/









































































































































Автор: Дьяков А.Ф. Овчаренко Н.И.
Теги: электротехника компьютерные технологии электроэнергетика микроэлектроника электрооборудование автоматика
ISBN: 978-5-383-00244-5
Год: 2008
Похожие



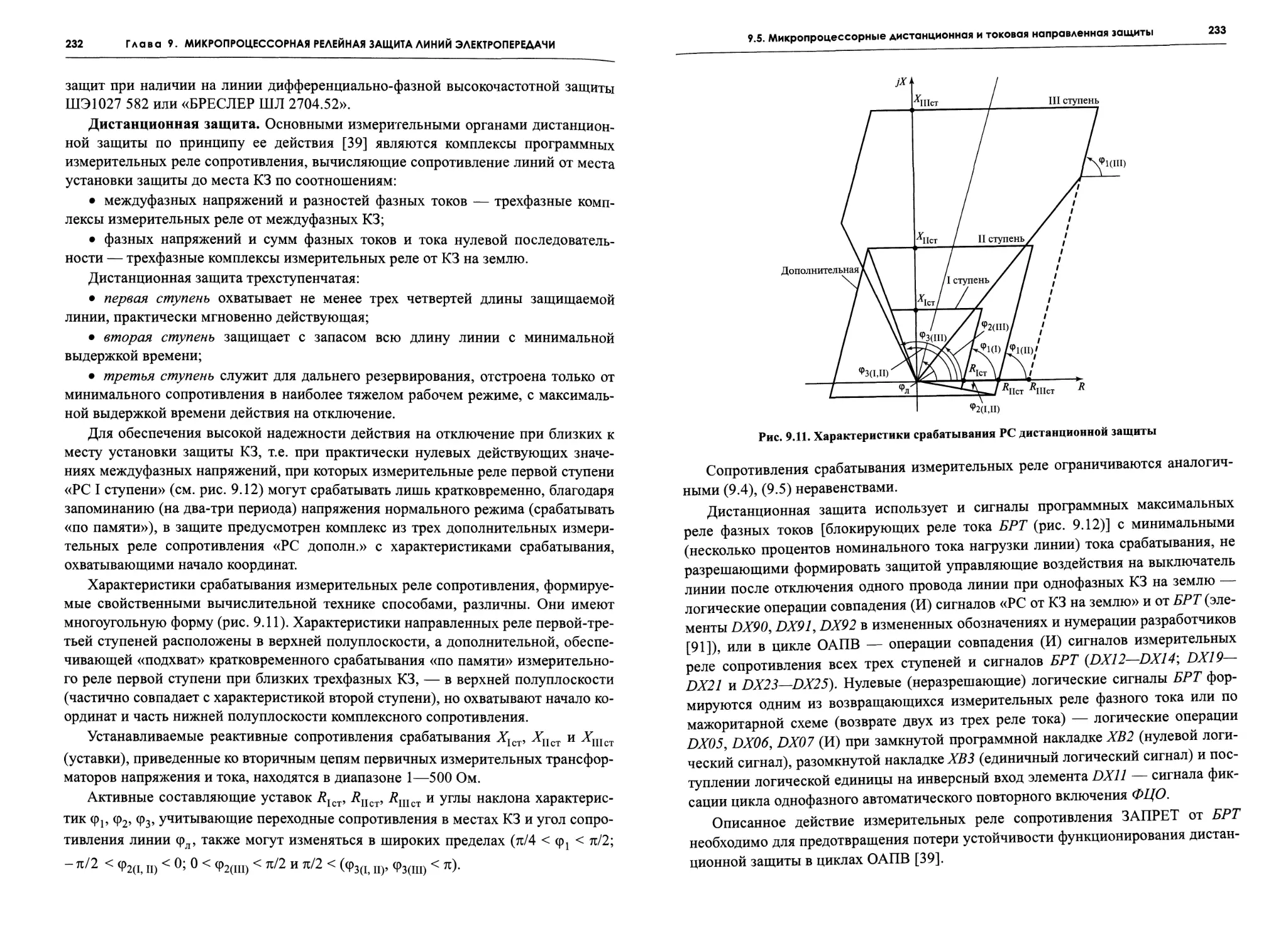
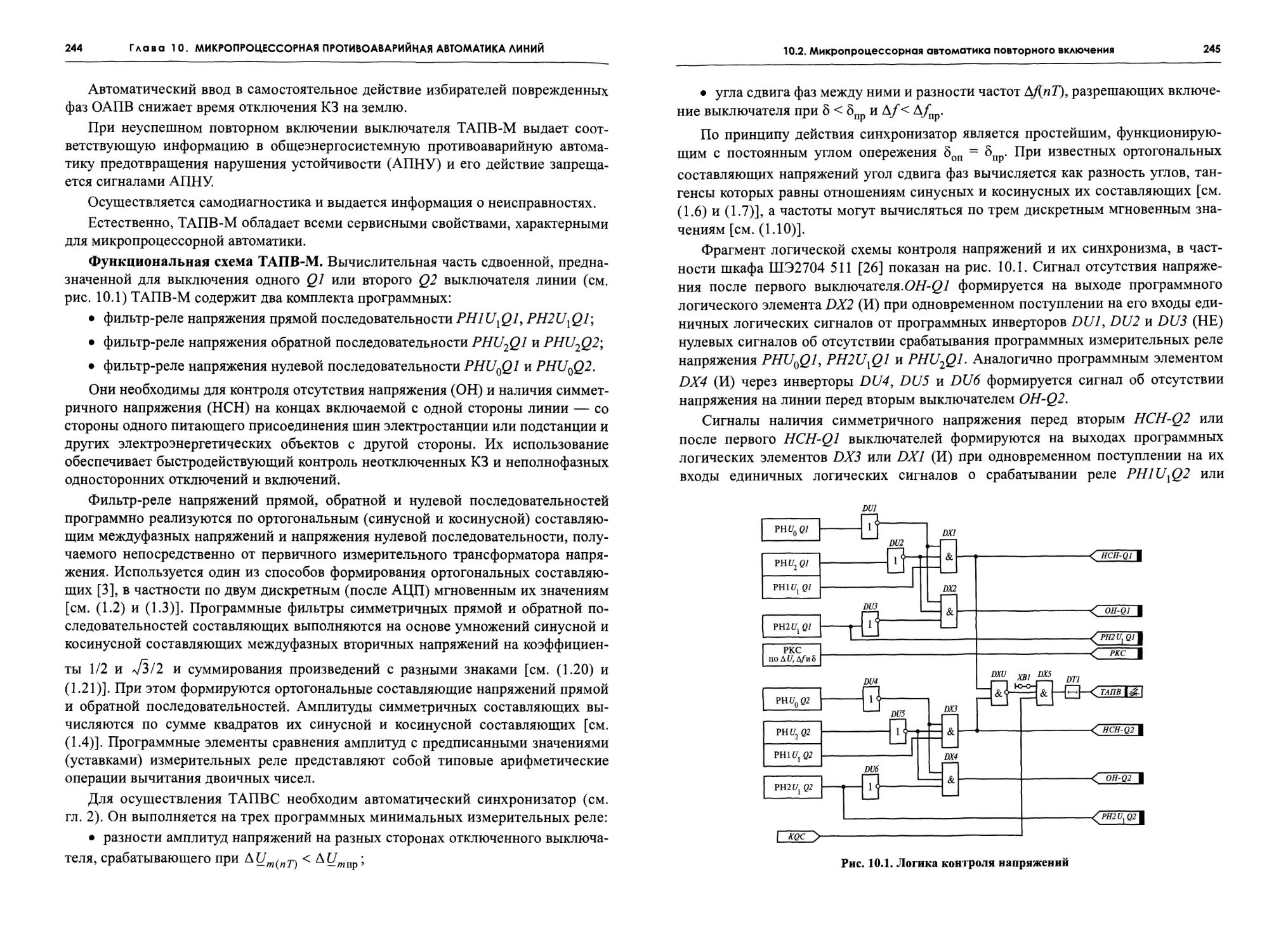
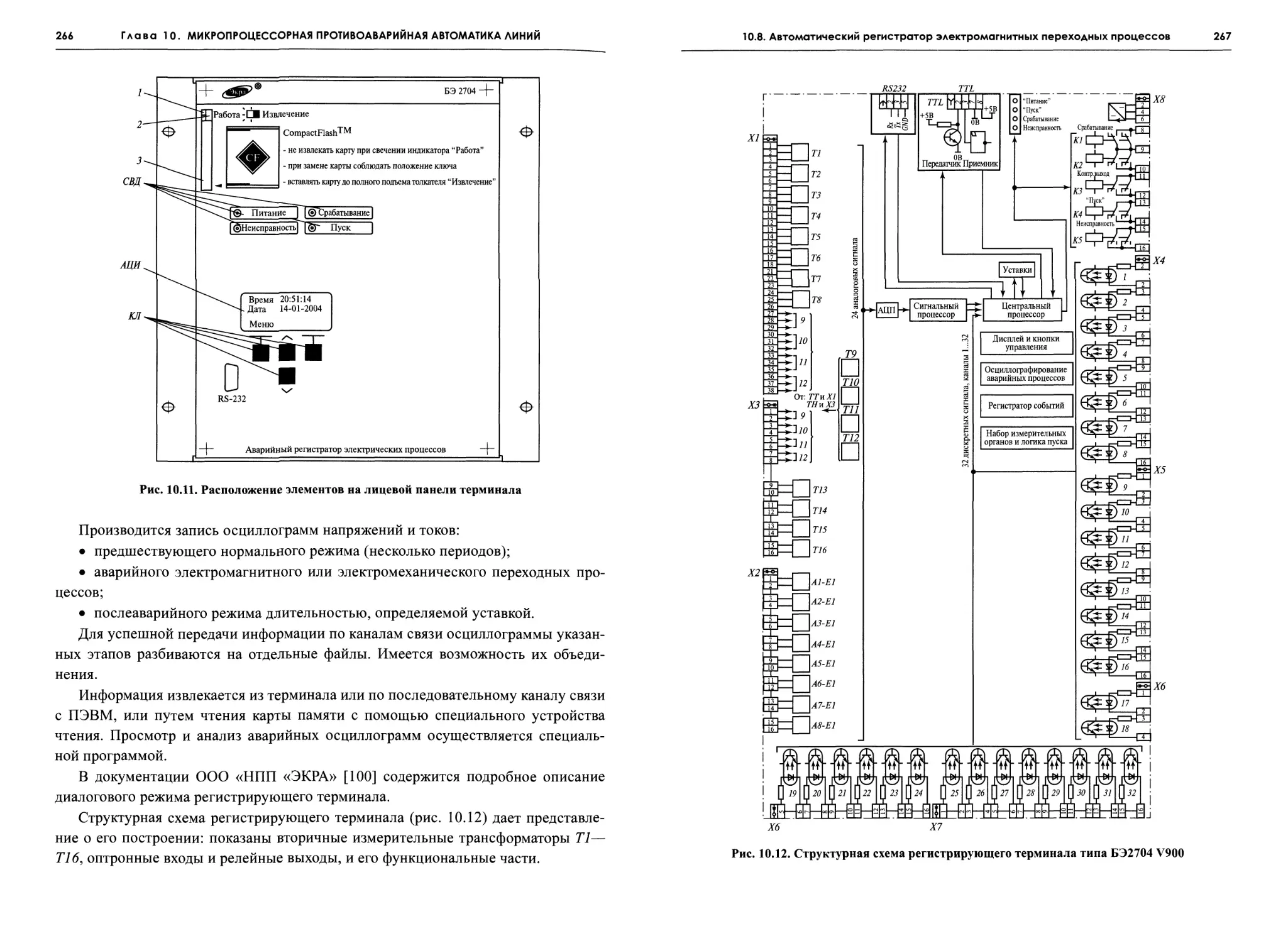
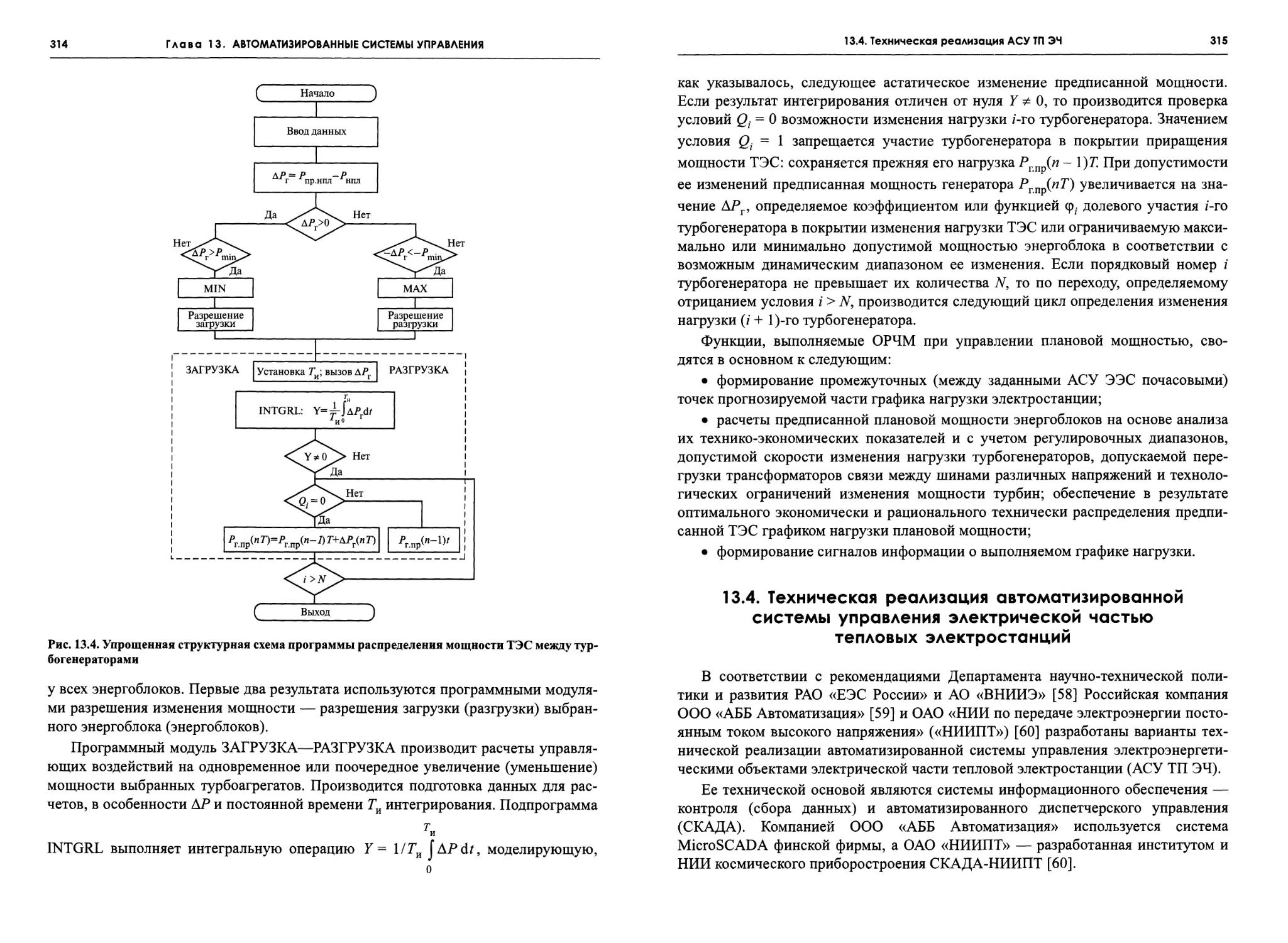
Текст
Н.И.Овчарвнко
Микропроцессорная автоматика
и релейная защита
электроэнергетических
систем
Допущено УМО вузов России по образованию
в области энергетики и электротехники
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по направлению подготовки 140200 «Электроэнергетика»
Рекомендовано Корпоративным энергетическим университетом
в качестве учебного пособия для системы подготовки,
переподготовки и повышения квалификации персонала
энергетических компаний, а также для вузов,
осуществляющих подготовку энергетиков
W
Москва
Издательский дом МЭИ
2008
УДК 621.311:621.316.9:681.3.06 (075.8)
ББК 31.27-05
Д92
Рецензенты:
кафедра «Автоматическое управление электроэнергетическими системами»
Ивановского государственного энергетического университета;
А.В. Жуков, заместитель главного диспетчера ОАО «СО-ЦДУ» РАО ЕЭС России
Дьяков А.Ф.
Д 92 Микропроцессорная автоматика и релейная защита
электроэнергетических систем: учеб. пособие для вузов / А.Ф. Дьяков, Н.И. Овчаренко. —
М.: Издательский дом МЭИ, 2008. — 336 с: ил.
ISBN 978-5-383-00244-5
Изложены принципы действия и алгоритмы функционирования, приведены
функциональные и структурные схемы интегрированных микропроцессорных устройств
автоматики нормального режима и противоаварийного управления (релейной защиты и противо-
аварийной автоматики) электроэнергетических систем, разработанных в последнее время
отечественными ведущими электроэнергетическими организациями (ГУП ВЭИ; ОАО
«Институт «Энергосетьпроект»; АО ВНИИЭ; ФГУП «НИИ Электромаш»),
научно-техническим и исследовательским центрами (НТЦ «Механотроника», «ИЦ «БРЕСЛЕР»),
научно-производственными предприятиями (ООО НПП «ЭКРА», НПП ЗАО «РАДИУС
Автоматика») и др.
Для студентов, магистрантов и аспирантов, обучающихся по направлению 140200
«Электроэнергетика» по специальности 140203 «Релейная защита и автоматизация
электроэнергетических систем» и для эксплуатационного персонала электрических станций и
электроэнергетических систем.
УДК 621.311:621.316.9:681.3.06 (075.8)
ББК 31.27-05
© Дьяков А.Ф., Овчаренко Н.И., 2008
ISBN 978-5-383-00244-5 © ЗАО «Издательский дом МЭИ», 2008
ПРЕДИСЛОВИЕ
Издание книги обусловлено значительными достижениями отечественных
научно-исследовательских электроэнергетических организаций, инженерных
центров и научно-производственных предприятий по разработке и внедрению
следующих поколений или новых микропроцессорных, особенно интегрированных,
устройств автоматического управления нормальным режимом электрических
станций и электроэнергетических систем и противоаварийного управления ими.
Информация о них в научно-технических статьях периодических изданий и
сборниках докладов научно-технических конференций довольно общая, не
позволяющая изучить принцип их действия и программную техническую реализацию.
Возникла необходимость более детального изложения не только принципов
действия, но и алгоритмов функционирования, функциональных и структурных
схем и способов технической реализации современной отечественной
микропроцессорной автоматики и релейной защиты электроэнергетических систем.
Предпринимается попытка сделать это в условиях трудно доступной
информации, часто не раскрываемой производителями в условиях конкуренции рыночной
экономики, интеллектуальной собственности.
Целью издания является обеспечение студентов, магистрантов и аспирантов
учебным материалом по новым отечественным микропроцессорным
интегрированным автоматическим устройствам и системам, способствование повышению
квалификации персонала электрических станций и электроэнергетических систем
и внедрение в эксплуатацию микропроцессорной техники автоматики и релейной
защиты электроэнергетических систем в процессе современного ее обновления.
Замечания и пожелания по книге просьба направлять по адресу: 111250, Москва,
Красноказарменная ул., д. 14, Издательский дом МЭИ.
ВВЕДЕНИЕ
Процесс производства и передачи электроэнергии является столь динамичным и
постоянно подверженным случайным возмущающим воздействиям, что без
автоматического управления его функционирование невозможно. Такие его особенности
как равенство в каждый момент времени генерируемой и случайно изменяющейся
требуемой нагрузкой мощности, время от времени возникающие короткие
замыкания (КЗ), высокая быстротечность электромагнитных и электромеханических
переходных процессов обусловили развитие технических средств автоматического
управления в еще начальный период становления электроэнергетики. Под
автоматическим понимается управление и процессом производств, передачи и
потребления электроэнергии в целом без непосредственного участия человека.
На современном этапе автоматическое управление производится отдельными
электроэнергетическими объектами и взаимодействующими их совокупностями.
Управление процессом производства и передачи электроэнергии в целом пока еще
осуществимо лишь при некотором оперативном вмешательстве человека —
диспетчера электроэнергетической системы (ЭЭС). Такое управление называется
автоматизированным. Оно реализуется автоматизированной системой
диспетчерского управления (АСДУ) (рис В.1), важнейшей частью которой является
управляющий вычислительный комплекс УВКЬ расположенный на диспетчерском пункте
электроэнергетической системы ЭЭС [2].
Автоматическое управление осуществляется на основе переработки
информации [3] о свойствах управляемых электроэнергетических объектов (УЭО), их
состояниях и режимах работы, характеризующихся режимными параметрами Y и
складывающейся ситуации в ЭЭС в результате возмущающих воздействий Z.
Информация в виде различных электрических сигналов поставляется
автоматическими информационными устройствами АИУХ—АИУп по каналам
высокочастотной (ВЧ) связи с ее источниками: первичными измерительными
преобразователями (ПИП) режимных параметров ПИПУ и управляемых электроэнергетических
объектов ПИП2. На диспетчерском пункте информация вводится в цифровые ЭВМ
управляющего вычислительного комплекса и отображается (устройствами
отображения УОИ) для восприятия человеком.
На УОИ поступают (постоянно или по вызову) результаты обработки
информации УВКв виде рекомендаций Хр для действий диспетчера Д. В соответствии с
программой Хпр функционирования УВК, задаваемой человеком, управляющие ЭВМ
вырабатывают программные задания XupX—Xnpn действия автоматических
управляющих устройств АУУХ—АУУП, установленных на управляемых
электроэнергетических объектах УЭОх—УЭОп и непосредственно оказывающих на них управляющие
воздействия ХуХ—Хуп. Большинство автоматических управляющих устройств также
используют сигналы Хс7, XcZ от источников информации ПИПу, ПИП2.
ВВЕДЕНИЕ
5
пип2 z\
+- Y;
^Y„
г~л
Рис. В.1. Структурная схема автоматической системы управления производством, передачей и
распределением электроэнергии
Управляющий вычислительный комплекс УВК с устройствами
информационного обеспечения АИУХ—АИУП и автоматические управляющие устройства
АУУХ—АУУП образуют автоматическую управляющую систему (АУС).
В зависимости от видов используемой информации: известной заранее —
априорной или получаемой в реальном времени функционирования ЭЭС —
рабочей — автоматические управляющие устройства совместно с управляемым
электроэнергетическим объектом образует автоматическую систему с разомкнутой
(рис В.2, а и б), замкнутой (рис В.2, в) или комбинированной (рис В.2, г) цепями
воздействия [1]. По разомкнутой схеме работают программные автоматические
устройства (рис В.2, а) и функционирующие только по возмущающим
воздействиям Z (рис В.2, б), а по замкнутой — автоматические устройства,
использующие рабочую информацию о режимных параметрах Y (рис В.2, в)
электроэнергетического управляемого объекта.
Технические средства автоматического управления процессом производства и
передачи электроэнергии, в связи с указанными и другими специфическими его
особенностями, делятся на автоматические устройства — автоматику управления
нормальными режимами работы ЭЭС и автоматические устройства противоава-
6
ВВЕДЕНИЕ
пр
Z'
АУУ
АУУ
лсУ
УО
а)
Z'
УО
гос
в)
АУУ
XcZ ГП
УО
ПС
б)
пр т у |
г—Науу!—J
I Zcr ГОС
УО
^cZ
о
ПС
г)
Рис. В.2. Структурные схемы автоматической системы управления с разомкнутой (я, б),
замкнутой (в) и комбинированной (г) цепями воздействия
рийного управления — автоматику защитных отключений и противоаварийную
автоматику.
Автоматика управления нормальными режимами ЭЭС обеспечивает [4, 7]:
• автоматический пуск электроэнергетических блоков турбина—генератор и
включение на параллельную работу синхронного генератора, т.е. его
синхронизацию;
• автоматическое поддержание на заданном уровне напряжения на шинах
электрических станций и реактивной мощности синхронных генераторов;
• автоматическое управление режимами ЭЭС по напряжению и реактивной
мощности;
• автоматическое поддержание на неизменном уровне частоты вращения
синхронно работающих генераторов;
• оптимальное (по характеристикам относительного прироста расхода
условного топлива) распределение случайно изменяющейся электрической нагрузки
ЭЭС между электрическими станциями и электроэнергетическими блоками
электростанций.
Указанные функции автоматики управления нормальными режимами
реализуются автоматическими воздействиями на изменения впуска энергоносителя в
турбины, автоматическим включением в определенный момент времени и при
соответствующих условиях выключателя синхронного генератора, непрерывным
управлением (регулированием) возбуждения синхронных генераторов и
компенсаторов, дискретным управлением устройствами регулирования под нагрузкой
(УРПН) трансформаторов и автотрансформаторов, регулированием реактивной
мощности непрерывно управляемых ее источников — статических компенсаторов
(СТК) и дискретным управлением мощностью конденсаторных установок.
ВВЕДЕНИЕ
7
Соответственно различаются: пусковые автоматы (ПА) гидротурбин и
комплексы автоматических устройств управления пуском (КАУП) тепловых
турбоагрегатов, автоматические регуляторы частоты вращения турбин (АРЧВ), устройства
автоматической синхронизации гидро- и турбогенераторов (УАС), автоматические
регуляторы возбуждения (АРВ) синхронных генераторов и компенсаторов,
автоматические регуляторы частоты промышленного тока и активной мощности
синхронных генераторов (АРЧМ), автоматические устройства оптимального
распределения нагрузки (УРАН) электроэнергетической системы между частото-
регулирующими электростанциями, автоматические регуляторы коэффициентов
трансформации (АРКТ) и автоматические регуляторы реактивной мощности
статических установок ее генерирования или потребления (АРРМ).
В последнее время, в связи с бурным внедрением в технику автоматического
управления микропроцессоров и цифровых ЭВМ разрабатываются комплексные
(интегрированные) автоматические системы управления режимами работы
электроэнергетических блоков электростанций, узловых общесистемных подстанций и
магистральных линий электропередачи высокого и сверхвысокого напряжений.
Назначением автоматики противоаварийного управления [4, 5] является
решение острой и специфической проблемы современных объединенных (ОЭС) и
единой (ЕЭС) электроэнергетических систем страны — обеспечение совместного
функционирования (синхронной устойчивости) множества мощных
электростанций, связанных длинными и сильно нагруженными линиями электропередачи в
условиях больших возмущающих воздействий в виде неизбежных КЗ и связанных
с ними отключений мощных электроэнергетических объектов, обусловливающих
скачкообразные изменения генерируемых и передаваемых мощностей («набросы»
и «сбросы» мощности). При этом возникает аварийный режим работы ЭЭС с
избытком или недостатком генерируемой мощности, грозящий развитием
общесистемной аварии с нарушением устойчивости и разъединением ОЭС, остановом
тепловых электростанций и прекращением электроснабжения потребителей на
больших территориях.
Аварийная ситуация начинается с возникновения главного возмущающего
воздействия — КЗ и нарушения баланса мощностей, обусловленного этим КЗ и его
отключением, и развивается с понижением напряжения и частоты вращения
синхронных генераторов в недостаточной по мощности (дефицитной) и их
повышением в избыточной частях ЭЭС. Особенно опасно уменьшение частоты,
приводящее к снижению производительности установок собственных нужд тепловых
электростанций и в результате к опасности необратимого ее падения — «лавины
частоты». Аналогично снижение напряжения, обусловленное недостатком
генерируемой реактивной мощности, может развиться в «лавину напряжений».
Противоаварийная автоматика должна, прежде всего, ликвидировать
возмущающее воздействие. Это делается автоматическими устройствами релейной защиты
(АУРЗ) и автоматикой повторного включения (АПВ) выключателей, отключенных
АУРЗ. Короткие замыкания (особенно однофазные на воздушных линиях) в
большинстве своем неустойчивые (дуговые). При успешном повторном включении
возмущающее воздействие, оказываемое релейной защитой на ЭЭС, устраняется.
8
ВВЕДЕНИЕ
При устойчивых КЗ и повторных отключениях релейной защитой
поврежденных электроэнергетических объектов, как следствие, вновь появляется небаланс
мощностей. Возникает опасность нарушения синхронной устойчивости
электроэнергетической системы. Вступает в действие общесистемная противоаварийная
автоматика, предназначенная не допустить нарушения синхронных динамической
или статической устойчивости или сохранить результирующую (после
кратковременного асинхронного режима) устойчивость функционирования ЭЭС, ОЭС и
ЕЭС в целом. Она состоит из рассредоточенных по электроэнергетическим
системам комплекса автоматических устройств, связанных каналами обмена
информацией и управляемых от УВК, а именно:
• автоматики предотвращения нарушения устойчивости (АПНУ);
• автоматики ликвидации возникающего асинхронного режима работы (АЛАР).
Особенно сложной, централизованной и иерархически построенной является
АПНУ. Она функционирует на основе результатов постоянных, производимых
циклически (через 5—10 с) расчетов устойчивости цифровыми ЭВМ. При этом
вырабатываются необходимые по интенсивности и длительности (дозированные)
противоаварийные воздействия на электроэнергетические объекты для каждого из
фиксируемых возмущающих воздействий. После каждого цикла расчетов они
передаются на места их возможного применения и запоминаются там, как готовые
к немедленной реализации по сигналу о возникшем возмущающем воздействии.
Противоаварийные управляющие воздействия производят:
• повышение пропускной способности электропередачи, т.е. ее предельную
передаваемую мощность;
• снижение генерируемой мощности в избыточной передающей части ЭЭС,
частота вращения синхронных генераторов в которой увеличивается;
• увеличение генерируемой мощности в дефицитной приемной части ЭЭС,
синхронные генераторы которой уменьшают частоту своего вращения;
• уменьшение мощности, потребляемой нагрузкой приемной части ЭЭС;
• увеличение нагрузки синхронных генераторов передающей части ЭЭС.
Соответственно для предотвращения нарушения динамической устойчивости
противоаварийные управляющие воздействия осуществляют:
• программную форсировку возбуждения ФВ (рис В.З) синхронных
генераторов — быстрое кратковременное увеличение ЭДС генераторов до допустимого по
их термической стойкости уровня, обусловливающего повышение напряжений на
шинах электростанции и предел передаваемой мощности электропередачи;
• интенсивное кратковременное снижение мощности, развиваемой паровыми
турбинами — импульсную разгрузку турбоагрегатов ИРТ;
• быстрое кратковременное подключение, обычно к гидрогенераторам
передающей части, искусственной активной нагрузки — электрическое торможение ЭТ
гидроагрегатов;
• быстрый перевод тиристорных преобразователей в инверторный режим
накопителей электроэнергии в приемной части — их форсировку на выдачу
энергии в нагрузку ФНЭЭ.
ВВЕДЕНИЕ
9
ё
¥1
^ 1
о
X
о
к
\увк
>
>
'
*
УТИ,
УТС,
БСПА
,
к
f
э
ё
о
-
о
О)
3
н
X
е
s
а-
10
ВВЕДЕНИЕ
Для сохранения статической устойчивости в послеаварийном режиме
используются противоаварийные управляющие воздействия, обеспечивающие:
• изменение настройки автоматических регуляторов возбуждения сильного
действия ИНАРВ в целях достижения максимально возможной пропускной
способности электропередачи в сложившихся после возмущающего воздействия условиях;
• увеличение емкостного сопротивления устройства продольной компенсации
индуктивного сопротивления линии, повышающего предельную передаваемую
мощность линии — форсировку продольной компенсации ФПК;
• отключение реакторов ОР, повышающее напряжения в начале и в конце линии;
• отключение гидрогенераторов ОГ передающих ГЭС и длительное снижение
мощности — длительную разгрузку ДРТ турбоагрегатов ТЭС;
• быстродействующую загрузку недогруженных гидрогенераторов БЗГ
приемной части ЭЭС и перевод гидрогенераторов из режима работы синхронным
компенсатором в генераторный режим СК-Г;
• частичное программное отключение нагрузки ОН приемной части до
развития процесса снижения частоты.
При недостаточности указанных воздействий для предотвращения снижения
частоты производится частотный (ускоренный) пуск, самосинхронизация и
быстрый набор нагрузки резервных гидрогенераторов ЧПГ и отключение нагрузки —
автоматическая частотная разгрузка АЧР приемной части ЭЭС.
Противоаварийные управляющие воздействия общесистемной противоаварий-
ной автоматики вырабатываются управляющим вычислительным комплексом
УВК, расположенном на диспетчерском пункте ДП. Необходимые сигналы
информации о параметрах предшествующего возмущающему воздействию и послеава-
рийного режимов, схеме электроэнергетической системы и происходящих
отключениях выключателей — возмущающих воздействиях, и противоаварийные
управляющие воздействия передаются по высокочастотным каналам связи ВЧКС,
осуществляемым по проводам линий электропередачи установкой заграждающих
LC-фильтров и конденсаторов связи Ссв или по волоконно-оптическим линиям
связи (ВОЛС).
Аналогичные противоаварийные воздействия характерны и для АЛАР. Если
асинхронный режим ликвидировать не удается, действует делительная автоматика,
отключающая от ЭЭС несинхронно работающую электростанцию.
Балансы мощностей в обеих частях нарушаются. В избыточной части ЭЭС
частота и напряжение возрастают, а в недостаточной по мощности (дефицитной) —
снижаются.
Начинает действовать противоаварийная автоматика предотвращения
недопустимых, опасных изменений режимных параметров:
• автоматика ограничений снижений (АОСН) и повышений (АОПН)
напряжения;
• автоматика ограничений снижений (АОСЧ) и повышений (АОПЧ) частоты.
Ее задачи — быстро снизить нарушенные балансы мощностей и
способствовать их полному восстановлению и возврату режимных параметров к
номинальным значениям.
ВВЕДЕНИЕ
11
Последующее восстановление связи между разделенными частями ЭЭС
производится автоматикой повторного включения с синхронизацией (АПВС).
В настоящее время происходит всеобщий переход от традиционных
автоматических устройств к современным микропроцессорным интегрированным
автоматическим устройствам управления нормальным режимом и противоаварийного
управления электроэнергетическими объектами и автоматизированными
системами управления (АСУ) электрическими станциями, ЭЭС, ОЭС и ЕЭС страны.
В последние годы интенсивно разрабатывалась, совершенствовалась и
внедрялась в эксплуатацию микропроцессорная автоматика и релейная защита
отечественными электроэнергетическими научно-исследовательскими и
научно-техническими организациями.
Созданы вторые поколения микропроцессорных автоматических устройств
точной синхронизации — автоматических синхронизаторов (АС) [8, 9] и
автоматических регуляторов возбуждения синхронных генераторов [10, 11].
Разработана микропроцессорная электрическая часть электрогидравлических
АРЧВ гидравлических, паровых и газовых турбин и автоматических систем
оптимального управления активной мощностью гидро- и турбогенераторов [17].
Автоматическое регулирование действующего значения напряжения и
реактивной мощности совершенствуется с появлением микропроцессорных
автоматических регуляторов реактивной мощности вращающихся и статических тиристорных
компенсаторов реверсивного действия и микропроцессорных автоматических
регуляторов напряжения трансформаторов и автотрансформаторов [19, 21].
Особенно интенсивно развивается отечественная интегрированная
микропроцессорная техника противоаварийного управления процессом производства,
передачи и распределения электроэнергии — релейная защита и противоаварийная
автоматика.
Разработана интегрированная микропроцессорная релейная зашита и
автоматика не только электроэнергетических объектов напряжением до 35 кВ, но и
присоединений высокого и сверхвысокого напряжений.
Научно-техническим центром (НТЦ) «Механотроника», научно-технической
фирмой (НТФ) ЗАО «РАДИУС Автоматика» и исследовательским центром «ИЦ
«БРЕСЛЕР» созданы полные комплексы микропроцессорной релейной защиты,
АПВ и автоматики частотной разгрузки (АЧР) распределительных электрических
сетей и систем собственных нужд электрических станций напряжениями от 0,4 до
35 кВ [22, 23].
Научно-производственным предприятием ООО НПП «ЭКРА» на основе
типового терминала разработан унифицированный комплекс микропроцессорной
защиты и автоматики синхронных генераторов и трансформаторов. ООО НПП
«ЭКРА», «ИЦ «БРЕСЛЕР» и «НТЦ «Механотроника» поставляют фильтровую
направленную обратной последовательности и дифференциально-фазные
высокочастотные, дистанционную и токовую направленную нулевой последовательности
защиты линий электропередачи напряжением до 330 кВ, интегрированные с
трехфазным АПВ линий [25, 28].
12
ВВЕДЕНИЕ
Особым достижением является выпуск ООО НПП «ЭКРА» и «ИЦ «БРЕСЛЕР»
дифференциально-фазной высокочастотной дистанционной и токовой
направленной нулевой последовательности защит [27, 29], интегрированных с однофазным
автоматическим повторным включением с контролем погасания электрической
дуги и успешности включения отключенной фазы линии электропередачи
сверхвысокого напряжения с одного конца, разработанного АО «ВНИИЭ», [30].
Развивается централизованная микропроцессорная автоматика
предотвращения нарушения устойчивости энергосистем, автоматика ликвидации асинхронного
режима и автоматика предотвращения недопустимых изменений действующего
значения и частоты напряжения в послеаварийных режимах.
Государственным унитарным предприятием «Всероссийский
электротехнический институт им. В.И. Ленина» (ГУП ВЭИ) и ОАО «Институт «Энергосетьпроект»
разрабатывается новое поколение микропроцессорной автоматики
предотвращения нарушения устойчивости электроэнергетических систем [63]. В ОАО
«Институт «Энергосетьпроект» создана новая по принципу действия автоматика
ликвидации асинхронного режима [52] и разработана автоматика ограничений повышения
напряжения на электроэнергетических объектах сверхвысокого напряжения [66].
В создании отечественной микропроцессорной автоматики
электроэнергетических систем принимают активное участие и учебные заведения: Московский
энергетический институт (технический университет), Ивановский
государственный энергетический университет, Южно-Российский государственный
университет, Дальневосточный государственный технический университет и др.
Глава первая
ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ
РЕЖИМНЫХ ПАРАМЕТРОВ В СИГНАЛЫ
ИНФОРМАЦИИ МИКРОПРОЦЕССОРНОЙ
АВТОМАТИКИ И РЕЛЕЙНОЙ ЗАЩИТЫ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ
1.1. Назначение и виды измерительного преобразования
Микропроцессорная автоматика и релейная защита [1] электроэнергетических
систем функционирует в соответствии с информацией о режимах ее работы и
возмущающих на нее воздействиях.
Общими источниками информации являются первичные измерительные
трансформаторы напряжения (ПИТН) и тока (ПИТТ). Их вторичные напряжения и токи
представляют собой входные информационные процессы, принужденные
составляющие промышленной частоты соп которых и являются входными сигналами
микропроцессорной автоматики и релейной защиты электроэнергетических систем.
При электромагнитных и электромеханических переходных процессах в ЭЭС
вторичные напряжения и токи ПИТН и ПИТТ содержат и неинформационные —
свободные апериодические и колебательные некратных частот и принужденные
гармонические составляющие. Поэтому необходимо выделение входных сигналов из
входных информационных процессов.
Выделение входных сигналов производится входными частотными фильтрами.
Как правило, применяются классические аналоговые фильтры нижних частот
(ФНЧ) перед аналого-цифровыми преобразователями (АЦП), необходимые в связи
с периодичностью амплитудно-частотных характеристик (АЧХ) цифровых
фильтров [2]. Они задерживают свободные и принужденные составляющие вторичных
напряжений и токов с частотами, при которых возникают второй и последующие
периоды АЧХ цифровых фильтров.
Аналого-цифровые преобразователи выдают дискретизованные (с интервалом
дискретизации 7) и квантованные (младшим разрядом АЦП) цифровые
мгновенные значения (отсчеты или выборки) и(пТ), i(nT) частично отфильтрованных
(указанными ФНЧ) входных информационных процессов. Затем производится
выделение принужденных составляющих специализированными нерекурсивными
цифровыми частотными фильтрами (ЦЧФ) промышленной частоты или формирование
их ортогональных (синусной и косинусной) составляющих нерекурсивным
фильтром Фурье [3].
Рекурсивные ЦЧФ, имеющие бесконечную длительность импульсной
характеристики, выделяют входной сигнал на уровне 0,95 установившегося значения
практически за три постоянных времени затухания свободных составляющих их
14
Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
собственного переходного процесса (при нулевых его начальных условиях). Их
применение допустимо в относительно медленно действующих
микропроцессорных автоматических устройствах, в частности в автоматических синхронизаторах
синхронных генераторов (см. гл. 2).
Нерекурсивные ЦЧФ имеют конечную, равную длительности периода Тп
промышленной частоты, длительность импульсной характеристики, поэтому их
применение практикуется в виде фильтра Фурье [3] в быстродействующей автоматике
защитных отключений — микропроцессорной релейной защите.
Разрабатываются и в некоторых микропроцессорных устройствах релейной
защиты применяются и более быстродействующие (с временем установления
сигнала Гп/2 < Ту < Тп и Ту < Тп/2) адаптивные нерекурсивные фильтры входных
сигналов и их ортогональных составляющих.
При выделении ортогональных составляющих нерекурсивными фильтрами
Фурье производится умножение я-х дискретных мгновенных значений (отсчетов)
входного информационного процесса на соответствующие значения синуса и
косинуса с последующим суммированием произведений в соответствии с
соотношениями [3]
2 N )
Us(nT) = - ]Г u{nT) sincon^r;
п7 <1л>
2
Uc(nT) = x^u(nT) cosconnT,
П=\ J
где N — число интервалов дискретизации мгновенных значений напряжения за
период Гп.
Например, при N = 12 значения синуса и косинуса принимаются
приближенными (по модулю 8), например, синуса: 0, 4, 7, 8, 7, 4, [9, 20]. При этом
погрешность преобразования не превышает 0,5 %. Нерекурсивные фильтры Фурье
выделяет ортогональные составляющие в виде фиксированных численных значений,
т.е. выдают результат в виде проекций на вещественную и мнимую оси
комплексной плоскости вращающегося вектора.
Недостатками выделения ортогональных составляющих фильтром Фурье
является влияние свободной апериодической составляющей в информационном
процессе, создающей во второй (после действия фильтра) период Ти погрешность
преобразования до 10—15 % (в зависимости от постоянной времени ее затухания)
(рис 1.1, а, б). Поэтому апериодическую свободную составляющую
целесообразно предварительно программно исключить за два интервала дискретизации
(рис 1.1, в) [72].
Фильтр Фурье по принципу действия имеет и частотные погрешности
преобразования [64]. Они обусловливаются несовпадением действительных (истинных)
значений периода колебания Тп входного сигнала и его частоты fn с расчетными
1.1. Назначение и виды измерительного преобразования 15
u(f), UAt), отн. ед.
>+
;/
Х-
х
\
1
1
\ _
V
h\
/
/
*
\
\
У
I
\
7
У
V
V
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 t, с
а)
Wm>*
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 t, с
б)
u(t), Um(f), отн. ед.
Рис. 1.1. Входной информационный процесс фильтра Фурье 1 при наличии апериодической
составляющей, вычисленная амплитуда 2 (#, в\ погрешности вычисления амплитуды (б) и
входной сигнал 3 (в)
номинальными Гп§ном = 20 мс и/п ном = 50 Гц: фиксируемое число отсчетов
происходит не за период Гплюм, а за большее или меньшее время. Например, при Г =
= Гпном/20 nfn = 49 Гц последний отсчет приходится не на текущий фазный угол
изменения входного сигнала, равный 360 эл. град., а на угол 352,8 эл. град. В
результате появляются искажение оценки ортогональных составляющих и погрешность
вычисления по ним амплитуды и фазы входного сигнала, меняющаяся во времени.
16 Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
Средние значение сумм (1.1) получаются пропорциональными сумме синусов
и разности косинусов разностной и суммарной частот (номинальной сопном и
истинной соп) [106]:
sin [К.ном " ^п)"^] + sin [(©плюм + со>Г];
cos [(®п.ном - ш>Г] - cos [(о>мом + (*п)пТ].
(1.1а)
График 2 на рис 1.2 демонстрирует указанные частотные погрешности
вычисления амплитуды по искаженным ортогональным составляющим. Для их
снижения предлагается усреднять результаты расчетов амплитуды [106], требующие
дополнительных затрат времени.
Если входные сигналы выделяются рекурсивными полосовыми частотными
фильтрами или свободные составляющие вторичных напряжений ПИТН и тока
ПИТТ отсутствуют, например при синхронных качаниях или асинхронном
режиме, целесообразно непосредственное использование дискретных мгновенных
значений (после АЦП) напряжений и токов для формирования синусной и
косинусной составляющих в виде дискретных значений Us(nT), Uc(nT).
Известны несколько способов формирования ортогональных составляющих
[3]. Одним из практически используемых способов является вычисление синусной
составляющей как среднего значения двух следующих последовательно во
времени дискретных мгновенных значений, например напряжения и[(п - 1)] и и(пТ):
U (пТ) = Ц[("-1)Л + ц(иП
а косинусной — как первого приближения производной
С/
{пТ) = и(пТ)-и[(п-1)Т]
(о„Т
(1.2)
(1.3)
Синусная Us(nT) и косинусная Uc(nT) составляющие входного сигнала
(принужденной составляющей промышленной частоты напряжений и токов электро-
"(0, Um{t), отн. ед
1
Рис. 1.2. Графики вычислений амплитуд при номинальной частоте 1 и отличной от нее 2
входного сигнала 3
1.2. Программные измерительные преобразователи
17
магнитных и электромеханических переходных процессов в ЭЭС) обеспечивают
практически безынерционное (с временем установления сигнала Ту * 37)
измерительное преобразование информационных параметров входного сигнала — его
амплитуды, фазы и частоты, изменяющихся при переходных процессах, и
измерительное преобразование активной и реактивной мощности [3]. Столь же
быстродействующее измерительное преобразование производится и для сопротивления
как отношение действующих дискретных мгновенных принужденных
составляющих напряжения и тока.
Составляющие Us(nT) и Uc(nT) применяются и при программном разложении
несимметричных и неуравновешенных трехфазных напряжений и токов на их
симметричные составляющие прямой, обратной и нулевой последовательностей.
Измерительное преобразование на основе ортогональных составляющих
входных сигналов является генеральным направлением формирования сигналов
информации микропроцессорной автоматики и релейной защиты
электроэнергетических систем.
1.2. Программные измерительные преобразователи
информационных параметров входных сигналов
Программный измерительный преобразователь амплитуды (ПИПА). По
известным ортогональным составляющим (1.2) и (1.3) или выделяемым
нерекурсивным ЦЧФ Фурье амплитуда, например принужденной составляющей
промышленной частоты напряжения, определяется как
Um(nT) = №{пТ)+и2с{пТ). (1.4)
В соответствии с (1.2), (1.3) она вычисляется без учета машинного времени за
один интервал дискретизации. Однако на указанном интервале времени при
дискретном изменении амплитуды появляются выбросы вычисляемых ее значений
(график 4 на рис 1.3, а) по дискретным мгновенным значениям входного сигнала.
Причиной их является изменение частоты преобразуемого напряжения и неадап-
тивность интегральных АЦП к ее изменению (адаптивным является АЦП,
разработанный в МЭИ [3]).
Для устранения выбросов вводится алгоритмическая коррекция [5] выдачи
первого численного значения амплитуды, требующая его задержки еще на один
или два интервала дискретизации (рис 1.3, б). Поэтому время установления
сигнала информации об амплитуде оценивается как равное трем интервалам
дискретизации АЦП: Ту « ЪТ < Гп/4. На вычисление амплитуды дискретное изменение
фазы влияния не оказывает (рис 1.3, в).
18
Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
«>и»,>в
u,U„,B
10
5
0
-5
-10
-15
^
л
л
ш
ЧА
N
0 5 10 15 20 25 30 35 40 t, мс
б)
u,U„,B
-15
\7
г
X
]
.,-*<
1
\
X
.3
'7
J~
f
1
-^2
\
Л
У
J
71
/Г
/
ч
0 5 10 15 20 25 30 35 40 t, мс
е)
Рис. 1.3. Графики вычислительного эксперимента по быстродействующему измерительному
преобразованию амплитуды:
3 с выбросом (а) и без выброса (б) при дискретных изменениях амплитуды и фазы (а, б) и только фазы (в)
синусоидального непрерывного 1 и дискретизованного 2 напряжения
1.2. Программные измерительные преобразователи
1?
Вычисление действующего значения напряжения (тока) требует времени,
равному одному периоду Гп промышленной частоты, и производится суммированием
возведенных в квадрат всех N дискретных мгновенных значений за период:
ЩпТ) = Ju2[(n-N)T] + u2[(n-N- 1)Г] + ... + и\пТ). (1.5)
При этом гармонические составляющие удвоенной промышленной частоты,
обусловленные возведением в квадрат дискретных мгновенных значений, взаимно
компенсируются [3]: получается «чистый» сигнал информации о действующем
значении напряжения или тока в виде постоянной составляющей суммы квадратов (1.5).
В случае непрерывного изменения напряжения новое действующее значение
фиксируется после каждого интервала Т дискретизации. Однако при обычно
дискретном изменении напряжения (при КЗ и их отключениях) новое действующее
значение фиксируется через время, равное периоду Гп, хотя его изменение
(приближенно по дискретизованной экспоненте) начинается через один интервал
дискретизации.
Вычисления амплитуды и действующего значения по выражениям (1.4) и (1.5)
широко практикуется в микропроцессорной автоматике электроэнергетических
систем, особенно в автоматике противоаварийного управления ими (релейной
защите и собственно противоаварийной автоматике).
Программный измерительной преобразователь фазы (ПИПФ) и угла сдвига
фаз между двумя синусоидальными напряжениями (токами) реализуется по
программе вычисления тригонометрической функции угла по их ортогональным
составляющим. Текущая фаза у(пТ) определяется как
9(«r) = arctg^. (1.6)
Угол сдвига вычисляется как разность текущих фаз двух синусоидальных
напряжений:
UAnT) Us2(nT)
^D-arcg^-arctg^. (1.7)
Вычислительный эксперимент на ПЭВМ по проверке функционирования
программного измерительного преобразователя угла сдвига фаз и практика применения
выражений (1.6) и (1.7) подтвердили работоспособность и быстродействие ПИПФ.
20
Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
Программное измерительное преобразование частоты (ПИПЧ).
Быстродействующее вычисление частоты достигается использованием косинусной
ортогональной составляющей, определяемой по (1.3). При известной амплитуде
напряжения Um частота вычисляется как
сог
и(пТ) - и[(п-\)Т]
(1.8)
т и:
и(пТ) + и[(п - 1)Г]
2
Поскольку амплитуда также может изменяться при изменении частоты, то за
счет увеличения времени вычисления на один интервал дискретизации Г
амплитуда из выражения для вычисления частоты исключается.
В соответствии с (1.4) и с учетом (1.2) и (1.3)
ит =
или
ит =
и{пТ) + и[(п - 1)Г]
2
+
и(пТ) + и[(п - \)Т]
°>пТ
«[("- 1)Л + и[(п-2)Т]
2
и[(п - 1)Т] - и[(п - 2)Т]
*ат
(1.9)
Приравняв выражения (1.9), можно получить [6]:
со
= I [и(пТ) - и{пТ- Т)} - [и(пТ- Т) - и{пТ-2Т)Х
п пг \
и[(п-1)Т] + и[(п~2)Т]
2
+
и{пТ) + и[(п - 1)71
2
(1.10)
Результаты вычисления частоты по выражению (1.10) представлены на рис 1.4, а.
Как видно, в особых частных случаях получаются значительные выбросы
результатов вычислений. Они обусловливаются равенствами нулю отдельных абсолютных
дискретных мгновенных значений напряжения, используемых в (1.10) при
вычислениях частоты.
Выдача результатов вычислений частоты с указанной алгоритмической
коррекцией демонстрируется графиком на рис 1.4, б. Частота определяется за два
интервала дискретизации с относительной погрешностью, составляющей всего 0,25 %.
Результаты вычислений частоты не зависят от амплитуды и фазы напряжения.
1.2. Программные измерительные преобразователи
21
/,Гц
i
90
80
70
60 1
50
40
и, в
1
20 :
ю :
-10
-20
i
i
•л
■\ ]
- \
г V/
л
'\
\i
\j\
пТ,с
ъ-
0,02
0,04 0,06
а)
0,08
яГ, с
U, В
0 20 40 60 80 100 120 140 160 180 200 пТ, мс
б)
Рис. 1.4. Результаты вычисления в реальном времени значений частоты и осциллограммы
мгновенных значений напряжения с дискретно изменяющимися амплитудой (а) и частотой (6)
22
Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
1.3. Программные измерительные преобразователи активной
и реактивной мощности
Непосредственное прямое численное перемножение дискретных мгновенных
значений синусоидальных напряжения и(пТ) и тока i(nT), формирует
последовательность двоичных чисел, отображающих дискретные значения мгновенной
мощности:
р(пТ) = u(nT)i(nT) = UI(nT) cos ср - UI{nT) cos (2соплГ- ф). (1.11)
Для формирования цифрового сигнала информации об активной мощности
Р{пТ) = С//cos ф необходимо численное интегрирование (1.11) за период
изменения мгновенной мощности, т.е. применение простейшего нерекурсивного
цифрового выходного частотного фильтра с длительностью импульсной характеристики,
равной половине периода промышленной частоты TJ2 [3].
Цифровой сигнал информации о реактивной мощности получается
указанными операциями над дискретными мгновенными значениями тока i(nT) и
задержанными на число интервалов дискретизации, равное длительности четверти
периода Ти промышленной частоты, дискретными мгновенными значениями
напряжения и[(п - к)Т].
При синусоидальных входных напряжении и токе программные
измерительные преобразователи мощности (ПИПМ) могут выполняться
быстродействующими на основе двух перемножений двух составляющих напряжения и тока,
сдвинутых по фазе на одинаковые углы, в частности ортогональных составляющих.
При суммировании или вычитании их результатов происходит взаимная
компенсация дискретных мгновенных значений гармонических составляющих удвоенной
промышленной частоты результатов двух перемножений.
В общем случае алгоритмы функционирования ПИПМ на основе
перемножений составляющих сдвинутых по фазе на любой угол, описываются выражениями:
Р{ПТ) = 2sin1co iT{u{nT)i{nT) + и^п ~ 1)ТШп ~ /)Г1 > "
- ^ctg (0nlT{u(nT)i[(n - l)T] + u[(n - l)T]i(nT)}; \ (1.12)
Q(nT) = 2s.n1(o lT{u(nT)i[(n - l)T] - u[(n - l)T\KnT)}9
где/Г<Гп/4.
Соответствующий указанному интервалу времени угол сдвига фаз может
устанавливаться значительно меньше тс/2.
1.3. Программные измерительные преобразователи активной и реактивной мощности 23
В частности при ортогональных — синусных Us(nT), Is{nT) и косинусных
Uc(nT), 1с(пТ) составляющих sin ®П1Т = 1, a ctg соп/Г= 0 и алгоритмы (1.12)
упрощаются:
Р(пТ) = l-[Us(nT)Is(nT) + Uc(nT)Ic{nT)];
Q(nT) = l-[Uc(nT)Is(nT) - Us(nT)Ic(nT)].
(1.13)
На выходах ПИПМ получаются «чистые» сигналы информации об активной и
реактивной мощности.
Действительно в соответствии с (1.13) и [2] активная мощность
Р{пТ) - Um sin connT-Im sin (соплГ- ср) +
+ Um cos (OunT • Im cos (ыипТ- ф) =
= UI cos ф - UI cos (2сопиГ - ф) + UI cos ф +
+ Шсо8(2соплГ-ф) = 2С//со8ф. (1.14)
В соответствии с (1.14) реактивная мощность
Q{nT) - Um cos соп«Г- Im sm((ounT- Ф) -
- Um sin ыипТ- Im cos(con^r- ф) = UI sin ф - UI $т(2ыипТ- ф) -
- [-UI sin ф - UI sm(2(onnT- ф)] = 2UI sin ф. (1.15)
Результаты моделирования быстродействующих ПИПМ приведены на рис 1.5. На
графике 1 зафиксированы выбросы вычисляемой мощности в первом интервале
дискретизации. При указанной алгоритмической коррекции результат выдается, спустя
еще один интервал дискретизации (график 2).
Структурные схемы программных измерительных преобразователей активной
и реактивной мощности приведены на рис 1.6.
При программной реализации измерительных преобразователей активной
мощности согласно (1.13) формируются ортогональные составляющие
(формирователь ФОС) и используются операции перемножения ZA7, ZX2 одноименных
ортогональных составляющих и суммирования SM их результатов (рис 1.6, а).
При измерительном преобразовании реактивной мощности перемножаются
разноименные ортогональные составляющие и производится вычитание (сумматор SM
на рис 1.6, б в режиме вычитания) их результатов.
Быстродействующий измерительный преобразователь сопротивления.
Измерительные преобразователи сопротивления функционируют на основе
программного выполнения операции деления действующих значений принужденных
колебательных составляющих промышленной частоты напряжений и токов
электромагнитных переходных процессов КЗ в электроэнергетической системе. Их
24
Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
u{t)
Q
р
Н?) ^п
Q
Hf)^
Р
—i—— —i— ._ —1 1
10
20
30
а)
40
50 пТ,ыс
Р, отн. ед.
пТ,ис
Рис. 1.5. Результаты измерительного преобразования активной и реактивной мощности:
кривые тока и напряжения (а); сигналы активной мощности без коррекции результата 7 и с алгоритмической
коррекцией 2 (б)
выходные сигналы информации о сопротивлении до места КЗ используются для
действия автоматики защитных отключений (релейной защиты) и автоматики
определения расстояния до места повреждения линии электропередачи.
Для функционирования программного измерительного преобразователя
сопротивления используются ортогональные составляющие напряжения и тока, по
которым вычисляются их амплитуды.
Деление квадратов амплитуд напряжения и тока с извлечением квадратного
корня из их частного определяет модуль комплексного сопротивления
Z(nT)= Ju*(nT)/£(nT).
(1.16)
Операция извлечения корня исключается при вычислении активной и
реактивной составляющих сопротивления при делении активной и реактивной мощности
на квадрат амплитуды тока
R = 2PII2m = 2UI cosy/I*
(UII)cos ф;
X= 2QII2m = 2UI siny/I* = (U/I)smq>.
(1.17)
1.3. Программные измерительные преобразователи активной и реактивной мощности
25
UAnT)
и (л Г)
SM Р(пТ)
Z) о
iR (n T)
1/КА,
Гу£) О^ (Щ(пТ)
а)
и(пТ)
iR(nT)
ФОС
Us(nT)
Uc(nT)
\ /
ZX1
и
г->
ФОС
аюлпт)/
7X2
^ SM Q(nT)
(IR)c(nT)
б)
Рис. 1.6. Структурные схемы быстродействующих программных измерительных
преобразователей активной (а) и реактивной (б) мощности
Операцию деления можно заменить более практичной операцией
перемножения. В измерительных органах сопротивления [36], сравнивающих вычисляемые
составляющие сопротивления с предписанными (установленными) значениями
(уставками), согласно (1.17) в условиях срабатывания реле
XYI2m>2Q- RJ2m>2Py
у m
(1.18)
Это особенно целесообразно при формировании сложных характеристик
срабатывания направленных измерительных реле сопротивления в виде
многоугольников [3].
26
Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
1.4. Программные фильтры симметричных составляющих
Из известных [3] алгоритмов программного измерительного преобразования
несимметричных трехфазных напряжений и токов в симметричные составляющие
прямой и обратной последовательностей (фильтров симметричных
составляющих) в микропроцессорной автоматике и релейной защите электроэнергетических
систем целесообразно применять фильтры симметричных составляющих,
формирующие ортогональные составляющие напряжений (токов) прямой и обратной
последовательностей из ортогональных составляющих междуфазных напряжений
(токов). Поскольку
УаЪ = Uab с +JUab s = Uab(C0* Ф* +7 SHI фа)\ |
Шс= Ubcc+JUbcs = UbciMSVb+J^Vb)' J
то напряжения обратной и прямой последовательностей фазы А определяются
выражениями:
И2а = U2a с + JU2a s ~ Uab(C0* Ф* +J sin Фв) +
+ Ubc(cos (pb +j sin 9fe)[cos (-я/3) + y sin (-тс/3)] =
yia~Uabe + \ubec-£ubca+j(uaba+ (1.21)
Как видно из (1.20) и (1.21), вычисление ортогональных составляющих
обратной и прямой последовательностей сводится к алгебраическому суммированию
умноженных на постоянные коэффициенты ортогональных составляющих между-
фазных величин.
Квадраты амплитуд U*2(nT), U*Y(nT) и текущие фазы <р2(лГ), (рх(пТ)
напряжений обратной и прямой последовательностей вычисляются по (1.4) и (1.6)
соответственно.
Реализация алгоритма иллюстрируется примером комбинированного
программного фильтра напряжения обратной U2a(nT) и прямой Ula(nT)
последовательностей (рис 1.7). Их ортогональные составляющие вычисляются по выражениям
(1.20) и (1.21) с противоположными знаками последних слагаемых вещественной
и мнимой составляющих соответственно. Косинусные составляющие междуфаз-
ных напряжений Uab, Ubc вычисляются формирователями ортогональных
составляющих ФОС по соотношению (1.3) за время одного интервала дискретизации,
Вопросы для самопроверки
27
Uab№
Рис. 1.7. Структурная схема программного фильтра амплитуд напряжений обратной и прямой
последовательностей
которое с учетом вычислительного времени расчетов амплитуд и фаз напряжений
прямой и обратной последовательностей и определяет минимально достижимое
время действия программного фильтра, не превышающее двух интервалов
дискретизации: 2 мс при Т- TJ20.
Вопросы аля самопроверки
1. Что представляют собой источники информации и информационные процессы релейной защиты
и автоматики электроэнергетических систем (ЭЭС)? Каково их аналитическое представление?
2. Что называется входными сигналами микропроцессорной автоматики и релейной защиты ЭЭС?
3. Как и в каком виде выделяются входные сигналы из входных информационных процессов в
современной микропроцессорной релейной защите и противоаварийной автоматике ЭЭС?
4. По каким аналитическим соотношениям функционируют нерекурсивные частотные фильтры
Фурье? Что представляют собой их выходные сигналы?
5. Что представляют собой информационные параметры входных сигналов? Почему необходимо их
измерительное преобразование?
6. Что такое ортогональные составляющие входных сигналов? Как они формируются? Почему
целесообразно использование при измерительном преобразовании информационных параметров
входных сигналов их ортогональных составляющих?
7. По каким аналитическим соотношениям вычисляются цифровые сигналы информации об
амплитуде и фазе входного колебательного тока промышленной частоты по его ортогональным
составляющим?
8. Как традиционным способом производится измерительное преобразование частоты
колебательного промышленного напряжения?
9. В чем состоит быстродействующий способ измерительного преобразования частоты напряжения
в цифровой сигнал? Какими аналитическими соотношениями он описывается?
28 Глава 1. ИЗМЕРИТЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ РЕЖИМНЫХ ПАРАМЕТРОВ
10. Как формируются цифровые измерительные формирователи дискретных мгновенных значений
напряжений прямой и обратной последовательностей трехфазных несимметричных напряжений
и токов? Благодаря чему достигается их быстродействие?
11. Объяснить действие цифрового быстродействующего фильтра напряжений прямой и обратной
последовательностей (см. рис. 1.7).
12. По каким аналитическим соотношениям производится быстродействующее измерительное
формирование сигналов информации об активной и реактивной мощностях управляемого
энергетического объекта?
13. Объяснить действие цифровых быстродействующих измерительных преобразователей активной
и реактивной мощностей (см. рис. 1.6).
14. Как формируется сигнал информации о сопротивлении линии электропередачи до места
короткого замыкания?
15. Как формируются по сигналам информации об активной и реактивной мощности характеристики
срабатывания программных измерительных направленных реле сопротивления в виде прямых
линий?
Глава вто рая
МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ
СИНХРОНИЗАТОРЫ
2.1. Автоматические синхронизаторы
синхронных генераторов
Автоматические синхронизаторы обеспечивают включение синхронного
генератора G (рис 2.1) на параллельную работу с генераторами электростанции G3C и
электроэнергетической системой ЭЭС — производят его точную автоматическую
синхронизацию. Синхронизация генератора является крайне ответственной и
небезопасной для его целостности операцией, поскольку [40]:
• при включении выключателя Q возникает ток включения, возбуждаемый
разностью АС/ сдвинутых по фазе ЭДС холостого хода генератора Етх и
эквивалентной ЭДС, определяемой Еээс и Еэс, и ограничиваемый только внутренним
сопротивлением генератора и эквивалентным сопротивлением связи с ЭЭС хсв и
хэс. Ток включения создает ударные динамические воздействия на обмотки и вал
синхронного генератора;
Рис. 2.1. Упрощенная схема электростанции и укрупненная функциональная схема АУТС
30 Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
• при значительном отличии частоты вращения генератора сог от синхронной
сос генератор после его включения выпадает из синхронизма.
Автоматический синхронизатор является основной частью автоматического
устройства точной синхронизации АУТС синхронных генераторов, подключаемого
к первичным измерительным трансформаторам напряжений генератора TV1 и шин
электростанции TV2. Автоматическое устройство состоит из трех частей,
обеспечивающих три условия точной синхронизации:
• равенство амплитуд и напряжений генератора UT и на шинах
электростанции Um;
• близкая к синхронной частота вращения (малая частота скольжения со5 =
= сос - сог) генератора;
• совпадение по фазе напряжений генератора UT и на шинах электростанции
иш в момент включения (замыкания контактов) выключателя Q синхронного
генератора G.
Эти части соответственно называются уравнителем амплитуд напряжений УА,
уравнителем частоты скольжения УЧС и автоматическим синхронизатором АС.
Автоматический синхронизатор обеспечивает выполнение наиболее
ответственной операции точной синхронизации по обеспечению практического
совпадения по фазе напряжений генератора Ur и на шинах электростанции Um в момент
включения выключателя генератора. Он выдает управляющее воздействие УВ на
включение привода выключателя с опережением момента времени совпадения
находящихся в относительном вращении векторов UT и Um при наличии между
ними уменьшающегося угла сдвига по фазе — угла опережения 80П с таким
расчетом, чтобы за время включения выключателя tB векторы UT и U совместились.
Появившиеся исторически первыми автоматические синхронизаторы
определяли заданный неизменный угол опережения и назывались автоматическими
синхронизаторами с постоянным углом 80П = const опережения (СПУО). Однако даже
при равномерном вращении генератора и при постоянном времени включения
выключателя tB угол опережения должен быть переменным, пропорциональным
угловой частоте скольжения со * 5ЛТТ = сох.
Л UIl S В
При равномерном вращении генератора постоянным является время опережения
ton, равное времени включения tB выключателя. Поэтому находящиеся длительное
время в эксплуатации аналоговые автоматические синхронизаторы определяют
момент включения привода выключателя по постоянному времени ton = const
опережения (СПВО) [2].
При неравномерном, обычно равноускоренном, вращении генератора при его
пуске угол опережения должен быть и функцией ускорения вращения as. Поэтому
последние разработки аналогового [40] и современных микропроцессорных [1,8]
синхронизаторов представляют собой специализированные аналоговые и цифро-
2.1. Автоматические синхронизаторы синхронных генераторов
31
вые вычислительные устройства, определяющие необходимый изменяющийся с
изменением со5 угол опережения 80П (со5, as) в предположении равноускоренного
(или равнозамедленного) вращения синхронного генератора, т.е. при постоянном
ускорении \±as\ = const ротора генератора. Угол опережения 50П вычисляется
измерительным органом угла опережения ИОУО:
8on = "WB±«A2/2, (2.1)
где q — угловая частота скольжения в момент времени начала вычисления угла
опережения.
Автоматические синхронизаторы выдают управляющее воздействие на
включение выключателя синхронного генератора только в случае, если разность
амплитуд MJ = U„m - Е„г и частота скольжения со, не превышают ограниченных уело-
J*^ ТП /Will mi л
виями включения выключателя при отсутствии или малом значении тока
включения и успешности синхронизации (генератор после включения не выпадает
из синхронизма) допустимых значений AUmJX и Дсо5Д. Допустимые значения &итд и
Дсо контролируются измерительными органами амплитуд ИОА и скольжения
ИОС и обеспечиваются уравнителями амплитуд УА и частоты скольжения УЧС с
установленными значениями Umy и со5у автоматического устройства точной
синхронизации АУТС. Принципиально они представляют собой автоматические
регуляторы разности амплитуд и частоты скольжения и воздействуют на элементы
изменения установленных напряжения (7гу и частоты вращения согу — уставок
автоматических регуляторов возбуждения АРВ синхронного генератора G и
частоты вращения АРЧВ турбины Г соответственно.
Автоматический синхронизатор формирует управляющее воздействие УВ при
поступлении в его логическую часть ЛЧ сигналов об угле опережения Ub и
допустимых разностях амплитуд Um и частоты скольжения Us.
Микропроцессорные синхронизаторы, вычисляющие угол опережения по (2.1)
обладают важной особенностью — ограничением угловой частоты скольжения
максимально допустимым значением со5Д не в указанный момент начала
вычисления, а в момент включения выключателя синхронного генератора:
СО,д = Ко + аЛп)' <2"2)
На рис 2.1 показаны гасительный резистор Rr, контакт ATM контактора
подключения к обмотке возбуждения LG генератора при его самосинхронизации [40],
возбудитель GE и контакт автомата гашения поля генератора ASV.
Микропроцессорные автоматические устройства включения синхронных
генераторов на параллельную работу способом точной автоматической синхронизации,
называемые микропроцессорными автоматическими синхронизаторами, типов
АС-М и СПРИНТ-М [1] созданы и производятся соответственно ГУП ВЭИ и
научно-производственным предприятием (НПП) ЗАО «РАДИУС-Автоматика».
32
Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
2.2. Микропроцессорный автоматический
синхронизатор типа АС-М
Микропроцессорные автоматические устройства точной синхронизации —
синхронизаторы АС-MI и АС-М2, разработанные и выпускаемые ГУП ВЭИ,
содержат все три функциональные части (см. рис 2.1):
• собственно автоматический синхронизатор АС;
• уравнитель амплитуд УА напряжения синхронного генератора и напряжения
шин электростанции (автоматический регулятор уставки С/ АРВ)\
• автоматический регулятор разности частот — уравнитель частоты
скольжения УЧС с установленной © .
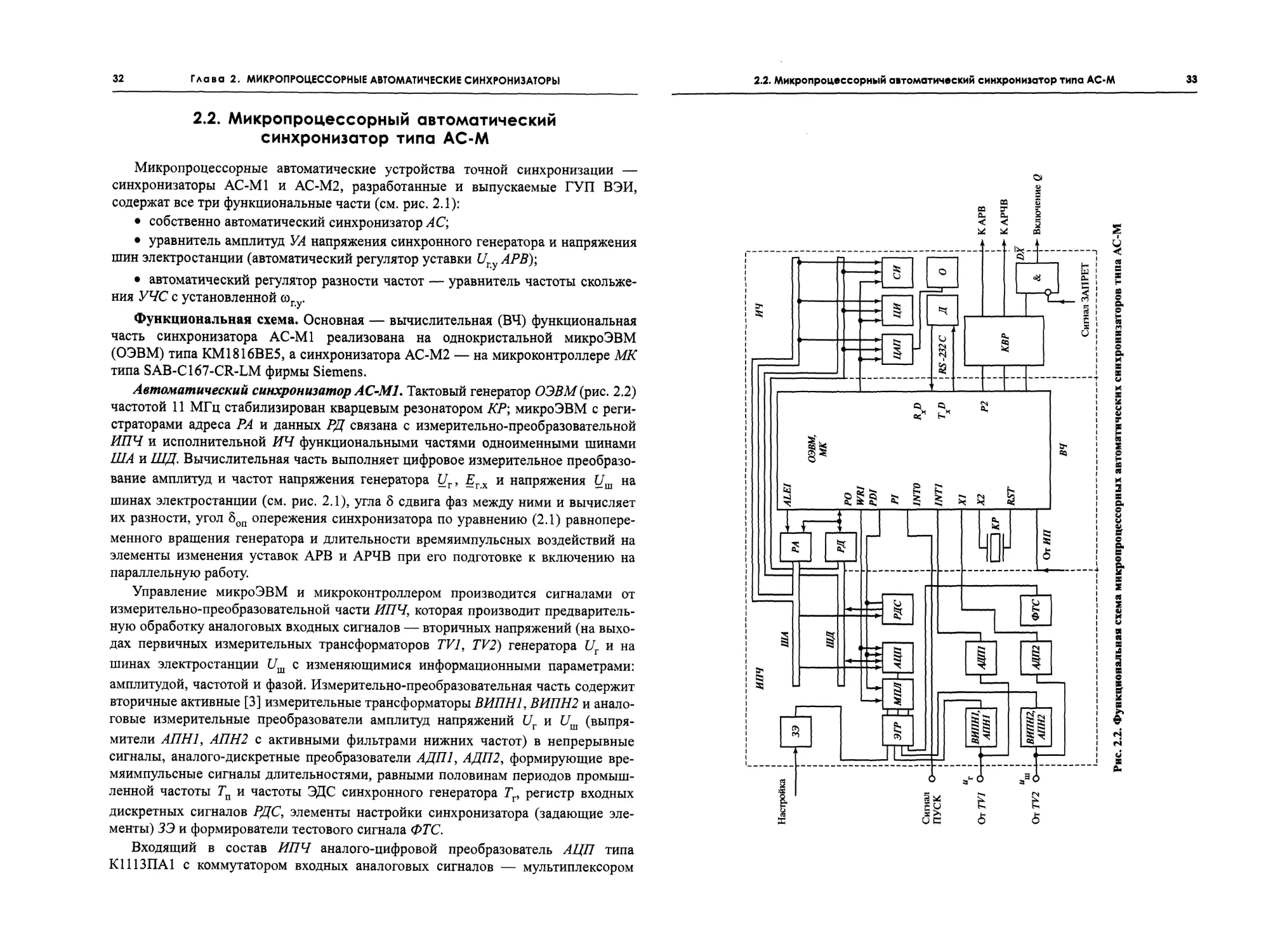
Функциональная схема. Основная — вычислительная (ВЧ) функциональная
часть синхронизатора АС-MI реализована на однокристальной микроЭВМ
(ОЭВМ) типа КМ1816ВЕ5, а синхронизатора АС-М2 — на микроконтроллере МК
типа SAB-C167-CR-LM фирмы Siemens.
Автоматический синхронизатор АС-MI. Тактовый генератор ОЭВМ (рис 2.2)
частотой 11 МГц стабилизирован кварцевым резонатором КР\ микроЭВМ с
регистраторами адреса РА и данных РД связана с измерительно-преобразовательной
ИПЧ и исполнительной ИЧ функциональными частями одноименными шинами
ША и ШД. Вычислительная часть выполняет цифровое измерительное
преобразование амплитуд и частот напряжения генератора UT, ЕТХ и напряжения С/ш на
шинах электростанции (см. рис 2.1), угла 5 сдвига фаз между ними и вычисляет
их разности, угол 80П опережения синхронизатора по уравнению (2.1)
равнопеременного вращения генератора и длительности времяимпульсных воздействий на
элементы изменения уставок АРВ и АРЧВ при его подготовке к включению на
параллельную работу.
Управление микроЭВМ и микроконтроллером производится сигналами от
измерительно-преобразовательной части ИПЧ, которая производит
предварительную обработку аналоговых входных сигналов — вторичных напряжений (на
выходах первичных измерительных трансформаторов TV1, TV2) генератора UT и на
шинах электростанции Um с изменяющимися информационными параметрами:
амплитудой, частотой и фазой. Измерительно-преобразовательная часть содержит
вторичные активные [3] измерительные трансформаторы ВИПН1, ВИПН2 и
аналоговые измерительные преобразователи амплитуд напряжений С/г и С/ш
(выпрямители АПН1> АПН2 с активными фильтрами нижних частот) в непрерывные
сигналы, аналого-дискретные преобразователи АДП1, АДП2, формирующие вре-
мяимпульсные сигналы длительностями, равными половинам периодов
промышленной частоты Гп и частоты ЭДС синхронного генератора Гг, регистр входных
дискретных сигналов РДС, элементы настройки синхронизатора (задающие
элементы) ЗЭ и формирователи тестового сигнала ФТС.
Входящий в состав ИПЧ аналого-цифровой преобразователь АЦП типа
К1113ПА1 с коммутатором входных аналоговых сигналов — мультиплексором
34 Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
МПЛ электрически отделен от аналоговых сигналов (развязан) оптронными
элементами гальванической развязки ЭГР.
Автоматический синхронизатор АС-М2 имеет чисто аппаратную
измерительно-преобразовательную часть, поскольку АЦП входит в состав
микроконтроллера. Она представлена в виде отдельного конструктивного блока или платы
(ячейки), обозначенной разработчиками на внешнем виде синхронизатора (рис 2.3)
как AL В ней расположен и элемент запрета несинхронного включения генератора
DX (см. рис 2.2).
Вычислительная часть представлена ячейкой VI67, в которой расположен
микроконтроллер с разъемом для подключения персонального компьютера ПК.
На панели индикации LI расположены семисегментный [3] цифровой
индикатор, функционирующий в процессе синхронизации аналогично синхроноскопу
Вид спереди
ПК
D
V167
®Пуск
а Синхронизация
<8>
=и
®
вкл
®
и
AI
PS
О
а)
Вид сзади
ХТ19 Х20
Х21
ШШй
DIO
ХТ13
ХТ16 ХТ17 ХТ18
ХТ5
ХТ6
ХТ7 ХТ8
шт шй
ж
ХТ4
ХТ1
i
ХТ2
ХТ9
Щ
ою
ХТ10
ч
о
9
А!
XTU
1°
о}
ХТ12
[о
о]
ХТ13
[о.
ХТ14
1?
9
А!
ХТ15
[?
9
о
б)
Рис. 2.3. Внешний вид синхронизатора АС-М2
2.2. Микропроцессорный автоматический синхронизатор типа АС-М 35
с дискретной индикацией угла сдвига фаз 5 = (UTMm) и отображающий коды
неисправностей, обнаруживаемых при самодиагностике. Светодиоды
сигнализируют пуск синхронизатора показанным на панели ключом, процесс синхронизации
и его время, угол 8 < 8тах, времяимпульсные воздействия ±£/, ±F синхронизатора
на АРВ и АРЧВ для выравнивания с допустимой погрешностью абсолютных
значений ЭДС холостого хода генератора, напряжения шин электростанции и
наступления установленной разности их частот (частоты скольжения генератора) cojy (см.
рис 2.5, а) и воздействие на включение выключателя синхронного генератора.
В исполнительную часть ИЧ (см. рис 2.2) синхронизаторов входят комплект
электромагнитных реле КВР с герметизированными контактами — герконами, и
логический элемент DX (ЗАПРЕТ), не допускающий синхронное включение
генератора при 8 > 8тах или оз5 > со5тах = 5 Гц. К ней относятся и элементы
отображения информации: цифровой индикатор ЦИ угла 8 сдвига фаз между UT и Um и
другой информации, табло светодиодных индикаторов СИ, дисплей Д
персональной ЭВМ, цифроаналоговый преобразователь ЦАП типа КР572ПА1 и
подключаемый к АС-MI осциллограф О.
Исполнительная часть АС-М2 размещена на плате DIO (рис 2.3, б); на рисунке
показаны все зажимы для подключения синхронизатора. Панель PS (см. рис 2.3, а)
является источником питания синхронизатора.
Действие синхронизаторов. Синхронизаторы функционируют на основе вре-
мяимпульсного измерительного преобразования частот ЭДС холостого хода
генератора и напряжения шин электростанции и угла сдвига фаз между ними [3]. На
рис 2.4, а приведена схема измерительного преобразования частот/г и/ш
инверсной ЭДС генератора -ет и напряжения иш и вычисления их разности: Af=fm-fT9
а на рис 2.4, б — графики, иллюстрирующие ее действие. Аналого-дискретные
преобразователи АДП1, АДП2 (см. рис 2.2, а) инверсной ЭДС генератора -ет и
напряжения шин иш формируют, как указывалось, времяимпульсные сигналы UfT и
Ufm, импульсы запуска Us и останова UR счетчиков С7У, СТ2 микроконтроллера
импульсов ии, следующих от генератора G с частотой 1,25 МГц. Число
зафиксированных счетчиками импульсов (на рис 2.4, б не показано) в течение времяимпуль-
сных сигналов, например Nm, отображает длительности периодов ЭДС генератора
Тг и напряжения шин электростанции Гш. Операциями 1/Гг и 1/Гш вычисляются их
частоты fT и/ш, а операцией вычитания SM формируется цифровой сигнал £/цДу
информации о частоте скольжения генератора А/=^.
Инверсия ЭДС генератора используется для формирования сигнала
информации об угле сдвига фаз 8 = (С/г, £/ш), пропорционального времени совпадения tcn
по знаку мгновенных значений -ытииш (обычно угол сдвига фаз определяется по
времени несовпадения по знаку мгновенных значений двух напряжений [3]).
36
Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
При этом используется вычитаемый (сканируемый) счетчик указанных
импульсов. Как показано на рис. 2.4, в угол сдвига фаз пропорционален разности
чисел импульсов, например, Nbl = Nml - NTl в счетчике в моменты времени переходов
от отрицательных мгновенных значений к положительным напряжениям иш и от
положительных — к отрицательным инверсной ЭДС -ег
~ет
ЛДП1
US
UR
ш
АДП2
G
"и
US
UR
s
T
R
CT1
\
S
T
R
CT2
тт
тш
UTT
1/Гш
_
SM
2
Ли
^
и
<W
fr
*■
a)
Рис. 2.4. Схема (а) и временные графики (б, в), иллюстрирующие действие программного
измерительного преобразования частот, их разности и угла сдвига фаз
2.2. Микропроцессорный автоматический синхронизатор типа АС-М
37
Численным дифференцированием сигнала £/цЛу вычисляется сигнал
информации об ускорении вращения генератора, необходимый, согласно (2.1), для
вычисления угла опережения, выполняемого собственно микропроцессором
микроконтроллера.
Максимальный угол сдвига фаз 5тах вычисляется по абсолютному
действующему значению Ub напряжения биений иъ = ит - um: 8max = 2 arcsin (Ub/2U) при
UT = иш = U. Например при Щ = (Jl/2)(2U) угол 6тах = я/4.
В процессе подготовки генератора для включения на параллельную работу
программные регуляторы разности амплитуд напряжений и частоты скольжения
[уравнители УА и УЧС (см. рис. 2.1)] вычисляют длительности времяимпульсных
управляющих воздействий на элементы изменения уставок автоматических
регуляторов возбуждения АРВ и частоты вращения генератора АРЧВ.
Уравнители периодически включают микроэлектродвигатели указанных
элементов на время, уменьшающееся по мере сближения амплитуд и приближения
частоты скольжения к установленной, что необходимо для предотвращения
«перерегулирования». Длительность Ги (рис. 2.5, б) включенного состояния
электродвигателей — импульсов напряжения их питания Uu при постоянной устанавливаемой
паузе Гп между ними рассчитывается в реальном времени и пропорциональна
остающимся разностям АС/= UT - Um и Afs =f ~fs.
a)
-Aco _;-Ai/;f
'и1
'и1
Aco _;Atf;f
Рис. 2.5. Диаграмма рабочих значений частоты скольжения (а) и зависимости длительности вре-
мяимпульсного воздействия синхронизатора на задающий элемент АРЧВ разности частот
скольжения (б)
Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
В синхронизаторах принята установленная круговая частота скольжения:
Kyi = Kmax + Ш*тт|/2 И «W = 5(0min (рис. 2.5, а). ЕСЛИ |ю5| < (0smb (УГОЛ 5 ИЗ-
меняется очень медленно: практически «зависает»), то синхронизатор АС-М2
формирует импульсное воздействие на АРЧВ минимальной длительности по углу
сдвига фаз. При 8 < 0 формируется воздействие на повышение частоты вращения
генератора, а при 5 > 0 — на ее снижение. Если разности, амплитуд и частот больше
допустимых \±AUm\ > 0,01 и \±cos\ > ©Jmax, то выдаются первые импульсы воздействия
ограниченной установленной длительности для соответствующего изменения
амплитуды и частоты ЭДС синхронного генератора. По мере уменьшения AUm и со5
вычислительной частью рассчитываются длительности Ги импульсов воздействий,
уменьшающиеся так, чтобы без перерегулирования (автоколебаний) абсолютные
значения ЭДС генератора и напряжение на шинах электростанции практически
выровнялись, а частота скольжения стала равной установленной со
Длительность паузы между импульсами превышает время затухания
переходных процессов изменений состояний элементов изменения уставок АРВ и АЧВ.
После установления cos » ш^у и AUm < 0,1 управляющие воздействия
прекращаются и синхронизатор переходит к программе вычисления угла опережения по
(2.1) и при удовлетворении условий точной синхронизации формирует импульсное
управляющее воздействие достаточной для включения выключателя синхронного
генератора длительности.
Синхронизаторы АС-MI и АС-М2 обладают свойством однократности, а
АС-М2 — и многократности действия. Если выключатель не включился или тут
же после включения отключился, то при однократности действия повторный
процесс синхронизации не формируется; а при многократности — повторяется. Для
обеспечения указанного действия в синхронизаторе АС-М2 предусмотрено три
сигнала его пуска.
Настройка и диагностика автоматического синхронизатора АС-М. После
подключения синхронизатора к источнику питания запускается программа
инициализации и стартового контроля: производится настройка элементов микроЭВМ
или микроконтроллера: по сигналу элемента начальной установки — задающего
элемента ЗЭУ (см. рис 2.2) все функциональные элементы синхронизатора
приводятся в исходное состояние.
После завершения стартового контроля вступает в действие программа обмена
информацией с оператором: синхронизатор настраивается от ПЭВМ (рис 2.6).
Предусмотрено три уставки по времени опережения — времени включения выключателя
^оп = 'в в Диапазоне 0,1—1,0 с; допустимым разностям амплитуд MJm = 0,5*10 % и
частот Afsy = 0,05*0,5 Гц; максимально допустимому углу сдвига фаз 8тах = п/2+п/З.
Параметры настройки выводятся на экран дисплея ПЭВМ.
После пуска настроенного синхронизатора начинается выполнение
функциональных программ измерительного преобразования, управления АРВ и АРЧВ,
вычисления угла опережения и формирования управляющего воздействия на
включение привода выключателя синхронного генератора.
2.3. Микропроцессорный автоматический синхронизатор типа «СПРИНТ-М» 3?
5, эл. град
ll I I
1 ТА |\ 1
60 пп
п LLJ
бо га
1 ГП
-12U1 н
г '
А/Гц
П ,1 I
п I
П А I
-U,4- I"
-0.8 LL
I ll I
2i In
У I
\
1
1
i
6\
ii
8
у
л
\F°l
\
\\
/(
1
М
+и
J
8
12
Ху
он
У 14|
16
^
tS\
F
1Й
W
fF
,20
^
V
1
ч
>i
_^
4
/
JnBkji.
А I/
__L
-8
Вкл-
~
h
V
HO
s
4/
i i i i i
ЭТ1
'
-0,13Гц;А1/=
-(
),5%
^B
200
160
120
80
40
0 t, с
A.(\
-80
-120
-160
-200
6
4
2
0
_2
-4
-6
10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 /, с
Рис. 2.6. Вид экрана ПЭВМ
Микропроцессорный синхронизатор АС-М2 выводит на экран ПЭВМ
результаты измерительного преобразования и формируемых сигналов: угла 5 сдвига фаз,
вычисленного по (2.1), угла 50П опережения, графики процессов изменений
разностей амплитуд и частот, управляющих воздействий ±U, ±F на АРВ и АРЧВ,
уменьшающихся разностей амплитуд AUm и А/, выходного управляющего воздействия
Вкл. и включенного Вкл-но состояния выключателя.
2.3. Микропроцессорный автоматический синхронизатор
типа «СПРИНТ-М»
Функциональная схема. Основной — вычислительной частью ВЧ(рис. 2.7, а)
автоматического устройства точной синхронизации (АУТС, см. рис 2.1) типа
«СПРИНТ-М» является собственно синхронизатор АС. Первая его модификация
[1] содержит уравнитель частоты скольжения генератора ю5 с установленной
cosy — ее автоматический регулятор УЧС, а вторая — «СПРИНТ-М2» — снабжена
и уравнителем амплитуды УА напряжения генератора UT (его ЭДС холостого хода
Егх) с амплитудой напряжения на шинах электростанции Um.
Первая модификация функционирует на базе микропроцессора К1810ВМ88,
а вторая — на базе микропроцессора TN80C196KC20. Микропроцессор МП
(рис 2.7, а) представляет собой по существу однокристальную ЭВМ с
оперативным ОЗУ и постоянным ПЗУ запоминающими устройствами, контроллером
прерываний КП и таймером Т.
40
Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
ДС-
ит
"ш-
г
,L
зэ
витц
АДП,
вип
—*•
—*•
ФТС Г
ипч
\мпл
—►-
АЦП
\
1 i—^
ВЧ
МП
КП
Т
пзу\
\озу\
! t
*=220B(=100B) f
ИИ
!
1—I—*"
ич '
^ КАРЧВ
1
К АРВ*
Ha вкл. Q
• г
КВР
АЦИ
КЛ
+5, +15,-15В
+27, -5, -2,5В
—i ►
а)
СВД
/"
L
/г = 49,47 Гц
выход 4 ^
питание пуск БЛОКИРОВКА СБРОС
RS-232
Р) Спринт-М
АЦИ
Ш
б)
Рис. 2.7. Функциональная схема (а) и внешний вид (б) микропроцессорного автоматического
синхронизатора «СПРИНТ-М»
Измерительно-преобразовательная часть ИПЧ содержит: вторичные
измерительные трансформаторы ВИТН напряжений UT и Um; аналого-дискретные
преобразователи АДП синусоидальных напряжений в прямоугольные импульсы
длительностями, равными полупериодам изменений напряжений UT и Um, и время-
импульсный преобразователь ВИП; аналоговый переключатель — мультиплексор
МПЛ, подключающий к АЦП аналоговые сигналы; задающий (установочный)
элемент ЗЭ и формирователь тестовых сигналов ФТС.
Комплект выходных электромагнитных реле КВР, формирующих времяим-
пульсные воздействия на электродвигательные элементы изменения уставок (зада-
2.3. Микропроцессорный автоматический синхронизатор типа «СПРИНТ-М» 41
ющие элементы) АРЧВ турбины и АРВ синхронного генератора и дискретные
воздействия на включение выключателя Q генератора, алфавитно-цифровой
индикатор АЦИ и клавиатура КЛ образуют исполнительную часть ИЧ.
Бестрансформаторный источник питания ИП может подключаться к
переменному или к постоянному напряжению.
