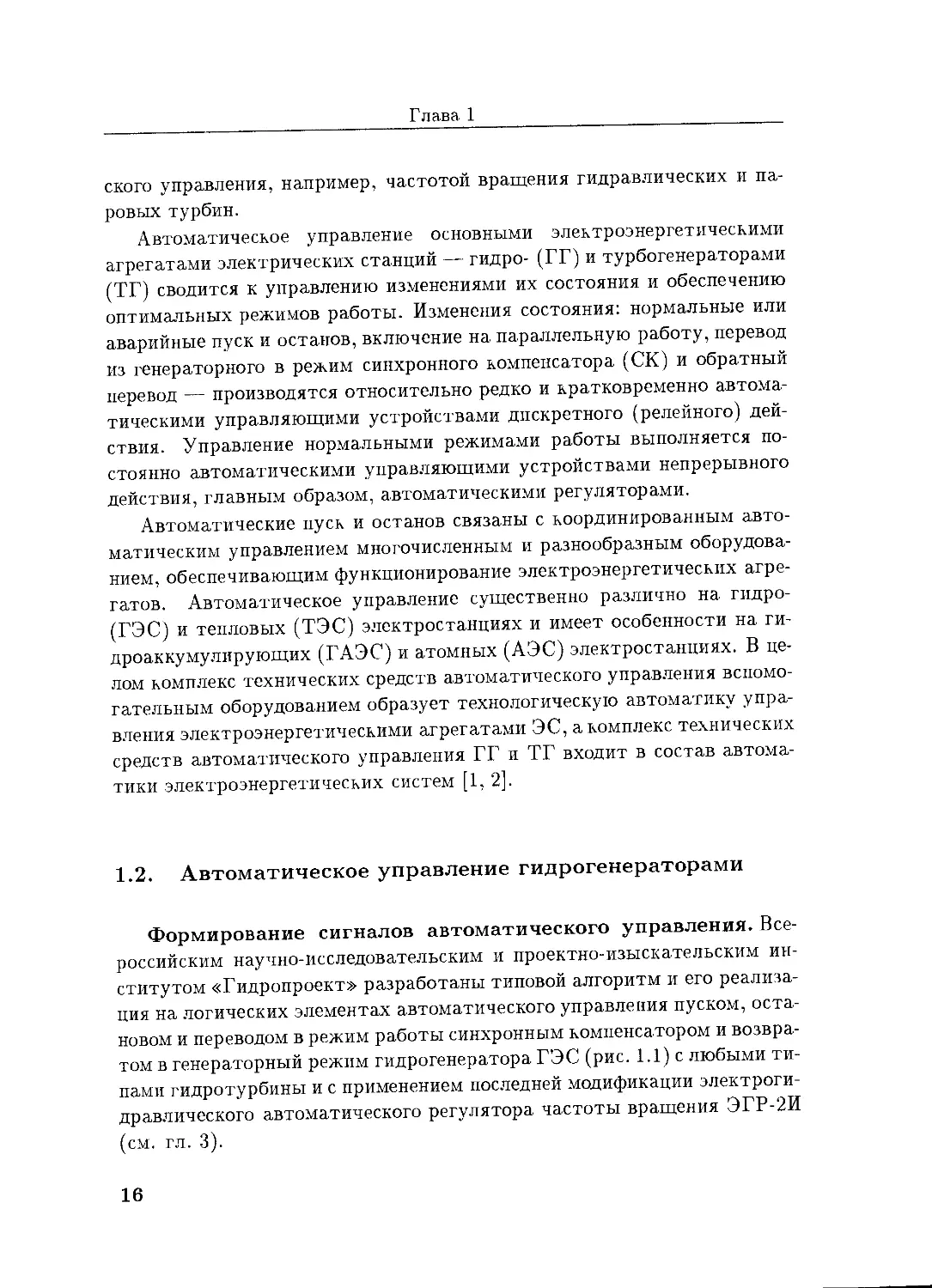
Рис. 1.1. Схема вертикального гидроагрегата и взаимодействия его
вспомогательного оборудования
Алгоритм действия и типовая схема автоматического устройства
обеспечивают полностью автоматическое управление технологическими
процессами указанных изменений состояния гидрогенератора и предпо-
лагают выполнение следующих операций:
• контроль готовности турбины Т генератора Г к пуску с провер-
кой его исправности и работоспособности устройств технического
водоснабжения ТВ С, а также подшипника гидротурбины ПТ (с
резиновыми вкладышами);
17
Глава 1
• охлаждение масла в ваннах подшипника синхронного генерато-
ра ПГ и опорного подшипника ОП — подпятника гидроагрега-
та, снабжение дистиллированной охлаждающей водой ДВ обмоток
статора, развозбужденного состояния и отключенного выключате-
ля синхронного генератора;
• наличие достаточного давления в маслонапорной установке МНУ;
• нормальный и ускоренный пуск и включение синхронного генера-
тора способом точной автоматической синхронизации и способом
самосинхронизации соответственно с автоматическим набором на-
грузки;
• пуск и перевод в режим синхронного компенсатора (СК) и перевод
из режима СК в генераторный режим;
• нормальный и аварийный останов гидроагрегата.
Алгоритм реализует приоритет выполнения последней команды как
в процессе осуществления нормальных операций, так и при ускоренном
пуске и аварийном останове.
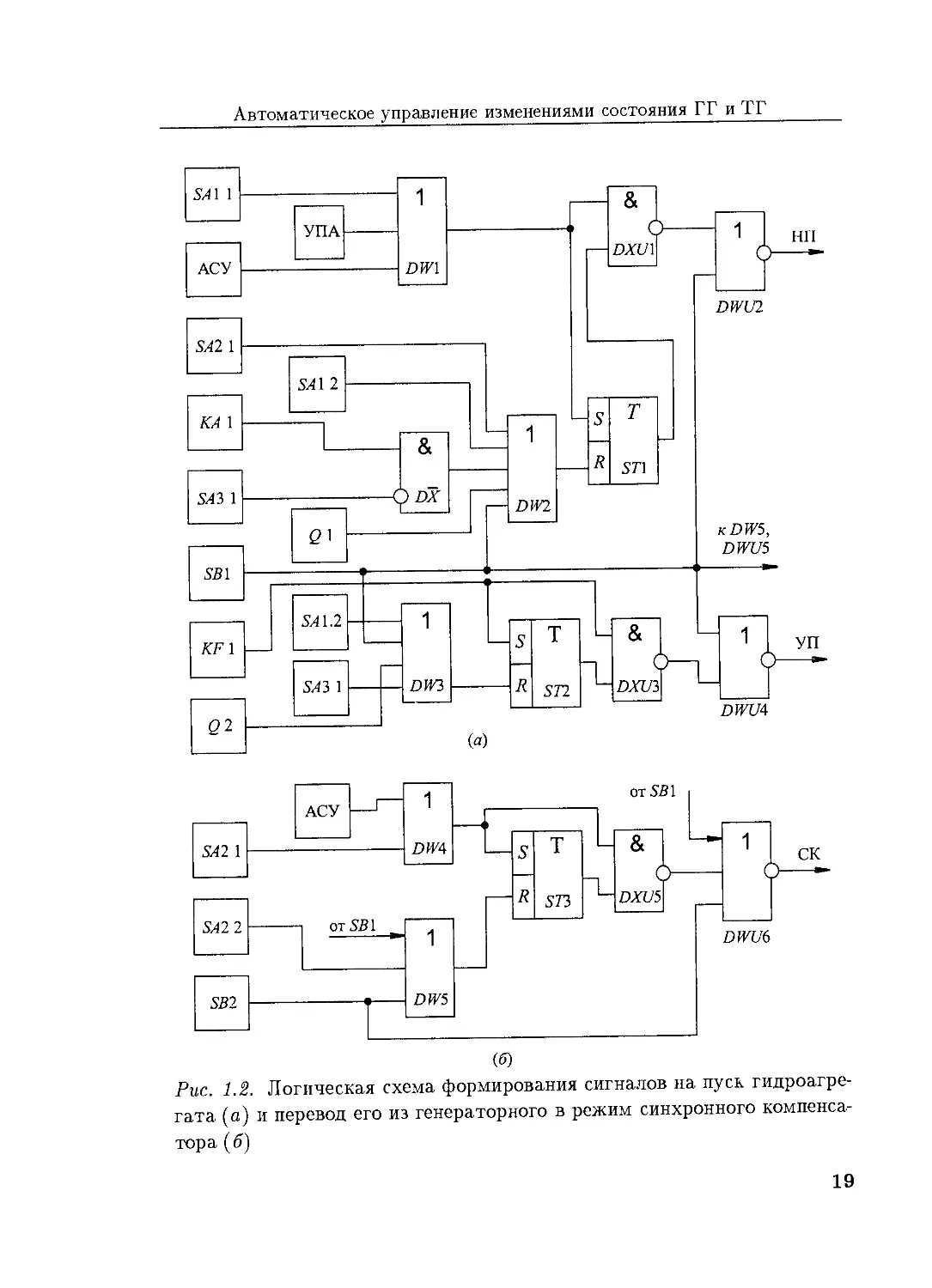
На рис. 1.2,а приведена логическая схема формирования сигналов
командной информации по автоматическому управлению изменением со-
стояния гидроагрегата.
Сигнал нормального пуска НП (рис. 1.2,а) формируется через логи-
ческий элемент DW3 (ИЛИ) от ключа управления 541.1, или от АСУ
технологическими процессами ГЭС, или от устройства противоаварий-
ной автоматики У ПА, запоминается статическим триггером ST1 (вход
записи 5), если на его считывающий вход R через элемент ZW2 не
приходит один из следующих приоритетных командных сигналов или
сигналов неготовности синхронного генератора:
пуск в режим СК— от ключа управления 542.1, или нормальный
останов— от положения ключа 541.2, или отмена пуска— от
кнопки SB1;
генератор возбужден — от измерительного реле КАЛ тока ротора,
или его выключатель включен — от контакта Q.I.
Запоминание сигнала нормального пуска разрешается и при возбу-
жденном генераторе, если включен ключ ЗАЗ автоматического синхро-
низатора (см.ниже) — положение 543.1: логический сигнал (единица)
18
Автоматическое управление изменениями состояния ГГ и ТГ
(6)
Рис. 1.2. Логическая схема формирования сигналов на пуск гидроагре-
гата (а) и перевод его из генераторного в режим синхронного компенса-
тора (б)
19
Глава 1
от £43.1 на инверсном входе логического элемента DX (ЗАПРЕТ) не
пропускает на элемент ZW2 сигнал о наличии тока в обмотке возбуж-
дения генератора.
Для надежности действия сигнала на отмену пуска предусмотрено
его поступление на вход DWU'2 (ИЛИ-HE) и прохождение сигнала нор-
мального пуска последовательно через DXU1 (И-НЕ) и ЛИЛД2 с допол-
нительным контролем операции на отмену пуска от кнопки SB1.
Логическая схема на рис. 1.2,а иллюстрирует и реализацию алго-
ритма прохождения сигнала на ускоренный пуск УП гидроагрегата от
У ПА, а именно от измерительного реле KF снижения частоты в элек-
троэнергетической системе. Он фиксируется триггером ST2 (вход запи-
си £), если на его вход считывания R через элемент DW3 не поступает
один из сигналов: от £41.2 (останов) или от SB1 (отмена пуска), или
от Q.2 (генератор включен), или от £43.1 (точная синхронизация) — при
ускоренном пуске гидрогенератор включается на параллельную работу
более быстрым способом самосинхронизации. Сигнал проходит через
последовательно соединенные элементы DXU3 и DWU4, дублирующие,
как указывалось, запрет на пуск гидроагрегата сигналом с наивысшим
приоритетом на отмену пуска от SB1.
При выполнении условий формирования сигнала от £42.1 или от
АСУ (элемент DW4 на рис. 1.2,6) на пуск гидрогенератора в режим ра-
боты синхронным компенсатором он запоминается триггером ST3 при
условии отсутствия на входах элемента DW5 одного из запрещающих
сигналов от SA2.2 (вывод из режима СК), или от SB2 (отмена пуска в
режим СК), или от SB1. Сигнал также проходит последовательно через
элементы DXU5, DWU6, обеспечивающие, как указывалось, резервиро-
вание запретов на его выполнение сигналами от SB1 и SB2.
Аналогично формируется сигнал на останов гидроагрегата. Типовой
алгоритм формирует и ряд дополнительных сигналов.
Исполнение сигналов управления состоянием гидрогенера-
тора. Исполнение сформированных рассмотренными схемами сигналов
управления изменением состояния гидрогенератора обеспечивается ло-
гическими схемами, реализованными интегральными логическими эле-
ментами или электромеханическими реле с герметизированными кон-
тактами (герконами), при указанных условиях обеспечения его функци-
онирования вспомогательным оборудованием, в особенности готовности
гидроагрегата к пуску в генераторный режим работы.
20
Автоматическое управление изменениями состояния ГГ и ТГ
Рис. 1.3. Упрощенная схема автоматического управления пуском ги-
дроагрегата
На рис. 1.3 приведена упрощенная релейно-контактная схема авто-
матического пуска гидрогенератора. Сигналы на нормальный НП или
ускоренный УП пуск (см. рис. 1.2,а и б) фиксируются электромеха-
ническими реле постоянного тока КL1 и КL2 соответственно (на схеме
показаны только их контакты). Указанные реле прежде всего включают
(контактами A'Zl.l, KZ2.1) в действие устройство технического водо-
снабжения ТВС (смазка подшипника турбины и охлаждение масляных
ванн подпятника и подшипника синхронного генератора). При ускорен-
21
Глава 1
ном пуске — замкнут контакт SAF ключа самосинхронизации гидроге-
нератора, возбуждается (контактами А'А1.2, KL2.2) реле К L3 команды
автоматического пуска АП.
Контактом А’АЗ.1 включаются приводы открытия затворов гидро-
технического оборудования, а А'АЗ.2 — привод отвода стопора огра-
ничителя открытия направляющего аппарата ООНА турбины. Кон-
тактом А’АЗ.З подготавливается цепь возбуждения реле KIA стартовой
команды пуска СП на электрогидравлический автоматический регуля-
тор частоты вращения гидротурбины АРЧВ. Реле А’А4 срабатывает
после замыкания контактов реле КL5 и KLQ контроля расходов воды в
рабочем уплотнении вала турбины и технического водоснабжения соот-
ветственно и концевого выключателя KQ закрытия затвора.
По цепи, замыкаемой контактом А’А4.1, АРЧВ полностью отводит
механизм ограничения открытия направляющего аппарата турбины и
открывает его на 30-35% полного открытия.
При достижении частотой вращения значения примерно 80% номи-
нальной направляющий аппарат прикрывается до положения, соответ-
ствующего холостому ходу турбины. Частота вращения контролирует-
ся измерительным реле напряжения KVF измерительного синхронного
генератора с возбуждением постоянным магнитом (на схеме не показан).
При частоте вращения, равной 95% номинальной, включается воз-
буждение синхронного генератора ВВГ — включается автомат гашения
поля ASV контактами реле KVF и KIA.2 при отключенном контакторе
КМ (замкнут его вспомогательный контакт КМ.1) резистора R, замы-
кавшего обмотку ротора LG генератора (см. рис. 2.1). После появления
ЭДС генератора Ег контактом измерительного реле KV.1, подключен-
ного к измерительному трансформатору TV1 синхронного генератора,
при замкнувшемся контакте А'А4.3 и замкнутом размыкающем контак-
те KL8.1 реле контроля отсутствия сигнала ускоренного пуска возбу-
ждается реле KL7 включения устройства точной автоматической син-
хронизации генератора АТС (контактом А’А7.1).
После наступления условий автоматической синхронизации (см.
гл. 2) контактом ASS автоматического синхронизатора через замкнув-
шийся контакт KL7.2 возбуждается реле К L9 включения выключате-
ля Q (см. рис. 2.1) синхронного генератора ВГ.
Сигнал на ускоренный пуск исполняется после срабатывания ре-
ле KL2, которое контактом KL2.2 при, как указывалось, включенном
22
Автоматическое управление изменениями состояния ГГ и ТГ
ключе SAF самосинхронизации (на схеме показан его замыкающий кон-
такт) возбуждает реле автоматического пуска KL3. При указанном по-
ложении ключа самосинхронизации и отключенном и невозбужденном
синхронном генераторе включается контактор КМ (см. рис. 2.1), за-
мыкающий контактом обмотку ротора через гасительный резистор R,
размыкающий контактом КМ.1 цепь включения ASV и подготавлива-
ющий замыкающим контактом КМ.2 (рис. 1.3) цепь питания обмот-
ки реле КL8, которое срабатывает после замыкания KL2.3 и Л’Т4.4
при замкнутом размыкающем контакте KV.2 измерительного реле на-
пряжения синхронного генератора (контроль его невозбужденного со-
стояния) и запускает автоматическое устройство самосинхронизации
АСС.
После наступления условий самосинхронизации (см. гл. 2) замыкает-
ся его контакт ASF.1 и через уже замкнутый контакт KL8.2 возбуждает
реле KL9 включения выключателя Q синхронного генератора, вспомо-
гательным контактом Q.1 которого включается его возбуждение ВВГ
(автоматом ASV"). Синхронный генератор втягивается в синхронизм и
начинает работать синхронно с генераторами своей электростанции и
электроэнергетической системы ЭЭС (см. рис. 2.]).
Автоматика управления изменениями состояний ГГ входит в состав
АСУ ТП гидроэлектростанцией [31]. Микропроцессорная автоматизи-
рованная система управления ГЭС содержит соответствующую подси-
стему ПУСК. Микропроцессорная АСУ ТП гидроаккумулирующих ГЭС
обеспечивает автоматическое управление и гораздо более сложными спе-
цифическими для ГАЭС изменениями состояний обратимых гидроагре-
гатов [32]: частотный пуск в насосный или в компенсаторный режимы с
насосным направлением вращения, перевод из насосного режима в ком-
пенсаторный или наоборот, останов из насосного или компенсаторного
режима с насосным вращением. Процессы изменения состояния отобра-
жаются на дисплеях ПЭВМ.
1.3. Автоматическое управление пуском
турбогенераторов
Технологические особенности. Тепловые электрические станции
(ТЭС) состоят из нескольких технологических частей (цехов), соответ-
ствующих основным технологическим процессам создания и преобразо-
23
Глава 1
вания энергоносителя — водяного пара: топливной, парогенераторной,
турбинной и электрической. Современные мощные ТЭС имеют блоч-
ное построение — состоят из энергоблоков парогенератор - турбина -
электрический генератор - трансформатор.
По условиям работы ТЭС в современных электроэнергетических си-
стемах требуются довольно частые изменения состояний турбоагрега-
тов, а именно их останов на нерабочие дни и практически еженедель-
ный пуск. Все в большей мере мощные турбоагрегаты используются
и для больших и экстренных изменений мощности электроэнергетиче-
ской системы в аварийных условиях. Изменение состояния турбоагре-
гата ТЭС технически весьма сложно, производится при координирован-
ном автоматическом управлении топливным и парогенераторным тех-
нологическими процессами и требует значительного времени, особенно
пуск турбины. Время пуска и последующего набора нагрузки (нагруже-
ния) определяется, главным образом, двумя факторами: постепенным
и непрерывным прогревом пароподводящих и рабочих частей турбины
и температурными линейными расширениями его конструктивных час-
тей, особенно ротора турбины.
Неравномерность прогрева может вызывать опасные внутренние на-
пряжения в стальных конструкциях, нарушать уплотнения в местах их
сопряжений, а удлинение вала, доходящее до 10 мм, приводит к нерабо-
тоспособности вращающихся ее частей.
Турбины для энергоблоков ТЭС мощностью 300, 500 и 800 МВт вы-
пускаются АО ЛЭМЗ (Ленинградский электромеханический завод) и АО
ХТГЗ (Харьковский турбогенераторный завод). Они состоят из цилин-
дров высокого (ЦВД), среднего (ЦСД) и низкого (ЦНД) давлений. Ци-
линдр высокого давления работает при сверхкритических параметрах
свежего пара давлением 23,5 МПа (260 кГс/см2) и температурой 560 °C.
Перед ЦСД производится промежуточный перегрев пара.
Разработан и введен в эксплуатацию на Костромской ГРЭС энер-
гоблок с пятицилиндровой (три ЦНД) турбиной ЛЭМЗ мощностью
1200 МВт. Управляются турбины изменением впуска в ЦВД свежего
пара через регулирующие и стопорные клапаны. Кроме вспомогатель-
ного оборудования, обеспечивающего механическое функционирование
турбоагрегата (смазка подшипников, охлаждение обмоток генератора
и др.), аналогичного вспомогательному оборудованию гидроагрегатов,
работоспособность и необходимое функционирование тепловой турбины
24
Автоматическое управление изменениями состояния ГГ и ТГ
обеспечивается значительно более сложным, специфическим и громозд-
ким теплотехническим оборудованием.
Тепловая схема (рис. 1.4,а) паровой турбины включает пароге-
нератор ПГ, паропроводы с главными паровыми задвижками ГИЗ.
сепаратор-промперегреватель пара СПП, пускосбрасывающее пар
устройство ПСБУ — быстродействующая редукционно-охладительная
установка БРОУ, конденсатор отработанного пара К, различные насо-
сы, в особенности питательные, и другое оборудование, которое долж-
но координированно взаимодействовать, своевременно включаясь в дей-
ствие и изменяя режимы работы в процессе пуска турбоагрегата.
Главная особенность пускового режима — необходимость постепен-
ного и непрерывного прогрева конструктивных частей турбины и паро-
подводящих конструкций обусловливает, как указывалось, длительное
время пуска турбоагрегата и постепенный длительный набор нагруз-
ки — нагружения турбины. Даже при современном оптимальном авто-
матически управляемом пуске процесс разворота, включения в работу и
нагружения турбоагрегата продолжается несколько часов.
Различаются пуски агрегата из остановленного, неостывшего и го-
рячего состояний. Процесс пуска турбоагрет ата разделяется на этапы:
предтолчкового прогрева, толчковых оборотов, холостого хода, синхро-
низации и включения генератора, начального нагружения до 1/3 номи-
нальной мощности, достижения заданной мощности и номинальных па-
раметров пара.
Управление пуском турбоагрегата. Автоматическое управление
производится автоматикой пуска турбины, входящей в состав АСУ ТП
электростанции [4]. Автоматика управляет доступом пара в турбину,
воздействуя на соответствующие элементы турбоустановки и пуско-
сбросных устройств и задавая автоматическим устройствам управления
парогенератором возрастающие, соответственно тепловому состоянию
турбины, скользящие параметры пара и производительность. Автома-
тика пуска включает в свой состав (рис. 1.4,6): логическое устройство
дискретного управления пусковыми операциями; комплекс пусковых ав-
томатических регуляторов; информационное устройство контроля теп-
ловых и механических параметров гурбоустановки.
Логическое управляющее устройство ЛУУ проверяет выполнение
условий, необходимых для начала очередной операции; производит за-
пуск технологических операций в требуемой последовательности их вы-
25
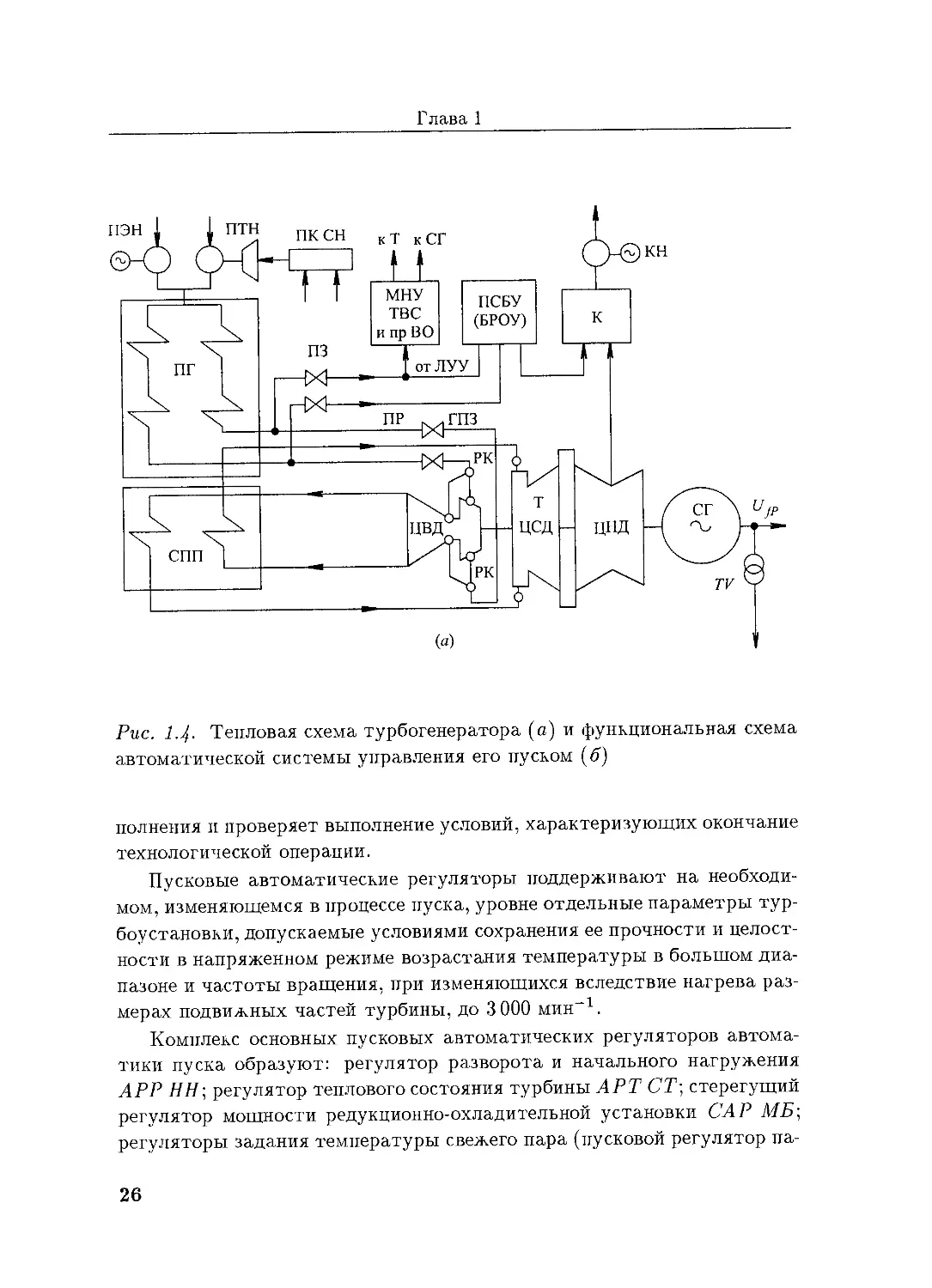
Глава 1
Рис. 1Ц. Тепловая схема турбогенератора (а) и функциональная схема
автоматической системы управления его пуском (б)
полнения и проверяет выполнение условий, характеризующих окончание
технологической операции.
Пусковые автоматические регуляторы поддерживают на необходи-
мом, изменяющемся в процессе пуска, уровне отдельные параметры тур-
боустановки, допускаемые условиями сохранения ее прочности и целост-
ности в напряженном режиме возрастания температуры в большом диа-
пазоне и частоты вращения, при изменяющихся вследствие нагрева раз-
мерах подвижных частей турбины, до 3 000 мин-1.
Комплекс основных пусковых автоматических регуляторов автома-
тики пуска образуют: регулятор разворота и начального нагружения
АРР НН\ регулятор теплового состояния турбины APT СТ; стерегущий
регулятор мощности редукционно-охладительной установки САР МБ;
регуляторы задания температуры свежего пара (пусковой регулятор па-
26
Автоматическое управление изменениями состояния ГГ и ТГ
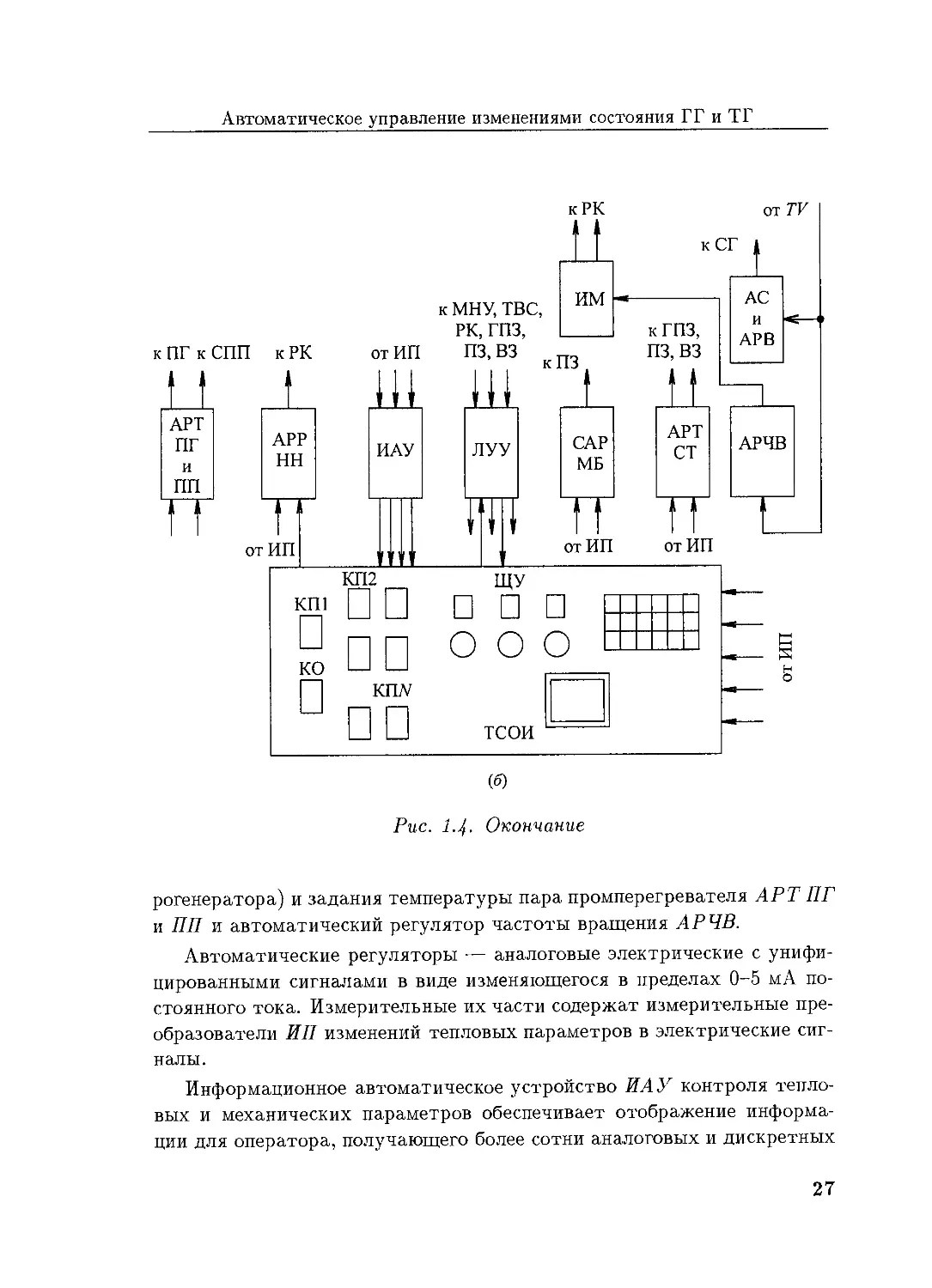
(0
Рис. 1-4. Окончание
регенератора) и задания температуры пара промперегревателя APT ПГ
и ПП и автоматический регулятор частоты вращения АРЧВ.
Автоматические регуляторы — аналоговые электрические с унифи-
цированными сигналами в виде изменяющегося в пределах 0-5 мА по-
стоянного тока. Измерительные их части содержат измерительные пре-
образователи ИП изменений тепловых параметров в электрические сиг-
налы.
Информационное автоматическое устройство ИАУ контроля тепло-
вых и механических параметров обеспечивает отображение информа-
ции для оператора, получающего более сотни аналоговых и дискретных
27
Глава 1
сигналов, и использование информации для изменений по ходу процес-
са пуска заданий автоматическим регуляторам и логическому устрой-
ству.
Логическое управляющее устройство на каждом этапе пуска фор-
мирует дискретные управляющие воздействия на оборудование масло-
напорной установки и технического водоснабжения, на регулирующие
клапаны РК турбины, главную паровую задвижку паропровода ГПЗ,
паровую задвижку ПЗ пуско-сбросных устройств ПСБУ (БРОУ) и дру-
гие исполнительные элементы, обеспечивающие выполнение очередной
технологической операции, и выдает на щит управления ЩУ дискрет-
ную информацию для оператора.
На щите управления находятся ключ пуска КП 1 и ключи перехода к
очередной операции пуска КПТКПУ для возможности вмешательства
оператора или выдачи (изменения) задания логическому управляющему
устройству. Как указывалось, на ЩУ находятся современные техниче-
ские средства отображения информации ТСОИ о ходе процесса пуска,
текущих значениях тепловых и механических параметров парогенерато-
ра, турбины и синхронного генератора, включая и дисплей.
На первом этапе автоматического пуска турбоагрегата производится
прогрев пароперепускных труб, главной паровой задвижки и клапанов
турбины в закрытом их состоянии путем открытия байпасов (обходных
пароперепускных труб) ГПЗ. Прогревается цилиндр высокого давления
и сепаратор-пароперегреватель СПП (рис. 1.4,а) пропуском пара через
стопорные клапаны. Разворот турбины начинается с толчка ее ротора
путем небольшого открытия регулировочных клапанов РК автоматиче-
ским регулятором разворота и начального нагружения АРР НП, кото-
рый постепенно по мере дальнейшего повышения температуры турбины
доводит частоту вращения до близкой к синхронной, при этом относи-
тельно быстро частота увеличивается лишь при 750 мин-1 — крити-
ческой частоте по условию механического резонанса. Толчок и разво-
рот турбины производится при постоянных пусковых параметрах пара
управлением регулировочными клапанами. Повышение параметров па-
ра происходит после включения генератора по мере нагружения турбо-
агрегата до номинальной мощности. Процессом набора мощности управ-
ляет автоматический регулятор частоты вращения генератора АРЧВ
через исполнительный механизм управления турбиной ИМ под контро-
лем автоматического регулятора теплового(осгояния APT СТ турбины.
28
Автоматическое управление изменениями состояния ГГ и ТГ
Регулятор теплового состояния определяет темп роста нагрузки
энергоблока и выдает задания для пускового регулятора мощности па-
рогенератора ПГ, регулятора топлива, а после перехода на прямоточ-
ный режим — регулятора питательно!! воды, воздействующего на пи-
тательные турбонасосы ПТН, и стерегущему автоматическому регуля-
тору САР МБ мощности БРОУ. Его уставка изменяется APT СТ с
некоторым опережением нарастания давления с таким расчетом, чтобы
паровые задвижки ПЗ были закрыты. Они открываются в случае, если
парогенератор по какой-либо причине вырабатывает больше пара и бо-
лее высоких параметров, что угрожает нарушению пусковой динамики
теплового состояния турбины. При этом излишки пара сбрасываются
в БРОУ и далее в конденсатор К турбины. Температура свежего и
прошедшего ЦВД после перегрева пара поддерживается соответствую-
щими регуляторами APT ПГ. Общее время автоматического пуска из
холодного состояния от розжига горелок парогенератора до включения
генератора энергоблоков прямоточными парогенераторами мощностью
300 МВт составляет около 2 ч, а мощностью 800 МВт — 3 ч. По-
сле включения генератора автоматическим синхронизатором АС набор
мощности до номинальной длится 3 и 4 ч соответственно. Пуск после
кратковременной остановки продолжительностью до 30 мин, т.е. из го-
рячего состояния, по установленным нормам должен укладываться в 30
и 40 мин соответственно.
1.4. Особенности автоматического управления пуском
турбогенераторов атомных электростанций
Автоматическое управление пуском турбогенераторов АЭС произво-
дится с учетом особенностей технологии генерирования водяного пара:
используется насыщенный пар, производимый ядерным реактором. По-
этому пуск и нагружение турбогенератора производятся при номиналь-
ном давлении и температуре насыщения пара воздействием на регули-
рующие клапаны турбины. Соответствующие особенности свойственны
и паровым турбинам АЭС: они не имеют цилиндра среднего давления,
а снабжены несколькими цилиндрами низкого давления, температура
перед которыми (после ЦВД) повышается до температуры его насы-
щения в сепараторах-пароперегревателях. Конструкции роторов ЦНД
жесткие.
29
Глава 1
В связи с указанным возникают специфические тепловые и механиче-
ские факторы, определяющие особенности автоматического управления
пуском турбоагрегатов АЭС, а именно: возможность коробления корпу-
сов цилиндров, поскольку температура насыщенного пара ниже темпе-
ратуры ползучести металла; опасность нарушения плотности горизон-
тальных фланцевых соединений верхней и нижней частей корпусов ци-
линдра высокого давления; проникновение влажного пара и конденсата
в неплотности фланцевых соединений и их размывание; опасность хруп-
кого разрушения жестких роторов цилиндра низкого давления. Поэтому
процесс автоматического пуска организуется по разомкнутой схеме вре-
менной программой, построенной на основе математического моделиро-
вания тепловых и механических процессов в турбине и соответствующих
расчетов на ЭВМ.
Поскольку при этом практически не реализуется оптимальный ре-
жим, предпринимаются попытки повысить технико-экономические по-
казатели, особенно на стадии постепенного нагружения турбины, авто-
матическим управлением по замкнутой схеме путем отслеживания раз-
ности температур по ширине фланцев ЦВД как главного фактора.
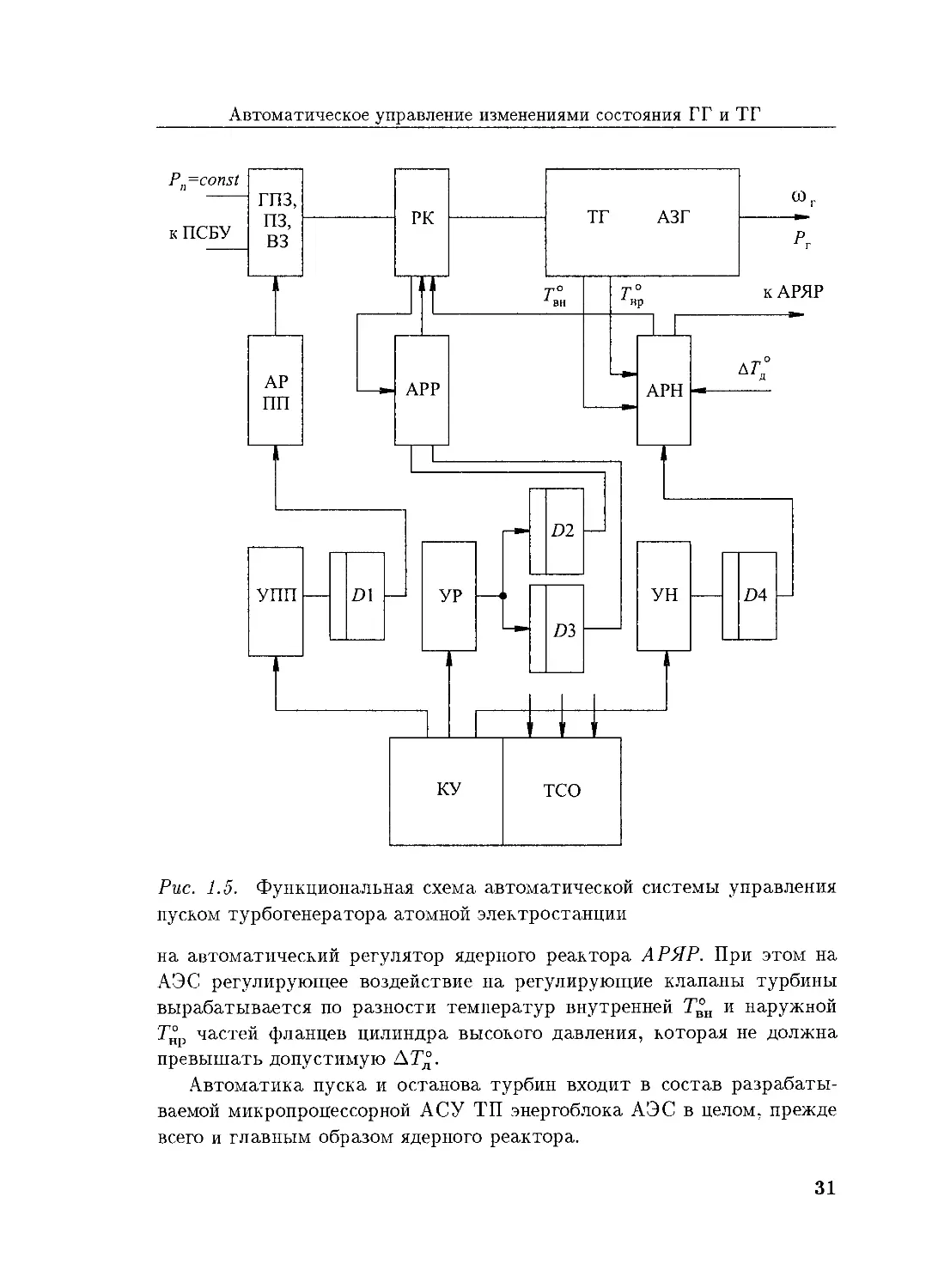
Типовая автоматика пуска, в частности разработанная для Кольской
АЭС [5], состоит (рис. 1.5) из автоматических устройств дискретного
управления с временной последовательностью операций D1 предтолч-
кового прогрева УПП и начального разворота турбины УР до 1/3 но-
минальной частоты вращения, выдержки D2 турбины при указанной
частоте и дальнейшего разворота до номинальной частоты вращения,
управляемого АРЧВ за время D3.
Автоматика запускается одним из ключей управления КУ щита
управления. Названные устройства дискретного управления вводят в
действие пусковые автоматические регуляторы с одноименными назва-
ниями АРПП и АРР, которые управляют главной паровой задвижкой
ГПЗ, паровыми задвижками обходных паропроводов ПЗ, задвижками
воды ВЗ и регулирующими клапанами РК турбины.
Разворот турбины начинается с толчка ротора после завершения
предтолчкового прогрева и готовности турбоагрегата к пуску. После
синхронизации и включения турбогенератора на параллельную работу
с выдержкой времени Д4 вступает в действие устройство дискретного
управления УН и автоматический регулятор его нагружения АРН. Он
функционирует, увеличивая мощность турбогенератора и воздействуя
30
Автоматическое управление изменениями состояния ГГ и ТГ
Рис. 1.5. Функциональная схема автоматической системы управления
пуском турбогенератора атомной электростанции
на автоматический регулятор ядерного реактора АР ЯР. При этом на
АЭС регулирующее воздействие на регулирующие клапаны турбины
вырабатывается по разности температур внутренней Т°н и наружной
Т°р частей фланцев цилиндра высокого давления, которая не должна
превышать допустимую ДТд.
Автоматика пуска и останова турбин входит в состав разрабаты-
ваемой микропроцессорной АСУ ТП энергоблока АЭС в целом, прежде
всего и главным образом ядерного реактора.
31
Глава 1
Вопросы для самопроверки
1 Каковы технологические условия автоматического пуска гидрогенерато-
ров9
2 В чем состоят особенности технологических условий автоматического
пуска турбогенераторов ТЭС9
3 Каковы технологические факторы, определяющие специфические особен-
ности процесса автоматического управления пуском турбогенераторов
АЭС9
4 Чем отличается автоматическое управление нормальным и ускоренным
пуском гидрогенераторов9
5 Как действует логическая схема формирования сигнала автоматического
управления пуском гидрогенератора9
6 В чем состоит различие логических схем формирования сигналов авто-
матического управления нормальным и ускоренным пуском гидрогенера-
тора9
7 Какие особенности логической схемы формирования сигнала автоматиче-
ского управления пуском гидрогенератора в режим работы синхронным
компенсатором9
8 Объяснить действие схемы реализации сигнала нормального пуска ги-
дрогенератора (см рис 1 3)
9 Объяснить действие схемы реализации сигнала ускоренного пуска гидро-
генератора (см рис 1 3)
10 Чем отличается действие схемы реализации сигнала ускоренного пуска
гидрогенератора от ее действия при нормальном пуске9
11 Какие автоматические устройства применяются для управления пуском
турбогенераторов ТЭС9
12 Каково назначение логического устройства управления пуском турбоге-
нератора ТЭС (см рис 1 4)9
13 Какие основные автоматические регуляторы функционируют при упра-
влении пуском турбогенератора ТЭС (см рис 1 4)9
14 В чем состоят особенности автоматических устройств управления пуском
турбогенераторов АЭС9
15 Почему при управлении разворотом турбогенератора АЭС автоматика
функционирует по отклонению разности температур внутренней и на-
ружной частей фланцев ЦВД турбины (см рис 1 5)?
32
Глава 2. Автоматическое управление
включением синхронных генераторов
на параллельную работу
2.1. Способы автоматического управления
Синхронные генераторы всех электростанций вращаются с одинако-
вой установившейся (синхронной) частотой <дс - 100% рад/с, соответ-
ствующей номинальной частоте промышленного синусоидального тока
/ном — — 50 Гц.
Z7T
Их ЭДС сдвинуты по фазе лишь на углы фт, определяемые передава-
емой активной мощностью и сопротивлениями электропередачи и обу-
словливаемые сопровождающими выработку и передачу электроэнергии
электромагнитными процессами (реактивной мощностью). Угол сдви-
га фаз и частота вращения изменяются лишь при электромеханиче-
ских переходных процессах в электропередачах в пределах, не наруша-
ющих синхронной динамической устойчивости электроэнергетической
системы.
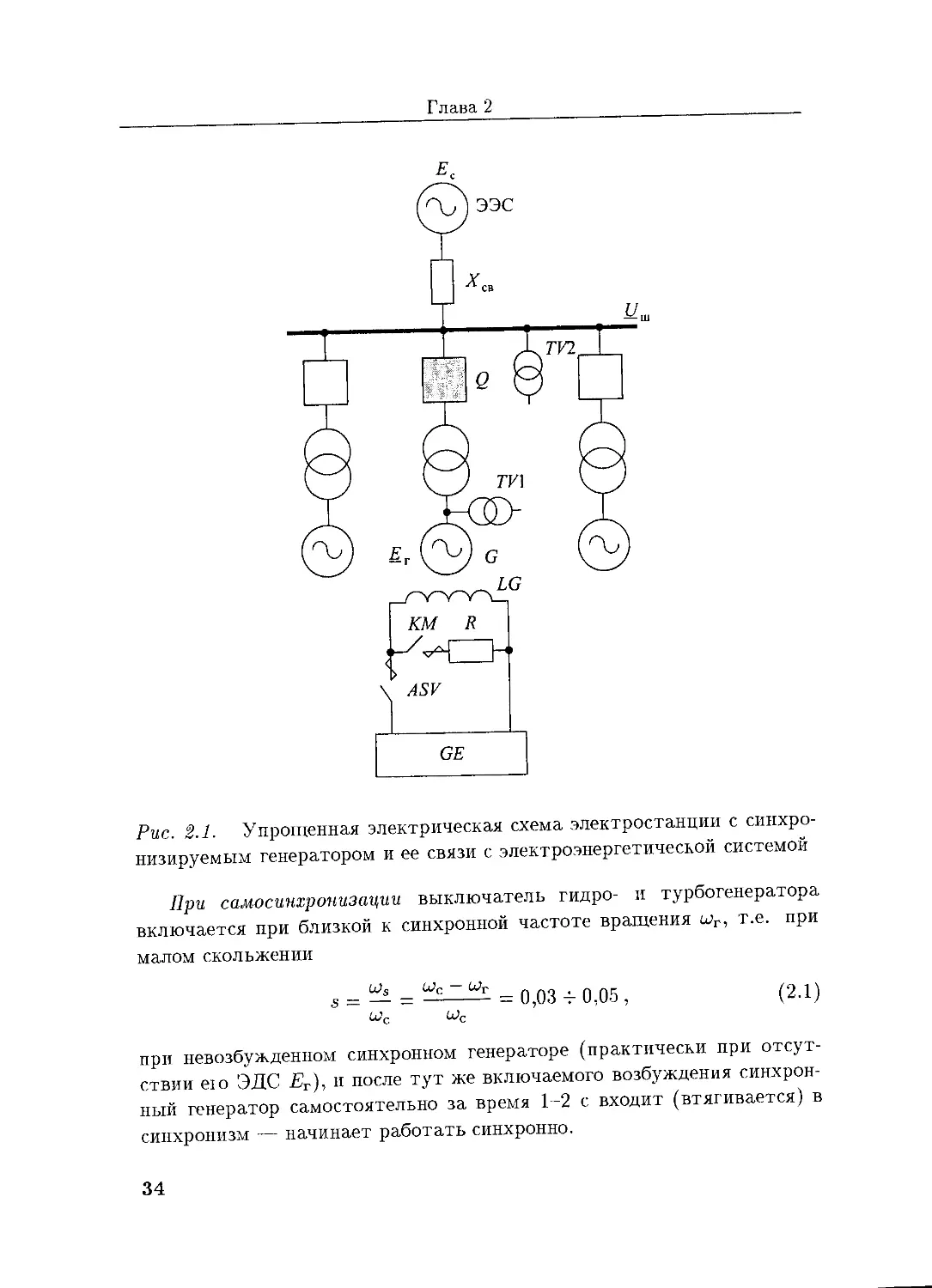
Для того чтобы включить выключателем Q (рис. 2.1) синхронный
генератор G на параллельную работу с синхронно вращающимися гене-
раторами электростанции и ЭЭС, необходимо выполнить ряд операций.
Используются два способа включения синхронных генераторов на па-
раллельную работу: быстродействующий способ самосинхронизации и
относительно медленный способ точной синхронизации. Соответствен-
но различаются два вида автоматического управления включением син-
хронных генераторов, а именно автоматическая самосинхронизация и
автоматическая точная синхронизация.
33
Глава 2
Рис. 2.1. Упрощенная электрическая схема электростанции с синхро-
низируемым генератором и ее связи с электроэнергетической системой
При самосинхронизации выключатель гидро- и турбогенератора
включается при близкой к синхронной частоте вращения <дг, т.е. при
малом скольжении
= 0,03 4-0,05,
(2-1)
при невозбужденном синхронном генераторе (практически при отсут-
ствии ею ЭДС Ег), и после тут же включаемого возбуждения синхрон-
ный генератор самостоятельно за время 1-2 с входит (втягивается) в
синхронизм — начинает работать синхронно.
34
Автоматическое управление включением СГ на параллельную работу
При точной автоматической синхронизации генератор возбужда-
ется до ЭДС холостого хода Егх, практически равной напряжению Дш
на шинах электростанции (при блочной схеме определяемому с учетом
трансформатора). Выключатель синхронного генератора включается
при весьма малом скольжении s = 0,01 4- 0,025 в момент совпадения по
фазе его ЭДС и напряжения на шинах электростанции. После неболь-
ших затухающих качаний ротора, обусловленных указанным скольже-
нием, генератор входит в синхронный режим работы.
Как указывалось (см. § 1.2), быстродействующая самосинхронизация
применяется при автоматических ускоренном пуске и пуске в режим
работы синхронным компенсатором гидрогенераторов и при попытках
незамедлительного восстановления нормального режима работы отклю-
чившихся турбогенераторов. При автоматическом управлении нормаль-
ным пуском гидро- и турбогенераторы включаются на параллельную
работу автоматическим устройством точной синхронизации.
2.2. Автоматическое включение по способу
самосинхронизации
Процесс самосинхронизации. В момент включения выключате-
ля Q в обмотках статора генератора возникает ток включения /"с, огра-
ниченный суммой сверхпереходного сопротивления генератора X" >
> X" > X" — в зависимости от положения ротора — и сопротивле-
ния связи Хсв с источником эквивалентной ЭДС электроэнергетической
системы Ес.
Ток 1”с вызывает динамическое воздействие на обмотки и обусло-
вливает возникновение ударного вращающего момента Мв с на валу ги-
дроагрегата. Вращающий момент асинхронный, его значение зависит
от скольжения s и угла SB между продольной осью ротора и магнитной
осью вращающегося магнитного поля статора и имеет максимум при
угле §в, равном или кратном тг/4 [2].
Однако указанные воздействия на синхронный генератор менее ин-
тенсивны, чем при трехфазном КЗ на его выводах, поскольку ток КЗ
ограничивается только сверхпереходным сопротивлением X". с учетом
которого генератор рассчитывается по условиям механической прочно-
сти при его проектировании. Поэтому самосинхронизация практически
всегда допустима.
35
Глава 2
Асинхронный вращающий момент создается трехфазной системой
токов, наведенных в проводящих частях ротора — магнитопроводе и
успокоительных обмотках с частотой скольжения. Однофазный инду-
цированный ток в обмотке возбуждения ротора, замкнутой через га-
сительный резистор R (для предотвращения разрушения изоляции об-
мотки наведенной относительно высокой ЭДС), создает пульсирующий
магнитный поток, который не влияет на результирующий процесс са-
мосинхронизации генератора. Направление зависящего от скольжения
асинхронного вращающего момента Мас всегда уменьшает скольжение
генератора: при о?г < шс момент Мас разгоняет генератор, а при шг > <дс
отрицательный Мас снижает частоту его вращения. Поэтому асинхрон-
ный вращающий момент быстро приближает частоту вращения к
синхронной. Установившееся скольжение sy определяется равенством
Мас у небольшому механическому моменту Мм на валу энергоагрегата,
развиваемому турбиной (рис. 2.2,а).
На вал гидрогенератора воздействует и реактивный вращающий мо-
мент Мр, обусловленный явнополюсностью ротора и изменяющийся с
двойной частотой скольжения (рис. 2.2,6)
Mp = C^^sin2^t. (2.2)
При малом механическом моменте Мм, в течение периода скольжения
турбины реактивный момент дважды с равной вероятностью снижает
частоту скольжения до ws = 0 и может зафиксировать положение ротора
как при углах « 0, так и при ~ 7Г- Второе из указанных положе-
ний ротора неправильно: при углах ё > тг отрицательный синхронный
электромагнитный момент Мс, появляющийся после включения возбу-
ждения генератора, ударно вытолкнет ротор на одно полюсное деление,
дополнительно механически воздействуя на вал энергоагрегата. Поэто-
му возбуждение генератора включается (автоматом ASV) немедленно
после его подключения к шинам электростанции вспомогательным кон-
тактом выключателя Q.1 (см. рис. 1.3). После включения возбуждения
генератор под воздействием нарастающего момента Мс самостоятельно
в течение 1-2 с втягивается в синхронизм [2]. Втягивание генератора
в синхронизм с фиксированием установившегося положения ротора при
угле ё « 0 производится нарастающим экспоненциально [отражено на
начальном участке графика Мс = /(ф/) на рис. 2.2,в] синхронным мо-
ментом.
36
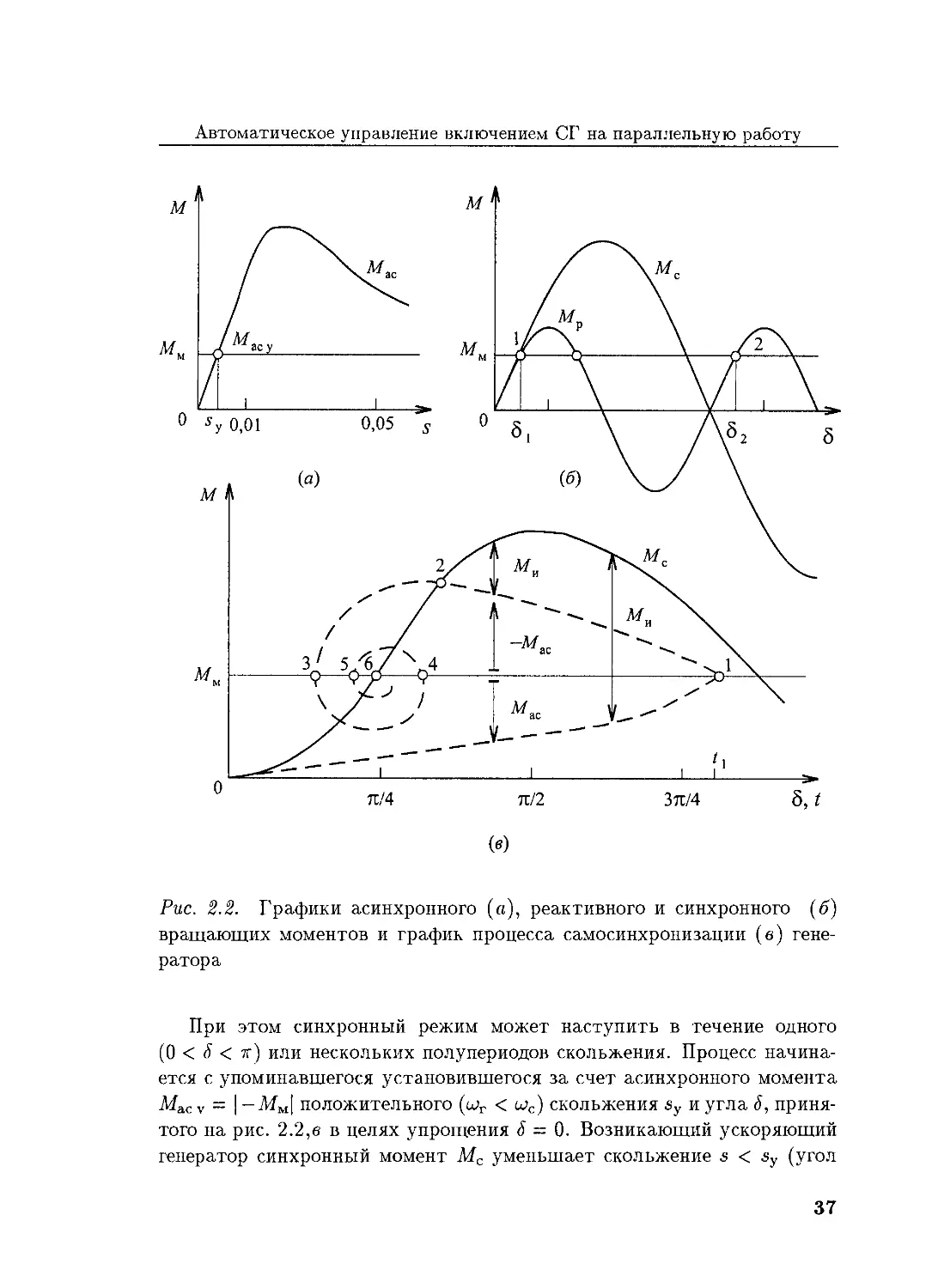
Автоматическое управление включением СГ на параллельную работу
Рис. 2.2. Графики асинхронного (а), реактивного и синхронного (5)
вращающих моментов и график процесса самосинхронизации (в) гене-
ратора
При этом синхронный режим может наступить в течение одного
(О < 6 < 7г) или нескольких полупериодов скольжения. Процесс начина-
ется с упоминавшегося установившегося за счет асинхронного момента
Мас у — | - Мм| положительного (wr < wc) скольжения sy и угла 6, приня-
того на рис. 2.2,б в целях упрощения 6 = 0. Возникающий ускоряющий
генератор синхронный момент Мс уменьшает скольжение s < sy (угол
37
Глава 2
6 = wst увеличивается). При этом уменьшается и средний ускоряющий
асинхронный момент + Л1ас (см. рис. 2.2,а). В момент времени р сколь-
жение и асинхронный момент снижаются до нуля (точка 1 на рис. 2.2,в).
Однако по инерции, за счет избыточной кинетической энергии, ротор
продолжает ускоряться, скольжение, поскольку > д>с, согласно (2.1)
меняет знак. Снова возникающий, но отрицательный асинхронный мо-
мент — Мас становится тормозным, нарастает по абсолютному значе-
нию, пока не уравновешивает положительный избыточный момент, со-
здаваемый синхронным вращающим моментом Ма = Мс — М&с — Мы
(точка 2), и затем более интенсивно снижает скольжение. Точка 3 сно-
ва соответствует отсутствию скольжения и асинхронного момента. На
участке графика между точками 3 и 4 скольжение и асинхронный мо-
мент снова положительны (<дг < шс), ротор ускоряется. На рис. 2.2,6
показаны также участки графика изменения отрицательного и положи-
тельного асинхронного момента между точками 4, 5 и 5,6 соответствен-
но. В момент времени, соответствующий точке 6, наступает установив-
шийся синхронный режим работы. Как указывалось, процесс втягива-
ния в синхронизм может быть более длительным и заканчиваться после
нескольких полупериодов скольжения, т.е. при угле 6 — 2шг [1].
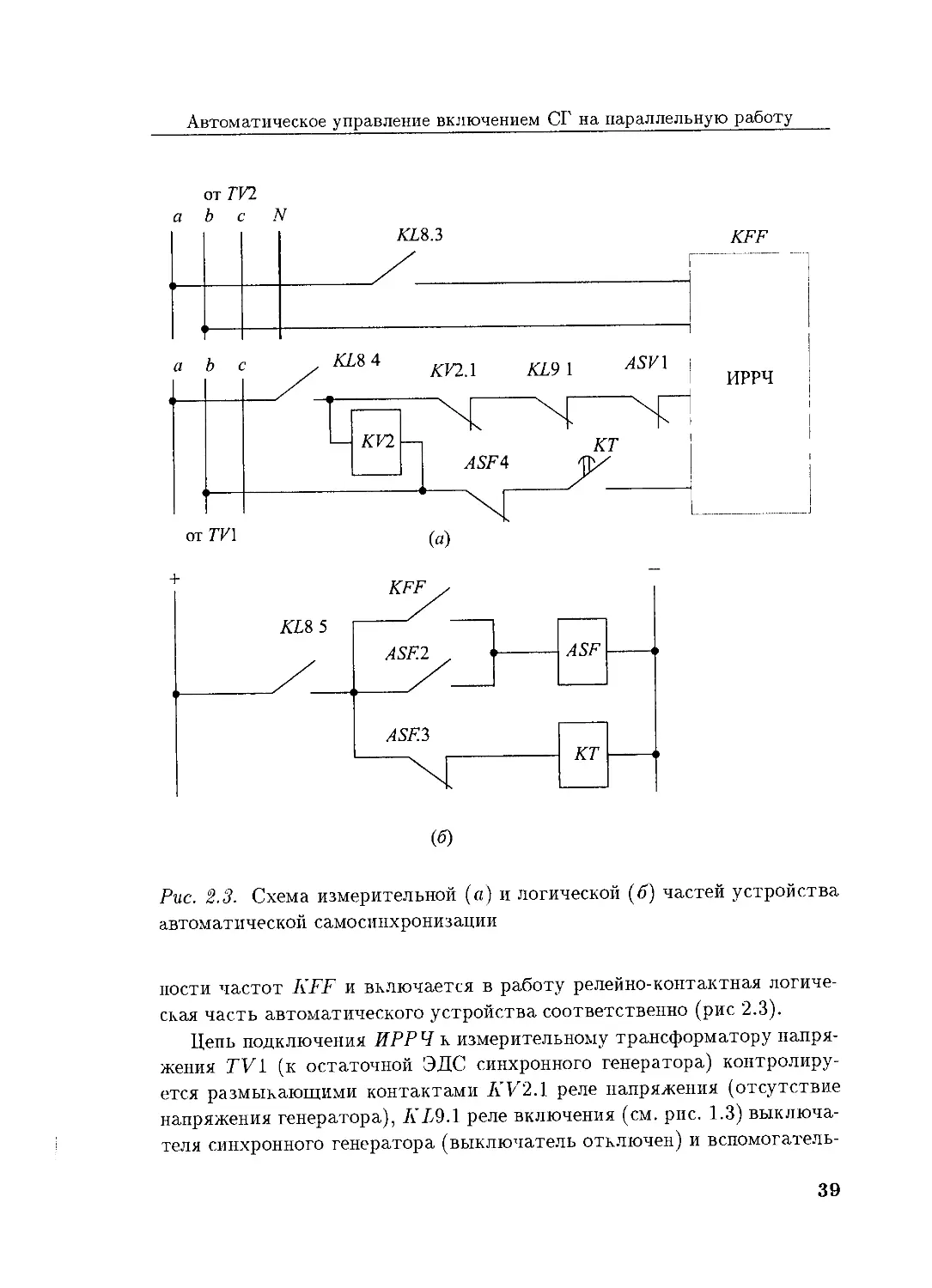
Устройство автоматической самосинхронизации входит в со-
став автоматической системы управления изменением состояния гидро-
генератора. Измерительной его частью является измерительное реле
KFF (рис. 2.3) разности частот ИРРЧ с двумя входными воздейству-
ющими величинами: вторичным напряжением Дш первичного измери-
тельного трансформатора напряжения TV2 шин электростанции и оста-
точной ЭДС синхронного генератора, возбуждаемой остаточной намаг-
ниченностью его ротора. Относительно низкое ее значение Ег.ост
« 0,02Ег х и интенсивное возрастание до ЭДС холостого хода Ег х в про-
цессе возбуждения генератора определяют особенности цепи подключе-
ния ИРРЧ к трансформатору напряжения TV 1 генератора и необходи-
мость его автоматического отключения максимальным измерительным
реле напряжения KV2.
Устройство автоматической самосинхронизации включается в рабо-
ту контактами реле КL8 при включенном положении ключа самосинхро-
низации SAF. Замыкающим контактом SAF (см. рис. 1.3) разрешает-
ся исполнение сигнала на ускоренный пуск гидроагрегата. Контактами
KL8.3, КL8A и KL8.5 подготавливаются цепи подключения реле раз-
38
Автоматическое управление включением СГ на параллельную работу
от 7V2
а Ъ с N
Рис. 2.3. Схема измерительной («) и логической (5) частей устройства
автоматической самосинхронизации
ности частот KFF и включается в работу релейно-контактная логиче-
ская часть автоматического устройства соответственно (рис 2.3).
Цепь подключения ИРРЧ к измерительному трансформатору напря-
жения TV1 (к остаточной ЭДС синхронного генератора) контролиру-
ется размыкающими контактами Л’У2.1 реле напряжения (отсутствие
напряжения генератора), KL9.1 реле включения (см. рис. 1.3) выключа-
теля синхронного генератора (выключатель отключен) и вспомогатель-
39
Глава 2
ным контактом ASV.1 автомата включения возбуждения — генератор
невозбужден. Цепь замыкается с выдержкой времени реле КТ и размы-
кается контактом ASFA исполнительного реле устройства самосинхро-
низации.
При достижении гидрогенератором частоты вращения wr, близкой к
синхронной, т.е. при разности частот u>s = рс -<дг|, равной или меньшей
установленной частоты срабатывания ИРРЧ, оно кратковременно замы-
кает свой контакт KFF и возбуждает исполнительное реле ASF, которое
контактом ASF.2 самоудерживается (запоминает срабатывание ИРРЧ),
а контактом ASF.1 при замкнувшемся ранее контакте К L8.2 возбужда-
ет реле KL9 включения выключателя Q синхронного генератора (см.
рис. 1.3). Затем его вспомогательным контактом Q.1 замыкается цепь
питания обмотки автомата ASV включения возбуждения синхронного
генератора.
При этом обмотка контактора КМ, замыкающего, как указыва-
лось, обмотку ротора генератора на гасительный резистор R (см.
рис. 2.1), обесточивается (на схеме не показано) и его контакт КМ
размыкается. Реле разности частот KFF отключается от изме-
рительного трансформатора напряжения TV1 синхронного генерато-
ра поочередно размыкающимися контактами /ГС2.1, KL9.1, ASV.1
(рис. 2.3,а).
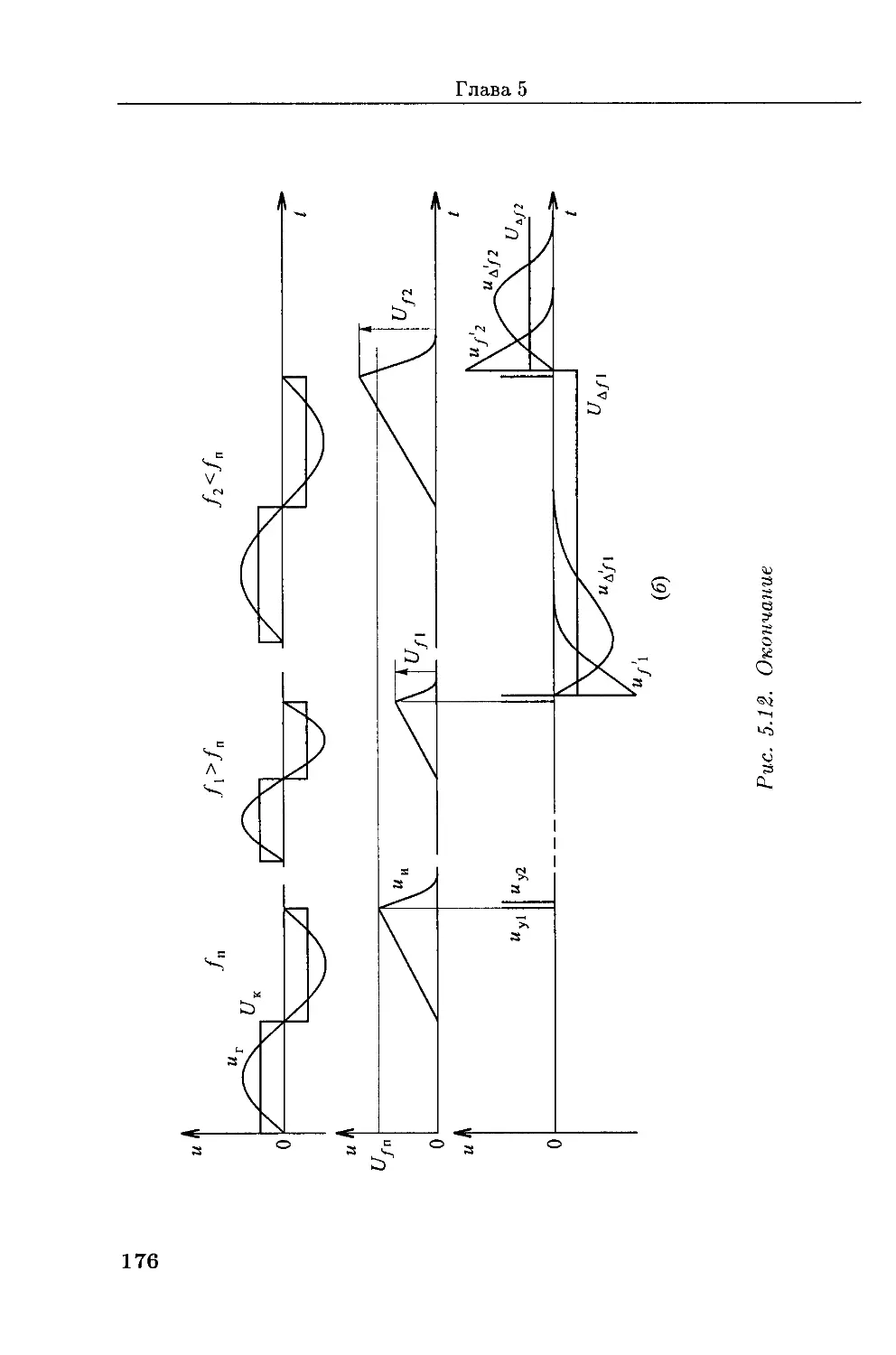
Чебоксарским электроаппаратным заводом (ЧЭАЗ) выпускается ми-
кросхемное реле разности частот РГРП. Реле состоит из двух актив-
ных управляемых интеграторов длительностей полупериодов изменения
Ч.ост и иш, напряжения на выходах которых обратно пропорциональны
частотам и (см. ниже рис. 5.12), и элемента сравнения их абсо-
лютных значений релейного действия [8].
2.3. Автоматическое включение по способу точной
синхронизации
При точной синхронизации, как указывалось, генератор включает-
ся в возбужденном состоянии при ЭДС холостого хода Ег х. Спокой-
ное — без динамических воздействий на обмотки и вал — и успешное
включение синхронного генератора на параллельную работу обеспечи-
вается при следующих условиях точной синхронизации:
40
Автоматическое управление включением СГ на. параллельную работу
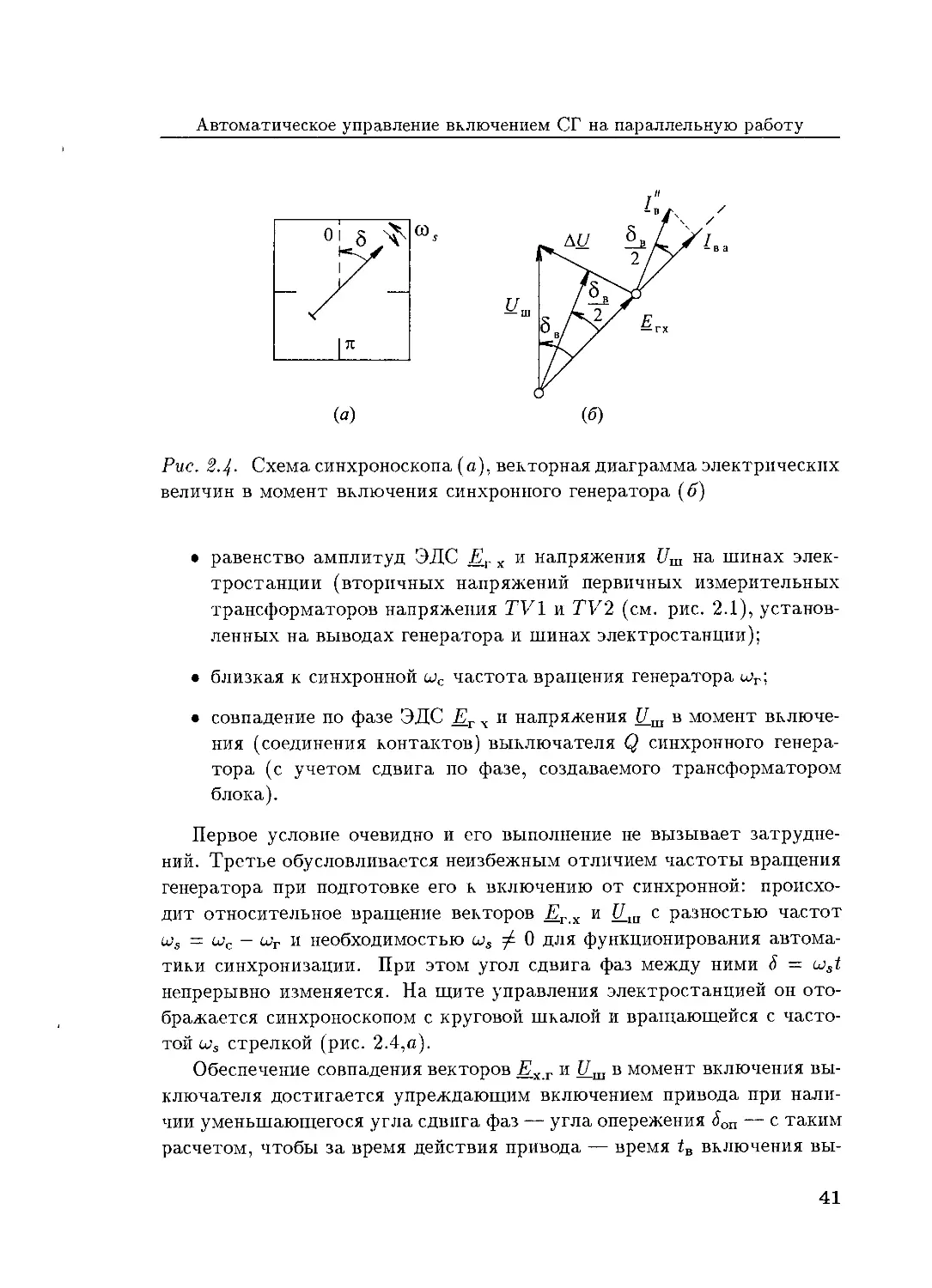
Рис. 2-4- Схема синхроноскопа (а), векторная диаграмма электрических
величин в момент включения синхронного генератора (б)
• равенство амплитуд ЭДС Дг х и напряжения Дш на шинах элек-
тростанции (вторичных напряжений первичных измерительных
трансформаторов напряжения TV1 и TV2 (см. рис. 2.1), установ-
ленных на выводах генератора и шинах электростанции);
• близкая к синхронной оу частота вращения генератора иг;
• совпадение по фазе ЭДС Е_г х и напряжения Ц_ш в момент включе-
ния (соединения контактов) выключателя Q синхронного генера-
тора (с учетом сдвига по фазе, создаваемого трансформатором
блока).
Первое условие очевидно и его выполнение не вызывает затрудне-
ний. Третье обусловливается неизбежным отличием частоты вращения
генератора при подготовке его к включению от синхронной: происхо-
дит относительное вращение векторов Д г х и Дш с разностью частот
ws = и необходимостью 0 для функционирования автома-
тики синхронизации. При этом угол сдвига фаз между ними 6 — cjst
непрерывно изменяется. На щите управления электростанцией он ото-
бражается синхроноскопом с круговой шкалой и вращающейся с часто-
той ws стрелкой (рис. 2.4,а).
Обеспечение совпадения векторов Дх г и Ц_ш в момент включения вы-
ключателя достигается упреждающим включением привода при нали-
чии уменьшающегося угла сдвига фаз — угла опережения 4ОП — с таким
расчетом, чтобы за время действия привода — время tB включения вы-
41
Глава 2
ключателя — угол д сдвига фаз уменьшился до 6 — 0. Например, при
равномерном вращении генератора (ws = const) угол <5ОП должен быть
равен
$оп — •
(2-3)
Операция выбора момента включения привода выключателя явля-
ется основной и крайне ответственной, что и обусловило исторически
раннюю автоматизацию включения синхронных генераторов на парал-
лельную работу.
Ограничение разности частот ws < wsa связано с выбором угла опе-
режения. Однако значения допустимой ограничиваются и услови-
ем успешности синхронизации, т.е. устойчивой параллельной работой
синхронного генератора после его включения. Ротор генератора в мо-
мент включения обладает избыточной кинетической энергией. Поэтому
после включения начинаются затухающие колебания ротора (качания)
синхронного генератора, интенсивность которых не должна привести к
выпадению генератора из синхронизма в первый их полупериод.
Воздействия на генератор при точной синхронизации. В ре-
альных условиях включение генератора на параллельную работу прак-
тически всегда происходит при некотором угле сдвига фаз между ЭДС
£г х и напряжением Дш — угле включения Ja. Даже современные доста-
точно совершенные автоматические устройства точной синхронизации
полностью не исключают его. Поэтому синхронный генератор подвер-
гается менее или более интенсивным динамическим воздействиям и при
точной автоматической синхронизации.
Напряжение ДД (рис. 2.4,6), обусловленное углом 6В и равное при
Ег х = иш = Е
ДД — 2Е згп(6в/2) ,
(2-4)
вызывает начальный периодический ток включения генератора, огра-
ниченный его сверхпереходным сопротивлением и сопротивлением
связи А’св с источником эквивалентной ЭДС электроэнергетической сис-
Как и при самосинхронизации, ток 1В оказывает динамическое воз-
действие на обмотки статора синхронного генератора. При этом воз-
никает ударный электромагнитный синхронный вращающий момент на
42
Автоматическое управление включением СГ на. параллельную работу
валу генератора, равный в относительных единицах мощности, созда-
ваемой активной составляющей тока включения JB а (рис. 2.4,6):
Мс = Е/в а = El" cos ~ = -х^х~ sin у cos у = Д/ sin • (2.6)
Свободные апериодические токи в обмотках статора, создавая не-
подвижное в пространстве магнитное поле, взаимодействующее с маг-
нитным полем вращающегося ротора, создают свободную затухающую
составляющую электромагнитного момента, изменяющуюся в функции,
в частности, косинуса угла 6Г = wrt вращения неявнополюсного турбо-
генератора, равную при неучете затухания
, <?В
2Е2 sin — , . v
мсв = —
Опасным для генератора является максимальный результирующий
вращающий момент Л/втах = Мс+Мсвтах, возникающий при угле вклю-
чения дв « 2тг/3 и u>rt = 7Г - (JB/2). Однако угол включения, обеспечивае-
мый автоматическим устройством точной синхронизации, относительно
небольшой, и поэтому синхронный генератор при его включении на па-
раллельную работу по способу точной автоматической синхронизации
подвергается менее интенсивным динамическим воздействиям, чем при
самосинхронизации. Они показательны лишь с точки зрения недопус-
тимости ошибочных включений при больших углах 6В и учитываются
как условия допустимости противоаварийных несинхронных включений
электропередач [2].
Что касается качаний синхронного генератора после его включения,
то, при ограниченной принципом действия или техническими возмож-
ностями автоматического устройства точной синхронизации разности
частот оэзд, они обычно не вызывают опасности выпадения ненагружен-
ного генератора из синхронизма.
2.4. Автоматические синхронизаторы
Автоматические устройства точной синхронизации (АУТС) синхрон-
ных генераторов состоят из трех частей, обеспечивающих три условия
43
Глава 2
точной синхронизации: равенство амплитуд ЭДС генератора Ег.х и на-
пряжения иш на шинах электростанции, близкая к синхронной часто-
та вращения (малая частота скольжения a?s) генератора и совпадение
по фазе указанных ЭДС и напряжений в момент включения (замыкания
контактов) выключателя синхронного генератора. Такие устройства со-
ответственно называются уравнителем амплитуд напряжения, уравни-
телем частот и автоматическим синхронизатором.
Автоматический синхронизатор обеспечивает выполнение наиболее
ответственной операции точной синхронизации по обеспечению практи-
ческого совпадения по фазе ЭДС генератора и напряжения на шинах
электростанции в момент включения выключателя генератора. Он вы-
дает управляющее воздействие на включение привода выключателя с
опережением момента времени совпадения находящихся в относитель-
ном вращении векторов Егх и Дш, т.е. при наличии между ними умень-
шающегося угла сдвига по фазе — угла доп опережения.
Поэтому появившиеся исторически первыми автоматические синхро-
низаторы определяли заданный неизменный угол опережения и назы-
вались автоматическими синхронизаторами с постоянным углом <5ОП =
const опережения (СПУО). Однако угол опережения <5ОП = ustB при по-
стоянном времени включения выключателя iB должен быть переменным,
зависящим от ws.
При равномерном вращении генератора постоянным является вре-
мя опережения /оп, равное времени tB включения выключателя. По-
этому современные автоматические синхронизаторы определяют момент
включения привода выключателя по постоянному времени опережения
(СПВО) /Оп = const.
При неравномерном, обычно равноускоренном, вращении генерато-
ра при его пуске угол опережения должен быть переменным. Поэто-
му последние разработки автоматического синхронизатора представля-
ют собой специализированное аналоговое или цифровое вычислительное
устройство, определяющее необходимый изменяющийся с изменением ivs
угол опережения ^оп(шз) в предположении равноускоренного (или равно-
замедленного) вращения синхронного генератора, т.е. при постоянном
ускорении | ± as| = const ротора генератора.
Автоматические синхронизаторы дают управляющее воздействие на
включение выключателя синхронного генератора, только если часто-
та скольжения не превышает ограниченного их техническими воз-
44
Автоматическое управление включением СГ на параллельную работу
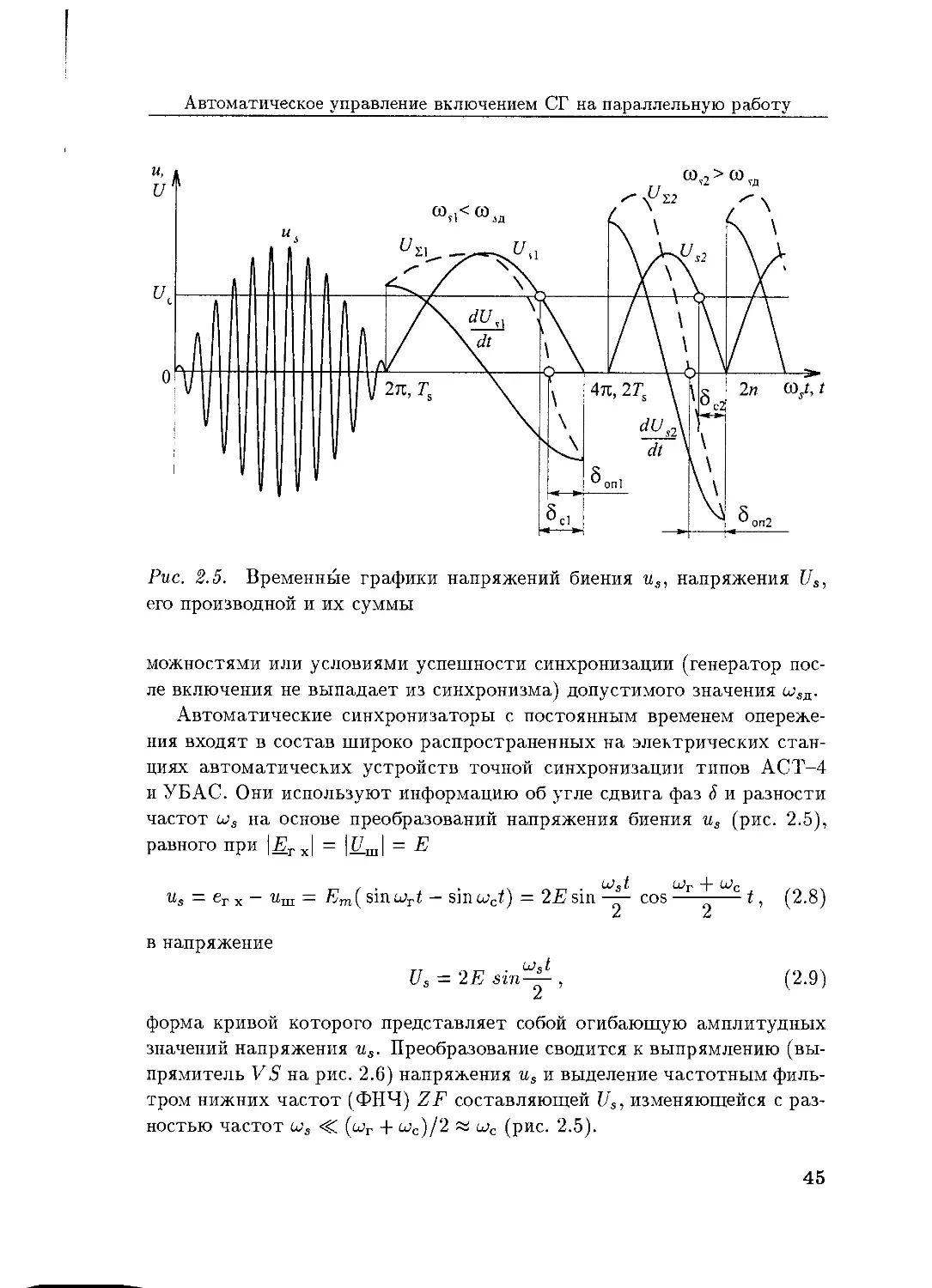
Рис. 2.5. Временные графики напряжений биения ия, напряжения Us,
его производной и их суммы
можностями или условиями успешности синхронизации (генератор пос-
ле включения не выпадает из синхронизма) допустимого значения
Автоматические синхронизаторы с постоянным временем опереже-
ния входят в состав широко распространенных на электрических стан-
циях автоматических устройств точной синхронизации типов АСТ-4
и У Б АС. Они используют информацию об угле сдвига фаз 6 и разности
частот cjs на основе преобразований напряжения биения us (рис. 2.5),
равного при |ЕГХ| = Ц7Ш| = Е
IjJ g i —|— IjJq
us — ег х - иш = Ет( sinwri - sinwcZ) = 2Esin — cos-----t, (2.8)
в напряжение
Us = 2E sin^- , (2.9)
форма кривой которого представляет собой огибающую амплитудных
значений напряжения us. Преобразование сводится к выпрямлению (вы-
прямитель VS на рис. 2.6) напряжения us и выделение частотным филь-
тром нижних частот (ФНЧ) ZF составляющей Us, изменяющейся с раз-
ностью частот ws <F. (а?г + шс)/2 ~ о?с (рис. 2.5).
45
Глава 2
Напряжение Us снижается до нуля согласно (2.9) при ivst = 2тгп, на-
пример Usi = 0 при wst — 4тг, в моменты времени nTs совпадения по
фазе Ej. х и Ц_ш (в конце каждого периода Ts биений). Для фиксирования
постоянного времени опережения ion = const используется свойство сум-
мы напряжения Us и его производной (дифференциатор AD и сумматор
AW на рис. 2.6)
dUs ^st tn
— = Eus cos — (2.10)
проходить через нулевое значение с опережением оптимального для син-
хронизации момента nTs снижения до нуля напряжения Us на время ion,
не зависящее при ограниченных углах £оп = ustoli < тг/З от разности
частот ws.
Суммарное напряжение (рис. 2.5)
th = IhUs + K2^ = 2К1Ез\п<^- + К2Ешясоб^- = 0 (2.11)
at 2 2
в момент времени to = TS- ton. Поскольку aisTs = 2т, то при ion = Ts — to
согласно (2.11)
2A\tg^ = /f2u>s. (2.12)
При малых углах <5ОП = uston < т/3 функция tg(Jon/2) « 5оп/2.
Поэтому в соответствии с (2.12)
ion = A'2/A’i = const. (2.13)
Таким образом, независимость времени опережения от ws обеспечива-
ется, как и указывалось, лишь при ограниченных допустимых значениях
ljs, в частности при ion = iB = 0,3 с, не превышающих
т
~ тг рад/с или fs я 0,5 Гц.
Дискретный сигнал на включение привода выключателя формиру-
ется компаратором ЕА (рис. 2.6) релейного действия, сравнивающим
напряжение на выходе сумматора AW с нулевым значением (нуль-
индикатором).
Сигнал превращается в управляющее воздействие УВ на включение
привода выключателя логической частью ЛЧ при условии, что разность
46
Автоматическое управление включением СГ на. параллельную работу
Рис. 2.6. Функциональная схема автоматического синхронизатора с по-
стоянным временем опережения
частот не превышает указанное допустимое значение шад, ограничи-
ваемое измерительным органом скольжения ИОС. Он содержит изме-
рительное реле минимального напряжения, фиксирующее допустимый
угол опережения £опд.
Напряжение срабатывания реле
[/с = [7msSin^ = 2Esin^. (2.14)
При < wsa (см. рис.2.5) угол опережения, определяемый синхро-
низатором, <УОП1 = < 5ОПд = ‘‘Wb, поэтому по мере снижения на-
пряжения Us и угла 6 первым (при <Ус1) срабатывает реле ИОС (сигнал
Uc) и разрешает прохождение появляющегося позднее (<Уоп1 < dci) сигна-
ла UB компаратора ЕА через логическую часть ЛЧ (рис. 2.6). Если же
> ^sdi то и угол <УОП1 > £Опд, поэтому первым (<УОП2 > (ta) срабаты-
вает компаратор ЕА, но его сигнал UB не проходит на выход логической
части.
Запрещение формирования управляющего воздействия на включе-
ние привода выключателя производится и от измерительного органа
47
Глава 2
амплитуд ИО А (сигналом Um) при недопустимой разности амплитуд
Егх и Um, поскольку рассмотренные соотношения, определяющие вре-
мя опережения синхронизатора, справедливы только при равенстве амп-
литуд.
Разработанный более совершенный автоматический синхронизатор
типа СА-1 с вычисляемым углом опережения устанавливает угол опере-
жения в соответствии с соотношением для равноускоренного вращения
синхронного генератора
<U = ^o/on + a^. (2.15)
Условие срабатывания синхронизатора
6 + <5ОП = 2тг (2.16)
>,2 1ОП
6+Ttton + ^2~ = 2?Г- (2ЛМ
Он содержит времяимпульсный преобразователь ВИП U0 (рис. 2.7)
угла сдвига 6 фаз между Ег х и Ц_ш, ФНЧ ZF, выделяющий постоянную
составляющую напряжения Us, пропорциональную углу J, два диффе-
ренциатора ADI, AD2 и сумматор-компаратор WEA1, сравнивающий
согласно (2.16а) напряжения
Us + ТгТ2 = -^Т. + Uso , (2.17)
где Г1 = /оп, Т2 — 1Оп/2 — постоянные времени дифференциаторов с
передаточными функциями
Н^ = рТ\- Н2(р)-рТ2-, (2.18)
Us о — напряжение на выходе ZF при углах 5 = 0; 2тгтг.
Указанные элементы образуют измерительный орган угла опереже-
ния ИОУО, вычисляющий угол опережения согласно (2.15) и формиру-
ющий дискретный потенциальный сигнал UB на включение выключате-
ля синхронного генератора. Автоматический синхронизатор содержит
48
Автоматическое управление включением СГ на. параллельную работу
Рис. 2.7. Функциональная схема автоматического синхронизатора, вы-
числяющего переменный угол опережения
измерительные органы частоты скольжения ИОС (разности частот) и
ИО А — разности амплитуд ЭДС генератора Ег х и напряжения Иш на
шинах электростанции.
Важной особенностью такого синхронизатора является ограничение
частоты скольжения максимально допустимой в момент включения
выключателя. Для этого контролируется максимально допустимый угол
опережения, вычисляемый по частоте скольжения в момент срабатыва-
ния синхронизатора uso и ускорению:
“Лад = (^sO + О, st on) i
(2.19)
Указанная особенность синхронизатора, вычисляющего угол опере-
жения <5ОП с учетом ускорения энергоагрегата, позволяет ему срабаты-
вать при углах опережения, значительно больших допускаемых СПВО.
49
Глава 2
Его особенностями являются также высокая точность дифференцирова-
ния напряжения его независимость от разности амплитуд и незави-
симость рассмотренных соотношений от и доп.
Измерительный орган ИОС содержит элемент сравнения угла 6 —
компаратор напряжения Ug и установленного напряжения
и^опд ~ Ч?5д/Оп 1 (2.20)
скорректированного согласно (2.19) по ускорению as (сумматор-компа-
ратор 1ЕД12)
d2Us 2
,2 ‘on
^онд+-------2--. (2.21)
В измерительном органе ИО А абсолютное значение |ДДт| разности
амплитуд формируется на выходе диодного элемента сравнения непре-
рывного действия: релейные компараторы ЕА1,2 сравнивают его с уста-
новленным ДДту. Дискретный потенциальный сигнал Um и сигналы
Uс и UB поступают в логическую часть ЛЧ синхронизатора, которая
разрешает формирование управляющего воздействия УВ на включение
выключателя, если сигналы Um и Uc соответствуют логическим нулям
Um = Uc = 0, а дискретный сигнал UB — логической единице UB = 1.
Конструктивно автоматический синхронизатор СА-1 содержит и
устройство уравнивания частот, вернее устройство подгонки частоты
скольжения генератора к некоторому установленному значению | ±ол, |у
7^ 0, поскольку при ал, = 0 синхронизатор теряет информацию и функ-
ционировать не может (на рис. 2.7 не показано).
2.5. Автоматический синхронизатор с вычисляемым
углом опережения
Автоматический синхронизатор с вычисляемым углом опережения
типа СА-1 выполняется на интегральных микросхемах и состоит из не-
скольких конструктивных блоков, соответствующих отдельным платам
печатного монтажа. Полные принципиальные схемы блоков приведены
в [7]. Ниже описываются упрощенные функционально-принципиальные
схемы измерительной части собственно синхронизатора и устройства
автоматического управления частотой скольжения синхронного генера-
тора — ее подгонки к установленному значению.
50
Автоматическое управление включением СГ на параллельную работу
Измерительный орган угла опережения. Времяимпульсный из-
мерительный преобразователь UQ (рис. 2.8) угла сдвига фаз 8 = ust
между напряжением Ц_ш на шинах электростанции и ЭДС синхронного
генератора Е_г х = U_г выполнен на транзисторных элементах несовпа-
дения по знаку их мгновенных значений.
При положительных или отрицательных напряжениях иш и иг тран-
зисторы УТ1, VT3 или VT2, VT4 соответственно открыты токами
базы гб, и напряжение U$ на выходе ВИП фазы практически отсут-
ствует (определяется остаточным падением напряжения на переходах
коллектор-эмиттер открытых транзисторов). В течение времени несо-
впадения tHC мгновенных значений напряжений иш и иг один из ука-
занных двух транзисторов, а именно VT1 и VT4 в положительные по-
лупериоды напряжения иг (рис. 2.9) или VT2 и VT3 в отрицательные
его полупериоды, закрыты обратными напряжениями на их эмиттерных
переходах. Напряжение U$ равно части ЭДС источника питания Еп,
определяемой ее делителем — резисторы 7?1, R2. Таким образом, напря-
жение Пф представляет собой практически прямоугольные импульсы с
изменяющейся длительностью £ф = £HC = 8/wc, пропорциональной углу
сдвига фаз 8 (рис. 2.9,а).
Постоянная составляющая Us времяимпульсного напряжения про-
порциональна углу 8 = wst при стабильной ЭДС питания (Еп — const).
Она выделяется высокодобротным инерционным (быстродействие, вви-
ду относительно малой частоты скольжения u>s, не требуется) фильтром
нижних частот ZF четвертого порядка в виде последовательно соеди-
ненных двух (на рис. 2.8 показана схема одного из них) унифицирован-
ных активных ФНЧ второго порядка [8]. Минимальное напряжение U$o
(при углах 8 = 0; 2п7г) составляет 0,5 В, а максимальное (при углах
8 = птг) 10,5 В.
Активный дифференциатор AD1 (рис. 2.8) на интегральном опера-
ционном усилителе в инвертирующем включении формирует сигнал в
виде напряжения U's = -T^dUsIdt, моделирующего производную угла
сдвига фаз 8 — частоту скольжения синхронного генератора ws. На-
пряжение на выходе второго аналогичного активного дифференциато-
ра AD2 отображает ускорение as вращения гидро- или турбогенерато-
ра U'&' = l\T2d2Ud/dt2. Постоянные времени дифференциаторов Тг =
= Яос1С'1, Т2 = R0C2C2 устанавливаются дискретными изменениями со-
противлений реЗИСТОрОВ Яос1, Ro.c2-
51
СП
Ь5
Рис. 2.8. Схема измерительного органа угла опережения
Глава 2
Автоматическое управление включением СГ на параллельную работу
(б) (0s t
Рис. 2.9. Графики, иллюстрирующие формирование сигнала по углу
сдвига фаз (а) и других сигналов (б) измерительным органом угла опе-
режения
53
Глава 2
Сумматор-компаратор WEA1 релейного действия (благодаря поло-
жительной обратной связи Ro с) суммирует и сравнивает напряжения
согласно равенству (2.17). При этом напряжение U&o устанавливается
делителем Еп (резисторы /?3, JZ4). В момент их равенства он выдает
дискретный (единичный) сигнал UB (рис. 2.9,5), по которому при удо-
влетворении всех условий точной синхронизации формируется управля-
ющее воздействие на включение привода выключателя с опережением
включения выключателя (соединения силовых контактов) с вычислен-
ным углом опережения <УОП и временем опережения ton.
