/




















































































































































































































































































































































Текст
УПРАВЛЕНИЕ
СВЕРХЗВУКОВОГО
САМОЛЕТА
4."
М A LL Z м Г Р О С М Л t - I О О 4
Ф. И. СЕЛЯНСКИЙ
УПРАВЛЕНИЕ
СВЕРХЗВУКОВОГО
САМОЛЕТА
ИЗДАТЕЛЬСТВО
«МАШИНОСТРОЕНИЕ»
Москва 1964
УДК 629.13.014.5.001.2
В книге изложены пути и способы обеспечения устойчивости
и управляемости сверхзвукового самолета.
Автор, не пользуясь сложным математическим аппаратом,
излагает причины изменения нормальных характеристик устой-
чивости и управляемости самолета на около- и сверхзвуковых
скоростях и рассматривает аэродинамические способы улучше-
ния этих характеристик.
Описаны конструкции и схемы систем управления современ-
ных сверхзвуковых самолетов.
Специальные разделы книги посвящены рассмотрению бу-
стерного управления (с различными механизмами и автомата-
ми) и влияния деформаций конструкции самолета на его устой-
чивость и управляемость.
Книга рассчитана на инженеров авиационной промышленно-
сти, вместе с тем она будет полезна летному составу, а также
студентам авиационных втузов.
Рецензенты докт. техн, наук Г. С. Бюшгенс и инж. А. В. Минаев
Редактор К. И. Григораш
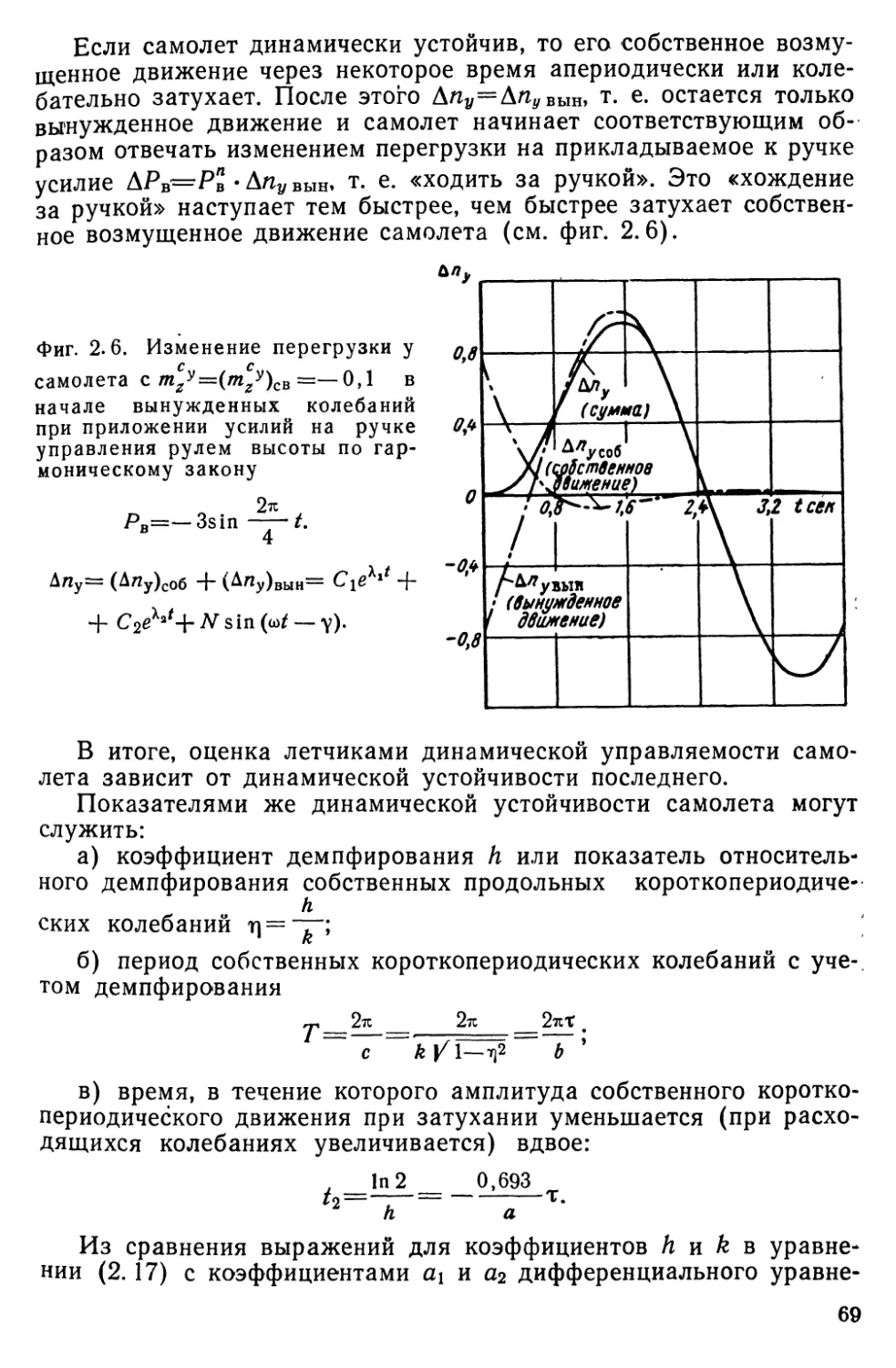
ПРЕДИСЛОВИЕ
В развитии авиационной техники в последнее время наблю-
дается невиданный рост скоростей и высот полета. Это поставило
перед конструкторами и учеными ряд сложнейших задач по обес-
печению устойчивости и управляемости самолетов особенно
на сверхзвуковых скоростях.
Для успешного решения этих задач потребовались глубокие
теоретические и экспериментальные исследования по аэродинами-
ке, устойчивости и управляемости самолетов.
Результаты этих работ позволили создать достаточно строгую,
с научной точки зрения, методику выбора форм и аэродинамиче-
ского расчета сверхзвукового самолета, расчета его устойчивости
и управляемости, а также методику экспериментальных и летных
испытаний. Этим вопросам посвящено большое количество опуб-
ликованных в последнее время трудов советских и иностранных
авторов ’. В некоторых из них специально рассматриваются устой-
чивость и управляемость скоростных самолетов2. Однако в боль-
шинстве этих работ недостаточное внимание уделено специальным
автоматическим устройствам для улучшения характеристик устой-
чивости и управляемости, которые широко применяются в системах
управления современных сверхзвуковых самолетов. Наряду
с этим в опубликованных в последнее время работах по автомати?
ческим системам стабилизации полета8 недостаточно отражены
особенности аэродинамики сверхзвукового самолета и его управ-
ляемости, так как требование обеспечения приемлемых характе-
ристик управляемости непосредственно связано с включением
летчика в контур управления самолета и в связи с этим не являет-
ся необходимым для системы автоматической стабилизации.
Поэтому в работах, посвященных вопросам автоматического
г См, список литературы в конце книги.
И. М. Пашковский, Особенности устойчивости и управляемости ско-
ростного самолета, Воениздат, 1961.
• В. А. Б однер и М. С. Козлов, Стабилизация летательных аппара-
тов и автопилоты, Оборонгиз, 1961.
3
управления самолетом, обычно не упоминаются средства автомати-
зации ручного 1 управления, необходимость которых для сверхзву-
ковых самолетов отмечается многими авторами2.
Некоторые отрывочные сведения о применении специальных
устройств и принципах их работы в системах ручного управления
современных скоростных самолетов можно найти в отдельных жур-
нальных статьях. Однако, как правило, в этих статьях недостаточ-
но объяснены причины, обусловившие необходимость применения
этих устройств.
Отсутствие отечественной литературы, обобщающей теорию
и практику проектирования управления сверхзвукового самолета,
затрудняет подготовку специалистов в авиационных учебных заве-
дениях, а также летчиков и инженерно-технического персонала
ВВС и ГВФ. В задачу инженерно-технического персонала входит
обеспечение правильной эксплуатации и безаварийной работы до-
статочно сложных автоматических систем в управлении самолетом,
что, естественно, невозможно сделать без четкого понимания физи-
ческой картины явлений, назначения и принципов действия различ-
ных устройств.
Данная книга представляет собой попытку связать теорети-
ческие вопросы, т. е. проблемы обеспечения устойчивости и управ-
ляемости скоростного самолета с практическими решениями этих
проблем в конструкциях систем и органов управления современных
Сверхзвуковых самолетов.
В книге вместе с тем систематизированы помещенные в много-
численных журнальных статьях материалы по проектированию си-
стем и органов управления сверхзвуковых самолетов, что может
быть полезно инженерам при проектировании систем управления
новых самолетов, а также студентам авиационных учебных заве-
дений при курсовом и дипломном проектировании.
Проблема обеспечения устойчивости и управляемости совре-
менных сверхзвуковых самолетов является весьма сложной
вследствие того, что ее разрешение потребовало со стороны конст-
руктора знания динамики самолета, теории автоматического регу-
лирования, теории упругости и вопросов непосредственного конст-
руирования элементов электро- и гидроавтоматики совместно
с конструированием систем и органов управления самолета.
1 Здесь и далее в тексте термином «ручное управление» обозначается систе-
ма управления самолетом, включающая управление относительно всех трех осей
(продольное, поперечное и путевое) при помощи рулей высоты, элеронов и руля
направления, отклоняемых летчиком посредством определенных воздействий на
рычаги управления: ручку (или штурвал) и педали. Понятие «ручное управление»
вводится здесь для отличия этой системы управления от системы автоматического
управления самолетом с помощью автопилота. Согласно принятой у нас термино-
логии системы ручного управления с автоматами для улучшения характеристик
устойчивости и управляемости называются «полуавтоматическими».
2 Н. А. Фомин, Проектирование самолетов, Оборонгиз, 1961;
В. Г. Денисов и Р. Н. Лопатин, Летчик и самолет, Оборонгиз, 1962.
4
В настоящее время под термином «система управления самоле-
та» понимает целую совокупность его бортовых систем и устройств.
В такую систему входят:
1. Система полуавтоматического ручного управления, состоя-
щая из рычагов управления и проводки, соединяющей их с органа-
ми управления самолета, различного рода автоматов (для повыше-
ния устойчивости и демпфирования, изменения передаточных
чисел, загрузки, триммирования и пр.), а также силовых приводов
(гидравлических и электрических) с энергетическими источниками
основного и аварийного питания.
2. Система автоматического управления (автопилот и другие
системы специального назначения, как, например, наведения, авто-
матического захода на посадку и пр.).
3. Система директорных и паравизуальных приборов, повы-
шающих эффективность ручного пилотирования.
Система управления в указанном объеме должна рассматри-
ваться как единое целое, так как агрегаты и элементы каждой
из входящей в нее систем в работе взаимосвязаны. Однако в силу
специфики вопроса в настоящей книге рассматриваются только
различные системы полуавтоматического ручного управления
и приводятся примеры действительно существующих и возможных
вариантов конструктивных решений
Книга знакомит читателя с особенностями пилотирования со-
временного сверхзвукового самолета, а также с особенностями
проектирования систем его ручного управления.
Собранный в книге материал может быть полезен не только
конструкторам, занимающимся проектированием самолетов,
но и специалистам по электронике и автоматике, участвующим
в разработке новых систем управления.
При изложении материала основное внимание уделено физиче-
ской картине явлений, описанию принципов устройства и работы
основных агрегатов системы управления, а также изложению мето-
дов расчета некоторых их характеристик без применения сложных
математических выкладок, что делает книгу доступной для доста-
точно широкого круга читателей.
Приводимые в тексте числовые величины и зависимости в боль-
шей своей части гипотетические и не могут быть использованы
Для практических расчетов.
1 По системам автоматического управления имеется достаточное количество
литературы. В частности, можно указать упоминавшуюся выше книгу В. А. Бод-
нера и М. С. Козлова. Системы приборов описаны в книге В. Г. Денисова
и Р. Н. Лопатина, Летчик и самолет, Оборонгиз, 1962.
5
Автор выражает благодарность В. П. Журавлеву, В. Е. Ротину
и Ю. Н. Каштанову за оказанную ими большую помощь в работе
над рукописью, а также докт. техн, наук, проф. И. В. Остославско-
му, проф. Н. А. Фомину, докт. техн, наук А. Э. Стерлину,
Л. М. Роднянскому, Р. А. Белякову, С. И. Юровскому за ценные
замечания, сделанные ими при просмотре рукописи.
Автор также весьма признателен рецензентам докт. техн, наук
Г* С. Бюшгенсу и А. В. Минаеву за указание на некоторые неточ-
ности, устранение которых, безусловно, повысило качество книги.
ВВЕДЕНИЕ
За последнее десятилетие авиационная техника развивалась
невиданными темпами. Если за 50 лет развития авиации, прошед-
шие с начала XX века, серийные самолеты достигли скоростей
порядка 1000 км1час и высот Около 16 км, то теперь уже не кажут-
ся неправдоподобными скорости, в 2—2,5 раза превышающие ско-
рость звука, и высоты 25—30 км и более1. Некоторые эксперимен-
тальные самолеты с жидкостными реактивными двигателями
по данным зарубежной печати летают на значительно больших
скоростях и высотах2.
Создание летательного аппарата и, в частности, самолета не-
возможно без разрешения двух проблем:
а) обеспечения необходимой тяги для преодоления сопротивле-
ния и тяготения;
б) обеспечения эффективного управления положением аппара-
та относительно центра тяжести и траекторией полета.
Быстрый рост скоростей и высот полета в последнее время стал
возможным в результате успешного решения проблемы управления
сверхзвуковыми самолетами, а также развития и усовершенство-
вания турбореактивных и жидкостных реактивных двигателей.
Только благодаря появлению реактивных двигателей удалось обес-
печить необходимую тяговооруженность3 самолетов для успеш-
ного преодоления «звукового барьера» и дальнейшего роста ско-
ростей и высот полета.
1 Уже в конце 1959 г. советский летчик Г. К. Мосолов на отечественных са-
молетах с одним турбореактивным двигателем достиг скорости 2504 км!час и вы-
соты свыше 34 200 м.
2 В ФАИ были переданы материалы для регистрации в качестве абсолютных
мировых рекордов результатов, достигнутых в полетах экспериментальным ^само-
летом с ЖРД Норт Америкен Х-15, по скорости 6687 км!час и по высоте
490 м (см. Aviation Week, No. 4, 28 VIII, 1962). Там же в № 15 от 7 X 1963 г.
опубликовано сообщение о новом рекорде этого самолета по высоте 107 958 м.
w3 Термином «тяговооруженность» обозначают обычно отношение максималь-
ной тяги, развиваемой двигателями самолета у земли, к взлетному весу самолета.
у современных сверхзвуковых истребителей это отношение приближается к еди-
нице и иногда даже превосходит эту величину.
7
При разгоне самолета до сверхзвуковой скорости значительно
изменяется характер обтекания его воздушным потоком, что при-
водит к существенному изменению величин (а часто и знаков)
аэродинамических сил и моментов, действующих на самолет в по-
лете. Это изменение аэродинамических сил и моментов, как прави-
ло, вызывает значительное ухудшение устойчивости и управляе-
мости самолета, которое на первых иностранных около- и сверх-
звуковых самолетах представляло весьма большие затруднения
для пилотирования и даже нередко приводило к авариям и ката-
строфам. Объяснялось это тем, что первые экспериментальные
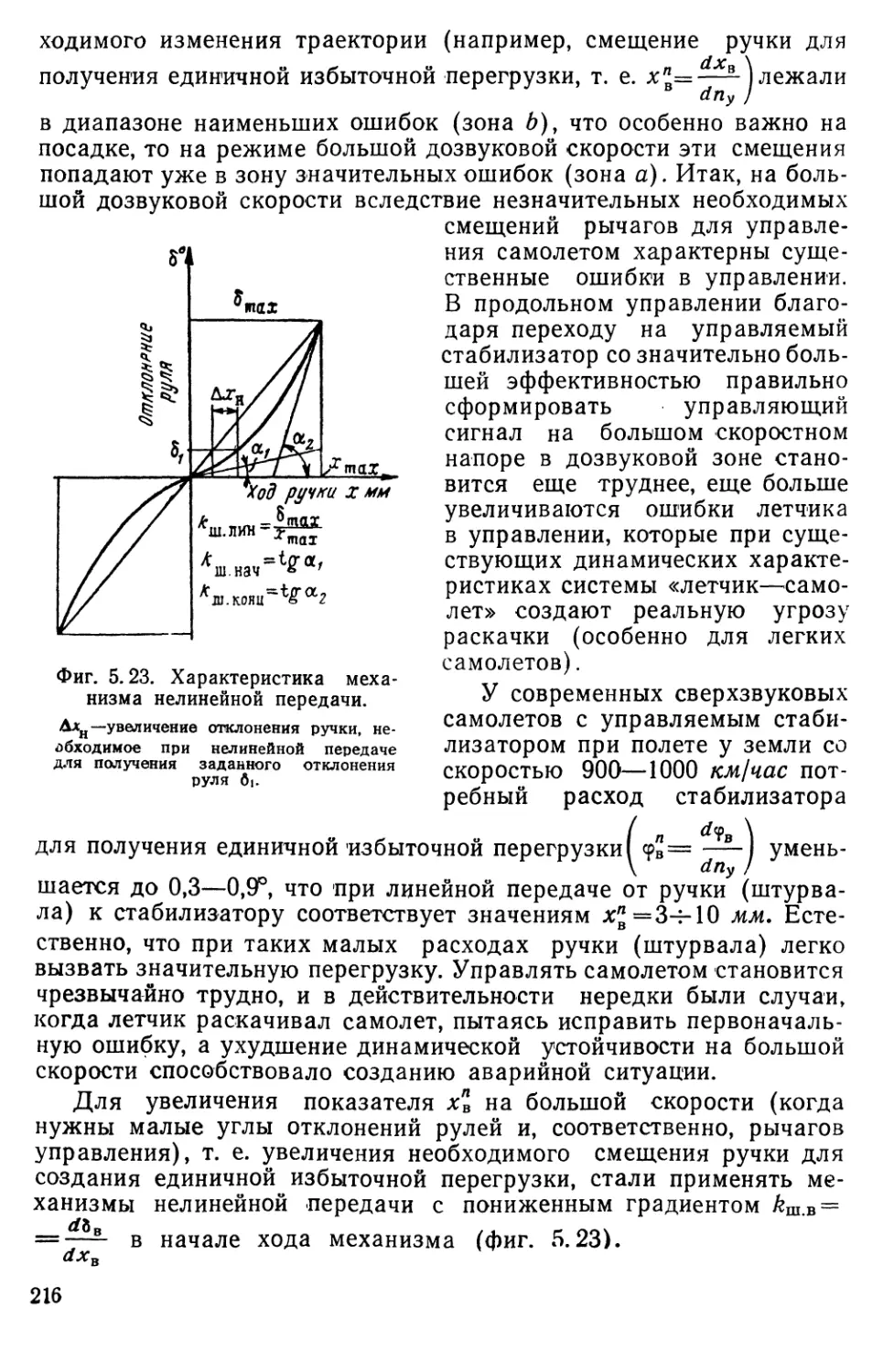
сверхзвуковые самолеты были «сверхзвуковыми» только в том
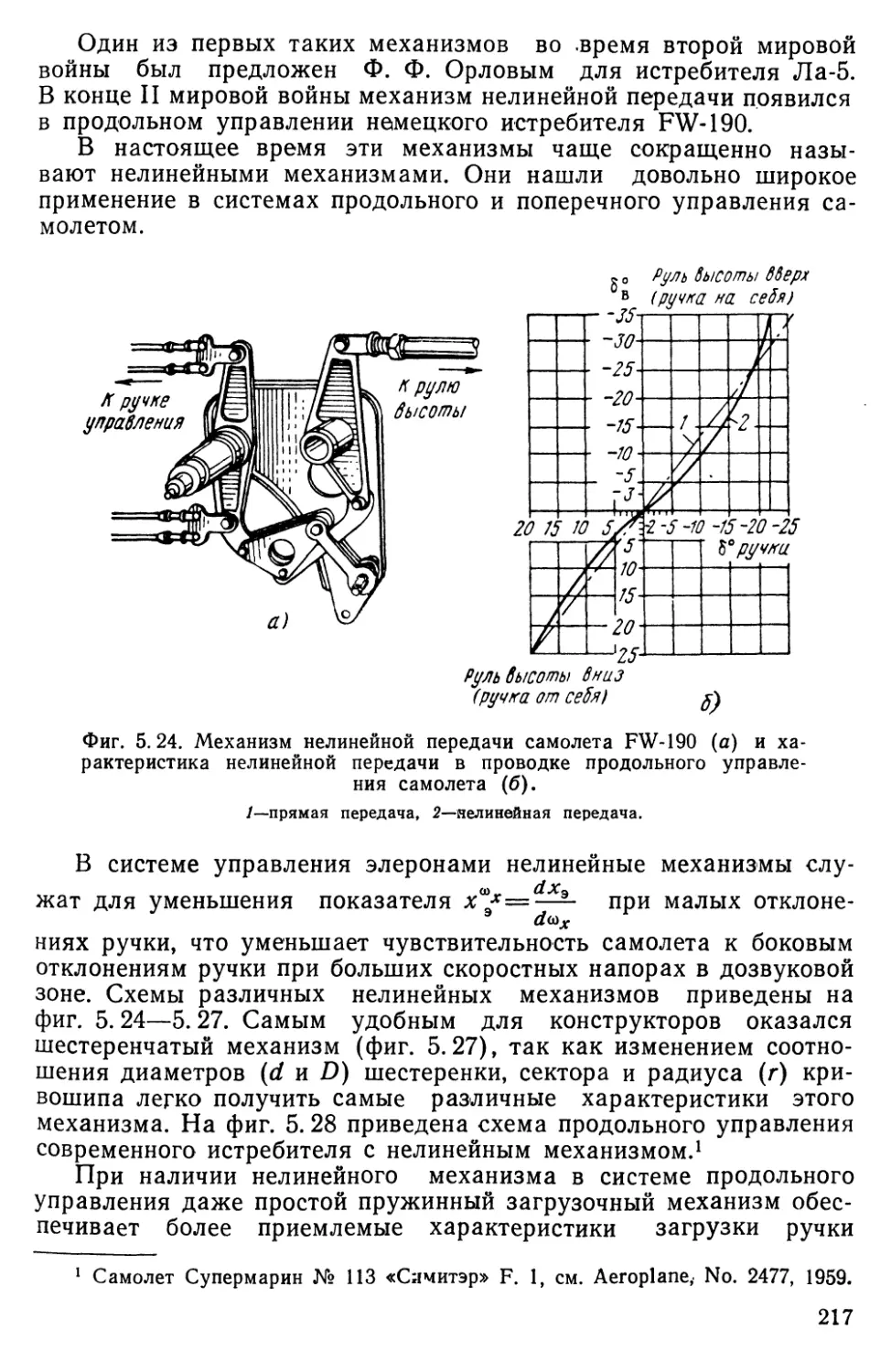
смысле, что их двигатели обеспечивали необходимую тягу для
преодоления резко возрастающего при околозвуковых скоростях
сопротивления, но их аэродинамические схемы и системы управле-
ния были далеко несовершенными и мало отличались от схем ста-
рых дозвуковых самолетов. Несовершенство форм первых сверх-
звуковых самолетов приводило к очень резким изменениям
характеристик устойчивости и управляемости при околозвуковых
скоростях. Это делало характер управления таким сверхзвуковым
самолетом необычным для летчиков, обученных и привыкших
летать на дозвуковых машинах, так как самолет, летящий
на около- или сверхзвуковой скорости, часто отвечал на действия
летчика иначе, чем при дозвуковой скорости полета.
Экспериментальное и теоретическое исследование процессов,
происходящих при околозвуковых и звуковых скоростях полета,
началось еще перед второй мировой войной, в результате чего
были получены первые сведения о резком возрастании сопротивле-
ния при околозвуковых скоростях L Однако необходимость в раз-
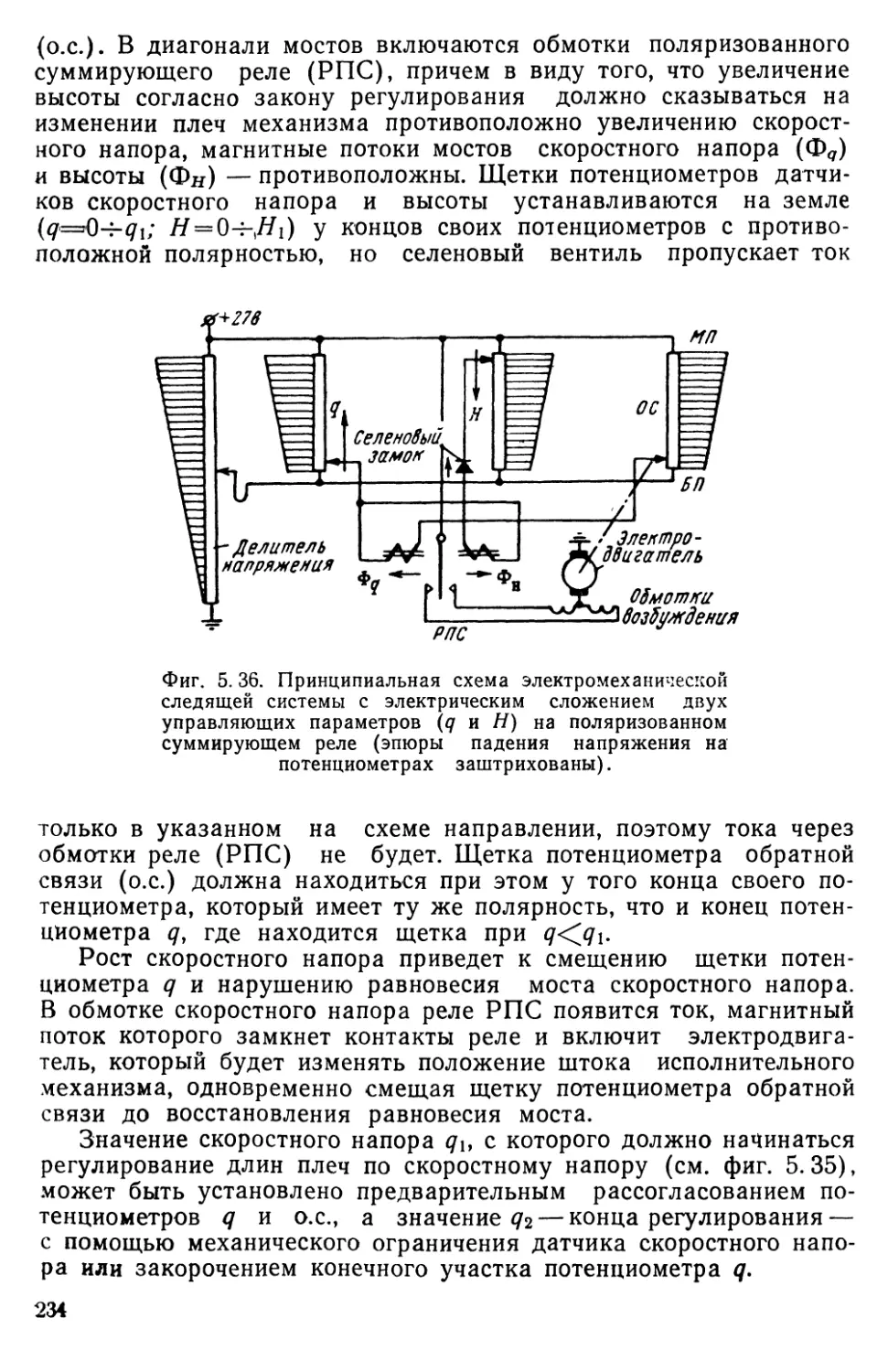
витии военной техники в годы второй мировой войны и усиленная
гонка вооружений, начатая империалистами после ее окончания,
привели к тому, что практика создания скоростных самолетов
стала опережать уровень научных знаний по аэродинамике боль-
ших скоростей. Этому способствовала и загруженность аэродина-
мических лабораторий работами, непосредственно связанными
с доводкой новых образцов военной техники и сокращением
объема перспективных исследований.
Поэтому некоторые явления, с которыми столкнулись непосред-
ственно в воздухе летчики-испытатели первых скоростных самоле-
тов, были недостаточно известны науке и только впоследствии
объяснены учеными. Так было и с явлениями резкого изменения
устойчивости и управляемости самолета старой схемы при перехо-
де к сверхзвуковой скорости.
Весьма характерным примером стремлений получить сверхзву-
ковую скорость на самолете без достаточных предварительных
1 В 1937—1938 гг. были завершены первые работы С. А. Христиановича
и Ф. Г. Гласса в области крыльевых сверхзвуковых профилей.
Первые сведения о резком возрастании сопротивления на больших числах
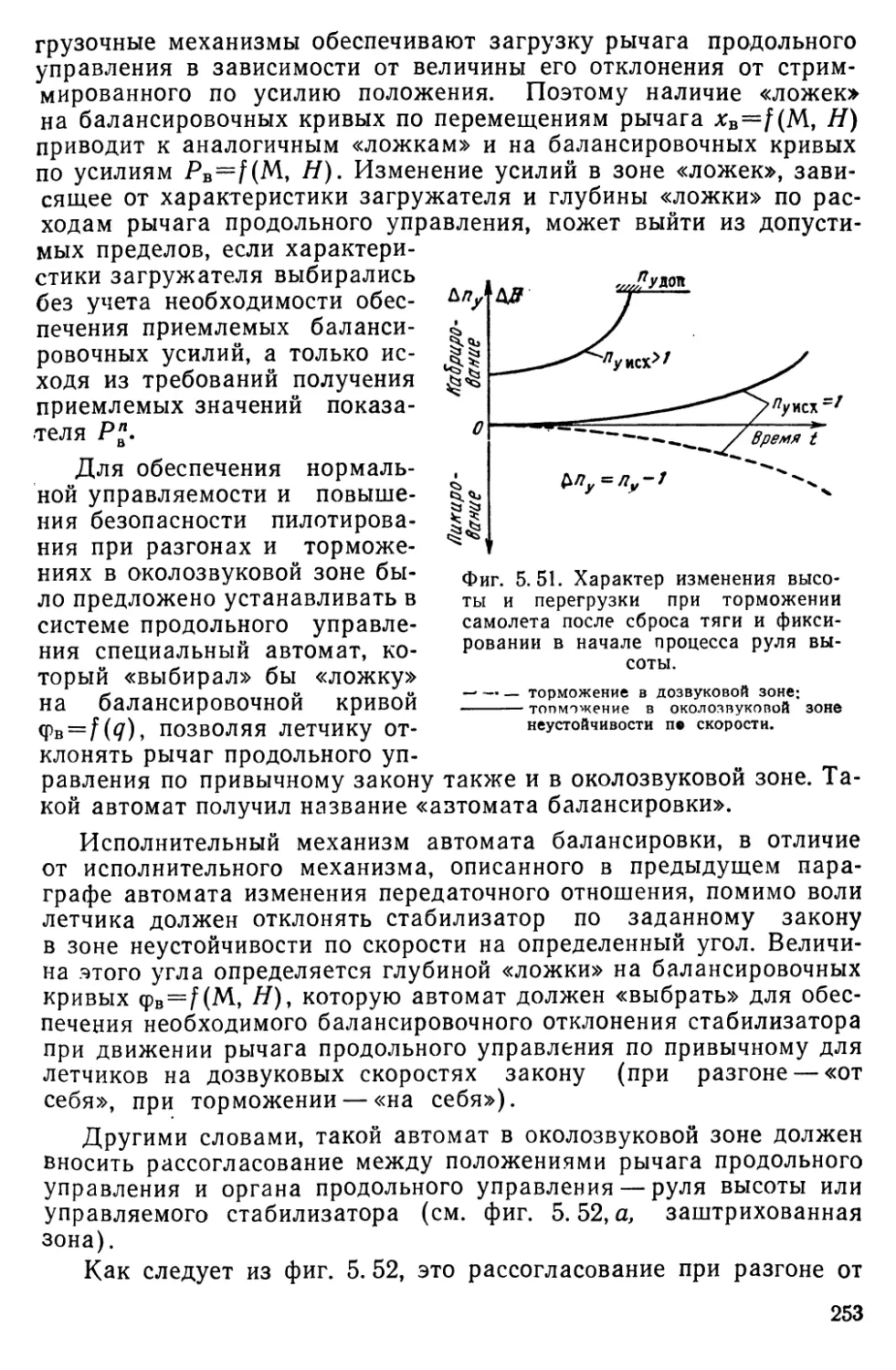
М были получены уже в XIX в. при испытаниях артиллерийских снарядов.
8
исследований была постройка в США экспериментального само-
лета Белл Х-1 с ЖРД, на котором были достигнуты достаточно
высокие значения чисел М полета ценой многих катастроф и ава-
рий. Описанные в предлагаемой читателям книге примеры из лет-
ных испытаний самолета Х-1 свидетельствуют о серьезных трудно-
стях в управлении сверхзвуковым самолетом, вызванных резким
изменением характеристик устойчивости и управляемости дозвуко-
вого самолета при переходе к скорости звука.
Неожиданное и незнакомое для летчиков поведение первых
экспериментальных сверхзвуковых самолетов в воздухе создало
значительные затруднения в освоении новой техники и сделало
проблему устойчивости и управляемости сверхзвукового самолета
наиболее острой, от успешного решения которой зависела возмож-
ность дальнейшего развития авиации.
Именно в то время американским аэродинамиком У. Боллеем
были сказаны слова: «В настоящее время в связи с переходом
от дозвуковых скоростей полета самолета к сверхзвуковым
проблема устойчивости и управляемости самолета приобретает та-
кое же важное значение, как это было полстолетия тому назад», —
которые в достаточной степени характеризуют важность возник-
шей проблемы.
Таким образом, «звуковой барьер» оказался барьером не толь-
ко с точки зрения огромных потребных для сверхзвукового полета
мощностей двигателей, но и главным образом с точки зрения труд-
ностей разрешения проблем устойчивости и управляемости само-
лета при этих скоростях.
В процессе длительных и кропотливых исследований в аэроди-
намических трубах, на летающих моделях и электронных модели-
рующих установках, а также в летных экспериментах были найде-
ны способы полного устранения или «смягчения» резких изменений
характеристик управляемости сверхзвуковых самолетов. Летчики
стали проходить специальную подготовку на натурных стендах
управления, соединенных с электронными моделирующими уста-
новками, позволяющими имитировать на земле условия сверхзву-
кового полета.
Переход на сверхзвуковые скорости полета связан с коренными
качественными изменениями самолета в целом —- его аэродинами-
ки, конструкции, вооружения и оборудования, являющимися ре-
зультатом проведения огромных научно-исследовательских, летно-
экспериментальных и других опытных работ в самых различных
областях науки и техники.
В кнйге рассмотрены наиболее важные проблемы устойчивости
и управляемости самолета, с которыми столкнулись летчики и кон-
структоры при штурме «звукового барьера». На конкретных при-
мерах показаны конструктивные решения этих проблем в процес-
се развития авиационной техники.
Решение проблем обеспечения устойчивости и управляемости
сверхзвуковых самолетов во всех странах шло двумя путями:
9
путем изменения схем и аэродинамических параметров самолета
и его органов управления, а также путем совершенствования и ав-
томатизации систем ручного управления с целью создания прием-
лемых для летчиков характеристик управляемости.
Вследствие этого современные системы управления сверхзвуко-
вых самолетов становятся полуавтоматическими и значительно
отличаются от систем управления дозвуковых самолетов.
Следует отметить выдающуюся роль советских ученых самых
различных специальностей в разрешении проблем обеспечения
устойчивости и управляемости сверхзвуковых самолетов. Еще в до-
военные годы в ЦАГИ проводились некоторые исследования стре-
ловидного крыла !, которое явилось весьма эффективным средст-
вом снижения сопротивления и улучшения характеристик
устойчивости и управляемости на околозвуковых скоростях и по-
этому в настоящее время широко применяется во всех странах.
Теоретические основы аэродинамики больших скоростей, обес-
печения устойчивости и управляемости современных самолетов
и разработки методики расчетов, а также методики эксперимен-
тальных и летных исследований были изложены в работах
С. А. Чаплыгина, В. П. Ветчинкина, А. С. Христиановйча,
И. В. Остославского, В. С. Ведрова, В. С. Пышнова, Г. С. Калаче-
ва, Б. Т. Горощенко, В. Н. Матвеева1 2, М. А. Тайца. Очень большое
значение имели работы Г. С. Бюшгенса, Ю. А. Бориса, Г. В. Алек-
сандрова, Т. М. Башты в области автоматизации, механизации
систем управления, исследования их характеристик и разработки
требований к ним.
Следует отметить, что впервые новая система управления
для скоростных самолетов^была разработана в ОКБ А. И. Микоя-
на по предложению А. В. Минаева. Эта система впервые в воздухе
была испытана летчиками-испытателями К. К. Коккинаки,
Г. К. Мосоловым. Г. А. Седовым3.
Огромную опасность для скоростных самолетов представляло
явление флаттера 4, без победы над которым невозможно было бы
дальнейшее развитие авиации. Немало катастроф во всем мире
вызвало это явление, сущность которого была еще неизвестна
ученым.
Большое значение в выяснении природы флаттера и причин
его возникновения, разработки методики его теоретического и экс-
1 Е. М. Минский, Изучение распределения циркуляции. по стреловидному
крылу, Труды ЦАГИ, вып. 117, 1935.
2 В. Н. Матвеев уже в 1946 г. предложил первую систему полуавтоматическо-
го управления для скоростного самолета.
3А. Аграновский, Счастливые, изд. «Молодая гвардия», 1958.
4 Флаттер — высокочастотные колебания конструкции самолета (крыла и опе-
рения), вызванные взаимодействием аэродинамических и инерционных сил и сил
упругости конструкции. Колебания носят расходящийся характер и приводят
к мгновенному разрушению конструкции.
10
периментального исследования и методов предупреждения сыгра-
ли работы выдающегося советского ученого— академика М. В. Кел-
дыша Ч
Благодаря большим предварительным теоретическим и экспе-
риментальным исследованиям были получены необходимые данные
для создания первоклассных сверхзвуковых машин. На самолетах,
спроектированных под руководством А. Н. Туполева, А. И. Микоя-
на, П. О. Сухого, А. С. Яковлева, |С. А. Лавочкина|, В. М. Мяси-
щева, не раз устанавливались мировые рекорды по скорости, вы-
соте, по грузоподъемности и дальности полета1 2.
В настоящее время в связи со значительным ростом скоростей
и высот полета процесс управления самолетом для летчиков весьма
усложнился.
Все процессы, происходящие в воздухе при сверхзвуковых ско-
ростях полета, становятся настолько скоротечными, что летчик уже
часто не в состоянии правильно принять решение и прореагировать
на то или иное явление вследствие запаздывания реакции. Поэтому
в последнее время во многих странах все большее внимание уде-
ляется вопросам автоматического управления полетом самолета,
разрабатываются все более совершенные системы автопилотов
и других автоматических систем, способных вести самолет по за-
данной или вычисляемой траектории с заданными параметрами
полета и решать другие задачи. Вследствие этого большинство
современных сверхзвуковых самолетов имеет в системе управле-
ния автопилоты различных систем.
Однако вопросы проектирования и конструирования автомати-
ческих систем управления достаточно специфичны и органически
не связаны с вопросами создания специальных автоматических
устройств для улучшения характеристик устойчивости и управляе-
мости, которые рассматриваются в книге.
Стремительный рост скоростей самолетов после преодоления
«звукового барьера» привел к возникновению нового, так называе-
мого «теплового барьера», т. е. значительного аэродинамического
нагрева конструкции самолета при полете с большими (М?>2,5)
сверхзвуковыми скоростями. Этот нагрев приводит к снижению
прочности элементов конструкции, вызывает дополнительные на-
пряжения и деформации в конструкции. Появляется необходимость
в применении новых конструкционных материалов, теплоизоляции
и специального оборудования для создания нормальных условий
работы экипажа. Увеличение деформаций конструкции вследствие
нагрева может привести к значительному изменению характери-
стик устойчивости и управляемости самолета, что необходимо учи-
1 См. «Комсомольскую правду» за 24 ноября 1962 г.
2 28 апреля 1961 г. советский летчик Г. К. Мосолов на самолете Е-66 уста-
новил мировой рекорд высоты для самолетов с ТРД — 34 714 м, а 7 июля 1962 г.
на самолете Е-166 — мировой рекорд скорости для самолетов с ТРД на базе
15/25 км — 2681 км/час. Во время одного захода скорость превысила 3000 км/час.
11
тывать при проектировании систем управления новых самолетов,
подвергающихся значительному нагреву в полете. Высокие темпе-
ратуры, развивающиеся в полете, заставляют предусматривать
в системах управления специальные конструктивные мероприятия
для обеспечения надежной работы всей системы и ее агрегатов
при весьма широком диапазоне изменения температур.
Глава I
ОБЩИЕ СВЕДЕНИЯ. УРАВНЕНИЯ ДВИЖЕНИЯ.
ОПРЕДЕЛЕНИЯ
§ 1. Системы осей координат
В аэродинамических расчетах и расчетах устойчивости и управ-
ляемости самолета используются следующие прямоугольные систе-
мы осей координат:
1. Связанная система (фиг. 1.1,а и б). Начало координат О
располагается в центре тяжести самолета. Ось Охх расположена
в плоскости симметрии самолета и направлена вперед по направле-
нию хорды крыла!, ось Оу\ перпендикулярна оси Ох\ и также
лежит в плоскости симметрии самолета, ось Oz\ перпендикулярна
плоскости Х\Оу\ и направлена в сторону правого полукрыла. Поло-
жительные направления углов, сил и моментов указаны стрелками
на фиг. 1.1.
2. Полусвязанная система (фиг. 1.1,6). Ось Oxf лежит в плос-
кости симметрии самолета и направлена по проекции вектора ско-
рости полета на эту плоскость, ось Otf перпендикулярна оси Ох'
в плоскости симметрии самолета, ось Oz' перпендикулярна плос-
кости x’Otf и совпадает с осью Oz^.
В практике при обозначении осей полусвязанной системы
штрих часто опускается. Поэтому на фиг. 1. 1,6 полусвязанные оси
обозначены Ох, Оу, Oz,
3. Скоростная система. Ось Охс направлена по скорости поле-
та, ось Оус по перпендикуляру к оси Охс в плоскости симметрии
самолета, ось Ozc перпендикулярна плоскости хсОус и направлена
в сторону правого полукрыла.
4. Земная система (фиг. 1.1,а). Начало координат Оё поме-
щается. в какой-либо выбранной на поверхности Земли точке.
1 В связанной системе координат ось Охх может быть направлена и по дру-
гому направлению, например, по строительной горизонтали фюзеляжа или по
главной оси инерции. В последнем случае исчезают центробежные моменты инер-
ции, что облегчает расчеты. На самолетах-истребителях угол заклинения крыла
чаще всего равен нулю, поэтому направления строительной горизонтали и хорды
крыла совпадают.
13
Фиг. 1.1. Системы осей координат и правило знаков.
а—земная (х&, у zg) и связанная (хх, yn zj; б—связанная (xlt yt, zt) и полусвязанная (х, у, z).
Ось OgXg направлена горизонтально по географическому или маг-
нитному меридиану, ось Ogyg— вертикальна, ось Ogzg— также
горизонтальна и составляет с осями Ogxg и Ogyg правую систему
осей координат.
В случае необходимости ориентировать связанную с вектором
скорости подвижную систему координат относительно Земли при-
меняют еще систему, в которой начало координат помещают
в центре тяжести самолета, а ось Ох направляют по вектору ско-
рости. В такой системе ось Оу лежит в вертикальной плоскости
и перпендикулярна оси Ох. Ось Oz расположена в горизонтальной
плоскости и составляет с осями Ох и Оу правую систему коор-
динат.
Положение подвижной связанной с самолетом системы осей
координат (xi, ylt zi) относительно выбранной неподвижной зем-
ной системы определяется линейными координатами центра
тяжести самолета xg, yg=H и zg, а также тремя углами поворота
связанной системы (см. фиг. 1.1,а):
1) углом рыскания ф между выбранным направлением оси
OgXg и проекцией оси Oxi на горизонтальную плоскость. Если
ось OgXg направлена по географическому или магнитному мери-
диану, то угол ф называется соответственно углом курса или маг-
нитного курса;
2) углом тангажа ft между связанной осью Ох\ и горизонталь-
ной плоскостью;
3) углом крена у между плоскостью симметрии самолета и вер-
тикальной плоскостью, проходящей через связанную ось Охь
При аэродинамических расчетах в связанной системе координат
обычно задается сила тяги двигателей Р, а в земной — высота по-
лета Н и сила тяжести (вес) G.
Положение подвижной скоростной системы координат (хс, ус,
zc) относительно неподвижной земной также определяется тремя
координатами центра тяжести самолета и тремя углами поворота
скоростных осей:
1) углом фс между проекцией вектора скорости на горизон-
тальную плоскость и принятым направлением земной оси OgXg.
Если ось Оех& направлена по географическому или магнитному
меридиану, то угол фс называется путевым углом (относительно
географического или магнитного меридиана);
2) углом наклона траектории в между вектором скорости
(т- е. осью Охс) и горизонтальной плоскостью;
3) углом ус между осью Оус и вертикальной плоскостью, со-
держащей вектор скорости V (т. £. ось Охс). Здесь следует отме-
креЬ’ что угол Ус не совпаДает с определенным выше углом
В практике аэродинамических' расчетов наиболее широко при-
меняется полусвязанная система координат, в проекциях на оси
15
которой задаются все аэродинамические силы и моменты при про-
дувках моделей в аэродинамических лабораториях. Направление
вектора скорости по отношению к полусвязанной системе коорди-
нат определяется двумя углами (см. фиг. 1. 1,6) —углом атаки а
между проекцией вектора скорости на плоскость симметрии само-
лета и корневой хордой крыла (или между осями Оу и Оу{)
и углом скольжения 0 — между вектором скорости и плоскостью
симметрии самолета.
§ 2. Органы и рычаги управления самолета
Положение самолета в пространстве может изменяться летчи-
ком путем воздействия на рычаги управления самолетом и измене-
нием тяги двигателей.
Рычаги управления (ручка, штурвал, педали и пр.) связаны
с органами управления самолета — рулями. Изменение летчиком
положения рычага управления приводит к отклонению соответст-
вующего руля и вызывает изменение воздушной нагрузки на соот-
ветствующей поверхности, т. е. аэродинамической силы, которая,
будучи приложенной не в центре тяжести самолета, определяет
и изменение действующего на самолет аэродинамического мо-
мента.
Благодаря наличию неуравновешенного момента самолет начи-
нает вращаться относительно соответствующей оси, т. е. появляют-
ся угловые ускорения и изменяется угловая скорость вращения,
вследствие чего начинают изменяться и задаваемые летчиком углы,
определяющие положение самолета.
Вращение самолета относительно оси Охь т. е. изменение угла
крена у, достигается отклонением рулей крена — элеронов, распо-
ложенных обычно у концов крыла. Элероны отклоняются на пра-
вом и левом полукрыльях в противоположные стороны, при этом
подъемные силы на них изменяются противоположно и появляется
момент крена Мх, под действием которого и изменяется угол
крена. С помощью элеронов осуществляются также и развороты
самолета, т. е. изменение угла ф.
Для изменения угла скольжения 0 используется руль направле-
ния, расположенный в хвостовой части вертикального оперения
(киля). При отклонении этого руля от нейтрального положения
создаются боковая сила и момент Му.
Управление положением самолета в вертикальной плоскости
(относительно оси Ozx) осуществляется рулем высоты, располо-
женным на горизонтальном оперении, которое может находиться
позади крыла или впереди него (схема «утка»). При отклонении
руля высоты изменяется продольный момент Mz и угловая ско-
рость сог, определяющая изменение углов атаки а, тангажа Ф
16
и наклона траектории 0, а также весьма важный параметр — нор-
мальную перегрузку пу.
Действие аэродинамических рулей основано на изменении
при постоянном угле атаки подъемной силы профиля при измене-
нии его кривизны. Отклонение руля вниз увеличивает кривизну
профиля и поэтому его подъемная сила увеличивается (фиг. 1.2);
отклонение руля вверх искривляет профиль в противоположную
Фиг. 1.2. Изменение суммарной эпюры давле-
ний и подъемной силы на профиле при откло-
нении руля (М<МКр.).
сторону и приводит к уменьшению подъемной силы или даже к пе-
ремене ее знака. На фиг. 1.2 рассмотрен характер изменения сум-
марной эпюры давлений 1 на профиле при отклонении руля вниз
на дозвуковых скоростях.
Управление рулями самолета осуществляется летчиком путем
смещения соответствующих рычагов управления, расположенных,
в кабине2. Для управления рулем высоты на легких самолетах
используется продольное смещение ручки управления, на тяже-
лых — продольное смещение штурвала, установленного на качаю-
щейся в вертикальной плоскости колонке или в специальных на-
правляющих, допускающих поступательное смещение штурвала
вдоль продольной оси самолета.
Поперечное управление осуществляется элеронами при соответ-
ствующем поперечном смещении ручки управления (на легких
самолетах) или поворотом штурвала (на тяжелых).
Управление рулем направления на самолетах всех типов осу-
ществляется смещением педалей.
Для облегчения процесса управления кинематика проводки си-
стемы управления всегда проектируется таким образом, чтобы
1 Суммарная эпюра давлений есть результат сложения эпюр давлений на
верхней и нижней поверхностях профиля.
2 Основные требования к размещению рычагов управления см. в книге
О. А. Сидоров, Физиологические факторы человека, определяющие компонов-
ку поста управления машиной, Оборонгиз, 1962.
17
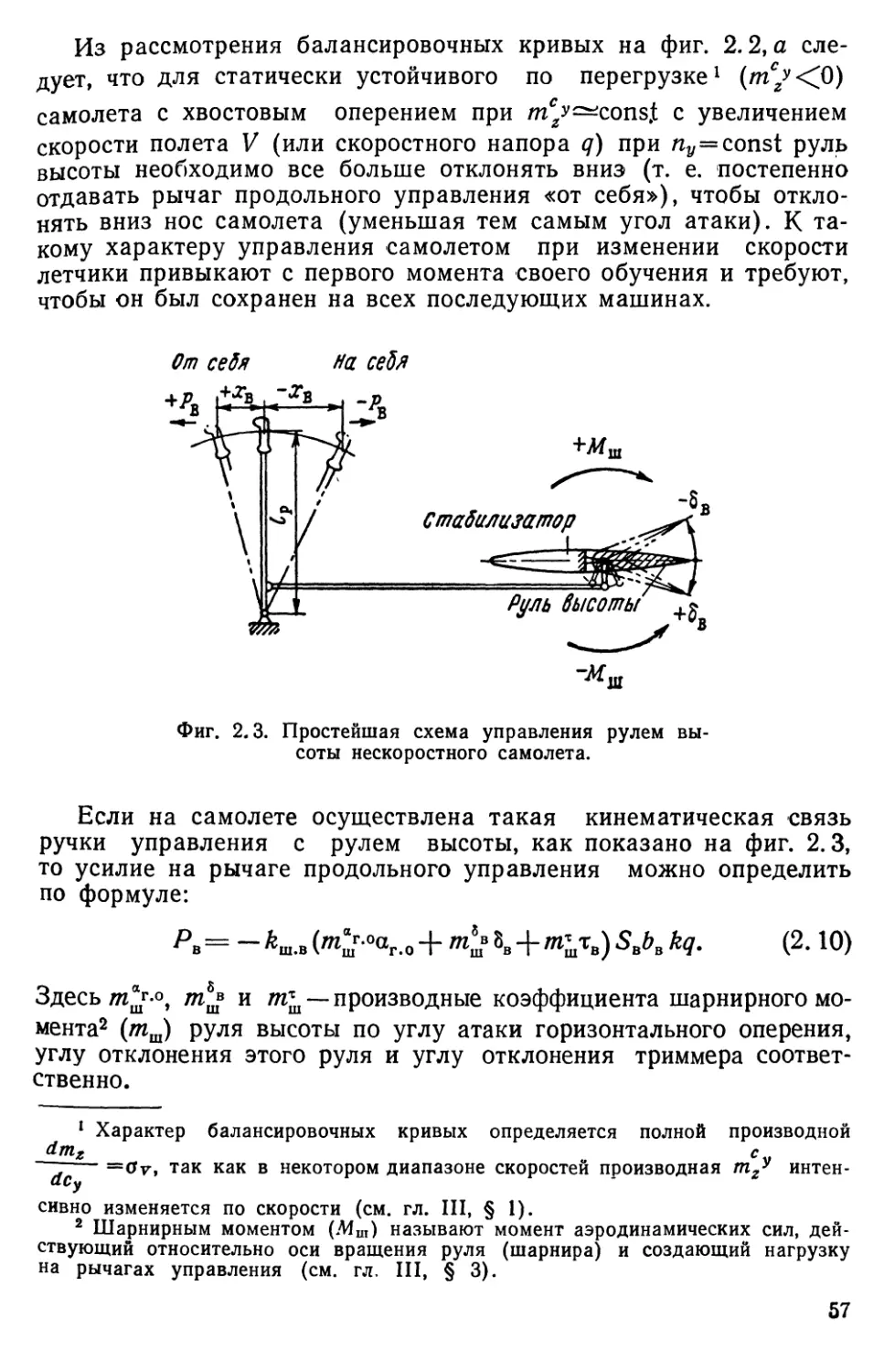
Фиг. 1.3. Кинематическая схема проводки простейшей системы
управления рулями самолета (а) и правила знаков для отклонения
рулей, рычагов управления и усилий на рычагах управления (б),
/—тяга проводки управления элеронами, 2—педали управления рулем направ-
ления, '3—элерон, 4—триммер элерона, 5—ручка продольного и поперечного
управления, 6—руль высоты (р. в.), 7—киль, 8—руль направления (р. н.),
9—^триммер р. н., /0—-триммер р. в., 11—стабилизатор, 12—тяга проводки
управления р. н., /3—тяга проводки управления р. в., 14—элерон.
18
направления движения командных рычагов совпадали с желаемым
летчиком направлением вращения самолета. При смещении, на-
пример, ручки вперед «от себя» руль высоты на самолете с гори-
зонтальным оперением позади крыла отклоняется вниз и нос
самолета тоже опускается вниз, скорость растет, перегрузка па-
дает. При смещении ручки «на себя» — руль высоты отклоняется
вверх, нос самолета поднимается вверх, скорость падает, пере-
грузка растет. При отклонении ручки вправо — самолет кренится
тоже вправо. Движением правой педали вперед осуществляется
разворот носа самолета тоже вправо и т. д.
Для самолета, спроектированного по схеме «утка» (горизон-
тальное оперение перед крылом), отклонение руля высоты при тех
же смещениях ручки, что и у самолета обычной схемы, будут
обратными. Независимо от схемы самолета движение ручки (или
штурвала) вправо вызывает опускание левого элерона и подъем
правого, а движение вперед правой педали («дача правой
ноги») — отклонение руля направления вправо.
Движение ручки или штурвала влево вызывает опускание пра-
вого элерона и подъем левого, а «дача левой ноги» — отклонение
руля направления влево.
На фиг. 1.3 изображены органы управления самолета обычной
схемы и принятые в СССР правила знаков для отклонения рулей,
рычагов управления и усилий на рычагах управления. Максималь-
ные величины линейных перемещений (х) рычагов управления
и усилий (Р) на них задаются обычно в технических условиях
на основе летной практики для самолета данного типа.
§ 3. Уравнения движения самолета и характеристики
его устойчивости
Длиннопериодическое и короткопериодическое движение
Движение самолета как и всякого твердого тела в пространстве
описывается системой дифференциальных уравнений. Так как са-
молет при движении в воздухе обладает шестью степенями свобо-
ды, то описывающая его движение система уравнений состоит
из шести дифференциальных уравнений второго порядка. Три урав-
нения описывают движение центра тяжести самолета в выбранной
системе осей координат под действием внешних сил, дающих сум-
марные проекции на оси координат X, Y, Z, и три — вращение
самолета с некоторой переменной угловой скоростью, которая дает
составляющие по осям координат <ох, и cdz под действием внеш-
них моментов, имеющих суммарные составляющие относительно
осей координат Мх, Му и
19
В связанной с самолетом системе координат эти шесть уравне-
ний движения имеют следующий вид:
(i.i)
+Л,К-“П=Л1-
Здесь Vx, Vy и Vz — составляющие скорости движения центра
тяжести самолета по осям координат; Jx, Jy, Jz — (моменты инерции
самолета относительно связанных осей Охь Оух и Oz\, Jxy — цент-
робежный момент инерции; tn — масса самолета.
Исследование пространственного движения самолета с по-
мощью этой системы уравнений представляет весьма серьезные
трудности, так как написанные дифференциальные уравнения
являются нелинейными и их решение возможно только методами
численного интегрирования, требующего весьма трудоемких вычис-
лений. Такой метод исследования движения к тому же не позво-
ляет определить характер движения в любой момент времени после
прекращения действия возмущения, так как для этого потребова-
лось бы выполнить бесчисленное множество расчетов для различ-
ных начальных условий (т. е. заданных возмущений) и бесконеч-
ного множества моментов времени. Эти расчеты усложняются,
кроме того, и тем, что внешние силы и моменты являются нелиней-
ными функциями параметров полета (скорости, перегрузки, углов
а, ₽и пр.). При этом такие функции далеко не всегда могут быть
выражены аналитически при любых значениях этих параметров.
Чаще всего эти функциональные зависимости получают экспери-
ментально и выражают графически.
20
В результате численное интегрирование уравнений движения
в общей форме не позволяет судить об устойчивости движения са-
молета при различных начальных возмущениях.
С развитием машинной математики решение полных уравнений
движения самолета методами численного интегрирования стало
возможным на цифровых вычислительных машинах, но наиболее
наглядную картину процессов дает интегрирование этих уравнений
на электронных интеграторах (электронных аналоговых машинах-
моделях).
Исследования движения летательных аппаратов при помощи
аналоговых машин получили в настоящее время самое широкое
распространение и применяются даЖе на стадии проектирования
самолета, так как для моделирования процессов могут использо-
ваться значения аэродинамических коэффициентов, полученные
при продувках модели или же расчетным путем.
Самолет считается устойчивым, если его возмущенное движе-
ние затухает через некоторое время после прекращения действия
возмущения, и самолет восстанавливает исходный установившийся
режим полета без всякого вмешательства летчика L Свойство
устойчивости проявляется еще и в стремлении самолета сбаланси-
роваться на новом режиме установившегося полета при отклоне-
нии руля на постоянный угол (если это отклонение руля не выво-
дит самолет на закритические режимы1 2).
Под установившимся режимом полета понимается такое движе-
ние, при котором все параметры, определяющие движение само-
лета относительно связанных с нйм осей,, с течением времени
не изменяются. Таким образом, при установившемся движении
должны оставаться неизменными скорость полета, угол атаки,
углы крена и скольжения. Наибольший интерес для исследования
представляет чаще всего встречающийся на практике вид устано-
вившегося режима полета — прямолинейный полет с постоянной
скоростью. Устойчивость движения рассматривается обычно имен-
но относительно этого исходного режима полета.
Возмущенным движением называют движение самолета после
прекращения действия на него возмущающих внешних сил (возни-
кающих вследствие порыва ветра, отклонения руля летчиком,
изменения тяги двигателей и др.), нарушивших исходный режим
1 Свойство устойчивости, т. е. свойство возвращения к исходному режиму
полета после действия возмущения, заключается в сохранении исходных значе-
ний поточных углов: а (или пу) и р, пространственные же углы О, у, гр при этом
могут изменяться. Для сохранения без вмешательства летчика исходных (задан-
ных) значений углов О, у и *ф, определяющих положение самолета в пространстве,
необходим автопилот, стабилизирующий самолет по тангажу, крену и рысканию.
2 Закритическим режимом полета называют обычно режим, соответствующий
выходу самолета на угол атаки, превышающий акр, определяемый максимумом
оэффициента подъемной силы су [на кривой cy=f(a)] или потерей продольной
Этической устойчивости по перегрузке [кривая приобретает положи-
тельный наклон].
21
установившегося полета, при котором все силы и моменты, дейст-
вующие на самолет, были уравновешены. Возмущения нарушают
равновесие сил и моментов, вследствие чего самолет начинает дви-
гаться по-новому, причем это возмущенное движение будет уже
неустановившимся.
«Если в процессе этого неустановившегося движения значения
всех параметров, определяющих кинематику самолета, будут стре-
миться к значениям, которые эти параметры имели в исходном
установившемся движении, то самолет будет устойчивым; такой
самолет без всякого вмешательства летчика будет восстанавливать
исходный установившийся режим. Наоборот, неустойчивый само-
лет стремится отойти все дальше и дальше от исходного устано-
вившегося режима; если такой самолет представить самому себе,
то он может настолько далеко уйти от установившегося режима,
что полет может кончиться катастрофой» L
Целью исследования устойчивости являются: определение преде-
лов возмущений, при которых испытывающий их самолет возвра-
щается к исходному установившемуся движению, определение
характера возмущенного движения и времени восстановления
исходного режима после прекращения действия возмущения.
Как было отмечено выше, такое исследование, при достаточно
больших возмущениях, в настоящее время встречается с серьезны-
ми математическими трудностями и поэтому на практике не может
быть применено, тем более, что для практических целей чаще всего
достаточно ограничиться исследованием устойчивости при малых
возмущениях, используя (метод малых возмущений1 2.
Благодаря методу малых возмущений и симметрии самолета
систему из шести нелинейных дифференциальных уравнений мож-
но разделить на две независимые системы линейных дифференци-
альных уравнений, с известной степенью точности описывающих
движение в плоскости симметрии самолета (продольное движе-
ние) и в двух других плоскостях (боковое движение), что
значительно облегчает исследование характера движений.
Однако независимое рассмотрение этих движений при некото-
рых исходных режимах полета (например, на вираже, штопоре
и других пространственных маневрах) может привести к грубым
ошибкам. Такое раздельное рассмотрение движений в разных
плоскостях недопустимо, например, и для современных сверхзву-
ковых самолетов на посадке и при полетах на больших высотах
с большими углами атаки, а также при значительных угловых ско-
ростях крена вследствие значительного взаимного влияния обоих
видов движений.
1 В. С. В е д р о в, Динамическая устойчивость самолета, Оборонгиз, 1938,
стр. 12. Здесь также идет речь о сохранении поточных углов, а пространственные
углы сохраняются летчиком или автопилотом.
2 Подробное описание метода изложено в книгах: В. С. В е д р о в, Динами-
ческая устойчивость самолета, Оборонгиз, 1938, стр. 13, 35; И. В. О ст осла в-
ский, Аэродинамика самолета, Оборонгиз, 1957, стр. 224.
22
При изучении устойчивости продольного движения обычно
применяют скоростную систему осей координат, которая в этом
случае совпадает с полусвязанной, так как движение предполагает-
ся беэ скольжения (р=0).
Продольное движение самолета в скоростной системе осей ко-
ординат описывается следующей системой уравнений (фиг. 1.4,а).
т—-—=Р cos (а — <р) —Q — G sin 6;
dt
mV -^-=K-|-Psin(a — <р) — Geos 6;
dt
(1-2)
(здесь ф — угол заклинения крыла).
В этой системе первое уравнение получено проектированием
всех внешних сил на ось Охв, касательную к траектории, второе —
проектированием внешних сил на ось Оус, нормальную к траекто-
рии. Как известно, сумма действующих сил, дающих проекции
на некоторую ось, вызывает ускорение тела в направлении этой
оси. При этом сумма проекций этих сил равна произведению уско-
рения на массу тела. Этот закон механики использован при состав-
лении первого и второго уравнений.
Искривление траектории в вертикальной плоскости (вращение
относительно мгновенного центра кривизны) происходит под дей-
ствием сил, дающих проекции на нормальную к траектории ось
Оуе (фиг. 1.4,6) и вызывающих, вследствие этого, появление цен-
тростремительного ускорения
где 2У — сумма проекций всех сил на нормаль к траектории;
т — масса самолета.
Центростремительное ускорение, как известно, определяется
также выражением:
/ =—=v —
Jn R dt'
Третье уравнение системы (1.2) составляется также на основа-
нии известного из механики закона (произведение момента инер-
ции тела на его угловое ускорение равно сумме моментов всех
внешних сил относительно выбранной оси).
К уравнениям движения (1.2) следует добавить два соотно-
шения:
23
(1.3)
а=&—6.
Для решения общей системы дифференциальных уравнений
(1.2) и (1.3) составляется характеристическое уравнение путем
приравнивания нулю характеристического определителя системы,
составленного из коэффициентов при неизвестных в дифференци-
альных уравнениях.
Фиг. 1.4. Элементы траектории самолета в вертикальной плоскости (в ско-
ростной системе координат).
Обычно, перед составлением характеристического определителя,
уравнения движения приводятся к безразмерному виду. Для этого
все силы и моменты представляются в следующем виде:
24
Q-'^;
K = C,S^;
л,.=мЛау-г,«:
Далее вводятся:
безразмерное время t=— (здесь т = —--------масштаб времени
т \ eSVo
относительные скорости
V=
у
у0
ДИ=
ДУ
Va
и безразмерный радиус инерции
^2-(—V
J Z
m-b^ ‘
В результате систему уравнений (1.2) можно привести к виду
^+2^cAV+(^-5)Aa + c/&=0;
ш ^-2k 6дМ;К>4л#=0;
dt ' y
=£- М/п^Д V—=t>- от’Да —
rz
В этих уравнениях
dt
dm
dfl
d&a
dt
тг
т
_^_0.
dt
(1-4)
моСу,
2^X с
2 2су
дсу t* dCv
см хс . см =_________
хс дм ' У дМ ’
25
2т
м =---- ;
^Ьа
mzc = mz—-
дсх с dCy
=—; сл =------;
да у да
тп = дтгс
гс д!Л
Р Удв .
с еК1 ’
о •
/п’=^-; тп>=^;
да г дыг
т'=д-^
da
„ л • da ba
где a =-------
di V
При составлении уравнений (1.4) индекс «О» у обозначений
параметров исходного режима полета обычно опускается \
Коэффициент ц называют относительной плотностью самолета.
Этот коэффициент играет весьма существенную роль в динамике
самолета.
Характеристическое уравнение системы (1.4) четвертой степени
вида
= О,
Здесь коэффициенты:
(1.5)
„ Z I
^Z * mZ । / ч । г» L \
ai~c у =2 h О + 2^i) сх с;
Мп- + ^.- (1+М-)с
r\
™z + mz
~п~
с1 2
^Су ~2
гг
аз~ - 2 [£2су (с, - ) + kiCx Сс * ]
r Z
а м
_(1 + 2^)Схс^+М.^^
rz rz
ата М
Д4= — 2(^1^с + ^2Су)_^2£'+ (cxcCx + C/y)M'^zr5
Z rz
1 Подробно приведение уравнений движения к безразмерной форме изложено
в книге И. В. Остославского, Аэродинамика самолета, Оборонгиз, 1957,
стр. 377.
26
Уравнение (1. 5) имеет четыре решения — корня М, Х2, Хз, ко-
торые и определяют характер возмущенного движения.
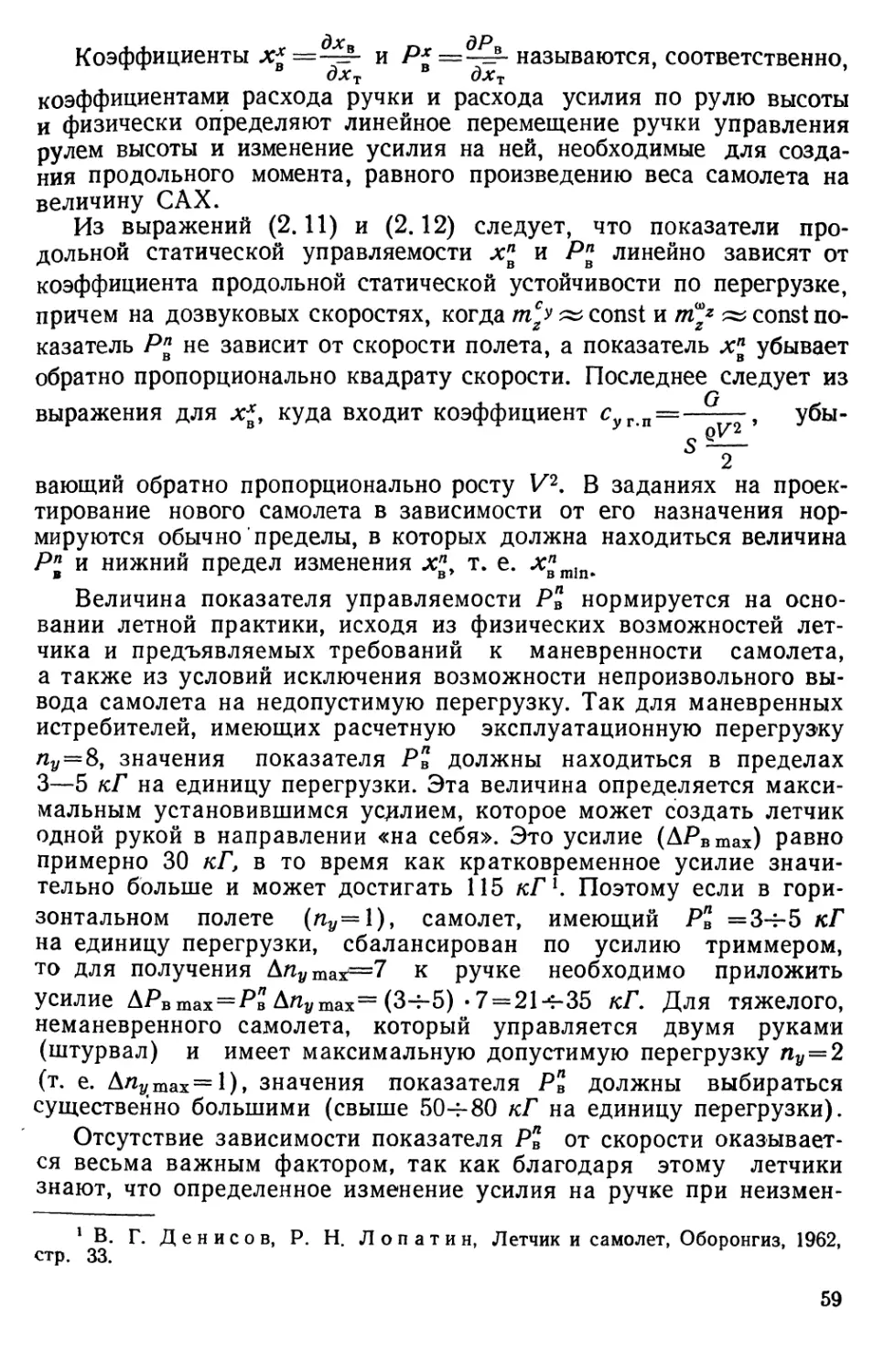
Возмущение угла, атаки
I/ 'Исходное значение угла
атаки (Ьа=С)
Сумма короткопериоди-
ческих и длиннопери-
одических колебаний
\ Длиннопериодические. колебания
Tj^(20i30)T после затухания,
короткопериодических
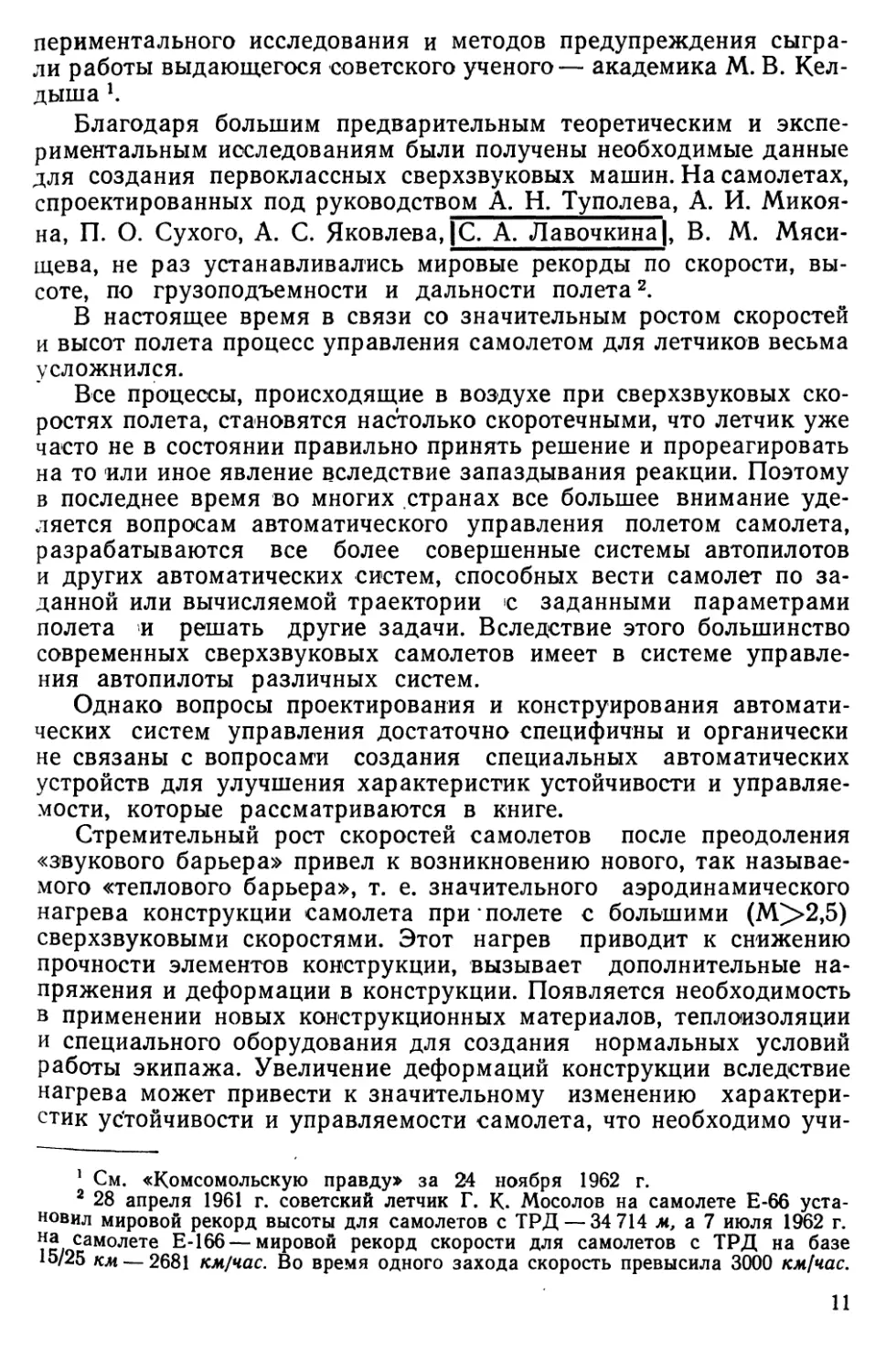
Фиг. 1.5. Характер изменения угла атаки в длиннопериодическом и ко-
роткопериодическом продольном возмущенном движении самолета.
Характеристическое уравнение системы дифференциальных
уравнений, описывающих продольное возмущенное движение само-
лета, имеет обычно два больших и два малых комплексных корня.
В соответствии с этим в возмущенном движении различаются разви-
вающиеся одновременно два типа движения: короткопериодиче-
ское и длиннопериодическое, называемое также фугоидным
(фиг. 1.5). (При действительных корнях возмущенное движение бу-
дет апериодическим) Ч Это разделение возмущенного движения на
сумму двух (или более) развивающихся одновременно с различной
скоростью движений обусловливается тем, что угол атаки в воз-
мущенном движении изменяется значительно быстрее, чем скорость
полета.
Следует отметить, что для летной практики собственные коротко-
периодическое и длиннопериодическое движения самолета при
возмущениях (поддуве или даче летчиком руля) имеют различное
значение. Длиннопериодическое движение развивается медленно
и легко парируется летчиком (часто незаметно для него самого).
Быстро развивающееся короткопериодическое движение имеет
гораздо большее значение в оценке летчиком устойчивости и управ-
ляемости самолета.
Если неустойчивость самолета в длиннопериодическом движении
часто вообще не замечается летчиками, то неустойчивость в корот-
копериодическом движении сразу вызывает их резко отрицательные
отзывы о самолете. Если короткопериодические колебания интен-
1 В практике прочно утвердилось называть короткопериодическим возмущен-
ное движение, описываемое большими корнями, хотя они, вообще говоря, могут
быть и действительными, т. е. определять апериодическое движение.
27
сивны, не затухают достаточно быстро и имеют небольшой период,
то управление самолетом становится чрезвычайно затруднительным.
Летчик не успевает парировать колебания, а часто даже усиливает
их, так как вследствие малости периода этих колебаний он не
может своевременно и правильно отклонять соответствующие рыча-
ги управления *. Поэтому при рассмотрении устойчивости наиболь-
шее внимание уделяется короткопериодическому движению.
На практике часто применяется упрощенная теория короткопе-
риодического движения, которая основывается на предположении,
что в начале возмущенного движения скорость не успевает заметно
измениться, и можно считать AV—0. В этом случае в системе урав-
нений (1.4) первое уравнение выпадает. Если при этом за исход-
ный режим принять горизонтальный установившийся полет, когда
сила тяги равна лобовому сопротивлению (схс=сх—ср=0), то урав-
нения движения (1.4) примут вид:
^Д& ДДа „ . л
—=---=—с“Да=0;
dt dt у
Д2Д&
d&
/п“Да
г, z
dtw
~?г ' dt
dtS, Q
dt
(1. 6)
Эти два уравнения могут быть приведены к следующему одному
уравнению:
|-<22Да=0,
(L7)
где коэффициенты
т“г + <
-------2---
Г Z
И
/ с
------= -‘J--------------7г-----
те же, что и в характеристическом уравнении (1.5) полной систе-
мы дифференциальных уравнений движения (1. 4), написанных для
случая исходного установившегося горизонтального полета, т. е. при
Сх с==0.
1 При существующих динамических характеристиках современных самолетов
говорить о возможности парирования короткопериодических колебаний можно
при их частоте не свыше 0,3—0,4 гц. При больших частотах летчик, пытаясь пари-
ровать колебания, раскачивает самолет. Это важное обстоятельство связано с за-
паздыванием реакции летчика. В системе управления, особенно бустерной (см.
гл. V, §§ 1 и 7), также существует запаздывание (сдвиг фаз между приложенным
на рычаге усилием И отклонением руля), которое с ростом частоты изменения
усилий на рычаге управления достаточно быстро возрастает.
28
Дифференциальное уравнение (1.7) имеет характеристическое
уравнение второй степени
корни которого
а2—О,
(1.8)
и определяют характер собственного короткопериодического воз-
мущенного движения.
При а2 > — корень I/ —— а2 получается мнимым и собствен-
ное короткопериодическое движение имеет колебательный характер,
определяемый комплексным видом корней Х1>2=(а±гТ>) характерис-
тического уравнения (1.8). В этом случае изменение угла атаки
может быть записано:
Да = Aeat sin (bt -f-ф),
(1.9)
где
2
Постоянные Д и ф определяются по начальным условиям при 0.
ai
Если a2<Z—, то корни и Х2 получаются действительными и
4
собственное возмущенное „короткопериодическое“ движение ста-
новится суммой двух апериодических. В этом случае изменение угла
атаки может быть представлено в виде суммы:
= ~}-С2е^ ,
(1.10)
где произвольные постоянные Ci и С2 также определяются из на-
чальных условий.
Условием устойчивости самолета в короткопериодическом дви-
жении, т. е. условием затухания этого возмущенного движения
будет:
а<0 — в случае колебательного движения или
Х]<Х) и Х2<0 — в случае апериодического.
Эти условия удовлетворяются при ai>0 и а2>0.
29
Если необходимо исследование полного возмущенного движения,
то решается характеристическое уравнение (1.5) полной системы
дифференциальных уравнений движения (1.4) и по его корням
судят об устойчивости самолета.
Как уже отмечалось, корни характеристического уравнения рас-
падаются на большие и малые, причем они могут быть:
— действительными (в этом случае возмущенное движение есть
сумма четырех апериодических движений, развивающихся с раз-
ными скоростями);
— комплексными (возмущенное движение становится суммой
двух колебательных движений с большим и малым периодом);
— попарно комплексными и действительными, что определяет
возмущенное движение как сумму двух апериодических и одного
колебательного движения.
Эти варианты решений полной системы дифференциальных
уравнений движения (1.4) на примере изменения угла тангажа
могут быть описаны следующими выражениями:
+ С2^г+ С3е^т + С4еМ;
д&=A efl7sin (6/ 4- ф) -|- A 'ea'^sin (b't+ф');
д&=A e^sin (&/ Ф) + С3ех»74" ;
д &—Сх ех»7 4" 4- Д' 7 sin (b ft 4- Ф') .
Из рассмотрения этих выражений следует, что для затухания
возмущенного движения и, следовательно, обеспечения устойчиво-
сти самолета во всех случаях необходимо, чтобы корни М, Хз, U
характеристического уравнения (1.5), если они действительные,
были бы отрицательны. Если же корни характеристического урав-
нения комплексные, то должны быть отрицательны их действи-
тельные части.
Чтобы корни уравнения (1.5) были бы отрицательны или име-
ли отрицательные вещественные части, необходимо выполнение
следующих условий:
<^1 >0; а2>°; «з>0; «4>°; 1
R=a1-a2-a3—a2ai — a~^>Q, J ( • )
Здесь /? — дискриминант Рауса.
Выполнение этих условий свидетельствует только об устойчиво-
сти движения, т. е. затухании собственного возмущенного движения.
Для выяснения степени устойчивости и характера возмущенного
движения необходимо решить характеристическое уравнение (1.5)
и найти его корни М, Хг, ^з и Х41.
1 Метод отыскания корней приведен в книге И. В. Остославского,
Аэродинамика самолета, Оборонгиз, 1957, стр. 387.
30
Боковое движение самолета описывается также системой диф-
ференциальных уравнений, связывающих боковые силы и моменты
с линейными и угловыми ускорениями относительно выбранных осей
координат.
Эти уравнения в безразмерной форме (в вариациях) в связан-
ной системе координат имеют следующий вид1.
4==— с₽-р4- —— с-у;
dt 2 z 1 r xiryi2 у г>
d“x xy d<&y fl®- m X =~ ft-4- x — । тхУ —
dt ~r2 ' X dt /.2^1 У 1 x rx —— <d : -2 шу’ ' X
doiy ' xy d^x 8
dt r2 У dt “2 ‘ 1 “2 ЛУ У J 72 o)y ry
dy dt~ -tg&0 >(Dy).
(1.12)
Здесь применены обозначения:
— <йх*1 — «у/
О)=----- ; (ом =----
х 2V 1 2V
2 -ч
•6 _ __ *
х mH’ У
4-/у_ —2 ^ху
Гху~ тР ’
— t ! т \
здесь т=— ;
т \ qSV /
2т ,
qS-1 ’
с₽=-^-;
г
I —размах.
При анализе бокового возмущенного движения скорость полета
V принимается постоянной и равной скорости в исходном режиме
полета.
Характер бокового возмущенного движения определяется корня-
ми характеристического уравнения системы (1. 12) вида:
где
х4^а1Хз+а2х2+азх+а4=о, (1.13)
/ С- __(О __ш
а^~ (у+«хх4-/Пуу
«2~
-у ( т*х+Щу”) + (тп“хтп“у
— — (л (ту + azwx);
1 Подробнее об уравнениях бокового движения см. И. В. Остославский,
Аэродинамика самолета, Оборонгиз, 1957, стр. 454.
31
а3 ~ — !х —т9ту)\
й4 ~ Iх -у- — т?ут!°хУ+tg % («Лп“* - т?тх*)];
Здесь применены обозначения:
Уравнение (1. 13) имеет обычно два действительных (%i и %2)
и два комплексных (Х3,4 = а±/&) сопряженных корня, которые со-
ответствуют двум апериодическим и одному колебательному движе-
нию, сумма которых и определяет полное боковое возмущенное
движение самолета.
Например, в возмущенном боковом движении изменение угла
скольжения будет описываться уравнением:
Э -|- С2еХз/ 4" Aeat sin (pt+Ф)«
(I-Н)
Очевидно, что в этом случае условием затухания собственного
возмущенного движения, т. е. условием устойчивости движения
будет:
Хх<0, Х2<0 и а<0.
Условие Ai<0 выполняется обычно легко, так как
_
Таким образом, первое боковое апериодическое движение, харак-
теризуемое корнем Xi уравнения (1. 13), представляет собой демп-
фирование крена. Это движение быстро затухает и поэтому не
представляет интереса для исследования.
а4
Второй действительный корень Х2^—~ может быть положи-
тельным и отрицательным, но обычно он небольшой по абсолютной
величине и определяет достаточно медленно развивающееся боко-
вое апериодическое движение, называемое спиральным.
Наиболее важным собственным боковым движением является
быстро развивающееся колебательное движение, определяемое
32
большими по абсолютной величине комплексными сопряженными
корнями Х3 и Л,4 характеристического уравнения (1. 13).
Об устойчивости бокового движения можно судить по знакам
коэффициентов а\, а2, а3 и а4 характеристического уравнения (1. 13)
и знаку дискриминанта Рауса (/?), причем для обеспечения устой-
чивости бокового движения необходимо выполнение условий, ана-
логичных условиям устойчивости продольного движения (1. 11).
В боковом возмущенном движении нарушение условия а4>0
приводит к апериодической спиральной неустойчивости, а наруше-
ние условия — к колебательной. Следовательно, выполнение
последнего условия (7?>0) является наиболее важным для само-
летов.
Для более полного представления о характере бокового возму-
щенного движения необходимо найти все четыре корня Л2, и Х4.
характеристического уравнения (1.13) системы дифференциальных
уравнений (1.12), описывающих боковое движение.1.
§ 4. Статическая устойчивость. Демпфирование.
Известный советский ученый В. С. Ведров, исследовавший
устойчивость самолета, указывает:
«Не существует ни статической, ни динамической устойчивости
самолета. Существует только одна единственная устойчивость, и эта
устойчивость в силу исторического недоразумения называется
динамической устойчивостью. Та величина, которая в расчетной
практике авиационного конструктора называется коэффициентом
статической устойчивости, определяет лишь значение восстанавли-
вающего момента, действующего на самолет; она является только
одним из очень большого числа факторов, обусловливающих истин-
ную (динамическую) устойчивость...» 2.
Таким образом, постоянно употребляемое в практике понятие
статической устойчивости является достаточно условным и опре-
деляет лишь величину и знак возникающего при возмущении до-
полнительного аэродинамического момента, действующего на са-
молет. Если этот момент действует в сторону исходного положения
равновесия, то самолет называют статически устойчивым. Если же
этот момент стремится еще дальше отклонить самолет от исходного
режима полета, то в этом случае самолет называют статически
неустойчивым.
В продольном движении самолета условием статической устой-
чивости'при возмущениях по скорости или углу атаки будет возник-
новение такого дополнительного продольного момента AAU под
действием которого самолет без вмешательства летчика стремился
1 Нахождение корней см. в книге И. В. Остославского, Аэродинамика
самолета, Оборонгиз, 1957, стр. 463.
2 В. С. Ведров, Динамическая устойчивость самолета, Оборонгиз, 1938,
стр. Ю.
33
бы вернуться к исходному режиму полета. Если рассматривается
возмущение по скорости при неизменной перегрузке пу, соответст-
вующей ее значению в исходном установившемся полете (например,
в горизонтальном установившемся полете с пу=1), то говорят
о продольной статической устойчивости самолета по скорости. Если
самолет
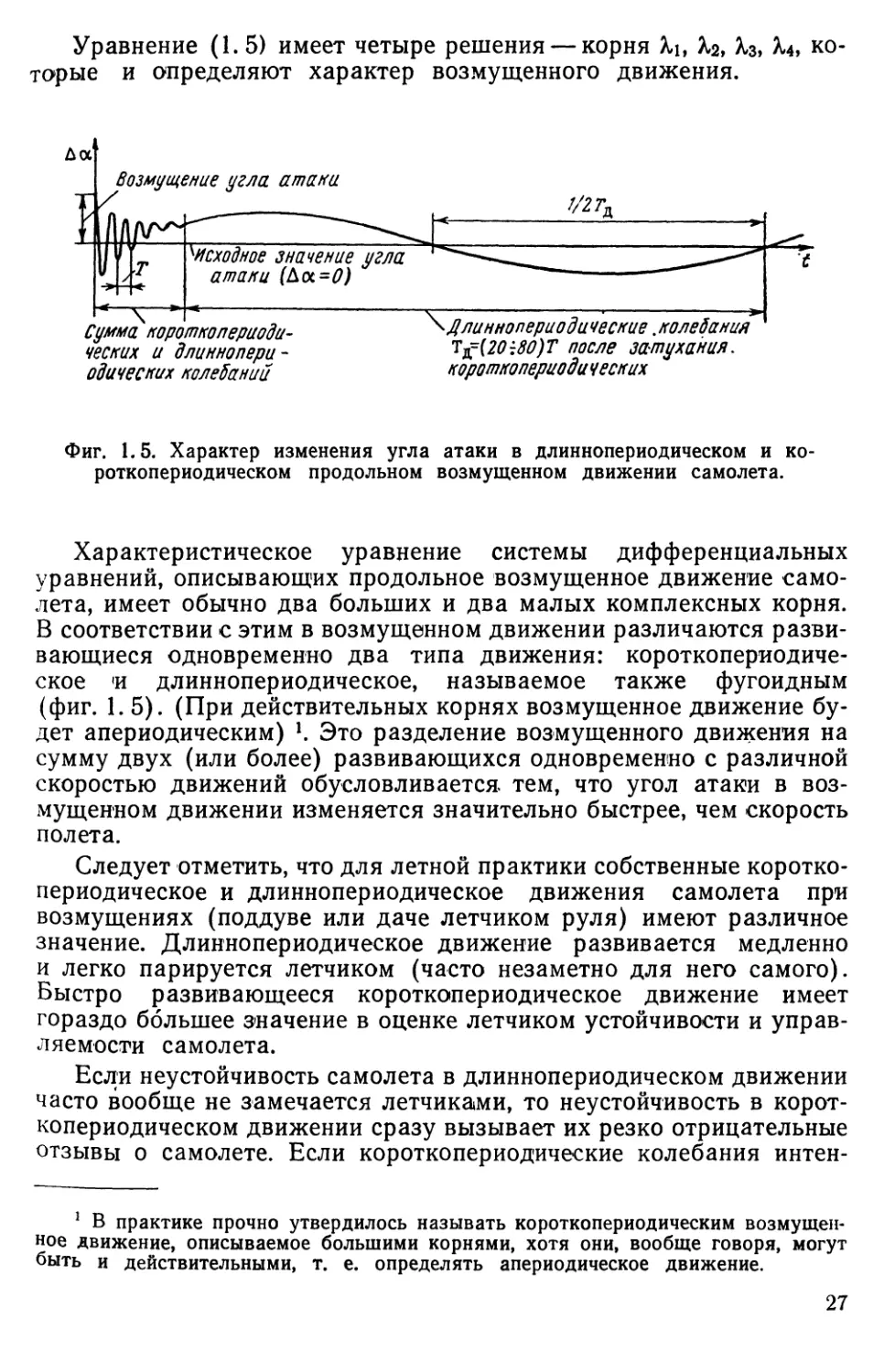
Фиг. 1.6. Характер зависимости продольного мо-
мента Мг от угла атаки а у статически устойчи-
вого и неустойчивого по перегрузке самолета.
же в возмущенном движении скорость считается неизменной и рас-
сматривается только изменение угла атаки а и связанной с ним
перегрузки пу, то говорят о продольной статической устойчивости
по перегрузке.
Пусть у самолета при некоторой постоянной (М = const) скоро-
сти полета зависимость продольного момента Mz от угла атаки а
выражается сплошной линией, приведенной на фиг. 1.6, а самолет
сбалансирован рулем высоты при некотором значении угла атаки
си. Если под действием возмущения (например, «поддува», т. е. вос-
ходящего или нисходящего потока воздуха) угол атаки возрастет
на величину Да, то возникнет неуравновешенный отрицательный
момент —ДМ* стремящийся уменьшить угол атаки, т. е. вернуть
самолет в исходное положение равновесия. Следовательно, самолет
при подобной зависимости продольного момента от угла атаки
будет статически устойчивым по перегрузке пу,
У самолета, имеющего зависимость продольного момента от
угла атаки, выражающуюся пунктирной линией (фиг. 1.6), с уве-
личением угла атаки на Да появляется дополнительный положи-
тельный момент +ДЛ1г. Под действием этого неуравновешенного
момента угол атаки будет еще больше увеличиваться и самолет
будет все дальше отклоняться от исходного режима полета.
Поэтому такой самолет будет статически неустойчивым по пере-
грузке.
34
Таким образом, необходимым условием продольной статической
устойчивости самолета по перегрузке является отрицательный
наклон кривой зависимости продольного момента от угла атаки,
т. е.
^<0.
да
Из аналогичных рассуждений относительно возникновения до-
полнительных боковых моментов при отклонении самолета от исход-
ного режима полета без крена и скольжения можно сделать выводы,
что условием путевой статической устойчивости является
дМу
~дГ< ’
а условием поперечной статической устойчивости —
^<0.
др
Как было отмечено выше, наличие статической устойчивости
является необходимым, но недостаточным условием устойчивости
движения самолета, т. е. условием возвращения его после действия
возмущения к исходному режиму полета. Действительно, после
действия возмущения помимо моментов статической устойчивости
на самолет действуют моменты аэродинамических сил от органов
управления, моменты демпфирования, а также моменты инерци-
онных сил. От соотношения между этими моментами и зависит
устойчивость движения самолета, называемая в практике динами-
ческой.
Моменты от органов управления определяются эффективностью
рулей и углами их отклонения, задаваемыми летчиком или автопи-
лотом. Эффективность рулей определяется при продувках модели
самолета путем подсчета по соответствующим формулам безразмер-
ных коэффициентов моментов т/, ту и т* относительно
трех осей самолета при единичном отклонении соответствующих
рулей управления при различных числах М полета. Эти коэффици-
енты могут быть получены и проверены специальными методами,
а также и в результате летных испытаний самолета.
При отклонении руля высоты на угол бв на самолет будет дей-
ствовать продольный момент управления
^упр=^’в-8в = ^в-8в-5-ф^
При отклонении элеронов на угол дэ от нейтрального положе-
ния возникает момент крена
35
мх w.=mX=4-s,-s—•/,
•* упр э * э 2
а при отклонении руля направления на угол дн — путевой момент
В этих выражениях значения коэффициентов т^9, т* и т*в,
полученные экспериментально, должны браться при соответствую-
щих числах М полета.
Большое значение для устойчивости самолета и характера пере-
ходных процессов, возникающих при возмущениях, играют момен-
ты демпфирования, которые возникают при вращении самолета
относительно соответствующих осей и, как правило, препятствуют
начавшемуся вращению. Однако моменты демпфирования не могут
вернуть самолет в исходное положение равновесия. Демпфирующие
моменты появляются при вращении самолета относительно какой-
либо его оси вследствие возникновения у поверхностей крыла, гори-
зонтального и вертикального оперений относительной воздушной
скорости, направленной в противоположную вращению сторону
(фиг. 1.7). Эта относительная воздушная скорость для точки про-
филя, расположенной на расстоянии L от оси возникшего вращения
с угловой скоростью со, может быть вычислена по простой формуле
Voth = wL. Возникающая при вращении самолета относительная
воздушная скорость приводит к изменению углов атаки у профилей
крыла, горизонтального и вертикального оперений (фиг. 1.7, г)
и появлению дополнительных аэродинамических сил, моменты ко-
торых относительно центра тяжести самолета препятствуют начав-
шемуся вращению.