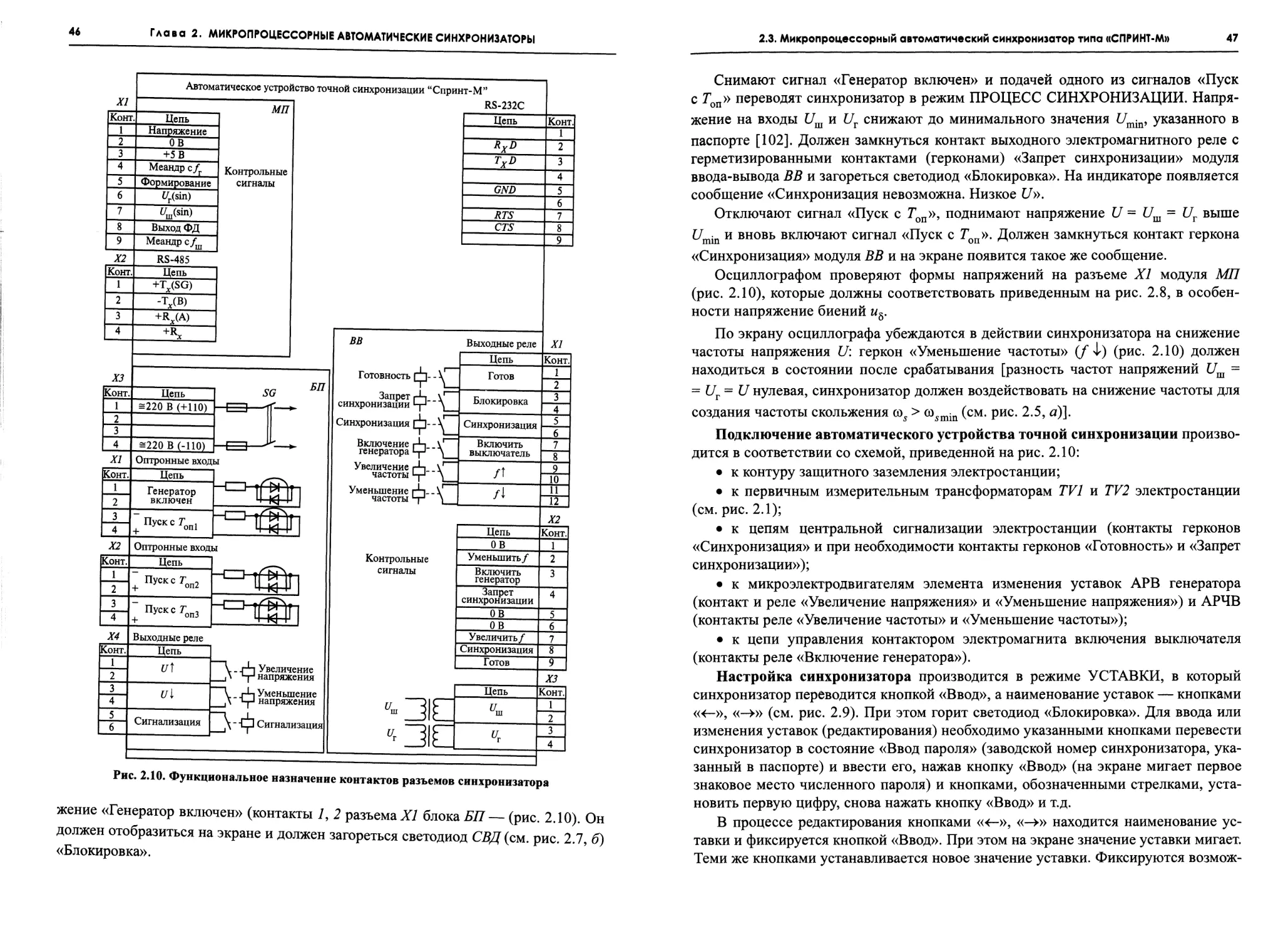
Выполнение и уставки. Автоматическое устройство точной синхронизации
типа «СПРИНТ-М» размещается в металлическом каркасе (рис 2.7, б) со
съемными крышками, в котором располагаются унифицированные конструктивные
блоки — модули микропроцессора МП, ввода информации и вывода управляющих
воздействий и модули источника питания, соединенные плоскими кабелями
(шинами) между собой и с разъемами, расположенными на торцах модулей для
подключения к внешним цепям. Передняя панель каркаса представляет собой
модуль клавиатуры и индикации, в котором расположены жидкокристаллический
алфавитно-цифровой индикатор АЦИ и клавиатура КЛ диалогового режима. На
лицевой панели находятся светодиоды сигнализации СВД и разъем типа RS-232
для подключения ПЭВМ при настройке АС, УЧС и УА — изменениях уставок
АУТС (см. рис 2.1):
• времени опережения (времени включения выключателя) в пределах Гоп =
= 0,l-s-l,0 с;
• минимально и максимально допустимых частот скольжения (см. рис 2.5, а),
при которых разрешается синхронизация:
A/min = ^miiA2*); 4/max =Лшах ^ 8опА2п Гоп)>
где 80П д — допускаемый автоматическим синхронизатором угол опережения
8оп.дтах = 2я/3;
• максимально допустимой относительной разности действующих значений
напряжений генератора и шин электростанции Д[/тах = 0,01+0,02;
• длительности импульсного воздействия на включение выключателя Ги =
= 1,1+1,0 с;
• длительностей импульсов Ти, 7^и паузы между времяимпульсными
воздействиями на АРВ генератора и АРЧВ турбины (см. рис 2.5, б);
• коэффициентов пропорциональности Ки, К, длительностей времяимпуль-
сных воздействий от разности амплитуд Д[/и и отклонения частоты скольжения /±fs
от установленной: Afs =fs -f (см. рис 2.5, а);
• установленной частоты скольжения (см. рис 2.5, а)
Jsy ~~ Vsmax —/sminy >
гдеобычно/5т1п=/5тах/5;
• максимальное время синхронизации Гтах и др.
Принцип действия синхронизатора. Автоматический синхронизатор
использует информацию непосредственно о текущем угле 5 сдвига фаз между напряже-
42
а в а 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
ниями игииш. Из напряжений £/ш и Ur формируются сигналы в виде
последовательностей прямоугольных импульсов (меандров) постоянных напряжений 1/кш и
UKT длительностями, равными периодам синхронной частоты Тс = Тш и частоты
напряжения генератора Тт (рис. 2.8). По ним формируется времяимпульсный
сигнал Ц,.ф» Длительностью, равной времени несовпадения /нс мгновенных значений
напряжений иш и иг по знаку, пропорциональному углу сдвига фаз между ними.
Времяимпульсный сигнал преобразуется в двоичный код.
Vt
У-в
Контакт
©
П г^п
1 ~т— i*~
т
l_D_Sn П П [
А
1—II IL
J—U—11 1 1
ш
. Ги
. 5»
\\\
I
W
п®
4 1 ►
п@
1 1 ►
t
1©
1 ►
t
►
t
Рис. 2.8. Осциллограммы сигналов, выведенных на контрольный разъем XI модуля МП (в кру-
ГГ!Г.а_?_Н_Н°Мер К0НТаСТа раЗЪема> и Управляющего воздействия на включение выключа-
теля генератора
2.3. Микропроцессорный автоматический синхронизатор типа «СПРИНТ-М» 43
Из цифрового сигнала об угле сдвига фаз численным дифференцированием
формируются сигналы информации о частоте скольжения синхронного генератора
(Os(nT) и ускорения as{nT) его вращения.
Угол опережения 80П (пТ) вычисляется по уравнению (2.1) равнопеременного
вращения генератора при его подготовке к включению на параллельную работу.
Автоматический синхронизатор клавиатурой может устанавливаться в
следующие режимы (рис 2.9):
• КОНТРОЛЬ — производится контроль всех подводимых к устройству
сигналов с непосредственным отображением текущих значений контролируемых
величин;
• УСТАВКИ — производится ввод или изменения установленных значений
контролируемых величин — уставок синхронизатора;
• АРХИВ СОБЫТИЙ — просмотр всех зафиксированных в памяти
микропроцессора параметров последних десяти процессов синхронизации;
• ПРОЦЕСС СИНХРОНИЗАЦИИ — производится автоматическая
синхронизация генератора.
Первые три режима диалоговые: устанавливаются кнопками «Ввод» и «Выход»
клавиатуры. Затем кнопками, обозначенными стрелками (см. рис 2.7, б)
последовательно вызываются на индикатор значения уставок или контролируемых
сигналов (рис 2.9).
После ввода уставок и контроля входных сигналов включения питания
автоматически производится тестовый контроль и при его успешности на экране
индикатора появляется сигнал «Готов к работе».
Действие синхронизатора. В режим ПРОЦЕСС СИНХРОНИЗАЦИИ
синхронизатор вводится внешним дискретным сигналом «Пуск с Гоп». При
несоответствующей установленной разности действующих значений напряжений At/max или
частоте скольжения^ > |±5| Гц на экране появляется надпись «Запрет
синхронизации» и включается светодиод БЛОКИРОВКА (см. рис 2.7, б), а при
возможности синхронизации — высвечивается сигнал «Синхронизация». Начинаются
процессы уравнивания амплитуд напряжений UT и Um и частоты скольжения cos с
установленной со (см. рис 2.5, а), сопровождаемые надписями «Увеличить с7»,
«Увеличить/с» или «Уменьшить [/», «Уменьшить^»: функционируют уравнители
амплитуд УА и частоты скольжение УЧС (см. рис 2.1). Они формируют время-
импульсные воздействия на элементы изменения уставок АРВ и АРЧВ.
На верхней строке двухстрочного АЦИ выводится направление изменения
частоты вращения турбины, а на нижней — направление измерения напряжения. При
этом вычисляется действующее значение напряжения синхронного генератора как
квадратный корень из суммы квадратов двенадцати дискретных мгновенных
значений. Частота вращения турбины вычисляется по частоте напряжения
возбужденного синхронного генератора или измерительного — тахогенератора или по
импульсным сигналам электромагнитного датчика частоты вращения, установлен-
44
Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
Рис. 2.9. Структура диалога устройства
«СПРИНТ-М»:
1 — переход на нижестоящий уровень и,
подтверждение выбора индицируемого действия или
корректируемого параметра осуществляется по нажатию
кнопки «Ввод»; 2 — циклический перебор
состояний в пределах выбранного уровня или параметров
в пределах выбранной группы осуществляется
кнопками «<-» и «->»; 3 — переход на
вышестоящий уровень диалога осуществляется по нажатию
кнопки «Выход»
<Ввод»
СКорр е ктировкгГ)
ного на статоре у вала генератора и возбуждаемого вращающимся якорем,
расположенным на валу турбины — так называемой «звездочкой».
После сближения амплитуд и достаточного приближения частоты скольжения
к со,у формируется управляющее воздействие УВ (рис. 2.10) длительностью Ти на
включение выключателя синхронного генератора Q (см. рис. 2.1).
После завершения процесса синхронизации энергонезависимой памятью ОЗУ
фиксируются: углы опережения 8оп и включения 5ВКЛ (бвкл - угол сдвига фаз
2.3. Микропроцессорный автоматический синхронизатор типа «СПРИНТ-М» 45
между напряжениями UT и Um в момент замыкания контактов выключателя —
момент включения генератора), напряжения £/г, С/ш, частоты/г и/ш =/с и
включение выключателя. Если синхронизация не производится за время, меньшее
установленного Ттях9 то производится повторный сигнал «Пуск с Тои».
Особенностью АУТС типа «СПРИНТ-М» является возможность
синхронизации гидрогенератора при его частотном пуске в режим синхронного компенсатора,
на его выбеге [22]. При этом генератор разгоняется до частоты вращения,
превышающей номинальную, и отключается. Синхронизатор формирует управляющее
воздействие на его включение после снижения частоты скольжения до
установленного значения со5у (см. рис 2.5, а).
Проверка, подключение, настройка и работа синхронизатора. Перед
установкой АУТС для его эксплуатации рекомендуется произвести проверку его
действия и технических характеристик в электролаборатории электростанции.
Питание устройства производится от сети переменного напряжения 220 В или от
аккумуляторной батареи электростанции, подключение к которой рекомендуется
через ЛС-фильтр нижних частот (R = 200-^-500 Ом; С = 50-И 00 мкФ) для
предотвращения воздействий пульсации напряжения во время подзарядки батареи.
После включения питания автоматически производится тестовый контроль и
высвечивается, как указывалось, сигнал «Готов».
Подробная информация о настройке и настройке АУТС типа «СПРИНТ-М»
содержится в его паспорте [102].
Присоединение автоматического устройства точной синхронизации к
переменным напряжениям Um и UT производится согласно схеме его подключения [102].
На рис 2.8 обозначены номера зажимов контрольного разъема модуля МП, к
которым подведены: напряжения иш(7)иит (б); сформированные из них аналого-диск-
ретным преобразователем напряжения прямоугольной формой (меандры) UKm (9)
и [/кг (4); напряжения С/иф времяимпульсного преобразователя (8) и напряжения
биений иь = иш - ит (1); показано и дискретное управляющее воздействие UyB
длительностью Ги на включение генератора при правильном подключении.
Проверка автоматического синхронизатора производится в диалоговом
режиме оператором с подключенной ПЭВМ и при наличии осциллографа. Для проверки
работоспособного состояния синхронизатора рекомендуется соединить между
собой входы напряжений Um и UT и подключить их к источнику переменного
напряжения С/, подключить синхронизатор к источнику питания и включить его ключом SG.
Синхронизатор оказывается в режиме ПРОЦЕСС СИНХРОНИЗАЦИИ: проходят
внутренние тесты и на экран выводятся значения Um=zUT=U\ fm = fT.
Кнопкой «ВВОД» и кнопками, обозначенными стрелками «<—», «—»»,
переходят в состояние КОНТРОЛЬ и убеждаются, что указанные действующие значения
и частоты напряжений одинаковы (см. рис 2.9).
Проверяют дискретные сигналы ДС (см. рис 2.7, а): на индикаторе должны быть
логические нули. Подают дискретный сигнал — постоянное или переменное напря-
46
Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
XI
Автоматическое устройство точной синхронизации "Спринт-М"
IKoht.i
Цепь
Напряжение
Х2
[Конт.
0B
+5 В
Меандр с/
Формирова
tfoin)
Чп№)
Выход ФД
Меандр с/
МП
Контрольные
сигналы
RS-485
Цепь
+TY(SG)
-тх(В)
+R*(A>
X?
fR*
|Конт.
Х7
IKoht.1
1
Цепь
=220 В (+1Ю)
=220 В (-110)
SG
-Э-
Оптронные входы
Цепь
Генератор
включен
Пуске Гоп1
Х2
Конт.
Х4
[Конт.
стп
таг
Оптронные входы
Цепь
Пуске Топ2
Пусков
1гИт
4-J44J
1^
ш
Выходные реле
Цепь
U\
ul
RS-232C
Цепь
RXD
[Конт.|
Г*Д
GND
RTS
CTS
БП
ВВ
Выходные реле
V. j-Ц Увеличение
J Л V1 напряжения
Сигнализация Р^^
Сигнализация
Готовность □- - ^
Запрет гЦ \' I
синхронизации "-т-1"" \|
Синхронизация Г> - ^
Включение г-Ц
генератора Lj-1
Увеличение Дп \l I
частоты "-р1'" \\
U
Уменьшение гЦ. _ \п
частоты ltj \_
JJT7
Цепь
Готов
Блокировка
Синхронизация
Включить
выключатель
/Т
/I
Контрольные
сигналы
Цепь
|Конт
10
ТГ
12
Х2
0В
Уменьшить/
Включить
генератор
Запрет
синхронизации
0В
0В
Увеличить/
Синхронизация
Готов
"-за
Цепь
U
|Конт.
X?
uCoht.I
Рис. 2.10. Функциональное назначение контактов разъемов синхронизатора
жение «Генератор включен» (контакты 7, 2 разъема XI блока БП — (рис 2.10). Он
должен отобразиться на экране и должен загореться светодиод СВД (см. рис 2.7, б)
«Блокировка».
2.3. Микропроцессорный автоматический синхронизатор типа «СПРИНТ-М» 47
Снимают сигнал «Генератор включен» и подачей одного из сигналов «Пуск
с Гоп» переводят синхронизатор в режим ПРОЦЕСС СИНХРОНИЗАЦИИ.
Напряжение на входы Um и UT снижают до минимального значения C/min, указанного в
паспорте [102]. Должен замкнуться контакт выходного электромагнитного реле с
герметизированными контактами (герконами) «Запрет синхронизации» модуля
ввода-вывода В В и загореться светодиод «Блокировка». На индикаторе появляется
сообщение «Синхронизация невозможна. Низкое U».
Отключают сигнал «Пуск с Топ», поднимают напряжение U = Um= UT выше
t/min и вновь включают сигнал «Пуск с Гоп». Должен замкнуться контакт геркона
«Синхронизация» модуля ВВ и на экране появится такое же сообщение.
Осциллографом проверяют формы напряжений на разъеме XI модуля МП
(рис 2.10), которые должны соответствовать приведенным на рис 2.8, в
особенности напряжение биений иъ.
По экрану осциллографа убеждаются в действии синхронизатора на снижение
частоты напряжения U: геркон «Уменьшение частоты» (f i) (рис 2.10) должен
находиться в состоянии после срабатывания [разность частот напряжений Um =
= UT= U нулевая, синхронизатор должен воздействовать на снижение частоты для
создания частоты скольжения ш5 > co5min (см. рис 2.5, а)].
Подключение автоматического устройства точной синхронизации
производится в соответствии со схемой, приведенной на рис 2.10:
• к контуру защитного заземления электростанции;
• к первичным измерительным трансформаторам TV1 и TV2 электростанции
(см. рис 2.1);
• к цепям центральной сигнализации электростанции (контакты герконов
«Синхронизация» и при необходимости контакты герконов «Готовность» и «Запрет
синхронизации»);
• к микроэлектродвигателям элемента изменения уставок АРВ генератора
(контакт и реле «Увеличение напряжения» и «Уменьшение напряжения») и АРЧВ
(контакты реле «Увеличение частоты» и «Уменьшение частоты»);
• к цепи управления контактором электромагнита включения выключателя
(контакты реле «Включение генератора»).
Настройка синхронизатора производится в режиме УСТАВКИ, в который
синхронизатор переводится кнопкой «Ввод», а наименование уставок — кнопками
«<-», «->» (см. рис 2.9). При этом горит светодиод «Блокировка». Для ввода или
изменения уставок (редактирования) необходимо указанными кнопками перевести
синхронизатор в состояние «Ввод пароля» (заводской номер синхронизатора,
указанный в паспорте) и ввести его, нажав кнопку «Ввод» (на экране мигает первое
знаковое место численного пароля) и кнопками, обозначенными стрелками,
установить первую цифру, снова нажать кнопку «Ввод» и т.д.
В процессе редактирования кнопками «<-», «—»» находится наименование
уставки и фиксируется кнопкой «Ввод». При этом на экране значение уставки мигает.
Теми же кнопками устанавливается новое значение уставки. Фиксируются возмож-
48 Глава 2. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ СИНХРОНИЗАТОРЫ
ные установленные значения Гтах, ДС/тах, Д/тах, 8оптах и других (см. рис 2.9)
указанных в паспорте АУТС типа «СПРИНТ-М» [102].
Из режима УСТАВКИ синхронизатор выводится кнопкой «Выход».
Процесс синхронизации, как указывалось, начинается с подачи входного
дискретного сигнала «Пуск с Гоп». При его отсутствии синхронизатор находится в
состоянии слежения: ведется постоянный контроль за действующими значениями
(амплитудами) и частотами синусоидальных напряжений Um и UT, которые
отображаются на верхней и нижней строках АЦИ.
По сигналу «Пуск с Гоп» на верхней строке экрана появляется слово
«Синхронизация», сохраняющееся в течение всего процесса подготовки и включения
генератора на параллельную работу длительностью, меньшей установленного Гтах.
Регулирование напряжения и частоты вращения в процессе синхронизации
отображается на экране АЦИ обозначением их изменений: на верхней строке
частоты, на нижней — амплитуды.
После успешной синхронизации — прихода дискретного сигнала о
подключении генератора к шинам электростанции (контакты 7, 2 разъема XI модуля БП —
см. рис 2.10), в верхней строке индикатора высвечивается действующее значение
и частота напряжения £/ш, а на нижней — сообщение «Генератор подключен».
Вопросы для самопроверки
1. В чем состоит различие между самосинхронизацией и точной синхронизацией синхронного
генератора?
2. Какова роль асинхронного и реактивного вращающих моментов синхронного генератора в
процессе его самосинхронизации?
3. В чем состоят условия точной автоматической синхронизации генераторов? Как они
обеспечиваются?
4. Каким воздействиям подвергается синхронный генератор при самосинхронизации и точной
синхронизации?
5. При каких условиях ударные воздействия на генератор при его включении способом точной
синхронизации не оказываются?
6. В какие моменты времени должны подаваться воздействия автоматического синхронизатора на
привод выключателя и включаться выключатель синхронного генератора при его точной
автоматической синхронизации?
7. Чем по принципами действия автоматическое синхронизаторы различаются?
8. По какому аналитическому соотношению микропроцессорной автоматический синхронизатор
вычисляет угол опережения 50П?
9. Какие известны микропроцессорные автоматические синхронизаторы?
10. Каким способом в микропроцессорных автоматических синхронизаторах выравниваются
амплитуды напряжения холостого хода генератора и напряжения на шинах электростанции? Как
определяются их значения?
11. Что представляет собой напряжение биений? Как оно используется в микропроцессорных
автоматических синхронизаторах?
12. Как микропроцессорные синхронизаторы вычисляют частоты напряжений генератора и шин
электростанции? Почему не допускается их выравнивание?
Вопросы для самопроверки
49
13. Каковы относительные значения минимальной co5min и максимальной сотах разностей частот
напряжений генератора и шин электростанции, определяющих зону синхронизации?
14 Каким условием ограничивается допустимая для воздействия синхронизатора на выключатель
генератора разность частот его напряжения и напряжения на шинах электростанции?
15 В какой момент времени — в момент воздействия синхронизатора на привод выключателя или
в момент его включения — контролируется микропроцессорными синхронизаторами допустимая
разность частот?
16 Что понимается под устойчивостью автоматической синхронизации генератора /
\1. Как микропроцессорными синхронизаторами вычисляется ускорение вращения синхронного
генератора при его подготовке к включению на параллельную работу с ЭЭС?
18. Какими способами микропроцессорные автоматические синхронизаторы вычисляют угол сдвига
фаз между напряжениями генератора и шин электростанции?
19 Какие воздействия на автоматические регуляторы возбуждения и частоты вращения генератора
оказывает автоматический синхронизатор для выравнивания амплитуд напряжении генератора
и шин электростанции и ввода разности их частот в зону синхронизации w5min <(os< co5max.
20. Объяснить информацию, выводимую на экран дисплея ПЭВМ микропроцессорным
автоматическим синхронизатором типа АС-М2 (см. рис. 2.6)?
Глава третья
МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ
РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
СИНХРОННЫХ ГЕНЕРАТОРОВ
3.1. Современное возбуждение генераторов
В настоящее время применяются следующие виды возбуждения синхронных
генераторов:
• тиристорное независимое возбуждение (ток /в) с кольцами ротора К,
щетками Щ и управляемым от автоматического регулятора возбуждения
пропорционально-дифференциального («сильного») действия АРВ СД тиристорным
преобразователем VST (импульсные токи включения тиристоров /и в) в цепи обмотки
возбуждения LG синхронного генератора G (рис 3.1, я), питаемой от генератора
возбудителя GE с самовозбуждением (ток 1В в) — тиристорный преобразователь
VSTL в цепи обмотки его ротора LGE, управляемый от АРВ ПД
(пропорционального действия) и трансформатор TL с диодным выпрямителем VS начального
возбуждения (от трансформатора собственных нужд ТСН);
Рис. 3.1. Схемы тиристорного независимого (а) и бесщеточного (6) возбуждения синхронного
генератора
3.1. Современное возбуждение генераторов
51
• тиристорное самовозбуждение синхронного генератора G (на рис. 3.1. а
не показано) с питанием преобразователя VST от обмотки статора через
трансформатор (аналогичное самовозбуждению генератора GE с автоматом гашения поля ASV)\
• диодно-тиристорное бесщеточное возбуждение с управляемым тиристорным
преобразователем VST в цепи обмотки возбуждения LGE обращенного
синхронного генератора GE с обмоткой возбуждения на его статоре (рис 3.1, б) и трех- или
многофазной обмоткой переменного тока на роторе, непосредственно
соединенной через вращающийся диодный выпрямитель VS с обмоткой возбуждения LG
синхронного генератора G с питанием тиристорного преобразователя VST,
управляемого от АРВ СД или АРВ ПД, от подвозбудителя GEA (генератора переменного
тока с возбуждением постоянным магнитом) или от ТСН.
Автоматические регуляторы подключаются ко вторичным обмоткам
первичных измерительных трансформаторов напряжения TV синхронного генератора G
или TVL генератора возбуждения GE.
Акционерным обществом (АО) «Электросила» разработан и выпускается
новый щит тиристорного возбуждения ЩВ (рис 3.2) типа 2П-2000-482 и его авто-
КМ4 I \
U^^->OtCH
Рис. 3.2. Современная схема тиристорного самовозбуждения синхронного генератора
52 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
матического регулирования [7]. Он содержит два взаимозаменяемых (рабочий
и резервный) тиристорных преобразователя Ul9 U2 (в обозначениях
разработчиков) и два микропроцессорных автоматических регулятора возбуждения второго
поколения RV1, RV2 {АРВ СД— сильного действия на рис 3.1, а) типа АРВ-М,
разработанного совместно ГУП ВЭИ и АО «Электросила» [10].
Тиристорный преобразователь не содержит последовательно соединенных
тиристоров, но предполагает параллельное соединение трех преобразовательных
мостов с принудительным охлаждением для возможности применения на
генераторах мощностью до 1000 МВт. Преобразователи питаются от трансформатора Г,
подключенного к генератору G (схема самовозбуждения). Предусмотрен
выпрямитель UE (VS на рис 3.1, а) начального возбуждения, подключаемый контактами
КМ2—КМ4 к собственным нуждам (СН) электростанции. В цепи возбуждения
предусмотрены автомат гашения поля QE (ASV ш рис 3.1, а), контакт КМ1
подключения к обмотке возбуждения резистора R (при самосинхронизации
генератора), динисторные разрядники FVn резистор (шунт) RS — измерительный
преобразователь тока возбуждения в сигнал информации для АРВ.
На рис 3.2 показан сенсорный дисплей А контроля и передачи информации в
АСУ ТП электростанции. Разъединители QS1—QS6 служат для подключения
одного из двух тиристорных преобразователей £//, U2 и регуляторов RV1, RV2 к
цепям возбуждения.
Источниками информации автоматических регуляторов служат, как обычно,
первичные измерительные трансформаторы напряжения TV1, TV2 и тока ТА1—ТА5.
Регуляторы воздействуют на возбудители через разработанную цифровую
исполнительную часть фазоимпульсного управления тиристорами.
Такая же схема тиристорного возбуждения и его автоматического регулирования
предлагается и Федеральным государственным унитарным предприятием (ФГУП)
НИИ «Электромаш» с разработанной микропроцессорной автоматической
комплексной системой управления и регулирования возбуждения типа «КОСУР» [11].
Схемы самовозбуждения и независимого возбуждения с микропроцессорным
управлением серий СТС-КОСУР и СТН-КОСУР (рис 3.3) предназначены для
питания автоматически изменяемым постоянным током обмотки возбуждения LG
синхронного генератора G во всех режимах его работы.
Тиристорные преобразователи U1 генератора и U2 возбудителя выполнены по
трехфазной мостовой схеме с одним сильноточным вентилем в плече. Тиристоры
защищены быстродействующими предохранителями, включенными в каждую
тиристорную ветвь. Вентиль имеет двухсторонний охладитель. На стороне
переменного тока установлено защитное устройство от перенапряжений, состоящее из
конденсаторов и резисторов. В зависимости от тока возбуждения синхронного
генератора тиристорные преобразователи соединяются параллельно.
Цифровое управление возбуждением полностью резервировано:
устанавливаются по два комплекта микропроцессорных модулей автоматического регулятора
возбуждения АРВ1—АРВ4, устройства управления возбуждением УУВ1—УУВ4 и
3.1. Современное возбуждение генераторов
53
Информация к
ЩУиАСУТП
IE
Рис. 3.3. Структурная схема системы независимого тиристорного возбуждения генератора типа
СТН-КОСУР
комплекты защит КЗВ1—КЗВ4 возбуждения синхронного генератора G и
генератора возбудителя GE.
Все модули программно реализованы на базе универсального 32-разрядного
микроконтроллера типа МС 68376, плат дискретного ввода/вывода на 24 входа и
24 выхода, измерительных преобразователей токов и напряжений генератора и
платы управления тиристорным преобразователем.
Все микропроцессорные устройства объединены вычислительной сетью типа
CAN и могут работать в составе АСУ ТП энергоблока.
Настройка автоматических регуляторов возбуждения и установка параметров
защит осуществляется с универсального пульта оператора (УНИ-ПО) либо с
ПЭВМ, подключенной к контроллеру через разъем типа RS-232.
На рис 3.3 показаны контакты КМ1, КМ2 контакторов, замыкающие обмотки
возбуждения LG и LGE через защитные (гасительные) резисторы Rl,R2n автомат
гашения поля ASV в цепи возбуждения генератора GE возбудителя. Показаны
также первичные измерительные трансформаторы напряжения TV1, TV2, токов
ТА1—ТАЗ, трансформаторы Т1 питания указанных комплектов
микропроцессорных модулей и Т2 питания цепи самовозбуждения генератора возбудителя GE и
магистраль передачи информации на щит управления ЩУ и в АСУ ТП.
54
Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
3.2. Общая функциональная схема автоматического
регулирования возбуждения
Схема состоит из двух основных функциональных частей:
измерительно-преобразовательной ИПЧи исполнительной ИЧ (рис. 3.4). Особенностью регулятора
АРВ-М является наличие в нем логической функциональной части ЛЧ,
координирующей использование сигналов по производным режимных параметров.
В соответствии с алгоритмом функционирования ИПЧ регулятора содержит три
основных измерительных органа (ИО), подключенных к первичным
измерительным трансформаторам напряжения TV1 и тока ТА 1: напряжения ИОН, изменения
частоты ИОИЧ я тока возбуждения ИОТВ. Измерительный орган напряжения
формирует сигналы информации об отклонении ДС/, скорости изменения U' ~ dUldt
действующего значения напряжения синхронного генератора и интегральной функ-
t—©—t
р , о
г' ^г
TV1
ТА1
VST 1И
К,
[*Г
Ф-
ТА2
©"
От ПРНж РМ
ИПЧ
ИОН
AU
U'
\LUdt
ИОИЧ]
ИОР
и
AT
ИОТВ\
ЭУ
А'/
/'
/:
AL
К2
t.
ОтАУТС
ЭИУ
г.пр
SM
лч
ИЧ
ЦФИУ\
perv '
Рис. 3.4. Функциональная схема автоматической системы регулирования возбуждения
3.3. Микропроцессорные автоматические регуляторы тиристорного возбуждения 55
ции отклонения напряжения jA U dt, а ИОИЧ— сигналы по изменению Д'/ и
производной частоты f'~df/dt.
Измерительный орган тока возбуждения кроме сигнала /^, отображающего
скорость изменения ЭДС синхронного генератора dE /dt ~ dljdt, формирует
сигналы по отклонению тока возбуждения от номинального Д/в и по интегральной
функции [Д/ dt, необходимые для поддержания тока возбуждения на неизменном
уровне в режиме выбега синхронных генераторов атомных электростанций (по
технологическим условиям останова турбоагрегата), для разгрузки синхронного
генератора по генерируемой мощности соответственно и для ограничения
кратности форсировки возбуждения генератора.
На рис 3.4 показан дополнительный измерительный орган реактивного и
активного токов ИОР и AT и элемент изменения уставки ЭИУ регулятора.
Формируемые ими сигналы используются для предотвращения нарушения синхронной
статической устойчивости электропередачи в режиме потребления реактивной
мощности синхронным генератором и для его автоматической точной
синхронизации (от АУТС) и воздействий от подсистемы АСУ ТП регулирования напряжения
и реактивной мощности ПРИ и РМ электростанции.
Сумма сигналов измерительно-преобразовательной части ИПЧ превращается в
регулирующее воздействие U (пТ) исполнительным элементом цифрового фазо-
импульсного управления ЦФИУ, формирующим импульсные токи включения
тиристоров возбудителя /и в — управления тиристорным преобразователем VST
(см. также рис 3.1, а, б).
3.3. Микропроцессорные автоматические регуляторы
тиристорного возбуждения синхронных генераторов
Разработаны микропроцессорные автоматические регуляторы возбуждения
синхронных генераторов нового поколения двух типов, а именно: АРВ-М,
созданный совместно ГУП ВЭИ и АО «Электросила» [10], и КОСУР-Ц, входящий в
состав комплекса оборудования систем управления и регулирования (КОСУР),
созданный во ФГУП НИИ Электромаш [11].
Автоматический регулятор типа АРВ-М функционирует на микроконтроллере
Е167-ЗИМ, выполненном на быстродействующем микропроцессоре SAB C167CR-
LM фирмы Siemens, а регулятор типа КОСУР-Ц — на микропроцессоре фирмы
Motorola типа МС68376. Они обеспечивают эффективное регулирование
возбуждения синхронных генераторов и решение общеэнергосистемных задач, реализуя
как пропорционально-дифференциальный (ПД-), так и пропорционально-интег-
рально-дифференциальный (ПИД-) алгоритмы автоматического регулирования.
56 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
Функции автоматических регуляторов. Кроме собственно автоматического
регулирования возбуждения автоматические регуляторы выполняют следующие
функции:
• поддерживают напряжение на шинах электростанции с малым статизмом
(при ПД-алгоритме) или астатически (при ПИД-алгоритме);
• поддерживают заданную генерируемую реактивную мощность генератора;
• обеспечивают максимально возможную пропускную способность
электропередачи, статическую и динамическую устойчивость электроэнергетической
системы и релейную форсировку возбуждения.
Регуляторы формируют ряд управляющих воздействий по ограничению
режимных параметров и выполнению технологических функций.
Автоматические регуляторы осуществляют ограничения:
• перегрузки генератора током статора и ротора с временем, зависимым от
степени перегрузки;
• потребляемой генератором реактивной мощности при снижении
возбуждения, зависящей от его активной мощности, не допуская нарушения статической
устойчивости ЭЭС;
• допустимого по условию насыщения магнитопровода трансформатора блока
генератор — трансформатор соотношения амплитуды и частоты напряжения.
Основными технологическими функциями регуляторов являются:
• осуществление начального возбуждения;
• выравнивание действующих значений напряжений генератора и шин
электростанции при его включении способом точной автоматической синхронизации;
• обеспечение режима зарядки линии электропередачи;
• автоматическая разгрузка генератора по реактивной мощности;
• перевод тиристорного преобразователя в инверторный режим для развозбуж-
дения генератора при нормальном останове;
• воздействие на АГП в аварийном режиме с последующим переводом
тиристорного преобразователя в инверторный режим;
• автоматические переключения без толчка тока возбуждения на резервный
АРВ;
• быстродействующее снятие импульсов управляющих тиристорами токов при
КЗ на стороне постоянного тока тиристорного преобразователя.
Функциональная схема, принципиально общая для микропроцессорных
автоматических регуляторов типов АРВ-М и КОСУР-Ц, приведена на рис 3.5. Она
состоит из вычислительной части ВЧ, содержащей два взаимно резервируемых
микропроцессора МП1, МП2, программно реализующих измерительные органы
регуляторов (см. рис 3.4), измерительно-преобразовательной ИПЧи исполнительной ИЧ
функциональных частей. В цифровых устройствах на микропроцессорах
измерительно-преобразовательная и исполнительная функциональные части обычно
объединяются под общим названием УСО — устройство связи с управляемым объектом.
Измерительно-преобразовательная часть содержит активные [3] вторичные
измерительные трансформаторы напряжения ИТН и тока ИТТ9 пассивные мало-
инерционные (Т= 1 мс) первого порядка фильтры нижних частот ФНЧи элементы
3.3. Микропроцессорные автоматические регуляторы тиристорного возбуждения 57
-гНЯТЯМ
\ФНЧУ
ИПЧ I
W#t£>j
Мддяр>1
д#сг£>!
иттн
ФНЧ\
АИТ^х
вч
МП1
\ион\
\иоич\
щ
эк
МП2
ПОР
иАТ
ИОУ
иотв
экм
■уЛмпл
ИЧ
:£> эгр \]цфю\
м
ЦАП\
ЫэгрИ
випу
\-^ХКВР
S
ко
КЭИУ
ДУВ
Рис. 3.5. Функциональная схема микропроцессорных автоматических регуляторов возбуждения
синхронных генераторов
аналогового измерительного преобразования напряжений и токов АИН и АИТ,
формирующие сигналы в виде:
• чисто синусоидальных напряжений, пропорциональных фазным
напряжениям и токам синхронного генератора, используемых затем программными
измерительными органами вычислительной части;
• постоянных напряжений, пропорциональных напряжениям генератора и на
шинах электростанции;
• импульсных напряжений (длительностью Гин = 30 мкс) управления
прерываниями микропроцессоров МП1, МП2.
Они формируются усилителями, трехфазными выпрямителями с пассивными
или активными [3] фильтрами нижних частот ФНЧ и аналого-дискретным
преобразователем АДП9 входящими в состав элементов АИН и АИТ. На схеме показаны
элементы ввода дискретных сигналов ВДС в виде малогабаритных реле с
герметизированными контактами (герконов).
Исполнительная часть представляет собой разработанное устройство
цифрового фазоимпульсного управления ЦФИУ тиристорами возбудителя синхронного
генератора и содержит элементы аналогового гальванического отделения
(развязки) ЭГР вычислительной части ВЧ от устройства ЦФИУ и выходные герконы
вывода дискретных управляющих воздействий ДУВ (комплект выходных реле
КВР). Предусмотрены: цифроаналоговый преобразователь ЦАП для подключения
(через ЭГР) осциллографа 0\ и времяимпульсный преобразователь ВИП
воздействий на элемент изменения уставки ЭИУ АРЧВ.
Дискретные управляющие воздействия обеспечивают выполнение
регуляторами указанных функций по ограничению режимных параметров (генерируемой,
и, особенно, потребляемой реактивной мощности и др.). технологических
функций (управление начальным возбуждением и гашение поля генератора) и
автоматической защиты управляемых тиристорных преобразователей возбудителя.
58 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
Регуляторы имеют развитой программно-аппаратный контроль исправности
всех его частей. Элементы контроля ЭК формируют сигналы неисправностей,
поступающие в элемент коммутации ЭКМ выходных сигналов микропроцессоров,
который переводит вычислительные операции на резервный микропроцессор или
выводит регулятор из действия.
Основной группой программ комплекса математического обеспечения
регуляторов являются программы автоматического регулирования возбуждения
синхронного генератора.
Аппаратная структура регулятора типа АРВ-М. Микропроцессорный
автоматический регулятор возбуждения синхронных генераторов типа АРВ-М
представляет собой совершенно новое современное автоматическое устройство,
существенно отличающееся от регулятора типа АРВ-СДМ [1]:
• малыми габаритными размерами аппаратной части;
• значительно меньшим количеством и номенклатурой комплектующих изделий;
• модульным построением;
• существенным упрощением наладки, настройки и обслуживания.
Автоматический регулятор выполнен в виде кассеты модулей фирмы RITTAL
«Евромеханика» 100x160 мм, На рис 3.6 они показаны с принятыми
разработчиками позиционными обозначениями.
Модуль микроконтроллера E167-3UM является главным. В его состав входят:
• микропроцессор SAB-C167-CR-LM с ПЗУ объемом 1 Мбайт и ОЗУ объемом
256 кбайт;
XI
Х2
DI-AT96
DI-AT96 |
1
АРВ-М
DO-AT96 \
L
I ВВ-АТ96 \
\cvt,
\ХТ2
PAS \
—►
LC,
XI
ХТ1
S1
*
E167-3UM
1
i
ее
PS
«**•
*
>
'
1 АО-АТ96 |
MP |
1 тс |
т*»
ХЗ
Х4
Х5
-
*
Х6
Х9
хю 1
Рис. 3.6. Структура аппаратных средств микропроцессорного регулятора
3.3. Микропроцессорные автоматические регуляторы тиристорного возбуждения 59
ATVL1
DAU
*ab
*-",
be
Рис. 3.7. Схема общей аналоговой части измерительных органов напряжения и изменения частоты
• два 12-разрядных 8-канальных аналого-цифровых преобразователя (АЦП) с
временем 2 мс формирования двоичного кода одного дискретного мгновенного
значения входных напряжений -5 ... 0 ... +5 В;
• один 12-разрядный 8-канальный цифроаналоговый преобразователь (ЦАП)
с выходными напряжениями -5 ... 0 ... +5 В;
• гальванически развязанные (оптоизолированные) порты: разъемы типов
RS-232C связи с ПЭВМ, RS-485 связи с сенсорным дисплеем и с АСУ ТП
электростанции, интерфейс типа CAN обмена информацией с другим регулятором,
интерфейс типа SP1 с пультом местного управления регулятором;
• 8-разрядные параллельные входной и выходной порты и порт связи с
объединительной платой (местной шиной) типа АТ96.
Программное управление обеспечивает выполнение модулем задач
функционального микропроцессора и логического контроллера. Он производит аналого-
цифровое преобразование входных информационных процессов, выделяет из них
входные сигналы программными частотными фильтрами, производит их
программное измерительное преобразование и формирование сигналов измерительных
органов, выполняет все программные функции по реализации алгоритмов
автоматического регулирования, производит тестирование и самодиагностику и выдает
сигналы выходной информации и формирует управляющие воздействия.
Модуль (ячейка) преобразования входных (от первичных измерительных
трансформаторов) напряжений и токов CVT (разъем ХТ2), содержит:
• малогабаритные вторичные измерительные активные трансформаторы
напряжения ATVL и тока ATAL (рис 3.7) типов LV25-P и LA25-NP зарубежного
производства фирмы LEM, функционирующие с использованием гальваномагнитного
генератора ЭДС Холла, пропорциональной индукции намагничивания магнитопро-
вода трансформатора, в цепи отрицательной обратной связи интегрального
операционного усилителя [3]; трансформатор напряжения, например ATVL1
представляет собой трансформатор тока ATAL1, подключенный к междуфазному напряжению
через балластный резистор R6 значительного сопротивления, преобразующий
60 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
источник ЭДС, каким является первичный измерительный трансформатор
напряжения, например, иаЪ в источник тока 1а;
• резисторы нагрузки RH (рис 3.7) активных измерительных трансформаторов
тока АТАЫ, ATAL2, номинальные напряжения на которых -2,5 ... 0 ... +2,5 В;
• малоинерционные (с постоянной времени т = 0,5 мс) пассивные ЛС-фильтры
нижних частот первого и второго порядков, задерживающие гармонические
составляющие повышенных частот и импульсные помехи, возникающие при
коммутационных операциях в силовых цепях.
Ячейка обработки входных аналоговых информационных процессов PAS
содержит:
• активные [на интегральных операционных усилителях (ИОУ)] повторители
напряжений DAU(см. рис 3.7) на выходах указанных 7?С-фильтров;
• аналого-дискретные преобразователи (АДП), формирующие импульсные
сигналы (ииа -иИС)в моменты времени переходов мгновенных напряжений
генератора иаЬ - иса через нулевые (от отрицательных к положительным) мгновенные
значения [1,3];
• однофазный выпрямитель напряжения шин электростанции и активный
частотный фильтр нижних частот.
Ячейки CVT и PAS образуют аппаратную часть измерительных органов
напряжения и изменения частоты регулятора.
Модули ввода (разъемы XI, Х2) DI-AT96 и вывода (разъемы ХЗ, Х4) DO-AT96
дискретных и цифровых соответственно 16-входных и 32-х выходных сигналов
представляют собой входные оптроны, фототранзисторы и выходные транзисторы
которых управляют малогабаритными электромагнитными реле с магнитоуправля-
емыми герметизированными контактами (герконами); состоянием выходных
транзисторов управляет микроконтроллер по системной шине ВВ-АТ96.
Управление индикатором, светодиодами и переключателями производится
микроконтроллером AT90S8515 фирмы Atmel, а обмен информацией с
микроконтроллером регулятора производится по последовательному интерфейсу SP1 (на рис 3.6
не показан).
Интерфейсы типов CAN {разъем Х9) и RS-485 (разъем Х10) служат, как
указывалось, для обмена информацией между контроллерами рабочего и резервного
АРВ-М и для передачи информации и управления регулятором от сенсорного
дисплея А (см. рис 3.2), установленного на щите возбуждения ЩВ.
Сенсорный дисплей — это терминал ОР7100 фирмы Z-WORD, у которого
дисплей совмещен с программируемой клавиатурой. Предусмотрены следующие
экраны: основной, меню, настроек и переменных величин (сигналов), памяти
микроконтроллера и цифроаналоговых преобразователей.
Ячейка аналогового вывода АО-АТ96 (разъем Х5) служит для вывода
аналоговых сигналов и содержит 8-канальный 12-разрядный ЦАП, входные цифровые
сигналы в который поступают от микроконтроллера по шине ВВ-АТ96, а выходные
аналоговые сигналы представляют собой напряжения, изменяющееся в пределах
-10 — +10В.
3.4. Программные измерительные органы микропроцессорных регуляторов
61
Модуль контроля регулятора MR следит за длительностью (5 мс) выполнения
цикла программы функционирования регулятора и формирует сигналы
информации о его состоянии как результат логической обработки информации
поступающей от микроконтроллера.
Ячейка перекрестных связей СС обеспечивает электрические соединения
микроконтроллера и аппаратной части регулятора: содержит разъемы плоских
кабелей (шин) и микропереключатель задания конфигурации программного
обеспечения микроконтроллера.
Объединительная плата ВВ-АТ96 содержит розетки разъемов, в которые
устанавливаются штепсельные части разъемов рассмотренных модулей (ячеек)
регулятора и источника питания PS подключаемого выключателем S1 (разъем ХТ1)
к напряжению генератора или аккумуляторной батарее электростанции.
Модуль фазоимпульсного управления тиристорным преобразователем
возбудителя генератора ТС (разъем Х6) формирует шесть оптоизолированных импульсных
токов включения тиристоров трехфазного мостового управляемого выпрямителя
(с возможностью перевода в инверторный режим). Он функционирует на основе
последовательного сдвигового регистра, на шести выходах которого и формируются
указанные импульсные токи включения тиристоров. Регистр управляется
микроконтроллером регулятора по арккосинусной зависимости угла включения тиристоров
от цифрового регулирующего воздействия, поскольку среднее значение
выпрямленного тока является косинусоидальной функцией угла включения.
Пульт местного управления содержит:
• семисегментный синтезирующий индикатор вывода диагностической
информации;
• светодиоды отображения состояния автоматического регулятора;
• переключатели управления состоянием автоматического регулятора;
• разъем типа RS-232 подключения ПЭВМ;
• гнезда цифроаналогового преобразователя для подключения осциллографа;
• кнопку перезапуска программы.
3.4. Программные измерительные органы
микропроцессорных регуляторов
Измерительные органы АРВ-М. В измерительных органах напряжения ИОН,
изменения частоты ИОИЧ, реактивного и активного тока ИОР и AT и тока
возбуждения ИОТВ синхронного генератора (см. рис 3.4) применены вторичные
измерительные трансформаторы напряжения и тока зарубежного производства фирмы
LEM, функционирующие с использованием гальваномагнитного генератора ЭДС
Холла (холлотрона) в цепи отрицательной обратной связи интегрального
операционного усилителя [3].
62 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
Измерительные органы напряжения и изменения частоты содержат общую
аналоговую аппаратную часть, состоящую (рис. 3.7):
• из двух активных измерительных трансформаторов напряжения в виде
трансформаторов тока ATAL1, ATAL2, подключенных к двум междуфазным
напряжениям иаЪ и иЬс генератора через балластные резисторы R6 значительного
сопротивления, преобразующие источники ЭДС (какими являются первичные
измерительные трансформаторы напряжений uab, ubc — на схеме не показаны), в
источники токов ia9 ic\
• из пассивных малоинерционных (постоянная времени т = 0,5 мс) ЛС-фильт-
ров нижних частот F, задерживающих гармоники повышенной частоты
напряжений генератора и импульсные помехи;
• из согласующих активных повторителей напряжений DAU, которые
подводят их к АЦП1, АЦП2 и сумматору DAW (рис. 3.8).
Программный измерительный преобразователь напряжения (ИПН)
(рис. 3.7, а) содержит интегральные аналого-цифровые преобразователи АЦП1,
АЦП2 с интервалом дискретизации Т= Гп/24, формирует (операция
суммирования SM1) дискретные мгновенные значения третьего междуфазного напряжения
ucJ<nT)> выполняет функцию цифрового выпрямителя трехфазной системы
ABS
Unp(nT)
б)
Рис. 3.8. Схемы программной части измерительного органа напряжения (а) измерительного
органа изменения частоты (б)
3.4. Программные измерительные органы микропроцессорных регуляторов 63
напряжений генератора — операция ABS выделения постоянной составляющей
суммы абсолютных дискретных мгновенных значений трех напряжений на
выходе сумматора SM2 нерекурсивным фильтром ZF.
Поскольку в последовательности указанных абсолютных дискретных
мгновенных напряжениях содержатся лишь четные гармоники, длительность импульсной
характеристики фильтра принята равной Гп/2 = 10 мс [3]. Фильтр представляет
собой программный интегратор-сумматор указанных абсолютных дискретных
мгновенных значений в течение времени Гп/2: дискретные мгновенные значения
четных гармоник исключаются. Особенность фильтра — импульсная,
характеристика в виде последовательности однополярных 8-функций, следующих через
каждый интервал дискретизации Г, которая обеспечивает выдачу информации о начале
процесса изменения действующего значения напряжения генератора уже через
один интервал Т = 0,83 мс. Дискретное изменение действующего значения
напряжения генератора отображается дискретной переходной характеристикой,
напоминающей дискретизованную экспоненту длительностью Гп/2 [3].
Измерительный орган напряжения программно формирует цифровые
сигналы информации об отклонении действующего значения напряжения от
предписанного AU(nT), о скорости его изменения U(nT) и интегральной функции
1АЩпТ). Он содержит элемент сравнения — сумматор SM3 в режиме вычитания
двоичного числа на выходе измерительного преобразователя напряжения (ИПН) и
числа, отображающего предписанное напряжение (уставку регулятора) U (пТ), и
выполняет программную функцию численного дифференцирования ZD и
интегрирования ZJ(рис. 3.8, а).
Измерительный орган изменения частоты по своему действию аналогичен
ранее применяемому в АРВ СДМ [1]. Его аппаратная часть содержит (рис. 3.8, б):
• аналоговый активный сумматор DAW, формирующий третье напряжение иса\
• три аналого-дискретных преобразователя АЦП, формирующих импульсные
сигналы ит, ииЫ иш в моменты времени перехода напряжений иа, иь, ис через
нулевые (от отрицательных к положительным) мгновенные значения [1].
В программной части используется счетчик СТ микропроцессора тактовых
импульсов N(nTT) частотой 1,25 МГц, управляемый указанными импульсными
сигналами. По фиксируемым в указанные моменты времени в начале и конце периода
числам импульсов N'a, N'b, N'c и N^9 N^9 N^ (см. рис. 2.4) программной частью
3 раза за период определяется его истинная длительность Гпи, вычисляется
(операцией деления 1/Тпм) обратное число, отображающее истинную частоту f{nT)
напряжения генератора; вычисляется (сумматором SM в режиме вычитания, см.
рис. 3.7, б) отклонение частоты Af(nT) от номинальной/ном(иГ), производится
численное дифференцирование сигнала Af(nT) — формирование сигнала по
производной частоты f'(nT) и полученная последовательность чисел, пропускаемая
через программное апериодическое звено — рекурсивный ФНЧ ZF 1-го порядка,
формирует сигнал по изменению частоты A'f(nT).
64 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
Измерительный орган реактивного и активного токов содержит
программные измерительные преобразователи реактивной и активной мощностей. В нем
используется активный измерительный трансформатор тока фазы В и его АЦП.
Программно выполняется функция перемножения дискретных мгновенных
значений напряжения и тока. В симметричном режиме результаты перемножений
ub{nT)ib(nT) = Um sin ©пл77т sin(соппТ- <рг) =
.= UI cos yT-UIcos(2(onnT-(pr); (3.1)
uca{nT)ib{nT)
— = C/wsin(con«r-7r/2)/wsin(o)n«r-9r) =
= E//sin<pr- UI sin (2&unT-(pT) (3.2)
содержат постоянные составляющие, отображающие активную и реактивную
мощности соответственно.
Они выделяются программными нерекурсивными частотными фильтрами,
аналогичными применяемому в измерительном органе напряжения — с конечной
длительностью импульсной характеристики (фиксированным временем
собственного переходного процесса) равной Гп/2, исключающими из результатов
перемножения дискретизованные гармонические составляющие удвоенной частоты.
Формирование сигналов информации о соотношении потребляемого
реактивного и активного токов производится с использованием программных операций
перемножения дискретных мгновенных значений тока фазы В на функции sin фг и
cos фг соответственно. Для их генерирования вычисляется угол сдвига фаз q>
между напряжением и током одноименных фаз.
Как указывалось, измерительный орган ограничивает потребляемую
синхронным генератором реактивную мощность (ограничивает снижение возбуждения
генератора), допускаемую по условию сохранения статической устойчивости ЭЭС
и зависящую от вырабатываемой активной мощности. Соотношение мощностей
вычисляется соответствующей программой, использующей цифровое
моделирование характеристик генератора.
Измерительный орган тока возбуждение функционирует аналогично
измерительному органу напряжения (см. рис 3.7 и 3.8, а). В нем используются
активные измерительные трансформаторы ATAL токов ia и ic в цепи переменного тока
тиристорного преобразователя (см. ТА2 на рис 3.4), нагруженные резисторами для
преобразования токов в напряжения.
При автоматической диагностике измерительных органов проверяется наличие
напряжений, чередование их фаз, несимметрия трехфазной системы напряжений.
3.5. Особенности микропроцессорного автоматического регулятора возбуждения КОСУР-Ц 65
3.5. Особенности микропроцессорного автоматического
регулятора возбуждения КОСУР-Ц
Разработанный ФГУП НИИ Электромаш в составе КОСУР [11]
микропроцессорный автоматический регулятор реализован на базе 32-разрядного
микроконтроллера фирмы Motorola МС68376, выполняющего содержащимися в нем
аппаратными элементами и программно все функциональные операции, необходимые для
осуществления автоматического регулирования возбуждения по ПИД-алгоритму и
выполнения указанных и других функций автоматической системы управления
возбуждением.
Одной из важных его особенностей является измерительное преобразование
действующего (а не среднего выпрямленного как в АРВ-М) значения напряжения
ид(пТ) в цифровой сигнал, что обеспечивает более высокую точность при наличии
в напряжении синхронного генератора гармонических составляющих.
Действующее значение преобразуется путем возведения в квадрат дискретных
мгновенных значений напряжения трех фаз, их суммирования и извлечения корня.
При интервале дискретизации Т= Гп/24 действующее значение напряжения
>
ид(пТ) = Ju2a[(n - 24)Г] + и\[{п - 24)7] + и\\{п - 24)Г] + ... +
+ u2a(nT) + u2b(nT) + u2e(nT).
Сигнал формируется в каждый интервал дискретизации. Однако для получения
полной информации о возникновении возмущающего воздействия в ЭЭС
требуется время, равное длительности Гп периода промышленной частоты, в течение
которого сигнал представляет собой дискретизованную экспоненту [3]. В
симметричном режиме сигнал получается «чистым» — не содержащим гармонической
составляющей удвоенной промышленной частоты (помехи), генерируемой при
возведении в квадрат мгновенного значения напряжения. Однако при
несимметрии напряжений синхронного генератора она практически исчезает только спустя
указанное время Гп, благодаря взаимной компенсации гармонических
составляющих, обусловленных дискретными мгновенными значениями, сдвинутыми во
времени на четверть периода, например и[(п - 6)Т] и и(пТ)9 генерирующими
указанные гармоники в противофазе [3].
Сигнал UJjiT) используется для программного формирования сигналов по
отклонению действующего значения от устанавливаемого в соответствии с
графиком напряжения на шинах электростанции (уставки регулятора).
Сигнал Д£/г(иГ), как обычно, определяет пропорциональную (П-)
составляющую алгоритма автоматического регулирования, а его численное
дифференцирование, т.е. формирование сигнала по производной действующего значения
напряжения U\nT)9 — его дифференциальную (Д-) составляющую. Совместно с сигна-
66 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
лом 1в(пТ) [см. (3.4)] производная напряжения осуществляет, как указывалось,
функцию стабилизатора внутреннего движения автоматической системы
регулирования (АСР) [11].
Интегральная (И-) составляющая формируется инерционно и обеспечивает
устойчивое функционирование автоматической системы регулирования при
высоких коэффициентах усиления кио > 100 [см. (3.3) и (3.4)] сигнала MJT{nT) после
затухания колебательного процесса в ЭЭС (нулевой индекс у коэффициента ки —
нулевая частота). При колебаниях в ЭЭС коэффициент существенно снижается
(ки«кио). Регулирование напряжения происходит со статизмом, обусловленным
только стабилизацией (элементом установки статизма) распределения реактивной
мощности электростанции между параллельно работающими синхронными
генераторами. На блочной электростанции возможно и астатическое регулирование на
шинах высшего напряжения.
Измерительное преобразование частоты выполняется программно по существу
способом формирования цифрового сигнала, отображающего длительность
периода Тп промышленной частоты и его преобразования в сигнал информации о
частоте напряжения синхронного генератора. Сравнение сигнала с моделирующим
предписанную, в частности номинальную, частоту, т.е. формирование сигнала
информации об отклонении частоты Д/(лГ), производится программной
операцией их численного вычитания, а формирование сигналов по производной частоты
f (пТ) и ее изменению A'f(nT) производится численным дифференцированием
Af(nT) и операцией, моделирующей пропускание сигнала f\nT) через
инерционное (апериодическое) звено первого порядка (см. рис 3.7, б).
Сигналы Af(nT) и f\nT)9 отображающие, как указывалось, первую и
вторую производные угла 5 электропередачи, обеспечивают устойчивость
функционирования автоматически регулируемой электропередачи — осуществляют
функцию системной стабилизации [11].
3.6. Особенности цифрового управления
тиристорами возбудителя
Выходным сигналом аналоговых регуляторов является изменяющееся по
значению и знаку постоянное напряжение Е/рег, поступающее на элемент управления
тиристорным преобразователем ЭУ (см. рис 34). Оно формирует шесть импульсов
токов управления (включения) тиристоров /ив, фаза которых относительно
питающего напряжения тиристорного преобразователя зависит от значения выходного
сигнала регулятора. Использование высокопроизводительных микроконтроллеров
позволило включить в состав АРВ-М и АРВ, входящего в КОСУР, цифровой
элемент фазоимпульсного управления тиристорным преобразователем ЦФИУ (см.
рис 3.4) [10, 11].
3.7. Алгоритмы функционирования и структурная схема 67
В нем используется цифровой опорный генератор, который синхронизируется
по частоте и фазе с напряжением питания тиристорного преобразователя по
принципу фазовой автоподстройки частоты. Угол а (угол, отсчитываемый от начала
полупериода напряжения на тиристоре до момента появления тока его включения
/ — см. рис 34) включения тиристоров определяется относительно фазы
опорного генератора, который выполнен на таймере и счетчике микроконтроллера.
Таймер формирует импульсы с периодом 0,25 эл. град., поступающие на счетчик,
отсчитывающий фазу опорного генератора. Изменение кода загрузки таймера
приводит к изменению фазы и частоты его цифрового сигнала.
Для синхронизации используется элемент сравнения фаз [3] (фазовый
детектор) междуфазного напряжения питания тиристорного преобразователя
(напряжение синхронизации) после аналого-цифрового преобразователя и текущей фазы
опорного генератора. Для сглаживания формы кривой напряжения синхронизации
используется активный ДС-фильтр второго порядка [3]. Предусмотрена
компенсация фазового сдвига фильтра (примерно 41 эл. град, при частоте 50 Гц) и
частотного изменения его фазы (примерно 0,7 эл. град/Гц). Предусмотрено смещение
фазы опорного генератора, позволяющее использовать трансформаторы с любой
группой соединения обмоток.
Выходной сигнал фазового детектора, пропорциональный синусу разности фаз
цифрового генератора и напряжения синхронизации, формирует код загрузки
таймера цифрового генератора. В результате воздействия на его частоту выходной
сигнал фазового детектора снижается практически до нуля — наступает
совпадение фаз напряжения питания тиристорного преобразователя и цифрового
генератора.
Программа синхронизации выполняется с интервалом дискретизации, равным
15 эл. град. Квант изменения угла а включения тиристоров (угла регулирования)
составляет 0,25 эл. град.
Зависимость выпрямленного напряжения тиристорного преобразователя от угла
регулирования является косинусоидальной функцией. Для обеспечения линейной
характеристики регулирования возбуждения угол а включения тиристоров
определяется по арккосинусной зависимости от выходного сигнала регулятора.
3.7. Алгоритмы функционирования и структурная схема
микропроцессорных регуляторов возбуждения
Алгоритм функционирования пропорционально-дифференциального
регулятора. Алгоритм микропроцессорной реализации автоматического
пропорционально-дифференциального регулирования возбуждения описывается дискретным
z-преобразованием временной функции
С/ = kvAU+k'vU' + ЬД/+ k}f + к\Гъ (3.3)
68
Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
и ее ^-операторным изображением
UpQr(p) = {ки + k'uP)AU(p) + { T/P+l + k}p)Af(p) + *Х(р), (3.4)
где А/=/пр -/г — отклонение частоты/г напряжения генератора от предписанной
(установленной); Д'/— сигнал по изменению частоты (формируется реальным
дифференциатором с относительно большой постоянной времени Тд9 близким к
идеальному дифференциатору с Гдр > Гд, существует только при переходном
процессе изменения частоты); ки, kf — безразмерные коэффициенты настройки
регулятора; кц, kf, кj — коэффициенты с размерностью постоянной времени Т
дифференциаторов, близких к идеальным.
В соответствии с соотношением [3]
1-z"1 z-1
£ = -y- = 7F"' (3*5)
где Т— интервал дискретизации АЦП,
и/?-изображением по (3.4) регулирующего воздействия, его z-изображение:
Uvet{z)=[ku+j;(\-Z-X)
к'
1*71. —. . .
AU(I) +
*/ 1-z-1
1 + т/тдр1_2 V(i + r/rflp)
+ г(! -*"0]Л/(5Г) + j{} -^1)/.(?)- (з.б)
В дискретном времени алгоритм непрерывного времени (3.3) описывается
разностным уравнением, соответствующим (3.6) [1]
к'
ир,г(пТ) = kvAU{nT) + -2[ьЩпТ) - АЩпТ- Т)] +
Г
к,
''Д-Р А ^ А/1Д.р
+ ^[АЛя^-АЛяУ-Г)] + ^[/.(яГ)-/.(я7'-Г)]э (3.7)
где А/(л Г- Г) — дискретное значение выходного сигнала цифрового реального
дифференциатора (сигнала изменения частоты) в предшествующем интервале
дискретизации; ки,кр k'fb к j — указанные коэффициенты настройки регулятора.
3.7. Алгоритмы функционирования и структурная схема
6?
Алгоритм функционирования и структурная схема пропорционально-
интегрально-дифференциальных регуляторов. Пропорционально-интегрально-
дифференциальный (ПИД-) алгоритм функционирования регуляторов АРВ-М и
КОСУР-Ц не допускает развития крутильных колебаний мощных синхронных
генераторов и развития колебательной неустойчивости, особенно в режиме
потребления реактивной мощности (недовозбуждения). Это достигается за счет
снижения коэффициента усиления сигнала ки по отклонению напряжения At/ [см.
(3.3)] с повышением частоты колебаний, обусловленного интегрированием АС/, и
повышает точность регулирования напряжения, поскольку интегральная
составляющая алгоритма создает астатическую характеристику регулирования UT =f(IT)-
Астатическое регулирование возможно на шинах высшего напряжения блочных
электростанций, поскольку распределение реактивной мощности электростанции
определяется отношением сопротивлений трансформаторов блоков.
Статизм характеристики регулирования на шинах генераторного напряжения,
необходимый для распределения реактивной нагрузки между параллельно
работающими генераторами, создается специальным элементом ввода и изменения ста-
тизма по реактивному току, моделирующим падение напряжения на
сопротивлении трансформатора.
Интегральная составляющая ПИД-алгоритма обеспечивается вводом в цепь
отклонения напряжения интегратора AUT с /^-передаточной функцией Ни(р) =
= 1/(рТи) и z-передаточной функцией программного интегратора, записываемой с
учетом (3.5) в виде
#.(*) = т.
i-^ir.
(3.8)
В ПИД-микропроцессорных АРВ сигнал, формируемый программным
интегратором, суммируется с сигналами информации о АС/Г и производной напряжения
аналогично (3.3), т.е. в структурной схеме (см. рис 3.8) интегратор подключается
параллельно к дифференциатору.
Существует другой способ, состоящий в охвате интегратора функциональной
гибкой отрицательной обратной связью, осуществляемой реальным
дифференциатором с постоянной времени Гд = Т0 с и /7-передаточной функцией
Электрическая цепь, эквивалентная замкнутому указанной обратной связью
интегратору, представляет собой параллельное соединение апериодического звена
70 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
(П-канал) и интегратора с увеличенной постоянной времени Т ,
последовательно соединенного с апериодическим звеном (И-канал):
Нэк(Р) =
1 + Ни(р)Н0С(р) 1 + [1/(рТи)]р/(рТ0С + 1)
К 1 1
+ -^-Г^-Г' (3-Ю)
^а+1 рТижРТа+1
где
■'и.эк- ■'и -*о.С а — ■* и■* о.с'v■* и •* о.с/>
К=т0.с/(т0.с+ ти.ж)=Щ\ + ги,к/гох).
(3.11)
Согласно (ЗЛ1) коэффициент передачи апериодического звена к& < 1 —
происходит уменьшение коэффициента усиления сигнала по отклонению напряжения
ПИД-регулятора киэк = кика и возрастание статизма при переходных процессах,
что означает повышение устойчивости автоматической системы регулирования.
Интегратор становится реальным: сигнал идеального интегратора согласно (3.10)
проходит через апериодическое звено, т.е. интегратор по существу превращается в
фильтр нижних частот, снижающий амплитудно-частотную характеристику
автоматической системы регулирования (АСР) в разомкнутом состоянии по мере
повышения частоты колебаний напряжения.
Динамические свойства структурных звеньев цифрового автоматического
регулятора описываются z-передаточными функциями #(z).
В соответствии с соотношением (3.5) z-передаточная функция цифрового
ПИД-регулятора согласно (3.9) и (3.10) и произведению ^-передаточных функций
в (3.6) представляется в виде
\ kJljT^T) , Т2/[Тизк(Та+Т)] 1
Ярег0О ~ки\ -{ + ~2 17 ГХ
11 - z 1ТДТЛ + Т) z 2TJ{T, + Г) -z~l[(2Ta + Т)/(Та + Т)] + 1J
х At/(z) + *^i—2-AC/(j) + * i -i АД?) +
r l-z"7(l —
/(1 + 27Гад)
+ *; i-^-AAz) + *; ^-1ъ{х). (3.12)
1 -1 1 -1
3.7. Алгоритмы функционирования и структурная схема
71
дад
A/(z)
kaT/(Ta+T)
1-z
,-1_
т+г
KU Т (Т +7)
и.эк4 a '
2 Tg z-l2Tg+T
т +т т+т
1-2"
V -
^(l-z-1)
1-2-1/(1+27Гдр)
1-z"
Я
., 1-z"
W
Рис. 3.9. Структурная схема регулятора АРВ-М
Операторному выражению (3.12) соответствует структурная схема программной
измерительно-преобразовательной и вычислительной частей цифрового
ПИД-регулятора, приведенная на рис 3.9.
Временные процессы в цифровом регуляторе описываются разностным
уравнением, которое в соответствии с z-передаточной функцией (3.12) выглядит как
U(nT) = kv
КТ
Т+Т Т (Т+Т)
. а * и.экЛх а л
AU(nT)-j^jAU[(n-l)T] +
+
Т+Т
AUKn_2)T]+kimm^mi^m+
+ kT ДЯпП-ДЖя-ОГ] А7Т(я-1)П |
/д-р
т + г,
д.р
1 + TIT,
д.р
+ к
, Af(nT) - А/[(п - \)Т] , т_^в(^г)-/в[(^-1)Г]
+ &
(3.13)
где Д'/[(л - 1) Л — дискретное значение выходного сигнала реального цифрового
дифференциатора в предшествующем интервале дискретизации.
72 Глава 3. МИКРОПРОЦЕССОРНЫЕ АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ВОЗБУЖДЕНИЯ
3.8. Адаптивные автоматические регуляторы возбуждения
Рассмотренные автоматические регуляторы возбуждения синхронных
генераторов имеют «... жесткий детерминированный алгоритм ...» функционирования
[13]. Однако ситуация в ЭЭС все время изменяется. Настроенные по одной, даже
самой тяжелой послеаварийной ситуации такие АРВ плохо справляются с обще-
энергетическими (системными) проблемами при других или вновь возникающих
возмущающих воздействиях. Да и синхронные генераторы, в связи с
нелинейностью их характеристик, изменяются в зависимости от схемно-режимных условий
их работы. В разных режимах и при разных возмущающих воздействиях для
наилучшего эффекта от действия АРВ необходима различная их настройка.
Поэтому необходимы адаптивные к ситуации в ЭЭС самонастраивающиеся
автоматические регуляторы возбуждения.
С переходом на микропроцессорную цифровую вычислительную технику
появились возможности создания таких АРВ [12, 13]. Во ФГУП НИИ Электромаш
разработан и испытан на физической модели адаптивный системный стабилизатор
(«... стабилизатор внешнего движения ...») [13] — часть АРВ, использующая
сигналы, формируемые по изменению (отклонению от установившейся) частоты и ее
производной, т.е. по первой и второй производным угла 8 электропередачи. В АО
«Электросила» и Ленинградском электротехническом институте разрабатывается
робастный (адаптивный) регулятор (под робастностью понимается «...
способность регулятора поддерживать устойчивость и качество функционирования
системы в различных режимных условиях, несмотря на неопределенность описания
управляемого объекта ...» [13], т.е. неопределенность ситуации в ЭЭС).
Поэтому функционирование робастного регулятора происходит на основе
нечеткой логики или «... нечеткого множества ...»: для оценки ситуации используются не
количественные, а качественные показатели. Функция М(х) принадлежности
значения используемого информационного параметра х к нечеткому множеству может
быть любым числом [13] (между 0 и 1, тогда как в четком множестве различается
только или 0, или 1). Достоинством нечеткого множества является «... возможность
формирования большого числа правил управления в зависимости от сочетаний ...»
[13] входных сигналов регулятора.
Нечеткая логика является понятием, связанным с искусственным интеллектом
[12, 13]. При разработке адаптивных самонастраивающихся регуляторов
возбуждения используются и другие его понятия: искусственная нейронная сеть и
генетический алгоритм, характерные для теории распознавания образов.
В указанной литературе приводятся конкретные положительные результаты
исследований функционирования адаптивного системного стабилизатора и
регулятора возбуждения в целом. Нечеткий системный стабилизатор [12] позволил
увеличить потребляемую реактивную мощность синхронного генератора (в режиме
недовозбуждения) и улучшить демпфирование электромеханических колебаний:
их длительность сократилась в одной из ситуаций в 2 раза.
Исследования автоматического регулятора, функционирующего на основе
нечеткой логики (АРВ-НЛ), с настройкой, выполненной с помощью генетического
Вопросы для самопроверки
73
алгоритма, на пятимашинной схеме энергосистемы показали его «... высокую
эффективность во всем многообразии схемно-режимных ситуаций, возможных в
ЭЭС» [13].
Таким образом, приведенные [12,13] результаты «... указывают на
перспективность применения принципов нечеткого управления для регулирования
синхронных генераторов».
Вопросы для самопроверки
1. Объяснить схемы тиристорного возбуждения современных синхронных генераторов (см. рис. 3.1.
и 3.2).
2. Из каких измерительных органов состоит микропроцессорный автоматический регулятор
возбуждения «сильного» действия? Каково их назначение (см. рис. 3.4)?
3. Как записывается алгоритм автоматического пропорционально-дифференциального
регулирования возбуждения во временном преобразовании и в виде/?- и z-операторных представлений?
4. Объяснить общую функциональную схему микропроцессорных автоматических регуляторов
возбуждения синхронных генераторов (см. рис. 3.5)?
5. Какие известны микропроцессорные АРВ, функционирующие по ПИД-алгоритмам? Каково
назначение интегральной составляющей их алгоритма?
6. Объяснить аппаратную структуру микропроцессорного автоматического регулятора возбуждения
синхронного генератора типа АРВ-М (см. рис. 3.6).
7. В чем состоят особенности микропроцессорного АРВ типа КОСУР-Ц?
8. Какие сигналы информации используются в микропроцессорных автоматических регуляторах
возбуждения синхронных генераторов?
9. Как функционируют программные измерительные органы напряжения и изменения А'/ частоты
(см. рис. 3.8) микропроцессорного автоматического регулятора возбуждения АРВ-М?
10. Как из цифрового сигнала по отклонении частоты формируются цифровые сигналы об изменении
А'/ частоты и ее производной, приближенно отображающие скорость и ускорение угла 5 фаз
между ЭДС генераторов электростанции и напряжением на конце линии электропередачи (шинах
приемной подстанции ЭЭС)?
11. Каково назначение и как действует программный измерительный орган комбинации реактивного
и активного токов синхронного генератора АРВ-М?
12. Как вычисляются сигналы информации об отклонениях амплитуды и действующего значения
напряжения в микропроцессорных автоматических регуляторах возбуждения синхронных
генераторов типов АРВ-М и КОСУР-Ц?
13. Как функционирует цифровое устройство управления тиристорами возбуждения синхронного
генератора?
14. Как производится преобразование р-изображения ПИД-регулирования в z-изображение алгоритма
микропроцессорного АРВ-М и как математически описывается алгоритм его функционирования?
15. Из каких структурных звеньев и с какими z-передаточными функциями состоит структурная
схема (см. рис. 3.9) микропроцессорного ПИД-регулятора возбуждения?
Глава четвертая
МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА
УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ
АСИНХРОНИЗИРОВАННЫХ ГЕНЕРАТОРОВ
4.1. Особенности возбуждения и регулирования возбуждения
асинхронизированного генератора
Асинхронизированный генератор AG имеет две обмотки возбуждения:
продольную LG1 и поперечную LG2 (рис. 4.1). Он вращается с рабочей частотой
скольжения оо^0 « 0,002юном = 0,2тс рад/с, и его токи возбуждения IBd, I являются
переменными с частотой fB « 0,002/с = 0,1 Гц.
Асинхронизированный генератор (АСГ) обладает важными с точки зрения
автоматического управления режимами работы свойствами:
• простым процессом включения на параллельную работу, не связанным с
опережением включения привода выключателя — главной функцией
автоматических синхронизаторов;
• отсутствием ограничений потребляемой реактивной мощности условием
сохранения статической устойчивости;
• повышенным запасом динамической устойчивости как при генерировании,
так и при потреблении реактивной мощности.
Поэтому асинхронизированный генератор является перспективным [33, 34].
Вращение с указанной частотой скольжения и отсутствие ограничений
потребляемой реактивной мощности обеспечивается разделением процесса управления
электромагнитным вращающим моментом и напряжением, достигнутым
применением двух указанных взаимно перпендикулярно расположенных на роторе обмоток
Ч£пТ)
Uq(nT)
ЦФИУ1
ЦФИУ2ГЛ
ч
VST1
VST2 I*d_
Рис. 4.1. Схема возбуждения асинхронизированного генератора
4.2. Алгоритм функционирования автоматического регулятора
75
возбуждения. Одна из них — LG1 с током возбуждения IBd служит для изменения
электромагнитного момента генератора в соответствии с соотношением, отн. ед.
Ки ~ ишЕ,/хг = U^MIJxT, (4.1)
где хм — сопротивление взаимоиндукции между обмоткой возбуждения и
обмоткой статора.
Вторая обмотка — LG2 с током возбуждения I используется для управления
реактивной мощностью
QT=UmxMIBqlxT-U2JxT. (4.2)
Переменные токи /в^, / , изменяющиеся с частотой скольжения, являются
ортогональными составляющими вектора тока возбуждения /в
асинхронизированного генератора. Их источниками служат два реверсивных, состоящих каждый из
двух встречно-включенных трехфазных тиристорных управляемых выпрямителей
VST1, VST2, подключенных через трансформатор Т к выводам генератора (схема
самовозбуждения).
Тиристорные выпрямители управляются переменными (с частотой
скольжения) воздействиями Ud(nT) и U (пТ) микропроцессорного автоматического регу-
лятора возбуждения асинхронизированного генератора (АРВ АСГ-М).
4.2. Алгоритм функционирования
автоматического регулятора
Автоматическое регулирование возбуждения асинхронизированного
генератора производится по двум каналам с выходными цифровыми воздействиями UX9
UY (рис 4.2), взаимозависимыми лишь в связи с необходимостью их
преобразования в указанные цифровые воздействия ЦЛпТ), UAnT), обусловленного углом 8
сдвига фаз между магнитной осью первой из указанных обмоток возбуждения и
магнитной осью ротора генератора, определяемой фазой тока /в возбуждения.
Преобразование состоит в сдвиге по фазе на угол 8 векторов Ux(nT) и UY(nT).
Однако в связи с изменяющимися частотой скольжения оо5 генератора и углом 8
при электромеханических переходных процессах указанное преобразование
производится путем перемножения комплексных величин в алгебраическом виде
Ud{nT) + Uq{nT) = [Ux(nT) +jUY(nT)](cos8 +ysin8). (4.3)
76
Глава 4. МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ АСГ
От ТА1 От ТА2
s
I
^(лГ)
Щ{пТ)
SM1
ПК
Uy(nT)\
SM2
HIC
277
0W
иоосв
ИОТВ
5с5
ЯОУР
#ос
' ZD7
МОИМ
< г-РСВД
я/им
зэ
Я07Т
ZD2
И
ЖШУ
НОРМ
ZJ2
эснд\
ХИПРЩ
зэ
Рис. 4.2. Функциональная схема автоматического регулятора возбуждения асинхронизирован-
ного генератора
Для этого используются четыре операции перемножения, составляющие
специфичный программный функциональный элемент АРВ АСГ-М —
преобразователь координат ПК.
Специфичным функциональным элементом измерительно-преобразовательной
части регулятора является измерительный преобразователь (датчик) угла ротора
ИПУ (см. рис 4.1). Он представляет собой индукционный генератор импульсного
напряжения, момент времени появления которого в пределах периода изменения
напряжения генератора определяется углом 8. Датчик выполнен в виде
постоянного магнита с обмоткой, расположенного на статоре АСГ у торца вала ротора. На
торце вала размещена пластина из магнитного материала, перекрывающая зазор
между полюсами постоянного магнита в момент времени, изменяющийся
относительно момента перехода через нуль мгновенным значением напряжения иа
статора с изменением угла 8 асинхронизированного генератора. В момент перекрытия
зазора между полюсами постоянного магнита в обмотке индуцируется импульс
напряжения ии, смещающийся по оси времени при изменении угла 8.
Соответственно 1 раз за период изменяется напряжение £/д6 (рис 4.3), запоминаемое
соответствующими элементами программных измерительных органов угла положения
ротора ИОУР генератора (см. рис 4.2).
Регулирующие воздействия Ux и UY являются функциями режимных
параметров генератора: изменения А'Р активной мощности при электромеханических
переходных процессах, отклонения AQ реактивной мощности от предписанной
(AQ = Qr - Qnp), изменения напряжения Д'с7г, отклонения частоты скольжения
4.2. Алгоритм функционирования автоматического регулятора
77
Рис. 4.3. Графики, иллюстрирующие формирование выходного напряжения измерительного
органа угла автоматического регулятора возбуждения
Асо5 = со5 - со50 и угла А8 = 8 - 80 от установившихся значений, разности токов
возбуждения и превышения токами статора А/г = 1Т - /гном и ротора А/в = 1В - 1В ном их
номинальных значений. Поэтому автоматический регулятор имеет сложную
измерительно-преобразовательную часть, состоящую из программных измерительных
органов (ИО): изменений активной мощности МОИМ (рис 4.2), скольжения ИОС
и угла положения ротора ИОУР, разности ортогональных составляющих ИООСВ
тока возбуждения, реактивной мощности НОРМ, изменения напряжения ИОИН,
тока нагрузки генератора ИОТГ и тока его возбуждения ИОТВ. Каждый из них
включает обязательные программные функциональные элементы: задающий ЗЭ,
измерительные преобразователи (ИП) и элемент сравнения непрерывного
действия ЭСНД. В состав ИО входят соответствующие измерительные
преобразователи активной ИПАМ и реактивной ИПРМ мощностей, амплитуды напряжения и
частоты скольжения, угла положения ротора, токов статора и ротора и
ортогональных составляющих тока возбуждения. Измерительные органы напряжения и
активной мощности и ИО реактивной мощности и разности ортогональных
составляющих тока возбуждения содержат реальные цифровые дифференциаторы
ZD7, ZD2 и цифровые интеграторы Z/7, ZJ2 соответственно.
Суммирование сигналов производится цифровыми сумматорами SMI, SM2.
После преобразователя координат ПК регулирующие воздействия Ud(nT) и U (пТ)
поступают в устройства цифрового фазоимпульсного управления ЦФИУ1, ЦФИУ2
тиристорными возбудителями асинхронизированного генератора (см. рис 4.1).
78
а во 4. МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ АСГ
Результирующие воздействия Ux(z) и UY(I) являются следующими
операторными функциями указанных режимных параметров асинхронизированного
генератора:
кр \-z~l
+ -1 U^) - Iaq(z)]; (4.4)
*/.(l-*~'
тт (^\ - ku \-zl _ T
uxV) - , +T/T AU(z) + AQ{z) +
+ kjTAIr(z) + klBAIB(z), (4.5)
где к1и, кди — коэффициенты передачи интеграторов с размерностью, обратной
размерности постоянной времени: Д/ =1,-1
г в во ъд'
В соответствии с (4.4), (4.5) и аналогично (3.13) выходные сигналы ЩпТ) и
их(пГ) двух каналов вычислительной части регулятора являются следующими
функциями дискретного времени:
*р ГЛО, тч 1
^("Г) = 1 + Т/Т [АР(ПТ) ~ АР(пТ~ Г)] + i+r/r А'Р("Т- V ~
Д-Р ! + Г/7д.р
- kaA<os(nT) + ksA5(nT) + (1 + кыТ)[1ьа(пТ) - 1щ(пТ)} +
+ Д/Л'вЛиТ'- П - /в,(иТ- Т)] ■ (4.6)
А:
^"Л = Tjjfe-lAUinT) - АЩпТ- Г)] + —1—-А1 ЩпТ- Т) +
Д-Р * + 7/-'д.р
+ (1 + kQli)TAQ{nT) + AaQ(nT- T) + kIr(nT) + kjAI^nT), (4.7)
где АЩпТ-Т) и А'Р(пТ-Т) — дискретные выходные сигналы цифровых
реальных дифференциаторов (сигналы изменений напряжения и мощности) в
предшествующий интервал дискретизации.
4.3. Микропроцессорная автоматическая система управления
7?
у* ГуЧ^Г
А/в©
AG© ,
J A:
1 *7в
kQnT
1-2"
1
i
Л)
tf)
Рис. 4.4. Структурные схемы вычислительной части двух каналов цифрового автоматического
регулятора (а) и микропроцессорной системы управления возбуждением (б)
асинхронизированного генератора
Как видно из (4.4) и (4.5), сигналы об изменениях напряжения A'U(nT) и
активной мощности А'Р{пТ) формируются аналогично сигналу по изменению
частоты A'f(nT) в АРВ-М [см. (3.12)], а сигналы об отклонениях реактивной
мощности и разности токов возбуждения формируются цифровыми интеграторами:
AJ[IB(j(nT~ Т) -1 (пТ- Г)], Аи<2(пТ- Т) — дискретные выходные сигналы
интеграторов в предшествующий интервал дискретизации.
На рис 4.4 приведены структурные схемы формирования регулирующих
воздействий Uy(z) (рис 4.4, а) и U^z) (рис 4.4, б) двухканальным
микропроцессорным автоматическим регулятором возбуждения асинхронизированного генератора.
4.3. Микропроцессорная автоматическая система
управления возбуждением и мощностью
асинхронизированного генератора
Микропроцессорный автоматический регулятор возбуждения
асинхронизированного генератора входит в состав автоматической системы управления
возбуждением и мощностью (СУВМ-АС) [14]. Она выполнена на
высокопроизводительном микропроцессорном комплекте (МПК) больших интегральных микросхем
(БИС) серии К1810. Система производит измерительное преобразование в
цифровом виде параметров турбогенератора, обрабатывает дискретную информацию о
его состоянии, вычисляет регулирующие воздействия в соответствии с
алгоритмами (4.4) и (4.5) или (4.6) и (4.7), формирует импульсы токов управления
тиристорами возбудителя и выводит цифровую информацию о состоянии автоматиче-
80
Глава 4. МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ АСГ
От7М
От7У
Дисплей
Дискретные
сигналы
-H~-.---.y-
итт
ИПУ
АИТ
Аналоговые
<:
МП1 h—И МП2 МСК Г 1
Внутрисистемная
магистраль
О
ппи
I
ПУ
Обмен информацией
УВР
ВР
\7 ИЧ
ИПТН\ НС
итн
АМН
t t t t
ипч
ABB
ИВЧ
ю
вч
о л Л
i>
ИФУ
ИФУ
вил
-П
I Г=М?
ягя
СФ£0
СФКИ
mft'
#сх
гВкл. 0
гкл/>ад
-r..q-:.j..i-|
От схемы
контроля
l?l{ V,Sll Сигналы
UdKnl) Uq{nT) состояния
Рис. 4.5. Схема микропроцессорной системы управления возбуждением асинхронизированного
генератора
ской системы регулирования. Как и в ранее описанных микропроцессорных
устройствах, для обеспечения надежности функционирования применяются два
взаиморезервируемых комплекта вычислительных средств.
На рис 4.5 приведена функциональная схема СУВМ-АС [14]. Основной ее
частью является вычислительная ВЧ, состоящая из микропроцессоров МП1, МП2
типа К1810ВМ86, микросхемы памяти данных и интерфейсов ППИ, элемента
(модуля) ввода ВДС и вывода (управления выходными реле УВР и выходных реле
ВР) дискретных сигналов, модуля аналогового ввода-вывода ABB, содержащего
АЦП и ЦАП, и модулей импульсно-фазового управления ИФУ. Модуль ИВЧ
обеспечивает реализацию программного измерительного преобразования частот
напряжения и вращения АСГ, угла положения его ротора и формирования
цифровых сигналов на основе времяимпульсных преобразований.
Устройство связи с объектом (измерительно-преобразовательная ИПЧ и
исполнительная ИЧ части) обеспечивает гальваническое отделение (развязку) цепей ВЧ
от внешних цепей и содержит аналоговые элементы: преобразования по уровню
трехфазных и однофазных токов АИТ и напряжений АИН с активными
вторичными измерительными трансформаторами ИТТ, ИТН [3], измерительного преобра-
4.3. Микропроцессорная автоматическая система управления
81
зования токов и напряжений ИПТН, формирующие аналоговые сигналы
информации о средних значениях напряжения генератора, токов статора АСГ, активной и
реактивной их составляющих. Сигналы в виде изменяющихся по абсолютному
значению и знаку постоянных токов формируются выпрямительными
измерительными преобразователями с частотными выходными фильтрами [3].
Модуль НС нормализации сигналов приводит к унифицированному виду и
уровню сигналы измерительного преобразования угла ИПУ положения ротора и
сигналы измерительных преобразователей токов возбуждения АСГ.
Выходные модули синхронизации, формирования и контроля импульсов
СФКИ являются частью устройства цифрового фазоимпульсного управления
реверсивными тиристорными возбудителями VST1 и VST2 (см. рис 4.1).
На схеме показаны модуль системного контроля МСК и сигнализации
неисправностей КСК рабочего микропроцессорного комплекта и сигналов выводов
результатов вычислительных операций из резервного комплекта, а также пульт
управления ПУ
Выполнение функциональных операций, соответствующих алгоритмам (4.6) и
(4.7) регулирования, достигается программным обеспечением, включающим
следующие группы программ: инициализации и стартового контроля, организации
вычислительного процесса функциональной реализации алгоритмов управления и
регулирования, защитной функции и сервисного контроля.
Как указывалось, формирование цифровых сигналов о режимных параметрах
производится на основе времяимпульсных преобразований с использованием
счетчика для фиксирования длительностей временных интервалов. В частности,
частота, разность частот и углы сдвига фаз определяются способами, применяемыми
в программных измерительных органах АРВ-СДМ [1].
Программными средствами формируются и импульсно-фазовые
регулирующие воздействия на тиристоры возбудителей: сигналы управления фазой
импульсного тока /ив (см. рис 3.4) включения тиристоров представляют собой
двоичный код.
Кроме осуществления непростых алгоритмов автоматического регулирования
возбуждения асинхронизированного генератора, микропроцессорная система
СУВМ-АС обеспечивает автоматическое управление пуском, подготовкой
воздействий на АРЧВ через ВИП и включением на параллельную работу
(синхронизацией и нагружением турбогенератора). Защитными функциями СУВМ-АС
являются ограничения перегрузок турбогенератора по токам ротора и статора по
условию допустимого нагрева, максимального и минимального тока возбуждения в
синхронном режиме работы только с одной обмоткой ротора.
Сервисные функции, являющиеся специфичными, свойственными только
микропроцессорным автоматическим системам, как и аналогичные для АС-М (см. (2.2))
и АРВ-М (см. (3.3)), обеспечивают удобство их технического обслуживания и
высокий уровень производственной культуры в технике автоматического управления
процессом производства и передачи электроэнергии.
82 Глава 4. МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ АСГ
Вопросы для самопроверки
1. В чем состоят режимные особенности асинхронизированного генератора (АСГ)?
2. Как АСГ включается на параллельную работу с синхронными генераторами?
3. Каковы особенности возбуждения и автоматического регулирования возбуждения АСГ (см.
рис. 4.1)?
4. Как функционирует автоматическая система регулирования возбуждения АСГ (см. рис. 4.2)?
5. Каково функциональное назначение двух каналов автоматического регулирования возбуждения
АСГ? По каким алгоритмам они функционируют?
6. Какие формируются входные сигналы информации в автоматической системе регулирования и
возбуждения АСГ?
7. Как выполняется измерительный преобразователь внутреннего угла 5 (положения ротора) АСГ
(см. рис. 4.3)?
8. Объяснить функциональную схему двухканального автоматического регулятора возбуждения
АСГ (см. рис. 4.2).
9. Объяснить структурные схемы и z-операторные описания регулирующих воздействий двух
каналов регулирования возбуждения АСГ (см. рис. 4.4)?
10. Как функционирует микропроцессорная система автоматического управления (СУВМ-АС)
возбуждением АСГ (см. рис. 4.5)?
Глава пятая
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
СИНХРОННЫХ ГЕНЕРАТОРОВ
5.1. Особенности автоматического регулирования
частоты и мощности
Частота вращения гидравлической или тепловой турбины определяет частоту
синусоидального напряжения синхронного генератора как важнейший показатель
качества вырабатываемой им электрической энергии. Частота должна быть высо-
костабильной: допустимые ее отклонения А/от номинального значения
промышленной частоты /ном = 50 Гц не должны превышать Д/= ±0,1 Гц. Удержать частоту
в указанных пределах допустимых изменений в условиях равенства в каждый
момент времени генерируемой и непрерывно и случайно изменяющейся
требуемой нагрузкой электроэнергетической системы активной мощности можно только
астатическим автоматическим регулированием частоты вращения турбин.
Основная задача автоматического регулирования активной мощности
синхронных генераторов — обеспечить выработку и передачу электроэнергии при
наименьшем удельном расходе условного топлива. Она решается оптимизацией режимов
работы синхронных генераторов и электрических станций в целом по активной
мощности, прежде всего — распределением активной нагрузки между
параллельно работающими генераторами и электростанциями по их показаниям. Однако
астатические регуляторы не обеспечивают такого распределения активной
мощности. Свойством распределения обладают статические автоматические
регуляторы, однако они не могут поддерживать стабильную частоту вращения.
В связи с противоречивостью требований к автоматическому регулированию
частоты вращения и активной мощности на гидрогенераторах устанавливаются
астатические, а на турбогенераторах — статические автоматические регуляторы
частоты вращения.
Подвижные гидрогенераторы покрывают случайно изменяющуюся часть
графика нагрузки, а инерционные турбогенераторы — базовую прогнозируемую
его часть.
На частотно регулирующих гидрогенераторах устанавливают
электрогидравлические автоматические регуляторы частоты вращения гидротурбин,
функционирующие по ПИ- или ПИД-алгоритму и обеспечивающие астатическое
автоматическое регулирование частоты промышленного тока.
Тепловые турбины выпускаются с гидродинамическими АРЧВ, являющимися
статическими регуляторами, функционирующими по П-алгоритму.
84 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
a>,W +
Рис. 5.1. Графики, иллюстрирующие определенность распределения нагрузки
электростанциями между синхронными генераторами при статических АРЧВ
Оптимальное управление активной нагрузкой электростанцией между
параллельно работающими турбогенераторами в нормальном режиме работы
производится отдельными астатическими автоматическими регуляторами активной
мощности, времяимпульсные воздействия (см. рис 2.5, б) которых на заданные элементы
— элементы изменения уставок АРЧВ, используют их статические характеристики
регулирования частоты вращения и изменяют нагрузку турбогенераторов (рис 5.1).
В современных устройствах оптимизация режимов работы ТЭС и ГЭС
обеспечивается программной подсистемой оптимального распределения активной нагрузки
автоматизированной системы управления технологическими процессами (АСУ ТП).
Разработаны микропроцессорные электрогидравлические автоматические
регуляторы частоты и активной мощности типа ЭГР-МП, предназначенные как для
гидравлических, так и для тепловых турбин [15], и регуляторы для гидротурбин
сдвоенных энергоблоков ГЭС [16].
Длительное время функционирует и совершенствуется [17]
микропроцессорная электрическая часть автоматической системы регулирования частоты и
активной мощности турбогенераторов (ЭЧСРМ), обеспечивающая и противоаварийное
управление активной мощностью турбогенераторов под воздействием автоматики
предотвращения нарушения устойчивости (АПНУ) и ликвидации асинхронного
режима (АЛАР) в электроэнергетической системе.
5.2. Микропроцессорные автоматические регуляторы
частоты вращения и активной мощности
Микропроцессорный электрогидравлический регулятор частоты и
активной мощности ЭГР-МП выпускается ООО «Пром-Автоматика» (г.