Схема сумматора-компаратора WEA1 отличается от типовой схе-
мы релейного компаратора [8] наличием гибкой отрицательной обратной
связи (конденсатор Со с), предотвращающей возможные ложные его сра-
батывания за счет некоторого замедления, что, как указывалось, допу-
стимо для элементов синхронизатора как относительно медленно функ-
ционирующего.
Измерительный орган содержит активный выпрямитель AVS напря-
жения выходное напряжение которого отображает абсолютное
значение угловой частоты скольжения | ± u>s |.
Временные графики (рис. 2.9) иллюстрируют действие измеритель-
ного органа, вычисляющего угол опережения синхронизатора.
Измерительный орган разности амплитуд содержит, как ука-
зывалось, диодный элемент сравнения амплитуд напряжения Um и Ur
(трансформаторы TLV1, TLV2) в виде двух выпрямителей VS1, VS2,
простейшие частотные фильтры RC, выделяющие постоянные соста-
вляющие выпрямленных напряжений Еош, ^'ог и их разности Д{70 =
= Uom - Uor (рис. 2.10,а). Релейность действия измерительного орга-
на обеспечивается двумя компараторами ЕА1, ЕА2, выполненными на
интегральных операционных усилителях в инвертирующем и дифферен-
циальном включениях соответственно, сравнивающими возможные раз-
нополярные напряжения ±Д{70, пропорциональные разности амплитуд
ДКт = Umui - U,nr с допустимым значением их разности ДГту, устана-
вливаемым делителем Еп (резисторы Л1, /?2).
Компаратор ЕА1 срабатывает при отрицательной -ДКо, а ЕА2 —
при положительной + Д£70 разностях амплитуд, превышающих по абсо-
лютному значению допустимую Д?7ту. Их дискретные сигналы в ви-
де положительных постоянных напряжений Ui = U2 = Еп, соответ-
ствующие логическим единицам, проходят через диодный логический
54
Автоматическое управление включением СГ на параллельную работу
элемент DW (ИЛИ) и после интегрального инвертора DU1 (НЕ) пре-
вращаются в запрещающий сигнал Um, соответствующий логическо-
му нулю. При разностях амплитуд, меньших допустимой, напряжения
Г/1 = U? ~ -Еи. Они не проходят через диодный элемент DW, поэтому
на входе DLA напряжение отсутствует (логический нуль), а на выходе
имеет место разрешающий единичный логический сигнал.
Измерительный орган частоты скольжения. На его входы
(рис. 2.10,6) поступают сигналы с выхода измерительного органа угла
опережения (см. рис. 2.8) в виде напряжений {7$, и U", моделирую-
щих угол сдвига фаз между напряжениями Ц_ш, Ц_г, абсолютное значение
частоты скольжения и ускорение вращения синхронного генератора со-
ответственно.
Сумматор-компаратор IVЕЛ2, сравнивающий напряжение Us ~ wst,
поступающее на инвертирующий вход ИОУ, с суммой установленного
напряжения Uy = UsOnR, моделирующего максимально допустимый угол
опережения, и напряжения U" [см. (2.21)], реализует соотношение (2.19),
т.е. контролирует максимально допустимую частоту скольжения д>зд в
момент включения выключаяеля.
При < (uso + aston)a напряжение Us меньше суммы (Uy + U”),
на выходе WEA2 положительное напряжение Uc — сигнал, разреша-
ющий через логическую часть (см. рис. 2.9) формирование воздей-
ствия на включение выключателя. При ws > cvsa напряжение Us пре-
вышает: сумму Uy + U", на выходе WEA2 (рис. 2.10) будет отрица-
тельное напряжение — запрещающий логический сигнал (нулевое на
рис. 2.9).
Сумматором-компаратором WEA3 формируется еще один сиг-
нал USIlp запрета действия синхронизатора на включение выключателя
по предельным абсолютным значениям частоты скольжения fSIip = 1 Гц
и ускорения вращения гидро- или турбогенератора asnp. Он производит
сравнение напряжения иш ~ | ± U's\ ~ fs (см. выпрямитель ASV на
рис. 2.8) или и'&' ~ as с установленным напряжением Usnpy, моделиру-
ющим /5Пр или а.,пр- Благодаря диодам V D1. VD2 на инвертирующий
вход ИОУ поступает большее из указанных напряжений: иш или по-
ложительное U" (при положительном ускорении). При отрицательном
ускорении (торможении синхронного генератора) напряжение U$ меняет
знак и через диод VD3 поступает на неинвертирующий вход ИОУ, его
абсолютное значение вычитается из напряжения Usnpy.
55
Г лава 2
56
(б)
Рис. 2.10. Схемы измерительных органов разности амплитуд (а) и частоты скольжения (б)
втоматическое управление включением СГ на параллельную работу
Глава 2
Релейный элемент сравнения ЕАЗ напряжения Us с установленным
напряжением Usnpy ~ | ±2тг/3| запрещает положительным напряжением
на его выходе Д<5пр (см. рис. 2.9,6'), возникающем при Us > Д<5пр.у, дей-
ствие синхронизатора на включение выключателя при изменении угла 6
сдвига фаз в диапазоне 2тг/3 < 4тг/3. Он ограничивает максимально
возможный угол опережения ^оп.пр — 2тг/3. Положительное напряже-
ние U(логическая единица) поступает через диодный элемент DW на
инвертор DU1 и непосредственно на DU2, которые выдают логические
нули Um, Usnp в логическую часть автоматического синхронизатора (см.
рис. 2.7).
Логическая часть синхронизатора обеспечивает его действие на
включение выключателя синхронного генератора при отсутствии запре-
щающих (нулевых) сигналов Um ~ О, U $пр ~ 0, Usnp ~ 0, т.е. отсут-
ствии единичных сигналов Um ~ 1, Usnp ~ 1, Usnp ~ 1 (см. рис. 2.10),
и при наличии дискретного сигнала Uc ~ 1 (см. рис. 2.9), и единичного
сигнала UB ~ 1 (см. рис. 2.8).
Как современное микросхемное устройство логическая часть выпол-
няет функции диагностики автоматического синхронизатора и индика-
ции ее результатов [7].
2.6. Автоматическое устройство управления частотой
скольжения генератора
Автоматический синхронизатор получает информацию и может
функционировать лишь при неравенстве частоты вращения генерато-
ра синхронной частоте шс: при отсутствии скольжения он, как ука-
зывалось, теряет информацию. Для поддержания частоты скольжения
ws = wc-ijr в некотором диапазоне usy < |we| < uSI1 и предусматривается
устройство ее подгонки к установленному значению. Оно представляет
собой, по существу, автоматический регулятор частоты скольжения.
В связи с инерционностью процесса изменения частоты вращения
турбины, устройство воздействует на изменения впуска в нее энергоно-
сителя кратковременно в начале каждого периода скольжения и лишь
при конечной разности |Aws| = |u>s - u>sy|, т.е. является регулятором
импульсного действия с зоной нечувствительности ||нч.
Парис. 2.11 представлена функционально-принципиальная схема ав-
томатического устройства управления частотой скольжения синхронно-
го генератора.
58
Рис. 2.11. Схема автоматического устройства управления частотой скольжения генератора
Автоматическое управление включением СГ на параллельную работу
Глава 2
Рис. 2.12. Релейные характеристики измерительного органа частоты
скольжения
Измерительная часть устройства (элементы сравнения непрерыв-
ного ЭСНД и релейного ЭСРД действия, формирователи на транзи-
сторах VT1, VT2 практически прямоугольных импульсов с пассив-
ным дифференциатором RC, компаратор ЕА2 и нуль-индикаторы НИ1,
НИ2) формирует релейные характеристики с зоной нечувствительности
(рис. 2.12) и обеспечивает их реализацию только в первом полупериоде
скольжения (при 0 < 6 < тг).
Сигналом информации о частоте скольжения является, как указы-
валось, напряжение Еш = |^|, пропорциональное ее абсолютному зна-
чению. Элементом сравнения непрерывного действия ЭСНД напряже-
ние иш сопоставляется с установленным {7sy, отображающим | ± шау |, —
формируется сигнал об отклонении частоты скольжения от установлен-
ной в виде напряжения ±AJ7S, пропорционального абсолютному значе-
нию | ± Aws| и имеющему соответствующий знак. Сигнал фиксирует-
ся нуль-индикатором НИ1, положительное напряжение U&s которого,
60
Автоматическое управление включением СГ на параллельную работу
дискретно появляющееся при > 0, соответствует единичному логи-
ческому сигналу. Сигнал поступает на один из входов элемента DX1
(И-НЕ) логической части ЛЧ устройства и на инвертор DU2 (НЕ), вы-
дающий логическую единицу при отрицательном напряжении (от-
сутствии напряжения после диода VD2), т.е. при < 0.
Непрерывно зависящее от До>3 напряжение ±AUa на выходе ЭСНД
выпрямляется активным выпрямителем AVS (аналогичным показанно-
му на рис. 2.8, но с противоположным знаком выходного напряжения
|[/дэ|), образующим с компаратором ЕА1 элемент сравнения релейного
действия ЭСРД абсолютного значения напряжения | U&a | с напряжением
Днч.у, устанавливающим зону нечувствительности и пропорциональным
(рис. 2.12). Его дискретно появляющееся (при |ДДЭ| > Um.y)
положительное напряжение является единичным логическим сиг-
налом, поступающим на входы элементов DX2 и DX3 и разрешаю-
щим формирование управляющих воздействий или на ускорение УВу
или торможение УВТ турбины соответственно.
Вид управляющего воздействия определяется знаками частоты
скольжения ±ws и ее отклонения от установленного значения (знаком на-
пряжения [Тдз на выходе НИУ). Как видно из релейных характеристик
измерительной части устройства (рис. 2.12), ускоряющее воздействие
УВу необходимо при ша > 0 и и>а > и>ау или при и>а < 0 и | - и>а | < и>ау,
а тормозящее воздействие УВТ — при и>а > 0 и и>а < и>ау или и>а < 0
и | - 4>| > шау-
Знак частоты скольжения ±ws определяется элементом DX1 и фик-
сируется синхронным триггером ST в течение изменения угла тг/12 <
< S < 2тг/3. Разрешающий единичный сигнал Usi при 6 > тг/12 выдает-
ся на вход DX1 компаратором ЕА2 напряжения U& и постоянного уста-
новленного напряжения Usy, отображающего начальный угол 6 = тг/12.
Угол 6 = 2тг/3 ограничивается логическим нулем Ugnp (см. рис. 2.10),
существующим при 2тг/3 < 6 < 2тг (см.рис. 2.9,6). Дополнительно еди-
ничным сигналом U'd нуль-индикатора НИ2, формируемым отрицатель-
ным напряжением U& (см. рис. 2.9,6), область действия измерительной
части ограничивается, как указывалось, первым полупериодом сколь-
жения.
Оказывается, что при шг < шс, т.е. при ша > 0, кратковременные
импульсы ии на выходе ДС-дифференциатора (см. рис. 2.11) переднего
фронта напряжения Дш.к на транзисторе VT1, управляемом напряжени-
61
Глава 2
ем иш (закрытым в отрицательный его полупериод), совпадают по вре-
мени с инвертированными микросхемой DU1 прямоугольными импуль-
сами Ur к напряжения Ur к на транзисторе VT2, управляемом напряже-
нием иг (рис. 2.13,а). Импульс ди проходит через микросхему DXl(uai)
на синхронизирующий вход С триггера ST, обеспечивая фиксирование
им логической единицей на инверсном выходе Uq — 1, обусловленной
первым же импульсом Ur к на его входе R, положительного знака угло-
вой частоты скольжения.
Соответственно при > шс, т.е. при — ws, кратковременные им-
пульсы ди дифференциатора совпадают по времени с импульсами на-
пряжения UrK на транзисторе VT2, поступающими на вход S записи
триггера и обусловливающими логическую единицу на его прямом вы-
ходе Uq , фиксирующую отрицательный знак частоты скольжения < О
(рис. 2.13,6).
Если > 0 HWj > wsy, т.е. если Uq = 1, U&s = 1 и /7днч = 1, то (см.
рис. 2.12) должно производиться ускоряющее управляющее воздействие
УВу на турбину. Действительно, при этом на входах микросхем: DX1
единица и нуль (Uq = 0); DX3 единица и нуль (Uд8 = 0); на их выхо-
дах, т.е. на двух входах элемента DX2, единицы — на ее выходе нуль,
а на выходе инвертора DU3 — положительное напряжение (единица).
Она возбуждает открывающий ток базы /53 транзистора VT3 при от-
сутствии нуля на выходе микросхемы DX2. Положительное напряжение
на ее выходе, обусловленное {/днч = 1, дополнительно подтверждается
наличием достаточного скольжения иш — 1 и запуском элемента време-
ни D от нуль-индикатора НИ 2, фиксирующего, как указывалось, начало
первого полупериода скольжения: при этом на выходе элемента DT, т.е.
инверсном входе элемента D X (ЗАПРЕТ), нуль, а на выходе единица.
Таким образом, на всех трех входах микросхемы DX2 единицы.
Транзистор VT3 открывается, срабатывает реле KL1 и выдает уско-
ряющее управляющее воздействие УВу. Однако воздействие должно
быть импульсным — кратковременным. Поэтому спустя время задерж-
ки единичного сигнала элементом DT на инверсном входе элемента D X
оказывается единица, обусловливающая появление нуля на одном из вхо-
дов и на выходе микросхемы DX2, закорачивающей цепь тока базы /ез
и соединяющей базу транзистора VT3 с его эмиттером: он закрывается,
реле KL1 развозбуждается, управляющее воздействие УВу прекраща-
ется.
62
Автоматическое управление включением СГ на параллельную работу
Рис. 2.13. Временные графики, иллюстрирующие действие автомати-
ческого устройства управления частотой скольжения при < шс (а) и
> wc (б')
63
Глава 2
Если же при ws > 0 частота скольжения ws < wsy, т.е. если меняет-
ся знак ее отклонения от установленного значения — напряжение U&s
отрицательно на выходе НИ1, то микросхемы DX1, DU2, DX3 и DX2
переключаются: положительное напряжение (единица) на выходе DX3
обусловливает открытие (током /54) транзистора VT4, но при прежних
условиях — наличии единиц на всех трех входах микросхемы DX3 воз-
буждается реле KL2 и выдает тормозящее генератор (для увеличения
скольжения) управляющее воздействие УВТ, которое прекращается, как
и УВу, после истечения времени задержки элемента DT.
При uy > Uy, т.е. при ws < 0, указанные импульсы напряжения диф-
ференциатора RC совпадают по времени с прямоугольными импульса-
ми UrK (рис. 2.13,6), которые, поступая на вход S триггера ST, обусло-
вливают логическую единицу на его прямом выходе Uq = 1. При этом
в случае | — ws| > | — wsy|, т.е. при положительном напряжении U&s ~ 1
формируется УВТ, уменьшающее абсолютное значение частоты сколь-
жения, а в случае | — ws| < | - wsy|, т.е. при = 0, выдается УВу,
увеличивающее абсолютное значение частоты скольжения.
2.7. Микропроцессорные автоматические
синхронизаторы
Функциональные схемы. Разработанные [9, 10] цифровые авто-
матические синхронизаторы типа АС-М и СПРИНТ выполняют все
три основные функции АУТС с выдачей через дисплей (АС-М) или
алфавитно-цифровой индикатор (СПРИНТ) информации о состоянии ав-
томатического устройства и синхронизируемого генератора и произво-
дят контроль и диагностику исправности его элементов и анализ досто-
верности выдаваемой информации, что является их важным достоин-
ством.
Основная — вычислительная ВЧ функциональная часть синхрони-
заторов реализована на одной, поскольку они работают эпизодически
и кратковременно, микроЭВМ: АС-М — на однокристальной ОЭВМ
типа КМ1816ВЕ51 с тактовым генератором частотой 11 МГц, стаби-
лизируемой внешним кварцевым резонатором КР, и регистрами адреса
РА и данных РД (рис. 2.14,а), а синхронизатора СПРИНТ — на ми-
кропроцессоре МП типа К18108ВМ88 с контроллером прерывания КП,
таймером Т и оперативным ОЗУ и постоянным ПЗУ запоминающими
64
Автоматическое управление включением СГ на параллельную работу
устройствами (рис. 2.14,5). Вычислительная часть выполняет цифровое
измерительное преобразование амплитуд и частот ЭДС генератора E_v х
и напряжения шин электростанции (см. рис. 2.1), угла сдвига фаз 8
между ними и вычисляет их разности и угол опережения синхронизато-
ра Jon по уравнению (2.15) равнопеременного вращения генератора при
его подготовке к включению на параллельную работу.
Управление микроЭВМ производится измерительно-преобразова-
тельной частью ИПЧ. Она выполняет предварительную обработку ана-
логовых входных сигналов — вторичных (на выходах ТУ1, TV2) ЭДС
генератора Ет х и напряжения Дш на шинах электростанции с изме-
няющимися информационными параметрами: амплитудой, частотой и
фазой.
Она содержит вторичные измерительные трансформаторы напряже-
ния TVL, выпрямительные с частотными фильтрами аналоговые из-
мерительные преобразователи ИПН амплитуд Ег х и Дш в непрерыв-
ные сигналы, аналого-дискретные преобразователи АДП, формирую-
щие сигналы прерываний, аналого-цифровой интегральный АЦП ти-
па К1113ПА1 с коммутатором входных аналоговых сигналов — мульти-
плексором МПЛ, регистры РЛС входных дискретных (логических) сиг-
налов и РКС контрольной суммы ПЗУ, элемент начальной установки
ЭНУ, задающие элементы ЗЭ настройки синхронизаторов и формиро-
ватели тестового сигнала ФТС (рис. 2.14,а).
В исполнительную часть Ис. Ч синхронизаторов входят комплект
электромагнитных реле КВР с герметизированными контактами — гер-
конов и логический элемент DX ЗАПРЕТа включения генератора при
Jon > 2тг/3 или ws > 5 Гц. К ней относятся и элементы отображения ин-
формации: цифро-аналоговый преобразователь ЦАП типа КР572ПА1,
цифровой ЦИ или аналого-цифровой АЦИ индикаторы угла J сдвига
фаз между Ег х и Дш и других величин, табло светодиодных индика-
торов СИ, дисплей Д или ПЭВМ, подключаемая к разъему RS 232, и
осциллограф О (рис. 2.14,а) или алфавитно-цифровой индикатор и кла-
виатура диалогового режима КЛ (рис. 2.14,5).
Измерительно-преобразовательная и исполнительная части свя-
заны с вычислительной частью шинами адреса ША и данных
ШД (рис. 2.14,а) и содержат обязательные для микропроцессорных
устройств элементы их гальванического отделения (развязки) от вычи-
слительной части с изоляцией, выдерживающей испытательное, преду-
65
Глава 2
(б)
Рис. 2.Ц. Функциональные схемы микропроцессорных автоматических синхронизаторов АС-М (а)
и СПРИНТ (б)
автоматическое управление включением СГ на параллельную работу
Глава 2
смотренное соответствующим ГОСТ, напряжение 0,5 кВ. Такими эле-
ментами в цепях дискретных сигналов служат герконы КВР.
В цепях аналоговых сигналов применяются или оптотранзисторные
усилители с оптронными парами (излучающим и фотодиодом), или
оптоэлектронные элементы на двух интегральных операционных уси-
лителях — элементы ЭГР.
Действие синхронизаторов. Вычислительная часть синхрониза-
тора функционирует на основе времяимпульсного преобразования. В
АС-М оно осуществляется с использованием вычитающего (сканиру-
емого) счетчика импульсов тактовой частоты, который периодически
после каждого его обнуления полностью заполняется.
Длительности периодов ЭДС генератора и напряжения электростан-
ции, необходимые для вычисления их частот и частоты скольжения,
и время несовпадения их мгновенных значений по знаку, пропорцио-
нальное углу сдвига фаз <5, фиксируются считыванием кодов таймера
в моменты переходов ЭДС ег.х и напряжения иш через нулевые мгновен-
ные значения. Считывание производится воздействием на входы пре-
рывания INTO и INT1 микроЭВМ прямоугольных импульсов Дк.г и
ик.ш (рис. 2.15), формируемых аналого-дискретными преобразователя-
ми ЭДС ег х и дш соответственно.
Текущие коды Nr и Аш фиксируются в моменты времени исчезно-
вения напряжений UK г и UK ш. Их разность Nr — Аш определяет код
R's угла сдвига фаз 6, а числа, обратно пропорциональные разностям
кодов, зафиксированных в текущем и предыдущем периодах, частоты
ЭДС генератора Кшт и напряжения электростанции Кшш. Очевидно,
что разность указанных чисел отображает частоту скольжения генера-
тора в виде двоичного кода КШа.
В зависимости от результатов вычислений синхронизатор формиру-
ет времяимпульсные управляющие воздействия на задающие элементы
автоматических регуляторов возбуждения (АС-М) АРВ и частоты вра-
щения АРЧВ генератора (оба синхронизатора). Если разности ампли-
туд и частот больше допустимых | ± ДДт| > 0,01 и | ± ws| > шзд, то
выдаются первые импульсы воздействия ограниченной установленной
длительности для соответствующего изменения амплитуды и частоты
ЭДС синхронного генератора.
По мере уменьшения ДДт и ws вычислительной частью рассчиты-
ваются уменьшающиеся длительности Ти импульсов воздействий по ли-
68
Автоматическое управление включением СГ на параллельную работу
Рис. 2.15. Временные графики, иллюстрирующие действие измеритель-
ной части цифрового синхронизатора
69
Глава 2
нейной зависимости Та от разности истинной и установленной частот
скольжения Aws = ws - wsy при длительности паузы Ти и заданного
коэффициента подстройки частоты А’под.
В синхронизаторах принята установленная частота скольжения:
KI = l^smax + Wsmm|/2 и wsmax/5 = wmin (см. рис. 2.12). После устано-
вления ws « wsy и ДДт < 0,1 управляющие воздействия прекращаются
и синхронизатор переходит к программе вычисления угла опережения по
закону (2.15) равнопеременного вращения генератора и при удовлетворе-
нии условия (2.17) формирует импульсное управляющее воздействие до-
статочной для включения выключателя Q синхронного генератора дли-
тельности.
Синхронизаторы обладают свойством однократности действия. Если
выключатель не включился или тут же после включения отключился,
повторное действие не формируется: предусмотрен новый запуск про-
граммного обеспечения путем кратковременного отключения синхрони-
затора от источника питания.
Программное обеспечение АС-М. После подключения синхро-
низатора к источнику питания ИП элементом ЭНУ приводятся в ис-
ходное состояние все регистры синхронизатора (см. рис. 2.14,а) и за-
пускается программа инициализации и стартового контроля START
(рис. 2.16): производится настройка элементов микроЭВМ.
После завершения стартового контроля и разрешения управления
(прерывания) микроЭВМ вступает в действие программа обмена ин-
формацией с оператором CONSOL. По сигналу ПУСК оператора на-
чинается выполнение функциональных программ измерительного пре-
образования, управления АРВ и АРЧВ и формирования воздействия на
включение синхронного генератора.
Функциональное программное обеспечение состоит из трех прерыва-
ющих программ: INT-G, INT-N, INT-T. Первая из них запускается ка-
ждый период скольжения в момент исчезновения импульса напряжения
UKr (см. рис. 2.15) и производит считывание кода Nr. В момент ис-
чезновения импульса напряжения Дк.ш запускается основная программа
INT-N: считывается код Аш, по разностям кодов Nr и Аш рассчитыва-
ются, как указывалось, разности частот ЭДС генератора и напряжения
электростанции и угол сдвига фаз между ними; определяются разность
амплитуд NEm и рассчитываются длительности импульсов управле-
ния АРВ и АРЧВ; вычисляется угол опережения и после проверки трех
70
Автоматическое управление включением СГ на параллельную работу
Разрешение
прерываний
Считывание кода Аг
Стартовый контроль I
Рис. 2.16. Структурная схема программного обеспечения АС-М
71
Глава 2
условий точной автоматической синхронизации формируется цифровой
сигнал управляющего воздействия на включение привода выключателя
синхронного генератора.
Операции, производимые по третьей программе INT-T, указаны на
структурной схеме программного обеспечения (рис. 2.16). Программы
выполнены на языке Ассемблера.
Как указывалось, микропроцессорный синхронизатор производит ди-
агностику и настройку АС-М программой START и сервисные функции
по программе CONSOL: выводит на экран дисплея параметры настрой-
ки и результаты измерительного преобразования, значения угла опере-
жения, а на экран осциллографа, подключенного через ЦАП, графики
процессов измерений разностей амплитуд и частот, угла сдвига фаз,
управляющих воздействий на АРВ и АРВЧ и выходного управляюще-
го воздействия. Угол сдвига фаз и частота скольжения символически
отображаются цифросинтезирующим индикатором. Светодиодное та-
бло фиксирует состояние синхронизатора в процессе его работы по под-
готовке синхронного генератора к включению на параллельную работу.
Особенности синхронизатора СПРИНТ. Синхронизатор упра-
вляется четырьмя клавишами КЛ (рис. 2.14,6), устанавливающими ре-
жимы:
• УСТАВКИ, в котором производится настройка синхронизатора на
заданные уставки 1оп1 — 0,1-0,5 с; 1ОП2 — 0,5-1,0 с; Д(7тд < 0,1;
< 2тг/3/оп; А'ПОд = 0,1-2,0 с/Гц при рассчитываемой дли-
тельности импульсов управления частотой вращения Ти = 2,0-
0,1 с и установленной постоянной длительности паузы между ними
7пу = 2, 0-1,0 с.
• КОНТРОЛЬ — все сигналы, поступающие на вход синхронизато-
ра, отображаются на алфавитно-цифровом индикаторе;
• РАБОТА — проводится синхронизация генератора;
• ПРОСМОТР, позволяющий просмотреть зафиксированные в памя-
ти микропроцессора результаты нескольких выполненных процес-
сов синхронизации.
Бестрансформаторный источник питания обеспечивает подключение
его и к постоянному оперативному току.
72
Автоматическое управление включением СГ на параллельную работу
Вопросы для самопроверки
1 Какие известны способы включения синхронных генераторов на парал-
лельную работу и в каких условиях они применяются?
2 Какие процессы происходят в генераторе при его самосинхронизации?
3 Какова роль асинхронного и реактивного вращающих моментов генера-
тора в процессе его самосинхронизации?
4. В чем состоят условия точной автоматической синхронизации генерато-
ров7
5. Каким воздействиям подвергается синхронный генератор при самосин-
хронизации и точной синхронизации?
6. При каких условиях включается выключатель синхронного генератора
при его самосинхронизации7
7 В связи с чем необходимо опережающее воздействие на включение вы-
ключателя генератора при его точной автоматической синхронизации и
какие известны способы его обеспечения?
8 Какими факторами ограничивается частота скольжения синхронного ге-
нератора при его включении на параллельную работу способами само-
синхронизации и точной синхронизации?
9. Как различаются синхронизаторы по способам выбора момента времени
включения привода выключателя генератора при точной автоматической
синхронизации7
10 Какие электрические величины используются автоматическим синхро-
низатором с постоянным временем опережения (СПВО)?
И Почему независимость времени опережения автоматического синхрони-
затора типа СПВО от частоты скольжения сохраняется лишь при огра-
ниченных углах опережения?
12. В чем преимущества автоматического синхронизатора с вычисляемым
углом опережения7
13. Из каких отдельных функциональных частей состоит автоматическое
устройство точной автоматической синхронизации?
14. Благодаря каким свойствам автоматического синхронизатора с вычисля-
емым углом опережения включение им привода выключателя допускает-
ся при значительно больших расхождениях по фазе ЭДС генератора и
напряжения на шинах электростанции, чем синхронизатором с постоян-
ным временем опережения7
73
Глава 2
15
16
17
18
19
20
21
22
23.
24
25
26
27
Какое значение частоты скольжения контролируется автоматическим
синхронизатором с вычисляемым углом опережения то, которое име-
ет место в момент времени включения привода выключателя, или то,
которое соответствует моменту замыкания силовых контактов выключа-
теля?
Почему устройство автоматического управления частотой скольжения
настроено на некоторое ее конечное, а не нулевое значение?
Зачем автоматические синхронизаторы имеют устройство контроля раз-
ности амплитуд ЭДС синхронного генератора и напряжения на шинах
электростанции7
Как определяется знак ускорения синхронного генератора в процессе ав-
томатического управления частотой его скольжения7
Как автоматическими синхронизаторами фиксируется меньшая и боль-
шая допустимого значения частота скольжения синхронного генератора?
Чем отличаются временные последовательности появления сигналов
от измерительных органов определения времени (или угла) опереже-
ния и частоты скольжения при меньшем и большем допустимого ее зна-
чения?
Как функционирует микропроцессорный автоматический синхронизатор,
в чем состоят его особенности (см рис 2.14)7
Какие способы измерительного преобразования разности амплитуд и
угла сдвига фаз и какой способ определения угла опережения исполь-
зуются в цифровых автоматических синхронизаторах?
Как функционирует измерительный орган угла опережения аналогового
микросхемного автоматического синхронизатора СА-1 (см рис. 2.8)?
Какие информационные процессы, происходящие в синхронизаторе, ил-
люстрируют графики, приведенные на рис. 2 9?
Как функционирует измерительный орган разности амплитуд ЭДС ге-
нератора и напряжения на шинах электростанции синхронизатора СА-1
(см рис 2 10,а)7
Как функционирует измерительный орган частоты скольжения
(см рис. 2 10,б)7
При каких соотношениях между частотами вращения синхронизируемо-
го генератора и параллельно работающих генераторов электростанпии и
каким образом (см рис 2 11) формируются ускоряющее или тормозящее
управление воздействия на турбину7
74
Автоматическое управление включением СГ на параллельную работу
28. Как функционирует автоматический регулятор частоты скольжения ана-
логового синхронизатора СА-1 (см рис. 2.11)?
29 Каким образом формируются цифровые сигналы об угле сдвига фаз и ча-
стоте скольжения в микропроцессорном автоматическом синхронизаторе
(см рис 2 15)?
30. Каково назначение основных программ, обеспечивающих функциониро-
вание цифрового синхронизатора (см. рис. 2.16)?
75
Глава 3. Автоматическое регулирование
частоты вращения гидро-
и турбогенераторов
3.1. Назначение и особенности
Частота вращения гидравлической или тепловой турбины опреде-
ляет частоту синусоидального напряжения синхронного генератора как
важнейшего показателя качества вырабатываемой им электрической
энергии. По требованиям ГОСТ 13109-87 на нормы качества электро-
энергии частота должна быть высокостабильной: допустимые ее откло-
нения Д/ от номинальной промышленной /ном = 50 Гц не должны пре-
вышать Д/ - ±0,1 Гц.
Удержать частоту в указанных пределах в специфических услови-
ях работы гидро- и турбогенераторов, обусловленных необходимостью
равенства генерируемой и потребляемой активной мощности в каждый
момент времени при непрерывно и случайно изменяющейся нагрузке
электроэнергетической системы, можно только непрерывным автомати-
ческим управлением частотой вращения турбин.
Непрерывное автоматическое управление называется [1] автоматиче-
ским регулированием, а именно стабилизирующим регулированием, под-
держивающим частоту вращения на неизменном установленном (пред-
писанном) уровне а.’Пр = ЮОтг рад/с. Оно осуществляется автоматиче-
скими регуляторами частоты вращения (АРЧВ).
В режиме пуска паровой турбины АРЧВ функционирует как про-
граммный регулятор при изменяющемся предписанном значении часто-
ты вращения, определяемом технологическими условиями ее разворо-
та. В процессе подготовки генератора к включению на параллельную
работу способом точной синхронизации АРЧВ, взаимодействуя с авто-
76
Автоматическое регулирование частоты вращения ГГ и ТГ
магическим устройством управления частотой скольжения синхронного
генератора, обеспечивает целесообразную для функционирования авто-
матического синхронизатора частоту скольжения wsy.
Необходимость высокой стабильности частоты напряжения синхрон-
ного генератора определяет соответствующие особенности автоматиче-
ского регулирования частоты вращения турбины.
В нормальном режиме параллельно и синхронно работающих нагру-
женных генераторов указанные изменения нагрузки электроэнергетиче-
ской системы нарушают оптимальные технико-экономические показа-
тели режима их работы, восстанавливаемые устройствами автоматиче-
ского управления активной мощностью синхронных генераторов — авто-
матическими регуляторами активной мощности (АРМ). Поэтому АРЧВ
турбин функционируют совместно с АРМ синхронных генераторов, вза-
имодействуя с ними, что является важной особенностью автоматическо-
го регулирования их частоты вращения.
Взаимодействие АРЧВ гидравлических и паровых турбин с АРМ
оказывается существенно различным, ввиду подвижности (мобильно-
сти) первых и чрезвычайной инерционности, обусловленной технологией
подготовки пара, вторых. Гидроагрегаты могут изменять свою нагруз-
ку быстро и в полном диапазоне от холостого хода до номинальной. На-
гружение теплового энергоагрегата, как указывалось, происходит дли-
тельно и при автоматическом управлении; снижение мощности паровой
турбины ограничивается технологическим минимумом производитель-
ности парогенератора.
Дискретное уменьшение активной нагрузки синхронного генератора
безболезненно для гидравлических и весьма опасно для паровых турбин.
Еще одна особенность АРЧВ обусловливается различным поведени-
ем турбины синхронного генератора как регулируемого объекта при ме-
ханическом переходном процессе — пуске и подготовке генератора к син-
хронизации или при его холостом ходе и при электромеханическом пере-
ходном процессе, возникающем в нагруженном режиме его параллельной
работы в электроэнергетической системе. При механическом переходном
процессе турбина описывается передаточной функцией интегрирующего
звена, а при электромеханическом переходном процессе в нагруженных
гидро- или турбогенераторе — передаточной функцией апериодического
звена [1].
77
Глава 3
3.2. Алгоритмы автоматического регулирования
Под алгоритмом автоматического регулирования частоты вращения
понимается аналитическая зависимость между положением регулиро-
вочного элемента — направляющего аппарата гидравлической или регу-
лировочных клапанов паровой турбин и отклонением частоты вращения
от предписанной Aw - wnp — ш.
Способностью поддерживать регулируемый параметр — частоту
вращения на неизменном уровне — обладает астатический регулятор
(характеристика регулирования 1 — зависимость частоты вращения ш
от мощности нагрузки Р на рис. 3.1). Он функционирует по интеграль-
ному (И), пропорционально интегральному (ПИ) или пропорционально-
интегрально-дифференциальному (ПИД) алгоритмам автоматического
Рис. 3.1. Характеристики регулирова-
ния:
регулирования. интегри-
рование отклонения часто-
ты вращения Aw обеспе-
чивает изменение состоя-
ния регулировочного эле-
мента турбины и фикси-
рование его изменившегося
состояния после исчезнове-
ния Aw. Этим и обеспечи-
вается астатическая харак-
теристика регулирования.
Однако в процессе раз-
ворота турбины и подго-
товки генератора к синхро-
низации и для необходи-
мого взаимодействия с ав-
томатическим регулятором
активной мощности АРЧВ
1 — астатическая; 2 — статическая; 3 — ха-
рактеристика при отсутствии автоматическо-
го регулирования; 4 — с изменяемым статиз-
мом
должен обеспечивать статическую характеристику регулирования 2.
Статическим является регулятор, функционирующий на основе про-
порционального (П) или пропорционально-дифференциального (ПД) ал-
горитмов регулирования. Пропорциональная зависимость между поло-
жением регулировочного элемента турбины и отклонением частоты вра-
щения Aw означает невозможность полного устранения возникшего Aw,
78
Автоматическое регулирование частоты вращения ГГ и ТГ
Рис. 3.2. Функциональная схема АСРЧВ
поскольку именно его отличие от нуля (Aw ф 0) определяет изменение
состояния регулировочного элемента. Поэтому, если исчезает откло-
нение частоты вращения, то регулировочный элемент возвращается в
исходное состояние. Статический регулятор может лишь уменьшить
отклонение частоты вращения AwHp, которое было бы при отсутствии
регулирования (характеристика 5), до остаточного отклонения Awp, во
много раз меньшего. Относительное остаточное отклонение частоты
вращения определяет наклон характеристики регулирования, характе-
ризуемой коэффициентом статизма
Awn р
А'ст = tga =---2- = ---. (3.1)
^'ном ном
Взаимодействующая совокупность автоматического регулятора АР
(рис. 3.2) и регулируемого объекта РО — турбины генератора Т пред-
ставляет собой автоматическую систему регулирования частоты вра-
щения (АСРЧВ). Она функционирует как замкнутая главной жесткой
отрицательной обратной связью ГООС, реализуемой безынерционным
звеном (цепью) с коэффициентом передачи Кос = —1.
Автоматический регулятор АР в функциональной схеме АСРЧВ
представляется измерительной частью ИЧ, содержащей измерительный
79
Глава 3
орган частоты вращения ИОЧВ. Он, в свою очередь, состоит из эле-
мента сравнения непрерывного действия ЭСНД сигнала о частоте вра-
щения XCjJ, формируемого ее измерительным преобразователем ИПЧВ,
и сигнала Л'сшу о ее предписанном (установленном) задающим элемен-
том ЗЭЧВ значении wnp и усилителя-сумматора УСС сигналов
местной отрицательной обратной связи Хос и оз АРМ. Исполнитель-
ная часть Ис. Ч состоит из усилителя-преобразователя УП и исполни-
тельного элемента (механизма) ИМ. При этом в составе РО выделяется
элемент, воспринимающий регулирующее воздействие Хр регулятора
на турбину, обычно называемый регулировочным РЭ, — направляю-
щий аппарат гидротурбины или регулирующие клапаны паровой тур-
бины.
Алгоритм автоматического регулирования реализуется синтезом
структурной схемы АСРЧВ, состоящей из типовых звеньев, различаю-
щихся по их передаточным функциям, двумя способами: параллельным
и последовательным их соединением в цепи прямой связи (см. рис. 3.4);
охватом последовательно соединенных звеньев функциональной, т.е. со-
держащей одно из типовых структурных звеньев, местной отрицатель-
ной обратной связью (см. рис. 3.5).
При первом способе алгоритм регулирования и способ воздействия
на регулировочный элемент турбины зависят от динамических свойств
исполнительного элемента регулятора. Применяются исполнительные
механизмы двух типов:
• с гидравлическим (масляным) усилителем, или с гидравлическим
двигателем;
• с электрическим двигателем и механическим редуктором.
Автоматический регулятор с гидравлическим исполнительным меха-
низмом воздействует на регулировочный элемент турбины непрерывно,
что и свойственно автоматическим управляющим устройствам с непре-
рывной характеристикой (рис. 3.3,а).
Особенность электродвигательного исполнительного механизма —
постоянная скорость его движения, обусловливает возможность прак-
тической реализации алгоритмов автоматического регулирования толь-
ко при дискретном (импульсном) воздействии на электродвигатель —
его включении и отключении [4]. Такое воздействие достигается про-
стейшим аналого-дискретным преобразованием сигнала измерительной
80
Автоматическое регулирование частоты вращения ГГ и ТГ
Д®(
ДСП с= ДСП нч
дсов
(а)
(б)
Рис. 3.3. Характеристики усилителей-преобразователей:
а — непрерывная; б — релейная
части — релейным усилителем-преобразователем УП (см. рис. 3.2) ре-
гулятора двухстороннего действия. Автоматический регулятор имеет
релейную характеристику (рис. 3.3,6) и обычно называется релейно-
импульсным или позиционным [6]. Он характеризуется зоной нечувстви-
тельности, т.е. не реагирует на отклонения частоты вращения Ашнч,
определяемой частотой срабатывания | ± шс | релейного элемента.
Исполнительный элемент оказывает влияние на алгоритм автомати-
ческого регулирования:
• при гидравлическом усилителе, замещаемом апериодическим
структурным звеном с передаточной функцией Н(р) » 1/(рТа + 1),
реализуем любой из названных алгоритмов непрерывного регули-
рования;
• при гидравлическом двигателе, движение которого описывается
передаточной функцией интегрирующего звена Н(р) ~ 1/рТи> ре-
гулирование ограничивается только ПИ или ПИД алгоритмами не-
прерывного регулирования.
81
Глава 3
Указанными (ПИ и ПИД) алгоритмами ограничивается и функцио-
нирование автоматических регуляторов дискретного действия (позици-
онных) с электродвигательным исполнительным механизмом. Устойчи-
вое функционирование позиционного регулятора возможно только при
динамических свойствах релейного усилителя-преобразователя, харак-
терных для типового интегрирующего структурного звена [6].
Достаточное для практики приближение к передаточной функ-
ции интегрирующего звена достигается охватом релейного усилителя-
преобразователя функциональной отрицательной обратной связью, реа-
лизуемой апериодическим звеном [6].
Сигнал отрицательной обратной связи в виде экспоненциально нара-
стающего напряжения Uo с после срабатывания УП и пуска электродви-
гателя возвращает его и отключает электродвигатель гораздо раньше
момента снижения напряжения на выходе УСС (см. рис. 3.2) до напря-
жения возврата UB AwB (см. рис. 3.3,6) релейного элемента. За счет
экспоненциально убывающего напряжения Uo с после возврата релейного
элемента он снова срабатывает. Таким образом, непрерывное дискрет-
ное воздействие релейного элемента на электродвигатель превращается
во времяимпульсное. Причем относительная длительность включенно-
го состояния электродвигателя с каждым срабатыванием релейного эле-
мента уменьшается. Периодически включаемый на все меньшее время
электродвигатель постепенно подводит регулировочный элемент турби-
ны к новому установившемуся состоянию, соответствующему практи-
ческому (в пределах AwH4) исчезновению Aw.
Таким образом, благодаря указанной обратной связи, не допускается
неизбежно возникшее бы перерегулирование и, как результат, автоколе-
бательное, т.е. неустойчивое, состояние АСРЧВ.
На рис. 3.4,a-в приведены структурные схемы, реализующие фор-
мируемые по первому способу алгоритмы автоматического регулирова-
ния И-, ПИ-, ПИД-регуляторов соответственно. Передаточные функции
АСРЧВ в разомкнутом состоянии определяются перемножением переда-
точных функций последовательно и сложением параллельно соединен-
ных структурных звеньев, включая и турбину с передаточной функ-
цией Ят(р). При замещении для простоты относительно малоинерци-
онного измерительного преобразователя частоты ИПЧВ (см. рис. 3.2)
и элемента сравнения ЭСНД безынерционными звеньями с единичным
коэффициентом передачи А'э.с — 1, гидравлического усилителя УП —
82
Рис. 3-4- Структурные схемы АСРЧВ с И- (а), ПИ- (б) и ПИД- (в)
регуляторами, синтезируемыми звеньями в цепи прямой связи
апериодическим с постоянной времени Ту, а исполнительного механиз-
ма — интегрирующим звеном с постоянной времени, равной постоянной
времени дифференциаторов Там = Тл передаточные функции АСРЧВ в
разомкнутом состоянии записываются как пропорциональные:
~ = ’ (3-2)
рТу + 1 р7им рТам(рТу + 1)
83
Глава 3
= [РТ, + 1 + рТ.„(рТ, +1)]Лт(р); (3'3)
Япид(?) ~ d + PT. + P^^^JAp) =
= Ьри + рТ^рТХ +1)+ ^+т]",(р| • (3'4)
Однако оказывается, что при интегрирующем исполнительном ме-
ханизме АРЧВ с рассмотренной структурной схемой астатического 11-
регулятора неработоспособна. Как указывалось, в процессе пуска и при
холостом ходе гидро- или турбоагрегата динамические свойства турби-
ны, как и исполнительного элемента регулятора, описываются переда-
точной функцией интегрирующего звена. Поэтому структурная схема
АСРЧВ получается с двумя последовательно соединенными интегриру-
ющими звеньями, что означает структурную ее неустойчивость [1].
Теоретически такая АСРЧВ в замкнутом состоянии находится на
грани устойчивости, поскольку характеристическое уравнение — ра-
венство нулю знаменателя передаточной функции замкнутой АСРЧВ —
имеет мнимые корни. Практически это означает, что она возбуждает-
ся — переходит в автоколебательное, т.е. неустойчивое состояние при
любом сколь угодно малом воздействии (возмущении).
Автоматические системы с ПИ-регуляторами и ПИД-регуляторами
реализуемы. Однако алгоритм автоматического регулирования частоты
вращения турбин с интегрирующими механизмами, воздействующими
на их регулировочные элементы, формируется исключительно по вто-
рому способу, т.е. охватом функциональной обратной связью исполни-
тельного и других последовательно с ним соединенных элементов АРЧВ.
При этом динамические свойства исполнительного элемента не влияют
на алгоритм автоматического регулирования: второй способ формирова-
ния алгоритма и синтеза структурной схемы АСРЧВ универсален. Если
функциональная отрицательная обратная связь охватывает практически
весь регулятор (рис. 3.5,а), то алгоритм автоматического регулирова-
ния при обычно достаточно высоком коэффициенте усиления сигналов
регулятором определяется передаточной функцией Но с(р) структурного
звена, реализующего обратную связь.
84
Автоматическое регулирование частоты вращения ГГ и ТГ
Как известно [1], передаточная функция Н3(р) замкнутого элемента
или совокупности последовательно соединенных элементов, замкнутых
отрицательной обратной связью, определяется по передаточным функ-
циям разомкнутой их совокупности, в данном случае регулятора, Нр(р),
и обратной связи Но с(р) как
я-® = ЧадВйй' (3'5)
Комплексный коэффициент передачи (при р = ju>)
(3'6)
Если при любом значении р, т.е. при любой частоте воздействия на
АСЧВ, абсолютные значения
Нр(р)Но с(р) > 1; /<р(щ)Л'о с(о>) > 1, (3.7)
то передаточная функция и комплексный коэффициент передачи
= КМ=к^)- (3-8)
Соотношения (3.7) практически, а для так называемых предельных
АСР и теоретически [4, 6], всегда выполняются.
Если функциональная обратная связь жесткая (см. рис. 3.5,а)
Яо.с(р) = А'о.с , (3-9)
то получается алгоритм пропорционального регулирования, а регуля-
тор — статический пропорционального действия (П-регулятор). При
апериодическом звене с постоянной времени Тап, представляющем изме-
рительный преобразователь частоты ИПЧВ с коэффициентом преобра-
зования кич, передаточная функция П-регулятора согласно (3.8) и с уче-
том (3.9)
Нп(р) ~ '"''И "И’ 1'-1 ~ —Z7 (3.10)
рТи п + 1 л о.с рТи п + 1
При гибкой функциональной обратной связи, реализуемой реальным
дифференцирующим звеном (см. рис. 3.5,а)
Я“® = ^Т' (ЗЛ1)
85
Глава 3
Рис. 3.5. Структурные схемы П- или ПИ- (а,б), ПИ- (б,в) и ПИД- (г)
регуляторов, синтезируемые функциональной обратной связью
86
Автоматическое регулирование частоты вращения ГГ и ТГ
получается согласно (3.5) и (3.11) и с учетом (3.10) астатический (мни-
мостатический) ПИ-регулятор с такой же передаточной функцией, как
и (3.3):
При переходном процессе регулятор функционирует аналогично ста-
тическому, но установившийся режим наступает после полного восста-
новления частоты вращения.
Здесь стоит отметить, что местная гибкая отрицательная обратная
связь, выполняемая идеальным дифференциатором
Ягос(р) = рТос, (3.13)
не является функциональной. Она используется лишь для изменения
постоянных времени апериодических звеньев [1].
Второй вариант формирования алгоритма автоматического регули-
рования по рассматриваемому способу предполагает отдельное преобра-
зование интегрирующего Н(р) = ки.м/рТим исполнительного механизма
в инерционный усилитель, замещаемый апериодическим структурным
звеном, охватом его местной жесткой отрицательной обратной связью
(рис. 3.5,6 и в). В соответствии с (3.5) и (3.9)
1 1
= = (3.14)
1+4?^ 4^+1 р,и+
рТи.м А о с
Автоматический регулятор — статический с П-алгоритмом и пере-
даточной функцией, определяемой произведением передаточных функ-
ций звеньев, замещающих измерительную часть, — относительно ма-
лоинерционный (с постоянной времени Тип) ИПЧВ и обычно безынер-
ционные элемент сравнения и усилитель-сумматор с общим коэффици-
ентом преобразования ка ч, и исполнительную часть — апериодический
усилитель с постоянной времени Ту и и коэффициентом усиления &уи.
С учетом (3.14) передаточная функция П-регулятора
Яп(Й = ^.к(рГи11+ 1)1(рТуи+ 1( (3'15’
87
Глава 3
Астатический ПИ-регулятор получается охватом рассмотренной
функциональной обратной связью в виде реального дифференциатора с
передаточной функцией (3.11) только элементов измерительного органа
частоты ИОЧВ (кроме ИПЧВ) и усилителя-преобразователя регулятора
(рис. 3.5,6")
Пци(р) = кичку и f 1 + 7Т7Г-г~т । 1 ’ (3.16)
\ Р2и/ (рТи,п+1)(рГу.и+1)
Тот же результат достигается и без функциональной обратной связи
вводом в измерительную часть П-регулятора (параллельным подключе-
нием) интегратора с постоянной времени Та (рис. 3.5,в).
Пропорционально-интегрально-дифференциальный алгоритм фор-
мируется вводом в измерительную часть ПИ-регулятора (параллельным
подключением) идеального дифференциатора с постоянной времени Тд
(рис. 3.5,г). С учетом (3.12) передаточная функция ПИД-регулятора
Япид(Р) = &ич (1 + рТа + 7 • (ЗЛ7)
\ PJo.c/ р2ип+ 1
Учитывая, что постоянные времени исполнительного механизма и
турбины на порядок превышают постоянные времени элементов регу-
лятора, для выяснения устойчивости функционирования АСРЧВ в за-
мкнутом состоянии допустимо принять передаточные функции АСРЧВ
в разомкнутом состоянии в виде произведений коэффициента передачи
ИЧ и УП (см. рис. 3.2) регулятора Кр = 1 и передаточных функций
звеньев, замещающих исполнительный механизм Яи.м(р) или Яиу(р) и
турбину Ят(р) = 1!рТт.
Для замкнутой АСРЧВ согласно (3.5) при Ко.с = 1 (главная обратная
связь) и, например (3.2) при Ту = 0, при первом способе формирования
алгоритма регулирования
1 1
Яи(р) ~ рТц м рТт _ ____________1____ (3 18)
1 + Яи(р)Аос ~ 1 1 ” Р2ТимТт + 1 ’ k ’
рТи.м РТт
а при втором способе формирования, например согласно (3.15) при
Та п ~ О
Яз2(р) ~ рТт(рТуи+1)+1 = р2ТуиТт + рТт + 1 (3'19)
88
Автоматическое регулирование частоты вращения ГГ и ТГ
Как указывалось, корни характеристического уравнения в первом
случае [см. (3.18)]
р2ТимТт + 1 = 0, (3.20)
мнимые
Р1.2 = +3
(3-21)
т.е. АСРЧВ в замкнутом состоянии неустойчива.
При формировании алгоритма автоматического регулирования по
второму способу в соответствии, например, с (3.19):
р2Ту.иТт + рТт + 1 = 0 , (3.22)
и корни уравнения (3.22)
Т, у/т!>-4Ту.„Тт
Р1'г 2Гу.иТт
(3.23)
содержат отрицательную вещественную составляющую, обеспечива-
ющую затухание колебательного переходного процесса в замкнутой
АСРЧВ.
Применяемые на практике АРЧВ турбин функционируют по алго-
ритмам автоматического регулирования, формируемым способом охвата
их элементов функциональными отрицательными обратными связями.
Автоматические регуляторы частоты вращения паровых турбин
являются статическими П-регуляторами, а гидравлических турбин —
астатическими ПИ- или ПИД-регуляторами. Различие обусловливает-
ся несоизмеримостью постоянных времени инерции турбин. Необходи-
мый для апериодичности [условие Т? > 4Тул1Тт — см. (3.23)] изменения
частоты вращения при пусках турбин и подготовке генераторов к син-
хронизации статизм характеристик регулирования частоты вращения
паровых турбин укладывается в допустимые пределы А'стп ~ 0,05, а
гидравлических достигает А'СтГ > (0,15-0,2), что недопустимо [1].
3.3. Гидродинамические регуляторы частоты вращения
турбогенераторов
Регуляторы тепловых электростанций. Типовой гидродинами-
ческий АРЧВ паровых турбин ТЭС выпускается АО ЛЭМЗ для тур-
89
Глава 3
богенераторов мощностью от 200 до 1200 МВт [11]. Он выполнен из
унифицированных гидродинамических функциональных элементов: цен-
тробежного измерительного преобразователя частоты вращения (ИПЧВ
см. рис. 3.2) в давление масла, гидромеханического элемента сравнения
давлений, усилителя в виде гидравлического двигателя двухстороннего
действия, охваченного местной жесткой отрицательной обратной связью
[Яос(р) = А'о.с — см. рис. 3.5] и наименее инерционного исполнитель-
ного механизма в виде гидравлического усилителя одностороннего дей-
ствия, т.е. с поступлением масла в цилиндр с одной стороны поршня,
удерживаемого противодействующей пружиной (рис. 3.6).
Динамические свойства таких элементов описываются передаточны-
ми функциями апериодических звеньев, различающихся только посто-
янными времени, поэтому автоматический регулятор является статиче-
ским пропорционального действия (П-регулятор).
Упрощенная гидрокинематическая схема автоматической системы
регулирования частоты вращения конденсационной паровой турбины с
указанным гидродинамическим регулятором приведена на рис. 3.6.
Показан исполнительный механизм ИМ только одного из регулирую-
щих клапанов РК турбины. Центробежный измерительный преобразо-
ватель ИПЧВ имеет облегченную ленточную конструкцию и расположен
непосредственно на валу турбины. Он состоит из ленточной пружины
с грузами G, удерживаемыми радиальными пружинами Fp. С из-
менением частоты вращения турбины под воздействием центробежной
силы, развиваемой грузами, ленточная пружина деформируется, сокра-
щаясь и удлиняясь по горизонтальной оси и изменяя просвет 6 между
отбойным кольцом К и выходным концом (соплом) трубки А, через ко-
торый вытекает масло из камеры 0 (отверстие а) цилиндра струйного
следящего золотника СЗ. Таким образом, частота вращения преобразу-
ется в давление масла (сигнал Хсш — см. рис. 3.2).
Следящий золотник выполняет функцию элемента сравнения давле-
ния масла ЭСНД, пропорционального частоте вращения (в камере 0) с
давлением, установленным дросселирующими шайбами ДШ напорной
масляной линии Н1 в камере 1 золотника и моделирующим установлен-
ную, в частности, номинальную частоту вращения а?ном = тг • Ю2 рад/с.
При указанных изменениях просвета 6 давление в камере 0 увеличива-
ется (при снижении частоты вращения) или уменьшается (при ее возра-
стании). В результате букса Бсз золотника перемещается по горизон-
90
Ру от ЭГП
Рис. 3.6. Схема гидродинамического регулятора частоты вращения турбогенератора
Автоматическое регулирование частоты вращения ГГ и ТГ
Глава 3
тальной оси в том же направлении, что и кольцо К ленточной пружины
ИПЧВ [11]. Следящий золотник производит и значительное усиление
слабого сигнала Хсш за счет сильно различающихся площадей поверх-
ностей буксы, подвергающихся давлению в камерах 0 и 1.
Перемещаясь, букса Бс 3 изменяет открытие окон 2 и 4, через кото-
рые масло под давлением ру уходит к промежуточному золотнику ПЗ по
линии управления УПЗ и на слив С1. Управляющее давление ру опре-
деляется разностью давлений в камерах 0 и 1 следящего золотника, т.е.
моделирует сигнал Х&ш (см. рис. 3.2) об отклонении частоты вращения.
Например, при повышении частоты вращения и увеличении просве-
та 6 букса Бс з под воздействием уменьшающегося давления в камере О
перемещается влево (по расположению на схеме) и приоткрывает окно 4
на слив масла С1. Поэтому давление ру в линии УПЗ и в камере 7
промежуточного золотника ПЗ гидравлического усилителя ГУ снижа-
ется. Его букса 5ПЗ смещается вверх. При этом отсечным поршнем 1П
золотника приоткрываются окна 8, соединяющие через просвет /31 ок-
но 9 с линией слива С2. В результате давление масла в камере 12
цилиндра отрицательной обратной связи ЦОС и в камере 15 золотника
исполнительного механизма ИМ падает. Под воздействием избыточно-
го давления пружины 16 букса золотника 53,и.м перемещается вверх и,
приоткрывая отсечным поршнем 5П окно и его просвет 17, соединяет
через окно 19 и масляную линию камеру 18 цилиндра гидравлическо-
го двигателя ИМ одностороннего действия с линией слива масла СЗ.
Давление в камере 18 падает, и под воздействием избыточного усилия
пружины 20 поршень 7П и сочлененный с ним через раму 21 регулиру-
ющий клапан турбины РК перемещаются вниз, уменьшая впуск пара в
турбину. Частота ее вращения уменьшается.
Прикрывание регулирующего клапана происходит за счет усилия
пружины исполнительного механизма, что обеспечивает надежность и
быстроту действия регулятора при опасных для турбины разгонах и эф-
фективность противоаварийной импульсной ее разгрузки. Этим и обу-
словливается, как указывалось, применение исполнительного механизма
в виде гидравлического усилителя одностороннего действия.
Новое состояние вращения турбины наступает благодаря действию
местной жесткой отрицательной гидромеханической обратной связи —
рычаг ОБВ с поршнем ЦОС, охватывающей гидравлический двигатель
двухстороннего действия ГД (промежуточный золотник ПЗ). В связи
92
Автоматическое регулирование частоты вращения ГГ и ТГ
с уменьшением давления в камере 12 ЦОС, под воздействием пружи-
ны поршень 4П перемещается вверх и через рычаг ОБВ приподнимает
поршни 1П-ЗП, закрывая поршнем 1П окно 8 в цилиндре ПЗ и, тем
самым, останавливая дальнейшее снижение давления масла ру в линии,
подводящей его к исполнительным механизмам ИМ. Указанная обратная
связь является функциональной, определяющей согласно формуле (3.10)
при Яос(Р) = Ко.с и структурной схеме на рис. 3.5,а пропорциональ-
ный алгоритм автоматического регулирования. Коэффициент обратной
связи К0.с, определяемый соотношением плеч АБ и АВ рычага, может
дискретно изменяться перестановкой положений А', А" его опоры. Соот-
ветственно изменяется и статизм [см. (3.1)] характеристики регулиро-
вания. Перестановка производится в процессе пуска для устойчивости
АСРЧВ: при малых оборотах требуется большой статизм. Поэтому ха-
рактеристика регулирования частоты вращения 4 (см. рис. 3.1) имеет
излом.
Механическая жесткая отрицательная обратная связь в виде рыча-
га ГДЕ, охватывающая гидравлический двигатель одностороннего дей-
ствия ИМ (см. рис. 3.5,6), способствует его действию как апериодиче-
ского усилителя.
Механизм управления турбиной МУТ служит задающим элементом
установки предписанной частоты вращения щпр (уставки АСРЧВ). Она
изменяется смещением поршня следящего золотника СЗ рычагом, пово-
рачиваемым червячным редуктором электродвигателя М или вручную.
При смещении поршня, например влево (по чертежу), окно 4 буксы Бсз
на слив С1 масла прикрывается, частота вращения о>пр увеличивается
Ув, поскольку давление в камере 1 возрастает и для его восстановления
требуется большее перемещение влево буксы, т.е. смещение влево коль-
ца К ленточного центробежного маятника ИПЧВ, что происходит при
большей частоте вращения турбины.
Электродвигатель служит исполнительным элементом автоматиче-
ской системы регулирования частоты и мощности электростанции и
является исполнительным механизмом с постоянной скоростью движе-
ния, который замещается интегрирующим звеном при дискретном воз-
действии от позиционного регулятора.
На рис. 3.6 показана также масляная линия пропорционального воз-
действия на гидравлический усилитель ГУ от электрогидравлического
преобразователя ЭГП электрического регулятора мощности синхронно-
93
Глава 3
го генератора. Показан и механический ограничитель мощности тур-
бины ОМ в виде перемещаемого ручным или электрическим приводом
упора У, препятствующего дальнейшему перемещению вниз буксы Бпз.
Особенности регуляторов атомных электростанций. Выра-
ботка ядерными реакторами насыщенного (влажного) пара обусловли-
вает как указанные особенности конструкции паровых турбин [5] и их
разворота в процессе пуска, так и соответствующие особенности авто-
матических регуляторов частоты вращения турбин [12]. Прежде все-
го потребовался более динамичный измерительный преобразователь ча-
стоты вращения, в частности лучше приспособленный к изменяющейся
по временной программе частоте вращения при пуске турбогенерато-
ра. Во-вторых, пришлось повысить быстродействие гидродинамических
элементов АРЧВ, из-за значительной инерционности турбины, обусло-
вленной аккумулируемой влажным паром тепловой энергией, способной
быстро разгонять турбину при скачкообразных уменьшениях (сбросах)
ее мощности.
На рис. 3.7 [12] приведена упрощенная схема гидродинамического
АРЧВ турбогенератора мощностью 500 МВт атомной электростанции.
В качестве измерительного преобразователя частоты вращения ИПЧВ
применяется центробежный масляный насос 1, расположенный на валу
турбины. Развиваемое им давление масла определяется частотой вра-
щения.
Элементом сравнения непрерывного действия служит гидродинами-
ческое поршневое устройство одностороннего действия с пружиной с из-
меняемой затяжкой 2. Снижение инерционности гидравлического уси-
лителя достигнуто применением дроссельных золотников 3. Отсеч-
ный золотник 6 как абсолютно необходимый для функционирования
гидравлического двигателя 7 двухстороннего действия оставлен толь-
ко в исполнительном механизме, а охватывающая его жесткая отрица-
тельная обратная связь — гидродинамическая с двумя дросселями мас-
ла 8 и 9.
При отклонениях частоты вращения от предписанной изменяется да-
вление масла, развиваемое насосом 1, под поршнем 2, и он перемещается
вверх или вниз (по чертежу) соответственно, изменяя открытие масля-
ного дросселя 3 и давление масла в линии Сив камере а под порш-
нем 5 гидравлического усилителя. Вследствие перемещения поршня 5
изменяется открытие дросселя 8 на слив масла из камеры b над порш-
94
Автоматическое регулирование частоты вращения ГГ и ТГ
Рис. 3.7. Гидравлическая часть системы регулирования турбин ХТЗ
нем золотника 6. При этом, вследствие перемещения поршней отсечного
золотника 6, сочлененного с поршнем 5, соответственно изменяются от-
крытия окон его цилиндра, через которые поступает масло из линии А
под давлением, развиваемым рабочим масляным насосом 4, в верхнюю
или нижнюю камеры цилиндра гидравлического двигателя 7, или сли-
вается соответственно из нижней или верхней камер.
Перемещение поршня двигателя 7 изменяет открытие дросселя 9 ма-
сляной линии В отрицательной обратной связи гидравлического двига-
теля на слив масла, противодействующее изменению давления в каме-
ре Ь, вызванному изменением открытия дросселя 8. Поршни отсечного
золотника возвращаются в исходное состояние. Наступает установив-
шийся режим вращения с частотой в соответствии со статической ха-
рактеристикой ее регулирования.
На рис. 3.7 показаны два гидравлических усилителя и исполнитель-
ных механизма соответственно двух регулировочных клапанов турбины.
95
Глава 3
Автоматический регулятор — статический пропорционального дей-
ствия, поскольку содержит только элементы, замещаемые апериоди-
ческими структурными звеньями, в том числе и исполнительный ме-
ханизм, функционирующий как гидравлический усилитель благодаря
жесткой отрицательной обратной связи, охватывающей гидравлический
двигатель. Структурная схема регулятора получается из приведенной
на рис. 3.5,6 при отсутствии функциональной обратной связи, охваты-
вающей усилитель.
Разработан и совершенствуется электрогидравлический АРЧВ. Тех-
ническая целесообразность применения электрической части регулято-
ра [12] обусловливается не только прогрессом интегральной электрони-
ки, но и необходимостью программного непрерывного изменения пред-
писанной частоты вращения в процессе пуска турбины.
Электрогидравлический АРЧВ органически входит в состав АСУ
турбогенератором атомной электростанции, обеспечивающей программ-
ное изменение мощности турбины после синхронизации генератора и ав-
томатическое регулирование мощности турбогенератора.
3.4. Электрогидравлические регуляторы частоты
вращения гидрогенераторов
Электрогидравлические АРЧВ состоят из двух частей: электриче-
ского регулятора частоты и гидравлической исполнительной части, свя-
занной с регулятором электрогидравлическим преобразователем (ЭГП)
его выходного тока в механическое воздействие на гидротурбину.
По алгоритмам функционирования, способам его формирования и
техническому исполнению различаются два основных вида электроги-
дравлических регуляторов (ЭГР) частоты:
• с ПИ-алгоритмом (рис. 3.8), его формированием функциональ-
ной обратной связью, охватывающей последовательно соединенные
указанные две части ЭГР (см. рис. 3.5.а), и выполнением на тран-
зисторных (прежних выпусков на магнитных) усилителях (регуля-
торы типов ЭГР-1Т и ЭГР-М соответственно);
• ПИД-регулятор с формированием алгоритма электрической ча-
стью ЭГР, т.е. собственно электрическим регулятором, выпол-
няемый на интегральных микросхемах типа ЭГР-2И.
96
Автоматическое регулирование частоты вращения ГГ и ТГ
97
Глава 3
Структурная схема АСРЧВ (рис. 3.9) с ЭГР-2И содержит схему соб-
ственно регулятора АР и схему электрогидравлической исполнительной
части ГИУ, представляющей собой, благодаря главной (для нее) жесткой
отрицательной обратной связи ГООСгиу, замкнутое автоматическое
следящее [за выходным током /Р(р) регулятора на входе ЭГП] устрой-
ство (следящий регулятор): ток 1р(р) является задающим предписанное
для следящего регулятора значение регулирующего воздействия. Его
функционирование аналогично действию следящего золотника СЗ (см.
рис. 3.6) гидродинамического АРЧВ турбогенератора. В связи с от-
носительно малой постоянной времени эквивалентного апериодического
звена, замещающего исполнительную часть, она практически не влияет
на переходные процессы в замкнутой АСРЧВ.
Пропорционально-интегральная составляющая алгоритма регули-
рования формируется функциональной отрицательной обратной свя-
зью, охватывающей только электронный интегрирующий усилитель
ЭИУ. Переключаемая обратная связь (контакты Al, К2) обеспечива-
ет: гибкая, реализуемая реальным дифференцирующим звеном (см.
рис. 3.5,б,г), действие регулятора как астатического; жесткая, реали-
зуемая безынерционным звеном (Л'0.с), — как статического, а комбини-
рованная обратная связь — функционирование регулятора как статиче-
ского с интенсивным затуханием переходного процесса.
Пропорционально-интегрально-дифференциальный алгоритм авто-
матического регулирования в целом обеспечивается параллельным под-
ключением электронного дифференциатора ЭД (на рис. 3.9) на входе
электрического регулятора (см. рис. 3.5,г).
Еще одна особенность структурной схемы регулятора ЭГР-2И
(рис. 3.9) — ввод воздействия ДР(р) от автоматического регулятора
мощности (АРМ) непосредственно в ЭГП, обеспечивает быстродействие
его реализации: в прежних ЭГР воздействие от АРМ вводилось на вхо-
де регулятора и его исполнение зависело от инерционности регулятора
в целом. Одновременный ввод воздействия от АРМ в цепь гибкой от-
рицательной обратной связи (см. рис. 3.8) снижал указанную инерцион-
ность.
Поэтому ЭГР имеют (рис. 3.10 и 3.11) независимые устройства из-
менения предписанных частоты и мощности — механизмы изменения
частоты МИЧ и мощности МИМ вместо одного механизма управления
турбиной МУТ гидродинамических регуляторов (см. рис. 3.6).
98
Автоматическое регулирование частоты вращения ГГ и ТГ
Рис. 3.9. Структурная схема АСРЧВ с ПИД-регулятором ЭГР-2И
99
100
Рис. 3.10. Функциональная схема ПИ-регуляторов типа ЭГР-М (а), амплитудно-частотная и фазоча-
стотная характеристики ИПЧ (6) и характеристика ИОЧ (в)
Глава 3
Автоматическое регулирование частоты вращения ГГ и ТГ
Указанные два вида автоматических регуляторов различаются элек-
трическими измерительными преобразователями частоты напряжения
гидрогенератора и по схеме их подключения. В ПИ-регуляторах
применяются пассивные ИПЧ в виде параллельного ПС-контура (см.
рис. 3.10) или двойного Т-образного ЙС-моста, представляющие собой
узкополосные заграждающие частотные фильтры с нулевой настрой-
кой при номинальной промышленной частоте, имеющие одинаковые
амплитудно-частотные (АЧХ) и фазочастотные (ФЧХ) характеристи-
ки [8]. Они подключаются к напряжению измерительного синхронного
мини-генератора ИГ с возбуждением постоянным магнитом, располо-
женного на валу турбины.
В ПИД-регуляторе используется активный интегрирующий ИПЧ на
управляемых электронных интеграторах, подключаемый к измеритель-
ному трансформатору напряжения гидрогенератора TV (рис. 3.11).
Реальный резонансный ИО Ч выполняется как компенсированный по
активному току параллельный ПС-контур (см. рис. 3.10,а). Компенса-
ция обеспечивается включением двух первичных обмоток трансреакто-
ра TAV в цепь контура и в цепь компенсации с резистором R, сопроти-
вление которого равно эквивалентному сопротивлению контура R3K при
резонансной частоте, равной номинальной промышленной /ном: одина-
ковые токи 1а и Пд создают в обмотках МДС разных знаков, поэтому
ЭДС трансформатора Етр = 0. При снижении или повышении часто-
ты ЭДС определяется только реактивной — соответственно индуктив-
ной IL или емкостной 1С составляющей тока Пр резонансного конту-
ра, находящимися в противофазе (рис. 3.10,б'). Совместно с элементом
сравнения фаз непрерывного действия ЭСФНД [8] ЭДС трансреакто-
ра Е_тр и напряжения синхронного генератора U j ПС-контур образует
измерительный орган частоты (ИОЧ) с непрерывной характеристикой
(рис. 3.10,в). Такие же характеристики имеет, как указывалось, и из-
мерительный орган с ИПЧ в виде двойного Т-образного ЙС-моста с ну-
левой настройкой.
Особенностью измерительной части ЭГР первого из указанных двух
видов является суммирование сигналов от ИПЧ, цепи жесткой обратной
связи, установочных сигналов по частоте и мощности на переменном
токе в пассивном сумматоре сигналов ПСС перед элементом сравнения
фаз. При этом ЭДС трансреактора Дтр, напряжение жесткой обрат-
ной связи Пос и ЭДС от МИЧ и МИМ всегда синфазны (совпадают
101
Глава 3
Рис. 3.11. Функциональная схема регулятора ЭГР-2И
102
Автоматическое регулирование частоты вращения ГГ и ТГ
103
Глава 3
по фазе или находятся в противофазе). Их источниками служат элек-
тромеханические измерительные преобразователи углов поворота валов
направляющего аппарата турбины и редуктора электродвигателей Ml,
М‘2 в ЭДС в виде заторможенных синхронных микромашин, возбужда-
емых напряжением синхронного генератора — сельсинов BG1-BG3 (на
рис. 3.10,а для примера обозначена ЭДС Дос) [8].
Поэтому постоянная составляющая Дои напряжения на выходе
ЭСФНД определяется абсолютным значением суммы указанных ЭДС,
которые смещают характеристику ИОЧ по оси частоты f (показано на
рис. 3.10,в штрихпунктирными линиями).
Реальный пассивный ЙС-дифференциатор (с переключаемыми по-
стоянными времени) гибкой обратной связи (электрического изодрома),
формирующий сигнал по производной действующего значения ЭДС Ео с,
естественно функционирует на постоянном токе: дифференцирует выде-
ленную частотным фильтром ZF нижних частот постоянную составля-
ющую Д0о с напряжения на выходе выпрямителя VS. Поэтому в функци-
ональной схеме (см. рис. 3.10,а) предусмотрен суммирующий усилитель
СУ сигналов постоянного тока от измерительной части Дои и гибкой
обратной связи ио с.
Электрогидравлический преобразователь ЭГП представляет собой
магнитоэлектрическое устройство преобразования значения и знака то-
ка регулятора 1р в поступательное перемещение штока золотника ги-
дравлического двигателя направляющего аппарата турбины. Он состо-
ит из собственно электромеханического преобразователя тока в переме-
щение якоря электромагнита и гидравлического усилителя в виде сле-
дящего золотника, аналогичного СЗ измерительного преобразователя
частоты вращения гидродинамического АРЧВ тепловой турбины (см.
рис. 3.6) [8, 13].
Функциональная схема современного ПИД-электрогидравлического
регулятора частоты вращения гидрогенераторов на интегральных ми-
кросхемах типа ЭГР-2И (рис. 3.11) содержит интегрирующий измери-
тельный преобразователь частоты ИПЧ напряжения генератора Дг = Uj
в электрический сигнал в виде изменяющегося напряжения постоянного
тока ДОи/.
Он выполнен на двух управляемых интеграторах АЛ, AJ2 [8].
Управление производится парафазными напряжениями Ду1, Ду2 с пря-
моугольной формой кривой на выходах аналого-дискретного АДП пре-
104
Автоматическое регулирование частоты вращения ГГ и ТГ
образователя синусоидального напряжения синхронного генератора. Ин-
тегрируется постоянное напряжение Uq = const в течение каждого из по-
лупериодов напряжения U/. Например, в положительный полупериод,
в течение которого напряжение Uy\ положительно, a Гуг отрицатель-
но, работает интегратор АЛ: транзистор VT1 закрыт, a VT2 открыт,
а в отрицательный полупериод — интегратор AJ2. Напряжение иа/
на выходе ИПЧ линейно нарастает с нуля в каждый полупериод и его
постоянная составляющая Uoaf пропорциональна длительности периода
промышленной частоты, т.е. обратно пропорциональна частоте.
Элемент сравнения непрерывного действия ЭСНД,, выполняющий и
функцию ФНЧ, выделяющего указанную постоянную составляющую на-
пряжения uuj, сопоставляет ее с установленным напряжением Ujy, по-
ступающим от МИЧ и отображающим предписанную частоту регулято-
ра (его уставку по частоте). Выходное напряжение Дои измерительного
органа частоты ИОЧ изменяется по абсолютному значению и по знаку
в зависимости от снижения или повышения относительно предписанной
частоты напряжения синхронного генератора Uj, т.е. частоты вращения
гидрогенератора. Характеристика ИОЧ аналогична показанной харак-
теристике 1 на рис. 3.10,в.
Элемент задания уставки регулятора по частоте МИЧ выполнен в
виде специализированного элемента длительной аналоговой памяти, по-
казанного на рис. 3.11 условно в виде интегратора AJ3 управляющего
сигнала Дуч, запоминающего конденсатора С и повторителя напряже-
ния AU. Реально применяется типовой интегрирующий электродвига-
тельный с импульсным управлением задающий элемент, входящий в
состав агрегатированного комплекса электрических средств регулиро-
вания (АКЭСР-2) в микросхемном исполнении (см. рис. 4.1) [6].
В измерительную часть ЭГР-2И входит, как указывалось, активный
(близкий к идеальному) дифференциатор AD выходного напряжения
До и измерительного органа частоты, формирующий Д-составляющую
алгоритма автоматического регулирования. Его выходной сигнал, ото-
бражающий производную частоты, как и сигнал ИО Ч, поступает на сум-
мирующий интегрирующий усилитель СИУ AWJ. На другие его вхо-
ды приходят сигналы функциональной обратной связи: жесткой ЖОС
и гибкой ГОС, выполненной в виде реального дифференциатора ADR.
Функциональная ГОС, охватывающая указанный усилитель AWJ, опре-
деляет ПИ-составляющую алгоритма автоматического регулирования.
105
Глава 3
Взаимодействующие описанные функциональные элементы и образуют
электрический автоматический регулятор частоты АР.
Электрогидравлическое исполнительное устройство ГИУ состоит из
суммирующего усилителя регулирующего воздействия АР — тока Гр,
воздействий в виде токов Гм, Го.с от МИМ и от цепи главной (для ГИУ )
отрицательной обратной связи ГООСгиу, источником сигнала которой
служит поворотный трансформатор ПТ, установленный на выходе ги-
дравлического исполнительного механизма ИМ, а именно сочлененный
с валом направляющего аппарата турбины Т.
Переменное напряжение трансформатора, изменяющееся по абсолют-
ному значению в функции угла его поворота, выпрямителем VS преобра-
зуется в постоянное, возбуждающее ток 1О,С.
Электрогидравлический преобразователь ЭГП, как указывалось,
связывает электрическую и гидравлическую части ЭГР. Все электро-
гидравлические регуляторы снабжены вторым измерительным преобра-
зователем частоты ИПЧ (на схемах не показан) напряжения на шинах
электростанции, используемым при подготовке гидрогенератора к син-
хронизации [11]. Поэтому ЭГР выполняют функцию уравнителя ча-
стот ЭДС генератора и указанного напряжения. Они обеспечивают
автоматическое управление и установление необходимой для четкого
действия автоматического синхронизатора частоты скольжения генера-
тора [13].
Вопросы для самопроверки
1 В чем состоят особенности автоматического регулирования частоты вра-
щения турбин синхронных генераторов?
2 Какой автоматический регулятор (статический или астатический) удо-
влетворяет требованиям к автоматическому регулированию частоты вра-
щения синхронных генераторов?
3 Почему неосуществимо астатическое регулирование частоты вращения
турбин?
4 . Как выглядят и чем отличаются статическая и астатическая характери-
стики автоматического регулирования частоты вращения?
5 Что такое структурная неустойчивость автоматической системы регули-
рования частоты вращения? Как она устраняется?
106
Автоматическое регулирование частоты вращения ГГ и ТГ
6. Какие алгоритмы автоматического регулирования частоты вращения су-
ществуют и чем они различаются?
7. Какие известны способы формирования алгоритма автоматического ре-
гулирования?
8 Что представляет собой и как реализуется функциональная отрицатель-
ная обратная связь? Какие два основных ее вида применяются?
9. Какой местной отрицательной обратной связью (жесткой, гибкой с пе-
редаточной функцией идеального дифференцирующего звена или гибкой,
осуществляемой реальным дифференциатором) устраняется структурная
неустойчивость астатической АСРЧВ?
10. Каковы структурные схемы П-, ПИ- и ПИД-регуляторов частоты враще-
ния?
И. Каким способом формируется ПИ-составляющая алгоритма функциони-
рования ПИД-регулятора?
12. Как формируется Д-составляющая алгоритма действия АРЧВ7
13. Зачем в автоматическом регуляторе частоты вращения предусматрива-
ется задающий элемент активной мощности синхронного генератора?
14. Почему на паровых турбинах применяются гидродинамические, а на ги-
дротурбинах электрогидравлические АРЧВ7
15 Почему АРЧВ паровых турбин всегда статические?
16. Как выполняются гидродинамические измерительные преобразователи
частоты вращения АРЧВ турбогенераторов?
17. Какие известны электрические измерительные преобразователи частоты
ЭГР гидрогенераторов?
18. Как функционирует гидродинамический АРЧВ паровой турбины (см.
рис. 3.6)?
19. Почему в АРЧВ турбогенераторов применяются поршневые гидравли-
ческие элементы одностороннего действия? Какова роль механической
пружины такого устройства?
20. Почему при электродвигательном исполнительном механизме (с постоян-
ной скоростью действия) автоматический регулятор должен быть пози-
ционным? Каким способом достигается устойчивость функционирования
регулятора при указанном исполнительном механизме7
107
Глава 3
21. Как достигается измерительное преобразование параллельным резонанс-
ным ГС-контуром отклонений частоты в сигнал в виде напряжения по-
стоянного тока, изменяющегося по абсолютному значению и знаку (см.
рис 3.10)?
22. Как действует интегрирующий измерительный преобразователь частоты
ЭГР-2И (см. рис. 3.11)?
23 В чем состоит существенное различие структурных схем двух основных
видов электрогидравлических регуляторов частоты7
24 Как действует (см. функциональную схему на рис. 3 10) ПИ-регулятор
частоты7
25. В чем состоят особенности функциональной схемы ЭГР-2И? Как рабо-
тает АРЧВ (см. рис 3.11)?
108
Глава 4. Автоматическое управление
мощностью гидро- и турбогенераторов
4.1. Назначение и особенности
Основная задача автоматического управления активной мощностью
синхронных генераторов — обеспечить выработку и передачу электро-
энергии при наименьшем удельном расходе условного топлива. Она
решается оптимизацией режимов работы гидро- и турбогенераторов и
электрических станций в целом по активной мощности. Как извест-
но [1], оптимальность режима достигается при равенстве относитель-
ных приростов расхода условного топлива электростанциями с учетом
потерь электроэнергии на ее передачу и равенстве относительных при-
ростов расхода топлива энергоагрегатами электростанции. Однако су-
щественно различные технические возможности гидро- и турбогенера-
торов вынуждают по-разному подходить к их использованию при ав-
томатическом управлении активной мощностью. Как указывалось (см.
гл. 3), автоматическое управление мощностью органически связано с ав-
томатическим регулированием частоты вращения энергоагрегатов. При
этом одно из них оказывается главным, определяющим режим работы
синхронного генератора.
Крайне инерционные и малоподвижные громоздкие электроэнергети-
ческие блоки парогенератор-турбина-электрогенератор тепловых и осо-
бенно атомных электростанций практического участия в автоматиче-
ском регулировании частоты промышленного тока не принимают. Они
подвергаются автоматическому управлению исключительно по мощно-
сти и покрывают базовую прогнозируемую часть графика нагрузки
энергосистемы. Их режимы работы определяются автоматическими ре-
гуляторами активной мощности, воздействующими на автоматические
109
Глава 4
регуляторы частоты вращения. Поэтому на турбогенераторах приме-
няются статические АРЧВ со значительным статизмом, обусловливаю-
щим практическую независимость их мощности от частоты при обычно
малых ее отклонениях от номинальной.
Турбогенераторы разных лет выпусков и различной мощности имеют
существенно отличающиеся характеристики относительных приростов
расхода топлива. Автоматические регуляторы распределяют мощность
нагрузки электростанции между параллельно работающими турбогене-
раторами по указанному критерию оптимальности режимов работы по
активной мощности и поддерживают ее на заданном уровне.
Подвижные, легко переносящие любые изменения нагрузки, гидро-
генераторы покрывают случайно изменяющуюся часть графика нагруз-
ки под воздействием астатических ПИ-регуляторов частоты вращения.
Автоматическое регулирование частоты промышленного тока — глав-
ная задача автоматического управления мощностью гидрогенераторов.
Все гидроэлектростанции являются частоторегулирующими. Автома-
тическое управление мощностью практически сводится к уравниванию
активных мощностей, т.е. равномерному распределению нагрузки элек-
тростанции между однотипными гидрогенераторами.
В соответствии с указанными особенностями изменения мощности
турбо- и гидрогенераторов автоматические регуляторы мощности рабо-
тают в одном из двух указанных режимов: автоматическое регулиро-
вание мощности с дополнительным воздействием по частоте; автомати-
ческое регулирование частоты промышленного тока с дополнительным
воздействием по мощности. Первый режим характерен для турбогене-
раторов, а второй — для гидрогенераторов. Автоматические регулято-
ры мощности реализуют задаваемое общестанционной автоматической
системой управления частотой и мощностью (АСРЧМ) вторичное ре-
гулирование частоты промышленного тока: АРЧВ турбин выполняют
функцию первичных регуляторов частоты.
Турбогенераторы, как указывалось, практически не принимают уча-
стия в поддержании частоты в нормальных режимах работы при ее до-
пустимых отклонениях А/ = ±0,1 Гц. Однако при значительных сниже-
ниях частоты автоматические регуляторы мощности турбогенераторов
увеличивают их нагрузку по сигналу отклонения частоты.
Автоматические регуляторы мощности синхронных генераторов
являются электрическими следящими (за изменяющейся предписанной
110
Автоматическое управление мощностью ГГ и ТГ
общестанционной АСРЧМ мощностью) инерционными, функционирую-
щими по И-алгоритму, регуляторами, воздействующими на АРЧВ че-
рез задающие их элементы — МУТ или МИМ. Поскольку изменения их
состояний производятся электродвигателями — исполнительными меха-
низмами с постоянной скоростью движения, то АРМ выполняются как
позиционные (импульсные) регуляторы. Как указывалось (см. §3.2),
только при импульсном воздействии на электродвигатель и только при
охвате релейного усилителя регулятора функциональной обратной свя-
зью, реализуемой апериодическим элементом, обеспечивается формиро-
вание интегрального алгоритма регулирования. Автоматические регу-
ляторы мощности обеспечивают астатическое регулирование мощности
в первом из указанных режимов и астатическое регулирование частоты
во втором режиме.
Особенность управления мощностью турбогенераторов — ее кратко-
временное (импульсное) снижение в аварийных режимах в целях предот-
вращения нарушения динамической устойчивости параллельной рабо-
ты электростанции с электроэнергетической системой, обусловила обо-
рудование современных мощных турбогенераторов двумя АРМ: обыч-
но достаточно инерционным автоматическим регулятором их нагрузки
в нормальных режимах и быстродействующим регулятором активной
мощности (БАРМ) в аварийных режимах кратковременного действия.
Используются и возможности длительного, ограниченного технологиче-
скими особенностями тепловых энергоблоков, снижения вырабатывае-
мой ими электроэнергии для предотвращения нарушения статической
устойчивости в послеаварийных режимах.
4.2. Автоматические регуляторы мощности
турбогенераторов
Типовой АРМ турбогенераторов (рис. 4.1) содержит достаточно
сложную измерительную часть ИЧ, обеспечивающую необходимое его
функционирование не только в нормальных режимах, но и при пуске и
синхронизации генератора, а также взаимодействие с автоматическими
регуляторами парогенератора (АРПГ).
Выполнение основной задачи — оптимизации режимов работы тур-
богенераторов по активной мощности — достигается двумя главными
функциональными элементами измерительной части АРМ: интегриру-
111
Глава 4
ющим задающим элементом мощности ИЗЭМ, управляемым от АСРЧМ
электростанции и устанавливающим предписанную нагрузку синхрон-
ного генератора сигналом в виде тока 1рпр, и измерительным преобра-
зователем ИПМ истинной активной мощности генератора с выходным
током (сигналом) /рг. Сигналы сопоставляются активным микросхем-
ным элементом сравнения сигналов непрерывного действия ЭСНД пу-
тем вычитания токов на входах интегрального операционного усилителя
(ИОУ) А5.
На один из входов элемента сравнения ЭСНД поступает и сигнал
от измерительного органа частоты ИОЧ, особенностью которого
является нечувствительность к малым ее отклонениям. Измерительный
орган ИОЧ содержит измерительный, в частности интегрирующий (см.
рис. 3.11), преобразователь частоты ИПЧ и два интегрирующих задаю-
щих элемента частоты (на рис. 4.1 показан один ИЗЭЧ), аналогичных
ИЗЭМ, и активный элемент сравнения сигналов о предписанном и ис-
тинном значениях частоты (выполнен на ИОУ АЗ).
Один из них используется в пусковом режиме — управляется от ав-
томата пуска турбины АПТ. Второй — при подготовке генератора к син-
хронизации: на него воздействует устройство подгонки частоты сколь-
жения автоматического синхронизатора АС. Он же задает предписан-
ную частоту в нормальных режимах работы синхронного генератора.
В измерительную часть АРМ входит и измерительный орган давле-
ния свежего пара перед ЦВД турбины ИОДП, содержащий измеритель-
ный преобразователь ИПДП, задающий элемент ЭЗДП давления пара и
элемент сравнения их сигналов (выполнен на ИОУ А4). В зависимости
от режима работы турбины, он следит за постоянным или скользящим
давлением пара (воздействие от АРПГ). В частности, при его падении
АРМ снижает нагрузку синхронного генератора (сигнал 1др).
Выходной сигнал элемента сравнения ЭСНД измерительной части
АРМ после усилителя сигнала непрерывного действия УС (ИОУ Аб)
поступает на усилитель-преобразователь релейного действия УП, со-
стоящий из двух бесконтактных реле, выполненных на ИОУ А7 и А8,
охваченных положительными обратными связями [8]. Они формируют
положительные (прибавить мощность) и отрицательные (убавить мощ-
ность) дискретные сигналы Upi, Up?.
Импульсный режим работы релейного усилителя, необходимый, как
указывалось, для формирования И-алгоритма регулирования мощности,
112
Автоматическое управление мощностью ГГ и ТГ
обеспечивается функциональной обратной связью ФОС, реализуемой ак-
тивным фильтром нижних частот ZF3, являющимся апериодическим
структурным звеном; обратная связь охватывает последовательно со-
единенные непрерывный и релейный усилители.
Импульсные сигналы УП транзисторным исполнительным усилите-
лем ИУ превращаются в управляющие воздействия на электродвига-
тель МУТ турбины, который является задающим элементом ее АРЧВ.
В автоматическом регуляторе применяются типовые функциональ-
ные элементы агрегатированного комплекса электрических средств ре-
гулирования в микросхемном исполнении (АКЭСР-2) [6]. При этом ис-
пользуются операционные усилители А1-А8 серий интегральных микро-
схем УД140 и УД553, охваченные отрицательными (элементы непрерыв-
ного действия: фильтры нижних частот ZF1-ZF3, элементы сравнения
сигналов, усилитель УС) и положительными (релейные элементы УП)
обратными связями. Фильтры первого порядка типовые, различающие-
ся только постоянными времени. Свойством частотного фильтра обла-
дает и ЭСНД, выполненный и как сумматор сигналов на одном из входов
операционного усилителя .45 [8].
Специфичным является интегральный задающий элемент ИЗЭМ. Он
выполнен с использованием шагового электродвигателя ШМ, управляе-
мого генератором импульсов Г И и кольцевым счетчиком А'С, запускае-
мых сигналом от АСРЧМ электростанции. Электродвигатель переме-
щает якорь индукционного измерительного преобразователя ИИП (дат-
чика), в котором угол поворота механического редуктора преобразуется
в ЭДС повышенной частоты. Выпрямителем VS и активным ФНЧ ZF1
ее амплитуда преобразуется в постоянный, пропорциональный предпи-
санный мощности генератора, ток 1рар.
Измерительный преобразователь активной мощности ИПМ синхрон-
ного генератора показан на схеме (рис. 4.1) как трехфазный с двумя пе-
ремножителями АХ1, АХ 2 мгновенных междуфазных напряжений и и
фазных токов г, включенными по схеме двух ваттметров [11]. Посто-
янные составляющие их выходных напряжений суммируются и выде-
ляются ФНЧ ZF2 в виде пропорционального активной мощности син-
хронного генератора постоянного тока IpY. Возможно выполнение ИПМ
и как однофазного с двумя перемножителями ортогональных составля-
ющих напряжения и тока одноименных фаз, не требующего выходного
частотного фильтра [18].
113
Глава 4
114
Автоматическое управление мощностью ГГ и ТГ
Рис. 4-1- Функциональная схема автоматического регулятора мощности
турбогенератора
115
Глава 4
Действие АРМ, например на увеличение нагрузки синхронного гене-
ратора, вследствие возрастания тока 1рпр по заданию АСРЧМ, или при
появлении тока вследствие снижения частоты Д/ > Д/нч, происхо-
дит следующим образом.
Один из указанных токов на неинверсном входе операционного уси-
лителя А5 приводит к появлению положительных напряжения /7ЭС на его
выходе и тока 1ЭС на инверсном входе ИОУ Аб.
В результате на выходе усилителя УС появляется отрицатель-
ное напряжение Uyc, которое переключает реле, если Uyc превыша-
ет напряжение срабатывания реле на ИОУ А7, создаваемое источ-
ником питания +ЕП на его инверсном входе и удерживающее ре-
ле в исходном состоянии, при котором на его выходе напряжение
ДР1 отрицательно (транзистор VT1 закрыт). Под воздействием по-
ложительного напряжения Upi возбуждается ток базы 1б1 транзисто-
ра VT1, который открывается и запускает электродвигатель МУТ в
сторону увеличения нагрузки генератора. Под воздействием напря-
жения Upi начинает экспоненциально нарастать ток го.с отрицатель-
ной обратной связи, уменьшающий ток 1ЭС — го.с на входе усилите-
ля Аб.
В результате реле на ИОУ А7 возвращается, и воздействие на МУТ
прекращается. Ток го с экспоненциально уменьшается, ток на входе Аб
возрастает, и реле снова срабатывает и запускает электродвигатель
МУТ. При этом длительность каждого последующего импульса напря-
жения Upi и, следовательно, время вращения электродвигателя МУТ
уменьшаются.
Именно благодаря такому импульсному режиму работы регулятора
и обеспечивается устойчивое без возникновения автоколебаний последо-
вательное приближение МУТ к новому установившемуся состоянию.
После компенсации тока 1рпр от ИЗЭМ током 1рг от ИПМ, нараста-
ющим вследствие увеличивающейся мощности синхронного генератора
на инверсном входе А5, или исчезновения тока /д/ от ИОЧ, вследствие
восстановления частоты, схема в целом переходит в исходное состояние,
при котором оба транзистора VT1, VT2 закрыты.
После воздействия от АСРЧМ на уменьшение предписанной мощно-
сти ток 1рпр становится меньше тока 1рг от ИПМ. Появляющийся поло-
жительный ток на инверсном входе ИОУ А5 или отрицательный ток /др
на его неинверсном входе, обусловленный снижением давления свежего
116
Автоматическое управление мощностью ГГ и ТГ
пара рс.п перед ЦВД турбины [11], приводят к нарастаниям абсолютно-
го значения отрицательного U3C и положительного Uyc напряжений на
выходах элемента сравнения ЭСНД и усилителя УС соответственно.
Положительное напряжение Uyc приводит к срабатыванию реле на
ИОУ А8, а именно изменению отрицательного напряжения Up2 (тран-
зистор VT2 закрыт), создаваемого положительным напряжением Еп на
его инверсном входе, на положительное, возбуждающее ток 1б2 насыще-
ния транзистора VT2. Он открывается и запускает электродвигатель
МУТ в сторону уменьшения нагрузки синхронного генератора. Поло-
жительное напряжение Up2 обусловливает нарастание тока отрицатель-
ной обратной связи го.с и кратковременный возврат реле. Его после-
дующие срабатывания со все ускоряющимся возвратом обеспечивают
устойчивый апериодический переход МУТ в новое установившееся со-
стояние.
4.3. Автоматическое управление мощностью
гидрогенераторов
Поскольку гидроэлектростанции являются частоторегулирующими,
то астатические АРЧВ загружают синхронные генераторы по отклоне-
нию частоты. Автоматическое управление мощностью СГ заключается
в обеспечении покрытия гидроэлектростанциями случайно изменяющей-
ся нагрузки, обусловливающей отклонение частоты, и базовой (плано-
вой) нагрузки ГЭС при номинальной частоте и их распределении между
параллельно работающими генераторами.
Если вся установленная мощность ГЭС не может быть передана по
условию статической устойчивости электропередачи, то возникает до-
полнительная задача автоматического ограничения передаваемой мощ-
ности (ее перетока) или обеспечения заданного перетока мощности.
Так как астатические АРЧВ принципиально не могут распределять
нагрузку ГЭС между параллельно работающими гидрогенераторами, то
эту функцию выполняют автоматические регуляторы мощности. В свя-
зи с однотипностью гидрогенераторов распределение мощности сводится
к ее уравниванию. При этом обычно говорят о групповом автоматиче-
ском управлении активной мощностью [1].
Функциональная схема (рис. 4.2) иллюстрирует простейшее автома-
тическое управление мощностью гидрогенераторов с устройством урав-
117
118
Рис. 4-2. Схема автоматического управления мощностью гидрогенераторов
Глава 4
Автоматическое управление мощностью ГГ и ТГ
нивания УРАМ. Схема представляет собой многоконтурную автомати-
ческую систему, замкнутую по цепи главной обратной связи, которая
передает информацию о суммарной нагрузке ГЭС.
Источниками такой информации являются или непосредственные —
измерительные преобразователи мощности ИПМ синхронных генера-
торов, или косвенные — датчики открытия направляющих аппаратов
(обычно сельсины BG) гидротурбин с сумматорами СС1 и СС2 их сиг-
налов, в частности выпрямленных ЭДС сельсинов.
Задающий нагрузку ГЭС интегрирующий элемент ИЗЭМ (см.
рис. 4.1), управляемый от АСРЧМ электроэнергетической системы,
устанавливает предписанную активную мощность ГЭС. Сигнал в виде,
например, ЭДС Ерпр индукционного датчика ИЗЭМ, как обычно сопо-
ставляется элементом сравнения непрерывного действия ЭСНД с сигна-
лом— ЭДС Е^р-n одного из сумматоров. Разность указанных ЭДС АЕр
определяет воздействие через релейный усилитель — преобразователь
УП (см. рис. 4.1) на электродвигатели МИМ электрогидравлических
АРЧВ гидротурбин ЭГР.
В устройстве уравнивания обычно используется схема параллельно-
го соединения ветвей с источниками ЭДС (схема многолучевой звезды).
В каждую ветвь схемы включается входная цепь МИМ с входным сопро-
тивлением RBX и выходная цепь с выпрямленной ЭДС ЕрГ1 сельсина BG
или ЭДС ИПМ одного из гидроагрегатов с выходным сопротивлением
Двых (на схеме условно показано их подключение контактами К).