При вращении самолета относительно поперечной оси Oz\
с угловой скоростью сог суммарный демпфирующий момент Afz(coz)
создается демпфирующим моментом от горизонтального оперения
и фюзеляжа (Л42)г.о+ф(а)г) и демпфирующим моментом крыла
Mzkp(coz), причем при прямом крыле его демпфирующий момент
составляет приблизительно 10% от момента (Mz)r.0^(coz). При
стреловидном и треугольном крыле его демпфирующий момент зна-
чительно повышается и составляет 20—25% (в зависимости от угла
стреловидности) демпфирующего момента горизонтального опере-
ния и фюзеляжа. При «бесхвостой» схеме самолета практически
весь момент продольного демпфирования создается крылом.
Значительное влияние на продольное демпфирование оказывает
запаздывание скоса потока в зоне горизонтального оперения.
Скос потока в зоне горизонтального оперения играет существен-
ную роль в продольной устойчивости самолета. Возникновение ско-
са объясняется тем, что сбегающие с концов крыла присоединенные
воздушные вихри дают в зоне горизонтального оперения направлен-
ные вниз вертикальные индуцированные воздушные скорости,
36
которые, складываясь с вектором скорости невозмущенного потока
У, дают некоторое суммарное значение скорости Уг.о в зоне гори-
зонтального оперения (фиг. 1.8). Угол г между векторами скорости
невозмущенного потока V и скоростью потока в зоне горизонталь-
ного оперения Уг.о называют углом скоса потока в зоне
Фиг. 1.7. к пояснению возникновения демпфирующих моментов при враще-
нии самолета.
а—продольный демпфирующий момент, б—поперечный демпфирующий момент, в—путевой
демпфирующий момент, г—изменение угла атаки Да профиля, расположенного на рас-
стоянии L от оси вращения самолета (ц. т.), летящего со скоростью V и вращающегося
с угловой скоростью (0.
горизонтального оперения. Угол скоса потока s зависит от угла
атаки крыла а (или коэффициента су) и числа М полета. Эта зави-
симость имеет следующий вид:
е = е0(М)+^(М)Да,
да
(1-15)
где е0 — скос потока при нулевом угле атаки, а символами е0(М) и
—-(М) условно показана зависимость е0 и от числа М полета.
При вращении самолета относительно поперечной оси Oz^ угол
атаки крыла постоянно изменяется. Каждому мгновенному значе-
нию угла атаки соответствует и определенное значение угла скоса
37
потока, которое может быть вычислено по вышеприведенной фор-
муле (1. 15). Однако, как показывает практика, при наличии вра-
щения самолета реальные значения угла скоса потока существенно
отличаются от расчетных, что объясняется некоторым запаздыва-
нием скоса потока в зоне горизонтального оперения. Такое запазды-
вание вызывается тем, что интесивность присоединенного вихря,
зависящая от циркуляции скорости по крылу, определяющей зна-
чения су при различных углах атаки, изменяется при изменении
угла атаки крыла вследствие вращения самолета. Это изменение
(l80°- уУ^-угол продольного У
Фиг. 1.8. Угол скоса потока в зоне горизонтального оперения,
расположенного за крылом.
Уи—воздушная скорость, индуцированная присоединенным вихрем.
интенсивности вихря сказывается в зоне горизонтального оперения
с некоторым запаздыванием Д£ определяемым временем, необходи-
мым для достижения зоны оперения, сбежавшим с крыла вихрем,
т. е. скоростью полета V и удалением (Lr.o) горизонтального опере-
ния от крыла Д/=
Поэтому в каждый момент времени t величина угла скоса
потока в зоне горизонтального оперения определяется не соответ-
ствующим этому моменту времени углом атаки а, а углом атаки
в некоторый предшествующий момент времени t' = t—At. Запазды-
вание скоса потока создает некоторый дополнительный препятст-
вующий вращению продольный момент Afzr.o(a), увеличивающий
продольное демпфирование и оказывающий, тем самым, благопри-
ятное влияние на продольную динамическую устойчивость самоле-
та. Для самолета схемы «утка» скос потока от крыла в зоне гори-
зонтального оперения отсутствует, но зато возникает скос потока
на крыле от расположенного впереди оперения.
Итак, коэффициент продольного момента демпфирования само-
лета с хвостовым горизонтальным оперейием может быть записан
в виде суммы:
mz (тг)г.о+ф М + кр (шг) + т2 г0 (а),
S 2
38
аа оа
где а=—• —характеризует скорость изменения угла атаки при
вращении самолета относительно оси Ozv
В практике демпфирование самолета оценивается „вращатель-
СО ш V “v
ными“ производными тг , тхх и тп/-
Эти производные определяются по следующим формулам:
О)
дч>г
дтх(ух)
ди>х
(здесь ,
здесь ”ь = ~
? дшу
( - <^yl \
(здесь %,=—j-
Производная коэффициента продольного демпфирующего мо-
мента по безразмерной угловой скорости о)2 определяется суммой:
т^=(т^\ хл+<* (1.16)
2 \ Z /г.о + ф ZKP’ ' '
где
Q Т 2 / т/2 \
/ СО \ ^Г.О^г.О п Г~1~ 1 1 *г» о 1
(тЛ ^—~~аго----------9—vk здесь k=---------I;
\ Z /Г.о + ф г*° 5^2 г у V2 /
<lP=~^H+^tgx+CX2tg2z)-D
(коэффициенты А и В зависят от сужения крыла ц и координаты
центра тяжести самолета хт, а С и D — только от сужения крыла) L
Влияние запаздывания скоса потока в зоне горизонтального опе-
рения на продольное демпфирование оценивается производной
^v-k,rKD^.
Если оси двигателей самолета не совпадают по высоте с его
продольной осью, то их тяга также дает некоторый продольный
момент Mz дВ = Р • Удв, направленный на пикирование, при располо-
жении осей двигателей выше центра тяжести самолета (см.
фиг. 1.4), или на кабрирование — если оси двигателей лежат ниже
центра тяжести.
Момент от тяги двигателей у современных сверхзвуковых само-
летов вследствие значительного возрастания величины тяги может
оказать существенное влияние на продольную устойчивость и управ-
ляемость самолета.
1 И. В. Остос л а веки й, Аэродинамика самолета, Оборонгиз, 1957,
стр. 319—322.
39
(1.18)
Таким образом, выражение для полного действующего на само-
лет в полете продольного момента с учетом всех рассмотренных
выше факторов, будет иметь вид:
+ (1.17)
Здесь Afz0 — продольный момент при нулевом угле атаки (см.
фиг. 1.6),
Хв— производная продольного момента по углу отклонения
дв руля высоты, характеризующая эффективность про-
дольного управления.
Это выражение для продольного момента было использовано
при приведении третьего уравнения системы (1.2) к безразмерной
форме (1.4). При этом составляющие продольного момента были
заменены их безразмерными коэффициентами /пгс, /п“г, /п“.
По аналогии с (1.17) полные поперечный и путевой аэродинами-
ческие моменты в общем случае могут быть представлены следую-
щими выражениями:
мх=м^ 4-жХ 4-жХ
7Иу=Ж^+Л4Х+^Ч+ХЧ+^-гдв,
где и ТИур-— соответственно моменты поперечной и путевой
статической устойчивости, обусловленные сколь-
жением;
Л1/, и 7Иун8н—-моменты, вызванные отклонением элеронов и
руля направления от нейтрального положения;
Мхх^х и Л1ууа)у — моменты поперечного и путевого демпфирова-
ния;
ТИ/сОу и 7Hyx(ox—-моменты, обусловленные перекрестными свя-
зями движений крена и рыскания.
Путевой разворачивающий момент ЛТ2/дв = Р^Дв появляется толь-
ко при несимметричной тяге или отказах двигателей, расположен-
ных на некотором расстоянии гдв от оси симметрии самолета, при-
чем Р~Рщ)ав—Р лев*
Выражения для поперечного и путевого моментов (1. 18) после
приведения их к безразмерной форме использованы при составлении
2-го и 3-го уравнений системы уравнений (1. 12), описывающих бо-
ковое движение самолета.
§ 5. Устойчивость, управляемость и маневренность самолета
Под управляемостью самолета понимают его способность из-
менять режим полета в результате действий летчика, которые сво-
40
дятся к перемещениям рычагов управления (самолетом и двигате-
лями) при приложении к ним определенных усилий.
Таким образом, управляемость самолета можно «...характеризо-
вать соотношениями или зависимостями между отклонениями рыча-
гов управления и усилиями, прикладываемыми к ним летчиком,
с одной стороны, и изменениями параметров движения самолета,
с другой» h
В практике понятие «управляемость» по аналогии с понятием
«устойчивость» стали разделять на два более узких: «статическая»
и «динамическая управляемость».
Хотя оба эти понятия достаточно условны, однако они прочно
вошли в теорию и практику исследования устойчивости и управляе-
мости самолета.
В статической управляемости рассматриваются вопросы балан-
сировки самолета на различных установившихся режимах полета.
«...Статическая управляемость характеризуется усилиями на
рычагах управления и отклонениями рычагов, необходимых для осу-
ществления балансировки самолета в различных установившихся
режимах полета»* 2.
Динамическая управляемость связана с пилотированием само-
лета при выполнении различных неустановившихся движений, ча-
стным случаем которых может быть перевод самолета из одного
установившегося режима полета в другой.
«...Динамическая управляемость характеризуется усилиями
и отклонениями рычагов управления, необходимыми для выполне-
ния неустановившегося движения (маневров) самолета, в процессе
которого величины и знаки параметров движения изменяются во
времени» 2.
Так как всякое отклонение руля вызывает изменение аэроди-
намических сил и моментов, действующих на самолет, то это от-
клонение руля можно рассматривать как некое возмущение, вызы-
вающее отклонение самолета от исходного режима полета.
Поэтому поведение самолета после отклонения руля будет
определяться, в частности, его устойчивостью. Таким образом,
управляемость и устойчивость оказываются тесно связанными
между собой, и оценка летчиками .управляемости самолета в зна-
чительной мере будет зависеть от степени его устойчивости.
Многочисленные специальные летные исследования показали,
что в отношении продольного длиннопериодического движения от-
рицательные отзывы летчиков вызывает лишь апериодическая
неустойчивость (а4<0). Случай колебательной неустойчивости
Длиннопериодического движения самолета не вызывает никаких за-
труднений при пилотировании, так как при обычно имеющих место
Г. С. Калачев, Показатели маневренности, управляемости и устойчи-
вости самолетов, Оборонгиз, 1958, стр. 44.
2 Там же, стр. 45.
41
на практике периодах этих колебаний (Тд = 304-150 и более сек)
и весьма медленно возрастающих амплитудах они легко парируют-
ся летчиками.
«Наоборот, характеристики короткопериодических движений
играют очень большую роль, так как от них зависит управляемость
самолета. В самом деле, при быстрых маневрах, связанных с быст-
рым изменением режима самолета, скорость не успевает в первые
моменты времени заметно измениться. Следовательно, при быстром
движении рулем высоты самолет будет в первые моменты времени
двигаться по законам короткопериодического движения» L
Фиг. 1.9. К пояснению процессов выхода на новое
значение перегрузки при одинаковом отклонении
руля высоты на самолетах с разной степенью
продольной статической устойчивости по пере-
грузке и различным демпфированием.
---------исходное значение демпфирования,
_ . — . — демпфирование уменьшено,
---------демпфирование сильно увеличено.
Недостаточно быстрое затухание собственных колебаний, не го-
вори уже о случае, когда они усиливаются (т. е. при неустойчиво-
сти в короткопериодическом движении), является причиной резко
отрицательных отзывов летчиков о самолете. Управление таким
самолетом сильно затруднено, что может даже привести к ката-
строфе.
В боковом управлении наблюдается аналогичная картина: мед-
ленно развивающееся апериодическое боковое движение (спираль-
ное) не вызывает особых нареканий летчиков даже при его некото-
рой неустойчивости, зато достаточно высокие требования предъяв-
ляются к устойчивости колебательного движения.
Основными аэродинамическими моментами, определяющими
динамическую устойчивость самолета, являются моменты статиче-
ской устойчивости и демпфирования. Кривые на фиг. 1.9 иллю-
1 В. С. Ведров и М. А. Т а й ц, Летные испытания самолетов, Оборон-
гиз, 1951, стр. 299.
42
стрируют характер процессов выхода на новое установившееся
значение перегрузки \пу при одинаковом отклонении руля высоты
самолетов с разными степенями продольной статической устойчиво-
сти (по перегрузке) и демпфированием.
Из рассмотрения процессов следует, что при недостаточном демп-
фировании отклонение руля высоты 1 влечет за собой значительный
начальный заброс перегрузки и длительный колебательный процесс
установления ее нового значения.
Слишком большое демпфирование сильно затягивает переход-
ный процесс, т. е. снижает маневренность самолета. Таким образом,
для получения оптимальных характеристик управляемости и манев-
ренности необходимо для каждого конкретного самолета подбирать
определенное соотношение между моментами статической устойчи-
вости и демпфирования.
Маневренность является одним из основных, определяющих
качеств самолета, особенно истребителя.
Под маневренностью самолета понимают его способность
«...быстро изменять свое положение в пространстве: скорость, высо-
ту и направление полета»2.
Маневренность может быть определена и как способность са-
молета создавать перегрузки (ускорения), определяемая тяговоору-
женностью, несущими возможностями крыла и эффективностью
рулей. При этом большое значение играет время, в течение которого
самолет переходит от исходного к новому режиму полета.
Чем меньше это время, тем естественно, более маневренен са-
молет.
Таким образом, маневренность самолета определяется не только
тяговооруженностью и несущими свойствами крыла, но и его устой-
чивостью и управляемостью 3.
§ 6. Летчик в системе управления
Основной задачей летчика в самолете является управление ма-
шиной с целью выполнения полетного задания.
1 Следует отметить, что характер переходного процесса в значительной сте-
/ •
пени зависит и от скорости I ор= и продолжительности отклонения руля,
т. е. интенсивности и длительности возмущения. В зависимости от динамических
характеристик самолета существует некоторая максимальная скорость перекладки
Wpmax), после превышения которой переходные процессы практически не отли-
чаются и, соответствуют ступенчатому (мгновенному) отклонению руля («реак-
ция на ступеньку»),
2 Г. С. Калачев, Показатели маневренности, управляемости и устойчиво-
сти самолетов, Оборонгиз, 1958, стр. 44.
3 С материалами, изложенными выше, а также в гл. II, можно ознакомиться
подробнее по упоминавшимся книгам В. С. Ведрова, И. В. Остославского,
Г. С. Калачева, В. С. Ведрова и М. А. Тайца, а также по книгам Б. Т. Горо-
Щ е н к о, Динамика полета самолета, Оборонгиз, 1954 и В. С. П ы ш н о в а, Ди-
намические свойства самолета, Оборонгиз, 1951.
43
Управление самолетом «...представляет собой довольно сложный
процесс, в котором должны быть выполнены как сенсорная (то есть,
чувственная), так и моторная (то есть двигательная) работа»1.
Пилотирование самолета летчиком сводится к установлению
необходимого режима полета путем воздействия на органы управ-
ления с помощью соответствующих рычагов. При этом летчик
устраняет возникающие несоответствия между действительными
и потребными положениями в пространстве и режимами полета
самолета. Величина и характер воздействий на рычаги управления
зависят от свойств самолета, навыков летчика по управлению и об-
становки.
Изменение положения самолета в пространстве по высоте, углам
крена, тангажа и рыскания, а также изменение режима полета (по
скорости, перегрузке, углам атаки и скольжения) обычно опреде-
ляется летчиком визуально по земным ориентам и линии горизон-
та, а при отсутствии видимости земли — по пилотажно-навигацион-
ным и специальным приборам (указатель скорости, высотомер,
указатели углов атаки, скольжения и др.). Большую роль в инфор-
мации летчика об изменении режима полета и о действии органов
управления играют физические ощущения или изменения усилий на
рычагах управления и перегрузок. С помощью органов чувств лет-
чик контролирует также результаты своих воздействий на органы
управления, прекращая их в том случае, если устанавливается со-
ответствие между действительными и необходимыми параметрами
полета.
Таким образом вполне обосновано утверждение о том, что
«...летчик и самолет образуют единую систему; управление самоле-
том представляет собой замкнутый процесс, состоящий из последо-
вательных действий летчика и маневров самолета, обеспечивающих’
выполнение плана полета. Для летчика этот процесс состоит из вос-
приятия информации, ее обработки, формирования выходного сиг-
нала (подготовки решения) и создания управляющего воздействия.
Характер управления самолетом, точность и быстрота приведе-
ния его к новому требуемому положению согласно принятому
плану полета зависят не только от динамических характеристик
самолета, но и от свойств и психико-физиологических особенностей
летчика, как главного звена замкнутой системы управления само-
летом» 2.
На фиг. 1. 10 приведена блок-схема замкнутой системы ручного
управления, объединяющей летчика (оператора) и самолет. Оче-
видно, что характеристики этой системы и ее устойчивость опреде-
ляются характеристиками основных входящих в нее элементов
(человека-оператора, самолета и собственно системы управления)
и их взаимным соответствием.
13. Гератеволь, Психология человека в самолете, ИЛ, 1956, стр. 53—54.
2 В. Г. Денисов, Р. Н. Лопатин, Летчик и самолет, Оборонгиз,
1962, стр. 27.
44
Следовательно, успешность выполнения задания полета «...опре-
деляется эффективностью комбинации «человек—самолет», которая
зависит от эффективности человека и эффективности само-
лета» L
Летчик, как звено системы управления, имеет воспринимающие
органы (органы чувств-рецепторы) и центральную нервную систе-
му, выполняющую функции аппарата, обрабатывающего получен-
ную информацию и вырабатывающего решения. Центральная нерв-
ная система управляет движением исполнительных органов
(эффекторов), т. е. мускулов рук, ног, спины... Движения исполни-
в пространстве и режиме полегла
0-суммирующее звено
Фиг. 1.10. Блок-схема замкнутой системы управления «человек — самолет».
тельных органов летчика и развиваемые ими усилия являются «вы-
ходными сигналами» («выходом») человека, как звена системы
управления. При этом информация о действии эффекторных органов
передается в центральную нервную систему через кинестатические
рецепторы. Это свойство осуществления обратной связи в организ-
ме подобно обратной связи в системах автоматического регули-
рования, поэтому оно получило название «кинестатической об-
ратной связи» 1 2, благодаря которой осуществляется «дозирование»
движений исполнительных органов и развиваемых при этом
усилий.
Возможность такого «дозирования» позволяет летчику, знакомо-
му с характеристиками управляемости данного самолета, осущест-
вить необходимые, наперед заданные изменения режима полета
путем соответствующего перемещения рычагов управления и при-
ложения к ним определенных усилий. Другими словами, система
«регулятора—летчика» получается замкнутой благодаря наличию
этих кинестатических обратных связей. Здесь следует отметить,
что в общей информации летчика об изменении режима полета
1 В. Г. Денисов, Р. Н. Лопатин, Летчик и самолет, Оборонгиз, 1962,
стр. 3.
2 Там же, стр. 27—28.
45
усилия на рычагах управления играют большую роль, чем переме-
щения этих рычагов, так как изменение усилий лучше ощущается
летчиками. Поэтому и точность дозирования усилий превышает
точность дозирования перемещений. Следствием этого является
тот факт, что летчики управляют самолетом, основываясь больше
на изменении усилий (т. е. управление «по усилиям»), чем пере-
мещений.
Если летчик не ощущает изменений усилий на рычагах управле-
ния при изменении режима полета (что может быть, например,
при применении необратимого бустерного управления без соответ-
ствующих загрузочных механизмов), то он лишается важнейшей
части информации, а система регулятора—летчика получается
разомкнутой по одному из параметров обратной связи. Это может
Фиг. 1.11. Блок-схема замкнутой системы автоматического управления «авто-
пилот — самолет», в которой предусмотрена возможность перехода на ручное
управление через автопилот.
привести к очень большим ошибкам в управлении, следствием ко-
торых может быть раскачка самолета или апериодическая потеря
им устойчивости.
При применении в системе управления самолета автоматическо-
го регулятора (автопилота) обратные связи в нем (в зависимости
от типа автопилота) заводятся по положению или по скорости от-
клонения рулей (фиг. 1. 11). В этом случае сохраняется возмож-
ность ручного управления самолетом через автопилот с помощью
«строевой ручки», причем это управление осуществляется по ее
положению и никаких устройств для загрузки этой ручки не тре-
буется, так как кинестатические обратные связи по усилиям в этом
случае заменяются обратными связями в автопилоте.
Таким образом, управление самолетом с точки зрения летчика
представляет собой органическое единство процессов восприятия,
мышления и действия.
Летчик, как звено замкнутой системы (контура) управления,
обладает рядом свойств, влияющих на процесс управления самоле-
том, из которых основными являются: 1
1 В. Г. Денисов, Р. Н. Лопатин, Летчик и самолет, Оборонгиз, 1962,
стр. 35, 36.
46
1. Запаздывание реакции (ответная реакция на внешние сиг-
налы раздражения), выражающееся временем в 0,2ч-0,3 сек.
2. Наличие некоторой зоны нечувствительности к внешним раз-
дражениям.
3. Способность фильтрации внешних возмущений (летчик —
«логический» фильтр). Летчик в системе управления является как
бы одноканальным усилителем, последовательно устраняющим
рассогласование по какому-либо одному параметру.
4. Способность к дифференцированию и интегрированию (т. е.
реакция не только на отклонение параметра от заданного значения,
но и на первую и вторую производные этого отклонения, а также
и на интеграл от отклонения).
5. Наличие полосы пропускания (способность следить за сигна-
лами, поступающими с частотой 0-н2,5—3 гц).
Амплитудная частотная характеристика летчика имеет линей-
ный характер.
«Для оценки динамических свойств человека как звена системы
управления необходимо воспользоваться понятием передаточной
функции. Передаточной функцией в теории автоматического регу-
лирования называют математическое выражение, характеризующее
отношение выходной величины звена системы к его входной вели-
чине в переходном (неустановившемся) режиме. Знание переда-
точной функции человека позволит выбрать передаточную функцию
остальной части системы управления как дополнение к динамике
человека, исходя из требуемых условий и, в первую очередь, легко-
сти и простоты управления самолетом...
Человек может изменять свою передаточную функцию в зависи-
мости от поставленных задач, тренировки, обучения, морального
состояния и г. д., он может быть так натренирован, что с успехом
выполняет функции усиления, усиления с опережением, усиления
с запаздыванием или полное усиление с заданным опережением
и запаздыванием. Однако наиболее точно человек выполняет про-
стейшую функцию, т. е. усиление» Ч
Следовательно, эффективность летчика в системе управления
самолетом может быть повышена подбором соответствующих его
качеств и тренировкой.
Однако общая эффективность системы «человек—самолет»
может быть повышена и за счет повышения эффективности второго
элемента этой системы, т. е. самого самолета. Самолет, как дина-
мическая система, также обладает рядом характеристик, опреде-
ляющих его свойства в замкнутой системе управления. Эффектив-
ность самолета может быть повышена соответствующим выбором
его характеристик устойчивости и управляемости на стадии проек-
1 В. Г. Денисов, Г. Н. Лопатин, Летчик и самолет, Оборонгиз, 1962,
стр. 36, 37.
47
тирования и доводки в результате более тщательного подбора
схемы самолета, его аэродинамических и конструктивных парамет-
ров и органов управления. При этом необходимо стремиться
к наиболее полному использованию возможностей человека и, по
возможности, компенсировать его недостатки. Однако, при харак-
терных для современной авиации скоростях и высотах полета, ха-
рактеристики самолета, необходимые для обеспечения эффектив-
ности системы «человек—самолет», не всегда могут быть
получены только путем подбора его аэродинамических и конструк-
тивных параметров при проектировании. На некоторых режимах
полета (например, на больших скоростных напорах у земли при
М<4) не всегда даже удается обеспечить устойчивость системы
«человек—самолет». Поэтому в последнее время большое внима-
ние уделяется выбору соответствующих параметров проводки са-
мой системы ручного управления от рычагов управления к рулям.
Эти параметры (например, передаточные числа) могут изменяться
автоматически в зависимости от режима полета, что позволяет
создать такие характеристики устойчивости и управляемости, ко-
торые обеспечили бы не только устойчивость системы «человек—
самолет», но и ее необходимую эффективность. Такая автоматизи-
рованная и механизированная система ручного управления и полу-
чила название «полуавтоматической» Ч
Летчик, обладая достаточно ограниченными возможностями
в переработке получаемой информации, при большой скоротечно-
сти явлений на больших скоростях полета не всегда в состоянии
правильно разобраться в них и следовательно принять правильное
решение. Для облегчения пилотирования самолета в таких условиях
в настоящее время применяются специальные системы полуавтома-
тическогошилотирования по директорным приборам. В этом случае
уже не летчик, а специальная система на основании переработан-
ной информации вырабатывает директорные сигналы в виде про-
стейших команд («выше», «ниже», «вправо», «влево» и т. д.).
По этим командам летчик и управляет самолетом с помощью полу-
автоматической системы управления, обеспечивающей ему прием-
лемые характеристики управляемости.
Полуавтоматические системы управления «...для пилотируемой
авиации еще долго будут необходимы, а на некоторых этапах
полета останутся единственными системами управления.
Полностью автоматическая система во многих случаях не
оправдывает себя. Есть целый ряд функций, которые человек вы-
полняет без особого труда, но выполнение которых автоматами
потребовало бы большого числа сложных схем и приборов. Для
введения автоматизации недостаточно того факта, что она дает
улучшенные характеристики, надо еще убедиться, что система
1 Вопросам автоматизации ручного управления для создания приемлемых
характеристик управляемости посвящены гл. V и VI настоящей книги.
48
нуждается в этих улучшениях характеристик, что эти улучшения
не влияют отрицательно на характеристики системы в отношении
веса, габаритов и надежности. Преимущество человека — приспо-
собляемость к изменяющимся требованиям обстановки — одна из
основных причин того обстоятельства, что система может много
«выиграть» от включения в нее человека. В ряде случаев участие
человека в системе управления обеспечивает большую точность
и большую безопасность полета, чем это может дать полностью
автоматическая система» \
1 В. Г. Денисов, Р. Н. Лопатин, Летчик и самолет, Оборонгиз, 1962,
стр. 4.
Глава II
ПОКАЗАТЕЛИ УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ
САМОЛЕТА.
ФОРМИРОВАНИЕ УСИЛИЙ
НА РЫЧАГАХ УПРАВЛЕНИЯ САМОЛЕТОМ
ПРИ БЕЗБУСТЕРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ
§ 1. Показатели продольной статической устойчивости
и управляемости
В установившемся прямолинейном полете (coz=O и 6B=const)
можно достаточно обоснованно считать, что действующий на само-
лет продольный момент зависит только от угла атаки и скорости:
Mz=f (а, V) или тг—fx (а, V),
Этот момент в установившемся полете должен быть сбаланси-
рован -моментом от руля высоты.
Для определения изменения момента при изменении режима
полета продифференцируем последнее уравнение
dm,=d^da±d^dV = m'da+mvdV. (2.1)
г da dV z \ z \ )
В полученном уравнении dmz— коэффициент некоторого доба-
вочного продольного момента, возникающего при изменении скоро-
сти на dV и угла атаки на da. Такой момент с помощью руля вы-
соты и надо приложить к самолету, чтобы вывести его на новый
установившийся режим полета со скоростью V-\-dV и углом атаки
a+da при n2/=l=const.
На этом новом режиме полета избыточный момент от отклонения
руля высоты (dmz) будет уравновешен изменением продольного
момента самолета, так что сохранится условие установившегося
полета т2=0.
Прикладывая к самолету различные продольные моменты dmz,
получим ряд различных установившихся режимов полета или ли-
бо
нейную серию установившихся режимов (равновесия), для которых
все параметры являются функциями только одного угла атаки х.
Если же в каждом из таких режимов скорость полета является
функцией только угла атаки, то можно взять полную производную
по углу атаки от выражения коэффициента продольного мо-
мента:
^-=т«4-тГ —• (2.2)
da г 1 2 da 4 '
Это выражение определяет величину момента, который необ-
ходимо приложить к самолету для перевода его с исходного на
другой, близкий установившийся режим полета, отличающийся от
исходного единичным изменением угла атаки и соответствующим
изменением тяги двигателей и скорости полета.
В полете продольный момент создается летчиком путем откло-
нения руля высоты, поэтому приведенное выражение и определяет
величину продольного момента от руля высоты, которая необходима
для перевода самолета на другой установившийся режим полета.
В практических расчетах полная производная от выражения
коэффициента продольного момента берется чаще не по углу ата-
ки (2.2), а по безразмерному коэффициенту подъемной силы cv
и имеет вид:
dmz dmz j dmz dV
dcy dcy dV dcy
Благодаря линейной зависимости cy от а при небольших углах
атаки
dmz dmz дсу dmz
----= . = са
да--дсу да у дсу
И
дтг__ 1 dmz
дсу с* да
Полная производная
dm2 dV
dcy z 2 dcy
(2.3),
определяет величину продольного момента, который надо прило-
жить к самолету для единичного изменения коэффициента подъем-
ной силы су при условии соответствующего изменения скорости
и перехода на новый установившийся режим полета с неизменной
перегрузкой пу=1.
Производная
ас у
— dv называется «коэффициентом
продоль-
ной статической устойчивости по скорости».
1 В. С. В е д р о в и М. А. Тайн, Летные испытания самолетов, Оборон-
гиз. 1951, стр. 302.
51
с дтг
Входящая в выражение (2.3) частная производная mzу—-^-
определяет величину коэффициента продольного момента, возни-
кающего при единичном изменении коэффициента подъемной силы
самолета су в условиях неизменной скорости полета, и называется
«степенью продольной статической устойчивости по перегрузке».
Эта производная по физическому смыслу определяет величину
коэффициента продольного момента, который необходимо прило-
жить к самолету для единичного изменения его коэффициента су
при неизменной скорости полета и соответствующем изменении
перегрузки пу.
При переходе к безразмерным коэффициентам полученное ранее
условие продольной статической устойчивости самолета по пере-
грузке может быть записано в виде тсу<^0, так как
да
гп*=гпс2ус* и
Условием продольной статической устойчивости по скорости,
при котором с изменением скорости возникает продольный момент,
стремящийся вернуть самолет к исходной (до возмущения) скоро-
сти полета, будет сГу<Д
В уравнении (1.7), описывающем изменение угла атаки в ко-
роткопериодическом движении (т. е. при неизменной скорости по-
лета), коэффициент а2 при вариации угла атаки Да содержит
<*>z
с I mz
выражение тУ-\--------,- которое называется «коэффициентом ripo-
р-
дольной статической устойчивости, по перегрузке» 1 и обозначается
через ап:
m*zz
(2.4)
г-
Коэффициенты av, <зп и шсху в значительной степени определяют
продольную устойчивость и управляемость самолета. Эти коэффи-
циенты различаются при зажатых рулях и при брошенном (свобод-
ном) управлении. В последнем случае они обозначаются через
(Мс». (аАв И (от^)св.
Следует отметить, что термин «свободное управление» приме-
ним только к самолетам, не имеющим необратимого бустерного
управления (см. § 1, гл. V), так как в последнем случае даже при
свободных рычагах управления рули не будут отклоняться под
1 Следует отметить, что в литературе существует известная путаница в на-
званиях коэффициентов, характеризующих! продольную статическую устойчивость
с
по перегрузке. Производная т2У и коэффициент <уп часто называются и «сте-
пенью», и «мерой», и «запасом» продольной статической устойчивости.
Так как величина и знак производной mzy в первый момент после действия
возмущения характеризуют восстанавливающий момент относительно центра
52
действием шарнирных моментов, а будут удерживаться бустерами
неподвижно.
Заметим, что расход рычагов управления определяется аэроди-
намическими коэффициентами и показателями с зажатыми руля-
ми, а усилия на них — коэффициентами, определенными при бро-
шенном управлении, которые обозначаются индексом «св».
Это правило распространяется и на боковую управляемость само-
лета.
Показатели продольной устойчивости и управляемости обычно
связывают с понятиями центровки самолета и его фокуса.
(^г)б.г.о=^/^а
Фиг. 2. 1. Схема равновесия сил и продольных мо-
ментов у статически устойчивого по перегрузке
самолета с горизонтальным оперением позади крыла.
(Пунктиром показано смещение подъемной силы кры-
ла и увеличение балансировочной силы на горизон-
тальном оперении при переходе к сверхзвуковой
скорости).
Под центровкой (хт) самолета понимают выражаемое часто
в процентах САХ отношение расстояния центра тяжести (ц. т.)
самолета от носка средней аэродинамической хорды (САХ) к пол-
X
ной величине этой хорды хт= Т~ (фиг. 2.1).
"а
Фокусом самолета (или профиля) называют точку приложения
равнодействующей приращений аэродинамических сил, возникаю-
щих при изменении угла атаки при постоянной скорости. Коэффи-
тяжести, то ее логичнее всего называть «степенью продольной статической
устойчивости по перегрузке».
Коэффициент On в отличие от производной тгу учитывает влияние продоль-
ного демпфирования на формирование продольного восстанавливающего момента
устойчивости. Поэтому он характеризует продольную статическую устойчивость
по перегрузке с учетом демпфирования и в дальнейшем (гл. VI) будет называться
«коэффициентом продольной статической устойчивости по перегрузке».
В практике летных испытаний самолетов под термином «запас продольной
статической устойчивости» понимают величину разности между нейтральной
и предельно задней эксплуатационной центровками, выраженную в долях или
процентах от длины САХ.
53
циент аэродинамического момента относительно фокуса остается
неизменным при изменениях угла атаки. Поэтому положение фо-
куса может быть определено и как положение центра тяжести
самолета, при котором т*у=О.
Фокус самолета не совпадает с фокусом крыла, так как послед-
ний смещается за счет влияния фюзеляжа и, главным образом,
за счет установки горизонтального оперения. Относительная коор-
дината, определяющая положение фокуса от носка САХ самолета,
может быть вычислена по формуле
Хр = Т = (^^)б. г. о i ^г. о^г. о (~~а Л/» ’ (2.5)
Оа \ су °Су/
где первое слагаемое (#г)б.г.о — координата фокуса самолета
без горизонтального оперения. Второе слагаемое выражает отно-
сительный (в долях САХ) сдвиг фокуса за счет установки гори-
зонтального оперения. У самолета обычной схемы (с хвостовым
оперением) этот сдвиг происходит назад, поэтому второе слагаемое
в формуле (2.5) имеет знак « + ». У самолета, построенного по схе-
ме «утка», сдвиг фокуса от установки горизонтального оперения
происходит вперед и в формуле (2.5) второе слагаемое будет
со знаком «—», причем в этом случае коэффициент торможения
V2
1 г.о <
потока в зоне оперения k =-=1.
Положение фокуса профиля при дозвуковых скоростях прак-
тически не зависит от скорости и для современных кр’ыльевых про-
филей соответствует 0,22-4-0,25 хорды. Это позволяет при учете
влияния формы крыла в плане, влияния фюзеляжа и других над-
строек на смещение фокуса определить координату фокуса
самолета без горизонтального оперения (#г)б.г.о-
Так как положение фокуса самолета было уже определено как
положение центра тяжести, при котором тсгУ =0, то для этой
производной, очевидно, можно написать выражение:
+ (2.6)
\ Су осу / v
где знак «—» между первым и вторым слагаемыми относится
к самолету с хвостовым горизонтальным оперением. Выражение
(2.6) получено дифференцированием по су известного из аэроди-
намики выражения для коэффициента продольного момента
(^го)б.г.о ~Ь [*^т С^/Об.г.о] Су “Ь~ ^^г.о^г.о X
х(а + ?в + «в8в —еф—(2-7)
Исходя из выражения (2.6) для т*?, можно коэффициент ал,
определяющий статическую устойчивость по перегрузке в коротко-
54
периодическом движении, выразить в несколько другом виде, чем
приводилось ранее (уравнение 2.4):
ая=хт-лг4-^-. (2.4')
р-
Положение центра тяжести самолета, при котором ап=0, назы-
вается «нейтральной центровкой по перегрузке» и обозначается
тг
через -----, а положение центра тяжести, при котором
<7^=0,— «нейтральной центровкой по скорости» и обозначается
через (хт.н)у. Достаточно часто употребляемое в практике выра-
жение «запас устойчивости» (по перегрузке или скорости) и опре-
деляет разность между координатой действительного положения
центра тяжести самолета (центровкой) и соответствующей ней-
тральной центровкой.
Продольная статическая управляемость характеризуется ба-
лансировочными кривыми, т. е. зависимостями хв=fi(V, Н, пу)
и Рв—fz(y, Н, пу)), определяющими положение рычага продоль-
ного управления и усилия на нем при балансировке самолета
на различных установившихся режимах полета. Так, например,
определяются зависимости xB=fi(V) и PB=fz(V) при различных
#=COnst И /ZJ/ = COnst ИЛИ XB = f3 (Пу ИЛИ Су) И PB = fi (Пу ИЛИ Су)
при различных Н=const и I/—const и т. д.
Для сверхзвуковых самолетов параметр V (скорость), по кото-
рому строятся эти кривые, чаще заменяется параметром М=— .
Балансировочные отклонения рычага продольного управления
самолетом определяются балансировочными углами отклонения
руля высоты и коэффициентом кинематической передачи от руля
высоты до рычага продольного управления (km,B=dbB/dxB).
Балансировочный угол отклонения руля высоты может быть
определен по формуле’:
X _______ 1 (^го)б.г.о
°в.бал
। । ”ус
ао~?в + еф4'_^“
о
- • (2.8)
я J
_&?г.О-^Г .0
^^г.о^г.о
Примерный вид семейства балансировочных кривых 8в.бал=/(9»пу)
при nty —const и /7=const приведен на фиг. 2.2, а.
Для перехода от балансировочных углов отклонения руля вы-
соты бв.бал к балансировочным линейным отклонениям рычага про-
дольного управления хв.бал может быть использовано соотношение
•^в.бал==-7 ‘^в.бал’ (2.9)
*ш.в
1 Вывод формулы см. И. В. О с т о с л а в с к и й, Аэродинамика самолета,
Оборонгиз, 1957, стр. 279—280.
55
Обычно характеризующие продольную статическую управляе-
мость балансировочные кривые строятся в виде семейства кривых
^в.бал=/: (я или V) для наиболее характерных высот Н=const
и различных перегрузок %=const.
Фиг. 2.2. Семейства продольных балансировочных кривых.
а—вависимость 5вв/ (7; л«) при М < М • зависимость (У ,• при М<М^.
у KJs" В I* у
Линейные балансировочные отклонения рычага продольного
управления могут быть определены и по другому выражению:
*в.балМ('Иго)б.г.о+<У^у] Т“-----. (2. 9')
^ш.в
которое легко получается из несколько измененного выражения
для балансировочного угла отклонения руля высоты
. Мб.г.о+т^су
"в.бал-----------Г » (Z- ° )
т;В
получаемого из условия равновесия продольных моментов при го-
ризонтальном установившемся полете
/гаг = (/«го)б.г.о + '«>у + ?”Н.бал=0- (2.7')
Построенные по формулам (2.9) и (2. 9') балансировочные кри-
вые определяют необходимые отклонения рычага продольного
управления самолета на различных установившихся режимах
полета.
56
Из рассмотрения балансировочных кривых на фиг. 2.2, а сле-
дует, что для статически устойчивого по перегрузке1 (пг/<0)
самолета с хвостовым оперением при шсу—const с увеличением
скорости полета V (или скоростного напора q) при пу=const руль
высоты необходимо все больше отклонять вниз (т. е. постепенно
отдавать рычаг продольного управления «от себя»), чтобы откло-
нять вниз нос самолета (уменьшая тем самым угол атаки). К та-
кому характеру управления самолетом при изменении скорости
летчики привыкают с первого момента своего обучения и требуют,
чтобы он был сохранен на всех последующих машинах.
Фиг. 2.3. Простейшая схема управления рулем вы-
соты нескоростного самолета.
Если на самолете осуществлена такая кинематическая связь
ручки управления с рулем высоты, как показано на фиг. 2.3,
то усилие на рычаге продольного управления можно определить
по формуле:
Рв=- ^ш.в «г°аг.о + mLB 8В+ПГШХВ) SBbB kq. (2.10)
Здесьи пг^ — производные коэффициента шарнирного мо-
мента2 * * (/пш) руля высоты по углу атаки горизонтального оперения,
углу отклонения этого руля и углу отклонения триммера соответ-
ственно.
1 Характер балансировочных кривых определяется полной производной
dmz cv
------=cTv, так как в некотором диапазоне скоростей производная тгу интен-
ЛСу
сивно изменяется по скорости (см. гл. Ill, § 1).
2 Шарнирным моментом (Мш) называют момент аэродинамических сил, дей-
ствующий относительно оси вращения руля (шарнира) и создающий нагрузку
на рычагах управления (см. гл. III, § 3).
57
Пользуясь формулой (2.10), можно определить балансировоч-
ные усилия на ручке управления (или колонке штурвала) Рв.бал,
если для каждого режима полета, определяемого параметрами q
и а, использовать вычисленный по формуле (2.8) дв.бал и соответ-
ствующий угол атаки горизонтального оперения
аг.о=а + ?в — е-
В результате расчета, проведенного для различных #=const
и пу = const, получим семейство балансировочных кривых Рв.бал—
=f(g, пу)> определяющих усилия на рычаге управления рулем
высоты, необходимые для совершения полета на различных устано-
вившихся режимах.
Для удобства практического применения эти балансировочные
кривые строятся чаще по индикаторной (приборной) скорости
^в.бал=/(Vi, Пу) для различных высот Н=const. Как следует
из рассмотрения таких кривых» на фиг. 2.2,6, с ростом скорости
у статически устойчивого по скорости самолета давящие усилия
на ручке управления увеличиваются (усилие «от себя»).
Кроме балансировочных кривых важными показателями, харак-
теризующими продольную статическую управляемость, являются
градиенты перемещений рычага продольного управления и усилий
на нем по перегрузке и скорости
dx3\dny, dP^dtiy, dx^dV и dP^dV,
определяющие необходимые расходы рычага продольного управле-
ния rfxB и усилия на нем dP3 при единичном изменении перегрузки
или скорости.
Эти градиенты по перегрузке определяются по формулам:
<211>
(2-12)
U Пу
где
г 1 су г.п / G \
Xх —__________-___ • / с —______ 1 •
в k 5В ’ \ уг,п Sa Г
«ш.в тгъ \ °" '
(°А.
тгв Ъ
58
дхв Пг дРв
-=2- и Р* =-^~ называются, соответственно.
dXt дхт
Коэффициенты х*
коэффициентами расхода ручки и расхода усилия по рулю высоты
и физически определяют линейное перемещение ручки управления
рулем высоты и изменение усилия на ней, необходимые для созда-
ния продольного момента, равного произведению веса самолета на
величину САХ.
Из выражений (2.11) и (2.12) следует, что показатели про-
дольной статической управляемости л" и Р" линейно зависят от
коэффициента продольной статической устойчивости по перегрузке,
причем на дозвуковых скоростях, когда тр «const и « const по-
казатель Р" не зависит от скорости полета, а показатель х" убывает
обратно пропорционально квадрату скорости. Последнее следует из
выражения для х*, куда входит коэффициент суг.п=———, убы-
s'-?
вающий обратно пропорционально росту V4 В заданиях на проек-
тирование нового самолета в зависимости от его назначения нор-
мируются обычно пределы, в которых должна находиться величина
Р* и нижний предел изменения х”, т. е.
Величина показателя управляемости Р" нормируется на осно-
вании летной практики, исходя из физических возможностей лет-
чика и предъявляемых требований к маневренности самолета,
а также из условий исключения возможности непроизвольного вы-
вода самолета на недопустимую перегрузку. Так для маневренных
истребителей, имеющих расчетную эксплуатационную перегрузку
пу = 8, значения показателя Р” должны находиться в пределах
3—5 кГ на единицу перегрузки. Эта величина определяется макси-
мальным установившимся усилием, которое может создать летчик
одной рукой в направлении «на себя». Это усилие (ДРвтах) равно
примерно 30 кГ, в то время как кратковременное усилие значи-
тельно больше и может достигать 115 кГ1. Поэтому если в гори-
зонтальном полете (^=1), самолет, имеющий Рв = 34-5 кГ
на единицу перегрузки, сбалансирован по усилию триммером,
то для получения Дп2/тах=7 к ручке необходимо приложить
усилие ДРВтах = Рв Дпутах= (34-5) • 7 = 214-35 кГ. Для тяжелого,
неманевренного самолета, который управляется двумя руками
(штурвал) и имеет максимальную допустимую перегрузку пу = 2
(т. е. Ди2/тах=1), значения показателя Рв должны выбираться
существенно большими (свыше 504-80 кГ на единицу перегрузки).
Отсутствие зависимости показателя Рв от скорости оказывает-
ся весьма важным фактором, так как благодаря этому летчики
знают, что определенное изменение усилия на ручке при неизмен-
1 В. Г. Денисов, Р. Н. Лопатин, Летчик и самолет, Оборонгиз, 1962,
стр. 33.
59
ноц скорости приводит к постоянному на всех режимах полета
приросту перегрузки, так как
ДРв=РвлДпу.
Для тяжелых неманевренных самолетов, для которых макси-
мальная допустимая перегрузка обычно невелика (24-3), может
оказаться полезным некоторое увеличение показателя Рв с ростом
скорости. Такой характер изменения Pl по скорости может обес-
печить более надежное предохранение самолета от случайного вы-
хода на недопустимую перегрузку вследствие ошибки летчика
на большой скорости (при М<1), когда значения показателя хв
сильно убывают.
В практике летных испытаний самолетов определению градиен-
та усилия на рычаге продольного управления по перегрузке Pl
уделяется большое внимание. Для определения Pl применяются
две методики. По первой из них строится кривая зависимости уси-
лия на рычаге продольного управления от перегрузок
по получаемым данным в полете по спирали или на вираже при
V= const, включая также прямолинейный установившийся полет.
Тангенс угла наклона этой кривой к оси абсцисс (перегрузок) при
пу—\ и определяет значение Pl . Другая методика наиболее широ-
ко применяющаяся в настоящее время исходит из непосредствен-
ного физического смысла Pl и заключается в следующем. В полете
на различных режимах с пу=1 летчиком выполняются резкие
отклонения (дачи) руля высоты, при которых скорость не успевает
заметно измениться, и замеряются ДРВ и Дп^. По полученным дан-
ным вычисляется
рп. _&Рв
Если от выражения (2.1), характеризующего изменение коэф-
фициента продольного момента при изменении режима полета,
взять полную производную не по углу атаки (или коэффициенту
су), а по другому независимому параметру, характеризующему
режим полета, по скороти V, то получим
dmz__
dV ~
—4-/П
zdV ‘
V
Z
или
dinz - de у
---=.rriу—-
dV z dV
ml
ъ dmz
В этом выражении производная характеризует изменение
коэффициента, действующего на самолет продольного мрмента
при переходе на новый установившийся режим полета, соответст-
60
вующий единичному изменению скорости. Такой момент и необхо-
димо создать рулем высоты для единичного изменения скорости
полета при пу = 1 = const.
Так как величина коэффициента продольного момента от руля
высоты может быть вычислена как произведение эффективности
руля на угол его отклонения (т. е. dmz = —/п2в(1д3), то коэффициент
потребного продольного момента от руля высоты для единичного
изменения скорости может быть определен выражением
^-= —
dV 2 dV’
Из этого выражения можно определить изменение угла отклонения
руля высоты, необходимое для перевода самолета на соседний уста-
новившийся режим полета при единичном изменении скорости
и пу=Л\
dZ3__ 1 dmz
~dV~ ’ ~dV"
Из последнего выражения легко можно получить показатель про-
дольной статической управляемости Хв , характеризующий необхо-
димое перемещение рычага продольного управления самолета для
единичного изменения скорости:
dx3 ______1 dmz
кшлт^ dV ’
Известное из аэродинамики выражение для показателя х^ мо-
жет быть получено, если брать производную не по скорости, а по
аТ7 AV
относительному изменению скорости Д1/=-----:
у -2xpv.
В dV dCy
(2.13)
Градиент изменения усилия на рычаге продольного управления
по скорости, называемый иногда «коэффициентом расхода усилия
на скорость», может быть записан:1
Pva=^-=-2P^v\B. (2.14)
Для скоростных самолетов обычно принимается несколько другая
форма записи производной —^-=оИ1 а именно
dcy
(2.3')
dCy 1 dCy 1 2ev г ’
1И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 428—431.
61
которая справедлива для горизонтального полета или полета с ма-
лыми углами наклона траектории 6, когда можно считать cos 0^1-
Как видно из выражений (2.13) и (2. 14) показатели хв и PVB
линейно зависят от степени продольной статической устойчивости
по скорости av. При плавном изменении скорости и сохранении не-
Фиг. 2.4. Определение показателя
rfPB у
7=РВ по балансировочной кривой.
изменнои перегрузки ny=i
в процессе перевода само-
лета с одного установивше-
гося режима полета, на ко-
тором он был сбалансиро-
ван летчиком по уси-
лию с помощью триммера
(Рв=0), на другой режим
полета, характеризуемый от-
носительным изменением
скорости Д7= — , измене-
ние усилия на рычаге про-
дольного управления может
быть вычислено по формуле:
РВ=Р^У.
Показатель Р^=У может быть легко
dV \dV ) при Рв=0
получен из балансировочной кривой PB=/(IZ) для различных высот
и значений скорости при условии балансировки самолета по усилию
(т. е. Рв=0) на данной скорости соответствующим отклонением
триммера (фиг. 2.4).
§ 2. Показатели боковой статической устойчивости
и управляемости
В книге, посвященной летным испытаниям самолетов, извест-
ные отечественные специалисты по динамике самолета отмечают:
„Теория боковой устойчивости самолета показывает, что основ-
ную роль при анализе боковой устойчивости играют в сочетании
с другими параметрами следующие коэффициенты: производная
коэффициента т по р /тс!* =—— (коэффициент устойчивости пути) и
у др
производная коэффициента m, по йот₽=-^*- (коэффициент попе-
х др
речной устойчивости)"1.
1 В. С. Ведров и М. А. Т а й ц, Летные испытания самолетов, Оборон-
гиз, 1951, стр. 326.
62
Как уже было ранее отмечено, необходимыми условиями путе-
вой и поперечной статической устойчивости самолета являются:
ml <"0 и ml «<0.
Термин «путевая устойчивость» несколько условен, так как
он определяет не выдерживание самолетом заданного ему направ-
ления полета, а его свойства устранять возникающий угол сколь-
жения. Таким образом самолет, обладающий «устойчивостью
пути», при боковом возмущении не возвращается к исходному на-
правлению полета, а лишь поворачивается носом в направлении
нового вектора скорости. Поэтому был бы более правильным тер-
мин «флюгерная устойчивость», который, однако, до настоящего
времени не нашел широкого распространения.
По аналогии с понятием фокуса, введенным при рассмотрении
продольного движения, можно ввести понятие «боковой фокус»,
определив его как точку приложения приращения боковых сил
(Z₽ -р), возникающих при изменениях угла скольжения. Исполь-
зуя понятие бокового фокуса, можно коэффициент Шу определить
следующим выражением:
или
где Хрр — координата, определяющая расстояние бокового фокуса
от носка САХ.
Выражения для коэффициентов т$х и могут быть представ-
лены в следующем виде:
т9х ~ ИР кр + Н)„.о = тхо С^СТ Ф COS2 X -
-± су sin х - *ав.о , (2.15)
где х — угол стреловидности крыла;
ф — угол поперечного V крыла;
Ув.о — координата точки приложения боковой силы на верти-
кальном оперении относительно оси ОХ] самолета;
1 г-г с
При принятом правиле знаков производная т* статически устойчивого
в путевом отношейии самолета — положительна.
63
zCT — расстояние от плоскости симметрии до центра тяжести
площади полукрыла, отнесенное к полуразмаху; для тра-
- 1 т) + 2
пециевидного крыла zCT=----——;
3 >) — 1
I — размах крыла;
>)—сужение крыла.
m3 « _ 0,06с2 tg х - а (т₽)кр - kaB.oAB.o уу, (2.16)
где
Л.о=-^г^; ^^0,32(хф-0,25)+^.
Значения, входящих в выражения (2.15) и (2.16) обозначений гео-
метрических параметров ув.о, и др., приведены на фиг. 3.17.
Отрицательный знак производной т* определяет нормальную
реакцию самолета по крену на дачу летчиком ноги (т. е. самолет
кренится в сторону отклоненного руля направления или ноги лет-
чика, идущей вперед). Такая взаимосвязь между перемещением
педалей и реакцией на них самолета по крену позволяет летчику
в случае необходимости управлять креном самолета с помощью
педалей.
Боковая статическая управляемость характеризуется зависи-
мостями поперечных отклонений ручки (или штурвала) хэ и сме-
щений педалей хн, а также возникающих на них усилий Р9 и Рн,
соответственно, от параметров бокового движения самолета, в ка-
честве которых рассматриваются угловые скорости сох и со^, угол
скольжения р, угол крена у и боковая перегрузка nz.
Для общей оценки боковой статической управляемости* как
и при оценке продольной статической управляемости, используются
балансировочные кривые, определяемые на разных высотах при
// = const. Наиболее важными из них можно считать:
а) хэ=Л(Р или nz) и ^9=^2(Р или nz), а также xH=f3(P или nz),
и PH=f4(p или nz), определяемые из серии установившихся прямо-
линейных полетов со скольжением или плоских разворотов при
различных постоянных значениях скорости полета;
б) Хэ=/5(о)х) и Рэ=/б((ох), определяемые из серии установив-
шихся режимов вращения самолета (с различными сох = const)
при различных постоянных скоростях полета;
в) xH=f?(₽ ИЛИ nz) и PH=f8(P ИЛИ nz), а также хэ=/9(Р
или nz), и Рэ=Ло(Р или nz), снимаемые в установившемся полете
с несимметричной тягой двигателей при различных постоянных
значениях скорости.
Для современных скоростных самолетов весьма важными ока-
зываются балансировочные кривые, характеризующие зависимость
отклонений ручки и педалей, а также усилий на них, от скорости
(или числа М) прямолинейного полета при у = |3 = 0. Балансиро-
64
вочные кривые xa=fn(M), РЭ=Ь(М), хн=Лз(М) и PH=fu(M)
при различных 7/=const характеризуют усилия на рычагах управ-
ления и их отклонения, необходимые для парирования моментов
крена и рыскания, возникающих вследствие влияния сжимаемости,
Фиг. 2.5. Балансировочные кривые, характеризующие боковую управляемость
самолета.
а—зависимости хн=/(у); хэ=<р (?); Рн=/' (т) и Р9в?' (т) для установившегося скольжения при
V=const и ff=const; б—зависимость x3=f (о>х> М); в—зависимость />э=/(а)х, М); г—баланси-
ровочная кривая бн=/(р) приж7Пу = 0. “
или нежесткости конструкции или асимметрии. Эти отклонения ры-
чагов и соответствующие усилия на них при определенных скоро-
стях могут достигать весьма больших величин.
На фиг. 2.5 приведены некоторые балансировочные кривые,
характеризующие боковую статическую управляемость самолета
(см. также фиг. 4.35).
В качестве частных показателей для оценки боковой статиче-
ской управляемости могут быть использованы следующие произ-
65
водные от перемещений и усилий на ручке или педалях по какому-
либо из параметров движения самолета, взятые на режиме исход-
ного установившегося прямолинейного полета без крена
и скольжения:1
рт _ . pl _ dPn .
dy ’ dy ’
, пЗ__.
х*~ W ’ э'~ ’
Л₽ = ^2-; Pl = d-^ ИЛИ
d$ d$ dn2
<0 . dx3 . rVD- dP3
хэх——~-; P3X= и т. д.
Частными показателями боковой статической управляемости
можно считать и максимальные значения параметров бокового
движения (Ox max» Ртах И Пг тах» СООТВеТСТВуЮЩИе МаКСИМЗЛЬНЫМ 0T-
клонениям или заданным усилиям на рычагах управления на раз-
личных режимах полета (см. например, фиг. 8. 16 и 8. 17,а).
Если характеризовать боковую статическую управляемость про-
изводными линейных перемещений рычагов управления (хэ, хн) и
усилий на них (Р9, Рн) по боковой перегрузке пг (т. е. хп/
Р”г и т0 можно установить идентичность этих производных
с характеризующими продольную статическую управляемость про-
изводными линейных перемещений рычага продольного управления
и уси 1Ия на нем по перегрузке пу (т. е. х% и Р“).
§ 3. Динамическая устойчивость и управляемость
Как уже отмечалось, динамическая устойчивость самолета
определяется затуханием собственного возмущенного движения,
которое характеризуется корнями соответствующих характеристи-
ческих уравнений, а именно (1.5) для продольного и (1.13) для
бокового движений. Корни этих уравнений определяют периоды
собственных колебаний, время и коэффициент (декремент) их за-
тухания.
Для оценки динамической управляемости можно пользоваться
двумя методиками. По первой (более старой) методике динамиче-
ская управляемость самолета оценивается по его способности, как
говорят летчики, «ходить за ручкой (педалями)», которая и опре-
деляется при выполнении летчиком относительно резких маневров
по запаздыванию ответной реакции самолета на действия летчика
’Г С. Калачев, Показатели маневренности, управляемости и устойчи-
вости самолета, Оборонгиз, 1958, стр. 90—94.
66
и соотношением между величинами усилий (или отклонений)
на ручке (педалях) и изменением параметров движения самолета.
Нагляднее всего способность самолета «ходить за ручкой (педа-
лями)» определяется при гармоническом законе приложения
усилий на рычагах управления, например по закону: PB = Posin(oZ,
где Ро — некоторая максимальная амплитуда прикладываемого
усилия.
В этом случае связь между изменением усилия на ручке про-
дольного управления и изменением перегрузки (при V=const)
описывается уравнением:
Здесь
Т2-Рв2-—
at1
dkriy, „ _
+ Рв • Д/г,=Posin и/.1
рп__ - рх
dny
рл __ dPB
* в1 ——;
dbriy
г1-
dPB
dkrty
В последних двух выражениях
Ьп =—
у dt
рпл
* в2
1 \ 2 Jqb
СУ
рх л
Д/г, = —— ;
у </г2
В
где
1=-
2m
Т =-----.
qSH
2m
Н'=—Z7--
(Здесь /и —масса самолета).
Разделив обе части этого уравнения на т2РВ2, получим:
d/2 -|-2й- /Дпу dt 4-£2Д/гу=<78Ш ш/, (2.17)
где 2й ^_1_
£2 ^в2 . Pl т СУ са СУ л J >
п> • ^вП2 Т2 (1= Л Рр ^2 ’
’И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 440.
67
Решение уравнения (2.17) и определяет характер изменения
перегрузки при раскачке самолета ручкой. Полное решение уравне-
ния (2.17) в зависимости от соотношения между величинами h и k
имеет вид:
Any==Ciex,*-|-C2eX3/-|-.Vsin(<fl/ —у) (2.18а)
или
ЬПу—sin (с/—ф)-]-М51п(ш/ — у). (2.186)
Здесь Х1;2 = — h ± Vh2 — k2-,
N— Affly max — ^========,
; (2.19)
№--
с=У k2 — h2 — частота колебаний с учетом демпфирова-
ния (в отличие от собственной частоты колебаний
самолета k).
Из рассмотрения решений (2.18) следует, что при раскачке
ручкой движение самолета складывается из суммы собственного
возмущенного и вынужденного движений: Дп2/ = Дп2/Соб + Д^вын.
Величины h и k определяют действительный или комплексный
вид корней и Хг характеристического уравнения X2 + 2/zX+F = 0,
написанного для дифференциального уравнения (2.17).
Корни этого характеристического уравнения определяют вид
собственного возмущенного движения самолета. При действитель-
ных Xi и А/2 собственное движение является суммой двух апериоди-
ческих движений и описывается в решении (2. 18а) членами
С1вХ|/и С2^Хз/> При комплексных корнях вида М;2 = а±гс (где а=
= —h, с= У k2—h2) собственное движение самолета — колебатель-
ное с частотой с и описывается в решении (2.186) членом
Ae~A/sin(c/—гр). Произвольные постоянные Ci и С2 или А и гр
определяются по начальным условиям.
Вынужденное колебательное движение с частотой со в решениях
(2.18а) и (2.186) описывается членом N sin (со/—у), из рассмотре-
ния которого следует, что имеется запаздывание по фазе у между
прикладываемым летчиком усилием РВ = Л) sin со/ на рычаге про-
дольного управления и изменением перегрузки.
Здесь следует отметить, что это запаздывание в действитель-
ности всегда несколько больше, так как собственное запаздывание
реакции самолета как динамической системы в реальных условиях
усиливается наличием запаздывания отклонения руля высоты
относительно прикладываемого на ручке усилия, определяемого ха-
рактеристиками самой системы управления (см. примечание
на стр. 28).
68
Если самолет динамически устойчив, то его собственное возму-
щенное движение через некоторое время апериодически или коле-
бательно затухает. После этого Ап„=Ап4,вын, т. е. остается только
вынужденное движение и самолет начинает соответствующим об-
разом отвечать изменением перегрузки на прикладываемое к ручке
усилие ДРв=/эв • Апу вын. т. е. «ходить за ручкой». Это «хождение
за ручкой» наступает тем быстрее, чем быстрее затухает собствен-
ное возмущенное движение самолета (см. фиг. 2.6).
Фиг. 2.6. Изменение перегрузки у
самолета с тгу=(тгу)св =—0,1 в
начале вынужденных колебаний
при приложении усилий на ручке
управления рулем высоты по гар-
моническому закону
2тс
Рв——3s in-----t.
4
Д/?у== (А/2у)соб 4” (АЯу)выН= С+
+ С2£ХаЧ“ N sin (о)/ — у).
В итоге, оценка летчиками динамической управляемости само-
лета зависит от динамической устойчивости последнего.
Показателями же динамической устойчивости самолета могут
служить:
а) коэффициент демпфирования h или показатель относитель-
ного демпфирования собственных продольных короткопериодиче-
h
ских колебаний « = —;
1 k
б) период собственных короткопериодических колебаний с уче-.
том демпфирования
у._2к __ 2п _____2хт в
— с ~ b ’
в) время, в течение которого амплитуда собственного коротко-
периодического движения при затухании уменьшается (при расхо-
дящихся колебаниях увеличивается) вдвое:
J In 2 0,693
/2=— =--------— т.
h а
Из сравнения выражений для коэффициентов h и k в уравне-
нии (2. 17) с коэффициентами а\ и а2 дифференциального уравне-
69
ния (1.7) продольного короткопериодического движения, состав-
ленного для случая свободной ручки управления, можно сделать
вывод, что они отличаются только формой. Это отличие вызвано
только тем, что в уравнении (1.7) время безразмерное, а в уравне-
нии (2.17) размерное. Учитывая, что можно выразить соот-
ношения между коэффициентами уравнений (1.7) и (2.17) следую-
щим образом:
2/г=^, откуда —и
т 2т т
(2. 20)
— соответственно действительная часть и коэффициент при
мнимой части комплексных корней Xi; 2 = аСв±^св характеристиче-
ского уравнения (1.8), составленного для дифференциального
уравнения собственного короткопериодического движения (1.7)
в случае свободной ручки продольного управления. (При зажатой
ручке или необратимом бустерном управлении выражения для
а и b сохраняют этот же вид, но индекс «св» у аэродинамических
коэффициентов отсутствует).
Таким образом, при раскачке самолета ручкой продольного
управления собственное возмущенное движение также описывает-
ся уравнением короткопериодического движения (1.7), но состав-
ленным для случая свободной ручки продольного управления.
Если собственное короткопериодическое движение оказывается
колебательным [см. выражения (1.9) и (2.186)], то его период Т
определяется коэффициентом Ь при мнимой части комплексного
корня характеристического уравнения (1.8), а затухание — дейст-
вительной частью комплексного корня а.
70
Ранее уже отмечалось, что при колебательном характере соб-
ственного возмущенного движения (короткопериодическое движе-
ние) затухание его определяется условием а<0, которое выпол-
няется при ai>0. Из рассмотрения выражения для коэффициента сц
уравнения (1.7) следует, что коэффициент а{ не зависит от степени
продольной статической устойчивости т^, а зависит только от по-
казателей продольного демпфирования, которые, следовательно,
и определяют быстроту затухания короткопериодических коле-
баний.
Период собственных короткопериодических колебаний самоле-
та Т определяется обоими коэффициентами ах и а2, так как
гр______ 2т/г
(2.21)
Коэффициент а2 линейно зависит от коэффициента с увеличе-
нием которого период Т продольных колебаний уменьшается.
Если собственное возмущенное движение оказывается суммой
двух апериодических движений, что может иметь место при очень
сильном продольном демпфировании и небольшой продольной ста-
тической устойчивости по перегрузке (mjy ->0), то коэффициент
ап уже влияет на затухание этого движения, так как в выражениях
(1. 10) и (2. 186) в составе коэффициента а2 входит в оба показате-
ля степени
«1
Х‘;2= 2
затухание собственного
(условия затухания
определяющих
Cte^‘ +С2е^‘
и Х2<0).
Одно из условий устойчивости короткопериодического движения
О)
тгу + П^—
а2 = —Су Р -=2-^>°
У гг
может выполняться и при некотором положительном значении ко-
эффициенТа шсу (обычно, шсу<^0 и —если только
z р. *
возмущенного движения
этого движения М<0
и
Следовательно, увеличивая продольное демпфирование, можно
получить отрицательное значение коэффициента оп, что необходи-
мо для обеспечения нормальных характеристик продольной стати-
71
ческой управляемости, а также динамической устойчивости
и управляемости для самолета с 0.
Этот вывод весьма важен, так как может быть использован
для обеспечения возможности полета на самолетах с центровкой,
близкой к нейтральной по перегрузке (см. гл. VI, § 4).
При уменьшении продольного демпфирования выполнение усло-
вия тсгУ <0 может оказаться недостаточным для обеспечения
удовлетворительных характеристик динамической устойчивости
и, следовательно, управляемости самолета. Так, например, при
(tn*zz + т“ ) ->0 и существенном уменьшении Су , что имеет место,
например, на сверхзвуковых скоростях, коэффициент ах характери-
стического уравнения (1.8) значительно уменьшается. В резуль-
тате существенно уменьшается действительная часть корней
Xi; 2 =a±ib этого характеристического уравнения, определяющая
затухание собственных продольных колебаний.
Вследствие одновременного существенного возрастания
с с?
на сверхзвуковых скоростях производной обычно а2> —
4
и корни характеристического уравнения (1.8) всегда получаются
комплексными. Это подтверждается практически, при испытаниях
самолетов при М>1 тем, что у них отсутствуют апериодические
собственные возмущенные движения. Колебательное же движение
затухает значительно медленнее, чем на дозвуковых скоростях
(см. гл. III и VI § 1).
При выполнении летчиком резкого маневра в вертикальной
плоскости с определенной перегрузкой отклонение руля высоты,
а, следовательно, и усилие на ручке, будут значительно отличаться
от их значений при установившемся полете с той же перегрузкой,
так как продольный момент, создаваемый отклонением руля высо-
ты, при резком маневре должен не только сбалансировать самолет
на новом режиме, но и преодолеть момент инерционных сил и мо-
мент демпфирования.
Математически соотношение моментов при резком маневре
в вертикальной плоскости можно выразить следующим образом:
Здесь — момент от отклонения руля высоты;
Jг------момент инерционных сил;
1 Это имеет место у всех сверхзвуковых самолетов, однако на некоторых
самолетах применяются различные методы для уменьшения этого возрастания
(см. гл. IV).
72
Мсгу^су-\-МХ—изменение аэродинамического момента статиче-
ской устойчивости вследствие изменения режима
полета (на Дсу и ДИ);
—демпфирующий момент;
пл* dДа 1
-----демпфирующий момент от запаздывания скоса
потока у горизонтального оперения.
Из этого уравнения моментов, перейдя к безразмерным коэффи-
циентам и времени, можно получить1 выражение для отклонения
руля высоты, необходимого для совершения маневра:
* СУ
Д8В — —г
тг
72 •• 1 -
->-д«У+—И
тгг+ тг | д
I Дгеу
су /
m,z I п / с
-----I Д/гу + 21 тгУ
Н* J \
„м \
2су /
(2. 22)
„ . d&nv .. d^ny — ду
Здесь величины Д/гм =——, A/zv =—, bv =--------- зада-
r у dt ’ у d& ’ V
ются условиями совершения маневра.
Первое слагаемое в квадратных скобках уравнения (2.22)
определяет угол отклонения руля высоты, необходимый для прео-
доления момента инерционных сил; второе — для преодоления
демпфирования; третье и четвертое — угол, необходимый для ба-
лансировки самолета на новом режиме полета с изменением пере-
грузки на Д/ly и скорости на ДК
По аналогии с уравнением (2.22) можно написать и выраже-
ние, определяющее изменение усилия на ручке продольного управ-
ления при выполнении маневра, которое складывается из тех же
компонентов и имеет следующий вид:
ДРв=Рвл2 д«у+Р2.Д пу+ РпвЬпу 4-PUF. (2.23}
выражении (2.23) члены РвъкПу и Рв^Иу определяют при
ДУ — 0 отличие усилия на рычаге продольного управления при
резком маневре от этого усилия в статических условиях перехода
с одного режима на другой при V — const, когда ^Рв=Р^пг
Степень этого отличия характеризуется динамическим коэффици-
ентом усилий кв.
Итак, характеристиками динамической управляемости самолета
или его способности «ходить за ручкой» могут служить:
1И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 423—426.
73
а) запаздывание по фазе между усилием на ручке и перегруз-
кой у (это запаздывание может выражаться также и во време-
ни А/);
б) динамический коэффициент усилий Хв, характеризующий от-
ношение величины усилия на ручке при резком изменении пере-
грузки на единицу Р01 к величине усилия, необходимого для такого
же изменения перегрузки в статических условиях (при V = const),
т. е.
. Р0 /(^2 —w2)2 + 4A2uj2
k2
в) производные Рв1 и Рв2, определяющие скорость изменения
перегрузки при приложении к ручке усилия, и, следовательно, ско-
рость достижения желаемой перегрузки при маневре.
Следует отметить, что для благоприятной оценки летчиками
способности самолета «ходить за ручкой», числовые значения ука-
занных величин должны лежать в определенных пределах. Рассмот-
рим подробнее возможные пределы этих величин.
Самолет без всякого запаздывания (у = 0) будет следовать из-
менением перегрузки за изменением усилия на рычаге продольного
управления при V=const (т. е. при Д7=0) только в том случае,
если Рв2=Рв1 =0, так как при этом изменение перегрузки &пу про-
порционально изменению усилия АРВ : АРв=Рв &пу [см. уравне-
ние (2.23)]. Однако, это равенство в реальных условиях никогда не
выполняется и всегда существует запаздывание у, существенно
уменьшающееся при росте производной тс2У и уменьшении резкости
маневра, определяемой периодом вынужденных колебаний
2 тс
7вын=— при раскачке самолета ручкой (фиг. 2.7,а).
<0
Как показывает летная практика, полное устранение запазды-
вания и не является желательным. В этом случае самолет, как го-
ворят летчики, «не будет прощать» даже малейших ошибок
в управлении, ибо он будет способен мгновенно изменять перегруз-
ку даже при малейших случайных отклонениях ручки. Такие свой-
ства самолета приводят к быстрой утомляемости летчика и управ-
лять таким самолетом будет очень трудно.
Наоборот, если запаздывание слишком велико, то реакция са-
молета на усилия летчика будет вялой, самолет будет медленно
выполнять его команду, т. е. будет иметь плохую маневренность.
Запаздывание по времени между усилием и перегрузкой можно
определить по соотношению:
1 В данном случае Pq определяется из такого условия, чтобы при приложении
усилия на ручке по закону Рп = Ро sin cot достигалось максимальное периодиче-
ское изменение перегрузки bjiy m&x=N— 1.
74
Как видно из фиг. 2. 7, б, на управляемость самолета, характе-
ризуемую в данном случае Д/, сильно влияет повышение степени
продольной статической устойчивости тс2? в пределах от 0 до —0,1.
Дальнейшее повышение устойчивости оказывает на управляемость
уже значительно меньшее влияние.
Фиг. 2.7. Изменение у и At характеризующих «хождение са-
молета за ручкой» в зависимости от степени его продольной ста-
тическои устойчивости т гу и степени резкости выполнения
маневра Твын при гармоническом раскачивании самолета ручкой,
а—запаздывание по фазе (угловое у) изменения перегрузки по отноше-
нию к усилию на ручке, б—запаздывание п© времени А/ сек.
Показатели P”i и P"z непосредственно не связаны со степенью
продольной статической устойчивости по перегрузке тсгУ (см. выра-
жения для Pei и Рв2 на стр. 67) в то время как показатель Р£ за-
висит от т^. Но здесь следует учесть, что обычно показатель
Pl=Pl
4 /св 1 р J
задается в общих технических требованиях к вновь проектируемо-
му самолету.
75
Поэтому при изменении тсгУ для сохранения Рв в заданных пре-
делах приходится изменять Рв путем изменения степени осевой
компенсации руля высоты1, пользуясь соотношением
Рп
~ в
'в— / <*> \ ’
т.+
где Рв—-заданная величина.
Учитывая, что Рв1 и РВ2 зависят от Рв, легко понять, что
изменение степени продольной статической устойчивости по пере-
грузке будет оказывать влияние и на изменение этих показателей.
С увеличением mczy показатели Рв\ и Рв2 уменьшаются, что сви-
детельствует о повышении маневренности. Однако чрезмерное
уменьшение этих показателей тоже нежелательно в силу того, что
в этом случае самолет очень резко изменяет перегрузку при при-
ложении летчиком усилия к ручке управления (ДРВ), а это свой-
ство самолета вызывает отрицательные отзывы летчиков.
Таким образом, изменяя величину Р* путем изменения степени
осевой компенсации руля высоты, можно получить PBi и Рв2 такой
величины, при которой обеспечиваются приемлемые характеристики
продольной управляемости.
Как уже говорилось, динамический коэффициент усилий Хв
сильно уменьшается при увеличении тсгУ и периода вынужденных
колебаний ГВыН, что иллюстрируется на фиг. 2. 8. Практически при
—тс2у >0,1 и ТВын>2,5 сек Хв^1. Вместе с тем при небольших
значениях тсгу усилия на ручке при выполнении маневра будут зна-
чительно превышать усилия, необходимые для балансировки
самолета на режиме нового значения перегрузки в стати-
ческих условиях при одинаковых изменениях перегрузки в обоих
случаях.
Для облегчения процесса продольного управления желательно,
чтобы прирост усилия на рычаге продольного управления (ДРВ)
был бы пропорционален отклонению этого рычага от балансиро-
вочного положения ДРв=&Дхв, причем коэффициент пропорцио-
нальности k не зависел бы от перегрузки, а изменялся бы только
1 Степенью осевой компенсации руля называют отношение площади осевого
аэродинамического компенсатора S0.K к общей площади руля Sp. Осевым аэро-
динамическим компенсатором является передняя часть руля до оси вращения
(см. фиг. 3.20, а). Изменение степени осевой компенсации руля высоты в первую
очередь влияет на производную коэффициента его шарнирного момента по углу
отклонения (тшв), входящую в выражение для Рв [см. обозначения к выраже-
нию (2. 12)].
76
пропорционально скоростному напору. Выполнение этих условий
приведет к полной гармоничности (по величине и знаку) между
усилием на рычаге продольного уп-
равления и его отклонением при
маневре, что в реальных условиях не
всегда выполняется.
При проектировании самолета
необходимо по возможности стре-
миться к выполнению приведенных
выше условий, для чего прежде всего
необходимо достигнуть прямой про-
порциональности между коэффици-
ентами уравнений, описывающих от-
клонение ручки управления и изме-
нение усилия на ней при выполнении
маневров.
Фиг. 2.8. Изменение динамиче-
ского коэффициента усилий Хв
в зависимости от степени продоль-
ной статической устойчивости
т У и резкости маневра ТВЫн.
При линейном коэффициенте пе-
редачи в системе управления рулем
высоты £ш.в вместо выражения, ха-
рактеризующего отклонения ручки,
можно использовать выражение
(2. 22), определяющее углы отклоне-
ния руля высоты (Дбв) при маневре,
так как при линейном £ш.в пропор-
циональность Дбв и Дхв всегда обеспечивается (Дбв = ^ш.вДхв).
Изменение усилия ДРВ при этом будет описываться уравнением
(2. 23).
Таким образом, пропорциональность ДРВ и Дбв (или Дхв) мо-
жет быть достигнута при обеспечении пропорциональности коэффи-
циентов при одинаковых производных в уравнениях (2/22)
и (2. 23). Сравнение этих коэффициентов приведено в табл. 2.1.
Итак, получили четыре условия пропорциональности Дбв (или
Дхв) и ДРВ, выполнение которых обеспечивает полную гармонич-
ность между усилием на ручке и ее перемещением:
шсу= К/)св;
<г=«г)св;
т\ =
(2.24)
dmz Id mz \
dCy \ d Су J св
Эти условия выполняются, если обеспечить т^-° = 0, а так как
практически это неосуществимо, то приходится довольствоваться
только частичным удовлетворением условий (2.24), а получить пол-
77
00
Таблица 2. 1
Компоненты, составляющие необходимое отклонение руля высоты и соответствующее изменение усилия на ручке при маневре Коэффициенты уравнений Условия пропорциональ- ности коэффициентов
для Д&в уравнение (2.22) для ДРВ уравнение (2. 23)
Преодоление момента инер- ционных сил ~2 СУ Г2 —рх — В Н^у Всегда пропорциональны
Преодоление демпфирова- ния / “г 1 а \ Су \ \ Z су ) Рх В Iх 0 +(mz) 1 _2 V z Jv* \ 2 /св г* с' У J Пропорциональны только при * \ */св
Изменение перегрузки Су с mz 1 — «/ + m z\ V- ) Рх ко +^М \ 2 /св^ Пропорциональны только при тгу = («?)„: -Х-Пе
Изменение скорости 2Су ( с т* \ mz у z 2су J \ dCy /св Пропорциональны только при d mz / dmz \ d.Cy у dCy /qB
ную пропорциональность между усилиями на ручке и ее переме-
щениями не удается.1
Для улучшения характеристик управляемости без существен-
ной переделки конструкции уже готового самолета в распоряже-
нии конструктора обычно имеются только
два простейших средства — балансир
(груз) и пружина, с помощью которых и +/яр _
стараются удовлетворить наиболее важ- -
ным из условий (2.24), а именно: + 6
Из этих условий с учетом правил знаков,
указанных на фиг. 2. 9, можно получить
выражения 2 для подбора в системе уп-
равления грузов (балансиров) и пружин, балансир
обеспечивающих на ручке управления до-
полнительные усилия:
Фиг. 2.9. Правило зна-
ков при установке в си-
стеме продольного уп-
равления балансиров
(грузов) и пружин.
Из приведенных выражений видно, что для каждого режима
полета необходимо подбирать свои балансир и пружину, а так как
это невозможно, то балансир и пружину подбирают для режима
полета, наиболее характерного для данного самолета.
При исследовании путевой и поперечной динамической управ-
ляемости может применяться методика, аналогичная описанной
на стр. 66—67, и о маневренности самолета можно судить по его спо-
собности «ходить за ручкой (по элеронам) или педалями». Напри-
мер, при приложении усилий на ручке (по элеронам Рэ) по гармо-
ническому закону Pq = Pqq sin со/ и одновременном выдерживании
педалями 0 = 0 и со^ = 0 изолированное движение крена самолета
описывается следующим дифференциальным уравнением3.
1 При необратимой бустерной системе управления, когда загрузка ручки
осуществляется искусственно специальными загружателями, пропорциональность
между усилиями на ручке и ее перемещениями обычно обеспечивается (см. гл. V).
2 И. В. Остославский, Аэродинамика самолета. Оборонгиз, 1957,
стр. 433—435.
3 1ам же, стр. 499.
79
где
(2. 25)
—-т -Гх\ т=——(для бокового движения);
су qSV
Су
тшЭ G
Р2э=кш з S9-b3----------коэффициент расхода усилия по эле-
5 ронам.
В левой части уравнения (2.25) первое слагаемое определяет
часть усилия, необходимую для преодоления момента сил инерции,
а второе — аэродинамического момента демпфирования. Отсутст-
вие момента поперечной статической устойчивости в данном случае
объясняется поставленным в начале условием: (3 = 0.
Решение уравнения (2.25) имеет вид:
Р эО^У
sin — ф) + sin ф е
(2. 26)
где =-^—безразмерная угловая скорость крена;
(2. 27)
В выражении (2.26) первое слагаемое, стоящее в квадратных
скобках, описывает вынужденные колебания с частотой со и запаз-
дыванием по фазе гр угловой скорости крена от усилия на ручке,
а второе слагаемое —собственное возмущенное движение само-
лета. Собственное возмущенное движение крена обычно быстро
затухает, так как показатель степени __отрицателен
т т
и значителен по абсолютной величине [см. решение (1.14) характе-
80
ристического уравнения (1. 13) и выражения для его корней
на стр. 32]. После затухания собственного возмущенного движе-
ния самолет с некоторым запаздыванием (ф) отвечает изменением
угловой скорости крена на прикладываемые летчиком усилия, т. е.
начинает «ходить за ручкой».
Из рассмотрения выраже-
ний (2. 26) и (2. 27) можно сде-
лать вывод, что аналогично
продольной управляемости, по-
перечная динамическая управ-
ляемость, характеризуемая сте-
пенью «хождения за ручкой»
(по элеронам), зависит от ди-
намической устойчивости само-
лета, определяемой в данном
случае затуханием собственно-
го возмущенного движения кре-
на. Однако эта зависимость су-
щественно меньше, чем для
продольного движения, вслед-
ствие достаточно быстрого за-
тухания собственного возму-
щенного движения, определяе-
мого наличием значительного
момента демпфирования крена
Фиг. 2. 10. Изменение безразмерной
угловой скорости крена по времени
при раскачивании самолета ручкой
Рэ = 2 sin Jtf и различных значениях по-
перечного демпфирования (тхх)Съ.
, где Твып — период вынужденных
(т^)св (фиг. 2.10).
Запаздывание по времени А/
угловой скорости крена по
отношению к прикладываемо-
му летчиком усилию (Рэ) свя-
зано с запаздыванием по фазе
ф°
(ф) соотношением: А/ = ^— ТВын
360
колебаний ^Твын = — ] . Поэтому из выражения (2.27) следует, что
запаздывание ответной реакции самолета по крену (А/) увеличи-
вается при уменьшении поперечного демпфирования (т^г)Св. Это
наглядно иллюстрируется на фиг. 2. 10, где при уменьшении
(^>)св в два раза запаздывание увеличивается в 2 раза (Л/2 =
= 2Д/1). Степень резкости маневра также оказывает влияние на
поперечную управляемость: с ростом частоты вынужденных коле-
баний (со) увеличивается запаздывание по фазе ответной реакции
самолета.
При отсутствии запаздывания угловая скорость крена оказы-
вается прямо пропорциональной усилию, приложенному на ручке
управления. Однако, аналогично продольному движению, отзывы
летчиков о поперечной управляемости самолета будут положитель-
81
ными, если запаздывание по времени (А/) угловой скорости крена
(Ох от усилия Р9 будет лежать в определенных пределах, причем
слишком малое запаздывание также нежелательно.
Уменьшение момента инерции самолета Jx относительно его
продольной оси (что характерно, например, для современных ско-
ростных самолетов) приводит к уменьшению запаздывания, так как
при этом в выражении (2. 27) г2х уменьшается. Одновременно уве-
личивается максимальное значение угловой скорости крена (оХтах,
определяемое в выражении (2. 26) коэффициентом, стоящим перед
квадратными скобками. Это максимальное значение угловой скоро-
сти крена достигается при со/—ф = -^- п, где п=1; 3; 5... .
Для современных скоростных самолетов с крыльями малого
удлинения значения производной т/ существенно уменьшились
по сравнению с ее значениями для самолетов с прямыми крыльями
относительно большого удлинения. Это повлекло за собой увеличе-
ние (Oxmax и более быстрое нарастание крена при приложении
к ручке управления усилия Рэ. Существенного же увеличения за-
паздывания ф, которого можно было бы ожидать при уменьшении
исходя из выражения (2. 27), у современных самолетов прак-
тически не происходит, так как уменьшение т°хх в знаменателе
выражения (2.27) в значительной степени компенсируется одно-
временным уменьшением г2х в числителе L
Для обеспечения возможности получения необходимой макси-
мальной угловой скорости крена (охтах при допустимом запаздыва-
нии конструктор в процессе проектирования самолета может изме-
нять величину коэффициента Рэ, подбирая соответствующим обра-
зом степень аэродинамической компенсации элеронов, коэффициент
передачи от элеронов £ш.э или размеры элеронов для изменения
их эффективности
Максимальное увеличение поперечного демпфирования, в конеч-
ном счете, всегда оказывается целесообразным при условии выбора
соответствующей степени аэродинамической компенсации элеронов.
В дальнейшем (гл. VIII) будет показано, что при больших ско-
ростях весьма неблагоприятное влияние на поперечную управляе-
мость оказывает уменьшение эффективности элеронов (т^) вслед-
ствие закручивания крыла (и его изгиба, если крыло стреловидное).
При приложении к педалям усилий по гармоническому закону
(Рн=Pnosino)/) и выдерживании с помощью элеронов (ох—0 и у = 0
изменение угла скольжения в таком «плоском» движении можно
1 На больших высотах снижение т™х оказывается более существенным, что
и определяет там возрастание запаздывания и ухудшение управляемости (см.
гл. II).
82
связать следующим уравнением1 с изменением усилия на пе-
далях:
+ ₽-28>
at* at *
где Рн2= — Гу Ph'i
4^
8
тт G
Р*=йш н —--------------коэффициент расхода усилия по ру-
т* s лю направления;
SH —площадь руля направления;
Ьа—хорда руля направления;
Ьпу
Первое слагаемое в левой части уравнения (2. 28) определяет
ту часть приложенного к педали усилия, которая идет на преодо-
ление момента инерции самолета, второе — часть усилия, необхо-
димую для преодоления аэродинамического путевого демпфирова-
ния, третье — на создание угла скольжения, т. е. преодоления мо-
мента путевой статической устойчивости.
Решение уравнения (2. 28) дает закон изменения угла сколь-
жения:
? = - N - е~м sin (/й2- й2 i - <р) + Wsin (<of - ф), (2. 29)
у №— №
где
N= а = -------- .. 1 ...— •
PmaX ^н2 / (*2_ «>2)2 4-4*20,2’
<2-30>
Я2 — (и2
й2
р₽
'н!
эр?
Z7h2
£L.
Р«2 '
коэффициент путевого демпфирования;
квадрат частоты собственных путевых колебаний без
учета демпфирования;
tgf
-/ *2— *2
wctg ф — h
h
1 И. В. Остосл авский, Аэродинамика самолета, Оборонгиз» 1957.
стр. 503.
83
В выражении (2. 29) первое слагаемое описывает собственное
возмущенное движение при отклонении педалей, а второе — вы-
нужденные колебания. Чем быстрее затухает собственное возму-
щенное движение, тем быстрее самолет начинает следовать изме-
нениям угла скольжения за прикладываемыми к педалям усилиями,
но с некоторым запаздыванием угла скольжения по фазе (ф).
Показателями, характеризующими «хождение самолета за педа-
лями», могут служить запаздывание по фазе ф угла скольжения
(3 от усилия на педалях Рн и динамический коэффициент усилия
на педалях Хн, который определяется отношением максимального
усилия на педалях Лю при раскачивании самолета к усилию Ри,
необходимому для совершения установившегося прямолинейного
полета с тем же углом скольжения P = Pmax = Ar:
=у (2.31)
где а=~—отношение частот вынужденных и собственных коле-
k баний (без учета демпфирования);
= ——отношение коэффициента путевого демпфирования к
k частоте собственных колебаний.
С учетом выражений, определяющих т] и о, выражение для 1£ф
будет иметь вид:
(2-30')
С учетом выражений для h и k из уравнения (2. 31), следует, что
увеличение путевого демпфирования (т^) и .момента инерции Jy
приводит к росту динамического коэффициента усилий на педалях
Хн и утяжелению управления на маневрах.
При резких маневрах, когда частота вынужденных колебаний
больше частоты собственных (а>1), увеличение путевого демпфи-
рования и уменьшение резкости маневра уменьшают запаздывание
реакции самолета на приложенное к педалям усилие. Если а<4,
то запаздывание реакции самолета при тех же условиях увеличи-
вается. Анализ показывает, что с уменьшением путевой статической
устойчивости (ту )св запаздывание реакции самолета увеличивается
и его управляемость ухудшается. Аналогичные результаты полу-
чаются и при увеличении момента инерции самолета Jy. Последние
выводы имеют большое значение для современных скоростных
самолетов, у которых вследствие большой длины фюзеляжей значе-
ние Jy велико, а значения производной (ту)св при больших числах
М полета быстро убывают.
84
На фиг. 2. 11 приведены полученные расчетом графики, харак-
теризующие развитие изолированного движения рыскания при
7U
раскачивании самолета педалями по закону Рн = 5 sin~/(n вы-
держивании при этом с помощью элеронов у=0 и сох = 0). Обра-
щает на себя внимание медленное затухание собственного возму-
щенного движения (Рсоб). Из сравнения фиг. 2.10 и 2.11 можно
сделать вывод, что при имеющих место на практике соотношениях
собственное возмущенное изолированное движение рыскания зату-
хает медленнее, чем изолированное движение крена. Это объяс-
няется тем, что обычно Jy^>Jx и (^у)св <(^х)св-
На основании изложенного в § 1—3 настоящей главы можно
сделать общий вывод о том,
что характеристики управля-
емости самолета (статиче-
ской и динамической) опре-
деляются соответствующими
характеристиками устойчи-
вости самолета, которые
вследствие этого и опреде-
ляют общую оценку летчика-
ми управляемости самолета.
Поэтому в настоящее время
для исследования динами-
ческих характеристик само-
лета в воздухе чаще приме-
няется методика, основанная
на изучении собственного
Фиг. 2.11. Изменение угла скольже-
ния р при раскачивании самолета
7U
педалями Рн = 5 sirr^~/.
движения самолета при возмущении по углу атаки или скольжения,
а также переходных процессов изменения режима полета.
Если собственное движение самолета достаточно быстро зату-
хает (что определяется характеристиками демпфирования nty,
rn°zz...), то самолет быстро изменяет режим полета в соответст-
вии с действиями летчика. Характеристики демпфирования в ко-
лебательном процессе перехода самолета с одного .режима на дру-
гой, вызванном отклонением руля, определяют величину начального
заброса того параметра полета (а, пу, 0...), который изменяется
летчиком путем воздействия на рычаги управления.
В случае уменьшения демпфирования (что характерно, напри-
мер, при* полетах с большими сверхзвуковыми скоростями на
больших высотах) этот начальный заброс существенно увеличи-
вается (см. фиг. 1.9), значительно усложняя пилотирование. Одна-
ко при излишне большом демпфировании процесс выхода самолета
на новый режим полета очень затягивается, что тоже является
нежелательным, особенно для маневренного самолета. В реальных
условиях проектирования самолета пределы возможного увеличе-
ния демпфирования конструктивными методами достаточно огра-
85
ничены, поэтому в этих пределах увеличение демпфирования прак-
тически всегда будет полезным, так как при этом снижается на-
чальный заброс без существенного увеличения времени, в течение
которого изменение регулируемого параметра в переходном про-
цессе первый раз достигает требуемой, т. е. новой установившейся
величины (в теории регулирования это время называют «временем
срабатывания»).
Фиг. 2. 12. Показатели, характеризующие движе-
ние самолета как динамической системы при
выходе на новое значение перегрузки динамически
устойчивого самолета после мгновенного откло-
нения руля высоты (колебательный переходный
процесс).
На фиг. 2. 12 на примере изменения перегрузки Дпу при мгно-
венном отклонении руля высоты Адв приведены показатели, харак-
теризующие движение самолета как динамической системы в коле-
бательном 1 переходном процессе:
Т — период собственных колебаний;
/Ср — время срабатывания;
Д^забр — начальный заброс величины регулируемого параметра
(в данном конкретном примере — вертикальной пере-
грузки Пу)\
АпууСт— установившееся значение регулируемого параметра;
^зат — время затухания колебаний, которое условно прини-
мается равным времени от начала процесса до затухания
амплитуды колебаний регулируемого параметра до ве-
личины ±5% ее установившегося значения;
Язат — число периодов от начала процесса до момента зату-
хания амплитуды колебаний до величины ±5% ее уста-
новившегося значения.
1 Переходный процесс может быть и апериодическим, однако для современных
скоростных самолетов такие процессы не характерны и поэтому здесь не рассмат-
риваются.
86
Аналитическое выражение для кривой переходного процесса
можно получить решением уравнения (1.7) с правой частью
Дбв, выражающей возмущение по продольному моменту
гг
при отклонении руля высоты на угол Абв от балансировочного по-
ложения. В этом случае уравнение (1.7), записанное символами,
принятыми в теории регулирования, примет вид (сравни с 2. 17):
rf24a dAa ю2 Да _ т6В§ (2. 32)
rf/2 1 dt ' Г2 2 В '
где
- G»-”'*'»"'') (2,зз)
\ r Z )
— безразмерный декремент затухания, который в уравнении
(2.17) имел размерность и был обозначен для самолета со
свободными рулями символом h\
*2=аг=-^с**п (2.34)
г ?
— квадрат безразмерной собственной частоты колебаний самоле-
та без учета демпфирования, который в уравнении (2.17) имел
размерность Г—— и был обозначен для самолета со свободными
[ сек2 J
рулями символом k2.
Решение уравнения (2. 32) может быть представлено в виде:
а
т,ВД5В
Да-=----------------—
j _ e-it cos W — <?)
COS <Р
(2. 35)
где т| = уга)2 —$2 — собственная безразмерная частота колебаний с уче-
том демпфирования,^которая ранее (см. выражение 2.18 6) обознача-
лась символом с и имела размерность [—];
tg?=y при 0<?<-^-.
Решение (2. 35) уравнения (2. 32) может быть приведено к фор-
ме, отражающей изменение перегрузки, с помощью соотношения
^=~5Г^а =
су г. п
Как следует из выражения (2. 35) возмущенное движение пол-
ностью определяется характеристиками <тп, | и <о; поэтому, зная
эти характеристики, по приведенным ниже соотношениям можно
87.
вычислить и все показатели, характеризующие качество переход-
ного процесса установления нового значения перегрузки при откло-
нении руля высоты и, следовательно, — управляемость:
Т =----т сек
(относительный начальный заброс —
Дпуст
перерегулирование);
t = -*-v
^зат ’
(2. 36)
АРвО
в уст (ал)св
Эти соотношения легко могут быть получены из выражения
(2. 35).
Последнее соотношение в (2. 36) определяет относительный на-
чальный заброс величины усилия на рычаге продольного управле-
ния при выводе самолета на перегрузку Диу. В этом соотношении
АРв.о — усилие на ручке в начале маневра, ДРвуст— усилие на
ручке при новом установившемся режиме полета.
Из рассмотрения равенств (2.33), (2.34) и (2.36) следует, что
характеристики продольного короткопериодического движения
определяются коэффициентами и а2 характеристического урав-
нения (1.5) системы уравнений продольного'движения (1.4), из
которых а2 определяется коэффициентом статической устойчивости
по перегрузке оп.
Анализ решений уравнений движения показывает, что характе-
ристики длиннопериодического движения определяются в основном
коэффициентом а4 характеристического уравнения (1.5), пропор-
циональным коэффициенту продольной статической устойчивости
по скорости Оу. Эта зависимость коэффициента а4 от av наглядно
выражается соотношением
которое легко может быть получено из выражения для коэффици-
ента ait приводившегося ранее (см. выражения для коэффици-
ентов характеристического уравнения 1.5).
88
Из этой зависимости следует, что одно из условий (1. 11) устой-
чивости продольного движения а4>0 определяется наличием у са-
молета продольной статической устойчивости по скорости
Если это условие соблюдается, то при имеющих место на прак-
тике соотношениях аэродинамических параметров у скоростных
самолетов длиннопериодическое движение имеет колебательный
характер с большим периодом и достаточно медленным затуха-
нием.
Период длиннопериодических колебаний можно вычислить по
формуле
V'l/
' dcy
из которой следует, что этот период изменяется пропорционально
скорости.
Если условие аг<0 не соблюдается, что имеет место, например,
у всех самолетов при околозвуковых скоростях (М^1) (см. гл. III
§ 1), то длиннопериодическое движение распадается на два аперио-
дических, и самолет становится апериодически неустойчивым, т. е.