Санкт-Петербург) как для гидро-, так и для турбогенераторов. Регулятор гидрогенераторов
функционирует по ПИД-алгоритму и обеспечивает астатическую (горизонтальную)
характеристику регулирования — зависимость частоты от активной мощности
ю ^/(Р) в нормальном режиме нагруженного генератора. Активная нагрузка ГЭС
5.2. Микропроцессорные автоматические регуляторы 85
(как частоторегулирующей) распределяется между параллельно работающими
гидрогенераторами отдельной программой.
В режиме пуска и холостого хода гидроагрегата производится переключение на
П-алгоритм, поскольку при холостом ходе динамические свойства гидравлической
турбины описываются ^-передаточной функцией интегрирующего звена, а при
наличии в автоматической системе регулирования двух интегрирующих звеньев
(первое — формирующее интегральную составляющую ПИД-алгоритма) она
оказывается структурно неустойчивой [40], т.е. возбуждается (переходит в
автоколебательное состояние) при любых значениях ее параметров.
При использовании на турбогенераторах автоматический регулятор
функционирует по П- или ПД-алгоритму и является статическим регулятором:
характеристика регулирования — наклонная, поскольку ТЭС в нормальном режиме (при
малых, допускаемых ГОСТ отклонениях частоты) участия в ее регулировании не
принимает, регулятор вступает в действие по регулированию частоты при
значительных, превышающих зону нечувствительности ее отклонениях от
номинальной. При статических характеристиках обеспечивается четкое распределение
активной нагрузки электростанции между параллельно работающими
турбогенераторами (см. Pl9 Р2 на рис 5.1).
Автоматический регулятор ЭГП-МП выполнен на двух зарубежных
микропроцессорах, собранных из стандартных модулей фирм Octagon и Fastwel [15].
Они взаиморезервируемые и функционируют по принципу «ведущий —
ведомый». Ведущий микропроцессор определяется автоматическим троированным
(работающим в режиме «два из трех») арбитром. Такая структура обеспечивает
необходимую надежность функционирования автоматического регулятора. Для
обеспечения безударности переключения ведущий микропроцессор постоянно
передает ведомому информацию о состоянии регулятора и его уставках [15].
Автоматический регулятор имеет и аппаратную часть, содержащую
измерительные преобразователи частоты и активной мощности. Измерительное
преобразование частоты производится путем формирования времяимпульсного сигнала
индукционным измерительным преобразователем (см. ИПУяг рис 4.1),
возбуждаемым так называемой «звездочкой», расположенной на валу гидро- или
турбогенератора, вместо пластины, перекрывающей воздушный зазор постоянного магнита
с обмоткой 2 раза за один оборот вала — в начале и в конце периода Тп
промышленной частоты. Формируются интервалы времени, равные периоду Тп. Интервалы
времени заполняются единичными счетными импульсами высокой (относительно
промышленной) частоты: формируется числоимпульсный сигнал, отображающий
длительность периода Гп, обратно пропорциональную частоте вращения
энергоагрегата. Программируемая логическая матрица [3] формирует сигнал в двоичной
системе счисления о частоте напряжения гидро- или турбогенератора, который и
поступает в микропроцессор.
86 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
Микропроцессор формирует в общем случае, как указывалось, ПИД-алгоритм
регулирования частоты:
• сравнивает указанный сигнал с уставкой регулятора — номинальной
частотой или установленной в соответствии с загрузкой генератора активной
мощностью [статические характеристики регулирования турбогенераторов
перемещаются параллельно самим себе вверх или вниз при повышении или снижении
заданной активной мощности турбогенератора (см. рис 5.1)], т.е. определяет
отклонение Дю(иГ) частоты вращения от установленной, необходимое для
реализации пропорциональной составляющей алгоритма регулирования;
• численно дифференцирует отклонение частоты — формирует
дифференциальную составляющую алгоритма;
• численно интегрирует отклонение частоты для обеспечения интегральной
составляющей, необходимой для астатического регулирования частоты вращения
гидрогенераторов.
Сумма указанных сигналов поступает в ЦАП, выходной сигнал которого
представляет собой постоянный ток, пропорциональный двоичному коду суммы
сигналов. После его усиления мощным выходным усилителем ток как регулирующее
воздействие поступает в электрогидравлический преобразователь (см. рис 5.4).
Измерительное преобразование активной мощности синхронного генератора
производится серийным аналоговым измерительным преобразователем. Его
непрерывный сигнал в виде изменяющегося по абсолютному значению и знаку
постоянного тока аналого-цифровым преобразователем превращается в двоичный
цифровой код, поступающий в микропроцессор.
Цифровой сигнал измерительного преобразователя программно сравнивается с
сигналом о задаваемой синхронному генератору мощности — формируется
разность необходимой и истинной его загрузки, т.е. отклонение мощности АР(пТ).
Сигнал информации о АР(пТ) численно интегрируется и после преобразования
ЦАП в пропорциональный постоянный ток и усиления воздействует на
электрогидравлический преобразователь—сумматор регулирующих воздействий по
частоте и по активной мощности. Так производится быстродействующее, но
статическое регулирование мощности.
Цифровой сигнал после численного интегрирования АР(пТ) воздействует на
задающий (установочный) элемент по частоте, увеличивая или уменьшая
заданную частоту шу = шпр > шном статического регулятора турбогенератора —
обеспечивает астатическое регулирование активной мощности. Регулирование активной
мощности в целом производится по ПИ-алгоритму.
Кроме автоматического регулирования частоты и активной мощности в
нормальном режиме работы нагруженного гидрогенератора ЭГР-МП выполняет и
другие функции, в особенности:
• обеспечивает пуск и останов гидроагрегата и автоматическую нагрузку или
разгрузку тепловой турбины по контролю теплонапряженного состояния ее
металла;
5.2. Микропроцессорные автоматические регуляторы
87
Рис. 5.2. Внешний вид панели электрооборудования ЭГР-МП
• устанавливает задаваемую автоматическим синхронизатором (см. § 2.1)
разность частот о при подготовке генератора к его синхронизации;
• осуществляет противоразгонную защиту гидро- и тепловой турбины при
«сбросе» нагрузки синхронным генератором.
Панель управления ЭГР-МП, внешний вид которой показан на рис 5.2,
включает и микропроцессорное автоматическое устройство управления гидравлической
исполнительной установкой [15].
Микропроцессорные автоматические регуляторы частоты вращения
гидравлических турбин. Государственным унитарном предприятием ВЭИ и
филиалом ОАО «Инженерный центр ЕЭС — «Фирма «ОРГРЭС» разработан
микропроцессорный автоматический регулятор частоты вращения гидротурбин
Чебоксарской ГЭС, входящий в состав микропроцессорной системы комплексного
управления гидрогенераторами [16] — регулятор типа МПРЧ. Заводами Ленинградским
металлическим и «Электросила» производственного объединения ООО «Силовые
машины» поставляются гидротурбины с микропроцессорной электрической
частью электрогидравлических регуляторов частоты их вращения.
Автоматические регуляторы функционируют по ПИД-алгоритму с
переключением в алгоритм пропорционального действия при пуске и холостом ходе
турбины, что необходимо, как указывалась, для устойчивости функционирования
автоматической системы управления разворотом гидроагрегата.
88 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
Алгоритм формируется параллельным соединением сумматором SM3 (рис 5.3, а)
программных элемента сравнения частоты вращения со(пТ) с установленной
частотой (оу(пТ) — сумматор SM1 в режиме вычитания, цифрового дифференциатора
ZD и цифрового интегратора ZJL После суммирования сигналов информации об
отклонении частоты вращения Дсо(я7) от установленной, ее производной &'(пТ)9
интеграле БДсо(иГ) и цифроаналогового преобразования в аналого-дискретный
сигнал в виде тока / регулятор воздействует на электрогидравлический
преобразователь Э/77, связывающий электрическую часть регулятора с гидравлической
исполнительной частью — гидравлической установкой ГИУ Ее гидравлический
двигатель ГИУ жесткой отрицательной обратной связью превращается в
гидравлический усилитель [3], что необходимо для устранения структурной
неустойчивости функционирования замкнутой автоматической системы регулирования:
гидравлический двигатель и турбина на холостом ходу описываются передаточными
функциями интегрирующего звена [40].
Функциональная схема микропроцессорного автоматического регулятора
частоты вращения и активной мощности гидрогенератора состоит из
аппаратно-программной измерительно-преобразовательной ИПЧ (рис 5.3, а),
микропроцессорной вычислительной ВЧи аппаратной исполнительной if ¥ частей. Двухканальная
измерительно-преобразовательная часть стандартная: содержит аппаратные
измерительные преобразователи частоты вращения ИПЧВ и активной мощности
ИПАМ или датчик открытия направляющего аппарата гидротурбины [3] и
программные интегрирующие задающие элементы частоты ЗЭЧи мощности ЗЭМ—
элементы изменения уставок со , Р регулятора в аппаратном исполнении с
микроэлектродвигателями. Их аналоговые сигналы, как обычно, преобразуются в
цифровые аналого-цифровым преобразователем АЦП с аналоговым
мультиплексором МПЛ.
Микропроцессорная вычислительная часть формирует в общем случае
ПИД-алгоритм регулирования частоты вращения и ПИ-алгоритм регулирования
активной мощности параллельно действующими программными элементами
сравнения — сумматоры SM1 и SM2 в режиме вычитания, истинных частоты
вращения (о(пТ) и мощности Р(пТ) с заданными — установленными со , Р . Они
формируют сигналы пропорциональных составляющих, цифровые
дифференциатор ZD и интеграторы ZJ1 и ZJ2 — сигналы дифференциальной и интегральной
составляющих алгоритмов автоматического регулирования. Интегратор ZJ1
охватывается включаемой (контакт К) жесткой отрицательной обратной связью (Кос)
для перевода регулятора частоты вращения в ПД-алгоритм функционирования.
Сумматор SM5 формирует результирующий цифровой сигнал, а цифроаналого-
вый преобразователь ЦАП — аналого-дискретное управляющее воздействие в
виде его выходного тока / , который после усиления (усилитель на схеме не
показан) воздействует на электрогидравлический преобразователь ЭГП
исполнительной части — гидравлической установки ГИ У.
В автоматическом регуляторе предусмотрены два аппаратных измерительных
преобразователя частоты. Первый из них — числоимпульсный, использует
5.2. Микропроцессорные автоматические регуляторы
89
импульсные сигналы от индукционного преобразователя в виде зубчатого колеса
(«звездочки»), установленного на валу гидроагрегата и постоянного магнита с
обмоткой, расположенного на статоре, в которой индуцируется импульсная ЭДС в
моменты времени перекрытия воздушного зазора постоянного магнита зубцами
звездочки.
Если число зубцов равно числу пар полюсов ротора гидрогенератора, то
импульсы следуют с промышленной частотой. Числоимпульсный сигнал
информации о частоте вращения гидрогенератора формируется как число единичных
счетных импульсов высокой (относительно промышленной) частоты,
размещающееся на интервале времени, равном одному периоду частоты напряжения
гидрогенератора.
Второй измерительный преобразователь частоты является выпрямительным
измерительным преобразователем амплитуды ЭДС тахогенератора на валу
гидроагрегата, пропорциональной частоте его вращения.
ипчв
ипч
\ИПАМ\
мпл,\
АЦП
зэч
ЗЭМ
Асо(«Г)
SM1
\
ZD
со'("7) вч
SM3
ZJ1
АР(пТ)^ о.с|
SM2
ХАсо(иГ)
ИЧ
xJzjA гЧ
SM4
ZJ2
SM5 1/
X
г*-
1
1
(пТ)
ЦАП
per
-*"
ЭГП
К ГИУ
а)
Aco(z) >
A/4z)
б)
Рис. 5.3. Функциональная (а) и структурная (б) схемы микропроцессорного автоматического
регулятора частоты вращения и активной мощности гидрогенератора
90 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
Структурная схема реализации алгоритма функционирования
микропроцессорного автоматического регулятора частоты вращения и активной мощности типа
МПРЧ (рис 5.3, б) в z-операторном представлении
Ц«(*) =
per
k + к + к -
V 1 1 - z У
Aco(z) +
+
к Л- к
V 1 - z У
Д^) (5.1)
состоит из безынерционных звеньев с коэффициентами настройки регулятора к^ и
кр, дифференцирующего, близкого к идеальному, с коэффициентом к^ с
размерностью постоянной времени, и интегрирующих звеньев с коэффициентами к(0Ии
кРи с размерностью, обратной постоянной времени.
Алгоритм (5.1) обеспечивает устойчивое астатическое регулирование частоты
и мощности в рабочем режиме нагруженного гидрогенератора.
При пуске и синхронизации гидрогенератора канал регулирования активной
нагрузки Р отключается, а алгоритм регулирования частоты вводом жесткой
отрицательной обратной связи (замыканием контакта К) переключается на
пропорционально-дифференциальный: как указывалось, интегратор, охваченный жесткой
отрицательной обратной связью, становится апериодическим звеном, а регулятор —
статическим с наклонной характеристикой со =f(P) (см. рис 5.1).
Реальное временное представление алгоритма автоматического регулирования
описывается разностным уравнением:
Цюг(иГ) = к„А<х>(пТ) + ^[Асо(пТ) - Дсо(лГ- Т)] +
+ *ши£Д©(лГ) + кРАР(пТ) + кРи^АР(пТ), (5.2)
1 1
где N— число дискретных мгновенных значений частоты вращения си(иГ) и
мощности Р(пТ) за период Ти промышленной частоты N = TJT.
Электрогидравлический преобразователь. Микропроцессорные
автоматические регуляторы частоты вращения и активной мощности представляют собой
микропроцессорную электрическую часть электрогидравлических регуляторов
(ЭГР) частоты вращения гидравлических турбин и гидродинамических
регуляторов паровых турбин. Гидравлической частью являются мощный гидравлический
двигатель или усилитель — двигатель, охваченный жесткой отрицательной
обратной связью [3], развивающие достаточные для изменения положений
направляющего аппарата гидротурбины или регулирующих клапанов паровой турбины уси-
5.2. Микропроцессорные автоматические регуляторы
91
10 НапорТ
Рис. 5.4. Конструкция электрогидравлического преобразователя
лия. Связь между электрической и гидравлической частями ЭГР осуществляет
электрогидравлический преобразователь. Одна из его конструкций, разработанная
АО «Ленинградский металлический завод», показана на рис 5.4. Преобразователь
состоит из магнитоэлектрического электромеханического преобразователя ЭМП и
гидравлического усилителя ГУ с дроссельным золотником [3].
Электромеханический преобразователь состоит из двух полуцилиндров 1 с обмотками и>,
подвижного штока (якоря) 2 и центрирующих пружин 3. Полуцилиндры с обмотками
расположены между кольцевыми постоянными магнитами 5 и цилиндрическим
сердечником б, внутри которого может перемещаться шток 2. Верхний конец
подвижного штока через пружину 8 связан с установочным винтом Р, а на нижнем его
конце закреплено отбойное кольцо 4' дроссельного золотника.
Электромеханический преобразователь размещается в корпусе 7.
Гидравлический усилитель выполнен в виде так называемого следящего
золотника с дифференциальным, т.е. имеющим разные площади поверхностей Sv S2,
поршнем 10. Именно за счет различия площадей поверхностей и достигается
увеличение усилия штока электромеханического преобразователя на поршень,
которое определяется разностью давлений в полостях I и II цилиндра и отношением
указанных площадей. В полости // давление постоянно, а в полости / зависит от
дросселирующего отверстия, т.е. зазора 8 между отбойным кольцом 4' и соплом 4м
золотника.
92 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
При отсутствии электрического управляющего воздействия, т.е. при /рег = О,
шток 2 электромеханического преобразователя и поршень 10 находятся в
исходных положениях. Через зазор 5 масло проходит с определенной скоростью. При
появлении тока / в зависимости от его знака шток 2 перемещается вверх или
вниз и увеличивает или уменьшает зазор 5. При этом давление в полости
/соответственно уменьшается или увеличивается. Поршень 10 перемещается вслед за
штоком 2 и соответствующим образом изменяет впуск масла в гидравлический
двигатель. Для функционирования гидравлического усилителя необходима
жесткая отрицательная обратная связь, которая осуществляется тем, что
дросселирующий зазор 8, увеличиваемый (или уменьшаемый) перемещением штока (входным
перемещением), уменьшается (или увеличивается) по мере движения поршня
(выходное перемещение): дроссельный золотник с гидроусилителем представляет
собой гидравлическое следящее устройство с замкнутой цепью воздействий.
Электрогидравлический преобразователь обладает практически линейной
характеристикой и является достаточно быстродействующим, его постоянная
времени т„ = 10-=-25 мс
5.3. Микропроцессорная автоматическая система
регулирования частоты и мощности турбогенераторов
Автоматическое управление режимами работы генераторов электрических
станций осуществляется автоматической системой регулирования частоты и
мощности (АСРЧМ), содержащей гидродинамическую и электрическую части.
Существенное совершенствование АСРЧМ достигнуто с созданием
микропроцессорной электрической части системы регулирования мощности турбогенераторов
(ЭЧСР-М) [17].
Автоматическое регулирование мощности в нормальном и частоты в
утяжеленном режимах осуществляется по медленнодействующему контуру управления
МКУ (рис 5.5) в соответствии с ПИ-алгоритмом: регулирующее воздействие
определяется интегральной функцией отклонения мощности АР от предписанного
значения Ргпр.
Микропроцессорная электрическая часть АСРЧМ выполняет и функции
быстродействующего по контуру БКУ управления мощностью турбогенераторов по
сигналам противоаварийной автоматики (ПА) предотвращения нарушения
устойчивости (АПНУ) и ликвидации асинхронного режима (АЛАР), а именно:
• быстродействующего кратковременного снижения мощности — импульсной
разгрузки турбины БИР для сохранения динамической устойчивости в аварийном
режиме;
• длительного снижения — ограничения мощности турбины ОМТ для
сохранения статической устойчивости в послеаварийном режиме и для
ресинхронизации турбогенераторов.
5.3. Микропроцессорная автоматическая система регулирования
93
МКУ
ЩПАМ\4
о^
ггПА
отз
SM1
№,
гъ
Дсо
ИПЧ
\П
о-2-
я«
SM2
|±Аш|>-
SM3
Ар
SM5
КАРП Г
►
Дсо
.Н
гутш
Jen
SM4
МАХ
Д#
SM6
д
№
ггПА
Jn.n
От ПА
О
Дсо
ггПА
ОтО
I г—ч к
нкн
**«■«
БИР
ОМТ
AP(tX
и.р
SM9
MIN
\вип
КМУТ
БКУ
SM10
АР*
РФ
КЭШ
КЭМ
►
РУ
SMU\
\SM12
Г
вил
вип
:ь
эд
Рис. 5.5. Функциональная схема микропроцессорной электрической части автоматической
системы регулирования мощности турбогенераторов (ЭЧСР-М)
Быстродействие импульсной разгрузки достигается воздействием ЭЧСР-М
непосредственно на исполнительную гидравлическую часть АРЧВ через ЭГП
(см. рис 5.4). Через ЭГП исполняется и функция обеспечения приемистости
турбины — способности быстро изменять свою производительность. При этом
реализуется ПИД-алгоритм автоматического регулирования: регулирующее
воздействие определяется отклонением мощности и ее производной (скоростью
изменения).
94 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
Устойчивость автоматического регулирования по МКУ достигается за счет вре-
мяимпульсного воздействия ЭЧСР-М на микроэлектродвигатель элемента
изменения уставки АРЧВ, называемый механизмом управления турбиной МУТ
гидродинамических регуляторов паровых турбин [40]: программно выполняется функция
позиционного автоматического регулятора мощности (АРМ). Только такой АРМ
устойчиво реализует ПИ-алгоритм автоматического регулирования при
интегрирующем исполнительном элементе с постоянной скоростью движения, каким
является электродвигатель МУТ. Вычисляемая в реальном времени переходного
процесса регулирования, уменьшающаяся по мере приближения истинной мощности
турбогенератора Рт к установленной Ргу длительность импульсных воздействий
(см. рис 2.5, б) на включение электродвигателя обеспечивает спокойное, без
перерегулирования, наступление установившегося режима работы.
В микропроцессорной ЭЧСР используется информация и об отклонениях
неэлектрических параметров от установленных, а именно, о давлении свежего
паРа ^с.п ПРИ работе турбины с постоянным (номинальным) давлением, или
открытии Я ее регулирующих клапанов при работе на скользящем давлении.
Реализуется один из алгоритмов регулирования
Рт.у ~ Рт + kp(Py -Реп) - kf^ = 0 (5.3)
или
Рту - Рт + тах(крАр, кнАН) - kfAa = 0, (5.4)
где Рг, Ргу — истинная и установленная активная мощности турбогенератора; р ,
ру — истинное и установленное давления свежего пара; АН— отклонение
положения регулирующих клапанов турбины от установленного значения Яу; кр, kf9 kH —
коэффициенты настройки регулирования.
В цифровом виде сигналы формируются реализацией вычитания (сравнения)
цифровыми сумматорами SM1—SM4 (см. рис 5.5) максимального из двух
сигналов: по отклонениям давления пара Ар или положения клапанов турбины АЯ —
определяется их сравнением, обозначенным на схеме выделителем максимального
сигнала МАХ.
Скорость (темп) изменения установленной мощности энергоблока, сигналы о
которой поступают от общестанционной АСРЧМ (Руг) или от противоаварийной
автоматики (РгПА), устанавливается программным модулем ограничения темпа
задания ОТЗ в зависимости от термических напряжений в металле турбины.
Сигналы информации о мощности Рг, частоте вращения генератора со и ее отклонении с
зоной нечувствительности Асонч формируются измерительными
преобразователями активной мощности ИПАМ, частоты ИПЧи цифровым сумматором SM2.
При неполадках в работе технологического оборудования энергоблока или
появлении технологических ограничений гибкая функциональная структура ЭЧСР-М
перестраивается. Например, при снижении давления свежего пара включается
5.3. Микропроцессорная автоматическая система регулирования
95
защитный контур регулирования давления по сигналу Pymin через выделитель MIN
минимального сигнала, а при отключении автоматического регулятора
парогенератора АРПГ устройство переходит в режим регулирования давления свежего пара.
Времяимпульсное воздействие ЭЧСР-М времяимпульсным преобразователем
ВИП по медленно действующему контуру управления МКУ на электродвигатель
МУТ условно показано на функциональной схеме (рис 5.5). Сумма сигналов по
ДРГ и Асо через сумматор SM5 воздействует и на АРПГ.
Быстродействующий контур автоматического управления БКУ реализуется,
как указывалось, чрез ЭГП. Программным модулем, составной частью которого
является дифференциатор Д сигнала по изменению частоты со, и сумматором SM7
формируется сигнал о мощности турбины
rdo)
d/
PT = Pr + ^. (5.5)
Программными модулями быстродействующей противоаварийной импульсной
разгрузки БИР длительного ограничения мощности турбины ОМТ и изменения
(в начальное время переходного процесса) статизма АРЧВ (так называемой
начальной коррекции неравномерности НКН), необходимой для повышения
приемистости турбины, формируются цифровые сигналы управления от
противоаварийной автоматики:
• о необходимом изменении АРИ p(t) мощности турбины — импульсной ее
разгрузки при аварийной ситуации;
• о длительности ограничений мощности АР0 м турбины в послеаварийном
режиме;
• о начальной коррекции неравномерности (статизма) AkCT(t): сигнал
формируется по информации о мощности генератора Рг и давлении пара/?пп в промперегре-
вателе парогенератора: именно объем перегретого пара, поступающего в цилиндр
среднего давления турбины, обусловливает ее инерционность (низкую
приемистость).
Программный модуль ОМТ реализуется по схеме регулирования механической
мощности турбины Рт, а программа модуля БИР выполняет сложные вычисления
дозированного противоаварийного импульсного воздействия на регулирующие
клапаны турбины.
На рис 5.5 показан защитный сигнал релейной форсировки РФ стопорных
клапанов турбины (электромагнитом ЭМ) при отключении выключателя QT
генератора. Предусмотренные в ЭЧСР-М цепи (сумматоры SM11, SM12) управляют
(через ВИП) электродвигателями регулятора давления пара рпп в промперегрева-
теле и регулятора положения поворотной диафрагмы теплофикационной турбины.
Цепи диагностики и контроля прогрева ротора турбины на схеме не отображены.
В соответствии с требованиями безотказности функционирования в ЭЧРС-М
предусмотрены по два взаиморезервируемых микропроцессорных комплекта
МПК1, МПК2 (рис 5.6): один — рабочий (ведущий), а второй — резервный (ведо-
96 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
мый). Они связаны между собой устройством (блоком) контроля БК,
обрабатывающим сигналы информации об исправности вычислительных средств.
Устройство связи с объектом содержит, прежде всего, элементы
гальванического отделения ЭГР источников сигналов и выходных воздействий от
микропроцессоров. В цепях дискретных сигналов ДС используются миниатюрные
электромагнитные реле с герметизированными контактами — герконы, образующие
устройства приема контактов УПК, называемые так разработчиками.
Мультиплексоры ввода дискретной информации МВ1 обеспечивают рациональное
использование входного параллельного интерфейса микропроцессора.
Непрерывные аналоговые сигналы, в частности, от быстродействующего [3]
измерительного преобразователя активной мощности БИПАМ и частоты ИПЧВ9
передаются через изолирующие оптронные интегральные усилители — элементы
гальванической развязки ЭГР. Они преобразуют унифицированные токовые
(±5 мА) сигналы ИПАМ, ИПЧВ и индукционных измерительных преобразователей
(датчиков) давлений и тепловых параметров ДДТП в электрические сигналы
напряжения АЦП.
Вывод основной дискретной информации производится выходным
параллельным интерфейсом и мультиплексорами МВ2 по схеме ИЛИ через преобразователи
дискретных цифровых потенциальных сигналов МПК1, МПК2 в состояния герко-
нов ПЛК (преобразование в логические сигналы их контактов). Аналоговые
сигналы с выходов ЦАП через аналоговый коммутатор АК поступают через оптронные
элементы гальванической развязки ЭГР на ВИП и усилитель УВ, формирующие
БИЛАМПГ
ИПЧВ С
дс
УПК
=а
галшкз
I
AM
\^ЦАП\Ы
МПК1
2
БНК\
УПК
I
7\
2L
1
I
УВ
эгп
£>
АК
R=
2Е
£И
MB2UZZ
БК
1
МПК2
I
МВ2
плк\
\ЩИ)\
\$>\ЦАп\$>\ АК
I
3Z
I
Ымк
AM
УВ Mv
мутЬ?
1L
ЭГР
7Г
гтЫвип\=$>
КМУТ
дс
=>
УВ
кэш
Рис. 5.6. Структурная схема ЭЧСР-М
5.3. Микропроцессорная автоматическая система регулирования
97
времяимпульсное и непрерывное управляющие воздействия на МУТ и ЭГП
соответственно. Аналоговые мультиплексоры AM, связывающие выход ЦАП с МПК1,
МПК2, мультиплексоры МК и блок БНК являются элементами диагностики и
контроля исправности ЭЧСР-М.
Программное обеспечение ЭЧСР-М представляет собой организованные в
определенную структуру программы различного функционального назначения
иерархического построения — программы верхнего уровня определяют и
координируют функционирование программ нижнего уровня. Используется библиотека
стандартных программ.
Указанная структура программ обеспечивает циклическое функционирование
ЭЧСР-М с обновлением управляющего воздействия на выходе к ЭГП через
каждые 10 мс (половину периода промышленной частоты), а на выходе к МУТ —
через 100 мс
Микропроцессорная ЭЧСР выполняет и функции автоматического управления
частотой вращения в процессе пуска турбоагрегата и начального нагружения
турбины, производимого с учетом тепловой ее инерционности.
В настоящее время в ГУП ВЭИ разработана [17] современная ЭЧСР-М для
турбогенераторов с паровыми и газовыми турбинами и вычислительная часть
(устройство) ВУ-ЭЧСР-М для замены морально устаревшей вычислительной
части находящейся в эксплуатации ЭЧСР-М. Она функционирует на
специализированном управляющем микроконтроллере с зарубежным микропроцессором
Intel 80188 и выполняет следующие основные функции всережимного
автоматического регулятора турбоагрегата [17]:
• разворот и нагружение турбоагрегата при автоматическом пуске турбины
с контролем термонапряженного ее состояния;
• автоматическое регулирование частоты вращения турбоагрегата;
• автоматическое регулирование активной мощности в нормальном режиме
с коррекцией по частоте вращения в утяжеленном режиме;
• противоаварийное и автоматическое управление мощностью турбины
(импульсная ее разгрузка и послеаварийное ограничение мощности);
• автоматическое управление мощностью в режимах технологических внутри-
блочных ограничений;
• техническая диагностика гидравлической части автоматической системы
регулирования турбины;
• автоматическая защита турбины от разгона (при сбросах нагрузки) и
недопустимого понижения давления пара перед турбиной;
• компенсация инерционности промперегрева пара.
Основной особенностью новой ЭЧСР-М и ее вычислительного устройства
является существенное увеличение количества сервисных функций и наличие
переносного дисплейного пульта с упрощенной клавиатурой, отображающего
текущую информацию о режиме работы и параметрах сигналов [17].
Постоянная связь с ПЭВМ, оснащенной специализированным программным
обеспечением, позволяет оперативно изменить настройку микропроцессорного
всережимного автоматического регулятора турбины.
98 Глава 5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И АКТИВНОЙ МОЩНОСТИ
Новая и модернизированная, находящаяся в эксплуатации ЭЧСР-М является
частью АСУ ТП электростанции, поскольку ее программное обеспечение
совместимо с программным функционированием верхнего уровня АСУ ТП (см. гл. 12).
Вопросы аля самопроверки
1. В чем состоят особенности автоматического регулирования частоты вращения и активной
мощности генераторов?
2. Какой автоматический регулятор — статический или астатический — удовлетворяет требованиям
автоматического регулирования частоты вращения синхронных генераторов?
3. Как выглядят статическая и астатическая характеристики автоматического регулирования
частоты вращения и в чем их различие?
4. Что такое структурная неустойчивость автоматической системы регулирования частоты
вращения? Как она устраняется?
5. Что такое функциональная отрицательная обратная связь? Какие два основных ее вида
применяются?
6. Какой местной отрицательной обратной связью: жесткой, гибкой с передаточной функцией
идеального дифференцирующего звена или гибкой, осуществляемой реальным дифференциатором,
устраняется структурная не устойчивость астатической АСРЧВ?
7. Какие бывают алгоритмы автоматического регулирования частоты вращения? Какие известны
способы формирования алгоритма автоматического регулирования?
8. Чем различаются структурные схемы П-, ПИ- и ПИД-регуляторов частоты вращения?
9. Какими способами формируется И-составляющая алгоритма функционирования ПИД-регу-
лятора?
10. Как формируется Д-составляющая алгоритма действия АРЧВ?
11. Почему в автоматическом регуляторе частоты вращения предусматривается задающий элемент
активной мощности синхронного генератора?
12. Какие известны микропроцессорные автоматические регуляторы частоты вращения и активной
мощности синхронных генераторов?
13. В чем состоят особенности микропроцессорного автоматического регулятора частоты и активной
мощности синхронных генераторов типа ЭГР-МП?
14. Как производится измерительное преобразование частоты вращения турбины в ЭГР-МП?
15. Объяснить структурную схему микропроцессорного автоматического регулятора частоты
вращения и активной мощности гидрогенератора (см. рис. 5.6).
Глава шестая
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
И РЕАКТИВНОЙ МОЩНОСТИ СИНХРОННЫХ
И СТАТИЧЕСКИХ КОМПЕНСАТОРОВ
6.1. Особенности режимов работы синхронных
и статических компенсаторов
Современные линии электропередачи высокого и сверхвысокого напряжений
являются мощными неуправляемыми генераторами реактивной мощности при
передаваемой активной мощности PR9 меньшей натуральной Рнат, или
потребителями — при Рл > Ртг Поэтому традиционные современные генераторы
реактивной мощности — синхронные компенсаторы функционируют как управляемые
реверсивные источники, т.е. и как ее потребители.
Созданы и продолжают разрабатываться новые непрерывно управляемые
тиристорными устройствами реакторные (потребляющие) и реакторно-конденса-
торные (реверсивные) статические компенсаторы реактивной мощности,
предназначенные для подключения к шинам электрических станций и промежуточных
узловых подстанций магистральных линий электропередачи.
Реверсивные управляемые синхронные и статические компенсаторы
реактивной мощности обеспечивают:
• требуемые режимы работы линий электропередачи по напряжению и
реактивной мощности;
• эффективное демпфирование колебаний роторов (качаний) синхронных
генераторов;
• высокие пределы передаваемой активной мощности по условиям
статической и динамической устойчивости ЭЭС;
• симметрирование напряжений и токов даже в неполнофазных режимах
работы линий электропередачи;
• предотвращение коммутационных перенапряжении на линиях и улучшение
условий гашения электрической дуги однофазного КЗ при отключениях только
одного поврежденного провода воздушной линии.
Синхронный компенсатор используется в современных ЭЭС не только как
генератор реактивной мощности, но и как ее управляемый потребитель. Режим
генерирования (выдачи) или потребления определяется возбуждением
синхронного компенсатора.
В соответствии с [/-образной его характеристикой (рис 6.1, а) при номинальном
токе возбуждения 1В ном синхронный компенсатор выдает реактивную мощность
бсКном ~ Uui(EqKOM ~ Цтт)/х</>
(6.1)
100
Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
Рис. 6.1. Графики зависимостей реактивной мощности от тока возбуждения (а) вращающих
моментов (б) и потребляемой реактивной мощности (в) от внутреннего угла синхронного
компенсатора
а при отсутствии возбуждения (7В = 0) — потребляет реактивную мощность
1-еско| = ^ш/^-о,5еСКном. (6.2)
Наибольшая возможная загрузка синхронного компенсатора потребляемой
реактивной мощностью достигается или при граничном отрицательном токе
возбуждения -1Ъ гр, или при отсутствии возбуждения /в = 0 и внутреннем угле
компенсатора 8 = я/2 (рис. 6.1, в), т.е. при расположении ротора по поперечной оси. При
этом
■ескгР| = ^ш^«о,75еСКном.
(6.3)
Граничный режим потребления реактивной мощности определяется условием
устойчивости работы синхронного компенсатора — сохранением синхронизма.
Синхронизирующий вращающий момент создается синхронным
электромагнитным Мс и реактивным (обусловленным явнополюсностью) М моментами
М = -*— sin 8;
С/Т1Т х j - хп
Mv = -f * sin 25.
2 xdxq
(6.4)
6.1. Особенности режимов работы синхронных и статических компенсаторов 101
В частности, при отсутствии возбуждения синхронный компенсатор
удерживается в синхронизме только за счет реактивного момента. При отрицательном
возбуждении синхронный момент противодействует реактивному и ухудшает
устойчивость работы синхронного компенсатора.
Граничное значение отрицательной ЭДС Е определяется приравниванием
к нулю производной синхронизирующего момента по углу 5. С учетом (6.4)
4z{Mc + MD) = qTp ш cos 8 + U* ^^ cos 28 = 0, (6.5)
d5 P xd xdxq
при 8 = 0
_£ =u ХЛ±1 = и Д£. (6.6)
grp win ^ш r v '
Xq Xq
При отрицательном возбуждении наибольшая потребляемая реактивная
мощность -£?скгр теоретически достигается в граничном режиме при 8 = 0.
Практически, в связи с наличием потерь активной мощности (на вентиляцию, трение)
мощность -£?скгр достигается при угле 8 « я/10.
В граничном режиме синхронный компенсатор выпадает из синхронизма.
Согласно (6.4) и рис 6.1, б при 8 = я/4
а при 8 > я/4 синхронизирующий момент отрицательный. Даже при отсутствии
отрицательного возбуждения угол 8 > я/4 увеличивается, поскольку реактивный момент
уменьшается. При 8 = я/2, т.е. при положении ротора по поперечной оси,
сопротивление статора равно х и потребляемая мощность достигает близкого к наибольшему
значения (6.3) при отсутствии возбуждения (7В = 0). Но такой режим возможен только
в условиях искусственной устойчивости синхронного компенсатора.
Возможность непрерывного управления мощностью реакторов и дискретного
изменения мощности конденсаторных установок мощными тиристорными
управляемыми устройствами и тиристорными выключателями соответственно
обусловила разработку статических реверсивных управляемых компенсаторов (СТК),
более надежных, быстродействующих и менее дорогих, чем вращающиеся
синхронные компенсаторы. В связи с выявившимися особенностями коммутации
секционированных конденсаторных установок оказалось целесообразным выполнять
СТК, состоящими из непрерывно управляемой реакторной части и постоянно
включенной или только включаемой и отключаемой в целом конденсаторной
установки. Поскольку непрерывно управляемые реакторные СТК в режимах малой
загрузки потребляемой реактивной мощностью (при больших углах включения
тиристоров я/2 < а < 2я/3) генерируют гармонические составляющие напряжения
и тока, пришлось их секционировать и осуществлять дискретно-непрерывное
управление их мощностью, т.е. производить включение и отключение отдельных
реакторов с непрерывно изменяемой мощностью каждого из них тиристорными
преобразователями, работающими с малыми углами включения тиристоров
102
Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
(тс/6 < а < я/2). Поэтому определились два типа СТК: оба состоят из отдельных
секций (модулей), но один — с постоянно подключенной конденсаторной
установкой, а второй — с периодически коммутируемой.
Первый тип СТК является частично, а второй — полностью реверсивным.
Например, СТК одной из подстанций напряжением 1150 кВ состоит из 14
реакторных непрерывно управляемых модулей, потребляющих реактивную мощность до
-1100 Мвар, и конденсаторной установки мощностью +300 Мвар. Реверсивный
СТК мощностью +55 Мвар содержит непрерывно управляемую тиристорным
преобразователем KST (см. рис 6.6, а) реакторную часть LR и дискретно управляемую
несекционированную, т.е. включаемую или отключаемую, конденсаторную
установку — батарею СВ напряжением 10 или 20 кВ [19].
Компенсаторами потребляемой реактивной мощности (ее генераторами)
являются и синхронные электродвигатели. Однако в режиме потребления реактивной
мощности они практически работать не могут.
6.2. Возбуждения современных синхронных компенсаторов
Современные перспективные синхронные компенсаторы GC имеют по две
обмотки возбуждения LG1, LG2, расположенные или параллельно (рис 6.2, а) или по
продольной и поперечной магнитным осям ротора (рис 6.2, б). Две параллельных
VSl VST2 GE2 VS2 LG2 LG1 GC
фиу1 у_^и—еЕ1\ФИУ2
Фс
+3-
\ ФИУ4
ФИУ1
VST1
ФИУ2
\*
л_
а)
VST2
НтН
±w^
±w^
APB-q
APB-d
б)
Рис. 6.2. Схема тиристорного бесщеточного возбуждения (а) и возбуждения синхронного
компенсатора с поперечной обмоткой ротора (б)
6.2. Возбуждения современных синхронных компенсаторов
103
обмотки, создающие реверсное возбуждение, обеспечивают искусственную
устойчивость синхронного компенсатора в режиме потребления реактивной мощности.
При бесщеточном возбуждении обмотки ротора LG1, LG2 (рис 6.2, а)
подключаются к вращающимся диодным выпрямителям VS19 VS2, питаемым от двух
обращенных синхронных генераторов GE1, GE2. Генераторы имеют тиристорное
возбуждение — тиристорные преобразователи VST1, VST2 подключены через
трансформатор Т к выводам синхронного компенсатора. Тиристорные
преобразователи в режиме выпрямления через устройства фазоимпульсного управления
ФИУ1, ФИУ2 (формирователи импульсов токов включения тиристоров)
управляются положительным и отрицательным воздействием ±U (пТ) реверсивного
автоматического регулятора и автоматическим регулятором возбуждения АРВ.
В режиме генерирования реактивной мощности управляющее воздействие
U QT(nT) положительно, возбуждение создается первым возбудителем — GE1, VS1,
VST1. Оно пропорционально положительному отклонению напряжения шин
подстанции Um от предписанного значения Um : AU= Е/шлф - Um.
При напряжении Um > U регулирующее воздействие U (пТ) отрицательно.
При этом VST1 закрывается и вступает в действие второй возбудитель — GE2, VS2,
VST2, создающий отрицательное возбуждение. Синхронный компенсатор
переходит в режим потребления реактивной мощности и стремится к выпадению из
синхронизма: его внутренний угол 8 увеличивается, сигнал информации об угле 8
генерируется импульсным измерительным преобразователем угла ИПУ,
аналогичным ранее рассмотренному (см. рис 4.1). Возникающие при этом положительный
или отрицательный вращающие моменты замедляют или ускоряют ротор,
который, вибрируя, удерживается в динамически равновесном положении, близком к
поперечной оси.
Обмотки возбуждения синхронного компенсатора при этом выполняют роль
только удерживающих ротор в указанном положении. Такую же роль
удерживания ротора в положении по продольной оси, т.е. при угле 8 = 0, и отрицательном
возбуждении выполняет вторая удерживающая обмотка возбуждения LG2,
расположенная по поперечной оси ротора (см. рис 6.2, б). Синхронные компенсаторы с
двумя обмотками возбуждения — основной продольной и удерживающей
поперечной — могут загружаться любой, ограниченной лишь термической
стойкостью обмоток статора потребляемой реактивной мощностью при угле положения
ротора 8 « 0.
Реверсивное возбуждение синхронного компенсатора с дополнительной
обмоткой ротора LG2, расположенной по поперечной его оси, также создается двумя
тиристорными возбудителями VST1, VST2 (рис 6.2, б), состоящими каждый из
двух встречно включенных тиристорных выпрямителей, подключенных через
трансформатор Т к выводам обмоток статора, управляемых двумя
автоматическими регуляторами возбуждения APB-d и APB-q.
Автоматический регулятор APB-d тот возбуждения ±IBd в обмотке LG1
обеспечивает поддержание напряжения Um на шинах изменением генерируемой или
потребляемой синхронным компенсатором реактивной мощности. Его регулирующее
104 Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
воздействие ±U (nT) пропорционально отклонению напряжения на линиях U
подстанции и отклонению £/д6 внутреннего угла 6 от граничного значения 8гр < тс/2.
Автоматический регулятор тока возбуждения ±1 в поперечной обмотке LG2
удерживает ротор синхронного компенсатора в положении по продольной оси, т.е.
при внутреннем угле 8 = 0, в режиме потребления реактивной мощности. Его
регулирующее воздействие ±U пропорционально отклонению угла 8 от нулевого
значения С/д5.
6.3. Автоматические регуляторы реактивной мощности
синхронных компенсаторов
Автоматический регулятор синхронного компенсатора с двумя
продольными обмотками ротора. Основной особенностью цифрового автоматического
регулятора реверсивного (знакопеременного) возбуждения, обусловленной
обеспечением искусственной устойчивости синхронного компенсатора в режиме
потребления реактивной мощности, является необходимость быстродействующего
формирования сигналов информации об отключении угла 8 ротора от значения,
близкого к граничному 8 = тс/2. Поэтому его функциональная схема (рис 6.3)
кроме главного измерительного органа напряжения ИОН содержит измерительный
орган внутреннего угла положения продольной магнитной оси ротора синхронного
компенсатора ИОУ
Измерительный орган угла ИОУ использует импульсные сигналы
измерительного преобразователя угла ИПУ (см. рис 6.2), такого же как и на асинхронизиро-
ванном генераторе (см. рис 4.1). Он содержит элемент аналоговой памяти ЭАП
(рис 6.3), запоминающий мгновенное значение напряжения иа фазы А синхрон-
К ФИУ1 К ФИУ2
I I
-и.
Фс
per
+иП1
НФ
UAS Or TA1 Or TA2 От ТА От TV
До
AlBl(nT)
и<Х<яТ> SM6
H илп
КкЩ
U Ъ'{пТ)
ИОТВ1\
\sM3\
а
и
АЬ(пТ)
АЩпТ)
и\Щ
йоте
Е
SM5
AIJnT)
ИОТВ2
\SM4\
а
titi
МПЛ,АЦП
ИОУ
П
ЭАП
П
ЭАП
Г
в2тах
SM1
s
ZD1
П
От ИПУ
ZD1
П
ИОН
ш.у
Рис. 6.3. Функциональная схема цифрового автоматического регулятора реверсивного
бесщеточного возбуждения синхронного компенсатора (см. рис. 6.2, а)
6.3. Автоматические регуляторы реактивной мощности синхронных компенсаторов
105
ного компенсатора в момент появления импульсного сигнала ии от ИПУ,
перемещающегося по оси времени при изменении угла 8: на рис 4.3 показаны три
значения угла 815 82, 83 и три зафиксированных ЭАП напряжения С/Дб1, UAd2> ^д§з>
являющиеся аналоговыми сигналами информации о внутреннем угле 8
синхронного компенсатора.
Выполнению главной указанной особенности способствуют измерительные
органы токов положительного и отрицательного возбуждения ИОТВ1, ИОТВ2.
В измерительно-преобразовательную функциональную часть регулятора входит и
измерительный орган тока статора ИОТС.
Измерительные органы реализуются вычислительной функциональной частью
регулятора, использующей цифровые сигналы АЦП с мультиплексором МПЛ
аналоговых сигналов от первичных измерительных трансформаторов напряжения TV
и тока ТА синхронного компенсатора, измерительных трансформаторов токов его
возбуждения ТА1, ТА2 и сигнала сУд5 аналоговой части ИОУ
Необходимые для алгоритма функционирования регулятора цифровые
сигналы информации: об отклонениях напряжения на шинах подстанции Um от
установленного значения ±AU(nT) = U - Um(nT) и угла ±Д8(иГ) = 8у - Ь(пТ)\ их
производных, обеспечивающих искусственную устойчивость синхронного
компенсатора в режиме потребления максимальной, близкой к номинальной,
реактивной мощности; сигналов об отклонении токов возбуждения Д/в1(иГ), А1в2(пТ) от
установленных максимальных значений /в1тах, ^В2тах и Т0ка статоРа &1с.к(пТ) от
номинального /ном формируются программными элементами сравнения
цифровых сигналов — операциями алгебраического суммирования SMI—SM5 и
цифрового дифференцирования ZD7, ZD2.
Выходной цифровой сигнал UcI(jiT) сумматора SM6 превращается цифроанало-
говым преобразователем ЦАП в непрерывно-дискретное регулирующее воздействие
±U на элементы фазоимпульсного управления ФИУ1, ФИУ2 (см. рис 6.2, а)
тиристорных преобразователей возбудителей синхронного компенсатора.
Алгоритм функционирования микропроцессорного автоматического
регулятора в z-операторном виде в соответствий с функциональной схемой
представляется в следующем виде:
Uez(z) =
/ 1 "^
Ки Ки т
V 7 J
( ] - ~1Л
v 1
х к1вр[ЫъХ{2) + A/B2(z)] + £7A/C.K(F), (6.8)
где kjj, къ, к1ъ, к2— безразмерные коэффициенты настройки регулятора; к'и9 к'ъ —
коэффициенты настройки с размерностью постоянной времени.
106
Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
AUCz)
kU V
к'иЧА-
Д8(2)
—*—н
>
, J_2-l
5 Т
кь
4i©
42®
\
\
ЫС¥<*\
*/
Н Y
А
/" А
А^(2)
я)
иш®
АРл1®
кр(1-г-х)
(1+7/^д.р)
1-г-'/(1+г/гдр)
0)
"с*®
Рис. 6.4. Структурные схемы цифровых автоматических регуляторов бесщеточного
возбуждения (в) — см. рис. 6.2, а и возбузкдения синхронного компенсатора с дополнительной поперечной
обмоткой ротора (б, в) — см. рис. 6.2, б
Соответствующая (6.8) структурная схема регулятора приведена на рис. 6.4, а.
Алгоритм функционирования в реальном дискретном времени и Г описывается
разностным уравнением
к'
исг(пТ) = kvMJ{nT) + -^[АЩпТ) - AU(nT- T)] +
К
+ к5А8(пГ) + ^[А8(пТ) - А8{пТ- Г)] +
+ к1в[А1в1(пТ) + А1в2(пТ)] + kjAI^inT). (6.9)
Автоматическое регулирование возбуждения синхронного компенсатора с
поперечной обмоткой ротора осуществляется двумя отдельными регуляторами
APB-d и APB-q (см. рис. 6.2, б), которые в отличие от двух каналов АРВ асинхро-
низированного генератора не взаимодействуют между собой.
Первый регулятор — APB-d имеет лишь одно назначение — поддержание
напряжения Um на шинах электростанции или подстанции изменением
генерируемой или потребляемой реактивной мощности синхронным компенсатором. Он
представляет собой ПД-регулятор, формирующий регулирующее воздействие по
отклонению напряжения AUm и его производной. Достигается полное использова-
6.3. Автоматические регуляторы реактивной мощности синхронных компенсаторов 107
ние синхронных компенсаторов не только в режиме генерирования, но и
потребления реактивной мощности.
Задачами второго регулятора APB-q являются: удержание синхронного
компенсатора в режиме искусственной устойчивости при положении ротора по
продольной оси и отрицательном токе возбуждения IBd, не ограничиваемом условием
(6.5) равенства отрицательного электромагнитного и положительного реактивного
вращающих моментов; предотвращение самораскачивания ротора и
демпфирование его колебаний и поддержание, как указывалось, угла 6 « 0. Поэтому
регулирующее воздействие С/пег_ формируется ПД-регулятором, функционирующим по
отклонениям угла А8 от 8 = 0 и по его первой и второй производным.
Алгоритмы функционирования автоматических регуляторов определяются их
назначением. Регулятор APB-d обеспечивает поддержание напряжения Um на
шинах изменением генерируемой или потребляемой синхронным компенсатором
реактивной мощности. На него возлагается и задача демпфирования качаний
синхронных генераторов электростанций созданием принужденных колебаний
напряжения на шинах с частотой колебаний роторов генераторов с фазой,
обеспечивающей эффективное затухание.
Это достигается использованием сигнала по изменениям активной мощности
Д'Рл1 в линиях электропередачи, формируемого реальным дифференцирующим
звеном. Регулирующее воздействие U d определяется суммой сигналов,
отображающих отклонение напряжения АС/ = U - Um производной напряжения и
указанного изменения мощности.
В соответствии с функциональной схемой автоматических регуляторов (рис 6.5)
указанные сигналы после аналого-цифрового (мультиплексор МПЛ и АЦП)
преобразования аналоговых входных сигналов информации о напряжении на шинах
подстанции — первичный измерительный трансформатор TV (см. рис 6.2, б), о токе
синхронного компенсатора — первичный измерительный трансформатор ТА и о
токе нагрузки линий электропередачи /л1 (от TAJ формируются:
• программными функциональными элементами измерительных органов
напряжения ИОН, внутреннего угла 8 синхронного компенсатора ИОУ и
измерительных органов активной мощности линий электропередачи ИОАМи
электромагнитного вращающего момента синхронного компенсатора ИОЭМ (рис 6.5);
• измерительными преобразователями активных мощностей ИПАМ1 и ИПАМ2;
• элементами сравнения цифровых сигналов установленных (задающие
элементы ЗЭ7, ЗЭ2) мощности и вращающего момента, напряжения U и угла 8у « 0
с их истинными значениями (сумматорами SMI—SM4 в режиме вычитания);
• дифференциаторами ZD1, ZD2, близкими к идеальным;
• реальным дифференциатором ZD3.
Сумматоры SM5 и SM6 формируют сигналы U^^nT) и f/cS q(nT)9
превращаемые ЦАП1 и ЦАП2 в аналого-дискретные управляющие воздействия UpQTd и UpeTq
на элементы фазоимпульсного управления ФИУ1—ФИУ4 тиристорными
преобразователями возбудителей синхронного компенсатора (см. рис 6.2, б).
108
Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
U\nT)
+,щ
SM5
—К
Н z
АЩпТ)
\И0АМ
ИПАМ1' Г
ZD3 SM3
A'^l0
пЦЛ—I
ЗЭ1
-ЪЬ
W^
SM6
'per?
44-
MJnV
АЬ(пТ)
Ъ'(пТ)
И0ШИПАМ2\
SM4
ЗЭ2
JAb OtTAjiOtTAOtTV
} I I I
МПЛ,АЦП
ZDl
□
SMI
0
Я0Я
И0У
\ЭАП\
SM2 ZD2
D
От ЯЯУ
Рис. 6.5. Функциональная схема автоматического регулятора возбуждения синхронного
компенсатора с поперечной обмоткой ротора
Сигнал, формируемый по производной напряжения, является
стабилизирующим автоматическую систему регулирования возбуждения по продольной оси, т.е.
предотвращающий ее переход в неустойчивое автоколебательное состояние из-за
обычно весьма высоких значений коэффициента усиления сигнала по отклонению
напряжения (кця 100).
Алгоритм формирования выходного сигнала цифрового автоматического
регулирования возбуждения по продольной оси в z-операторном виде представляется
следующим образом:
UaJz) =
к + k' l~z
V
AU(z) +
J
+ kc
1 -z~
(i + r/r^fi-z-Vo + r/r^)]
Д^лх(^).
(6.10)
Выражению (6.10) соответствует структурная схема цифрового APB-d (см.
рис 6.4, б).
Алгоритм автоматического регулирования возбуждения по поперечной оси
определяется его назначением, состоящим, как указывалось, в удержании ротора в
положении по продольной оси, т.е. при угле 8 = 0, в режиме потребления
реактивной мощности при отрицательном токе возбуждения IBd в продольной обмотке воз-
6.4. Автоматические регуляторы реактивной мощности статических компенсаторов 109
буждения LG1 и демпфирования колебаний ротора в режиме искусственной
устойчивости синхронного компенсатора.
Поэтому регулятором APB-q используются сигналы по отклонению угла А5 от
6 = 0, его производной и отклонению (появлению) электромагнитного момента —
активной мощности на валу синхронного компенсатора.
Алгоритм формирования выходного сигнала цифрового автоматического
регулирования возбуждения по поперечной оси в z-операторном виде выглядит
следующим образом:
*w*> =
к 1 кл~2
v 1
А8(1) + кмАМэм(1). (6.11)
Выражению (6.11) соответствует структурная схема APB-q (см. рис 6.4, в).
Алгоритмы функционирования микропроцессорных автоматических
регуляторов APB-d и APB-q в соответствии с (6.10) и (6.11) являются следующими
функциями дискретного времени пТ:
U^d(nT) = kvAU{nT) + j[AU(nT) - AU(nT- T)] +
+ тпщ$",*<яТ> - AP^"T-T)]- (Г+1й5а''-(-г- п; <6Л2)
Uclq(nT) = кдА8(пТ) + к^[А8(пТ) - АЦпТ- Т)] + кмАМш(пТ), (6.13)
где А!РпЪ(пТ- Т) — дискретное значение выходного дифференциатора (сигнала
изменения мощности линий электропередачи) в предшествующем интервале
дискретизации Т.
6.4. Автоматические регуляторы реактивной мощности
статических компенсаторов
Для реверсивных СТК (рис 6.6, а) разработаны аналоговый автоматический
регулятор реактивной мощности с элементом дискретного действия и
микропроцессорная автоматическая система комплексного управления и защиты (САУЗ).
Регулирующие воздействия аналогового и цифрового автоматических
регуляторов формируются по отклонению AU напряжения, первой и второй его
производной и по сигналу об изменениях А!РЛ потоков мощности в магистральных
линиях электропередачи, способствующему затуханию синхронных качаний
генераторов электростанций.
Изображения регулирующих воздействий непрерывной части аналогового
регулятора и микропроцессорной САУЗ определяются следующими р- и z-onepa-
110
Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
_пГ
ЭУ
LR
VST
в
W7^
h^ \=№-
Ql T
^69
TV
ТА
а)
AU(z)
кц I—
1-Z"
Ща^г^+г-2)
АРл®
kpd-z-1)
(1+77Гдр)[1-г-7(1+77Гдр)]
V®
б)
Рис. 6.6. Схема СТК реактивной мощности (а) и структурная схема вычислительной части (б)
микропроцессорной системы комплексного управления и защиты СТК
торными выражениями, отображающими функционирование их измерительной и
вычислительной частей соответственно:
аналогового автоматического регулятора
Uper(p) = [kv + k'uP + k^P2]AU(p) + -~— АРл(р); (6.14)
Р д-р
цифрового регулятора САУЗ с учетом соотношения (3.5)
к';
^рег(^) -
per
^+^(l-z-1)+3l-2z-1+ -2
AU(z) +
+
W1-.
(1 + Г/Гд.р)[1-гЛ(1 + 7УГд.р)]
APR{z).
(6.15)
Структурная схема регулятора приведена на рис. 6.6, б.
6.4. Автоматические регуляторы реактивной мощности статических компенсаторов 111
В соответствии с (6.15) выходной сигнал вычислительной частя цифрового
регулятора САУЗ является следующей функцией дискретного времени
С/рег(пГ) = кцАЩпТ) + j[AU(nT) - АЩпТ- Т)] +
+ -Ц[АЩпТ) - 2АЩпТ- Т) + АЩпТ-2Т)] +
Г
+ , . * [АР(пТ) - АР(пТ- Т)] + I A'P{nT- T), (6.16)
1 ' 1 д.р 1 д.р
где А'Р(пТ- Т) — дискретное значение выходного сигнала цифрового реального
дифференциатора (сигнал изменения мощности) в предшествующий интервал
дискретизации.
Составляющая (6.16), пропорциональная отклонению напряжения АС/,
определяет загрузку СТК генерируемой или потребляемой реактивной мощностью.
Сигналы по первой и второй производным напряжения стабилизируют
автоматическую систему регулирования.
Регулятор содержит элемент формирования дискретных сигналов (на схеме
рис 6.6, а не показан) полного открытия тиристоров С/п 0, их частичного
фиксированного открытия U4Q и сигналов включения или отключения выключателей Q1
компенсатора и Q2 его конденсаторной части СВ. Они необходимы для
предотвращения периодического включения и отключения выключателя Q2 (неустойчивости
его коммутации) при воздействии на дискретное изменение мощности СТК
отключением или включением его конденсаторной части. Перед ее включением с
опережением по времени на один-два периода промышленной частоты формируется
дискретный сигнал полного открытия тиристоров Uu 0, т.е. перевода СТК в режим
потребления максимальной мощности его реакторной частью LR. Включаемая тут
же конденсаторная часть полностью компенсируют потребляемую реактором
мощность — нулевой режим СТК. Затем непрерывным и постепенным прикрытием
тиристоров мощность реактора уменьшается, обеспечивая непрерывное
нарастание генерируемой мощности СТК конденсаторной его частью.
По мере повышения напряжения на шинах Um и необходимости перевода СТК
в режим потребления реактивной мощности путем отключения конденсатора СВ с
опережением на несколько периодов по дискретным сигналам U40 тиристоры
переводятся в состояние частичного открытия, а выключатель Q1 компенсатора
отключается. Конденсатор апериодически разряжается на реактор через частично
открытые тиристоры: при полном их открытии вследствие равенства
сопротивлений реакторной и конденсаторной частей при промышленной частоте имел бы
место длительный слабо затухающий периодический процесс перезаряда
(неустойчивость заряда конденсатора).
112
Глава i. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
Затем в обесточенном состоянии выключатель Q2 конденсатора отключается, а
выключатель Q1 снова включается. Тиристоры непрерывным сигналом
переводятся в режим, соответствующий необходимой, определяемой напряжением U
потребляемой реактивной мощности.
Микропроцессорная автоматическая система комплексного управления
статическим компенсатором выполнена на базе микросредств управляющей
вычислительной техники (МСУВТ) В7 [19]. Она производит автоматическое
регулирование напряжения и реактивной мощности СТК и противоаварийное
управление: защиту тиристорных преобразователей, ограничение перенапряжений,
дискретное повышение предписанного напряжения (уставки) по сигналу проти-
воаварийной автоматики.
Как обычно, для обеспечения надежности функционирования
предусматриваются две взаиморезервируемые управляющие микроЭВМ, образующие
вычислительную функциональную часть ВЧ(рис. 6.7). Каждая из них содержит по два
микропроцессора МП1, МП2.
Измерительно-преобразовательная ИПЧ и исполнительная ИЧ
функциональные части, образующие устройство связи с объектом, выполняют аналоговое
измерительное преобразование входных сигналов — напряжений и токов
промышленной частоты, формируют фазоимпульсное управляющее воздействие на тиристоры
СТК и обеспечивают гальваническое разделение (развязку) их цепей и входов ВЧ.
При этом используются, как указывалось, герконы — реле дискретных сигналов
РДС и оптоэлектронные усилители в цепях аналоговых сигналов (на схеме не
показаны).
i ипч
От ТА
АИТр±Я
пСН
ОтТИ
АНН
АК
АЦП
п
фнч\=$\
АДП
\ВИПН\
рдс
=н
ВЧ
Т1
Т2
МП1
МП2
Т1
Т2
МП1
МП2
МК
\МПЛ,
МК
ИЧ
М
ФИУ\
/
KVST
ЦАП,
О
М
КВР
KQIQ2
Рис. 6.7. Функциональная схема микропроцессорной системы
и защиты СТК
комплексного управления
6.4. Автоматические регуляторы реактивной мощности статических компенсаторов 113
Элементы аналогового измерительного преобразования токов АИТ и
напряжений АМН содержат активные измерительные трансреакторы и трансформаторы [3]
с унифицированными сигналами в виде переменных напряжений с ограниченной
на уровне 5 В амплитудой. Они поступают через коммутатор аналоговых сигналов
АК (аналоговый мультиплексор) в АЦП.
Поскольку напряжения на шинах подстанции и на линии при работе СТК,
генерирующего гармоники, несинусоидальны, то перед аналого-дискретными
преобразователями АДП, формирующими импульсы управления микропроцессорами,
установлены активные частотные фильтры нижних частот ФНЧ.
Два АДП формируют короткие импульсы в моменты переходов через нулевые
мгновенные значения трех фазных напряжений и одного из них, необходимые для
цифровых измерительных преобразований вычислительной части.
В цепях напряжений предусмотрены аналоговые выпрямительные
измерительные преобразователи средних значений напряжений ВИПН.
В связи с указанной несинусоидальностью напряжений производится
цифровое измерительное преобразование действующего значения напряжения в сигнал,
что является оригинальной особенностью вычислительной части САУЗ.
Программа такого преобразования (рис 6.8) предполагает вычисление сумм квадратов
дискретных действующих значений фазных напряжений С/ через интервалы
времени, равные одной четверти периода их изменений, и извлечение квадратного
корня. Цифровой сигнал информации о действующем напряжении формируется по
среднему их значению за период промышленной частоты Гп. Прерывание
вычислений производится соответствующими таймерами 77, Т2 микроЭВМ.
Оригинальной разработкой является цифровой способ формирования
управляющих воздействий — вычисление двоичного кода угла включения тиристоров
СТК и его фазоимпульсное преобразование. Запуск программы фазоимпульсного
преобразования происходит по прерываниям 12 раз в течение периода
промышленной частоты по импульсным сигналам, формируемым аналого-дискретным
преобразователем АДП (см. рис 6.7) при каждом переходе через нулевые
мгновенные значения 6-фазной системы переменных напряжений, получаемой от
измерительных трансформаторов TV с разными группами соединений первичной и
вторичной обмоток. На выходе второго микропроцессора МП2 по шести линиям
передаются сигналы информации об углах включения тиристоров прямого и
обратного вентилей трехфазного тиристорного преобразователя. Сигналы
усиливаются и распределяются по тиристорам в формирователях импульсных токов
управления ФИУ базы тиристоров исполнительной части САУЗ. В формирователи
поступают и сигналы установки диодного режима работы тиристоров.
В исполнительную часть входят и комплект герконов дискретных выходных
сигналов КВР, поступающих от мультиплексора МПЛ, микромодуль контроля МК
и подключаемый через ЦАП осциллограф О. Процессорная САУЗ выполняет и
функции защиты СТК от токов перегрузки и повреждений тиристорного
преобразователя. Широкий набор сервисных функций, реализуемых программно,
обеспечивает удобство контроля и обслуживания САУЗ.
114
Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
Н
а
£
о
=
ч
чет
1 У
^
/*Ч
hBL
СО I
J.
Ч^
*V
+
kcU
с» 1
"i
S_j^ I
fN-ft
+
^-N ►
^BL
m 1
J»
\^> 1
<N Q
^s
II
/-*s
^BM
m 1
J.
s>« 1
Ч-У
1 ! /—N
b.ak
tl
'V
+
/*-"N
ь,вк
^
<N«C
3
+
/""*S
b,Bk
^
fN «
4r 1
hBk
^
b4 1
6.5. Микропроцессорное управление бесщеточным возбуждением
115
6.5. Микропроцессорное управление бесщеточным
возбуждением мощных синхронных электродвигателей
Компенсатором реактивной мощности является и синхронный
электродвигатель. Однако практически, в связи с постоянной нагрузкой, он, главным образом,
генерирует реактивную мощность.
Схема независимого бесщеточного возбуждения синхронного
электродвигателя М (рис 6.9) состоит из двух тиристорных преобразователей Ul, U2 (в
обозначениях разработчиков), питаемых через трансформаторы Т1 и Т2 от зажимов
электродвигателя или от собственных нужд подстанции СН (переключатель SA1) и
обеспечивающих возбуждение обращенного синхронного генератора GE,
трехфазная обмотка ротора которого через жестко присоединенный к ней вращающийся
диодный выпрямитель возбуждает синхронный электродвигатель.
На схеме показаны выключатели Ql, Q2 пуска электродвигателя через реактор Р9
автоматические выключатели отдельных цепей SF1—SF6, источник питания МП.
Для синхронных электродвигателей с бесщеточным возбуждением ГУП НИИ
Электропривод поставляет цифровую автоматическую комплексную систему
управления и регулирования возбуждения типа КОСУР 120 со 100 %-ным
резервированием. Система содержит два цифровых канала регулирования, состоящих из
модулей, реализующих функции АРВ, управления тиристорами (СУТ) и
возбуждением (СУВ) в целом и защит возбуждения (ЗВ). Все функциональные модули
реализованы программно на единой аппаратной базе. Основой является
универсальная плата с 32-разрядным микроконтроллером фирмы Motorola типа МС 68376.
от защит Д
220 В СН
380 В СН
^380 В Д
Рис. 6.9. Структурная схема бесщеточного возбуждения синхронного электродвигателя с
цифровой системой управления КОСУР 120
116 Глава 6. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ
К комплексной системе управления и регулирования подводится напряжение U
и ток / электродвигателя (от первичных измерительных трансформаторов
напряжения TV и тока ТА), ток возбуждения /в в возбудителя — генератора GE и
напряжение питания тиристоров — напряжение синхронизации U н с цифровым фазо-
импульсным управлением (см. § 3.6), сигналы о состоянии выключателей Ql, Q2 и
управляющие воздействия от местного управления МУ и АСУ ТП подстанции.
Автоматическая система выдает информацию в АСУ ТП и воздействия на
отключение выключателя Q1 и защиты возбудителя.
Автоматическое регулирование возбуждения обеспечивает:
• поддержание коэффициента мощности cos ф электродвигателя или
действующего значения напряжения на выводах его статора в соответствии с заданной
уставкой, со статизмом, изменяемым в диапазоне от 0 до 20 %;
• устойчивую работу и эффективное демпфирование качаний ротора
синхронного электродвигателя;
• форсирование возбуждения при снижении напряжения статора;
• ограничение минимального тока возбуждения в соответствии с заводской
характеристикой электродвигателя в режиме потребления реактивной мощности;
• ограничение тока возбуждения по времяимпульсной характеристике при
перегрузке током ротора;
• ограничение предельного значения тока возбуждения;
• автоматическое непрерывное слежение резервного регулятора за уставкой
регулятора, находящегося в работе, обеспечивающее при переходе с рабочего на
резервный канал отклонение тока возбуждения резервного и работающего каналов
регулирования не более чем на 3 %.
Программный модуль управления возбуждением СУВ выполняет функции
контроля, управления и наблюдения за возбуждением, а именно: сбор информации о
состоянии коммутационной аппаратуры, о работе источников питания и
повреждении вентилей тиристорных преобразователей, выдачу информации оператору и
принятие решений, обеспечивающих работоспособность возбуждения и нормальную
работу электродвигателя, отображение информации на местном пульте и запись в
память последовательности событий, фиксированием информации в АСУ ТП.
В модуль ЗВ входят программные защиты от несимметричного режима работы
тиристорного преобразователя, потери возбуждения, перегрузки по току ротора,
асинхронного режима, снижения сопротивления изоляции обмотки возбуждения
на землю, затянувшегося пуска и перенапряжений на обмотке возбуждения при
выпадении двигателя в асинхронный режим (тиристорный разрядник).
Перед включением в рабочий режим выполняется опробование, при котором
проверяется исправность тиристорного преобразования и внешних силовых цепей,
защит возбуждения и работоспособность сигнализации.
Комплексная автоматическая система управления и регулирования отражает на
дисплее: напряжение и ток статора, напряжение и ток возбуждения, активную и
реактивную мощности, частоту питающего напряжения, cos (p электродвигателя.
Вопросы для самопроверки
117
Настройка автоматической системы управления и регулирования производится
с использованием или универсального пульта оператора УНПО (рис 6.9) или
ПЭВМ, подключенной через стандартный разъем типа RS-232.
Вопросы для самопроверки
1. Какие управляемые источники реактивной мощности применяются на общесистемных и
распределительных подстанциях? Почему они должны быть реверсивными?
2. Почему синхронные генераторы могут потреблять ограниченную реактивную мощность?
3. Какую относительную реактивную мощность потребляет синхронный компенсатор при
отсутствии возбуждения? Почему он не выпадает из синхронизма?
4. Каким условием ограничивается максимально возможная потребляемая синхронным
компенсатором реактивная мощность?
5. Как обеспечивается удержание в синхронизме синхронного компенсатора при отрицательном
возбуждении и потреблении максимальной реактивной мощности?
6. Как должно изменяться возбуждение синхронного компенсатора в режиме искусственной
устойчивости его синхронной работы?
7. В чем состоит назначение и особенности автоматически регулируемых источников реактивной
мощности?
8. По какому алгоритму функционирует автоматический регулятор возбуждения синхронного
компенсатора с реверсивным возбуждением?
9. Как выполняется измерительный преобразователь внутреннего угла 5 (положения ротора)
синхронного компенсатора?
10. По какому алгоритму функционирует автоматический регулятор тока возбуждения в продольной
обмотке ротора?
11. В чем состоят назначение второй обмотки ротора синхронного компенсатора, расположенной по
поперечной его оси и особенность алгоритма автоматического регулирования тока возбуждения
в поперечной обмотке ротора?
12. Каково назначение сигналов, формируемых измерительно-преобразовательной частью
регуляторов возбуждения синхронных компенсаторов по изменениям электромагнитного момента и
активной мощности линии электропередачи? Какими функциональными элементами они
формируются?
13. В чем состоят назначение и особенности автоматически регулируемых статических
компенсаторов реактивной мощности?
14. По какому алгоритму функционирует непрерывная часть микропроцессорного автоматического
регулятора реактивной мощности реверсивного статического компенсатора?
15. Каково назначение дискретной части автоматического регулятора реактивной мощности
статического реверсивного компенсатора?
Глава седьмая
МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
И АВТОМАТИКА СОБСТВЕННЫХ НУЖД
ЭЛЕКТРОСТАНЦИЙ И ЭЛЕКТРИЧЕСКИХ СЕТЕЙ
НАПРЯЖЕНИЕМ 6—35 KB
7.1. Виды микропроцессорных устройств
Микропроцессорная интегрированная автоматика противоаварийного
управления собственными нуждами электрических станций и электрических сетей
напряжением 6—35 кВ — релейная защита и органически связанная с ней противо-
аварийная автоматика повторного включения (АПВ) отключенных релейной
защитой выключателей, включения выключателей резервных
электроэнергетических объектов (АВР), автоматика частотной разгрузки (АЧР) и частотного АПВ
были первыми отечественными разработками. Инициатива принадлежит НТЦ
«Механотроника» [23]. Микропроцессорная автоматика противоаварийного
управления электроэнергетическими объектами указанных напряжений выпускается
также научно-технической фирмой ЗАО «РАДИУС Автоматика» [22] и «ИЦ
«БРЕСЛЕР».
Схема части собственных нужд электростанции или двухтрансформаторной
подстанции (рис 7.1) демонстрирует полное их оснащение созданной и
внедренной в эксплуатацию микропроцессорной релейной защитой и автоматикой
указанных научно-производственных организаций.
В НТЦ «Механотроника» разработаны и поставляются блоки
микропроцессорной релейной защиты, интегрированной с АПВ или АВР [23]:
БМРЗ-ДЗ — дистанционной защиты и АПВ воздушных линий напряжением 35 кВ;
БМРЗ-ВВ — токовых защит вводов подстанций или собственных нужд
электрических станций;
БМРЗ-КН — токовых защит и контроля напряжения трансформаторов;
БМРЗ-ВС — токовых защит и АВР секционного выключателя;
БМРЗ-ВЛ или КЛ — токовых защит и АПВ воздушных или кабельных линий
напряжением 6 (10) кВ;
БМРЗ-ДС — специальной защиты синхронных электродвигателей;
БМРЗ-ДА — защит токовых и минимального напряжения (ЗМН) и автоматики
повторного пуска (АПП) асинхронных электродвигателей.
Поставляется микропроцессорная автоматика частотной разгрузки (АЧР) и
частотного автоматического повторного включения (ЧАПВ) в виде блоков
многофункционального микропроцессорного измерительного реле снижения и повышения
частоты типа БММРЧ и логической части автоматики типа БМАЧР.
7.1. Виды микропроцессорных устройств
11?
От шин , л,
35-220 кВ Q1
БММРЧ
шз
БМАЧР
Шины 6—10 кВ1 секции
г-* г-\
О ФО •- |
||°60оо.-]|
f й — — 1\
lr=M=JF 11
Ht.—iJ
г*—н
о оо —
rv»-j
\Г~Щ ]|
1 ♦ ~ ♦ 1
БМРЗ-ДА
" Сириус -Д"
Рис. 7.1. Пример оборудования типовой двухтрансформаторной подстанции терминалами БРМЗ
НТЦ «Механотроника», ЗАО «РАДИУС Автоматика» и «ИЦ «БРЕСЛЕР»
Научно-техническая фирма ЗАО «РАДИУС Автоматика» выпускает
интегрированную микропроцессорную релейную защиту и автоматику в виде
терминалов серии «Сириус» [31, 32]:
дЗ_35 — дистанционной защиты и АПВ воздушных линий напряжением 35 кВ;
УВиВ — токовых вводов защит АПВ и АВР вводов подстанций или
собственных нужд электростанции;
т и ТЗ — токовых защит двух- или трехобмоточных трансформаторов;
2С — токовых защит и АВР секционного выключателя;
2Л — токовых защит и АПВ воздушной или кабельной линии напряжением
6(10)кВ;
д _ токовых защит, защиты минимального напряжения и АПП асинхронных и
синхронных электродвигателей.
Поставляется и микропроцессорная АЧР и ЧАПВ в виде терминала «Сириус-
АЧР». Разработан и выпускается микропроцессорный автоматический регулятор
напряжения трансформаторов типа «РНМ-1» [20].
Исследовательский центр «ИЦ «БРЕСЛЕР» поставляет интегрированную
микропроцессорную защиту и автоматику собственных нужд электростанций и
120
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
распределительных сетей напряжением до 35 кВ на терминалах серии «ТЭМП
2501» в виде комплексных устройств защиты и автоматики:
• присоединений напряжениями 0,4—35 кВ типа «ТЭМП 2501-1Х» и 6-—35 кВ
типа «ТЕМП 2501-31»;
• секционного выключателя типа «ТЭМП 2501-2Х»;
• синхронных и асинхронных электродвигателей типа «ТЭМП 2501-4Х».
В ООО «РК Таврида Электрик» разработана и выпускается интегрированная
микропроцессорная защита и автоматика воздушных линий электрических сетей
напряжением 6—1'0'кВ с вакуумным выключателем — реклоузер вакуумный серии
PBA/TEL [96].
Названные блоки и терминалы интегрированной микропроцессорной релейной
защиты и противоаварийной автоматики выполняют и функции логической
защиты шин (ЛЗШ), резервирования отказа отключения выключателей (УРОВ) и
регистрации напряжений и токов электромагнитных переходных процессов. Они
являются современными интеллектуального типа разработками, обладающими
всеми сервисными функциями, свойственными микропроцессорной
вычислительной технике и не уступают зарубежным аналогам концерна ABB, внедряемых в
отечественную технику релейной защиты и автоматики его российским
представительством — ООО «АББ Автоматизация»; немецкой и французской фирмам.
7.2. Программные измерительные органы
релейного действия
В микропроцессорной интегрированной защите и автоматике применяются
программные измерительные органы, состоящие из программных
измерительных реле.
Программные измерительные реле тока и напряжения. На рис 7.2
приведены упрощенные структурная схема (рис 7.2, а) и схема алгоритма (рис 7.2, б)
программного реле максимального тока L(nT). По ортогональным составляющим
отфильтрованного цифрового кода тока I (nT), Lc(nT), сформированным
элементом [/0Z, путем их квадратирования операциями ZXn суммирования SM [см. (1.4)]
вычисляется квадрат амплитуды тока I который сравнивается с квадратом
2
уставки / . При этом нет необходимости в операции извлечения корня. При
2 2
выполнении условия срабатывания / > / формируется выходной дискретный
цифровой сигнал. Ток возврата IBm определяется возможной областью
неустойчивой работы цифрового реле, обусловленной погрешностями квантования
мгновенного значения тока. Программные измерительные реле максимального и
минимального напряжения выполняются аналогично.
7.2. Программные измерительные органы релейного действия
121
mz
iv(nT)
О
^ЧТХ
VnT)
а)
( Пуск J
Ввод
Не^
I
Формирование
^
рт
(nT) = Ivc(nT)+Ips(nT)
к
б)
Рис. 7.2. Структурная схема (а) и алгоритм (б) цифрового измерительного реле
максимального тока
Измерительные реле направления мощности и сопротивления.
Измерительное реле направления мощности (угла сдвига фаз между напряжением и
током) является частным случаем направленного измерительного реле
сопротивления с трех- или многоугольной характеристикой [3]. Поэтому рассматривается
алгоритм и программная реализация в общем случае направленного
измерительного реле сопротивления.
При программной реализации реле сопротивления могут выполняться на
основе непосредственного расчета сопротивления делением действующих
значений принужденных составляющих напряжения и тока в комплексной форме
Z = UJ£ на их входах. При этом характеристики срабатывания Zср((р) реле
сопротивления в комплексной плоскости задаются аналитически уравнениями
линий, ее составляющих. Поэтому алгоритм состоит из двух частей: расчета
сопротивления Z (рис 7.3, а) и формирования условий срабатывания
программного измерительного реле (рис 7.3, в).
В первой части алгоритма, если дискретные мгновенные значения
принужденных составляющих и (пТ) и i (пТ) после цифрового фильтра представлены ортого
нальными составляющими U (пТ) = Uc(nT) - Ux, Ups(nT) - Us(nT)
U7,Ipc(nT) =
122 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
( Пуск )
L
***ic,i,,vt,v,
Да
7
V'c
Нет
WW
I
VW'c
-WW
I
VSWJL)
. Ws-Vc
\y-Us-WcW
bBOjxR,X,XQVXov
(x-xQ л-щя<о
Да
^-JQ2-tgB2J?>0
.Нет
.Нет
Да
(Z-(J?-^2)tgp3 < 0)^Ц
Да
(X-jR-Rqл)Щ < О)
Нет
Да
В зоне
Вне зоны
в)
б)
е)
Рис. 7.3. Схемы алгоритмов вычисления активной и реактивной составляющих сопротивления
(а) и условий срабатывания (в) цифрового измерительного реле сопротивления с
четырехугольной характеристикой срабатывания (б)
= 1с(пТ) = Ix, Ips(nT) = IJjiT) = IY, могут определяться действительная (активная) R
и мнимая (реактивная) X части сопротивления Zv = Z:
Z=R+jX=(Ux+jUY)/(Ix+jIY),
или после преобразований
Z =
uxix+uyiy
4+4
+j
4+4
(7.1)
Расчет выполняется по различным ветвям в зависимости от соотношения
между ортогональными составляющими тока 1Х и IY. После деления (7.1) на
большую из составляющих в знаменателе получается некоторый ток
IN = IY + IXIIY при IY > 1Х;
In = Ix + 4iixKV*iy<ix-
Расчеты активной и реактивной составляющих повторяются циклически при
поступлении последующих дискретных мгновенных значений ортогональных
составляющих напряжения и тока.
Во второй части алгоритма формирования и проверки выполнения условий
срабатывания измерительного реле сопротивления должны быть сначала
сформулированы ограничения области срабатывания. Характеристика срабатывания
7.2. Программные измерительные органы релейного действия
123
в виде четырехугольника (рис 7.3, б) задается полностью уравнениями прямых,
образующих стороны четырехугольника:
Хх =Х0Д +tgp17J;
X3=iR-Roa)tg$3
jr4 = (i?-i?01)tgp4.J
(7.2)
Здесь X0 j, X0 2, i?0 j и R0 2, а также значения или функции углов р —
предварительно задаваемые параметры характеристики. При размещении комплекса Z =
= R +jX внутри области срабатывания, т.е. внутри четырехугольника, должны
выполняться одновременно условия
Z<X01+i?tgpi;
X>X02 + i?tgp2;
X<(i?-i?0)2)tgp3
X<(i?-i?01)tgP4J
(7.3)
Схема алгоритма проверки условий приведена на рис 7.3, е.
При непосредственном расчете Z характеристика Zср(ф) направленного реле
сопротивления практически любой сложности в отличие от характеристик
измерительных реле сопротивления компенсационного типа может быть задана
уравнениями линий, ее образующих, и нет необходимости в формировании
компенсированных напряжений [3, 77].
Например, характеристика реле полного сопротивления — окружность с
центром в начале координат, радиус которой Z описывается как
~ + -2 = \ или R2+lf = Z2y.
z) z\
(7.4)
Измерительное реле срабатывает, если точка Z находится внутри окружности,
следовательно, условие срабатывания имеет вид
Z2p = R2+X2<Z2r
(7.5)
При подстановке в (7.5) значений R и Хиз (7.1) получается удобное для
вычисления выражение условия срабатывания
(u2ps + u2pcw2ps + i2pc)<z2y.
(7.6)
124
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
v^
V"7)
m-V-i»
ах
Рис. 7.4. Структурная схема программного измерительного реле полного сопротивления
Для реле полного сопротивления нет необходимости вычислять R и X.
Структурная схема программного реле полного сопротивления представлена на рис 7.4.
Характеристика направленного реле сопротивления в виде окружности со
смещенным относительно начала координат центром с координатами i?0? X0,
описывается уравнением
(R')2 + (X)2 = Z2y,
(7.7)
где
R' = (R- R0) cos Фмч + (Х-Х0) sin Фмч;
X' = -(R- R0) sin Фм_ч + (X-X0) cos Фмл.
(7.8)
После подстановки значений R' и1'в (7.7) получается условие срабатывания
направленного реле сопротивления
(R-R0)2 + (X-X0)2 = Z2y,
(7.9)
где R и Xвычисляются по (7.1); R0, XQ — заданные координаты центра
характеристики.
Структурная схема программного направленного реле сопротивления
представлена на рис 7.5.
Структурная схема программного измерительного реле сопротивления с
характеристикой срабатывания в виде четырехугольника (см. рис 7.3, б) получается
довольно сложной. Как указывалось (см. § 1.3) уравнения линий характеристики сра-
7.3. Микропроцессорные комплексы «НТЦ «Механотроника»
125
|*Ь
tfpcW 1—1
МпТ)
V71
«W7*
X
7
W">
Ips(nT)
7\4Ш
I2
Ж.
Рис. 7.5. Структурная схема программного направленного измерительного реле сопротивления
батывания программных измерительных реле сопротивления (см. § 7.6 и рис 7.22)
можно, а реле направления мощности нужно задавать в комплексной плоскости
мощности S = Р +jQ.
7.3. Микропроцессорные комплексы
«НТЦ «АЛеханотроника»
Микропроцессорный терминал. Структура микропроцессорного терминала
НТЦ «Механотроника» показана на рис 7.6. Он состоит из семи модулей:
• входных аналоговых сигналов MAC;
• аналого-цифрового преобразования с предварительной обработкой
информации МАЦП;
• центрального микропроцессора МЦП;
• ввода дискретных сигналов и вывода управляющих воздействий МВБ;
• пульта управления МПУ;
• монтажного модуля и блока питания БП.
Модуль аналоговых сигналов MAC содержит активные измерительные
преобразователи — вторичные измерительные трансформаторы напряжений U и токов /
с усилителями-преобразователями на интегральных операционных усилителях
(ИОУ) соответственно в прямом и инвертирующем включениях (показаны
условно) с предельно сильными (интенсивными) отрицательными обратными
связями, обеспечивающими режим повторителя напряжения и преобразователя тока в
напряжение [3]. Они разгружают вторичные измерительные трансформаторы
напряжения и тока: обеспечивают их работу при холостом ходе и коротком
замыкании соответственно. Это главная особенность MAC, практически исключающая
126
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
'И И 1
I I Экран
RS-232
Рис. 7.6. Структура терминала БМРЗ
^ГГТзГвеГ™ТоЬН0Г° Ч«*Г-- ™Р»™» "'мерительных транс
trrCcaio™:^.™"" " *°" *™ «в. неволь-
М»*л» аншого.цифрм0го преобрпоынш МАЦП состоит из собственно
&Г™""4" *=* " ™ГНШЬН0ГО ™-ФО„ро„.ссора СМ7 „выГняет
трами™KSST-» (П°- И0У> — пассивными фнль-
зов^°СЛеДОЮТеЛЫ,ОГО "° ВРеМеН" <,еРИ "^ " -»«н-*Р-о. преобра-
• выделения нерекурсивным фильтром Фурье (см. § 1.1) ортогональных со
ньГиГал^Г^™ " ""» ">™—~7*Z
• выделения амплитуд и действующих значений входных напряжений и
напряжения, пропорционального току обратной последовательности
.' ZZTm НаПраВЛеШМ М0ИВ°™Й Ч— " "У-вой последовательностей;
диагностики измерительных преобразователей и самодиагностики ШИП
основанной на анализе прохождения тестовых сигналов. 0ДИаГ"°СТИКИ ШЦП-
7.3. Микропроцессорные комплексы «НТЦ «Механотроника»
127
Модуль центрального процессора МЦП состоит из микропроцессора ЦМП,
постоянных и программируемых запоминающих устройств ПЗУ и ППЗУ,
оперативного запоминающего устройства ОЗУ, процессора управления дисплеем МП
каналов RS-485 и RS-232, шины обмена информацией ЦМП с МП и МВБ,
регистров РГ, часов и вспомогательных элементов.
Центральный процессор ЦМП:
• получает значения электрических параметров защищаемого объекта от
МАЦП и информацию о состоянии дискретных входов от МВБ, на основании
которых и уставок, хранящихся в ОЗУ, вырабатываются управляющие воздействия;
• передает информацию МП для вывода на жидкокристаллический дисплей
ЖКИ, обслуживает клавиатуру КЛ модуля пульта управления МПУ, формирует и
хранит в ОЗУ информацию, выводимую на дисплей и обеспечивает обмен
информацией по последовательным каналам RS-232 и RS-485.
В энергонезависимом ОЗУ хранятся:
• программные ключи, которыми задается конфигурация (набор функций)
защиты и автоматики;
• уставки защиты;
• параметры трех аварийных событий;
• накопительная информация.
Программа функционирования центрального процессора заносится в ПЗУ
предприятием-изготовителем.
Модуль ввода-вывода МВБ содержит элементы гальванической развязки
входных цепей и вычислительной части терминала входных дискретных сигналов (опт-
роны ОПТ со светодиодом и фототранзистором) и выходные реле с
герметизированными контактами (герконы) ГР.
Релейные выходы МВБ имеют аппаратные и программные средства защиты от
ложных срабатываний при любой неисправности терминала и при воздействии
внешних помех и любых перерывах оперативного питания.
Модуль пульта МПУ Основным элементом МПУ является
жидкокристаллический буквенно-цифровой индикатор ЖКИ или дисплей, содержащий две строки
по 32 символа заглавных и прописных букв русского, латинского и греческого
алфавитов, большие и малые цифры и различные знаки.
Информация выводится на дисплей, разбита на кадры с фиксированным
содержанием. Просмотр кадров осуществляется кнопками клавиатуры КЛ.
На дисплее отображаются: межфазные напряжения и фазные токи; напряжения
и токи нулевой и обратной последовательностей; напряжение рабочего источника,
необходимое для восстановления схемы после АВР; состояние дискретных входов
и выходов; конфигурации уставки защит и автоматики; параметры аварийных
событий; результаты диагностирования терминала и текущие дата и время.
Многофункциональный микропроцессорный блок БМРЗ наиболее
универсален и выполняет функции:
• направленной трехфазной или ненаправленной двухфазной трехступенчатой
токовой защиты с комбинированным пуском по напряжению с независимой и
обратно зависимой от тока выдержкой времени;
128 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
• направленной или ненаправленной защиты от однофазных замыканий на
землю;
• защиты от несимметрии нагрузки и обрыва фазы;
• устройства резервирования отказов действия выключателей на отключение
(УРОВ);
• автоматики повторного включения;
• автоматики включения резервных выключателей;
• автоматики ограничения снижения напряжения (защиты минимального
напряжения);
• исполнения воздействий автоматики ограничения снижений и повышений
частоты и частотного АПВ;
• определения места повреждения и осциллографирования электрических
величин в аварийных режимах;
• электродуговой защиты и самодиагностики;
• автоматического осциллографирования напряжений и токов
электромагнитных переходных процессов;
• памяти аварийных событий.
Выполняются измерительные преобразования и индикация:
• действующих значений и частоты фазных напряжений и токов;
• активной и реактивной составляющих токов прямой последовательности
активной и реактивной мощностей;
• токов и напряжений обратной и нулевой последовательностей.
Измерительное преобразование производится по ортогональным
составляющим (см. гл. 1), и его результаты отображаются на дисплее БМРЗ.
Модификации БМРЗ могут объединяться в информационно-управляющий
комплекс и входить в состав АСУ в качестве нижнего ее уровня.
Функции релейной защиты. Трехступенчатая токовая защита с
контролем по напряжению и направлению мощности КЗ и ускорением действия имеет
независимые выдержки времени (программный элемент DT3) первой — реле
максимального тока КА1 (рис 7.7) и (элемент DT2) второй — реле КА2 ступеней и
обратно зависимые (от тока) характеристики выдержек времени элемента DT3
третьей — реле тока КАЗ ступени. Характеристики определяются вычислениями
времени срабатывания по аналитическим соотношениям, соответствующим одной из
четырех их характеристик: международная L, инверсная N и аналогичная
характеристикам электромеханических реле РТ-80 и РТВ [39].
Характеристики устанавливаются ключами SG10, SG11, а ключом SG9
вводится независимая от тока выдержка времени программного элемента DT4.
Измерительно-преобразовательная часть защиты реализуется программными
операциями:
• трех однофазных измерительных реле максимального тока КА1—КАЗ,
подключенных (ключами SGI—SG3) через максиселектор Мах ко вторичным
измерительным трансформаторам тока TAL1—TAL3 с усилителями на ИОУ АЗ—А5,
преобразующими токи в ЭДС;
7.3. Микропроцессорные комплексы «НТЦ «Механотроника»
12?
ZV2 KV1
KL
П
DX4
DX1
<&
DX2
-6 &
Сигнализация
АПВ
по/>»
DT1
У О—>
ЖГ ГХдтз^ет
-6 &
DT2
DW2
Отключение
SG9
1
LP1
т
\SGU\
Lin
' Li
FT-80
FTB-1
X5G17
Сигнализация
перегрузок
программ
Рис. 7.7. Функциональная схема алгоритма релейной защиты микропроцессорного устройства
БМРЗ
• одного измерительного реле минимального напряжения KV2 с мини-селекто-
ром Min трехфазного напряжения вторичных трансформаторов TVL1, TVL2 с
усилителями на ИОУ А1,А2;
• фильтра ZV2 и реле KV1 напряжения обратной последовательности;
• двух измерительных реле ЮГ угла, сдвига фаз [3] (направления мощности),
включенных по 90-градусной схеме [39], с выходом через логическую операцию
ИЛИ (на схеме не показана).
Все три ступени могут контролироваться [логические операции DX1—DX3
(ЗАПРЕТ)] через ключи SG4—SG6 по минимальному напряжению (ключ SG7) или
(операция DWU):
• по напряжению обратной последовательности (ключ SG8);
• по направлению мощности КЗ (ключи SG13, SG14).
Первая (КА1) и вторая (КА2) ступени с токами срабатывания, обозначенными
как / >», / », соответственно действуют (операция DW2) на отключение
выключателя. Третья ступень (КАЗ) с током срабатывания /> действует в зависимости от
положения ключа SG17 на отключение или на сигнализацию о перегрузке.
На рис 7.7 показаны основные операции программной защиты:
• цепь (DW3 и ключ SG16) формирования сигналов контактами реле АХ,
запускающего логический алгоритм отключения шин распредустройства;
• формирование (операция DX4) сигнала о запуске первой и второй ступеней
защиты;
130 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
• цепь запрета (блокировки) АПВ от первой (КА1) ступени защиты;
• дистанционное управление настройкой (переключение программ)
измерительной и логической частей;
• цепь ускоренного отключения УО.