Эквивалентное напряжение параллельно соединенных п ветвей с
одинаковыми проводимостями Y ~ 1/(йвх + ДВых):
£дРггу £дРгг
Даб = n ~ ~ ~ Prinp (4.1)
1 = 1
отображает равную долю в покрытии нагрузки 52 Ргг гидроэлектростан-
ции одним синхронным генератором, т.е. моделирует его предписанную
-Рггпр МОЩНОСТЬ.
Выходная ЭДС Ергг сельсина или ИПМ пропорциональна истинной
мощности синхронного генератора Ргг. В каждой ветви происходит срав-
119
Глава 4
нение предписанной и истинной нагрузок синхронного генератора, по-
скольку входное напряжение UBX1 пропорционально их разности
UBXl — ItRBX —
Ерп ~ Уаб „ _ 1 А р
1 + ^вых/Лвх Гг п
(4-2)
Электродвигатель МИМ электрогидравлического АРЧВ турбины
вращается (прерывисто) до тех пор, пока напряжение UBXl практически
(с точностью до напряжения срабатывания УП) не исчезнет, т.е. пока
мощность синхронного генератора Ргг не станет равной ^Ргг/п.
Таким образом, воздействие АРЧВ определяется отклонением ча-
стоты и изменением предписанной мощности в соответствии с соотно-
шением
(4-3)
которое отображает так называемый мнимо-статический закон автома-
тического регулирования частоты и мощности гидрогенератора. Он
обеспечивает, как и указывалось, астатическое регулирование частоты
и принудительное равномерное распределение нагрузки ГЭС между па-
раллельно работающими однотипными гидрогенераторами.
Известно несколько модификаций технической реализации рассмо-
тренной общей схемы автоматического управления мощностью синхрон-
ных генераторов гидроэлектростанций [13, 14]. Среди них есть вари-
анты без схемы уравнивания с индивидуальными заданиями нагрузки
каждого гидрогенератора.
Сигнал равнодолевой предписанной мощности формируется дискрет-
но управляемым делителем выходного напряжения интегрирующего за-
дающего элемента мощности электростанции ИЗЭМ на число п парал-
лельно работающих синхронных генераторов.
В современном выполнении он представляет собой интегральный опе-
рационный усилитель с набором параллельно соединенных резисторов
отрицательной обратной связи Ro с, определяющих коэффициент его пе-
редачи: как известно, при постоянном сопротивлении RBX резистора на
обычно инвертирующем входе ИОУ (см. например схему усилителя .46
120
Автоматическое управление мощностью ГГ и ТГ
на рис. 4.1) коэффициент передачи равен отношению эквивалентного со-
противления Ro.dn и Явх [8].
Такую схему группового управления активной мощностью называют
схемой с радиальным распределением нагрузки ГЭС между гидрогене-
раторами. Выходное напряжение управляемого делителя сравнивается
с ЭДС датчика открытия направляющего аппарата гидротурбины или
ИПМ синхронного генератора. Она применяется совместно с электроги-
дравлическими АРЧВ типа ЭГР-2И (см. рис. 3.11).
4.4. Быстродействующий автоматический регулятор
мощности турбогенераторов
Как указывалось, БАРМ предназначается для безынерционного и ин-
тенсивного воздействия на турбину при возникновении опасности нару-
шения динамической (в аварийном режиме) или статической (в послеа-
варийном режиме) устойчивости синхронной работы тепловой электро-
станции с электроэнергетической системой. Для сохранения динами-
ческой устойчивости, например при коротком замыкании на одной из
линий двухцепной электропередачи, производится интенсивное кратко-
временное снижение мощности турбины, а для предотвращения выпа-
дения из синхронизма турбогенераторов, из-за уменьшающейся (после
отключения поврежденной цепи линии) пропускной способности элек-
тропередачи — длительное уменьшение генерируемой мощности.
Быстродействующий АРМ воздействует непосредственно на элек-
трогидравлический преобразователь ЭГП, связывающий электрическую
часть автоматической системы регулирования мощности с гидравличе-
ской исполнительной частью АРЧВ турбины (см. рис. 3.6), или на элек-
тромагниты закрытия ее регулирующих и стопорных клапанов.
Быстродействующий АРМ выполняет и защитные функции, предот-
вращая разгон турбины при отключении синхронного генератора, и су-
щественно повышает ее динамические свойства при переходных процес-
сах, а именно приемистость — способность турбины быстро изменять
развиваемую мощность.
В соответствии с назначением БАРМ функционирует как ПД-регу-
лятор и использует обширную информацию как об электрических, так и
тепловых и механических режимных параметрах. Поэтому его измери-
тельная часть состоит из нескольких измерительных преобразователей,
121
Глава 4
нелинейных функциональных преобразователей и специфических фор-
мирователей сигналов, определяющих дозированные по интенсивности
и длительности противоаварийные управляющие воздействия на тур-
бину.
Применяются быстродействующие измерительные преобразователи
активной мощности (БИПМ) и частоты напряжения синхронного гене-
ратора (БИПЧ), измерительный преобразователь вращающего момен-
та (мощности) турбины (ИПМТ) и датчики давления свежего пара
(ДСП) — перед ЦВД турбины и перегретого — перед ЦСД [11] турбины
(ДПП).
Совместно с элементами сравнения непрерывного и релейного дей-
ствия и функциональными преобразователями они образуют следующие
измерительные органы (ИО) и органы формирования (ОФ) сигналов до-
зированных управляющих воздействий регулятора (рис. 4.3): мощно-
сти турбины ИОМТ; соответствия развиваемого турбиной вращающего
и тормозного моментов нагрузки генератора ИОСМ-, кратковременной
(импульсной) разгрузки турбины ОФИР-, ограничения мощности (дли-
тельной разгрузки) турбогенератора ОФОМ; давления пара ИОДП; за-
крытия клапанов турбины ИОРД (релейного действия).
Мощность турбины, равная в относительных единицах ее вращаю-
щему моменту, определяется по истинной мощности синхронного гене-
ратора и ускорению вращения турбины
P^Fr + j‘P, (4.4)
at
где J — общий момент инерции турбогенератора.
Поэтому измерительный орган ИОМТ содержит измерительные пре-
образователи активной мощности синхронного генератора БИПМ, изме-
рительный преобразователь частоты БИПЧ с дифференциатором AD и
сумматор Д1У2, образующие измерительный преобразователь момента
или мощности турбины ИПМТ, и вычитатель АН1 сигналов информа-
ции о мощности турбины в виде тока /рт и заданной мощности Ргпр
(ток /рПр) синхронного генератора.
Однофазный быстродействующий БИПМ показан на схеме в целесо-
образном его выполнении на двух перемножителях АХ1, АХ 2 ортого-
нальных составляющих, на которые напряжение иг и ток гг разлагаются
активными фазовращателями А0\, А02 [8]. Напряжение Up суммато-
ра AW1 выходных напряжений перемножителей не содержит гармони-
122
Автоматическое управление мощностью ГГ и ТГ
ческой составляющей удвоенной промышленной частоты, свойственной
произведениям мгновенных синусоидальных величин, как в симметрич-
ном режиме, так и в условиях несимметрии трехфазных напряжения и
тока синхронного генератора: быстродействие ИПМ достигается за счет
отсутствия инерционного выходного частотного фильтра.
Приемлемая инерционность БИПЧ достигается его выполнением на
управляемых интеграторах (см. рис. 3.11) с выходным малоинерцион-
ным ФНЧ, необходимым в связи с последующим дифференцированием
его выходного напряжения. Активные дифференциатор AD, сумматоры
и вычитатели выполняются на ИОУ в инвертирующем и дифференци-
альном их включениях соответственно [8]. Вычитатель АН1 выходных
токов /рт ИПМТ и /рпр служит элементом сравнения непрерывного дей-
ствия сигналов информации о развиваемой турбиной мощности и задан-
ной нагрузке синхронного генератора.
Вычитатель АН2 выходных напряжений БИПМ и датчика давле-
ния перегретого пара ДПП определяет степень несоответствия враща-
ющего момента, развиваемого ЦСД и ЦНД турбины за счет потенци-
альной энергии значительного объема пара в сепараторе-перегревателе
СПП (см. рис. 1.4,а) и электрической нагрузки генератора при переход-
ных процессах. Совместно с БИПМ и ДПП вычитатель АН2 образует
измерительный орган ИОСМ, выходной сигнал которого необходим для
повышения приемистости турбины. На его выходе условно стабилитро-
ном VD показан многоступенчатый ограничитель интенсивности сигна-
ла на закрытие клапанов турбины, которое происходит под воздействием
пружин исполнительных гидравлических двигателей (см. рис. 3.6), т.е.
быстрее, чем их открытие под воздействием давления масла. Ограниче-
ние способствует некоторому выравниванию скоростей сброса и набора
мощности турбиной при переходных процессах.
Формирователь сигнала импульсной разгрузки турбины ОФИР со-
держит переключаемые ключами SA3-SA6, управляемыми от устрой-
ства противоаварийной автоматики (УПА), делитель Я1-ЯЗ напряже-
ния Еп источника питания и набор резисторов Я4-Я6 в цепи заряда
конденсатора С. Они обеспечивают формирование сигнала прямоуголь-
ной формы с дискретно изменяемой интенсивностью и длительностью
и экспоненциальным затуханием, обеспечивающего определяемую УПА
степень кратковременного снижения развиваемой турбиной мощности,
необходимую для предотвращения нарушения динамической устойчиво-
123
Глава 4
124
Автоматическое управление мощностью ГГ и ТГ
Рис. 4-3. Функциональная схема быстродействующих АРМ турбогене-
ратора
125
Глава 4
сти электропередачи [1]. Интенсивность сигнала пропорциональна на-
пряжениям Ui, U2 на входе их активного повторителя AU, длительность
определяется постоянной времени заряда конденсатора С до напряже-
ния ис, равного напряжению срабатывания Uc.p элемента их сравнения
релейного действия (ИОУ А2 в дифференциальном включении с поло-
жительной обратной связью). Он управляет ключом SA7, закорачива-
ющим вход повторителя напряжений AU. Экспоненциальное затухание
импульса от напряжения Uc = Uc.p обусловливается разрядом конденса-
тора С через (благодаря диоду на выходе AU) сопротивление на входе
общего сумматора сигналов AW3. В реальном ОФИР предусмотрено по
три (на схеме показаны две) ступени изменения как интенсивности, так
и длительности (от 0,05 до 0,5 с) сигнала импульсной разгрузки [2].
При необходимости длительной разгрузки турбогенератора для пре-
дотвращения нарушения статической устойчивости электропередачи
устройствами противоаварийной автоматики УПА вводится в действие
орган формирования сигнала ограничения мощности ОФОМ. Он содер-
жит элемент запоминания предписанной мощности ЭЗМ Д-.пр = Л-.и
в доаварийном (исходном) режиме — напряжение Upr.a и вычитатель
АНЗ из него напряжений U3, U4, устанавливаемых управляемыми от
УПА ключами £48, £49 и пропорциональных мощности Рргр разгрузки
турбогенератора. Сниженная предписанная мощность в послеаварийном
режиме Рг.п а = Рги - Рргр в виде напряжения Ррг.п.а подводится (клю-
чом £42) к элементу его сравнения (вычитатель АН1) с напряжением на
выходе сумматора AW2, отображающим мощность, развиваемую тур-
биной (при этом ключ £41 размыкается).
Измерительный орган давления свежего (перед ЦВД турбины) пара
ИОДП состоит из индукционного датчика ДСП давления рс.п и элемента
сравнения его ЭДС с напряжением задающего элемента, моделирующим
заданное давление рпр (на схеме не показаны).
Релейное воздействие ИОРД на экстренное закрытие регулирующих
клапанов турбины (электромагнитами ЭМ) при аварийном отключении
синхронного генератора производится по дискретному сигналу от вспо-
могательного контакта выключателя синхронного генератора Qr.
Сигналы от всех измерительных органов и формирователей через
суммирующий усилитель AW3 поступают в электрогидравлический
преобразователь ЭГП, воздействующий на исполнительную гидравли-
ческую часть АРЧВ турбины (см. рис. 3.6).
126
Автоматическое управление мощностью ГГ и ТГ
4.5. Микропроцессорные устройства управления
мощностью турбоагрегата
Совершенствование электрической части автоматической системы
регулирования (ЭЧСР) турбогенераторов большой мощности обусло-
вило создание устройства управления мощностью ЭЧСР-М1 на
микроЭВМ [15], а затем унифицированного микропроцессорного
ЭЧСР-М2 [16]. Они выполняют, прежде всего, функции автоматиче-
ских регуляторов мощности (АРМ и БАРМ) турбоагрегата: формиру-
ют управляющие воздействия на турбину по медленному (через МУТ)
и быстродействующему (через ЭГП) контурам регулирования при ее
пуске, нагружении и останове, синхронизации генератора, оптимизации
нормальных режимов его работы и при аварийных ситуациях в ЭЭС
и выполняют функции защиты и диагностики состояния энергоблока и
самого устройства управления.
Выполнение ЭЧСР-М2 на микропроцессорных средствах вычисли-
тельной техники повышенной надежности [16] расширило его функции
и повысило быстродействие формирования управляющих воздействий в
предаварийных и послеаварийных режимах электроэнергетической си-
стемы, придало ему свойство самонастройки. Ее программное обеспе-
чение позволяет изменять алгоритмы управления и функциональное на-
значение устройства.
Автоматическое регулирование мощности в нормальном и частоты в
утяжеленном режимах осуществляется по медленно действующему про-
порционально-интегральному алгоритму.
В соответствии с простейшим р-изображением регулирующего воз-
действия аналогового пропорционально-интегрального регулятора мощ-
ности с р-передаточной функцией (3.12)
^®~(1 + ^)^?г (4'5)
г-изображение составляющей регулирующего воздействия цифровой
ЭЧСР-М, определяемое отклонением мощности ДР, с учетом [см. (5.22)]
представляется в простейшем виде как
127
Глава 4
и (z) ~ 2 AP(z) =
Рег( } [(l-^Ta/Tj + l ( }
= Г1 +-------J------------------------ДР(г), (4.6)
L (1 — ^-1)TO.C/Tj [(1 — 2_1)Та/Т] + 1 7
где Та — постоянная времени апериодического звена, Та = Ти.п
[см. (3.12)].
Устойчивость автоматического регулирования достигается за счет
времяимпульсного воздействия ЭЧСР-М на микроэлектродвигатель
МУТ — программно выполняется функция позиционного автоматиче-
ского регулятора мощности (АРМ). Только такой АРМ, как известно,
устойчиво реализует пропорционально-интегральный алгоритм автома-
тического регулирования при интегрирующем исполнительном элемен-
те с постоянной скоростью движения, каким является электродвигатель
МУТ. Вычисляемая в реальном времени переходного процесса регулиро-
вания, уменьшающаяся по мере приближения истинной мощности тур-
богенератора Рг к предписанной Ргпр длительность импульсных воз-
действий на включение электродвигателя обеспечивает спокойное, без
перерегулирования, наступление установившегося режима работы.
Функциональная схема ЭЧСР (рис. 4.4) обеспечивает выполнение
всех требований, предъявляемых к автоматической системе регулирова-
ния частоты и мощности (АРЧМ) энергоблока, и реализует ряд функ-
ций, выполнявшихся ранее отдельными устройствами: ограничения
темпа задания мощности по технологическим условиям (ОТЗ), контроля
за температурными напряжениями при прогреве роторов турбин, опре-
деления допустимого по тепловому состоянию диапазона изменения на-
грузки энергоблока, начальной коррекции неравномерности (НКН) —
статизма характеристики регулирования турбины при переходных про-
цессах.
В нормальных режимах работы турбогенератора ЭЧСР-М воздей-
ствует на турбину по медленно действующему контуру управления
МКУ и реализует один из алгоритмов регулирования [16]:
РГ.пр ~ Рг + &р(Рпр ~ Рс.п) — kfAw = О
при работе турбины с постоянным (номинальным) давлением рс.п све-
жего пара или
Л-.пр - Рг + Max (крАр, khAH) - fcyAw = О
128
Автоматическое управление мощностью ГГ и ТГ
Рис. 4-4- Функциональная схема микропроцессорного устройства авто-
матического управления мощностью турбогенератора
129
Глава 4
при работе на скользящем давлении при определенном положении Нпр
клапанов турбины.
В цифровом виде сигналы формируются реализацией вычитания
(сравнения) цифровыми сумматорами SM1-SM4; максимальный из двух
сигналов: по отклонениям давления Др пара или положения клапанов
турбины ДЯ определяется их сравнением, обозначенным на схеме вы-
делителем максимума Мах.
Скорость изменения предписанной энергоблоку мощности Рпр, сигна-
лы о которой поступают от общестанционной АСРЧМ (Рг пр) или от про-
тивоаварийной автоматики (_РГ п а), ограничивается программным моду-
лем ОТЗ в зависимости от термических напряжений в металле турбины.
Сигналы информации о мощности Рг и частоте w и ее отклонении с зо-
ной нечувствительности Дй?нч формируются быстродействующими из-
мерительными преобразователями активной мощности БИПМ, частоты
БИПЧ и цифровым сумматором SM2.
При неполадках в работе технологического оборудования энергобло-
ка или появлении технологических ограничений гибкая функциональная
структура ЭЧСР-М перестраивается. Например, при снижении давле-
ния свежего пара включается защитный контур регулирования давления
по сигналу рПр тт через выделитель Min (см. рис. 4.4) минимального
сигнала, а при отключении автоматического регулятора парогенератора
АРПГ устройство переходит в режим регулирования давления свежего
пара.
Устройство ЭЧСР-М совместно с электродвигателем постоянного
тока МУТ осуществляет ПИ-алгоритм регулирования, благодаря вре-
мяимпульсному преобразователю ВИП потенциального регулирующего
воздействия в импульсы с уменьшающейся длительностью [аналогично
исполнительной части позиционных ПИ-регуляторов (см. 3.2)]. Сумма
сигналов по ДРГ и Ди> через сумматор SM5 воздействует и на автома-
тический регулятор парогенератора АРПГ.
Быстродействующий контур автоматического управления БКУ, как
и БАРМ, реализуется через электрогидравлический преобразователь
ЭГП. Программный модуль, состоящий из дифференциатора сигнала
о частоте Д и сумматора SM1, функционирующий согласно (4.4) и
соответствующий измерительному органу мощности турбины ИОМТ
(см. рис. 4.3) БАРМ; модуль аварийной импульсной разгрузки АИР,
быстродействующий модуль ограничения мощности ОМТ турбины и
130
Автоматическое управление мощностью ГГ и ТГ
начальной коррекции неравномерности НКН, соответствующие измери-
тельным органам ОФИР, ОФОМ и ИОСМ (см. рис. 4.3), формируют
цифровые сигналы противоаварийного управления энергоагрегатом по
сигналам УПА.
Сигнал начальной коррекции неравномерности способствует улучше-
нию ее приемистости путем компенсации объемов пара давлением рп п
в сепараторе-промперегревателе (СПП) [11] и формируется с учетом
мощности Рг генератора. Сигнал ДРО.М служит для быстрой длительной
разгрузки турбоагрегата в послеаварийном режиме, а сигнал ДР(/)и.р —
кратковременной разгрузки при аварийной ситуации.
Программный модуль ОМТ выполняется по замкнутой схеме регу-
лирования механической мощности Рт турбины, а АИР обеспечивает
формирование дозированного по длительности и интенсивности [2] им-
пульсного воздействия на регулирующие клапаны турбины.
На функциональной схеме (см. рис. 4.4) показан защитный сигнал
релейной форсировки РФ к электромагнитам закрытия клапанов турби-
ны ЭМ при отключении выключателя генератора Qr; в ЭЧСР-М2 пре-
дусмотрены цепи (сумматоры SM11, SM12) управления (через ВИП)
электродвигателями регулятора давления рп.п пара в СПП и регулято-
ра положения поворотной диафрагмы теплофикационной турбины. Це-
пи диагностики и контроля прогрева ротора турбины на схеме не от-
ражены.
Более производительный микропроцессор ЭЧРС-М2 обеспечивает
выполнение дополнительных функций и повышение информативности
диагностики состояния турбины и каналов автоматического управления.
Информация анализируется и передается в ПЭВМ.
В соответствии с требованиями безотказности функционирования в
ЭЧРС-М предусмотрены по два взаиморезервируемых комплекта ми-
кроЭВМ или микропроцессорного комплекта МПК: один рабочий (веду-
щий), а второй резервный (ведомый). Они связаны между собой устрой-
ством (блоком) контроля БК, обрабатывающим сигналы информации об
исправности вычислительных средств (рис. 4.5).
Устройство связи с объектом содержит, прежде всего, элементы
гальванического отделения источников сигналов и выходных воздей-
ствий от микроЭВМ или микропроцессоров. В цепях дискретных сигна-
лов ДС используются миниатюрные электромагнитные реле с гермети-
зированными контактами — герконы, образующие устройства приема
131
132
Рис. 4-5. Структурная схема ЭЧСР-М
Глава 4
Автоматическое управление мощностью ГГ и ТГ
контактов УПК. Мультиплексоры ввода дискретной информации МВ1
обеспечивают рациональное использование входного параллельного ин-
терфейса микроЭВМ или МПК.
Непрерывные аналоговые сигналы, в частности от быстродейству-
ющего измерительного преобразователя активной мощности БИПМ и
датчиков тепловых параметров ДТП, передаются через изолирующие
оптронные интегральные усилители, входящие в элементы гальва-
нической развязки ЭГР. Они преобразуют унифицированные токовые
(±5 мА) сигналы БИПМ и сигналы индукционных измерительных пре-
образователей (датчиков) давлений во входные электрические сигналы
напряжения (±5 В) АЦП.
Вывод основной дискретной информации производится выходным па-
раллельным интерфейсом и мультиплексорами МВ2 по схеме ИЛИ через
преобразователи дискретных потенциальных (логических) сигналов ми-
кроЭВМ или МПК в состояние контактов реле ПЛК. Аналоговые сиг-
налы с выходов ЦАП через аналоговый коммутатор А К и оптронные
элементы гальванической развязки ЭГР поступают на входы ВИП и
усилителя УВ, формирующие времяимпульсное и непрерывное управля-
ющие воздействия на МУТ и ЭГП соответственно.
Аналоговые мультиплексоры AM, связывающие выход ЦАП с микро-
ЭВМ или МПК, мультиплексоры МК и блок БК являются элементами
диагностики и контроля исправности ЭЧСР-М.
Программное обеспечение представляет собой организованные в
определенную структуру программы различного функционального на-
значения иерархического построения — программы верхнего уров-
ня определяют и координируют функционирование программ нижнего
уровня [16]. Используется библиотека стандартных программ, напри-
мер функционирования программного модуля измерительного преобра-
зователя частоты БИПЧ вращения турбоагрегата, определяемой фик-
сированием таймером длительности периода (полупериода) напряжения
измерительного генератора повышенной частоты.
Указанная структура программ обеспечивает циклическое функцио-
нирование ЭЧСР-М с обновлением управляющего воздействия на выхо-
де БКУ через каждые 10 мс (половину периода промышленной часто-
ты), а на выходе МКУ — через 100 мс (см. рис. 4.4).
133
Глава 4
Вопросы для самопроверки
1 Почему при наличии АРЧВ турбин необходимы автоматические регуля-
торы мощности синхронных генераторов?
2 . Почему АРЧВ турбогенераторов являются статическими, а гидрогенера-
торов, как правило, астатическими?
3 . В чем состоит основная задача автоматических регуляторов активной
мощности?
4 Почему главным для турбогенераторов является автоматическое регули-
рование мощности, а для гидрогенераторов — частоты промышленного
тока7
5 По каким алгоритмам (И-, ПИ-, ПИД-) функционируют автоматические
регуляторы мощности7
6 Почему автоматические регуляторы мощности работают как позицион-
ные регуляторы?
7 Чем обусловливается необходимость установки на турбогенераторах вто-
рого быстродействующего автоматического регулятора мощности?
8 По какому алгоритму функционирует и как воздействует на турбину бы-
стродействующий автоматический регулятор мощности?
9 Какие два функциональных элемента измерительной части АРМ турбо-
генератора обеспечивают выполнение его основной задачи — оптимиза-
ции режима работы7
10 По какому критерию производится распределение нагрузки тепловой
электростанции между параллельно работающими турбогенераторами?
11 . В чем состоит особенность распределения нагрузки гидроэлектростанции
между ее гидрогенераторами?
12 Для чего в АРМ турбогенераторов предусматриваются два измеритель-
ных органа частоты вращения?
13 Каково назначение измерительных органов давления свежего и перегре-
того пара в АРМ турбогенераторов?
14 Как функционирует интегрирующий задающий предписанную мощность
турбогенератора элемент АРМ (см рис. 4.1)7
15 Чем различаются показанные на рис. 4.1 и 4.3 функциональные схемы
и свойства измерительных преобразователей мощности АРМ и БАРМ
турбогенераторов?
134
Автоматическое управление мощностью ГГ и ТГ
16.
17
18.
19
20
21.
22
23
24
25
26
27
28
29
30
Как функционирует усилитель-преобразователь релейного действия
(см рис 4.1), охваченный функциональной отрицательной обратной
связью, реализуемой активным ФНЧ с передаточной функцией аперио-
дического звена7
Как действует в целом АРМ, функциональная схема которого приведена
на рис. 4 I7
Как функционирует схема (см. рис 4 2) автоматического управления
мощностью гидрогенераторов7
Как действует устройство уравнивания мощностей (УРАМ) гидрогене-
раторов (см. рис. 4 2)?
Почему в схеме автоматического управления мощностью гидрогенерато-
ров предусмотрено две цепи главной отрицательной обратной связи по
активной мощности синхронного генератора и по открытию направляю-
щего аппарата гидротурбины?
Каково назначение кратковременной и длительной разгрузки турбогене-
ратора, выполняемой БАРМ?
Как и почему производится измерительное преобразование вращающего
момента турбины в БАРМ турбогенератора (см. рис. 4 З)7
Как функционирует орган формирования сигналов кратковременной (им-
пульсной) разгрузки турбины ОФИР (см рис. 4.3)?
Как функционирует орган формирования длительной разгрузки (ограни-
чения мощности) турбины ИФОМ (см рис 4.3)?
Какова роль электрогидравлического преобразователя в автоматических
регуляторах турбо- и гидрогенераторов7
Как функционирует микропроцессорное устройство ЭЧСР-М (см
рис 4.4)7
Почему микропроцессорное устройство ЭЧСР-М состоит из двух конту-
ров управления, какова их роль в автоматическом управлении мощно-
стью турбогенератора?
По каким алгоритмам регулирования функционирует медленно действу-
ющий контур управления ЭЧСР-М; зачем необходимо времяимпульсное
преобразование его управляющего воздействия?
Как формируется сигнал информации о механической мощности тур-
бины7
Объяснить аппаратное построение микропроцессорного устройства
ЭЧСР-М (см. рис. 4.5)
135
Глава 4
31. Как и каким устройством производится распределение нагрузки гидро-
электростанции между однотипными гидрогенераторами?
32. По какому технико-экономическому показателю производится распреде-
ление нагрузки тепловой электростанции между турбогенераторами?
33 Почему выполнение основных задач автоматического управления часто-
той и мощностью — поддержание частоты на неизменном уровне и рас-
пределение нагрузки электростанции между параллельно работающи-
ми энергоагрегатами приходится возлагать на разные автоматические
устройства?
34 Из каких функциональных элементов состоит и как действует микропро-
цессорная автоматическая система регулирования частоты и мощности
турбогенераторов (см. рис. 4.5)?
35. В чем состоит программное обеспечение распределения неплановой
предписанной мощности тепловой электростанции между турбогенера-
торами?
136
Глава 5. Автоматическое регулирование
напряжения и реактивной мощности
синхронных генераторов
5.1. Назначение автоматического регулирования
напряжения и реактивной мощности
Техническая необходимость и экономическая целесообразность авто-
матического регулирования напряжения и реактивной мощности обу-
словливаются специфическими особенностями процесса производства и
распределения электроэнергии. Напряжение, определяемое возбуждени-
ем синхронных генераторов, различно по абсолютному значению и по
фазе в каждом из узлов схемы электроэнергетической системы. Оно
является многомерным вектором (рис. 5.1,6). Различие напряжений не-
обходимо для передачи (транспортировки) электроэнергии. Напряжение
в начале линии электропередачи (рис. 5.1,а) от гидро- или тепловой
электростанции ЭС в электроэнергетическую систему ЭЭС отличается
от напряжения Щ системы на Д17, определяемое активной Рл и реак-
тивной Qn мощностями в линии
ил = ис + ^и = ис + -^- + ]-^г = ис + 1рхл + лахл. (5.1)
Из (5.1) и векторной диаграммы рис. 5.1,6 видно, что:
• различие напряжений по фазе необходимо для передачи активной
мощности
Р = ^£ыП(5л; (5.2)
X л
• различие абсолютных значений напряжений определяется реактив-
ной мощностью электропередачи.
137
Глава 5
Рис. 5.1. Схема (а) и векторная диаграмма напряжений (5) электропе-
редачи
При данном напряжении U_c передаваемая мощность Рл определяется
вектором напряжения Ц_п и реактивной мощностью Qn.
При неизменных абсолютных значениях напряжений Рл и Uc и угле
^лпр = ir/2 по линии передается, как известно [1, 2], наибольшая воз-
можная мощность — предельная мощность линии Рл.пр-
138
Автоматическое регулирование U uQ синхронных генераторов
Если напряжение ил по мере возрастания мощности Рл уменьшает-
ся, что имеет место при неизменной нерегулируемой ЭДС генераторов
электростанции, то угол 6Л достигает предельного значения <5лпр при
Рл < Рл пр- При дальнейшей попытке увеличения передаваемой мощно-
сти нарушается статическая устойчивость электропередачи.
При внезапном снижении напряжения во время короткого замыкания
в электроэнергетической системе сохранение синхронной работы элек-
тростанции зависит от скорости восстановления напряжения в процессе
и после отключения короткого замыкания.
В случае наступления асинхронного хода от скорости восстановле-
ния и уровней напряжения зависит успешность и время восстановления
синхронной работы электрических станций. Поэтому автоматическое
регулирование напряжения и реактивной мощности имеет важное зна-
чение для обеспечения статической, динамической и результирующей
устойчивости электропередачи.
Конечным пунктом транспортировки электроэнергии является ее по-
требитель. Напряжение потребителя должно иметь номинальное значе-
ние вне зависимости от случайных изменений ситуации в электроэнер-
гетической системе или количества потребляемой электроэнергии. На-
пряжение — один из показателей качества электроэнергии. Согласно
ГОСТ на нормы качества электрической энергии отклонение напряже-
ния у потребителей не должно превышать ±5% номинального, только
в послеаварийных режимах допускается понижение напряжения на 10%.
Указанные нормы могут быть выдержаны только при автоматическом
регулировании напряжения.
Таким образом, основными задачами автоматического регулирова-
ния напряжения и реактивной мощности являются:
• обеспечение рациональных потоков реактивной мощности в про-
цессе передачи электроэнергии от электрических станций к потре-
бителям;
• сохранение или повышение статической устойчивости электропе-
редач в нормальных режимах работы;
• повышение динамической и результирующей устойчивости элек-
троэнергетической системы в аварийных режимах;
• обеспечение требуемого напряжения у потребителей, т.е. обеспе-
чение одной из норм качества электроэнергии.
139
Глава 5
Указанные задачи автоматического регулирования напряжения и ре-
активной мощности решаются:
• автоматическим регулированием возбуждения синхронных генера-
торов электростанций;
• регулированием возбуждения синхронных компенсаторов и элек-
тродвигателей;
• регулированием мощности управляемых статических источников
реактивной мощности;
• автоматическим регулированием коэффициентов трансформации
трансформаторов.
Синхронные машины, управляемые источники реактивной мощности
и трансформаторы с устройствами изменения их коэффициентов транс-
формации являются регулируемыми объектами.
5.2. Автоматическое регулирование возбуждения
синхронных генераторов
Наиболее важное значение для решения перечисленных выше задач
автоматического регулирования напряжения и реактивной мощности
имеет автоматическое регулирование возбуждения синхронных генера-
торов.
Ток возбуждения генератора определяет его ЭДС E_q (рис. 5.1,а),
напряжение Ц_г и напряжение линии Дл, связанные между собой отно-
шениями
Ед = ^r + iPXd)2 + UaXd)2; (5.3)
иг = у/(ил + 1рХту + (1аХту . (5.4)
При отсутствии автоматического регулирования возбуждения ЭДС
Ед = const. Реактивная мощность генератора
= = (5'5)
где Хс = X, + Х„; S = (£,, Сс).
140
Автоматическое регулирование UnQ синхронных генераторов
Рис. 5.2. Характеристики мощности (а) и графики предельных зависи-
мостей между активной и реактивной мощностями (б)
Активная мощность электропередачи определяется статической ха-
рактеристикой 1 (рис. 5.2,а)
Рг = РЕд= Sin^-
А^ + Ас
(5-6)
Наибольшая передаваемая активная мощность достигается при угле
5 = 7г/2. При этом по мере роста активной мощности переходная ЭДС
Е' и напряжение Ur генератора снижаются.
Активной мощности соответствует определенная реактивная мощ-
ность. Исключая из уравнений (5.5) и (5.6) при допущении Qr = Qn
напряжение Uc, можно получить зависимость Qr = /(Рг) для неявнопо-
люсного генератора [1]. В частности, для угла 5 = тг/2 такая зависи-
мость представляет собой уравнение окружности
<5-7’
с центром, расположенным на оси реактивной мощности (рис. 5.2,6)
Qr - Ur(Xd - Xc)/2XdXc, и радиусом г = UflXd + Xc)/2XdXc (кри-
141
Глава 5
вая 1). Точки пересечения окружности с осью Q соответствуют наи-
большим при Рг = 0 генерируемой Qrmax = U^/Xc и потребляемой
Qnmax = -Ur /Xd реактивными мощностями.
При автоматическом регулировании возбуждения отдаваемая гене-
ратором наибольшая по условию устойчивости активная мощность воз-
растает, вследствие увеличения ЭДС Eq.
При автоматическом регулировании, обеспечивающем неизменность
потокосцепления обмотки возбуждения, считается неизменной переход-
ная ЭДС генератора Е' = const. Активная мощность при этом равна
= Wcsin<? _ t/c2№-X>in2<?
Е' (X'd + Xc) 2(Xd + Xc^Xld + Xc)-
Наибольшая передаваемая мощность определяется динамической ха-
рактеристикой 2 (рис. 5.2,а), достигается при углах 6 > тг/2 и превыша-
ет наибольшую мощность при отсутствии регулирования возбуждения.
При этом зависимость реактивной мощности от активной неявнополюс-
ного генератора при предельном угле 6' = (E!,Uc) = тг/2 изображается
окружностью 2 (рис. 5.2,5).
Характеристика мощности 3 (рис. 5.2,а) соответствует автоматиче-
скому изменению тока возбуждения, при котором поддерживается неиз-
менным напряжение генератора Ur = const. При таком автоматическом
регулировании активная мощность определяется выражением
Р„г = sin4 _ sin2Л• (5.9)
Наибольшая передаваемая активная мощность достигает (150-180)%
наибольшей мощности, соответствующей статической характеристи-
ке 1, и наступает при 5Г = (Дг, Д<.) = тг/2.
Рассмотренные два результата влияния на пропускную способность
и статическую устойчивость электропередач автоматического регули-
рования возбуждения синхронных генераторов практически обеспечива-
ются соответственно двумя основными видами автоматического регули-
рования возбуждения, а именно:
• пропорционального (П-) действия;
• пропорционально-дифференциального (ПД-) — «сильного» дей-
ствия (СД).
142
Автоматическое регулирование U и Q синхронных генераторов
При пропорциональном регулировании управляющее воздействие
определяется отклонением напряжения от заданного значения, током
нагрузки генератора и коэффициентом мощности cosyy. Для выраба-
тывания регулирующего воздействия при автоматическом регулирова-
нии возбуждения сильного действия используются производные (первая
и вторая) напряжения и других режимных параметров электропередачи.
Повышение динамической устойчивости достигается быстрым уве-
личением тока возбуждения до его предельно допустимого значения —
так называемой форсировкой возбуждения синхронного генератора. Для
обеспечения результирующей устойчивости путем ресинхронизации ге-
нератора и в других случаях необходимо его развозбуждение. Форсиров-
ка возбуждения и развозбуждения осуществляется устройствами релей-
ного автоматического управления возбуждением.
Автоматическое регулирование и релейное управление возбуждением
способствуют быстрому и полному гашению колебаний, возникающих
после восстановления синхронной работы электропередачи: повышают
четкость действия устройств релейной защиты; способствуют быстро-
му восстановлению напряжения после отключения коротких замыканий,
облегчая самозапуск электродвигателей; решают другие задачи по улуч-
шению качества режимов электроэнергетической системы.
5.3. Возбудители синхронных генераторов
и их характеристики
Виды возбудителей. Напряжение и реактивная мощность син-
хронного генератора определяются состоянием его возбудителя, вос-
принимающего управляющее воздействие автоматического регулятора
возбуждения (АРВ). От свойств и характеристик возбудителя зависит
успешность выполнения указанных выше задач автоматического регу-
лирования возбуждения.
Классическим возбудителем синхронного генератора G является
электрическая машина GE постоянного тока с параллельным самовозбу-
ждением — положительной обратной связью по напряжению (рис. 5.3,а).
В связи с его существенным техническим недостатком — низкой надеж-
ностью действия и ограниченной пропускной (по току) способностью
щеточного коллектора, по мере роста мощности синхронных генерато-
ров появился возбудитель, состоящий из индукторного генератора GE
143
Глава 5
(а)
Рис. 5.3. Схемы возбуждения синхронных генераторов
144
Автоматическое регулирование U и Q синхронных генераторов
переменного тока повышенной частоты с последовательным самовозбу-
ждением (положительной обратной связью по току) и неуправляемого
полупроводникового (диодного) выпрямителя VS (рис. 5.3,5).
Современная модификация такого возбудителя содержит обращен-
ный (с обмотками переменного тока на роторе) многополюсный гене-
ратор GE и вращающийся (расположенный на валу синхронного гене-
ратора G) диодный выпрямитель VS, жестко соединенный с обмоткой
возбуждения LG, — бесщеточное возбуждение (рис. 5.3,е). Питание це-
пи возбуждения обращенного генератора GE производится от вспомога-
тельного многополюсного генератора GEA с возбуждением постоянными
магнитами (рис. 5.3,5) или индукторного генератора с самовозбуждени-
ем (рис. 5.3,е).
Возбудителем современных мощных синхронных генераторов с коль-
цами ротора служит вспомогательный синхронный генератор GE и
управляемый тиристорный преобразователь VST — тиристорное неза-
висимое возбуждение (рис. 5.3,г). Некоторое распространение получило
и тиристорное самовозбуждение, при котором тиристорный преобразо-
ватель VST подключается через трансформатор Т к возбуждаемому син-
хронному генератору.
Тиристорный преобразователь VST используется и при бесщеточном
возбуждении в цепи обмотки возбуждения обращенного синхронного ге-
нератора GE. В инверторном режиме он производит развозбуждение
(гашение поля синхронного генератора). В перспективе — создание
бесщеточного тиристорного возбудителя с вращающимся управляемым
(тиристорным) преобразователем.
Показатели и характеристики возбудителей. Установлены два
показателя для оценки возбудителя синхронного генератора:
• скорость нарастания напряжения на обмотке ротора LG в пере-
ходном процессе его изменения от номинального до наибольшего
возможного значения (в процессе форсировки возбуждения);
• кратность форсировки возбуждения, равная отношению наиболь-
шего возможного установившегося тока ротора (тока форсировки)
/в ф к номинальному /в.ном-
Первый показатель обусловлен инерционностью возбудителей. На-
пример, при форсировке возбуждения генератора с электромашинным
возбудителем постоянного тока (рис. 5.3,а) производится релейное (за-
145
Глава 5
мыкание контакта КМ) изменение самовозбуждения до наибольшей воз-
можной степени. При этом к обмотке самовозбуждения прикладывается
напряжение Д6В = Дв.ном Дев-
Средняя скорость нарастания напряжения возбуждения (dUB/dt)cp
практически с учетом нелинейности характеристики возбудителя опре-
деляется как:
где ДТ — время нарастания напряжения UB от номинального до зна-
чения
UB = С^в.ном + 0,632(С7в.ф — UB ном)-
Переходный процесс в возбудителе описывается нелинейным диффе-
ренциальным уравнением первого порядка. Возбудитель представляют
линеаризованным апериодическим звеном первого порядка с коэффици-
ентом передачи kB и некоторой эквивалентной постоянной времени Те и
передаточной функцией
Тиристорный возбудитель практически безынерционен. Он вносит
лишь фиксированную задержку в переходный процесс, обусловленную
дискретностью управления тиристорами. В структурной схеме авто-
матической системы регулирования он представляется запаздывающим
звеном или, в целях упрощения, безынерционным звеном. Поэтому при-
нимается, что у тиристорного возбудителя скорость нарастания напря-
жения (dUB/dt) —* оо. Для инерционных возбудителей скорость нара-
стания напряжения ротора установлена не менее (d,UB/dt)cp = 2 ед.в./с.
За единицу возбуждения (ед.в.) принимается номинальное напряже-
ние Дв.ном возбуждения синхронного генератора.
Кратность форсировки Кф возбуждения может определяться по отно-
шению наибольшего возможного (предельного) напряжения UB ф к номи-
нальному UB ном или, как указывалось, по отношению токов 1В.Ф и /в.ном.
Кратность форсировки электромашинного возбудителя обычно не пре-
вышает 2, а тиристорного составляет примерно 4.
Скорость нарастания при данной кратности форсировки Кф зави-
сит, как указывалось, от постоянной времени Те, определяющей воз-
можности реализации П- или ПД-регулирования. Наиболее инерционны
146
Автоматическое регулирование U и Q синхронных генераторов
(Те > 0,5 с) электромашинные возбудители постоянного тока, при кото-
рых реализуется только П-регулирование возбуждения.
Быстродействующие тиристорные возбудители: собственно тири-
сторный (рис. 5.3,г) и бесщеточный с тиристорным преобразователем
в цепи возбуждения обращенного генератора (рис. 5.3,е) — обеспечива-
ют эффективность ПД-регулирования возбуждения.
Малая инерционность бесщеточного возбудителя обеспечивается за
счет мощности тиристорного преобразователя, рассеиваемой на бал-
ластном резисторе Дб в Цепи возбуждения обращенного генератора GE
значительного сопротивления и жесткой отрицательной обратной связи
(ОС), снижающей его постоянную времени Те.
5.4. Автоматические регуляторы возбуждения
синхронных генераторов с электромашинными
возбудителями
Автоматические регуляторы напряжения и реактивной мощности
синхронных генераторов с электромашинными возбудителями являют-
ся, как указывалось, П-регуляторами их возбуждения.
Ввиду пропорциональности регулирующего воздействия /рег (см.
рис. 5.3,а,б) отклонению действующего значения напряжения ДСГ =
= Ur - £7ГПР, характеристика регулирования Ur — f(Ir) — внешняя ха-
рактеристика 2 (см. рис. 3.1) регулируемого синхронного генератора —
получается наклонной — статической. Относительное остаточное от-
клонение напряжения Д/7г.ном = А^г.ном/^г.ном в номинальном режиме
синхронного генератора (/г.ном, cos</>r.HOM), создающее ток /рег.ном и чи-
сленно равное коэффициенту статизма спрямленной характеристики
Ест = А^г.ном = tg о: ,
определяет статическую погрешность автоматического регулирования
напряжения Д[7Г, зависящую от cos<^r, т.е. от распределения тока
нагрузки синхронного генератора на активную /а и реактивную 1Р со-
ставляющие. Она обычно укладывается в указывавшиеся допустимые
ГОСТ отклонения напряжения | ± ДД| < 0,05. Поэтому в астатических
регуляторах возбуждения необходимости нет. К тому же они инерцион-
147
Глава 5
ны и неприемлемы с точки зрения повышения пропускной способности
электропередачи.
Регуляторы синхронных генераторов с электромашинными
возбудителями постоянного тока. Ток нагрузки генератора /г и его
cos<pr являются возмущающими воздействиями, вызывающими откло-
нения напряжения синхронного генератора, поэтому согласно (5.3) и
рис. 5.1,6
Ur= у] El-{I&Xdy-IpXd =
= У- С№)2 cos2 9?г - IrXd sin 9?г . (5.12)
Поэтому в технике автоматического регулирования напряжения и ре-
активной мощности синхронных генераторов с электромашинными воз-
будителями постоянного тока используются автоматические устройства
компенсации падений напряжения на внутреннем сопротивлении син-
хронных генераторов — устройства их компаундирования.
Они относятся к простейшим автоматическим П-регуляторам возбу-
ждения, функционирующим по возмущающим воздействиям и образую-
щим с регулируемым (управляемым) электроэнергетическим объектом
УЭО (см. рис. В.2,6) автоматическую систему регулирования с разо-
мкнутой цепью воздействий.
Автоматический регулятор, функционирующий по отклонению на-
пряжения, как указывалось, образует при взаимодействии с УЭО ав-
томатическую систему регулирования с замкнутой цепью воздействий
(см. рис. В.2,е). При этом автоматический регулятор, функционирую-
щий по отклонению напряжения, производит лишь исправление внеш-
ней характеристики компаундированного генератора, обычно получа-
ющейся из-за простоты устройств компаундирования неоднозначной,
ввиду воздействия других возмущений, и неудовлетворяющей требо-
ванию точности регулирования напряжения, — корректирует ее, и по-
этому называется корректором напряжения компаундированного генера-
тора [1].
Наиболее совершенным комбинированным автоматическим регуля-
тором, выпускавшимся электротехнической промышленностью для син-
хронных генераторов с электромашинными возбудителями постоян-
ного тока (см. рис. 5.3,а), был электромагнитный регулятор типа
148
Автоматическое регулирование UnQ синхронных генераторов
УБК-3, представлявший собой управляемое корректором напряжения
КН устройство фазового компаундирования УФК, функционирующее по
двум основным указанным возмущающим воздействиям: току нагруз-
ки /г и cos 9?г синхронного генератора.
Как видно из упрощенной его принципиально-функциональной схемы
(рис. 5.4,а), он выполняется на магнитных усилителях: трансформатор-
ном ALT1 и реакторном ALT2.
Ток питания усилителя ALT1, которому при неизменном токе упра-
вления им (/У1 = const) пропорционален выходной ток регулятора /рег,
определяется геометрической суммой вторичного тока нагрузки генера-
тора /г, поступающего от измерительного трансформатора тока ТА, и
тока/н, возбуждаемого вторичным напряжением и поступающего от
измерительного трансформатора напряжения TV, который балластной
LCR-цепью преобразован в резонансный источник тока ИТ.
В соответствии с векторными диаграммами (рис. 5.4,6) абсолютное
значение тока /к зависит не только от тока /г, но и от cos tpr: при актив-
ной нагрузке генератора (cos = 1) ток /к определяется геометрической
суммой векторов токов /г и /н, сдвинутых по фазе на угол тг/2, а при
реактивной нагрузке (cos <рг = 0) — арифметической их суммой. Однако
при такой простой схеме формирования тока /к и нелинейности внешних
характеристик возбудителя и нерегулируемого синхронного генератора
возможна лишь приближенная грубая компенсация падения напряжения
внутри генератора от тока /г путем повышения возбуждения возбуди-
теля током /рег ~ /к.
Корректор напряжения управляет степенью компаундирования гене-
ратора — изменяет абсолютное значение тока /к, уменьшая или уве-
личивая усилителем ALT1 ток управления /У1, равный выходному то-
ку Лс.н реакторного магнитного усилителя ALT2, который определяется
отклонением напряжения ДДГ = Ur - /7г.пр- Например, при снижении
действующего значения напряжения Ur синхронного генератора умень-
шается и ток /к.н = /У1, при этом в соответствии с проходной характери-
стикой трансформаторного магнитного усилителя ALT1 [8] абсолютное
значение его выходного тока /к и ток /рег возрастают, возбуждение воз-
будителя и синхронного генератора усиливается, увеличивая ЭДС Eq
синхронного генератора до значения, достаточного для восстановления
(со статической погрешностью регулирования) напряжения синхронного
генератора.
149
Глава 5
(а)
Рис. 5-4- Упрощенная схема (а), векторные диаграммы (5) и характе-
ристики (е, г) автоматического регулятора возбуждения (управляемого
фазового компаундирования) (окончание рис. на стр. 151}
Реакторный магнитный усилитель ALT2 управляется током /у2 —
выходным током измерительного органа напряжения ИОН регулятора.
Он выполнен на диодном элементе сравнения абсолютных значений двух
токов, линейно и нелинейно зависящих от напряжения Ur генератора, с
150
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5Ц. Окончание
магнитным вычитанием их выпрямленных значений 10л, (рис. 5.4,а)
в двух встречно включенных одинаковых обмотках wyi, wy2 управления
магнитным усилителем ALT2.
В соответствии с проходной характеристикой реакторного магнит-
ного усилителя с положительной обратной связью [8] для рассмотрен-
ного снижения его выходного тока /кн = lyi (при снижении напряже-
ния Ur) необходим уменьшающийся и затем отрицательный ток упра-
вления /у2 = /онл — Л)л (см. рис. 5.4,6).
Сравниваемые токи формируются линейным и нелинейным измери-
тельными преобразователями напряжения Ur, выполненными на трех-
обмоточном трансформаторе TLT с насыщающимся магнитопроводом
(рис. 5.4,а). Ток /Ол возбуждается трехфазным напряжением вторич-
ной обмотки W2 трансформатора и пропорционален напряжению Ur, а
ток /онл — однофазной ЭДС включенных по схеме разомкнутого тре-
угольника обмоток W3 утроенной частоты. Ее абсолютное значение
является нелинейной функцией напряжения Ur, как и третья гармоника
тока намагничивания насыщающегося магнитопровода [1, 2].
151
Глава 5
Характеристики ИОН и магнитных усилителей [8] обеспечивают на-
стройку (установочным автотрансформатором TLy} и действие автома-
тического регулятора в целом [1,2]. В частности, многозначные графи-
ки 1—3 на рис. 5.4,г показывают зависимости тока /рег от напряжения
генератора при разных, например, трех возрастающих значениях cos<^r
и тока нагрузки /г синхронного генератора.
Показанная на схеме регулятора (рис.5.4,а) местная гибкая отри-
цательная обратная связь ГОС, как известно (см. §3.2), обеспечивает
устойчивость функционирования (предотвращает возникновение авто-
колебаний) замкнутой автоматической системы пропорционального ре-
гулирования возбуждения синхронного генератора.
Автоматический регулятор обеспечивает необходимое возбуждение
генератора от холостого хода, устанавливаемого резистором Ясв (см.
рис. 5.3,а), до номинального и форсировку возбуждения током КЗ.
Предусматривается также релейно-контактная форсировка возбуждения
при снижении напряжения более чем на 10% [1, 2].
Регуляторы синхронных генераторов с электромашинны-
ми возбудителями переменного тока. На синхронных генераторах
с электрошинными возбудителями в виде индукторного генератора пе-
ременного тока повышенной частоты с диодными выпрямителями (см.
рис. 5.3,6) установлен электромагнитный регулятор АРВ, функциони-
рующий только по отклонению напряжения (рис. 5.5), дополненный
бесконтактным устройством форсировки возбуждения генератора УФВ.
Особенностью такого возбудителя является сильное перевозбуждение
током ротора генератора: как указывалось, индукторный генератор име-
ет последовательное самовозбуждение (обмотка LE3). Поэтому автома-
тический регулятор действует только на снижение его возбуждения во
всех нормальных режимах работы от холостого хода до номинального.
Однако органически сочетаемые и согласованно настроенные собственно
регулятор АРВ и устройство форсировки возбуждения УФВ образуют
в целом автоматическое устройство реверсивного действия, не только
снижающее, но и увеличивающее возбуждение возбудителя в режиме
форсировки возбуждения синхронного генератора. Автоматическое из-
менение возбуждения в нормальных режимах производится противодей-
ствующим самовозбуждению током /орег.п в обмотке LE1 возбуждения —
выходным током магнитного усилителя ALT1 собственного регулятора.
Форсировка возбуждения достигается выходным током /орег.с магнитно-
152
153
J
Рис. 5.5. Схема возбуждения и автоматического регулирования напряжения синхронного генератора
с диодно-электромашинным возбудителем
Автоматическое регулирование I' и Q синхронных генераторов
Глава 5
го усилителя ALT2 в обмотке LE2, согласованно действующим с током
самовозбу ждения.
Измерительный орган напряжения регулятора ИОН выполнен ана-
логично применяемому в электромагнитных корректорах. Его особенно-
стью является использование нелинейного тока намагничивания TLT и
наличие двух дополнительных установочных резисторов Ry с, Яу.п, необ-
ходимых для соответствующей настройки согласно- и противовключен-
ной частей регулятора и получения характеристики /орег = /(Пг) регу-
лятора в целом. Резисторами устанавливаются зависимости линейных
токов 1олс, А)лп от напряжения генератора Ur, необходимые для дей-
ствия магнитных усилителей в указанных выше диапазонах изменения
возбуждения турбогенератора.
На рис. 5.6,а,б приведены две характеристики измерительного ор-
гана напряжения и характеристики управления магнитных усилителей.
Усилитель ALT1 управляется током /оу.п = Л)нл - А)л.п? а усилитель
ALT2 — током /Оу.с = Л)л с - /онл- Равенство токов /Оу п и /Оу с нулю
наступает при разных напряжениях UT генератора. Ток /Оу.п равен ну-
лю при заданном (предписанном) напряжении в номинальном режиме
Ur ном, при этом рабочий ток магнитного усилителя ALT1 равен номи-
нальному току регулятора /орег.пном- Напряжение 11гф < Ur.SOM, при
котором равен нулю ток /Оу.с, устанавливается резистором Яус таким,
чтобы по мере снижения напряжения турбогенератора до Ur, при кото-
ром исчерпывается рабочий диапазон характеристики усилителя ALT1
(Л)Регп ~ 0), вступал в действие магнитный усилитель ALT2. Напряже-
ние Ur ф можно рассматривать как условно эквивалентное напряжению
начала действия устройства форсировки возбуждения генератора.
На рис. 5.6,в приведены совмещенные характеристики согласно-
и противовключенной частей регулятора, образующие характеристику
/Орег = /({7Г) автоматического регулятора в целом. На характеристике
помечены токи регулятора в характерных режимах работы турбогене-
ратора.
Для обеспечения форсировки возбуждения при глубоких снижениях
напряжения, при которых разность токов измерительных преобразова-
телей снижается практически до нуля, в измерительный орган напря-
жения вводится ток /Оп от подвозбудителя (см. рис. 5.3,6), заменяющий
линейные токи 10л измерительного органа. Ток 10п необходим для со-
здания начального возбуждения генератора при его пуске. При этом за
154
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.6. Характеристики электромагнитного регулятора:
а — измерительного органа; б — магнитных усилителей; в — регулятора в
целом
счет тока /Оп в возбудитель вводится максимальный ток /Орег ф, обусло-
вливающий начальное его возбуждение.
Как указывалось, целесообразна возможно большая кратность фор-
сировки возбуждения синхронных генераторов в целях повышения ди-
намической устойчивости электропередачи. Однако для современных
155
Г лава 5
мощных турбо- и гидрогенераторов с интенсивным использованием ак-
тивных материалов, несмотря на форсированное охлаждение обмоток,
по условию термической стойкости высокая форсировка возбуждения не-
допустима. Поэтому ограничение кратности форсировки возбуждения
является одной из особенностей автоматического управления возбужде-
нием таких генераторов. При этом высокая форсировочная способность
возбудителей должна сохраняться для обеспечения высокой скорости на-
растания напряжения ротора генератора.
Устройство ограничения кратности форсировки УОФ (см.рис. 5.5)
представляет собой, по существу, регулятор напряжения Дв ротора
генератора нереверсивного действия. Измерительный орган напряже-
ния Us выполняется по типовой схеме (см. рис. 5.4,а) и настраивает-
ся на {7в.пр = 2ДВ.НОМ. В магнитном усилителе с самонасыщением ре-
гулятора предусматривается дополнительная внешняя положительная
обратная связь, обеспечивающая работу усилителя в релейном режиме
при UB > tfB.np.
При двухкратном напряжении на роторе турбогенератора ток /Оф
магнитного усилителя резко возрастает (практически от нуля) и воздей-
ствует на магнитные усилители ALT1 и ALT2 регулятора напряжения
турбогенератора. При этом ток /орегс усилителя ALT1 ограничивается
значением /орег.о.ф (рис. 5.6,в), соответствующим двухкратной форси-
ровке возбуждения.
5.5. Автоматические регуляторы напряжения
и реактивной мощности синхронных генераторов
с тиристорным возбуждением
Назначение и особенности. Как указывалось, при практически
безынерционных тиристорных возбудителях современных мощных син-
хронных генераторов (см. рис. 5.3,в,г) реализуются алгоритмы про-
порционально-дифференциального (ПД-) автоматического регулирова-
ния напряжения и реактивной мощности. Интенсивность и быстрота
их воздействия на возбудитель обусловили привившееся в специальной
литературе название регулирования «сильного» действия (АРВ СД).
Указанные весьма ценные свойства АРВ СД обеспечиваются исполь-
зованием сигналов, формируемых не только по отклонению, но и по ско-
рости изменения действующего значения напряжения синхронного гене-
156
Автоматическое регулирование U и Q синхронных генераторов
ратора и отображающих скорость и ускорение нарастания важнейше-
го для обеспечения нормального функционирования современных про-
тяженных и сильно нагруженных электропередач режимного параме-
тра — угла сдвига фаз между ЭДС Е_д синхронного генератора электро-
станции и напряжением Ц^. на шинах приемной подстанции ЭЭС (см.
рис. 5.1,6).
Поэтому назначением АРВ СД является не только поддержание на-
пряжения на заданном уровне на шинах электростанции и генерируемой
или потребляемой синхронным генератором реактивной мощности, но и
повышение до максимально возможных уровней статической и динами-
ческой устойчивости параллельной работы электрических станций.
Графики регулирующих воздействий (РВ) при пропорциональном
(рис. 5.7,а) и при пропорционально-дифференциальном автоматическом
регулировании возбуждения (рис. 5.7,6), например при использовании
только первой производной напряжения синхронного генератора, демон-
стрируют указанные достоинства АРВ СД.
Регулирующее воздействие РВС равно сумме воздействий РВп и РВ1,
обусловленных отклонением и скоростью изменения напряжения. Из
графиков видно, что в начальный момент изменения напряжения регули-
рующее воздействие РВП еще отсутствует, тогда как воздействие РВ'
максимально и тем больше, чем большим могло бы оказаться откло-
нение ДУнб напряжения при отсутствии регулирования возбуждения.
Поэтому в одних и тех же условиях наибольшее отклонение напряже-
ния ДДнб.с при автоматическом регулировании сильного действия зна-
чительно меньше отклонения ДДНб.п при пропорциональном регулиро-
вании.
Процесс восстановления напряжения протекает быстрее (/рег.с <
< ^рег.п) и более качественно, т.е. при менее выраженных явлениях
перерегулирования и более интенсивном затухании обычно колебатель-
ного переходного процесса. Указанное улучшение качества регулиро-
вания обусловливается изменением знака регулирующего воздействия
РВС с опережением момента времени, когда регулируемое напряжение
достигает первоначального значения: начинается противодействие вос-
становлению напряжения. Поэтому превышение (-ДДнб.с) напряжением
заданного значения в первый период колебательного процесса его вос-
становления при регулировании сильного действия меньше превышения
(—ДДнб.п) при пропорциональном регулировании. Таким образом, авто-
157
Рис. 5.7. Временные графики изменений напряжения синхронного генератора и регулирующих воз-
действий П-регулятора (а) и ПД-регулятора (/>) возбуждения
Глава 5
Автоматическое регулирование U и Q синхронных генераторов
матическое регулирование возбуждения сильного действия обеспечивает
успокоение (демпфирование) колебаний напряжения.
Алгоритм автоматического регулирования возбуждения
сильного действия. Под алгоритмом или законом автоматического ре-
гулирования понимается функция режимных параметров электропере-
дачи, определяющая регулирующее воздействие на возбудитель генера-
тора. В соответствии с назначением автоматического регулирования
возбуждения сильного действия естественным было бы формирование
воздействия по основному параметру, от которого зависит статическая,
динамическая и результирующая устойчивость электропередачи — по
углу 6 сдвига фаз между ЭДС генератора и напряжением Ц^. под-
станции ЭЭС (см. рис. 5.1,6). Для получения соответствующих сиг-
налов необходима передача информации (телепередача) о векторе Ц^. с
приемного на передающий конец линии.
В связи со сложностью и недостаточной надежностью действия
устройств телепередачи используется изменение частоты напряжения —
мгновенная частота синхронного генератора, пропорциональная произ-
водной угла д по времени. Поэтому в алгоритм автоматического регу-
лирования возбуждения сильного действия входят: отклонение ампли-
туды или действующего значения напряжения Ur от заданного (предпи-
санного) значения D’rnp; производная напряжения U[ = dUTldt-, измене-
ние Д'/ га dd/dt и первая производная /' = df/dt ~ d26/dt частоты /
и производная тока возбуждения генератора /' = dl^/dt.
Отклонение напряжения ДПГ необходимо для обеспечения практиче-
ски постоянного (с точностью статической погрешности регулирования)
напряжения Ur при изменениях тока нагрузки синхронного генератора
или напряжения в начале линии электропередачи
|Ел1 = |Ег - ЯЛт| « const, (5.13)
формируемого на выходе регулятора моделированием падения напря-
жения ЩХТ на сопротивлении Хт трансформатора блока генератор-
трансформатор (см. ниже, рис. 5.10,а).
Роль производной напряжения Ur в автоматическом регулировании
возбуждения иллюстрировалась графиками РВ' (рис. 5.7,6). Как из-
вестно [1], использование сигнала по производной регулируемой величи-
ны представляет второй способ обеспечения устойчивости функциониро-
вания замкнутой автоматической системы регулирования: первый спо-
159
Глава 5
соб — введение местной гибкой отрицательной обратной связи (см. § 3.2),
т.е. способ ее стабилизации. Сигнал по производной напряжения стаби-
лизирует автоматическую систему регулирования возбуждения прежде
всего при холостом ходе генератора.
Сигналы, отображающие изменение и производную частоты совмест-
но с сигналами по производным напряжения и тока возбуждения, т.е.
ЭДС генератора, повышают устойчивость замкнутой автоматической
системы регулирования, включающей нагруженную линию электропе-
редачи, обеспечивая затухание электромеханических переходных про-
цессов, — повышают, как указывалось, статическую и динамическую
устойчивость параллельной работы электростанции с ЭЭС.
Таким образом, алгоритм автоматического регулирования возбужде-
ния сильного действия представляется в виде:
Uper = kuAU + k'uU' + kfA'f + k'ff’ + A/,/' (5.14)
или в операторной форме в виде
^рег(р) = (ки +рк,и) MJ(p) + [-ТГ^-Г +pfc/l Д/(р)+р^/в(р), (5.15)
lP1 д.р Т 1 J
где Д/ — отклонение частоты напряжения генератора /г от синхрон-
ной /с, Д/ = fc - /г = 2тгД/; ку, kf, к'^, k'j — коэффициенты с размер-
ностью постоянной времени.
Из выражений (5.14) и (5.15) видно, что сигнал по изменению ча-
стоты Д'/ формируется реальным дифференцирующим звеном с отно-
сительно большой постоянной времени Тд.р; он существует только при
переходном процессе изменения частоты. В установившемся режиме при
наличии отклонения частоты Д/ сигнал Д'/ отсутствует.
Структурная схема регулятора. Как указывалось (см. §3.2),
структура автоматического регулятора при известном алгоритме может
формироваться двумя способами. В соответствии с алгоритмом (5.15)
однозначно определяется первый способ параллельного соединения соот-
ветствующих структурных звеньев в цепи прямой связи схемы.
Идеализированная структурная схема АРВ СД (рис. 5.8) содержит
безынерционное звено с коэффициентом усиления кц, идеальные диффе-
ренцирующие звенья с передаточными функциями pk'v, рк'?, рк\ и реаль-
ное дифференцирующее звено с передаточной функцией [р/(рТд.р +1)]kf;
безынерционный сумматор AW и апериодическое звено с передаточной
160
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.8. Структурная схема автоматической системы регулирования
возбуждения автоматическим регулятором сильного действия
функцией 1/(рТу + 1), отображающее исполнительный усилитель авто-
матического регулятора.
Регулируемый объект — синхронный генератор с возбудителем в
структурной схеме автоматической системы регулирования возбужде-
ния сильного действия представляется двумя последовательно соединен-
ными апериодическими звеньями 1/(рТе + 1) с постоянными времени воз-
будителя Те < 0,1 с и синхронного генератора Td0 = TdoX'd/Xj ~ 1 с.
В реальной структурной схеме АРВ СД все звенья инерционны, од-
нако их постоянные времени несоизмеримы. Так, постоянные времени
дифференцирующих звеньев, близких к идеальным Тд.и, и реального Тл р
различаются на порядок: Та р ~ 10Тд.и. В связи с меньшим быстродей-
ствием измерительных преобразователей отклонения частоты А/, чем
измерительных преобразователей отклонения амплитуды A U напряже-
ния генератора, в схему вводятся апериодические звенья в цепи фор-
161
Глава 5
мирования сигналов по изменению и производной частоты. Известен
[см. (5.15)], например, следующий близкий к реальному алгоритм функ-
ционирования АРВ СД, использовавшийся при исследованиях динами-
ческих свойств регулятора (без сигнала по производной тока /в возбуж-
дения)
Uper(p) =
[ ku + pk’J ] дг(й + [ pkl + Д/(й
[0,014р+ 1 0,026p+lJ [0,9р+ 1 0,026p+lj J А )
~ (0,03р + 1)(0,045р + 1)(0,00042р2 + 0,041р + 1) ’
(5.16)
в котором звеньями второго порядка учтены последовательно соединен-
ные два апериодических звена в цепи формирования сигналов Д'/ и /'
и в усилительно-исполнительной части АРВ СД. Однако их постоянные
времени относительно малы (по сравнению с постоянными времени воз-
будителя Те и синхронного генератора Т[о). Поэтому вполне допустимо
при расчетах параметров настройки АРВ СД — определении коэффици-
ентов усиления сигналов ки, к'ц, к/, k'j пользоваться идеализированными
алгоритмом (5.15) и структурной схемой рис. 5.8.
Функциональная схема автоматического регулятора возбу-
ждения сильного действия. Автоматический регулятор, как извест-
но [1, 8], состоит из двух основных функциональных частей: измери-
тельной ИЧ и исполнительной Ис.Ч (рис. 5.9). Особенностью АРВ СД
является наличие в нем логической функциональной части ЛЧ, коор-
динирующей использование сигналов по производным режимных пара-
метров.
В соответствии с алгоритмом функционирования (5.14), (5.15) ИЧ
содержит три основных измерительных органа (ИО): напряжения ИОН,
изменения частоты ИОИЧ и тока возбуждения ИОТВ. Измерительный
орган напряжения формирует сигналы по отклонению AJ7 и скорости
изменения dU/dt действующего значения напряжения синхронного ге-
нератора, а ИОИЧ — сигналы по изменению Д'/ и производной df / dt
частоты.
Измерительный орган тока возбуждения кроме сигнала, отобража-
ющего, как указывалось, скорость изменения ЭДС синхронного гене-
ратора dEg/dt ~ d!B/dt, формирует сигналы по отклонению тока воз-
162
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.9. Функциональная схема автоматической системы регулирова-
ния возбуждения с АРВ СД
163
Глава 5
буждения от номинального Д/в и по интегральной функции J Д/2 dt,
необходимые для поддержания тока возбуждения на неизменном уров-
не в режиме выбега синхронных генераторов атомных электростанций
(по технологическим условиям останова турбоагрегата) и для разгрузки
синхронного генератора по генерируемой реактивной мощности соответ-
ственно.
На рис. 5.9 показаны дополнительные измерительные органы реак-
тивного и активного токов ИОРиА Т и угла сдвига фаз ИОУ между ЭДС
холостого хода генератора Е_г х (перед его синхронизацией) и напряже-
нием на шинах электростанции и элемент изменения уставки ЭИУ
регулятора.
Формируемые ими сигналы используются для предотвращения нару-
шения синхронной статической устойчивости электропередачи в режиме
потребления реактивной мощности синхронным генератором и для его
автоматической точной синхронизации.
Измерительная часть АРВ СД содержит активный сумматор AW
сигналов в соответствии с (5.15).
Сумма сигналов измерительной части ИЧ превращается в регули-
рующее воздействие в виде напряжения {7рег исполнительным усилите-
лем или двумя усилителями Al, А2 при двух тиристорных преобразова-
телях.
Техническое исполнение автоматических регуляторов воз-
буждения сильного действия. На многих электростанциях нахо-
дится в эксплуатации электромагнитный АРВ СД, выполненный на
магнитных усилителях. В последние годы АО «Электросила» по-
ставляет аналоговый микросхемный (полупроводниковый) АРВ СДП,
выполненный на интегральных операционных усилителях, и аналого-
цифровой АРВ СД для турбогенераторов с бесщеточным возбуждением
(см. рис. 5.3,в).
В настоящее время проходит опытную эксплуатацию цифровой ми-
кропроцессорный АРВ СДМ. В первой его разработке использовался 8-
разрядный микропроцессор серии К580 и 10-разрядный АЦП с време-
нем аналого-цифрового преобразования одного входного сигнала не бо-
лее 10-2Тп. В последней модификации применяется высокопроизводи-
тельный 16-разрядный микропроцессорный комплект БИС серии К1810
и быстродействующий 12-разрядный АЦП с временем преобразования
одного канала 10-3Тп.
164
Автоматическое регулирование U и Q синхронных генераторов
Программа на языке Ассемблера AS М-80 обеспечивает его функцио-
нирование в соответствии с алгоритмом (5.14) и формирование сигналов,
необходимых для указанных других функций АРВ СДМ по управлению
возбуждением синхронного генератора. Регулятор содержит выходной
ЦАП и выдает регулирующее воздействие в виде указанного напряже-
ния Uper постоянного тока, изменяющееся по абсолютному значению и
по знаку: регулятор реверсивного действия.
5.6. Измерительная часть аналоговых регуляторов
возбуждения сильного действия
Выходными сигналами измерительных органов аналоговых АРВ СД
являются напряжения постоянного тока, изменяющиеся по значению и
знаку пропорционально, как указывалось, отклонениям действующего
значения напряжения от предписанного значения, его производной, из-
менениям и производной частоты, значениям реактивного и активного
токов синхронного генератора, отклонению тока возбуждения и его про-
изводной. Формирование таких сигналов связано с выпрямлением пере-
менных напряжений и токов промышленной частоты, сопровождаемым,
как известно, генерированием внутренних помех в виде гармонических
составляющих выпрямленных величин. Выделение сигналов на их фоне
производится инерционными частотными фильтрами. Однако эффек-
тивность АРВ СД достигается только при быстродействующих ИО.
Поэтому измерительные органы напряжения и тока возбуждения
аналоговых АРВ СД выполняются на трехфазных выпрямителях с ма-
лоинерционными частотными фильтрами.
Измерительные органы электромагнитного регулятора. В
электромагнитном АРВ СД оказалось возможным применение пассив-
ных фильтров нижних частот (ФНЧ) с малыми постоянными времени,
благодаря фильтрующим свойствам магнитных усилителей постоянных
составляющих выпрямленных токов [1, 8].
В схеме измерительного органа напряжения ИОН электромагнитно-
го АРВ СД (рис. 5.10, а) на выходе трехфазного выпрямителя VS ис-
пользуется быстродействующий компенсационный частотный фильтр,
задерживающий только вторую гармонику выпрямленного напряжения,
появляющуюся при несимметрии трехфазных напряжений синхронно-
165
Глава 5
го генератора. В трехфазном измерительном органе тока возбуждения,
подключенном к измерительным трансформаторам ТА2, установленным
на стороне переменного тока тиристорного преобразователя, питаемого,
как указывалось (см. рис. 5.9) от вспомогательного синхронного гене-
ратора GE, используется ЛС-фильтр первого порядка.
В однофазной же схеме измерительного органа изменения частоты
ИОИЧ (рис. 5.10,6) применяются три ЛС-фильтра на выходах двух маг-
нитных усилителей, образующих реверсивный усилитель ALT [8], и на
общем выходе. Поэтому в реальном алгоритме (5.16) инерционность це-
пи формирования сигналов по изменению и производной частоты учтена
двумя последовательно соединенными апериодическими звеньями.
Измерительный орган напряжения ИОН (рис. 5.10,а) регуля-
тора выполнен на трехфазном диодном элементе сравнения абсолютного
значения напряжения 6'Г1Х, пропорционального, согласно (5.13), напря-
жению на шинах электростанции Лл (в начале линии электропередачи)
с постоянным заданным (предписанным) значением.
Сравнение производится при помощи стабилитронов VD с напряже-
нием стабилизации UCT. Выходное напряжение Идс/ элемента сравнения
(и ток 1д,и) пропорционально отклонению напряжения ДЛл от предпи-
санного значения Лпр, моделируемого напряжением Лст,
U^u = 2dCT — Uq ~ 2{7СТ—knUn = А?П(2{7СТ/А?П —{7Л) = &п({7пр —Лл), (5.17)
где ки — коэффициент передачи задающего элемента ИОН — элемента
изменения уставки регулятора ЭИУ (см. рис. 5.9), учитывающий и
выпрямление Un.
На рис. 5.10,в показаны зависимости напряжения Uajj от напряже-
ния Un при двух предписанных его значениях {7пр1 и Лпр2 — характе-
ристики измерительного органа Лду = f(Un). Горизонтальные участки
характеристик соответствуют глубокому снижению напряжения генера-
тора (при КЗ), при котором стабилитронный элемент сравнения через
диод I7D1 подключается к источнику питания регулятора, чем обеспе-
чивается форсировка возбуждения генератора (ток /ду).
Напряжение UBX = U„ создается согласно (5.13) элементом токо-
вой компенсации падения напряжения на сопротивлении трансформато-
ра jXT, моделируемого резисторами Ra, Rc, подключенным через вто-
ричные измерительные трансформаторы токаТГА1, TLA2 к первичным
измерительным трансформаторам тока фаз А и С.
166
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.10. Схемы и характеристики измерительных органов:
167
Глава 5
Рис. 5.10. Окончание
Моделирование резистором индуктивного сопротивления jXT транс-
форматора достигается сочетанием указанных фазных токов и между-
фазных напряжений Uj>c и Ц_аЬ соответственно. В частности, при чисто
реактивном токе /р падение напряжения, например от тока 1ар на рези-
сторе Ra, арифметически вычитается из напряжения Uber-
Ubcn = UbcBX = Uber ~ UipRa 5 (5.18)
как и падение напряжения на реактивном сопротивлении jXT от тока 1ар
вычитается из фазного напряжения [см. (5.1)].
Сигнал (ток /у') по производной напряжения U^u формируется пас-
сивным ЛС-дифференциатором D1.
Измерительный орган изменения частоты ИОИЧ выпол-
нен на диодной схеме сравнения абсолютных значений токов Д, Гг (см.
рис. 5.10,6), являющихся разными функциями частоты (рис. 5.10,г).
Преобразование изменений частоты в изменения абсолютных значений
токов осуществляется резонансными контурами LI, С1 и Z2, С2 с раз-
ными резонансными частотами /01 = 45 Гц, /02 = 55 Гц. Предписанная
частота равна номинальной /пр = faoM = 50 Гц.
Элемент сравнения выполнен с магнитным вычитанием выпрямлен-
ных токов /01, 1о2 управления магнитным усилителем ALT. Выход-
ной ток элемента сравнения — ток управления магнитным усилителем
Гу = Ли — Л)2-
168
Автоматическое регулирование U и Q синхронных генераторов
Формирование сигнала по изменению частоты k/A'f (ток /д,у) и по
производной частоты k'jf' (ток If>) производится последовательной RC-
цепью с большой, как указывалось, постоянной времени и пассивным
дифференциатором D2 соответственно.
Измерительный орган тока ротора ИОТР формирует сигнал
(ток 1^) по производной тока ротора необходимый в соответствии
с законом (5.15) автоматического регулирования возбуждения сильного
действия. В связи с тем, что регулятор, кроме поддержания напряже-
ния U„ ~ const, выполняет ряд операций автоматического управления
возбуждением, измерительный орган тока ротора вырабатывает соот-
ветствующие сигналы: ограничения на двухкратном уровне тока рото-
ра при форсировке возбуждения; разгрузки генератора при перегрузке
током возбуждения (генерируемым реактивным током) и сигнал по от-
клонению тока ротора при выбеге генераторов атомных электростанций.
Ограничение кратности форсировки возбуждения необходимо, как
указывалось, по условию термической стойкости цепей ротора и статора
мощных генераторов с непосредственным охлаждением обмоток и в свя-
зи с целесообразностью сохранения высокой форсировочной способности
возбудителей для повышения скорости нарастания напряжения.
Сигнал на разгрузку генератора вырабатывается с выдержкой вре-
мени, зависящей от степени перегрузки. Сигнал формируется путем
сравнения напряжения на выходе интегрирующего магнитного усилите-
ля, пропорционального
4,= / (-Д--1) / М’Л
J Vbhom / J
О О
с некоторым постоянным напряжением, пропорциональным
А = / (-у5----1^ = const
'Ав ном /
Равенство напряжений означает, что при токе возбуждения 1В >
> ^вном за время tc появления сигнала на разгрузку ротор генерато-
ра нагревается до предельно допустимой температуры. Сигнал f AIBdt
о
поступает в логическую часть ЛЧ регулятора (см. рис.5.9), а с нее
169
Глава 5
на сумматор сигналов AW и на задающий элемент (изменения устав-
ки регулятора) ЭИ У. Таким образом, производится быстродействующее
статическое регулирование по отклонению тока возбуждения от номи-
нального и медленное астатическое регулирование через интегрирую-
щий задающий элемент.
Измерительный орган потребляемого реактивного и ак-
тивного токов ИОРиАТ необходим в связи с тем, что синхрон-
ные генераторы современных мощных тепловых и гидроэлектростан-
ций, связанных с ЭЭС длинными линиями высокого и сверхвысокого
напряжений, генерирующими значительную реактивную мощность, в
режимах минимальных нагрузок электропередач работают с недовоз-
буждением в режиме потребления реактивной мощности. Допустимая
потребляемая реактивная мощность генератора ограничивается стати-
ческой устойчивостью электропередачи.
Возможные режимы генератора при недовозбуждении по условию
устойчивости определяются областью в координатах -1Гр, 1Г а (см.
рис. 5.2,6). В соответствии с векторной диаграммой неявнополюсного
генератора (см. рис. 5.1,6)
или
U2
Q = + PrCtg5r = -Qnmax + PrCtgdr, (5.19)
где Qnmax — наибольшая потребляемая реактивная мощность при РГ =
= 0 и полном развозбуждении генератора (/в = 0).
Выражение (5.19) приводится к виду:
/rp-Ir.aCtg4 = -^. (5.20)
Ad
При 8Г = const выражение (5.20) представляет собой уравнение пря-
мой, проходящей через точки, соответствующие граничным режимам
при /г а ~ Рг = 0 и при Qn = 0 (см. рис. 5.2,6).
Измерительный орган ИОРиА Т, формирующий сигнал на ограниче-
ние минимального возбуждения генератора, называется ограничителем
минимального возбуждения.
170
Автоматическое регулирование U nQ синхронных генераторов
Согласно (5.20) в измерительном органе производится сравнение
абсолютных значений двух напряжений Z7qi ~ Ur и Z7q2 ~ Игр-
-Zractg£r) [1].
Выходное напряжение измерительного органа в режиме потребления
реактивной мощности появляется, если потребляемая мощность превы-
шает допустимую. Оно обусловливает возрастание тока ротора генера-
тора, т.е. снижение потребляемой реактивной мощности.
Элемент изменения уставки регулятора служит для ввода
программной информации о необходимом изменении предписанного на-
пряжения генератора от автоматического устройства (АУТС) включе-
ния генератора на параллельную работу от центрального регулятора
напряжения (ЦРН) электростанции (см. ниже) и устройства автомати-
ческого распределения реактивной ее нагрузки (УРРН) между парал-
лельно работающими синхронными генераторами.
Измерительные органы микросхемного регулятора. Пробле-
ма обеспечения быстродействия ИО решается в АРВ СДП применени-
ем наименее инерционных частотных фильтров с конечной импульсной
характеристикой — аналоговых прототипов нерекурсивных цифровых
фильтров — в виде управляемых активных интеграторов [8, 17].
Измерительный орган напряжения функционирует на осно-
ве интегрирования мгновенных отклонений |Дп| выпрямленного напря-
жения на шинах электростанции |ил| от предписанного значения Uup
(рис. 5.11,5). Интегрирование производится в течение времени t = Ти/3
каждым из трех активных интеграторов AJ1-AJ3 (рис. 5.И,а), упра-
вляемых тремя фазными напряжениями иа, иъ, ис.
Мгновенное отклонение напряжения определяется активным элемен-
том сравнения, состоящим из измерительного преобразователя — трех-
фазного выпрямителя VS, задающего элемента — установочного рези-
стора Ry делителя напряжения ЕП стабилизированного источника пита-
ния и активного вычитателя АН. Напряжение |Дцл| поступает на вхо-
ды указанных интеграторов. Интегральными ключами SA1-SA-1, от-
крываемыми кратковременными импульсами иу (рис. 5.11,5), формиру-
емыми в начале каждого периода фазных напряжений компараторами
ДА1-ДАЗ и пассивными RC дифференциаторами с выходными диода-
ми VD1-VD3, интеграторы подключаются к запоминающим конденса-
торам С1-СЗ, фиксирующим отклонение напряжения AZ7 ~ ±ДИ. Через
активные повторители напряжений AU с высоким входным сопротивле-
171
Глава 5
172
Автоматическое регулирование UnQ синхронных генераторов
Рис. 5.11. Функциональная схема (а), временные графики электрических величин (б) и проходная
характеристика (в) измерительного органа напряжения
173
Глава 5
нием, предотвращающим разряд конденсаторов, отклонение напряже-
ния поступает на выходной активный сумматор AW 1 и по цепям отри-
цательных обратных связей Roc — на входы интеграторов. Поэтому
интеграторы в каждом рабочем интервале определяют лишь прираще-
ния отклонения напряжения. Значение отклонения напряжения Д(7 на
входе AW1 изменяется дискретно 3 раза за период промышленной час-
тоты.
Сформированный таким образом сигнал по отклонению напряжения
ЛИ дифференциатором AD превращается в сигнал dU/dt, отображаю-
щий скорость изменения напряжения синхронного генератора. Сигналы
поступают на выходной активный сумматор AW2 измерительной части
регулятора (см. рис. 5.9). На рис. 5.11,в приведена характеристика
ИОН, ее изломы соответствуют максимальному и минимальному значе-
ниям выпрямленного напряжения генератора в рабочем диапазоне.
Измерительный орган изменения частоты ИОИЧ форми-
рует сшналы в виде напряжений пд<; и uj>, отображающих, как указы-
валось, первую и вторую производные угла 6 путем реального и практи-
чески идеального дифференцирования напряжения [7ду, пропорциональ-
ного отклонению частоты / от номинальной промышленной.
Напряжение Сд/ получается на выходе элемента сравнения постоян-
ного напряжения ?7;п, отображающего номинальную частоту, на уста-
новочном резисторе Ry (рис. 5.12,а) и напряжения Uf, обратно про-
порционального частоте, на выходе управляемого активного интегра-
тора AJ.
Интегрируется отрицательное напряжение Г'к (рис. 5.12,6) с прямо-
угольной формой кривой, формируемое компаратором ЕА из синусои-
дального (после пассивного ФНЧ ZF1~) между фазного напряжения иГ
синхронного генератора. Время интегрирования равно длительности
изменяющегося (при изменении частоты) периода напряжения иГ. По-
этому наибольшее значение Uf напряжения ии на выходе интеграто-
ра тем больше, чем меньше частота. Напряжение Uf в конце каждо-
го интервала интегрирования (например, отрицательного полупериода
напряжения пг) фиксируется запоминающим конденсатором С2 и че-
рез повторитель напряжения AU поступает на вход элемента сравне-
ния — вычитателя АН, напряжение U&f на выходе которого пропор-
ционально отклонению длительности периода напряжения иг от номи-
нальной.
174
Рис. 5.12. Функциональная схема (а) и временные графики (б) измерительного органа изменения
частоты (окончание рис. на стр. 176)
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.12. Окончание
Глава 5
Автоматическое регулирование UuQ синхронных генераторов
Активным дифференциатором AD с коэффициентом усиления, рав-
ным обратному значению квадрата номинальной частоты f ~ /ном, фор-
мируется сигнал -Uf> по производной частоты по правилу дифференци-
рования дроби Т = 1//.
Сигнал цд/f по изменению частоты получается пропусканием напря-
жения -Uf через активный ФНЧ ZF2 первого порядка (апериодическое
звено). Сигналы в виде напряжений дд</ и ир поступают на выходной
сумматор AW измерительной части регулятора (см. рис. 5.9).
Интегратор AJ управляется короткими импульсами uyl, ду2 их
формирователя F из напряжения UK с прямоугольной формой кривой
(рис. 5.12,5) в конце интервала интегрирования. Они открывают ключи
SA1 и SA2, обеспечивающие передачу напряжения в запоминающий кон-
денсатор С2 и разряд конденсатора С1 интегратора (перевод интегра-
тора в исходное состояние).
Измерительный орган реактивного и активного токов
ИОРиА Т состоит из управляемых выпрямителей напряжений ивх =
= ibRe, пропорциональных одному из фазных токов, например гь, пере-
ключаемых напряжениями UK с прямоугольной формой кривой, сформи-
рованными нуль-индикаторами ЕА из напряжений иса и щ синхронного
генератора соответственно (рис. 5.13,а).
Выбор указанных напряжений определяется косинусной характери-
стикой управляемых выпрямителей [8]. В симметричном режиме работы
постоянные составляющие выпрямленных напряжений на их выходах
пропорциональны
Uq ~ Ir sin = 1г.р ; Up ~ Ir cos = 1г.а. (5.21)
Выпрямитель выполняется на интегральном операционном усилите-
ле А и управляется указанным (иса или иъ) напряжением, переключа-
ющим его из инвертирующего в дифференциальное включение. Ес-
ли, например, в положительный полупериод управляющего напряжения
ключ SA1 открыт, то неинвертирующий вход усилителя А соединен с
общей шиной (заземлен) и усилитель А находится в инвертирующем
включении.
Напряжение дв на выходе усилителя А при показанных на рис. 5.13
условных положительных направлениях равно и противоположно по зна-
ку входному напряжению ивх = ibRs, пропорциональному току генерато-
ра. В отрицательный полупериод управляющего напряжения ключ .SA1
177
Глава 5
178
179
Рис. 5.13. Функциональная схема (а) и временные графики (б) измерительного органа реактивного и
активного токов
Автоматическое регулирование UitQ синхронных генераторов
Глава 5
закрыт, и усилитель А оказывается в дифференциальном включении.
При Ri = Ri напряжение ив равно входному и совпадает с ним по
знаку. Постоянная составляющая напряжения Uqb определяется коси-
нусоидальной функцией угла фаз между входным Ц_ъх и управляющим
напряжениями.
Постоянная составляющая выделяется интегрированием напряже-
ния ив в течение каждого полупериода управляющего напряжения упра-
вляемым интегратором AJ с запоминающим конденсатором С2, ана-
логичными используемым в измерительном органе изменения частоты
(рис. 5.13,6). Напряжение Uq используется для распределения реактив-
ной нагрузки между параллельно работающими генераторами. Сумма
напряжений (на выходе AW) Uq + IcUp сравнивается (в вычитателе AH')
с некоторым постоянным напряжением Un и используется для ограниче-
ния возбуждения в режиме потребления генератором реактивной мощ-
ности.
5.7. Аналого-цифровой автоматический регулятор
генераторов с бесщеточным возбуждением
Аналоговая часть автоматического регулятора, поста-
вляемого АО «Электросила», функционирует по пропорционально-
дифференциальному (ПД) алгоритму (5.14), но без составляющей, про-
порциональной производной тока возбуждения. Бесщеточное возбужде-
ние (см. рис. 5.3,6) с инерционной электромашинной частью GE воз-
будителя обусловливает существенную особенность аналого-цифрового
автоматического регулятора: эффективность ПД-алгоритма регулиро-
вания достигается дополнением регулятора ПД-АР (см. рис. 5.14,а)
пропорциональным П-АР регулятором тока вобуждения 1ВВ обращен-
ного генератора, питающего через вращающийся диодный выпрями-
тель обмотку ротора синхронного генератора. Жесткая (главная для
П-регулятора) отрицательная обратная связь ГООС с коэффициентом
передачи Ко с существенно снижает постоянную времени Тв цепи возбу-
ждения обращенного генератора: эквивалентная передаточная функция
1 1
1 + Аос. + 1
рТв+1 #ос+1
где Тэк < Тв.
180
Автоматическое регулирование U nQ синхронных генераторов
Структурная схема регулятора ПД-АР (рис. 5.14,а), соответ-
ствующая (5.15), в разомкнутой схеме автоматической системы ре-
гулирования реализована с использованием интегрирующего Яи(р) =
= ка/рТа) звена (рис. 5.14,6"), установленного на входе цепи отклоне-
ния напряжения АД(р) и охваченного местной жесткой отрицательной
обратной связью с коэффициентом передачи Ко,с > 1.
Как известно [1], при этом получается эквивалентное апериодиче-
ское звено, выполняющее лишь функцию дополнительного ФНЧ первого
порядка, а перед элементом сравнения, формирующим сигнал АД, в ре-
гуляторе установлен ФНЧ второго порядка (на рис. 5.14 не показаны).
В цепи формирования сигналов по изменению частоты А'/ и ее про-
изводной f на схеме (рис. 5.14,6) показано звено временной задержки
(е-0’02р), отображающее дискретность (за один период промышленной
частоты) получения сигнала по отклонению А/ частоты.
Функциональная схема измерительной части регулятора состоит
из необходимых для формирования сигналов ПД- и П-регуляторов изме-
рительных органов напряжения ИОН (см. рис. 5.9), изменения частоты
ИОИЧ, реактивного и активного токов ИОРиАТ и тока возбуждения
обращенного генератора ИОТВ.
Измерительный орган напряжения ИОН содержит простейший ана-
логовый измерительный преобразователь ИПН (рис. 5.15) действующего
значения входного напряжения Дг ИПН (рис. 5.15) в пропорциональное
напряжение ДОг, представляющий собой активные трехфазный выпря-
митель AVS и ФНЧ второго порядка ZF [8]. Кроме основной цепи не-
прерывного действия с выходным сумматором AW сигналов АД и Д'
(дифференциатор AD) ИОН имеет и бесконтактный релейный выход
двустороннего действия (А’У1, A’V2), формирующий дискретные сиг-
налы о максимально Дтах и минимально Дт;п допустимых значениях
напряжения генератора, используемые для противоаварийных воздей-
ствий на его снижение и повышение (форсировки) возбуждения.
Аналого-цифровой задающий элемент ЗЭ, напротив, достаточно
сложный: запоминание предписанного напряжения генератора (устав-
ки регулятора) производится 10-разрядным двоичным счетчиком СТ
(вход Г) единичных импульсов высокой (относительно промышленной)
частоты микроэлектронного генератора G (см. рис. 5.16,а).
Цифровой выходной сигнал счетчика — двоичный код преобразует-
ся в пропорциональное постоянное напряжение Дпр цифро-аналоговым
181
Глава 5
Рис. 5.Ц- Принципиальная (а) и реализованная (б) структурные схемы
аналого-цифрового автоматического регулятора бесщеточного возбужде-
ния синхронного генератора
182
G от АСДУ PC
ИОН
Рис. 5.15. Функциональная схема измерительного органа напряжения
Автоматическое регулирование U н Q синхронных генераторов
иоич
Глава 5
(а)
Рис. 5.16. Функциональная схема (а) и временные графики (б), иллюстрирующие действие измери-
тельного органа изменения частоты (окончание рис. на стр. 185)
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.16. Окончание
преобразователем ЦАП (рис. 5.15). Записанный в счетчике двоичный
код изменяется сигналами местного или дистанционного управления ДУ
оператором, времяимпульсным сигналом от элемента уравнивания на-
пряжения генератора с напряжением шин электростанции автоматиче-
ским синхронизатором АС при подготовке генератора к включению на
параллельную работу или в режиме слежения PC за напряжением гене-
ратора при ручном управлении током возбуждения, что необходимо для
«безударного» включения автоматического регулятора в работу.
Активные элементы сравнения непрерывного действия ЭСНД на-
пряжений Лог и Дпр и дифференциатор AD ПД-регулятора, формиру-
ющие сигналы по отклонению напряжения ДД и его производной, и
185
Глава 5
аналогичный элемент сравнения его выходного напряжения Uper с на-
пряжением UB, пропорциональным току возбуждения возбудителя 1вв
П-регулятора (на схеме не показан), — типовые [8].
Перед дифференциатором AD установлен, как указывалось, актив-
ный интегратор AJ, охваченный активной цепью жесткой отрицатель-
ной обратной связи ОС, изменяемый коэффициент передачи Ко с которой
используется для установки статизма ПД-регулятора.
Измерительный орган изменения частоты. Дискретно-аналоговый
измерительный преобразователь частоты ИПЧ (рис. 5.16,а) функцио-
нирует на основе сравнения импульса постоянного напряжения Ut дли-
тельностью, равной полупериоду Та/2 изменяющейся при переходных
процессах промышленной частоты, с эталонным импульсом Ut3 посто-
янной длительности, равной половине номинального периода Тном/2 =
= 10 мс. Сравниваемые импульсы формируются счетчиками СТ1 и СТ2
единичных импульсов высокой частоты электронного генератора G, ста-
билизированного кварцевым резонатором. Первый из них СТ1 управля-
ется (запускается и останавливается) аналого-дискретным преобразова-
телем (АДП) синусоидального напряжения и/ с изменяющейся промыш-
ленной частотой: его релейный компаратор ЕА формирует импульсы UK
(рис. 5.16,6"), управляющие (через элемент УС) счетчиком СТ1, кото-
рый определяет длительность импульса Ut-
Импульсы Ut и Ut3 сопоставляются логическим элементом сравне-
ния ЛЭС [8], длительность выходного импульса которого равна разности
АТ = (Дном - Тп)/2 и отображает отклонение частоты от номинальной.
Импульс разностной длительности АТ превращается активным управ-
ляемым интегратором AJ (элемент У И формирует напряжения uyi, иУ2,
открывающие последовательно во времени с интервалом в несколько
микросекунд в конце процесса интегрирования АТ ключи SA1 и SA2\
первый ключ заряжает запоминающий конденсатор С1, подключаемый
к выходу интегратора, а второй разряжает конденсатор С2 интегра-
тора) в напряжение С/д/ на выходе повторителя AU напряжения на
конденсаторе С1, пропорциональное отклонению А/ частоты от номи-
нальной.
Активные дифференциаторы: близкий к идеальному (с малой посто-
янной времени) AD и реальный (с относительно большой постоянной
времени Тдр) ADR формируют сигналы u'j и «д'/, отображающие про-
изводную частоты f' — вторую производную угла 6, и изменение час-
186
Автоматическое регулирование U и Q синхронных генераторов
тоты А'/ — первую производную угла д' (рис. 5.16,б'). Сигнал f/д/ об
отклонении частоты используется для снижения напряжения генерато-
ра при значениях частоты / < 47 Гц для предотвращения насыщения
магнитопровода трансформатора.
Измерительный орган реактивного и активного токов выполнены
на управляемых выпрямителях, как и в АРВ СДП (см. рис. 5.13).
Измерительный орган тока возбуждения представляет собой или
трехфазный выпрямитель вторичных токов трансформаторов тока в це-
пи тиристорного преобразователя с ФНЧ, или микросхемный измери-
тельный преобразователь постоянного тока в напряжение, пропорцио-
нальное току возбуждения возбудителя.
Цифровая часть автоматического регулятора обеспечива-
ет выполнение ряда функций автоматического управления бесщеточным
возбуждением синхронного генератора. Она состоит из одноплатной ми-
кроЭВМ на микропроцессоре типа Z180X, снабженной жидкокристал-
лическим дисплеем и клавиатурой, и имеет стандартные разъемы для
подключения ПЭВМ и волоконно-оптической линии связи к АСУ ТП
электростанции.
Цифровая часть функционирует по программному обеспечению
Dinamic С с версиями для DOS и для Windows. Библиотека Dinamic С
содержит множество драйверов и средства для многозадачной работы в
реальном времени.
Связь микропроцессора с источниками информации через элементы
гальванической развязки цепей, мультиплексор и аналого-цифровой пре-
образователь, и с исполнительными элементами автоматической упра-
вляющей системы и элементами отображения информации (дисплей
и светодиодные индикаторы) осуществляется развитым интерфейсом
«ввода-вывод а»: ввод параметров настройки с клавиатуры и управле-
ние отображением информации на экране дисплея производится через
интерфейс оператора.
Цифровая часть аппаратно-программными средствами осуществля-
ет контроль исправности и диагностику оборудования бесщеточного
возбуждения, тестирование и самодиагностику, реализуя следующие
функции:
• контроль состояния бесщеточного возбуждения и отображение его
результатов и текущих значений напряжений и токов в цепях воз-
буждения;
187
Глава 5
• определение работоспособности (проводимости, управляемости)
тиристоров;
• контроль исправности канала ручного (местного или дистанцион-
ного) управления тиристорным выпрямителем;
• диагностика функционирования элементов аналогового автомати-
ческого регулятора возбуждения;
• контроль исправности автоматической защиты цепей возбуждения;
• фиксирование состояния выключателей в цепях питания бесщеточ-
ного возбуждения;
• формирование цифровых сигналов о состоянии возбудителя;
• формирование и хранение в памяти текстовых сообщений о неис-
правностях и срабатываниях автоматической защиты возбудителя
и генератора;
• переключение каналов ручного и автоматического регулирования.
Оценка состояния и контроль исправности оборудования программ-
но осуществляется на основе анализа аналоговых и дискретных сигналов
от измерительных преобразователей режимных параметров, сигнальных
контактов выключателей, элементов контроля проводимости и управля-
емости тиристоров, датчиков тепловых и механических параметров.