при нарушении равновесия происходит апериодическое нарастание
скорости («затягивание в пикирование») или торможение с возра-
станием угла атаки и перегрузки. В отличие от движения, описы-
ваемого большими корнями характеристического уравнения (1.5)
(«короткопериодического»), эти апериодические движения разви-
ваются сравнительно медленно, что и позволяет летчику своевре-
менно принять меры противодействия, если эффективность продоль-
ного управления достаточна.
Описанная выше методика исследования характеристик про-
дольной устойчивости и управляемости может быть применена
и для определения характеристик боковой устойчивости и управ-
ляемости при возмущении по углу скольжения, вызванному «дачей»
педали и отклонением руля направления на угол Ддн-
§ 4. Боковое движение — совместное движение крена
и рыскания. Показатель %
Раздельное рассмотрение путевого и поперечного движений
самолета, проведенное в § 3, является, вообще говоря, весьма
условным так как в действительности эти два вида движения раз-
виваются совместно и тесно связаны между собой.
1 Для прикидочных расчетов бокового колебательного движения, определяю-
щего в основном характеристики боковой динамической управляемости, такой
метод разделения движений с известной степенью точности может применяться,
что существенно упрощает расчеты. Подробнее см. книгу И. В. Остослав-
ского, Аэродинамика самолета, Оборонгиз, 1957, стр. 475—479.
89
Физически эта связь обусловлена тем, что появление скольже-
ния всегда вызывает появление не только путевого восстанавли-
вающего момента Му, но и момента Мх относительно продольной
оси, возникающего вследствие несимметричности обтекания и на-
креняющего самолет. При крене нарушается равновесие вертикаль-
ных сил и возникает неуравновешенная боковая составляющая
силы веса Z=G sin у (фиг. 2. 13), под действием которой самолет
Увеличен угол а тали для устранения
потери высоты
Угпсо$ ^<0 (потеря высоты
при накренении)
Вираж вез потери высоты
Фиг. 2. 13. Силы, действующие на самолет
при возникновении крена.
начинает скользить в сторону опустившегося крыла. При этом воз-
никает поперечный момент статической устойчивости 0, стре-
мящийся уменьшить крен (у статически устойчивого самолета
Л1₽<0).
Аналитически связь между поперечным и путевым движениями
выражается „перекрестными вращательными производными" nty и
ni*x производной /пР, характеризующей поперечную статическую
„ 8 6
устойчивость самолета, а также производными т/ и ту\ харак-
теризующими соответственно возникающие момент крена Мх при
отклонении 8Н руля направления и момент рыскания Му — при от-
клонении 39 элеронов. В настоящее время при расчетах производ-
ную туэ вследствие ее малости редко учитывают.
Как уже говорилось (см. стр. 32), собственное возмущенное
боковое движение, как правило, распадается на два апериодиче-
ских и одно колебательное, описываемое третьим слагаемым в вы-
ражении (1. 14). Апериодическое движение демпфирования крена,
определяемое большим действительным корнем Xi характеристи-
ческого уравнения (1. 13) системы уравнений бокового движения
«4
(1. 12), быстро затухает. Второй действительный корень -------
характеризует медленно развивающееся апериодическое спираль-
ное движение, затухание которого (или «спиральная устойчивость»)
определяется условием а£>0.
Затухание колебательного бокового движения, от характера
которого зависят отзывы летчиков о боковой устойчивости и управ-
ляемости самолета, определяется действительной частью а комп-
лексных сопряженных корней K3f4 = a±ib характеристического
уравнения (1. 13). Это затухание можно характеризовать пока-
зателем t2, определяющим время, в течение которого начальная
амплитуда боковых колебаний уменьшается вдвое (при расходя-
щихся колебаниях t2— время увеличения амплитуды колебаний
вдвое). Выражение для t2 легко может быть получено из выраже-
ния, описывающего боковое колебательное движение [см. третье
слагаемое в решении (1.14)] характеристического уравнения боко-
вого движения (1.13):
. 1п2 0,693 г п
/2=-------т «-------т [сек]. (2. 37)
а а
Так как в выражении (1. 14) коэффициент b определяет частоту
колебательного движения, то период этих колебаний можно найти
из соотношения:
(2. 38)
Таким образом, период боковых колебаний определяется коэф-
фициентом b при мнимой части комплексных корней А,3,4 характери-
стического уравнения бокового движения (1. 13).
Коэффициенты а и Ь определяются из выражений:
Т= — т [сек],
ь
Из выражений (2. 39) видно, что затухание боковых колебаний
определяется в основном путевым демпфирующим моментом nty,
а период_этих колебаний — моментом путевой статической устой-
чивости ТПу.
Решение системы уравнений бокового движения (1. 12) и на-
хождение выражений для остальных неизвестных параметров (сох,
<оу, у) показывает, что колебания по крену и скольжению сдвинуты
по фазе. Анализ этих решений для параметров поперечного движе-
ния показывает, что коэффициенты момента поперечного демпфи-
рования т^х и момента поперечной статической устойчивости
определяют величины и знаки угловой скорости сох и угла крена у
91
(2.40)
при изменениях угла скольжения. Если поперечная устойчивость
слишком велика, то движение рыскания будет сопровождаться весь-
ма интенсивными изменениями угла крена и перебросами самолета
с крыла на крыло, которые в свою очередь будут дополнительно
изменять угол скольжения. При больших значениях и умень-
шении Шу может появиться даже колебательная неустойчивость,
т. е. прогрессивное увеличение боковых колебаний.
Обработка результатов летных испытаний и анализ отзывов
летчиков о боковой устойчивости испытанных ими самолетов по-
зволили сделать вывод о том, что на оценку летчиками боковой
устойчивости и управляемости самолета существенно влияет ве-
личина отношения максимальных угловых скоростей крена и ры-
скания при боковых колебаниях ^тах =Х) которая может быть
вычислена по приближенной формуле:
«X 1
X ---— ----
* |л
Как показываем практика, желательно, чтобы этот показатель
по величине был не более единицы. Чем меньше величина х, тем
благоприятнее при прочих равных условиях отзывы летчиков о бо-
ковой устойчивости и управляемости самолета. При малых значе-
ниях х реакция самолета на «дачу ноги» не сопровождается резким
кренением, т. е. самолет не будет «строгим» в отношении «недодачи»
или «передачи» ноги. При малых величинах критерия х лучше
поведение самолета в неспокойной атмосфере, что значительно об-
легчает его пилотирование в этих условиях, в то время как при
больших значениях этого критерия интенсивные перебросы само-
лета с крыла на крыло сильно затрудняют управление им и быстро
утомляют летчика. Такие свойства самолета вызывают со стороны
летчиков резко отрицательные отзывы об его «устойчивости».
Здесь следует отметить несоответствие между понятиями
«устойчивости» с точки зрения летного состава и с точки зрения
аэродинамики. В аэродинамике под поперечной устойчивостью
понимают способность самолета реагировать на скольжение соот-
ветствующим креном (z7i^<0), с помощью которого самолет
и устраняет возникшее скольжение. Чем больше т* (т. е. чем боль-
ше поперечная статическая устойчивость), тем больший возникает
крен даже при незначительном скольжении. Летчики же самолет
с такими свойствами оценивают как «недостаточно устойчивый»,
понимая в данном случае под «устойчивостью» способность само-
лета слабо реагировать на возмущения по углу скольжения и сохра-
нять нулевой угол крена без вмешательства летчика (о таком
самолете летчики говорят, что он «плотно сидит в воздухе», так как
92
он не требует постоянного вмешательства летчика в управление
при полете в «болтанку»). Поэтому самолет более устойчивый
в поперечном отношении с точки зрения аэродинамики по отзывам
летчиков ведет себя в полете хуже, чем менее устойчивый, так как
при возникновении скольжения либо быстро реагирует на него
резким креном, который летчик не всегда сумеет парировать с со-
ответствующим отклонением элеронов, либо вызовет резкие раска-
чивания с крыла на крыло. Особенно опасен такой самолет (с боль-
шим отрицательным тх ) в случае отказа расположенного на крыле
двигателя, так как появляющийся вследствие возникновения сколь-
жения из-за несимметричной тяги поперечный момент статиче-
ской устойчивости может даже перевернуть самолет. Мнение лет-
чиков по поводу боковой устойчивости самолета достаточно четко
выражает заслуженный летчик-испытатель СССР, Герой Совет-
ского Союза М. Л. Галлай:
«Таким образом, поперечная устойчивость отнюдь не обеспечи-
вает хорошей стабилизации самолета по крену, а в ряде случаев
даже прямо препятствует ей. Незнание этого обстоятельства и при-
водит к ряду недоразумений при оценке пилотажных свойств само-
лета, а также при формулировке требований к оптимальным ха-
рактеристикам устойчивости самолета. Избыток поперечной устой-
чивости следует считать опасным, а недостаток ее до нейтральности
включительно, наоборот, не только безопасным, но даже жела-
тельным.
Иначе обстоит дело с путевой устойчивостью. Ее увеличение
улучшает стабилизацию самолета в путевой плоскости и поэтому
весьма полезно. Характерно, что в летной практике не зафиксиро-
вано ни одного случая, чтобы летчики жаловались на избыточность
путевой устойчивости. Чем выше путевая устойчивость, тем меньшие
углы скольжения возникают при том же внешнем возмущении, тем,
следовательно, стабильнее сохраняет самолет свое положение
в воздухе.
Более того, хорошая путевая устойчивость в какой-то степени
уменьшает вредное дестабилизирующее влияние избыточной попе-
речной устойчивости, так как, чем меньше углы скольжения, тем
меньше и поперечный момент (при постоянном значении попереч-
ной устойчивости)» L
Как следует из выражения (2. 40) значения критерия к опреде-
ляются в основном соотношением коэффициентов поперечной (тх)
и путевой (/Пу) статической устойчивости. Соотношение этих же
коэффициентов определяет величину и знак коэффициента а4 урав-
1 Сб. «Летчику о практической аэродинамике» под ред. Седова Г. А. и Реб-
рова М. Ф., Воениздат, 1961, стр. 74—75. Здесь следует отметить,, что на больших
числах М путевая устойчивость быстро снижается, а при М>2 часто > 0,
Это вызывает серьезные затруднения.
93
нения (1. 13), который характеризует спиральное движение само-
лета. __ _
Таким образом, соотношение коэффициентов Шх и Шу опреде-
ляет устойчивость или неустойчивость не только колебательного,
но и спирального движений самоле_та.
При излишне большой величине возникновение бокового
возмущения по крену приводит к появлению скольжения за счет
неуравновешенной боковой составляющей силы веса (Z — на
фиг. 2. 13). Скольжение вызывает появление значительного восста-
навливающего момента крена (/пхр) и небольшого момента устой-
чивости пути (zzzjp). Под действием поперечного момента самолет
приобретает угловую скорость вращения сох и начинает выправлять
крен. Тар как момент очень велик, то самолет приобретает значи-
тельную угловую скорость крена и вследствие инерции проходит
положение равновесия (у = 0), после чего начинает крениться
в противоположную сторону, вызывая скольжение в эту же сторону,
развитию которого мало препятствует незначительный момент Шу р.
Скольжение в другую сторону вызывает обратный момент попереч-
ной статической устойчивости, который начинает вращать самолет
снова в противоположную сторону и снова переводит его через
положение равновесия и т. д. Препятствуют этим движениям мо-
менты демпфирования. Hpji значительном уменьшении путевой
устойчивости, особенно при/Иу>0, эти колебания могут даже но-
сить расходящийся характер, т. е. самолет будет колебательно не-
устойчивым. Летать на таком самолете невозможно.
Даже при отсутствии колебательной неустойчивости, как это
отмечено выше, большие значения т?х при недостаточной путевой
статической устойчивости приводят к интенсивным забросам по
крену (большие х) и сильно _затрудняют пилотирование. __
При небольших значениях т?х и значительном возрастании т?у
возмущение по крену, вызывающее скольжение (или просто воз-
никновение скольжения), приводит к возникновению значительной
угловой скорости соу, направленной на уменьшение возникшего
скольжения, и развороту самолета в сторону крена. Момент попе-
речной статической устойчивости вследствие своей малости умень-
шает крен очень медленно. Поэтому разворот происходит быстрее,
чем ликвидация крена. При вращении самолета относительно оси
Оух возникает момент путевого демпфирования (m“vcoy ), препят-
ствующий вращению, и момент крена от перекрестных связей
/п“усоу), который вообще может быть демпфирующим или усили-
вающим движение крена. В последнем случае, имеющем место при
большой путевой устойчивости, самолет не успевает выправиться
от крена и вертикальная составляющая подъемной силы умень-
шается (У cos y<G), вследствие чего самолет начинает снижаться
по спиральной траектории, уменьшая ее радиус и увеличивая крен.
94
Отсюда этот вид боковой апериодической неустойчивости и получил
свое название «спиральной». Таким образом, на спиральное дви-
жение оказывают влияние моменты:
т?у$, т>ах,
а устойчивость или неустойчивость этого движения определяется
соотношениями величин статических и вращательных производных.
Если взять выражение коэффициента а4, приведенное после урав-
нения (1. 13), то условие спиральной устойчивости а4>0 может быть
выражено в развернутой форме:
Условие боковой колебательной устойчивости приводилось ранее
(/?>0) и может быть записано более подробно:
— я^4—а2 > 0, (2.42)
где Яь а2, аз, — коэффициенты характеристического уравнения
(1. 13) системы дифференциальных уравнений бокового движения
(1. 12). Таким образом, для боковой динамической устойчивости
необходимо выполнение условий (2.41) и (2.42), в которых опре-
деляющую роль играют коэффициенты путевой и поперечной ста-
тической устойчивости (ту и ГПх}-
Для правильного выбора этих коэффициентов строят обычно
__3 — Р
в координатах тх—ту граничные линии, определяющие границы
спиральной (а4 = 0) и колебательной (/? = 0) устойчивости. Здесь
же строят И Граничные ЛИНИИ Х = ХДОп И Пзат=^зат.доп.
Последние две линии ограничивают область выбора коэффи-
циентов тх и ту соответственно из условия обеспечения значений
критерия и меньше максимально допустимых (хдоп), а также
из условия затухания боковых колебаний не более, чем за макси-
мально допустимое (пзат.доп) число периодов. Критерии хДОп
и п3ат.доп определяются из летной практики.
В результате построения этих граничных линий и получают об-
ласть выбора коэффициентов тх и ту (фиг. 2.14).
Зависимость коэффициентов боковой статической устойчивости
тх и ту от режима полета [см. выражения (2.15) и (2. 16)] приво-
дит к существенному изменению показателей боковой управляе-
мости при изменении режима. Так, например, критерий % сущест-
венно изменяется при различных скоростях и высотах полета
(см. фиг. 2.15), т. е. при различных су полета, однако в тактико-
технических требованиях к самолету ограничивают естественно
только верхнее значение х. Поэтому граничные линии х=хдоп
и ПзаТ=п3ат.доп приходится строить при различных значениях Су,
95
Фиг. 2. 14. Диаграммы границ боковой устойчивости самолета.
Фиг. 2. 15. Изменение критерия х при изменении
скорости и высоты полета.
96
Как следует из выражений (2.15) и (2.16), поперечную стати-
ческую устойчивость легче всего менять изменением угла попереч-
ного V крыла (ф), а путевую — изменением площади вертикального
оперения SB.O, что на готовом самолете можно достигнуть установ-
кой так называемых форкилей или подфюзеляжных гребней
(см. гл. IV).
Условие (2.41) спиральной устойчивости нельзя удовлетворять
за счет увеличения отношения так как это приведет к росту
критерия %. Поэтому необходимо это делать за счет уменьшения
отношения тпхУ/гйуУ, увеличивая демпфирование путевых колеба-
ний путем установки специальных автоматов (см. гл. VI) или
увеличивая плечо вертикального оперения £в.о, что на готовом
самолете весьма затруднительно, так как требует больших пере-
делок.
В этой главе были кратко рассмотрены важнейшие показатели
устойчивости и управляемости самолета, а также некоторые
их зависимости от режимов полета. С этими показателями летчики
сталкиваются с первых полетов и привыкают к их определенным
изменениям по режимам полета.
Появление первых около- и сверхзвуковых самолетов, имевших
еще достаточно несовершенные аэродинамические схемы, поста-
вило летчиков и конструкторов перед весьма неприятным фактом —
существенным ухудшением характеристик устойчивости и управ-
ляемости при подходе к околозвуковым скоростям полета, что
было вызвано влиянием сжимаемости воздуха на характер
обтекания самолета при больших скоростях. Эти изменения весьма
трудно поддавались предварительному учету и расчету, что требо-
вало значительного расширения экспериментальных исследований
в аэродинамических трубах, а также непосредственно в воздухе,
для чего были необходимы специально построенные скоростные
экспериментальные самолеты, полеты на которых были доступны
только очень опытным летчикам-испытателям.
Накопление необходимых данных позволило успешно преодо-
леть «звуковой барьер» и сделать серийный сверхзвуковой самолет
доступным для рядовых летчиков, несмотря на изменение характе-
ристик устойчивости и управляемости на больших скоростях,
особенно в околозвуковой зоне. Характер этих изменений и вызвав-
шие их причины описаны в гл. III.
Глава III
ИЗМЕНЕНИЕ ХАРАКТЕРИСТИК УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ САМОЛЕТА НА ОКОЛОЗВУКОВЫХ
И СВЕРХЗВУКОВЫХ СКОРОСТЯХ ПОЛЕТА1
§ 1. Изменение характеристик продольной устойчивости
и управляемости
Весной 1942 г. в нашей стране были проведены испытания само-
лета «БИ» с жидкостным ракетным двигателем. Самолет успешно
совершил несколько полетов, постепенно увеличивая скорость, ко-
торая уже далеко превзошла пределы, доступные для самых
скоростных истребителей того времени.
Однако, во время одного полета самолет «БИ» внезапно пере-
шел из стремительного горизонтального разгона в крутое пикиро-
вание и, не выходя из него, врезался в землю.
Полностью разобраться в причинах катастрофы самолета «БИ»
и продолжать работы по его развитию в то время не удалось.
Существует предположение, что причиной катастрофы было
«затягивание в пикирование». С этим явлением летчики-истребите-
ли столкнулись уже в конце второй мировой войны. Сущность
этого явления заключалась в том, что по достижении определенной
скорости, самолет при неподвижной ручке управления начинал
стремиться самопроизвольно опускать нос и быстро увеличивать
скорость и угол пикирования. Пытаясь парировать это стремление
самолета, летчик был вынужден прикладывать к ручке весьма
большие усилия «на себя». Однако, несмотря на это, самолет
1 В этой главе рассмотрено изменение характеристик устойчивости и управ-
ляемости при около- и сверхзвуковых скоростях, с которым столкнулись летчики
и конструкторы первых скоростных самолетов. Впоследствии благодаря боль-
шому количеству исследований удалось так изменить форму сверхзвукового са-
молета, что эти изменения оказались значительно менее резкими, а часто и просто
незаметными (см. гл. IV). Большую роль в приведении характеристик управляе-
мости к приемлемому виду сыграла автоматизация систем управления (см.
гл. V—VI).
98
не всегда сразу «подчинялся» действиям летчика, а нередко выхо-
дил из пикирования только на малой высоте, когда у летчика уже
почти не оставалось надежд на благополучный исход1.
Во время второй мировой войны случаи «затягивания в пикиро-
вание» происходили со скоростными истребителями только при
пикировании на больших высотах, так как даже самые скоростные
из них в то время не могли достигать в горизонтальном полете
чисел М свыше 0,64-0,65. Будучи же введенным в пикирование
на большой высоте, самолет достаточно быстро увеличивал
скорость. При этом иногда и проявлялось стремление самолета
к дальнейшему прогрессивному увеличению скорости и угла пики-
рования, получившее в то время название «затягивания в пикиро-
вание».
Причины этого явления были изучены только в послевоен-
ные годы, в период бурного развития скоростной реактивной
авиации.
Было установлено, что при подходе к околозвуковым скоростям,
когда в областях наибольших разрежений на профилях крыла
и оперения появляются зоны со сверхзвуковым обтеканием, изме-
няется характер распределения давлений по этим профилям
(фиг. 3.1,а)2. Изменение эпюры распределения давлений по хорде
профиля продолжается до сверхзвуковых скоростей и происходит
таким образом, что приводит к смещению фокуса профиля назад
(фиг. 3.1,6).
Как следует из выражения (2.5), смещение фокуса профиля
крыла назад [(£г)б.г.о растет] приводит к смещению назад и фокуса
самолета, что в свою очередь вызывает увеличение действующего
на самолет момента на пикирование (см. выражение 2.7
и фиг. 2.1). У самолетов старых схем явление «затягивание в пики-
рование» усугублялось существенным изменением mz0 при около-
звуковых скоростях тоже в сторону пикирования.
Первые реактивные самолеты проектировались по схемам су-
ществовавших самолетов с поршневыми двигателями или даже
просто использовался планер самолета с поршневым двигателем
для установки реактивного двигателя.
Например, для реактивного самолета Ту-12 использовался пла-
нер известного самолета Ту-2; для самолета Як-15 — несколько
измененный планер истребителя Як-3. Поэтому для этих самолетов
явление «затягивания в пикирование» представляло реальную
опасность, так как у прямого крыла с достаточно большой относи-
1 Случаи «затягивания в пикирование», происходившие во время второй ми-
ровой войны с американскими истребителями типа «Мустанг», упоминаются,
например, летчиком-испытателем У. Бриджмэном (см. У. Бриджмэн,
Ж. Азар, Один в бескрайнем небе, Воениздат, 1959, стр. 13).
2 Число М полета, при котором местная скорость обтекания в каком-либо
месте (обычно на верхней поверхности крыла) самолета достигает звуковой, на-
зывается критическим для данного самолета и обозначается Мкр.
99
о
о
M = 0J8 М«7Л
{точка П {точка Д)
Фиг. 3. 1. К пояснению
причин сдвига фокуса
профиля при околозву-
ковых скоростях.
а—изменение 'распределения
давлений по поверхностям
профиля крыла и характер
соответствующего изменения
коэффициента подъемной
силы Су профиля при раз
личных числах М (a-const)
р —статическое давление на
поверхности просЬиля.
Ро— статическое давление
в невозмущенном потоке.
------верхняя поверхность
профиля.
------нижняя поверхность
профиля.
б—смещение точки приложе-
ния равнодействующей при-
роста подъемной силы на
профиле крыла в случае
изменения угла атаки при
различных числах М (сдвиг
фокуса профиля при росте
чисел М).
тельной толщиной сдвиг фокуса назад происходит весьма интен-
сивно и на значительную величину, а для преобладавших в то вре-
мя схем самолетов при околозвуковых скоростях было характерно
возрастание отрицательных значений т20 (на пикирование).
Ко времени испытаний первых советских скоростных реактив-
ных самолетов, способных развивать в горизонтальном полете
околозвуковые скорости, уже была достаточно хорошо известна
опасность явления «затягивания в пикирование» на околозвуковых
скоростях.1 *
Для того, чтобы обезопасить самолет от опасных явлений при
приближении к околозвуковым скоростям, для каждого конкретно-
го самолета устанавливались ограничения по максимальным допу-
стимым (Мдоп) числам М полета, которые выбирались на основа-
нии расчетов и экспериментального определения Мкр, причем
МДоп<СМКр. Так, например, для самолета МИГ-9 было установлено
ограничение: Мдоп= 0,80.
Если для данного самолета это Мдоп будет превышено, то само-
лет может «затянуть в пикирование», из которого он уже не вый-
дет. Но имели место случаи, когда самолет неожиданно сам резко
выходил из пикирования на малой высоте. Такой случай наблю-
дался, например, во время одного полета на самолете МИГ-9,
когда случайно Мдоп было превышено и число М достигло значе-
ния свыше 0,83. Самолет перешел в пикирование, скорость нара-
стала, а попытки летчика выйти из пикирования, несмотря на от-
клонение ручки «на себя» и очень большие усилия на ней, ни к чему
не привели. Катастрофа казалась неизбежной, как вдруг на малой
высоте самолет резко вышел из пикирования.
Явление затягивания в пикирование представляло весьма
большую опасность для первых скоростных самолетов, потому что
оно сопровождалось значительным снижением эффективности
(т$в) продольного управления с помощью руля высоты. В резуль-
тате этого невозможно было компенсировать резко возрастаю-
щий при околозвуковых скоростях продольный момент на пикиро-
вание.
Как следует из выражения (2.7), продольный момент склады-
вается из момента самолета без горизонтального оперения
^z б.г.о = ^гОб.г.о + [#т (хр) б.г.о]^
и момента от горизонтального оперения
т2г.0 = £аг.0Дг,0 (а + ?в+»в8в- еф
дсу
1 М. Галлай, Через невидимые барьеры, изд. «Молодая гвардия», 1962,
стр. ИЗ.
101
которые в установившемся полете должны уравновешиваться:
ТПг—^IzO.r.o 4” г.о == 0«
Как уже отмечалось у статически устойчивого по перегрузке
самолета шсу <0, т. е. xt<xf [причем ху=(ху)б.г.о+(ху)г.о +
"Н(Дхр) б.г.о (М)], поэтому момент статической устойчивости
(хт—xF)cy отрицателен, т. е. действует на пикирование. Изменение
mzQ в сторону возрастания отрицательных значений и увеличение
xf на околозвуковых скоростях за счет увеличения (хг)б.г.о приво-
дит к необходимости значительного увеличения обратного по знаку
момента от горизонтального оперения для сохранения условия
установившегося полета (mz = 0).
Фиг. 3.2. Смещение фокуса назад (в долях САХ) при росте чисел М
полета при М>Мкр самолета со стреловидным крылом (а) и изменение
степени продольной статической устойчивости по перегрузке самолета
с прямым крылом при различных числах М полета (б) (самолет Дуглас
D-558-III).
Изменение продольного момента при переходе самолета
на сверхзвуковую скорость оказывается весьма существенным,
так как только за счет смещения фокуса, достигающего 20—25%
САХ (см. фиг. 2.1 и 3.2,а), происходит увеличение момента на пи-
кирование в зависимости от исходного значения разности хт—хр=
— тсгУв 3—4 и более раз. Поэтому необходимый для балансировки
на сверхзвуковой скорости момент от горизонтального оперения
тоже должен быть значительно увеличен (см. фиг. 3.3), что на са-
молетах с неподвижным стабилизатором могло быть достигнуто
только отклонением руля высоты.
Если отклонением руля высоты можно создать необходимый
продольный момент, то самолет будет сбалансирован и затягива-
ния в пикирование не произойдет. Но поскольку резкое изменение
продольного момента на околозвуковых скоростях ко времени по-
стройки первых реактивных самолетов не было достаточно изучено
и не были найдены методы борьбы с этим явлением, то сначала
102
Фиг. 3.3. Изменение коэффициента продоль-
ного момента (тг)б.г.о, действующего на са«
молет без горизонтального оперения, при за-
данном значении коэффициента с* с ростом
чисел М полета.
просто вводились ограничения по числу М полета, а случаи полета
при М>Мкр не предусматривались1. Поэтому эффектив-
ность продольного управ-
ления с рулем высоты,
как правило, была недо-
статочна для компенсации
резко возрастающего мо-
мента на пикирование при
случайном переходе за
ограничение по числу М
на большой высоте.
В этом случае (если ока-
зывалось М>Мкр) само-
лет затягивало в пики-
рование, и даже если лет-
чику хватало сил выби-
рать ручку полностью «на
себя» на максимальной
скорости, этого было не-
достаточно для вывода
самолета из пикирования.
Самопроизвольный выход самолета из пикирования на неболь-
шой высоте объясняется тем фактом, что при снижении число
V
М=~ постепенно уменьшается за счет возрастания скорости
звука на меньших высотах вследствие роста температуры воздуха
(так как а^20 |/Г°абс [м/сек]). Скорость же пикирования при
этом не возрастает неограниченно вследствие быстрого роста со-
противления Q=cxS “jp которое постепенно уравновешивает состав-
ляющие сил тяги и тяжести.
Поэтому, в случае, когда при пикировании скорость звука
вследствие потери высоты увеличивается быстрее, чем растет ско-
рость пикирования, число М может уменьшиться до М<Мкр.
На малой высоте этому может способствовать и некоторое сниже-
ние скорости (особенно у самолетов старой конструкции с боль-
шим сх) за счет существенного возрастания сопротивления (опре-
деляемого скоростным напором q= ~^1 вследствие быстрого роста
плотности воздуха q на малых высотах.
Действительно, с уменьшением высоты при постоянном значе-
нии скоростного напора, определяющего сопротивление и показа-
1 Современные сверхзвуковые самолеты также имеют ограничения по числу
М полета, однако эти ограничения вызываются совершенно другими причинами
(возможностью потери путевой устойчивости, условиями работы двигателей, аэро-
динамическим нагревом и др.). Для дозвуковых самолетов устанавливалось
МДоп<МКр, в то время как у современных сверхзвуковых самолетов МДОп>МКр.
103
ния указателя скорости, число М полета быстро снижается. На-
пример, при 9=3900 кг/м2 Vi = 900 км/час. На разных высотах это
соответствует весьма различным значениям истинной воздушной
скорости V и числа М полета:
Н=20 км\ V=3360 км/час\ М=3,17;
Я=10 км\ V=1500 км/час\ М=1,44;
Н=0 км\ V=900 км/час\ М = 0,74.
Из этого примера видно, что если на большой высоте при не-
которой приборной скорости .может оказаться М>Мкр, и вследст-
вие значительного возрастания отрицательного продольного момен-
та летчик не сможет удержать самолет от самопроизвольного
входа в пикирование даже полным отклонением руля высоты вверх,
то при снижении число М уменьшается и может оказаться М<Мкр-
При этом отрицательный продольный момент уменьшится, а эффек-
тивность руля высоты возрастет, что приведет к резкому выходу
самолета из пикирования.
Однако, как показала практика, такие случаи были весьма
редки, особенно при совершенствовании аэродинамической схемы
самолета для уменьшения сопротивления (сх), так как в этом слу-
чае при пикировании сопротивление самолета было меньше,
и он быстро увеличивал скорость, а недостаточная эффективность
продольного управления, не рассчитанного на полет при М>МД0П,
не позволяла вывести самолет из пикирования.
Так, например, из-за нарушения балансировки при разгоне
самолета до скорости, превышающей скорость звука, разбился
20 августа 1959 г. английский стратегический бомбардировщик
«Виктор» В. 2. Самолет был введен в пикирование автопилотом, по-
лучившим неправильный сигнал изменения воздушной скорости,
и достиг М=1,25. Так как система продольного управления не рас-
считывалась на случай полета со сверхзвуковой скоростью, то лет-
чику не удалось вывести самолет из пикирования.1
Изменение продольного момента при М>Мкр, особенно
вследствие смещения фокуса назад, приводит к значительному
изменению характеристик продольной устойчивости и управ-
ляемости.
Так, например, степень продольной статической устойчивости
по перегрузке возрастает в 2,5—3 и более раз. Это следует из вы-
ражения (2.6), где при М>Мкр величина (хг)б.г.о увеличивается.
Увеличение (хр)б.г.о продолжается до значений М=1,2—1,5, после
чего (хр)б.г.о практически изменяется мало.
С учетом влияния сжимаемости выражение (2.6) может быть
переписано несколько в другом виде:
1 Aeroplane, No. 2566, 23X11, 1960.
104
Щ У— [(*f) б.г.о, М=0 «£т] ^^г.о^г.о ( а л (ДХр)б>г.о (М),
\^у °СУ /
(3.1)
где степень статической устойчивости по перегрузке, определяемая
на дозвуковой скорости первыми двумя слагаемыми, выбирается
в зависимости от типа самолета (0,05—0,15), а (Дхг)б.г.о(М) при
росте скорости свыше Мкр достигает значений 0,24-0,25, определяя
рост степени продольной статической устойчивости по перегрузке
ПрИ ОКОЛОЗВУКОВЫХ СКОРОСТЯХ. При М<Мкр(Дхр)б.г.о(М) ~0.
Характер изменения степени продольной статической устойчи-
вости по перегрузке при различных числах М полета сверхзвуко-
вого самолета приведен на фиг. 3.2, б.
На изменение характеристик продольной управляемости при
переходе к около- и сверхзвуковым скоростям полета, как уже от-
мечалось, очень большое влияние оказывает и уменьшение эффек-
тивности руля высоты. Уменьшение эффективности при М>Мкр
характерно для всех рулей самолета и объясняется особенностями
сверхзвуковых течений, в которых возмущения не распространяют-
ся против потока. Поэтому, если при дозвуковых скоростях откло-
нение руля, расположенного в задней части профиля, вызывало
перераспределение эпюры давлений по всей поверхности профиля
(см. фиг. 1.2), то при увеличении М свыше Мкр область перерас-
пределения давлений распространяется вперед все меньше и мень-
ше по мере смещения скачка уплотнений к задней кромке.
При М>1 отклонение руля вызывает изменение эпюры давлений
только на нем самом (фиг. 3.4,а).
Эффективность продольного управления, характеризуемая про-
изводной т^в, зависит от прироста коэффициента подъемной силы
оперения при единичном отклонении руля высоты, т. е. производной
дсу г.о
^«в)г о=—-—, изменение которой по числам М полета показано
на фиг. 3.4,6. Для сравнения здесь же показана зависимость про-
0Су р о
изводной аг 0= ----- от чисел М. Последняя производная ©преде-
ла г.о
dmz
ляет значение производной т характеризующей измене-
ние коэффициента продольного момента при единичном изменении
угла установки горизонтального оперения. По производной пг**
оценивается эффективность продольного управления, осуществляе-
мого цельноповоротным стабилизатором. Из сравнения кривых
на фиг. 3.4,6 следует, что на сверхзвуковых скоростях цельнопово-
ротный стабилизатор в 3—4 раза эффективнее, чем руль высоты.
Следует также отметить, что снижение эффективности цельно-
поворотного стабилизатора при М>1 происходит менее интен-
сивно.
105
Увеличение момента на пикирование при М>Мкр на величину
Amz(M) = (Дт2о)б.г.о(М)+[(Дхр)б,г.о(М)] су вызывает необходи-
мость дополнительного отклонения руля высоты вверх на угол
Дбв=-----^у-^-для компенсации этого момента. Это отклонение
тг*
руля высоты вверх для сохранения горизонтального полета при раз-
гоне в области затягивания в пикирование противоположно обычному
постепенному отклонению руля вниз при росте скорости полета.
Фиг. 3.4. Изменение эффективности продольного управления
самолетом при М>Мкр.
а—изменение суммарной эпюры давлений на профиле при отклонении руля;
б—изменение коэффициентов, характеризующих эффективность продольного
управления самолетом при отклонении стабилизатора (саг.о)гО=дг 0 или
8 \ У
руля высоты (с в)г.о.
/—цельноворотный стабилизатор; 2— руль высоты (дв“25%дгО).
Следствием такого необычного характера отклонения руля при
разгоне является то, что на балансировочной кривой dB=f(g, пу)
при #=const [см. выражение (2.8) и (2. 8') и фиг. 2. 2, а)] в неко-
торой зоне по числам М полета появляется так называемая «лож-
ка». Зона «ложки» на балансировочной кривой по числам М соот-
ветствует зоне а (неустойчивости по скорости, т. е. ^^>0)
dcy
на кривой продольных моментов при разгоне самолета с nv=\
(см. фиг. 3.7).
106
Теперь уже по мере разгона самолета до М/>1 ручку управле-
ния рулем высоты надо отдавать от себя только до М=МКр.
Потом отдачу надо замедлить и даже брать ручку «на себя», что-
бы противодействовать затягиванию в пикирование. После преодо-
ления «звукового барьера» закон движения ручки при дальнейшем
разгоне становится обычным, так как фокус практически перестает
смещаться назад, a tnzQ тоже мало изменяется (фиг. 3.5).
Фиг. 3.5. Балансировочные кривые при М>Мкр.
а—зависимость хв=/ (М; лу) для руля высоты (тон-
кими линиями с надписями иРазгон* и .Торможение*
показаны привычные действия летчика при разгоне и тор-
можении); б—зависимость <рв=«/ (М; лу) при управляемом
стабилизаторе (истребитель F-86D).
Особенно наглядно видно происхождение «ложки» на баланси-
ровочной кривой дв.бал = /(М) из выражения (2.8'). Плавный ха-
рактер протекания кривой дв.бал нарушается резким изменением
шсу и (т20)б.г.о при М>Мкр.
Уменьшение эффективности руля высоты (/п*в) на околозвуко-
вых скоростях приводит к тому, что если его эффективности
вообще хватает для предотвращения затягивания в пикирование,
то «ложки» на балансировочных кривых (дв)бал=/(М) получаются
107
достаточно глубокими, причем «глубина ложки» растет с ростом
высоты.
Из выражения (2. 10) следует, что вследствие изменения харак-
тера отклонения руля высоты в критическом по числам М диапа-
зоне скоростей изменяется и характер балансировочных усилий
на рычаге продольного управления. Давяшие усилия на ручке при
разгоне увеличиваются только до МКр, после чего достаточно
быстро уменьшаются и даже могут переменить знак (фиг. 3.6).
У самолетов старых схем1 после
Фиг. 3.6. Пример изменения от-
клонения руля высоты и усилия на
ручке продольного управления
при разгоне самолета до М>Мкр
(запись летных испытаний).
изменения знака тянущие усилия,
необходимые для балансировки, зна-
чительно возрастают, что особенно
усугубляется увеличением шарнир-
ных моментов (ш“г-° ит8шв—растут)
на руле высоты (см. ниже § 3). Вот
как описывает изменение усилий на
ручке управления рулем высоты при
разгоне самолета МИГ-9 летчик-ис-
пытатель М. Л. Галлай:
«До числа М = 0,77 самолет вел
себя нормально: чем больше я уве-
личивал скорость, тем сильнее при-
ходилось для этого давить на ручку
управления...
Я увеличил число М до 0,79. Уси-
лия на ручке внезапно заметно изме-
нились — давить на нее больше не
приходилось.
Еще небольшое увеличение ско-
рости. Стрелка указателя часла М
дрожит возле цифры 0,80. Самолет явно стремится опустить нос, его
еще можно сравнительно небольшим усилием руки удержать от
этого, но чувствуется, что стоит чуть чуть уступить — и машину
затянет в пикирование. Создается ощущение балансирования на
острие ножа»2 (см. фиг. 3.6).
При торможении самолета со сверхзвуковой скорости до дозву-
ковой происходят обратные явления: фокус смещается вперед,
mzQ принимает «дозвуковое» значение, и восстанавливается эффек-
тивность руля высоты. Вследствие этого, если по аналогии с тор-
можением в дозвуковой зоне для сохранения горизонтального
полета летчик по привычке возьмет ручку на себя, то создается
1 Под «старой схемой» самолета здесь и далее в тексте подразумевается
классическая схема типичного дозвукового самолета с прямым крылом и опере-
нием, имевшими толстые профили и относительно большое удлинение. Фюзеляж
такого самолета наоборот имел сравнительно небольшое удлинение (см. § 4 на-
стоящей главы, табл. 3. 1).
2 М. Галлай, Через невидимые барьеры, изд. «Молодая гвардия», 1962
108
достаточно большой избыточный момент на кабрирование
(см. фиг. 3.5,а). Этот момент вызывает при торможении достаточ-
но опасное (особенно для тяжелых самолетов) явление заброса
по перегрузке, интенсивность которого так же как интенсивность
«затягивания в пикирование», определяется аэродинамическими ха-
рактеристиками самолета.
Если самолет обладает большой тяговооруженностью, то при
разгоне он достаточно быстро проходит зону неустойчивости по ско-
рости и при этом иногда, даже если летчик во время не взял ручку
на себя, может не произойти затягивания в пикирование в полном
смысле слова, а самолет только качнет носом вниз вследствие
резкого нарушения продольной балансировки, так как при росте
скорости уже в сверхзвуковой зоне отклонение руля высоты, соз-
данное летчиком в начале разгона, может совпасть с балансиро-
вочным на новом сверхзвуковом режиме, особенно при небольшой
потере высоты (см. переход от режима а к режиму б на
фиг. 3.5,а).
Время торможения при сбросе тяги в зоне неустойчивости
по скорости (обычно, это диапазон чисел М^0,94-1,15) зависит
от аэродинамических качеств самолета и его веса (т. е. инерцион-
ности). Если момент на кабрирование при торможении не очень
велик и самолет тормозится медленно, то медленное нарастание
перегрузки может достаточно легко парироваться летчиком соот-
ветствующим движением ручки «от себя».
Если же аэродинамические качества самолета недостаточно вы-
соки и к тому же он имеет небольшой вес, то интенсивное торможе-
ние при сбросе тяги в критической зоне может привести к очень
резкому забросу по перегрузке, который летчик просто не успеет
предотвратить и даже, при недостаточной подготовке, может уси-
лить, если по привычке, как всегда во время торможения в дозву-
ковой или сверхзвуковой зоне возьмет ручку «на себя». Так, для
самолета с балансировочными кривыми, приведенными на
фиг. 3.5, а, ошибка летчика при торможении в критической зоне
может привести к забросу перегрузки до значений ^>6.
Явление заброса по перегрузке наблюдалось при испытаниях
первых сверхзвуковых самолетов (с ЖРД).
Например, при испытаниях самолета Белл Х-1 (США) с пря-
мым крылом летчик производил разгон достаточно медленно; при
достижении Мкр самолет плавно качнуло, так как изменение про-
дольного момента за счет изменения mz0 и сдвига фокуса назад
происходило постепенно, растянуто по времени. Когда кончилось
горючее, то одновременно выключились двигатели, так что тяга
резко упала до 0. При резком торможении со сверхзвуковой ско-
рости пустого самолета (на высоте 21 000 м) «ложка» была прой-
дена очень быстро, и в момент ее прохождения самолет резко
забросило по перегрузке так, что летчик потерял сознание. Не-
управляемый самолет падал 15000 м (51 сек), пока летчик не при-
109
шел в себя и не взял управление на высоте 6000 м, когда перегруз-
ка при беспорядочном падении достигала значений 11g *.
Особенно резким заброс по перегрузке был у первых сверхзву-
ковых самолетов с продольным управлением рулем высоты, так
как в начале торможения руль высоты, имевший малую эффектив-
ность на сверхзвуковой скорости, должен был быть отклонен вверх
на значительный угол, необходимый для балансировки самолета
при М>1, а при переходе к дозвуковой скорости эффективность
руля резко восстанавливается, что создает дополнительный момент
на кабрирование. Этот дополнительный момент на кабрирование,
возникающий вследствие резкого восстановления эффективности
отклоненного вверх руля высоты еще больше увеличивает угол
атаки самолета и, следовательно, перегрузку1 2.
Приведенные примеры достаточно наглядно показывают, на-
сколько неустойчивость по скорости на околозвуковых скоростях,
в большей или меньшей степени характерная для всех сверхзвуко-
вых самолетов, усложняет пилотирование, особенно если аэродина-
мическая схема и система продольного управления самолета недо-
статочно совершенны.
Возрастание степени продольной статической устойчивости
по перегрузке (mS) вследствие смещения назад фокуса самолета
при М>Мкр вызывает значительное изменение и других характе-
ристик продольной управляемости.
Резко возрастает показатель Рв [см. выражение (2.12), где
при М>Мкр (Оп)св возрастает], что значительно затрудняет вывод
самолета на заданную перегрузку, т. е. делает самолет более тя-
желым в управлении на сверхзвуковых скоростях.
Зависимости mz=f(cy) при различных числах М показаны
на фиг. 3.7. До М = Мкр при изменении чисел М полета кривые
практически совпадают. Тоже наблюдается при прекра-
щении смещения фокуса назад (при М>1,5—1,8). В зоне
Мкр<М<1,5—1,8 коэффициент продольного момента mz самолета
зависит от су и М.
Если самолет разгоняется с пу=1 от дозвуковой до сверхзвуко-
вой скорости, то необходимые для полета значения су могут быть
подсчитаны по формуле:
с=-°......
где рн — атмосферное давление на высоте разгона.
1 Сб. «Сверхзвуковые самолеты» под ред. Н. И. Листвина, ИЛ, 1958, стр. 107.
2 Так, например, заброс по перегрузке свыше расчетных значений при выходе
из пикирования, при котором достигалось М>Мкр, приводил на первых вариан-
тах американского истребителя Рипаблик F-84 «Тандерджет» с прямым крылом
и рулем высоты к тому, что у него отваливались крылья (см. книгу Ф. К. Э в е
реста, Человек, который летал быстрее всех, ИЛ, 1960, стр. 82—83).
110
Соединив кривой (жирная кривая на фиг. 3.7) точки
с соответствующими значениями М и су, получим кривую,
характеризующую величину коэффициента продольного мо-
мента самолета, который нужно балансировать рулем высо-
ты при разгоне самолета (заштрихованная область на фиг. 3.7),
чтобы получить диг=0, т. е. выполнить необходимое условие гори-
зонтального полета. Тангенс угла наклона касательной к этой кри-
Фиг. 3.7. Изменение зависимости mz=f(cy) при раз-
личных числах М полета.
вой дает значение производной-^^, т. е. меры продольной стати-
dcv
у V
ческой устойчивости по скорости, от которой зависит показатель х в
продольной статической управляемости [см. выражение (2.13)].
Как следует из фиг. 3.7, самолеты в зоне а обладают статиче-
ской неустойчивостью по скорости (аг>0), связанной с резким
изменением продольного момента самолета в критической по чис-
лам М зоне.
Неустойчивость по скорости на околозвуковых скоростях при-
водит к достаточно резкому изменению хГ по величине и знаку,
что и определяет описанное выше изменение характера балансиро-
вочных кривых xB=f(M), т. е. изменение привычного для летчиков
направления движения ручки на разгонах и торможениях самолета
В этом диапазоне скоростей.
Неустойчивость по скорости определяет и изменение величины
и знака показателя продольной статической управляемости Рв
[см. выражение (2.14)], т. е. непривычное для летчиков изменение
усилий на рычаге продольного управления при разгонах и тормо-
111
жениях, приводящее к описанному выше изменению характера
балансировочных кривых PB=f(M).
Как уже отмечалось, нарушение условия огг<0 (т. е. а<>0) при-
водит к расходящимся длиннопериодическим колебаниям или апе-
риодической потере устойчивости.
Рост степени продольной статической устойчивости по пере-
грузке (тсгУ) при переходе к сверхзвуковым скоростям приводит
к увеличению частоты собственных продольных колебаний само-
Фиг. 3.8. Изменение динамических характеристик при изменении продольной
статической устойчивости по перегрузке (т Z?)C3.
X
л—изменение периода собственных колебаний (rcOg), коэффициента расхода усилия (Рв) и
относительного коэффициента демпфирования ; б—изменение перегрузки по времени
при раскачивании ручкой ^Рв=—3 sin “ самолета с различными (т<?у)св (с увеличением
с
уменьшается запаздывание и растут забросы по перегрузке)»
лета kx и максимальных значений перегрузки Дп2/тах = Л^ при от-
клонениях рычага продольного управления по гармоническому
закону при анализе «хождения самолета за ручкой» [см. обозначе-
ния после выражений (2.17) и (2.18) и фиг. 3.8]. Фиг. 3.8,6
иллюстрирует полученное расчетным путем1 2 изменение ответной ре-
1 При определении динамических характеристик самолета по переходным
процессам выхода на новый режим после отклонения руля [см. уравнение (2. 32)
и фиг. 2. 12] собственная частота колебаний самолета без учета демпфирования
обозначалась принятым в автоматике символом со [см. выражение (2.34)].
2 И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 443
112
акции самолета на приложение к ручке усилий по гармоническому
закону при различных (?Пгу)св. Хорошо видно, что увеличение (тп^)св
приводит к увеличению затрудняющих пилотирование забросов
перегрузки при отклонении руля высоты, которые в реальных усло-
виях сверхзвукового полета существенно увеличиваются вследствие
ухудшения продольного демпфирования.
Уменьшение демпфирования продольных колебаний связано
с уменьшением производной Су профилей крыла и горизонтального
оперения вследствие перераспределения давлений по их поверхно-
стям на сверхзвуковых скоростях. Уменьшение производной Су
(см. фиг. 3. 16) приводит к уменьшению демпфирующих колебания
дополнительных подъемных сил на профилях крыла и горизонталь-
ного оперения, которые появляются при изменении углов атаки
профилей, вызванном вращением самолета относительно попереч-
ной оси (см. фиг. 1.7,г).
Из выражения (1. 16) для производной самолета следует, что
уменьшение производной профилей крыла и горизонтального
оперения приводит к уменьшению производных /п“^о+ф 1так как
#г.о = (^у)г.о] И TZZ2Kp
При сверхзвуковых скоростях, вследствие уменьшения аг.о, Су
и £)==--, существенно уменьшается и производная тг, характерн-
ому
зующая продольное демпфирование вследствие запаздывания ско-
са потока в зоне горизонтального оперения. Приблизительный
характер изменения производных rrty и по числам М показан
на фиг. 3. 9, а.
Рост продольной статической устойчивости по перегрузке
и ухудшение демпфирования приводит к значительному ухудше-
нию динамической устойчивости и управляемости самолета
на сверхзвуковых скоростях.
Сильно уменьшается период продольных короткопериодических
колебаний (см. уравнение 2.21), определяемый увеличивающимся
на сверхзвуковых скоростях коэффициентом b при мнимой части ре-
шения (%it2 = a±ib) характеристического уравнения (1.8)
следовательно, частота этих колебаний (с) возрастает 1 [см. обозна-
чения после выражений (2. 18)].
Ухудшается затухание колебаний, характеризуемое коэффи-
циентом демпфирования2 h [см. обозначения после уравнения
' Частота колебаний с учетом демпфирования обозначалась также принятым
в автоматике символом т] [см. обозначения после решения уравнения (2.32)].
2 Коэффициент демпфирования h в автоматике называют обычно декрементом
затухания и обозначают £ [см. выражение (2.33)].
ИЗ
(2. 17)}, определяемым действительной частью а комплексного
решения характеристического уравнения (1.8).
Коэффициент а уменьшается вследствие уменьшения всех вхо-
дящих производных продольного демпфирования [см. выраже-
ния (2.20)] для коэффициентов а и Ь.
Таким образом, существенно возрастает колебательность собст-
венного короткопериодического движения самолета, которое, как
отмечалось, определяет характеристики продольной динамической
Фиг. 3.9. Характер изменения некоторых динамических характеристик
по числам М полета.
а—характер изменения производных m™z и т“ , определяющих продольное демпфиро-
вание,
б—изменение периода (T----) и частоты (с------) продольных колебаний самолета,
в—изменение числа циклов («ю----) и времени (6о-----), необходимых для затуха-
ния амплитуды колебаний до 0,1 первоначальной величины.
управляемости. В выражениях (2.36) с переходом к сверхзвуковой
скорости Т и /Ср уменьшаются, т|, v и п3ат увеличиваются. Показа-
тель динамической управляемости Хв (динамический коэффициент
усилий) также возрастает. Характер изменения по числам М и вы-
сотам некоторых динамических характеристик, полученных расче-
том по формулам (2.36), показан на фиг. 3.9,6 и в. Как следует
из фиг. 3.9, в время затухания колебаний с ростом скорости убы-
вает, однако увеличение высоты приводит к его существенному
возрастанию.
Здесь следует отметить, что на больших скоростях реальное
изменение динамических показателей может существенно отличать-
ся от расчетного вследствие значительного влияния нежесткости
114
конструкции на степень устойчивости по перегрузке и демпфирова-
ние (см. гл. VIII § 1—2); ,
Увеличение частоты колебаний rj и уменьшение их демпфирова-
ния g сильно затрудняет управление самолетом. Так как сами коле-
бания затухают медленно, то летчику приходится пытаться спе-
циально гасить их отклонениями руля высоты. Однако вследствие
малости периода! колебаний и имеющего место запаздывания
реакции самолета на действия летчика у [см. выражения (2.18)
и (2.19)], запаздывания реакции самого летчика и запаздывания
в системе управления, становится труднб правильно отклонять ры-
чаг продольного управления для устранения этих колебаний. Зна-
чительно повышается возможность раскачки машины вследствие
попадания фактических отклонений рычага в противофазу по отно-
шению к необходимым для устранения колебаний. Затрудняют
управление и увеличивающиеся вследствие роста устойчивости
и уменьшения демпфирования начальные забросы по перегрузке
v при отклонениях руля высоты или других возмущениях.
В выражения для коэффициента демпфирования h и собствен-
ной частоты колебаний без учета демпфирования k [см. обозначен
ния к уравнению (2.17), стр. 67] входит масштаб времени т=-^Ц
который зависит от скорости и высоты полета. При росте скоро-
сти t — уменьшается, при росте высоты — растет (так как с ростом
высоты q уменьшается).
Так как для сверхзвуковых самолетов характерны полеты
на больших высотах, то рост т с ростом высоты определяет значи-
тельное ухудшение демпфирования h помимо уменьшения произ-
водных m™z и т*. Увеличение скорости полета уменьшает т и, сле-
довательно, увеличивает демпфирование h (при предположении
неизменности т*гг и т* ), но влияние высоты обычно оказывается
более существенным, что видно из приводимой ниже табл. 3.1, где
показано изменение массовой плотности воздуха q с увеличением
высоты, которое на больших высотах превосходит кратное увеличе-
ние скорости.
Влияние изменения т по режимам полета на собственную часто-
ту колебаний самолета k оказывается аналогичным его влиянию
на демпфирование Л: с ростом скорости частота растет, а с ростом
высоты — уменьшается, однако определяющим здесь оказывается
увеличение частоты вследствие роста статической устойчивости
по перегрузке при переходе к сверхзвуковым скоростям полета.
Резкое увеличение продольной статической устойчивости по пе-
регрузке и уменьшение эффективности руля высоты на сверхзвуко-
вых скоростях приводят к тому, что для совершения маневров
[см. выражение (2.22)] или балансировки [см. выражения (2.8)
и (2.8')] на определенном режиме полета необходимы по расчету
очень большие углы отклонения руля высоты. Так как практически
увеличение угла отклонения руля высоты дает прирост подъемной
115
Таблица 3.1
Высота Н км Скорость V км[час Относительное увеличение высоты и скорости Р к Г -сек^м* Относительное уменьшение р
5 500 Исходный режим 0,0751 —
10 1000 в 2 раза 0,0421 в 1,79 раза
15 1500 в 3 раза 0,0197 в 3,81 раза
20 2000 в 4 раза 0,0090 в 8,35 раза
25 2500 в 5 раз 0,0041 в 18,35 раза
силы только до углов порядка ±30—40°, то первые скоростные
самолеты при больших числах М оказались неманевренными. Не-
возможность сбалансировать машину на больших высотах (так
как именно там достигались значительные числа М) сильно сни-
жали высотность первых сверхзвуковых истребителей, которая
могла бы быть достигнута по расчету, исходя из возможностей дви-
гателя и несущих свойств крыла.
Если же такой самолет на сверхзвуковой скорости, используя
инерцию, поднимется на большую высоту, то он становится
неуправляемым, превращаясь, по существу, в баллистический
снаряд.
Так было, например, при полетах на ракетном самолете Белл
Х-1. Этот самолет имел руль высоты и подвижный стабилизатор,
угол установки которого можно было менять для облегчения ба-
лансировки самолета. Во время одного испытательного полета
на высоте свыше 16 500 м летчик-испытатель Ф. К. Эверест разо-
гнал машину до сверхзвуковой скорости и начал набирать высоту.
Так как мощный ракетный двигатель еще работал, то набор высоты
происходил с ускорением и число М полета непрерывно увеличива-
лось, вследствие чего эффективность руля высоты значительно
уменьшилась (см. фиг. 3.4,6), а предусмотренное изменение угла
установки стабилизатора оказалось недостаточным. Вследствие
этого на высоте 19 800 м при М=1,3 самолет полностью перестал
«слушаться» руля высоты L
Потеря эффективности рулем высоты на больших скоростях
отмечалась летчиками и на других скоростных самолетах, которые
летали с около- или сверхзвуковой скоростью: Дуглас D-558-II
«Скайрокет» (США), Глостер «Джевелин» (Англия) и др. Послед-
ний, как отмечали летчики, обладал прекрасной маневренностью
на средних скоростях (приблизительно до М=0,8), которая значи-
тельно снижалась при максимальных скоростях.
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, 1960,
стр. 106—107.
116
При испытательных полетах на самолете D-558-II с околозвуко-
вой скоростью (М^1) отмечалась почти полная потеря эффектив-
а)
Фиг. 3. 10. Изменение скоса потока по режимам полета.
а—изменение скоса потока в зоне горизонтального оперения с ростом коэффициента с у
при различных числах М полета, б—характер изменения скоса потока в зоне горизон-
тального оперения самолета с ростом чисел М. полета при различных с у = con st.
ности руля высоты. Ручку можно было отклонять на полный диапа-
зон вперед и назад, но самолет на это никак не реагировал.
При переходе скорости звука руль высоты восстанавливал эффек-
тивность лишь частично и машиной удавалось управлять только
с помощью изменения угла установки стабилизатора электриче-
ским приводом.
Изменение продольной статической устойчивости по перегрузке
при М>Мкр вследствие смещения фокуса самолета усугубляется
еще тем фактом, что при этих скоростях происходит изменение
скоса потока в зоне горизонтального оперения, вызванное перерас-
пределением циркуляции по размаху крыла.
На фиг. 3.10 показана зависимость скоса потока в зоне гори-
зонтального оперения 8 от коэффициента подъемной силы су при
различных числах М полета, полученная при продувках модели
самолета Ч Из фиг. 3. 10, а следует, что при околозвуковых скоро-
стях в выражении (1. 15) для угла скоса потока г изменяются и 8о
и дг/да (или д&/дсу). Особенно резко эти изменения происходят
у самолетов с прямым (в плане) крылом, у которых вследствие
интерференции крыла и фюзеляжа кризисные явления наступают
прежде всего в корневой части крыла. Это приводит к такому пере-
распределению циркуляции по размаху крыла при М>Мкр, что
происходит уменьшение скоса потока в зоне горизонтального опе-
рения, так как присоединенные вихри, сбегающие с крыла,
смещаются дальше от корня к его концам. Уменьшение скоса
потока приводит к уменьшению отрицательной подъемной (балан-
1И. В. Остославский, Аэродинамика самолета, Оборонгиз, 1957,
стр. 263,
117
сировочной) силы горизонтального оперения и появлению дополни-
тельного момента на пикирование АМДДе)1, который возникает
одновременно с другим дополнительным моментом на пикирова-
ние— от смещения назад фокуса самолета на околозвуковых
скоростях ДМг(Л4) и способствует затягиванию самолета в пики-
рование.
На фиг. 3.11, а приведена схема, поясняющая образование до-
полнительного момента на пикирование при уменьшении скоса
потока, вызывающего уменьшение балансировочной подъемной
силы на оперении вследствие уменьшения отрицательного угла
атаки горизонтального оперения на угол Даг.о = ео—е. Индексом «О»
на схеме отмечены углы и векторы сил и скоростей, соответствую-
щие исходному режиму установившегося полета.
Явление скоса потока в зоне горизонтального оперения, распо-
ложенного за крылом, может оказать весьма существенное влия-
ние на продольную устойчивость самолета, и при неудачном распо-
ложении оперения может привести к серьезным неприятностям
как при дозвуковых, так и при сверхзвуковых скоростях. В послед-
нем случае наибольшие изменения скоса потока происходят
у фронта косых скачков уплотнений, идущего от задней кромки
крыла (см. фиг. 3.11,6). На больших высотах вследствие полета
1 Здесь следует обратить внимание на тот факт, что для обеспечения про-
дольной устойчивости необходимо, чтобы фокус находился позади центра тяжести
самолета (хр>хг) и момент статической устойчивости mzcy • су был отрицателен.
Поэтому расположенное позади крыла оперение должно создавать для баланси-
ровки отрицательную подъемную силу и иметь для этого отрицательный угол
атаки. Поэтому существует сформулированное еще Н. Е. Жуковским правило
продольного V, которое устанавливает, что угол между хордами крыла и рас-
положенного сзади оперения должен быть меньше 180° (см. фиг. 1.8). В аэро-
динамике принято отсчитывать угол <рв установки стабилизатора от плоскости
корневой хорды крыла, а угол отклонения руля высоты дв — от его нейтрального
положения, когда хорды стабилизатора и руля лежат на одной прямой.
Если самолет имеет горизонтальное оперение с рулем высоты, то стабилиза-
тор обычно устанавливают под некоторым отрицательным углом (носок вниз)
по отношению к плоскости хорд крыла с тем, чтобы обеспечить балансировку
машины по продольному моменту на определенном, наиболее характерном для
нее режиме полета без отклонения руля высоты. Тогда при полете со скоростью,
меньшей, чем выбранная для балансировки, руль высоты надо отклонять вверх
(ручка «на себя»), а если скорость больше, то руль надо отклонять вниз (ручка
«от себя»), В этом случае балансировочные кривые горизонтального полета
6B=f(V) пересекают ось абсцисс, соответствующую дв=0 и имеют вид согласно
фиг. 2. 2, а и 3. 5, а.
Если же продольное управление самолетом спроектировано с цельноповорот-
ным стабилизатором, то при любых режимах горизонтального полета (и пу >1)
должно сохраняться правило продольного V, и стабилизатор должен быть уста-
новлен по отношению к крылу с отрицательным углом —<рв. Поэтому баланси-
ровочные кривые горизонтального полета <pB=f(Vr) не пересекают ось абсцисс
и лежат в области отрицательных углов установки стабилизатора (см. фиг. 3. 5, б,
5. 29, а, 5. 44, а).
Если учесть эти замечания, то становится ясным, почему уменьшение скоса
потока, уменьшающее отрицательный угол атаки (и, следовательно, отрица-
тельную балансировочную подъемную силу) оперения способствует затягиванию
в пикирование самолета с хвостовым горизонтальным оперением.
118
СО
М >7
Фиг. 3. 11. Влияние скоса потока на характеристики устойчивости и управляемости,
а—возникновение дополнительного Момента на пикирование при уменьшении скоса потока в зоне горизонтального опе-
рения (самолет с горизонтальным оперением позади крыла), пунктиром показано уменьшение балансировочной подъем-
ной силы оперения, б—скос потока за крылом при большой сверхзвуковой скорости и динамическое давление за крылом
(М=4, а=20°), в—влияние высоты расположения горизонтального оперения относительно крыла на балансировочные кри-
вые dB=f(Cy).
на больших углах атаки, этот фронт в зоне оперения отходит до-
статочно высоко вверх от продольной оси самолета. Вследствие
этого, при высоком расположении горизонтального оперения (как
это делалось на многих околозвуковых самолетах, например,
МИГ-15 фиг. 4.1,6 для вынесения горизонтального оперения
из спутной струи за крылом) на сверхзвуковом самолете при М>1
оно может попасть в зону наибольшего скоса потока. Это может
привести к серьезным затруднениям в продольной балансировке
самолета (см. например, фиг. 3. 2, б — пунктирная кривая) и даже
привести к статической неустойчивости (по перегрузке), о чем сви-
детельствуют «ложки» на балансировочных кривых dB=f(c?/)» полу-
ченных при продувках в сверхзвуковой трубе модели самолета
с высоким расположением горизонтального оперения (см. фиг.
3.11,в).1
На стреловидном крыле, в отличие от прямого, кризисные явле-
ния при росте скорости наступают прежде всего не у корня,
а у концов. Это вызывает такое перераспределение циркуляции
по размаху, что скос потока в зоне горизонтального оперения уве-
личивается, так как вследствие роста циркуляции у бортовых сече-
ний крыла сбегающие с крыла присоединенные вихревые жгуты
сближаются (см. фиг. 3.12, а).
Фиг. 3. 12. К пояснению измене-
ния скоса потока по числам М по-
лета.
а—перераспределение циркуляции по
размаху крыла при М>МКО для пря-
мого и стреловидного крыльев, б—ко-
нусы возмущений от крыла при больших
сверхзвуковых скоростях полета.
1 В настоящее время существуют компоновки сверхзвуковых самолетов, у ко-
торых горизонтальное оперение расположено на киле. Вопрос о наиболее рацио-
нальном месте расположения оперения приходится решать в каждом конкрет-
ном случае в результате длительных исследований (см. гл. IV). Большую роль
здесь играет форма крыла в плане и его удлинение.
120
В результате этого степень продольной статической устойчиво-
сти по перегрузке уменьшается, что у самолетов со стреловидными
и треугольными крыльями на околозвуковых скоростях усугуб-
ляется еще уменьшением подъемной силы у концов крыла вследст-
вие кризисных явлений (см. фиг. 3. 12, а). Так как концы таких
крыльев расположены позади центра тяжести самолета, то умень-
шение подъемной силы на них вызывает увеличение продольного
момента на кабрирование, что в сумме с увеличивающимся мо-
ментом от увеличения скоса потока в зоне горизонтального опе-
рения может привести к значительной продольной статической
неустойчивости на некоторых режимах полета (при больших зна-
чениях Су).
При сверхзвуковых скоростях скос потока в зоне оперения по-
степенно уменьшается, так как по мере разгона уменьшаются углы
при вершинах конусов возмущений от концов крыла, определяемые
по формуле 0=2 arc sin-—-(см. фиг. 3. 12,6), а при сверхзвуковой
скорости все возмущения распространяются только внутри этих
конусов возмущений и в области, ограниченной фронтами косых
скачков от передней и задней кромок крыла. В зависимости от со-
отношения размахов крыла и оперения, начиная с некоторого
М полета, скос потока от крыла в зоне горизонтального оперения
может полностью исчезнуть, так как оперение выйдет из конусов
возмущений (см. фиг. 3.10,6).
Ухудшение характеристик продольной устойчивости и управ-
ляемости на больших скоростях, наряду с ухудшением характери-
стик боковой устойчивости (см. ниже § 2 настоящей главы),
у первых сверхзвуковых самолетов значительно усложняло полеты
и требовало от летчиков чрезвычайно осторожного управления,
так как малейшее неосторожное движение могло вызвать потерю
управляемости и в результате — катастрофу. Это делало невозмож-
ным применение подобных самолетов для практических целей, так
как все внимание летчика было сосредоточено на выдерживании
режима полета.
Примером может служить рассказ уже упоминавшегося лет-
чика-испытателя Ф. К. Эвереста о своих полетах на Х-1:
«...Х-1 имел обыкновенные рули управления, включая регули-
руемый стабилизатор, который не предназначался для полета
на очень больших скоростях. В результате этого я обычно был
всецело поглощен управлением рулями и у меня почти не остава-
лось времени для того, чтобы следить за соблюдением правильного
режима набора высоты».1
Для того, чтобы сделать полет на сверхзвуковом самолете до-
статочно простым и безопасным для рядовых летчиков строевых
частей, т. е. сделать такой самолет пригодным для практического
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, 1960,
стр. 109.
121
применения в широких масштабах, потребовались значительные
усовершенствования аэродинамической схемы самолета и системы
управления, позволившие приблизить характеристики устойчи-
вости и управляемости сверхзвукового самолета к привычным для
летчиков характеристикам его дозвукового предшественника.
§ 2. Изменение характеристик боковой устойчивости
и управляемости
При достижении околозвуковых и сверхзвуковых скоростей воз-
никли серьезные затруднения с обеспечением и боковой устойчи-
вости и управляемости. Это объяснялось возникновением кризис-
ных явлений на крыльях и оперении, связанных с изменением
характера обтекания при М>Мкр и вызывавших резкое изменение
аэродинамических коэффициентов и их производных, а также но-
выми формами сверхзвуковых самолетов.
Например, при околозвуковых скоростях отмечалось явление
«валежки» с крыла на крыло, которое отклонением элеронов очень
трудно парировалось.
С этим явлением впервые встретились на третьем опытном
экземпляре самолета МИГ-9, который испытывал летчик-испыта-
тель Г. М. Шиянов. На первых двух экземплярах (которые испыты-
вали А. Н. Гринчик и М. Л. Галлай) этого не наблюдалось1.
Фиг. 3. 13. Самопроизвольное сва-
ливание самолета на крыло («ва-
лежка») при разгоне до Мкр
(запись летных испытаний).
Явление «валежки» заклю-
чалось в том, что при некото-
рой скорости самолет резко
накренялся, а попытки летчика
парировать крен отклонением
элеронов часто приводили
к угрожающей раскачке само-
лета с крыла на крыло.
Как было выяснено впослед-
ствии, причиной возникновения
«валежки» оказались незначи-
тельные отличия (в пределах
производственных допусков на
изготовление) профилей право-
го и левого крыльев и углов
установки консолей крыла. При
М полета, близком к Мкр, эти
отклонения (несимметричность
1 См. журнал «Октябрь» № 7, 1961,. стр. 132, а также книгу М. Галлая,
«Через невидимые барьеры», изд. «Молодая гвардия», 1962, стр. ИЗ.
Явление валежки (на левое крыло) при околозвуковой скорости отмечалось,
например, и у экспериментального самолета Дуглас D-558-II, имевшего стрело-
видное крыло (см. гл. IV).
122
самолета) вызывали появление скачков уплотнений на . одном
крыле несколько раньше, чем на другом. Это приводило к резкому
несимметричному изменению подъемной силы крыльев и непроиз-
вольному крену (фиг. 3. 13), который было трудно устранить вслед-
ствие имевшего место уменьшения эффективности элеронов при
этих скоростях и резкого возрастания усилий, необходимых для
большого отклонения элеронов. На ряде самолетов «валежка» усу-
гублялась изменением знака моментов крена при скольжении
в околозвуковом диапазоне скоростей (см. фиг. 4. 33, а — штрих-
пунктирная кривая).
Несимметричность обтекания правой и левой консолей крыла
и оперения существует в полете практически всегда из-за произ-
водственных отклонений при изготовлении или незначительного
скольжения. Однако возникающий при этом небольшой момент
крена на дозвуковых скоростях легко уравновешивается мало за-
метным для летчика отклонением элеронов. При околозвуковых
скоростях эффективность элеронов (так же как и руля высоты)
снижается вследствие нежесткости конструкции крыла и влияния
сжимаемости воздуха.
Причиной снижения эффективности элеронов при больших чис-
лах М является изменение характера обтекания крыла в зоне
элерона при около- и сверхзвуковых скоростях полета, которое
нередко сопровождается интенсивным срывом потока за скачком
уплотнений. Уменьшение эффективности элеронов вследствие влия-
ния сжимаемости при М>Мкр благоприятствует появлению ревер-
са, но не является непосредственной его причиной, заключающейся
в закрутке упругого крыла под действием аэродинамических сил
от отклонения элерона (см. гл. VIII, § 3). Концевой срыв потока
за скачком уплотнений на околозвуковых скоростях может при-
вести при относительно низкой, эффективности элеронов к более
резким ее изменениям и даже явиться причиной обращения дейст-
вия элеронов (реверса), которое в отличие от реверса из-за не-
жесткости конструкции крыла вызывается чисто аэродинамически-
ми причинами. Действительно отклонение элерона вниз может
настолько усилить волновой срыв потока на верхней поверхности
крыла за скачком уплотнений, что вызовет существенное умень-
шение подъемной силы крыла вместо ожидаемого ее увеличения.
Отклонение элерона вверх на другом крыле, наоборот, может
вызвать срыв на нижней поверхности этого крыла, что приведет
к некоторому увеличению его подъемной силы вместо ожидаемого
уменьшения. В результате момент крена от отклонения элеронов
изменяет свой знак.
Потеря эффективности элеронов вследствие нежесткости конст-
рукции крыла проявляется больше на малых высотах, так как здесь
/ pV2 \
даже при дозвуковых скоростях скоростной напор I Дости-
гает достаточно высоких значений и вызывает существенные
123
деформации крыла при отклонении элеронов, снижающие их эф-
фективность или даже приводящие к обращенному их действию —
реверсу (см. гл. VIII, § 3). Влияние сжимаемости воздуха на
уменьшение эффективности элеронов проявляется на больших
числах М. Поэтому на малых высотах «валежка» наступает при
определенной приборной скорости, а на больших — при определен-
ных числах М.
При полетах на самолетах со стреловидными крыльями (при
М, близком к Мкр) летчики столкнулись с явлением «обратной
реакции по крену на дачу ноги». Для летчиков было привычно,
что на дозвуковой скорости при даче, например, правой ноги, са-
молет кренился тоже вправо, так как при скольжении, вызванном
отклонением руля направления, возникал момент поперечной ста-
тической устойчивости (МХ = М?;Р), накренявший самолет в сторо-
ну отклонения руля направления. Так было на самолетах с пря-
мыми и стреловидными крыльями. А при разгоне до Мкр на само-
лете со стреловидным крылом и появлении левого скольжения
(р<0) вследствие дачи правой ноги, левое крыло идет вперед,
его эффективная стреловидность по отношению к потоку умень-
шается (%Эфф.лев = х—Р) и, вследствие этого, уменьшается Мкр
этого крыла. Поэтому волновой кризис возникает раньше именно
на левом крыле, и его подъемная сила падает, вызывая тем самым
левый крен вместо ожидаемого правого (фиг. 3.14).
Реакцию самолета по крену на дачу ноги оценивают обычно
с помощью производной Лох/^бн, характеризующей величину и на-
правление угловой скорости крена, возникающей при единичном
отклонении руля направления. Если самолет обладает нормальной
реакцией, то эта производная положительна:
d^x
I I W5H
r-t-ZW “ -----
x dt
---Г"
x rfp
(3. 2)
Так как обычно и < О,
то знак производной
daxldbw определяется числителем, в котором для статически устой-
чивого в поперечном отношении самолета т?х<^0. Второе слагаемое
в числителе определяет дополнительный момент крена от отклоне-
ния руля направления.
При преобладающих схемах вертикального оперения, когда
киль с рулем направления расположен выше продольной оси само-
лета, и самолет обладает путевой статической устойчивостью
/? в
(дпу<0), производная тхн, определяющая возникающий момент
крена при отклонении руля направления, тоже отрицательна. Та-
ким образом, момент крена от Отклонения руля направления всегда
124
в)
Фиг. 3. 14. Обратная реакция по крену на* «дачу ноги».
а—скольжение самолета со стреловидным крылом при М s? MRp, б—возникно-
вение момента крена, препятствующего развороту, при отклонении руля на-
правления (сплошной стрелкой показано желательное направление движения
носовой части фюзеляжа, т. е. скольжение на левое крыло, но крен в противо-
положную сторону вызывает скольжение на правое крыло — пунктирная
стрелка), в—характер изменения по числам М полета реакции самолета
по крену на отклонение руля направления (нормальная реакция: руль вправо —
правый крен, обратная реакция: руль вправо — левый крен).
/—самолет с крылом малой стреловидности с большим отрицательным попе-
речным V (ф СО), 2—поперечное V сильно уменьшено, 3—крыло большой
стреловидности с тонким профилем
125
действует в противоположную отклонению руля (даче ноги) сто-
рону и препятствует развороту (см. фиг. 3.14,6). Следовательно,
второе слагаемое числителя положительно, а знак числителя зави-
в в dbv
величин Шх и т » —
х d$
сит от соотношения
. Поэтому появление
у самолета обратной реакции по крену на дачу ноги может иметь
место не только при уменьшении абсолютного значения производ-
ной тх (или даже изменении ее знака, т. е. т^>0), имеющего
место на больших скоростях (при малых углах атаки), но также
и при увеличении прироста момента крена от боковой силы верти-
кального оперения при отклонении руля направления. Последнее
явление особенно характерно для современных самолетов с боль-
шими вертикальными оперениями и крыльями малых удлинений,
у которых существенно уменьшается момент инерции Jx относи-
тельно продольной оси.
Из сказанного следует, что обратная реакция по крену на дачу
ноги может быть следствием влияния сжимаемости воздуха и на-
ступления кризисных явлений при несимметричном обтекании
правого и левого крыла, а также следствием изменения формы
сверхзвукового самолета и уменьшения его момента инерции отно-
сительно продольной оси. Следует отметить, что значения характе-
ризующей поперечную статическую устойчивость производной mJ
обычно снижаются не только в околозвуковом диапазоне скоростей,
но и при больших числах М>1,5ч-2 (см. фиг. 4.33,а). Поэтому
для современных сверхзвуковых самолетов нередко свойственны
две области обратной реакции по крену на дачу ноги: околозвуко-
вая (охватывающая сравнительно ограниченный диапазон чисел
М^0,9н-1,1) и сверхзвуковая, распространяющаяся в сторону
больших чисел М.
Переход к околозвуковым и сверхзвуковым скоростям полета
связан со значительными изменениями как поперечной так и путе-
вой статической устойчивости, которая характеризуется производ-
ными Шх И ГПу.
Из определяющих эти производные выражений (2. 15) и (2.16)
следует, что они зависят от аэродинамических коэффициентов
(сау, ав.о = \ и конструктивных параметров самолета
\ О / /
Для самолетов со стреловидными крыльями производная т*
существенно зависит от коэффициента подъемной силы су (т. е. из-
меняется по режимам полета), а производная ту теоретически
зависит от су значительно меньше. Однако практически зависи-
мость путевой устойчивости (ту) от угла атаки оказывается весьма
126
существенной вследствие затенения киля на больших углах атаки
фюзеляжем и крылом, а также из-за нежесткости конструкции
киля.
О
в Одно вертикальное оперение
т* \ __
Самолет пу - i
Устойчивость
неустойчивость г л
. вез вертикального
пу>! (увеличен
угол а такт
Фиг. 3.15. Изменение характеризующих поперечную и путевую статическую
устойчивость производных т* и по режимам полета.
Л У
В 8
а—зависимость производных тпх (-------) и Шу (-----) от коэффициента подъемной силы
с самолетов с прямым и стреловидным крылом; [расчетные кривые по форму-
Д Л д
лам (2. 15) и (2. 16) для mJ и тх J; — • — • — характер действительного изменения mJ за
счет затенения вертикального оперения фюзеляжем и крылом; б—изменение производной
/Пу самолета и отдельных его частей с ростом чисел М полета и при увеличении угла атаки.
С увеличением угла атаки поперечная статическая устойчивость
(т*х) самолета со стреловидным (и треугольным) крылом значи-
тельно возрастает, а путевая (ту) —снижается. Уменьшение про-
изводной Шу на больших углах атаки особенно значительно у са-
молетов с длиной носовой частью фюзеляжа (kf — возрастает
при росте Хф) и крыльями малого удлинения вследствие весьма
сильного торможения потока в зоне вертикального оперения
и влияния сбегающих с крыла вихрей (фиг. 3. 15, а — штрих-
пунктирная кривая).
Рост поперечной статической устойчивости и снижение путевой,
как отмечалось в § 4 гл. II, приводит к интенсивным забросам
по крену при возникновении скольжения вследствие бокового по-
рыва или дачи ноги. Эти забросы по крену особенно усиливаются
вследствие уменьшения у современных самолетов момента инер-
ции /х [следовательно, гх= —— уменьшается, поэтому z»x==r—
m/2 г
растет более интенсивно, приводя к росту критерия х— см. выра-
жение (2.40)1, что значительно усложняет пилотирование самолета
127
-со стреловидным крылом при посадке и на больших высотах (т. е.
на режимах с большими значениями су).
Фиг. 3.16. Характер изме-
нения производной Су=
дСу / 3
=----- (аналогично сг,=
да \ г
dcz \
= при изменении
чисел М полета.
Увеличение т* при одновременном уменьшении т\ приближает
самолет к границе колебательной неустойчивости (см. диаграмму
на фиг. 2. 14) и увеличивает колебательность бокового движения.
При значительном снижении путевой устойчивости, особенно при
/п^>0, |может наступить даже колебательная неустойчивость
(7?<^0), при которой управление самолетом становится невозмож-
ным. Этому в значительной степени способствует и уменьшение
демпфирования боковых колебаний самолета, особенно относи-
тельно оси Оух (т°уу уменьшается при сверхзвуковых скоростях
весьма быстро).
Уменьшение производных с у крыла и ав 0 = Лвертикал ь-
ного оперения при сверхзвуковых скоростях (фиг. 3. 16) опреде-
ляет характер уменьшения поперечной и путевой статической
устойчивости самолета, а также характеризующих демпфирование
«вращательных» производных т™х и /п^у,для которых могут быть
написаны следующие выражения:
<-««-)кр+(/п»в.о= + -2ав. 0 (3.3)
где |2 — квадрат радиуса инерции половины площади крыла отно-
сительно оси симметрии самолета, отнесенный к полураз-
маху;
..л 1 “I- з
для трапециевидного крыла $2=——------;
6(1 + 1)
^=0,9(0,54-0,033k);
с Z.2
пф М^)в.о+Ф= - 2,4яв.о V-7T- k- (3-4)
Так как для сверхзвуковых самолетов характерен переход
на крылья малого удлинения, то это еще больше снижает попереч-
ное демпфирование [в выражении (3.3) коэффициенты g и ki
уменьшаются].
128
Демпфирование колебаний относительно вертикальной оси Oyi
снижается еще (так же как и путевая статическая устойчивость)
за счет затенения вертикального оперения фюзеляжем и крылом,
а также вследствие нежесткости конструкции.
Как следует из выражения для коэффициента а [см. выражения
(2.39)], определяющего затухание боковых колебаний, уменьшение
и cl при сверхзвуковых скоростях приводит к уменьшению
этого коэффициента, т. е. более медленному затуханию колебаний.
Здесь следует отметить, что вследствие имеющего место значитель-
ного удлинения фюзеляжа у современных сверхзвуковых самоле-
тов сильно увеличивается радиус инерции относительно вертикаль-
ной оси самолета (г2у = ^-, что влечет за собой еще более быстрое
m22
—со _
уменьшение производной т?—и рост интенсивности боковых
гу
колебаний.
На фиг. 3.17 приведены основные геометрические параметры
фюзеляжа и вертикального оперения самолета, влияющие на боко-
вую устойчивость.
Влияние сжимаемости воздуха на аэродинамические коэффи-
циенты и их производные при больших числах М приводит к су-
щественному изменению показателей боковой управляемости, что
вызывает значительные трудности при управлении самолетом.
Так уменьшение эффективности элеронов и руля направления
приводит к возрастанию балансировочных отклонений ручки управ-
ления элеронами (или штурвала) и педалей, а также усилий
на них при полете со скольжением или для создания определенной
угловой скорости крена на околозвуковых скоростях. Особенно
неприятны эти изменения в зоне обратной реакции по крену
на скольжение и обращенного действия элеронов, что еще больше
усугубляется изменением шарнирных моментов рулей в этом диа-
пазоне скоростей.
На фиг. 3. 18 в качестве примера показано изменение показате-
лей поперечной управляемости Рэх и при различных числах М1.
Из-за влияния сжимаемости воздуха и нежесткости конструкции
на больших скоростях сильно изменяется такой показатель попе-
речной управляемости как максимальная угловая скорость крена
при полном отклонении элеронов (см. фиг. 8. 16 и 8.17, а).
Вследствие значительного изменения этих показателей при
больших числах М напрашивается мысль об изменении передаточ-
ных чисел в системе управления элеронами при различных скоро-
стях, чтобы получить единообразную технику пилотирования.
Как будет показано в гл. V, эта мысль была конструктивно осу-
ществлена, а изменение передаточных чисел получило широкое
1 Г. С. Калачев, Показатели маневренности, управляемости и устойчи-
вости самолетов, Оборонгиз, 1958, стр. 100, 102.
129
распространение в системах управления современных скоростных
самолетов.
При уменьшении производных Шу, тп^уъ т°/ на сверхзвуковых
скоростях сильно ухудшается боковая динамическая управляемость.
Возрастают амплитуда колебаний по крену при отклонении элеро-
нов [см. выражение (2. 26), где уменьшаются ГхИ(т“х)св, стоящие
в знаменателе] и запаздывание угловой скорости крена относитель-
но приложенного к ручке усилия, особенно на больших высотах,
так как т растет (см. выражение 2.27). Аналогичные явления про-
исходят с путевой управляемостью (см. выражения 2.29 и 2.30).
Фиг. 3.17. Определение геометрических пара-
метров самолета, входящих в выражения (2.15)
и (2.16) для производных и характе-
ризующих боковую статическую устойчивость
_ Хф
Хф = ’7Г:
Лф
Хф = — — удлинение фюзеляжа.
^Ф
Ухудшение управляемости, вызванное значительным уменьше-
нием путевой статической устойчивости, эффективности элеронов
и ухудшением демпфирования на больших скоростях, вызывало
серьезные затруднения при полетах на первых скоростных самоле-
тах, особенно на экспериментальных самолетах с ЖРД, так как
именно на них достигались раньше всего высокие сверхзвуковые
скорости (М>2,5), хотя на этих самолетах еще не было предусмот-
рено никаких мер для повышения боковой устойчивости и улучше-
ния управляемости.
Например, при полетах на самолетах Белл Х-1А и Х-1В была
отмечена полная потеря боковой устойчивости и управляемости
на больших сверхзвуковых скоростях.
Вот как описывает свой полет на самолете Х-1В на высоте
21 000 м со скоростью, соответствующей М=2, уже упоминавшийся
летчик-испытатель Ф. К. Эверест:
130
Фиг. 3.18 Изменение пока-
зателей боковой управля-
емости Рэх и х* при раз-
личных числах М полета.
«...Х-1 начал сильно крениться то в одну, то в другую сторону
и медленно, как рыба, водить хвостом вправо и влево...».
При скорости 2430 км/час (М=2,3)
самолет «...подвергался кренам до 70°,
и хвост заносило то в одну, то в другую
сторону, так что угол отклонения от курса
составлял 100.»1.
Аналогичное поведение самолета отме-
чалось и летчиком-испытателем У. Брид-
жменом при полете с максимальной ско-
ростью на самолете Дуглас D-558-II
«Скайрокет». Наблюдалось неуправляе-
мое покачивание самолета с крыла на
крыло, причем крен доходил до ±10°,
а его скорость достигала \Ъ°/сек, руль на-
правления испытывал сильнейшую тряс-
ку, приводившую к ударам на педалях,
появлялось рыскание с углами ±1°. Ча-
стично это явление было устранено меха-
ническим заклиниванием руля поворота
на сверхзвуковой скорости с помощью
гидравлического замка, но поперечное
раскачивание устранить не удалось, так
как элероны на большой высоте почти
совершенно теряли эффективность2.
Летчик-испытатель самолета Дуглас
D-558-II «Скайрокет» У. Бриджмен опи-
сывает это явление полной потери эффек-
тивности элеронов на высоте свыше
19 500 м и скорости, соответствующей
значению М=1,4, следующим образом:
«Самолет вновь плавно сваливается на
чтобы парировать это, я полностью отклоняю элероны. Но на этот
раз элероны не реагируют, они совершенно не эффективны. Крен
продолжает увеличиваться»3.
Как было установлено впоследствии, явление раскачки самоле-
та D-558-II было следствием приближения к границе «инерционно-
го резонанса» (см. § 4 настоящей главы) при малых значениях
угла атаки и перегрузке пу=0,2-^0,3. С увеличением перегрузки
это явление постепенно исчезало.
Во время полета на самолете Х-1 А другого летчика-испытателя
Ч. Игера на высоте 23 000 м со скоростью 2500 км/час (М = 2,42)
• --- показа-
_э
О) ,
тель х х без учета влияния сжи-
э
маемости воздуха и деформаций
конструкции.
левое
1 Ф. К. Эверест,
стр. 160—161.
2 У. Б р и д ж м е н,
стр. 286, 299, 303—305,
3 Там же, стр. 334.
Человек, который летал быстрее всех, ИЛ, 1960,
Ж. Азар, Один в бескрайнем небе, Воениздат, 1959,
318, 319.
131
самолет оказался полностью неуправляемым и начал беспорядочно
кувыркаться, причем перегрузка достигала значений 14. Беспоря-
дочно падая, самолет пролетел вниз более 9 км L
Аналогичный случай произошел с летчиком-испытателем
К. Мюрреем во время попытки побить на самолете Х-1А рекорд
высоты, установленный У. Бриджменом на самолете Дуглас
D-558-II «Скайрокет» (24 100 м). В этом случае самолет тоже пол-
ностью потерял управляемость и беспорядочно падал 12 км1 2.
В обоих случаях самолет, войдя в более плотные слои атмосферы
(где уменьшалось число М полета), снова становился управляемым
и летчикам удавалось его благополучно посадить.
Характерной особенностью было то, что «...пилот, пытаясь
исправить первоначальное отклонение самолета, способствовал
возникновению колебаний вокруг нейтрального положения. Борясь
с этими колебаниями, пилот сам увеличивал их амплитуду.
Самолет летел, все время рыская по курсу и кренясь с крыла на
крыло.
Часто во время первых полетов на Х-1А и с Мюрреем и с Иге-
ром случалось, что они совершали полные бочки, переворачиваясь
на 360°, прежде чем могли восстановить управление самолетом.
При этом самолет сильно отклонялся от курса»2.
Управление сверхзвуковым самолетом требовало чрезвычайной
осторожности и сноровки. Малейшее неверное движение могло
привести к полной потере управляемости, как было, например,
во время одного из полетов на самолете Белл Х-2, в результате
чего самолет разбился, а летчик-испытатель М. Эпт погиб.
Приведенные факты наглядно демонстрируют значительное
ухудшение и боковой устойчивости и управляемости самолета
на сверхзвуковых скоростях, что делало полеты на первых сверх-
звуковых самолетах недоступными для рядовых летчиков и требо-
вало специальных усовершенствований как самого самолета, так
и его системы управления. Это положение может быть подтверж-
дено следующим примером.
Во время испытаний опытных экземпляров сверхзвукового
истребителя Норт Америкен YF-100 «Супер-Сейбр» была обнару-
жена недостаточная путевая устойчивость, но на этот факт не обра-
тили особого внимания, так как у опытных летчиков-испытателей
это не вызывало особых затруднений, а на скорейших поставках
самолета настаивали представители фирмы и военных кругов.
Однако, когда серийные самолеты F-100 начали поступать в строе-
вые части, произошло подряд 4 катастрофы, явившиеся следствием
недостаточной устойчивости самолета на курсе. Все F-100 при-
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, 1960,
стр. 154.
2 Там же, стр. 156.
132
шлось вернуть обратно фирме для модификации, потребовавшей
много времени и средств (см. гл. IV).1 *
Из приведенного примера можно сделать очень важный вывод,
что при выборе средств для улучшения характеристик устойчивости
и управляемости сверхзвукового самолета необходимо ориентиро-
ваться не на опытнейших летчиков-испытателей, а на рядовых лет-
чиков строевых частей.
§ 3. Изменение шарнирных моментов рулей и усилий
на рычагах управления
Усилие на рычаге управления может быть определено из прос-
того соотношения: Р = —&ШМШ, где коэффициент передачи от руля
к рычагу управления ---------------=-------—[1/XI опреде-
^рычага 57,3 ^ХрЫчага
ляется кинематикой проводки'системы управления.
Результаты продувсж моделей в трубах для определения шар-
нирных моментов рулей выдаются обычно в виде зависимостей без-
размерного коэффициента шарнирного момента /иш=---------
от углов атаки, и углов отклонения руля и триммера при различ-
ных числах М полета.
Тогда Р =—kmmmSpbp^-f где д, т, М). Отсюда сле-
дует, что усилие на рычаге управления возрастает пропорциональ-
но квадрату скорости и кубу линейных размеров руля (произведе-
ние Sp*&p имеет размерность м3).
При дозвуковых скоростях коэффициент шарнирного момента
является линейной функцией угла атаки (а) и угла (др) отклоне-
ния руля (при небольших а и бр фиг. 3. 19)’ и от скорости не зави-
сит. При расчетах, обычно, пользуются выражением:
• а+Ч& + тшг’
благодаря которому значение коэффициента шарнирного момента
тш подсчитывается как сумма трех компонентов, каждый из кото-
рых просто снимается с экспериментальных графиков (имеющих
вид, аналогичный показанному на фиг. 3. 19) для соответствующих
углов атаки а, отклонений руля др и триммера т.
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, I960,
стр. 25.
133
С ростом скоростей полета усилия на рычагах управления стали
сильно возрастать, так как значительно возрос скоростной напор.
Кроме того, усилия на рычагах сильно возросли из-за необходи-
мости отклонять рули на значительные углы при большой скорости
из-за потери ими эффективности. Рост усилий на рычагах управле-
ния сильно затруднял управление самолетом и приводил к быстрой
Фиг. 3.19. Характер изменения
коэффициента шарнирного момента
тш в зависимости от угла атаки
и угла отклонения руля.
tg <Р1 = tg Т2 =
утомляемости летчика.
Уже довольно давно для
уменьшения шарнирных моментов
стали применять осевую аэроди-
намическую компенсацию рулей,
которая оказалась очень эффек-
тивной. Осевая аэродинамическая
компенсация руля S0.K создается
частью его площади, расположен-
ной впереди оси вращения
(фиг. 3.20, а). При наличии осевой
компенсации распределенная воз-
душная нагрузка, действующая
на руль, может быть сведена к
двум равнодействующим силам:
Уь приложенной впереди оси вра-
щения руля, и Y2, приложенной
позади оси. Поэтому суммарный момент аэродинамических сил от-
носительно оси вращения руля (т. е. шарнирный момент) может
быть выражен разностью Л4Ш=У2^2—У1П, где гх и г2— соответст-
венно расстояния от оси вращения руля до точек приложения
равнодействующих аэродинамических сил на носке руля (У1)
и на его хвостовой части (У2). Воздушная нагрузка, приложенная
на хвостовой части руля (У2), создает шарнирный момент, препят-
ствующий отклонению руля и ощущается летчиком на рычаге
управления самолетом в виде силы, препятствующей отклонению
этого рычага. Для уменьшения этой силы, растущей с ростом ско-
ростного напора и размеров руля, увеличивают степень осевой
компенсации руля , т. е. отношение части площади руля, рас-
Sp
положенной впереди оси вращения — S0.K, ко всей площади
руля Sp. Увеличение степени осевой компенсации руля приводит
к увеличению части воздушной нагрузки, приложенной к носку
руля и помогающей его отклонению (У1). Поэтому при увеличении
отношения шарнирный момент Мш уменьшается и, следова-
Ор
тельно, уменьшаются значения его безразмерного коэффициен-
та тш, а также значения производных Шш и Изменение произ-
водной mL (при изменении степени осевой компенсации руля)
определяет изменение коэффициентов Рв, Рэ, Рн, от которых зави-
сят усилия на рычагах управления при маневрах [см. выражения
134
(2.12), (2.23), (2.25), (2.28)]. При этом с увеличением степени
осевой компенсации Рв, Рэ, Р* уменьшаются. Характер изменения
производных коэффициента шарнирного момента /Иш и тпт ПРИ
5.'
Фиг. 3.20. Влияние осевой аэродинамической
компенсации на шарнирный момент руля.
а—возникновение шарнирного момента от воздушной на-
грузки на руле и уменьшение шарнирного момента руля
при применении осевой компенсации (шарнирный момент
создает препятствующее отклонению руля усилие на ры-
чаге управления при У1г1 < У2г2. Перекомпенсация, т. е.
помогающее отклонению усилие на рычаге, возникает при
> У*гл;
б—зависимость относительных коэффициентов
а 6
И1щ /Лщ
----------- и —-——-------- от степени осевой ком-
• 4, (4)s
6о.к^0 °о.к«0
^о.к
пенсации —~.
росте степени осевой компенсации показан на фиг. 3.20, б1.
Из графиков видно, что на дозвуковых скоростях степень осевой
1И. В. Остославский, Аэродинамика самолета, Оборонгиз, стр. 343.
135
i)
Фиг. 3.21. Изменение шарнирного момента
по числам М полета.
а—изменение распределения давлений по поверхности
профиля с отклоненным рулем при росте скорости,
р—относительное избыточное давление в точке про-
филя, р —давление в невозмущенном потоке,
q—скоростной напор. Пунктиром показан характер
изменения эпюр давления при росте скорости, б—изме-
нение шарнирных моментов рулей немецкой ракеты
V-2 (при различных углах отклонения) по числам М
полета, в—относительное изменение производной
коэффициента шарнирного момента руля по углу его
отклонения при изменении чисел М полета в около-
звуковом диапазоне скоростей для прямого и стрело-
видного крыльев и крыльев малого удлинения.
компенсации нельзя проектировать более 0,25-4-0,26, так как из-за
производственных допусков можно получить перекомпенсацию, т. е.
обратные (помогающие) усилия на рычагах управления (теорети-
чески перекомпенсация при М<Мкр наступает при ^->0,28).
При приближении к Мкр изменение характера обтекания про-
филя (см. фиг. 3.1) приводит к резкому изменению шарнирных
моментов. В области докритических чисел М полета при увеличении
скорости эпюра давлений изменяется таким образом, что быстрее
всего возрастают наибольшие начальные ординаты. Поэтому дав-
ления, действующие на переднюю часть руля, возрастают быстрее,
вызывая уменьшение шарнирного момента, иногда даже с измене-
нием его знака, что приводит к изменению знака на рычаге
управления, т. е. наступает перекомпенсация (фиг. 3.21).