Устройство отключений однофазных замыканий на землю функционирует с
контролем или только напряжения, или напряжения и тока, или и направления
мощности нулевой последовательности (устанавливается программно) с одной или
двумя независимыми выдержками времени. Характеризуется высокой
чувствительностью — низкими током (от 0,05 А) и напряжением (от 5 В) срабатывания.
Защита от несимметричных токов, в частности от обрыва фазы, действует
на отключение с выдержкой времени при появлении тока обратной
последовательности.
Защита минимального напряжения программно реализуется с контролем
напряжений двух или трех фаз измерительными реле минимального напряжения
KV2 и выдержками времени 0,1—100 с, изменяемыми через 1 В и ОД с
соответственно. При пуске токовой защиты КА1—КАЗ (см. рис 7.7) производится запрет
ее действия (на схемах не показано).
Защита от снижения напряжения при включении выключателя запускается
при понижении междуфазного напряжения или появлении напряжения обратной
последовательности (программный фильтр-реле ZV2).
Дальнее резервирование действия защит и выполнение функции УРОВ БМРЗ
осуществляет минимальной защитой реактивного тока с пуском по
минимальному напряжению.
Функции автоматики. Универсальный БМРЗ программно выполняет функции
органически связанной с релейной защитой противоаварийной автоматики, а
именно автоматики повторного включения отключенных релейной защитой
выключателей (АПВ) и включения выключателей резервных источников питания (АВР).
Автоматика повторного включения выключателя (рис 7.8) запускается как
обычно [40], при несоответствии положения ключа управления и состояния
выключателя. Пуск производится дискретным сигналом (логической единицей) от
токовой защиты ТЗ или (операция DW1) от реле РПО отключенного положения
выключателя и при готовности АПВ к действию (операция DX1).
При включенном ключе SG1 релейный формирователь F1 выдает дискретный
импульсный сигнал, который, поступая на вход S триггера S77, запоминается им
при отсутствии запрещающего сигнала на входе R «Запрет АПВ по / >»»
(операция DW3) от первой ступени (КА1 на рис 7.7) защиты, запрета при действии УРОВ
или неисправности БМРЗ.
Через операцию DX2 при наличии единичного логического сигнала об
отключенном выключателе от РПО запускается таймер микропроцессора DT1 и, спустя
время срабатывания первого цикла АПВ1, формирователь F3 через DW4
импульсным воздействием повторно включает выключатель.
При необходимости (включен SG2) срабатывание АПВ] запоминается
триггером ST2 (через F2, DX3) второго цикла АПВ2, если на его входе R отсутствует один
7.3. Микропроцессорные комплексы «НТЦ «Механотроника» 131
ТЗ
РПО
DW1 DX1
1
Подготовка
УРОВ
Запрет АПВ
по/>» .
—» г —|
SG3
Неисправность
Рис. 7.8. Функциональная схема алгоритма программной автоматики повторного включения
из указанных запрещающих сигналов или сигнал «Запрет АПВ2 по 3£/0» —
напряжению нулевой последовательности (операции DW3, DW6, ключ SG4). При
этом сигналом формирователя F2, поступающим через DW5 на вход R, триггер ST1
возвращается в исходное состояние.
Через установленное время таймера DT2 при наличии сигнала на входе DX4 о
новом отключении выключателя (от РПО) формирователь F4 через DW4 выдает
импульсное воздействие на включение выключателя второй раз. Формирователь
F5 через DW6 возвращает триггер ST2 в исходное состояние и через DW5
подтверждает возврат триггера STL
Время срабатывания устанавливается от 0,5 с через 0,1 с, а время готовности к
новому действию составляет 120 с
Автоматика включения резервного выключателя имеет особенность —
обеспечивает повторное включение рабочего и отключение резервного выключателей
после восстановления напряжения на рабочем вводе. Поэтому программно
реализуются традиционный пусковой орган как минимального напряжения (измерительные
реле КУ1—КУЗ на рис 7.9, подключенные через вторичные трансформаторы
TV11—TVL3 к первичным измерительным трансформаторам напряжения TV1
рабочей секции 1 и ввода ТУЗ (см. ниже рис 7.21), так и максимального напряжения
(реле КУ4)9 подключенного к ТУЗ.
Формирование сигнала разрешения АВР (геркон KL3) происходит при наличии
напряжения на резервирующей секции 2 с выключателем Q2 и первичным
измерительным трансформатором напряжения ТУ2 (см. рис 7.21). Формирование сигнала
контролируется операцией совпадения с инверсией DXU сигналов о
срабатывании двух реле максимального напряжения КУ5, КУб и отсутствии напряжения на
рабочем вводе — реле КУ4 (см. рис 7.8). Особенностью АВР является запрет его
действия при наличии однофазного замыкания на землю, производимый измери-
132
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
^ Запрет АВР
Рис. 7.9. Функциональная схема алгоритма программной автоматики включения резервного
выключателя Q3 (см. рис. 7.21)
тельным реле напряжения KV7 нулевой последовательности (при включенном
SG2) через DWU.
При наличии сигналов разрешения АВР и от реле включенного положения РПВ1
рабочего выключателя при срабатывании всех трех реле KV1—KV3 минимального
напряжения и отсутствии сигналов запрета АВР и «Неисправность сигнала»
программной операцией DX1 (при включенном SG1) запускается таймер DT1 выдержки
времени срабатывания АВР. Его дискретный сигнал, поступая на вход S триггера
ST1, запоминается им при отсутствии на входе R (операция DW1) указанных
запрещающих сигналов и отключает рабочий выключатель Q1 (см. рис. 7.21). При
наличии сигнала от реле отключенного положения РП01 рабочего выключателя Q1
через операцию DX2 формирователь F1 возбуждает геркон KL1, воздействующий на
включение резервного выключателя Q3.
Сигнал включения запоминается триггером ST2 (рис.7.9), подготавливающим
(операция DX3) формирование воздействия на включение рабочего Q1 и
отключение резервного Q3 выключателей. Включение рабочего и отключение секционного
выключателей происходит после срабатывания реле KV4 максимального
напряжения: запускается (через DX3) таймер DT2, включающий рабочий выключатель QI,
а при наличии сигнала от реле включенного положения секционного выключателя
7.3. Микропроцессорные комплексы «НТЦ «Механотроника»
133
РПВЗ (операция DX4) с выдержкой времени DT3 импульсным сигналом
формирователя F2 возбуждается геркон KL2: резервный выключатель Q3 отключается.
Длительности выдержек времени постоянны (0,5 с), а длительности
импульсных воздействий возбуждения герконов KL1, KL2 равны 0,8 с
На рис 7.10 приведена схема внешних подключений БМРЗ к первичным
измерительным трансформаторам напряжения TV и тока ТА, тока нулевой
последовательности ТА0, цепям управления электромагнитами включения УАСи отключения
YAT и фиксации состояний выключателя Q: включен (реле РПВ), отключен (реле
РПО), а также к ПЭВМ и волоконно-оптической линии к АСУ (каналы типов
RS-232C и RS-485). Показаны контакты разъемов подключения модулей, из
которых состоит БМРЗ (см. также рис. 7.6): аналоговых сигналов MAC, цифрового
преобразования МЦП, ввода-вывода МВБ, блока питания БП. Показаны оптотранзис-
торные элементы — оптроны VE гальванической развязки внешних цепей и
микропроцессорных микросхем.
Электромагнитное реле с герметизированными контактами (герконы) КЫ—
KL3 производят включение (электромагнит YAC) и отключение (электромагнит
YAT) выключателя. Назначение контактных выходов KL4—KL14 — в паспорте
БМРЗ [23].
На схеме показан однофазный первичный трансформатор TL, подключенный
до выключателя g, необходимый для поддержания БМРЗ в состоянии готовности и
действий при отключенном выключателе.
Микропроцессорные защиты асинхронных и синхронных
электродвигателей. Универсальный блок микропроцессорных дифференциальных токовых защит
БМРЗ-ДД представляет собой интегрированную автоматику противоаварийного
управления мощными (5 МВт и более) асинхронными и синхронными
электродвигателями, программно выполняющую функции всех современных видов релейной
защиты и противоаварийной автоматики электродвигателей.
Микропроцессорные блоки типов БМРЗ-ДА2 и БМРЗ-ДС являются
специальными. Первый из них — БМРЗ-ДА2 — выполняет и функции автоматического
управления режимами работы двухскоростных двухобмоточных асинхронных
электродвигателей напряжением 6—10 кВ приводов циркуляционных насосов
парогенераторов, вентиляторов дымоходов и другого оборудования тепловых
электрических станций, а второй — БМРЗ-ДС — содержит новую по принципу
действия защиту опережающего отключения синхронного электродвигателя при
возможности выпадения его из синхронизма после отключения короткого
замыкания в сети.
В блоке БМРЗ-ДД функционируют три вида дифференциальных защит:
• продольная токовая от междуфазных КЗ, сравнивающая амплитуды
принужденных составляющих токов электромагнитных переходных процессов;
• дифференциально-фазная с торможением, определяемым изменением фазы
на противоположную одного из токов при внешнем КЗ;
• дифференциальная токовая нулевой последовательности (предназначена для
электродвигателей сети с заземленной нейтралью).
134
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
ABC
TL
— 111
35П
ТА
Т\
щ
щш
V
Г\02
22
04
24
01
11
12
21
02
22
RS-232 С
КЛЭВМ-
'RxTx'
Конт.
RS-485
КАСУ< | |
Экран Т
£
Конт.
-1,= 88 Г
264В-Г
MAC
Цепь
, иШ
<т
4kL
ОС
С
VE
МВБ
®3
MAC
Цепь
З&Ообш
3/р обш
Oic
MAC
Цепь
±
Ж
VE
pic
pic
QIC
=©c^q
3§C^3
ТТёЪь
IT
Bx.7
ЖГ
ЖЕ
bcJ0_
Bx.ll
Bx.U
Ж
Bx.14
Ж7Г
Конт. I
иг
иг
1Г
-w
иг
ТГ
1Г
^r
иг
it
Счетчик ^
MBB
Цепь
+ 220B
РПО
-тщ-
VE
KL4 ^ f
KL5 ^ I
£3@c
MBB
Цепь
Откл.1
Откл.2
Вкл.
KL1
KLSklw
Kill
KL12
Вых. 4
Вых. 5
Вых. 11
| \JfL2
\ ^ KL3
KL13
KL6 ^ |
KL7 ^
"ВхТх"МП
Цепь
GND
ВхР
ТхР
KL14 p>^J
KL15 ^ \
KL16 :
мвв
Цепь
Вых. 12
Вых. 13
Вых. 6
Вых. 7
Вых. 14
Вых. 15
Вых. 16
мцп
VE
Цепь
AR+)
Ы-
R(120 Ом)
У(Г+)
ДТ-)
Д120 Ом)
SGND
+ 5В
Общ.
3§L^lpk
ЮС^Ц
п^с^п
^ЗС^З
БП
Цепь
ЖГ
ЖГ
БП
Цепь
СегГ~/,^20В
Сеть~/,=220В
Корпус
KL1 ^_
KL2 ^ [
►+5В
__ 15В
►+24В
KL3-KL6
KL7 -^ 1
БП
Цепь
Вых.1
Вых. 2
1Г
-w
Конт. |
Ж.
ж.
Конт. I
иг
1Г
~1Г
1Г
1Г
10
1Г
20
Конт. I
¥
ИГ
JSL.
~аГ
тг
Конт. I
1Г
ТГ
Вых,7
9*4#
Рис. 7.10. Схема подключения интегрированной защиты и автоматики типа БМРЗ
7.3. Микропроцессорные комплексы «НТЦ «Механотроника»
135
Предусмотрена резервная токовая направленная трехступенчатая защита от
замыканий на землю в сети с изолированной нейтралью, токовая защита обратной
последовательности от несимметричных режимов, минимальная токовая защита
от потери нагрузки, защита от затянувшегося пуска и защиты от перегрева
электродвигателя.
Однократная автоматика повторного пуска электродвигателей разрешается
при нормальном напряжении и облегчает самозапуск группы электродвигателей.
Действие автоматики запрещается при срабатывании дифференциальных и
тепловых защит.
Производится контроль количества холодных и горячих пусков
электродвигателя в течение последнего часа. Напряжения и токи пуска и коротких замыканий
осциллографируются. Выполняются функции измерений действующих значений и
частоты фазных токов, напряжения и тока нулевой последовательности.
При отказе действия выключателя на отключение формируется сигнал У РОВ.
В блоке БМРЗ-ДА2 действуют такие же защиты, как и в блоке БМРЗ-ДД, кроме
дифференциальных. Не предусматривается и автоматический повторный пуск.
При автоматическом управлении режимом работы электродвигателя производится
последовательное переключение обмоток 1-й (низкой) и 2-й (высокой) частот
вращения двухобмоточного электродвигателя ЭД (рис 7.11) при пусках и обратное
±
±
ж Q1 Q2 ж
(1-я частота (2-я частота
—'—i вращения) впашения) ■—'—
вращения) i
-3<3gB>^
Рис. 7.11. Схема подключения двухобмоточного асинхронного электродвигателя,
управляемого БМРЗ-ДА2
136 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
переключение под воздействием автоматики ограничений снижений напряжения
собственных нужд электростанции.
Как утверждают разработчики [23] «... предусмотрено программирование
работы двигателя по сигналам датчиков технологического оборудования в
зависимости от режима эксплуатации. При возникновении аварий двигатель переводится
в специальный режим работы, повышая надежность эксплуатации оборудования
электростанции».
Специальная защита в блоке БМРЗ-ДСкак «... новая ..., не имеющая мировых
аналогов ...» [23] производит опережающее в начальной стадии
электромагнитного переходного процесса короткого замыкания отключение синхронных
электродвигателей газокомпрессорных, водо- и нефтеперекачивающих станций,
выпадение из синхронизма которых с возбуждением может вызвать гидравлические
удары и разрушения трубопроводов. Какая это защита и как она выполняет
указанную уникальную функцию — из опубликованных материалов НТЦ «Механотро-
ника» неизвестно.
Предусмотрены также: защита приводного агрегата, отключающая
электродвигатель при возникновении колебаний нагрузки (активной мощности
электродвигателя), из-за нарушений технологических процессов — защита от несимметричного
режима и защита от повторного пуска перегретого электродвигателя.
В блоке БМРЗ-ДС производится:
• измерительное преобразование и индикация потребляемой
электродвигателем активной и реактивной мощностей;
• контроль и индикация положения выключателя электродвигателя;
• запись пускового тока и учет количества пусков электродвигателя;
• хранение и отображение информации о запусках защиты при пусках
электродвигателя и срабатывания защит при трех последних аварийных ситуациях;
• осциллографирование напряжений и токов последнего КЗ;
• непрерывный самоконтроль исправности и возможность проверки
оператором без отключения блока;
• двусторонний обмен информацией с ПЭВМ и АСУ.
На рис 7.12 приведена схема подключения БМРЗ-ДС к измерительным
трансформаторам напряжения TV и тока ТАi, TA2 электродвигателя, электромагнитам
отключения YAT и включения YAC выключателя (через сигнальные контакты QU
Q2 выключателя Q (не показан), источнику питания -/-220 В (постоянного и
переменного тока), а также к ПЭВМ (канал типа RS-232) и волоконно-оптической
линии связи с АСУ (канал RS-485). На схеме (как и на рис 7.6) обозначены модули
аналоговых сигналов MAC, цифрового преобразователя МЦП, ввода-вывода МВБ,
блока питания БП. Показаны светодиоды VD1, VD2 сигнализации включенного
(РПВ) и отключенного (РПО) положений выключателя.
К модулю МВВ-Х2 розеткой РП10-ЗОЛУ подключается жгут проводов от
контактов исполнительных реле KL1—KL14, функциональные назначения которых:
ФОО — функция опережающего отключения;
ЗМН — защита минимального напряжения;
7.3. Микропроцессорные комплексы «НТЦ «Механотроника»
137
220B
ТАЩ
ТА2
н
А В С
БП-ХТ1
О
1
3
4
Цепь
+/-220В
-/-220В
Корпус
и
БМРЗДС
!-► +5В
+15B
-15B
+24B
МВВ-Х2
KL1
"^ЧГ
KL2
^<Г
МВВ-ХТ1
KL3^
KL4^-
KL5^
МАС-ХТ1
Цепь
Г*
Г*
О
МАС-ХТ2
о
1
2
4
5
6
Цепь
Ua
Ub
Uc
Ub
Корпус
3\
3\
—1
•_!_•
KL6^^
KL8^
KL9^
KLIO^
KL13
^ЧГ
KL14^
Цепь
Отказ 1
Отказ 2
Защ.ср.1
Защ.ср.2
ПРДП
Вызов
ЗМН-2
ФОО
ЗМН-1
ЗПД-1
ЗПД-2
МЦП-Х2
МП-Х2
Цепь
RxD
TxD
GND
Rl
Розетка
РП 10-30 ЛУ
Конт.
)>Жгут1
Вилка D-Sub,
Конт. DB-ЭМ
{RS-485)
Конт.
КАСУ
Вилка D-Sub,
DB-ЭМ
(RS-232Q
TxD ^
К ПЭВМ
жх
GND
Рис. 7.12. Схема подключения специальной защиты синхронного электродвигателя типа БМРЗ-ДС
ЗПД— защита перегретого электродвигателя;
ПРДП — предупредительная сигнализация.
Контактом реле KL15 производится отключение выключателя электродвигателя.
138 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
7.4. Микропроцессорные терминалы
ЗАО «РАДИУС Автоматика»
Терминалы защиты и автоматики собственных нужд электростанций и
подстанций систем электроснабжения, как видно из рис 7.1, унифицированы —
представляют собой модульные конструкции с общей функциональной схемой.
Представление об их конструкции дает внешний вид интегрированной защиты и
автоматики вводного выключателя — терминал типа «Сириус-В» (рис 7.13) и
терминал автоматики частотной разгрузки и частотного АПВ (см. рис 7.19). На
лицевой его стороне расположены ключи (тумблеры) К{Т) установки конфигурации
(набора выполняемых функций), клавиатура КЛ и жидкокристаллический дисплей
ЖКД диалогового режима, разъем типа RS-232 для подключения ПЭВМ и табло
светодиодного отображения СВД информации о действии защиты и автоматики.
В общем случае терминал состоит из шести модулей (рис 7.14): двух модулей
ввода аналоговой информации ВА1, ВА2 — вторичных напряжений и токов
первичных измерительных трансформаторов двух секций шин; микропроцессорного
ё
320
Г
свд^
#(Л
Оперативное управление
Вкл. Вкл. Вкл. Вкл. Вкл. RS-232C
# % Щ) % Щ СВИВ)
,УРОВ ЛЗШ АВР АПВ ЗМН
ш. Опер}
j> о
Диет. Питание
о"5
Откл.
о
Вкл.
f Устройство микропроцессорной ^
защиты вводного выключателя
ЖКД
Уставки ТЗ - 2
Ускорение ВК -1
"СИРИУС-В
Выход -<- -►
,|рШ О
Г® Пуск защиты
© Срабатывание защиты
[©ПускУРОВ
©
©Аварийное отключение ©,
© Неисправность
©АПВ сработало
©
®,
^
Сброс
АВР сработало (Qi)
АВР блокировано
ЗМН блокировано
АПВ блокировано J
nJ
Рис. 7.13. Внешний вид микропроцессорного устройства типа «Сириус-В»
7.4. Микропроцессорные терминалы ЗАО «РАДИУС Автоматика»
139
Чп1,
7в ,
зи0 t
ВА1
шт-Щ
ш tZHrf^
RS-232C]
СЕР
МП
ВА2
Jm2
3t/n
ВВД
ОтДУ
ОтЯМ
УВшПМ
СИ
HZJ ИП
-220В
Рис. 7.14. Модульная структура терминалов типа «Сириус»
модуля МП, модулей клавиатуры и индикации КИ, ввода-вывода дискретных
сигналов и управляющих воздействий ВВД и источника питания ИП постоянным или
переменным током.
На рис 7.15 приведена общая функциональная схема терминалов типа
«Сириус». Их измерительно-преобразовательная часть содержит вторичные
измерительные преобразователи — активные трансформаторы [3] напряжения TVL и тока
TAL, аналоговые пассивные фильтры нижних частот АФ, аналоговый
мультиплексор МПЛ и аналого-цифровой преобразователь АЦП напряжений трех фаз Ua,Ub,
U и нулевой последовательности 3U0, напряжений на балластном резисторе /?б,
пропорциональным фазным токам Ia, 1Ъ, Ic и току нулевой последовательности 3/0,
и сигнальный микропроцессор МП1.
Сигнальный процессор выполняет:
• выделение ортогональных составляющих принужденных напряжений и
токов промышленной частоты нерекурсивными фильтрами Фурье (см. гл. 1);
• вычисление (через каждые 10 мс) их амплитуд, действующих значений и фаз;
• вычисление напряжений нулевой последовательности, напряжений и токов
обратной последовательности;
• самодиагностику.
Главный микропроцессор МП2 с ПЗУ, ОЗУ, *Г£>-таймером, контроллером
прерываний КП и энергонезависимой памятью ЭНП представляет собой
вычислительно-логическую функциональную часть [3] и программно выполняет все
функции интегрированной релейной защиты и автоматики.
Он производит измерительное преобразование как потребляемых, так и
отдаваемых активной и реактивной мощностей и обеспечивает диалоговый режим с
оператором и самодиагностику.
140
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
Uc
I
3V
ЗКг
К=У
КЛСУ
МП2
{ПЗУ, ОЗУ;
WD - таймер;
КП,
ЭНП)
кН
От СКВ, АЧР
и другой автоматики
ЭГР К
ЬЫквр
=>
На управление
и сигнализацию
Рис. 7.15. Общая функциональная схема микропроцессорных устройств автоматики типа
«Сириус»
Главный микропроцессор обслуживает интерфейс с дисплеем ЖКД, который,
как и клавиатура КЛ, управляется платой управления ПУ, выполненной на
специальном процессоре [22].
Клавиатура содержит кнопки «Ввод» «Выход» и обозначенные стрелками «<-»,
«-^» установки в диалоговом режиме состояний ПОДСВЕТКА ДИСПЛЕЯ,
УСТАВКИ, КОНТРОЛЬ и ПАРАМЕТРЫ ОТКЛЮЧЕНИЯ (см. рис 7.13 и 7.19).
Элементы гальванической развязки ЭГР — оптроны (рис 7.15) обеспечивают
электрическое разделение входных дискретных сигналов от сигнальных контактов
выключателей СКВ, автоматики частотной разгрузки АЧР и другой автоматики.
Блок индикации КИ (рис 7.14) и светодиоды СВД (рис 7.15) совместно с ЖКД
выводят информацию о состоянии и действии терминала. Ключи (тумблеры) К(Т)
оперативного управления задают конфигурацию (набор выполняемых функций)
терминала.
Комплект выходных реле с герметизированными контактами (герконов) выдает
управляющие воздействия на выключатели электроэнергетических объектов и
центральную сигнализацию электростанции и подстанции.
Терминал интегрированной защиты и автоматики вводов напряжений 6—
35 кВ типа «Сириус В» выполняет функции:
• трехступенчатой токовой защиты, любая ступень которой может быть
выполнена направленной;
• защиты минимального напряжения;
• защиты от однофазного режима, наступающего при потере (обрыве) одной
из фаз источника питания;
7.4. Микропроцессорные терминалы ЗАО «РАДИУС Автоматика» 141
• логической защиты шин;
• реализацию воздействий электродуговой защиты комплексных распредуст-
ройств;
• формирование воздействия на отключение выключателей неповрежденных
системных участков при отказе отключения выключателя поврежденного участка
(функция УРОВ);
• автоматического повторного включения выключателя как резервного.
Предусмотрена и возможность реализации автоматической разгрузки
трансформатора.
Сервисными его функциями являются:
• определение вида КЗ;
• фиксация напряжений и токов электромагнитного переходного процесса;
• измерительное преобразование фазных токов и напряжения, и вычисление
тока обратной последовательности;
• измерительное преобразование активной и реактивной мощностей и учет
электроэнергии.
Трехступенчатая токовая защита выполняется:
• направленной, обеспечиваемой программными измерительными реле
направления мощности, функционирующим по традиционной 90-градусной схеме
включения [39];
• реагирующей на наибольшее действующее значение одного из трех фазных
токов: ток фазы В вычисляется, а минимальный фазный ток выделяется главным
микропроцессором;
• с пуском от программных минимальных измерительных реле напряжения;
• с ускоряемой первой и второй ступенями при любом включении
выключателя ввода собственных нужд электростанции или подстанции;
• с одной из шести стандартных зависимых от тока КЗ выдержками времени
второй и третьей ступеней [22].
Защита минимального напряжения (ЗМН) традиционная: срабатывает при
снижении всех трех межфазных напряжений, включается ключом (см. рис 7.13) и
действует при наличии сигнала разрешения от второй секции шин, формируемой
при нормальном ее напряжении — отсутствие сигнала «ЗМН блокировано».
Защита от несимметрии или однофазного режима (обрыва фазы) (ЗОФ)
также традиционна: реагирует на ток обратной последовательности и не отличает
указанного режима от двухфазного КЗ в электрической сети. Поэтому действует на
отключение со значительной выдержкой времени.
Логическая защита шин (ЛЗШ) (см. рис 7.13) включается ключом и
формирует управляющее воздействие на отключение под воздействием тока ввода, но
при отсутствии пусков защит отходящих присоединений. При этом используются
операции логического суммирования (ИЛИ) единичных сигналов от защит
указанных присоединений или операция логического перемножения (И) нулевых
логических сигналов.
Второй вариант, как указывается в [22], предпочтительнее, «... ввиду
действенного контроля целостности ...» цепи ЛЗШ.
142 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
Резервирование отказов выключателя (функция УРОВ) запускается
воздействием на отключение выключателя с выдержкой времени, превышающей время
его отключения. Сигнал поступает от устройств защит, установленных на
отходящих присоединениях, и формирует воздействие на отключение выключателя
ввода. При этом для исключения излишних его отключений предусматривается
контроль наличия тока.
Автоматика включения резерва (АВР) имеет существенные особенности:
при включенном ключе (см. рис 7.13) производит или традиционное включение
секционного выключателя (АВР СВ) или включение выключателя ввода, как
правило трансформатора (АВР Т), по внешнему сигналу АВР. При этом сигнал
запрета «АВР блокировано» отсутствует.
Пуск АВР на включение секционного выключателя запрещается от
электродуговой защиты, от логической защиты шин и от УРОВ. Запрет действия АВР
исключает подключение поврежденной секции ко второму вводу подстанции.
Автоматика повторного включения реализуется терминалом «Сириус-В»
традиционно: пуск по цепи несоответствия наложения ключа управления и состояния
выключателя и отсутствие запрета его действия — сигнал «АПВ блокировано» от
основных защит трансформатора, электродуговой защиты, ЗМН и при отключении
выключателя от УРОВ.
Особенностью терминалов типа «Сириус» является диалоговое общение с
оператором. Кнопками клавиатуры КЛ (см. рис 7.15) могут устанавливаться
состояния (см. рис 2.9):
УСТАВКИ, КОНТРОЛЬ, ПАРАМЕТРЫ ОТКЛЮЧЕНИЯ.
В режиме УСТАВКИ выставляются или изменяются установленные
напряжения и токи срабатывания и независимые от тока КЗ выдержки времени действия на
отключение защит, могут выбираться характеристики зависимых от тока времен
срабатывания защит, устанавливаться времена действия АПВ и АВР.
В состоянии КОНТРОЛЬ просматриваются текущие действующие значения и
частоты напряжения и токов, их симметричных составляющих активной и
реактивной мощностей.
При считывании результатов действия терминала в состоянии ПАРАМЕТРЫ
ОТКЛЮЧЕНИЯ на дисплее отображаются:
• причины отключения выключателя, дата и время возникновения КЗ;
• наибольшее действующее значение фазного тока КЗ;
• амплитуды и фазы входных токов и напряжений относительно напряжения
фазы А;
• время, прошедшее от момента возникновения КЗ до момента срабатывания
защиты;
• общее время отключения;
• причины и время повторного включения выключателя.
Предусмотрено включение и гашение подсветки дисплея.
При нажатии кнопки «Сброс сигнала» (см. рис 7.16) светодиоды и подсветка
дисплея гаснут, на его экране появляются три точки, отображающие рабочие
режимы слежения терминала.
7.4. Микропроцессорные терминалы ЗАО «РАДИУС Автоматика» 143
6-35 кВт
А \В \С
+ШУ
-ШУ
Вводной выключатель
7..V..7.
Рис. 7.16. Схема подключения внешних цепей к устройству «Сириус-В»
144
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
На рис 7.16 приведена взятая из [24] схема подключения терминала «Сириус-В»
к первичным измерительным трансформаторам тока ТА 7, ТА2, напряжения ввода
TV1 и секции шин TV2 и к шинам управления ШУ Показанные на схеме назначения
аналоговых и дискретных входных сигналов, управляющих воздействий на
электромагнит отключения УАТи контактор КМ электромагнита включения YAC
выключателя представляют исчерпывающую информацию о функционировании терминала.
На схеме показаны и разъемы типа RS-232C для подключения ПЭВМ и линии связи
с АСУ электростанции или подстанции.
7.5. Терминалы «ИЦ «БРЕСЛЕР»
Терминалы типа «ТЭМП 2501» выполнены в виде кассет блочно-унифициро-
ванной конструкции (рис 7.17). Связь между блоками осуществляется
объединительной печатной платой. Жидко-кристаллический индикатор ЖКИ, элементы
управления и индикации (кнопки управления КУ, светодиоды СВД) располагаются
на лицевой панели. Кроме того, на лицевую панель выведен разъем порта
последовательной связи типа RS-232 с персональным компьютером (ПЭВМ).
Измерительно-преобразовательная часть, подключаемая гибким жгутом
проводов к блоку входных трансформаторов типа Д1860, входит в состав блока типа
L2302 (рис 7.18) и содержит: аналоговые частотные фильтры, аналого-цифровой
преобразователь АЦП и ключи набора выполняемых функций (конфигурации
терминала).
ЖКИ-
КУ-
свд~
О <£Ю
OvO
О <|>о
ои„
ОСраб
ОНеиспр.
J
ТЭМП 2501-X3
RS-232
110V □ □ □
220V И ПЗ □
$
fckkkkkkMddnd
Рис. 7.17. Терминал типа «ТЭМП 2501»; вертикальное исполнение с задним присоединением
проводников
7.5. Терминалы ((ИЦ ((БРЕСЛЕР»
145
3/п
БлокД1860
(трансформаторы)
я
=%
Линия связи
RS-232 <J=
с ПЭВМ
Блок
типа L2303
Измерительно-
преобразовательная часть:
аналоговые фильтры;
АЦП;
ключи конфигурации
Вычислительная часть:
микропроцессор МП с
ПЗУ; ОЗУ и
энергонезависимой памятью
I
Блок управления!
и индикации
| Клавиатура |
(5 кнопок) I
Светодиоды
индикации
(10 шт)
+5В
+5В
1 Т±12В
+5В
Источник питания
П1274
-О-
I
У
Блок
ввода-вывода
Р1458
ЭГР
ВР
^
Сигналы
управления
терминалом
Воздействие
, управления
и сигнализация
+24В
Неисправность
=220В
(НОВ)
Рис. 7.18. Структурная схема терминала «ТЭМП 2501»
В указанный блок типа L232 входит и вычислительно-логическая часть,
выполненная в виде программируемого логического контроллера, имеющего в качестве
ядра центральный процессор МП с ПЗУ, ОЗУ и энергонезависимой памятью,
который обеспечивает прием поступающей на его вход информации от промежуточных
трансформаторов тока, блока ввода-вывода типа Р1458, кнопок управления, порта
последовательной связи с ПЭВМ для последующего преобразования и обработки
по заранее заданным алгоритмам и взаимодействие между всеми входящими в
состав терминала блоками.
Цепи входных дискретных сигналов управления терминалом электрически
отделены от микропроцессора оптронными элементами гальванической развязки
ЭГР. В указанный блок типа Р1458 входит исполнительная часть терминала —
выходные электромеханические реле, в том числе с герметизированными контактами
(герконами) ВР вывода дискретных управляющих воздействий на
электроэнергетический объект.
Нормальное функционирование терминала обеспечивается бесперебойным
питанием от преобразовательного блока типа П1274 и развитой системой
самодиагностики, которая постоянно производит оценку работоспособности его составных
частей и программного обеспечения.
Терминалы «ИЦ «БРЕСЛЕР» типа «ТЭМП 2501» выполняют функции
микропроцессорной защиты:
• трехступенчатой ненаправленной токовой от междуфазных КЗ;
• от однофазных замыканий на землю в сетях с изолированной
(компенсированной) нейтралью;
146
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
• от двойных замыканий на землю;
• от однофазного режима работы асинхронных электродвигателей;
• от асинхронного хода синхронных электродвигателей и функцию логической
защиты шин подстанции.
Они производят двукратное автоматическое повторное включение
отключенных защитой выключателей и частотное АПВ.
На рис 7.19 (см. вклейку) в качестве примера приведена функциональная схема
терминала «ТЭМП 2501-31» защиты и автоматики присоединения. На ней показаны
цепи управления выключателем присоединения и фиксирования его состояния,
элементы трехступенчатой токовой защиты и автоматического повторного включения,
условно обозначенный регистратор напряжений и токов электромагнитных
переходных процессов, оптроны входных дискретных сигналов, выходные герконы и цепи
формирования сигналов информации о функционировании терминала.
Токовая защита (ТЗ) двухфазная трехступенчатая — одно системная:
больший из токов 1а91с выбирается макси-селектором МАХ. Программные
измерительные максимальные реле тока выполняются по структурным схемам, показанным
на рис 7.2.
Защита состоит из трех ненаправленных ступеней ТЗ-1, ТЗ-2, ТЗ-3 с
возможностью ускорения второй ступени при включении выключателя. Ввод в работу первой
и второй ступеней ТЗ осуществляется программными переключателями SGF2.2 и
SGF2.1, а возможность автоматического удвоения уставок тока срабатывания
программными переключателями SGF2.4 и SGF2.3 соответственно. Удвоение
уставок производится при отключении выключателя (срабатывании реле РПО). Таким
образом, при включении выключателя на время возврата реле РПО-DS
измерительные реле тока в 2 раза загрубляются.
Первая 73-7 и вторая ТЗ-2 ступени имеют независимые от тока DTI, DT2, а
третья ступень ТЗ-3 — независимую и обратнозависимые характеристики времени
DT3 срабатывания: четыре типа, соответствующие стандартам BS 142 и IEC 255
(«чрезвычайно инверсная», «сильно инверсная», «нормально инверсная» и
«длительно инверсная») [107]. Выбор характеристики и ввод/вывод третьей ступени из
работы производится программными переключателями SGF1.1—SGF1.3.
Каждая ступень ТЗ выполнена в виде трех однофазных реле тока, которые
срабатывают, когда ток одной или обеих фаз превышает уставку соответствующей
ступени. По истечении выдержки времени происходит срабатывание выходного
реле К1 защиты через программные элементы DW3—DW6 (ИЛИ) и DX9 (И) — при
включенном ключе SGR1.1. Пуск ступеней защит сопровождается
соответствующей светодиодной индикацией, фиксируемой триггерами Г (см. рис 7.19),
срабатыванием выходного реле «Сигнализация» и записью параметров аварийного
режима в энергонезависимую память терминала.
Ускорение второй ступени ТЗ при включении выключателя организуется от
сигналов пуска второй ступени и сигнала срабатывания РПО. Ввод или вывод
ускорения осуществляется установкой программного переключателя SGF2.5.
Ускорение вводится на время возврата реле РПО-DS.
7.5. Терминалы «ИЦ «БРЕСЛЕР»
147
Вторая ступень ТЗ-2 имеет регулируемую выдержку времени возврата. Такая
возможность предусмотрена для выполнения защиты синхронных
электродвигателей от асинхронного хода. При установке минимальной уставки выдержки
времени на возврат, равной 0,04 с время возврата второй ступени определяется
собственным временем возврата измерительных реле тока ступени. Уставка выдержки
времени на возврат влияет только на сигналы срабатывания второй ступени с
выдержкой времени DT2 и не влияет на цепь ускорения DT2yCK.
Предусмотрен запрет защит —^локирование действия ступеней защит
внешним сигналом операции DX1—DX2 (ЗАПРЕТ) — производится программными
переключателями SGB1.1—SGBL5. Это обеспечивает выполнение пуска ТЗ по
минимальному напряжению с помощью внешних измерительных реле напряжения.
Сигналы пуска второй или третьей ступени ТЗ, используемые для построения
«логической защиты шин», вводятся/выводятся переключателями SGF2.6 и SGF2.7
соответственно через операцию DW1. Программным переключателем SGF2.8
предусмотрено формирование выходного сигнала пуска ТЗ по схеме И (программный
элемент DX1) с контролем включенного положения выключателя (сигнал РПВ).
Токовая защита от однофазных замыканий на землю. Одноступенчатая
ненаправленная ТЗ от замыкания на землю (измерительное реле тока нулевой
последовательности ОЗЗ) имеет независимую и обратнозависимые характеристики
срабатывания (аналогичные третьей ступени ТЗ от междуфазных замыканий). Выбор
вида характеристики, а также ввод/вывод защиты от замыканий на землю из
работы, осуществляется программными переключателями SGF1.4. _
Предусмотрена (программный переключатель SGB1.4 и операция DX4)
возможность запрета действия защиты от замыканий на землю внешним сигналом.
Автоматика повторного включения обеспечивает выполнение однократного
или двукратного АПВ с поочередным пуском по цепи несоответствия положения
ключа управления выключателем и состояния выключателя.
Действие АПВ1 разрешается программным переключателем SGF4.6, а второго
цикла АПВ2 — переключателем SGF4.7. Второй цикл АПВ вводится при
неуспешном первом цикле с контролем цепи несоответствия — элементы DTT0T (аналоги
заряжающихся конденсаторов электромеханического устройства [40]). Выдержка
времени от 0,5 до 25 с отсчитывается с момента перехода выключателя во
включенное состояние (после срабатывания реле фиксации команды включения РФК).
Выдержка времени готовности обнуляется при появлении сигнала запрета АПВ.
Программными переключателями SGF4.1SGF4.5 вводится (операцией DW7)
дополнительный запрет АПВ при отключении выключателя от первой, второй и
третьей ступеней ТЗ или от 033; отключении выключателя внешним сигналом и от
реле контроля отключенного оператором состояния выключателя РКО.
Автоматическое повторное включение первого цикла выполняется с
выдержкой времени, устанавливаемой в диапазоне от 0,5 до 20 с, АПВ второго цикла —
с выдержкой времени, устанавливаемой в диапазоне от 20 до 120 с.
Обеспечивается подсчет количества попыток АПВ первого счетчиком АПВ1 и
второго счетчиком АПВ2 циклов раздельно. Количество попыток хранится в
энергонезависимой памяти и доступно для считывания.
148 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
Запускаемыми операциями DX5 или DX6 (И) совпадения сигналов
срабатывания АПВ и воздействия на выключение выключателя — срабатывание выходного
реле К2 (при включенном ключе SGR1.1 через операцию DX10), формируемого
программными элементами DW8 (ИЛИ) и DX5 (ЗАПРЕТ), пропускающего
воздействие АПВ 1 раз (при нулевом логическом сигнале на его инверсном входе):
сигнал 0 заменяется логической единицей после запоминания триггером
(элементы DX7 и DW9, охваченные положительной обратной связью ОС) воздействия
АПВ на время возврата DS после исчезновения воздействия (блокировка от
многократных срабатываний).
В терминалах защиты и автоматики линий, питающих нагрузку подстанций,
предусмотрено ЧАПВ. Его схема аналогична схемам АПВ1 и АПВ2 (см. вклейку,
рис 7.19). Подготавливается ЧАПВ внешним сигналом автоматики частотной
нагрузки.
Терминал секционного выключателя исполняет и функцию автоматики
включения его как резервного (АВР) по сигналу об отключении рабочего выключателя
секции с контролем наличия напряжения на резервирующей секции.
Защита от однофазного режима работы (обрыва фаз) предусмотрена в
терминалах защиты и автоматики асинхронных электродвигателей. Она реализуется путем
определения максимального и минимального тока трех фаз. Вычисляется
относительная разность токов А/* = (7тах - 1т{п)/1тах, ПРИ определенном значении которой
и срабатывают программные измерительные реле. Защита имеет две независимые
выдержки времени, вводимые переключателем.
Терминалы типа «ТЭМП» исполняют сигнал электродуговой защиты
комплектных распредустройств и выполняют функцию резервирования отказа выключателей.
7.6. Особенности дистанционных защит и автоматического
повторного включения линий напряжением 35 кВ
Микропроцессорные дистанционные защиты типов БМРЗ-ДЗ и «Сириус-ДЗ-35»
представляют собой новые разработки НТЦ «Механотроника» и ЗАО «РАДИУС
Автоматика» соответственно.
Дистанционная защита типа БМРЗ-ДЗ линий электрических сетей
напряжением 6—35 кВ с изолированной или компенсированной нейтралью обладает
свойством отключения только одной из двух поврежденных линий во всех случаях
замыканий на землю. Она содержит программный избиратель поврежденной фазы
(ИПФ) логического типа, который обеспечивает очередность отключения линий с
замыканием на землю.
При междуфазных КЗ программные измерительные реле как обычно [39]
производят измерительное преобразование сопротивления по междуфазным
напряжениям и разностям соответствующих фазных токов. При двойных замыканиях на
землю током нулевой последовательности защита от междуфазных КЗ выводится
из действия. Программные измерительные реле производят измерительное преоб-
7.6. Особенности дистанционных защит и автоматического повторного включения 149
разование сопротивления по фазным напряжениям и суммам соответствующего
фазного тока и тока нулевой последовательности [39].
Трехступенчатая дистанционная защита является направленной:
характеристики измерительных реле (круговые, трех- и многоугольные) располагаются,
главным образом, в первом квадранте комплексной плоскости и охватывают начало
координат для исключения мертвой зоны при близких КЗ.
Дистанционная защиты интегрирована с автоматикой повторного включения:
программно реализуется одно- или двукратное АПВ, при этом предусмотрено
ускорение действия второй или третьей ступени защиты на отключение
выключателей после неуспешного действия автоматики повторного включения.
Микропроцессорный блок дистанционной защиты БМРЗ-ДЗ программно
выполняет и функции автоматики ограничений снижения напряжения — защиты
минимального напряжения (ЗМН) и контролирует фазные напряжения и
появление напряжения обратной последовательности.
При возникновении неисправностей цепей напряжения, дистанционная защита
переводится в режим резервной двухступенчатой токовой направленной (или
ненаправленной) защиты. Возможно и одновременное функционирование
дистанционной как основной и токовой как резервной защит.
При отказе выключателя на отключение КЗ формируются сигналы на
отключение трех смежных выключателей (выполняется функция У РОВ).
В процессе работы защиты и автоматики производится автоматическая
самодиагностика.
Дистанционная защита типа «Сириус ДЗ-35» функционирует как
многосистемная [41] — одновременно вычисляет сопротивления по междуфазным
напряжениям и разностям фазных токов (сопротивлений программных измерительных
реле от междуфазных КЗ) и по фазным напряжениям и суммам фазных токов и
тока нулевой последовательности (сопротивлений программных измерительных
реле от двойных замыканий на землю). Однако током нулевой последовательности
двойного замыкания на землю защита от междуфазных КЗ из действия на
отключение не выводится. При этом отключается только одна из поврежденных линий в
2/3 случаев или обе линии во всех случаях двойных замыканий на землю.
Программные измерительные реле сопротивлений трех ступеней
дистанционной защиты являются направленными, но их характеристики (четырехугольные и
круговые) смещены в третий квадрант комплексной плоскости (рис 7.20, а, б).
Поэтому направленность действия дистанционной защиты обеспечивается отдельными
программными измерительными реле направления мощности, использующими
фазные токи и междуфазные напряжения, соответствующие 90-градусной схеме
включения аппаратных реле [39] с углом максимальной чувствительности тс/4.
Дистанционная защита имеет двойной направленый пуск — программные
измерительные реле KW1—KW3 — по фазным токам:
• грубый — программные измерительные реле тока КА1—КАЗ;
• чувствительный — реле КА4—КА6, контролируемый программными
минимальными реле междуфазных напряжений КК
Xl:l
XI :2
Х1:3
5А«
1А-
\Х1:7
Х1:8 '
Х1:9
5А«
1А-
а
Ш:70[
Ш:77
Ш;72
JAJ
0^2Й
П
ЗА
JO:9
\ХЗ:10\
&>
\ХЗ:11\
$ш$
\ХЗ:12\
«и
\ХЗ:13\
\ХЗ:14\
&>
\ХЗ:15\
\хЗ:1б\
<$п)
МАХ
РПО
РПВ
От ключа
[ОТКЛЮЧИТЬ
От ключа
ВКЛЮЧИТЬ
Вн.откл./
запрет
защит
ТЗ-3
Л
/SGF2.6
DW1
ТЗ-2
Л
SGF2.7
DX1SGF2.8
FV Пуск 73
&
1
РПВ
SGF1.1
DX1
DT3
Выбор
характеристики
SGF2.1 DS
SGF2.3
73-7
SGF2.2
SGF2.4
SGB1.1
SGB1.2
&
DX2
^
ТЗ-3
DT2
&
<с_1
^
ТЗ-2
SGF2.5 DX2 ^Цуск
Ускор,
SGB1.3
&
ВХЗ
^
7)77
*т*
73-7
РПО-DS
Запрет
защит
033 SGFL4
SGB1.4
DX4
DT
Выбор
-^характеристики
&
ч*
033
Запрет
DS
DT
25мс
i 1
В U
От
oJsGTJj]
72уск
+ 1с
защит
РПО-DS
РПО
DS
DT
25мс
В U
О?
SGF3.2
1с
РПВ-DS
РПВ
РКО
DT
25мс
i 1
Откл.
BW1
DT
25мс
Упр.
Вкл.
72
РКО-ОД
F3
РКВ-ОД
РКВ
DT
25мс
Запрет
. DU ^
,УШ.З SGF3.4.
F4 защит
Вн.откл.
-П-
BS
РПО
0,2с
DU
О-
7)7
РКО-ОД
DW2
Вн.откл.
73-3
DW3
Сброс 5(773.5
73-2
73-7
Ускор.
DW4
033
^.
SGB1.5
15мс
DX8
&
Сброс
DW5
DW6
РКО
DW7
ТЗ-1
ТЗ-2
SGF4.
ЖГ
ШЩ
033
^
'GF4.:
Вн.откл.
'SGF4.'
'SGF4.5\
Запрет АПВ
РПО
РФК
SGF4.6
SGF4.7
ПускАЛВ1,АЛВ2
АПВ
АПВ1
DX3
<LA
Разрешение АПВ
—•
DX4
&
ВюлАПВ
ВТ АПВ1 DT АПВ1
гот ср
и я-
0,5 -25с 0,5 -20с
АПВ2_
7)7 АПВ2 DT АПВ2
гот ср
и
■7*
0,5-25с 0,5-120с-
L _ _' '_ J
Неиспр.
Откл.
DS1
0,1с
DX5
DS2
г-Шс
&
Счетчик АПВ1
DW12
АПВ
pjcLLf^T-i-fo^
Счетчик АПВ2
Вкл.
АПВ1
F1
АПВ2
РКВ
РПВ
РПО
ВТ
РКО
РКВ
О
<5П
10с
Л
DX5
ВД
BS
Вкл.
ОС
ВХ7 BW1
1с
&
Блокировка
многократных
" 1тываний
Откл.
1 Н
Неиспр.ЦУ
Проверка
■Щ
$
1
Регистратор
Событие!
Событие5
RGR1.1
■If—
Откл.
Вкл.
Сигн.
Пуск 73
ВХ9
&
вхю
К1
&
\К2
вхп
&
X
КЗ
ВХ12
&
X
К4
X
IRF
BU
-Он
РПВ
ЛЯВ
73-7
Неиспр.
.SGF3.6
К5
£
РКВ-ОД
41
73-2
Тг^Еп^и
73-3
033
Сброс -<—1—ср J
H=fp^-i
ЛПВ7
АПВ2
РПО
РПВ
\г-
Проверка
is
Отключить
Включить
Сигнализация
Пуск ТЗ
Неисп
равность
Х3:1
Х3:2
Х3:3
Х3:4
Х3:5
Х3:6 ,
Х3:7
Х3:8
Х2:13\
Х2:14
\Х2:15\
Х2:16\
2-я ступень ТЗ \
я ступень ТЗ
-я ступень ТЗ
озз
Пуск АПВ
-Ф-
Откл.
Вкл.
■#
'*
Рис. 7.19. Функциональная схема терминала типа «ТЭМП 2501-31»
150
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
а)
DX1
\КА1 ^г
\кА2 Ж
\клз ^г
\kwi
\KW2
\KW3
\КЛ4 ^
\КА5 ^г
\КА6 _jr\
Yv< I
\kv
7
J 1
_l
\&
\&
-]&
T
1—
ц
1"
DX2
&
&
&
SG
1
1 1
1 1
J
Рис. 7.20. Характеристики измерительных органов первой и второй (а), а также третьей (б)
ступеней и структурная схема пускового органа ДЗ по току и напряжению дистанционной защиты (в)
Для ввода в действие на отключение программных измерительных реле
сопротивления от двойных замыканий на землю используется «... специальный
чувствительный орган тока нулевой последовательности ...» [41] с торможением от
фазных токов, а для отключения двух поврежденных линий — грубое программное
реле тока нулевой последовательности.
В терминале применен нетрадиционный контроль направленности от цепей
напряжений, при нарушении целостности которых дистанционная защита
выводится из действия. Используется появление напряжения обратной
последовательности, исчезновение всех трех напряжений и дискретный сигнал отключения авто-
7.7. Автоматика частотной разгрузки и частотного повторного включения 151
магического выключателя вторичных напряжений первичного измерительного
трансформатора напряжения.
В связи с указанным запретом действия дистанционной защиты в терминале
«Сириус ДЗ-35» предусмотрена трехступенчатая токовая защита.
Первая ее ступень (токовая отсечка) или действует постоянно или временно
вводится в действие при включении выключателя оператором. В последнем случае
вводится и ускорение действия первой и второй ступеней дистанционной и второй
и третьей ступеней токовых защит.
Терминал дистанционной защиты содержит и токовую обратной
последовательности защиту от несимметрии и обрыва фазы.
Формируется и сигнал, обеспечивающий выполнение функции У РОВ.
С указанными защитами интегрировано программное одно- или двукратное
автоматическое повторное включение отключенного ими выключателя.
Микропроцессорные дистанционные защиты типов БМРЗ-35 и «Сириус-ДЗ-35»
имеют разъемы типа RS-232 связи с ПЭВМ и типа RS-485 связи с АСУ и выполняют
все возможные сервисные функции: производят измерительное преобразование и
индикацию напряжения и токов, их симметричных составляющих, осциллографи-
руют напряжения и токи электромагнитных переходных процессов и др.
7.7. Автоматика частотной разгрузки и частотного
повторного включения
Повсеместно применяемая и эффективная противоаварийная автоматика
частотной разгрузки, предотвращающая развитие общеэнергосистемных аварий
вследствие наступления необратимого аварийного процесса — «лавины» частоты,
реализуется микропроцессорными блоками измерительного реле частоты БМ МРЧ и БМ
АЧР, выпускаемыми НТЦ «Механотроника», или терминалом типа «Сириус-АЧР»,
поставляемым ЗАО «РАДИУС Автоматика».
Микропроцессорный блок автоматической частотной разгрузки БМ АЧР
совместно с блоком многофункционального реле частоты БМ МРЧ обеспечивают
функционирование исполнительной и измерительно-вычислительной частей
автоматики ограничения снижения частоты —г автоматики частотной разгрузки
категорий АЧР1, АЧРИ и АЧРШ и частотного АПВ.
Важная особенность микропроцессорной частотной автоматики — свойство
адаптивности к возникающему дефициту мощности, не допускает излишних
отключений при снижении частоты.
Отличительными особенностями ее измерительной части являются:
• программирование восьми частотных измерительных реле с контролем
частоты, скорости ее изменения и напряжения;
• высокая точность и стабильность уставок по частоте в пределах 45—55 Гц,
скорости изменения частоты 0 < df/dt < 10 Гц/с, напряжения 0,4—1,2 номинального
значения, выдержек времени АЧРП и ЧАПВ, изменяемых в пределах 0—120 с;
152 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
• осциллографирование электрических величин переходных процессов
изменений частоты;
• интеллектуальный интерфейс (с оператором) с клавиатурой и алфавитно-
цифровым дисплеем;
• наличие каналов связи с ПЭВМ и АСУ;
• высокоэффективная самодиагностика.
Действие измерительной части (БМ МРЧ) основано на счете тактовых
импульсов в течение изменяющейся (при снижении или повышении частоты)
длительности периода. Используется вычитающий счетчик, в который периодически
после каждого считывания записывается некоторое количество импульсов,
значительно превышающее их число, размещающееся на интервале времени, равном
номинальной длительности периода промышленной частоты. В течение истинного
времени периода изменения входного напряжения производится вычитание
тактовых импульсов из счетчика. Разность записанного и оставшегося к концу периода
в счетчике импульсов отображает его длительность, обратно пропорциональную
частоте (см. рис 2.4, б).
Вычисленное значение частоты сопоставляется с хранящимся в памяти
микропроцессора набором установленных ее значений, соответствующих
срабатываниям очередей АЧР1, АЧРП или ЧАПВ. Цифровым дифференцированием
определяется скорость изменения частоты, двоичный код которой сопоставляется с
установленной скоростью, соответствующей срабатыванию АЧРШ.
Одной из особенностей БМ МРЧ является программирование и хранение двух
наборов установленных значений частоты срабатывания АЧР, автоматически
переключаемых при изменениях режимов работы, собственных нужд электростанций
или систем электроснабжения, т.е. свойство адаптивности.
Функционирование логической части автоматики частотной разгрузки и
частотного повторного включения поясняется функциональной схемой на рис 7.21, а.
Предусмотрено два его варианта А и Б, переключаемые ключом SG8. По варианту
А производится отключение и включение выключателя двумя разными внешними
дискретными сигналами АЧР и ЧАПВ, а по варианту Б — по появлению и
исчезновению одного дискретного сигнала АЧР.
При включенном ключе SG7 и положении А ключа SG8 дискретный сигнал
(логическая единица) АЧР поступает на вход S записи триггера ST1 и
запоминается им, если на входе R считывания отсутствует логическая единица или
(логическая операция DW1) от ЧАПВ, или дискретные сигналы от ключа МУ местного
управления и (логическая операция DX1) от ключа включения выключателя
оператором SA. При этом на третьем (инверсном) входе DW1 логическая единица АЧР,
на выходе DW1 и на входе R триггера логический нуль: запоминание сигнала АЧР
разрешается. С выхода триггера ST1 единичный логический сигнал проходит в
цепь АЧР управления отключением выключателя.
Формирователь F дискретного сигнала ограниченной длительности (одновибра-
тор), равной времени разрешения частотного повторного включения выключателя,
воздействует на вход S триггера ST2 при условии (логическая операция DX2)
наличия дискретных сигналов «Подготовка» (о готовности повторного включения) и от
7.7. Автоматика частотной разгрузки и частотного повторного
153
А ЧР на отключение
DX2
ЧАПВ на
Рис. 7.21 Функциональная схема алгоритма АЧР и ЧАПВ («) и схема подключения устройства
типа БМ АЧР (б)
реле РПО отключенного положения выключателя. Сигнал формирователя F
запоминается триггером ST2 только после прекращения действия очередей автоматической
частотной разгрузки - исчезновения логической единицы АЧР Логический нуль
АЧР, превращенный в логическую единицу инверсным входом DW1, поступающую
на вход R считывания триггера ST1, возвращает его в исходное состояние. На
выходах ST1 DW2km входе R триггера ST2 нули: запоминание сигнала формирователя
154 Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
F разрешается. Выходная логическая единица ST2 запускает таймер DT отсчета
выдержки времени срабатывания ЧАПВ, воздействующего на включение
отключенного АЧР выключателя. По обратным связям через DW2 триггер ST2 единицей
ЧАПВ, поступающей на его вход считывания R, возвращается в исходное состояние,
а через DW1 дублируется воздействие на возврат триггера ST1.
При положении Б ключа SG8 сигнал АЧР проходит прямо в цепь управления
отключением выключателя, а ЧАПВ с выдержкой DT производится после
исчезновения логической единицы АЧР со входа R триггера ST2.
Контактные выходы БМ АЧР с соответствующими обозначениями показаны на
схеме внешних подключений исполнительной части автоматики частотной
разгрузки и частотного повторного включения (рис 7.21, б). Электромагнитные реле
KL2—КЫО управляют цепями отключения и включения выключателей, a KL11—
КЫ7 выдают сигналы информации о действиях автоматики: выходы АЧРШ
обозначены как АЧРС1—АЧРСЗ (по скорости изменения частоты).
Терминал микропроцессорной автоматики «Сириус-АЧР» программно
выполняет функции трех очередей практически мгновенно действующей категории
АЧР1 и совмещенных с каждой из них по выходу трех очередей, действующих с
выдержками времени категории АЧРИ, интегрированных с ЧАПВ отключенных
указанными очередями АЧР потребителей электроэнергии после восстановления
частоты.
«Сириус-АЧР» характеризуется двумя особенностями:
• использованием вторичных напряжений первичных измерительных
трансформаторов напряжения двух секций собственных нужд электростанции или двух
секций шин подстанции;
• контролем скорости снижения частоты напряжения после потери питания
одной из секции, индуцируемого электродвигателями при их выбеге для запрета
действия очередей категории АЧР1.
На рис 7.22 показан внешний вид терминала. На лицевой панели расположены:
• ключи (тумблеры) К{Т) оперативного управления — установки
конфигурации (набора выполняемых функций), например вывода из действия ЧАПВ-1 или
включения цепей напряжения второй секции шин собственных нужд
электростанции или шин подстанции;
• клавиатура — кнопки управления КУ;
• жидкокристаллический дисплей ЖКД;
• светодиоды СВД сигналов информации о действии устройства и его
неисправности;
• разъем для связи с ПЭВМ по интерфейсу RS-232C.
Функционально терминал построен из шести модулей:
• ввода аналоговых сигналов ВА1, ВА2 (см. рис 7.14) — напряжений от двух
секций шин; напряжение второй секции используется для повышения надежности
функционирования — предотвращения излишних срабатываний АЧР под
воздействием напряжения, индуцируемого электродвигателями со снижающейся
частотой после отключения первой секции шин;
7.7. Автоматика частотной разгрузки и частотного повторного включения
155
СВД
ЖКД
ж
Оперативное
управление
(АЧР-1 ЧАПВ-Г
# Щ)
Оли. Опоь J
гАЧР-2
1 Ота.
(ШГ
V. Onoi.
й\
Onoi j
Ж
Сириус-АЧР
Цепи
напряжения
Секция /j\fo
RS-232C
/"=49,95 Гц
01.10.2001 12:43:13
ЗАО
"РАДИУС
Автоматика"
О Питание
© АЧР блокировано
OF контролируется
© Неисправность
ПускАЧР/ЧАПВ
©АЧР-1-1 ©АЧР-1-П ©ЧАПВ-
©АЧР-2-1 ©АЧР-2-И ©ЧАПВ-:
©АЧР-3-1 ©АЧР-З-И ©ЧАПВ-
г Готовность
ОАЧР-1 Уст.
ЮАЧР-2 АЧР
IOA4P-3 О J
Рис. 7.22. Лицевая панель терминала «Сириус-АЧР»
• микроконтроллера, выполненного на базе микропроцессора TN80C196KC209,
содержащего мультиплексор МПЛ, аналого-цифровой преобразователь АЦП (см.
рис 7.15) и аналого-дискретный преобразователь (АДП), формирующий время-
импульсный сигнал с длительностью импульсов, равной изменяющемуся периоду
(полупериоду) напряжения со снижающейся частотой;
• клавиатуры и индикации КИ (см. рис 7.14) с оптронными элементами
гальванической развязки (ЭГР);
• ввода-вывода ВВД дискретных сигналов и управляющих воздействий на
отключение и включение выключателей;
• источника питания ИП.
Алгоритм функционирования. На рис 7.23 приведена функциональная схема
одной из трех указанных совмещенных очередей категорий АЧР1, АЧРП и ЧАПВ.
Напряжения первой U1 и второй U2 секций вторичных измерительных
трансформаторов TVL1, TVL2 после аналоговых частотных фильтров нижних частот
ФНЧ подвергаются программному измерительному преобразованию в цифровые
сигналы об их амплитудах (действующих значениях) и частоте, выполняемому
микропроцессором: на рис 7.23 все программные операции показаны условными
графическими изображениями измерительных преобразователей напряжения
ИПН1, ИПН2 и его частоты ИПЧН1, ИПЧН2 измерительных реле напряжения
KV1, KV2 и частоты KF1, KF2 в принятом для микропроцессорных устройств
156
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
ИПЧН1
U1,
TVL1 ИПН1
Lrr^ttj
\АДП\
РАЧР
ЗАЧР
DX1
~Zj& Г
Н Fl
яг
ш KF1 DX2 KF1-I
П___^ЙУёГ1 If
KV1
и>
JT
KV2
DX1
U2
TVL2 ИПН2
ФНЧ1
U>
ИПЧН2
АДП
Кп
J 1 ел
KF2
F<
DTI
ST
KLJ Отклю-
KF1-II
R
.SG2
F<
I
DT2 I
^
DX3
KF3
.SG3
F>
I
DT3
H^
DW
чение
KL2
Вклю-
DX2
РЧАПВ
чение
Рис. 7.23. Функциональная схема терминала типа «Сириус-АЧР»
виде [19]) и логических элементов DX(H), DW (ИЛИ), DX (ЗАПРЕТ), DT
(ВРЕМЯ) и триггера ST (ПАМЯТЬ).
На рис 7.23 показан цифровой дифференциатор частоты £>Z, формирующий
сигналы запрещения (операция DX — ЗАПРЕТ) действия АЧР1 при высокой скорости
снижения частоты напряжения, индуцируемого потерявшими питание
электродвигателями. Она фиксируется максимальным программным измерительным реле KF1.
Автоматика частотной разгрузки вводится в действие разрешающим входным
дискретным сигналом РАЧР при отсутствии сигнала запрета ее действия ЗАЧР
(операция DX1) и разрешается при совпадении дискретных сигналов (операция
DX1) программного максимального измерительного реле напряжения KV2 и
минимального реле частоты KF2, подключенных, как указывалось, к напряжению
второй секции.
Программные измерительные реле частоты — минимальные KF1-I, KF1-II и
максимальное KF3 функционируют при напряжениях на шинах, превышающих
минимальные предписанные (установленные) значения, контролируемые
программными максимальными измерительными реле напряжения KV19 KV2, и
включенных ключах SGI—SG3.
Действие очередей категории АЧР1 происходит с небольшой задержкой (0,2 с) —
операция DT1, а очередей категории АЧРП — со значительными выдержками
времени (не менее 5 с) — операция DT2. Категории АЧР совмещены: они воздействуют
на вход S запоминания сигнала программным триггером ST через операцию DW
(ИЛИ) и на общее исполнительное электромагнитное реле с герметизированными
контактами (геркон) КЫ. Минимальная разность устанавливаемых частот
срабатывания реле KF1-I очередей АЧР1 Д/= 0,01 Гц.
С выдержкой времени (операция DT3) действует и ЧАПВ: программное
максимальное реле частоты KF2 срабатывает после восстановления частоты и совпаде-
7.8. Ускоренная автоматика включения резерва
157
ния логических сигналов (операция DX3) о действии АЧР и реле контроля
значения напряжения KV2 на второй секции.
Включение отключенных АЧР потребителей происходит при наличии сигнала
разрешения РЧАПВ (операция DX3). После формирования сигнала ЧАПВ его
воздействием на вход триггера ST схема приводится в исходное состояние.
Измерительные преобразователи в терминале. В автоматике «Сириус-АЧР»
производится измерительное преобразование действующих значений (амплитуды)
напряжения и его частоты. Напряжения промышленной частоты fn выделяется
нерекурсивным фильтром Фурье, формирующим за период Тп его ортогональные
составляющие — синусную Us(nT) и косинусную Uc(nT) в виде постоянных чисел.
Нерекурсивный фильтр Фурье осуществляется умножением дискретных
мгновенных значений напряжения и{пТ) на дискретные значения синуса и косинуса.
При интервале дискретизации АЦП Т = Гп/12 значения синуса и косинуса
задаются через я/6 в виде приближенных значений по модулю 8, а именно:
синуса — 0, 4, 7, 8, 7, 4, 0, -4, -7, -8, -7, -4;
косинуса — 8, 7, 4, 0, -4, -7, -8, -7, -4, 0, 4, 7,
что упрощает процесс вычисления и не вносит заметной погрешности (не более
0,5 %).
Суммирование одноименных составляющих и дает синусную и косинусную
составляющие. Амплитуда Um напряжения вычисляется по формуле (1.4).
Частота напряжения вычисляется так же, как и в БМ МРЧ, т.е. с
использованием вычитающего счетчика тактовых импульсов, размещающихся в интервале
времени, равном увеличивающейся при снижении частоты длительности периода
изменения мгновенного напряжения. Частота вычисляется как число, обратно
пропорциональное длительности периода.
7.8. Ускоренная автоматика включения резерва
Микропроцессорная автоматика включения резервных (секционных)
выключателей собственных нужд электростанций и подстанций (АВР) работает с
выдержкой времени, предотвращающей ее излишние действия при отключаемых
релейной защитой КЗ в сетях высокого и низкого напряжений.
При наличии синхронных электродвигателей (СЭД) действие АВР с
выдержкой времени приводит к выпадению их из синхронизма, что недопустимо для
установок водоснабжения, например питательных насосов парогенераторов,
газоснабжения и нефтепроводов, ввиду опасности возникновения гидравлических ударов с
разрывами водо-, газо- и нефтепроводов.
Поэтому разработана ускоренная микропроцессорная АВР (УАВР),
действующая без временной задержки. Программная техническая реализация УАВР со
специально разработанным пусковым органом предотвращает излишние действия
УАВР или восстанавливает рабочую схему после отключения КЗ и предотвращает
выпадение синхронных электродвигателей из синхронизма.
156
Главо 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
Л1
□
ИП1
X
ИП2\
О
УАВР1
ИНРС; ИРТ<; ИРТ>,
ИРН1>;ИРН2>
/К/ ♦
К4
Г"ФТА1
УАВР2
Рис. 7.24. Ускоренная микропроцессорная автоматика
гателями
подстанции с синхронными электродви-
*„!? ^ °ДН0И Ю °еКЦИИ ШИН НИЗШего «^Ряжения типовой двухтранс-
?ы? 7ТТ П0ДСтанции с ДВУМЯ источниками питания ИП1, ИП2 приведена на
рис. 7.24. Предусматривается установка на каждой секции УАВР1 и УАВР2
Рассматривается действие АВР1. ' ас
Быстродействие микропроцессорной УАВР обеспечивается программным
направленным измерительным реле сопротивления ИНРС, не срабатывающем при
КЗ на питаемых (точка К2) и отходящих от ИП1 (точка КЗ на некотором удалении)
жЗг^ТаТГ™ К ПерВИЧНЫМ измеР^льным трансформаторам напря-
В схему пускового органа УАВР также входят программные:
• минимальное измерительное реле тока ИРТ< для выявления потери питания
резервируемой секцией шин / (подключается к трансформатору тока ТА1);
7.8, Ускоренная автоматика включения резерва
159
• максимальное измерительное реле напряжения ИРН1, контролирующее
напряжение на резервирующей секции шин 2 (подключается к первичному
измерительному трансформатору напряжения TV2);
• максимальное измерительное реле напряжения ИРН2> (служит для
восстановления рабочей схемы после излишнего действия УАВР — включения рабочего
выключателя Q1 и отключения резервного выключателя Q3, если после действия
УАВР напряжение на вводе резервируемой секции восстанавливается;
подключается к первичному измерительному трансформатору напряжения TV3)\
• максимальное измерительное реле тока ИРТ>, отключающее секционный
выключатель Q3 и запрещающее включение рабочего выключателя Q1 при КЗ на
секции шин (точка К5) (подключается к трансформатору тока ТА2).
Указанные реле являются измерительными реле напряжения и тока прямой
последовательности. Для их реализации предусматриваются соответствующие
фильтры симметричных составляющих напряжения и тока прямой
последовательности, которые программно реализуются в соответствии с соотношением (1.21).
Особенности измерительного направленного реле сопротивления. Для
выполнения ИНРС указанной функции отличия внутренних КЗ (точки Kl9 К4 и К5) от
внешних (точки К2 и КЗ) характеристика срабатывания реле должна находиться в
третьем квадранте.
Характеристика его срабатывания формируется нетрадиционным способом:
не в комплексной плоскости Z, а в комплексной плоскости мощности S = Р +JQ,
поскольку активное сопротивление R пропорционально активной мощности
[см. (1.17) и (1.18)]:
R(nT)~RI2m(nT) = 2P(nT), (7.10)
а реактивное сопротивление — реактивной мощности:
JX(nT) ~JXI2m(nT) =j2Q{nT). (7.10a)
При этом исключается операция деления, необходимая для определения
сопротивления, что упрощает программную реализацию измерительного реле.
Направленное измерительное реле сопротивления имеет треугольную
характеристику срабатывания, расположенную в комплексной плоскости S - Р +jQ. Для
определения условия срабатывания реле прямые 7, 2 и 3 (рис 7.25) описываются
соответствующими алгебраическими уравнениями: общее уравнение для них Y-
= F0 + Xtg р. Прямые 1 и 2 проходят через начало координат, поэтому для них
YQ = 0 (рис 7.25, а). В характеристику входят области, расположенная справа 1 и
слева 2 от прямой.
160
Глава 7. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА
iJY;j2Q}
JY;j2Q,
Рис. 7.25. Обоснование граничных линий /, 2 (а) и 3 (0), определяющих характеристику
направленного реле сопротивления
Чтобы вектор сопротивления располагался между прямыми 1 и 2, необходимо
выполнение двух условий:
первое условие
y<(*t8Pi>*tgply-jr(-tg0rv))
\у>>>
(7.11)
поскольку по осиХрасполагается 2Р{, а по оси Y~ 2QX, то первое условие
принимает вид:
2e!<2P,tgPly или 20^-2/Vgp! <0
второе условие
y<(Ztgp^y=^tgP2y=Z(-tgp;y)),
(7.11а)
(7.12)
или
2C?1-2P1tgP2y<0. (7.12a)
Прямая 3 не проходит через начало координат (рис. 7.25, б). Она отсекает на
оси Г значение -2QX= -Xlylfm.
В характеристику реле входит область, расположенная выше прямой 3, что
обеспечивается при условии Y > -XXyl\m + *tg p3y, или, поскольку tg p3y = tg (- р3" ),
при следующих условиях:
'3yJ
■2Qi>-*iA + 2Pi*fi.
Зу
(7.13)
Вопросы для самопроверки
161
ИЛИ
-Zly/12w + 2P1tgP3y-2e1<0. (7.13a)
Таким образом, характеристика срабатывания реле определяется тремя
неравенствами (7.11)—(7.13): устанавливаемые углы Р1у, Р2у и Р3у определяют
положение прямых 1, 2 и 3.
Вопросы для самопроверки
1. Какие известны микропроцессорные интегрированные устройства защиты и автоматики
собственных нужд электростанций и распределительных электрических сетей напряжением до 10 кВ?
2. Каков принцип действия программных измерительных реле максимального тока (см. рис. 7.2)?
3. Как формируются характеристики срабатывания программных направленных измерительных
реле сопротивления, состоящие из прямых линий (см. рис. 7.3)?
4. Как построены и чем различаются терминалы, на которых выполняются БМРЗ и
микропроцессорные устройства защиты и автоматики типа «Сириус» (см. рис. 7.6 и 7.15)?
5. Как действует блок микропроцессорной релейной защиты (БМРЗ) электроэнергетических
объектов напряжением до 10 кВ (см. рис. 7.7)?
6. Как достигается односистемное при трех входных напряжениях и токах выполнение
программной функции релейной защиты устройством БМРЗ (см. рис. 7.7)?
7. Как функционирует в составе БМРЗ программная автоматика трех фазного повторного включения
выключателя отключенного программной защитой (см. рис. 7.8)?
8. Какими особенностями обладает и как действует в составе БМРЗ программная автоматика
включения секционного выключателя как резервного (см. рис. 7.9)?
9. В чем состоит принцип действия программных измерительных реле снижения и повышения
частоты промышленного напряжения в микропроцессорном блоке БМРЧ, выпускаемого «НТЦ
Механотроника»?
10. При каких условиях выполняется программа частотного повторного включения выключателя
(ЧАПВ), отключенного автоматикой частотной разгрузки (АЧР)?
11. В чем состоят особенности микропроцессорных защит асинхронных и синхронных
электродвигателей?
12. Каковы особенности микропроцессорных дистанционных защит линий напряжением 35 кВ,
выпускаемых «НТЦ Механотроника» и ЗАО НПП «РАДИУС Автоматика»?
13. Как действует терминал типа «Сириус-АЧР» (см. рис. 7.20)?
14. Каковы требования к микропроцессорной автоматике резервного включения секций шин
подстанций с синхронными электродвигателями? Каковы особенности такой АВР (см. рис. 7.21)?
15. Объяснить структуру микропроцессорного пускового органа ускоренной АВР и формирования
характеристики срабатывания направленного программного измерительного реле сопротивления
(см. рис. 7.21 и 7.22).
Глава восьмая
ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ
РЕЛЕЙНАЯ ЗАЩИТА И АВТОМАТИКА СИНХРОННЫХ
ГЕНЕРАТОРОВ И ТРАНСФОРМАТОРОВ
8.1. Виды и особенности
Отечественная микропроцессорная интегрированная защита и автоматика
синхронных генераторов, трансформаторов и электроэнергетических блоков
генератор — трансформатор разработана и поставляется ООО НПП «ЭКРА» в виде
шкафов серий ШЭ:
• генераторов и блоков генератор — трансформатор типов ШЭ 1110—ШЭ 1113;
• трансформаторов и автотрансформаторов с высшим напряжением 110—220 кВ
типа ШЭ2607 и с высшим напряжением 330—750 кВ типа ШЭ2710.
Эти шкафы выполняются на специализированном терминале ООО НПП «ЭКРА»
типаБЭ2704[47].
Исследовательский центр «ИЦ «БРЕСЛЕР» поставляет терминал основных и
резервных защит трансформаторов напряжением ПО—220 кВ типа «БРЕСЛЕР
2108». Микропроцессорная защита понижающих трансформаторов подстанций
выпускается ЗАО «РАДИУС Автоматика» в виде терминалов «Сириус-Т»,
«Сириус-ЗТ» и «Сириус-УВ» [22]. Разработан автоматический регулятор
коэффициентов трансформации (АРКТ) трансформаторов с устройством регулирования
под нагрузкой (УРПН) в виде терминала РНМ-1 (см. рис 7.1, б) [20]. На рис 7.1, а
показаны и микропроцессорные блоки: основной — токовой продольной
дифференциальной защиты БМРЗ-ТД и резервных защит трансформатора БМРЗ-ТР и
блок контроля напряжения БМРЗ-КН, предназначенный для управления УРПН,
научно-технического центра НТЦ «Механотроника». Они выполняются на
универсальном терминале.
Применение способов обработки информации цифровой вычислительной
техникой и ее технических средств позволило существенно повысить техническое
совершенство релейной защиты, особенно продольной токовой
дифференциальной. Программно преодолеваются специфические факторы, крайне затрудняющие
обеспечение высокой чувствительности продольной токовой дифференциальной
защиты блоков генератор — трансформатор и трансформаторов. Расчетными
алгоритмами производятся:
• компенсация сдвига фаз между вторичными токами измерительных
трансформаторов тока на сторонах высшего и низшего напряжений, обусловленного
группой соединения обмоток защищаемого трансформатора;
• выравнивание абсолютных значений вторичных токов, неравенство которых
в нормальном режиме и при внешнем КЗ обусловливается численным отличием
8.2. Микропроцессорная защита и автоматика синхронных генераторов 163
отношения коэффициентов трансформации указанных измерительных
трансформаторов от коэффициента трансформации защищаемого трансформатора;
• компенсация дискретных изменений абсолютных значений вторичных токов
при действиях микропроцессорного автоматического регулятора коэффициента
трансформации.
Более эффективно при цифровой реализации продольной токовой
дифференциальной защиты реализуются способы обеспечения ее недействия от бросков тока
намагничивания, возникающих при включениях трансформатора и дискретных
повышениях его первичного напряжения при отключениях внешних КЗ.
Микропроцессорная интегрированная защита и автоматика синхронных
генераторов и трансформаторов обладает теми же общими свойствами цифровой
вычислительной техники, техническими и сервисными особенностями, что и
ранее охарактеризованные применительно к микропроцессорным комплексам
защиты и автоматики собственных нужд электрических станций, подстанций и
распределительных сетей (см. гл. 7).
8.2. Микропроцессорная защита и автоматика
синхронных генераторов и трансформаторов
Виды защиты и автоматики. Выпускаемые ОАО НПП «ЭКРА» шкафы
микропроцессорной интегрированной защиты и автоматики синхронных
генераторов и блоков генератор — трансформатор мощностью до 800 МВт типов
ШЭ2607.1110—ШЭ2607.1113 содержат все современные виды релейной защиты:
• токовые продольные дифференциальные защиты генератора,
трансформатора и энергоблока генератор — трансформатор;
• токовую поперечную дифференциальную защиту генераторов;
• ступенчатую токовую защиту;
• токовую защиту от симметричных и токовую обратной последовательности
от несимметричных перегрузок обмоток статора и от перегрузок генератора токов
возбуждения;
• дистанционную защиту от междуфазных КЗ;
• от замыканий на землю в обмотках статора и ротора синхронного генератора;
• от КЗ на землю на стороне высшего напряжения трансформатора энергоблока;
• от перевозбуждения и обратной мощности синхронного генератора;
• от потери возбуждения и пробоя изоляции вводов высокого напряжения
трансформаторов.
Они интегрированы с автоматикой:
• синхронизации генератора;
• ограничений снижения и повышения напряжения синхронного генератора и
трансформатора;
• ограничений снижения и повышения частоты вращения синхронных
генераторов;
164 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
• прекращения асинхронного режима синхронного генератора;
• резервирования отказа в действии на отключение выключателей.
Терминалы защиты и автоматики. Интегрированная микропроцессорная
защита и автоматика синхронных генераторов и трансформаторов выполняется как
специализированный терминал, состоящий из трех, двух или одной кассет, в
которых располагаются аппаратные и программные их функциональные элементы и
части в виде конструктивных блоков типа БУК. Терминал имеет открытое
исполнение и устанавливается в шкаф защиты и автоматики.
На рис 8.1 приведен общий вид односистемного терминала, а на рис 8.2 — его
структурная схема с обозначениями разработчиков [58]. Главным является
конструктивный блок Е5 типа JI... (рис 8.1) центрального процессора BMP (в
фирменном обозначении), в котором размещены собственно микропроцессор MP (рис 8.2),
постоянное запоминающее устройство ПЗУ для хранения программ и оперативное
— ОЗУ— данных и результатов вычислений, коммутационная шина и два разъема
интерфейса RS-232C для связи с ПЭВМ и АСУ ТП электростанции [на рис 8.1 один
обозначен как коммутационный порт СОМ1, второй — COM2 (рис 8.2) находится
на задней стенке терминала], дисплей LCD, клавиатура SB, светодиоды
сигнализации In (включен) и Out (отключен), неисправности Неиспр., режима Работа и
кнопка Сброс сигналов.
Блок аналоговых входов Е6 типа ЭА... (см. рис 8.1) и блоки Е8 и Е9 типов
ДИ... и Д1... измерительных преобразователей напряжения С//С/и тока в
напряжение IIU (рис 8.2) содержат вторичные измерительные трансформаторы
напряжения и тока, нагруженные балластными резисторами, и пассивные фильтры нижних
р...
Вых. реле
|.__...Л
Е1
ЭО...
Вых.
о
о
о
о
О
О
О
О
О
О
О
О
О
о
О
Сигн.
О
О
О
О
О
О
О
О
О
оооо*
о
О
Е2
Э1... 1
о
оооо
Oil
Oil
Oil
Oil
Oil
l-J
©
Сброс
0
о
0
о
0
о
oooo<
°
0
E3
ПУ...
i
j i
/ЗГК
(ksS^)
%£У
<Пых
0+24V
0+5V
D+24V
По,
□+5V
□+15V
□-15V
иь
Е4
л!
О
In
О
Out
О
п
и
_0_
О Неиспр.
О Работа
СОМ1
LCD
т
О
О -*-0 SB О-^
Сброс п
Е5
ЭА...
г—|
Х2
ХЗ
Е6
3U...
г-н
. .
'—'
Г
L-I
i—i
L-I
1—•
г—1
г—1
и
L-J
. .
| 1
Е7
ди...
Д1...
ди...
Д1...
Е8
ди...
Д1...
Ди...
Д1...
Е9
П..."
^Ъч
\s5^y
Ди...
Д1-
ЕЮ
Рис. 8.1. Общий вид однокассетного терминала интегрированной защиты и автоматики
синхронных генераторов и трансформаторов
8.2. Микропроцессорная защита и автоматика синхронных генераторов
165
Коммуникационные
порты
RS-232C
RS-232C
Структурная схема цифровой защиты
A/D
DSP
FLASH]
BMP
\COMl
\C0M2
i
'
i
г
мр\
ПЗУ
ОЗУ
lcd\
SB
f<
Входные
цепи
Выходные
цепи
\#
СВД
Рис. 8.2. Структурная схема терминала защиты и автоматики синхронных генераторов,
трансформаторов и энергоблоков генератор — трансформатор
частот первого порядка. Они обеспечивают гальваническую развязку входных
цепей и аналого-цифрового преобразователя AID с мультиплексором.
Сигнальный процессор DSP выполняет функции программных частотных
фильтров и некоторые программные операции с выделенными входными сигналами.
Прием дискретных входных и выдача выходных сигналов производится блоками
ЕЗ и Е2 типов Э1... и ЭО..., а управляющих воздействий — электромагнитными
реле со сдвоенными переключающими контактами Е1 типа Р... На рис 8.2 они
обозначены как оптронные приемные цепи D/DI, светодиодные индикаторы D/DS и
преобразователи выходных дискретных сигналов DIDO, возбуждающие
электромагнитные реле (выходные цепи). Объединительная плата Е7 типа 3U... (см. рис 8.1)
связывает их с BMP, DSP и энергонезависимой памятью FLASH (рис 8.2).
Блок питания и управления Е4 типа ПУ... (см. рис 8.1), обозначенный на
рис 8.2 как DCIDC, обеспечивает терминал стабилизированными напряжениями
разных уровней.
Двух- и трехкассетные терминалы отличаются, главным образом, количеством
входных и выходных цепей и некоторых функциональных элементов.
166 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
8.3. Особенности интегрированной
микропроцессорной защиты
Продольные токовые дифференциальные защиты. Структурная схема
цифровой продольной токовой дифференциальной защиты традиционна (рис 8.3).
Двухступенчатая защита содержит два комплекса программных максимальных
измерительных реле тока KAI-1—KAI-3 чувствительной ступени и КАП-1—КАП-3
дифференциальной токовой отсечки, которые реагируют на фазные токи трех фаз
А, В и С. Они реализуются программно как показано на рис 7.2.
Логическая часть защиты состоит из операций ИЛИ, объединяющих действия
на отключение измерительных реле трех фаз отсечкой — операция DW1 и одной и
двух ступеней — программный логический элемент DW6. Операциями DW2—
DW4 формируются сигналы информации (высвечиванием светодиодов) о
срабатывании чувствительной ступени или отсечки каждой фазы, а программным
элементом DW5 — о действии на отключение защиты в целом.
Продольные токовые дифференциальные защиты обладают основными
особенностями микропроцессорной их реализации, указанными ранее (см. § 8.1).
Важной особенностью является использование дифференциально-фазного
торможения для повышения чувствительности: тормозной ток определяется как
/т = JlxI2 cos а
(8.1)
и формируется только при положительном значении cos a, т.е. при внешнем КЗ, при
котором угол а < тс/2 (при одинаковых условных положительных направлениях
токов 1Х, 12 с обеих сторон защищаемых обмоток статора генератора или
трансформатора). При КЗ в защищаемом генераторе или трансформаторе (внутреннем
КЗ), при котором cos a < 0 (при мнимом значении квадратного корня) тормозной
ток не формируется.
KAI-1
КАП-1
ЛЬлш
KAI-2
КАП-2
\DW2
\DW3
43-
DW1 ш
DW5
HD-
-A KAI-3
AKAII-3Y
4Ф-
1 ]DW4
-<^Фаза у
DW6
< Срабатывание
защиты
f£K
Отключение
i
_у^ Отключение
^ч^ отсечкой
<
<
Фаза В
Фаза С
Рис. 8.3. Структурная схема продольной токовой дифференциальной защиты генератора
(трансформатора)
8.3. Особенности интегрированной микропроцессорной защиты
167
•
0G
ТВ
г^^-
h
<ш
а)
I •!_ *Li
it ii
в)
Рис. 8.4. Токи, используемые продольной токовой дифференциальной защиты: генератора (а),
трансформатора энергоблока (б) и трехобмоточного трансформатора (в)
Дифференциальный ток равен абсолютному значению векторной разности
токов
I«=il-i2-
(8.2)
Тормозной ток дифференциальной защиты генератора G с трансформатором
его возбудителя ТВ (рис 8.4, а) энергоблока генератор — трансформатор ТБ с
подключенным трансформатором собственных нужд (рис 8.4, б) ТСН и защиты
трехобмоточного трансформатора Г (рис 8.4, в) или автотрансформатора
вычисляется с использованием наибольшего из трех токов l[ по аналогичному выражению
IT = Jl^ cos a,
(8.3)
где ^2 = iLi-h+h-fil-
Не менее важной с точки зрения повышения чувствительности защиты
является запрет ее действия {блокировка) при ограниченной кратности тока внешнего
КЗ — вертикальный участок характеристики срабатывания токовой продольной
дифференциальной защиты (рис 8.5), на которой показан и ток срабатывания
отсечки 1С 0. Расчетный ток небаланса, определяющий начальный ток
срабатывания / , может вычисляться при сниженных погрешностях первичных
измерительных трансформаторов тока и при указанной ограниченной кратности тока
внешнего КЗ.
В соответствии с предложением в [42] для повышения чувствительности
защиты вычисляется среднее значение за период Тп промышленной частоты
тормозного тока по выражению
2 * 1 '
ДОП Ji J 'ДОП '
п t-Tn/2
ДОП
dt,
(8.4)
168
Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Срабатывание при 1П> I
Срабатывание
пинии
N1 Срабатывание при
Рис. 8.5. Характеристика срабатывания микропроцессорной продольной токовой
дифференциальной защиты синхронного генератора (трансформатора) и энергоблока генератор —
трансформатор
где мгновенное значение дополнительного тока определяется как
ДОП
I'll + |'2
\1л Z<->
(8.5)
Особенностью токовой продольной защиты трансформаторов и энергоблоков
генератор-трансформатор, поставляемых ООО НПП «ЭКРА», является и новый
дополнительный (к типовому для микропроцессорной реализации —
использование второй гармоники броска тока намагничивания) способ предотвращения ее
излишнего срабатывания при бросках тока намагничивания. Используется
изменение (довольно быстрое уменьшение) составляющей броска тока намагничивания
промышленной частоты [42].
Отстройка от броска тока намагничивания грубой ступени токовой продольной
дифференциальной защиты (токовой отсечки) обеспечивается при обоснованном в
исследовании, проведенном в ООО НПП «ЭКРА», соотношении: ток срабатывания
отсечки должен превышать шестикратный номинальный ток трансформатора [42].
Направленная токовая защита обратной последовательности содержит
программные измерительные органы напряжения, тока и мощности обратной
последовательности. Характерны программная реализация по соотношениям
(1.20) фильтров ортогональных составляющих напряжения и тока обратной
последовательности, вычисления их амплитуд по (1.4) и мощности по выражениям
(1.14), (1.15).
8.3. Особенности интегрированной микропроцессорной защиты 169
Дистанционная защита от междуфазных КЗ. Ее особенности состоят:
• в отстройке от качаний и асинхронного хода в электроэнергетической системе;
• в отстройке от апериодической составляющей и гармоник тока КЗ;
• в запрете действия (блокировке) при нарушении цепей напряжения.
Короткие замыкания отличаются от качаний и асинхронного хода по скорости
изменения сопротивления на входе программного измерительного реле полного
сопротивления. Формирование характеристики срабатывания измерительных реле
сопротивления описано в гл. 7.
Защиты от трехфазных и несимметричных перегрузок обмоток статора
генератора имеют особенность, обусловленную цифровым математическим
моделированием процессов нагрева и охлаждения синхронного генератора,
повышающим эффективность выполняемых ими функций.
Защита от перегрузок обмотка ротора при бесщеточном возбуждении
функционирует на основе вычисления тока возбуждения по напряжению и току
нагрузки синхронного генератора прямой последовательности. При этом
используются характеристики холостого хода и короткого замыкания генератора [58].
Программные фильтры напряжения и тока прямой последовательности
функционируют по соотношению (1.21).
Защита от замыканий на землю в обмотках статора генератора. Ее
особенностями являются:
• использование наложенного на обмотки статора переменного тока
частотой 25 Гц;
• специализация программного исполнения защиты для генераторов,
работающих на сборные шины генераторного напряжения, энергоблоков различной
мощности с турбо- и гидрогенераторами, в том числе укрупненных с
гидрогенераторами, работающими параллельно через общий трансформатор.
Защита обратной (активной) мощности. Особенность защиты состоит в
использовании двух программных измерительных реле:
• активной мощности, потребляемой синхронным генератором в режиме, в
котором он вращает турбину;
• максимальной активной мощности, выдаваемой синхронным генератором в
электроэнергетическую систему.
Активная мощность вычисляется по ортогональным составляющим
напряжения и тока. Поскольку при реакции на обратную (потребляемую генератором)
активную мощность важно быстродействие и высокая чувствительность,
программный измерительный орган обратной мощности целесообразно выполнять с двумя
перемножителями одноименных ортогональных составляющих (см. § 1.3).
Защита от потери возбуждения выполнена на программных измерительных
реле направленного сопротивления и реле приращения AZ полного
сопротивления, вычисляемых по междуфазному напряжению и разности соответствующих
фазных токов. Основным является первое из них с круговой характеристикой,
расположенной в нижней полуплоскости комплексного сопротивления с
диаметром, совмещенным с мнимой осью, и установленными максимальным (по
абсолютному значению) и минимальным сопротивлениями, равными сопротивлению
170 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
генератора Xd и Xd/2. Именно в этой области оказывается вектор сопротивления
генератора без возбуждения. Направленное измерительное реле сопротивления
действует на отключение выключателя синхронного генератора с выдержкой
времени tc = (0,5+1,0) с.
Однако если за указанное время развивается асинхронный ход генератора, то
конец вектора сопротивления может на время, зависящее от периода (цикла)
асинхронного хода, выйти за пределы характеристики срабатывания направленного
реле сопротивления. Поэтому его срабатывание запоминается. Срабатывание
защиты на отключение происходит, если время нахождения годографа вектора
сопротивления за пределами характеристики направленного измерительного реле
меньше времени tB его возврата в область срабатывания, а время его нахождения в
пределах характеристики срабатывания больше tc.
Действие защиты на отклонение запрещается при внешних КЗ измерительным
реле полного сопротивления (см. рис 7.4), реагирующим на скорость изменения
сопротивления (при КЗ она на порядок величины выше, чем при развитии
асинхронного хода).
8.4. Особенности микропроцессорной автоматики,
интегрированной с защитой
Автоматика точной синхронизации генератора. Терминал интегрированной
защиты и автоматики синхронного генератора выполняет функцию автоматического
синхронизатора с постоянным временем опережения (см. § 2.1). При наличии более
современных микропроцессорных автоматических синхронизаторов с
вычисляемым углом опережения (см. гл. 2) указанная функция представляется излишней.
Автоматика содержит традиционные, но в программном исполнении,
измерительные органы разности амплитуд напряжений шин электростанции и ЭДС холостого
хода генератора и разности их частот (ИОА, ИОС — см. рис 2.1) и времени
опережения. Функции уравнивания амплитуд указанных напряжения и ЭДС и разности их
частот с установленной автоматический синхронизатор не выполняет.
Автоматика перевода генератора в допустимый асинхронный режим и
его отключение при возникновении недопустимого асинхронного режима,
называемая в [58] защитой от асинхронного режима, программно реализуется с
использованием упрощенного традиционного алгоритма функционирования
автоматики ликвидации асинхронного режима электростанции (см. гл. 12) в
релейно-контактном и микроэлектронном исполнениях [80]; реализована в
терминалах R30511-OVP и R30511-PAA ОАО «АББ Автоматизация» [25].
Особенностью является различие принципов действия и автоматики на
гидрогенераторах и турбогенераторах.