Исправность аналогового АРВ определяется по сигналам его измери-
тельных органов: при выходе из строя его функциональных элементов
производится автоматическое переключение на ручное управление воз-
буждением.
5.8. Микропроцессорный автоматический регулятор
возбуждения
Алгоритм микропроцессорной реализации автоматического регу-
лирования возбуждения описывается разностным уравнением и z-
преобразованием временной функции (5.14). В соответствии с извест-
ным [8] соотношением
188
Автоматическое регулирование U и Q синхронных генераторов
где Т — интервал дискретизации АЦП,
и р-изображением (5.15) регулирующего воздействия его г-изображение
ЦрегС?) + АЦ(г) +
+ ГГт/т 1---------I //1 । т/т—V + ~ +
[1 + 7/Тд.р 1-z 7(l + 777^p) 1 J
+ ^(1-г-1)4Р). (5.23)
Соответствующее разностное уравнение [8]
U^tnT) = kubUtnT) + ^[дС(пТ) - Ы(пТ - Г)] +
+ 1 4- TIT [дЛпГ) - ДЛ”7 - Г)] + ) 4. ТТ~А'КПТ - Г) +
1 Т 1 /^д.р L J 1 “Г 1 / 1 Д.р
+ |д/(пТ) - А/(пТ - Г)] + у [чпГ) - IB(nT - Т)] , (5.24)
где Д'f(nT — Т) — дискретное значение выходного сигнала цифрово-
го реального дифференциатора (сигнала изменения частоты) в предше-
ствующем интервале дискретизации; k'v, kj, k'j, к'т — коэффициенты
настройки регулятора с размерностями постоянных времени.
Функциональная схема. Микропроцессорный автоматический ре-
гулятор возбуждения сильного действия (АРВ-СДМ) поставляется АО
«Электросила» комплектно с турбогенератором. Он выполнен на основе
разработок ВЭИ [18] сначала на базе микросредств управляющей вычи-
слительной техники В7 (МСУВТ В7), а затем, как указывалось, на ми-
кропроцессорном комплекте (МПК) БИС серии К1810. При его создании
были разработаны алгоритмы программных измерительных органов и
цифровой реализации алгоритма функционирования АРВ-СД, использу-
емые и в последующих разработках.
Функциональная схема АРВ-СДМ (рис. 5.17) состоит из вычисли-
тельной части ВЧ, содержащей две взаимно резервируемые микроЭВМ,
измерительно-преобразовательной ИПЧ и исполнительной Ис. Ч частей.
189
Глава 5
В цифровых устройствах на ЭВМ и микропроцессорах измерительно-
преобразовательная и исполнительная функциональные части, как ука-
зывалось, обычно объединяются под общим названием — устройство
связи с управляемым объектом (УСО).
Измерительно-преобразовательная часть содержит вторичные изме-
рительные трансформаторы напряжения ИТН и тока ИТТ (или шун-
ты), пассивные малоинерционные (Т = 1 мс) первого порядка ФНЧ и
элементы аналогового измерительного преобразования напряжений и то-
ков АИН и АИТ, формирующие сигналы в виде:
• чисто синусоидальных напряжений, пропорциональных фазным
напряжениям и токам синхронного генератора, используемые за-
тем программными измерительными органами вычислительной
части;
• постоянных напряжений, пропорциональных напряжениям генера-
тора и на шинах электростанции;
• импульсных напряжений управления прерываниями и микроЭВМ
в целом (длительностью Ти = 30 мкс).
Они формируются усилителями, трехфазными выпрямителями с ак-
тивными ФНЧ и аналого-дискретным преобразователем АДП, входящи-
ми в состав элементов АИН и АИТ. На схеме показаны элементы ввода
дискретных сигналов ВДС в виде малогабаритных реле с герметизиро-
ванными контактами (герконов).
Исполнительная часть состоит из цифро-аналогового преобразовате-
ля ЦАП-. элементов аналогового гальванического отделения (развязки)
ЭГР вычислительной части от цепей управления в виде усилителей-
преобразователей с модулятором и демодулятором, исполнительных уси-
лителей ИУ аналогового регулирующего воздействия Uper на устрой-
ства управления УУ тиристорами преобразователей VST (см. рис. 5.9)
возбудителя; времяимпульсного преобразователя ВИП и выходных
герконов вывода дискретных сигналов (комплекта выходных реле
КВР).
Регулятор имеет развитой программно-аппаратный контроль ис-
правностей всех его частей. Элементы контроля ЭК формируют сигна-
лы неисправностей, поступающие в элемент коммутации ЭКМ выход-
ных сигналов микроЭВМ, который переводит вычислительные операции
на резервную микроЭВМ или выводит регулятор из действия.
190
Рис. 5.11. Функциональная схема микропроцессорного автоматического регулятора возбуждения син-
хронного генератора
Автоматическое регулирование U и Q синхронных генераторов
Глава 5
Основной группой программ комплекса математического обеспече-
ния АРВ-СДМ являются программы автоматического регулирования
возбуждения и синхронизации генератора.
Они обеспечивают выполнение алгоритма (5.15) регулирования воз-
буждения сильного действия, выполнение условий точной автома-
тической синхронизации (см. §2.3) и вычисление угла опережения
по закону (2.19) равнопеременного вращения синхронного генератора
(см. §2.7).
Измерительные органы микропроцессорного автомати-
ческого регулятора. Аналоге-дискретный преобразователь.
Функционирование программных измерительных органов АРВ СДМ
обеспечивается импульсами управления аналого-дискретного преобра-
зователя (АДП), формирующего короткие импульсы диа, ииь, иас в мо-
менты времени изменения знака мгновенными синусоидальными напря-
жениями трех фаз иа, щ, ис с отрицательного на положительный — в
момент положительных их переходов через нуль (рис. 5.18).
Компаратор ЕА сравнивает мгновенное напряжение иа, например,
на инвертирующем входе с нулевым значением на неинвертирующем
входе интегрального усилителя А с гибкой положительной обратной свя-
зью (Яо.с, Со.с), функционирующей только при переходном процессе фор-
мирования переднего и заднего фронтов прямоугольных импульсов по-
ложительного напряжения Дк1 длительностью в половину периода про-
мышленной частоты. Они выделяются из разнополярного напряжения
UK на выходе компаратора диодом VD2 и согласующим выход усили-
теля А с логическими элементами микросхемы серии К155 логическим
элементом И-НЕ типа К511ПУ1, включенным по схеме инвертора DU.
Прямоугольные импульсы /7ВЫХ.П = Дк1 и являются выходными дискрет-
ными потенциальными сигналами АДП одной фазы.
Импульсные выходные сигналы цвых.и формируются элементом крат-
ковременной (по сравнению с длительностью прямоугольного напряже-
ния UK) памяти его появления, выполненном на логических элементах
DXU микросхем К266ЛАЗ, К155ЛА7 и резисторно-конденсаторной це-
пи RC.
При отсутствии напряжения (положительном UK и отрицатель-
ных мгновенных напряжениях иа) на входах DXU1 логические нули (0),
поскольку конденсатор С разряжен. На нижнем (по расположению на
схеме) входе DXU2 логическая единица (1), а на верхнем 0, на его выхо-
192
и. н
(а)
Рис. 5.18. Функциональная схема (а) и временные графики (б) аналого-дискретного преобразователя
(окончание рис. на стр. 194)
Автоматическое регулирование U и Q синхронных генераторов
Рис. 5.18. Окончание
Автоматическое регулирование U v.Q синхронных генераторов
де 1, а на выходе DXU3, на всех входах которого 1 (на втором и третьем
от DXU2 аналогичных АДП двух других фаз), т.е. на выходе трехфаз-
ного АДП в целом, напряжение отсутствует.
В момент появления напряжения ДК1 состояние DXU1 не изменяется
(конденсатор С разряжен), a DXU2 переключается (на обоих его вхо-
дах 1). Нуль его выхода, поступая на верхний (первый) выход DXU3,
обусловливает его переключение и появление напряжения ивых и = диа.
Время его наличия, т.е. длительность выходного короткого импульса,
определяется временем заряда конденсатора С (под воздействием UK\)
до напряжения Uc > Е-н/2, соответствующего логической 1 на ниж-
нем входе DXU1. Элемент DXU1 переключается, обусловливая пере-
ключение DXU2 и DXU3, т.е. исчезновение напряжения ииа на выхо-
де АДП.
На входах каждой фазы установлены малоинерционные (с постоян-
ной времени Т » 1 мс) пассивные ФНЧ (Лф, Сф) и ограничитель (ста-
билитроны VD1) мгновенных значений преобразуемых фазных напря-
жений.
Измерительный орган амплитуды напряжения. Быстродей-
ствие измерительного органа напряжения АРВ СДМ достигается фик-
сированием положительных амплитудных мгновенных значений напря-
жений трех фаз Uma, Umt>, Umc (рис. 5.19). Производится вычисление
среднего значения амплитуды, которое сравнивается (путем вычитания)
с заданным (предписанным) значением — вычисляется ее отклонение.
На основе численного дифференцирования определяется производная ам-
плитуды. Указанные операции производятся за время, не превышающее
1/3 длительности периода ТП промышленной частоты.
Амплитуда фиксируется путем управления соответствующим кана-
лом мультиплексора АЦП, включаемого импульсным напряжением иит
на несколько микросекунд практически в момент прохождения фазным
напряжением генератора через положительное амплитудное мгновенное
значение.
Включение канала мультиплексора производится вычитающим счет-
чиком тактовых импульсов (частотой 2 МГц), в который в момент 7\
прохождения мгновенным фазным напряжением через нуль записыва-
ется число Хтп/4-> равное количеству тактовых импульсов, размещаю-
щемуся на интервале времени в 1/4 периода промышленной частоты.
Запись числа производится импульсом иа, формируемым АДП в момент
195
Глава 5
Рис. 5.19. Временные графики, иллюстрирующие формирование им-
пульсных сигналов управления АЦП и ЭВМ (см. рис. 5.17) цифрового
программного измерительного органа амплитуды напряжения
изменения знака с отрицательного на положительный (положительного
перехода через нуль) мгновенным фазным напряжением.
В момент времени Тз обнуления счетчика по переднему фронту им-
пульса ыит контроллером прерываний работы микропроцессора (МП)
включается в работу программа ввода информации в микроЭВМ и вы-
числения среднего значения амплитуды напряжения. Вычисления от-
клонения амплитуды и ее производной производятся отдельными про-
граммами.
Измерительный орган изменения частоты. Формирование
сигналов по изменению и производной частоты согласно (5.14) произво-
дится на основе вычислений длительности периода промышленной ча-
стоты. В измерительном органе используется второй вычитающий счет-
196
Автоматическое регулирование U и Q синхронных генераторов
чик тактовых импульсов, в который периодически после каждого считы-
вания до нуля вновь записывается число импульсов = Armax > -^Тп/4
(рис. 5.20). Поэтому за время, равное длительности периода промыш-
ленной частоты, число импульсов в счетчике уменьшается на неболь-
шую часть Л'тах.
Разность числа импульсов, например ANa = N'a — N", фиксируемых
импульсными напряжениями w„a, u"a, соответствующими положитель-
ным переходам через нуль мгновенного напряжения фазы А, получается
пропорциональной истинной длительности периода промышленной час-
тоты. По трем таким замерам A7Va, ATVj, = — N" и A.NC = TV' - N",
производимым с использованием напряжений и'аЬ, u”lb и соответствен-
но и'ис, и"1С (на графике рис. 5.20 м"с и N" не показаны), вычисляется
средняя истинная длительность Т периода напряжения синхронного ге-
нератора и, как указывалось, по правилу дифференцирования дробей —
производная частоты.
Выше на рис. 5.19 показаны включения (импульсами в моменты вре-
мени Т-2) программ ввода информации и вычислений. Формирование
цифровых сигналов об изменениях частоты производится пропускани-
ем сигналов о ее производной через программный ФНЧ первого порядка
(апериодическое звено).
Измерительный орган реактивного и активного тока. Не-
обходимое быстродействие измерительного органа достигается запоми-
нанием мгновенного тока генератора. Для этого по задним фронтам
импульсов напряжения иа и мит (см.рис. 5.19) включаются (в момен-
ты Дг и Т4) соответствующие каналы мультиплексора АЦП, фиксирую-
щего в двоичном коде мгновенные значения тока одной из фаз, например
га = Im sin(wnl — 9?), равные в момент t = 0 реактивной /р = Im sin (/?, а в
момент t — Тп/4 активной /а = Im cos <р составляющим тока синхронного
генератора. Они используются для измерительного органа потребляе-
мой генератором реактивной мощности, определяющего минимально до-
пустимый (по условию статической устойчивости электропередачи) ток
возбуждения синхронного генератора. Сигнал о минимально допусти-
мом возбуждении формируется как функция /р и /а (5.20) расчетами по
отдельной программе.
Измерительный орган угла сдвига фаз. В измерительном ор-
гане угла сдвига фаз между напряжением на шинах электростанции час-
тотой fc и напряжением холостого хода синхронного генератора часто-
197
Глава 5
Рис. 5.20. Временные графики, иллюстрирующие способ формирования
цифрового сигнала изменения частоты
той /г /с, непрерывно изменяющегося при подготовке генератора к
включению на параллельную работу с электроэнергетической системой
(синхронизации) в функции частоты скольжения /а = |/с — /г|, исполь-
зуется времяимпульсное преобразование фазы. Формируемый импуль-
сом одной из фаз, например ми.г — иаа (см. рис. 5.19), и аналогич-
ным импульсом циш (на графиках рис. 5.19 не показаны), фиксирую-
щим переход через нуль мгновенного напряжения на шинах электро-
станции, времяимпульсный сигнал является линейной функцией угла
сдвига [8].
Измерительное преобразование угла сдвига фаз в цифровой сигнал
производится аналогично рассмотренному фиксированию длительности
периода путем считывания из третьего вычитающего счетчика с перио-
198
Автоматическое регулирование U и Q синхронных генераторов
дически записываемым числом тактовых импульсов JVmax ~Э> Атп/4 чи-
сел в моменты времени появления указанных импульсов напряжений иа г
и иИш- По отдельной программе в измерительном органе вычисляется
угол сдвига фаз в начальный момент воздействия на привод выключа-
теля синхронного генератора, необходимый для совпадения по фазе на-
пряжений на шинах электростанции и генератора в момент включе-
ния (соединения силовых контактов выключателя), — угол опережения
(см. §2.3).
5.9. Исполнительная часть пропорционально-
дифференциальных автоматических регуляторов
возбуждения
Исполнительная часть статических аналоговых и цифровых АРВ СД
представляет собой достаточно мощный для воздействия на тиристор-
ный преобразователь возбудителя синхронного генератора усилитель.
В электромагнитных регуляторах применяется высокодобротный ревер-
сивный магнитный усилитель, выполняемый на двух наиболее совер-
шенных магнитных усилителях с самонасыщением [8]. Высокая доброт-
ность, характеризуемая отношением коэффициента усиления к постоян-
ной времени (магнитный усилитель инерционен), достигается примене-
нием высококачественного магнитопровода и источника питания повы-
шенной частоты (магнитный усилитель функционирует при источнике
питания переменного тока).
Магнитный усилитель с самонасыщением имеет внутреннюю поло-
жительную обратную связь критической глубины. Он находится в гра-
ничном между непрерывным управлением и релейным действием режи-
ме. Поэтому непрерывность управления им сохраняется лишь за счет
потерь на перемагничивание магнитопровода. Для повышения устойчи-
вости непрерывного управления в усилитель вводится внешняя жесткая
отрицательная обратная связь небольшой интенсивности [1, 8].
Для аналогового микросхемного и цифрового АРВ СД разработан
специализированный реверсивный транзисторный усилитель, обеспечи-
вающий необходимую мощность управляющего воздействия Uper при
ограниченной рассеиваемой мощности в транзисторе (рис. 5.21). В нем
использована зависимость тока, потребляемого интегральным операци-
онным усилителем (ИОУ) А от источника его питания (±ДП) при неиз-
199
Глава 5
Рис. 5.21. Схема реверсивного транзисторного исполнительного усили-
теля непрерывного действия
менной его нагрузке Ян? от усиливаемого сигнала — напряжения по-
стоянного тока ±1/вх, в частности постоянного тока выходного ЦАП
микроЭВМ. В цепи разнополярного источника питания интегрального
ИОУ включены маломощные различного типа проводимости транзисто-
ры VTX и VT2, токи управления которыми — токи эмиттеров Д1, 1Э2 —
являются зависимыми от ±УВХ токами, потребляемыми ОУ. Основная
часть токов коллекторов VT1, VT2 (меньшая часть ответвляется в ре-
зисторы RK) /к1у, /К2У усиливается мощными выходными разного типа
проводимости транзисторами УГЗ и VT4. Выделяющееся на резисторе
нагрузки Лн, включенном дифференциально на токи /кз, 1к4 (на их раз-
ность), напряжение ±/7вых и является управляющим воздействием Uper-
Оно поступает на устройство управления силовыми тиристорами возбу-
дителя синхронного генератора (см. рис. 5.9).
200
Автоматическое регулирование U и Q синхронных генераторов
Транзисторы VT5 и VT6 выполняют защитные функции — закры-
вают выходные транзисторы VT3 и VT4 при их перегрузке токами, осо-
бенно токами КЗ, между выходными зажимами усилителя: открываясь
под воздействиями токов /55, /бб, обусловленных напряжениями на ре-
зисторах R3, создаваемыми токами эмиттеров VT3, VT4, они закорачи-
вают входы VT3, VT4 — переводят их в состояние, близкое к закры-
тому. Интегральный ОУ работает без обратной связи: она вводится в
действие стабилитронами VD лишь при перегрузке усилителя входным
напряжением /7ВХ.
5.10. Особенности автоматического регулирования
возбуждения асинхронизированных генераторов
Асинхронизированный генератор, вращающийся с рабочим скольже-
нием (турбогенератор с wsq = ~ 0,002), обладает важными с точки
зрения автоматического управления режимами работы свойствами:
• простым процессом включения на параллельную работу, не связан-
ным с опережением включения привода выключателя — главной
функцией автоматических синхронизаторов;
• отсутствием ограничений потребляемой реактивной мощности по
условию сохранения статической устойчивости;
• повышенным запасом динамической устойчивости как при генери-
ровании, так и при потреблении реактивной мощности;
• низкой инерционностью реализации регулирующих воздействий,
формируемых по отклонениям напряжения или реактивной мощ-
ности.
Отсутствие взаимозависимости между активной и реактивной мощ-
ностью обеспечивается разделением процесса управления электромаг-
нитным вращающим моментом и напряжением, достигнутым примене-
нием в асинхронизированном генераторе двух взаимно перпендикуляр-
но расположенных на роторе обмоток возбуждения. Одна из них LG1
(рис. 5.22) с током возбуждения служит для изменения электромаг-
нитного момента генератора в соответствии с соотношением [19]
м UmEd UmXMIBd
Мэм ~ = ——------, (5.25)
201
Глава 5
где А’м — сопротивление взаимоиндукции между обмоткой возбуждения
и обмоткой статора.
Вторая обмотка LG2 с током возбуждения IBq используется для упра-
вления реактивной мощностью
Qr = Ц/в, _ (5 2б)
Переменные токи I_Bd, I_Bq, изменяющиеся с частотой скольжения,
являются ортогональными составляющими вектора тока возбуждения /в
асинхронизированного генератора. Их источниками служат два ре-
версивных тиристорных преобразователя, состоящих каждый из двух
встречновключенных трехфазных тиристорных управляемых выпрями-
телей V,$T1, VST2, подключенных через трансформатор Т к выводам
генератора (схема самовозбуждения).
Тиристорные выпрямители через устройства управления УУ1,
УУ2 — формирования импульсных токов включения базы ги.у (см.
рис. 5.9) тиристоров управляются переменными (с частотой скольже-
ния) напряжениями ДреГ(/ и U_perq исполнительных усилителей Al, А2
(рис. 5.22) автоматического регулятора возбуждения асинхронизирован-
ного генератора AG (АРВ АСГ). Он состоит из двух каналов автомати-
ческого регулирования с выходными напряжениями Дрегу, Ирегу, вза-
имодействующих лишь в связи с необходимостью их преобразования в
напряжения Дрега!, ДреГ(?, обусловленного углом 6 сдвига фаз между маг-
нитной осью У первой из указанных обмоток возбуждения и магнит-
ной осью ротора генератора, определяемой фазой тока возбуждения 1_в.
Преобразование состоит в сдвиге по фазе на угол 6 напряжений U_perx
И U_PerY Однако в связи с изменяющимися частотой скольжения гене-
ратора и углом 6 при электромеханических переходных процессах ука-
занное преобразование производится путем перемножения комплексных
величин в алгебраическом виде
Eperd + Uperq = (tfper% + j Upery )(cos 6 + j sin 6). (5.27)
Для этого используются четыре интегральных перемножителя, со-
ставляющих специфичный функциональный элемент АРВ АСГ — пре-
образователь координат ПК (рис. 5.22).
Специфичным функциональным элементом измерительной части ре-
гулятора является и измерительный преобразователь (датчик) угла ро-
202
203
Рис. 5.22. Функциональная схема автоматической системы регулирования возбуждения асинхронизи-
рованного генератора
Автоматическое регулирование U и Q синхронных генераторов
Глава 5
тора ИПУ. Он представляет собой индукционный генератор импульсно-
го напряжения, момент времени появления которого в пределах периода
изменения напряжения генератора определяется углом <У, и выполнен
аналогично такому же датчику угла 6, используемому в автоматиче-
ских системах регулирования возбуждения синхронных компенсаторов
(см. ниже рис. 6.3).
Регулирующие воздействия LLpeix 11 ZZpery являются следующими
операторными функциями режимных параметров: изменения Д'Р ак-
тивной мощности при электромеханических переходных процессах, от-
клонения AQ реактивной мощности от предписанной (AQ = Qr - Qnp),
изменения напряжения Д7/г, отклонения частоты скольжения Aws =
= - ivso и угла Д<У = 6 - <Уо от установившихся значений, разности
токов возбуждения и превышения токами статора Д/г = 1Г - /г ном и
ротора Д/в = 1в - 1в ном их номинальных значений
ирегу(р) = /срД'Р(р) - ksAw3(p) +
+ к5Ы(р) + \lBd(p) - /В9(р)] ; (5.28)
Ррегх(р) = киУ'иг(р) + ^Д<Э(р) + ЛЛпД/г(р) + ki2&.IB(jj). (5.29)
Сигналы по изменениям активной мощности Д'Р и напряже-
ния Д'С7Г формируются реальными дифференциаторами отклонений
мощности ДР и напряжения ДРГ аналогично формированию сигнала
по изменению частоты в АРВ СД [см. (5.15)]
Д7Р(р) = ДР . (5.30)
рТа.Р + 1
Аналоговый микросхемный регулятор АРВ-АСГ в соответ-
ствии с алгоритмами (5.28) и (5.29) содержит сложную измерительную
часть, состоящую из измерительных органов изменений активной мощ-
ности ИОИМ (рис. 5.22), скольжения ИОС и угла положения ротора
ИОУР, разности ортогональных составляющих тока возбуждения ИО-
ОСВ, реактивной мощности НОРМ, изменения напряжения ИОИН, тока
нагрузки генератора ИОТГ и тока его возбуждения ИОТВ.
204
Автоматическое регулирование U и Q синхронных генераторов
Каждый из них включает обязательные функциональные элементы:
задающий ЗЭ, измерительный преобразователь и элемент сравнения не-
прерывного действия ЭСНД. В состав ИО входят соответствующие из-
мерительные преобразователи активной ИПАМ и реактивной ИПРМ
мощностей, амплитуды напряжения и частоты скольжения, угла поло-
жения ротора, токов статора и ротора и ортогональных составляющих
тока возбуждения. Измерительные органы напряжения, активной и ре-
активной мощностей и разности ортогональных составляющих тока воз-
буждения содержат реальные дифференциаторы ADI, AD2 и активные
интеграторы АЛ, AJ2 соответственно.
Суммирование сигналов согласно (5.28) и (5.29) производится актив-
ными сумматорами AW1, AW2. После преобразователя координат ПК
и исполнительных усилителей Al, А2 регулирующие воздействия Uperd
и Uperq поступают в устройства управления УУ1, УУ2 тиристорными
возбудителями асинхронизированного генератора. Аналоговый АРВ-
АСГ выполняется на интегральных микросхемах.
Цифровой микропроцессорный автоматический регулятор
возбуждения асинхронизированных генераторов (система управления
возбуждением СУВМ-АС [20]) выполнен на высокопроизводительном
асинхронном комплекте БИС серии К1810.
Система производит измерительное преобразование в цифровом виде
параметров турбогенератора, обрабатывает дискретную информацию о
его состоянии, вычисляет дискретизованные регулирующие воздействия
Ud(nT), Ug(nT) (рис. 5.23), формирует импульсы токов управления ти-
ристорами возбудителей и выводит цифровую информацию о состоянии
автоматической системы регулирования. Как и в ранее описанных ми-
кропроцессорных устройствах, для обеспечения надежности функцио-
нирования применяются два взаиморезервируемых комплекта вычисли-
тельных средств.
Выходные сигналы Ux(nT) и UylnT) вычислительной части явля-
ются следующими ^-операторными функциями режимных параметров:
изменения Д'Р активной мощности при электромеханических переход-
ных процессах, отклонения AQ реактивной мощности от предписанной,
изменения напряжения Д'РГ, отклонения частоты скольжения Aws и
угла Д<У от установившихся значений, разности токов возбуждения и
превышения токами статора Д/г и ротора Д/в их номинальных зна-
чений:
205
Глава 5
Uy(z) 1 + Т/Тл.р 1-г-1/(1 + Т/Тд^АРИ
- кш&ш3(Т) + ksAS(z) + fc/и ! j~~ZT рв47) “ JB9(X)j ; (5-31)
Ux^ = 1 + 'T/T 1 z-Чн+т/т } ^U(P> +
/(l + J/Гд.р)
+ kQa—&Q(z) + kIr A/r(J) + kjA/B(J), (5.32)
1-2
где kia, ^Qn — коэффициенты интеграторов с размерностью, обратной
постоянной времени; Д/в = /В(/ - /В9.
В соответствии с (5.28), (5.29) и аналогично (5.23) выходные сигналы
двух каналов вычислительной части регулятора являются следующими
функциями Uy(nT) и Ux(nT) дискретного времени:
= г-Тг/т [др(гаГ) - ДР(пТ - Г)] +
1 Ф 1 [ 1 д р l J
+ —-А—Д'Р(пТ - Т) - ^Д^(пТ) + к5Лб(пТ) +
1 + Г /1д р
+ kIaTAIB(nT) + Ди7в(пТ - Т); (5.33)
\^и(пТ) - - d +
1 + г/1др|_ J
—Д'Р(пТ - Т) + kQaTAQ(nT) +
1 -h 1 /1 д р
+ Ди<2(пТ - Т) + к1гЛ1г(пТ) + ^Д/в(пТ), (5.34)
где A'U(nT — Т) и А'Р(пТ — Т) — дискретные выходные сигналы циф-
ровых реальных дифференциаторов (сигналы изменений напряжения и
мощности) в предшествующий интервал дискретизации.
Как видно из (5.31)—(5.34), сигналы об изменениях напряжения
Д'Р(пТ) и активной мощности Д/Р(пТ) формируются аналогично
сигналу по изменению частоты A'f(nT) в АРМ-СВМ (см. (5.23)),
206
207
от TV
Рис. 5.23. Схема микропроцессорной системы управления возбуждением асинхронизированного гене-
ратора
Автоматическое регулирование U и Q синхронных генераторов
Глава 5
а сигналы об отклонениях реактивной мощности и разности токов
возбуждения формируются цифровыми интеграторами: ДИ/В(7?Т — Т),
Д„<2(пТ’ — Т) — дискретные выходные сигналы интеграторов в предше-
ствующий интервал дискретизации.
На рис. 5.23 приведена функциональная схема СУВМ-АС [20]. Ос-
новной ее частью является вычислительная ВЧ, состоящая из микро-
процессоров МПЦ1, МПЦ2 типа К1810ВМ86, микросхемы памяти дан-
ных и интерфейсов ППИ, элемента (модуля) ввода ВДС и вывода
(управления выходными реле УВР и выходным реле ВР) дискретных
сигналов, модуля аналогового ввода,/вывода АВВ, содержащего АЦП
и ЦАП, таймерного элемента измерения временных интервалов ИВИ
и модуля импульсно-фазового управления ИФУ. Модуль ИВИ обеспе-
чивает реализацию программного измерительного преобразования ча-
стот напряжения и вращения АСГ, угла положения его ротора и фор-
мирования цифровых сигналов на основе времяимпульсных преобразо-
ваний.
Устройство связи с объектом (измерительно-преобразовательная
ИПЧ и исполнительная Ис. Ч части) обеспечивает гальваническое от-
деление (развязку) цепей микропроцессорной ВЧ от внешних цепей и
содержит аналоговые элементы преобразования по уровню трехфазных
и однофазных токов АИТ и напряжений АИН (с активными вторичны-
ми измерительными трансформаторами ИТТ, ИТН [8]), измерительные
преобразователи токов и напряжений ИНН, формирующие аналоговые
сигналы информации о средних значениях напряжения генератора, то-
ков статора АСГ, активной и реактивной их составляющих. Сигналы
в виде изменяющихся по абсолютному значению и по знаку постоянных
токов формируются выпрямительными измерительными преобразовате-
лями с частотными выходными фильтрами [8].
Модуль нормализации сигналов НС приводит к унифицированному
виду и уровню сигналы измерительного преобразования угла положения
ротора ИПУ, в частности формирует опорное синусоидальное напряже-
ние (см. рис. б.З), и сигналы измерительных преобразователей токов
возбуждения АСГ.
Выходные модули синхронизации, формирования и контроля им-
пульсов СФКИ являются частью устройства импульсно-фазового управ-
ления ИФУ реверсивными тиристорными возбудителями VST1 и
VST2.
208
Автоматическое регулирование U и Q синхронных генераторов
На схеме показан и модуль системного контроля МСК и сигнали-
зации неисправностей К СК рабочего микропроцессорного комплекта и
сигналов выводов результатов вычислительных операций из резервного
комплекта, а также пульт управления ПУ.
Выполнение функциональных операций, соответствующих алгорит-
мам регулирования (5.28) и (5.29), достигается программным обеспе-
чением, включающим следующие группы программ: инициализации и
стартового контроля, организации вычислительного процесса функцио-
нальной реализации алгоритмов управления и регулирования, защитной
функции и сервисного контроля.
Как указывалось, формирование цифровых сигналов о режимных па-
раметрах производится на основе времяимпульсных преобразований с
использованием счетчика (модуль ИВИ) для фиксирования длительно-
стей временных интервалов. В частности, частота, разность частот и
углы сдвига фаз определяются способами, применяемыми в программ-
ных измерительных органах АРВ-СДМ (см. §5.8).
Программными средствами формируются и импульсно-фазовые ре-
гулирующие воздействия на тиристоры возбудителей: сигналы управле-
ния фазой импульсного тока ги у включения тиристоров (см. рис. 5.9)
представляют собой двоичный код.
Кроме осуществления непростых алгоритмов автоматического ре-
гулирования возбуждения асинхронизированного генератора, микропро-
цессорная система СУВМ-АС обеспечивает автоматическое управление
пуском, подготовкой воздействием на АРЧВ через ВИП и включени-
ем на параллельную работу (синхронизацией) и нагружением турбоге-
нератора. Защитными функциями СУВМ-АС являются ограничения
перегрузок турбогенератора по токам ротора и статора по условию до-
пустимого нагрева, максимального тока возбуждения и минимального
возбуждения в синхронном режиме работы только с одной обмоткой ро-
тора.
Сервисные функции, являющиеся специфичными, свойственными
только микропроцессорным автоматическим системам, как и аналогич-
ные для АС-М (см. §2.7), ЭЧСР-М (см. §4.5) и АРВ СДМ (см. §5.8),
обеспечивают удобство их технического обслуживания и высокий уро-
вень производственной культуры в технике автоматического управления
процессом производства и передачи электроэнергии.
209
Глава 5
Вопросы для самопроверки
1 Почему необходимо автоматическое регулирование напряжения и реак-
тивной мощности электрической станции9
2 В чем состоят задачи автоматического регулирования возбуждения син-
хронных генераторов9
3 Как воздействуют автоматические регуляторы напряжения и реактивной
мощности на электромашинные и тиристорные возбудители синхронных
генераторов9
4 Какие известные типовые автоматические регуляторы устанавливаются
на синхронных генераторах с электромашинными возбудителями посто-
янного тока9
5 Чем по принципам действия различаются типовые автоматические регу-
ляторы возбуждения синхронных генераторов с электромашинными воз-
будителями?
6 Какой алгоритм автоматического регулирования возбуждения называет-
ся алгоритмом «сильного» действия9 При каких возбудителях он эффек-
тивно реализуется9
7 В чем состоит алгоритм автоматического регулирования возбуждения
«сильного» действия9
8 Что отображают сигналы автоматического регулятора возбуждения,
формируемые по изменению и производной частоты9 Какими структур-
ными звеньями (с какими передаточными функциями) формируются эти
сигналы9
9 Какова роль сигнала, формируемого по производной действующего зна-
чения напряжения9
10 Как выполняется и действует измерительный орган напряжения анало-
гового автоматического регулятора возбуждения сильного действия, вы-
полняемого на интегральных микросхемах (см. рис 5.И)9
И. Как выполняется и действует измерительный орган изменения частоты
АРВ СДП (см рис. 5 12)9
12 Как функционирует измерительный орган напряжения микропроцессор-
ного автоматического регулятора возбуждения (см. рис 5 19)?
13 Каким способом формируется цифровой орган отклонения частоты Д/
от номинальной в АРВ СДМ (см рис 5.20)?
210
Автоматическое регулирование U и Q синхронных генераторов
14
15
16
17
18
19
20
21
22
23
24
25
Как из цифрового сигнала по отклонению частоты формируются цифро-
вые сигналы об изменении частоты Д'/ и ее производной df/dt, прибли-
женно отображающие скорость и ускорение изменения угла 6 фаз между
ЭДС генераторов электростанции и напряжением на конце линии элек-
тропередачи (шинах приемной подстанции ЭЭС)?
Каково назначение измерительного органа комбинации реактивного и ак-
тивного тока синхронного генератора АРВ СД?
Как выполняется и действует измерительный орган комбинации реак-
тивного и активного токов синхронного генератора в АРВ СДП (см
рис 5 13)?
Каким способом определяются в цифровом виде вторичные реактивный
и активный токи синхронного генератора в АРВ СДМ7
Как выполняется исполнительный усилитель АРВ СД7
В чем состоят особенности возбуждения и автоматического регулирова-
ния возбуждения асинхронизированного генератора7
Как функционирует автоматическая система регулирования возбуждения
асинхронизированного генератора (см. рис. 5 22)7
Каково функциональное назначение двух каналов автоматического регу-
лирования возбуждения асинхронизированного генератора (АСГ)7
По каким алгоритмам функционируют два канала автоматического ре-
гулирования возбуждения АСГ7
Как функционирует микропроцессорная система автоматического упра-
вления (СУВМ-АС) возбуждением АСГ (см рис 5 23)7
В каком виде — аналоговом или цифровом — формируются входные сиг-
налы информации о напряжении, активном и реактивном токах статора
и токах в двух обмотках ротора АСГ7
В чем состоят сервисные функции СУВМ-АС7
211
Глава 6. Автоматическое регулирование
источников реактивной мощности
и трансформаторов
6.1. Назначение и особенности
Синхронные генераторы электрических станций при полной их за-
грузке работают с высоким коэффициентом мощности cos <^г, т.е. гене-
рируют относительно небольшую реактивную мощность, а ее потребле-
ние ими ограничено статической устойчивостью параллельной работы
электрических станций.
Современные линии электропередачи высокого и сверхвысокого на-
пряжений являются мощными неуправляемыми генераторами при пере-
даваемой активной мощности Рл, меньшей натуральной Рнат, или потре-
бителями реактивной мощности при Рл > Раат. Традиционные совре-
менные генераторы реактивной мощности — синхронные компенсаторы
функционируют как управляемые реверсивные ее источники, т.е. и как
ее потребители.
Созданы и продолжают разрабатываться новые непрерывно упра-
вляемые тиристорными устройствами реакторные (потребляющие) и
реакторно-конденсаторные (реверсивные) статические компенсаторы
реактивной мощности (СТК), предназначенные для подключения к ши-
нам электрических станций и промежуточных узловых подстанций ма-
гистральных электропередач.
Реверсивные управляемые синхронные и статические компенсаторы
реактивной мощности обеспечивают:
• требуемые режимы работы электропередач по напряжению и ре-
активной мощности;
212
Автоматическое регулирование ИРМ и трансформаторов
• эффективное демпфирование колебаний роторов (качаний) син-
хронных генераторов;
• высокие пределы передаваемой активной мощности по условиям
статической и динамической устойчивости;
• симметрирование напряжений и токов даже в неполнофазных ре-
жимах работы электропередач;
• предотвращение коммутационных перенапряжений на линиях и
улучшение условий гашения электрической дуги однофазного ко-
роткого замыкании при отключениях только одного поврежденного
провода воздушной линии.
Трансформаторы и автотрансформаторы связи шин различных на-
пряжений электростанций имеют устройства для изменения коэффици-
ента трансформации — регулирования под нагрузкой (УРПН), необхо-
димые для управления перетоками реактивной мощности и поддержания
напряжений шин на согласованных уровнях. Разрабатываются высоко-
надежные тиристорные УРПН.
Указанные управляемые электроэнергетические объекты оснащают-
ся автоматическими регуляторами реактивной мощности (АРРМ) и
регуляторами коэффициента трансформации (АРКТ) соответственно.
Особенностями АРРМ являются безынерционность и, как правило, не-
прерывность действия, а особенностью АРКТ — дискретность действия
с относительно большими временными задержками.
На распределительных подстанциях установлены традиционные кон-
денсаторные источники реактивной мощности, дискретно управляемые
АРРМ, переключающими секции конденсаторов воздействием на элек-
тромеханические или тиристорные выключатели. Разрабатываются и
внедряются и непрерывно управляемые источники реактивной мощно-
сти (ИРМ) с тиристорными преобразователями.
Все трансформаторы и автотрансформаторы подстанций имеют
встроенные УРПН и поставляются комплектно с АРКТ. Основным на-
значением ИРМ и трансформаторов с УРПН является обеспечение одно-
го из основных показателей качества электроэнергии — практического
постоянства напряжения на зажимах ее приемников при любых измене-
ниях потребляемой ими активной мощности.
213
Глава 6
6.2. Автоматическое регулирование реактивной
мощности синхронных компенсаторов
Синхронный компенсатор (СК) — традиционный генератор реактив-
ной мощности, используется в современных ЭЭС и как ее управляемый
потребитель. Режим генерирования (выдачи) или потребления опреде-
ляется возбуждением СК. В соответствии с [/-образной его характери-
стикой (рис. 6.1,а) при номинальном возбуждении (/вном) синхронный
компенсатор выдает реактивную мощность
о Uui(EqunM — (/ш)
Q СКном = ------v, (6.1)
Ad
а при отсутствии возбуждения (/в = 0) — потребляет реактивную мощ-
ность
I — QcKol — ~ 0,5QcKhom-
Xd
(6-2)
Наибольшая возможная загрузка СК потребляемой реактивной мощ-
ностью достигается или при граничном отрицательном токе возбужде-
ния — 1В гр, или при отсутствии возбуждения (/в = 0) и внутреннем угле
компенсатора 6 = тг/2, т.е. при расположении ротора по поперечной оси.
При этом
U2
I — QcKrpI = ~ 0,75Qckhom- (6-3)
Граничный режим потребления реактивной мощности определяется
условием устойчивости работы СК — сохранением синхронизма. Син-
хронизирующий вращающий момент создается синхронным электромаг-
нитным Мс и реактивным (обусловленным явнополюсностью) Мр мо-
ментами
Мс
Мр
EqUug .
—-г-— sm о ;
^^-Asin2^.
2 AdAg
(6-4)
В частности, при отсутствии возбуждения СК удерживается в син-
хронизме только за счет реактивного момента. При отрицательном воз-
буждении синхронный момент противодействует реактивному и ухуд-
шает устойчивость работы СК: отрицательное возбуждение уменьшает
Xd-, снижая эффект явнополюсности.
214
Автоматическое регулирование ИРМ и трансформаторов
Рис. 6.1. Характеристики синхронного компенсатора:
а — идеальная {/-образная характеристика, б — зависимость вращающих мо-
ментов от положения ротора, в — зависимости потребляемой реактивной мощ-
ности от угла
Граничное значение отрицательной ЭДС Eqrp определяется прирав-
ниванием к нулю производной синхронизирующего момента по углу 6.
С учетом (6.4)
^(Мс + Мр)К^=ео85 + ^^А^соз25 = 0. (6.5)
215
Глава 6
При 8 — О
-Ечгр = = . (6.6)
Л-q ^q
При отрицательном возбуждении наибольшая потребляемая реак-
тивная мощность — QcKrp теоретически достигается в граничном ре-
жиме при 8 = 0. Практически, в связи с наличием потерь активной
мощности (на вентиляцию, трение) мощность -QcKrp достигается при
угле 8 к тг/10 (рис. 6.1,б).
В граничном режиме СК выпадает из синхронизма. Согласно (6.4)
и рис. 6.1,6 при 5 = 7г/4 моменты равны
| — Л1с.Гр| = Мртах , (6.7)
а при 8 > тг/4 синхронизирующий момент отрицательный. Даже при
отсутствии отрицательного возбуждения угол 8 > тг/4 увеличивается,
поскольку реактивный момент уменьшается. При 8 = тг/2, т.е. при
положении ротора по поперечной оси, сопротивление статора равно Xq,
и потребляемая мощность достигает наибольшего значения (6.3) при
отсутствии возбуждения (7В = 0). Но такой режим возможен только в
условиях искусственной устойчивости СК.
Искусственная устойчивость работы СК при расположении ротора
по поперечной оси обеспечивается быстродействующим знакоперемен-
ным автоматическим регулированием реверсивного возбуждения СК по
отклонениям угла ±AJ от граничного значения Jrp = тг/2. Возникаю-
щие при этом положительный или отрицательный синхронизирующие
вращающие моменты замедляют или ускоряют ротор, который, вибри-
руя, удерживается в динамически равновесном положении по попереч-
ной оси.
Обмотка возбуждения СК при этом выполняет роль только удержи-
вающей ротор в указанном положении. Такую же роль удерживания
ротора в положении по продольной оси, т.е. при угле 8 = 0, и отрица-
тельном возбуждении может выполнять вторая удерживающая обмотка
возбуждения, расположенная по поперечной оси ротора.
Такие СК с двумя обмотками возбуждения — основной продольной и
одерживающей поперечной — могут загружаться любой, ограниченной
шшь термической стойкостью обмоток статора, потребляемой реактив-
ной мощностью при угле положения ротора 8 и 0.
216
Автоматическое регулирование ИРМ и трансформаторов
Режим значительного потребления реактивной мощности возможен
только при автоматическом знакопеременном регулировании тока воз-
буждения IBq в поперечной обмотке LG2 (см. рис. 6.4). Потребляемая
реактивная мощность определяется током возбуждения 1вд в основной
(продольной) ZG1 обмотке ротора.
Таким образом, как и в асинхронизированном генераторе (см. §5.10),
автоматическое регулирование возбуждения СК с поперечной обмоткой
ротора осуществляется двумя отдельными регуляторами, которые в от-
личие от двух каналов АРВ АСГ не взаимодействуют между собой. Ис-
точниками токов возбуждения 7ВС/, IBq синхронного компенсатора служат
два реверсивных тиристорных возбудителя, управляемые двумя автома-
тическими регуляторами АРВ- d и APB-q.
Первый из указанных регуляторов APB-d имеет лишь одно на-
значение — поддержание напряжения иш на шинах электростанции
или подстанции путем изменения генерируемой или потребляемой ре-
активной мощности СК. Он представляет собой пропорционально-
дифференциальный (ПД-) регулятор, формирующий регулирующее воз-
действие по отклонению напряжения Д(/П1 и его производной dUm/dt.
Задачами второго регулятора APB-q являются: удержание СК в ре-
жиме искусственной устойчивости при положении ротора по продольной
оси и отрицательном, не ограничиваемом условием (6.7) равенства отри-
цательного электромагнитного и положительного реактивного вращаю-
щих моментов, токе возбуждения 1в,г. предотвращение самораскачивания
ротора и демпфирование его колебаний и поддержание, как указывалось,
угла <5^0. Поэтому регулирующее воздействие Дрегд формируется ПД-
регулятором, функционирующим по отклонениям угла Д<У от = 0 и по
его первой и второй производным.
Таким образом, достигается полное использование синхронных ком-
пенсаторов не только в режиме генерирования, но и потребления реак-
тивной мощности, причем возможна даже кратковременная, ограничен-
ная лишь термической стойкостью форсировка СК по реактивной мощ-
ности. Повышение скорости набора реактивной нагрузки и снижение
инерционности СК с поперечной обмоткой ротора достигается частич-
ной компенсацией его переходного сопротивления конденсаторами,
включаемыми в цепь статора. Такие компенсированные СК имеют и
другие полезные в смысле автоматического управления напряжением и
реактивной мощностью свойства [22].
217
Глава 6
6.3. Автоматические регуляторы возбуждения
синхронных компенсаторов
Регулятор знакопеременного возбуждения. Основной осо-
бенностью автоматического регулятора знакопеременного возбуждения,
обусловленной задачей обеспечения искусственной устойчивости СК в
режиме потребления реактивной мощности, является его быстродей-
ствие и необходимость формирования сигнала по отклонению угла 8 от
значения, близкого к тг/2. Такой полупроводниковый регулятор был раз-
работан и достаточно широко внедрен еще на СК с электромашинным
возбуждением постоянного тока. В современной модификации он приме-
няется на СК с тиристорным бесщеточным возбуждением.
Реверсивный возбудитель состоит из двух встречно включенных ти-
ристорных преобразователей. При бесщеточном возбуждении обмотка
ротора состоит из двух параллельных ветвей ZG1, LG2 (рис. 6.2), ка-
ждая из которых подключена к вращающимся диодным выпрямителям
VST, VS2, питаемым от двух обращенных синхронных генераторов GE1,
GE2. Генераторы имеют тиристорное возбуждение — тиристорные пре-
образователи VST1, VST2, подключенные через трансформатор Т к вы-
водам СК. Тиристорные преобразователи в режиме выпрямления через
устройства управления УУ1, УУ2 — формирователи импульсов токов
ги у включения тиристоров управляются положительным и отрицатель-
ным напряжением ±{7рег реверсивного автоматического регулятора.
В режиме генерирования реактивной мощности напряжение Uper по-
ложительно, возбуждение создается первым возбудителем — GE1, V5T,
VST1. Оно пропорционально положительному отклонению напряжения
иш от предписанного Д U = Еш пр - Еш и его производной в соответствии
с характеристикой измерительного органа напряжения ИОН регулятора
Еди = /(^ш) (рис. 6.3,а).
При напряжении Еш > (/шпр регулирующее воздействие Uper отри-
цательно. При этом VST1 закрывается и вступает в действие второй
возбудитель — GE2, VS2, VST2, создающий отрицательное возбужде-
ние. После достижения граничного режима по потребляемой реактив-
ной мощности СК стремится к выпадению из синхронизма — его вну-
тренний угол 8 увеличивается. При достижении им значения 8 > тг/4
начинается формирование сигнала измерительным органом угла ИОУ,
характеристика которого = f(8) показана на рис. 6.3,6. При этом
218
Рис. 6.2. Функциональная схема автоматической системы регулирования возбуждения синхронного
компенсатора с реверсивным бесщеточным возбуждением
СО
Автоматическое регулирование ИРМ и трансформаторов
Глава 6
Рис. 6.3. Характеристики измерительных органов:
а — напряжения, б — угла; в — суммарная характеристика измерительной ча-
сти, г — графики, иллюстрирующие формирование выходного напряжения из-
мерительного органа угла автоматического регулятора знакопеременного воз-
буждения
220
Автоматическое регулирование ИРМ и трансформаторов
напряжение Uper пропорционально сумме сигналов измерительных орга-
нов Us - ~UsumiiX + Uss (рис. 6.3,в).
После достижения углом значения 5 = тг/З положительное напряже-
ние Uss становится равным ограниченному абсолютному значению от-
рицательного напряжения | - Usuma.x\, а суммарное напряжение Us = О
(рис. 6.3,в). Соответственно снижается до нуля и регулирующее воздей-
ствие (t/per = 0).
Синхронный компенсатор работает при отсутствии возбуждения с
углом 5 = тг/З. Потребляемая реактивная мощность согласно харак-
теристике на рис. 6.1,в практически равна -QcKrp- Дальнейшее на-
растание угла 6 по мере выпадения СК из синхронизма обусловливает
положительные напряжения Us и Дрег (рис. 6.3,в). Снова вступает в
действие первый возбудитель, создающий положительное возбуждение:
выпадение из синхронизма СК прекращается, угол д уменьшается. Но
при 5 = тг/З напряжение Uper снижается до нуля и при дальнейшем
уменьшении угла становится отрицательным. Начинает работать вто-
рой возбудитель, создающий отрицательное возбуждение, что приводит
к возрастанию угла 6. Таким образом, благодаря знакопеременному воз-
буждению, компенсатор искусственно удерживается в синхронизме при
угле 5 ~ тг/З и потребляет реактивную мощность -QcKrp-
Быстродействие измерительного органа угла обеспечивается прин-
ципом его действия. Напряжение Uss формируется запоминанием мгно-
венного значения синусоидального напряжения, например фазы А, ста-
тора иа путем заряда конденсатора в момент появления импульса ии
от индукционного измерительного преобразователя (датчика) угла ИПУ
(рис. 6.3,г).
Датчик угла положения ротора СК состоит из постоянного магни-
та с обмоткой (см. рис. 6.2), расположенного на статоре СК у торца
вала ротора. На торце вала размещена пластина из магнитного мате-
риала, перекрывающая зазор между полюсами постоянного магнита в
момент времени, смещающийся относительно момента перехода через
нуль мгновенным значением напряжения иа с изменением угла 5. В
момент перекрытия зазора между полюсами постоянного магнита в об-
мотке индуцируется импульс напряжения пи, положение которого на оси
времени (в пределах первой четверти периода иа) определяется углом 5.
Соответственно 1 раз за период изменяется напряжение Uss на запоми-
нающем конденсаторе (рис. 6.3,г).
221
Глава 6
Измерительные органы напряжения ИОН, токов статора ИОТ и воз-
буждения И0ТВ1, ИОТВ‘2 (регулятор не допускает длительной пере-
грузки СК) в полупроводниковом регуляторе выполнены на диодных
элементах сравнения с 12-фазными выпрямителями и поэтому не содер-
жат частотных фильтров. В современном микросхемном регуляторе их
быстродействие обеспечивается новыми, аналогичными рассмотренным
ранее (см. § 5.6) способами формирования сигналов.
Оригинальную разработку представляет собой и быстродействую-
щий реверсивный тиристорный исполнительный усилитель А полупро-
водникового регулятора.
Усилитель выполнен на тиристорах, управляемых импульсными ра-
бочими токами быстродействующих магнитных усилителей [8]. Маг-
нитные усилители, в свою очередь, управляются токами коллекторов
транзисторов, образующих, по существу, усилитель постоянного тока с
питанием выпрямленным током.
Автоматические регуляторы возбуждения синхронных ком-
пенсаторов с поперечной обмоткой ротора. Реверсивное измене-
ние возбуждения СК с дополнительной удерживающей обмоткой рото-
ра, расположенной по поперечной его оси, создается, как указывалось,
двумя тиристорными возбудителями VST1, VST2 (рис. 6.4), состоящими
каждый из двух встречно включенных тиристорных выпрямителей, под-
ключенных через трансформатор Т к выводам обмоток статора, упра-
вляемых двумя автоматическими регуляторами возбуждения АРВ-с?
и АРВ-</.
Алгоритмы функционирования автоматических регуляторов опреде-
ляются их назначением. Регулятор АРВ-с? обеспечивает поддержание
напряжения Сш на шинах путем изменений генерируемой или потребля-
емой СК реактивной мощности. На него возлагается и задача демп-
фирования качаний синхронных генераторов электростанций путем со-
здания принужденных колебаний напряжения на шинах с частотой ко-
лебаний роторов генераторов с фазой, обеспечивающей эффективное их
затухание.
Это достигается использованием сигнала по изменениям активной
мощности А'Р в линии электропередачи, формируемого реальным диф-
ференцирующим звеном. Регулирующее воздействие СреГ£/ определя-
ется суммой сигналов, отображающих отклонение напряжения АС =
= Unp — иш, производной напряжения и изменения Д'Р мощности. В
222
223
Рис. 6-4- Функциональная схема автоматической системы регулирования возбуждения синхронного
компенсатора с поперечной обмоткой ротора
Автоматическое регулирование ИРМ и трансформаторов
Глава 6
операторной форме алгоритм автоматического регулирования имеет сле-
дующий вид:
ku^U (р) + кцр^и (р) +
=-----------ГУЛ—— • <6'8)
Сигнал, формируемый по производной напряжения, является стаби-
лизирующим автоматическую систему регулирования возбуждения по
продольной оси — предотвращает ее переход в неустойчивое автоколе-
бательное состояние из-за обычно весьма высоких значений коэффици-
ента ku усиления сигнала по отклонению напряжения (Агу > 100).
Алгоритм автоматического регулирования возбуждения по попереч-
ной оси определяется его назначением, состоящим в удержании ротора в
положении по продольной оси, т.е. при угле 6 = 0, в режиме потребления
реактивной мощности при отрицательном токе возбуждения Цл в про-
дольной обмотке возбуждения LG1 и демпфирования колебаний ротора
в режиме исскуственной устойчивости СК. Поэтому регулятором АРВ-д
используются сигналы по отклонению угла Л 4 от 6 = 0, его производ-
ной и отклонению (появлению) электромагнитного момента — активной
мощности на валу СК. В операторном виде алгоритм автоматического
регулирования
ц \ + Wp) + кРЛР(р)
Uperq(.P)- 1 + рТ:] (b.J)
Автоматические регуляторы АРВ-с? и АРВ-g содержат соответству-
ющие алгоритмам (6.8) и (6.9) измерительные органы (рис. 6.4): на-
пряжения ИОН с дифференциатором AD1, активной мощности линии
ИОАМ с реальным дифференциатором AD2; угла положения ротора
ИОУ с дифференциатором ADZ и электромагнитного момента ИОЭМ
на валу СК. Измерительные органы ИОАМ и ИОЭМ содержат измери-
тельные преобразователи мощности линии ИНАМ! и синхронного ком-
пенсатора ИПАМ2-, их задающие элементы ЗЭ1, ЗЭ2 устанавливают
сигналы, отображающие установленную передаваемую мощность по ли-
нии РЛПр и мощность РсКпр> определяемую главным образом его венти-
ляцией.
Измерительные части регуляторов выполняются на интегральных
микросхемах: ИОН с использованием управляемых интеграторов AJ,
224
Автоматическое регулирование ИРМ и трансформаторов
как и в микросхемном аналоговом АРВ-СДП синхронных генерато-
ров (см. рис. 5.11), а измерительный орган угла ИОУ — анало-
гично описанному измерительному органу автоматического регулято-
ра знакопеременного возбуждения СК без поперечной обмотки (см.
рис. 6.3).
После суммирования сигналов измерительных органов интегральны-
ми сумматорами AW1, AW2 исполнительными усилителями Al, А2 они
преобразуются в регулирующие воздействия Uperd, Uperq на устройства
управления У У1-УУ4 тиристорами возбудителей через разделительные
диоды: разнополярные напряжения Uperd и Uperq воздействуют на раз-
ные тиристорные выпрямители возбудителей VST1, VST2 синхронного
компенсатора GC.
6.4. Автоматическое регулирование реактивной
мощности статических компенсаторов
Возможность непрерывного управления мощностью реакторов и дис-
кретного изменения мощности конденсаторных установок мощными ти-
ристорными управляемыми устройствами и тиристорными выключате-
лями соответственно обусловила разработку статических реверсивных
управляемых компенсаторов (СТК), более надежных, быстродействую-
щих и менее дорогих, чем вращающиеся синхронные компенсаторы. В
связи с выявившимися особенностями коммутации секционированных
конденсаторных установок оказалось целесообразным выполнять СТК,
состоящими из непрерывно управляемой реакторной части и постоянно
включенной или только включаемой и отключаемой в целом конденса-
торной установки.
Поскольку непрерывно управляемые реакторные СТК в режимах ма-
лой загрузки потребляемой реактивной мощностью (при больших углах
включения тиристоров тг/2 < а < 2тг/3) генерируют гармонические со-
ставляющие напряжения и тока, пришлось их секционировать и осуще-
ствлять дискретно-непрерывное управление их мощностью, т.е. про-
изводить включение и отключение отдельных реакторов с непрерывно
изменяемой мощностью каждого из них тиристорными преобразователя-
ми, работающими с малыми углами включения тиристоров (тг/6 < о <
тг/2). Поэтому определились два типа СТК: оба состоят из отдельных
225
Глава 6
секций (модулей), но один — с постоянно подключенной конденсаторной
установкой, а второй — с периодически коммутируемой.
Первый тип СТК является частично, а второй полностью реверсив-
ным. Например, СТК одной из электропередач напряжением 1150 кВ
состоит из 14 реакторных непрерывно управляемых модулей, потребля-
ющих реактивную мощность до -1100 Мвар, и конденсаторной установ-
ки мощностью +300 Мвар [23].
Реверсивный СТК мощностью +55 Мвар содержит непрерывно упра-
вляемую тиристорным преобразователем VST (рис. 6.5,а) реакторную
часть LR и дискретно управляемую несекционированную, т.е. включае-
мую или отключаемую, конденсаторную установку СВ напряжением 10
или 20 кВ [25].
Для реверсивных СТК разработаны аналоговый автоматический ре-
гулятор реактивной мощности с элементом дискретного действия [23] и
микропроцессорная автоматическая система комплексного управления и
защиты (САУЗ) [26].
Регулирующие воздействия аналогового и цифрового автоматиче-
ских регуляторов формируются по отклонению АД напряжения, пер-
вой и второй его производной и по сигналу об изменениях А/Р;1 потоков
мощности в магистральных линиях электропередачи, способствующему
затуханию синхронных качаний генераторов электростанций.
Изображения регулирующих воздействий непрерывной части анало-
гового регулятора и микропроцессорной САУЗ определяются следующи-
ми р— и z— операторными выражениями, отображающими функциони-
рование их измерительной и вычислительной частей соответственно:
аналогового автоматического регулятора
Срег(р) = [ки + k'uP+ k'uP2] AU(p) + ~=,—; (6.10)
Р + 1
цифрового регулятора САУЗ с учетом соотношения (5.21)
/7рег(^) = [ku + (1 - г"1) + ^ (1 - 2г-1 + г’2)] АД(г) +
+ 1 + т/тдр i-z-Vti + T/^p)^20
(6.И)
226
Рис. 6.5. Схема управляемого статического компенсатора (а), структурная схема непрерывной ча-
сти (б) и условная схема дискретной части (в) его автоматического регулятора
Автоматическое регулирование ИРМ и трансформаторов
Глава 6
В соответствии с (6.11) выходной сигнал вычислительной части ци-
фрового регулятора САУЗ является следующей функцией Uper(riT) дис-
кретного времени
Uper(nT) = киЫЦп'Г) + |д[/(пТ) - AU(nT - Т)] + |д/7(пТ) -
- 2Д/7(дТ - Т) + AU(nT - 2Т)I + -—- [дР(?гТ) -
J 1 + -* Мдр L
- ДР(пТ - Т)1 + \ А'Р(дТ - Т), (6.12)
J 1 т 1 Мд.р
где Д.'Р(пТ - Т) — дискретное значение выходного сигнала цифрового
реального дифференциатора (сигнала изменения мощности) в предше-
ствующий интервал дискретизации.
Составляющая (6.12), пропорциональная отклонению напряжения
АР, определяет загрузку СТК генерируемой или потребляемой реактив-
ной мощностью. Сигналы по первой и второй производным напряжения
стабилизируют автоматическую систему регулирования, работающую
при высоких коэффициентах усиления сигнала по отклонению напря-
жения. Сигнал, отображающий изменения активной мощности линии
электропередачи, формируемый реальным дифференцирующим звеном
по ее отклонению АРЛ, обеспечивает затухание электромеханических пе-
реходных процессов в электропередаче. Из условия наиболее эффектив-
ного их демпфирования и выбирается постоянная времени Тл р реального
дифференциатора.
Структурная схема непрерывной части автоматического регулято-
ра реактивной мощности (рис. 6.5,б’) состоит из апериодических зве-
ньев с передаточными функциями Яа1(р)[Яа2(р)] ~ 1/(рТл + 1), за-
мещающими принятые в (6.10) безынерционными измерительные пре-
образователи напряжения и активной мощности, идеальных с переда-
точными функциями Яд1(р)[Яд2(р)] ~ рк'^ и реального [Ядр(р) =
= ркр/(рТлр + 1)] дифференциаторов и инерционных с передаточными
функциями Яу1(р)[Яу2(р)] ~ 1/(рТу + 1) звеньев первого порядка, заме-
щающих суммирующий и исполнительный усилители. Автоматический
регулятор пропорционально-дифференциальный, статический.
Функциональная схема автоматического регулятора реактивной
мощности СТК, аналогично схеме регулятора синхронного компенсато-
228
Автоматическое регулирование ИРМ и трансформаторов
ра (см.рис. 6.4), содержит измерительные органы напряжения ИОН и
активной мощности ИОАМ линии, состоящие из свойственных им типо-
вых функциональных элементов: измерительных преобразователей на-
пряжения и мощности, задающих элементов ЗЭ, элементов сравнения
непрерывного действия ЭСНД и обусловленных алгоритмом регулиро-
вания (6.10) активных дифференциаторов.
Суммарный непрерывный сигнал Uc^(p') на выходе сумматора WA
(рис. 6.5,6) исполнительным усилителем А превращается в регулиру-
ющее воздействие на непрерывно управляемый (через устройство УУ)
тиристорный преобразователь VST (рис. 6.5,а), непрерывно изменяю-
щий потребляемую реактивную мощность реактора LR статического
компенсатора.
Регулятор содержит элемент формирования дискретных сигна-
лов — элемент управления ЭУ (рис. 6.5, в) — полного от-
крытия Uno тиристоров, их частичного фиксированного откры-
тия U4 о и сигналов Qsi, Qs? включения или отключения вы-
ключателей Q1 компенсатора и Q2 конденсаторной части. Сиг-
налы {7П.О, U4O необходимы для предотвращения периодическо-
го включения и отключения выключателя Q2 (неустойчивости его
коммутации) при воздействии на дискретное изменение мощно-
сти СТК путем отключения или включения его конденсаторной
части.
Дискретные сигналы формируются релейным нуль-индикатором —
компаратором ЕА суммарного сигнала {7cs и логической частью ЛЧ
элемента управления ЭУ. При изменении знака напряжения ±ДСЕ кон-
денсаторная установка СВ должна включаться или отключаться. Пе-
ред ее включением (по дискретному сигналу QS2 — 1) с опережением
по времени на один-два периода промышленной частоты формируется
дискретный сигнал полного открытия тиристоров (7ПО, т.е. перевода
СТК в режим потребления максимальной мощности. Включаемая тут
же конденсаторная часть полностью компенсирует потребляемую реак-
тором мощность — нулевой режим СТК. Затем путем непрерывного и
постепенного прикрытия тиристоров мощность реактора уменьшается,
обеспечивая непрерывное нарастание генерируемой мощности СТК кон-
денсаторной его частью.
По мере повышения напряжения на шинах и необходимости пере-
вода СТК в режим потребления реактивной мощности путем отключе-
229
Глава 6
ния конденсатора СВ с опережением на несколько периодов по дискрет-
ным сигналам U4.o и Qsi = 1 тиристоры переводятся в состояние частич-
ного открытия, и выключатель Q1 компенсатора отключается. Конден-
сатор апериодически разряжается на реактор через частично открытые
тиристоры: при полном их открытии, вследствие равенства сопротивле-
ний реакторной и конденсаторной частей при промышленной частоте,
имел бы место длительный слабо затухающий периодический процесс
перезаряда (неустойчивость разряда конденсатора).
Затем в обесточенном состоянии выключатель Q2 конденсатора от-
ключается, а выключатель Q1 снова включается. Тиристоры непре-
рывным сигналом -Uc% переводятся в режим, соответствующий необ-
ходимой, определяемой напряжением 11ш потребляемой реактивной мощ-
ности.
Все элементы регулятора выполняются на интегральных микросхе-
мах с использованием управляемых интеграторов в измерительных пре-
образователях напряжения, интегральных перемножителей в измери-
тельных преобразователях активной мощности и дискретных логиче-
ских микросхем.
Микропроцессорная автоматическая система комплексного управле-
ния и защиты статическими компенсаторами выполнена на базе микро-
средств управляющей вычислительной техники (МСУВТ) В7 [26]. Она
производит не только автоматическое регулирование напряжения и ре-
активной мощности СТК, но и противоаварийное управление: защиту
тиристорных преобразователей, ограничение перенапряжений, дискрет-
ное повышение предписанного напряжения (уставки) по сигналу проти-
воаварийной автоматики.
Как обычно для обеспечения надежности функционирования преду-
сматривается две взаиморезервируемые управляющие микроЭВМ, обра-
зующие вычислительную ВЧ функциональную часть (рис. 6.6). Каждая
из них содержит по два микропроцессора МПС МП2.
Измерительно-преобразовательная ИПЧ и исполнительная Ис. Ч
функциональные части, образующие, как указывалось, устройство связи
с объектом, выполняют аналоговое измерительное преобразование вход-
ных сигналов — напряжений и токов промышленной частоты, форми-
руют фазоимпульсное управляющее воздействие на тиристоры СТК и
обеспечивают гальваническое разделение (развязку) их цепей и входов
вычислительной части. При этом используются герконы — реле дис-
230
Рис. 6.6. Упрощенная схема микропроцессорной системы комплексного управления и защиты СТК
Автоматическое регулирование ИРМ и трансформаторов
Глава 6
кретных сигналов РДС и оптоэлектронные усилители в цепях аналого-
вых сигналов (на схеме не показаны).
Элементы аналогового измерительного преобразования токов АИТ и
напряжений АИН содержат активные измерительные трансреакторы и
трансформаторы [8] с унифицированными сигналами в виде переменных
напряжений с ограниченной на уровне 5 В амплитудой. Они поступают
через коммутатор аналоговых сигналов АК (аналоговый мультиплек-
сор) в АЦП.
Поскольку напряжения на шинах подстанции и на линии при рабо-
те СТК, генерирующего гармоники, несинусоидальны, то перед аналого-
дискретными преобразователями АДП, формирующими импульсы упра-
вления микропроцессорами, установлены активные частотные фильтры
нижних частот ФНЧ.
Два АДП формируют короткие импульсы в моменты переходов через
нулевые мгновенные значения трех фазных напряжений (см. рис. 5.18),
необходимые для цифровых измерительных преобразований вычисли-
тельной части.
В связи с указанной несинусоидальностью напряжений производится
цифровое измерительное преобразование действующего значения напря-
жения в сигнал, что является оригинальной особенностью вычислитель-
ной части САУЗ. Программа такого преобразования (рис. 6.7) предпо-
лагает вычисление сумм квадратов дискретных мгновенных значений
фазных напряжений ид через интервалы времени, равные 1/4 периода
их изменений, и извлечение квадратного корня. Цифровой сигнал ин-
формации о действующем напряжении формируется по среднему за пе-
риод Тп промышленной частоты их значению. Прерывание вычислений
производится соответствующими таймерами Tl, Т2 микроЭВМ.
В цепях напряжений предусмотрены и аналоговые выпрямительные
измерительные преобразователи средних значений напряжений ВИПН.
Оригинальной разработкой является и цифровой способ формиро-
вания управляющих воздействий — вычисление двоичного кода угла
включения тиристоров СТК и его фазоимпульсное преобразование.
Запуск программы фазоимпульсного преобразования происходит по
прерываниям 12 раз в течение периода промышленной частоты по им-
пульсным сигналам, формируемым третьим АДП при каждом переходе
через нулевые мгновенные значения шестифазной системы переменных
напряжений, получаемой от измерительных трансформаторов TV с раз-
232
Автоматическое регулирование ИРМ и трансформаторов
Рис. 6.7. Структура программы вычисления действующего значения
несинусоидального напряжения на входе СТК
233
Глава 6
ними группами соединений первичной и вторичной обмоток. На выхо-
де второго микропроцессора МП2 по шести линиям передаются сигна-
лы информации об углах включения тиристоров трехфазных вентилей
(прямого и обратного) тиристорного преобразователя. Сигналы усили-
ваются и распределяются по тиристорам в формирователях импульс-
ных токов управления ФИУ — токов гиу (см. рис. 5.9) базы тиристоров
исполнительной части САУЗ. В формирователи поступают и сигналы
установки диодного режима работы тиристоров.
В исполнительную часть входят комплект герконов дискретных вы-
ходных сигналов КВР, поступающих от их мультиплексора МПЛ, мо-
дуль контроля МК и подключаемый через ЦАП осциллограф О. Ми-
кропроцессорная САУЗ выполняет функции защиты СТК от токов пере-
грузки и повреждений тиристорного преобразователя. Широкий набор
сервисных функций, реализуемых программно, обеспечивает удобство
контроля и обслуживания САУЗ.
6.5. Автоматическое регулирование трансформаторов
и автотрансформаторов
Особенности автоматического регулирования коэффициен-
та трансформации. Основные особенности автоматического регули-
рования коэффициента трансформации обусловливаются дискретностью
его изменения при переключении ответвлений обмоток и относительной
сложностью и инерционностью процесса переключения электромехани-
ческими УРПН.
На рис. 6.8 показаны схемы, соответствующие основным коммута-
ционным операциям переключения двух соседних ответвлений с реак-
торным ограничителем тока замыкания между ними, возникающего в
процессе переключения.
В установившемся режиме работы — до переключения (рис. 6.8, а)
или после переключения (рис. 6.8, 6) — реактор LR не оказывает вли-
яния на работу трансформатора: по его двум встречно включенным
обмоткам проходят одинаковые токи и результирующее реактивное со-
противление равно нулю.
Первой операцией процесса переключения является размыкание кон-
такта КМ2 контакторов в цепях обмоток реактора (рис. 6.8,6). Ток
234
Автоматическое регулирование ИРМ и трансформаторов
Рис. 6.8. Схемы переключения одного ответвления от обмотки транс-
форматора с УРПН
нагрузки проходит по одной обмотке реактора, обладающей определен-
ным сопротивлением. Затем происходит изменение положения контакта
П2 переключателя ответвлений в условиях отсутствия тока, после че-
го контакт КМ2 снова замыкается и соединяет два ответвления между
собой через согласно включенные обмотки реактора (рис. 6.8,в). Значи-
тельное сопротивление реактора ограничивает ток 1К в цепи замыкания
двух ответвлений. Далее размыкается контакт КМ1 (рис. 6.8,г), изме-
няется положение контакта П1 переключателя без разрыва цепи тока и
контакт КМ1 снова замыкается (рис. 6.8Д).
Переключающее устройство приводится в движение электродвига-
телем и поэтому содержит механическое устройство, преобразующее
непрерывное его вращательное движение в дискретное переключателя
(мальтийское колесо). При переключении двух соседних ответвлений
напряжение трансформатора на обмотке без ответвлений изменяется на
ступень регулирования | ± ДПСр| = (1,25-2,5)%.
235
Глава 6
Основными особенностями автоматического регулирования коэффи-
циента трансформации являются:
• дискретность действия регулятора и нечувствительность к изме-
нениям напряжения, меньшим ступени регулирования;
• действие с относительно большой выдержкой времени для предот-
вращения переключений при кратковременных изменениях напря-
жения при пусках и самозапусках электродвигателей, удаленных
КЗ и в других случаях;
• необходимость (для понижающих трансформаторов) регулирова-
ния напряжения с отрицательным статизмом для поддержания на-
пряжения у потребителя на неизменном уровне при возрастании
нагрузки.
Указанные особенности обусловливают соответствующие требова-
ния к измерительной части автоматических регуляторов коэффициентов
трансформации, а именно:
• релейность действия с зоной нечувствительности измерительного
органа напряжения;
• высокий (близкий к единице) коэффициент отпускания (возврата)
релейных элементов;
• необходимость ввода в измерительный орган напряжения сигнала
по току нагрузки для установки отрицательного статизма.
Высокий коэффициент возврата необходим для обеспечения возмож-
ной точности регулирования путем максимального приближения зоны
нечувствительности регулятора к ступени регулирования.
На рис. 6.9 показаны предписанное (обычно номинальное) напряже-
ние на шинах Сш.ном, ступень регулирования АКС р, зона нечувствитель-
ности A Um и напряжения срабатывания и возврата релейных элементов
измерительного органа, обусловливающих действие регулятора на повы-
шение напряжения (Д1/спв, А(/впв) и его снижение (А(/ссн, АС/всн).
Необходимым условием настройки регулятора является соотношение
А(/Нч > АКср, а именно 2ДКВ > At/C.p. С учетом коэффициента от-
стройки кот = 1,05 4- 1.1 напряжение возврата ДКВ = fcOTAt/c.p/2, а с
учетом коэффициента возврата kB = Д{7В/Д{7С напряжение срабатыва-
236
Автоматическое регулирование ИРМ и трансформаторов
0----------------------------------------------Г
Рис. 6.9. Графики, иллюстрирующие особенности автоматического ре-
гулирования коэффициента трансформации посредством УРПН
ния ДГС = (А:от/А:в)ДГср/2. Таким образом, зона нечувствительности
регулятора
ДГнч = 2ДГС = ДГср (6.13)
тем ближе к ступени регулирования ДГср, чем ближе к единице коэф-
фициент возврата.
График изменения напряжения (рис. 6.9) показывает, что при выходе
напряжения за пределы зоны нечувствительности на время ii или t2,
меньшее выдержки времени регулятора /рег, переключение ответвлений
не происходит; показано и изменение напряжения на ДГС р при действии
регулятора, если t > /рег.
При невыполнении условия (6.13) происходили бы многочисленные
переключения ответвлений обмоток то в сторону повышения, то в сто-
рону снижения напряжения, т.е. автоматическое регулирование было
бы неустойчивым.
Сложность процесса переключения обмоток, необходимость обеспе-
чения согласованного действия трех однофазных УРПН, шести одно-
фазных или трех трехфазных УРПН при переключениях ответвлений
обмоток параллельно работающих трансформаторов или автотрансфор-
маторов и относительно высокая вероятность появления неисправностей
в сложных электромеханических устройствах обусловливают еще две
особенности автоматического регулирования коэффициента трансфор-
237
Глава 6
мации, а именно однократность и импульсность регулирующего воз-
действия и необходимость автоматического контроля завершения пе-
реключения и исправности автоматической системы регулирования в
целом.
Автоматические регуляторы коэффициента трансформа-
ции. До последнего времени применялся полупроводниковый автомати-
ческий регулятор коэффициента трансформации (АРКТ) типа АРТ-1Н.
Объединенным предприятием «АББ Реле - Чебоксары» производит-
ся микропроцессорный автоматический регулятор SPAU341C [80].
Полупроводниковый регулятор АРТ-1Н обладает всеми указанны-
ми особенностями АРКТ. Он состоит из собственно автоматического
регулятора АР (рис. 6.10) и автоматического устройства управления и
контроля АУУК, которое содержит управляемый генератор тактовых
импульсов G и автоматическое устройство контроля АУК, образующее
цепь обратной связи.
Генератор обеспечивает необходимые однократность и импульсность
воздействия регулятора на приводной механизм ПМ устройства регули-
рования, а цепь обратной связи обеспечивает координацию действия ре-
гулятора в процессе переключения ответвлений обмоток трансформато-
ра и контроль исправноеги регулятора и УРПН. Генератор воздействует
на логическую часть регулятора ЛЧ и на АУА”, функционирующее по
логическому алгоритму. Автоматическое устройство контроля после ка-
ждого воздействия регулятора АР на приводной механизм ПМ изменяет
период следования тактовых импульсов генератора и увеличивает зону
нечувствительности измерительного органа напряжения ИОН.
При выходе напряжения на шинах электростанции или подстан-
ции за пределы зоны нечувствительности напряжением f7BbIxi или СВЬгх2
на выходах измерительной части ИЧ запускается соответствующий эле-
мент выдержки времени DT. Срабатывание элемента времени запоми-
нается одним из триггеров STI (ST2), в который записывается логи-
ческая единица при поступлении на вход записи S напряжения от эле-
мента DT и тактового импульса от генератора G. Запоминание необ-
ходимо для однократности воздействия регулятора на приводной меха-
низм.
Через элемент DX1 (DX2) (ЗАПРЕТ) при логическом нуле на ин-
версном входе сигнал с выхода триггера проходит на исполнительное
реле KL1 или KL2, запускающее ПМ. После начала процесса переключе-
238
239
Рис. 6.10. Функциональная схема автоматического регулятора типа АРТ-1Н
Автоматическое регулирование ИРМ и трансформаторов
Глава 6
ния от ПМ поступает сигнал в АУК, которое: отключает исполнитель-
ное реле, подавая запрещающую логическую единицу на инверсный вход
элемента DX1 (DX2); снимает запоминание (считывает единицу) триг-
гера, воздействуя на вход R считывания; увеличивает период следования
тактовых импульсов генератора G до времени, превышающего длитель-
ность процесса переключения одного ответвления от обмоток трансфор-
матора; увеличивает зону нечувствительности регулятора.
Перечисленные операции необходимы для проверки исправности ре-
гулятора и привода УРПН. Если привод не запустился (не пришел сиг-
нал в А УК о начале процесса переключения) или если до момента по-
явления импульса от тактового генератора через увеличенный период
в АУК не поступил сигнал от ПМ о завершении процесса переключе-
ния, то фиксируется неисправность привода, выдается информация о
его неисправности и повторное воздействие регулятора на ПМ запре-
щается.
Увеличением зоны нечувствительности производится проверка регу-
лятора. В частности, при отклонениях регулируемого напряжения, при
которых необходимы переключения не менее трех ответвлений обмоток
трансформатора, увеличение зоны нечувствительности обусловливает
отсутствие сигнала исправной измерительной части после переключе-
ния двух ответвлений. Поэтому зона нечувствительности восстанавли-
вается и разрешается следующий запуск ПМ на переключение третьего
ответвления без повторной выдержки времени (конденсатор элемента
DT за время проверки не разряжается). Если же после увеличения зо-
ны нечувствительности сигнал измерительной части не снимается, то
фиксируется неисправность регулятора, выдается информация о неис-
правности регулятора и повторный запуск ПМ запрещается.
Таким образом производится автоматическая диагностика автома-
тической системы регулирования, что соответствует современным тре-
бованиям к автоматическим управляющим устройствам.
Схема и временные графики рис. 6.11 показывают выполнение и дей-
ствие измерительной части регулятора. Измерительный орган напряже-
ния ИОН (см. рис. 6.10) выполнен с применением импульсного элемента
сравнения напряжения с предписанным значением и обладает близкой к
релейной характеристикой двухстороннего действия с зоной нечувстви-
тельности, аналогичной приведенной на рис. 3.3,6 характеристике изме-
рительного органа частоты вращения.
240
(a)
Рис. 6.11. Схема (а) и временные графики (б) измерительного органа напряжения (окончание рис. 6.11
на стр. 2р2)
Автоматическое регулирование ИРМ и трансформаторов
Г лава 6
Рис. 6.11. Окончание
Входное напряжение UBX измерительного органа (рис. 6.11,а) обычно
равно разности вторичного напряжения на шинах и падения напря-
жения на резисторе, моделирующем реактивное сопротивление линии,
от вторичного тока нагрузки соответствующей фазы (на рис. 6.11,а не
242
Автоматическое регулирование ИРМ и трансформаторов
показано) — элемента установки отрицательного статизма, аналогич-
ного (только однофазного) приведенному ранее на рис. 5.10,а. Среднее
значение входного напряжения отображается переменной составляющей
м^вх на выходе выпрямителя VS удвоенной частоты. Оно выделяется из
суммы напряжений — постоянной {7овх и переменной и~вх составляющих
на резисторе R1 нагрузки выпрямителя конденсатором С1.
Максимальное отрицательное мгновенное значение переменной со-
ставляющей равно среднему значению Uqbx выпрямленного входного на-
пряжения (рис. 6.11,5). Переменная составляющая и~вх суммируется с
напряжением нечувствительности инч с близкой к прямоугольной фор-
мой кривой, сформированным из входного напряжения стабилитрона-
ми VD3: резисторно-конденсаторная цепь R2, С 2 создает необходимый
сдвиг по фазе основной гармоники напряжения инч относительно ивх.
Напряжение инч создает зону нечувствительности измерительного ор-
гана: из суммы напряжения щ~вх + инч диодом VD5 выделяются от-
рицательные практически треугольные импульсы в виде и'ш, которые
сравниваются с постоянным напряжением UCT стабилитрона VD4 эле-
мента сравнения, включающего транзистор VT1 (рис. 6.И,а). Если им-
пульс и'и превышает напряжение f7CT, то транзистор VT открывается,
и на выходе элемента сравнения появляется импульсное напряжение и"
(рис. 6.11,5).
Напряжение и" в виде последовательности импульсов частотой 50 Гц
соответствует напряжению Uvx. не выходящему за пределы зоны не-
чувствительности Д{7НЧ измерительного органа, при котором сигналы
на выходах измерительной части регулятора /7ВЫх1, ГВЫХ2 отсутствуют.
Когда напряжение UBX повышается и выходит за пределы зоны нечув-
ствительности (см. интервал времени Z2 на рис. 6.9), максимальные
мгновенные значения меньших импульсов и'п (рис. 6.11,5) также превы-
шают напряжение стабилитрона UCT, и напряжение на выходе элемента
сравнения д" представляет собой последовательность импульсов часто-
той 100 Гц. Если напряжение Г/вх снижается (интервалы ti и /рег на
рис. 6.9), то импульсы напряжения u'w отсутствуют.
Импульсное напряжение д" управляет транзисторным (VT2, VT3)
одновибратором, усиливающим и формирующим соответствующие вы-
ходные импульсы ии измерительного органа напряжения (рис. 6.11,5).
Они выделяются электронным повторителем на транзисторе VT4
(рис. 6.11,а).
243
Глава 6
Потенциальные выходные сигналы ГВЫХ1, ГВЫХ2 измерительной ча-
сти регулятора формируются импульсно-потенциальными преобразова-
телями ИП\, ИП2 (см. рис. 6.10), выполненными на транзисторах VT5,
VT6 и VT7, VT8 соответственно (рис. 6.11,а). Импульсным током ба-
зы «б, возбуждаемым напряжением ни периодически с частотой 50 или
100 Гц открывается транзистор VT5, закорачивающий конденсатор СЗ
и вход транзистора VT6. Значительное сопротивление резистора Лк в
цепи коллектора VT5 препятствует заряду конденсатора в интервалы
времени между импульсами напряжения иа. Поэтому транзистор VT6
эмиттерного повторителя остается все время закрытым, и выходное на-
пряжение tTBbIxi отсутствует.
Напряжение Гвых1 возникает лишь после исчезновения импульсов
напряжения д„, что соответствует, как указывалось, выходу входного
напряжения Г/вх регулятора за пределы зоны нечувствительности (ин-
тервал времени t\ или /рег на рис. 6.9), когда регулятор запускается
для действия на повышение напряжения на шинах электростанции или
подстанции. При этом транзистор VT5 закрыт, конденсатор СЗ заря-
жен, а открытый транзистор VT6 обусловливает наличие напряжения
Свых1 = Еп. Поэтому импульсно-потенциальный преобразователь ИП1
показан с инверсией на выходе (см. рис. 6.10).
Второй импульсно-потенциальный преобразователь ИП2 формирует
выходное напряжение {7ВЫХ2 только под воздействием меньших из им-
пульсов и'а, появляющихся при повышении напряжения Uax с выходом
за пределы зоны нечувствительности (интервал времени t? на рис. 6.9).
При их отсутствии транзистор VT7 закрыт, поскольку на его вход по-
ступают одинаковые по абсолютному значению, но противоположно на-
правленные токи i6, гк (рис. 6.11,а), возбуждаемые находящимся в про-
тивофазе импульсным напряжением и„ с частотой 50 Гц и компенсиру-
ющим напряжением нк (рис. 6.11,а,б), импульсы которого формируются
диодами VD7, VD8, а фаза устанавливается резисторно-конденсаторной
цепью ЯЗ, С5. Конденсатор С4 заряжен, а транзистор VT8 открыт,
напряжение ГВЫХ2 = 0.
После появления меньших по абсолютному значению импульсов на-
пряжения и'п на резисторе элемента сравнения R3 возникают и соот-
ветствующие им импульсы ни на выходе одновибратора (транзистор
VT4), размещающиеся на оси времени между показанными на рис. 6.11,5
большими импульсами и'и.
244
Автоматическое регулирование ИРМ и трансформаторов
Возбуждаемый ими ток базы «е транзистора VT7 периодически с ча-
стотой 50 Гц открывает его. Конденсатор С4, разрядившись через от-
крытый VT7, из-за большого сопротивления RK не успевает заряжаться
в интервалы времени между импульсами тока базы (как и конденсатор
(73 в ИШ): ток базы транзистора VT8 исчезает, и он закрывается, по-
является выходное напряжение ивых?, воздействующее на УРПН в сто-
рону снижения напряжения на шинах электростанции или подстанции.
Микропроцессорный автоматический регулятор SPAU 341С явля-
ется интеллектуальным автоматическим устройством, выполняющим
кроме функций собственно АРКТ ряд дополнительных и набор сервис-
ных функций, свойственных современным микропроцессорным техни-
ческим устройствам автоматического управления. Регулятор функци-
онирует по программе, содержащейся в ПЗУ микроЭВМ, и отличает-
ся высокой точностью функциональных характеристик и показателей,
обеспечиваемой их определением вычислительными операциями над ци-
фровыми сигналами.
Четко фиксируемый в цифровой форме коэффициент возврата из-
мерительной части позволяет максимально возможно приблизить зону
нечувствительности к дискретному изменению напряжения при пере-
ключениях соседних ответвлений обмотки высшего напряжения (ступе-
ни регулирования). Вычислительный процесс определения падений на-
пряжения в линиях электроснабжения нагрузки обеспечивает их компен-
сацию, необходимую для поддержания постоянства напряжения электро-
приемников при изменениях потребляемой ими электроэнергии. Расчет-
ное определение выдержки времени действия регулятора в зависимости
от степени отклонения напряжения придает ему свойства адаптации и
позволяет оптимизировать процесс автоматического управления УРПН.
Автоматический регулятор имеет алфавитно-цифровой дисплей, ото-
бражающий текущую информацию о режиме работы трансформатора с
фиксированием значений напряжений, тока нагрузки, угла сдвига фаз
между ними, напряжения компенсации и сигнала о состоянии УРПН
с указанием его положений, т.е. рабочих ответвлений обмотки и по-
ложений приводного механизма. Автоматическое тестирование и само-
диагностика с выводимой информацией о появляющихся неисправностях
обеспечивает надежность функционирования регулятора.
Автоматический регулятор имеет модульное построение. Основным
является модуль автоматического регулирования SPCU 1DSO. Он про-
245
Глава 6
изводит все вычислительные операции и формирует цифровые сигна-
лы, преобразуемые выходным модулем в управляющие воздействия на
УРПН. В соответствии с отклонением Д{7 от установленного (предпи-
санного) напряжения, определяемого с учетом рассчитываемого в ре-
альном времени напряжения компенсации, при выходе изменяющегося
напряжения за пределы зоны нечувствительности Д{7 > ДУ„Ч модуль
регулирования запускает программу вычисления первой выдержки вре-
мени, зависящей от Д{7/Д11нч = В в соответствии с соотношением
= ^7 (6Л4>
при фиксированном 7тяу ~ 25 с.
Если отклонение напряжения уменьшается до ДУ < 0,75^1/^, от-
счет времени прекращается, и регулятор на УРПН не действует.
После окончания первой выдержки времени тем меньшей, чем соглас-
но (6.14) больше отклонение напряжения, производится переключение
одного ответвления обмотки трансформатора. Если одного переключе-
ния недостаточно для вхождения напряжением в зону нечувствительно-
сти, запускается отсчет второй выдержки времени /реГ2 < ^peri и, при
необходимости, производится переключение второго ответвления.
Автоматический регулятор как интеллектуальное микропроцессор-
ное устройство обладает функциональными особенностями и отличает-
ся информационным общением с оператором непосредственно или че-
рез ПЭВМ и с более высоким иерархическим уровнем автоматического
управления. Он вычисляет напряжение на своем входе — напряжение
регулятора Up по предписанному напряжению Unp (уставке), пропор-
циональному напряжению, которое должно поддерживаться на шинах,
вычисляемому падению напряжения в линиях, питающих потреби-
телей электроэнергии, и по выдаваемому снижению уставки ДУпр в ре-
жиме минимальной нагрузки трансформатора. При этом учитывается и
реактивный ток 1Р ц, циркулирующий между параллельно работающими
трансформаторами, в том числе различной мощности. В относительных
единицах
UP = Unp + AUz±Ipa- Atfnp- (6.15)
Активная AUr и реактивная ДГ/х составляющие падения напряже-
ния в линиях вычисляются по известным их сопротивлениям и то-
246
Автоматическое регулирование ИРМ и трансформаторов
кам. Возможно определение NU_Z и с использованием телеинформации
о напряжениях на зажимах приемников электроэнергии.
Для вычисления относительного тока циркуляции 1Р ц/7ном автома-
тический регулятор каждого из параллельно работающих трансформа-
торов передает (по волоконно-оптической связи) информацию о векторе
тока другим регуляторам (предусмотрена возможность индивидуально-
го автоматического управления трех трансформаторов). Каждый вычи-
сляет общий ток нагрузки трансформаторов и сравнивает его по ампли-
туде и фазе с током данного трансформатора. В результате составля-
ющая 1рЦ в (6.15) корректирует управляющие воздействия каждого из
регуляторов, обеспечивающие минимизацию балластного тока циркуля-
ции, и пропорциональную номинальной мощности трансформатора его
загрузку.
Предписанное напряжение Дпр и степень его снижения AUnp изменя-
ются оператором дистанционно.
Предусматривается ЗАПРЕТ (блокировка) действия регулятора на
УРПН по максимальному и минимальному напряжению трансформато-
ра, выполняемый микропроцессором.
Расположенные на передней панели модуля автоматического регули-
рования дисплей и светодиодное табло отображают обширную информа-
цию о настройке и режиме работы автоматического регулятора. Высве-
чиваются значения напряжения и тока нагрузки трансформатора, пред-
писанное напряжение Дпр = Us и его снижение Д/7пр = NLLrsv, соста-
вляющие ДДд и ДГ/\- падения напряжения Д{7/, зона нечувствительно-
сти ДДНЧ = AUS, вычисляемые выдержки времени £peri = Ti и /реГ2 = Тг!
светодиодами фиксируются срабатывание измерительной части на повы-
шение (RAISE') или снижение (LOWER) напряжения, действие блоки-
ровки по току (I >) или напряжению (U <), действие (OUT) УРПН с ин-
дикацией по миллиамперметру его положения; автоматическое управле-
ние параллельно работающими трансформаторами (PARALLEL)-, функ-
ционирование (IRF) автоматической самодиагностики; отключение мо-
дуля автоматического (AUTO) регулирования при переходе на ручное
управление УРПН оператором (MAN). На передней панели расположе-
ны и кнопки управления программированием, дисплеем, переключения-
ми на параллельную работу или на ручное управление УРПН.
Указанные в скобках обозначения приведены на функциональной схе-
ме автоматического регулятора SPAU 341С (рис. 6.12). На ней показаны
247
Глава 6
Рис. 6.12. Схема подключения регулятора напряжения SPAU 341С
248
Автоматическое регулирование ИРМ и трансформаторов
249
Глава 6
описанный модуль U1 автоматического регулирования с микропроцессо-
ром U и логическими элементами и модуль U2 ручного управления; кон-
структивно выделенные блок {76 (в фирменном обозначении) вторичных
измерительных трансформаторов тока и напряжения с элементами галь-
ванической развязки и блок питания с входными зажимами ХО; блоки
входных герконов (75 с зажимами X1 их обмоток и выходных герконов со
сборкой зажимов Х2 от их контактов; показаны вход под миллиампер-
метр резистивного датчика положения УРПН (ТАР POS) и оптоэлек-
трический преобразователь (SPA-ZS) с разъемом волоконно-оптической
линии передачи информации.
Герконы ТСО фиксируют процесс переключения УРПН, в течение
которого действие регулятора запрещается, a BLOCK выводит его из
работы по внешнему запрещающему сигналу: при замыкании контакта
одного из них на выходе элемента DWU (ИЛИ-НЕ) — логический нуль,
поступающий на один из трех входов элементов DX (И), и запреща-
ющий формирование их единичных выходных сигналов, определяющих
управляющие воздействия RAISE (поднять) и LOWER (снизить) на-
пряжение. Их формирование происходит под воздействием единичных
логических сигналов микропроцессора U при возбуждавшемся герконе
AUTO (автоматическое управление): логическая единица, зафиксиро-
ванная элементом ее запоминания (триггером ST) поступает на соот-
ветствующие входы элементов DX1, DX2. Эта же единица на инверс-
ных входах DX3- DX6 запрещает формирование воздействий RAISE
или LOWER модулем U2 ручного управления или внешними сигнала-
ми, т.е. дистанционно (ключом SA и входными герконами). При воз-
буждении геркона MAN на выходе ST логический нуль, запрещающий
прохождение единичных логических сигналов через DXI, DX2 и раз-
решающий формирование управляющих воздействий элементами РХЗ,
DX4 при ручном дистанционном (входными герконами) или местном
(ключом SA) управлении.
Вопросы для самопроверки
1 Какие управляемые источники реактивной мощности применяются на
электростанциях и подстанциях магистральных электропередач? Поче-
му они должны быть реверсивными7
250
Автоматическое регулирование ИРМ и трансформаторов
2
3
5
6.
8
9
10
11
12
13
14
15
16
Почему синхронные генераторы могут потреблять ограниченную реак-
тивную мощность7
Какую относительную реактивную мощность потребляет синхронный
компенсатор при отсутствии возбуждения7 Почему он не выпадает из
синхронизма?
Каким условием ограничивается максимально возможная потребляемая
синхронным компенсатором реактивная мощность?
Как обеспечивается удержание в синхронизме синхронного компенсатора
при отрицательном возбуждении и потреблении максимальной реактив-
ной мощности7
Как должно изменяться возбуждение синхронного компенсатора в режиме
искусственной устойчивости его синхронной работы?
По какому алгоритму функционирует автоматический регулятор возбу-
ждения синхронного компенсатора с реверсивным возбуждением7
Как выполняется измерительный преобразователь внутреннего угла д
(положения ротора) синхронного компенсатора7
В чем состоит назначение второй обмотки ротора синхронного компенса-
тора, расположенной по поперечной его оси7
По какому алгоритму функционирует автоматический регулятор тока
возбуждения в продольной обмотке ротора7
В чем состоит особенность алгоритма автоматического регулирования
тока возбуждения в поперечной обмотке ротора7
Какие измерительные органы содержат автоматические регуляторы воз-
буждения синхронных компенсаторов?
Каково назначение сигнала, формируемого измерительной частью регу-
ляторов возбуждения синхронных компенсаторов по изменению активной
мощности линии электропередачи7 Какими функциональными элемен-
тами он формируется?
В чем состоят назначение и особенности автоматически управляемых
статических компенсаторов реактивной мощности7
По какому алгоритму функционирует непрерывная часть автоматическо-
го регулятора реактивной мощности реверсивного статического компен-
сатора7
Каково назначение дискретной части автоматического регулятора реак-
тивной мощности статического реверсивного компенсатора7
251
Глава 6
17 Какими типовыми структурными звеньями формируются сигналы авто-
матического регулятора реактивной мощности по изменениям электро-
магнитного момента синхронного компенсатора и изменениям активной
мощности линии электропередачи7
18 Каково назначение и в чем особенности автоматического регулирова-
ния коэффициента трансформации трансформаторов и автотрансформа-
торов7
19 Как производится переключение ответвлений от обмотки высшего напря-
жения трансформатора со стороны его нейтрали без разрыва цепи тока
(под нагрузкой)?
20 Каковы особенности автоматического регулятора коэффициента транс-
формации? Чем они обусловливаются?
21 Что такое зона нечувствительности автоматического регулятора коэф-
фициента трансформации?
22 Почему коэффициент возврата релейных элементов измерительного ор-
гана напряжения автоматического регулятора коэффициента трансфор-
мации должен быть близким к единице? Какой показатель регулятора
зависит от коэффициента возврата7
23 Как функционирует измерительный орган напряжения регулятора
АРТ-1Н (см рис 6 И)7
24 Зачем необходимо компенсирование падения напряжения в линиях элек-
тропередачи или электроснабжения на входе автоматического регулятора
коэффициента трансформации7
25 Как функционирует в целом электронный автоматический регулятор на-
пряжения трансформаторов с УРПН (см рис 6.10)7
26 В чем состоят особенности микропроцессорного автоматического регу-
лятора коэффициента трансформации трансформаторов и автотрансфор-
маторов с УРПН7
27 Как определяются две выдержки времени действия микропроцессорного
регулятора на переключение ответвлений обмоток высщего напряжения
трансформатора и почему их две?
28 Как функционирует в целом микропроцессорный автоматический регу-
лятор коэффициента трансформации (см. рис. 6.12)7
29 Как осуществляется самодиагностика автоматического регулятора и
УРПН в полупроводниковом АРКТ (см рис. 6 10)?
30 Как производится тестирование и контроль исправности микропроцес-
сорного АРКТ (см рис. 6 12)?
252
Глава 7. Автоматическое управление режимами
работы электрических станций
и электроэнергетических систем
7.1. Назначение и осуществление автоматического
управления электростанциями
Электрическая станция как главная производственная единица элек-
троэнергетической системы в связи с особенностями процесса производ-
ства и передачи электрической энергии (см. введение) должна упра-
вляться полностью автоматически, т.е. без непосредственного участия
человека (оператора). Однако в настоящее время полностью автомати-
зированы только гидроэлектростанции.