При росте М полета свыше Мкр скачки уплотнений постепенно
смещаются по поверхности руля к задней кромке, а зона сверхзву-
кового обтекания расширяется, увеличивая шарнирный момент
вследствие возрастания разрежений в хвостовой части руля
(см. фиг. 3.1,6).
При М>1 скачки уплотнений смещаются на заднюю кромку
руля, руль целиком находится в сверхзвуковом потоке и характер
его обтекания с дальнейшим ростом скорости практически не изме-
няется.
В этом случае
_______2________ / | 2 $о.к
57,3 / М2 —Ц Sp
Как следует из приведенного выражения перекомпенсация
на сверхзвуковой скорости наступает не при -^=0,28, а при
SP
^-=0,5.
5Р
Рост шарнирных моментов, приводящий к значительному возра-
станию усилий на рычагах управления, и, главное, изменение
знака усилия при переходе к сверхзвуковой скорости сделали не-
возможным управление самолетом без соответствующих устройств
в системе управления, воспринимающих эти изменяющиеся по ве-
личине и знаку усилия. Такими устройствами явились широко
распространенные теперь на скоростных самолетах гидроусилите-
ли-бустеры.
§ 4. Новые проблемы устойчивости и управляемости,
связанные с изменением форм современных сверхзвуковых самолетов
Для уменьшения волнового сопротивления на около- и сверх-
звуковых скоростях в результате длительных исследований были
найдены наиболее рациональные формы и схемы скоростных само-
137
летов, которые значительно отличаются от форм старых1 дозвуко-
вых машин. В результате применения этих новых схем для совре-
менных сверхзвуковых самолетов значительно улучшились многие
характеристики устойчивости и управляемости (см. гл. IV), оказав-
шиеся весьма неудовлетворительными у первых экспериментальных
сверхзвуковых самолетов, которые еще мало отличались по аэро-
динамическим схемам и параметрам от своих «тихоходных» пред-
шественников.
Однако изменение форм и относительных размеров крыла, фю-
зеляжа и оперения в процессе совершенствования сверхзвуковых
самолетов неожиданно привели к возникновению новых проблем
устойчивости и управляемости, с которыми начали сталкиваться
уже при испытаниях первых сверхзвуковых самолетов со стрело-
видными крыльями.
Для современных скоростных самолетов характерны следующие
основные особенности, отличающие их от старых дозвуковых само-
летов:
1) применение крыльев и оперения с большой стреловидностью
(% = 50—60°), треугольных и прямых крыльев малого удлинения
с малой относительной толщиной профиля (с=44-5%);
2) очень длинные фюзеляжи (удлинение Хф=
=84-12)
^Ф
с длинной носовой частью (%ф), применяемые для уменьшения вол-
нового сопротивления, причем объем фюзеляжа, особенно на
истребителях, в отличие от старых самолетов, практически полно-
стью используется для размещения различного оборудования, топ-
лива, двигателей и других грузов;
3) значительное увеличение относительных размеров вертикаль-
ного оперения SB.o/S при одновременном уменьшении относительно-
го плеча вертикального оперения.
Эти изменения формы повлекли за собой изменение инерцион-
ных характеристик самолета относительно различных осей, а также
достаточно существенный поворот главной продольной оси инерции
за счет установки на верхней поверхности фюзеляжа более тяжело-
го (вследствие увеличения размеров) вертикального оперения
(фиг. 3.22).
Малые размеры крыла и его внутренних объемов у сверхзвуко-
вого самолета не позволяют использовать их, как раньше, для раз-
мещения грузов, шасси, топлива и др., что приводит к резкому
уменьшению момента инерции Jx относительно продольной оси
самолета при одновременном возрастании моментов инерции Jy и Jz
вследствие удлинения фюзеляжа и разноса значительных масс
вдоль него. За счет наклона главной продольной оси инерции по
отношению к полусвязанной появляется и возрастает центробеж-
ный момент инерции Jxy.
См. сноску на стр. 108.
138
В приводимой ниже табл. 3. 2 проведено сравнение некоторых
характеристик двух современных истребителей Конвэр F-102A (см.
приложение) и Локхид F-104 (см. фиг. 4.28), с типичным истре-
бителем периода второй мировой войны Супермарин Мк. V «Спит-
файр» с прямым крылом Ч
Из этой таблицы можно сделать следующие основные выводы
по поводу изменения относительных размеров современных сверх-
звуковых самолетов:
1) удлинение крыла уменьшилось в 2,2—2,5 раза;
о ' ~—
т<^д?гтавилизирующее влияние jxy (малые ос)
Стадилизируннцее влияние jxy
т I (волыиие а|
—j .
Фиг. 3.22. Положение продольной главной оси инерции Ох0
и скоростной оси Ох самолета.
2) относительная длина фюзеляжа /ф/Z увеличилась в 2—3,2 раза;
3) относительная длина носовой части фюзеляжа Хф// увеличи-
лась в 4,3—7 раз;
4) относительное плечо вертикального оперения Ьв.о/*ф умень-
шилось в 4,7—6 раз;
5) относительная площадь вертикального оперения увели-
чилась в 1,8—3,5 раза;
6) отношение моментов инерции Jx/Jz уменьшилось в 4,2—
7,5 раз.
Увеличение момента инерции относительно поперечной оси Jz
приводит к особенно неприятному для истребителей ухудшению
маневренности самолета в вертикальной плоскости (возрастают
показатели продольной управляемости и Рв2, см. выражения
для этих показателей, приведенные на стр. 67).
Уменьшение момента инерции относительно продольной оси (7Х)
усложнило управляемость по крену вследствие более резкого на-
растания угловой скорости крена (сильно увеличилась производ-
ная <ох= при отклонении элеронов. Наряду с этим уменьше-
ние Jx и увеличение Jy приводит к значительному уменьшению
1 Сб. «Летчику о практической аэродинамике» под ред. Седова Г. А. и Реб-
рова М. Ф., Воениздат, 1961, стр. 93 и журнал Canadian Aeronautical Journal V,
VI, 1957.
139
Таблица 3.2
Наименование параметра Локхид F-104 Конвэр F-102A Суперма- рин МК. V „Спитфайр*
Максимальная относительная толщина крыла, % 3-4 4 12
Удлинение крыла 2,5 2,2 5,6
Относительная длина фюзеляжа (отнесен- ная к размаху крыла) 2,5 1,6 0,8
Относительная длина носовой (располо- женной впереди от центра тяжести самоле- та) части фюзеляжа (отнесенная к размаху крыла) 1,6 1,0 0,23
Отношение плеча вертикального оперения к длине носовой части фюзеляжа 0,44 0,35 2,1
Относительная площадь вертикального оперения (отнесенная к площади крыла), °/о 21 11 6
Максимальная удельная нагрузка на кры- ло, кГ1м2 336 220 122
Отношение момента инерции Jx к моменту инерции Jz 1: 10 1:6 1:1,33
отношения Jxfly, значения которого для современных истре-
бителей снизились до 0,08-^0,12. Это накладывает определенный
отпечаток на боковую управляемость самолета, так как приводит
к более сильному влиянию на разворот самолета обратного момента
крена от отклонения руля направления (см. фиг. 3. 14,6), что мо-
жет даже явиться причиной обратной реакции по крену на дачу
ноги [см. выражение (3.2), где производная d^x)d^ может изме-
нить знак за счет возрастания имеющего положительное значение
второго члена числителя, что особенно вероятно при уменьшении
отрицательных значений производной ту на больших скоростях].
Сильное влияние отклонения руля направления на момент крена
затрудняет работу автоматических систем стабилизации и наведе-
ния и требует специального учета при их проектировании.
Увеличение длины фюзеляжа 1$ и уменьшение размаха крыла
I, а также увеличение коэффициента k$ вследствие роста длины
носовой части фюзеляжа, приводят к значительному увеличению
дестабилизирующего влияния фюзеляжа на путевую устойчивость
самолета [см. фиг. 3. 17 и выражение (2. 16) для коэффициента
о » 8 1 Яф^сЬ
путевой статической устойчивости ту, где член значи-
SI
тельно возрастает у современных самолетов].
Изменение аэродинамических и инерционно-массовых характе-
ристик современных самолетов привело к возникновению нового
140
затрудняющего пилотирование явления — «жесткости траектории»
(или уменьшению «подвижности»), сущность которого заключается
в том, что в короткопериодическом движении (как боковом, так
и в продольном) траектория практически не изменяется.
Для продольного короткопериодического движения связь изме-
нения угла наклона траектории 0 с изменением угла атаки описы-
вается уравнением
бШ Га .
----==----Да.
dt mV
Это соотношение может быть получено из второго уравнения
системы уравнений (1.2), описывающих продольное движение са-
молета. Применив метод малых возмущений, это уравнение можно
переписать:
mV f^o.4-^L')=Ko-|-PAa-G+Psin(a-<P).
\ dt dt /
Так как исходные значения параметров принимаются постоянны-
ми, то их производные равны 0, поэтому-^- =0.
dt
Если считать за исходный режим полета — горизонтальный уста-
новившийся, то Уо—G=0. Член Psin (a—ф) обычно мал и его не
учитывают. Поэтому уравнение принимает вид:
откуда и получаем приведенное выше соотношение, где Ка =------.
,да
У современных сверхзвуковых самолетов при больших числах
М полета Ya значительно уменьшается, а т (масса) и V существен-
но выросли. Вследствие этого величина Ya/mV уменьшается в не-
сколько раз по сравнению с ее значениями у дозвуковых самолетов.
Поэтому для получения той же скорости изменения угла наклона
траектории (угловой скорости вращения касательной к траектории)
необходимо увеличить изменение угла атаки в несколько раз. Легко
можно показать, что явление «жесткости траектории» приводит
к необходимости значительного увеличения перегрузки для совер-
шения маневра на современном скоростном самолете по сравнению
с выполнением того же маневра на дозвуковом самолете.
Используя уравнение сил в проекциях на нормальную ось,
написанное для случая исходного режима горизонтального полета,
когда 0=0 и cosO = l, т. е. mV = Y—G, можно вывести выраже-
ние для угловой скорости поворота касательной к траектории
в вертикальной плоскости dAbtdt в зависимости от значений пере-
141
грузки по оси Оух (riy), т. е. отношения ускорения по этой оси
Л7дГД9 \
\ dt /
к ускорению земного тяготения g:
V аде
g dt
Y~G 1 А
-----= n —-1 = д/г.
gm у
Отсюда
dt
(3.5)
Из выражения (3. 5) следует, что для получения той же угловой
скорости поворота касательной к траектории в вертикальной пло-
скости (т. е. скорости изменения траекторного угла при маневре)
с ростом скорости необходимо увеличивать перегрузку пропорцио-
нально росту скорости полета. Вследствие ограничения максималь-
ных допустимых значений нормальной перегрузки (Лпудоп), опре-
деляемых на малых высотах прочностью самолета или возможно-
стями летчика переносить перегрузки, на больших скоростях при-
{dM \
ходится уменьшать интенсивность вертикальных маневров ----
\ dt /
обратно пропорционально увеличению скорости полета.
С ростом скорости и в боковом движении наблюдается тенден-
ция к «жесткости траектории», т. е. к потребности значительного
увеличения углов скольжения или крена для получения необходи-
мой (одинаковой с дозвуковым самолетом) угловой скорости из-
менения направления касательного к траектории вектора скорости
V в боковом движении.
Уравнение сил в проекциях на связанную боковую ось Ozx имеет
вид:
т ю -V>^=-Z₽-? + GsinY.
\ dt у х у/
Считая значения углов а, 0 и у небольшими, можно принять
Vx^V, Vy~—Va, Vz=V»p и переписать уравнение1:
ttzIZ ---
Здесь выражение в скобках описывает скорость поворота каса-
тельной к траектории в боковом движении, которую для краткости
обозначим dkldt. Тогда получим: — =----— у, где производ-
ная ZP у современных самолетов уменьшается даже на дозвуковых
1 Это уравнение в безразмерной форме уже приводилось [см. первое уравне-
ние системы дифференциальных уравнений бокового движения (1. 12)].
142
скоростях аналогично уменьшению производной Уа вследствие при-
менения тонких стреловидных вертикальных оперений, а при М>1
значения снижаются с ростом скорости. Поэтому с ростом ско-
с
рости коэффициенты--- и — в правой части уравнения быстро
mV V
уменьшаются, и для получения прежнего значения угловой скорости
поворота вектора скорости при боковом маневре необходимо значи-
тельное увеличение углов р и у и боковой перегрузки nz. Допусти-
мые значения углов р, как правило, сильно ограничены из-за воз-
можности срыва потока у воздухозаборников двигателей и по проч-
ности вертикального оперения. Поэтому боковые маневры на боль-
ших скоростях совершаются практически с помощью одного только
крена. Необходимость значительного увеличения крена для полу-
чения приемлемой скорости бокового маневра приводит к возник-
новению очень больших вертикальных перегрузок при боковых
маневрах, так как нормальная перегрузка в координированных
разворотах (без скольжения) связана с углом крена простым
соотношением nw=—-—, которое может быть легко получено из
cos у
условия равновесия вертикальных сил при крене самолета (см.
фиг. 2. 13).
Действительно, вертикальная составляющая Y cos у подъемной
силы самолета Y при правильном вираже должна уравновесить си-
лу веса Kcosy=O. Следовательно: п=—=——.
у G cos у
Итак, «жесткость траектории» при больших скоростях вызывает
необходимость создания при маневрировании в пространстве значи-
тельных перегрузок в то время, как значения располагаемых пере-
грузок, которые можно создать рулем высоты, с ростом чисел М
полета и высоты полета интенсивно снижаются за счет роста про-
дольной статической устойчивости по перегрузке при М>1 и доста-
точно быстрого уменьшения эффективности руля высоты с ростом
чисел М полета. Поэтому для первых сверхзвуковых самолетов
возникла проблема обеспечения маневренности, которая была осо-
бенно острой для самолетов-истребителей, так как без достаточно
быстрого маневрирования в пространстве они не могли выполнять
поставленные задачи.
Применение цельноповоротного стабилизатора (см. гл. IV)
значительно расширило по числам М полета и высотам область
возможного создания необходимых перегрузок при маневрах (см.
фиг. 4. 13). Однако эта мера не смогла полностью решить пробле-
мы ограничения маневренности на больших скоростях и высотах,
вследствие ограниченной возможности увеличения углов атаки
и несущих свойств крыльев современных сверхзвуковых самоле-
тов (Су значительно уменьшается на больших сверхзвуковых ско-
ростях).
143
Здесь следует подчеркнуть также, что способность летчиков пе-
реносить действие перегрузки сильно зависит от времени их дей-
ствия. Кратковременные перегрузки могут быть очень велики,
в то время как длительно действующие перегрузки оказывают не-
благоприятное влияние на организм человека. Поэтому во время
маневров современных самолетов возникающие длительно дейст-
вующие перегрузки могут быть допущены сравнительно неболь-
шими. Это приводит к существенному увеличению радиусов
и времени разворота и других пространственных маневров.
Действительно, если воспользоваться, например, известными
выражениями для определения радиуса и времени правильного
п У2 г
виража: /?вир=—7==-, Гвир =—-=-,то, приняв максималь-
gV п2у~\ gV п2у—\
ную перегрузку пу постоянной для обоих самолетов, можно подсчи-
тать /?вир и 7вир для истребителя времен второй мировой войны
(V=600 км/час = 167 м/сек) и современного истребителя (V =
= 1500 юи/<шс = 416 м/сек). Если принять /гу = 5, то получим: для
истребителя второй мировой войны /?ВИр = 580 м, Твир = 22 сек; для
современного истребителя 7?вир = 3600 м, = сек.
При дальнейшем увеличении скорости полета эти величины воз-
растают еще больше.
• Отсюда можно сделать вывод, что если маневренность с точки
зрения возможности создания перегрузок современных истребите-
лей, благодаря принятым конструктивным мерам не ухудшилась
по сравнению с поршневыми самолетами, то их пространственная
маневренность («поворотливость») значительно снизилась. При
этом продолжительность действия перегрузок во время маневров
также значительно увеличилась (так в приведенном примере время
действия перегрузки пу = 5 увеличилось в 2,5 раза). Этим и объ-
ясняется применение на современных истребителях противопере-
грузочных костюмов, которые при достаточной тренировке позво-
ляют повысить предел переносимой длительно действующей пере-
грузки приблизительно на единицу и тем самым улучшить про-
странственную маневренность самолета. В нашем примере это
обеспечивает (теперь пу = 6) снижение радиуса виража до 3000 м,
а его времени до 45 сек.
Ухудшение маневренности истребителей (с точки зрения уве-
личения радиусов разворотов и других маневров) на сверхзвуко-
вых скоростях потребовало и новой методики их применения, так
как при обнаружении противника на незначительном расстоянии
такой истребитель уже не сможет необходимым образом выполнить
маневр перехвата. Этим и объясняется достаточно широко рекла-
мируемое иностранной печатью применение радиолокаторов даль-
него действия для заблаговременного обнаружения цели и исполь-
зования электронных счетных машин для вычисления траектории
перехвата цели при выполнении маневров с располагаемой пере-
грузкой. При этом наземная автоматическая система наведения
144
сама должна управлять перехватчиком через автопилот, и только
на конечном участке траектории перехватчик управляется борто-
вой автоматической системой перехвата и реже — летчиком.
Изменение форм современных самолетов, в результате которо-
го значительно изменилось соотношение моментов инерции Jx и Jy
привело к возникновению новой проблемы — значительному деста-
билизирующему влиянию инерционных моментов на характери-
стики устойчивости самолета.
Увеличение момента инерции J у отрицательно сказывается на
затухании боковых колебаний. [Это следует из выражений (2.39),
где определяющий затухание боковых колебаний коэффициент а
-2 “<> 1
уменьшается с ростом г2у =—— , так как уменьшается туу=-^~ .
Увеличение Jy и уменьшение Jx у современных самолетов создают
значительные трудности в обеспечении приемлемых значений кри-
терия %, так как увеличение отношения
Гу
ходимости значительного уменьшения отношения т^ту, чтобы сохра-
ТПх т Г
нить необходимую величину отношения -Л-, определяющего
mJ mJ, rj
величину х (см.выражение 2.40). Уменьшение отношения ntyrrfty у сов-
ременных самолетов также оказывается весьма трудным, так как
при больших сверхзвуковых скоростях уменьшается, а при боль-
ших углах атаки сильно возрастает т^х. Все это и приводит к
ухудшению боковой управляемости современных самолетов и тре-
бует использования специальных автоматических систем для повы-
шения демпфирования боковых колебаний (см. гл. VI).
Большую роль играет в боковой устойчивости центробежный
момент инерции Jxy, или его безразмерный радиус
где <рг — угол между продольной главной осью инерции и ско-
ростной осью координат Ох, совпадающей с направле-
нием вектора скорости (см. фиг. 3.22);
г % и Гуо — безразмерные радиусы инерции относительно главных
осей инерции самолета.1
У современных скоростных самолетов вследствие роста гуо
и уменьшения г2х0 центробежный радиус инерции г2Ху значительно
возрастает даже при малых углах фг. Центробежный момент инер-
1 Главной осью инерции называют ось, относительно которой центробежный
момент инерции равен нулю. Самолет, как всякое твердое тело, имеет три глав-
ных оси инерции.
10 649
145
ции оказывает дестабилизирующее влияние на боковую устойчи-
вость при его отрицательных значениях, что может иметь место
только при отрицательных углах фг, так как Гуо —r^oX). Поэтому
потеря боковой устойчивости вследствие дестабилизирующего
влияния центробежного момента инерции скорее должна насту-
пать при полете с малыми углами атаки или даже при отрицатель-
ных углах атаки (п^О), так как у всех современных самолетов
главная ось инерции направлена под отрицательным углом к про-
дольной оси фюзеляжа. Эти режимы полета даже могут оказать-
ся расчетными для определения границ боковой устойчивости.
С потерей боковой устойчивости на малых углах атаки вслед-
ствие дестабилизирующего влияния центробежного момента инер-
ции столкнулись, например, при испытаниях экспериментального
самолета Дуглас D-558-II «Скайрокет», когда при перегрузке
пу = 0,2—0,3 начиналась неуправляемая прогрессирующая раскач-
ка самолета !. Увеличение угла атаки снова делало самолет устой-
чивым, так как при положительных значениях центробежный мо-
мент инерции оказывает стабилизирующее влияние на боковые ко-
лебания и они затухают быстрее (т. е. область боковой устойчи-
вости расширяется).
Неблагоприятное соотношение моментов инерции Jy, Jz и Jx
приводит при отклонении элеронов и вращении самолета отно-
сительно продольной оси к взаимодействию инерционных сил,
вызывающему изменение параметров бокового и продольного
движения, которое при определенных условиях может носить рас-
ходящийся характер и вызвать полную потерю устойчивости
и управляемости 1 2.
Это явление инерционного взаимодействия продольного и бо-
кового движений на больших скоростях, возникающее при наличии
угловой скорости крена и приводящее к прогрессивному увеличе-
нию углов атаки и скольжения или раскрутке самолета («авторо-
тация») в иностранной литературе часто называют «инерционным
резонансом».
С инерционным резонансом столкнулись при полетах со сверх-
звуковыми скоростями на больших высотах, так как вероятность
наступления этого явления увеличивается с ростом чисел М, вы-
соты и углов атаки (в результате срыва процесса управления и на-
ступившего затем инерционного резонанса и погиб, в частности,
самолет Белл Х-2) 3.
Причина наступления инерционного резонанса заключается
в появлении при вращении самолета относительно продольной оси
дестабилизирующих моментов инерционных сил от грузов, разне-
1 У. Бриджмен, Ж. Азар, Один в бескрайнем небе, Воениздат, 1959,
стр. 322.
2 На дозвуковых скоростях с явлением инерционного взаимодействия продоль-
ного и бокового движения сталкивались только на режиме штопора, т. е. при
закритических углах атаки.
3 Aeroplane, No. 2436, 1958.
146
сенных вдоль длинного фюзеляжа современного самолета. Эти мо-
менты стремятся увеличить первоначальные углы атаки ’и сколь-
жения.
Пусть самолет летит с некоторым углом атаки а и углом сколь-
жения р. При отклонении элеронов появляется момент крена Мх
и угловая скорость сох. Если самолет обладает бесконечной путевой
и продольной статической устойчивостью, то он начинает вра-
щаться, не меняя исходных углов аир, так как этому препятству-
ют бесконечно большие моменты устойчивости. Поэтому такой
самолет будет двигаться по прямолинейной траектории, а его про-
дольная ось будет описывать коническую поверхность с вершиной
Фиг. 3.23. Вращение самолета (при отклоне-
нии элеронов) относительно оси, на совпадаю-
щей с продольной осью, и возникновение
инерционных сил от грузов в носовой
и хвостовой частях фюзеляжа.
в центре тяжести (фиг. 3. 23). Если самолет нейтрален в отношении
путевой и продольной статической устойчивости, то при отклонении
элеронов он начнет вращаться относительно своей продольной
оси, смещающейся в пространстве параллельно самой себе, так
как при этом не будет возникать никаких сил, способных вывести
ось вращения из вертикальной плоскости. При этом углы атаки
и скольжения будут меняться местами.
При отклонении элеронов на реальном самолете, имеющем
конечные значения путевой и продольной статической устойчиво-
сти, вращение будет происходить относительно некоторой оси, не
совпадающей ни с направлением траектории полета, ни с продоль-
ной осью самолета, так как моменты устойчивости будут поворачи-
вать продольную ось, стремясь уменьшить изменение первоначаль-
ных углов аир, происходящее при вращении. Чем меньше угло-
вая скорость крена, тем ближе будут истинные значения углов
а и р к их исходным значениям, и ось вращения будет почти совпа-
дать с направлением полета, а инерционные силы будут невелики
147
и не оказывают заметного влияния на развитие движения. При
увеличении угловой скорости крена моменты статической устой-
чивости уже не будут успевать поворачивать ось самолета для
сохранения исходных значений а и 0, а инерционные силы от гру-
зов, расположенных в носовой (Тн) и хвостовой (Тх) частях
фюзеляжа, будут стремиться увеличить исходные углы атаки
и скольжения (см. фиг. 3.23).
Препятствовать этому увеличению будут моменты статической
устойчивости и демпфирования.
Значительное удлинение фюзеляжа современных сверхзвуковых
самолетов (с разносом масс вдоль оси Охх) создает благоприят-
ные предпосылки для увеличения дестабилизирующих инерцион-
ных моментов относительно вертикальной и поперечной осей. Раз-
нос масс вдоль оси Ozx (например, установка двигателей на концах
крыла как у французского истребителя-перехватчика «Тридан»
см. фиг. 8. 22) уменьшает эти дестабилизирующие моменты.
Действительно, при отклонении элеронов и вращении самоле-
та относительно некоторой оси, не совпадающей с его продольной
осью, относительно оси Оу\ создается момент инерционных сил
от грузов, расположенных вдоль фюзеляжа — Л4уи.ф =
= 2 (m^xf sin р)(Ох, и от грузов, расположенных в крыле —
Му и.к == 2 (/TIj^k COS Р sin |3)(0х»
В этих выражениях символами и тк обозначены массы эле-
ментарных грузов, расположенных в фюзеляже и крыле соответ-
ственно, а символами Xi и zE координаты этих грузов по осям
Oxi и Ozi — соответственно. При малых углах 0 можно заменить
cos P^l, sin Тогда суммарный момент инерционных сил от-
носительно оси Oyi может быть записан:
Аналогичным образом может быть получено выражение для
дестабилизирующего момента инерционных сил относительно по-
перечной оси OZi!
Mz и ~ (/у /х)
При увеличении значений разностей —Jx и Jz—Jx, свойствен-
ном современным самолетам, дестабилизирующие моменты инер-
ционных сил могут превысить моменты статической устойчивости
даже при весьма умеренных угловых скоростях крена сох, встре-
чающихся при маневрах. Тогда и наступает потеря устойчивости
вследствие инерционного резонанса.
Моменты статической устойчивости, возникающие при измене-
нии исходных углов атаки (Да) и скольжения (р), могут быть
определены:
Mz=m^aSbaq,
My=mftSlq.
148
Приравняв эти выражения к выражениям соответствующих
инерционных моментов, можно получить значения критических
угловых скоростей крена, при которых наступает потеря продоль-
ной или путевой устойчивости:
rn*№Sbaq — — (Уу — Jx) Дао)^
отсюда ЮКр.проД
m*Sbaq
Jy — Jx
m^Slq= — (J,— Л) £«>2,
отсюда К)ко.пут = I/--------— .
r Jz Jx
Переход к сверхзвуковым скоростям полета сопровождается
ростом продольной и падением путевой статической устойчивости.
Следствием этого является наличие двух критических угловых ско-
ростей крена из условия наступления инерционного резонанса:
((Ох)кр.пут — сравнительно небольшая, критическая в отношении
потери путевой устойчивости и
((Ох)кр.прод — значительно более высокая, критическая в отношении
потери продольной устойчивости.
В соответствии с этим известны два типа проявления инерци-
онного резонанса:
1) непроизвольная раскрутка самолета в движении крена
(авторотация), которая начинается при отклонении элеронов и не
прекращается даже при полном их отклонении в обратную сторону
(фиг. 3. 24, а);
2) резкое увеличение угла атаки а и перегрузки пу при вра-
щении самолета относительно продольной оси вследствие отклоне-
ния элеронов (фиг. 3.24,6).
При значительном увеличении угла атаки вследствие неблаго-
приятного скоса потока в зоне горизонтального оперения продоль-
ная статическая устойчивость по перегрузке может резко умень-
шиться, что приведет к уменьшению критической угловой скорости
крена и внезапному наступлению инерционного резонанса даже
при наличии небольшой угловой скорости крена на маневре с пере-
грузкой.
Максимальная угловая скорость крена при полном отклонении
элеронов ограничивается их эффективностью и предельными угла-
ми отклонения элеронов:
^тах = ^(М)8этах.
а Од
Так как с ростом чисел М полета эффективность элеронов сна-
чала возрастает, а при М>1 падает, а путевая устойчивость при
149
М>1 снижается достаточно интенсивно, то при обычно сущест-
6 d^r
вующих соотношениях производных Шу и —- на дозвуковых ско-
ростях вероятность наступления инерционного резонанса весьма
мала. При росте чисел М>1 эта вероятность существенно повы-
шается и, начиная с некоторого числа М, инерционный резонанс
может наступить при незначительном отклонении элеронов
(фиг. 3.25).
Фиг. 3. 24. Различные проявления инерционного резо-
нанса Ч
а—самопроизвольное вращение самолета при отклонении
элеронов (авторотация), б—рост перегрузки при отклонении
элеронов.
Величина поперечной статической устойчивости rrix оказывает
существенное влияние на характер потери устойчивости в резуль-
тате инерционного взаимодействия. При больших значениях а уве-
личение т$х ведет к ухудшению затухания боковых колебаний при
отклонении элеронов (фиг. 3.26,а). При уменьшении исходного
угла атаки (перегрузки) в случае большого значения т$х могут
наступить раскрутка самолета (авторотация) и потеря поперечной
управляемости (фиг. 3. 26, б).
Уменьшение поперечной устойчивости до положительных зна-
чений (mJ>0) приводит при отклонении элеронов и увеличении
угловой скорости крена в полете с большими углами атаки к апе-
1И. М. Пашковский, Особенности устойчивости и управляемости
скоростного самолета, Воениздат, 1961, стр. 221.
150
Фиг. 3.25. Характер изменения угло-
вой скорости крена сох max, соответ-
ствующей максимальному отклоне-
нию элеронов, и критической угловой
скорости крена сох кр с ростом чи-
сел М полета.
Отклонение Угол Угловая скорость
злерона скольжения крена
Фиг. 3. 26. Влияние поперечной устойчивости на поведение само-
лета при отклонении элеронов на различных режимах полета
(//^12 км; М^2).
а—полет с большой перегрузкой, б-—полет на отрицательных углах атаки.
0
------исходный самолет стх<0;
В
------самолет с
151
риодической потере устойчивости, выражающейся в неограничен-
ном возрастании углов крена и скольжения, для предотвращения
которого летчику приходится быстро перекладывать элероны в об-
ратную сторону (см. фиг. 3. 26, а —
пунктирная кривая).
Как показывают исследования, с
точки зрения предупреждения на-
ступления инерционного резонанса
на всех режимах полета желательно
иметь поперечную устойчивость,
близкую к нейтральной L
О)
Индикаторная скоростьв км/час
Фиг. 3.28. Снижение значений крити-
ческой угловой скорости крена по
мере совершенствования схем ско-
ростных самолетов.
Фиг. 3.27. Влияние измене-
ния путевой устойчивости
на поведение самолета при
отклонении элеронов в го-
ризонтальном полете.
-----• исходный самолет,
—----путевая устойчивость nzj, Увеличение степени путевой ста-
увеличена. ТИЧССКОЙ УСТОЙЧИВОСТИ бЛЗГОПрИЯТНО
сказывается на расширении зоны
безопасного маневрирования с точки
зрения невозможности наступления инерционного резонанса
(фиг. 3.27) 1 2.
Итак, полет на больших высотах (большие углы атаки) с боль-
шими числами М современных самолетов с длинными фюзеляжами
и крыльями малых удлинений создает все предпосылки для на-
ступления инерционного резонанса вследствие роста поперечной
статической устойчивости самолетов с треугольными и стреловид-
1 И. М. Пашковский, Особенности устойчивости и управляемости ско-
ростного самолета, Воениздат, 1961, стр. 228—229.
2 Там же, стр. 230—231.
152
ными крыльями на больших су и уменьшения путевой статическол
устойчивости. Развитию инерционного резонанса способствует
и уменьшение демпфирования колебаний. Вследствие этого для
современных сверхзвуковых самолетов инерпионный резонанс
представляет реальную опасность (фиг. 3.28)
На основании изложенного в гл. III можно отметить следующие
основные недостатки устойчивости и управляемости современных
скоростных самолетов, связанные с особенностями перехода
к сверхзвуковым скоростям полета и изменением аэродинамиче-
ских схем и компоновки.
1. Значительное увеличение продольной статической устойчиво-
сти по перегрузке, снижающее маневренность истребителя, умень-
шающее качество \k~ —), а также вызывающее возрастание по-
\ сх I
терь на балансировку.
2. Уменьшение эффективности руля высоты при М>1, что в со-
четании с п. 1 вызывает серьезные трудности обеспечения продоль-
ной балансировки с помощью руля высоты.
3. Резкое изменение градиентов перемещений рычага продоль-
ного управления и усилий на нем по перегрузке (%в и Р” ) во всем
летном диапазоне.
4. Местная неустойчивость по скорости на околозвуковых ско-
ростях, приводящая к затягиванию в пикирование при разгоне
и забросу по перегрузке при торможении со сверхзвуковой ско-
рости.
5. Ухудшение демпфирования, приводящее к слабому затуха-
нию собственных колебаний самолета.
6. Уменьшение путевой устойчивости при больших числах
М полета, особенно при увеличении угла атаки.
7. Возможность наступления инерционного резонанса, т. е. по-
тери устойчивости при маневре по крену.
8. Жесткость траектории.
9. Возможность проявлений обратной реакции по крену на дачу
ноги.
10. Неблагоприятное соотношение угловых скоростей крена
и рыскания при боковых маневрах (большие х).
1 Вопросы предупреждения наступления инерционного резонанса и пилоти-
рование в зоне возможного резонанса изложены в статье М. Г. Котика
и А. А. Щербакова «Устойчивость и управляемость сверхзвукового самолета
на маневрах с креном», см. сборник «Летчику о практической аэродинамике» под
ред. Г. А. Седова и М. Ф. Реброва, Воениздат, 1961, стр. 107.
Глава IV
УЛУЧШЕНИЕ ХАРАКТЕРИСТИК УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ МЕТОДАМИ АЭРОДИНАМИЧЕСКОЙ
КОМПОНОВКИ И ВЫБОРОМ ФОРМ СВЕРХЗВУКОВОГО
САМОЛЕТА
Резкое возрастание сопротивления за счет сжимаемости возду-
ха при околозвуковых скоростях и ухудшение характеристик устой-
чивости и управляемости заставили конструкторов и ученых искать
пути уменьшения волнового сопротивления с целью максимально
возможного уменьшения потребной тяги двигателей, а также пути
улучшения характеристик устойчивости и управляемости для обес-
печения безопасности полетов. Последние мероприятия были не-
обходимы для того, чтобы сделать сверхзвуковой самолет доступ-
ным для широкого и безопасного применения с различными це-
лями, вплоть до перевозки пассажиров со сверхзвуковой скоростью
на огромные расстояния.
В результате теоретических и экспериментальных исследований
было найдено, что весьма эффективной мерой для уменьшения вол-
нового сопротивления и снижения интенсивности кризисных явле-
ний на околозвуковых скоростях является применение стреловид-
ного крыла и оперения, использование которых позволило сравни-
тельно легко превысить скорость звука. Если преодоление
звукового барьера за счет резкого увеличения тяги двигателей на
самолете с прямым крылом и оперением с достаточно большой
относительной толщиной профиля вызывало весьма серьезные
трудности в управлении и приводило нередко к созданию аварий-
ной ситуации (см. приведенные в гл. III примеры испытаний само-
лета Х-1), то на самолетах со стреловидным крылом на околозву-
ковой скорости катастрофических явлений уже не было.
Одними из первых преимущества стреловидного крыла оцени-
ли советские авиационные конструкторы. Первые реактивные са-
молеты со стреловидными крыльями создаются в нашей стране
в 1947 г. в ОКБ, руководимых А. И. Микояном и С. А. Лавочки-
ным. На основе первого самолета со стреловидным крылом
(Ла-160), достигшего числа М=0,92, в ОКБ С. А. Лавочкина со-
154
здается околозвуковой (М=0,984) истребитель Ла-15 со стрело-
видностью крыла х=45°, на котором в 1948 г. И. Е. Федоров при
пологом пикировании достиг М>1. При этом не было отмечено
особых трудностей в управлении и интенсивного затягивания в пи-
кирование Ч Во время испытаний истребителя МИГ-15 (фиг. 4. 1, б)
летчик-испытатель В. Н. Юганов одним из первых достиг сверх-
звуковой скорости без существенных аномалий в управлении.
Фиг. 4. 1. Истребители МИГ-9 (а) и МИГ-15 (б).
Экспериментальный самолет Дуглас D-558-II «Скайрокет» со
стреловидным крылом, испытывавшийся одновременно с самолетом
Белл Х-1 (х=0; с=10%), переходил на сверхзвуковую скорость
и обратно на дозвуковую, в отличие от последнего, достаточно
плавно, если не считать явлений околозвукового бафтинга и незна-
чительной «валежки» 1 2.
Было установлено, что с увеличением угла стреловидности
крыла увеличивается значение Мкр, кризисные явления и измене-
ние mzQ в околозвуковой зоне проходят более плавно, а смещение
фокуса назад происходит не только более плавно, но и на меньшую
величину (фиг. 4.2). Еще более эффективным оказывается приме-
1 П. Т. Асташенков, Полет в новое, Госполитиздат, 1961, стр. 36.
2 У. Бриджмен, Ж- Азар, Один в бескрайнем небе, Воениздат, 1959,
стр. 187—189.
Бафтинг — тряска самолета в результате срывного обтекания его частей:
крыла, оперения, фюзеляжа.
155
видными и треугольными крыльями
Фиг. 4.2. Изменение по числам М полета
степени устойчивости по перегрузке
(хр—хт) за счет сдвига фокуса у самоле-
тов разных схем:
/—самолет с прямым крылом большого удлине-
ния и толстым профилем (х=0, Х=5, £=10%),
2—сверхзвуковой самолет со стреловидным кры-
лом (х=35°; Х=3,4, с=8%), 3—сверхзвуковой бес-
хвостый самолет с треугольным крылом (Х=2.5,
с=5»/о).
нение треугольных крыльев, при применении которых удается со-
четать эффекты стреловидности, малого удлинения и малой отно-
сительной толщины профиля крыла при достаточной жесткости.
Последняя является весьма благоприятным фактором, так как
жесткость стреловидного крыла с увеличением угла стреловидно-
сти быстро уменьшается, что приводит к новым затруднениям
(см. гл. VIII).
Более плавное смещение фокуса назад у самолетов со стрело-
при переходе на сверхзвуко-
вую скорость и обеспечивает
более плавное изменение по-
казателей продольной стати-
ческой устойчивости ап и av
и отсутствие явлений интен-
сивного затягивания в пики-
рование, так как у современ-
ных самолетов зона неустой-
чивости по скорости оказы-
вается достаточно ограни-
ченной (фиг. 4.3, а). Вслед-
ствие этого «ложки» на ха-
рактеризующих продольную
статическую управляемость
балансировочных кривых
xB=f(M) значительно «сгла-
живаются» (см. фиг. 4.3,6).
Уменьшение относитель-
ной толщины профилей
крыла и оперения, рекомен-
дованное по результатам предварительных исследований первона-
чально для уменьшения волнового сопротивления, оказалось также
весьма полезным и для улучшения управляемости. В продольном
управлении применение более тонких профилей крыла даже при
безбустерной системе управления обеспечивает более приемлемые
характеристики изменения усилий на рычаге продольного управле-
ния при разгоне самолета до сверхзвуковой скорости, т. е. «ложки»
на балансировочных кривых РВ = /(М) становятся менее глубокими
(фиг. 4. 4). Эта мера обеспечивает и повышение эффективности по-
перечного управления при больших скоростях, так как в результате
исследований было найдено, что рули с меньшим углом схода верх-
ней и нижней поверхностей у задней кромки профиля обладают
большей эффективностью на около- и сверхзвуковых скоростях
полета (фиг. 4.5).
Уменьшение относительной толщины профиля крыла наряду
с увеличением его жесткости для увеличения эффективности попе-
речного управления было применено, например, при модификации
крыла самолета Белл Х-2, после того как в начале 1947 г. в резуль-
тате продувок модели самолета в аэродинамической трубе было
156
установлено, что на больших скоростях элероны неэффективны
и не обеспечивают поперечного управления самолетом. Самолет
Х-2 с модифицированным крылом сохранял поперечную управляе-
мость при осторожном управлении до М = 31.
Фиг. 4.3. Сравнение изменения по числам М показателей продольной
статической устойчивости и управляемости у современных сверхзвуковых
самолетов и самолетов старых схем (с прямым крылом большого удлине-
ния и толстым профилем).
а—характер изменения коэффициентов продольной статической устойчивости по пере-
грузке (ол) и по скорости ((Ту),
б—характер балансировочных кривых хв =f(M).
-----современный сверхзвуковой самолет %=60°,----------самолет старой схемы %=0.
Однако, применение стреловидных и треугольных крыльев
создало новую проблему — уменьшение продольной статической
устойчивости по перегрузке (вплоть до неустойчивости) на боль-
ших углах атаки вследствие концевых срывов потока. Эти срывы
Появление скачков уплотнении
на верхней поверхности крыла
''Появление скачков уплотнений
на нижней поверхности крыла
Фиг. 4. 4. Влияние относительной толщины про-
филя крыла на характер балансировочных кри-
вых PB=f(M).
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, 1961,
стр. 166 и 203.
Изучение характеристик устойчивости и управляемости на больших скоростях
при применении крыльев с различной относительной толщиной профиля прово-
дилось в воздухе на самолетах Х-1В (с=8°/о) и Х-1Е (с=4°/о).
157
происходят из-за наращивания пограничного слоя в течении по-
тока вдоль размаха крыла со скоростью Vsinx, вызванном наличи-
ем стреловидности (фиг. 4.6), и отрывом потока от по-
верхности крыла вследствие уменьшения его кинетической
энергии. При этом происходит резкое уменьшение подъ-
емной силы на расположенных позади центра тяжести самолета
концах крыла, что и дает прирост продольного момента на кабри-
рование и уменьшение продольной статической устойчивости по
перегрузке на больших углах атаки вследствие смещения вперед
фокуса крыла.
Фиг. 4.5. Влияние сжимаемости воздуха на эффективность по-
верхностей управления различных типов.
О—угол схода, д—угол отклонения рулевой поверхности.
Из-за наличия концевых срывов у стреловидных и треугольных
крыльев на больших углах атаки значительно снижается эффек-
тивность элеронов \ что приводит к серьезным затруднениям обес-
печения поперечной управляемости на режимах посадки и полета
на больших высотах.
Для борьбы с отрывом пограничного слоя у концов стреловид-
ных крыльев достаточно эффективной мерой оказалось разделение
потока, обтекающего крыло вдоль всего полуразмаха, на отдель-
ные короткие участки с целью предотвращения интенсивного на-
капливания пограничного слоя у концов крыла и его отрыва. Для
этой цели на верхней поверхности стреловидных крыльев стали
устанавливать перегородки — аэродинамические гребни (см.
фиг. 4.1,6), которые предотвращали перетекание пограничного
слоя и его накопление вдоль размаха, приводившее при взаимо-
действии с концевым интенсивным вихрем к отрыву пограничного
слоя. Теперь вместо одного интенсивного вихря образуется ряд
незначительных вихрей, число которых определяется числом пере-
городок. В последнее время вместо перегородок часто стали приме-
нять «запилы» на передней кромке крыла, которые работают как
1 Это снижение эффективности элеронов на стреловидных крыльях при боль-
ших углах атаки не следует путать с потерей эффективности элеронов вследствие
влияния сжимаемости (при больших числах М) или нежесткости крыла (при
больших скоростных напорах).
158
перегородки, предотвращающие перетекание пограничного слоя
вдоль размаха, но в отличие от них эффективны во всем диапа-
зоне скоростей. «Запилы» применяются на стреловидных и тре-
угольных крыльях.
Так, например, при проектировании канадского истребителя —
перехватчика Авро CF-105 «Эрроу» (фиг. 4. 7) 1 в процессе проду-
вок модели самолета было установлено, что вследствие интенсив-
ного вихреобразования и концевых срывов зависимость mz=f(a)
становится неблагоприятной («ложка» даже при небольших
углах атаки). Наличие «ложки» на кривой про-
Фиг. 4. 7. Канадский истребитель-перехват-
чик Авро CF-105 «Эрроу» с модифициро-
ванным треугольным крылом, на передней
кромке которого имеются «запилы» и «на-
плывы».
больших углах атаки, появляющейся в результате
срыва потока на концах первоначального вари-
Фиг. 4.6. Состав-
ляющие скорости
обтекания стрело-
видного крыла.
(Подъемную силу
создает состав-
ляющая скорости
V cos %).
анта крыла.
Применение одного только «запила» не давало устойчивых
результатов и оказалось значительно эффективнее с «наплывами»
от «запила» по передним кромкам концевых частей крыла.
Весьма существенной оказалась глубина запила, которую
нельзя делать большой вследствие уменьшения прочности крыла.
При модификациях крыла самолета CF-105 были учтены ре-
зультаты работ фирмы «Конвэр» по уменьшению индуктивного
сопротивления крыла самолета F-102 путем конической профили-
ровки крыла (которая приближает распределение циркуляции по
размаху крыла к оптимальному — эллиптическому) и английской
фирмы «Авро» по отодвиганию границы начала бафтинга на само-
лете «Вулкан» путем отгиба вниз носка крыла и уменьшения отно-
сительной толщины его профиля. В результате этого хорда конце-
вых участков крыла самолета CF-105 была увеличена на 10% («на-
плыв») и применена коническая профилировка крыла с отгибом
1 Aeroplane, No. 2458, 2459, 1958;
Flight, No. 2594, 1958.
Journal RAS, No. 576, XII, 1958.
159
носка вниз на 4° у «запила» и увеличением угла отгиба до 8° у кон-
цов, что значительно сдвинуло границу бафтинга. При крейсер-
ском значении числа М=0,925 бафтинг у модели с наплывом, но
без отгиба носка начинался при су—0,26, а после конической про-
филировки— пои cJ/=0,41.
Фиг. 4.8. Характер вихреобразования и соответствующая зависи-
мость коэффициента продольного момента mz от угла атаки а
на первоначальном варианте и модифицированном крыле само-
лета CF-105.
на современных сверхзвуковых
местн
Зоныверхзйукобого яятиОиш1
обтекания Скачок уплотнении
Фиг. 4.9. Отрыв пограничного слоя
на профиле за скачком уплотнения.
Отгиб носка концевых участков крыла, уменьшая индуктивное
сопротивление на дозвуковых скоростях, не вызывает значительно-
го прироста сопротивления при сверхзвуковых скоростях, что
и объясняет достаточно широкое применение конической крутки
самолетах (например, Конвэр
F-1024, F-106A, В-58, Авро
CF-105, Дассо «Мираж» IV и
Др-)-
Околозвуковой бафтинг
свойственен в большей или
меньшей степени всем самоле-
там, так как вызывается отры-
вом пограничного слоя на про-
филе в результате резкого пе-
репада давлений за скачком
уплотнения (фиг. 4.9).
Большие исследования бафтинга были проведены английской
фирмой Авро и NACA *. Отработка формы крыла бомбардировщика
Авро «Вулкан» велась не только с помощью продувок моделей, но
и летных исследований бафтинга на прообразах «Вулкана» —
экспериментальных самолетах Авро 707А и 707В. Для предотвра-
1 Национальный консультативный комитет по авиации (США).
160
щения преждевременного отрыва пограничного слоя за скачком
и наступления бафтинга было найдено два средства: уменьшение
интенсивности скачка путем уменьшения относительной толщины
профиля и увеличение энергии пограничного слоя путем установки
предкрылков, *сдува пограничного слоя или установкой турбулиза-
торов, т. е. небольших выступающих в поток пластинок, установ-
ленных с некоторым углом к направлению потока для его за-
крутки.
Уменьшение относительной
толщины профиля оказалось весь-
ма эффективной мерой против
околозвукового бафтинга, однако
это привело к возникновению
бафтинга на малых скоростях
вследствие срыва потока с острой
передней кромки профиля. Для
ликвидации этого срыва пришлось
отогнуть носок профиля на концах
крыла вниз (фиг. 4. 10). Такой
модификации (уменьшено с и
отогнут носок у «наплыва») под-
верглось крыло бомбардировщика
Авро «Вулкан» В.2 для увеличе-
ния его скорости и высоты поле-
та *.
Исследования показали, что.
при относительной толщине про-
филя с менее 5% установка турбу-
Фиг. 4. 10. Модификация крыла
самолета Авро «Вулкан».
лизаторов для устранения срыва
потока в хвостовой части профиля за скачком уплотнения не тре-
буется.
Вместо концевых наплывов или предкрылков весьма часто при-
меняются отклоняемые носки крыла (например, на самолетах
фирмы Боинг, на французском палубном истребителе-бомбарди-
ровщике Дассо «Этандар» IV М и др.).
Наиболее эффективной мерой борьбы с околозвуковым бафтин-
гом, потерей эффективности элеронов и ухудшением продольной
устойчивости из-за концевых срывов на стреловидных крыльях
оказалось применение сдува пограничного слоя, которое находит
все более широкое распространение на современных самолетах
(например, на английском палубном самолете Блэкберн NA.39.
«Бакэнир»’ и др.) наряду с системами сдува пограничного слоя
с закрылков для улучшения посадочных характеристик (фиг. 4. 11).
Однако, системы сдува пограничного слоя достаточно сложны;
1 Interavia, No. 4509, 21 VI; No. 4562, 2 IX, 1960;
Aeroplane, No. 2422, 1957;
Flight, No. 2551, 1957; No. 2558, 1958.
161
они требуют отбора воздуха от компрессоров двигателей самолета
и установки специальной системы трубопроводов и выдувных со-
пел, что достаточно часто определяет отказ от этих систем и при-
менение более простого способа поперечного управления на боль-
ших углах атаки — с помощью интерцепторов1 2.
На современных скоростных самолетах интерцепторы широко
применяются не только для повышения эффективности поперечного
управления
управления
турбулиза-
Фиг. 4.11. Размещение
торов, воздушного канала и щели
системы сдува пограничного слоя
на концевых участках крыла са-
молета Блэкберн NA.39 «Бакэ-
нир».
на больших углах.атаки, но также и- для поперечного,
на больших скоростях, когда элероны постепенно те-
ряют эффективность вследствие вли-
яния сжимаемости и нежесткости
крыла.
Следует ожидать, что дальней-
ший рост скоростей и высот полета
приведет к необходимости проекти-
ровать элероны в виде цельнопово-
ротных концов крыла или даже
цельноповоротных крыльев, как это
делается сейчас на некоторых управ-
ляемых снарядах (например, Боинг
«Бомарк»). Эта необходимость ста-
новится особенно острой вследствие
все больших конструктивных затруд-
нений обеспечения жесткости тонких
/—щель для выдувания воздуха, 2—тур-
булизаторы, 3—элервн, 4—воздушный
канал системы сдува пограничного
слоя.
крыльев.2
Ухудшение маневренности скоро
стных истребителей вследствие недо
статочной эффективности продоль
ного управления с помощью руля высоты заставило конструкторов
искать пути повышения эффективности продольного управления.
Значительно большая эффективность цельноповоротного стаби-
лизатора по сравнению с рулем высоты (см. фиг. 3.4, б) навела
на мысль использовать для продольного управления отклонение
стабилизатора.
Уже на первых экспериментальных сверхзвуковых самолетах
для обеспечения продольной балансировки применялся подвижный
1 Интерцепторы — пластины, выдвигающиеся или отклоняющиеся из профи-
ля крыла с помощью специальных приводов и вызывающие срыв потока на этом
крыле, чем и достигается получение дополнительного момента крена.
На многих самолетах (особенно палубных) одновременное отклонение интер-
цепторов на обоих крыльях используется для увеличения крутизны планирования
во время посадки на палубу авианосца, так как отклонение интерцепторов вызы-
вает значительное ухудшение качества. Это используется также для торможения
самолета при пробеге.
2 Так, например, уже на английском экспериментальном самолете Бристоль
Т. 188 (М=3) расположенные у концов прямого крыла элероны имеют мощную
роговую компенсацию в виде отклоняемых концевых участков крыла, которые
на больших сверхзвуковых скоростях и создают при отклонениях основную часть
момента крена.
162
стабилизатор с отдельным электрическим или механическим при-
водом. Скорость перекладки стабилизатора и углы его отклонения
были недостаточны для повышения маневренности самолета, но
это создавало возможность сбалансировать машину на режимах
сверхзвукового полета.
Вопрос о продольной маневренности самолета нужно рассмат-
ривать с двух сторон:
1) исходя из возможных перегрузок по несущим свойствам
крыла;
0,0 0,7 0,8 0,9 1,0 7,7 1,2 13 7,4 1.5 1fi 1,7 1.8 M
Фиг. 4.12. Диапазоны используемых значений
коэффициента су крыла при продольном
управлении рулем высоты и цельноповоротным
стабилизатором.
Зона /—ограничение с у несущими свойствами крыла
или началом тряски самолета (судоп). В этой зоне
эффективность продольного управления достаточна
для достижения су>Судоп)’ 30на 7/—ограничение с у
возможностью горизонтального оперения создавать
необходимые балансировочные моменты. В этой зоне
несущие возможности крыла не используются пол-
ностью (cv<Cy ДОп), вследствие недостаточной эффек-
тивности продольного управления; стрелкой показано
расширение зоны I за счет применения цельнопово-
ротного стабилизатора.
2) исходя из достижимых перегрузок по максимальной воз-
можности горизонтального оперения создавать большие продоль-
ные балансировочные моменты.
На фиг. 4. 12 показан возможный диапазон использования су
крыла при балансировке рулем высоты и цельноповоротным стаби-
лизатором. Как следует из приводимых кривых, при наличии цель-
ноповоротного стабилизатора несущие свойства крыла на сверх-
звуковых скоростях удается использовать значительно полнее.
Поэтому продольное управление с помощью цельноповоротного
стабилизатора оказалось исключительно эффективным и самоле-
ты, имеющие такое управление, по своей маневренности значитель-
но превзошли своих предшественников с рулем высоты (фиг. 4. 13).
За границей цельноповоротный стабилизатор был установлен
впервые на самолете Норт Америкен F-86 «Сейбр» модификации
«Е», что, по отзыву летчика-испытателя, значительно улучшило
163
Фиг. 4. 13. Расширение обла-
стей, в которых возможно соз-
дание заданной перегрузки,
при переходе на продольное
управление цельноповоротным
стабилизатором (расчет).
1 1 > ’ 1 1 руль высоты,-- цельно-
поворотный стабилизатор.
маневренность самолета на больших скоростях и высотах Ч При-
менение цельноповоротного стабилизатора наряду с включением
в систему управления бустеров (см. гл. V § 1) существенно облег-
чило управление экспериментальным сверхзвуковым самолетом
Белл Х-2, достигшим скорости 3380 км!час. В настоящее время
сверхзвуковые маневренные самоле-
ты имеют управляемый стабилиза-
тор, за исключением самолетов,
спроектированных по бесхвостой
схеме.
При применении на самолете
цельноповоротного стабилизатора
явление заброса по перегрузке при
торможении с постоянным углом
отклонения стабилизатора (зафикси-
рованной ручкой) проявляется менее
резко, так как изменение эффектив-
ности стабилизатора при изменении
скорости от сверхзвуковой до дозву-
ковой происходит в значительно
меньших пределах, чем у руля высо-
ты. Поэтому забросы по перегрузке
при торможении на самолете с пря-
мым крылом достаточно большого
удлинения и большой относительной
толщиной профиля с рулем высоты
могут достигать значений порядка
nw=10, в то время как у самолета
с цельноповоротным стабилизатором
значения перегрузки не превосходят
3—4, как следует, например, из фиг.
3. 5, б (переход самолета F-86D с режима «б» на режим «а» с за-
фиксированной ручкой, при котором Путах не превышает 3,2, хотя
самолет F-86D и проектировался как околозвуковой самолет и име-
ет крыло с небольшим углом стреловидности и достаточно боль-
шой относительной толщиной профиля).
Следует особо отметить, что аэродинамической компоновкой
и выбором профилей крыла и оперения можно добиться значитель-
но более плавного изменения производной коэффициента продоль-
ного момента гп? при изменении чисел М полета свыше Мкр, что
приводит к существенно менее резкому проявлению неустойчивости
по скорости, и если не к устранению, то к значительному «смяг-
чению» опасных явлений (забросов по перегрузке при торможении,
затягиванию в пикирование и пр.). Так для современных сверх-
звуковых самолетов с крыльями большой стреловидности (а также
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, I960,
стр. 124.
164
и треугольными крыльями) и тонкими профилями заброс по пере-
грузке при торможении с зафиксированным стабилизатором не
превышает значений Дпу=1—1,5, а сам процесс торможения зна-
чительно растягивается во времени вследствие высокого аэродина-
мического совершенства самолета, имеющего достаточно малое со-
противление.
Как уже отмечалось, переход к сверхзвуковой скорости сопро-
вождается возрастанием момента на пикирование, для компенса-
ции которого у самолета с хвостовым горизонтальным оперением
необходимо увеличивать направленную вниз подъемную силу гори-
зонтального оперения с тем, чтобы увеличить балансировочный
момент на кабрирование и сохранить условие (mz)6.r.o+(^z)r.o==0
(см. фиг. 2. 1).
Общая подъемная сила статически устойчивого самолета с хво-
стовым горизонтальным оперением может быть выражена раз-
ностью:
Y=Y — Y
1 л кр 1 Г.О’
Если при дозвуковой скорости Уг.о составляет в горизонтальном
полете приблизительно 0,1Укр, то при сверхзвуковой скорости от-
рицательная подъемная сила горизонтального оперения возрастает
до (0,25—0,3) Укр. Это влечет за собой довольно существенное
уменьшение качества самолета k= — при переходе к сверхзвуко-
вой скорости вследствие возрастания потерь на балансировку
(сила сопротивления Q растет).
Потери качества самолета, обусловленные балансировкой, осо-
бенно невыгодны вследствие общего снижения качества из-за
резкого возрастания сопротивления при переходе к сверхзвуковой
скорости (фиг. 4. 14). Как показывает практика, у сверхзвуковых
самолетов при (М>1) значения качества не превышают k=b—7.
Именно поэтому дополнительные потери качества на балансиров-
ку, возрастающие приблизительно пропорционально росту стати-
ческой устойчивости, и становятся особенно невыгодны, так как
только в результате балансировочных потерь дальность самолета
на сверхзвуковых режимах снижается на 10—20%.
Величина потерь качества на балансировку сильно зависит от
выбранной схемы самолета. Так на фиг. 4. 15 приведены резуль-
таты расчетов потерь качества Дй на балансировку самолетов
различных схем при скорости, соответствующей М=3, при измене-
нии центровки (Дхт) или смещения фокуса (Дхр) L Из приведенной
схемы хорошо видно, как велики потери качества, связанные с ба-
лансировкой статически устойчивого самолета. Из приведенных
данных следует непригодность бесхвостой схемы с прямым
крылом. (Пунктиром показано приближенное изменение потерь
качества на балансировку бесхвостого самолета с треугольным
крылом большой стреловидности).
1 Flugwelt, No. 7, 8, VII, VIII, 1960.
165
м
Фиг. 4. 14. Снижение качества
самолета при достижении
сверхзвуковой скорости полета.
(Пунктиром показано измене-
ние характера исходной кривой
при увеличении угла стрело-
видности и уменьшении отно-
сительной толщины профиля
крыла).
Фиг. 4. 15. Потери качества на балансиров-
ку самолетов различных схем при измене-
нии центровки (М=3) (расчеты фирмы
«Локхид»).
Фиг. 4.16. Продольная балансировка само-
лета, построенного по схеме «утка».
1G6
Из фиг. 4. 15 следует также, что наименьшие потери качества
на балансировку получаются при применении схемы «утка», в ко-
торой горизонтальное оперение расположено впереди крыла
и создает положительную балансировочную подъемную силу
(фиг. 4. 16):
Г=Гкр+Гг.о.
Поэтому, как следует из сообщений зарубежной печати, боль-
шинство сверхзвуковых самолетов с большой дальностью полета
проектируются по схеме «утка» (фиг. 4. 17) и значительно реже —
бесхвостки с треугольным крылом (фиг. 4. 18).
Фиг. 4. 17. Проекты сверхзвуковых дальних самолетов (схема «утка»).
а—один из вариантов бомбардировщика Норт Америкен В-70 «Валькирия> (М=3),
б—проект пассажирского самолета фирмы Дженерал Электрик (М=3), в и г—два
проекта пассажирских самолетов (М=3) фирмы Боинг с различным размещением
двигателей.
Так как на самолете схемы «утка» горизонтальное оперение
получается несущим, то можно несколько сократить площадь кры-
ла, что дает выигрыш в весе и сопротивлении. Поэтому качество
самолета, спроектированного по схеме «утка», получается несколь-
ко выше, чем у самолета с хвостовым оперением. Однако действи-
тельный выигрыш не так велик как по расчету, вследствие доста-
точно сильного влияния скоса потока от оперения на крыло.
Рост продольной статической устойчивости по перегрузке при
переходе на сверхзвуковую скорость и увеличение в связи с этим
потерь качества на балансировку, снижающее дальность полета,
заставляют искать пути снижения этой устойчивости до минималь-
но допустимого предела, определяемого условиями нормальной
управляемости.
Для этого было предложено изменять центровку самолета (на-
пример, перекачиванием топлива) при перемене положения фокуса
для сохранения xf—хт = const Практически осуществить такое
предложение оказалось достаточно трудно, так как требовалась
разработка специальных автоматов, определяющих и изменяющих
167
положение центра тяжести самолета при смещениях фокуса, а так-
же установка мощных перекачивающих насосов и специальных
балансировочных баков в хвостовой части фюзеляжа. Однако,
несмотря на эти трудности, такой способ сохранения приблизитель-
но постоянной степени продольной статической устойчивости по
перегрузке при переходе на сверхзвуковую скорость полета при-
меняется на некоторых современных сверхзвуковых самолетах
со значительной дальностью полета. Например, на американском
бомбардировщике Конвэр В-58 «Хаслер» (М>2,2) и французском
Фиг. 4. 18. Сверхзвуковые дальние самолеты бесхвостой схемы.
а—сверхзвуковой бомбардировщик Конвэр В-58 «Хаслер» (М—2,2).
1—элевон, 2—триммер, 3—дефлектор.
б—проект пассажирского самолета ВАС — Сюд Авиасьон «Конкорд»
(М=2,2).
бомбардировщике Дассо «Мираж» IV (М>2) в хвостовой части
фюзеляжа имеются специальные балансировочные баки для пере-
качки топлива, что позволяет на этих самолетах получить мини-
мальные запасы устойчивости и высокое значение качества
на сверхзвуковой скорости, чем и достигается существенное уве-
личение дальности этих самолетов.
Другим способом сохранения постоянной степени продольной
статической устойчивости по перегрузке на дозвуковой и сверх-
звуковой скоростях может быть смещение фокуса вперед при пе-
реходе на сверхзвуковую скорость за счет «установки» в носовой
части горизонтальной поверхности — дестабилизатора. Этот спо-
соб смещения вперед фокуса самолета в последнее время доста-
точно широко обсуждается в печати 1 и заключается, по существу,
в изменении схемы самолета в полете, так как на дозвуковой
скорости носовое оперение должно быть убрано или свободно
1 См. например, статью аэродинамика фирмы «Боинг» Р. Б. Брауна «Балан-
сировочное сопротивление помогает определить форму сверхзвукового пассажир
ского самолета», SAE Journal, XI, 1962, стр. 78—80 и А. А. Лебедев,
Л. С. Чернобровкин, Динамика полета, Оборонгиз, 1962, стр. 157.
168
флюгировать в потоке («плавающее оперение»). «Плавающее»
оперение может создавать подъемную балансировочную силу, ко-
торая сохраняется постоянной при изменениях угла атаки, вызван-
ных атмосферными возмущениями, так как, устанавливаясь в соот-
ветствующее условию тш=0 положение, будет при этом отслежи-
вать изменение угла атаки (т. е. флюгировать). Поэтому такое
оперение не влияет на положение фокуса самолета.,
При переходе к сверхзвуковой скорости носовое оперение
должно быть выпущено в поток, если оно было сложено, или
заклинено специальным приспособлением — в случае применения
флюгирующего на дозвуковой скорости оперения. В этом случае
смещение назад фокуса крыла вследствие перераспределения
давлений будет компенсироваться за счет смещения фокуса впе-
ред от «установки» носового оперения (фиг. 4.19). Кривая 2
на фиг. 4. 19 показывает характер изменения положения фокуса
самолета, спроектированного с флюгирующим на дозвуковой ско-
рости носовым оперением (или по схеме «бесхвостка»). Степень
статической устойчивости такого самолета, определяемая раз-
ностью т^У=хт—xf, при переходе на сверхзвуковую скорость
сильно возрастает. Если же носовое оперение при М>1 заклинить,
то схема самолета «изменится» на схему «утка», положение фо-
куса которой определяется кривой 5. Таким образом, заштрихо-
ванная область на фиг. 4. 19 соответствует степени продольной
/ 2 М
Фиг. 4. 19. Изменение положения фокуса при
различных числах М полета самолетов различ-
ных схем.
/—самолет с хвостовым горизонтальным оперением,
2—самолет с флюгирующим носовым оперением или
«бесхвостка», 3—самолет, спроектированный по схеме
«утка».
статической устойчивости по перегрузке самолета, имеющего
в носовой части стабилизатор, флюгирующий при М<1 и заклини-
вающийся при М>1. Как видно, степень устойчивости такого са-
молета практически не изменяется при переходе с дозвукового
169
на сверхзвуковой режим и обратно и поэтому может быть выбра-
на (путем изменения центровки хт) из условия обеспечения нор-
мальных характеристик управляемости.
Сохранение приблизительно постоянной минимально допусти-
мой степени продольной статической устойчивости по перегрузке
на всех режимах полета позволяет получить не только выигрыш
в дальности для дальнего сверхзвукового самолета, но и выигрыш
в маневренности для легкого самолета на сверхзвуковых ско-
ростях.
Действительно, из выражения 2.8' для балансировочного угла
отклонения руля высоты, написанного для случая продольного
управления с управляемым стабилизатором, можно получить вы-
ражение для максимальных значений су, на которых можно сба-
лансировать машину при полном отклонении стабилизатора (руч-
ка полностью на себя):
<РВ г
max + mzQ
(лу max/бал
Из этого выражения следует, что при уменьшении статической
устойчивости (тсгУ=хТ — хР) по перегрузке значения <?у, которые
Фиг. 4.20. Схема французского сверхзвукового истреби-
теля-перехватчика Норд 1500 «Грифон» со смешанной
силовой установкой (ТРД4-ПВРД) и балансировоч-
ной поверхностью (/) в носовой части фюзеляжа.
170
можно получать в полете, увеличиваются. Следовательно, увели-
/ су \
чиваются и возможные перегрузки п =----------|, т. е. маневрен-
\ су т.п /
ность самолета.
В настоящее время примеры конструктивного осуществления
идеи смещения фокуса за счет изменения схемы самолета в поле-
те не известны, хотя несколько необычная схема французского
сверхзвукового истребителя-перехватчика Норд 1500 «Гриффон»
(фиг. 4.20), имеющего по сообщениям печати1 носовую баланси-
ровочную поверхность и обычный управляемый стабилизатор
в хвостовой части фюзеляжа, позволяет сделать предположение,
что на нем, возможно, осуществлена идея флюгирующего на до-
звуковой скорости носового горизонтального оперения с заклине-
нием его при переходе на сверхзвуковую скорость.
Для вынесения из зоны неблагоприятных скосов потока, кото-
рые могут привести к серьезным осложнениям в продольной ба-
лансировке на сверхзвуковых скоростях, на большинстве совре-
менных сверхзвуковых самолетов, спроектированных по нормаль-
ной схеме, горизонтальное оперение устанавливается в нижней
части фюзеляжа, так как именно в этой зоне скос потока за кры-
лом на сверхзвуковых скоростях получается наименьшим
(см. фиг. 3.11,6). Низко расположенный стабилизатор имеют по-
давляющее большинство сверхзвуковых самолетов со стреловид-
ными крыльями, например, Норт Америкен F-100, Рипаблик F-105,
Чанс Воут F8U, Инглиш Электрик Р.1, Хоукер Р.1121 и многие
другие. Исключение составляют самолеты с очень «короткими хво-
стами» (например, Саундерс PoSR.53, Норд 1402), а также с пря-
мыми крыльями малого удлинения (Локхид F-104 и Бристоль
Т.188), где горизонтальное оперение установлено на киле.
Для экспериментального самолета Бристоль Т.188 наиболее
благоприятное положение горизонтального оперения на конце
киля было найдено в результате длительных исследований устой-
чивости и управляемости в аэродинамических трубах и на летаю-
щих моделях, в результате которых было изменено первоначаль-
ное положение оперения (в нижней части киля).
Особые затруднения вызывает обеспечение боковой устойчи-
вости и управляемости современных скоростных самолетов
на больших сверхзвуковых скоростях и при больших углах атаки,
так как здесь особенно сильно сказывается влияние неблагоприят-
ного изменения аэродинамических, инерционно-массовых и жест-
костных характеристик современных самолетов. Как было отмече-
но в гл. III, аэродинамическими причинами, вызывающими эти
затруднения, являются, в основном, потеря эффективности верти-
1 Сб. «Сверхзвуковые самолеты» под ред. Н. И. Листвина, ИЛ, 1958,
стр. 208.
171
кального оперения (уменьшение и ) и увеличение попереч-
ной статической устойчивости (увеличение т£) на больших углах
атаки самолетов со стреловидными и треугольными крыльями.
На малых скоростях путевая устойчивость и путевое демпфирова-
ние сильно снижаются вследствие применения на современных
сверхзвуковых самолетах тонких стреловидных вертикальных опе-
рений (имеющих более низкие значения с?, чем у дозвуковых
самолетов с прямыми килями, имевшими с= 104-12%) и затене-
ния оперения длинными фюзеляжами и крыльями малого удлине-
ния. На больших сверхзвуковых скоростях обеспечение необходи-
мой путевой устойчивости (т^) и путевого демпфирования (тУ )
оказывается весьма затруднительным, вследствие обычного
уменьшения производной с% (см. фиг. 3. 16) вертикального опере-
ния из-за перераспределения давлений по профилям. Это усугуб-
ляется также значительным затенением вертикального оперения
фюзеляжем и крылом, вследствие необходимости полета на боль-
ших высотах с большими углами атаки. Как уже отмечалось
(см. гл. III, § 4), уменьшение путевой устойчивости и демпфирова-
ния наряду с увеличением поперечной устойчивости приводит
к возрастанию колебательности бокового движения, уменьшить
которую можно легче всего увеличением путевого демпфирования
[см. выражение (2.39), где определяющий затухание боковых ко-
лебаний коэффициент а зависит, в основном, от производной
и путевой статической устойчивости [см. выражение (2.40), где
определяющий интенсивность забросов по крену критерий к умень-
шается с ростом путевой устойчивости ту].
Увеличить путевое демпфирование (т “у) можно, в основном,
за счет увеличения плеча вертикального оперения LB.o (см. выра-
жение 3.4), что на готовом самолете сделать весьма затруднитель-
но, а увеличить путевую устойчивость (т?) —за счет увеличения
площади вертикального оперения SB.O (см. выражение 2.16).
В результате выявления при летных испытаниях недостаточной
путевой устойчивости была увеличена площадь вертикального
оперения многих скоростных самолетов (например, Норт Амери-
кен F-100 «Супер Сейбр», Инглиш Электрик Р.1 «Лайтнинг»,
Боинг 707-720 и многих других).
При проектировании самолета Белл Х-2 были учтены замеча-
ния летчиков-испытателей о недостаточной путевой устойчивости
выпущенного ранее самолета Х-1 при больших числах полета
и результаты продувок первоначальной модели самолета Х-2.
Киль самолета Х-2 был значительно увеличен и на руле поворота
установлены турбулизаторы (см. ниже). В результате этого путе-
вая устойчивость самолета Х-2 была значительно улучшена, что
впоследствии отмечалось летчиками. Но на предельных скоростях
172
(М>3) этой меры уже оказалось недостаточно и самолет снова
становился недостаточно устойчивым.
Уменьшить поперечную устойчивость (т?х) самолета со стрело-
видным и треугольным крылом можно путем придания крылу от-
рицательного угла поперечного V (ф<СО), что и применяется
на многих самолетах (см. фиг. 4.1,6) для уменьшения колебатель-
ности бокового движения на больших углах атаки (см. фиг.
4.21,а).
Фиг. 4.21. Характер изменения поперечной статической устойчивости т$х само-
лета со стреловидным крылом с различными углами поперечного V при измене-
нии коэффициента подъемной силы су(а). Применение отогнутых вниз концов
крыла для уменьшения производной т?х на английском сверхзвуковом бомбар-
дировщике ВАС TSR.2 (М>2,2) (б).
/—отогнутые концы крыла, 2—закрылки со сдувом пограничного слоя, 3—элевоны, 4—откло-
няемая задняя часть элевона, 5—обтекатель привода, 6—цельноповоротный киль.
Однако, существенно улучшить динамические характеристики
современных самолетов в боковом движении путем значительного
увеличения отрицательного поперечного V крыла не удается, так
173
как это может привести либо к поперечной неустойчивости
на больших скоростях (тх>0), либо к недопустимому опусканию
концов крыла и возможности их задевания за землю.
Поэтому в настоящее время изыскиваются другие способы
уменьшения тх на больших углах атаки. Так например, в RAE
(Английский институт авиации) были найдены два новых спо-
соба: 1
1. Придание положительного поперечного V (ф = 7,5°) цент-
ральной части крыла на 2/3 полуразмаха и значительного отрица-
тельного поперечного V (ф =—15°) консолям.
В результате этого мероприятия тх у крыла с задней кромкой
без стреловидности (треугольное крыло, треугольное крыло со сре-
занными концами или с оживальной передней кромкой), имеющего
отношение —=0,24-0,25, уменьшается на 0,05. (&0 — хорда крыла
2^о
по оси самолета, I — размах). При этом расстояние концов крыла
от земли остается таким же, как у крыла без поперечного V.
Аналогичный способ уменьшения производной т?х применен,
например, на новейшем английском сверхзвуковом бомбардиров-
щике ВАС TSR.2, имеющем треугольное крыло с отогнутыми вниз
концами2 (см. фиг. 4.21,6).
2. Добавление больших треугольных наплывов по передней
кромке крыла, в особенности при отгибании вниз этих наплывов.
Характер изменения путевой статической устойчивости самоле-
та при увеличении площади вертикального оперения показан
на фиг. 4. 22, а.
Из графика следует, что для существенного увеличения путе-
вой устойчивости на больших сверхзвуковых скоростях требуется
такое увеличение площади киля, что это вызывает уже существен-
ные конструктивные трудности. Аналогичное увеличение площади
вертикального оперения требуется и для обеспечения приемлемых
характеристик боковой устойчивости и управляемости на посадке
самолета со стреловидным крылом, вследствие значительного
снижения путевой устойчивости самолета из-за недостаточной
эффективности вертикального оперения на малой скорости.
Затенение вертикального оперения на больших углах атаки
сказывается и на существенном снижении демпфирования путе-
вых колебаний (т^у ), как это следует из фиг. 4. 22, б, на которой
приведены результаты английских исследований3 влияния увели-
(5 \
”s^/
и угла атаки на производную
1 Journal RAS, No. 616, IV, 1962, pp. 211—215.
2 Flight, No. 2851, 1963;
Interavia, No. 5156, 5203, 5355, 5359, 5361, 5362, 1963;
Aviation Week, 4 XI, 1963.
з Journal RAS, No. 616, IV, 1962, pp. 211—225.
174
Как показывают исследования, поперечное демпфирование
(гп“хх) с ростом угла атаки увеличивается [см. выражение (3. 3)К
На фиг. 4.23 приведено изменение характеристик боковой ди-
намической устойчивости самолета Боинг В-47 на режиме захода
на посадку при изменении площади вертикального оперения
и угла отрицательного поперечного V крыла. Как следует
из фиг. 4.23, изменение площади вертикального оперения значи-
тельно больше влияет на степень затухания боковых колебаний,
Ось вращения расположена
"\на O.MZ b0
Фиг. 4.22. Влияние изменения площади вертикального оперения на путевую
устойчивость самолета.
а—влияние увеличения площади вертикального оперения SB 0 на статическую путевую
устойчивость самолета при сверхзвуковых скоростях, б—влияние увеличения относитель-
л. *^В.О . .
ной площади расположенного на фюзеляже вертикального оперения ______ на коэффи-
со
У
циент демпфирования рыскания т
У
при различных углах атаки.
испытания фирмы Бристоль (осредненные данные),-----------------испытания RAE
(осредненные данные).
чем на их период. Однако при практически допустимом без су-
щественной переделки конструкции самолета изменении площади
вертикального оперения (на 10—20%) на малых скоростях поле-
та не удается получить удовлетворительных характеристик затуха-
ния боковых колебаний.
Увеличение отрицательного поперечного V крыла тоже мало
сказывается на изменении периода боковых колебаний, так как
влияет, в основном, на уменьшение производной тх [см. выраже-
ние (2.15)], от которой период практически не зависит [см. выра-
жение (2.39) для коэффициента Ь, определяющего период боко-
175
вых колебаний]. Уменьшение производной Шх при увеличении
отрицательного угла поперечного V крыла приводит к уменьшению
колебательности бокового движения [критерий к уменьшается,
см. выражение (2.40)].
Невозможность обеспечения значительного улучшения затуха-
увеличения площади
Фиг. 4.23. Влияние
киля и угла отрицательного поперечного V
крыла на характеристики боковой динами-
ческой устойчивости самолета Боинг В-47
(период короткопериодических колебаний Т
и время затухания амплитуды этих колеба-
ний вдвое t2). Условия захода на посадку:
Я=0, У=240 км/час, закрылки отклонены.
Начало осей координат соответствует
исходному варианту самолета.
ния боковых колебаний с помощью допустимых переделок конст-
рукции самолета заставила конструкторов применять для этой
цели специальные автома-
ты-демпферы рыскания
(см. гл. VI, § 1).
Как следует из фиг.
4. 22, а, наибольшее увели-
чение путевой устойчиво-
сти достигается при уста-
новке дополнительного
вертикального оперения
на нижней поверхности
хвостовой части фюзеля-
жа, так как в этом случае
о оно не находится в затор-
моженном потоке. Такое
размещение вертикально-
го оперения оказывается
наиболее благоприятным
и для увеличения демпфи-
рования рыскания. Уста-
новка вертикального опе-
рения на верхней и ниж-
ней поверхностях фюзеля-
жа применена на экспери-
ментальном гиперзвуко-
вом самолете Норт Америкен Х-15, в конструкции которого имеется
ряд интересных особенностей, с точки зрения обеспечения устойчи-
вости и управляемости на больших и малых скоростях. Так вместо
обычного руля направления применен цельноповоротный киль кли-
новидного сечения, для поперечного управления используются диф-
ференциально отклоняемые половины управляемого стабилизато-
ра— элевоны (см. фиг. 4.24).
Аналогичная схема размещения вертикального оперения была
предусмотрена в проекте гиперзвукового экспериментального са-
молета Дуглас D-558-III.
Однако такое размещение вертикального оперения неприемле-
мо для обычных самолетов, так как приводит к значительным
усложнениям эксплуатации, вследствие невозможности взлета
и посадки с использованием самолетного шасси. (Самолет Х-45,
как и предыдущие экспериментальные самолеты с ЖРД Х-1
и Х-2, запускается со специально оборудованного самолета-носи-
теля, а при посадке нижний киль сбрасывается). Поэтому на про-
176
Фиг. 4.24. Схема экспериментального гиперзвукового самолета Норт Амери-
кен Х-15 «(а) и характеристики устойчивости и управляемости самолета (б),
полученные при продувках в трубах (сплошные кривые) и при летных испыта-
ниях (точки).
/—посадочные закрылки, 2—элевоны, 5—нижний руль направления (сбрасываемый), 4—тор-
мозные щитки, 5—верхний руль направления.
177
актируемых самолетах для больших сверхзвуковых скоростей
увеличение путевой устойчивости предусматривается путем уста-
новки двух килей на верхней поверхности крыла или широкого
фюзеляжа (фиг. 4.17, а, б, в).
По опубликованным в печати 1 сведениям, специальный высот-
ный скоростной самолет Локхид А-11 «Джет Интерцептор» поми-
мо двух верхних килей имеет также большой киль, расположен-
ный снизу, который при посадке, очевидно, сбрасывается, как на
самолете Х-15.
Фиг. 4.25. Схема установки аэродинамического гребня на нижней по-
верхности хвостовой части фюзеляжа.
На современных сверхзвуковых самолетах для увеличения пу-
тевой устойчивости очень часто устанавливают подфюзеляжные
аэродинамические гребни таким образом, чтобы они не мешали
взлету и посадке (фиг. 4.25). Установка нижних килей или греб-
ней ограничивает перетекание воздуха с одной стороны фюзеляжа
на другую при скольжении или колебаниях рыскания, благодаря
чему в создание моментов путевой статической устойчивости
и демпфирования рыскания включается значительно большая
поверхность хвостовой части фюзеляжа [в выражениях (2. 16)
и (3.4) SB.o значительно увеличивается].
Установка подфюзеляжных аэродинамических гребней являет-
ся наиболее простым средством увеличения путевой устойчи-
вости, что и объясняет весьма широкое их применение на сверх-
звуковых самолетах, например, на самолетах Рипаблик F-105
«Тандерчиф», Локхид F-104G «Супер Старфайтер», Чанс Воут
F8U-2N «Крусейдер» (США); Дассо «Мираж» IIIA, Сюд Авиасьон
S0.4050 «Вотур» ПА, Норд 1402 «Жерфо» I (Франция) и др.
В настоящее время на проектируемых вертикально взлетаю-
щих скоростных самолетах нижняя поверхность хвостовой части
фюзеляжа нередко используется для размещения значительных
аэродинамических гребней, подобно тому, как это сделано
^Aeroplane, No. 2870, 12, III, 1964, р. 377.
178
на английском вертикально взлетающем истребителе Хоукер
Р.1127, имеющем подфюзеляжный гребень, по размерам прибли-
жающийся к килю (фиг. 4.26).
На некоторых самолетах роль подфюзеляжных гребней выпол-
няют опущенные вниз половины стабилизатора, установленные
с большим отрицательным поперечным V. В этом случае стабили-
затор выполняет двойную роль: собственно стабилизатора для ба-
лансировки и управления продольным движением и аэродинами-
Фиг. 4.26. Схема английского вертикального взлетающего истребителя Хоу-
кер Р.1127.
/—подфюзеляжный гребень.
ческих гребней для повышения путевой устойчивости. Так сделано,
например, на французских истребителях SNCASO 9050 «Три-
дан» II (угол поперечного V стабилизатора фСт^—20°) и Норд
1500 «Грифон», а также на американском палубном истребителе-
перехватчике Мак Доннел F4H-1 «Фантом» II (фиг. 4.27), устано-
вившем в свое время ряд рекордов по скорости, высоте и скоро-
подъемности для самолетов с ТРД. Угол поперечного V стабилиза-
тора самолета «Фантом» II фСт = —23°.
Значительно повышает эффективность вертикального оперения
и, следовательно; путевую устойчивость самолета (особенно
на дозвуковых скоростях) установка горизонтального оперения
на конце киля. Такая схема, несмотря на серьезные конструктив-
179
ные трудности обеспечения жесткости оперения (флаттер), при-
менена, например, на самолетах Локхид F-104 «Старфайтер», Мак
Доннел F-101 «Вуду», Бристоль Т.188, Саундерс Ро SR-53, Гло-
стер «Джевелин», Хэндли Пейдж «Виктор», Виккерс VC.10,
Боинг 727 и др. По заявлению инженеров фирмы «Локхид», уста-
новка стабилизатора на конце киля самолета F-104 приблизи-
тельно вдвое увеличивает путевую устойчивость, так как в этом
случае стабилизатор играет роль концевой шайбы на киле, значи-
Фиг. 4.27. Схема самолета Мак Доннел F4H-1 «Фантом» II (США).
тельно повышая его эффективность. Однако, как оказалось впо-
следствии, эта мера была недостаточной и после испытаний само-
лета площадь киля была увеличена, а при поставках самолета
странам НАТО и Японии в хвостовой части фюзеляжа был уста-
новлен аэродинамический гребень для повышения путевой устой-
чивости на сверхзвуковых скоростях (модификация F-104Q), так
как, вероятно, европейские требования к устойчивости самолета
оказались выше американских (фиг. 4.28). Последнее предполо-
жение может быть подтверждено еще и следующим примером:
при поставке американских пассажирских самолетов Боинг 707
английской авиационной компании ВОАС по требованию компа-
нии был установлен небольшой подфюзеляжный киль для увели-
чения боковой устойчивости. В США самолет Боинг 707 получил
удостоверение о годности к эксплуатации без этой доработки
(фиг. 4. 29).1
Дальнейшее повышение скоростей полета и связанное с этим
ухудшение путевой устойчивости самолетов требует от конструк-
торов применения еще более эффективных мер для обеспечения
приемлемых характеристик боковой устойчивости и управляе-
мости.
1 Flight, No. 2653, 19 II, 1960.
180
Так как на большой сверхзвуковой скорости (М>2) аэродина-
мические подфюзеляжные гребни оказываются уже недостаточно
эффективными, то это заставило конструкторов начать устанавли-
Фиг. 4.28. Схема самолета Локхид F-104G «Супер Старфайтер»
(М>2,5) (США). (Модификация с подфюзеляжным аэродинами-
ческим гребнем).
вать в нижней части фюзеляжа дополнительные кили, которые
приходится проектировать поворачивающимися до горизонталь-
ного положения или втягивающимися внутрь фюзеляжа для обес-
печения возможности взлета и посадки. Так, например, при проек-
тировании палубного истребителя-перехватчика Грумман F11F-1F
Фиг.-4. 29. Схема самолета Боинг 707 (США). На нижней поверхно-
сти хвостовой части фюзеляжа пунктиром нанесен контур дополни-
тельного киля, установленного по требованию компании ВОАС.
<Супер Тайгер» проблема обеспечения путевой устойчивости
на больших сверхзвуковых скоростях решалась установкой снизу
фюзеляжа двух дополнительных килей, убиравшихся при выпуске
шасси.
181
Очень интересно проследить развитие конструктивных мер для
обеспечения путевой устойчивости на модификациях самолетов
Фолленд «Нэт» (Англия) и Чанс Воут «Крусейдер» (США). Са-
молет «Нэт» модификации Мк.2 был рассчитан на скорость, соот-
ветствующую М=1,35, и не имел в хвостовой части фюзеляжа
никаких гребней. Самолет модификации Мк.5 проектировался
на скорость значительно большую (М>2,2), и для обеспечения
путевой устойчивости в хвостовой части фюзеляжа снизу пред-
усматривалась установка убирающегося при посадке киля.
Для обеспечения возможности уборки этого киля в фюзеляже
пришлось установить два двигателя, между которыми и распола-
гался убирающийся киль с механизмами уборки и выпуска
(фиг. 4. 30) L
На фиг. 4.31 показано развитие самолета Чанс Воут «Крусей-
дер», где по мере увеличения скорости и высоты полета увеличи-
вается площадь подфюзеляжных аэродинамических поверхностей.
На самолете модификации F8U-3 «Крусейдер» III (М>2,5),
установлено уже два подфюзеляжных киля, которые на по-
садке поднимаются вверх и устанавливаются горизон-
тально.
В конструкции бомбардировщика Норт Америкен В-70 «Вальки-
рия» (М = 3) помимо установки двух килей на верхней поверхно-
сти крыла предусмотрено использование поворачивающихся
вниз на большой скорости концов крыла в качестве ниж-
них килей (фиг. 4.17,а). Такое же отклонение концов крыла
вниз для повышения путевой устойчивости предусмотрено
в проекте вертикально взлетающего истребителя Фоккер Рипаб-
лик D.24 (М>2).
Естественно, что такие конструкции вызывают значительное
увеличение веса, но это утяжеление вызывается необходимостью
обеспечения ухудшающихся с ростом скоростей и высот полета
характеристик путевой устойчивости.
Как отмечалось выше, при переходе к сверхзвуковой скорости
эффективность рулей значительно снижается. Особенно сильно
это сказывается на поперечной и путевой управляемости, так как
влияние сжимаемости здесь дополняется уменьшением эффектив-
ности рулей, вследствие нежесткости конструкции крыла и киля
(см. гл. VIII). Поэтому для повышения эффективности органов
поперечного и путевого управлений изыскивались дополнительные
средства. Было установлено, что установкой турбулизаторов
на рулях можно добиться повышения их эффективности, так как
создаваемые турбулизаторами завихрения, повышающие кинети-
ческую энергию пограничного слоя, препятствуют отрыву его
от поверхности руля. Установка турбулизаторов на рулях направ-
ления самолетов Боинг 377 «Стратокрузер», Белл Х-2, Конвэр
1 Interavia, No. 4580, 28 IX, 1960.
182
F-102A, Норт Америкен F-1001 и др. существенно повысила их эф-
фективность, но при этом увеличились и шарнирные моменты.
Некоторое повышение эффективности руля направления дает
установка над ним небольшой горизонтальной пластины (дефлек-
S)
Фиг. 4.30. Схемы английских самолетов Фолленд «Нэт»
двух модификаций (обе с корневыми элеронами).
.а—Мк.2 (М=1,35), б—Мк.5 (М>2,2) с убирающимся нижним
килем 1,
тора). Это устройство является своего рода спрямителем потока
для сохранения плавности обтекания при отклонениях руля
1 Турбулизаторы на руле направления самолетов F-100 хорошо видны на не-
которых опубликованных ,в иностранной печати фотографиях самолета (см., на-
пример, Interavia, No. 4780, 13 VII, 1961).
183
Фиг. 4.31. Разви-
тие самолета Чанс
Воут «Крусейдер»
(США).
a-F8U-1 (М=1,55),
6-F8U-2 (М=1,8) с
двумя подфюзеляж-
ными аэродинамиче-
скими гребнями (/>.
в—F8U-3 (М=2,5) С
двумя подфюзеляж-
ными поворачиваю-
щимися килями 2.
184
на большой скорости и применяется на некоторых сверхзвуковых
самолетах, например, Конвэр F-102A и В-58, Нортроп N-156F
(фиг. 4.32).
Как показали исследования на больших сверхзвуковых скоро-
стях, наибольшей эффективностью обладают рули с тупой задней
кромкой1. Такая форма рулей применена для обеспечения про-
дольной и поперечной управляемостей на больших сверхзвуковых
скоростях в конструкции сверхзвуковых «бесхвостых» истребите-
F-106 (М = 2,5) SAAB-35 «Дракон»
леи-перехватчиков Конвэр
(М = 2), Авро CF-105 (М>
>2).
При гиперзвуковых ско-
ростях (М = 5^-7) наиболь-
шей эффективностью обла-
дают клиновидные профили,
которые и использованы, в
частности, в конструкции
вертикального оперения ги-
перзвукового эксперимен-
тального самолета Норт
Америкен Х-15 (фиг. 4. 24).
Выше было отмечено, что
падение эффективности руля
высоты на сверхзвуковых
Фиг. 4.32. Самолет Нортроп N-156F «Фри-
домфайтер». Обращает на себя внимание
очень большая площадь киля, на котором
установлен дефлектор 1.
скоростях наряду с увеличением продольной статической устойчиво-
сти по перегрузке привело к переходу в продольном управлении на
цельноповоротный стабилизатор. В путевом управлении рули сохра-
нялись дольше, но дальнейшее падение их эффективности при ро-
сте скоростей приведет, скорее всего, к переходу на управление
цельноповоротными килями. Процесс этот уже начался созданием
цельноповоротного киля на самолетах SNCASO 9050 «Тридан» II,
Норт Америкен A3J-1 «Виджилент» и ВАС TSR.2. Такой киль спро-
ектирован для экспериментального самолета Х-15 и предусматри-
вался в проекте гиперзвукового самолета Дуглас D-558-III. Приме-
нение цельноповоротных килей может быть вызвано еще и необхо-
димостью обеспечения достаточной эффективности работы автома-
тических систем стабилизации и демпфирования на больших ско-
ростях полета (см. гл. VI), так как эффективности обычных рулей
для этого может оказаться недостаточно.
Свойственное современным скоростным самолетам ухудшение
и поперечной статической устойчивости и управляемости особенно
на околозвуковых скоростях заставляет принимать специальные
конструктивные меры для обеспечения приемлемых характе-
ристик.
1 Д ж. Нилсен, Аэродинамика управляемых снарядов, Оборонгиз, 1962,
стр. 266, формула (8.75).
185
Для устранения «валежки» на околозвуковых скоростях были
повышены требования к точности профилей крыла и увеличена
жесткость крыльев. Хорошие результаты дало и увеличение стре-
ловидности крыльев (фиг. 4.33,а). Повышение точности обводов
было достигнуто путем применения нового метода сборки «от об-
шивки», вместо общепринятого старого — «от каркаса», при котором
обшивка приклепывалась к предварительно собранному каркасу,
так что общий допуск на контур был суммой допусков на изготов-
ление деталей каркаса и точности их сборки. При сборке «от об-
Фиг. 4.33. Влияние формы крыла на изменение по числам М характеристик
поперечной устойчивости и управляемости..
«—изменение поперечной статической устойчивости самолетов различных схем при росте
чисел М полета.
Штрихпунктирная кривая соответствует неудачной компоновке самолета с крылом ма-
лой стреловидности (% <35°).
б—относительное изменение эффективности элеронов вследствие влияния сжимаемости
на крыльях разной стреловидности.
шивки» контур определяется ложементами стапеля сборки,
к которому прижата обшивка, а каркас собирается на ней, причем
окончательное соединение деталей каркаса производится с по-
мощью технологических компенсаторов отклонений. Для обеспече-
ния возможностей применения метода сборки от обшивки потребо-
валось проектирование специальных конструкций элементов
каркаса.
Увеличение угла стреловидности крыла благоприятно сказы-
вается на характере изменения производной Шх по числам М.
В околозвуковом диапазоне скоростей т?х самолета с крылом
большой стреловидности (или треугольным крылом) меняется
в значительно меньших пределах, чем при крыле малой стреловид-
ности. Поэтому увеличение стреловидности приводит если не
к полному устранению обратной реакции по крену на дачу ноги
в околозвуковом диапазоне скоростей, то, по крайней мере, к зна-
186
чительному снижению интенсивности этого явления и сужению
области его проявления.
Увеличение угла стреловидности крыла благоприятно также
и с точки зрения уменьшения влияния сжимаемости воздуха
на падение эффективности элеронов на сверхзвуковых скоростях
(фиг. 4.33,6).
Однако увеличение угла стреловидности совместно с уменьше-
нием относительной толщины профилей крыла приводит к новой,
весьма сложной проблеме — уменьшению эффективности элеро-
нов, вследствие закрутки и изгиба крыла из-за существенного сни-
жения жесткости его конструкции (см. гл. VIII). Это наряду
с ухудшением взлетно-посадочных характеристик и несущих
свойств (уменьшение <?у) крыльев с большим углом стреловидно-
Фиг. 4.34. Экспериментальный самолет Бристоль
Т.188 (М=3) с прямым крылом.
сти: нередко заставляет применять на сверхзвуковых самолетах
прямые крылья (Локхид F-104, Норт Америкен Х-15, Нортроп
N-156F, Бристоль Т.188, SNCASO 9050). Правильность примене-
ния тонкого прямого крыла на самолете F-104 конструкторы под-
тверждали еще и тем фактом, что при расчетных скоростях
(М>2,5) сопротивление тонкого прямого крыла мало отличается
от сопротивления стреловидного или треугольного. Основным не-
достатком прямого крыла является большое смещение фокуса
в околозвуковом диапазоне скоростей, ухудшающее управляе-
мость на этих скоростях. Этот недостаток на самолете Бристоль
Т.188 был частично компенсирован большим углом стреловидности
передней кромки концевых участков крыла при окончательном
выборе формы крыла по результатам исследований устойчивости,
управляемости и флаттера (фиг. 4.34).
Большие затруднения в обеспечении поперечной управляе-
мости наряду со значительным уменьшением эффективности эле-
ронов создает существенное увеличение поперечной устойчивости
(гпх) самолетов со стреловидными и треугольными крыльями
на больших углах атаки, так как даже при небольшом скольже-
нии это вызывает появление значительного момента крена. Пари-
ровать этот момент отклонением элеронов очень трудно
вследствие их недостаточной эффективности на малой скорости
187
или из-за концевых срывов на больших углах атаки. Следует отме-
тить, что для обеспечения необходимой путевой устойчивости на
больших скоростях и углах атаки, а также на случай посадки
с сильным боковым ветром или полета с отказавшим двигателем
на одном крыле (на тяжелом самолете) кили и рули направления
современных скоростных самолетов делаются достаточно больши-
ми. В этом случае недостаточная эффективность поперечного управ-
ления может привести к невозможности полного отклонения руля
направления, так как возникающий при этом крен вследствие дей-
ствия большого момента поперечной устойчивости невозможно
Фиг. 4.36. Эффективность руля на-
правления самолета DC-8 при сколь-
жении.