На гидрогенераторе развитие асинхронного режима определяется по углу 5
сдвига фаз между ЭДС генератора ЕТ и напряжением на выводах обмоток его
статора UT. При этом в качестве ЭДС генератора используется напряжение холостого
8.4. Особенности микропроцессорной автоматики, интегрированной с защитой 171
хода измерительного (тахо-) генератора, расположенного на общем валу с
гидрогенератором.
При достижении углом сдвига фаз значения ±тс/2 автоматика выдает
предупредительный сигнал, а при угле, превышающем |±я|, действует на прикрытие
направляющего аппарата гидротурбины (разгрузку генератора). При его
изменении в диапазоне 5 > |±Зя/2| и при токе статора и частоте скольжения со5
гидрогенератора, превышающих установленные значения, автоматика отключает
гидрогенератор.
Углы сдвига фаз вычисляются, например по (1.7), программными
измерительными реле угла KW1 и KW2 (рис 8.6, б) с отрицательными косинусной и синусной
характеристиками срабатывания соответственно (рис 8.6, а): на выходе KW1
логическая 1 при угле сдвига фаз Зя/2 > 5 > я/2, а на выходе KW2 — при Зя/2 < 8 < 2тс.
Автоматика (рис 8.6, б) запускается при наличии напряжений гидрогенератора
и тахогенератора, контролируемых минимальными программными
измерительными реле напряжения KVT, KVTT (на входах программного логического элемента
DWU (ИЛИ-НЕ) логические 0, а на выходе — 1), срабатывании программных
максимального реле тока КА и реле угла сдвига фаз KW1 (при 8 > я/2 ЭДС Ет
опережает по фазе напряжение £/тг). Программный логический элемент DX1 (И) выдает
единичный логический сигнал на светодиод предупредительной сигнализации.
Через DX (ЗАПРЕТ), на инверсных входах которого 0 (реле KW2 еще не
сработало, а триггер ST2 находится в исходном состоянии) сигнал запоминается
триггером ST1 и через DX3 и DW (ИЛИ) формирует управляющее воздействие на
разгрузку гидрогенератора.
После превышения углом значения 8>к срабатывает реле KW2, его единичный
сигнал через DX29 DX3 и DWтакже формирует управляющее воздействие на
разгрузку гидрогенератора.
При снижении угла 8 < я/2 программное реле KW2 возвращается, логический 0
на среднем входе, на выходе DX1 и на инверсном входе R триггера ST1 возвращает
его в исходное состояние. Разгрузка генератора прекращается.
При отставании по фазе ЭДС генератора Ет от напряжения U (отрицательном
угле 8) сначала (при 8 > -я/2) срабатывает реле угла сдвига фаз KW2 (см. рис 8.6, а)
и через DX2 единичным сигналом на инверсных входах DX1 и DX3 запрещает
формирование воздействия на разгрузку генератора. Единичный сигнал реле KW1
через DX1 формирует предупредительный сигнал, а возникающий при 8 < -я/2,
через элемент DX2, на инверсном входе которого 0 (триггер ST1 в исходном
состоянии), запоминается триггером ST2. После достижения углом сдвига фаз значения
8 < -я реле KW2 возвращается и нулевым сигналом на инверсном входе DX3 через
DСформирует воздействие на разгрузку гидрогенератора.
Отключение гидрогенератора производится при скольжении s, превышающем
критическое значение, при котором ресинхронизация генератора невозможна.
172
Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Ускорение
Зона срабатывания KW1
DX4
НЖгда
5<—тс
DT3
■^{еисправность iff]
б)
^ер^^]ГРЖ€ТЕКК СрабаТЫВания КШ и KW2 W и структурная схема автоматики гидро-
Скольжение контролируется таймером микропроцессора DT1: выдержка времени
tKp9 с, определяется [58] как
гкр=1/(200*кр)-0,01.
(8.6)
При s > sK? единичный сигнал с выхода DW1 успевает пройти через
программный логический элемент DX4, пока на его инверсном входе 0 — таймер DT1,
спустя время tKp> еще не выдал запрещающую логическую единицу. Благодаря
программному элементу задержки на возврат DT2 сигнал DX4 через DX5 формирует
кратковременное управляющее воздействие на отключение генератора после
8.4. Особенности микропроцессорной автоматики, интегрированной с защитой 173
исчезновения единичного сигнала на выходе DW1, т.е. после возврата реле KW1,
вследствие практически полного проворота ротора генератора (увеличении угла до
8> |±Зтс/2|). Цепь отключения реализуется операцией DX5 при срабатывании
максимального программного реле тока КА2 асинхронного режима.
Программные элементы — инвертор DU и DX4 — формируют сигнал
неисправности цепей напряжения гидрогенератора.
В автоматике турбогенераторов энергоблоков генератор — трансформатор
используются два программных направленных измерительных реле
сопротивления KZ1, KZ2 и измерительное реле угла сдвига фаз KW (рис 8.7, б) с близкой к
отрицательной косинусной характеристикой срабатывания W9 а именно с углом
максимальной чувствительности срм ч < тс, т.е. срабатывающего в левой
полуплоскости (рис 8.7, а). Круговые характеристики срабатывания Zx и Z2 измерительных
реле сопротивления расположены практически в нижней и верхней
полуплоскостях комплексного сопротивления и охватывают начало координат: характеристика
Z2 смещена в нижнюю полуплоскость на переходное сопротивление xd
генератора, а характеристика Z1 — в верхнюю полуплоскость на часть сопротивления
трансформатора блока хТ. Диаметр характеристики Z2 определяется суммой jxT и
эквивалентного сопротивления электроэнергетической системы Zc.
Характеристика Zx пересекает отрицательно направленную мнимую ось при
синхронном сопротивлении генератора с коэффициентом отстройки 1,2л^.
Через первую характеристику Zx проходит годограф 1 вектора сопротивления
на входе измерительного реле KZ1 при электрическом центре качаний (см. § 11.2),
находящемся в энергоблоке генератор — трансформатор, а вторая характеристика
Z2 реле KZ2 пересекается годографом 2 вектора сопротивления при электрическом
центре качаний на линии электропередачи, связывающей электростанцию с
электроэнергетической системой.
В нормальном режиме вектор сопротивления Z находится в первом
квадранте комплексной плоскости.
Совместным действием измерительных реле определяются четыре области
комплексной плоскости (рис 8.7, а): 1 — срабатывания KZ1, KZ2 и KW\ 2 —
срабатывания KZ1 и KZ2\ 3 — срабатывания KZ2 и KW; 4 — срабатывания только KZ2.
Совместно с логическими операциями DX1, DX3, DX4 (И-ЗАПРЕТ), ST1 и ST2
(ПАМЯТЬ) программные измерительные реле KZ1, KZ2 и KW (рис. 8.7, б) и
выявляют возникновение асинхронного режима.
Действие автоматики разрешается элементами DX1 и DX2 при наличии
рабочего тока в линии — срабатывании максимального реле тока КА1 (сигнал 1 на его
выходе) и нулевом сигнале на инверсных входах DX1 и DX2 от элемента
контроля исправности цепей напряжения КИН.
Более тяжелым для генератора является асинхронный режим, при котором
электрический центр качаний находится в энергоблоке генератор-трансформатор.
174
два 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Отключение
по II ступени
Отключение
по I ступени
DX3
KW
KZ2
KZ1
КА1
КИИ
DX1
&
Ш1
&
КА2
U
а)
ST1 DX5 DT1
DX4
&
гш.
\ш^^
DC1
I Ч&1 ST2 \\и
ЧМЕЙ
DT3
~{Ш
DT4
DX6 DT2
^0,02с?
б)
DC2
1ст.
D%7 DT5
Отключение!
DX DT6
"^ТЩ-^^ОтключениТ]
Рис. 8.7. Характеристики срабатывания измерительных реле сопротивления (в) и структурная
схема автоматики турбогенератора (6) w^ урман
При нахождении вектора сопротивления в области 1 (см. рис. 8.5, а) единичные
логические сигналы от реле KZ1, KZ2 и KW через операции DX1, DX2 и DX3
(при нулевом сигнале на инверсном входе от ST2) запоминаются программным
триггером ST1. После выхода годографа 1 за пределы характеристики Z, реле KZ1
возвращается и логическим нулем на выходе DX1 и инверсном входе
программного логического элемента DX5 с небольшой задержкой DT1 запускает счетчик
8.4. Особенности микропроцессорной автоматики, интегрированной с защитой 175
DC1 циклов асинхронного режима. После нескольких его циклов формируется
воздействие I ступени автоматики на отключение генератора и закрытие
регулирующих клапанов турбины через операцию DX1 (И) при возбужденном
программном максимальном реле тока КА2 асинхронного режима. Управляющее
воздействие на отключение генератора и разгрузку турбины II ступенью автоматики
формируется после большего числа циклов более легкого для генератора
асинхронного режима при расположении электрического центра качаний в линии связи
станции с электроэнергетической системой.
Прохождение годографом 2 вектора сопротивления области 3 обусловливает
формирование логических единичных сигналов измерительными реле KZ2 и KW.
Сигналы от KZ2 через DX1, а от KW непосредственно поступают на входы
элемента DX4 и при нулевых сигналах на его инверсных входах (реле KZ1 не
возбуждено, а триггер ST1 — в исходном состоянии) проходят на вход S записи в триггер
ST2 (запоминаются). Его возврат, как и возврат триггера ST1 единичным
логическим сигналом от KWm инверсном входе R запрещается. После выхода годографа 2
вектора сопротивления за пределы характеристики реле KZ2 оно возвращается и
нулевым сигналом на выходе DX2 и инверсном входе программного элемента
DX6 с задержкой DT2 запускает счетчик DC2 циклов асинхронного режима II
ступенью автоматики.
Управляющие воздействия исполняются под контролем программного
измерительного максимального реле тока асинхронного режима КА2 через логические
операции DX1, DX2 и элементы задержки при возврате DT4, DT5 и DT6.
Счетчики циклов DCl, DC2 (через таймер задержке tB при возврате DT3), как и
программные триггеры £77, ST2, возвращаются в исходное состояние сигналами О
на инверсных входах R (после возврата реле KZ1 и KW).
Автоматика ограничений повышения напряжения и снижения и
повышения частоты в микропроцессорном исполнении реализуется, главным образом,
как защита с действием на отключение. Особенностями защиты от повышения
напряжения (как она называется разработчиками [58]) является:
• программное выполнение измерительного максимального реле напряжения,
реагирующего на средневыпрямленное напряжение для независимости его
действия от изменений частоты;
• ввод в действие от программного минимального реле тока,
контролирующего отсутствие тока в «... цепи генератора или в цепи обмотки высокого
напряжения трансформатора блока ...» [58].
Особенности защиты от изменения частоты [58] обусловливаются:
• выполнением программного измерительного органа частоты с двумя
выходами с сигналами срабатывания при снижении и повышении частоты;
• двухступенчатым действием как при снижении, так и при повышении частоты;
• контролем действия на отключение программным измерительным
максимальным реле напряжения.
Собственно функцией автоматики, реагирующей на снижение частоты,
является автоматическое снижение предписанного (установленного) напряжения —
176 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
уставки автоматического регулятора возбуждения синхронного генератора для
предотвращения перегрузки трансформатора энергоблока током намагничивания
при снижении частоты.
Измерительное преобразование частоты производится интегрированием
длительности периода напряжения, хотя частота может вычисляться в соответствии с
соотношением (1.10) по трем дискретным мгновенным значениям напряжения [6].
8.5. Микропроцессорная защита и автоматика
трансформаторов
Микропроцессорные релейная защита и автоматика трансформаторов с высшим
напряжением до 220 кВ выпускаются НТЦ «Механотроника», «ИЦ «БРЕСЛЕР» и
ЗАО «РАДИУС Автоматика». Они выполняются на терминалах, разработанных
названными производителями.
Основными задачами разработчиков микропроцессорных защит
трансформаторов были использование способов обработки информации и технических
средств цифровой вычислительной техники для повышения технического
совершенства и устойчивости функционирования защиты. Важными показателями
технического совершенства являются быстродействие и чувствительность защиты с
абсолютной селективностью, какой является токовая продольная
дифференциальная — основная защита трансформаторов.
Удовлетворительные взаимозависимые указанные показатели ее технического
совершенства достигались при аналоговой реализации со значительными
трудностями, обусловленными специфическими факторами, свойственными
трансформаторам как защищаемым электроэнергетическим объектам. Главными из них
являются разные схемы соединений первичной и вторичной обмоток защищаемого
трансформатора и различные абсолютные значения и фазы вторичных токов в цепях
циркуляции защиты. Несовпадение абсолютных значений и фаз токов обусловливается
коэффициентами трансформации первичных измерительных трансформаторов
тока, коэффициентом трансформации защищаемого трансформатора, схемами
соединения его обмоток и дискретными изменениями коэффициентов трансформации
при переключениях обмоток трансформатора устройством регулирования под
нагрузкой (УРПН).
Обеспечение устойчивости функционирования токовой продольной
дифференциальной защиты, т.е. ее абсолютной селективности, осложнялось особым
специфическим явлением, происходящим в защищаемом объекте, — многократными (по
отношению к номинальному току трансформатора) начальными значениями
(«бросками») токов намагничивания при включении трансформатора, особенно
ненагруженного (его «холостом» ходе) и дискретном восстановлении напряжения
после отключения внешних КЗ.
Как указывалось, способы обработки информации и технические средства
микропроцессорной вычислительной техники обеспечивают практическое
преодоление указанных затруднений по обеспечению более высоких показателей техни-
8.6. Особенности микропроцессорной защиты и автоматики трансформаторов 177
ческого совершенства и устойчивости функционирования токовой продольной
дифференциальной защиты.
За счет свойств способов обработки информации и технических
микропроцессорных средств повышается и техническое совершенство резервных защит с
относительной селективностью, обеспечиваемой выдержками времени их действия на
отключение.
Разработчики микропроцессорной токовой продольной дифференциальной
защиты трансформаторов добились повышения его технического совершенства
практически одинаковыми способами, охарактеризованными выше.
Несколько различными оказались разработанные ООО НПП «ЭКРА» более
эффективные приемы по обеспечению устойчивости функционирования защиты,
т.е. обеспечению ее недействия на отключение трансформаторов при бросках тока
их намагничивания, возникающих при включениях трансформаторов и при
дискретном восстановлении напряжения после отключения внешнего КЗ.
Что касается автоматики регулирования коэффициентов трансформации
трансформаторов, то в ЗАО «РАДИУС Автоматика» она выполняется как
усовершенствованный за счет возможностей микропроцессоров классический автоматический
регулятор коэффициента трансформации (АРКТ) типа РНМ-1, а в НТЦ
«Механотроника» — как оригинальное интегрированное, устройство, выполняющие
функции регулятора на стороне низшего напряжения трансформатора и пускового
органа по снижению амплитуды и частоты напряжения автоматики включения
резервного выключателя типа БМРЗ-КН.
8.6. Особенности микропроцессорной защиты и автоматики
трансформаторов НТЦ «Механотроника»
Основная — токовая продольная дифференциальная защита и автоматика
управления УРПН, интегрированная, с пусковым органом АВР представляет собой
отдельные устройства типов БМРЗ-ТД и БМРЗ-КН, выполненные на
универсальном терминале, на котором функционируют и высокочастотные защиты линий
электропередачи. На рис 7.6 было показано расположение его модулей (ввода
аналоговых сигналов MAC, аналого-цифрового преобразователя МАЦП, центрального
процессора МЦП и ввода дискретных сигналов и вывода управляющих
воздействий с источником питания МВБ).
На рис 8.8 приведен внешний вид лицевой панели терминала БМРЗ-ТД с
модулем управления МУ, аналого-цифровым индикатором (дисплеем) АЦИ,
кнопками управления КУ и светодиодами СВД сигнализации о срабатывании
дифференциальных токовой отсечки ДТО, чувствительной ступени токовой продольной
дифференциальной защиты ДЗТ, воздействий на устройства РПН, действии УРОВ,
отключения внешним сигналом ВНЕШ, режима РАБОТА и вызова информации
ВЫЗОВ функционировании терминала. Показан и разъем RxTx типа RS-232 для
подключения ПЭВМ.
178 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
СВД-
Ф
Ф
Я БМРЗ-ТД
МУ
дто^
дзт^
BHEUJ>
РПН^
УРОВ^
вызове
шш
ш.
3>
RxTx
£5$
ф
ф
-АЦИ
-КУ
Рис. 8.8. Лицевая панель терминала БМРЗ-ТД
Терминалы БМРЗ-ТД и БМРЗ-КН защиты и автоматики трансформатора
располагаются на двери шкафа типа ШЗТ-МТ.
Токовая продольная дифференциальная защита двухступенчатая:
чувствительная дифференциальная защита с торможением (ДЗТ) и грубая
дифференциальная отсечка (ДТО) — см. программные измерительные реле KAI-1—KAI-3 и
реле KAII-1—КАП-3 на рис 8.3 соответственно.
Характеристика обычного [не дифференциально-фазного, см. (8.3)]
торможения трехступенчатая, отличающаяся от приведенной на рис 8.5. Вторая и третья ее
ступени различаются интенсивностью торможения кт3 > кт2 (рис 8.9).
Основной особенностью микропроцессорной токовой продольной
дифференциальной защиты НТЦ «Механотроника» является способ обеспечения ее
недействия на отключение трансформатора от бросков тока намагничивания при его
включении, особенно на холостой ход, и при дискретном восстановлении
напряжения после отключения внешнего КЗ. Осуществляется запрет срабатывания защиты
(ее блокировка) путем формирования «... информационного признака ...» броска
тока намагничивания на основе анализа формы кривой броска тока (как минимум
обнаружения в токе относительно большой апериодической составляющей и
второй гармоники) и контроля отсутствия тока со стороны трансформатора,
противоположной включаемой, в частности низшего напряжения понижающего
трансформатора. Цепь отключения контролируется наличием тока с двух сторон трансфор-
8.6. Особенности микропроцессорной защиты и автоматики трансформаторов
I , отн. ед.
'с.н
I ! 1 ►
0 Л™880'5 U /т>отн.ед.
Рис. 8.9. Тормозная характеристика срабатывания токовой продольной дифференциальной
защиты трансформатора типа БМРЗ-ДТ
матора. При включении трансформатора на холостой ход бросок тока
намагничивания возникает только с одной (включаемой) его стороны. Фазные токи с другой
стороны отсутствуют.
Автоматика контроля напряжения — терминал БМРЗ-КН — действует как
устройство ручного непосредственного или дистанционного управления УРПН
трансформатора или функционирует по алгоритму АРКТ.
В режиме автоматического управления УРПН воздействия на повышение или
снижение напряжения формируются путем сравнения вторичного напряжения на
шинах Um подстанции, из которого вычитается приведенное на вторичной цепи
падение напряжения в линиях связи с нагрузкой трансформатора lHZR с
установленными напряжениями, определяющими верхнюю UB34 и нижнюю Uu34 границы
зоны чувствительности. Их разность — это зона нечувствительности АРКТ,
превышающая ступень изменения напряжения UCT при переключении одного из
ответвлений обмотки высшего напряжения трансформатора со стороны нейтрали [80]:
А^нч=^в.з.ч-^н.з.ч>^ст-
Если напряжение
|^ш-/н^л|<^н.з.ч?
то терминал выдает сигнал, необходимый для формирования управляющего
воздействия на привод УРПН для снижения коэффициента трансформации, т.е. умень-
180 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
шения числа витков обмотки высшего напряжения, что и необходимо для
повышения напряжения Um на шинах подстанции, питающих нагрузку.
При неравенстве
\Уш-1М>ивм
формируется сигнал на переключение ответвления от обмотки высшего
напряжения, повышающего коэффициент трансформации, т.е. снижающее напряжение Um.
Привод УРПН запускается, и переключение ответвлений производится с
выдержкой времени, предотвращающей излишние переключения при
кратковременных снижениях напряжения, например при пусках мощных электродвигателей.
Выдержка времени определяется реверсивным счетчиком тактовых импульсов
микропроцессора: при выходе компенсированного напряжения UK = \UUI-I_UZJ1\
за указанные пределы зоны чувствительности счетчик суммирует импульсы, а
после возврата напряжения UK в зону нечувствительности — вычитает их. Поэтому
возможен накопительный эффект, т.е. сокращение выдержки времени при двух-
или многократном выходе напряжения UK из зоны нечувствительности, т.е.
ускорение действия терминала на напряжения на шинах подстанции.
При возрастании тока нагрузки /н трансформатора терминал увеличивает
напряжение 1/ш на шинах подстанции, т.е. обеспечивает так называемое «встречное»
регулирование напряжения, необходимое для обеспечения практического
постоянства напряжения у потребителя электроэнергии при изменениях потребителей
им мощности.
Терминал БМРЗ-КН управляется рядом внешних сигналов, может
функционировать в режиме выдачи непрерывных и импульсных управляющих воздействий
на УРПН, контролирует его исправность и процесс довольно сложных
переключений, осуществляет самодиагностику и выдает информацию о его
функционировании.
Как указывалось, он программно выполняет и автоматику ограничений
снижений напряжения (защиту минимального напряжения), и функции пускового органа
по снижению действующего значений и частоты напряжения автоматики
включения секционного выключателя как резервного.
8.7. Микропроцессорная защита трансформаторов
«ИЦ «БРЕСЛЕР»
Интегрированная основная и резервная релейная защита двух- и трехобмоточ-
ных трансформаторов высшим напряжением 110—220 кВ типа «БРЕСЛЕР ТТ 2108»
выполняется на специализированном терминале (рис 8.10). На лицевой панели
терминала расположены:
• кнопки управления КУ человеко-машинным интерфейсом, обеспечивающим
диалоговый режим;
8.7. Микропроцессорная защита трансформаторов «ИЦ «БРЕСЛЕР»
181
Рис. 8.10. Терминал защиты трансформатора
• кнопки ОК перевода терминала из дежурного режима в главное меню;
• жидкокристаллический индикатор (дисплей) ЖКД;
• светодиоды СВИ вывода информации о выполняемых терминалом
операциях, указанных на рисунке, и о состоянии терминала;
• разъем типа RS-232 для подключения ПЭВМ;
• кнопка С сброса сигналов информации.
Разъем для связи с автоматизированной системой управления подстанции типа
RS-485 расположен на задней панели терминала.
Терминал микропроцессорных интегрированных основной и резервных защит
трансформаторов осуществляет:
• токовую продольную дифференциальную защиту с типовой тормозной
характеристикой срабатывания (см. рис 8.5);
• ненаправленную максимальную токовую защиту с пуском по минимальному
напряжению стороны высшего напряжения;
• трехступенчатые направленные токовые защиты с пуском по минимальному
напряжению сторон среднего и нижнего напряжений;
• токовые защиты от перегрузки трансформатора;
• токовую ненаправленную нулевой последовательности защиту от КЗ на
землю на стороне высшего напряжения.
182 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Терминал формирует сигналы логической защиты двух секций шин низшего
напряжения и реализует сигналы двух электродуговых защит комплектных
распределительных устройств напряжением 6—10 кВ.
Информационными функциями терминала являются:
• измерительное преобразование и индикация текущих абсолютных
действующих значений фазных напряжений и токов и их симметричных составляющих
обратной и нулевой последовательностей;
• формирование цифрового сигнала информации о частоте напряжения;
• вычисление величин, пропорциональных активной и реактивной мощностям
и сопротивлению как отношению действующих значений напряжения и тока.
Терминал производит ускорение ступеней токовых защит, действующих с
выдержками времени при включении трансформатора, пуск автоматики его
охлаждения и запрет (блокировку) управления УРПН.
Особенности микропроцессорных защит трансформаторов, как и линий
электропередачи [29], «ИЦ «БРЕСЛЕР» обусловливается программной реализацией
измерительно-преобразовательной части. Естественно, измерительные органы
защит программно реализуются на основе ортогональных (синусной и косинусной)
составляющих принужденных колебательных токов и напряжений промышленной
частоты электромагнитных переходных процессов КЗ. Однако их формирование
принципиально отличается от применяемого другими разработчиками.
Для оценки ортогональных составляющих применяются не получившие
широкое распространение в микропроцессорных разработках нерекурсивные частотные
фильтры Фурье, функционирующие на основе классических интегральных
преобразований Фурье, а разрабатываемые «ИЦ «БРЕСЛЕР» адаптивные, в том числе
так называемые дольные [73, 74] частотные фильтры.
Измерительно-преобразовательная функциональная часть микропроцессорных защит в целом программно
осуществляется на основе применения теории распознавания аварийных
ситуаций, т.е. элементов искусственного интеллекта.
8.8. Микропроцессорная защита и автоматика
трансформаторов типа «Сириус»
Микропроцессорная защита трансформаторов сосредоточена: основная в
терминалах «Сириус-Т» для двухобмоточных и «Сириус-ЗТ» для трехобмоточных
трансформаторов; резервные защиты и автоматика повторного включения — в
терминале «Сириус-УВ».
Основная — двухступенчатая продольная токовая дифференциальная
защита обладает особенностями, обеспечивающими ее повышенное техническое
совершенство.
Оригинальный способ сборки токовых цепей дифференциальной защиты
стороны высшего напряжения защищаемого трансформатора, реализованный
программным обеспечением, упрощает общепринятую процедуру замены сборки
цепей тока проводами программными операциями. Вместо нескольких десятков
8.8. Микропроцессорная защита и автоматика трансформаторов типа «Сириус»
183
возможных операций в зарубежных терминалах выполняется одна операция из 16
возможных.
Ток срабатывания чувствительной ступени дифференциальной защиты, не
превышающий половины номинального тока трансформатора, обеспечивается
нетрадиционными способами снижения токов небаланса при внешних КЗ и отстройки
от броска тока намагничивания трансформатора.
Кроме известного программного уравнивания вторичных токов применяется
восстановление их равенства, нарушаемого действием УРПН, по балансу токов
нормального нагрузочного режима.
Отстройка от бросков тока намагничивания производится принципиально
известным способом — использованием второй гармоники броска тока
намагничивания, однако для ее выделения применяется модифицированный более
эффективный нерекурсивный частотный фильтр Фурье, выделяющий ортогональные
[синусную Is{nT) и косинусную 1с(пТ)] составляющие удвоенной промышленной
частоты соп дифференциального тока по предложенным вместо традиционных
соотношениям [43]:
2 N
9 N
i(nT) + i[nT-jT
i(nT) + i[nT-^T
sin2wco„r;
cos2«conr,
(8.7)
где n— число интервалов дискретизации мгновенных значений тока за период Тп
промышленной частоты, N= TJT.
При этом длительность импульсной характеристики нерекурсивного фильтра
увеличивается с 20 до 30 мс, амплитудно-частотная характеристика 2 фильтра
(рис 8.11, а) получается существенно лучшей, чем характеристика 1
классического фильтра Фурье [3].
В связи с возможностью появления второй гармоники, вследствие насыщения
магнитопроводов первичных измерительных трансформаторов током внутреннего
КЗ, быстродействие дифференциальной защиты на его отключение достигается
использованием различия в изменениях во времени амплитуды составляющих
вторичных токов промышленной частоты: при броске тока намагничивания
колебательный принужденный ток уменьшается, а при внутренних КЗ — увеличивается
[43]. Однако он увеличивается и при ответном броске тока намагничивания,
возникающем в параллельно подключенном трансформаторе. Поэтому дополнительно
используется ток небаланса нулевой последовательности.
Загрубление защиты при внешних КЗ производится традиционно
торможением, в том числе направленным (дифференциально-фазным) в терминале «Си-
риус-ЗТ» [см. (8.3)].
184 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Отн.ед.
1,0
0,8
0,6
0,4
0,2
0 50 100 150 200 250 /, Гц
а)
А
(Л
+
/
/
/
/
/_.
<-'
У
\
\
\
\
уч
£±
ёЬ*
/^Ы
'«
/ t
с.н |
Зона срабатывания
^\ ^=tg<p
1 ММ^ ^
со2/ ном
^ __—^
£/) п/3
'т
б)
Рис. 8.11. Характеристика классического 7 и модифицированного 2 фильтра Фурье (а) и
тормозная характеристика чувствительной ступени дифференциальной защиты (б)
Тормозная характеристика состоит из трех участков с расчетным углом ср и
фиксированным углом наклона тс/3 второго и третьего ее участков соответственно
(рис 8.11, б). Начальный ток срабатывания защиты при отсутствии торможения
(первый участок характеристики) составляет /с н = (0,3-s-0,5)/HOM, угол наклона
второго участка вычисляется как ср = arctg kT, а коэффициент торможения
определяется соотношением [45]
К > ^отс^нб.р^сн./т)'
(8.8)
где котс > 1 — коэффициент отстройки; /нб — расчетный ток небаланса,
соответствующий принятому тормозному /т; &снт < 1 — коэффициент снижения
тормозного тока, определяется по выражениям, приведенным в [43].
Тормозной ток /т в защите двухобмоточного трансформатора («Сириус-Т»)
формируется как полусумма абсолютных значений вторичных токов двух сторон, в
защите трехобмоточного трансформатора («Сириус-ЗТ») торможение
направленное: используется скалярное произведение [см. (8.3)] наибольшего тока трех
сторон и суммы токов двух других сторон [45].
Вторая точка излома тормозной характеристики определяется относительным
током второй гармоники /^^ном-
К основной защите трансформатора относятся и двухступенчатые токовые
защиты с пуском по минимальному напряжению сторон высшего и низшего
напряжений. Особенностей, кроме усиленного пуска при включении выключателя, они
не имеют.
Резервные защиты трансформатора выполняются терминалом «Сириус-УВ»
[46]. Они являются двухступенчатыми токовыми защитами, реагирующими на
фазные токи (максимальная токовая защита МТЗ) и ток нулевой
последовательности (ТЗНП для трансформаторов с высшим напряжением ПО или 220 кВ), кото-
8.8. Микропроцессорная защита и автоматика трансформаторов типа «Сириус»
185
рые могут быть направленными, и токовой защитой обратной последовательности
от несимметрии токов, особенно вследствие обрыва фазы источника питания.
Терминал «Сириус-УВ» выполняет функцию программного одно- и двукратного
автоматического трехфазного повторного включения (ТАПВ) и функцию У РОВ.
Предназначенный для управления выключателями терминал производит
контроль состояния электрического привода выключателя. Как и другие
микропроцессорные устройства ЗАО «РАДИУС Автоматика», он производит измерительное
преобразование, индикацию электрических величин, их регистрацию при КЗ,
хранение информации и выполняет другие сервисные функции.
Микропроцессорный автоматический регулятор коэффициента
трансформации. Автоматический регулятор типа РНМ-1 имеет унифицированное с
терминалом защит модульное выполнение и состоит из шести конструктивных блоков
(см. рис 7.14).
Лицевая панель регулятора показана на рис 8.12. На ней расположены:
• жидкокристаллический дисплей — индикатор ЖКИ\
• кнопки управления диалоговыми режимами «Ввод», «Выход» и
обозначенная стрелками «<-», «->» клавиатура KJI;
• общие кнопки «Сброс» и «Выбор» регулируемой секции;
сад,
Устройство регулирования напряжения
трансформатора под нагрузкой РНМ-1
ЖКИ
О Питание
О Переключение
О U выше нормы
Q U ниже нормы
Q Блокировка
О Отказ ПМ
Г Сброс J
Регулирование
О Секция 1
Q Секция 2
RS-232
сад
Рис. 8.12. Лицевая панель регулятора коэффициента трансформации типа РНМ-1
186 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
• светодиоды СВД отображения информации;
• разъем интерфейса RS-232 для подключения ПЭВМ.
Автоматический регулятор выполняет главную задачу — поддержание
напряжения на секциях шин низшего напряжения подстанции с учетом напряжения
компенсации падения напряжения в линиях, и обеспечивает:
• формирование импульсного или непрерывного потенциального
управляющего воздействия на электропривод УРПН;
• контроль исправности электропривода;
• запрет действия и выдачу информации о неисправности УРПН;
• запрет автоматического регулирования внешними дискретными сигналами;
• запрет действия при появлении перегрузки по току трансформатора или
сильном и длительном снижении напряжения;
• оперативное изменение предписанного напряжения (уставки регулятора);
• переключение на ручное управление напряжением подстанции.
Программным измерительным органом регулятора производится сравнение
действующих значений напряжения на шинах подстанции Um и тока нагрузки
трансформатора 1Т с установленными максимальными Umax9 /max, а напряжения и с
минимально допустимыми c7min значениями соответственно. Контролируется и
напряжение 3U0 нулевой последовательности при незаземленной нейтрали
трансформатора.
Если граничные условия С/ш < [/max, Um > Umin, 1ШТ < /max выполняются, то
проверяется условие нахождения напряжения в зоне нечувствительности AUm:
UpeT- AUm/2 <Um< UpeT + AUH4/2, (8.9)
где £/рег — напряжение на входе регулятора, определяемое с учетом напряжения
компенсации UK падения напряжения в линиях связи потребителей электроэнергии
с подстанцией:
^рег = Uy + UK = Uy + С/К.р(/Т - /с)//в.ном, (8.10)
где С/у — установленное (предписанное) напряжение — уставка регулятора; С/ —
расчетное напряжение компенсации, вычисляемое в реальном времени; /с — ток
нагрузки регулируемой секции шин; /влом — номинальный ток ввода подстанции.
При выполнении условия (8.9) на индикаторе высвечивается истинное
напряжение и номер рабочего ответвления обмотки высшего напряжения со стороны
нейтрали. Если условие (8.9) нарушается, то программный измерительный орган
выдает сигнал на формирование управляющих воздействий на приводной
механизм (ПМ) УРПН.
При импульсном управляющем воздействии регулятор контролирует реакцию
электропривода УРПН на регулирующее воздействие: если через определенное
время сигнал о запуске привода в регулятор не поступает, то автоматическое регу-
8.8. Микропроцессорная защита и автоматика трансформаторов типа «Сириус» 187
лирование запрещается, на индикаторе высвечивается сигнал об отказе
приводного механизма и включается светодиод «Отказ ПМ».
Если соотношение (8.9) после переключения одного ответвления обмотки
высшего напряжения через время Tv зависящее от степени отклонения
напряжения Ас7/АС/нч, не устанавливается, то запускается подсчет времени Т2 < Тх
формирования управляющего воздействия на переключение следующего ответвления.
При обнаружении перенапряжения С/ш > с7тах на шинах секции на дисплей
выводится соответствующее сообщение, включается светодиод «[/выше нормы» и
с небольшой задержкой по времени Тъ запускается программа ускоренного
снижения напряжения: переключения продолжаются до тех пор, пока напряжение на
шинах не вернется в зону нечувствительности.
Если действующее значение напряжения сильно снижается — становится
меньше c7min — светодиод «[/ниже нормы», то через время Т4= 10 с
автоматическое регулирование прекращается.
При перегрузке трансформатора IT > /тах или появлении напряжения 3 U0
автоматическое регулирование запрещается. Автоматическое регулирование
прекращается и при превышении температурой масла ПМ допустимого значения.
Автоматический регулятор типа РНМ-1 может находиться в пяти режимах,
устанавливаемых клавиатурой:
УСТАВКИ;
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ;
КОНТРОЛЬ;
РЕГУЛИРОВАНИЕ;
АРХИВ СОБЫТИЙ.
Режимы устанавливаются кнопками клавиатуры как показано на рис 8.13, а:
• выбор режима осуществляется кнопками, обозначенными стрелками <«-»,
• кнопкой «Ввод» запускается отработка режима — производится перебор,
например, уставок автоматического регулятора (рис 8.13, б);
• кнопка «Выход» используется при возврате в состояние выбора режима.
Уставки регулятора по напряжениям и токам указаны на рис 8.13, б.
Основными из них являются устанавливаемые напряжения на шинах С/ и зона
нечувствительности Д[/нч, которая определяется ступенью регулирования Д£/ст, т.е.
дискретным изменением напряжения на шинах при переключении одного ответвления
обмотки высшего напряжения трансформатора со стороны его заземленной
нейтрали. С учетом коэффициента отстройки k0TC > 1 и коэффициента возврата kB < 1
программных максимальных измерительных реле, реагирующих на отклонение
напряжения,
Д^нч = ^остАС/ст^в-
(8.11)
188
лава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Корректировка^)
Рис. 8.13. Структура диалога в состоянии выбора режима работы (а) и в режиме УСТАВКИ (б)
8.8. Микропроцессорная защита и автоматика трансформаторов типа ((Сириус» 189
Микропроцессорное выполнение автоматического регулятора обеспечивает
высокий (близкий к единице) коэффициент возврата къ » 0,97 и возможность
использования низкого (также близкого к единице) коэффициента отстройки,
поэтому получается максимальное приближение зоны нечувствительности к ступени
регулирования, т.е. высокая точность автоматического регулирования напряжения.
На рис 8.13, б показаны и граничные уставки: максимальные и минимальные
напряжения (7тах и Umin шин, токи ввода /втах, токи нагрузки секций шин 1С ном,
наибольшее напряжение компенсации £/Kmax, выдержки времени Т{, Т2 и задержки
Г3 ускоренного действия регулятора на снижение напряжения и др.
Основным является режим АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ. После
включения в один из указанных режимов регулятор через определенное время
возвращается в рабочее состояние, т.е. автоматическое регулирование
возобновляется. В процессе работы производится измерительное преобразование и
индикация напряжений и токов и контролируются входные дискретные сигналы. На
дисплее в верхней строке отображаются действующее значение напряжения
регулируемой секции, ее номер и состояние УРПН.
В нижней строке высвечивается напряжение, поддерживаемое на шинах сУП0Д =
= Uy + UK (напряжение поддержания как показано на рис 8.13, б) и его частота.
Светодиоды «С/выше нормы», «[/ниже нормы» (см. рис 8.12) отображают выход
напряжения (7П0Д за пределы зоны нечувствительности. Светодиод
«Переключение» светится в процессе действия УРПН по переключению ответвлений от
обмотки высшего напряжения трансформатора, а секция с регулируемым
напряжением отображается светодиодами «Секция 1» и «Секция 2».
В режиме КОНТРОЛЬ автоматическое регулирование сохраняется. На дисплей
«Ввод» выводится информация о напряжениях, токах ввода и секции, дискретные
сигналы и выходные воздействия, выработанный ресурс регулятора, дата и
текущее время (рис 8.13, б).
Вход в режим РЕГУЛИРОВАНИЕ производится по паролю и разрешает
регулирование напряжения оператором: автоматическое регулирование отсутствует.
Команды «Прибавить» и «Убавить» генерируются кнопками клавиатуры,
обозначенными стрелками «<-», «-»». Просмотр информации о происшедших событиях
в режиме АРХИВ СОБЫТИЙ осуществляется кнопками «Ввод» и «<-», «-»».
Внешнее ручное регулирование производится после снятия дискретного
сигнала Ручн/Автомат — зажимы A4IB4 клеммника XI, модуль ВВ (см. правую часть
рис 8.14).
На рис 8.14 приведена схема подключения автоматического регулятора, схема
на которой указаны назначение зажимов и контактов разъемов регулятора.
Отдельных пояснений схема не требует. В [96] приведены рабочие схемы включения
модуля ВВ в цепи управления, обеспечивающие выполнение алгоритма
автоматического регулирования и ограничительных функций автоматического регулятора.
190 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
|Конт.|
ЙСонт.
Т
Х1.2\
IKoht.I
Х1.1\
IKoht.I
Х2.2\
IKoht.I
Х2Л\
IKoht.I
Устройство регулирования напряжения трансформатора РНМ-1
RS-485
Цепь
T +
-2L.
Т -
R*+
RS-232C
Цепь
ExD
TxD
GND
RTS
CTS
Цепь
^мф
Цепь
/секции
/ввода
^
имф
Цепь
/секции
/ввода
Цепь
=220 В
5220 В
МП
КИ
ВА1 (секция 1)
/секции
/ввода
ВА2 (секция 2)
:>мф
/секции
/ввода
ИП
-В-
Sz
ввд
Оптронные входы
2
g
S
X
i
8.
^
т^г
^gfc
Цепь
Переключение
рапрет прибавить!
Запрет убавить
Ручн/автомат
Прибавить""
Убавить
Секция 1
Секция 2
ifwf^f -I I—Ьнеш.блокировка
[Токов, блокировка
Блокировка по t°
Контроль 2-х секц.
ит
под1_
ишг
UnOR3
Прибавить □-
Убавить □- - -|
Сигнализация □- - -J
Перегрузка □
Отказ привода □
Отказ РНМ ф-Ч
--Л1— Прибавить
ч«—| Прибавить
'—I Убавить
■а
-И
Питание ПМ □- - -! ^}
Выходные реле
Цепь
Убавить
Сигнализация
Сигнализация
Перегрузка
Отказ ПМ
Отказ РНМ
Отказ РНМ
Питание ПМ
Питание ПМ
XI
Конт.1
А1
В1
А2
В2
A3
ВЗ
А4
В4
JIBS
JL„
В6
А7
тг
А8
В8
А9
В9
А10\
В10\
АЩ
ВПЛ
AJ2]
шя
АЩ
МП
АЩ
ВЫЛ
АЩ
ВЩ
Х2
Контч
А1
В1
А2
A3
В3_
А4
В4
JL.
В5
ж
В6
А7
В7
А8
В8
А9
В9,
А10\
ВШ\
АЩ
ВТТ\
АЩ
В12\
Рис. 8.14. Функциональное назначение зажимов и контактов разъемов регулятора
8.9. Особенности микропроцессорной защиты и автоматики автотрансформаторов
191
8.9. Особенности микропроцессорной защиты и автоматики
автотрансформаторов высокого и сверхвысокого
напряжений ООО НПП «ЭКРА»
Научно-производственным предприятием ООО «НПШ «ЭКРА» разработана и
выпускается на терминалах БЭ2704 (см. § 9.2) микропроцессорная защита и
автоматика автотрансформаторов:
• с высшим напряжением до 220 кВ в виде шкафов типов ШЭ2607 042 и
ШЭ2607 071;
• с высшим напряжением 500 и 750 кВ в виде шкафов типов ШЭ2710 542,
ШЭ2710 543, ШЭ2710 544 и ШЭ2710 572.
Микропроцессорные терминалы защиты и автоматики
автотрансформаторов напряжением до 220 кВ. Шкаф типа ШЭ2607 042 содержит шоковые
основную и резервную защиты автотрансформатора и автоматику его разгрузки, а шкаф
ШЭ2607 071 — резервную дистанционную и токовую направленную нулевой
последовательности резервную защиты и автоматику управления выключателем, в
том числе автоматику его повторного включения.
Шкаф типа ШЭ2607 042 состоит из двух комплектов с независимыми
источниками оперативного тока. Микропроцессорным является первый комплект,
выполненный на указанном терминале и выполняющий функции:
• продольной дифференциальной токовой защиты от всех видов КЗ;
• токовой защиты стороны низкого напряжения с пуском по минимальному
междуфазному напряжению и максимальному напряжению обратной
последовательности;
• максимальной защиты напряжения нулевой последовательности для
контроля изоляции стороны НН;
• защиты от перегрузки автотрансформатора (ЗП);
• максимальной токовой защиты от перегрузки УРПН автотрансформатора;
• токового пуска автоматики охлаждения;
• автоматики (устройств) отказа в действии на отключение выключателей
(УРОВ) высшего (ВН) и среднего (СН) напряжений;
• приема сигналов от сигнальной и отключающей ступеней газовой защиты
автотрансформатора и его УРПН и датчиков повышения температуры, понижения
и повышения уровня охлаждающего масла.
Второй комплект выполнен на электромеханических реле,
герметизированными контактами которых осуществляется действие на выходную отключающую
группу реле и отключение через терминал первого комплекта. Он также принимает
сигналы от газовых защит автотрансформатора и УРПН.
Особенностью продольной дифференциальной защиты являются ее модульное
построение и принятые разработчиками условные положительные направления
токов к обмоткам автотрансформатора, обусловливающие формирование диффе-
192 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
ренциального тока как абсолютного значения геометрической суммы [в отличие от
разности (8.2)] трех токов автотрансформатора,
/д = /1+/2+/з> (8Л2)
а тока направленного (дифференциально-фазного) торможения как [в отличие от (8.3)]
/т= Jl&cosin-a), (8.13)
где 1[ — наибольший из трех токов; 1'2 — сумма двух остальных токов.
Защита состоит из модулей:
• формирования дифференциального и тормозного токов;
• первой (чувствительной) токовой ступени;
• второй ступени — отсечки;
• запрета действия защиты (ее блокировки) при бросках тока намагничивания
автотрансформатора.
Характеристика срабатывания чувствительной токовой ступени с торможением
не отличается от показанной на рис 8.5. Особенностью является ее переключение
с наклонного участка на вертикальный при превышении одного их двух токов 1[,
l'2 значения тормозного тока 1Тбл.
В качестве еще одной особенности можно отметить вычисление тока в общей
части обмоток ВН и СН (в выводах нейтрали) для защиты от перегрузки.
Шкаф типа ШЭ2607 071 содержит, как указывалось, направленные
дистанционную и токовую нулевой последовательности резервные защиты
автотрансформаторов. Как и шкаф основной защиты, он также состоит из двух аналогичных
комплектов.
Дистанционная защита, программно реализуемая микропроцессорным
первым комплектом, четырехступенчатая с характеристиками срабатывания прямой
(к автотрансформатору, I и II ступени) и обратной (от автотрансформатора к
линии, III и IV ступени) направленностей (рис 8.15). Первая направленная
ступень отключает автотрансформатор со всех сторон при КЗ в его обмотках в точках
К2 (рис 8.16). При этом формируются сигналы пуска УРОВ и запрета АПВ.
Особенностью является взаимодействие вторых ступеней дистанционных
защит автотрансформатора и смежного с ним. Если короткое замыкание
происходит в зоне работы второй ступени на стороне СН в точке КЗ (рис 8.16), то
отключение автотрансформатора AT со всех сторон происходит с ускорением по сигналу
от второй ступени дистанционной защиты смежного автотрансформатора. При
этом контролируется отсутствие сигнала срабатывания третьей ступени.
При КЗ в точке К4 на смежной стороне и отсутствии указанного сигнала
ускорения защита автотрансформатора действует на ускорение защиты смежного
автотрансформатора.
8.9. Особенности микропроцессорной защиты и автоматики автотрансформаторов
193
а)
б)
Рис. 8.15. Характеристики срабатывания программных измерительных реле сопротивления,
направленных в автотрансформатор (а) и к шинам высшего напряжения (б)
При внешних КЗ, например в точке К1 (рис 8.16), в защищаемой зоне работы
третьей и четвертой ступеней она действуют (при отказе защиты или выключателя
предыдущего защищаемого электроэнергетического объекта) с выдержками
времени сначала на отключение шиносоеденительного 6шсвн и секционного йсВН
выключателей, а затем с большой выдержкой времени на отключение
автотрансформатора со всех сторон (выключатели бвн, 6ich> 6hhi > бит)*
Действие дистанционной защиты разрешается программной блокировкой от
качаний (БК) и запрещается программным элементом контроля неисправности
цепей напряжения (БНН).
Токовая направленная защита нулевой последовательности пятиступенчатая и
содержит программное реле направления мощности нулевой последовательности
прямой и обратной направленностей. Прямая направленность используется первой
и второй ступенями защиты. Они действуют аналогично рассмотренному
действию дистанционной защиты при КЗ в точках К2 и КЗ (рис 8.16).
Третья, четвертая и пятая ступени контролируются программным реле
направления мощности нулевой последовательности обратной направленности и при КЗ
на шинах или отходящих от них присоединений (точка К1) также действуют на
отключение аналогично действию дистанционной защиты.
Программные реле второй и четвертой ступеней защиты отстроены от бросков
намагничивающего тока автотрансформатора.
Функциональные схемы дистанционной и направленной токовой нулевой
последовательности приведены в документации ООО НПП «ЭКРА» [38] и здесь
опускаются, поскольку в гл. 9 рассмотрены аналогичные функциональные схемы
дистанционной и направленной токовой нулевой последовательности защит линий
электропередачи.
194 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Рис. 8.16. Схема, поясняющая действие резервной защиты автотрансформатора на базе шкафа
ШЭ2607071
Автоматика управления выключателем программно выполняет
формирование сигналов подготовка (с задержкой DT33) и разрешение АПВ (с задержкой
DT32), запускающих — сигнал «Пуск АПВ», автоматику повторного включения
без контроля АПВ БК9 с контролем отсутствия и наличия напряжения АПВ КН, с
синхронизацией напряжений АПВ С и сигнала «Запрет АПВ» (рис 8.17).
Автоматическое повторное включение подготавливается операцией DW15
(ИЛИ) сигналов от двух реле KQC19 KQC2 включенного положения выключателя.
При этом единичный логический сигнал DW16 устанавливает программный триг-
8.9. Особенности микропроцессорной защиты и автоматики автотрансформаторов 195
196 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
гер, реализованный двумя операциями ИЛИ DWU9 и DWU11, в исходное
состояние нулевым алогическим сигналом на нижнем входе программного элемента
DX10 (И).
Сигнал «Разрешение АПВ» поступает:
• или по цепи АПВ БК через операцию DWU3 при нулевом логическом
сигнале на дискретном входе 13 схемы выбора видов АПВ (логическая 1 на
инверсном выходе DWU3 и выходе таймера DT51 (по нумерации разработчиков);
• или по цепи АПВ шин через программный элемент DX1 с задержкой DT50 и
контролем наличия — программное реле максимального напряжения Uim на стороне
НН и отсутствия — реле минимального напряжения Um < на стороне ВН при
единичном сигнале на входе 13 и нулевом сигнале — на входе 14 указанных цепей —
единице на выходе операции DX2 (ЗАПРЕТ);
• или по цепи АПВ КН через операцию DX6 (ЗАПРЕТ) и DX4 (И) при
замкнутой программируемой накладке ХВ2 (нулевой сигнал на инверсных входах DX5 и
DX6 и единичный — на его выходе с контролем наличия напряжений
(программные максимальные реле Um >, С/нн >) на шинах ВН и на стороне НН;
• или по цепи АПВ С через операцию DX7 при разомкнутой (сигнал 1)
программируемой накладке ХВ2 с контролем разностей амплитуд AUm> AC/ и
частот Д/< Д/у указанных напряжений и угла сдвига фаз 5 < 5у между ними.
Сигнал «Пуск АПВ» формируется кратковременным запоминаем
программным триггером на операциях DWU9 и DWU11 сигнала Пуск АПВ от РЗ»
(релейной защиты) после появления единичных логических сигналов от реле KQT
отключенного состояния выключателя, который поступает и на верхний вход
программного логического элемента DX10 (И).
Управляющее воздействие от АПВ с задержкой DT32 через схему включения
[операция DW12 и DX13 (ЗАПРЕТ)] при отсутствии логической единицы на
выходе «Блокировка от многократных включений» (логическом нуле от датчика тока
в электромагните отключения ДТЭМО) выключателя производит повторное
включение выключателя QAT, отключенного релейной защитой. Надежность
включения обеспечивается операцией DW12 от датчика тока в электромагните включения
ДТЭМВ. Выдается светодиодный сигнал о действии АПВ.
Сигнал «Запрет АПВ» выдается в автоматику повторного включения
операцией DW15 от релейной защиты (РЗ), автоматики управления (АУ) выключателем
или от УРОВ.
Из особенностей автоматики автотрансформатора может быть отмечено
действие автоматики его разгрузки по току (APT). Она выполнена двухступенчатой с
программным измерительным реле тока прямой последовательности. Действие
первой ступени разрешается программным измерительным реле направления
мощности прямой последовательности, срабатывающим при ее направлении от
8.9. Особенности микропроцессорной защиты и автоматики автотрансформаторов 197
автотрансформатора к шинам, а второй — при обратном направлении мощности
прямой последовательности.
Особенности комплекса микропроцессорных защит и автоматики
автотрансформаторов с высшим напряжением до 750 кВ. Комплекс состоит из
шкафов типов ШЭ2710 542, ШЭ2710 543 и ШЭ2710 544 основных [38] и простых
резервных защит и ШЭ2710 572 резервных защит и автоматики. Выполнен в
соответствии с требованиями к защите и автоматике автотрансформаторов с высшим
напряжением 500 и 750 кВ.
Шкафы основных защит характеризуется существенными особенностями:
• предусмотрены две независимые продольные дифференциальные защиты
(ДЗТ), сосредоточенные в терминалах БЭ2704У542 и БЭ2704У544
соответственно; терминалы расположены в разных шкафах, могут подключаться к разным
первичным измерительным трансформатора тока и отдельным источникам
оперативного постоянного тока своими автоматическими выключателями;
• для резервирования защит стороны НН применены две независимые
токовые защиты;
• в терминале БЭ2704У542 сконфигурировано устройство контроля изоляции
вводов (КИВ), содержащее избиратели для определения фазы поврежденного
ввода ВН;
• в терминале защит автотрансформатора напряжениями 750/500/10 кВ в
шкафу ШЭ2710 544 дополнительно предусмотрено устройство КИВ СН;
• в шкафу ШЭ2710 544 производится прием сигналов от отключающих
ступеней газовой защиты электромеханическими реле, которые действуют на
отключение автотрансформатора через выходные отключающие группы реле названных
шкафов;
• в каждом шкафу предусмотрена группа выходных реле, отключающих на
стороне ВН до четырех выключателей с пофазными приводами управления через
два электромагнита отключения, одного выключателя на стороне СН с трехфазным
приводом управления через два электромагнита отключения и двух выключателей
на стороне НН.
Шкаф ШЭ2710 542 выполнен с использованием терминала типа БЭ32704У542.
Аппаратно функции двух указанных (для шкафов типа ШЭ2607) комплектов
шкафа ШЭ2710 542(543) реализуются с помощью двух микропроцессорных
терминалов: указанного типа и БЭ2704У543 — соответственно.
Первый комплект шкафа ШЭ2710 544 выполнен на терминале типа БЭ2704У544,
а второй — на электромеханических реле.
Основная продольная токовая дифференциальная защита по сравнению с
защитой автотрансформаторов с высшим напряжением 220 кВ принципиальных
особенностей не имеет; состоит из аналоговых четырех программных модулей и
имеет такую же характеристику срабатывания (см. рис 8.5).
Контроль изоляции вводов, предназначенный для защиты от пробоя вводов
стороны ВН и СН, содержит программный избиратель поврежденной фазы и выпол-
198 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
няет сигнальную и отключающую операции. Действие избирателя основано на
сравнении абсолютного значения емкостного тока каждого из вводов с абсолютным
значением геометрической суммы емкостных токов вводов в двух других фазах.
При частичном ухудшении уровня изоляции ввода одной из фаз происходит
возрастание емкостного тока данной фазы, срабатывает сигнальный элемент; с
выдержкой времени обеспечивается светодиодная сигнализация с указанием фазы
поврежденного ввода.
Отключение выключателей всех сторон автотрансформатора, пуск УРОВ и
запрет АПВ производится при одновременном появлении сигналов на выходах
трех названных операций программного устройства КИВ.
Избиратель не срабатывает при обрыве цепи тока любой из фаз. При этом
выполняется отключающая операция и выдается сигнал «Неисправность».
Резервные защиты и автоматика, программно реализованные совместно с ос*
новной защитой в шкафах ШЭ2710 542(544), простые традиционные: токовые за*
щиты от КЗ на стороне НН с пуском по напряжению и от перегрузки
автотрансформатора и его УРПН (от повышения температуры и снижения уровня масла);
защита минимального напряжения (автоматика ограничений снижения напряжения);
двухступенчатая автоматика охлаждения автотрансформатора; автоматическое
программное устройство резервирования отказов в действии выключателей на
отключение и автоматика пожаротушения; защита минимального напряжения.
Особенностью токовой защиты от КЗ на стороне НН является ее двухступенча-
тость и четыре варианта пуска по минимальному междуфазному напряжению и от
программного фильтр-реле напряжения обратной последовательности. Первая
ступень отключает выключатель НН, производит пуск АПВ и запрещает АВР
(включением секционного выключателя). Вторая ступень отключает автотрансформатор
со всех сторон.
Как особенность может быть отмечена и логическая резервная защита. Она
отключает автотрансформатор со всех сторон при одновременном появлении
сигналов срабатывания программных максимальных измерительных реле тока и
минимальных реле напряжения защиты ввода напряжением 6—10 кВ при отсутствии
сигналов срабатывания токовых защит с пуском по минимальному напряжению
присоединений, отходящих от секции шин НН.
Терминалы принимают и выполняют сигналы электродуговых защит
комплектных распределительных устройств.
Дополнительной функцией терминалов является регистрация токов и
напряжений электромагнитных переходных процессов.
Микропроцессорный шкаф типа ШЭ2710 572 содержит программные
резервные защиты автотрансформатора: максимальную токовую с пуском по
минимальному напряжению, дистанционную и токовую направленную нулевой
последовательности и автоматику разгрузки автотрансформатора по току. Главной
особенностью дистанционной и токовой нулевой последовательности защит, как и защит
автотрансформатора напряжением до 220 кВ, является наличие в терминале их
8.9. Особенности микропроцессорной защиты и автоматики автотрансформаторов 199
ступеней, направленных не только от автотрансформатора в линию, но и в
автотрансформатор [56]. При этом защиты, направленные в параллельно работающие
(смежные) автотрансформаторы взаимодействуют между собой и ускоряют
отключение поврежденного автотрансформатора аналогично рассмотренному
взаимодействию защит трансформаторов напряжением до 220 кВ (см. рис 8.16).
Характеристики срабатывания измерительных реле сопротивления
четырехступенчатой дистанционной защиты приведены выше (см. рис 8.15):
характеристики первой и второй ступеней расположены в верхней, а третей и четвертой — в
нижней полуплоскостях комплексного сопротивления. Предусмотрены
дополнительные реле сопротивления с характеристикой срабатывания, расположенной,
главным образом, в первом квадранте и охватывающей начало координат
комплексной плоскости (на рис 8.15 не показана), необходимые для надежности действия
первой ступени при близких трехфазных КЗ (при практически нулевом остаточном
напряжении).
Логическими элементами ИЛИ, как обычно, действие программных
измерительных реле сопротивления каждой ступени, реагирующих на отношения
междуфазных напряжений и разностей фазных токов, объединяются. Действие каждой
ступени защиты запрещается устройством (блоком) неисправности цепей
напряжения (БНН), действие первой и второй ступеней кратковременно, а третьей и
четвертой — более длительно, разрешается блокировкой от качаний (БК). Их
действие аналогично рассмотренным БНН и БК в составе дистанционной защиты линий
электропередачи (см. гл. 9).
Первая ступень дистанционной защиты резервирует основную защиту при
внутренних КЗ автотрансформатора AT (K2 на рис 8.18) и с выдержкой времени
действует на отключение трансформатора со всех сторон. Также защита действует
при КЗ на смежной стороне в зоне работы второй ступени (например, точка КЗ),
если принимается сигнал ускорения от защиты смежной стороны. При этом
контролируется отсутствие сигнала срабатывания PC третьей ступени.
Если срабатывает PC второй ступени и сигнал ускорения от смежной стороны
отсутствует (например, при КЗ в точке К4), дистанционная защита с выдержкой
времени действует на отключение шиносоединительного и секционного
выключателей среднего напряжения СН (на схеме рис 8.18 не показаны, см. Qmc и Qc на
рис 8.16) смежной стороны, затем выключателя Q5 (рис 8.18) этой стороны и
далее отключения AT со всех сторон.
При срабатывании PC второй ступени с контролем от БНН и БК, и если
отключены все выключатели стороны ВН, выдается сигнал ускорения для второй
ступени ДЗ смежного автотрансформатора.
При КЗ на отходящих присоединениях своей стороны (например, точка К1) в
зоне работы третьей (четвертой) ступени защита действует с выдержкой времени
вначале на отключение выключателей Q1 и Q2, затем с выдержкой времени
выключателей Q3 и Q4, и далее с выдержкой на доотключение автотрансформа-
200 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
Рис. 8.18. Схема, поясняющая действие резервной защиты стороны ВН автотрансформатора на
базе шкафа ШЭ2710 572
тора со всех сторон. Выдаются сигналы на отключение выключателей, пуска
УРОВ и запрета АПВ всех выключателей.
Пятиступенчатая токовая направленная защита нулевой
последовательности (ТНЗНП) принимает сигналы от программных максимальных реле тока (РТ)
первой — пятой ступеней и программных измерительных реле направления
мощности (РНМНП) прямой и обратной направленностей. Реле тока второй и
четвертой ступеней контролируются от реле тока нулевой последовательности,
отстроенного от бросков тока намагничивания автотрансформатора.
Срабатывание РТ первой и второй ступеней контролируется РНМНП прямой
последовательности, а третьей — пятой — РНМНП обратной последовательности.
Первая ступень ТНЗНП резервирует основную защиту при внутренних КЗ на
землю в AT (точка К2 на рис 8.18) и с небольшой задержкой действует на
отключение AT со всех сторон. Аналогично защита действует, если КЗ происходит на
смежной стороне в зоне работы второй ступени (например, точка КЗ) и
принимается сигнал ускорения от защиты смежной стороны.
При отсутствии сигнала ускорения от смежной стороны (например, при КЗ в
точке К4) вторая ступень ТНЗНП с выдержкой времени действует в цепь отключе-
Вопросы для самопроверки
201
ния £?шссн и бссн защиты (см. рис 8.16) смежной стороны, затем выключателя Q5
этой стороны и далее отключения ^Гсо всех сторон.
Сигнал ускорения для второй ступени ТНЗНП смежной стороны выдается при
срабатывании РТ второй ступени с контролем направленности, и если отключены
все выключатели своей стороны.
При КЗ на отходящих присоединениях своей стороны (например, точка К1 на
рис 8.18) в зоне работы третьей, четвертой и пятой ступеней ТНЗНП действует с
их выдержками времени аналогично отклонению автотрансформатора
дистанционной защитой.
Действие РТ пятой ступени ТНЗНП блокируется при появлении входного
сигнала от схемы рассогласования действия автоматических регуляторов
коэффициентов трансформации (АРКТ) параллельно работающих автотрансформаторов.
Максимальная токовая защита имеет те же особенности, что и
соответствующая защита автотрансформатора напряжением до 220 кВ. Для ее пуска по
напряжению используются программные измерительные реле минимального
напряжения на шинах, реле напряжения обратной последовательности на шинах ВН и
пусковой орган по напряжению стороны НН.
Автоматика разгрузки автотрансформатора (АРПТ) двухступенчатая:
состоит из двух программных реле тока, реагирующих на ток прямой
последовательности, и двух реле направления мощности прямой последовательности, одно из
которых срабатывает при направлении мощности от шин к автотрансформатору,
а другое — при противоположном направлении мощности.
Вопросы для самопроверки
1. Какие разработаны терминалы защиты и автоматики синхронных генераторов, трансформаторов
и энергоблоков генератор — трансформатор и кем?
2. Из каких микропроцессорных модулей состоит терминал программных защит и автоматики
синхронных генераторов, трансформаторов и энергоблоков генератор — трансформатор (см. рис. 8.1
и 8.2)?
3. В чем состоят особенности программной продольной токовой дифференциальной защиты
синхронных генераторов и трансформаторов?
4. Как функционирует микропроцессорная продольная токовая дифференциальная защита в составе
шкафов серии ШЭ2607 (см. рис. 8.3)?
5. В чем состоит особенность характеристики срабатывания микропроцессорной продольной
токовой защиты синхронного генератора, трансформатора и энергоблока генератор — трансформатор
(см. рис. 8.5)?
6. Каково принципиальное отличие торможения, осуществляемого в микропроцессорной токовой
продольной дифференциальной защите от традиционного торможения?
7. Каковы особенности формирования тормозного тока в микропроцессорной продольной токовой
дифференциальной защите (см. рис. 8.4)?
8. По каким условиям вычисляется ток срабатывания программной продольной токовой
дифференциальной защиты трансформатора?
9. В чем состоят особенности микропроцессорной продольной токовой защиты трехобмоточных
трансформаторов (автотрансформаторов) типа «Сириус-ЗТ»?
202 Глава 8. ИНТЕГРИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
10. Как функционирует программная автоматика ликвидации асинхронного режима гидрогенератора
(см. рис. 8.6)?
11. Как функционирует микропроцессорная автоматика прекращения асинхронного режима
турбогенератора (см. рис. 8.7)?
12. В чем состоят особенности микропроцессорной автоматики ограничений повышений амплитуды
напряжения синхронного генератора и снижения и повышения его частоты?
13. Как функционирует шкаф типа ШЭ2710 программных резервных защит автотрансформатора?
14. Каковы особенности программного автоматического регулирования коэффициента
трансформации трансформатора (автотрансформатора)?
15. Как выполнен и действует микропроцессорный автоматический регулятор коэффициента
трансформации типа РНМ-1 (см. рис. 8.9—8.11)?
16. В чем состоят особенности основных защит автотрансформаторов с высшим напряжением 750 кВ?
17. Как функционирует устройство контроля изоляции вводов автотрансформаторов с высшим
напряжением 750 кВ?
18. Какие виды резервной защиты и автоматики автотрансформатора содержит микропроцессорный
шкаф тип ШЭ2710 572?
19. Как и почему взаимодействуют вторые ступени резервных защит двух (смежных)
автотрансформаторов (см. рис. 8.18)?
20. В чем состоят особенности характеристик срабатывания резервных защит трансформаторов
и автотрансформаторов (см. рис. 8.15)?
Глава девятая
МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА
ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ ВЫСОКОГО
И СВЕРХВЫСОКОГО НАПРЯЖЕНИЙ
9.1. Виды и особенности.
Унифицированные терминалы
В последние годы разработана и выпускается отечественная
микропроцессорная интегрированная автоматика противоаварийного управления (релейная
защита и противоаварийная автоматика) линий электропередачи высокого и
сверхвысокого напряжений. ООО «НПП «ЭКРА», исследовательский центр «ИЦ «Брес-
лер» (г. Чебоксары) и научно-исследовательский центр «НТЦ «Механотроника»
(г. Санкт-Петербург) поставляют шкафы для энергетики серии ШЭ 2706 и
ШЭ2710, «Бреслер 0400», БМРЗ НВЧ и БМРЗ-ДФЗ микропроцессорных защит,
интегрированных с противоаварийной автоматикой линий электропередачи.
Они программно выполняют алгоритмы функционирования основных защит:
высокочастотных фильтровой направленной обратной последовательности (для
линий напряжением до 220 кВ) и дифференциально-фазных для линии как
указанных, так и сверхвысокого напряжений и резервных защит: дистанционной и
токовой направленной нулевой последовательности, интегрированных с трехфазным и
однофазным автоматическим повторным включением.
Схема на рис 9.1 иллюстрирует оснащение линий электропередачи
сверхвысокого напряжения, их реакторов и автотрансформаторов терминалами
интегрированной защиты и автоматики и аппаратами обмена информацией между
полукомплектами высокочастотных (ВЧ) защит, установленных на разных концах линий, по
высокочастотным (например, типа АНКА) и волоконно-оптическим линиям связи
(ВОЛС).
Необходимое для линий электропередачи высокого и сверхвысокого
напряжений техническое совершенство интегрированной автоматики противоаварийного
управления (главным образом ее быстродействие) достигается способами
обработки информации, свойственными микропроцессорной вычислительной технике,
а именно выделением ортогональных (синусной и косинусной) составляющих
принужденных составляющих промышленной частоты напряжений и токов
(входных сигналов) электромагнитных переходных процессов в ЭЭС нерекурсивными
на основе преобразований Фурье и адаптивными частотными фильтрами,
вычислениями амплитуд и фаз, как входных сигналов, так и их симметричных
составляющих и практически безынерционным вычислением сигналов информации об
активной и реактивной мощности (см. гл. 1).
204 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
~ШЩЩШ ВЛ2 {АНКА){ПВЗУ]
pi] pal
B^upl Scjw HjB ЯР0* 1*1
I J Pi №Э2710 541\ \ШЭ27Ю541\ |§|| |il V
ШЭ2710 511\\ШЭ2710 511\
ШЭ2710 542,543,544,572
V
aa
::::: i
I ;
i Bi i
[ a a
[i
ЖЭ2770 511 ШЭ2710 511
ATI
AT2
+—СШ2
ШЭ2710 542,543,544,572
V
[ BB
:::::
a a
1
1 aa i
:::::
i
Рис. 9.1. Схема оснащения подстанции микропроцессорной защитой и автоматикой
В дифференциально-фазной ВЧ-защите применены цифровые времяимпуль-
сные элементы сравнения фаз, повышающие (особенно двухполупериодный
многоканальный элемент сравнения) ее быстродействие.
Применены новые алгоритмы функционирования, сформированы более
сложные характеристики срабатывания ранее применявшихся программных
измерительных избирателей поврежденной фазы в однофазной автоматике повторного
включения.
Формирование характеристик применяемых программных измерительных реле
сопротивления производится с использованием сигналов, отображающих
активную и реактивную мощность, вычисляемых по быстродействующим алгоритмам с
использованием ортогональных составляющих (см. гл. 1) напряжения и тока, т.е.
без операции деления их действующих значений.
Возможность оперативного выбора из находящихся в памяти
микропроцессоров наборов установленных сопротивлений и токов срабатывания (уставок)
придает микропроцессорной релейной защите свойство адаптивности к режимам
работы линий электропередачи.
?.!. Виды и особенности. Унифицированные терминалы
205
Гибкое программное изменение уставок и обмен информацией по
высокочастотным каналам связи повышают быстродействие и эффективность
взаимодействия автоматики защитных отключений и повторных включений.
Возможность оперативного пополнения библиотеки программ и выполняемых
ими функций придает интегрированной противоаварийной автоматике линий
электропередачи способность «самосовершенствования».
Микропроцессорная интегрированная защита и автоматика линий
электропередачи выполняются на унифицированных терминалах, которые, естественно,
производят самотестирование, автоматическую диагностику и имеют интерфейс с
ПЭВМ и выходы для подключений к ВОЛС дистанционной связи с АСУ.
Терминал серии БЭ 2704, разработанный ЗАО «ЭКРА», представляет собой
унифицированное микропроцессорное устройство, функционирование которого
определяется установленным программным обеспечением. Его внешний вид
показан на рис 9.2. На рис 9.2, а видна часть лицевой панели с дисплеем
(жидкокристаллическим индикатором) ЖКИи клавиатурой (кнопками) управления КУ,
интерфейсом радиальной последовательной связи ИРПС типа RS-232 и основной
частью светодиодного отображения информации СВД. В его разрезе
просматриваются вторичные измерительные трансформаторы напряжения и тока 3.
Терминал имеет модульное построение в виде отдельных конструктивных
блоков — плат (рис 9.2, б) [47]: 1 — центрального процессора; 2 —
аналого-цифрового преобразователя с аналоговыми ДС-фильтрами нижних частот (ФНЧ); 3 —
входов аналоговых (через вторичные измерительные преобразователи) и
дискретных (через элементы гальванической развязки — оптроны) [8] сигналов; 4 —
входов дискретных сигналов с оптроннои развязкой электрических цепей; 5 —
выходных электромагнитных реле (герконов) и входов-выходов с оптроннои развязкой;
блока питания терминала от источника постоянного тока напряжением 220 или
НОВ с электрически развязанным преобразователем в низкие напряжения
питания микропроцессоров, АЦП и герконов.
Показаны также объединительная плата (общая шина) 7, в условном
изображении лицевая плата 8, вторичные измерительные трансформаторы тока и
напряжения 6.
Терминал выполняет функции:
• автоматики противоаварийного управления (релейной защиты и
противоаварийной автоматики);
• осциллографирование напряжений и токов электромагнитных и
электромеханических переходных процессов;
• определения расстояния до места КЗ;
• связи с АСУ (через преобразователь типа «токовая петля») и с ПЭВМ (через
RS-232);
• самодиагностики.
Модуль центрального процессора типа Л2370 [108] состоит из:
• 32-разрядного микропроцессора с ОЗУ и энергонезависимой памятью (типа
FLASH) программы, уставок и конфигураций (набора выполняемых функций)
осциллограмм и событий;
206 Глава ?. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
Рис. 9.2. Лицевая панель терминала типа БЭ2704 (а) и расположение блоков в его кассете (б)
9.2. Микропроцессорная фильтровая направленная высокочастотная защита
• сигнального микропроцессора обработки входных аналоговых сигналов
(фильтрация, формирование ортогональных составляющих принужденных
напряжений и токов электромагнитных переходных процессов и др.). Он и выполняет
программируемые функции автоматики противоаварийного управления.
Главной особенностью терминала БЭ 2407 является обширное «меню»,
обеспечивающее подробный диалоговый режим с оператором. Исчерпывающие
указания по его использованию содержатся в [108].
Надежность функционирования терминала высокая: наработка на отказ [3] —
25 000 ч, срок службы — 20 лет. Терминал устойчив к воздействиям магнитного
поля промышленной частоты и к импульсному магнитному воздействию.
Микропроцессорные терминалы серии «БРЕСЛЕР-400», разработанные в
ИЦ «БРЕСЛЕР» для микропроцессорных защит и автоматики повторного
включения линий электропередачи высокого и сверхвысокого напряжений, аналогичны
терминалу защиты трансформаторов (см. § 8.7) [9].
Микропроцессорный терминал «НТЦ «Механотроника» описан в § 7.3.
9.2. Микропроцессорная фильтровая направленная
высокочастотная защита
Защита выпускается ООО НПП «ЭКРА» в виде шкафа типа ШЭ2607 031 для
линий электропередачи напряжением ПО—330 кВ, в том числе с ответвлениями,
на которых не предусматривается однофазная автоматика повторного включения
(ОАПВ). Выполняется на терминале типа БЭ2704.
Принцип действия [39, 77] микропроцессорной направленной
высокочастотной защиты (НВЧЗ) иллюстрируется схемой на рис 9.3. На линии
электропередачи W, связывающей две части электроэнергетической системы ЭЭС1 и ЭЭС2
устанавливаются два полукомплекта защиты НВЧ31 и НВЧ32, подключаемых к
первичным измерительным трансформаторам напряжения TV1, TV2 и тока ТА1,
ТА2. Они обмениваются ВЧ-сигналами, передаваемыми по организованному по
одному из проводов линии каналу связи (см. рис 9.7). На рис 9.3 показаны только
конденсаторы связи Ссв. Высокочастотная часть защиты состоит из ВЧ-передатчи-
ков ПРД1, ПРД2 и приемников ЛРМ1, ПРМ2.
ЭЭС1
Q1
&&L1 Г
ен5
TV1Y
ТА1
Го
L-Гя
НВЧ31
UZ
ПРД1
ЭЭС2
_Ссв К1
-Г ВЧ-канал
^
прм1 W
ВЧ-аппаратура
ВЧ-аппаратура
Рис. 9.3. Схема взаимодействия полукомплектов направленной ВЧ-защиты
208 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
Абсолютная селективность защиты обеспечивается сопоставлением
направлении мощностей обратной (при несимметричных КЗ) и прямой (при трехфазных
КЗ) последовательностей. Как известно при КЗ на защищаемой линии
(внутренних) в точке К1 мощности направлены:
• обратной последовательности — от линии к шинам;
• прямой последовательности от шин в линию.
При внешних КЗ, например, в точке К2, направления мощностей в
полукомплекте НВЧ31 сохраняются, а в полукомплекте НВЧ32 изменяются на обратные.
В начальный момент времени КЗ программными пусковыми органами
полукомплектов защиты запускаются их ВЧ-передатчики ПРД1 и ПРД2, запрещающие
ВЧ-сигналами, поступающими в приемники ПРМ1, ПРМ2, действие защиты на
отключение выключателей Q1 и Q2 линии электропередачи. При внутреннем КЗ
(точка К1) срабатывают программные измерительные реле направления
мощностей (ПИРНМ) и останавливают ВЧ-передатчики: действие защиты на отключение
разрешается. При внешнем КЗ (например, в точке К2) ПИРНМ полукомплекта
НВЧ32 не срабатывает; ВЧ-передатчик ПРД2 не останавливается и сигналом виде
тока высокой частоты, поступающим в приемники ПРМ1 и ПРМ2, запрещает
действие полукомплектов НВЧ31 и НВЧ32 на отключение выключателей Q1 и Q2
линии электропередачи (блокируют защиту).
Измерительно-вычислительная часть защиты программно реализует
пусковые и измерительные органы направленной ВЧ-защиты. Основными пусковыми
огранами являются программные измерительные фильтр-реле:
• напряжения С/2бл (блокировки) — в обозначениях разработчиков, U2m
(отключения) и тока /2бл, 12от (рис 9.4, а) обратной последовательности;
• приращений А/бл и Д/оп токов прямой и обратной последовательностей (см.
рис 9.6);
• сопротивления Z6jlC4, реагирующего на отношение действующих значений
междуфазного напряжения UCA и разности токов фаз С и А.
Основные измерительные органы реализуются программными
измерительными реле:
• направления мощности обратной последовательности М2от;
• направленным измерительным реле сопротивления ZotCA.
Поскольку защита предназначена и для линий электропередачи с
ответвлениями, предусмотрены дополнительные более чувствительные программные
измерительные реле, вводимые в действие программными накладками ХВ (см. рис 9.5):
• тока обратной последовательности /2пуск, /2от;
• сопротивления гцоиАВ и гдоиВС;
• тока нулевой последовательности РГ/обл, /Оот.
В связи с применением измерительных реле сопротивления, защита снабжена
программными блокировкой от качаний БК (см. рис 9.4, а) и блокировкой при
неисправности цепей напряжений БНН.
9.2. Микропроцессорная фильтровая направленная высокочастотная защита
209
Рис. 9.4. Упрощенная структурная схема (а) и характеристика срабатывания (б) программных
измерительных реле сопротивления фильтровой направленной высокочастотной защиты
Принятое в фильтровой направленной ВЧ-защите измерительное
преобразование — типичное для микропроцессорных защит. Используются принужденные
составляющие промышленной частоты напряжений и токов электромагнитных
переходных процессов. После частичной фильтрации посредством аналоговых
пассивных ФНЧ граничными частотами 200—300 Гц, предотвращающими
периодичность амплитудно-частотной характеристики нерекурсивного цифрового фильтра
Фурье, им выделяются ортогональные составляющие указанных напряжений и
токов в виде, постоянных чисел (см. § 1.5). По ним вычисляются их амплитуды
[см. (1.4)] и фазы [см. (1.5)], формируются программные фильтры прямой и
обратной последовательностей [см. (1.20) и (1.21)], вычисляются мощности [см. (1.14),
(1.15)] и формируются характеристики срабатывания программных
измерительных реле сопротивления [см. (1.16)—(1.18)]. На рис 9.4, б приведены
характеристики направленных измерительных реле сопротивления Z6jI, Z0T и Zflon. Две из них,
а именно Z6jI и Zflon, — в виде параллелепипедов, ориентированных по
направлениям вектора сопротивления линии (угол (рл), расположенных в нижней и верхней
полуплоскостях комплексного сопротивления, охватывают начало координат.
Характеристика наиболее ответственного и строго направленного реле
сопротивления Z0T несколько более сложная и проходит через начало координат.
Логическая часть защиты. Как видно из упрощенной схемы (рис 9.4, а)
пуск ВЧ-передатчиков производится пусковыми программными фильтр-реле тока
и напряжения обратной последовательности /2бл, [/2бл и сопротивления Z6jlC4
через логические операции DX1 (И), DW1 (ИЛИ) и DX1, DX2, DX3 (ЗАПРЕТ)
210 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
(рис 9.4, а). Запрещение пуска от реле ZotCA контролируется блокировкой от
качаний БК через операцию DX3 (И). Останов ВЧ-передатчика происходит, как и
указывалось, при срабатывании программных измерительных реле направления
мощности обратной последовательности М2от, реле сопротивления ZotCA и после
формирования воздействия на отклонение.
Воздействие на отключение формируется программными логическими
элементами DX2 совпадения (И) сигналов от программных измерительного фильтр-реле
напряжения С/2от, тока /2от и направления мощности обратной последовательности
М2от или (операция DW2) от реле сопротивления ZotCA или от дополнительного
программного фильтр-реле тока обратной /2от последовательности. Операцией
DX4 (ЗАПРЕТ) отключение запрещается при наличии ВЧ-сигнала от ВЧ-прием-
ника. Прохождение воздействия на отключение задерживается таймером
микропроцессора DT на 0,015 с
Практически полная (лишь с некоторым сокращением) схема логической части
фильтровой направленной ВЧ-защиты на терминале БЭ2704, взятая из материалов
ООО «НПП «ЭКРА» [89] и приведенная на рис 9.5, поясняет действие защиты при
различных КЗ, особенности пуска ВЧ-передатчиков и формирования воздействий
на отключение.
Действие защиты. Несимметричные КЗ вне защищаемой зоны. При
несимметричных КЗ в каждом полукомплекте защиты срабатывают пусковые реле /2бл,
с72бл, и через логические элементы DX16 (И), DX18, DX19 (ЗАПРЕТ), DW20,
DW21 и DW14 (ИЛИ) и DX22, DX25 и дискретный выход терминала
осуществляется ненаправленный пуск ВЧ-передатчиков.
При внешнем несимметричном КЗ, например, в точке К2 (см. рис 9.3), в
полукомплекте НВЧ31 мощность обратной последовательности направлена от линии к
шинам, измерительное фильтр-реле М2от срабатывает и запрещает пуск ВЧ-пере-
датчика на элементе DX18. В полукомплекте НВЧ32 передатчик остается
запущенным, так как мощность обратной последовательности направлена от шин в
линию и фильтр-реле М2от не срабатывает. В полукомплекте НВЧ31 от /2от, U2oT
через элементы DX31, DX30 (И), DW28 (ИЛИ) формируются сигнал запрета пуска
ВЧ-передатчика на элементе DX19 и через элементы DX31, DX30 (И), DW29
(ИЛИ) — сигнал в цепь отключения — на вход «Старт» элемента D99.
Однако, поскольку в цепи отключения предусмотрена задержка времени на
срабатывание DT7 (0,015 с), выходной сигнал с элемента D99 блокируется
сигналом ВЧ-приемника от полукомплекта НВЧ32, который приходит на вход «Стоп»
раньше. Задержка времени DT6 (0,002 с) на входе «Сброс» программного элемента
D99 предусмотрена для предотвращения формирования его выходного сигнала под
воздействием кратковременных помех на выходе ВЧ-приемника. Если
длительность помех больше, то задержка времени на срабатывание DT7 увеличивается на
9.2. Микропроцессорная фильтровая направленная высокочастотная защита
Неисправность
цепей Съем
напряжения сигнализации
Рис. 9.5. Структурная схема фильтровой направленной высокочастотной защиты
время суммарной длительности помех. Если длительность помех меньше, то
обеспечивается сброс набранной задержки времени на срабатывание элемента D99.
В полукомплекте НВЧ32 измерительное фильтр-реле М2от не срабатывает.
Таким образом, при внешних несимметричных КЗ защита на отключение
защищаемой линии не действует.
Симметричные повреждения вне защищаемой зоны. При внешнем
трехфазном КЗ (на рис 9.3 точка К2) за счет предварительной несимметрии первоначально
212 Глава ?. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
срабатывают пусковые фильтр-реле /2бл, С/2бл обоих полукомплектов защиты и
запускают их ВЧ-передатчики.
В полукомплекте НВЧ31 срабатывает измерительное реле сопротивления Z6
и через логический элемент DW20 (ИЛИ) действует на пуск ВЧ-передатчика.
Одновременное срабатывание программного измерительного фильтр-реле А/бл и
hпуск обеспечивает пуск блокировки при качаниях БК: логические элементы DW7
(ИЛИ), DX36, DX35 (И), задержки времени DTI, DT2. Если в течение времени
DT1 ввода от БК в действие измерительного реле ZorCA оно сработает, то на выходе
логического элемента DX34 (И) появится сигнал, действующий через элемент
DW29 (ИЛИ) в цепь отключения.
Однако действие полукомплекта НВЧ31 на отключение не произойдет, так как
сигнал выхода D99 будет заблокирован ВЧ-сигналом от полукомплекта НВЧ32
раньше, чем закончится задержка времени на срабатывание DT7.
Несимметричные КЗ на защищаемой линии {точка К1). Первоначально
срабатывают пусковые фильтр-реле /2бл, U26jl каждого полукомплекта защиты и
обеспечивают пуск ВЧ-передатчиков. Затем в каждом полукомплекте срабатывают
измерительные фильтр-реле /2от, U2oT, М2от и запрещают пуск ВЧ-передатчиков на
элементах DX18 и DX19 (ЗАПРЕТ) через DW30, DW28 (ИЛИ). Через элементы
DX319 DX30 (И), DW29 (ИЛИ) формируются сигналы в цепях отключения на
входы «Старт» элементов D99. Так как на входах «Стоп» элементов D99
блокирующие сигналы от ВЧ-приемников отсутствуют, то после задержки времени DT7 на
их выходах появляются сигналы 1, которые поступают на верхние входы элемента
DX27 (И). Сигналами на нижних их входах контролируется срабатывание
измерительных реле глопАВ, ZaonBC и пускового реле РТ /0 по схеме DW44 (ИЛИ) при
наличии на линии электропередачи ответвления. Если защищаемая линия без
ответвлений, то размыканием программируемых накладок ХВ1 (единица на
соответствующем входе DW44) обеспечивается присутствие сигналов 1 на нижних
входах элементов DX27 (И) постоянно.
Выходной сигнал 1 через элемент DW26 (ИЛИ) поступает на вход элемента
DX51 (И), на втором входе которого уже присутствует сигнал 1 от срабатывания
чувствительного пускового реле /2бл или измерительных реле ZmCA, Z6jlCA,
объединенных на элементе DW39 (ИЛИ). Сигнал 1 через логические элементы
DW26 (ИЛИ), DX51, DX52 (И), DW53, DW58 (ИЛИ) и элемент времени с
задержкой на возврат DT18 действует на отключение через элементы DW55 (ИЛИ), DT9,
DX56 (И) и DW59 (ИЛИ) — на выдачу сигнала высокочастотного
телеотключения (ВЧТО), а выходной сигнал с элемента DW53 (ИЛИ) через дискретные
выходы — на пуск внешних УРОВ, в устройство противоаварийной автоматики
(ПАА) и на пуск ТАПВ. Сигнал с выхода элемента DX52 (И) через DT20 пускает
УРОВ терминала ВЧ-защиты (на схеме рис 9.5 схема УРОВ не показана).
В случае отказа одной или двух фаз выключателя в ходе отключения КЗ в
защищаемой зоне измерительное фильтр-реле М2ог может вернуться в исходное состоя-
9.2. Микропроцессорная фильтровая направленная высокочастотная защита 213
ние. Однако отказа защиты при этом не произойдет, так как на элементах DW26
(ИЛИ) и DX51 (И) (они охвачены положительной ОС и образуют программный
элемент памяти — триггер) предусмотрен подхват сигнала срабатывания с выхода
элемента DX27 (И) в цепи отключения, который исчезает только при исчезновении
сигнала на выходе элемента/)W39 (ИЛИ). Логический сигнал 1 с выхода элемента
DX51 (И) через инверсный вход элемента DX22 (ЗАПРЕТ) действует на останов
ВЧ-передатчика.
Защита отключает линию электропередачи с двух сторон.
Симметричное повреждение на защищаемой линии. За счет возникающей в
начале КЗ несимметрии напряжений и токов пусковые реле /2бл, U26jI обоих
полукомплектов защиты и кратковременно срабатывают и обеспечивают пуск ВЧ-пере-
датчиков.
Пуск БК происходит от пусковых реле обратной последовательности /2от, U2oT
или /2пуск или от реагирующих на приращение токов прямой и обратной
последовательностей А/бл (элемент DW7). Схема блокировки при качаниях в течение
времени DT1 разрешает прохождение сигнала срабатывания программного реле ZotCA
на отключение через элемент DX34 (И) и запоминает его до окончания отработки
выдержки времени на возврат DT2: операции DX35 nDW7 благодаря ОС образуют
программный триггер. Сигнал срабатывания измерительного реле ZotCA через
элементы DX34 (И), DW28 (ИЛИ), DX19 (ЗАПРЕТ) запрещает пуск ВЧ-передатчика
и через элементы DW29 (ИЛИ) действует в цепь отключения.
При трехфазном КЗ вблизи шин и отказе трех фаз выключателя измерительное
реле сопротивления ZotCA после срабатывания может вернуться в исходное
состояние. Однако защита подействует на отключение и пуск УРОВ, так как сигнал
срабатывания реле сопротивления запоминается программным триггером на DX51 и
DW26.
Одной из особенностей микропроцессорной НВЧЗ является предотвращение
возможности ее действия на отключение при изменении направления мощности
(ее реверсе) в процессе каскадного отключения КЗ на параллельной линии;
внешнее повреждение может восприниматься как внутреннее. При этом возможно,
что в полукомплекте НВЧ31 (см. рис 9.3) переориентация и срабатывание
измерительного реле направления мощности (ИРНМ) М2от произойдет раньше, чем
соответствующая переориентация и возврат реле М2от полу комплекта НВЧЗ 2.
В промежутке времени, когда оба ИРНМ М2от находятся в состоянии после
срабатывания, ВЧ-передатчики обоих полукомплектов будут остановлены и защита
может успеть подействовать на отключение выключателей Q1 и Q2 (см. рис 9.3).
Для исключения излишнего действия защиты на отключение предусмотрено
продление сигнала пуска ВЧ-передатчика на время возврата элемента DT4
(0,025 с), если он непрерывно существовал в течение времени, превышающего
задержку элемента времени DT3 (0,04 с). Тогда, если ВЧ-передатчик
полукомплекта НВЧ32 запущен в течение времени не менее 0,04 с (минимально возможное
214 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
время отключения одного из выключателей параллельной линии), то независимо
от реверса мощности по линии он остается работающим еще в течение 0,025 с
(максимальное время разброса по временах отключения выключателей
параллельной линии).
При неисправностях в цепях напряжения могут сработать программные
измерительные реле сопротивления ZotCA, X6jiCA, ZnonAB и ZJlonBC. Ложного
действия на отключение защиты от измерительного реле ZotCA при этом не произойдет,
поскольку БК, разрешающая его действие, запускается только от реле приращений
токов обратной и прямой последовательностей А/бл. Устройство БНН действует с
выдержкой времени DT10 (5 с) на сигнализацию и, при необходимости — на пуск
ВЧ-передатчика при разомкнутых программных накладках ХВЗ [единицы на
верхнем и нижнем входах DX9, DX10 (И)].
Для выявления неисправностей в цепях переменного напряжения устройство
БНН максимальными измерительными реле напряжения контролирует
алгебраическую сумму векторов напряжений:
^бнн = (UB0 + Uco - UM) + (UW- Um)/J~3 ,
где УА0, UB0, Uco —векторы напряжений вторичных обмоток первичных
измерительных трансформаторов напряжения (ТН), соединенных в «звезду»; иш, £/ик —
векторы напряжений вторичных обмоток ТН, соединенных в «разомкнутый
треугольник».
Для контроля одновременного исчезновения трехфазных напряжений
используются три реле минимального напряжения, включенные по схеме И (на схеме рис 9.5
не показано). Ими производится сигнализация и пуск ВЧ-передатчика.
При качаниях и асинхронном ходе за счет увеличения небалансов могут
сработать измерительные фильтр-реле 12бя9 £/2бл и запустить ВЧ-передатчики. При
качаниях одновременное срабатывание фильтр-реле /2от, U2oT произойти не может
и элемент DX31 (И) при возможном ложном срабатывании измерительного реле
М2оТ не допускает действия на отключение. Пусковые программные фильтр-реле
^2от > ^2пуск > ^бл отстраиваются от небалансов при качаниях, поэтому их действие
на отключение и пуск БК не происходит, следовательно возможное неправильное
срабатывание измерительного реле сопротивления ZotCA также не приводит к
действию защиты на отключение.
При включении линии (или выполнении ТАПВ) из-за разновременности
включения фаз выключателя возникает кратковременная несимметрия напряжений,
вызывающая несимметричный бросок емкостного тока линии. Однако уставки
пусковых реле тока /2от, /^ и сопротивления ZotCA отстраиваются от емкостного
тока линии, их срабатывание не происходит.
9.2. Микропроцессорная фильтровая направленная высокочастотная защита 215
При включении неповрежденной линии электропередачи с ответвлением цепь
отключения контролируется измерительными реле сопротивления ZqtCA, Z^QnAB,
^доивс и тока нУлевой последовательности РТ10, отстроенными от броска
намагничивающего тока трансформатором ответвления.
Для обеспечения действия защиты на отключения при включении линии на КЗ
или при неуспешном ТАПВ по факту срабатывания измерительных реле Z6jlCA, /2от
и ZotCA предусмотрена цепь ускорения действия на отключение выключателя с
контролем от РПО (KQT) и действием на отключение через логические элементы
DX49, DX51 (И), DW26 (ИЛИ).
При наличии на линии электропередачи ответвления рассматриваемая цепь
отключения дополнительно контролируется измерительными реле ZotG4, ZRQnAB,
ZAonBC и пусковым реле РТ10 на логическом элементе DX49 (И). Ввод в работу
цепи ускорения производится размыканием программной накладкой ХВ4
(единица на входе DX48), а контроль отсутствия напряжения на линии UR перед
включением — размыканием программной накладки ХВЗ (нуль на входе DW47).
Размыканием программной накладки ХВ10, воздействующей сигналом 1 на
программный переключатель D46, задается способ контроля отсутствия
напряжения: с использованием реле минимального напряжения на линии UR < Umin или от
внешнего реле контроля напряжения на линии. Задержка срабатывания в режиме
ускорения определяется таймером DT13 (0,02 с), а время ввода ускорения —
регулируемой выдержкой времени на возврат DT8.