Тепловые и атомные электростанции управляются автоматизирован-
ными системами, предполагающими эпизодическое вмешательство в их
функционирование дежурного оператора электростанции. Тем не менее,
в связи с программированием современных систем управления ГЭС че-
ловеком и предусматриваемой (на всякий случай) возможностью «руч-
ного» воздействия на них, они также называются автоматизированными
(АСУ ГЭС).
Громоздкая, обусловленная сложностью тепловых процессов техноло-
гическая автоматика ТЭС и АЭС обусловливает наименование систем
управления ими как автоматизированных систем управления техноло-
гическими процессами (АСУ ТП).
Автоматизированное управление режимами работы электроэнерге-
тических систем осуществляется АСУ ЭЭС, ОЭС и АСУ ЕЭС соответ-
ственно. Их техническая реализация стала возможной лишь с появле-
нием цифровой вычислительной техники. Назначением АСУ является
обеспечение надежного, технически рационального и оптимального по
253
Глава 7
технике- экономическим показателям функционирования электрических
станций и электроэнергетических систем.
Конкретные задачи АСУ электростанций сводятся к следующим:
• поддержание активной мощности электроэнергетических блоков на
предписанном постоянной прогнозируемой (плановой) частью гра-
фика нагрузки электростанции уровне;
• изменение активной мощности энергоблоков под воздействием сиг-
налов АСУ ЭЭС, поступающих по каналам передачи информации,
для покрытия случайно изменяющейся неплановой нагрузки элек-
троэнергетической системы;
• экономичное распределение плановой и неплановой активных мощ-
ностей электростанции между параллельно работающими электро-
энергетическими блоками;
• поддержание частоты напряжения на шинах электростанции на
номинальном уровне с заданной точностью (отклонениями не бо-
лее Л/ = ±0,1 Гц) — вторичное автоматическое регулирование
частоты;
• изменение амплитуды напряжения на шинах электростанции в со-
ответствии с графиком;
• изменение обусловленной режимами работы ЭЭС реактивной мощ-
ности электростанции и оптимальное ее распределение между син-
хронными генераторами;
• взаимодействие с автоматическими устройствами противоаварий-
ного управления и защиты энергоблоков — противоаварийной ав-
томатики (УПА).
Автоматизированная система управления выполняет и ряд технико-
экономических и планово-производственных и даже коммерческих
функций.
Разработка научно-исследовательскими организациями (ВТИ, ВЭИ,
ВНИИЭ, ОАО «Энергосетьпроект», ВНИИР) и внедрение автоматизи-
рованных систем управления на основе ставшей доступной для широко-
го применения цифровой вычислительной техники началось еще в 70-х
годах [27, 28]. В настоящее время создается уже третье — интегриро-
ванное поколение АСУ ГЭС и АСУ ТП тепловыми и атомными электро-
станциями на основе разработанных в ВЭИ микропроцессорных средств
254
Автоматическое управление режимами работы ЭС и ЭЭС
для автоматизации электроэнергетических комплексов (МС АЭК), удо-
влетворяющих требуемой надежности функционирования автоматиче-
ских устройств электроэнергетических систем [30]. Разработана систе-
ма комплектных автоматических устройств управления на микропроцес-
сорах (САУ-М) [29, 30] для технической реализации АСУ ТП. Предпри-
ятием «АББ Реле - Чебоксары» поставляется программно-технический
комплекс (ПТК) микропроцессорных средств [33].
Указанными научно-исследовательскими организациями согласова-
на и принята общая концепция построения и функциональная структура
АСУ ТП [27]. Они являются интегрированными двухуровневыми иерар-
хическими и распределенными (по территории электростанций). Верх-
ний уровень — общестанционная часть, нижний — агрегатная (блочная)
часть. Интегрированными они называются потому, что используют об-
щее информационное обеспечение: подсистему сбора и первичной обра-
ботки информации от энергоагрегатов, входящую в блочную часть, и
подсистему представления информации через ПЭВМ персоналу, входя-
щую в общестанционную часть, а также из-за концентрации обширного
комплекса выполняемых ими функций.
Верхний уровень АСУ включает подсистему автоматического упра-
вления нормальными режимами общестанционного уровня, состоящую
из автоматических устройств:
• общестанционного регулирования частоты и активной мощности
электростанции (ОРЧМ);
• общестанционного регулирования напряжения и реактивной мощ-
ности (ОРНМ);
• управления изменениями состояний энергоагрегатов (с условным
названием ПУСК) и противоаварийного управления.
Нижний уровень образует комплекс автоматических устройств упра-
вления гидро- и турбогенераторами: автоматика изменения состояния,
автоматический синхронизатор, автоматические регуляторы частоты
вращения, мощности и возбуждения синхронного генератора, автома-
тические регуляторы трансформаторов.
До появления и внедрения АСУ управление изменениями состояний,
частотой и активной нагрузкой, напряжением и реактивной мощностью
электростанции осуществлялось отдельными аналоговыми автоматиче-
скими устройствами: автоматикой пуска и устройствами, соответству-
255
Глава 7
ющими ОРЧМ и ОРНМ, которые назывались устройствами группово-
го управления частотой вращения и возбуждением синхронных гене-
раторов. В простейшем варианте равномерного распределения актив-
ной и реактивной нагрузок между параллельно работающими однотип-
ными генераторами они выполнялись на агрегатном уровне (см., на-
пример, рис. 4.2). Наиболее современными из них были автоматиче-
ские устройства группового управления с центральными общестанцион-
ными автоматическими регуляторами частоты (ЦАРЧ) и напряжения
(ЦАРН), обеспечивающими поддержание частоты и амплитуды напря-
жения на шинах электростанции, и элементами (устройствами) опти-
мального распределения активной (УРАН) и реактивной (УРРН) на-
грузок между синхронными генераторами по их технико-экономическим
показателям.
Такое разделение задач поддержания частоты и напряжения и рас-
пределения активной и реактивной нагрузок обусловлено противоречи-
востью требований к алгоритмам функционирования автоматических
устройств регулирования частоты и активной нагрузки или напряже-
ния и реактивной мощности. Для поддержания частоты на неизменном
номинальном уровне или предписанного графиком напряжения принци-
пиально необходимы астатические регуляторы, а для распределения ак-
тивной и реактивной нагрузок электростанции между параллельно ра-
ботающими синхронными генераторами — статические АРЧВ и АРВ.
На рис. 7.1 приведены совмещенные статические характеристики 1,
2 регулирования ш = f(Pr) или U = f(Qr) для двух синхронных генера-
торов, иллюстрирующие определенность их нагрузок Pi, Р? или Qi, Qi
при наличии отклонения частоты До? или напряжения ДР от предпи-
санных значений шпр1, (7npi, поддерживаемых только при холостом ходе.
Мощности определяются коэффициентами статизма характеристик, на-
пример
Р1 _ А'ст2 _ tg <Д2
Р2 A'ctI tgtti ’
Очевидно, что при астатических — горизонтальных характеристи-
ках (А'ст — 0) возникает неопределенность распределения мощностей.
Наиболее современные из таких устройств производят выдачу за-
даний по мощностям и контроль их исполнения по принципу следяще-
го астатического регулирования. Частота и напряжение поддержива-
ются воздействиями ЦАРЧ и ЦАРН на задающие элементы статиче-
256
Автоматическое управление режимами работы ЭС и ЭЭС
Рис. 7.1. Графики, иллюстрирующие определенность распределения на-
грузки электростанциями между синхронными генераторами
ских АРЧВ и АРВ, увеличивающих предписанные значения частоты
д>пр2 > wnpi и напряжения Гпр2 > Гпр1, т.е. перемещающих статиче-
ские характеристики 1, 2 регулирования вверх до положений 3, 4 при
сохранении определенности в распределении мощностей.
7.2. Автоматические устройства группового управления
Функциональные структуры автоматических устройств группового
управления частотой и активной нагрузкой и группового управления на-
пряжением и реактивной мощностью принципиально одинаковы. Раз-
личия между ними состоят лишь в том, что ЦАРЧ — астатический
ПИ-регулятор, а ЦАРИ — обычно статический ПД-регулятор с малым
статизмом (А'ст < 0,01), и в том, что распределение активной мощности
между параллельно работающими генераторами, особенно ТЭС, всегда
производится по технико-экономическому показателю энергоагрегата —
характеристике относительного прироста расхода условного топлива, а
реактивной нагрузки — аналоговыми устройствами, как правило, рав-
номерно, т.е. уравнивается, и учитываются лишь такие ограничения,
как перевод генератора в режим СК или возврат в генераторный ре-
жим. Поэтому для пояснения их действия на рис. 7.2 приведена только
257
Глава 7
общая функциональная схема автоматической системы регулирования
частоты и активной мощности (АСРЧиМ) электростанции как несколь-
ко более сложной. Она осуществляет вторичный уровень регулирования
(первичный произвоцится, как указывалось, АРЧВ энергоагрегатов).
Автоматическая система соцержит ЦАРЧ в общем случае с интегри-
рующим измерительным преобразователем изменений частоты, форми-
рующим сигнал интегрального отклонения частоты (срецнего за время
начала и окончания изменения частоты Al = tK — ZH)
6f = k4j\fdt. (7.1)
Интегрирующим измерительный преобразователь изменения часто-
ты получается поцключением к измерительному органу частоты ИОЧ
с выходным сигналом в виде постоянного напряжения Рд/, пропорци-
онального отклонению А/ частоты (см. рис. 3.10 и 3.11), активного
интегратора АЛ (рис. 7.2).
Интегральная функция (7.1) целесообразна, поскольку качественно
аналогична изменениям нагрузки электроэнергетической системы и мо-
жет использоваться для формирования сигнала предписанной мощности
Upap электростанции [1], если он не передается от АСУ ЭЭС.
Выходной сигнал ИОЧ — напряжение Рду поступает в усилитель-
преобразователь УП релейного действия ЦАРЧ, а выходной сигнал ин-
тегратора — напряжение U/„ — на вход устройства распределения ак-
тивной нагрузки УРАН. Усилитель-преобразователь УП и интегратор
AJ2, охваченные функциональной отрицательной обратной связью ФОС
в виде апериодического активного ФНЧ, формируют (см. §3.2) ПИ-
алгоритм регулирования, т.е. обеспечивают астатическую характери-
стику регулирования частоты.
Устройство УРАН также представляет собой астатический регуля-
тор, следящий за изменяющейся предписанной мощностью Рпр путем
сравнения ее (вычитателем АН) с суммарной истинной мощностью элек-
тростанции УРгг, сигнал информации о которой формируется измери-
тельными преобразователями активной мощности ИПМ, установленны-
ми на каждом синхронном генераторе, и сумматором AW. Но главной
функцией УРАН является формирование сигналов Ррпр, предписанных
мощностей каждого из генераторов. Они формируются функциональны-
258
259
Рис. 7.2. Схема автоматического устройства группового управления частотой и мощностью
эматическое управление режимами работы ЭС и ЭЭС
Глава 7
ми преобразователями с функциями преобразования по характеристи-
кам относительного прироста расхода условного топлива энергоагрега-
тами. Их сумма равна предписанной мощности электростанции.
Сигналы о предписанной мощности Uрпр1, об истинной активной на-
грузке синхронного генератора Uprt и об отклонении частоты Сд/ через
сумматоры-вычитатели AWHt и УП поступают на входы задающих эле-
ментов АРЧВ турбин — механизм управления МУТ паровой турбины
(см. также рис. 3.6) или механизмы изменения мощности МИМ и ча-
стоты МИЧ регулятора гидротурбины (см. рис. 3.10, 3.11).
Автоматическая система АСРЧиМ электростанции реализует так
называемый мнимо-статический алгоритм регулирования частоты и
мощности:
kf^f + krt(Prt — РПрг) = 0
или / Г \
&/А/ + kri I Ргг ~ Тг J dt 1=0. (7.2)
Согласно (7.2) переходный процесс воздействия на турбину продол-
жится до тех пор, пока не исчезнет отклонение частоты А/ и пока ис-
тинная нагрузка генератора не станет равной предписанной мощности.
Наиболее современная, разработанная в ВЭИ, автоматическая си-
стема вторичного регулирования напряжения и реактивной мощности
содержит общестанционный астатический ПИ-регулятор напряжения
APV (рис. 7.3) и астатическое УРРН, обеспечивающее, как правило,
уравнивание реактивных мощностей синхронных генераторов, однако
предусматривающее и возможность их распределения с учетом загрузки
генераторов активной мощностью, их режимов работы и других условий
(ограничений). Оригинальное техническое решение исполнения воздей-
ствий ЦАРН и УРРН позволило отказаться от наиболее сложных эле-
ментов — измерительных преобразователей реактивной мощности син-
хронных генераторов.
Астатичность центрального регулятора напряжения APV
(рис. 7.3,а) достигается использованием в качестве интегрирующего эле-
мента электродвигателя в виде передающего сельсина BG, который со-
вместно с приемным сельсином БЕ задающих элементов АРВ СД гене-
раторов ADV 1-ADV3 образует синхронный вал передачи воздействия
от APV на элементы изменения уставок регуляторов (см. ЭИУ на
рис. 5.9).
260
Автоматическое управление режимами работы ЭС и ЭЭС
Рис. 7.3. Астатическое групповое управление возбуждением синхрон-
ных генераторов с регуляторами возбуждения сильного действия:
а — функциональная схема, б — схема уравнивания реактивных нагрузок
261
Глава 7
Измерительный орган напряжения ЦАРИ выполнен по схеме изме-
рительного органа АРВ СД и позволяет изменять заданное значение
напряжения на шинах станции в соответствии с программной инфор-
мацией от устройств задания графика напряжения. Трехфазный ревер-
сивный магнитный усилитель с самонасыщением (МУС) с выходом на
переменном токе преобразует напряжение постоянного тока ±U&u на
выходе измерительного органа напряжения в трехфазную систему на-
пряжений, изменяющих фазу на угол тг при изменении знака напряже-
ния U^u- Дифференциальный сельсин BG вращается в ту или иную
сторону до тех пор, пока напряжение U&u не снизится до нуля, т.е. на-
пряжение после отклонения от предписанного значения не восстановится
полностью.
Восстановление напряжения обеспечивается изменениями возбужде-
ния синхронных генераторов их регуляторами А1?У1-А1?УЗ, уставки
которых изменяются при вращении приемных сельсинов BE.
Схема устройства уравнивания реактивных нагрузок (рис. 7.3,6) со-
держит схему многолучевой звезды из резисторов R нагрузки измери-
тельных трансформаторов тока ТАД фазы В генераторов и трансреакто-
ров ТАУ, нагруженных обмотками управления wy двухфазных электро-
двигателей Ml, М2. Обмотки возбуждения wB электродвигателей под-
ключены и к напряжениям Ubc генераторов через измерительные транс-
форматоры напряжения TVL. Вращающий момент двухфазного элек-
тродвигателя пропорционален синусу угла сдвига фаз между токами в
обмотках возбуждения и управления. Поэтому указанное сочетание тока
и напряжения с учетом дополнительного опережения по фазе током 1у в
цепи управления на угол тг/6 тока 1_ь, создаваемый ТАУ, обеспечивает
пропорциональность вращающего момента электродвигателя реактив-
ной мощности.
Токи Z и 1_ь в обмотках при чисто реактивном токе сдвинуты по фа-
зе на угол тг/2, и вращающий момент максимален. При чисто активной
мощности генератора токи совпадают по фазе, и вращающий момент
равен нулю. Электродвигатель вращается в том или ином направлении
до тех пор, пока реактивная составляющая тока в ветви схемы много-
лучевой звезды не снизится до нуля. Реактивный ток генератора из-
меняется, поскольку электродвигатель через дифференциальный редук-
тор воздействует на поворотный трансформатор устройства изменения
уставки ADV1 или ADV2.
262
Автоматическое управление режимами работы ЭС и ЭЭС
Устройство содержит логическую часть, координирующую воздей-
ствия от ЦАРН и УРРН, от ограничителя перегрузки генератора реак-
тивным током и от измерительного органа тока ротора в режиме потре-
бления генератором реактивной мощности (ограничителя минимального
возбуждения).
На рис. 7.4 приведена схема, иллюстрирующая построение и дей-
ствие комплексной автоматической системы управления напряжением
и реактивной мощностью электростанции с шинами нескольких напря-
жений.
Система состоит из устройства группового управления реактивной
мощностью синхронных генераторов (см. рис. 7.3,6) и автоматического
регулятора коэффициента трансформации междушинных трансформа-
торов или трансформаторов связи с энергосистемой [1,2].
Групповое управление предполагает использование индивидуальных
регуляторов возбуждения ADVV ADV2 генераторов сильного действия.
Регулятор коэффициента трансформации АРКТ обеспечивает автома-
тическую диагностику измерительной части и УРПН трансформатора и
обладает особенностями, обусловленными необходимостью обеспечения
согласованной работы автоматических систем группового регулирова-
ния возбуждением генераторов и регулирования коэффициентов транс-
формации трансформаторов.
Через логическую часть ЛЧ регулятор АРКТ связан с элементом из-
менения уставки напряжения ЭИУ центрального регулятора напряже-
ния APV и с регуляторами возбуждения ADV синхронных генераторов,
а именно: с ограничителем перегрузки 077, образуемым измеритель-
ным органом тока ротора ИОТР и соответствующими элементами ЛЧ
регулятора (ADV2 на рис. 7.4), а также с измерительным органом реак-
тивного тока ИОТР, предназначенным для ограничения минимального
возбуждения генератора в режиме потребления реактивной мощности
(см. §5.6).
Приоритет действия в комплексной автоматической системе имеет
АРКТ. После каждого переключения ответвлений обмоток трансформа-
тора по сигналу от АРКТ производится подгонка уставки напряжения
регуляторов возбуждения с тем, чтобы реактивная нагрузка генерато-
ров не изменилась. Воздействие АРКТ на ОП регулятора возбуждения
ADV2 снимает выдержку времени на разгрузку генератора по реактив-
ному току, если перегрузка явилась следствием действия АРКТ.
263
264
Рис. 7-4- Функциональная схема комплексной автоматической системы управления напряжением и
реактивной мощностью электростанции
Автоматическое управление режимами работы ЭС и ЭЭС
Воздействие на АРКТ ограничителя перегрузки ОП и ограничи-
телей минимального возбуждения (измерительных органов реактивно-
го тока ИОРТ) запрещают действие АРКТ и даже обусловливают его
действие в противоположную сторону (реверс) в режиме полной нагруз-
ки всех генераторов выдаваемой реактивной мощностью или в режиме
максимального потребления реактивной мощности (ограничения мини-
мального возбуждения). После реверса АРКТ запрещается изменение
уставки напряжения ADV, чтобы сохранился один из указанных режи-
мов работы синхронных генераторов.
7.3. Микропроцессорная автоматизированная система
управления гидроэлектростанциями
Гидроэлектростанциям принадлежит важная роль в обеспечении на-
дежного и оптимального режимов работы Единой электроэнергетиче-
ской системы. Они покрывают переменную случайно изменяющуюся
часть графика нагрузки ЕЭС и тем самым обеспечивают равномерную
работу мощных электроэнергетических блоков ТЭС и АЭС. Именно на
ГЭС сосредоточен оперативный резерв мощности, вводимый в действие
в течение десятков секунд. Маневренность ГЭС широко используется
в аварийных ситуациях для быстрого восстановления баланса электро-
энергии (равенства требуемой потребителем и производимой) в целях
предотвращения нарушения устойчивости параллельной работы элек-
трических станций и восстановления нормального режима работы ЭЭС.
Технологический процесс производства электроэнергии на ГЭС несопо-
ставимо проще, чем на ТЭС. Поэтому первыми разрабатывались АСУ
ГЭС [31].
В настоящее время создана микропроцессорная интегрированная
АСУ ГЭС и ГАЭС [29, 32], функциональная структура которой иллю-
стрируется схемой на рис. 7.5. Как указывалось, АСУ является двух-
уровневой. Нижний агрегатный уровень (агрегатная часть АЧ АСУ)
содержит устройства:
• сбора и первичной обработки информации о состоянии гидрогене-
ратора ГГ и трансформатора Т блока и схеме его подключения
У СИ-, контроля и диагностики КД А гидроагрегатов ГА и комму-
тационного (подстанционного) оборудования КПО-,
265
266
Рис. 7.5. Функциональная структура микропроцессорной АСУ ГЭС
Глава 7
Автоматическое управление режимами работы ЭС и ЭЭС
• комплексного автоматического управления блоком гидротурбина -
генератор - трансформатор КУА-,
• регистрации аварийных ситуаций РАС на гидроагрегатах и рас-
предустройствах 0РУ1, 0РУ2.
Первая из указанных — группа информационных средств — поста-
вляет (через концентратор КИ) информацию о технических показате-
лях технологического оборудования, таких как уровни масла в маслона-
порной установке МНУ (см. рис. 1.1), в подпятнике гидротурбины ГТ
и подшипнике генератора, их температура, положения i идравлических
двигателей и др.; о ходе процессов пуска и синхронизации гидрогене-
ратора, электрических режимах гидрогенератора и трансформатора, о
состоянии выключателей В и их приводов и т.д.
Главную управляющую часть агрегатного уровня КУА составля-
ют микропроцессорная автоматика изменения состояния гидроагрега-
та, микропроцессорные АС, АРиЧМ и АРВ синхронного генератора.
Устройства РАС выдают осцилограммы процессов изменений напря-
жений и токов при коротких замыканиях и других возмущающих воз-
действиях, фиксируют состояния контактных и бесконтактных выходов
измерительной и исполнительной частей автоматических управляющих
устройств с последующей выдачей информации на экран дисплея ПЭВМ.
Верхний общестанционный уровень (общестанционная часть ОСЧ
АСУ) состоит из следующих подсистем:
• представления и отображения информации ОИ персоналу электро-
станции о нормальных режимах, регистрации и анализа аварий-
ных режимов;
• автоматического управления нормальными режимами работы
электростанции;
• противоаварийной автоматики ПА-,
• информационной связи с вышестоящим уровнем управления СВУ
и комплексного учета электроэнергии КУЭ.
Подсистема ОИ строится на базе локальной вычислительной се-
ти совместимых ПЭВМ, установленных на главном щите управления
ГЩУ гидроэлектростанцией, в электромашинном зале М3, в помеще-
ниях службы автоматики и защиты АЗ, администрации АД, планово-
производственного отдела ППО. Основными ее функциями являются:
267
Глава 7
• отображение информации о текущем состоянии энергооборудова-
ния и электрической схемы ГЭС; своевременное выявление откло-
нений режимных параметров технологического процесса и его на-
рушениях;
• регистрация действия автоматических управляющих устройств в
нормальных, предаварийных и аварийных режимах; вычисление
технико-экономических показателей, коммерческий учет электро-
энергии и сбор статистической информации.
Подсистема общестанционного автоматического управления состоит
из трех основных программных частей, осуществляющих: автомати-
ческое управление пуском и включением на параллельную работу ги-
дрогенераторов — ПУСК] общестанционное автоматическое регулиро-
вание частоты и оптимальное распределение активной мощности между
гидрогенераторами — ОРЧМ и общестанционное автоматическое регу-
лирование напряжения и реактивной мощности — ОРНМ.
Программная часть ПУСК формирует командные сигналы для
устройств технологической автоматики, обеспечивающей изменение со-
стояния гидроагрегата, управление процессами нормального и ускорен-
ного пусков в генераторный, насосный (на ГАЭС) или компенсаторный
режимы, перевода из одного режима в другой и обеспечение персонала
электростанции информацией о их протекании, отображаемой на экра-
нах дисплеев ПЭВМ, особенно на ГАЭС [32]: начале и окончании оче-
редной стадии электромеханического переходного процесса, например
открытия направляющего аппарата, достижении близкой к синхронной
частоты вращения, электромагнитных и электромеханических переход-
ных процессов само- и точной синхронизации и наборе гидрогенератором
нагрузки.
Микропроцессорная часть ОРЧМ по сигналам от АСУ ЭЭС фор-
мирует сигналы предписанной мощности каждого гидрогенератора и
распределяет ее изменения между гидроагрегатами с учетом индиви-
дуальных ограничений по активной мощности и зон нежелательных,
из-за повышения вибраций и кавитации, нагрузок, т.е. обеспечива-
ет технически рациональное и технико-экономически оптимальное рас-
пределение изменений нагрузки ГЭС между гидроагрегатами. Ана-
логовыми устройствами группового управления осуществляется лишь
равномерное ее распределение — уравнивание нагрузок гидрогенера-
торов (см. §4.3). Подсистема воздействует на АРЧВ турбин через
268
Автоматическое управление режимами работы ЭС и ЭЭС
их задающие элементы — механизмы изменения мощности МИМ (см.
рис. 3.10, 3.11).
Общестанционное автоматическое регулирование напряжения
ОРНМ (рис. 7.5) выявляет отклонения напряжения на шинах электро-
станции и реактивной мощности, отдаваемой в электроэнергетическую
систему — генерируемой или потребляемой, от предписанных значений
и воздействует на задающие элементы изменения уставок напряжения
ЭИУ (см. рис. 5.9) АРВ синхронных генераторов или статических ком-
пенсаторов реактивной мощности, обеспечивая оптимальное ее распре-
деление между ними, и воздействует на АРКТ трансформаторов и ав-
тотрансформаторов, связывающих шины различных напряжений.
Основные отличительные особенности микропроцессорной реализа-
ции ОРНМ по сравнению с аналоговой (см. рис. 7.4), обусловленные
возможностями цифровой вычислительной техники, сводятся к следу-
ющим:
• прогнозирование реактивной нагрузки электростанции, необходи-
мой для поддержания на предписанном уровне напряжений на ши-
нах, осуществляемое на основе учета регулировочной характери-
стики ГЭС (зависимости требуемой реактивной мощности от за-
даваемого напряжения);
• учет различий регулировочных характеристик гидрогенераторов
и индивидуальных ограничений по реактивной нагрузке, ее пере-
распределение в зависимости от режима работы (генераторный,
режим СК, насосный) и от активной нагрузки гидрогенераторов;
• анализ перетоков реактивной мощности через автотрансформато-
ры связи между шинами различных напряжений при формирова-
нии воздействия на АРКТ;
• поагрегатный контроль выполнения управляющих воздействий и
выдача соответствующей информации.
Микропроцессорная подсистема противоаварийной автоматики пред-
назначена для предотвращения нарушения устойчивости параллельной
работы электрических станций при аварийных возмущениях. Она фор-
мирует и запоминает на определенное время дозированные по интенсив-
ности и длительности противоаварийные управляющие воздействия на
гидрогенераторы: их ускоренный пуск, отключение или электрическое
торможение (см. гл. 10).
269
Глава 7
Микропроцессорная АСУ осуществляет обмен информацией с дис-
петчерским пунктом ЭЭС и ЦДУ ЕЭС через информационные автома-
тические устройства сбора и передачи сигналов ССПИ и быстродейству-
ющей передачи сигналов противоаварийной автоматики Б СПА.
7.4. Микропроцессорная автоматизированная система
управления тепловыми электростанциями
В связи с возрастающей по мере развития электроэнергетики сложно-
стью решения проблемы оптимального распределения активной нагруз-
ки при поддержании практически неизменной частоты и, особенно, про-
тивоаварийного управления мощностью электроэнергетических систем
и ее перетоками между ними к покрытию неплановой случайно изменя-
ющейся части графика нагрузки ЭЭС стали привлекаться и тепловые
электростанции. В соответствии с указанной (§7.1) общей концепцией
построения АСУ ТП тепловых электростанций на общестанционную ее
часть, кроме оптимального распределения плановой мощности, возла-
гается задача технически рационального и технико-экономически опти-
мального распределения между энергоблоками ТЭС неплановой, зада-
ваемой общей для ЭЭС автоматической системой управления активной
мощности. Общестанционная часть АСУ ТП обеспечивает участие ТЭС
и в автоматическом регулировании частоты. Особая роль принадле-
жит ТЭС в противоаварийном управлении мощностью: указывавшиеся
(см. §4.4) кратковременные импульсное и длительное снижение мощно-
сти турбогенераторов (их разгрузка) являются решающими факторами
предотвращения нарушения динамической и статической устойчивости
электроэнергетических систем соответственно (см. гл. 10).
Поэтому и в связи с громоздкостью теплоэнергетического техноло-
гического оборудования (см. гл. 1) функции микропроцессорной АСУ
ТП тепловой электростанции существенно сложнее выполняемых авто-
матизированной системой управления гидроэлектростанцией. В соот-
ветствии с общей концепцией построения АСУ ТП тепловых и атом-
ных электростанций (см. § 7.1) она является интегрированной, иерархи-
ческой, двухуровневой и распределенной, функционирующей на основе
переработки обширной информации.
Основной уровень АСУ ТП — это ее общестанционная часть ОСЧ
(рис. 7.6). Она состоит из информационного ИВК и управляющего УВК
270
в и от АСУ ЭЭС,
ОЭС и ЕЭС от ЦПА
Рис. 7.6. Функциональная схема АСУ ТП тепловой электростанции
Автоматическое управление режимами работы ЭС и ЭЭС
Глава 7
вычислительных комплексов. Информационное обеспечение АСУ имеет
решающее значение для эффективности ее функционирования. Обще-
станционная часть АСУ осуществляет обмен информацией по телеавто-
матическим каналам технических средств сбора и передачи информации
ССПИ с АСУ ЭЭС, автоматизированной системой диспетчерского упра-
вления (АСДУ) ОЭС и ЕЭС и по каналам быстродействующей переда-
чи сигналов БСПА с централизованной противоаварийной автоматикой
ЦП А. Общестанционная часть получает информацию о заданном графи-
ке загрузки электростанции плановой мощностью и о предписанной не-
плановой, покрытие которой связано с участием ТЭС в автоматическом
регулировании частоты, информацию о дозированных противоаварий-
ных воздействиях на кратковременное и длительное снижение мощности
турбин в аварийном и послеаварийном режимах соответственно и вы-
дает информацию о режимах работы ТЭС и ее технико-экономических
показателях, о схеме электростанции, состояниях энергоблоков, макси-
мально и минимально допустимых мощностях и об исполнении заданий
по плановой и неплановой мощностям.
Информационно-вычислительный комплекс ИВК собирает информа-
цию от измерительных преобразователей электрических режимных па-
раметров турбогенераторов и датчиков тепловых, термодинамических и
механических режимных параметров энергоблоков и оборудования соб-
ственных нужд (источников информации ИИ агрегатной части А Ч АСУ
ТП) и производит ее обработку, прежде всего для отображения опера-
тивному персоналу ООП, диагностики состояния и определения ресурсов
основного тепло- и электроэнергетического оборудования ДСЭО, уче-
та выработанной, потребляемой на собственные нужды и отпущенной
электрической и тепловой энергии У ЭТО, поступающей в устройства
отображения и использования информации У О и ИИ. В ИВК произво-
дятся расчеты по оптимальному распределению плановой и неплановой
мощностей электростанции между энергоблоками по рассчитываемым
циклически на основе собираемой информации технико-экономическим
показателям энергоблоков РОРМ, формируются данные для передачи в
АСУ ЭЭС и ЕЭС; производится регистрация и анализ аварийных ситу-
аций РА АС и ряд расчетов планово-производственного характера.
Управляющий вычислительный комплекс состоит из четырех частей
(см. § 7.1): управления пуском, включением на параллельную работу и
нагружением турбогенераторов ПУСК, общестанционного регулирова-
272
Автоматическое управление режимами работы ЭС и ЭЭС
ния частоты и мощности ОРЧМ, напряжения и реактивной мощности
ОРНМ и противоаварийного управления мощностью ПАУМ. Основные
отличительные от управляющей части АСУ ГЭС (см. рис. 7.5) особен-
ности УВК определяются сложностью технологических процессов пус-
ка, останова и нагружения паровых турбин (см. § 1.3) и рассмотренными
задачами автоматического управления мощностью в нормальных, ава-
рийных и послеаварийных режимах, реализуемого микропроцессорной
автоматической системой управления мощностью, выполняющей функ-
ции ОРЧМ и ПАУМ. Усложняются и функции ОРНМ по сравнению
с выполняемыми в АСУ ГЭС (см. §7.3), поскольку ТЭС и АЭС часто
имеют шины нескольких напряжений, а ТЭЦ — и генераторного напря-
жения. Соответственно требуется больший объем информации и согла-
сование управляющих воздействий на АРВ синхронных генераторов и
АРКТ трансформаторов и автотрансформаторов связи между шинами.
Автоматическая система ОРНМ (рис. 7.6) программно реализуется
как многосвязная автоматическая система регулирования.
Поскольку режим работы современных ТЭС и АЭС по напряжению и
реактивной мощности определяется множеством параметров: напряже-
ниями шин, распределением реактивной нагрузки электростанции меж-
ду синхронными и асинхронизированными генераторами, потоками ре-
активной мощности через трансформаторы связи между шинами раз-
личных напряжений и по линиям электропередачи, то метод расчета
управляющих воздействий на АРВ генераторов и АРКТ трансформа-
торов представляет собой нормализованный математический аппарат
решения оптимизационной задачи.
Разработанная в ОАО «Энергосетьпроект» [70] программная авто-
матическая система ОРНМ обладает свойством адаптации к составу
генераторов и трансформаторов и к электрической схеме электростан-
ции. При этом не требуется перепрограммирования: производится лишь
соответствующая ее настройка.
Микропроцессорная автоматическая система управления частотой и
мощностью ОРЧМ (см. рис. 7.6) является основной частью АСУ ТП. В
связи с противоречивостью энергосистемных и внутриблочных требова-
ний и условий она отличается значительной сложностью. Для поддержа-
ния оптимального режима и устойчивости функционирования энергообъ-
единений особенно важны скорость и точность отработки выдаваемых
ТЭС заданий по мощности, тогда как допустимая и реализуемая ско-
273
Глава 7
рости изменения мощности инерционных тепловых энергоблоков огра-
ничены. Поэтому автоматическая система управления содержит спе-
цифические элементы ограничения темпа задания мощности (ОТЗ) и
безударного ее подключения и отключения. По существу, только ми-
кропроцессорная реализация позволила на удовлетворительном уровне
компромиссно разрешить противоречивость общесистемных и внутри-
блочных условий и придала автоматической системе управления новые,
по сравнению с аналоговой реализацией, свойства [28].
В соответствии с указанными техническими задачами АСУ ТП
(см. §7.1) общестанционная автоматическая система управления (регу-
лирования) частоты и мощности тепловой электростанции программно
выполняет функции (рис. 7.7): задающих элементов плановой нагрузки
(ее графика) ЗГН и неплановой мощности ЗНМ; ограничителя темпа за-
даний на изменения мощностей ОТЗ и элемента безударного подключе-
ния и отключения ОРЧМ (безударных операций) ПО; элементов опти-
мального по технико-экономическим показателям распределения мощно-
сти ОРМ п задания мощности Рг прг энергоблокам 3МБ; измерительно-
го органа частоты ИОЧ с зоной нечувствительности Д/Нч > | ± 0,1| Гц.
Выходной сумматор сигналов SM воздействует на микропроцессорную
ЭЧСР-М турбоагрегата (см. гл. 4) и аналоговый регулятор парогенера-
тора АРПГ (см. гл. 1).
Плановая предписанная нагрузка Рпр пл рассчитывается в обще-
энергосистемном оперативном информационно-управляющем комплексе
АСУ ЭЭС (см. ниже) и передается по каналам связи системы сбора
и передачи информации на ТЭС заблаговременно в виде почасовых то-
чек графика нагрузки и состава турбогенераторов (их пуска и остано-
ва). Задачи, связанные с управлением неплановой предписанной мощ-
ностью Рпр нпл и противоаварийным управлением, решаются в реаль-
ном времени управляющим вычислительным комплексом общеэнергоси-
стемного уровня. Расчеты заданий плановой мощности энергоблокам
по их технико-экономическим показателям производятся микропроцес-
сорами общестанционной части АСУ ТП в соответствии с почасовым
графиком нагрузки, а неплановой — в реальном времени (циклически
каждые 0,2 с).
Функции заданий мощностей ЗГН, ЗНМ и 3МБ выполняются по
замкнутым схемам следящего автоматического регулирования, поэто-
му функция задания неплановой нагрузки энергоблокам называется ре-
274
275
Рис. 1Л. Функциональная схема микропроцессорной автоматической системы управления мощностью
тепловой электростанции
Автоматическое управление режимами работы ЭС и ЭЭС
Глава 7
гулятором неплановой мощности. Они функционируют по интеграль-
ному алгоритму автоматического регулирования и принципиально реа-
лизуются как программные позиционные астатические регуляторы, со-
держащие, например ЗНМ, элемент сравнения непрерывного действия
ЭСНД (рис. 7.7), релейный усилитель-преобразователь УП и интегра-
тор И, охваченные функциональной гибкой отрицательной обратной свя-
зью ФОС с передаточной функцией апериодичного звена (см. § 3.3). Их
техническая реализация — цифровая по соответствующим программам
управления микропроцессорными вычислительными средствами, т.е. в
виде цифровых моделей астатического следящего регулятора.
Программа оптимального распределения мощности обеспечивает вы-
числение функций ф, изменений мощностей энергоблоков по их технико-
экономическим показателям и технологическим ограничениям и опреде-
ляет приоритет загрузки отдельных энергоблоков или их групп с учетом
технологически допустимых регулировочных диапазонов. Их числен-
ным интегрированием, что условно (знаками интегралов) и обозначено
на рис. 7.7, и определяются предписанные мощности Рт прг энергоблоков.
Ограничители темпа задания (их два в каналах мощностей Рпрпл
и Рпр.нпл) также представляют собой цифровые модели астатических
регуляторов с интеграторами, постоянные времени которых и устана-
вливают допустимые по технологическим условиям скорости изменений
заданий мощностей, поступающих из АСУ ЭЭС, или скорость измене-
ний нагрузок энергоблоков при подключениях и отключениях, ввиду или
недостоверности информации, или неисправности АСРМ. Программно
реализуется и измерительный орган частоты ИОЧ с зоной нечувстви-
тельности.
Например, показанная на рис. 7.8 упрощенная программа распреде-
ления предписанной ТЭС неплановой мощности Рпр.нпл между турбоге-
нераторами — определения Pr.npt — состоит из ряда подпрограмм —
программных модулей. Модуль сравнения предписанной РпрНпл и ис-
тинной Рнпл мощностей электростанции выявляет необходимое ее при-
ращение ДР = РПр.нпл _ Рнпл- Производится проверка условия | ДР| > О
и условий перехода к загрузке генераторов ДР > ДРтт или их раз-
грузке -ДР < —ДРт,п, где | ± ДРтт| — порог чувствительности вы-
числительной части к изменениям мощности. Модуль загрузки Min
при выполнении первого из двух указанных условий перехода опреде-
ляет энергоблок, с которого по его технике-экономическим показателям
276
Автоматическое управление режимами работы ЭС и ЭЭС
и технологическим условиям должна начинаться загрузка турбогенера-
тора дополнительной мощностью и проверяет наличие регулировочно-
го диапазона на увеличение его нагрузки. Модуль разгрузки Мах при
выполнении второго условия перехода выбирает энергоблок, начиная с
которого должно производиться снижение мощности турбогенераторов,
и проверяет отсутствие технологических ограничений уменьшения его
нагрузки.
По подпрограммам Min и Мах циклически анализируется состояние
всех энергоблоков ТЭС. Определяется один из возможных результатов
анализа: найден один энергоблок с минимальным (максимальным) ин-
дексом приоритета на загрузку или разгрузку соответственно; найдено
несколько турбогенераторов с одинаковыми приоритетами; получен при-
знак отсутствия регулировочных диапазонов у всех энергоблоков. Пер-
вые два результата используются программными модулями разрешения
изменения мощности — разрешения загрузки (разгрузки) выбранного
энергоблока (энергоблоков).
Программный модуль ЗАГРУЗКА-РАЗГРУЗКА производит расче-
ты управляющих воздействий на одновременное или поочередное уве-
личение (уменьшение) мощности выбранных турбоагрегатов. Произво-
дится подготовка данных для расчетов управляющих воздействий по
ДР и постоянной времени интегрирования Ти. Подпрограмма INTGRL
т„
выполняет интегральную операцию Y = 1/Ти f АР dt, моделирующую
о
следующее астатическое изменение предписанной мощности. Если ре-
зультат интегрирования отличен от нуля (У / 0), производится провер-
ка условий Q, = 0 возможности изменения нагрузки г-го турбогенера-
тора. Значением условия Qt = 1 запрещается участие турбогенератора
в покрытии приращения мощности ТЭС: сохраняется прежняя его на-
грузка Ргпр[(п ~ 1)7]. При допустимости ее изменений предписанная
мощность генератора Ргпр(пТ) увеличивается на ДРГ, определяемую
коэффициентом или функцией <рг долевого участия г-го турбогенератора
в покрытии изменения нагрузки ТЭС или ограничиваемую максимально
или минимально допустимой мощностью энергоблока в соответствии с
возможным динамическим диапазоном ее изменения. Если порядковый
номер ?.-го турбогенератора не превышает их количества ./V, то по пере-
ходу, определяемому отрицанием условия ?. > N, производится следую-
щий цикл определения изменения нагрузки (г + 1)-го турбогенератора.
277
Глава 7
278
Автоматическое управление режимами работы ЭС и ЭЭС
Рис. 7.8. Упрощенная структурная схема программы распределения
мощности ТЭС между турбогенераторами
Функции, выполняемые ОРЧМ при управлении плановой мощно-
стью, сводятся в основном к следующим:
• формирование промежуточных точек (между заданными АСУ ЭЭС
почасовыми) прогнозируемой части графика нагрузки электро-
станции;
• расчеты предписанной плановой мощности энергоблоков на основе
анализа их технике-экономических показателей и с учетом регу-
лировочных диапазонов, допустимой скорости изменения нагрузки
турбогенераторов, допускаемой перегрузки трансформаторов связи
между шинами различных напряжений и технологических ограни-
чений изменения мощности турбин;
279
Глава 7
• обеспечение в результате оптимального экономически и рациональ-
ного технически распределения предписанной ТЭС графиком на-
грузки плановой мощности;
• формирование сигналов информации о выполняемом графике на-
грузки.
Последняя из указанных функций выполняется информационной
функциональной частью, содержащейся в общестанционной микропро-
цессорной автоматической системе управления мощностью — устрой-
ством УСИ (см. рис. 7.7) сбора информации о режимах работы ТЭС,
передаваемой в АСУ ЭЭС, и о режимах энергоблоков, поступающей в
соответствующие элементы микропроцессорной системы, в особенности
в 3МБ и ОТЗ. Указанное устройство производит и тестирование при
диагностике автоматической системы и выдает информацию персона-
лу ТЭС с выводом на дисплей ПЭВМ о режимных параметрах энерго-
блоков, неисправностях в автоматической системе управления или не-
достоверной ее входной информации. Оно выполняется на микропро-
цессорном ПТК, поставляемом предприятием «АББ Реле - Чебокса-
ры» [33].
Агрегатную часть АЧ АСУ ТП (см. рис. 7.6) составляют: авто-
матика изменения состояния турбогенератора (см. §1.3), микропроцес-
сорный автоматический синхронизатор (см. §2.6), электрическая часть
автоматической системы регулирования частоты и мощности ЭЧСР-М
(см. §4.5), автоматический регулятор возбуждения АРВ СДМ синхрон-
ного генератора (см. § 5.8), АРКТ трансформатора, автоматический ре-
гулятор реактивной мощности СТК (см. §6.6), АРЧВ турбогенератора,
АРПГ и автоматика управления технологическим оборудованием энер-
гоблоков.
7.5. Цифровая автоматическая система управления
частотой и активной мощностью
электроэнергетических систем
Автоматическое регулирование частоты и управление активной
мощностью является главной задачей автоматизированного диспетчер-
ского управления режимами работы ЭЭС, ОЭС и ЕЭС [3]. Соответству-
ющие автоматические устройства образуют централизованную авто-
280
Автоматическое управление режимами работы ЭС и ЭЭС
матическую систему регулирования частотой и мощностью (ЦАРЧМ),
функционирующую по ступенчато-иерархическому принципу.
Нижним ее уровнем являются АСУ ТП гидро-, тепловых и атом-
ных электростанций. Второй уровень образуют автоматические устрой-
ства, установленные на диспетчерских пунктах ЭЭС. В соответствии
с расчетами по прогнозированию графика нагрузки и его оптимально-
му по технико-экономическим показателям выполнению УВК, используя
технические средства передачи информации, выдают почасовые графи-
ки нагрузок — задания плановой мощности и определяют участие ча-
стоторегулирующих электростанций в покрытии изменений внеплано-
вой мощности ЭЭС. Новой по сравнению с общестанционной АСУ ТП
функцией автоматизированной системы управления ЭЭС является кон-
троль и ограничение перетоков мощности по линиям электропередач по
условию сохранения статической устойчивости электроэнергетической
системы.
Указанная задача ограничения перетоков мощностей становится
главной для автоматических устройств управления частотой и актив-
ной мощностью ОЭС, часто содержащих линии связи между ЭЭС, вхо-
дящими в объединение, с ограниченной пропускной способностью.
Они образуют третий (верхний) уровень автоматической системы
управления частотой и мощностью. Ее высшим (четвертым) уровнем
является комплекс автоматических устройств, установленных в Цен-
тральном диспетчерском управлении (ЦДУ) Единой электроэнергети-
ческой системой.
Основными задачами автоматической системы управления частотой
и мощностью ЕЭС являются непрерывное поддержание баланса между
генерируемой и требуемой потребляемой мощностями при наиболее эко-
номичном режиме и рациональном использовании энергоресурсов и обес-
печение устойчивости параллельной работы ОЭС и надежности элек-
троснабжения. Особенности автоматического управления на верхнем и
высшем уровнях определяются снижением случайных отклонений ча-
стоты по мере роста установленных мощностей ОЭС и ЕЭС в целом
и, наоборот, возрастанием нерегулярных изменений обменных мощно-
стей между ОЭС. Поэтому в ОЭС и ЕЭС производится автоматическое
регулирование среднего за некоторое время значения частоты по инте-
гральному критерию и управление перетоками мощностей и их ограни-
чений.
281
Глава 7
Накопленный опыт эксплуатации аналоговой ЦАРЧМ, разработан-
ной в ОАО «Энергосетьпроект» [34], способствовал разработке и внедре-
нию цифровой автоматической системы регулирования частоты и мощ-
ности в ЕЭС с расширенными функциями и новыми свойствами [35, 36]:
• способностью приспосабливаться (свойством адаптации) к измене-
ниям режимов работы и складывающейся ситуации в ОЭС и ЕЭС;
• обеспечением технически рационального совместного использова-
ния гидравлических и тепловых электростанций в общем процессе
производства и передачи электроэнергии;
• реализацией сложных взаимосвязей при анализе текущих режимов,
выявлением их нарушений и определения оптимальных управляю-
щих воздействий;
• повышением работоспособности управляющего комплекса в целом
и предотвращением неправильных его действий при неисправно-
стях отдельных элементов;
• повышением помехоустойчивости за счет достоверизации исполь-
зуемой информации;
• обеспечением диспетчера информацией, достаточной для оценки
текущего режима и контроля за его изменениями при действии
ЦАРЧМ.
В цифровой, как и в аналоговой АРЧМ, регулирующее воздействие
на у-ю электростанцию формируется по интегральному соотношению
j (kf^f + kp3^P^dt, (7.3)
где А/, ДР — отклонения частоты и перетока мощности от номинально-
го и предписанного значений соответственно; kfj, кр3 — коэффициенты
долевого участия ;-й электростанции в покрытии изменений мощности,
необходимых для восстановления частоты и допустимых по условию ста-
тической устойчивости перетоков мощности.
В разработанной ЦАРЧМ регулирование осуществляется дискретно
во времени с циклом Та = 1 с. Интегрирование согласно (7.3) естествен-
но заменяется последовательным суммированием. При этом выполняет-
ся два вида расчетов: приращений Д/(Т~), ДР(Т) за интервал Т дискре-
тизации и накопленных сумм за цикл регулирования Тн. Рассчитанное
282
Автоматическое управление режимами работы ЭС и ЭЭС
воздействие U(nTa) за n-й цикл распределяется между регулирующи-
ми электростанциями. В целом ЦАРЧМ функционирует по алгоритму,
структурная схема которого в упрощенном виде показана на рис. 7.9.
Основной алгоритм дополняется вспомогательными операциями,
учитывающими:
• возможности замены коэффициентов долевого участия функций
времени (рг(пТ) или режимных параметров;
• ограничения по скорости изменений мощности и регулировочным
диапазоном электростанций;
• равенство единице сумм коэффициентов или значений соответству-
ющих функций ^(пТ), определяющих участие электростанции в
регулировании;
• возможность ручной коррекции диспетчером регулирующих воз-
действий на электростанции и др.
Высокие требования к надежности функционирования ЦАРЧМ обу-
словили ее осуществление на двух комплектах цифровых ЭВМ, взаимно
контролируемых и резервируемых. Для наиболее полного использова-
ния ресурсов ЭВМ принято несимметричное математическое обеспече-
ние: первая ЭВМ! (рис. 7.10) — ведущая, а вторая ЭВМ2, резервирую-
щая ее, — ведомая. Первая производит вычислительную обработку ин-
формации ВОИ, поступающей от телеавтоматических информационных
устройств ТАИУ, и выполняет все расчеты по автоматическому упра-
влению (по программам вычислений интегральных отклонений частоты
ВОЧ и мощности ВОМ, программам вычислений управляющих воздей-
ствий ВУВ и их распределения по электростанциям РУВ ЭС). Вторая
дублирует расчеты первой, выполняет вспомогательные операции и вы-
дает оперативную (рабочую) информацию для ее отображения и реги-
страции ОРИ на пульт управления оператора ПУ О управляющего вы-
числительного комплекса УВК и пульт управления главного диспетче-
ра ПУГД. Исполнение результатов расчетов разрешается только при их
идентичности на выходах обеих исправных ЭВМ. Взаимный контроль
ЭВМ производится периодическим обменом сигналами, подтверждаю-
щими их работоспособность. При отказе одной из ЭВМ ее функции вы-
полняет другая — автоматическая система переходит в одномашинный
режим работы, в котором производится специальный контроль, выявля-
283
Глава 7
START
Ввод информации
Определение Д/(и7); ДР(п7)
| ДСрс1 (iiT)=\f{nT) +Ы\пТ)
| 'NTGRL Z Д Срег (пТ)|
ррс, (иГц)=1/ре, ((л -1)ГЦ) +£ДСрсг(и7)
Распределение
СреГ7(лТц)=ф7(пТц)Срег(пТц)
Рис. 7.9. Общая структурная схема программы распределения измене-
ний мощности ЭЭС между частоторегулирующими электростанциями
284
Рис. 7.10. Функциональная схема цифровой централизованной автоматической системы управления
частотой и мощностью в ОЭС и ЕЭС
Автоматическое управление режимами работы ЭС и ЭЭС
Глава 7
ющий отказы, остановы или ложную работу и запрещающий передачу
pei улирующих воздействий на электростанции.
Измерительно-преобразовательная часть высшего уровня ЦАРЧМ
состоит из измерительного преобразователя частоты ИПЧ: специально
разработанного генератора номинальной промышленной частоты, ста-
билизированного кварцевым резонатором; приемной части телеавтома-
тических информационных устройств ТАИУ, передающих информацию
о режимах работы по мощности электрических станций и системообра-
зующих линий электропередач, их технико-экономических показателях,
перетоках мощностей и информацию об исполнении управляющих воз-
действий ЦАРЧМ. Как и в ранее рассмотренных микропроцессорных
системах управления, она содержит элементы согласования выходов
ТАИУ со входами вычислительной части и гальванического их разде-
ления ЭГР.
Исполнительную часть образуют телеавтоматические управляющие
устройства ТАУУ, передающие информацию в УВК атоматических си-
стем управления ОЭС и ЭЭС и управляющие воздействия на частоторе-
гулирующие электростанции ЭС, и элементы гальванического разделе-
ния ЭГР с вычислительной частью. В исполнительную часть входит и
весь комплекс отображения и регистрации информации, главным обра-
зом дисплеи, установленные на пультах управления оператора УВК и
главного диспетчера.
Централизованная цифровая АРЧМ является основной частью АСУ
ЕЭС, осуществляемой на основе современной вычислительной техни-
ки [3]. Для АСУ ЕЭС в перспективе предназначается и разработан-
ная [70] программная автоматическая система управления напряжением
и реактивной мощностью.
Вопросы для самопроверки
1 Каково назначение автоматизированной системы управления технологи-
ческими процессами (АСУ ТП) электрической станции7
2 Какие автоматические устройства входят в агрегатную часть АСУ ТП7
3 Какие функции выполняет общестанционная часть АСУ ТП7
4 В чем состоят различия определений заданий плановой составляющей
графика нагрузки и неплановых изменений мощности электростанции и
их распределения между гидро- и турбогенераторами7
286
Автоматическое управление режимами работы ЭС и ЭЭС
5 Почему выполнение основных задач автоматического управления часто-
той и мощностью — поддержание частоты на неизменном уровне и рас-
пределение нагрузки электростанции между параллельно работающими
энергоагрегатами — приходится возлагать на разные автоматические
устройства9
6 По какому технико-экономическом} показателю производится распреде-
ление нагрузки тепловой электростанции между турбогенераторами9
7 Как и каким устройством производится распределение нагрузки гидро-
электростанции между гидрогенераторами9
8 Какие функции выполняет и как действует автоматическое устройство
группового управления турбогенераторами (см. рис 7 2)9
9 Какая разница между астатическим, статическим и мнимо-статическим
законами автоматического регулирования частоты и активной мощности
пли напряжения и реактивной мощности9
10 Какие функции выполняет и как действует автоматическое устройство
общестанционного (вторичного) автоматического регулирования напря-
жения и реактивной мощности (см рис 7 З)9
11 Какие функции выполняет и как действует комплексная автоматическая
система управления напряжением и реактивной мощностью электростан-
ции (см рис 7 4)9
12 Из каких функциональных частей состоит и как действует агрегатная
часть микропроцессорной автоматической системы управления (ACS')
гидроэлектростанцией (см рис 7 5)9
13 Из каких функциональных частей состоит и как действует общестанци-
онная часть АСУ гидроэлектростанцией (см рис 7 5)9
14 В чем состоит общая концепция построения АСУ ТП тепловой электро-
станции9
15 Из каких функциональных частей состоит и как действует АСУ ТП теп-
ловой электростанции (см рис 7 6)9
16 Каковы задачи информационно-вычислительного комплекса (ИВК) АСУ
ТП тепловой электростанции9
17 Чем определяются и в чем состоят отличительные особенности управля-
ющего вычислительного комплекса (УВК) АСУ ТП тепловой электро-
станции9
18 Из каких функциональных элементов состоит и как действует микро-
процессорная общестанционная автоматическая система регулирования
частоты и мощности тепловой электростанции9
287
Глава 7
19 Как выполняются и функционируют задающие элементы планового гра-
фика нагрузки и неплановой мощности турбогенераторов микропроцес-
сорной автоматической системы управления мощностью тепловой элек-
тростанции (см. рис 7 7)?
20 В чем состоит программное обеспечение распределения неплановой пред-
писанной мощности тепловой электростанции между турбогенератора-
ми(см. рис 7 8)?
21 Каковы функции общестанционной микропроцессорной автоматической
системы по управлению плановой нагрузкой тепловой электростанции7
22 Какие иерархические уровни различаются в цифровой автоматической
системе управления частотой и активной мощностью в Объединенной и
Единой электрических системах?
23 В чем состоят особенности автоматического управления частотой и мощ-
ностью в электроэнергетических системах?
24 Как функционирует цифровая автоматическая система регулирования
частотой и мощностью (ЦАРЧМ) в ЕЭС (см. рис. 7 10)?
25 В чем состоит математическое обеспечение функционирования ЦАРЧМ
(см. рис. 7 9)?
288
Раздел второй
Противоаварийная автоматика
Глава 8. Особенности и задачи
противоаварийного автоматического
управления электроэнергетическими
системами
8.1. Режимы работы электроэнергетических систем
и управление ими
Процесс производства, передачи и распределения электроэнергии
является динамичным, характеризующимся необходимым равенством
в каждый момент времени генерируемой и требуемой потребителями
электрической энергии (балансом мощности) и подверженным случай-
ным возмущающим воздействиям, относительно слабым (малым), обу-
словленным случайно изменяющейся нагрузкой, и интенсивным (боль-
шим), связанным с повреждениями и отключениями генерирующего и
передающего энергию электрооборудования.
Большие собственно возмущающие воздействия вызывают отклоне-
ния от динамического равновесия, которые могут привести к нарушени-
ям синхронной параллельной работы электрических станций и развить-
ся в общесистемную аварию с прекращением функционирования тепло-
вых электростанций и полной потерей электроснабжения.
Обычно электроэнергетические системы работают в нормаль-
ном режиме, в котором основные режимные параметры: амплитуды
(действующие значения) — далее просто напряжение и частота напря-
жения — при непрерывных изменениях нагрузки остаются практически
неизменными, т.е. номинальными; распределение активной и реактив-
ной мощностей между генерирующими электроэнергию управляемыми
объектами оптимально, а перетоки мощностей по передающим электро-
энергию линиям связи между электроэнергетическими системами и их
289
Глава 8
объединениями, образующими единую энергосистему, находятся в пре-
делах, ограничиваемых нормируемым запасом мощности по статической
устойчивости параллельной работы электрических станций. К нормаль-
ному относится и неоптимальный, обычно кратковременный, режим по
мощности, при котором напряжения и частота не выходят за пределы
длительно допустимых ГОСТ отклонений.
Нормальный режим обеспечивается автоматическим управлением
электроэнергетическими объектами ранее рассмотренным арсеналом
управляющих автоматических устройств и систем (см. гл. 1-7).
Основная задача автоматического управления нормальным режи-
мом — обеспечить производство и передачу электроэнергии при ми-
нимальных затратах энергоресурсов (условного топлива) и обеспечить
надежность электроснабжения потребителей электроэнергией требуе-
мого качества и исправность электроэнергетических управляемых объ-
ектов.
Под воздействием внезапных интенсивных возмущений в виде неиз-
бежных коротких замыканий или случайных отключений генерирующих
или передающих электроэнергетических объектов ЭЭС, ОЭС или ЕЭС
в целом переходят в утяжеленный или в аварийный режим.
Утяжеленный режим характеризуется отклонениями режимных па-
раметров, обычно пониженными значениями напряжений и частоты, до-
пустимыми лишь кратковременно. Перетоки мощностей могут превы-
шать длительно допустимые в нормальном режиме, но не доходить до
опасных для статической устойчивости значений. Задача автоматиче-
ского управления «... в утяжеленном режиме — не допустить его даль-
нейшего утяжеления, что может привести к переходу в аварийный ре-
жим; устранить причину, вызвавшую ... » его и « ... восстановить
нормальный режим» [39].
Если хотя бы один из режимных параметров достигает недо-
пусз имых даже кратковременно значений, режим становится а в а -
р и й и ы м.
Аварийный режим развивается из утяжеленного или непосредственно
вследствие интенсивных возмущающих воздействий. Основными зада-
чами автоматического управления в аварийном режиме являются: вы-
явление и устранение, если возможно, возмущающего воздействия; пре-
дотвращение дальнейшего развития аварийной ситуации и ее распро-
странения; восстановление нормального режима.
290
Особенности и задачи ПА автоматического управления ЭЭС
Автоматическое управление в утяжеленном и, особенно, аварийном
режимах производится управляющими автоматическими устройствами
противоаварийного управления. В результате противоаварийного упра-
вления наступает послеаварийный режим или восстанавливает-
ся нормальный режим работы. Задача автоматического управления в
послеаварийном режиме состоит в скорейшем восстановлении нормаль-
ного режима.
При организации противоаварийного управления реализуется еще и
ремонтный режим, в частности ремонтная схема ЭЭС, характеризу-
ющийся выводом в ремонт отдельных электроэнергетических объектов.
8.2. Возмущающие воздействия на
электроэнергетические системы и управляющие
противоаварийные воздействия
Возмущающие воздействия вызывают внезапные скачкообраз-
ные изменения мощностей, передаваемых по линиям электропередачи, и
интенсивные и в широких пределах изменения режимных параметров ра-
боты электроэнергетической системы. По степени тяжести различаются
три категории или группы опасных возмущающих воздействий [39].
К первой группе относятся отключения линии электропередачи на-
пряжением 500 кВ и ниже (линий связи с АЭС 750 кВ) при однофазных
КЗ на землю с успешным или неуспешным однофазным автоматиче-
ским повторным включением на указанных линиях или линиях более
высокого напряжения при успешном О АП В и отключение одного блока
генератор-трансформатор, кроме наиболее мощного в ОЭС.
Вторую группу составляют отключения линий электропередачи лю-
бого напряжения при двухфазных КЗ на землю и успешном или неуспеш-
ном ТАПВ, отключение наиболее мощного синхронного генератора или
двух генераторов АЭС, относящихся к одному ядерному реактору, одно-
временное отключение двух цепей или линий.
К третьей, наиболее тяжелой, категории относятся возмущающие
воздействия, обусловленные однофазными КЗ на землю на линии или
шинах любого напряжения при отказе одного из выключателей и дей-
ствии устройства резервирования отказов выключателей на отключение
неповрежденного элемента и отключениями синхронных генераторов од-
ной системы (секции) шин или распредустройства одного из напряже-
291
Глава 8
ний суммарной мощностью, составляющей половину мощности электро-
станции.
Возмущающие воздействия угрожают нарушениями динамической
в аварийном или статической в послеаварийном режиме устойчивости
электроэнергетической системы.
Противоаварийные управляющие воздействия. Для предот-
вращения нарушения динамической устойчивости необходимы быстро-
действующие, интенсивные, но кратковременные управляющие воздей-
ствия. Обеспечение статической устойчивости достигается также по-
являющимися практически безынерционно, однако длительно существу-
ющими управляющими воздействиями.
Поскольку противоаварийное управление производится при электро-
механических переходных процессах, а опасность нарушения синхронной
параллельной работы определяется развивающимися снижением и повы-
шением частот вращения синхронных генераторов, начинающихся после
возмущающего воздействия, в одной — дефицитной по мощности (обыч-
но приемной), и в другой — избыточной по мощности (передающей)
частях электроэнергетической системы соответственно, то противоава-
рийные управляющие воздействия должны главным образом изменять
генерируемые мощности, а в крайних случаях и снижать мощности на-
грузки.
Конкретно противоаварийные управляющие воздействия произ-
водят:
• повышение пропускной способности электропередачи, т.е. ее пре-
дельную передаваемую мощность;
• снижение генерируемой мощности в избыточной передающей ча-
сти ЭЭС, частота вращения синхронных генераторов в которой
увеличивается;
• увеличение генерируемой мощности в дефицитной приемной ча-
сти, синхронные генераторы которой уменьшают частоту своего
вращения;
• уменьшение мощности, потребляемой нагрузкой приемной части
электроэнергетической системы;
• увеличение нагрузки синхронных генераторов передающей части.
292
Особенности и задачи ПА автоматического управления ЭЭС
Соответственно для предотвращения нарушения динамической
устойчивости противоаварийные управляющие воздействия осуще-
ствляют:
• программную форсировку возбуждения ФВ (рис, 8.1) синхронных
генераторов — быстрое кратковременное увеличение ЭДС генера-
торов до допустимого по их термической стойкости уровня, обу-
словливающего повышение напряжений на шинах электростанции
и предел передаваемой мощности электропередачи;
• интенсивное кратковременное снижение мощности, развиваемой
паровыми турбинами, — импульсную разгрузку турбоагрегатов
ИРТ-
• быстрое кратковременное подключение, обычно к гидрогенерато-
рам передающей части, искусственной резистивной нагрузки —
электрическое торможение ЭТ гидроагрегатов;
• быстрый перевод тиристорных преобразователей в инверторный
режим накопителей электроэнергии в приемной части — их фор-
сировку на выдачу энергии в нагрузку ФНЭЭ.
Для сохранения статической устойчивости в послеаварийном режиме
используются противоаварийные управляющие воздействия, обеспечи-
вающие:
• изменение настройки автоматических регуляторов возбуждения
сильного действия ИН АРВ в целях достижения максимально воз-
можной пропускной способности электропередачи в сложившихся
после возмущающего воздействия условиях;
• увеличение емкостного сопротивления устройства продольной ком-
пенсации индуктивного сопротивления линии, повышающего пре-
дельную передаваемую мощность линии, — форсировку продоль-
ной компенсации ФПК;
• отключение реакторов ОР, повышающее напряжения в начале и в
конце линии;
• отключение гидрогенераторов ОГ передающих ГЭС и длитель-
ное снижение мощности — длительную разгрузку турбоагрегатов
ТЭС ДРТ;
293
Глава. 8
Рис. 8.1. Фрагмент электрической схемы объединенной электроэнерге-
тической системы
294
Особенности и задачи ПА автоматического управления ЭЭС
295
Глава. 8
• быстродействующую загрузку недогруженных гидрогенераторов
БЗГ приемной части электроэнергетической системы и перевод
гидрогенераторов из режима работы синхронным компенсатором
в генераторный режим СК - Г;
• частичное программное отключение нагрузки ОН приемной части
до развития процесса снижения частоты.
При недостаточности указанных воздействий для предотвращения
снижения частоты производится частотный (ускоренный) пуск, само-
синхронизация и быстрый набор нагрузки резервных гидрогенераторов
ЧПГ и отключение нагрузки — автоматическая частотная разгрузка
приемной части электроэнергетической системы.
Противоаварийные управляющие воздействия общесистемной про-
тивоаварийной автоматики вырабатываются управляющим вычисли-
тельным комплексом УВК, расположенным на диспетчерском пункте
ДП. Необходимые сигналы информации о параметрах предшествующего
возмущающему воздействию и послеаварийного режимов, о схеме элек-
троэнергетической системы и о происходящих отключениях выключате-
лей — возмущающих воздействиях и противоаварийные управляющие
воздействия передаются по высокочастотным каналам связи ВЧКС, осу-
ществляемым по проводам линий электропередачи путем установки по
их концам высокочастотных заградителей в виде параллельных резо-
нансных £С'-контуров и конденсаторов связи Ссв, устройствами телеиз-
мерений УТИ, телесигнализации У ТС и быстродействующими устрой-
ствами передачи сигналов противоаварийной автоматики БСПА.
8.3. Основные функции и особенности управляющих
устройств и систем противоаварийной автоматики
Автоматические устройства и системы противоаварийного управле-
ния, воздействующие на электроэнергетические объекты, выполняют
следующие основные функции:
• фиксацию возмущающего воздействия или опасных изменений ре-
жимных параметров;
• запоминание исходного (накануне возмущающего воздействия) и
оценку послеаварийного режимов, прежде всего путем фиксирова-
ния активных мощностей и их изменений;
296
Особенности и задачи ПА автоматического управления ЭЭС
• оценку степени тяжести возмущающего воздействия и необходимо-
сти управляющих воздействий;
• выработку видов, интенсивности и длительности (дозировку) про-
тивоаварийных управляющих воздействий и выбор управляемых
электроэнергетических объектов;
• запоминание интенсивности управляющих воздействий и эффек-
тивную их реализацию на управляемых объектах.
Эффективность автоматических устройств противоаварийного упра-
вления определяется главным образом их быстродействием и дозировкой
управляющих воздействий, что является их главной и специфической
особенностью.
Существенной особенностью функционирования автоматических
устройств противоаварийного управления является использование об-
ширной априорной и получаемой при переходных процессах в электро-
энергетических системах рабочей информации, взаимосвязь и взаимо-
действие по быстродействующим каналам передачи сигналов противо-
аварийного управления и воздействия на рассредоточенные по значи-
тельной территории управляемые электроэнергетические объекты.
Трудности обеспечения эффективности противоаварийного управле-
ния связаны с большим разнообразием и рассредоточенностью возму-
щающих воздействий, изменениями исходных режимов и необходимо-
стью в реальном времени переходных процессов в электроэнергетиче-
ской системе корректировки управляющих воздействий в соответствии
с достигаемыми при их реализации результатами. Поэтому наиболее
сложные иерархические общесистемные комплексы АПНУ (см. введе-
ние), управляющие многими электростанциями, подстанциями и лини-
ями электропередачи и электроэнергетической системой в целом, осу-
ществляются на основе цифровых ЭВМ управляющего вычислительно-
го комплекса (рис. 8.1), который, как указывалось, располагается на
диспетчерском пункте. В УВК поступает вся информация о текущих
режимных параметрах и о схеме электроэнергетической системы по
каналам технических средств — УТИ, УТС сбора и передачи инфор-
мации.
Цифровые ЭВМ циклически производят расчеты устойчивости прак-
тически для всех возможных возмущающих воздействий с учетом па-
раметров электрических режимов электроэнергетической системы. При
297
Глава. 8
этом противоаварийные управляющие воздействия вырабатываются по-
сле каждого цикла расчетов и фиксируются специальными устройствами
автоматического запоминания дозированных воздействий (АЗД). Их ре-
ализация происходит немедленно и выборочно по сигналам пусковых ор-
ганов, фиксирующих возмущающие воздействия. Таким образом обеспе-
чивается максимально возможное быстродействие АПНУ и наиболее эф-
фективный набор дозированных противоаварийных управляющих воз-
действий при соответствующем возмущении.
Определение характера и дозирование управляющих воздействий не-
обходимо и для эффективного функционирования автоматики ликвида-
ции асинхронного режима, основной задачей которой является, как ука-
зывалось (см. введение), обеспечение результирующей устойчивости
электроэнергетических систем. В создаваемой в последнее время ми-
кропроцессорной АЛАР это достигается благодаря вычислениям, произ-
водимым однокристальными ЭВМ.
В разрабатываемых интегрированных микропроцессорных много-
функциональных комплексах противоаварийной автоматики форми-
рование и координация управляющих воздействий автоматических
устройств различных назначений (см. введение) также производится
методами и средствами обработки информации цифровой вычислитель-
ной техникой.
Усиливается тенденция к созданию интегрированных устройств и
систем на микропроцессорной вычислительной технике противоаварий-
ной автоматики, выполняющих большинство или все функции техники
противоаварийного автоматического управления ЭЭС, ОЭС и ЕЭС в
целом.
8.4. Назначение и виды противоаварийной автоматики
Назначением технических средств противоаварийного управления
электроэнергетическими системами — противоаварийной автоматики
является «... предотвращение возникновения и развития аварийных
процессов в энергосистеме и ускорение восстановления нормальных ре-
жимов ...» [39]: противоаварийная автоматика предотвращает обще-
энергосистемные аварии с нарушением электроснабжения на длительное
время и на значительной территории, приводящие к катастрофическим
последствиям.
298
Особенности и задачи ПА автоматического управления ЭЭС
Как указывалось (см. введение), к противоаварийному управлению,
по существу, относятся прежде всего технические средства автоматиче-
ской защиты электроэнергетической системы от неизбежных КЗ — ав-
томатические устройства релейной защиты (АУРЗ), отключающие по-
врежденные электроэнергетические объекты (рис. 8.2).
В соответствии с особой опасностью коротких замыканий основным
свойством АУРЗ является мгновенное определение их расположения и
воздействие на отключение соответствующего выключателя. Поэтому
современные АУРЗ очень сложны и используют организованные по про-
водам линий электропередач высокочастотные каналы обмена информа-
цией (см. рис. 8.1).
Самые быстродействующие из них вырабатывают противоаварий-
ные управляющие воздействия в течение длительности одного перио-
да промышленной частоты. Однако не всегда противоаварийные упра-
вляющие воздействия исполняются современными сложными быстро-
действующими выключателями поврежденных электроэнергетических
объектов. Поэтому АУРЗ дополняются автоматическими устройствами
резервирования отказов выключателей (УРОВ).
Они отключают ближайшие к неотключившимся поврежденным со
стороны источника питания исправные электроэнергетические объекты
с замедлением не менее собственного времени отключения выключателя.
При этом, хотя возмущающее воздействие на электроэнергетическую
систему утяжеляется, тем не менее, действуя в самом начале возник-
новения токов коротких замыканий и сильных снижений напряжения,
АУРЗ и УРОВ, как правило, предотвращают развитие аварийной ситу-
ации.
Автоматические устройства релейной защиты исторически появи-
лись в самом начале развития электроэнергетики и, развиваясь совмест-
но с УРОВ, выделились в отдельную область автоматики противоава-
рийного управления [40].
Собственно к противоаварийной автоматике относятся бурно разви-
вавшиеся по мере усложнения электроэнергетики — создания объединен-
ных и единой электроэнергетических систем специфические технические
средства предотвращения развития аварийных ситуаций после действия
автоматических устройств релейной защиты, создающей не менее опас-
ные, чем КЗ, возмущающие воздействия на ЭЭС, ОЭС и ЕЭС: отключе-
ние мощных генерирующих и сильно загруженных магистральных ли-
299
Глава 8
Возмущающие воздействия
Рис. 8.2. Схема функционирования противоаварийной автоматики
300
Особенности и задачи ПА автоматического управления ЭЭС
ний электропередач, вызывающих внезапные скачкообразные наруше-
ния баланса мощностей, обычно и приводит к развитию аварий.
Прежде всего действует автоматика повторного (АПВ) и резервного
(АВР) включения отключенных АУРЗ или соответственно резервных
выключателей, пытающаяся устранить возмущающее воздействие.
Высокая эффективность АПВ обусловила обязательность ее установ-
ки на выключателях линий электропередач (особенно воздушных), ши-
нах и секциях шин электрических станций и подстанций, трансформа-
торах и даже синхронных генераторах.
Эффективность АПВ обусловлена неустойчивостью (самоликвидаци-
ей) дуговых КЗ (особенно однофазных на землю). Поэтому на лини-
ях сверхвысокого напряжения кроме трехфазного применяется однофаз-
ное автоматическое повторное включение отключенного АУРЗ провода
с однофазным КЗ на землю. Устройства АВР обеспечивают необходи-
мую надежность функционирования собственных нужд ЭС и надежность
электроснабжения от подстанции с секционированными шинами низше-
го напряжения.
Существенно облегчает возмущающее воздействие на электроэнер-
гетическую систему коротких замыканий автоматика релейной форси-
ровки возбуждения (АРВФ) синхронных генераторов, компенсаторов и
синхронных электродвигателей до технически возможного или ограни-
чиваемого термической стойкостью современных мощных синхронных
генераторов уровня [1, 2]. При этом за счет возрастания их ЭДС повы-
шаются и остаточные напряжения (при КЗ) на шинах электростанций
и подстанций.
При неудачном действии АПВ и неэффективности АРФВ аварий-
ная ситуация обычно начинается с потери динамической или наруше-
ния статической после отключения поврежденного электрооборудова-
ния устойчивости параллельной работы ЭС, развивается с наступлени-
ем асинхронного режима отдельных частей электроэнергетической си-
стемы, усугубляется снижениями напряжения и частоты, обусловлива-
ющими уменьшение производительности агрегатов собственных нужд
тепловых электростанций, и нарушениями устойчивости работы элек-
тромеханической нагрузки.
Сохранение динамической или статической устойчивости в аварий-
ных ситуациях является задачей централизованной и рассредоточенной
иерархической автоматической системы — автоматики предотвращения
301
Глава 8
нарушения устойчивости АПНУ (рис. 8.2), которая функционирует на
основе современной управляющей цифровой вычислительной техники.
При нарушении, несмотря на действие АПНУ, устойчивости парал-
лельной работы и наступлении асинхронного режима вступает в дей-
ствие второй комплекс технических средств противоаварийного управле-
ния, имеющий назначением обеспечить результирующую устойчивость
ЭЭС путем ресинхронизации выпавшей из синхронизма ЭС или ЭЭС —
автоматика ликвидации асинхронного режима АЛАР. При неуспешно-
сти попыток устранить несинхронную работу АЛАР отключает линию
связи между несинхронно работающими частями электроэнергетической
системы — действует делительная автоматика ДА.
Развитие аварийной ситуации, обусловленной дискретными измене-
ниями активной ДР и реактивной AQ мощностей, вызывающих возник-
новение их небаланса, сопровождается отклонением основных показате-
лей нормального режима работы и качества электроэнергии — напряже-
ния и частоты от номинальных. Напряжение и частота или снижаются
в дефицитной по мощности части электроэнергетической системы, или
повышаются в избыточной по мощности ее части.
Поэтому получила развитие и широко применяется противоаварий-
ная автоматика предотвращения недопустимых (по условиям наступле-
ния «лавины» напряжения или частоты) снижений и опасных повыше-
ний режимных параметров. Она состоит из совокупности разрознен-
ных автоматических устройств, рассредоточенных по электроэнергети-
ческим системам.
Автоматические устройства самостоятельно (автономно) функцио-
нируют на основе получаемой ими в реальном времени развития аварий-
ных ситуаций рабочей информации об опасных изменениях режимных
параметров. Они производят противоаварийные отключения и включе-
ния отдельных электроэнергетических объектов, необходимые для про-
тиводействия изменениям режимных параметров, и тем самым способ-
ствуют восстановлению их нормальных значений.
Применяется автоматика ограничения снижений напряжения АОСН
и частоты АОСЧ и их повышения АОПН, АОПЧ. К АОСН относит-
ся прежде всего АУРЗ минимального напряжения электродвигательных
объектов. Наиболее широко из АОСЧ применяется автоматика частот-
ной разгрузки А ЧР дефицитной по мощности части ЭЭС, эффективно
ограничивающая и даже предотвращающая снижение частоты путем
302
Особенности и задачи ПА автоматического управления ЭЭС
адаптивного по мощности отключения нагрузки. Нежелательные для
потребителей электроэнергии действия АОСН и АОСЧ компенсируют-
ся устройствами автоматического повторного пуска электродвигателей
и адаптивного по частоте (частотного) повторного включения по мере
восстановления напряжения и частоты.
Недопустимые для изоляции повышения напряжения (возникновение
КЗ) и опасные для турбогенераторов и сохранения устойчивости парал-
лельной работы ЭС повышения частоты предотвращаются различными
автоматическими устройствами их ограничения, особенно автоматиче-
ским подключением компенсирующих реакторов к шинам ЭС и ПС и
отключением быстро разгоняющихся гидрогенераторов при резком сни-
жении (сбросе) их нагрузки.
Эффективной в послеаварийном режиме является автоматика тепло-
вых электростанций, отключающая отдельные синхронные генераторы
от общих шин электростанций и выделяющая их только для снабжения
электроэнергией нормального качества собственных нужд и обеспечения
максимальной производительности электростанций в условиях аварий-
ного и восстановления нормального режимов.
Важная роль в восстановлении нормального режима принадлежит
противоаварийной автоматике частотного (при снижениях частоты)
ускоренного пуска, включения с самосинхронизацией и быстрого набо-
ра нагрузки гидрогенераторов и их отключений при повышении час-
тоты.
Восстановление электрической связи между разделенными частями
электроэнергетической системы производится после действия АСРЧМ
и АРВ (рис. 8.2) автоматикой повторного включения с синхронизаци-
ей АПВС.
Таким образом, целесоообразно различать следующие основные
групповые виды автоматики противоаварийного управления электро-
энергетическими системами:
• автоматика ликвидации и снижения тяжести возмущающих воз-
действий — автоматика отключений коротких замыканий и по-
вторного или резервного включения;
• общесистемная автоматика ликвидации нарушения синхронной
устойчивости электроэнергетических систем;
303
Глава 8
• автоматика ликвидации асинхронного режима;
• автоматика предотвращения недопустимых изменений режимных
параметров электроэнергетических систем.
Разрозненные и самостоятельные функции отдельных управляющих
автоматических устройств, входящих в состав первой и последней из
указанных групповых видов противоаварийной автоматики, в настоя-
щее время интегрируются при создании современных микропроцессор-
ных комплексов противоаварийного управления электроэнергетически-
ми системами (см. гл. 13)
Вопросы для самопроверки
1. Какими автоматическими устройствами и системами производится
управление нормальным режимом работы электроэнергетической сис-
темы?
2. Чем утяжеленный режим работы отличается от нормального режима?
3 Почему электроэнергетическая система может оказаться в аварийном ре-
жиме7
4. Что понимается под послеаварийным режимом электроэнергетической
системы?
5 Как по степени тяжести различаются возмущающие воздействия на
ЭЭС? Чем они опасны7
6. Какие противоаварийные воздействия на управляемые электроэнергети-
ческие объекты оказывает противоаварийная автоматика?
7. Чем отличаются и какие применяются противоаварийные управляющие
воздействия, предназначенные для предотвращения нарушения динами-
ческой в аварийном и статической в послеаварийном режимах устойчи-
вости?
х
8. В чем состоит назначение устройств и систем противоаварийного управ-
ления?
9. Какова роль в противоаварийном управлении автоматических устройств
релейной защиты (АУРЗ)7
10 Для чего производится релейная форсировка возбуждения синхронных
машин при коротких замыканиях в ЭЭС?
304
Особенности и задачи ПА автоматического управления ЭЭС
11. Каково назначение устройств автоматического повторного включения
(АПВ) и включения резервных источников питания (АВР)?
12. Какова роль в противоаварийном автоматическом управлении автомати-
ки частотной разгрузки?
13. Что такое частотное автоматическое повторное включение
(ЧАПВ)7
14. В чем состоят назначение и особенности АПНУ? Почему она является
общесистемной, иерархической и рассредоточенной по ЭЭС автоматикой?
15. На основе каких технических средств осуществляется АПНУ7
16. Как АПНУ вырабатывает дозированные противоаварийные управляю-
щие воздействия?
17. Как обеспечивается АПНУ необходимой для ее функционирования инфор-
мацией?
18. Для чего необходимо автоматическое запоминание дозированных проти-
воаварийных управляющих воздействий (АЗД)?
19. Каковы функции АЛАР? Что такое делительная автоматика (ДА)?
20. Какова роль и какой вид АПВ используется для восстановления элек-
трической связи между вышедшими из синхронизма и разделенными ДА
частями ЭЭС?
21. Как осуществляется информационное обеспечение АПНУ и АЛАР?
22. Какие функции выполняет и на какие электроэнергетические управляе-
мые объекты воздействует АОСН и АОПН?
23. Почему необходима автоматика ограничения повышения частоты
(АОПЧ)?
24. Какова роль цифровой вычислительной техники в вырабатывании
дозированных противоаварийных управляющих воздействий АПНУ
и АЛАР?
25. Какова роль микропроцессорной вычислительной техники в совершен-
ствовании автоматических устройств противоаварийной автоматики?
305
Глава 9. Автоматика отключений
коротких замыканий, повторного
и резервного включений
9.1. Автоматика отключений коротких замыканий
Главное возмущающее воздействие — короткое замыкание, разру-
шающее электроэнергетическое оборудование и угрожающее развити-
ем общесистемной аварии, отключается автоматическими устройствами
релейной защиты (см. рис. 8.2). Они являются, как уже указывалось,
самыми первыми и необходимыми устройствами противоаварийного ав-
томатического управления.
Современные комплексы АУРЗ представляют собой сложные бы-
стродействующие технические средства противоаварийного управления
ЭЭС, ОЭС и ЕЭС в целом [40]. В них широко используется обмен ин-
формацией между полукомплектами, установленными на разных концах
линий электропередач. Информация в первый же момент времени воз-
никновения короткого замыкания передается по высокочастотным кана-
лам связи по проводам линии электропередачи или по радиорелейным
каналам.
Автоматика отключений коротких замыканий функционирует на
основе характерных возрастаний амплитуды и изменений фазы, как
правило, принужденных составляющих тока и снижений амплитуды
напряжения электромагнитного переходного процесса. Поэтому широ-
ко распространенными являются простые ступенчатые токовые АУРЗ
(с временнными задержками отключения). Более сложные диффе-
ренциальные токовые по принципу действия устройства обеспечивают
практически мгновенное воздействие на отключение короткого замы-
кания.
306
Автоматика отключений КЗ, повторного и резервного включений
Одновременное использование указанных изменений тока и напря-
жения характерно для дистанционных (с измерительными реле сопро-
тивления) устройств релейной защиты [40]. При наличии обмена ин-
формации они также обеспечивают необходимое быстродействие на от-
ключение короткого замыкания.
Наиболее современные и практически безынерционные АУРЗ исполь-
зуют появление симметричных составляющих обратной и нулевой после-
довательностей принужденных токов и напряжений переходного процес-
са короткого замыкания. Такими являются фильтровая направленная
(по мощности обратной последовательности) и дифференциально-фазная
высокочастотные устройства защиты линий электропередач сверхвысо-
кого напряжения [39].
В связи с особой ответственностью АУРЗ, обусловленнной обязатель-
ностью отключения короткого замыкания, «... поскольку работа энер-
госистемы с неотключенными КЗ невозможна ... », предусматривается
резервирование их действия: «... дальнее — на соседних подстанциях
и ближнее — на своей подстанции» [39].
Дальнее резервирование достигается установкой второго — резерв-
ного АУРЗ, способного отключать выключатель при коротких замыка-
ниях не только на своей, но и на соседней, более удаленной от источни-
ка питания линии или другом электроэнергетическом объекте. Ближ-
нее резервирование осуществляется главным образом автоматически-
ми устройствами резервирования отказа выключателей, отключающи-
ми выключатель соседнего объекта, ближе расположенного к источнику
питания. И в том и другом случае отключается неповрежденное элек-
трооборудование, что допускается ради ликвидации возмущающего воз-
действия.
Как указывалось (см. гл. 8), АУРЗ совместно с УРОВ, историче-
ски развиваясь с самого начала становления электроэнергетики и в свя-
зи с созданием поистине огромного их арсенала, выделились в отдель-
ную область автоматики противоаварийного управления [40]. Однако
в последнее время в противоаварийную автоматику электроэнергети-
ческих систем бурно внедряются методы и технические средства об-
работки информации цифровой вычислительной техники. Создаются
микропроцессорные многофункциональные автоматические комплексы
противоаварийного управления, в которых функции АУРЗ, как и авто-
матических устройств собственно противоаварийной автоматики, вы-
307
Глава 9
полняются программно во взаимодействии. Различаемые по выполняе-
мым функциям отдельные автоматические устройства противоаварий-
ного управления интегрируются. Автоматические устройства релейной
защиты все труднее, а может и невозможно, отделить от автоматиче-
ских устройств собственно противоаварийной автоматики. Поэтому в
соответствии с названием настоящего параграфа комплекс АУРЗ рас-
сматривается как противоаварийная автоматика отключений коротких
замыканий.
9.2. Автоматика повторного включения
Автоматика повторного включения отключенных АУРЗ выключате-
лей поврежденных (а иногда и неповрежденных) электроэнергетических
объектов высокоэффективна, поскольку в большинстве случаев ликвиди-
рует возмущающее воздействие, восстанавливает схему и нормальный,
хотя нередко вышедший из оптимального, режим работы ЭЭС, ОЭС и
ЕЭС в целом. Ее эффективность в плане сохранения нормального режи-
ма немного снижается из-за небольшой задержки действия устройств
АПВ, необходимой для восстановления диэлектрической прочности воз-
душной изоляции в области горения электрической дуги КЗ (ее де-
ионизации). В зависимости от напряжения 110-750 кВ она составля-
ет 0,2-0,5 с. Ею и ограничивается выполнение главного требования к
устройствам АПВ — быстродействия.
Из других сформулированных в директивных технических материа-
лах по противоаварийной автоматике требований указываются: задан-
ная кратность действия (обычно однократное АПВ, реже двукратное);
пуск по цепи несоответствия положения ключа управления и состояния
выключателя и, следовательно, недействие при отключении выключате-
ля оператором; недействие после отключения АУРЗ ошибочно включен-
ного ключом управления выключателя на искусственное КЗ (забытую,
не снятую после ремонта закоротку); запрет действия от АУРЗ, сра-
батывающих при устойчивых КЗ, например от газовой защиты транс-
форматора; повторное включение только одного выключателя линии с
двусторонним питанием шин; ускорение действия АУРЗ; автоматиче-
ская подготовка (с выдержкой времени) к новому действию.
Автоматика повторного включения, как правило, является трехфаз-
ной (ТАПВ). Однако на линиях сверхвысокого напряжения от 500 кВ
308
Автоматика отключений КЗ, повторного и резервного включений
с пофазным управлением выключателями, на которых обычно возника-
ют однофазные дуговые, обусловленные грозовыми перенапряжениями,
КЗ, применяется и однофазная автоматика повторного включения —
ОАПВ [1, 39]. При этом определение поврежденного провода линии
возлагается именно на ОАПВ, а отключение выключателей провода с
двух сторон линии производится при взаимодействии АУРЗ и специ-
альных избирательных измерительных органов ОАПВ, определяющих
поврежденную фазу.
Тщательные теоретические исследования по созданию избиратель-
ных органов и обоснованию характеристик их срабатывания, отстроен-
ных от других видов КЗ, и опыт эксплуатации ОАПВ определили целе-
сообразность использования направленных измерительных реле сопро-
тивления со специфическими характеристиками срабатывания в виде
сдвоенных окружностей или вытянутого четырехугольника [8].
Различают несколько видов ТАПВ магистральных и системообразу-
ющих линий электропередач, применяемых в зависимости от конкрет-
ных технических возможностей, типов выключателей и установленных
АУРЗ. На линиях напряжением 35-220 кВ с масляными выключателя-
ми и ступенчатыми АУРЗ [40] прежде всего проверяется возможность
использования несинхронного повторного включения (НАПВ). Оно до-
пустимо, если ток несинхронного включения /нс, определяемый по удво-
енному номинальному напряжению (в предположении противофазы на-
пряжений на конце линии и шинах ЭС или ПС), распределяясь между
синхронными генераторами, не превышает в генераторе с наибольшей
его частью IBCt max допустимого относительного значения, а именно в
общем случае [1]:
т _ т к — р -^р тах <- 0>675
^нсг max — 1 нсЛртах — & v _ vn
* * Асв
где А’ртах — наибольший коэффициент распределения тока, А’ртах =
= Inci max/Aic! *св — сопротивление связи между эквивалентными ЭДС
несинхронно работающих частей ЭЭС.
Установленный на основе фундаментальных теоретических исследо-
ваний электромеханических переходных процессов и проверенный экспе-
риментально указанный критерий допустимости НАПВ имеет различ-
ные для разных типов синхронных генераторов значения [1, 2]. Произ-
водится также проверка трансформаторов по динамической стойкости
при воздействиях тока /нс [1].
9.1)
309
Глава 9
При Н АПВ сначала включается только один выключатель линии при
условии полного отсутствия на ней напряжения (ОН), а затем после по-
явления на противоположном ее конце симметричного трехфазного на-
пряжения (его наличия — НСН) включается второй выключатель без
контроля угла сдвига фаз между напряжениями на линии и шинах ЭС
или ПС. Несинхронное АПВ, называемое также ускоренным с контролем
отсутствия или наличия напряжения — АПВ-ОН (НСН) [49], продемон-
стрировало высокую эффективность: синхронный режим, как правило,
восстанавливается. Оборудование линии указанных и более высокого
напряжений воздушными, а в перспективе вакуумными, выключателя-
ми и безынерционными высокочастотными АУРЗ, мгновенно отключа-
ющими оба конца линии, позволило осуществить быстродействующее
повторное включение при ограниченном, не успевающем заметно увели-
читься за время обесточенного дугогасительными камерами выключате-
лей состояния линии угле 6 сдвига фаз между напряжениями на шинах
соединяемых линией частей электроэнергетической системы — Б АП В
или АПВ-БК (без какого-либо контроля) [49].
Правда, рекомендуется при возможных значительных ускорениях
вращения синхронных генераторов одной из частей ЭЭС проверять угол
по вероятным ускорениям разных знаков и времени бестоковой паузы,
создаваемой выключателями [1]. При этом, по существу, игнорируют-
ся вероятность повторного зажигания электрической дуги в месте КЗ и
утяжеление возмущающего воздействия на ЭЭС от устойчивого КЗ, по-
вторно включаемого двумя выключателями. Поэтому в последнее время
наметилась тенденция отказа от БАПВ.
При недопустимости НАПВ и отсутствии технических условий для
БАПВ или его нежелательности автоматическое устройство повторно-
го включения второго выключателя линии (первый включается, как и
при НАПВ) дополняется синхронизатором — производится, как указы-
валось, ТАПВС.
Практика показала допустимость применения самого простого по
принципу действия из известных — автоматического синхронизатора с
постоянным углом опережения (см. §2.3). Упрощенное ТАПВС, контро-
лирующее только одно из трех условий точной синхронизации — угол
сдвига фаз между напряжениями на линии и шинах ЭС или ПС в момент
включения привода второго выключателя, называется ускоренным —
УТАПВС.
310
Автоматика отключений КЗ, повторного и резервного включений
9.3. Автоматические устройства трехфазного повторного
включения
Промышленностью (ЧЭАЗ) длительное время выпускалось типо-
вое релейно-контактное автоматическое устройство — реле повторного
включения однократного РПВ-58 и двукратного РПВ-258 действия. На-
ходятся в эксплуатации релейно-контактные устройства БАПВ и ОАПВ
линий напряжением 500 кВ. Они описаны в различных учебных пособи-
ях [1, 2, 43] и электротехническом справочнике [47].
Современная автоматика повторного включения представляется ми-
кросхемными реле повторного включения РПВ-01 и РПВ-02, панеля-
ми комплексных бесконтактных автоматических устройств ПДЭ 2004.01
и ПДЭ 2004.02 и разработанными микропроцессорными программными
устройствами повторного включения [73, 80].
Реле РПВ-01 и РПВ-02 выполнены на интегральных микросхемах и
на унифицированной конструкции. Для гальванического отделения це-
пей реле от источников входных сигналов и выходных цепей включения
выключателя используются электромагнитные реле с герметизирован-
ными контактами (герконы) и выходное реле с двумя обычными контак-
тами.
В функциональной схеме автоматического устройства РПВ-01
(рис. 9.1) различаются элементы формирования (контактами) дискрет-
ных потенциальных сигналов, а именно: пуска ЭП контактом А'Ы, за-
прета действия ЗД, разрешения подготовки к новому действию — воз-
врату в исходное состояние РВ, защитного сигнала, предотвращающего
ложные действия РПВ при перерывах его питания от источника посто-
янного напряжения Еп (элемент ЗП), элемент управления ЭУ выходным
реле KL2 и элемент информации о действии РПВ (сигнализации) ИЭ.
Схема РПВ-01 содержит элементы формирования сигналов включе-
ния выключателей без выдержки времени БАПВ и АПВ с выдержкой
времени, элемент однократности действия (запрета) ЭОД, элемент под-
готовки к новому действию ПД и элемент выдержек времени ЭВ сраба-
тывания /с и подготовки к новому действию (возврата) 1В.
Функции названных элементов, кроме контактных, выполняются вза-
имодействующими дискретными интегральными микросхемами DX (И)
серий К175, К176, реализующими логические операции совпадения сиг-
налов (логических единиц) и их отрицания DX (И-НЕ). На функцио-
311
312
Рис. 9.1. Функциональная схема микросхемного устройства реле автоматического включения РПВ-01
Глава 9
Автоматика отключений КЗ, повторного и резервного включений
нальной схеме показан, например, синтезированный из двух микросхем
DX1 и DU (НЕ) элемент логического перемножения (конъюнкции) дис-
кретных потенциальных сигналов DX1.
Элемент выдержки времени выполнен на пассивных
ЯС-интеграторах и активном элементе сравнения постоянного напря-
жения, получаемого от источника питания, с напряжением на заряжа-
ющемся конденсаторе релейного действия на основе интегрального опе-
рационного усилителя типа К553УД1 в дифференциальном включении,
охваченного положительной обратной связью [8]. Заряд конденсаторов
от транзисторных источников токов обеспечивает линейное нарастание
напряжений на них и, следовательно, более высокую, чем при экспо-
ненциальном нарастании, четкость срабатывания бесконтактного реле
времени. Источники токов включаются и отключаются дискретно из-
меняющимися напряжениями на выходах логических интегральных ми-
кросхем. Элемент запрета ЭОД, обеспечивающий однократность дей-
ствия РПВ, содержит интегральные триггеры DS для запоминания сиг-
нала.
В элемент управления ЭУ выходным электромагнитным реле КL2
входит выходной транзистор VT, переключаемый в открытое состоя-
ние дискретно изменяющимся током, возбуждаемым напряжением на
выходе логической интегральной микросхемы DX2. Реле КL2 имеет
две обмотки, вторая из них (токовая) — удерживающая — включается
последовательно в цепь управляющего воздействия УВ на возбуждение
контактора электромагнита включения выключателя линии электропе-
редачи, трансформатора, шин электростанции. Информационный эле-
мент ИЭ выполнен на интегральных транзисторных переключателях и
светодиодах.
На вход РПВ поступают дискретные потенциальные сигналы от це-
пей управления выключателем: сигнал пуска СП возникает при несо-
ответствии положений ключа управления (включено) и выключателя
(отключен); сигнал на разрешение подготовки к включению СРВ —
от ключа управления включением выключателя; сигналы запрета СЗ
действия РПВ — от ключа управления отключением выключателя,
от устройств релейной защиты, срабатывающих только при внутрен-
них повреждениях трансформатора, от дифференциальной защиты шин
электростанции (кроме РПВ выключателя, предназначенного для их
опробования).
313
Глава 9
На вход элемента ЗП защиты от неправильного действия при пере-
рывах питания схемы поступает напряжение Еп от источника оператив-
ного тока. При его наличии РПВ готово к действию, т.е. находится в
состоянии ожидания (геркон ЗП разомкнут).
При поступлении сигнала пуска срабатывает реле KL1 элемента ЭП
и возбуждает элемент БАПВ, выходной дискретный сигнал которого
проходит через логическую микросхему DX2 элемента управления ЭУ,
благодаря поступлению на второй ее вход сигнала от ЭП. Появляющее-
ся напряжение относительно отрицательного потенциала эмиттера VT
на выходе DX2 (нулевой потенциал) возбуждает ток через эмиттерный
переход транзистора, переключающий его в открытое состояние; вы-
ходное реле KL2 срабатывает и возбуждает соответствующую цепь У В
управления воздушным выключателем линии электропередачи, осуще-
ствляющим БАПВ.
Элемент БАПВ одновременно переключает триггер DS сигналом,
поступающим на его вход записи S, напряжение на выходе которого,
появляющееся с небольшой задержкой t3, убирает, воздействуя на ин-
версный вход DX1 (ЗАПРЕТ), выходной сигнал БАПВ, обеспечивая од-
нократность его действия.
Если выключатель масляный, то его АПВ производится с выдержкой
времени.