Фиг. 4.35. Углы отклонения
элеронов, потребные для
парирования крена при
скольжении на посадке са-
молета Дуглас DC-8, по ре-
зультатам летных испыта-
ний (кривая 1) и испыта-
ний в аэродинамической
трубе (кривая 2).
О летные испытания, ----------испытания
в аэродинамической трубе.
будет парировать. С таким явлением
встретились, например, при испытани-
ях пассажирского самолета Дуглас
DC-8 !.
На фиг. 4.35 приведены полученные при продувках в аэродина-
мической трубе и при летных испытаниях значения углов отклоне-
ния элеронов, необходимые на посадке для парирования крена,
возникающего при боковом скольжении самолета DC-8. Сущест-
венное отличие кривых можно объяснить, очевидно, более силь-
ным, чем принималось при расчетах, влиянием нежесткости
конструкции крыла на уменьшение эффективности элеронов. Об-
ращают на себя внимание весьма большие потребные углы откло-
нения элеронов даже при незначительном скольжении (самолет
DC-8 имеет стреловидное крыло %=35° с положительным попереч-
ным V), что свидетельствовало о недостаточной эффективности
поперечного управления. Это не позволяло полностью использо-
вать большой руль направления, размеры которого были выбраны
из условия обеспечения возможности посадки с боковым ветром
1 Самолет Дуглас DC-8 достигает сверхзвуковой скорости при пологом пики-
ровании (М== 1,005—1,01). Летные характеристики самолета см. SAE Journal, No.2,
II 1961, рр. 38—40.
188
или полета с отказавшим крайним двигателем (фиг. 4.36), так как
при больших отклонениях руля направления невозможно было
создать элеронами необходимый при скольжении уравновешиваю-
щий момент крена.
Применение отрицательного поперечного V крыла, часто ис-
пользуемое для уменьшения производной тх при больших су, вы-
зывает конструктивные трудности, приводящие, в конечном итоге,
к утяжелению веса конструкции и уменьшению весовой отдачи.
(Это хорошо понятно при учете того факта, что при применении
Фиг. 4. 37. Улучшение поперечной управляемости самолета Дуглас DC-8
с помощью интерцепторов.
а—крыло самолета DC-8, б—зависимость потребного отклонения элеронов (§э)
при отклонении руля направления (дн) на посадке без интерцепторов и с интер-
цепторами.
отрицательного поперечного V на самолете с большим удлинением
крыла приходится существенно удлинять стойки шасси для обес-
печения необходимого расстояния от концов крыла до поверх-
ности земли на взлете и посадке с учетом возможного крена.
Высокое расположение фюзеляжа от поверхности земли затруд-
няет также эксплуатацию и обслуживание самолета).
Эффективной мерой улучшения поперечной управляемости
самолета DC-8 явилось применение интерцепторов (фиг. 4.37), ко-
торые отклоняются только после отклонения элеронов на полови-
ну возможного полного отклонения. Это обеспечивает отсутствие
отклонения интерцепторов на тех режимах полета, когда элероны
189
достаточно эффективны. Как следует из фиг. 4.37, б применение
интерцепторов для поперечного управления при посадке со сколь-
жением самолета DC-8 позволило полностью использовать пред-
усмотренное отклонение руля направления, причем элероны еще
имеют при этом запас отклонения 5—6°.
Из фиг. 4.38 следует, что установка интерцепторов помимо
обеспечения возможности полностью использовать руль направле-
ния существенно повышает эффективность поперечного управле-
ния на малых скоростях. Этим
и объясняется тот факт, что
большинство самолетов со стре-
ловидными крыльями и поло-
жительным поперечным
V (ф>0) имеют для попереч-
ного управления помимо элеро-
нов еще и интерцепторы (см.
также гл. VIII, § 3).
30
20
10
//=0
Заход на
^посадку
О 100 200 300 400 Vкм/час
Фиг. 4.38. Угловые скорости крена само-
лета DC-8 при полном отклонении эле-
ронов с выдвинутыми и убранными ин-
терцепторами при заходе на посадку.
Z—с интерцепторами, 2—-без интерцепторов.
Существует два метода обе-
спечения удовлетворительных
характеристик боковой устой-
чивости и управляемости.
1.„По_ первому из них с по-
мощью применения отрицатель-
ного поперечного V стреловидного крыла уменьшают поперечную
устойчивость (см. фиг. 4.21) и улучшают затухание боковых коле-
баний при возмущении (см. фиг. 4.23). Однако это приводит
к необходимости значительно удлинять стойки шасси (следова-
тельно, неизбежно увеличение веса конструкции) и вызывает не-
удобства в эксплуатации..
2. При^втором„методеприменяют положительное поперечное V,
так как при „этом длина стоек шасси (а следовательно, и их вес)
получаются минимальными, а эксплуатация самолета наиболее
простой и удобной. Однако, вследствие того, что при положитель-
ном поперечном V стреловидного крыла на режимах полета
‘с большими углами атаки сильно возрастает колебательность
бокового движения, устранить которую удается чаще всего только
путеэд установки в систему управления специальных автоматов
(см. гл. VI), то для обеспечения приемлемых характеристик
управляемости и приходится применять демпферы рыскания
и крена, автоматы скольжения и др. При отказе автоматической
системы посадка такого самолета, может оказаться весьма затруд-
нительной вследствие значительных колебаний по крену.
В настоящее время существует ряд скоростных пассажирских
самолетов, построенных по первой (Ту-104, Ту-124, «152»
см. фиг. 4.39) и по второй схеме (Дуглас DC-8, Конвэр 990,
Боинг 707, Де Хевиленд «Комета», Виккерс VC.10 см. фиг. 4.40).
Окончательный выбор схемы при проектировании следует произ-
190
водить на основании весового анализа различных путей обеспече-
ния боковой устойчивости и управляемости самолета с учетом
степени надежности и безопасности автоматических систем повы-
шения устойчивости.
Фиг. 4.39. Схемы скоростных пассажирских самолетов с отрицательным
поперечным V крыла.
а—Ту-104 (СССР), б—«152» (ГДР)
Описанные в гл. IV методы улучшения характеристик устойчи-
вости и управляемости современных скоростных самолетов путем
изменения их схем и аэродинамической компоновки при дальней-
шем увеличении скоростей и высот полета не всегда дают возмож-
ность обеспечить приемлемость этих характеристик.
Создать приемлемые характеристики устойчивости и управляе-
мости современных самолетов на всех режимах полета удается
только путем применения искусственной стабилизации самолета
относительно всех трех осей, автоматизацией ручного управления
и совершенствования конструкции.
191
Фиг. 4.40. Схемы
скоростных пасса-
жирских самолетов
с положительным
поперечным V
крыла.
а—Де Хэвилленд «Ко-
мета» (Англия), б—
Конвэр 990 «Корона-
до» (США).
J, 88м
192
Глава V
БУСТЕРНОЕ УПРАВЛЕНИЕ
ФОРМИРОВАНИЕ УСИЛИЙ НА РЫЧАГАХ УПРАВЛЕНИЯ
САМОЛЕТОМ ПРИ БУСТЕРНОМ УПРАВЛЕНИИ
§ 1. Переход к бустерному управлению
Как уже отмечалось (гл. III, § 3), рост усилий на рычагах
управления самолетом при переходе к сверхзвуковым скоростям
полета и возможное изменение знака этих усилий при возникнове-
нии кризисных явлений (при достижении Мкр) привели к необхо-
димости устанавливать в системах управления специальные
устройства, воспринимающие эти переменные по величине и знаку
нагрузки. В настоящее время в системах управления самолетов
самое широкое распространение получили гидравлические усили-
тели, кратко называемые бустерами.
Гидроусилитель (бустер) является гидравлической следящей
системой с большим коэффициентом усиления (по усилиям),
входным сигналом которой служат перемещения входного звена,
жестко связанного системой проводки с рычагом управления само-
летом или с рулевой машинкой автопилота. По характеру движе-
ния выходного звена различают гидроусилители поступательного
и вращательного действия. До настоящего времени более широкое
применение в самолетных системах управления нашли гидроусили-
тели поступательного действия, принципиальная схема устройства
которых показана на фиг. 5. 1.
Входным звеном бустера является качалка 1, смещения кото-
рой под действием тяги 2 передаются управляющему распредели-
тельному золотнику 3. Тяга 2 связывает входную качалку бустера
с проводкой системы управления от рычага управления самоле-
том (или автопилота). В изображенном на фиг. 5.1 нейтральном
положении управляющего золотника 3, последний перекрывает
отверстия гидромагистралей (напорной 5 и сливной 4), подводи-
мых к бустеру. Вследствие этого бустер находится в неподвижном
193
состоянии и воспринимает только статическую нагрузку Рш(Л1ш),
которая приходит на силовой шток (выходное звено) 10 бустера
от шарнирного момента руля. Эта нагрузка воспринимается дав-
лением р гидросмеси, заключенной в замкнутом объеме силового
цилиндра бустера 8, на поршень 9, жестко соединенный со што-
ком. С другой стороны давление гидросмеси передается на стенку
силового цилиндра и воспринимается конструкцией самолета,
к которой силовой цилиндр бустера крепится с помощью шарнир-
ной подвески 12. Таким образом усилие от шарнирного момента
в этом случае на ручку не передается.
Фиг. 5. 1. Принципиальная схема устройства однокамерного
гидроусилителя поступательного действия с неподвижным си-
ловым цилиндром (а) и схема (б) для пояснения уменьшения
ощущения на рычаге управления самолетом зоны нечувстви-
тельности бустера.
Если летчик (или автопилот) через систему тяг смещает
управляющий золотник бустера относительно отверстий каналов
питания и слива, то гидросмесь под большим давлением в зависи-
мости от направления этого смещения поступает в правую или ле-
вую полость силового цилиндра, причем другая полость одновре-
менно соединяется со сливной магистралью. Под действием
неуравновешенного давления с одной стороны поршень бустера
начинает смещаться в цилиндре, в результате чего силовой шток
через систему проводки отклоняет руль.
Как хорошо видно из схемы, движения поршня в силовом ци-
линдре одновременно являются и движениями распределительной
коробки 6, в которой находится управляющий золотник, причем
эти движения происходят в ту же сторону, в которую был смещен
управляющий золотник от нейтрального положения. Поэтому рас-
пределительная коробка (вместе со штоком бустера) после сме-
194
щения золотника начинает двигаться за ним, стремясь снова пере-
крыть отверстия каналов питания и слива. Если летчик (или
автопилот) перестает смещать золотник, то распределительная
коробка надвинется на золотник и перекроет отверстия гидрома-
гистралей и бустер остановится.
Таким образом в конструкции бустера осуществляется обрат-
ная связь, в результате чего бустер отслеживает перемещения
управляющего золотника (со значительным усилением), вызван-
ные смещениями командных рычагов управления самолетом.
Здесь следует подчеркнуть, что ввиду отсутствия передачи усилия
от шарнирного момента руля на рычаг управления, последний при
отсутствии специальных загрузочных устройств (см. § 2 настоящей
главы) может быть остановлен и брошен летчиком в любом поло-
жении, которое и будет выдерживаться бустером неизменным,
обеспечивая неизменность положения руля.
Для обеспечения надежного запирания каналов гидросистемы
управляющим золотником и уменьшения утечек конструктивно
предусматривается некоторое перекрытие (х0) золотником краев
отверстий гидромагистралей. Это перекрытие является причиной
возникновения зоны нечувствительности на статической характе-
ристике гидроусилителя (см. фиг. 5.62, а), вызывающей нелиней-
ность этой характеристики. Зона нечувствительности бустера
воспринимается летчиком на рычаге управления как люфт, для
уменьшения величины которого в конструкциях бустеров нередко
применяется дифференциальный рычаг, роль которого выполняет
входная качалка.
Действительно (см. фиг. 5.1,6) при использовании на входе
бустера дифференциальной качалки, большое плечо которой (Ц)
соединяется с управляющим золотником, а к малому (Л2)—под-
соединяется управляющая тяга системы управления, зона нечув-
ствительности (перекрытие золотника х0) при приведении к рычагу
управления должна уменьшаться, так как
c = xQ — и при ZX>>Z2 с<х0.
Для устранения возможности возникновения высокочастотных
автоколебаний бустера, управляющий золотник во многих бусте-
рах имеет гидравлический демпфер 7 (фиг. 5.1,а), ограничиваю-
щий максимальную скорость смещения золотника.
В настоящее время разработано достаточно большое количест-
во систем гидроусилителей (бустеров) поступательного действия,
отличающихся подвижными частями (шток или корпус), входны-
ми устройствами и системой распределения. Схемы некоторых
типов однокамерных бустеров показаны на фиг. 5.2—5.5.1
1 Подробнее ознакомиться с устройством и работой гидроусилителей раз-
личных систем можно, например, по книге Т. М. Б а ш т а, Расчеты и конструк-
ции самолетных гидравлических устройств, Оборонгиз, 1961.
195
Фиг. 5.2. Установка гидроусилителя
с подвижным силовым цилиндром и зо-
лотниковой коробкой, расположенной на
нем (без дифференциального рычага).
1—ручка управления самолетом, 2—проводка
управления, 3—золотник, 4-—подвижный сило-
вой цилиндр, 5—руль, Н—напорная магистраль,
С—сливная магистраль.
Фиг. 5.3. Гидроусилитель с неподвижным сило-
вым цилиндром и дифференциальным рычагом,
установленным на силовом штоке.
Н—напорная магистраль, С—сливная магистраль, д. р.-—
дифференциальный рычаг.
Фиг. 5.4. Гидроусилитель с неподвижным
силовым цилиндром и золотником, располо-
женным внутри силового штока.
Н—напорная магистраль, С—сливная магистраль.
196
На фиг. 5. 6, а изображена схема бустера с дифференциальным
поршнем и подвижным корпусом, принцип действия которого не-
сколько отличается от описанного выше.
В этом бустере полость А — постоянно соединена с напорной
магистралью; а полость Б — соединяется с напорной или сливной
магистралью в зависимости от направления смещения управляю-
щей тяги и, следовательно, золотника. Движение поршня в сило-
вом цилиндре в одну сторону осуществляется под действием
Фиг. 5.5. Гидроусилитель с крановым распределительным устройством.
Н—напорная магистраль, С—сливная магистраль.
разности сил давления на торец поршня (в полости Б) и на коль-
цевую площадь поршня (в полости А) при поступлении давления
от управляющего золотника в полость Б. В другую сторону дви-
жение происходит под действием силы давления жидкости на пор-
шень в полости А при соединении полости Б со сливом. Так как
в одну сторону движение происходит под действием давления
на кольцевую площадь штока (равную разности площадей торца
поршня и поперечного сечения штока), а в другую — под дейст-
вием разности сил давления на торец поршня и на кольцевую
площадь, то, выбрав отношение площадей торца и кольца поршня
2:1, можно получить одинаковые усилия бустера в обе стороны,
197
чего невозможно достигнуть в конструкциях бустеров, показанных
на фиг. 5.1—5.5.
По опубликованным зарубежной печатью сведениям бустеры
с дифференциальными поршнями обеспечивают большую плав-
ность хода и поэтому нашли сейчас широкое распространение.
Так, например, бустеры такого типа применены в системе управ-
ления известного французского самолета «Каравелла».
Фиг. 5.6. Гидроусилители с дифференциальным поршнем.
а—принципиальная схема гидроусилителя с подвижным цилиндром и дифференциальным
рычагом (д. р.), б—конструкция гидроусилителя без дифференциального рычага.
Для уменьшения усилий на рычагах управления самолетом
первоначально применяли включение гидроусилителя в систему
управления по обратимой схеме (обратимый гидроусилитель,
фиг. 5.7). При этой схеме часть шарнирного момента передается
на рычаги управления и создает у летчика чувство управления.
Действительно, при изображенной на схеме (фиг. 5.7) системе
проводки, усилие от шарнирного момента в тяге привода руля
Рш= - приведется к ручке управления следующим образом:
^в= . В случае отсутствия бустера (пунктирная про-
бе /о
198
водка) усилие на ручке будет Р'в=Рш-^-. Отношение этих уси-
zp
лий —5-=-^- называют коэффициентом обратимости схемы. Чем
Рв Ьс
меньше этот коэффициент, тем меньшая часть усилия от шарнир-
ного момента передается на ручку управления.
Так как при установке бустера по обратимой схеме часть уси-
лия от шарнирного момента передается на ручку управления
и определяет характер изменения этих усилий при изменении
режима полета, т. е. определяет показатели управляемости (по
усилиям), то применять обратимую схему включения гидроусили-
теля можно на самолетах, не достигающих критических чисел М
полета, когда изменяются знаки шарнирных моментов.
На сверхзвуковых самолетах гидроусилитель включается в си-
стему управления по необратимой схеме (фиг. 5.8), при которой
усилия, возникающие в проводке управления от шарнирных мо-
ментов на органах управления, не передаются на рычаги управле-
ния самолетом, так как целиком воспринимаются силовым
цилиндром гидроусилителя, а с него через узлы крепления пере-
даются на конструкцию самолета. Летчик управляет рулями, сме-
щая управляющий золотник гидроусилителя, что не требует зна-
чительных усилий.
При использовании для продольного управления цельнопово-
ротного стабилизатора установка гидроусилителя по необратимой
схеме является обязательной, так как при переходе через скорость
звука направление усилий в тягах привода стабилизатора (а зна-
чит и на ручке) будет изменяться (фиг. 5.9). Это изменение про-
исходит вследствие того, что ось вращения стабилизатора распо-
лагают обычно между центрами давлений (ц. д.) на стабилизаторе
при дозвуковой и сверхзвуковой скорости, для того чтобы умень-
шить плечо равнодействующей аэродинамических сил относитель-
но
но оси вращения L Этим уменьшается шарнирный момент, что
позволяет уменьшить и потребную мощность гидроусилителя, так
как уменьшаются усилия в тягах. Благодаря этому можно значи-
Фиг. 5. 8. Установка гидроусилителя по необратимой схеме.
ДРПр—прирост усилия по пружине при ее обжатии;
ДРв~прирост усилия на ручке при ее отклонении.
тельно выиграть в весе системы управления и гидравлической
системы питания гидроусилителя рабочей смесью под высоким
давлением.
Таким образом, если на сверхзвуковой скорости полета шар-
нирный момент на стабилизаторе создает на ручке (или штурва-
Л/ш при
Ц.Д приМ<М^
-ъ^М^при №>1
/м>'| \
'/////////А Ц.Д ПриМ>1
Ли приЫ<Мю \ \ ""Ось вращения ста-
" ХА* билизатора
'Р^приМ>1 X о >
Тяга привода
стабилизатора
Фиг. 5.9. Схема аэродинамических нагру-
зок, действующих на цельноповоротный
стабилизатор при дозвуковой и сверхзвуко-
вой скоростях.
ле) привычное для летчика усилие, препятствующее ее отклоне-
нию и возрастающее с ростом скорости, т. е. при разгоне летчик
должен отдавать ручку (или колонку штурвала) от себя и при
1 Н. А. Фомин, Проектирование самолетов, Оборонгиз, 1961, стр. 323.
200
этом давить на нее, то при переходе к дозвуковой скорости полета
изменение знака шарнирного момента приведет к изменению знака
усилий на рычаге управления и они окажутся помогающими.
Теперь, отдавая ручку от себя при разгоне самолета, летчик дол-
жен бы был одновременно создавать усилие на себя, так как шар-
нирный момент будет создавать на ручке усилие в сторону
ее отклонения, т. е. создавать у летчика впечатление перекомпен-
сации в продольном управлении. Естественно, что с таким управ-
лением летать невозможно, а поэтому необходимо устанавливать
гидроусилитель по необратимой схеме («необратимый гидроусили-
тель»).
При установке такого гидроусилителя аэродинамические на-
грузки на рулях на рычаги управления не передаются, так как пол-
ностью воспринимаются силовым гидравлическим цилиндром гид-
роусилителя, который препятствует самопроизвольному отклонению
органов управления (рулей). Поэтому при установке гидроусили-
телей по необратимой схеме теряют смысл все аэродинамические
коэффициенты и производные со «свободной ручкой (педалями)»,
определяющие градиенты усилий на рычагах управления самоле-
том при изменении режима полета (Рв, Рв, Р3Х, Рн и др.), а лет-
чик при смещениях рычага управления прикладывает к нему
усилие, необходимое лишь для преодоления трения в системе
управления и в золотнике гидроусилителя.
Сила трения в золотнике бустера не превышает обычно 0,5—
1,0 кГ, поэтому при существующих кинематических соотношениях
и трении в проводке управления усилие страгивания рычага
управления при необратимой схеме составляет 0,5—2,0 кГ, причем
следует подчеркнуть, что это усилие на рычаге управления появ-
ляется только при его движении и совершенно не зависит от ре-
жима полета. Следовательно, при установке бустера по необходи-
мой схеме летчик не чувствует изменение режима полета по изме-
нению усилий на рычагах управления.
Впервые в нашей стране бустерная система на серийном само-
лете была применена для управления элеронами истребителя
МИГ-15. За границей бустер был впервые применен во время вой-
ны в системе управления элеронами истребителя Локхид Р-38,
а необратимая бустерная система — для управления стабили-
затором на самолете Норт Америкен F-86 модифика-
ции «Е».
Вот как описывает летчик-испытатель свои впечатления о пер-
вом варианте этого самолета: «Я проводил испытания модели Е,
определяя летные данные и устойчивость самолета. Это был пер-
вый самолет, у которого руль высоты и стабилизатор представляли
собой единую подвижную систему. Это являлось большим шагом
вперед, так как на прежних моделях самолетов неподвижные хво-
стовые поверхности ограничивали маневренность самолета на
больших скоростях.
201
Кроме подвижного хвостового оперения, на самолете было еще
одно нововведение — полностью необратимая гидравлическая си-
стема управления. При наличии такой системы нечего было опа-
саться обратного действия рулей при полете на больших
скоростях, которое имело место на более ранних реактивных само-
летах во время пикирования на сверхзвуковой скорости. Однако
наличие такой системы ставило перед нами новую проблему. Пи-
лот в этом случае хуже «чувствовал» самолет. Управляя рулями,
он теперь имел дело с клапанами гидравлической системы и не
чувствовал, какие силы действуют на ручку управления. Это уве-
личивало возможность создания больших перегрузок и поврежде-
ния самолета во время резких маневров».1
При применении необратимой бустерной системы управления
элеронами и рулем направления также создавалась опасность не-
произвольного вывода самолета на недопустимые режимы. Вслед-
ствие этого и возникла необходимость искусственно создать
загрузку рычагов управления, чтобы обеспечить привычное для
летчиков «чувство управления».
«...После того, как на самолете были установлены специальные
приспособления, которые помогали пилоту «чувствовать» самолет,
новая гидравлическая система управления вполне себя оправдала,
и мы рекомендовали использовать ее на всех новых реактивных
самолетах».1
§ 2. Загрузочные механизмы
Первые загрузочные механизмы, применявшиеся для создания
усилий на ручке управления при наличии в системе управления
необратимого бустера, были достаточно примитивны и представля-
ли собой простую пружину, характеристики которой были подоб-
раны по величине заданных максимальных усилий на ручке
(фиг. 5. 10). При отклонении ручки летчик теперь чувствовал уси-
лие тем большее, чем больше он отклонял ручку, так как простой
пружинный механизм имел линейную характеристику обжатия
и создавал на ручке постоянный градиент усилия по ходу
дРв=-^-дхв,
иХв
где —характеристика жесткости загрузочного механизма, при-
веденная к ручке управления.
Для уменьшения созданного загрузочным механизмом усилия
на рычаге управления при отклонении последнего для выполнения
длительных режимов полета, стали применять специальные меха-
низмы, которые уменьшали обжатие пружины, смещая точку креп-
ления загрузочного механизма. Эти механизмы с электрическим
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, I960,
стр. 124.
202
приводом включает летчик, нажимая на специальную трехпози-
ционную гашетку (или тумблер). При нажатии на гашетку в ту
или другую сторону меняется полярность подаваемого на электро-
мотор механизма тока и этим изменяется направление движения
механизма, чем и достигается уменьшение или увеличение загруз-
ки. По аналогии с действием аэродинамических триммеров эти
механизмы получили названия «триммерных», «триммирующих»,
или «триммерного эффекта» (фиг. 5.11 и 5.20).
Большим недостатком первых загрузочных механизмов с ли-
нейной характеристикой было создание малых усилий при малых
Фиг. 5. 10. Простейший загрузочный механизм с одной пружи-
ной (а) и диаграмма обжатия механизма (б).
1—без предварительной затяжки пружины, 2—с предварительной затяжкой.
отклонениях ручки. Это было очень неудобно, особенно на боль-
шой дозвуковой скорости на малых высотах (М = 0,8—0,9), т. е.
при больших скоростных напорах, когда небольшое отклонение
ручки (а значит и небольшое усилие на ней) могло вызвать зна-
чительную перегрузку. Наоборот, при больших потребных расхо-
дах загрузка оказывалась слишком тяжелой.
Для создания большего усилия при малых отклонениях ручки
и меньшего — при больших стали применять загрузочные механиз-
мы с «изломом» характеристики, т. е. с повышенным градиентом
(dP \
____Li в начале обжатия механизма от нейтрального по-
^•*пр /
ложения (фиг. 5.12).
При помощи пружинного загрузочного механизма с повышен-
ным градиентом усилия в начале обжатия можно несколько
исправить важный показатель продольной статической управляе-
мости АРв/Дпу, характеризующий прирост усилий на ручке управ-
ления при изменении перегрузки на маневре (чаще считают при
Дп2/=1). Этот показатель считают обычно от стриммированного
по усилию (Рв=0) положения загрузочного механизма. Выбрав
соответствующим образом ход механизма (а) до «перелома» ха-
рактеристики обжатия пружинного механизма (она должна при-
203
Фиг. 5.11. Схема установки механизма трим-
мерного эффекта в систему загрузки.
±д^т—управляемый летчиком ход механизма;
Дхпр—деформация пружины;
Дхв—перемещенные ручки;
ДРПр—прирост усилия на пружине;
ДРВ—прирост усилия на ручке.
Фиг. 5. 12. Загрузочный механизм с тремя пружинами для создания повы-
шенного градиента загрузки («жесткости» загрузки dP/dx) в начале хода,
а—схема механизма, б—диаграмма обжатия.
204
близительно соответствовать минимальному значению хода ручки
на единицу приращения перегрузкихвmin), можно уменьшить раз-
брос величин ДРВ, необходимых для вывода самолета на опреде-
ленную заданную перегрузку (например, Дп2/=1), при различных
числах М, т. е. сделать более однообразными ощущения летчика
(по усилиям на ручке) при маневрах на различных режимах
полета. Так в приведенном на фиг. 5. 13 примере путем замены
линейной характеристики загрузочного механизма на характери-
стику с «изломом» разброс значении показателя --------— умень-
Дпу=1
30 30 .
шается от — до — , т. е. в 4 раза.
Фиг. 5.13. Исправление показателя продольной статической управляемости
ХРв/Дпу с помощью подбора загрузочного механизма с повышенным гра-
диентом усилия в начале хода.
а—заданная кривая л^=/(М), б—характеристики загрузки ручки от загрузочных
механизмов, /—линейная, 2—с повышенным начальным градиентом прироста усилия
по ходу ручки, в—полученные соответственные значения прироста усилий на ручке
при выходе на единичную избыточную перегрузку.
При применении загрузочных механизмов с «изломом» показа-
тель управляемости Рв должен определяться по двум участкам
диаграммы обжатия.
Использование загрузочных механизмов с изломом характери-
стики существенно уменьшает усилия на рычагах управления при
больших цх отклонениях, необходимых, например, для управления
самолетом на посадке, а также для балансировки самолета
на различных режимах установившегося полета во всем диапазоне
скоростей и высот.
Так, например, при помощи «излома» характеристики загрузоч-
ного механизма можно уменьшить слишком большое изменение
усилий на рычаге продольного управления при балансировке
на различной скорости, имеющее место в случае применения за-
205
грузочного механизма с линейной характеристикой, так как
dP3 * *
наклон этой характеристики —- обычно выбирается из условия
dx3
обеспечения минимальных значений показатели Р" не менее допу-
стимых (Рв) mln доп. Как уже отмечалось, значения (Рв) min доп
выбираются для каждого типа самолета из летной практики
с целью обеспечения надежности предохранения самолета от слу-
чайного вывода на недопустимую перегрузку при ошибке летчика
(особенно для тяжелых неманевренных самолетов). Поэтому
ldP~ \
жесткость загрузки ----1 приходится выбирать достаточно боль-
WxB /
шой, что при использовании загружателя с линейной характери-
стикой и приводит к существенному увеличению диапазона изме-
нения балансировочных усилий Рв.бал = /(М, /7). Уменьшить этот
диапазон можно применением загружателя с «изломом» характе-
ристики.
Для загрузочных механизмов описанных выше двух типов ха-
рактерен один общий недостаток. Этот недостаток связан с тем,
что при росте скорости (в дозвуковой зоне) для получения опре-
деленного приращения перегрузки (Дпу) руль высоты надо откло-
нять все на меньший угол (Ддв) все меньшим отклонением ручки,
т. е., как было раньше отмечено, показатель продольной управляе-
мости хв с ростом скорости убывает. Это можно показать, если
выражение (2.11) для показателя х" переписать в развернутой
форме:
^ш.в m* Q^2
Из выражения (5. 1) следует, что расход ручки на единицу при-
ращения перегрузки убывает обратно пропорционально квадрату
скорости.
В случае применения в продольном управлении цельноповорот-
ного стабилизатора при больших скоростных напорах в дозвуко-
вой зоне показатель Хв может стать меньше предусмотренного
нормами нижнего предела (Хв)тшдоп. Это объясняется тем, что
управляемый стабилизатор обладает значительно большей эффек-
тивностью, поэтому для создания единичной избыточной перегруз-
ки его нужно отклонять на меньший, чем руль высоты, угол мень-
шим отклонением ручки (в выражении 5. 1 для показателя х“ при
применении управляемого стабилизатора вместо производной tnz*
необходимо брать производную mJ®, причем всегда mJB>mJB).
Уменьшение показателя х" с ростом скорости приводит при
необратимой бустерной системе управления и простейшем пружин-
ном загружателе к аналогичному изменению показателя продоль-
ной управляемости так как он в этом случае определяется
206
dPB .
градиентом жесткости загрузочного механизма ------ =ктл и расхо-
иХв
дом ручки на единицу перегрузки (Хв):
---dPa dPB dx„ • я
В - ------ ------------
dny dx3 dny
(5-2)
Отсюда следует, что при росте скорости (при М<4) показатель
Рв на самолете с необратимой бустерной системой управления
и простым пружинным загружателем также убывает обратно про-
порционально квадрату скорости (если не учитывать упругих де-
формаций конструкции).
При безбустерном управлении уменьшение показателя хв
с увеличением скорости компенсировалось ростом усилий от воз-
растающего шарнирного момента руля высоты ^Л4ш.в=/иш.в5в6в^-2 j
при его отклонениях для создания перегрузки. Поэтому, если
не учитывать влияние нежесткости конструкции, показатель управ-
ляемости Рв у самолетов с безбустерными системами управления
на дозвуковых скоростях, когда влияние сжимаемости практически
отсутствует, не зависит от скорости [см. выражение (2. 12)]. Бла-
годаря этому летчики привыкали к тому, что каждый самолет
определенным усилием можно было вывести на вполне определен-
ную перегрузку независимо от режима полета.
В действительности нежесткость (упругость) конструкции
с увеличением скорости все сильнее сказывается на увеличении
показателей хв и xB = f(V), так как для компенсации потери эф-
фективности руля высоты (или стабилизатора) из-за деформаций
фюзеляжа, хвостового оперения и проводки управления прихо-
дится увеличивать отклонение (см. гл. VIII) рычага управления,
чтобы обеспечить необходимый угол отклонения руля для получе-
ния определенного маневра. Это влияние нежесткости конструк-
ции у современных самолетов возрастает вследствие применения
тонких профилей и длинных тонких фюзеляжей.
На самолетах с безбустерной системой управления изменение
показателей хв и xB=f(V) вследствие упругих деформаций конст-
рукции сказывалось на изменении показателей управляемости Рв
и PB=f(V) только в той части, которая определялась необходи-
мостью компенсировать дополнительными отклонениями руля
высоты влияние деформаций фюзеляжа и оперения. Деформации
проводки управления и самого руля высоты под действием возни-
кавших усилий от воздушной нагрузки на руле не сказывались
на изменении этих показателей, так как усилия, определяющие по-
казатели управляемости Рв и PB=f(V), при одинаковых отклоне-
ниях руля будут одинаковыми при упругой и жесткой проводке.
У самолетов с необратимой бустерной системой управления
необходимость увеличения расходов рычага управления для ком-
207
пенсации упругих деформаций конструкции полностью отражается
на увеличении показателей Рв и PB=f(V) с ростом скорости поле-
та, так как создаваемое загружателем усилие, как правило, про-
порционально отклонениям рычага (ДРв=&ж.зЛХв)-
Характер изменения показателя Рв по скорости (числу М) при
управлении без гидроусилителя и необратимом бустерном управ-
лении с простым пружинным загружателем показан на фиг. 5.14,
там же штрих-пунктирными линиями показан характер изменения
этих характеристик из-за влияния нежесткости конструкции.
Значительное уменьшение показателя Рв на больших скоро-
стях в дозвуковой зоне при необратимых бустерных системах
управления с простыми
пружинными загружате-
лями создавало серьез-
ную опасность непроиз-
вольного вывода самолета
на недопустимую пере-
грузку.
Для исправления этого
недостатка и корректиров-
ки показателя Р” по пере-
грузке делались попытки
применить в системе уп-
равления наряду с загру-
зочной пружиной допол-
нительный несбалансиро-
ванный груз, который при
Фиг. 5. 14. Характер изменения показателя
продольной статической управляемости Р"
при увеличении скорости.
/—при отсутствии необратимого бустера в системе
продольного управления, 2—при установке гидро-
усилителя по необратимой схеме с простым пру-
жинным загрузочным механизмом, 3—с бустером
и нелинейным механизмом.
росте перегрузки вследст-
вие увеличения своего ве-
са (G^riy) создавал допол-
нительное усилие на ручку
(см. фиг. 2. 9), повышая
градиент Р". Но при рез-
ком отклонении ручки в
начале маневра перегруз-
ка еще не успевает возрасти и Дпу^0, вследствие чего груз не соз-
дает дополнительного усилия, а самолет может выйти на значитель-
ную перегрузку, после чего действие груза будет уже бесполезным
или даже на некоторых режимах может привести к раскачке само-
лета. Однако при плавном движении ручки и медленном нарастании
перегрузки груз в системе продольного управления улучшает харак-
теристики загрузки, чем и объясняется применение дополнительных
грузов в системах управления некоторых современных самолетов
(например, у самолета Нортроп N-156F «Фридомфайтер»).
При росте скорости до сверхзвуковой вследствие быстрого сме-
щения назад фокуса самолета и возрастания продольной статиче-
208
ской устойчивости по перегрузке (аи^у) при одновременном умень-
шении эффективности органов продольного управления (mJB ста-
билизатора или гпгв руля высоты) существенно увеличивается
показатель <рв = —^-(или 6" — ——характеризующий расход
dn,y у dtiy)
стабилизатора (или руля высоты) на единицу приращения пере-
грузки. При линейной зависимости отклонения руля высоты от
отклонения ручки продольного управления («линейное £ш.в») это
приводит к соответствующему резкому возрастанию показателя Хв
в узком диапазоне чисел М (при М^0,9-Н,1), что при простых
пружинных загрузочных механизмах в необратимых бустерных
системах управления вызывало и резкое возрастание показателя
Р“ при переходе к сверхзвуковой скорости (см. фиг. 5. 14).
Применение загрузочных механизмов, имеющих характеристи-
ку с изломом, связано, однако, с опасностью возможности раскач-
ки машины летчиком при выполнении маневров с нестриммирован-
ным в начале маневра усилием на ручке, особенно при малом
значении х£. В этом случае при смещении ручки летчик может
перейти за точку перелома характеристики загружателя на поло-
гую ветвь (см. фиг. 5.12), где приращение усилия на создание
перегрузки будет гораздо меньше обычного, к которому привык
летчик при маневрировании со стриммированным по усилию
до Рв^0 загрузочным механизмом. Поэтому при малом прираще-
нии усилия летчик может случайно создать большую перегрузку,
для скорейшего уменьшения которой резко отдаст ручку «от себя».
Вследствие малого изменения усилия на ручке даже при больших
ее отклонениях на пологой ветви характеристики загружателя
легко «передать» от себя ручку и вызвать отрицательную пере-
грузку, для компенсации которой опять придется брать ручку
на себя и т. д. При наличии запаздывания реакции самолета
на прилагаемые на ручке усилия, а также запаздывания ре-
акции самого летчика это и может легко привести к рас-
качке машины. Поэтому при наличии в системе продольного
управления загружателей, характеристика которых имеет две
ветви — крутую и пологую, рекомендуется в прямолинейном полете
перед выполнением маневров триммировать усилие до Рв^0.
Для того чтобы предотвратить опасность раскачки машины
или случайного вывода на недопустимый режим полета, на неко-
торых самолетах было предложено изменять характеристики
загрузки на разных режимах полета с различными потребными
расходами рулей переключением загружателей (фиг. 5.15).
На малых скоростях захода на посадку, когда для маневрирова-
ния требуются большие расходы рулей и, следовательно, рычагов
управления, в системе управления устанавливается более «слабая»
загрузка с помощью взлетно-посадочного загружателя, имеющего
достаточно «мягкую пружину». При переходе на большие скорости,
209
когда расходы рулей резко уменьшаются, к взлетно-посадочному
загружателю подключается дополнительно полетный загружатель
с более жесткой пружиной.
Однако такие системы были достаточно громоздки и на неко-
торых режимах полета нередко приводили к излишнему перетяже-
Фиг. 5. 15. Характеристики загрузки рычага
продольного управления с помощью взлет-
но-посадочного и полетного загружателей.
лению характеристик за-
грузки, вызывая быструю
утомляемость летчика. Для
сверхзвуковых самолетов тя-
желая «полетная» загрузка
приводила в конечном итоге
к ограничению маневренно-
сти самолета, так как на
сверхзвуковых скоростях по-
требные расходы рулей и ры-
чагов управления возраста-
ли, и загрузка оставалась
тяжелой. Кроме того, такое
ступенчатое изменение ха-
рактеристик загрузки на
различных режимах полета
по-прежнему не создавало летчику ощущения изменения режима
полета по изменению усилий на ручке.
Чтобы обеспечить приемлемые характеристики загрузки ручки,
стали применять загрузочные механизмы с коррекцией по скорост-
ному напору q. Конструктивно эти загрузочные механизмы делят-
ся на два типа:
Фиг. 5. 16. Загрузочный механизм с непосредственной
коррекцией по скоростному напору (<7=рПолн—Рст) с по-
мощью воздушных цилиндров с поршнями (а) и характе-
ристика загружателя (б).
I — загрузка создавалась непосредственно скоростным напо-
ром <7=рполн — Рст, где рполн и рст брались от ПВД (фиг. 5.16
и 5. 17);
210
II — загрузка создавалась гидравлическим цилиндром, а ско-
ростной напор q был управляющим параметром (фиг. 5. 18 и 5. 19).
На фиг. 5. 18, а показана
конструкция нагрузочного авто-
мата, подающего в гидравличе-
ский цилиндр загрузочного ме-
ханизма гидросмесь с редуци-
рованным давлением, величина
которого пропорциональна ско-
ростному напору. Чувствитель-
ным элементом автомата яв-
ляется мембрана S, находящая-
ся под действием разности пол-
ного и статического давлений
воздушного потока. Чем боль-
ше эта разность (т. е. рполн—
—pc4 = Q~ ~—), тем больше
Тяга к рычагу управления
Фиг. 5. 17. Схема загрузочного уст-
ройства с использованием сильфон-
ной коробки, создающей загрузку
пропорционально ходу рычага и ско-
ростному напору.
прогибается вниз мембрана
и больше смещает золотник ре-
дукционного клапана 5, соединяя полости высокого и редуцирован
кого давлений. Степень редуцирования давления зависит от ве
Фиг. 5. 18. Загрузочный механизм с гидравлическим цилиндром и автоматом
загрузки, управляемым скоростным напором.
а—-нагрузочный автомат (фирмы Хобсон).
/—полное давление от ПВД, 2—статическое давление от ПВД, 3—редуцированное давление
гидросмеси, 4—подвод гидросмеси высокого давления из гидросистемы, 5—редукционный
клапан, 6—в сливную магистраль, 7—предохранительный клапан, 8— мембрана, 9—соедини-
тельная магистраль.
б-—загрузочный механизм с кулачком, задающим закон загрузки по ходу рычага управления,
/б—силовой цилиндр загрузочного механизма с редуцированным давлением гидросмеси,
//—шток с роликом, /2—кулачок, 13—тяги системы управления, 14—корпус загрузочного
механизма, /5—качалка системы управления, на валу которой неподвижно укреплен кулачок.
211
личины открытых золотником редукционного клапана отверстий,
через которые поступает жидкость под высоким давлением. Чем
больше скоростной напор, тем больше открыты отверстия и сте-
пень дросселирования меньше. Поэтому редуцированное давление
возрастает, создавая все более жесткую загрузку при росте ско-
механизмаь
Фиг. 5. 19. Управляющий блок
гидравлического загрузочного ав-
томата с коррекцией по скорост-
ному напору и перегрузке.
/—демпфирующее устройство, 2—груз
(датчик перегрузки), 3—пружина,
4—мембрана (датчик скоростного напо-
ра), 5—дозирующая игла редукционно-
го клапана, находящаяся под воздей-
ствием мембраны и груза, 6—предохра-
нительный клапан.
Рред =f(Q> л )—редуцированное давле-
ние гидросистемы, поступающее в ци-
линдр загрузочного механизма. Чем
больше q и пу , тем больше так
как игла больше перекрывает проход-
ное сечение редукционного клапана.
ростного напора.
Схема исполнительного механиз-
ма автомата загрузки с кулачком,
задающим закон загрузки, приведе-
на на фиг. 5. 18, б. При подаче в гид-
равлический цилиндр редуцирован-
ного автоматом (в зависимости от
скоростного напора) давления мож-
но получить любой заданный про-
филем кулачка закон загрузки по
ходу рычага с коррекцией по скоро-
стному напору q.
Конструкция автомата загрузки
с коррекцией по q, приведенная на
фиг. 5. 18, обладает еще тем досто-
инством, что допускает возможность
создания автомата загрузки с кор-
рекцией по двум параметрам: q и
Пу. Возможная схема управляющего
блока такого автомата показана на
фиг. 5. 19.
На фиг. 5. 20 показаны автоматы
загрузки ручки с обычным пружин-
ным механизмом, но величина плеча
/, к которому подсоединен загрузоч-
ный механизм, увеличивается специ-
альным двигателем с ростом скоро-
стного напора. Двигатель управ-
ляется автоматом по заданному за-
кону. Таким образом, с ростом ско-
рости растет усилие на ручке от пру-
жины при одинаковом ее обжатии,
сохраняя показатель Р” приблизи-
тельно постоянным.
Загрузочные механизмы с коррекцией по q обеспечивали при-
емлемый характер показателя = На дозвуковых скоростях,
dny
но не обеспечивали однообразие линейных перемещений ручки
для создания единичной перегрузки = на разных режимах
driy
полета.
212
При необходимости создать сложные характеристики загрузки,
например различные характеристики на различных режимах поле-
та (посадка и максимальная скорость), попытки использовать для
этого пружинные механизмы с системами переключения приводят
к значительному усложнению и утяжелению конструкции. Поэтому
и возникла идея создания гидравлических загрузочных механиз-
мов с кулачковыми передачами.
Фиг. 5.20. Специальные автоматы для ре-
гулирования жесткости загрузки (dP[dx)
с помощью изменения плеч загрузочных
механизмов в зависимости от режима по-
лета.
а—схема установки исполнительного механизма
автомата в ручке управления самолетом и харак-
теристика загрузки, /—управляющий блок автома-
д) та с приемниками сигналов скоростного напора q
и высоты Я, 2—управляющий сигнал на исполни-
тельный механизм, 3—мотоо с преобразователехм
движения; -/—изменение выходного плеча механизма (Zg п—большое плечо, большая
жесткость загрузки; ZM п—малое плечо, малая жесткость загрузки);5—сигнал обрат-
ной связи положения штока исполнительного механизма; 5—пружинный загрузочный
механизм; 7—механизм триммерного эффекта (ZT—диапазон хода триммерного меха-
низма для снятия усилия на ручке); 8—тяга к рулю; 9—ручка управления самоле-
том; б—загрузочный механизм самолета Авро «Вулкан» с двумя пружинными загру-
жателями; /—пружинный загружатель, создающий коррекцию по скоростному
напору; 2—положение оси вращения кулисного рычага при малой скорости; 3— кулис-
ный рычаг с переменными плечами; 4—передвижная точка опоры рычага; 5—поло-
жение оси вращения кулисного рычага при большой скорости; 6—пружинный загру-
жатель, создающий постоянную загрузку; 7—привод механизма изменения плеч
кулисного рычага; 8—сигналы от указателя скорости; 9—сигналы от кнопки управ-
ления триммерным механизмом; 10—тяга к рычагу управления самолетом; //—трим-
мерный механизм.
В таких механизмах профилированием кулачка можно создать
любую необходимую характеристику загрузки по ходу рычага
управления (фиг. 5.21,6), а смену характеристик можно обеспе-
чить переключением подачи гидросмеси под давлением из одного
силового цилиндра в другой. Так, например, в конструкции загру-
зочного механизма, изображенного на фиг. 5.21, а, смена характе-
ристик загрузки (с полетной на взлетно-посадочную и обратно)
производится поворотом гидравлического крана 6. При этом гидро-
смесь под высоким давлением из гидросистемы действует на боль-
213
X
Фиг. 5.21. Гидравлический загрузочный механизм (а) с переключе-
нием на взлетно-посадочную и полетную характеристики загрузки
(б).
/—силовой гидравлический цилиндр, имеющий два отсека с различными внут-
ренними диаметрами, 2—качалка с роликом, 3—рычаг, на валу которог©
неподвижно укреплен кулачок, создающий закон загрузки, 4—корпус механиз-
ма, 5—тяги системы управления, 6—кран переключения питания цилиндров
(режима загрузки) в гидросистеме.
214
шой (диаметр D) или на малый (диаметр d) поршень загрузоч-
ного цилиндра 1. В зависимости от этого меняется усилие на
выходном штоке загрузочного цилиндра Р3.ц, которое может быть
подсчитано по простой формуле
Р З.Ц — pF ,
где р — давление в гидросистеме, а г =---- или ---- . Это усилие
4 \ 4 /
посредством качалки 2 преобразуется в усилие прижатия ролика
к поверхности кулачка, задающего закон загрузки по ходу вход-
ного рычага 3.
Загрузочные механизмы с гидравлическими цилиндрами удоб-
ны еще и тем, что в случае возможности перехода на ручное управ-
ление при падении давления в гидросистеме питания бустера
(и, следовательно, загрузочного механизма) не требуется специ-
альных устройств для отключения загрузки.
§ 3. Механизмы нелинейной передачи
Для всех скоростных самолетов характерна повышенная эффек-
тивность органов управления на больших скоростных напорах
в дозвуковой зоне (полет у земли). Это объясняется тем, что обыч-
но геометрические размеры рулей под-
бирают теперь из условия обеспечения
необходимой эффективности на боль-
ших высотах при М>1, когда dcv!db
сильно уменьшается. Поэтому на малой
высоте при большой скорости (при
М<1) самолет становится слишком
«строг» в управлении, так как очень
небольшое смещение ручки или педа-
лей вызывает значительное изменение
режима полета.
Проведенные исследования показа-
ли, что величина ошибки, совершаемой
летчиком при формировании управляю-
щего сигнала (т. е. смещения рычага
управления самолетом), в значитель-
ной степени зависит от величины необ-
ходимого смещения (Дхр)ПОтр рычага
для получения нужной реакции самоле-
та. Величина ошибки сильно воз-
Фиг. 5.22. Изменение от-
носительной ошибки 6 =
(ДХр)Дейст~ (^^р)потр
-------—— ---------- лет-
(ДХр)пОтр
чика при различных пот-
ребных смещениях ручки
(Дхр)П0Тр для совершения
маневра определенной
интенсивности.
растает при слишком малых и слиш-
ком больших потребных смещениях
(фиг. 5.22). Из приведенного графика
следует, что существует некоторый диапазон смещений рычага
управления, в котором ошибка получается наименьшей. Если вы-
брать характеристики системы управления так, чтобы на режиме
малой скорости смещения рычага управления для получения необ-
215
ходимого изменения траектории (например, смещение ручки для
получения единичной избыточной перегрузки, т. е. лежали
dny /
в диапазоне наименьших ошибок (зона 6), что особенно важно на
посадке, то на режиме большой дозвуковой скорости эти смещения
попадают уже в зону значительных ошибок (зона а). Итак, на боль-
шой дозвуковой скорости вследствие незначительных необходимых
смещений рычагов для управле-
Фиг. 5.23. Характеристика меха-
низма нелинейной передачи.
Д*н—увеличение отклонения ручки, не-
обходимое при нелинейной передаче
для получения заданного отклонения
руля бь
ния самолетом характерны суще-
ственные ошибки в управлении.
В продольном управлении благо-
даря переходу на управляемый
стабилизатор со значительно боль-
шей эффективностью правильно
сформировать управляющий
сигнал на большом скоростном
напоре в дозвуковой зоне стано-
вится еще труднее, еще больше
увеличиваются ошибки летчика
в управлении, которые при суще-
ствующих динамических характе-
ристиках системы «летчик—само-
лет» создают реальную угрозу
раскачки (особенно для легких
самолетов).
У современных сверхзвуковых
самолетов с управляемым стаби-
лизатором при полете у земли со
скоростью 900—1000 км!час пот-
ребный расход стабилизатора
для получения единичной избыточной перегрузки ( <р2= ——) умень-
\ dny /
шается до 0,3—0,9°, что при линейной передаче от ручки (штурва-
ла) к стабилизатору соответствует значениям х" =34-10 мм. Есте-
ственно, что при таких малых расходах ручки (штурвала) легко
вызвать значительную перегрузку. Управлять самолетом становится
чрезвычайно трудно, и в действительности нередки были случаи,
когда летчик раскачивал самолет, пытаясь исправить первоначаль-
ную ошибку, а ухудшение динамической устойчивости на большой
скорости способствовало созданию аварийной ситуации.
Для увеличения показателя х" на большой скорости (когда
нужны малые углы отклонений рулей и, соответственно, рычагов
управления), т. е. увеличения необходимого смещения ручки для
создания единичной избыточной перегрузки, стали применять ме-
ханизмы нелинейной передачи с пониженным градиентом йш.в =
в начале хода механизма (фиг. 5.23).
216
Один из первых таких механизмов во .время второй мировой
войны был предложен Ф. Ф. Орловым для истребителя Ла-5.
В конце II мировой войны механизм нелинейной передачи появился
в продольном управлении немецкого истребителя FW-190.
В настоящее время эти механизмы чаще сокращенно назы-
вают нелинейными механизмами. Они нашли довольно широкое
применение в системах продольного и поперечного управления са-
молетом.
Фиг. 5.24. Механизм нелинейной передачи самолета FW-190 (а) и ха-
рактеристика нелинейной передачи в проводке продольного управле-
ния самолета (6).
/—прямая передача, 2—нелинейная передача.
В системе управления элеронами нелинейные механизмы слу-
CD „ dx~
жат для уменьшения показателя х х=—- при малых отклоне-
ниях ручки, что уменьшает чувствительность самолета к боковым
отклонениям ручки при больших скоростных напорах в дозвуковой
зоне. Схемы различных нелинейных механизмов приведены на
фиг. 5.24—5.27. Самым удобным для конструкторов оказался
шестеренчатый механизм (фиг. 5.27), так как изменением соотно-
шения диаметров (d и D) шестеренки, сектора и радиуса (г) кри-
вошипа легко получить самые различные характеристики этого
механизма. На фиг. 5. 28 приведена схема продольного управления
современного истребителя с нелинейным механизмом.1
При наличии нелинейного механизма в системе продольного
управления даже простой пружинный загрузочный механизм обес-
печивает более приемлемые характеристики загрузки ручки
1 Самолет Супермарин № 113 «Симитэр» F. 1, см. Aeroplane, No. 2477, 1959.
217
Фиг. 5.25. Простейший не-
линейный механизм с жест-
ким треугольником.
Фиг. 5.26. Кулисный механизм (а)
и его характеристика (б).
вход
Фиг. 5. 27. Шестеренчатый не-
линейный механизм с криво-
шипом.
/-качалка-водило, 2—шестерня с
кривошипом (d—начальный диаметр
шестерни, г—радиус кривошипа)
3—неподвижный зубчатый сектор
(D—начальный диаметр окружности
зубьев сектора), 4—выходная тяга.
218
(см. фиг. 5.14 — пунктирная кривая), так как в начале отклоне-
ния от нейтрального положения х* имеет теперь повышенное зна-
чение за счет уменьшения £ш.в (см. фиг. 5.23), и ручку надо откло-
нять больше, чтобы получить тот же прирост перегрузки. В ре-
зультате этого больше сжимается пружина и увеличивается
усилие на ручке, т. е. растет Р%.
Кроме снижения чувствительности управления при малых хо-
дах ручки, нелинейные механизмы выполняли и вторую роль —
аварийного механизма, так как вследствие замедления движения
системы в начале хода от нейтрального положения они давали со-
Фиг. 5.28. Схема (а) продольного управления палубного истребителя бом-
бардировщика Супермарин N.113 «Симитэр» F.1 (Англия)' и характеристика
(б) нелинейной кинематической передачи фв=/(хв).
/—ручка управления; 2—загрузочный механизм с коррекцией по q и механизм триммер-
ного эффекта; 3—проводка управления; 4—нелинейный механизм; 5—механизм автома-
тической балансировки при выпуске закрылков (отклоняет стабилизатор на 4°); 5—двойная
качалка привода механизма балансировки, 7—трос к закрылкам, 8—двухкамерный бустер,
9— управляемый стабилизатор; 10—силовой шпангоут.
ответствующий выигрыш в силе (ибо работа по закону сохранения
энергии должна оставаться постоянной). Этот выигрыш в силе
при отказе бустера может создать возможность вручную управ-
лять машиной на больших скоростях, когда потребные расходы
рычагов управления невелики.
Основным недостатком нелинейных механизмов, устанавливае-
мых в системах продольного управления самолетом, является то,
что нейтральное положение ручки (а значит, и нелинейного меха-
низма), которому соответствует наибольшее замедление передачи
и повышение усилия от ручки к рулю, не соответствует балансиро-
вочному положению руля высоты (стабилизатора) на различных
режимах полета. Для борьбы с этим недостатком стали смещать
нейтральное положение нелинейного механизма, обеспечивая со-
впадение его с балансировочным положением руля (и ручки) на
наиболее характерном для данного самолета режиме полета
(фиг. 5.29 и 5.30). Однако таким способом невозможно устранить
большой недостаток нелинейных механизмов, устанавливаемых
в системе продольного управления,— неблагоприятное увеличение
219
Фиг. 5. 29. к выбору характеристики нелинейного
механизма в продольном управлении.
а—балансировочные кривые (ф ) =/(М: Я); б—измене-
л в г,п
ние показателя фв по числам М и высотам; в—выбранный
закон изменения передачи в продольном управлении с по-
мощью нелинейного механизма ?В=7С*В): г—исправление
показателя х£ с помощью механизма нелинейной пере-
дачи.
------х” при нелинейном в;
------х” при линейном в.
Фиг. 5. 30. Характеристика
нелинейного механизма в
системе продольного управ-
ления истребителя Норт
Америкен F-100C (США).
220
kin.B при балансировке машины на больших углах атаки, когда
ручка сильно отклонена «на себя» и механизм сильно отклонен
от нейтрального положения. Так как при больших углах атаки
чаще всего снижается степень продольной статической устойчи-
вости по перегрузке (т^у), то это приводит к повышенной «стро-
гости» пилотирования вследствие существенного уменьшения рас-
ходов рычагов при этих условиях.
При установке нелинейного механизма в систему управления
элеронами или рулем поворота обеспечивается совпадение ней-
тральных положений рулей, нелинейного механизма, ручки и пе-
далей.
§ 4. Изменение передаточных отношений
в системах управления в полете
Значительный диапазон изменения эффективности органов
управления при полете с различными дозвуковыми и сверхзвуко-
выми скоростями и как следствие этого, значительное изменение
величин ходов рычагов управления при одинаковых маневрах на-
вели на мысль об изменении в полете передаточного отношения
от ручки управления к рулю.
Первоначально передаточное отношение изменялось летчиком
вручную (фиг. 5.31, а) или с помощью специального электромеха-
низма. Одна из первых конструкций с изменением передаточного
отношения (£ш) с помощью электромеханизма приведена на
фиг. 5.31,6. Здесь летчик при достижении определенной скорости
с помощью тумблера 2 включал электродвигатель и уменьшал
выходное плечо ручки управления с целью уменьшения передаточ-
ного отношения в системах управления стабилизатором и элерона-
ми для того, чтобы уменьшить чувствительность машины на боль-
шой скорости к случайным небольшим перемещениям ручки
(увеличить показатели управляемости х™х на большой скоро-
сти). В системе может быть предусмотрен автомат, который при
достижении определенной приборной скорости переключал бы ме-
ханизм на малое плечо и обратно. При изменении передаточного
числа изменяется диапазон углов отклонения руля и тем самым
воздействие руля на траекторию самолета при одинаковом сме-
щении ручки управления.
В системе продольного управления экспериментального сверх-
звукового. самолета Фэйри FD-2 «Дельта» летчик при помощи спе-
циального механизма мог изменять передаточное число в 9 раз.
Схема исполнительной части механизма изменения передаточного
числа показана на фиг. 5.32.
На фиг. 5. 33 приведен исполнительный механизм системы изме-
нения передаточного отношения с помощью изменения выходного
плеча специальной качалки смещением поршня в силовом цилинд-
ре. Этот механизм имеет только два положения выходного плеча:
221
1) большое плечо (БП), соответствующее полному использова-
нию диапазона углов отклонения руля и применяемое при его ма-
лой эффективности;
Фиг. 5.31. Изменение передаточного отношения в систе-
мах управления с помощью изменения выходного плеча
ручки управления самолетом.
а—ручка управления с ручным изменением выходного плеча.
1—рычаг изменения передаточного отношения: 2—корпус ручки;
3—соединительная тяга; 4—подвижный стержень-. 5—шаровая
опора; 5—подшипник шаровой опоры; 7—переменное выходное
плечо;
б—ручка управления с электромеханизмом для изменения выход-
ного плеча.
1—ручной привод ходового винта; 2—тумблер переключения элек-
тродвигателя (3 положения); 3—электродвигатель, 4—редуктор;
5— привод ходового винта; б—выдвижной шток с гайкой; 7—хо-
довой винт; 8—корпус ручки.
2) малое плечо (МП), соответствующее уменьшению диапазона
углов отклонения руля и применяемое при его большой эффектив-
ности.
Управление механизмом осуществляется гидравлическим кра-
ном, подающим жидкость из гидросистемы под давлением в по-
лость А и устанавливающим большое выходное плечо. При выклю-
чении крана полость А соединяется со сливной магистралью
222
и механизм устанавливается на малое плечо под действием сжа-
того воздуха (из специального баллона) на поршень в полости Б.
Этот механизм мог бы служить и как аварийный при отказе
бустера, так как в этом случае он автоматически при падении дав-
ления в гидросистеме под действием сжатого воздуха переключал-
ся бы на малое плечо, соответствующее передаче большего усилия
от ручки к рулю, что должно было бы помочь летчику управлять
самолетом при аварийной посадке. Однако, применение сжатого
воздуха для изменения передаточных чисел крайне опасно, так
как при отказе гидравлики шток такого механизма может практи-
чески мгновенно переместиться. Если при этом механизм и связан-
Фиг. 5.32. Схема механизма изменения передаточного отно-
шения в системе управления самолета Фэйри F.D.2 «Дельта»
(Англия).
а—положение механизма при коэффициенте передачи : 1; б—положе-
ние механизма при п=9 : 1.
/—управляющий электродвигатель; 2—шестерня; 3—сектор с пазом:
4—каретка.
ный с ним руль не находились в нейтральном положении, то про-
изойдет очень быстрое отклонение руля при одновременном ударе
на рычаге управления самолетом, которые могут быть опаснее
отказа гидросистемы. Поэтому в случае использования подобных
механизмов для изменения передаточного числа необходимо приме-
нять перемещение штока в сторону уменьшения выходного плеча
при помощи электромеханизма или давления жидкости из другой
(аварийной) гидросистемы, подводимого через ограничивающее
расход калиброванное отверстие.
В случае переключения механизма на малое плечо маневрен-
ность самолета на малых скоростях значительно понижается, так
как при этом может быть использован только уменьшенный диа-
пазон углов отклонения руля. Но при отказе бустерной системы
это и не так уже важно, ибо основная задача состоит в том, чтобы
дать возможность летчику посадить самолет, преодолевая шарнир-
223
224
Фиг. 5.33. Гидравлический механизм
изменения передаточного отношения,
/—силовой гидроцилиндр с цапфами, вы
полненный в виде качалки; 2—поршень со
штоком; 3—шарики в обойме; 4—гильза
шарикового замка, 5—двухпозиционный
электрокран в гидросистеме, 6—клапан-пе-
реключатель.
ный момент руля только собственными силами. Следует отметить,
что в случае применения подобных механизмов в качестве аварий-
ных, посадка с отказавшей бустерной системой должна произво-
диться на повышенных скоростях, чтобы обеспечить достаточную
эффективность органов управления при уменьшенном диапазоне
их отклонения.
Все описанные механизмы имели один общий большой недо-
статок: допускали только очень грубую ступенчатую регулировку
передаточного числа и требовали управления в полете часто
по достаточно сложному закону в зависимости от изменения пара-
метров полета. А летчик, особенно на истребителе, и без того до-
статочно загружен. Поэтому возникла мысль изменять передаточ-
ное отношение в полете автоматически в зависимости от изменения
параметров полета. Конструктивному выполнению этой идеи спо-
собствовало развитие теории и практики автоматического регули-
рования и разработка принципов построения следящих си-
стем.
§ 5. Автоматы изменения передаточных отношений
в системах управления самолетом
Как уже отмечалось, показатели управляемости самолета, ха-
рактеризующие расходы рычагов управления на изменение
режима полета, определяются рядом факторов, часть из которых
зависит только от весовых, аэродинамических и конструктивных
параметров самолета и его центровки, часть определяется кине-
матикой проводки системы управления, а часть зависит от режи-
мов полета Ч
Применительно к продольной управляемости влияние этих фак-
торов можно рассмотреть на примере показателя Хв, который при
необратимой бустерной системе управления определяет и показа-
тель Рв (см. выражение 5.2).
Для показателя Хв уже приводилось выражение (5.1), в ко-
тором параметр G/S (нагрузка на квадратный метр площади
крыла) является весьма важным при аэродинамическом расчете
самолета и выбирается обычно еще при эскизном проектировании
для обеспечения необходимых летно-тактических характеристик
самолета.
о / oV'2 ол2
Скоростной напор 1= М21 в значительной степени
определяет изменение характеристик управляемости. Так как с ро-
стом скоростного напора повышаются создаваемые органами
управления (рулями) аэродинамические моменты относительно
Н. А. Фомин, Проектирование самолетов, Оборонгиз, 1961, стр. 325.
225
осей самолета (например, Л42 = т^вфв5вйв?), то это и определяет
уменьшение расхода рычага Продольного управления на единицу
приращения перегрузки обратно пропорционально скоростному на-
пору.
На дозвуковых скоростях коэффициенты ап и т^в, определяю-
щие соответственно статическую устойчивость самолета (по пере-
грузке) и эффективность продольного управления при помощи
цельноповоротного стабилизатора, приблизительно постоянны.1
Поэтому из выражения (5. 1) для х* следует, что если изменять
коэффициент передачи &ш.в в проводке продольного управления
обратно пропорционально изменению скоростного напора, то мож-
но получить Хв=const, а значит, и Pl = const.
Если задаться некоторым, наиболее удобным, значением пока-
зателя (Хв )noTp=const2 * * *, то необходимый закон изменения коэффи-
циента передачи при изменении скоростного напора можно выра-
зить следующим образом:
(ь \ =~___________—_____L=a_
К^Ш.В/ПОТр О / „\ Ф. ’
о (хп) q q
\ в Лютрг
где с — постоянный коэффициент.
Эта зависимость (^ш.в)потр от скоростного напора и является
исходной для проектирования следящей системы автомата измене-
ния передаточного числа.
Однако этот закон изменения передаточного числа в проводке
продольного управления по скоростному напору оказывается при-
емлемым только на дозвуковых скоростях, когда можно считать,
что вп = const и m^B = const.
Коэффициент продольной статической устойчивости по пере-
грузке ап в значительной степени определяет показатель управляе-
мости Хв, причем влияние изменений коэффициента оп на показа-
тель Хв противоположно влиянию изменения скоростного напора.
Это определяет характер зависимости ‘ необходимого изменения
коэффициента передачи (&ш.в)потр от изменений коэффициента ап.
Переход к сверхзвуковым скоростям связан с увеличением про-
дольной статической устойчивости по перегрузке (оп — возрастает,
см. фиг. 4.3,а), вызывающим возрастание и показателя xl на
сверхзвуковых скоростях [см. выражение (5.1)].
1 Изменение показателя ап за счет изменения центровки в полете при выго-
рании топлива и сбросе грузов здесь не учитываем.
2 Выполнение требования х”=const не является необходимым, но оно опре-
деляет постоянство значений показателя = const при простом пружинном
загружателе и поэтому является исходным при расчете необходимого закона
изменения коэффициента передачи.
226
Для учета влияния увеличения продольной статической устой-
чивости по перегрузке при переходе на сверхзвуковые скорости
на изменение показателя х£ в закон регулирования передаточного
числа по скоростному напору следует ввести соответствующую по-
правку.
Следует отметить, что ввиду быстрого уменьшения плотности
воздуха р и скорости звука а с ростом высоты при одних и тех же
значениях скоростного напора числа М полета на различных вы-
сотах будут сильно отличаться, а именно с ростом высоты значе-
ния чисел М увеличиваются (см. пример на стр. 104). Поэтому
с ростом высоты при постоянном значении скоростного напора
(приборной скорости) на некоторой высоте скорость самолета
может превзойти звуковую, и в закон изменения передаточного
числа (бщ.в)потр по скоростному напору необходимо будет ввести
поправку в сторону его увеличения для компенсации роста устой-
чивости самолета.
На малых высотах, особенно у земли, влияние увеличения про-
дольной статической устойчивости по перегрузке из-за сдвига
фокуса практически не проявляется, вследствие того, что на этих
высотах большие числа М не достигаются по причине значитель-
ного возрастания скоростного напора и, следовательно, сопротив-
ления (так, при скорости, соответствующей М=1 у земли, q=
= 7233 кГ/м2 без учета сжимаемости).
Характеристики управляемости в значительной степени зависят
и от эффективности органов управления. В рассматриваемом при-
мере эффективность продольного управления определяется способ-
ностью управляемого стабилизатора создавать при отклонениях
продольные моменты. Как уже отмечалось, с ростом чисел М эф-
фективность органов управления и, в частности, стабилизатора
(zn*B) уменьшаются, что приводит к необходимости увеличивать его
отклонения для создания единичной перегрузки. Следовательно,
в закон регулирования передаточного числа (^ш.в)потр по скорост-
ному напору с ростом высоты приходится вводить еще одну по-
правку — на уменьшение эффективности органов продольного
управления. Эта поправка тоже в сторону увеличения передаточ-
ного числа при постоянном значении скоростного напора.
Схематично влияние всех трех факторов: скоростного напора,
продольной статической устойчивости и эффективности управляе-
мого стабилизатора на изменение показателя продольной управ-
ляемости Хв при постоянном значении йш.в показано на фиг. 5.34.
Для получения х£= (Хв)Потр = const необходимо изменять &ш.в по
такому же закону в зависимости от q и Н.
Как следует из фиг. 5.34, необходимый закон регулирования
передаточного числа в продольном управлении для обеспечения
= const получается очень сложным, и его не удается практи-
чески реализовать, в частности, еще и потому, что для современных
227
самолетов, обладающих большим диапазоном скоростей и высот,
требуется изменение передаточного числа во столько раз, что вы-
полнение этого требования невозможно по конструктивным сооб-
ражениям.
При этом еще необходимо учесть и вопросы обеспечения
безопасности на случай отказа автоматики, так как, изменяя пере-
даточное число &ш.в автомат изменяет и диапазон максимальных
отклонений стабилизатора. Поэтому при отказе в положении, соот-
ветствующем самому малому передаточному числу (^ш.в)тш
на большой дозвуковой скорости, сильно ограниченный диапазон
отклонения стабилизатора не позволит совершить посадку.
Фиг. 5. 34. Влияние изменения скоро-
сти, степени продольной статической
устойчивости и эффективности орга-
нов управления на величину потреб-
ного угла отклонения управляемого
стабилизатора для получения еди-
ничной избыточной перегрузки.
/—увеличение потребного отклонения за
счет роста продольной статической устой-
чивости; 2—увеличение потребного откло-
нения за счет падения эффективности.
--------- возможное изменение передаточ-
ного отношения в с помощью автомата.
Кроме того, принятое в начале для расчета закона изменения
передаточного числа требование хв = const слишком «жестко»
и практически не является необходимым. Для получения приемле-
о п
мых значении характеристики управляемости хв вполне достаточ-
ным оказывается наиболее просто реализуемое линейное уменьше-
ние передаточного числа &ш.в с ростом скоростного напора, как это
показано на фиг. 5.34 пунктиром. Необходимый диапазон измене-
ния передаточного числа автоматом при росте скоростного напора
(^ш.в)тах/(^ш.в)шт нужно выбирать таким образом, чтобы значе-
ния показателя Хв лежали в наиболее удобном для управления диа-
пазоне наименьших ошибок (зона b на фиг. 5. 22) при наиболее
характерных для данного самолета режимах полета. При этом ми-
нимальные значения показателя х£ на любых режимах полета
должны быть выше допустимого нижнего предела (хв)пнп для дан-
ного типа самолета.
Так, например, по сообщениям печати,1 для английского экспе-
риментального самолета Бристоль Т.188 изменение передаточного
числа в продольном управлении приводит к изменению диапазона
углов отклонения стабилизатора от +44—15° (на малых скоро-
стях) до +1,254—10,5° (на больших скоростях) при максимальном
диапазоне отклонений ручки продольного управления 19,5°.
1 Flight No. 2773, 1962;
Interavia, No. 4973, 4976, 1962.
228
Из диаграммы фиг. 5.34 следует, что необходимое изменение
передаточного числа в системе продольного управления является
по существу функцией двух параметров — скоростного напора
и высоты полета, причем с ростом скоростного напора &ш.в следует
уменьшать. Влияние высоты оказывается обратным, так как
с ростом высоты при тех же значениях скоростного напора значе-
ния числа М увеличиваются и £ш.в следует увеличивать. На малых
высотах регулировать £ш.в можно только по скоростному напору.
Эта закономерность и должна быть положена в основу проектиро-
вания следящей системы автомата регулирования £ш.в, задачей
которой является установить в системе продольного управления
значение передаточного числа в соответствии с выбранным зако-
ном регулирования при изменении скоростного напора (приборной
скорости) и высоты полета.
Конструктивно изменять передаточное число можно различны-
ми способами (см. фиг. 5.314-5.33), но наиболее простым кажется
изменение длины выходного плеча ручки управления (см. фиг.
5.31), причем при увеличении выходного плеча йш.в увеличивается.
Внутренний объем ручки может быть использован для размещения
электродвигателя привода, редуктора и других деталей исполни-
тельного механизма автомата. Однако такое конструктивное реше-
ние не является наиболее благоприятным с точки зрения обеспече-
ния максимальной жесткости проводки управления при минималь-
ном весе. Это связано с тем, что при установке исполнительного
механизма на малое выходное плечо, соответствующее минималь-
ному значению &щ.в, увеличивается передаточное число по усилиям
от летчика, так как длина верхней части ручки сохраняется
постоянной. Поэтому расчетные усилия в проводке возрастают,
что и требует увеличения веса всей системы. Отсюда следует, что
исполнительный механизм автомата изменения передаточного чис-
ла, выполненный в виде качалки с переменным плечом, лучше
всего устанавливать в непосредственной близости от гидроусили-
теля.
Как было отмечено выше, конструктивные трудности и необхо-
димость обеспечения безопасной посадки при отказе автомата из-
менения передаточного числа в положении, соответствующем
минимальным £ш.в и диапазону углов отклонения стабилизатора,
не позволяют использовать в продольном управлении необходи-
мый закон изменения передаточного числа km,B для получения
•*в== const. Вследствие этого показатель управляемости хв изме-
няется на различных режимах полета. Это не является причиной
особых затруднений в управлении, так как летчики привыкли
к изменению Хв по режимам полета еще на старых, дозвуковых
машинах с безбустерными системами управления (см. выражение
5.1). Важно, чтобы этот показатель не снижался ниже допустимых
пределов (Хвтш), когда его значения могут попать в зону наи-
больших ошибок управления (зона а на фиг. 5.22) и стать причи-
229
ной раскачки самолета. Эта задача увеличения минимальных
значений показателя х“ и выполняется автоматами изменения
передаточного числа в проводке продольного управления.
Однако, как уже отмечалось, изменение показателя по ре-
жимам полета при необратимых бустерных системах управления
и простейших пружинных загружателях приводит к существенно-
му изменению показателя управляемости Рв, чего не было при
безбустерных системах управления. Поэтому теперь, приложив
к ручке продольного управления одинаковое усилие на разных
режимах полета, летчик может вывести машину на совершенно
различные перегрузки. На малой высоте при большой дозвуковой
скорости даже небольшое усилие может вывести самолет на недо-
пустимую перегрузку.
Для устранения этого недостатка можно, одновременно с изме-
нением передаточного числа в проводке от ручки к стабилизатору
изменять еще и жесткость загрузки (т. е. прирост усилия на ручке
dPB \
при ее единичном отклонении —- , причем закон этого изменения
dxB /
при изменении скорости и высоты должен быть обратным измене-
нию &ш.в.
Действительно, из выражения (5. 2) для показателя Р" ПРИ не’
обратимом бустерном управлении Рп=^^- /где -^^-=хп при
в dx3 dny \ dny в
М <С 1 изменяется обратно пропорционально изменению скоростного
напора, следует, что для сохранения х^— const и Р" = const при
/ dPn < л
простом пружинном загружателе (когда —= 3= const)автомат
в продольном управлении, как было ранее показано, должен изме-
нять &шв тоже обратно пропорционально изменению скоростного
напора, т. е. йшв = —. Однако, как следует из рыражения (5.2),
я
выполнить более важное условие Р£=const можно и путем изменения
dPn
--- пропорционально изменению скоростного напора для компен-
сации изменениях" при &шв = соп8Ь Таким образом, для получения
Рв=const необходимо увеличивать жесткость загрузки пропорцио-
нально росту скоростного напора, т. е. —-=с1<7 и Cj — постоян-
dxQ
ные коэффициенты).
Практически реализовать изменение жесткости загрузки мож-
но аналогично изменению передаточного числа, т. е. путем автома-
тического изменения длины плеча ручки (или специальной качал-
ки), к которому подсоединяется загрузочный механизм (см.
фиг. 5.20), причем увеличение плеча, к которому подсоединяется
загрузочный механизм (Z — фиг. 5.20), повышает жесткость за-
грузки.
230
Противоположный закон необходимого изменения по режимам:
полета длин плеч исполнительных механизмов автоматов измене-
ния передаточного числа в проводке управления (£ш.в) и автомата
изменения жесткости загрузки по режимам полета наводит на
мысль о совмещении функций этих автоматов в одном исполни-
тельном механизме, выполненном в виде качалки с двумя перемен-
ными плечами (см. фиг. 5.35). К одному плечу (/с) должна под-
соединяться тяга системы продольного управления, идущая
к гидроусилителю привода стабилизатора, к другому (/3) — загру-
зочный механизм. Одновременное изменение длин плеч при такой
конструкции достигается перемещением одной детали — штока
исполнительного механизма с помощью установленного в корпусе
качалки электродвигателя.
С помощью такого комбинированного автомата можно добить-
ся приемлемых значений показателей х* и Р* во всем летном диа-
пазоне скоростей и высот полета при законе регулирования,
достаточно просто поддающемся практической реализации.
При этом будет сохранена возможность посадки при отказе авто-
мата, т. е. обеспечена безопасность.
При выбранном законе регулирования £ш.в по скоростному на-
пору с коррекцией по высоте закон изменения длин плеч (/с и /3)
исполнительного механизма такого комбинированного автомата
будет иметь вид, приведенный на фиг. 5.35, б.
Следует отметить, что при линейном законе изменения длин
плеч на загрузочный механизм и на гидроусилитель, изменение
передаточного числа £ш.в будет тоже происходить по линейному
закону, а изменение жесткости загрузки dP^/dxB — по закону квад-
ратной параболы.
Действительно, на основании закона сохранения энергии для
системы загрузочного механизма можно написать соотношение:
dP^dx^dP^dx^ (см. фиг. 5.35, где rfxnp— обжатие пружины,
a dPnp — соответствующее усилие деформации пружины), из кото-
рого можно выразить значение передаточного числа от загрузочно-
1 dxBB dP о
го механизма к ручке: km=—=-------------
dxB dPBP
При смещении ручки на dxB пружина деформируется на dxnp =
—knpdxB, создавая на ручке усилие dPB=kBpdPnp. Так как усилие
деформации пружины dPnp может быть вычислено через ее жест-
кость (F) и линейную деформацию: йРПр=^хПр=/;&прС?Хв, то при-
рост усилия на ручке при ее смещении выразится: dPB=Fk2BPdxB.
Отсюда и получаем > гДе передаточное число в цепи
загрузочного механизма кщ> линейно зависит от длины плеча
на загрузочный механизм (/3) исполнительного механизма комби-
нированного автомата. Поэтому при изменении плеча /3 по линей-
ному закону жесткость загрузки изменяется пропорционально
231
Фиг. 5.35. Схема установки автомата изменения передаточного числа в систему продольного управ-
ления самолетом и систему загрузки (а) и возможный характер изменения длин плеч исполнительного
механизма автомата (б).
1—ручка управления самолетом; 2—проводка управления; 3— исполнительный механизм автомата изменения передаточ-
ного отношения; 4—гидроусилитель стабилизатора; 5—загрузочный механизм и механизм триммерного эффекта;
6—управляемый стабилизатор; 7—управляющий блок автомата изменения передаточного отношения.
dP3 ,
квадрату этого изменения, т. е.—- = с2/3 (где с2— постоянный
dx3
коэффициент).
Используя это свойство соответствующим выбором плеча /3,
можно получить показатель Pl даже увеличивающийся с ростом
скоростного напора для того, чтобы предохранить машину от не-
произвольного вывода на недопустимую перегрузку на тех режи-
мах полета, когда xl имеет минимальные значения, т. е. на боль-
ших дозвуковых скоростях у земли.
Для реализации выбранного закона регулирования передаточ-
ного числа в проводке продольного управления (£ш.в) и переда-
точного числа в цепи загрузочного механизма (£Пр) необходимо
проектирование электро-механической следящей системы, которая
должна состоять из двух основных частей: управляющей и испол-
нительной, включающей силовые реле и электродвигатель испол-
нительного механизма.
Входными сигналами этой системы являются изменения пара-
метров полета q и Н, а выходным — изменение длины плеч испол-
нительного механизма автомата — А/. Эти величины связываются
между собой законом регулирования, и автоматическая система
должна включать электродвигатель исполнительного механизма
для устранения рассогласования между необходимым, т. е. пред-
усмотренным законом регулирования положением штока исполни-
тельного механизма при данных текущих значениях скоростного
напора и высоты и его действительным положением.
Таким образом, формирование управляющего сигнала на дви-
жение штока исполнительного механизма должно происходить на
основании сложения сигналов датчиков скоростного напора и вы-
соты и сигнала обратной связи, характеризующего положение
штока и, следовательно, установленное автоматом в системе
управления передаточное отношение. Это сложение может быть
выполнено непосредственно на магнитном усилителе или обмотках
электромагнитного поляризованного реле, если с потенциометров
датчиков скоростного напора и высоты поступают электрические
сигналы, соответствующие текущим значениям этих параметров.
На фиг. 5.36 показана принципиальная схема электромеханиче-
ской следящей системы с электрическим сложением двух входных
управляющих параметров (q и Н) и сигнала обратной связи на
обмотках поляризованного реле. Эта схема может быть применена
для автомата изменения передаточного числа в системе продоль-
ного управления, если включаемый управляющим поляризован-
ным реле электродвигатель, смещающий щетку потенциометра
обратной связи, будет одновременно изменять плечи /с и /3 испол-
нительного механизма автомата.
Управляющая схема автомата составляется из потенциометров
датчиков скоростного напора (q) и высоты (Я), которые соеди-
няются по схеме двойного моста с потенциометром обратной связи
233
(о.с.). В диагонали мостов включаются обмотки поляризованного
суммирующего реле (РПС), причем в виду того, что увеличение
высоты согласно закону регулирования должно сказываться на
изменении плеч механизма противоположно увеличению скорост-
ного напора, магнитные потоки мостов скоростного напора (Ф?)
и высоты (Фн) — противоположны. Щетки потенциометров датчи-
ков скоростного напора и высоты устанавливаются на земле
(^=0—?!; Я = 0-г-Д1) у концов своих потенциометров с противо-
положной полярностью, но селеновый вентиль пропускает ток
Фиг. 5.36. Принципиальная схема электромеханической
следящей системы с электрическим сложением двух
управляющих параметров (q и Н) на поляризованном
суммирующем реле (эпюры падения напряжения на
потенциометрах заштрихованы).
только в указанном на схеме направлении, поэтому тока через
обмотки реле (РПС) не будет. Щетка потенциометра обратной
связи (о.с.) должна находиться при этом у того конца своего по-
тенциометра, который имеет ту же полярность, что и конец потен-
циометра <?, где находится щетка при
Рост скоростного напора приведет к смещению щетки потен-
циометра q и нарушению равновесия моста скоростного напора.
В обмотке скоростного напора реле РПС появится ток, магнитный
поток которого замкнет контакты реле и включит электродвига-
тель, который будет изменять положение штока исполнительного
механизма, одновременно смещая щетку потенциометра обратной
связи до восстановления равновесия моста.
Значение скоростного напора qh с которого должно начинаться
регулирование длин плеч по скоростному напору (см. фиг. 5. 35),
может быть установлено предварительным рассогласованием по-
тенциометров q и о.с., а значение — конца регулирования —
с помощью механического ограничения датчика скоростного напо-
ра или закорочением конечного участка потенциометра q.
234
При изменении высоты полета, щетка потенциометра Н будет
смещаться, и в обмотке «высоты» поляризованного реле при за-
данных законом регулирования значениях скоростного напора
и высоты появится ток, магнитный поток которого (Фн) будет
вычитаться из магнитного потока (Фд). Поэтому равновесие
в электрическом мостике скоростного напора будет наступать
не при одинаковых положениях щеток потенциометров q и о.с.
(как было бы без коррекции по высоте), а при некоторых других,
определяемых законом регулирования. На высоте свыше #2 ток
коррекции по высоте должен замкнуть контакты реле (РПС)
и включить двигатель для выдвижения штока исполнительного
механизма в положение, соответствующее максимальному переда-
точному отношению в проводке управления (максимальное
/с — БП), так как на большой высоте необходим полный диапазон
углов отклонения стабилизатора независимо от значений скорост-
ного напора (см. фиг. 5.34).
На фиг. 5.37 изображена возможная схема использования опи-
санной выше следящей системы для механизма изменения переда-
точного отношения в проводке продольного управления.
Диапазон регулирования £ш.в и £Пр по скоростному напору и вы-
соте должен подбираться для каждого конкретного самолета в за-
висимости от его типа и аэродинамических показателей.
Электрическую схему управляющего блока можно упростить,
если предварительно с помощью специальной механической систе-
мы сложить перемещения анероидных коробок датчиков q и Н,
вызванные деформациями при изменениях динамического и стати-
ческого давления. Такое механическое сложение позволяет сразу
учесть противоположное влияние скоростного напора и высоты
на положение штока исполнительного механизма с помощью наи-
более надежной механической системы, которая и будет формиро-
вать суммарное смещение щетки теперь уже единственного управ-
ляющего потенциометра режима полета.
В этом случае электрическая схема следящей системы автома-
та может быть выполнена в виде потенциометрического моста,
в диагональ которого включается обмотка магнитного усилителя
или поляризованного реле, с помощью которых производится уси-
ление сигнала рассогласования и замыкание контактов силовых
реле, включающих двигатель исполнительного механизма для
перемещения штока в сторону устранения возникшего рассогласо-
вания. Пример одного варианта выполнения следящей системы
с механическим сложением двух управляющих параметров и одним
управляющим потенциометром приведен на фиг. 5.55.
На фиг. 5.38 показаны схемы управления стабилизатором, эле-
ронами и рулем поворота палубного истребителя Де Хевиленд
«Си Виксн».1 На самолете применена необратимая бустерная си-
1 Aeroplane, No. 2498, 1959;
Flight, No. 2656, 1960.
235
Фиг. 5.37. Принципиальная схема электромеханической следящей системы,
примененной для осуществления выбранного закона регулирования переда-
точного отношения в системе продольного управления.
(Схема показана в положении штока исполнительного механизма «Большое
плечо» на бустер).
БП—большое плечо; МП—малое плечо; Фд—магнитный поток моста скорост-
ного напора; Фн—магнитный поток моста высоты; рСт—статическое давле-
ние; Рполн—полное давление набегающего потока.
I—управляющий блок автомата.
1—делитель напряжения (для понижения напряжений в управляющей схеме): 2—датчик
скоростного напора; 3—датчик высоты; 4—селеновый замок (выпрямитель): 5—реле поля-
ризованное суммирующее (РПС); 6—7 два силовых реле (правого и левого вращения
электродвигателя).
II—исполнительный механизм автомата.
8—электродвигатель постоянного тока с последовательным возбуждением; 9—обмотки
возбуждения (правого и левого вращения); /0—концевой выключатель малого плеча;
//—концевой выключатель большого плеча, сблокированный с выключателем сигнальной
лампы («большое плечо»); 12—наконечник для подсоединения тяги системы управления
самолетом; 13—потенциометр обратной связи; /-/—потенциометр указателя положения
штока.
III—щиток управления автоматом на приборной доске.
/5—ручной переключатель: «автоматическое» или «ручное» управление автоматом;
16—ручной тумблер переключения механизма для изменения положения штока; /7—ука-
затель положения штока; 18—сигнальная лампа «большое плечо» (взлетно-посадочное
положение механизма).
236
7
Рили направления
Фиг. 5.38. Система управления палубного истребителя Де Хэвилленд
«Си Виксн» (Англия).
/—педали; 2—загрузочный механизм с коррекцией по <?; 3—центрирующие пружинные
механизмы, 4—механизм триммирования, 5—бустеры привода рулей направления;
6—демпфер рыскания; 7—8 левый и правый рули направления; 9—механизм передачи;
10—промежуточный вал; //-—ось поворота складывающейся консоли крыла; 12—пружин-
ные тяги; 13—центрирующие и' нагрузочные механизмы; 14—механизм триммирования;
/5—рулевые машинки автопилота; 16—бустеры привода элеронов; 17—18—левый и пра-
вый элероны; 19—балансировочный груз; 20— механизм натяжения тросов; 21—механизм
триммирования; 22—механизм изменения передаточного числа в продольном управлении;
23—механизм натяжения тросов; 24—механизм изменения нейтрального положения (ба-
лансировочный привод); 25—механизм передачи; 26— центрирующий механизм и автомат
усилий; 27—бустеры привода стабилизатора; 28—29—проушины крепления бустеров
за правую и левую стороны стабилизатора.
237
стема управления (по всем трем каналам). Бустеры двухкамер-
ные, питаемые от двух различных гидросистем, причем в одной
из систем давление может создаваться в аварийном случае насо-
сом с приводом от ветрянки. Каждая из систем управления снаб-
жена пружинным загрузочным механизмом, а в системе управле-
ния рулями поворота усилия имитируются пропорционально
скоростному напору. В цепях управления рулями поворота (само-
лет спроектирован по двухбалочной схеме, фиг. 5.39) с каждой
стороны имеется электромеханизм (4 и 6 на фиг. 5.38) со звеном
переменной длины («раздвижные тяги»). Правый механизм, управ-
Фиг. 5. 39. Палубный истребитель Де Хэвилленд
«Си Виксн».
ляемый летчиком, используется в качестве механизма триммерного
эффекта для путевой балансировки, а левый — работает как
демпфер рыскания и управляется одним из гироскопов авто-
пилота.
В систему управления стабилизатором включены:
1) механизм изменения передаточного числа (22);
2) ограничитель перегрузок;
3) демпфер, связанный с датчиком скоростного напора.
Передаточное число изменяется в зависимости от числа М с по-
мощью электромеханизма, который изменяет длину звеньев при
достижении заданного числа М. Руль высоты используется только
для балансировки при отклоненных закрылках и при их уборке
запирается, составляя одно целое со стабилизатором. Отклоняется
руль высоты специальным электромеханизмом.
Система управления элеронами также с переменным переда-
точным числом. Рулевые машинки автопилота включены только
в цепи управления элеронами, которые при этом работают как
элевоны, обеспечивая более плавное управление по сравнению
с включением автопилота в цепь управления стабилизатором. Ру-
левые машинки автопилота воздействуют на бустеры элеронов
через многозвенник, минуя пружинный загрузочный механизм
и ручка управления при этом не отклоняется. Чтобы избежать при
этом большого рассогласования между отклонениями ручки
и элеронов, введен специальный электронный контур, дающий сиг-
нал механизму триммерного эффекта на ликвидацию этого рассо-
гласования.
238
На фиг. 5.40 приведены результаты расчетов показателя
п
(ps = —— для гипотетического легкого сверхзвукового самолета
dny
в зависимости от qcm 1 для различных высот. При отсутствии изме-
нения передаточного отношения в системе управления показатели
срв и %в связаны линейно, следовательно, кривые изменения показа-
теля управляемости х" имеют аналогичный характер. На этом же
Фиг. 5.40. Результаты расчетов изменения показателей <рлв и лв гипотетического
сверхзвукового самолета с управляемым стабилизатором в зависимости от qc>*
для различных высот.
------.*в=/(<7сж) при #ш.в= ОД°1мм~const;
------х” = f (<7сж) при работе автомата изме-
нения передаточного отношения #ш.в по выбран-
ному линейному закону (на высоте Н = 8 км).
графике пунктиром показано изменение показателя хл в результате
работы автомата изменения передаточного отношения в проводке
управления (£ш.в) для высоты 8 км. Хорошо видно, что при вклю-
чении автоматики показатель хл приблизительно совпадает с задан-
1 Символом (/сж обозначают значения скоростного напора с учетом сжимае-
мости. Так как все датчики скоростного напора воспринимают именно ^Сж,
то проектирование законов управления для всех автоматов необходимо вести
именно по этому параметр. При М<1 ^сж = Ря [(1 + 0,2м2)3»5— 1], а при
М 1 Q рук — Рн I ' — 1 I •
сж рну (7М2 —I)2»5 J
В этих выражениях р„— статическое давление на данной высоте. Если рн
выражено в кПм2, то и вычисленные значения qCiK имеют такую же размер-
ность (см. В. С. В е д р о в и М. А. Т а й ц, Летные испытания самолетов, Обо-
ронгиз, 1951, стр. 74—76).
239
ным во всем диапазоне регулирования (по скоростному напору),
хотя углы отклонения стабилизатора для создания единичной пере-
грузки по-прежнему должны изменяться по нелинейному закону
в зависимости от скоростного напора.
В связи с дальнейшим повышением скоростей и высот полета
самолетов изменение передаточного числа в продольном управле-
нии (&ш.в) по простому линейному закону оказывается уже
неудовлетворительным, так как вследствие значительного роста
устойчивости самолета и одновременного падения эффективности
органов управления при сверхзвуковых скоростях на больших высо-
тах это уже не обеспечивает однообразия техники пилотирования
из-за весьма существенных разбросов значений показателя х£ при
различных режимах полета. Это, в свою очередь, вызывает и значи-
тельный разброс величин показателя Р* при простых пружинных
загрузочных механизмах в системе продольного управления. Поэто-
му приходится выбирать для автоматов изменения передаточных
чисел в продольном управлении более сложные законы регулирова-
ния с изменением передаточных чисел в 4; 5; 10 и более раз.
По сведениям, появившимся в печати,1 в системе продольного
управления американского сверхзвукового бомбардировщика Кон-
вэр В-58 «Хаслер» (М>2) применен автомат, изменяющий переда-
точное число в 25 раз в зависимости от скоростного напора (<?),
высоты (//) и перегрузки (пу) таким образом, что на всех режимах
полета Рв = Н,4 кГ = const.
На фиг. 5.41 приведен пример выбора характеристики автомата
изменения &ш.в в продольном управлении гипотетического сверхзву-
кового самолета для получения постоянного значения показателя х"
независимо от режима полета, что может потребоваться для обеспе-
чения Р"= const при простом пружинном загружателе. Исходными
данными для выбора закона регулирования &ш.в являются кривые
потребных расходов стабилизатора на единицу' приращения пере-
грузки (см. фиг. 5. 41, а).
Величина ^.потр^0011^ выбирается, исходя из требования обес-
печения наиболее удобного пилотирования с учетом типа самолета
и его летных данных. Зная полный диапазон углов отклонения ста-
билизатора (для примера принято фвтах=40°) и максимальный ход
рычага управления хв.Полн (принято 400 мм), легко построить кри-
вые x"=f(M, Н), так как
— —-— ф" мм
в А тв
кш.в
1 Broad Outline of Aircraft Feel Pilot’s Appreciation, Preprint, No. 854,
CAI Joint Meeting, 7, 8 X, 1958.
Journal RAS, XI, 1962.
А. В. Честнов, Летная эксплуатация самолетов, Воениздат, 1962, стр. 186.
240
Фиг. 5.41. Пример выбора закона регулирования передаточного числа в про-
дольном управлении.
fl—кривые изменения показателя <рц по числам М и высотам Н, необходимое изменение пере-
даточного числа (^авт) в ПР°ДОЛЬНОМ управлении для получения (-Гв)пОтр — const; --не-
обходимый закон регулирования ----------------------------------------------------принятый закон; в—выбранный для отработки авто-
матом закон регулирования передаточного числа (максимальные пределы регулирования переда-
точного числа Лшв от 0,1 : 1,7=0,17 а/мм до 0,1:3=0,0333 °/мм, т. е. 0,17:0,0333 = 5,1 : 1; г-из-
менение показателя по числам М и высотам при работе автомата с выбранным законом
регулирования в>
241
в зависимости от числа
/7/7? летчика.
Фиг. 5.42. Схема испол-
нительного механизма
автомата изменения пе-
редаточного отношения
с диапазоном регулиро-
вания 1 : 5.
/—электродвигатель; 2—кор-
пус редуктора-преобразова-
теля с цапфами; 3—выдвиж-
ной* шток.
/ 40 \
(для принятых величин кш-в——=О,1°/мм^. Характер этих кри-
вых будет идентичен с характером исходных кривых <р"=/(М,//).
Приняв (л£)потр= const (для примера принято (х")потр=40 .wjf —
= const), можно легко подсчитать необходимый коэффици-
ент изменения передаточного отношения автоматом kBBT равт=
(О <
—----E2IL при ИЛИ &ав,— ---- ПРИ (•*„)
ХП г \ в/потр^ В авт (хп\ r v в/потр в -»
М и высоты (Н) полета (см. фиг. 5.41,6).