При любых операциях с выключателем в целях исключения ложного действия
на отключение из-за разновременности включения фаз выключателя через
дискретный вход терминала по сигналу от ТАПВ, реле команды включить РКВ, реле
команды отключить РКО осуществляется пуск ВЧ-передатчика с задержкой на
возврат на элементе DT5 (0,25 с).
С фильтровой направленной высокочастотной защитой интегрировано УРОВ
(на рис 9.5 показаны только цепи на пуск УРОВ и воздействий от УРОВ) с пуском
от релейной защиты или по сигналу от реле (РПВ) включенного состояния
выключателя и с автоматической проверкой исправности выключателя.
Устройство резервирования отказов действия выключателей на отключение
содержит: трехфазные программные максимальные измерительные реле тока,
логическую часть и входы для приема внешних сигналов пуска.
В части формирования отключающих воздействий УРОВ обеспечивает
возможность действия на отключение резервируемого выключателя без выдержки
времени (действие «на себя»), а затем с выдержкой времени действия на
отключение смежных (более близких к источниками питания) выключателей.
Поскольку входной пусковой сигнал УРОВ может быть кратковременным, в
его логической части предусмотрено продление сигнала пуска на время 0,1 с
216 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
9.3. Микропроцессорная дифференциально-фазная
высокочастотная защита
Наиболее совершенная, абсолютно селективная в любых условиях — качания,
асинхронный ход, неполнофазный режим, дифференциально-фазная
высокочастотная защита линий электропередачи в микропроцессорном исполнении
выпускается в трех модификациях в виде:
• шкафов типов ШЭ 2607 для линий электропередачи напряжением 110—220 кВ
и типов ШЭ 2710 581 и ШЭ 2710 582, защита интегрирована с однофазным
автоматическим повторным включением (ОАПВ) для линий электропередачи напряжением
330—750 кВ, поставляется ООО «НПП «ЭКРА» [27];
• шкафов типов «БРЕСЛЕР 0411.01» для линий электропередачи напряжением
до 220 кВ [29], защита интегрирована с трехфазным АПВ, и «БРЕСЛЕР 0411.03»
для линий электропередачи напряжением 330—750 кВ, защита интегрирована с
ОАПВ, поставляется «ИЦ «БРЕСЛЕР»;
• шкафов типа БМРЗ-ДФЗ, выпускается «НТЦ «Механотроника».
Одинаковые по принципу действия модификации дифференциально-фазной
защиты ООО «НПП «ЭКРА» и «ИЦ «БРЕСЛЕР» существенно различаются
программной реализацией измерительно-вычислительных функциональных частей.
Принцип действия дифференциально-фазной защиты (ДФЗ) состоит в
сравнении фаз токов /', /" по концам защищаемой линии (рис 9.6, а),
осуществляемом передачей по одному из ее проводов сигналов в виде импульсов токов
высокой частоты длительностями, равными половине периода промышленной
частоты (рис 9.6, б, в). При показанных на схеме (рис 9.6, а) условных
положительных направлениях токов /', /" и КЗ за пределами защищаемой линии — внешнем
КЗ, например в точке К2, токи находятся в противофазе. Формируемые из
полупериодов одного знака импульсы токов высокой частоты сдвинуты во времени на
полпериода и образуют в линии дискретный потенциальный сигнал (рис 9.6, в).
При КЗ на защищаемой линии (точка К1) векторы токов /', /" практически
совпадают и импульсы токов высокой частоты в линии совмещаются (рис 9.6, б). При
этом в защите ее элементом сравнения фаз формируется ток, воздействующий на
отключение выключателя линии.
Для недействия защиты в первом и действия на отключение выключателей Q1,
Q2 линии во втором случае необходим обмен информацией о фазе токов между
двумя полукомплектами защиты П/к А и П/к В (рис 9.6, а).
Канал передачи информации организуется установкой в одном из проводов
линии по ее концам заграждающих частотных фильтров ЗФ в виде параллельных
резонансных LC-контуров, настроенных на несущую сигналы частоту и не
пропускающих ток высокой частоты в электрические цепи электростанции или
подстанции; конденсаторов связи Ссв с изоляцией, соответствующей напряжению линии, и
фильтров присоединения ФП в виде последовательных резонансных LC-контуров.
9.3. Микропроцессорная дифференциально-фазная высокочастотная защита 217
П/к А П/к£
ШЭ2710 582 ШЭ2710 582
а)
б)
t
I
в)
Рис. 9.6. Схема взаимодействия полукомплектов ДФЗ (а), токи высокой частоты в проводе
линии при КЗ в точке К1 (б) и в точке К2 (в)
Функциональная схема дифференциально-фазной защиты. Дифференци-
ально-фазная ВЧ-защита содержит все четыре функциональные части
автоматического устройства [3] (рис 9.7, а): измерительно-вычислительную ИВЧ,
передающую информацию ПЧ, логическую ЛЧ и исполнительную ИЧ части, которые
состоят из двух одинаковых полукомплектов (ИВЧ1, ЛЧ1, ИЧ1 и ИВЧ2, ЛЧ2,
ИЧ2), установленных по концам линии W и связанных передающей частью ПЧ—
каналом связи КС.
Измерительно-вычислительная часть защиты подключена к первичным
измерительным преобразователям — трансформаторам напряжения TV и тока ТА и
содержит пусковой и измерительные органы релейного действия, включающие:
• пусковые реле фазных токов (максимальные измерительные реле тока КА),
токов обратной 12 последовательности (фильтр-реле тока KAZ2), приращений токов
прямой и обратной последовательностей (фильтр-реле токов KAZM 2)> междуфаз-
ных напряжений (минимальные измерительные реле KV) и сопротивления
(направленные измерительные реле KZ)\
• измерительный элемент управления (манипуляции) ВЧ-передатчиком ZAX 2;
• измерительный элемент сравнения фаз токов ЭСФ.
218 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
£
^ . ЛУШ ТА, ЗФ ЗФ ГЛ2
У0<->ГI 1 "ТСГЙГ 4-R
л
#Д¥7
Z4,
1,2
\ощ
Етн
ЭСФ
A^Z,
'ли*
KAZ2
КА L
KV;KZ
\DM1\
---.Jj1TABM-
<У
AC
6Щ
DM2
n.
<7У2
ЩВЧ2,ЛЧ2\
ИЧ2
нэ
^2
TD
DWl
ЛЧ1
у*
DX
1 U
-=3 i
ir
#¥i
KL1
KAZ,
6)
a)
Рис. 9.7. Функциональные схемы дифференциально-фазной высокочастотной защиты линии
электропередачи (а) и ее пускового органа приращений токов прямой и обратной
последовательностей (б)
Пуск передатчика, например GM1, производится дискретными сигналами
фильтр-реле KAZ2 и KAZAl 2, состоящих из фильтров токов обратной ZA2 (рис 9.7, б)
и прямой ZAX последовательностей, сумматора токов SMn элемента сравнения
амплитуд ЭСА токов с зафиксированными запоминающим элементом ЗЭ значениями
токов в предшествующем короткому замыканию нормальном режиме /1н, 12я.
Ток обратной последовательности, как известно [93], появляется при любом
несимметричном, а кратковременно и при трехфазном КЗ. Пусковые
максимальные реле фазных токов КА9 минимальные реле напряжения KV и сопротивления
KZ используются для повышения чувствительности пуска ВЧ-передатчика при
симметричных КЗ.
Как видно из упрощенной функциональной схемы логической части ЛЧ1,
сигнал Хп на пуск управляемого ВЧ-передатчика GM1 проходит через логический
элемент DWl (ИЛИ). Сигнал от KAZ2, если он кратковременный, запоминается на
определенное время элементом памяти TD.
Орган управления (манипуляции) ВЧ-передатчиком ОМ содержит
комбинированный фильтр ZAX 2 токов прямой и обратной последовательностей,
обеспечивающий манипуляцию передатчиком током прямой последовательности при
симметричных и практически током обратной последовательности при несимметричных
КЗ. Его сигнал Хы представляет собой напряжение промышленной частоты,
пропорциональное сумме токов £х + k£2 прямой £х и обратной /2 последовательностей.
9.3. Микропроцессорная дифференциально-фазная высокочастотная
21?
Манипуляция генератором ВЧ-передатчика GM1 состоит в формировании
импульсов тока ВЧ лишь в течение положительного полупериода тока на выходе Z412.
Элемент сравнения фаз ЭСФ (рис 9.8, а) токов на выходах фильтров ZAU2 двух
полукомплектов защиты представляет собой времяимпульсный элемент сравнения
фаз двух синусоидальных величин релейного действия [3]. Он формирует
дискретен* *А-
3,6
3,2
2,8
2,4
2,0
1,6
1,2
0,8
0,4
';«>„'
к __1
н
1
а
■ч
Jl
s
\
lX
zh
ш
ш
г
л
D
0 40 80 120 160 200 240 280 <р, град
б)
+/j"+ U2
i-i+Щ
в)
Рис. 9.8. Временные графики, иллюстрирующие времяимпульсный способ сравнения фаз (а),
зависимость среднего значения тока на выходе ВЧ-приемника от угла сдвига фаз (б) и фазная
характеристика дифференциально-фазной защиты (в)
220 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
ный потенциальный сигнал СА при углах <р сдвига фаз между токами на выходах
ZAX 2, соответствующих КЗ на защищаемой линии (см. рис 9.7, б), в частности
Ф = 0. Сигнал поступает на верхний вход элемента DX (И) логической части,
например ЛЧ1, на нижний вход которого приходит дискретный потенциальный
сигнал от элемента DW2 (ИЛИ) при поступлении на его вход одного (или двух)
сигналов от пусковых фильтр-реле KAZ2, KAZA1 2 или измерительных реле КА, KV,
KZ. При этом электромагнитными выходными реле КЫ и KL2 (на схеме не
показано) формируются отключающие воздействия X х и X 2 на отключение
выключателей Q1 и Q2 линии электропередачи (см. рис 9.7, а).
Элемент сравнения фаз токов действует по времяимпульсному способу
сравнения фаз (рис 9.8, я), при котором производится сопоставление времени tcn
совпадения по знаку мгновенных значений токов i', /" (см. рис 9.7) с постоянным
установленным временем t . Время совпадения равно времени наложения импульсов
ВЧ и связано с углом ср сдвига фаз токов (напряжений и'м, и J манипуляции
ВЧ-передатчиками полукомплектов защиты) соотношением
t =П~Ы (9 1)
Среднее значение импульсного тока /0п (рис 9.8, б) на выходе каждого из
ВЧ-приемников при неизменном наибольшем значении 1П = const (рис 9.8, а)
определяется углом ф сдвига фаз токов /', /":
Ток /0п сравнивается с током срабатывания / поляризованного элемента
сравнения фаз релейного действия, моделирующим установленное время t . На рис 9.8, б
показана зависимость тока /0п от угла q> расхождения векторов токов l\ + k£'2 и
1\ + к?2 по концам защищаемой линии. Она определяет фазную характеристику
(рис 9.8, в) защиты.
В диапазоне углов |(р| < |ф1стах ток /0п > 1С и ЭСФ срабатывает, обеспечивая
действие защиты на отключение линии.
При углах 1ф1стах < |ф| ^ я ток /0п < 1С и защита не срабатывает —
блокируется. Угол запрета действия на отключение (блокировки) защиты
1ф1бл = *- Метах- (9-3)
9.4. Терминалы микропроцессорной дифференциально-фазной защиты 221
9.4. Терминалы микропроцессорной
дифференциально-фазной защиты
Микропроцессорные дифференциально-фазные высокочастотные защиты в
виде шкафов типов ШЭ 2706 и «БРЕСЛЕР 2604.111» линий электропередачи
высокого и шкафов типов ШЭ 2710 и «БРЕСЛЕР 2704.51» — сверхвысокого напряжений
ООО «НПП «ЭКРА» и «ИЦ «БРЕСЛЕР» соответственно существенно различаются
по принципам действия их измерительно-вычислительной части. Внешний вид
шкафов ШЭ 2710 582 (см. рис 9.1, а) и «БРЕСЛЕР 2704.51» (рис 9.1, б),
интегрированных с однофазным повторным включением, также различается, хотя
выполняются шкафы в одном Евростандарте.
Микропроцессорная дифференциально-фазная защита в составе шкафа
ШЭ 2710 582 выполняется на унифицированном терминале БЭ 2704 (см. § 9.2)
с соответствующим программным обеспечением.
Программная измерительно-вычислительная часть защиты
функционирует на основе ортогональных (синусной и косинусной) составляющих
принужденных напряжений и токов электромагнитных переходных процессов,
выделяемых нерекурсивными частотными фильтрами Фурье (см. гл. 1). Амплитуды или
действующие значения напряжений и токов и симметричных составляющих
несимметричных трехфазных напряжений и токов вычисляются по формуле (1.4).
Программные фильтры токов прямой и обратной последовательностей
выполняются в соответствии с выражениями (1.20) и (1.21). Характеристики
измерительных реле сопротивления формируются с использованием соотношений (1.18).
Программные пусковые органы имеют определенные особенности. В связи с
использованием нерекурсивного частотного фильтра Фурье с фиксированной
длительностью импульсной характеристики, равной одному периоду промышленной
частоты, время их срабатывания tc при трехкратных токах (относительно токов
срабатывания) составляет 25 мс
Сигналы пуска по дискретным приращениям или изменениям токов прямой и
обратной последовательностей KAZAl 2 (см. рис 9.7, а) импульсные, длительность
импульсов определяется временем запоминания токов /1н, /2н (см. рис 9.7, б).
Пусковые органы фазных токов КА (см. рис 9.7, а) реагируют на абсолютное
значение векторной разности фазных токов.
Программные измерительные реле сопротивления KZ функционируют по
фазным напряжениям и суммам фазных токов и тока нулевой последовательности [39]
и состоят из двух измерительных реле в каждой фазе с разной характеристикой
(рис 9.9, а, б). Они выполняют, главным образом функцию избирателей
поврежденной фазы (ИПФ), результирующая характеристика которых (рис 9.9, в)
обеспечивает отключение только поврежденного провода линии электропередачи при
однофазных КЗ. В соответствии с (1.18) характеристики ограничиваются соотно-
222
лава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
JX
\ 1
! \
\ч
ч ф3=4я/3 /
^1 /4*1
\0 ty R
а)
-(0,1-0,15)^2
б)
в)
(9.4)
Рис. 9.9. Характеристики срабатывания программных избирателей поврежденной фазы с
полным (а), с уменьшенным (б) коэффициентом компенсации током нулевой последовательности и
результирующая (в)
шениями, использующими производимое терминалом ДФЗ измерительное
преобразование активной Р и реактивной Q мощностей по (1.13):
для первых трех программных измерительных реле сопротивления
Х>Ху1 или 2Q>I2mXyl-
Х<Ху1 или 2Q>I^Xyl;
R-Xz\gqx<Ryl или 2(P-6ctg91)</^yl;
Xctg91-/?<0 или gctg9j-P<0;
для вторых трех реле
Х<Ху2 или 2Q<I*X;2;
R-Xctg<$>x<Ry2 или 2(P-Qctgq>1)<I*Ry2;
(X+Xy2/S)ctgq>2-R<0 или (Q + 1^Ху2/16)аёц>2-Р <0;
(Xy2/8)-Rtgq>3+X>0 или (I^Xy2/l6) -Ptgq>3 + Q > 0. J
Главные пусковые органы KAZ2, KAZAl 2 и КА (см. рис 9.7, а) имеют по два
выхода, воздействующие на пуск ВЧ-передатчика, например GM1 [через операцию
DW1 (ИЛИ)] и на отключение выключателя линии (через операцию DW2). Первые
выходы более чувствительны к токам КЗ [39, 48].
Микропроцессорная ДФЗ снабжена и дополнительными пусковыми органами:
максимальными фазных токов и напряжений, напряжения обратной
последовательности и измерительным элементом тока нулевой последовательности.
(9.5)
9.4. Терминалы микропроцессорной дифференциально-фазной защиты 223
В связи с использованием цепи напряжения первичных измерительных
трансформаторов напряжения TV1, TV2 (см. рис 9.7, я), защищаемых плавкими
предохранителями, при перегорании одного из них или при других повреждениях цепей
напряжения программный элемент (блок) неисправности цепей напряжения (БНН)
ограничивает функционирование ДФЗ только по цепям тока. Дополнительный
измерительный элемент тока нулевой последовательности выводит из действия
БНН в случаях КЗ на землю внутри контура заземления электростанции или
подстанции.
Особенностью органа манипуляции ОМ (см. рис 9.7, а) ВЧ-передатчиком
микропроцессорной ДФЗ является формирование дискретных мгновенных значений
напряжения, пропорционального сумме токов прямой и обратной
последовательностей /j + k£2 из ее ортогональных составляющих обратным преобразованием
Фурье (см. § 1.5). Это требует затраты времени длительностью еще одного
периода промышленной частоты. Поэтому микропроцессорная ДФЗ не получается
более быстродействующей, чем ее традиционное аппаратное исполнение [48]:
время действия защиты на отключения — не менее длительности двух периодов,
т.е. 40 мс
Как и в аппаратной ДФЗ линий электропередачи напряжением выше 330 кВ, в
органе манипуляции микропроцессорной защиты предусмотрена компенсация
емкостных токов линии, необходимая для выравнивания токов, подводимых к
полукомплектам защиты [39].
Программный элемент сравнения фаз ЭСФ (см. рис 9.7, а) в
микропроцессорной ДФЗ в составе шкафа ШЭ 2710 582 является принципиально традиционным:
длительность импульса постоянного тока /п, равная времени совпадения tcu
(см. рис 9.8, а) по знаку мгновенных напряжений манипуляции и^, и^ ,
интегрируется — преобразуется в среднее значение — ток /0п (см. рис 9.8, б), который
сравнивается с током срабатывания 1С элементом сравнения их абсолютных
значений [3]. Угол блокировки защиты (см. рис 9.8, в) фбл = я/4-з-5я/12.
Действие защиты при КЗ целесообразно проследить по схеме логической
части с показанными на ее входе сигналами измерительно-вычислительной части
и на выходе сигналами информации о действии защиты и управляющими
воздействиями на отключение линии (рис 9.10). Сигналы реле пускового органа с двумя
выходами обозначены:
• на пуск ВЧ-передатчика, т.е. запрет (блокировку) действия защиты на
отключение — ^2бл' ^2бл> ^бл' ^л.бл (сигнал Реле линейного тока) пусковых фильтр-реле
KAZ2, KAZAl2 и реле КА;
• дополнительного пуска и отключения от реле по напряжению обратной
последовательности U26jl, U2oT (вводится в действие размыканием двух программных
накладок ХВ4) с операциями DX98 и DX99 (И);
• на отключение линии как [/2от, /2от, Д/от, /л от.
224 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
1уров>
Щ НеисправностьПП^»
1апк>
Рис. 9.10. Функциональная схема логической
9.4. Терминалы микропроцессорной дифференциально-фазной защиты
225
■^Отключение 3-х фаз от УРОВ | jg\
<ПускВЧС№Ц
DW25
Пуск ОМП
Индикация
ОМП
DWU0
шт&
-< ЗапретОАПВ {7,1,7,21
-^Отключение 3-х фаз со- ВЧС №1| &.{
-—^ Отключение 3-х фаз от РЗ \Щ-\
-< Действие ДФЗ \&\
DW29 DT9
-^Отключение 3-х фаз от ДФЗ \&\
1 f^fbnHEferT < Отключение3-хф^|
' U j L ' <;ПускОАПВ|7,7|^Ц
<Ekr
ХВЗ DX55
га-
•—£ Неиспр.цепей напряжения \^Ц
■^—^TlycK на отключение \ & \
Щ119\
tHw5 DT15
=т^Ъ-& г
ШШГ~\ I—- т_1
^~7&Ь——| ОСФ для сигнализации |—'
< Вызов |-^н1
-^Вызов ДФЗ при неисправности ПП | jP
—«^ Сигнализация неисправности ПП | ^Ц
части терминала БЭ2704 V582
226 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
Пусковые сигналы программных измерительных реле сопротивления и
максимальных и минимальных программных реле напряжения и тока измерительных
органов (ИО) обозначены как гфА, гфв, гфс, UmaxA, UmaxB, UmaxC и UminA, UminB9
ЦптС РТъА,РТъВ, РТвС.
Несимметричное КЗ вне защищаемой линии (точка К2 на рис 9.6, а). Пуск
защиты каждого из полукомплектов при несимметричных КЗ осуществляется
пусковым органом (ПО), реагирующим на ток (и напряжение) обратной
последовательности (его дискретное изменение), и на разность фазных токов — линейный
ток /л.
Высокочастотный передатчик запускается сигналами /2бл (£/2бл), Д/бл, /л бл через
логический элемент DW1 (ИЛИ). Сигнал пуска передатчика запоминается
элементом б задержки времени на возврат DT11, что необходимо для обеспечения
селективности защиты при внешних симметричных КЗ, и через логическую операцию
DX8 (ЗАПРЕТ) подается на вход ОМ— сигнал «Разрешение манипуляции». Его
сигнал «Выход» производит пуск ВЧ-передатчика и управляет (манипулирует)
генерируемым им током высокой частоты в соответствии с фазой выходного
сигнала цифрового комбинированного фильтра токов £l + kl_2.
Токи передатчиков полукомплектов защиты образуют непрерывный ВЧ-сигнал
(см. рис 9.6, в) на входе каждого из ВЧ-приемников. На выходах элементов
сравнения фаз ЭСФ ток /0п равен или близок нулю (см. рис 9.8, б) и они формируют
логический сигнал 0, поступающий на прямой вход элемента DX22 (ЗАПРЕТ) и
препятствующий прохождению сигнала на отключение, подготовленному
операцией DW13 (ИЛИ) сигналами /2от, Д/от, /л от, U2or
Для исключения излишнего срабатывания защиты в первый момент внешнего
КЗ предусмотрен элемент временной задержки 14 {DT20). Каждый полукомплект
защиты принимает ВЧ-сигнал с противоположного конца с запаздыванием,
определяемым временем его распространения по линии и временем установления
процесса в относительно узкополосном ВЧ-канале связи. Поэтому и необходима
минимальная задержка времени не менее 0,01 с
Симметричное КЗ вне защищаемой линии. При симметричных КЗ
составляющие обратной последовательности появляются кратковременно в начале его
возникновения. Пуск ВЧ-передатчика обеспечивается фиксацией кратковременного
срабатывания пусковых органов (ПО) — сигналы /2бл и Д/бл. Импульсный сигнал
пуска передатчика запоминается (расширяется) элементом б (DT11) на 0,6 с
Цепи отключения защиты подготавливаются сигналами кратковременного
срабатывания ПО /2от или Д/от через элемент DW13 (ИЛИ), а также ИО Z^A,I^B, Z^c,
включенными по логической схеме DW96 (ИЛИ), по цепи прямых входов
элементов DX97 и DX10 (ЗАПРЕТ) и замкнутой цепью обратной связи ОС логической
схемы DX11, DX13 (И) и DX17 (ЗАПРЕТ) на время DT2.
9.4. Терминалы микропроцессорной дифференциально-фазной защиты 227
Фиксация кратковременного срабатывания ПО на отключение осуществляется
обратной связью с выхода элемента DX17 (ЗАПРЕТ) на вход элементов DX11,
DW13 и DW15 (ИЛИ) на время 0,2 с [определяется элементом 16 (задержка
времени DT2)].
Вывод из действия канала отключения при трехфазных КЗ сигналом 1 на
выходе элемента 16 (DT2), через 0,2 с после начала КЗ производится до того, как
хотя бы на одном конце запрещается пуск ВЧ-передатчика. Это обеспечивает
недействие защиты на отключение при внешних симметричных повреждениях при
неодновременном запрете пуска передатчиков.
Схема подготовки канала отключения при трехфазных КЗ построена так, что
не происходит повторного ее пуска цепи отключения внешнего трехфазного КЗ,
когда могут кратковременно появиться составляющие обратной
последовательности. Указанное определяется тем, что сигналы срабатывания ИО Z^A, Z^B, Z^c,
включенные по логической схеме ИЛИ (элемент DW96), запрещают прохождение
сигнала по цепи отключения на элементе DX10 (ЗАПРЕТ) через время 0,2 с,
определяемое элементом 9 (DT1).
Короткие замыкания на защищаемой линии (точка К1 на рис 9.6, а). Пуск
защиты при симметричных и несимметричных КЗ на защищаемой линии
происходит так же, как и в случае КЗ вне защищаемой зоны. После задержки по времени
операцией 14 (DT20) в канале отключения с контролем [операции DW22 и DX26
(И)] включенного выключателя линии программными максимальными реле тока
РТвА, РТвВ, РТъС (с током срабатывания 1С = 0,04/ном) благодаря наличию пауз в
приеме токов ВЧ (см. рис 9.6, б и 9.8, а), появляется логический сигнал 1 на
выходе элемента сравнения фаз ЭСФ (рис 9,10) и при отсутствии на инверсном
входе элемента DX18 логической единицы от цепи ускорения защиты в цикле
ОАПВ через операции 20 (DT6), 21 (DT17 — задержка на возврат), DX22 (И), 23
(DT8), 24 (программный переключатель М в противоположном показанному на
схеме рис 9.10 положении), DW25 (ИЛИ), DX90 (И-ЗАПРЕТ), программный
переключатель 28 (М) в противоположном состоянии, DW29 (ИЛИ) и 30 (DT9)
защита действует на отключение трех фаз выключателями Ql, Q2 и выдает
сигналы «Действие ДФЗ» и «Отключение трех фаз от ДФЗ». Элемент 30 (DT9) с
выдержкой времени на возврат обеспечивает наличие дискретного выходного
воздействия достаточной для отключения выключателя длительности.
Производится запрет пуска и манипуляции ВЧ-передатчика по цепи: операции
30 (DT9), DW38 (ИЛИ), 41 (DT3) и 42 (DT4 — задержка на возврат), DW110 (ИЛИ),
инверсный вход элемента DX4 (ЗАПРЕТ), операция DW7 (ИЛИ) и инверсный
вход элемента DX8 (ЗАПРЕТ). Блокируются сигналы «Пуск» и «Разрешение
манипуляции», и работа передатчика прекращается. При этом подачей логического
сигнала 1 на вход R производится сброс выдержки времени DT11 элемента
временной памяти сигнала пускового органа на манипуляцию передатчиком. Так же
228 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
действует через DW38 и непосредственно через DT15 (43) внешний (на входе
терминала) сигнал «Запрет пуска ВЧ».
Сигнал запрета пуска передатчика с выхода элемента 42 (DT4) на элементе
DX54 (И) создает обходную цепь ЭСФ, подавая логический сигнал 1 с выхода
элемента 14 (DT20) на вход элемента DW25 (ИЛИ).
Предусмотрен подхват пуска защиты на время DT12 при симметричном КЗ
программными измерительными реле Z^A, Z^B, гфс, включенными по логической
схеме ИЛИ (элемент DW96), операциями И DX129 DX17, образующими за счет
обратной связи программный триггер.
При введенном ОАПВ (сигнал «Работа без ОАПВ» отсутствует), выходной
сигнал канала отключения через элементы DX90, DW28 (переключатель Мв
показанном на схеме положении) и DT10 (31) действует на его пуск.
В этом случае сигнал запрета пуска ВЧ-передатчика на входе элемента DW38
(ИЛИ) определяется схемой устройства ОАПВ, подающей сигнал «Запрет ВЧ при
отключении 3-х фаз от ОАПВ». При отключении ОАПВ одной фазы указанный
сигнал не формируется и запрет пуска ВЧ-передатчика не происходит.
Для исключения излишнего срабатывания защиты при КЗ на смежной
параллельной линии и изменении направления (реверсе) мощности за счет
неидентичного переходного процесса в ОМ ее полукомплектов, предусмотрена специальная
логическая схема, состоящая из элементов DX18 и DX22 (ЗАПРЕТ), задержки
времени DT6 на срабатывание (0,04 с) и элемента DT7 задержки времени на
возврат (0,05 с).
При отключении выключателя Q3 параллельной ВЛ возможен реверс
мощности и ЭСФ может кратковременно выдать логический сигнал 1. Излишнее
отключение неповрежденной линии при этом не произойдет, так как в течение
выдержки времени 0,05 с на возврат элемента 21 (DT7) на инверсном входе
элемента DX22 (ЗАПРЕТ) будет присутствовать логический сигнал 1.
Поведение защиты в цикле ОАПВ. При работе ДФЗ совместно с ОАПВ (на
двери шкафа устанавливается в соответствующее положение переключатель
«ОАПВ») программный переключатель 28 (М) подключает выходную цепь канала
отключения к элементу 31 (DT10). Защита действует на пуск устройства ОАПВ,
которое определяет вид повреждения и производит отключение только
поврежденной фазы при однофазных КЗ или действует на отключение трех фаз выключателя
в случае многофазных КЗ.
При однофазных КЗ на землю на защищаемой линии запрет пуска
ВЧ-передатчика не происходит, так как при однофазных отключениях не появляется
логический сигнал от схемы ОАПВ «Запрет пуска ВЧ при отключении 3-х фаз от ОАПВ».
При этом не создается обходная цепь ЭСФ на элементе DX54 (И), и он остается
в работе.
После отключения поврежденной фазы в цикле ОАПВ токи нагрузки в непол-
нофазном режиме соответствуют внешней несимметрии. В ВЧ-канале сигнал ста-
9.4. Терминалы микропроцессорной дифференциально-фазной защиты 229
новится практически непрерывным, и ЭСФ воспринимает неполнофазный режим
как внешнее повреждение, его выходной сигнал устанавливается в логический
нуль. По истечении задержки (0,025 с) элемента 31 (DT10) сигнал пуска ОАПВ
исчезает.
Если в цикле ОАПВ возникает новое КЗ на оставшихся двух фазах линии,
повторное действие на пуск защиты производится так же, как и при несимметричном
повреждении в полнофазном режиме; ЭСФ воспринимает его как повреждение в
защищаемой зоне. Формируется сигнал «Неполнофазный режим в цикле ОАПВ»,
появляется логическая единица на входе элемента DW63 (ИЛИ), и через время
0,02 с, определяемое элементом 64 (DT24), появляется логическая единица на
инверсном входе элемента DX18 (И-ЗАПРЕТ), элемент задержки 20 (DT6) не
запускается, переключатель М (элемент 24), управляемый указанной единицей,
исключает из канала отключения элемент задержки времени 23 (DT8) отключения
трех фаз. От DT9 (30) формируется сигнал «Запрет пуска ВЧ», благодаря чему
ускоряется и отключение противоположного конца линии.
На рис 9.10 сохранены ряд показанных на фирменной схеме входных сигналов
программных логических операций, выходных управляющих воздействий и
сигналов информации, связанных с особенностями реакции микропроцессорной ДФЗ на
включение неповрежденной линии и ее включение на КЗ, возникновение КЗ на
линии, включенной с одной стороны, проверку аппаратуры высокочастотного
канала связи (АПК), описание которых содержится в [90] и здесь опускается.
Важной особенностью микропроцессорной ДФЗ является применение
недостаточно надежных (повреждаемых) цепей вторичных напряжений первичных
измерительных трансформаторов напряжения, в связи с чем в защите
предусматривается устройство (блок) неисправности цепей напряжения (БНН). По его
сигналу и при срабатывании трех программных минимальных реле напряжения
ЦптЛ> UminB> UminC [опеРаЦия DX44 (И)], контролируемых максимальными реле
включенного состояния выключателя линии РТвА, РТвВ, РТвС [операции DW92
(ИЛИ) и DX44 (И)], выводятся из действия пусковые программные реле
сопротивления Z±A, Z±B, Z±c цепей отключения [операции DW96 (ИЛИ) и DX97
(ЗАПРЕТ)] и формируется сигнал «Неисправность цепей напряжения» через
DW47 и DT21(53). При этом происходит лишь некоторое загрубление защиты при
трехфазных КЗ.
Однако воздействие на отключение пускового программного реле напряжения
обратной последовательности U2oT разрешается разомкнутый накладкой ХВ4
(сигнал 1) — операция DX99 (И), но только при наличии сигналов /2бл, А/бл [операция
DW116 (ИЛИ)].
Сигнал БНН контролируется программным реле тока /0 нулевой
последовательности, поскольку БНН может излишне сработать при однофазном КЗ внутри
контура заземления электростанции или подстанции: запрещение его действия произ-
230 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
водится сигналом 1 на инверсном входе программного элемента DX (ЗАПРЕТ),
сигнал 0 фиксируется программным триггером на элементах DX50 и DW51,
замкнутых ОС.
Дифференциально-фазная защита серии «БРЕСЛЕР». Микропроцессорная
ДФЗ «ИЦ «БРЕСЛЕР», выпускается на специальном терминале типа «БРЕСЛЕР-401»
в трех модификациях для линий электропередачи напряжением 110—220 кВ и 330 кВ
и линий сверхвысокого напряжения 500—750 кВ, интегрированная с однофазным
АПВ, в виде шкафов «БРЕСЛЕР 2604.111» и «БРЕСЛЕР 2704.51» соответственно.
Защита отличается применением ряда новшеств, совершенствующих алгоритм
ее функционирования и повышающих быстродействие на отключение КЗ [29], а
терминал имеет высокоскоростной аппаратный выход для управления
высокочастотным передатчиком.
Новым, более эффективным и менее инерционным является способ
формирования ортогональных составляющих принужденных напряжений и токов
промышленной частоты электромагнитных переходных процессов в ЭЭС. Вместо
цифрового частотного фильтра Фурье применяется несколько различных нерекурсивных
фильтров, в том числе адаптивный с автоматическим выбором наиболее
эффективного и быстродействующего в конкретной ситуации.
В пусковом органе защиты применены программные фильтр-реле аварийных
составляющих фазных токов, их разностей и симметричных составляющих с
ортогональным алгоритмом их выделения [29]. Используется и ток нулевой
последовательности. В токовый пусковой орган введена компенсация емкостных токов
линий сверхвысокого напряжения.
При этом к пусковым программным реле напряжения обратной
последовательности полукомплектов защиты подводится одно и то же вычисляемое напряжение,
пропорциональное напряжению обратной последовательности в середине
защищаемой линии, что повышает устойчивость функционирования защиты [39].
Пуск защиты по аварийным составляющим токов существенно повышает
чувствительность, особенно при КЗ в неполнофазном режиме в цикле ОАПВ.
Для снижения влияния помех от короны на длинных линиях сверхвысокого
напряжения в органе манипуляции высокочастотным передатчиком осуществлена
специальная фазовая коррекция [29]. Связь между приемопередатчиками
полукомплектов защиты производится по волоконно-оптической линии, что повышает
быстродействие сравнения фаз токов.
Элемент сравнения фаз является более быстродействующим за счет трехка-
нального [29] его выполнения.
По новым алгоритмам функционируют программные избиратели
поврежденного провода линии при однофазных КЗ и органы контроля погасания
электрической дуги (КПЭД) и успешности включения линии (КУВ) с одной стороны при
ОАПВ. Избиратель поврежденных фаз выпускается в виде отдельного изделия
типа «БРЕСЛЕР ТЛ 2605».
9.5. Микропроцессорные дистанционная и токовая направленная защиты 231
Выбор поврежденной фазы производится комбинированными программными
реле суммы токов обратной и нулевой последовательностей и реле приращения
абсолютного значения суммы их векторов. Второе из них предназначено и для
защиты линии электропередачи в неполнофазном режиме цикла ОАПВ. Важной их
особенностью является высокое быстродействие — они должны срабатывать
раньше формирования сигнала на отключение дифференциально-фазной защитой.
Особенности органов КПЭД и КУВ рассмотрены в гл. 10.
Особенностями действия ДФЗ и ОАПВ на отключение и включение
выключателей линии электропередачи являются также:
• отключение только одной фазы при двухфазных КЗ;
• отключение неповрежденных фаз при непогасании электрической дуги
однофазного КЗ на землю;
• очередность отключения неповрежденных фаз при неуспешном ОАПВ.
Дифференциально-фазная защита в виде терминала БМРЗ-ДФЗ,
выпускаемая «НТЦ Механотроника» и предназначенная для линий электропередачи
напряжением ПО и 220 кВ, интегрирована с трехфазным АПВ. Основными ее
особенностями являются:
• только токовые пусковые органы — кроме токов обратной и нулевой
последовательностей; для пуска защиты используются сигналы, формируемые по
приращениям токов прямой и обратной последовательностей, аварийной
составляющей фазного тока и по разности векторов фазных токов;
• наличие третьей уставки пусковых органов, обеспечивающей защиту
трансформатора без выключателя на отпайке от защищаемой линии;
• отстройка от бросков тока намагничивания трансформатора;
• интегрирующий орган сравнения фаз, накапливающий сигнал в зависимости
от соотношения длительностей импульсов тока высокой частоты и пауз между
ними, и расширение длительности его выходного сигнала;
• задержка на 25 мс действия на отключение линии при внутренних КЗ (точка
К1 на рис 9.6) и задержка на 50 мс при фиксации внешнего КЗ (точка К2) для
повышения устойчивости функционирования защиты — предотвращения
излишних срабатываний.
9.5. Микропроцессорные дистанционная
и токовая направленная нулевой последовательности
защиты линий электропередачи
Микропроцессорные дистанционная и токовая направленная нулевой
последовательности защиты, интегрированные с однофазными автоматическим
повторным включением, выпускаются ООО «НПП «ЭКРА» в виде шкафов ШЭ1027 521
[91]. Они применяются или в качестве основных, поскольку используют
высокочастотный канал связи для ускорения действия на отключение, или резервных
232 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
защит при наличии на линии дифференциально-фазной высокочастотной защиты
ШЭ1027 582 или «БРЕСЛЕР ШЛ 2704.52».
Дистанционная защита. Основными измерительными органами
дистанционной защиты по принципу ее действия [39] являются комплексы программных
измерительных реле сопротивления, вычисляющие сопротивление линий от места
установки защиты до места КЗ по соотношениям:
• междуфазных напряжений и разностей фазных токов — трехфазные
комплексы измерительных реле от междуфазных КЗ;
• фазных напряжений и сумм фазных токов и тока нулевой
последовательности — трехфазные комплексы измерительных реле от КЗ на землю.
Дистанционная защита трехступенчатая:
• первая ступень охватывает не менее трех четвертей длины защищаемой
линии, практически мгновенно действующая;
• вторая ступень защищает с запасом всю длину линии с минимальной
выдержкой времени;
• третья ступень служит для дальнего резервирования, отстроена только от
минимального сопротивления в наиболее тяжелом рабочем режиме, с
максимальной выдержкой времени действия на отключение.
Для обеспечения высокой надежности действия на отключение при близких к
месту установки защиты КЗ, т.е. при практически нулевых действующих
значениях междуфазных напряжений, при которых измерительные реле первой ступени
«PC I ступени» (см. рис 9.12) могут срабатывать лишь кратковременно, благодаря
запоминанию (на два-три периода) напряжения нормального режима (срабатывать
«по памяти»), в защите предусмотрен комплекс из трех дополнительных
измерительных реле сопротивления «PC дополн.» с характеристиками срабатывания,
охватывающими начало координат.
Характеристики срабатывания измерительных реле сопротивления,
формируемые свойственными вычислительной технике способами, различны. Они имеют
многоугольную форму (рис 9.11). Характеристики направленных реле первой-тре-
тьей ступеней расположены в верхней полуплоскости, а дополнительной,
обеспечивающей «подхват» кратковременного срабатывания «по памяти»
измерительного реле первой ступени при близких трехфазных КЗ, — в верхней полуплоскости
(частично совпадает с характеристикой второй ступени), но охватывают начало
координат и часть нижней полуплоскости комплексного сопротивления.
Устанавливаемые реактивные сопротивления срабатывания Х1ст, Х11ст и ХШст
(уставки), приведенные ко вторичным цепям первичных измерительных
трансформаторов напряжения и тока, находятся в диапазоне 1—500 Ом.
Активные составляющие уставок i?IcT, i?IIcT, i?IIIcx и углы наклона
характеристик ф1? ф2, ф3? учитывающие переходные сопротивления в местах КЗ и угол
сопротивления линии фл, также могут изменяться в широких пределах (я/4 < ф1 < тс/2;
- тс/2 < ф2(1> п) < 0; 0 < ф2(ш) < я/2 и я/2 < (ф3(1> п), ф3(ш) < я).
9.5. Микропроцессорные дистанционная и токовая направленная защиты
233
III ступень
чф1(Ш)
Дополнительная
^2(1,11)
Рис. 9.11. Характеристики срабатывания PC дистанционной защиты
Сопротивления срабатывания измерительных реле ограничиваются
аналогичными (9.4), (9.5) неравенствами.
Дистанционная защита использует и сигналы программных максимальных
реле фазных токов [блокирующих реле тока БРТ (рис 9.12)] с минимальными
(несколько процентов номинального тока нагрузки линии) тока срабатывания, не
разрешающими формировать защитой управляющие воздействия на выключатель
линии после отключения одного провода линии при однофазных КЗ на землю —
логические операции совпадения (И) сигналов «PC от КЗ на землю» и от БРТ
(элементы DX90, DX91, DX92 в измененных обозначениях и нумерации разработчиков
[91]), или в'циклеОАПВ — операции совпадения (И) сигналов измерительных
реле сопротивления всех трех ступеней и сигналов БРТ (DX12—DX14; DX19—
DX21 и DX23—DX25). Нулевые (неразрешающие) логические сигналы БРТ
формируются одним из возвращающихся измерительных реле фазного тока или по
мажоритарной схеме (возврате двух из трех реле тока) — логические операции
DX05, DX06, DX07 (И) при замкнутой программной накладке ХВ2 (нулевой
логический сигтл), разомкнутой накладке ХВЗ (единичный логический сигнал) и
поступлении логической единицы на инверсный вход элемента DX11 — сигнала
фиксации цикла однофазного автоматического повторного включения ФЦО.
Описанное действие измерительных реле сопротивления ЗАПРЕТ от БРТ
необходимо для предотвращения потери устойчивости функционирования
дистанционной защиты в циклах ОАПВ [39].
9.5. Микропроцессорные дистанционная и токовая направленная защиты 235
Поскольку дистанционная защита по принципу действия использует
малонадежные цепи вторичных напряжений первичных измерительных трансформаторов
напряжения, а ее измерительное реле сопротивления подвержены влиянию
качаний в энергосистеме [39], то на нее воздействуют:
• запрещающий единичный логический сигнал от программного блока
неисправности цепей напряжения БНН (логические операции И-ЗАПРЕТ: DX27,
DX28, DX31, DX35, DX40, DX71 и DX93);
• разрешающие единичные сигналы программной блокировки от качаний БК и
асинхронного режима, разрешающей действовать лишь на время, достаточное для
срабатывания быстродействующей первой «I ступень ДЗ» и ускоренной второй
«II ступень ДЗ» ступеней защиты (операция задержки на быстрый возврат DTB) и
разрешающий на более длительное время действовать медленной третьей «III
ступень ДЗ» ступени защиты (операция задержки на медленный возврат DTM).
Действие комплексов из трех фазных измерительных реле сопротивления «PC
от КЗ на землю», вводимых размыканием (единичный логический сигнал на
верхнем входе DX04 (И) накладки ХВ7 и измерительных реле сопротивления трех
ступеней защиты от междуфазных КЗ объединено логическим операциями ИЛИ
DX03, DW16, DW17, DW22 и DW26. Размыкание программной накладки ХВ8
(логическая единица на среднем входе DX18) обеспечивает указанный «подхват»
кратковременного (при близких КЗ) срабатывания «PC I ступени» с
характеристиками срабатывания, проходящими через начало координат комплексной плоскости
сопротивлений, дополнительными реле сопротивления «PC дополн.» с
характеристиками, охватывающими начало координат (см. рис 9.11).
От измерительных реле сопротивления второй ступени и через операцию
DW32 (ИЛИ) от измерительных реле трех ступеней защиты подаются
вспомогательные сигналы к БК, обеспечивающие должное ее действие, в частности возврат
в исходное состояние, при качаниях и асинхронном режиме: измерительными реле
БК являются чувствительное и грубое максимальные программные реле тока.
Разрешение действия на отключение первой с незначительной задержкой DT1
ступени (выходное воздействие «I ступень ДЗ») сигналом от элемента DTE
обеспечивается логическими операциями DX28 (И-ЗАПРЕТ), DW29 (ИЛИ),
образующими, благодаря охватывающей их положительной обратной связи (ОС) логическую
операцию ПАМЯТЬ (программный триггер). Аналогично операциями DX05 (И) и
DW30 (ИЛИ) производится ввод в действие на время элемента DTE второй ступени
защиты, которая формирует выходное воздействие «II ступень ДЗ» с выдержками
времени или через DX31 (И-ЗАПРЕТ) и DT2 при показанном на рис 9.12
положении программного переключения М— D36 (накладка ХВ10 замкнута —
логический нуль) или с незначительной задержкой DT4 при наличии на нижнем входе
элемента DX37 (И) сигнала оперативного ускорения ее действия «Ввод ОУ ДЗ».
236 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
На время задержки элемента DTM операцией ПАМЯТЬ [программные элементы
DW33 (ИЛИ) и DX34 (И) охвачены обратной связью] вводятся в действие:
• вторая ступень — с большей, чем DT2, выдержкой времени DT3 через DX35
(И-ЗАПРЕТ) при разомкнутой накладке ХВ10 (логическая единица —
переключатель M{D36) в противоположном показанному на схеме положении);
• третья ступень — с выдержкой времени DT5 через программный элемент
DX40 (И-ЗАПРЕТ) — выходное воздействие «III ступень ДЗ».
Логическими операциями DX28, DX31, DX35, DX40 (И-ЗАПРЕТ)
формируются сигналы о срабатывании измерительных реле сопротивления первой,
второй и дополнительной ступеней защиты. Сигналы о срабатывании «I ступень ДЗ»,
«II б ступень ДЗ» (быстродействующая) и «II м ступень ДЗ»
(медленнодействующая), об ускорении второй ступени «Оперативное ускорение» и о срабатывании
«III ступень ДЗ».
Токовая направленная защита нулевой последовательности.
Принципиально микропроцессорная токовая направленная защита нулевой
последовательности (ТНЗНП) выполняется по традиционной схеме четырехступенчатой защиты.
Ее основными измерительными органами являются комплекты максимальных
измерительных реле тока (РТ /0) и реле направления мощности нулевой
последовательности (РНМНП).
Основные особенности программной ТНЗНП обусловливаются
автоматическими изменениями (программными накладками) выполняемых функций как
направленной, так и ненаправленной защиты с использованием не только
разрешающего, но и запрещающего (блокирующего) РНМНП (см. рис 9.13), вводом
автоматического ускорения АУ при включении выключателя линии, ускорения
действия высокочастотным сигналом полукомплекта противоположного конца линии
фиксацией цикла ОАПВ ФЦО, вводом ускорения от блокирующих РНМНП
параллельной линии и свойственными микропроцессорной реализации сервисными
функциями.
Программные измерительные реле тока и реле направления мощности нулевой
последовательности функционируют на основе ортогональных (синусной и
косинусной) составляющих тока и напряжения нулевой последовательности (см. гл. 1)
с вычислениями амплитуды тока и угла сдвига фаз между напряжением и током по
соотношениям (1.4) и (1.7).
Разрешающее РНМНП срабатывает при КЗ на землю на защищаемой или
следующей (по контролируемому направлению) линии (при направлении мощности
нулевой последовательности от линии к шинам подстанции), а блокирующее —
при ее направлении от шин в линию (КЗ на землю «за спиной»).
Направленность первой ступени «РТ 10 I ступени» (рис 9.13) контролируется
[через логическую операцию DW03 (ИЛИ)] только разрешающим РНМНП
логической операцией (программным логическим элементом) DX07 (И) при замкнутой
программной накладке ХВ43 (логический сигнал 0 на верхнем входе DW06).
9.5. Микропроцессорные дистанционная и токовая направленная защиты
237
DW00
ФЦ02 » |Тп
| ФЦ01 123
ВводАУзащитнп
QlwmQl ]1У
I ступень ТНЗНП»
II ступень ТШНП>>-Гг 1
III ступень ТНЗНП
Шст.ТНЗНПсОУ»
IV ступень ТНЗНП >>-
Каскадная отсечка »-
РНМНП
разрешающее
РТ БТНТ
II ступени
Ввод ОУТНЗНП
-«ФЦО
и
ГУ ступени
.Ввод ускорения от
[параллельной линии
Ускорение от
i параллельной линии
21
DW24 Щ25
Ш53
ХВ55
DX29
[Шб
D27
ХВ54
DW0
ЛШП
XB52\*xhU г—I I
DX33
DT26
&Н-4
С<МФО
Токовая отсечка
■f—« I ступень ТНЗНП
I ст. ТНЗНП
—« II ступень ТНЗНП
II ст. ТНЗНП
III ст. ТНЗНП
-*—« III ступень ТНЗНП
Опер, ускорение
-« III ст. ТНЗНП с ОУ
Щ ГУ ст. ТНЗНП
«IV ступень ТНЗНП
РТ/
СIII ступени°(БТНТ)
, Контроль ВЧС № 4
' от ТНЗНП
.Контроль ВЧС №2,3
' от ТНЗНП
-« Каскадная отсечка
,, Ускорение к ТНЗНП
параллельной линии
Рис. 9.13. Схема токовой направленной защиты нулевой последовательности (ТНЗНП) и
междуфазной отсечки (МФО)
Направленность второй—четвертой ступеней «РТ /0II ступени», «РТ /0III
ступени» и «РТ /0 IV ступени», контролируется как разрешающим РНМНП (через
DW03), так и запрещающим [через инвертор DU12 при разомкнутых накладках
ХВ47, ХВ48 (логические сигналы 1 на нижних входах DX09 и DX13\ операциями
DX11, DX17 и DX23 (И) при замкнутых программных накладках ХВ44, ХВ45 и
^/[сигналы 0 на верхних входах DW10, DW16 и DW22 (ИЛИ)].
238 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
Воздействия на отключение выключателя линии и на светодиоды сигнализации
выдаются:
• первой ступенью — с небольшой задержкой по времени DT21\
• второй — четвертой ступенями — с выдержками времени DT22, DT23 и
D724 соответственно.
При введенном оперативном ускорении — дискретный входной сигнал
«Ввод ОУ» третья ступень через DX21 (И) действует лишь с задержкой DT25.
Для обеспечения устойчивого действия защиты на отключение при неполно-
фазном включении выключателя или неполнофазном его отключении
предусмотрен вывод направленности действия соответственно:
• при введенном разомкнутой программной накладкой ХВ42 [логическая 1 на
нижнем входе программного элемента DX05] автоматическом ускорении
отключения выключателя линии при его включении оператором;
• после срабатывания одной из ступеней защиты через операцию DW01 (ИЛИ)
при разомкнутой программной накладке ХВ41 [логическая 1 на нижнем входе
программного элемента DX02.
В цикле однофазного повторного включения дискретным сигналом фиксации
его цикла ФЦ01 (от ОАПВ панелей защиты выключателя Q1) или ФЦ02 (от
ОАПВ панелей защиты выключателя Q2, см. § 9.2) производится:
• или вывод направленности первой-третьей ступеней ТНЗНП через
программные логические элементы DW00 и DW03 (ИЛИ) при замкнутых программных
накладках ХВ43, ХВ44 и ХВ45 (логические нули на входах DW06, DW10hDW16);
• или вывод трех ступеней ТНЗНП из действия при замкнутых программных
накладкахХВ49, ХВ50, ХВ51 (логические нули на входах DW08, DW14, DW18).
В нижней части (рис 9.13) показаны цепи формирования третьей ступени [через
DX31 (И)] воздействия на отключение «Каскадная отсечка» от блокирующего
РНМНП защиты параллельной линии — сигнал «Ввод ускорения от параллельной
линии» через операцию DX33 (И) при наличии сигнала 1 на входе «Ускорение от
параллельной линии» и замкнутой накладке ХВ52 [логический нуль на нижнем
входе программного логического элемента DW32]. Воздействие разрешается при
срабатывании разрешающего и несрабатывании [инвертор DU12 и программный элемент
DX15 (И)] блокирующего РНМНП защищаемой линии и запрещается в цикле ОАПВ
сигналами его фиксации ФЦО. Последняя цепь от блокирующего РНМНП
формирует сигнал ускорения третьей ступени ТНЗНП параллельной линии.
В состав панели ШЭ2710 521 входит и одноступенчатая трехфазная токовая
защита (многофазная отсечка) МФО — программные максимальные
измерительные реле тока РТ1А, РТ1В, РТ1С. При разомкнутой накладке ХВ57 [(логическая
единица на нижнем входе DX41 (И)] они действуют на отключение или по
мажоритарной схеме (срабатывание двух реле из трех), организуемой логическими
операциями DX35, DX36 и DX37 (И) или самостоятельно через программный элемент
DW34 (ИЛИ) в зависимости от состояния программного переключателя D40. Он
переключается в цикле ОАПВ сигналами ФЦО. При замкнутой программной
накладке ХВ57 (логический нуль на входе DX41) токовая отсечка через операцию
DX42 (И) действует только по сигналу «Ввод АУ».
9.5. Микропроцессорные дистанционная и токовая направленная защиты
239
ФЦО
ДФЗ, МФО"
PC I ступени
PC II ступени
DX25
DW59
МФО
Отключение трех фаз от ОАЛВ^-
DX30
-< Пуск ВЧС №3 |
DW08
II ступень ДЗ
II ступень ДЗ с ОУ
>J
III ступень ДЗ
^
II ступень ТНЗНП
III ступень ТНЗНП ~>-
III ступень ТНЗНП с ОУ >-
ГУ ступень ТНЗНП У-
Ю-О-1
ХВ61
&
ХВ62 ,
DX11
ВЧС №2
DX13
Ф1Ю
ХВ56 ,
Контроль ВЧС № 2,3 отТНЗНП^>-
гь
DW12
Контроль ВЧС №2-4 от ДЗ "V—f
&
-< ЗапрегТАПВ |
DW22
-< Пуск ВЧС №2 |
DW09
ХВ63 ,
DX27
ВЧС№3
Щ-
/ Трехфазное I
\ отключение 1
DW58
Контроль ВЧС № 4 от ТНЗНП
АУ
DX30
4 &
-< ЗапрегТАПВ |
-< Пуск ВЧС №4 |
\XB64
L
DX31
ВЧС №4
Ж-
На пуск ОАПВ |
Рис. 9.14. Схема, иллюстрирующая взаимодействие между полукомплектами защит по
высокочастотным сигналам
Взаимодействие между полукомплектами резервной зашиты двух концов
линии. Резервные защиты линии шкафов ШЭ2710 521, установленным по концам
линии, взаимодействуют между собой путем выдачи и приема высокочастотных
сигналов (ВЧС) № 1—4 (рис 9.14) с использованием соответствующей
аппаратуры, например типа АНКА (см. рис 9.1). Сигнал № 1 выдается шкафом
автоматики управления выключателем типа ШЭ2710 511 при срабатывании УРОВ линии,
УРОВ и защит реактора ШР.
На приемном конце ВЧС № 1 принимается шкафом ШЭ2710 521 —
дискретный вход 25 (рис 9.14) и действует на трехфазное отключение выключателя с
запретом ТАПВ. Цепь приема ВЧС № 1 вводится размыканием программной
накладки ХВ61 (сигнал 1 на нижнем входе DX30).
Сигнал запуска ВЧС № 2 формируется через операцию DW08 (рис 9.14) при
срабатывании: второй и третьей ступеней ТНЗНП и второй ступени ДЗ с
оперативным ускорением (см. рис 9.12); второй — четвертой ступеней и третьей ступени
ТНЗНП с оперативным ускорением (см. рис 9.13).
240 Глава 9. МИКРОПРОЦЕССОРНАЯ РЕЛЕЙНАЯ ЗАЩИТА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
Цепь приема ВЧС № 2 — дискретный вход 26 (рис 9.14) вводится размыканием
программной накладки ХВ62 (сигнал 1 на верхнем входе DX11) и контролируется
через программные элементы DW30, DX22, DW70, DX71, DW39 (см. рис 9.12)
сигналами срабатывания ДЗ (второй ступени), ее БК (от DTE) (см. рис 9.12) и
избирателей поврежденной фазы ИПФ схемы ОАПВ (сигнал фиксации его цикла ФЦО
через элементы DW24 (при замкнутой накладке ХВ53, см. рис 9.13) или при
срабатывании «РТ10IV ступени» — элемент DX29 [при разомкнутой накладке ХВ55
(сигнал 1 на верхнем его входе)], DX26, DW30 и программный переключатель D27 (при
замкнутой накладке ХВ54) схемы ТНЗНП.
Размыканием программной накладки ХВ56 [сигнал 1 на нижнем входе DX13
(рис 9.14)] разрешается действие на отключение по цепи приема ВЧС № 2 в цикле
ОАПВ (по сигналу ФЦО) без указанного контроля.
Выполняется трехфазное отключение линии [через элемент DW22 (ИЛИ)]
операциями DX11 (при разомкнутой накладке ХВ62), DW09 и DW22 с выдачей
сигналов запрета ТАПВ.
Сигнал № 3 выдается (через элемент DW59) при срабатывании ДФЗ или МФО
(рис 9.14), самостоятельном действии первой или второй (через элемент DW24)
ступеней ДЗ («PC I ступени», «PC II ступени») на отключение в цикле ОАПВ
(через элемент DX25 сигналом ФЦО) или действии ОАПВ на отключение трех фаз
через программный элемент DW59.
На приемном конце ВЧС № 3 (дискретный вход 27) контролируется теми же
сигналами, что и ВЧС № 2, вводится разомкнутой программной накладкой ХВ63
(сигнал 1 на верхнем входе DX27) и действует (через DW22) на трехфазное отключение.
Сигнал № 4 формируется срабатыванием: «PC I ступени» и «PC II ступени» ДЗ
или избирателя поврежденной фазы (ИПФ) схемы ОАПВ (см. DW39 на рис 9.12);
реле тока третьей ступени (через DX26) и разрешающего РНМНП [через DX15 и
DX25 (см. рис 9.13)] или только разрешающего РНМНП [выбирается замкнутой
программной накладкой ХВ54 [сигнал 0 на входе переключателя D27)].
На приемном конце ВЧС № 4 (дискретный вход 28 на рис 9.14) вводится
разомкнутой программной накладкой ХВ64 (сигнал 1 на верхнем входе DX31) и
контролируется соответствующими сигналами срабатывания ДЗ и схемы ТНЗНП (см.
рис 9.12 и 9.13).
На время ввода автоматического ускорения резервных защит АУ (рис 9.14) при
включении выключателя пуск ВЧС № 4 запрещается элементом DX30.
Вопросы для самопроверки
1. Какие известны и кем разработаны отечественные микропроцессорные защиты линий
электропередачи высокого и сверхвысокого напряжений?
2. В чем состоят принципы действия, обеспечивающие абсолютную селективность
микропроцессорных высокочастотных фильтровой направленной и дифференциально-фазной защит?
3. Какие известны отечественные микропроцессорные высокочастотные защиты линий
электропередачи высокого напряжения ПО—220 кВ? Какие из них интегрированы с трехфазным
повторным включением (ТАПВ)?
Вопросы для самопроверки
241
4. Какие микропроцессорные высокочастотные защиты линий электропередачи сверхвысокого
напряжения 500—750 кВ интегрированы с однофазным автоматическим повторным включением
(ОАПВ)?
5. Как выделяются входные сигналы в виде принужденных составляющих токов КЗ в
дифференциально-фазных защитах ООО «НПП «ЭКРА» и 000 «ИЦ «БРЕСЛЕР»?
6. Почему в фильтровой направленной высокочастотной защите предусматривается два
программных измерительных реле, действующих на пуск высокочастотного передатчика и
подготавливающих цепь отключения? Какая между ними разница?
7. Как выглядит фазная характеристика микропроцессорной дифференциально-фазной
высокочастотной защиты (ДФЗ) линии электропередачи?
8. Какими программными измерительными реле осуществляется пуск микропроцессорных
высокочастотных фильтровой направленной и дифференциально-фазной защит при несимметричных и
трехфазных КЗ?
9. В чем состоят различия между программными пусковыми органами дифференциально-фазных
защит ООО «МПП «ЭКРА» и ООО «ИЦ «БРЕСЛЕР»?
10. Почему в высокочастотных микропроцессорных защитах с абсолютной селективностью
предусматриваются программные измерительные сопротивления?
11. Как действуют высокочастотные микропроцессорные защиты с абсолютной селективностью при
нарушениях, в частности перегораниях предохранителя во входных цепях напряжения?
12. В чем состоят особенности микропроцессорной дистанционной защиты линий электропередачи?
Какие программные измерительные реле сопротивления и с какими характеристиками в них
применяются?
13. Как обеспечивается устойчивость функционирования микропроцессорных дистанционных защит
при качаниях в электроэнергетических системах?
14. Какими особенностями и достоинствами обладает микропроцессорная токовая направленная
нулевой последовательности защита линий электропередачи?
15. В чем состоит взаимодействие между полукомплектами резервных микропроцессорных защит
линий электропередачи?
Глава десятая
МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ
АВТОМАТИКА ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
ВЫСОКОГО И СВЕРХВЫСОКОГО НАПРЯЖЕНИЙ
10.1. Виды микропроцессорной автоматики
Микропроцессорная противоаварийная автоматика линий электропередачи
высокого и сверхвысокого напряжений принципиально традиционная.
Особенность состоит лишь в интегрированном с релейной защитой выполнении.
Основными видами являются автоматика повторного включения линии после ее
отключения релейной защитой и автоматика ограничений повышения напряжения.
На линиях электропередачи напряжением до 330 кВ применяется, главным
образом, автоматика трехфазного повторного включения (ТАПВ). Линии с
односторонним питанием оснащаются простейшей ТАПВ БК (без всякого контроля).
На линиях с двусторонним питанием ТАПВ действует как несинхронная (НТАПВ)
с контролем отсутствия напряжения на линии (ОН) при включении первого из
выключателей и наличии симметричного напряжения (НСН) при включении
второго из них. Различаются и виды ускоренной автоматики (УТАПВ).
При невозможности применения НТАПВ из-за больших токов несинхронного
включения в генераторах электростанций применяется трехфазная автоматика
повторного включения с синхронизацией (ТАПВС) [40].
Линии электропередачи напряжением 500 и 750 кВ оборудуются наряду с
ТАПВ однофазной автоматикой повторного включения (ОАПВ).
Микропроцессорная автоматика трехфазного повторного включения (ТАПВ-М)
интегрирована с автоматикой управления выключателем присоединений высокого
и сверхвысокого напряжений в виде шкафа типа ШЭ2710 511 ООО «НПП «ЭКРА»
[26], дифференциально-фазной и направленной высокочастотными защитами
«БРЕСЛЕР ШЛ 2604», и «БРЕСЛЕР ШЛ2607», автоматикой управления
выключателем «БРЕСЛЕР ШЛ 2606» [26—29] и с направленной высокочастотной защитой
типа БМРЗ-НВЧ (НТЦ «Механотроника»).
Микропроцессорная однофазная автоматика повторного включения (ОАПВ-М)
функционирует в терминалах дифференциально-фазной и дистанционной защит
типов ШЭ2710 582, ШЭ2607 521 [27, 28] и «БРЕСЛЕР ШЛ 0411» с избирателями
«БРЕСЛЕР ТЛ 2605.10» [29].
С микропроцессорной релейной защитой в указанных терминалах
интегрированы автоматика определения расстояния до места повреждения (ОМП),
регистрация напряжений и токов электромагнитных переходных процессов и устройства
резервирования отказа выключателей (УРОВ).
10.2. Микропроцессорная автоматика повторного включения
243
В ОАО «Институт «Энергосетьпроект» разработана микропроцессорная
автоматика ограничений повышений напряжения на линиях высокого и сверхвысокого
напряжений (ОАПН-М) с контролем ресурса изоляции линий [66]. Более простая
АОПН-М выпускается и АО «АББ Автоматизация» в виде терминала типа «REO
511 VSP»[25].
В ЗАО «РАДИУС Автоматика» создано микропроцессорное устройство
определения расстоянии до мест КЗ — индикаторы микропроцессорные фиксирующие
типов ИМФ-1М, ИМФ-ЗС [95].
НПП «ЭКРА» поставляет терминал типа БЭ2704 V900, регистрирующий
напряжения и токи электромагнитных и электромеханических переходных
процессов в ЭЭС [100].
10.2. Микропроцессорная автоматика
повторного включения
Автоматика трехфазного повторного включения реализуется терминалами
автоматики управления выключателем (АУВ) в виде шкафа типа ШЭ2710 511, защит
и АУВ типа «БРЕСЛЕР ШЛ 2606», дифференциально-фазной защиты «БРЕСЛЕР
ШЛ2604.11» и направленной высокочастотной защиты типа БМРЗ-НВЧ, которые
выполняют:
• несинхронное АПВ с включением выключателя отключаемой линии
электропередачи с одной стороны с контролем отсутствия напряжения (ТАПВ-ОН), а с
другой — с контролем наличия симметричного напряжения (ТАПВ-НСН);
• ускоренное повторное включение (УТАПВ) с временем действия от 0,05 с,
осуществляемое при фиксировании первого срабатывания быстродействующей
автоматики защитного отключения линии электропередачи: дифференциально-фаз-
ной и фильтровой направленной мощности обратной последовательности
высокочастотных защит, дистанционной и токовой направленной нулевой
последовательности с высокочастотными сигналами ускорения их действия;
• АПВ с контролем наличия симметричных и синхронных напряжений с обеих
сторон отключенного выключателя и с синхронизацией (ТАПВС).
Микропроцессорный комплекс ТАПВ обладает не только традиционными
(пуск по цепи несоответствия, недействие при включении выключателя ключом
управления на КЗ и др., но и специфическими свойствами. Микропроцессорная
автоматика (ТАПВ-М) осуществляет оценку тяжести КЗ, отключаемого релейной
защитой: при близких КЗ автоматически изменяется очередность повторного
включения выключателей линий электропередачи. Первым включается более
удаленный выключатель. Таким образом, облегчается работа и существенно
снижается износ выключателей.
Ускорение действия защит повторно включаемого выключателя при УТАПВ и
ТАПВ-ОН снижает тяжесть возмущающего воздействия на
электроэнергетическую систему при устойчивых КЗ.
244 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
Автоматический ввод в самостоятельное действие избирателей поврежденных
фаз ОАПВ снижает время отключения КЗ на землю.
При неуспешном повторном включении выключателя ТАПВ-М выдает
соответствующую информацию в общеэнергосистемную противоаварийную
автоматику предотвращения нарушения устойчивости (АПНУ) и его действие
запрещается сигналами АПНУ.
Осуществляется самодиагностика и выдается информация о неисправностях.
Естественно, ТАПВ-М обладает всеми сервисными свойствами, характерными
для микропроцессорной автоматики.
Функциональная схема ТАПВ-М. Вычислительная часть сдвоенной,
предназначенной для выключения одного Q1 или второго Q2 выключателя линии (см.
рис 10.1) ТАПВ-М содержит два комплекта программных:
• фильтр-реле напряжения прямой последовательности PHI Ux Ql, РН2 Ux Ql;
• фильтр-реле напряжения обратной последовательности PHU2Q1 и PHU2Q2;
• фильтр-реле напряжения нулевой последовательности PHU0Q1 и PHU0Q2.
Они необходимы для контроля отсутствия напряжения (ОН) и наличия
симметричного напряжения (НСН) на концах включаемой с одной стороны линии — со
стороны одного питающего присоединения шин электростанции или подстанции и
других электроэнергетических объектов с другой стороны. Их использование
обеспечивает быстродействующий контроль неотключенных КЗ и неполнофазных
односторонних отключений и включений.
Фильтр-реле напряжений прямой, обратной и нулевой последовательностей
программно реализуются по ортогональным (синусной и косинусной)
составляющим междуфазных напряжений и напряжения нулевой последовательности,
получаемого непосредственно от первичного измерительного трансформатора
напряжения. Используется один из способов формирования ортогональных
составляющих [3], в частности по двум дискретным (после АЦП) мгновенным их значениям
[см. (1.2) и (1.3)]. Программные фильтры симметричных прямой и обратной
последовательностей составляющих выполняются на основе умножений синусной и
косинусной составляющих междуфазных вторичных напряжений на
коэффициенты 1/2 и 7з/2 и суммирования произведений с разными знаками [см. (1.20) и
(1.21)]. При этом формируются ортогональные составляющие напряжений прямой
и обратной последовательностей. Амплитуды симметричных составляющих
вычисляются по сумме квадратов их синусной и косинусной составляющих [см.
(1.4)]. Программные элементы сравнения амплитуд с предписанными значениями
(уставками) измерительных реле представляют собой типовые арифметические
операции вычитания двоичных чисел.
Для осуществления ТАПВС необходим автоматический синхронизатор (см.
гл. 2). Он выполняется на трех программных минимальных измерительных реле:
• разности амплитуд напряжений на разных сторонах отключенного
выключателя, срабатывающего при AUm^nT^ < &У ;
10.2. Микропроцессорная автоматика повторного включения 245
• угла сдвига фаз между ними и разности частот А/(л7), разрешающих
включение выключателя при 8 < 5пр и Д/< Af .
По принципу действия синхронизатор является простейшим,
функционирующим с постоянным углом опережения 80П = 8пр. При известных ортогональных
составляющих напряжений угол сдвига фаз вычисляется как разность углов,
тангенсы которых равны отношениям синусных и косинусных их составляющих [см.
(1.6) и (1.7)], а частоты могут вычисляться по трем дискретным мгновенным
значениям [см. (1.10)].
Фрагмент логической схемы контроля напряжений и их синхронизма, в
частности шкафа ШЭ2704 511 [26] показан на рис 10.1. Сигнал отсутствия
напряжения после первого выключателя.OH-Q1 формируется на выходе программного
логического элемента DX2 (И) при одновременном поступлении на его входы
единичных логических сигналов от программных инверторов DU1, DU2 и DU3 (НЕ)
нулевых сигналов об отсутствии срабатывания программных измерительных реле
напряжения PHU0Q1, PH2UXQ1 и PHU2Q1. Аналогично программным элементом
DX4 (И) через инверторы DU4, DU5 и DU6 формируется сигнал об отсутствии
напряжения на линии перед вторым выключателем OH-Q2.
Сигналы наличия симметричного напряжения перед вторым HCH-Q2 или
после первого HCH-Q1 выключателей формируются на выходах программных
логических элементов DX3 или DX1 (И) при одновременном поступлении на их
входы единичных логических сигналов о срабатывании реле PH1UXQ2 или
mu2Qi
PHl^Qi
РШС^ Ql
PKC
по At/, А/и5
РНШ^
I KQC >-
DU1
DU2 i|
ш
1
DU3
DX1
DX2
DU4
В-
DU5
DX3
&Г
DX4
DU6
-< HCH-Q1 |
OH-Q1 |
-< РКС |
DXU
ХВ1
to-o-f
DX5
DTI
8с\-^-<шЕШ\
-< HCH-Q2 1
-< OH-Q2 |
r PH2U.
Ц|
Рис. 10.1. Логика контроля напряжений
246 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
PHXUXQ1 и на входы инверторов DU4, DU5 или DU1, DU2 нулевых логических
сигналов о несрабатывании реле PHU0Q2, PHU2Q2 или PHU0Q1, PHU2Q1.
При наличии сигнала пуск автоматики ТАПВ-ОН первого выключателя Q]
производится при отсутствии напряжения на линии OH-Q1, а несинхронное
повторное включение (НАПВ) второго выключателя Q2 — при наличии
симметричного напряжения на ее конце HCH-Q2; ТАПВ-ОН второго выключателя Q2
происходит при отсутствии напряжения перед ним (на конце линии) по сигналу OH-Q2,
а первого Q1 — при наличии симметричного напряжения после него (в начале
линии) по сигналу HCH-Q1.
Действие НАПВ обеспечивается программной логической схемой на рис 10.2.
В зависимости от того, ближе к первому Q1 или второму Q2 выключателям
произошло КЗ, определяется последовательность их повторного включения:
переключаются программные накладки ХВ2—ХВ5. Если, например, КЗ произошло ближе к
Q2, то программные накладки ХВЗ (в ТАПВ Q1) иХВ4 (в ТАПВ Q2) автоматически
размыкаются: логические единицы на входах DX9 и DX10, г накладки ХВ2 и ХВ5
остаются замкнутыми: логические нули на входах DX3 и DX4. Программными
элементами DX9, DX6, DX14 (И), DW1 (ИЛИ) при наличии единичных сигналов
«Пуск ТАПВ» и «Готовность ТАПВ» формируются сигнал ТАПВ-ОН Q1 и
воздействие ТАПВ-ОН на его включение. Второй выключатель Q2 включается
воздействием ТАПВ-НСН, формируемым операциями DX4, DX7, DX9, DW2, и
выдается сигнал ТАПВ-НСН Q2.
ХВ2 DX2
к?Г>-
&
ХВЗ DX3
H-Q1 У~
LP
Пуск V_
ТАТГВ /^
ХВ4 DX4
шу-
&h
ХВ5 Ш5
U-Q2 У~
DX6
DT1
НВ-
DX7
DT2
&НЭ-
DX8
&
DX9
/ ТАПВ-ОН
Л (HCH)Q1
_Хтапвгон
(HCH)Q1
]
<
ТАПВ-НСгГИ
(0H)Q2 1
/ТАПВ-НСН | //\
"Ч то? 1-й-
<
KQC1
]
< Готовность
ТАПВ
1
<
KQC2
]
Рис. 10.2. Логическая схема реализации несинхронного ТАПВ
10.3. Программная автоматика однофазного повторного включения 247
Сигнал «Пуск ТАПВ» формируется, как указывалось, по цепи несоответствия
положений ключа управления выключателем и выключателя, после его
отключения релейной защитой.
Реле включенного состояния выключателей KQC1, KQC2 трех фаз выдают
логические единицы, которые через программные элементы DX10, DX11 (И) и
DW3 (ИЛИ) поступают на вход S триггера ST и запоминаются им: выдается
единичный сигнал «Готовность ТАПВ». Память снимается логической единицей на
входе R триггера, запрещающей ТАПВ.
Пуск УТАПВ производится только при фиксации первого срабатывания
основной высокочастотной защиты линии или резервной защиты с высокочастотным
ускорением первого или второго конца линии.
При осуществлении ТАПВС используется автоматический синхронизатор [1],
выполняемый на трех программных минимальных измерительных реле:
• разности амплитуд напряжений на разных сторонах отключенного
выключателя, срабатывающего при AUm< AUmup;
• угла 5 сдвига фаз между ними;
• разности частот А/напряжений на конце линии и на шинах подстанции,
разрешающих включение выключателя при 8 и А/, меньших установленных
(предписанных) значений 8 < 5пр и А/< А/пр (см. воздействие РКС на рис 10.1).
По принципу действия синхронизатор функционирует с постоянным углом
опережения 8 = 8П . При известных ортогональных составляющих напряжений
угол сдвига фаз вычисляется как разность углов, тангенсы которых равны
отношениям синусных и косинусных их составляющих [2, 17], а частоты могут
вычисляться по трем дискретным мгновенным значениям [2].
10.3. Программная автоматика однофазного
повторного включения
Программная автоматика однофазного повторного включения в несколько
различных ее реализациях интегрирована с релейной защитой в микропроцессорных
терминалах типов ШЭ2710 582, ШЭ2710 521 и «БРЕСЛЕР ШЛ 2704.52» [27—29].
Программно измерительно-вычислительная часть названных
микропроцессорных автоматических устройств различна. В шкафах ШЭ2710 582 и ШЭ2710 521
применяются традиционные, но в программном исполнении, пусковые
комбинированные измерительные реле напряжения и токов нулевой (РНТНП) и обратной
(РТОП) последовательностей и избиратели поврежденной фазы (ИПФ) в виде
программных направленных измерительных реле сопротивления.
Три избирателя поврежденных фаз, к которым подводятся вторичные фазные
напряжения и суммы фазных токов и тока нулевой последовательности /ф + к0 /0,
состоят из двух измерительных реле сопротивления, каждый с разными
численными коэффициентами компенсации к0 при токе нулевой последовательности. Их
характеристики срабатывания показаны на рис 10.3, а, б. Они имеют разные уста-
248 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
JX
*у
~\Kl i
JX>
1
Li
^у.к
A\
_K. *
;*!
(
/ °
.
_J *
e)
1-^.Kll =(0,05-0,1)^
6)
e)
Рис. 10.3. Характеристики срабатывания измерительных реле сопротивления избирателей
поврежденной фазы: с полным (а) и с уменьшенным (б) коэффициентами компенсации тока
нулевой последовательности; характеристика срабатывания избирателя поврежденной фазы (в)
новленные реактивные Ху9 Ху1, Хук, Хук1 и активные Ry - Ryl, 7^K - RyKl
сопротивления. Результирующая характеристика срабатывания избирателя поврежденной
фазы (рис 10.3, в) получается их наложением, обеспечиваемым программной
операцией логического суммирования (ИЛИ) дискретных сигналов двух
измерительных реле сопротивления.
Микропроцессорная автоматика «ИЦ «БРЕСЛЕР» содержит только токовые
программные пусковые и избирательные органы, а именно комбинированные реле
токов обратной /2 и нулевой /0 последовательностей (72 + /0) и приращений
А/20 их векторов, равных разностям А/20 = /20к -/2,0н токов несимметричного
КЗ А/2 0к, возникающего в течение цикла однофазного повторного включения, и
тока обратной и нулевой последовательностей нагрузки А/2 0н в неполнофазном
режиме, т.е. равных аварийным составляющим токов. Для этого используются
специальные фильтры аварийных оставляющих токов (в терминале дифференциаль-
но-фазной защиты) прямой последовательности [29].
К измерительно-вычислительной части микропроцессорной автоматики
однофазного повторного включения относятся и специфические измерительные органы
контроля погасания электрической дуги однофазного КЗ на землю после
отключения поврежденной фазы, поддерживаемой током, возбуждаемым наведенной
магнитным потоком нулевой последовательности ЭДС в проводе (ОКПЭД), и орган
контроля успешности повторного включения отключенной фазы с одной стороны
(ОКУВ). Они также функционируют по разным алгоритмам в указанных двух
микропроцессорных устройствах автоматики противоаварийного управления линиями
электропередачи сверхвысокого напряжения.
В шкафах ШЭ2710 582 и ШЭ2710 521 используется алгоритм специально
разработанного [30] микропроцессорного устройства — модуля контроля погасания
электрической дуги и успешного включения линии с одной стороны.
10.4. Микропроцессорное устройство контроля погасания электрической дуги
249
10.4. Микропроцессорное устройство контроля
погасания электрической дуги и успешного включения
отключенной фазы с одной стороны
После отключения выключателей поврежденной электродуговыми
(неустойчивыми) однофазным КЗ на землю провода линии электропередачи электрическая
дуга поддерживается током, возбуждаемым ЭДС, наведенной в отключенном
проводе магнитным потоком нулевой последовательности неполнофазного режима.
Для успешности ОАПВ необходимо дождаться ее погасания. Поэтому
предусматривается выдержка времени его действия, превышающая наиболее длительное
время горения электрической дуги и снижающая эффективность ОАПВ.
Для ускорения действия и повышения его эффективности разработано
микропроцессорное устройство (модуль) контроля погасания дуги (КПЭД) [30]. Им
контролируется указанная наведенная ЭДС, практически появляющаяся только после
погасания электрической дуги.
Наведенная ЭДС зависит от схемы линии электропередачи, а именно наличия
или отсутствия так называемых шунтирующих реакторов (см. рис 9.1) —
реакторов LR (см. ниже рис 10.4), компенсации генерируемой линией высокого и
сверхвысокого напряжений реактивной мощности. На линиях с реакторами возникает и
свободная составляющая ЭДС, обусловленная резонансным эффектом,
создаваемым емкостной составляющей проводимости линии и индуктивной
проводимостью реакторов. Используется свободная составляющая частотой ниже
промышленной. Поэтому применяется цифровой задерживающий частотный фильтр,
настроенный на частоту 50 Гц [30].
Для обеспечения чувствительности устройства контроля погасания дуги
производится добавка к наведенной ЭДС Е падения напряжения на половине
вторичного сопротивления линии ZJ2 от тока /0 нулевой последовательности неполно-
фазного режима в цикле ОАПВ — используется компенсированное на середину
линии [30] напряжение
Щ=\Е+1,и2\. (ЮЛ)
На рис 10.4 приведены взятые из [30] графики зависимости
частоты/свободной колебательной составляющей и относительного (к номинальному фазному
напряжению С/ф.ном) абсолютного значения наведенной ЭДС ЕШфши от степени
компенсации (коэффициент К < 1,0) реакторами LR емкостного сопротивления
линии. При низких ее значениях в проводе линии без реакторов (при К = 0) и
больших токах 10 компенсированное напряжение по (10.1) отключается
электромагнитным реле KL с герметизированными контактами (герконом), управляемым
программным максимальным измерительным реле КА (рис 10.5) тока нулевой
последовательности.
250
Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
/CR> ГЦ
50
40
30
20
10
1 Е
и*
ф.ном
—10
— 0 8
— 0 6
—0 4-^4-
L/o 2—L
0,2
Зона по
•'ев
F
ф.ном
0,4 0,6
Зона по/св
0,8 К
Зона по Е
Рис. 10.4. Зависимость частоты свободных колебаний наведенной принужденной ЭДС в
отключенном проводе линии при ОАПВ от степени компенсации К ее емкостной проводимости
KV1
ОтИПФ
^
-°»
-Uc
1
'
мпл
DW1
KV2
ZF
>
>Е
1 ев
KV3
>
^0
DW2
KW
А-гУ | 1 |
KV4
KV5 DX
SA1
КПЭД
SA2
КОАПВ
КУВ
Рис. 10.5. Функциональная схема микропроцессорного модуля контроля погасания дуги
и успешного включения
10.4. Микропроцессорное устройство контроля погасания электрической дуги 251
Предусматривается четыре канала действия устройства, соответствующие
показанным на рис 10.4 зонам, определяемыми используемой информацией,
обеспечивающей максимальную чувствительность микропроцессорного модуля.
Первый канал, содержащий программное максимальное измерительного реле
KV1 напряжения cVs (рис 10.5), функционирует на линиях электропередачи с
практически полной компенсацией реакторами ее емкостной проводимости [зона по Е
при К -> 1,0 (см. рис 10.4)].
Второй канал с указанными программным задерживающим составляющую
промышленной частоты ЭДС фильтром ZF и максимальным измерительным реле
напряжения KV2 (рис 10.5) надежно действует по абсолютному значению
выделяемой свободной колебательной составляющей ЭДС частоты /св на линиях с
частичной компенсацией (зона по /св при 0,2 < К < 0,8, см. рис 10.4).
Эти каналы выдают сигнал о погасании электрической дуги через логическую
операцию DW1 (ИЛИ) (рис 10.5).
На линиях электропередачи со слабой компенсацией (К < 0,2) или без
реакторов используется или абсолютное значение свободной колебательной
составляющей частотой 5—25 Гц (третий канал), или угол сдвига фаз между C/s и током /0
(четвертый канал). Эти каналы содержат программные измерительные реле
максимального напряжения KV3 и реле угла сдвига фаз KW и выдают сигналы о
погасании электрической дуги через логическую операцию DW2. Каналы переключаются
ключом SA1.
Микропроцессорный модуль содержит входной мультиплексор МПЛ,
подключающий цепь указанного формирования напряжения, пропорционального току /0
нулевой последовательности ко вторичному напряжению отключенной фазы Ua,
Ub, Uc. Мультиплексор управляется сигналами избирателей поврежденной фазы
ИПФ панели ОАПВ.
На конце линии электропередачи, включаемом вторым, т.е. после повторного
включения отключенного провода с одной стороны, микропроцессорный модуль
переключателем SA2 переводится в состояние контроля успешности включения
(КУВ).
Канал КУВ содержит программное максимальное реле напряжения KV4,
срабатывающее при номинальном фазном напряжении на включенном с одной стороны
проводе. Для предотвращения его излишнего срабатывания под воздействием
высокой наведенной ЭДС на линиях с практически полной компенсацией
емкостного сопротивления (К -» 1,0, см. рис 10.4) после погасания дуги, т.е. перед
повторным включением провода с одной стороны, производится запрет его действия
[операция DX (ЗАПРЕТ)] от программного измерительного реле напряжения
нулевой последовательности KV5, к которому подводится напряжение на
вторичном сопротивлении линии ZR от тока /0 нулевой последовательности.
Микропроцессорный модуль типа МР-301К выполняется на сигнальном
микропроцессоре ADSP 21061. Его вычислительная часть, реализующая функции
252 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
задерживающего частотного фильтра и программных измерительных реле,
функционирует по способам обработки информации, свойственным цифровой
вычислительной технике [3].
Программный элемент контроля погасания электрической дуги и успешного
включения отключенной линии с одной стороны в микропроцессорной
интегрированной защите и автоматике «ИЦ «БРЕСЛЕР» содержит не четыре (рис 10.5), а два
канала, реализуемых комбинацией программных: направленного измерительного
реле сопротивления и измерительного реле полного сопротивления с круговыми
характеристиками срабатывания, подключаемых к напряжению отключенной фазы
и току нулевой последовательности; максимального измерительного реле
напряжения и минимального измерительного реле тока нулевой последовательности.
10.5. Действие автоматики однофазного
повторного включения
Интегрированная с релейной защитой автоматика однофазного повторного
включения линий электропередачи сверхвысокого напряжения выполняет не
только основные стандартные функции:
• отключение поврежденной фазы при однофазном КЗ, повторное включение
отключенной фазы при неустойчивом (дуговом) однофазном КЗ;
• отключение трех фаз линии электропередачи при устойчивом однофазном
КЗ (неуспешном однофазном повторном включении), двухфазном на землю и меж-
дуфазных КЗ.
Выполняется и ряд дополнительных функций, существенно повышающих ее
эффективность, основными из которых являются:
• отключение только одной фазы при двухфазных КЗ, в том числе на землю;
• повторное включение отключенного провода линии только после погасания
электрической дуги и после ее успешного включения с одной стороны;
• очередность отключения неповрежденных фаз при неуспешном однофазном
повторном включении и при КЗ, возникающем в неполнофазном режиме в цикле
однофазного повторного включения;
• очередность включения фаз при трехфазном автоматическом повторном
включении.
При возникновении однофазного КЗ на землю срабатывают
быстродействующие пусковые РНТНП, РННП и РТОП (рис 10.6) или РТОНП (в автоматике
«ИЦ «БРЕСЛЕР ТЛ 2605»), которые:
• операцией DX1 (ЗАПРЕТ) через DW3 предотвращают отключение трех фаз
ОТФ дифференциально-фазной ДФЗ или быстродействующей резервной БРЗ
релейной защитой;
• операциями DX3, DX4 и DX5 (И) разрешают (при наличии сигналов от
указанных защит и пусковых реле) действие избирателей поврежденной фазы ИПФА,
ИПФВ, ИПФС на ее отключение, а операцией DW4 (ИЛИ) фиксируется сигнал ИПФ;
10.5. Действие автоматики однофазного повторного включения
253
1 От КПЭД и КУВ >
| ОтТЗНФ 3>
DW1
Рис. 10.6. Функциональная схема микропроцессорного однофазного АПВ линии
электропередачи
• операцией DX6 при наличии сигнала ИПФ и пусковых реле через DW2 и
DW3 формируют сигнал СП пуска ОАПВ.
После срабатывания одного из реле KQTA, KQTB, KQTC, фиксирующего
отключение соответствующего выключателя, операциями DX2—DX4 vlDW5
фиксируется отключение одной фазы Ф01.
Сигнал Ф01 при отсутствии сигналов фиксации воздействия на включение
отключенного выключателя ФВВ1 или воздействия на отключение трех фаз ФОЗ
(операция DW6) операцией DX5:
• вводит в действие токовую защиту неотключенных фаз ТЗНФ;
• при разомкнутой программной накладке ХВ — единица на нижних прямом
DX10 и инверсном DX6 входах (накладка определяет, какой из выключателей Q1
на одном или Q2 на другом конце линии, должен включиться первым) операцией
DX10 вводит в действие орган КПЭД однофазного КЗ на землю;
• операциями DX7 и DX8 подготавливает цепь включения отключенного
выключателя QU который должен включаться первым после погасания
электрической дуги однофазного КЗ на землю, и запрета его ТАПВ (сигнал «Запрет
ТАПВ1»);
254 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
• операциями DX7 и DX8 подготавливает цепи отключения трех фаз «ОТФ
от КПЭД» или «ОТФ от КУВ».
Сигнал СП пуска ОАПВ:
• через DX9 подготавливает формирование воздействия на включение
выключателя отключенной фазы ФВВ1\
• после срабатывания КПЭД операцией совпадения DX9 сигналов формирует
воздействие на его включение ФВВ1, которое по цепи обратной связи ОС через
DW7 запоминается (на время существования СП).
Операцией DX7 при наличии сигнала Ф01 воздействием ФВВ1 выключатель
Q1 отключенной фазы включается, а операцией DX8 запрещается ТАПВ1.
После включения линии с одной стороны и срабатывания контроля
успешности включения КУВ на другой ее стороне, на которой накладка ХВ замкнута —
на инверсном входе DX6 нуль, операцией DX11 (при наличии СП) формируется
воздействие на включение выключателя Q2 другой стороны линии ФВВ2, которое
также (через DW8) операцией DX11 запоминается, и через DX12 при наличии
сигнала Ф02 (отключенное состояние Q2) выключатель Q2 включается, операцией
DX13 запрещается ТАПВ2. Отключенная фаза линии вводится в работу.
При успешном ОАПВ воздействием ФВВ1 через DW6 и DX5 токовая защита
неотключенных фаз выводится из действия; пусковые реле обратной и нулевой
последовательностей возвращаются, исчезает СП, снимается запоминание
фиксации воздействий ФВВ1 и ФВВ2, схема в целом приходит в исходное состояние.
При устойчивом однофазном КЗ на землю органы КПЭД и успешности
включения КУВ не срабатывают: нули на инверсных входах DX7 и DX8. Поэтому
спустя определенное время, с запасом превышающее время, устанавливаемое
таймерами микропроцессоров DT1 и DT2, формируется воздействие на отключение
трех фаз линии ОТФ и через DX8 и DX13 трехфазные автоматические повторные
включения линии не запрещаются.
Отключение трех фаз производится программным элементом DW1, через
который проходит и воздействие на ОТФ от ТЗНФ, если произошло новое КЗ в цикле
ОАПВ.
Логические реле отключенного состояния выключателей трех фаз KQTA,
KQTB9 KQTC через операцию DX14 фиксируют отключение линии в целом —
сигналом ФОЗ. При этом операциями DX159 DX2, DX3 9 DX4 и DW5 запрещается
формирование сигнала Ф01.
При двухфазном КЗ на землю избирателями поврежденных фаз ИПФА, ИПФВ9
ИПФС отключаются выключатели с двух сторон линии, и мажоритарным органом
М2. 2 (два сигнала из трех) воздействиями от реле KQTA, KQTB, KQTC
отключенных состояний выключателей формируется разрешение на отключение трех фаз
линии РОТФ, которые реализуются операцией DX2 (при наличии СП).
При междуфазных КЗ без земли пусковые реле РНТНП, РННП, РТОП или
РТОНП (в устройстве «БРЕСЛЕР ТЛ 2605») не срабатывают — на инверсном
10.6. Микропроцессорная автоматика ограничений повышений напряжения 255
входе DX1 нуль. Релейная защита (ДФЗ, БРЗ) через операции DW2 и DX1
отключает три фазы воздействием ОТФ.
После отключения трех фаз линии действует один из видов трехфазного
автоматического повторного включения, выполняемого микропроцессорными
устройствами типов ШЭ2710 511 или «БРЕСЛЕР ШЛ 2506». При этом воздействия на
включение фаз выключателя с пофазным управлением подаются последовательно
во времени в целях исключения перегрузки аккумуляторного источника питания
постоянным током привода выключателей.
10.6. Микропроцессорная автоматика ограничений
повышений напряжения
Терминал автоматики ограничений повышения напряжения (АОПН-М) на
линиях электропередачи ОАО «АББ Автоматизация» типа RE0511 VSP [15]
принципиально функционирует по алгоритму ранее выпускавшейся микроэлектронной
панели типа ШП2704, однако за счет микропроцессорного выполнения отличается
более высокими техническим совершенством, эффективностью действия и
лучшими сервисными свойствами.
Микропроцессорная АОПН-М является двухступенчатой, содержащей грубую
и чувствительную ступени. Ее особенностями являются:
• высокая точность измерительного преобразования амплитуды напряжения,
вычисляемой по его ортогональным составляющим, и близкий к единице
коэффициент возврата программных максимальных измерительных реле напряжения;
• независимая для каждой ступени направленность: прямая — в сторону
передачи активной мощности или обратная — в сторону протекания реактивной
мощности;
• формирование характеристик срабатывания программных измерительных
реле реактивной мощности в зависимости от активной нагрузки линии
электропередачи.
Микропроцессорная автоматика ограничения повышения напряжения
действует на включение реакторов LR19 LR2 и отключение линии W2 сверхвысокого
напряжения при обратном направлении реактивной мощности (см. рис 10.9).