При этом цепь БАПВ выводится из действия, как условно показано
на схеме накладкой SX. По сигналу ЭП срабатывает элемент АПВ и
запускает реле выдержки времени срабатывания tc. Сигнал пуска по-
ступает также на один из двух входов микросхем DX1 и DX2. После
срабатывания релейного элемента времени tc его сигнал поступает на
второй вход микросхемы DX1 и разрешает прохождение пускового сиг-
нала на вход S записи триггера DS элемента однократности действия
ЭОД и второй вход микросхемы DX2, которая переключается до нуле-
вого потенциала 0 — положительного относительно отрицательного по-
тенциала эмиттера транзистора VT. Напряжением, возбуждающим ток
эмиттерного перехода, транзистор VT открывается, реле KL2 срабаты-
вает. Его контакт, соединенный последовательно со второй (удержива-
ющей) обмоткой, замыкает цепь возбуждения контактора цепи электро-
магнита включения масляного выключателя.
Выходной сигнал элемента DX 1, как указывалось, поступает на вход
записи S триггера DS, выходное напряжение которого с небольшой за-
314
Автоматика отключений КЗ, повторного и резервного включений
держкой /в производит (через DX2) запрет действия АПВ, обеспечивая
однократное повторное включение выключателя.
Как видно из схемы, пусковой сигнал ЭП через элемент подготовки
к новому действию ПД запрещает запуск (микросхема РХЗ) элемента
ЭВ выдержки времени tB возврата схемы в исходное состояние. После
исчезновения СП и истечения времени tB (не менее 10 с) выходным сиг-
налом ЭВ, проходящим через DX2, благодаря наличию на втором его
входе сигнала от ПД, и поступающим на вход считывания R триггера
DS снимается запрет действия АПВ. Схема в целом приходит в исходное
состояние.
Функциональная схема РПВ-02 (рис. 9.2) не содержит БАПВ, но в ее
состав входят два элемента АПВ1 и АПВ2 двукратного действия РПВ,
элементы ЭОД1, ЭОД2 их однократности и два геркона элемента ЗД
запрета действия АПВ1 и АПВ2 или только АПВ2. Соответственно
реле РПВ-02 содержит более сложный элемент выдержки времени ЭВ,
задерживающий сигналы пуска на время срабатывания Zci, /С2, а сигнал
подготовки к новому действию (возврату) — на время tB.
Логическая часть состоит из трех микросхем РХ1-РХЗ и допол-
нительных элементов координации действия и подготовки к исходному
состоянию: на схеме показан элемент формирования сигнала о снятии
запрета и разрешения возврата СЗРВ элемента АПВ2.
При поступлении первого сигнала пуска СП срабатывает АПВ1 и
запускает ЭВ для отсчета времени Zcl, по истечении которого через ми-
кросхемы DX1, DW1 и DX2 элемента ЭУ дискретный сигнал возбу-
ждает выходное электромагнитное реле KL2, осуществляющее первое
повторное включение выключателя.
Через DX1 переключается триггер элемента однократности дей-
ствия ЭОД1, который запрещает (через DXI) прохождение возможного
второго сигнала пуска через АПВ1. При этом первое срабатывание ЭУ
запоминается элементом СЗРВ (вход S') разрешения действия АПВ2 и
возврата схемы в целом в исходное состояние. На вход S приходит дис-
кретный сигнал от ЭУ, а выходной сигнал СЗРВ поступает на входы
АПВ2 и элемента подготовки к новому действию ПД. При неуспешном
первом АПВ выключателя и отключении его второй раз снова появля-
ется сигнал пуска СП, который проходит через элемент запрета DX2
благодаря отсутствию сигнала на инверсном (верхнем) и наличию сиг-
нала (от СЗРВ) на нижнем его входах, и АПВ2 срабатывает, запуская
315
316
Рис. 9.2. Функциональная схема реле РПВ-02
Глава 9
Автоматика отключений КЗ, повторного и резервного включений
ЭВ с выдержкой времени tC2 и подготавливая сигналом на верхнем входе
схемы DX2 возбуждение ЭУ.
По истечении времени tC2 сигнал ЭВ проходит через микросхе-
му DX2 и поступает (через схему DW1) на второй (верхний) вход DX2,
транзистор VT (см. рис. 9.1) переключается в открытое состояние и вы-
ходное реле KL2 срабатывает. Происходит АПВ выключателя второй
раз. Выходным сигналом микросхемы DX2 переключается ЭОД2, обес-
печивающий однократность действия АПВ2: его логическая единица
поступает на инверсный вход элемента DX2 (ЗАПРЕТ).
При успешном втором АПВ сигнал пуска СП, поступающий на ин-
версный вход микросхемы DX3, исчезает, элемент ПД подготовки РПВ
к новым действиям запускает ЭВ, который сигналом, поступающим по-
сле выдержки времени возврата /в через микросхему DX3 на Я-входы
ЭОД1, ЭОД2, снимает запрет действия АПВ1 и АПВ2. Снятие запре-
та действия АПВ2 дублируется сигналом ЭВ, приходящим на Я-вход
триггера разрешения его действия СЗРВ.
При неуспешном АПВ выключатель отключается защитой третий
раз. Снова появляется сигнал пуска, который, поступая на инверсный
вход микросхемы DX3 запрещает подготовку РПВ к новому действию.
Сигнал пуска не исчезает до квитирования его ключом управления вы-
ключателем (устранения несоответствия положений ключа управления
и выключателя).
9.4. Микросхемный комплекс автоматических устройств
повторного включения
Упрощенная и укрупненная функциональная схема панелей автома-
тики типа ПДЭ 2004, представляющей собой комплекс автоматических
устройств повторного включения линий электропередач с двусторонним
питанием 330 кВ и выше, приведена на рис. 9.3. На схеме условно по-
казаны автоматические устройства А УЗ быстродействующей высокоча-
стотной фильтровой направленной ФН и дифференциально-фазной ДФ,
дистанционной Д защит и токовой направленной ступенчатой защиты
нулевой последовательности ТИП. Они обеспечивают быстрое отключе-
ние линий электропередачи с двух сторон при возникновении на ней КЗ.
317
Глава 9
Рис. 9.3. Функциональная схема панели автоматики ПДЭ 2004
318
Автоматика отключений КЗ, повторного и резервного включений
319
Глава 9
Отключение одной поврежденной фазы (выключателями с пофаз-
ным приводом) производится избирательными измерительными органа-
ми (ИИО) KZa, К Zb, KZC, выполненными в виде направленных измери-
тельных органов сопротивления релейного действия. К ним подводятся
фазные напряжения U_a, U_b, Щ и суммы фазного тока /а, Ц, Ц соот-
ветственно и тока нулевой последовательности к!#. Характеристики их
срабатывания в виде пересекающихся двух окружностей или четырех-
угольников, расположенных в первом квадранте комплексной плоскости
и охватывающих начало координат, обеспечивают четкое срабатывание
ИИО только поврежденных фаз линии при однофазных и двухфазных
КЗ на землю.
При указанных КЗ срабатывают пусковые измерительные органы
тока (ПИОТ) КА и комбинированный орган тока и напряжения KAV
нулевой последовательности с торможением от фазных токов 1ф. Бы-
стродействующий комбинированный орган нулевой последовательно-
сти К AV воздействует на инверсный вход логического элемента DX1 и
запрещает отключение указанными АУЗ всех трех фаз линии.
Пусковой орган тока нулевой последовательности КА через управля-
емые ключи SA вводит в действие ИИО сопротивления KZa, К Zb, KZC,
которые при однофазных КЗ на землю через соответствующий логи-
ческий элемент DX2-DX4 при условии срабатывания одного или всех
указанных АУЗ линий формируют управляющие воздействия на элек-
тромагнит отключения YАТ поврежденной фазы линии с двух сторон.
При двухфазном КЗ на землю срабатывают два ИИО сопротивления
и через соответствующий логический элемент DX5-DX7 обеспечивают
отключение всех трех фаз выключателей двух сторон линии электропе-
редачи.
По цепи несоответствия положения ключа управления SА выключа-
телем и его состояния (реле KQT) после отключения однофазного КЗ
запускается (сигналом пуска СП) автоматическое устройство повторно-
го включения AKS и по цепи однофазного автоматического повторного
включения ОАПВ производится включение выключателя поврежденной
фазы.
Для надежного и быстрого повторного отключения линии при устой-
чивом однофазном КЗ предусматривается кратковременный ввод ИИО
для самостоятельного действия на отключение всех трех фаз линии че-
рез соответствующий логический элемент DX8-DX10 и элементы DW1
320
Автоматика отключений КЗ, повторного и резервного включений
и J9X11. Для этого на третьи (средние на схеме) их входы и второй
вход jDXll через элемент задержки при возврате D1 и элемент ZW2
подводится единичный логический сигнал, например от реле положе-
ния KQT выключателя отключившейся фазы.
После отключения трех фаз линии (при двухфазном КЗ на землю
по указанной цепи через один из элементов DX5-DX7, а при двух- и
трехфазных КЗ непосредственно АУЗ через DX1, на инверсном входе
которого логический нуль, — КAV не срабатывает) производится трех-
фазное повторное включение линии.
При условии срабатывания быстродействующей защиты осущест-
вляется УТАПВ (ускоренное ТАПВ — без выдержки времени): бы-
стродействующее обеих сторон линии по цепи УТАПВ-БК (без кон-
троля) — БТАПВ при наличии сигналов от AKS и ФН ДФ или не-
синхронное ТАПВ — выключателя одной стороны линии с контролем
полного отсутствия напряжения ОН или с контролем наличия симме-
тричного напряжения НСН на другом конце линии по цепи УТАПВ-ОН
или НСН.
Это происходит при отсутствии логической единицы (сигнала) на
инверсном входе указанной цепи, что имеет место при невозбужденных
измерительных органах А’VI напряжения прямой U\ и KV2 напряжения
обратной последовательности U? (условие ОН) или соответственно при
возбужденном KV1, но невозбужденном A'V2 (условие НСН): при нали-
чии на линии симметричного напряжения А'VI возбуждено, на одном
входе £)ЛТ2 единица, а на втором — логический нуль от невозбужден-
ного KV2, поэтому на его выходе логический нуль, разрешающий по
инверсному входу цепи УТАПВ-ОН или НСН включение выключате-
ля линии. Несинхронное ТАПВ запрещается при возбужденных А'VI,
A'V2, т.е. при несимметричном напряжении линии, что может иметь
место при неотключенном несимметричном КЗ.
При отключении КЗ на линии небыстродействующей защитой, на-
пример второй ступенью дистанционной Д или токовой направленной за-
щиты нулевой последовательности ТНП. производится ТАПВ выключа-
теля с одной стороны линии с выдержкой времени (элемент D2) и кон-
тролем отсутствия напряжения на линии по цепи ТАПВ-ОН при логи-
ческом нуле (КV1 невозбуждено) на ее инверсном входе.
После успешного ТАПВ одного конца линии выключатель второго
ее конца включается устройством АКS с контролем синхронизма на-
321
Г лава 9
пряжения на линии и шинах U_m измерительными органами К 01
и К 0'2 угла 6 сдвига фаз между ними и частоты скольжения ш по цепи
ТАПВ-С.
Указанный измерительный орган представляет собой простей-
ший автоматический синхронизатор с постоянным углом опережения
АСПУ [1]. При недопустимом угле сдвига фаз или частоте скольже-
ния логическая единица на его выходе через инверсный вход указанной
цепи запрещает АПВ выключателя. При наступлении условий синхро-
низма — при допустимых угле сдвига фаз 6 и частоте скольжения ш
логический нуль на выходе измерительных реле К01 (контроля § и ws)
и К02 (угла опережения 4ОП) синхронизатора через инверсный вход це-
пи ТАПВ-С разрешает включение выключателя. Измерительные реле
углов сдвига фаз функционируют по времяимпульсному способу сравне-
ния фаз [8, 49].
Микропроцессорная реализация автоматического повторного вклю-
чения осуществляется многофункциональными интегрированными ми-
кропроцессорными автоматическими устройствами противоаварийной
автоматики (см. гл. 13).
9.5. Устройства автоматического включения резерва
Устройства автоматического включения резервных источников пита-
ния и резервного электрооборудования обеспечивают надежность элек-
троснабжения и необходимую производительность собственных нужд
ЭС и повышают безопасность обслуживания АЭС. Обязательной явля-
ется установка устройств АВР на выключателях резервных трансфор-
маторов собственных нужд ЭС, а также резервных маслонасосах и пита-
ющих водой парогенераторы насосах, вентиляторах топок парогенерато-
ров и на другом ответственном оборудовании, обеспечивающем нормаль-
ное функционирование электростанций. Они широко распространены в
системах электроснабжения, прежде всего на секционных выключателях
двухтрансформаторных ПС.
Главное требование к ним — быстродействие, особенно при наличии
подключенных к секциям шин синхронных электродвигателей, выпаде-
ние из синхронизма которых в бестоковую паузу после исчезновения ра-
бочего питания технологически недопустимо. Другим требованием, как
и к устройствам АПВ, является однократность действия; пуск только
322
Автоматика отключений КЗ, повторного и резервного включений
при исчезновении напряжения и, как правило, после отключения рабо-
чего выключателя; ускорение действия АУРЗ. Весьма простые устрой-
ства АВР существенно усложняются из-за требования недействия при
КЗ, после отключения которых напряжение восстанавливается, и, осо-
бенно, из-за указанной безынерционности обеспечения резервным пита-
нием синхронной нагрузки, когда приходится игнорировать указанное
требование отключения рабочего выключателя.
Различные релейно-контактные устройства АВР органически входят
в состав цепей управления выключателями и дополняют их лишь посто-
янно возбужденным электромагнитным реле однократности действия,
развозбуждаемым перед включением резервного выключателя и, благо-
даря задержке по времени его отпускания t3O, обеспечивающим лишь
однократную сборку цепи питания электромагнита включения резерв-
ного выключателя: в случае его немедленного отключения АУРЗ цепь
возможного повторного его включения оказывается уже разомкнутой.
Их схемы в избытке приведены в учебной литературе [1, 2, 43, 50].
Пусковой, а вернее, измерительный орган минимального напряжения
усложняется из-за специфичности цепей подключения первичных изме-
рительных трансформаторов напряжения через защитные предохрани-
тели, большого возможного диапазона остаточных напряжений КЗ и по-
ниженных напряжений в начале самозапуска неотключаемой при исчез-
новении напряжения ответственной затормозившейся в течение бесто-
ковой паузы электродвигательной нагрузки, целесообразности контро-
ля напряжения резервного источника. При наличии синхронных элек-
тродвигателей, поддерживающих напряжение на шинах, в устройства
АВР вводятся и другие измерительные реле: угла сдвига фаз, напра-
вления мощности, направленного сопротивления, снижения частоты и
даже фильтр-реле напряжения и тока прямой или обратной последова-
тельностей [50, 51].
На рис. 9.4 приведена часть типовой схемы устройства АВР
трансформатора собственных нужд тепловой электростанции, а на
рис. 9.5,6 — функциональная схема быстродействующего автомати-
ческого устройства включения секционного резервного выключателя
(БАВР) подстанции (рис. 9.5,а), питающей от двух частей ЭЭС ИП1,
ИП2 мощные синхронные электродвигатели Ml, М2 водонасосных или
нефтеперекачивающих станций, выпадение из синхронизма которых в
цикле АВР приводит к гидравлическим ударам с разрывами маги-
323
Глава 9
Рис. 9-4- Схемы питания собственных нужд электростанции (а), пуско-
вого органа минимального напряжения (6), цепей управления отключе-
нием рабочего (в) и одного из резервных выключателей (г)
324
Автоматика отключений КЗ, повторного и резервного включений
стральных трубопроводов — авариям с экологическими последствия-
ми [51].
Фрагмент цепей управления выключателями, например Q1 рабоче-
го Т1 и Q3 резервного ТЗ (рис. 9.4,а,в,г) трансформаторов собственных
нужд (в предположении включенного выключателя Q5), иллюстрирует
сказанное о релейно-контактной исполнительной части устройства АВР:
электромагнитное реле однократности действия KQCT (реле фиксации
включенного состояния (J1) включено в цепь управления выключателем
рабочего трансформатора (рис. 9.4,в) и возбуждено его вспомогатель-
ным (сигнальным) замыкающим контактом Q1.1; в цепи обмотки кон-
тактора КМЗ управления электромагнитом YАСЗ включения резервно-
го выключателя (рис. 9.4,г) находится размыкающий сигнальный кон-
такт Q 1.2 и замыкающий, размыкающийся с указанной выше задерж-
кой t3.o контакт KQCT, — цепь включения выключателя Q3 резервного
трансформатора подготовлена, но разомкнута контактом Q1.2.
При отключении рабочего выключателя Q1 его сигнальные контак-
ты Q 1.1 и Q 1.2 переключаются — приходят в показанные на схеме состо-
яния; обмотка электромагнитного реле KQCT контактом Q1.1 отсоеди-
няется от шин управления ШУ С но не обесточивается: через диод VD в
ней циркулирует экспоненциально затухающий ток, обусловленный ис-
чезающим магнитным потоком реле, который удерживает его якорь в
притянутом положении в течение времени t3O. На это время, доста-
точное лишь для одного включения резервного выключателя (J3, че-
рез контакт Q1.2 возбуждается контактор КМЗ в цепи электромагни-
та включения YAC3 (рис. 9.4,г). На схемах показаны также обмотка
тока KBS1.1 и контакт KBS3.1 реле предотвращения возможных мно-
гократных включений выключателей Q1 и Q3, в частности от ключей
управления 5А1, SАЗ: показанное точками замкнутое состояние их це-
пей соответствует положениям «отключить» Q1 и «включить» Q3 со-
ответственно.
На рис. 9.4,6 приведены схемы пускового органа минимального
напряжения: минимальные измерительные реле с выдержкой време-
ни A'VTl, KVT2 и фильтр-реле KVZ2 напряжения обратной последова-
тельности, подключенные ко вторичным цепям первичного измеритель-
ного трансформатора напряжения TV 1 (рис. 9.4,а), и цепей контроля на-
пряжения резервного источника максимальным измерительным реле на-
пряжения А'УЗ, подключенным к трансформатору напряжения ТУЗ. Их
325
Глава 9
контакты: замыкающий А’УЗ и размыкающие A'VTl, KVT2 и KVZ2
собирают цепь отключения рабочего выключателя Q1 при исчезнове-
нии напряжения рабочего источника по другим (кроме отключения Q1)
причинам.
Пусковой орган выполнен с двумя реле ЛЛУТ1, KVT2 и дополнен
фильтром-реле А'У^ для предотвращения его излишнего срабатыва-
ния при перегорании плавкой вставки одной из фаз предохранителя F1
в цепи подключения TV 1 — срабатывает одно из них: A’VT1 или KVT2,
или оба при расплавлении вставки фазы В. При этом срабатывает
фильтр-реле напряжения обратной последовательности KVZ2. При ис-
чезновении напряжения все три реле невозбуждены и их контакты за-
мкнуты, реле А'УЗ возбуждено напряжением на выходе TV3 и его кон-
такт А’УЗ также замкнут: как указывалось, производится отключе-
ние Q1 и включение Q3.
Настройка минимальных измерительных реле производится по усло-
вию четкого их возврата в возбужденное состояние под воздействи-
ем наименьшего напряжения на шинах в начале процесса самозапус-
ка затормозившейся за время существования КЗ электродвигательной
нагрузки [1], а напряжение срабатывания максимальных реле А’УЗ и
фильтр-реле KV Z2 — по условиям четкого срабатывания при мини-
мальном напряжении нормального режима и несрабатывания при воз-
можном наибольшем напряжении небаланса на выходе фильтра напря-
жения обратной последовательности соответственно [40].
Выдержки времени реле А'УТ1, KVT2 определяются предотвраще-
нием излишних действий устройств АВР при КЗ, после отключения
которых напряжение рабочего источника восстанавливается, например
на отходящей от шин кабельной линии (точка К на рис. 9.4,а), и вы-
бираются большими максимального времени действия на отключение
АУРЗ [1, 40].
9.6. Быстродействующие автоматические устройства
резервного включения
Пусковой орган БАВР (рис. 9.5,6) значительно сложнее. Он состо-
ит из двух различных комплектов измерительных реле ЛА'1 и АА’2,
действующих через логическую часть ЛЧ одновременно на включение
резервного (секционного) Q3 и отключение соответствующего рабоче-
326
Рис. 9.5. Схема подстанции (а) и функциональная схема (б) быстродействующего микросхемного
устройства АВР
Автоматика отключений КЗ, повторного и резервного включений
Глава 9
го (или Q2) быстродействующих вакуумных выключателей двух-
трансформаторной подстанции (рис. 9.5,а), питающей синхронную на-
грузку от двух разных взаиморезервирующих источников питания ИП1,
ИП2 [51].
Первый комплект АА'1, предназначенный для действия при потере
питания секции, в частности при трехфазном КЗ в цепях рабочего ис-
точника питания (например, К1 на линии Ж1), содержит измеритель-
ные фильтр-реле напряжения A'VZi и направления активной мощно-
сти A’lVZi прямой последовательности и угла K0Z1 сдвига фаз между
напряжениями прямой последовательности на секциях шин ПС. В нор-
мальном режиме напряжение номинальное, сдвиг по фазе отсутствует,
а мощность направлена от источника питания к нагрузке. При ука-
занном трехфазном КЗ или отключении выключателя на передающем
конце линии напряжение снижается или исчезает, изменяется на проти-
воположное направление активной мощности, выдаваемой синхронны-
ми электродвигателями (СД), появляется и увеличивается угол 0 сдви-
га фаз между напряжением на выводах уменьшающих частоту враще-
ния СД — напряжением резервируемой и напряжением резервирующей
секций: фильтр-реле K0Z\ подключены к измерительным трансформа-
торам напряжения TV1, TV2 разных секций. Срабатывают фильтр-
реле A'VZi, или K0Z\^ или оба (логический элемент ZW1) и A'lVZt
(логический элемент j9X1), и через логический элемент ZW2 форми-
руется управляющее рабочим и резервным выключателями воздействие
АВР.
При трехфазном или двухфазном КЗ на отходящей от секции шин
линии (А'2), при которых АВР не требуется, не срабатывает фильтр-ре-
ле А'ЖД1: СД потребляют активную мощность, и БАВР не действует.
Однако по указанной причине оно не запускается и при несимметрич-
ных КЗ в цепях источника питания (А1), при которых АВР необходи-
мо. При этом вступает в действие второй комплект пусковых реле АК2:
фильтр-реле KVZ2 напряжения обратной последовательности и A'AZi
реактивных мощности или тока прямой последовательности (логический
элемент DX2). Действие KV Z2 очевидно, а фильтр-реле KAZi сраба-
тывает, вследствие возрастания в несколько раз генерируемого СД ре-
активного тока.
Рассмотренный пусковой орган излишне срабатывает при КЗ в элек-
трической сети рабочего источника (например, A3), когда АВР не
328
Автоматика отключений КЗ, повторного и резервного включений
Рис. 9.6. Функциональная схема микропроцессорного устройства БАВР
требуется: происходит излишнее его действие. Как указывалось, ре-
ле A'lVZi отказывает при несимметричных КЗ, при которых АВР не-
обходимо. Поэтому в разработанном микропроцессорном БАВР [82]
пусковой измерительный орган состоит из направленного измеритель-
ного фильтр-реле сопротивления KZZ\ и минимального фильтр-реле
тока KAZ\ прямой последовательности (рис. 9.6), подключенных к из-
мерительным трансформаторам напряжения резервируемой секции, на-
пример 7V1, и тока ТА1 (см. рис. 9.5,а). Фильтр-реле KZZ^ чет-
ко срабатывает при любом КЗ в цепях источника питания (А'1) и не
срабатывает при КЗ на линиях, отходящих от резервируемой секции
шин (А’2), поскольку направление мощности прямой последовательно-
сти (реле направленное) сохраняется таким же, как и в нормальном ре-
жиме.
Фильтр-реле KAZ\ запускает БАВР (логический элемент DW) при
потере питания, например вследствие отключения выключателя пере-
дающего конца рабочей линии W1.
329
Глава 9
Однако фильтр-реле К ZZ\ не отличает КЗ в сети рабочего источни-
ка (ГГ 1) от КЗ на питающей линии (А’З): излишнее действие БАВР не
устраняется. Поэтому предусматривается максимальное измерительное
фильтр-реле напряжения A'VZ2i, подключенное к трансформатору на-
пряжения TV3 рабочего трансформатора (см. рис. 9.5,а), которое после
отключения КЗ в сети и восстановления напряжения рабочего источни-
ка ликвидирует излишнее действие БАВР, включая рабочий и отключая
резервный выключатели.
На схеме (рис. 9.6) показано и максимальное фильтр-реле KVZli
напряжения прямой последовательности, подключенное к измеритель-
ному трансформатору напряжения TV‘2 резервирующей секции (см.
рис. 9.5,а), контролирующее наличие на ней напряжения и поэтому дей-
ствующее с измерительным органом через элемент DX логической ча-
сти ЛЧ автоматического устройства.
Микропроцессорный пусковой орган практически безынерционен: на
формирование ортогональных составляющих междуфазных напряже-
ний (цифровые формирователи — ЦФОСН) и разностей фазных то-
ков (ЦФОСТ) затрачивается один-два интервала Т их дискретизации
аналого-цифровым преобразователем, а на формирование из них ортого-
нальных составляющих напряжений (ОСНПП) и токов (ОСТПП) пря-
мой последовательности и на действие измерительных реле — лишь вы-
числительное время микропроцессора, укладывающееся в один интер-
вал дискретизации [8]. При быстродействующих вакуумных выключа-
телях микропроцессорные устройства БАВР значительно эффективнее
его аналоговых прототипов.
Микропроцессорные устройства АВР входят в состав несколь-
ких, разработанных в последнее время, многофункциональных инте-
грированных программных устройств противоаварийной автоматики
(см. гл. 13).
Вопросы для самопроверки
1. Какова роль в противоаварийном управлении ЭЭС, ОЭС и ЕЭС автома-
тических устройств релейной защиты? Каковы принципы их действия7
2 Каковы назначение и эффективность противоаварийной автоматики по-
вторных включений отключаемых электроэнергетических объектов7
330
Автоматика отключений КЗ, повторного и резервного включений
3
5
6
7
8
9
10
11
12
13
14
15
16
В чем состоит противоаварийная роль автоматики включения резервного
электрооборудования?
Какие требования предъявляются к автоматике повторного и резервного
включений7
Почему необходимы временные задержки действия автоматических уст-
ройств повторного и резервного включений, снижающие их эффектив-
ность?
Почему автоматика повторных включений воздушных линий наиболее, а
кабельных — наименее эффективна7
Почему автоматические устройства повторного и резервного включений
должны действовать, как правило, только однократно7
Какие типовые релейно-контактные и микросхемные автоматические
устройства повторного включения известны7
Как выполняется и действует микросхемное автоматическое устройство
противоаварийного трехфазного повторного включения линии с односто-
ронним питанием (см рис 9 I)7
В чем состоят особенности выполнения и действия автоматического уст-
ройства двукратного повторного включения (см рис 9.2)7
Какие виды противоаварийного трехфазного повторного включения вы-
ключателей линии электропередач с двусторонним питанием известны7
В чем их достоинства и недостатки7 При каких условиях и в каком по-
рядке они производят повторное включение выключателей линии7
Каковы достоинства и условия осуществления однофазного автоматиче-
ского повторного включения7
Как функционирует микросхемная автоматика повторного включения,
выпускаемая промышленностью в виде панели ПДЭ2004 (см рис. 9 З)7
Как функционирует автоматическое устройство включения резервного
трансформатора собственных нужд электростанции7
Каковы особенности осуществления быстродействующего автоматиче-
ского устройства противоаварийного включения секционного выключа-
теля подстанции при подключенных к секции шин синхронных электро-
двигателях (см рис. 9 5,а)?
Как выполнен и действует пусковой орган микросхемного быстродейству-
ющего автоматического устройства включения резервного (секционного)
выключателя подстанции с синхронной нагрузкой (см рис 9 5,б)7
331
Глава 9
17 Как функционирует микропроцессорный пусковой орган быстродей-
ствующего устройства резервного включения секционного выключателя
(см. рис 9.6)?
18 Для чего в устройстве АПВ в виде панели ПДЭ 2004 используются бы-
стродействующие измерительные реле тока и комбинированное реле тока
и напряжения нулевой последовательности?
19 Как выполняются избиратели поврежденной фазы в устройстве ОАПВ
(см. рис 9 3)?
20 Какие известны разработанные микропроцессорные автоматические уст-
ройства повторного и резервного включений? В какие многофункцио-
нальные интегрированные программные устройства противоаварийной
автоматики они входят7
332
Глава 10. Автоматика предотвращения
нарушения устойчивости
10.1. Назначение и особенности
При указанных возмущающих воздействиях (см. §8.2) в электро-
энергетической системе возникает интенсивный, опасный для синхрон-
ной параллельной работы электрических станций электромеханический
переходный процесс. Не допустить выпадения из синхронизма элек-
тростанций в ЭЭС или несинхронной работы ЭЭС в их объедине-
нии — ОЭС и обеспечить синхронную устойчивость ЕЭС в целом и есть
назначение противоаварийной автоматики предотвращения нарушения
устойчивости.
Особенностью АПНУ прежде всего являются три фазы ее функцио-
нирования:
• противоаварийное управление по сохранению динамической устой-
чивости в аварийном режиме;
• противоаварийное управление, необходимое для устойчивости пе-
рехода к послеаварийному режиму;
• противоаварийное управление по предотвращению нарушения ста-
тической устойчивости в послеаварийном режиме.
Сохранение динамической устойчивости, как указывалось (см.
рис. 8.1), достигается форсировкой возбуждения синхронных машин ФВ,
быстродействующим кратковременным снижением мощности турбоге-
нераторов (импульсной разгрузкой паровых турбин ИРТ}, электриче-
ским торможением ЭТ или отключением ОГ части гидрогенераторов,
быстродействующими дискретными изменениями параметров: индук-
тивного сопротивления и допустимого угла 6 сдвига фаз эквивалентных
333
Глава 10
ЭДС по концам управляемых (гибких) [53] электропередач переменного
тока, в частности форсировкой продольной компенсации ФПК; дискрет-
ными изменениями мощности электропередач и вставок постоянного то-
ка (на рис. 8.1 не показаны).
Для предотвращения нарушения статической устойчивости в после-
аварийном режиме производятся дискретные изменения настройки ав-
томатических регуляторов возбуждения сильного действия ИНАРВ, по-
вышение пропускной способности линий электропередач изменениями
указанных их параметров; длительные снижения мощности турбогене-
раторов (длительной разгрузкой турбин ДРТ) и отключения гидрогене-
раторов О Г и нагрузки ОН соответственно в избыточной и дефицитной
частях ЭЭС; изменения режимов работы по мощности электропередач и
вставок постоянного тока.
Оказывается, что эффективное противоаварийное управление в ава-
рийном и послеаварийном режимах обеспечивает и устойчивость элек-
тромеханического переходного процесса от аварийного режима к после-
аварийному [39]. Поэтому в практике функционирования АПНУ реа-
лизуются первая и третья фазы противоаварийного автоматического
управления. Следующей важнейшей особенностью функционирования
АПНУ является практическая бесчисленность потенциально возможных
возмущающих воздействий в ЭЭС и соответственно многовариантность
необходимых, различающихся по интенсивности и длительности (дози-
рованных) противоаварийных управляющих воздействий. Она обусло-
вливает и такую специфическую особенность АПНУ, как очень обшир-
ная априорная и рабочая (поступающая в реальном времени) исполь-
зуемая информация о состоянии электроэнергетических управляемых
объектов, режимах работы электрических станций и электроэнергети-
ческих систем и эффективности противоаварийных управляющих воз-
действий.
Поэтому АПНУ постоянно взаимодействует с информационны-
ми автоматическими устройствами непрерывного телеизмерения УТИ
(рис. 10.1) режимных параметров электрических станций и систем и пе-
редачи дискретных сигналов устройствами телесигнализации УТС об
изменениях их электрических схем [1]. К информационной функциональ-
ной части АПНУ относятся и быстродействующие специализированные
технические средства быстродействующей передачи сигналов противо-
аварийной автоматики Б СП А [58].
334
ГТТТ ТВ
АПНУ
Рис. 10.1. Общая функциональная структура автоматики предотвращения нарушения устойчивости
Автоматика предотвращения нарушения устойчивости
Глава 10
Множеством потенциально возможных возмущающих воздействий
обусловливается и такая особенность, как необходимость взаимодей-
ствия с соответствующим числом устройств генерирования дискретных
сигналов о местах возникновения возмущений в ЭЭС — пусковых орга-
нов.
Главная же особенность АПНУ — это дозирование противоаварий-
ных управляющих воздействий. Их набор, интенсивность и длитель-
ность должны соответствовать виду, тяжести и месту возникновения
возмущающего воздействия. Недостаточность или избыточность дози-
рованных противоаварийных управляющих воздействий означает неэф-
фективность функционирования АПНУ или усугубление ее действием
развивающейся аварийной ситуации.
10.2. Общее функциональное построение
Автоматика предотвращения нарушения устойчивости АПНУ
(рис. 10.1) представляется характерными для любой автоматической си-
стемы [8] функциональными частями, основными из которых являются
показанная объединенной с вычислительной и логической измерительная
часть ИВЛЧ, перерабатывающая информацию, получаемую от разви-
той, как указывалось, функциональной части ее сбора и передачи ЧПИ.
Исполнительная часть Ис. Ч по сигналам переработанной ИВЛЧ вход-
ной информации формирует и передает на управляемые объекты проти-
воаварийные управляющие воздействия.
В соответствии с указанными особенностями АПНУ на функцио-
нальной схеме обозначены специфические функциональные элементы
контроля предшествующего режима (КНР), автоматической дозировки
противоаварийных управляющих воздействий АДВ и их автоматиче-
ского запоминания АЗД. В современной АПНУ их функции выполняют
цифровые ЭВМ управляющего вычислительного комплекса УВК, вхо-
дящие в вычислительную часть. Однако элементы АЗД часто терри-
ториально отделены — располагаются в местах реализации управляю-
щих воздействий. Поэтому как отдельные функциональные элементы
они входят в исполнительную часть АПНУ и должны на функциональ-
ной схеме размещаться после БСПА. Не показаны пусковые органы как
источники дискретных сигналов о возникновении возмущающих воздей-
ствий СИ ВВ.
336
Автоматика предотвращения нарушения устойчивости
В соответствии с указанными возмущающими воздействиями (см.
§8.2) на электроэнергетическую систему АПНУ можно представить в
виде различных автоматических устройств (АУ), объединяемых по ре-
комендации [37, 39, 59] в следующие группы, измерительно-вычисли-
тельные или измерительно-логические части которых соответственно
обозначены на рис. 10.1:
• разгрузки электропередачи при отключении линий РОЛ или
трансформаторов РОТ\
• разгрузки при опасности нарушения динамической устойчивости
электропередачи РДУ\
• разгрузки при коротких замыканиях РКЗ;
• разгрузки и повышения пропускной способности при опасности на-
рушения статической устойчивости электропередачи РПСУ-,
• разгрузки при отключении мощных синхронных генераторов РОГ.
В общем случае их действие координируется управляющим вычисли-
тельным комплексом УВК, в который поступают сигналы информации
о режимных параметрах СИ РП и о схеме электроэнергетической систе-
мы СИ СЭС по УТИ и УТС и сигналы о возмущающих воздействиях
СИ В В по каналам БСПА.
Указанные автоматические устройства выдают соответствующие
сигналы о дозированных противоаварийных управляющих воздействи-
ях, показанных на рис. 10.1 в составе исполнительной части Ис.Ч. ко-
торые передаются на управляемые электроэнергетические объекты по
каналам БСПА.
Простые автоматические устройства функционируют как программ-
ные по возмущающим воздействиям — образуют с управляемыми объ-
ектами автоматическую систему с разомкнутой цепью воздействий (см.
рис. В.2,а,6). Их ИВЛЧ содержит только измерительные органы и логи-
ческие элементы автоматической дозировки управляющих воздействий.
Более сложные автоматические устройства используют, как указы-
валось, и рабочую информацию о предшествующем возмущающему воз-
действию режиме, о скачкообразных изменениях и скоростях изменений
активных мощностей при возмущающем воздействии и о режимных па-
раметрах, устанавливающихся в процессе и после противоаварийных
управляющих воздействий. Они функционируют по замкнутой или ком-
бинированной схемам (см. рис. В.2,в,г) автоматического управления.
337
Глава 10
Автоматика предотвращения нарушения устойчивости в началь-
ный период своего развития выполнялась в виде местных релейно-
контактных автоматических устройств — была децентрализованной.
Современная АПНУ является централизованной с универсальной ЭВМ
на ДП (см. рис. 8.1) или иерархической, функционирующей на основе
универсальных мини- и микроЭВМ на всех уровнях, рассредоточенной
по ЕЭС в целом.
К децентрализованным АПНУ относятся комплексы автоматических
устройств, в которых противоаварийные управляющие воздействия и их
дозировка формируются на тех электроэнергетических объектах, на ко-
торых устанавливается основная часть пусковых органов, выявляющих
возмущающие воздействия, и измерительных органов контроля тяжести
электрических режимов. Такими являются АПНУ мощной электростан-
ции или протяженной, состоящей из нескольких последовательно соеди-
ненных участков линии электропередачи.
Функциональная схема АПНУ, например одной из Волжских ГЭС
или Рязанской ГРЭС [39], состоит из пусковых органов ПОГ, ПОЛ, фик-
сирующих отключения выключателей синхронных генераторов и отхо-
дящих от шин электростанции линий электропередачи и ПО ПС, рас-
положенных на приемных подстанциях (рис. 10.2). Большинство из-
мерительных органов также расположены на электрической станции:
показаны измерительные органы контроля мощностей линий ИОМЛ и
суммарной мощности станции ИОМЭС. Часть измерительных органов
мощности находится на приемных подстанциях: на схеме показаны пе-
редатчики ПД и приемники ПМ каналов передачи информации.
Устройства АДВ, АЗД и исполнительная часть АПНУ расположены
на электрической станции, управляющие воздействия оказываются на
синхронные генераторы и турбины: в качестве примеров показаны воз-
действия на электрическое торможение ЭТ и быстродействующую за-
грузку БЗГ гидрогенераторов, импульсную ИРТ или длительную ДРТ
разгрузку паровых турбин.
Комплекс АПНУ электропередачи, например, напряжением 500 кВ
Центр - Средняя Волга - Урал [63], содержит ПОЗ, фиксирующие от-
ключения выключателей участков линий и, в частности двухступенча-
тые, измерительные органы реверсивных перетоков мощностей и их из-
менений И0М1, И0М2 (рис. 10.3). Вырабатывание противоаварийных
управляющих воздействий в виде, например, двух ступеней отключе-
338
Автоматика предотвращения нарушения устойчивости
ния генераторов ОГ на передающем и отключения нагрузки ОН на
приемном концах электропередачи и их дозировка АДВ производится
на электрических станциях, связываемых линией электропередачи. Эф-
фективность функционирования АПНУ электропередачи обеспечивает-
ся системой передачи сигналов противоаварийной автоматики БСПА в
виде, в частности, 14-командной аппаратуры передачи сигналов проти-
воаварийной автоматики АНКА-АВПА [58].
Централизованные комплексы АПНУ являются общесистемными —
управляют многими электростанциями, подстанциями и линиями элек-
тропередачи ЭЭС и ОЭС. Они представляют собой иерархические систе-
мы межмашинного обмена информацией рассредоточенными цифровыми
ЭВМ, расположенными на электростанциях и диспетчерских пунктах
ДП (см. рис. 8.1) ЭЭС и ОЭС. Управляющий вычислительный комплекс
центрального диспетчерского пункта ЕЭС координирует их функциони-
рование.
Цифровые ЭВМ циклически (каждые несколько секунд) производят
расчеты динамической и статической устойчивости при всех фиксиру-
емых возмущающих воздействиях с учетом параметров предшествую-
щих каждому циклу расчетов нормальных режимов работы и электри-
ческих схем ЭЭС. Противоаварийные управляющие воздействия выра-
батываются после каждого цикла расчетов и фиксируются устройства-
ми АЗД. Их реализация производится немедленно и выборочно по дис-
кретным сигналам пусковых органов, фиксирующих возмущающие воз-
действия. Таким образом достигается максимально возможное быстро-
действие АПНУ. Цифровые ЭВМ различных уровней иерархии работа-
ют в режиме параллельного счета, используют и рабочую информацию
о протекании переходного процесса и последствиях противоаварийно-
го управления и корректируют при необходимости дозировку управля-
ющих противоаварийных воздействий, особенно необходимых для пре-
дотвращения нарушения статической устойчивости в послеаварийных
режимах.
Быстродействующие микроЭВМ позволяют рассчитывать дозиро-
ванные противоаварийные воздействия и после поступления сигнала от
пускового органа по рабочей информации о возмущающем воздействии
и начальной стадии развития аварийного режима с учетом предшеству-
ющего нормального режима и электрических схем нормального и после-
аварийного режимов, что повышает степень соответствия дозирован-
339
Глава 10
Рис. 10.2. Функциональная схема автоматики предотвращения наруше-
ния устойчивости ГРЭС или ГЭС
ных противоаварийных управляющих воздействий тяжести возмущаю-
щего воздействия, а следовательно, и эффективность функционирова-
ния АПНУ.
Такой является, например, двухуровневая АПНУ объединенной элек-
троэнергетической системы Средней Волги. На рис. 10.4 приведена взя-
340
Автоматика предотвращения нарушения устойчивости
на ТЭС
тая из [60] схема ее построения. Верхний ее уровень реализован на мини-
и микроЭВМ, установленных в объединенном диспетчерском управле-
нии (ОДУ) Средней Волги. На нижнем (станционном) уровне примене-
ны микропроцессорные панели противоаварийного управления мощно-
стью типа ПАА (на схеме обозначены как АДВ) [57]. Связь между ни-
341
342
Рис. 10.3. Функциональная схема АПНУ электропередачи
Глава 10
343
Рис. 10-4- Структурная схема иерархической системы противоаварийного управления ОЭС Средней
Волги
Автоматика предотвращения нарушения устойчивости
Глава 10
ми осуществляется по каналам межмашинного обмена информацией М.
В [37, 39, 61, 62] приведены сведения по более сложным иерархическим
АПНУ. Создается [37, 39] многоуровневая автоматика предотвращения
нарушения устойчивости ЕЭС.
10.3. Автоматическое дозирование противоаварийных
управляющих воздействий
Эффективность функционирования АПНУ определяется соответ-
ствием противоаварийных управляющих воздействий разновидностям
и тяжести возмущающих воздействий, угрожающих нарушением син-
хронной устойчивости электроэнергетических систем. Они вырабаты-
ваются (дозируются) в соответствии с обширной априорной и рабочей
информацией.
Для предотвращения нарушения динамической устойчивости в ава-
рийном или статической в послеаварийных режимах производятся не-
обходимые соответственно кратковременные и длительные повышения
пропускной способности электропередач или их разгрузка — снижение
передаваемой мощности.
Необходимые мощность разгрузки АРр или уменьшение эквивалент-
ного индуктивного сопротивления электропередачи ААЭП определяются
по ее характеристикам мощности. Наиболее просто по применяемой на
практике методике [37, 63] определяется снижение передаваемой мощно-
сти, необходимое для предотвращения нарушения статической устойчи-
вости в послеаварийном режиме. Например, при двух возможных воз-
мущениях, обусловленных отключениями одного из двух разной длины
участков линии электропередачи Ж1 или W2 (см. рис. 8.1), необходимо
различное снижение вырабатываемой ГЭС мощности.
В соответствии с характеристиками мощности автоматически регу-
лируемой электропередачи в нормальном 1 (рис. 10.5) и послеаварийных
режимах 2 (отключение выключателей Ql, Q2 короткого участка PEI)
и более тяжелом 3 (отключение выключателей Q3, Q4 длинного участ-
ка W2) необходимо снижение АРгр > APip генерируемой ГЭС мощности
для разгрузки линии электропередачи.
Снижение мощностей АРр вычисляется как разность мощностей, пе-
редаваемой по линии в исходном (доаварийном) режиме Рл и и допусти-
мой в послеаварийном режиме Рплл, ограничиваемой минимальным ко-
344
Автоматика предотвращения нарушения устойчивости
Рис. 10.5. Характеристики передаваемой мощности автоматически ре-
гулируемой электропередачи в нормальном (1) и послеаварийных (2, 3)
режимах разной тяжести и необходимой для сохранения статической
устойчивости ее разгрузки
эффициентом запаса мощности, необходимым для сохранения статиче-
ской устойчивости, КЗЛ1а, = 1,08. С учетом нерегулярных колебаний
передаваемой мощности АРН » 0,1Рл.и:
АРр = Рп и + АРН — Рпа.д =
_ 1 1 Р -Рпр.па ~ ОДРпр.па _ 1 л р 0,9Рпр.па п
-iJPn.H AVna -1,1Рл.и 1/)8 , (Ю.1)
где Рпр.па — предельная мощность электропередачи в послеаварийном
режиме, определяется характеристикой мощности 2 или 3.
Наибольшая разгрузка необходима при наибольшей допусти-
мой Рнб н.д передаваемой в нормальном режиме мощности, ограничивае-
мой предельной мощностью электропередачи Рпр н и коэффициентом за-
паса мощности, необходимым для сохранения статической устойчивости
в нормальном режиме Кзв = 1,2:
др _р р _ -Рпр.н - АРн Рпр.па - ОДРпрпа
^Гр.нб — * нб.н.д ~ Глад — т, ~
Л3.н ЛЗПа
345
Глава 10
При обычно пропорционально-дифференциальном (сильного дей-
ствия) автоматическом регулировании возбуждения синхронных гене-
раторов ЭС, обеспечивающем в любом режиме Ur = const и полную
компенсацию внутреннего сопротивления генератора (Хг = 0)
р _UrUL. р fl03)
1 пр.н — y ’ 1 пр па — у ’
-^эп.н -^эп.па
где Хэйт Хэппа — сопротивления трансформаторов Хт блоков
генератор-трансформатор и линии Хл электропередачи в нормальном
и послеаварийном режимах соответственно.
В частности, при дискретном увеличении емкостного сопротивле-
ния ХХс противоаварийным управляющим воздействием в виде ФПК
(см. рис. 8.1) и при сопротивлении ЛИНИИ ХЛпа > Хлн
хэп.па = Хт + Хл па - ХСа - ХХс , (10.4)
где Хен — сопротивление продольной компенсации в нормальном ре-
жиме.
Дозирование наиболее характерных и эффективных управляющих
воздействий для предотвращения нарушения динамической устойчиво-
сти, обеспечивающих электрическое торможение гидрогенераторов и
импульсную кратковременную разгрузку паровых турбин состоит в фор-
мировании уровня, длительности и формы управляющего импульса Аа
прямоугольной формы, производящего электрическое торможение, и экс-
поненциального снижения интенсивности импульса Ua разгрузки турби-
ны (рис. 10.6,а). За счет быстрого уменьшения мощности турбины Рт
(рис. 10.6,6^) увеличивается площадка ST торможения ротора турбоге-
нератора (рис. 10.6,е): при Рт — const площадка ST, ограниченная ха-
рактеристикой 1 мощности, передаваемой в исходном (предаварийном)
режиме, может оказаться меньше площадки ускорения Sy, обусловлен-
ного снижением характеристики 2 передаваемой мощности при КЗ в
электроэнергетической системе.
Ротор турбогенератора, обладающий избыточной кинетической энер-
гией, проворачивается, и турбогенератор выпадает из синхронизма:
угол S увеличивается до 2тг и периодически изменяется (0 < S < 2тг)
(рис. 10.6,г).
При быстром снижении мощности турбины Рт1 и тем более Рт2 пло-
щадка торможения увеличивается (.S'T2 > 5Ti > Sy), ротор после дости-
жения углов <У1Нб > <^2нб после нескольких периодов затухающих качаний
346
Глава 10
(см. графики <^i и 82 на рис. 10.6,г) возвращается в исходное положение
с углом <УН, динамическая устойчивость не нарушается.
Скорость и степень снижения мощности PTi, Рт2 (рис. 10.6,5) зави-
сят от интенсивности Ри и длительности Ти импульсного управляющего
воздействия , Ри2, а процесс ее восстановления — от постоянной вре-
мени экспоненциального затухания воздействия т1? т2 (рис. 10.6,а).
Вычисления площадок ускорения и торможения и зависимостей про-
цессов снижения и восстановления мощности турбины в соответствии с
теплотехническими и механическими ее параметрами, определение не-
обходимых значений Аи, Ти и ти и составляют объем и содержание рас-
четов по дозированию управляющего воздействия на импульсную раз-
грузку турбогенератора.
В общем случае формирование дозированных управляющих воздей-
ствий ЭВМ централизованных и иерархических систем АПНУ предста-
вляет собой сложную задачу нелинейного программирования, решаемую
на основе принципа многофакторного планирования эксперимента [62,
64, 65]. Необходимое г-противоаварийное управляющее воздействие на
изменение мощности при j-возмущающем воздействии вычисля-
ется [57] как полиномиальная функция /г-значений исходной (в предше-
ствующем возмущающему воздействию) мощности и /-состояний схемы
APV=COV +
fc=i k=i
(10.5)
где С — весовые коэффициенты, рассчитываемые для каждого из воз-
можных возмущающих воздействий и послеаварийных режимов.
Алгоритм (10.5) является общим, обеспечивающим эффективное
функционирование АДВ иерархических систем АПНУ и вычисление про-
тивоаварийных управляющих воздействий, необходимых как для со-
хранения статической устойчивости в послеаварийных, так и для пре-
дотвращения нарушения динамической устойчивости в аварийных ре-
жимах.
Разработанные [37, 63] методы расчетов противоаварийных управля-
ющих воздействий обеспечивают достижение максимально возможной
степени динамической устойчивости и затухания электромеханического
переходного процесса.
348
Автоматика предотвращения нарушения устойчивости
10.4. Типовая микросхемная автоматика
Релейно-контактные устройства контроля предшествующего (исход-
ного) режима, автоматического дозирования и запоминания дозирован-
ных противоаварийных управляющих воздействий применяются в де-
централизованных и, как резервные, в централизованных и иерархи-
ческих системах АПНУ. Они достаточно подробно описаны в учебной
литературе [2,38,39].
Промышленностью (ЧЭАЗ) выпускались типовые наборы панелей
релейно-контактной противоаварийной автоматики типов ПДЭ2101-
ПДЭ2103, ШДЭ2601 и выпускаются в микросхемном исполнении шка-
фы противоаварийной автоматики типов ШП 2701-ШП2703 [54, 55, 56]
и их усовершенствованные серии ШЭ 2708 и ШЭ 2707, обеспечивающие
контроль режимных параметров, а именно многоступенчатое аналого-
дискретное преобразование (фиксацию) мощностей исходных (доаварий-
ных) режимов, изменений и скорости изменений возрастающей мощно-
сти (ее набросов) и снижений мощности (сбросов) при КЗ и отключениях
генерирующих источников и изменений угла S сдвига фаз между напря-
жениями по концам электропередачи.
Из них только первое аналога-дискретное преобразование (АДП) про-
изводится до возникновения возмущающего воздействия. Ступенчатое
фиксирование возрастания мощности (статической перегрузки) и скоро-
сти ее изменения (динамической перегрузки), как и АДП сброса мощ-
ности и угла S электропередачи, возможно только в реальном времени
электромагнитных и электромеханических переходных процессов. По-
этому очевидна необходимость их быстродействия. Однако речь идет
лишь о переходных процессах, вызванных КЗ и отключениями генери-
рующих и передающих энергию электроэнергетических объектов. При
затухающих колебательных электромеханических процессах изменений
мощностей (синхронных качаниях) и периодических изменениях мощно-
сти в асинхронном режиме (см. § 11.2) работы электрической станции
АПНУ не должна функционировать. Необходимость отстройки от ука-
занных, не угрожающих нарушением или уже вызвавших нарушение
устойчивости процессов обусловливает инерционность действия АДП
мощностей и применения специальных пусковых органов при КЗ.
Панель ШП2702 является, по существу, расширением ШП2701 —
шкафа фиксации мощностей исходного режима, а панель ШЭ2708 их
349
Глава 10
усовершенствованной разработкой. Поэтому на рис. 10.7 приведена
упрощенная общая для указанных панелей функциональная схема изме-
рительного аналого-дискретного преобразования (фиксации) мощности
исходного (нормального, утяжеленного), текущей мощности послеава-
рийного (статической перегрузки) режимов, ее нарастания и скорости
изменения в аварийном режиме динамической перегрузки.
Измерительный АДП автоматики предотвращения нарушения устой-
чивости запоминает мощность исходного режима Ри, определяет ее скач-
кообразное возрастание ДР, скорость изменения мощности dP/dt и те-
кущую мощность Рт.
Поэтому АДП содержит измерительный преобразователь активной
мощности трехфазного симметричного тока, состоящий из трех одно-
фазных измерительных преобразователей мощности [8] J7P71-PW3, под-
ключенных к соответствующим фазным напряжениям Да, Р(>, Рс, и то-
кам /д, Ц, 1с через вторичные измерительные трансформаторы напря-
жения TLV1-TLV3 и тока TLA1TLA3, и сумматор AW1 на интеграль-
ном операционном усилителе А1. Поскольку речь идет о симметричных
режимах работы электропередачи, активная мощность в которых равна
мгновенной мощности, выходного частотного фильтра измерительный
преобразователь не содержит. Его выходной сигнал представляет собой
чистое (при синусоидальных напряжениях и токах) постоянное напряже-
ние, значение которого пропорционально текущей мощности Рт, а знак
соответствует ее направлению.
Предусмотрена возможность использования и сигналов телеизмеря-
емой мощности Рти, передаваемых в цифровом виде по одному из двух
взаимно резервированных устройств телеизмерения ТИА, ТИ2 и пре-
образуемых цифро-аналоговыми преобразователями ЦАП\ или ЦАП2
в пропорциональное напряжение необходимого уровня и знака на вы-
ходе инвертирующего усилителя на операционном усилителе А2. Вы-
ходное напряжение сумматора AW2 отображает суммарную текущую
мощность РТЕ в исходном режиме.
Значения мощности исходного режима Рт% фиксируются максималь-
ными измерительными реле постоянного напряжения с выдержками вре-
мени срабатывания и возврата, например, KVT1, KVT2 (всего восемь
реле) и запоминаются электромагнитными реле с самоудерживанием
KLT1, KLT2. Максимальное реле, в частности KVT1, состоит из соб-
ственно измерительного реле напряжения KV и элемента DT указанных
350
Автоматика предотвращения нарушения устойчивости
выдержек времени. Измерительное реле KV содержит элемент сравне-
ния (компаратор) ЕА напряжения, пропорционального мощности Рт% в
исходном режиме, с постоянным заданным напряжением переключаемо-
го (контактами К дистанционно управляемых реле — на схеме не по-
казаны) делителя Ra напряжения Еп источника питания. Компаратор
выполнен на усилителе А4 в дифференциальном включении без обрат-
ных связей, работающем в режиме переключения, близком, благодаря
высокому коэффициенту усиления, к идеальному релейному режиму с
коэффициентом отпускания Ко — 1 [8]. Поэтому реле KV содержит
элемент задержек действия БТД и отпускания DTO, которые совмест-
но с элементом логического перемножения их единичных сигналов DX1
обеспечивают его четкие срабатывание и возврат (предотвращают ви-
брацию реле) при наличии в напряжении на выходе AW2 гармониче-
ской составляющей удвоенной промышленной частоты (помехи), появля-
ющейся в несимметричном режиме электропередачи (несимметричном
коротком замыкании, неполнофазном кратковременном — при однофаз-
ном отключении и автоматическом повторном включении, или длитель-
ном режиме). При несимметрип активная мощность трехфазного тока
не равна его мгновенной мощности, поэтому в напряжениях на выходах
сумматоров AW1 и AW2 и появляется указанная помеха [8].
По воздействиям ее положительной (совпадающей по знаку с посто-
янной составляющей напряжения на выходе АЗ) полуволны максималь-
ное измерительное реле XV могло бы кратковременно сработать при
меньшей, чем установленная, мощности. Однако это не происходит,
благодаря задержке действия Тд, равной или несколько превышающей
длительность половины периода изменения гармонической составляю-
щей (четверти периода промышленной частоты Тп). Под воздействием
ее отрицательной полуволны реле могло бы вернуться в исходное состо-
яние при мощности, большей установленной мощности срабатывания.
Это предотвращается задержкой отпускания То на указанное время.
Прохождение сигнала срабатывания реле на выход элемента DX1
обеспечивается только при наличии логических единиц на двух его вхо-
дах, что кратковременно получается, если уже закончилась задержка Тд,
но еще не закончилась задержка То. Появляющаяся на выходе элемен-
та DX1 логическая единица фиксируется путем ее передачи по цепи
обратной связи на вход ИЛИ элемента задержки действия DTa, чем и
обеспечивается четкое и устойчивое срабатывание реле XV.
351
Глава 10
Рис. 10.7. Схема измерительного АДП фиксации перегрузки линий элек-
тропередачи
352
Автоматика предотвращения нарушения устойчивости
353
Глава 10
Аналогично выполнен элемент выдержек времени срабатывания Тс
и возврата Тв реле, состоящий из элементов DTC, DTB и DX2. Они не-
обходимы для указанной отстройки измерительных реле KVT1, KVT2
от периодических изменений мощности электропередачи при синхрон-
ных качаниях, интенсивность которых неопасна для устойчивости элек-
тропередачи, или при асинхронном режиме. Элемент DX2 имеет тре-
тий — инверсный вход для выполнения логической операции ЗАПРЕТ
дискретным потенциальным сигналом от автоматического устройства
АУК контроля исправности измерительного АДП (его автоматической
диагностики).
Для определения прироста мощности ДР, вследствие возмущающего
воздействия, необходимо запоминание значения исходной мощности Ри
непосредственно перед ее изменением. Кратковременное запоминание
осуществляется инерционным с постоянной времени т — RC = 10 с
элементом — фильтром нижних частот первого порядка ZF на опера-
ционном усилителе А5. На выходе вычитателя АН1 (усилитель Аб)
сигналов о мощностях PTs и Ри получается сигнал о приращении мощ-
ности ДР.
Сигнал о скорости изменения мощности dXP/dt формируется диф-
ференцирующим сумматором ADW на операционном усилителе 47, вы-
ходной сигнал которого отображает уровень и интенсивность измене-
ния мощности Ри + dXP/dt после возникновения возмущающего воздей-
ствия. Он характеризует динамическую перегрузку электропередачи и
ступенчато фиксируется несколькими, в частности тремя, быстродей-
ствующими максимальными измерительными реле напряжения AV1-
KV3, подключенными к запоминающим реле КЬТЗ-КЬТЪ через эле-
менты РХЗ-РХ5, запрещающими запоминание их срабатывания при
указанных синхронных качаниях электропередачи, при которых проти-
воаварийное управление не требуется. Операция ЗАПРЕТ выполняется
логической единицей, формируемой при наличии периодического про-
цесса снижения -ДР и приращения +ДР мощности, характерного для
синхронных качаний.
Сигнал о снижении мощности -ДР получается на выходе вычита-
теля АН2. Необходимые уровни ±ДР фиксируются измерительными
реле KV4 и KV5 и запоминаются на некоторое время элементами памя-
ти TD1, TD2. При более длительном сигнале о приращении мощности
ДР от реле KV5 запрещающая единица с инверсных входов элементов
354
Автоматика предотвращения нарушения устойчивости
DX3-DX5 снимается, и реле КLT3-KLT5 фиксируют динамическую
перегрузку электропередачи.
Шкаф противоаварийной автоматики ШП2703, фиксирующий сброс
активной мощности при КЗ и его тяжесть, содержит аналогичные, но
минимальные измерительные АДП (трехступенчатые) сигналов измери-
тельных преобразователей активной мощности и действующего значе-
ния напряжения прямой последовательности и характеризуется особен-
ностью, обусловленной необходимостью его быстродействия. Он произ-
водит дискретизацию сигналов о быстро снижающихся активной мощ-
ности и напряжении прямой последовательности при КЗ: временные
задержки формирования сигналов измерительного АДП недопустимы.
Поэтому он снабжен пусковым органом, разрешающим только при КЗ
действие АДП на короткое время, достаточное для формирования дис-
кретных сигналов о сбросе активной мощности, и элементом запрета
действия при повреждениях в цепях первичных измерительных транс-
форматоров напряжения.
В релейно-контактных панелях ПДЭ 2104 для этой цели использова-
лось устройство блокировки дистанционной релейной защиты при кача-
ниях [40], разрешающее их действие только при КЗ. Действие устрой-
ства блокировки основано на появлении напряжений и токов обратной
последовательности (при трехфазных КЗ кратковременно в начальный
момент времени их возникновения).
В последующем было разработано и применено в панели ШП 2703 [56]
специальное устройство пуска в действие измерительного АДП фикса-
ции сброса мощности, более четко отличающее аварийный режим КЗ
от синхронных качаний, асинхронного хода и отключений нагрузки и
приспособленное к условиям функционирования автоматики предотвра-
щения нарушения устойчивости. Для его действия использовано скачко-
образное снижение при КЗ напряжения прямой последовательности. По-
этому оно содержит типовой, используемый в релейной защите [40] ана-
логовый фильтр напряжения прямой последовательности ZV1 (рис. 10.8)
и активные [8] выпрямитель VS с входным частотным фильтром ZF1
первого порядка и выходной частотный фильтр ZF2, состоящий из двух
фильтров второго порядка, соединенных последовательно, выделяющий
постоянную составляющую 77qi выпрямленного напряжения прямой по-
следовательности. Напряжение До1 поступает через DW1, DW2 (ИЛИ)
на входы активных измерительных реле КVI, фиксирующих дискретное
355
356
Рис. 10.8. Функциональная схема устройства разрешения действия измерительного органа фиксации
снижения мощности и напряжения при КЗ
Глава 10
Автоматика предотвращения нарушения устойчивости
изменение XU}, и минимального реле KV2 напряжения прямой после-
довательности. Они выполнены на тех же функциональных элементах,
что и реле фиксации скачкообразного снижения или повышения мощ-
ности [инерционный элемент — апериодический частотный фильтр ZF
(см. рис. 10.7) с очень медленно (г = RC = 10 с) затухающим на-
пряжением на его выходе, соответствующим нормальному режиму, и
элемент его сравнения — вычитатель АН1, с напряжением прямой по-
следовательности в аварийном режиме, снизившимся на ДС/i (рис. 10.8)]
и реле KV.
Логическая часть устройства разрешает действовать измерительно-
му органу фиксации изменений мощности (см. рис. 10.7) в течение огра-
ниченного времени только при КЗ. Разрешение обеспечивается прохо-
ждением двух дискретных — импульсного ДС/щ от KV1 (рис. 10.8) и
потенциального Ui от KV2 — сигналов (логических единиц) через эле-
мент DX1(H) и запоминанием (через DW3) логической единицы на его
выходе элементом временной памяти TDA с выходным дискретным сиг-
налом U-рд (разрешение действия). Сигнал разрешения проходит через
элемент DX (ЗАПРЕТ) при отсутствии на его инверсном входе запре-
щающего единичного сигнала. Он появляется при неисправности це-
пей напряжения (обычно перегорании плавких вставок предохранителей
первичных измерительных трансформаторов) — сигнал контроля 1/к.н
от срабатывающего реле минимального напряжения AV3 (на схеме не
показано), запрещающий действие измерительных АДП фиксации мощ-
ности и напряжения прямой последовательности. Сигнал появляется
(элемент ZW4) и с выхода элемента выдержки времени DT1, если на
выходе DX1 оказывается потенциальный единичный сигнал длитель-
ностью более 2 с, что свидетельствует о неисправности измерительной
части устройства (реле KV1, KV2).
Логические элементы запоминания TD2 кратковременного сигна-
ла Д/71и о дискретном снижении XUi напряжения прямой последова-
тельности, совпадения DX2 сигналов XIj\ и Di, выдержки времени DT2
и запоминания TD3 служат для фиксирования затяжного КЗ: срабаты-
вает геркон KL, подключенный к TD3 через усилитель А, запрещает
возбуждение выходных цепей шкафов и сигнализирует о возможной не-
исправности измерительной части (AVI, AV2). При этом по сигна-
лу Дк.и, создающему условия срабатывания реле AVI, AV2 произво-
дится контроль их исправности.
357
Глава 10
Необходимая надежность функционирования микросхемных панелей
противоаварийной автоматики в целом достигается автоматической их
диагностикой: производится периодическая (ежесуточная) проверка их
действия тестовыми сигналами от генератора. При этом разреше-
ние действия измерительной части панели ШП2703, имеющей рассмо-
тренное устройство (рис. 10.8), выдается на время запоминания эле-
ментом TD1 импульсного сигнала автоматического контроля UK.a (че-
рез DW3). Через DW5 он обусловливает срабатывание реле KL.
Таким образом, рассмотренный комплект шкафов противоаварий-
ной автоматики обеспечивает ступенчатую фиксацию активной мощно-
сти исходного режима, возрастания и скорости изменения мощности при
статической и динамической перегрузках и снижение активной мощно-
сти при коротких замыканиях и не реагирует на изменения мощностей в
режимах, не опасных для нарушения динамической и статической устой-
чивости параллельной работы электрических станций.
При этом короткое замыкание фиксируется по быстрому дискретно-
му изменению — срабатыванию реле КVI (рис. 10.8) и глубокому сни-
жению — срабатыванию реле KV2 напряжения прямой последователь-
ности. При синхронных качаниях снижение напряжения непрерывное
и медленное — срабатывает только A’V2, а при отключениях нагруз-
ки, при которых возможно некоторое дискретное изменение напряжения
прямой последовательности (возможное срабатывание КVI), не проис-
ходит его уменьшение до напряжения срабатывания A’V2.
Панель противоаварийной автоматики ШДЭ2601 и ее усовершен-
ствованная модификация ШЭ 2707 фиксации углов сдвига фаз и сколь-
жения приспособлены, главным образом, для автоматики ликвидации
асинхронного режима и поэтому рассматриваются ниже (см. § 11.4).
10.5. Микропроцессорная автоматика
Как указывалось, в централизованных и иерархических комплексах
АПНУ цифровые универсальные мини- и микроЭВМ циклически (через
несколько десятков секунд) производят расчеты динамической и стати-
ческой устойчивости для всех возможных возмущающих воздействий с
учетом их тяжести и параметров электрических режимов работы элек-
троэнергетических систем (исходного нормального и послеаварийного) и
протекания электромеханического переходного процесса. На основе рас-
358
Автоматика предотвращения нарушения устойчивости
четов определяют набор и интенсивности противоаварийных управля-
ющих воздействий и их запоминание до окончания следующего цикла
расчетов.
Применение цифровых ЭВМ для автоматического дозирования про-
тивоаварийных управляющих воздействий обеспечивает необходимое
соответствие их интенсивности возмущающим воздействиям и взаим-
ную координацию между устройствами АДВ иерархических комплексов
АПНУ электроэнергетических систем, их объединений и ЕЭС в целом
и, следовательно, повышает эффективность действия ПА.
Проблемой осуществления АДВ и АЗД на ЭВМ является необходи-
мая надежность действия, которая обеспечивается взаимным резервиро-
ванием ЭВМ. При этом используются три ЭВМ, работающие синхронно
по одним программам. Обязательным для исполнения является наличие
и совпадение результатов расчетов не менее двух из трех ЭВМ.
Алгоритм автоматической дозировки противоаварийных управляю-
щих воздействий содержит три комплекса основных функциональных
программ:
• обработки информации и предварительных расчетов условий со-
хранения синхронной устойчивости параллельной работы;
• собственно программы расчетов дозированных управляющих воз-
действий для каждого из пусковых органов;
• вывода и передачи дозированных воздействий в устройство АЗД.
Предварительные расчеты являются общими для всех пусковых ор-
ганов и служат для определения параметров, необходимых для выраба-
тывания дозированных управляющих воздействий.
Расчеты дозирования управляющих воздействий производятся для
следующих стадий электромеханических переходных процессов:
• возникновения возмущения и необходимых мер для предотвраще-
ния нарушения динамической устойчивости электропередачи;
• сохранения статической устойчивости в послеаварийном режиме
до действия автоматических регуляторов частоты и мощности на
частоторегулирующих электростанциях;
• статической устойчивости нового установившегося режима в про-
цессе и после действия автоматической системы регулирования ча-
стоты и мощности.
359
Глава 10
Дозированные противоаварийные управляющие воздействия выра-
батываются в общем случае на основе полиномиальных (10.5) алгорит-
мов и в соответствии с разработанными методами [37] определения воз-
можных областей устойчивости в координатах режимных параметров и
коэффициентов настройки автоматических регуляторов, их анализа по
критериям устойчивости. Производится проверка сохранения устойчи-
вости при реализации выработанных воздействий. Выбор из возможных
вариантов наборов и интенсивности управляющих воздействий произво-
дится итеративно с последовательным их перебором. Программа вывода
принятого варианта дозированных управляющих воздействий и переда-
чи их в устройства АЗД запускается после каждого из циклов расчетов.
Типовым, выполняющим и указанные функции программного
устройства АДВ на основе микроЭВМ является микропроцессорный
комплекс противоаварийной автоматики типа ПАА, разработанный в
ВЭИ [57, 61, 62]. Он состоит из трех необходимых для надежности
функционирования однотипных микропроцессорных комплектов (пане-
лей), устанавливаемых на электростанции — три комплекта вычисли-
тельных средств и пульт управления с элементами ввода и вывода ин-
формации (четвертая панель).
Микропроцессорный комплекс ПАА реализует станционный или уз-
ловой (противоаварийное управление несколькими электростанциями)
уровень иерархической АПНУ.
Функции АЗД при осуществлении программной автоматической до-
зировки на основе указанных циклических расчетов ЭВМ органически
сочетаются с функциями АДВ: автоматическое запоминание дозирован-
ных управляющих воздействий осуществляется ОЗУ микроЭВМ. В па-
нелях ПАА дозированные управляющие воздействия реализуются по
дискретным сигналам пусковых органов их выборкой из ОЗУ.
Вычислительная часть ПАА выполнена на микропроцессорном на-
боре серии К580 и содержит одноплатную микроЭВМ с математиче-
ским процессором и программируемыми параллельным и последователь-
ным интерфейсами, оперативным и перепрограммируемым постоянным
(ППЗУ) запоминающими устройствами и пультом управления.
Собственно измерительной части комплекс ПАА не содержит: ис-
пользуются сигналы информационных устройств телеизмерения и вто-
ричных измерительных преобразователей [8], установленных на син-
хронных генераторах и линиях электропередач. Поступающие в виде
360
Автоматика предотвращения нарушения устойчивости
изменяющихся постоянных токов (±5 мА) входные сигналы нормализу-
ются, преобразуются в пропорциональные напряжения и гальванически
отделяются от вычислительной части [62]. Гальваническая развязка
производится преобразователями тока в напряжение с промежуточной
модуляцией постоянного и демодуляцией переменного токов.
Преобразовательная часть содержит входные аналого-цифровые с
цифровыми полосовыми частотными фильтрами и выходные цифро-
аналоговые преобразователи.
Ввод дискретных сигналов входной информации и вывод выходных
управляющих воздействий производится, как и во всех микропроцессор-
ных автоматических устройствах, электромагнитными реле с гермети-
зированными магнитно-управляемыми контактами (герконами).
Выполнение функциональных алгоритмов в ПАА достигается соот-
ветствующим программным обеспечением на языке Ассемблера, общая
структура которого представлена на рис. 10.9 [61, 62]. По программе
Включение производится тестовый контроль микропроцессорной систе-
мы. Затем запускаются сервисные программы: Программатор, обес-
печивающая запись информации в ППЗУ; Монитор, предназначенная
для подготовки и отладки программного обеспечения с использовани-
ем дисплея; Тест, производящая полную проверку вычислительной и
преобразующей функциональных частей и системы обеспечения надеж-
ности функционирования ПАА; Печать, фиксирующая значения мощно-
стей синхронных генераторов и линий электропередач, рабочую схему и
дозированные противоаварийные управляющие воздействия.
Программа Начальный пуск выполняет подготовку ПАА к работе
в нормальном (доаварийном) режиме по замкнутым циклам длительно-
стью 5 с. Программа SPS вводит информацию о режимных параметрах
и состояниях синхронных генераторов (их технологических ограничени-
ях). По программе CONTRL обеспечивается надежность функциониро-
вания ПАА (см. ниже).
Расчет значений режимных параметров и весовых коэффициентов,
входящих в полиномиальные зависимости (10.5), для текущего состоя-
ния схемы ведется программой UPRDO. Мажоритарная проверка вы-
численных противоаварийных управляющих воздействий производится
программой CNTUVY, а программа PGA формирует информацию о го-
товности каждого управляемого электроэнергетического объекта к про-
тивоаварийному управлению. Для оптимизации вычислений в реальном
361
Глава 10
Рис. 10.9. Структурная схема программного обеспечения ПАА
362
Автоматика предотвращения нарушения устойчивости
времени противоаварийного управления программа PS производит ран-
жирование элементов массивов регулировочных диапазонов энергоагре-
гатов электростанции.
Микропроцессорный комплекс ПАА выполняет и оптимальное рас-
пределение случайно изменяющейся составляющей нагрузки в процессе
нормального автоматического регулирования частоты и мощности по
программе PRSH (см. гл. 4).
Микропроцессорный комплекс ПАА запускается в действие для про-
тивоаварийного управления дискретными сигналами более высокого
(верхнего) иерархического уровня и пусковых органов о возникновении
КЗ, изменений схемы сети, небыстродействующем отключении (затяж-
ке) КЗ. Запускаются соответствующие наборы программ. Ввод необ-
ходимой информации в вычислительную часть ПАА осуществляется по
программам WWOD, NOMPO, FIKOT и CNTUV2 соответственно.
От верхнего уровня противоаварийного управления ПАА получает
задание на разгрузку электростанций, необходимую для предотвраще-
ния нарушения динамической и статической устойчивости. По сигналам
пусковых органов о возникновении КЗ или изменении схемы сети (от-
ключении линии или синхронного генератора) вводится информация о
тяжести возмущающего воздействия. Необходимые дозированные про-
тивоаварийные управляющие воздействия (функции АДВ) производятся
по программам РО1, РО2 и РОЗ соответственно. Результаты вычисле-
ний по программе РО2 используются и при затяжных КЗ.
Программы RIR распределяют противоаварийные управляющие воз-
действия между управляемыми электроэнергетическими объектами. Но
перед этим программы CNTUV2 производят проверку дозированных
противоаварийных управляющих воздействий, вычисленных каждой из
трех панелей ПАА по мажоритарной схеме резервирования.
По программам UPIND на основе рабочей информации, поступаю-
щей в реальном времени электромагнитных переходных процессов, про-
изводится корректировка последующих управляющих воздействий, не-
обходимость в которых возникает сразу же после реализации предыду-
щих управляющих воздействий, вследствие прихода сигналов от двух
пусковых органов последовательно во времени, но в интервале одного
цикла расчетов. Коррекция организуется программой SOD.
Программы RSPR служат для равномерного распределения управля-
ющих воздействий, необходимых для предотвращения нарушения стати-
363
Глава 10
ческой устойчивости в послеаварийных режимах, между синхронными
генераторами электростанции.
Необходимая высокая надежность (частота отказов или излишних
срабатываний не более 0,01 в год) программной автоматики дозирова-
ния управляющих воздействий обеспечивается, как указывалось, про-
граммами CONTRLk CNTUVI, управляющими индивидуальными (для
каждой из трех панелей) и общими аппаратными средствами — схемами
контроля [62] соответственно. Обеспечение достоверности информации
о дозированных противоаварийных управляющих воздействиях с резер-
вированием по принципу мажорирования и надежности функциониро-
вания в реальном времени по прерываниям связано с необходимостью
синхронизации вычислительных процессов и прерываний в трех ком-
плектах (панелях) [64].
Временное выравнивание состояний трех ЭВМ достигается путем
взаимного обмена результатами расчетов, организуемого специальной
подпрограммой, в так называемых контрольных точках рабочих функ-
циональных программ.
Программа обеспечивает создание временных интервалов, необходи-
мых для указанного выравнивания состояний, временную синхрониза-
цию и выявление неисправности вычислительной части одной из трех
панелей и, наконец, производит мажорирование выходных данных или
фиксирует их расхождение. Синхронность прерываний трех комплексов
вычислительных средств достигается применением программируемого
контроллера прерываний [64].
Надежность функционирования обеспечивается и автоматической
диагностикой собственно вычислительных средств и преобразователь-
ной части (устройств связи с объектом) панелей ПАА. Предусматрива-
ется также автоматический перезапуск ПАА для сохранения в работе
вычислительной части при возникновении сбоев микроЭВМ.
В последнее время в ОАО «Энергосетьпроект» разработано ми-
кропроцессорное устройство АДВ и АЗД станционного и энергорай-
онного уровней, функционирующее на программно-техническом ком-
плексе (ПТК) ВЕНЕЦ, целенаправленно созданном Российским научно-
исследовательским институтом космического приборостроения. В связи
с повышенной надежностью ПТК устройство АДВ [69] состоит только из
двух взаиморезервируемых шкафов, комплектуемых из наиболее совер-
шенных и быстродействующих микропроцессорных специализирован-
364
Автоматика предотвращения нарушения устойчивости
ных больших интегральных микросхем, включая однокристальную ми-
кроЭВМ и микропроцессорный многофункциональный измерительный
преобразователь режимных параметров электроэнергетических систем
(сигнальный процессор TMS32020) фирмы «Octagon Systems» (США).
Измерительно-преобразовательная функциональная часть ПТК АДВ
(устройство связи с объектом) содержит вторичные измерительные
трансформаторы напряжений и токов трех фаз (рис. 10.10) с частотны-
ми фильтрами — модули трансформаторов МТН и МТТ, связанные с
указанным многофункциональным микропроцессорным измерительным
преобразователем МПИП (называемым в [69] модулем предпроцессор-
ной обработки сигналов МПОС) через типовые оптронные элементы
гальванической развязки аналоговых сигналов ЭГР. Он формирует ци-
фровые сигналы, отображающие информационные параметры (ампли-
туду, фазу, частоту) синусоидальных напряжений и токов и симме-
тричных составляющих трехфазных систем, углы сдвига фаз, актив-
ную и реактивную мощности прямой, обратной и нулевой последователь-
ностей.
Предусмотрены входы с гальванической развязкой для унифициро-
ванных аналоговых сигналов (модуль аналоговых сигналов МАС) в
виде изменяющегося в пределах ±5 мА постоянного тока от измери-
тельных преобразователей электрических режимных параметров и дат-
чиков сигналов ДС об изменениях неэлектрических технологических
величин управляемых электроэнергетических объектов — платы 5648
и МРВ-9 [69]. На функциональной схеме показаны и многочисленные
входы приема цифровых сигналов из каналов связи КС от информацион-
ных автоматических устройств телеизмерения УТИ, телесигнализации
УТС и БСПА, а также дискретных сигналов от их источников ИДС в
виде комплекта герконовых реле — ввод дискретных сигналов ВДС с
элементами гальванического отделения их контактов от микропроцес-
сорной вычислительно-логической части ПТК АДВ.
Основными элементами вычислительно-логической части являются
микроконтроллер (microPC) управления МКУ и управляющая однокри-
стальная микроЭВМ типа КР1830ВЕ31. Микроконтроллер программно
и конструктивно совместим с персональными ПЭВМ типа IBM PC и
связан с ними через интерфейсы (модули интерфейса) МИ. Через соот-
ветствующие интерфейсы микроконтроллеры управления двух шкафов
обмениваются информацией и воспринимают управляющие сигналы от
365
366
Рис. 10.10. Функциональная схема программно-технического комплекса дозирования и запоминания
противоаварийных управляющих воздействий
Глава 10
Автоматика предотвращения нарушения устойчивости
высшего иерархического В У уровня АПНУ. Микроконтроллеры произ-
водят сбор и обработку поступающей в ПТК АДВ информации. Микро-
ЭВМ выполняет функции дозирования и запоминания противоаварий-
ных управляющих воздействий. Важной особенностью процесса дозиро-
вания является использование расчетов, выполняемых периферийными
персональными микроЭВМ.
Исполнительная часть содержит комплект выходных герконовых ре-
ле КВР с элементами гальванического разделения ЭГР выходных це-
пей микроЭВМ и обмоток герконов. В исполнительную часть входят
и элементы выдачи информации о срабатывании устройства или его
неисправностях, которая может расшифровываться персоналом функци-
ональной клавиатурой управления КУ. Вся информация высвечивается
жидкокристаллическим алфавитно-цифровым дисплеем Д.
В доаварийном (нормальном) режиме работы электроэнергетической
системы ПТК АДВ циклически (через 2-3 с) производит прием и про-
верку достоверности телеавтоматической и местной информации о ре-
жимных параметрах и ее схеме и определение по таблицам «условия-
воздействия», введенным в память однокристальной ЭВМ периферий-
ными ПЭВМ, рассчитывающими для всех фиксируемых аварийных си-
туаций дозированные противоаварийные управляющие воздействия на
управляемые электроэнергетические объекты; выполняет команды по
заполнению таблиц дозированных управляющих воздействий, определя-
емых верхним уровнем В У иерархической АПНУ; формирует и запи-
сывает в оперативную память (функция АЗД) программы их исполне-
ния; производит контроль и диагностику технических и программных
средств и выдает по заказу персонала сообщения о текущих дозирован-
ных управляющих воздействиях.
В аварийном режиме по сигналам от пусковых органов ПТК АДВ в
течение одного периода промышленной частоты реализует запомненные
дозированные противоаварийные воздействия ДПА У В.
Программное обеспечение функционирования ПТК АДВ включает
прежде всего так называемый инструментальный комплекс [69], предна-
значенный для персонала служб и подразделений противоаварийной ав-
томатики электроэнергетических систем и проектных организаций, про-
изводящего на ПЭВМ расчеты динамической и статической устойчиво-
сти при всех возможных в электроэнергетическом районе возмущающих
воздействиях и формирующего указанные таблицы взаимозависимостей
367
Глава 10
между условиями, характеризующими режимы работы, возмущающими
воздействиями и необходимыми для предотвращения нарушения устой-
чивости противоаварийными управляющими воздействиями. Условия и
соответствующие им противоаварийные воздействия автоматически по
специальным программам группируются по пусковым органам, фикси-
рующим возмущающие воздействия, в таблицы, имеющие форму пря-
моугольных матриц.
Важнейшим для эффективного функционирования ПТК АДВ явля-
ется программное обеспечение его действия в реальном времени.
Кроме основной задачи — выбора из ОЗУ и реализации противо-
аварийных управляющих воздействий — оно осуществляет опрос и диа-
гностирование входных и выходных элементов, обеспечивает обмен дан-
ными между двумя полукомплектами ПТК АДВ, взаимодействие с пер-
соналом через функциональную клавиатуру и демонстрацию реализа-
ции дозированных управляющих воздействий. Немаловажны и его за-
дача по обработке прерываний, инициируемых контроллерами управле-
ния, и отличие их от обусловленных неполадками, особенно с неред-
ко нарушаемой четкостью размыканий контактов герконов (их залипа-
нием).
Производится проверка работоспособности многофункционального
измерительного преобразователя режимных параметров — МПОС и од-
нокристальной микроЭВМ.
Формирование оптимальных дозированных управляющих воздей-
ствий производится программой автоматизированного выбора границ
(набора) дискретных ступеней воздействий. Главными из них являются
ограничение мощности отключением гидрогенераторов или разгрузкой
паровых турбин и отключение нагрузки.
Программа SET-ADV [69] на языке Турбо-Си обеспечивает наиболее
эффективное использование подмножеств сочетаний ступеней управля-
ющих воздействий и наборов управляемых объектов по критерию мини-
мального технико-экономического ущерба.
За один запуск она выполняет дозировку управляющих воздействий
для одного сочетания пускового органа и схемы управляемого энерго-
района и выдает субтаблицу «условия-воздействия» в виде выходного
файла. Количество исполнительных герконов КВР ограничивает число
ступеней управляющих воздействий десятью на каждый из пяти управ-
ляемых объектов.
368
Автоматика предотвращения нарушения устойчивости
Программа общения с периферийными ПЭВМ и программа парал-
лельной работы дублированного комплекса обеспечивают удобство кон-
троля, наглядность управляющего действия и надежность функциони-
рования микропроцессорного ПТК АДВ.
10.6. Функционирование и развитие автоматики
предотвращения нарушения устойчивости
Автоматика предотвращения нарушения устойчивости начала раз-
виваться со времени сооружения первых протяженных и сильно нагру-
женных линий электропередач сверхвысокого напряжения, связывавших
мощные Волжские ГЭС с ОЭС Центра, когда и возникла необходимость
обеспечения динамической и статической устойчивости противоаварий-
ным автоматическим управлением.
Отдельные релейно-контактные устройства АПНУ, обеспечивавшие
устойчивость параллельной работы электрических станций, были слабо
связаны между собой и их действие, по существу, не координировалось.
С появлением миниЭВМ М6000, СМ-1 и СМ-2 были созданы центра-
лизованные системы АПНУ электроэнергетических систем с УВК на
диспетчерских пунктах ДП (см. рис. 8.1) ЭЭС с координацией функ-
ционирования устройств АПНУ станционного уровня. Централизован-
ные системы АПНУ с очень широким арсеналом технических средств
информационного обеспечения и относительно медленно действующими
миниЭВМ по мере объединения ЭЭС и создания ЕЭС страны исчерпали
свои технические возможности по обеспечению устойчивости электро-
энергетических систем.
С появлением быстродействующих промышленных микропроцессо-
ров и микроЭВМ начали развиваться многоуровневые иерархические
системы АПНУ, рассредоточенные по ОЭС и ЕЭС, с параллельными
процессами вычислений, отличающиеся надежностью действия и соот-
ветствием вырабатываемых дозированных противоаварийных управля-
ющих воздействий тяжести возмущающих воздействий и их достаточно-
стью для сохранения устойчивости функционирования ЕЭС при услож-
нившихся и утяжелившихся предаварийных и аварийных ситуациях.
Первой иерархической системой АПНУ стал двухуровневый микро-
процессорный комплекс противоаварийного управления ОЭС Средней
Волги [60]. Двухуровневая АПНУ обеспечивает противоаварийным
369
Глава 10
управлением электроэнергетический район, состоящий из нескольких
десятков электроэнергетических объектов: системообразующих линий
электропередач напряжением 500 кВ, узловых подстанций и мощных
электрических станций, в том числе Волжской ГЭС, Заинской ТЭС и
Балаковской АЭС (см. рис. 10.4).
Технические средства верхнего уровня иерархической АПНУ пред-
ставляет УВК, состоящий из двух микроЭВМ и двух миниЭВМ. Систе-
ма сбора информации в ОЭС (каналы передачи информации — телека-
налы от УТИ и УТС) обеспечивает микроЭВМ информацией о доава-
рийном режиме, которая предварительно обрабатывается и системати-
зируется ими. Используются:
• телеизмерения перетоков активной и реактивной мощностей по ли-
ниям напряжением 500 и 220 кВ и через автотрансформаторы связи
(несколько сотен сигналов);
• телеизмерения напряжений на шинах электрических станций и
подстанций (50 сигналов);
• телесигнализации положений выключателей присоединений напря-
жениями 500 и 220 кВ (более ста сигналов).
На основе первичной (в микроЭВМ) обработки информации мини-
ЭВМ производят расчеты устойчивости при возможных наиболее тяже-
лых и рассредоточенных по ОЭС возмущающих воздействиях и выра-
батывают дозированные противоаварийные управляющие воздействия
для соответствующих пусковых органов после каждого цикла расчетов
длительностью в 1 мин. Дозированные управляющие воздействия пере-
даются в микроЭВМ нижнего (станционного) уровня, а именно в микро-
процессорные комплексы противоаварийного управления в виде панелей
ПАА (см. § 10.5), установленных на указанных электростанциях.
Микропроцессорные ПАА выполняют:
• запоминание дозированных управляющих воздействий, передан-
ных от УВК;
• расчеты дозировки управляющих воздействий с циклом малой дли-
тельности (5с), необходимых при возможных возмущающих воз-
действиях на электростанциях и линиях электропередачи, отходя-
щих от них, при которых необходимы управляющие воздействия
на синхронные генераторы данной электростанции;
370
Автоматика предотвращения нарушения устойчивости
• исполнение дозированных противоаварийных воздействий как в
пределах электростанции, так и с передачей их по системе БСПА
(см. рис. 10.1), а именно импульсную и длительную разгрузку
турбогенераторов, отключение гидрогенераторов и нагрузки, пуск
и быстродействующую загрузку гидрогенераторов, перевод их из
режима СК в генераторный режим.
Исполнение управляющих воздействий производится по сигналам
пусковых органов, при поступлении которых работа ПАА в цикле рас-
четов прерывается и осуществляется перевод ее в режим непосредствен-
ного противоаварийного управления. После идентификации возмущаю-
щего воздействия, выборки из ОЗУ микроЭВМ и исполнения соответ-
ствующих противоаварийных управляющих воздействий ПАА передает
информацию в УВК о произведенных действиях и остается в режиме
ожидания развития аварийной ситуации до наступления установивше-
гося послеаварийного режима ОЭС.
Более сложной является иерархическая автоматика предотвращения
нарушения устойчивости ОЭС Урала. Ее второй — узловой (район-
ный) — уровень обеспечивает противоаварийным управлением группу
электростанций и линий электропередач между ними, выделяемую вну-
три ОЭС.
Уровень иерархической АПНУ, обеспечивающий устойчивость функ-
ционирования ОЭС Урала в целом, различается как региональный [39]
или системный [61]. Еще более сложной получается формируемая иерар-
хическая автоматика предотвращения нарушения устойчивости ОЭС
Центра, содержащей многоконтурную и протяженную системообразу-
ющую сеть высокого и сверхвысокого напряжений. В ней создаются
несколько узловых или районных уровней, действие которых должно ко-
ординироваться региональным уровнем, вычислительные технические
средства которого находятся на диспетчерском пункте ОЭС.
Формируемая иерархическая система противоаварийного управле-
ния ЕЭС в целом имеет (верхний) центральный уровень, координиру-
ющий функционирование региональных АПНУ: управляющий вычисли-
тельный комплекс расположен в центральном диспетчерском управле-
нии (ЦПУ) Единой электроэнергетической системы [3, 39]. На верх-
нем уровне формируются и оптимизируются противоаварийные упра-
вляющие воздействия, реализуемые в различных региональных уров-
нях. Разрабатываются общие методы расчетов и оптимизации управля-
371
Глава 10
ющих воздействий на основе функционального моделирования [61, 67].
Их применение и распараллеливание вычислительных процессов позво-
ляет обеспечить эффективное противоаварийное управляющее действие
распределенных и параллельно работающих вычислительных средств
различных уровней иерархической автоматики обеспечения устойчиво-
сти функционирования («живучести») ЕЭС.
Разрабатываются алгоритмы и общее программное обеспечение ие-
рархической системы противоаварийной автоматики ЕЭС. На рис. 10.11
для иллюстрации приведена его структурная схема [67].
На центральном уровне ЦУ ПАА генератор аварийных ситуаций мо-
делирует в соответствии с заранее заданной последовательностью ава-
рийные ситуации, вызванные возможными возмущающими воздействи-
ями. С учетом данных об исходном режиме ЕЭС вычисляются и оптими-
зируются начальные противоаварийные управляющие воздействия УВ
для к-го [см. (10.5)] возмущающего воздействия, которые по коммутаци-
онной сети передаются в системные (региональные) уровни СУ ПАА. На
системных уровнях параллельно производятся расчеты так называемых
функциональных характеристик [68] всех ОЭС, и по информационным
каналам указанной сети результаты расчетов передаются в ЦУ ПАА.
На основе решения системных уравнений связи СУС между ЭЭС и их
функциональных характеристик в ЦУ ПАА определяются приращения
мощностей АР [см. (10.5)], которые снова передаются в СУ ПАА, где
вновь рассчитываются функциональные характеристики ОЭС.
Расчеты с межмашинным обменом информации производятся, пока
итерационный процесс не сойдется или разойдется, что оценивается в
ЦУ ПАА. В последнем случае формируются новые управляющие воз-
действия, и процесс их оптимизации продолжается. После определения
дозированных управляющих воздействий для к-го возмущающего воз-
действия производятся расчеты для (к + 1)-го возмущающего воздей-
ствия.
Все полученные результаты расчетов по коммутационной сети пе-
редаются в микроЭВМ узловых или станционных УПА в виде таблиц,
решений. МикроЭВМ панелей ПАА, выполняющих, как указывалось,
функции станционных и узловых уровней, определяют необходимые до-
зированные противоаварийные управляющие воздействия на управляе-
мые электроэнергетические объекты электрических станций, подстан-
ций и линий электропередач.
372
Автоматика предотвращения нарушения устойчивости
Рис. 10.11. Структурная схема программной части распределенно-
параллельной системы противоаварийного управления
373
Глава 10
Быстродействующие вычислительные параллельные системы, спо-
собные реализовать центральные и региональные уровни иерархической
противоаварийной автоматики обеспечения «живучести» ЕЭС, в насто-
ящее время выпускаются только зарубежными фирмами [67] на основе
быстродействующих микропроцессоров I860 (25 МГц), функционирую-
щих под управлением указанных на схеме (рис. 10.11) операционных
систем Unix, Helios, и микропроцессора TMS320CHO, управляемого опе-
рационной системой реального времени Virtuoso. На схеме указаны так
называемые рабочие вычислительные станции, объединенные для рас-
параллеливания вычислительных процессов в локальную вычислитель-
ную сеть, фирмы SUN на микропроцессорах Super SPARC (100 МГц) и
операционная система Windows NT.
Эффективное функционирование иерархической противоаварийной
автоматики ЕЭС возможно лишь при волоконно-оптических линиях свя-
зи показанной на схеме коммуникационной сети зарубежного техническо-
го исполнения. Министерством связи, Минэнерго и РАО «ЕЭС России»
разрабатываются программы по созданию сети волоконно-оптических
линий на всей территории России.
Вопросы для самопроверки
1. Какие противоаварийные управляющие воздействия вырабатывает ав-
томатика предотвращения нарушения устойчивости?
2 Чем различаются противоаварийные управляющие воздействия АПНУ,
необходимые для сохранения динамической и статической устойчивости?
3. Какая разница между децентрализованной и централизованной АПНУ?
4. В чем особенность иерархической автоматической системы предотвраще-
ния нарушения устойчивости?
5. Почему необходимо дозирование вырабатываемых АПНУ противоава-
рийных управляющих воздействий?
6. Почему и на какое время целесообразно запоминание дозированных про-
тивоаварийных управляющих воздействий?
7. Где территориально размещаются автоматические устройства дозировки
(АДВ) и запоминания (АЗД) централизованной АПНУ?
374
Автоматика предотвращения нарушения устойчивости
8. Какими техническими средствами централизованной и иерархической си-
стем АПНУ производится дозирование противоаварийных управляющих
воздействий?
9. Какие воздействия и на какие электроэнергетические объекты оказывает
автоматика предотвращения нарушения устойчивости?
10. Для предотвращения какой динамической или статической устойчивости
и в каких условиях применяются и чем объясняется эффективность:
• форсировки возбуждения синхронных генераторов;
• импульсной разгрузки паровых турбин;
• отключения гидрогенераторов;
• отключения нагрузки;
• дискретного изменения настройки автоматических регуляторов возбу-
ждения сильного действия;
• дискретных изменений сопротивлений линий электропередачи (какими
способами);
• электрического торможения синхронных генераторов?
И. Как функционирует релейно-контактное устройство дозировки разгрузки
линии электропередачи (см. рис. 8 5 и 8 6 [2])?
12 Как действует релейно-контактное устройство определения числа от-
ключаемых гидрогенераторов, необходимого для разгрузки линии элек-
тропередачи (см. рис. 8.6 [2])?
13. Как обеспечивается достоверность информации о дозированных проти-
воаварийных возмущающих воздействиях при ее передаче от устройств
АДВ к устройствам АЗД (см. рис. 11.9 и 11.10 [43])?
14 Как функционирует измерительная часть устройства фиксаций статиче-
ской и динамической перегрузки электропередач (см. рис 10.7)?
15. Каким способом достигается несрабатывание устройства фиксации пере-
грузки при синхронных качаниях (см. рис. 10.7)?
16. Как обеспечивается недействие устройства фиксации перегрузки при ко-
ротких замыканиях на линии электропередачи (см рис. 10 7)?
17. Как обеспечивается действие измерительного органа фиксации мощности
только при КЗ (см. рис. 10.8)7
18. Как функционирует микропроцессорное устройство (панель) противо-
аварийной автоматики (ПАА); в чем состоит программное обеспечение
функционирования ПАА (см. рис. 10.9)?
375
Глава 10
19. Какова функциональная структура микропроцессорного программно-тех-
нического комплекса (ПТК) автоматического дозирования противоава-
рийных управляющих воздействий (см. рис. 10.10)?
20. Что понимается под инструментальным комплексом микропроцессорного
АДВ; каковы его функции?
21. Как функционирует автоматика предотвращения нарушения устойчиво-
сти объединенной ЭЭС (на примере ОЭС Средней Волги, см. рис. 10.4)?
22. В чем состоит различие в алгоритмах формирования дозированных про-
тивоаварийных управляющих воздействий в микропроцессорных ПАА и
ПТК АДВ?
23. Какие известны микросхемные промышленные панели устройств АПНУ?
24. Как действует и в чем технические недостатки релейно-контактного
устройства АЗД (см. рис. 11.5 и 11.8 [43])?
25. Как функционирует иерархическая АПНУ Единой электроэнергетиче-
ской системы в целом (см. рис. 10.11)?
376
Глава 11. Автоматика прекращения
асинхронного режима
11.1. Способы действия и виды автоматических
устройств
Несмотря на оснащение электроэнергетических систем автоматикой
предотвращения нарушения устойчивости, синхронная параллельная ра-
бота мощных электростанций или отдельных частей электроэнергети-
ческой системы часто не сохраняется: наступает асинхронный режим
их работы с относительными проворотами роторов синхронных гене-
раторов с угловой частотой скольжения a>s = a>i — о>2- Несинхронный
режим наступает обычно вследствие неполного соответствия дозиров-
ки противоаварийных управляющих воздействий тяжести возмущения,
т.е. недостаточной эффективности АПНУ или даже отказов отдельных
автоматических устройств противоаварийного управления.