В результате расчета получается до-
вольно сложный закон регулирования,
который для упрощения инструменталь-
ного выполнения приходится несколько
корректировать (см. фиг. 5. 41, в). Это при-
водит к некоторому нарушению желаемо-
го закона управления х ” =const, но
в вполне допустимых пределах. (В разоб-
ранном примере принято максимально
возможное изменение &авт в пределах
1 : 5,1).
На фиг. 5. 42 приводится один из воз-
можных вариантов конструктивного вы-
полнения исполнительного механизма ав-
томата изменения передаточного отно-
шения в 5 раз.
При установке в системе продольного
управления автомата изменения переда-
точного отношения с исполнительным ме-
ханизмом, выполненным по схеме соглас-
но фиг. 5.42 и фиг. 5.35, следует обра-
щать внимание на тот факт, что при отра-
ботке автоматом закона регулирования
передаточного отношения (&ш.в) при раз-
личных ре’жимах полета исполнительный
механизм находится в различных поло-
жениях по отношению к присоединенным
тягам управления, соответствующих раз-
личным балансировочным положениям
стабилизатора и проводки управления,
которая соединяет стабилизатор с рычагом продольного управления
в кабине летчика (ручкой или штурвалом). Поэтому изменение
длин плеч исполнительного механизма может изменять не только
передаточное число (&ш.в) и общий диапазон углов отклонения ста-
билизатора, но и угол отклонения стабилизатора при зажатом лет-
чиком рычаге продольного управления, если только шток исполни-
тельного механизма не установился перпендикулярно к подходя-
242
щим к нему тягам. При таком положении штока, изображенном
на фиг. 5.43, перемещения штока исполнительного механизма
автомата практически не влияют на угол отклонения стабилизатора
(«увод стабилизатора» отсутствует).
При любых других положениях исполнительного механизма
по отношению к тягам системы управления, отработка автоматом
закона изменения длин плеч будет приводить к дополнительному
отклонению стабилизатора («уводу стабилизатора») на некоторый
угол (Дфавт), величина и знак которого в значительной степени
зависят от относительного положения исполнительного механизма
автомата и тяг системы управления. «Увод стабилизатора» нару-
Фиг. 5.43. Схема взаимного положения штока исполнительного ме-
ханизма автомата изменения передаточного отношения и подходя-
щих к нему тяг системы управления, при котором работа автомата
практически не влияет на положение стабилизатора (т. е. не изме-
няет балансировки).
шает балансировку самолета и требует от летчика некоторого до-
полнительного отклонения ручки на величину Дхв.авт Для восстанов-
ления балансировочного положения стабилизатора. Таким образом
оказывается, что автомат изменения передаточного отношения
в продольном управлении изменяет балансировочные кривые хв=
=f(M, Н), являющиеся одним из важнейших показателей продоль-
ной статической управляемости. Используя это свойство, при соот-
ветствующем выборе точки на балансировочной кривой <pB=f(M),
которой будет соответствовать взаимно перпендикулярное положе-
ние штока исполнительного механизма автомата изменения £ш.в
и присоединенных к нему тяг, можно улучшить балансировочную
кривую xB=f(M), так как характерная «ложка» в околозвуковой
зоне будет «смягчена» уводом стабилизатора вследствие движения
штока автомата. Разберем этот вопрос подробнее.
Пусть балансировочная кривая <pB=f(M) самолета имеет вид,
показанный на фиг. 5.44, а, и автомат изменения £ш.в работает
по закону, показанному на фиг. 5.44,6. Если установить исполни-
тельный механизм автомата изменения &ш.в в систему управления
так, чтобы его шток был перпендикулярен подходящим тягам при
положении стабилизатора срв = —6° (точка «Б» на фиг. 5.44,а), то
243
в начале разгона (М = 0,6) исполнительный механизм (фиг. 5. 45, а)
займет положение «Оа», ручка — хв0, а стабилизатор фво. При раз-
гоне летчик отдает ручку от себя на Дхв и отклоняет стабилизатор
на угол Дфв, чтобы сбалансировать машину при М=0,9. Если бы
автомат не работал, то он занял бы при этом положение «Об».
о
•5
Конец разгона (М =0,3)
/в v '
+5(^-6°)
0,2 04 0.6 0.8 7,0 7,2 7,6 7,8 М
V(ipB=^)
z
7,7
1
2
0,2 ОЛ 0,6 0.8 7,0 7,2 7,Ь 76 7,8 К
____j__।____J__I___-1__1 ....।-й----□—
к тм.ъ — О*]?
Шезшчение \ Лш ъ~0,72
1 Г ---------------------
\ Уменьшение \ /
' ^ш.в \ /
*ш.вж^ V/
i)
Фиг. 5. 44. Исходные данные для расчета влия-
ния работы автомата изменения &ш.в на ба-
лансировку.
а—балансировочная кривая б—выбранный
закон регулирования Лш в продольном управлении.
Однако, вследствие отработки закона регулирования &гав (см. фиг.
5.44, б), исполнительный механизм за время разгона изменяет
плечи и переходит в положение «Ов» и при этом «уводит» стабили-
затор на угол Дфавт (на пикирование), для компенсации которого
и восстановления балансировочного положения стабилизатора при
М=0,9 (фв) летчику приходится отдавать ручку от себя при разгоне
несколько меньше (на Дхв.авт)« В результате балансировочная кри-
вая xB = f(M) получается с менее глубокой «ложкой» (см. фиг. 5.46,
кривая Б).
244
При неудачном выборе положения стабилизатора, при котором
тяги системы управления оказываются перпендикулярными к штоку
исполнительного механизма, исходные балансировочные кривые мо-
гут оказаться ухудшенными вследствие необходимости компенсиро-
вать «увод» стабилизатора при работе автомата соответствующими
перемещениями ручки управления. Например, если автомат уста-
новлен так, что шток его исполнительного механизма перпендику-
Фиг. 5.45. Установка исполнительного механизма автомата изменения
передаточного отношения, при которой отработка закона регулирова-
ния Лгш.в улучшает балансировочные кривые Н) («уменьшает»
неустойчивость по скорости) (а) и соответствующие зависимости углов
отклонения стабилизатора от хода ручки q)3=fxB при различных поло-
жениях штока механизма (б).
лярен к присоединенным тягам при фв =—10° (точка В на фиг.
5.44,а), то яри разгоне до М=0,9 автомат так «уведет» стабили-
затор, что летчику придется еще «додавать» ручку от себя, чтобы
сбалансировать машину (см. фиг. 5.47,а).1 В этом случае балан-
сировочная кривая xB=f(M) ухудшается, так как «ложка» делает-
ся «глубже» (см. фиг. 5.46, кривая В).
Если Же установить исполнительный механизм автомата пер-
пендикулярно к тягам при нулевом угле отклонения стабилизатора
(фв==0 — точка Г на фиг. 5.44,а), то, как показано на фиг. 5.48,а,
вследствие значительного «увода» стабилизатора при переходе
1 На фиг. 5.47 и 5.48 для обозначения положений ручки, исполни-
тельного механизма автомата и стабилизатора применены те же символы,
что и на фиг. 5.45.
245
исполнительного механизма из положения Оа (в начале разгона)
в положение Ов (в конце разгона), летчику придется для компен-
сации этого увода при разгоне не отдавать ручку «от себя»,
а даже несколько брать «на себя» при М<Мкр. Таким образом,
при подобной установке автомата может появиться «неустойчи-
вость по скорости» по ощущениям летчика на дозвуковых скоро-
стях (кривая Г на фиг. 5.46).
Фиг. 5.46. Изменение балансировочных
кривых xB=f(M) при различной установке
в систему управления исполнительного ме-
ханизма автомата изменения km,B.
А—исходная кривая (&ШеВв0,const (автомат
не работает — вариант А, фиг. 5.43): Б—улучшен-
ная кривая (автомат установлен по варианту Б,
приведенному на фиг. 5.45); В—увеличение «лож-
ки» на балансировочной кривой (автомат установ-
лен по варианту В, приведенному на фиг. 5.47);
Г—«неустойчивость по скорости» на дозвуковых
скоростях, вызванная работой неправильно уста-
новленного автомата (автомат установлен по ва-
рианту Г, фиг. 5.48).
На фиг. 5.45, 5.47, 5.48 для наглядности влияние исполнитель-
ного механизма автомата на отклонение стабилизатора несколько
утрировано, но основной вывод остается правильным: с помощью
соответствующего выбора положения стабилизатора, при котором
тяги подходят к штоку исполнительного механизма перпендику-
лярно (начальной точки установки), можно улучшить балансиро-
вочные кривые xB=f(M). При этом следует заметить, что вследст-
вие смещения балансировочных кривых фв=ИМ) по оси ординат
(ось фв) при изменении высоты полета, может оказаться, что вы-
бранное для одной высоты наиболее благоприятное положение
начальной точки установки автомата будет неудачным для другой
высоты (балансировочные кривые хв=/(М) будут ухудшаться).
Поэтому необходимо выбирать наиболее благоприятное положе-
246
Фиг. 5.47. Вариант установки исполнительного механизма, при котором
работа автомата изменения &ш.в ухудшает балансировочные кривые
xB=f(M) (а) и соответствующие зависимости фв = Нхв) при различных
штока
механизма (б).
положениях
вариант Г
Фиг. 5.48. Вариант установки исполнительного механизма автомата
изменения ^ш»в> при котором отработка автоматом закона регулирова-
ния &ш.в приводит к изменению характера управления при разгоне
самолета («неустойчивость» по скорости на дозвуковых скоростях) (а)
и соответствующие зависимости q)B — f(xB) при различных положениях
штока механизма (б).
мм
247
ние начальной точки установки автомата для всего диапазона вы-
сот, чтобы случайно резко не ухудшить управляемость на каких-
либо высотах, немного улучшив на других.
На фиг. 5.45,6; 5.47,6; 5.48,6 показаны также возможные
диапазоны отклонений ручки и стабилизатора при различном вы-
боре начальной точки установки исполнительного механизма авто-
мата изменения &ш.в в случае отработки автоматом положений
штока, соответствующих большому (БП) и малому (МП) выход-
ным плечам на бустер стабилизатора. Из этих диаграмм следует,
что при малом плече на бустер [минимальное передаточное отно-
шение (^ш.в)тш] диапазон углов отклонения стабилизатора значи-
тельно сокращается. [На этих диаграммах, а также на фиг. 5. 44,
5.46 так же как и раньше, условно принято:
(^)полн = 400 ММ',
foU =40°;
^ш.в==°. 1 °/мм=const1 * *].
В результате применения необратимых гидроусилителей и про-
стых пружинных загружателей изменились привычные характери-
стики управляемости не только в продольном управлений.
Для примера можно показать изменение характера зависимо-
го» dPa
сти показателя Р*=—- от скорости полета для случаев системы
управления элеронами без необратимого бустера и с бустером.
Во втором случае считаем, что загрузка создается простым пру-
жинным механизмом с линейной характеристикой.
Для системы без бустера
рв = - -я • • 38 4- /п^9Даэ).
При вращении самолета относительно продольной оси некото-
рое среднее изменение угла атаки крыла в зоне элеронов вслед-
ствие вращения может быть вычислено (см. фиг. 5.49):
где
— (йЛ — Za
(йг=—, 2Л= — .
х 2V ’ 9 //2
Так как
тхХ
1 При практических расчетах, когда углы отклонения стабилизатора задают-
ся в градусах, а смещение ручки — в миллиметрах, обычную размерность коэф-
фициента передачи (1/ж) удобнее заменять на (°/млс).
248
то
Поэтому можно написать:
РЭ= -Ьш.д8аЬач>х[ т-ш эга — /Иш9.
Отсюда (взяв производную по <ох):
du>x \ /
— (Or I
и, учитывая, что (Ол="^Г»
/ “ж \
p:x==lf3==_2^.ey5e.de т«.9.^-/п‘э ^£_ ; (5.3)
d<*x 2 I тъ /
Таким образом, из (5. 3) можно сделать заключение, что при
отсутствии влияния сжимаемости и учета упругости конструкции
показатель поперечной статической управляемости Р^х при безбу-
стерной системе управления линейно зависит от скорости»
Фиг. 5.49. Изменение угла атаки крыльев при вращении
самолета относительно оси Охь
В случае наличия необратимого бустера в проводке управле-
ния элеронами показатель Р™х может быть выражен:
__ dP3 dX3
3 dx3 сРлх
(dP
—^-=£Ж 3 8 —наклон характеристики загружателя поперечного
dx^ управления).
249
то
Так как
dx3 _ аъ9 . 1 _ 1 . тхх
d<&x du>x ^ш.э ^ш. э /п^э
откуда получаем:
(5.4)
Следовательно, при установке необратимого бустера и линей-
ного загрузочного механизма в системе управления элеронами
Фиг. 5. 50. Характер изменения пока-
зателя поперечной управляемости
при безбустерном и бустерном
управлении с ростом скорости.
------ без бустера:
------при необратимой бустерной систе-
ме управления.
показатель поперечной управ-
ляемости Р™х при разгоне са-
молета убывает обратно про-
порционально скорости полета,
если не учитывать влияния уп-
ругой деформации крыла. Гра-
фически изменение показателя
Р^х для систем управления с
бустером и без бустера пока-
зано на фиг. 5. 50.
Практически, упругие де-
формации крыла с ростом ско-
рости значительно возрастают,
что приводит к существенному
о 8
уменьшению производной тхэ
и увеличению показателя Р3Х
э
э
как при бустерном, так и при
безбустерном поперечном управлении. Это вызывается необходи-
мостью отклонять элероны на большие углы для получения необхо-
димой угловой скорости крена сох. Характер влияния упругих де-
формаций крыла на изменение показателя Р™х с росто.м скорости
показан на фиг. 5.50 штрих-пунктирными линиями.
Размеры элеронов выбираются теперь из условия обеспечения
необходимой угловой скорости крена и возможности компенсиро-
вать момент крена от скольжения на малых скоростях, а также
для обеспечения необходимой эффективности поперечного управ-
ления при больших скоростях, когда элероны теряют эффектив-
ность из-за влияния нежесткости крыла и сжимаемости. Поэтому
на некоторых режимах полета такие элероны оказываются чрез-
мерно эффективными, а показатель Р”х при бустерном управлении
250
const
т. е. ^ш.э —
V
и пружинном загружателе становится слишком мал. Это легко
может привести к раскачке машины по крену на таких режимах
полета и даже вызвать катастрофу из-за запаздывания реакции
летчика и фазового сдвига дэ по отношению к Рэ, а также из-за
слишком быстрого нарастания угловой скорости крена (сох), вслед-
ствие малости Jx у современных самолетов.
Для увеличения расходов рычагов поперечного управления
(ручки или штурвала по элеронам), необходимых для совершения
определенных маневров на больших дозвуковых скоростях и, соот-
ветственно, повышения усилий на этих рычагах, можно применять
не только нелинейные механизмы, но и автоматы изменения пере-
даточных отношений в проводке управления элеронами.
Из полученного для показателя Р™х выражения (5. 4) хорошо
видно, что если при бустерном управлении с ростом скорости
коэффициент передачи в проводке управления элеронами умень-
шать пропорционально изменению скорости
с помощью автомата изменения передаточного числа, то можно
получить Р*х = const. Этого же можно достигнуть и при увеличении
коэффициента жесткости загрузки по элеронам (6ж.3.э), пропор-
ционально скорости (т. е. £ж.з.э=соп81 V).
Поэтому на современных самолетах с необратимым бустерным
управлением автоматы изменения передаточных отношений или из-
менения жесткости загрузки часто устанавливаются не только
в системе управления стабилизатором или рулем высоты, но
и в системе управления элеронами.
Так, например, на английском палубном самолете Супермарин
«Симитэр» F. 1. вследствие очень большой разницы в эффективно-
сти элеронов на разных скоростях и высотах (см. фиг. 8. 18) при-
шлось установить автомат изменения передаточного отношения
в проводке управления элеронами !. Подобный автомат установлен
и на палубном истребителе «Си Виксн»1 2. На экспериментальном
самолете Бристоль Т. 188 на больших скоростях элероны имеют
слишком большую эффективность, так как прямое крыло этого
самолета имеет, очевидно, большую жесткость. Поэтому в этом
случае применено не изменение передаточного числа в проводке
управления элеронами, а постепенное ограничение возможных
углов отклонений ручки управления (по элеронам) с ростом ско-
рости с помощью специальных стопоров, управляемых автоматом.
На малых 'скоростях ручка может отклоняться на угол ±32°,
а элероны — на ±12,5°. При больших дозвуковых числах М полета
диапазон углов отклонений ручки ограничивается до ±17°, а эле-
1 Aeroplane, No. 2477, 1959.
2 Aeroplane, No. 2498, 1959;
Flight, No. 2656, 1960.
251
ронов до ±4,8°. Таким же образом с ростом скорости постепенно
ограничивается диапазон углов отклонения руля направления от
±25 до ±1,5О1.
Сравнение диапазона углов отклонений элеронов и ручки
управления при ограничении хода ручки стопорами с диапазоном
углов их отклонений при отсутствии скоростного ограничения, на-
водит на мысль, что в проводке управления элеронами самолета
Т. 188 применена также нелинейная передача.
В управлении рулем направления обычно используется изме-
нение только характеристик загрузки (см. фиг. 5.15 и 5.21),
в частности, вводится коррекция по скоростному напору, хотя
возможно, что со временем, изменение передаточного отношения
потребуется и в этой системе, особенно при переходе на цельно-
поворотные кили.
§ 6. Автоматы балансировки
Установка в системе управления автоматов изменения переда-
точных чисел и жесткости загрузки, наряду с применением раз-
личных систем загрузочных механизмов, существенно улучшает ряд
показателей статической управляемости самолета, изменившихся
в результате применения необратимых гидроусилителей (бусте-
ров), а также вследствие значительного изменения аэродинамиче-
ских характеристик самолета в околозвуковой зоне.
Однако, с помощью описанных в предыдущем параграфе
автоматов практически не удается заметно улучшить балансиро-
вочные кривые хв=/:(М, Я), которые, вследствие свойственной
в большей или меньшей степени всем самолетам в околозвуковой
зоне неустойчивости по скорости, имеют характерные «ложки» (см.
фиг. 3.5 и 4.3,6). Как уже отмечалось (гл. III), наличие этих
«ложек» на балансировочных кривых усложняет управление само-
летом и требует специальной подготовки летчиков, так как непра-
вильные действия летчика, вызванные привычной реакцией при
разгонах и торможениях в дозвуковой зоне, в зоне «ложки» могут
привести к опасным последствиям (см. фиг. 3.5,а).
Особенно большие неприятности может принести явление «за-
броса по перегрузке» при торможении со сверхзвуковой скорости,
тем более, если торможение производится на маневре с исходной
перегрузкой пу>1 (фиг. 5.51). Как следует из фиг. 5.51 при тор-
можении со сверхзвуковой скорости самолет достаточно быстро
увеличивает перегрузку вместо обычной на дозвуковых скоростях
тенденции к уменьшению перегрузки.
Применяющиеся при необратимом бустерном управлении за-
1 Flight, No. 2773, 1962;
Interavia, No. 4973, 4976, 1962.
252
грузочные механизмы обеспечивают загрузку рычага продольного
управления в зависимости от величины его отклонения от стрим-
мированного по усилию положения. Поэтому наличие «ложек»
на балансировочных кривых по перемещениям рычага xB=f(M, Н)
приводит к аналогичным «ложкам» и на балансировочных кривых
по усилиям PB=f(M, Н). Изменение усилий в зоне «ложек», зави-
сящее от характеристики загружателя и глубины «ложки» по рас-
ходам рычага продольного управления, может выйти из допусти-
мых пределов, если характери-
стики загружателя выбирались
без учета необходимости обес-
печения приемлемых баланси-
ровочных усилий, а только ис-
ходя из требований получения
приемлемых значений показа-
теля Р".
Для обеспечения нормаль-
ной управляемости и повыше-
ния безопасности пилотирова-
ния при разгонах и торможе-
ниях в околозвуковой зоне бы-
ло предложено устанавливать в
системе продольного управле-
ния специальный автомат, ко-
торый «выбирал» бы «ложку»
на балансировочной кривой
фв=/(?)» позволяя летчику от-
Фиг. 5.51. Характер изменения высо-
ты и перегрузки при торможении
самолета после сброса тяги и фикси-
ровании в начале процесса руля вы-
соты.
— — — торможение в дозвуковой зоне:
-------топможение в околозвуковой зоне
неустойчивости не скорости.
клонять рычаг продольного уп-
равления по привычному закону также и в околозвуковой зоне. Та-
кой автомат получил название «автомата балансировки».
Исполнительный механизм автомата балансировки, в отличие
от исполнительного механизма, описанного в предыдущем пара-
графе автомата изменения передаточного отношения, помимо воли
летчика должен отклонять стабилизатор по заданному закону
в зоне неустойчивости по скорости на определенный угол. Величи-
на этого угла определяется глубиной «ложки» на балансировочных
кривых фв=НМ, Н), которую автомат должен «выбрать» для обес-
печения необходимого балансировочного отклонения стабилизатора
при движении рычага продольного управления по привычному для
летчиков на дозвуковых скоростях закону (при разгоне — «от
себя», при торможении — «на себя»).
Другими словами, такой автомат в околозвуковой зоне должен
вносить рассогласование между положениями рычага продольного
управления и органа продольного управления — руля высоты или
управляемого стабилизатора (см. фиг. 5.52, а, заштрихованная
зона).
Как следует из фиг. 5. 52, это рассогласование при разгоне от
253
(] (соответствует Мкр)
Фиг. 5.52. Изменение характера протекания
балансировочной кривой (pB = f(^) сверхзвуко-
вого самолета при работе автомата балан-
сировки (а) и характер изменения зависимости
угла отклонения руля высоты от отклонения
ручки при отказе автомата балансировки в по-
ложении, соответствующем сверхзвуковой
скорости (б).
1 — Нормальная кинематическая зависимость.
2 — Изменение кинематической зависимости при отказе
автомата балансировки.
Длгв. авт —уменьшение диапазона отклонений ручки
управления «на себя»:
А6 в. авт —уменьшение диапазона углов отклонения
руля высоты вниз (на пикирование), соот-
ветствующее максимальному отклонению
руля высоты при работе автомата.
254
МКр до конца зоны неустойчивости по скорости должно постепенно
увеличиваться, а при торможении от сверхзвуковой скорости
до Мкр — постепенно уменьшаться. При дозвуковых скоростях
рассогласование равно нулю, а при сверхзвуковых — остается по-
стоянным, равным максимальному отклонению стабилизатора
автоматом (Лфавт). Эта закономерность должна служить исходной
при проектировании закона управления автомата балансировки.
Исполнительный механизм этого автомата может быть выполнен
в виде «раздвижной тяги», возможные варианты установки кото-
рой в системе продольного управления показаны на фиг. 5. 53.
Отрабатывая закон изменения длины по сигналам управляюще-
го блока в зависимости от изменения режима полета «раздвижная
тяга» автомата балансировки смещает золотник бустера, который
и отклоняет стабилизатор (или руль высоты). В связи с этим,
мощность двигателя раздвижной тяги автомата балансировки мо-
жет быть незначительной.
Автоматы балансировки могут устанавливаться и на дозвуко-
вых самолетах, если они достигают скоростей, при которых уже
начинает проявляться влияние сжимаемости на изменение балан-
сировки. Так, например, на английском стратегическом бомбарди-
ровщике Авро «Вулкан» при околозвуковых скоростях имело место
изменение характера движения рычага продольного управления
при разгоне, связанное с необходимостью парирования «затяги-
вания в пикирование». Для устранения этого явления и приведе-
ния характеристик управляемости самолета при разгонах и тормо-
жениях в околозвуковом диапазоне скоростей к привычному для
летчиков виду, на самолете был установлен автомат балансировки.
Установка этого автомата изменила характер балансировочных
кривых хв=/(М, Н) самолета, и позволила летчику при разгоне
все время отдавать штурвал от себя, причем характер изменения
усилий также стал соответствовать привычкам летчиков: с ростом
скорости возрастали давящие усилия L
Из рассмотрения фиг. 5. 52 следует, что автомат балансировки
должен работать в достаточно ограниченной области скоростей
полета, в которой резко проявляется неустойчивость самолета по
скорости. Поэтому управляющий блок автомата должен включать
двигатель исполнительного механизма при изменениях скоростного
напора (приборной скорости) именно в этой зоне для обеспечения
необходимого закона отклонения стабилизатора (или руля вы-
соты) фв=/(М, Н).
Таким образом, для автомата балансировки необходимо про-
ектирование электро-механической следящей системы, которая
обеспечивала бы выполнение заданного закона регулирования
длины «раздвижной тяги» автомата при изменении скорости полета
в околозвуковой зоне.
4 Flight, No 2551, 1957, No. 2558, 1958;
Aeroplane, No. 2422, 1958.
255
Затруднения при осуществлении закона регулирования по ско-
ростному напору вызываются тем, что на разных высотах кризис-
ные явления наступают при различных значениях скоростного на-
пора (приборной скорости), так как эти явления определяются
значением Мкр.
Кроме того, глубина «ложек» на балансировочных кривых
<Рв=7(?) с ростом высоты возрастает. Поэтому в закон регулиро-
Фиг. 5. 53. Схемы установки исполнительного механизма автомата балансировки
(или демпфера) в системах управления.
а—«раздвижная тяга»; б—с применением «двойной качалки»;
/—раздвижная тяга; 2—двойная качалка; 3—малая качалка.
в—с применением дифференциальной качалки.
/—раздвижная тяга автомата; 2—дифференциальная качалка.
вания хода штока раздвижной тяги по скоростному напору необ-
ходимо вводить соответствующую коррекцию по высоте подобно
тому, как это делалось в автомате изменения передаточного числа
£ш.в (см. фиг. 5.36).
Однако, выполнение такой коррекции по высоте в управляющей
схеме автомата балансировки чисто электрическим путем достаточ-
но затруднительно вследствие того, что максимальный выходной
сигнал управляющего блока, соответствующий Дфавт (см. фиг. 5. 52),
должен не только изменяться по величине при изменениях высоты,
но и сдвигаться на различные значения скоростного напора (при-
256
борной скорости). Поэтому более простым способом может ока-
заться механическое введение коррекции путем смещения управ-
ляющего потенциометра скоростного напора механизмом высоты
с одновременным изменением напряжения питания потенциометра
скоростного напора (см. фиг. 5.54). При такой схеме смещением
*+27в
1пРиН0
6
М>7
Закорочен-
ные участки потенци-
ометра смещаемые
механизмом высоты
Per Ат ^полн
Фиг. 5. 54. Возможный вариант осуществления закона регулирования хода испол-
нительного механизма автомата балансировки по скоростному напору с меха-
нической коррекцией по высоте.
/—потенциометр коррекции по высоте и его эпюра напряжений; 2—щетка потенциометра
коррекции по высоте, смещаемая механизмом высоты; 3—управляющий потенциометр ско-
ростного напора с переменными закороченными участками и его эпюра напряжений при
минимальной (Яо) и максимальной (#тах ) высоте полета; 4—щетка управляющего потен-
циометра, смещаемая механизмом скоростного напора; 5—датчик скоростного напора с меха-
низмом передачи (РпОлн —полное давление набегающего потока, рст —статическое давле-
ние); 6—датчик высоты с механизмом передачи; 7—усилитель; 8—силовые реле; 9—обмотки
возбуждения правого и левого вращения электродвигателя; /0—электродвигатель; //—редук-
тор-преобразователь; /2—выдвижной шток раздвижной тяги; 13—потенциометр обратной связи;
Д*тах —максимальный ход раздвижной тяги.
потенциометра скоростного напора механизмом высоты можно
внести поправку на изменение чисел М при постоянных значениях
скоростного напора на разных высотах, а изменением напряжения
запитки этого потенциометра при изменении высоты — поправку
на разную глубину «ложки» на балансировочной кривой.
Очевидно, могут быть предложены и другие варианты механи-
ческого сложения двух сигналов изменения режима полета
(q и Н) для формирования управляющего сигнала для исполни-
257
тельного механизма автомата балансировки, например, подобно
тому, как это делалось с помощью рычажных механизмов в ука-
зателях числа М полета Ч
Фиг. 5.55. Принципиальная схема электромеханической следящей системы
с механическим сложением двух управляющих параметров (q и Н) с по-
мощью коноида.
I. Управляющий блок автомата.
/—делитель напряжения; 2—коноид, воспроизводящий закон регулирования автомата
(в сечениях коноида, перпендикулярных оси вращения, отображен необходимый закон
изменения длины исполнительного механизма в зависимости от изменения скоростного
напора на данной высоте, которой соответствует сечение); 3—датчик высоты; 4—датчик
скоростного напора; 5—щуп; 6—потенциометр (управляющий); 7—два диода, пропускаю-
щие ток в противоположных направлениях; 8—два силовых реле, включающих обмотки
возбуждения правого или левого вращения двигателя исполнительного механизма.
II. Исполнительный механизм («раздвижная тяга.->).
9—электродвигатель; 10—обмотки возбуждения правого и левого вращения; //—выдвиж-
ной шток; 12—потенциометр обратной связи; 13—проушины для подсоединения исполни-
тельного механизма в систему продольного управления самолета.
На фиг. 5. 55 показан пример одного из возможных вариантов
построения электромеханической следящей системы с механиче-
ским сложением двух управляющих параметров (q и Н) с по-
мощью коноида, который приводится в движение механизмами от
чувствительных элементов датчиков скоростного напора и высоты.
Закон регулирования определяется формой коноида, который про-
филируется в сечениях, перпендикулярных оси вращения, в соот-
ветствии с необходимым законом изменения длины раздвижной
тяги по скоростному напору, причем каждое сечение соответствует
определенной высоте полета. Таким образом, в плоскости сечения
1 Т. И. В и л я ев ск а я, Авиационные приборы и автопилоты, Оборонгиз,
1954, стр. 96, фиг. 65.
258
коноида, включающей ось вращения, получается кривая, соответ-
ствующая необходимому закону изменения длины раздвижной
тяги автомата балансировки при изменении высоты полета и по-
стоянном значении скоростного напора. Скользящий по поверхно-
сти коноида щуп является, по-существу, суммирующим звеном,
которое выдает на щетку потенциометра управляющего блока
суммарное (от действия механизмов скоростного напора и высоты)
смещение, которое будет соответствовать необходимому на данной
высоте и скорости изменению длины раздвижной тяги и отклоне-
нию стабилизатора (и, следовательно, смещению контакта на
потенциометре обратной связи до восстановления равновесия
в электрическом мостике).
Показанная на фиг. 5.55 схема удобна тем, что характеристики
автомата могут легко изменяться при смене коноида.
Исследование балансировочных кривых cpB=f(M, Н) современ-
ных сверхзвуковых самолетов показывает, что их характер мало
зависит от высоты полета, а происходит как бы сдвиг балансиро-
вочной кривой фв==/?(М) по оси ординат (по оси срв) в зависимости
от высоты (с ростом высоты — в сторону больших отрицательных
углов), причем глубина ложки тоже возрастает с ростом высоты.
Это позволяет существенно упростить закон работы автомата
балансировки и сделать управляющим только один параметр по-
лета— число М. Закон работы автомата можно выбрать по неко-
торой средней высоте полета, наиболее характерной для данного
конкретного самолета.
Для получения большей безопасности в случае возможного от-
каза автоматики, могущего вызвать самопроизвольную перекладку
руля высоты и неожиданную тенденцию самолета к выходу на пе-
регрузку (положительную или отрицательную), следует выбирать
для отработки автоматом закон с возможно меньшим максималь-
ным углом отклонения стабилизатора (или руля высоты). Так,
например, для балансировочной кривой, показанной на фиг. 5. 44, а,
с достаточной степенью точности можно выбрать линейный закон
отклонения руля высоты с помощью автомата балансировки по
фиг. 5. 56, а, т. е. так, чтобы на наиболее характерной высоте само-
лет стал казаться летчику нейтральным по скорости в том диапа-
зоне чисел М, где происходит интенсивное смещение назад фокуса
самолета. Тогда, вследствие того, что на разных высотах «ложка»
на балансировочной кривой cpB=f(M) имеет различную глубину,
балансировочные кривые хв=/(М) на разных высотах при работе
автомата балансировки по одному параметру получатся несколь-
ко различными. На меньших высотах самолет будет казаться лет-
чику устойчивым по скорости, а на больших — несколько неустой-
чивым (но в допустимых пределах, см. фиг. 5.56,6).
Применение автоматов балансировки с законом регулирования
по числу М стало возможным в связи с разработкой более точных
приборов, определяющих число М полета.
259
При необходимости более точного учета «глубины ложки» на
различных высотах и обеспечения устойчивости по скорости по
ощущениям летчика при управлении во всем диапазоне высот,
в управляющий блок автомата, выдающий исполнительному меха-
низму сигнал, пропорциональный изменению числа М в диапазоне
регулирования, может быть введена коррекция по высоте. Для
О 0,2
0/> 0,6 0.8 1.0 12 1fr 1,6 18 М
t-.in.U . й ।—----1----1--------1_______L_____
Выключение автомата
включение автомата,
а)
6)
Фиг. 5.56. Пример выбора закона работы
автомата балансировки по одному управляю-
щему параметру.
а—закон работы автомата балансировки по числу М
полета; б—изменение балансировочных кривых
ЖВ=ЦМ, Н) при работе автомата балансировки
с одним управляющим параметром.
------ без автомата балансировки;
------с автоматом.
этого возможно осуществить изменяющуюся по высоте запитку
управляющего потенциометра числа М (подобно тому, как это
показано на фиг. 5.54).
На фиг. 5. 57 показана блок-схема автомата балансировки, ра-
ботающего по числу М полета с коррекцией по высоте.
В настоящее время, в связи с резким ухудшением динамических
характеристик скоростных и высотных самолетов, в системах управ-
ления большинства сверхзвуковых самолетов приходится устанав-
ливать демпферы колебаний (см. гл. VI).
Исследования показывают, что при наличии в системе про*
дольного управления демпфера тангажа, переходные процессы при
260
ошибке летчика в околозвуковой зоне оказываются более плав-
ными; «затягивание в пикирование» и заброс по перегрузке рас-
тягиваются по времени, хотя, если летчик не примет во время
мер, конечные значения перегрузки с демпфером и без демпфера
отличаются незначительно, так как на балансировочные кривые
при пу=1 и coz=0 демпфер не влияет.
Таким образом, для истребителей автоматы балансировки ока-
зались практически ненужными, а влияние кризисных явлений
в околозвуковой зоне на изменение характеристик управляемости
частично компенсируется установкой демпфера продольных ко-
лебаний.
Стабилизатор
Ручка
Фиг. 5. 57. Блок-схема автомата балансировки с регулированием длины раздвиж-
ной тяги по числу М с коррекцией по высоте.
Для тяжелых сверхзвуковых самолетов, у которых существенно
меньше допускаемая перегрузка, явление самопроизвольного вы-
хода на перегрузку при торможении от сверхзвуковой скорости
до дозвуковой (от М^1,1 до М^0,9) представляет значительно
большую опасность, то же относится и к затягиванию в пикиро-
вание. У тяжелого самолета, вследствие меньших избыточных
тяг и большего момента инерции, процессы разгона и торможения
происходят более растянуто по времени, поэтому автоматы балан-
сировки на тяжелых самолетах способны обеспечить «отслежива-
ние» режима полета с необходимой точностью и обеспечить нор-
мальные характеристики управляемости в околозвуковой зоне.
На тяжелом самолете, у которого достаточно длительны про-
цессы разгона и торможения в околозвуковой зоне, безопасность
полета в случае отказа автомата балансировки и непроизвольной
перекладки руля высоты может быть обеспечена за счет доста-
точно медленного срабатывания автомата, которое летчик успеет
парировать. Поэтому в конструкции исполнительного механизма
автомата необходимо предусматривать ограничение максимальной
скорости движения штока при максимальном сигнале рассогла-
сования, определяемое необходимой скоростью перекладки руля
в зоне прохождения «ложки». Это ограничение проще всего может
быть выполнено с помощью большой редукции оборотов двигателя
261
раздвижной тяги специальным редуктором, который при отказе
в следящей системе и внезапном максимальном рассогласовании
не позволит тяге «выстрелить», а обеспечит медленное движение
штока, которое легко может парироваться летчиком.
Здесь следует заметить, что вследствие своего назначения па-
рировать «затягивание в пикирование» отклонением руля высоты
вверх при разгоне в околозвуковой зоне на самолете с хвостовым
горизонтальным оперением автомат балансировки при любом от-
казе не может ограничить диапазон углов отклонения руля высоты
(стабилизатора) вверх (т. е. поме-
Фиг. 5.58. Балансировочные
кривые PB=f(M) горизон-
тального полета самолета
Дуглас DC-8 с автоматом
балансировки и без авто-
мата.
1—с автоматом балансировки;
2—без автомата.
балансировочные кривые
шать балансировке на посадке), а ог-
раничивает лишь ход ручки «на себя»
и отклонение руля высоты вниз в слу-
чае отказа, приводящего к остановке
раздвижной тяги в положении, соот-
ветствующем сверхзвуковой скорости
(см. фиг. 5.52,6). При таком же от-
казе на дозвуковой скорости никаких
изменений с диапазоном углов откло-
нений ручки и руля высоты не проис-
ходит.
Однако, несмотря на это, на совре-
менных самолетах чаще используется
установка автомата балансировки не
в систему продольного управления,
а в систему загрузки. В этом случае
xB=f(M, Н) не изменяются и по-прежне-
му имеют ложку, а «ложки» на более важных балансировочных
кривых РВ = /(М, Н) устраняются автоматом, который изменяет
характеристики загрузки путем смещения точки крепления загру-
жателя. В этом случае в качестве исполнительного механизма авто-
мата балансировки берется триммерный механизм, куда и заводит-
ся сигнал с управляющего блока.
Автомат балансировки такого типа применен, например, на ан-
глийском стратегическом бомбардировщике Хэндли Пейдж «Вик-
тор» 1 и американском пассажирском самолете Дуглас DC-82, ба-
лансировочные кривые РВ=/(М) которого без автомата баланси-
ровки и с автоматом изображены на фиг. 5.58.
§ 7. Некоторые характеристики гидроусилителей 3
До настоящего времени наибольшее распространение в систе-
мах управления самолетов получили гидроусилители (бустеры) по-
1 Flight, No. 2642, 1959.
2 SAE Preprint, No. 237 a, 1960;
SAE Journal, No. 2, II, 1961, стр. 38-40.
3 В параграфе кратко описаны основные характеристики бустеров, которые
используются при выборе и установке их на самолет и оказывают значительное
262
ступательного действия (фиг. 5. 1 —5.6 и 9.2). Однако в последнее
время, особенно на тяжелых машинах, начинают все чаще приме-
нять гидроусилители вращательного действия (гидромоторы см.
фиг. 8. 33), применение которых обеспечивает значительно большие
жесткости силовой части проводки управления за счет повышения
жесткости самого привода. Это обеспечивается тем, что у гидро-
моторов практически отсутствует раздутие цилиндров, меньше
влияние сжимаемости жидкости и деформаций силового штока.
Несмотря на конструктивные различия, бустеры имеют сходные
характеристики, по которым они и подбираются для установки в си-
стему управления само-
летом.
Основной характери-
стикой бустера является
его внешняя (механиче-
ская) характеристика, т. е.
зависимость скорости дви-
жения выходного штока
(или скорости вращения
выходного вала — для
гидромотора) от воспри-
нимаемого на силовом
штоке усилия (крутящего
момента — для гидромото-
ра). Обычно для данной
конкретной системы уп-
равления внешняя харак-
ристика перестраивается
для удобства расчетов
на другую масштабную
Фиг. 5.59. Внешняя (механическая) харак-
теристика гидропривода при регулировании
скорости движения штока дросселирова-
нием и объемном регулировании, перестро-
енная на координатную сетку Мш—
где б₽= w
/—регулирование дросселированием (т. е. при раз-
личном открытии золотника): 2—объемное регули-
рование.
сетку, а именно: зависимость возможной скорости перекладки
органа управления (бр) от шарнирного момента (Л4Ш) на нем
(фиг. 5.59).
В полете, в зависимости от выполняемых маневров и режимов
полета может понадобиться различная скорость перекладки рулей,
которая и задается летчиком (или автоматической системой управ-
ления). Поэтому установленные в системе управления гидроусили-
тели также должны иметь регулирование скорости, которое и про-
изводится изменением расхода гидросмеси, поступающей в силовой
цилиндр (или камеры гидромотора) под большим давлением.
В зависимости от способа регулирования расхода жидкости гидро-
влияние на характеристики всей системы управления. Желающие подробнее
ознакомиться с этим вопросом см. уже упоминавшуюся книгу Т. М. Б а ш т ы,
Расчеты и конструкции самолетных гидравлических устройств, Оборонгиз, 1961,
а также «Гидравлические следящие приводы», Машгиз, 1960, того же автора;
М. 3. Литвин-Седой, Гидравлический привод в системах автоматики, Маш-
гиз, 1956 и ряд др. изданий, приведенных в списке литературы.
263
приводы делятся на два типа: с дроссельным и объемным регули-
рованием.
При дроссельном регулировании расход жидкости, поступаю-
щей в гидроусилитель от насосов, регулируется путем изменения
сопротивления дросселя (т. е. проходного сечения магистрали
питания бустера, перекрываемым управляющим золотником).
Принцип дроссельного регулирования основан на изменении пло-
щади проходного сечения канала, по которому жидкость под боль-
шим давлением поступает в гидроусилитель. Чем больше сечение
канала, открываемое золотником, тем больше расход жидкости
через золотник и тем больше скорость гидропривода. (Схемы бу-
стеров с дроссельным регулированием скорости показаны на
фиг. 5. 1—5.6, 8.33, 9.2, 9.7).
При объемном регулировании скорость гидропривода регули-
руется изменением производительности насосов. В этом случае
насосы обеспечивают такой расход жидкости, который определяет-
ся необходимой скоростью гидропривода. Гидропривод с объемным
регулированием должен состоять из насоса переменной производи-
тельности и исполнительного силового привода, причем управление
скоростью перекладки рулей в этом случае осуществляется путем
управления производительностью насоса (фиг. 5.60) с помощью
изменения угла наклона у регулировочной шайбы. Реверсирование
движения бустера осуществляется изменением направления пода-
чи жидкости насосом с помощью изменения знака угла наклона
регулировочной шайбы (±у), при этом магистрали высокого
и низкого давления меняются местами. Как следует из фиг. 5. 60
при объемном регулировании скорости движения штока бустера
(или вращения вала силового гидромотора), каждый силовой при-
вод должен иметь свой насос переменной производительности.
В этом большой недостаток систем управления с объемным регу-
лированием, так как вследствие этого они усложняются и значи-
тельно утяжеляются.
«Гидропривод с объемным регулированием отличается высоким
к. п. д. (т]=0,5-^0,7), так как в нем отсутствуют местные потери
на дросселирование жидкости; большой жесткостью характери-
стик, малым удельным весом (весом на единицу полезной мощно-
сти), малыми габаритами привода и высокими динамическими
свойствами. К недостаткам привода этого типа следует отнести
сложность конструкции регулируемого насоса и значительно боль-
шее управляющее усилие, необходимое для изменения рабочего
объема насоса, по сравнению с дроссельным приводом, в котором
усилие управления золотником мало. Для механизации управления
расходом насоса обычно применяют гидравлические усилители...»
(Гидроусилитель для привода регулировочной шайбы насоса пере-
1 Н. С. Г а м ы н ин, Основы следящего гидравлического привода, Оборон-
гиз, 1962, стр. 18.
264
менной производительности на схеме фиг. 5. 60 условно показан
пунктиром). Более «жесткая» внешняя характеристика гидропри-
вода с объемным регулированием позволяет получить большую
Фиг. 5. 60. Принципиальная схема системы управления с объемным регу-
лированием скорости движения штока бустера (а), конструкция поршенько-
вого насоса переменной производительности (б) и схема работы насо-
са (в).
/—ручка управления; 2—дифференциальная качалка; 3—регулировочная шайба насоса
переменной производительности; 4—насос переменной производительности; 5—бустер:
6-—руль; 7—обратные клапаны; 8—компенсационный гидробачок; 9—привод насоса:
/0—бустер для привода регулировочной шайбы.
скорость перекладки руля при том же шарнирном моменте (см.
фиг. 5. 59 — пунктирная кривая).
Как видно из фиг. 5. 59 у современных бустеров с дроссельным
регулированием максимальная возможная скорость перекладки
органа управления в значительной степени зависит от величины
шарнирного момента, т. е. нагрузки на бустер.
В полете скорость перекладки рулей в случае дроссельного ре-
гулирования задается летчиком смещением управляющего золот-
265
ника бустера, в большей или меньшей степени перекрывающего
питающую гидромагистраль с высоким давлением (т. е. дроссели-
рованием), причем, практически, полная мощность бустера исполь-
зуется редко. При этом возникают значительные гидравлические
потери, переходящие в тепло (к. п. д. привода с дроссельным ре-
гулированием всего около 0,3—0,5 в зависимости от нагрузки и ско-
рости). Поэтому современные бустеры с дроссельным регулирова-
нием скорости движения выходного звена при работе сильно на-
греваются, что требует иногда даже специального охлаждения,
а их внешняя характеристика и оказывается весьма «мягкой» (см.
фиг. 5.59), т. е. увеличение нагрузки приводит к быстрому паде-
нию максимально возможной скорости перекладки руля при пол-
ном открытии золотника (см. фиг. 5.62).
Системы гидроусилителей с регулированием скорости движения
штока дросселированием обладают и значительными преимущества-
ми по сравнению с системами объемного регулирования.
Простота конструкции дроссельного распределительного
устройства, возможность централизованного питания нескольких
силовых приводов от одного источника (насоса), сравнительно
малый вес и габариты, способность развивать большие скорости
и ускорения выходного звена обусловили наиболее широкое при-
менение до настоящего времени гидроусилителей с дроссельным
регулированием.
Однако, как уже отмечалось, переход к сверхзвуковым скоро-
стям полета, связанный со значительным увеличением шарнирных
моментов рулей, приводит к значительному повышению потребной
мощности гидроприводов (фиг. 5.61) и, следовательно, питающих
их насосов. Поэтому применение гидроприводов с дроссельным
регулированием приводит к значительным непроизводительным
тепловым потерям мощностей и требует очень больших установоч-
ных мощностей насосов, которые исполь-
зуются в полете очень мало. С ростом
скоростей полета возрастает и аэродина-
мический нагрев конструкции, что соз-
дает значительные осложнения с охлаж-
дением гидроагрегатов на скоростных
самолетах.
Поэтому в настоящее время намечает-
ся тенденция к переходу на системы
с объемным регулированием, применение
которых позволит, уменьшив потери, бо-
лее полно использовать установочные
мощности насосов гидросистемы и, таким
образом, выиграть в весе.
Важной характеристикой гидропри-
вода является его скоростная характе-
ристика, т. е. зависимость скорости дв,и-
Фиг. 5.61. Увеличение мощ-
ности насосов самолетных
гидросистем по годам.
266
жения выходного звена от величины смещения входного
(фиг. 5.62). После полного открытия золотника или максималь-
ного наклона регулировочной шайбы скорость движения выход-
максимальная скорость штока
— (без нагрузки)
"просадка"под
нагрузкой
гидроприводов.
с объемным регулированием.
if Усек
а)
езол
Смещение золотника
максимальное
открытие
Фиг. 5.62. Скоростные характеристики
а—бустер с дроссельным регулированием: б—гидропривод
ного звена становится постоянной при постоянной нагрузке. Эта
скорость при объемном регулировании определяется производи-
тельностью насоса, а при дроссельном — максимальным расхо-
дом жидкости, который может быть обеспечен насосами гидро-
системы при проходном сечении питающей гидромагистрали, опре-
деленном полным открытием золотника.
Как уже отмечалось (§ 1 настоящей главы), обратная связь
в конструкциях гидроусилителей осуществляется механической
передачей движения выходного звена (силового штока или корпуса
бустера — при поступательных системах гидроусилителей, либо
выходного вала — при гидромоторных системах) на входное зве-
но. Поэтому ограничение максимально возможной скорости дви-
жения выходного звена приводит к ограничению и возможной
скорости смещения входного звена гидроусилителя, к которому
подсоединяется тяга системы управления, идущая к летчику. Сле-
довательно, в конечном итоге, ограничение максимальной скорости
движения гидроусилителя приводит к ограничению возможной
скорости смещения рычага управления самолетом. Это свойство
бустерных систем управления при резком смещении рычага мо-
жет создать у летчика ощущение «заклинения» системы управле-
ния. Поэтому при выборе бустеров следует учитывать максимально
267
возможную необходимую скорость перекладки рулей с тем, чтобы
бустер по своей конструкции мог бы обеспечить эту скорость (же-
лательно даже с некоторым запасом).
Для надежного запирания каналов гидросистемы питания бу-
стера с дроссельным регулированием и предупреждения его само-
произвольного движения («вождения»), а также для уменьшения
утечек, как было уже отмечено, применяется некоторое перекрытие
золотником (х0 на фиг. 5. 1) краев отверстий питающих и сливных
гидромагистралей. Это перекрытие, а также необходимость ком-
пенсации утечек, являются причиной появления «зоны нечувстви-
тельности» на скоростной характеристике гидроприводов, приводя-
щей к наличию этой зоны и на рычаге управления самолета. «Зона
нечувствительности» на скоростной характеристике определяет ве-
личину возможного смещения входного звена гидроусилителя
(и, следовательно, рычага управления самолетом), при котором
скорость выходного звена остается нулевой.
В результате наличия зоны нечувствительности скоростная ха-
рактеристика гидропривода с дроссельным регулированием яв-
ляется нелинейной (см. фиг. 5. 62, а). Скоростная характеристика
гидропривода с объемным регулированием обычно имеет меньшую
зону нечувствительности, появляющуюся из-за утечек (см.
фиг. 5.62,6).
Наличие нелинейности скоростной характеристики гидроприво-
да, наряду с другими нелинейностями в системе управления, возни-
кающими, например, из-за трения и люфтов, может привести
к автоколебаниям в системе. Поэтому при установке гидроприво-
дов в систему управления необходимы предварительные расчеты
динамических характеристик системы. Однако, точные расчеты
являются весьма затруднительными вследствие того, что наличие
нелинейности приводит к достаточно сложной системе дифферен-
циальных уравнений, упрощение которых за счет линеаризации
некоторых характеристик (например, скоростной характеристики
бустера, как это показано пунктирной линией на фиг. 5. 62, а)
может привести к существенным ошибкам.
Наиболее точным методом исследования динамических харак-
теристик системы управления является широко применяемое в на-
стоящее время моделирование процессов на электронных модели-
рующих установках, которые позволяют получить весьма близкую
сходимость полученных при моделировании результатов с действи-
тельными процессами.
Приведенные выше внешняя (механическая) и скоростная ха-
рактеристики гидроприводов 1 являются статическими характери-
стиками.
1 У гидроприводов вращательного действия с дроссельным регулированием
(см. фиг. 8.33) эти характеристики имеют вид, аналогичный показанному
на фиг. 5. 59 и 5. 62, а для гидроусилителей поступательного действия при усло-
вии замены скорости поступательного движения штока на скорость вращения
выходного вала.
268
В практике расчетов динамических характеристик систем управ-
ления используются также и следующие динамические харак-
теристики гидроусилителей:
1. Постоянная времени бустера Т=—(0,0014-0,05) сек, опре-
в
деляющая наклон скоростной характеристики (см. фиг. 5.62,а).
Фиг. 5. 63. Реакция гидропривода
на гармонические колебания вход-
ного звена (золотника).
Фиг. 5. 64. Некоторые динамические характеристики гидро-
приводов.
а—фазовая характеристика гидропривода (запаздывание по фазе при
различной степени демпфирования золотника); б—амплитудная ха-
рактеристика гидропривода (при различной степени демпфирования
золотника).
2. Фазовое запаздывание (Д^ или Дер), выражаемое в секундах
или градусах, определяет сдвиг по времени или по фазе макси-
мальной скорости движения выходного звена по отношению к мак-
симальной скорости движения входного звена 1 при гармонических
смещениях входного звена (например, по закону xBX=k sin
фиг. 5.63)' в зависимости от частоты (со) входных колебаний
(фиг. 5. 64, а).
1 У гидроприводов с дроссельным регулированием входным звеном является
управляющий золотник или связанная с ним входная качалка бустера
(см. фиг. 5. 1), у гидроприводов с объемным регулированием входным звеном
можно считать штангу управления наклоном регулировочной шайбы насоса пере-
менной производительности.
269
3. Амплитудная характеристика, т. е. отношение максимальных
— А
амплитуд выходного звена (штока или вала) и входного А= —
(см. фиг. 5. 64, б) в зависимости от частоты колебаний (со) вход-
ного звена.
Динамические характеристики гидроприводов в значительной
степени определяют динамические характеристики и всей системы
управления в целом. Исследование динамических характеристик
систем управления проектируемых самолетов с привлечением на-
турных стендов управления и электронной аппаратуры позволяет
сформулировать требования к характеристикам гидроприводов
при их проектировании с тем, чтобы получить необходимые харак-
теристики всей системы управления при установке на самолет гид-
роусилителей.
Глава VI
ПРИМЕНЕНИЕ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
ДЛЯ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ДИНАМИЧЕСКОЙ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ СОВРЕМЕННЫХ
САМОЛЕТОВ
§ 1. Демпферы рыскания, тангажа, и крена в системах управления
Как уже отмечалось в гл. III, увеличение скорости и высоты
полета, а также существенные изменения в конструкции современ-
ных сверхзвуковых самолетов
по сравнению с дозвуковыми,
привело к значительному ухуд-
шению динамических характе-
ристик устойчивости и управ-
ляемости. Для примера на
фиг. 6. 1 приведены сравнитель-
ные динамические характери-
стики продольного движения
истребителей конца второй ми-
ровой войны, начала пятидеся-
тых годов и современных. При-
веденный пример наглядно по-
казывает значительное ухудше-
ние динамических характери-
стик продольного движения:
периоды колебаний заметно
уменьшились, а затухание их
ухудшилось в несколько раз,
что сильно 'затрудняет управле-
ние самолетом.
Ухудшение динамических
характеристик современных са-
молетов в боковом движении
Фиг. 6. 1. Изменение динамических
характеристик продольного движения
по числам М у современных истре-
бителей,
-------современный истребитель;
— . — истребитель периода 1949—1953 г.;
-----истребитель периода 1939—1945 г.
'приводит к еще большим затруднениям, особенно на больших углах
атаки, т. е. при посадке и при полетах на больших высотах.
271
Действительная динамическая устойчивость самолета зависит
от возможности летчика реагировать правильным образом на те
или иные возмущения. Летчик, например, легко гасит медленные,
хотя и слабо демпфированные продольные колебания с большим
периодом (длиннопериодическое или фугоидное движение) и даже
часто их не замечает. Некоторые виды неустойчивости, как, напри-
мер, «голландский шаг», могут оказывать незаметное влияние на
летные качества самолета, если только постоянные времени этих
движений достаточно велики.
Как уже было отмечено в гл. III, ухудшение затухания собст-
венных короткопериодических колебаний современных самолетов
приводит к тому, что летчики пытаются гасить их соответствующи-
ми отклонениями рычагов управления. Однако, уменьшение пе-
риода этих колебаний и увеличение запаздывания реакции само-
лета на действия летчика (см. выражения 2. 19, 2. 27, 2. 30 и 2. 30')
для запаздывания реакции самолета по тангажу, крену и рыска-
нию на действия летчика, а также запаздывание реакции летчика
на изменение режима полета чаще всего приводят к тому, что
летчик, пытаясь погасить колебания, усиливает их. Такие случаи
из летной практики испытаний самолетов Х-1 и Х-2 на больших
скоростях и высотах приводились в гл. III.
Использование методов улучшения характеристик устойчивости
и управляемости самолета аэродинамическими средствами, как
уже отмечалось, часто приводит к необходимости значительного из-
менения его схемы и конструкции, а на больших скоростях и вы-
сотах не является достаточно эффективным (см. гл. IV).
Расчеты показали, что характеристики устойчивости и управ-
ляемости самолета можно улучшить путем искусственного увели-
чения значений некоторых аэродинамических производных и даже
инерционных характеристик. Практически это можно осуществить
отклонением рулей на некоторые углы (величина которых зависит
от параметров полета: углов атаки и скольжения, угловых скоро-
стей и ускорений тангажа, крена и скольжения) специальными
автоматами с использованием необратимого бустерного управ-
ления.
Было предложено несколько систем автоматов, которые помимо
воли летчика отклоняют рули самолета для парирования возни-
кающих колебаний и других изменений режима полета, причем
величина углов отклонений рулей зависит от параметров полета.
С помощью таких автоматических устройств можно существенно
улучшать характеристики устойчивости и управляемости самолета.
Автоматические устройства, предназначенные для демпфирова-
ния собственных короткопериодических колебаний самолета путем
соответствующих отклонений рулей с помощью необратимых бу-
стеров, получили название демпферов колебаний. Их создание
было вызвано необходимостью облегчить для летчика управление
современным скоростным самолетом. Для успешного выполнения
задачи парирования колебаний самолета демпферы должны обла-
272
дать большой чувствительностью и быстродействием, а также су-
щественно меньшим запаздыванием, чем летчик.
Чувствительная часть демпфера должна реагировать на угло-
вую скорость колебаний самолета, поэтому в датчиках угловой ско-
рости было использовано свойство прецессии гироскопов. В раз-
личных системах применяются двухстепенные (реагируют только
на угловую скорость) или трехстепенные (реагируют на угловую
скорость и угловое ускорение) гироскопы, отклонения рамки ко-
торых от нейтрального положения при колебаниях самолета и ис-
пользуются для формирования управляющих сигналов на испол-
Фиг. 6.2. Схема установки гироскопов датчиков угловых скоростей
(ДУС) демпферов крена, тангажа и рыскания (Н — вектор кинети-
ческого момента гироскопа).
нительные механизмы демпферов. Таким образом, конструктивно
демпфер должен состоять из трех частей: датчика угловой скоро-
сти, усилительного устройства и исполнительного механизма —
сраздвижной тяги» в системе управления.
В зависимости от положения оси вращения гироскопа датчик
угловой скорости (ДУС) будет реагировать на угловую скорость
вращения самолета относительно только одной определенной оси
(Охь Оу\ или OZ]), так как повороты самолета и жестко связанно-
го с ним корпуса ДУС с вращающимся внутри ротором гироскопа
будут вызывать прецессию последнего только в одной определенной
плоскости.
На фиг. 6. 2 изображена схема установки ДУС для замера угло-
вых скоростей вращения самолета относительно всех трех осей
(<ох, cov, (Dt).
273
В зависимости от того, какую угловую скорость восприни-
мает ДУС и относительно какой оси самолета гасит демпфер ко-
лебания, различают демпферы крена (относительно оси 0%i),
рыскания (относительно оси Оу0 и тангажа (относительно
оси Ozi).
На фиг. 6. 3 приводится схема датчика угловой скорости и угло-
вого ускорения, который при изображенном на схеме положении
относительно осей самолета является датчиком для демпфера
Фиг. 6. 3. Схема датчика угловой скорости и угло-
вого ускорения демпфера рыскания с трехстепен-
ным гироскопом.
/—ротор гироскопа; 2—внутренняя рамка; 3—внешняя
рамка; 4—демпфирующее устройство; 5—щетка управляю-
щего потенциометра; 6, 7—пружины с жесткостью
и F2 соответственно.
рыскания. Чувствительным элементом датчика является ротор ги-
роскопа 1 с тремя степенями свободы, к рамкам которого 2 и 3
подсоединяются пружины 6 и 7 с жесткостью Л и F2 и демпфи-
рующее устройство 4. К внешней рамке подсоединяется через спе-
циальное рычажное устройство (на схеме условно не показано)
ползунок (щетка) потенциометра 5. Легко доказывается, что если
жесткости пружин выбраны таким образам, чтобы собственный
период колебаний Т гироскопа с рамками был достаточно малым
относительно времени нарастания и убывания угловой скорости
со1/ = 'ф и углового ускорения ф самолета (т. е. периода колебаний
самолета относительно вертикальной оси), то изменение угла от-
274
клонения внешней рамки от нейтрального положения описывается
уравнением:
а=------—фч-------I/ — ф I-
2тс \2к т 1 12 У Г2 т/
где
т = 2пН
hh У’
Fi, F2 — жесткости пружин;
Я=/-со— кинетический момент гироскопа.
Из приведенного выражения следует, что угол а пропорциона-
лен гр и гр.
Фиг. 6. 4. Принципиальная схема демпфера.
/—датчик угловой скорости (ДУС); 2—усилитель: 3—силовое реле;
/—электродвигатель; 5—редуктор-преобразователь: 6—выдвижной шток;
7—потенциометр обратной связи; 5—фильтр высоких частот.
Так как с внешней рамкой соединен ползунок управляющего
потенциометра, то, следовательно, на выходе потенциометра будет
сниматься напряжение, тоже пропорциональное угловой скорости
ф и угловому ускорению ф:
иУпр=С1ф + С 2ф.
Сигнал с датчика 1 (фиг. 6.4) [7упр усиливается усилителем
2 и подается на обмотку силового реле 3, подающего ток с напря-
жением бортовой сети на электродвигатель 4 раздвижной тяги
демпфера. Вращение электродвигателя преобразуется редуктором-
преобразователем 5 в поступательное движение штока 6 раздвиж-
ной тяги демпфера. Движение штока передайся на золотник
бустера, который и отклоняет руль для парирования возникшей
угловой скорости на угол, пропорциональный угловой скорости
и угловому ускорению рыскания:
(Адн)д.р.==^соу(О2/ +
При движении шток раздвижной тяги смещает щетку потен-
циометра обратной связи 7, вследствие чего в усилитель поступает
сигнал обратной связи (—[7о.с.)« Этот сигнал, суммируясь с сигна-
лом от датчика ((7упр), вызывает своевременное прекращение дви-
275
жения штока при Л7уПр—£/о.с.==0 и выполнение заложенного в си-
стему закона управления Дхд.р=^1а)уа)у4-А^ (где и —
передаточные числа демпфера по угловой скорости и угловому
ускорению, выражающиеся обычно в мм хода штока на
градус1се& угловой скорости и градускек2 углового ускорения,
а и — те же передаточные числа, но переведенные в соот-
ветствующие угловые отклонения руля).
Для того, чтобы работа демпфера не отражалась на маневрен-
ности самолета при отклонении руля направления летчиком и воз-
Фиг. 6. 5. Схема датчика угловой скорости
демпфера рыскания с двухстепенным гиро-
скопом.
/—ротор гироскопа; 2—рамка; 5—демпфирующее
устройство; 4—щетка управляющего потенциомет-
ра; 5—пружина.
никновении вследствие
этого постоянной угловой
скорости 0)^, в схему дем-
пфера довольно часто
включается специальный
фильтр, пропускающий на
усилитель только перемен-
ную составляющую сигна-
ла соу, возникающую при
колебаниях самолета.
Отклоняя руль со зна-
чительно меньшим запаз-
дыванием, чем это может
осуществить летчик, демп-
фер гасит собственные
колебания самолета без
участия летчика, чем су-
щественно улучшает ди-
намическую устойчивость
самолета и облегчает пи-
лотирование.
Аналогичные схемы имеют демпферы тангажа и крена, только
их датчики реагируют на колебания самолета относительно попе-
речной и продольной осей — соответственно.
Если чувствительным элементом демпфера является гироскоп
с двумя степенями свободы (фиг. 6.5), то в этом случае датчик
выдает сигнал, пропорциональный только угловой скорости, на-
пример, для демпфера рыскания £7уПр = С1ф-
В этом случае демпферы отклоняют рули в соответствии с бо-
лее простыми законами:
демпфер тангажа— (Ддв)д.т=^ю<г<пг,
демпфер крена—(Ддэ)д.к = ^а)л.сол:л
демпфер рыскания— (Дби)д.р==^<пу(Оу,
где символами (Дбв)д.т, (Дбэ)д.к и (Ддн)д.р — обозначены углы от-
клонения рулей высоты, крена (элеронов) и направления соответ-
ственно.
276
Передаточные числа демпферов в полете иногда могут изме-
няться (в пределах области устойчивости системы «самолет —
демпфер») летчиком или автоматически для учета изменения
демпфирования на различных скоростях и высотах. Система
автоматической коррекции передаточных чисел демпферов рыска-
ния и тангажа применяется, например, на самолете Норт Амери-
кен F-100.
Первым в системах управления стали применять демпфер
рыскания, так как аэродинамическими средствами не удавалось
достигнуть существенного улучшения затухания боковых ко-
лебаний сверхзвуковых самолетов, особенно на режимах поле-
та с большими углами атаки, а интенсивные забросы по крену
(большие х) на посадке создавали серьезную опасность для са-
молета.
За границей один из первых демпферов рыскания был уста-
новлен на самолете Боинг В-47.
При первых испытаниях этого самолета было установлено, что
на больших высотах и при посадке, т. е. при полете на больших
углах атаки (большие значения су), самолет был склонен к неза-
тухающим боковым колебаниям по крену и рысканию, которые
были особенно опасны при слепой посадке. Причиной этих колеба-
ний было неблагоприятное соотношение производных т^х и ту
на больших углах атаки. Как показали исследования, увеличение
площади вертикального оперения и изменение угла поперечного
V крыла существенно улучшить демпфирование самолета не могут
(см. фиг. 4. 23), да и к тому же это требовало значительных пере-
делок в конструкции самолета. Кроме того, увеличение площади
киля повышает восприимчивость самолета к горизонтальным по-
рывам ветра, которые достигают на больших высотах скорости до
240 км/час. Поэтому было решено установить на самолете демпфер
рыскания, что дало прекрасные результаты (фиг. 6.6). Как видно
из фиг. 6. 6 включение демпфера полностью устраняет тенденцию
самолета к колебаниям.
На первый взгляд кажется несколько нелогичным и непонят-
ным, что боковые колебания и интенсивные забросы по крену
исправляют установкой демпфера рыскания, отклоняющего руль
направления и увеличивающего, тем самым, демпфирование коле-
баний относительно оси Оух (т. е. производную т”у).
Однако из выражения (2. 39) для коэффициента а, определяю-
щего затухание боковых колебаний, следует, что для улучшения за-
тухания этих колебаний (для увеличения коэффициента а) именно
и следует повышать демпфирование рыскания, что и достигается
с помощью установки демпферов в систему управления рулем по-
ворота.
Демпфер рыскания оказался настолько действенным средством
улучшения боковой динамической устойчивости, что по опублико-
277
ванным в иностранной печати сведениям, он устанавливается прак-
тически на всех сверхзвуковых самолетах. С помощью демпфера
рыскания удается добиться не только быстрого затухания бо-
ковых колебаний, но и ликвидировать спиральную неустойчи-
вость.
Как уже отмечалось в гл. IV, применение положительного по-
перечного V на сверхзвуковых транспортных самолетах со стрело-
видными крыльями из соображений удобства эксплуатации и эко-
Фиг. 6.6. Влияние включения демпфера рыскания на развитие бокового возму-
щенного движения самолета Боинг В-47 (запись летных испытаний).
/—заход на посадку /7=3000 м; =250 км/час (М=0,25); 2—полет на высоте /7=11600 м со
скоростью Vi =400 км/час (М=0,735).
номии веса шасси заставляет применять на этих самолетах демп-
феры рыскания для обеспечения удовлетворительных характери-
стик бокового движения на посадочных режимах.
Для улучшения динамических характеристик продольного
движения применяется демпфер тангажа, управляющий блок ко-
торого реагирует на изменение угловой скорости тангажа coz. Сиг-
нал o)z вводится в исполнительный механизм демпфера через
фильтр высоких частот (аналогично и сигналу (оу в демпфере ры-
скания) для того, чтобы исключить ненужное отклонение руля
высоты на постоянную величину от сигнала (oz = const при равно-
мерном вращении самолета во время выполнения маневров.
Фильтр высоких частот (пропускает только высокую частоту
изменения угловой скорости) может быть механическим и электри-
ческим (контур из сопротивлений и емкостей — RC-контур). На
фиг. 6. 7 схематически изображено действие механического фильтра
высоких частот. Рамка 1 гироскопа 2 датчика угловых скоростей
связана со щеткой 3 управляющего потенциометра 6 не непосред-
ственно, а через гидравлическое демпфирующее устройство 4. При
этом рамка связана только с поршнем демпфера (имеющим калиб-
рованные отверстия), а корпус демпфера, к которому и подсоеди-
няется ползунок потенциометра, крепится к конструкции посред-
ством пружины 5.
278
При малой частоте изменения угловой скорости вращения само-
лета отклоняющаяся вследствие прецессии рамка гироскопа мед-
ленно смещает поршень демпфирующего устройства. Так как при
этом жидкость успевает перетекать через калиброванные отверстия
в поршне из одной полости цилиндра в другую, то практически
не возникает усилий, которые деформировали бы пружину 5 и сме-
щали бы ползунок управляющего потенциометра. Поэтому не воз-
никает никакого электрического сигнала рассогласования и демп-
фер не работает.
Фиг. 6. 7. Схема гидромеханического фильт-
ра высоких частот, установленного на гиро-
скопическом датчике.
Если же частота изменения угловой скорости вращения само-
лета увеличится сверх тех пределов, на которые рассчитан фильтр
(что может произойти при полете на больших высотах с большими
скоростями, когда сильно возрастает частота собственных свобод-
ных колебаний), то жидкость в цилиндре уже не будет успевать
перетекать из одной полости в другую при быстрых колебательных
движениях поршня, связанного с рамкой гироскопа. В этом случае
поршень становится как бы жестко связанным с цилиндром демп-
фирующего устройства, благодаря чему отклонения рамки гиро-
скопа деформируют пружину 5 и передаются движку управляю-
щего потенциометра. Смещения движка потенциометра вызывают
появление некоторого напряжения рассогласования, которое уси-
ливается в усилителе и подается на исполнительный механизм
демпфера (раздвижную тягу). Раздвижная тяга отклоняет руль
в нужную сторону до тех пор, пока не исчезнет сигнал рассогласо-
вания в управляющем блоке.
На фиг. 6.8 изображена блок-схема демпфера продольных
колебаний (демпфера тангажа).
279
В настоящее время довольно широкое применение нашли демп-
феры, управляющий блок которых реагирует только на сигнал
Фиг. 6.8. Блок-схема демпфера тан-
гажа.
J—сигнал от рычага управления рулем высо-
ты; 2— суммирующий элемент (раздвижная
тяга); 3—суммарный сигнал на бусгер
(*л+ д-*ът); 4—бустер; 5—отклонение руля
высоты (§в); б—аэродинамика продольного
движения; 7—скооость изменения тангажа
(4—<o2); 8—скоростной гироскоп датчика уг-
ловой скорости <мг; 9—электрический сигнал от
датчика; 10—высокочастотный фильтр; 11-
сигнал на усилитель (только высокая частота
изменения <o^); 12—усилитель; 13—сигнал от
управляющего блока демпфера на раздвижную
тягу.
лаемую интенсивность маневра и
Вследствие этого увеличиваются
угловой скорости вращения само-
лета относительно соответствую-
щей оси, а фильтры высоких ча-
стот для упрощения схемы и по-
вышения надежности не приме-
няются.
Применение демпферов, в уп-
равляющие блоки которых не
включаются фильтры высоких ча-
стот, приводит к тому, что в нача-
ле маневра демпфер как бы ме-
шает летчику, так как парируя
начавшееся при маневре враще-
ние самолета, отклоняет рули
в сторону, противоположную от-
клонению их летчиком. Поэтому
маневр получается более вялым,
чем его задает летчик, что вызы-
вает необходимость отклонять
рули несколько больше (чем без
демпфера), чтобы получить же-
компенсировать работу демпфера,
расходы рычагов управления са-
молетом для совершения определенных маневров.
Для примера можно показать влияние работы демпфера про-
дольных колебаний (демпфера тангажа) на увеличение показателя
продольной статической управляемости х”.
Воспользовавшись выведенным в гл. III соотношением (3.5)
dh 6 g
и учитывая, что в статических условиях определения
показателя -^^-=0, можно написать:
в dt
tZAe
так как —
dt
dt
dka
dt
db&
---= (D
dt
И
z
Из полученного соотношения следует, что во время маневра
с отклоненным и неподвижно остановленным рулем высоты значе-
ния перегрузки и угловой скорости тангажа связаны линейно (в по-
лученном выражении coz в рад/сек):
При маневрах летчик, отклоняя ручку (или колонку штурвала),
отклоняет руль высоты (или стабилизатор) на некоторый угол,
280
величина которого определяется летчиком, исходя из величины пе-
регрузки, которую он желает получить при маневре. Отклонение
руля создает избыточный продольный момент, в результате дей-
ствия которого появляется угловая скорость со2.
Датчик угловых скоростей (ДУС) управляющего блока демп-
фера тангажа принимает сигнал
сигнал на компенсацию появляю-
щейся угловой скорости. Раз-
движная тяга демпфера откло-
няет руль высоты в сторону, про-
тивоположную отклонению, кото-
рое создал летчик и тем самым
уменьшает интенсивность нара-
стания перегрузки. Величина от-
клонения стабилизатора (или
руля высоты) демпфером зависит
от возникшей угловой скорости и
передаточного числа демпфера:
(Дфв)д.т=&<*z• (oz (здесь при прак-
тических расчетах обычно со2 за-
дается в град/сек).
(oz и выдает раздвижной тяге
V
Фиг. 6.9. Изменение прироста пока-
зателя от работы демпфера
тангажа без фильтра высоких частот
с ростом скорости полета.
Для компенсации этого угла летчик должен отклонить ручку
(или колонку штурвала) дополнительно на величину:
(Д-^в)д.т
k k
—------------------Шг=----------Л ДДу 57,3.
^ш.в ^ш.в ^ш.в У
Взяв производную от полученного выражения по Диу? получим
выражение для прироста показателя продольной статической
управляемости х" при работе демпфера тангажа:
М)д.т =
ММ,
V
который будет уменьшаться с ростом скорости полета (фиг. 6.9).
По этой формуле может быть найдена величина (дх^)д т, выражен-
t град * град •
ная в мм. если выражено в —-------------, —в------, а
2 г рад! сек мм
г-rr г» мм- м
-57,3 имеет размерность --------.
^ш.в
Таким образом, при установке демпфера тангажа без фильтра
высоких частот в систему управления самолета показатель про-
дольной статической управляемости хпв существенно возрастает,
что приводит к возрастанию и показателя Р* при загрузочных
механизмах, в которых величина создаваемого усилия пропорцио-
нальна отклонению рычага. Это свойство демпфера тангажа может
281
быть использовано для увеличения значений показателей х* и
при снижении их ниже допустимых пределов в некотором диапа-
зоне скоростей полета (см. фиг. 5.14, 5.29,г, 5.41,а).
При расчетах влияния работы демпферов на увеличение расхо-
дов рычагов управления на совершение маневров с определенными
угловыми скоростями следует учитывать, что раздвижные тяги
демпферов имеют достаточно ограниченный ход (соответствую-
щий, обычно, отклонениям рулей порядка ±2—3°), выбранный из
условия достаточной степени демпфирования колебаний при учете
необходимости обеспечения безопасности самолета на случай от-
каза автомата с ложным срабатыванием. Поэтому при совершении
маневров с большими угловыми скоростями (особенно на истре-
бителях) раздвижные тяги демпферов могут стать на упоры, после
чего они уже перестанут давать прирост расхода рычагов управ-
ления.
Применение демпфера тангажа существенно увеличивает про-
изводную характеризующую продольное демпфирование. Эта
производная входит в выражения для коэффициентов и а2 диф*
ференциального уравнения (1.7), описывающего собственное про-
дольное короткопериодическое движение самолета, причем коэф-
фициент ai определяет затухание собственных продольных корот-
копериодических колебаний, а ах и а2 — их период [см. выражения
(1.9) и (2.20)]. Поэтому установка демпфера тангажа не только
улучшает затухание продольных колебаний, но и несколько увели-
чивает их период.
Как уже отмечалось, быстрое затухание собственного движения
является весьма желательным для летчиков, так как существенно
облегчает управление самолетом и обеспечивает более точное вы-
держивание необходимого режима полета. (Это следует и из вы-
ражений (2. 18а и б), из которых видно, что после затухания соб-
ственного движения самолет следует за командными движениями
ручки).
При полете на больших высотах со сверхзвуковыми скоростями
ухудшение продольной динамической устойчивости сильно за-
трудняет совершение необходимых маневров, так как всякое откло-
нение руля высоты (которое является возмущением для исходного
установившегося полета) вызывает интенсивные продольные коле-
бания, при которых значения забросов по перегрузке, углам атаки
и тангажа могут достигать весьма больших величин. Эти забросы
не только затрудняют пилотирование, но и могут представлять
значительную опасность для самолета (особенно неманевренного),
так как легко могут выйти за допустимые пределы. Вот как описы-
ваются результаты установки демпфера тангажа на самолете Норт
Америкен F-100:
«При пикировании с больших высот с полными оборотами дви-
гателя или при полете с большими скоростями у самолета F-100
282
возникают продольные колебания, затрудняющие пилотирование
и снижающие точность стрельбы. Для устранения этого явления
на самолете установлен разработанный фирмой «Норт Америкен»
демпфер тангажа. Этот демпфер состоит из гироскопа, который
воспринимает изменение угловой скорости тангажа и передает
электрические сигналы через усилитель на гидравлический бустер,
который управляет углом отклонения стабилизатора. Сигналы от
постоянной угловой скорости тангажа при маневрах самолета на
бустер не передаются.
Демпфер тангажа включается на высотах больше 900 м; на
взлете, посадке и при малых скоростях полета демпфер должен
быть выключен, так как он может вызвать нежелательное для
летчика изменение углов атаки. На самолете имеется автомат,
корректирующий работу демпфера тангажа в зависимости от вы-
соты полета. Включение и выключение демпфера не приводит к на-
рушению балансировки самолета.
При одном из испытаний на высоте 10 700 м при максимальных
оборотах двигателя самолет выполнял «горку» с набором высоты
150 Л! и входил в пикирование под углом 10° к горизонту. Отклоне-
нием ручки управления «на себя» достигалась перегрузка порядка
2—3, после чего ручка резко бросалась. С выключенным демпфе-
ром тангажа самолет возвращался в нормальное сбалансированное
положение после 3—5 полных продольных колебаний. С вклю-
ченным демпфером тангажа продольные колебания при тех же
условиях затухали при первом цикле» L
На фиг. 6. 10 приведен приблизительный характер выхода на
новую перегрузку (при отклонении руля высоты) самолета без
демпфера тангажа и с включенным демпфером. Из графика
хорошо видно, что работа демпфера значительно улучшает про-
дольное демпфирование и качество переходного процесса.
Установка демпферов тангажа не устраняет неустойчивости по
скорости в околозвуковой зоне, так как не влияет ни на одну про-
изводную, входящую в выражение (2.3), определяющее продоль-
ную статическую устойчивость по скорости. Однако при наличии
демпфера тангажа ошибка летчика по управлению самолетом
в этой зоне уже не приведет к таким резким изменениям режима
полета (особенно забросу по перегрузке), так как возникающая
вследствие неправильного положения руля высоты угловая ско-
рость (oz будет частично гаситься демпфером. Как уже отмечалось,
показатель статической управляемости — балансировочная кривая
xB=f(M) — при установке демпфера не изменяется.
Так как на больших сверхзвуковых скоростях и больших высо-
тах ухудшается поперечная динамическая устойчивость и управ-
ляемость, то на новых самолетах начинают применять демпферы
поперечных колебаний, датчики управляющих блоков которых
1 Сб. «Сверхзвуковые самолеты» под ред. Н. И. Листвина, ИЛ, 1958,
стр. 144.
283
реагируют на изменение сох. Так на английском бомбардировщике
Хэндли Пейдж «Виктор» модификации В. 1 был установлен только
демпфер рыскания. В связи со значительным повышением высот-
ности модификации В. 2 в систему управления элеронами был
включен также демпфер поперечных колебаний (демпфер крена) *.
В настоящее время многие сверхзвуковые самолеты имеют в си-
стемах управления демпферы, парирующие колебания относительно
всех трех осей самолета (например, самолеты Локхид F-104, Норт
Америкен Х-15 и др.).
Фиг. 6. 10. Характер выхода на новое значение
перегрузки при отклонении руля высоты на само-
лете с недостаточным продольным демпфирова-
нием, без демпфера тангажа и с включенным
демпфером.
Ниже приводится выдержка из отчета двух летчиков-испыта-
телей о полетах на экспериментальном самолете Норт Америкен
Х-151 2, из которого следует, что динамическую устойчивость этого
самолета на больших числах М полета и высотах удалось обеспе-
чить только благодаря установке демпферов колебаний в системы
управления относительно всех трех осей.
«При включенных демпферах по всем трем осям самолет Х-15
имеет прекрасные характеристики управляемости на всех режимах,
на которых мы летали (Мтах=3,31; //тах = 40 км — примеч. автора),
включая планирование и посадку. Поворотное горизонтальное опе-
рение для продольного управления вместе с вертикальными сим-
метричными поверхностями обеспечивают управляемость и устой-
чивость самолета, который сравнительно свободен от перекрестного
влияния управления на тех скоростях и углах атаки, которые были
до сих пор исследованы (атах=18,5— примеч. автора); хотя мы
предполагаем, что на больших числах М и углах атаки проблема
1 Flight, No. 2642, 1959.
2 Pilot Reports on the X-15. Interavia, No. 4647, 1961, pp. 101—103.
284
взаимного влияния может стать очень серьезной. Однако при от-
ключенных демпферах тангажа и рыскания предполагалось нали-
чие области динамической неуправляемости, которая и была полу-
чена в полете».
Запись параметров полета при даче педалей, произведенная
при торможении самолета с выключенными двигателями (от
М = 2,9 до М = 2,4), пока-
зывает, что выключение
демпфера рыскания на
углах атаки свыше 4° при-
водит к расходящимся ко-
лебаниям по углу сколь-
жения. При уменьшении
угла атаки (до 2Э) коле-
бания начинают довольно
быстро затухать и снова
начинают расходиться при
повторном увеличении
угла атаки. Включение
демпфера полностью уст-
раняет эти колебания
(фиг. 6. 11),
Здесь следует отме-
тить, что в отличие от по-
давляющего большинства
современных сверхзвуко-
вых самолетов Х-15 имеет
-10
большой подфюзеляжный
киль (см, фиг. 4.24). Не-
смотря на это при скоро-
стях, превышающих ско-
рость звука более, чем
в 2 раза, не удалось обес-
печить достаточного демп-
фирования боковых коле-
баний без применения
демпферов рыскания и
О 5 10 15 20 25
—Демпфер рыскания выключен
~3()Тсек
Фиг. 6.11. Запись колебаний углов сколь-
жения и крена после дачи педали в полете
с различными углами атаки на самолете
Норт Америкен Х-15 при отключении
демпфера рыскания.
крена.
Исполнительный механизм демпфера смещает золотник бусте-
ра, поэтому потребная мощность двигателя раздвижной тяги до-
статочно невелика. Однако, при работе демпфера, исполнительный
механизм (раздвижная тяга) которого установлен в системе
управления по схемам согласно фиг. 5. 53, усилия от раздвижной
тяги передаются в обе стороны — на золотник бустера и на соот-
ветствующий рычаг управления.
Чтобы избежать неблагоприятного влияния работы демпфера
на возникновение дополнительных ударных нагрузок на рычагах
управления, раздвижную тягу демпфера следует ставить макси-
285
мально близко к золотнику, тогда небольшие по величине, но до-
статочно резкие усилия от демпфера будут гаситься инерционно-
стью проводки, загрузочным механизмом и трением в системе
управления до рычага и, таким образом, практически не будут
заметно ощущаться летчиками L
При включении системы искусственного демпфирования летчик
управляет самолетом обычным путем, а управляющие блоки си-
стемы вырабатывают необходимые сигналы для исполнительных
механизмов, отклоняющих рули на некоторые дополнительные
углы для парирования возникающих колебаний. Например, для
угла отклонения элеронов при работе демпфера крена можно напи-
сать следующее выражение:
В большинстве современных автопилотов предусматривается
возможность работы в режиме демпфирования при отключении
системы автоматического управления полетом. В этом случае авто-
пилот служит для улучшения характеристик динамической устой-
чивости и управляемости самолета (работают только каналы демп-
фирования).
§ 2. Автоматы путевой и продольной устойчивости
Большие затруднения, вызванные проблемой обеспечения путе-
вой устойчивости на современных самолетах при попытках решения
ее обычными конструктивными мерами, поставили конструкторов
перед необходимостью использования для этой цели автоматиче-
ских средств повышения путевой устойчивости. Этому способство-
вал приобретенный опыт эксплуатации демпферов рыскания, ока-
завшихся весьма эффективными.
В отличие от демпфера рыскания автомат путевой устойчивости
отклоняет руль направления на угол, пропорциональный не угло-
вой скорости рыскания, а углу скольжения р или боковой пере-
грузке nz т. е.
Д8н.а = М (ИЛИ Д8н.а = ЙЛгПг).
Чувствительным элементом автомата путевой устойчивости
является флюгер, замеряющий угол скольжения р, или акселеро-
метр, измеряющий боковую перегрузку nz.
Автомат путевой устойчивости освобождает летчика от непре-
рывного наблюдения за указателем скольжения и воздействия на
педали, чем существенно облегчает процесс управления.
Конструктивно исполнительный механизм автомата путевой
устойчивости, имеющего схему, аналогичную схеме демпфера (см.
1 При условии, что максимальная скорость штока раздвижной тяги демп-
фера не превышает максимальной скорости бустера. В противном случае, на ры-
чаге управления удары неизбежны.
286
фиг. 6.4), совмещается с исполнительным механизмом демпфера
рыскания. В этом случае раздвижная тяга отрабатывает сигналы
двух управляющих блоков, отклоняя руль направления пропорцио-
нально угловой скорости рыскания и углу скольжения (или боко-
вой перегрузке), причем угол скольжения и боковая перегрузка
должны быть практически равны нулю при всех маневрах, выпол-
няемых с помощью крена.
Такой комбинированный автомат путевой устойчивости был
разработан для канадского истребителя-перехватчика Авро CF-105
«Эрроу» \ для которого обеспечение естественной динамической
устойчивости при выбранной схеме (см. фиг. 4. 7) и диапазоне ско-
ростей (М>2,5) и высот полета явилось трудной задачей.
Особые трудности вызвало обеспечение путевой устойчивости
ввиду снижения эффективности вертикального оперения на боль-
ших числах М полета, которое усугублялось еще и затенением киля
фюзеляжем и крылом на больших высотах вследствие необходимо-
сти полета с большими углами атаки, а также нежесткостью кон-
струкции киля.
Попытки добиться улучшения путевой устойчивости с помощью
увеличения площади киля и установки подфюзеляжного гребня
не дали удовлетворительных результатов, так как необходимо
было бы увеличить площадь киля на 60%, что привело бы к суще-
ственному росту веса как самого киля, так и хвостовой части
фюзеляжа вследствие роста нагрузок от киля. Это привело бы к не-
допустимому смещению центровки назад.
Наибольший эффект дала система искусственного повышения
путевой устойчивости и демпфирования. Последняя была примене-
на на самолете во всех трех каналах управления.
Основным датчиком системы автомата путевой устойчивости
является акселерометр, а при малых скоростях — флюгер.
Система демпфирования работает в комплексе с системой авто-
матического управления и предназначена, в основном, для демп-
фирования короткопериодических колебаний относительно всех
трех осей и длиннопериодических продольных колебаний. Система
обеспечивает координированные развороты и сводит к минимуму
скольжения на маневрах с перегрузкой до 6-ти при выходе из пи-
кирования и до 4-х на виражах.
По желанию летчика для производства некоординированных
маневров (т. е. со скольжением) система автомата путевой устой-
чивости может быть выключена.
Автомат путевой устойчивости с датчиками, вычислителями
и силовыми приводами полностью дублирован, причем переклю-
чение на вторую (аварийную) систему происходит автоматически.
Аварийная система путевой устойчивости не допускает скольжения
1 Aeroplane, No. 2458, 2459, 1958:
Flight, No. 2594, 1958;
Journal RAS, No. 576, XII, 1958.
287
за пределами, допустимыми по условиям прочности конструкции
киля при максимальном скоростном напоре (при пикировании)
и при виражах с перегрузкой, равной 2.
Большую работу по улучшению недостаточной путевой устой-
чивости самолета F-100 провела фирма Норт Америкен после вы-
явления недопустимости этого недостатка при эксплуатации первых
серийных самолетов в строевых частях. Попытки добиться улуч-
шения путевой устойчивости путем увеличения площади киля не
дали существенных результатов. Тогда в управляющий блок
имевшегося в системе управления демпфера рыскания был вве-
ден дополнительно сигнал боковой перегрузки (от акселерометра),
что и привело к необходимому повышению путевой устой-
чивости.
Как уже отмечалось, установка демпферов тангажа в системы
продольного управления сверхзвуковых самолетов значительно
улучшила характеристики продольной динамической устойчивости
и управляемости, но не избавила их от достаточно неприятной
«болезни» — «ложки» на балансировочных кривых, вызванных сме-
щением фокуса. Наличие этой «ложки» достаточно сильно затруд-
няет управление сверхзвуковым самолетом. Кроме того, большие
потери на балансировку самолета на сверхзвуковой скорости (см.
фиг. 4. 15) заставляет изыскивать возможности полета на самолете
с центровкой, близкой к нейтральной (см. далее § 4).
Для обеспечения нормальной продольной управляемости в око-
лозвуковой зоне и повышения продольной устойчивости самолета
с центровкой, близкой к нейтральной, может быть использован спе-
циальный автомат продольной устойчивости, который вместо лет-
чика должен отклонять руль высоты на угол, пропорциональный
изменению угла атаки или нормальной перегрузки:
(Ддв) а
Такой автомат, однако, не выполняет задачи демпфирования
продольных колебаний, поэтому должен быть применен одновре-
менно с демпфером тангажа, или же должен быть разработан
специальный комбинированный автомат продольной устойчивости,
который одновременно выполнял бы обе задачи — повышения про-
дольной устойчивости и демпфирования. Такой автомат должен
ОТКЛОНЯТЬ руЛЬ ВЫСОТЫ ПО Закону: (Ддв)апу = &п уkny + k^toz.
Можно легко показать, что такой автомат повышает продоль-
ную устойчивость и продольное демпфирование.
Действительно, при изменении перегрузки на &пу вследствие
«поддува» или неправильного положения руля высоты, автомат
отклоняет руль высоты и создает продольный момент
т3
Так как дп =------(где дс =с — с г>п), то (д/пг)а=^------ дс
tyr.n у Суг.п
Взяв производную от полученного выражения для изменения про-
288
дольного момента по су, получим выражение прироста продольной
статической устойчивости по перегрузке вследствие работы авто-
мата:
.
У Су г.п
Этот прирост (Дт‘у)а вследствие работы автомата продольной
устойчивости при соответствующем подборе передаточного числа
kny может полностью компенсировать влияние производной т?
на устойчивость самолета по скорости в околозвуковой зоне [см.
выражение (2.3)] и обеспечить привычный для летчиков характер
балансировочной кривой xB=f(M) (при постоянной перегрузке
с ростом скорости отдавать ручку «от себя»), так как «ложка» на
балансировочной кривой 6В=/(М) в околозвуковой зоне будет
«выбираться» автоматом отклонением руля высоты раздвижной
тягой при изменении балансировки.
Одновременно автомат может обеспечить продольную устой-
чивость самолета в случае, если его центровка близка к нейтраль-
ной, так как при работе автомата обеспечивается наличие (Д^у)а
даже при mcy=xF—хт->0.
Изменение угловой скорости вызывает отклонение руля высоты
автоматом и создание продольного момента (д/пг) л T=km^zm^, взяв
производную по ‘»z=-^-5, от которого получим прирост характе-
ризующей продольное демпфирование производной самолета от
работы автомата:
(Лте?)д.т=Ч/ге*в Т •
°а
В отличие от демпфера, где расход рулей на демпфирование
(Дбв)д.т^±24-3°, раздвижная тяга автомата продольной устойчи-
вости должна иметь значительный ход для парирования также еще
и изменения перегрузки. В этом случае возникают сложные вопро-
сы обеспечения надежности работы автомата, так и как при не-
правильном (ложном) сигнале в неисправном управляющем блоке
раздвижная тяга может значительно отклонить руль высоты и вы-
звать катастрофу. При невозможности обеспечить гарантию полной
безопасности на случай отказа автоматики в полете, устанавливать
на самолет такой автомат крайне рискованно.
На фиг. 6. 12 приводится возможная принципиальная схема
работы автомата продольной устойчивости, управляющий блок
которого реагирует на сигналы «coz» и «Диу».
Датчиком перегрузки в управляющем блоке автомата является
акселерометр 2, чувствительным элементом которого служит под-
вешенный на пружине груз, который при росте перегрузки сме-
289
щается и смещает ползунок потенциометра перегрузки 3. На вы-
ходе потенциометра снимается напряжение рассогласования, про-
порциональное An„.
Датчиком угловой скорости сог служит двухстепенной гироскоп
4, который при вращении самолета относительно поперечной оси
Ozx с угловой скоростью сог начинает прецессировать в поперечной
Фиг. 6.12. Принципиальная схема устройства автомата продольной устой-
чивости, работающего по сигналам coz и Апу.
I. Управляющий блок автомата.
II. Блок передаточных отношений (управляется летчиком или автоматом по режимам
полета).
III. Коробка усилителей и реле.
IV. Исполнительный механизм автомата (раздвижная тяга).
плоскости, сжимая пружину, и смещая ползунок потенциометра
угловой скорости 5. На выходе потенциометра снимается на-
пряжение рассогласования, пропорциональное угловой скорости
тангажа coz.
Напряжения рассогласования от сигналов coz и кпу через блок
передаточных отношений 6 подаются на обмотки магнитного уси-
лителя 7, питаемого переменным током (~27пит). На первичную же
обмотку усилителя подается и напряжение рассогласования от
потенциометра обратной связи 15, установленного в раздвижной
тяге автомата. При этом магнитный поток обмотки обратной связи
направлен в сторону, противоположную магнитным потокам, воз-
никающим от токов в цепях потенциометров датчиков перегрузки
290
и угловой скорости. Таким образом, с выхода усилителя снимается
усиленное напряжение, пропорциональное разности токов управ-
ления и обратной связи.
В зависимости от направления вращения самолета и действия
перегрузки изменяется направление смещения ползунков потен-
циометров датчиков и, следовательно, направление тока в управ-
ляющих (первичных) обмотках усилителя. Вследствие этого изме-
няется направление тока и на выходе усилителя, благодаря чему
Фиг. 6.13. Принципиальная схема продольного управления
истребителя-перехватчика Авро CF-105 «Эрроу».
/—ручка управления; 2—преобразователь усилий в электрические сиг-
налы; 3—усилитель; 4—механизм пересиливания автоматической системы;
5—автомат загрузки; 6—управляющий блок автомата продольной устой-
чивости; 7—датчики режима полета; 8—командный сервомеханизм; 9—си-
стема автоматического управления полетом (САУ); /0—двухкамерный
бустер; //—усилитель системы демпфера тангажа; /2—датчик положения
руля; 13—исполнительный механизм демпфера (раздвижная тяга);
/-/—руль ВЫСОТЫ;
В—кнопка включения автоматической системы управления.
этот ток идет через один из вентилей (селеновых выпрямителей) S,
изменяя направление замыкания контактов реле 9. Вследствие это-
го напряжение постоянного тока бортовой сети 27 в подается на
обмотки возбуждения 10 правого или левого вращения электродви-
гателя 11 раздвижной тяги автомата.
Вращение электродвигателя через редуктор 12 передается
в преобразователь 13 вращательного движения в поступательное,
а оттуда на выходной шток 14 раздвижной тяги, который, вы-
двигаясь или втягиваясь, смещает золотник бустера и тем самым
отклоняет руль высоты (или стабилизатор) на необходимый
угол.
Управляющие потенциометры питаются пониженным (делите-
лем 1) напряжением.
Наличие потенциометров в блоке передаточных отношений по-
зволяет подбирать наиболее приемлемые передаточные отношения
k^z и kny автомата по сигналам coz и Апу в зависимости от пара-
метров полета. В этом случае движки потенциометров передаточ-
ных отношений должны смещаться специальными датчиками пара-
метров полета (например, q и Н) по заданному закону.
291
На фиг. 6. 13 изображена блок-схема продольного управления
с автоматом продольной устойчивости, разработанная для истре-
бителя-перехватчика Авро CF-105 «Эрроу». Для этого самолета
был разработан специальный командный сервомеханизм, который
смещает золотник бустера руля высоты (самолет спроектирован по
бесхвостовой схеме) в зависимости от приложенных летчиком
усилий на ручке и сигналов управляющего блока автомата про-
дольной устойчивости. Одновременно изменяется загрузка ручки
управления в зависимости от параметров полета.