Более совершенная микропроцессорная автоматика ограничения повышения
напряжения с контролем ресурса изоляции линий разработана в ОАО «Институт
«Энергосетьпроект» [14]. Она обладает специфическим свойством учета
накопительного эффекта воздействия повышенного напряжения. Микропроцессорная
АОПН-М функционирует в соответствии с вольт-секундной характеристикой
электроэнергетического оборудования (рис 10.7), определяющей согласно ГОСТ
допустимое время перенапряжения в зависимости от его кратности к, например 20 с,
при къ = 1,25.
256 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
U, отн. ед.
кА=\,1в
къ = 1,25
А;2=1Д0
^ = 1,025
0,1 с 1 с 20 с 1 мин 5 мин 20 мин 1ч 3 ч 8ч/
Рис. 10.7. Вольт-секундная характеристика электроэнергетического оборудования
Чувствительность АОПН повышена за счет введения предварительной
ступени, функционирующей в диапазоне от кх = 1,025 до к2 = 1,1. Как указывалось,
панель ШП2704 фиксирует минимальную кратность к2= 1,1-
Первой и второй ступеням АОПН-М соответствуют контролируемые кратности
от к2 = 1,1 до к3 = 1,25 и от къ = 1,25 до к4 = 1,76 с диапазонами времен
срабатывания от 20 мин до 20 с и от 20 с практически до нуля соответственно.
Повышенная гибкость микропроцессорной автоматики обусловливается
наличием в каждой из ступеней промежуточных диапазонов контролируемых кратно-
стей перенапряжения, показанных на рис 10.7 пунктирными линиями.
Алгоритм функционирования АОПН-М основан на вычислении амплитудного
и действующего значений напряжения и их сравнении с предписанными
значениями, определяемыми указанными промежуточными диапазонами кратностей
напряжения в пределах каждой из трех ступеней. При этом время срабатывания
вычисляется не только в соответствии с вольт-секундной характеристикой, но и с учетом
предыдущего уровня перенапряжения, чем и достигается указанный
накопительный эффект.
Амплитудные значения каждого из фазных напряжений вычисляются по
ортогональным (синусной и косинусной) составляющим напряжения промышленной
частоты, выделяемым нерекурсивными частотными фильтрами Фурье
ортогональных составляющих [2]; квадрат амплитуды равен сумме квадратов синусной
Us(nT) и косинусной Uc(nT) составляющих [2, 17].
Действующее значение напряжения вычисляется извлечением квадратного
корня из суммы квадратов дискретных мгновенных значений напряжения за
период его изменения.
Предварительная ступень сначала воздействует на электроэнергетические
объекты автоматического регулирования напряжения и реактивной мощности:
вращающиеся синхронные и статические компенсаторы реактивной мощности и
трансформаторы (автотрансформаторы) с УРПН и линейными (вольтодобавочными)
трансформаторами. Однако при неэффективности указанного воздействия производится
10.6. Микропроцессорная автоматика ограничений повышений напряжения
257
переход к воздействиям первой ступени на включение первого LR1 (см. рис 10.9, а)
и второго LR2 (при его наличии) реакторов и даже на отключение линии.
Первая ступень включает реакторы в начале линии (со своей стороны, если она
отключена с противоположной стороны) или передает сигнал по каналу связи на
включение реакторов противоположного конца линии, если она отключена со
своей стороны. Если перенапряжение существенно не снижается, то производится
отключение или телеотключение линии.
Третья ступень с выдержкой времени или безынерционно (в зависимости от
кратности напряжения) отключает выключатель Q3 (см. рис 10.9, а), или
производит телеотключение выключателя Q4, если он был включен, a Q3 отключен.
Отключенное состояние линии с противоположной стороны, вызывающее
перенапряжение на линиях подстанции (на своей стороне), фиксируется по
дискретному возрастанию или изменению направления перетока реактивной мощности из
линии к шинам. При этом реактивная мощность Qn сравнивается с предписанной
(установленной) gnp (см. рис 10.9, б и в), значение которой корректируется по
значению активной мощности Qup + kPR, что обеспечивает несрабатывание АОПН-М
на отключение своей линии, если перенапряжение возникло из-за отключения
(с противоположной стороны) смежной, отходящей от шин подстанции линии.
Отключенное состояние линии со своей стороны определяется по отсутствию тока
в линиях [контролируется измерительным преобразователем тока ИПТ (рис 10.8)].
Вычисление квадрата амплитуды тока, как и напряжения, производится по
ортогональным составляющим [синусной Is{nT) и косинусной 1с(пТ). Измерительное
DX1
и
<
J
—►—
1
1
1 -
[
^
ипн
1 1
ИПТ С
h
ИПРМ
\ИПАМ
V\
0
t
ГТПП
сдго 1
n tJlVIZ,
Г Q
Z
. кр i ~|
г-М
?5£
I
J 1
SM1
-\пм\
—
DX4
&
ил j
&
DW1
1 ■
DW2
1
&
DX2
&
\
1MJ
&
™;
&
DX6
&
\DX7,—
\пр
KCTK
BP
ОЛ
УРОВ
КС
Рис. 10.8. Функциональная схема микропроцессорной автоматики ограничения повышения
напряжения
258 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
преобразование активной и реактивной мощностей выполняется по
быстродействующим алгоритмам в соответствии с соотношениями, приведенными в [2, 17].
Функциональная схема (рис 10.8), на которой программные вычислительные и
логические операции показаны условными обозначениями измерительных
преобразователей напряжения ИПН, тока ИПТ (с инверсным выходом), реактивной и
активной мощности ИПРМ, ИПАМ и логических элементов совпадения DX,
суммирования DWvl инверсии DU дискретных сигналов, поясняет функционирование
АОПН-М.
Программа определения времени ПОВ формирования управляющих
воздействий в соответствии с указанной вольт-секундной характеристикой вычисляет с
учетом накопительного эффекта, через какое после возникновения
перенапряжения время должны загружаться потребляемой реактивной мощностью статический
компенсатор СТК, включатся реакторы ВР и отключатся линии электропередачи
ОЛ и должны формироваться сигналы на телевключение реакторов или
телеотключение выключателя линии на противоположном конце, передаваемые по
каналу связи КС передатчиками ПР и приемниками ПМ.
В соответствии с алгоритмом АОПН-М исполнение управляющих воздействий
на СТК, ВР и ОЛ производится при наличии сигнала от измерительных
преобразователей реактивной, проходящей от линии электропередачи к шинам подстанции
(генерируемой линией), и активной мощности, формируемого операциями
указанного суммирования.
Сигнал на выходе, разрешающий исполнение управляющих воздействий,
появляется при мощности срабатывания (рис 10.9, б), превышающей предписанную
Q (уставку автоматики)
ec>enP + ^
(Ю.2)
где к — коэффициент, устанавливаемый при настройке автоматики, к = tg a.
ЭЭС1
Рис. 10.9. Эквивалентная схема электроэнергетической системы (а) и характеристики
срабатывания программных измерительных реле реактивной мощности (б, в)
10.7. Микропроцессорные автоматические устройства определения мест повреждений 259
Указанное соотношение обеспечивает избирательность действия АОПН-М. Его
использование для уставки программного измерительного реле реактивной
мощности в функции от активной нагрузки линии является особенностью АОПН-М.
Управляющие воздействия на телевключение реактора или телеотключение
линий формируются, если, как указывалось, линия отключена со своего конца, что
контролируется логической единицей на инверсном выходе ИПТ — отсутствием
тока в линии (см. рис 10.8). На входах логических элементов DX,
символизирующих программные операции совпадения, стрелками показаны сигналы
конфигурации автоматики — набора выполняющих функций, устанавливаемых при настройке
или ее изменении от ПЭВМ автоматизированного рабочего места оператора.
Особенностями АОПН-М являются также:
• независимость для каждой ступени задания направленности действия по
реактивной мощности срабатывания Qc: прямой (рис 10.9, б) и обратной (рис 10.9, в);
• формирование характеристики срабатывания программных измерительных
реле реактивной мощности Qc в зависимости от активной нагрузки в соответствии
с соотношением (10.2), обеспечивающим селективность действия автоматики;
• возможность защиты от перенапряжений трансформаторов Т электрической
станции ЭС (см. рис 10.9, а).
10.7. Микропроцессорные автоматические устройства
определения мест повреждений линий электропередачи
Короткое замыкание является основным неизбежно, но случайно возникающим
возмущающим воздействием, часто неустойчивым — дуговым, не оставляющим
явных визуально обнаруживаемых признаков после его ликвидации автоматикой
повторного включения линии электропередачи и создающим потенциальную
опасность возникновения уже устойчивого разрушающего изоляцию линии.
Найти место КЗ, особенно на современных протяженных линиях высокого и
сверхвысокого напряжений и в распределенных воздушных сетях сельского
электроснабжения, — непростая задача, требующая значительных усилий
обслуживающего персонала и времени восстановления электроснабжения. Поэтому
автоматические устройства определения мест повреждения (ОМП) — расстояний до КЗ на
линиях электропередачи — относятся к особой разновидности противоаварийной
автоматики линий электропередачи и широко применяются [98].
По используемой информации и принципам действиями они образуют две
разновидности, функционирующие на основе одностороннего (на одной стороне
линии) и двустороннего фиксирования напряжений и токов КЗ. Поэтому
автоматические устройства ОМП называются фиксаторами, обычно импульсными,
напряжений и токов КЗ и их симметричных составляющих — параметров аварийного
режима. При микропроцессорной их реализации преимущественно применяется
одностороннее фиксирование параметров аварийного режима, получившее
теоретическое обоснование [99].
260 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
Вычисление расстояний до трехфазных и двухфазных КЗ принципиально
производится по выделенным частотными фильтрами принужденным составляющим
междуфазных напряжений и разностям соответствующих фазных токов
электромагнитного переходного процесса, а до однофазных и двухфазных КЗ на землю —
по принужденным составляющим фазного напряжения и сумме соответствующего
фазного тока и тока нулевой последовательности, т.е. по принципу действия
дистанционной защиты [39, 77].
Вычисляется результат деления абсолютных действующих значений указанных
напряжений и токов, который представляет собой абсолютное значение суммы
комплексного сопротивления ZK участка линии до металлического КЗ и
переходного активного сопротивления J?n (обычно электрической дуги). Поэтому
последующее деление указанной суммы на удельное сопротивление линии — определение
расстояния до места КЗ — получается с погрешностью, при трехфазных КЗ
неустранимой; если вычисление расстояния до места трехфазного КЗ производится по
формуле
= Цмф sinip
к \Т -Г I г ' чи.;>;
Кф1 ^ф2| Худ1
где С/Мф — междуфазные напряжения; /ф1? 1^2 — токи соответствующих фаз,
например А и В; худ1 — удельное реактивное сопротивление прямой последовательности
линии; ф — угол сдвига фаз между напряжением и разностью токов.
Разработаны [99] способы существенного снижения влияния переходного
сопротивления на результаты вычислений расстояний до коротких замыканий
между двумя фазами, однофазных и двухфазных КЗ на землю за счет
использования токов обратной и нулевой последовательностей в качестве опорных, и
вычислений расстояний по реактивным составляющим сопротивления до места КЗ в
соответствии с формулами:
при двухфазных КЗ, в том числе и на землю
Ьп[(£/ф1-£/ф2)/(/2ф3е^/2)]
/к = != ^ J-±- ; (10.4)
1т[(/ф1 -/ф2)2уд1/(/2ф3е^/2)]
при однофазных КЗ
lm[UJI0]
=^=^ (10.5)
к 1т[(/ф1+^0/о)2уд1//0]'
где С/ф, /0 — напряжения и токи поврежденных фаз; /2фз — ток обратной после-
Z - Z
довательности третьей, неповрежденной, фазы; К0 = ~уд ~уд — комплексный
10.7. Микропроцессорные автоматические устройства определения мест повреждений 261
коэффициент компенсации током нулевой последовательности; Zyfl0 — удельное
сопротивление нулевой последовательности.
Возможен и учет взаимоиндукции между параллельными линиями [95].
При одностороннем питании линии вектор частного отделения падения
напряжения на активном трехфазном сопротивлении на ток нулевой последовательности
направлен по вещественной оси и поэтому на результат вычислений не влияет.
Однако при двустороннем питании из-за возможного несовпадения по фазе токов
нулевой последовательности в местах КЗ и установки автоматического устройства
возникает погрешность вычисления, но на порядок меньше [99], чем при
неиспользовании опорного тока.
Аналогичное влияние на снижение погрешности вычислений расстояния до
двухфазных КЗ оказывает вектор тока обратной последовательности
неповрежденной фазы, повернутый на угол тс/2 [99].
Использование составляющих напряжений и токов нулевой
последовательности, фиксируемых на двух сторонах линии электрической системы с глухозазем-
ленной нейтралью, как и применявшихся ранее фиксирующих приборов [98],
обеспечивает независимость результата вычислений расстояний до однофазных и
двухфазных КЗ на землю от сопротивления Ru электрической дуги. Однако
вычисления могут выполняться только после обмена информацией между устройствами,
установленными по разным сторонам линии, а их результат зависит от
эквивалентного сопротивления электростанции или электроэнергетической системы.
Микропроцессорные автоматические устройства определения мест
повреждения линий электропередачи разработаны и выпускаются
научно-производственным предприятием ЗАО «РАДИУС Автоматика» и называются
микропроцессорными фиксирующими индикаторами (ИМФ):
• ИМФ-1С предназначен для линий напряжением 6—35 кВ с односторонним
питанием и длиной до 200 км;
• ИМФ-ЗС — для линий напряжением ПО—330 кВ и магистральных линий
электропередачи сверхвысокого напряжения 500—750 кВ с двусторонним
питанием и длиной до 400 км, в том числе с ответвлениями и с учетом взаимоиндукции
параллельных линий (рис 10.10).
Первые определяют (фиксируют) расстояния до двухфазных и трехфазных
коротких замыканий и выявляют двойные замыкания на землю в сетях с
изолированной (компенсированной) нейтралью, а вторые — и до однофазных и
двухфазных коротких замыканий на землю на системообразующих линиях электропередачи
и в сетях с глухозаземленной нейтралью. Они обладают широкими
информационными возможностями и обеспечивают вывод на алфавитно-цифровой индикатор
информации:
• о поврежденных фазах и расстоянии до места КЗ;
• о моменте времени возникновения и длительности КЗ;
• о действующих значениях токов КЗ: фазных, прямой, обратной и нулевой
(ИМФ-ЗС) последовательностей;
262 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
Разъем линии связи Клеммы для подключения
1CR0 I-123,4 КМ
12,12 23:45:05
т
АЦИ
Карман для
названия линии
]Р) ИМФ-ЗС
Исполнение 200В 5Ai
КЛ
а)
Сторона с разъемом связи
TAL-
TVL-
Устройство ИМФ-ЗС
[ DC ia "С
DIC h "С
DIC h "С
I зсз/окС
1 0-
2 0-
3 0-
4 0-
5 0-
6 0-
7 0
8 0
9 0-
10 0-
11 0
12 0
13 0-
14 0-
15 0-
16 0-
17 0
20 0-
21 0-
22 0-
23 0-
24 0-
25 0-
3/п
£/Л<100В
f/^lOOB
t^lOOB
От измерительных
трансформаторов
тока
От измерительных
трансформаторов
напряжения
0 напряжения
18+0+ v
19 0-1- '
От внешнего контакта
при селективном режиме
или перемычка для
неселективного режима
На сигнализацию отказа
На сигнализацию срабатывания
Оперативное питание -220B (=110В)
б)
Рис. 10.10. Внешний вид (а) и схема подключения (б) устройства ИМФ-ЗС к внешним цепям
• о действующих значениях напряжений при коротких замыканиях: междуфаз-
ных и фазных прямой, обратной и нулевой (ИМФ-ЗС) последовательностей;
• о фазах комплексных напряжений и токов КЗ;
• о длительности бестоковой паузы в цикле АПВ;
• о предписанных значениях контролируемых величин (уставках).
Информация фиксируется в течение 50—200 мс и сохраняется о десяти
последних КЗ, выводится на экран в любой последовательности, не пропадает при
исчезновении напряжения на время до 24 ч.
10.7. Микропроцессорные автоматические устройства определения мест повреждений 263
Уставки: коэффициенты трансформации первичных измерительных
трансформаторов напряжения и тока, удельные сопротивления прямой и нулевой
последовательностей, коэффициент взаимоиндукции параллельных линий, расстояние до
ответвлений от линии, время фиксации информации — вводятся с клавиатуры
после ввода пароля.
Точность определения расстояния до места КЗ характеризуется относительной
погрешностью, не превышающей 0,05, а при расстоянии меньшем 20 км —
не более 1 км.
Высокая надежность действия обеспечивается встроенным тестовым
контролем, проводимым при каждом появлении напряжения питания и режимом
контроля, включаемым оператором: наработка на отказ составляет 25 000 ч.
Индикаторы имеют встроенный канал RS-232 связи с ПЭВМ и RS-485 — связи
с АСУ.
Общая функциональная унифицированная (см. рис 7.10 и 7.11) структура
индикаторов содержит:
• элементы ввода напряжений и токов — вторичные измерительные
трансформаторы напряжения TVL и тока TAL с активными аналоговыми фильтрами нижних
частот, нагруженные балластными резисторами [в ИМФ-1С отсутствуют цепи
токов фазы В(1Ь) и тока нулевой последовательности 3/0];
• мультиплексор (МПЛ);
• аналого-цифровой преобразователь (АЦП) мгновенных напряжений трех
фаз Ua,Ub, Uc напряжений, пропорциональных фазным токам 1а, 1С (ИМФ-1С) или
Ia, Ib, 1С и току нулевой последовательности 3/0 (ИМФ-ЗС);
• микропроцессор (МП) типа К1810ВМ88 с контроллером прерываний (КП),
таймером (Т), постоянным (ПЗУ) и оперативным (ОЗУ) запоминающими
устройствами;
• элемент энергонезависимой памяти (ЭНП);
• последовательный интерфейс ПИ;
• элемент ввода и вывода (ВВ) дискретных сигналов управления («Режим»)
или информация о действии индикатора («Сигнал») или неисправности («Отказ»);
• алфавитно-цифровой индикатор АЦИ и клавиатуру диалогового режима КЛ;
• источник (блок) питания БП переменным или постоянным напряжением
(с бестрансформаторным входом); функционирование устройства не нарушается
при изменениях напряжения питания в пределах (0,7—1,2)С/ПЛЮМ.
Внешний вид — лицевая панель микропроцессорного индикатора типа ИМФ-ЗС
показан на рис 10.10, а.
В режиме готовности к действию (режиме слежения) на экране АЦИ
высвечиваются три точки. Функционирование микропроцессорных индикаторов ИМФ-1С
и ИМФ-ЗС обеспечивается разным программным обеспечением.
Запуск программного обеспечения вычисления расстояния до места КЗ,
фиксируемый появлением на экране АЦИ надписи «ЗАПУСК», производится токами
прямой 1Х, обратной 12 или нулевой /0 последовательностей, определяемыми
программными цифровыми фильтрами симметричных составляющих. Запуск произ-
264 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
водится, если их непрерывно вычисляемые действующие значения превышают
определяемые коэффициентами кп1, кп2, кп0 уставок значения 1Х > £п1/ном;
^2>^п2^ном' h > ^по^ном- Быстродействие запуска достигается использованием
дискретных мгновенных значений лишь предварительно отфильтрованных
указанными аналоговыми фильтрами токов трех фаз, следующих с интервалом
дискретизации Т- 1,66 мс (12 интервалов за период Гп промышленной частоты),
соответствующим углу сдвига фаз я/6. Вычисление симметричных составляющих
прямой и обратной последовательностей производится по дискретным,
мгновенным значениям токов [98].
Регистрация (фиксация) дискретных мгновенных напряжений и напряжений,
пропорциональных токам КЗ, производится в течение двух периодов Гп после
паузы в полпериода, в течение которой проверяется, укладываются наибольшие
мгновенные значения напряжений в рабочий диапазон АЦП: при необходимости
производится дискретное уменьшение напряжений.
Цифровыми частотными фильтрами из зафиксированных напряжений,
содержащих свободные составляющие, выделяются их принужденные составляющие
промышленной частоты, необходимые для вычислений расстояний до КЗ.
Производится коррекция их фаз, обусловленная временными задержками их
последовательного аналого-цифрового преобразования, определяются углы сдвига
фаз и вычисляются ортогональные составляющие принужденных напряжений и
токов.
По фазным соотношениям между симметричными составляющими
напряжений, пропорциональных токам, определяется вид КЗ и вычисляется расстояние
до него.
Индикаторы фиксируют момент времени отключения линии и длительность
цикла АПВ.
Информация записывается в ОЗУ, если замыкается внешний контакт или
поставлена перемычка между клеммами «Режим» (рис 10.10, б): различаются два
режима работы индикаторов: селективный и неселективный. В первом режиме,
устанавливаемом, в частности, сигнальным контактом выключателя, в память
записываются результаты анализа электромагнитного переходного процесса КЗ только
при условии отключения релейной защитой поврежденной линии. В неселектив-
ном режиме фиксируется информация о всех КЗ, при которых происходит запуск
программного обеспечения индикаторов.
Результаты вычисления расстояний до места КЗ высвечиваются на экране АЦИ
до следующего запуска или нажатия любой из четырех кнопок клавиатуры.
Клавиатура КЛ и АЦИ обеспечивают диалоговый режим (аналогичный
показанному на рис 8.13), схема которого предусматривает два варианта считывания
информации:
• о новом КЗ;
• об одном из ранее происшедших КЗ.
10.8. Автоматический регистратор электромагнитных переходных процессов 265
В первом случае нажатие крайних кнопок выводит время возникновения КЗ, а
кнопки, обозначенные стрелками, позволяют просмотреть зафиксированную о нем
информацию. Во втором случае согласно указанной схеме выбирается номер КЗ и
затем на экран выводятся:
• полный ток и длительность КЗ;
• токи и напряжения при КЗ прямой, обратной и нулевой последовательностей
(ИМФ-ЗС);
• длительность бестоковой паузы при АПВ;
• абсолютные действующие значения и фазы входных напряжений и токов.
Вывод в режим слежения производится левой кнопкой: на экране АЦИ
появляется, как указывалось, три точки и гаснет его подсветка.
10.8. Автоматический регистратор электромагнитных
переходных процессов
ООО «НПП «ЭКРА» разработан и выпускается микропроцессорный
автоматический регистратор напряжений и токов КЗ, электромеханических переходных
процессов и асинхронного режима [100]. Регистратор выполняется на серийном
терминале типа БЭ2704 (см. § 9.1).
Регистрирующий терминал выполняет функции:
• приема 24 входных аналоговых сигналов — напряжений и токов;
• приема 32 дискретных сигналов;
• пуска регистрирующего осциллографа;
• пуска внешних регистраторов контактным выходом;
• запись осциллограмм напряжений и токов;
• регистрацию событий аварийных ситуаций;
• выдачу информации посредством алфавитно-цифрового индикатора АЦИ
(дисплея) и сигнальных светодиодов СВД (рис 10.11);
• самодиагностику и сигнализацию о неисправностях.
Особенностью терминала типа БЭ2704 V900 является наличие съемной карты
энергонезависимой электронной памяти, в которую записывается цифровая
информация аварийного режима, типа Compact Flash. На рис 10.11 показано гнездо
5, в которое она вставляется, и кнопка для ее извлечения. Над гнездом расположен
индикатор рабочего состояния терминала «Работа».
Управляется регистрирующий терминал клавиатурой КЛ и от ПЭВМ через
последовательный канал связи типа RS-232. На задней стенке терминала
установлен и разъем для связи с АСУ типа RS-485 с преобразователем к уровням
транзисторно-транзисторной логики (TTL) с передатчиком и приемником — так
называемой токовой петлей (рис 10.12).
Пуск на осциллографирование производится по снижению междуфазного
напряжения и возрастанию фазного тока и по появлению и приращениям
напряжений обратной и нулевой последовательностей.
266 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
АЦИ,
Ф
(Работа -UM Извлечение
CompactFlash^^
БЭ 2704 -
- не извлекать карту при свечении индикатора "Работа"
- при замене карты соблюдать положение ключа
- вставлять карту до полного подъема толкателя "Извлечение*
Питание | [©Срабатывание|
©Неисправность JlTsT Пуск |
Время 20:51:14
Дата 14-01-2004
RS-232
—\— Аварийный регистратор электрических процессов —\—
Ф
Ф
Рис. 10.11. Расположение элементов на лицевой панели терминала
Производится запись осциллограмм напряжений и токов:
• предшествующего нормального режима (несколько периодов);
• аварийного электромагнитного или электромеханического переходных
процессов;
• послеаварийного режима длительностью, определяемой уставкой.
Для успешной передачи информации по каналам связи осциллограммы
указанных этапов разбиваются на отдельные файлы. Имеется возможность их
объединения.
Информация извлекается из терминала или по последовательному каналу связи
с ПЭВМ, или путем чтения карты памяти с помощью специального устройства
чтения. Просмотр и анализ аварийных осциллограмм осуществляется
специальной программой.
В документации ООО «НПП «ЭКРА» [100] содержится подробное описание
диалогового режима регистрирующего терминала.
Структурная схема регистрирующего терминала (рис 10.12) дает
представление о его построении: показаны вторичные измерительные трансформаторы 77—
Т16, оптронные входы и релейные выходы, и его функциональные части.
10.8. Автоматический регистратор электромагнитных переходных процессов 267
XII
RS232
ТТТ
Г38Т—►-1 >
kgJ Сигнальный
TTL
TTL ПГЬЬН
Передатчик Приемник|
"Питание"
"Пуск"
т
1X8
Неисправность Срабатывание »г~§—}
Контр.выход »ГТП
Неисправность
Уставки
процессор
тп
Центральный
процессор
Дисплей и кнопки
управления
Осциллографирование
аварийных процессов
Регистратор событий
Набор измерительных
органов и логика пуска
... гРЩ
^чггьгтН
6Щ)
да
«*е
т
Х5
USh
^б®
flg%*
да
(S^a
Ф&
-се)
-(^-(ттг-^-ЙШЙг ^^г^Й-|^т5г1?г-Рг
24
11
Рис. 10.12. Структурная схема регистрирующего терминала типа БЭ2704 V900
268 Глава 10. МИКРОПРОЦЕССОРНАЯ ПРОТИВОАВАРИЙНАЯ АВТОМАТИКА ЛИНИЙ
Вопросы для самопроверки
1. Какие виды микропроцессорной противоаварийной автоматики линий электропередачи
разработаны и какими организациями?
2. Какие виды автоматики трехфазного повторного включения программно выполняет терминал
типа ШЭ2710511 интегрированных с ней защит?
3. Как действует программная автоматика трехфазного повторного включения линий
электропередачи (см. рис. 10.1 и 10.2)?
4. Какими программными измерительными реле запускается микропроцессорная однофазная
автоматика повторного включения?
5. В какой последовательности и при каких условиях включаются выключатели с двух сторон линии
электропередачи микропроцессорной автоматикой трехфазного повторного включения?
6. Какая разница между избирателями поврежденной фазы, применяемыми в микропроцессорной
однофазной автоматике повторного включения, интегрированной с дифференциально-фазными
защитами ООО «НПП «ЭКРА» и ООО «ИЦ «БРЕСЛЕР»?
7. Как функционирует программная автоматика однофазного повторного включения (см. рис. 10.6)?
8. Как автоматикой однофазного повторного включения обеспечивается отключение трех фаз линии
электропередачи при двухфазном и двухфазном на землю КЗ (см. рис. 10.6)?
9. За счет чего повышается эффективность функционирования однофазной автоматики повторного
включения при использовании микропроцессорного контроля погасания электрической дуги
после отключения поврежденного однофазным КЗ провода линии электропередачи?
10. Как функционирует микропроцессорное устройство контроля погасания электрической дуги
однофазного КЗ и контроля успешности включения выключателя с одной стороны линии
(см. рис. 10.4 и 10.5)?
11. В чем состоят особенности микропроцессорной автоматики ограничений повышений
напряжения на линиях электропередачи?
12. Как действует программная автоматика ограничений напряжений на линиях электропередачи
(см. рис. 10.8)?
13. Какую функцию выполняет в микропроцессорной автоматике ограничений повышений
напряжений программное измерительное реле реактивной мощности линии электропередачи?
14. Как функционирует микропроцессорное автоматическое устройство определения расстояния до
места КЗ типа НМФ-ЗС (см. рис. 10.10)?
15. Какие функции выполняет и как функционирует микропроцессорный автоматический
регистратор электромагнитных переходных процессов — терминал БЭ2704У900 (см. рис. 10.11 и 10.12)?
Глава одиннадцатая
МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА
ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЯ УСТОЙЧИВОСТИ
11.1. Особенности микропроцессорной реализации
автоматики дозирования и запоминания
противоаварийных управляющих воздействий
В централизованных и иерархических комплексах автоматики предотвращения
нарушения устойчивости (АПНУ) цифровые универсальные, мини- и микроЭВМ
циклически (через несколько десятков секунд) производят расчеты динамической
и статической устойчивости для всех фиксируемых возмущающих воздействий с
учетом их тяжести и параметров электрических режимов работы
электроэнергетических систем (исходного нормального, аварийного и послеаварийного) и
протекания электромеханического переходного процесса. На основе расчетов и
определяется набор и интенсивность противоаварийных управляющих воздействий (их
дозирование) и запоминание до окончания следующего цикла расчетов.
Применение цифровых ЭВМ для автоматического дозирования
противоаварийных управляющих воздействий (АДВ) обеспечивает необходимое соответствие их
интенсивности возмущающим воздействиям, следовательно, повышает
эффективность действия АПНУ и позволяет взаимную координацию между устройствами
АДВ иерархических комплексов АПНУ электроэнергетических систем, их
объединений и ЕЭС в целом.
Проблемой осуществления АДВ и АЗД (запоминания дозированных
воздействий) на ЭВМ является надежность действия, которая обеспечивается при
неудовлетворяющей требованиям аппаратной надежности ЭВМ путем
мажоритарного их резервирования. При этом используются три ЭВМ, работающие синхронно
по одним программам. Обязательным для исполнения является наличие и
совпадение результатов расчетов не менее двух из трех ЭВМ.
Алгоритм автоматического дозирования противоаварийных управляющих
воздействий содержит три комплекса основных функциональных программ:
• обработки информации и предварительных расчетов условий сохранения
синхронной устойчивости параллельной работы;
• собственно программы расчетов дозированных управляющих воздействий
для каждого из пусковых органов;
• вывода и передачи дозированных воздействий в устройство АЗД.
Предварительные расчеты являются общими для всех пусковых органов и
служат для определения параметров, необходимых для вырабатывания дозированных
управляющих воздействий.
270
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
Расчеты дозирования управляющих воздействий производятся для следующих
стадий электромеханических переходных процессов:
• возникновения возмущения и принятия необходимых мер для
предотвращения нарушения динамической устойчивости электропередачи;
• сохранения статической устойчивости в послеаварийном режиме до
действия автоматических регуляторов частоты и мощности на частоторегулирующих
электростанциях;
• сохранения статической устойчивости нового установившегося режима в
процессе и после действия автоматической системы регулирования частоты и
мощности.
Дозированные противоаварийные управляющие воздействия вырабатываются
в общем случае на основе полиноминальных (7.5) алгоритмов и в соответствии с
разработанными методами [9] определения возможных областей устойчивости в
координатах режимных параметров и коэффициентов настройки автоматических
регуляторов, их анализа по критериям устойчивости. Производится проверка
сохранения устойчивости при реализации выработанных воздействий. Выбор из
возможных вариантов наборов и интенсивности управляющих воздействий
осуществляется итеративно.
11.2. Микропроцессорная панель автоматики
предотвращения нарушения устойчивости
Типовым, выполняющим указанные функции программных АДВ и АЗД,
является микропроцессорная панель противоаварийной автоматики (ПАА),
разработанная в ВЭИ [68]. Она состоит из трех необходимых для надежности
функционирования однотипных микропроцессорных панелей, устанавливаемых на
электростанции — трех комплектов вычислительных средств и пульта
управления с элементами ввода и вывода информации (четвертая панель).
Микропроцессорная панель ПАА реализует станционный или узловой (проти-
воаварийное управление несколькими электростанциями) уровень иерархической
АПНУ.
Функции АЗД при осуществлении программной автоматической дозировки на
основе указанных циклических расчетов ЭВМ органически сочетаются с
функциями АДВ: автоматическое запоминание дозированных управляющих воздействий
осуществляется ОЗУ микроЭВМ. В панелях ПАА дозированные управляющие
воздействия реализуются по дискретным сигналам пусковых органов их
выборкой из ОЗУ.
Вычислительная часть ПАА выполнена на микропроцессорном наборе серии
К580 и содержит одноплатную микроЭВМ с математическим процессором и
программируемыми параллельным и последовательным интерфейсами, оперативным
и перепрограммируемым постоянным (ППЗУ) запоминающими устройствами и
пультом управления.
11.2. Микропроцессорная панель автоматики предотвращения нарушения устойчивости 271
Выходные сигналы информационных устройств телеизмерения и вторичных
измерительных преобразователей [3], установленных на синхронных генераторах
и линиях электропередачи, поступающие в виде изменяющихся постоянных токов
(±5 мА), преобразуются в пропорциональные напряжения и гальванически
отделяются от вычислительной части. Гальваническая развязка производится оптронами,
состоящими из светодиода и фототранзистора. Сигналы фототранзисторов
поступают на АЦП.
Ввод дискретных сигналов входной информации и вывод выходных
управляющих воздействий производится как и во всех микропроцессорных автоматических
устройствах электромагнитными реле с герметизированными
магнитно-управляемыми контактами (герконами).
Выполнение функциональных алгоритмов в ПАА достигается
соответствующим программным обеспечением на языке Ассемблера, общая структура которого
представлена на рис 11.1 [49]. По программе «Включение» производится
тестовый контроль микропроцессорной системы. Затем запускаются сервисные
программы «Программатор», обеспечивающая запись информации в ППЗУ;
«Монитор», предназначенная для подготовки и отладки программного обеспечения с
использованием дисплея; «Тест», производящая полную проверку вычислительной и
преобразующей функциональных частей и системы обеспечения надежности
функционирования ПАА; «Печать», фиксирующая значения мощностей синхронных
генераторов и линий электропередач, рабочую схему и дозированные
противоаварийные управляющие воздействия.
Программа «Начальный пуск» выполняет подготовку ПАА к работе в
нормальном (доаварийном) режиме по замкнутым циклам длительностью 5 с Программа
SPS вводит информацию о режимных параметрах и состояниях синхронных
генераторах (их технологических ограничениях). По программе CONTRL
обеспечивается надежность функционирования ПАА (см. ниже).
Обработки информации о режимных параметрах для текущего состояния
схемы ведется программой UPRDO. Мажоритарная проверка вычисленных противо-
аварийных управляющих воздействий производится программой CNTUV1,
программа PGA формирует информацию о готовности каждого управляемого
электроэнергетического объекта к противоаварийному управлению. В целях оптимизации
вычислений в реальном времени противоаварийного управления программа PS
производит ранжирование элементов массивов регулировочных диапазонов
энергоагрегатов электростанции.
От верхнего уровня противоаварийного управления ПАА получает задание на
разгрузку электростанций, необходимую для предотвращения нарушения
динамической и статической устойчивости. По сигналам пусковых органов о
возникновении КЗ или изменении схемы сети (отключении линии или синхронного
генератора) вводится информация о тяжести возмущающего воздействия. Необходимые
дозированные противоаварийные управляющие воздействия (функции АДВ)
производится по программам POl, P02 и РОЗ. Результаты вычислений по программе
Р02 используются и при затяжных КЗ.
272
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
Включение
Программатор
Монитор
Тест
Печать
Начальный пуск
SOD
Обработка
сбоев
Доаварийный
режим
SPS
CONTRL
UPRDO
CNTUV1
PGA
PS
PRSH
Программы обработки прерываний
Вывод
комплекта
из работы
обслуживающим
персоналом
Верхний
уровень
WWOD
РОЗ
UPIND
CNTUV2
RIR
RSPR
Пусковые
органы
NOMPO
Р01
UPIND
CNTUV2
RIR
RSPR
Схема
сети
FIKOT
Р02
UPIND
CNTUV2
RIR
RSPR
NOMER
Затяжное
КЗ
CNTUV2
RIR
RSPR
Рис. 11.1. Структурная схема программного обеспечения ПАА
Программы RIR распределяют противоаварийные управляющие воздействия
между управляемыми электроэнергетическими объектами. Но перед этим
программы CNTUV2 производят проверку дозированных противоаварииных
управляющих воздействий, вычисленных каждой из трех панелей ПАА по мажоритарной
схеме резервирования.
По программам UPIND на основе рабочей информации, поступающей в
реальном времени электромагнитных переходных процессов, производится корректи-
11.3. Микропроцессорный программно-технический комплекс АДВ
273
ровка последующих управляющих воздействий, необходимость в которых
возникает сразу после реализации предыдущих управляющих воздействий, вследствие
прихода последовательно во времени, но в интервале одного цикла расчетов,
сигналов от двух пусковых органов. Коррекция организуется программой SOD.
Программы RSPR служат для равномерного распределения управляющих
воздействий, необходимых Дйя предотвращения нарушения статической устойчивости
в послеаварийных режимах, между синхронными генераторами электростанции.
Необходимая высокая надежность (частота отказов или излишних
срабатываний не более 0,01 в год) программной автоматики дозирования управляющих
воздействий обеспечивается, как указывалось, программами CONTRL и CNTUV1,
управляющими индивидуальными (для каждой из трех панелей) и общими
аппаратными средствами. Обеспечение достоверности информации о дозированных
противоаварииных управляющих воздействиях с резервированием по принципу
мажорирования и надежности функционирования в реальном времени по
прерываниям связано с необходимостью синхронизации вычислительных процессов и
прерываний в трех комплектах (панелях).
Временное выравнивание состояний трех ЭВМ достигается путем взаимного
обмена результатами расчетов, организуемого специальной подпрограммной, в так
называемых контрольных точках рабочих функциональных программ.
Программа обеспечивает создание временных интервалов, необходимых для
указанного выравнивания состояний, временную синхронизацию и выявление
неисправности вычислительной части одной из трех панелей и, наконец,
производит мажорирование выходных данных или фиксирует их расхождение.
Синхронность прерываний трех комплексов вычислительных средств
достигается применением программируемого контроллера прерываний.
Надежность функционирования обеспечивается и автоматической
диагностикой собственно вычислительных средств и преобразовательной части (устройств
связи с объектом — УСО) панелей ПАА. Предусматривается также
автоматический перезапуск ПАА для сохранения в работе вычислительной части при
возникновении сбоев микроЭВМ.
11.3. Микропроцессорный программно-технический
комплекс автоматического дозирования и запоминания
противоаварииных управляющих воздействий
Программно-технический комплекс (ПТК) автоматического дозирования
противоаварииных управляющих воздействий АПНУ электроэнергетических систем,
основанный на табличном алгоритме их выбора, создается в ОАО «Институт
«Энергосетьпроект» в содружестве с ЗАО «ПИК-Прогресс» [63]. Одна из первых
его микропроцессорных реализаций описана в [50]. В последнее время разработан
новый ПТК местного (локального) — станционного уровня автоматического
дозирования (ЛАДВ), запоминания (АЗД) и выдачи противоаварииных управляющих
воздействий (УВ), функционирующий на самой современной технической базе:
274
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
аппаратная часть ПТК создана ЗАО «ПИК-Прогресс» на основе элементного
комплекта «Космотроника-Э», а программная — разработки ОАО «Институт «Энерго-
сетьпроект» — на базе промышленного компьютера, функционирующего на
центральном микропроцессоре типа CPU686E фирмы Fastwell.
Состав программно-технического комплекса. Совместно с сигнальным
процессором (СП) входящим в состав модуля аналогового ввода МАВСП (рис 11.2),
промышленный компьютер Пр.К образует вычислительно-логическую
функциональную часть ВЛЧ [3] микропроцессорной автоматики предотвращения
нарушения устойчивости ЭЭС.
Измерительно-преобразовательная ИПЧ функциональная часть ПТК ЛАДВ
содержит модули МТНХ—МТНт вторичных активных измерительных
трансформаторов напряжений Щ—U4 и модули МТТ]—МТТП токов 1Х—1А трех фаз и нулевой
последовательности с аналоговыми частотными фильтрами, модули ввода
аналоговых сигналов МАМ информации об активных мощностях Рх—Р8 и ввода
дискретных сигналов МДСХ—МДСк. Они связаны с модулем аналогового ввода с сигналь-
От ТА <
От7У<
ИПЧ
МТТ,
МТТ„
МТН1
мтн„
МАМ
ЩС,
мдск
ВЛЧ
I I
Г7^
ETHERNET
МАВСП
CPU686E
Пр.К
ИПП
АЦИ, КЛ, СВД
ИЧ
r=>L^i
bz>K
Связь с верхним
уровнем ПА,
АСУТП,
аппаратурой
телемеханики
YBj
УВо
•УВ,
±УВ8
Рис. 11.2. Структурная схема полукомплекта ПТК ЛАДВ
11.3. Микропроцессорный программно-технический комплекс АДВ
275
ным процессором МАВСП через оптронные элементы гальванической развязки
электрических цепей (на схеме не показаны), а модули ввода информации об
активных мощностях МАМ я дискретных сигналов МДСХ—МДСк связаны с
промышленным компьютером Пр.К параллельным интерфейсом пользователя ИПП.
Сигнальный процессор совместно с мультиплексором аналоговых сигналов и
аналого-цифровым преобразователем (на схеме не обозначены) производит
цифровую фильтрацию лишь частично (указанными аналоговыми фильтрами нижних
частот, задерживающими составляющие входных напряжений и токов с частотами,
при которых возникает второй период амплитудно-частотных характеристик
цифровых фильтров) отфильтрованных входных напряжений и токов, и формирует
цифровые сигналы, отображающие информационные параметры (амплитуду, фазу,
частоту) колебательных составляющих входных напряжений и токов
промышленной частоты, их ортогональные составляющие, симметричные составляющие
трехфазных систем напряжений и токов и цифровые сигналы информации об
активных мощностях.
Вычисления цифровых сигналов производятся после выделения
ортогональных составляющих напряжений и токов промышленной частоты нерекурсивными
фильтрами Фурье по соотношениям, приведенным в гл. 1.
Исполнительная функциональная часть ИЧ, образующая с
измерительно-преобразовательной частью Ж7¥ устройство связи с объектом (УСО), состоит из
комплектов выходных электромагнитных реле с герметизированными контактами (герконов)
ВР{—BPj. Она выдает противоаварийные управляющие воздействия УВХ—УВ8.
Промышленный компьютер Пр.К через вычислительную сеть Ethernet имеет
связь с автоматической системой телеинформационного обеспечения (аппаратурой
телемеханики), с АСУ ТП электростанции, с верхним уровнем противоаварийной
автоматики (ПА), через разъем типа RS-232 к нему подключается ПЭВМ оператора.
Для обеспечения необходимой надежности действия ПТК ЛАДВ состоит из
двух идентичных вычислительно-логических функциональных частей. На рис 11.2
показан алфавитно-цифровой индикатор АЦИ (дисплей), клавиатура управления КЛ
и светодиодное табло СВД отображения информации о его функционировании.
Функционирование комплекса. Программно-технический комплекс ЛАДВ
обеспечивает:
• автоматическое дозирование противоаварийных управляющих воздействий,
соответствующих тяжести возмущающих воздействий на ЭЭС;
• определение и выдачу управляющих воздействий при поступлении
аварийных сигналов от пусковых органов (ПО);
• автоматическое их запоминание и фиксирование воздействий, передаваемых
от противоаварийной автоматики верхнего уровня по каналам связи.
В нормальном режиме при отсутствии аварийных сигналов от ПО в режиме
АДВ производятся:
• циклический (время цикла 0,2 с) прием, проверка достоверности и
идентификация местной и телеавтоматической информации о схеме и режимных
параметрах ЭЭС;
276
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
Рис. 11.3. Внешний вид ПТК ЛАДВ
• определение по таблицам текущих значений УВ, необходимых для
сохранения устойчивости в данной схеме и текущем режиме для всех заданных аварийных
возмущений, возможных в данной ситуации;.
• контроль и диагностика программных и технических средств;
• выполнение вводимых персоналом оперативных команд;
• выполнение поступающих по каналам связи с верхнего уровня системы ПА
команд задания и запоминания УВ и перевода устройства из режима АДВ в
режим АЗД;
• формирование по запросу персонала сообщений о текущих дозировках УВ.
Работа ПТК основана на использовании табличного алгоритма выбора
дозированных УВ, в соответствии с которым в ЛАДВ заносятся сочетания схем,
режимных параметров и возмущающих воздействий. Как правило, таблицы с
необходимыми данными имеются в распоряжении персонала служб ПА, и их ввод в ПТК
производится с помощью инструментального комплекса.
Инструментальный комплекс (ИК) обеспечивает настройку ЛАДВ и устраняет
необходимость в перепрограммировании при переходе на другой
электроэнергетический объект. Он предназначен для персонала подразделений ПА
соответствующих проектных организаций и служб ПА в электроэнергетических системах, в
задачу которых входит подготовка исходной информации, необходимой для
эффективности действия ПТК ЛАДВ по предотвращению нарушения устойчивости ЭЭС
на основе известной табличной зависимости между условиями,
характеризующими режимы работы ЭЭС, и противоаварийными управляющими воздействиями.
Процедура подготовки заключается в заполнении на ПЭВМ совокупности
табличных форм с описанием района управления и в последующей проверке
введенных данных путем проведения тестовых расчетов. Информация, задаваемая в
11.3. Микропроцессорный программно-технический комплекс АДВ 277
таких формах, составляет базу исходных данных инструментального комплекса,
открытую для расширения и изменения.
Программное обеспечение (ПО) ПТК состоит из
программно-инструментального комплекса (ПИК), функционирующего на персональной ЭВМ и
выполняющего:
• рабочее ПО, функционирующее на промышленном компьютере Пр.К;
• программы общения с оператором на автоматизированном рабочем месте
(АРМ);
• программы обеспечения параллельной работы дублированного комплекса.
Программное обеспечение ПИК кроме функций по ведению базы исходных
данных обеспечивает решение следующих задач:
• формирование рабочих структур данных, переносимых в ПТК, путем
преобразования информации исходной базы данных;
• выполнение комплекса расчетов, начиная от обработки аналоговой и
дискретной информации о текущем режиме и кончая формированием УВ в целях
проверки подготовленных данных;
• запись во флэш-память промышленного компьютера выполнимого файла —
вычислительного ядра рабочего ПО.
Рабочее программное обеспечение в отличие от программы ПИК имеет
сложную структуру, в которой наряду с основной задачей определения УВ по данным
входных контролируемых параметров представлены задачи:
• опроса входных модулей УСО;
• диагностирования модулей на входе и выходе ПТК АДВ;
• взаимодействия (общения) с персоналом через встроенные дисплей и
клавиатуру;
• взаимодействия (общения) с оператором АРМ на ПЭВМ.
Программа общения с оператором значительно расширяет возможности
отображения информации и диалога персонала с ПТК. В частности, достигаются:
• удобство контроля за состоянием района управления и состоянием устройства;
• наглядность и простота проверки правильности работы ПТК.
Программное обеспечение параллельной работы дублированного комплекса
повышает надежность ПТК, выполняемого в виде дублированного, состоящего из
двух одинаковых полукомплектов комплекса. В полукомплектах одновременно и
большей частью независимо выполняются одни и те же операции по обработке
входных данных и расчету УВ. К ним добавляются операции по обмену данными
между полу комплектами. Сеансы обмена данными производятся 1 раз в течение
цикла работы ЛАДВ после завершения опроса модулей УСО и проверки
достоверности информации.
В аварийном режиме время срабатывания ПТК от момента появления входного
пускового сигнала (от ПО) о возникновении возмущающего воздействия до
момента появления команды на выполнение УВ не превышает 15 мс
278
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
11.4. Микропроцессорное устройство
противоаварийной автоматики SMART-ПА
По существу аналогично по «табличному методу» производится заготовка
дозированных УВ и в появившихся в последнее время микропроцессорных
устройствах противоаварийной автоматики предотвращения нарушения устойчивости
инженерной компании ЗАО «Прософт-Системс» и ЗАО «РТСофт». В
микропроцессорных устройствах противоаварийной автоматики энергоузла [80] и
локальном устройстве противоаварийной автоматики SMART-ПА [81] на основе ввода и
обработки доаварийной информации о схеме и режиме ЭЭС циклически (за время
20 с) рассчитывают таблицы противоаварийных УВ для всего возможного
множества возмущающих воздействий.
Микропроцессорное устройство противоаварийной автоматики типа SMART-
ПА предназначено для создания территориально распределенной
противоаварийной автоматики, обеспечивающей устойчивость параллельной работы
электрических сетей в энергосистемах.
Устройство обеспечивает следующие функции:
• сбор и обработку доаварийной информации о параметрах режима от
измерительных преобразователей мощности и датчиков состоянии схемы района
управления по телесигнализации включенного или отключенного положения основных
сетевых элементов непосредственно на объекте;
• получение по каналам телемеханики доаварийной информации о схеме и
режиме в энергосистеме, передачу или ретрансляцию телеинформации на другие
уровни;
• фиксацию перетоков мощности в контролируемых сечениях и дозирование
противоаварийных управляющих воздействий (ПУВ) для различных схем сети
(нормальной и ремонтных) на основании местной и телемеханической
информации о схеме и режимных параметрах;
• ведение таблицы дозированных воздействий, т.е. массива ПУВ, для всего
множества аварийных возмущений, различных ступеней фиксации перетоков
мощности в каждом контролируемом сечении и для различных схем
контролируемого района;
• формирование в соответствии с выбранными ПУВ выходных команд проти-
воаварийного управления и выдачу их на соответствующие исполнительные
устройства;
• прием аварийных сигналов о срабатывании пусковых органов своего района
противоаварийного управления и выборку для данного пускового органа
управляющего воздействия, соответствующего текущему дозированию, из массы
заданных ПУВ;
• отображение на панели оператора и передачу по запросу на верхний
уровень противоаварийной автоматики статусной информации о состоянии самого
SMART-ПА, каналов связи, доаварийной информации о параметрах режима и
о состоянии схемы контролируемого района, а также текущем дозировании.
11.5. Функционирование и развитие микропроцессорной АПНУ
279
Функционально устройство SMART-ПА состоит из контроллерного
оборудования и программного обеспечения. Применяемые контроллеры типов SMART I/O,
SMART 2 и ШС-32, относятся к высоконадежному оборудованию с наработкой на
отказ 100 000 ч.
Для обеспечения особо высокой надежности устройство SMART-ПА может
выполняться в виде дублированного комплекса, состоящего из двух одинаковых
полукомплектов, работающих параллельно и независимо друг от друга, либо в виде
резервированного комплекса, работающего в режиме «горячего» резервирования.
Программное обеспечение SMART-ПА состоит из базового и прикладного.
Базовое программное обеспечение — операционная система реального времени OS-9.
Прикладное программное обеспечение разработано в двух вариантах, а именно:
• в инструментальном пакете IsaGraf;
• в инструментальной среде HAWK.
Конструктивно устройство SMART-ПА выполнено в виде индустриального
шкафа фирмы RITTAL (Германия).
11.5. Функционирование и развитие микропроцессорной
автоматики предотвращения нарушения устойчивости
Автоматика предотвращения нарушения устойчивости начала развиваться со
времени сооружения первых протяженных и сильно нагруженных линий
электропередачи сверхвысокого напряжения, связывавших мощные волжские ГЭС с ОЭС
Центра, когда возникала необходимость обеспечения динамической и статической
устойчивости противоаварийным автоматическим управлением.
Отдельные релейно-контактные устройства АПНУ, обеспечивающие
устойчивость параллельной работы электрических станций, были слабо связаны между
собой, и их действие, по существу, не координировалось. С появлением мини-ЭВМ
М6000, СМ-1 и СМ-2 были созданы централизованные системы АПНУ
электроэнергетических систем с управляющим вычислительным комплексом (УВК) на
диспетчерских пунктах (ДП) с координацией функционирования устройств АПНУ
станционного уровня. Централизованные системы АПНУ с очень широким
арсеналом технических средств обеспечения и относительно медленно действующими
мини-ЭВМ по мере объединения ЭЭС и создания ЕЭС страны исчерпали свои
технические возможности по обеспечению устойчивости электроэнергетических систем.
Разработка микропроцессорного управляющего вычислительного комплекса
автоматики предотвращения нарушения устойчивости (УВК АПНУ) ведется в
Сибирском ЗАО «Институт автоматизации электроэнергетических систем» (ИАЭС)
[82, 88]. В 2003 г. введены в эксплуатацию УВК АПНУ в Таймырэнерго и в ОЭС
Сибири: УВК установлен на подстанции «Итатская 1150» и контролирует западную
и центральную части ОЭС от подстанции «Барнаульская» до Красноярской ГЭС.
Управляющий вычислительный комплекс выполнен на зарубежной
микропроцессорной технике фирм Octagon Systems и других. Его общая структура для
необходимой надежности функционирования состоит из двух взаиморезервируемых
280
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
комплектов следующих основных аналого-дискретно-цифровых и
микропроцессорных модулей:
• ввода/вывода аналоговых сигналов информации о текущем (доаварийном)
режиме (действующих значениях напряжений на шинах электростанций к
подстанций, токах нагрузки, перетоках активной и реактивной мощности по линиям
электропередачи);
• ввода аналоговых сигналов информации об активной и реактивной
мощности синхронных генераторов;
• ввода/вывода дискретных сигналов о состоянии синхронных генераторов и
линий электропередачи и пусковых органов;
• сопряжения с устройствами телеизмерения и телесигнализации ТИ-ТС;
• концентратора местной вычислительной сети;
• микропроцессорной платы (с интегрированной сетевой картой связи с АСУ);
• вывода ПУВ;
• вывода информации о функционировании УВК;
• источника бесперебойного питания.
Программное обеспечение состоит из управляющей и информационной
частей. Управляющая часть обеспечивает функционирование микропроцессора и
осуществляет ввод данных текущего режима, расчет и выбор (дозирование),
запоминание и вывод (по сигналам пусковых органов) ПУВ. Информационная часть
функционирует на основе ПЭВМ и предназначена для отображения параметров
текущего режима и реализуемых противоаварииных воздействий на ее экране.
Программы управляющей части делятся на две группы: системные и
технологические. Системная группа обеспечивает функционирование технологической
группы и производит:
• запуск и перезапуск микропроцессорных модулей;
• само- и взаимодиагностику двух указанных комплектов;
• управление базой данных;
• рассылку сообщений от УВК;
• протоколирование его функционирования и другие, главным образом,
сервисные функции.
Технологическая группа программы обеспечивает выполнение основных
функций по противоаварийному управлению:
• ввод в микропроцессор аналоговой и дискретной информации;
• дозирование противоаварииных управляющих воздействий;
• дозирование ПУВ;
• запоминание ПУВ и их вывод по сигналам пусковых органов.
Дозирование противоаварииных управляющих воздействий производится
двумя способами:
• с использованием полной математической модели контролируемой части
ОЭС по данным текущего режима и доаварийной ее схеме;
• выбором заранее определенных наборов для пусковых органов в
зависимости от доаварийной схемы и значений параметров текущего режима, если
математическая модель неполная или недостаточно данных текущего режима.
11.5. Функционирование и развитие микропроцессорной АПНУ 281
Информационная часть программного обеспечения производит выдачу
информации о состоянии схемы, режимных параметрах, дозированных ПУВ и
функционировании УВК в целом и передачу ее в АСУ ОЭС.
С появлением быстродействующих промышленных микропроцессоров и мик-
роЭВМ начали развиваться многоуровневые иерархические системы АПНУ,
рассредоточенные по ОЭС и ЕЭС, с параллельными процессами вычислений,
отличающиеся надежностью действия и соответствием вырабатываемых дозированных
противоаварииных управляющих воздействий тяжести возмущающих воздействий
и их достаточностью для сохранения устойчивости функционирования ЕЭС при
усложнившихся и утяжелившихся предаварийных и аварийных ситуациях.
Первой иерархической системой АПНУ стал двухуровневый
микропроцессорный комплекс противоаварийного управления ОЭС Средней Волги [69].
Двухуровневая АПНУ обеспечивает противоаварийным управлением
электроэнергетический район, состоящий из нескольких десятков объектов: системообразующих
линий электропередачи напряжением 500 кВ, узловых подстанций и мощных
электрических станций, в том числе Волжской ГЭС, Заинской ТЭС и Балаковской АЭС
(рис 11.4).
Технические средства верхнего уровня иерархической АПНУ представляет
УВК, состоящий из двух микроЭВМ и двух мини-ЭВМ. Система сбора информа-
Система сбора информации ОЭС
ш.
МикроЭВМ!
W.
МикроЭВМ2
Мини-ЭВМ1
ММ
1
УВК ОДУ Средней Волги
Мини-ЭВМ2
И
Ял Я
»
м
мм
мм
м
JE
Релейная АДВ
ЗЕ
Программная
АДВ
Локальная
система
сбора
информации
К исполнительным устройствам
АДВ
Балаковской
АЭС
АДВ
Волжской ГЭС
Рис. 11.4. Структурная схема иерархической системы противоаварийного управления
ОЭС Средней Волги
282
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
ции в ОЭС (каналы передачи информации — телеканалы от УТИ и УТС)
обеспечивает микроЭВМ информацией о доаварийном режиме, которая предварительно
обрабатывается и систематизируются ими.
Используются:
• телеизмерения перетоков активной и реактивной мощности по линиям
напряжением 500 и 220 кВ и через автотрансформаторы связи (несколько сот сигналов);
• телеизмерения напряжений на шинах электрических станций и подстанций
(50 сигналов);
• телесигнализации положений выключателей присоединений напряжениями
500 и 220 кВ (более 100 сигналов).
На основе первичной (в микроЭВМ) обработки информации мини-ЭВМ
производят расчеты устойчивости при возможных наиболее тяжелых и
рассредоточенных по ОЭС возмущающих воздействиях и вырабатывают дозированные ПУВ для
соответствующих пусковых органов после каждого цикла расчетов,
длительностью 1 мин. Дозированные управляющие воздействия передаются в микроЭВМ
нижнего (станционного) уровня, а именно в микропроцессорные комплексы про-
тивоаварийного управления в виде панелей ПАА (см. § 11.2), установленных на
указанных электростанциях.
Микропроцессорные ПАА выполняют:
• запоминание дозированных УВ, переданных от УВК;
• расчеты дозирования УВ с циклом малой длительности (5 с), необходимых
при возможных возмущающих воздействиях на электростанции и линиях
электропередачи, отходящих от них, а также не учтенных УВК более легких
возмущающих воздействий, при которых необходимы УВ на синхронные генераторы данной
электростанции;
• исполнение дозированных ПУВ как в пределах электростанции, так и с
передачей их по системе быстродействующей передачи сигналов противоаварийной
автоматики (БСПА) [82], а именно импульсную и длительную разгрузку
турбогенераторов, отключения гидрогенераторов и нагрузки, пуск и быстродействующую
загрузку гидрогенераторов, перевод их из режима работы синхронным
компенсатором (СК) в генераторный режим.
Исполнение УВ производится по сигналам пусковых органов, при
поступлении которых работа ПАА в цикле расчетов прерывается и осуществляется перевод
ее в режим непосредственного противоаварийного управления. После
идентификации возмущающего воздействия, выборки из ОЗУ микроЭВМ и исполнения
соответствующих противоаварийных управляющих воздействий ПАА передает
информацию в УВК о произведенных действиях и остается в режиме ожидания
развития аварийной ситуации до наступления установившегося послеаварийного
режима ОЭС.
Более сложной является иерархическая автоматика предотвращения
нарушения устойчивости ОЭС Урала. Ее второй узловой (районный) — уровень
обеспечивает противоаварийным управлением группу электростанций и линий
электропередачи между ними, выделяемую внутри ОЭС.
11.5. Функционирование и развитие микропроцессорной АПНУ
283
Различается региональный или системный [86] уровень иерархической АПНУ,
обеспечивающий устойчивость функционирования ОЭС Урала в целом. Еще более
сложной получается формируемая иерархическая автоматика предотвращения
нарушения устойчивости ОЭС Центра, содержащей многоконтурную и протяженную
системообразующую сеть высокого и сверхвысокого напряжений. В ней создаются
несколько узловых или районных уровней, действие которых должно
координироваться региональным уровнем, вычислительные технические средства которого
находятся на диспетчерском пункте ОЭС.
Формируемая иерархическая система противоаварийного управления ЕЭС в
целом имеет (верхний) центральный уровень, координирующий
функционирование региональных АПНУ: управляющий вычислительный комплекс расположен в
центральном диспетчерском управлении (ЦДУ) Единой электроэнергетической
системы [88]. На верхнем уровне формируются и оптимизируются
противоаварийные управляющие воздействия, реализуемые в различных региональных уровнях.
Разрабатываются общие методы расчетов и оптимизация управляющих
воздействий на основе функционального моделирования [89]. Их применение и
распараллеливание вычислительных процессов позволяет обеспечить эффективное про-
тивоаварийное управляющее действие распределенных и параллельно
работающих вычислительных средств различных уровней иерархической автоматики
обеспечения устойчивости функционирования («живучести») ЕЭС.
Разрабатываются алгоритмы и общие программное обеспечение иерархической
системы противоаварийной автоматики ЕЭС. На рис 11.5 приведена его
структурная схема [88].
На центральном уровне ЦУ ПАА генератор аварийных ситуаций моделирует в
соответствии с заранее заданной последовательностью аварийные ситуации,
вызванные возможными возмущающими воздействиями. С учетом данных об исходном
режиме ЕЭС вычисляются и оптимизируются начальные противоаварийные УВ для
А>го [см. (7.5)] возмущающего воздействия, которые по коммутационной сети
передаются в системные (региональные) уровни СУ ПАА. На системных уровнях
параллельно производятся расчеты так называемых функциональных характеристик всех
ОЭС и по информационным каналам указанной сети результаты расчетов
передаются в ЦУ ПАА. На основе решения уравнений Кирхгофа с учетом связей между
ЭЭС и их функциональных характеристик в ЦУ ПАА определяются приращения
мощностей АР, которые снова передаются в СУ ПАА, где вновь рассчитываются
функциональные характеристики ОЭС. Расчеты с межмашинным обменом информации
производятся, пока итерационный процесс не сойдется или не разойдется, что
оценивается в ЦУПАА. В последнем случае формируются новые УВ, и процесс их
оптимизации продолжается. После определения дозированных УВ для &-го возмущающего
воздействия производятся расчеты для {к + 1)-го возмущающего воздействия.
Все полученные результаты расчетов по коммутационной сети передаются в
микроЭВМ узловых или станционных устройств противоаварийной автоматики
(УПА) в виде таблиц, решений. МикроЭВМ панелей ПАА, выполняющих, как
указывалось, функции станционных и узловых уровней, определяют необходимые
дозированные ПУВ на управляемые электроэнергетические объекты
электрических станций, подстанций и линий электропередачи.
284
Глава 11. МИКРОПРОЦЕССОРНАЯ АПНУ
ДУПЛА
Генератор
аварийных
ситуаций
Прием-передача данных
подсистем
Решение СУС
Оптимизация УВ
Unix, SunOS, WinNT, HeUos
Коммуникационная сеть
TCP/IP, IPX/SPX, NETBIOS
СУПАА
Прием-передача данных
Передача УВ в ПАА
Расчет потока мощности
Оптимизация УВ
Unix, SunOS, WinNT, Helios
f^ Коммуникационная сеть
VTCP/IP, IPX/SPX, NETBIOS
Узловые/станционные /
УПА
Узловые/станционные
УПА
Прием УВ и данных
Расчеты УВ
по таблицам решений
Прием пускового органа
Выдача УВ
Прием УВ и данных
Расчеты УВ
по таблицам решений
Прием пускового органа
Выдача УВ
Рис. 11.5. Структурная схема программной части распределено-параллельной системы проти-
воаварийного управления
Быстродействующие вычислительные параллельные системы, способные
реализовать центральные и региональные уровни иерархической противоавариинои
автоматики обеспечения «живучести» ЕЭС, в настоящее время выпускаются только
зарубежными фирмами на основе быстродействующих микропроцессоров,
функционирующих под управлением указанных на рис 11.5 операционных систем
Uniks и Helios и TMS320CHO, управляемого операционной системой реального
времени Virtuoso. На схеме указаны так называемые рабочие вычислительные
станции, объединенные для распараллеливания вычислительных процессов в
Вопросы для самопроверки
285
локальную вычислительную сеть, фирмы SUN на микропроцессорах Super SPARC
(100 МГц) и операционная система Windows NT.
Эффективное функционирование иерархической противоавариинои
автоматики ЕЭС возможно лишь при использовании волоконно-оптических линиях связи.
В настоящее время разрабатываются программы по созданию сети
волоконно-оптических линий на всей территории России.
Вопросы для самопроверки
1. В чем состоят особенности микропроцессорной автоматики предотвращения нарушения
устойчивости (АПНУ) электроэнергетической системы (ЭЭС)? Почему она является общесистемной,
иерархической и рассредоточенной по ЭЭС автоматикой?
2. Как АПНУ обеспечивается необходимой для ее функционирования информацией и на основе
каких технических средств она вырабатывает дозированные противоаварийные управляющие
воздействия?
3. Для чего необходимо автоматическое запоминание дозированных противоаварийных
управляющих воздействий?
4. Чем различаются противоаварийные управляющие воздействия АПНУ, необходимые для
сохранения динамической и статической устойчивости?
5. Где размещаются автоматические устройства дозирования (АДВ) и запоминания (АЗД)
централизованной АПНУ?
6. Какие из указанных воздействий обеспечивают предотвращение нарушения динамической
(статической) устойчивости ЭЭС:
• форсировка возбуждения синхронных генераторов;
• импульсная разгрузка паровых турбин;
• отключение гидрогенераторов;
• отключение нагрузки;
• дискретное изменение настройки пропорционально-дифференциальных автоматических
регуляторов возбуждения синхронных генераторов;
• дискретные изменения сопротивления линии электропередачи (какими способами);
• электрическое торможение синхронных гидрогенераторов;
• форсировка накопителей электромагнитной энергии?
7. Как функционирует микропроцессорное устройство (панель) противоавариинои автоматики
(ПАА); в чем состоит программное обеспечение функционирования ПАА (см. рис. 11.1)?
8. Какова функциональная структура микропроцессорного программно-технического комплекса
(ПТК) автоматического дозирования противоаварийных управляющих воздействий (см. рис. 11.2)?
9. Что понимается под инструментальным комплексом микропроцессорного АДВ; каковы его
функции?
10. Каковы особенности программного обеспечения ПТК дозирования противоаварийных
управляющих воздействий?
11. В чем состоит различие в алгоритмах формирования дозированных противоаварийных
возмущающих воздействий в микропроцессорных ПАА и ПТК АДВ?
12. Как функционирует микропроцессорное устройство противоавариинои автоматики типа SMART-ПА?
13. Чем различаются системная и технологическая части управляющего программного обеспечения
управляющего вычислительного комплекса АПНУ, функционирующем в ОЭС Сибири?
14. Как функционирует автоматика предотвращения нарушения устойчивости объединенной ЭЭС
(на примере ОЭС «Средняя Волга», см. рис. 11.4)?
15. Как функционирует иерархическая АПНУ Единой электроэнергетической системы в целом
(см. рис. 11.5)?
Глава двенадцатая
МИКРОПРОЦЕССОРНАЯ АВТОМАТИКА
ЛИКВИДАЦИИ АСИНХРОННОГО РЕЖИМА
12.1. Назначение и виды автоматических устройств
Несмотря на оснащение электроэнергетических систем автоматикой
предотвращения нарушения устойчивости, синхронная параллельная работа мощных
электростанций или отдельных частей электроэнергетической системы часто не
сохраняется: наступает асинхронный режим их работы с относительными проворотами
роторов синхронных генераторов с угловой частотой скольжения со^ = coj - со2.
Несинхронный режим наступает обычно вследствие неполного соответствия
дозирования противоаварийных управляющих воздействий тяжести возмущения, т.е.
недостаточной эффективности АПНУ или даже отказов отдельных автоматических
устройств противоаварийного управления.
Допустимый, хотя и нежелательный для синхронных генераторов,
асинхронный режим представляет серьезную опасность для ЭЭС. Сопровождаемый
периодическими значительными снижениями напряжения, он может привести к
уменьшению производительности и останову агрегатов собственных нужд ТЭС и АЭС,
отключениям электродвигательной нагрузки потребителя и в конечном итоге к
развитию общесистемной аварии. Поэтому необходимо противоаварийное
управление по его устранению. Оно осуществляется устройствами автоматического
прекращения (ликвидации) асинхронного режима.
В зависимости от складывающейся ситуации в ЭЭС асинхронный режим
может быть допустимым кратковременно, а иногда и относительно длительно, или
недопустимым вообще. Поэтому ликвидация асинхронного режима производится
или ресинхронизацией путем соответствующих управляющих воздействий на
синхронные генераторы, а иногда и на нагрузку ЭЭС, или немедленным делением
ЭЭС на несинхронно работающие части.
Соответственно устройства автоматики ликвидации асинхронного режима
(AJIAP) делятся на три группы [86]:
• устройства, производящие противоаварийные управляющий воздействия
при возникновении признаков нарушения синхронизма или в течение первого
цикла асинхронного режима (одного проворота роторов генераторов);
• устройства, осуществляющие ресинхронизацию обычно после нескольких
циклов асинхронного режима и действующие на деление ЭЭС при затянувшемся
асинхронном режиме длительностью более 30 с;
• быстродействующие неселективные устройства деления ЭЭС в начальной
фазе нарушения устойчивости.
12.2. Электрические признаки асинхронного режима
287
°Йш
АчзМо-оЬ^—QRHe
*эп' ~эп
i о)
«-«)&,
г
h^\ ]д ро \м2 ^^
h \
У 1 ^
-1 /
""^"^^ \^^^^^
ЭЦК^-^^^ \
—lmin ^^"/7
6)
^2min
^^>1
- — О
\J
Рис. 12.1. Схема (а) и изменения напряжений (б) линий электропередачи в асинхронном режиме
Устройства АЛАР, осуществляющие ресинхронизацию, достаточно
эффективны лишь при одночастотном асинхронном режиме, процессы при котором
рассматриваются в типовой двухмашинной эквивалентной схеме (рис 12.1, а). При
вероятности возникновения трехчасготного асинхронного режима, т.е.
возникновения трех несинхронно работающих частей ЭЭС, производится
незамедлительное ее деление.
12.2. Электрические признаки асинхронного режима
Наиболее характерным признаком нарушения устойчивости является
нарастание угла 8 = (Ev Е2) сдвига фаз между эквивалентными ЭДС Ех, Е2 двух частей
ЭЭС, связанных линиями электропередачи (рис 12.1, а). Однако
непосредственное его отслеживание технически сложно.
Поэтому прежде всего представляет интерес периодическое изменение тока
асинхронного режима I в функции синуса половинного угла 5 и достигающего
наибольшего значения /артах при 8 = п (рис 12.2, а):
ast
fi + Н 2Е . 8 .
/а.р = —" = — Sin-=/apmaxSin-2 ,
(12.1)
где хэп — практически чисто индуктивное сопротивление линии электропередачи
между источниками ЭДС; хэп = хГ + хт1 +хл + хт2; \ЕХ | = |2?2| = Е; источник Е2
идеальный.
288
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
к
a.pmax
/ !^
l"44^. n
л
фт
■ я
■71/2
2я *6
■ —тс
в) б)
Рис. 12.2. Изменения амплитуд и фаз тока (а) и напряжений (б)
Ток / и используется в простейшей быстродействующей АЛАР,
производящей деление ЭЭС на две несинхронно работающие части путем отключения линии
электропередачи при недопустимости асинхронного режима. Применяются
измерительные реле максимального тока. Ток их срабатывания определяется
условиями недействия в максимальном рабочем режиме (при токе /ртах) и достаточной
чувствительности (кч = 1,5) в асинхронном режиме
отс а.р max
a.pmin' ч'
где / min — наименьшее (при наибольшем возможном хэп) из максимальных (при
8 = тс) действующих значений тока I- котс =1,25.
Ток / изменяется и по фазе по отношению к условно принимаемой
неподвижной ЭДС Е2 (см. рис 12.1): при вращении ЭДС Ех избыточный по активной
мощности левой части ЭЭС (против часовой стрелки) угол 0<фт = (£2,/)<я
(рис 12.2, я), а при ее вращении по часовой стрелке (при дефиците активной
мощности) — 0 > фт > -тс.
Напряжение в асинхронном режиме в электрическом центре качаний (ЭЦК)
периодически снижается вплоть до нуля (при 8 = тс): С/Эцк = 0 (рис 12.2, б). Место
расположения ЭЦК и минимальные абсолютные значения напряжений C/lmin, k^min
определяются в предположении однородно распределенных составляющих
сопротивления хэп. Векторы ЭДС Ех, Е2 располагаются противоположно
направленными, что соответствует углу 8 = я. Пересечение прямой, соединяющей концы
векторов, с горизонтальной осью и определяет положение ЭЦК (см. рис 12.1, б).
Изменения напряжений С/Эцк ™UX,U2 на шинах в функции угла 8 или времени
(поскольку 8 = ш50 показаны на рис 12.2, б. Углы сдвига фаз ф1н, ф2н между
напряжениями Ux, у2 и условно неподвижной ЭДС Е2 изменяются в полном диапазоне
от 0 до 2тс(±тс).
12.2. Электрические признаки асинхронного режима
289
Поскольку иЭЦК = 0, то при расположении ЭЦК на контролируемой АЛАР
линии электропередачи, а АЛАР — на промежуточной подстанции с напряжением
У0 (см. рис, 12.1) всегда обеспечивается соотношение абсолютных значений
напряжений:
№>№<Щ- (12-2)
Показанные на рис 12.2 изменения электрических величин в асинхронном
режиме и указанное соотношение (12.2) поясняются векторной диаграммой
напряжений и токов, приведенной на рис 12.3, а. На ней показаны неподвижный
вертикально расположенный вектор ЭДС Е2 правой части упрощенной до так
называемой двухмашинной схемы ЭЭС (см. рис. 12.1, а) и вращающийся с частотой
скольжения со5 вектор ЭДС Ех левой ее части, описывающий своим концом
окружность 1. Изображены векторы их геометрической разности АЕ = Ех - Е2 для трех
значений угла 8 сдвига фаз между ними 8' = 2тс/3, 8" = 4тс/3 и 8 = (11/6)тс;
показаны векторы АЕ', АЕ" и АЕ'" соответственно.
При этом конец вектора тока асинхронного режима / описывает окружность
2 и имеет максимальное абсолютное значение /артах при 8 = я (ЭДС находятся в
противофазе, и абсолютное значение геометрической разности максимально).
Показаны векторы токов /J , 7^р, I™ и углы сдвига фаз у'т « тс/3, ф^ « 2тс/3 и
ср"' « (5/6)я между ЭДС Е2 и токами при указанных углах 8', 8" и 8'" .
На рис 12.3, а изображены и векторы напряжений U[9 U2, U", U2 и углы
сдвига фаз я/2 < ф'1н < 2я/3 ; <р2я « я/6; ф"н > 4я/3 , ц>'2ш « -я/3 между Е2 и
напряжениями при углах 8' и 8", иллюстрирующие фазные соотношения,
показанные на рис 12.2, б.
Графики на рис 12.3, б иллюстрируют еще одно характерное соотношение —
разность углов сдвига фаз Афн т между напряжением Ux и током / при
одинаковых абсолютных значениях тока при углах 8' < я и 8' > я. Как видно, разность
Афнт значительна и является признаком развития или появления асинхронного
режима, поскольку характеризует нарастание угла 8, превышающее я.
Если указанная разность углов превышает критическую
Афн.т>АфкР> (12-3)
то появляется угроза асинхронного режима [54]. Например, при / = /ар
(рис 12.3, а, б) фазовые углы тока ф^ = я/3 , ф" = 2я/3 , а фазовый угол напряже-
290
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
Рис. 12.3. Векторная диаграмма ЭДС, напряжений и токов (а) и изменений угла сдвига фаз
между напряжением и током и сопротивлений на зажимах измерительного реле при
асинхронном режиме линий электропередачи (б) (см. рис. 8.1)
ния £/1н в зависимости от соотношений сопротивлений хг + хт1 и хт2 составляют
2я/3 > (р'1н > я/2; Зя/2 > <р"н > 4тс/3, их разности я/3 > (рдт > я/6; 5я/6 > фдТ > 2я/3,
а приращение
я/2 < АФн>т = Ф;т - Ф;>т < 7я/6. (12.4)
12.3. Варианты микропроцессорной автоматики ликвидации асинхронного режима 291
Рис. 12.4. Изменения активной мощности линий электропередачи (а) и сопротивления на
зажимах измерительных реле (б)
При синхронных качаниях приращение угла Д(рн т отсутствует, поскольку ток
возвращается к тому же положению при 6'.
Активная мощность Р в линии электропередачи, пропорциональная sin 5,
дважды за период Ts асинхронного режима меняет направление (рис 12.4, а).
В связи с указанными изменениями состояний векторов напряжений Ux, U2 и
вектора тока / их отношения (комплексные сопротивления на зажимах
измерительных реле сопротивления) непрерывно и периодически изменяются по
абсолютному значению от весьма значительных (Zp -> со) практически до нуля (рис 12.4, б).
12.3. Варианты микропроцессорной автоматики
ликвидации асинхронного режима
В последнее время разработан ряд вариантов микропроцессорной АЛАР. В
первом из них — терминалах REO-511 PSP, REO-511 РАА предприятия ООО «АББ
Автоматизация» [25] — использован алгоритм функционирования,
осуществленный в ОАО «Институт «Энергосетьпроект» еще при первой релейно-контактной
реализации АЛАР на электромеханической элементной базе [40]. По такому же
алгоритму функционирует и АЛАР, предлагаемая Институтом автоматизации
энергосистем и Новосибирским государственным техническим университетом [51].
Более совершенный алгоритм, реализованный в микропроцессорной
разработке Всероссийского института релестроения (ВНИИР) панели ШДЭ 2601 в
микропроцессорном варианте, не повторен. Нет сведений по реализации
микропроцессорной избирательной АЛАР, устанавливаемой по концам линии электропередачи
292
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
(на шинах Ux и U2, см. рис 12.1, а) и обеспечивающей при делении ЭЭС
оставление нагрузки в избыточной ее части [25, 26].
В Дальневосточном государственном техническом университете изготовлены и
установлены в опытную, эксплуатацию микроэлектронные и разрабатываются
микропроцессорные АЛАР [54, 88], определяющие асинхронный режим по
приращению Дфнт угла сдвига фаз между напряжением Ux и током асинхронного
режима/ар (см. рис 12.3, б).
Ведущее положение в создании совершенной микропроцессорной АЛАР
занимает ОАО «Институт «Энергосетьпроект». Созданы два варианта
микропроцессорной автоматики, функционирующие:
• по зависимости скольжения s и угла сдвига фаз S [1];
• по определению наличия ЭЦК на контролируемой линии электропередачи
по (12.2), а отличие асинхронного режима от синхронных качаний — по
расчетному углу 8 линии электропередачи, вычисляемому по предлагаемому алгоритму
[52, 55], а знак скольжения, определяющий ускоряющее или тормозное противо-
аварийные управляющие воздействия — по знаку его производной.
12.4. Микропроцессорная автоматика
ООО «АББ Автоматизация»
Микропроцессорная автоматика ликвидации асинхронного режима (АЛАР-М)
реализована на терминалах REO-511 PSP и REO-511 РАА, в которых она
интегрирована с автоматикой ограничения повышения напряжения (АОПН-М),
принципиально функционирует по тому же алгоритму, что и АЛАР ОАО «Институт «Энергосеть-
проект» и ранее выпускавшаяся панель ШП 2704 [28]. Однако благодаря
микропроцессорному выполнению АЛАР-М отличается более высоким техническим
совершенством, эффективностью действия и сервисными свойствами.
В АЛАР-М асинхронный режим и синхронные качания отличаются от КЗ по
скорости изменения сопротивления Zp на зажимах двух программных
измерительных реле.
В автоматике ОАО «Институт «Энергосетьпроект» используются два
направленных измерительных реле сопротивления разной чувствительности с
характеристиками срабатывания грубого Zcr и чувствительного ZC4 (рис 12.5, а). При КЗ
сопротивление Zp на зажимах обоих реле снижается одновременно (рис 12.5, б), а
при асинхронном режиме (АР) и синхронных качаниях (СК) — разновременно через
время At. Таким образом исключается реагирование АЛАР на КЗ. Отличие АР от СК
осуществляется по углу 8 электропередачи.
На рис 12.5, а обозначены и углы электропередачи, соответствующие
срабатыванию 8С г, 8СЛ и возврату 8В г, 8В ч грубого и чувствительного измерительных реле
сопротивления.
12.4. Микропроцессорная автоматика ООО «АББ Автоматизация»
293
КЗ
^
АР
¥;---
А/
Момент возмущения
б)
Рис. 12.5. Характеристики чувствительного и грубого реле сопротивлений (а) и диаграммы
моментов их срабатывания и возврата при изменениях сопротивления во времени при КЗ,
синхронных качаниях или асинхронном режиме (б)
В автоматике ООО «АББ Автоматизация» применяются программные
измерительные реле полного сопротивления с характеристиками срабатывания в виде
параллелограммов — 1 (внешняя) и 2 (внутренняя) (рис 12.6, а). Они
обеспечивают обнаружение развития асинхронного режима и синхронных качаний путем
сравнения установленного таймером микроконтроллера интервала времени с
разностью моментов пересечения их (в точках а, Ъ или с, d) годографом
сопротивления Z : при КЗ, как указывалось, характеристики пересекаются годографом
вектора Z практически одновременно, а при возникновении качаний и развитии
асинхронного режима — разновременно.
Использование двух областей характеристик: 3 «прямого» (точки а, Ь) и 4
«обратного» (точки с, d) их переходов годографом вектора Zp позволяет
расширить возможности АЛАР по фиксированию развития асинхронного режима в
отличие от синхронных качаний роторов генераторов.
Нахождение вектора Z в области 5 означает расположение ЭЦК (см. рис 12.1, а)
на контролируемой линии электропередачи, а в области 6 — на смежной линии
и используется для отключения смежной линии (в порядке резервирования).
294
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
Рис. 12.6. Характеристики срабатывания в комплексной области измерительных реле
сопротивлений AJIAP-M ОАО «АББ Автоматизация» (а) и Новосибирского государственного
технического университета (б)
На рис 12.6, а показано направление вектора суммарного сопротивления
линий электропередачи Z3n двухмашинной схемы замещения ЭЭС (см. рис 12.1, а),
состоящей из практически однородных реальных сопротивлений (Z, а не X) ее
частей. Вектор определяет углы аэп наклона к горизонтальной оси R комплексной
плоскости сопротивлений соответствующих сторон характеристик срабатывания
измерительных реле сопротивления в форме параллелепипедов.
В микропроцессорной АЛАР Института автоматизации энергетических
систем и Новосибирского государственного технического университета
используются трапецеидальные характеристики 1 и 2 (рис 12.6, б) срабатывания
чувствительного и грубого направленных измерительных реле сопротивления.
Принципиально общая логическая часть указанных трехступенчатых АЛАР и
АЛАР-М приведена на рис 12.7.
Необходимое взаимодействие реле KZ1 и KZ2 с соответствующими
характеристиками ZCT и Zcч (см. рис 12.5, а) или внешней 1 и внутренней 2 (см. рис 12.6)
обеспечивается логической частью первой ступени, а именно элементами DX
(ЗАПРЕТ), временной задержки DT1 и DX1 (И). Первый из них не допускает
прохождение сигнала от реле KZ1 при практически одновременном с ним
срабатывании реле KZ2, что происходит при КЗ, вследствие дискретного уменьшения
сопротивления Z на их входах.
Логический элемент DX1 после срабатывания реле KZ2 под воздействием
сигнала на втором — нижнем входе формирует сигнал противоаварийного
управляющего воздействия на первых входах элементов DX2 и DX3.
Цепь обратной связи ОС необходима для запоминания сигнала на выходе DX1,
поскольку после срабатывания KZ2 сигнал на выходе элемента DX исчезает.
Однако пока еще неизвестно — под воздействием наступившего асинхронного
режима или синхронных качаний сформирован указанный сигнал на выходе DX1,
12.4. Микропроцессорная автоматика ООО «АББ Автоматизация))
295
ир Ж
-7р
^
-7р
-V
к
к
KZ2
Z<
KZ3
Р$
Ж
DX
&
DT1
DX1
DX2
U1
ос
ос
DW1
1 Н
DX4
& U
DX5
Г=!
DW2
1 h
DX6
ОС
УВ*
DX7
& И
ув„
DX3
DX9
DW3
DT2
СТ\
DX8
УВ,
т2
УВ,
DT3
УВл
У2
DX10
Рис. 12.7. Общая функциональная схема автоматики ликвидации асинхронного режима
а если он появился из-за нарушения устойчивости, то какое — тормозящее УВт1
или ускоряющее УВ х управляющее воздействие необходимо. Это определяется
измерительной частью второй ступени устройства, а именно поведением
измерительного реле мощности KW и его взаимодействием с измерительными реле
сопротивления KZ2 и KZ3. Реле KZ3 с характеристикой, расположенной главным
образом в третьем квадранте (ей соответствует часть внутренней характеристики 2
программных измерительных реле АЛАР-М, см. рис 12.6), обеспечивает
фиксацию ЭЦК, если он оказывается не на линии, а, например, в показанном на схеме
рис 12.1, а трансформаторе первой (левой) части схемы ЭЭС.
Мощность переориентирования измерительного реле KW определяется
критическим углом 8 выхода электропередачи из синхронизма. При синхронных
качаниях с углами 8 < 8 < к активная мощность сохраняет направление от шин
электростанции с напряжением Ux в линию — Р > 0 (см. рис 12.3, а): ЭДС Ех
опережает по фазе ЭДС Е2, и реле мощности KW находится в состоянии, при
котором выдается дискретный единичный сигнал с первого верхнего (по
расположению на схеме рис 12.7) его выхода.
При этом, несмотря на срабатывание реле KZ2 или KZ3 сигналы на выходах
элементов DX5 и DX7 отсутствуют, поскольку на нижнем DX5 и верхнем DX6
входах логический нуль, поступающий с нижнего выхода реле KW, поэтому
логические нули и на выходе DX6, и на нижнем входе DX7. Соответственно отсутствуют
единичные логические сигналы и на нижних входах элементов DX2 и DX3 первой
ступени. Устройство при синхронных качаниях не формирует управляющих
воздействий.
296
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
Асинхронный режим начинается при возрастании угла до 5 > 5 , активная
мощность в линии изменяет направление — становится отрицательной (см. рис 12.3, а).
Измерительное реле мощности KWизменяет свое состояние: на его верхнем выходе
(см. рис 12.7) нуль, а на нижнем — логическая единица. При этом, благодаря
обратной связи, состояние элемента DX4 не изменяется: единичный сигнал на его выходе
и на верхнем входе DX5 сохраняется. Поэтому, поступающая на нижний вход DX5
логическая единица проходит на его выход и, поступая на нижний вход элемента
DX2, обусловливает формирование управляющего воздействия У8т1 на снижение
частоты вращения синхронных генераторов первой части ЭЭС, например,
электрическим торможением гидрогенераторов. Управляющее воздействие тормозящее,
поскольку рассматривается увеличение опережающего угла 8 сдвига фаз между
ЭДС Ех и Е2 (вращение вектора Ех против часовой стрелки), т.е. ускорение
синхронных генераторов первой части схемы ЭЭС (см. рис 12.1, а).
При наступлении асинхронного режима, вследствие отставания по фазе ЭДС
Ех (вращения ее вектора по часовой стрелке, соответствующего торможению
синхронных генераторов первой части схемы ЭЭС), т.е. вследствие нарастания
отрицательного угла 8, передаваемая по линии мощность направлена от линии к шинам
с напряжением Uv т.е. Р < 0. Поэтому реле мощности KW выдает единичный
сигнал с нижнего (рис 12.7) его выхода и нулевой — с верхнего. При этом после
срабатывания реле KZ2 или KZ3 единица с выхода элемента DW1 не проходит на
выход DX4, так как нулевой логический сигнал — на нижнем его входе, а единица
с выхода DX6 не проходит на выход DX7, поскольку указанный нулевой
логический сигнал — на его верхнем входе.
Управляющее воздействие, но теперь уже ускоряющее — УВ\у, формируется
после достижения отрицательным углом 8 критического значения 8 и
переориентации реле KW, вследствие изменения направления активной мощности. При этом
появляющаяся на верхнем выходе реле KW логическая единица, поступая на
верхний вход элемента DX7, обусловливает прохождение через него сигнала от DX6 на
нижний вход элемента DX3, формирующего УВ v
При достаточности и эффективности управляющих воздействий первой
ступени асинхронный режим не развивается. Если же ресинхронизация не наступает
через 2—3 цикла асинхронного режима, то формируются дополнительные
управляющие воздействия УВт2 и УВт2 второй ступени. Происходит это после отсчета
нескольких циклов асинхронного режима счетчиком СГ, запускаемым выходными
единичными логическими сигналами элементов DX5 или DX7 через DX3.
Элемент выдержки времени DT2 контролирует длительность каждого цикла
Ts асинхронного режима. Если она превышает критическое значение, при
котором ресинхронизация обеспечивается, то счетчик циклов приводится в исходное
состояние и действие второй ступени устройства приостанавливается: с верхнего
12.5. Микропроцессорная автоматика Дальневосточного ГТУ
297
и нижнего входов элементов DX10 и DX9 снимаются единичные логические
сигналы.
Однако, если спустя допустимое время асинхронного режима,
устанавливаемое элементом выдержки времени DT3 и составляющее около 30 с,
ресинхронизация не наступает, то действует третья ступень рассмотренного устройства и
отключает линию связи, разделяя ЭЭС на две самостоятельно и несинхронно
работающие части. Восстановление связи производится включением линии
электропередачи автоматическим устройством ее повторного включения с синхронизацией,
т.е. после восстановления балансов мощностей в каждой части ЭЭС
автоматическими устройствами регулирования частоты и мощности.
Особенностью AJIAP-M является использование двух счетчиков циклов
асинхронного режима, независимо фиксирующих указанные «прямые» и «обратные»
переходы вектором сопротивления внешней 1 и внутренней 2 характеристик (см.
рис 12.6).
Надежность действия АЛАР-М обеспечивается пофазным ее выполнением и
формированием противоаварийных управляющих воздействий только при
идентичном функционировании не менее чем в двух из трех фазах.
12.5. Микропроцессорная автоматика Дальневосточного
государственного технического университета
Способ выявления асинхронного режима, реализованный в рассматриваемой
АЛАР-М, основан на использовании информации об изменениях угла сдвига фаз
между напряжением и током фнт (см. рис 12.3, б).
Зависимость абсолютного значения тока в цикле асинхронного режима
/=^V*2+l-2£cosS (12.5)
показана на рис 12.8 в общем случае для двух значений к = \ЕХ1Е2\ и реального Z3n.
Фаза тока определяется векторной диаграммой (см. рис 12.3, а). В частности
при к= \
Фт = = + !-агё2эп. (12.6)
Выражение для напряжения в любой точке линии электропередачи (см.
рис 12.1, а) имеет вид [24]
Ux =E2[a + k(l-a)eJb]. (12.7)
296
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
Указанный фазовый угол срн т между током и напряжением в точке установки
АЛАР (промежуточная подстанция с напряжением UQ, см. рис. 12.1, а) можно
представить следующим выражением [24]:
Фн.т = arg
= срэп + arctg
к(\ - q) sin 8
а + к(\ -а) cos б
Г
arctg
A: sin 5
к cos 5 - 1
л
, (12.8)
гдеФэп = аг§(2эп),а<1.
Сущность способа состоит в том, что измеряются два значения ср,, <р2 фазового
угла в моменты равенства тока в цикле его изменений некоторому значению 10 и
вычисляется разность углов Дф = ф2 - ср..
Как видно из рис. 12.8 при синхронных качаниях угол 5, периодически
увеличиваясь и уменьшаясь, не может превысить значение, равное 180 эл. град., поэтому
7, отн. ед
£=1,25
к = 0,8
0 20 40 60
Ф, эл. град
320
240
160
80
0
-80
-160
-240
-320 I-
80 100120140160180 200 220 240 260 280 300 320 340 8, эл. град
60 -80 100120.
I I
..7 160180 200 220 240 260 280 300 320 340 6, эл. град
V ? ' '
Ч ^-/. и%лJ_ I ..../
"-^^uZlZZ"
Рис. 12.8. Изменение тока и угла между напряжением и током ф в цикле АР:
1 - к = 0,8, а = 0,4; 2 - к = 0,S, а = 0,6; 3 - к = 1,25, а = 0,4; 4 - к = 1,25, а = 0,6
12.6. Микропроцессорная автоматика ОАО «Институт «Энергосетьпроект» 299
измеренные значения угла между напряжением и током при прохождении током
значения 10 одинаковы. В цикле АР углы ф15 ср2 при значениях 10 существенно
различаются.