Допустимый, хотя и нежелательный для синхронных генераторов,
асинхронный режим представляет серьезную опасность для электро-
энергетической системы. Сопровождаемый периодическими значитель-
ными снижениями напряжения, он может привести к уменьшению про-
изводительности и остановке агрегатов собственных нужд ТЭС и АЭС,
к отключениям электродвигательной нагрузки потребителя и, в конеч-
ном итоге, к развитию общесистемной аварии. Поэтому необходимо
противоаварийное управление по его устранению. Оно осуществляется,
как указывалось, устройствами автоматического прекращения (ликви-
дации) асинхронного режима.
В зависимости от складывающейся ситуации в электроэнергетиче-
ской системе асинхронный режим может быть допустимым кратковре-
менно, а иногда и относительно длительно, или недопустимым вооб-
377
Глава И
ше. Поэтому ликвидация асинхронного режима производится или ре-
синхронизацией путем соответствующих управляющих воздействий на
синхронные генераторы, а иногда и нагрузку электроэнергетической си-
стемы, или немедленным делением электроэнергетической системы на
несинхронно работающие части.
Соответственно устройства АЛАР делятся на три группы:
• устройства, производящие противоаварийные управляющие воз-
действия при возникновении признаков нарушения синхронизма
или в течение первого цикла асинхронного режима (одного про-
ворота роторов генераторов);
• устройства, осуществляющие ресинхронизацию обычно после не-
скольких циклов асинхронного режима и действующие на деле-
ние электроэнергетической системы при затянувшемся асинхрон-
ном режиме, длительностью более 30 с;
• быстродействующие неселективные устройства деления электро-
энергетической системы в начальной фазе нарушения устойчиво-
сти.
Автоматические устройства АЛАР, осуществляющие ресинхрониза-
цию, достаточно эффективны лишь при одночастотном асинхронном ре-
жиме, процессы при котором рассматриваются в типовой двухмашинной
эквивалентной схеме (рис. 11.1,а). При вероятности возникновения трех-
частотного асинхронного режима, т.е. возникновения трех несинхронно
работающих частей электроэнергетической системы, производится не-
замедлительное ее деление.
Разработаны и успешно функционируют различные устройства
АЛАР; ведущей научно-исследовательской организацией по их разра-
ботке является ОАО «Энергосетьпроект» [39]. Они функционируют на
основе использования периодических и характерных для асинхронно-
го режима изменений электрических параметров электроэнергетической
системы.
11.2. Изменения электрических величин в асинхронном
режиме, используемые для действия автоматики
Наиболее характерным признаком нарушения устойчивости являет-
ся нарастание угла 3 = (£1,£2) сдвига фаз между эквивалентными ЭДС
378
Автоматика прекращения асинхронного режима
Рис. 11.1. Схема (а) и изменения напряжений (б) электропередачи в
асинхронном режиме
Е2 ДвУх частей электроэнергетической системы, связанных линией
электропередачи (рис. 11.1,а). После наступления асинхронного режима
угол 6 = wst — (wi - )<; период Ts его изменений обычно составляет
несколько секунд (см. рис. 11.3,а). Однако непосредственное его отсле-
живание технически сложно.
Поэтому в быстродействующих устройствах деления электроэнер-
гетической системы на две несинхронно работающие части путем от-
ключения линии электропередачи применяются измерительные реле
максимального тока, так как ток в линии изменяется в функции синуса
половинного угла 6 (см. рис. 11.2,в)
т |Д-£г| 2Е . 6 _ т . ust
Za.p — % — X Sln 2 ~ ^ma-p Sln 2 ’
где Хэп — сопротивление электропередачи между источниками ЭДС,
Хп = хг + хт1 + Хл + хт2; |Д I = |Д| = Е.
Ток срабатывания устройства 1С определяется условиями его недей-
ствия в максимальном рабочем режиме (при токе /ртах) и достаточной
чувствительности (Кч = 1,5) в асинхронном режиме
Дотс-^pmax < Л: < -^a.pmin/Дч ? (И-2)
379
Глава И
Рис. 11.2. Диаграммы ЭДС и тока (а), изменения амплитуд и фаз на-
пряжений (5)и тока(в)
где Л.рпйп — наименьшее (при наибольшем возможном Хэп) из макси-
мальных (при 3 — 7г) действующих значений тока /ар; Котс — 1,25.
Напряжение в асинхронном режиме периодически снижается вплоть
до нуля (при 3 = 7г) в электрическом центре качаний ЭЦК (см.
рис. 11.1,5). Место его расположения и минимальные абсолютные значе-
ния напряжений Ui mjn, #2 min определяются в предположении однородно
распределенных составляющих сопротивления Хэп. Векторы ЭДС
IS? располагаются противоположно направленными, что соответствует
углу 8 = 7г. Пересечение прямой, соединяющей концы векторов, с гори-
зонтальной осью и определяет положение ЭЦК.
Изменения напряжений t/эцк и Ui, U? на шинах в функции угла 3 или
времени (поскольку 3 = показаны на рис. 11.2,5. Углы сдвига фаз
380
Автоматика прекращения асинхронного режима
Рис. 11.3. Изменения угла (а), сопротивлений (5) и мощности (в) изме-
рительных реле
^2н между напряжениями U_i-> IL2 и условно неподвижной ЭДС Е_2
изменяются в широких пределах. Угол сдвига фаз <^н между напряже-
ниями Ц_2, расположенными по разные стороны от ЭЦК, изменяется
в полном диапазоне —тг < <рв < тг, а при расположении с одной стороны
от ЭЦК — в пределах -тг/2 < <^iH, ^2н < тг/2, т.е. векторы напряжений
или проворачиваются, или совершают относительные качания соответ-
ственно.
Изменения абсолютного значения тока и углов сдвига фаз <^т между
ЭДС Ег, Е2 и током Lj p видны из круговой диаграммы на рис. 11.2,а и
показаны в функции угла 6 на рис. И.2,в.
381
Глава 11
В связи с указанными изменениями состояний векторов напряже-
ний Ц_г, U2 и вектора тока их отношения (комплексные сопроти-
вления на зажимах измерительных реле сопротивления) непрерывно и
периодически изменяются по абсолютному значению от весьма значи-
тельных (Zp —' оо) практически до нуля. Их аргументы могут иметь
любые значения в диапазоне от 0 до 2тг; если ЭЦК находится на ли-
нии (рис. 11.1,6), то векторы Z_p располагаются в верхней комплексной
полуплоскости, а если он оказывается в пределах электростанции или
подстанции, то в нижней полуплоскости (рис. 11.3,6). Концы векторов
Z_p на зажимах реле при изменениях 0 < 6 < 2тг описывают кривые
(годографы) в виде дуг окружностей при |КХ| |К2| или прямой при
|£11 = |К21, перпендикулярной линии максимальной чувствительности
(штрихпунктирная прямая), в частности вертикальной оси, комплексной
плоскости.
Основная составляющая активной мощности Р в линии электропе-
редачи, пропорциональная sin 6, дважды за период Ts асинхронного ре-
жима меняет направление (рис. 11.3,в).
График на рис. 11.4,а иллюстрирует своеобразный характер зави-
симости от угла ускорения 6 синхронных генераторов, сильно изменя-
ющегося в течение периода асинхронного режима. Поэтому скольже-
ние s = (ц>1 - и,’2)/и,’ном двух частей электроэнергетической системы,
работающих несинхронно, имеет колебательный характер и затухаю-
щее в процессе ресинхронизации среднее значение scp = (smax - Smin)/2
(рис. 11.4,6). Известно установленное теоретически и проверенное экс-
периментально его критическое значение
^ср.кр
= 0,0565
(U-3)
разграничивающее условия возможной и практически неосуществимой
ресинхронизации. Соответственно известна критическая длительность
периода асинхронного хода, превышение которой означает ликвидацию
асинхронного режима [63]:
rSKp ~
(И-4)
382
Автоматика прекращения асинхронного режима
Рис. 11.4- Изменения ускорения (о) и скольжения (б) генератора
где 1}эк — эквивалентная постоянная инерции, приведенная к базовой
мощности Рб,
— T.J1TJ2 Рл.пб .
- Tji + Tj2 Рб ;
Рпр, -Рл.нб — предельная и наибольшая передаваемая мощности электро-
передачи.
383
Глава 11
11.3. Типовые устройства автоматики прекращения
асинхронных режимов
Типовые автоматические устройства противоаварийного управления
при наступлении асинхронного режима являются комплексными, вы-
полняющими функции трех упоминавшихся видов устройств А Л АР, а
именно вырабатывающими управляющие воздействия, направленные на
ресинхронизацию несинхронно работающих частей электроэнергетиче-
ской системы. Они обеспечивают выявление асинхронного режима в
отличие от синхронных качаний и коротких замыканий, чувствитель-
ность к асинхронному режиму данной электропередачи, определение
знака скольжения и формирование управляющих воздействий соответ-
ственно на торможение или ускорение синхронных генераторов.
По используемой информации различаются устройства АЛАР, фик-
сирующие [39]:
• возрастание угла 6 сдвига фаз между напряжениями U_2 по
концам линии электропередачи (см. рис. 11.1,а);
• скорость изменений произведений и отношений комплексных на-
пряжений и токов на зажимах измерительных реле активной мощ-
ности и сопротивления соответственно;
• циклы асинхронного режима и изменения фазного тока.
Первое из разработанных ОАО «Энергосетьпроект» устройств
АЛАР функционирует с использованием информации об изменениях
комплексных сопротивлений и активной мощности. Устройство трех-
ступенчатое (рис. 11.5). Его измерительная часть содержит три ком-
плекта направленных измерительных реле сопротивления A’Zl, KZ2
и AZ3 и измерительное реле активной мощности KW двухстороннего
действия (с двумя выходами — с замыкающим и размыкающим контак-
тами).
Назначением первой ступени является выявление асинхронного ре-
жима работы электропередачи и быстродействующее формирование
управляющих воздействий на ускорение или торможение гидро- и тур-
боагрегатов электростанций с целью ограничения асинхронного режима
по возможности первым его циклом. Избирательное выявление нару-
шения устойчивости электропередачи обеспечивается взаимодействием
384
385
Рис. 11.5. Общая функциональная схема автоматики ликвидации асинхронного режима
Автоматика прекращения асинхронного режима
Глава 11
Рис. 11.6. Характеристики срабатывания измерительных реле сопро-
тивления (а) и диаграмма (б), иллюстрирующая их совместное функци-
онирование с измерительным реле активной мощности
двух измерительных реле сопротивления A’Zl и KZ2, а определение зна-
ка скольжения и, следовательно, ускоряющих или тормозящих управля-
ющих воздействий — изменением направления (знака) активной мощно-
сти, фиксируемого измерительным реле KW. Его переориентирование
позволяет отличить асинхронный режим от синхронных качаний.
Характеристики 1 и 2 (рис. 11.6,а) чувствительного KZ1 и гру-
бого KZ2 направленных реле сопротивления выбираются по условиям
отстройки сопротивления срабатывания реле A'Zl от отношения мини-
мального напряжения и максимального тока в рабочих режимах, а ре-
ле KZ2 — от сопротивлений на его входе при асинхронных режимах дру-
гих электропередач (внешних) и обеспечения чувствительности к асин-
хронному режиму данной электропередачи с расположением на ней ЭЦК
(внутреннему асинхронному режиму).
Указанные условия обеспечиваются, если ближайший годограф 4
векторов сопротивлений на зажимах реле KZ2 при внешних асинхрон-
ных режимах находится вне характеристики 2 его срабатывания, а годо-
графы, например 5, векторов сопротивлений при внутреннем асинхрон-
386
Автоматика прекращения асинхронного режима
ном режиме проходят через характеристику 2, и вектор Zq сопротивле-
ния от места установки автоматического устройства до ЭЦК находится
внутри ее (рис. 11.6,а).
Необходимое взаимодействие реле A’Zl и KZ2 (см. рис. 11.5) обеспе-
чивается логической частью первой ступени, а именно элементами DX
(ЗАПРЕТ), временной задержки DT1 и DX1 (И). Первый из них не
допускает прохождение сигнала от реле KZ1 при практически одновре-
менном с ним срабатывании реле KZ2, что происходит при коротких
замыканиях, вследствие дискретного уменьшения сопротивления Zp на
их входах.
При нарушении устойчивости (и синхронных качаниях) сопротивле-
ние Zp изменяется непрерывно, и конец его вектора Z_p двигается по го-
дографу, например 5 (рис. 11.6,а), сначала пересекая характеристику 1
в точке а первого, а затем через время Тр — характеристику 2 в точке b
второго измерительных реле сопротивления. Если время задержки Т3
меньше минимально возможной разновременности Тр срабатывания ре-
ле сопротивлений, то сигнал срабатывания реле KZ1 успевает пройти
на первый — верхний по расположению на схеме (рис. 11.5) вход эле-
мента DX1, который после срабатывания реле KZ2 под воздействием
сигнала на втором — нижнем — входе формирует сигнал противоава-
рийного управляющего воздействия на первых входах элементов DX2
и DX3.
Цепь обратной связи необходима для запоминания сигнала на выхо-
де DX1, поскольку после срабатывания KZ2 сигнал на выходе элемен-
та DX исчезает.
Однако пока еще неизвестно, под воздействием наступившего асин-
хронного режима или синхронных качаний сформирован указанный сиг-
нал на выходе DX1, а если он появился из-за нарушения устойчивости,
то какое — тормозящее УВТ\ или ускоряющее УВу\ управляющее воз-
действие необходимо. Это определяется измерительной частью второй
ступени устройства, а именно поведением измерительного реле мощ-
ности KW и его взаимодействием с измерительными реле сопротивле-
ния KZ2 и KZ3. Реле 7CZ3 с характеристикой 3, расположенной, глав-
ным образом, в третьем квадранте, обеспечивает фиксацию ЭЦК (век-
тор Z!o)-> если он оказывается не на линии, а, например, в показанном на
схеме рис. 11.1 трансформаторе первой (левой) части электроэнергети-
ческой системы.
387
Глава 11
Мощность переориентирования измерительного реле KW определя-
ется критическим углом <5кр выхода электропередачи из синхронизма.
При синхронных качаниях с углами 6 < 5кр < тг активная мощность
сохраняет направление от шин электростанции с напряжением Ui в ли-
нию — Р > 0 (см. рис. 11.3,в): ЭДС опережает по фазе ЭДС Е2,
и реле мощности KW находится в состоянии, при котором выдается
дискретный единичный сигнал с первого (верхнего по расположению на
схеме рис. 11.5) его выхода — показано дугой на рис. 11.6,6, т.е. за-
мкнут его замыкающий контакт KW.1 (см. рис. 8.8 [2]). При этом,
несмотря на срабатывание реле KZ2 или KZ3. сигналы на выходах эле-
ментов DX5 и DX7 отсутствуют, поскольку на нижнем входе DX5 и
верхнем входе DXG логический нуль, поступающий с нижнего выхо-
да реле KW — его размыкающий контакт KW.2 (см. рис. 8.8 [2] или
рис. 17 [39]) разомкнут, поэтому логические нули и на выходах DA5,
DXG и на нижнем входе DX7. Соответственно отсутствуют единич-
ные логические сигналы и на нижних входах элементов DX2 и DX3
первой ступени. Устройство при синхронных качаниях не формирует
управляющих воздействий.
Асинхронный режим начинается при возрастании угла до 6 > 5кр,
активная мощность в линии изменяет направление — становится от-
рицательной (см. рис. 11.3,в). Измерительное реле мощности KW из-
меняет свое состояние: на его верхнем выходе (см. рис. 11.5) нуль, а
на нижнем логическая единица, т.е. его контакт KW.1 размыкается,
a KW.2 (см. рис. 8.8,а [2]) замыкается. При этом, благодаря обратной
связи, состояние элемента РХ4 не изменяется: единичный сигнал на
его выходе и на верхнем входе DXG сохраняется. Поэтому поступаю-
щая на нижний вход DXG логическая единица проходит на его выход и,
поступая на нижний вход элемента DX2, обусловливает формирование
управляющего воздействия УВТ1 на снижение частоты вращения син-
хронных генераторов первой части электроэнергетической системы, на-
пример электрическим торможением гидрогенераторов. Управляющее
воздействие тормозящее, поскольку рассматривается увеличение опере-
жающего угла 6 сдвига фаз между ЭДС Ег и Е2 (вращение вектора E_i
против часовой стрелки), т.е. ускорение У синхронных генераторов пер-
вой части электроэнергетической системы (рис. 11.6,6).
При наступлении асинхронного режима, вследствие отставания по
фазе ЭДС Ег (вращения ее вектора по часовой стрелке, соответству-
388
Автоматика прекращения асинхронного режима
ющего торможению Т синхронных генераторов первой части электро-
энергетической системы), т.е. вследствие нарастания отрицательного
угла 6 (см. 11.6,6), передаваемая по линии мощность направлена от ли-
нии к шинам с напряжением U\, т.е. Р < 0. Поэтому реле мощно-
сти KW выдает единичный сигнал с нижнего (см. рис. 11.5) его выхода
и нулевой с верхнего. При этом после срабатывания реле KZ2 или KZ3
(1^Р| < |ZC. Р2.з|) единица с выхода элемента ZW1 не проходит на вы-
ход DX4, в связи с нулевым логическим сигналом на нижнем его входе,
а единица с выхода DXG не проходит на выход DX7, поскольку указан-
ный нулевой логический сигнал на его верхнем входе.
Управляющее воздействие, но теперь уже ускоряющее УВу1 форми-
руется после достижения отрицательным углом 6 критического значе-
ния -<5кр и переориентации реле KW, вследствие изменения направле-
ния активной мощности. При этом появляющаяся на верхнем выходе
реле KW логическая единица, поступая на верхний вход элемента DX7,
обусловливает прохождение через него сигнала от DXG на нижний вход
элемента DX3, формирующего УВу1.
При достаточности и эффективности управляющих воздействий пер-
вой ступени асинхронный режим не развивается. Если же ресинхрони-
зация не наступает через 2-3 цикла асинхронного режима, то формиру-
ются дополнительные управляющие воздействия УВТ2 и УВУ2 второй
ступени. Происходит это после отсчета нескольких циклов асинхронно-
го режима счетчиком СТ, запускаемым выходными единичными логи-
ческими сигналами элементов DX5 или DX7 через DW3.
Элемент выдержки времени DT2 контролирует длительность каждо-
го цикла Ts асинхронного режима. Если она превышает критическое
значение TSKP, определяемое соотношением (11-4), при котором ресин-
хронизация обеспечивается, то счетчик циклов приводится в исходное
состояние и действие второй ступени устройства приостанавливается:
с верхнего и нижнего входов элементов РХ10 и DX9 снимаются еди-
ничные логические сигналы. В [2, 39, 43] приведена релейно-контактная
схема формирования сигналов второй ступенью устройства.
Однако если спустя допустимое время асинхронного режима, уста-
навливаемое элементом выдержки времени РТЗ и составляющее около
30 с, ресинхронизация не наступает, то действует третья ступень (У5,з)
рассмотренного устройства и отключает линию связи, разделяя элек-
троэнергетическую систему на две самостоятельно и несинхронно рабо-
389
Глава 11
тающие части. Восстановление связи производится включением линии
электропередачи автоматическим устройством ее повторного включения
с синхронизацией, т.е. после восстановления балансов мощностей в ка-
ждой части электроэнергетической системы автоматическими устрой-
ствами регулирования частоты и мощности.
Размыкающий контакт реле времени КТ2.1 (см. DT2 на рис. 11.5)
прекращает действие устройства при Ts > Tsjsp.
11.4. Промышленная панель автоматики прекращения
асинхронного режима
Промышленностью (ЧЭАЗ) выпущена партия типовых микросхем-
ных панелей типа ШДЭ2601, а во ВНИИР разработана усовершенство-
ванная панель ШЭ 2707 автоматики ликвидации асинхронного режима.
Последняя является унифицированной, пригодной и для фиксации стати-
ческой перегрузки линий электропередачи по мощности, и угла 6 сдвига
фаз между напряжениями на их концах, и скорости изменения мощности
динамической перегрузки электропередачи с учетом исходного режима,
необходимой для функционирования автоматики предотвращения нару-
шения устойчивости (см. гл. 10).
В соответствии с главным назначением как панели трехступенчатой
АЛАР, ее аналого-дискретная измерительная часть выполняет следую-
щие функции:
• запоминание угла сдвига фаз 5И в исходном (доаварийном) нор-
мальном режиме в момент возникновения возмущающего воздей-
ствия;
• ступенчатое формирование дискретных потенциальных сигналов
(срабатывание) при превышении абсолютного значения угла 6
установленных допустимых значений |5| > 5У.Д.С — статической
перегрузки;
• срабатывание при установленных допустимых значениях скорости
изменения угла 6 — скольжения |s| > зуд;
• определение и фиксирование угла сдвига фаз в переходном электро-
механическом процессе с учетом исходного угла |£и|+&И > <^у.д.д —
динамической перегрузки.
390
Автоматика прекращения асинхронного режима
Измерительная часть формирует также сигналы запрета действия
автоматики во время КЗ, скачкообразных дискретных изменений ана-
логовых сигналов, отображающих угол 6 и скольжения s, и при неис-
правностях в цепях измерительных трансформаторов напряжения.
Логическая часть обеспечивает выявление асинхронного режима и
формирование ускоряющих УВу или тормозящих УВТ управляющих воз-
действий и функционирование всех трех ступеней АЛАР в целом.
Надежность функционирования панели обеспечивается автоматиче-
ской диагностикой (периодическим автоматическим контролем) исправ-
ности измерительной и логической ее частей.
Измерительная часть. Для выполнения указанных функций из-
мерительная часть содержит (рис. 11.7) соответствующие функциональ-
ные элементы, а именно: UV моделирования напряжений Ц_2 на про-
тивоположных концах линии или их телеизмерения ТИ, измерительные
преобразователи угла 6 сдвига фаз UQ и скольжения US, запоминаю-
щие исходные значения угла 5И — инерционный аналоговый активный
частотный фильтр первого порядка ZF, сумматоры AW и вычитатели
АН сигналов, релейные аналого-дискретные преобразователи входных
аналоговых сигналов, измерительные фильтр-реле напряжения обрат-
ной последовательности А'УТТ и его приращения KVF2. Входящие в
состав панели измерительные преобразователи активной мощности и
другие элементы, аналогичные измерительной части панелей АПНУ (см.
рис. 10.7), на схеме рис. 11.7 не показаны.
Измерительные преобразователи угла сдвига фаз UQ и скольже-
ния US выполнены как цифро-аналоговые с использованием цифрово-
го способа реализации времяимпульсного сравнения фаз и частоты пу-
тем заполнения временных интервалов, пропорциональных углу сдвига
фаз Ts и длительности периода Ту промышленной частоты импульса-
ми эталонного генератора высокой частоты [8]. Такой способ позволяет
компенсировать частотную погрешность измерительного преобразова-
ния угла сдвига фаз и линеаризовать нелинейную зависимость выходно-
го сигнала измерительных преобразователей частоты как обратно про-
порциональной длительности периода [48].
Указанные интервалы времени фиксируются кратковременными
(длительностью 10 мкс) управляющими импульсами Uqi, Дт1 и До2, Дт2,
формируемыми одновибраторами 51, 52 в моменты времени перехода
через нулевые значения мгновенными напряжениями Ui, Ui на выхо-
391
Глава И
Рис. 11.7. Упрощенная функциональная схема измерительной части па-
нели АЛАР типа ШЭ 2707
392
Автоматика прекращения асинхронного режима
393
Глава И
дах UV или ТИ в начале (До) и в конце (Дт) периодов их изменений.
Для этого напряжения «1 и ?г2 формирователями Fl, F2 преобразуют-
ся в прямоугольные импульсы длительностью в один период Tj про-
мышленной частоты, запускающие одновибраторы передними (в начале
периодов) и задними (в конце периодов) фронтами.
Измерительный преобразователь угла сдвига фаз. Интер-
валы времени между импульсами Ди и Дог (начала периодов напря-
жений Д1 и U2) или Дог и Дл равны времени несовпадения по знаку
мгновенных значений напряжений гл, и? — соответствуют отстающему
или опережающему углам | ± <5| < гг сдвига фаз между напряжения-
ми Дх и Д2 [8]. Например, при отстающем по фазе напряжении Д2,
импульсом Д01 от 51, как показано на схеме, ключ SA1 закрывается,
и счетчик СТ1 устанавливается в начальное (нулевое) положение: им-
пульс Д01 поступает на его вход R. Через 10 мкс ключ SA1 открывается
и на вход С счетчика ST1 поступают единичные (счетные) импульсы
частотой 100 кГц от генератора G1 до момента появления импульса Д02
от S2, который снова закрывает ключ SA1 и, воздействуя на вход ре-
гистра F1 цифро-аналогового преобразователя ЦАП\, переписывает в
него двоичный код счетчика STI, отображающий угол 6 сдвига фаз.
Напряжение Us выходного усилителя А цифро-аналогового преобразо-
вателя пропорционально абсолютному значению угла 0 < 6 < гг. При
значении 6 = гг и его дальнейшем возрастании, т.е. при опережающем по
фазе напряжении Д2, на входы R счетчика и Д1 цифро-аналогового пре-
образователя должны воздействовать управляющие импульсы Д02 и Д01
соответственно или должна переключением изменяться на угол гг фаза
напряжения Д2 (на схеме рис. 11.7 не показано).
Однако напряжение Us, являясь функцией угла 6, при 6 — const
увеличивается или уменьшается при снижении или повышении часто-
ты соответственно, поскольку при этом удлиняются или сокращаются
интервалы времени несовпадения по знаку мгновенных напряжений Ui
и Дг- Изменения напряжения Us в зависимости от частоты и есть ча-
стотные погрешности измерительного преобразования угла сдвига фаз.
Их компенсация достигается дискретными изменениями сопротивления
балластных резисторов Re на выходе ЦАП1 (входе повторителя АД),
производимыми разрядными выходами счетчика СТ2, управляющего
ключами, например SAA, SAb (в схеме N ключей), закорачивающими
соответствующие резисторы R&. Двоичный выходной код счетчика СТ2
394
Автоматика прекращения асинхронного режима
отображает длительность периода Tj, поскольку на его вход С через
ключ SA3 поступают счетные импульсы именно в течение времени Tj:
управляющий импульс CTqi устанавливает счетчик в исходное положе-
ние, а управляющий импульс Uy\, закрывая ключ S'АЗ и поступая на
вход Е регистра (на схеме не показан) счетчика С'Т’2, обеспечивает воз-
действие на ключи SA4-SAN. Например, при возрастании частоты
сопротивление Ябэк уменьшается, снижая напряжение на входе повто-
рителя AU и напряжение Ug на его выходе.
Начальное значение исходного режима сохраняется некоторое вре-
мя в виде напряжения Ug^ на выходе очень инерционного (г = RC — 10 с)
частотного фильтра ZF. При этом напряжение U&g на выходе вычитате-
ля АН1 напряжений Ug и Ufa моделирует приращение угла Л <5 = 5 - <5И.
Ступенчатое фиксирование значений исходного и текущего углов
сдвига фаз и его изменений производится группами максимальных из-
мерительных реле напряжений A'V1-A’V6, аналогичными ранее рассмо-
тренным (см. рис. 10.7), с различными установленными значениями Ugy,
U±Sy и Ufay. Одно из них, например A'V‘2, имеет установленное напря-
жение срабатывания Ugv, соответствующее максимальному абсолютно-
му углу сдвига фаз | ± <5|тах = тг. Оно и производит указанные выше
переключения в цепях напряжения Ц_2, изменяющее его фазу на угол 7Г,
в связи с изменением знака угла 6, т.е. его перехода от отстающего к
опережающему и наоборот.
Измерительный преобразователь скольжения. Скольже-
ние s определяется по разности частот Д, /2 напряжений J7i, U2 эле-
ментом сравнения абсолютных значений (вычитатель ЛЯ2) напряже-
ний Uji, Uf2 на выходах двух однотипных измерительных преобразова-
телей частоты UF1, UF2 (см. рис. 11.7). Они состоят из счетчиков СТЗ,
СТ4 импульсов частотой 500 кГц генератора G2 и цифро-аналоговых
преобразователей ЦАП2 и ЦАПЗ соответственно [48].
На счетчики и ключи SA6, SA1 между их входами С и генерато-
ром G2 воздействуют управляющие импульсы Г01, Upi и 7'q2, U?2- Им-
пульсы Coi, Cq2, закрывая ключи, устанавливают счетчики в состояния
полного заполнения и в течение периодов Tji и Tj2 они функционируют
как вычитающие счетные импульсы генератора G2 (входы С). Запол-
нение счетчиков определяются максимальной принятой в измеритель-
ных преобразователях длительностью периодов 7’тах, соответствующей
минимальной частоте fmm = 45 Гц. Максимальная частота принята
395
Глава 11
равной /тах = 55 Гц; ей и минимальной длительности периодов Т^п со-
ответствует наибольшее выходное напряжение UmaiX на выходах ЦАП.
Измерительные преобразователи частоты функционируют по соотноше-
нию [48]
ТГ — ТГ f ~ ^min _ ТГ ^тах — Гном
Uj — с/тах — (7тах . (И-б)
/тах "г /min -*тах -*min
В конце периодов ТД, Tj2 напряжений {Д, U2 управляющие импуль-
сы Un, Ut2i воздействуя на входы Е2 регистров ЦАП2, ЦАПЗ, перепи-
сывают в них в двоичном коде оставшиеся в счетчиках СТЗ, СТ4 числа
импульсов, определяющие в соответствии с (11.6) выходные напряже-
ния Ufi и U/2 цифро-аналоговых преобразователей. Перед преобразо-
ванием чисел импульсов в напряжения задержанными (элементы DT1,
DT2) управляющими импульсами U'T1, U'T2 их коды переписываются в
регистры Е1. При этом регистры Е2 освобождаются для записи дво-
ичных кодов о длительностях следующих периодов изменений напряже-
ний Ui и U2-
Напряжение ±US на выходе вычитателя АН2 пропорционально раз-
ности частот напряжений по концам линии электропередачи и отобра-
жает их взаимное скольжение. Сумматор AW напряжений Ufa и ±Ust
формирует сигнал ±Usa об угле сдвига фаз при переходном электромеха-
ническом процессе по углу сдвига фаз в исходном режиме и скольжени-
ях. Непрерывно изменяющиеся напряжения — аналоговые сигналы ±US
и ±U$S преобразуются в дискретные потенциальные сигналы группой
максимальных реле напряжения AV5-A’V8 с различными установлен-
ными значениями ±Usy, ±Ггзу. Положительное (при Д > Д) и отрица-
тельное (при fi < Д) напряжения U$s и Us фиксируются двумя группами
реле АТ5, A'V6 и KV7, KV8, разделенными диодами.
В измерительную часть входят и фильтр-реле A'VA’l и KVF2 на-
пряжения и приращения напряжения обратной последовательности,
возникающие при КЗ. Они воздействуют по схеме ИЛИ на инверс-
ные входы элементов DX1-DX4 (ЗАПРЕТ) и не разрешают сраба-
тывание измерительных реле KV при электромагнитных переходных
процессах и при повреждениях в цепях измерительных трансформа-
торов напряжения. На инверсные входы элементов ЗАПРЕТ воз-
действует и сигнал о неисправностях, формируемый автоматическим
устройством периодического контроля АУК исправности устройства в
целом.
396
Автоматика прекращения асинхронного режима
Логическая часть. Унифицированная панель ШЭ2707 имеет ло-
гическую часть, обеспечивающую ее функционирование как автоматики
ликвидации асинхронного режима, но может применяться и при исполь-
зовании панели в АПНУ. Логическая часть в соответствии с дискрет-
ными сигналами измерительной части формирует тормозящие УВТ или
ускоряющие УВу управляющие воздействия безынерционной первой сту-
пени АЛАР и после нескольких циклов асинхронного режима второй и
соответственно третьей ступеней.
Асинхронный режим выявляется первой ступенью непосредственно
по углу 6 > <5кр, а сопровождается ли он ускорением синхронных генера-
торов или торможением, определяется по знаку скольжения ±s.
Максимальные измерительные реле напряжения KV1, KV5, KV1
или KV6, KV8, срабатывающие под воздействием напряжений Us, Us,
Uss и Us, —Us, —Uss, пропорциональных углу 6, скольжению и сумме
угла 6И в исходном режиме и скольжению, умноженному на время, —
нарастанию угла 6, формируют через логические элементы DW1, DW2
(рис. 11.8) и DW3, DW4 (ИЛИ) единичный логический сигнал на сред-
них входах логических элементов DX1 или DX2 в зависимости от знака
скольжения.
Единичный логический сигнал поступает на верхний (по расположе-
нию на схеме) и нижний их входы соответственно от элемента временно-
го запоминания TD1, запускаемого через ZW5 срабатывания одного из
указанных измерительных реле. Поскольку в исходном состоянии АЛАР
триггер ST (расположен в середине второй половины схемы) выдает
логическую единицу на прямом выходе Q, поступающую на нижний и
верхний входы элементов DX1, DX2, то один из них формирует сигнал
управляющего воздействия первой ступени — тормозящего УВТ/ при
положительном скольжении или ускоряющего УВу/ при отрицательном
скольжении.
Указанное временное запоминание сигнала измерительных реле и
запоминание (по цепям обратных связей) выходных сигналов DX1 и
DX2 (через DW3 или ZW4) предусмотрено для надежности реализации
управляющих воздействий.
При неуспешности действия первой ступени и достижении углом
сдвига фаз значения <5 = | ± 7г| срабатывает, как указывалось, реле А'У2
и в зависимости от ускорения или торможения реле KV7 или KV8 со-
ответственно и через один из элементов DX3, DX4 запускают счет-
397
Глава 11
Рис. 11.8. Упрощенная логическая схема панели АЛАР типа ШЭ2707
398
Автоматика прекращения асинхронного режима
399
Глава И
чик СТ1 или СТ2 циклов асинхронного режима. Спустя три цикла
единичный сигнал с верхнего выхода СТ1 или СТ2 через W7 или
ZW8 поступает на средний вход одного из выходных элементов DX5
или DXQ второй ступени. Он проходит на его выход в виде сигнала
тормозящего УВту/ или ускоряющего УВуп воздействий, поскольку на
верхний DXb или нижний DXQ входы поступает логическая единица
от инверсного выхода элемента выдержки времени DT2, а на нижний
и верхний их входы — единица от АУК (неисправностей нет). При
этом через ZW10 триггер ST переключается: логическим нулем на его
прямом выходе запрещается действие первой ступени, а единицей на
инверсном выходе запускается элемент выдержки времени DT2 третьей
ступени.
Третья ступень вступает в действие через время 10-20 с и после трех
циклов асинхронного хода, отсчитываемых после срабатывания элемен-
та DT2-. единицей на его прямом (верхнем) выходе счетчики циклов
CTl, СТ2 через DW6 устанавливаются в исходное состояние. На вход
установки R счетчиков действует и элемент времени DT1, запускае-
мый через ZW9 выходными сигналами счетчиков и контролирующий
максимальную установленную длительность циклов асинхронного ре-
жима.
Логическим нулем на инверсном выходе, поступающим на вхо-
ды DX5 и DX6, элемент времени DT2 прекращает дальнейшее действие
второй ступени. Логическая единица с прямого выхода DT2, поступая
на входы элементов DX7 или DX8, подготавливает условия для про-
хождения через них дискретных сигналов с нижних выходов счетчиков
СТ1, СТ2 после новых трех циклов асинхронного режима и через ZW11
или ZW12 на средние входы выходных элементов DX9 или Т>Х10 тре-
тьей ступени.
При наличии логических единиц на выходе элемента TD3 вре-
менного запоминания единичных сигналов от DX7 или DX8 и от-
сутствии нулевых (запрещающих) логических сигналов от АУК на
остальных входах DX9 или DX10 они формируют тормозящее УВТ///
или ускоряющее УВу/// управляющие воздействия третьей ступени
АЛАР.
Возврат схемы в исходное состояние, в особенности триггера ST,
разрешающего действие первой ступени, происходит через время DT3
400
Автоматика прекращения асинхронного режима
по сигналу от DT2 после снятия с инверсного входа DX единицы —
прекращения ее выдачи счетчиками СТ1, СТ2, т.е. после прекращения
асинхронного режима.
11.5. Микропроцессорная автоматика
Релейно-контактным и микросхемным бесконтактным (см. рис. 11.5-
11.7) устройствам АЛАР [75] свойственны определенные недостат-
ки, обусловленные несовершенными способами косвенного определения
основных параметров, характеризующих опасность появления асинхрон-
ного режима— угла 6 и скольжения s (см. рис. 11.3,а и 11.4,5), и исполь-
зованием измерительных органов различного назначения [измеритель-
ных реле сопротивления KZ, активной мощности KW (см. рис. 11.5) и
других], а именно:
• невозможность выявления опасности наступления асинхронного
режима ранее достижения углом 6 критического значения;
• затруднительность обнаружения асинхронного режима при боль-
ших скольжениях (т.е. в наиболее тяжелых случаях его появле-
ния), обусловленная ограниченным быстродействием измеритель-
ных реле и необходимостью задержек (см. DT на рис. 11.5);
• сложность и недостаточная достоверность согласования статиче-
ских и, особенно, динамических характеристик разнотипных из-
мерительных органов.
Методы и технические средства обработки информации микропро-
цессорной вычислительной техникой в реальном времени позволяют про-
изводить прямой контроль указанных основных параметров — угла 5,
скольжения s и его производной ds /dt, применить быстродействующие
алгоритмы их вычисления и тем самым существенно повысить техни-
ческое совершенство автоматики, особенно эффективность действия по
предотвращению развития асинхронного режима.
Алгоритм функционирования микропроцессорной АЛАР основан на
использовании функциональной связи между скольжением и углом s =
= /(^) — фазовой траектории (рис. 11.9,а) и определении допустимо-
го 5доп (по опасности развития асинхронного режима) его значения [76]:
401
Глава 11
-5лоп = 2^ Х [(тг - -<fy)sin<fy - (cos 6 + cosSy)] , (11.7)
-*np-* J
где Sy = arcsin[(PTPup)/Pr2max]; PT — мощность эквивалентной турби-
ны электростанции с ЭДС Е1 (см. рис. 11.1,а); Ргтах — максималь-
ная мощность генераторов электростанции; Рпр — предельная мощность
электропередачи (см. рис. 10.5).
Фазовая траектория аппроксимируется прямыми 1 и 2 (рис. И.9,а),
при этом установленный угол срабатывания первой ступени автомати-
ки, выявляющей опасность появления асинхронного режима
Syi ~ S + ks . (11.8)
Действие первой ступени предусматривается только в процессе раз-
вития асинхронного режима, т.е. в первом его цикле Ts (см. рис. 11.3,а),
и запрещается после превышения скольжением допустимого значения
|5| > l^aonl-
Отстройка АЛАР от КЗ и отключений участков электропередачи
(см. рис. 8.1) достигается запретом ее действия по дискретным умень-
шениям ДД напряжений СД или Д2 (см. рис. 11.1,а), угла Д£ или сколь-
жения Дз.
Вторая ступень вступает в действие после не менее чем одного ци-
кла асинхронного режима. Ее назначением является прекращение уже
развившегося асинхронного режима.
Действие третьей ступени разрешается через установленное время
(до 20 с) после срабатывания второй ступени. Предусматривается кон-
троль длительности каждого цикла асинхронного режима.
Функциональные достоинства, обработка информации и вырабаты-
вание противоаварийных управляющих воздействий в реальном време-
ни электромеханического переходного процесса развития асинхронного
режима обеспечиваются быстродействующими алгоритмами:
• выделения колебательной составляющей напряжения промышлен-
ной частоты нерекурсивными цифровыми частотными фильтрами,
разлагающими напряжения на ортогональные составляющие [8];
• формирования цифровых сигналов информации об их амплитудах,
фазах и частоте, о симметричных составляющих напряжений пря-
мой последовательности;
402
403
Рис. 11.9. Графики зависимостей s — с аппроксимирующими прямыми (а) и структурная схема
алгоритма поворота вектора напряжения до совпадения с мнимой осью (б’)
Автоматика прекращения асинхронного режима
Глава И
• вычислений угла S сдвига фаз между моделируемыми ЭДС (см.
рис. 11.1,а)
E1 = Ur + IZ^T- E2 = U_i-L(Z^ + Zt) (11.9)
и вычислений скольжения s и его производной с использованием
ортогональных составляющих.
Длительность импульсной характеристики нерекурсивных фильтров
ортогональных составляющих равна, как обычно, длительности периода
Тп = 0,02 с. Симметричная составляющая прямой последовательности
формируется по ортогональным составляющим известным [8] способом.
Вычисление амплитуды напряжений и угла сдвига фаз производится
нетрадиционным методом «поворотов» вектора до совпадения с мнимой
осью jу координат комплексной плоскости [76].
Амплитуда равна координате у конца повернутого вектора напря-
жения, а угол сдвига между двумя напряжениями — разности углов
поворотов до указанного совпадения их векторов с мнимой осью.
Частота и скольжение, как относительное угловое ускорение, вычи-
сляются операциями над тремя следующими последовательно дискрет-
ными мгновенными значениями напряжений или их ортогональных со-
ставляющих [76].
На рис. 11.9,6 для иллюстрации приведена структурная схема ал-
горитма вычислений координат ж*+1, yk+i по исходным аго, Уо за пять
(fc = 1 4- 5) последовательных приближений к совпадению вектора Ц_т с
мнимой осью; после поворота вектора амплитуда напряжения Um = у*,.
Угол поворота после одного вычисления в к = arctg(2“/').
Вычислительная часть ВЧ (рис. 11.10) микропроцессорной АЛАР
эффективно функционирует только на основе 16-разрядного микропро-
цессора МП1 типа К1810ВМ88 или зарубежного TMS-32010 и быстро-
действующего 10-разрядного АЦП типа К1108ПВ1. Микропроцессор се-
рии 580ВМ80А оказался пригодным лишь для использования в качестве
сервисного МП2. Микропроцессор МП1 имеет интерфейс к ПЭВМ и
выход на волоконно-оптическую линию связи с АСУ.
Элементы памяти и логических операций реализуются на интеграль-
ных микросхемах серий К555, К561, К574, в частности перепрограмми-
руемое запоминающее устройство (ППЗУ) уставок АЛАР — на микро-
схеме К555ИД7.
404
Автоматика прекращения асинхронного режима
Измерительно-преобразовательная функциональная часть ИПЧ со-
держит вторичные измерительные преобразователи напряжений ИПН
и преобразователи фазных токов в напряжения ИПТН, аналоговые ча-
стотные фильтры А ЧФ, мультиплексоры МПЛ и АЦП с переключае-
мым (элементом управления ЭУ) коэффициентом преобразования, элек-
трически отделенного от входных цепей оптоэлектронными элементами
гальванической развязки ЭГР. Малоинерционные аналоговые частотные
фильтры производят предварительную обработку входных напряжений,
задерживая колебательные свободные и принужденные составляющие
высших частот.
На рис. 11.10 в составе ИПЧ показаны реле входных дискретных
сигналов РДС и клавиатура КЛ управления микропроцессорами.
Исполнительная часть Ис. Ч автоматики ликвидации асинхронного
режима содержит алфавитно-цифровой индикатор АЦИ отображения
информации и комплекты исполнительных (выходных) электромагнит-
ных реле ВР1-ВРШ тормозных УВТ или ускоряющих УВу противоава-
рийных управляющих воздействий на синхронные генераторы электро-
станций трех ступеней АЛАР.
Надежность несрабатывания исполнительных реле, т.е. исключение
недопустимых излишних управляющих воздействий, ввиду их особой
опасности, достигается специальными аппаратными и программными
средствами.
Надежность срабатывания ступеней АЛАР, т.е. выдачи противоава-
рийных управляющих воздействий, обеспечивается:
• автоматическим контролем исправности всех функциональных
элементов и микропроцессора МП1 (элемент контроля ЭК) с вы-
дачей информации о неисправностях;
• контролем правильности прохождения программ посредством раз-
личных «программных ловушек», исключающих возникновение
отказов в действии вследствие программных сбоев;
• периодическим генерированием сервисным микропроцессором МП2
тестовых сигналов.
Микропроцессорная АЛАР является одним из наиболее совершен-
ных, созданных за последнее время, цифровых устройств автоматиче-
ского управления электроэнергетическими системами.
405
Рис. 11.10. Функциональная схема микропроцессорной АЛАР
Глава 11
Автоматика прекращения асинхронного режима
Вопросы для самопроверки
1. Какой из режимных параметров электроэнергетической системы опреде-
ляет наступление асинхронного режима?
2. Как изменяется угол сдвига фаз между напряжениями по концам линии
электропередачи после наступления асинхронного режима?
3. В чем особенность изменения скольжения в асинхронном режиме?
4. Как изменяются действующие значения напряжения на шинах электро-
станции и тока в линии электропередачи после выпадения электростан-
ции из синхронизма?
5 Как изменяется активная мощность линии электропередачи в асинхрон-
ном режиме?
6. Как в соответствии с назначением автоматика ликвидации асинхронного
режима действует и на какие электроэнергетические объекты?
7 В чем состоит функциональное различие между несколькими ступенями
АЛАР?
8. Как достигается отстройка измерительной части АЛАР, фиксирующей
наступление асинхронного режима, от возникновения КЗ на линии и от
синхронных качаний генераторов?
9. Какие виды АЛАР различаются по используемым для фиксирования
асинхронного режима изменениям электрических величин?
10. Какие из измерительных реле определяют ускоряющие или тормозящие
противоаварийные управляющие воздействия на синхронные генерато-
ры, необходимые для прекращения (ликвидапии) асинхронного режима?
11 Как функционирует и какие управляющие воздействия вырабатывает
первая ступень устройства АЛАР (см. рис 11.5)?
12. Как действует и какие управляющие воздействия формирует вторая сту-
пень типового устройства АЛАР (см. рис. 11.5)?
13. Для чего необходим счетчик циклов асинхронного хода и элемент времени
DT2 второй ступени АЛАР (см. рис. И 5)?
14 Почему необходима делительная противоаварийная автоматика и как
восстанавливается после ее действия нормальный режим работы элек-
тропередачи?
15 Какие функции выполняет измерительная часть панели (шкафа) проти-
воаварийной автоматики ШЭ2707?
407
Глава 11
16 Какие функциональные микросхемные элементы содержит измеритель-
ная часть ШЭ2707 (см. рис 11.7)?
17. Как функционирует аналого-цифровой измерительный преобразователь
угла сдвига фаз 6 между напряжениями в микросхемной панели
(см рис 11.7)?
18. Как функционирует аналого-цифровой измерительный преобразователь
скольжения в микросхемной панели (см. рис. 11.7)7
19 Как действует логическая часть микросхемной панели при выработ-
ке противоаварийных управляющих воздействий первой ступени АЛАР
(см. рис 11.8)?
20. Как формируются противоаварийные управляющие воздействия второй
ступени микросхемной АЛАР (см рис. 11 8)?
21. В чем особенности функционирования третьей ступени АЛАР
(см. рис. 11.8)?
22 В чем состоит принципиальное различие между алгоритмами функпи-
онирования релейно-контактных или бесконтактных (см. рис. 11.5 и
рис. 11.6) и аналоговых микросхемных (см рис 11.7 и рис. 11.8) или
микропроцессорного (см. рис. 11.9 и рис. 11.10) устройств АЛАР?
23. Какова особенность алгоритма функционирования микропроцессорной
автоматики (см. рис. 11.9)7
24. За счет чего достигается быстродействие вычислительной части микро-
процессорной АЛАР?
25. Как функционирует микропроцессорная АЛАР (см. рис. 11 10)?
408
Глава 12. Автоматика предотвращения
недопустимых изменений режимных
параметров
12.1. Автоматика противоаварийных отключений
и включений по изменениям напряжения
Снижение напряжения характерно для аварийного режима, а его по-
вышение для утяжеленного, развивающегося по мере уменьшения за-
грузки передаваемой активной мощностью магистральных линий элек-
тропередачи высокого и, особенно, сверхвысокого напряжений, явля-
ющихся мощными генераторами реактивной мощности. Автоматика
ограничения снижения напряжения в аварийном режиме существенно
снижает вероятность развития общесистемной аварии, вследствие ла-
вины напряжения, а автоматика ограничения его повышения снижает
вероятность возникновения короткого замыкания в результате электри-
ческого пробоя изоляции.
Как известно (см. гл. 5), напряжение поддерживается генерирова-
нием или потреблением реактивной мощности синхронными генерато-
рами (гидрогенераторами в режиме компенсаторов), синхронными ком-
пенсаторами с реверсивным возбуждением, реакторно-конденсаторными
непрерывно и дискретно управляемыми источниками, особенно с тири-
сторными преобразователями и выключателями — статическими тири-
сторными компенсаторами (СТК) линий электропередачи сверхвысоко-
го напряжения с полностью включаемой и отключаемой конденсаторной
частью, включением и отключением реакторов поперечной компенсации,
устанавливаемых по концам линий. Дискретное отключение режима
генерирования при повышениях напряжения или потребления при сни-
жениях напряжения производится соответствующими автоматическими
409
Глава 12
устройствами релейного действия. Автоматические устройства проти-
воаварийного включения и отключения конденсаторной части СТК вхо-
дят в состав дискретной части автоматики управления им (см. рис. 6.5).
Включение и отключения реакторов поперечной компенсации произво-
дится соответствующим автоматическим устройством.
Обычно автоматика, действующая при снижении и повышении на-
пряжения, реализуется простыми ступенчатыми релейно-контактными
устройствами минимального и максимального напряжений соответ-
ственно. Характерным является одноступенчатое автоматическое
устройство релейной форсировки возбуждения (АРФВ) синхронных ма-
шин, действующее при снижениях напряжения, обусловленных коротки-
ми замыканиями [1, 2].
Автоматические устройства форсировки возбуждения.
Типовое одноступенчатое релейно-контактное автоматическое устрой-
ство форсировки возбуждения генераторов с классическим электрома-
шинным возбудителем постоянного тока (см. рис. 5.3,а) включает кон-
тактор, выводящий замыкающим контактом КМ из цепи обмотки LGE
самовозбуждения возбудителя резистор RCB. Напряжение UB возбужде-
ния синхронного генератора G приближенно, ввиду нелинейности цепи
самовозбуждения, экспоненциально нарастает до предельного техниче-
ски возможного значения.
Контактор управляется обычно двумя измерительными реле мини-
мального напряжения, подключенными к разным междуфазным вторич-
ным напряжениям первичного измерительного трансформатора напря-
жения генератора. Два минимальных реле, управляющие контактором
через схему логического умножения, предотвращают излишнее действие
АРФВ при перегорании плавной вставки одного из предохранителей в
первичных цепях трансформатора напряжения.
Первые из турбогенераторов с высокоинтенсивным использованием
активных материалов (обмоток) с электромашинным возбудителем пе-
ременного тока (см. рис. 5.3,6) и классическим (функционирующим по
отклонению напряжения) электромагнитным АРВ (см. § 5.4) имеют ор-
ганически сочетаемое с ним бесконтактное УФВ и устройство ограниче-
ния форсировки УОФ (см. рис. 5.5) возбуждения на двукратном уровне,
допускаемом термической стойкостью генераторов. Как и АРВ, они вы-
полнены на магнитных усилителях с самонасыщением, как технически
наиболее совершенным [8], релейный режим работы одного из которых
410
Автоматика предотвращения недопустимых изменений режимных параметров
(УОФ) обеспечивается дополнительной (к свойственной им критической
внутренней) относительно слабой внешней положительной обратной
связью.
Высокое быстродействие и эффективность форсировки достигается
потенциально перевозбужденным возбудителем, производящим началь-
ную форсировку возбуждения генераторов при снятии удерживающего
его возбуждение на номинальном уровне тока /орег.п.ном (см. рис. 5.6,а)
магнитного усилителя ALT1 (см. рис. 5.5) противовключенной части
АРВ. Возбуждение генератора до ограничиваемого на двукратном уров-
не (см. ток /орег.о.ф на рис. 5.6,б) доводится согласованно включенной
частью АРВ на магнитном усилителе ALT2 (см. рис. 5.5), которая и
выполняет функции УФВ.
Для обеспечения форсировки возбуждения при глубоких снижениях
напряжения, при которых ток 1оу измерительного органа ИОН снижа-
ется практически до нуля (показано пунктиром на рис. 5.6,а), в из-
мерительный орган напряжения вводится выпрямленный ток 10п от
подвозбудителя GEA (см. рис. 5.5). Ток 7оп действует согласо-
ванно с током /ол измерительного органа (осуществляется так назы-
ваемый подпор линейного элемента). Так как в нормальных режи-
мах работы 10а = 0 диоды выпрямителя VS7 закрыты обратным на-
пряжением на выходе выпрямителя VS4 измерительного органа на-
пряжения. После снижения напряжения турбогенератора до U" (см.
рис. 5.6,а,б) диоды V S7 открываются, а диоды выпрямителя VS4 за-
крываются.
Токи /олс и /ол.п в обмотках управления магнитными усилителя-
ми обусловливаются только током /оп, пропорциональным напряжению
подвозбудителя, т.е. не зависящим от напряжения турбогенератора. По-
этому на характеристиках /о л.с = f(Ur) и /ол.п — /(^г) на рис. 5.6,а,б
показаны горизонтальные участки при Ur < U".
Ток Ion м°г бы довести ток УФВ до максимального /орег.ф (см.
рис. 5.6,б). Однако он ограничивается на уровне /орег.о ф, соответствую-
щем двукратному номинальному току возбуждения генератора, устрой-
ством ограничения форсировки УОФ. Оно представляет собой электро-
магнитный регулятор напряжения UB возбуждения генератора релейно-
го действия — срабатывает при напряжении 2UB ном [11]. Измеритель-
ный орган напряжения UB выполнен по такой же схеме, как и ИОН (см.
рис. 5.5), а в магнитный усилитель с самонасыщением введена, как ука-
411
Глава 12
зывалось, внешняя положительная обратная связь, обеспечивающая ре-
лейный режим его работы.
При двукратном напряжении на обмотке ротора генератора ток /о.ф
магнитного усилителя УОФ скачкообразно (релейно) возрастает (прак-
тически от нуля) и воздействует на магнитные усилители AZTl, ALT2
регулятора. При этом ток /орег.с усилителя ALT2 ограничивается на
уровне /орег.о.ф (см. рис. 5.6,6), соответствующем двукратной форси-
ровке возбуждения синхронного генератора.
При современных АРВ СД мощных синхронных генераторов с ти-
ристорным возбуждением УРФ не предусматривается, поскольку при
высоких (см. § 5.5) коэффициентах усиления сигнала по отклонению на-
пряжения (ки ~ 100) форсировку возбуждения обеспечивает измеритель-
ный орган напряжения ИОН (см. рис. 5.9) регулятора. Обязательное
ограничение форсировки возбуждения на уровнях, ограничиваемых тер-
мической стойкостью генераторов, выполняется стабилитронным огра-
ничителем напряжения регулятора Дрег на входе устройств управления
тиристорными преобразователями.
Автоматика ограничений изменений напряжения. Автома-
тика ограничения снижения напряжения (АОСН), происходящего вслед-
ствие возникновения дефицита мощности и угрожающего развитием ла-
вины напряжений, выполняется многоступенчатой.
Каждая ступень (как и одноступенчатая АРФВ) содержит по два ми-
нимальных реле напряжения с близким к единице коэффициентом воз-
врата (А'в — 1,03-1,05), обеспечивающим мелкоступенчато разнесенную
настройку измерительной части устройства на установленные напряже-
ния срабатывания, например, трех ступеней
ДСр = (0,75; 0,8; 0,85)^.
Логическая часть содержит реле времени с минимальной выдерж-
кой времени первой ступени, отстроенной от времени действия АУРЗ
и АПВ или АВР, поскольку при снижениях (вплоть до нуля) напряже-
ния в процессе возникновения и ликвидации или отключения КЗ авто-
матика ограничения снижения напряжения не должна отключать на-
грузку. Мелкоступенчатая настройка обеспечивает некоторую адапта-
цию к степени снижения напряжения производимых АОСН отключений
нагрузки (прежде всего электродвигателей) или питающих ее линий,
412
Автоматика предотвращения недопустимых изменений режимных параметров
отключения реакторов поперечной компенсации, включение последова-
тельно или отключения параллельно соединенных секций конденсаторов
продольной компенсации линий электропередачи сверхвысокого напря-
жения [39].
Обычно двухступенчатая автоматика ограничений повышений на-
пряжения (АОПН), напротив, включает компенсирующие реакторы и
отключает линию при недопустимых повышениях напряжения, обусло-
вленных генерированием ею реактивной мощности и резонансными явле-
ниями. Она действует, главным образом, при отключенной линии с од-
ной стороны или во время ее включения, т.е. при холостом ходе линии
(рис. 12.1,а). При этом в условиях, близких к резонансу, напряжения Ua
и UK на шинах ЭС или ПС и отключенном конце линии могут, соответ-
ственно, в 1,5-2,0 раза превышать номинальные.
Например, линия напряжением 500 кВ и длиной 500 км при удельной
емкостной проводимости Ьс = 3,7 • 10~6 1/0м-км (емкостью 0,5 мкФ)
и сопротивлении Хс — 0,6 • 103 Ом генерирует реактивную мощность
Q„ = 250 Мвар.
Напряжения на шинах и на конце линии (рис. 12.1,а)
ХС-^
Cm = |Zj(v ~хс)\ = \Е\----------2-ХГ->Е'
Хс-(Хэс + ^)
UK - \I(-jXc)\ = |£|----Хс у > иш.
Хс-(ХЭС + ^)
При Л'эс = Хл = 150 Ом их значения превышают ЭДС Е в 1,4 и 1,7
раза соответственно.
Между тем повышение напряжения жестко ограничивается по уров-
ню и по длительности в пределах от 20 с до 0,1 с соответственно при
кратностях напряжения 1,25 и 2,0.
Снижение напряжения достигается быстродействующим включени-
ем компенсирующих реакторов LR (рис. 12.1,а), уменьшающих емкост-
ную проводимость электропередачи. Однако при недостаточной эффек-
тивности действия АОПН на их включения, т.е. при напряжении Um на
шинах, остающемся большим номинального, автоматика с выдержкой
времени отключает находящуюся на холостом ходу линию.
413
Глава 12
(а)
Рис. 12.1. Схема электропередачи (а) и функциональная схема (б)
автоматического устройства включения компенсирующего реактора и
отключения линии при повышении напряжения {окончание рис. на
стр. 415)
Выпускается типовая панель АОПН — шкаф противоаварийной ав-
томатики ШП2704.Функциональная схема АОПН (рис. 12.1,5) содержит
измерительный (пусковой) и избирательный органы, выполненные трех-
фазными. Двухступенчатый пусковой орган напряжения состоит из ше-
сти AVl-A'Ve максимальных реле фазных напряжений с высоким коэф-
фициентом возврата (А'в « 0,95) и разными установленными напряжени-
ями срабатывания. Три максимальных реле AVl-A'V'3 первой ступени
отстраиваются (известным [39, 40] способом) от минимально длительно
допустимого напряжения Umy = 1.ШПОМ, а реле A'V4-7fV6 — от напря-
жения, допустимого определенное время, например Um2 — 1,5(7НОм при
выдержке времени отключения линии = 1 с [39].
Первая ступень включает выключатель Q1 (рис. 12.1,а) реакто-
ра LR, а вторая предназначена для отключения выключателя Q3 линии
и запрета его АПВ (рис. 12.1,5). Предусмотрено возможное отключе-
ние линии и первой ступенью с выдержкой времени если после
включения реактора напряжение не снижается до напряжения воз-
врата реле A’V1-A'V3, т.е. остается большим Um > 1,1 Дном-
Избирательный орган необходим для выявления линии, отключен-
ной с противоположной стороны (от шин ЭС или ПС обычно отходят
414
Автоматика предотвращения недопустимых изменений режимных параметров
I r~llt I f r~]li I ! Г~11< I
415
Глава 12
несколько линий). Он представляет собой комплекты из трех измери-
тельных реле (для каждой линии) KQ1-KQ3 реактивной мощности [8],
включенных на фазные напряжения и токи трех фаз и срабатывающих
при направлении мощности от линии к шинам, т.е. генерируемой одно-
сторонне включенной линией (на рис. 12.1,6 показан один их комплект).
Для четкости действия установленная реактивная мощность их сраба-
тывания выбирается в 1,5 раза [39] меньше мощности генерируемой ли-
нией, отключенной с противоположного конца при напряжении Дш, со-
ответствующем установленному напряжению срабатывания первой сту-
пени пускового органа напряжения = Uyl, а для селективности их
действия — не менее чем в 1,25 раза большей (при возможности) макси-
мальной реактивной мощности в нагрузочном режиме, также направлен-
ной от линии к шинам (при реверсивной по мощности электропередаче).
Дополнительно предусмотрен контроль тока в линии: при невозмож-
ности указанной отстройки реле KQ от реактивной мощности рабоче-
го режима максимальные измерительные реле фазных токов А’А1-А’АЗ
с установленными токами срабатывания, превышающими ток, обусло-
вленный указанной реактивной мощностью, генерируемой односторонне
включенной линией, запрещают действие автоматики включения реак-
тора и отключения линии. При этом учитывается и опасность непра-
вильного (излишнего) срабатывания реле реактивной мощности в рабо-
чем режиме максимальной передаваемой по линии активной мощности.
Необходимое взаимодействие пускового и избирательного органов
обеспечивается логической частью устройства АОПН. Элементы DX1-
DX3 (И-ЗАПРЕТ) логического перемножения (совпадения) дискретных
(единичных) сигналов от измерительных реле напряжения A'Vl-А'ЕЗ и
KQ1-KQ3 соответственно с запретом их прохождения по сигналу ло-
гической единицы от реле тока соответственно А’А1-А'АЗ и элемент ло-
гического суммирования DW1 (ИЛИ) формируют дискретный исполни-
тельный сигнал на включение компенсирующего реактора при повыше-
нии напряжения и наличии потока реактивной мощности из линии к
шинам, если обусловленный ею ток не превышает установленного тока
срабатывания максимальных измерительных реле тока КА1- К АЗ.
С выдержкой элемента времени DT1 через DW3 и Д>1¥4 первая
ступень может отключать линию и запрещать ее АПВ.
Второй ступени пускового органа (реле А’У4-1ГУ6), формирующей
сигнал логической единицы через элемент AW2, поступающий на пер-
416
Автоматика предотвращения недопустимых изменений режимных параметров
вый (нижний) вход логического элемента DX (И), разрешается действо-
вать на отключение линии и запрещение ее АПВ (через элементы ZW3
и ZW4) с выдержкой времени > h элемента времени DT2 только при
условии нахождения в состоянии после срабатывания первой ступени
(наличие логической единицы на втором (верхнем) входе элемента DX
от DWI).
Известен [39] и другой способ автоматического включения компенси-
рующего реактора, при котором используются пробои искровых проме-
жутков в цепи подключения реактора, вследствие перенапряжения. По-
являющиеся токи в указанной цепи фиксируются измерительными реле
тока, которые и производят включение отключенного выключателя, в
частности Q1, реактора LR (см. рис. 12.1,а).
Обнинский приборный завод «Сигнал» производит на интегральных
микросхемах повышенной надежности серии К561, содержащей поле-
вые МДП (МОП) транзисторы, автоматические устройства отключения
выключателя при повышении напряжения и повторного его включения
при восстановлении. Оно входит в состав комплектных электронных
устройств (КЭУ) противоаварийной автоматики (см. гл. 13).
12.2. Процесс изменения частоты
в электроэнергетической системе
При нарушении, вследствие возмущающего воздействия, баланса
мощностей (см. гл. 8) в электроэнергетической системе начинается элек-
тромеханический переходный процесс, сопровождающийся снижением
или повышением частоты вращения синхронных генераторов. И то и
другое, однако, некатастрофично, поскольку нагруженная электроэнер-
гетическая система обладает способностью самоустановления послеа-
варийного установившегося режима, благодаря естественному свойству
нагрузки соответственно снижать и увеличивать свою производитель-
ность.
На рис. 12.2 приведены статические зависимости вырабатываемой
синхронными генераторами мощности Рг и потребляемой нагрузкой Ра
от частоты. При ограниченном небалансе мощности ДРг1 = РН1.о - Рго
(рис. 12.2,а) или ДРг1 = Рго — Лч.о (рис. 12.2,6), при котором графи-
ки 1, 2 указанных зависимостей пересекаются не только в точке а —
нормальный режим, но и в точке b — послеаварийный установившийся
417
Глава 12
Рис. 12.2. Статические частотные характеристики генерирующей ча-
сти и нагрузки электроэнергетической системы при «набросе» мощности
нагрузки (а) или «сбросе» мощности генераторов (б)
режим наступает при снижении частоты Д < /Ном и потребляемой мощ-
ности < Рп0 = Рц.ном- Однако при дефиците генерируемой мощности
ДРГ2 = РН2.о - Pro или ДРГ2 = Ло - Л-2.0, при котором характеристики
1 и 3 или 2 и 3 расходятся (рис. 12.2), аварийный процесс развивается,
вследствие лавины частоты — может произойти общесистемная авария.
Для спасения электроэнергетической системы необходимо снижение де-
фицита ДРг2, что и делается противоаварийным отключением нагрузки
418
Автоматика предотвращения недопустимых изменений режимных параметров
по снижению частоты автоматикой частотной разгрузки (АЧР) — наи-
более простым и эффективным видом АОСЧ.
Столь же опасно и повышение частоты вращения синхронных гене-
раторов в избыточной по мощности части ЭЭС, но уже с точки зрения
сохранения статической устойчивости в послеаварийном режиме. В этом
случае производится частотное отключение гидрогенераторов (АЧОГ).
Динамический процесс изменения, в частности снижения (рис. 12.3),
частоты описывается экспоненциальной функцией с постоянной време-
ни, определяемой моментом J электромеханической инерции электро-
энергетической системы. Она является решением дифференциального
уравнения движения ЭЭС при электромеханическом переходном процес-
се, обусловленном возникшим недостатком мощности ДРГ,
J^=— (12-1)
dt и v '
которое с учетом = /^ном! /Ра.ном — Tj и df/dt = dAf/dt после
умножения на <д/Рн.Ном в операторной форме выглядит как [1]
pTjA.f(p) = ДРПОм(р), (12.2)
где ДРНОМ = ДРГ/Рн.ном-
Согласно (12.2) электроэнергетическая система представляется ин-
тегрирующим структурно неустойчивым звеном
ДР ном(р)
= (12’3)
т.е. новый установившийся послеаварийный режим при ДРНОМ = const
невозможен.
Однако, как указывалось, недостаток мощности ДР уменьшается по
мере снижения частоты
ДР = ДРНОМ-1ГНД/, (12.4)
где Ка = (Р//) = tgo — коэффициент регулирующего эффекта нагруз-
ки (см. рис. 12.2,6).
419
Глава 12
Рис. 12.3. Характер изменения частоты при действиях очередей АЧР1
и АЧРП
С его учетом [подстановкой (12.4) в уравнение (12.3)] нагруженная
электроэнергетическая система подставляется инерционным — потен-
циально устойчивым структурным звеном первого порядка
ДР ном 1
Д/(р) = -^- —— , (12.5)
* Лн pl4 + 1
где Тч — постоянная времени изменения частоты, Тч = Tj/Ки.
В установившемся послеаварийном режиме (при t —> оо, р —> 0) ча-
стота оказывается сниженной на
ДР ном
Д/оо = -^-. (12.6)
* лн
Указанная подстановка (12.4) в (12.3) эквивалентна охвату интегри-
рующего звена жесткой отрицательной обратной связью с коэффициен-
том передачи Ко,с = Ка (см. рис. 3.5,6) [1], преобразующей его в ука-
занное апериодическое звено и обеспечивающей затухание электромеха-
нического переходного процесса в электроэнергетической системе.
420
Автоматика предотвращения недопустимых изменений режимных параметров
Решение уравнения (12.5) и определяет экспоненциальное изменение
частоты (см. рис. 12.3)
/ =/номТД/оо(1-е-//Тч) (12.7)
при недостатке или избытке мощности соответственно «-» или «+»
в (12.7).
В [1] обращено внимание на свойство производной функции (12.7),
равной с учетом (11.2) и (11.6)
# - тДР е~*/Тч
dt ~^.аомКаТч
максимальное значение которой при t = О
— тАР ^ном
—(-‘-“ном
« квТч
(12.8)
(12.9)
дает информацию о возникающем небалансе мощности ДРПом и умень-
шающемся по мере, в частности, снижения частоты недостатке (дефи-
ците) мощности.
Остановить процессы снижения или повышения частоты, затем из-
менить их соответственно на возрастание и снижение частоты с целью
восстановления ее номинального значения и есть задача автоматики про-
тивоаварийных частотных отключений нагрузки (АЧР) и частотного
ускоренного пуска гидрогенераторов (АЧУП) в дефицитной и отключе-
ния гидрогенераторов (АЧОГ) в избыточной по мощности частях ЭЭС.
12.3. Автоматика частотной разгрузки
Обязательная для всех подстанций автоматика частотной разгрузки
наносит ущерб потребителям электроэнергии, поэтому должна обладать
свойством адаптации к возникшему недостатку (дефициту) мощности.
Поскольку АЧР релейного действия, то возможно лишь дискретное по-
следовательное приближение отключаемой мощности к возникшему ее
дефициту. Поэтому она реализуется многими автоматами трех кате-
горий АЧР1, АЧРП и АЧРШ. Наиболее распространена и эффективна
первая из них, состоящая из N = 10-20 мгновенно действующих (по мере
421
Глава 12
снижения частоты) автоматов, установленных на ПС, с мелкоступенча-
то (через А/ = 0,1-0,2 Гц) разнесенными частотами срабатывания их
измерительных реле частоты от /уд — 48,5 до fyiN — 46,5 Гц и скру-
пулезно рассчитанными с учетом уменьшающегося в функции снижения
частоты и по мере отключения потребителей дефицита мощности от-
ключаемыми ими мощностями нагрузки [1].
Если в течение некоторого времени, начиная с ti = 5 с, частота не
восстанавливается до близкой к номинальной, т.е. утяжеленный режим
ЭЭС продолжается, то приходят в действие (обычно не более пяти ав-
томатов) АЧРП, имеющие одну установленную частоту срабатывания
fyll = 49,2 Гц, но различающиеся на At = 5 с выдержки времени, допол-
нительного отключения потребителей электроэнергии. Временные гра-
фики (рис. 12.3) иллюстрируют эффективность АЧР1 по приостановке
снижения частоты и АЧРП по ее восстановлению.
Категория автоматов АЧР1П устанавливается на ПС сильно дефи-
цитных частей ЭЭС, в которых возможно весьма быстрое снижение ча-
стоты до опасного уровня (45 Гц). Они функционируют по скорости
изменения частоты: производная функции изменения частоты является
показателем дефицита мощности и вероятной глубины снижения час-
тоты.
По мере восстановления частоты автоматикой противоаварийной ча-
стотной разгрузки, полного загружения недогруженных и частотного
ускоренного пуска резервных гидрогенераторов и в результате действия
автоматики управления нормальными режимами ЭЭС (см. гл. 3, 4) элек-
троснабжение отключенных потребителей электроэнергии восстанавли-
вается автоматами частотного повторного включения (ЧАПВ).
В эксплуатации находятся различные разновидности релейно-
контактных автоматических устройств частотной разгрузки (АУЧР),
нередко комбинированных, выполняющих функции одного комплекта ав-
томатов АЧР1, АЧРП и ЧАПВ. Они описаны в учебной литературе [2,
38, 43]. Основным их элементом является измерительное реле частоты с
автоматическим переключением установленных частот его срабатыва-
ния как при снижении, так и при повышении частоты.
До недавнего времени промышленностью выпускалось полупровод-
никовое измерительное реле частоты, по принципу действия аналогич-
ное ранее установленному в эксплуатацию индукционному электроме-
ханическому реле [1]. Принцип его действия состоит в сравнении по
422
Автоматика предотвращения недопустимых изменений режимных параметров
фазе двух токов, возбуждаемых напряжением с изменяющейся часто-
той в RL и RLC — резонансных контурах с сильно различающимися
фазочастотными характеристиками [8]. Предписанная частота их сра-
батывания устанавливается как соответствующая совпадению токов по
фазе дискретным изменениям добротности одного из них включениями
в его цепь резисторов или резонансной частоты переключениями витков
реактора. Индукционное устройство сравнивает по фазе токи по физи-
ческой его природе, поскольку его вращающий момент пропорционален
синусу угла сдвига фаз.
В полупроводниковом измерительном реле частоты элементом срав-
нения логического типа [8] сравнивается по фазе напряжение U_R, про-
порциональное и совпадающее по фазе с током I_R в резонансном RLC-
контуре и входное напряжение £7у(см. рис. 12.4). В реле установлены
два таких контура с переключаемыми витками реакторов, изменяющи-
ми частоту срабатывания реле. Первый контур относится к минималь-
ному, а второй к максимальному измерительным реле частоты, исполь-
зуемым в устройствах АЧР и ЧАПВ соответственно.
Срабатывание реле происходит при совпадении по фазе указанных
напряжений, т.е. в условиях резонанса напряжений в ЯЕС-контуре, и
реле остаются в состоянии после срабатывания: минимальное при опе-
режающем (при частоте, меньшей резонансной, преобладает емкостное
сопротивление), а максимальное — при отстающем по фазе от вход-
ного напряжении U_R. Поэтому снижение установленной частоты
срабатывания достигается увеличением числа витков и индуктивного
сопротивления реактора, а повышение — уменьшением числа витков
переключателями (см. KL1, KL2 на рис. 12.4) в цепях ответвлений от
обмоток реакторов.
В настоящее время выпускается аналого-цифровое измерительное ре-
ле частоты типа РСГ-11 [73]. Его действие основано на сравнении
длительностей периода (полупериода) мгновенного с изменяющейся ча-
стотой напряжения uj с установленным временем, определяемым гене-
ратором эталонной высокой (по сравнению с промышленной) частоты.
При этом используется цифровой сигнал в виде единичных импульсов
и их счетчик с переключаемым коэффициентом деления частоты, уста-
навливающим частоту срабатывания реле. Сравнение длительностей
периода напряжения и/ с временем, устанавливаемым счетчиком им-
пульсов, производиться дискретным элементом сравнения [8], реализуе-
423
Глава 12
Рис. 12.4- Функциональная схема комплексного автоматического
устройства АЧР1 и АЧРП
мым интегральным триггером. При частоте напряжения Uj, меньшей
или большей установленной, триггер минимального или максимально-
го измерительного реле частоты соответственно формирует выходной
дискретный сигнал срабатывания реле. Аналого-цифровое реле имеет
несравненно более высокую точность (дискретность) установленной ча-
стоты срабатывания 0,05 Гц, но весьма инерционно. Различные разра-
ботки [48] аппаратных цифровых измерительных реле частоты не нашли
практического применения, поскольку аппаратная реализация цифровых
устройств вообще оказалась технически нерациональной [8].
Перспективна интегральная микропроцессорная реализация быстро-
действующего измерительного преобразования частоты. Примерами
являются разработанный в научно-техническом центре НТЦ «Механо-
троника» (г. Санкт-Петербург) микропроцессорный многофункциональ-
ный комплект (блок) измерительных реле частоты типа БМ-МРЧ и
поставляемые совместными предприятиями «АББ Реле - Чебоксары»
424
Автоматика предотвращения недопустимых изменений режимных параметров
реле частоты SPAF-140 и SPAF-340 (см. гл. 13). Первый содержит во-
семь, а вторые по четыре программируемых высокоточных измеритель-
ных реле, функционирующих с учетом скорости изменения частоты и
снижения (повышения) напряжения; они осциллографируют аварийные
процессы и имеют интерфейс с оператором через алфавитно-цифровой
дисплей, обладают свойствами адаптации, самодиагностики и другими
характерными для цифровых программных устройств сервисными воз-
можностями.
На рис. 12.4 приведена функциональная схема известного [38] релей-
но-контактного совмещенного автомата АЧР1 и АЧРП с одним мини-
мальным измерительным реле частоты KF. В нормальном режиме рабо-
ты реле KF настроено на установленную частоту срабатывания АЧРП,
равную, как указывалось, /уц = 49,2 Гц: сигналом логической единицы
с инверсного выхода Q = 1 статического триггера ST1 возбуждено гер-
коновое реле (геркон) KL2, его контакт в цепи реактора L резонансного
контура реле KF замкнут.
В утяжеленном режиме после снижения частоты до f = fyu реле
KF срабатывает и дискретным выходным сигналом (логической еди-
ницей), проходящей через элемент DX (ЗАПРЕТ), поскольку на его
нижнем инверсном входе логический нуль, переводит триггер ST1 в
состояние запоминания срабатывания реле KF. Логической единицей
на прямом выходе Q = 1 триггер возбуждает герконовое реле KL1, а
логическим нулем инверсного выхода Q = 0 обесточивает обмотку гер-
кона KL2. Замыкающим контактом геркон KL1 дискретно увеличива-
ет индуктивность реактора L и тем самым уменьшает установленную
частоту срабатывания реле KF до, например, /уд = 48,5 Гц. Реле
частоты возвращается. Триггер ST1 логической единицей Q = 1 запус-
кает элемент времени DT1 с установленным временем разрешения дей-
ствия автомата АЧР1 и единицей на нижнем входе элемента DX1 (И)
подготавливает цепь его действия на отключение. Если частота успе-
вает снизиться до f = /ул за указанное время, то реле частоты KF,
срабатывая, через элемент DX1 и элемент DT небольшой задержки
(/з < 0,1 с) производит отключение потребителей электроэнергии, от-
носящихся к АЧР1.
Если же частота не снижается до указанной, элемент времени DT1
логической единицей, поступающей на вход считывания R тригге-
ра ST1, возвращает его в исходное состояние, вновь возбуждается гер-
425
Глава 12
кон KL2, а обмотка геркона KL1 обесточивается. При этом по цепи
положительной обратной связи, реализуемой триггером ST2, после по-
ступления на его вход записи S логической единицы элемент DT1 по
входу ИЛИ самоудерживается в состоянии после срабатывания, запре-
щая через инверсный вход элемента DX воздействие на триггер сраба-
тывающего, вследствие восстановления переключающимися контакта-
ми A'Zl, KL2 (снова замыкается KL2) частоты срабатывания до fyn
реле частоты KF.
Измерительные реле частоты через элемент DX2 (И), на верхнем
входе которого единица Q = 1 с инверсного выхода ST1, запускает эле-
мент времени DT2 действия на отключение автомата АЧРП; логиче-
ским нулем Q = 0 на прямом выходе ST1, поступающим на нижний
вход DX1, не разрешается прохождение сигнала от реле KF в цепь от-
ключения АЧР1.
Если за относительно большое время действия DT2 (не менее 5 с),
частота восстанавливается до f > fyn, то измерительное реле частоты
возвращается и логическим нулем на нижнем входе DX2, а через ин-
вертор DU логической единицей на входе считывания R триггера ST2
возвращает элементы времени DT2 и DT1 в исходное состояние. Триг-
гер DT1 выдает логическую единицу на инверсном выходе Q = 1, т.е.
удерживает возбужденным геркон KL2 и установленную частоту сраба-
тывания реле KF равной /у//, что и должно быть в нормальном режиме
работы при нормальной частоте. Аналогично функционирует и извест-
ное [2, 38] релейно-контактное устройство с одним измерительным реле
частоты, выполняющее функции автоматов АЧР и ЧАПВ.
Центральной лабораторией Тулэнерго и Обнинским приборным за-
водом «Сигнал» производятся аналоговые, а НТЦ «Механотроника»
и ОАО «Ритм» (г. Киев) разработаны цифровые микропроцессор-
ные комплексные устройства автоматической частотной разгрузки (КУ
АЧР), выполняющие и функции частотного автоматического повторно-
го включения отключенных АЧР потребителей [43].Первое из указанных
аналоговых КУ АЧР содержит три бесконтатных измерительных реле
частоты KF1-KF3 (рис. 12.5) и три ЛС-элемента выдержки времени
DT1-DT3, которые могут выводиться из действия накладками SX (на
схеме показана одна из них). Поэтому на нем могут быть реализова-
ны по два автомата как быстродействующих АЧР1, так и инерционных
АЧРП, комбинированный автомат АЧР1, АЧРП и устройство ЧАПВ.
426
Автоматика предотвращения недопустимых изменений режимных параметров
Рис. 12.5. Функциональная схема аналогового комплексного устройства АЧР
427
Глава 12
Измерительное реле частоты, как и РЧ-1, функционирует на основе
времяимпульсного, но другой разновидности, элемента сравнения по фа-
зе ЭСФ двух напряжений: входного U_BX — Uj и напряжения U_r — IR,
снимаемого с резистора последовательного £СЛ-резонансного контура,
настроенного на номинальную промышленную частоту /ном = 50 Гц.
Поэтому в нормальном режиме напряжения совпадают по фазе, а при
отклонениях частоты расходятся по фазе на угол, зависящий от степени
отличия частоты от номинальной.
Сформированные соответственно из положительной и отрицатель-
ной полуволн указанных синусоидальных напряжений прямоугольные
импульсы, длительностью в половину периода, при номинальной ча-
стоте образуют потенциальный сигнал, а при отклонении, в частности,
при снижении частоты, при которой напряжение U_r опережает по фазе
напряжение Ц_вх, — времяимпульсный сигнал в виде последовательно-
сти прямоугольных импульсов, длительность которых равна паузе меж-
ду указанными полупериодными импульсами и пропорциональна углу
сдвига фаз между напряжениями U_BX и U_R, а следовательно, и час-
тоте.
Времяимпульсный элемент сравнения фаз [8] сопоставляет длитель-
ность импульсов с установленным временем, моделирующим определен-
ную сниженную частоту — уставку измерительного реле частоты и,
следовательно, обладает свойством установки любого граничного угла
сдвига фаз и частоты срабатывания реле KF.
При равенстве возрастающей, по мере снижения частоты, длитель-
ности импульсов установленной, т.е. при снижении частоты до часто-
ты срабатывания, транзисторный усилитель ЭСФ, охваченный положи-
тельной обратной связью, релейно формирует дискретный потенциаль-
ный сигнал, возбуждающий выходное электромагнитное реле KL1 безы-
нерционного автомата АЧР1 или запускающий элементы времени DT1,
DT2 автомата АЧРП.
Благодаря инвертору DU на выходе измерительного реле часто-
ты КЕЗ формируется дискретный потенциальный сигнал, запускаю-
щий элемент выдержки времени DT3 автомата ЧАПВ при восстано-
влении частоты до номинальной. Устройство содержит логический эле-
мент DX (ЗАПРЕТ), не допускающий действия ЧАПВ при срабатыва-
нии АЧР (элемент DW (ИЛИ)). Выходы КУ АЧР контактные — элек-
тромагнитные реле КLl-K£3.
428
Автоматика предотвращения недопустимых изменений режимных параметров
Обнинский приборный завод «Сигнал» выпускает на новых повы-
шенной надежности и помехоустойчивости микросхемах К561 комплект-
ное микроэлектронное устройство КЭУ-12, выполняющее функции всех
трех категорий автоматической частотной разгрузки АЧР1, АЧРП и
АЧРП1 [80].
Оно состоит из набора соответствующих, конструктивно выполнен-
ных в виде кассетных блоков, взаимодействующих функциональных ча-
стей — функциональных блоков (по терминологии завода).
Для иллюстрации построения и действия КЭУ на рис. 12.6 при-
ведена функциональная схема блока контроля частоты, т.е. измери-
тельного реле частоты. Оно действует на основе счета импульсов
стабилизированного интегрального электронного генератора G высо-
кой частоты. Формирователь F3 вырабатывает прямоугольный им-
пульс нормированной (эталонной) длительности, равной периоду Тп но-
минальной промышленной частоты. Аналого-дискретный преобразо-
ватель АДП синусоидального входного напряжения U и формирова-
тель F1 вырабатывают прямоугольный импульс, длительность кото-
рого Tf обратно пропорциональна изменяющейся промышленной ча-
стоте. Элемент их сравнения ЭС1 (несовпадения указанных импуль-
сов по времени) формирует счетные интервалы, равные разности их
длительностей ДТ = Тп - Т/. В зависимости от знака разности
±ДТ формирователь F2 выдает сигнал направления счета (сумми-
рования или вычитания) счетных импульсов высокой частоты, про-
шедших за время ДТ через элемент DX1 (И), реверсивным счет-
чиком СТ. В него в начале каждого периода промышленной часто-
ты записывается 500 импульсов, фиксирующих эталонную длитель-
ность Та. При частоте следования импульсов 0,5 кГц один счет-
ный импульс соответствует изменению промышленной частоты на
±0,1 Гц.
По единичному логическому сигналу от элемента DXU (И-НЕ) об
окончании счета (логические нули на его входах от F1 и ЕЗ) запускает-
ся формирователь импульсов F4 разрешения считывания содержимого
счетчика СТ и его передачи в элементы сравнения ЭС2 и ЭСЗ, которые
сопоставляют число импульсов счетчика СТ с установленными задаю-
щими элементами ЗЭ1 реле снижения и реле повышения частоты.
Если число импульсов в счетчике ниже или выше установленных,
элементы сравнения выдают единичные логические сигналы на пере-
429
430
Рис. 12.6. Функциональная схема измерительного реле частоты
Автоматика предотвращения недопустимых изменений режимных параметров
ключаемые усилители А1 или А2 соответственно. При наличии на всех
входах элементов DX (И) усилителей логических единиц они переключа-
ются и возбуждают выходные электромагнитные реле KL1 или KL2 —
срабатывает измерительное реле снижения или повышения частоты со-
ответственно.
Логические элементы DX на входах усилителей Л1 и А 2 контро-
лируют нормальное функционирование АДП и генератора G (наличие
единицы на входе элемента DX2), разрешение считывания счетчика
(единица на входе формирователя F4) и отсутствия запрета действия
(блокировки) реле частоты по внешнему сигналу (логическая единица
от элемента VE оптотранзисторной развязки — наличия напряжения на
контактах 1Л, 4А разъема ХР2).
Формирователь F4 устанавливает счетчик в исходное состояние для
его работы в следующем цикле — периоде напряжения промышленной
частоты.
Проверка исправности и правильности работы блока контроля ча-
стоты производится контрольным переключателем SВ.
Штепсельные разъемы API и ХР2 показаны (рис. 12.6) для иллю-
страции кассетной конструкции измерительного реле частоты.
Микропроцессорные комплексные автоматические устройства КУ
АЧР (см. гл. 13) обеспечивают: выполнение десяти автоматов АЧР1,
нескольких автоматов АЧРП и АЧРШ, осуществление частотного АПВ
отключенных потребителей после восстановления частоты; возмож-
ность дискретно изменять установленные частоты срабатывания очере-
дей АЧР по частоте и времени; содержат восемь комплектов наборов их
значений; контроль снижения напряжения; автоматическую регистра-
цию процессов изменений частоты и напряжения и действий АЧР; хра-
нение в памяти до 30 событий; возможности передачи информации по
запросу и просмотра результатов регистрации на панели индикации;
предотвращение излишних отключений в условиях «лавины частоты».
Высокая надежность их функционирования достигается за счет автома-
тического самоконтроля и периодического тестирования.
12.4. Настройка автоматики частотной разгрузки
Эффективность АЧР и указанное свойство адаптации по отключа-
емой нагрузке к возникшей степени нарушения баланса мощностей —
431
Глава 12
недостатку (дефициту) генерируемой мощности обеспечивается ее на-
стройкой: определением количества автоматов (очередей) категорий
АЧР1, АЧРП и АЧРШ, выбором установленных частот срабатывания их
измерительных реле частоты (ИРЧ) и устройства ЧАПВ, определением
и установкой выдержек времени автоматов АЧРП и ЧАПВ (автоматы
категорий АЧР1 и АЧРШ являются быстродействующими).
Количество автоматов АЧР1 технически ограничивается лишь по-
грешностью установки частоты срабатывания минимальных (снижения
частоты) ИРЧ, т.е. различаемых ими двух установленных значений
снижающейся частоты напряжения: для максимального приближения
по мощности отключаемой нагрузки к возникшему дефициту необхо-
димо возможно большее число автоматов АЧР1. Современные анало-
говые микросхемные ИРЧ, а тем более измерительная часть цифро-
вой АРЧ по точности позволяют разносить установленные частоты на
Д/у = 0,1 Гц. При определившемся длительным опытом эксплуатации
диапазоне установленных частот срабатывания АЧР1 от А/Уц = 48,5 Гц
Д° fylN = 46,5 Гц наибольшее количество автоматов АЧР1 составляет
N = fyH^fylN +1 = 21. (12.10)
Afyl
Наиболее важным с точки зрения технико-экономического показате-
ля АЧР — максимального приближения мощности отключаемой нагруз-
ки к возникшему дефициту генерируемой мощности является определе-
ние мощностей нагрузки, отключаемых каждым автоматом частотной
разгрузки. Они рассчитываются с учетом регулирующего эффекта на-
грузки и отключаемой предыдущим (по ходу процесса снижения часто-
ты) автоматом, кроме первого, мощность которого определяется с уче-
том (12.6) как
Ротк1 = А’нАЛ = 0,02Ан(/ном - /уП). (12.11)
При обычном Ки = 1,2 4-1,5 и указанной /ул = 48,5 Гц
-Potki = (0,035 4- 0,045)РН.НОМ,
где Рн.ном — мощность нагрузки в момент возникновения возмущающего
воздействия.
432
Автоматика предотвращения недопустимых изменений режимных параметров
Мощность РОтк2 нагрузки, отключаемая второй очередью АЧР1, вы-
числяется С учетом МОЩНОСТИ РОткГ
-РоткЗ — 0,02АН(/Ном ~ /уГз)(1 — -foTKl) 1 (12.12)
где /у/2 = /УЛ - Д/у = 48,4 Гц.
Отключаемая n-м автоматом мощность нагрузки определяется ана-
логичным (12.12) выражением:
п-1
Роткп — 0,02АН(/НОМ — /у/п)^1 — Р QTKJ • (12.13)
По аналогичной (12.11) формуле и частоте fx., которая могла устано-
виться при отсутствии АЧР, вычисляется общая отключаемая мощность
нагрузки, равная возникающему дефициту генерируемой мощности:
АэткЕ = -Рдеф = 0,02Ан(/ном — /оо)^нном- (12.14)
На практике для простоты допускается равномерное распределение
общей отключаемой мощности между очередями АЧР1 [39],
РО.К1 = ^~. (12.15)
Иногда в потенциально остродефицитных районах предусматривает-
ся еще одна (специальная) быстродействующая очередь АЧР с частотой
срабатывания /у = 49 Гц, предназначенная для разгрузки линий элек-
тропередачи, связывающих ОЭС [39], к которой могут подключаться
часть потребителей, присоединенных к АЧР1.
Вторая категория АЧРП в соответствии с ее назначением — вос-
станавливать частоту близкой к номинальной в случаях, когда она дли-
тельно остается сниженной, состоит обычно из трех автоматов с устано-
вленной частотой срабатывания /уц = 49,2 Гц, отключающих дополни-
тельную нагрузку с выдержками времени. Первая из них определяется
временем действия АЧР1 по мере снижения частоты, укладывающимся в
одну постоянную времени Тч, (см. рис. 12.3), и временем затухания экс-
поненциального процесса ее изменения, принимаемого обычно равным
трем постоянным времени, т.е. устанавливается не менее tyi = 4ТЧ, а
третья доходит до /у3 = 90 с (время, достаточное для автоматического
частотного пуска и нагружения гидрогенераторов).
433
Глава 12
Отключаемая АЧРП мощность нагрузки принимается на основе опы-
та эксплуатации примерно равной: Ротк£2 = 0,4POtkS1 и распределяется
поровну между тремя автоматами. Таким образом, общая мощность на-
грузки, подключаемой к АЧР1 и АЧРП при раздельном их выполнении,
почти в полтора раза может превышать возникающий дефицит генери-
руемой мощности. При практикуемом совмещении АЧР1 и АЧРП —
комбинированном выполнении устройств АЧР с автоматически пере-
ключаемыми уставками одного ИРЧ (см. рис. 8.11 [2]), как утверждают
эксплуатационники [37], общая мощность нагрузки, которая потенци-
ально может быть отключена в процессе снижения и восстановления
частоты, уменьшается примерно до 1,2Рдеф [2].
Устанавливаемые в особенно опасных по «лавине частоты» энерго-
районах безынерционные автоматы категории АЧРП1 имеют уставку
срабатывания по максимальной скорости изменения частоты в началь-
ный момент переходного процесса быстрого ее снижения, определяемую
по производной (df/dt)tQ, т.е. по (12.9).
Автоматика частотного повторного включения имеет установлен-
ную частоту срабатывания-возврата минимального (снижения частоты)
ИРЧ 49,2 Гц, а установленные выдержки времени отдельных автоматов
возрастают ступенчато на А/ = 5 с от начальной lyi = 10-20 с.
12.5. Автоматика управления синхронными
генераторами при изменениях частоты
Автоматика отключений синхронных генераторов. Для
нормального функционирования механизмов, обеспечивающих произво-
дительность парогенераторов ТЭС и АЭС при снижениях частоты,
практикуется отключение одного или нескольких генераторов от элек-
троэнергетической системы для снабжения только собственных нужд
электростанции и наиболее ответственных потребителей. При этом схе-
мы распределительных устройств электрической части ТЭС выполня-
ются с учетом возможности такого выделения собственных нужд для
их питания от автономно работающего генератора отключением мини-
мального (даже только одного) выключателя.
На рис. 12.7,а,б приведены взятые из [38] примеры таких схем с
условным изображением простейших автоматических устройств тако-
434
Автоматика предотвращения недопустимых изменений режимных параметров
Рис. 12.7. Схемы электрических соединений электростанций, обеспечи-
вающие отделение части генераторов для питания собственного расхода
при аварийном понижении частоты в энергосистеме
435
Глава 12
го отключения, содержащих измерительное реле снижения частоты KF
и, иногда, реле времени КТ (рис. 12.7,а).
В первой схеме при снижении частоты с выдержкой времени от-
ключается шиносоединительный выключатель Q, отделяя вторые (ниж-
ние) шины с присоединенными к ним синхронным генератором G1 и
собственными нуждами СН, с ответственной нагрузкой Н, от первых
(верхних) шин, к которым подключены остальные синхронные генера-
торы G2 электростанции и трансформаторы Т связи с электроэнергети-
ческой системой.
Вторая схема (рис. 12.7,6) иллюстрирует полное отделение электро-
станции ЭС от электроэнергетической системы ЭЭС автоматикой от-
ключений при снижении частоты (реле КК), целесообразное при разви-
тии общесистемной аварии. Отделившаяся электростанция использует-
ся затем для восстановления нормального режима работы электроэнер-
гетической системы. На схеме условно показана и автоматика частот-
ной разгрузки АЧР, необходимая для ликвидации недостатка активной
мощности, который может возникнуть после такого отделения.
На схеме рис. 12.8, также взятой из [38], условно показана автома-
тика отключений синхронных генераторов ГЭС при повышении часто-
ты, опасном для турбогенераторов ТЭС. Необходимость в автоматике
отключений гидрогенераторов обусловлена тем, что при отключениях
одной цепи первого или второго участков линий электропередачи воз-
никает опасность нарушения статической устойчивости параллельной
работы ГЭС и ТЭС с электроэнергетической системой, ввиду сниже-
ния пропускной способности электропередачи: возникает избыток гене-
рируемой мощности и синхронные генераторы разгоняются. Хотя бы-
стродействующие автоматические регуляторы мощности (см. рис. 4.3)
турбогенераторов прикрывают регулирующие клапаны, обычно относи-
тельно медленно действующие через АРЧВ автоматические регуляторы
мощности генераторов и инерционные направляющие аппараты гидро-
турбин не успевают предотвратить разгон гидроагрегатов. Увеличение
частоты вращения гидрогенераторов приводит и к соответствующему,
опасному для паровых турбин, возрастанию частоты вращения и тур-
богенераторов.
Поэтому и предусматривается обычно двухступенчатая автоматика
ограничения частоты (АОПЧ), действующая на отделение ТЭС с на-
грузкой, соответствующей их мощности. На схеме показаны по два АУ1
436
Автоматика предотвращения недопустимых изменений режимных параметров
Рис. 12.8. Схема размещения устройств автоматики ограничения повы-
шения частоты в энергосистемах, связанных с мощной гидростанцией
и А У 2 быстродействующих автоматических устройства, установленные
по концам линий связи ТЭС и ГЭС с разными установленными частота-
ми срабатывания 52,5 и 53,5 Гц соответственно. Автоматика ограниче-
ния повышения частоты, установленная на гидроэлектростанции, ЛУЗ
с частотой срабатывания 51,5 Гц, отключает часть гидрогенераторов
ГЭС, не допуская отделения ТЭС от электроэнергетической системы.
Чебоксарским электроаппаратным заводом выпускается панель
(шкаф) типа ШДЭ 2602 [73] автоматики ограничения частоты враще-
ния синхронных генераторов. Она позволяет осуществить три ступени
437
Глава 12
управляющих воздействий по повышению частоты и скорости ее изме-
нения. Панель выполнена на интегральных микросхемах с применением
аналого-цифрового и цифро-аналогового преобразования сигналов.
Автоматика частотного пуска и загрузки гидрогенера-
торов. Обладающие способностью быстро разгоняться и набирать
нагрузку гидрогенераторы используются как резервные источники мощ-
ности для покрытия ее дефицита, вызывающего снижение частоты в
электроэнергетической системе. Выше указывалось, что сигнал на уско-
ренный пуск гидрогенератора формируется от измерительного реле ча-
стоты KF (на рис. 1.2 показано условно).
Автоматика частотного пуска и загрузка выдающих неполную мощ-
ность или работающих в режиме синхронного компенсатора гидрогене-
раторов эффективно способствует прекращению снижения и последую-
щему восстановлению частоты. При ее действии отключение потреби-
телей электроэнергии автоматикой АЧРП обычно не производится.
Функциональная схема (рис. 12.9) автоматики пуска и загрузки ги-
дрогенераторов при снижении частоты формирует импульсный сигнал
на ускоренный пуск при снижении частоты до /с у = 49,3 Гц и обеспе-
чивает:
• однократные воздействия на гидрогенераторы;
• двухступенчатые с разными выдержками времени воздействия;
• дополнительную загрузку гидрогенераторов только при наличии
их недогрузки или работы в режиме СК;
• одновременные с пуском первой очереди воздействия на увеличение
мощности гидрогенераторов;
• неавтоматическое (кнопкой SB) приведение в состояние готовно-
сти к новому действию.