§ 3. Исследование характеристик устойчивости и управляемости
с помощью самолетов, оборудованных системами
искусственного повышения устойчивости и демпфирования
Огромные затраты, потребные для летных испытаний совре-
менных сверхзвуковых самолетов вызывают необходимость раз-
работки новых методов исследования и отработки летных харак-
теристик. Большую экономию средств при отработке систем управ-
ления и характеристик управляемости можно получить путем при-
менения электронных моделирующих установок, соединенных
с натурными стендами управления, на которых имитируются усло-
вия полета вплоть до создания линейных и угловых ускорений.
Например, после отработки систем управления и методов пи-
лотирования экспериментального самолета Х-15, на стенде были
внесены существенные улучшения в систему управления и выбра-
ны наиболее благоприятные траектории. Натурные стенды управ-
ления с электронными моделирующими установками применяются
в настоящее время для отработки систем управления и современ-
ных сверхзвуковых самолетов.
Однако исследование некоторых характеристик управляемости
и разработка норм по показателям устойчивости и управляемости
требует весьма дорогостоящих летных испытаний на различных
самолетах.
Широкое применение на современных самолетах различных
автоматических устройств для повышения устойчивости и демпфи-
рования и значительные изменения, которые они внесли в харак-
теристики самолетов, создали предпосылку для применения этих
автоматов на специальных самолетах-лабораториях с целью разра-
ботки требований к характеристикам устойчивости и управляе-
мости непосредственно в полете.
Как показали исследования, с помощью различных автоматиче-
ских устройств, установленных в системе управления и отклоняю-
щих рули по различным законам, можно менять в полете не только
характеристики устойчивости и демпфирования, но даже и инер-
1 Так, например, по подсчетам NASA один полет самолета Х-15 обходится
в 300 000 долларов (Interavia, No. 4978, 25 IV, 1962).
292
ционные характеристики самолета. Таким образом, в одном полете,
на одном специально оборудованном самолете можно изучить
влияние различных факторов (изменения устойчивости, демпфиро-
вания, инерционных характеристик) на оценку летчиками устой-
чивости и управляемости самолетов. На основании таких исследо-
ваний можно разработать наиболее рациональные нормы на пока-
затели устойчивости и управляемости, а также рекомендации для
проектирования систем управления будущих самолетов.
Следовательно, автоматические системы искусственного повы-
шения устойчивости и демпфирования оказались не только мощ-
ным средством улучшения характеристик устойчивости и управ-
ляемости современных самолетов, но и весьма эффективным сред-
ством исследования этих характеристик и разработки норм на них.
Естественно, что такая методика исследования приносит гро-
мадную экономию средств, так как теперь вместо многочисленных
полетов на разных самолетах возможно простым переключением
тумблеров получать совершенно «различные самолеты» по харак-
теристикам устойчивости, демпфирования и инерционности, путем
изменения передаточных чисел и законов управления в автомати-
ческих системах.
Так, например, на фиг. 6. 14 изображена граница максимально
допустимой величины времени затухания колебаний до половины
начальной амплитуды в зависимости от периода колебаний, полу-
ченная NACA 1 из летных испытаний специально оборудованных
самолетов.
Фиг. 6.14. Границы максимально до-
пустимой величины времени затуха-
ния боковых колебаний до половины
начальной амплитуды (/2) в зависи-
мости от периода колебаний, полу-
ченные NACA из летных испытаний.
1 IAS, No. 3, III, 1950.
Aeronautics, No. 3, vol, 43, 1, 1961.
293
Фиг. 6. 15. Схема уравновешивания
сил и продольных моментов у ста-
тически неустойчивого по перегрузке
с
самолета (/nzy>0).
§ 4. Вопросы полета на самолете с центровкой, близкой
к нейтральной, и статически неустойчивом (по перегрузке) самолете
Ранее (гл. IV) было отмечено, что переход на сверхзвуковые
скорости полета связан с увеличением потерь качества на балан-
сировку, значительно снижающем дальность сверхзвуковых само-
летов. Эти потери на балансировку приблизительно пропорцио-
нальны увеличению степени продольной статической устойчивости
самолета по перегрузке (см. фиг. 4. 15). Поэтому на всех режимах
полета желательно иметь степень статической устойчивости (по
перегрузке) т*у минимально допустимой с точки зрения обеспе-
чения нормальной управляемости самолета (от в значительной
степени зависит коэффициент an = m^y4“ —~ » определяющий
р-
управляемость). Однако для сверхзвукового самолета решение
этой задачи простым выбором соответствующей центровки (хт)
невозможно, вследствие значительного смещения назад фокуса
самолета при переходе на сверхзвуковые скорости (т*у =хт—xF
возрастает по абсолютной ве-
личине). Поэтому, если вы-
брать центровку для обеспече-
ния минимальной степени
устойчивости на дозвуковой
скорости, то на сверхзвуковой
скорости устойчивость окажет-
ся излишне большой.
Если же выбрать центров-
ку, соответствующую мини-
мально допустимой степени
устойчивости на сверхзвуковом
режиме полета, то на дозвуко-
вых скоростях самолет окажет-
ся неустойчивым.
Как показывает практика, полет на статически неустойчивом
(по перегрузке) самолете (см. фиг. 6. 15) практически невозможен,
так как любое, даже незначительное, возмущение (поддув или от-
клонение руля высоты) приводит к прогрессивному увеличению
отклонения угла атаки от исходного значения и поэтому должно
немедленно парироваться летчиком с помощью отклонения руля
высоты для сохранения необходимого режима полета. Это приво-
дит к очень быстрой утомляемости летчика, а одно неверное дви-
жение может вызвать катастрофу.
Однако, судя по опубликованным в иностранной печати мате-
риалам в настоящее время начинает проявляться определенный
интерес к исследованию возможностей полета на статически не-
устойчивом самолете. Этот интерес вызывается прежде всего тем,
294
Фиг. 6. 16. Изменение угла атаки после
действия вертикального порыва у са-
молетов с различной степенью продоль-
ной статической устойчивости по пере-
грузке.
-------устойчивый самолет;
—-----нейтральный самолет;
--- • ---- ---неустойчивый самолет.
что на таком самолете сокращаются потери качества на баланси-
ровку в результате чего и получается выигрыш в дальности. По-
тери качества уменьшаются благодаря использованию полезной
подъемной силы горизонтального оперения, так как на статически
неустойчивом самолете эта сила должна быть направлена для ба-
лансировки вверх (фиг. 6. 15 сравни с фиг. 2. 1) и дополнять
подъемную силу крыла. Поэтому возможно уменьшение угла ата-
ки или площади крыла, что в конечном итоге приводит к уменьше-
нию сопротивления самолета.
Реальную возможность использования статически неустойчи-
вых самолетов создает развитие и усовершенствование в последнее
время автоматических систем
повышения устойчивости, при-
менение которых на неустойчи-
вых самолетах позволит осво-
бодить летчиков от необходи-
мости непрерывного поддержи-
вания исходного режима поле-
та. Теперь устойчивость в поле-
те статически неустойчивого
самолета может обеспечивать-
ся автоматом, отклоняющим
руль высоты пропорционально
изменению угла атаки (или
нормальной перегрузки).
Исследования показывают,
что для самолета любой схе-
мы минимум потерь на балан-
сировку и максимальное каче-
ство можно получить при нулевой степени устойчивости (т. е. при
/п^у = 0). Самолет с т*у=0 обладает еще тем преимуществом, что
порывы ветра, нормальные траектории полета, изменяя подъемную
силу самолета, сообщают ему только линейные ускорения (без
угловых). Особенно важно это при стрельбе или бомбометании.
Такая реакция самолета с т**=0 на порыв ветра, изменяющий
угол атаки (и коэффициент подъемной силы <су), объясняется тем,
что при изменении угла атаки у такого самолета не возникает мо-
мента статической устойчивости (или неустойчивости) Да, кото-
рый стремился бы повернуть самолет относительно поперечной оси,
так как Л4®=0. Поэтому под действием порыва ветра нейтральный
самолет смещается поступательно вместе с порывом до тех пор,
пока не приобретет его скорости, после чего изменение угла атаки
от порыва исчезнет. Схематически изменение угла атаки у самоле-
тов с различной степенью продольной статической устойчивости
по перегрузке после действия вертикального порыва показано на
фиг. 6.16.
295
Таким образом, при использовании автоматической системы
обеспечения продольной устойчивости можно спроектировать цен-
тровку самолета таким образом, чтобы на сверхзвуковой скорости
самолет имел бы тсгУ=хт—а неустойчивость на дозвуковой
скорости ликвидировалась бы автоматом продольной устойчивости
(фиг. 6. 17).
Но на самолете с тс2у ^0 летать тоже практически невозмож-
с т z
но, так как в этом случае коэффициент (Уп = тгу , опреде-
ляющий показатели продольной управляемости (см. выражение
2.11 и 5. 1) и Р" при безбустерном (выражение 2.12) и необ-
ратимом бустерном (выражение 5. 2) управлении тоже практиче-
ски обращается в нуль, так как на сверхзвуковых скоростях
mz
---—>0. Поэтому малейшим движением рычага продольного управ-
ления на таком самолете можно создать недопустимую перегрузку
или довести самолет до срыва.
0,50
—A<ZT полети
0,25
С
х^>хг (неустойчивость т2>0)
Фиг. 6. 17. Выбор центровки
для получения самолета с
mzy ~0 при сверхзвуковой
крейсерской скорости (на до-
звуковой скорости машина ста-
тически неустойчива).
7 2
М
Однако при наличии на самолете демпфера тангажа, работаю-
щего по закону (дЗв)д т k^z о)г, при соответствующем выборе
передаточного числа , он может быть использован для обеспе-
чения нормальной управляемости самолета с тсгУ ^0 за счет су-
щественного увеличения производной тп^, входящей в выражение
для ол. Следовательно, выбор передаточного числа демпфера тан-
гажа k^z для обеспечения приемлемой управляемости самолета
с тс? «0 должен производиться таким образом, чтобы его коэффи-
циент статической устойчивости по перегрузке <зп был бы равен
этому коэффициенту самолета, управляемость которого считается
нормальной ап норм=I т'у -}
норм J
У самолета с т2у^0 и демпфером тангажа ап
где (дт“2) = т2в .
2 /д. т z г Ьа
nTzz + Um"z\T
* \ z /д.т
Iх
296
Приравняем эти два выражения для коэффициентов <зп:
«о 8 V
тгг + V«zB Т"
z ua
Отсюда и получим:
с
<у+—
k г /норм
р
А
---I —mzz
\ И 'норм ba
‘V
В этом выражении все коэффициенты зависят от числа М по-
{ 2т \ г-, л
лета, ац — от плотности воздуха ( р =---- . Поэтому подобран-
\ QSba /
ное из условия обеспечения нормальной управляемости переда-
точное число демпфера необходимо менять по режимам поле-
та, либо выбрать какое-либо постоянное, обеспечивающее прием-
лемые характеристики управляемости на всех режимах полета.
При этом еще необходимо учесть, что демпфер должен обеспечить
заданную степень затухания продольных колебаний, определяемую
декрементом затухания g (см. выражение 2. 33, которое и может
быть использовано для выбора необходимого передаточного числа
демпфера, так как вместо входящего в это выражение значения
производной тшг с учетом работы демпфера нужно подставить
О) 8 V
сумму m™z +k^z тгв—, где производная m^z характеризует соб-
ственное демпфирование самолета без демпфера тангажа).
На основании такого выбора передаточного числа демпфера
из условия обеспечения нормальной управляемости самолета
с тсгУ^0 и необходимой степени демпфирования продольных ко-
лебаний и должен быть произведен окончательный выбор пере-
даточного числа демпфера, удовлетворяющий обоим условиям, что
должно быть проверено предварительно моделированием процессов
на электронных моделирующих установках, а потом — в полете.
Следует отметить, что выбранное передаточное число демпфера
всегда должно быть в пределах области устойчивости системы «са-
молет — демпфер».
Если передаточное число демпфера самолета с тс2У ^0 выбра-
но по описанной методике выбора k^z для обеспечения нормальной
управляемости, то вследствие равенства коэффициентов статиче-
ской устойчивости On У этого самолета и «эталонного» при одина-
ковой даче ручки продольного управления самолеты выходят на
одинаковую перегрузку, но переходные процессы будут носить
различный характер (фиг. 6. 18).
Итак, при обеспечении абсолютной надежности работы автома-
тических систем можно будет произвести целый ряд изменений
297
в конструкции самолета, в частности, уменьшить площади опере-
ний, летать на статически неустойчивых или нейтральных само-
Фиг. 6. 18. Переходные процессы выхода на
новое значение перегрузки при одинаковом
отклонении рулей высоты на самолетах
с одинаковыми коэффициентами ап, но
различными степенями статической устой-
чивости.
летах. Уменьшение площадей оперений уменьшит сопротивление
самолета (значит —повысит качество) и увеличит весовую отдачу.
§ 5. Вопросы повышения надежности и безопасности
автоматических устройств
При проектировании демпферов и автоматов повышения устой-
чивости и установке их в систему управления самолета следует
особое внимание обращать на обеспечение надежности их работы
и обеспечение безопасности самолета при возможных отказах
в системе автоматики. Особого внимания требует разработка демп-
феров тангажа и автоматов продольной устойчивости, так как пере-
кладка руля высоты с максимальной скоростью раздвижной тяги
при повреждении в управляющем блоке или исполнительном меха-
низме (например, обрыве цепей питания управляющего потенцио-
метра или потенциометра обратной связи) может привести при
полете на некоторых режимах или к выводу самолета на недопу-
стимую перегрузку или вводу самолета в пикирование. И то и дру-
гое может привести к катастрофе. Поэтому в процессе составления
технического задания на разработку демпфера необходимо иссле-
довать вопрос о последствиях различных отказов и принять меры
к предупреждению опасных последствий (предусмотреть ограни-
чители, блокировку, дублирование и пр.). При выборе максималь-
ного диапазона отклонений руля демпфером тоже нужно учиты-
вать возможные последствия при отказах (поэтому желательно
этот диапазон выбирать наименьшим).
Так, например, на фиг. 6. 19 изображен выход на недопусти-
мую перегрузку в результате отказа демпфера тангажа на манев-
ре, при котором раздвижная тяга выдвинулась до упора и перело-
298
жила руль высоты в сторону дальнейшего увеличения перегрузки.
Вероятность такого отказа в полете вполне реальна, а опасность
выхода на недопустимую перегрузку при отказе демпфера повы-
шается с ростом исходной перегрузки, с которой совершается ма-
невр. Поэтому и приходится предусматривать специальные меры
безопасности, а также проводить дальнейшие усовершенствования
конструкции автоматических систем.
Фиг. 6. 19. Выход на недопустимую перегрузку в ре-
зультате отказа демпфера тангажа на маневре
с перегрузкой.
/—изменение перегрузки в результате отказа демпфера на
маневре; 2—изменение перегрузки в результате отказа демп-
фера при горизонтальном полете.
Например, несмотря на то, что для самолета CF-105 был раз-
работан специальный автомат продольной устойчивости, исполни-
тельный механизм демпфера тангажа в системе продольного
управления был выполнен отдельным агрегатом в целях повы-
шения безопасности на случай возможных отказов (см. фиг. 6. 13).
На истребителе-перехватчике Конвэр F-102A для предохранения
самолета от выхода на недопустимую перегрузку в случае отказа
автоматических систем был разработан специальный ограничитель
перегрузки (см. гл. IX).
Рост скоростей и высот полета современных сверхзвуковых са-
молетов, а также изменение их форм, диктуемое требованиями
аэродинамики, приводит к необходимости предъявлять более вы-
299
сокие требования к характеристикам автоматов, устанавливаемых
в системы управления этих самолетов.
Значительно сокращаются допуски в отношении запаздывания
реакции автоматов на изменение режима полета. Поэтому за по-
следнее время появилось много новшеств в конструкции гироско-
пических датчиков, которые существенно повышают чувствитель-
ность этих датчиков и точность их работы. Как примеры этих
новшеств можно привести подвеску рамки гироскопа на торсион-
ных стержнях вместо подшипников и применение индукционных
датчиков положения вместо потенциометров.
а—старый вариант — на подшипни-
ках.
/—подшипник; 2—рамка гироскопа;
3—ограничительная пружина;
б—новый вариант — на торсионных
стержнях.
/—^торсионный стержень.
Фиг. 6.21. Торсионные стержни:
а—обычный торсионный стержень; б—два
вида торсионных стержней крестообразно-
го типа.
Подвеска рамки на торсионных стержнях (т. е. стержнях, ра-
ботающих на кручение, фиг. 6.20), обеспечивает уничтожение
влияния трения в подшипниках подвески, которое сильно меняется
при изменении температуры, на запаздывание системы. На
фиг. 6.21 показаны виды применяемых торсионных стержней.
Применение индукционных датчиков обеспечивает значительно
более высокую точность работы автоматов по сравнению с потен-
циометрами. Индукционные датчики являются и более надежными,
так как в их конструкции отсутствуют электрические контакты, ко-
торые в обычных потенциометрах являются источником довольно
частых отказов автоматических систем.
§ 6. Некоторые специальные автоматические системы
для улучшения управляемости и повышения безопасности полета
В гл. V и §§ 1—2 гл. VI описаны автоматические устройства
в системах управления, в задачу которых входит улучшение харак-
300
теристик устойчивости и управляемости сверхзвуковых самолетов.
Эти автоматические устройства призваны исправлять свойственные
всем (в большей или меньшей степени) сверхзвуковым самолетам
недостатки, вызванные резким изменением аэродинамических ха-
рактеристик при переходе к сверхзвуковым скоростям полета.
Помимо этих общих для всех сверхзвуковых самолетов
устройств, для каждого конкретного самолета могут разрабаты-
ваться и специальные автоматические устройства, учитывающие
особенности устойчивости и управляемости этого самолета. Основ-
ное назначение этих автоматов — повышать безопасность полета
и облегчать процесс управления.
В качестве примеров подобных устройств следует указать на
автоматы ограничения перегрузки и максимального угла атаки,
автоматы скольжения, автоматы компенсации отказа двигателя
и др.
Как следует из названия, автоматы ограничения перегрузки
и максимального угла атаки предохраняют самолет от выхода на
перегрузку, превышающую максимальную допустимую, и от превы-
шения максимального допустимого угла атаки (по сваливанию
или другим критическим явлениям).
Так на самолете Локхид F-104 с неблагоприятными срывными
характеристиками из-за наличия прямого крыла, в системе про-
дольного управления установлен автомат ограничения предельной
перегрузки, который предупреждает летчика о приближении к кри-
тическому режиму тряской ручки управления. Если при этом лет-
чик не отдает ручку от себя, то это за него выполняет автомат,
чтобы предотвратить срыв. Эта система хорошо себя зарекомен-
довала в полете и, наряду с применением демпферов колебаний,
обеспечила самолету F-104 характеристики управляемости, кото-
рые вполне удовлетворяли летчиков, несмотря на неблагоприятные
аэродинамические характеристики прямого крыла в околозвуко-
вой зоне. Вот как характеризует систему управления самолета
F-104 летчик-испытатель:
«Система управления на нем была одной из лучших, если не
самой лучшей на самолетах серии «Сенчури». Нас она полностью
удовлетворяла, мы даже посоветовали другим фирмам, чтобы они
устанавливали подобную систему управления на своих самоле-
тах» \
1 Ф. К. Эверест, Человек, который летал быстрее всех, ИЛ, 1960,
стр. 136.
В США серией «Сенчури» называют истребители сотой серии Норт Америкен
F-100, Мак Донелл F-101, Конвэр F-102A, Локхид F-104.
Здесь следует отметить, что такое восхваление системы управления само-
лета F-104 может носить либо рекламный характер, либо объясняется достаточно
плохими характеристиками управляемости других истребителей сотой серии.
Такое предположение можно сделать исходя из того, что на самолете F-104
с прямым крылом и очень большой удельной нагрузкой (— = 500—720 кГ/м2^
(см. продолжение на стр. 302).
301
Система ограничения перегрузки применяется и на самолете
Норт Америкен F-100, где она встроена в систему демпфера тан-
гажа.
Необходимость применения автоматов скольжения и автоматов
компенсации отказа двигателей появилась, в конечном итоге,
вследствие одной и той же причины — слишком большой попереч-
ной устойчивости (т£ ) самолетов со стреловидными или треуголь-
ными крыльями на больших углах атаки. Слишком большой мо-
мент поперечной устойчивости возникающий при появлении
скольжения (в частности, при остановке одного из разнесенных
по размаху крыла двигателей), приводит к такому быстрому нара-
станию крена, что летчик зачастую не успевает во время реагиро-
вать и парировать его отклонением элеронов. Быстро нарастающий
угол крена может достигнуть недопустимых (особенно для тяже-
лых самолетов) величин и вызвать катастрофу. Естественно, что
наиболее опасно это явление на взлете и посадке. Поэтому стали
применять специальные автоматы скольжения и автоматы компен-
сации отказа двигателя, которые вследствие большего быстродей-
ствия успевали отклонять руль направления и элероны в нужную
сторону для парирования скольжения и возникающего крена. Не-
принципиальное отличие этих двух автоматов заключается в том,
что в автомате скольжения специальный датчик (флюгер) реаги-
рует на изменение угла скольжения, а в автомате компенсации
отказа двигателя датчики следят за режимом работы двигателей
(например, по давлению в выхлопной струе у ТРД, которое должно
быть приблизительно одинаковым у всех двигателей, или по кру-
тящему моменту на валу у ТВД) и в случае остановки двигателя
подают в управляющий блок автомата соответствующий сигнал.
В зависимости от того, от которого из датчиков получен сигнал,
управляющий блок выдает нужные сигналы исполнительным ме-
ханизмам, отклоняющим руль направления и элероны, для
предотвращения резкого нарастания крена и разворота.
Установка таких устройств как демпферы, автоматы устойчи-
вости, балансировки и изменения передаточных отношений наряду
со специальными загрузочными механизмами при бустерном управ-
лении существеннно улучшает характеристики устойчивости
и управляемости современных сверхзвуковых самолетов. Это
упрощает задачи летчиков по управлению современным сверхзву-
ковым самолетом, повышает безопасность полетов на них и делает
трудно получить хорошие характеристики управляемости без применения специ-
альных автоматов, которых нет в системе управления F-104 по опубликованным
в печати сведениям, за исключением демпферов и ограничителя перегрузки.
На самолете F-104 в США и странах НАТО произошло наибольшее число
катастроф по сравнению с любыми другими самолетами. Возможно, что реко-
мендации, о которых пишет Эверест, относились именно к системе ограничения
перегрузки.
302
современный сверхзвуковой самолет доступным рядовым летчикам
строевых частей.
Однако не следует думать, что появление подобных автоматов
позволяет не заботиться больше об обеспечении устойчивости
и управляемости самолета при выборе его аэродинамической схемы
и органов управления.
Непрерывный рост скорости и высоты полета летательного
аппарата и особенно начавшийся в последние годы переход в об-
ласть гиперзвуковых и космических полетов стал возможен бла-
годаря не только изысканию новых аэродинамических форм, обес-
печивающих минимальное сопротивление, высокое качество
и минимальный нагрев конструкции аппаратов, но и благодаря
разработке систем автоматического управления ими. Однако на
уже построенных и летавших аппаратах наряду с автоматическим
было сохранено и ручное управление, обеспечивающее летчику
в особых случаях возможность управления аппаратом.
Можно полагать, что и на летательных аппаратах будущего
параллельно с автоматическим будет иметься и ручное управ-
ление.
Отсюда, естественно, возникает необходимость в процессе
проектирования таких аппаратов обеспечить хотя бы минимально
приемлемые для летчика характеристики управляемости. Эту за-
дачу конструктор должен решать прежде всего подбором соответ-
ствующих органов стабилизации и управления, подбором их аэро-
динамических форм и компоновкой их на аппарате.
Автоматика должна решать только те вопросы устойчивости
и управляемости, которые не удается решить методом аэродина-
мической компоновки.
Глава VII
НЕКОТОРЫЕ ВОПРОСЫ ДАЛЬНЕЙШЕГО РАЗВИТИЯ
СИСТЕМ УПРАВЛЕНИЯ 1
§ 1. Автоматическая система или летчик?
Способы повышения эффективности управления
Развитие авиационной науки и техники уже сейчас поставило
вопросы создания гиперзвуковых и орбитальных самолетов, а так-
же вопросы создания сверхзвуковых транспортных самолетов. Эти
вопросы в последнее время широко обсуждаются зарубежной
печатью.
Огромные трудности, с которыми связано создание гиперзвуко-
вого самолета и его системы управления, вызываются, в первую
очередь, очень большим диапазоном скоростей и высот полета та-
кого самолета. В гл. III указывалось, что даже у современных
сверхзвуковых самолетов (М= 1,54-2,5) характеристики устойчи-
вости и управляемости изменяются в очень широких пределах,
причем, как правило, рост высот и скоростей полета приводит
к ухудшению этих характеристик. Для сверхзвукового транспорт-
ного самолета недалекого будущего (М = 2,54-3) и тем более гипер-
звукового самолета (М>4) диапазон изменения аэродинамических
характеристик еще больше увеличивается.
Для отработки новых систем управления и решения многих
других проблем гиперзвукового полета в США построен экспери-
ментальный гиперзвуковой (М=54-7) самолет Норт Америкен
Х-15 (см. фиг. 4.24), проходящий в настоящее время обширную
программу испытаний, начатую в сентябре 1959 г.
Огромный диапазон скоростей и высот полета гиперзвукового
самолета, приводящий к изменению его характеристик устойчи-
вости и управляемости в очень широких пределах, сильно затруд-
няет пилотирование, так как летчик не всегда способен вовремя
и правильным образом реагировать на изменения режима полета,
1 Настоящая глава написана на основе обработки материалов из статей,
опубликованных в зарубежной периодической печати (см. список литературы,
приведенный в конце книги).
304
вызванные какими-либо причинами. Здесь следует еще учесть,
что при гиперзвуковых скоростях летательные аппараты имеют
весьма узкую область, в которой возможно совершение длительно-
го полета. Эта область, называемая «коридором возможных устано-
вившихся полетов» или «коридором безопасности» образуется
границами по минимальной подъемной силе (G = K+^^,
где У — аэродинамическая подъемная сила, а --- —центробеж-
R
ная сила) и границей по максимально допустимому аэродинамиче-
скому нагреву (фиг. 7. 1). Чем более высокую температуру нагрева
допускает конструкция гиперзвукового самолета, тем более широ-
кую область он имеет для маневрирования. На фиг. 7. 1 приведена
граница по аэродинамическому нагреву, полученная расчетом при
принятой допустимой температуре нагрева конструкции 1100°.
Трудности пилотирования гиперзвуковых самолетов нередко за-
ставляют считать, что полная автоматизация управления такими
Фиг. 7. 1. Ограничение зоны возможных установившихся по-
летов.
самолетами является наиболее приемлемым способом обеспечения
возможности выполнения полетного задания. Однако многообразие
возможных ситуаций как во время полета, так, особенно, и во
время взлета и посадки, делает чрезвычайно затруднительным
использование полностью автоматической системы управления
без вмешательства летчика.
Вопрос о роли и месте человека-летчика в контуре управления
даже современного сверхзвукового и тем более гиперзвукового
самолета чрезвычайно сложен. По опубликованным в зарубежной
печати сведениям, современные представления в этой области сво-
305
дятся к тому, что система обеспечения пилотирования должна
включать в себя информационные и командные визуальные при-
боры, пользуясь показаниями которых летчик производит
управление самолетом с помощью системы управления, обеспечи-
вающей приемлемые характеристики управляемости. В этой схеме
управления летчик выполняет функции восприятия информации,
управления на основе этой информации и принятия необходимых
мер при отказах систем и в аварийной ситуации.
Включение человека в контур управления позволяет значитель-
но расширить возможный диапазон применения самолета, а так-
же может существенно упростить систему управления, так как
целый ряд функций, без особого труда выполняемых человеком,
при реализации автоматами требуют весьма сложных устройств,
достаточно высокую степень надежности которых при современном
уровне техники еще трудно обеспечить.
Так, например, достаточно трудно создать автомат, который
управлял бы процессом посадки самолета без вмешательства лет-
чика. Из-за ограничений по допустимому уровню шума на земле
набор высоты до И —12 км, также как и снижение с этих высот
до посадки, должны производиться на дозвуковой скорости, на
которой ручное управление самолетом вполне возможно, так как
летчик должен при этом решать те же задачи, что при управлении
современным скоростным самолетом. В некоторых случаях управ-
ление полетом гиперзвукового самолета тоже кажется более вы-
годным предоставить летчику.
На основании опыта испытаний гиперзвукового самолета Норт
Америкен Х-15 директор центра летных исследований NASA так-
же высказывал опубликованное в печати мнение, что в системах
управления гиперзвуковых аппаратов летчикам следует отводить
более важное место, чем это первоначально предусматривалось
проектами. Летчик должен управлять аппаратом все время, так
как в этом случае он является составной частью системы и более
подготовлен к принятию нужных мер в случае возникновения
аварийной ситуации.
Высказывания ведущих летчиков в зарубежной печати о требо-
ваниях к системе управления сверхзвукового самолета будущего
также сводятся к определенному мнению, что наиболее рациональ-
ной схемой является использование автоматического управления,
контролируемого человеком (летчиком), а в полностью автомати-
ческом управлении без участия человека в течение всего полета
нет особой необходимости Ч
Таким образом очевидно, что даже на гиперзвуковом самолете
автоматическая система управления не заменит полностью лет-
1 Здесь и далее в этом параграфе приводятся высказывания иностранных
летчиков о требованиях к характеристикам управляемости и системам управле-
ния сверхзвукового и гиперзвукового самолетов (См. SAE Journal, No. 5,
19э1, р. 36 „3 pilots talk about supersonic transport*).
306
чика, а если это так, то для облегчения управления самолетом
необходимо обеспечить приемлемые характеристики управляемо-
сти. Современные критерии устойчивости и управляемости, по
мнению летчиков, будут действительны и для гиперзвукового са-
молета. При этом произвольные характеристики управляемости,
полученные на спроектированном из условий обеспечения макси-
мальных летных данных самолете, не всегда приемлемы для лет-
чиков. Летчики высказывают пожелания, чтобы характеристики
управляемости гиперзвукового самолета были бы приблизительно
одинаковы на всех режимах полета, причем были бы сходны
с аналогичными характеристиками управляемости дозвукового
самолета.
Обеспечить приемлемые характеристики устойчивости и управ-
ляемости гиперзвуковых самолетов можно только благодаря комп-
лексному применению новых, наивыгоднейших для гиперзвукового
полета аэродинамических схем самолетов, новых методов повыше-
ния эффективности органов управления, новых схем управления
и автоматизации систем ручного управления.
Сверхзвуковые и гиперзвуковые самолеты будущего для об-
легчения процесса пилотирования и повышения безопасности
должны проектироваться таким образом, чтобы были обеспечены
оптимальные характеристики управляемости, т. е. такие соотноше-
ния между величинами, характеризующими действия летчика (от-
клонениями рычагов управления и усилиями на них) и ответную
реакцию самолета (изменения перегрузки, угловых скоростей,
скорости...), которые были бы наиболее удобны для летчиков
и вызывали бы при пилотировании наименьшее напряжение и, сле-
довательно наименьшее утомление.
Определение оптимальных характеристик управляемости для
каждого типа самолетов требует проведения специальных исследо-
ваний. Следует помнить, что соответствующий подбор оптимальных
характеристик управляемости нового самолета сильно упрощает
пилотирование и может значительно сократить необходимую, чрез-
вычайно дорогую, подготовку его экипажа.
Главными проблемами при проектировании гиперзвукового са-
молета являются аэродинамический нагрев и обеспечение манев-
ренности. Гиперзвуковой самолет должен обладать приемлемыми
летными характеристиками на всех режимах полета, начиная от
взлета и посадки и кончая гиперзвуковым полетом. Трудности
проектирования схемы гиперзвукового самолета заключаются
в необходимости удовлетворения многих, зачастую противоречи-
вых требований.
Одной из задач проектирования является обеспечение продоль-
ной устойчивости в необходимых пределах на всех режимах поле-
та, которое затрудняется достаточно интенсивным перемещением
фокуса при околозвуковых скоростях (см. гл. Ill, § 1). Это смеще-
ние фокуса уменьшается при увеличении стреловидности, которое
является также наиболее эффективным средством уменьшения
307
притока тепла, особенно при применении скругленной (затуплен-
ной) передней кромки крыла.
Применение скругленной передней кромки крыла предупреж-
дает срыв потока на больших углах атаки у концов стреловидного
крыла и устраняет появление, вследствие этого, моментов на каб-
рирование, способных привести даже к потере продольной стати-
ческой устойчивости (по перегрузке). Крыло с толстой скруглен-
ной передней кромкой обладает еще одним преимуществом при
малых скоростях: ввиду отсутствия срыва на концах его возникает
разрежение, обеспечивающее уменьшение индуктивного сопротив-
ления до теоретических значений, что особенно важно для крыльев
малых удлинений, характерных для гиперзвуковых самолетов.
Установка килей у концов крыла также способствует умень-
шению индуктивного сопротивления. Такое расположение килей
у гиперзвукового самолета является наиболее благоприятным
и с точки зрения обеспечения их максимальной эффективности,
необходимой для получения приемлемых характеристик боковой
устойчивости и управляемости, так как при расположении киля на
фюзеляже при больших сверхзвуковых и гиперзвуковых скоростях
он находится в зоне сильного разрежения, создаваемого крылом
и фюзеляжем. Поэтому приходится одновременно устанавливать
киль и на нижней поверхности фюзеляжа как это сделано на ги-
перзвуковом самолете Х-15 (см. фиг. 4.24).
При расположении киля под крылом он будет подвержен наи-
большему нагреву при гиперзвуковых скоростях и кроме того бу-
дет создавать серьезные затруднения для обеспечения посадки.
Поэтому такая схема применима, очевидно, только для небольших
экспериментальных самолетов, обладающих небольшой продолжи-
тельностью полета (при условии сброса нижнего киля на посадке).
Высказанные предпосылки позволяют предположить, что наи-
более выгодной схемой гиперзвукового самолета является бесхво-
стая схема (без г.о.) со стреловидным или треугольным Крылом
со скругленными передними кромками и расположенными у кон-
цов крыла килями, также имеющими скругленные передние кром-
ки.1 Для повышения эффективности на больших скоростях аэро-
динамические поверхности управления должны иметь срезанные
(тупые) задние кромки.2
В большинстве опубликованных иностранными фирмами
(Боинг, Белл, NASA, RAE, Армстронг Уитворт) проектов гипер-
звуковых летательных аппаратов применена подобная схема,
которая обеспечивает получение максимального качества на режи-
мах захода на посадку (порядка 8—9), а на гиперзвуковых
скоростях аэродинамическое качество должно быть в грани-
1 Aero/Space Engineering, No. 2, 1961.
2 Так, например, по сведениям, опубликованным в печати, ракетоплан Боинг
Х-20 «Дайна-Cop» имеет кили с толщиной задней срезанной кромки около 100 леи
(Aviation Week, No. 14, 15, 1, 8 X, 1962).
308
цах, определяемых аэродинамическим нагревом конструкции
самолета.
Большие затруднения вызывает обеспечение эффективности
аэродинамических поверхностей управления на больших вы-
сотах.
Управление положением самолета в пространстве с помощью
аэродинамических рулей является самым простым, надежным
и сопряжено с наименьшими весовыми затратами. Поэтому естест-
венно стремление сохранить это управление до возможно больших
высот. Помимо выбора специальных профилей и аэродинамических
схем, обеспечивающих максимальную эффективность рулей, наме-
чается другой путь повышения высотности аэродинамического
управления — использование управления пограничным слоем на
аэродинамических поверхностях управления самолета. Этот путь
позволяет существенно увеличить максимальную высоту достаточ-
но эффективного применения обычного аэродинамического управ-
ления, которая возрастает также с ростом скорости полета вслед-
ствие роста скоростного напора
При использовании метода управления пограничным слоем для
повышения эффективности обычных аэродинамических поверхно-
стей управления к ним подводится воздух, отбираемый от послед-
них ступеней компрессоров двигателей. Теперь одновременно
с отклонением какого-либо руля с помощью бустера происходит
открытие клапана, выпускающего сжатый воздух с соответствую-
щей стороны на поверхность этого руля.
Для подавляющего большинства сверхзвуковых самолетов, не
имеющих в продольном управлении специальных автоматов изме-
нения передаточных отношений, свойственна повышенная чувстви-
тельность к отклонениям ручки (или штурвала) при полете с боль-
шой дозвуковой скоростью на небольших высотах, так как большая
площадь органов продольного управления выбирается из условия
обеспечения маневренности на больших высотах. Поэтому, как
уже было отмечено (гл. V, § 3—5) при полете на малых высотах
с большими дозвуковыми скоростями требуются особо точные
действия летчика, что весьма затрудняет пилотирование. Создание
систем автоматического изменения передаточного отношения в про-
дольном управлении для сверхзвуковых самолетов с очень боль-
шим диапазоном скоростей, как уже было отмечено, весьма затруд-
нительно, и эти системы могут оказаться неудовлетворительными
для гиперзвуковых самолетов.
Наиболее простой и надежной системой, обеспечивающей су-
щественное упрощение процесса пилотирования гиперзвукового
самолета на различных режимах полета, по мнению иностранных
специалистов, можно считать так называемую систему «верньерного»
управления. Сущность этого системы заключается в том, что функ-
ции управления относительно одной из осей самолета разделяются
309
между двумя аэродинамическими поверхностями — большой
и малой.
При этом малая поверхность, естественно, имеет малую эффек-
тивность и связана с управляющим рычагом постоянным переда-
точным отношением. Большая поверхность, имеющая большую эф-
фективность, связывается с рычагом управления специальной си-
стемой так, чтобы малые отклонения рычага управления самоле-
том (в выбранных пределах) от балансировочного положения на
нее совсем (или почти) не передавались (фиг. 7.2).
Фиг. 7.2. Согласование отклоне-
ний верньерной и основной по*
верхностей продольного управле-
ния при перемещениях ручки уп-
равления самолетом. (Направле-
ние отклонения поверхностей от-
несено к их задней кромке.
Верньерная поверхность располо-
жена в носовой части фюзеляжа,
а основная — в хвостовой).
В случае использования такой системы при полете на тех ре-
жимах, когда управление очень эффективно, для управления само-
летом достаточно одной малой верньерной поверхности, которую
вследствие малой ее эффективности надо отклонять на достаточно
большие углы, чтобы получить необходимые моменты для измене-
ния положения самолета. Это обеспечивает рост потребных расхо-
дов рычага управления и усилия на нем для совершения маневра
определенной интенсивности. При полете же на больших высотах
с большой сверхзвуковой скоростью (когда эффективность обыч-
ных органов управления существенно снижается), отклонение
верньерной поверхности не вызывает заметной реакции самолета,
и летчик должен больше смещать рычаг управления (больше хвь
см. фиг. 7.2), чтобы ввести в действие основную поверхность
управления. С вступлением в действие основной поверхности
эффективность данной системы управления сильно возрастает,
чем компенсируется необходимость сильно отклонять ручку или
штурвал. Значит разброс значений показателей управляемости
хв» ^в» хэх> Рэх> и др. при полете на различных режимах будет
уменьшен.
Для систем путевого и поперечного управлений верньерная
система осуществляется очень просто, так как балансировочное
положение педалей и ручки по управлению элеронами (штурвала)
совпадает с их нейтральным положением. Затруднения наступают
310
при проектировании верньерной системы продольного управления,
так как здесь задача усложняется необходимостью смещать нуле-
вую точку закона согласования отклонения поверхностей (см.
фиг. 7. 2) за балансировочным положением ручки на различных
режимах полета.
Впервые такая система продольного управления появилась
на английском околозвуковом истребителе Хоукер «Хантер», где
роль верньерной поверхности продольного управления выполняет
руль высоты, расположенный на подвижном стабилизаторе (см.
фиг. 9.9).
Фиг. 7.3. Возможная кинематическая схема продольного верньерного управ-
ления.
/—верньерная поверхность; 2—малый гидроусилитель; 3—рулевая машинка автопилота;
4—загрузочный механизм с механизмом триммерного эффекта; 5—ручка управления; 6—раз-
движная тяга автомата балансировки; 7—каретка; 8— качалка с прорезью; 9—управляемый
стабилизатор; 10—большой гидроусилитель.
На фиг. 7. 3 показана возможная схема верньерного продоль-
ного управления с разнесенными поверхностями управления. Дви-
жения ручки управления 5 самолетом передаются сначала только
верньерной поверхности 1 до тех пор, пока каретка 7 не пройдет
весь возможный свободный ход в качалке с прорезью 8. После
этого начинает отклоняться и основная поверхность управления 9.
Для сохранения центрального положения каретки в прорези на
всех режимах полета должен применяться специальный автомат
балансировки, раздвижная тяга 6 которого при изменении режима
полета ставит каретку нейтрально. В подобной системе необходи-
мо предусмотреть специальное устройство, препятствующее само-
произвольному отклонению качалки с прорезью.
По мнению иностранных специалистов, верньерное управление
целесообразно применять на самолетах, достигающих скоростей
превышающих скорость звука более чем вдвое. Большим недостат-
ком этих систем является необходимость очень высокой точности
изготовления узлов системы. Трение, люфты, мертвый ход и упру-
гие деформации в проводке управления должны быть сведены до
минимума.
311
Невозможность управления самолетом на больших высотах
обычными аэродинамическими поверхностями заставляет конст-
рукторов искать новые пути для создания «всевысотного» управле-
ния, добавляя к обычному аэродинамическому управлению, вполне
удовлетворительному при полетах на малых высотах, еще и реак-
тивное управление.
В настоящее время наиболее простым и перспективным мето-
дом управления вне пределов атмосферы можно считать использо-
вание реактивных сил, появляющихся при истечении газов из
специальных реактивных сопел управления, устанавливаемых так,
чтобы обеспечить при их работе создание моментов управления
относительно всех трех осей самолета. Питание этих сопел возмож-
но осуществлять продуктами разложения перекиси водорода или
других химических топлив, запас которых на самолете должен
обеспечить управление в течение всего полета в разреженных
слоях атмосферы и вне ее. Подача газов к соплам регулируется
клапанами, управляемыми летчиком (или автопилотом) посредст-
вом воздействия на обычные рычаги управления. Изменяя расход
газов через сопла, можно изменять и величину моментов, опреде-
ляющих наклон или поворот самолета.
Реактивная система управления на больших высотах должна
использоваться не только для управления положением самолета
(ориентации) и его траекторией, но и для искусственного созда-
ния демпфирования колебаний вследствие отсутствия собственного
демпфирования. Система демпфирования должна помимо воли
летчика управлять клапанами и открывать доступ газам к соответ-
ствующим соплам реактивной системы по сигналам датчиков угло-
вых скоростей.
Реактивная система управления применена, например, на экс-
периментальном гиперзвуковом самолете Норт Америкен Х-151
для управления на больших высотах (см. фиг. 7.4,6). Аналогич-
ная система управления при орбитальном полете и в период входа
в плотные слои атмосферы проектировалась и для ракетоплана
Боинг Х-20 «Дайна-Сор».
Таким образом, для гиперзвукового самолета помимо обычной
системы управления с помощью аэродинамических поверхностей,
обеспечивающей управляемость до высот порядка 30 км, необхо-
1 По сообщениям печати, отработка этой системы велась на модифициро-
ванном самолете F-104, имеющем на малых скоростях достаточно сходные с са-
молетом Х-15 аэродинамические характеристики. Эти самолеты использовались
для подготовки летчиков на самолеты Х-15 (Interavia, № 5082, 21 IX, 1962).
Здесь следует отметить, что показанная на фиг. 7.4, б реактивная система
управления может служить при работающих основных двигателях не только
системой ориентации самолета относительно его центра тяжести, но и системой
управления траекторией, так как изменение положения самолета вызывает изме-
нение направления вектора тяги. Если же основные двигатели не работают,
то с помощью этой реактивной системы управления уже невозможно изменить
траекторию, а можно изменять только ориентацию самолета в пространстве.
312
Фиг. 7.4. Схемы управления самолета Норт Америкен Х-15.
а—схема продольного аэродинамического управления самолета,
/—центральная (основная) ручка управления; 2— ручка на правом пульте; 3—вспо-
могательный гидроусилитель; 4—привод демпфера; 5—бустер привода поверхности
продольного управления; 6—механизм нелинейной передачи; 7—автомат загрузки,
б—схема размещения реактивной системы управления самолета.
/—перепускные клапаны управления тангажом и рысканием; 2—управление тангажом;
3—ручка управления самолетом с помощью реактивной системы; 4—управление кре-
ном; 5—управление рысканием; б—перепускные клапаны упра?ления креном;
7, 3—баки с перекисью водорода; 9—сопла реактивной системы управления креном
на крыле; 10, И, /2—тросовая проводка управления перепускными клапанами;
/3—сопла реактивной системы управления тангажом и рысканием в носовой части
фюзеляжа.
А— основное сопло с питанием перекисью из бака 7; В—дублирующее сопло с пита-
нием из бака 3.
в—принципиальная схема реактивной системы управления, работающей на перекиси
водорода.
/—регулирующий клапан (открывающий выход газам через сопло); 2—сопло; 3—бак
с перекисью водорода; 4—баллон с азотом-. 5— регулятор давления; б—газогенератор;
7—сопло; 3—дренаж; 9—перепускной (предохранительный) клапан.
313
димо наличие и другой системы — для управления и демпфирова-
ния на больших высотах.
Важной особенностью гиперзвукового самолета является необ-
ходимость длительного полета с большими продольными и нор-
мальными перегрузками, когда управление самолетом с помощью
обычной ручки управления сильно затрудняется. Поэтому для об-
легчения управления на этих режимах полета следует предусмат-
ривать боковую ручку управления, которой можно управлять
рукой, находящейся на подлокотнике. Такая ручка впервые в экс-
периментальных целях применена в системе управления самолета
Х-15 (фиг. 7. 4, а). Боковая ручка связывается с центральной спе-
циальным бустером, уменьшающим усилия на ней и синхронизи-
рующем отклонения двух ручек. На боковой ручке имеется кнопка
продольной балансировки.
Система управления аэродинамическими поверхностями само-
лета Х-15 — необратимая бустерная, загрузка создается пружин-
ными загружателями. В системе продольного управления примене-
на нелинейная передача и ограничитель перегрузки.
Система искусственного повышения демпфирования относи-
тельно всех трех осей имеет в качестве чувствительных элементов
гироскопы с тремя степенями свободы, в качестве исполнительных
механизмов демпферов применены гидравлические сервоцилиндры.
Передаточные числа демпферов могут изменяться летчиком в по-
лете. В контур . демпфирования поперечных колебаний заведен
сигнал с гироскопа рыскания для учета перекрестных связей. Си-
стема демпфирования на первых самолетах Х-15 управляла только
аэродинамическими поверхностями, а на больших высотах коле-
бания самолета становились незатухающими. Поэтому рассматри-
вается вариант модификации системы демпфирования путем
подключения ее к системе реактивного управления. Улучшение
демпфирования колебаний на больших высотах с помощью реак-
тивной системы управления должно обеспечить более простое
и точное управление самолетом в этих условиях.
По сообщениям печати1, третий самолет Х-15. достигший высо-
ты 94 490 м и скорости 6687 км/час, оборудован самонастраиваю-
щейся системой управления. Эта система, выполненная на полу-
проводниках, предназначена для облегчения задач пилотирования
при входе в плотные слои атмосферы, когда скорость и высота
полета изменяются в широких пределах.
Самонастраивающаяся система регулирует передаточные числа
в зависимости от изменения режима полета так, что обеспечивает
оптимальные характеристики управляемости. Такая система не-
прерывно регулирует свою эффективность путем сравнения ответ-
ной реакции самолета на действия летчика с эталоном (моделью)
и отличается от несамонастраивающихся систем тем, что ее харак-
теристики не зависят от предварительно заложенного в систему
1 Aviation Week, No. 4, 23 VIII, 1962.
314
закона связи внешних условий, определяющих характеристики
самолета, с характеристиками системы управления (например,
закона регулирования передаточных чисел по режимам полета).
Применение самонастраивающихся систем позволяет получить
оптимальные характеристики управляемости без весьма сложного
программирования изменения характеристик системы по режимам
полета сверх- и гиперзвукового самолета на больших высотах.
Для максимальной экономии химического топлива для реак-
тивной системы управления должна быть предусмотрена специ-
альная автоматическая система, включающая реактивное управле-
ние только тогда, когда эффективность аэродинамического управ-
ления падает ниже определенного уровня. Эта автоматическая
система должна обеспечивать правильное взаимодействие двух
систем управления при переходах с аэродинамического на реак-
тивное управление и обратно.
Применение специальных реактивных двигателей (реактивных
сопел) для управления самолетом и его стабилизации требует
значительно большего расхода энергии и весовых потерь, чем при
эквивалентном аэродинамическом управлении. Поэтому весьма
актуальной является задача сохранить эффективность аэродинами-
ческого управления до возможно больших высот полета.
§ 2. Возможные схемы автоматизации управления
Большой диапазон скоростей и высот полета гиперзвукового
самолета сильно затрудняет правильный выбор законов регулиро-
вания искусственной загрузки рычагов управления самолетом
и изменения передаточных чисел в проводках систем управления
для обеспечения оптимального чувства управления. До настоящего
времени наибольшее распространение за рубежом получили за-
грузочные автоматы, создающие усилие, пропорциональное скоро-
стному напору и углу отклонения поверхности управления. Однако
при больших числах М полета необходимо вводить поправку в та-
кой закон, так как падение эффективности органов управления при
больших числах М полета требует увеличения их расхода (даже
при больших скоростных напорах), что приводит к неприемлемому
утяжелению загрузки рычагов управления. (Подобная коррекция
загрузки на большие числа М полета, но достаточно упрощенная,
уже была рассмотрена в §§ 2 и 5, гл. V при разборе загрузочных
механизмов и автоматов изменения передаточных чисел).
Для обеспечения оптимальных характеристик управляемости
гиперзвукового самолета необходимо создание специальных комп-
лексных автоматических устройств в системах ручного управления.
Об этом уже говорилось в гл. VI, где был приведен пример прак-
тического осуществления специального автомата в продольном
управлении современного самолета (см. фиг. 6. 13), обеспечиваю-
щего оптимальные характеристики управляемости. Одновременно
этот автомат повышает и динамическую устойчивость самолета.
315
Эти комплексные электронные автоматические устройства
должны обеспечивать при изменении режима полета соответствую-
щее изменение передаточных чисел, изменение характеристики
загрузки, учитывать изменение балансировки самолета при смеще-
нии фокуса, а также выполнять роль демпфирующих устройств.
Все эти функции стараются передать одному исполнительному
механизму в системе управления, который отрабатывает выдавае-
мые счетно-решающим блоком сигналы.
Приведенная на фиг. 6.13 система имеет ряд существенных до-
стоинств, одним из которых является то, что автомат усилий может
иметь любую характеристику. В конечном итоге возможно полу-
чить постоянство градиента усилий по перегрузке (Р* = const),
что может быть достигнуто введением в счетно-решающий (управ-
ляющий) блок такого закона регулирования, который обеспечивал
бы при постоянном усилии на ручке в полете на различных режи-
мах различную величину хода штока сервомеханизма, которая
определялась бы изменением показателя по режимам полета.
Таким образом, при одинаковых усилиях на ручке, сервомеханизм
отклонял бы стабилизатор на различные углы в соответствии с из-
менением эффективности продольного управления на различных
режимах полета, чем обеспечивался бы одинаковый прирост пере-
грузки. (Другими словами, такая система, обеспечивая постоянство
показателя Р” = const, не обеспечивает постоянство показателя х” ,
так как при неодинаковых ходах штока сервомеханизма ручка
будет отклоняться на различную величину, но прирост перегрузки
при этом будет постоянным).
Большим достоинством вышеприведенной схемы является
и возможность легкого использования ее при автоматическом
управлении с земли от бортового радиолокатора или другой авто-
матической системы управления.
Аналогичная схема управления может быть применена для
управления элеронами (при этом акселерометр заменяется гиро-
скопом, измеряющим угловую скорость крена) и руля направления
(акселерометр заменяется датчиком угла скольжения). В этом
случае возможно получение постоянства показателей боковой
управляемости (Р“* = const и PH=const) независимо от режима
полета.
При необходимости введения ограничений по максимальной
эксплуатационной перегрузке (пу) или максимальной угловой
скорости крена ((Oxmax) это может быть легко осуществлено сто-
порением сервомеханизма при достижении этими параметрами
заданных значений, величина которых будет зависеть от режима
полета и скорости нарастания перегрузки или угловой скорости
крена. Чем больше эта скорость нарастания (т. е. ny— и cox =
— , тем раньше должно произойти стопорение сервомеханиз-
316
ма, чтобы обезопасить самолет от выхода на недопустимые
значения перегрузки или угловой скорости крена вследствие его
инерционности, так как заброс (перерегулирование) по перегрузке
или угловой скорости крена (см., например, фиг. 6. 10) зависит от
скорости нарастания этих параметоов.
В изображенном на фиг. 7. 5 другом возможном варианте прин-
ципиальной схемы продольного управления с помощью электрон-
ного автоматического устройства, получающего сигналы датчиков
режима полета (М, Н, nyt coz), вырабатываются управляющие
сигналы, поступающие на единственный исполнительный механизм
в системе продольного управления — раздвижную тягу 6 с большим
ходом штока. С помощью изменения длины раздвижной тяги в соот-
ветствии с выбранным законом регулирования в зависимости от
параметров полета можно компенсировать все недостатки продоль-
ной управляемости самолета (исправить балансировочные кривые
хв=/:(М, Я), создать x£=const, увеличить демпфирование) при
любом диапазоне скоростей и высот полета.
Фиг. 7.5. Принципиальная схема продольного управления с автоматом
продольной устойчивости и ограничителем перегрузки.
/—пружинные упоры ограничителя перегрузок; 2—механизм отключения ограничителя
перегрузок; 3—кнопка включения ограничителя перегрузок; 4—загрузочная пружина
с механизмом триммерного эффекта; 5—ручка управления; 6—раздвижная тяга автома-
та продольной устойчивости и управляемости; 7—бустер; 8—управляемый стабилиза-
тор; 9—электронный управляющий блок автомата продольной устойчивости; 10—дат-
чик положения ручки управления; //—балансировочный механизм; /2—рычаг ограничи-
теля перегрузок.
Вследствие получения постоянства показателя х* при такой си-
стеме отпадает необходимость в сложных автоматах загрузки, так
(dP
~d~^ ~
=const) при х” = const обеспечивает постоянство показателя
на всех режимах полета:
317
Pn dXn dP n ,
B= ~ • - = const.
dny dx3
Балансировочный механизм И служит для сохранения постоян-
ного положения рычага 12 ограничителя перегрузки относительно
упоров 1 при различных балансировочных положениях ручки
управления на различных режимах полета.
Применение подобной схемы для управления элеронами и пе-
далями обеспечивает постоянство показателей х*х и независи-
мо от режима полета и поэтому также создает возможность
использовать для загрузки педалей и ручки по элеронам (или
штурвала) простые пружины с линейными характеристиками.
Однако применение подобных систем управления требует спе-
циальной проработки вопросов обеспечения безопасности на слу-
чай отказов системы, которые могут привести к быстрому переме-
щению штока раздвижной тяги. Так как в такой системе раздвиж-
ная тяга должна иметь достаточно большой ход, то уход ее штока
в одно из крайних положений легко может вызвать катастрофу.
§ 3. Системы с электрическими связями рычага управления с рулем
и способы повышения их надежности
В самолетах будущего, рассчитанных на искусственную стати-
ческую и динамическую устойчивость, управлять которыми вруч-
ную при отказах автоматики или гидроусилителей становится не-
возможно, значительно уменьшается роль непосредственной
механической связи между летчикам и поверхностью управления.
При механической проводке управления усложняется ввод сигна-
лов от различных автоматических устройств в силовые приводы
поверхностей управления и требуется специальный исполнительный
механизм для каждого автомата. Все это усложняет и утяжеляет
систему управления, приводит к ухудшению ее динамических ха-
рактеристик и снижению надежности.
Поэтому в настоящее время начинает проявляться интерес
к отказу от прямой механической связи рычагов и поверхностей
управления с заменой ее на электрическую связь. При этом отпа-
дает влияние трения, люфтов, упругих деформаций, паразитных
гидравлических обратных связей и пр. на характеристики системы
управления. Система управления значительно облегчается
и получается более удобной и гибкой в отношении .монтажа на са-
молете.
На фиг. 7.6 приводится примерная схема электрического
управления стабилизатором. Смещения ручки передаются команд-
ным потенциометрам и преобразуются в командные электрические
сигналы, поступающие в электронный смеситель, где преобразуют-
ся в окончательные управляющие сигналы, поступающие через
усилители на обмотки электромагнитов управляющего золотника
318
Фиг. 7. 6. Система управления с электрической связью между рычагом и поверх-
ностью управления.
1—командные потенциометры; 2—нагрузочное устройство с коррекцией по q, М и Пу*
3—механизм триммерного эффекта: -/—центральный блок системы; 5—ручка управления;
6—центрирующие пружины; 7—двухкамерный гидроусилитель (с электроуправляемыми золот-
никами); 8—управляемый стабилизатор; 9—потенциометры обратной связи; 10—демпфер;
//—механический корректор передаточного числа и жесткости загрузки; /2—управляющий
блок автомата загрузки.
Электромагниты выключены
Фиг. 7.7. Схема устройства золотника гидроуси-
лителя с электрическим управлением.
319
гидроусилителя стабилизатора, схема устройства которого пока-
зана на фиг. 7.7.
Основным недостатком электрической системы управления
является невозможность обеспечения в настоящее время степени
ее надежности, сравнимой с надежностью механической проводки.
Единственным практическим путем повышения безопасности поле-
та при электрической системе является дублирование всех ее эле-
ментов, включая проводку и источники энергии. По сведениям,
опубликованным в печати, за границей разрабатываются специаль-
ные схемы дублирования электрической системы управления, при-
чем некоторые из них должны обладать свойством самоконтроля
за правильным функционированием и обеспечивать автоматиче-
ский переход на резервную систему в случае неисправности
в основной.
Надежность электрической системы управления определяется
безотказностью действия составляющих ее элементов. Поэтому
в систему необходимо включать только те агрегаты, которые про-
шли всесторонние испытания при всех режимах и окружающих
условиях, встречающихся в реальных условиях эксплуатации.
Особо ответственным агрегатом является электрогидравличе-
ский сервоклапан, управляющий по сигналам системы управления
распределительным золотником гидроусилителя привода руля.
Для уменьшения трения и реактивных сил потока жидкости
в управляющем золотнике, достигающих при больших потребных
расходах жидкости через золотник значительно больших величин,
чем могут обеспечить электромагниты, управляющие золотником
по электрическим сигналам, в сервоклапанах применяют двухсту-
пенчатые (или двухкаскадные) золотниковые распределители.
В этом случае электромагниты управляют только малым промежу-
точным золотником, который при своих смещениях от нейтрального
положения питает гидросмесью соответствующие полости основно-
го золотника, заставляя его тоже перемещаться, но уже под дейст-
вием высокого давления жидкости. Этот основной золотник, сме-
щаясь, открывает доступ гидросмеси в силовой гидроцилиндр.
В настоящее время в системах автоматического электроуправ-
ления наиболее широкое распространение нашли сервоклапаны
типа «сопло-заслонка», отличающиеся значительной простотой
устройства.
Разработанный фирмой Миннеаполис Ханиуэлл специально
для своей системы электрического управления сервоклапан отли-
чается простотой устройства и более высокой степенью надежно-
сти, чем сервоклапаны типа «сопло-заслонка».
Электрическая часть сервоклапана фирмы Миннеаполис-Ханиу-
элл (фиг. 7.8) состоит из электромагнита с почти замкнутым
сердечником, между полюсами которого помещена трубка прямо-
угольного сечения из изоляционного материала. Трубка заполнена
жидким металлическим проводником — эвтектическим сплавом
NaK (23% Na, 77% К)с температурой застывания —12° С. Находя-
320
Фиг. 7. 8. Принцип действия электромагнитного управляю-
щего устройства сервоклапана с жидким сплавом NaK-
Z3_____С
Резервный
Фиг. 7. 9. Схема привода золотника гидроусилителя
сервоклапанами со сплавом NaK.
/•—золотник распределителя; 2—центрирующая пружина;
3—сильфон резервного сервоклапана; 4—сильфон рабочего сер-
воклапана; 5 и 7—электроусилители, 6 и 8—компенсационные
резервуары, 9—двухкамерный гидроусилитель.
321
щийся в магнитном поле участок трубки имеет две противополож-
ные стенки из токопроводящего материала. Если их соединить с ис-
точником электроэнергии, то направление электрического тока
внутри трубки будет перпендикулярным к магнитным силовым ли-
ниям поля. Как известно, магнитное поле выталкивает находящийся
в нем проводник с электрическим током в направлении, опреде-
ляемом по известному правилу левой руки (на этом принципе
основано устройство всех электрических двигателей). Так как
в данном случае проводником с током является жидкий металли-
ческий сплав, то его и будет выталкивать магнитное поле при
возбуждении электромагнита и подаче управляющего электриче-
ского сигнала от системы к проводящим частям трубки со сплавом
^NaK. Поэтому сплав потечет в сторону, определяемую направле-
нием управляющего сигнала.
Давление, развиваемое потоком сплава, достаточно, чтобы пе-
ремещать нагруженный пружиной золотник гидравлического рас-
пределителя. На фиг. 7.9 показана схема привода золотника
двухкамерного гидроусилителя от двух сервоклапанов—рабочего
и резервного.
По сравнению с сервоклапаном типа «сопло-заслонка», где для
перемещения управляющего золотника используются реактивные
силы потока жидкости, вытекающего из сопла, прикрываемого
управляемой заслонкой, описанный сервоклапан имеет следующие
преимущества:
1. Отсутствует расход гидравлической жидкости, когда система
не работает.
2. Давление, развивающееся в потоке сплава и передающееся
на золотник, пропорционально силе тока входного сигнала.
3. Замкнутый контур со сплавом не подвержен загрязнению,
а входная мощность клапана достаточна, чтобы срезать инородные
частицы, попадающие между золотником и гильзой распредели-
теля.
4. Клапан сохраняет работоспособность при температурах
4304-540° С, что особенно важно для гиперзвуковых самолетов,
подвергающихся значительному нагреву.
Глава VIII
ВЛИЯНИЕ ДЕФОРМАЦИЙ КОНСТРУКЦИИ САМОЛЕТА
НА ЕГО УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ
Под действием возникающих в полете внешних сил происходят
деформации конструкции самолета вследствие того, что жесткость
реальной конструкции не может быть бесконечной. Деформации
конструкции приводят к перераспределению воздушных, нагрузок
по крылу и оперению, что вызывает изменение действующих на
самолет в реальном полете аэродинамических сил и моментов,
по сравнению с их значениями, определенными без учета влияния
нежесткости конструкции по продувкам моделей или расчетным
путем. Нежесткость конструкции сильно влияет и на эффектив-
ность органов управления, так как их отклонение всегда связано
с изменением воздушных нагрузок и, следовательно, изменением
деформаций конструкции. В конечном итоге это и приводит
к изменению реакции самолета на отклонение органа управления
по сравнению с реакцией абсолютно жесткого самолета.
Таким образом, деформации конструкции самолета приводят
к изменению характеристик устойчивости и управляемости самоле-
та, а также могут вызвать ряд опасных явлений (флаттер, дивер-
генция, реверс и др.).
Особенно велико влияние нежесткости конструкции на характе-
ристики устойчивости и управляемости современных самолетов
с тонкими профилями стреловидных крыльев и оперения и длинны-
ми тонкими фюзеляжами.
§ 1. Деформация оперения. Дивергенция и уменьшение
эффективности
Деформации оперения оказывают существенное влияние на
устойчивость и управляемость самолета, причем характер этого
влияния существенно зависит от формы оперения в плане и чис-
ла М полета.
Рули высоты и направления, расположенные у задних кромок
стабилизатора и киля, имеющих конечную жесткость, как прави-
ло, теряют эффективность с ростом скорости. Происходит это
323
потому, что отклонение руля вызывает увеличение воздушной
нагрузки в задней части профиля, возрастающей пропорционально
квадрату скорости. Эта воздушная нагрузка вызывает закрутку
профиля носком в сторону отклонения руля. Это и приводит
к уменьшению общего прироста подъемной силы на упругом про-
филе, т. е. снижению его эффективности, которую можно характе-
ризовать приростом подъемной силы оперения (или его су) при
единичном отклонении руля, т. е. производной сьу.
На стреловидном оперении расположенные у задних кромок
рули теряют эффективность более интенсивно, вследствие суммар-
ного влияния деформаций круче-
ния и изгиба.
На фиг. 8. 1 показано вызван-
ное нежесткостью конструкции
оперения относительное измене-
ние эффективности руля высоты
современного истребителя с ро-
стом чисел М полета у земли.
Уменьшение эффективности
руля высоты в продольном управ-
Фиг. 8. 1. Относительное умень-
шение эффективности руля высоты
вследствие нежесткости конст-
рукции с ростом скорости (чис-
ла М).
усилий PB=f2(V).
лении приводит к увеличению по-
казателей продольной управляе-
мости х” и Р” (см. фиг. 5. 14),
а также к изменению балансиро-
вочных отклонений руля высоты
бв=А (V) и балансировочных
При недостаточной жесткости стабилизатора,
начиная с некоторого значения скоростного напора производные
db3 dP3
—- и —- могут даже изменить знак.
Аналогичное влияние на изменение характеристик путевой
управляемости оказывает нежесткость конструкции киля, особенно
сильно отражающаяся на снижение путевой устойчивости, харак-
теризуемой производной т^.
Для самолетов с оперением без стреловидности большое влия-
ние на характеристики устойчивости может оказать явление дивер-
генции.
Дивергенцией называют такую деформацию закрутки оперения
(или крыла) под действием внешних нагрузок, которая приводит
к увеличению этих нагрузок. Такая закрутка может произойти,
если точка приложения равнодействующей аэродинамических сил
на крыле или стабилизаторе лежит впереди центра жесткости (что
обычцо и бывает при дозвуковых скоростях полета). В этом случае
приращение аэродинамической силы вызывает дополнительное
приращение угла атаки, вследствие закручивания крыла или ста-
билизатора. Это, в свою очередь, дает дополнительный прирост
подъемной силы, и т. д. до тех пор, пока не наступает равенство
324
моментов аэродинамических сил и моментов сил упругости конст-
рукции.
Аэродинамические силы и их моменты, закручивающие про-
филь, на постоянной высоте и при неизменном положении центра
давления (М<МКр) возрастают пропорционально скоростному на-
пору (т. е. квадрату скорости), а препятствующие этой закрутке
моменты сил упругости от скорости не зависят. Поэтому на боль-
ших дозвуковых скоростях на малой высоте (т. е. при больших
б)
Фиг. 8. 2. Схема возникновения дивергенции стабилизатора,
а—-при недостаточной жесткости; б—при достаточной жесткости.
значениях скоростного напора) жесткость конструкции может ока-
заться недостаточной для противостояния закручиванию от аэро-
динамических сил, в результате чего произойдет разрушение кон-
струкции (фиг. 8. 2, а), если это явление не учитывалось при
определении нагрузок и расчете на прочность.
Скорость полета, начиная с которой конструкция несущей по-
верхности стремится закрутиться до разрушения (т. е. происходит
потеря статической устойчивости поверхности), называется кри-
тической скоростью дивергенции. Естественно, что жесткость кон-
струкции крыла и оперения должна обеспечивать возможность
использования летных данных самолета без опасного приближе-
ния к критической скорости дивергенции.
Особую опасность явление дивергенции представляет для не-
стреловидного управляемого стабилизатора, так как конструктив-
325
но приходится весь крутящий момент передавать через ось вра-
щения, которая может быть выполнена только очень небольшого
диаметра (вследствие небольшой относительной толщины профи-
ля). Поэтому обеспечение жесткости конструкции управляемого
стабилизатора при проектировании требует особого внимания.
Явление дивергенции стабилизатора, помимо опасности разру-
шения конструкции, накладывает определенный отпечаток и на
управляемость самолета, так как требует от летчика при отклоне-
нии ручки на маневре (при М<Мкр) некоторой коррекции величи-
ны этого отклонения для получения нужной перегрузки (умень-
шаются показатели х* и Р” ), так как его действия усиливаются
закручиванием профиля стабилизатора.
При расположении фокуса профиля оперения впереди центра
жесткости (М<4) степень продольной статической устойчивости
по перегрузке вследствие закручивания (дивергенции) оперения
возрастает, причем абсолютная величина степени этого возрастания
пропорциональна скоростному напору.
Фиг. 8.3. Деформации стреловидного стабилиза-
тора в полете (М<1).
На сверхзвуковой скорости полета явление дивергенции стаби-
лизатора не возникает вследствие смешения фокуса за ось жест-
кости. При возрастании числа М>1, особенно на небольших высо-
тах, где велики значения скоростного напора, возникает явление,
обратное дивергенции стабилизатора и сходное качественно с ре-
326
версом элеронов (см. § 3 настоящей главы), а именно — уменьше-
ние угла атаки вследствие закрутки. Это явление снижает эффек-
тивность стабилизатора и требует больших расходов ручки
на единицу изменения перегрузки. Поэтому возможность такой
деформации тоже приходится учитывать при проектировании, т. е.
увеличивать максимальные углы отклонения стабилизатора для
компенсации уменьшения углов отклонения от закрутки. Обратная
закрутка профилей стабилизатора при М>1 приводит к некоторо-
му уменьшению степени продольной статической устойчивости по
перегрузке.
Большинство современных сверхзвуковых самолетов имеет
стреловидное оперение, деформации которого при нагрузке имеют
специфическое отличие от деформаций прямого в плане оперения
подавляющего большинства дозвуковых самолетов.
Рассмотрим схему работы стреловидного стабилизатора
(фиг. 8.3). Пусть под действием аэродинамической нагрузки на
дозвуковой скорости происходит закручивание профилей относи-
тельно центров жесткости носком вверх (дивергенция). В то же
время сечения, перпендикулярные оси жесткости, смещаются вверх
из-за прогиба стабилизатора под нагрузкой. Поэтому, если взять
сечение а — в стабилизатора по потоку, то от изгиба носок этого
сечения (точка а) сместится вверх меньше, чем конечная точка в,
т. е. эффективный угол атаки сечения а — в уменьшится. Поэтому
изгиб стреловидного стабилизатора при М<4 снижает эффект
закручивания и повышает, тем самым, критическую скорость ди-
вергенции. При М>1 деформации от изгиба и кручения склады-
ваются. Примерный характер изменения угла атаки некоторого
среднего сечения а — в стабилизатора вследствие деформаций от
воздушной нагрузки с ростом скорости приведен на фиг. 8.4.
У самолетов, способных развивать высокие сверхзвуковые ско-
рости, значительный аэродинамический нагрев конструкции может
привести к существенному снижению жесткости конструкции
на кручение (характеризуемой произведением модуля сдвига G на
момент инерции кручения JK) и, как следствие этого, к росту
углов закручивания несущих поверхностей. Рост скоростей само-
летов (и, следовательно, рост аэродинамического нагрева их кон-
струкции в полете) ставит перед конструкторами систем и органов
управления задачу более точного учета возможности закручива-
ния несущих поверхностей и его влияния на устойчивость и управ-
ляемость самолета.
На фиг. 8. 5 изображен приблизительный характер изменения
относительной жесткости на кручение конструкций из различных
материалов с ростом температур. Из приводимой диаграммы
следует, что увеличение опасности возникновения значительного
закручивания поверхностей при больших скоростях полета (вслед-
ствие нагрева) может заставить применить в конструкции более
теплостойкий материал, чем это нужно из условия расчета на проч-
327
ность. Опасность увеличения закручивания несущих поверхностей
вследствие снижения жесткости на кручение при аэродинамиче-
ском нагреве конструкции увеличивается еще больше из-за воз-
никновения температурных напряжений. На фиг. 8.6 показана
деформация профиля вследствие неравномерного нагрева нижней
Фиг. 8.5. Изменение относительной
жесткости на кручение конструкций
из различных материалов при росте
температуры.
/—из стали; 2—из титанового сплава; 3—из
алюминиевого сплава.
Фиг. 8.4. Характер изменения
угла атаки некоторого среднего
сечения (см. фиг. 8.3) стреловид-
ного стабилизатора вследствие
деформаций изгиба и кручения
в зависимости от скорости.
и верхней поверхностей при полете с некоторым углом атаки а0.
Подобная деформация по своему влиянию на характеристики
устойчивости и управляемости аналогична дивергенции.
Фиг. 8. 6. Деформация профиля вследст-
вие неравномерного нагрева верхней
и нижней поверхностей при полете с не-
которым углом атаки а0.
§ 2. Влияние деформаций фюзеляжа
Изменение угла отклонения руля высоты или управляемого
стабилизатора вызывает изменение подъемной силы горизонталь-
ного оперения, под действием которой происходит деформация
изгиба фюзеляжа (фиг. 8.7).
328
Изгиб фюзеляжа снижает эффективность руля высоты, так как
отклонение последнего вызывает такое изменение подъемной силы
оперения и изгиб фюзеляжа таким образом, что угол атаки опере-
ния меняется в сторону уменьшения действия отклонения руля
высоты (или стабилизатора), что хорошо видно из фиг. 8.7.
7
Фиг. 8.7. Уменьшение эффективности продольного управления вследствие
деформаций хвостовой части фюзеляжа.
Отклонение руля высоты вниз вызывает увеличение угла атаки г.о.
[(4-Даг.о)упр] и уменьшение момента на пикирование от отклонения руля
высоты.
Отклонение руля высоты вверх уменьшает угол атаки г.о [(—Даг.о)упр]
и уменьшает момент на кабрирование от отклонения руля высоты.
Хвостовая часть фюзеляжа с точки зрения строительной меха-
ники представляет консольную балку с сосредоточенной нагруз-
кой на конце. Прогиб такой балки пропорционален нагрузке Уг.о
и кубу длины Lr.o балки. Изменение угла атаки горизонтального
оперения пропорционально линейному смещению его вследствие
изгиба фюзеляжа, следовательно, падение эффективности горизон-
тального оперения из-за изгиба фюзеляжа пропорционально ско-
ростному напору (так как Yr,o = cyr,oSr,okq) и кубу длины хвостовой
части фюзеляжа. Поэтому это явление особенно опасно для тя-
желых скоростных самолетов, которые имеют относительно более
тонкий и более длинный фюзеляж.
Деформации фюзеляжа приводят не только к падению эффек-
тивности продольного управления, но и к значительному снижению
продольной статической устойчивости по перегрузке, так как уве-
личение угла атаки крыла (и, следовательно, горизонтального опе-
рения) вызывает дополнительную деформацию фюзеляжа, умень-
шающую этот угол атаки аг.о (фиг. 8.8), вследствие чего
уменьшается и восстанавливающий момент статической устойчи-
вости.
Деформации фюзеляжа могут оказать существенное влияние
и на характеристики системы управления, поэтому при установке
бустеров в проводке следует обращать внимание на следующее об-
стоятельство: силовой цилиндр бустера крепится за специальные
силовые узлы, связанные с конструкцией планера самолета, кото-
рая в полете может подвергаться знакопеременным нагрузкам,,
что приводит и к знакопеременным деформациям. Это вызывает
329
смещения силового цилиндра бустера с золотниковой коробкой
относительно управляющего золотника, который удерживается
неподвижно летчиком или автопилотом.
Фиг. 8.8. Уменьшение угла атаки горизонтального опе-
рения вследствие упругости фюзеляжа, приводящее
к уменьшению степени продольной статической устой-
чивости.
Смещения золотника бустера относительно золотниковой ко-
робки вызывают дополнительные отклонения рулой, которые могут
увеличить аэродинамическую нагрузку и этим вызвать еще боль-
шие деформации конструкции и, следовательно, дополнительное
смещение бустера относительно золотника.
Если аэродинамическая нагрузка от отклонения руля так нагру-
жает конструкцию, что смещает бустер в сторону увеличения пер-
воначального отклонения руля и увеличения этой нагрузки (как
говорят, в этом случае возникает так называемая положительная
обратная связь, усиливающая первоначальное воздействие на бус-
тер), то могут возникнуть колебания системы «руль — конструк-
ция— бустер». При совпадении собственных частот колебаний
конструкции и бустера с рулем эти колебания могут оказаться
незатухающими автоколебаниями системы 1 и привести к вибрации,
тряске или даже к разрушению конструкции.
Для предупреждения возникновения этого явления силовые
цилиндры бустеров следует располагать в зоне, минимально под-
верженной деформациям элементов от аэродинамических нагрузок
(в этом смысле, оказывается предпочтительнее установка бустеров
по схемам, приведенным на фиг. 8. 28 и 8. 29, так как в схеме на
фиг. 8. 27 бустер установлен на элементах максимально деформи-
рующихся под действием нагрузок, возникающих на горизонталь-
ном оперении). Это относится не только к бустерам, устанавли-
ваемым в фюзеляже, но и в равной мере — к устанавливаемым
в крыле.
1 Параметры этих автоколебаний определяются не только жесткостью кон-
струкции (опоры), но и присоединенной массой (силовая проводка и руль)
К штоку бустера и его динамической жесткостью.
330
Если ж.е конструктивно не удается установить бустер в зоне
нейтральной линии (т. е. на наименее деформирующихся элемен-
тах), то следует обратить внимание на то, чтобы деформация кон-
струкции, на которой установлен бустер, вызванная аэродинами-
ческой нагрузкой, таким образом действовала бы на силовой ци-
линдр бустера, смещая его относительно золотника, что отклоняла
бы руль в сторону уменьшения этой нагрузки (фиг. 8. 9, а).
Фиг. 8.9. Схемы проводки от бустера до управляе-
мого стабилизатора (руля высоты).
а—деформации фюзеляжа при отклонении стабилизатора
уменьшают первоначальный угол этого отклонения; б—де-
формации фюзеляжа увеличивают этот угол, приводя к уси-
лению воздействия стабилизатора на самолет и конструкцию
хвостовой части фюзеляжа (Уг 0 растет); <— направ-
ление управляющего сигнала от летчика или автопилота;
• <-----направление смещения силового цилиндра бустера,
связанного с конструкцией самолета, и дополнительного сме-
щения тяг бустером вследствие его перемещения относительно
неподвижного золотника при деформациях конструкции фюзе-
ляжа от действия силы Уг 0 на горизонтальном оперении.
При установке бустеров в системе управления следует обра-
щать особое внимание на обеспечение максимально возможной
жесткости узлов крепления бустера. Практика показала, что жест-
331
кость элементов конструкции крепления бустера должна быть та-
ковой, чтобы частота ее колебаний с учетом инерции приводимого*
в движение механизма (бустера) была бы в 5—10 раз больше наи-
Фиг. 8. 10. Схема упругих элементов в проводке бу-
стерного управления самолетом.
/—ручка управления; 2—нежесткость управляющей про-
водки; 3—нежесткость силовой проводки; 4—руль; 5—бустер:
6—нежесткость элементов конструкции планера, на которые
крепится бустер.
высшей резонансной частоты колебаний остальных звеньев системы,
иначе в системе, как правило, возникают резонансные колебания1.
На фиг. 8. 10 изображена схема установки бустера на недоста-
точно жесткие упругие элементы конструкции. В этом случае изме-
Фиг. 8.11. Схема установки ‘бустеров привода стабилизатора
английского истребителя Хоукер Р.1121.
нение нагрузки на выходе бустера (возникающее вследствие из-
менения шарнирного момента) вызывает смещение всего бустера
1 Т. М. Б а шт а, Гидравлические следящие приводы, Машгиз, 1960.
стр. 198—199.
332
вследствие упругости его крепления и, в частности, может привести
к автоколебаниям системы. Это происходит от того, что при упру-
гом смещении корпуса бустера происходит его смещение относи-
тельно золотника, удерживаемого ручкой, причем открывается
доступ жидкости из гидросистемы в полость силового цилиндра
бустера.
Давление поступающей жидкости всегда стремится вернуть бу-
стер в первоначальное положение, а накопленная потенциальная
энергия деформации конструкции при возвратном движении его
превращается в кинетическую и способствует проскакиванию кор-
пуса бустера относительно нейтрального положения золотника
(«забросы золотника») ч Если золотник обладает очень небольшим
перекрытием (т. е. большой чувствительностью), то может от-
крыться канал, по которому гидросмесь с высоким давлением по-
ступит в другую полость цилиндра, и процесс повторится в обрат-
ном направлении и т. д. Таким образом, при некоторых определен-
ных условиях в системе установятся автоколебания с постоянной
амплитудой и частотой собственных колебаний выходного звена,
определяемыми параметрами самой колебательной системы.
Как уже отмечалось, автоколебания в системе управления мо-
гут привести к тряске, вибрациям и даже к разрушению кон-
струкции.
Для предотвращения возможности возникновения автоколеба-
ний из-за знакопеременных деформаций конструкции помимо раз-
мещения бустеров в районе нейтральной линии может быть при-
менена их установка на таких элементах конструкции, деформа-
ции которых происходят во взаимно перпендикулярных направле-
ниях с командными смещениями управляющего золотника. Пример
такой установки бустеров приведен на фиг. 8.11.
§ 3. Деформации крыла. Реверс элеронов
Под действием воздушной нагрузки крыло прогибается и за-
кручивается вследствие того, что линия центров давлений не сов-
Фиг. 8. 12. Различный
характер изменения
углов атаки сечений
крыла по размаху
в результате дефор-
маций от аэродина-
мической нагрузки
при условии сохране-
ния неизменным зна-
чения коэффициен-
та су.
падает с осью жесткости. Изгиб прямого крыла практически не
влияет на его закрутку и на изменение углов атаки сечений крыла
333
по потоку, а направление закрутки прямого крыла зависит только
от взаимного расположения линии центров давлений и оси жестко-
сти. Схематично различный характер изменения углов атаки от
закручивания упругого крыла по его размаху изображен на
фиг. 8.12.
В случае расположения линии центров давлений (линия фоку-
сов) впереди оси жесткости крыла (М<4) угол атаки увеличи-
вается к концам крыла вследствие его закрутки (кривая 2). Увели-
чение углов атаки концевых частей крыла (дивергенция крыла)
вызывает перераспределение циркуляции по размаху (увеличение
ее к концам крыла) и, вследствие этого, уменьшение скоса потока
в зоне горизонтального оперения. Так как увеличение углов атаки
концевых сечений крыла приводит к общему увеличению су крыла,
то для сохранения значения су на желаемом режиме полета летчик
должен уменьшить угол атаки корневых сечений крыла (на Да)
и тем самым уменьшить угол атаки горизонтального оперения.
Если не учитывать влияния закрутки крыла на mz0, то можно счи-
тать, что при этом изменение продольного момента самолета равно
изменению момента горизонтального оперения, которое при перехо-
де к безразмерному коэффициенту продольного момента может
быть определено как Дт2 =—kAr^aT^ar.o- Здесь изменение угла
атаки оперения Даг.о складывается из изменения угла атаки корне-
вых сечений крыла (Да) и изменения скоса потока в зоне горизон-
тального оперения (Ле^-~^~ £* Да).
дсу у
Таким образом,
Д«г.о
« Да —Де^(1 — Да.
\ дсу у/
Так как 0<-^~ е“<1, то знак Даг0 определяется знаком Да.
дсу у
Следовательно, знак приращения коэффициента продольного мо-
мента Дт2 будет обратным знаку изменения угла атаки централь-
ного сечения крыла (Да).
Таким образом, при уменьшении угла атаки центрального се-
чения крыла для компенсации возрастания су на концевых сече-
ниях вследствие закрутки, появляется дополнительный момент на
кабрирование (Дт2>0), что свидетельствует об уменьшении сте-
пени продольной статической устойчивости по перегрузке
(Д/п‘у>0).
Следовательно, закрутка прямого крыла на дозвуковых ско-
ростях приводит к увеличению воздушных нагрузок на концах кры-
ла (дивергенция) и уменьшению степени продольной статической
устойчивости.
334
Угол закрутки профилей крыла возрастает прямо пропорцио-
нально росту скоростного напора и при некотором его значении
/ х __________________________ ^кр
^крЬив- ’
(где £Кр — жесткость крыла на кручение,
&х— расстояние от фокуса профиля до центра его жесткости,
отнесенное к Ьа.
соответствующем критической скорости дивергенции крыла, может
начать неограниченно возрастать (т. е. наступит апериодическая
потеря устойчивости конструкции крыла на кручение).
Для обеспечения увеличения степени продольной статической
устойчивости по перегрузке, вследствие закручивания крыла, не-
обходимо, чтобы ось жесткости располагалась впереди линии цен-
тров давлений, проходящей при дозвуковой скорости полета
приблизительно по V4 длины хорд сечений и поэтому очевидно, что
конструктивное выполнение этого требования практически неосу-
ществимо.
При переходе к сверхзвуковой скорости полета линия центров
давления смещается назад и ось жесткости оказывается впереди.
Это и приводит к обратной закрутке крыла при М>1, т. е. к умень-
шению углов атаки к концам крыла (кривая 1 на фиг. 8. 12) и уве-
личению степени продольной статической устойчивости по пере-
грузке.
При применении стреловидного крыла его изгиб под действием
воздушной нагрузки сопровождается значительным закручивани-
ем концевых участков крыла в сторону уменьшения их углов атаки
(см. фиг. 8. 3 и описание деформаций стреловидного стабилизатора
Фиг. 8.13. Изменение погонной воздушной
нагрузки на упругом стреловидном крыле при
маневре с перегрузкой.
в § 1 настоящей главы). Уменьшение угла атаки в концевых
сечениях стреловидного крыла вызывает и составляющая скорости
335
набегающего потока Vsin% (см. фиг. 4.6), направленная вдоль
крыла при прогибе концов крыла вверх. Вследствие уменьшения
углов атаки концевых сечений крыла подъемная сила на них пада-
ет (см. фиг. 8.13) и для сохранения прежнего ее значения прихо-
дится увеличивать угол атаки корневых участков крыла, т. е. уве-
личивать действующую на них воздушную нагрузку.
Рост воздушных нагрузок у корня крыла (впереди центра тя-
жести самолета) и уменьшение их у его концов (позади центра тя-
жести) приводит к существенному возрастанию момента на кабри-
рование при увеличении угла атаки и смещению вперед фокуса
самолета. Поэтому на маневре с перегрузкой на самолете с недо-
статочно жестким стреловидным крылом степень продольной ста-
тической устойчивости по перегрузке уменьшается и самолет
может даже потерять продольную устойчивость, чему в значи-
тельной степени может способствовать увеличение скоса потока
в зоне горизонтального оперения из-за неблагоприятного перерас-
пределения воздушной нагрузки по размаху крыла (чем больше
нагрузка у корня крыла, тем больше скос).
На дозвуковых скоростях закрутка стреловидного крыла благо-
приятно сказывается на уменьшении изменения угла атаки конце-
вых сечений крыла вследствие изгиба. При сверхзвуковых скоро-
стях деформации профилей стреловидного крыла от изгиба
и кручения складываются, так как при М>1 крыло начинает закру-
чиваться в сторону уменьшения первоначальных углов атаки.
Для борьбы с вредным влиянием нежесткости крыла на харак-
теристики продольной статической устойчивости самолета (по пе-
Фиг. 8. 14. Схема английского стратегического бомбардировщика
Хэндли Пейдж «Виктор» с серповидным крылом.
регрузке), которое может привести даже к потере устойчивости,
английские конструкторы предложили «серповидное» крыло,
у которого угол стреловидности уменьшается от корня к концам.
Такое крыло было разработано для стратегического дозвукового
336
бомбардировщика Хэндли Пейдж «Виктор» (фиг. 8. 14) и палуб-
ного истребителя-бомбардировщика Блэкберн NA. 39 «Бакэнир»
(М=1,5).
В серповидном крыле удается сочетать эффект стреловидности
и необходимые качества жесткости и большого удлинения (для
самолета с большой дальностью полета). Уменьшение стреловид-
ности на концах крыла благоприятно с точки зрения реверса эле-
ронов, если крыло имеет достаточную жесткость на кручение. При-
менение серповидного крыла позволяет уменьшить также интенсив-
ность концевых срывов, свойственных стреловидным крыльям на
больших углах атаки и приводящих к потере продольной стати-
ческой устойчивости по перегрузке.
Упругое крыло Гсум + уэ,где ос =а,-ДауЛр
Фиг. 8. 15. Деформации за-
крутки профиля крыла при
отклонении элерона на раз-
личных скоростях, приводя-
щие к потере эффективно-
сти элерона или реверсу при
одинаковых значениях ско-
ростного напора.
Интенсивность концевых срывов возрастает с ростом удлине-
ния крыла, что не позволяет применять крылья с большими стре-
ловидностью и удлинением, необходимыми для дальних скорост-
ных самолетов. Исследования фирмы Х'ендли Пейдж показали, что
при малом удлинении (Х=1,5) самолет не теряет продольной
устойчивости из-за срывов на больших углах атаки при стреловид-
ности передней кромки до 60°. При увеличении удлинения до зна-
чений Х = 5—6, необходимых для самолета с большой дальностью
полета, допустимая стреловидность с точки зрения появления сры-
вов и наступления продольной статической неустойчивости сни-
жается до %=25О1.
1 Flight» No. 2642, 1959.
337
Отклонение элерона на крыле приводит к изменению распре-
деления давлений по профилю, причем особенно сильно изменяют-
ся давления в хвостовой части профиля (см. фиг. 1.2 и 3.4, а).
Вследствие этого равнодействующая приращения подъемной силы
от отклонения элерона оказывается приложенной позади оси жест-
кости крыла и закручивает крыло носком в сторону отклонения
элерона (фиг. 8. 15).
Как следует из этой фигуры, закрутка крыла при отклонении
элерона приводит к такому изменению углов атаки профилей, что
это снижает общее приращение подъемной силы упругого крыла
от отклонения элерона по сравнению с приростом ее на абсолютно
жестком крыле при таком же отклонении элерона. Другими сло-
вами, эффективность элеронов, которая характеризуется приростом
коэффициента момента крена при единичном их отклонении (т. е.
производной т^э), на упругом крыле уменьшается. Эффективность
элеронов может характеризоваться также максимальной угловой
скоростью Крена СОхтах, которую можно получить при полном
отклонении элеронов. Эта угловая скорость сохшах также значи-
Фиг. 8.16. Изменение максималь-
ной угловой скорости крена при
полном отклонении элеронов на
самолете Дуглас DC-8 при росте
приборной скорости на различных
высотах.
ла при отклонении элерона, а
из-за закрутки крыла:
тельно снижается из-за влияния
нежесткости крыла.
С ростом скорости эффект
уменьшения прироста подъемной
силы нежесткого крыла при от-
клонении элерона увеличивается
пропорционально росту скорост-
ного напора, что определяет зна-
чительное снижение эффектив-
ности элеронов на больших ско-
ростях, в большей или меньшей'
степени свойственное всем само-*
летам (фиг. 8. 16).
Дальнейший рост скорости
приводит к все большему влия-
нию закрутки профилей крыла на
изменение подъемной силы кры-
при некоторой скорости может на-
ступить равенство прироста подъемной силы от отклонения элеро-
на и уменьшения ее вследствие уменьшения угла атаки профилей
фэ~сУ Д«упр=0-
Скорость полета, при которой эффективность элеронов из-за
нежесткости крыла снижается до нулевой, называется критической
скоростью реверса. При скорости, выше критической скорости
реверса, наступает обращенное действие элеронов, т. е. изменение
знака момента крена при отклонении элеронов, вызванное более*
сильным влиянием упругой закрутки крыла на изменение подъем-^
338
ной силы крыла при отклонении элеронов. Таким образом, явление
реверса элеронов заключается в том, что эффект от отклонения
элеронов оказывается обратным ожидаемому, и при отклонении
ручки управления самолетом (или штурвала), например, вправо —
возникает левый крен.
На стреловидном крыле закрутка профилей при отклонении
элеронов увеличивается еще и за счет изгиба крыла (аналогично
фиг. 8. 3), что приводит к снижению критической скорости реверса
с ростом стреловидности.
На фиг. 8. 17, а изображено изменение максимальной угловой
скорости крена при полном отклонении элеронов самолета Норт
Америкен F-86D «Сейбр Джет» с ростом приборной скорости. При
росте приборной скорости эффективность элеронов сначала значи-
тельно увеличивается, так как растет момент крена Мх~
= а потом начинает убывать вследствие упругого за-
кручивания крыла и уменьшения производной тх3. При скорости
около 1200 км/час у этого самолета наступает полная потеря
эффективности элеронов, а при дальнейшем увеличении скорости —
реверс. На фиг. 8. 17,6 приведены кривые, показывающие зависи-
мость от высоты и скорости необходимых углов отклонения элеро-
нов для парирования возникшего из-за «валежки» крена самолета
F-86D. Рассмотрение приведенных зависимостей показывает, что на
а)
6)
Фиг. 8.17. Влияние упругости конструкции на характеристики попе-
речной управляемости истребителя Норт Америкен F-86D «Сейбр
Джет» (США).
а—изменение максимальной угловой скорости крена при полном отклонении
элеронов с ростом приборной скорости;
б—зависимость углов отклонения элеронов для парирования возникшего крена
от режимов полета.
высоте ниже 1500 м из-за реверса на больших дозвуковых скоро-
стях элероны не обеспечивают необходимую поперечную управ-
ляемость самолета.
На фиг. 8.18 показан характер изменения эффективности
элеронов (при полном их отклонении) самолета Супермарин N. 113
339
«Симитэр» F. 1 при изменении скорости на различных высотах. Так
как на этом самолете площадь элеронов выбрана по режимам по-
лета, где их эффективность наименьшая (посадка и максимальная
скорость), то на средних скоростях элероны чрезмерно эффек-
тивны. Поэтому для обеспечения однообразия пилотирования
в системе управления элеронами установлен механизм изменения
передаточного отношения &ш.э-
Наибольшую опасность реверс элеронов представляет для са-
молетов, летающих со значительными сверхзвуковыми скоростями
и подвергающихся вследствие этого высокому аэродинамическому
нагреву. Ранее было отмечено (в § 1 настоящей главы), что на-
Фиг. 8. 18. Характер измене-
ния максимальной угловой
скорости крена при полном от-
клонении элеронов самолета
Супермарин N.113 «Симитэр»
F.1 (Англия) на различных ре-
жимах полета.
грев конструкции приводит к сни-
жению жесткости профилей на кру-
чение (^кр = С/к). Кроме того, рав-
нодействующая аэродинамических
сил на сверхзвуковой скорости спо-
собствует закручиванию профиля
носком вниз, так как при М>1 пере-
мещается за ось жесткости.
Отклонение элерона на сверх-
звуковой скорости, как уже отмеча-
лось в гл. III, не вызывает перерас-
пределения давлений по всему
профилю, а изменяет давление
только в хвостовой его части (на
самом элероне), что тоже способ-
ствует большему закручиванию
профиля, ибо весь прирост подъем-
ной силы при отклонении элерона оказывается на большом уда-
лении от оси жесткости.
Для борьбы с реверсом элеронов следует максимально увели-
чивать жесткость крыла на кручение, что особенно затруднительно
при больших удлинениях и углах стреловидности. Хороший эф-
фект дает применение в конструкции крыла слоистых панелей,
позволяющих получить значительную жесткость при небольшом
увеличении веса конструкции.
Особенно благоприятным оказывается применение крыльев
малого удлинения (прямых и треугольных), обладающих доста-
точно высокой жесткостью даже при очень малой относительной
толщине профиля. Вероятность появления реверса элеронов на
таких крыльях сильно снижается. Если же по некоторым сообра-
жениям не применяется крыло малого удлинения (например,
самолет большой дальности), то следует обратить особое внима-
ние на предотвращение возможности реверса элеронов и уже при
проектировании самолета принять необходимые меры.
Например, на самолете Норт Америкен F-100 «Супер Сейбр»
(фиг. 8. 19) со стреловидным крылом нормального удлинения, эле-
роны расположены не как обычно — у концов крыла, а у бортов
340
Фиг. 8. 19. Схема истребителя Норт Амери-
кен F-100 «Супер Сейбр» (США) со стрело-
видным крылом и элеронами, расположен-
ными вблизи бортов фюзеляжа (корневые
элероны).