На рис 12.8 пунктирными линиями показаны возможные значения углов ф1 и
Ф2 при двух значениях к. В любом случае выполняется условие
1Аф1т1п>Фу>
где |Аф|т1п — наименьшее возможное значение Аф в цикле асинхронного режима;
ф — установленный угол сдвига фаз между напряжением и током (уставка АЛАР).
Расчеты показали, что при асинхронном режиме в зависимости от значения к
и места установки устройства (значения а) обеспечиваются значения углов Аф =
= ±(75+200) эл. град. [88].
12.6. Микропроцессорная автоматика
ОАО «Институт ((Энергосетьпроект»
Ведущей в области противоаварийной автоматики научно-исследовательской
организацией ОАО «Институт «Энергосетьпроект» проработаны теоретические и
практические задачи микропроцессорной реализации функций АЛАР.
При этом из различных периодически изменяющихся в асинхронном режиме
электрических величин использованы наиболее характерные: угол 8 сдвига фаз
между эквивалентными ЭДС двух частей ЭЭС, разность их частот — скольжение s
несинхронно работающей части и его производная ds/dt.
Алгоритм функционирования первого поколения микропроцессорной АЛАР
[1] основан на функциональной связи между скольжением s и углом 8 — фазовой
траектории, описываемой соответствующим аналитическим соотношением.
Разработанная совместно с научно-производительным предприятием
«Энергоизмеритель» на основе специализированного программируемого контроллера
противоаварийной автоматики выполнена новая микропроцессорная АЛАР-М [52, 55],
функционирующая по другому алгоритму. Внешний ее вид представлен на рис 12.9.
Принцип выявления асинхронного режима состоит в расчетном определении
векторов напряжений и углов между ними в четырех узлах ЭЭС, к двум из которых
приложены ЭДС эквивалентных генераторов Е1э, Е2э (рис 12.10), а два других
ограничивают контролируемый участок ЭЭС. Расчет векторов ЭДС эквивалентных
генераторов и напряжений по концам контролируемой зоны производится в
режиме реального времени на основе измеряемых токов и напряжений в месте
установки устройства с учетом набора эквивалентных сопротивлений.
Параллельно с расчетом угла между векторами эквивалентных ЭДС фиксируется зйак
скольжения асинхронно движущихся частей ЭЭС.
300
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
Рис. 12.9. Внешний вид АЛАР
е-
АЛАР-М
т —т
КЗ
Ql »
LJIUJ
сь
к
*±2э
к
н-0
Рис. 12.10. Эквивалентная схема защищаемого участка
Функциональными особенностями устройства являются:
• непосредственное определение углов между векторами ЭДС эквивалентных
генераторов и использование угла 8 для выявления асинхронного режима;
• селективность действия, основанная на определении ЭЦК в контролируемой
зоне при наличии асинхронного режима в энергосистеме;
• три ступени срабатывания, позволяющие осуществлять широкие
возможности внешнего управления, в том числе и в первом полуцикле асинхронного
режима.
Устройство АЛАР-М устанавливается в узле п (рис 12.10), в котором
производится измерение токов /} и/2 и напряжения Un. Узлы тик соответствуют
граничным узлам контролируемого АЛАР участка ЭЭС. Сопротивления Zx и Z2
соответствуют эквивалентным сопротивлениям схемы до эквивалентных ЭДС Е1э
и Е2э, a Zn является комплексным сопротивлением нагрузки.
Периодически измеряются напряжения и токи трех фаз одной из ветвей схемы
и тока фазы А другой ветви.
12.6. Микропроцессорная автоматика ОАО «Институт «Энергосетьпроект» 301
Выявление асинхронного режима базируется на расчете векторов
эквивалентных ЭДС по выражениям:
где ах, а2 > t\ > t2 — комплексные коэффициенты, определяемые параметрами
участка от узла п до узлов приложения эквивалентных ЭДС.
Селективность работы устройства обеспечивается предварительным расчетом
диапазона разности углов напряжений на границах контролируемых зон
относительно узла установки устройства во всех случаях попадания ЭЦК в
контролируемый участок и выбором в качестве уставок минимальных значений разностей
углов для каждой из контролируемых зон по обе стороны от узла установки
устройства.
Расчет напряжений Um и Uk в узлах, ограничивающих контролируемые
участки, производится по аналогичным (12.9) выражениям.
Критерием наличия ЭЦК является выполнение одного из условий:
|Фт-Ф^>Ф„_„Д0П; (12.10)
|Ф*-Ф„|>Ф*_„Д0П, (12.11)
где Ф/|| = arg(C/J, Фя = arg(C/J, Ф* = arg(C/^), Фт_„доп, Ф*_„доп — уставки
углов между векторами напряжений по концам контролируемых участков и узла
установки устройства, выбранные на основе предварительных расчетов всех
реально возможных режимов сети, при которых асинхронный режим наблюдается
в сечении одной из контролируемых устройством зон.
Значения углов Фт_„доп, Ф^_„доп рассматриваются как предельные
(допустимые) между векторами напряжений по границам контролируемого участка сети,
если в пределах этих участков при наличии асинхронного режима имеет место
точка, характеризующаяся минимальным напряжением по всей линии
электропередачи.
Таким образом, при фиксации ЭЦК в контролируемой зоне алгоритм
устройства позволяет сработать выходным реле и тем самым осуществить управляющие
воздействия (отключение нагрузок или генераторов, деление ЭЭС на несинхронно
работающие части).
В устройстве реализована трехступенчатая схема функционирования. При
возникновении асинхронного режима и наличии ЭЦК в контролируемых участках
срабатывают соответствующие выходные реле в зависимости от знака скольжения,
что определяет действие первой ступени.
(12.9)
302
Глава 12. МИКРОПРОЦЕССОРНАЯ АЛАР
Действие второй ступени связано с фиксацией заданного числа проворотов
ЭДС с одновременным контролем ЭЦК.
Третья ступень действует аналогично второй ступени и также связана с
фиксацией определенного количества проворотов, но через заданное время после
срабатывания второй ступени.
Предусмотрен контроль длительности заданного числа проворотов: в случаях,
если длительность больше допустимой (что свидетельствует о ресинхронизации),
происходит возврат AJIAP в исходное состояние.
Настройка автоматики для работы в выбранном узле энергосистемы
производится путем ввода в память устройства определенных величин в виде рабочих уставок.
Ввод уставок производится с панели АЛАР или с персонального компьютера.
Недостатком рассмотренной АЛАР-М является использование в качестве
уставок эквивалентных параметров линий электропередачи, которые могут
изменяться, что приведет к ошибке определения угла между векторами ЭДС эквивалентных
генераторов и к возможному ошибочному действию устройства.
В связи с этим существует задача разработки быстродействующего способа
выявления асинхронного режима способного:
• использовать для работы только информацию о величинах, непосредственно
доступных для измерения (токи и напряжения в узле установки устройства) и
параметры контролируемого участка линий электропередачи, доступного для
непосредственной и достоверной оценки (параметры четырехполюсника участка
электропередачи);
• быть адаптивным к схемно-режимным изменениям в работе энергосистемы;
• определять в результате расчета текущий угол между векторами ЭДС
эквивалентных генераторов 8 и скорость изменения этого угла для последующего
использования этих параметров при формировании уставок срабатывания;
• определять наличие ЭЦК на контролируемом участке;
• выявлять асинхронный режим на первом полуцикле асинхронного движения
векторов ЭДС эквивалентных генераторов;
• реализовывать в устройстве автоматики выявления и ликвидации
асинхронного режима возможность самостоятельно формировать уставку срабатывания, т.е.
наделять его функциями самонастраивающейся автоматики.
Указанные задачи являются предметом продолжающейся
научно-исследовательской работы по совершенствованию АЛАР-М.
Вопросы для самопроверки
1. Какой из режимных параметров электроэнергетической системы определяет наступление
асинхронного режима?
2. Как изменяется угол сдвига фаз между напряжениями по концам линии электропередачи после
наступления асинхронного режима?
3. Как изменяются действующие значения напряжения на шинах электростанции и тока в линии
электропередачи после выпадения электростанции из синхронизма?
4. Как изменяется активная мощность линии электропередачи в асинхронном режиме?
Вопросы для самопроверки
303
5. Как в соответствии с назначением автоматика ликвидации асинхронного режима (АЛАР)
воздействует и на какие электроэнергетические объекты?
6 В чем состоит функциональное различие между несколькими ступенями АЛАР?
7 Как достигается отстройка измерительной вычислительной части АЛАР, фиксирующей наступ-
' ление асинхронного режима, от возникновения КЗ на линии и от синхронных качаний
генераторов (см. рис. 12.5)?
8. Как различаются виды АЛАР по используемым для фиксирования асинхронного режима
изменениям электрических величин?
9 Какие из измерительных реле определяют ускоряющие или тормозящие противоаварииные
управляющие воздействия на синхронные генераторы необходимые для прекращения (ликвидации)
асинхронного режима?
10. Как функционирует и какие управляющие воздействия вырабатывает первая ступень типового
релейно-контактного или микросхемного устройства АЛАР (см. рис. 12.7)?
11. Как действует и какие управляющие воздействия формирует вторая ступень типового устройства
12. Как функционирует микропроцессорная АЛАР в виде терминалов REO-511 PSP и REO-511 РАА
(см. рис. 12.5 и 12.7)?
13. В чем состоят особенности микропроцессорной АЛАР Дальневосточного государственного
технического университета (см. рис. 12.8)? ътт^™
14. Каков принцип действия микропроцессорной АЛАР, разработанной в ОАО «Институт «Энерго-
сетьпроект» (см. рис. 12.9)?
15. Как функционирует АЛАР-М (см. рис. 12.10)?
Глава тринадцатая
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРИЧЕСКИМИ СТАНЦИЯМИ
И ЭЛЕКТРОЭНЕРГЕТИЧЕСКИМИ СИСТЕМАМИ
13.1. Назначение и принципы реализации
автоматизированного управления электростанциями
Электрическая станция как главная производственная единица ЭЭС в связи с
особенностями процесса производства и передачи электрической энергии (см.
введение) должна управляться полностью автоматически, т.е. без непосредственного
участия человека (оператора). Однако в настоящее время полностью
автоматизированы только гидроэлектростанции (ГЭС). Тепловые (ТЭС) и атомные (АЭС)
электростанции управляются автоматизированными системами,
предполагающими эпизодическое вмешательство в их функционирование дежурного оператора
электростанции. Тем не менее, в связи с программированием современных систем
управления ГЭС человеком и предусматриваемой (на всякий случай)
возможностью «ручного» воздействия на них, они также называются автоматизированными
(АСУ ГЭС). Громоздкая из-за сложности тепловых процессов технологическая
автоматика ТЭС и АЭС обусловливает наименование систем управления ими как
автоматизированных систем управления технологическими процессами (АСУ ТП).
Автоматизированное управление режимами работы ЭЭС осуществляется АСУ
ЭЭС, ОЭС и АСУ ЕЭС соответственно. Их техническая реализация стала
возможной лишь с появлением цифровой вычислительной техники. Назначением АСУ
является обеспечение надежного, технически рационального и оптимального по
технико-экономическим показателям функционирования электрических станций
и ЭЭС.
Конкретные задачи АСУ электростанций сводятся к следующим:
• поддержание активной мощности электроэнергетических блоков на
предписанном постоянной прогнозируемой — плановой частью графика нагрузки
электростанции уровне;
• изменение активной мощности энергоблоков под воздействием сигналов
АСУ ЭЭС, поступающих по каналам передачи информации, для покрытия
случайно изменяющейся — неплановой нагрузки ЭЭС;
• экономичное распределение плановой и неплановой активной мощности
электростанции между параллельно работающими электроэнергетическими
блоками;
13.1. Принципы реализации автоматизированного управления электростанциями 305
• поддержание частоты напряжения на шинах электростанции на
номинальном уровне с заданной точностью (отклонениями не более А/= ±0,1 Гц) —
вторичное автоматическое регулирование частоты;
• изменение амплитуды напряжения на шинах электростанции в соответствии
с графиком;
• изменение обусловленной режимами работы ЭЭС реактивной мощности
электростанции и оптимальное ее распределение между синхронными генераторами;
• взаимодействие с автоматическими устройствами противоаварийного
управления и защиты энергоблоков — противоаварийной автоматикой (УПА).
Автоматизированная система управления выполняет и ряд
технико-экономических и планово-производственных и даже коммерческих функций.
Разработка научно-исследовательскими организациями и внедрение
автоматизированных систем управления на основе ставшей доступной для широкого
применения цифровой вычислительной техники началось еще в конце истекшего века
[67]. В настоящее время создается уже третье — интегрированное поколение АСУ
ГЭС и АСУ ТП тепловыми и атомными электростанциями на основе
разработанных в ГУП ВЭИ микропроцессорных средств для автоматизации
электроэнергетических комплексов (МК АЭК), удовлетворяющих требуемой надежности
функционирования автоматических устройств ЭЭС [68].
Приняты общая концепция построения и функциональная структура АСУ ТП
[59]. Она является интегрированной двухуровневой иерархической и
распределенной (по территории электростанций). Верхний уровень — общестанционная часть,
нижний — агрегатная (блочная) часть; использует общее информационное
обеспечение: подсистему сбора и первичной обработки информации от энергоагрегатов,
входящую в блочную часть, и подсистему представления информации через
ПЭВМ персоналу, входящую в общестанционную часть.
Верхний уровень АСУ включает подсистему автоматического управления
нормальными режимами общестанционного уровня, состоящую из автоматических
устройств:
• общестанционного регулирования частоты и активной мощности
электростанции (ОРЧМ);
• общестанционного регулирования напряжения и реактивной мощности
(ОРНМ);
• управления изменениями состояний энергоагрегатов (с условным названием
ПУСК) и противоаварийного управления (ПАУ).
Нижний уровень образует комплекс автоматических устройств управления
гидро- и турбогенераторами: автоматика изменения состояния, автоматический
синхронизатор (АС), автоматические регуляторы частоты вращения (АРЧВ),
активной мощности (АРАМ) и возбуждения (АРВ) синхронного генератора,
трансформаторов (АРКТ).
306
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
13.2. Микропроцессорная автоматизированная система
управления гидроэлектростанциями
Гидроэлектростанциям принадлежит важная роль в обеспечении надежного и
оптимального режимов работы Единой электроэнергетической системы. Они
покрывают переменную случайно изменяющуюся часть графика нагрузки ЕЭС и тем
самым обеспечивают равномерную работу мощных электроэнергетических блоков
ТЭС и АЭС. Именно на ГЭС сосредоточен оперативный резерв мощности,
вводимый в действие в течение десятков секунд. Маневренность ГЭС широко
используется в аварийных ситуациях для быстрого восстановления баланса (равенства
требуемой потребителем и производимой) электроэнергии в целях предотвращения
нарушения устойчивости параллельной работы электрических станций и
восстановления нормального режима работы ЭЭС. Технологический процесс
производства электроэнергии на ГЭС несопоставимо проще, чем на ТЭС. Поэтому первыми
разрабатывались АСУ ГЭС [67].
Создана микропроцессорная интегрированная АСУ ГЭС и ГАЭС [67],
функциональная структура которой иллюстрируется схемой на рис 13.1. Как
указывалось, АСУ является двухуровневой.
Нижний агрегатный уровень АСУ {агрегатная часть АЧ АСУ) содержит
устройства:
• сбора и первичной обработки информации о состоянии гидрогенератора ГГ и
трансформатора Г блока и схеме его подключения УСИ; контроля и диагностики КДА
гидрогенератора ГГи коммутационного (подстанционного) оборудования КДПО;
в асу ээс
±
От АСУ ЭЭС ОтЦПА
Ь-А
СВУ
ОСЧАСУ
ОИ,
ГЩУ
ОИ,
A3,
АД
ОИ,
ППО
КУЭ
сспщ
ки
(ПЭВМ)
ПУСК
ОРЧМ
^-\
OPHM
ши
ПА
БСПА
УСИ
ъ
\кдпо
РАС
УСИ
КДА
3zr
АЧАСУ
0РУ1; ОРУ2
КУА
=3=
РАС
Т JB |
ГГ}
ОИ,
МЗ
Рис. 13.1. Функциональная структура микропроцессорной АСУ ГЭС
13.2. Микропроцессорная автоматизированная система управления ГЭС 307
• комплексного автоматического управления блоком гидротурбина-генератор —
трансформатор КУА;
• регистрации аварийных ситуаций РАС на гидрогенераторах и распредуст-
ройствах ОРУ1, ОРУ2.
Первая группа информационных средств поставляет (через концентратор КИ)
информацию о технических показателях технологического оборудования таких,
как уровни масла в маслонапорной установке (МНУ), подпятнике гидротурбины и
подшипнике генератора, их температура, положения гидравлических двигателей и
др.; о ходе процессов пуска и синхронизации гидрогенератора, его и
трансформатора электрических режимах, о состоянии выключателей В и их приводов и т.д.
Главную управляющую часть агрегатного уровня КУА составляют
микропроцессорная автоматика изменения состояния гидрогенератора, микропроцессорные
АС, АРЧМ и АРВ синхронного генератора. Устройства РАС выдают
осциллограммы процессов изменений напряжений и токов при КЗ и других возмущающих
воздействиях, фиксируют состояния контактных и бесконтактных выходов
измерительной и исполнительной частей автоматических управляющих устройств с
последующей выдачей информации на экран дисплея ПЭВМ.
Верхний общестанционный уровень АСУ {общестанционная часть ОС АСУ)
состоит из следующих подсистем:
• представленная и отображенная информация ОИ персоналу электростанции
о нормальных режимах, регистрации и анализа аварийных режимов;
• автоматического управления нормальными режимами работы электростанции;
• противоаварийной автоматики ПА;
• информационной связи с вышестоящим уровнем управления СВУи
комплексного учета электроэнергии КУЭ.
Подсистема ОИ строится на базе локальной вычислительной сети
совместимых ПЭВМ, установленных на главном щите управления ГЩУ
гидроэлектростанцией, в электромашинном зале МЗ, в помещениях службы автоматики и защиты
A3, администрации АД, планово-производственного отдела Я/70. Основными ее
функциями являются:
• отображение информации о текущем состоянии энергооборудования и
электрической схемы ГЭС;
• своевременное выявление отклонений режимных параметров
технологического процесса и его нарушениях;
• регистрация действия автоматических управляющих устройств в
нормальных, предаварийных и аварийных режимах;
• вычисление технико-экономических показателей, коммерческий учет
электроэнергии и сбор статистической информации.
Подсистема общестанционного автоматического управления состоит из трех
основных частей, осуществляющих автоматическое управление пуском и
включением на параллельную работу гидрогенераторов — подсистема ПУСК;
общестанционное автоматическое регулирование частоты и оптимальное распределение
активной нагрузки между гидрогенераторами — общестанционная подсистема
308 Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
регулирования частоты и мощности ОРЧМи общестанционного автоматического
регулирования напряжения и реактивной мощности ОРНМ.
Основное назначение подсистемы ПУСК — формирование командных
сигналов для устройств технологической автоматики, обеспечивающей изменение
состояния гидрогенератора, управление процессами нормального и ускоренного
пусков в генераторный, насосный (на ГАЭС) или компенсаторный режимы, перевода
из одного режима в другой и обеспечение персонала электростанции информацией
о их протекании, отображаемой на экранах дисплеев ПЭВМ, особенно на ГАЭС:
начале и окончании очередной стадии электромеханического переходного
процесса, например, открытия направляющего аппарата, достижении близкой к
синхронной частоты вращения, электромагнитных и электромеханических переходных
процессов само- и точной синхронизации и наборе гидрогенератором нагрузки.
Микропроцессорная подсистема ОРЧМ по сигналам от АСУ ЭЭС формирует
сигналы предписанной мощности каждого гидрогенератора и распределяет ее
изменения между гидрогенераторами с учетом их индивидуальных ограничений
по активной мощности и зон нежелательных, из-за повышения вибраций и
кавитации, нагрузок, т.е. обеспечивает технически рациональное и технико-экономи-
чески оптимальное распределение изменений нагрузки ГЭС между
гидрогенераторами. Подсистема воздействует на АРЧВ турбин через их задающие элементы —
механизмы изменения мощности.
Подсистема общестанционного автоматического регулирования напряжения
ОРНМ (рис 13.1) выявляет отклонения напряжения на шинах электростанции и
реактивной мощности, отдаваемой в ЭЭС — генерируемой или потребляемой, от
предписанных значений и воздействует на задающие элементы изменения уставок
напряжения ЭИУ (см. рис 3.4) АРВ синхронных генераторов или статических
компенсаторов реактивной мощности, обеспечивая оптимальное ее распределение
между ними, и воздействует на АРКТ трансформаторов и автотрансформаторов,
связывающих шины различных напряжений.
Основными отличительными особенностями микропроцессорной подсистемы
ОРНМ, обусловленными возможностями цифровой вычислительной техники,
являются:
• прогнозирование реактивной нагрузки электростанции, необходимой для
поддержания на предписанном уровне напряжений на шинах, осуществляемое на
основе учета регулировочной характеристики (зависимости требуемой реактивной
мощности от задаваемого напряжения) ГЭС;
• учет различий регулировочных характеристик гидрогенераторов и
индивидуальных ограничений по реактивной нагрузке, ее перераспределение в
зависимости от режима работы (генераторный, режим синхронного компенсатора,
насосный) и от активной нагрузки гидрогенераторов;
• анализ перетоков реактивной мощности через автотрансформаторы связи
между шинами различных напряжений при формировании воздействия на АРКТ;
• поагрегатный контроль выполнения управляющих воздействий и выдача
соответствующей информации.
13.3. Микропроцессорная автоматизированная система управления ТЭС 309
Микропроцессорная подсистема противоаварийной автоматики предназначена
для предотвращения нарушения устойчивости параллельной работы
электрических станций при аварийных возмущениях.
Она формирует и запоминает на определенное время дозированное по
интенсивности и длительности противоаварийные управляющие воздействия на
гидрогенераторы: их ускоренный пуск, отключение или электрическое торможение
(см. гл. 11).
Микропроцессорная АСУ осуществляет обмен информацией с диспетчерским
пунктом ЭЭС и Системным оператором через информационные автоматические
устройства сбора и передачи сигналов ССПИ и быстродействующей передачи
сигналов противоаварийной автоматики БСПА.
13.3. Микропроцессорная автоматизированная система
управления тепловыми электростанциями
В связи с возрастающей по мере развития электроэнергетики сложностью
решения проблемы оптимального распределения активной нагрузки при
поддержании практически неизменной частоты и, особенно, противоаварийного
управления мощностью ЭЭС и ее перетоками между ними к покрытию неплановой
случайно изменяющейся части графика нагрузки ЭЭС стали привлекаться и тепловые
электростанции. В соответствии с указанной в § 13.1 общей концепцией
построения АСУ ТП тепловых электростанций на общестанционную ее часть, кроме
оптимального распределения плановой мощности, возлагается задача технически
рационального и технико-экономически оптимального распределения между
энергоблоками ТЭС неплановой, задаваемой общей для ЭЭС автоматической системой
управления активной мощностью. Общестанционная часть АСУ ТП обеспечивает
участие ТЭС и в автоматическом регулировании частоты. Особая роль
принадлежит ТЭС в противоаварийном управлении мощностью: кратковременные
импульсное и длительное снижение мощности турбогенераторов (их разгрузка) являются
решающими факторами предотвращения нарушения динамической и статической
устойчивости ЭЭС соответственно (см. гл. 10).
Поэтому и в связи с громоздкостью теплоэнергетического технологического
оборудования функции микропроцессорной АСУ ТП тепловой электростанции
существенно сложнее выполняемых автоматизированной системой управления
ГЭС. В соответствии с общей концепцией построения АСУ ТП тепловых и
атомных электростанций она является интегрированной, иерархической,
двухуровневой и распределенной, функционирующей на основе переработки обширной
информации.
Основной уровень АСУ ТП — это ее общестанционная часть ОСЧ (рис 13.2)
состоит из информационных ИВК и управляющего УВК вычислительных
комплексов. Информационное обеспечение АСУ имеет решающее значение для
эффективности ее функционирования. Общестанционная часть АСУ осуществляет обмен
информацией по телеавтоматическим каналам технических средств сбора и пере-
310
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
В и от
АСУЭЭСиЕЭС
От ЦПА
УОкИИ
7к
м
если
ж
JL
БСПА
ОСЧАСУТПТЭС
ивк
ООП
~7)Г
деэо
7Г"~
УЭТЭ
~7Г~
Р0РМ\
РААС
7V
ПУСК
У УВК
ОРЧМ
0РНМ\
ПАЖ
От ИИАЧАСУ ТП
Ч>
АЧАСУТП
Рис. 13.2. Функциональная схема АСУ ТП ТЭС
дачи информации ССПИ с АСУ электроэнергетической системы,
автоматизированной системой диспетчерского управления ОЭС и ЕЭС и по каналам
быстродействующей передачи сигналов БСПА с централизованной противоаварийной
автоматикой (ЦПА): как указывалось, она получает информацию о заданном
графике загрузки электростанции плановой мощностью и о предписанной
неплановой мощности, покрытие которой связано с участием ТЭС в автоматическом
регулировании частоты, информацию о дозированных противоаварийных
воздействиях на кратковременное и длительное снижение мощности турбин в аварийном и
послеаварийном режимах соответственно и выдает информацию о режимах
работы ТЭС и ее технико-экономических показателях, схеме электростанции,
состояниях энергоблоков, максимально и минимально допустимых мощностях и об
исполнении заданий по плановой и неплановой мощностям.
Информационно-вычислительный комплекс ИВК собирает информацию от
измерительных преобразователей электрических режимных параметров
турбогенераторов и датчиков тепловых, термодинамических и механических режимных
параметров энергоблоков и оборудования собственных нужд (источников
информации ИИ агрегатной части — АЧ АСУ ТП) и производит ее обработку, прежде
всего для отображения оперативному персоналу ООП, диагностики состояния и
определения ресурсов основного тепло- и электроэнергетического оборудования
ДСЭО, учета выработанной, потребляемой на собственные нужды и отпущенной
электрической и тепловой энергии УЭ ТЭ, поступающей в устройства
отображения и использования информации У О и ИИ. В ИВК производятся расчеты по
оптимальному распределению плановой и неплановой мощностей электростанции
между энергоблоками по рассчитываемым циклически на основе собираемой
информации технико-экономическим показателям энергоблоков РОРМ,
формируются данные для передачи в АСУ ЭЭС и ЕЭС, производится регистрация и анализ
аварийных ситуаций РААС и ряд расчетов планово-производственного характера.
13.3. Микропроцессорная автоматизированная система управления ТЭС 311
Управляющий вычислительный комплекс состоит из четырех частей (см. § 13.1):
• управления пуском и остановом, включением на параллельную работу и
нагружением турбогенераторов ПУСК;
• общестанционного регулирования частоты и мощности ОРЧМ;
• общестанционного регулирования напряжения и реактивной мощности ОРНМ;
• противоаварийного управления мощностью ПАУМ.
Основные отличительные от управляющей части АСУ ГЭС (см. рис 13.1)
особенности УВК определяются сложностью технологических процессов пуска,
останова и нагружения паровых турбин и рассмотренными задачами автоматического
управления мощностью в нормальных, аварийных и послеаварийных режимах,
реализуемого микропроцессорной автоматической системой управления
мощностью, выполняющей функции ОРЧМ и ПАУМ. Усложняются и функции ОРНМ по
сравнению с выполняемыми в АСУ ГЭС, поскольку ТЭС и АЭС часто имеют
шины нескольких напряжений, а ТЭЦ — и генераторного напряжения.
Соответственно требуется больший объем информации и согласование управляющих
воздействий на АРВ групп электрических блоков генератор — трансформатор и
АРКТ трансформаторов и автотрансформаторов связи между шинами.
Автоматическая система ОРНМ (рис. 13.2) программно реализуется как много-
связная автоматическая система регулирования, разработанная в ОАО «Институт
«Энергосетьпроект» [70]. Программная автоматическая система ОРНМ обладает
свойством адаптации к составу генераторов и трансформаторов и к электрической
схеме электростанции. При этом не требуется перепрограммирования:
производится лишь соответствующая ее настройка.
Поскольку режим работы современных ТЭС и АЭС по напряжению и
реактивной мощности определяется множеством параметров: напряжениями шин,
распределением реактивной нагрузки электростанции между синхронными и асинх-
ронизированными генераторами, потоками реактивной мощности через
трансформаторы связи между шинами различных напряжений и по линиям
электропередачи, то «... метод расчета управляющих воздействий ...» на АРВ генераторов
и АРКТ трансформаторов «... представляет собой нормализованный
математический аппарат решения оптимизационной задачи ...» [50].
Микропроцессорная автоматическая система управления частотой и
мощностью ОРЧМ (рис. 13.2) является основной частью АСУ ТП. В связи с
противоречивостью энергосистемных и внутриблочных требований и условий она отличается
значительной сложностью. Для поддержания оптимального режима и
устойчивости функционирования энергообъединений особенно важны скорость и
точность отработки выдаваемых ТЭС заданий по мощности, тогда как допустимая и
реализуемая скорости изменения мощности инерционных тепловых энергоблоков
ограничены. Поэтому автоматическая система управления содержит
специфические элементы ограничения темпа задания мощности (ОТЗ) и безударного ее
подключения и отключения. По существу, только микропроцессорная реализация
позволила на удовлетворительном уровне компромиссно разрешить противоречивость
общесистемных и внутриблочных условий и придала автоматической системе
управления новые, по сравнению с аналоговой реализацией, свойства.
312 Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ВАСУЭЭС
От
АСУ
ээс
р
пр.нпл
р
Пр.ГО1
i£^
зэш
L
HL
эснд\—
L_JK
УП
4фос[
1 и
зэпн\
ИОЧ
(КЧ)
L
"L
отз
ЭБО
т
р
нпл
Рш
ОРМ
1
J&MD
/ф!
т
1 г—►
р
^r.npl
|_1
\р г*
1 г.пря
-J
п
SM
Г
J
39CP-JI/
УСЯ
ЛЯ7Г
КАРВЧ
ОтИПТГ
~*
Рис. 13.3. Функциональная схема микропроцессорной автоматической системы управления
мощностью ТЭС
В соответствии с указанными в § 13.1 техническими задачами АСУ ТП обще-
станционная автоматическая система управления (регулирования) частоты и
мощности тепловой электростанции программно выполняет функции (рис 13.3):
задания плановой нагрузки (элемент ЗЭПН) и неплановой мощности ЗЭНМ,
ограничения темпа заданий на изменения мощностей ОТЗ и безударного
подключения и отключения (безударных операций) ЭБО; оптимального по
технико-экономическим показателям распределения мощности ОРМ и задания мощности Рп .
энергоблокам (элемент ЗЭМБ); измерительного органа частоты ИОЧ с зоной
нечувствительности A/H4 > |±0,1| Гц (корректор частоты КЧ). Выходной сумматор
SMnx сигналов воздействует на микропроцессорную ЭЧСР-М турбоагрегата (см.
гл. 5) и аналоговый регулятор парогенератора АРПГ.
Плановая предписанная нагрузка Рпрш рассчитывается в общеэнергосистем-
ном оперативном информационно-управляющим комплексе АСУ ЭЭС (см. ниже) и
передается по каналам связи системы сбора и передачи информации (ССПИ) на
ТЭС заблаговременно в виде почасовых точек графика нагрузки и состава
турбогенераторов (их пуска и останова). Задачи, связанные с управлением неплановой
предписанной мощностью Рпрнш и противоаварийным управлением решаются в
реальном времени управляющим вычислительным комплексом
общеэнергосистемного уровня. Расчеты заданий плановой мощности энергоблокам по их
технико-экономическим показателям производятся микропроцессорами
общестанционной части АСУ ТП в соответствии с почасовым графиком нагрузки, а
неплановой — в реальном времени (циклически каждые 0,2 с).
Функции заданий мощностей выполняются по замкнутым схемам следящего
автоматического регулирования, поэтому функция задания неплановой нагрузки
энергоблокам в [28] называется регулятором неплановой мощности. Регулятор
функционирует по интегральному алгоритму автоматического регулирования и
13.3. Микропроцессорная автоматизированная система управления ТЭС 313
принципиально реализуются как программные позиционные астатические
регуляторы, содержащие, например ЗЭНМ, элемент сравнения непрерывного действия
ЭСНД, релейный усилитель-преобразователь УП и интегратор И, охваченные
функциональной отрицательной обратной связью ФОС с передаточной функцией апе-
риодичного звена [40]. Их техническая реализация — цифровая по
соответствующим программам управления микропроцессорными вычислительными
средствами, т.е. в виде цифровых моделей астатического следящего регулятора.
Программа оптимального распределения мощности обеспечивает вычисление
функций ф. изменений мощностей энергоблоков по их технико-экономическим
показателям и технологическим ограничениям и определяет приоритет загрузки
отдельных энергоблоков или их групп с учетом технологически допустимых
регулировочных диапазонов. Их численным интегрированием, что условно (знаками
интегралов) и обозначено на рис 13.3, и определяются предписанные мощности
PTnpiэнергоблоков.
Ограничители темпа задания (их два в каналах мощностей Рпрпл и Рпрнпл)
также представляют собой цифровые модели астатических регуляторов с
интеграторами, постоянные времени которых и устанавливают допустимые по
технологическим условиям скорости изменений заданий мощностей, поступающих из АСУ
ЭЭС, или скорость изменений нагрузок энергоблоков при подключениях и
отключениях, ввиду или недостоверности информации, или неисправности АСРМ.
Программно реализуется и измерительный орган частоты ИОЧ с зоной
нечувствительности.
Например, показанная на рис 13.4 упрощенная программа распределения
предписанной ТЭС неплановой мощности Рпряш между турбогенераторами —
определения Р . состоит из ряда подпрограмм — программных модулей. Модуль
сравнения предписанной Рпр нпл и истинной Риш мощностей электростанции
выявляет необходимое ее приращение АР = Р нпл - Рнш. Производится проверка
условия |Д.Р| > 0 и условий перехода к загрузке генераторов АР > APmin или их
разгрузке -АР < -APmin, где АР — порог чувствительности вычислительной части к
изменениям мощности. Модуль загрузки MIN при выполнении первого из двух
указанных условий перехода определяет энергоблок, с которого по его технико-
экономическим показателям и технологическим условиям должна начинаться
загрузка турбогенератора дополнительной мощностью и проверяет наличие
регулировочного диапазона на увеличение его нагрузки. Модуль разгрузки МАХ при
выполнении второго условия перехода выбирает энергоблок, начиная с которого
должно производиться снижение мощности турбогенераторов, и проверяет
отсутствие технологических ограничений уменьшения его нагрузки.
По подпрограммам MIN и МАХ циклически анализируется состояние всех
энергоблоков ТЭС. Определяется один из возможных результатов анализа: найден
один энергоблок с минимальным (максимальным) индексом приоритета на
загрузку или разгрузку соответственно; найдено несколько турбогенераторов с
одинаковыми приоритетами; получен признак отсутствия регулировочных диапазонов
314
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Г Начало J
Нет
ЗАГРУЗКА [Установка Ги; вызов АРГ| РАЗГРУЗКА
INTGRL: Y=ifrJAPdt
Нет
Нет
Р^пТУ-Р^н-ПТ+ЩпТ)
С
W^1*'
Выход
J
Рис. 13.4. Упрощенная структурная схема программы распределения мощности ТЭС между
турбогенераторами
у всех энергоблоков. Первые два результата используются программными
модулями разрешения изменения мощности — разрешения загрузки (разгрузки)
выбранного энергоблока (энергоблоков).
Программный модуль ЗАГРУЗКА—РАЗГРУЗКА производит расчеты
управляющих воздействий на одновременное или поочередное увеличение (уменьшение)
мощности выбранных турбоагрегатов. Производится подготовка данных для
расчетов, в особенности АР и постоянной времени Ти интегрирования. Подпрограмма
INTGRL выполняет интегральную операцию Г= 1/Ги f APdt, моделирующую,
13.4. Техническая реализация АСУ ТП ЭЧ
315
как указывалось, следующее астатическое изменение предписанной мощности.
Если результат интегрирования отличен от нуля Y Ф 0, то производится проверка
условий Qt = 0 возможности изменения нагрузки z-ro турбогенератора. Значением
условия Qi = 1 запрещается участие турбогенератора в покрытии приращения
мощности ТЭС: сохраняется прежняя его нагрузка РТЛ1р(п - 1)7! При допустимости
ее изменений предписанная мощность генератора Ргир(пТ) увеличивается на
значение АРГ, определяемое коэффициентом или функцией фг долевого участия /-го
турбогенератора в покрытии изменения нагрузки ТЭС или ограничиваемую
максимально или минимально допустимой мощностью энергоблока в соответствии с
возможным динамическим диапазоном ее изменения. Если порядковый номер /
турбогенератора не превышает их количества N, то по переходу, определяемому
отрицанием условия / > N, производится следующий цикл определения изменения
нагрузки (/' + 1)-го турбогенератора.
Функции, выполняемые ОРЧМ при управлении плановой мощностью,
сводятся в основном к следующим:
• формирование промежуточных (между заданными АСУ ЭЭС почасовыми)
точек прогнозируемой части графика нагрузки электростанции;
• расчеты предписанной плановой мощности энергоблоков на основе анализа
их технико-экономических показателей и с учетом регулировочных диапазонов,
допустимой скорости изменения нагрузки турбогенераторов, допускаемой
перегрузки трансформаторов связи между шинами различных напряжений и
технологических ограничений изменения мощности турбин; обеспечение в результате
оптимального экономически и рационального технически распределения
предписанной ТЭС графиком нагрузки плановой мощности;
• формирование сигналов информации о выполняемом графике нагрузки.
13.4. Техническая реализация автоматизированной
системы управления электрической частью
тепловых электростанций
В соответствии с рекомендациями Департамента научно-технической
политики и развития РАО «ЕЭС России» и АО «ВНИИЭ» [58] Российская компания
ООО «АББ Автоматизация» [59] и ОАО «НИИ по передаче электроэнергии
постоянным током высокого напряжения» («НИИПТ») [60] разработаны варианты
технической реализации автоматизированной системы управления
электроэнергетическими объектами электрической части тепловой электростанции (АСУ ТП ЭЧ).
Ее технической основой являются системы информационного обеспечения —
контроля (сбора данных) и автоматизированного диспетчерского управления
(СКАДА). Компанией 000 «АББ Автоматизация» используется система
MicroSCADA финской фирмы, а ОАО «НИИПТ» — разработанная институтом и
НИИ космического приборостроения СКАДА-НИИПТ [60].
316
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Эти системы представляют собой «...мощное инструментальное средство
построения распределенной автоматизированной системы управления...» [59],
функционируют под управлением операционной системы Windows NT и
обеспечивают параллельное выполнение различных функций и одновременную работу
нескольких операторов, находящихся на различных автоматизированных рабочих
местах (АРМ).
Программные системы MicroSCADA и СКАДА-НИИПТ со встроенным
алгоритмическим языком программирования функционируют с использованием:
• базовых (основного и резервного) специализированных серверов большой
вычислительной мощности, получающих информацию о технологических
процессах и создающих базу данных;
• функциональных контроллеров;
• персональных компьютеров (ПЭВМ), установленных на АРМ;
• основного и резервного процессоров связи;
• локальной вычислительной сети с концентраторами информации;
• полевой (промышленной) сети;
• измерительных преобразователей режимных параметров
электроэнергетического оборудования электростанции в сигналы информации;
• микропроцессорных устройств релейной защиты и автоматики электростанции.
Реализованная автоматизированная система управления имеет
трехступенчатую структуру: между ее нижним (агрегатным) и верхним (общестанционным)
уровнями различается средний уровень. Он представляется сервером,
производящим централизованную обработку информации, ее хранение и выдачу по
требованию оператора АРМ верхнего уровня.
Сервер реализует два режима хранения информации:
• динамический — для хранения в ОЗУ данных о текущем состоянии
электротехнического оборудования электростанции;
• долговременный (не менее 3 мес) архив, в который заносятся обработанные
данные о. работе электростанции.
Верхний уровень АСУ ТП реализуется локальной вычислительной сетью и
ПЭВМ автоматизированных рабочих мест, обеспечивающими отображение
информации и управление электротехническим оборудованием.
Нижний уровень осуществляется функциональным контроллером,
объединяющим терминалы релейной защиты и автоматики и реализованным на базе
промышленных (работающих в условиях широкого диапазона изменения температуры,
влажности и запыленности) компьютеров и таких аппаратно-программных
технических средств как:
• устройство связи с объектом (УСО);
• измерительные преобразователи режимных параметров процесса
производства электроэнергии в сигналы информации;
• комплект элементов волоконно-оптической связи;
• терминалы защиты и автоматики электрической станции.
Сбор информации с нижнего уровня производится процессором связи —
совокупностью аппаратно-программных технических средств, обеспечивающих связь
13.4. Техническая реализация АСУ ТП ЭЧ
317
по полевым шинам с подключенными к ним устройствам связи с объектом;
измерительным преобразователям и терминалам релейной защиты и автоматики и
осуществляющих обмен информацией с сервером. Обмен данными производится по
волоконно-оптическим линиям связи с оптоэлектрическими преобразователями
интерфейса RS-485 по специализированной, обеспечивающей высокоскоростной
обмен информацией сети типа LON. Она выполнена по схеме многолучевой звезды
с множеством доступов. Сеть включает в свой состав концентраторы информации.
Обмен информацией производится с использованием общих и
специализированных протоколов связи.
На рис 13.5 приведена общая сконцентрированная структурная схема АСУ ТП
ЭЧ. На ее нижнем уровне размещены терминалы релейной защиты и автоматики
электростанции, устройства связи с объектом, в частности типа RTU560 и
измерительные преобразователи, например, цифровые типа Contrans.
На среднем уровне показаны взаиморезервируемые серверы и шины типа LON.
Верхний уровень АСУ ТП ЭЧ представлен автоматизированными рабочими
местами АРМ1 ... APMiVтехнических руководителей и эксплуатационного персонала
электростанции. Показана и связь с АСУ более высокого уровня (другими АСУ).
Достаточно подробная схема АСУ ТП ЭЧ электростанции, разработанная в
ООО «АББ Автоматизация» на основе системы управления и контроля типа
MicroSCADA, приведена на рис 13.6 (см. вклейку). Агрегатный (полевой) ее
уровень, сосредоточенный на энергоблоках генератор — трансформатор № 1 и 2, их
собственных нуждах и распределительных (РУ) и комплектных (КРУ) устройствах
напряжений собственных нужд КРУ 6 кВ, шин электростанции КРУ 10 кВ, генера-
Шины LON
В
iM>
'. JUjUJ
яы защиты и автоматики
/ fl
УСО
Измерительные
преобразователи
Рис. 13.5. Общая схема АСУ ТП ЭЧ электростанции
318
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
торов КРУ 20 кВ, распредустройств высоких напряжений РУ ПО и 220 кВ,
представлен:
• цифровыми измерительными преобразователями типа Contrans E-SU;
• устройствами связи с объектом типа RTU560;
• терминалами релейной защиты и автоматики серий SPACOM, БМРЗ и
«Сириус», устанавливаемых в РУ напряжением 6 и 10 кВ;
• терминалами релейной защиты синхронных генераторов и энергоблоков
генератор — трансформатор типов REG, RET (ООО «АББ Автоматизации»);
• шкафов типа Ш2607 научно-производственного предприятия ОАО НПП
«ЭКРА», автоматических синхронизаторов АС-М, автоматических регуляторов
возбуждения АРВ-М;
• электрической частью системы регулирования активной мощности ЭЧСР-М
разработки ГНЦ ВЭИ;
• электрогидравлическим автоматическим регулятором частоты вращения
генераторов ЭГР-МП фирмы ООО «ПромАвтоматика» (г. Санкт-Петербург);
• автоматическими регуляторами коэффициентов трансформации типов SPAU
или РИМ-1.
Они информационно объединяются функциональными контроллерами ФК.
Информация поступает в концентраторы и по шинам типа LON
волоконно-оптической сети Ethernet (через оптические распределительные коробки) в процессоры
связи и серверы — основной и резервный базовые компьютеры MicroSCADA.
Серверы, концентраторы информации и процессоры связи размещаются в
защитных шкафах вычислительной техники.
На схеме показаны и такие элементы информационной сети как
мини-конверторы (в шкафах RTU560) и инверторы (в шкафах ИБП).
Автоматизированные рабочие места АРМ располагаются на блочном БЩУ и
центральном ЦЩУ щитах управления. Они оборудованы персональными
компьютерами с дисплеями и принтерами.
Действие всех элементов АСУ ТП ЭЧ синхронизировано по времени с
точностью ±1 мс: на схеме показаны приемники сигналов единого времени GPS.
Автоматизированная система АСУ ТП ЭЧ обеспечивает:
• дистанционное управление электроэнергетическими объектами и их
автоматикой нормального режима и противоаварийного управления (изменения
настройки, диагностика и пр.);
• визуализацию состояния электротехнического оборудования и режимов его
работы;
• предупредительную и аварийную сигнализацию различными звуками и цветом
на экране дисплея в соответствии с программным обеспечением типа MicroALARM;
• регистрацию и отображение действий оператора, возмущающих воздействий
в ЭЭС и других событий с выдачей по требованию их протоколов с метками времени;
• поддержку диалога при выполнении функций телеуправления с
отображением ответной информации;
• отображение на русском языке текстовой информации, содержащейся на
экранах;
13.5. Цифровая автоматическая система управления частотой и активной мощностью 319
• ведение архивов событий;
• запись и считывание аварийных осциллограмм хранящихся в сервере;
• прием информации от общеэнергосистемной противоаварийной автоматики
(АПНУ, АЛАР);
• отображение текущих режимных параметров и учет производимой и
потребляемой электроэнергии;
• контроль ресурса выключателей.
Автоматизированная система выполняет целый ряд сервисных функций
свойственных микропроцессорной вычислительной технике.
13.5. Цифровая автоматическая система
управления частотой и активной мощностью
электроэнергетической системой
Автоматическое регулирование частоты и управление активной мощностью
является главной задачей автоматизированного диспетчерского управления
режимами работы ЭЭС, ОЭС и ЕЭС. Соответствующие автоматические устройства
образуют централизованную автоматическую систему управления частотой и
мощностью (ЦАРЧМ), функционирующую по ступенчато-иерархическому принципу.
Нижним ее уровнем являются АСУ ТП ГЭС, ТЭС и АЭС. В соответствии с
расчетами допустимой скорости изменения нагрузки турбогенераторов, допускаемой
перегрузки трансформаторов связи между шинами различных напряжении и
технологических ограничений изменения мощности турбин производится
оптимальное экономически и рациональное технически распределение предписанной ТЭС
графиком нагрузки плановой мощности между параллельно работающими
синхронными генераторами и формирование сигналов информации о выполняемом
графике нагрузки.
Последняя из указанных функций выполняется содержащимся в
общестанционной микропроцессорной автоматической системе управления мощностью
информационной функциональной частью — устройством У СИ (см. рис 13.1)
сбора информации о режимах работы ТЭС, передаваемой в АСУ ЭЭС, о режимах
энергоблоков, поступающей в соответствующие элементы микропроцессорной
системы, в особенности в ЗЭМБ и ОТЗ. Указанное устройство производит
тестирование при диагностике автоматической системы и выдает информацию персоналу
ТЭС с выводом на дисплей ПЭВМ о режимных параметрах энергоблоков и
неисправностях в автоматической системе управления или недостоверной ее входной
информации.
Агрегатную часть АСУ ТП (см. рис 13.2) составляют автоматика изменения
состояния турбогенератора, микропроцессорные автоматический синхронизатор
(см. гл. 2), электрическая часть автоматической системы регулирования частоты и
мощности ЭЧСР-М (см. гл. 5), автоматический регулятор возбуждения АРВ СДМ
синхронного генератора (см. гл. 3), АРКТ трансформатора, автоматический
регулятор реактивной мощности СТК (см. гл. 6), АРЧВ турбогенератора, автоматиче-
320
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ский регулятор парогенератора АРПГ и автоматика управления технологическим
оборудованием энергоблоков.
Второй уровень образуют автоматические устройства, установленные на
диспетчерских пунктах ЭЭС. В соответствии с расчетами по прогнозированию
графика нагрузки и его оптимальному по технико-экономическим показателям
выполнению УВК, используя технические средства передачи информации, они выдают
почасовые графики нагрузок — задания плановой мощности и определяют
участие частоторегулирующих электростанций в покрытии изменений внеплановой
мощности ЭЭС. Новой по сравнению с общестанционной АСУ ТП функцией
автоматизированной системы управления ЭЭС является контроль и ограничение
перетоков мощности по линиям электропередачи по условию сохранения статической
устойчивости ЭЭС.
Указанная задача ограничения перетоков мощностей становится главной для
автоматических устройств управления частотой и активной мощностью ОЭС,
часто содержащих линии связи между ЭЭС, входящих в объединение, с ограниченной
пропускной способностью. Они образуют третий {верхний) уровень
автоматической системы управления частотой и мощностью. Ее высшим {четвертым)
уровнем является комплекс автоматических устройств, установленных в Системном
операторе.
Основными задачами автоматической системы управления частотой и
мощностью ЕЭС являются непрерывное поддерживание баланса между генерируемой и
требуемой потребляемой мощностями при наиболее экономичном режиме и
рациональном использовании энергоресурсов и обеспечение устойчивости
параллельной работы ОЭС и надежности электроснабжения. Особенности автоматического
управления на верхнем и высшем уровнях определяются снижением случайных
отклонений частоты по мере роста установленных мощностей ОЭС и ЕЭС в целом
и, напротив, возрастанием нерегулярных изменений обменных мощностей между
ОЭС. Поэтому в ОЭС и ЕЭС производится автоматическое регулирование
среднего за некоторое время значения частоты по интегральному критерию, а на
первый план выступает управление перетоками мощностей и их ограничения.
Накопленный опыт эксплуатации аналоговой ЦАРЧМ, разработанной ОАО
«Институт «Энергосетьпроект», способствовал разработке и внедрению цифровой
автоматической системы регулирования частоты и мощности в ЕЭС с
расширенными функциями и новыми свойствами [35, 36]:
• способностью приспосабливаться (свойством адаптации) к изменениям
режимов работы и складывающейся ситуации в ОЭС и ЕЭС;
• обеспечения технически рационального совместного использования ГЭС и
ТЭС в общем процессе производства и передачи электроэнергии;
• реализации сложных взаимосвязей при анализе текущих режимов,
выявления их нарушений и определения оптимальных управляющих воздействий;
• повышения работоспособности управляющего комплекса в целом и
предотвращения неправильных его действий при неисправностях отдельных элементов;
• повышения помехоустойчивости за счет достоверизации используемой
информации;
13.5. Цифровая автоматическая система управления частотой и активной мощностью 321
• обеспечения диспетчера информацией, достаточной для оценки текущего
режима и контроля за его изменениями при действий ЦАРЧМ.
В цифровой, как и в аналоговой АРЧМ, регулирующее воздействие нау-ю
электростанцию формируется по интегральному соотношению
'к 'к
UperJ~ \KfiAf+KPJ]APdt9 (13.1)
'н 'н
где А/, АР — отклонения частоты и перетока мощности от номинального и
предписанного значений соответственно; Kfi9 KPJ — коэффициенты долевого участия у-й
электростанции в покрытии изменений мощности, необходимых для
восстановления частоты и допустимых по условию статической устойчивости перетока
мощности.
В разработанной ЦАРЧМ регулирование осуществляется дискретно во времени
с циклом Гп = 1 с Интегрирование согласно (13.1) естественно заменяется
последовательным суммированием. При этом выполняется два вида расчетов: приращений
ДДГ), АР{Т) за интервал Г дискретизации и накопленных сумм за цикл Тц
регулирования. Рассчитанное воздействие U{nT) за и-й цикл распределяется между
регулирующими электростанциями. В целом ЦАРЧМ функционирует по алгоритму,
структурная схема которого в упрощенном виде представлена на рис 13.7.
Основной алгоритм дополняется вспомогательными операциями,
учитывающими:
• возможности замены коэффициентов долевого участия функций (рДлГ)
времени или режимных параметров;
• ограничения по скорости изменений мощности и регулировочным
диапазоном электростанций;
• равенство сумм коэффициентов или значений соответствующих функций
(р.{пТ), определяющих участие электростанции в регулировании, единице;
• возможность ручной коррекции диспетчером регулирующих воздействий на
электростанции и др.
Высокие требования к надежности функционирования ЦАРЧМ обусловили ее
осуществление на двух комплектах цифровых ЭВМ, взаимно контролируемых и
резервируемых. Для наиболее полного использования ресурсов ЭВМ принято
несимметричное математическое обеспечение: первая — ЭВМ1 (рис 13.8) —
ведущая, а вторая — ЭВМ2, резервирующая ее, — ведомая. Первая производит
обработку поступающей от автоматических информационных устройств ТАИУ
информации и выполняет все расчеты по автоматическому регулированию, а
вторая дублирует расчеты первой, выполняет вспомогательные операции и выдает
оперативную информацию для ее отображения ООН на пульт управления
оператора ПУО управляющим вычислительным комплексом УВК и главного диспетчера
ПУГД. Исполнение результатов расчетов разрешается только при их идентичности
на выходах обеих исправных ЭВМ. Взаимный контроль ЭВМ производится перио-
ЦЩУ
АРМ
Главного
инженера
Начальника
смены
Ш
ИБП|[
ч! 1 I I 1| |
ш
ВАСУТП
Процессор
связи
Процессор
связи
ШШ
К антенне
|GPS
Ш
ИБП
>ПТП i
Ethernet
Инженера
1АСУТПЭЧ
Ш
, Switch
KVM Switch
iLON
iLON
Оптическая распред. панель
№Ш
шт
ш
Базовый
компьютер
MicroSCADA
(резервный)
! Концентратор
сети LON
Оптическая
распред. панель
.GPS
i Медиа-
i конвертор!
ЧЕМ
RTU560
Шкафы RTU560
Оптическая
распред. панель
КРУЭ 220 кВ
Концентратор
сети LON
Оптическая
распред. коробка
i Преобразователь]
i интерфейсов
МП РЗА:
МП РЗА:
i Комплекс
i телемеханики
_|"Черный ящик'
-Ш_
Сервер
"Черный ящик"
БМРЗ-ДФЗ,
ШЭ2706, БРЕСЛЕР,
ИМФ-ЗС,
ШЭ2710
Оптическая КРУ20кВ
распред. панель |
КРУ 10 кВ
Концентратор
сети LON
ФК
Оптическая
распред. панель
КРУ 10 кВ
ЙУЮ К°сНетЖ
I SPA-
' ZC100
3SPA-
ZC100
Н -S?A-
ИП Contrans
ZC100
Щ -SPA:
МП РЗА:
ZC100 |
Н _SPA
ФК
ZC100
МП РЗА:
ИМФ-1С Ц|
1 ZC100 |
SPACOM, БМРЗ, СИРИУС
ИБП1
.Mill I
^-Ц^ИЦЦг^ГГГП!
ИБП
пп
Инвертор
тш
|Шкаф ИБП
Оптическая
распред. коробка
Концентратор
сети LON
RET, БМРЗ, СИРИУС
БЩУ
АРМ персонала
Блока № 1
Блока №2 ■
J Принтер ||20"|
Ш
ИБП|
ибп;
.Mill I
Шкаф ВТ
К антенне
Процессор у
связи 1(
Jgg
I GPS
LON
Концентратор
сети LON
Оптическая
распред. панель
ИБП
пго
Инвертор
сгш
! Шкаф ИБП
Switch
Блок№1
МП РЗА:
Switch Блок №2
МП РЗА:
ФК
щ
ш
1 Contrans,
SPAU,
ФК
в
МП РЗА:
АРВ-М г|
ЭГР-МП,
ЭЧСР-М,
МП РЗА:
REG, RET, ШЭ2607
REG, RET, ШЭ2607
Оптическая
распред. коробка
Оптическая
распред. коробка
Оптическая
распред. коробка
Концентратор [
сети LON
Концентратор |
сети LON
Оптическая
распред. панель
.GPS
1 Медиа-
конвертор!
RTU560
Шкафы RTU560
^^яп|
"I ФК г
МП РЗА:
liiii
DD
}шЯ
"I ФК г
МП РЗА:
"|=П
.GPS
Медиа-
конвертор I
ю
SPACOM, БМРЗ, СИРИУС
SPACOM, БМРЗ, СИРИУС
RTU560
Шкаф RTU560
Рис. 13.6. Структурная схема АСУ ТП ЭЧ на основе систем контроля и управления MicroSCADA
322 Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
С
Начало
3
Ввод информации
Определение
а/(я7);АР(Я7)
Д#рег(л7)=А/(л7) + Д/>(л7)
INTGRL lAUptT(nT)
^г(»Тц)=ирет(п-1)Тц + ХД tfper(*7)
Распределение
С
Выход
J
Рис. 13.7. Общая структурная схема программы распределения изменений мощности ЭЭС
между частоторегулирующими электростанциями
дическим обменом сигналами, подтверждающими их работоспособность. При
отказе одной из ЭВМ ее функции выполняет другая — автоматическая система
переходит в одномашинный режим работы, в котором производится специальный
контроль, выявляющий отказы, остановы или ложную работу и запрещающий
передачу регулирующих воздействий на электростанции.
Измерительно-преобразовательная часть высшего уровня ЦАРЧМ состоит из
измерительного преобразователя частоты ИПЧ, специально разработанного
генератора номинальной промышленной частоты, стабилизированного кварцевым
резонатором, приемной части телеавтоматических информационных устройств
ТАИУ, передающих информацию о режимах работы электрических станций и сис-
Вопросы для самопроверки
323
\ипч
\ТЛИУ
шя
ООН ПУЩ
ЭСГР
ft
:
ПОДИ
то
ООП
воч
вом
дз
ООН ПУО УВК
it
РУВ
РУВ\
эс 1
Л
4>
it
ЭВМ2
ЭГР
ТАУУ
Рис. 13.8. Функциональная схема цифровой централизованной автоматической системы
управления частотой и мощностью в ОЭС и ЕЭС
темообразующих линий электропередачи, их технико-экономических показателях,
перетоках мощностей и информацию об исполнении управляющих воздействий
ЦАРЧМ. Как и в ранее рассмотренных микропроцессорных системах управления,
она содержит элементы согласования выходов ТАИУ со входами вычислительной
части и гальванического их разделения ЭГР.
Исполнительную часть, образуют телеавтоматические управляющие устройства
ТАУУ, передающие информацию в УВК автоматических систем управления ОЭС и
ЭЭС и управляющие воздействия на частоторегулирующие электростанции, и
элементы гальванического разделения ЭГР с вычислительной частью. В
исполнительную часть входит и весь комплекс отображения и регистрации информации,
главным образом дисплеи, установленные на пультах управления оператора УВК и
главного диспетчера.
Централизованная цифровая АРЧМ является основной частью АСУ ЕЭС,
осуществляемой на основе современной вычислительной техники [2]. Для АСУ ЕЭС в
перспективе предназначается и разработанная [62] программная автоматическая
система управления напряжением и реактивной мощностью.
Вопросы для самопроверки
1. Каково назначение автоматизированной системы управления технологическими процессами
(АСУ ТП) электрической станции?
2. Какие автоматические устройства входят в агрегатную часть и какие функции выполняет
общестанционная часть АСУ ТП?
3. Почему выполнение основных задач автоматического управления частотой и мощностью —
поддержание частоты на неизменном уровне и распределение нагрузки электростанции между парал-
324
Глава 13. АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
лельно работающими энергоагрегатами — приходится возлагать на разные программные
автоматические устройства?
4. По каким технико-экономическим показателям производится распределение нагрузки тепловой
электростанции между турбогенераторами и общей нагрузки электроэнергетической системы
(ЭЭС) между электрическими станциями?
5. Какова общая концепция построения АСУ ЭЭС? Какие уровни различаются в ее иерархическом
построении? По какому критерию отклонения частоты А/от номинальной осуществляется
автоматическое управление частотой промышленного тока от АСУ ЭЭС?
6. Из каких функциональных частей состоят и как действуют агрегатная и общестанционная
части микропроцессорной автоматизированной системы управления гидроэлектростанцией (см.
рис. 13.1)?
7. Из каких функциональных частей состоит и как действует общестанционная часть
микропроцессорной АСУ ТП тепловой электростанции (см. рис. 13.2)?
8. Из каких функциональных элементов состоит и как действует микропроцессорная
общестанционная автоматическая система регулирования частоты и мощности тепловой электростанции
(см. рис. 13.3)?
9. Каковы задачи информационно-вычислительного комплекса (ИВК) АСУ ТП тепловой
электростанции?
10. В чем состоят общность и различия в технической реализации АСУ электрической части
тепловой электростанции на MicroSCADA и СКАДА-НИИПТ?
11. Объяснить схему технической реализации АСУ электрической части тепловой электростанции
(см. рис. 13.5 и 13.6).
12. Какие терминалы входят в состав агрегатного уровня АСУ электрической части тепловой
электростанции (см. рис. 13.6)?
13. Объяснить структурную схему (см. рис. 13.7) программы распределения изменений мощности
ЭЭС между частоторегулирующими электростанциями.
14. Объяснить структурную схему программы распределения активной мощности тепловой
электростанции между турбогенераторами.
15. Объяснить функциональную схему (см. рис. 13.8) централизованной микропроцессорной
автоматической системы управления частотой и мощностью в ОЭС и ЕЭС.
СПИСОК ЛИТЕРАТУРЫ
1. Дьяков А.Ф., Овчаренко Н.И. Микропроцессорная релейная защита и автоматика
электроэнергетических систем: учеб. пособие для вузов. М.: Издательство МЭИ, 2000.
2. Дьяков А.И., Окин А.А., Семенов B.JI. Диспетчерское управление мощными энерго-
объединениями. М.: Издательство МЭИ, 1996.
3. Овчаренко Н.И. Аппаратные и программные элементы автоматических устройств
энергосистем. М.: Изд-во НЦ ЭНАС, 2004.
4. Богаченко Д.Д., Овчаренко Н.И. Быстродействующие измерительные преобразователи
для автоматических регуляторов // Электротехника. 2004. № 2.
5. Шитов Р.В. Быстродействующий программный измерительный преобразователь
амплитуды // Вестник МЭИ. 2004. № 1.
6. Пат. № 39231. Измеритель частоты синусоидального напряжения / Н.И. Овчаренко,
Р.В. Щитов. Приоритет: 08 апрель 2004 г.
7. Кириенко В.Г., Логинов А.Г., Фадеев А.В. Новое поколение статических систем
возбуждения турбо- и гидрогенераторов // Электросила. 2000. № 39. С. 43—52.
8. Бопмарина Е.А., Фадеев А. Д., Шеремет А.А. Микропроцессорный автоматический
синхронизатор // Электротехника. 1996. № 9. С. 30—34.
9. Устройство точной автоматической синхронизации «Спринт-М». Техническое описание,
руководство по эксплуатации, паспорт. М.: ЗАО «Радиус Автоматика», 2003.
10. Логинов А.Г., Фадеев А.В. Микропроцессорный автоматический регулятор типа АРВ-М
для систем возбуждения АО «Элекросила» // Электротехника. 2001. № 4. С. 66—10.
11. Кичаев В.В., Юрганов А.А. Современное состояние проблемы регулирования
возбуждения синхронных машин // Международная научно-техническая конференция «Современные
системы возбуждения для нового строительства и реконструкции электрических станций.
Опыт накладки и эксплуатации систем возбуждения нового поколения»: Сб. докладов.
СПб., 2004. С. 11—22.
12. Разработка и внедрения новых автоматических регуляторов возбуждения / М.Л. Богач-
ков, В.В. Кичаев, В.А. Кожевников и др. // Тр. технического семинара «Современные
решения в разработке оборудования, проектировании и эксплуатации электрической части
тепловых и гидравлических станций. Ч. 1. Генераторы и системы возбуждения, М.:
АО «Фирма ОРГРЭСЭ. 2002. С. 75—86.
13. Робастные регуляторы возбуждения мощных синхронных генераторов / Ю.А. Борцов,
А.А. Бурмистров/А.Г. Логинов и др. // Электричество. 2003. № 7. С. 29— 36.
14. Микропроцессорная система управления возбуждением асинхронизированного
турбогенератора типа СУВМ-АС. — Автоматическое управление электроэнергетическими
системами: Тр. ВЭИ. М.: Изд-во ВЭИ. 1992. С. 62—73.
15. Ларионова В.В. Системы регулирования в энергетике — подходы и решение //
Автоматизация в промышленности. 2004. № 4. С. 15—19.
16. Микропроцессорная система комплексного управления и контроля гидроагрегатов
Чебоксарской ГЭС / А.Н. Кузнецов, В.Н. Орлов, A.M. Титов и др. // Электрические станции.
2003. №9. С. 21—23.
326
СПИСОК ЛИТЕРАТУРЫ
17. Опыт внедрения вычислительных средств нового поколения в устройствах управления
мощностью турбоагрегата типа ЭЧСР-М / B.C. Мельников, А.Г. Мордкович, А.З.
Серебряников и др. // Электротехника. 2001. № 9. С. 56—58.
18. Давыдов Н.И., Павлова М.Ф. Микропроцессорная система управления мощностью ТЭС. —
Автоматическое управление мощностью ТЭС и АЭС: Тр. ВТИ. М.: Энергоатомиздат, 1990.
С. 89—99.
19. Микропроцессорная система автоматического управления и защиты статического тиристор-
ного компенсатора для линий электропередачи / Г.М. Бурунова, Е.А. Бушмарина, М.А. Лотков
и др. // Автоматическое управление электроэнергетическими системами: Тр. ВЭИ. М.:
Информэлектро, 1988. С. 28—34.
20. Регулятор напряжения трансформатора микропроцессорный «РНМ-1». Техническое
описание, руководство по эксплуатации, паспорт. М.: ЗАО «Радиус Автоматика», 2003.
21. Овчаренко Н.И. Микропроцессорная автоматика синхронных генераторов и
компенсаторов. М.: НТФ «Энергопрогресс», 2004. [Библиотека электротехника, приложение к журналу
«Энергетик». Вып. 10(70)].
22. Лукоянов В.Ю. Комплект микропроцессорных устройств релейной защиты и автоматики
для оснащения подстанций 6—35 кВ. В кн. Релейная защита и автоматика энергосистем
2004. М.: ВВЦ 2004. С. 277, 278.
23. Цифровые устройства релейной защиты и автоматики. СПб.: НТЦ «Механотроника», 2003.
24. Устройство микропроцессорной защиты вводного выключателя «Сириус-В»: Техническое
описание, инструкция по эксплуатации, паспорт. М.: ЗАО «Радиус Автоматика», 2002.
25. Арсентьев А.П., Нудельман Г.С., Шапеев А.А. Новые функциональные возможности
устройства РЗА высокого напряжения. В кн. Релейная защита и автоматика энергосистем
2004. М.: ВВЦ, 2004. С. 234—237.
26. Фурашов B.C., Камаев Е.В. Шкаф автоматики управления выключателем, ТАПВ УРОВ
типа ШЭ2710-511. В кн. Релейная защита и автоматика энергосистем 2004. М.: ВВЦ, 2004.
С. 100.
27. Дони Н.А., Левиуш А.И., Фокин Г.Г. Шкаф дифференциально-фазной защиты с ОАПВ
типа ШЭ2710-582. В кн. Релейная защита и автоматика энергосистем 2004. М/. ВВЦ, 2004,
С. 96—98.
28. Дони Н.А., Фурашав B.C. Комплекс микропроцессорных защит для присоединений
330 кВ: В кн. Релейная защита и автоматика энергосистем. М.: ВВЦ, 2004. С. 94—95.
29. Шкафы микропроцессорной дифференциально-фазной защиты «БРЕСЛЕР-0411» с
функцией однофазного автоматического повторного включения / В.А. Ефимов, О.Н. Григорьев,
Н.В. Подшивалин и др. В кн. Релейная защита и автоматика энергосистем 2004. М.: ВВЦ,
2004. С. 69—75.
30. Вазюлин М.В., Стрелков В.М., Фокин Г.Г. Микропроцессорный модуль для панели АПВ
типа ПДЭ-2-4.01, выполняющий функции погасания дуги и успешности ОАПВ линии. В кн.
Релейная защита и автоматика энергосистем 2004. М.: ВВЦ, 2004. С. 108—ПО.
31. Антонов Д.Б. «Сириус ДЗ-35» гарантирует дистанционную защиту // Новости
электротехники. 2004. № 4 (28).
32. Устройство микропроцессорной автоматической частотной разгрузки «Сириус-АЧР».
Техническое описание, инструкция по эксплуатации, паспорт. М.: ЗАО «РАДИУС
Автоматика», 2005.
СПИСОК ЛИТЕРАТУРЫ
327
33. Эффективность применения асинхронизированных турбогенераторов в ЕЭС России /
Н.А. Лабунец, А.П. Лохматов, Ю.Г. Шакарян и др. // Вестник ВНИИЭ-98. М.: ЭНАС, 1998.
С. 12—19.
34. Алексеев Б.А., Мамиконянц Л.Г., Поляков Ф.А. Актуальные вопросы создания и
эксплуатации электрических машин // Электричество. 2005. № 8. С. 55—62.
35. Лямец Ю.Я., Подшивалин Н.В. Разложение входных величин релейной защиты на
ортогональные составляющие // Изв. АН СССР. № 3. 1986. С. 62—71.
36. Андреев В.А., Овчаренко Н.И. Цифровое направленное реле сопротивления прямой
последовательности для быстродействующего УАВР // Электротехника. 2001. № 5. С. 32—34.
37. Соловьев И.И. Автоматические регуляторы синхронных генераторов. М.: Энергоиздат,
1981.
38. Шкаф основной защиты автотрансформатора 330 кВ и выше типа ШЭ 2710-542:
Руководство по эксплуатации. Чебоксары: ООО «НПП «ЭКРА», 2005.
39. Федосеев A.M. Релейная защита электроэнергетических систем. Релейная защита сетей.
М.: Энергоатомиздат, 2004.
40. Автоматика электроэнергетических систем: учеб. пособие для вузов / О.П. Алексеев,
В.Е. Казанский, В.Л. Козис и др.; под ред. В.Л. Козиса и Н.И. Овчаренко. М.: Энергоиздат,
1981.
41. Аржанников Е.А., Лукоянов В.Ю., Антонов Д.Б. Особенности выполнения
микропроцессорной дистанционной защиты для сетей 35 кВ // Электрические станции. 1998. № 3.
42. Наумов В.А. Анализ и совершенствование продольных дифференциальных защит
генераторов и блоков генератор-трансформатор: Автореф. дисс ... канд. техн. наук. М., 2005.
43. Антонов Д.Б. Исследование и разработка микропроцессорных защит силовых
трансформаторов с высшим напряжением 35—ПО кВ: Автореф. дисс ... канд. техн. наук. М., 2005.
44. Устройство микропроцессорной защиты трансформаторов «Сириус-Т». Техническое
описание, инструкция по эксплуатации, паспорт. М.: ЗАО «РАДИУС Автоматика», 2005.
45. Антонов Д.Б., Аржанников Е.А. Современная микропроцессорная защита силовых
трансформаторов // Энергетика и промышленность России. 2004. № 12 (52). С. 9.
46. Устройство микропроцессорной защиты вводного выключателя «Сириус-УВ»:
Техническое описание, инструкция по эксплуатации, паспорт. М.: ЗАО «РАДИУС Автоматика», 2003.
47. Терминалы защиты серии БЭ2704. Руководство по эксплуатации. Чебоксары: ООО «НПП
«ЭКРА», 2000.
48. Овчаренко Н.И. Дифференциально-фазная высокочастотная защита линий
электропередачи напряжением ПО—220 кВ. М.: НТФ «Энергопрогресс». 2002. Библиотечка
электротехника, приложение к журналу «Энергетика». 2000. Вып. 12 (48).
49. Кузнецов А.Н. Программное обеспечение устройства противоаварийной автоматики с
применением микроЭВМ // Электротехника. 1985. № 9. С. 54—57.
50. Программно-технический комплекс автоматической дозировки управляющих
воздействий энергосистем / А.К. Белотелов, Е.Л. Россовский, И.З. Глускин и др. // Электрические
станции. 1997. № 10. С. 18—28.
51. Реализация АЛАР на базе микропроцессорного устройства локальной противоаварийной
автоматики // В.В. Глазырин, Г.А. Олефиров, A.M. Петров и др.: В кн. Релейная защита и
автоматика энергосистем 2004. М.: ВВЦ, 2004. С. 111 —115.
328
СПИСОК ЛИТЕРАТУРЫ
52. Микропроцессорное устройство автоматической ликвидации асинхронного режима
«AJIAP-M» / И.В. Якимец, В.Г. Наровлянский, А.Б. Ваганов и др. В кн. Электроэнергетика
России: современное состояние, проблемы и перспективы: Сб. научных трудов. М.:
Энергоатомиздат. 2002. С. 350—365.
53. Адаптивная цифровая автоматика ликвидации асинхронного режима / СИ. Зеликов,
А.А. Лисицын, П.Я. Кац и др. В кн. Релейная защита и автоматика энергосистем 2002. М.:
ВВЦ, 2002.
54. Пат. РФ МКИ H02J. Способ выявления асинхронного режима электропередачи / B.C.
Пастухов//БИ. 1991. №26.
55. Нал евин А. А. Автоматика выявления и ликвидации асинхронного режима, адаптивная
к изменению режима и структуры энергосистемы // Вестник МЭИ. 2003. № 1. С. 50—54.
56. Основные принципы построения релейной защиты оборудования 330—750 кВ с
использованием микропроцессорных устройств серии ШЭ2710 / Ю.Н. Алимов, А.К. Белотелов,
А.И. Левиуш и др. // Электрические станции. 2005. № 9. С. 42—45.
57. Электротехнический справочник / под ред. Г.Б. Герасимова и др. (гл. ред. А.И. Попов) —
8-е изд. испр. и доп. Т. 3. Производство, передача и распределение электрической энергии.
М.: Издательство МЭИ, 2002.
58. Цифровые защиты генераторов, трансформаторов и блоков генератор — трансформатор
электростанций: Техническое описание. Чебоксары, 2005.
59. Белотелов А.К., Фотин Л.П. О проведении единой технической политики при создании
АСУ ТП ТЭС. В кн. Современные системы контроля и управления электрических станций
и подстанций (АСУ ТП) на базе микропроцессорной техники: Информационные
материалы, Второй научно-технический семинарам. М.: ОРГРЭС, 2001.
60. Юшков A.M., Орлов Л.П., Рычачев В.Н. Опыт компании «АББ Автоматизация» (Россия)
в области реализации систем АСУ ТП подстанций, сетей и электрической части
электростанции: В кн. Современные системы контроля и управления электрических станций и
подстанций (АСУ ТП) на базе микропроцессорной техники // Информационные материалы,
Второй научно-технический семинарам. М.: ОРГРЭС, 2001.
61. Интегрированная автоматизированная система управления энергообъектом СКАДА-
НИИПТ / Ю.А. Асанбаев, И.А. Ветрова, Т.Г. Горелик и др. В кн. Современные системы
контроля и управления электрических станций и подстанций (АСУ ТП) на базе
микропроцессорной техники // Информационные материалы. Второй научно-технический семинар.
М.: ОРГРЭС, 2001.
62. Гумин М.И., Косарева Е.Г., Лисицын М.В. Микропроцессорная система автоматического
регулирования напряжения и реактивной мощности электростанции. В кн. Современные
системы контроля и управления электрических станций и подстанций (АСУ ТП) на базе
микропроцессорной техники // Там же.
63. Микропроцессорные средства противоаварийной автоматики локального уровня / А. А.
Акинин, А.Б. Ваганов, Д.Р. Любарский и др. / под ред. В.А. Шуина, М.Ш. Мисриханова,
А.В. Мошкарина // Повышение эффективности работы энергосистем // Тр. ИГЭУ. Вып. VII.
М.: Энергоатомиздат. 2004. С. 436—444.
64. Акинин А.А. Программно-технические средства ввода и преобразования электрических
величин для микропроцессорных устройств релейной защиты и противоаварийной
автоматики энергосистем / под ред. В.А. Шуина, М.Ш. Мисриханова, А.В. Мошкарина // Повышение
СПИСОК ЛИТЕРАТУРЫ
329
эффективности работы энергосистем // Тр. ИГЭУ. Вып. VII. М.: Энергоатомиздат, 2004.
С. 478—486.
65. Акинин А.А., Любарский Д.Р., Россовский Е.Л. Средства ввода и преобразования
электрических величин для микропроцессорных устройств релейной защиты и
противоаварийной автоматики энергосистем // Современные энергетические системы и комплексы
управления ими: Материалы 3-й Международной научно-практической конференции.
Новочеркасск, 2003. С. 46—50.
66. Акинин А.А., Иванов И.А., Любарский Д.Р. Микропроцессорное устройство автоматики
ограничения повышения напряжения с контролем ресурса оборудования // Вестник ИГЭУ.
2005. Вып. 1.
67. Создание автоматизированных систем управления гидроэлектростанциями / В.Д. Ковалев,
А.Н. Кузнецов, В.Н. Орлов и др. // Высоковольтная и преобразовательная техника.
Системы управления электротехническим и энергетическим оборудованием // Тр. ВЭИ. М.: Эко-
линк. 1996. С. 99—101.
68. Микропроцессорные средства управления энергетическими комплексами МС АЭК для
автоматизации Волжской ГЭС / В.Д. Ковалев, А.Н. Кузнецов, В.Н. Орлов и др. //
Электротехника. 1996. № 9. С. 24—29.
69. Двухуровневая система противоаварийного управления ОЭС Поволжья / В.Н. Бердников,
Э.Р. Биргель, В. Д. Ковастев и др. // Высоковольтная и преобразовательная техника, системы
управления электроэнергетическим и энергетическим оборудованием // Тр. ВЭИ. М.: Эко-
линк, 1994. С. 63—76.
70. Линт М.Г. Внедрение автоматизированных систем управления и защиты подстанций и
электрической части электростанций. В кн. Информационно-методические материалы
научно-технического семинара: Современное состояние и перспективы развития систем
контроля и управления электрической частью станций и подстанций на базе
микропроцессорной техники. М.: Издательство НЦ ЭНАС, 1999.
71. Кочкин Н.А., Шурупов А.А., Фокин Г.Г. Шкаф дистанционной и токовой защиты линии
с ОАПВ типа ШЭ2710 521. В кн. Релейная защита и автоматика 2004. М.: ВВЦ, 2004. С. 99.
72. Шевцов М.В. Повышение быстродействия нерекурсивного частотного фильтра,
подавляющего свободную апериодическую составляющую вторичного тока короткого замыкания //
Вестник МЭИ. 2001. № 4. С. 25, 26.
73. Ильин В.А., Тямец Ю.Я. Задачи и методы спектрального анализа переходных процессов
в электрических сетях // Изв. РАН «Энергетика». 1997. № 6. С. 46—62.
74. Лямец Ю.Я. Метод производных уравнений в цифровой обработке напряжения и тока
электрической сети // Материалы Всесоюзной научно-технической конференции «Современная
релейная защита электроэнергетических объектов — Чебоксары». 1991. С. 38—41.
75. А.с 1780034 СССР. М. Кл3 J01R21/06. Измерительный преобразователь активной
мощности / И.Н. Овчаренко, Н.И. Овчаренко // Бюл. 1992. № 45.
76. Богаченко Д.Д. Алгоритмы функционирования микропроцессорных автоматических
регуляторов возбуждения // Водоподготовка и энергосбережение. 2003. №. 3. С. 58—60.
77. Басе Э.И., Дорогунцев В.Г. Релейная защита электроэнергетических систем: учебное
пособие / под ред. А.Ф. Дьякова. М.: Издательство МЭИ, 2002.
330
СПИСОК ЛИТЕРАТУРЫ
78. Овчаренко Н.И. Аналоговые элементы микропроцессорных комплексов релейной защиты
и автоматики. [Библиотечка электротехника, приложение к журналу «Энергетик». М.: НТФ
«Энергопрогресс», 2001. Вып. 9 (33)].
79. Овчаренко Н.И. Программные функциональные элементы микропроцессорной
автоматики и релейной защиты электроэнергетических систем. [Библиотечка электротехника,
приложение к журналу «Энергетик». М.: НТФ «Энергопрогресс», 2006. Вып. 5—6, (89—90)].
80. Овчаренко Н.И. Автоматика энергетических станций и электроэнергетических систем:
учебник для вузов / под ред. А.Ф. Дьякова. М.: Издательство НЦ ЭНАС, 2000.
81. РТСофт в электроэнергетике, каталог продуктов и решений. М.: ЗАО «РТСофт», 2005.
82. Провоторов И.В., Соболев Е.А. Устройство передачи сигналов противоаварийной
автоматики // Электрические станции. 1985. № 7. С. 65—69.
83. Ковалев В.Д. Иерархические системы противоаварийного управления // Электротехника,
1985. №9. С. 43—46.
84. Бурцев А.Б., Дзегеленок И.И., Ковалев СВ. Принципы организации противоаварийного
управления электроэнергетическими системами с использованием параллельных
вычислений // Электротехника. 1996. № 9. С. 18—23.
85. Ковалев В.Д., Суханов О.А., Ковалев СВ. Распределение системы противоаварийного
управления протяженными энергосистемами // Электротехника. 1996. № 9. С. 4—9.
86. Семенов В.А. Противоаварийная автоматика в ЕЭС России. [Библиотечка электротехника,
приложение к журналу «Энергетик». М.: НТФ «Энергопрогресс». 2004. Вып. 6 (66)].
87. Справочник по математике для научных работников и инженеров / Г. Корн, Т. Корн. М.:
Наука. Главная редакция физико-математической литературы, 1984.
88. Кислюков В.А., Пастухов B.C. Некоторые алгоритмы локальных устройств
микропроцессорной автоматики для ОЭС Востока. В кн. Релейная защита и автоматика. 2004. М.: ВВЦ,
2004.
89. Шкаф направленной высокочастотной зашиты линии типа 2607 031. Руководство по
эксплуатации. Чебоксары: ООО «НПП «ЭКРА», 2000.
90. Шкаф дифференциально-фазной защиты линии и устройства однофазного
автоматического повторного включения типа ШЭ2710 582. Руководство по эксплуатации. Чебоксары:
ООО «НПП «ЭКРА», 2005.
91. Шкаф резервной защиты и однофазного автоматического повторного включения линий
типа ШЭ2710 521. Чебоксары: ООО «НПП «ЭКРА», 2004.
92. Шкаф основной защиты автотрансформаторов ШЭ2710 542. Чебоксары: ООО «НПП
«ЭКРА», 2004.
93. Исследование алгоритмов выбора управляющих ЦПА воздействий верхнего уровня ОЭС
Центра / А.В. Жуков, А.И. Маркун, А.А. Семин. В кн. Релейная защита и автоматика
энергосистем. 2004. М.: ВВЦ, 2004. С. 281—284.
94. Шкаф резервных защит трансформаторов ШЭ2710 572. Чебоксары: ООО «НПП «ЭКРА»,
2004.
95. Индикатор микропроцессорный фиксирующий ИМФ-ЗС. Техническое описание,
инструкция по эксплуатации, паспорт. М.: ЗАО «РАДИУС Автоматика», 2004.
96. Реклоузер вакуумный серии РВА/TEL. М.: ООО «РК Таврида Электрик», 2005.
СПИСОК ЛИТЕРАТУРЫ
331
97. Устройство автоматического ограничения повышения напряжения на базе шкафа ШП 2704 //
Электрические станции. 1989. № 4. С. 60—65.
98. Арцишевский ЯЛ. Определение мест повреждения линий электропередач в сетях с
заземленной нейтралью. М.: Высш. школа, 1988.
99. Аржанников Е.А., Чухин A.M. Методы и приборы определения мест повреждения на
линиях электропередачи. [Библиотечка электротехника, приложение к журналу «Энергетик»].
М.: НТФ «Энергопрогресс», 1998. Вып. 3.
100. Терминал регистрирующий типа БЭ2704У900. Руководство по эксплуатации. Чебоксары:
ООО «НПП «ЭКРА», 2004.
101. Карташов И.И., Новелла В.Н., Федченко В.Г. Вычислительные методы выбора средств
компенсации и измерения высших гармоник в электрических сетях // Электротехника. 1990.
№11. С. 51—55.
102. Устройство точной автоматической синхронизации «Спринт-М». Руководство по
эксплуатации, паспорт. М.: ЗАО «РАДИУС Автоматика». 2003.
103. Таратута И.П., Крайнов СВ., Чуприков B.C. Статические тиристорные компенсаторы
наружного исполнения / Высоковольтная и преобразовательная техника. Системы управления
электротехническим и энергетическим оборудованием // Тр. ВЭИ. М.: Эколинк, 1996.
С. 34—40.
104. Адаптивная цифровая автоматика ликвидации асинхронного режима / СИ. Зеликов,
А.А. Лисицын, П.Я. Кац и др. В кн. Релейная защита и автоматика энергосистем. 2002. М.:
ВВЦ, 2002.
105. Наровлянский В.Г., Нал евин А.А. Метод определения эквивалентных параметров схемы
замещения энергосистемы в асинхронном режиме // Электричество. 2005. № 8. С. 15—21.
106. Акинин А.А. Совершенствование технических средств и принципов выполнения устройств
противоаварийной автоматики электрических сетей сверхвысокого напряжения: Автореф.
дисс.... канд. техн. наук. Иваново, 2006.
107. Овчаренко Н.И. Микропроцессорные комплексы релейной защиты и автоматики
распределительных электрических сетей. [Библиотечка электротехника, приложение к журналу
«Энергетик»] М.: НТФ «Энергопрогресс», 1999. Вып. 7 (10).
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 4
Глава первая. Измерительное преобразование режимных параметров в сигналы
информации микропроцессорной автоматики и релейной защиты
электрических систем 13
1.1. Назначение и виды измерительного преобразования 13
1.2. Программные измерительные преобразователи информационных параметров
входных сигналов 17
1.3. Программные измерительные преобразователи активной
и реактивной мощности 22
1.4. Программные фильтры симметричных составляющих 26
Вопросы для самопроверки 27
Глава вторая. Микропроцессорные автоматические синхронизаторы 29
2.1. Автоматические синхронизаторы синхронных генераторов 29
2.2. Микропроцессорный автоматический синхронизатор типа АС-М 32
2.3. Микропроцессорный автоматический синхронизатор типа «Спринт-М» 39
Вопросы для самопроверки 48
Глава третья. Микропроцессорные автоматические регуляторы возбуждения
синхронных генераторов 50
3.1. Современное возбуждение генераторов 50
3.2. Общая функциональная схема автоматического регулирования возбуждения 54
3.3. Микропроцессорные автоматические регуляторы тиристорного возбуждения
синхронных генераторов 55
3.4. Программные измерительные органы микропроцессорных регуляторов 61
3.5. Особенности микропроцессорного автоматического регулятора
возбуждения КОСУР-Ц 65
3.6. Особенности цифрового управления тиристорами возбудителя 66
3.7. Алгоритм функционирования и структурная схема микропроцессорных
регуляторов возбуждения 67
3.8. Адаптивные автоматические ругуляторы возюуждения 72
Вопросы для самопроверки 73
Глава четвертая. Микропроцессорная автоматика управления возбуждением
асинхронизированных генераторов 74
4.1. Особенности возбуждения и регулирования возбуждения
асинхронизированного генератора 74
4.2. Алгоритм функционирования автоматического регулятора 75
4.3. Микропроцессорная автоматическая система управления возбуждением
и мощностью асинхронизированного генератора 79
Вопросы для самопроверки 82
ОГЛАВЛЕНИЕ 333
Глава пятая. Автоматическое регулирование частоты вращения
и активной мощности синхронных генераторов 83
5.1. Особенности автоматического регулирования частоты и мощности 83
5.2. Микропроцессорные автоматические регуляторы частоты вращения и активной
мощности 84
5.3. Микропроцессорная автоматическая система регулирования частоты и мощности
турбогенераторов 92
Вопросы для самопроверки 98
Глава шестая. Автоматические регуляторы напряжения и реактивной мощности
синхронных и статических компенсаторов 99
6.1. Особенности режимов работы синхронных и статических компенсаторов 99
6.2. Возбуждение современных синхронных компенсаторов 102
6.3. Автоматические регуляторы реактивной мощности синхронных компенсаторов 104
6.4. Автоматические регуляторы реактивной мощности статических компенсаторов 109
6.5. Микропроцессорное управление бесщеточным возбуждением мощных
синхронных электродвигателей 115
Вопросы для самопроверки 117
Глава седьмая. Микропроцессорная релейная защита и автоматика собственных нужд
электростанций и электрических сетей напряжением 6—35 кВ 118
7.1. Виды микропроцессорных устройств 118
7.2. Программные измерительные органы релейного действия 120
7.3. Микропроцессорные комплексы НТЦ «Механотроника» 125
7.4. Микропроцессорные терминалы ЗАО «РАДИУС Автоматика» 138
7.5. Терминалы «ИЦ «БРЕСЛЕР» 144
7.6. Особенности дистанционных защит и автоматического повторного включения
линий напряжением 35 кВ 148
7.7. Автоматика частотной разгрузки и частотного повторного включения 151
7.8. Ускоренная автоматика включения резерва 157
Вопросы для самопроверки 161
Глава восьмая. Интегрированная микропроцессорная релейная защита и автоматика
синхронных генераторов и трансформаторов 162
8.1. Виды и особенности 162
8.2. Микропроцессорная защита и автоматика синхронных генераторов
и трансформаторов 163
8.3. Особенности интегрированной микропроцессорной защиты 166
8.4. Особенности микропроцессорной автоматики, интегрированной с защитой 170
8.5. Микропроцессорная защита и автоматика трансформаторов 176
8.6. Особенности микропроцессорной защиты и автоматики трансформаторов
НТЦ «Механотроника» 177
8.7. Микропроцессорная защита трансформаторов «ИЦ «Бреслер» 180
8.8. Микропроцессорная защита и автоматика трансформаторов типа «Сириус» 182
8.9. Особенности микропроцессорнай защиты и автоматики автотранформаторов
высокого и свехвысокого напряжений ООО НПП «ЭКРА» 191
Вопросы для самопроверки 201
334
ОГЛАВЛЕНИЕ
Глава девятая. Микропроцессорная релейная защита линий электропередачи высокого
и сверхвысокого напряжений 203
9.1. Виды и особенности. Унифицированные терминалы 203
9.2. Микропроцессорная фильтровая направленная высокочастотная защита 207
9.3. Микропроцессорная дифференциально-фазная высокочастотная защита 216
9.4. Терминалы микропроцессорной дифференциально-фазной защиты 221
9.5. Микропроцессорная дистанционная и токовая направленная нулевой
последовательности защиты линий электропередачи 231
Вопросы для самопроверки 240
Глава десятая. Микропроцессорная противоаварийная автоматика линий
электропередачи высокого и сверхвысокого напряжений 242
10.1. Виды микропроцессорной автоматики 242
10.2. Микропроцессорная автоматика повторного включения 243
10.3. Программная автоматика однофазного повторного включения 247
10.4. Микропроцессорное устройство контроля погасания электрической дуги
и успешного включения отключенной фазы с одной стороны 249
10.5. Действие автоматики однофазного повторного включения 252
10.6. Микропроцессорная автоматика ограничений повышения напряжений 255
10.7. Микропроцессорные автоматические устройства определения мест повреждений
линий электропередачи 259
10.8. Автоматический регистратор электромагнитных переходных процессов 265
Вопросы для самопроверки 268
Глава одиннадцатая. Микропроцессорная автоматика предотвращения нарушения
устойчивости 269
11.1. Особенности микропроцессорной реализации автоматики дозирования
и запоминания противоаварийных управляющих воздействий 269
11.2. Микропроцессорная панель автоматики предотвращения нарушения
устойчивости 270
11.3. Микропроцессорный программно-технический комплекс автоматического
дозирования и запоминания противоаварийных управляющих воздействий 273
11.4. Микропроцессорное устройство противоаварийной автоматики SMART-ПА 278
11.5. Функционирование и развитие микропроцессорной автоматики предотвращения
нарушения устойчивости 279
Вопросы для самопроверки 285
Глава двенадцатая. Микропроцессорная автоматика ликвидации
асинхронного режима 286
12.1. Назначение и виды автоматических устройств 286
12.2. Электрические признаки асинхронного режима 287
12.3. Варианты микропроцессорной автоматики ликвидации асинхронного режима 291
12.4. Микропроцессорная автоматика ООО «АББ Автоматизация» 292
12.5. Микропроцессорная автоматика Дальневосточного государственного
технического университета 297
12.6. Микропроцессорная автоматика ОАО «Институт «Энергосетьпроект» 299
Вопросы для самопроверки 302
ОГЛАВЛЕНИЕ 335
Глава тринадцатая. Автоматизированные системы управления электрическими
станциями и электроэнергетическими системами 304
13.1. Назначение и принципы реализации автоматизированного управления
электростанциями 304
13.2. Микропроцессорная автоматизированная система управления
гидроэлектростанциями 306
13.3. Микропроцессорная автоматизированная система управления
тепловыми электростанциями 309
13.4. Техническая реализация автоматизированной системы управления
электрической частью тепловых электростанций 315
13.5. Цифровая автоматическая система управления частотой и активной мощностью
электроэнергетической системой 319
Вопросы для самопроверки 323
Список литературы
325