Ускоренный пуск гидрогенераторов (их групп) Gl, G2 происходит
при готовности автоматики к действию — наличии дискретного потен-
циального сигнала (логической единицы) на нижнем входе логическо-
го элемента DX1 (И), поступающего с выхода элемента запоминания
(прямого выхода статического триггера ST) после нажатия оператором
кнопки SB, т.е. поступления логической единицы на вход S записи триг-
гера, после срабатывания измерительного реле частоты KF с устано-
вленной частотой /с.у — выдаче им логической единицы на верхний вход
438
Автоматика предотвращения недопустимых изменений режимных параметров
Рис. 12.9. Функциональная схема автоматики частотного ускоренного
пуска и нагрузки гидрогенераторов
элемента 0X1, выходным дискретным сигналом которого запускается
элемент выдержки времени DT1. Спустя время ti он воздействует на
формирователь F1 (одновибратор) импульсного сигнала, запоминаемого
триггером ST2 (см. рис. 1.2) схемы формирования сигнала ускоренного
пуска УП гидрогенератора G1.
С указанной небольшой задержкой времени дискретным потенци-
альным сигналом РТ1 через трехвходовые логические элементы DX2
и DX3 при наличии на остальных двух входах единичных логических
сигналов от вспомогательных (сигнальных) контактов Ql.l, Q2.1 вы-
ключателей гидрогенераторов (выключатели включены) и от контак-
тов SQ1.1, SQ2.1 конечных выключателей направляющих аппаратов
гидротурбин (они недогружены, направляющие аппараты полностью не
открыты и указанные их контакты еще замкнуты) запускаются время-
импульсные преобразователи ВИП дискретных потенциальных сигналов
в импульсы с уменьшающейся по мере увеличения нагрузки генератора-
ми длительностью (см. релейный усилитель-преобразователь УП, охва-
439
Глава 12
ченный отрицательной обратной связью, реализуемой апериодическим
звеном, на рис. 3.2). Импульсное воздействие на электродвигатель М
механизма изменения мощности МИМ (см. рис. 3.10) — задающий эле-
мент по мощности АРЧВ — обеспечивает устойчивый процесс загрузки
гидрогенераторов G3, G4.
С той же задержкой запускается второй элемент выдержки време-
ни DT2, после истечения которой (/2) запускается формирователь F2
(рис. 12.9) импульсного сигнала, поступающего на вход записи S ука-
занного триггера ST2 (см. рис. 1.2) схемы формирования сигнала уско-
ренного пуска УП генераторов G2. Элемент DT2 логической единицей,
поступающей на вход считывания R триггера ST, снимает единицу с
нижнего входа элемента DX1 и выводит схему из действия (обеспечи-
вает однократность ее действия).
Вопросы для самопроверки
1 Какие виды противоаварийных отключений и включений применяются и
какова их эффективность для предотвращения недопустимых изменений
режимных параметров?
2 В чем назначение автоматических отключений при снижениях действу-
ющих значений и частоты напряжения?
3 Какие виды автоматики противоаварийных отключений применяются
при повышении действующего значения и частоты напряжения?
4. Как функционирует автоматическое устройство включения реактора по-
перечной компенсации и отключения линии при повышенных напряже-
ниях (см. рис. 12.1)?
5. Как изменяется частота промышленного тока при нарушении баланса
генерируемой и требуемой нагрузкой мощностей? Почему и всегда ли
возможен установившийся режим работы с пониженной частотой?
6. Что такое регулирующий эффект нагрузки, наблюдающийся при изме-
нениях частоты вращения синхронных генераторов?
7. В чем состоит различие назначения и настройки автоматов частотной
разгрузки АЧР1 и АЧРП и как определяются установленные значения
частот их срабатывания?
8. Почему автоматы АЧР1 многочисленны и имеют разные установленные
частоты срабатывания, а АЧРП малочисленны и имеют одну частоту
срабатывания?
440
Автоматика предотвращения недопустимых изменений режимных параметров
9. Почему необходимо быстродействие автоматов АЧР1 и действие на от-
ключение потребителей автоматами АЧРП с выдержками времени?
10. Как определяются мощности нагрузки, отключаемой автоматами частот-
ной разгрузки?
11. Как функционирует устройство АЧР, совмещающее функции автоматов
АЧР1 и АЧРП (см рис 12.4)?
12. Как выполнено и действует совмещенное микросхемное устройство ав-
томатики частотной разгрузки и частотного повторного включения
(см. рис. 12 5)?
13. В каких частях электрических систем целесообразно применение автома-
тов АЧРШ? В чем состоят их особенности?
14 Почему целесообразно и как достигается отключение части синхронных
генераторов электростанции от электроэнергетической системы для ав-
тономного электроснабжения собственных нужд (см. рис. 12.7)?
15 Почему необходима автоматика отключений синхронных генераторов
(каких электростанций) при повышении частоты в электроэнергетиче-
ской системе?
16. Как функционирует автоматика частотного пуска и загрузки гидрогене-
раторов (см. рис. 12.9)?
17 В каких случаях целесообразно отключение конденсаторной части упра-
вляемых статических компенсаторов реактивной мощности?
18 Какие известны принципы действия измерительных реле частоты? Как
изменяются частоты их срабатывания?
19. Как действует автоматическое устройство релейной форсировки возбу-
ждения синхронных генераторов с электромашинным возбудителем по-
стоянного тока (см. рис. 5.3)? Каково его назначение?
20. За счет чего обеспечивается быстродействие бесконтактного устрой-
ства форсировки возбуждения синхронных генераторов с диодно-
электромашинным возбуждением при его выполнении на инерционном
магнитном усилителе (см. рис 5 5)7
441
Глава 13. Микропроцессорная интегрированная
противоаварийная автоматика
13.1. Особенности микропроцессорных интегрированных
автоматических устройств
Применение методов и технических средств обработки информации
цифровой вычислительной техникой при ее микропроцессорной реали-
зации привело к созданию интегрированных автоматических комплек-
сов противоаварийного управления, программно выполняющих функции
традиционных автоматических устройств релейной защиты и собствен-
но противоаварийной автоматики. Они являются интеллектуальными
техническими средствами с присущими микропроцессорной вычисли-
тельной технике информационными свойствами и сервисными функция-
ми, существенно повышающими эффективность автоматического управ-
ления.
Микропроцессорным интегрированным автоматическим комплексам
присущи важные преимущества и достоинства. Основные из них:
• многофункциональность и малые размеры;
• возможность дистанционного (от ПЭВМ пульта управления опе-
ратора) изменения настройки и программ функционирования;
• автоматическое тестирование и самодиагностика;
• ускорение противоаварийных отключений и включений электро-
технического оборудования;
• выдача оператору информации о состоянии управляемых элек-
троэнергетических объектов и о готовности к противоаварийным
управляющим воздействиям на них противоаварийной автома-
тики;
442
Микропроцессорная интегрированная ПА
• регистрация и хранение информации о развитии аварийных ситу-
аций, о функционировании и эффективности действия интегриро-
ванных комплексов противоаварийного управления;
• возможность вхождения в состав вышестоящих уровней автомати-
зированного управления электроэнергетическими системами;
• отсутствие необходимости кропотливых периодических проверок
технического состояния и настройки противоаварийной автома-
тики.
В интегрированных микропроцессорных комплексах противоаварий-
ной автоматики реализованы новые принципы действия их измеритель-
ной части. Они обеспечили снижение инерционности и превышение эф-
фективности прежде всего предварительной обработки входной инфор-
мации, поступающей на фоне интенсивных помех, обусловленных сво-
бодными апериодической и колебательными составляющими и прину-
жденными гармониками напряжений и токов электромагнитных пере-
ходных процессов, создаваемых короткими замыканиями. Как извест-
но [1, 2, 8, 40], сигналами входной информации обычно являются прину-
жденные синусоидальные составляющие промышленной частоты напря-
жений и токов электромагнитных и электромеханических переходных
процессов.
Применение современных, реализуемых только техническими сред-
ствами цифровой вычислительной техники, способов выделения входных
сигналов — программной адаптивной фильтрации входных информаци-
онных процессов [81], формирования ортогональных составляющих [8]
синусоидальных принужденных токов и напряжений и их разложения
на симметричные составляющие подняло на новые информационный и
функциональный уровни технику автоматического противоаварийного
управления электроэнергетическими системами и повысило необходимое
быстродействие.
В создание интегрированных микропроцессорных комплексов проти-
воаварийного управления включились конверсионные научно-исследова-
тельские организации с их ранее недоступными для электроэнергетики
информационными технологиями. При этом не осталась забытой и свой-
ственная военной технике аналоговая микроэлектронная интегральная
элементная база, пережившая в последнее десятилетие свое возрожде-
ние. Так, Обнинский приборный завод «Сигнал» разработал и выпус-
443
Глава 13
кает комплексные электронные устройства (КЭУ) противоаварийной ав-
томатики распределительных электрических сетей. Они выполняются
на новых интегральных микросхемах серии К561 и функционируют как
интегрированная противоаварийная автоматика с функциями ступенча-
той токовой защиты АПВ, АВР и АЧР, АОПН.
Но генеральное перспективное направление развития и повышения
технического совершенства противоаварийной автоматики, как и авто-
матики управления нормальными режимами работы электроэнергети-
ческих систем (см. гл. 7), безусловно определяется продолжающимся
обновлением методов обработки информации цифровой вычислительной
техникой и возрастанием степени интеграции ее микропроцессорной эле-
ментной базы.
Ведущими организациями по разработке и внедрению микропро-
цессорной интегрированной противоаварийной автоматики в настоящее
время являются научно-техническая фирма (НТФ) «Радиус» НИИ «Зе-
нит» (г. Москва), научно-технический центр (НТЦ) «Механотроника»
(г. Санкт-Петербург) и совместное с международным концерном АВВ
предприятие «АББ Реле - Чебоксары».
В российскую электроэнергетику проникают и разработки интегри-
рованных автоматических устройств противоаварийной автоматики за-
рубежных фирм (Siemens и др.), выполненных на терминалах — оконеч-
ных элементах АСУ электроснабжением.
13.2. Микропроцессорные комплексы автоматических
устройств противоаварийной автоматики
Автоматические устройства «Сириус» и «Орион-М» выпус-
каются НТФ «Радиус» (г. Москва) и предназначаются для собственных
нужд ЭС и распределительных сетей с изолированной или компенсиро-
ванной нейтралью. Выполняют функции:
• отключения междуфазных КЗ программной трехступенчатой токо-
вой защитой: ненаправленной («Сириус»), направленной с обрат-
нозависимой выдержкой времени третьей ступени («Орион-М»);
• отключения однофазных замыканий на землю программной защи-
той, действующей от высших гармоник тока нулевой последова-
тельности;
444
Микропроцессорная интегрированная ПА
• отключений при несимметрии, в частности «потере» фазы, токовой
защитой обратной последовательности;
• резервирования отказа в действии выключателей на отключение
КЗ;
• исполнения воздействий автоматики частотной разгрузки (АЧР);
• повторного включения выключателей, отключенных релейной за-
щитой и АЧР;
• фиксирования и хранения обширной информации о девяти послед-
них аварийных ситуациях, о запусках и действиях устройства и
производимых противоаварийных отключениях и включениях.
Интегрированное микропроцессорное устройство противоаварий-
ной автоматики «Сириус» обладает особенностями, обусловливающи-
ми его информационные и технические достоинства:
• использование для действия на отключение замыканий на землю
гармонических составляющих тока нулевой последовательности —
независимость действия от степени компенсации емкостного тока
замыкания на землю;
• вычисление расстояния до места КЗ;
• сохранение работоспособности устройства в течение некоторого
времени (не менее 0,5 с) после пропадания напряжения источни-
ка питания;
• возможности дистанционного ввода уставок и переноса информа-
ции о действиях устройства в ПЭВМ;
• расширенный диапазон рабочих температур (от -20 до +50 °C).
Надежность функционирования сложного интегрированного устрой-
ства обеспечивается постоянным самотестированием с выдачей сигнала
об отказе его действия. Наработка на отказ составляет 25 000 часов.
На рис. 13.1 приведена функциональная схема устройства «Сири-
ус». Его вычислительная часть состоит из платы главного микропро-
цессора МИЛ. Вспомогательный микропроцессор МП2 расположен на
плате аналого-цифрового преобразователя АЦП предварительно обра-
ботанных аналоговыми активными частотными фильтрами мгновенных
напряжений. Напряжения пропорциональны фазным токам 1а, Ц, 1С и
445
446
Рис. 13.1. Структурная схема устройства «Сириус»
Глава 13
Микропроцессорная интегрированная ПА
току нулевой последовательности 3Iq первичных измерительных транс-
форматоров и трансформатора тока нулевой последовательности. Токи
преобразуются в напряжения вторичными измерительными трансфор-
маторами TAL, нагруженными балластными резисторами R5.
Аналого-цифровой преобразователь, подключенный к указанным на-
пряжениям аналоговым мультиплексором (на рис. 13.1 не показан) с ин-
тервалом дискретизации Т — = 1,66 с выдает дискретные в дво-
ичном коде мгновенные значения напряжений м(пТ) — их выборки.
Микропроцессор МП 2 выполняет функции нерекурсивных цифровых
частотных фильтров принужденных составляющих напряжений, про-
порциональных токам электромагнитного переходного процесса КЗ, вы-
деляет их ортогональные — синусную Z7s(nT) и косинусную Uc(nT) со-
ставляющие и симметричную составляющую обратной последователь-
ности и вычисляет сумму гармоник (7-й и близких к ней) тока нулевой
последовательности.
Через каждые три интервала дискретизации, т.е. периодически че-
рез время ЗТ = Тп/4 = 5 мс, необходимое для выделения указанных
составляющих [8], результаты вычислений передаются в главный про-
цессор МП\.
Содержащий ПЗУ с программами функционирования, ОЗУ дискрет-
ных значений указанных напряжений и их составляющих и другой опе-
ративной информации МП\ производит:
• возведение в квадрат ортогональных составляющих;
• вычисление квадратов амплитуд наибольшего из фазных токов и
тока обратной последовательности;
• вычисление сумм квадратов амплитуд гармоник — тока нулевой
последовательности.
Затем они сравниваются с установленными значениями (уставками)
токов срабатывания программных измерительных реле токов. При пре-
вышении им уставок запускается таймер иногда вводимой небольшой
задержки действия на отключение первой ступени (отсечки) токовой
защиты от КЗ или выдержек времени ее второй и третьей ступеней
и других указанных защит. После срабатывания уставки измеритель-
ных реле автоматически несколько снижаются для обеспечения высоко-
го (близкого к единице) коэффициента возврата, что является одной из
особенностей микропроцессорного устройства.
447
Глава 13
Главный процессор выполняет логические алгоритмы автоматики
резервирования отказа выключателя, двухкратного повторного включе-
ния выключателя, отключенного защитой или автоматикой частотной
разгрузки — частотного повторного включения, ускорения действий на
отключение и координацию сигналов управления выключателем и ото-
бражения информации (сигнализацию).
При запуске, срабатывании и наборе задержек и выдержек времени
защиты и автоматики процессор перепрограммирует так называемый
сторожевой ГКЛ-таймер (см. рис. 13.1), который в обычном (ждущем)
режиме устройства производит его периодическое тестирование и мог
бы приводить к отказам действий противоаварийной автоматики на от-
ключение и включение выключателей.
Главный процессор может обмениваться информацией с ПЭВМ (по
интерфейсу KS232C) или (по волоконно-оптической линии связи) с
вышестоящими уровнями иерархической автоматизированной системы
управления.
На функциональной схеме (см. рис. 13.1) показаны плата гальвани-
ческой (оптронной) развязки — отделения входных цепей от сигналь-
ных контактов выключателей СКВ и другой автоматики, в частно-
сти АЧР от микропроцессоров, исполнительные (выходные) электро-
магнитные реле — их комплект КВР, с герметизированными магнитно-
управляемыми контактами, панель управления и источник питания ИП
постоянного или переменного (по бестрансформаторной схеме) тока.
Панель управления содержит клавиатуру (четыре кнопки) и жид-
кокристаллический ЖК-дисплей с платой управления, ключи (тумбле-
ры) задания программы работы (конфигурации) устройства и светоди-
оды индикации его действий. Настройка конфигурации осуществляет-
ся с клавиатуры, от ПЭВМ или по волоконно-оптической линии связи
от АСУ.
Микропроцессорный комплекс противоаварийной автомати-
ки НТЦ «Механотроника» формируется из отдельных функциональ-
ных микропроцессорных автоматических устройств противоаварийных
отключений и включений БМРЗ 04, автоматической частотной разгруз-
ки и частотного АПВ типа БМАЧР и цифрового измерительного реле
частоты БММРЧ и предназначен для собственных нужд ЭС и распре-
делительных сетей напряжением до 35 кВ.
448
Микропроцессорная интегрированная ПА
Многофункциональное микропроцессорное устройство
(блок) БМРЗ 04 выполняет функции:
• отключения междуфазных КЗ направленной трехфазной или нена-
правленной двухфазной трехступенчатой токовой защитой с ком-
бинированным пуском по напряжению;
• отключения замыканий на землю направленной защитой тока ну-
левой последовательности;
• отключения при несимметрии нагрузки и обрыве фазы защитой
тока обратной последовательности;
• отключения КЗ на шинах распредустройства логическим алгорит-
мом;
• резервирования отказа выключателей;
• повторного включения выключателей, отключенных релейной за-
щитой и АЧР;
• включения резервных выключателей;
• автоматики ограничения снижения напряжения;
• исполнительной части автоматики ограничения снижений и повы-
шений частоты;
• определения места повреждения и осциллографирования электри-
ческих величин в аварийных режимах;
• выполнения команд от внешних устройств управления;
• электродуговой защиты;
• самодиагностики.
Трехступенчатая токовая защита с контролем по напряжению
и направлению мощности КЗ и ускорением действия имеет независи-
мые выдержки времени DT3 первой — реле максимального тока КА1
(рис. 13.2) и DT2 второй — реле КА2 ступеней и обратнозависимые
(от тока) характеристики выдержек времени DT3 третьей — реле то-
ка А’АЗ, ступени. Характеристики определяются вычислениями време-
ни срабатывания по аналитическим соотношениям, соответствующим
449
450
программ
Рис. 13.2. Функциональная схема алгоритмов максимальной токовой защиты
Глава 13
Микропроцессорная интегрированная ПА
одной из четырех характеристик: международной L (рис. 13.2), ин-
версной N и аналогичным характеристикам электромеханических реле
РТ-80 и РТВ [40].
Они устанавливаются ключами AGIO, SG11, а ключом SG9 вводится
независимая от тока выдержка времени DT4.
Измерительная часть защиты реализуется программными операци-
ями:
• трех однофазных измерительных реле максимального тока
AL41-AL43, подключенных (ключами SGl-SGty через макси-
селектор max ко вторичным измерительным трансформаторам то-
ка TAL, нагруженным балластными резисторами Яб!
• одного измерительного реле минимального напряжения KV2 с
мини-селектором min трехфазного напряжения вторичных транс-
форматоров TV L\
• фильтра ZY2 и реле А’VI напряжения обратной последовательно-
сти;
• двух измерительных реле KW угла сдвига фаз [8] (направления
мощности), включенных по 90-градусной схеме [40], с выходом че-
рез логическую операцию ИЛИ (на схеме не показана).
Все три ступени могут контролироваться [логические операции
DX1-DX3 (И)] через ключи SGY-SG7 по минимальному напряжению
(ключ SG7) или (операция DWU):
• по напряжению обратной последовательности (ключ SG8);
• по направлению мощности КЗ (ключи SG13, SG14).
Первая (А'А1) и вторая (АА2) ступени с токами срабатывания, обо-
значенными как />», /» соответственно, действуют (операция DW2)
на отключение выключателя. Третья ступень (AL43) с током срабаты-
вания 1> действует в зависимости от положения ключа SG17 на от-
ключение или на сигнализацию о перегрузке.
На схеме (рис. 13.2) показаны особенности программной защиты:
• цепь (DW3 и ключ SG16) формирования сигналов контактами ре-
ле KL, запускающего логический алгоритм отключения шин рас-
предустройства;
451
Глава 13
• формирование (операция ВХ4) сигнала о запуске первой и второй
ступеней защиты;
• цепь запрета (блокировки) АПВ от первой (AL41) ступени защиты;
• дистанционное управление настройкой (переключение программ)
измерительной и логической частей;
• цепь ускоренного отключения У О.
Устройство отключений замыканий на землю функционирует с
контролем или только напряжения, или напряжения и тока, или и на-
правления мощности нулевой последовательности (устанавливается про-
граммно) с одной или двумя независимыми выдержками времени. Ха-
рактеризуется высокой чувствительностью— низкими током (от 0,05 А)
и напряжением (от 5 В) срабатывания.
Автоматика повторного включения выключателя (рис. 13.3) запус-
кается, как обычно [1], при несоответствии положения ключа управле-
ния и состояния выключателя. Пуск производится дискретным сигна-
лом (логической единицей) от токовой защиты ТЗ или (операция £Л¥1)
от реле РПО отключенного положения выключателя и при готовности
АПВ к действию (операция DX1).
При включенном ключе SG1 релейный формирователь F1 выдает
дискретный импульсный сигнал, который, поступая на вход S тригге-
ра ST1, запоминается им при отсутствии запрещающего сигнала на вхо-
де R общей блокировки АПВ (операция DW3), его блокировки от первой
ступени (АА1) защиты, запрета при действии УРОВ или неисправности
БМРЗ.
Через операцию DX2 при наличии единичного логического сигнала
об отключенном выключателе от РПО запускается таймер микропроцес-
сора DT1 и, спустя время срабатывания первого цикла АПВ1, форми-
рователь F3 через DW4 импульсным воздействием повторно включает
выключатель.
При необходимости (включен SG2) срабатывание АПВЗ запомина-
ется триггером ST2 (через F2, DX3) второго цикла АПВ2, если на
его входе R отсутствует один из указанных запрещающих сигналов или
сигнал запрета АПВ2 по напряжению нулевой последовательности 36го
(операции DW3, DW6, ключ SG4). При этом сигналом формировате-
ля F2, поступающим через DW5 на вход R, триггер ST1 возвращается
в исходное состояние.
452
453
Рис. 13.3. Функциональная схема алгоритма АПВ
Микропроцессорная интегрированная ПА
Глава 13
Через установленное время таймера DT2 при наличии сигнала на
входе DX4 о новом отключении выключателя (от РПО) формирова-
тель F4 через VW4 выдает импульсное воздействие на включение вы-
ключателя второй раз. Формирователь F5 через DWQ возвращает триг-
гер ST2 в исходное состояние и через DW5 подтверждает возврат триг-
гера ST1.
Время срабатывания устанавливается от 0,5 с через 0,1 с, а время
готовности к новому действию составляет 120 с.
Автоматика включения резервного выключателя имеет особен-
ность — обеспечивает повторное включение рабочего и отключение
резервного выключателей после восстановления напряжения на рабо-
чем вводе. Поэтому программно реализуются традиционный пусковой
орган как минимального напряжения (измерительные реле KV1-KV3
на рис. 13.4), так и максимального напряжения (реле А’У4-А’У6), под-
ключаемых к трансформаторам напряжения TV 1 резервируемой секции
шин и TV2 рабочего ввода соответственно.
Второй особенностью является формирование сигнала разрешения
АВР (геркон АТЗ), которое не происходит при несимметричном напря-
жении на рабочем вводе (неотключенное двухфазное КЗ), контролиру-
емом операцией совпадения с инверсией DX3 (И-НЕ) сигналов о сра-
батывании всех трех реле максимального напряжения, и при наличии
однофазного замыкания на землю, контролируемого измерительным ре-
ле напряжения KV1 нулевой последовательности (при включенном SG2)
через DWV (ИЛИ-НЕ).
При наличии сигналов разрешения АВР и от реле включенного по-
ложения РПВ1 рабочего выключателя, при срабатывании всех трех ре-
ле KV1-KV3 минимального напряжения и отсутствии сигналов бло-
кировки АВР и неисправности БМРЗ программной операцией DX1 (при
включенном SG1) запускается таймер DT1 выдержки времени срабаты-
вания АВР. Его дискретный сигнал, поступая на вход S триггера ST1,
запоминается им при отсутствии на входе R (операция AW1) указан-
ных запрещающих сигналов. При наличии сигнала от реле отключен-
ного положения РПО2 резервного (секционного) выключателя через опе-
рацию DX2 формирователь F1 возбуждает геркон KL1, воздейству-
ющий на отключение рабочего и включение резервного выключателя
(АВР вкл.).
454
455
Рис. 13.4. Функциональная схема алгоритма АВР
Микропроцессорная интегрированная ПА
Глава 13
Сигнал включения запоминается триггером ST2, подготавливаю-
щим (операция DX4) формирование воздействия на отключение ре-
зервного и включение рабочего выключателей (АВР откл.). Операции
производятся после срабатывания одного из реле (А'У4) максимально-
го напряжения: запускается таймер DT2 и при наличии сигнала от
реле включенного положения секционного выключателя РПВ2 (опера-
ция DX5) с выдержкой времени DT3 импульсным сигналом формиро-
вателя F2 возбуждается геркон KL2. Выдаются сигналы информации
о пуске, включении Пуск АВР и отключении АВР откл. резервного
выключателя.
Длительности выдержек времени постоянны — составляют 0,5 с,
а длительности импульсных воздействий возбуждения герконов А’А1,
KL2 равны 0,8 с.
Автоматика ограничения снижения напряжения программно реа-
лизуется с контролем напряжений двух или трех фаз с уставками из-
мерительных реле минимального напряжения 20-80 В и выдержками
времени 0,1-100 с, изменяемыми через 1 В и 0,1 с соответственно. При
пуске токовой защиты производится запрет ее действия.
Автоматика частотной разгрузки и повторного включе-
ния БМ АЧР совместно с программным измерительным реле частоты
БМ МРЧ обеспечивают функционирование: АЧР1, АЧРП и АЧРШ и ча-
стотного АПВ. Важная особенность микропроцессорной частотной авто-
матики — свойство адаптивности к возникающему дефициту мощности,
не допускает излишних отключений при снижении частоты.
Отличительными особенностями ее измерительной части являются:
• программирование восьми частотных измерительных реле с кон-
тролем частоты, скорости ее изменения и напряжения;
• высокая точность и стабильность уставок по частоте в пределах
45-55 Гц, скорости изменения частоты 0 < df /dt < 10 Гц/с, напря-
жения 0,4-1,2 номинального значения, выдержек времени АЧРП и
ЧАПВ, изменяемых в пределах 0-120 с;
• осциллографирование электрических величин переходных процес-
сов изменений частоты.
Действие измерительной части БМ МРЧ основано на счете такто-
вых импульсов в течение изменяющейся (при снижении или повышении
частоты) длительности периода. Используется вычитающий счетчик,
456
Микропроцессорная интегрированная ПА
в который периодически после каждого считывания записывается неко-
торое количество импульсов, значительно превышающее их число, раз-
мещающееся на интервале времени, равном номинальной длительности
периода промышленной частоты. В течение истинного времени перио-
да изменения входного напряжения производится вычитание тактовых
импульсов из счетчика. Разность записанного и оставшегося к концу
периода в счетчике импульсов отображает его длительность, обратно
пропорциональную частоте.
Вычисленное значение частоты сопоставляется с хранящимся в па-
мяти микропроцессора набором установленных ее значений, соответ-
ствующих срабатываниям очередей АЧР1, АЧРП или ЧАПВ. Цифровым
дифференцированием определяется скорость изменения частоты, двоич-
ный код которой сопоставляется с установленной скоростью, соответ-
ствующей срабатыванию АЧРШ.
Одной из особенностей БМ МРЧ является программирование и хра-
нение двух наборов установленных значений частоты срабатывания
АЧР, автоматически переключаемых при изменениях режимов работы,
собственных нужд электростанций или систем электроснабжения, т.е.
свойство адаптивности.
Функционирование логической части автоматики частотной разгруз-
ки и частотного повторного включения поясняется функциональной схе-
мой на рис. 13.5,а. Предусмотрено два его варианта А и Б, переключа-
емые ключом SG8. По варианту А производится отключение и включе-
ние выключателя двумя разными внешними дискретными сигналами
АЧР и ЧАПВ, а по варианту Б — по появлению и исчезновению одного
дискретного сигнала А ЧР.
При включенном ключе SG7 и положении А ключа SG8 дискретный
сигнал (логическая единица) АЧР поступает на вход S записи тригге-
ра ST1 и запоминается им, если на входе R считывания отсутствует
логическая единица или (логическая операция Р1У1) от ЧАПВ, или от
ключа МУ местного управления и (логическая операция ЛХ1) от ключа
Вкл. включения выключателя оператором. При этом на третьем (ин-
версном) входе DW1 логическая единица АЧР, на выходе DW1 и на
входе R триггера логический нуль: запоминание сигнала А ЧР разреша-
ется. С выхода триггера ST1 единичный логический сигнал проходит в
цепь А ЧР откл. управления отключением выключателя.
457
Глава 13
Рис. 13.5. Схемы алгоритмов частотного повторного включения (а) и
подключения БМАЧР (б) (окончание рис. на стр. 459)
Формирователь F дискретного сигнала ограниченной длительно-
сти (одновибратор), равной времени разрешения частотного повторно-
го включения выключателя, воздействует на вход S триггера ST2 при
условии (логическая операция DX2) наличия дискретных сигналов о
готовности повторного включения и от реле РПО отключенного поло-
жения выключателя. Сигнал формирователя F запоминается тригге-
ром ST2 только после прекращения действия очередей автоматической
частотной разгрузки — исчезновения логической единицы А ЧР. Логи-
ческий нуль А ЧР, превращенный в логическую единицу инверсным вхо-
дом DW1, поступающую на вход R считывания ST1, возвращает его в
исходное состояние. На выходах STI, DW2 и на входе R триггера ST2
нули: запоминание сигнала формирователя F разрешается. Выходная
логическая единица ST2 запускает таймер DT отсчета выдержки време-
ни срабатывания ЧАПВ, воздействующего на включение отключенного
А ЧР выключателя. По обратным связям через DW2 триггер ST2 еди-
ницей ЧАПВ, поступающей на его вход считывания R, возвращается в
исходное состояние, а через DW1 дублируется воздействие на возврат
триггера ST1.
При положении Б ключа SG8 сигнал АЧР проходит прямо в цепь
управления отключением выключателя, а ЧАПВ с выдержкой DT про-
изводится после исчезновения логической единицы А ЧР со входа R триг-
гера ST2.
458
Микропроцессорная интегрированная ПА
459
Глава 13
Контактные выходы БМ АЧР с соответствующими обозначения-
ми показаны на схеме внешних подключений исполнительной части
автоматики частотной разгрузки и частотного повторного включения
(рис. 13.5,б). Электромагнитные реле KL2-KL9 управляют цепями от-
ключения и включения выключателей, а КL10-KL17 выдают сигналы
информации о действиях автоматики.
13.3. Микропроцессорные терминалы интегрированной
противоаварийной автоматики
Назначения и особенности. Объединенное (с международной
компанией АВВ) предприятие «АББ Реле - Чебоксары» ведет интен-
сивную научно-техническую работу по адаптации и внедрению в рос-
сийскую электроэнергетику микропроцессорных устройств и комплек-
сов противоаварийной автоматики, производимых зарубежными фирма-
ми, и по созданию российской микропроцессорной интегрированной ав-
томатики противоаварийного управления электроэнергетическими сис-
темами.
Предлагается большая номенклатура цифровых автоматических
устройств — цифровых реле серии SPA для собственных нужд ЭС и рас-
пределительных электрических сетей от 0,4 кВ и терминалов SPACOM
для распредустройств 6-35 кВ финского производства, модернизирован-
ных в соответствии с требованиями к противоаварийной автоматике
российских электроэнергетических систем. Микропроцессорные терми-
налы АВВ серий REG и REL являются основой построения интегриро-
ванной противоаварийной автоматики синхронных генераторов, транс-
форматоров и линий электропередачи напряжениями 110-750 кВ.
Основанные на последних достижениях информационной технологии,
они являются наиболее совершенными, отвечающими современным тре-
бованиям к автоматике противоаварийного управления, их считают ин-
теллектуальными техническими средствами с гибким, обеспечивающим
адаптацию и способность к «самосовершенствованию», программирова-
нием. Они обладают всеми свойственными современной вычислитель-
ной технике информационными, функциональными и сервисными свой-
ствами.
Хотя отдельные цифровые реле серии SPA специализированы, од-
нако во взаимодействии они образуют комплексные многофункциональ-
460
Микропроцессорная интегрированная НА
ные автоматические устройства, унифицированные по программному и
функциональному построению.
Некоторые из них многофункциональны сами по себе. Например —
цифровые реле SPAD346 и SPAF340. Первые выполняют функции токо-
вой продольной дифференциальной и трехступенчатой токовой защит,
отключающих междуфазные КЗ, и устройств отключений замыканий
на землю и при несимметрии напряжений и токов. Вторые — SPAF340
представляют собой четырехступенчатую противоаварийную автомати-
ку ограничений снижений частоты (в том числе скорости снижения) и
ее повышения с контролем напряжения.
Терминалы SPACOM можно считать достаточно интегрированны-
ми микропроцессорными устройствами противоаварийных отключений
всех видов повреждений электрооборудования распределительных сетей,
его повторного и резервного включений, исполнения сигналов с автома-
тики ограничений изменения напряжения и частоты. Их действие ил-
люстрируется функциональной схемой (см. рис. 13.6 и 13.7) базового
терминала SPAC 800.
На терминалах серий REG-RET реализуется интегрированная про-
тивоаварийная автоматика синхронных генераторов (REG 316), блочных
трансформаторов (RET 316) и линий электропередачи высокого и сверх-
высокого напряжений (REL-511R, REL-521).
Функциональная схема терминала SPAC 800. Измерительно-
вычислительная функциональная часть терминала содержит измери-
тельные преобразователи ИП (рис. 13.6) — вторичные (входные) изме-
рительные трансформаторы фазных токов TAL и тока нулевой последо-
вательности TALq, нагруженные на балластные резисторы Дб, и вычи-
слительный модуль SPCJ 4D28, выполняющий функции программных
устройств защитного отключения.
Логическая часть реализуется программным блоком управления
L2210 (рис. 13.7). Он формирует алгоритмы функционирования авто-
матики повторного включения выключателей АПВ и резервирования
отказов их действия на отключение УРОВ, обеспечивает взаимодей-
ствие токовой защиты и АПВ, а именно ускорение ее действия УСК,
до и после АПВ осуществляет самодиагностику терминала, выполняет
функции управления выключателем внешними воздействиями, от ключа
оператора, от АСУ и автоматики ограничений изменений режимных па-
раметров.
461
Глава 13
Рис. 13.6. Функциональная схема измерительно-вычислительной части
терминала SPAC 800
462
Микропроцессорная интегрированная ПА
Цепи входных дискретных сигналов
АЛ8-7 РКО
/¥18:5 РКВ
/¥19:2 АЧР —I
/¥18.9 Автоматика противоаварийная
/¥19.9 Внешнее отключение
/¥18:8 Автомат шинки питания (ШП)
/¥18.2 От датчика дуговой защиты
/¥196
/¥18:6 Ключ АПВ
.¥19.5 Ключ “Местное/Дистанцион- ное управление”
/¥18.14 РПВ —
/¥18:15 РПО
/¥19.7 Блокировка защит (
/¥19-12 Газовая защита. Откл.
/¥19:13 Газовая защита. Сигн
/¥19:8 Вход счетчика импульсов
/¥18.1 + шины пит. дуговой защиты
А18-3 - шины пит дуговой защиты
/¥19:1 + шины пит. АЧР
-¥19'3 - шины пит. АЧР
О — О СЧ СП OS 6s об 00 00 + ШУ
.¥18 4 А19'4 А19:14 /¥19:15 -ШУ
/¥14:1 /¥14-3 —-Улн I - Ц,1ИТ | Последовательный
DX6
Неиспр. цепей
управления
&
DX7
Счетчик
импульсов
-—Ш"
DX2
к ВОЛС
Оптоэлектрический преобразователь
463
Глава 13
464
Микропроцессорная интегрированная ПА
Рис. 13.7. Функциональная схема логической и исполнительной частей
терминала SPAC 800
465
Глава 13
Исполнительная часть представляет собой релейно-контактный
блок выходов, цепи от контактов электромагнитных реле (герконов)
которого выведены на штепсельные разъемы Х15-Х17. Обмотки ре-
ле подключаются к выходам блока управления логическими операци-
ями И (DX2, DX5-DXN) с ключом 5(91.8 готовности цепей управле-
ния. Цепи входных дискретных сигналов заведены на разъемы X 18-Х 19
(рис. 13.6).
К контактам разъема ХО проводятся вторичные токи первичных из-
мерительных трансформаторов фазных токов и тока нулевой последова-
тельности (на схеме не обозначены). К соответствующим контактам
разъемов ХО подключены указанные вторичные (входные) измеритель-
ные преобразователи токов в напряжения.
Через макси-селектор max наибольшее по амплитуде напряжение на
резисторах R5, пропорциональное соответствующему фазному току, и
напряжение, пропорциональное току нулевой последовательности, по-
ступают в вычислительный модуль.
По соответствующим программам вычислительный модуль произво-
дит сравнение преобразованных АЦП (на схеме не обозначен) указанных
напряжений с установленными значениями, определяемыми уставками
токов срабатывания трехступенчатой токовой защиты ТЗ (программ-
ные измерительные реле максимального тока К Al-К АЗ) от междуфаз-
ных КЗ, двухступенчатой (реле КАо, КАб) — от замыканий на зем-
лю и защиты (реле А'А4) от несимметричных режимов работы и обры-
вов фаз.
Задержки срабатывания первых ступеней, выдержки времени второй
ступени защиты от КЗ создаются таймерами микропроцессоров DT1,
DT2, DT4, DT5, а обратнозависимых от токов выдержек времени тре-
тьей ступени защиты от КЗ и второй ступени защиты от однофазных
замыканий на землю вычисляются по заданным аналитическим соотно-
шениям: вычислительные операции условно обозначены на схеме эле-
ментами времени DT3 и DT6.
Выходные сигналы 551-553 и Т51, TS2 (рис. 13.6) вычислительно-
го модуля о срабатывании указанных защит поступают в блок управле-
ния (рис. 13.7). По цепям дискретных входных сигналов в блок упра-
вления поступают сигналы от фототиристорного датчика электродуго-
вой защиты КРУ и газового реле защиты трансформатора, автоматиче-
ской частотной разгрузки АЧР, ключа ввода в действие АПВ, команды
466
Микропроцессорная интегрированная ПА
от ключа управления включением РКВ и отключением РКО, сигналы
от вспомогательных сигнальных контактов выключателя для релейно-
го фиксирования его включенного РПВ и отключенного РПО состоя-
ний, сигнального контакта автоматического выключателя шин питания
1ПП, команды переключения управления выключателем с местного на
дистанционное и сигнал запрета действия (блокировки).
Блок управления программными логическими операциями, зафикси-
рованными в ПЗУ микроЭВМ и условно обозначенными на рис. 13.7 со-
ответствующими логическими элементами, формирует сигналы упра-
вления выключателем, воздействующие на выходные герконы К1Л.2,
К£1.3, К£2.3 и KL2A. Сигналы информации поступают на светодиоды
VD1-VD8, четырехразрядный цифровой индикатор (на схеме не пока-
зан), электромагнитные реле дискретных выходных сигналов и на опто-
электрический преобразователь (рис. 13.6) волоконно-оптической линии
связи ВОЛС с вышестоящими уровнями АСУ.
Блок управления осуществляет автоматическое тестирование и са-
модиагностику терминала с выдачей сигналов о неисправностях.
Логические алгоритмы устанавливаются набором ключей SG1-SG4
(рис. 13.7), расположенных, как и ключи уставок SGI-SG10 программ-
ных измерительных реле, на передней панели терминала.
Воздействие на отключение выключателя выдается возбуждением
геркона KL1.2 сигналом, формируемым логическими операциями DW1,
DX1 (рис. 13.6), DW2-DW5 и DX3 — операция ЗАПРЕТ (рис. 13.7).
Через DW2 проходят сигнал TS2 от первой (/Ml) и второй (/М2) сту-
пеней токовой защиты (цепь 2), сигналы от газовой защиты (цепь б) и
цепи 10 внешнего отключения. При необходимости (ключ SG1.7) они
запоминаются по обратной связи DW4 (для отключения с «защелкой»):
память снимается кнопкой SB.
Сигналы отключения через также с запоминанием по обрат-
ной связи через 0X3 (при отсутствии логической единицы в цепи 25 от
РПО — выключатель отключен) и операцию DX2 блока выходов, кон-
тролирующую готовность выходных цепей (ключ SGI.8), воздействуют
на электромагнитное реле KIA.2 отключения.
Операциями DX1, DW3 и DW5 разрешается прохождение сигналов
отключения SS1 (цепь 4):
• от второй (/М2) ступени токовой защиты с ускорением (с неболь-
шой задержкой /?Т8) логической единицей цепи 13 инверсного вы-
467
Глава 13
хода элемента памяти DS1 сигнала от РПО, снимающего ускоре-
ние через /уск = 1 с после отключения выключателя — логическая
единица ключа SGI.2 цепи 18: ускорение вводится при включении
выключателя от ключа управления (на случай его включения на
КЗ);
• от ключа управления — реле команды отключения РКО (цепь 1)
при отсутствии логической единицы на инверсном входе DX1 от
ключа «местное/дистанционное» управление;
• от противоаварийной автоматики (цепь 7 с ключом 5G1.5), в част-
ности от АЧР (цепь 3);
• от фототиристорного датчика электродуговой защиты (цепь 3),
проходящего через DX4 (цепь 9) на вход DW3 (при замкну-
том 5G1.6) при условиях срабатывания второй ступени (А’А2) то-
ковой защиты (единица SS1 в цепи 4 с инверсией DU1 (НЕ) и
замкнутым 5G3.2, — операция DW7): логический нуль, обусло-
вленный инверсией на входе DW7, снимает запрещающую едини-
цу с инверсного входа DX4) при отсутствии логической единицы
на инверсном выходе контакта Х19 : 7 входного разъема (цепь 19,
замкнут 5G3.1); первое из указанных условий — это пуск элек-
тродуговой защиты по току, а второе — отсутствие ее блокировки
внешним сигналом (и блокировки других защит — инверсные вхо-
ды элементов времени DT1-DT6).
При этом по цепи 9 через DРЕЮ выдается сигнал (светодиод VD5)
о действии электродуговой защиты; светодиод зажигается и при неис-
правности (пробое) фототиристорного датчика операцией 2?ХЗ (цепь 24,
элемент времени DT14) при длительном (свыше 10 с) единичном сигна-
ле в цепи 8 в нормальном режиме, когда сигнал 551 от токовой защиты
соответствует логическому нулю (на выходе DU1 и DW7 логическая
единица); при этом через £W8, DT12, DW9 и ключ 5G3.6 возбуждает-
ся выходное реле KL1.6 предупредительной сигнализации.
Третья (А'АЗ) ступень токовой защиты от междуфазных КЗ с обрат-
но зависимой от тока выдержкой времени DT3 (сигнал TS1, цепь 23)
действует на сигнализацию о перегрузке и на отключение, возбуждая
выходные электромагнитные реле KL1.G — через DW9 длительно или
(ключ 5G2.6) в течение импульсного сигнала формирователя F2, и со-
ответственно KL2.3, при этом через AW13 возбуждается и реле KL1.7
общей сигнализации о срабатывании защит.
468
Микропроцессорная интегрированная ПА
Вторая ступень (7L45, 2?Т5) защиты от однофазных замыканий на
землю (сигнал 552, цепь 5) может действовать на отключение (в поло-
жении 1 ключа 5G3.7) с дополнительной задержкой DT15, возбуждая
выходное реле KL2A, или на предупредительный сигнал: возбуждается
реле KL1.6 и загорается светодиод VD4.
При отказе выключателя в действии на отключение КЗ формиру-
ется воздействие на отключение предыдущего неповрежденного присо-
единения УРОВ: возбуждается выходное электромагнитное реле А’£1.4
через DW1, DT7 и ключ 5G1.1 (цепь 17) или сигналом TS2 (цепь 2)
первой и второй ступеней токовой защиты, или при введенном ускоре-
нии действия защиты (цепь 18), или при внешнем отключении (цепь 10,
ключ 5G1.3).
Автоматика повторного включения выключателя, отключенного
защитой, АПВ или автоматической частотной разгрузкой — частот-
ное повторное включение ЧАПВ, действует при отсутствии сигнала
ЗАПРЕТ (операция DXb) от DW6 (ИЛИ) на отключение от:
• первой ступени (/С41) токовой защиты (сигнал 553 цепи 16);
• цепи 17 УРОВ;
• реле РКО команды на отключение ключом управления (цепь 1);
• газовой защиты трансформатора (цепь 6 при включенном 5G2.4);
• электродуговой защиты (цепь 9 при включенном SG2.2);
• внешней противоаварийной автоматики (цепь 7 при включен-
ном SG2A);
• цепи внешнего отключения (цепь 10 при включенном SG2.3).
Автоматическое повторное включение производится по сигналу
Пуск, формируемому при несоответствии состояния выключателя — от-
ключен: логические единицы от РПО и положения ключа управления —
зафиксирована команда на включение выключателя. Сигнал Пуск фор-
мируется операцией DX8 при наличии логических единиц:
• на выходе элемента DS1 (цепь 13) в течение обозначенного на схе-
ме времени (/уск = 1 с) запоминания им логической единицы от сиг-
нального контакта выключателя, поступающей при его отключе-
нии на РПО;
469
Глава 13
• от реле фиксации команды включения выключателя ключом упра-
вления РФК (цепь 21) — сигнал готовности Гот;
• на выходе BW11 от ключа управления АПВ (цепь 14) — сигнал
разрешения Разр.
Ключом SG2.6 через BW11 может разрешаться повторное включе-
ние внешней противоаварийной автоматикой (цепь 7), в частности клю-
чом SG2.5 — автоматикой частотной разгрузки (цепь 3).
Программное реле AKS повторного включения двукратного дей-
ствия. Второй цикл АПВ2 вводится ключом SG2.7. Повторные включе-
ния выключателя производятся с выдержками времени таймеров DT1
(АПВ1), DT2 (АПВ2) и DT3 (ЧАПВ) — через DW12. Время готовно-
сти АПВ к новому действию 20 с.
Прохождение сигнала АПВ или (операция DW12) сигнала дистан-
ционного управления включением (цепь 15) контролируется операци-
ей DX6 наличия питания (цепь 11) и отсутствия на инверсном входе
DX6 логической единицы от реле блокировки от многократных включе-
ний РБМВ выключателя. Формирователем F3 и операцией DX9 сиг-
налов по цепям 21 (от РФК) и 25 (от РПО) возбуждается реле KL2.5
сигнализации об аварийном отключении выключателя в цикле АПВ.
Воздействие на включение выключателя выдается электромагнит-
ным реле К 1,1.3, возбуждаемым на достаточное для включения время
формирователем импульса F1 при готовности цепей управления (опера-
ция DX5 и включенный ключ SGI.8).
На схеме (рис. 13.7) показаны светодиоды VD1-VD8, расположенные
на лицевой панели терминала, местной индикации и электромагнитные
реле блока выходов, формирующие внешние (обозначенные на схеме)
сигналы информации о функционировании терминала. Условно обозна-
чен и программный контроль его исправности.
13.4. Интегрированная противоаварийная автоматика
синхронных генераторов, трансформаторов
и линий электропередачи
Выполняемые функции и особенности. Микропроцессорная
противоаварийная автоматика синхронных генераторов на терминалах
REG 216 и REG 316 выполняет функции:
470
Микропроцессорная интегрированная ПА
• традиционных автоматических устройств защитных отключе-
ний [40] генератора при коротких замыканиях и замыканиях на
землю в обмотках статора и ротора;
• отключений при опасных режимах несимметричной нагрузки, по-
тери возбуждения, двигательном режиме;
• автоматики ограничений снижений и повышений напряжения и ча-
стоты [38, 39].
В модификации REG 316(2), предназначенной для электроэнергети-
ческих блоков генератор-трансформатор, дополнительно предусмотрены
функции защитного отключения при перегревах обмоток трансформато-
ра и повышениях давления масла.
Микропроцессорная противоаварийная автоматика трансформато-
ров на терминале RET-316, как и французской фирмы GEC Alsthom,
обладает новыми, осуществляемыми только цифровой вычислитель-
ной техникой, свойствами адаптивности, обеспечивающими реализацию
принципиальных достоинств продольной токовой дифференциальной за-
шиты.
Программно преодолеваются специфические факторы, крайне за-
трудняющие обеспечение высокой чувствительности продольной токо-
вой дифференциальной защиты трансформатора [40]. Расчетными ал-
горитмами производятся:
• компенсация сдвига фаз между вторичными токами измеритель-
ных трансформаторов тока на сторонах высшего и низшего напря-
жений, обусловленного группой соединений обмоток защищаемого
трансформатора;
• выравнивание абсолютных значений вторичных токов, неравен-
ство которых в нормальном режиме и при внешнем КЗ обусло-
вливается численным отличием отношения коэффициентов транс-
формации указанных измерительных трансформаторов от коэффи-
циента трансформации защищаемого трансформатора;
• компенсация дискретных изменений абсолютных значений вторич-
ных токов при действиях микропроцессорного автоматического ре-
гулятора коэффициента трансформации SPAU341 С (гл. 6);
471
Глава 13
• более эффективная при цифровой реализации продольной токовой
дифференциальной защиты реализация способов обеспечения ее
недействия от бросков тока намагничивания, возникающих при
включениях трансформатора и дискретных повышениях его пер-
вичного напряжения при отключениях внешних КЗ.
Наиболее интегрированной является противоаварийная автоматика
линий электропередачи высокого и сверхвысокого напряжений, функцио-
нирующая на терминалах REL-511R и REL-521 компании «АББ Реле -
Чебоксары», как и на терминалах 7SA513 немецкой фирмы Siemens и
указанной французской фирмы. Они выполняют следующие функции
устройств защиты и собственно противоаварийной автоматики:
• дистанционной (на терминалах REL-561 — дифференциальной)
как от междуфазных, так и однофазных КЗ;
• ступенчатой токовой нулевой последовательности от КЗ на землю;
• ступенчатой токовой от междуфазных КЗ;
• резервирования отказов выключателей в действии на отключение;
• отключения при включении линии на КЗ (закоротку);
• обеспечения недействия дистанционной защиты при качаниях в
электроэнергетической системе и повреждениях в цепях измери-
тельного трансформатора напряжения;
• трехфазного и однофазного повторного включения линии, трехфаз-
ного любого вида (см. гл. 9), в том числе с синхронизацией;
• ограничения снижения и повышения напряжения;
• определения места повреждения линии электропередачи;
• фиксирования действующих значений напряжения и тока, актив-
ной и реактивной мощностей в линии и частоты;
• регистрации аварийных ситуаций.
Терминалы обеспечивают программную настройку дистанционной
защиты на пять (три фиксированные и две расширяемые ускоренного
отключения), а токовой нулевой последовательности — на четыре зоны
(ступени), т.е. высокую степень дальнего резервирования.
472
Микропроцессорная интегрированная ПА
Возможность оперативного выбора одного из находящихся в памяти
микропроцессоров четырех наборов установленных сопротивлений и то-
ков срабатывания (уставок) придает указанной автоматике защитных
отключений свойство адаптивности к режимам работы линий электро-
передачи.
Гибкое программное изменение уставок и обмен информацией по вы-
сокочастотным каналам связи повышают быстродействие и эффектив-
ность взаимодействия автоматики защитных отключений и повторных
включений.
Возможность оперативного пополнения библиотеки программ и вы-
полняемых ими функций придает интегрированной противоаварийной
автоматике линий электропередачи способность «самосовершенство-
вания».
Названные терминалы, естественно, производят самотестирование,
автоматическую диагностику и имеют интерфейсы с ПЭВМ и выходы
для подключений к ВОЛС дистанционной связи с АСУ.
Функциональная схема терминала REL-521. Универсальный
терминал на мультипроцессорной основе осуществляет противоаварий-
ную автоматику отключений и включений как внутрисистемных, так и
межсистемных воздушных и кабельных линий электропередачи. Выпол-
няет все перечисленные функции и входит как основной в состав проти-
воаварийной автоматики электростанции или системной подстанции.
Вычислительно-логическая часть ВЛЧ (рис. 13.8) терминала со-
стоит из нескольких микропроцессоров MII1-MIJN, функционирующих
одновременно и выполняющих необходимые для реализации указанных
функций противоаварийной автоматики вычислительные и логические
операции. Один из них производит фильтрацию информационных про-
цессов, поступающих от АЦП, — выделение принужденных составляю-
щих напряжений и токов электромагнитных переходных процессов при
КЗ. Программно реализуются рекурсивный полосовой второго порядка
или нерекурсивный цифровые частотные фильтры [8].
Вычислительно-логическая часть содержит главный контроллер ГК,
который принимает решения, основанные на информации, поступающей
от микропроцессоров. Они выдают информацию через интервал дискре-
тизации Тм = 1 мс.
Измерительно-преобразовательная часть ИПЧ состоит из комплек-
тов вторичных измерительных трлнсформнтсфсж.- фаатах j
Рис. 13.8. Функциональная схема терминала REL-521
Глава 13
Микропроцессорная интегрированная ПА
ных) и нулевой последовательности напряжений TVL, фазных и нулевой
последовательности токов TAL, нагруженных балластными резистора-
ми R6; аналоговых фильтров нижних частот первого порядка ФНЧ с
граничной частотой 250 Гц; мультиплексора МПЛ и аналого-цифрового
преобразователя АЦП.
В связи с большими кратностями токов КЗ АЦП дискретным сиг-
налом о его переполнении уменьшает сопротивление балластных ре-
зисторов в 2 раза, соответственно увеличивая динамический диапазон
аналого-цифрового преобразования токов. От АЦП цифровые сигналы
проходят в микропроцессоры через оптоэлектронные элементы гальва-
нической развязки цепей ЭГР.
Входные дискретные сигналы поступают в вычислительно-логиче-
скую часть от контактов электромагнитных реле входных сигналов
РВС. Управляющие воздействия на отключение и включение выводятся
контактами комплекта выходных электромагнитных реле КВР с повы-
шенной коммутационной способностью, а сигналы информации — гер-
метизированными магнитоуправляемыми контактами ГМК.
Вычислительно-логическая часть имеет стандартный интерфейс с
ПЭВМ и ВОЛС. Терминал снабжен клавиатурой КЛ для настройки на
выбранные функции и параметры и жидкокристаллический дисплей ЦП
отображения информации.
Одной из особенностей функций дистанционной защиты является
программная реализация измерительных реле полного сопротивления с
многоугольными характеристиками срабатывания и программируемой
направленностью действия защиты во всех зонах не только при всех
сочетаниях поврежденных фаз междуфазными КЗ (междуфазных реле),
но и при однофазных коротких замыканиях (однофазных реле). Послед-
ние функционируют и как избиратели поврежденных фаз при выпол-
нении терминалом функции автоматики однофазного повторного вклю-
чения.
Схема логических операций (рис. 13.9) иллюстрирует программную
реализацию определения поврежденной фазы при однофазном и сочета-
ния фаз двухфазных КЗ на землю. Предусмотрены контролируемые опе-
рациями DX1-DX3 (ЗАПРЕТ) цепи ненаправленного выбора (от фаз-
ных реле полного сопротивления KZHa-KZHc) поврежденной фазы А,
В или С. Через операциюИХ4 формируется сигнал (от реле KAV на-
пряжения и тока нулевой последовательности) о коротком замыкании
475
476
Рис. 13.9. Схема алгоритма определения поврежденной фазы
Глава 13
Микропроцессорная интегрированная ПА
на землю (сигнал PHSN по фирменному обозначению). Запрет произво-
дится единичным логическим сигналом СЗ от программных реле блоки-
ровок КВ при повреждениях в цепях измерительных трансформаторов
напряжения и качаниях в электроэнергетической системе.
Операциями ЗАПРЕТ контролируется и определение поврежденных
фаз программными направленными измерительными реле сопротивле-
ния: однофазными KZ&-KZc и междуфазными KZab~ К%са- Так, сиг-
нал выбора фазы А линии при ее коротком замыкании на землю фор-
мируется направленным однофазным измерительным реле сопротивле-
ния KZa при наличии логических единиц на всех трех входах DX1 (опе-
рация их совпадения), т.е. и от указанного реле KAV фиксации КЗ на
землю, и от DX4 (при отсутствии на инверсном входе запрещающей
единицы). Логическая единица с выхода DX1 проходит через DW1
(ИЛИ) в виде сигнала, определяющего воздействие на электромагнит
отключения YAT выключателя фазы А. Аналогично направленными
однофазными измерительными реле KZb и KZc через операции DX2,
DX3 и DW2, DW3 при наличии логических единиц на выходах KAV и
РХ4 формируются сигналы выбора поврежденной фазы В или С соот-
ветственно.
Сочетание поврежденных фаз при двухфазном КЗ на землю опреде-
ляется междуфазными измерительными реле сопротивления. Так, при
коротком замыкании на землю фаз А и В дискретный сигнал от ре-
ле KZab проходит через DX4 при наличии логических единиц от реле
KAV фиксации КЗ на землю и от _DA'4. Операции DW1 и DW2 обеспе-
чивают выходные сигналы о повреждении фаз А и В.
Логическими операциями DW4 и DX7 формируется сигнал инфор-
мации PSN о направленном выборе поврежденных фаз при КЗ на
землю.
При однофазном КЗ на землю отключается один поврежденный про-
вод линии электропередачи и запускается программа однофазного ав-
томатического повторного включения (ОАПВ). При двухфазном КЗ
на землю логическими операциями ЛО, включающими и аналогичные
DX5-DX7 (см. рис. 9.3), формируются воздействия на электромагниты
YAT отключения трех фаз линий и сигнал TP TRIP запуска программы
трехфазного автоматического повторного включения (ТАПВ).
Программная автоматика повторного включения обладает рядом
особенностей:
477
Глава 13
• осуществление одной из восьми программ, в том числе и про-
граммы многократных и с синхронизацией трехфазных повторных
включений;
• пуск программ в момент выдачи управляющего воздействия на от-
ключение выключателя с проверкой исправности его привода и го-
товности к отключению и включению;
• быстродействующее повторное включение при наличии высокоча-
стотного сигнала об отключении выключателя противоположного
конца линии и замедленное (с расширенной паузой) при его отсут-
ствии;
• недействие функции АПВ при включении выключателя на корот-
кое замыкание (закоротку) за счет задержки прохождения сигнала
о его включенном состоянии;
• отображение обширной информации о включенной функции АПВ,
о готовности терминала к ее выполнению, о функционировании в
цикле автоматического повторного включения и его неуспешности,
количестве попыток АПВ и др.
Действие программной автоматики повторного включения иллю-
стрируется типовой упрощенной логической схемой функций ОАПВ и
ТАИВ (рис. 13.10). Сигналы информации SETON о включенном состо-
янии и READY о готовности к выполнению функции АПВ формируются
логическими операциями:
• совпадения DX1 внешних дискретных сигналов (логических еди-
ниц) включения ON функции АПВ и готовности ТR терминала к
функционированию;
• их запоминания триггером ST с контролем операцией DX1 (ЗА-
ПРЕТ) отсутствия внешнего единичного логического сигнала
OFF, проходящего через DX2, выключения функции АПВ;
• операцией DX2 при отсутствии входного дискретного сигнала
INH запрета выполнения функции АПВ на входе инвертора DUY
т.е. логической единицы на его выходе, отсутствии единичного
сигнала Пуск функции АПВ на инверсном входе DX2 (после за-
пуска функции АПВ сигнал информации о готовности ее выпол-
нения исчезает) и при наличии сигнала Возвр. восстановления
программы функции АПВ — возврата в исходное состояние после
ее выполнения.
478
479
Микропроцессорная интегрированная ПА
Глава 13
Сигнал Пуск формируется воздействием на отключение одной или
трех фаз линии (цепи к YAT выключателей на рис. 13.9), показанным
на рис. 13.10 входным дискретным сигналом START (фирменным обо-
значением) и логическими операциями DX3, DW1 и DAT4 при условиях:
• включенного в течение времени, превышающего устанавливаемое
таймером DTA., состояния выключателя — сигнал CBCL на сред-
нем (по расположению на схеме) входе ПАЗ (условие, необходимое
для отключения выключателя без АПВ при его включении на КЗ);
• готовности привода выключателя — сигнал CBR на нижнем вхо-
де DX3-
• включенной функции АПВ — сигнал SETON на верхнем вхо-
де DX4\
• отсутствия сигнала INН запрета выполнения функции АПВ —
логической единице на выходе инвертора DUA..
Сигнал Пуск запоминается по цепи обратной связи ОС, охватыва-
ющей EWT и DX4. В зависимости от того, логический нуль — от-
ключение одной фазы или логическая единица — отключение трех фаз,
поступает по цепи ТВ TRIP (см. также рис. 13.9) по сигналу Пуск,
проходящему через DX3 или DX5, соответственно запускаются тай-
меры DT2 или DT3 задержек формирования сигналов SPTO функции
однофазного или ТРТО функции трехфазного АПВ.
Операцией DW2 выдается сигнал информации PROGR о программ-
ной реализации цикла АПВ.
Длительность задержек таймеров DT2, DT3 может быть увеличе-
на при отсутствии уверенности об одновременном отключении линии с
двух сторон. Если с противоположного конца линии не поступает вы-
сокочастотный сигнал PL CLOST (буквально «потерян» сигнал), то
логического единицей на выходе инвертора DU2 и сигналом START на
входах DXQ и (после ИРЛЗ) на одном из входов DX1 совместно с сигна-
лом Пуск на втором его входе через DW4 задержка таймеров DT2, DT3
увеличивается. Воздействие на таймеры запоминается по цепи обрат-
ной связи, охватывающей DX1 и £W3, поскольку нормально сигнал
START исчезает после отключения выключателя. Задержка АПВ уве-
личивается также при «затягивании» процесса отключения выключа-
теля, а именно, если сигнал START не исчезает в течение времени за-
держки таймера DT3 (цепь с операциями DX8 и DWA).
480
Микропроцессорная интегрированная ПА
Воздействие на повторное включение выключателя Вкл. одной фазы
формируется операцией DX10 (через ZW5) совпадения сигналов SPTO
однофазного АПВ и от реле KQT отключенного состояния выключателя.
Повторное включение выключателей трех фаз происходит при на-
личии на входах DX9 сигнала ТРТО трехфазного АПВ и одного из
дискретных сигналов от программного измерительного реле KV ми-
нимального напряжения, контролирующего отсутствие напряжения /71
(или 172) на одном конце линии, или (операция ZW6) от программно-
го устройства KSS контроля синхронизма напряжений на другом конце
линии и на шинах подстанции.
Восстановление функции АПВ (возврат в исходное состояние) после
неоднократных (на рис. 13.10 не показано) попыток повторного включе-
ния производится с выдержкой времени таймера DTA после исчезно-
вения на инверсном входе DX4 единичного сигнала о воздействии на
включение выключателя или (операция DW7) сигнала PROGR о про-
исходящем цикле АПВ. Сигнал Возвр. запоминается по цепи обратной
связи, охватывающей DTA и DX4.
Как указывалось, формируются сигналы информации о выполнен-
ных циклах АПВ и о неуспешном автоматическом повторном включении
(на рис. 13.10 не показано).
Вопросы для самопроверки
1. В чем состоят основные особенности микропроцессорных интегрирован-
ных автоматических устройств электроэнергетических систем7
2. Какие функции выполняет микропроцессорное автоматическое устрой-
ство «Сириус»? Как оно функционирует (см. рис. 13.1)?
3. Что представляет собой и какие функции выполняет микропроцессорный
комплекс противоаварийной автоматики НТЦ «Механотроника»?
4. Как выполнено и как функционирует (см. рис. 13.2-13.4) микропроцес-
сорное автоматическое устройство БМРЗ?
5. Как реализуются функпии релейной защиты устройством БМРЗ 04
(см. рис. 13 2)7
6. Как выполняется указанным микропроцессорным устройством функция
АПВ (см рис. 13.3)?
7. Как выполняется функция АВР (см. рис. 13 4)?
481
Глава 13
8 В чем состоят особенности программной измерительной части автома-
тики частотных разгрузки и АПВ микропроцессорного устройства БМ
АЧР (см рис 13 5,а)7
9 Почему микропроцессорные интегрированные автоматические устрой-
ства серии SPAC 800 называются терминалами?
10 Функции каких программных автоматических устройств выполняют тер-
миналы SPAC 800?
11 Как выполняются функции программной релейной защиты терминалами
серии SPAC 800 (см рис. 13 6)7
12 Как терминалами SPAC 800 выполняется функция программного авто-
матического повторного включения (см. рис. 13.7)?
13 Как функционирует в целом терминал SPAC 800 (см. рис. 13.6 и 13 7)7
14 Какими микропроцессорными модулями выполняются функции измери-
тельной и логической частей терминалов SPAC 800 (см рис 13 6 и 13 7)?
15 Какие функции противоаварийного автоматического управления син-
хронным генератором выполняет терминал REG-316?
16 В чем состоят дополнительные особенности программной защиты транс-
форматора, реализуемой терминалом REG 316(2)?
17 В чем состоят особенности программной продольной токовой дифферен-
циальной защиты трансформатора, реализуемой микропроцессорными
интегрированными автоматическими устройствами7
18 В чем состоят особенности программной дистанционной защиты линий
электропередачи, реализуемой микропроцессорными интегрированными
автоматическими устройствами?
19 Как выполнен и функционирует терминал REL-521 (см. рис 13.8)?
20 Как осуществляется программная функция выбора поврежденной фазы
при однофазном КЗ на линии (см рис. 13.9)?
21 Как терминалом REL-521 выполняется программная функция одно-
фазного автоматического повторного включения линий электропередачи
(см рис 13 10)?
482
Заключение
Автоматика управления процессом производства, передачи и рас-
пределения электроэнергии, ввиду его специфических особенностей, ис-
ключающих практическую возможность управления им человеком (см.
введение), появилась с самого начала становления электроэнергетики и
непрерывно развивалась, опережая теорию автоматического управления
и технику автоматизации других производственных процессов.
Ряд частных теоретических проблем автоматического управления
режимами работы и, особенно, противоаварийного управления электро-
энергетическими объектами на основе процессов выявления, передачи,
переработки и использования информации были проработаны и разре-
шены специалистами в области автоматики электроэнергетики до сфор-
мировавшихся общей теории автоматического управления и теории ин-
формации.
Служившие безотказно длительное время электромеханические и
электромагнитные управляющие автоматические устройства были дове-
дены до высокого технического совершенства как информационные тех-
нические средства.
Появившаяся полупроводниковая и, особенно, интегральная аналого-
вая и дискретная элементная база интенсивно и успешно применялась
для создания нового поколения автоматических устройств управления
электроэнергетическими объектами и автоматических управляющих си-
стем электроэнергетическим производством.
Цифровая вычислительная техника с ее информационными возмож-
ностями обусловила создание интегрированных управляющих автома-
тических устройств, автоматизированных систем управления техноло-
гическими процессами и противоаварийного управления электрически-
483
ми станциями и автоматизированных систем диспетчерского управле-
ния электроэнергетическими системами и Единой электроэнергетиче-
ской системой в целом, предполагающих, однако, непосредственное, ко-
ординирующее их функционирование, участие человека-оператора.
Но именно на основе цифровой вычислительной техники становит-
ся реальным осуществление генерального завершающего этапа разви-
тия и совершенствования автоматики электроэнергетики — создание
комплексной полностью автоматической (функционирующей без участия
человека) системы управления процессом производства, передачи и рас-
пределения электроэнергии, что несомненно и будет сделано будущи-
ми высококвалифицированными, в совершенстве владеющими способа-
ми и техническими средствами обработки информации цифровой вычи-
слительной техникой, специалистами по автоматическому управлению
электроэнергетическими системами — ныне студентами электроэнерге-
тических высших учебных заведений.
484
АР PM — автоматический регулятор реактивной мощности
АРР — автоматический регулятор разворота (турбины)
APT СТ — автоматический регулятор теплового состояния турбины
АРЧВ — автоматический регулятор частоты вращения
АС — автоматический синхронизатор
АСДУ — автоматизированная система диспетчерского управления
АСМ — автоматический синхронизатор микропроцессорный
АСР — автоматическая система регулирования
АСРЧМ — автоматическая система регулирования частоты и мощ-
ности
АСУ — автоматизированная система управления
АСУ ТП — автоматизированная система управления технологически-
ми процессами (электростанции)
АУРЗ — автоматические устройства релейной защиты
АУС — автоматическая управляющая система
АУУ — автоматическое управляющее устройство
АЧР — автоматическая частотная разгрузка
БАПВ — быстродействующее автоматическое повторное включение
БАРМ — быстродействующий автоматический регулятор мощности
БСЗ — букса следящего золотника
БЗГ — быстродействующая загрузка гидрогенераторов
БИП — быстродействующий измерительный преобразователь
БКУ — быстродействующий контур управления
БСПА — быстродействующая передача сигналов противоаварийной
автоматики
ВИП — времяимпульсный преобразователь
ГД — гидравлический двигатель
ГМК — гидромеханическая колонка
ГОС — гибкая отрицательная обратная связь
ГО О С — главная отрицательная обратная связь
ГУ — гидравлический усилитель
ДА — делительная автоматика
ДП — диспетчерский пункт
ДРТ — длительная разгрузка турбины
486
ЕЭС — Единая электроэнергетическая система
ЖОС — жесткая отрицательная обратная связь
ИЗЭ — интегрирующий задающий элемент
ИИП — интегрирующий измерительный преобразователь
ИОА — измерительный орган разности амплитуд
ИОДП — измерительный орган давления пара
ИОИЧ — измерительный орган изменения частоты
ИОМТ — измерительный орган мощности турбины
ИОМЭС — измерительный орган мощности электростанции
ИОН — измерительный орган напряжения
ИОР и АТ— измерительный орган реактивного и активного тока
ИОС — измерительный орган скольжения
ИОУ — измерительный орган угла
ИОУО — измерительный орган угла опережения
ИОЧ — измерительный орган частоты
ИПАМ — измерительный преобразователь активной мощности
ИПН — измерительный преобразователь напряжения
ИПРМ — измерительный преобразователь реактивной мощности
ИПТ — измерительный преобразователь тока
ИПУ — измерительный преобразователь угла
ИПЧ — измерительный преобразователь частоты
ИЧ — измерительная функциональная часть (автоматического
устройства)
Ис.Ч — исполнительная функциональная часть
КПР — контроль предшествующего (аварийному) режима
ЛЧ — логическая функциональная часть
ЛУУ — логическое управляющее устройство
МКУ — медленно действующий контур управления
МНУ — маслонапорная установка
МУТ — механизм управления турбиной
НКН — начальная коррекция неравномерности (вращения тур-
бины)
487
ОМТ — ограничитель мощности турбины
О ОНА — ограничитель открытия направляющего аппарата
ОТЗ — ограничитель темпа задания
ОЭС — объединенная электроэнергетическая система
ПА — противоаварийная автоматика
ПАА — панель противоаварийной автоматики
ТВ С — техническое водоснабжение
ТСОИ — технические средства отображения информации
РОЛ — разгрузка при отключении линии
СИРП — сигналы информации о режимных параметрах
СИСЭС— сигналы информации о схеме электроэнергетической сис-
темы
СИВВ — сигналы информации о возмущающих воздействиях
УДУ — устройство дискретного управления
УПА — устройство противоаварийной автоматики
УП — усилитель-преобразователь релейного действия
УРАМ — устройство распределения активной мощности
УРОВ — устройство резервирования отказа выключателей
УРПН — устройство регулирования под нагрузкой
УТИ — устройство телеизмерения
УТС — устройство телесигнализации
УЭО — управляемый электроэнергетический объект
ФВ — форсировка возбуждения
ФИР — формирователь импульсной разгрузки (турбины)
ФНЭЭ — форсировка накопителей электроэнергии
ФОС — функциональная обратная связь
ФПК — форсировка продольной компенсации
ЧАПВ — частотное автоматическое повторное включение
ЧП Г — частотный пуск гидрогенераторов
ЦФОС — цифровой формирователь ортогональных составляющих
ЭГП — электрогидравлический преобразователь
ЭС — электрическая станция
ЭСНД — элемент сравнения непрерывного действия
ЭЭС — электроэнергетическая система
488
Список литературы
1. Автоматика электроэнергетических систем: Учеб, пособие для
вузов / О. П. Алексеев, В. Е. Казанский, В. Л. Козис и др.; Под ред.
В. Л. Козиса и Н.И. Овчаренко. — М.: Энергоиздат, 1981.
2. Автоматизация электроэнергетических систем: Учеб, пособие
для вузов / О.П. Алексеев, В. Л. Козис, В. В. Кривенков и др.; Под
ред. В.П. Морозкина, Д. Энгелаге. — М.: Энергоатомиздат, 1994.
3. Дьяков А. Ф., Окин А. А., Семенов В. А. Диспетчерское
управление мощными энергообъединениями. — М.: Изд-во МЭИ,
1996. — 244 с.: ил.
4. Прокопенко А. Г., Мысак И. С. Стационарные, переменные и
пусковые режимы энергоблоков ТЭС. — М.: Энергоатомиздат,
1990.
5. Лойзерович А.Ш., Меламед А.Д., Кириллов В. Б. Автома-
тизация пусков турбин АЭС // Проблемы создания и эксплуатации
атомных электростанций / Тр. ВТИ. — М.: Энергия, 1977.
6. Плетнев Г.П. Автоматизированные системы управления объек-
тами тепловых электростанций. — М.: Изд-во МЭИ, 1995.
7. Методические указания по техническому обеспечению автомати-
ческого синхронизатора СА-1. — М.: Союзтехэнерго, 1980.
8. Овчаренко Н. И. Элементы автоматических устройств энергоси-
стем: Учебник для вузов: В 2 кн. — М.: Энергоатомиздат, 1995.
489
9. Аганичев Е. С., Лукоянов В. Ю., Панфилов Н. И. Автомати-
ческий микропроцессорный синхронизатор «Спринт» мощного син-
хронного генератора // Электрические станции. — 1999. — № 8. —
С. 48-51.
10. Бушмарина Е. А., Фадеев А. В., Шеремет А. А. Микропро-
цессорный автоматический синхронизатор / / Электротехника. —
1996. — № 9. —- С. 30-34.
11. Соловьев И. И. Автоматические регуляторы синхронных генера-
торов. — М.: Энергоиздат, 1981.
12. Кириллов И. И. Автоматическое регулирование паровых турбин
и газотурбинных установок: Учеб, пособие для вузов. — Л.: Ма-
шиностроение, 1988.
13. Гидротехническое и вспомогательное оборудование гидро-
электростанций. Справочное пособие: В 2 т. / Под ред. Ю.С. Ва-
сильева, Д. С. Щавелева. — М.: Энергоатомиздат, 1988. — Т. 1.
Основное оборудование гидроэлектростанций.
14. О принципах реализации системы группового регулирования
активной мощности ГЭС на базе микроЭВМ / Г. С. Киселев,
И. И. Ляткер, В. В. Нуждин и др. //Автоматическое регулирование
и управление в энергосистемах / Тр. ВЭИ. — М.: Энергоатомиз-
дат, 1983. — С. 42-45.
15. Система управления мощностью турбоагрегата на базе микро-
ЭВМ / Ю.Л. Горячева, Н.В. Колобродов, В.С. Мельников и др. //
Автоматическое регулирование и управление в энергосистемах /
Тр. ВЭИ. — М.: Энергоатомиздат, 1983. — С. 12-20.
16. Унифицированное микропроцессорное устройство управле-
ния мощностью крупных турбогенераторов / В. С. Мельников,
Ю.В. Чугунников, Э.М. Провотарь и др. // Электротехника. —
1996. — №9. — С. 15-17.
17. Регуляторы возбуждения сильного действия на интегральных
микросхемах для мощных синхронных генераторов / Г.Р. Герцен-
берг, В.Е. Каштелян, М.И. Покровский и др. // Автоматическое
регулирование и управление в энергосистемах / Тр. ВЭИ. — М.:
Энергоатомиздат, 1980. — Вып. 89. — С. 3-10.
18. Микропроцессорный унифицированный автоматический
регулятор возбуждения сильного действия АРВ-СДМ / Б. И. Ак-
керман, Е. А. Бушмарина, В. В. Долгов и др. // Автоматическое
490
регулирование и управление в энергосистемах / Тр. ВЭИ. — М.:
Энергоатомиздат, 1983, — С. 3-12.
19. Автоматический регулятор возбуждения для асинхронизи-
рованных турбогенераторов / И. А. Лабунец, А. П. Лохматов,
В. А. Марков и др. // Электрические станции. — 1985. — №7. —
С. 46-51.
20. Микропроцессорная система управления возбуждением асин-
хронизированного турбогенератора типа СУВМ-АС // Автома-
тическое управление электроэнергетическими системами / Тр.
ВЭИ. — М.: Изд-во ВЭИ, 1992. — С. 62-73.
21. Жданов П. С. Вопросы устойчивости электрических систем / Под
ред. Л. А. Жукова. — М.: Энергия, 1979.
22. Сравнение эффективности работы статических и синхронных
компенсаторов на линии электропередачи 1150 кВ / Н.И. Соколов,
В. К. Фокин, В. И. Филатов и др. // Электрические станции. —
1987. — №9. — С. 45-57.
23. Кочкин В.Н., Обязуев А. И., Фокин В. К. Статические ти-
ристорные компенсаторы для электрических сетей высокого и
сверхвысокого напряжения // Электрические станции. — 1993. —
№11. — С. 20-24.
24. Правила устройства электроустановок. — 6-е изд. перераб. и
доп. с изм. — М.: Главэнергонадзор, 1998.
25. Таратута И.П., Крайнов С. В., Чуприков В. С. Статиче-
ские тиристорные компенсаторы наружного исполнения / / Вы-
соковольтная и преобразовательная техника: Системы управле-
ния электротехническим и энергетическим оборудованием / Тр.
ВЭИ. — М.: Эколинк, 1996. — С. 34-40.
26. Микропроцессорная система автоматического управления и за-
щиты статического тиристорного компенсатора для линий электро-
передачи / Г. М. Бурунова, Е. А. Бушмарина, М. А. Лотков и др. //
Автоматическое управление электроэнергетическими системами /
Тр. ВЭИ. — М.: Информэлектро, 1988. — С. 28-34.
27. Системы автоматического регулирования частоты и мощно-
сти блочных ТЭС / Н. И. Давыдов, М. Д. Трахтенберг, Л. П. Фотин
и др. // Теплоэнергетика. — 1979. — №8. — С. 2-6.
491
28. Давыдов Н.И., Павлова М.Ф. Микропроцессорная система
управления мощностью ТЭС // Автоматическое управление мощ-
ностью ТЭС и АЭС / Тр. ВТИ. — М.: Энергоатомиздат, 1990. —
С. 89-99.
29. Создание автоматизированных систем управления гидроэлек-
тростанциями / В.Д. Ковалев, А. Н. Кузнецов, В.Н. Орлов и др.
// Высоковольтная и преобразовательная техника: Системы упра-
вления электротехническим и энергетическим оборудованием / Тр.
ВЭИ. — М.: Эколинк, 1996. — С. 99-101.
30. Микропроцессорные средства управления энергетическими
комплексами МС АЭК для автоматизации Волжской ГЭС /
В.Д. Ковалев, А. Н. Кузнецов, В.Н. Орлов и др. // Электротех-
ника. — 1996. — №9. — С. 24-29.
31. Карпов В. А. Принципы построения АСУ ТП общестанционного
уровня ГЭС (ГАЭС) // Автоматическое регулирование и управле-
ние в энергосистемах / Тр. ВЭИ. — М.: Энергоатомиздат, 1983. —
С. 38-41.
32. Гущина Н.Б., Карпов В. А., Орлов В.Н. Отображение про-
цессов пуска и останова обратимых гидроагрегатов на дисплеях
ПЭВМ в условиях АСУ ТП ГАЭС // Высоковольтная и преобразо-
вательная техника: Системы управления электроэнергетическим и
энергетическим оборудованием / Тр. ВЭИ. — М.: Эколинк, 1996. —
С.105-108.
33. Линт М. Г. Внедрение автоматизированных систем управления
и защиты подстанций и электрической части электростанций //
Информационно-методические материалы научно-технического се-
минара: Современное состояние и перспективы развития систем
контроля и управления электрической частью станций и подстан-
ций на базе микропроцессорной техники. — М.: Изд-во НЦ ЭНАС,
1999.
34. Автоматизация регулирования частоты и активной мощно-
сти в Единой энергетической системе СССР / М.А. Беркович,
А.Н. Комаров, С. А. Совалов и др. // Электричество. — 1971. —
№8. — С. 1-6.
492
35. Экспериментальная цифровая система автоматического регу-
лирования частоты и активной мощности ЕЭС СССР / С. А. Со-
валов, М.А. Беркович, А. Н. Комаров и др. // Электричество. —
1979. — №3. — С. 1-7.
36. Цифровая система автоматического регулирования частоты
и активной мощности в энергообъединении Сибири / Ю.С. Венев-
цев, Б. И. Гвоздев, В.П. Нестеренко, Т.С. Яковлева // Электриче-
ские станции. — 1984. — № 1. — С. 49-52.
37. Окин А. А. Противоаварийная автоматика. — М.: Изд-во МЭИ,
1995.
38. Беркович М. А., Комаров А.Н., Семенов В. А. Основы авто-
матики энергосистем. — М.: Энергоиздат, 1981.
39. Окин А. А., Семенов В. А. Противоаварийные управления в
ЕЭС России / Под ред. А. Ф. Дьякова. — М.: Изд-во МЭИ, 1996. —
156 с.: ил.
40. Чернобровое Н.В., Семенов В. А. Релейная защита энергети-
ческих систем: Учеб, пособие для техникумов. — М.: Энергоатом-
издат, 1998. — 800 с.: ил.
41. Двухуровневая система противоаварийного управления ОЭС
Поволжья / В.Н. Бердников, Э.Р. Биргель, В.Д. Ковалев и др.
// Высоковольтная и преобразовательная техника, системы упра-
вления электроэнергетическим и энергетическим оборудованием /
Тр. ВЭИ. — М.: Эколинк, 1994. — С. 63-76.
42. Комплекс технических средств повышенной надежности ми-
кропроцессорного локального устройства автоматической дозиров-
ки управляющих воздействий // Релейная защита и автоматика /
Тезисы докладов научно-технической конференции на ВВЦ. — М.:
Изд-ние ВВЦ, 1966. — С. 41-42.
43. Беркович М. А., Гладышев В. А., Семенов В. А. Автоматика
энергосистем. — М.: Энергоатомиздат, 1991.
44. Микропроцессорный блок релейной защиты типа БМРЗ.
Комплектное устройство автоматической частотной разгрузки
КУ-АЧР-С // Каталог экспозиции ВВЦ / Релейная защита и ав-
томатика энергосистем. — М.: ОРГРЭС, 1996. — С. 4, 17, 18.
493
45. Иофьев Б. И., Семенов В. А. Развитие противоаварийной авто-
матики энергосистем на базе цифровой вычислительной техники. —
М.: ВИНИТИ, 1990.
46. Совалов С. А., Семенов В. А. Противоаварийное управление в
энергосистемах. — М.: Энергоатомиздат, 1988.
47. Электротехнический справочник / В 3 т. — Т. 3: В 2 кн. —
Кн. 1. Производство и распределение электрической энергии // Под
общ. ред. проф. МЭИ И.Н. Орлова и др. — 7-е изд., исп. и доп. —
М.: Энергоатомиздат, 1988.
48. Розенблюм Ф. М. Измерительные органы противоаварийной ав-
томатики энергосистем. — М.: Энергоиздат, 1981.
49. Стрелков В.М., Фокина Г. Г., Якубсон Г. Г. Многофункцио-
нальное устройство АПВ для ВЛ 500-750 кВ на интегральных ми-
кросхемах // Электрические станции. — 1985. — №9. — С. 54-58.
50. Андреев В. А. Релейная защита и автоматика систем электро-
снабжения. — М.: Высш, шк., 1991.
51. Повышение эффективности пускового органа быстродействую-
щего устройства АВР / С. Н. Гамазин, Д. Б. Понаровкин, С. А. Цы-
рук и др. // Промышленная энергетика. — 1992. — №4. — С. 18-21.
52. Руководящие указания по противоаварийной автоматике энер-
госистем (основные положения). — М.: Союзтехэнерго. 1987.
53. Ивакин В.Н., Ковалев В.Д., Худяков В. В. Гибкие электро-
передачи переменного тока // Электротехника. — 1996. — №8. —
С. 16-21.
54. Розенблюм Ф.М., Салова В. Г., Вундер Т.Я. Шкаф автома-
тики фиксации мощности исходного режима ШП2701 // Электри-
ческие станции. — 1995. — №11. — С. 65-69.
55. Розенблюм Ф.М., Иванов Л. К. Шкаф автоматики перегрузки
по мощности типа ЩП2702 / Тр. ВНИИР. — Чебоксары: ВНИИР,
1989. — С. 56-64.
56. Розенблюм Ф. М., Белов В.П., Брухис Г. Л. Устройство бло-
кировки при качаниях // Электротехника. — 1985. — №9. —
С. 36-38.
57. Ковалев В. Д. Иерархические системы противоаварийного упра-
вления // Электротехника. — 1985. — №9. — С. 43-46.
494
58. Провоторов И. В., Соболев Е. А. Устройство передачи сигна-
лов противоаварийной автоматики // Электрические станции. —
1985. — № 7. — С. 65-69.
59. Управление мощными энергообъединениями / Под ред.
С. А. Совалова. — М.: Энергоатомиздат, 1984.
60. Иерархическая система противоаварийной автоматики сети
500 кВ ОЭС Поволжья / В.И. Бердников, Э.Я. Биргель, В.Д. Ко-
валев и др. // Электротехника, 1996. — №9. — С. 10-17.
61. Ковалев В.Д., Суханов О. А., Ковалев С. В. Распределенные
системы противоаварийного управления протяженными энергоси-
стемами // Электротехника. — 1996. — №9. — С. 4-9.
62. Богуславский Л. А., Ковалев В.Д., Шевченко А.Т. Устрой-
ство противоаварийной автоматики для сохранения устойчиво-
сти параллельной работы электростанций / / Электрические стан-
ции. — 1985. — № 10. — С. 51-54.
63. Гуревич Ю.Е., Либова Л.Е., Окин А. А. Расчеты устойчи-
вости и противоаварийной автоматики в энергосистемах. — М.:
Энергоатомиздат, 1990.
64. Алгоритмы и устройство противоаварийной автоматики с при-
менением микроЭВМ / Л.А. Богуславский, Г.Н. Ботин, В.Д. Ко-
валев и др. // Автоматическое регулирование и управление в энер-
госистемах / Тр. ВЭИ. — М.: Энергоатомиздат, 1983. — С. 21-29.
65. Кузнецов А. Н. Программное обеспечение устройства противо-
аварийной автоматики с применением микроЭВМ // Электротех-
ника. — 1985. — №9. — С. 54-57.
66. Мазуренко А. К., Носик Л.П., Серебрякова Л. В. Резерви-
рование систем защиты и управления на базе микроЭВМ в режиме
реального времени // Электротехника. — 1985. — №9. — С. 51-54.
67. Бурцев А. Б., Дзегеленок И. К., Ковалев С. В. Принци-
пы организации противоаварийного управления электроэнергети-
ческими системами с использованием параллельных вычислений //
Электротехника. — 1996. — №9. — С. 18-23.
68. Веников В. А., Суханов О. А. Кибернетические модели электри-
ческих систем. — М.: Энергоиздат, 1982.
495
69. Программно-технический комплекс автоматической дози-
ровки управляющих воздействий энергосистем / А. К. Белотелов,
Е. Л. Россовский, И. 3. Глускин и др. // Электрические станции. —
1997. — № 10. — С. 18-28.
70. Многосвязная общестанционная система регулирования на-
пряжения / М. И. Гумин, Е. Г. Косарева, М. В. Лисицин и др. //
Электрические станции. — 1997. — № 10. — С. 12-17.
71. О внедрении в эксплуатацию микропроцессорных устройств
релейной защиты и автоматики типа БМРЗ и БМАЧР / Инфор-
мационное письмо ИП-18-97(Э) дирекции по научно-технической
политике РАО ЕЭС России. — М.: РАО ЕЭС России, 1997.
72. Комплект многофункциональных микропроцессорных бло-
ков релейной защиты и автоматики: Блок микропроцессорный ав-
томатической частотной разгрузки БМАЧР: Микропроцессорный
блок — многофункциональное реле частоты БММРЧ / Информа-
ционные выпуски НТЦ «Механотроника» на ВВЦ. — М., 1998.
73. Каталог электротехнической продукции, предлагаемой к ре-
ализации в 1998 г. — Чебоксары, ВНИИР, 1998.
74. Комплексные устройства защиты и автоматики серии
SPAC 800. — Чебоксары: Издание АББ Реле - Чебоксары, 1998.
75. Гоник Я. Е., Иглицкий Е. С. Автоматика ликвидации асинхрон-
ного режима. — М.: Энергоатомиздат, 1988. — 112 с.: ил.
76. Саухатас А. С. Синтез и оптимизация измерительных органов
микропроцессорных устройств релейной защиты и противоаварий-
ной автоматики линий электропередачи: Автореф. дис. на соиска-
ние ученой степени д-ра техн. наук. — Рига, 1991.
77. Рабинович Р. С. Автоматическая частотная разгрузка энергосис-
тем. — М.: Энергия, 1980.
78. Общие технические требования к микропроцессорным устрой-
ствам защиты и автоматики энергосистем. — М.: СПО ОРГРЭС,
1997.
79. Барзам А. Б. Системная автоматика. — М.: Энергоатомиздат,
1994.
496
80. Овчаренко Н. И. Микропроцессорные комплексы релейной защи-
ты и автоматики распределительных сетей. — М.: НТФ «Энерго-
прогресс», 1999. (Библиотечка электротехника, приложение к жур-
налу «Энергетик». Вып. 7(10)).
81. Лямец Ю.Я., Антонов В. И., Арсентьев А.П. Адаптивная
цифровая обработка входных величин релейной защиты // Изв. АН.
Энергетика и транспорт. — 1988. — №6. — С. 51-59.
82. Андреев В. А., Овчаренко Н. К. Быстродействующее микро-
процессорное устройство АВР // Промышленная энергетика. —
2000. — №2. — С. 5-8.
497
Оглавление
Предисловие.................................................... 3
Введение....................................................... 7
Раздел первый
Автоматика нормальных режимов................................. 15
Глава 1. Автоматическое управление изменениями
состояния гидро- и турбогенераторов.................... 15
1.1. Назначение и особенности автоматического управления 15
1.2. Автоматическое управление гидрогенераторами........... 16
1.3. Автоматическое управление пуском турбогенераторов .... 23
1.4. Особенности автоматического управления пуском
турбогенераторов атомных электростанций.............. 29
Вопросы для самопроверки................................... 32
Глава 2. Автоматическое управление включением
синхронных генераторов на параллельную
работу................................................. 33
2.1. Способы автоматического управления.................... 33
2.2. Автоматическое включение по способу самосинхронизации 35
2.3. Автоматическое включение по способу точной
синхронизации........................................ 40
2.4. Автоматические синхронизаторы......................... 43
498
2.5. Автоматический синхронизатор с вычисляемым углом
опережения............................................. 50
2.6. Автоматическое устройство управления частотой
скольжения генератора.................................. 58
2.7. Микропроцессорные автоматические синхронизаторы .... 64
Вопросы для самопроверки............................... 73
Глава 3. Автоматическое регулирование частоты
вращения гидро- и турбогенераторов........................ 76
3.1. Назначение и особенности.......................... 76
3.2. Алгоритмы автоматического регулирования........... 78
3.3. Гидродинамические регуляторы частоты вращения
турбогенераторов....................................... 89
3.4. Электрогидравлические регуляторы частоты вращения
гидрогенераторов....................................... 96
Вопросы для самопроверки................................106
Глава 4. Автоматическое управление мощностью
гидро- и турбогенераторов.................................109
4.1. Назначение и особенности..........................109
4.2. Автоматические регуляторы мощности турбогенераторов 111
4.3. Автоматическое управление мощностью гидрогенераторов 117
4.4. Быстродействующий автоматический регулятор
мощности турбогенераторов..............................121
4.5. Микропроцессорные устройства управления мощностью
турбоагрегата ........................................ 127
Вопросы для самопроверки...............................134
Глава 5. Автоматическое регулирование напряжения
и реактивной мощности синхронных
генераторов 137
5.1. Назначение автоматического регулирования напряжения и
реактивной мощности....................................137
5.2. Автоматическое регулирование возбуждения синхронных
генераторов ...........................................140
5.3. Возбудители синхронных генераторов и их характеристики 143
499
5.4. Автоматические регуляторы возбуждения синхронных
генераторов с электромашинными возбудителями...........147
5.5. Автоматические регуляторы напряжения и реактивной
мощности синхронных генераторов с тиристорным
возбуждением...........................................156
5.6. Измерительная часть аналоговых регуляторов
возбуждения сильного действия .........................165
5.7. Аналого-цифровой автоматический регулятор генераторов
с бесщеточным возбуждением.............................180
5.8. Микропроцессорный автоматический регулятор
возбуждения............................................188
5.9. Исполнительная часть пропорционально-дифференциаль-
ных автоматических регуляторов возбуждения.............199
5.10. Особенности автоматического регулирования
возбуждения асинхронизированных генераторов............201
Вопросы для самопроверки...............................210
Глава 6. Автоматическое регулирование источников
реактивной мощности и трансформаторов........212
6.1. Назначение и особенности..........................212
6.2. Автоматическое регулирование реактивной мощности
синхронных компенсаторов ..............................214
6.3. Автоматические регуляторы возбуждения синхронных
компенсаторов .........................................218
6.4. Автоматическое регулирование реактивной мощности
статических компенсаторов .............................225
6.5. Автоматическое регулирование трансформаторов
и автотрансформаторов..................................234
Вопросы для самопроверки...............................250
Глава 7. Автоматическое управление режимами работы
электрических станций
и электроэнергетических систем............................253
7.1. Назначение и осуществление автоматического управления
электростанциями ......................................253
7.2. Автоматические устройства группового управления...257
7.3. Микропроцессорная автоматизированная система
управления гидроэлектростанциями...................265
500
7.4. Микропроцессорная автоматизированная система
управления тепловыми электростанциями..................270
7.5. Цифровая автоматическая система управления частотой
и активной мощностью электроэнергетических систем 280
Вопросы для самопроверки...............................286
Раздел второй
Противоаварийная автоматика...............................289
Глава 8. Особенности и задачи противоаварийного
автоматического управления
электроэнергетическими системами.........................289
8.1. Режимы работы электроэнергетических систем
и управление ими.......................................289
8.2. Возмущающие воздействия на электроэнергетические
системы и управляющие противоаварийные воздействия 291
8.3. Основные функции и особенности управляющих устройств
и систем противоаварийной автоматики...................296
8.4. Назначение и виды противоаварийной автоматики.....298
Вопросы для самопроверки...............................304
Глава 9. Автоматика отключений коротких замыканий,
повторного и резервного включений........................306
9.1. Автоматика отключений коротких замыканий .........306
9.2. Автоматика повторного включения...................308
9.3. Автоматические устройства трехфазного повторного
включения..............................................311
9.4. Микросхемный комплекс автоматических устройств
повторного включения ..................................317
9.5. Устройства автоматического включения резерва......322
9.6. Быстродействующие автоматические устройства
резервного включения...................................326
Вопросы для самопроверки...............................330
501
Глава 10. Автоматика предотвращения нарушения
устойчивости.............................................333
10.1. Назначение и особенности........................333
10.2. Общее функциональное построение.................336
10.3. Автоматическое дозирование противоаварийных
управляющих воздействий................................344
10.4. Типовая микросхемная автоматика.................349
10.5. Микропроцессорная автоматика....................358
10.6. Функционирование и развитие автоматики
предотвращения нарушения устойчивости..................369
Вопросы для самопроверки..............................374
Глава 11. Автоматика прекращения асинхронного
режима...................................................377
11.1. Способы действия и виды автоматических устройств .... 377
11.2. Изменения электрических величин в асинхронном режиме,
используемые для действия автоматики...................378
11.3. Типовые устройства автоматики прекращения
асинхронных режимов....................................384
11.4. Промышленная панель автоматики прекращения
асинхронного режима....................................390
11.5. Микропроцессорная автоматика....................401
Вопросы для самопроверки..............................407
Глава 12. Автоматика предотвращения недопустимых
изменений режимных параметров............................409
12.1. Автоматика противоаварийных отключений и включений
по изменениям напряжения...............................409
12.2. Процесс изменения частоты в электроэнергетической
системе................................................417
12.3. Автоматика частотной разгрузки..................421
12.4. Настройка автоматики частотной разгрузки........431
12.5. Автоматика управления синхронными генераторами при
изменениях частоты.....................................434
Вопросы для самопроверки..............................440
502
Глава 13. Микропроцессорная интегрированная
противоаварийная автоматика...........................442
13.1. Особенности микропроцессорных интегрированных
автоматических устройств............................442
13.2. Микропроцессорные комплексы автоматических
устройств противоаварийной автоматики...............444
13.3. Микропроцессорные терминалы интегрированной
противоаварийной автоматики.........................460
13.4. Интегрированная противоаварийная автоматика
синхронных генераторов, трансформаторов и линий
электропередачи....................................470
Вопросы для самопроверки...........................481
Заключение............................................483
Список принятых сокращений............................485
Список литературы.....................................489
503
Автоматика электрических станций
и электроэнергетических систем
Учебник для студентов вузов электроэнергетических специальностей
Лицензия ЛР №071727 от 01.09.98.
Сдано в набор 09.11.99 Подписано в печать 28.04.2000.
Заказ № 193
Тел /Факс (095) ИЗ 53 90
с готового оригннал-макета
109088, Москва, Южиопортовая ул , д 24