фюзеляжа («корневые» элероны). Вследствие этого пришлось от-
казаться от посадочных закрылков, но, как показали исследования
фирмы, малая эффективность закрылков на крыле большой стре-
ловидности не оправдывает увеличения веса и усложнения конст-
рукции крыла при их установке. Зато расположение элеронов
ближе к бортам фюзеляжа, где крыло обладает максимальной
жесткостью, уменьшает вероятность возникновения реверса и тем
самым значительно улучшает поперечную управляемость на
больших скоростях. Корневые элероны нашли сейчас довольно
широкое применение на ско-
ростных самолетах со стре-
ловидными крыльями.
Весьма широкое распро-
странение для обеспечения
достаточной эффективности
поперечного управления на
различных режимах полета
в настоящее время нашли
интерцепторы, которые на
посадке могут использовать-
ся также и как тормозные
щитки (см. например, фиг.
4.37 и 8.21). Интерцепто-
ры широко применяются на
гражданских и военных,
легких и тяжелых самолетах
как вспомогательный орган
поперечного управления на
тех режимах полета, когда
элероны становятся недоста-
точно эффективными. С по-
мощью интерцепторов зна-
чительно увеличивается эф-
фективность поперечного уп-
равления и на многих палубных самолетах. Например, на амери-
канском палубном сверхзвуковом бомбардировщике Норт Амери-
кен A3J-1 «Виджилент» (М = 2,2) для поперечного управления по-
мимо элеронов используются очень мощные интерцепторы.
При применении для поперечного управления элеронов и
интерцепторов кинематика проводки системы поперечного управ-
ления проектируется чаще всего так, чтобы интерцепторы начи-
нали отклоняться после отклонения элеронов приблизительно на
половину максимального отклонения. Таким образом, интерцепто-
ры чаще используются только на тех режимах полета, когда необ-
ходимы большие расходы элеронов. Так на английском пассажир-
ском самолете Виккерс VC. 10 интерцепторы обеспечивают 50%
необходимого максимального момента крена.
На пассажирских самолетах Коцвэр 880 и 600 со стреловиднь^
ми крыльями большого удлинения для предотвращения закручи-
вания крыла и реверса небольшие элероны установлены в корне-
вой части крыла и обеспечивают только одну треть потребного
момента крена, максимальное расчетное значение которого опре-
делялось условиями посадки с боковым ветром 12,8 м/сек. Две
трети необходимого момента крена на этих самолетах создается
мощными интерцепторами (фиг. 8. 20) с гидравлическим приводом.
Таким образом, борьба с закруткой стреловидных крыльев
большого удлинения при отклонении элеронов приводит к посте-
пенному уменьшению роли элеронов в поперечном управлении.
Фиг. 8. 20. Механизация крыла и органы попе-
речного управления самолетов Конвэр 880
и 600.
/—корневой закрылок; 2—корневой интерцептор;
3—элерон; 4—триммер элерона; 5—сервокомпенсатор
элерона; 6—концевой интерцептор; 7—концевой за-
крылок; 8—неподвижная хвостовая часть крыла;
9—концевой предкрылок; 10—корневой предкрылок.
Наряду с широким использованием интерцепторов, для умень-
шения влияния закрутки крыла на снижение эффективности элеро-
нов на стреловидных крыльях большого удлинения на ряде са-
молетов (Дуглас DC-8, Боинг 727 и др.) применяется секциониро-
вание элеронов, т. е. разделение их на две секции, из которых одна
расположена у конца крыла и создает максимальный момент крена
на малых скоростях, а другая, расположенная ближе к борту
фюзеляжа на более жестком участке крыла, — на больших (см.
фиг. 8.21).
Такое разделение функций поперечного управления на разных
скоростях между двумя секциями элеронов основано на том, что
эффективность элеронов на жестком крыле с ростом скорости воз-
растает, а на упругом — падает. Две секции элерона соединяются
с помощью специального, работающего на кручение, вала (тор-
сионного), который оттарирован на передачу определенного кру-
тящего момента. Привод элеронов осуществляется только за
корневую секцию, которая отклоняет и наружную секцию с по-
мощью торсионного вала до тех пор, пока шарнирный момент от
воздушных нагрузок на внешней секции не превзойдет предвари-
342
тельного нагружения этого вала и внешняя секция перестанет
отклоняться. Это происходит при больших значениях скоростного
напора, когда эффективность корневой секции сильно возрастает
и ее становится достаточно для управления самолетом. Отсутст-
вие отклонения внешней секции элерона при больших скоростях
обеспечивает значительное уменьшение закрутки крыла и тем
самым отсутствие потери эффективности элеронов (реверса).
Фиг, 8.21. Органы управления и механизация крыла
пассажирского самолета Боинг 727 (США), в конструк-
ции которого предусмотрен ряд мер для обеспечения
поперечной управляемости на разных режимах полета,
/—корневая часть предкрылка; 2—предкрылок; 3—триммер элеро-
на; 4—концевой элерон (работает совместно с корневым только
на малых скоростях); 5—интерцепторы (служат для повышения
эффективности поперечного управления на больших углах ата-
ки); б—корневой элерон (на больших скоростях служит для
поперечного управления, когда концевые элероны во избежание
реверса не работают); 7—интерцепторы-щитки (отклоняются
только после приземления); в—трехщелевые закрылки; 9-трим-
мер руля направления; 10—двухсекционный руль направления;
//—подвижной стабилизатор (для балансировки); /2—руль вы-
соты: 13—триммер руля высоты.
Французские конструкторы при проектировании истребителя-
перехватчика «Тридан», для борьбы с реверсом элеронов пошли
совершенно по другому пути. Так как реверс элеронов возникает
вследствие закручивания крыла, то они решили убрать элероны
с крыла. Для поперечного управления самолетом используется
дифференциальное отклонение половин управляемого стабилиза-
тора, которые отклоняются в разные стороны при движении ручки
управления самолетом вправо и влево (фиг. 8.22). Этот опыт, оче-
видно, оказался удачным, так как был использован при проекти-
343
ровании горизонтального оперения экспериментального самолета
Норт Америкен Х-15, у которого для поперечного управления в ат-
мосфере применяется стабилизатор, половины которого тоже
могут отклоняться дифференциально (см. фиг. 4.24). Аналогичная
схема поперечного управления применена на английском страте-
гическом бомбардировщике ВАС TSR. 2.
Фиг. 8.22. Схема истребителя-перехватчика
SNCASO S0.9050 «Тридан» II (Франция).
(Элеронов на крыльях нет. Для поперечного
управления используются дифференциально
отклоняемые половины стабилизатора).
Для поперечного управления на больших скоростях, когда эле-
роны теряют эффективность, либо даже наступает их реверс,
возможно использование дифференциального отклонения посадоч-
ных закрылков (такая система поперечного управления на боль-
ших скоростях была предложена, например, для самолета Боинг
ХВ-47). В этом случае, при переходе на управление закрылками
элероны должны заклиниваться, а конструкция закрылков и их
силового привода должна быть рассчитана на воздушную на-
грузку при больших скоростях (в то время, как обычные закрылки
чаще всего имеют достаточно узкие ограничения по максимальной
скорости полета, на которой допускается их отклонение).
♦ *
♦
Выше рассмотрены две критические скорости, определяющие
границы допустимых скоростей полета из-за опасности наступле-
344
ния явлений дивергенции и реверса. Третьей весьма важной кри-
тической скоростью является критическая скорость флаттера.
Эти три критические скорости, зависящие от характеристик
жесткости конструкции самолета, должны обязательно определять-
ся при проектировании самолета, а их сравнение может оказать
серьезное влияние на окончательный выбор схемы самолета.
Для прямого крыла, обычно самой низкой и, следовательно,
определяющей, является критическая скорость флаттера; крити-
ческая скорость реверса выше, а самой высокой является критиче-
ская скорость дивергенции.
Фиг. 8.23. Характер изменения критических ско-
ростей флаттера, дивергенции и реверса элеронов
при изменении угла стреловидности крыла.
/—по дивергенции; 2—по изгибно-крутильному флаттеру;
3—по реверсу элеронов.
Для крыла с прямой стреловидностью определяющей (т. е.
самой низкой) чаще всего оказывается критическая скорость ре-
верса. Критическая скорость флаттера значительно выше, а явле-
ние дивергенции чаще всего не представляет интереса, так как
его критическая скорость быстро увеличивается с ростом стрело-
видности вследствие более существенного влияния изгиба на по-
ворот профиля из-за деформаций от воздушной нагрузки. Поэтому
концы стреловидных крыльев закручиваются носками вниз.
Применение крыла обратной стреловидности наталкивается на
весьма значительные трудности обеспечения достаточно высокой
критической скорости дивергенции, так как в этом случае на за-
крутку крыла влияют действующие в одном направлении изгиб
и кручение, деформации от которых складываются.
Характер изменения критических скоростей по флаттеру, ди-
вергенции и реверсу при изменении угла стреловидности крыла
приведен на фиг. 8.23.
§ 4. Деформации проводки управления
Значительное влияние на устойчивость и управляемость само-
лета оказывают и упругие деформации самой проводки управле-
ния, роль которых в связи с ростом шарнирных моментов и, еле-
345
довательно, усилий в проводке управления на современных
самолетах существенно возрастает. Усложнение систем управле-
ния современных самолетов и удлинение проводки вследствие уве-
личения их размеров приводит к возможности существенного рас-
согласования между отклонениями рычагов управления и рулей
при недостаточной жесткости проводки.
Применение необратимого бустерного управления позволяет
разгрузить большую часть проводки от аэродинамической нагруз-
ки, поэтому при проектировании систем управления следует макси-
мально использовать преимущества, которые создаются бустером
при расположении его как можно ближе к органу управления.
В этом случае деформации проводки управления будут наимень-
шими (так как линейная деформация по закону Гука пропорцио-
нальна усилию и длине нагруженного элемента), а жесткость ее
и, следовательно, точность управления — наибольшими. Кроме
того, расположение бустеров ближе к отклоняемым ими органам
управления дает и значительный выигрыш в весе, так как сокра-
щается число силовых элементов в проводке управления.
Следует отметить, что при установке бустеров на максимально
близком расстоянии от отклоняемого органа управления значи-
тельно повышает безопасность в отношении возможности возник-
новения различных видов колебаний (например, флаттера) этого
органа, связанных с самопроизвольными отклонениями из-за де-
формации проводки под нагрузкой. Количество деформирующихся
под нагрузкой элементов между бустером и рулем должно быть
сведено до минимума, так как это обеспечивает значительное со-
кращение величины самопроизвольных отклонений руля за счет
упругости проводки.
В современном самолетостроении влияние упругих деформаций
в проводке управления на ухудшение динамических характеристик
системы (увеличение запаздывания и падение частот собственных
колебаний) настолько возросло по сравнению со старыми самоле-
тами, что борьбе за увеличение жесткости 1 проводки приходится
уделять все больше и больше внимания при проектировании само-
летов. Для увеличения жесткости проводки и упрощения схемы ее
силовой части авиационные инженеры в последнее время доста-
точно часто идут на «ухудшение» аэродинамического совершенст-
ва самолета, устанавливая силовые приводы органов управления
в непосредственной близости от этих органов, так что эти приводы
приходится закрывать выступающими в поток обтекателями.
Так на французском истребителе Дассо MD-550 «Мираж» III. А
бустеры отклоняют рули непосредственно за качалки, причем
вследствие применения тонких профилей бустеры с качалками
приводов рулей выступают за обводы крыла и оперения и поэтому
1 В практике под «жесткостью проводки» понимают обычно величину уси-
лия, необходимого для единичного изменения длины проводки вследствие упру-
гих деформаций (кГ/мм).
346
закрываются достаточно большими обтекателями (фиг. 8.24).
Аналогично выполнен привод элеронов и рулей высоты и на бом-
бардировщике «Мираж» IV (фиг. 8.25).
По сообщениям иностранной печати *, система управления
истребителя «Мираж» III. А имеет еще одну интересную особен-
ность: управление рулем поворота осуществляется без механиче-
ской связи педалей с бустером руля поворота. На педалях уста-
новлены тензометрические преобразователи усилий, которые выра-
батывают управляющие электрические сигналы в зависимости от
величины усилия, приложенного летчиком к педали. Эти сигналы
подаются в электрогидравлическую золотниковую коробку бустера
и управляют с его помощью отклонениями руля поворота. Подоб-
ная система является шагом вперед на пути к окончательному от-
казу от механической проводки со всеми свойственными ей поро-
ками— люфтами, деформациями, возможностями возникновения
положительных обратных связей (приводящих к автоколебаниям),
не говоря уже о значительном весе проводки. (Вопросы примене-
ния системы управления с электрической передачей командных
сигналов уже разбиралась в § 3, гл. VII).
Установка бустеров в крыле, непосредственно у элерона, к ка-
чалке привода которого и крепится силовой шток бустера, до-
вольно широко распространена в современных конструкциях. Такая
схема выбрана, например, для привода элеронов на английском
палубном истребителе-бомбардировщике Супермарин N. 113 «Си-
митэр» F. 1, где для уменьшения габаритов бустера, установлен-
ного в консоли крыла у самого элерона, применено разделение
силового цилиндра бустера и золотниковой коробки, между кото-
рыми существует связь по гидропроводам и жесткая обратная
связь, которая не является силовой и поэтому имеет очень малые
габариты (фиг. 8.26). Аналогичная схема привода применена и на
самолете Локхид F-104 «Старфашер», где для облегчения разме-
щения силового гидропривода на очень тонком крыле число сило-
вых цилиндров малого диаметра увеличено до 10.
Обтекатели, закрывающие привод элеронов, хорошо видны и на
тонких треугольных крыльях самолетов Конвэр F-102A, F-106,
Фейри FD. 2 «Дельта» и многих др.
Естественно, что всякие выступы в теоретическом обводе обте-
каемой поверхности самолета увеличивают его сопротивление.
Однако этот рост сопротивления из-за наличия обтекателей прово-
да органов управления очень незначителен и, безусловно, окупается
значительным выигрышем в весе, жесткости и простоте конструк-
ции привода. Стремление «спрятать» привод руля в обвод приво-
дит очень часто к сложным, тяжелым конструкциям, обладающим
еще, кроме того, значительным трением и люфтами, ухудшающи-
ми качество системы управления. Поэтому это стремление далеко
не всегда следует считать оправданным,
1 Flight" No. 2667, 1960;
Interavia Review, No. 4, 1960.
347
Фиг. 8.24.
а—схема французского истребителя Дассо «Мираж> III. А (М>2).
1—обтекатель привода внешнего элевона; 2—обтекатель привода внутренне-
го элевона; 3—внешний элевон; 4—внутренний элевон; 5—руль высоты;
6—тормозной щиток; 7—подфюзеляжный гребень; S—обтекатель привода руля
направления; 9—узел крепления бустера; 10—бустер; //—обтекатель бустера
на крыле; 12—обтекатель рычага привода на элевоне; 13—рычаг привода эле-
вона; Я—-элевон; /5—передний лонжерон элевона с узлами крепления к кры-
лу; /5—задний лонжерон крыла с узлами навески элевона; /7—двойная уси-
ленная нервюра; 18—дополнительная стенка; 19—тяга управления.
б—установка бустера привода руля высоты, /—бустер; 2—крыло; 3—элевон;
4—руль высоты; 5—ось вращения руля; 6—бортовая нервюра; 7—рычаг привод*
руля.
348
Конструкция систем управления современных сверхзвуковых
самолетов свидетельствует о том, что при проектировании этих
Фиг. 8.25. Бомбардировщик Дассо «Мираж» IV
(М = 2,4). (На нижней поверхности крыла хорошо
видны выступающие обтекатели привода элеронов
и рулей высоты. На киле выступает в поток обте-
катель привода руля направления).
систем стали уделять значительно большее внимание обеспечению
жесткости проводки систем управления. На фиг. 8. 27—8. 30 при-
ведены схемы установки бустеров привода стабилизатора, элеро-
Фиг. 8.26. Схема установки бустера привода элерона на па-
лубном истребителе-бомбардировщике Супермарин N.113
«Симитэр» F.I.
/—тросовая проводка; 2—ролик; 3—тяга; 4—привод золотника; 5—тяга
обратной связи; 6—золотниковая коробка; 7—гидромагистрали питания
и слива; 8—трубопроводы питания и слива силового цилиндра; 9—сило-
вой цилиндр бустера; 10—элерон.
нов и руля поворота различных современных сверхзвуковых
самолетов. Из приведенных схем видно, что бустеры расположены
349
максимально близко к приводимому органу управления, а системы
силовых приводов чрезвычайно просты.
Для обеспечения максимальной жесткости проводки управле-
ния необходимо обеспечить, чтобы под нагрузкой находилось наи-
меньшее число элементов конструкции. Поэтому желательно рас-
полагать загрузочные механизмы максимально близко к загру-
жаемым рычагам управления. В этом смысле схемы управления
самолетом, показанные на фиг. 5. 28 и 5. 38, более удачны-, чем схе-
а)
Фиг. 8.27. Компоновочная схема истребителя-бомбардировщика
Рипаблик F-105 «Тандерчиф» (США) (а) и схема привода стабили-
затора (б) (аналогичная схема применена на истребителе Норт
Америкен F-100 «Супер Сейбр»),
/—двухкамерный бустер привода стабилизатора; 2—две половины стабилизатора
на общей изогнутой балке-оси; 3—подфюзеляжный гребень; 4—бустер привода
руля направления; 5—тормозные щитки-створки форсажной камеры.
ма фиг. 5. 35. При расположении загрузочных механизмов макси-
мально близко к рычагам управления легче обеспечить желаемый
закон загрузки, так как на него будут значительно меньше оказы-
вать влияние упругие деформации, трение и люфты.
При наличии в системе управления автоматов изменения пере-
даточного отношения следует помнить, что при установке автома-
та на «малое плечо» на бустер, вследствие уменьшения передаточ-
1 ^°р \
ного числа (^ш=57~з 1/-^), усилия, возникающие в проводке
после автомата от расчетной силы летчика, приложенной на рычаге
управления самолетом, могут достигать весьма значительных
величин. Поэтому для облегчения системы управления и получе-
ния необходимых характеристик загрузки без искажений исполни-
тельные механизмы автоматов изменения передаточных отношений
в системах управления рулями и загрузки рычагов управления
следует проектировать раздельными. Это облегчает также приме-
нение при необходимости различных законов регулирования пере-
даточных чисел в проводках управления и загрузки. Установку
350
Фиг. 8.28. Хвостовая часть эксперимен-
тального гиперзвукового самолета Норт
Америкен Х-15.
/—бустер; 2—рычаг; 3—ось вращения элевона.
Фиг. 8.29. Хвостовая часть американского
палубного истребителя-перехватчика Чанс
-Воут F8U-1 «Крусейдер», (Гидроусилители
привода поверхностей управления расположе-
ны непосредственно у приводимых поверх-
ностей).
/—бустер руля направления; 2—бустер стабилизатора.
351
механизма изменения передаточного числа в системе загрузки
следует предусматривать, как уже отмечалось выше, как можно
ближе к загружаемому рычагу (лучше всего в кабине), а меха-
низма изменения передаточного отношения в цепи управления ру-
лем— по возможности ближе к бустеру (см. фиг. 9.8).
На фиг. 8.31 приводится полученный расчетным путем график,
показывающий рост запаздывания (по фазе) отклонения руля
Фиг. 8. 30. Размещение силовых приводов элеронов, стабилизатора и руля
направления на экспериментальном самолете Бристоль Т.188 (М=3)
(Англия).
/—элерон с роговым компенсатором; 2—качалка привода элерона; 3—бустер привода
элерона; 4—обтекатель»; 5—ось вращения стабилизатора; 6—бустер привода стабили-
затора; 7—руль направления; 8—рычаг привода руля направления; 9—бустер руля
направления.
высоты от отклонения ручки при уменьшении жесткости проводки.
Жесткость проводки определяется усилием, необходимым для ее
единичной деформации:
[кГ1мм].
Расчет запаздывания (сдвига по фазе) приведен при частоте
отклонений ручки 1 гц. Хорошо видно, что при недостаточной жест-
кости проводки это запаздывание, ухудшающее характеристики
управляемости самолета и являющееся одной из причин возмож-
ной раскачки самолета на некоторых режимах полета, может до-
стигать недопустимых величин.
352
Фиг. 8.31. Зависимость запаздывания по
фазе отклонения руля высоты по отно-
шению к усилию на ручке от изменения
жесткости проводки системы управле-
ния (при частоте изменения знака уси-
лий по гармоническому закону 1 гц).
Запаздывание (фазовый сдвиг) в системе управления в зна-
чительной степени определяет запаздывание реакции самолета на
управляющий сигнал (от летчика или автоматической системы
управления). Поэтому при
больших фазовых сдвигах на
рабочих (т. е. встречающихся
в полете) частотах системы за
счет большого запаздывания
реакции самолета становится
невозможно правильно сфор-
мировать управляющий сиг-
нал, что и может привести к
раскачке машины.
Величина фазового сдвига
в системе управления опреде-
ляется не только жесткостью
механической проводки систе-
мы, но и люфтами и, главным
образом, характеристиками бу-
стера (см. гл. V, § 7).
Особое внимание на нали-
чие фазовых сдвигов в системе
управления следует обращать
при установке в систему авто-
матических средств, так как на-
личие достаточно большой ве-
личины сдвига фаз на частотах, близких к собственным частотам
самолета (как твердого тела), и наличие нелинейности характе-
ристик в системе может легко привести к автоколебаниям или даже
потере устойчивости системы «самолет — автоматическая система
управления».1
§ 5. Системы управления с вращающимися тягами (валами)2
По сообщениям печати, в последнее время внимание специа-
листов, занимающихся проектированием систем управления само-
летов, все больше начинают привлекать системы проводки управ-
ления с передачей движения вращением (с помощью вращающихся
1 С критериями качества регулирования систем автоматического управления
по их частотным характеристикам (и, в частности, расчетом допустимых вели-
чин фазовых сдвигов в системе) можно подробно ознакомиться по книге
Н. Т. К у з о в к о в а, Теория автоматического регулирования, основанная на ча-
стотных методах, Оборонгиз, 1957, а также по статье Р. Ольденбургера
«Изображение частотных характеристик, стандарты и расчетные критерии»
в сб. «Частотные методы в автоматике» под ред. В. А. Карабанова, ИЛ, 1957,
стр. 21.
2 Системы управления с вращательной проводкой описаны, например,
в статье Е. Brodda „Die Flugzeugmaschinensteuerung* Luftfahrttechnik, No. 11I,
1961, ss. 316—322.
353
тяг — валов). Объясняется это тем, что вращением можно передать
ту же мощность с меньшими относительными деформациями эле-
ментов проводки. Рассмотрим этот вопрос подробнее.
При обычном бустерном управлении (или ручном с поступа-
тельным движением тяг) развиваемая в системе мощность может
быть вычислена как произведение усилия в проводке на скорость
перемещения: N=P • V. Так как конструктивно не удается обеспе-
чить большие скорости движения штока бустера, то для обеспе-
чения необходимой скорости перекладки рулей приходится идти на
значительные усилия Р в проводке. А по закону Гука линейная
деформация пропорциональна произведению действующего усилия
на длину элемента (т. е. в данном случае тяг):
где I — длина нагруженного элемента;
Е — модуль упругости материала элемента;
F — площадь поперечного сечения элемента.
При значительном усилии в проводке и большой длине этой
проводки, линейная деформация А/ получается очень большой
(сравнимой с величиной командных перемещений тяг, т. е. отно-
сительная деформация тяг получается очень большой), что, ко-
нечно, недопустимо, так как приводит к значительным рассогласо-
ваниям в системе управления и нарушениям процесса управления
самолетом.
При передаче мощности вращением тяг-валов передаваемая
мощность может быть вычислена по формуле:
N=M^ • со,
где Л4Кр — момент кручения на валу в кГ • м, а о — угловая ско-
рость вращения вала в рад/сек.
Из этого выражения следует, что если сделать большой ско-
рость вращения валов со, то момент кручения будет незначитель-
ным. А ведь на деформацию закручивания вала оказывает влия-
L. рад. Таким образом,
к
при увеличении скорости вращения валов открываются широкие
возможности для уменьшения относительных деформаций в про-
водке управления. (Под относительными деформациями здесь по-
нимается отношение линейной деформации к максимальному ли-
нейному командному перемещению тяг или отношение угла
закрутки вала к максимальному командному углу поворота этого
вала)
На фиг. 8. 32 показана возможная принципиальная схема управ-
ления рулем высоты с помощью вращающихся тяг — валов.
Применение систем управления с передачей мощности враще-
нием валов требует использования гидроусилителей вращательного
354
А tzf) *
ние именно момент кручения: Афупр=
ив
п
Редуцированное
давление от
автомата загрузки
15
| ^Нагнетание
Клив
Управляющее давление от автомата
| переключения скоростей
Пикиро-
вание
13 J
со
8
Фиг. 8.32. Принципиальная схема продольного управления
/—тумблер триммирования усилия; 2—кнопка аварийного управления с
летом; 4—механизм триммерного эффекта; С :
самолета с применением вращающихся валов.
г помощью электродвигателя; 3—ручка управления само-
__________________ ________г___ . . ... 5—загрузочный механизм; 6—проводка с поступательным движением; 7—управ-
ляющий золотник; 8—втулка-золотник обратной связи; 9—распределительная коробка; 10—вал обратной связи; //—гидромотор;
12—шестерня привода вала механизма обратной связи; 13—вращающаяся трансмиссия; /4—электродвигатель аварийного приво-
де; 16—механизм переключения скоростей; 16—выходной вал привода; 17—редуктор; 18—винтовой преобразователь (шарико-
вый подъемник); 19—руль.
действия (гидромоторов). В настоящее время нашли наибольшее
применение поршеньковые гидромоторы, по конструкции сходные
с поршеньковыми насосами (см. фиг. 5. 60), в конструкции которых
удалось сочетать высокие мощности при приемлемых габаритах
и весах.
Аналогично регулированию скорости выходного штока гидро-
усилителей поступательного действия, скорость вращения выход-
ного вала гидромотора может регулироваться либо дросселирова-
нием давления питающей гидросистемы с помощью управляющего
золотника, либо применением объемного регулирования.
На фиг. 8.33 приводится принципиальная схема устройства пор-
шенькового гидромотора, скорость вращения которого регулирует-
ся с помощью управляющего золотника.
Фиг. 8.33. Принципиальная схема устройств поршенькового гидромотора с золот-
никовым распределительным устройством (дроссельное регулирование скорости)
и схема установки его в систему управления.
/—ручка управления; 2—загрузочный механизм; 3—проводка; 4—входная качалка; 5—гайка:
6—управляющий золотник; 7—вал обратной связи; 8—распределительная шайба; 9—поршни;
10—ротор гидромотора; 11, /5—регулировочные винты; 12—трансмиссия; 13—винтовой шарико-
вый преобразователь; /4—редуктор; /5—шестерня привода механизма обратной связи;
/7—наклонная шайба; 18—регулятор расхода.
Смещая ручку управления самолетом 1, летчик смещает управ-
ляющий золотник 6 гидромотора с помощью несиловой проводки 3.
Этим открывается доступ гидросмеси из магистрали высокого
давления в рабочие полости группы цилиндров, расположенных
в роторе 10, Гидросмесь поступает в цилиндры через полукольце-
вую прорезь распределительной шайбы 8, которая и определяет
разделение цилиндров на две группы. В одной группе цилиндров
поршни 9 совершают полезную работу (рабочий ход) под дейст-
вием давления поступающей гидросмеси. В другой группе цилинд-
ров в это время происходит холостой ход, т. е. вытеснение отрабо-
танной жидкости в сливную магистраль через другую полукольце-
вую прорезь в отсечной шайбе. Поршни, совершающие рабочий
ход, упираются в наклонную шайбу 17, и при этом создается не-
уравновешенная боковая сила, которая действует на поршни и за-
ставляет их поворачиваться вместе с ротором.
356
Вращение ротора передается через редуктор 14 на силовую
трансмиссию 12, которая через преобразователь 13 отклоняет руль.
На выходном валу гидромотора устанавливается специальная
шестерня 15, с помощью которой приводится во вращение вал об-
ратной связи 7. При вращении вала гайка 5 смещается по нему
и смещает входную качалку 4 так, что золотник перекрывает пи-
тающую магистраль, и вращение прекращается, если летчик пере-
стал смещать рычаг управления.
Реверсирование вращения осуществляется тем, что при измене-
нии направления смещения рычага управления самолетом управ-
ляющий золотник открывает доступ гидросмеси под высоким
давлением в другую группу цилиндров, и ротор начинает вращать-
ся в противоположную сторону.
Для уменьшения расходов жидкости через гидромотор при не-
значительных нагрузках в целях разгрузки питающих гидронасо-
сов применяется регулятор расхода 18, изменяющий наклон шайбы
в зависимости от перепада давлений в питающей и сливной магист-
ралях. Если нагрузка возрастает, то этот перепад увеличивается
и регулятор сильнее отклоняет шайбу. При этом расход жидкости
через гидромотор увеличивается и увеличивается момент на вы-
ходном валу. Если нагрузка уменьшается, то перепад давлений
в напорной и сливной магистралях уменьшается, регулятор умень-
шает наклон шайбы, что резко сокращает расход гидросмеси.
Для регулирования максимального и минимального наклонов шай-
бы 17 (определяющих максимальный момент на валу и максималь-
ную скорость вращения гидромэтора) служат регулировочные
упорные винты 11 и 16.
В случае применения гидроусилителя вращательного действия
загрузка рычагов управления тоже осуществляется специальными
загрузочными автоматами 2.
На фиг. 8.34 приведена принципиальная схема управления
с использованием вращательного гидропривода с объемным регу-
лированием скорости вращения. Эта схема имеет те же преиму-
щества и те же недостатки, о которых говорилось в § 7, гл. V
при описании работы системы управления с объемным регулирова-
нием скорости поступательного движения силового штока бустера..
В приведенной на фиг. 8.34 схеме летчик управляет самолетом
с помощью изменения наклона шайбы 3 в насосе 4 переменной
производительности. Изменение наклона шайбы насоса приводит
к изменению его производительности и изменению скорости вра-
щения гидромотора 9, определяющей и скорость отклонения руля
в нужную сторону.
Для преобразования вращения гидромотора в поступательное
движение отклонения рычагов привода рулей с минимальными
потерями в настоящее время широко используются винтовые шари-
ковые подъемники — домкраты, имеющие достаточно высокий
к. п. д. благодаря замене трения скольжения в винтовых парах тре-
нием качения шариков по винтовым канавкам. Схема устройства
357
винтового шарикового преобразователя — подъемника показана
на фиг. 8.35.
Подъемник крепится к конструкции планера самолета за проу-
шины 1. Приводной вал подъемника передает вращение гидро-
мотора на винт 5 подъемника через редуктор 4, В зависимости от
расположения подъемника на самолете приводной вал может под-
ходить под различными углами к оси винта. Вращение винта
с помощью шарикового преобразователя (заменившего винтовую
пару) преобразуется в поступательное движение силового штока 9,
который с помощью проушины 10 крепится к рычагу привода
руля.
Фиг. 8.34. Принципиальная схема управления с использованием вра-
щательного гидропривода с объемным регулированием скорости вра-
щения.
1—управляющая тяга (от рычага управления самолетом или вспомогательного
гидроусилителя привода шайбы); 2—привод насоса (от двигателя самолета);
3—-наклонная шайба; 4—ротор насоса переменной производительности; 5—компен-
сационный бачок; 6—обратный клапан; 7—ротор гидромотора; 8—руль; 9—наклон-
ная шайба гидромотора; 10—шариковый винтовой преобразователь-домкрат;
//—редуктор; 12—привод вала обратной связи; 13—регулятор мощности; /4—соеди-
нительная гидромагистраль; /5—вал обратной связи; /6—дифференциальный ре-
дуктор; /7—привод наклонной шайбы насоса переменной производительности;
18—аварийный привод насоса; 19—гайка привода дифференциального рычага (осу-
ществление обратной связи); 20—дифференциальный рычаг.
Расчеты, экспериментальные исследования и опыт конструиро-
вания показали, что при использовании гидроприводов вращатель-
ного действия при одинаковых весах силовой проводки и равных
передаваемых мощностях эти приводы обеспечивают жесткость
проводки в несколько раз выше, чем жесткость этой проводки при
использовании гидроусилителей поступательного действия. Это
и объясняет все более частое применение гидроприводов враща-
тельного действия на современных самолетах, как тяжелых
(фиг. 8.36), так и легких (фиг. 8.37).
358
Фиг. 8.35. Схема устройства винтового шарикового преобразователя-подъемника.
1—проушины для крепления подъемника к конструкции самолета; 2—радиально-упорные
подшипники; 3—привод; 4—редуктор; 5—ходовой винт подъемника; 6—гайка шарикового пре-
образователя; 7—канавка для возврата шариков; 8—кожух; 9—-силовой шток; /0-—проушина
для крепления к рычагу привода руля.
Фиг. 8.36. Принципиальная схема управления рулями
английского стратегического бомбардировщика Хэндли
Пейдж «Виктор» В.2 с гидроусилителями вращательного
действия и автономным электрическим приводом насосов,
/—рычаг управления; 2—механизм триммерного эффекта; 3—пружин-
ный загрузочный механизм; -/—рулевая машинка автопилота;
5—дифференциальный рычаг; 6—управляющий золотник; 7—автоном-
ный электропривод насоса. ААУ — автономный агрегат управления
(пунктиром показаны дублирующие агрегаты ААУ); 8—насос гид-
роусилителя; 9—гидробачок; 10—гидромотор; //—дифференциальный
редуктор; 12, /5—выходные штоки шариковых преобразователей-подъ-
емников; 13—редуктор; /-/—ходовой винт; 16—механизм коррекции
загрузки по скоростному напору; 17, 18—секции руля.
359
Фиг. 8.37. Схема системы управления английского истребителя-перехватчика Инглиш Электрик Р.1В «Лайтнинг», в ко-
торой применены вращательные гидроприводы для отклонения стабилизатора.
/—бустеры элеронов, 2—двойные качалки для подключения рулевой машинки автопилота, 3—рулевые машинки элеронов, -/—тяги системы
управления элеронами, 5—центральная качалка привода элеронов, 6—гермовывод из кабины, 7—педали, 8—ручка управления, 9—закручи-
вающийся стержень для загрузки по элеронам; 10—триммирующий механизм элеронов, //—качалка системы управления рулем, 12—качалка
системы управления стабилизатором, 13—тяги, 14—триммерный механизм, /5—автомат загрузки продольного управления, 16—тяга привода
золотника гидромоторов, /7—рулевая машинка стабилизатора, 18—рычаг привода стабилизатора, 19—треугольная качалка привода стабилизато-
ра; 20—преобразователи-подъемники; 2/—гидромоторы. 22—ось стабилизатора; 23—корпус подшипника крепления оси стабилизатора; 24—тяга,
25—пружинный загружатель педалей; 26—триммерный механизм; 27—автомат загрузки; 28—рулевая машинка руля направления; 29—тяга.
30—бустер руля; 31—подшипник руля направления.
Кроме значительно большей жесткости системы управления
с передачей движения вращением обладают еще тем положитель-
ным качеством, что компоновка их на машине осуществляется зна-
чительно проще, так как проводка вращающихся тонких валов
и установка небольших поворотных редукторов (с коническими
шестернями) требует значительно меньше места, а влияние дефор-
маций конструкции планера может быть сведено до минимума
применением телескопических тяг (валов).
Основным недостатком такой системы проводки является зна-
чительная сложность изготовления узлов и деталей, требующая
высокой точности и большого объема механических работ.
Кроме того, имеет большое значение правильный выбор смаз-
ки, которая не должна терять своих свойств при высоких и низких
температурах и обеспечивать минимальное трение в системе.
§ 6. Влияние деформаций конструкции самолета на работу
автоматических систем
Изменение частотных характеристик современных самолетов,
связанное с изменением форм и конструкции самолета, привело
к возникновению нового явления, с которым авиационным конст-
рукторам раньше не приходилось сталкиваться. Сущность этого
явления заключается в том, что на определенных режимах полета
работа систем искусственной стабилизации приводит к раскачке
самолета, возникновению вибраций и тряске. Причиной этого было
то, что датчики системы искусственной стабилизации (датчики
угловых скоростей и перегрузок), установленные в фюзеляже,
реагируют не только на изменения положения самолета, но и на
колебания конструкции, на которой они установлены. Переход
к сверхзвуковым скоростям полета сопровождался, с одной сторо-
ны, увеличением частот собственных продольных колебаний само-
лета и, с другой стороны,— уменьшением частот упругих колебаний
фюзеляжа вследствие увеличения его удлинения, вызванного требо-
ваниями аэродинамики больших скоростей. Поэтому происходило
сближение этих частот колебаний, а для тяжелых самолетов
с длинными фюзеляжами эти частоты стали даже совпадать.
При установке датчиков угловой скорости в фюзеляже может
оказаться, что место установки выбрано неудачно, так как при
упругих колебаниях фюзеляжа в этом месте образуется «узел»,
и при колебаниях конструкции установленный на ней датчик угло-
вых скоростей фиксирует максимальное изменение угловой скоро-
сти, но уже не за счет продольных колебаний самолета, а за счет
поворота датчика вследствие деформаций при упругих колебаниях
(фиг. 8.38). Датчик дает ложный сигнал исполнительному меха-
низму демпфера тангажа, который и отклоняет руль высоты на
парирование этой мнимой угловой скорости. Возможно, что в этот
момент угловая скорость вращения самолета coz была направлена
в противоположную сторону (в противофазе), и, таким образом,
361
отклонение руля высоты от ложного сигнала из-за колебаний кон-
струкции может не погасить, а увеличить угловую скорость вра-
щения самолета. Кроме того, изменение угла отклонения руля
высоты приведет и к изменению деформации фюзеляжа вследствие
изменения нагрузки. Таким образом, в полете возникают сложные
колебания самолета и фюзеляжа, которые при совпадении частот
могут привести к резонансным колебаниям, раскачиванию машины
и разрушению.
Для того, чтобы исключить влияние деформаций конструкции
на работу систем искусственной стабилизации, необходимо при
проектировании иметь точную картину упругих колебаний фюзе-
ляжа (I, II и, желательно, III тонов). Используя эти данные, не-
обходимо датчики угловой скорости располагать в «пучностях»
волн упругих колебаний, тогда, смещаясь при колебаниях фюзеля-
жа поступательно, датчики не будут давать ложных сигналов
изменения угловой скорости (см. фиг. 8.38).
Пучность
Итон
I тон
Фиг. 8.38. Схема упругих колебаний фюзеляжа и размещение датчиков
угловых скоростей и акселерометров для обеспечения отсутствия влияния
вибраций и прогибов конструкции на работу автоматических устройств
повышения устойчивости.
0 — датчик угловой скорости;
□ —датчик перегрузки (акселерометр);
Пунктиром показано неверное размещение датчиков.
Датчики перегрузок (акселерометры) следует располагать
в «узлах» волн упругих колебаний, так как при этом они будут
иметь только угловые перемещения при колебаниях конструкции
и не будут фиксировать ложное изменение линейных ускорений.
Правильное размещение датчиков требует большой исследова-
тельской работы, которая и была проделана, в частности, при про-
ектировании самолета CF-105. На этом самолете первоначальное
неправильное размещение датчиков системы искусственной стаби-
лизации привело в результате взаимодействия деформаций конст-
рукции самолета, колебаний самолета и работы автоматических
систем к значительным колебаниям типа рулевого флаттера. В ре-
зультате проведенных исследований удалось так разместить дат-
чики, что влияние колебаний конструкции было сведено до мини-
мума.
362
Глава IX
ПОВЫШЕНИЕ БЕЗОПАСНОСТИ ПОЛЕТА
И АВАРИЙНОЕ УПРАВЛЕНИЕ
Усложнение систем управления современных скоростных само-
летов, насыщение их различными автоматическими устройствами
и переход к необратимому бустерному управлению поставили пе-
ред конструкторами ряд весьма трудных задач по обеспечению
безопасности полета на случай возможных отказов в этих си-
стемах.
Наряду с разработкой различных систем повышения безопас-
ности полета на современных сверхзвуковых самолетах и устране-
нием потенциально опасных факторов, важнейшим условием повы-
шения безопасности полета является обеспечение хороших харак-
теристик устойчивости и управляемости на всех режимах полета,
так как такие характеристики могут сделать основной вклад в дело
безопасности полета. Самолет, который легко пилотировать, сни-
жает рабочую нагрузку на летчика, который будет иметь больше
возможностей справиться с любым аварийным положением, кото-
рое может возникнуть в полете.
Фирма Виккерс, например, под термином «хорошие характе-
ристики управляемости» понимает выполнение следующих шести
условий Ч
1. Самолет должен обладать продольной и боковой устойчи-
востью на всех режимах полета, предпочтительно, без каких-либо
средств искусственного увеличения устойчивости.
Так как у современных самолетов очень трудно обеспечить
удовлетворительную боковую устойчивость без введения автомати-
ческих устройств (например, демпфера рыскания), то ставится
задача сделать самолет управляемым в самых тяжелых условиях
без демпфера рыскания, но демпфер в этих условиях должен обес-
печивать получение приятных характеристик управляемости.
2. Надлежащая эффективность органов управления при всех
условиях полета.
1 «Controlling VC. 10“, Aeroplane, No. 2600 (17 VIII, 1961, pp. 181—186).
363
3. Изменения в балансировке, возникающие из-за изменений
конфигурации самолета (выпуск шасси, закрылков, воздушных
тормозов) должны быть минимальными.
4. Усилие летчика на штурвал и педали при маневрировании
не должны быть очень большими, чтобы не ограничивать манев-
ренности самолета. Равным образом, оно не должно быть и слиш-
ком малым, чтобы не создавать возможности возникновения пере-
напряжений в конструкции самолета из-за случайных перегрузок.
5. При заходе на посадку не должно быть неустойчивости по
скорости.
6. При всех режимах крейсерского полета границы бафтинга
должны быть достаточно далеки, чтобы обеспечить достаточный
запас на нормальные маневры и порывы ветра.
При применении различного рода автоматических устройств
в системах управления самолетом следует особое внимание обра-
щать на вопросы обеспечения надежности и безопасности в экс-
плуатации этих автоматических устройств. Зачастую приходится
отказываться от применения на самолете весьма полезных автома-
тов только из соображений невозможности обезопасить самолет от
последствий выхода из строя этого автомата.
Например, при применении в системе управления автоматов
изменения передаточных чисел (£ш) очень острой является про-
блема обеспечения безопасности посадки при отказе автоматики
на наименьшем передаточном числе (например, при положении
штока автомата МП на фиг. 5.35). В этом случае необходимо
предусматривать либо принудительную установку автомата изме-
нения передаточного числа во взлетно-посадочное положение (БП)
специальным аварийным приводом, либо обеспечивать возмож-
ность совершения посадки при ограниченном диапазоне углов
отклонения рулей Ч Большие трудности вызывает обеспечение пра-
вильного согласования между устанавливаемым автоматически
передаточным отношением и балансировочным положением ручки
и руля высоты при резких изменениях режима полета с тем, чтобы
получить необходимый диапазон отклонений руля на пикирование
и на кабрирование для создания расчетных эксплуатационных пе-
регрузок на любых возможных режимах полета.
Применяемые автоматы, непосредственно воздействующие на
рули (демпферы, автоматы балансировки, автоматы устойчиво-
сти), требуют особого внимания для обеспечения безопасности
при возможных отказах. Обычно предусматриваются сложные схе-
мы дублирования, сравнения и компенсации ложных сигналов,
чтобы обезопасить самолет от выхода на недопустимую перегрузку
или угловую скорость вращения при неправильной работе автома-
1 В ряде случаев может быть весьма опасным и отказ на максимальном
передаточном числе, так как на большой дозвуковой скорости на малых высотах
это может привести к раскачке машины и созданию аварийной ситуации вслед-
ствие чрезмерной чувствительности самолета.
364
та. Особенно опасны отказы автоматики при взлете и посадке, так
как вследствие близости земли нет времени на принятие противо-
действующих мер. Поэтому нередко средства автоматики на взлете
и заходе на посадку выключаются, если эти средства не предназна-
чены специально для взлетно-посадочных режимов.
В некоторых системах автоматизации управления предусматри-
ваются специальные средства ограничения перегрузок и резкости
маневров на случай выхода из строя автоматических устройств.
Такие ограничители разрабатываются отдельно от системы управ-
ления и служат для обеспечения безопасности полетов с автомати-
ческими устройствами (на случай их отказа).
Для примера можно указать на ограничитель перегрузок, раз-
работанный фирмой Конвэр для истребителя-перехватчика F-102A
на случай отказа автопилота. На этом самолете отклонение
элеронов на большой скорости на малых и средних высотах на 3°
(из 50°) могло вызвать недопустимую перегрузку. Поэтому были
очень опасны отказы автопилота на этих режимах полета, которые
могли вызвать ложное отклонение элевонов.
Управляющий блок ограничителя замеряет нормальное (аксе-
лерометром) и угловое (гироскопом) ускорение и при возрастании
их суммы выше определенного расчетного значения мгновенно
(время срабатывания 0,04 сек) ставит элевоны нейтрально. После
этого у летчика есть время на обдумывание и принятие соответ-
ствующих мер. Испытания ограничителя в полете дали прекрасные
результаты Ч
На самолете Авро «Вулкан» на случай выхода из строя авто-
мата балансировки также установлен ограничитель перегрузок,
замеряющий перегрузку и переключающий автомат для отклоне-
ния рулей в сторону ее уменьшения1 2.
В настоящее время на многих скоростных тяжелых самолетах
применяется необратимая бустерная система управления, Хотя эти
самолеты являются дозвуковыми, и возможно было бы применение
безбустёрных систем управления с использованием обычных аэро-
динамических средств для уменьшения шарнирных моментов
(аэродинамической компенсации, триммеров, сервокомпенсаторов
и др.). Поэтому существуют скоростные тяжелые самолеты с при-
близительно одинаковыми летными данными, но на одних система
управления — бустерная (английские и французские самолеты:
«Виктор», «Вулкан», VC.10, «Каравелла»), а на других — без-
бустерная с аэродинамическими сервокомпенсаторами (американ-
ские самоле.ты Боинг 707, 720, Конвэр 600, 880, Дуглас DC-8).
Какие же преимущества дает применение бустерных систем
управления, ради которых авиационные конструкторы отказывают-
1 Space Aeronautics (Aviation Age), No. 6, vol. 30, 1958.
2 Flight, No. 2551, 1957; No. 2558, 1958;
Aeroplane, No. 2422, 1958.
365
ся от более простых в изготовлении и эксплуатации, надежных
и дешевых безбустерных систем?
Эти преимущества оказываются весьма существенными:1 .
1. При достаточной жесткости силовой проводки (а это может
быть достигнуто установкой бустеров у самых рулей) не требуется
весовой балансировки рулей, что для тяжелого самолета экономит
достаточно много веса (например, для самолета VC.10 — 454 кг).
2. Органы управления могут быть уменьшены по размерам
и облегчены по весу, так как:
а) вследствие отсутствия перетекания воздуха через щели
у ненужных при бустерном управлении сервокомпенсаторов и
у носка самого руля без аэродинамической компенсации эффектив-
ность руля получается выше;
б) рули без аэродинамических компенсаторов можно отклонять
на большие углы, так как при наличии достаточной мощности
приводов нелинейность характеристик шарнирного момента при
больших углах отклонения не имеет особого значения;
в) не требуется установка триммеров или сервокомпенсаторов.
По сообщению фирмы Локхид применение бустерного управле-
ния на самолете «Электра» с четырьмя ТВД дало возможность
уменьшить суммарную площадь киля и руля направления на 40%,
а стабилизатора и руля высоты — на 25%; соответственно была
уменьшена и площадь элеронов. Это позволило снизить все конст-
рукции самолета на 183 кг и увеличить крейсерскую скорость по-
лета приблизительно на 18 км/час при тех же двигателях. Увели-
чение жесткости системы управления и отсутствие триммеров
и сервокомпенсаторов значительно снижает опасность флаттера.
3. Устойчивость самолета одинакова при свободном и зажатом
управлении.
4. «Чувство управления» создается искусственно и поэтому
может быть сделано любым, удобным и приятным.
5. Значительно сокращается время летной доводки системы
управления и характеристик управляемости, так как большая
часть работы может быть проделана на стендах при создании са-
молета.
Основным недостатком бустерной системы управления являет-
ся значительно более низкая надежность, чем у систем без бусте-
ров, с простой проводкой из жестких тяг или тросов при использо-
вании мускульной силы летчика для преодоления шарнирных
моментов при отклонении рулей. Это и заставляет конструкторов
применять дублирование наиболее важных агрегатов и принимать
ряд других мер для повышения безопасности полета и обеспечения
возможности посадки при отказах в системе управления.
1 Здесь приведены соображения инженеров фирмы Виккерс, на основании
которых для самолета VC.10 была выбрана бустерная система управления
(см. Aeroplane, No. 2600, 17 VIII, 1961, рр. 181—186).
366
Самым «капризным» элементом бустеров с дроссельным регу-
лированием скорости является управляющий золотник, поэтому
для повышения надежности в некоторых конструкциях этот золот-
ник дублируется (фиг. 9. 1) на случай его возможного заклинения
(изготовление и монтаж золотников требует особой точности
и зазора между золотником и гильзой не превышают обычно не-
скольких микрон).
Для обеспечения бесперебойного питания бустеров в случае
возможного выхода из строя специальной бустерной гидросисте-
мы, почти одновременно
с появлением бустеров в
системах управления са-
молетом стали применять
дублирование питающей
гидросистемы. Чаще всего
это дублирование осуще-
ствлялось посредством пе-
реключения питания гид-
росмесью под высоким
давлением из бустерной
гидросистемы на питание
из основной самолетной
гидросистемы. Так как
для основной гидросисте-
мы свойственны значи-
тельные кратковременные
расходы жидкости (на-
пример, при выпуске или
уборке шасси), приводя-
щие к падению давления
в системе, то для обеспе-
Фиг. 9.1. Сдвоенный золотниковый распре-
делитель бустерного управления палубного
истребителя Чанс Воут F8U-1 «Крусейдер»
(США).
/—тяга управления; 2—дифференциальный рычаг;
3—4—управляющие распределительные золотники;
5—напорная магистраль; 6—сливная магистраль;
7—в камеры бустера.
чения надежной работы
бустеров при аварийном питании из основной гидросистемы самоле-
та в последнюю стали включать дополнительные гидроаккумулято-
ры, которые компенсировали резкие падения давления и пульсации.
Основной задачей, ставившейся перед аварийной системой
управления, было обеспечение минимально возможной маневрен-
ности для обеспечения возможности продолжения горизонтального
полета и совершения посадки при отказе питающей гидросистемы
или неисправности бустера.
При применении бустеров в системах управления легких манев-
ренных самолетов для уменьшения усилий на рычаги управления,
при маневрах на больших скоростях, т. е. для улучшения маневрен-
ности самолета, возможность горизонтального полета и посадки
достаточно легко может быть обеспечена и при отказе питающей
бустер гидросистемы, вызывающем падение давления. В этом слу-
чае бустеры поступательного действия (с дроссельным регулирова-
нием скорости — типов, показанных на фиг. 5. 1—5.5) могут быть
367
использованы для отклонения рулей просто как обычные жесткие
тяги в системе управления. Естественно, что усилия на рычагах
управления от аэродинамической нагрузки на рулях при этом воз-
растут и для их снижения могут быть использованы аэродинами-
ческие триммеры, устанавливаемые при бустерном управлении
специально для обеспечения аварийного управления.
Для обеспечения возможности использования бустера как жест-
кой тяги в аварийном случае падения давления в питающих гидро-
системах, в конструкции бустеров должны быть предусмотрены
специальные устройства: клапаны кольцевания (или другие спо-
собы соединения полостей бустера) и фиксатор золотника. Клапан
кольцевания должен соединять рабочие полости силового цилинд-
ра бустера для обеспечения возможности свободного перетекания
жидкости из одной полости в другую при перемещениях поршня
в цилиндре под действием усилия, приложенного летчиком к соот-
ветствующему рычагу управления. Фиксатор золотника должен
заклинивать золотник относительно подвижной части бустера для
устранения люфта в системе управления, вызванного наличием
предусмотренной конструкцией бустера возможности свободного
смещения золотника для регулирования скорости движения штока
бустера изменением расхода жидкости (это смещение обычно по-
рядка 1-т-2 мм).
Фиг. 9.2. Специальные устройства в золотниковой коробке бустера, обеспечи-
вающие надежность работы бустера при различных отказах и повреждениях,
а также работу бустера как жесткой тяги.
/—пружина клапана-переключателя питающих гидросистем, 2—клапан-переключатель;
3—фиксатор; 4—пружина фиксатора; 5—основной золотник; 6—аварийный золотник; 7—кла-
пан кольцевания; 8—пружина; 9—пружина аварийного золотника.
368
На фиг. 9.2 показаны основные устройства, применяемые в раз-
личных системах бустеров для повышения их надежности и обес-
печения возможности использования в аварийных случаях как
жестких тяг системы управления (эти устройства для наглядности
условно объединены в одной схеме бустера).
При аварийной работе бустера как жесткой тяги загрузочные
механизмы, установленные в системе управления, желательно от-
ключать, чтобы не получать дополнительно (к аэродинамической)
загрузки рычагов управления самолетом. Если в системе установ-
лены загрузочные механизмы типов, показанных на фиг. 5.18,
5.19 и 5.21, то отключение происходит автоматически при падении
давления в гидросистеме, а летчик будет ощущать на рычагах
управления усилия только от аэродинамической нагрузки. Для от-
ключения загрузочных механизмов других типов необходимо при-
менение специальных устройств.
Итак, первая аварийная система управления на легких само-
летах заключалась в переходе на аварийное ручное управление
с помощью триммеров при использовании бустеров как жестких
тяг.
На тяжелых самолетах, где в случае отсутствия аэродинамиче-
ской компенсации значительные шарнирные моменты не позволяют
управлять рулями вручную, для повышения надежности системы
управления рули разделяются на несколько секций, каждая из
которых приводится отдельным бустером и специальной гидроси-
стемой. Таким образом, при отказе одного бустера для управления
самолетом остается действующая часть секций рулей, которая
рассчитывается так, чтобы обеспечить возможность продолжения
полета и аварийной посадки. Такая система повышения безопасно-
сти применена, например, на самолете Виккерс VC.10 (фиг. 9.3),
где элероны и рули высоты разделены на две секции (с каждой
стороны), а руль направления — на три.
На фиг. 9.4, а и б приводятся схемы продольного и поперечно-
го управления самолета Виккерс VC.101. Системы управления
основаны на комбинации электрогидравлической и дублированной
гидравлической систем, связанных с синхронизированными поверх-
ностями управления.
При проектировании системы управления самолета VC.10
основное внимание было обращено на повышение безопасности
при применении необратимой бустерной системы управления,
причем ставилась задача обеспечения полной безопасности само-
лета даже при двух отказах в любой части системы. Эта задача
и была решена с помощью разделения поверхностей управления
на секции с совершенно независимыми приводами.
На самолете имеется 11 секций рулей, каждая из которых от-
клоняется электрогидравлическим силовым приводом. Все 11 при-
водов совершенно идентичны и автономны, так как включают
в себя электродвигатель, гидронасос, силовой цилиндр и дифферен-
1 Aviation Week, No. 71, vol. 72, 1960;
Aeroplane, No. 2561, 1960.
369
циальную передачу. При выходе из строя какой-либо секции, дей-
ствие ее привода нейтрализуется приводами остальных секций без
изменения положения самолета в пространстве до тех пор, пока
электродвигатель привода неисправной секции не будет выключен
Фиг. 9.3. Схема пассажирского самолета Виккерс VC.10 (Англия). Органы
управления самолетом разделены на секции с независимыми приводами для по-
вышения безопасности.
летчиком. После этого вследствие падения давления в системе
неисправная секция постепенно устанавливается в положение, со-
ответствующее минимальной нагрузке, и автоматически запирается
для предотвращения флаттера и нагрузок от порывов. Телескопи-
ческая пружинная тяга в проводке управления каждой секции
обеспечивает возможность управления остальными исправными
секциями поверхностей управления при заклинивании бустера
одной из секций. По утверждению фирмы Виккерс самолет VC.10
может безопасно летать с одной работающей секцией в данной си-
стеме управления. Системы управления рулями высоты и направле-
ния полностью дублированы.
Самолет имеет управляемый в полете (для балансировки) ста-
билизатор, системы приводов которого тоже дублированы.
Два гидромотора, управляющие стабилизатором, питаются от двух
независимых гидросистем и действуют через дифференциальный
механизм и самотормозящийся (необратимый) червячный меха-
низм. Дублирована также система автоматической балансировки.
1 Aviation Week, No. 71, vol. 72, 1960;
Aeroplane, No. 2561, 1960.
370
Фиг. 9.4. Разделение на секции
Пружинные тяги
поверхностей управления для
повышения безопасности.
а—схема системы поперечного
управления самолета VC.10.
1—механическое отключение соеди-
нения штурвалов; 2—пружинный ав-
томат усилий; 5—рычаг управления
воздушными тормозами; ^—штур-
вальная колонка; 5—проводка уп-
равления интерцепторами; 6—управ-
ление воздушными тормозами; 7—
проводка управления элеронами;
8—бустер элерона; 9—дублирующая
рулевая машина; 10—рулевая маши-
на; //—секции элерона; /2—замок
обратной связи; 13—телескопическая
пружинная тяга; 14—замки с двумя
соленоидами; 15—пружинная тяга;
16—смесительная коробка; 17—дуб-
лированный автомат усилий; 18—
триммерный механизм элеронов,
б—схема продольного управления.
/—механизм отключения (разъединения штурвалов), 2—штурвальная колонка, 3—регулятор
напряжения тросов; -/—дублирующая рулевая машинка; 5—секции руля высоты; б—рулевая
машинка; 7—бустер руля высоты; 8—пружинная тяга; 9—замок обратной связи; 10—замки
с двумя соленоидами; //—дублированный автомат усилий.
в—схема членения рулевой поверхности на секции с независимыми гидроприводами с объем-
ным регулированием.
/—секции рулевой поверхности; 2—гидромоторы с преобразователями; 3—насосы регулируемой
производительности; -/—загрузочное устройство; 5—привод управления производительностью
насосов, б—рычаг управления; 7—электропривод установки секции в нейтральное положение.
371
Загрузка рычагов управления на самолете VC.10 осуществляет-
ся так же дублированными гидравлическими загружателями, пи-
таемыми независимо друг от друга от двух гидросистем. Загрузка
педалей осуществляется пропорционально отклонению руля и ско-
ростному напору. В продольном и поперечном управлении в закон
загрузки вводится еще коррекция по высоте.
Электродвигатели автономных приводов секций рулей питают-
ся от генераторов переменного тока (альтернаторов), установлен-
ных по одному на каждом из четырех двигателей, а в аварийном
случае — еще и от ветрянки, приводящей аварийный альтернатор.
Мощность аварийного альтернатора достаточна для питания пере-
менным током электродвигателей привода двух секций элеронов,
двух секций руля высоты и одной секции руля направления.
Давление в двух независимых гидросистемах создается четырь-
мя (по 2 на каждую систему) насосами с максимальной произво-
дительностью 81,5 л!мин при давлении 210 ат. Дополнительно
к основным насосам с приводом от двигателей имеются вспомога-
тельный насос с электроприводом и аварийный с приводом от дру-
гой ветрянки. Аварийный привод может обеспечить работу четы-
рех из шести имеющихся на самолете интерцепторов (внутренних
и наружных), стабилизатора, предкрылков и закрылков.
Для повышения безопасности автоматического полета (с авто-
пилотом) установка автопилота полностью дублирована, причем
каждый автопилот управляет рулями с помощью своей отдельной
рулевой машинки в системе управления относительно данной оси.
Один автопилот приводит внутренние секции левого элерона и ле-
вого руля высоты, а также нижнюю секцию руля направления.
Другой — внутренние секции правого элерона и правого руля вы-
соты и среднюю секцию руля направления. Рулевых машинок как
таковых на самолете VC.10 нет, так как сигналы автопилота вво-
дятся непосредственно в сервоклапаны соответствующих гидро-
приводов. Автопилоты воздействуют также и на механизм
установки стабилизатора посредством сервоклапанов, управляю-
щих гидромоторами привода стабилизатора.
Независимый от двигателей самолета автономный привод на-
сосов гидросистемы от электродвигателей, питаемых от бортовой
электросети, в настоящее время достаточно широко применяется
в системах управления самолетов (Хэндли Пейдж «Виктор», Вик-
керс VC.10, Авро «Вулкан» и др.), так как это обеспечивает ряд
преимуществ и повышает надежность работы гидросистемы:
1) устраняется вредное влияние высокой температуры самолет-
ных двигателей на насосы гидросистемы и облегчается их охлаж-
дение;
2) насосы вращаются с постоянной скоростью, независимо от
числа оборотов двигателей;
3) остановка двигателей в полете не влечет за собой прекра-
щения подачи жидкости в гидросистему, так как питание электро-
372
двигателя привода насоса будет осуществляться от электроакку-
мулятора;
4) значительно сокращается длина трубопроводов, что сущест-
венно уменьшает потери и вероятность нарушения герметичности
системы (в результате разрывов трубопроводов);
5) облегчается наземная эксплуатация и проверка гидросисте-
мы, так как давление в системе можно создать, не запуская дви-
гателей или не используя аэродромную гидротележку, а простым
подключением аэродромного электропитания к бортовой сети.
При невозможности перехода при отказе гидросистемы или не-
исправности бустера на аварийное ручное управление вследствие
слишком больших шарнирных, моментов или изменения их знаков
в околозвуковой зоне (например, на управляемом стабилизаторе,
см. фиг. 5.9) для повышения безопасности полета и обеспечения
возможности посадки могут применяться и другие методы.
Одним из таких методов было применение полного дублирова-
ния бустера и питающей гидросистемы (фиг. 9.5).
Подобная система была разработана, например, для привода
стабилизатора первоначального варианта истребителя Рипаблик
F-105 «Тандерчиф». Аналогичная система (но без дифференциально-
го звена) применяется в поперечном управлении истребителя-пере-
хватчика Инглиш Электрик Р.1В «Лайтнинг» F.1 (см. фиг. 8.37)
и ряде других самолетов (например, Локхид «Геркулес»), несмотря
на присущие ей существенные недостатки (значительное увеличе-
ние веса, возможность перекосов и защемлений при эксцентрич-
ном приложении силы от одного бустера при отказе другой систе-
мы и др.).
На многих современных сверхзвуковых самолетах с двигателя-
ми, расположенными в хвостовой части фюзеляжа, применяется
Фиг. 9. 5. Схема дублирования силовых цилиндров бустеров привода стабилиза-
тора (а) и двойной золотник, применяемый для обеспечения синхронизации
работы силовых цилиндров (б).
раздельное управление половинами стабилизатора (см. фиг. 8.11,
8.28 и 8.29), причем для повышения безопасности в проводке
373
управления предусматриваются предварительно затянутые на
определенное усилие пружинные тяги, обеспечивающие возмож-
ность управления одной половиной стабилизатора при заклинении
другой.
Фиг. 9.6. Принципиальная схема дублированной и аварийной
гидросистем, питающих двухкамерный бустер.
/-воздушно-жидкостной теплообменник; 2—топливо-жидкостной теплооб-
менник; 5—компенсатор (бак); 4—насос; 5—коробка приводов левого двига-
теля; 6—коробка приводов правого двигателя: 7—золотник; 8—фильтр;
9—ветрянка; 10—бустер.
Наиболее широкое распространение в современном самолето-
строении нашло применение двухкамерных бустеров с питанием
камер от независимых гидросистем. При этом, если на самолете
установлено более одного двигателя, то насосы гидросистем уста-
навливаются на разных двигателях (см. фиг. 9.6). Для обеспече-
ния возможности управления в случае остановки двигателя самоле-
та, приводящего насосы гидросистемы, для питания одной камеры
двухкамерного бустера применяется специальная аварийная гидро-
система. Давление в этой системе создается автономной насосной
станцией, привод которой осуществляется либо электродвигателем
от самолетных аккумуляторов (так, например, на самолете Дассо
«Мираж» ША), либо специальной ветрянкой, приводимой скорост-
ным напором набегающего потока. Эта ветрянка выдвигается
в наружный поток (так, например, на самолетах Чанс Воут F8U
«Крусейдер», Локхид F-104 «Старфайтер», Норт Америкен A3J-1
374
«Виджилент», Де Хэвилленд «Си Виксн», Дассо «Мираж» IV и др.)
или устанавливается в специальном канале, вход в который из
воздушного канала двигателя закрывается специальной заслонкой
(например, на самолете Норт Америкен F-100).
Специальный аварийный привод может не применяться, если
производительности насосов основных гидросистем при автороти-
рующих от скоростного напора отказавших двигателях оказывает-
ся достаточно для поддержания минимально допустимого давления
в гидросистемах питания бустера (например, на самолете Инглиш
Электрик Р.1В «Лайтнинг») Ч
Если самолет имеет очень небольшую продолжительность по-
лета, то вместо аварийных насосных станций могут применяться
гидроаккумуляторы, объем которых должен обеспечить посадку
самолета.
Следует отметить, что для уменьшения расхода жидкости с вы-
соким давлением при аварийной посадке с авторотирующим дви-
гателем или отказавшей основной гидросистемой все потребители
гидросмеси, без которых можно обойтись на посадке, должны
быть выключены. Так например, при аварийной посадке истреби-
теля с управляемым стабилизатором гидросистема должна обеспе-
чивать питание только гидроусилителей привода стабилизатора,
а бустеры элеронов и руля направления, если это возможно, долж-
ны быть выключены. Шасси и закрылки должны выпускаться
своими аварийными системами.
Схема конструкции современного двухкамерного бустера посту-
пательного действия показана на фиг. 9.7.
При применении в системах управления гидроусилителей вра-
щательного действия (см. фиг. 8.33) использование их в аварий-
ном- случае отказа гидросистемы как жестких тяг при переходе на
ручное управление невозможно. Поэтому в их конструкции обяза-
тельно должна быть предусмотрена возможность перехода на пи-
тание от другой (аварийной) гидросистемы или на аварийный
электропривод. В конструкции привода должно быть предусмотре-
но дифференциальное устройство, допускающее возможность
вращения выходного вала от исправных систем при заклинении
одного из гидромоторов.
В ряде случаев может оказаться рациональным использова-
ние для аварийного управления специальных аварийных электро-
механизмов (АЭМ), непосредственно приводящих рули при отка-
зах гидравлического привода. Большим преимуществом такой
схемы является действительная полная независимость основной
и аварийной систем и возможность аварийного управления при
полном отказе гидросистем и бустера. Для питания электродви-
гателя аварийного привода электрическим током необходимы про-
вода, которые для обеспечения меньшей уязвимости могут быть
1 Flight, No. 2731, 1961;
Aeroplane, No. 2595, 1961.
375
Фиг. 9. 7. Схема двухкамерного бустера.
/—пружинная защелка клапана выключения первой гидросистемы (при открытии защелки
клапан кольцует полости гидроцилиндра /5); 2—клапан выключения первой гидросистемы;
3, 9—дифференциальные рычаги; 4, 7— раздвижные шариковые фиксаторы; 5—управляю-
щая тяга; 6—коромысло; 8—блокирующие плунжеры; 10—пружинная защелка клапана
выключения второй гидросистемы (при открытии защелки клапан кольцует полости
гидроцилиндра 14}\ //—клапан выключения второй гидросистемы (клапаны 2 и И при
неравномерных давлениях в цилиндрах 14 и 15 могут работать как переливные);
/2—общий силовой шток; 13, 16—поршни; 14, /5—силовые цилиндры; /7—перепускные
клапаны; 18—управляющий золотник второй гидросистемы; 19—управляющий золотник
первой гидросистемы; (обратная связь осуществляется движением корпуса гидроусили-
теля относительно золотников).
376
/—ручка управления самолетом с механизмом изменения жесткости загрузки в зависимости от параметров полета, II—кнопка аварийного
управления электромеханизмом аварийного привода стабилизатора, ///—загрузочный механизм, /V-—механизм триммерного эффекта, V—-проме-
жуточная качалка, V/—механизм изменения передаточного отношения, VII—датчик управления аварийным механизмом привода стабилизатора:
/—входной шток, соединенный тягой с ручкой управления, 2—управляющий рычаг, 5—концевые выключатели пикирования и кабрирования,
4—корпус датчика, х—рассогласование.
V///—демпфер продольных колебаний, IX—двойная качалка для установки демпфера, X—бустер привода стабилизатора с дублированием
гидросистемы, (о. н.—основная напорная, о. с.—основная сливная, а. н.—аварийная напорная, а. с.—аварийная сливная), XI—аварийный
электрический механизм привода стабилизатора.
5—электродвигатель, 6—электромагнитные кулачковые муфты правого или левого вращения привода механизма движения штока, 7—фрикцион-
ная муфта ограничения момента, 8—фрикционная муфта включения механизма привода штока, 9—механизм привода штока, 10—ходовой
сэ винт штока, //—гидропривод (при наличии давления в гидросистеме размыкает муфту 8 включения механизма п| ивода выходного штока
3 и этим исключает возможность одновременной работы бустера и АЭМ), р—давление в гидросистеме питания бустера (основной или аварийной).
XII—качалка привода стабилизатора, XIII—управляемый стабилизатор, XIV—реле давления в магистрали питания бустера.
легко дублированы и подводится по верхней и нижней панелям
фюзеляжа (или по правому и левому бортам). Возможная прин-
ципиальная схема управления стабилизатором с аварийным элек-
тромеханизмом показана на фиг. 9.8. Там же приведены схемы
основных агрегатов системы.
Из фиг. 9. 8 следует, что при переходе на аварийное управление
летчик отклоняет стабилизатор, как и обычно, путем смещения
ручки управления. Но привод стабилизатора при этом осуществ-
ляется не бустером, а АЭМ, включенным специальным датчиком
(VII) в системе управления. Если проводка управления оказалась
разрушенной, то управлять можно чисто электрически с помощью
специальной кнопки II на ручке управления. В случае применения
на самолете системы управления с вращающимися тягами, элек-
трической аварийный привод легко стыкуется с основной системой
(см. фиг. 8.32, поз. 13).
Наиболее надежным и простым средством аварийного продоль-
ного управления при отказе гидропривода кажется использование
для этой цели обычного руля высоты. При этом нормальное управ-
ление мыслится с помощью отклоняемого бустером цельноповорот-
ного стабилизатора, обеспечивающего необходимую маневренность
самолета, а в аварийной ситуации, при отказе бустера, посадка
совершается с помощью руля высоты. В этом случае отпадает не-
обходимость в применении специальных аварийных систем, так как
рулем высоты можно управлять вручную с помощью аэродинами-
ческого триммера. Остается необходимость в небольшом механизме
для установки стабилизатора в необходимое для балансировки
положение на тот случай, если отказ бустера произойдет при ка-
ком-то отклоненном положении стабилизатора. Так как скорость
перекладки стабилизатора в этом случае может быть незначитель-
ной, то и потребная мощность механизма для его привода может
быть небольшой. Значит и размеры и вес механизма получатся
невелики.
В качестве примера переходной к описанной выше системе про-
дольного управления можно привести систему управления англий-
ского истребителя Хоукер «Хантер» (фиг. 9. 9) !. Этот самолет
пользуется известностью у летчиков многих стран благодаря хоро-
шей управляемости и маневренности.
В системе продольного управления самолетом применяется
обычный руль высоты и подвижной стабилизатор, который исполь-
зуется только в том случае, если для совершения маневра недоста-
точно предусмотренного диапазона углов отклонения руля высоты.
В этом случае руль высоты, отклоняясь до упора, нажимает спе-
циальный концевой выключатель, который приводит в действие
механизм изменения угла установки стабилизатора. Отклоняясь,
стабилизатор увеличивает продольный момент и одновременно
1 Flight, No. 2572, 9 V, 1958, р. 639.
378
смещает концевой выключатель, увеличивая тем самым диапазон
углов отклонения руля высоты.
Фиг. 9. 9. Схема продольного управления с рулем высоты и управляемым стаби-
лизатором английского истребителя Хоукер «Хантер».
У—ручка управления, 2—кнопка балансировки (управляет положением стабилизатора), 3—за-
грузочный механизм (нулевое значение усилий на ручке смещается синхронно с отклоне-
нием стабилизатора), 4—электропривод стабилизатора, 5—бустер, 6—качалка привода руля
высоты, 7—стабилизатор, 8—руль высоты, 9—телескопическая пружинная тяга, 10—тяга при-
вада рычага, //—рычаг, /2—микровыключатель пикирования, 13—микровыключатель кабриро-
вания, /4—установка микровыключателей привода стабилизатора на подвижном рычаге,
/5—электропривод рычага микровыключателей (работает синхронно с электроприводом стаби-
лизатора).
Следует отметить, что самолет «Хантер» является дозвуковым
самолетом, хотя он и достигает сверхзвуковой скорости при пики-
ровании. Поэтому для управления им достаточно небольшой
скорости перекладки стабилизатора, так как основную роль
в управлении играет руль высоты. Аналогичная схема продольного
управления разработана для итальянского истребителя Фиат G.91
(фиг. 9.10).
Для сверхзвукового маневренного самолета необходимо приме-
нение на сверхзвуковой скорости цельноповоротного стабилизато-
ра, поэтому сейчас существует ряд самолетов 1 с системами про-
дольного управления стабилизатором с переходом на управление
рулем высоты на дозвуковой скорости или в аварийной ситуации—
при отказе бустера. В этом случае возможно упростить систему
изменения передаточных отношений в проводке управления, так
как изменение потребных углов отклонения стабилизатора (или
руля высоты) на единицу избыточной перегрузки (ср") сростом
скорости будет в значительной степени компенсироваться измене-
нием эффективности продольного управления при переходе с управ-
1 Например, английский палубный истребитель «Си Виксн» (см. фиг. 5.38
и 5. 39) и французский палубный истребитель Дассо «Этандар» IVM.
379
ления рулем высоты на управление цельноповоротным стабилиза-
тором. В этом случае техника пилотирования на разных режимах
полета будет более однообразной, так как изменение показателя
управляемости Хв не будет уже таким резким.
На фиг. 9.11 приведен пример одного из возможных вариантов
схемы продольного управления с помощью управляемого стабили-
затора и руля высоты.
В нормальном полете летчик управляет стабилизатором 16 по-
средством бустера 1, привод золотника которого осуществляется
тягой 2 через качалку 5, которая имеет вертикальную ось враще-
Фиг. 9. 10. Агрегаты системы продольного управления в хвостовой части фю-
зеляжа итальянского истребителя-бомбардировщика Фиат G.91.
/—тяги от ручки, 2—загрузочный механизм с коррекцией по 3—бустер руля высоты,
4—качалка с осью вращения на балке 7, 5—качалка привода половин руля высоты,
6—тяги привода руля высоты, 7—трубчатая балка, соединяющая половины стабилизато-
ра, 8—электромеханизм балансировочного поивода стабилизатора, 9, 10—правая и левая
половины стабилизатора.
ния О — О и установлена на фигурной четырехплечей качалке 5,
которая имеет горизонтальную ось вращения О'— О', но удержи-
вается неподвижно замком 4, который закрыт пока в гидросисте-
мах (основной и аварийной) есть давление, и продольное управле-
ние осуществляется бустером. При падении давления в гидроси-
стемах пружина отжимает фиксатор замка и освобождает
качалку 5, которая теперь сможет качаться относительно оси
О'— О', а качалка 3 может качаться только относительно точки А,
380
Фиг. 9.11. Возможная схема продольного управления самолета с управляемым стабилизатором и рулем вы-
соты, используемым при отказе бустера привода стабилизатора.
/—бустер, 2—тяга, 3—качалка, 4—замок, 5—качалка, 6, 7, а, 7, б, 9—тяги, 8—электромеханизм аварийного привода, 10—рычаг,
//—качалка, /2—кардан, /3—двухпозиционный кран, 14—полость высокого давления, 15—механический привод, 16—стабилизатор,
17—руль высоты.
ставшей неподвижной вследствие затормаживания муфт электро-
механизма 8 балансировочного привода стабилизатора. Дви-
жение тяги 6 в этом случае через качалки 3 и 5 передается тягам
7, а и 7, б и далее на управление рулем высоты 17. Для облегчения
балансировки машины применяется аварийный электропривод S,
мощность которого может быть небольшой вследствие незначи-
тельных скоростей перекладки стабилизатора, необходимых для
балансировки машины при изменении режима полета. Для пере-
хода на управление рулем высоты по желанию летчика служит
двухпозиционный кран 13, отсекающий давление из гидросистем
и соединяющий одновременно полость высокого давления 14 ци-
линдра замка со сливной магистралью. Для повышения надежно-
сти работы механизма выключения замка устанавливается еще
и механический привод 15 от специального рычага в кабине лет-
чика.
Для обеспечения независимости отклонения руля высоты от
отклонения стабилизатора тяги привода руля 9 проходят через
подшипники, на которых вращается стабилизатор и конструктивно
совмещаются с теоретической осью вращения стабилизатора.
Для того, чтобы обеспечить жесткую связь руля высоты со стаби-
лизатором при нормальном управлении (отклоняется стабилиза-
тор, замок 4 — закрыт) тяга 9 привода руля имеет рычаг 10, конец
которого скользит в специальных направляющих, которые не поз-
воляют тяге проворачиваться относительно стабилизатора, чем
достигается отклонение стабилизатора с рулем высоты как одной
целой управляющей поверхности. Для управления • рулем высоты
тяга 9 должна иметь поступательное движение, которое она полу-
чает от качалки 11 через кардан 12 только в случае аварийного
управления (замок 4 — открыт).
Со временем будет известно, какие конструктивные схемы бу-
дут предложены, насколько эффективны окажутся такие схемы
в полете и будет доказана рациональность или нерациональность
подобных систем продольного управления.
ЛИТЕРАТУРА
Арзуманян А. М., Генеральный конструктор А. И. Микоян, Госполитиз-
дат, 1961.
Асташенков П. Т., Полет в новое, Госполитиздат, 1961.
Аграновский А., Счастливые, изд. «Молодая гвардия», 1958. Открытые
глаза, «Октябрь», 1961, № 7.
Б а ш т а Т. М., Расчеты и конструкции самолетных гидравлических уст-
ройств, Оборонгиз, 1961.
Б а шт а Т. М., Гидравлические усилители систем управления самолетами,
Редиздат Аэрофлота, 1958.
Б а шт а Т. М., Гидравлические следящие приводы, Машгиз, 1960.
Бисплингхофф Р. Л., Эшли X., Халфмэн Р. Л., Аэроупругость,
ИЛ, 1958.
Сборник статей под ред. Б л а н д о в а П. И., «Исследования в области
самолетных гидравлических устройств», Труды МАИ, вып. 117, Оборонгиз, 1959.
Боднер В. А., Фридлендер Г. О., Чистяков Н. И., Авиационные
приборы, Оборонгиз, 1960.
Боднер В. А., Козлов М. С., Стабилизация летательных аппаратов
и автопилоты, Оборонгиз, 1961.
Богданов А. П., Виноградов Р. И., Сверхзвуковые крылатые лета-
тельные аппараты, Воениздат, 1961.
Бриджмен У., Азар Ж., Один в бескрайнем небе, Воениздат, 1959.
Васильев Г. С., Лысенко Н. М., Микиртумов Э. Б., Аэродина-
мические особенности реактивных самолетов-истребителей, Воениздат, 1956.
Виляевская Т. И., Авиационные приборы и автопилоты, Оборон-
гиз, 1954.
Ведров В. С., Динамическая устойчивость самолета, Оборонгиз, 1938.
Ведров В. С., Романов Г. Л., Сурина В. А., Самолет как объект
регулирования, Труды МАИ, вып. 74, Оборонгиз, 1957.
Ведров В. С., Т а й ц М. А., Летные испытания самолетов, Оборон-
гиз, 1951.
Г а м ы н и н И. С., Основы следящего гидравлического привода, Оборон-
гиз, 1962.
Галлай М. Л., Особенности пилотирования реактивных самолетов,
изд. «ДОСААФ», 1962.
Галлай М. Л., Через невидимые барьеры, изд. «Молодая гвардия», 1962.
Гератеволь 3. Психология человека в самолете, ИЛ, 1956.
Грин В., Кросс Р., Реактивные самолеты мира, ИЛ, 1957.
Денисов В. Г., Лопатин Р. Н., Летчик и самолет, Оборонгиз, 1962.
Закс Н. А., Основы экспериментальной аэродинамики, Оборонгиз, 1953.
Калачев Г. С., Показатели маневренности, управляемости и устойчиво-
сти самолетов, Оборонгиз, 1958.
Князев В. Н., Полищук К. Е., Оборудование самолетов, Оборон-
гиз, 1952.
383
Колосов С. П., Элементы авиационных автоматических устройств, Обо-
ронгиз, 1958.
Колосов С. П., Стромилов В. М., Основы автоматического пилоти-
рования, Оборонгиз, 1959.
Крассов И. М., Гидравлические усилители, Госэнергоиздат, 1959.
Лебедев А. А., Чернобровкин Л. С., Динамика полета, Оборон-
гиз, 1962.
Лебедев А. А., Отражена И. В., Сахаров Г. И., Аэромеханика
самолета, Оборонгиз, 1955.
Литвин-Седой М. 3., Гидравлический привод в системах автоматики,
Машгиз, 1956.
Сборник переводов под ред. Листвина Н. И., «Сверхзвуковые самолеты»,
ИЛ, 1958.
Локк А. С., Управление снарядами, ГТТИ, 1957.
Мартынов А. К., Экспериментальная аэродинамика, Оборонгиз, 1950.
Матвеев В. Н., Расчет возмущенного движения самолета, Оборон-
гиз, 1960.
Мельников А. П., Аэродинамика больших скоростей, Воениздат, 1961.
Нилсен Дж. Аэродинамика управляемых снарядов, Оборонгиз, 1962.
Остославский И. В., Аэродинамика самолета, Оборонгиз, 1957.
Остославский И. В., Калачев Г. С., Продольная устойчивость
и управляемость самолета, Оборонгиз, 1951.
Остославский И. В., Стр а ж ев а И. В., «О формировании контура
управления самолетом», Труды МАИ, вып. 124, Оборонгиз, 1960.
Пашковский И. М., Особенности устойчивости и управляемости скорост-
ного самолета, Воениздат, 1961.
Пауэлл Г. П., Испытательный полет, ИЛ, 1959.
Платонов К. К., Психология летного труда, Воениздат, 1960.
Попков С. Л., Основы следящего электропривода, Оборонгиз, 1958.
Пономарев В. М., Устойчивость и управляемость самолета на сверхзву-
ковых скоростях, ВВФ, 1956, № 11.
Сборник статей под ред. Рябова Б. А., «Авиационное приборостроение
и автоматика», Труды МАИ, вып. 109, Оборонгиз, 1959.
Сб. под ред. Седова Г. А. и Реброва М. Ф., Летчику о практической
аэродинамике, Воениздат, 1961.
Ф е о д о с ь е в В, И., С и н я р е в Г. Б., Введение в ракетную технику,
Оборонгиз, 1961.
Фомин Н. А., Проектирование самолетов, Оборонгиз, 1961.
Хохлов В. А., Гидравлические усилители мощности, Изд. АН СССР, 1961.
Честнов А. В., Летная эксплуатация самолетов, Воениздат, 1962.
Шульженко М. Н., Конструкции самолетов, Оборонгиз, 1953.
Эверест Ф. К-, Человек, который летал быстрее всех, ИЛ, 1960.
Arnzen Н. Е., Contollability: flight control for manned aircraft (.Auto-
matic Control", VII, 1960, vol. 13, No. 1, pp. 26—29).
Bonin P., Strahlverkehrsflugzeug, 152, II, fur den Mittelstreckeneinsatz
(Deutsche Flugtechnik, No. 1, vol. 3, 1959, pp. 3—8).
Dunn O. R., Flight characteristics of the DC-8 (SAE Journal No. 2, 11,
1961, pp. 38—40).
Floyd J. C., The Canadian approach to allweather interceptor develop-
ment („RAS", No. 576, XII, 1958, vol. 62, pp. 845—866).
Fuechsel К. M. High-speed gliding vehicles (Astronautics, No. 8,
vol. 3, VIII, 1958, pp. 34-35, 72-73).
Gambu J. et Pera rd J., La France en tete de la therno-propulsion
avec le Griffon II (Aviation Magazine, No. 271, 15 III, 1959, pp. 18—28).
Grossman N., Automatic flight control systems requirements for hygh
performance fighter aircraft, .SAE Preprint", No. 110, 1957, p. 6.
Heinemann E. H., Design of high-speed aircraft („Fifth International
Aero Conference, Los Angeles, 1955", New York, 1955, pp. 99—125).
384
Holladay W. L. and Hoffman D. P., Systems approach to flight
controls (Astronautics, No. 5, vol. 7, v, 1962, pp. 36, 37, 74, 76, 78, 80.).
Lick ley R. L. and Twiss L. P., The Fairey Delta 2 („Flight",
No. 2509, pp. 235—237; No. 2510, pp. 266—267, 1957 „Aeroplane", No. 2373,
pp. 275—276, 1957).
Moss W. W., Gannet J. R., Patten P. H., 3 pilots talk about super-
sonic transport („SAE Journal", No. 5, v, 1961, pp. 36—40).
Neal M., Sea Vixen („Flight", No, 2656, 5 II, 1960, vol. 77, pp. 179—186).
Sjoberg S. A., Flying qualites associated with several types ot com-
mand flight control systems („Seventh Anglo-American Aero Conference",
New York, 1960, pp. 295—311.).
Stafford R. S., Flugreuge fur hohe Machzahlen (Luftfahrttechnik„, No. 1,
15 I, 1956, vol. 2, pp. 13—14).
Stevens J. H., Une note technique sur le Fairey F. D. 2 („Air Revue",
No. 5, V, 1956, pp. 205—207, 230).
Strobel L. W., What’s ahead for piloted flight control systems („SAE
Journal", No. 11, XI, 1958, vol. 66, pp. 93—96).
Whitfield G. A., The future of automatic control of fixed—wing air-
craft („Seventh Anglo-American Aero Conference", New York, 1960, pp. 280—
294).
Broad Outline of Aircraft Feel Pilot’s Appreciation (Preprint, No. 854,
CAI—IAS Joint Meeting, 7—8 X, 1958).
Jane’s All the World’s Aircraft, 1959—1962.
Aeroplane, No. 2315, 1955; 2335, 1956; 2385, 2404, 1957; 2422, 2458; 2459,
2460, 2463, 1958; 2477, 2478, 2488, 2498, 2499, 2509, 1959; 2522, 2561, 2562, 2563,
2564, 2566, 1960; 2568, 2574, 2584, 2595, 2600, 2617, 1961.
Aeronautical Engineering Review, No. 9, IX, 1957.
Aero Space Engineering, No. 4, 6, 7, 1959; No. 2, 7, 11, 1961.
Aeronautics, No. 3 vol. 43, I, 1961.
Air Age, No. 3, vol. 5, v. 1958.
Air Pictorial, No. 6, VI, 1960; No. 11, XI, 1961.
Aircraft Production, No. 4, IV, 1959.
Airlift, No. 8, I, 1961.
Applied Hydraulics, No. 3, III, 1958; No. 6-8, VI—VIII, 1958, (vol. 11).
Astronautics, No. 5. vol. 7, 1962.
Aviation Magazine, No. 157, 1955; No.252, 1958; No. 263, 1958; No. 271, 1959;
No. 337, 1961.
Austroflug, No. 6, VI, 1958.
Aviation Week, No. 6, vol. 68, 10 II; No.2, vol. 68, 2 VI; No. 15—17, vol. 69,
13, 20—27 X, 1958;
No. 2, 6, 7, 8, 24, vol. 70, 12 I, 9 II, 16 II, 23 II, 15 VI, 1959; No. 7, 27, vol. 71
17 VIII, 28 XII, 1959;
No. 1, vol. 72, 2 V; No. 24, vol. 73, 5 XII, 1960;
No. 18, vol. 74, 1 V; No. 2, vol, 75, 7 VIII, 1961;
No. 8, vol. 77, 23 VIII; No. 14, vol. 77, 1 X; No. 15, vol. 77, 8 X, 1962.
Air Revue, No. 1, I, 1960.
Aircraft and Missiles Manufacturing, No. 10, vol. 1 X, 1958; No.5, vol. 2,
V, 1959.
Aviation Age. No.5, vol. 27, v, 1957.
Canadian Aeronautical Journal, No. 6, vol. 5 VI, 1959.
Control Engineering, No. 9, vol. 3, IX, 1956; No. 2, vol. 5, II 1958.
Compressed Air and Hydraulics, No. 295, X, 1930.
Engineer, No. 5267, 5268, vol. 203, 1957; No. 5350, 1958.
Engineering, No. 4833, vol. 186, 1957; No. 4854, vol. 187, 1959.
Flight, No. 2430, 1955; No. 2472, 1956;
No. 2515, 2517, 2521, 2523, 2540, 2551, 1957;
No. 2558, 2572, 2575, 2593, 2594, 1958;
No. 2624, 2629, 2630, 2642, 2650, 1959;
No. 2656, 2658, 2667, 2678, 2699, 2703, 1960;
No. 2717, 2731, 2745, 2746, 2751, 1961;
385
No. 2756, 2773, 2774, 1962.
Flugwehr und Technik, No. 12, XII, 1958; No. 3, III; 5 V, 7 VII, 1958.
Flugwelt, No. 7, 1958; No. 7, 8, 1960; No. 11, 1961.
Flug—Revue, No. 6, VI, 1961.
Interavia, No. 4087, 4114, 4137, 1958; No. 4155, 4178, 4182, 4188, 4212, 4213,
4248, 4320, 4326, 4355, 4368, 1959:
No. 4427, 4509, 4562, 4580, 4622, 1960;
No. 4780, 4846, 4852, 4857, 4883, 4885, 4888, 1961;
No. 4973, 4976, 4978, 5082, 1962,
Interavia Review, No. 10, 1956; No. 1, 1958; No. 1,1959; No. 3, 4, 8 1960; No. 10,
11, 1961.
Journal of the Royal Aeronautical Society (RAS),No. 576, XII, 1958, No.609,
IX, 1961; No. 616, 623, IV, XI, 1962.
Les Ailes, No. 1637, 1649, 1957; No. 1681 1958; No. 1711, 1959.
Missiles and Rockets, No. 33, vol. 5, 10 VIII, 1959; 3, vol. 6, 18 I, 1960;
No. 9, vol. 8, 27 II, 1961.
Missiles Design and Development, No. 5, vol. 7, V, 1960.
Product Engineering, No. 6—9, vol. 32, II, 1961.
Royal Air Force Flying Review (RAF), No. 6, 7, vol. 14, 1959; No. 7, vol. 17,
1962.
SAE Journal, No. 6, 1959; No. 2, 5, 11, 12, 1961; No. 11, 1962.
SAE Preprint, No. 273—a, 1960; S—247, 1960.
Space Aeronautics, No. 6, vol. 30, 1958. (Aviation Age); No. 1, vol. 32, 1959;
No. 2, vol. 33, 1960; No. 1, 2, vol. 35, 1961.
Vestern Aviation, No. 8, vol. 36, VIII, 1956.
ОГЛАВЛЕНИЕ
Стр,
Предисловие.......................................................... 3
Введение ............................................................ 7
Глава I. Общие сведения. Уравнения движения. Определения............ 13
§ 1. Системы осей координат..................................... 13
§ 2. Органы и рычаги управления самолета........................ 16
§ 3. Уравнения движения самолета и характеристики его устойчивости. 19
Длиннопериодическое и короткопериодическое движение .... 19
§ 4. Статическая устойчивость. Демпфирование.................... 33
§ 5. Устойчивость, управляемость и маневренность самолета .... 40
§ 6. Летчик в системе управления................................ 43
Глава II. Показатели устойчивости и управляемости самолета. Формирова-
ние усилий на рычагах управления самолетом при безбустерных систе-
мах управления................................................ 50
§ 1. Показатели продольной статической устойчивости и управляе-
т мости.................................................. 50
§ 2. Показатели боковой статической устойчивости и управляемости 62
§ 3. Динамическая устойчивость и управляемость.............. 66
§ 4. Боковое движение — совместное движение крена и рыскания.
Показатель % ........................ 89
Глава III. Изменение характеристик устойчивости и управляемости само-
лета на околозвуковых и сверхзвуковых скоростях полета........ 98
§ 1. Изменение характеристик продольной устойчивости и управляе-
мости ........................................................ 98
§ 2. Изменение характеристик боковой устойчивости и управляемости 122
§ 3. Изменение шарнирных моментов рулей и усилий на рычагах
управления..................................................... 133
§ 4. Новые проблемы устойчивости и управляемости, связанные с из-
менением форм современных сверхзвуковых самолетов............ 137
Глава IV, Улучшение характеристик устойчивости и управляемости мето-
дами аэродинамической компоновки и выбором форм сверхзвукового
самолета........................................................... 154
Глава V. Бустерное управление. Формирование усилий на рычагах управ-
ления самолетом при бустерном управлении..................... 193
§ 1. Переход к бустерному управлению........................... 193
§ 2. Загрузочные механизмы..................................... 202
§ 3. Механизмы нелинейной передачи............................ 215
§ 4. Изменение передаточных отношений в системах управления в по-
лете ........................................................ 221
387
Стр-
§ 5. Автоматы изменения передаточных отношений в системах управ- 225
ления самолетом ...............................................
§ 6. Автоматы балансировки...................................... 252
§ 7. Некоторые характеристики гидроусилителей.................. 262
Глава VI. Применение автоматических устройств для улучшения характе-
ристик динамической устойчивости и управляемости современных са-
молетов ........................................................ 271
§ 1. Демпферы рыскания, тангажа и крена в системах управления , 271
§ 2. Автоматы путевой и продольной устойчивости................. 286
§ 3. Исследование характеристик устойчивости и управляемости с по-
мощью самолетов, оборудованных системами искусственного по-
вышения устойчивости и демпфирования............................ 292
§ 4. Вопросы полета на самолете с центровкой, близкой к нейтраль-
ной, и статически неустойчивом (по перегрузке) самолете . . . 294
§ 5. Вопросы повышения надежности и безопасности автоматических
устройств . . . . .............................................. 298
§ 6. Некоторые специальные автоматические системы для улучшения
управляемости и повышения безопасности полета................... 300
Глава VII. Некоторые вопросы дальнейшего развития систем управления . 304
§ 1. Автоматическая система или летчик? Способы повышения эф-
фективности управления . ....................................... 304
§ 2. Возможные схемы автоматизации управления.................... 315
§ 3. Системы с электрическими связями рычага управления с рулем
и способы повышения их надежности............................... 318
Г лава VIII. Влияние деформаций конструкции самолета на его устойчивость
и управляемость . . , . . ...................................... 323
§ 1. Деформации оперения. Дивергенция и уменьшение эффективности 323
§ 2. Влияние деформаций фюзеляжа..............................., 328
§ 3. Деформации крыла. Реверс элеронов.......................... 333
§ 4. Деформации проводки управления............................. 345
§ 5. Системы управления с вращающимися тягами (валами) .... 353
§ 6. Влияние деформаций конструкции самолета на работу автомати-
ческих систем................................................. 359
Глава IX. Повышение безопасности полета и аварийное управление .... 363
Литература........................................................... 383
Феликс Иосифович Склянский
УПРАВЛЕНИЕ СВЕРХЗВУКОВОГО САМОЛЕТА
Техн, редактор А. Я. Новик
Подписано в печать 10/IX 1964 г. Учетно-изд. л. 23,90
ерьский редактор Л. И. Коваленко
Формат бумаги 60X90716=12,13 бум. л.— 24,25 печ. л.
Цена 1 р. 30 к. Тираж 4800 экз. Заказ 649/1832
Тем. план Оборонгиза 1964 г. № 34
Московская типография № 26 «Главполиграфпрома»
Государственного комитета Совета Министров СССР по печати
Ул. Чернышевского, 9
Замеченные опечатки
Стр. Строка Напечатано Должно быть
80 Формула (2. 26) Г Гт* х\ 1 \ X /СВ |_sin(o)/ — ф) -f-sin фе х -t J \ х 7св t _sin(atf — ф)4-з1пфе х
105 131 178 209 280 282 369 13 снизу Подпись под фиг. 3.18 16 снизу 9 сверху 9 снизу 1 сверху (4в)г.о = конструкции. Шу (при М^О,9^1,1) nd ка « “° р Нет сноски. (4Е)-.о= конструкции; „в ^у (при М^0,9ч- 1,1) п at Pl Сноску читать со стр. 370.
Заказ 649/1832